/

Author: Кузьмин С.З.
Tags: электротехника компьютерные технологии радиолокация
ISBN: 966-7192-20-2
Year: 2000



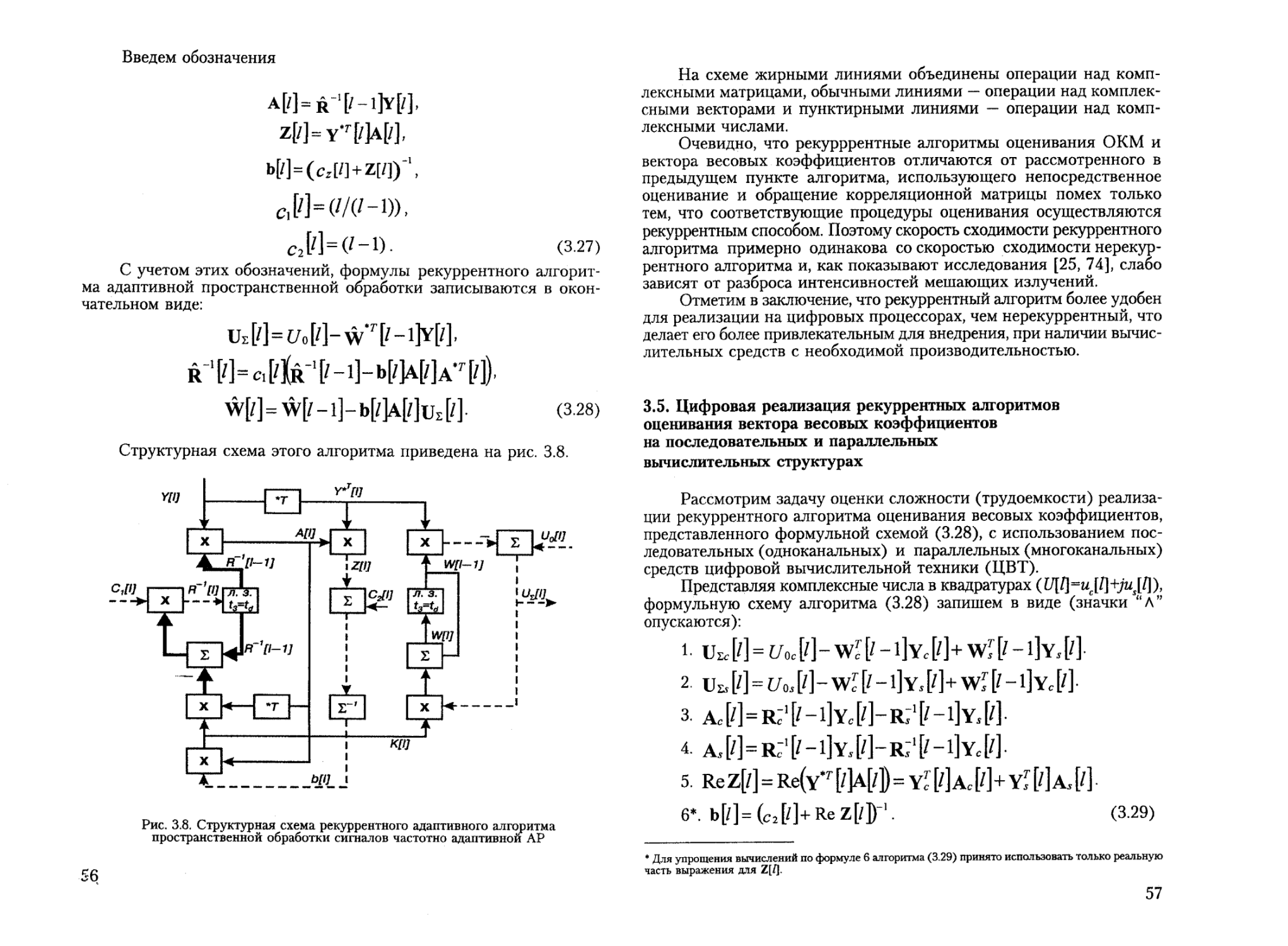
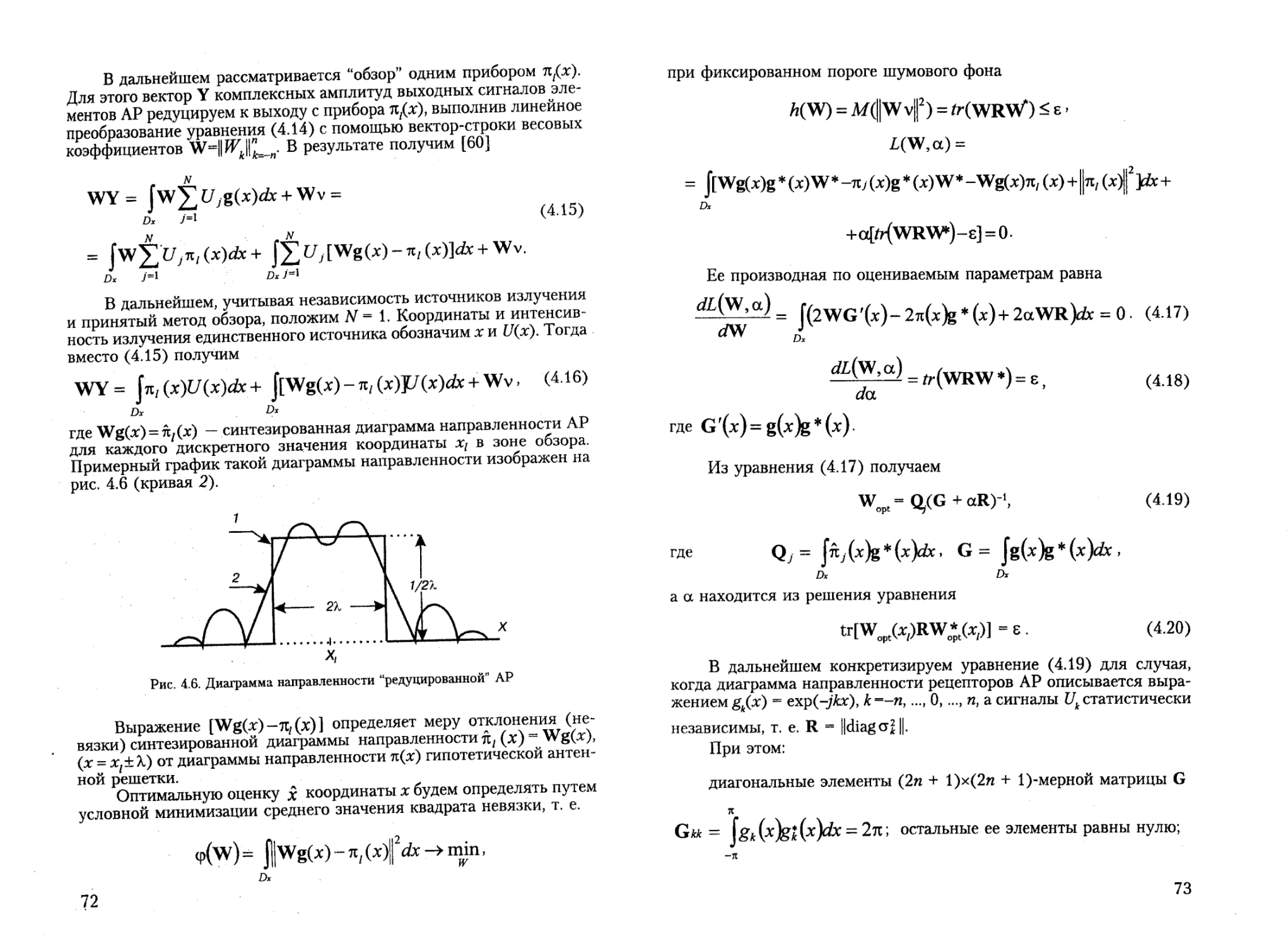
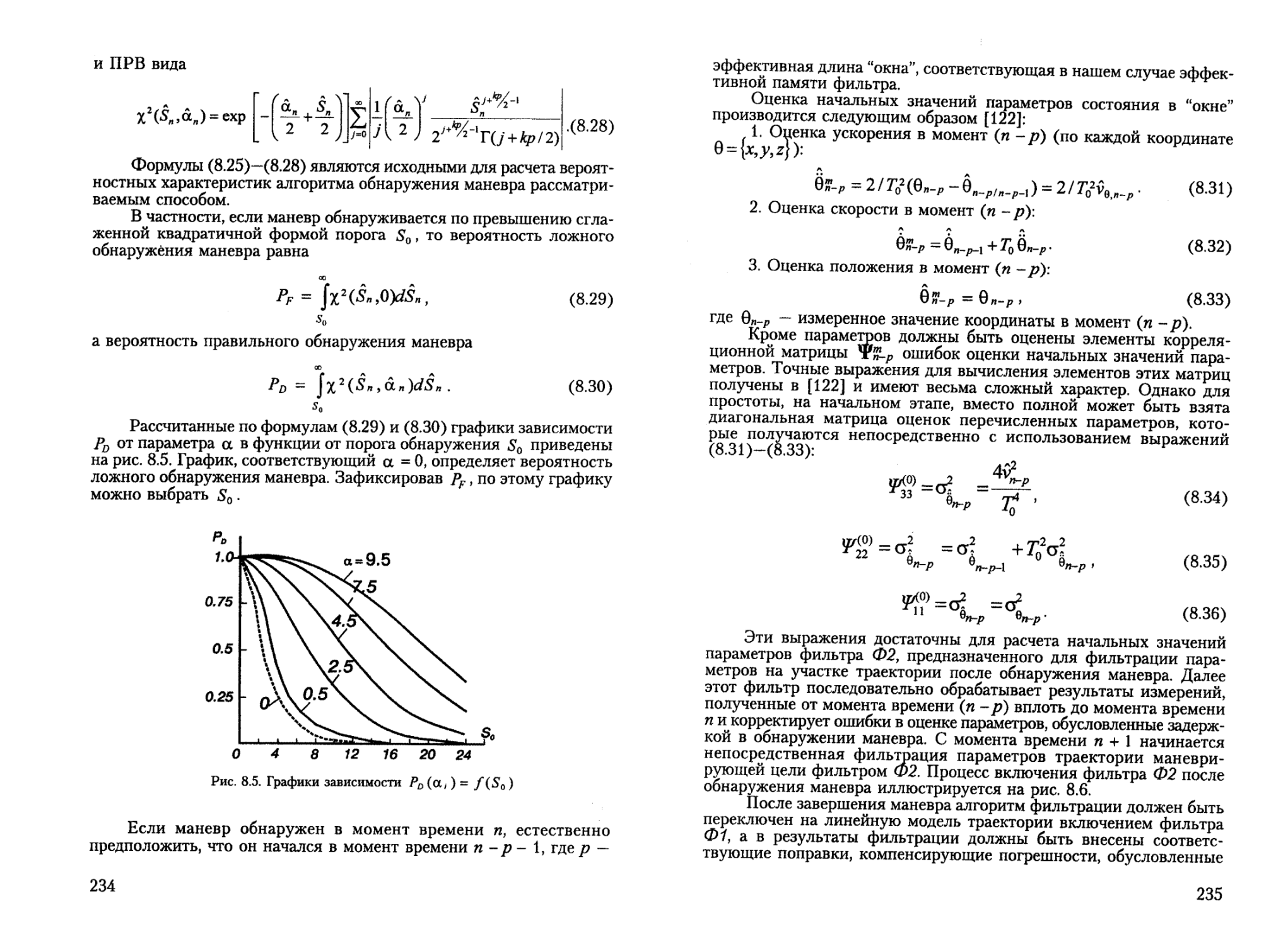
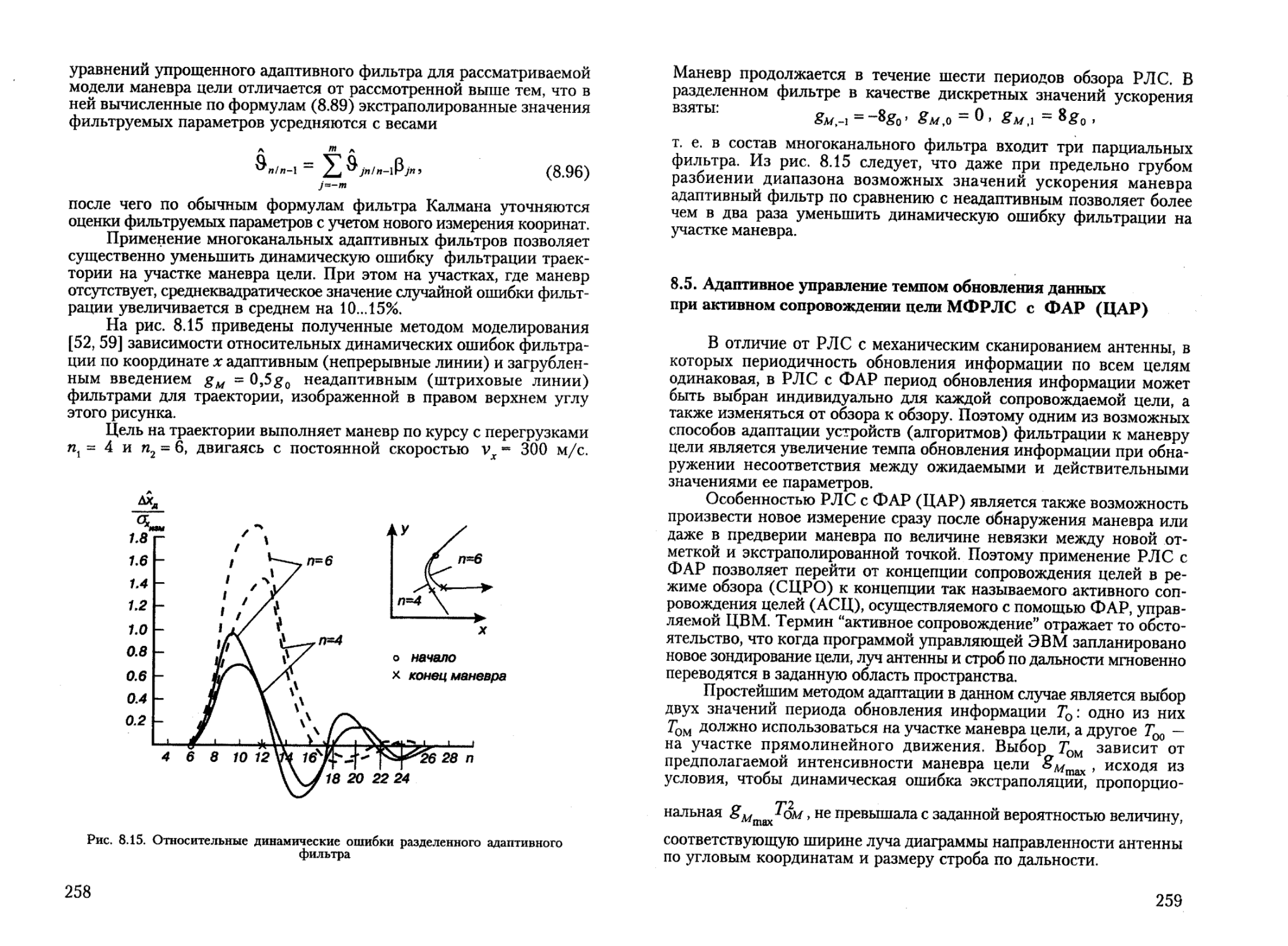
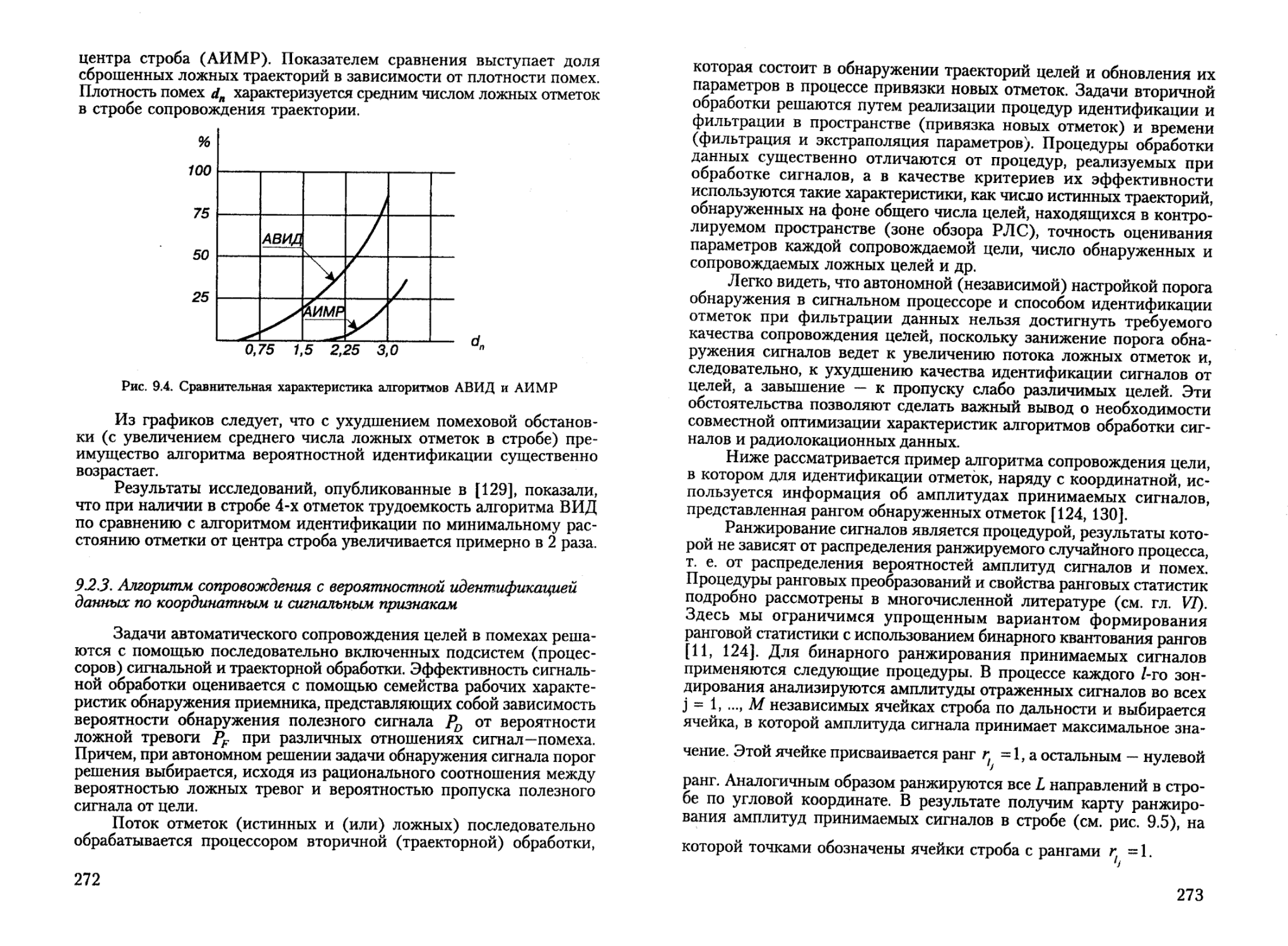
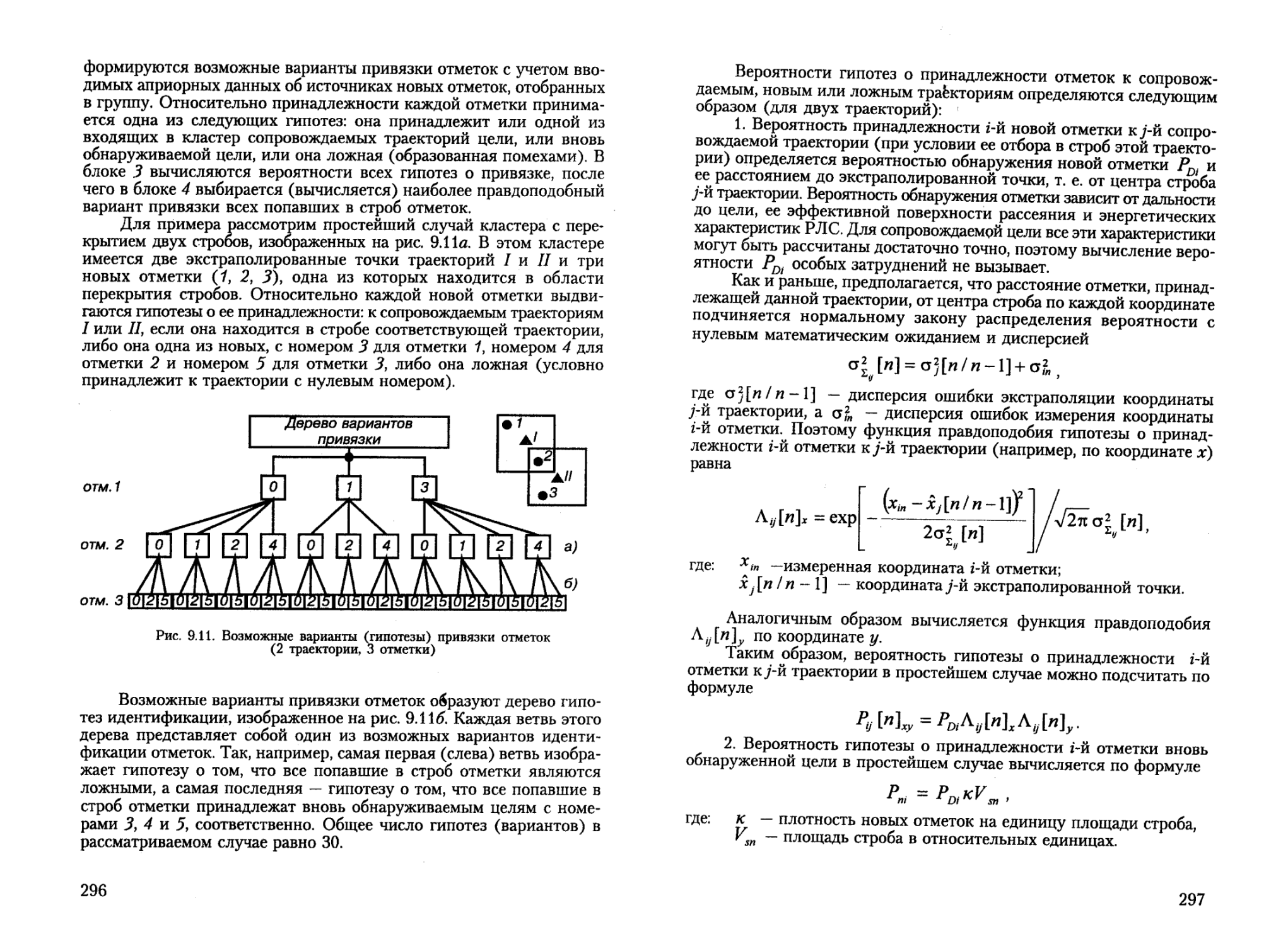
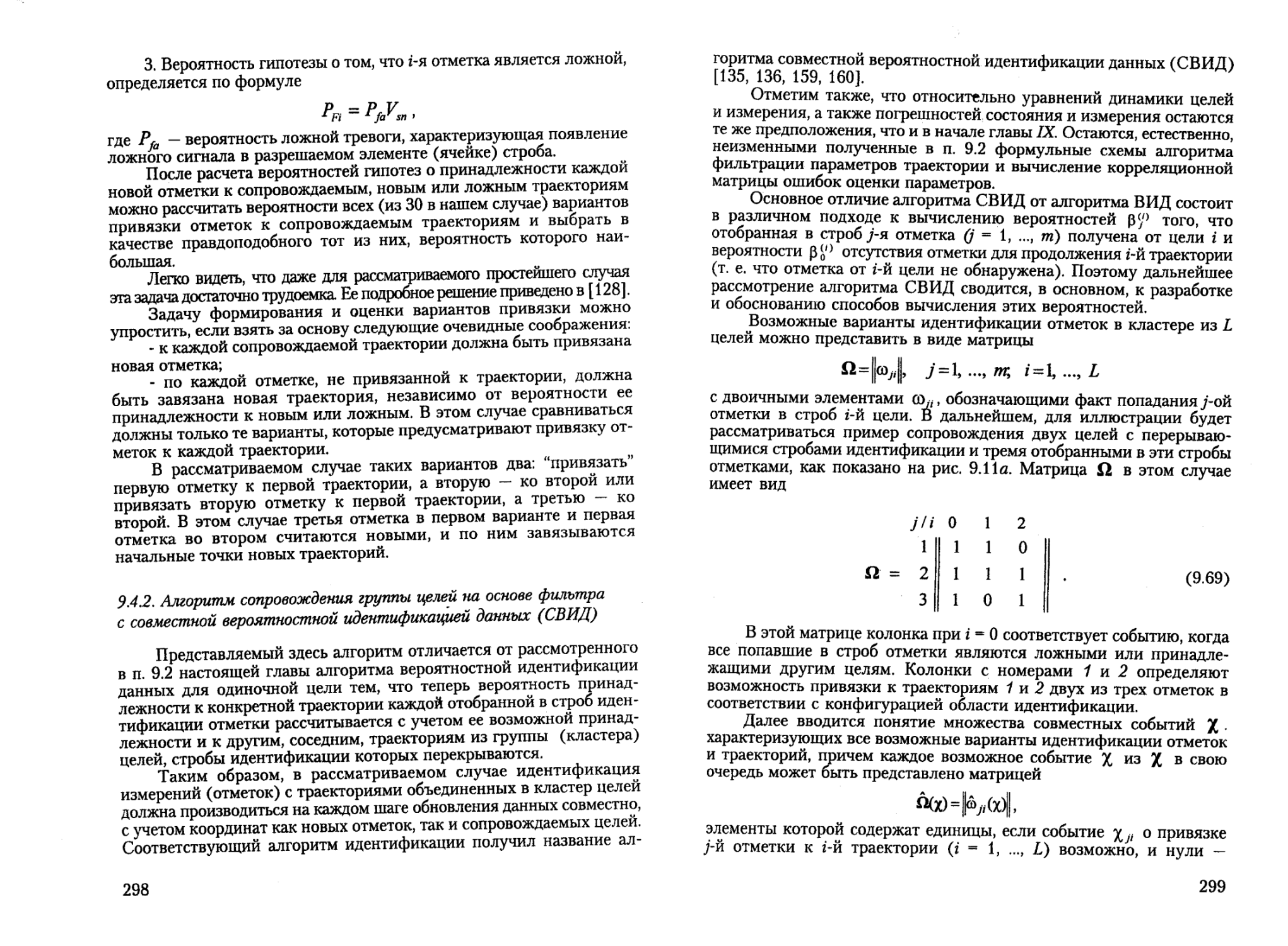
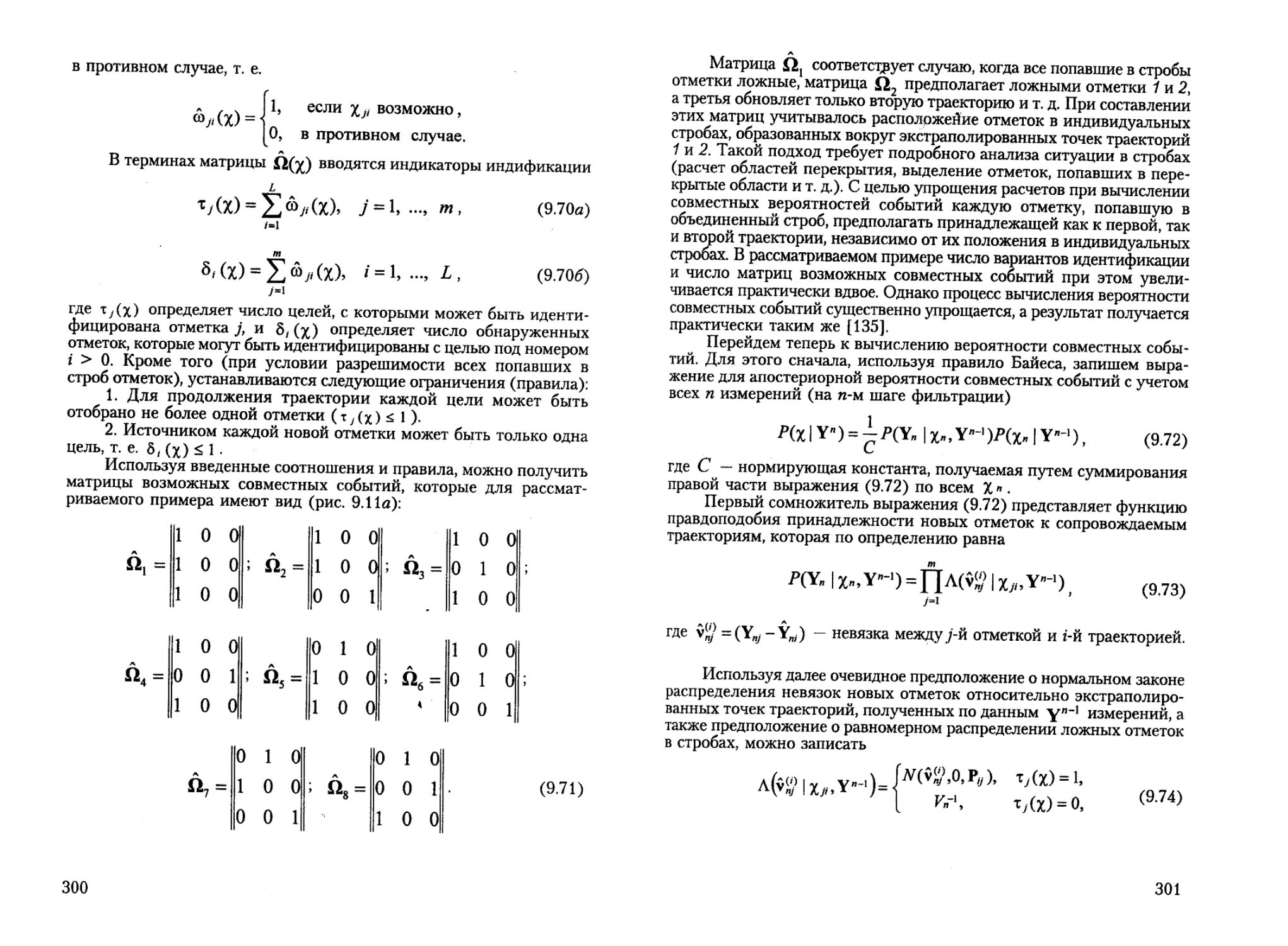
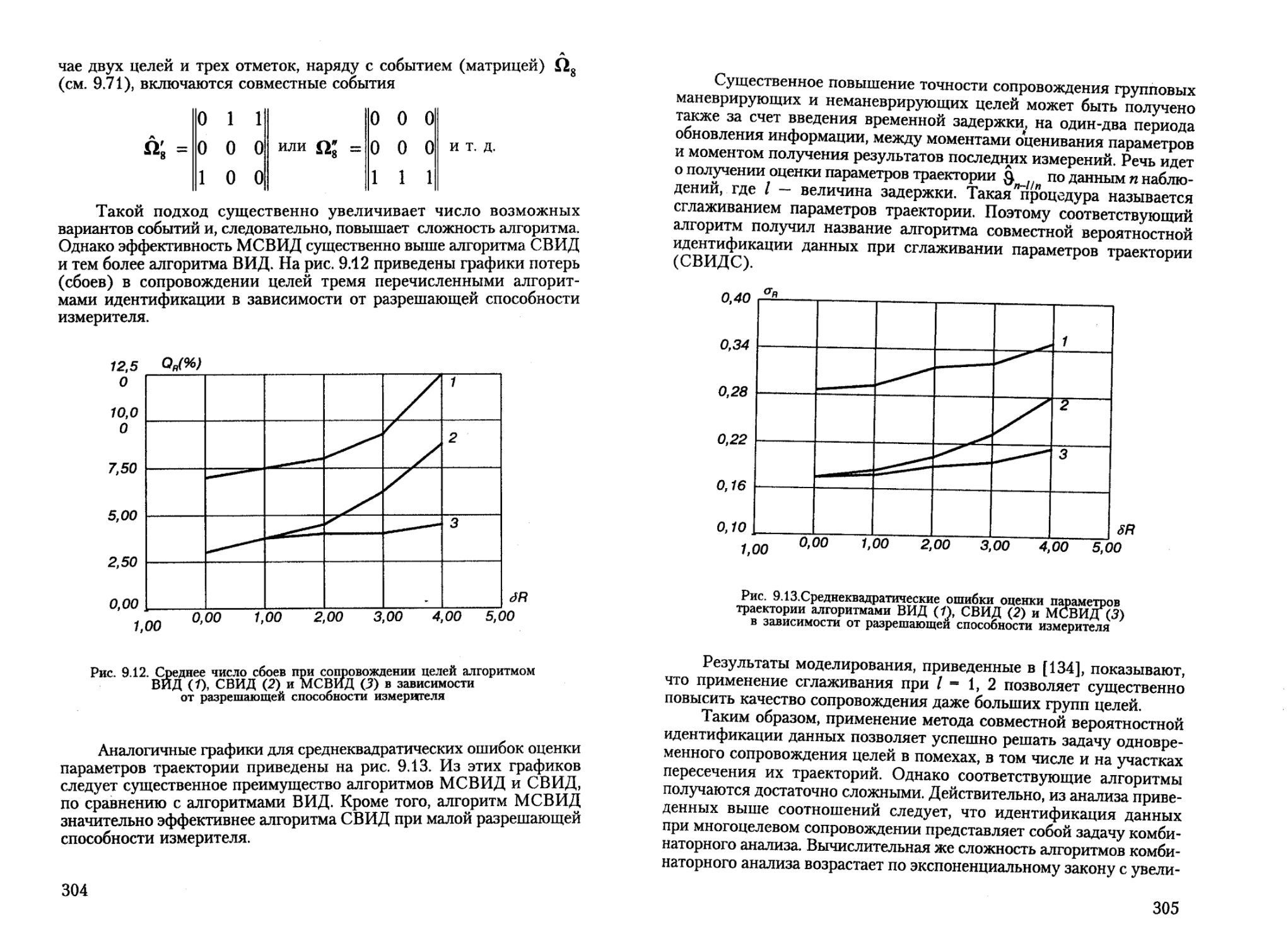
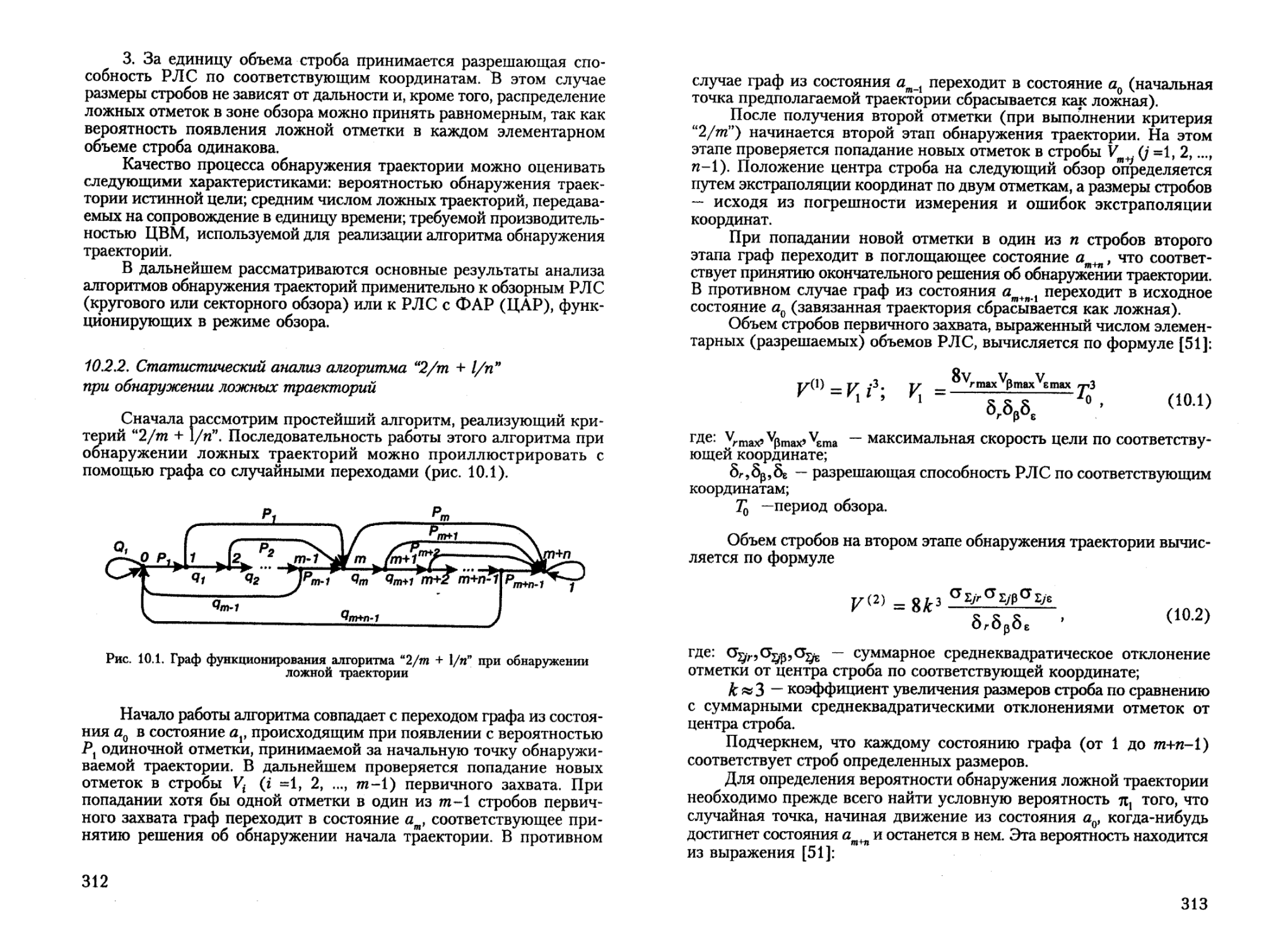
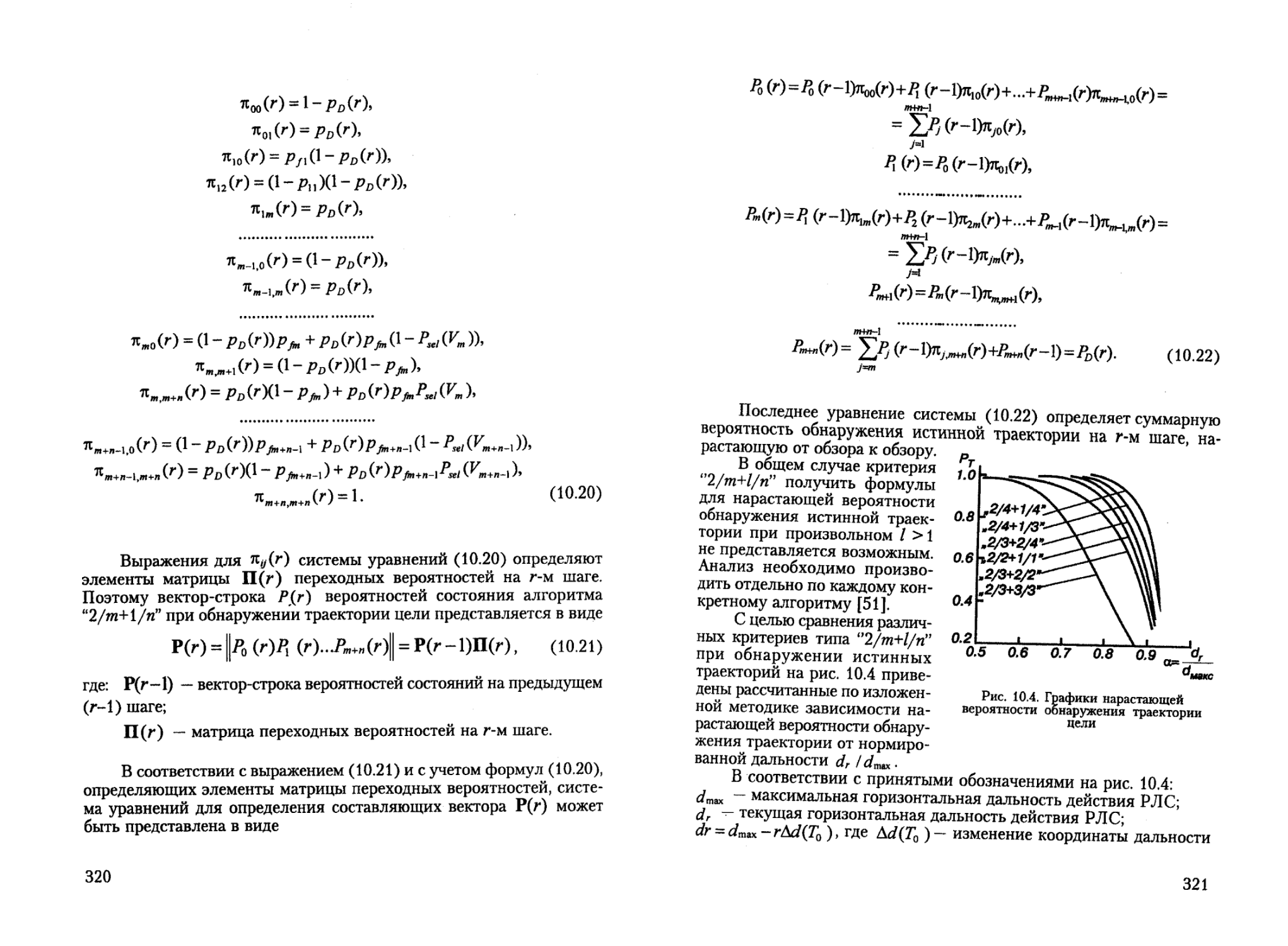
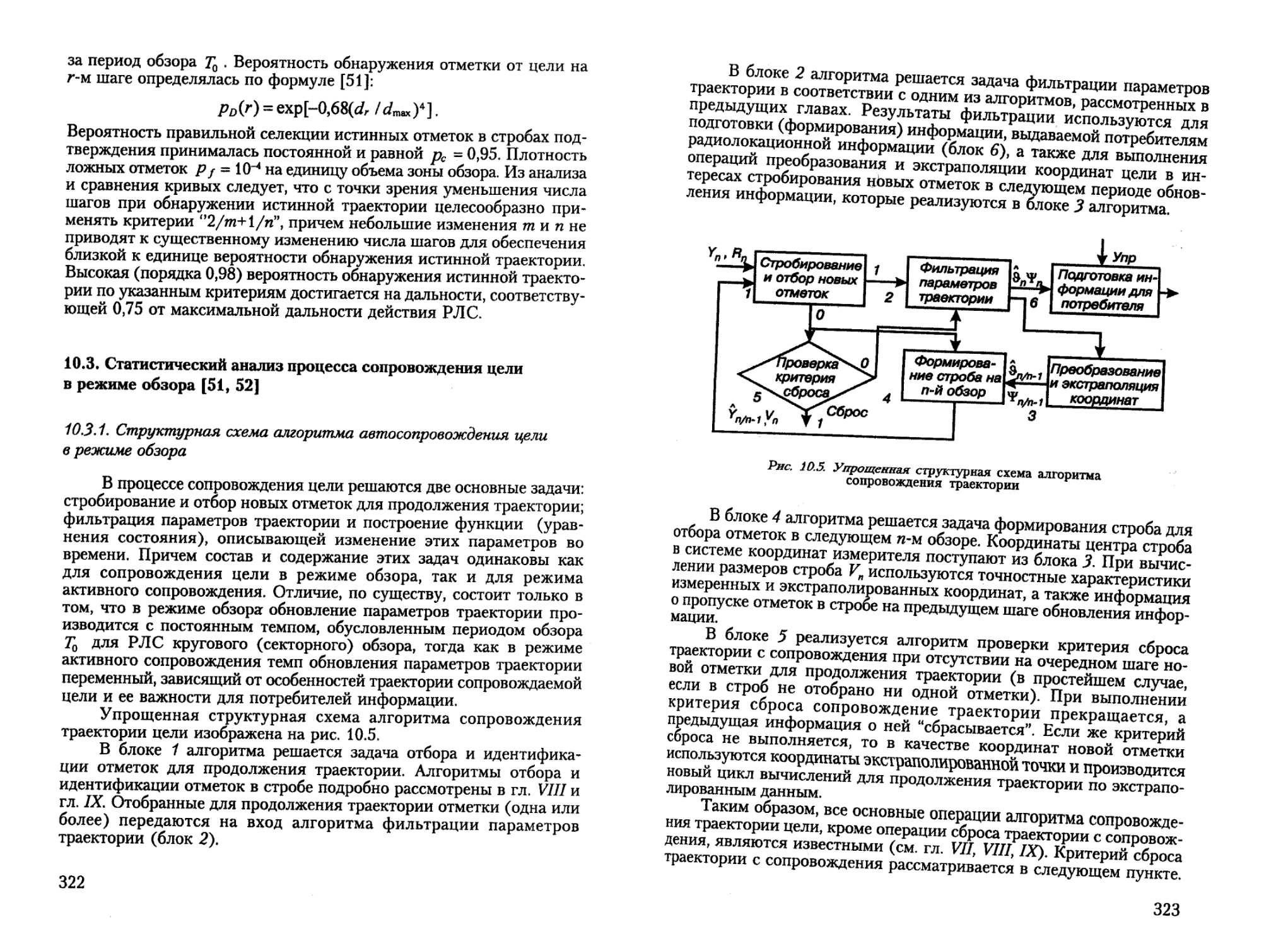
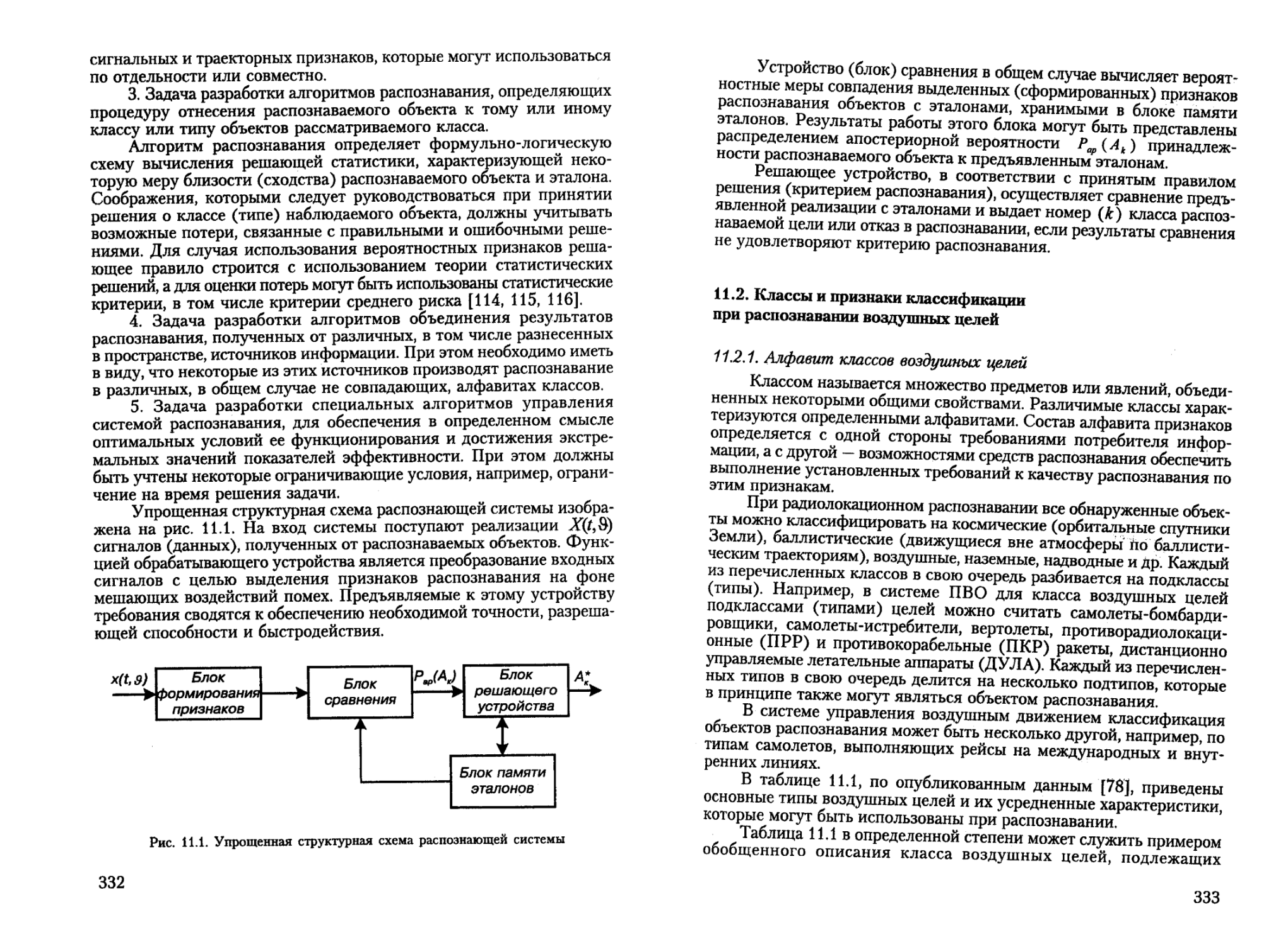
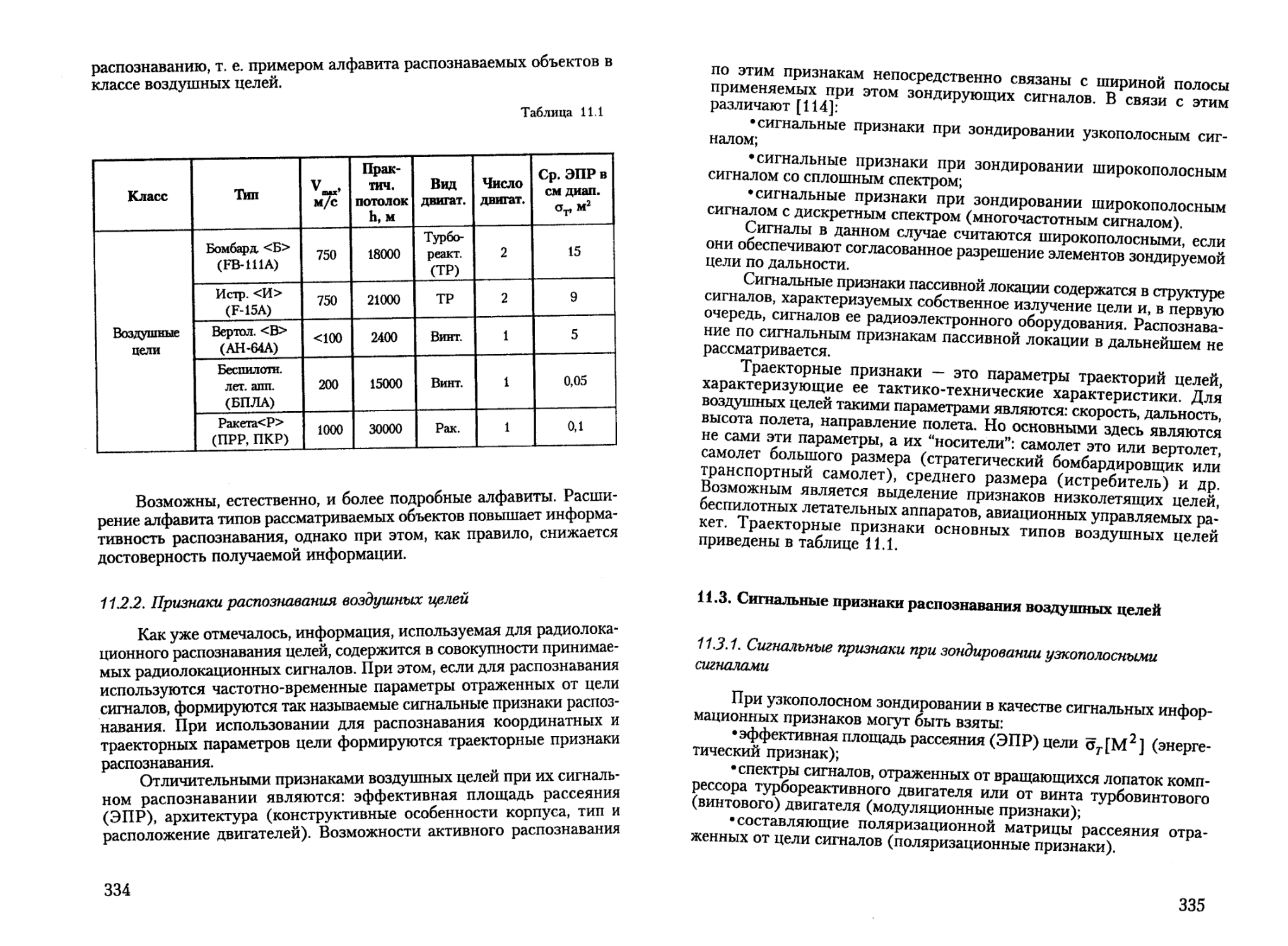
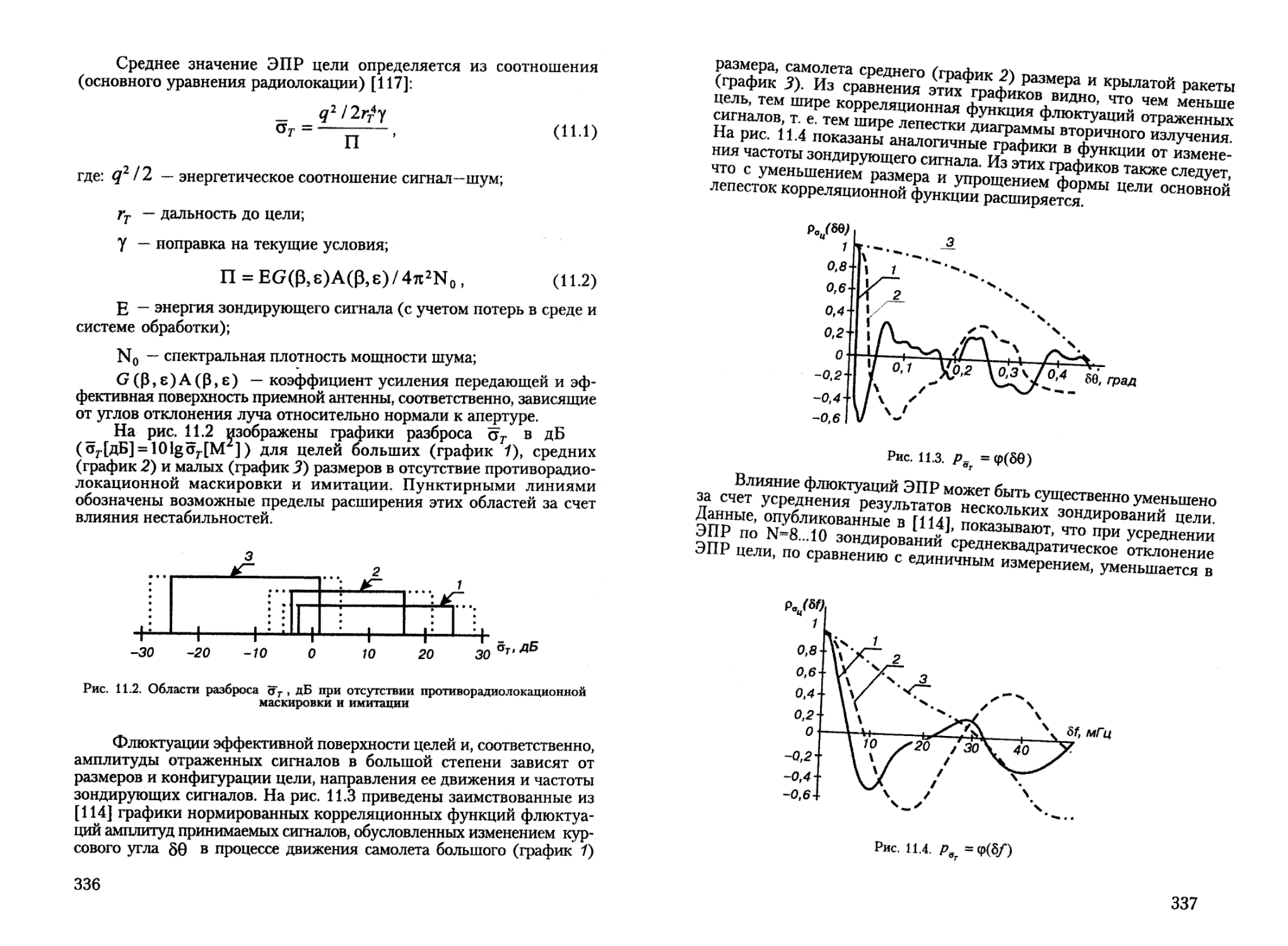
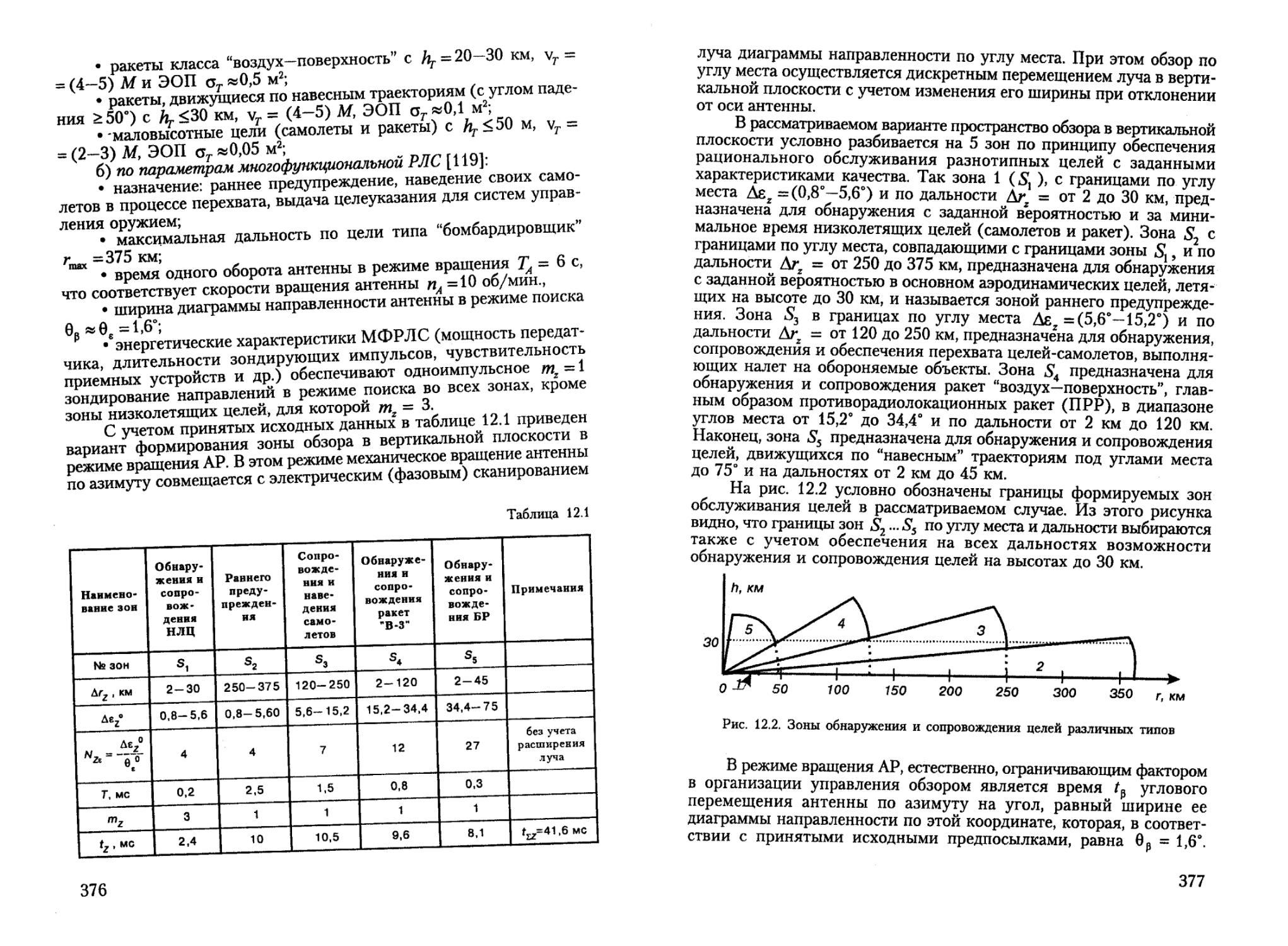
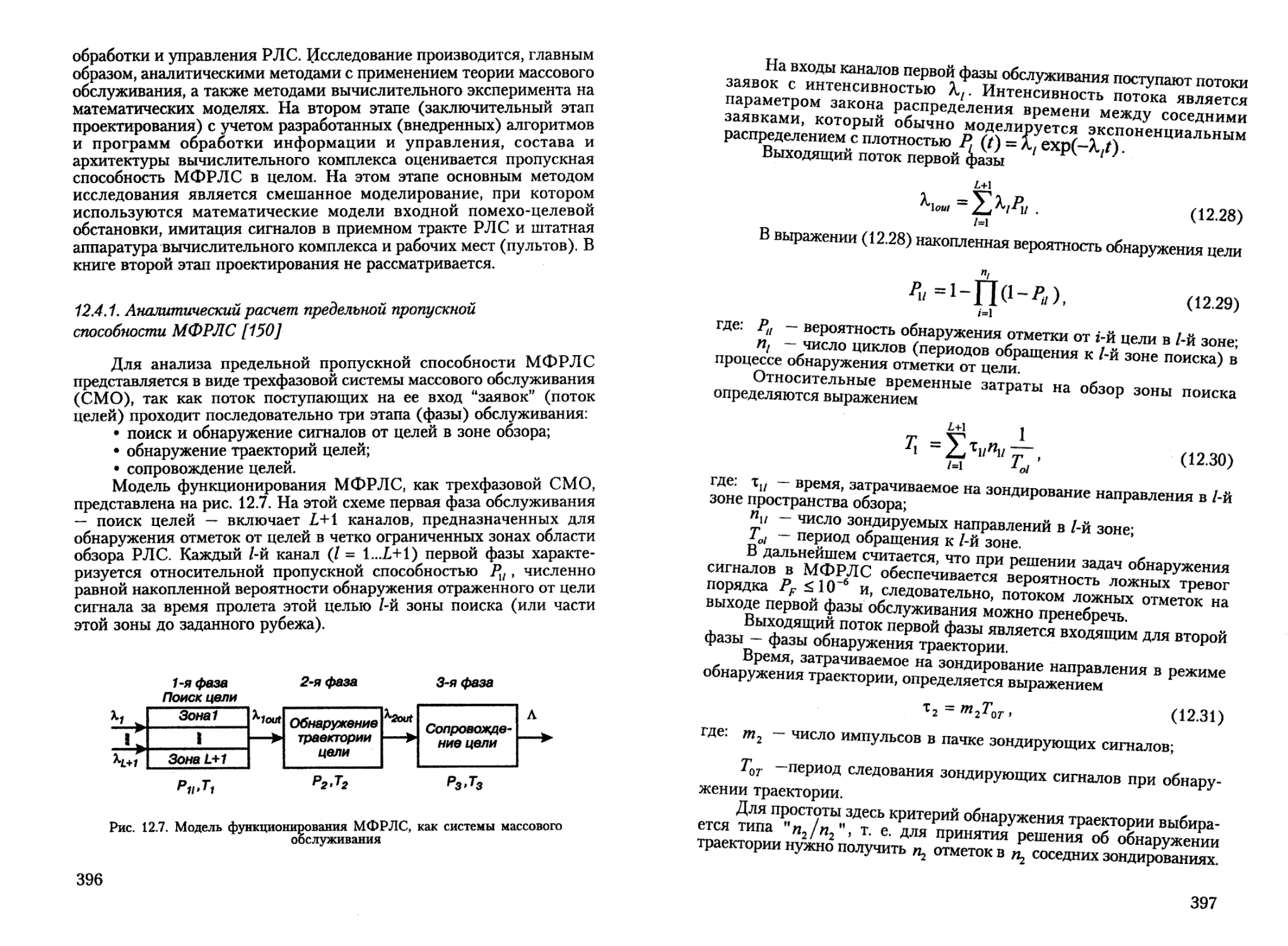
Text
С. 3. КУЗЬМИН
Цифровая радиолокация .к г Л
Введение в теорию
Киев Издательство «КВЩ» 2000
УДК 621.396.96:681.32
ББК 32.95
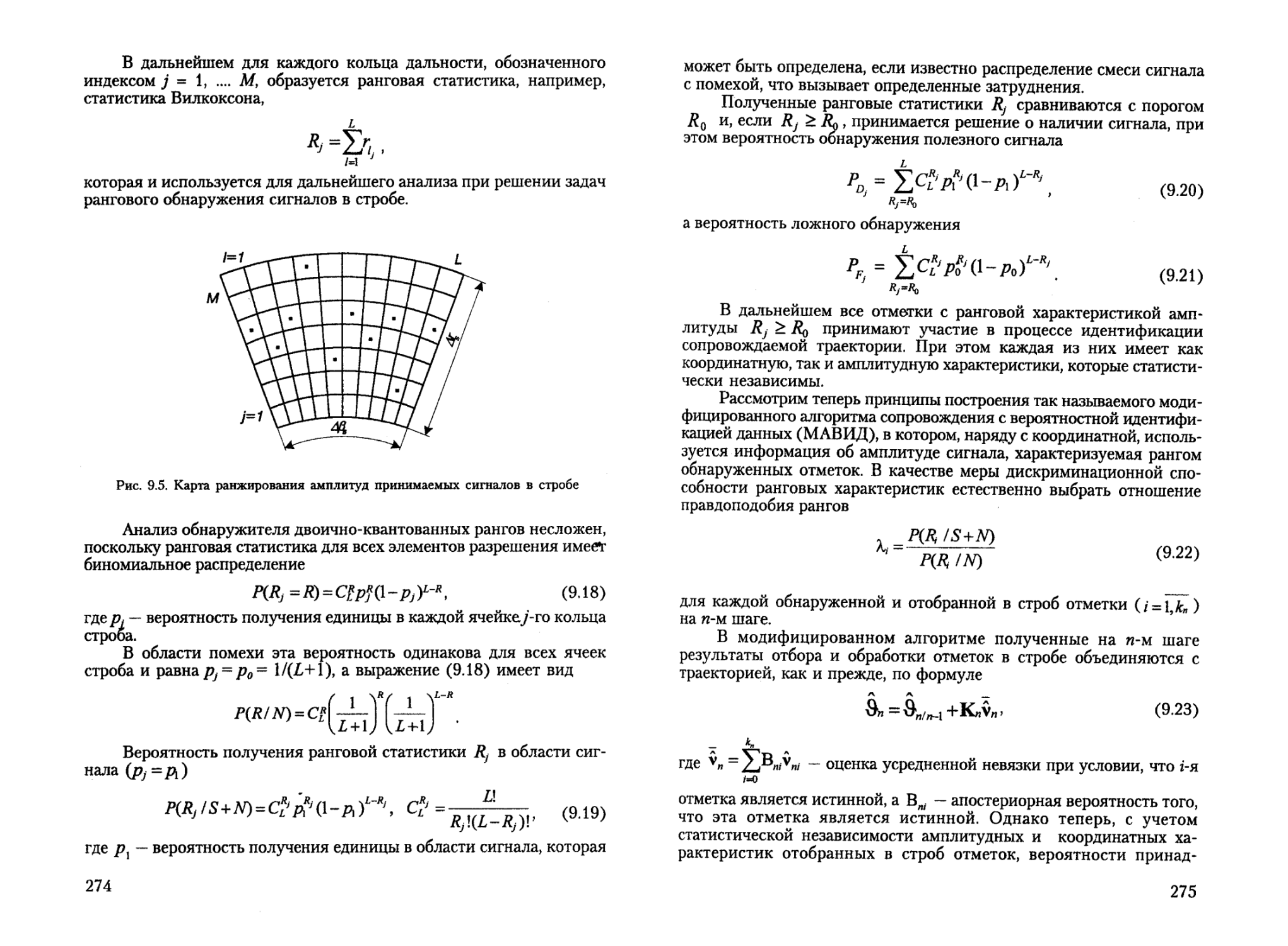
К-89
К-89
КУЗЬМИН С. 3. Цифровая радиолокация. Введение в теорию. — Киев: Издательство КОД, 2000. — 428 с.: илл.
В книге, в доступной для инженеров-разработчиков форме, излагаются основные результаты и перспективы развития теории и техники цифровой обработки информации и управления в сложных радиолокационных комплексах, к которым относятся многофункциональные РЛС с антенными решетками (ФАР и ЦАР),
В основу решения задач обработки информации и управления в многофункциональных РЛС, наряду с традиционными статистическими методами, положены новые вычислительные методы организации и интерпретации измерений, в том числе метод математической редукции результатов радиолокационных измерений на ЭВМ к выходу с устройства (прибора) с наперед заданными характеристиками качества. Комплекс “РЛС+ЭВМ” представляется в этом случае как единая информационно-вычислительная система, показатели качества которой превышают показатели качества отдельно взятой РЛС.
Для научных работников и инженеров, занимающихся разработкой новой радиолокационной техники, а также в качестве учебного пособия для подготовки инженерных и научных кадров в области радиолокации.
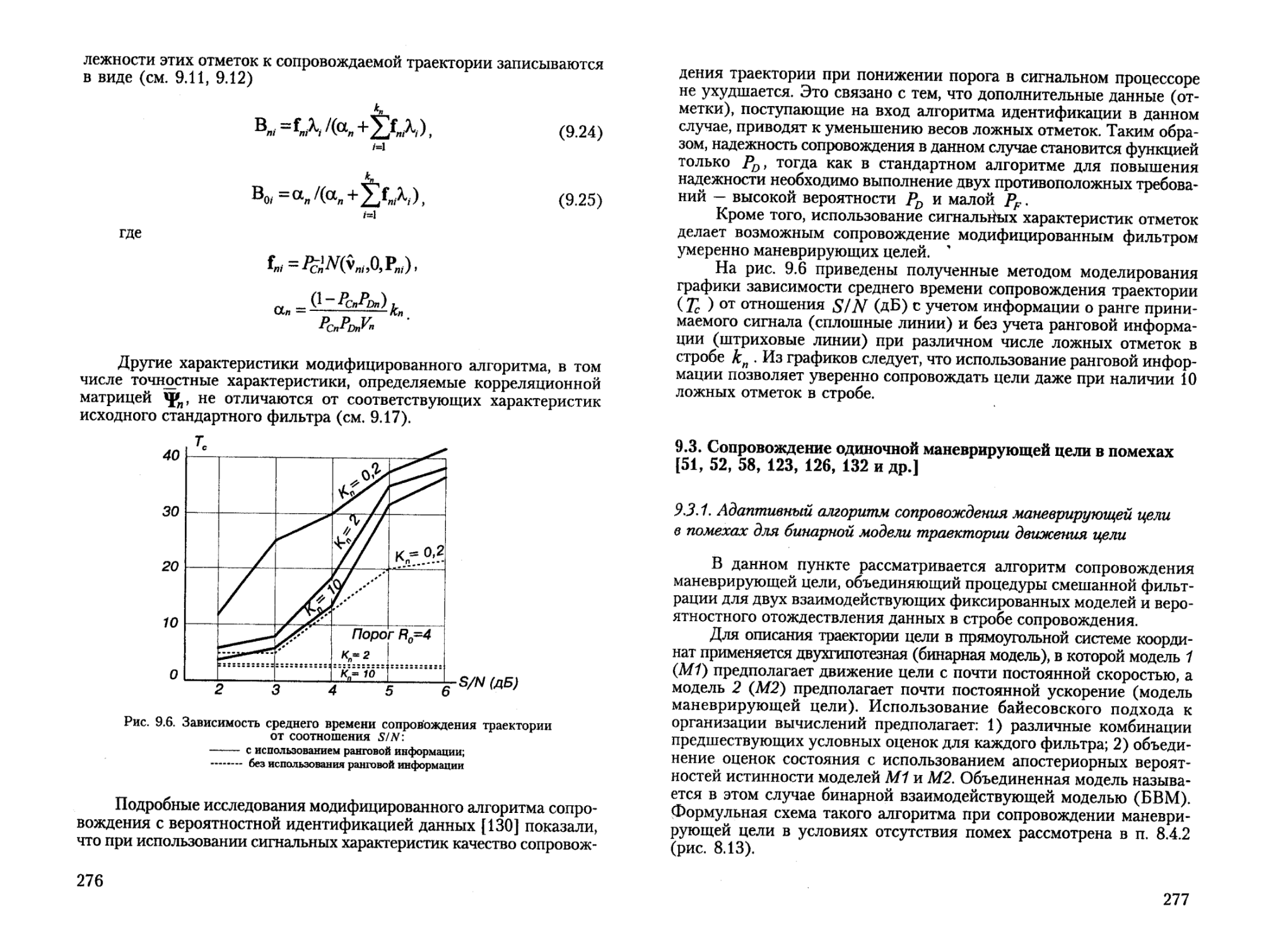
Рисунков — 140, таблиц — 10.
ISBN 966-7192-20-2
© Издательство КШЦ, 2000
ПРЕДИСЛОВИЕ
Расширение областей применения и усложнение задач, решаемых радиолокационными комплексами, с одной стороны, а также существенные достижения в обеспечении мобильности и быстродействия современной цифровой вычислительной техники — с другой, обусловили появление и широкое развитие нового класса радиолокационных станций (РЛС), которые способны одновременно вести поиск новых и сопровождение большого числа обнаруженных целей и получивших, в связи с этим, название многофункциональных РЛС (МФРЛС).
По отдельным вопросам построения и функционирования МФРЛС имеется большое число журнальных публикаций, далеко не полный перечень которых приведен в списке литературы. Однако, до настоящего времени произошедший существенный скачек в радиолокации в связи с внедрением антенных решеток с фазовым (ФАР) и цифровым (ЦАР) методами формирования лучей и мощной микропроцессорной вычислительной техники для обработки радиолокационной информации, еще слабо освещены как в отечественной, так и в иностранной (поскольку можно судить по имеющимся опубликованным сведениям) литературе. В связи с этим автор на основе известных публикаций и многолетних собственных разработок в составе ряда творческих коллективов, предпринимает попытку частично восполнить этот пробел.
В книге основное внимание уделяется вопросам алгоритмизации основных задач, решаемых МФРЛС с цифровыми антенными решетками. В этом случае все этапы и операции обработки информации и управления в процессе радиолокации объектов (целей) решаются в цифровом виде, а сама МФРЛС представляется как цифровая информационно-вычислительная система (ИВС).
Ниже излагаются современные взгляды на совершенствование и применение цифровых методов обработки информации и управления в радиолокации, которые определяют основное содержание книги.
1. Уже в современных РЛС применение цифровых методов и средств далеко выходит за пределы решения задач обработки информации. Наметилась тенденция к внедрению цифровых методов формирования зондирующих сигналов, что позволяет существенно расширить информационные возможности РЛС, как многофункциональных источников информации. Цифровые методы с успехом используются при решении задач формирования лучей, управления диаграммой направленности (ДН) ФАР и коррекции искажений в ФАР. При цифровом методе управления ФАР можно построить эффективную систему коррекции погрешностей при излучении в зависимости от углового положения луча ДН. Однако, формирование и управление ДН антенной решетки при помощи установки фазы элементов в
3
общем случае связано с потерей энергии. В результате, возможности формирования лучей требуемой формы ограничиваются. Ограничи-ваются также возможности одновременного формирования множества лучей, т. е. многолучевой диаграммы направленности. Более целесообразным и перспективным является цифровое формирование лучей ДН на видеочастоте и генерация пространственных характеристик антенны при помощи весовой суперпозиции преобразованных в цифровую форму комплексных выходных сигналов от каждого элемента (или группы элементов) антенной решетки. Дальнейшее взвешивание и суммирование может быть выполнено с помощью цифровых устройств, вместо аналоговых высокочастотных блоков. В этом случае мы имеем дело с так называемой цифровой антенной решеткой (ЦАР).
Разработка теории и техники применения цифровых методов формирования и управления диаграммой направленности передающей и приемной антенных решеток является одним из важнейших перспективных направлений развития радиолокации.
2. Давно известно, что пространственная фильтрация сигналов на выходе приемной АР (ФАР или ЦАР) в условиях сложной помеховой обстановки должна быть адаптивной. Аналоговые методы адаптивной пространственной обработки не нашли сколько-нибудь существенного распространения из-за малой эффективности, особенно при наличии нескольких мешающих источников излучения. Поэтому переход к чисто цифровым методам адаптивной пространственной фильтрации сигналов на выходе АР является неизбежным. Для цифровой пространственной фильтрации необходимо, в общем случае, оцифровать сигнал на выходе каждого элемента АР. Основной проблемой в этом случае является чрезвычайная сложность вычислений. Решение этой проблемы может быть получено как за счет совершенствования алгоритмов, так и за счет рационального построения вычислительного комплекса.
Разработка теории и техники цифровой пространственной фильтрации сигналов на выходе АР также является перспективным направлением внедрения цифровых методов в радиолокацию.
3. Цифровая время-частотная обработка когерентных и некогерентных радиолокационных сигналов получила широкое распространение. Основная проблема здесь — преодоление априорной неопределенности принимаемых сигналов и помех. Поэтому актуальными являются задачи разработки методов и алгоритмов обработки сигналов, инвариантных к энергетическим и статистическим характеристикам помех.
Немаловажное значение должны иметь также исследования по совершенствованию базовых процедур обработки сигналов, наиболее приспособленных для реализации средствами цифровой вычислительной техники. С этой точки зрения заслуживают внимания исследования последних лет по математическим моделям цифровой
обработки сигналов, на основе абстрактных алгебраических систем (полей Галуа, конечных колец, алгебр А-значных функций и др.). Такие модели наиболее полно учитывают структуру цифрового сигнала, что упрощает реализацию соответствующих алгоритмов на специализированных цифровых устройствах.
4. При интерпретации радиолокационных данных, полученных от лоцируемых объектов, (фильтрация, экстраполяция, обнаружение и поддержание траекторий по данным радиолокационных измерений), задача состоит в нахождении параметров модели лоцируемого объекта, которые непосредственно не наблюдаются. В общем случае такие задачи относятся к классу некорректно поставленных задач. Для их решения требуется использовать идеи и способы нахождения устойчивых алгоритмов, например, путем регуляризации или редукции измерений. Получаемые в процессе решения задач интерпретации радиолокационных данных оценки параметров можно считать оптимальными, если они характеризуются минимальными дисперсией и смещением, т. е. являются решением двухкритериальной задачи одновременной минимизации этих показателей качества. Соответствующие оценки называются при этом парето-оптимальными.
Следовательно, четко определяются два новых направления исследований при решении задач восстановления параметров модели объекта по данным дискретных радиолокационных измерений:
•разработка устойчивых решений обратных задач в радиолокации;
•разработка методов и алгоритмов парето-оптимального оценивания параметров модели траекторий, управления лучом ДН и др.
5. В сложных цифровых радиолокационных комплексах при работе в условиях мешающих воздействий принципиальное значение приобретает их адаптация к быстро меняющейся внешней обстановке с целью обеспечения оптимального распределения ограниченных временных и энергетических ресурсов по множеству обрабатываемых объектов локации (целей). Задачи управления ограниченными ресурсами многофункциональных РЛС поставлены давно и решались в ряде опубликованных работ. Однако проблема в целом остается до конца не решенной и требует дальнейшей детальной проработки как в теоретическом плане, так и с точки зрения реализации соответствующих алгоритмов специализированными вычислительными средствами и на ЭВМ.
6. Связующим звеном между теоретическими достижениями (в алгоритмах) и практически реализуемыми показателями качества систем цифровой обработки радиолокационной информации и управления РЛС является архитектура цифрового вычислительного комплекса (ЦВК), сопрягаемого с РЛС, с учетом имеющихся элементов базы и базовых структур отдельных вычислителей. В настоящее время при решении большинства задач цифровой обработки радиолокационной информации возникает необходимость в пере-
5
4
стройке алгоритмов и архитектуры ЦВК в зависимости от полученных промежуточных результатов и состояния внешней среды. Для этого необходимо, чтобы высокая производительность ЦВК сочеталась с
четкой логикой управления вычислительным процессом. Архитектуры, способные перестраиваться в процессе функционирования и адапти
роваться к изменяющимся условиям работы, называются адаптивными. Разработка ЦВК с адаптивной архитектурой является новым этапом
развития вычислительных средств для цифровой обработки информа-
ции и управления в РЛС.
Перечисленные и кратко обоснованные направления исследова-
ний, на Наш взгляд, определяют перспективу развития не только цифровой обработки радиолокационной информации, но в радиолокации в целом. При этом за основу принимается цифровая реализация всех основных функциональных узлов РЛС: формирования зондирующих сигналов, формирования многолучевой диаграммы направленности на базе АР, управления ДН АР, обработки принимаемых сигналов и радиолокационных данных, управления обзором пространства и распределения энергетических ресурсов многофункциональных РЛС, адаптации к изменяющейся внешней обстановке и др.
С внедрением цифровых методов реализации всех основных этапов и операций, выполняемых в процессе радиолокации объектов, РЛС с ЦАР преобразуется в систему “ЦАР+ЭВМ”, т. е. становится, по сути дела, специализированной цифровой вычислительной системой сбора и обработки радиолокационной информации. Поэтому, на наш взгляд, целесообразно выделение и самостоятельная разработка нового научно-технического направления — “Цифроваярадиолокация” аналогично, например, направлению “Цифровая связь”, уже давно получившему признание и интенсивно разрабатываемому в последнее
время.
В монографии автор, в рамках своей компетенции, ставит задачу сформулировать и обосновать теоретические предпосылки, проблематику и методы решения задач цифровой радиолокации.
По содержанию книга разделена на 12 глав.
Главы I и II посвящены определению предмета и проблематики цифровой радиолокации, а также краткому описанию структурной схемы многофункциональной РЛС с ЦАР, как прототипа информационно-вычислительной системы в цифровой радиолокации.
Главы III и IV посвящены адаптивной цифровой пространственной обработке сигналов в МФРЛС с применением статистических (глава III) методов и методов математической редукции (глава IV) при обработке оцифрованных сигналов на выходе АР.
Главы V и VI посвящены цифровой время-частотной обработке оцифрованных импульсных сигналов на фоне пассивных помех.
Главы VII—X посвящены цифровой вторичной обработке радиолокационных данных, полученных от неманеврирующих и маневрирующих целей на фоне помех.
6
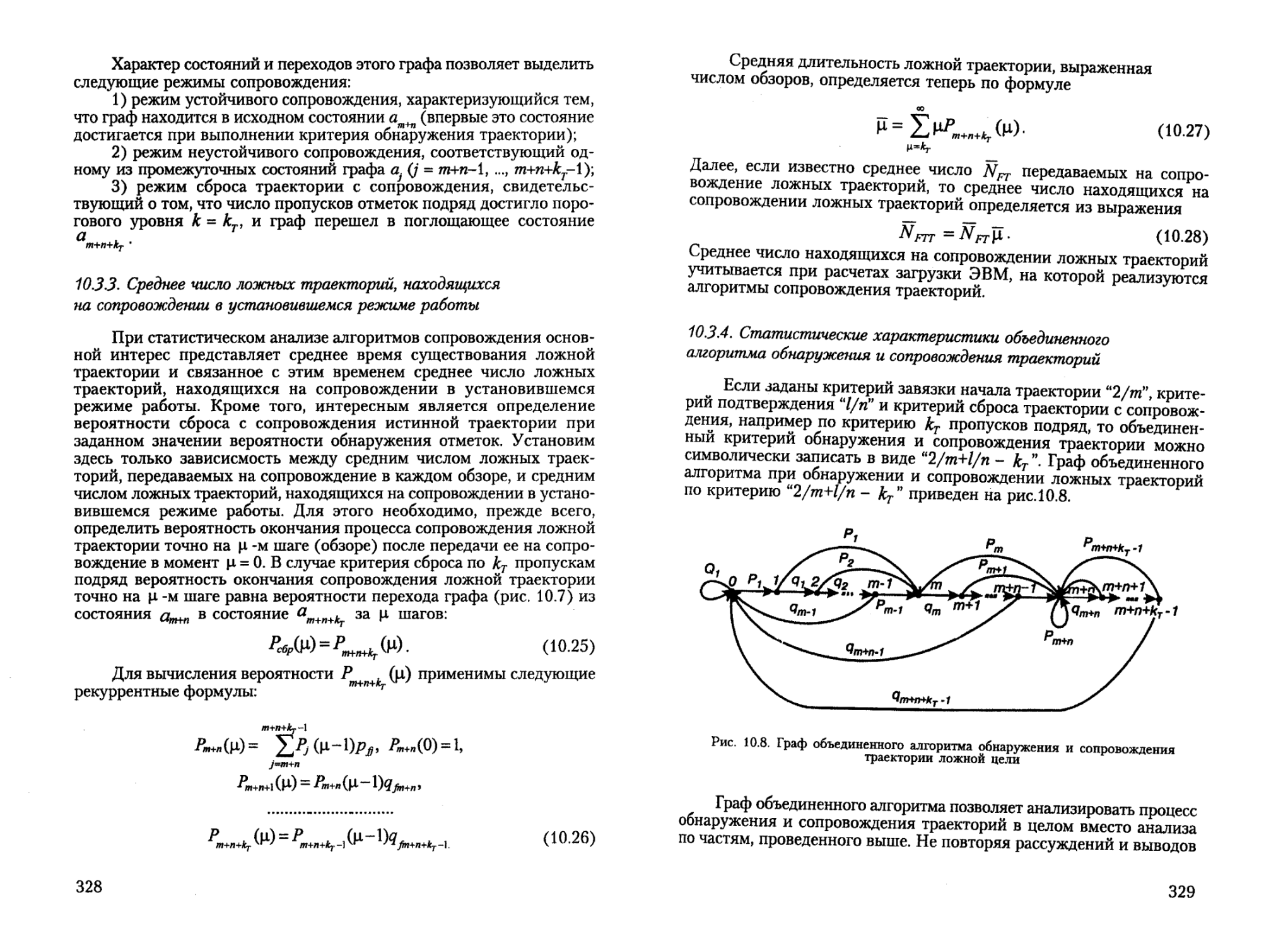
Глава XI посвящена радиолокационному распознаванию воздушных целей.
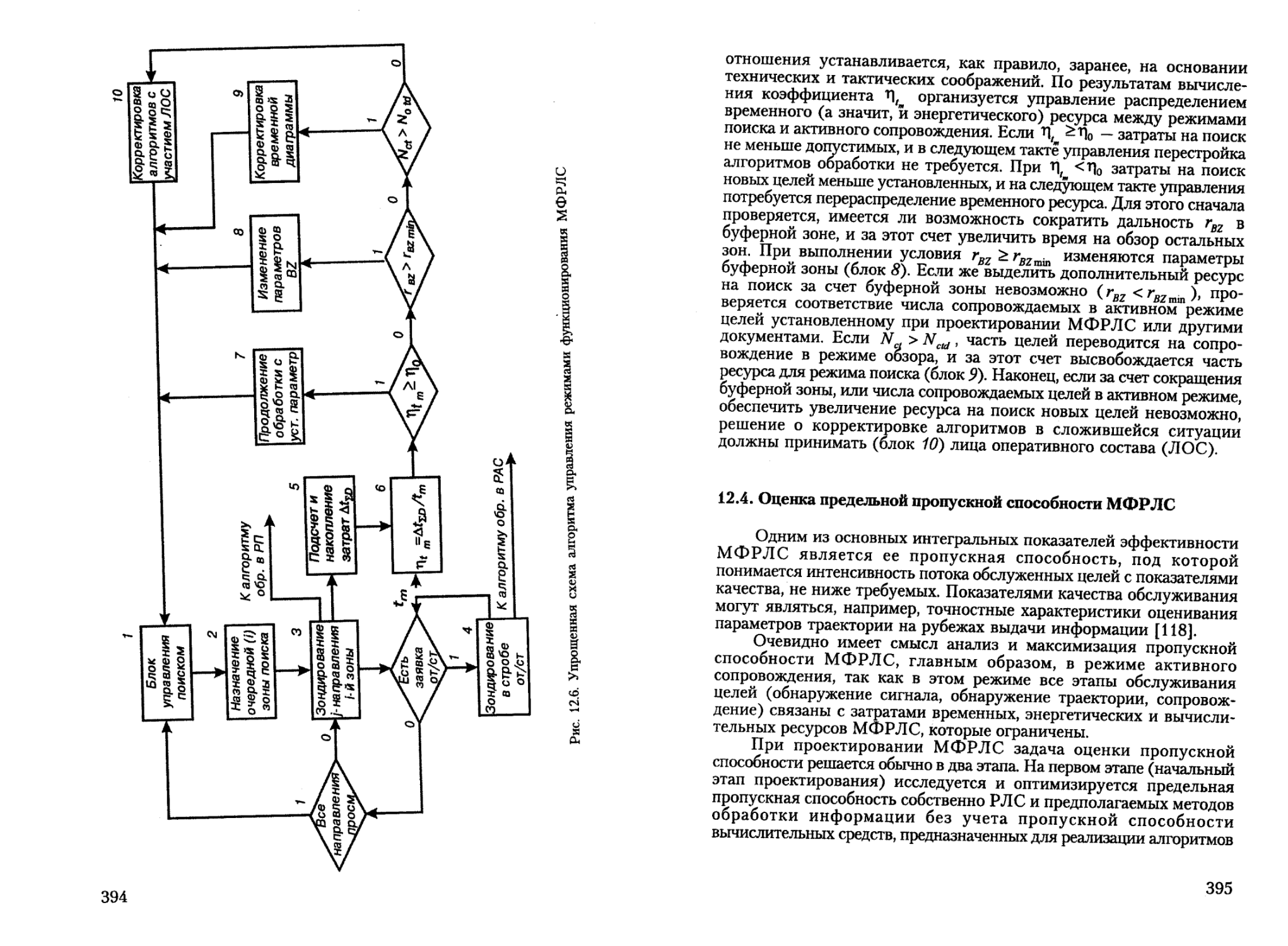
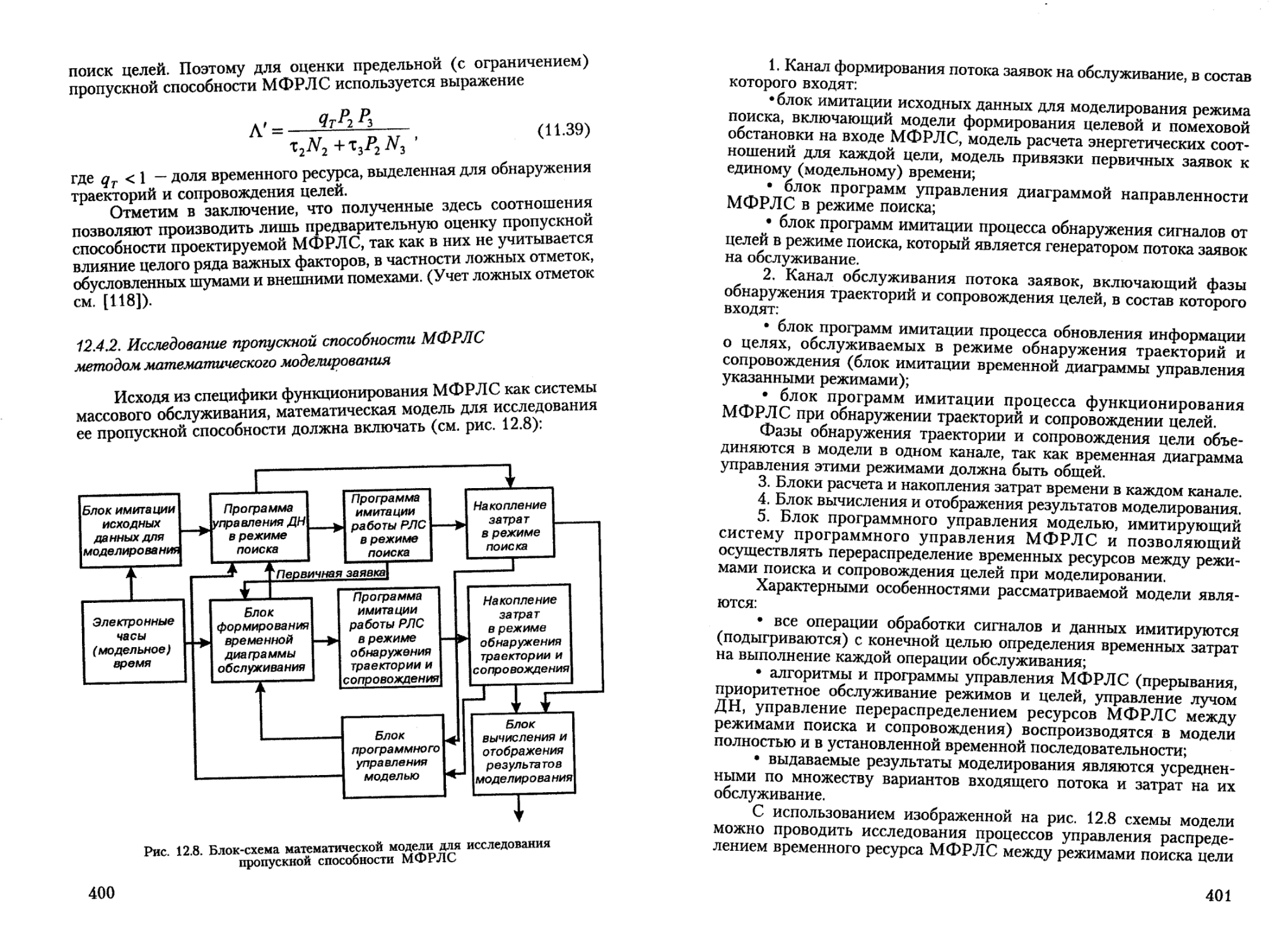
Глава XII посвящена алгоритмизации задач управления функционированием МФРЛС при распределении ресурса между режимами поиска и активного сопровождения.
Таким образом, в книге ставятся и обсуждаются все основные научно-технические проблемы, которые могут быть объединены единым названием ^Цифровая радиолокация”.
Естественно, не все из обозначенных направлений и проблем раскрыты в книге с требуемой подробностью и в достаточной мере научно обоснованы. Сделать это в одной книге и, так сказать, в начале пути, не представлялось возможным. Поэтому автор приглашает заинтересованных специалистов к творческому обсуждению, как предмета в целом, так и отдельных его направлений.
7
ПРЕДМЕТ И ПРОБЛЕМАТИКА ЦИФРОВОЙ РАДИОЛОКАЦИИ
1.1. Состояние и перспективы внедрения цифровых методов и устройств в радиолокации
В истории развития радиолокации можно выделить ряд этапов, существенно связанных с развитием и совершенствованием вычислительной математики и вычислительной техники. На начальном этапе развития (40-е — 50-е годы) для радиолокации объектов использовались чисто аналоговые системы (станции), в которых основную роль в извлечении и интерпретации радиолокационной информации играл оператор у визуального индикатора. Вычислительная техника в этот период только зарождалась и развивалась в направлении разработки и совершенствования универсальных электронных вычислительных машин (УЭВМ). Соответствующая аппаратура была громоздкой и малопроизводительной, что практически исключало ее применение для обработки радиолокационных сигналов и данных в реальном масштабе времени. Однако уже на этом этапе ЭВМ стали применяться для построения траекторий лоцируемых объектов сначала в режиме полуавтоматического сопровождения, а затем и для автоматического слежения [50].
Второй этап внедрения цифровой вычислительной техники в радиолокации связан, во-первых, с появлением РЛС с фазированными антенными решетками, а во-вторых, с бурным развитием и внедрением специализированных цифровых устройств, получивших название сигнальных процессоров (СП). Высокое быстродействие и малые габариты сигнальных процессоров позволили, в основном, решить проблему цифровой обработки сигналов в реальном времени с применением методов и алгоритмов, полученных в статистической теории радиолокации [5, 14, 16, 33, 48, 50, 81, 85].
Появившиеся широкие возможности в повышении производительности вычислительных средств способствовали разработке новых методов и алгоритмов обработки радиолокационной информации, в том числе и специально ориентированных для реализации средствами цифровой вычислительной техники. При этом выяснилось, что многие задачи обработки радиолокационной информации в традиционной постановке являются некорректными, а получаемые решения удовлетворяют условиям устойчивости и единственности только в частных случаях [88, 104].
Началом третьего этапа внедрения цифровых методов и вычислительной техники в радиолокации можно, очевидно, считать наме
8
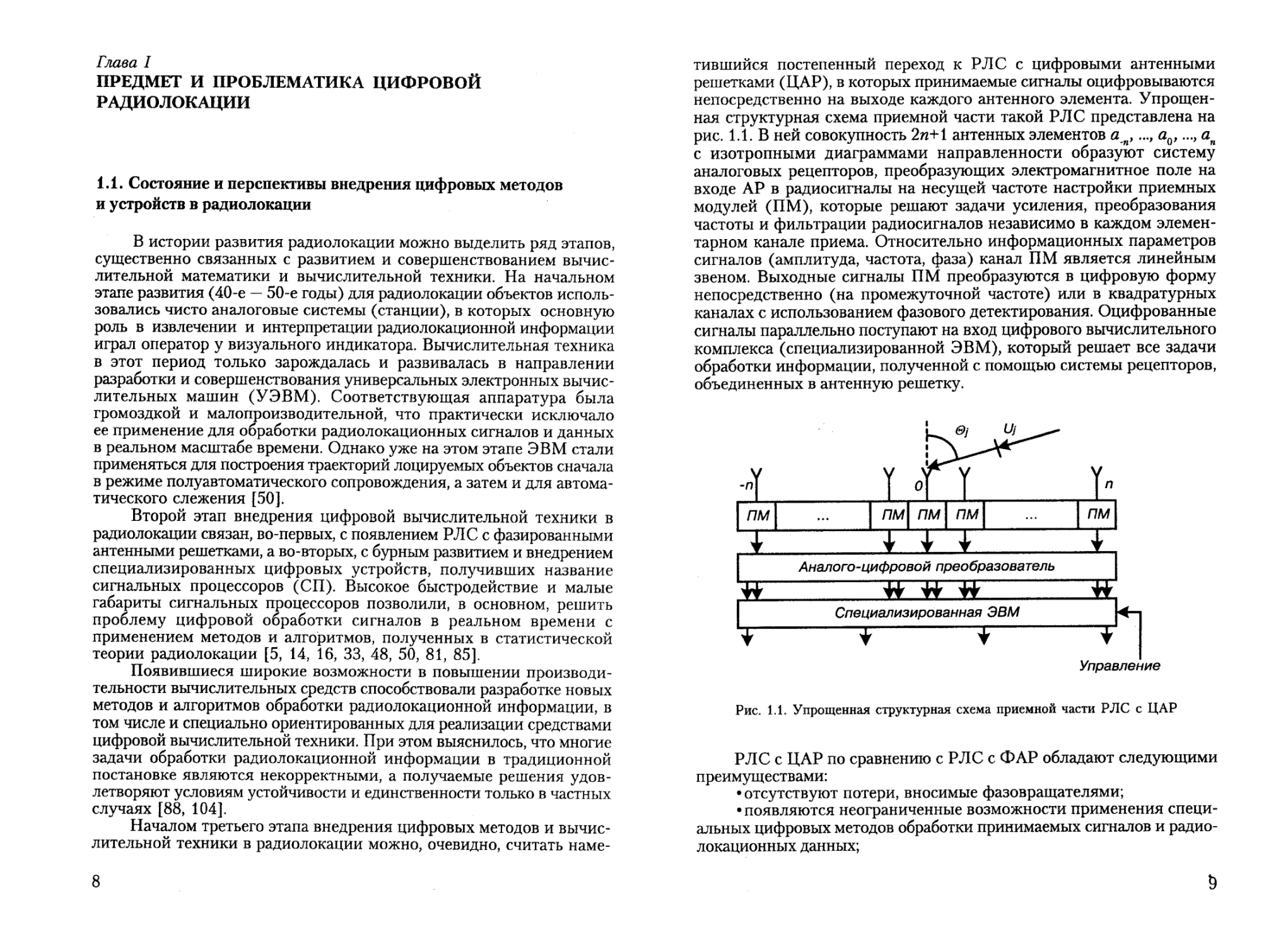
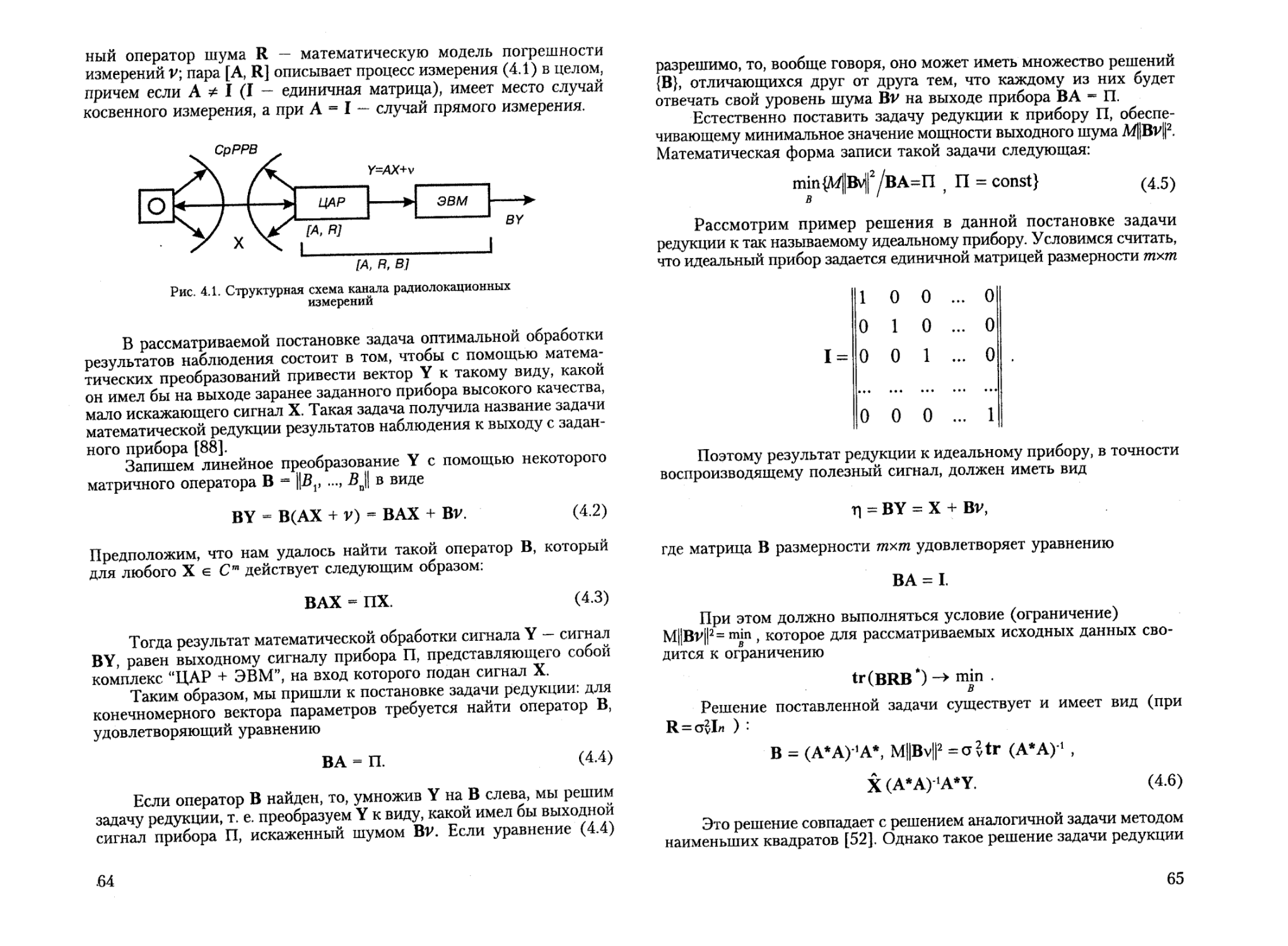
тившийся постепенный переход к РЛС с цифровыми антенными решетками (ЦАР), в которых принимаемые сигналы оцифровываются Непосредственно на выходе каждого антенного элемента. Упрощенная структурная схема приемной части такой РЛС представлена на рис. 1.1. В ней совокупность 2и+1 антенных элементов а п,aQ,..., ап с изотропными диаграммами направленности образуют систему аналоговых рецепторов, преобразующих электромагнитное поле на входе АР в радиосигналы на несущей частоте настройки приемных модулей (ПМ), которые решают задачи усиления, преобразования частоты и фильтрации радиосигналов независимо в каждом элементарном канале приема. Относительно информационных параметров сигналов (амплитуда, частота, фаза) канал ПМ является линейным звеном. Выходные сигналы ПМ преобразуются в цифровую форму непосредственно (на промежуточной частоте) или в квадратурных каналах с использованием фазового детектирования. Оцифрованные сигналы параллельно поступают на вход цифрового вычислительного комплекса (специализированной ЭВМ), который решает все задачи обработки информации, полученной с помощью системы рецепторов, объединенных в антенную решетку.
Аналого-цифровой преобразователь
Управление
Рис. 1.1. Упрощенная структурная схема приемной части РЛС с ЦАР
РЛС с ЦАР по сравнению с РЛС с ФАР обладают следующими преимуществами:
• отсутствуют потери, вносимые фазовращателями;
• появляются неограниченные возможности применения специальных цифровых методов обработки принимаемых сигналов и радиолокационных данных;
• появляется возможность формирования множества независимо управляемых лучей диаграммы направленности антенны.
Для успешного решения задач современной радиолокации последнее преимущество, очевидно, является решающим. При этом за основу принимается цифровая реализация всех основных функциональных операций РЛС, выполняемых в процессе приема отраженных или излучаемых лоцируемыми объектами сигналов: формирование многолучевой диаграммы направленности антенной решетки (АР), управление диаграммой направленности АР, обработка принимаемых сигналов и радиолокационных данных, адаптация к изменяющейся внешней обстановке и др.
Применение цифровой вычислительной техники на всех этапах сбора и обработки радиолокационной информации, кроме преимуществ, связанных с техническими особенностями (стабильность параметров, надежность и простота перестройки программ и др.), обеспечивает расширение функциональных возможностей и повышение качественных характеристик РЛС за счет:
• расширения круга решаемых задач и применения более совершенных методов и алгоритмов, использующих новейшие достижения вычислительной математики и техники вычислительного эксперимента;
• применения адаптивных структур, обеспечивающих успешное решение основных задач радиолокации в сложной, быстро изменяющейся обстановке.
Представленная на рис. 1.1 схема, объединяющая приемные каналы РЛС с антенной решеткой (РЛСАР) с СЭВМ, по сути дела является структурной схемой специализированной информационно-вычислительной системы, предназначенной для решения всех основных задач приема и обработки радиолокационной информации.
В общем случае специализированная информационно-вычислительная система обработки радиолокационных сигналов и данных (радиолокационной информации) есть вычислительная система реального времени, включающая совокупность специализированных вычислительных средств и специализированного программного обеспечения, объединенных операционной системой реального времени (ОСРВ), и предназначенная для реализации комплексного алгоритма функционирования системы. Комплексный алгоритм системы включает решение задач дискретизации и квантования принимаемых сигналов, пространственной фильтрации сигналов, режекции пассивных помех, когерентного и некогерентного накопления сигналов, обнаружения, оценки координат, распознавания и сопровождения объектов радиолокации и ряд других операций. Результаты расчетов, приведенные в ряде источников [52, 94], показывают, что для реализации основных алгоритмов цифровой обработки сигналов необходимо быстродействие ЭВМ:
• пространственная обработка (включая адаптивную компенсацию активных помех) Bs> 30406оп/с;
• временная обработка (согласованная фильтрация, СДЦ, обнаружение и оценка параметров сигналов) Bt> 40406оп/с.
Аналогично, для реализации алгоритмов обработки радиолокационных данных, включающих операции обнаружения и сопровождения целей, управления поиском и планирование ресурсов РЛС, требуемое быстродействие ЦВМ оценивается величиной Вс> 6,4406оп/с.
Очевидно, столь высокие требования к быстродействию вычислительных средств, при условии удовлетворения множества ограничений (технических и экономических) могут быть обеспечены только на путях нетрадиционного подхода к алгоритмизации задач и организации архитектуры вычислительных средств системы цифровой обработки информации в перспективных многофункциональных РЛС с антенными решетками. Основными направлениями такого подхода являются:
1. Совершенствование методов и алгоритмов цифровой обработки сигналов и данных. Рациональное сочетание и использование в алгоритмах всех видов параллелизма для сокращения требуемого времени их реализации.
2. Совершенствование элементной базы и архитектуры специализированных цифровых вычислительных средств, предназначенных для обработки радиолокационной информации.
3. Оптимальное распределение задач обработки между аппа-ратурно управляемыми и программно управляемыми вычислительными средствами.
4. Разработка и применение единого системного подхода к проектированию всех компонентов информационной вычислительной системы, объединяющей РЛС с АР и ЭВМ, исходя из особенностей частных и комплексного алгоритмов обработки информации и управления с учетом влияния внешней среды.
Необходимо также отметить, что в современной радиолокации применение цифровых методов и средств далеко выходит за пределы решения задач обработки информации. Давно уже наметилась тенденция к внедрению цифровых методов формирования зондирующих сигналов [94]. Цифровая техника позволяет достаточно просто управлять генераторами колебаний с произвольными амплитудой и частотой модуляций или фазовой манипуляцией, обеспечивать компенсацию искажений при передаче и приеме отраженных сигналов. Цифровые методы с успехом используются при решении задач формирования и управления диаграммой направленности (ДН) антенных решеток (АР) и коррекции искажений диаграммы направленности.
1*0
И
1.2. Математическая модель измерительно-вычислительной системы “АР + ЦВК”
В дальнейшем для рассматриваемой системы вводится сокращенное обозначение “АР + ЦВК”, которое определяет АР как источник информации, а цифровой вычислительный комплекс (ЦВК) как подсистему ее обработки.
Характерным для радиолокации является процесс наблюдения (измерения), описываемый уравнением
Y = AX+v
или
Y = Jg(x)u(x)dk +v,
D
(1.2)
(1.2а)
где:
комплекснозначный случайный
вектор
результатов измерения (Т— знак транспонирования);
V= |vp v2,vjp — случайный вектор погрешностей измерения с нулевым средним M(v) « 0 и известной невырожденной корреляционной матрицей R = A^vv7);
“аппаратные функции
(матрица и линейный интегральный оператор), характеризующие (задающие) модель РЛС как измерительного прибора;
я
а = ЦАр л2, лп 1 — вектор параметров, которые нужно восстановить по результатам измерения Y;
и(х) е L(D) — наблюдаемое поле, подлежащее восстановлению по результатам измерения Y.
Решение уравнения (1.2) (для уравнения (1.2а) рассуждения аналогичны) относится к разряду так называемых обратных задач математической физики, когда по данным вектора измеренных значений Y требуется определить вектор параметров X, который непосредственно не наблюдается. В общем случае такие задачи относятся к классу некорректных (некорректно поставленных) задач [104]. Задача называется некорректно поставленной по Тихонову, если априорно неизвестно, что решение х существует, что оно единственно, что оно устойчиво, т. е. бесконечно малые вариации исходных данных не приводят к существенным изменениям решения.
При цифровой обработке радиолокационной информации некорректность решаемой задачи может возникнуть также вследствие огра
ничения разрядной сетки ЦВК и округления результатов промежуточных вычислений.
Для решения некорректных задач разработаны методы приближенных устойчивых решений, получивших название методов регуляризации [152]. Регуляризация по Тихонову состоит в добавлении к матрице ошибок измерений R матрицы al, где I — единичная матрица, a — параметр регуляризации. Таким образом, вместо R вводится матрица (R+al), которая при соответствующем выборе a является положительно определенной. Параметр а должен удовле-
творять в этом случае условию 8/е(б) < a < a0(8), где 8 — точность задания матрицы R; е(8), а0(8) — какие-либо убывающие функции, стремящиеся к нулю при 8 0.
Таким образом, общий подход для получения регуляризирован-ных решений состоит в данном случае в искусственном загруолении
результатов измерений. Однако применение этого метода в чистом виде практически невозможно, т. к. способы выбора параметра регуляризации обычно отсутствуют.
При проектировании радиолокационной техники разработчика
интересует не только устойчивость получаемых решений, но и достижение соответствующих показателей качества, главным образом, таких как разрешающая способность и точность вычисления оцениваемых параметров. При этом в классическом случае эта проблема
решается методом совершенствования аппаратуры РЛС, как физического прибора, что связано с существенными материальными затратами и имеет предел, обусловленный потенциальными возможностями элементной базы.
Есть еще один путь повышения возможностей измерительных приборов, который не связан с большими материальными затратами. Этот путь состоит в применении новых математических методов обработки принимаемых сигналов. Причем в ряде случаев математическая обработка данных измерительного эксперимента может интер
претироваться как результат измерения на некотором гипотетическом приборе, характеристики которого превышают предельно допустимые для реальных (физических) приборов. Такое преобразование получило название редукции одного прибора к другому и направлено на уменьшение влияния искажений в результатах измерений, обусловленных погрешностями математического описания прибора А и влия
ния помех.
Простейшая задача редукции ставится следующим образом [89]. Заданы результаты (вектор) Y измерений прибором А наблюдаемого параметра X, искаженного помехой V
Y = АХ + V,
т. е. сигналы на входе и выходе прибора связаны между собой интегральным уравнением Фредгольма первого рода, решение которого неустойчиво по отношению к ошибкам в данных.
13
Запишем линейное преобразование вектора Y с помощью некоторой матрицы В
BY = ВАХ + Bv
(1.3)
Предположим, что нам удалось найти такую матрицу В, которая для всех X действует следующим образом
ВАХ - КХ,
(1.4)
где К заданная матрица (прибор).
Таким образом, результат математической обработки входного сигнала Y — сигнал BY — равен выходному сигналу прибора К, на
вход которого подан сигнал X. Шум на его выходе Bv характеризуется нулевым средним значением и матрицей ковариации RB = М |[Bv|p . В рассматриваемой задаче редукции выбирается такое линейное преобразование В, которое при соблюдении равенства ВА = К обес-
печивает минимальный уровень шума. Математическая форма записи такой задачи выглядит следующим образом
min в
{м ||Bv||7ba = к}
К — фиксировано.
(1.5)
>
Однако уровень шума Bv в (1.5) может оказаться слишком большим, так что в шуме окажется “замаскированным” полезный сигнал.
Снизить шум можно, отказавшись от равенства ВА = К в задаче редукции (1.5). Для этого матрицу В в выражении (1.3) выберем так, чтобы прибор ВА был как можно ближе к К и, в то же время, шум на выходе Bv был ограничен некоторым значением, гарантирующим его приемлемый уровень:
М Bv < £.
Рассмотрим тождество
BY = ВАХ + Bv « КХ + (ВА - К)Х + Bv
I
(1.6)
Вектор BY в этом выражении можно рассматривать как сигнал на выходе прибора К, искаженный шумом Bv и ложным сигналом (ВА - К)Х.
Судя по выражению (1.6) матрицу В можно выбрать таким образом, чтобы как шум Bv, так и ложный сигнал (ВА - К)Х были по возможности меньше. При этом надо решать двухкритериальную задачу оптимизации (задачу Парето). Решение такой задачи рассматривается в главе IV.
14
1.3. Проблемы совершенствования методов и алгоритмов цифровой обработки радиолокационных сигналов и данных
Решение задач цифровой обработки информации предполагает предварительное построение и обоснование соответствующих математических моделей входных обрабатываемых сигналов и способов их обработки.
В радиолокации существует небольшое число математических моделей зондирующих и обрабатываемых сигналов. Все они сводятся к комплексным скалярным или векторным детерминированным или случайным функциям пространства и времени и их дискретным вариантам. Математические модели помех представляются случайными процессами с известными или неизвестными функциями распределения. В основном математические модели сигналов и помех разрабатываются и обосновываются в статистической теории радиолокации [107, 117].
Столь же ограничено число математических моделей методов и устройств (приборов) обработки сигналов и данных, которые называются базовыми операциями обработки.
К ним относятся:
• линейная и нелинейная фильтрация сигналов и данных:
• спектральный анализ сигналов;
• вычисление свертки и корреляционной функции;
• операции линейной алгебры (умножение матриц и векторов, обращение матриц и др.).
Перечисленные операции в той или иной мере используются при решении всех основных задач обработки радиолокационной информации, к которым относятся:
• задачи пространственно-временной фильтрации сигналов;
• задачи оптимального обнаружения отдельно взятого сигнала или упорядоченной совокупности отраженных от цели сигналов (при обнаружении траектории цели) на фоне естественных и искусственных (преднамеренных) помех;
• задачи оценки параметров одиночного (пачечного) радиолокационного сигнала или совокупности координат и параметров движения лоцируемых объектов.
Ниже кратко обсуждается проблематика решения перечисленных задач при цифровой обработке радиолокационной информации..
13.1. Проблемы цифровой фильтрации и обнаружения сигналов и траекторий
Классическими математическими моделями операций фильтрации дискретных сигналов являются операции свертки и спектрального
15
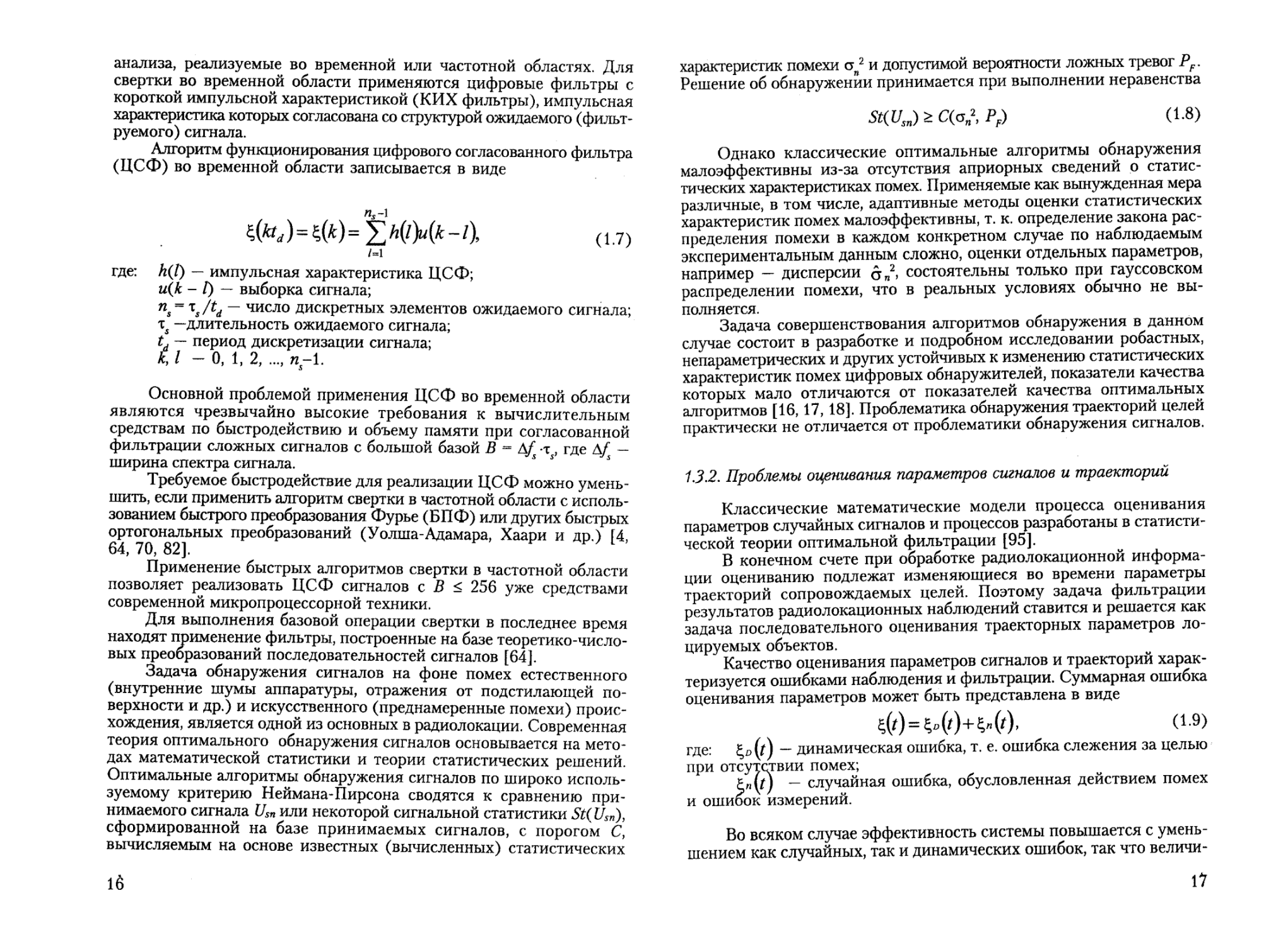
анализа, реализуемые во временной или частотной областях. Для свертки во временной области применяются цифровые фильтры с короткой импульсной характеристикой (КИХ фильтры), импульсная характеристика которых согласована со структурой ожидаемого (фильтруемого) сигнала.
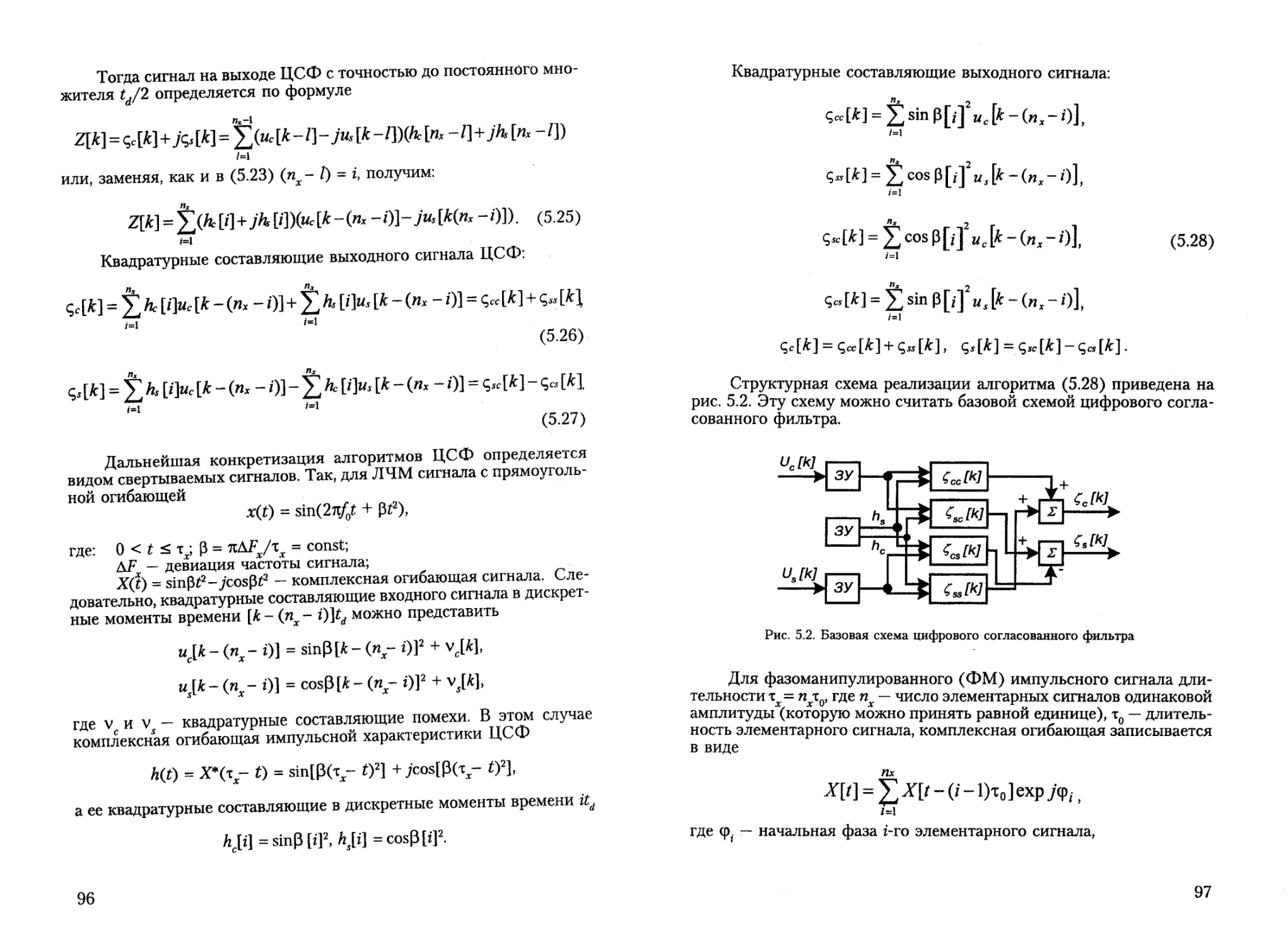
Алгоритм функционирования цифрового согласованного фильтра (ЦСФ) во временной области записывается в виде
=$(*)= 2Х0«(* - Л <1.7)
/=1
где: h(l) — импульсная характеристика ЦСФ;
и(к - /) — выборка сигнала;
ns = А, — число дискретных элементов ожидаемого сигнала;
ts —длительность ожидаемого сигнала;
td — период дискретизации сигнала;
к>1 — 0, 1, 2, п-1.
Основной проблемой применения ЦСФ во временной области являются чрезвычайно высокие требования к вычислительным средствам по быстродействию и объему памяти при согласованной фильтрации сложных сигналов с большой базой В в А/* т, где А/ —
ширина спектра сигнала.
Требуемое быстродействие для реализации ЦСФ можно уменьшить, если применить алгоритм свертки в частотной области с использованием быстрого преобразования Фурье (БПФ) или других быстрых ортогональных преобразований (Уолша-Адамара, Хаари и др.) [4, 64, 70, 82].
Применение быстрых алгоритмов свертки в частотной области
позволяет реализовать ЦСФ сигналов с В < 256
уже средствами
современной микропроцессорной техники.
Для выполнения базовой операции свертки в последнее время находят применение фильтры, построенные на базе теоретико-числовых преобразований последовательностей сигналов [64].
Задача обнаружения сигналов на фоне помех естественного
(внутренние шумы аппаратуры, отражения от подстилающей по-
верхности и др.) и искусственного (преднамеренные помехи) происхождения, является одной из основных в радиолокации. Современная теория оптимального обнаружения сигналов основывается на методах математической статистики и теории статистических решений. Оптимальные алгоритмы обнаружения сигналов по широко используемому критерию Неймана-Пирсона сводятся к сравнению принимаемого сигнала Usn или некоторой сигнальной статистики St(USn)} сформированной на базе принимаемых сигналов, с порогом С, вычисляемым на основе известных (вычисленных) статистических
характеристик помехи qw2 и допустимой вероятности ложных тревог PF. Решение об обнаружении принимается при выполнении неравенства
St(Us„) > C(Gn\ PF) (1.8)
Однако классические оптимальные алгоритмы обнаружения малоэффективны из-за отсутствия априорных сведений р статистических характеристиках помех. Применяемые как вынужденная мера различные, в том числе, адаптивные методы оценки статистических характеристик помех малоэффективны, т. к. определение закона распределения помехи в каждом конкретном случае по наблюдаемым экспериментальным данным сложно, оценки отдельных параметров, например — дисперсии оп2, состоятельны только при гауссовском распределении помехи, что в реальных условиях обычно не выполняется.
Задача совершенствования алгоритмов обнаружения в данном случае состоит в разработке и подробном исследовании робастных, непараметрических и других устойчивых к изменению статистических характеристик помех цифровых обнаружителей, показатели качества которых мало отличаются от показателей качества оптимальных алгоритмов [16,17,18]. Проблематика обнаружения траекторий целей практически не отличается от проблематики обнаружения сигналов.
13.2. Проблемы оценивания параметров сигналов и траекторий
Классические математические модели процесса оценивания параметров случайных сигналов и процессов разработаны в статистической теории оптимальной фильтрации [95].
В конечном счете при обработке радиолокационной информации оцениванию подлежат изменяющиеся во времени параметры траекторий сопровождаемых целей. Поэтому задача фильтрации результатов радиолокационных наблюдений ставится и решается как задача последовательного оценивания траекторных параметров лоцируемых объектов.
Качество оценивания параметров сигналов и траекторий характеризуется ошибками наблюдения и фильтрации. Суммарная ошибка оценивания параметров может быть представлена в виде
^(0=^(0+^ (О-
где: ^(0 динамическая ошибка, т. е. ошибка слежения за целью при отсутствии помех;
Ьи) — случайная ошибка, обусловленная действием помех и ошибок измерений.
Во всяком случае эффективность системы повышается с уменьшением как случайных, так и динамических ошибок, так что величи-
17
на каждой из них является показателем качества соответствующей системы обработки.
Вместо рассмотренных двух можно ввести единый (совместный) показатель качества
K^fJK^KJ, (1.10)
где K = b(t), , и решать двухкритериальную задачу одно-
временной минимизации случайной и динамической ошибок, что существенно расширяет круг возможных решений за счет согласованного выбора значений математического ожидания и дисперсии суммарной ошибки.
Задача совместной минимизации двух составляющих ошибок носит название задачи Парето, а получаемые при ее решении оценки называются парето-оптимальными оценками, Парето-оптимальный подход к решению задач фильтрации параметров широко используется в дальнейшем.
В качестве математической модели алгоритмов фильтрации параметров траектории обычно используются линейные рекурентные фильтры (фильтры Калмана) с различными усложнениями, обеспечивающими надежное сопровождение маневрирующих целей.
Задача обнаружения маневра и внесения соответствующих корректив в априорную модель траектории, заложенную в матрицу А уравнения наблюдения (1.2) называется задачей контроля надежности априорной модели. Решение этой задачи представляет важнейший элемент теории и техники траекторией обработки радиолокационных данных и составляет предмет дальнейшего исследования.
1.4. Проблемы повышения быстродействия вычислительных средств для цифровой обработки информации
Архитектура и технические параметры цифровых вычислительных средств (ЦВС) выступают в качестве связующего звена между теоретически достижимыми (в алгоритмах) и практически реализуемыми (в технике) показателями эффективности цифровой обработки информации.
Показателями эффективности ЦВС являются:
• скорость решения задачи (задач), оцениваемая быстродействием (оп/с), или производительностью, равной среднему числу задач, решаемых в единицу времени;
• количество основных и вспомогательных аппаратурных средств;
• затраты, в том числе энергетические.
Основными, естественно, являются показатели эффективности ЦВС по быстродействию.
В системах цифровой обработки информации, из-за прикладного характера алгоритмов, для их реализации используются, как правило, 18
специализированные вычислительные средства (спецпроцессоры). Быстродействие спецпроцессоров может быть больше быстродействия универсальной ЦВМ примерно на три порядка [16]. Однако, даже по приближенным расчетам, для цифровой обработки сложных сигналов и изображений потребуются спецпроцессоры, имеющие быстродействие, на 2-3 порядка превышающее уже достигнутое [24].
Одним из основных направлений повышения быстродействия цифровой вычислительной техники является совершенствование элементной базы. В рамках традиционной элементной базы основным направлением повышения ее быстродействия является повышение быстродействия самих интегральных схем (ИС) и снижение потерь и задержек сигнала на линиях связи. По данным специальной литературы, обобщенной в [24], сделан вывод, что собственная частота дискретного полупроводникового прибора (современной ИС на транзисторах) ограничена значением порядка 1 ТГц, а реальное значение задержки на вентиле — приблизительно 10 пикосекунд (/*== 100 ГГц).
Дальнейшее повышение быстродействия элементной базы связано, очевидно, с переходом от электронных к оптическим системам формирования и передачи сигналов (оптическим ИС).
Другим реальным путем решения проблемы повышения быстродействия является распараллеливание алгоритмов с последующей одновременной обработкой по всем параллельным каналам. Система обработки состоит в этом случае из определенного числа аппаратурно или программно-аппаратурно реализованных модулей (спецпроцессоров), объединенных системой линий связи и промежуточных накопителей.
Связи между модулями должны, в общем случае, обеспечивать как статическую, так и динамическую перестройку подсистем и системы в целом для обеспечения максимального быстродействия при решении конкретных задач.
Вычислительные системы, способные перестраиваться в процессе функционирования и адаптироваться к изменяющимся условиям работы, называются адаптивными. Разработка вычислительных систем с адаптивной архитектурой является важным направлением совершенствования вычислительных средств цифровой обработки информации.
Применительно к задачам обработки радиолокационных сигналов и данных основными способами адаптации архитектуры вычислительной системы являются [48]:
• реконфигурация — введение перестраиваемых связей между такими функциональными блоками вычислительной системы, как процессоры, ЗУ и устройства ввода-вывода, что изменяет конфигурацию всей системы и позволяет приспосабливать ее к изменяющимся условиям работы;
• коммутационная адаптация — введение перестраиваемых связей на уровне крупных функциональных узлов-модулей, из которых построена распределенная вычислительная система.
19
В результате появляется возможность динамического перераспределения имеющихся аппаратурных и программных ресурсов и увеличение числа решаемых задач, реализуемых тем же самым объемом аппаратуры.
Однако при внедрении параллельных ЦВМ и систем ЦВМ возникают существенные трудности методического и технического характера. Во-первых, отсутствуют регулярные, обоснованные способы и алгоритмы распараллеливания решаемых задач, а во-вторых, возникают сложности управления параллельными процессорами, которые практически исключают возможности обеспечения эффективной перестраиваемости связей между ними. Существует также закон Эмдала, гласящий, что повышение быстродействия с увеличением числа параллельных процессоров растет медленнее, чем по линейному закону, и тем медленнее, чем больше их число.
Поэтому проблема обеспечения требуемого быстродействия ЦВС не может быть решена только путем распараллеливания алгоритмов и процессоров. Очевидно рассматриваемая проблема может быть решена только с применением комплекса возможных методов, рассматриваемых в теории алгоритмов и вычислительных систем.
20
МНОГОФУНКЦИОНАЛЬНАЯ РЛС С ЦАР КАК ПРОТОТИП
ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ
В ЦИФРОВОЙ РАДИОЛОКАЦИИ
2.1. Определение и назначение многофункциональных РЛС
Современные радиолокационные средства военного и гражданского назначения должны выполнять целый ряд функций, для реализации каждой из которой ранее создавались отдельные РЛС. При этом выделялись три основные группы:
1. Обзорные РЛС, предназначенные для обнаружения целей в заданном секторе пространства, путем механического вращения апертурной антенны с плоской диаграммой направленности (ДН).
2. Радиолокационные станции сопровождения целей с узкой по угловым координатам Д Н, предназначенные для точного определения координат и параметров движения выделенных (обнаруженных обзорной РЛС) целей, которые используются для прогнозирования положения цели, управления оружием, наведения или навигации.
3. Вторичные обзорные РЛС, которые решают задачи поиска и опознавания целей в соответствии с методом “запрос—ответ”. При этом предполагается, что цели оснащены необходимой аппаратурой, основной из которых является наземный (бортовой) запросчик и бортовой приемоотвегчик.
В последние годы возник большой интерес к исследованиям и разработкам по созданию РЛС с электрическим сканированием ДН антенны, выполненной в виде решетки излучателей — антенной решетки (АР). Для формирования ДН АР широкое распространение получил фазовый метод с использованием дискретных электрических фазовращателей. В этом случае решетка называется фазированной антенной решеткой (ФАР).
Радиолокационные станции с электрическим сканированием луча ДН обеспечивают выполнение функций поиска и сопровождения целей так же, как если бы эти функции выполнялись двумя РЛС, одна из которых оптимизирована на решение задач обнаружения (поиска) целей, а другая — на решение задачи их сопровождения. Возможность практически мгновенно направлять один или несколько лучей в любую точку контролируемого пространства позволяет одновременно производить поиск и сопровождение нескольких целей, передачу данных, наведение ракет и выполнять другие операции. Поэтому такие РЛС называются многофункциональными (МФРЛС).
21
Непременной составной частью таких РЛС является подсистема (блок) управления, реализованная на ЭВМ, которая выполняет функции управления сканированием луча ДН, временем облучения цели и излучаемой мощностью сигнала. Управление осуществляется адаптивно с учетом обстановки, назначения РЛС и потребностей обслуживаемой системы [ИЗ].
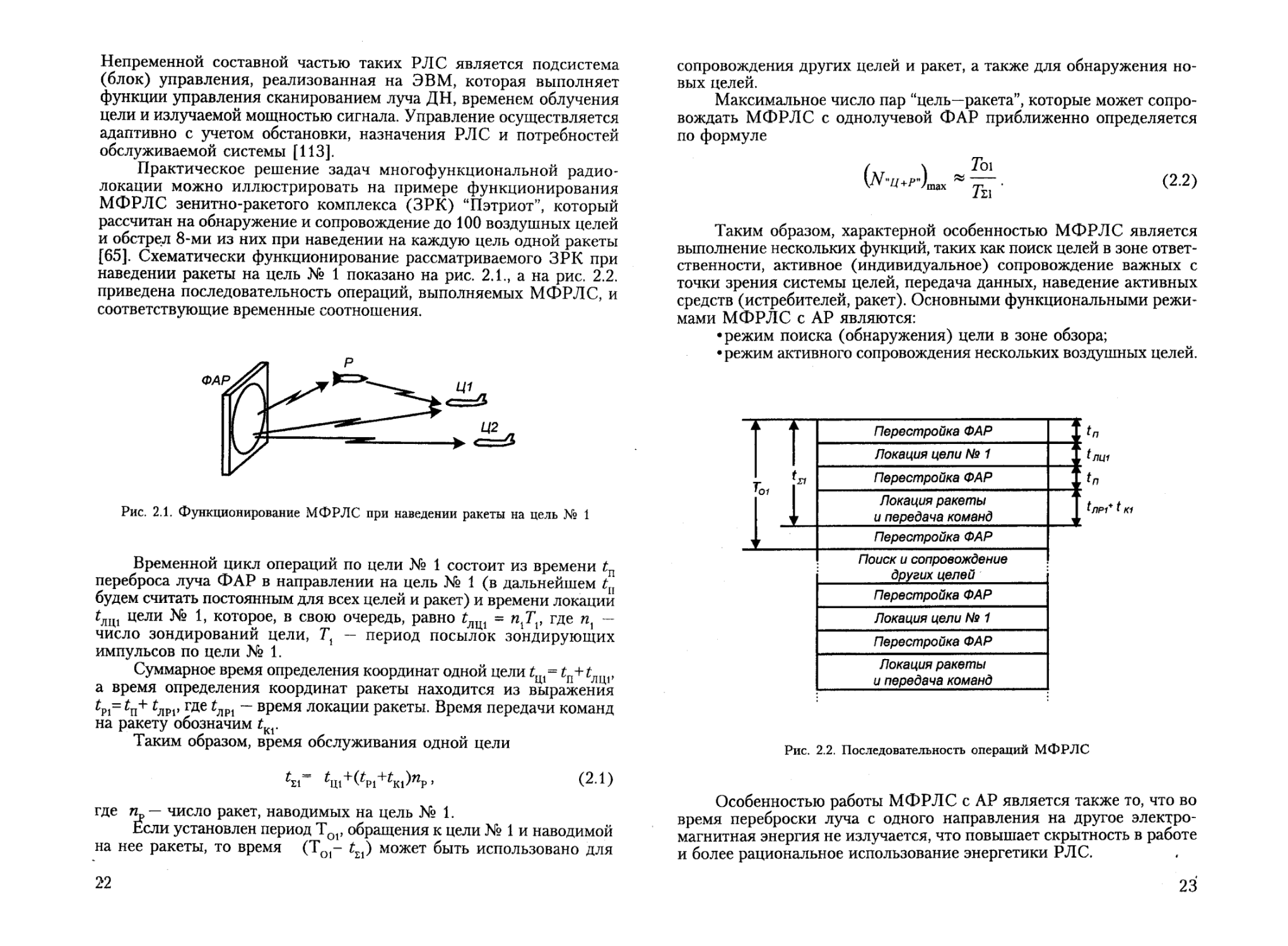
Практическое решение задач многофункциональной радиолокации можно иллюстрировать на примере функционирования МФРЛС зенитно-ракетого комплекса (ЗРК) “Патриот”, который рассчитан на обнаружение и сопровождение до 100 воздушных целей и обстрел 8-ми из них при наведении на каждую цель одной ракеты [65]. Схематически функционирование рассматриваемого ЗРК при наведении ракеты на цель № 1 показано на рис. 2.1., а на рис. 2.2. приведена последовательность операций, выполняемых МФРЛС, и соответствующие временные соотношения.
Рис. 2.1. Функционирование МФРЛС при наведении ракеты на цель № 1
Временной цикл операций по цели № 1 состоит из времени £ переброса луча ФАР в направлении на цель № 1 (в дальнейшем tn будем считать постоянным для всех целей и ракет) и времени локации £ЛЦ1 Чели № 1’ которое, в свою очередь, равно £ - nj\, где пх —
число зондирований цели, 7\ — период посылок зондирующих импульсов по цели № 1.
Суммарное время определения координат одной цели £щ= £п+£лцг а время определения координат ракеты находится из выражения V ^лр1> где ^лр1 ~ время локации ракеты. Время передачи команд на ракету обозначим £К1.
Таким образом, время обслуживания одной цели
^ш+^Р1+^к1)ир» (2-1)
где Пр — число ракет, наводимых на цель № 1.
Если установлен период ТО1, обращения к цели № 1 и наводимой на нее ракеты, то время (ТП1- О может быть использовано для V/1 Zj 1
22
сопровождения других целей и ракет, а также для обнаружения новых целей.
Максимальное число пар “цель-ракета”, которые может сопровождать МФРЛС с однолучевой ФАР приближенно определяется по формуле
7Ь1
7ei ’
(2.2)
Таким образом, характерной особенностью МФРЛС является выполнение нескольких функций, таких как поиск целей в зоне ответственности, активное (индивидуальное) сопровождение важных с точки зрения системы целей, передача данных, наведение активных средств (истребителей, ракет). Основными функциональными режимами МФРЛС с АР являются:
•р ежим поиска (обнаружения) цели в зоне обзора;
• режим активного сопровождения нескольких воздушных целей.
О1
Перестройка ФАР Локация цели № 1 Перестройка ФАР Локация ракеты и передача команд Перестройка ФАР
Поиск и сопровождение других целей
Перестройка ФАР Локация цели № 1 Перестройка ФАР Локация ракеты и передача команд
1лц1
*ЛР1+ г К1
Рис. 2.2. Последовательность операций МФРЛС
Особенностью работы МФРЛС с АР является также то, что во время переброски луча с одного направления на другое электромагнитная энергия не излучается, что повышает скрытность в работе и более рациональное использование энергетики РЛС.
23
2.2. Принципы построения и структурная схема многофункциональной РЛС с АР
Классическим типом МФРЛС является система с неподвижной АР, которая позволяет осуществлять электрическое сканирование луча антенны по двум координатам: азимуту — р и углу места — е. Для обзора всей полусферы (360° по р) объединяются несколько (4—5) плоских АР. При этом полностью устраняются ограничения, связанные с вращением антенны, и появляются неограниченные возможности по темпам обзора пространства и сопровождения целей в сложной помехо-целевой обстановке. Однако размеры, сложность и стоимость таких систем чрезвычайно высоки.
Возможности цифровой вычислительной техники и систем оптимального управления позволяют в настоящее время создавать смешанные по принципам построения МФРЛС, совмещающие режим вращения антенны и электрического сканирования диаграммы направленности (ДН). Такая РЛС получила название вращающаяся радиолокационная станция (система) с электронным сканированием (ВРЛСЭС) [119] или просто вращающаяся МФРЛС. В ней используется единственная плоская АР, которая обеспечивает электронное сканирование луча по азимуту и углу места при одновременном вращении АР по азимуту с помощью механического привода. В такой, можно сказать, “смешанной” радиолокационной системе могут быть применены все методы многофункциональной работы с распределением ресурсов, что и в МФРЛС с неподвижной АР. Как показывают опубликованные в [119] результаты исследований, РЛС с вращающейся плоской АР по сравнению с обычными РЛС сопровождения на проходе обеспечивают существенно более высокие показатели качества функционирования. При этом габариты, масса и стоимость таких РЛС незначительно выше соответствующих параметров обычных РЛС, но значительно ниже, чем МФРЛС с неподвижными решетками.
В дальнейшем, учитывая тот факт, что основные существенные операции формирования ДН на передачу и прием, обработки информации и распределения временных и энергетических ресурсов в МФРЛС с неподвижной и вращающейся АР не отличаются по существу, при рассмотрении методов и алгоритмов этих операций предполагается МФРЛС с неподвижной АР.
Выше уже отмечалось, что применение цифровых методов формирования ДН АР на прием позволяет существенно расширить арсенал используемых методов и алгоритмов обработки информации и управления и обеспечить таким образом повышение эффективности МФРЛС в целом. Однако, при оцифровывании принимаемых сигналов на выходе каждого рецептора (излучателя) АР для формирования ДН и обработки сигналов (особенно пространственной обработки) потребуются вычислительные средства, чрезвычайно высокого быстро
действия. Поэтому при цифровом формировании диаграммы направленности АР на прием часто прибегают к объединению приемных элементов решетки в подрешетки (модули), внутри которых объединение принимаемых сигналов (формирование ДН модулей) производится аналоговыми устройствами, после чего выходные сигналы подрешеток преобразуются в цифровую форму и вся дальнейшая обработка сигналов производится в цифровом виде. Число излучателей, объединяемых в подрешетки, устанавливается при конкретном проектировании и в соответствии с наличными вычислительными ресурсами. Отметим, чем крупнее модули цифровой приемной решетки, тем сложнее управление ее функционированием и тем больше потери в эффективности управления по сравнению с АР с оцифровкой выходных сигналов каждого излучателя.
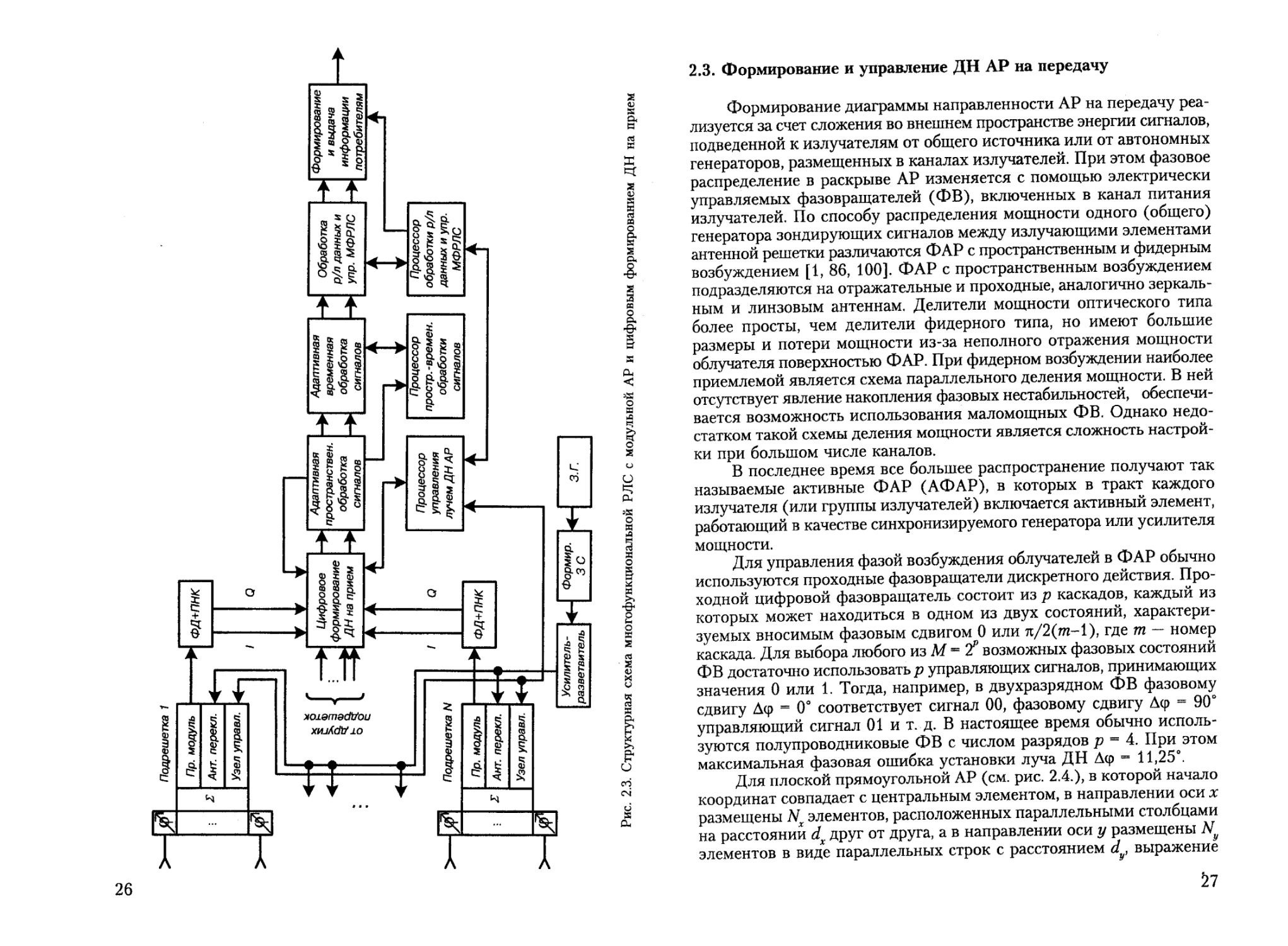
С учетом перечисленных исходных предпосылок и на основе анализа опубликованных результатов исследований и разработок [119, 153], укрупненная структурная схема многофункциональной РЛС с модульной АР и цифровым формированием диаграммы направленности на прием может быть представлена в виде, изображенном на рис. 2.3.
В состав схемы входят следующие основные подсистемы:
1. Подсистема формирования и управления однолучевой диаграммой направленности АР на передачу. В состав этой подсистемы входят блоки формирования и распределения зондирующих сигналов, процессор управления лучем диаграммы направленности антенны, узлы управления подрешеток и система управляемых фазовращателей на входе каждого излучателя.
2. Подсистема формирования подрешеток, усиления, гетеродинирования и цифрового преобразования сигналов на выходе модулей АР. В состав подсистемы входят сумматоры, приемные модули, включающие усиление на СВЧ, преобразование частоты, усиление на промежуточной частоте, фазовое детектирование и цифровое преобразование квадратурных составляющих принимаемых сигналов подрешеток.
3. Подсистема цифрового формирования и управления диаграммы направленности АР на прием, выполненная в виде отдельного цифрового блока. Эта подсистема связана непосредственно и по каналу обратной связи с блоком адаптивной пространственной обработки сигналов, который включается при воздействии активных шумовых помех.
4. Подсистема цифровой обработки принимаемых радиолокационных сигналов и данных, включая адаптивное управление как системой обработки, так и выдачей информации потребителям. Эта подсистема реализуется с помощью ряда мощных специализированных и универсальных цифровых вычислительных систем (процессоров).
В дальнейшем функционирование перечисленных подсистем рассматривается более подробно.
24
25
Подрешетка 1
Рис. 2.3. Структурная схема многофункциональной РЛС с модульной АР и цифровым формированием ДН на прием
26
2.3. Формирование и управление ДН АР на передачу
Формирование диаграммы направленности АР на передачу реализуется за счет сложения во внешнем пространстве энергии сигналов, подведенной к излучателям от общего источника или от автономных генераторов, размещенных в каналах излучателей. При этом фазовое распределение в раскрыве АР изменяется с помощью электрически управляемых фазовращателей (ФВ), включенных в канал питания излучателей. По способу распределения мощности одного (общего) генератора зондирующих сигналов между излучающими элементами антенной решетки различаются ФАР с пространственным и фидерным возбуждением [1, 86, 100]. ФАР с пространственным возбуждением подразделяются на отражательные и проходные, аналогично зеркальным и линзовым антеннам. Делители мощности оптического типа более просты, чем делители фидерного типа, но имеют большие размеры и потери мощности из-за неполного отражения мощности облучателя поверхностью ФАР. При фидерном возбуждении наиболее приемлемой является схема параллельного деления мощности. В ней отсутствует явление накопления фазовых нестабильностей, обеспечивается возможность использования маломощных ФВ. Однако недостатком такой схемы деления мощности является сложность настройки при большом числе каналов.
В последнее время все большее распространение получают так называемые активные ФАР (АФАР), в которых в тракт каждого излучателя (или группы излучателей) включается активный элемент, работающий в качестве синхронизируемого генератора или усилителя мощности.
Для управления фазой возбуждения облучателей в ФАР обычно используются проходные фазовращатели дискретного действия. Проходной цифровой фазовращатель состоит из р каскадов, каждый из которых может находиться в одном из двух состояний, характеризуемых вносимым фазовым сдвигом 0 или л/2(т-1), где т — номер каскада. Для выбора любого из М « 2Р возможных фазовых состояний ФВ достаточно использовать р управляющих сигналов, принимающих значения 0 или 1. Тогда, например, в двухразрядном ФВ фазовому сдвигу Дф =* 0° соответствует сигнал 00, фазовому сдвигу Дф = 90° управляющий сигнал 01 и т. д. В настоящее время обычно используются полупроводниковые ФВ с числом разрядов р = 4. При этом максимальная фазовая ошибка установки луча ДН Дф 11,25°.
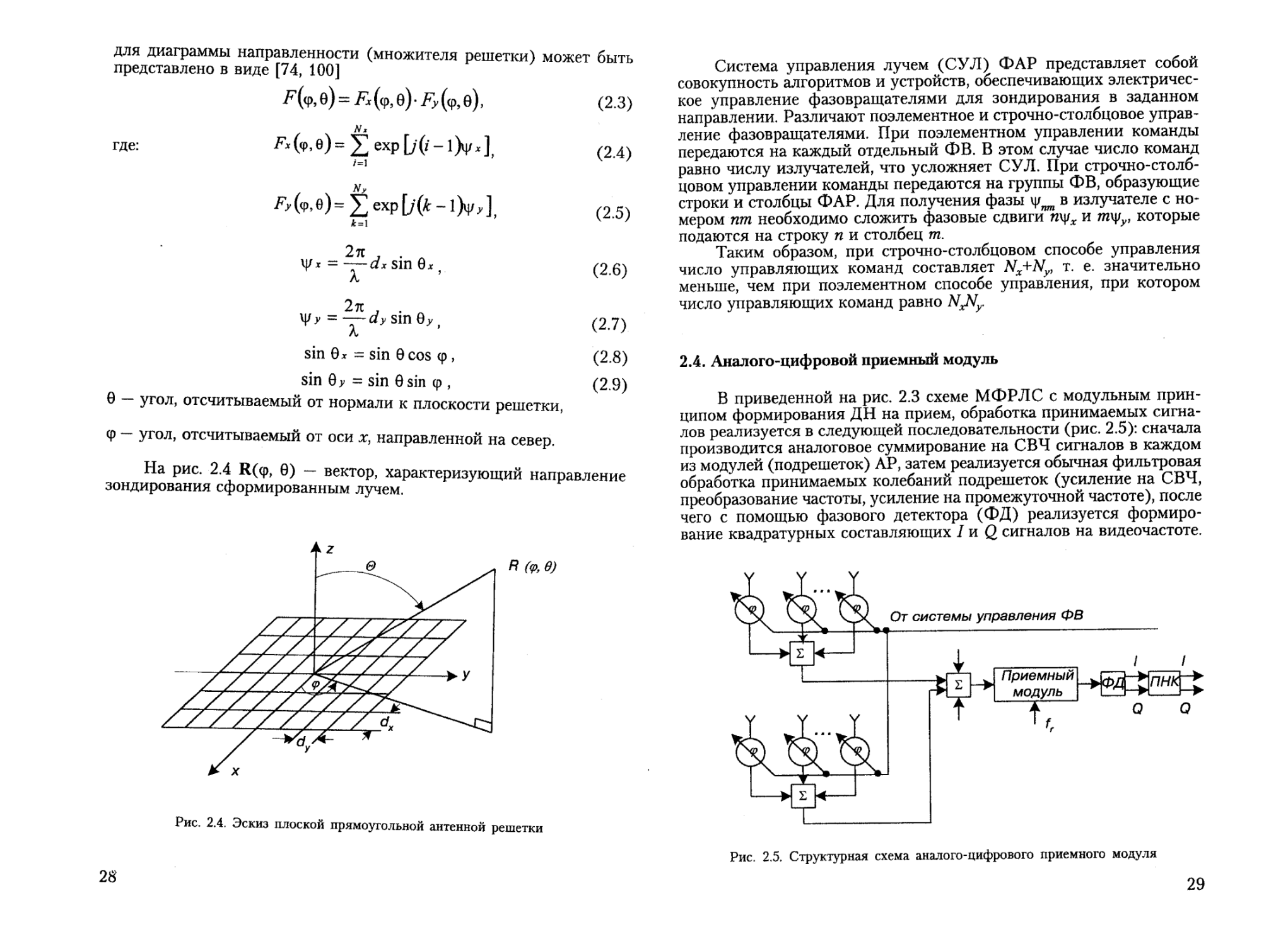
Для плоской прямоугольной АР (см. рис. 2.4.), в которой начало координат совпадает с центральным элементом, в направлении оси х размещены N элементов, расположенных параллельными столбцами на расстоянии dx друг от друга, а в направлении оси у размещены N элементов в виде параллельных строк с расстоянием d. выражение
57
для диаграммы направленности (множителя решетки) может быть представлено в виде [74, 100]
F($>, б) = Fx (ф, б) Fy (<р, о), (2.3)
где:
JVjT
л(ф,е)= 2 ехР Ь‘ (’ -1 )фх ], 7=1
(2.4)
N,
Fy (ф,0) = £ exp [д£ - l)i|O J,
Л=1
(2.5)
2л
dx sin 0х
(2-6)
фу = ^rfysinO,, (2.7)
Л
sin Gx = sin 0 cos tp , (2.8)
sin Qy = sin 0sin cp , (2.9)
0 — угол, отсчитываемый от нормали к плоскости решетки,
(р — угол, отсчитываемый от оси х, направленной на север.
На рис. 2.4 R(cp, 0) — вектор, характеризующий направление зондирования сформированным лучем.
Рис. 2.4. Эскиз плоской прямоугольной антенной решетки
28
Система управления лучем (СУЛ) ФАР представляет собой совокупность алгоритмов и устройств, обеспечивающих электрическое управление фазовращателями для зондирования в заданном направлении. Различают поэлементное и строчно-столбцовое управление фазовращателями. При поэлементном управлении команды передаются на каждый отдельный ФВ. В этом случае число команд равно числу излучателей, что усложняет СУЛ. При строчно-столбцовом управлении команды передаются на группы ФВ, образующие строки и столбцы ФАР. Для получения фазы \|/ в излучателе с номером пт необходимо сложить фазовые сдвиги п\ух и т\цу, которые подаются на строку п и столбец т.
Таким образом, при строчно-столбцовом способе управления число управляющих команд составляет Nx+NyJ т. е. значительно меньше, чем при поэлементном способе управления, при котором число управляющих команд равно Nfly.
2.4. Аналого-цифровой приемный модуль
В приведенной на рис. 2.3 схеме МФРЛС с модульным принципом формирования ДН на прием, обработка принимаемых сигналов реализуется в следующей последовательности (рис. 2.5): сначала производится аналоговое суммирование на СВЧ сигналов в каждом из модулей (подрешеток) АР, затем реализуется обычная фильтровая обработка принимаемых колебаний подрешеток (усиление на СВЧ, преобразование частоты, усиление на промежуточной частоте), после чего с помощью фазового детектора (ФД) реализуется формирование квадратурных составляющих I и Q сигналов на видеочастоте.
От системы управления ФВ
Приемный модуль
^Т\пнк!гТ
Рис. 2.5. Структурная схема аналого-цифрового приемного модуля
29
В дальнейшем квадратурные составляющие принимаемых сигналов преобразуются в цифровую форму с помощью преобразователя “напряжение-код” (ПНК).
Цифровое преобразование сигналов включает два этапа: дискретизация по времени и квантование по амплитуде. Период временной дискретизации видеосигналов в квадратурных каналах определяется из условия td< где &fs — ширина спектра принимаемого сигнала. Число разрядов цифрового преобразования выборок напряжения квадратурных каналов определяется из условия
nd = £*[10g2 (Nd -I-1)],
(2.10)
АГ _ ^max ^min
где: ivrf — - — число уровней амплитудного квантования;
Aw
и ,и . - соответственно максимальное и минимальное значе-max mm w
ния квантуемых напряжении;
Ди — шаг амплитудного квантования;
E(z) — ближайшее целое, не меньшее числа z.
При цифровом формировании лучей приемной ДН необходимо многоразрядное (nd = 10...12) квантование выборок напряжения при высокой частоте временной дискретизации (порядка 5 и более МГц). Более подробно задачи дискретизации и квантования рассмотрены в литературе [21, 44, 69].
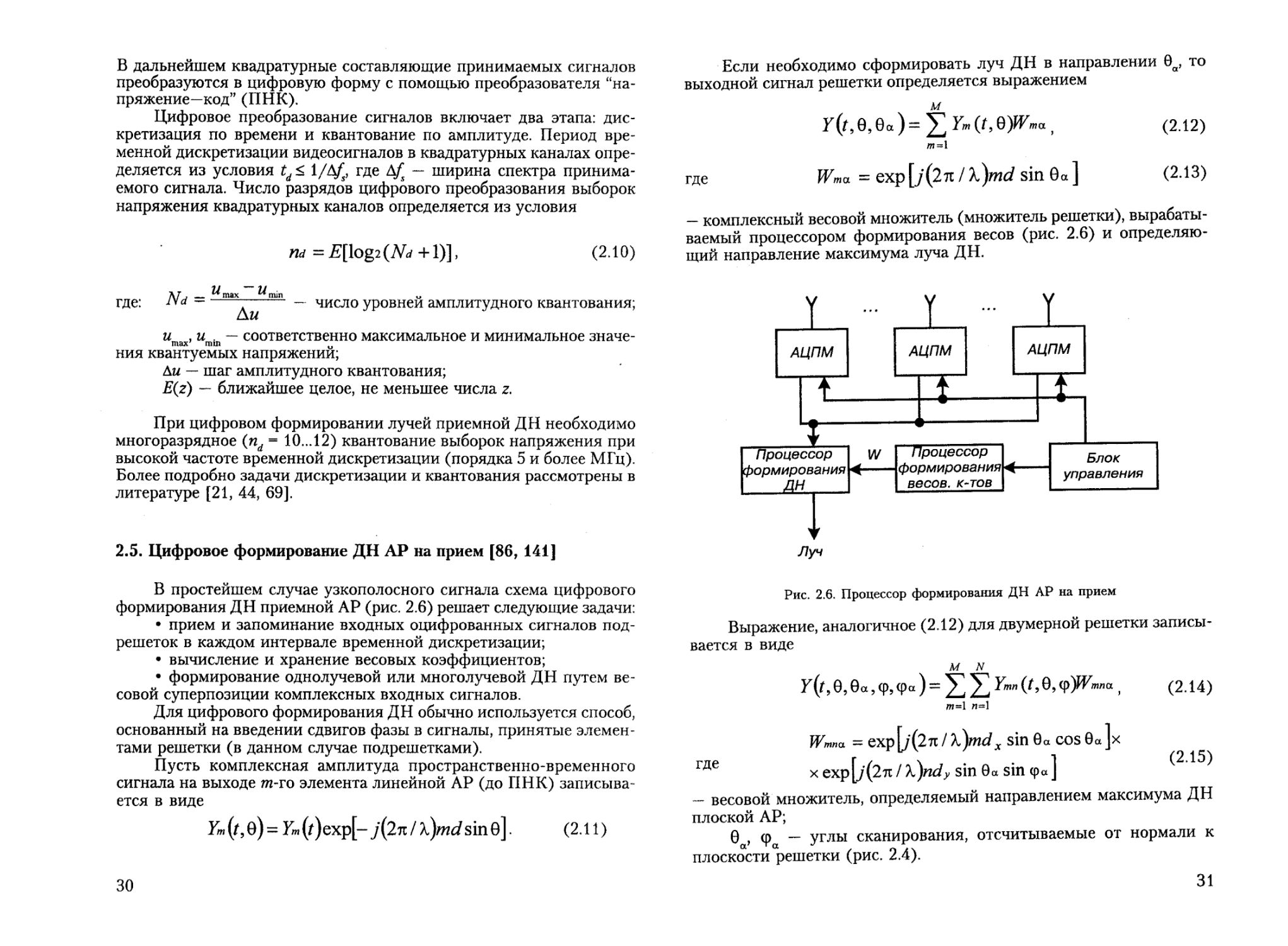
2.5. Цифровое формирование ДН АР на прием [86, 141]
В простейшем случае узкополосного сигнала схема цифрового формирования ДН приемной АР (рис. 2.6) решает следующие задачи:
• прием и запоминание входных оцифрованных сигналов подрешеток в каждом интервале временной дискретизации;
• вычисление и хранение весовых коэффициентов;
• формирование однолучевой или многолучевой ДН путем весовой суперпозиции комплексных входных сигналов.
Для цифрового формирования ДН обычно используется способ, основанный на введении сдвигов фазы в сигналы, принятые элементами решетки (в данном случае подрешетками).
Пусть комплексная амплитуда пространственно-временного сигнала на выходе m-го элемента линейной АР (до ПНК) записывается в виде
Ки(^Э) = Ки(/)ехр - у(2л / X)wu7sine]. (2.11)
30
Если необходимо сформировать луч ДН в направлении 0а, то выходной сигнал решетки определяется выражением
м
Y(t,e,ea)=YYn,(t’QyVma, т=1
(2.12)
где
Wma = exp [7(27t / sin Ga J
(2.13)
— комплексный весовой множитель (множитель решетки), вырабатываемый процессором формирования весов (рис. 2.6) и определяющий направление максимума луча ДН.
Луч
Рис. 2.6. Процессор формирования ДН АР на прием
Выражение, аналогичное (2.12) для двумерной решетки записывается в виде
М N
Y(t, 0,0a ? ф? фа J = Ymn (t, 0, ф))^ипа ,
да=1 л=1
где
Wmna. = ехр[/(2тс/ \)md х sin 0а COS 0а X х ехр[/(2тг / \)nd у sin 0а sin фа]
(214)
(2.15)
— весовой множитель, определяемый направлением максимума ДН плоской АР;
6 , <р — углы сканирования, отсчитываемые от нормали к плоскости решетки (рис. 2.4).
31
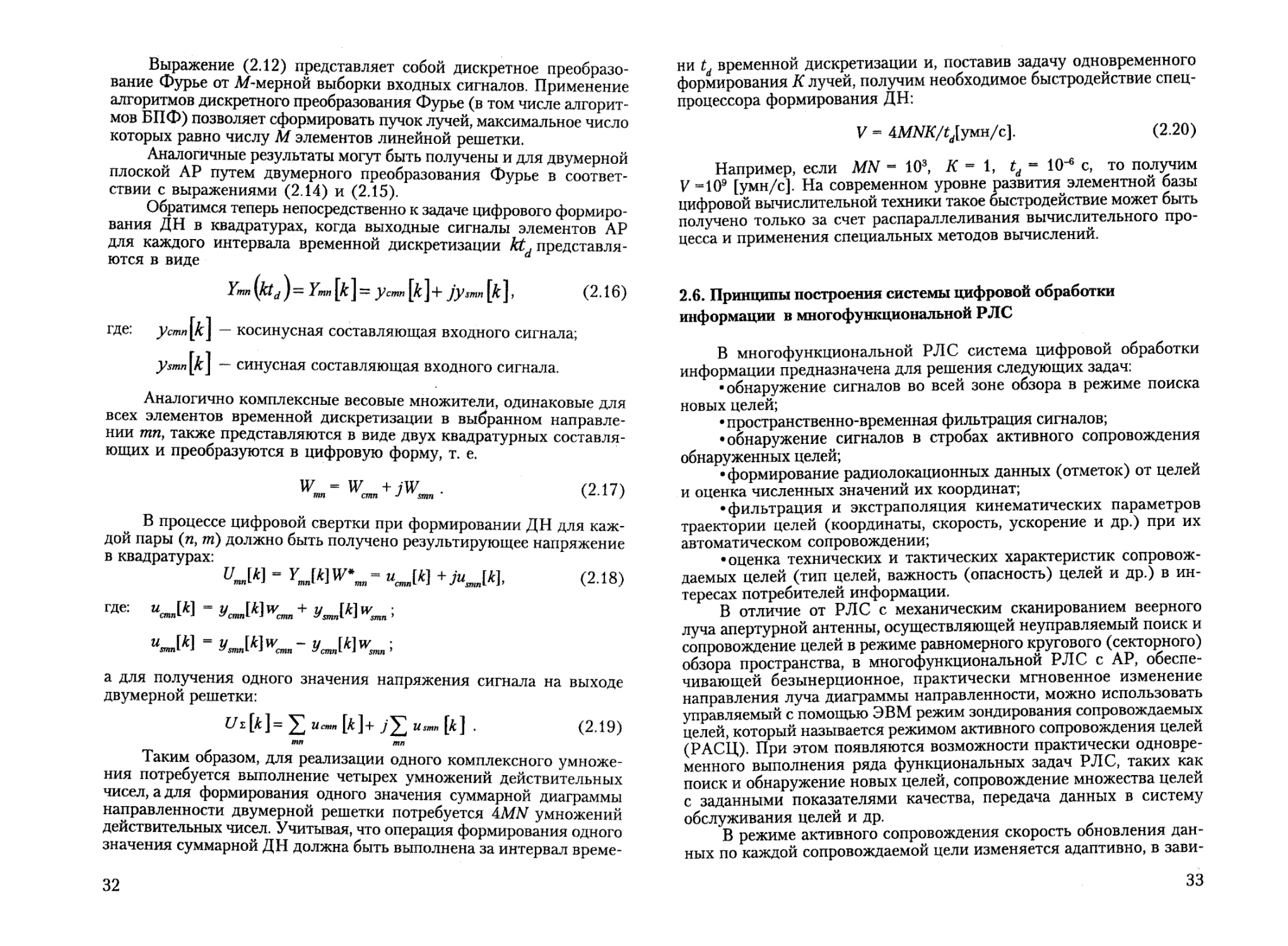
Выражение (2.12) представляет собой дискретное преобразование Фурье от М-мерной выборки входных сигналов. Применение алгоритмов дискретного преобразования Фурье (в том числе алгоритмов БПФ) позволяет сформировать пучок лучей, максимальное число которых равно числу М элементов линейной решетки.
Аналогичные результаты могут быть получены и для двумерной плоской АР путем двумерного преобразования Фурье в соответствии с выражениями (2.14) и (2.15).
Обратимся теперь непосредственно к задаче цифрового формирования ДН в квадратурах, когда выходные сигналы элементов АР для каждого интервала временной дискретизации ^представляются в виде
(2.16)
где:
— косинусная составляющая входного сигнала;
— синусная составляющая входного сигнала.
Аналогично комплексные весовые множители, одинаковые для всех элементов временной дискретизации в выбранном направлении тпу также представляются в виде двух квадратурных составляющих и преобразуются в цифровую форму, т. е.
ТУ = ТУ + jW . mn стп J smn
(2.17)
В процессе цифровой свертки при формировании ДН для каждой пары (п, т) должно быть получено результирующее напряжение в квадратурах:
tfj*] - «^[к] +ju [к], (2.18)
где: w [Л] « у ШW + у \k}w ; cmnL J стп*- J стп smn*- J smn ’
u [Л] = у [W - у ;
smn1 •* ''smni -* cmn cmn*- J smn ’
а для получения одного значения напряжения сигнала на выходе двумерной решетки:
и г [А:] — ' W стп J 4~ j U smn [А] . (2.19)
тп тп
Таким образом, для реализации одного комплексного умножения потребуется выполнение четырех умножений действительных чисел, а для формирования одного значения суммарной диаграммы направленности двумерной решетки потребуется 4MN умножений действительных чисел. Учитывая, что операция формирования одного значения суммарной ДН должна быть выполнена за интервал време
32
ни td временной дискретизации и, поставив задачу одновременного формирования К лучей, получим необходимое быстродействие спецпроцессора формирования ДН:
V = iMNK/t,[умн/с]. (2.20)
U
Например, если MN - 103, К = 1, td~ 10"6 с, то получим V =109 [умн/с]. На современном уровне развития элементной базы цифровой вычислительной техники такое быстродействие может быть получено только за счет распараллеливания вычислительного процесса и применения специальных методов вычислений.
2.6. Принципы построения системы цифровой обработки информации в многофункциональной РЛС
В многофункциональной РЛС система цифровой обработки информации предназначена для решения следующих задач:
• обнаружение сигналов во всей зоне обзора в режиме поиска новых целей;
• пространственно-временная фильтрация сигналов;
• обнаружение сигналов в стробах активного сопровождения обнаруженных целей;
• формирование радиолокационных данных (отметок) от целей и оценка численных значений их координат;
• фильтрация и экстраполяция кинематических параметров траектории целей (координаты, скорость, ускорение и др.) при их автоматическом сопровождении;
• оценка технических и тактических характеристик сопровождаемых целей (тип целей, важность (опасность) целей и др.) в интересах потребителей информации.
В отличие от РЛС с механическим сканированием веерного луча апертурной антенны, осуществляющей неуправляемый поиск и сопровождение целей в режиме равномерного кругового (секторного) обзора пространства, в многофункциональной РЛС с АР, обеспечивающей безынерционное, практически мгновенное изменение направления луча диаграммы направленности, можно использовать управляемый с помощью ЭВМ режим зондирования сопровождаемых целей, который называется режимом активного сопровождения целей (РАСЦ). При этом появляются возможности практически одновременного выполнения ряда функциональных задач РЛС, таких как поиск и обнаружение новых целей, сопровождение множества целей с заданными показателями качества, передача данных в систему обслуживания целей и др.
В режиме активного сопровождения скорость обновления данных по каждой сопровождаемой цели изменяется адаптивно, в зави-
33
симости от изменения характера ее движения, или при изменении требований к качеству выдаваемой информации. В частности, увеличение скорости обновления информации при сопровождении цели, совершающей маневр, позволяет уменьшить ошибки фильтрации и экстраполяции координат и, соответственно, повысить надежность сопровождения более простым, чем при сопровождении в режиме обзора, методом.
Повышенная частота обновления информации необходима также при обнаружении траектории цели в связи с малой точностью оценки скорости на начальном участке наблюдения.
Таким образом, основными, требующими выбора и обоснования методами и алгоритмами цифровой обработки информации в МФРЛС являются:
• методы и алгоритмы пространственно-временной фильтрации принимаемых сигналов;
• методы и алгоритмы цифровой обработки сигналов в режимах поиска и активного сопровождения целей;
• методы и алгоритмы фильтрации и экстраполяции параметров траектории сопровождаемых целей и оценки их тактико-технических характеристик в интересах потребителя.
Подробное рассмотрение и обоснование методов и алгоритмов цифровой обработки информации в МФРЛС является основным содержанием последующих глав книги.
Однако синтез и оптимизация алгоритмов основных режимов еще не решает задачи полной автоматизации системы обработки радиолокационной информации в МФРЛС. Необходимо еще разработать методы и алгоритмы управления расходованием ресурсов в основных режимах, а также предусмотреть в некотором смысле оптимальное взаимодействие между режимами, исходя, например, из следующих соображений:
1. В реальных условиях далеко не все обнаруженные в зоне обзора цели являются важными для потребителей радиолокационной информации и, следовательно, их не обязательно сопровождать в активном режиме с расходованием ограниченного энергетического ресурса МФРЛС. Поэтому, наряду с активным режимом сопровождения, в автоматизированной системе цифровой обработки радиолокационной информации целесообразно предусмотреть алгоритмы сопровождения в режиме поиска. При этом в режиме активного сопровождения будет обрабатываться информация от наиболее важных с точки зрения потребителя целей, а в режиме пассивного (при поиске) — практически все цели.
2. В установившемся режиме работы МФРЛС большинство из обнаруженных в режиме поиска отметок не являются “новыми”, а принадлежат уже сопровждаемым целям. Поэтому первым долгом необходимо каждую обнаруженную отметку проверить на принадлежность к траектории одной из сопровождаемых целей. Осуществить
такую проверку можно только при наличии алгоритма сопровождения целей в режиме поиска.
3. Взаимодействие режимов при обнаружении очередной отметки в режиме поиска состоит в следующем:
• если обнаруженная отметка не отождествляется ни с одной из сопровождаемых целей, т. е. является новой, по ней в активном режиме “завязывается” новая траектория и одновременно оценивается ее важность (опасность);
• важная, с точки зрения потребителя, цель передается для сопровождения в активном режиме, а также организуется ее сопровождение в режиме поиска;
• цель, важность которой ниже пороговой, передается только на сопровождение в режиме поиска;
• в процессе сопровождения в режиме поиска непрерывно отслеживается изменение важности каждой цели, и при выполнении соответствующего критерия она передается в режим активного сопровождения;
• наоборот, если важность цели в процессе ее активного сопровождения уменьшается ниже пороговой, она снимается с активного сопровождения.
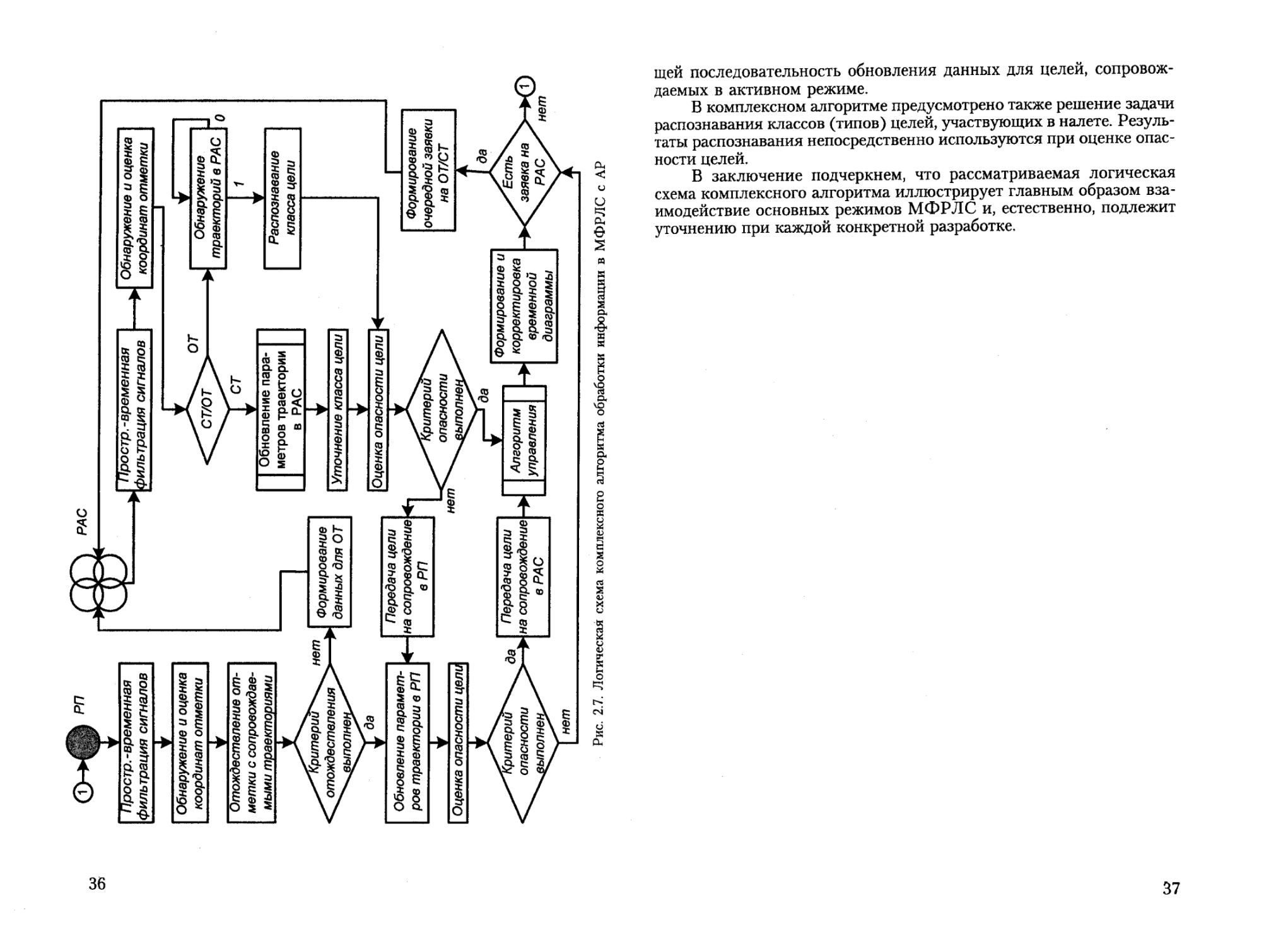
Один из возможных вариантов логической схемы комплексного алгоритма обработки информации в МФРЛС изображен на рис. 2.7. На схеме четко выделены два основных режима функционирования станции: режим поиска (РП), в задачу которого входит обнаружение сигналов от всех целей, движущихся в зоне обзора на фоне естественных и преднамеренных помех, и режим активного сопровождения (РАС), решающий задачи активного, с заданным темпом, обновления информации по важным для потребителей целям. В обоих режимах для зондирования пространства формируется о дно лучевая диаграмма направленности ФАР; на прием в режиме поиска формируется однолучевая диаграмма направленности, а в режиме активного сопровождения — многолучевая ДН, обеспечивающая моно-импульсное измерение координат целей.
Задача обнаружения траекторий новых целей решается только в режиме активного сопровождения, за минимальное время. Задачи сопровождения целей решаются как в режиме поиска, так и в режиме сопровождения, что упрощает управление процессом обработки и, кроме того, обеспечивает повышение надежности сопровождения целей.
В алгоритме предусмотрен автоматический (алгоритмический) переход между алгоритмом сопровождения в режиме поиска (АСРП) и алгоритмом активного сопровождения (ААС). Алгоритм управления решает задачи распределения и перераспределения временных и энергетических ресурсов между режимами поиска и активного сопровождения. Кроме того, на этот алгоритм возлагается задача формирования и корректировки временной диаграммы, определяю-
34
35
РП
hpocrp. -временная фильтрация сигналов
РАС
Обнаружение и оценка координат отметки
ipocrp. -временная илырация сигналов
Обнаружение и оценка координат отметки
СТ/ОТ
СТ
Обновление параметров траектории в РАС
Обнаружение I траекторий в РАС [р
нет
Отождествление отметки с сопровождаемыми траекториями
да
Формирование данных для ОТ
Обновление параметров траектории в РП
отождествления
выполне
Критерии
[Уточнение класса цели |
Распознавание класса цели
Передача цели на сопровождение вРП
[Оценка опасности цели
Критерии
опасности
| Оценка опасности цели|
нет
да
да
Алгоритм управления
Формирование и корректировка временной диаграммы
Формирование очередной заявки на ОТ/СТ
Передача цели на сопровождение в РАС
ыполне
нет
нет
Критерии
опасности
ыполне
Есть
заявка на
РАС
Рис. 2.7. Логическая схема комплексного алгоритма обработки информ яппи в МФРЛС с АР
щей последовательность обновления данных для целей, сопровождаемых в активном режиме.
В комплексном алгоритме предусмотрено также решение задачи
Глава III
АДАПТИВНАЯ ПРОСТРАНСТВЕННАЯ ОБРАБОТКА СИГНАЛОВ В ЦИФРОВОЙ АНТЕННОЙ РЕШЕТКЕ
3.1. Постановка задачи. Модели сигналов и помех
Для успешного решения задач радиолокации объектов в сложной целевой и помеховой обстановке необходимо как можно более полное использование различий в структуре принимаемых сигналов как во временной, так и в пространственной областях. В этом отношении цифровые антенные решетки (ЦАР) обладают рядом преимуществ, т. к. позволяют программно или адаптивно изменять форму и пространственную ориентацию диаграммы направленности АР в соответствии со складывающейся радиолокационной ситуацией.
Перечисленные возможности ЦАР позволяют в настоящее время успешно решать задачи оптимизации пространственно-временной обработки сигналов в условиях априорной неопределенности о структуре и параметрах мешающих отражений.
Перед рассмотрением задач оптимальной пространственной обработки уточним модель сигналов и помех на выходе ЦАР.
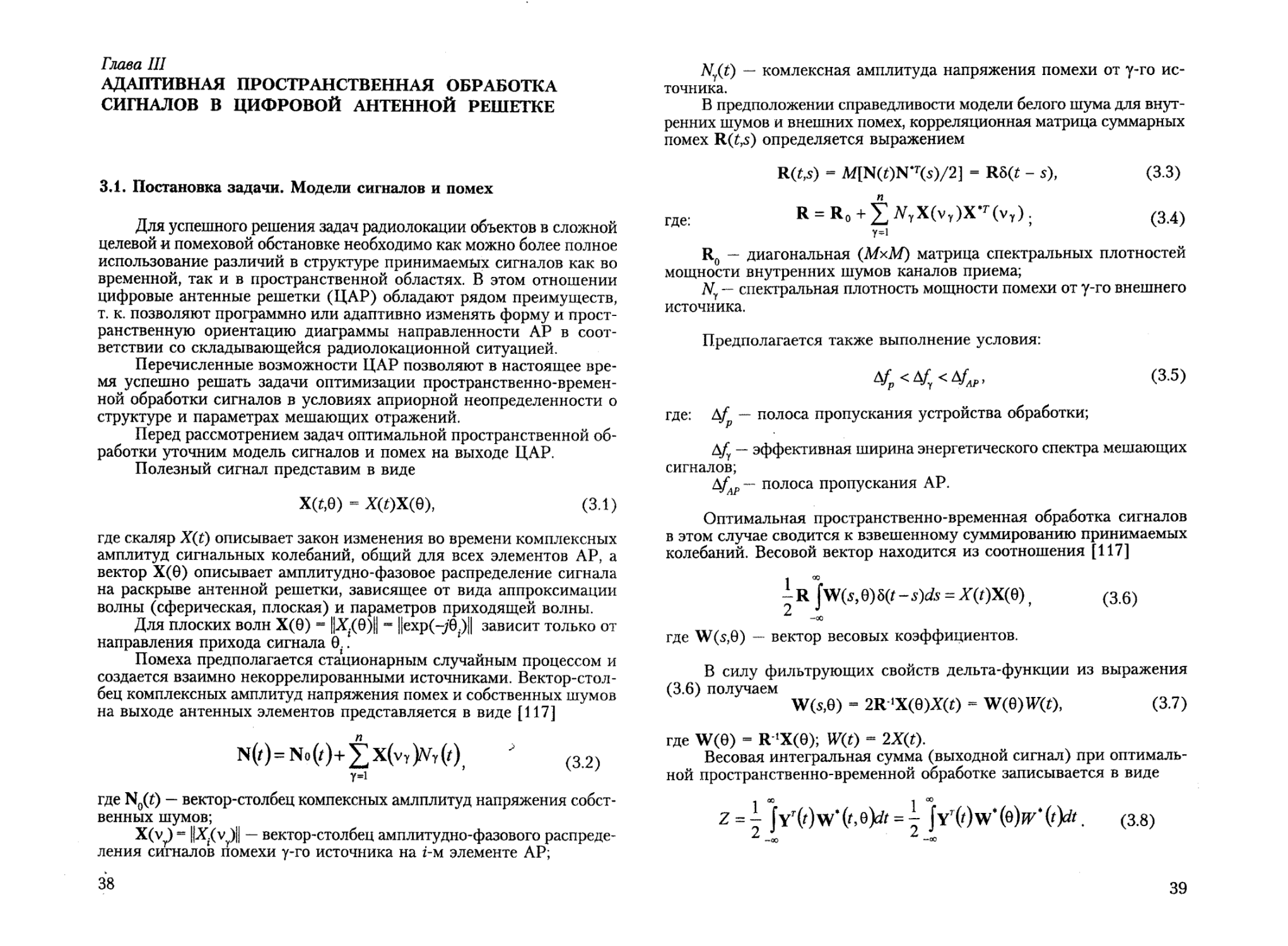
Полезный сигнал представим в виде
X(t,0) - Х(0Х(0),
(3.1)
где скаляр Х(€) описывает закон изменения во времени комплексных амплитуд сигнальных колебаний, общий для всех элементов АР, а вектор Х(0) описывает амплитудно-фазовое распределение сигнала на раскрыве антенной решетки, зависящее от вида аппроксимации волны (сферическая, плоская) и параметров приходящей волны.
Для плоских волн Х(0) e ||Х.(0)|| - ||exp(-j0.)|| зависит только от направления прихода сигнала 0 .
Помеха предполагается стационарным случайным процессом и создается взаимно некоррелированными источниками. Вектор-столбец комплексных амплитуд напряжения помех и собственных шумов на выходе антенных элементов представляется в виде [117]
N(0=No(;)+£x(v,>Vt(0,
(3.2)
где N0(t) — вектор-столбец компексных амлплитуд напряжения собственных шумов;
X(v ) - ||Х.(v )|| — вектор-столбец амплитудно-фазового распределения сигналов помехи у-го источника на z-м элементе АР;
38
— комлексная амплитуда напряжения помехи от у-го источника.
В предположении справедливости модели белого шума для внутренних шумов и внешних помех, корреляционная матрица суммарных помех R(£,s) определяется выражением
R(t,s) = A1IN(0N#t(5)/2] = R8(£ - s), (3.3)
n
где: R = R0 + £#yX(vy)X’"(v7). (34)
y=l
Ro — диагональная (MxM) матрица спектральных плотностей мощности внутренних шумов каналов приема;
N — спектральная плотность мощности помехи от у-го внешнего источника.
Предполагается также выполнение условия:
Д/р < Д/у < tfAP, (3.5)
где: — полоса пропускания устройства обработки;
ч
Д/' — эффективная ширина энергетического спектра мешающих сигналов;
— полоса пропускания АР.
Оптимальная пространственно-временная обработка сигналов в этом случае сводится к взвешенному суммированию принимаемых колебаний. Весовой вектор находится из соотношения [117]
|r/W(j,0)5C-s)ds = ^(r)X(9), (3.6)
- 00
где W(s,9) — вектор весовых коэффициентов.
В силу фильтрующих свойств дельта-функции из выражения (3.6) получаем
W(s,0) = 2R1X(0)X(O - W(0) W), (3.7)
где W(0) = R4X(0); W(t) - 2X(t).
Весовая интегральная сумма (выходной сигнал) при оптимальной пространственно-временной обработке записывается в виде
z = I fYr(')w‘k0> = I 1yt(Ow*(0)^‘(^ . (3.8)
2 < 2 _
39
Выделим из (3.8) весовую сумму пространственной обработки
jKe(O^ (3.10)
у£ (0 = Yr (0 w‘ (0) = Г/ (О^’(е). (3.9)
/=1
Тогда выражение (3.8) приводится к виду
”00 **’00
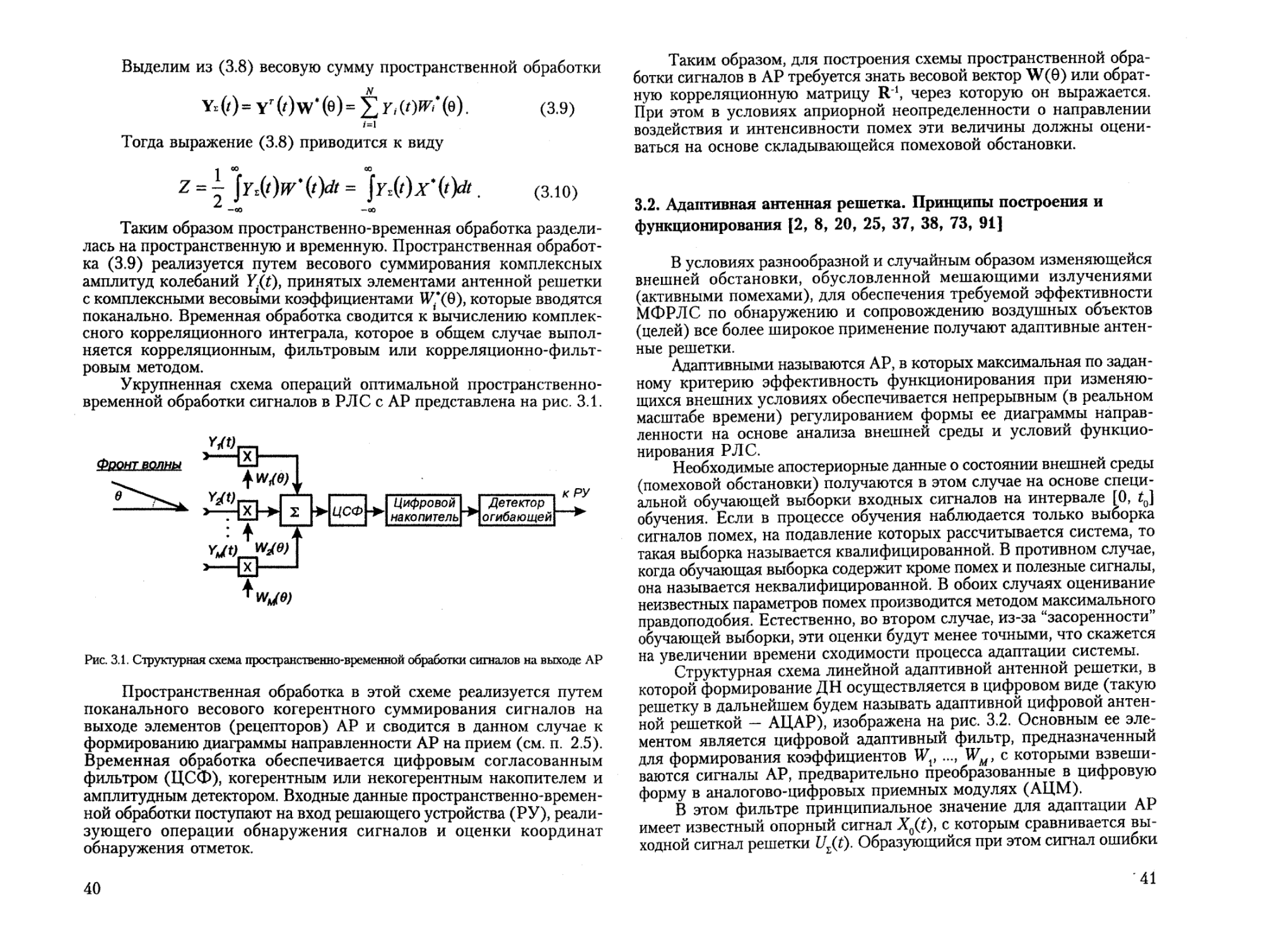
Таким образом пространственно-временная обработка разделилась на пространственную и временную. Пространственная обработка (3.9) реализуется путем весового суммирования комплексных амплитуд колебаний У*(£), принятых элементами антенной решетки с комплексными весовыми коэффициентами ТИ*(0), которые вводятся поканально. Временная обработка сводится к вычислению комплексного корреляционного интеграла, которое в общем случае выполняется корреляционным, фильтровым или корреляционно-фильтровым методом.
Укрупненная схема операций оптимальной пространственно-временной обработки сигналов в РЛС с АР представлена на рис. 3.1.
ЦСФ +
Цифровой накопитель
Детектор огибающей
КРУ
Рис. 3.1. Структурная схема пространственно-временной обработки сигналов на выходе АР
Пространственная обработка в этой схеме реализуется путем поканального весового когерентного суммирования сигналов на выходе элементов (рецепторов) АР и сводится в данном случае к формированию диаграммы направленности АР на прием (см. п. 2.5). Временная обработка обеспечивается цифровым согласованным фильтром (ЦСФ), когерентным или некогерентным накопителем и амплитудным детектором. Входные данные пространственно-временной обработки поступают на вход решающего устройства (РУ), реализующего операции обнаружения сигналов и оценки координат обнаружения отметок.
40
Таким образом, для построения схемы пространственной обработки сигналов в АР требуется знать весовой вектор W(9) или обратную корреляционную матрицу R1, через которую он выражается. При этом в условиях априорной неопределенности о направлении воздействия и интенсивности помех эти величины должны оцениваться на основе складывающейся помеховой обстановки.
3.2. Адаптивная антенная решетка. Принципы построения и функционирования [2, 8, 20, 25, 37, 38, 73, 91]
В условиях разнообразной и случайным образом изменяющейся внешней обстановки, обусловленной мешающими излучениями (активными помехами), для обеспечения требуемой эффективности МФРЛС по обнаружению и сопровождению воздушных объектов (целей) все более широкое применение получают адаптивные антенные решетки.
Адаптивными называются АР, в которых максимальная по заданному критерию эффективность функционирования при изменяющихся внешних условиях обеспечивается непрерывным (в реальном масштабе времени) регулированием формы ее диаграммы направленности на основе анализа внешней среды и условий функционирования РЛС.
Необходимые апостериорные данные о состоянии внешней среды (помеховой обстановки) получаются в этом случае на основе специальной обучающей выборки входных сигналов на интервале [0, £0] обучения. Если в процессе обучения наблюдается только выборка сигналов помех, на подавление которых рассчитывается система, то такая выборка называется квалифицированной. В противном случае, когда обучающая выборка содержит кроме помех и полезные сигналы, она называется неквалифицированной. В обоих случаях оценивание неизвестных параметров помех производится методом максимального правдоподобия. Естественно, во втором случае, из-за “засоренности” обучающей выборки, эти оценки будут менее точными, что скажется на увеличении времени сходимости процесса адаптации системы.
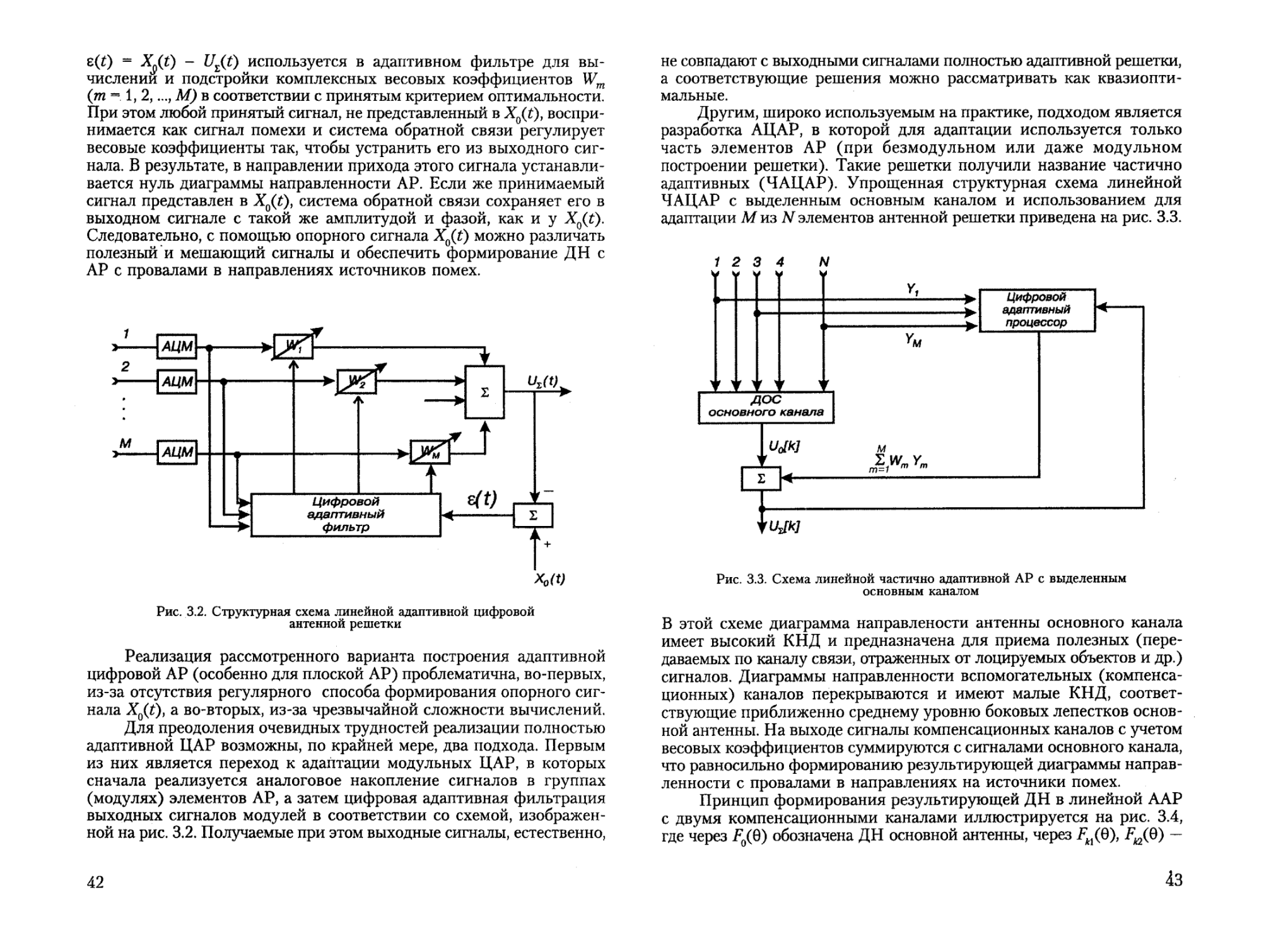
Структурная схема линейной адаптивной антенной решетки, в которой формирование ДН осуществляется в цифровом виде (такую решетку в дальнейшем будем называть адаптивной цифровой антенной решеткой — АЦАР), изображена на рис. 3.2. Основным ее элементом является цифровой адаптивный фильтр, предназначенный для формирования коэффициентов ..., WM> с которыми взвешиваются сигналы АР, предварительно преобразованные в цифровую форму в аналогово-цифровых приемных модулях (АЦМ).
В этом фильтре принципиальное значение для адаптации АР имеет известный опорный сигнал Хо(£), с которым сравнивается выходной сигнал решетки UL(t). Образующийся при этом сигнал ошибки
'41
e(0 e XJt) - UL(t) используется в адаптивном фильтре для вычислении и подстройки комплексных весовых коэффициентов Wm (т *1, 2,М) в соответствии с принятым критерием оптимальности. При этом любой принятый сигнал, не представленный в XQ(t), воспринимается как сигнал помехи и система обратной связи регулирует весовые коэффициенты так, чтобы устранить его из выходного сигнала. В результате, в направлении прихода этого сигнала устанавливается нуль диаграммы направленности АР. Если же принимаемый сигнал представлен в Хо(0, система обратной связи сохраняет его в выходном сигнале с такой же амплитудой и фазой, как и у Хо(£). Следовательно, с помощью опорного сигнала Хо(0 можно различать полезный и мешающий сигналы и обеспечить формирование ДН с АР с провалами в направлениях источников помех.
X0(t)
Рис. 3.2. Структурная схема линейной адаптивной цифровой антенной решетки
Реализация рассмотренного варианта построения адаптивной цифровой АР (особенно для плоской АР) проблематична, во-первых, из-за отсутствия регулярного способа формирования опорного сигнала Хо(£)> а во-вторых, из-за чрезвычайной сложности вычислений.
Для преодоления очевидных трудностей реализации полностью адаптивной ЦАР возможны, по крайней мере, два подхода. Первым из них является переход к адаптации модульных ЦАР, в которых сначала реализуется аналоговое накопление сигналов в группах (модулях) элементов АР, а затем цифровая адаптивная фильтрация выходных сигналов модулей в соответствии со схемой, изображенной на рис. 3.2. Получаемые при этом выходные сигналы, естественно,
42
не совпадают с выходными сигналами полностью адаптивной решетки, а соответствующие решения можно рассматривать как квазиопти-мальные.
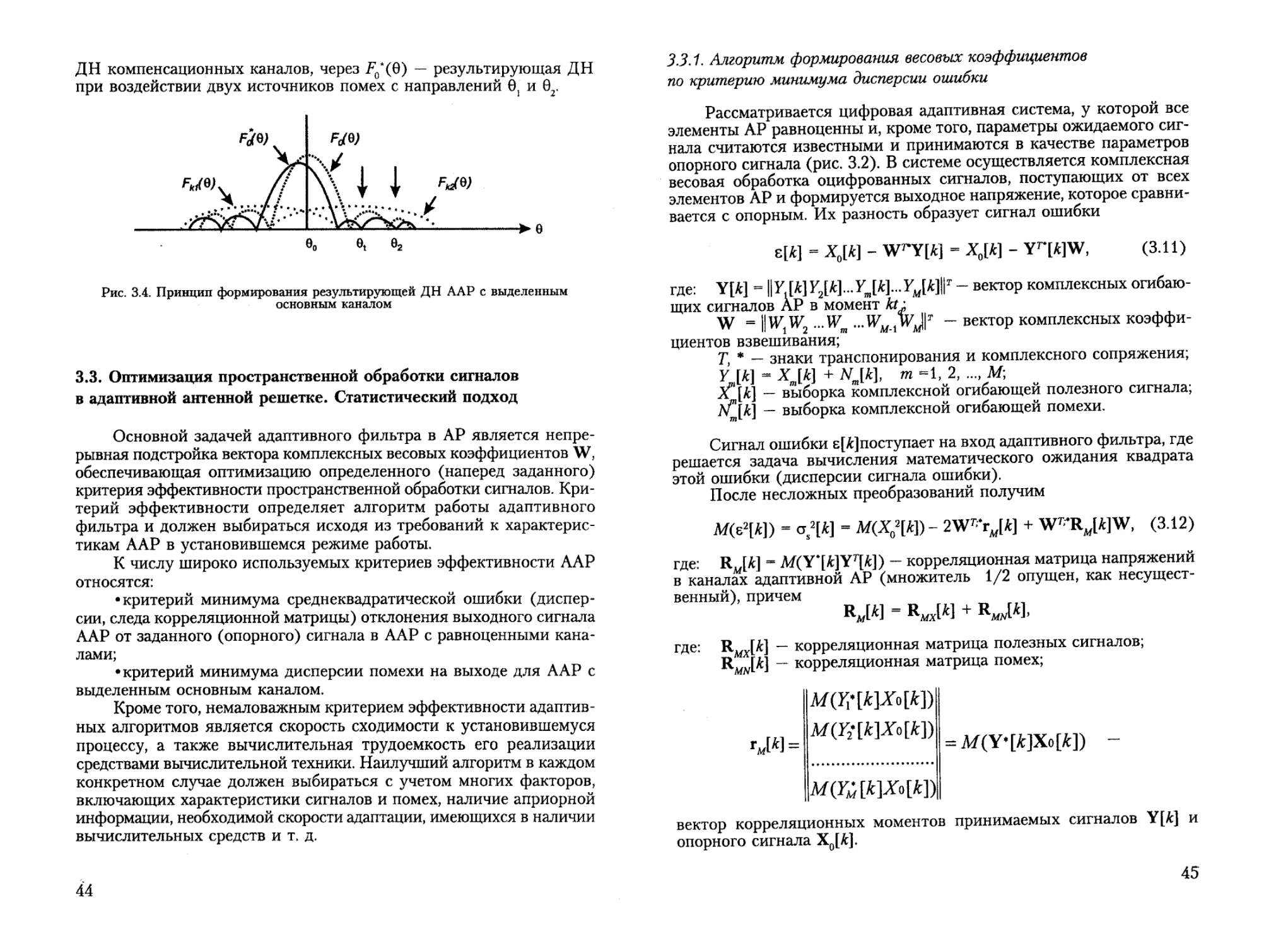
Другим, широко используемым на практике, подходом является разработка АЦАР, в которой для адаптации используется только часть элементов АР (при безмодульном или даже модульном построении решетки). Такие решетки получили название частично адаптивных (ЧАЦАР). Упрощенная структурная схема линейной ЧАЦАР с выделенным основным каналом и использованием для адаптации М из элементов антенной решетки приведена на рис. 3.3.
основного канала
и<Щ
Цифровой адаптивный процессор
м
ZW Y
UJk]
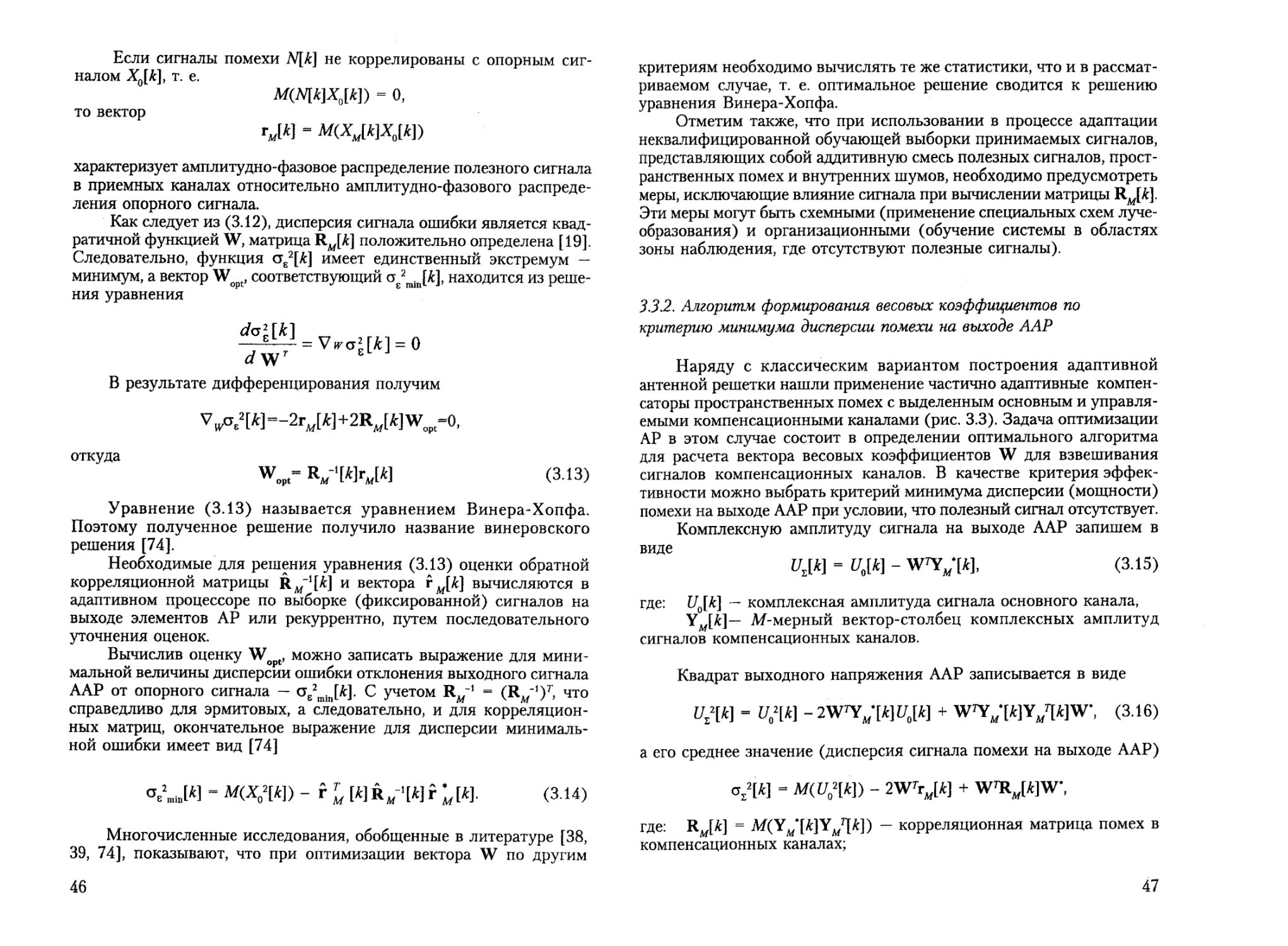
Рис. 3.3. Схема линейной частично адаптивной АР с выделенным основным каналом
В этой схеме диаграмма направлености антенны основного канала имеет высокий КНД и предназначена для приема полезных (передаваемых по каналу связи, отраженных от лоцируемых объектов и др.) сигналов. Диаграммы направленности вспомогательных (компенсационных) каналов перекрываются и имеют малые КНД, соответствующие приближенно среднему уровню боковых лепестков основной антенны. На выходе сигналы компенсационных каналов с учетом весовых коэффициентов суммируются с сигналами основного канала, что равносильно формированию результирующей диаграммы направленности с провалами в направлениях на источники помех.
Принцип формирования результирующей ДН в линейной ААР с двумя компенсационными каналами иллюстрируется на рис. 3.4, где через Fo(0) обозначена ДН основной антенны, через FM(0), 7*^(0) ~
4з
ДН компенсационных каналов, через Fo*(&) — результирующая ДН при воздействии двух источников помех с направлений и 6Г
Рис. 3.4. Принцип формирования результирующей ДН ААР с выделенным основным каналом
3.3. Оптимизация пространственной обработки сигналов в адаптивной антенной решетке. Статистический подход
Основной задачей адаптивного фильтра в АР является непрерывная подстройка вектора комплексных весовых коэффициентов W, обеспечивающая оптимизацию определенного (наперед заданного) критерия эффективности пространственной обработки сигналов. Критерий эффективности определяет алгоритм работы адаптивного фильтра и должен выбираться исходя из требований к характеристикам ААР в установившемся режиме работы.
К числу широко используемых критериев эффективности ААР относятся:
•критерий минимума среднеквадратической ошибки (дисперсии, следа корреляционной матрицы) отклонения выходного сигнала ААР от заданного (опорного) сигнала в ААР с равноценными каналами;
•критерий минимума дисперсии помехи на выходе для ААР с выделенным основным каналом.
Кроме того, немаловажным критерием эффективности адаптивных алгоритмов является скорость сходимости к установившемуся процессу, а также вычислительная трудоемкость его реализации средствами вычислительной техники. Наилучший алгоритм в каждом конкретном случае должен выбираться с учетом многих факторов, включающих характеристики сигналов и помех, наличие априорной информации, необходимой скорости адаптации, имеющихся в наличии вычислительных средств и т. д.
44
33.1, Алгоритм формирования весовых коэффициентов по критерию минимума дисперсии ошибки
Рассматривается цифровая адаптивная система, у которой все элементы АР равноценны и, кроме того, параметры ожидаемого сигнала считаются известными и принимаются в качестве параметров опорного сигнала (рис. 3.2). В системе осуществляется комплексная весовая обработка оцифрованных сигналов, поступающих от всех элементов АР и формируется выходное напряжение, которое сравнивается с опорным. Их разность образует сигнал ошибки
ад = ХД] - WHfW - ХД] - YH*]W, (3.11)
где: Y[A;] ||У [£] У2[Л]...УДЛ]...УДЛ]||Г ~ вектор комплексных огибающих сигналов АР в момент kt*
— вектор комплексных коэффи
циентов взвешивания;
Т, * — знаки транспонирования и комплексного сопряжения;
У [Л] - хад 4- АД*], т -1, 2, ..., М;
— выборка комплексной огибающей полезного сигнала; АД Л] — выборка комплексной огибающей помехи.
Сигнал ошибки е[Л]поступает на вход адаптивного фильтра, где решается задача вычисления математического ожидания квадрата этой ошибки (дисперсии сигнала ошибки).
После несложных преобразований получим
WW) = аДЛ] = М(ХДЛ])- 2¥Г%[*] + W^RJi]W, (3.12) где: = A^VftJY^]) — корреляционная матрица напряжений
в каналах адаптивной АР (множитель 1/2 опущен, как несущественный), причем
R ад = RU*] + RU4
где:
RMX[£] — корреляционная матрица полезных сигналов;
RMJA] — корреляционная матрица помех;
гад =
лцвдвд*])
вектор корреляционных моментов принимаемых сигналов Y[A] и опорного сигнала Х0[А].
Если сигналы помехи Л/[А] не коррелированы с опорным сигналом Хо[£], т. е.
M(N[k]X0[k]) = О, то вектор
гД*] = МОДЩА])
характеризует амплитудно-фазовое распределение полезного сигнала в приемных каналах относительно амплитудно-фазового распределения опорного сигнала.
Как следует из (3.12), дисперсия сигнала ошибки является квадратичной функцией W, матрица ЙДА] положительно определена [19]. Следовательно, функция аЁ2[А] имеет единственный экстремум — минимум, а вектор W , соответствующий a.2min[*]> находится из решения уравнения
d W’
= Vr<y|[fc] = 0
В результате дифференцирования получим
УОДОД2гДАД2КД£ОД=0,
откуда
W рГ КД[*]гД*] (3.13)
Уравнение (3.13) называется уравнением Винера-Хопфа. Поэтому полученное решение получило название винеровского решения [74].
Необходимые для решения уравнения (3.13) оценки обратной корреляционной матрицы ЯД[А] и вектора г ДА] вычисляются в адаптивном процессоре по выборке (фиксированной) сигналов на выходе элементов АР или рекуррентно, путем последовательного уточнения оценок.
Вычислив оценку W , можно записать выражение для минимальной величины дисперсии ошибки отклонения выходного сигнала ААР от опорного сигнала — оДДЛ]. С учетом КД = (КД)7, что справедливо для эрмитовых, а следовательно, и для корреляционных матриц, окончательное выражение для дисперсии минимальной ошибки имеет вид [74]
<ОД*] - МОД*]) - Г L [*]ЙД[*]Г U4 (3.14)
Многочисленные исследования, обобщенные в литературе [38, 39, 74], показывают, что при оптимизации вектора W по другим
46
критериям необходимо вычислять те же статистики, что и в рассматриваемом случае, т. е. оптимальное решение сводится к решению уравнения Винера-Хопфа.
Отметим также, что при использовании в процессе адаптации неквалифицированной обучающей выборки принимаемых сигналов, представляющих собой аддитивную смесь полезных сигналов, пространственных помех и внутренних шумов, необходимо предусмотреть меры, исключающие влияние сигнала при вычислении матрицы RM[£]. Эти меры могут быть схемными (применение специальных схем луче-образования) и организационными (обучение системы в областях зоны наблюдения, где отсутствуют полезные сигналы).
332. Алгоритм формирования весовых коэффициентов по критерию минимума дисперсии помехи на выходе ААР
Наряду с классическим вариантом построения адаптивной антенной решетки нашли применение частично адаптивные компенсаторы пространственных помех с выделенным основным и управляемыми компенсационными каналами (рис. 3.3). Задача оптимизации АР в этом случае состоит в определении оптимального алгоритма для расчета вектора весовых коэффициентов W для взвешивания сигналов компенсационных каналов. В качестве критерия эффективности можно выбрать критерий минимума дисперсии (мощности) помехи на выходе ААР при условии, что полезный сигнал отсутствует.
Комплексную амплитуду сигнала на выходе ААР запишем в
виде
(3.15)
где: UJk] - комплексная амплитуда сигнала основного канала, УДА]— Af-мерный вектор-столбец комплексных амплитуд
сигналов компенсационных каналов.
Квадрат выходного напряжения ААР записывается в виде
£42[*] “ ^о21^] - 2W%/[*]tJ0[£] + (3.16)
а его среднее значение (дисперсия сигнала помехи на выходе ААР)
оД£] - M(U^k]) - 2W7rv/[lJ + WTy*]W,
где: RM[i] = M(Ym*[^]Y/[^) — корреляционная матрица помех в компенсационных каналах;
47
ЛГ(ГГ[А:]С7о[А:])
гмИ] =
— вектор взаимной корреляции вы
адда])
ходных сигналов основного и компенсационных каналов.
Оптимальное значение вектора весовых коэффициентов, как и прежде, находится из условия
dcr| dyVTt
= -2 r.v [*]+ 2 R, HWopt = 0 ,
откуда получаем
W — Rm I*m — 0 .
opt
(3.17)
Выражение (3.17) аналогично выражению (3.13), полученному в предыдущем пункте. В каждом из них для вычисления оптимального вектора весов требуется оценить обратную корреляционную матрицу помех и вектор взаимной корреляции сигналов опорного (основного) канала и каналов, принимающих участие в компенсации помех.
Структурная схема цифрового адаптивного процессора частично адаптивной АР изображена на рис. 3.5.
Рис. 3.5. Структурная схема цифрового адаптивного процессора
Отметим, что в этой схеме, с учетом сильной корреляционной обратной связи, для вычисления гД£], вместо используется выходной сигнал АР Ц.[Л] [117].
На рис. 3.6. приведены результаты моделирования воздействия активных шумовых помех на линейную модульную частично-адап
48
тивную антенную решетку (ААР) с тейлоровским амплитудным распределением. Решетка состоит из 80 излучателей, объединенных в 20 модулей по 4 излучателя в каждом. Диаграмма направленности такой ААР при отсутствии активных помех изображена на рис. 3.6, а.
На рис. 3.6, б изображена диаграмма направленности рассматриваемой ААР при воздействии одного источника помех с координатой, обозначенной на рисунке стрелкой, и отношением помеха—шум <Jc2/an2 в 60 дБ, а на рис. 3.6, в — та же диаграмма при воздействии двух источников помех с примерно теми же, что и в первом случае, отношениями помеха-шум. .
Результаты моделирования показывают, что в рассматриваемой ААР при воздействии активных шумовых помех по боковым лепесткам в направлениях их воздействия образуются глубокие провалы в ДН ААР, а главный лепесток искажается незначительно.
333. Особенности адаптации ЦАР в режиме активного сопровождения
Изображенная на рис. 3.3 схема частично адаптивной АР пригодна для применения в процессе одноканального обнаружения и измерения координат целей, т. е. при функционировании МФРЛС в режиме поиска. В режиме активного сопровождения МФРЛС пеленгация целей производится с использованием двухканальных моно-импульсных измерителей угловых координат. Естественно поэтому, и в этом режиме должны быть предусмотрены специальные меры защиты моноимпульс-ного обнаружителя-измерителя от активных помех, и в качестве таких мер целесообразно, как и ранее, применение алгоритмов адаптивной пространственной обработки сигналов.
Рис. 3.6. Диаграмма направленности частично-адаптивной модульной линейной АР
49
Исходными предпосылками для решения этой задачи являются: 1. Адаптивная антенная решетка, как и прежде, строится по схеме с выделенными основными каналами и частичной адаптацией путем формирования и применения ряда компенсационных диаграмм направленности (компенсационных каналов).
2. В рассматриваемой двухканальной системе каждый канал защищается независимо друг от друга. Парами таких независимых каналов могут быть взяты:
• диаграммы направленности двух парциальных каналов моно-импульсного обнаружителя-измерителя;
•сформированная из парциальных суммарная и разностная диаграммы направленности.
В рассматриваемом ниже примере в качестве непосредственно защищаемых выбраны парциальные диаграммы направленности. Такой выбор сделан, во-первых, с учетом однородности подходов к адаптации пространственной обработки в суммарном канале режима поиска и амплитудно-амплитудном моноимпульсном измерителе режима активного сопровождения, а во-вторых, с учетом того, что по результатам ряда исследований [39] в системе с непосредственной защитой парциальных диаграмм направленности пеленгационная характеристика моноимпульсного измерителя (для случая, когда помеха действует по боковым лепесткам парциальных каналов) искажается незначительно и не имеет смещения нулевого положения.
Оцифрованные сигналы подрешеток
«иаач
VtMl
ДОС
Адаптивный процессор
Адаптивный процессор F^)
Рис. 3.7. Структурная схема адаптивной пространственной обработки сигналов в каналах моноимпульсного измерения угловых координат
Формирование каналов моноимпульсной пеленгации
50
Структурная схема адаптивной пространственной обработки сигналов в каналах моноимпульсного измерения координат приведена на рис. 3.7.
В этой схеме когерентная адаптивная пространственная обработка принимаемых сигналов производится независимо в каждой из двух парциальных диаграмм направленности 7^(0) и F2(0) способом, рассмотренным в предыдущем пункте. При этом предполагается, что для одновременной защиты от активных помех двух парциальных ДН антенны выбирается единая группа компенсационных каналов, т. е. используются одни и те же входные сигналы.
В этом случае достаточно одного блока (алгоритма) оценки обратной корреляционной матрицы помех RM4, что значительно сокращает затраты при реализации на ЭВМ.
На схеме рис. 3.7 алгоритм вычисления RM4 выделен в отдельный блок. Результаты вычисления этого блока используются в двух цифровых адаптивных процессорах для расчета весовых коэффициентов W(1) и W(2).
3.4. Методы оценивания вектора весовых коэффициентов в частично адаптивной АР
34.1 Оценивание вектора весов по выборке сигналов АР на конечном интервале наблюдения
Для вычисления вектора адаптивных весовых коэффициентов W по формулам (3.13) или (3.17) необходимо знать статистические характеристики сигналов и помех на входах адаптивного процессора. Эти характеристики априори не известны. Поэтому в процессе обучения адаптивной системы пространственной обработки необходимо оценивать матрицу R^[A] и вектор на основе выборки сигналов на входе и выходе адаптивного процессора на конечном интервале наблюдения.
Полагая, что выборки входных сигналов являются выборками гауссового случайного процесса с нулевым средним, оценка максимального правдоподобия для матрицы Rw[£] (при отсутствии полезного сигнала) вычисляется по формуле:
м4#Й -
(3.18)
51
где:
м. О? №/ И=
L — число однократных оценок элементов корреляционной матрицы, полученных в соседних интервалах временной дискретизации к, к-Л, ..., k-L+l.
Оценка максимального правдоподобия вектора взаимной корреляции сигналов на входе и выходе адаптивного процессора в общем случае определяется выражением
(3.19)
где: Y[£—Z] — вектор выборочных значений выходных напряжений элементов АР, используемых для компенсации помех;
YW] = IIи[£-/] ... YM[k-l
Uz [& ~ d — выборочное значение выходного сигнала ААР.
Теперь после выполнения обычной процедуры обращения корреляционной матрицы помех оценка оптимального весового вектора вычисляется по формуле
(3.20)
В рассматриваемой процедуре оценивания оптимального весового вектора существенным является выбор числа L усредняемых частных оценок. Такой выбор производится, исходя из допустимых потерь в отношении сигнал—помеха на выходе ААР из-за неточного вычисления матрицы и вектора гж[л]. Как показано в [74], для получения приемлемой точности оценки корреляционной матрицы помех и вектора взаимной корреляции, число выборок L должно быть в 2 раза больше числа степеней свободы адаптивной антенной решетки, т. е. 2М для частично адаптивной АР с выделенным основным каналом. Потери в отношении сигнал—помеха при этом не превышают 3 дБ. Время, затрачиваемое на уточнение оценок рассматриваемых статистических характеристик определяет длительность переходного процесса адаптации в системе.
Сделаем теперь приближенную оценку вычислительных затрат, потребующихся для оценки вектора весовых коэффициентов рас
52
сматриваемым методом. Затраты будем характеризовать числом комплексных умножений в ААР с М компенсационными каналами.
Матрица Rwz является комплексной эрмитовой матрицей с числом независимых элементов М(М-1)/2. Поэтому для ее вычисления потребуется £М(Л/+1)/2 комплексных умножений. Обращение эрмитовой матрицы потребует ЛР/2+М2 комплексных умножений. Вычисление вектора взаимной корреляции потребует LM2 комплексных умножений. Наконец, на вычисление весового вектора по формуле (3.20) потребуется еще М2 комплексных умножений. Таким образом, для однократного вычисления выборочного значения весового вектора потребуется
Nw~ М[М*/2 + 2М + 3LM/2 + L/2] комплексных умножений.
Учитывая, что помеховая обстановка на входе АР быстро и непрерывно изменяется из-за перемещения луча, целей и источников помех, вычислять новые значения весовых коэффициентов потребуется практически в каждом периоде Т посылок зондирующих сигналов. Поэтому, в рассматриваемом методе оценивания и обращения корреляционной матрицы помех по фиксированной выборке сигналов, к адаптивному процессору предъявляются чрезвычайно высокие требования по быстродействию, что ставит под сомнение возможность реализации этого метода при больших М (в базовых системах адаптации). Однако в системах с выделенным каналом, где число М компенсационных каналов невелико, возможность реализации рассматриваемого метода не отвергается.
3.4.2. Рекуррентное оценивание вектора весовых коэффициентов
Для преодоления вычислительных проблем обычно применяются рекуррентные методы при вычислении обратных корреляционных матриц (ОКМ) помех Rw и вектора взаимной корреляции Гм , а также при непосредственном вычислении вектора весовых коэффициентов W.
Процесс последовательного формирования корреляционной матрицы Rw по выборке входных сигналов Yf^^YfAZj в момент очередного отсчета kt, организуется следующим образом (индексы М в дальнейшем опускаются).
В момент первого отсчета вектора элементы КМ находятся из выражения
й[1] = Y* [1] Y’ [1]
53
В дальнейшем, в соответствии с процедурой усреднения: на втором шаге
Й[2] = ' (у*[']У ' [I] - Y* [2]Yr [2])= |(r[1]+ Y*[2]Yr [2] , на третьем шаге
адЦИ]уг[1ку*[2]уФ]+у*[зМз])=
=|адДу*[з]уг[з]
на Z-м шаге
к[/]=^ад1]Цу-иуги. <з.21)
V V
Для рекуррентного обращения КМП применяется правило Дуайра и Уо [19, 49], в соответствии с которым (в общем случае для матрицы А)
А 1 = В 4/yB 'uvB 1 ,
где: у « 1 + vB^u;
В — неособенная матрица, обратная для которой известна; и — вектор-столбец;
v — вектор-строка.
Полагая в нашем случае
В — ^r[/-1], u = jY[/]> v = — Y*r [/],
после подстановок и преобразований получим
к1[<-1]уИу'гИк1М
(3.22)
Таким образом, получено выражение для рекуррентного оценивания обратной корреляционной матрицы (ОКМ) помехи, не изменяющейся за время оценивания (за I периодов временной дискретизации). Существуют также способы рекуррентного оценивания
54
изменяющейся во времени корреляционной матрицы помех. В частности, если известны законы изменения во времени всех МхМ элементов этой матрицы, то для рекуррентного оценивания могут быть применены методы оптимальной линейной фильтрации [95].
Для рекуррентного оценивания вектора r[Z] по аналогии с (3.21) получим
(3.23)
Задача рекуррентного оценивания может быть поставлена и решена непосредственно для вектора весовых коэффициентов W. Для этого в уравнение
Wopt И = Ил/ 1 И
подставим полученные выше выражения (3.22) и (3.23) для рекуррентных оценок матрицы Ry] и вектора г [/]. В результате несложных преобразований получим окончательное выражение для вектора весовых коэффициентов в виде
w[z]=w[z-i]+
C-l)+Y,r[/]R4[/-l]Y[d
(3.24)
или, обозначая
К И =
получим
W[/]= w[/-l]+K[/]Uz[4
(3.25)
Таким образом, формульная схема адаптивного фильтра пространственной обработки сигналов в ААР с выделенным каналом на /-м шаге итерации записывается в виде
w[z]= W[Z-l]+K[z]u£[/]>
кгл- r’MM]
11" (/-1)+у’Ик-'[Му'И
(3.26)
55
Введем обозначения
a[z]=r-,[/-i]y[z], Z[z]=Y,r[z]A[7], bfzHczfzj+ztz])-1, с, И = «/« ~ О) >
С2И = (*-1)- (3-27)
С учетом этих обозначений, формулы рекуррентного алгоритма адаптивной пространственной обработки записываются в окончательном виде:
Us[/] = t7oH“W
к'И=с.['](к_,['-1]-ьР]а[/]а,г['])-
W[Z]=W[Z-l]-b[(]A[/]uE[/] (3.28)
Структурная схема этого алгоритма приведена на рис. 3.8.
А ад
Рис. 3.8. Структурная схема рекуррентного адаптивного алгоритма пространственной обработки сигналов частотно адаптивной АР
На схеме жирными линиями объединены операции над комплексными матрицами, обычными линиями — операции над комплексными векторами и пунктирными линиями — операции над комплексными числами.
Очевидно, что рекурррентные алгоритмы оценивания ОКМ и вектора весовых коэффициентов отличаются от рассмотренного в предыдущем пункте алгоритма, использующего непосредственное оценивание и обращение корреляционной матрицы помех только тем, что соответствующие процедуры оценивания осуществляются рекуррентным способом. Поэтому скорость сходимости рекуррентного алгоритма примерно одинакова со скоростью сходимости нерекуррентного алгоритма и, как показывают исследования [25, 74], слабо зависят от разброса интенсивностей мешающих излучений.
Отметим в заключение, что рекуррентный алгоритм более удобен для реализации на цифровых процессорах, чем нерекуррентный, что делает его более привлекательным для внедрения, при наличии вычислительных средств с необходимой производительностью.
3.5. Цифровая реализация рекуррентных алгоритмов оценивания вектора весовых коэффициентов на последовательных и параллельных вычислительных структурах
Рассмотрим задачу оценки сложности (трудоемкости) реализации рекуррентного алгоритма оценивания весовых коэффициентов, представленного формульной схемой (3.28), с использованием последовательных (одноканальных) и параллельных (многоканальных) средств цифровой вычислительной техники (ЦВТ).
Представляя комплексные числа в квадратурах (Щ/]“иД/]+/мД/]), формульную схему алгоритма (3.28) запишем в виде (значки “Л” опускаются):
1- Uzc И = U Ос И- wr [/ - 1]ус [Z]+ wl [/ - 1]Y,И-
И = UOs И- w' [Z -1] Ys [/]+ wl [/ -1] Yc [Z
ac[z]=rc-1[z-i]yc[<-
4. A5 [/] = Rc 1 [Z -1] Y, И - RJ‘ [Z -1] Ye [z] •
5. Re Z[Z] = Re(v‘7 [/]a[/]) = yI [z]Ac [z] + Yl ИаД/] •
6*- b[/]= (c2[/]+Re Z[/D’'.
(3.29)
* Для упрощения вычислений по формуле 6 алгоритма (3.29) принято использовать только реальную часть выражения для Z[/].
57
7- Rc1^. =ci .d.Rc’^-lj-bp^Acf/lAc И+аД/]аГ[/). •
8- н;,И=с1[/1к;1[/-1]-ь[/ХаД/]аП^+АсИаГЙ
9. Wc [z] = Wc [Z -1]+ bf/jAc [z]uSc [z]+ As [Z]Uic И•
1 о. Ws [z] = Ws [z -1]+b[zjAs [z]u2c [z]+ Ac [z]Uic [z]) •
Вещественные скалярные величины UOc[Z], UOs[/], ЦД/], UJ/J, а также вещественные вектор-столбцы Yc[/] и YJ/] вводятся в вычислительную систему в каждой итерации (в каждом интервале временной дискретизации). Вещественные матрицы R71 И — 1] раз-
мерностью МхМ и вещественные вектор-столбцы WJ/-1], WJ/-1] размерностью Мх 1 вычисляются на предыдущей итерации и хранятся в памяти вычислителя. В памяти вычислителя формируются и запоминаются также текущие значения чисел сД/] и с2[/].
В дальнейшем предполагается также, что время, затрачиваемое на пересылку данных из ОЗУ в процессор и обратно, пренебрежимо мало по сравнению со временем выполнения арифметических операций.
При сделанных предпосылках оценим алгоритм (3.29) по числу требуемых арифметических операций сложения и умножения сначала при его реализации на однопроцессорном вычислителе (ЭВМ), а затем на многопроцессорном вычислительном комплексе, структура которого максимально приспособлена для реализации алгоритма (3.29).
Результаты расчетов по каждой из формул (от 1 до 10), входящих в выражение (3.29), сведены в таблицу 3.1.
Из таблицы следует, что для реализации одного шага итерации на однопроцессорной ЭВМ необходимо выполнить 12М 2+12М+1 операций умножения и 8М 2+8А/ операций сложения действительных чисел. Следовательно, если в каждом такте работы ЭВМ выполняется одна арифметическая операция (время выполнения операций умножения и сложения предполагается одинаковым), то на выполнение одного шага итерации потребуется 20М 2+20М+1 тактов работы ЭВМ.
При этом потребуется ячеек памяти:
1. Для записи входных данных UJ/], YJ/], YJ/J, сД/], с2[1] и выходных данных UJZ], иг/]
0,= 2М + 6.
2. Для хранения вычисляемых векторов W [Z-l], WJ/-1] и обратных корреляционных матриц R ‘[/-1], R ’[/-1]
С 5
0^= 2М(М + 1).
58
3. Для записи промежуточных результатов AJZ], AJZ], 6[Z] и другой информации не менее
оперативной памяти.
2(М + 1)
Таблица 3.1
№ формулы Последовательная реализация Параллельная реализация Примечания
умножений сложений умножений сложений
1 2М 2М 2 2]log2M[+2 ]Х[ -наибольшее целое X
2 2М 2М 2 2]log2M[+2
3 2М2 М(2М-1) 2 2]log,M[+l
4 2М2 М(2М-1) 2 2]1о^М[+1
5 2М 2М-1 2 2]1о^Ы[+1
6 1 1 1 1
7 зм2 2М2 4 2 без учета эрмитовости КМП
8 зм2 2М2 4 2
9 зм 2М 3 2
10 зм 2М 3 2
Рассмотрим теперь возможности распараллеливания вычислений при реализации алгоритма (3.29), имея основной целью уменьшение времени решения задачи за счет увеличения объема оборудования и выбора оптимальной архитектуры вычислительного комплекса.
Как видно из формульной схемы алгоритма (3.29), основными типами сложных операций в этом алгоритме являются:
• скалярное произведение векторов;
• умножение вектора на число;
• умножение матрицы на вектор;
• умножение матрицы на число;
• умножение вектора-столбца на вектор-строку (умножение Afx 1 матрицы на 1 хМ матрицу).
59
Таким образом, основными операциями алгоритма являются операции линейной алгебры.
Для параллельного решения задач линейной алгебры наиболее подходит вычислительная система, содержащая М2 элементарных процессоров (при размерности матриц МхЛ/), каждый из которых предназначен для выполнения арифметических операций над двумя, подаваемыми на его вход числами [48]. Связь элементарных процессоров (ЭП) с общей оперативной памятью и между собой осуществляется специальным коммутационным устройством. Упрощенная схема вычислительной системы изображена на рис. 3.9.
Коммутатор
ОЗУ
Коммута тор
ЭПМ1
ЭПМ2
]>
&пмм
Рис. 3.9. Параллельная вычислительная система для реализации алгоритма (3.29)
При реализации на рассматриваемой вычислительной системе алгоритма (3.29) временные затраты определяются “высотой” параллельной формы соответствующих частных алгоритмов, под которыми понимается число операций, которые должны выполняться последовательно. Так, например, при умножении МхМ матрицы R/Д/] на М-мерный вектор Y [/], получается вектор АД/] с элементами
[/], ij 1, 2, ..., Л/.
Для параллельного вычисления элемента R^ [/] на вход 1 всех 9IL подаются элементы матрицы на входы 2 процессоров 9lfi}, ЭПу...ЭП^ подаются числа УД/] (j - 1,2, ..., М) и вычисля-
ется М произведений [/]?>[/] за один шаг. Затем перечисленные процессоры коммутируются для сложения полученных чисел, напри-
60
мер, по схеме сдваивания, условно изображенной на рис. 3.10. Это позволяет получить значение АД/] за Jlo^Mfonepaunft, где ].[ означает большее целое число.
... 1-й такт
... 2-й такт
... 3-й такт
Рис. 3.10. Схема сдваивания вычислений в параллельной системе
Таким образом, для вычисления потребуется одна операция умножения и ]log2M[ операций сложения. “Высота” параллельной формы алгоритма в этом случае равна h ~ ]log2A/[ + 1. Другие элементы вектора АД/] вычисляются аналогично и одновременно с вычислением элемента АД/]. Элементы вектора АД/] вычисляются по рассмотренной схеме после вычисления вектора АД/].
Если теперь рассмотреть выполнение всех других операций алгоритма (3.29) на параллельной вычислительной структуре, изображенной на рис. 3.9, получим результаты, приведенные в таблице 3.1 (колонка — параллельная реализация). Из таблицы следует, что в рассматриваемом случае параллельной обработки для реализации одной итерации алгоритма (3.29) необходимо последовательно выполнить 24 операции умножения и 10 ]log2JVf[+16
операций сложения. “Высота” рассматриваемого алгоритма (снова при условии одинакового времени выполнения операций умножения
h(N)
10
10
10
Последовательная обработка
Параллельная обработка
N
4 8 12 16
Рис. 3.11. Сравнение числа операций при параллельной и последовательной обработке
61
и сложения), т. е. число шагов, которые необходимо выполнить последовательно, в данном случае равно
hp~ 10]1о^М[ + 41.
Сравнение числа операций при выполнении одной итерации алгоритма (3.29) на последовательной и параллельной вычислительных структурах приведено на рис. 3.11.
Из графиков, приведенных на рис. 3.11, следует существенное преимущество параллельной реализации алгоритма рекуррентного вычисления вектора весовых коэффициентов при адаптации АР.
В заключение отметим, что при параллельной обработке необходимо увеличить на М2 числа ячеек оперативной памяти для хранения результатов промежуточных вычислений.
62
Глава IV
ПРИМЕНЕНИЕ МЕТОДОВ МАТЕМАТИЧЕСКОЙ
РЕДУКЦИИ И ПАРЕТО-ОПТИМАЛЬНОЙ
ИНТЕРПОЛЯЦИИ ДЛЯ ПРОСТРАНСТВЕННОЙ
ОБРАБОТКИ СИГНАЛОВ В ПОМЕХАХ
4.1. Математический аппарат оптимальной редукции как методическая основа алгоритмизации задач цифровой пространственной обработки информации в радиолокации [88, 89, 106, 154, 155]
Рассмотрим структурную схему канала радиолокационных измерений (рис. 4.1), включающую объект наблюдения (О), среду распространения радиоволн (СрРРВ), измерительный комплекс (прибор), под которым понимается РЛС с цифровой антенной решеткой (сокращенно ЦАР) и специализированный вычислительный комплекс (сокращенно ЭВМ). В соответствии с этой схемой результат наблюдения объекта можно представить в виде
Y = АХ + V,
(4Л)
где: Y е Сп, X g С"1 ~ векторы п- и m-мерных, соответственно, комплексных пространств;
А — комплексная матрица размерности пхт\
V — случайный элемент из Сп с нулевым средним и известным корреляционным оператором
M(V) « 0, Af(W*) = R, detR # О,
где: * — знак эрмитова сопряжения;
М — символ математического ожидания.
Как следует из (4.1), параметры объекта (О) не являются непосредственно наблюдаемыми, т. е. не измеряются в “чистом виде”. Наряду с данными о среде они содержатся в сигнале X, поступающем на вход прибора. В выходном сигнале Y характеристики объекта присутствуют в еще более искаженном виде, обусловленном свойствами измерительного прибора А и искажающими действиями шумов (погрешностей измерения).
В простейшем случае линейная математическая модель схемы измерения (4.1) задается парой операторов [A, R], причем А задает математическую модель измерительного прибора, а корреляцион-
63
ный оператор шума R — математическую модель погрешности измерений V; пара [A, R] описывает процесс измерения (4.1) в целом, причем если А I (I — единичная матрица), имеет место случай косвенного измерения, а при А = I — случай прямого измерения.
[A, В, В]
Рис. 4.1. Структурная схема канала радиолокационных измерений
В рассматриваемой постановке задача оптимальной обработки результатов наблюдения состоит в том, чтобы с помощью математических преобразований привести вектор Y к такому виду, какой он имел бы на выходе заранее заданного прибора высокого качества, мало искажающего сигнал X. Такая задача получила название задачи математической редукции результатов наблюдения к выходу с заданного прибора [88].
Запишем линейное преобразование Y с помощью некоторого матричного оператора В = ..., Bj| в виде
BY - В(АХ + V) - ВАХ + В1Л (4.2)
Предположим, что нам удалось найти такой оператор В, который для любого X g Ст действует следующим образом:
ВАХ - ПХ.
(4.3)
Тогда результат математической обработки сигнала Y — сигнал BY, равен выходному сигналу прибора П, представляющего собой комплекс “ЦАР + ЭВМ”, на вход которого подан сигнал X.
Таким образом, мы пришли к постановке задачи редукции: для конечномерного вектора параметров требуется найти оператор В, удовлетворяющий уравнению
ВА = П.
(4.4)
Если оператор В найден, то, умножив Y на В слева, мы решим задачу редукции, т. е. преобразуем Y к виду, какой имел бы выходной сигнал прибора П, искаженный шумом BV. Если уравнение (4.4)
.64
разрешимо, то, вообще говоря, оно может иметь множество решений {В}, отличающихся друг от друга тем, что каждому из них будет отвечать свой уровень шума В^ на выходе прибора ВА - П.
Естественно поставить задачу редукции к прибору П, обеспе-
чивающему минимальное значение мощности выходного шума Af||Bv|2.
Математическая форма записи такой задачи следующая:
min{M||Bvj|2 /ВА=П П = const} в ' ’
(4.5)
Рассмотрим пример решения в данной постановке задачи редукции к так называемому идеальному прибору. Условимся считать, что идеальный прибор задается единичной матрицей размерности тхт
Поэтому результат редукции к идеальному прибору, в точности воспроизводящему полезный сигнал, должен иметь вид
r] = BY = X + Bv,
где матрица В размерности тхт удовлетворяет уравнению
BA = I.
При этом должно выполняться условие (ограничение)
М |Bv 2 = min t которое для рассматриваемых исходных данных
сво-
дится к ограничению
tr(BRB *) —> min .
В
Решение поставленной задачи существует и имеет вид (при
R=ct2vI« ) :
В = (A*A)’1 A*, M||Bv||2 =avtr (А* А)4 ,
X (A*A)-‘A*Y.
(4.6)
Это решение совпадает с решением аналогичной задачи методом наименьших квадратов [52]. Однако такое решение задачи редукции
65
удовлетворительно лишь в случае низкого значения мощности шума, характеризуемого значением а2. В самой же постановке задачи редукции к прибору, обеспечивающему выполнение уравнения ВА - П (в том числе и при редукции к идеальному прибору, удовлетворяющему уравнению BA = I), уровень шума не контролируется и не ограничивается, следовательно, может оказаться даже таким, что в шуме будет замаскирован полезный сигнал.
Рост шума при решении задачи (4.6) отражает тот факт, что в интегральном уравнении Фредгольма Pro рода, из которого получено векторное уравнение (4.1), решение X сильно зависит от ошибок измерения, иначе говоря, неустойчиво по Адамару [104]. Неустойчивость проявляется в том, что малые ошибки в задании элементов матрицы А или неконтролируемые изменения ошибок измерения v могут привести к сколь угодно большим ошибкам в решении задачи редукции (4.6).
Таким образом, при синтезе методом редукции прибора ВА, в точности тождественного заданному прибору П, мы можем не получить удовлетворительных результатов по следующим причинам:
• уравнение В А = П не всегда разрешимо;
• если уравнение В А «П разрешимо, то шум Bv может оказаться настолько большим, что в нем “утонет” полезный сигнал ПХ;
• решение задачи неустойчиво по отношению к ошибкам в задании элементов матрицы А.
Чтобы исключить перечисленные недостатки, откажемся от равенства ВА - П в задаче редукции (4.2) и выберем матрицу (оператор) В так, чтобы прибор (преобразование) ВА был достаточно близок (но не равен) прибору П и, в то же время, шум BV на выходе был ограничен на некотором приемлемом уровне.
Запишем тождество
BY = ВАХ + Bv = ПХ + (ВА - П)Х + Bv
(4.7)
Вектор BY можно теперь рассматривать как сигнал на выходе прибора П, искаженный шумом Bv и ложным сигналом (ВА - П)Х, а задачу оптимальной редукции решать как вариационную задачу, если задать допустимый уровень шумов в на выходе и выбрать такое преобразование В, которое обеспечивает минимальный ложный сигнал для любого входного сигнала X, т. е. выбрать В так, чтобы элементы матрицы С ~ ||ВА - П|| были как можно ближе к нулю. Математически это условие записывается в виде
mm{||B А - П||2 / М||В v||2 < 8,
П = const} - р . £
(4.8)
Пусть В6 — решение задачи (4.8). Тогда сигнал B6Y можно рассматривать как выходной сигнал прибора ВеА, отличающегося от заданного прибора П на величину рв, причем шум на выходе прибора В А ограничен величиной M||Bev||2 < s.
66
В отличие от задачи (4.6), здесь вместо равенства ||ВА - П|| = О требуется максимальная близость ВА к П при заданных ограничениях. Поэтому задача (4.8) разрешима даже в случаях, если среди элементов
А.. матрицы А есть нули. Для ее решения используется метод неопределенных множителей Лагранжа. Окончательные результаты решения имеют вид [88]:
Bg(a) = ПА*(АА* + aR)-1, a = ag, 0<8<е0, (4.9)
где a = ae — единственный корень уравнения tr[IIA*(AA* + a R)-2AII*] - 8.
При этом интенсивность шумового фона
h (а, В) = tr[B (a)RB ‘(a)] = 1 ’ , (4.10а)
| OO j Cr to
а коэффициент смещения оценки
<р (а, В) = tr[(B (a)A - П)(Ве(а)А - П)‘], (4.106)
а = а , 0 < £ < е„. s' 0
Редукция, определяемая уравнением (4.8), называется смещенной. При этом между А (а, В) и ф (а, В) при 0<а<оо существует зависимость, выражаемая законом сохранения [154].
dhe (а, В) </фЕ (а, В) а------------1----------
da da
(4.11)
Совокупность параметров /ге(а, В) и ф (а, В) называется оперативной характеристикой модели [A, R, В] в задаче редукции (4.8) и может служить паспортом комплекса “ЦАР + ЭВМ”, так как полностью характеризует качество редукции, которое при прочих равных условиях тем выше, чем меньше значение коэффициента смещения Фе(а, В) при заданном уровне интенсивности шумового фона hz(a, В) в диапазоне от 0 до Ео.
Таким образом, решение задачи смещенной редукции в рассматриваемом случае имеет вид
BY=ПХ=ПА* (АА* +aR)-' Y,
(4.12)
и является единственным.
67
В более общем виде задачу оптимальной редукции для линейной модели можно решать как задачу Парето одновременной минимизации интенсивности шумового фона Ле(а, В) и коэффициента смещения оценки <р (а, В), т. е, £
Л(а, В) = min , ф(а, В) = min . в в
Ее решение по форме совпадает с предыдущим (4.9)
В(а) = ПА*(АА* + ocR)1, 0 < а < оо, (4.13)
с тем отличием, что теперь определен целый континуум решений Ва, определяемый равенством (4.13).
На рис. 4.2 и рис. 4.3 изображены графики h(a) и <р(а) как функции параметра а, который в данном случае называется параметром Парето.
Рис. 4.2. График h = Да)
<р(а)
Рис. 4.3. График <р -f(oc)
Объединение уравнений
h = А(а)
1<р = <р(а) в виде ф = ^>’ 0 - а < 00 представляет собой оперативную характеристику парето-оптимальной редукции в параметрической форме (рис. 4.4).
Кроме рассмотренных для выбора параметра а существует ряд других подходов [155]:
•по принципу равномерной оп-
Рис. 4.4. График ф -ДА)
тимальности, когда
а = arg min й(а, В) + ф(а, В) J; а
•по принципу справедливого компромисса, когда а = arg min[/z(a, В), ф(а, В)];
а
68
•по принципу гарантированного результата, когда
а - arg min тах[й(а,В), ф(а,В)]; а
•по принципу Эльдорадо, когда
а = arg тт[й2(а,В) + Ф2(а,В)]. а
Для выбора параметра Парето а может быть также использована любая априорная информация об оцениваемом параметре, которая дает возможность определить а как решение некоторого уравнения, составленного на основе априорной информации.
В результате краткого рассмотрения математического аппарата редукции измерений можно сделать следующие выводы.
1. Математический метод редукции обеспечивает получение устойчивых приближенных решений операторного уравнения (4.1) за счет отказа от точного соответствия между выходным сигналом редукции и выходом с заданного (гипотетического) прибора. Параметр а выбирается однозначно, что выгодно отличает этот метод от классического метода регуляризации некорректных задач по Тихонову [104].
2. Решение задачи обработки результатов измерений методом смещенной редукции позволяет за счет минимального и контролируемого отклонения решения от точного значения X получить существенное подавление шума измерительного прибора. Это, вообще говоря, известное из теории статистики явление в данном случае проявляется непосредственно как один из показателей качества комплекса “ЦАР + ЭВМ”.
4.2. Пространственная цифровая обработка сигналов на выходе ЦАР методом оптимальной редукции
4.2,1, Постановка задачи
Рассматривается линейная приемная ЦАР, на вход которой поступают колебания п независимых источников мешающих излучений с координатами x.,is 1, ...Ди комплексными амплитудами U. ~ M.expOV). Совокупность принимаемых сигналов записывается в виде
(7(х)=ХЦХх-х,), *,eD,.
ы
где D — наблюдаемое пространство, 3()— символ Кронекера.
69
Прием производится 2п+1 -элементной линейной антенной решеткой с характеристиками направленности элементов
g.(.r), к = -п,О,п, где х = — d sin 0 , %
0 — угол, отсчитываемый от нормали к АР и характеризующий направление прихода принимаемых колебаний (рис. 4.5).
Процессор простра нственной обработки сигналов
Рис. 4.5. Модель наблюдаемого процесса для пространственной обработки сигналов
При d = Хд/2 , где \ — длина волны, координата х = nsinQ и принимает значения в диапазоне D е[ -л, л]. На выходах приемных рецепторов фиксируются данные наблюдения Yk на фоне аддитивной помехи vk. Комплексные амплитуды выходных сигналов с элементов АР представляются в виде
N
И = 3(х-х, )gk(x)dx+vk’ к = - п,..., п.
Вектор комплексных амплитуд сигналов на выходе АР равен
У = [g(x)U(x)cir + v , (4.14)
D,
где: Y = ||У_ я... Уо... Уя||г — ((2м+1)х1)-вектор результатов измерений;
g(x) = ||g_n(x)... g0(x) ... g„(x)||r- вектор диаграмм направлености рецепторов;
v = ||v_o ... v0 ... vj|r, M[v] = 0, M[vv*] “ R, detR 0.
70
Таким образом, в рассматриваемом случае исходной линейной математической моделью наблюдаемого процесса, подлежащего редукции, является уравнение (4.14).
Задача пространственной обработки принимаемых АР колебаний состоит в данном случае в обнаружении-разрешении априори неизвестного числа N сигналов (источников излучения) и оценивании их коодинат х.. Эта задача эквивалентна классической задаче оптимальной обработки пространственно-временных сигналов. В главе IV сформулированная задача решается методом оптимальной редукции результатов измерений к выходу с прибора с заданной диаграммой направленности, обеспечивающей высокую пространственную разрешающую способность.
4.2.2. Оптимальная редукция принимаемых сигналов к выходу ЦАР с диаграммой направленности заданной формы
Для решения поставленной задачи можно воспользоваться методом так называемого цифрового сканирования, при котором “обзор” области Dx е [—71, л] осуществляется последовательно с помощью непересекающихся “окон” (стробов) [х, - X, х;+Х] шириной 2К, где х,= -л+(2/ - 1)Х, I = 1,..., q, q = тс/Х. Полученные в каждом Лом “окне” данные редуцируются к выходу приемного устройства с диаграммой направленности шириной 2Х у основания. При редукции могут быть применены диаграммы направленности с прямоугольной, треугольной, косинусоидальной и другими формами.
В рассматриваемом случае решается задача редукции к прибору с прямоугольной диаграммой направленности, записываемой в виде
Функцию тг.(х) (рис. 4.6, график 1) будем считать характеристикой направленности гипотетической антенной решетки в направлении xf Размер “окна” 2Х определяется, исходя из требуемой разрешающей способности гипотетического решающего прибора при обнаружении и оценке числа источников излучения. “Обзор” области Dx с помощью характеристики направленности 7tz(x) осуществляется последовательно (одним прибором) или параллельно совокупностью q приборов так, чтобы участки Dx не пересекались.
При параллельном обзоре математическая модель прибора представляется вектором
П(х) = ||т1 (х) ... л.(х) ... тс (х)||7’ .
1 I q
71
В дальнейшем рассматривается “обзор” одним прибором л;(х). Для этого вектор Y комплексных амплитуд выходных сигналов элементов АР редуцируем к выходу с прибора я/х), выполнив линейное преобразование уравнения (4.14) с помощью вектор-строки весовых коэффициентов W=|| W, ||” . В результате получим [60]
/С
WY= Jw£ U;g(x)<fc + Wv = Dx 7=1
= (x)dx + J^t7y[Wg(x)-K/(x)]<& + Wv.
(4.15)
В дальнейшем, учитывая независимость источников излучения и принятый метод обзора, положим N = 1. Координаты и интенсивность излучения единственного источника обозначим х и /7(х). Тогда вместо (4.15) получим
WY = (x)U(x)dx + j[Wg(x) - я, (x)JJ(x)dx + Wv, (4.16) Dx Dx
где Wg(x) = ftz(x) — синтезированная диаграмма направленности АР для каждого дискретного значения координаты х1 в зоне обзора. Примерный график такой диаграммы направленности изображен на рис. 4.6 (кривая 2).
1
Рис. 4.6. Диаграмма направленности “редуцированной” АР
Выражение (Wg(x) — 7tz(x)] определяет меру отклонения (невязки) синтезированной диаграммы направленности (х) = Wg(x), (х = х,+ X) от диаграммы направленности п(х) гипотетической антенной решетки.
Оптимальную оценку х координаты х будем определять путем условной минимизации среднего значения квадрата невязки, т. е.
<p(w) = | Wg(x) - л, (х) dx —> min, J JV
Dx
72
при фиксированном пороге шумового фона
A(W) = M(||Wv||2) = /r(WRW*) < е -Z(W,a) =
= J[ Wg(x)g * (x) W * -itj (x)g * (x) W* - Wg(x)7t/ (x)+(x)||2 ]dx+
+a[/r(WRW‘)-s] = 0.
Ее производная по оцениваемым параметрам равна
a) ~ f(2WG'(x)-2n(x)g * (х)+ 2aWR)tic = 0 . (4.17) б/W r?
= /r(WRW *) = e , da
где G'(x)= g(x)g*(x).
(4.18)
Из уравнения (4.17) получаем
где
wopt = Q/G + aR)->,
(4.19)
Dx
а а находится из решения уравнения
OfWJ'TCW) - е (4.20)
В дальнейшем конкретизируем уравнение (4.19) для случая, когда диаграмма направленности рецепторов АР описывается выражением g(x) = exp(-jfcc), k~-n,..., 0,.... п, а сигналы U.статистически
независимы, т. е. R = diagc* .
При этом:
диагональные элементы (2п + 1)х(2и + 1)-мерной матрицы G
остальные ее элементы равны нулю;
73
множитель
X.+А. .. Х,+к . ТА
f / ч / ч j If / ./ ч J /о 4Sin«A
= J*/ (x)g'k(x)dx=— J exp(-jkx)dx=exp (-/Ax,) —- (4 21 у
„ * Л/v
В окончательном виде выражение для к-й компоненты вектора-строки оптимальных весов
W _ ехр(- jkxt) sin кк ,к (2л + аст I) кк
(4.22)
а результаты редукции вектора измерений Y к выходу с прибора я;(х) с прямоугольной диаграммой направленности представляются выражением:
«уч/ xh < -1 xSinirX
WY = > -----------exp(~jkx,)------ (Л23)
£,(2я + ас?) кк ’
При этом синтезированная диаграмма направленности прибора записывается в виде
7tz(x) = Woptg(x) =
ехр[ -jk(x - xz )] (271 +ас О
(4.24)
Поточечная операторная невязка, характеризующая отклонение синтезированной диаграммы я, (х) от идеальной я, (х) вычисляется по формуле
<р[я, (х) - л, (х)] =
sin кк ехр[-jk(x - xz)] 1
кк (2% + aoj?) 2к
(4.25)
Анализ выражения (4.24) показывает, что ДН, полученная в процессе редукции данных линейки рецепторов с диаграммами направленности g/x) = exp(-/Ах) к выходу с прибора я, (х) с прямоугольной огибающей отличается от n-й частичной суммы ряда Фурье, которой описывается суммарная ДН линейки изотропных излучателей наличием двух множителей:
. «множителя (sin кк)/кк , называемого множителем спектрального окна, который корректирует ядро Дирихле, подавляя боковые лепестки;
• множителя (2я+аст*)“', который уменьшает шумовую компоненту, вносимую Yh до уровня
sin кк кк ,
ас
74
Таким образом, оптимальная редукция данных к выходу с выбранного прибора наряду с обеспечением требуемой разрешающей способности решает проблему уменьшения уровня боковых лепестков и шумового фона на выходе ЦАР.
В заключение отметим, что кроме прямоугольной ДН при оптимальной редукции могут быть применены гипотетические ДН других типов. К ним относятся:
•параболическая ДН с шириной 2Х у основания, определяемая выражением
Я/(*) =
(4.26)
синтезированная диаграмма направленности в этом случае вается в виде
записы-
sin kk . Л
---------cos kk kk
ехр[-Д(х~х,)]
(4-27)
• косинусоидальная ДН с шириной 2Х у основания, определяемая выражением
Ttj (х) =
7CCOS
(я/2Х|х-х; )/4% x-xj <k
0. lx-x/l>X
синтезированная диаграмма направленности в этом случае имеет вид
я2 cos kk ехр[ - jk(x - xz )]
^пл2 - 4£2X2 (2% + aa^) * (^^9)
Из выражений (4.27), (4.29) следует, что параболическая и косинусоидальная синтезированные диаграммы, как и прямоугольная, обладают корректирующими ядро Дирихле свойствами, обеспечивающими уменьшение боковых лепестков и шумового фона ДНЦАР.
423. Обнаружение, разрешение и оценка координат источников излучения
В Х-окрестности точек х, цифрового сканирования функция W;Y имеет локальные максимумы, количество которых определяется числом полезных (отраженных от наблюдаемых целей) и мешающих сигналов на входе АР. Поэтому результаты редукции, представленной комплексными амплитудами ц,, являются исходными сигналами для решения задач обнаружения, разрешения, распознавания и оценки координат источников излучения.
п
75
Укрупненная структурная схема алгоритма пространственно-временной обработки сигналов в рассматриваемом случае представлена на рис. 4.7.
Рис. 4.7. Структурная схема алгоритма пространственно-временной обработки сигналов
Основными блоками этой схемы являются:
1. Блок формирования вектора весовых коэффициентов W/ = W* "
W/=l|FFrf для каждой точки цифрового сканирования хг Если точки рассчитаны заранее и, кроме того, известны (выбраны) значения а и а,, то весовые коэффициенты также могут быть вычислены заранее и храниться в ЗУ ЦВМ.
2. Блок взвешивания комплексных амплитуд сигналов на выходе рецепторов АР в соответствии с правилом
п
п
(4.30)
к~-п
76
Результаты взвешивания могут быть отнесены ко всему интервалу 2Х с центром в точке х{ или к середине интервала, т. е. непосредственно к точке хг
Операции блоков 7 и 2 представляют решение задачи пространственной обработки (фильтрации) выходных сигналов рецепторов АР методом математической редукции. Эти операции можно выполнять параллельно, сразу для всех q направлений, назначенных для редукции в зоне обзора Dx> или последовательно, проходя все направления х„ рассчитываемые по формуле к
х^-п + (21 - 1)Х; /-1,^, q=n/‘k)
или даже с дискретностью меньше xt для уточнения структуры редуцированного сигнала внутри интервала ±Х. Очевидно, в первом случае необходимо иметь q вычислительных каналов с умеренной производительностью, а во втором — можно обойтись одним каналом, но требования к его производительности существенно возрастают.
3. Блок обнаружения, оценки координат и амплитуд сигналов на выходе фильтра пространственной обработки. В классической постановке перечисленные задачи решаются методами теории проверки статистических гипотез и максимального правдоподобия. Эти методы, естественно, должны использоваться и в рассматриваемом случае. Однако, для выбора порога обнаружения здесь необходимы дополнительные исследования статистики помех (шумов, отражений от подстилающей поверхности, ХИП и др.) на выходе рассматриваемого фильтра пространственной обработки.
4. Блок межпериодной временной обработки сигналов, состоящей в накоплении и сравнении результатов ряда разнесенных во времени операций пространственной обработки и обнаружения сигналов с целью оценки числа N, координат $ и распознавания обнаруженных источников излучений.
Необходимо иметь в виду, что при цифровом сканировании (“обзоре”) оперируют с информацией, полученной (снятой) с каждого рецептора АР, т. е. на каждом шаге цифрового сканирования используются данные всех 2n+1 рецепторов. Поэтому в рассматриваемом методе обработки чрезвычайно важным является организация процесса обзора £>х.
При сканировании с максимальной разрешающей способностью (с минимальным X) процесс обзора затягивается и для его реализации в ограниченное время потребуются большие вычислительные затраты. Поэтому для сокращения времени и вычислительных затрат процесс обзора целесообразно разделять на ряд этапов (шагов). Сначала реализуется сканирование с небольшим q (с большим X) на-всем интервале [-л, л]. На участках зоны, где выходной сигнал превышает порог, организуется повторное сканирование с использованием тех же данных, но с меньшим X и т. д. до тех пор, пока не будет получено решение с требуемой точностью и разрешающей способностью.
77
На рис. 4.8 приведены результаты вычислительного эксперимента по цифровому сканированию интервала [-л, л], в котором расположены два точечных источника с координатами 0, х2= 0,5 и амплитудами 10, и2== 5 при п = 32 без помех (графики а, Ь> с) и с 5% погрешностью в данных (графики а’, 6', d). Ширина синтезируемых прямоугольников диаграммы определялась величиной 2Х = 2л/<? для q = 8, 32, 64.
Рис. 4.8. Результаты вычислительного эксперимента по цифровому сканированию двух точечных источников излучения
78
Из приведенных графиков следует, что в результате первого этапа цифрового сканирования с q = 8 (% « 0,4) можно сделать вывод о наличии излучений в центральной части зоны. Перейдя к зондированию в узкой зоне сначала с q - 32, а затем с q = 64 можно разрешить и оценить координаты лоцируемых источников излучения с точностью ±Х . = л/6 4 » 0,05. mm 7 ’
На рис. 4.9 представлены аналогичные результаты вычислительного эксперимента для случая п = 32, X = 0,06, когда в интервале [-л, л] расположены 5 источников излучения с координатами. xt= -2,3; х2 = -2; х3 = 0; х4 = 0,5 и х5 = 0,8; амплитудами 10; и2 = 2; и3= 7; м4 = 12; и5- 1. В отличие от рис. 4.8, где результаты редукции отнесены ко всему интервалу ±Х и изображаются прямоугольниками; на рис.' 4.9 эти результаты относятся к центру интервала ±Х и изображаются вертикальными линиями соответствующей амплитуды.
14 II
—2,3 -2,0
1кш1
О 0,5 0,8
Рис. 4.9. Результаты цифрового сканирования пяти источников излучения
Величина X, а следовательно, и соответствующая разрешающая способность редукции, ограничиваются снизу числом элементов АР и уровнем шумового фона в них. При малых п величина операторной невязки велика и редуцированная диаграмма направленности ЦАР далека от прямоугольной. С увеличением числа элементов решетки . (п оо) редуцированная диаграмма может быть сделана сколь угодно близкой по форме к прямоугольной даже для малых X.
Таким образом, рассматриваемый метод формирования диаграммы направленности ЦАР в принципе обеспечивает возможность повышения разрешающей способности измерителя (в частности РЛС с ЦАР) сверх релейного предела.
79
4.3. Формирование диаграммы направленности ЦАР с провалами в заданных направлениях
... wn... w -л 0 п
min w
Метод и результаты синтеза диаграммы направленности ЦАР при оптимальной редукции данных линейки рецепторов к выходу с заданного прибора обсуждались в п. 4.2.2. Здесь задача диаграммо-образования усложняется дополнительными ограничениями на синтезированную диаграмму, в частности необходимостью формирования нулевых провалов в заданных направлениях.
Математическая постановка задачи синтеза таких ДН при условии, что все ранее сделанные обозначения и предположения остаются в силе, состоит в следующем.
Решая задачу Парето, определить вектор W = ||W который минимизирует функцию невязки
<p(W) = f||Wg(x)- Ki (х)|| dx
Dx и уровень шумового фона й( W) = М[( Wv)2 ] = tr( WRW) -> min
и, кроме того, синтезированная диаграмма должна иметь нулевые значения (нули первого порядка) в точках (направлениях) xv хт, т. е. вводится дополнительное ограничение
Wg(x.) = 0; j=l,2, т.
Решение поставленной задачи связного экстремума, как и прежде, содержится в точке минимума функции Лагранжа. Функция Лагранжа сформулированной задачи Парето в этом случае имеет вид
£( W, а, ) = WGW* - ng* W - W(IIg* )+[nz (х)]2 +
т
wgW, (4.31)
= jir, (x)g* (x)dx,
где
G = jg(x)g* (x)dx
и поиск ее минимального значения не вызывает затруднений. Для этого достаточно вычислить градиент и найти стационарные точки, поскольку это квадратичная функция, и она имеет единственный минимум.
Уравнения, определяющие стационарные точки имеют вид
— = 2WG-2ITg* -2aWR+ У = О
dW
(4.32)
%, -Wg(x'’=°-
80
Из первого уравнения определяем
W =
(4.33)
а для определения используется второе уравнение
(4.34)
для которой G = 2л/, R = diag
Конкретные результаты вычислений для линейной эквидистантной решетки рецепторов с ДН gk(x) = exp(jfa), k — -п,О,п, и т = 1 с учетом, что идеальная диаграмма направленности при редукции
л, (х)
1/2Х, ! °-
х- xt х-х.
получены в виде (провал формируется в точке х,)
Wg(x) = я, (х) =
у ехр[Д(х-х,)] к--п (2л + аоЦ
sin кк кк
(4.35)
Пример синтезированной ДН с нулем первого порядка в точке х^ 0,1 при X = 0,3, п = 100, Х/=0 приведен на рис. 4.10а. Аналогичный график при п = 100, А, = 0,03 приведен на рис. 4.106.
Совершенно аналогично ставится и решается задача синтеза диаграммы направленности 7tz(x) с нулями второго порядка в заданном направлении хр ..., хт, в которой равны нулю не только функция g(xz), но и ее производная g'(xz).
Для синтеза такой диаграммы достаточно решить задачу связного экстремума, сформулированную в виде
j||Wg(x)-7tz(x)||2<&
min w
trWRM' ->min
Wg(Xj) = 0
Wg'(x7) = 0
(4.36)
j = 1,2,..., m
Рис. 4.10. Синтезированная ДН АР с нулем первого порядка в точке х, 0,1
Функция Лагранжа в этом случае имеет вид
Z(W,a,Py,Yi) = WGW * -Hg * W - W (ng*) + (л, (x))2 +
+aWRW*+^₽JWg(xy)+£YJWg'(x7);
а уравнения, определяющие стационарные точки, записываются так: ^L = 2WG-2ng*-2aWR + X₽7g*(^) + EYi^*(x>) = 0’
—=wg(x7)=о
= Wg'(xJ)=о. dlj
Из первого уравнения определяем
для отыскания р. и yj используется второе и третье уравнения
а
82
“I
(4.38)
* —
Для данных направленности
эквидистантной линеинои решетки с диаграммой
g(x) - [e-jkx,
G = 2л/, R « diago^, т = 1, п^х) = 1/(2Х)
после громоздких, но несложных, выкладок получено выражение для синтезированной диаграммы направленности с нулем второго порядка в направлении х{ в виде
ехр[ Д(х - х; )] (2л + аст^)
A sin кк г , A ехр[ j'k(х - х,)]
/ —— ехрГ/Нх, -Х/)]> ——-------------------
*£ U 1Л£„ (2л + ао?)
(4.39)
ri sin кк г , -А к exp[jk(x - х,)]
-ПЙГеХР[Л(Х1 ~Х')]£ + ..
'-п к*-п {ZJt 4-OCG^}
Рис. 4.11. Синтезированная ДН АР с нулем второго порядка в точке х{ 0,1
83
Примеры синтезированной диаграммы с нулем второго порядка приведены на рис. 4.11. При этом использовались данные, аналогичные случаю формирования диаграммы с нулем первого порядка (Ху в 0,3; * 0,003; п « 100; xt в 0; xt = 0,1).
Таким образом, применение цифрового сканирования с использованием парето-оптимальной интерполяции линейных функционалов в гильбертовом пространстве [155] и метода редукции измерений к выходу с прибора с заданной диаграммой направленности [154] позволяет сформировать ДН АР с нулями (провалами) первого или второго порядка в направлении х, воздействия мешающего источника излучения, т. е. решить оптимальным образом одну из основных задач пространственной обработки сигналов.
4.4. Принципы построения алгоритма пространственной обработки сигналов в ЦАР методом оптимальной редукции
В общем случае, с использованием рассмотренных в главе математических методов редукции и парето-оптимальной интерполяции, задачи пространственной обработки сигналов с компенсацией мешающих отражений (активных помех) решаются в два этапа. На первом этапе решаются задачи обнаружения, разрешения и оценки угловых координат источников мешающих излучений, а на втором — задача пространственной обработки отраженных от цели сигналов с использованием результатов первого этапа. Укрупненная структурная схема алгоритма цифровой обработки информации в рассматриваемом случае приведена на рис. 4.12.
Для решения задач первого этапа (блоки У, 2 на рис. 4.12) производится одна или несколько независимых выборок напряжений на оцифрованных выходах рецепторов антенной решетки (АР). Эти выборки должны быть получены из области, в которой полезные сигналы отсутствуют, непосредственно перед излучением очередного зондирующего сигнала, т. е. Y/n = Y(£ > t3 гаах), где t3 max ~ время задержки отраженного сигнала, соответствующего максимальной дальности обнаружения РЛС. Амплитуды Uj и координаты ху полученных выборок запоминаются и являются в дальнейшем исходной информацией для реализации всех операций первого этапа обработки, рассмотренных в п. 4.2.3. Выходными данными первого этапа являются оценки числа N и координат х. обнаруженных мешающих источников излучения (активных помех).
Не без основания можно предположить, что за время съема и обработки данных на первом этапе координаты источников мешающих излучений и коэффициент усиления АР в направлении на эти источники изменяются незначительно и ими можно пренебречь. Поэтому рассмотренная в п. 4.2.3 процедура поиска и уточнения
84
координат источников мешающих излучений может выполняться с частотой, по крайней мере не превышающей частоту посылок зондирующих сигналов Fn, что не создает вычислительных трудностей при цифровой реализации.
АР
Блок съема данных
Запоминающее устройство
Рис. 4.12. Укрупненная структурная схема алгоритма парето-оптимальной пространственной обработки сигналов
Для решения основной задачи второго этапа необходимо предварительно сформировать диаграмму направленности ЦАР с
“провалами” первого или второго порядка в оцененных на первом
этапе направлениях и вычислить (сформировать) (2п + 1)-мерный вектор-строку весовых коэффициентов =1 ^2) | (блок 5 на рис. 4.12). При этом надо предварительно условиться, с помощью какой по форме ДН будет осуществляться пространственная обработка
отраженных от целей сигналов. Сразу можно сказать, что между диаграммой направленности, используемой при обнаружении и оценке координат источников активных помех и диаграммой направленности ЦАР для пространственной обработки отраженных от целей сигналов
нет принципиальной непосредственной связи, хотя, конечно, синтезированную диаграмму прямоугольной формы можно использовать и на втором этапе. В этом случае ширина диаграммы 2Л. выбирается
85
из условия обеспечения заданной разрешающей способности при обнаружении радиолокационных целей.
Формирование диаграммы направленности ЦАР для второго этапа пространственной обработки сигналов можно упростить, если в качестве эталонной использовать диаграмму направленности F(x), описываемую аналитической функцией, например, F(x) (sin х)/х, кроме того, отказаться от учета шумов измерения и корректирующих свойств весового окна (sin кк)/кХ), В этом случае при формировании ДН с провалами первого порядка решается задача поиска связного экстремума функции
<р( W) = | Wg(x) - F(xf dx min
Dx
при единственном ограничении
Wg(x.)-0,
а решение получается в виде
(4.40)
где fy является решением системы уравнений
g(x)= о,
(4.41)
G = Fg*(x) = fF(x)g*(x)dx.
Dx Dx
Если F(x) — аналитическая функция, решение уравнений (4.40) и (4.41) значительно проще, чем (4.34) и (4.37).
По приведенным выше соображениям, частота вычисления весового вектора-строки W(2) не должна превышать частоту посылок зондирующих сигналов F и, следовательно, эта операция также не создает проблем при машинной реализации.
Основной и наиболее трудоемкой операцией второго этапа пространственной обработки сигналов методом редукции является операция формирования выходных сигналов пространственного фильтра Н = W(2)Y(2) в каждом периоде td временной дискретизации отраженных сигналов. Например, для направления xt по угловой координате и интервала mtd по времени задержки отраженного сигнала при формировании ДН с одним провалом первого порядка в направ
86
лении хр выходной сигнал пространственного фильтра вычисляется по формуле
гт V4» Y* sin£X z ,f 4
Ht =WtmYm = >,-----------X------exp(-yfcc,)-
^„2л + (ш| k\
Yk exp( - jkx\) y1 2n + acs I k~„
sin kX r z 41
——-exp[-y£(x, -x,)] (4.42)
/СА
Очевидно, при больших П1л/Л = l/£rf=(5...1O) МГц реализация этой операции на современных СЦВМ в реальном масштабе времени является проблематичной. Потребуется упрощение алгоритма и применение методов и средств распараллеливания операций обработки.
87
Глава V
ЦИФРОВАЯ КОГЕРЕНТНАЯ ФИЛЬТРАЦИЯ И НАКОПЛЕНИЕ ИМПУЛЬСНЫХ СИГНАЛОВ
5.1. Канал временной когерентной фильтрации сигналов
В соответствии с общим статистическим подходом к решению задач обработки сигналов на фоне помех [103], в канале время-частотной фильтрации принимаемых колебаний должны решаться следующие задачи (рис. 5.1).
Uc[k]
Us[k]
Согласованная фильтрация когерентных сигналов
Когерентная компенсация пассивных помех
Накопление сигналов
Рис. 5.1. Последовательность операций время-частотной обработки сигналов
1. Временная внутрипериодная обработка принимаемых когерентных сигналов, включающая нелинейную обработку (ограничение, логарифмирование и т. д.) и согласованную фильтрацию или корреляционную обработку. В дальнейшем в данном разделе рассматривается только решение задачи согласованной фильтрации широкополосных импульсных сигналов.
2. Межпериодная компенсация коррелированных во времени помех, обусловленных отражениями от подстилающей поверхности, местных предметов, гидрометеоров (облаков, дождя, тумана и др.) и специально созданных мешающих отражателей. Такие помехи получили название пассивных помех. Основным способом компенсации пассивных помех является селекция лоцируемых объектов по доплеровскому смещению частоты отраженных сигналов относительно частоты зондирующего сигнала. Такой способ компенсации помех получил название селекции движущихся целей (СДЦ). Принципам построения и оценке качества цифровых систем СДЦ (ЦСДЦ) в главе V уделено основное внимание.
3. Когерентное (или некогерентное) накопление сигналов на выходе режекторного фильтра СДЦ и формирование некоторой статистики о фильтруемом процессе, на основе которой принимается решение об обнаружении и оцениваются информационные параметры полезного сигнала. В главе основное внимание уделено решению
88
задачи когерентного накопления сигналов с неизвестной доплеровской поправкой частоты фильтровыми схемами на основе ДПФ (БПФ).
В процессе объединения блоков, изображенных на рис. 5.1, в канал когерентной обработки сигналов потребуется ряд вспомогательных, но весьма существенных операций (компенсация боковых лепестков автокорреляционной функции сигнала на выходе согласованного фильтра, взвешивание амплитуд огибающих напряжений на входе или выходе фильтра БПФ, формирование пачек сигналов и др.). Эти операции, по мере необходимости, будут рассматриваться в процессе решения основных задач, перечисленных в п.п. 1—3.
5.2. Статистические характеристики случайного процесса на выходе канала временной когерентной обработки сигналов
Комплексная амплитуда напряжения сигнала на выходе линейной части приемника (при условии отсутствия пространственных помех) записывается в виде
У[г] » AxX(t, 0) + л с(г, е > + N(t),
(5.1)
где:
с вероятностью рх наличия полезного сигнала, с вероятностью 1 - р ;
X(t, 0ж) — комплексная амплитуда напряжения полезного сигнала с параметрами 9 ;
с вероятностью рс наличия сигнала пассивной помехи, с вероятностью 1 - р ;
(у
C(t, 0с) — комплексная амплитуда напряжения пассивной помехи с параметрами 9С;
ДГ(0 — комплексная амплитуда напряжения шума с дисперсией .
Комплексная амплитуда огибающей напряжения одиночного отраженного от нефлюктуирующей цели сигнала на выходе линейной части приемника представляется в виде
X(t, tr, Fd) = X(t - i^exp^nf^ + ф0], (5.2)
где: X(t - tr) — амплитуда огибающей отраженного сигнала;
F^ — доплеровское смещение частоты сигнала;
t — задержка отраженного сигнала относительно зондирующего;
Фо = — начальная фаза огибающей.
При межпериодной обработке сигналов, отраженных от движущихся целей на фоне пасивных помех, используются последова
89
тельности (пачки) выборочных значений огибающей, полученных в т подряд следующих периодах зондирования Т при одной и той же задержке tr, т. е. относящихся к одному интервалу дискретизации по дальности.
Для случая приема когерентной пачки вектор нормированного полезного сигнала представляется в виде
Хт= ,* = 0, 1, 2, .... т-1, (5.3)
где; Х[£Г| - ехр[-Д<рх],
<р = 2TrFn Г — “набег” фазы сигнала за период Т.
Огибающую энергетического спектра флюктуаций отраженного от цели сигнала обычно аппроксимируют резонансной кривой [12, 69]
G. (/) =
где: /0 — несущая частота сигнала;
Д/* — ширина спектра отраженного сигнала. X
Суммарный сигнал пассивной помехи образуется вследствие наложения сигналов, отраженных от элементарных рассеивателей, каждый из которых представляет собой высокочастотный радиоимпульс той же формы и длительности, что и зондирующий. Элементарные сигналы имеют случайные амплитуду и время прихода. Образовавшийся при этом флюктуационный процесс (суммарный сигнал пассивной помехи) можно рассматривать как результат наложения неслучайных по форме сигналов, возникающих в случайные моменты времени. Распределение мгновенных значений этого процесса обычно принимается гауссовским, а распределение выборочных амплитуд огибающей Ск = C[kTj — рэлеевским с плотностью вероятности
W(C*) =
к = 0, т -1,
(5.5)
где <Уск — дисперсия (мощность) пассивной помехи.
Однако, в ряде практически важных случаев, особенно при облучении подстилающей поверхности под малыми углами скольжения (например, при локации низколетящих объектов над взволнованной морской поверхностью) для описания флюктуаций огибающей
90
пассивной помехи лучше использовать логарифмически-нормальное распределение с плотностью вероятности [12]
где: Со — медиана распределения; ~ дисперсия lgCv
(5.6)
или распределение Вейбулла с плотностью вероятности
w(Ck ) =
(5.7)
где X — параметр формы.
При X = 1 распределение Вейбулла преобразуется в экспоненциальное распределение, а при X = 2 — в распределение Рэлея.
Огибающую энергетического спектра пассивной помехи аппроксимируют либо гауссовской функцией вида [69]
(5.8)
где д/с — ширина спектра пассивной помехи, либо резонансной кривой вида (5.4) с заменой &fx , на д/с .
Выборки напряжения пассивной помехи представляются в виде дискретного коррелированного процесса с дисперсией п? и комплексным коэффициентом межпериодной корреляции
р IЛ = Рс[Лехр[7<рс], (5.9)
где: Р[7] — модуль коэффициента межпериодной корреляции пассивной помехи;
фс - 2hFdT— “набег” фазы огибающей пассивной помехи за период зондирования Т\
^dc ~~ доплеровское смещение частоты сигнала пассивной помехи.
Выборки комплексных амплитуд напряжения собственных шумов приемного канала представляются в виде дельта-коррелированного дискретного случайного процесса с дисперсией о „ .
91
В реальных условиях функционирования устройств фильтра-ции сигналов дисперсия пассивной помехи (если она есть) значительно превышает дисперсию собственных шумов аппаратуры, т. е. <Тс /<т«> 1- Поэтому при синтезе алгоритмов когерентной фильтрации сигналов составляющей шумов в выражении (5.1) обычно пренебрегают.
При совместной обработке m-мерной выборки принимаемых сигналов используется корреляционная матрица пассивной помехи, записываемая в виде
•^12
&22
R.2
Rim Rim
* «
Rjrnn
элементы которой
Ry =Oc Р[(г - £)Л> (i, к =1, m ),
(5.10)
(5.11)
где: Р[(:-Л)7] = p [(г-Л)Т]ехр[/(г-А)(р ], (512)
I*
РС[О-Л)Л — модуль коэффициента корреляции z-й и к-vi выборок пассивной помехи.
При гауссовской аппроксимации спектра пассивной помехи
Р[(/-ВД = р4Л('“)2 ехр[Лх-Л)фс]( (5.13)
где
рс[Г] = ехр
(5-14)
модуль коэффициента межпериодной корреляции пассивной помехи.
5.3. Цифровая согласованная фильтрация когерентных импульсных сигналов [15, 22, 75, 80, 82, 85]
5.3.1. Исходные предпосылки
В соответствии с общей теорией приема, оптимальная временная обработка принимаемого на фоне стационарного белого шума сигнала iz(t) сводится к вычислению корреляционного интеграла, который для
92
скалярного вещественного ожидаемого сигнала x(tt а) с известным параметром а записывается в виде
со
z(a) = [x(/,a)w(Z)df . (5.15)
Если a — параметр запаздывания ожидаемого сигнала относительно исходного х(£), то
ОО
z(a) = \x(t — a)u(t)dt.
—со
(5.16)
Выражение (5.16) аналогично интегралу свертки, описывающему реакцию линейного фильтра с импульсной характеристикой h(t) на сигнал ы($):
ОО
<;(/) = J h(t — s)u(s)ds .
—<зо
(5.17)
Эта аналогия позволяет использовать для вычисления корреляционного интеграла линейный фильтр, импульсная характеристика которого согласована с ожидаемым сигналом. Согласование сводится к выбору соответствующей импульсной характеристики фильтра, исходя из условия
g(?0 + a) = z(a). (5.18)
Для рассматриваемого случая приема сигнала на фоне стационарного белого шума импульсная характеристика согласованного фильтра зеркальна по отношению к ожидаемому сигналу [23]:
h(f) = ax(tQ -t), (5.19)
где: t0 — запаздывание максимума сигнала на выходе фильтра, которое для импульсного сигнала должно быть t0 > тх;
а — постоянный масштабный множитель;
тх~ длительность сигнала.
Если на вход фильтра, согласованного с сигналом x(tt а), поступает аддитивная смесь u(t) сигнала x(t, а) и шума n(t), то напряжение на выходе фильтра при tQ = т , в соответствии с (5.18), определяется по формуле
сО
g(Z)=a L(5')x('tx -t+s)ds. (5.20)
93
В частном случае при n(t) = О
оо
cj(f) = a |х(5)х(Тх-^ + 5)е& = а/гхх(Тх-Г), (5.21) t-^x
vn,e Rxx(yx—t) — “автокорреляционная” функция ожидаемого сигнала.
Из выражений (5.20), (5.21) следует, что выходной сигнал согласованного фильтра с точностью до постоянного множителя совпадает с взаимокорреляционной функцией входного и ожидаемого сигналов, а при n(t) = 0 этот сигнал с той же точностью совпадает с “автокорреляционной” функцией ожидаемого сигнала в момент времени (Тх - 0. Энергетическое отношение сигнал—помеха на выходе согласованного фильтра достигает величины, равной q2= 2Ex/Nn, т. е. совпадают с соответствующим отношением при корреляционной обработке [84,96]. Следовательно, согласованный фильтр — это оптимальное с точки зрения получения максимального отношения сигнал—шум устройство обработки сигналов.
Реализация аналоговых согласованных фильтров сложна, особенно для широкополосных сигналов. Кроме того, аналоговые фильтры не допускают перестройки параметров. Поэтому во многих случаях целесообразна реализация операций линейной согласованной фильтрации с помощью цифровых устройств (фильтров).
Цифровым согласованным фильтром называется цифровой фильтр с импульсной характеристикой
где п = т /td — число дискретных элементов ожидаемого сигнала. В дальнейшем для простоты положим а = 1 /td и будем считать
A(Ztrf) = х[(пх~l)td], (I = 0, 1, 2, ..., пх - 1).
Из сравнения импульсных характеристик аналогового и цифрового согласованных фильтров (СФ) следует, что принципы их работы в основном совпадают. Отличия выходных характеристик этих фильтров вызваны только дискретизацией входной последовательности и квантованием выборок.
По аналогии с (5.17) алгоритм работы цифрового согласованного фильтра (ЦСФ) может быть представлен в виде
Их ~1 Их ~~1
= S Ж/MW'J =£*[(«*(5.22) /=о /=о
94
Цифровые фильтры, реализующие алгоритм (5.22), называют нерекурсивными или фильтрами с конечной импульсной характеристикой (КИХ-фильтрами).
Если в (5.22) произвести замену переменных (п -1) - in положить = х[], получим выражение
,^[ktd] = 2 x[itd]х[к(пх -i)td] i—0
(5.23)
которое, по аналогии с (5.21), называется “автокорреляционной” функцией ожидаемого дискретизированного сигнала. Автокорреляционная функция сигнала на выходе ЦСФ имеет периодический характер по частоте. При малой частоте дискретизации сечения автокорреляционной функции могут перекрываться, что приведет к искажению выходного эффекта. Однако, если частота дискретизации выбрана в соответствии с теоремой отсчетов, эти искажения несущественны.
Как следует из (5.23), при поступлении на вход ЦСФ ожидаемой цифровой последовательности x[it.] сигнал на его выходе совпадает (с точностью до постоянного множителя atd) с автокорреляционной функцией Поскольку автокорреляционная функция симметрична относительно своего максимума TJJO], то выборки последовательности на выходе ЦСФ будут сначала возрастать и достигнут максимального значения при [AiJ = [я/J, а затем за время от п t. до 2nxtd спадут до нуля. Огибающая выходной последовательности повторяет огибающую автокорреляционной функции R [kt,]. Описанное свойство выходных сигналов ЦСФ формально совпадает с хорошо известным свойством аналоговых СФ [84].
53.2. Цифровые согласованные фильтры для свертки сигналов во временной области
Так как принимаемые радиолокационные сигналы перед дискретизацией преобразуются в две квадратурные составляющие, то реализация ЦСФ должна производиться в двух квадратурных каналах. Квадратурные составляющие входного сигнала в дискретные моменты времени ktd обозначим ис[к] и Тогда комплексную огибающую входного сигнала можно представить в виде
ОД1 = иЩ -ju[k].
(5.24)
По аналогии с (5.24) комплексную огибающую сопряженной импульсной характеристики СЦФ представим в виде
= hc[k] +jhs[k\.
95
Тогда сигнал на выходе ЦСФ с точностью до постоянного множителя td/2 определяется по формуле
ад=^И+л4А]=£(ме[Л-/]-А[А-/])(йс[пх -Л+А[«* -Л) /=1
или, заменяя, как и в (5.23) (п - /) = г, получим:
ад = £(^[Л+АИХ«с[^-(^ -0]- jus[k(nx -/)]). (5.25)
Г=1
Квадратурные составляющие выходного сигнала ЦСФ:
<;<[*] = ^he [Л«с [А: - (пх - 0]+£ hs [ф, [Л - (Их - 0] = [*1
/=1 7=1
(5.26)
и*] = [Л«с [* - (Пх - 0] - £ he [ф, [к - (пх - /)] - g,f [Аг] - [АЦ Г=1 Ф1
(5.27)
Дальнейшая конкретизация алгоритмов ЦСФ определяется видом свертываемых сигналов. Так, для ЛЧМ сигнала с прямоугольной огибающей
x(t) = sin(2nfot + 0£2),
где: 0 < t < тх; £ = kAF/t* = const;
AF, — девиация частоты сигнала;
X(t) = sin£t2-/cospt2 — комплексная огибающая сигнала. Следовательно, квадратурные составляющие входного сигнала в дискретные моменты времени [А - (и - i)]t, можно представить
лг а
и [к~(п - i)] = sinP[A- (и - г)]2 + v И],
«,[*- (пх- г)] = cosP[A- (п- г)]2 + vJA],
где vc и vs — квадратурные составляющие помехи. В этом случае комплексная огибающая импульсной характеристики ЦСФ
h(t) = Х*(тх- t) = sin[p(rx- О2] + ;cos[P(v t)2].
а ее квадратурные составляющие в дискретные моменты времени itd
/г [г] = snip [г]2, h [г] = cosp [:]2.
V J
96
Квадратурные составляющие выходного сигнала:
th 2 г 1
= S sin 0[/] ис\к-(п„-0],
/=1
<>[*] =
cos p[f]2«, [*-(»,-/)],
<^с[£] -
(5.28)
qw[£] - sin p[z J w5[A - (их- О], /=1
= g«[£] + g«[*], д,[Аг] = <>[*] - <> [Л].
Структурная схема реализации алгоритма (5.28) приведена на рис. 5.2. Эту схему можно считать базовой схемой цифрового согласованного фильтра.
Рис. 5.2. Базовая схема цифрового согласованного фильтра
Для фазоманипулированного (ФМ) импульсного сигнала длительности тх ~ ижт0, где пх — число элементарных сигналов одинаковой амплитуды (которую можно принять равной единице), т0 — длительность элементарного сигнала, комплексная огибающая записывается в виде
Пх
-Гр] = £ Х[Г - (' -1)4 ] ехр УФ,,
где ф ~ начальная фаза i-ro элементарного сигнала,
97
*И=
O<t<xo
в остальных случаях.
Наибольшее распространение получили бинарные ФМ сигналы, фазы которых могут принимать только два значения 0 и я.
В этом случае
ехруф,- = q, =
а комплексная амплитуда сигнала записывается в виде
Пх
(5.29)
Из (5.29) следует, что свойства бинарного ФМ сигнала определяются свойствами последовательности {«/J, которая должна быть подобрана так, чтобы в результате свертки получить сжатый сигнал с амплитудой в пх раз большей амплитуды элементарного сигнала и минимальным уровнем боковых лепестков.
Простейшими из таких последовательностей, удовлетворяющих указанным требованиям, являются последовательности (коды) Баркера, известные только для п - 3, 4, 5, 7, 11, 13 [96].
На рис. 5.3 алгоритм согласованной фильтрации ФМ сигнала иллюстрируется на примере свертки бинарной последовательности {?< }/=! вида 111-1-11-1 (семиэлементный код Баркера), которая на
£ -1 0 -1 0 -1 0 7 0-10-10-1
Рис. 5.3. Пояснение принципа согласованной фильтрации ФМ сигнала
98
рис. 5.3 записана в верхнюю горизонтальную строку таблицы. В левый столбец этой таблицы записана последовательность h.=-q(n - i + 1), представляющая собой кодовую последовательность значений импульсной характеристики согласованного фильтра. В поле таблицы
представлены результаты перемножения последовательности элементов q. на элементы Л.. Запись очередной строки таблицы производится со сдвигом на один элемент вправо. Просуммировав элементы каждого столбца, получим значение выходного сигнала согласованного фильт
ра в дискретных точках. Соединив соседние значения, получим автокорреляционную функцию свертываемой последовательности, изображенную в нижней части рис. 5.3. Как видим, максимальное значение
этой функции соответствует сумме п элементарных сигналов, а боковые лепестки не превышают уровня 1/пх.
Естественно, при цифровой согласованной фильтрации сложных сигналов имеют место энергетические потери, обусловленные квантованием выборок сигналов. Результаты исследований, опубли
кованные в [2], показали, что при многоразрядном квантовании величина этих потерь почти не зависит от базы сигнала, имеет
величину порядка 1 дБ при умеренных отношениях сигнал-помеха, существенно увеличивается при отношениях сигнал—помеха, близких
к пороговому уровню.
Возвратимся теперь снова к общей структурной схеме алгоритма ЦСФ (рис. 5.2) и рассмотрим возможности его реализации во временной области, т. е. непосредственно по формуле (5.28), для сжатия ЛЧМ сигнала. Как видно из рис. 5.2, для реализации ЦСФ потребуются четыре свертывающих устройства, каждое из которых в процессе вычисления одного (Л-го) значения выходного сигнала (т. е. за время одного периода дискретизации входного сигнала Q должно выполнять пх умножений и п-i сложений.
Оценим требуемое быстродействие Nr [умн./с] свертывающего устройства (только по операциям умножения) для наиболее распространенного случая согласованной фильтрации ЛЧМ сигналов при частоте дискретизации fd = AF и длительности сигнала п , когда Nr-nx\Fx. Например, при пх- 100, ДЕ, = 5106 Гц требуемое быстродействие должно быть Nr = 5-108 умн./с. Следовательно, в рассматриваемом случае непосредственная реализация свертки с помощью обычных цифровых средств последовательного действия нереальна. Необходимо применять специальные способы организации вычислений. Во-первых, можно использовать тот факт, что задача свертки обладает естественным параллелизмом, позволяющим вычисление пх попарных произведений /г[г]и[к- (п- /)] 0=1, •••> пх) производить одновременно с помощью пх параллельных умножителей с последующим суммированием частных произведений (рис. 5.4). В этом случае каждый умножитель должен иметь быстродействие Nr = AFx = 540е умн./с, т. е. одно умножение за 40 нс. Такое быстродействие уже можно обеспечить с помощью современных сигнальных процессоров (СП).
99
Другим примером реализации ускоренной свертки является применение спецвычислителя (спецпроцессора), в котором для хранения заранее рассчитанных результатов поразрядных умножений используется постоянное запоминающее устройство (ПЗУ), а в качестве
lt w , ЗУ входных сигналов
иJк]
и[к] |ufk-Ц |ufk-2J | - |LWnx-7);|
Рис. 5.4. Цифровой согласованный фильтр с параллельными умножителями
h
ЗУ h
адресов выборки этих результатов используются коды сомножите-лей [82]. Рассмотрим более подробно принцип свертки в спецпроцессоре с ПЗУ. Для упрощения выкладок операцию свертки представим в виде
N
q = ^h,u, г (5.30)
/=1 тде h — весовые коэффициенты (элементы импульсной характеристики фильтра); w( — выборки входных сигналов; N — объем выборки.
Пусть входные сигналы масштабированы так, что \ut\ < 1, и представлены в «-разрядном дополнительном коде с фиксированной запятой. Тогда выражение (5.30) можно представить в виде
(5.31)
где — значение (0 или 1) к-го разряда i-й выборки сигнала. Выражение (5.31) можно также представить в виде
100
(5.32)
Введем функцию fk с N двоичными аргументами в следующем виде:
Л - ,и(нк}) = ^hi и[к).
1-1
Тогда соотношение (5.32) примет вид
п-1
(4°\м20), • •,^0)). (5.зз)
Так как аргументы функции fk(*) могут принимать значение О или 1, то сама функция характеризуется конечным числом 2N своих значений, которые можно вычислить заранее и записать в ПЗУ. Теперь значения двоичных разрядов входных сигналов можно использовать для адресации ПЗУ с целью выбора соответствующего значения функции^-). В дальнейшем эти значения используются для вычисления по формуле (5.33).
Таким образом, свертку £ можно получить с помощью п операций обращения к памяти, и-1 операций сложения и одной операции вычитания (для к = 0), причем число операций не зависит от объема выборки N, а определяется только разрядностью квантования входных сигналов. Упрощенная схема спецпроцессора для реализации свертки в соответствии с выражением (5.33) представлена на рис. 5.5.
Prd гТ»1 Ргс2 Ht- -t—I prcN h
I U W I и (ЮI // (k) | и (к)
Y ________Y 2 ▼ ^N-1 Y
ПЗУ на n-разрядных чисел
----------—jp..........d---------
| Pr1 I I Pr2 I
2-'
Рис. 5.5. Структурная схема согласованного фильтра с ускоренной сверткой
101
Последовательность (пачка) входных сигналов поочередно сдвигается в регистрах сдвига Prcl, ..., PrcNt начиная с младшего значащего разряда. Сначала значения u.(n i) на выходе каждого регистра сдвига используются в качестве адреса для выбора из ЗУ соответствующего значения/^0. Это значение загружается в регистр Рг\ и прибавляется к содержимому регистра Рг2 (нулевому, на первом шаге), а результат записывается в регистр РгЗ, На следующем такте выбирается следующее значение Л-2(’)> а содержимое регистра РгЗ (предыдущая сумма) поступает в Рг2 со сдвигом на один разряд вправо, что соответствует умножению на 1/2. Содержимое регистра Prl, равное/20> складывается с содержимым регистра Рг2, равным в результате образуется очередной частный результат. Такая операция повторяется п раз, причем на последнем шаге функция /о0 вычитается из накопленной суммы, так что после п тактов в регистре РгЗ будет находиться окончательный результат свертки в соответствии с выражением (5.33).
Как видим, реализация рассмотренной схемы ускоренной свертки не вызывает затруднений для малых N я 10...12. При увеличении N требуемая емкость ПЗУ становится слишком большой (при ЛМ5 2пзу = 32798 слов) и время выборки существенно увеличивается. Уменьшения емкости памяти можно добиться, расчленив процесс вычислений на ряд этапов с последующим суммированием результатов. Если, например, представить N = LM, то выражение (5.30) можно записать в виде
L 2L ML
с, = J/г, w; + hiи, +...+ ^h, щ i=l <=£+1 <=(M-1)£+1
Каждую частную сумму можно вычислить описанным выше способом. Для этого необходимо иметь М различных функций Л ) с L двоичными аргументами. При этом (2ПЗУ= 2LM вместо 2Л'= 2мх2г без расчленения процесса вычислений.
53.3. Цифровой согласованный фильтр для свертки сигналов в частотной области
Рассмотрим теперь особенности дискретной свертки типа согласованной фильтрации в частотной области. В соответствии с теорией дискретного представления непрерывных функций, ограниченных во времени или частоте, функция u(t), представленная последовательностью отсчетов {«((О} (г = 0,1, 2,..., п-1), может быть отображена в частотную область с помощью дискретного преобразования Фурье (ДПФ), которое для каждого к - 0, 1, 2,..., п-1 имеет вид
л—1 л—1
Fu [Ar] = £ u\i\e~J2nikln =£u[i]W„* , где W„ =eJ2ldn, i—0 /=0
102
и, наоборот, любая функция, представленная ограниченным дискретным спектром {FJ4]} (£“ 0, 1, 2,п-1), может быть восстановлена во временной области с помощью обратного ДПФ (ОДПФ) по формуле
«Ш = - X Fu [к]е^1п = - 2 Fu .
к~0 /—О
Заметим, что число дискретных элементов функции u(t) одинаково при ее представлении как во временной, так и в частотной области.
Свертка последовательностей в частотной области сводится к умножению результатов их ДПФ. Для этого необходимо предварительно осуществить два прямых преобразования Фурье — для свертываемой последовательности и последовательности отсчетов импульсной характеристики свертывающего фильтра. Если после свертки необходимо снова перейти во временную область, потребуется осуществить ОДПФ последовательности составляющих свертки.
Для комплексных функций (сигналов) алгоритм операции “ДПФ"“Свертка—ОДПФ”:
л-1
1. F'h[k] = ^ h[i]Wntk t Л= 0, 1, 2, ..., n-1, (5.34)
где Л[г] — последовательность отсчетов комплексной импульсной характеристики, свертывающего фильтра.
/-1
2. Fu [А] = £ u[i]W,ik , (5.35)
i=0
где и[г\ — последовательность комплексных выборок входной (свертываемой) функции.
3. Fz [£] = Fh [Л]'К [£], А=0, 1, ..., Z+n-1. (5.36)
1 Z+Л*-!
4. Zlll ~ Т~ , z = 0, 1, ..., Z+n-1.
/ + и tzi
(5.37)
Принципиальной особенностью рассматриваемого алгоритма является режим групповой обработки, когда анализу подвергается массив входных данных длиной I > п. Результат свертки имеет длину 1+п—1.
При решении задачи согласованной фильтрации радиосигналов импульсная характеристика СФ неизменна (по крайней мере для
103
зондирующих сигналов одного типа). Поэтому ее ДПФ производится заранее и записывается в ЗУ соответствующего вычислителя. В процессе же свертки необходимо осуществлять одно прямое и одно обратное ДПФ.
Необходимо также иметь в виду, что свертываемая последовательность в задачах обработки радиосигналов имеет длину L, соответствующую длине развертки РЛС, которая значительно больше длины свертывающей последовательности, равной длине пк, импульсной характеристики СФ. Одновременная свертка таких последовательностей слишком трудоемка. Поэтому обычно входную последовательность делят на блоки, длиной I каждый, так что элемент р-го блока образуется из общей последовательности I7[i] (г = 0, 1, 2, ..., I) по правилу
up[i] “ иУ + pl\,p = 0, 1,2.£[!//]>
где £[] — целая часть отношения в квадратных скобках.
Для каждого блока входных данных длиной I вычисляется (/+п-1)-точечное ДПФ. Для свертывающей последовательности импульсной характеристики СФ также предварительно должны быть получены и заполнены составляющие (/+п-1 )-точечное ДПФ. Свертка в частотной области для каждого блока получается перемножением ДПФ свертываемой и свертывающей последовательностей в /+и-1 точках. Для вычисления свертки во временной области производится ОДПФ. Длина полученной при этом последовательности Zp[i] равна 1+п-1, причем соседние последовательности Z [i] и Zp+)[i] перекрываются в п-1 точках, так что верными будут только I значений последовательности. В дальнейшем, чтобы получить верные результаты для Z[i] во всех точках, применяется суммирование перекрывающихся частных последовательностей [82].
В процессе проектирования возникает задача выбора оптимального по критерию минимума времени свертки значения I при фиксированном п. При малых значениях nh < 100 выполняется соотношение / « 5пк [75].
Рассмотрим теперь вопрос о трудоемкости реализации ЦСФ в частотной области. Преобразование Фурье (прямое и обратное) требует для получения 1+п-1 частотных (временных) выборок (l+n-1)2 операций умножения комплексных чисел и, кроме того, около (/+п-1)2 операций комплексного суммирования. Полное же число операций с учетом перехода после свертки во временную область составляет 2(/+и-1)2+ (l+n-Г) комплексных умножений и 2(1+п-1)2 комплексных сложений. При этом получаем выборку выходных данных длиной I. Для получения такой же выборки выходных данных во временной области потребуется I2 операций комплексного умножения и 1(1-1) операций комплексного сложения. Следовательно, свертка в частотной области более трудоемка, чем во временной (примерно в 8 раз, если
104
19» nh), и применять ее в рассмотренном виде для согласованной фильтрации сигналов нецелесообразно.
Существенно уменьшить число операций при свертке в частотной области можно, применив специальные алгоритмы ДПФ, получившие название алгоритмов быстрого преобразования Фурье (БПФ). (Подробное описание алгоритмов БПФ см. в [70, 75, 82] и др.). Здесь рассмотрим принцип построения алгоритма БПФ с прореживанием во времени по основанию 2 действительной последовательности.
Пусть последовательность {«[:]}, подлежащая БПФ, имеет длину М, соответствующую целой степени числа 2, т. е. = 2т. Эта исходная последовательность может быть разложена на две части по правилу
u£[i] “ w[2i], wo[i] = u[2i + 1], i ~ 0, 1, 2, M/2.
Последовательность uE[i] содержит элементы исходной последовательности с четными номерами, а последовательность wo[i] — с нечетными. Длина каждой последовательности М/2. Полученные в результате разложения последовательности снова разлагаются на две части до тех пор, пока будет получено М/2 двухточечных последовательностей. Число шагов разложения т * log2M.
Суть алгоритма БПФ с прореживанием во времени состоит в том, что ДПФ последовательности длиной I > 2 вычисляется путем комбинации результатов ДПФ двух последовательностей длиной 1/2. В соответствии с этим в процессе реализации алгоритма БПФ М-точечной последовательности сначала производится М/2 ДПФ двухточечных последовательностей, затем полученные преобразования объединяются с целью получения М/4 четырехточечных, затем Л//8 восьмиточечных и т. д. до тех пор, пока после т шагов будет получено преобразование длиной М. Вычисление преобразований производится по формулам
F[k] = FE[k]+W$Fo[k]> к = 0, 1,..., М/2-l
(5.38)
Г[Л+М/2} = Ft [Л] - W/fFQ [Л],
М /2-1
где: [Л] = j ие[^м/2
i®0
Л//2-1
7*о [&] = /, ^о[?Ул</2 — ДПФ четной и нечетной после-довательности.
105
Для графического представления алгоритма БПФ используются направленные графы, в которых применяют следующие обозначения [82]: точка (кружок) означает операцию сложения-вычитания, причем сумма появляется в верхней выходной ветви, а разность — в нижней выходной ветви, стрелка на ветви — операцию умножения на константу, записанную над стрелкой (при отсутствии стрелки константа равна единице). Направленный граф для восьмиточечного БПФ с прореживанием во времени по основанию 2 представлен на рис. 5.6.
Этап 1
Этап 2
Этап 3
Рис. 5.6. Направленный граф 8-точечного БПФ
Порядок задания входных данных на этом графе получен с помощью процедуры двоичной инверсии чисел 0,1,..., 7. Это упрощает изображение графа и позволяет получить входную последовательность в естественном порядке (Fo, Fv F2, F3 — в верхних выходных ветвях, F, F F6, Fj — в нижних выходных ветвях). Как видно из рисунка, восьмиточечное БПФ осуществляется за три этапа.
На 1-ом осуществляется 4 двухточечных ДПФ, причем при вычислении учитывается, что W2~ Поэтому операции умножения отсутствуют и в соответствии с (5.37)
flO] = FJO] + Fo[0], 7=11] = Fe[0] - Го[0].
На П-ом этапе две пары двухточечных БПФ объединяются в 2 четырехточечных по формулам (5.38), а на Ш-м этапе по этим же формулам полученные 2 четырехточечных — в восьмиточечное. В общем случае число этапов m = log2M. На каждом этапе, кроме 1-го, производится М/2 комплексных умножений и М комплексных сложений. Поэтому для вычисления М-точечного БПФ требуется комплексных умножений и комплексных
сложений.
106
Ранее было показано, что при вычислении прямого ДПФ требуется М2 комплексных умножений и М(М-\) комплексных сложений. Выигрыш в реализации БПФ по сравнению с прямым ДПФ по числу операций умножения составит
М2 _ 2М
(M/2)log2 М log2 М ’
Например, v » 200 при М = 1024, у ® 21 при М = 128.
Вернемся к вопросу реализации согласованной фильтрации радиосигналов в частотной области с учетом применения алгоритма БПФ. Структурная схема соответствующего вычислительного устройства представлена на рис. 5.7. Состав схемы и назначение блоков ясны из рисунка. Необходимо только отметить, что на вход процессора прямого БПФ одновременно поступают две квадратурные составляющие, которые вместе образуют комплексный сигнал, подлежащий преобразованию БПФ—комплексное умножение—ОБПФ. Поэтому входное ЗУ, выходное ЗУ и все промежуточные регистры должны иметь двойную длину разрядной сетки.
Рис. 5.7. Структурная схема согласованного фильтра в частотной области
Для согласованной фильтрации сигналов в частотной области с применением БПФ необходимо выполнить одно прямое БПФ, одно обратное БПФ и перемножение двух Af-точечных комплексных чисел. Общее число комплексных умножений
Nr~ 2[(M/2)log//] +М - А/[1 + log//].
Так как при прямом вычислении во временной области число комплексных умножений на одну М-мерную выборку равно М2, выигрыш в числе операций комплексного умножения при применении БПФ равен К = А//[1 + log//].
Скорость свертки можно значительно увеличить, применив поточную структуру алгоритма БПФ. В этом случае процессор БПФ содержит (A//2)log//арифметических устройств, работающих параллельно. Каждое арифметическое устройство выполняет операции преобразования на одном из этапов БПФ. При этом в пределе может
107
быть получено сокращение времени вычислений в log2M/2 раз [82]. Поточная организация БПФ потребует дополнительной памяти в виде межкаскадных регистров задержки.
Отметим также, что для сокращения времени свертки, кроме БПФ, могут быть применены другие быстрые методы ортогональных преобразований, в частности преобразования Уолша-Адамара и теоретико-числовые преобразования [64, 70].
5.4. Цифровая селекция движущихся целей [35, 45, 71, 83, 105, 142, 149]
5.4.1. Принципы построения и показатели эффективности цифровой селекции движущихся целей (ЦСДЦ)
Задача оптимальной фильтрации временных когерентных сигналов ставится и решается аналогично задаче пространственной фильтрации и сводится к образованию весовой суммы [13].
= WrZ‘ = Zv W*- (5.39)
где Z„ — v-мерный вектор комплексных амплитуд входных сигналов, W — вектор комплексных весовых коэффициентов, определяемый из решения уравнения Винера-Хопфа
W^R^Xv, (5.40)
где Rc — nxn-мерная матрица пассивных помех, Xv — вектор комплексных амплитуд полезного сигнала.
Подставляя (5.40) в (5.39) и учитывая результаты пункта 5.2, получим
— модуль соответствующего элемента обратной корреляци-
(5.41)
где
онной матрицы пассивной помехи.
Внутренняя сумма в выражении (5.41) соответствует операциям
нормировки амплитуды входного сигнала и компенсации доплеровского набега фазы, обусловленного движением пассивной помехи. Для их реализации потребуется гребенчатый фильтр подавления [103]. Внешняя сумма соответствует когерентному накоплению остатков
108
после компенсации пассивной помехи с учетом разности фаз сигнала и помехи. Для ее реализации потребуется гребенчатый фильтр накопления.
Таким образом, оптимальная схема обработки пачек импульсных сигналов на фоне пассивных помех состоит из гребенчатого фильтра компенсации (режекции) сигналов пассивной помехи и когерентного накопителя остатков после компенсации. Такая схема получила название схемы селекции движущихся целей (СДЦ), при аналоговой реализации, или схемы цифровой селекции движущихся целей (ЦСДЦ), при цифровой реализации.
Упрощенная схема ЦСДЦ при квадратурном представлении обрабатываемых сигналов изображена на рис. 5.8. Квадратурные составляющие напряжения с выхода согласованного фильтра поступают на входы двух аналогичных цифровых режекторных фильтров (ЦРФ) и в ЗУ, выполняющее роль линии задержки входных сигналов для каждого элемента временной дискретизации процесса. Остатки после компенсации пассивных помех поступают на вход когерентного накопителя (КН). При этом, если доплеровский сдвиг частоты сигнала известен, накопление может производиться в одноканальном фильтре. Если же, как обычно, величина (фх“<рс) неизвестна, что соответствует отсутствию информации о радиальной скорости цели и помех, накопитель строится в виде параллельной многоканальной фильтровой схемы.
I ш
Рис. 5.8. Упрощенная структурная схема ЦСДЦ
В связи со сложностью реализации когерентных накопителей (и по другим техническим причинам) когерентные накопители заменяются некогерентными накопителями (НКН), естественно с потерей информации о радиальной скорости цели. На входе некогерентного накопителя напряжения квадратурных каналов объединяются, что соответствует операции выделения огибающей. Некоторые способы
109
объединения сигналов квадратурных каналов показаны непосредственно на рис. 5.8 (выходы 1, 2, 3).
При оценке эффективности СДЦ (ЦСДЦ) в инженерной практике используют следующие показатели:
1. Коэффициент подавления Ks, который определяется как отношение мощностей пассивной помехи на входе и выходе системы компенсации
при сЦ:,„ » ОЙ ,
(5.42)
где: Рст(Рап) ~ мощность (дисперсия) пассивной помехи на входе системы компенсации;
Рсош(.асош) ~ мощность (дисперсия) некомпенсированных остатков пассивной помехи;
<5 г — дисперсия внутренних шумов.
2. Коэффициент подпомеховой видимости Ksv, который для случая линейной межпериодной компенсации пассивных помех определяется в виде
n^XQUt
(5.43)
где Кх — коэффициент прохождения сигнала через систему компенсации пассивных помех. В общем случае нелинейной обработки коэффициентом подпомеховой видимости называется величина, определяющая, во сколько раз можно увеличить интенсивность помехи на входе приемника с системой компенсации пассивных помех, не меняя при этом показателей качества обнаружения.
3. Коэффициент улучшения К/р, который характеризует отклик ЦСДЦ на сигналы пассивной помехи по отношению к усредненному отклику на сигналы от целей:
(5.44)
— входное и выходное отношения сигнал-
помеха соответственно, усредненные по всем скоростям целей.
5.4.2. Цифровые режекторные фильтры СДЦ
Основным элементом ЦСДЦ является цифровой режекторный фильтр (ЦРФ), предназначенный для подавления (компенсации) коррелированных пассивных помех. Вариант структурной схемы 110
нерекурсивного гребенчатого режекторного фильтра изображен на рис 5.9.
Входные сигналы фильтра образуются путем задержки (оператор Z~!) на п периодов зондирования Т сигналов, поступающих с выхода одноканальной приемной системы, например согласованного фильтра, рассмотренного в предыдущем параграфе. Вектор входных сигналов имеет размерность п+1, соответствующую числу выборок, используемых для компенсации помех. Весовые коэффициенты Wo,W„ рассчитываются на основе известных (оцененных) статистических характеристик сигналов и помех. На выходе сумматора образуются остатки нескомпенсированных помех и сигналы от целей, доплеровский сдвиг частоты которых отличается от соответствующего сдвига для пассивных помех. Рассматриваемый фильтр получил название трансверсального фильтра. Как и ранее, предполагается цифровая реализация такого фильтра. На практике статистические характеристики пассивных помех, как правило, нестационарны и априори неизвестны. Поэтому синтез оптимального режекторного фильтра проблематичен. В инженерной практике обычно исходят из следующих
соображений (если не ставится задача проектирования адаптивных ЦРФ, о чем идет речь ниже):
1. Предполагается, что набег фазы сигналов пассивной помехи за период зондирования близок к нулю или имеет некоторое постоянное (медленно изменяющееся) значение, которое можно скомпенсировать, например, подстройкой гетеродина вручную.
2. Модуль коэффициента межпериодной корреляции помех р(Т) близок к единице, что соответствует отражениям от нефлюктуирующих объектов. В этом случае компенсация пассивной помехи сводится к подавлению сигналов, не изменяющихся по амплитуде от периода к периоду зондирования.
Для решения задачи компенсации пассивных помех при рассмотренных исходных предпосылках используют фильтры черезпе-риодного вычитания (ЧПВу), где v — кратность вычитания, v < N. N — число импульсов в пачке.
Простейшим из этого класса является фильтр ЧПВ-1 с однократным вычитанием (v = 1), изображенный на рис. 5.10, а. В соответ-
^U[l]
Рис. 5.9. Структурная схема нерекурсивного гренчатого фильтра
111
ствии с обозначениями на этом рисунке выходной сигнал фильтра
(5.45)
Импульсная характеристика такого фильтра изображена на рис. 5.10, б и равна
h[iT] = Z5fc~ v) Г1= 8И"“0 Г1 (5-46)
v=0
Рис. 5.10. Фильтр ЧПВ-1: а) структурная схема; б) импульсная характеристика
Амплитудно-частотная характеристика фильтра ЧПВ-1 записывается в виде
Я) (я) = 2|sin xFT|
(5.47)
и изображена на рис. 5.11 (график 1). Она обращается в нуль на к 1
частотах Fk - — и достигает максимума при F = Fk На том же рис. 5.11 показаны огибающая спектральной плотности мощности
1/Т 2/Т
Рис. 5.11. Амплитудно-частотная характеристика фильтра ЧПВ
112
отражений от местных предметов (график 2) и огибающая ампли
тудно-частотного спектра сигнала (график 5). На основании рис. 5.11
можно сделать следующие важные заключения.
1. Область режекции фильтра ЧПВ-1 имеет форму, не позволяющую полностью подавить сигналы пассивных помех (заштрихованные на рис. 5.11 участки спектра сигналов пассивной помехи не будут скомпенсированы).
2. В полосе прозрачности фильтра, особенно на ее краях, наблюдается существенное ослабление полезного сигнала.
3. Имеет место явление “слепых” скоростей, когда доплеровское
смещение частоты сигнала равно или кратно частоте повторения зондирующих сигналов, при котором отраженный от движущейся цели сигнал подавляется как сигнал от неподвижной цели.
Для расширения и улучшения формы области режекции нашли применение многозвенные фильтры ЧПВ-v, где v = 2, 3, ..., которые образуются путем последовательного соединения фильтров ЧПВ-1. На рис. 5.12 изображена схема фильтра ЧПВ-2, в котором реализуется
алгоритм
Ucs (z)=Дд^ [/]- Дд« [/ -1]=(jw [/] - 2g« [i - 1J+[i ~ 2],
(5.48)
что соответствует значениям весовых коэффициентов 1, Л, - -2, й, 2= 1. Амплитудно-частотная характеристика фильтра ЧПВ-2 получается путем перемножения АЧХ двух фильтров ЧПВ-1 и записы
s
Рис. 5.12. Структурная схема фильтра ЧПВ-2
вается в виде
#2(F) = 4sin2 л FT.
На рис. 5.11 пунктирной линией изображена АЧХ фильтра ЧПВ-2. Видно, что зона режекции этого фильтра по сравнению с ЧПВ-1
ИЗ
расширяется, что обеспечивает лучшее подавление помех с широким спектром, однако неравномерность полосы прозрачности усиливается.
Практически ограничиваются применением фильтров ЧПВ-v с кратностью v не более 3, 4.
Для улучшения равномерности АЧХ гребенчатого режекторного фильтра в зоне прозрачности вместо фильтров ЧПВ-v или совместно с этими фильтрами применяют рекурсивные фильтры с прямыми и обратными связями. Разностное уравнение цифрового рекурсивного фильтра имеет вид
v к
гьИ = & М* , (5.49)
/=Ю 7=1
где и b — весовые коэффициенты.
Методы синтеза и схемы реализации цифровых рекурсивных фильтров приведены в многочисленной литературе [45, 69, 75, 82]. Не вдаваясь в подробности, отметим, что для рекурсивных режектор-ных ЦФ СДЦ наиболее подходящим считается синтез по квадрату АЧХ в соответствии со следующей методикой [69]: сначала на основе заданных параметров внешней обстановки и исходных предпосылок выбирается порядок и определяется АЧХ аналогового фильтра-прототипа, а затем ищется приближение квадрата АЧХ цифрового фильтра к квадрату АЧХ аналогового фильтра-прототипа с учетом ограничений на сложность реализации. Этим требованиям лучше всего удовлетворяет так называемый эллиптический фильтр (фильтр Золотарева — Кауэра).
При реализации режекторного ЦФ в соответствии с алгоритмом (5.49) удобно, чтобы коэффициенты az и Ь. были простыми двоичными числами. В этом случае отпадает необходимость в ПЗУ коэффициентов, а операции умножения заменяются простыми операциями сдвига и суммирования. Например, для рекурсивного фильтра второго порядка, синтезированного по квадрату АЧХ, получены коэффициенты [69]: а0= а2= 1, а} = -1,9682, Ьх = -0,68, Z>2= -0,4928. Чтобы упростить реализацию, коэффициенты ах, Ьх, Ьг можно округлить следующим образом = -1,875 = -21 + 2‘3, Ьх = -0,75 - 2° + 2-3, Ь2~ -0,5 = -2'1. Как показывают исследования, влияние округления коэффициентов фильтра на качество компенсации пассивных помех невелико, и им, как правило, можно пренебречь.
За счет улучшения формы АЧХ рекурсивный ЦФ обеспечивает лучшую компенсацию пассивных помех, чем нерекурентный того же порядка. Однако степень корреляции остатков пассивных помех на выходе рекурсивного ЦФ больше, чем на выходе нерекурсивного. Кроме того, наличие положительной обратной связи приводит к увеличению времени переходного процесса и соответствующим потерям в эффективности при числе отраженных от цели сигналов в пачке N < 20.
114
Эффективность ЧПВ при различных кратностях v можно сравнивать по коэффициенту подавления пассивной помехи Ks. Для случая, когда фильтр ЧПВ реализован в двух квадратурных каналах на видеочастоте, а помеха является узкополосным случайным процессом и не содержит постоянной составляющей, выражение для коэффициента подавления имеет вид
Ks = ZS^AypJ(Z-j)r]
I Z=0 7=0
(5.50)
где:
и hj — коэффициенты импульсной характеристики фильтра; рс [(/ - j)r] — нормированный коэффициент корреляции пассив-помехи.
При расчете обычно принимается, что спектр пассивной помехи является гауссовским, а ее коэффициент межпериодной корреляции определяется выражением (5.14).
На рис. 5.13 приведены рассчитанные по формуле (5.50) графики зависимости Ks от безразмерного параметра (AfcT) для ряда значений кратности ЧПВ. Как видно, применение ЧПВ-2 по обеспечивает выигрыш в Ks порядка 15 дБ, при переходе к ЧПВ-З увеличение Ks уже меньше, а при переходе к ЧПВ-4 — совсем незначительно. Поэтому на практике обычно не применяют ЧПВ с v > 3.
Коэффициент подавления для рекурсивных фильтров зависит от объема выборки тс пассивной помехи. Поэтому непосредственное сравнение по коэффициенту Ks рекурсивных и нерекурсивных фильтров не имеет смысла. Сравнительную эффективность ЧПВ и рекурсивных фильтров можно оценить по коэффициенту подпомеховой видимости сначала преобразовать рекурсивный фильтр (5.49) в “нерекурсивный т. е. представить алгоритм его работы в виде т-1
нои
Кв.дБА
сравнению с ЧПВ-1
ЧПВ-4
ЧПВ-3
ЧПВ-2
ЧПВ-1
70*
60-
50
40
30’
20
10
0t010,03 0,05
С
Рис. 5.13. Графики K, = F(AfcT)
sy. Для этого необходимо
(5.51) /=о
где т — объем выборки фильтруемого процесса, й/ — коэффициенты импульсной характеристики преобразованного фильтра, определяемые из выражения [83] .
0
115
Например, для рекурсивного фильтра второго порядка (v = 2, k = 2):
/1'0=1, /2'.= u,+&., h'j-cij+b.h'i+b..
v 1 1 1 Л z 1 * z
При I > 2:
hi ~ by"^"^2 bi-i j ~ •••> !
Если теперь предположить, что пассивная помеха неподвижна (ф = 0), а скорость цели оптимальная (ФОх= л), то для расчета коэффициента KSJZ справедлива следующая формула
Ks, (я) = -------------
£*Лре[(/-»Г] /,М
(5.52)
где: тх — объем выборки полезного сигнала;
тс — объем выборки пассивной помехи.
рх[ ] — модуль коэффициента межпериодной корреляции сигнала, который при расчетах обычно принимается
рДГ) = ехр(-тгЛ/х Т), (5.53)
модуль коэффициента межпериодной корреляции
РСН -пассивной помехи (см. п. 5.2).
На рис. 5.14 приведены зависимости Ksv от безразмерного параметра (Д4.Т)при р [Г] = 1 для двух нерекурсивных фильтров (ЧПВ-2, ЧПВ-3), рекурсивного фильтра второго порядка (РФ-2) и комбинированного, состоящего из нерекурсивного фильтра с ЧПВ-1 и рекурсивного фильтра второго порядка, соединенных последо-вательно. Из этих рисунков, а также результатов более подробных расчетов и моделирования следует, что рекурсивные ЦФ по сравнению с фильтрами ЧП В соответствующего порядка по-
Рис. 5.14. Графики Kst = F(6.fcT)
зволяют получить выигрыш в Ksy порядка 10 дБ. Однако, время переходного процесса в рекурсивных фильтрах существенно больше, чем в нерекурсивных. Поэтому объем выборки помехи для рекур-
116
сивных фильтров второго порядка должен быть тс > 30. При этом объем выборки сигнала на эффективность рекурсивных фильтров второго и третьего порядков не влияет уже при тс > 10.
Для ускоренной реализации алгоритма (5.49) рекурсивного ЦФ можно использовать различные процедуры распараллеливания вычислительного процесса. В качестве примера рассмотрим аппаратную реализацию рекурсивного фильтра с помощью итерационной сети [22]. Для этого запишем уравнение (5.49) в виде (при v—k^N)
ф] = ^а, Z-ЧФЪ - , (5.54)
/=0 j=\
где Z~l — оператор задержки входных данных на / тактов.
Уравнение (5.54) в развернутом виде
«И = аьф]+г-1(цф1-61ф])+...+2-/(а/ф1-й, ф])+...
+ Z-*(а„ф]-МШ)
После элементарных преобразований получим окончательно
ф] = а0ф] + г-Ч(а1ф1)-ЛФ]) + ^-Ч(«2Ф1)-^Ф]) + .-.
+ 2ф(а„фЪ «Л)}--.} • (5.55)
Из выражения (5.55) следует, что алгоритм рекурсивного ЦФ может быть реализован с помощью итерационной сети, которая состоит из однородных элементов (рис. 5.15), имеющих три сигнальных входа и один сигнальный выход, и реализующий алгоритм:
С, =<СМ +alq[i]-blu[i])Z-1, b0= 0. (5.56)
Быстродействие сети определяется быстродействием одной ячейки, выполняющей два умножения на постоянные коэффициенты и
UUI
Рис. 5.15. Структурная схема рекурсивного фильтра, реализованного с помощью итерационной сети
да
117
два сложения. Поэтому дальнейшее повышение быстродействия сети можно получить, используя специальные способы вычислений по формуле (5.56). Если принять в рассматриваемой сети все bz- 0, то она будет настроена на реализацию нерекурсивного ЦФ.
При реализации режекторных ЦФ возникают специфические потери в эффективности, основными источниками которых являются: квантование входных сигналов, округление весовых коэффициентов фильтра и результатов вычислений. Показано [69], что эти ошибки не превышают допустимых значений при числе разрядов квантования п >8...1О.
5.4.3. ЦСДЦ в РЛС с переменной частотой повторения импульсов
При селекции движущихся целей в РЛС с постоянным периодом повторения зондирующих сигналов имеют место так называемые “слепые” скорости на частотах Доплера PD*= ±k/T (&= 0, 1, 2, ...), так как на этих частотах фаза отраженного от движущейся цели сигнала за время Т изменяется в 2Лтг раз. Для исключения этого явления обычно используют вобуляцию (модуляцию) периода повторения зондирующих сигналов, что приводит к “размыванию” скоростной характеристики СДЦ и, в конечном счете, к уменьшению числа и глубины провалов результирующей скоростной характеристики.
Реализация аналоговых СДЦ с вобуляцией Т представляет большие трудности, так как для этого необходимо иметь отдельные линии задержки и сложную систему комутации этих линий. При реализации ЦСДЦ с вобуляцией Т достаточно синхронизовать выборку задержанных данных из ЗУ с моментами излучения зондирующих сигналов. При этом емкость памяти не изменяется и не зависит от числа дискретных значений и закона вобуляции периода повторения Т. В ЦСДЦ с вобуляцией Т максимальные результаты по улучшению скоростной характеристики могут быть достигнуты, если каждому импульсу в пачке объемом тпх сопоставить свой (новый) период повторения, а изменение периода повторения относительно среднего значения Та производить симметрично в обе стороны на величину, кратную фиксированному временному интервалу АТ. В этом случае последовательность периодов повторения Т в пределах пачки имеет вид (при тх нечетном)
7}= Та + ;Д7; ; - 0, ±1, ..., ±0,5 (mx-1). (5.57)
Задача проектирования ЦСДЦ с вобуляцией Т состоит в выборе Та и закона вобуляции импульсов в последовательности (5.57).
При выборе Та и АГ в когерентно-импульсной РЛС учитываются следующие обстоятельства. Минимальный период Tmin должен удовле-
творять условию однозначного определения заданной дальности действия РЛС, поэтому
7'„ - 0,5(mx-l)A7’> Tmin (5.58)
Максимальный период также выбирается из соображений, не связанных с работой СДЦ. При известных Гт1п и Т1!ах и симметричном расположении интервала вобуляции относительно Та получим Та = 0,5(Tmin + Tmat). Далее, зная тх, из (5.57) можно определить АТ.
Выбор закона вобуляции производится в общем случае по критерию максимизации Ksv с учетом обеспечения при этом минимума пульсации АЧХ фильтра в полосе пропускания. Обычно такая задача решается методом моделирования на ЭВМ. Применяют следующие законы вобуляции:
линейный — последовательное увеличение (уменьшение) Т на ±АГ от импульса к импульсу пачки;
перекрестный, например, по правилу
Тя = Та + г А Г, i = 0, 2, .... 0,5(mx- 1),
Т2М = то- (i + 1)ДТ, i = 1, 3, ..., 0,5(mx- 2);
случайный, например, путем реализации “урновой” схемы с возвращением из совокупности предварительно рассчитанного набора Т.
Расчеты и моделирование показывают, что вобуляция Т приводит к уменьшению провалов АЧХ нерекурсивных и рекурсивных фильтров, однако при этом происходит сужение полосы режекции фильтра при одновременном расширении и искажении спектра помех. Поэтому эффективность подавления пассивных помех ухудшается. Абсолютный проигрыш в Ks по сравнению с системой ЦСДЦ без вобуляции Т (при оптимальной скорости) для рекурсивных фильтров второго порядка от 0,3 до 4,3 дБ и от 4 до 19 дБ для фильтров третьего порядка [52].
Устранение зон “слепых” скоростей может быть достигнуто за счет вобуляции несущей частоты зондирующих импульсов. Однако, здесь возникают трудности с выделением доплеровской частоты, так как для этого требуется излучение, как минимум, двух импульсов с одной и той же несущей. Возможные способы формирования зондирующих сигналов и обработки отраженных сигналов в системах с вобуляцией частоты рассмотрены в литературе [35].
5.4.4. Адаптивные цифровые режекторные фильтры (АЦРФ)
В реальных условиях приема спектрально-корреляционные характеристики пассивных помех априори неизвестны, кроме того, неоднородны в пространстве и нестационарны во времени.
Естественно, если не принять специальных мер, эффективность компенсации пассивных помех при этом существенно ухудшается. Для обеспечения высокой эффективности системы селекции движущихся целей в условиях априорной неопределенности и неста-
118
119
ционарности параметров пассивных помех применяются адаптивные цифровые режекторные фильтры (АЦРФ).
Адаптивные режекторные фильтры пассивных помех могут быть построены аналогично многоканальным корреляционным автокомпенсаторам активных помех [142]. На входы такого компенсатора с выхода одноканального приемника поступают колебания, задержанные на различное число периодов повторения зондирующих сигналов Т. Число каналов адаптации равно v , где v — число отводов линии задержки. Незадержанный сигнал не подвергается взвешиванию, что по терминологии главы III соответствует системе режекции с выделенным основным (опорным) каналом. Структурная схема АРФ на базе одноканальных корреляционных автокомпенсаторов помех приведена на рис. 5.16.
ад
Рис. 5.16. Структурная схема адаптивного цифрового режекторного фильтра
Выходной сигнал такого АРФ получается путем сложения незадержанного сигнала Z[i] и весовой суммы п задержанных на Т> 2Tf..., пТ сигналов
ад=Z[z]+Z[i-/] =Z[i]+w z'v,
/=1
где W — вектор-столбец из v коэффициентов взвешивания, вырабатываемых в замкнутых контурах самонастройки, Zv ~ вектор-столбец из v комплексных сигналов на входах схем самонастройки (одноканальных автокомпенсаторов).
Уравнение, определяющее квазиоптимальную самонастройку вектора W, записывается в виде [103]
ти dW/dt + W = -у Uz Z* •
120
В стационарном режиме, когда М(dW/dt)® 0, вектор весовых коэффициентов определяется из выражения
WJZ =-YM(t72z*v)-
В АРФ, использующем принципы корреляционной обратной связи, реализуется алгоритм самонастройки, обеспечивающий минимальную мощность колебаний на выходе фильтра. Если на вход такого фильтра поступают сигналы пассивной помехи, то они будут скомпенсированы независимо от изменения доплеровского сдвига частоты и ширины спектра помехи. В этом — основное достоинство фильтров с замкнутой системой самонастройки. Наряду с высокой эффективностью, таким фильтрам присущ ряд недостатков, среди которых наиболее существенными являются:
• плохое подавление кромок протяженной помехи, что является следствием большой постоянной времени (порядка 10 элементов разрешения) адаптивной обратной связи;
♦ ухудшение качества подавления пассивной помехи в присутствии мощного сигнала цели;
• сложность реализации, особенно в цифровом виде.
Задачу адаптации ЦРФ можно решить, используя так называемый эмпирический байесов подход, при котором сначала производится максимально правдоподобная оценка параметров пассивной помехи, а затем эти оценки используются для расчета весовых коэффициентов режекторного фильтра. Адаптивный фильтр получается при этом разомкнутым, с переходным процессом, соответствующим объему памяти канала адаптации.
Алгоритм функционирования разомкнутой v -канальной системы режекции пассивной помехи определяется выражением (см. формулу (5.41)).
+ t
(5.59)
где
модуль /^-элемента обратной корреляционной матрицы
помех (z, к - 1, 2, ...,v), фс— доплеровский набег фазы сигнала пассивной помехи за период зондирования Т.
С учетом принятой (например, гауссовской) модели спектра сигналов пассивной помехи для модуля /Лг-элемента необращенной матрицы помех можно записать
П 7 0 ^0
Rik =O?pf
(5.60)
где
— модуль коэффициента межпериодной корреляции сигналов пассивной помехи.
121
Таким образом, для реализации адаптивного разомкнутого фильтра компенсации пассивных помех необходимо обеспечить текущую (в реальном масштабе времени) оценку параметров рс и фс. Оценки могут производиться раздельно и независимо друг от друга.
Рассмотрим пример построения схемы адаптивного цифрового режекторного фильтра, в котором реализуется простейший способ адаптации к среднему доплеровскому смещению частоты сигналов пассивной помехи, обусловленному ее перемещением относительно приемного пункта. В этом случае в составе режекторного фильтра необходимо дополнительно иметь устройство оценки доплеровского смещения частоты помехи FDct или эквивалентного доплеровского сдвига фазы за период повторения зондирующих сигналов Т, т. е. фс = 2nFDT. Вычисления FDc, фс должны производиться в реальном масштабе времени.
Для оценки среднего доплеровского сдвига фазы пассивной помехи за период зондирования Т методом максимального правдоподобия обычно используется выборка из к отсчетов пар квадратурных составляющих пассивной помехи, относящихся к смежным элементам дискретизации по дальности, в двух соседних периодах зондирования.
Оценка среднего доплеровского сдвига фазы производится по формуле [85]
= arctg , (5.61)
Xi + ‘sib'sslj
7=1
где , Qsi ~~ квадратурные составляющие входного сигнала
в двух соседних периодах зондирования. В формуле (5.61) используется предположение об отсутствии корреляции помехи в соседних элементах дискретизации по дальности и о ее стационарности в к смежных периодах дискретизации. Для получения приемлемой точности расчета к должно быть порядка 5... 10.
Полученные оценки фПс используются для коррекции задержанных квадратурных составляющих, заключающейся в повороте суммарного вектора комплексной огибающей Zp-1] = c^[z-1]+jQs[i-1] на угол фрс.
Вычисление скоррелированных квадратурных составляющих этого вектора производится по формулам
де[i -1] = дс[i -1] cos - д, [/ -1] sin фDc,
(5.62) Ф [/ -1] = де [г -1] sin (pDc + [/' -1] cos ср .
122
Структурная схема ЦАРФ с адаптацией к перемещению помехи приведена на рис. 5.17. В схему входят ЗУ для хранения (£-1 ^мерных выборок входных сигналов для каждого элемента дальности, алгоритмы вычисления <рЛ., sin фДс., cos фОс, д'с [/ -1], d [/ -1] и два фильтра ЧПВ-1. Для фильтров других кратностей ЧПВ схема не содержит новых элементов, однако трудоемкость вычислений возрастает.
Отметим также, что вместо оценки (pDe можно непосредственно вычислять оценку ехр(/ ср ) и использовать эту оценку при адаптации режекторного фильтра [142].
С,[1]
Рис. 5.17. Структурная схема адаптивного цифрового режекторного фильтра
ЧПВ-1
ЧПВ-1
Более полная адаптация к корреляционным свойствам помехи включает наряду с оценкой срдс также оценку модуля коэффициента межпериодной корреляции помехи р . Однако, как показывают расчеты, при одногорбом спектре помех и небольшой кратности ЧПВ замена pDc единицей приводит к незначительным потерям, но существенно упрощает вычисления,
5.4.5. Цифровые когерентные накопители сигналов на выходе ЦРФ
Как уже отмечалось в начале раздела, при неизвестной скорости движения цели (неизвестной ср* ) когерентное накопление остатков на выходе режекторного фильтра может быть реализовано параллельной n-канальной фильтровой схемой, изображенной на рис. 5.18. Ширина полосы каждого канала в такой схеме соответствует одному из сравнительно узких участков спектра ожидаемых частот Доплера, а совокупность всех ее каналов полностью перекрывает этот спектр.
123
Требуемое число частотных каналов (элементарных фильтров) определяется по формуле
п = 2FDxmax/bFD , (5.63)
где:
2FZ3Sfmax диапазон значений доплеровской частоты сигнала, определяемый на основе известного соотношения FDjcmax =2КгтахД;
5FD — разрешающая способность РЛС по доплеровской частоте, характеризуемая протяженностью тела неопределенности сигнала вдоль оси F[3];
Kmax“ максимальная радиальная скорость цели.
г
Реализация многоканальной фильтровой схемы во временной области сложна. Поэтому представляет интерес реализация многоканальной схемы накопителя в частотной области, на основе дискретного преобразования Фурье (ДПФ). Как известно, особенностью ДПФ является наличие специфических искажений спектральных характеристик, обусловленных ограниченностью объема N выборки входного сигнала. В результате каждому коэффициенту ДПФ может быть поставлен в соответствие полосовой фильтр с центральной частотой Fk =k!NT (£ - О, 1, 2, ДО-1). Полоса про-
I I
Рис. 5.18. Х-каиальная фильтровая схема
пускания каждого фильтра порядка 1/ДО. Эскиз главных лепестков АЧХ анализатора спектра на основе ДПФ
Рис. 5.19. Эскиз главных лепестков АЧХ 8-канального ДПФ
при ДО - 8 показан на рис. 5.19.
Рассмотренные свойства ДПФ позволяют использовать соответствующие многоканальные фильтры для накопления когерентных сигна-
лов раздельно в каждом из п образованных частотных каналов. В этом случае обнаружение и оценка доплеровской частоты сигнала производится по номеру канала ДПФ, в котором накопленный сигнал превысил порог обнаружения. Если
этот порог превышен в нескольких частотных каналах, производится усреднение или весовое объединение соответсвующих частот.
При больших ДО для вычисления коэффициентов ДПФ применяются алгоритмы быстрого преобразования Фурье (БПФ), что во мно
гих случаях позволяет решать поставленную задачу в реальном масштабе времени.
124
Эскиз полной АЧХ одного из элементарных каналов восьмиточечного ДПФ приведен на рис. 5.20 (сплошная линия). Из этого рисунка следует, что эквивалентные АЧХ элементарных фильтров ДПФ имеют высокий уровень боковых лепестков (УБЛ) (уровень мощности первого бокового ле
пестка порядка —13 дБ) и перекрываются. Наличие боковых лепестков приводит к ухудшению селективности фильтровой схемы. Для ослабления влияния боковых лепестков используются весовые функции (окна), на которые надо умножить последовательность выборок сигналов на входе фильтра ДПФ (БПФ), или, что эквивалентно, сглаживать спектральные отсче
ты на выходе фильтра ДПФ. Операции ДПФ и сглаживания данных с помощью весовых функций можно выполнять в произвольном порядке, определяемом соображениями удобства реализации.
При взвешивании на входе дискретное преобразование Фурье
Рис. 5.20. Эскиз АЧХ одного канала 8-точечного ДПФ
имеет вид
[Ar] = £ ехр[- jlitik /
(5.64)
где W[i]=W[iT], (г==0, 1,..., ДМ) — коэффициенты весовой функции.
Обширный каталог весовых функций, применяемых в спектральном анализе, имеется в литературе [110]. Ниже, в таблице 5.1, приводятся математические выражения и основные характеристики нескольких разновидностей весовых функций, нашедших применение при решении задач цифровой обработки сигналов.
Применение окон со спадающими к краям весами приводит к существенному снижению боковых лепестков элементарных фильтров ДПФ по сравнению с ДПФ без взвешивания (с прямоугольной весовой функцией). На рис. 5.20 пунктирной линией показана амплитудно-частотная характеристика одного из доплеровских фильтров 8-точечного ДПФ после обработки входной последовательности весовой функции Хэннинга. Видно, что уровень первого бокового лепестка снизился до —36 дБ и одновременно произошло расширение основного лепестка АЧХ, что, с одной стороны, расширяет полосу режекции помех в области нуля доплеровсхой частоты, но, с другой стороны, приводит к ухудшению разрешающей способности фильтра по доплеровской частоте.
Другим источником потерь при накоплении фильтром ДПФ со взвешиванием является паразитная амплитудная модуляция спектра
125
при обработке пачек сигналов, доплеровская частота которых не совпадает с базовыми тонами, кратными частоте 1/ЛТ. Потери из-за паразитной амплитудной модуляции составляют 1...2 дБ для окон с плавно спадающими к краям весовыми коэффициентами.
Максимальные потери преобразования, как сумма максимальных потерь из-за паразитной амплитудной модуляции спектра для данного окна и потерь, обусловленных формой этого окна, не превышают 3...4 дБ (табл. 5.1).
Таблица 5.1
Название функции Математическое выражение Макс. УБЛ (ДБ) Относительная ширина главного лепестка Максимальные потери преобразования (ДБ)
Хэннинга W[i] = 0,5[1 - cos(2Tti/N)] i=0, 1,..., AM -32 1,44 3,18
Хемминга VT[i] = 0,54 - 0,46 cos(2ni/N)] i = 0, 1,..., AT—1 -43 1,30 3,10
Блек мана W[i] = 0,42 - 0,5 cos(2tu/W)]+ +0,08 cos(4ra/AT) i = 0, -58 1,68 3,47
Блекмана-Харриса (четырехчленное) W[<] = 035875 - 0,48829 cos(2ni/N)]+ +0,14128 cos(4ni/2V) -- 0,01168 cos(6ni/N) i — 1 N-l -92 1,90 3,85
Кайзера-Бесселя Нф] = /Jita'/l - (2i/AM)2] 0s|i|<N/2, a = 2,5 /„[.] —модифицированная функция Бесселя I-го рода нулевого порядка -69 1,74 3,56
Выигрыш от применения в ЦСДЦ комбинации фильтров ЧПВ-v + ДПФ со взвешиванием по сравнению с некогерентным накоплением остатков на выходе фильтра ЧПВ- v может быть оценен отношением
С(дБ) = 10 1g
(5.65)
где:
(•)с — выходное отношение сигнал—помеха при когерентном накоплении остатков;
(•)«— это же отношение при некогерентном накоплении остатков.
126
Ниже приведены результаты моделирования, отражающие зависимость коэффициента G от числа накапливаемых импульсов и вида весовой функции при следующих исходных предпосылках.
1. Входной сигнал — пачка из т импульсов одинаковой амплитуды; фильтр БПФ с числом каналов N- 25, 5 = 3 ... 6; фильтр ЧПВ-v, v-1 ... 3.
2. Сигнал, отраженный от цели, — случайный процесс с энергетическим спектром, описываемым резонансной кривой с относительной шириной &fcT = 0,05. Доплеровский сдвиг частоты сигнала совпадает с одной из базовых частот фильтра БПФ,
3. Пассивная помеха — стационарный случайный процесс, энергетический спектр которого аппроксимируется гауссовской кривой с относительной шириной &fcT -0,1. Доплеровская частота помехи считается полностью скомпенсированной.
4. Отношение сигнал-помеха на входе фильтра ЧПВ q2~ 10‘2... 10»
5. Внутренние шумы аппаратуры не учитываются.
Результаты моделирования представлены графиками, изображенными на рис. 5.21, 5.22 и 5.23.
Графики на рисунках 5.21 и 5.22 отображают зависимость коэффициента G от числа накопленных импульсов т при двух значениях v =1, 3 и применении весовых функций:
кривая 1 — прямоугольная весовая функция (прямоугольное окно),
кривая 2 — окно Хэннинга,
кривая 3 — окно Блекмана,
кривая 4 — окно Кайзера-Бесселя (а = 2, 5),
кривая 5 — окно Блекмана-Харриса.
G (ДБ)
Рис. 5.21. График G « F(m) с фильтром ЧПВ-1
Рис. 5.22. График G ~ F(m) с фильтром ЧПВ-3
127
На рис. 5.23 представлены графики зависимости коэффициента G от числа накопленных импульсов при различной кратности ЧПВ
в(дб)
(v = 1, 2, 3) и применении для взвешивания окна Хэннинга.
На основе этих графиков можно сделать следующие выводы.
1. Применение в качестве
накопителя фильтра ДПФ (БПФ) без взвешивания (прямоугольное окно) обеспечивает выигрыш по сравнению с некогерентным накопителем порядка 13 ... 20 дБ в зависимости от числа W накапливаемых импульсов.
2. Использование окон (из числа приведенных в таблице 5.1) позволяет получить выигрыш от 40 до 60 дБ при малых А' - З2, до 80 дБ при т = 2®.
3. С увеличением числа каналов ДПФ (БПФ) относительный
выигрыш растет.
4. С увеличением кратности фильтра ЧПВ относительный вы-
Рис. 5.23. График G = Г(ти) при различной кратности ЧПВ
игрыш падает (рис. 5.23). Этот важный фактор свидетельствует о том, что при обработке больших пачек можно ограничиться простейшим, например, однократным фильтром ЧПВ или даже применять только фильтр ДПФ (БПФ) с одним из рекомендованных окон без
предварительной режекции помехи.
5.4.6. Процессор когерентной межпериодной обработки сигналов на фоне пассивных помех
В заключение рассмотрим более детальную, чем в начале главы, функциональную схему взаимодействия устройств канала цифровой когерентной обработки сигналов на фоне пассивных помех (рис. 5.24).
В соответствии с рассмотренными выше операциями когерентной обработки сигналов пачечной структуры основными функциональными элементами такой схемы являются [143]:
1. Цифровой согласованный фильтр одиночных импульсов сигналов, реализованный во временной или частотной областях.
2. Цифровой режекторный фильтр (фильтр ЧПВ-v), реализованный раздельно для двух квадратурных составляющих входного сигнала.
128
3. Когерентный накопитель остатков после режекции пассивных помех, реализованный в виде цифрового процессора ДПФ (БПФ) со взвешиванием сигналов на входе. Фильтры 2 и 3 включены последовательно и составляют основу межпериодной когерентной обработки сигналов пачечной структуры на фоне помех с временной корреляцией.
2 3
i 1 i * F «
ЦСФ
1
I)
ЧПВ-v.
ЧПВ-Ч
9
J f
1 I
I 1 (I
ЩРФ..
1 ’ I ’
1 1
1 >
[Объединений U f [квадратурным —>
i каналов
N-1
ионару-житель
Фильтр нулевой скорости
ВФ
кн
Процессор карты помех
Un
Формирование * порога
i
I
1
I I
I
И -------------
I 1
Рис. 5.24. Функциональная схема взаимодействия устройств канала цифровой когерентной обработки сигналов
Дополнительными, но весьма важными, элементами схемы являются:
1. Запоминающее устройство с произвольной выборкой данных (ЗУПВ), в которое записываются выборки входных сигналов синфазного и квадратурного каналов для каждого элемента разрешения по дальности за N+v периодов повторения зондирующих сигналов Т, где У — число точек разложения ДПФ (число параллельных фильтров когерентного накопителя), v — кратность ЧПВ.
Если элемент разрешения по дальности равен 5г, то число подлежащих обработке (N+ v )-мерных выборок
М, = Дг/5г>
где Ar = Лпах — rmin — участок зоны обзора РЛС по дальности, в которой решается задача СДЦ.
Число ячеек (многоразрядных) ЗУПВ определяется по формуле Q—Adr(N+v)- Если, например, Дг= 100 км, 5г = 100 м, N = 8, v= 2, Q, = 104 ячеек.
2. Цифровой фильтр накопления сигналов с нулевым смещением доплеровской частоты (фильтр нулевой скорости), представляющий собой когерентный фильтр нижних частот, предназначенный для
129
накопления сигналов, отраженных от целей, движущихся с малыми радиальными скоростями, а также со скоростями, близкими к слепым, на фоне пассивных помех. На вход фильтра подаются квадратурные составляющие входного сигнала параллельно входу фильтра ЧП В. Ширина полосы фильтра аналогична ширине полосы частотных каналов фильтра ДПФ. Если в какой-либо ячейке по дальности и угловой координате сигналы, отраженные от медленно движущейся цели, превышают сигналы от пассивных помех, она будет обнаружена.
3. Процессор формирования средних уровней сигналов, мешающих отражений (“карты” помех) во всей зоне обзора РЛС или в части этой зоны. Для построения карты мешающих отражений используются сигналы на выходе фильтра нулевой скорости. В процессе обзора пространства запоминаются и периодически обновляются уровни (амплитуды) напряжений, обусловленных ложными отражениями в каждом элементе разрешения дальность— угловая координата. Эти напряжения используются в дальнейшем для управления порогами при обнаружении сигналов с целью стабилизации вероятности ложного обнаружения. (Подробно эти вопросы будут рассматриваться в следующей главе.)
Схема, изображенная на рис. 5.24, получила название обнаружителя движущихся целей (ОДЦ). Она с успехом применяется в современных системах обработки сигналов на фоне помех с временной межпериодной корреляцией [12].
130
Глава VI
ЦИФРОВОЕ ОБНАРУЖЕНИЕ И ИЗМЕРЕНИЕ КООРДИНАТ ПРИНИМАЕМЫХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
6Л. Оптимальные цифровые обнаружители сигналов на фоне помех с известными параметрами [101, 102, 117]
6.1,1. Постановка и методика решения задачи оптимального обнаружения сигналов
В радиотехнических системах задача обнаружения сигналов решается обычно на видеочастоте, после объединения сигналов квадратурных каналов (на выходе детектора огибающей). Принимаемый сигнал на входе обнаружителя представляется в виде
U = ^X + N>
где: U — в общем случае вектор входных сигналов;
Я= 1, если полезный (обнаруживаемый) сигнал есть;
А = 0, если полезный сигнал отсутствует;
N — вектор аддитивной помехи.
Задача оптимального обнаружения сигнала ставится и решается как задача проверки статистической гипотезы HQ (нулевой гипотезы) об отсутствии полезного сигнала относительно альтернативной гипотезы о его наличии. При этом возможны следующие ошибки решения.
1. Ошибка первого рода при отклонении правильной нулевой гипотезы. Эта ошибка называется ложным обнаружением. Условная вероятность ложного обнаружения обозначается PF.
2. Ошибка второго рода при отклонении правильной альтернативной гипотезы. Эта ошибка называется пропуском сигнала. Условная вероятность пропуска сигнала Рв - 1 - PD, где PD — условная вероятность обнаружения сигнала.
При синтезе оптимальных обнаружителей сигналов в помехах широко применяется критерий Неймана-Пирсона, в соответствии с которым вероятность ложного обнаружения фиксируется на некотором уровне, и выбирается такое правило решения, при котором вероятность пропуска сигнала имеет минимальную величину. Правило решения Неймана-Пирсона состоит в образовании отношения правдоподобия
•№|Л=»)'
где: w(U| A = Y) — условная плотность распределения вероятности (ПРВ) входного сигнала при наличии полезного сигнала;
131
w(U | A = 0) — условная ПРВ входного сигнала при отсутствии
полезного сигнала и сравнении этого соотношения с порогом Lth, выбираемым, исходя из заданной вероятности ложного обнаружения.
Решение принимается по правилу: при £(U) > полезный сигнал считается обнаруженным, т. е. Ji — 1, при £(U) < Lth принимается решение Ji—0-
В дальнейшем задачи обнаружения сигналов решаются с учетом
следующих предпосылок.
1. Входной одиночный сигнал представляется в виде
Ut (61)
где X(ti ,a) — полезный сигнал — функция времени и параметров а. Параметрами сигнала являются время задержки /z, доплеровская частота FD и направление прихода 0. Суммарный полезный сигнал представляет собой последовательность периодически повторяющихся импульсов (пачку импульсов). При равномерном вращении антенны РЛС в плоскости обзора пачка модулирована по амплитуде огибающей ДН. Число импульсов в пачке
m-$pF / Q (6.2)
где — ширина луча антенны ДН в плоскости сканирования на заданном уровне мощности P,F — частота повторения зондирующих сигналов, £2 — угловая скорость сканирования луча антенны. При дискретном сканировании (в РЛС с ФАР и ЦАР) огибающая пачки имеет прямоугольную форму, а число импульсов в пачке назначается исходя из заданной вероятности обнаружения на границе зоны обзора цели с минимальной эффективной отражающей поверхностью.
Что касается статистических характеристик полезных сигналов, то далее, как обычно, рассматриваются два случая: пачка нефлюктуирующих сигналов и пачка независимо флюктуирующих по закону Рэлея сигналов с дисперсией , т. е.
XX /о?)ехр[-Х /2о?].
2. В качестве модели помехи при синтезе алгоритмов обнаружения и оценки параметров сигналов принимается в основном гауссовский случайный процесс (шум) с нулевым математическим ожиданием и дисперсией a I. При отсутствии пассивных помех выборки этого процесса не имеют межпериодной корреляции. При наличии пассивных помех (или остатков после их компенсации в ЦСДЦ) последовательность выборок помехи представляется приближенно цепью Маркова. Для ее статистического описания, кроме дисперсии, необходимо знать коэффициент межпериодной корреляции пассивных помех рс (при отсутствии ЦСДЦ) или коэффициент корреляции остатков пассивных помех на выходе ЦСДЦ.
132
В качестве примера дополнительной негауссовской помехи можно рассматривать хаотическую импульсную помеху (ХИП), создаваемую другими источниками излучения. Эта помеха характеризуется скважностью <2ХИП и амплитудой Uxm, которые являются случайными величинами. Анализ воздействия хаотической импульсной помехи в процессе приема проводится, как правило, методом имитационного моделирования.
3. Выборки принимаемого сигнала при отсутствии флюктуаций отражающей поверхности цели описываются обобщенным законом Рэлея с плотностью распределения вероятности
, Ц>0,
(6.3)
где 10 — функция Бесселя нулевого порядка. Аналогично для случая флюктуирующей цели
Wxn(Ui
(6.4)
где ст2, —дисперсия амплитуды сигнала.
Введя обозначения: w, -Ut /ап — относительная амплитуда огибающей, q? = X? / — отношение квадрата амплитуды нефлюк-
туирующего сигнала к дисперсии амплитуды помехи, у? = ст/ стй — отношение дисперсии амплитуды флюктуирующего сигнала к дисперсии помехи, получаем, вместо (6.3) и (6.4), соответственно
Wxn (М; ) = И,
ехр
(6.5)
жя(м,) = —-—ехр ———
1 + у? \2(1+у?)
(6.7)
При отсутствии сигнала в обоих случаях
иЦ», ) = w, ехр[- м,2/2]. (6.7)
4. Совместная плотность вероятности пачки из т некоррелированных нормированных выборок при отсутствии флюктуаций полезного сигнала (при равномерном сканировании антенны)
т
wm(и{ ,и2,.,.,ит) = [и}т = и, ехр
/=1
(6.8)
где:
<7,- q& Si —весовые коэффициенты, зависящие от формы ДН антенны;
<70 — отношение сигнал—помеха в максимуме ДН.
133
Аналогично для пачки из тп выборок при рэлеевских флюктуациях полезного сигнала
2(1 + Т,!)
(6.9)
Для случая дискретного сканирования антенны формулы (6.8) и (6.9) остаются в силе при условии - и2=... = um, qf~ q0.
5. Цифровая реализация алгоритмов обнаружения сигналов рассматривается в двух вариантах.
5.1. Сигнал квантуется по амплитуде так, что цена младшего разряда не превышает среднеквадратического значения внутренних шумов приемной аппаратуры ст„. В этом случае учет влияния квантования сводится к добавлению к помехе на входе независимых шумов квантования, а синтез алгоритмов цифровой обработки — к цифровой реализации алгоритмов оптимальной аналоговой обработки.
5.2. Сигнал квантуется на два уровня (двоичное квантование). В этом случае необходимо проводить непосредственный синтез алгоритмов и решающих устройств для обработки цифровых двоичноквантованных сигналов. Необходимые для этого статистические характеристики m-мерных выборок при наличии и отсутствии сигнала имеют следующий вид [51]:
где:
(6.10)
(б.И)
00 00
Pxni = J Wx» (и, )du, . pni = J w(w,)du, .
Uih
dt = 1, если ил, и dt = 0, если u,< uth (ua — нормированный порог двоичного квантования сигналов).
6.1.2. Оптимальный обнаружитель пачки оцифрованных сигналов
Теория оптимальных обнаружителей достаточно подробно рассмотрена в литературе [81, 96, 101,102]. Здесь алгоритмы оптимального обнаружения приводятся в конспективном плане, чтобы, главным образом, сравнить их по трудоемкости реализации с другими алгоритмами.
134
Рассмотрим случай обнаружения полностью известного сигнала — пачки из т нефлюктуирующих импульсов, принимаемых на фоне собственных шумов приемника с известными статистическими характеристиками.
Используя выражения (6.5), (6.7) и (6.8) для плотности распределения вероятности совокупностей выборки смеси нефлюктуирующего сигнала с помехой и одной помехи, отношение правдоподобия получаем в виде
Следовательно, алгоритм оптимального обнаружения пачки в этом случае будет
(6-12)
После логарифмирования и преобразования (6.12) получим
2Jn70 (ц qt ) > In(6 j3) 1=1 ;=1
Дальнейшие преобразования выражения (6.13) связаны с аппроксимацией функции In zo (w, qt)
Для случая слабых сигналов « 1) In I0(ut q, ) « u?q?/4. Следовательно, алгоритм обнаружения пачки слабых сигналов (с учетом qt = gfl0) будет следующий
(6.14)
Для случая сильных сигналов (qt » 1) In Zo (u, qt)» u, q, оптимальный алгоритм обнаружения пачки
(6.15)
Таким образом, для пачки полностью известных сигналов, модулированных ДН антенны, оптимальный алгоритм обнаружения сводится к весовому суммированию нормированных выборок сигналов на выходе квадратичного или линейного детектора в пределах ширины пачки и сравнению накопленной суммы с порогом.
В реальных системах пачка отраженных сигналов содержит неизвестные параметры: отношение сигнал—шум q0 в максимуме ДН антенны, задержку сигналов пачки tr относительно зондирующего сигнала, а также угловое смещение центра пачки 0О. Поэтому для обработки информации во всей зоне обзора реализация алгоритма
135
(6.14) или (6.15) должна быть организована в каждом интервале дискретизации по дальности (времени), а накопление сигналов должно производиться в пределах “движущегося окна”, равного числу сигналов в пачке. В данном случае, при малом отношении сигнал — шум (для r-го интервала дискретизации), алгоритм обнаружения пачки нефлюктуирующих сигналов представляется в виде
т-1
In Дг) = £ g?u$> >Llh> (6.16)
Z=0
где: r= 1, 2, ..., М\ M-T/t^ ц>/и;
td — период временной дискретизации сигналов.
Аналогично, для пачки флюктуирующих сигналов при у 0 « 1, алгоритм обнаружения записывается в виде
(6.17)
Алгоритмы обнаружения в пределах “движущегося окна” при у0 > 1 получаются аналогично.
Таким образом, оптимальный обнаружитель пачки сигналов с неизвестными параметрами представляет собой устройство скользящего весового суммирования, дополненное пороговым устройством и устройством формирования сигнала об обнаружении пачки.
6.1.3. Оптимальный обнаружитель пачки двоично-квантованных сигналов
Рассмотрим теперь случай, когда пачка нефлюктуирующих входных сигналов квантуется на два уровня. Алгоритм оптимального обнаружения пачки двоично-квантованных сигналов также сводится к образованию отношения правдоподобия и сравнению его с порогом. При этом используются выражения (6.10) и (6.11). Полученный таким образом алгоритм в окончательном виде записывается так (детектор линейный):
т-1
In ДР = £ тъ <Д-1 С , /=0
(6.18)
где весовые коэффициенты и порог обнаружения
(6.19)
136
— вероятность получения еди
ницы на г-ой позиции сигнальной пачки;
— вероятность получения единицы в области
помех (при отсутствии полезного сигнала);
1, Ufa ,
= 1 А
(uth ~ нормированный порог двоичного квантования).
Алгоритм оптимального обнаружения немодулированной пачки (в случае обзора с остановкой антенны) имеет вид
/и**1
lnZ|i — / — С > (6.20)
/=0
т. е. сводится к накоплению единиц в пределах пачки (в пределах ширины дискретно перемещающегося окна) и сравнению накопленной суммы с порогом.
6.1.4. Цифровые программные обнаружители пачек двоично-квантованных сигналов
В практике инженерного проектирования обнаружителей пачек двоично-квантованных сигналов часто используются эвристические алгоритмы, фиксирующие наличие сигнала по плотности единиц в пределах каждого интервала временной дискретизации выборок на выходе детектора огибающей.
Наиболее распространенными из этого класса алгоритмов являются так называемые программные обнаружители, фиксирующие начало пачки по наличию I единиц на т смежных позициях, где 1<т> т<5.Л$ (критерий ‘7из т”). Критерий фиксации начала пачки может быть одновременно критерием ее обнаружения. Для исключения неоднозначности при отсчете угловой координаты пачки устанавливается критерий конца пачки. Обычно конец пачки фиксируется по наличию серий из к пропусков (нулей) подряд (к = 2 ... 3). Для счета позиций между началом и концом пачки применяют двоичные счетчики.
137
Каждая из рассмотренных программ может быть реализована с помощью конечного цифрового автомата. Композиция этих автоматов дает структурную схему программного обнаружителя (рис. 6.1, где At — конечный автомат, реализующий критерий обнаружения “l/т"', А2 — конечный автомат, реализующий критерий конца пачки по серии из к нулей; А3 — конечный автомат (счетчик), предназначенный для счета позиций от момента обнаружения пачки до момента сброса накопленной информации).
Рис. 6.1. Структурная схема программного обнаружителя двоично-квантованных сигналов
Используя известные методы композиции абстрактных цифровых автоматов [48], можно для каждого конкретного набора значений I, т и к получить матрицу переходов и граф объединенного автомата, реализующего программу “1/т — к’’. Граф является исходным для разработки средств реализации алгоритма, а матрица переходов позволяет обоснованно подойти к расчету характеристик качества программных обнаружителей [50, 51].
В качестве примера рассмотрим статистический подход к решению задач синтеза и анализа обнаружителя, реализующего программу (критерий) “3/4 — 2”, в котором решение об обнаружении начала пачки принимается при появлении в обрабатываемой последовательности двоично-квантованных сигналов 3-х единиц на четырех смежных позициях, а конец пачки фиксируется при появлении в этой последовательности двух пропусков (нулей) подряд. Логическая схема процесса функционирования обнаружителя начала пачки записывается в этом случае в виде
уь = Х\ Х2Х3 + X] Х2Х3Х4 + X] Х2Х3 х4,
а логическая. схема фиксации конца пачки в виде уе = xt х2, где обозначено xt =1, xz =0. Направленный граф функционирования рассматриваемого цифрового обнаружителя приведен на рис. 6.2, где точками обозначены внутренние состояния графа, а стрелками — разрешенные переходы между состояниями. Стрелки отмечены входными сигналами (хи х ), при поступлении которых осуществляются переходы в графе. Состояние 0 графа является исходным.
138
Переход в состояние 6, означающий выполнение критерия обнаружения начала пачки, сопровождается выдачей сигнала уь. После выдачи сигнала обнаружения при появлении новых единиц граф остается в состоянии 6 и возвращается в это состояние из состояния 7 после одиночных пропусков единиц. При появлении двух нулей подряд граф возвращается в исходное (нулевое) состояние с выдачей сигнала уе.
Рис. 6.2. Направленный граф функционирования обнаружителя “3/4 — 2”
Если в графе заменить логические переменные (сигналы х{ = 1 и X/ = 0) вероятностями их появления pt и 1 -p^q^ получим граф со случайными переходами, который является исходным при анализе обнаружителя, При воздействии на входе стационарных помех, представляющих собой последовательность испытаний Бернулли с исходами 0 и 1, совокупность состояний рассматриваемого обнаружителя представляет собой простую эргодическую цепь Маркова с матрицей переходных вероятностей
"3/4-2"
Рп 0 0 рп о о о о о о о о о о о о
о о
Qn 0 о о 0 Рп qn 0 0 0
о о о о
ООО ООО qn рп 0
ООО 0 рп о
0 рп о
0 Рп qn
0 рп 0
(6.21)
0
0
<7* о
0
где р — вероятность получения единицы за счет помехи, одинаковой на всех позициях, qn = 1 - рп.
139
Для эргодической цепи Маркова вектор-строка Р финальных вероятностей состояний не зависит от вектора начального состояния и связан с матрицей переходных вероятностей П векторно-матричным соотношением [51]
Р = РП, Р=Р0, Р
(6.22)
Это соотношение позволяет непосредственно находить финальные вероятности состояний алгоритма, если известна его матрица переходных вероятностей.
Для рассматриваемого алгоритма финальные вероятности состояний находятся из выражений [50]
Aq$ + Bp2(l-qP) ’
где:
рпдп(\-2рп-дпр^) \-рпдп
_ 1+^(1+qp) tHU ~ 1 "L"t "" lr—1
\-рпд«
Вероятность ложного обнаружения определяется в этом случае по формуле
(6.23)
А — (1—рпУ +
При анализе вероятности обнаружения полезного сигнала (пачки) рассматриваемым обнаружителем необходимо учитывать следующие особенности.
1. К моменту поступления сигнала (этот момент является произвольным) обнаружитель может находиться в любом из возможных состояний за счет воздействия помех. Если входные сигналы анали-
зируются во всем кольце дальности или в пределах широкого строба по угловой координате, то в качестве вектора-строки вероятностей
исходного состояния графа (перед поступлением полезного сигнала)
Р7 (0) , где
можно принять вектор-строку Р(0)= Ро(О), Д (0),
значок (0) показывает, что этот вектор относится к нулевой позиции
пачки.
140
2. Последовательность дискретных состояний обнаружителя в области нестационарного сигнала (пачки сигнальных импульсов с произвольной огибающей) образует неоднородную цепь Маркова. Для неоднородной цепи Маркова нельзя вычислить финальные вероятности состояний. Задача расчета вектора-строки вероятностей состояний может быть решена теперь только рекуррентно (по шагам) путем последовательного применения формулы
Р(0 = Р(/ - 1)П(0, (6.24)
где П(0 — матрица переходных вероятностей неоднородной цепи Маркова на г-й позиции пачки (/ = l,m), P(i -1) — вектор-строка вероятностей состояний на (i -1)-й позиции.
3. Для расчета нарастающей вероятности обнаружения пачки удобно преобразовать исходную цепь Маркова в цепь Маркова с поглощающим экраном (поглощающим состоянием). Поглощающий экран должен быть совмещен с состоянием» переход в которое приводит к выполнению критерия обнаружения. В процессе преобразования исходной цепи Маркова в цепь Маркова с поглощающим экраном необходимо также преобразовать вектор-строку исходных состояний Р(0) так, чтобы его размерность соответствовала размерности матрицы переходных вероятностей цепи с поглощающим экраном, и при этом выполнялось условие £/? (0)=1. Преобразование это производится
i
путем объединения вероятностей достижения "закороченных” состояний с вероятностью состояния, в котором установлен поглощающий экран. Для рассматриваемой логики обнаружения начала пачки “3/4” матрица переходных вероятностей цепи Маркова с поглощающим экраном имеет вид
Я* 0 0 0 0 0 р* 0 0 Ях1 0 0 0 0 0 0 Qxi 0 0 Pxi
0 0 0 Pxi 0 0
0 0 0 Я Xi 0 0 Pxi
Я* 0 0 0 0 0 0 0 0 0 0 0 Pxi 1
(6.25)
где: pxi — вероятность обнаружения сигнала на z-й позиции пачки,
141
Вероятности состояний обнаружителя на z'-й позиции пачки вычисляются по формулам
Р> ®=чЛР0 (i-Ъ+Р, (i-V+Ps G-i)];
Р\ (i)=Ро (i - l)Pxi> Рг 0)=Pl (i- l)Pxi ’
P3 (/) = И (/ -1)+P4 (i -1)]^; P4 (i) = P3 (i -1)Pxi;
Ps (i) = P2 (i -1)^,; P6 (i)=[P2 (i -1)+P4 (i -1)+Ps (i - l)]p„ + Л O’ -1) •
Суммарная вероятность обнаружения пачки в этом случае равна
Pd =^6 0") = Л (w-l)+[P2 (w-l) + Л (w-l)+P5 (6.26)
К другой группе алгоритмов рассматриваемого класса относятся цифровые накопители двоично-квантованных сигналов. Начало пачки фиксируется накопителем на первой единице, полученной после сброса счетчика-накопителя. Конец пачки фиксируется при появлении серии из к нулей, т. е. так же, как и в программных обнаружителях. Сигнал обнаружения выдается в момент сброса счетчика, если накопленное в нем число единиц равно или больше порогового mtk. Нако
пители другого типа строятся так, что в счетчике накапливается не число единиц между сериями из к и более пропусков подряд, а число позиций (тактов) в тех же пределах, характеризующих ширину пачки. При этом пропуски единиц на внутренних позициях пачки восстанавливаются. В таких накопителях проще реализуется алгоритм отсчета угловой координаты пачки [51].
Анализ характеристик качества цифровых программных обнаружителей и накопителей может производиться аналитическим методом
или методом моделирования. В качестве примера на рис. 6.3 представлены графики вероятности обнаружения программными обнару-
жителями “3/3 — 2”, “3/4 — 2“, “4/5 — 2” и цифровым накопителем единиц при фиксированной вероятности ложного обнаружения
Sh
10“4 для пачки из 15 импульсов, модулированных огибающей
антенны вида g(x)=sinx/x
. Пороги двоичного квантования
рассчитывались по методике, изложенной в [51]. Для накопителя порог обнаружения (порог счетчика) mth рассчитывался по формуле:
rentier 1,50 = 1, 15).
V
(6.27)
Для сокращения числа экспериментов при оценивании вероятности обнаружения методом моделирования может быть использован метод значимой выборки, суть которого состоит в замене при модели
142
ровании исходных воздействий модифицированными, с последующей корректировкой результатов соответствующими весовыми коэффициентами [53, 54].
1234 Р^Ю"4 т=15
1 нефлюктуирующие сигналы ММ MW * быстрофлюкгуирующие сигналы
Рис. 6.3. Графики вероятности обнаружения программными обнаружителями и цифровыми накопителями
Результаты моделирования показывают:
1. При обнаружении нефлюктуирующих сигналов накопители эффективнее программных обнаружителей, а при обнаружении быстрофлюктуирующих сигналов эффективнее программные обнаружители с “мягким” критерием обнаружения “l/m" (I < m).
2. Потери в пороговом сигнале при обнаружении пачки сигналов в “движущемся окне” программными обнаружителями и накопителями невелики. Цифровая реализация таких обнаружителей достаточно проста, что делает целесообразным их применение в тех случаях, когда требования простоты реализации преобладают над требованиями минимизации энергетических потерь.
3. При двухэтапном обнаружении программные обнаружители целесообразно применять на первом этапе.
143
6.2. Цифровые обнаружители сигналов на фоне помех с неизвестными параметрами [13, 15, 29, 47, 99, 109]
6.2.1. Исходные предпосылки
Оптимальные алгоритмы обнаружения сигналов обладают предельными характеристиками только для тех условий функционирования, которые принимались при синтезе. Отклонение статистических характеристик помехи и сигнала от принятых при синтезе приводит, как правило, к резкому ухудшению эффективности оптимальных алгоритмов или даже к потере их работоспособности. Поэтому особый интерес представляет синтез “устойчивых” алгоритмов, обладающих достаточно стабильными показателями качества в условиях неизвестных и изменяющихся во времени условий функционирования.
Обычно ставится задача обеспечения устойчивости (стабильности) не всех, а только наиболее важных показателей качества обнаружения или только одного из них — вероятности ложного обнаружения PF. Особенно это важно в системах цифровой обработки сигналов, так как увеличение числа ложных обнаружений сверх установленного приводит к перегрузке вычислительных средств.
В зависимости от наличия и характера априорной информации о статистических характеристиках обрабатываемых сигналов различают параметрическую и непараметрическую неопределенность. В случае параметрической неопределенности априори известными являются формульные выражения для плотности распределения вероятности (ПРВ) выборок обрабатываемого процесса Ul как при наличии так и при отсутствии полезного сигнала.
Параметры этих плотностей (например, математическое ожидание и дисперсия для гауссовской ПРВ) до опыта являются неизвестными. Считается, что изменение внешних условий функционирования сводится к случайному (непредвиденному) изменению параметров сигнала и помехи. Устойчивые к изменению внешних условий функционирования алгоритмы включают в данном случае предварительную оценку неизвестных параметров сигнала и помехи по дополнительной (обучающей) выборке, и последующее использование этих оценок для нормировки входных сигналов обнаружителя или для управления порогом обнаружения. Такие обнаружители получили название адаптивных обнаружителей.
Обычно адаптивные пороговые алгоритмы обнаружения предназначаются для стабилизации вероятности ложного обнаружения и поэтому получили название алгоритмов с постоянной вероятностью ложного обнаружения (ПВЛО) или алгоритмов с постоянным уровнем ложных тревог (ПУЛТ).
При непараметрической априорной неопределенности считается неизвестным вид (формула) ПРВ выборочных отсчетов, а о различии
распределений сигнала и помехи известны только сведения общего характера (различия в сдвиге, масштабе и др.). В этом случае синтез устойчивых алгоритмов обнаружения производится на основе методов непараметрических статистических гипотез [23, 29]. Получаемые при этом непараметрические алгоритмы обнаружения (главным образом, знакомые и ранговые) обладают независимостью (инвариантностью) вероятности ложного обнаружения от ПРВ помехи.
Однако, считать, что статистические данные совсем отсутствуют, тоже нет оснований. Как правило, известны разновидности ПРВ шумов (помех), но неизвестно, какая из них основная, а какие являются дополнительными, “загрязняющими” основную ПРВ. Одна из популярных моделей “загрязненных” ПРВ шума записывается в виде
wn(U) = (1 -e)w°(t/) + ew'n (U), (6.28)
где:
w„(U) — исходная (основная) ПРВ;
w„ (U) — произвольная “загрязняющая” ПРВ из заданного класса распределений,
е < 1 — число, характеризующее уровень “загрязнения” wS (U) . Аналогичным образом может быть представлена “загрязненная” ПРВ для полезного случайного сигнала.
Задача обнаружения сигналов в условиях “загрязненных” распределений получила название робастной проверки гипотез, а синтезированные при этом алгоритмы называются робастными (устойчивыми). Подробный обзор робастных методов обработки сигналов приведен в литературе [36, 47].
Эффективность алгоритмов обнаружения сигналов на фоне помех с неизвестными параметрами, по сравнению с оптимальными алгоритмами (в случае известных параметров помех), оценивается требуемым увеличением порогового отношения сигнал—помеха для получения одинаковых показателей качества. Потери в отношении сигнал-помеха [дБ] определяются выражением
В = 101g(<tf /ql), (6.29)
где:
ql — пороговое отношение сигнал—помеха, обеспечивающее заданную вероятность обнаружения PD при некоторой фиксированной вероятности ложного обнаружения для оптимального алгоритма;
ql — пороговое отношение сигнал—помеха, обеспечивающее те же характеристики для алгоритма обнаружения на фоне помех с неизвестными параметрами.
Для сравнения относительной эффективности обнаружителей можно применять также так называемый коэффициент асимптотической относительной эффективности [81]:
(6.30)
144
145
где Nt, N2 — объемы выборок, необходимые обнаружителям At и Л2 для достижения одной и той же PD при заданной PF (при этом суммарная энергия сигнала предполагается независимой от объема выборки). Если Е(-) > 1, алгоритм более эффективен, чем алгоритм А2.
6.2.2. Адаптивные цифровые обнаружители
Как уже отмечалось, для преодоления априорной параметрической неопределенности применяется формирование на основе произведенных наблюдений оценок неизвестных параметров сигналов и помех или их распределений [99]. Эти оценки используются затем при решении задач обнаружения вместо неизвестных истинных параметров. Алгоритмы, в которых используются полученные по данным предварительной оценки распределения, их параметры или какие-либо другие статистические характеристики входных сигналов, называют адаптивными алгоритмами обнаружения.
При наличии неизвестного параметра помехи можно записать условное отношение правдоподобия в виде
ци । е„)=жл(?71 en)/w„(?71 е„).
Если теперь каким-либо статистическим методом получена оценка Q п неизвестного параметра, то это соотношение позволяет вычислить безусловное отношение правдоподобия, на основе которого можно синтезировать оптимальный алгоритм обнаружения. Оценка неизвестного параметра обычно находится методом максимального правдоподобия на основе решения уравнения
dw(U\Qn)
Таким образом, суть подхода к адаптации в этом случае состоит в том, что сначала по ограниченной выборке входных данных находится оценка максимального правдоподобия для неизвестных
параметров распределения, а затем решается задача оптимального обнаружения при фиксированном значении этих параметров ©„ - Qn. Эффективность такого алгоритма будет зависеть от качества оценок неизвестных параметров, что определяется объемом выборки, используемой для их получения (так называемой обучающей выборки).
Основной задачей адаптации является стабилизация уровня ложного обнаружения. Поэтому в составе адаптивного обнаружителя (рис. 6.4) должно быть устройство, вычисляющее оценку текущих параметров помехи. Эти оценочные значения параметров помехи используются далее в блоке формирования решающей статистики Z( СТ) для нормировки принятых сигналов, а также после некоторого функционального преобразования для установки адаптивного порога
146
обнаружения. Ниже более подробно рассматриваются методы и схемы формирования порогов адаптивного обнаружителя при параметрической стабилизации уровня ложного обнаружения Рр на выходе одного из каналов многоканального когерентного накопителя или на выходе некогерентного (одноканального) накопителя.
Формирование решающей статистики
п
оценка параметров помехи
Z(U)
Принятие решения
Формирование порога
Рис. 6.4. Упрощенная схема адаптивного обнаружителя
Обычно для формирования адаптивного порога используется выборка напряжений выходных сигналов накопителя в одномерном (по дальности) или двухмерном (по дальности и угловой координате) “скользящем окне”. По этой выборке оценивается среднеквадратичное значение помехи стя, затем это значение умножается на пороговый коэффициент К, связанный с заданной вероятностью ложного обнаружения. В результате вычисляется порог обнаружения Un = Kan, с которым и сравнивается выборка напряжения из анализируемой (сигнальной) ячейки, в качестве которой обычно принимается центральная ячейка “скользящего окна”. При этом для исключения влияния сигнала от цели на формирование оценки ал не используется анализируемая и соседние с ней ячейки “скользящего окна”. Таким образом, если для вычисления используется выборок, то общее число ячеек окна должно быть ^ + 3.
Способ оценивания зависит от принимаемой модели помехи в пределах “окна”. В практике проектирования обнаружителей со стабилизацией вероятности ложного обнаружения (СВЛО) обычно рассматриваются следующие основные модели [15]:
• модель однородной по мощности и стационарной помехи в пределах “окна”;
• модель помехи со скачкообразным изменением мощности в пределах “окна”;
• модель помехи однородной по мощности в пределах “окна”, но “засоренной” мешающими сигналами (например, хаотическими импульсными помехами или отражениями от посторонних целей).
Естественно, перечисленные модели не исчерпывают все возможные ситуации в “окне”, но позволяют рассмотреть разновидности основных схем СВЛО.
147
Простейшая схема СВ Л О, рассчитанная на использование модели 1 помехи изображена на рис. 6.5. Предполагается, что плотность распределения вероятности (ПРВ) огибающей нескомпенсированных остатков пассивных помех и шумов аппроксимируется законом Рэлея.
Рис. 6.5. Схема стабилизации вероятности ложного обнаружения (СВ Л О) при стационарной помехе
Оценке подлежат математическое ожидание ап и среднеквадратическое отклонение помехи, причем, вследствие известной взаимосвязи этих параметров для закона Рэлея (ап =1,25 а«), можно ограничиться оценкой одного параметра ап с последующим вычислением
ст л = 0,8аи
(6.31)
Пороговый коэффициент К вычисляется по формуле
K=yl-2hiPF =-lnPF>
где PF — заданная вероятность ложного обнаружения.
Решение об обнаружении принимается по правилу
UQ >Кд„, где UQ — амплитуда огибающей в центральной (сигнальной) ячейке окна .
Точность вычисления порога в рассматриваемой схеме определяется размерами “окна”, заданными вероятностями ложного обнаружения Pf и правильного обнаружения PD. Связанные с этим потери L дБ в отношении сигнал—помеха в функции от длины “окна” N при фиксированном значении Р =0,5 для нефлюктуирующей цели
148
приведены на рис. 6.6. Задаваясь вероятностью PF и допустимым уровнем потерь, можно выбрать необходимую длину “окна” ЛГЛГ.
Рис. 6.6. Потери в отношении сигнал—помеха при PD = 0,5 в функции от размера “окна”
При воздействии на входе пассивной помехи, кромка которой плохо компенсируется режекторным фильтром СДЦ, наблюдаются скачки интенсивности помехи в пределах “окна”. В этом случае адекватной является модель 2 помехи. Оценка интенсивности помехи производится в этом случае раздельно справа и слева от центральной ячейки “окна” (рис. 6.7), а для расчета порога используется максимальная из двух оценок
и
= тах{ 6)и,ст2н}
(6.32)
Оценка a
Рис. 6.7. Схема С ВЛ О при нестационарных помехах
Оценка a
149
Некоторое усложнение этой схемы за счет введения операции а1л "а2л >1 с последующим использованием для расчета порога обеих оценок, если разница оценок в полуокнах меньше заданной величины или одной (большей), если эта разница превышает Z, делает рассматриваемую схему пригодной также для модели 1 помехи, уступая при этом предыдущей схеме по потерям на 0,1 ... 0,3 дБ.
Модель помехи 3 предполагает “засорение” ПРВ выборки помехи в “окне”, например, за счет ХИП и отражений от посторонних целей. Для исключения влияния мешающих сигналов при вычислении в данном случае применяется предварительное преобразование выборки в “окне” путем ее усечения или винзорирования. При усечении из выборки исключаются сигналы, превышающие порог усечения U'. Вычисление производится в этом случае по укороченной выборке =N-nt где п — число исключенных из выборки сигналов. Метод эффективен при у 20 и п < 0,25У.
При винзорировании выборка преобразуется по правилу
(6.33)
где Uv — порог винзорирования. При этом в вычислении ап участвуют все (винзорированные) сигналы выборки в “окне”.
На рис. 6.8 приведена упрощенная схема СВЛО, реализующая второй из рассматриваемых метод преобразования выборки. Она отличается от рассмотренных выше схем наличием блока, реализующего алгоритм винзорирования выборки. Этот блок может быть интерпретирован в виде безинерционного элемента, последовательно (в порядке поступления) преобразующего входные сигналы в соответствии с выражением (6.33).
Рис. 6.8. Упрощенная схема СВЛО с винзорированием выборки сигналов
150
Задача СВЛО при комбинированных воздействиях мешающих отражений без существенного понижения вероятности обнаружения полезного сигнала может быть решена путем многоступенчатого порогового испытания принимаемого сигнала. На рис. 6.9 приведена упрощенная структурная схема трехступенчатой стабилизации вероятности ложного обнаружения на выходе многоканального когерентного накопителя, реализованного в виде процессора БПФ. На первой ступени с помощью компараторов —> Q.4)i проверяется, превышают
ли сигналы на выходе процессора БПФ пороги, установленные в соответствии с заданной вероятностью ложного обнаружения при наличии только шумов приемной системы. Для оценки среднеквадратического значения шума используется выборка, свободная от сигналов и внешних помех. Обычно такие выборки получаются перед каждым очередным зондированием (за пределами максимальной дальности обнаружения). Чтобы учесть имеющиеся в такой схеме различия в усилении шумов в каждом канале процессора БПФ, коэффициенты Ко, Кх,KN } должны быть разными.
Рис. 6.9. Упрощенная структурная схема трехступенчатой СВЛО
151
Сигналы, прошедшие первый тест, проверяются в компараторах ..., на превышение порогов Д* П12> выби-
раемых исходя из среднего уровня фона помех, обусловленного отражениями от гидрометеоров (облаков, дождя и пр.). Пороги Дг, Дэ ..., Дд,-!) 2оцениваются путем усреднения ограниченного числа выборок по дальности методом “скользящего окна”. Наконец, сигнал, обладающий максимальной амплитудой из прошедших двух предыдущих тестов, проверяется на превышение порога, определяемого средним уровнем помех нулевого канала в той ячейке зоны, к которой относится тестируемый сигнал. Сигнал (его координаты), прошедший третий тест совместно с сигналом нулевого доплеровского канала, прошедшим два первых теста, поступает на вход блока, реализующего дальнейшую обработку обнаруженных сигналов.
Рассмотренные методы адаптации к уровню помех имеют общий недостаток — число ложных сигналов на выходе обнаружителя никак не контролируется, т. е. изменение этого числа не обнаруживается и не вызывает ответной реакции системы. Поэтому в системах автоматической обработки сигналов, где стабилизация вероятности ложного обнаружения чрезвычайно важна, наряду с нормализацией должны применяться способы и устройства стабилизации вероятности ложного обнаружения, построенные по принципу замкнутой или разомкнутой системы регулирования порога решения.
6.2.3. Непараметрические цифровые обнаружители
При непараметрической неопределенности неизвестными являются ПРВ выборок w(t7) как при отсутствии, так и при наличии полезного сигнала. В этом случае для решения задачи обнаружения применяют непараметрические методы теории статистических решений. Это позволяет синтезировать алгоритмы обнаружения сигналов с вероятностью PF, не зависящей от вида функции w(C7)> 'г е- с постоянной вероятностью ложного обнаружения в широком классе неизвестных распределений выходных сигналов. Поскольку требование постоянства PF является основным при синтезе устройств цифровой обработки сигналов в информационных системах, то изучение возможностей и принципов реализации непараметрических алгоритмов обнаружения представляет большой интерес.
Отметим, что в непараметрических цифровых обнаружителях используются не сами значения выборочных отсчетов входных сигналов, а их взаимная упорядоченность, характеризуемая векторами “знаков” и “рангов”. Поэтому первоначальной операцией непараметрических алгоритмов является преобразование последовательности входных сигналов {Ц, С72,..., UN} в последовательности знаков {sgnt/p sgn£7,, ..., sgnLy или рангов {rangl7p rangTZ,, ..., rangLy. При этом в классической задаче непараметрического преобразования
152
необходимым условием является статистическая независимость элементов выборки входных сигналов, т. е.
w(U„ U2, .... ВД=Пи/Ц).
1=1
Ниже рассматриваются принципы построения знаковых и ранговых обнаружителей.
Знаковые непараметрические обнаружители. При двухполярном входном сигнале выборка знаков {sgnUp sgn£A, sgn UN} формируется по правилу sgn!7z= [/;/|(/,|. Элементы этой выборки имеют два возможных значения: +1, если > 0 и -1, если Ut< 0. В области стационарной помехи с симметричным относительно нуля распределением амплитуд выборок число положительных и отрицательных знаков в совокупности независимых выборок помехи (при -> оо) будут одинаковыми. При появлении, например, положительного сигнала вероятность положительных знаков в выборке становится больше, чем вероятность отрицательных, что и позволяет обнаружить такой сигнал.
Детектор огибающей
Компаратор и формирователь знаков
Формирователь решающей статистики
Пороговое устройство
th
Рис. 6.10. Структурная схема знакового обнаружителя
f
На выходе устройства объединения квадратурных каналов (или на выходе детектора огибающей) для получения выборки знаков применяется схема, приведенная на рис. 6.10. В этой схеме сигналы на вход формирователя знаков поступают по двум каналам, в одном из которых введен элемент задержки на время td, равное интервалу временной дискретизации входного сигнала. Задержанные и незадержанные сигналы сравниваются в компараторе. Выходные сигналы компаратора
AC7[ferf] = tZ[fed]-6/[(^-lK]
преобразуются затем в знаки (1 и 0 вместо +1 и —1)
Jl, Д^]>0,
п\ ktd I = ->
|0, ДС7[Л*Л<0.
Для каждого Л-го интервала дискретизации (кольца дальности) по
153
совокупности выборок знаков в N соседних зондированиях
Й,[Л:] = Л(Д^ [fcrf]),i=l, 2, ...,N
на основе линейной знаковой статистики реализуется алгоритм обнаружения
/Л ,
(6.34)
где Cth — порог обнаружения, выбираемый исходя из допустимой вероятности ложного обнаружения.
Рассмотренный алгоритм реализует метод одностороннего контраста. Основной предпосылкой его применения является большое значение функции контраста между выборками полезного сигнала и помех по сравнению с выборками одной помехи.
Находят примененение также двухвыборочные знаковые тесты, основанные на подсчете знаков разностей пар помеховой {Unl, Un2,..., UrtN} и исследуемой {Uv UT .... UH} выборок и формировании статистики
(6.35)
которая потом сравнивается с порогом обнаружения С,А.
Качество знаковых непараметрических алгоритмов оценивается с помощью коэффициента асимптотической относительной эффективности (АОЭ). Показано [81], что для нефлюктуирующего сигнала коэффициент АОЭ знакового алгоритма по отношению к оптимальному алгоритму при гауссовском распределении равен 2/л « 0,65, т. е. применение знакового алгоритма приводит в этом случае к потере эффективности примерно на 35% по сравнению с оптимальным. Однако при других распределениях помех ситуация изменяется. Например, для помехи с ПРВ вида w(U) = 0s5Xexp[-AlL/|] коэффициент АОЭ равен 2.
Ранговые непараметрические обнаружители. Более мощными, чем знаковые, являются ранговые тесты, которые учитывают не только факт, но и степень отклонения элементов исследуемой выборки от некоторого уровня или элементов опорной выборки.
Рангом Г/ элемента U{ конечномерной выборки {с/}/ называется порядковый номер этого элемента в вариационном ряду, составленном из элементов выборки в порядке возрастания их величины. При этом, как и в случае знакового теста, непременным условием является условие статистической независимости ранжируемой выборки.
В практике обнаружения радиолокационных сигналов, когда число элементов (каналов) по дальности, в которых сигнал отсутствует, намного больше числа сигнальных элементов, для ранжирования применяется способ контраста, суть которого сводится к следующему. Каждый из ранжируемых (принимаемых за сигнальный)
154
отсчетов Uxi (i= 1, 2, (помеховых) отсчетов
N) сравнивается с совокупностью опорных б7п/1, U„l2,U„iM, взятых из смежных разреша-
емых ячеек по дальности. В результате вычисляется ранг отсчета Uxi по формуле
(6.36)
где:
, _ (Цxi - Unij) > О,
7 [0, (Uxi-UttlJ)<0.
Ранжируемую и опорную выборки, а также результаты вычисления рангов можно представить в виде
б^nN 2 • • • 67nNM
nil
п2М
l<rt <М. (6.37)
»* I
Дальнейшая обработка состоит в накоплении некоторой ранговой статистики и сравнении ее с порогом
= (6.38)
/=1
где /(г,) — известная функция от рангов, Cth — порог, выбираемый исходя из допустимой вероятности ложного обнаружения.
Простейшей является ранговая статистика Вилкоксона, определяемая суммой рангов. По критерию Вилкоксона решение об обнаружении принимается в соответствии с алгоритмом
N
~С- (6.39)
Укрупненная структурная схема цифрового рангового обнаружителя Вилкоксона изображена на рис. 6.11. В схему входят вычислитель рангов (ВР), вычислитель ранговой статистики (ВРС) и пороговое устройство (ПУ). Сигнал Uj m m-го интервала дискретизации по дальности в г-ом периоде зондирования сравнивается в М компараторах (К) с сигналами на выходе запоминающего устройства опорной выборки (ЗУОВ) Цт-2* •••> ЦшгА/5 составленной из Мсигналов предыдущих интервалов дискретизации по дальности. Результаты сравнения Uim с (/ = m—l, т—2, т~М) представляют собой
двоичную переменную hijy принимающую значение: единица, если и нуль — в противном случае. Сумма единиц на выходах
155
ВР
Рис. 6.11. Укрупненная структурная схема цифрового рангового обнаружителя
компараторов (К) определяет ранг г, т отсчета Ц т. Для расчета и двоичного кодирования рангов применяется специальная схема (СКР). Двоичный код ранга m-го канала (кольца дальности) в г-м зондировании записывается в ЗУ рангов. По накопленным за W зондирований значениям рангов в т~М и других каналах вычисляется ранговая статистика (6.39), которая затем сравнивается с порогом Cth.
Ранжирование рассмотренным способом предполагает, что опорная выборка представлена только отсчетами помехи. Если же среди помеховых отсчетов есть сигнальные, то это приводит к искажению статистики SB для М последующих каналов, т. е. имеет место подавление одного сигнала другим. Однако при обнаружении радиолокационных сигналов, когда общее число разрешаемых элементов значительно больше числа элементов, занятых полезными сигналами, эти искажения невелики, и ими можно пренебречь при числе элементов опорной выборки М = 20 ... 30.
Использование теста Вилкоксона, основанного на статистике, определяемой суммой рангов, целесообразно при обнаружении неслучайного сигнала на фоне аддитивных помех с
нулевым средним и симметричным распределением. Если же параметры распределения помехи неизвестны, а известно лишь, что воздействие сигнала состоит в сдвиге распределения помехи (альтернатива сдвига), то более целесообразным является двухвыборочный непараметрический тест Вилкоксона (тест Манна-Уитни), который состоит в сравнении с порогом статистики N М
^МУ “ LEW - Uy)>Cth , (6.40)
/s=l j~\
где {U}, i = 1, 2, N — анализируемая, а {[/ },;= 1, 2, ...,М — опорная выборки.
156
При многоканальном приеме за {Щ принимается пачка сигналов из анализируемого элемента по дальности (N — ширина пачки).
Если выборки {U, и {Uy взяты из одной и той же генеральной совокупности, т. е. представляют реализацию помех с одной и той же ПРВ, а их отсчеты статистически независимы, то распределение 5МУ не зависит от закона распределения {Ut} и {Uy}, что подчеркивает непараметричность двухвыборочного теста.
Кроме рассмотренных разработан целый ряд других тестов: Ван-дер-Вардена, Смирнова, Севиджа и др. [157]. Все известные тесты получены эвристическим путем.
Количественной мерой сравнения качества ранговых тестов между собой и с оптимальными алгоритмами обнаружения является коэффициент асимптотической относительной эффективности (АОЭ). При обнаружении постоянного положительного сигнала на фоне гауссовской помехи АОЭ алгоритма Вилкоксона (в том числе и двухвыборочного) по сравнению с линейным накопителем отсчетов (оптимальный обнаружитель) составляет 3/л = 0,955. Таким образом, в данном случае ранговый обнаружитель лишь незначительно уступает линейному накопителю. При самом неблагоприятном распределении помехи АОЭ алгоритма Вилкоксона не может быть меньше 0,864 [81].
При цифровой обработке узкополосных сигналов на фоне широкополосного гауссовского шума с целью сохранения информации о начальной фазе огибающей ранжирование выборки может быть выполнено в квадратурах, ^мерный ранговый вектор для каждой квадратурной составляющей входного сигнала формируется с использованием опорных выборок с числом элементов М. Квадратурные составляющие элементов рангового вектора Вилкоксона записываются в виде
'/(cs)
где индексы (с$) обозначают соответственно синфазную и квадратурную составляющие.
При отсутствии во входной выборке полезного сигнала компоненты являются равномерно распределенными величи-
нами, математическое ожидание которых ar = М/2, а дисперсия а ? = М(М - 1 )/12. Переходя далее к нормированным и центрированным составляющим рангов
•н _ Qr
l(cS} ~ -
и применяя дискретное преобразование Фурье к последовательности {^) »получим для каждой базовой частоты fk = где td— период
временной дискретизации входных сигналов, следующие статистики 157
N .
7 \r£ cos2^4 /N+rff sin2nlk/N)
sin 2тйк / Лг)
(6.41)
Sk = ^+$1 .
На основе сравнения статистики Sk с порогом Cth, выбираемым исходя из заданной вероятности ложного обнаружения PF, принимается решение об обнаружении сигнала.
Эффективность когерентной ранговой обработки оценивалась методом имитационного моделирования [56]. Показано, что потери в отношении сигнал—помеха при когерентном накоплении рангов, по сравнению с оптимальным когерентным накоплением, не превышают 1 дБ.
В заключение необходимо отметить, что ранговые обнаружители обеспечивают стабильность вероятности ложного обнаружения, если опорная выборка однородна, т. е. если помеха на опорном интервале стационарна. Неоднородность опорной выборки оказывает дестабилизирующее влияние на вероятность ложного обнаружения. Для ослабления этого влияния необходимо принимать специальные меры, одной из которых является рациональный выбор расположения опорной выборки относительно ранжируемого отсчета.
6.2.4. Адаптивно-непараметрические обнаружители
Непараметрические обнаружители не обеспечивают стабилизации вероятности ложного обнаружения при воздействии на входе коррелированных помех. Например, для знаковых обнаружителей возрастание коэффициента корреляции входных сигналов от 0 до 0,5 приводит к увеличению вероятности ложного обнаружения на три-четыре порядка. Аналогичное (или даже более существенное) влияние нестабильностей имеет место и в непараметрических ранговых обнаружителях.
Одним из способов стабилизации вероятности ложного обнаружения на выходе непараметрических обнаружителей при работе в условиях коррелированных помех является адаптивная подстройка порога в зависимости от корреляционных свойств помехи. Получаемые таким образом обнаружители получили название адаптивнонепараметрических обнаружителей. Исходный непараметрический алгоритм, составляющий основу адаптивно-непараметрического алгоритма, должен обеспечивать постоянную вероятность ложного
158
обнаружения при изменении дисперсии или вида плотности вероятности распределения помехи, а подстройка порога должна компенсировать нестабильности вероятности ложного обнаружения при изменении корреляционной функции помех.
Упрощенная структурная схема адаптивно-непараметрического обнаружителя приведена на рис. 6.12. В этой схеме вычислитель непараметрической статистики реализует основную часть исходного непараматрического алгоритма
N
где — результаты преобразования входных сигналов Ut в знаки sign U. или ранги rangt/..
и
Вычислитель непараметрической статистики
А
i
Оценка корреляционной матрицы помех
R[k]
Пороговое устройство
Вычислитель порога
Рис. 6.12. Упрощенная схема адаптивно-непараметрического обнаружителя
Для оценки элементов 7?[Л] корреляционной функции помех RN могут быть использованы неклассифицированная выборка из основной анализируемой последовательности {t/J (i = 1, 2, N), а также
обучающая выборка {Xt} со вспомогательного (опорного) канала. При использовании неклассифицированной выборки дискретные значения корреляционной функции определяются по формуле
k=Q, 1, 2, ..., N-1. (6.42)
Если известен вид функции /?[£], например, экспоненциальная Л[Л] = (ДЦ]У или гауссовская = (/?[!])* , то Аля автоподстройки порога обнаружения достаточно оценить коэффициент межпериодной корреляции помехи р = 7?[1]/Я[0], поскольку все остальные 2?[i] с ним связаны однозначно.
В предположении, что порог обнаружения Cth зависит от заданной вероятности ложного обнаружения и коэффициента межпериодной корреляции помех, адаптивно-непараметрический алгоритм обнаружения имеет вид Sv > С(р, PF ).
159
Вычисление порога упрощается, если последовательность статистик, определяемая по последовательности xif удовлетворяет условиям центральной предельной теоремы для зависимых отсчетов [156]. Тогда распределение статистики является асимптотически нормальным, и вероятность ложного обнаружения определяется по формуле
m,(p)-C(p,PF)
<Лр)
Из этого выражения можно получить алгоритм управления порогом обнаружения в виде
С(р, PF ) = ms (р) - Ф-1 (PF )<у, (р), (6.43)
где Ф-1(7/г) — функция, обратная функции нормального распределения, Wj(p) — математическое ожидание решающей статистики при коррелированном входном процессе, которое совпадает с математическим ожиданием решающей статистики исходного непараметрического алгоритма, с?(р) — дисперсия решающей статистики при коррелированном входном процессе.
Адаптивно-непараметрические алгоритмы обнаружения с подстраиваемым порогом на основе знаковых и ранговых критериев обладают удовлетворительной устойчивостью к изменению корреляционной функции помехи. Так, результаты расчетов и моделирования показывают, что с изменением коэффициента корреляции р от 0 до 0,5 вероятность ложного обнаружения на выходе адаптивно-непараметрического знакового обнаружителя увеличивается в 2...5 раз, тогда как у исходного знакового обнаружителя с постоянным порогом она возрастает в 100...300 раз. Аналогичными характеристиками по стабилизации вероятности ложного обнаружения обладают адаптивнонепараметрические ранговые алгоритмы обнаружения.
В заключение отметим, что, кроме адаптивно-непараметрических алгоритмов, для обнаружения сигналов на фоне коррелированных помех с произвольным распределением могут быть применены цифровые регуляризованные алгоритмы [17], а также алгоритмы с использованием принципов подобия и инвариантности [69, 71]. Каждый из них имеет свои особенности, определяющие целесообразность их применения в конкретных ситуациях. Алгоритмов, одинаково эффективных в неконтролируемом диапазоне входных воздействий, создать, очевидно, не представляется возможным.
160
6.3. Цифровые измерители параметров сигналов [6, 36, 68, 108, 112]
63.1. Постановка и методика решения задачи оптимального оценивания параметров сигналов
В дальнейшем предполагается, что для решения задачи оценивания параметров сигналов используется та же выборка входных колебаний, что и при решении задачи обнаружения. Все исходные предпосылки о статистике входных сигналов, введенные при рассмотрении алгоритмов обнаружения, остаются в силе.
Универсальным критерием качества решения задач оптимального оценивания параметров является критерий минимума среднего риска [117]. Для скалярного параметра а средний риск 7?(а) определяется соотношением
2?(а) = j jF(a,d)w(a,d)<Zat/d , (6.44)
а а
где F(a,a) — функция риска (потерь), характеризующая плату за ошибку в ситуации (a,а), где а — оценка параметра a, w(a,a) — совместная плотность распределения вероятности (ПРВ) ситуации (а, а). Оптимизация решения состоит в минимизации среднего риска путем выбора оценки aopt=/(U), где U — в общем случае вектор выборок входного процесса.
Среди множества предложенных функций риска ^наибольшее распространение получила квадратичная функция F(a,a)=c(a-a)2, где с = const. Оптимальная оценка параметра в этом случае вычисляется по формуле
aopt = jaw(a | U)iZa, (6.45)
(a)
где w(a|U) — апостериорное распределение оцениваемого параметра после приема выборки U.
Алгоритм (6.45) сложен в реализации и обычно не применяется на практике.
Кроме квадратичной, используется простая функция потерь, записываемая в виде
(6.46)
F(a., a) = [1 - 5(a - a)] где б(-) — дельта функция.
Оптимальная оценка при простой функции потерь находится по максимуму апостериорной ПРВ оцениваемого параметра
aopt = maxw(a | U)| ,
161
т. е. из решения уравнения
dw(a | U) da
(6.47)
получение и решение которого не вызывает труда, если известна априорная информация о ПРВ оцениваемого параметра w(a).
Однако, в большинстве случаев априорное распределение информационных параметров является неизвестным, и при синтезе измерителей его приходится принимать равномерным. В этом случае, представляя ф-
м(а | U) = -1— w(a)w(U | а) = Cw(U | а), w(U)
где w(U|a) называется функцией правдоподобия оцениваемого параметра, оптимальную оценку находят из решения уравнения
dw(U | a)
da
(6.48)
которое называется уравнением правдоподобия, а сама оценка получила название оценки максимального правдоподобия.
Оценки максимального правдоподобия являются несмещенными, состоятельными и асимптотически эффективными. Метод их нахождения чрезвычайно прост. Это позволяет с успехом использовать метод максимального правдоподобия в большинстве задач оценивания параметров сигналов и данных.
В математической статистике при весьма общих предположениях доказано [157], что дисперсия оценки максимального правдоподобия, полученной на основе N-мерной выборки входного процесса, не менее некоторой нижней границы, которая для случая несмещенной оценки одного параметра определяется неравенством Крамера-Рао
<У1п((/|а)Тг
da
(6.49)
где М — знак математического ожидания.
Если в выражении (6.49) достигается равенство при некоторой оценке a(U), то такая оценка называется эффективной, а ее дисперсия минимальной, характеризующей потенциальную точность оценивания параметра а.
В заключение отметим, что в уравнение правдоподобия и неравенство Крамера-Рао, вместо функции правдоподобия, можно подставить хорошо известную статистику — отношение правдоподобия Z(U | a) = Wxn(U | а)/ wn (U), т. к. плотность распределения вероятности помехи не зависит от параметра а.
162
6.3.2, Оценивание времени задержки и доплеровской частоты сигнала
В импульсной радиолокации для получения однократной оценки времени задержки отраженных от цели сигналов методом максимального правдоподобия используется напряжение на выходе детектора огибающей оптимального приемника U(tr), пропорциональное функции правдоподобия оцениваемого информативного параметра tr (рис. 6.13). В каждом периоде зондирования это напряжение используется сначала для решения задачи обнаружения полезного сигнала.
СФ
ПУ
at.
ОИ
! льный рриемник ]
Л*К1 Bljfg
Рис. 6.13. Схема оценивания времени задержки сигнала
Решение об обнаружении сигнала принимается по превышению огибающей t/(?r) порога Uth, показанного на пояснительных временных диаграммах рис. 6.13 пунктиром. Участок V(tr) огибающей U(tr), превысившей порог Ulh, используется в дальнейшем для оценки методом максимального правдоподобия параметра tr. Для этого напряжение J7(?r) дифференцируется, и результат дифференцирования вместе с недифференцированным напряжением подается на логический элемент “НЕТ”. На выходе этого элемента выдается отсчетный импульс (ОИ) съема, соответствующий положению на оси времени нулевого значения производной функции U(tr). При цифровом съеме оценка ir определяется путем подсчета числа стандартных имульсов на интервале tm<tr^ton. (рис. 6.13). С учетом того, что за время приема пачки отраженных сигналов положение цели практически не изменяется, оценки, полученные по всем У импульсам пачки, можно усреднить
163
Дисперсия потенциальной ошибки оценки времени задержки по одиночному отраженному сигналу определяется выражением [117]
о? =1/^2ДД , (6.50)
где q2 — энергетическое отношение сигнал—шум, bfx — эффективная ширина спектра полезного сигнала.
Формула (6.50) применима при отношении сигнал—шум q > qlh » 7 [117].
Кроме потенциальной ошибки в рассматриваемой схеме кодирования имеются специфические ошибки, обусловленные несовпадением импульсов ГСИ с импульсами запуска (ИЗ) и отсчетными импульсами (ОИ). Дополнительную случайную ошибку одиночного отсчета, вносимую схемой кодирования, можно представить в виде суммы двух составляющих
= Д/д + Л/*2,
где Д/д — случайный сдвиг первого счетного импульса относительно ИЗ, Д/и — случайный сдвиг ОИ относительно последенего счетного
импульса.
। //
Рис. 6.14. Пояснение метода медианной оценки времени задержки сигнала
Обе эти ошибки — независимые случайные величины, равномерно распределенные в интервале -Тгси/2 ... тгси/2. Поэтому дисперсия ошибки кодирования в этом случае будет crj = т?си /6. Если же временное положение счетных импульсов ГСИ синхронизировано с запускающими импульсами, то /и - 0 и о2 — Тгси /12.
В РЛС, решающих задачи непрерывного автоматического сопровождения целей по дальности, используется метод медианной оценки времени задержки сигнала, суть которого поясняется на рис. 6.14. Для этого на вход устройства, называемого временным дискриминатором, подаются видеоимпульс (7(/г) (вр. диагр. 1 на рис. 6.14) и
опорное напряжение UB(tr- tD) (вр. диагр. 2 на рис. 6.14) в виде двух сомкнутых полустробов длительностью xD каждый, антисиммет-
ричных по отношению к точке L. В дискриминаторе производятся
UU)
(6.51)
164
Зависимость (6.51) называется дискриминаторной характеристикой (вр. диагр. 3 на рис. 6.14). Медианной оценке f соответствует такое положенение точки при котором UD~ Sx — S2^ 0. На линейном участке АВ дискриминаторной характеристики это напряжение характеризует величину и знак ошибки совмещения центра строба с медианой сигнала U(t^. Поэтому выходное напряжение дискриминатора называется сигналом ошибки. Этот сигнал используется для управления положением строба в схемах автоматического сопровождения по дальности.
При симметричном сигнале U(tr) медианная оценка i совпадает с оценкой максимального правдоподобия. г
Для неследящей оценки доплеровского сдвига частоты сигнала используется многоканальный измеритель, структурная схема которого приведена на рис. 6.15. В схеме предусмотрено М частотных каналов с согласованными фильтрами и детекторами огибающей (ДО). Частотный разнос между каналами выбирается исходя из разрешающей способности зондирующего сигнала по доплеровской частоте, которая определяется эффективной длительностью сигнала. Расчет числа параллельных каналов М производится по формуле (5.63). Оценка частоты fd грубо производится по номеру канала (фильтра) с максимальной амплитудой выходного напряжения. Для повышения точности оценивания (достижения потенциальной точности) используется напряжение на выходах трех и более частотных каналов. Оценка фиксируется в этом случае, например, по максимуму параболической аппроксимации огибающей выходных напряжений выбранных частотных каналов.
Дисперсия потенциальной ошибки оценки доплеровской частоты при известном времени задержки tr (при раздельном измерении tr и Fd) вычисляется по формуле [117]
qfd =1/7I?2T?, (6.52)
где — эффективная длительность зондирующего сигнала.
Рис. 6.15. Фильтровая схема измерения доплеровской частоты сигнала
165
При соответствующем выборе вида сигнала и согласованных с ним фильтров схема на рис. 6.15 обеспечивает совместное измерение времени задержки и доплеровской частоты. Для этого необходимо подавать на вход решающего устройства непрерывные процессы, представляемые огибающими Ufa, FD) с выходов каждого частотного канала. Решающее устройство выбирает тот канал, на выходе которого отмечается наибольший в течение интервала наблюдения выброс огибающей. Временное положение этого максимального выброса служит оценкой максимального правдоподобия времени задержки frt сигнала, а частота настройки канала, на выходе которого он зафиксирован, служит оценкой максимального правдоподобия доплеровской частоты FDi
{iri,FDi}* max {U(tri,FDi)} .
t.F
При совместной оценке времени задержки и доплеровской частоты сигнала корреляционная матрица ошибок оценивания имеет вид
где к — коэффициент корреляции ошибок оценивания времени задержки и доплеровской частоты.
Коэффициент к равен нулю при использовании зондирующих сигналов, диаграмма рассогласования которых симметрична относительно осей tr и Fd (импульсные сигналы без внутриимпульсной модуляции, фазоманипулированные сигналы) и отличается от нуля для сигналов, у которых такая симметрия отсутствует (сигналы с внутриимпульсной модуляцией по частоте). В первом случае
(6.53)
Во втором случае
т. е. при одновременной (совместной) оценке время-частотных параметров сигналов с внутриимпульсной модуляцией частоты имеют место потери в точности оценивания за счет их взаимной корреляции.
6.3.3. Оценивание угловой координаты при равномерном сканировании антенны
Оптимальные алгоритмы измерения угловой координаты синтезируются обычно по критерию максимального правдоподобия. Вид функции правдоподобия зависит от статистических характеристик 166
сигналов и помех, формы ДН антенной системы и способа скани-
рования антенны РЛС в процессе измерения. В дальнейшем решаются
задачи оценки азимута цели рг по пачке сигналов, полученной в
процессе равномерного сканирования луча приемной антенны в горизонтальной плоскости.
1. При отсутствии квантования (или при многоуровневом квантовании) функция правдоподобия для оценки азимута пачки из т нормированных нефлюктуирующих отраженных сигналов, принимаемых на фоне стационарного шума, записывается в виде
A(«! ,иг,...,ит | >₽о) = П W(M/ I?' >Р< ), где для рассматриваемого случая
w(Ui | qtР,) = w, ехр[0,5(м/ + ?,2)]/0 (<?, а,).
(6,55)
В свою очередь
Q, = ?og(P/,Pr),
где: qQ — отношение сигнал-шум по напряжению в центре пачки (рис. 6.16, а);
) = #[(₽/ ”Рт)/фо] = ^(а) — функция, описывающая огибающую ДН на прием и передачу в плоскости сканирования;
<р0 — половина ширины основного лепестка ДН на нулевом уровне;
Р, ~ значение азимутального угла при приеме г-го импульса пачки.
При фиксированном значении qQ уравнение правдоподобия для оценки координаты Рг имеет вид
т
/=1
где
Л, (Р/ ?Рг) — Ф(Р< >Рт)/Фг ’ г' I’ •••’ т ’
(6.56)
(6.56а)
Т)/(Р> >Рт)~ дискретная весовая функция (последовательность весовых коэффициентов) для взвешивания нормированных амплитуд принимаемых сигналов (рис. 6.16, б). Эта функция имеет вид дискриминаторной характеристики, крутизна которой зависит от формы ДН, а нулевая точка совпадает с ее максимумом.
При оценке азимута цели по пачке быстрофлюктуирующих сигналов уравнение правдоподобия имеет вид [51]
(й,Рг)=О, (6.57)
/“1
167
где
П? (Р/»₽т-) =
(6.57а)
Т|* (ft >Рг) ~ дискретная весовая функция для взвешивания нормированных амплитуд сигналов быстрофлюктуирующей цели.
Сравнение выражений (6.56) и (6.57) показывает, что в отличие от случая нефлюктуирующей цели для оценки азимута быстрофлюктуирующей цели необходимо суммировать с весами квадраты амплитуд принимаемых сигналов пачки. В этом случае выражение для весовой функции rtf (рнрг) более сложно, однако ее характер не меняется. Таким образом, оптимальный алгоритм оценки азимута цели при равномерном сканировании антенны включает следующие операции:
• запоминание принимаемых сигналов в движущемся “окне”, ширина которого соответствует длительности пачки;
• взвешивание амплитуд каждого принимаемого сигнала в соответствии со значениями соответствующих весовых коэффициентов;
• образование полусумм взвешенных амплитуд, принятых в движущемся “окне” сигналов слева и справа от нулевого значения весовой функции;
• сравнение полусумм и фиксация позиции, где результат сравнения проходит через нулевое значение.
Рис. 6Д6. К измерению азимута цели по пачке отраженных сигналов:
а) пачка сигналов; б) дискретная весовая функция
168
При многоуровневом квантовании амплитуд сигналов пачки и весовых коэффициентов получим цифровой эквивалент оптимального измерителя угловой координаты, упрощенная структурная схема которого показана на рис. 6.17. В соответствии с этой схемой при приеме каждого сигнала для реализации алгоритма оценки необходимо выполнить тп -1 умножений и m -1 сложений многоразрядных двоичных чисел.'
ЗУ.
от ГМИ
Счетчик масштабных импульсов
m iu. п
г"i
m/2
Компаратор
И
код азимута цели
Рис. 6.17. Структурная схема цифрового измерителя угловой координаты
Задача определения потенциальной точности оценки азимута цели по пачке принимаемых сигналов может быть решена с определенными допущениями аналитическими методами или методом моделирования. Результаты аналитических расчетов приведены в [51, 69].
2. При двоичном квантовании амплитуд принимаемых сигналов (весовая функция многоразрядная) функция правдоподобия оцениваемой угловой координаты pz имеет вид
Л(Рт) = П^С1 “’ > (6.58)
/"1
где pxni — вероятность превышения входным сигналом порога двоичного квантования на i-ой позиции пачки, dt = 1, если и, > щ, и dt = О, если < ц0 (м0 — порог двоичного квантования сигналов).
Для нефлюктуирующих сигналов
оо
ио
169
а для флюктуирующих сигналов
После дифференцирования (6.58) и соответствующих преобразований получим следующее уравнение правдоподобия для рассматриваемого случая
,=1
(6.59)
где n"(p,.,pr) = _J------ (6.59а)
рхт (I-/?хт ) «Рг
rf(P/ ^Рг) “ весовая функция позиций сигнальной пачки при оценке азимута цели.
Таким образом, в рассматриваемом случае оптимальная оценка угловой координаты сводится к образованию сумм значений весовых коэффициентов Г|/г(Р1,рг) на позициях, где = 1, справа и слева от нулевого значения весовой функции. Оценка координаты фиксируется при равенстве в установленных допусках накопленных таким образом сумм. Реализация алгоритма по сравнению с рассмотренным в п. 1 значительно упрощается, так как отсутствуют операции умножения многоразрядных чисел. Потенциальная точность такого измерителя, полученная из равенства Крамера Рао, определяется по формуле [51]:
(6.60)
3. При двоичном квантовании сигналов без учета формы ДН антенны приходим к эвристическим алгоритмам оценки угловой координаты:
а) по положению начального и конечного импульсов пачки
Рг - {0,5[Х - (/-!) + и - *]}АР, (6.61)
где: X — номер позиции (относительно направления, выбранного за начало отсчета), на которой зафиксировано начало пачки по критерию I из т (l/т); Ц — номер позиции, на которой зафиксирован конец пачки по критерию к пропусков подряд; Др — угловая дискретность импульсов в пачке. Алгоритм предусматривает компенсацию сдвига момента обнаружения пачки на (/ - 1) позиций и сдвига момента обнаружения конца пачки на к позиций:
170
б) по положению конечного импульса пачки и числу позиций от начального до конечного импульсов пачки
Рг =[Ц-Одар -&-1)]Др, (6.62)
где #р— число позиций, соответствующих ширине обнаруженной пачки; этот алгоритм реализуется в цифровых накопителях двоичноквантованных сигналов.
Эвристические алгоритмы оценки угловой координаты наиболее просты в реализации, однако приводят к потере в точности по сравнению с оптимальными алгоритмами на 25 ... 30%.
Графики относительной дисперсии оценки угловой координаты по формуле (6.61) от отношения сигнал—помеха в центре пачки при т$ = 15, 10"4 приведены на рис. 6.18.
3/3-2
4/5—2*
4/5-2
3/4-2*
т- 15
1СГ4
нефлюктуирующие сигналы
--------быстрофлюктуирующие сигналы
Рис. 6.18. Относительные ошибки оценки угловой координаты при двоичном квантовании сигналов
Сплошные линии соответствуют нефлюктуирующей пачке сигналов, пунктирные — пачке флюктуирующих сигналов. Для
171
сравнения, на том же рисунке приведены графики относительной дисперсии при оптимальной оценке угловой координаты методом максимального правдоподобия (формулы (6.56) и (6.57)).
6.3.4. Одноканальные измерители угловых координат при автосопровождении одиночных целей
В РЛС сопровождения с “игольчатой” диаграммой направленности для углового измерения и автосопровождения одиночных целей используется метод равносигнальной зоны, который может быть реализован способом конического развертывания либо способом переключения диаграмм. При коническом развертывании (сканировании), которое реализуется путем вращения с частотой Q облучателя, смещенного из фокуса параболической антенны, создается равносигнальное направление (РСН), совпадающее с осью параболоида (рис. 6.19). Если направление на цель совпадает с равносигнальным направлением, огибающая последовательности отраженных импульсов не изменяется во времени и имеет амплитуду
о
= t/mF(Q0),
где: Um — амплитуда огибающей сигнала от цели, находящейся на оси ДН;
— значение функции, описывающей диаграмму направленности антенны на прием и передачу в равносигнальном направле
нии.
При смещении цели с РСН появляется амплитудная модуляция последовательности отраженных импульсов с частотой вращения облучателя Q. Глубина модуляции определяется величиной угла 8 отклонения цели от РСН, а фаза ф — угловым положением цели в “картинной плоскости”, перпендикулярной РСН (рис. 6.19, а). При небольших угловых оклонениях (0 < 0О) огибающая последовательности принимаемых сигналов модулируется по гармоническому
закону
w(i') = 1/0 [1 + m cos(Qf - ф) J,
(6.63)
где т — коэффициент модуляции сигналов, который для рассматриваемого случая можно представить в виде т — Ц0, где ц=(0) / ^(0)|9=в называется коэффициентом пеленгационной чувствительности, харак
теризующим относительную крутизну результирующей (на прием и передачу) ДН антенны в равносигнальном направлении.
Выражение wOT = Ua р.0 cos(Qz - ф)
(6.64)
называется сигналом ошибки. Из этого выражения следует, что огибающая сигнала ошибки является периодической функцией частоты развертывания Q, достигающей максимума и минимума один раз за
172
период сканирования антенны. Центральный участок этой функции практически линеен и его можно использовать в качестве дискрими-натора ошибки при автосопровождении целей (рис. 6.19, Ь).
&
Рис. 6.19. Одноканальный измеритель угловой координаты цели методом равносигнальной зоны
Для управления антенной в процессе сопровождения сигнал ошибки разлагают на ортогональные составляющие 1Л. и Ug, пропорциональные угловым рассогласованиям по азимуту Др и углу места Ле. Разложение производится с помощью фазовых детекторов (ФД), на входы которых с генератора опорных напряжений (ГОН) подаются напряжения w0₽= sinQl и мОе = cosQf, изменяющиеся с частотой вращения облучателя (рис. 6.19, а). Выходные сигналы ФД
, . 1
«в = Wco sin Qidt -—t/op0sin<p t
} • 2
f 1
Ue= WcoCOSQr<^r = -{7oH0COS(p
J 2
173
являются управляющими для совмещения РСН антенны с направлением на цель, используя для этого систему управления антенной (СУА).
Пеленгационная чувствительность метода равносигнальной зоны значительно (примерно на порядок) выше, чем у метода пеленгации по максимуму сигнала при линейном сканировании. Она в значительной степени зависит от выбора угла 0О смещения максимума диаграммы направленности антенны от РСН. Чем больше этот угол, тем выше пеленгационная чувствительность, но тем меньше энергия отраженных импульсов, пропорциональная квадрату диаграммы направленности в точке 0О, при котором потенциальная ошибка пеленгации минимальна. Это значение составляет 0^- (0,3 ... О,4)0р/2, где 0р/2 ” ширина луча ДН на уровне —3 дБ [108].
Наряду с коническим развертыванием для создания равносигнального направления применяется метод переключения диаграмм направленности параболической антенны, имеющей четыре симметрично смещенных из фокуса облучателя в плоскостях угловых координат Р и 8. Облучатели последовательно подключаются к одноканальному приемному устройству, на выходе которого формируется сигнал ошибки по каждой из пеленгуемых координат. В дальнейшем, как и в предыдущей схеме, полученный сигнал ошибки используется для управления антенной с целью совмещения равносигнального направления с направлением на цель. При этом для формирования равносигнального направления в данном методе сканирования требуется как минимум четыре импульса, тогда как в методе конического развертывания для этого требуется один оборот луча антенны.
6.3.5. Моноимпулъсные измерители угловых координат
Одноканальные измерители угловых координат, благодаря сравнительной простоте, получили широкое распространение. Однако, из-за чувствительности к модуляционным искажениям огибающей последовательности принимаемых импульсов, свойственной любым одноканальным методам, они не всегда обеспечивают требуемую точность измерения. Этот недостаток устраняется при переходе к многоканальным методам пеленгации, использующим принцип одновременного сравнения амплитуд и фаз сигналов на выходе нескольких приемных каналов. Поскольку многоканальные методы позволяют измерять угловую координату по одному принимаемому импульсу, их называют моноимпульсными методами пеленгации (углового измерения). В дальнейшем рассматриваются принципы построения моноимпульсных пеленгаторов в двухканальной системе, формирующей на прием в каждой координатной плоскости два луча, отклоненных от равносигнального направления на угол 0О (рис. 6.20, а). Если отклонение цели от РСН отсутствует, сигналы, принимаемые
174
независимыми каналами, равны, и угловая координата цели совпадает
с РСН. При отклонении цели от РСН на угол 0 на входах приемных каналов сигналы будут определяться выражениями
Uj (t, 0) = UmF(G0 - 0) exp(J<or),
u2 (I, 0) = UmF(Q0 + 0) exp(/w/) •
При малых отклонениях цели от РСН справедлива следующая аппроксимация
Ж - 0) = F(0O )(1 + И0),
(6.65)
F(G0+0) = F(0o)(l-p0),
где ц — относительная крутизна диаграмм направленности антенн приемных каналов в точке 0О.
®ясн
РСН
Вычисление К
РСН
Ь)
Рис. 6.20. Моноимпульсный амплитудный измеритель угловой координаты
175
С учетом (6.65) на выходе детектора огибающей получим
u1(0) = i1t7mF(0o)(l + p.0),
(6.66)
**,(0) ~ ^2^т/^(0о)(1 ~ Ц0) > kit к2— коэффициенты усиления каналов.
Формирование пеленгационной характеристики в рассматриваемом измерителе производится по правилу [68]
5(0) =
ц (0)—1*2(6)
Ц (0) +1*2(0)'
(6.67)
При идентичных приемных каналах (&i = &2= на выходе суммирующего устройства
ц!(0)=ц (0)4-1*2(0)=Ши^(0о), а на выходе вычитающего устройства
Ц/(6)=Ц (6)-г*2(6) = Шт/’(0о)ц0.
Тогда на выходе схолы деления получим (рис. 620, by
5(0) =
«,(0)
(6.68)
— piO*
Таким образом, на выходе моноимпульсного амплитудного измерителя получается сигнал, пропорциональный угловой ошибке пеленгования, который используется для управления антенной (в системах непрерывного автосопровождения цели) или для точного измерения угловых координат (в обзорных РЛС с ФАР или ЦАР).
В рассмотренном моноимпульсном измерителе угловых координат предъявляются жесткие требования к идентичности характеристик приемных каналов, так как при появляется сдвиг нуля пеленгационной характеристики (6.67). Этого недостатка лишены
моноимпульсные измерители с суммарно-разностным угловым дискриминатором, в которых принятые от цели сигналы с выходов антенн независимых приемных каналов поступают в суммарно-разностный преобразователь (СРП), где происходит их суммирование и вычитание на высокой частоте (рис. 6.21, а). С выхода СРП суммарный и разностный высокочастотные сигналы поступают в соответствующие приемные каналы: суммарный (ПСК) и разностный (ПРК). С учетом аппроксимации (6.65) эти напряжения записываются в виде
(ц (/, 0)+«2 (t, 0)) = V2t4F(0o)exp(/coZ)
ud (t, 0) = Д==- (Mi (Л 0) ” иг (А 0)) = yl2UmF(QQ )р0 ехр( jcnf) V2
176
После преобразования и усиления с учетом системы АРУ, которая исключает зависимость сигнала ошибки от амплитуд принимаемых сигналов, на входе фазового детектора (ФД) суммарный и разностный сигнал могут быть представлены выражениями
us (Г, 9) - ехр[ + ФJ)],
ud(t,&) = ks /^ц0ехр|Ха^+Ф<*)]>
где ф5 и (prf — фазовые нестабильности суммарного и разностного каналов, ks и kd — модули коэффициентов усиления суммарного и разностного каналов, G\y — промежуточная частота.
рсн
для оценки
a tr
б
Рис. 6.21. Моноимпульсный суммарно-разностный измеритель угловой координаты
На выходе фазового детектора получим (рис. 6.21, б) 5(0) = k^ks / irfp.0cos((ps - q>d) . (6.69)
В формуле (6.69) при 0 = 0, при любых нестабильностях ks, kd, q>t, cprf, 5(0) = 0. Это значит, что в суммарно-разностном измерителе аппаратурные нестабильности не приводят к смещению нуля
177
пеленгационной характеристики. Изменяется только ее крутизна, причем на крутизну влияют не абсолютные, а относительные нестабильности. В этом — основное преимущество суммарно-разностного дискриминатора по сравнению с амплитудным.
Отметим в заключение, что в рассматриваемом моноимпульсном суммарно-разностном пеленгаторе для обнаружения сигналов и автосопровождения по дальности используется выход суммарного канала.
6.3.6. Алгоритм оптимального моноимпульсного измерения угловых координат в многофункциональной РЛС с АР
В многофункциональных РЛС, наряду с поиском и обнаружением новых целей, реализуется моноимпульсное измерение угловых координат и активное сопровождение выбранных целей с заданным темпом обновления информации. В режиме сопровождения прием отраженных от целей сигналов осуществляется с помощью пучка лучей, образующих равносигнальное направление, совпадающее с максимумом ДН передающей антенны. В отличие от РЛС непрерывного сопровождения, в которых в процессе сопровождения цели решается задача минимизации сигнала ошибки путем совмещения РСН антенны с направлением на цель, в многофункциональных РЛС моноимпульсная оценка угловых координат производится непосредственно по амплитудам (или фазам) принимаемых сигналов в смежных приемных каналах.
Рассмотрим оптимальный, в смысле критерия максимального правдоподобия, алгоритм моноимпульсного оценивания одной угловой координаты в методом сравнения амплитуд сигналов на выходах двух независимых приемных каналов с перекрытыми диаграммами направленности приемных антенн ^(0) и /2(0) [42]. Цель предполагается нефлюктуирующей.
Функция правдоподобия одиночного отсчета напряжений на выходах детекторов огибающей имеет вид
А / im Ц2+912(0)
A(uj и210) = ц ехр ——
г г /ом «2+9г(0)
/0 к 91 (0)1х w2 ехр ——~—
Д [W2?2 (0)]
где щ9 и2 — нормированные амплитуды сигналов на выходах первого и второго каналов;
?1(0>«Ж+0)>
92(0)=9оД0о-0)>
где qG ~ отношение сигнал—шум по амплитуде в максимуме диаграммы направленности приемной антенны, одинаковое для обеих антенн.
178
Логарифмируя Л(и1и2|0) и решая уравнение правдоподобия
d In A(W]U2 I 9)
для случая ln/o[w1(2)g1(2)(0)]« (случай большого отношения сигнал—шум), после элементарных преобразований получим следующее уравнение, описывающее алгоритм оптимальной обработки принимаемых сигналов
(6.70)
Если далее воспользоваться уже известной аппроксимацией (6.65), для функций F(90+9) и F(90-9) получим
г(0о-ё)=део)[1+ц1(0)ё], ^(0о+ё)=я0о)[1-ц2(ё)ё],
(6.71)
где
(6.72)
то уравнение (6.70) с учетом (6.71), (6.72) можно преобразовать к виду
ё = Hi(0)«i -Н2(6)«2 _ Pi (9) - Н2(9) zg73)
<7oF(0o)[h?(0) + М(0)] [ц?(ё) + Pi(0)]
Как и ранее, нормировка сигналов на выходе приемных каналов производится суммарным сигналом с использованием приближенного соотношения
4оЖ) « 0,5(ы1 + w2).
Тогда оценку Q можно представить в виде
где
2Ц1 (9) с 2ц2(0) [ц?(ё)+ц!(9)]’ 2 [ц?(ё)+ц!(0)]’
(6.74)
(6.75)
Из соотношения (6.74) следует, что когда цель находится в РСН, 0=0, Н1(ё) = ц2(ё) = ц, где ц — крутизна рабочего участка
179
пеленгационной характеристики антенны в направлении РСН, получим
щ -и2
(6.76)
X«i +иг)
т. е. оценка совпадает с выражением (6.68). Однако в рассматриваемом случае применение этой формулы приводит к большим погрешностям, так как крутизна пеленгационных характеристик антенн цДЭ) и ц2(0) в направлении на цель неодинакова и неизвестна.
Оценку можно уточнить, применяя следующую итерационную процедуру [43].
1. Зная расчетную крутизну пеленгационной характеристики диаграмм направленности антенн в РСН, находим первое приближение оценки 0(,)по формуле (6.76).
2. Подставив значение этой оценки в выражение (6.72), вычисляем оценки ^^(0) и ^(0). Например, для ДН, описываемых гауссовской кривой
Л(2>(0) = Fo ехр|-а(9о ±6)2],
получим ° (0) = 2а(0о - 0(1)), p.j} (0)= 2а(0о + 0(1)).
3. Подставив полученные значения для рГДб), 14w) в выражения (6.75), рассчитываем значения коэффициентов и с0).
4. Подставив полученные^ значения С](1) и с® в формулу (6.74), получим уточненную оценку 0(2), после чего путем сравнения полученной оценки с предыдущей принимается решение о целесообразности следующей итерации.
Если для оценки угловой координаты используется пачка из У отраженных сигналов, то вместо (6.76) получим
(6.77)
где u2j — амплитуды напряжения сигналов пачки на выходах
первого и второго каналов.
В случае флюктуирующей цели необходимо использовать вместо линейного квадратичный детектор огибающей, и алгоритм однократного (по одному импульсу) оценивания угловой координаты имеет
вид
«2-«2
2p(W|2+w^) ‘
(6.78)
180
Формула для оценивания координаты по пачке из N импульсов в этом случае имеет вид, аналогичный (6.77) с заменой и» на Щ.
Дисперсия ошибки измерения угловой координаты на фоне внутренних шумов амплитудно-амплитудной моноимпульсной РЛС определяется выражением [68]:
где о п — дисперсия шума в основном канале;
к — коэффициент усиления сигнала в приемных каналах (одинаковый для обоих каналов);
А2 = AqF(Q) — квадрат амплитуды принимаемого сигнала с направления 0;
ц — крутизна пеленгационной характеристики.
Дисперсия ошибки, обусловленной внутренними шумами приемника, определяет предельно достижимую точность моноимпульс-ного измерения координат при отсутствии активных помех.
Как уже отмечалось в главе III, в адаптивных антенных решетках при воздействии активных шумовых помех (АШП) наблюдается искажение формы и сдвиг нуля пеленгационной характеристики моно-импупьсного измерителя координат. Это приводит к существенному увеличению ошибок пеленгации. Причем, кроме увеличения дисперсии, появляется и сдвиг оценки, т. е. результаты измерения имеют не равное нулю математическое ожидание.
Некоторые результаты моделирования точностных характеристик моноимпульсного измерителя угловых координат цели в условиях АШП приведены на рис. 6.22 [42].
На рис. 6.22 показана зависимость нормированной дисперсии ошибки измерения угловой координаты от величины нормированного рассогласования положения цели и помехи по измеряемому параметру. Нормировка дисперсии ошибки в помехах производится дисперсией ошибки при отсутствии помех. Графики 1 и 2 соответствуют отношению помеха—шум в компенсационных каналах 30 и 40 дБ, соответственно.
Более подробные результаты исследований, опубликованные в литературе [38, 39], показывают, что в случае воздействия АШП по боковым лепесткам основная диаграмма направленности дисперсия ошибок измерения угловых координат цели незначительно отличается от дисперсии ошибок при отсутствии помех и не превышает некоторой величины, зависящей от отношения помеха—шум в компенсационных каналах.
Если помеха воздействует в области обоих основных лепестков диаграммы направленности амплитудно-амплитудного измерителя угловых координат, ошибка пеленгации существенно увеличивается,
181
и ее среднеквадратическое значение становится соизмеримым с шириной диаграммы направленности антенны.
2 3 4
0,5
2
Рис. 6.22. Графики -у = /(х)
С увеличением отклонения цели от равносигнального направления дисперсия ошибки измерения угловых координат также растет, причем тем быстрее, чем ближе источник помех находится по отношению к цели.
Полученные результаты относятся к случаю отсутствия полезного сигнала в компенсационных каналах. Если это условие не выполняется, потери в соотношении сигнал—шум пропорциональны квадрату коэффициента усиления диаграммы направленности основных каналов в направлении помехи, что приводит к соответствующему увеличению ошибок измерения угловых координат.
182
Глава VII
ФИЛЬТРАЦИЯ И ЭКСТРАПОЛЯЦИЯ ПАРАМЕТРОВ
ТРАЕКТОРИИ НЕМАНЕВРИРУЮЩЕЙ ЦЕЛИ
7.1. Общая характеристика этапов и операций вторичной обработки радиолокационной информации
В РЛС с ФАР (ЦАР) в режиме поиска и сопровождения с периодическим обзором зоны ответственности в подсистему обработки радиолокационных данных с выхода подсистемы сигнальной обработки выдаются в виде числовых кодов координаты мгновенного положения обнаруженных истинных и “ложных” (обусловленных помехами) отметок. Координаты отметки приближенно представляют координаты цели в момент ее локации. Однако, по одиночной отметке еще нельзя принять решение об обнаружении цели, тем более нельзя по ней определять параметры траектории ее движения (направление движения, скорость и др.) Для этого необходимо проанализировать и увязать данные, полученные за несколько зондирований цели, разнесенных во времени. Автоматическое (без участия оператора) решение этой задачи будет называться вторичной обработкой радиолокационной информации.
Процесс вторичной обработки информации от каждой цели обычно реализуется в два этапа: обнаружение траектории и периодическое обновление параметров траектории обнаруженной цели, которое называется сопровождением траектории цели, или для краткости, сопровождением цели.
Реализация этого процесса по данным двухкоординатной РЛС с равномерным обзором в прямоугольной системе координат иллюстрируется на рис. 7.1.
уд
о
Обнаружение траектории
Сопровождение траектории
Рис. 7.1. Пояснение процесса обнаружения и сопровождения траекторий целей
183
Пусть в некоторой точке зоны обзора зафиксирована одиночная отметка О0, не пригодная для подтверждения ни одной из уже существующих (сопровождаемых) траекторий. Эта отметка принимается за начальную точку траектории новой цели. Если априори известны (заданы) составляющие по осям X, Y минимальной v^(>) . и максимальной Ук(у)тах скорости движения подлежащих сопровождению целей, то область в которой следует искать принадлежащую этой цели отметку в следующем обзоре, можно представить в виде пространства между двумя прямоугольниками, размеры сторон которых равны: внутреннего - 2уЛтшГ0 и 2vJmin^, а внешнего - 2\тахГ0и
>где ” период обзора зоны поиска. Операция формирования области называется стробированием, а сама эта область называется стробом первичного захвата.
В строб первичного захвата может попасть не одна, а несколько отметок. Каждую из них приходится считать как одно из возможных продолжений предполагаемой траектории. По двум отметкам уже можно вычислить скорость и направление движения цели по каждой из предполагаемых “завязанных” траекторий, а затем рассчитать возможное положение отметки на следующий (третий) обзор (рис. 7.1). Операции расчета начальных значений параметров (скорости, направления движения) и экстраполяции положения отметки на следующий обзор реализуются специальными алгоритмами фильтрации и экстраполяции.
Вокруг экстраполированных отметок, которые на рис. 7.1 обозначены треугольниками, образуются прямоугольные стробы, размеры которых определяются теперь возможными ошибками экстраполяции и измерения координат отметок. Если в какой-либо строб S2 в третьем обзоре попала новая отметка, то она считается принадлежащей обнаруживаемой траектории. С учетом значений координат этой отметки уточняются параметры обнаруживаемой траектории и строятся новые стробы. После реализации установленного критерия по числу отметок тп, попавших в п последовательно образованных стробов, принимается решение об обнаружении траектории и она передается на сопровождение. На рис. 7.1 решение об обнаружении траектории принимается по трем подряд следующим отметкам (критерий “3 из 3-х”).
Слежение за траекторией цели состоит в последовательной от измерения к измерению “привязке” к ней новых отметок и уточнении ее параметров. При автоматическом слежении за траекторией, которое называется автосопровождением, выполняются следующие операции: уточнение параметров траектории после привязки к ней новой отметки;
экстраполяция параметров на момент следующего сеанса измерения;
стробирование зоны возможного положения новой отметки для продолжения траектории;
отбор новых отметок в строб сопровождаемой траектории.
При попадании в строб сопровождения нескольких отметок решается задача отбора для продолжения траектории одной из них или по каждой попавшей в строб отметке строится свое продолжение, как это показано на рис. 7.1. Если в строб сопровождаемой траектории не отобрано ни одной отметки, для ее продолжения может быть использована экстраполированная “точка”. При повторении пропусков отметок, например к раз подряд, автосопровождение траектории прекращается, т. е. траектория снимается с сопровождения.
Важно отметить, что в рассматриваемой схеме, как на этапе обнаружения траектории, так и на этапе ее сопровождения решаются фактически одни и те же задачи:
фильтрация и экстраполяция параметров траектории;
стробирование зон возможного положения новых отметок для продолжения сопровождаемой (обнаруживаемой) траектории;
отбор новых отметок для сопровождения (обнаружения) траектории;
прекращение сопровождения (обнаружения) траектории по установленному числу (комбинации) пропусков отметок.
Глава VII посвящена решению центральной задачи вторичной обработки радиолокационной информации — задачи фильтрации и экстраполяции параметров траектории движения цели для случая, когда уравнение траектории движения цели и статистические характеристики ошибок измерения координат априори известны.
7.2. Представление фильтруемого процесса
7.2.1. Модель траектории цели
При решении задач фильтрации случайных (неизвестных) параметров динамической системы принципиальное значение имеет способ представления процесса изменения этих параметров во времени и уравнение, связывающее их между собой. В нашем случае это соответствует выбору математической модели траектории цели. В дальнейшем такие модели рассматриваются только применительно к классу воздушных целей (ВЦ).
Обычно траекторию ВЦ делят на участки равномерного и прямолинейного движения, где ускорение движения отсутствует, и участки маневрирования, т. е. движения с ускорением. Эти участки чередуются случайным для наблюдателя (системы обработки) образом. Предполагается, что в моменты перехода от участка к участку ускорение движения изменяется скачком.
Маневрирование ВЦ может быть по скорости и направлению. Маневрирование по скорости ограничено допустимым для летательных аппаратов тангенциальным ускорением, которое не превышает
184
185
(0,8 ... l,0)go, где g0 = 9,81 м/с2 — ускорение земного притяжения. Маневрирование по направлению (вираж) может осуществляться со значительно большей перегрузкой п =gM/gQ- 5...8, где gM ~ ускорение маневра. В простейшем случае можно предположить, что основным видом маневрирования ВЦ является вираж по курсу на постоянной высоте с постоянной интенсивностью, т. е. по дуге окружности. В этом случае проекция траектории ВЦ на горизонтальную плоскость представляет собой последовательность прямолинейных отрезков, сопряженных дугами окружностей, минимальный радиус которых связан с допустимой прегрузкой пр соотношением
(7.1)
где Ум — скорость цели на участке маневра.
Маневрирование ВЦ, особенно в конфликтных ситуациях, относится к классу преднамеренных возмущений траектории цели. Обнаружение, оценка интенсивности маневра и воспроизведение траекторий маневрирующих целей по данным радиолокационных изме-рений является одной из сложнейших задач вторичной обработки радиолокационной информации.
При синтезе алгоритмов фильтрации параметров траектории ВЦ, кроме преднамеренных, должны учитываться возмущения траектории, обусловленные неоднородностью среды, в которой движется цель, атмосферными явлениями, а также неточностью и инерционностью системы управления и стабилизации параметров траектории в полете. В дискретных измерительных системах эти возмущения обычно представляются в виде некоррелированного шума с нулевым математическим ожиданием и известной (предполагаемой) дисперсией.
Математическое описание принятой за основу модели траектории цели называется уравнением ее состояния. Уравнение состояния может быть динамическим и кинематическим. В динамическом уравнении состояния должны быть учтены силы, действующие на цель в процессе ее движения, т. е. должны быть использованы уравнения динамики цели. В кинематическом уравнении состояния учитывается только движение центра масс цели (цель рассматривается в виде материальной точки). Такое уравнение значительно проще динамического, хорошо согласуется с результатами радиолокационных наблюдений и, как правило, удовлетворяет требованиям потребителей радиолокационной информации.
В общем случае кинематическое уравнение состояния (в дальнейшем просто уравнение состояния) записывается в виде дифференциального уравнения
^=кад)+ь.(п(/))
dt
(7.2)
186
где: 3(Z) — вектор параметров траектории цели;
f [ ] — известная вектор-функция;
ь„(п(0) - случайная вектор-функция, описывающая возмущения параметров траектории цели.
При дискретном наблюдении и полиномиальном представлении измеряемых координат, линейное разностное уравнение состояния записывается в виде
ад=Ф[«]3[« -1]+в[п]п[л],
(7.3)
где: &[и] — (s+1 )-мерный вектор параметров траектории, представленной полиномом s-й степени, на n-м шаге наблюдения (в момент времени /„);
Ф[и] — известная [(5+1)х(д+1)]-мерная переходная матрица, которая записывается в виде
Ф[и] =
1 0 0 0
Т„2/2! 7?/3!
Т„ Т?/21 1 Т„
0 1
(7.4)
tn — момент последнего отсчета измеряемой координты;
Г|[ц] — вектор, характеризующий возмущения параметров траектории;
В[л] — известная матрица.
Первое слагаемое в выражении (7.3) представляет собой уравнение состояния невозмущенной полиномиальной траектории, фильтрация параметров которой и рассматривается в данной главе.
7.2.2. Модель процесса измерения
При решении задач фильтрации параметров траектории необходимо четко определить зависимость между вектором Y(t) измеряемых координат и вектором 3(Z) оцениваемых (наблюдаемых и ненаблюдаемых) параметров траектории. Эта зависимость, в общем случае, задается соотношением (уравнением измерения)
У(0 = ЧШ+?(0. (7-5)
где: h[ ] — известная вектор-функция;
^(0 — случайная вектор-функция, представляющая аддитивные ошибки измерения координат.
187
Для рассматриваемого случая дискретных наблюдений уравнение измерения записывается в виде
Y[«] = h„(3[n]) + AY[«],
(7.6)
где: У[и] — вектор измеряемых координат на и-ом шаге;
h„ — известный оператор, устанавливающий связь между наблюдаемыми координатами и оцениваемыми параметрами траектории цели;
AY[n] — вектор погрешностей намерения координат.
Оператор Ьй имеет вид простейшей матрицы Нй, состоящей из нулей и единиц, если по наблюдаемым координатам оцениваются параметры траектории в той же системе координат. Например, если измеряются полярные координаты цели (ги, ), а фильтруются параметры гл,гП5Ви,рл (гипотеза равномерного и прямолинейного движения цели), матрица Нл имеет вид
(7.7)
Если же по измеренным полярным координатам фильтруются параметры траектории в декартовой системе координат (xrt?in> Д, £„), то пересчет фильтруемых параметров в полярную систему производится по нелинейным формулам, которые для рассматриваемого случая имеют вид:
„ / «2 [ 2 А . Хп
гп = \хп +Уп • рл = arctg—, У"
(7.8)
а для пересчета элементов корреляционной матрицы ошибок вводится линеаризованный матричный оператор
drn/dxn d$„/ dxn
0 drn / dy„
0 4 n /dyn
(7.9)
0
Погрешности измерения координат, представленные в уравнении (7.6) вектором ДУЯ = AY(/n), с достаточно обоснованных позиций можно рассматривать как гауссовскую случайную последовательность, относительно которой обычно принимаются следующие предположения.
188
1. Погрешности измерения независимых наблюдаемых координат не зависят друг от друга. Это позволяет решать задачи фильтрации раздельно по каждой наблюдаемой координате.
2. В первом приближении фиксированную совокупность случайных погрешностей измерения каждой координаты в моменты времени t2, ..., t„ можно представить как n-мерную последовательность нормально распределенных случайных величин с корреляционной матрицей
« * •
7?п
^22 ^23
• « • • • «
R-n2 ^пЗ
(7.Ю)
Диагональные элементы матрицы R„ представляют дисперсии ошибок измерения. Симметричные относительно диагонали элементы равны между собой, т. е. Ry = Это значит, что при транспонировании матрица R„ не изменяется ( = R„). Такая матрица называет-
ся эрмитовой матрицей. Если погрешности измерения некоррелиро-ваны, все элементы корреляционной матрицы, кроме диагональных, равны нулю. Такая матрица называется диагональной.
3. Кроме случайных в процессе радиолокационных измерений возможны также систематические и медленно меняющиеся погрешности, обусловленные неточностью юстировки антенн температурными искажениями апертуры антенны, влиянием условий распространения радиоволн в тропосфере и ионосфере. Одновременный учет всех погрешностей (случайных, систематических, медленно меняющихся и др.) затруднителен и целесообразен лишь в высокоточных радиолокационных системах.
В заключение отметим, что модель траектории цели вместе с моделью процесса измерения образуют модель объединенной динамической системы, выходные сигналы которой подлежат фильтрации и дальнейшей траекторной обработке.
7.3. Оптимальная фильтрация параметров состояния динамической системы
В отличие от рассмотренной в главе V задачи фильтрации сигналов известной формы с известными и неизвестными параметрами, при восстановлении параметров состояния динамической системы фильтрации подлежат изменяющиеся во времени, в том числе ненаблюдаемые, параметры процесса. В классической постановке
189
задача фильтрации теперь состоит в том, чтобы по результатам наблюдения случайного процесса y(f) = Л[&(/)] + v(t) на полубесконечном интервале времени оценить значение полезного сигнала
3(Z + т) с наименьшими искажениями. Решение этой задачи при т<0 называется сглаживанием параметров случайного процесса, при т > О говорят о экстраполировании параметров случайного процесса, а при т=0 — о собственно фильтрации параметров случайного процесса.
Теория оптимальной фильтрации случайных процессов базируется на теории статистических решений. При этом исходят из следующих основных выводов последней [26, 36, 40, 41, 95, 107]:
- формирование апостериорной плотности вероятности является достаточной первичной операцией процесса оптимальной фильтрации случайных процессов;
- выражение для апостериорной плотности вероятности можно записать и для параметров изменяющихся во времени, если известен характер этого изменения.
Широкий класс подлежащих фильтрации случайных процессов относится к классу марковских процессов. Ниже излагаются основные результаты теории фильтрации марковских параметров [52]. Эта теория базируется на теореме Байеса и поэтому часто называется байесовской фильтрацией.
Пусть наблюдаемый случайный процесс y(t) представляет собой аддитивную смесь полезного сигнала 4(0, являющегося марковским процессом, и стационарной помехи v(t). Ставится задача оптимальной фильтрации параметра 9(Z) по выборке смеси y(f) в дискретные моменты времени Z1 ,t2,t„. Решение этой задачи сводится прежде всего к формированию выражения для апостериорной плотности вероятности фильтруемого параметра.
В соответствии с формулой Байеса выражение для «-мерной апостериорной плотности распределения вероятности (ПРВ) фильтруемого параметра имеет вид
У1 ,Уг,-,у«)А,-AWi ,У1,-,уп I fy А>- А),
(7-И)
где: р„ () — «-мерная априорная ПРВ фильтруемого параметра;
wCVi ,У1,—,Уп А А,—А) — «-мерная функция правдоподобия этого параметра;
с„ — нормирующий множитель, независимый от 3,.
Имея в виду, что для марковского параметра условная ПРВ w(3n | 3] ) = w(3„ |3„_]),где иАА-,) называется плот-
ностью вероятности перехода из состояния Зп_, в момент времени в состояние Зи в момент времени Z„, можно записать
п
ри(®1 ~ р\ (S'i)PJw(S'^ (7*12)
j=2
190
где -наблюдения.
априорная ПРВ параметра в момент времени начала
Предположим далее, что выборочные значения помехи vt (/ = 1, 2, п) не коррелировали между собой. Тогда функцию правдоподобия фильтруемого параметра можно записать в виде
п
I®')- (7-13)
/=1
С учетом (7.12) и (7.13) выражение (7.11) для апостериорной ПРВ фильтруемого параметра на n-ом шаге имеет вид
w(^,32,...,3Л |у, ,у2,...,уп) =cnpt I fy)f]w(3/1fy-,My, |3,)_ /-2
Аналогичным образом для (и+1)-мерной апостериорной ПРВ можно записать:
и(31,32,...,Э„1|у1,у2,...5у„+1)=с№1д(91Му113,13,ч)и<у( ]»,).
/=2
Выражая теперь S2,...,3n+11,у2,...,у»н)
через w(31532,...,3n |у] ,у2,.-,У»)>
после элементарных преобразований получим окончательно
w(31,32,...,3„+i |y1,y2,-,yn+i) = ci/>„(»,.32,...,3n+1)w(y„+1 |Зл+|), (7.14)
где P«(3i?32э...,3„+|) w(3i,32,...,3Л j У1,у2,...,ул)w(l)„+i |3Л)
представляет собой априорную ПРВ фильтруемого параметра в момент t‘n+i последнего измерения по данным предыдущих измерений на интервале (/„, /и+1).
Выражение (7.14) называется основным уравнением фильтрации марковского параметра. В соответствии с этим уравнением для формирования апостериорной ПРВ на очередном шаге измерения необходимо с помощью функции плотности вероятности перехода экстраполировать многомерное апостериорное распределение параметра, полученное на предыдущем шаге, и умножить результат экстраполяции на значение функции правдоподобия очередного измерения, которое содержит вновь поступившие сведения о фильтруемом параметре.
В общем случае нелинейные модели уравнений состояния и измерения и произвольных ПРВ погрешностей измерения вычисления по формуле (7.14) в замкнутом виде, как правило, невозможны. Поэтому при решении практических задач фильтрации используют различные аппроксимации моделей и статистических характеристик фильтруемого процесса. Наиболее разработанными и широко при
191
меняемыми в инженерной практике являются методы линейной фильтрации, в которых модели состояния системы и процесса измерения предполагаются линейными, а шумы — гауссовскими.
При вторичной обработке радиолокационных данных фильтрации подлежат изменяющиеся во времени параметры сопровождаемых траекторий. Как уже отмечалось, наиболее распространенным является представление траектории в виде детерминированного процесса, в том числе в виде полиномов с неизвестными коэффициентами (параметрами движения). Следовательно, в рассматриваемом случае мы имеем дело с фильтрацией детерминированных процессов с неизвестными параметрами. Для детерминированных параметров плотность вероятности перехода w(3n13„_t) имеет вид дельтафункции, вследствие чего многомерное апостериорное распределение предыдущего шага пересчитывается на следующий с помощью неслучайного оператора экстраполяции Фп, т. е.
При этом задача формирования и расчета апостериорной ПРВ становится не только возможной, но и существенно упрощается.
Выражение для апостериорной ПРВ фильтруемого параметра непосредственно используется для получения его оптимальной оценки. Так, оптимальная оценка векторного параметра по критерию минимального среднего риска при квадратичной функции потерь находится из соотношения
| Y")tZ3«, (7.15)
где: v^ShlY”) — апостериорная ПРВ текущего значения вектора параметров по данным последовательности измерений Y” =(у1,у2,...;1уя);
0 — пространство возможных значений оцениваемого параметра.
Если функция апостериорной ПРВ оцениваемого параметра унимодальна и обладает симметрией по отношению к моде, то оптимальная оценка параметра определяется из решения уравнения
<Л|(&И | Y" )
d$„
= 0,
при
d2w(-)
—о
d&2„
(7.16)
и называется оптимальной оценкой по критерию максимума апостериорной вероятности.
Наконец, если априорные сведения о фильтруемом параметре
отсутствуют, оптимальная оценка определяется из решения уравнения правдоподобия
192
rfA(Y"|3„)
A,
(7-17)
и называется оптимальной оценкой по критерию максимального правдоподобия.
В соответствии с разработанными в математической статистике методами постановки статистических экспериментов возможны два подхода к вычислению апостериорной ПРВ и соответствующей оценки фильтруемого параметра: групповой, когда используется фиксированная выборка измерений, и рекуррентный, состоящий в последовательном уточнении апостериорной ПРВ после каждого нового измерения. При первом подходе предварительно должна быть задана априорная плотность распределения вероятности оцениваемого параметра (в том числе и предположение о его равномерном распределении в пространстве состояний при отсутствии априорных сведений). При втором подходе в качестве априорной на следующем шаге используется прогнозируемая ПРВ по данным, полученным на предыдущем шаге.
Ниже рассматриваются конкретные алгоритмы фильтрации и экстраполяции параметров полиномиальной траектории на фоне гауссовских помех с применением как групповых, так и рекуррентных процедур обработки дискретных радиолокационных данных. Поскольку в книге рассматривается только полиномиальное представление траектории целей в дальнейшем термин “полиномиальная” всюду опускается.
7.4. Оптимальная линейная фильтрация и экстраполяция параметров траектории по фиксированной выборке данных
При синтезе алгоритмов оптимальной линейной фильтрации и экстраполяции за основу принимаются следующие исходные предпосылки.
1. Модель невозмущенной траектории цели по каждой из независимых координат задается в виде полиномиальной функции
X(S, I) = У 0,
(7.18)
степень 5 которой определяется принятой гипотезой о движении цели. В выражении (7.18) коэффициенты полинома имеют смысл координаты, скорости, ускорения и т. д., которые являются параметрами движения цели. Совокупность параметров 0Z, записанная в виде столбца, образует (5+1)-мерный вектор параметров траектории 0= ||0О? 0l? ...5 0s ||г. Предполагается, что за время однократного измерения этот ветор остается неизменным.
193
2. Вектор Yjy результатов измерения, полученных в дискретные моменты времени tu t2, линейно связан с вектором параметров траектории уравнением
Ул, = Aw3 + ДУд,. (7.19)
где:
1 tN
tf/2! ... /f/s!
Zj/2! ... ф.
• * * * • • * • »
/^/2! ...
(7.20)
матрица Вандермонда, элементы которой представляют результат дифференцирования уравнения (7.18) по /-му параметру;
ДУ = ||ДУГ ДУ2, •••> Д^1Г“ вектор погрешности измерения.
3. Условная плотность вероятности (функция правдоподобия) единичного измерения имеет вид
Л(У,
(7.21)
где ст* — дисперсия погрешности измерения, т, = (/, - Q.
4. Совокупность погрешностей У-кратного измерения координат представляет собой в общем случае A-мерную систему коррелированных нормально распределенных случайных величин и характеризуется (АхА)-мерной корреляционной матрицей Rv (см. 7.10). При решении задачи фильтрации эта матрица должна быть известной. Функция правдоподобия A-мерной выборки коррелированных нормально распределенных случайных величин записывается в виде
Л(У, ,У2,...,Уу|3) =
1
(2n)N/2 |R„ |,/г
(7.22)
где:
ду,
ДУ£ = Д^ ,ay2,...,ayn
Ry1 — обратная корреляционная матрица погрешностей измерения,
| Ry | — определитель корреляционной матрицы |Ry|-
194
7.4.1. Алгоритм оптимальной фильтрации параметров траектории по критерию максимального правдоподобия (общий случай)
Функцию правдоподобия для оценивания векторного параметра фу по результатам выборки измерений {F}y=Y” представим в виде
A(Y" /&„) = Cexp[-0,5(AYyRy AYy)], (7.23)
а ее натуральный логарифм
1пЛ(У” / S„) = InC-OSAY^AX,. (7.24)
Для нахождения оценок максимального правдоподобия необходимо продифференцировать выражение (7,24) по составляющим вектора оцениваемых параметров и приравнять производную нулю при = 0Л • В результате получим векторное уравнение правдоподобия
1=0
(7.25)
= 0, i = 1, W,
где А» — транспонированная матрица (7.20).
Окончательное решение уравнения правдоподобия для общего случая коррелированных ошибок измерения имеет вид
Sy = By^Ry'Y
(7.26)
В— ДГИ-’А у — Ау«.у Лу ,
где Yy — TV-мерный вектор результатов измерения.
Если погрешности измерения не коррелированы, то
D-iv =V = и/ у *N "1 ‘1
w2y2
WY
где Wt =l/o^ — “вес” z-го измерения.
В этом случае выражение (7.26) записывается в виде
Зу = BL'A^YL • (7.27)
Потенциальные ошибки оценки параметров траектории рассматриваемым методом можно получить, используя прием линеаризации уравнения правдоподобия (7.25). В окончательном виде выражение для корреляционной матрицы ошибок оценки параметров в рассматриваемом случае имеет вид [50]
Ту = By1 = (A^Ry1 Ay)-'. (7.28)
В качестве примера применения общих соотношений (7.27) и (7.28) получим выражения для оптимальной фильтрации параметров линейной функции x(t) по результатам ее дискретных измерений
195
x, (i = 1, 2, ...» N), характеризуемых некоррелированными погрешностями с дисперсией . В качестве фильтруемых параметров рассматриваются координата xN и скорость ее изменения xN в конечной точке наблюдения tN. При этом предполагается, что измерения производятся в равноотстоящие моменты времени с интервалом (&•- /j_i) = То.
Закон изменения координаты представим в виде
Xj = xN ~(N -i)^xN > / = 1, 2, ..., N,
где &}xN =ToxN — приращение координаты за время TQ, Таким образом, в рассматриваемом случае вектор оцениваемых (фильтруемых) параметров имеет вид
а транспонированная матрица Вандермонда
Корреляционная матрица погрешностей измерения будет в рассматриваемом случае диагональной. Поэтому обратная корреляционная матрица этих погрешностей представляется в виде
- W 8
N rr i
Подставляя выражения для и R^1 в общее уравнение правдоподобия (7.25), получаем систему из двух уравнений для оценки параметров линейной траектории:
N
1 N
Snxn
где:
196
Решение этой системы уравнений получается в виде
(7.29)
где kN=fNhN-gh.
Допустим теперь, что на ограниченном интервале наблюдения измеренные значения координаты можно считать равноточными ГК, =ГК2 = ... = WN= W. В этом случае
fN=NW,
N(N -1)
, #(# -1)(2# -1)
uf WW , __ __ . . - --
Пу —
а окончательные формулы для оценки параметров линейной траектории при равнодискретных и равноточных наблюдениях:
*№=£Пг(О*/ , ,
1=1 >=1 1
(7.30)
N(N+l) ’
6(2i-#-l)
N(N2 -1)
— веса измерений при
оценке координаты и первого приращения, соответственно. Например, при N - 3 имеем:
ni(l) = -l/6, т]5(2)=2/6, пЯЗ) = 5/6,
т| (1) = -1/2, nAi(2) = 0, т] .(3) = 1/2.
Следовательно,
=(5Хз +2х2-Х])/6,
AjJtj =(Хз -х, )/2.
Заметим, что для весовых коэффициентов всегда выполняются условия:
Емо=1, £ т]Д|/о=° /-1 /=1
197
Наряду с оценкой параметров должна вычисляться корреляционная матрица ошибок оценки параметров по формуле (7.28). При равнодискретных, но неравноточных измерениях матрица ошибок оценки параметров
gN /n
При равноточных измерениях элементы этой матрицы зависят только от числа измерений:
2(2ЛГ-1)/ЛГ(#+1)
6/да + 1)
6/ЛДУ+1) 12/ЛДУ2-1)
(7.31)
Например, при N = 3 корреляционная матрица ошибок оценки параметров линейной траектории имеет вид
2,о
Следовательно, дисперсия ошибки оценки сглаженной координаты по трем равноточным измерениям составляет 5/6 дисперсии погрешности одиночного измерения, дисперсия ошибки оценки приращения координаты из-за неточной оценки скорости составляет половину дисперсии погрешности одиночного измерения, а корреляционный момент связи между ошибками оценки координаты и ее приращения равен половине дисперсии одиночного измерения координаты. Зависимости нормированных элементов корреляционной матрицы ошибок оценки параметров линейной траектории от числа измерений показаны на рис. 7.2. Как следует из рисунка, для получения приемлемых по точности оценок необходимо 5—6 измерений.
Обращаясь снова к алгоритмам (7.29) и (7.30) оценки параметров линейной траектории, легко видеть, что они представляют собой алгоритмы нерекурсивных фильтров, а весовые коэффициенты т^фи 'Пд^СО образуют последовательность значений импульсной характеристики этих фильтров. Для поточной обработки (фильтрации) измерений таким фильтром необходимо на каждом шаге (после каждого измерения наблюдаемых координат) выполнить У умножений измереннных зна
1,2
0,8
0,4
0
2
4
Рис. 7.2. Зависимость нормированных элементов корреляционной матрицы ошибок от числа N
198
чений координат на соответствующие весовые коэффициенты и N-1 сложений полученных частных произведений. Это создает определенные трудности при цифровой реализации нерекурсивных фильтров при больших N.
Отметим в заключение, что в системах обработки радиолокационной информации алгоритмы нерекурсивной фильтрации применяются в основном на этапе обнаружения траектории при небольших выборках измерений (У = 3-4).
7.4.2. Алгоритмы экстраполяции параметров траектории
Задача экстраполяции заключается в определении оценок параметров траектории в точках, лежащих вне интервала наблюдения. Для этого используются либо исходная выборка наблюдаемых координат, либо результаты оценивания (фильтрации) параметров на момент последнего наблюдения.
При полиномиальном представлении независимой координаты ее экстраполированные на время Тр параметры определяются по формулам
%N+p
(7.32)
где Тр= tp- tN — интервал времени экстраполяции. Выражения (7.32) позволяют находить экстраполированные значения параметров для каждого конкретного случая представления траектории. Например, для линейной траектории при равнодискретном измерении координаты и экстраполяции на целое число периодов обзора То
XN+P = X у + xNpT0 =xN+ &iXNp
(7.33)
где р = Tp/Tq. Подставив в (7.33) соответствующие выражения для сглаженных параметров, получим
XN+P +PgN^Wi Х‘ +PfN^(N~i>)W‘ Х> _ м м
(7.34)
где kN — fNhN — gij
199
Если, кроме того, измерения равноточные, то
При Тр= Т0(р = 1):
*N+P = X i № + РЛ д х (О]*/ • /=1 1
(7.35)
где г]. (z) = 2(3z-jV-2)/jV(jV-1) — весовая функция измеренных зна-чений координаты при экстраполяции параметров на один период измерения.
Корреляционная матрица ошибок экстраполяции параметров линейной траектории при равнодискретных измерениях имеет вид [51]
hn + 2pgn + p2fN gN + PfN
gN + PfN
Jn
(7.36)
Если, кроме того, измерения равноточные, то для элементов корреляционной матрицы (7.36) получим
2[(lV-l)(2W-l) + 6p(2V-l) + 6p2] , ------------ — ------------—ст
ЛГ(№ -1)
6[(# -1)+р] 2
N(N2 -1) х
(7.37)
12
N(N2 -1)
Если независимая координата представляется полиномом второй степени, формулы экстраполяции параметров и выражение для корреляционной матрицы ошибок получаются аналогично [51].
7.5. Рекуррентные алгоритмы фильтрации параметров невозмущенной траектории
7.5.1. Формульная схема оптимального алгоритма рекуррентной фильтрации
В общем случае задача синтеза алгоритма рекуррентной фильтрации совокупности (вектора) параметров траектории ставится
200
следующим образом. Пусть модель невозмущенной траектории объекта задана разностным уравнением в прямоугольной системе координат
а наблюдаемая случайная последовательность (в той же системе координат) представлена уравнением
где: & — (s + 1 )-мерный вектор фильтруемых параметров траектории; у„ — Z-мерный вектор наблюдаемых координат; ду, — 7-мерный вектор погрешностей измерения с математическим ожиданием, равным нулю, и известной корреляционной матрицей R„; Фи , Н — известные матрицы (см. п. 7.2).
Пусть далее А — вектор оценок значений параметров траектории цели, вычисленный по результатам п-1 измерений координат, а — соответствующая корреляционная матрица ошибок оценивания. Требуется получить выражение для <)я, используя для этого вектор о, предыдущих оценок и результаты нового измерения Y„, а также выражение для корреляционной матрицы ошибок по известным матрицам и R„.
В соответствии с общей теорией оценивания оптимальное решение задачи рекуррентной фильтрации сводится прежде всего к определению апостериорной плотности вероятности фильтруемых параметров, так как она содержит всю информацию, полученную из априорных источников и результатов наблюдений. Дифференцируя апостериорную плотность вероятности, можно получить оптимальную оценку интересующих нас параметров по критерию максимума апостериорной вероятности. Именно в этом смысле и понимается оптимальная рекуррентная фильтрация в дальнейшем.
Итак, пусть имеется оценка ( вектора параметров (К, полученная по результатам предыдущих (и -1) измерений координаты. Распределение вектора jSu предполагается нормальным с математическим ожиданием А и корреляционной матрицей Вектор 3 экстраполируется на момент следующего (n-го) измерения в соответствии с уравнением
’-'л/л-1 —^и^п-г '
Конкретный вид матрицы экстраполяции Фл определяется моделью траектории цели. Например, для координаты х„, представляемой полиномом второй степени
201
фя —
т„ 1 о
1
о о
Ти2/2
т„
1
а выражение (7.38) представляется в виде
Т„2/2
Т„
1
где Тп tn
Корреляционная матрица также экстраполируется к моменту времени t„ по формуле
• (7.38а)
С учетом линейности оператора экстраполяции ф„ распределение вектора экстраполированных параметров будет также нормальным = ехр[-0,5(Эв„_,-9,)’-Т;;..1(&„^,-9„)], (7.39)
где: хК — вектор истинных значений параметров в момент /л;
С} — нормирующий множитель.
Плотность вероятности (7.39) является априорной плотностью вероятности для вектора оцениваемых параметров перед очередным (n-м) измерением.
В момент времени tn производится очередное измерение Yn-Предполагается, что погрешности измерения координат нормально распределены и не коррелированы в соседних обзорах. Следовательно, функция правдоподобия вектора Yn
A(Y, |9,) = C2exp[-0,5(Y,-H9,)rR;1(Y.-H9„)], (7.39а) где — обратная корреляционная матрица погрешностей измерения.
При принятых допущениях об отсутствии межобзорной корреляции погрешностей измерения апостериорная плотность вероятности для параметра а после п измерений определяется по формуле Байеса й
Ч». I Y„) = C3M<V1)A(YJS,), (’«)
причем вследствие того, что распределения составляющих нормальные, апостериорное распределение (7.40) также будет нормальным:
M<an|Yn) = C4exp[-0,5(a„-dn)rW(^-an)], (7.41)
где Д — вектор усредненных (отфильтрованных) параметров по
202
результатам п измерений; " корреляционная матрица ошибок оценки вектора параметров.
Для нормального распределения max w($n | Yrt) соответствует математическому ожиданию вектора оцениваемых параметров. Следовательно, задача оценки параметров по максимуму апостериорной вероятности сводится в нашем случае к нахождению параметров $ и матрицы Ч?мв выражении (7.41).
Используя выражения (7.39) и (7.39а) для плотностей вероятности, входящих в формулу (7.40), после логарифмирования получаем
(&, (&, -&)=(V4 Л’йм &/и_, -&)+
+(¥„ -Н&УШЧУ, - на,)+const.
Из этого уравнения находим [51]:
WxT^+HWH;
-Н9и/п4). (7.42)
Учитывая выражения (7.38) и (7.38а) для и основные соотношения оптимального алгоритма последовательной фильтрации можно представить в виде:
^л/л-1 — Фл^и-Г
2. V. =ФИТИ Ж
3. =’РП/Й_1 -Yn/n_1IF(HY„/n_1№+R„)-4WB/e_l.
(7.43)
4 Кл=ТДГШ>.
5- &.=$n/^+K4Yn-HW
Система уравнений (7.43) представляет алгоритм оптимального рекуррентного линейного фильтра и обычно называется равнениями фильтра Калмана [9]. Эти уравнения могут быть преобразованы к более удобному для реализации виду [51]:
1' ^л/л-1 = Фл^лЧ •
2. ТЛ/ИЧ = ФВТЛ1Ж •
К, =Tn?n_1Hr(HT„/n_1IF+Rn)_1 .
(7.43а)
Ш — ш
К
203
Общая структурная схема фильтра Калмана представлена на рис. 7.3 (обозначения экстраполированных значений &я/лЧ и для сокращения записи заменены обозначениями А и
Рис. 7.3. Структурная схема линейного рекуррентного фильтра (фильтра Калмана)
Дискретный оптимальный рекуррентный фильтр обладает следующими свойствами:
уравнения фильтра имеют рекуррентную форму и хорошо подходят для реализации на ЦВМ;
уравнения фильтра одновременно представляют собой непосредственное описание способа реализации фильтра, причем часть фильтра подобна модели траектории объекта;
корреляционная матрица ошибок оценки параметров вычисляется независимо от результатов измерения Уя. Следовательно, если заданы статистические характеристики погрешностей измерения, то корреляционную матрицу можно вычислить заранее и хранить в ЗУ, что значительно сокращает время реализации алгоритма фильтрации параметров.
7.5.2. Рекуррентная фильтрация параметров линейной траектории
Формулы алгоритма последовательной фильтрации параметров линейной траектории получают непосредственно из уравнения (7.43а). В качестве фильтруемых параметров будем рассматривать координату
204
и скорость ее изменения %п на момент последнего (n-го) измерения. Измерения хп предполагаются равнодискретными с периодом То. В этом случае:
О
1. Пусть по данным предыдущих (п -1) измерений координаты х получены вектор фильтруемых параметров
и корреляционная матрица ошибок оценки этих параметров [51]
2. В соответствии с принятой моделью траектории экстраполяция координаты на момент следующего измерения производится по формулам
и/л“1
3. Корреляционная матрица ошибок экстраполяции вычисляется по формуле = ф„’Рл_1Фг и в окончательном виде записывается так:
К-A +2g„-l +fn-\ (gn-l + fn-1) / То
п/п-1
(s-i +/п-1Ут0
fn-A
4. После и-го измерения координаты х„ с дисперсией погрешности измерения можно рассчитать корреляционную матрицу ошибок фильтрации параметров:
где: h, = + 2g„_} +f^; g„ = g„_i +fn_l;
' = Л-i +W„; k„ =k„, +W„h„; л J л-1 л 7 л л-i л л 7
(7.44)
W =!/<?
И
— вес последнего измерения.
205
Формулы (7.44) позволяют непосредственно формировать элементы матрицы из элементов матрицы с учетом веса последнего измерения.
5. Матричный коэффициент усиления фильтра
К„ = TnHrRn‘
в рассматриваемом случае имеет вид
где = h„W„/kn- Вп= g„Wn /кп. (7.45)
6. С учетом полученных соотношений окончательные формулы для вычисления оценок параметров линейной траектории имеют вид:
(7-46)
Хп
(7.47)
7. При равнодискретных и равноточных измерениях координаты:
J п
= nW-, gn=^-^-W; " 2
hn = »(n-lX2»-l) w. к
12
(7-48)
Подставляя эти значения в выражения (7-45), получаем
Ап =2(2и-1)/и(п + 1); Вп = 6/и(и + 1). (7.49)
Зависимости коэффициентов Ап и Вп от числа наблюдений п приведены на рис. 7.4. Как видно из рисунка, с увеличением п
2 3 4 5 6 7 8 9 п
Рис. 7.4. Зависимость коэффициентов А„ и В„ от числа наблюдений
коэффициенты усиления фильтра по координате и скорости асимптотически приближаются к нулю. Следовательно, с увеличением п результаты последних измерений при фильтрации координаты и скорости учитываются все с меньшим весом, и алгоритм перестает реагировать на изменение входного сигнала. Кроме того, возникают существенные затруднения при реализации фильтра на специализированных ЭВМ с ограниченной разрядностью представления чисел.
206
При больших п накапливающиеся ошибки вычислений становятся соизмеримыми с ценой младшего разряда ЭВМ, что приводит к потере обусловленности и положительной определенности корреляционных матриц экстраполяции и фильтрации параметров. Наступает явление "расходимости” фильтра, когда ошибки фильтрации резко возрастают и фильтр перестает выполнять свои функции.
Таким образом, без принятия специальных мер коррекции линейный рекуррентный фильтр мало пригоден для использования в автоматизированных системах обработки радиолокационной информации.
В качестве одной из таких мер может быть взято ограничение коэффициентов А„ и В„ снизу на заданном уровне [51].
7.5.3. Расширенный фильтр Калмана
До сих пор в п. 7.5 рассматривались методы решения задач рекуррентной фильтрации параметров линейных систем, т. е. систем, в которых связь между измеряемыми и фильтруемыми параметрами является линейной. Однако непосредственное применение этих методов при обработке радиолокационных данных связано с существенными трудностями, так как при решении задач фильтрации параметров радиолокационной цели уравнение состояния обычно записывается в декартовых координатах (х, у, z), а уравнение измерения — в сферических (г, р, е). Формулы пересчета координат цели из сферической в прямоугольную систему с началом в точке стояния РЛС имеют вид (рис. 7.5):
X = Г COS £ COS р , y = rcos£sinp, z = rsins.
Таким образом, связь результатов измерений с фильтруемыми параметрами траектории в данном случае является сугубо нелинейной. Поэтому и оптимальные методы линейной фильтрации здесь принципиально неприменимы.
Кардинальным решением рассматриваемой за-
Рис. 7.5. К пересчету координат цели из сферической в декартову систему координат
дачи является непосредственное применение для синтеза фильтров теории оптимальной нелинейной фильтрации [95]. Однако известные нелинейные алгоритмы сложны в реализации, а их эффективность исследована пока недостаточно. Поэтому в инженерной практике вместо оптимальных находят применение различного рода субоптимальные решения рассматриваемой задачи с возможно более полным использованием подходов и структур, разработанных для линейных фильтров Калмана.
207
К числу таких субоптимальных подходов относится применение так называемого расширенного [107, 127] или обобщенного [41] фильтра Калмана (в дальнейшем будем пользоваться названием “расширенный” фильтр Калмана).
Расширенный фильтр Калмана представляет собой нелинейный субоптимальный алгоритм, в основу которого положено предположение о нелинейности как функций f„(3„) и b„(S„) в уравнении фильтруемого процесса
3„+1=fn(9„) + b„(^)4„, (7.50)
так и функции h„(&„) в уравнении наблюдения
Y„ =Ь„(Яи) + 4и> (7.51)
где: Зи ~ (5 +1)-мерный вектор состояния системы;
Т]„ — /-мерный возмущающий процесс;
f„(-), b„() — матрицы нелинейных, зависящих от времени, функций
МО — нелинейная вектор-функция, определяющая связь измеряемых координат и фильтруемых параметров;
- шумовой процесс.
Вместе с тем предполагается, что функции f„ (•) , bn(-)> hn(-) являются достаточно гладкими и, следовательно, могут быть разложены в ряд Тейлора и аппроксимированы полиномами первого порядка. Вводятся следующие матрицы:
Фи
где точка разложения пока не определена.
Считается, что Ф„ — (х+1)х(з+1)-мерная матрица, (у)-й элемент которой является частной производной г-й составляющей f„ (Э) по у-й составляющей & . По аналогии с этим Вп — ($+1)х/-мерная и Н п — тих(5+1)-мерная матрицы.
Теперь, если нелинейные функции f„ (•), bn(-), hn( ) являются достаточно гладкими в окрестности точки у.Е, то их можно представить следующим образом:
f„ (&>) -fn (&) = Ф„(Э» )
bn(Q'n) —В
п >
Ьи(Э>,)-Ьп(^)=Яи (&-&)•
Поэтому уравнения исходной модели (7.50) и (7.51) можно записать в виде
^Л+1 — Фл^И "Ь ВиТ|и + 11л t
(7.52)
208
где:
U» —fw(^e) ,
Vn =he(3n)-^^e.
7.53)
где:
С учетом (7.52) и (7.53) при заданных Ф„, В „ , H„, u „ , v„ построение линейного фильтра Калмана не представляет трудностей, если выбрана точка разложения так, чтобы линейная аппроксимация была достаточно корректной.
Ключевая идея построения расширенного фильтра Калмана состоит в том, что в качестве точки разложения выбирается оценка вектора параметров о, (в матрицах ф, Вп и и» ), или оценка вектора экстраполированных значений параметров ф (в матрицах Нп, и v„). Эта идея вытекает из достаточно обоснованного предположения о том, что если аппроксимация допустима в окрестности истинного среднего, то она не может быть слишком грубой в окрестности оценки этого среднего.
С учетом выбранных точек разложения функций f„ (•), bn(-), hn(-) в ряд Тейлора, уравнения расширенного калмановского фильтра записываются в следующем виде:
=ФД-1 +«»=t(S'„-i)>
Тя/л-1 = ФЛ',^<И + BnQnBL
(7.54)
(7.55)
Qn=M[nX],
=¥й/иЧ г
(7.56)
К„ = л >
(7.57)
(7.58)
Анализ уравнений (7.54)—(7.58) показывает, что расширенный калмановский фильтр является нелинейным, так как в состав его формульной схемы входит вычисление на каждом шаге нелинейных функций f„ (-)и h«(-), а также линеаризованного оператора Нп, от которого зависит коэффициент усиления фильтра К п.
Рассмотрим теперь квазиоптимальный вариант расширенного фильтра Калмана в предположении, что траектория движения цели (фильтруемый процесс) представляется линейной функцией в прямоугольных координатах (%, у, г) при = 0, т. е.
209
^и/л-i ~ Фя^п-1 ’ (7.59)
а измеренные координаты — в сферической системе (г, Р, е). Для простоты ограничимся случаем двухкоординатной РЛС, измеряющей дальность и азимут цели гп и р„. В качестве фильтруемых параметров в данном случае используются прямоугольные координаты х„ и уп и их производные и уп.
По результатам предыдущего шага транспонированный вектор фильтруемых параметров записывается в виде
а корреляционная матрица ошибок фильтрации этих параметров в виде
Основные операции квазиоптимального расширенного фильтра Калмана сводятся в этом случае к следующим:
1. Экстраполяция параметров траектории производится в соответствии с уравнением (7.59), а корреляционная матрица ошибок вычисляется по формуле
где
где То — период обновления координат.
2. Экстраполированные значения полярных координат рассчитываются по формулам
^n/n-1 N%n/n-l ’
(7.60)
Л/л-1 9
^nln-1 < ^9
•^и/И-1 < ^9
2 л:—Л,
JU-i > о, Уп! п-1 > ^9
Уп!п-\ ^9 К/л-1 < 0.
(7.61)
210
3. Вектор измеренных координат и ошибок измерения имеют вид:
корреляционная матрица
4. Для пересчета корреляционной матрицы ошибок экстраполяции параметров в полярную систему координат используется линеаризированный оператор
О
О
drnln_Jdx ^Рп/л-i /dx
/dy О d^nin-i/dy О
cos Р„/лЧ “ sin Pn/n_j /
О sin рл/л_!
о <MS$nin-Jrnin-i
(7.62)
5. Обычным образом (см. уравнения (7.56), (7.57)) вычисляется корреляционная матрица ошибок и матричный коэффициент усиления фильтра
где
6. Вектор оценок параметров на n-м шаге фильтрации вычисляется по формуле
(7.63)
Из этой формулы легко получить окончательные выражения для составляющих вектора фильтруемых параметров &п. Так для X,, получаем
*и = « W (г„ - г„,^)+а W (р„ - ,
п *п РП нл
где- а =^1En)-^^+%^^=THMcosP„/„I+T13f„1sinp„/„_l
U ~л/л—1 >
211
sinpB/i
Л
+Ч'1ХИ)
cosft,^
л/л—1
аналогично для хп
Х„ =х^ +7rnwrn(rn -^-1)+Ури^(Р„ ,
где:
у =4/2I,nx^^ = ,P21z„1cosB„/„.
I j-r £1{П) j 21 (Л} г Л/Л—1
Рл
Из приведенных рассуждений и полученных соотношений следует, что и в рассматриваемом фильтре коэффициенты усиления должны рассчитываться на каждом шаге в реальном времени. Это затрудняет процедуру получения оценок и создает трудности в реализации алгоритмов.
Дальнейшее упрощение фильтра можно получить, если на каждом шаге сначала (вне фильтра) пересчитывать результаты очередного измерения в прямоугольную систему координат и реализовать фильтрацию параметров в этой системе, а затем результаты фильтрации пересчитать в полярную систему координат для решения задач стробирования и селекции новых отметок.
Последовательность операций упрощенной фильтрации сводится к следующим:
1. Каждая пара измеренных координат гп и р„ пересчитывается вне фильтра в прямоугольную систему по формулам
Хп = гп cospn,
= Гп Sin .
Полученные значения хп > Уя считаются независимыми измеренными координатами и дисперсиями погрешностей измерения
и2 =cos2B„a2 + л? sin2 Вист?
Хп Ъ к р
о2 = sin2Bna2 + я? cos2 В»о2 Уп гп Рл
2. Каждая прямоугольная координата фильтруется независимо, в соответствии с принятой гипотезой изменения прямоугольных координат.
3. Экстраполированные значения прямоугольных координат пересчитываются в полярную систему по формулам (7.60), (7.61) и используются для формирования стробов и отбора новых отметок.
На рис. 7.6 приведены полученные методом моделирования графики среднеквадратических ошибок оценки координаты азимута
212
в зависимости от числа измерений п (для траекторий, изображенных в верхнем правом углу рисунка) для квазиоптимального (графики 1) и упрощенного (графики 2) алгоритмов при rrain, равных 10 и 20 км.
Ё— Ду
Рис. 7.6. Сравнение точностных характеристик расширенного квазиоптимального и упрощенного фильтров Калмана
Анализ результатов моделирования показывает, что в упрощенном фильтре ухудшение точности составляет от 5 до 15% в зависимости от дальности, курса, скорости и числа наблюдений. При z^in< 10 км это ухудшение может достигать 30%. Объем вычислений при применении упрощенного фильтра уменьшается на порядок.
7.6. Применение методов оптимальной редукции при решении задач фильтрации параметров траектории
7.6.1. Применение метода оптимальной редукции при оценке параметров траектории по фиксированной выборке измерений
Операторное уравнение для решения задачи оценивания параметров траектории как и прежде задается в данном случае выражением
Х/~
Т
=Ay3+v.
(7.64)
Матрица Ад, и статистические характеристики помехи v, определяемые матрицей считаются известными.
213
Оценка векторного параметра Эу определяется теперь с использованием процедуры редукции результатов измерения к идеальному прибору, задаваемому единичной матрицей I. Результат редукции представляется в виде (см. гл. Г):
SN = BYy = S.v + (ВАУ - I)S.V + Bv, (7.65)
где В — оператор редукции, представляющий собой матрицу размерности (5+1) X У, который является в общем случае результатом решения двухкритериальной задачи Парето — задачи одновременной минимизации интенсивности шумового фона
Л(В) = fr(BRvBr) = min и коэффициента смещения оценки
g(B) = tr[(BA у - 1)(ВА у -1/ ] = min . В
Это решение (точнее континуум решений) с произвольным параметром а имеет вид [60]:
(7.66)
Bopt = Адг(АЛ)А^ +aRv)~l, 0<а<ао. (7.67)
Для выбора параметра а в выражении (7.67) могут быть применены перечисленные выше подходы (см. гл. 7V), в том числе решение с контролируемым уровнем шумового фона, когда а является корнем уравнения tr (В Opt R VB opt ) = е , а оптимизация по В состоит в минимизации коэффициента смещения оценки g(B).
Оптимальная оценка вектора параметров $ находится в рассматриваемом случае из выражения
Зор1 = АИАу + aRv)-1 Y = (А£ A.v + aRv)-’ Ay Y. (7.68)
При a = 0 оптимальная оценка совпадает с оценкой, получаемой методом наименьших квадратов.
На рис. 7.7 представлены результаты вычислительного эксперимента, иллюстрирующие зависимость шумового фона й(а) оценки и коэффициента смещения оценки g(a) от изменения параметра а в пределах ОД £ a <1,0.
Расчеты проводились для моделей линейной (5=1) траектории (рис. 1.1а) и квадратичной (s = 2) траектории (рис. 1.16) по равнодискретной выборке координаты объемом ЛГ=10 с дисперсией ошибки измерения q? = ю м2. Результаты расчетов показывают, что при a = (0Д..ДЗ) за счет незначительного смещения оценки можно существенно уменьшить интенсивность шумового фона оценки параметров траектории. Характер изменения показателей й(а) и g(a) зависит от модели траектории и ошибок измерения координаты.
Применение метода смещенной оптимальной редукции практически неизбежно при оценивании параметров траектории по данным нескольких разнотипных источников информации. В этом случае
214
система уравнении, связывающая измеряемые координаты и оцениваемые параметры, является, как правило, переопределенной.
Рис. 7.7а. Графики h,g~f(а)
Для ее решения методом редукции применяется псевдообратный оператор [88]
A" =limA^(AyA^+aI)->, a—>0
(7.69)
а само решение записывается в виде
3 = A“Y. (7.70)
Таким образом оценивание параметров траектории методом оптимальной смещенной редукции по фиксированной выборке измеряемой координаты позволяет:
в нормальных условиях, когда оператор А^ AN обусловлен, добиться повышения точности оценивания за счет незначительного смещения оценки;
в экстремальных условиях, когда традиционные методы не работают вследствие вырожденности оператора ATN AN или неполноты данных, получить удовлетворительное приближенное решение постав-ленной задачи.
7.6.2. Применение метода рекуррентной редукции для фильтрации параметров траектории
Как уже отмечалось, рекуррентная (последовательная) фильтрация параметров траектории с применением линейных фильтров
215
Калмана находит широкое применение в системах цифровой обработки радиолокационной информации. Этому способствует целый ряд положительных свойств рекуррентных фильтров, особенно удобство реализации средствами ЦВТ. Однако у таких фильтров имеются существенные недостатки, особенно при фильтрации параметров маневрирующих целей. Поэтому представляют интерес новые подходы к решению задач рекуррентной фильтрации, в частности, метод рекуррентной редукции, предложенный в [89].
С учетом полиномиальной модели траектории лоцируемого объекта и при допущении о некоррелированности ошибок измерения наблюдаемой скалярной координаты полученная в [89] формульная схема алгоритма рекуррентной редукции аналогична формульной схеме фильтра Калмана и представлена системой уравнений, аналогичной (7.43). Параметр редукции при этом вводится в начальные условия задачи, которые предполагаются нулевыми, т. е. $0 = о, Т0=ач1, где а — параметр редукции.
В процессе радиолокационных измерений задача фильтрации параметров траектории обычно решается в два этапа: на первом этапе по ограниченной выборке результатов измерения определяются начальные значения параметров траектории, а затем на втором этапе эти параметры рекуррентно уточняются до требуемого качества. Следовательно, при рекуррентной редукции в качестве начальных условий должны использоваться выходные данные (значения оценок и их точностные характеристики), полученные на первом этапе фильтрации. В принципе это не меняет сути и методов выполнения второго этапа, однако возникают затруднения с выбором параметра а для рекуррентной редукции. Кроме того, в формульной схеме рекуррентной редукции, полученной в [89], не полностью учитывается динамика движения лоцируемого объекта. В частности, в уравнении для получения новой оценки используется результат фильтрации предыдущего шага, тогда как по сути для этого должна быть использована экстраполированная на момент последнего (обновляющего) измерения предыдущая оценка. Аналогично, для вычисления корреляционной матрицы ошибок фильтрации на очередном шаге используется корреляционная матрица фильтрации предыдущего шага, тогда как в динамической системе для этого должна быть использована корреляционная матрица ошибок экстраполяции.
Если ввести перечисленные поправки, формульная схема алгоритма рекуррентной редукции совпадает с формульной схемой линейного фильтра Калмана. Следовательно, алгоритму рекуррентной редукции присущи те же недостатки, что и фильтру Калмана, и при его использовании необходимо принимать меры обеспечения устойчивости при отклонении модели движения объекта от заложенной в алгоритм априорной модели. В теории редукции эта задача называется задачей контроля надежности модели.
Под надежностью модели понимается в данном случае вероятность ошибочно отвергнуть принятую модель на основании измерений ¥. В общем случае векторных измерений для проверки надеж-ности модели можно использовать текущее значение квадратичной формы
S„ = (¥и -)IV(Y, -Х/и-1)г, (7.71)
где Rr1 = (HY^IF +R, )ч.
Если результаты измерения соответствуют принятой модели, текущее значение квадратичной формы (7.71) подчиняется центральному %2 -распределению с / степенями свободы, где I — размерность вектора Y„, а при отсутствии такого соответствия это распределение является нецентральным X2-распределением с параметром нецентральное™ а пропорциональным отклонению реальной модели от гипотезы. Таким образом, в данном случае проверка надежности модели сводится к проверке гипотезы о центральности X 2 -распределения квадратичной формы (7.71).
Для адаптивного управления процессом рекуррентной редукции результатов измерений с целью недопущения срыва сопровождения и обеспечения заданной точности оценки параметров траектории, кроме рассмотренных выше, могут быть использованы: коэффициент усиления фильтра
K,=T„M_IlF[(HTn/^IF+RI)r, (7.72)
который характеризует степень влияния нового (n-го) измерения на результат редукции, и оператор
= (ТЛ/Л_1Н9(ТЛ/В_1Н9Г[(НТЯ/Л_]№ +R,)]-', (7.73) характеризующий степень влияния нового измерения на погрешность редукции.
Таким образом, используя параметры (7.72), (7.73) можно на каждом шаге рекуррентной редукции принимать решения:
• продолжать рекуррентный процесс, если не получена достаточная точность оценки параметров траектории при приемлемой надежности модели;
• прекратить рекуррентный процесс (отказаться от n-го измерения или от обработки его результата), если достигнута достаточная точность оценивания параметров траектории при приемлемой надежности модели;
• при резком падении надежности модели прекратить итерационный процесс и внести коррективы в априорную информацию о характере движения цели.
216
217
Глава VIII
ФИЛЬТРАЦИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ МАНЕВРИРУЮЩЕЙ ЦЕЛИ
8.1. Способы описания динамики маневрирующей цели
Маневром называется внезапное (непредвиденное) изменение характера движения объекта под воздействием случайных и (или) детерминированных сил. Общее уравнение движения маневрирующей цели записывается в виде
= + В«11л + Т|л t (8.1)
где: — уравнение невозмущенной траектории движения
цели, ил — вектор управления (интенсивность маневра) размерностью rX 1, — матрица размерностью (s+1 Xr), m — белый шум с нуле-
вым математическим ожиданием и матрицей ковариации Qn.
Управляемые человеком объекты (самолеты, корабли) движутся, как правило, прямолинейно и с постоянной скоростью. Преднамеренные развороты, маневры уклонения и ускорения могут рассматриваться как возмущения, накладываемые на процесс движения, осуществляющийся с постоянной скоростью. При этом на участке невозмущенного движения траектория цели представляется полиномом первой степени, а на участке маневра — полиномом второй степени.
Следовательно, траекторию маневрирующей цели можно представить в виде последовательности сопряженных участков прямолинейного и равномерного движения и равноускоренного движения. Поэтому в качестве вектора управления ии в уравнении (8.1) в данном случае рассматривается и подлежит оцениванию скалярный параметр gM, характеризующий ускорение движения объекта на участке маневра.
В теории фильтрации задача обнаружения и оценивания gM решается с использованием двух предположений (подходов).
1. Ускорение gM считается случайным процессом и оценивается статистическими методами.
2. Ускорение gM считается детерминированным процессом и оценивается в реальном времени по результатам наблюдения за целью.
Ниже рассматриваются более подробно оба перечисленных подхода к описанию модели ускорения цели на участке маневра.
8.1.1. Статистические модели маневра воздушной цели
В порядке увеличения сложности, для представления ускорения маневрирующей цели рассматриваются следующие статистические модели.
218
1. В первом приближении можно принять, что ускорение gM представляет собой стационарную случайную, распределенную по нормальному закону, переменную с нулевым средним значением и заданной дисперсией о . Предполагается также независимость (некоррелированность) ускорений в различные моменты времени. Математическая запись принятых допущений имеет вид (по каждой независимой координате 0 = {x,y,z}):
и постоянно при всех п,
М[Ям1£мп]=0, п*к.
В этом случае уравнение состояния фильтруемого процесса можно записать в виде (слагаемое т]и в дальнейшем опускается):
^и+1 = + BgM,
где:
1 То
О 1
То — период обновления данных;
В — матрица коэффициентов преобразования шумов манев
ра;
В - Т//2 То
Необходимо отметить, что принятие гипотезы о гауссовском распределении и “белом” спектре ускорений цели обеспечивает в данном случае непосредственное использование для фильтрации параметров траектории стандартного фильтра Калмана.
2. Лучше учитывает реальные особенности маневра воздушных целей модель коррелированного случайного процесса с нулевым математическим ожиданием и недиагональной корреляционной матрицей G„. Максимальное значение интенсивности маневра определяется в этом случае допустимыми для летательного аппарата перегрузками gumax. ~ iHpgo, где пР — допустимая прегрузка, g0 =9,81 м/с2 — ускорение земного притяжения.
Для плотности распределения вероятности (ПРВ) интенсивности маневра принимается модель типа (рис. 8.1):
(8.2)
где: Ро — вероятность отсутствия маневра;
вероятность маневра с интенсивностью ± gM
219
Автокорреляционная функция маневра записывается в этом случае в виде [121]:
M[gM <t)gM +T)J = rm СО = ста е “|Т| о Л/
(8.3)
где а = —, tM — продолжительность маневра.
Дисперсия ускорения маневра вычисляется в этом случае по формуле
Ст2 =^(1+4/» -Ро).
3
(8.4)
При рассматриваемой модели маневра непосредственное применение для фильтрации параметров траектории алгоритмов фильтра Калмана невозможно, поскольку входное воздействие не является
Мтаж О О Мти
гауссовским белым шумом. В [121] предложен способ введения эквивалентного (с тем же средним значением и СКО) гауссовского белого возмущающего процесса путем расширения вектора состояния за счет ускорения цели. Такой подход позволяет моделировать маневр случайным процессом типа белого шума только для ансамбля возмож-
вероятности ускорения ных траекторий. Следовательно, и форми-
руемый далее фильтр является оптимальным по отношению к ансамблю (совокуп-
ности) сопровождаемых траекторий. На практике, при одновременной фильтрации параметров траекторий маневрирующих и неманеврирующих воздушных целей, такая модель имеет ограниченное применение.
3. Более адекватно физическую сущность реальных процессов маневрирования каждой цели отражает модель маневра в виде случайного процесса, среднее значение и дисперсия которого может принимать произвольные значения (состояния) 5, на некотором конечном множестве и переходить из одного состояния в другое с заданными вероятностями ity. При этом до перехода в новое состояние S процесс будет находиться в течение времени ху в состоянии S.. Величины ту являются случайными величинами, подчиняющимися определенному набору плотностей вероятности распределения w(Ty) 2, АГ), N ~~ число состояний системы.
Рассматриваемый процесс называется полумарковским случайным процессом, а соответствующая модель — полумарковской моделью описания маневра цели [107]. Вероятности тс» (i, j ж 1, 2, ..., N)
220
называются вероятностями перехода и должны удовлетворять следующим условиям
j=i
Совокупность вероятностей 7^ образует матрицу переходных вероятностей, которая записывается в виде
^12 •••
^22 ••• ^2#
В « * «II • В •
ТСдгг — nNN
(8.5)
Уравнение состояния модели цели в этом случае записывается в виде ^,=Ф^+В^ + ч-). (8-6)
где: g$ — значение детерминированного ускорения, определяемого полумарковской моделью (для i-го состояния);
— составляющая зингеровского шума с нулевым средним и корреляционной матрицей Q„, которая принимается идентичной для каждого состояния полумарковской модели.
Отметим в заключение, что полумарковская модель находит широкое применение при разработке адаптивных алгоритмов фильтрации параметров маневрирующих целей.
8.1.2. Моделирование маневра по результатам оценивания входного воздействия
В данном случае вектор состояния цели описывается уравнением без учета входного управляющего воздействия, характеризующего маневр цели, а интенсивность маневра gM должна быть оценена в процессе фильтрации, и затем использована для коррекции оценки вектора состояния.
Для описания состояния цели используются две модели:
модель с постоянной (приблизительно) скоростью и помехой, моделирующей небольшие флюктуации скорости, для неманеврирующей цели;
модель с постоянным (приблизительно) ускорением и помехой, моделирующей небольшие флюктуации ускорения, для маневрирующей цели.
Уравнение состояния для неманеврирующей цели в прямоугольных координатах (х, у) записывается в виде:
221
&Л+1
(8.7а)
где:
М[т|л] — О,
Л^[Т|лТ|т] — Q5тп •
П« = П1
Уравнение состояния для маневрирующей цели записывается в виде
^»+1 =ф«3« +ВЖ'П»
(8.76)
где:
Хп
1 То 0 0 7?/2 О
О 1 0 0 То О
О 0 1 То О Т02/2
0 0 0 1 0 То
0 0 0 0 1 О
0 0 0 0 0 1
Пя = nt
Т?/4
То/2
о о 7?/4 Го/2 о 1
П2Г, W] = 0, M[«] = Qm8„t-
Приведенные модели относятся к классу моделей, где маневр рассматривается как составная часть динамики цели. Алгоритм фильтрации в этом случае включает операции обнаружения маневра, оценки интенсивности маневра и способ использования результатов оценки для коррекции фильтруемых параметров.
О
О
1
О
222
8.2. Применение фильтра Калмана и его модификаций для фильтрации параметров слабоманеврирующих целей
В общем случае задача фильтрации и экстраполяции параметров траектории маневрирующей цели формулируется как задача оценки вектора состояния динамической системы, уравнение состояния которой соответствует характеру ее движения. Для решения этой задачи широкое распространение получили рекуррентные алгоритмы (фильтры), рассмотренные в предыдущей главе. Благодаря простоте и удобству реализации на ЭВМ такие фильтры служат основой для большого числа модификаций, в том числе и для фильтрации параметров маневрирующих целей. В зависимости от точностных характеристик РЛС и предполагаемого характера маневрирования цели возможны несколько подходов к построению рекуррентных алгоритмов фильтрации ее параметров.
В простейшем случае, когда последовательность выборочных значений интенсивности маневрирования цели представляется как стационарный белый шум с математическим ожиданием, равным нулю, и дисперсией ст2 , 0 = {х, у, z] , учет в алгоритме фильтрации характеристик возможного маневра цели сводится к загрублению фильтра Калмана либо за счет введения дополнительного члена в корреляционную матрицу ошибок экстраполяции параметров по формуле (для каждой независимой координаты)
ФТЯ.Л>Г + В,(8.8)
где ВР
тР — интервал времени экстраполяции,
F*
либо путем введения искусственного старения ошибок измерения координат, что эквивалентно замене корреляционной матрицы ошибок
измерения Rrt4 в момент матрицей
— ехр[с(б» — tn_j)Rn_j] (с > 0).
Как в первом, так и во втором подходе при равнодискретных и равноточных измерениях координат коэффициенты сглаживания фильтра Калмана Ап и Bn/TQ сходятся к положительным постоянным, лежащим в области устойчивости фильтра. Другое дело, что для выбора конкретных значений в первом случае и коэффициента с во втором, априорных данных, вообще говоря, не имеется.
Дальнейшим шагом в этом направлении является применение фильтров с постоянными коэффициентами усиления А = а,
223
В/То = $/То- Такие фильтры получили название а, 0-фильтров или фильтров скользящего сглаживания параметров линейной траектории. Формульная схема алгоритма а, 0-фильтра имеет вид (для одной
координаты)
Хп=х„м+а(хп-хп/пА)
(8.9)
Xnln-l ~ Хп-1 + Хп-1*0 ’
где: хп — результат измерения координаты х на n-ом шаге обновления информации;
Хп, Хп — результаты оценки параметров на n-ом шаге.
Алгоритм (8.9) представляет дискретную систему автоматического управления с обратной связью с постоянными коэффициентами сглаживания а и 0. Эта система характеризуется такими динамическими характеристиками, как переходный процесс, устойчивость, случайные и динамические ошибки в установившемся режиме работы, которые не свойственны исходному алгоритму калмановской фильтрации.
Многочисленные исследования показывают [51]:
а) необходимые и достаточные условия устойчивости а, 0-фильтра имеют вид: а > 0, 0 S 0, 2а + 0 < 4;
б) для большей части области устойчивости переходный процесс имеет колебательный или слабо демпфированный характер;
в) дисперсия случайных ошибок фильтрации параметров в установившемся режиме работы определяется выражениями:
2 2а2-Зар +20
О’* —-------------а
Хп а(4 - 2а - 0) Хп
(8.10)
---------------.
7?а(4 - 2а - 0) х"’
(8.И)
г) дисперсия случайной ошибки одношаговой экстраполяции координаты
2а2 + а0 + 20
%- = а(4 - 2а- W ; <812>
д) динамическая ошибка одношаговой экстраполяции координаты, обусловленная постоянным ускорением gu объекта равна
&dxn/n-i = 8мТ02/& • (8.13)
Анализ выражений (8.10)—(8.13) показывает, что влияние ошибок измерения можно снизить, выбирая малые значения а и Р; с
224
другой стороны, для уменьшения динамических ошибок значения этих коэффициентов (по крайней мере коэффициента 0) должны быть большими. Следовательно, может быть выбран компромиссный вариант, удовлетворяющий противоречивым требованиям хорошего сглаживания ошибок измерения и способности мгновенного реагирования на маневр объекта.
Выбор оптимальных значений а и 0 может быть произведен по критерию минимума суммарной (случайной плюс динамической) ошибки одношаговой экстраполяции координаты [52]:
°? = (CT?’W + л(Г*п/и-1) = min .
и/л~1 и/Л"“1 ос,р
В литературе [107] предложен и обоснован другой подход к выбору коэффициентов а и 0, исходя из условия минимизации динамической ошибки экстраполяции координаты, обусловленной маневром объекта при заданном ограничении на случайную ошибку фильтрации координаты, обусловленную ошибками измерения. Из решения этой задачи получено соотношение
0 = а2/(2-а). (8.14)
Показано, что пара а, а2 / (2 - а) является оптимальной для а, 0-фильтра как при фильтрации координат, так и при фильтрации скорости их изменения.
Пару значений а и 0 можно выбрать, исходя из условия попадания с заданной вероятностью новых отметок в строб сопровождения траектории. При этом размеры строба выбираются таким образом, чтобы число мешающих (ложных) отметок, которые могут попасть в строб, было минимальным. Условие попадания отметок в строб сопровождения записывается в виде
(8.15)
где: L (в простейшем случае) — ширина стороны квадратного строба; с — коэффициент надежности, обычно принимаемый равным 2-3.
Оставив в выражении (8.15) только знак равенства и разделив обе его части на среднюю квадратическую ошибку измерения о
получим
Далее с учетом выражений (8.10) и (8.14), получим окончательно
6а-а2 а2
^8-8а+а2 2-а
(8.16)
225
г 1
На рис. 8.2 приведены графики зависимости ём /®х от коэффициента а при различных значениях параметра q=LI?s (принято с ~ 2).
Рис. 8.2. Графики для выбора параметров а, р-фильтра
По этим графикам можно (по известным периоде обзора Тй и нормализованном размере строба q) определить значение а как функцию интенсивности маневра gM.
8.3. Фильтрация параметров траектории маневрирующей цели адаптивным фильтром с обнаружителем маневра
Результаты исследований, посвященных фильтрации параметров маневрирующей цели фильтром с обнаружителем маневра опубликованы в многочисленной литературе [10, 52, 58, 59, 122, 125, 145 и др.]. Основным отличием подходов к решению этой задачи является представление маневра либо как случайного процесса, либо как детерминированного процесса с неизвестными параметрами. В подходе, который будет рассматриваться в данном пункте, маневр представляется как часть динамики цели, т. е. как детерминированный процесс с неизвестными параметрами. Следовательно, для его обнаружения могут быть использованы известные статистические
226
методы обнаружения неслучайных сигналов (событий) на фоне помех, создаваемых шумами управления и ошибками измерения координат.
В алгоритмах с обнаружителем маневра фильтр сопровождения функционирует в нормальном режиме в предположении об отсутствии маневра. Для обнаружения маневра применяется алгоритм, принимающий решения как об обнаружении начала маневра, так и об обнаружении его окончания (завершения). После обнаружения начала (конца) маневра используется другая модель состояния и вносятся поправки в параметры траектории, обусловленные запаздыванием в обнаружении начала (конца) маневра. Такой фильтр относится к классу адаптивных фильтров с обнаружителем маневра.
Для адаптивных фильтров с обнаружителем маневра возможно по крайней мере два способа их реализации.
1. В качестве базовых используются два фильтра, первый из которых настроен на фильтрацию параметров траектории на участке необнаруженного маневра, а второй — на фильтрацию параметров траектории на участке обнаруженного маневра. Переключение фильтров и коррекция параметров производится по результатам обнаружения начала и конца маневра. Такой фильтр получил название переключающегося фильтра Калмана (ПФК).
2. В адаптивном алгоритме используется единственный фильтр, обычно настроенный на фильтрацию параметров траектории неманеврирующей цели. При обнаружении маневра в уравнение состояния включается дополнительный (адаптивный) член, характеризующий составляющую модели, обусловленную маневром цели, т. е. составляющую, характеризующую интенсивность ускорения маневра. Интенсивность маневра оценивается рекурсивно или по фиксированной выборке невязок в процессе обнаружения маневра. Такой фильтр получил название модифицированного фильтра Калмана (МФК) [126].
В дальнейшем раздельно рассматриваются оба из перечисленных подходов. При этом, как обычно, динамика цели при отсутствии маневра описывается уравнением
S'n+l = Фл$л + Т|и >
а уравнение измерения имеет вид
А Л — 11V л I *}Л •
Помехи и представляются белыми гауссовскими шумами с математическим ожиданием, равным нулю, и известными корреляционными матрицами Q„ и R„.
Динамика цели на участке маневра определяется уравнением <7п+! = ФПЭ„ + Bg + ч», где аддитивная составляющая, обусловленная маневром цели, представляется как детерминированный процесс с неизвестными параметрами.
227
83.1, Переключающийся фильтр Калмана с обнаружителем маневра
Применение преключающихся алгоритмов фильтрации целесообразно при сопровождении объектов (целей), совершающих “глубокие”, но редкие по времени, маневры, когда можно четко выделить три основных участка траектории:
• участок установившегося прямолинейного движения до начала маневра;
• участок маневра, длительность которого позволяет оценить его интенсивность и принять соответствующие меры по изменению алгоритма фильтрации;
• участок после завершения маневра, аналогичный участку до его начала.
Маневр в этом случае характеризуется дополнительным ускорением по фильтруемым координатам, а интенсивность маневра представляется в виде
ёму) ” ] ём
о.
где:
— момент времени начала маневра;
— момент времени окончания (завершения) маневра.
Для представления траектории цели используются две модели: модель с постоянной (приблизительно) скоростью на участке прямолинейного движения и модель с постоянным (приблизительно) ускорением на участке маневра. Эти две модели можно рассматривать как сложную (бинарную) модель движения с двумя состояниями gM = 0 и gM = const, переходы между которыми образуют полумар-ковский процесс.
Алгоритм фильтрации параметров траектории в этом случае должен включать следующие составляющие алгоритма (рис. 8.3):
• подалгоритм обнаружения начала маневра (ОНМ);
• подалгоритм обнаружения конца маневра (ОКМ);
• подалгоритм фильтрации параметров траектории на участках необнаруженного маневра (ФУ);
• подалгоритм фильтрации параметров траектории на участках обнаруженного маневра (Ф2).
В исходном состоянии переключатели 77.и П2 занимают верхнее положение и подключают ко входу фильтр Ф1 (рис. 8.3). В момент времени tOM обнаружения начала маневра входной сигнал переключается на вход фильтра Ф2. Аналогично, после окончания маневра в момент времени tOK обнаружитель конца маневра возвращает переключатели П. и 77, в исходное положение и запускает фильтр Ф1.
1 А-
228
После обнаружения начала маневра сначала корректируются значения параметров траектории с целью исключения динамических ошибок, обусловленных запаздыванием тзн в обнаружении маневра.
Рис. 8.3. Упрощенная структурная схема переключающегося фильтра с обнаружителем маневра
Скорректированные данные по линии S0H передаются в фильтр Ф2 в качестве исходных данных. Аналогично, после обнаружения конца маневра производится соответствующая корректировка параметров траектории, обусловленная запаздыванием тзк обнаружения конца маневра, и скорректированные параметры по линии S0K передаются в фильтр Ф1.
Таким образом, на участке обнаруженного маневра экстраполяция параметров производится по формуле
где: gM — оценка интенсивности маневра по фильтруемой координате;
/« — /ою
тзн?
/он < Л» < /ок 5
хзк>
/л — /ок •
Кроме вектора экстраполированных параметров уточнению подлежит также корреляционная матрица ошибок экстраполяции.
229
Абсолютная ошибка оценки вектора скорректированных экстраполированных параметров определяется ошибками сглаживания параметров на предыдущем шаге обработки, ошибками оценки интенсивности маневра, а также ошибками оценки времени запаздывания в обнаружении начала и конца маневра. При этом, если верна гипотеза о малости ошибок и допустимости линеаризации соответствующих функций в окрестности истинного значения параметров, то выражение для абсолютной ошибки экстраполяции имеет вид
= ФА'Э'д.,! + ВяА^а/ (8.17)
где: — ошибка оценки интенсивности маневра;
Дхл “ ошибка в оценке времени запаздывания, равная
f ~ Айн ^он <
Атя = О,
Атзк,
п — ^(ВиА#^) ип —---------
dxn
— оператор пересчета ошибок в оценке времени
запаздывания в ошибки оценки экстраполированных параметров.
Корреляционная матрица ошибок экстраполяции получается теперь по общему правилу
= М[Д9и/п_1Д»^/и_1]. (8.18)
Л Если далее предположить, что ошибки сглаживания параметров дф. , ошибки оценки интенсивности маневра и ошибки в оценке времени запаздывания обнаружения начала и конца маневра дХи взаимно независимы, то выполнение операций (8.18) с учетом (8.17) дает следующий окончательный результат
Тл л1 = ФТ„_,Ф +В„ст2 B£+D„a2DL (8.19)
Sm
На рис. 8.4 изображены графики относительных значений ошибок экстраполяции одной координаты при применении переключающегося алгоритма сглаживания параметров. График на рис. 8.4, а характеризует изменение относительной динамической ошибки экстраполяции при интенсивности маневра gM ~ 5g0 . Хорошо видно резкое возрастание динамической ошибки на участке от момента начала маневра до его обнаружения, а также на участке от момента окончания маневра до момента обнаружения этого события. После коррекции динамическая ошибка практически равна нулю. Графики на рис. 8.4, б характеризуют изменение относительных среднеквадратических значений случайных ошибок экстраполяции при двух
230
значениях среднеквадратических ошибок оценки интенсивности маневра (ошибки оценки времени запаздывания в обнаружении начала и конца маневра в данном случае не учитывались) и двух интервалах времени сопровождения цели (tc = 1 ОТо и ЗОГо ) до начала маневра-По этим графикам можно проследить влияние переключения на качество фильтрации случайных ошибок.
Рис. 8.4. Графики относительных ошибок экстраполяции параметра х: а) динамические ошибки;
б) случайные ошибки
В рассматриваемом подходе к фильтрации параметров маневрирующих целей принципиальное значение имеет задача обнаружения начала маневра. Для ее решения используются различные “входные сигналы” и применяются байесовские и небайесовские статистические
231
методы, в основе которых лежат идеи проверки статистических гипотез, аналогично тому, как ставится и решается задача обнаружения сигнала в помехах. При этом для обнаружения начала маневра необходимо следить за таким параметром (входным сигналом), который при отсутствии маневра характеризуется стабильными статистическими характеристиками, а при его наличии изменяется достаточно интенсивно по известному закону.
При синтезе небайесовских параметрических алгоритмов обнаружения маневра в качестве входного сигнала рассматривается обычно обновляющая последовательность
v„=(Yn-H3n/„_,), <8'20)
которая для неманеврирующей цели представляет собой гауссовскую случайную последовательность с нулевым средним значением и корреляционной матрицей
Р„ = (HT„/,MIF+Rn). (8.21)
С момента начала маневрирования цели обновляющая последовательность уже не обладает указанными свойствами и калмановский фильтр теряет оптимальность по отношению к такой траектории. Это свидетельствует о том, что обнаружение маневра может быть основано на принципе контроля в реальном времени обновляющей последовательности и выявления отклонения ее среднего значения от нуля, а самой последовательности от гауссовского некоррелированного процесса. Естественно, в качестве решающей статистики может быть использована не сама обновляющая последовательность, а некоторая функция этой последовательности (см. п. 8.3).
Далее рассматривается параметрический алгоритм обнаружения маневра, в котором в качестве входного сигнала используется значение квадратичной формы на выходе фильтра Ф1, определяемое выражением
Sn = vSPB-‘v„ > (8.22)
а в качестве решающей статистики используется выходной сигнал фильтра экспоненциального сглаживания значений квадратичной формы Sn , вычисляемый по формуле [51]:
Sn = Е5».! + (1 - е)5„, (8.23)
где е < 1 — постоянное число, имеющее смысл коэффициента сглаживания фильтра.
Считается, что маневр обнаружен, если Sn превышает пороговое значение So , выбираемое исходя из допустимой вероятности ложного обнаружения маневра.
Если маневр обнаружен в момент п дискретного времени, считается, что объект начал ускоренное движение в момент п - р - 1,
232
где р — эффективная память фильтра экспоненциального сглаживания, которая равна [122]:
(8.24)
Для определения характеристик качества обнаружения маневра рассматриваемым методом необходимо знать плотность распределения вероятности (ПРВ) квадратичнойАформы Sn при отсутствии и наличии маневра. Известно, что если Vn — ^-мерный вектор с независимыми нормально распределенными компонентами, каждая из которых имеет дисперсию (у = 1, 2, к) и математическое ожидание
при отсутствии маневра, при наличии маневра,
то при A/[vn] = 0 ПРВ Sn соответствует центральному X2 распределению с к степенями свободы и записывается в виде
- 1 V-i 5
X (S„) = -J7T2-----sn ехР - —
2*/2Г(£/2) I 2 /
(8.25)
где Г(-) — гамма-функция.
Если же Af[vn] Ф 0, то Sn подчинена нецентральному X2 распределению с к степенями свободы и параметром нецентральное™
d„ = ^.dv^Pnl^dVn , (8.26)
где
Для суммы изр (гдер — эффективная память фильтра экспоненциального сглаживания) взвешенных квадратичных форм можно считать справедливым X2 распределение с кр степенями свободы. При этом, если маневр отсутствует, то это распределение будет центральным с ПРВ вида
Х ^'2Г(Лр/2)еХР k 2/ (8.27)
а при наличии маневра хотя бы по одной независимой координате распределение S„ будет нецентральным с параметрами нецентральное™
dn =еал_! +(1-е)ап
233
и ПРВ вида
Х2(£я>а„) = ехр
2>+%1Г(у + Ар/2)
.(8.28)
Формулы (8.25)—(8.28) являются исходными для расчета вероятностных характеристик алгоритма обнаружения маневра рассматриваемым способом.
В частности, если маневр обнаруживается по превышению сглаженной квадратичной формой порога So, то вероятность ложного обнаружения маневра равна
Л = ,
а вероятность правильного обнаружения маневра
(8.29)
Р/з — (Sn, ct п )dSn . (8.30)
Sq
Рассчитанные по формулам (8.29) и (8.30) графики зависимости PD от параметра а в функции от порога обнаружения So приведены на рис. 8.5. График, соответствующий а = 0, определяет вероятность ложного обнаружения маневра. Зафиксировав PF, по этому графику можно выбрать So.
О 4 8 12 16 20 24
Рис. 8.5. Графики зависимости PD (а, ) = /(So)
Если маневр обнаружен в момент времени п, естественно предположить, что он начался в момент времени п - р- 1, где р —
234
эффективная длина “окна", соответствующая в нашем случае эффективной памяти фильтра.
Оценка начальных значений параметров состояния в “окне” производится следующим образом [122]:
1. Опенка ускорения в момент (п - р) (по каждой координате Q = {x,y,z}y.
^.Р = 2/Т0*(вп-Р -0я_р/„.м) = 2/T^v9„_p (8.31)
2. Оценка скорости в момент (п - р):
п-р
*
(8.32)
3. Оценка положения в момент (п - р):
0 m п-р
(8.33)
где 0п_р — измеренное значение координаты в момент (п -р).
Кроме параметров должны быть оценены элементы корреляционной матрицы Тп-/> ошибок оценки начальных значений параметров. Точные выражения для вычисления элементов этих матриц получены в [122] и имеют весьма сложный характер. Однако для простоты, на начальном этапе, вместо полной может быть взята
диагональная матрица оценок перечисленных параметров, кото
рые получаются непосредственно с использованием
выражений
(8.34)
(8.31)—(8.33):
(8.35)
(8.36)
Эти выражения достаточны для расчета начальных значений параметров фильтра Ф2, предназначенного для фильтрации параметров на участке траектории после обнаружения маневра. Далее этот фильтр последовательно обрабатывает результаты измерений, полученные от момента времени (п -р) вплоть до момента времени п и корректирует ошибки в оценке параметров, обусловленные задержкой в обнаружении маневра. С момента времени п + 1 начинается непосредственная фильтрация параметров траектории маневрирующей цели фильтром Ф2. Процесс включения фильтра Ф2 после обнаружения маневра иллюстрируется на рис. 8.6.
После завершения маневра алгоритм фильтрации должен быть переключен на линейную модель траектории включением фильтра Ф1, а в результаты фильтрации должны быть внесены соответствующие поправки, компенсирующие погрешности, обусловленные
235
задержкой в обнаружении конца маневра. В общем случае для этого может быть использована процедура, аналогичная процедуре обнаружения начала маневра. Однако эффективность такой процедуры в большей степени зависит от длительности маневра. Возможно также
Вкл Ф2
п п+1
Ф2
ОМ
Рис. 8.6. Переключение фильтров после обнаружения маневра
применение более простой процедуры, в соответствии с которой на каждом шаге обновления информации оценка интенсивности ускорения маневрирующей цели сравнивается со стандартным отклонением этой оценки ^gM, т. е. вычисляется величина 8 = SmJи Г
формируется статистика
п
= Е 5г О'), (8.37)
J=n~q
где q — эффективная память фильтра экспоненциального сглаживания в обнаружителе конца маневра.
Статистика (8.37) затем сравнивается с порогом, выбираемым исходя из допустимой вероятности ложного обнаружения конца
^Я-Ио- <8-38)
При выполнении неравенства (8.38) считается, что маневр закончился в момент времени (и - q).
Выбор порога ц0 — сложная задача, которую можно решить методом вычислительного эксперимента. В известной литературе эта задача рассмотрена недостаточно.
В заключение еще раз отметим, что перечисленные процедуры обнаружения конца маневра эффективны только в случае, когда маневр цели интенсивный и продолжительный. В противном случае целесообразно применение упрощенного переключающегося фильтра, в котором реализуется только алгоритм обнаружения начала маневра,
236
а алгоритм фиксации конца маневра отсутствует. В таком фильтре, после обнаружения начала маневра, вся накопленная информация сбрасывается и фильтр переходит в начальное состояние, при котором фильтрация параметров отсутствует, а экстраполяция параметров реализуется по результатам двух последних измерений. В дальнейшем в процессе нового накопления данных возможно повторное обнаружение маневра и переход к двухточечному экстраполятору. После завершения маневра фильтр постепенно переходит в нормальный режим фильтрации параметров линейной траектории. Такой фильтр, естественно, значительно проще полноразмерного, реализующего процедуры обнаружения начала и конца маневра.
На рис. 8.7 приведены полученные методом моделирования графики относительных среднеквадратических ошибок сглаживания скалярного параметра 0 цели, совершающей маневр интенсивностью продолжительностью 18 с, полноразмерным переключающимся фильтром (график 1) и линейным фильтром с обнаружителем начала маневра и последующим переходом в режим двухточечного экстраполятора (график 2). Ввиду достаточной продолжительности маневра (темп обновления информации т 0 = 2 с) полноразмерный переключающийся фильто обеспечивает на участке маневра существенное уменьшение ошибок фильтрации по сравнению с линейным фильтром с обнаружителем начала маневра, который на участке маневра (после затухания переходного процесса) выдает в основном нефильтрованные результаты измерений. Однако второй фильтр значительно проще первого.
Рис. 8.7. Графики относительных ошибок сглаживания переключающимся фильтром
Отметим в заключение, что кроме параметрических возможно применение непараметрических методов и алгоритмов обнаружения маневра, аналогичных непараметрическим методам обнаружения сигналов в помехах. Простейшим из них является знаковый алгоритм, кратко рассмотренный ниже.
237
signvn -
Пусть In = signvn> для простоты, скаляр, принимающий значения
4-1, vn>0,
— 1, Vn < 0.
Статистическое правило обнаружения маневра в данном случае имеет вид
у? 1 Ул!
в пр =
1-0 "°
где В о - порог решения.
Нетрудно заметить, что при отсутствии маневра последовательность {7} представляет собой последовательность Бернулли с вероятностью появления плюс (минус) единицы, равной 0,5. Следовательно, величина Впр является случайной и распределенной по биномиальному закону со средним значением, равным нулю. Порог BQ определяется, как обычно, допустимой вероятностью ложного обнаружения маневра, и его значение может быть определено по таблицам биномиального распределения.
Реализация данного метода чрезвычайно проста, по крайней мере для обнаружения начала маневра, однако его эффективность изучена слабо.
83.2. Модифицированный адаптивный фильтр с обнаружителем маневра
В рассматриваемом случае, как и в п. 8.3.1, уравнение состояния фильтруемого процесса при отсутствии маневра описывается выражением (8.7а), а при наличии маневра — выражением (8.7б). Маневр представляется как детерминированный процесс с неизвестными параметрами.
Однако, в отличие от п. 8.3.1, для фильтрации параметров траектории применяется не два, а один фильтр Калмана, обычно настроенный на линейную модель траектории цели. Для фильтрации параметров траектории на участках маневра адаптивно реализуется алгоритмическое преобразование (модификация) фильтра Калмана. Упрощенная структурная схема модифицированного алгоритма фильтрации приведена на рис. 8.8.
В состав модифицированного алгоритма фильтрации включен обнаружитель маневра, основанный на непосредственном анализе последовательности невязок между измеренными и экстраполированными параметрами траектории цели, что обеспечивает сокращение времени задержки обнаружения маневра.
238
Одновременно с обнаружителем маневра в состав алгоритма фильтрации включен реккурентный алгоритм оценивания интенсивности маневра цели. Оба эти алгоритма (алгоритм обнаружения
л
Модифицированный фильтр Калмана
^П/П-1
U
> Алгоритм обнаружения маневра
п
8
Алгоритм оценки интенсивности маневра
Рис. 8.8. Упрощенная схема модифицированного алгоритма фильтрации
маневра и алгоритм оценивания его интенсивности) функционируют одновременно. После обнаружения маневра с использованием результатов оценивания интенсивности маневра реализуется модификация основного фильтра (фильтра Калмана) путем введения в состав его формульной схемы дополнительного аддитивного члена, учитывающего наличие и интенсивность маневра по каждой фильтруемой координате.
В рассматриваемом варианте адаптивного фильтра так же, как и в предыдущем, решающее значение имеет задача своевременного и надежного обнаружения маневра цели, которая формулируется как бинарная задача проверки гипотезы HQ об отсутствии маневра относительно альтернативной гипотезы Нх о его наличии.
Поскольку априорные данные о наличии маневра отсутствуют, задача обнаружения маневра решается по критерию Неймана-Пирсона, в соответствии с которым максимизируется вероятность правильного обнаружения PD при фиксированной вероятности ложного обнаружения PF-
В отличие от рассмотренного в предыдущем пункте подхода, когда в качестве входного сигнала использовалось значение квадратичной формы (8.11), в данном случае принято маневр цели обнаруживать на основе последовательности невязок между измеренными и экстраполированными координатами сопровождаемой цели. При этом, естественно, для обнаружения маневра с высокой достоверностью необходимо увеличивать число испытаний (замеров невязок), а с целью сокращения времени обнаружения маневра это число должно быть как можно меньшим. Поэтому в качестве оптимизиру
239
емого параметра далее рассматривается длительность выборки, необходимой для принятия обоснованного решения об обнаружении маневра, которая определяет размер движущегося (скользящего) окна, в котором хранятся участвующие в расчетах невязки.
Пусть Ln — длина скользящего окна. Сумма невязок D в этом окне (например, по координате х) определяется как "
i=n—L+l
(8.38)
ГДе V, — (Х/ ) *
Задача проверки гипотез формулируется с учетом статистики BLn . При отсутствии маневра (гипотеза Яо) D подчинена нормальному закону со средним значением, равным нулю и дисперсией
1-Л“£+1
(8.39)
где С ? — дисперсия V, .
Если верна гипотеза (цель маневрирует), D имеет нормальное распределение с не равным нулю математическим ожиданием, но с той же (8.39) дисперсией. Среднее значение £Лп при справедливости гипотезы Н\ будет
п
M[D, | Я] ] = mr = V Av, ,
где Ду. определяется из выражения
Av, =(v( -VM).
J
(8.40)
(8.41)
Оптимальное решение Неймана-Пирсона находится из отношения правдоподобия
A(Dl
____Ln
A(D
где Г — порог решения.
После логарифмирования с учетом нормального распределе-
ния для A(D | Н, ) и MD I Но) и выражений (8.38) и (8.40) ^л и
получим окончательно
240
[о? 1пГ+1/2от? ]=Y„.
0
Порог ул выбирается из условия
У» =aLerf-l(\-PF),
где PF — допустимая вероятность ложного обнаружения,
erf (и) = pV(x, 0, l)dx, (8.43)
—СО
где N(x, 0,1) — сокращенное обозначение нормального (гауссовского) распределения случайной величины х с нулевым математическим ожиданием и единичной дисперсией.
Таким образом, для принятия решения статистика , т. е. сумма невязок в скользящем окне, последовательно вычисляется и сравнивается с порогом у„. Если BL превышает порог у„, считается, что маневр обнаружен. Далее необходимо рассчитать среднюю задержку в обнаружении маневра. Для этого предположим, что маневр начался в момент пт дискретного времени. Среднее значение гауссовской статистики Dl в момент пт + 1 равно
M[DL(nm + 1)] - mL(nm +1) = ]TAv, , (8.44)
i~n„-L + 2
а ее дисперсия — +1) .
Вероятность обнаружения маневра в момент времени пт + 1 равна
00
р(пт +1) = Pd +1) = /^[х,тДии+1),о£(«т4Д)]б&, (8.45)
Аналогично, в момент времени ( пт + 2), DL ( пт + 2) — гауссовская случайная величина с другими средним значением mL(nm + 2) и дисперсией оЦит +1) , а вероятность обнаружения маневра
Р{п„ + 2) = (1 - Pd (rh, + 1))Р, (пп + 2), (8.46)
где: Pd (пт +1) определяется выражением (8.45), а
^(«m+2) = +2),стд(и„+ 2)]аЬ; . (8.47)
241
Подобным образом находится выражение для вероятности Р(пт + р) В виде
р-1
р(пт+р)= П (1 - л +о) л (««+р)
Pd <Рт + Р) = /Ж mL <Рт + Р)’ (Рт + Р)№
(8.48)
(8.49)
Средняя задержка в обнаружении маневра, если он начался в момент пт , находится теперь из выражения
Nd (пт ) = lim >, iP(nm + i)
(8.50)
Эта задержка является функцией системной модели, вида и интенсивности маневра, порога решения, а также размеров следящего окна. Вероятность ложного обнаружения задается вышестоящей системой и, естественно, должна быть малой. Для малой PF порог должен быть высоким, что увеличивает задержку в обнаружении маневра. Интенсивность маневра также существенно влияет на время задержки его обнаружения (при фиксированной PF). Однако, интенсивность маневра, как правило, неизвестна и не может быть использована для оптимизации (минимизации) времени задержки обнаружения маневра. Необходимо также подчеркнуть, что при заданной вероятности ложного обнаружения PF порог ?(«) известен и не подлежит изменению. Поэтому для минимизации задержки в обнаружении маневра имеет смысл варьировать только размером скользящего окна.
Имея в виду сложность и многомерность задачи оптимизации длительности окна, ее решение может быть получено методом вычислительного эксперимента [126].
На рис. 8.9 представлены графики, характеризующие зависимость среднего времени задержки обнаружения маневра от длительности окна при Рг=510-3 для интенсивностей маневра gm = (4,5 -ь 6,5)g0. Из анализа этих графиков следует, что при фиксированной PF = 5Ю~3 и маневре средней и большой интенсивности оптимальный размер окна лежит в пределах 5-ти периодов обновления информации. С уменьшением интенсивности маневра наблюдается плавный сдвиг в сторону увеличения размера окна. Другой важный результат, следующий из рис. 8.9, состоит в том, что время задержки обнаружения маневра больше ширины окна и увеличивается с уменьшением интенсивности маневра.
242
На рис. 8.10 различных значениях
11.0
‘ юмтеяьно<;-
Л р *
10.5
10.0
и» 4.5
9.5
9.0
8.5
и *6.5
L
5
9. Зависимость
10
среднего времени от размера окна
и = 5.0
и *6,0
ихв9м/д0
8.0 0
Рис. 8.
15
задержки обнаружения маневра 'УС1 УТЯ
Из анализа этих графиков следует, что уже при средней интенсивности маневра (gm >(34-4)g0) средняя длительность задержки слабо зависит от допустимой вероятности ложного обнаружения PF. Таким образом, вычислительный эксперимент подтверждает высокую эффективность обнаружителя маневра цели на основе статистического анализа последовательности невязок в движущемся окне.
Как только маневр обнаружен, необходимо заменить модель траектории цели с линейной на квадратичную, т. е. включить в уравнение состояния фильтруемого процесса слагаемое, характеризующее маневр цели, и внести соответствующие поправки в оценки, полученные на предыдущих шагах фильтрации. При этом, поскольку интенсивность маневра априори неизвестна, в составе фильтра должен быть предусмотрен алгоритм оценивания интенсивности маневра цели (рис. 8.8).
В статье [126] рассмотрен алгоритм оценки интенсивности маневра на базе линейного рекурсивного фильтра (фильтра Калмана), который включается после обнаружения маневра цели. Полученные этим фильтром оценки используются в дальнейшем для модификации оценок вектора состояния входного процесса. Однако, сложность расчетов исходных данных, а также задержки в установлении его параметров после включения приводит к необходимости проведения сложных вычислений при модификации основного фильтра.
Имея в виду, что интенсивность разового маневра цели является, как правило, постоянной величиной, а сам процесс маневрирования является непродолжительным, для оценки интенсивности маневра целесообразно использовать более простой, чем фильтр Калмана, рекуррентный фильтр, например, фильтр экспоненциального сглаживания постоянного параметра [51]. При этом процесс оценивания интенсивности маневра целесообразно совместить по времени с процессом его обнаружения по фиксированной выборке невязок в скользящем окне определенной (заданной) длительности, рассмотренном выше.
Формула экспоненциального сглаживания безразмерного параметра un~gMlg^ записывается в виде
йп = (1 - г)ип + емпЧ , (8.51)
где е — коэффициент экспоненциального сглаживания. Формула (8.51) может быть записана в виде
й„ =(l-£)wn +e(1-s)m„_1 + E2(1-e)w„.2 + ... + Е"(1-Е) = ^Т],ИЛ_, t /=0
(8.52)
где Т|/ = (1 - e)s' — весовой коэффициент при сглаживании измеренного значения параметра и„ч
244
На рис. 8.11 изображены графики весовой функции п, при трех значениях коэффициента сглаживания е (е = 0,9; 0,5; 0,1). Из
рисунка видно, что весовая функция имеет вид экспоненты, причем,
чем меньше £, тем в меньшей степени учитываются результаты пре-
дыдущих измерений.
В рассматриваемом случае, когда размер скользящего окна выбирается исходя из обеспечения оптимальных условий для обнаружения маневра, коэффициент сглаживания е должен, очевидно, выбираться с учетом обеспечения эффективного участия в процедуре оценивания интенсивности маневра всех выборок в скользящем окне.
Дисперсия случайной ошибки экспоненциального сглажи-
0.9 0.8
0.7
0.6 0.5
0.4
0.3 0.2 0.1
вания параметра и определяется / 4 3 2 1 О
по формуле [51]
Рис. 8.11. Графики весовой функции т], (8.53)
где и 2 — дисперсия ошибки единичного измерения безразмерного
параметра и.
Как видно из (8.53), дисперсия случайной ошибки экспоненциального сглаживания уменьшается при увеличении коэффици-
ента 8.
В дальнейшем будем считать, что для вычисления текущего значения интенсивности маневра (конкретно для вычисления gMn ) используется разность невязок ” 0 л . Тогда квадрат динамической ошибки сглаживания параметра 0Л определяется по формуле [51]:
(ДА)2
2
(Л)2>
(8.54)
где Д(1)9л — имеет смысл интенсивности маневра.
С учетом выражений (8.53) и (8.54) дисперсия относительной суммарной ошибки сглаживания равна
(8.55)
где у/2 = (Д(1)0и)2/ое — относительная интенсивность маневра.
245
На рисунке 8.12 изображены графики, представляющие зависимость относительной дисперсии суммарной (случайной плюс динамической) ошибки фильтрации неизменного во времени параметра 0 от коэффициента сглаживания £ при различных значениях относительной интенсивности маневр Графики имеют экстремумы минимального типа, которые смещаются влево (в сторону меньших значений е) при увеличении интенсивности маневра. Из анализа этих графиков можно сделать вывод о целесообразности изменения коэффициента сглаживания с целью поддержания суммарной ошибки фильтрации на близком к минимальному уровне для каждого конкретного значения интенсивности маневра.
I ।___________х.,,,, 0.2 0.4 0.6_________0.8 £
Рис. 8.12. Графики зависимости относительных суммарных ошибок фильтрации параметра от коэффициента £
Рассмотрим теперь кратко процедуру модификации алгоритма фильтра Калмана. Как уже отмечалось, в обычном режиме основной фильтр настроен на фильтрацию параметров неманеврирующей цели. В момент обнаружения маневра этот фильтр подлежит модификации с использованием для этого результатов оценки интенсивности маневра. Модификации подлежат (в момент дискретного времени п =пт +р обнаружения маневра):
1. Экстраполированное значение вектора параметров маневрирующей цели по формуле
С1М = +Ып*£Мп > (8.56)
где: Su ~~ оценка интенсивности маневра;
М1 — матрица пересчета интенсивности маневра при экстраполяции параметров траектории;
Ф ~ вектор экстраполированных параметров в предположении, что цель не маневрирует;
— вектор экстраполированных параметров маневрирующей цели" (на участке маневра).
246
2. Корреляционная матрица ошибок экстраполяции параметров маневрирующей цели
= ’«Гй+1/я + МЛ+1П2 М:+1 б8 57ч
п+1/И n+L/n Л+1 g И+1 ) yO.U i j
zy2
где °g — дисперсия ошибки оценки интенсивности маневра.
3. Вектор отфильтрованных параметров маневрирующей цели по формуле
, (8.58)
где Nn+| — матрица пересчета интенсивности маневра при фильт-рации параметров.
4. Корреляционная матрица ошибок фильтрации параметров маневрирующей цели
= ^и+1 + N„+1 о2 Nf+I f8 594
Я+1 И+1 Л+1 Л+1 •
При расчетах по формулам (8.56)—(8.59) используются матрицы
Мй+1 и N„+t, которые взаимно связаны соотношением [126]:
= [I - , (8.60)
где К л+1 — коэффициент усиления фильтра.
Обычно структура матриц М и N выбирается предварительно, исходя из соображений, связанных с характером процесса установления оценок параметров маневрирующей цели.
5. Вектор невязок для модели маневрирующей цели
= (Y.« - Н9" ) •
6. Корреляционная матрица ошибок невязок
^1=(нч^,„нг)+к„,.
где R„+1 — корреляционная матрица ошибок измерения координат.
Таким образом, рассмотренные порядок и содержание модификации не изменяют смысла и последовательность вычислений, используемых в фильтре Калмана. При этом сохраняется рекурсивный процесс улучшения оценок как на участках необнаруженного, так и на участках обнаруженного маневра.
Необходимо также отметить, что вычислительная сложность модифицированного алгоритма как на участке прямолинейного движения, так и на участке маневра остается практически одинаковой.
Результаты моделирования, приведенные в [126], показали достаточную эффективность рассмотренного алгоритма при сопровождении маневрирующих целей.
247
8.4. Адаптивная байесовская фильтрация параметров маневрирующей цели
Одним из перспективных направлений преодоления априорной неопределенности при сопровождении маневрирующих целей является переход к адаптивной байесовской фильтрации параметров траектории. При этом возмущения траектории, обусловленные преднамеренным маневром цели, представляются в виде коррелированного гауссовского процесса со случайно изменяющимся средним значением. Интенсивность маневра gM ограничена маневренными возможностями целей, подлежащих сопровождению, т. е. ^мтп ~ 8м ~^тах- Переходы процесса из состояния г, соответствующего интенсивности маневра gM (i), в состояние j, соответствующее интенсивности маневра gM{j) и наоборот, определяются матрицей переходных вероятностей П процесса, которая априори считается известной. Время пребывания процесса в состоянии i до перехода в состояние j есть случайная величина с произвольной плотностью распределения вероятности р(т}. Как известно, математическая модель такого процесса называется полумарковским процессом.
В качестве модели траектории, как и прежде, рассматривается линейная динамическая система, описываемая уравнением состояния
Э'и = ФпЗ„ _ [ +B„(g^ +Т]«), где: Зп = ФЛ„_| — уравнение невозмущенной траектории (полином первой степени);
gM — вектор интенсивности маневра, определяемого полумар-KOBCKoif моделью;
т| п — составляющая коррелированного шума с нулевым средним значением и корреляционной матрицей QM ;
ФП, Ви — известные матрицы.
Уравнение измерения представляется в обычном виде
Y =Н S +С .
п п п
Относительно статистических характеристик ошибок измерения предполагаются те же предпосылки, что и в главе VII.
Задача фильтрации состоит в том, чтобы, используя априорные данные и результаты наблюдения, получить оценки параметров траекторий маневрирующих целей с максимальной точностью. При этом задача оптимизации решается не для всех целей в среднем, а для каждой цели в отдельности.
В литературе [52,90,123,158] опубликован целый ряд способов адаптации параметров или структуры фильтров, предотвращающих расходимость при маневре цели и обеспечивающих приемлемую точность сопровождения. В данном параграфе рассматривается байесовский подход к решению задачи адаптивной фильтрации
248
параметров траекторий маневрирующих целей на примере двух методов (соответственно двух алгоритмов) решения этой задачи:
• оптимальный байесовский алгоритм фильтрации для бинарной модели маневра объекта (0 — маневра нет, 1 — маневр есть);
• оптимальный байесовский алгоритм для множественной модели маневра, учитывающий как величину, так и направление (знак) маневра.
8.4.1. Адаптивный байесовский алгоритм фильтрации параметров траектории цели с бинарной моделью маневра
Как и в п. 8.3.1, в качестве модели движения цели принимается составная бинарная модель, в которой составляющая — модель прямолинейного движения, а составляющая Л/, — модель движения на участке маневра с постоянным ускорением. ТВ отличие от п. 8.3.1 задается также матрица условных вероятностей переходов между составными частями модели в виде
(8.61)
где тс — соответствующие вероятности переходов, которые должны быть известны (вычислены) заранее.
Адаптивная фильтрация параметров траектории в рассматриваемом случае может быть реализована двумя способами:
• с независимым по входам функционированием фильтров Ф1 и Ф2 и усреднением результатов фильтрации в соответствии с апостериорными вероятностями гиоптез у] и у2. В этом случае в состав адаптивного фильтра, кроме фильтров Ф1 и Ф2, настроенных на фильтрацию соответственно параметров траектории прямолинейного движения цели и движения по кривой, описываемой полиномом второй степени, должен быть включен адаптивный процессор для вычисления на каждом шаге обновления информации апостериорных вероятностей и гипотез Yi и Уз;
• с организацией взаимодействия фильтров Ф1 и Ф2 путем взвешивания подаваемых на их входы задержанных параметров предыдущего шага фильтрации. В этом случае в состав адаптивного фильтра дополнительно включается взвешивающее устройство. В дальнейшем рассматривается вариант 2 схемы.
Структурная схема адаптивного фильтра со взвешиванием на входе для бинарной модели маневра представлена на рис. 8.13. В этой схеме апостериорные вероятности гипотез у (у = 1, 2) на n-ом шаге обновления информации вычисляются в адаптивном процессоре с использованием формулы Байеса
249
Рпи} = Р(У?И | Y") =
A(Y„ |Y?B,Y")P(Y7n P(Y")
(8.62)
где: A(Y„ |у7И,Ул) — функция правдоподобия гипотезы у, на га-ом шаге;
P(Y") — нормирующий множитель.
w
Взвешивание оценок ~(1) — (1)
Уп
Ф1
Й т.°!
л
Ф2
п *л
Адаптивный процессор
(D р<2) Л »
Рис. 8.13. Структурная схема адаптивного бинарного фильтра со взвешиванием на входе
Входящая в выражение (8.62) априорная вероятность гипотезы у. по данным (и - 1) предыдущих измерений вычисляется по формуле
P(YZ„ | У’4) = £ rt,7P(Y7.„_, | У"’1), j = 1, 2, (8.63)
где: Л a — условная вероятность перехода в соответствии с матрицей (8.61);
-Р(У7Л_11Y ) — апостериорная вероятность гипотезы у . по результатам (п - 1) предыдущих измерений.
Для алгоритма со взвешиванием перед фильтрацией дополнительно выполняются следующие операции:
250
а) взвешивание задержанных на То оценок параметров предыдущего шага фильтрации
(8.64)
б) взвешивание корреляционных матриц по формуле
2 *
(8.65)
где
(8.66)
вероятность того, что модель Mt, функционирующая на (и - 1)-ом шаге, перейдет в модель М на п-ом шаге.
Ниже приводится подробная формульная схема адаптивного алгоритма фильтрации для рассматриваемого варианта построения фильтра.
0. Исходные данные:
Ml ЭД», Y*0, Л« , М2\№\, Y<2’ Л ?
-м fl—j э * П—I * И—I } 7 I fl—1 7 Л~1 > /
1. Взвешивание данных, поступающих на вход парциальных фильтров:
1.1. Параметров траектории по формулам
(8.67)
где п_] вычисляется по формуле (8.66).
1.2. Корреляционных матриц ошибок оценки взвешенных параметров
(8.68)
Результаты взвешивания параметров и корреляционных матриц ошибок оценки параметров используются в дальнейшем как входные данные для фильтров Ф1 и Ф2, настроенных на маневр цели в соответствии с гипотезами у ] и у2.
2. Фильтрация параметров траектории:
2.1. Экстраполяция параметров траектории
(8.69)
251
где
2.2, Экстраполяция корреляционных матриц ошибок оценки параметров
ш(1) — ф шО) АГ ш(2) „ф • /опг\\
”ф1Тл-1ф1 !Т«/п-1 “ Ф2Т«-1Ф2 > (8.70)
2.3. Вычисление коэффициентов усиления фильтров Ф1 и Ф2
Ki” = НУ’Р-,' , Р„ = (Hil>'P<l>,.,Hi”r + R.), (8.71)
К<’> = , Р„2 = (H<»4-“_,Н<21Г + R„); (8.72)
2.4. Вычисление оценок параметров на n-ом шаге фильтрации 8»> = + Ki"(Y, - Н<'>8<”,.,), (8.73)
= Эй_, + K<«(Y. - Н™Э'!(8.74) 2.5. Оценивание корреляционных матриц ошибки оценок параметров на n-ом шаге фильтрации
шО) = шО) _к(0н0)ф0) ф(2) — Щ(2) . f(2)u(2)w(2) /q 7С-х
in I л/л-1 *и/д-1 s Гл I п/п—\ ГТ л *л/п-1‘ (8.75)
3. Вычисление функций правдоподобия гипотез о маневре цели по формуле
(8.76)
где ^.=(¥В-НЭД^).
4. Вычисление апостериорных вероятностей функционирования моделей и М2 по формуле (8.62).
5. Вычисление объединенных данных (параметров и матрицы ошибок) на выходе фильтра
1^1
(8.77)
(8.78)
252
Рассмотренный вариант адаптивного фильтра со взвешиванием на входе для бинарной модели маневра цели может быть усовершенствован путем включения в его состав нескольких параллельных фильтров, один из которых настроен на фильтрацию параметров траектории неманеврирующей цели, а ряд других — на фильтрацию параметров траектории целей, совершающих маневр с интенсивностью из предусмотренного в фильтре набора. Как и прежде, переходы между состояниями фильтра определяются матрицей переходных вероятностей, которая должна быть известна априори. Естественно, такая множественная модель фильтра со взвешиванием на входе эффективнее бинарной модели, однако сложнее в вычислительном смысле.
В [123] приведены результаты моделирования бинарного и троичного фильтров со взвешиванием на входе. Показано, что увеличение размерности фильтра повышает качество фильтрации параметров траектории цели на участке маневра, особенно при фильтрации скорости изменения координаты.
8.4.2. Адаптивный байесовский алгоритм фильтрации параметров траектории маневрирующих целей с применением разделенных фильтров
Исходные предпосылки по представлению уравнения состояния маневрирующей цели и характера возмущения траектории при ее
маневрировании в данном случае полностью совпадают с приведенными во вводной части п. 8.4. Задача адаптивной фильтрации, как и прежде, состоит в получении текущих оценок с минимальной дисперсией для вектора параметров траекторий сопровождаемых маневрирующих целей.
В рассматриваемом случае для решения поставленной задачи используется ряд фильтров, каждый из которых настроен на фик-
сированное значение g MJ (j = -т, ... маневра цели из интервала [“£*/
-1, 0, 1, ..., т) интенсивности ], общее число которых
Априорная информация о маневре задается в виде матрицы переходных вероятностей П, аналогичной (8.61).
При наличии возмущающего параметра g MJ оптимальная оценка векторного параметра траектории цели определяется из выражения [52]:
/Ч rf* Л
& = Y^Mjn)P(gMjn IY"), (8.79)
где Э'СЯллл) — условная оценка параметра $ на и-ом шаге фильтрации, соответствующая gMJ -му значению интенсивности маневра. В предположении о полумарковской модели маневра и гауссовском распределении ошибок измерения координат, условные оценки
253
являются оптимальными оценками (оценками с минимальной дисперсией) и могут быть получены с помощью 2т + 1 фильтров Калмана, каждый из которых настроен на одно из установленных значений интенсивности маневра.
Вероятность P(gMjn | Y”) — апостериорная вероятность события Sm„ “ Smj по Данным n-мерной выборки измерений Y" , Для вычисления этой вероятности используется правило Байеса, в соответствии с которым
iv Л A(Yn | gMjn)P(gMjn IY” *)
IY,) =----------}-------------• (8.80)
В этом выражении P(gMjn I Y"’1) — априорная вероятность параметра g^ на n-ом шаге, по данным п -1 измерений и вычисляется по формуле
т
IY^)’ <8-81>
где: л у — условная вероятность перехода возмущающего процесса из состояния g на п - 1 шаге в состояние g на n-ом шаге;
A(Y« | g^jn) — условная плотность вероятности (функция правдоподобия) вектора наблюдаемой координаты Y« на n-ом шаге при условии, что возмущающий параметр имеет значение g Mj . Эту плотность вероятности можно аппроксимировать гауссовским распределением и записать в виде
A(Y„ | gMJ„) = с exp I -1 vT P;’v
(8.82)
где: v =[Yn-H„4„/w_1(gW7)]}
n/n-l
WHD+R",
&л/л-1(£лД ЧпМ(&*> - оценки экстраполированных параметров и корреляционной матрицы ошибок оценки этих параметров при условии, что gMn = gMJ„ .
Теперь, в соответствии с выражением (8.79), можно вычислить усредненные оценки вектора параметров
a m а
, где Y*1),
корреляционной матрицы ошибок оценки этих параметров
(8.83)
254
m
j=—m
(8.84)
а также среднее значение интенсивности маневра
т
%мп “ (8.85)
Упрощенная структурная схема разделенного адаптивного фильтра приведена на рис. 8.14. В этой схеме входной сигнал одновременно подается на входы 2т + 1 фильтров Калмана, каждый из которых настроен на соответствующее фиксированное значение интенсивности маневра (gMj ). В адаптивном процессоре рекуррент-но вычисляются веса выходных данных каждого фильтра. После взвешенного суммирования частных оценок параметров и элементов корреляционных матриц ошибок оценки параметров потребителю выдаются усредненные значения оценок.
Не обозначенные на рис. 8.14 блоки для вычисления усредненной корреляционной матрицы ошибок оценки параметров и коэффициентов усиления фильтров К„ являются общими для всех парциальных фильтров. Поэтому усложнения в реализации рассматриваемого адаптивного фильтра связаны главным образом с вычислениями частных оценок фильтруемых параметров и вычислением весов этих оценок.
n(O)t
п(т
££*»-» п ш -''л (‘tn) (чт)
0*0
Усреднение — оценок
Рис. 8.14. Структурная схема разделенного адаптивного фильтра
MW
п(т)
fmJ
255
Очевидно, основной проблемой многоканальной адаптивной фильтрации является выбор числа параллельно работающих фильтров, настроенных на фиксированные значения интенсивности маневра. Интуитивно считается очевидным, что для обеспечения высокого качества выдаваемой информации число фильтров должно быть достаточно большим, так как чем больше таких фильтров, тем ближе адаптивный фильтр к оптимальному аналоговому фильтру. Однако, с увеличением числа фильтров существенно возрастают вычислительные затраты на реализацию адаптивного фильтра, что не всегда приемлемо с практической точки зрения.
Одним из основных источников ошибок при раздельной фильтрации параметров является несоответствие, как правило, истинного значения интенсивности маневра gyn ни с одним из дискретных настроек g mj парциальных фильтров Калмана, входящих в многоканальный адаптивный фильтр. Поэтому имело бы смысл вводить при расчете корреляционных матриц ошибок экстраполяции параметров дополнительные составляющие для компенсации такого несоответствия. Однако, рассчитать такие добавки практически не представляется возможным.
Другой подход к решению этой задачи состоит в вычислении на каждом шаге усредненного квадрата отклонения между средним значением интенсивности маневра gMn, вычисленным по формуле (8.85) и дискретными настройками g парциальных фильтров по формуле
т
Qm = £ (gwj - gMn)2 Рл/, (8.86)
j--m
с последующим использованием этих оценок при расчете корреляционных матриц ошибок экстраполяции для каждого фильтра. Этот подход слабо изучен и требует оценки методом моделирования.
Наконец, несоответствие между истинным ускорением и настройками фильтров можно учесть путем вычисления корреляционной матрицы невязок между усредненными значениями оцениваемых параметров и частными оценками, полученными на выходе каждого /то фильтра по формуле
U = М[(&, -S7„)(3„ -^Jny ] (8.87)
с последующим суммированием этой матрицы с алгоритмической (вычисленной по стандартной формуле фильтра Калмана) матрицей
(8.88)
Такой подход целесообразно использовать при исследовании многоканальных адаптивных фильтров методом моделирования.
Ниже, с учетом рассмотренных в данном пункте теоретических предпосылок, формульная схема разделенного адаптивного фильтра представляется в виде:
256
1. Экстраполяция параметров траектории, полученных на (п - 1) шаге для каждого парциального фильтра по формулам
<8-89)
2. Пересчет в экстраполированные точки корреляционных матриц ошибок фильтрации
4%,-, = ФТу.-,Фг + BQ„B' (8.90)
(матрица Q считается известной).
3. Вычисление весов для каждого парциального фильтра по формуле (8.80).
4. Вычисление коэффициентов усиления фильтров по формулам
= Ч'у„/„_1НЦНл’1’уп/и_1НА + R„) . (8.91)
5. Вычисление частных оценок параметров для каждого /-го фильтра по формулам
=^и/л-1 +Куи(Ул (8.92)
6. Вычисление вектора усредненных оценок на выходе адаптивного фильтра по формуле (8.83).
7. Вычисление алгоритмических матриц ошибок оценки параметров на выходе каждого парциального фильтра по формулам
(8.93)
8. Вычисление корреляционной матрицы невязок по формуле (8.87).
9. Вычисление результирующих матриц ошибок оценки параметров с учетом невязок по формуле (8.88).
10. Вычисление усредненной корреляционной матрицы ошибок оценки параметров на выходе адаптивного фильтра по формуле
т
j~-m
(8.94)
11. Вычисление усредненной интенсивности маневра по формуле
(8.95)
Адаптивный фильтр, построенный по принципу взвешивания частных оценок, может быть упрощен, если вместо взвешивания выходных фильтруемых параметров осуществлять взвешивание только экстраполированных значений этих параметров, а затем использовать полученное взвешенное значение для вычисления фильтруемых параметров в обычном (одноканальном фильтре) [52]. Система
257
уравнений упрощенного адаптивного фильтра для рассматриваемой модели маневра цели отличается от рассмотренной выше тем, что в ней вычисленные по формулам (8.89) экстраполированные значения фильтруемых параметров усредняются с весами
А /И А
^я/л-1 “ У! /л/и-1Р /И > (8.96)
jts—m
после чего по обычным формулам фильтра Калмана уточняются оценки фильтруемых параметров с учетом нового измерения кооринат. Применение многоканальных адаптивных фильтров позволяет существенно уменьшить динамическую ошибку фильтрации траектории на участке маневра цели. При этом на участках, где маневр отсутствует, среднеквадратическое значение случайной ошибки фильтрации увеличивается в среднем на 10...15%.
На рис. 8.15 приведены полученные методом моделирования [52, 59] зависимости относительных динамических ошибок фильтрации по координате х адаптивным (непрерывные линии) и затрубленным введением gM = 0,5go неадаптивным (штриховые линии) фильтрами для траектории, изображенной в правом верхнем углу этого рисунка.
Цель на траектории выполняет маневр по курсу с перегрузками п. = 4 и п, = 6, двигаясь с постоянной скоростью vr = 300 м/с.
ч.
Рис. 8.15. Относительные динамические ошибки разделенного адаптивного фильтра
258
Маневр продолжается в течение шести периодов обзора РЛС. В разделенном фильтре в качестве дискретных значений ускорения взяты. &и,-1 = ~8g0, 8м,о = ®> 8м,\=^8о’
т. е. в состав многоканального фильтра входит три парциальных фильтра. Из рис. 8.15 следует, что даже при предельно грубом разбиении диапазона возможных значений ускорения маневра адаптивный фильтр по сравнению с неадаптивным позволяет более чем в два раза уменьшить динамическую ошибку фильтрации на участке маневра.
8.5. Адаптивное управление темпом обновления данных при активном сопровождении цели МФРЛС с ФАР (ЦАР)
В отличие от РЛС с механическим сканированием антенны, в которых периодичность обновления информации по всем целям одинаковая, в РЛС с ФАР период обновления информации может быть выбран индивидуально для каждой сопровождаемой цели, а также изменяться от обзора к обзору. Поэтому одним из возможных способов адаптации устройств (алгоритмов) фильтрации к маневру цели является увеличение темпа обновления информации при обнаружении несоответствия между ожидаемыми и действительными значениями ее параметров.
Особенностью РЛС с ФАР (ЦАР) является также возможность произвести новое измерение сразу после обнаружения маневра или даже в предверии маневра по величине невязки между новой отметкой и экстраполированной точкой. Поэтому применение РЛС с ФАР позволяет перейти от концепции сопровождения целей в режиме обзора (СЦРО) к концепции так называемого активного сопровождения целей (АСЦ), осуществляемого с помощью ФАР, управляемой ЦВМ. Термин “активное сопровождение” отражает то обстоятельство, что когда программой управляющей ЭВМ запланировано новое зондирование цели, луч антенны и строб по дальности мгновенно переводятся в заданную область пространства.
Простейшим методом адаптации в данном случае является выбор двух значений периода обновления информации То: одно из них Том должно использоваться на участке маневра цели, а другое Г00 — на участке прямолинейного движения. Выбор Гом зависит от предполагаемой интенсивности маневра цели ^мтах > исходя из условия, чтобы динамическая ошибка экстраполяции, пропорциональная , не превышала с заданной вероятностью величину,
соответствующую ширине луча диаграммы направленности антенны по угловым координатам и размеру строба по дальности.
259
Величина 7^ может выбираться, исходя, например, из условия обеспечения выдачи потребителю информации с заданной точностью на установленных рубежах.
Повышение темпа обновления информации на участке маневра способствует уменьшению как динамической ошибки экстраполяции, так и дисперсии случайных ошибок фильтрации параметров траектории. Поэтому при активном сопровождении требование обеспечения высокой точности фильтрации не вступает в противоречие с требованием высокой чувствительности фильтра к непредвиденному маневру цели.
В качестве индикатора характера движения цели обычно используется статистическое расстояние отметки от центра строба. Поэтому для переключения периодов обновления информации могут быть использованы известные алгоритмы обнаружения начала и конца маневра (см. п. 8.3.1).
По результатам работы этих алгоритмов блок программирования ФАР устанавливает необходимый период зондирования и корректирует временную диаграмму работы ФАР.
В [11] рассматривается возможность повышения качества сопровождения маневрирующей цели при использовании для фильтрации параметров а, р -фильтров. Адаптивное управление периодом зондирования производится в этом случае непрерывно (от обзора к обзору) в соответствии с выражением
ТОп = ГОп-1 /|/СТл ’ <8’97>
где: Т^, — период обзора РЛС на n-ом и (п - 1)-ом обзоре,
соответственно;
v(ri) — разность (“невязка”) между измеренной и экстраполированной координатами на n-ом шаге;
ст „ — среднеквадратическая ошибка измерения координаты.
Показано, что при сопровождении цели, выполняющей разворот на 90° с ускорением 30 м/с2, применение алгоритма (8.97) позволяет уменьшить ошибки фильтрации ее координат примерно в два раза.
Однако, применение такого метода адаптации сложно с точки зрения формирования временной диаграммы функционирования РЛС на ЭВМ.
260
Глава IX
ИДЕНТИФИКАЦИЯ ОТМЕТОК
И ФИЛЬТРАЦИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ
ПРИ СОПРОВОЖДЕНИИ ЦЕЛЕЙ В ПОМЕХАХ
9.1. Постановка и классификация задач
Сопровождение целей в условиях помех представляет собой одну из сложнейших проблем автоматизации процессов вторичной обработки радиолокационной информации. Сложность проблемы состоит в том, что при наличии помех, даже в условиях применения современных средств помехозащиты, число ложных отметок, поступающих на вход подсистемы вторичной обработки радиолокационной информации, резко возрастает. Поэтому, наряду с традиционной задачей уточнения параметров траектории сопровождаемых целей, в процессе обработки радиолокационных данных возникает сложная задача идентификации и селекции отметок с целью выбора одной из них для обновления параметров траектории в очередном такте (периоде) наблюдения. В главе IX задачи фильтрации параметров траектории и идентификации радиолокационных данных (отметок) для их продолжения рассматриваются совместно, как единая задача сопровождения одиночных и групповых целей в сложной помеховой обстановке.
Способы (алгоритмы) идентификации отобранных в строб отметок на каждом шаге обновления информации делятся на небайесовские и байесовские. Простейший небайесовский подход состоит в том, что для каждой попавшей в строб отметки вычисляется коэффициент правдоподобия ее принадлежности к сопровождаемой траектории, и для продолжения траектории выбирается та из них, для которой этот коэффициент принимает максимальное значение. При использовании в качестве меры правдоподобия статистического расстояния отметки от центра строба для продолжения траектории выбирается ближайшая к центру строба отметка (см. п. 7.1).
Другим вариантом небайесовского подхода может быть следующий. При получении в стробе более одной отметки траектория разветвляется, и для каждого разветвления вычисляется функция правдоподобия. Далее, путем сравнения функций правдоподобия с порогом, отбрасываются варианты (разветвления), не прошедшие пороговое испытание. Остальные варианты продолжаются. Основной проблемой в этом случае является выбор порога. Кроме того, резко возрастает трудоемкость вычислений.
При оптимальном байесовском подходе к решению задачи идентификации новых отметок на каждом шаге наблюдения рассчитываются апостериорные вероятности возможных вариантов
261
построения траектории по данным всех выполненных циклов наблюдения, вплоть до n-го, и в качестве рабочего выбирается вариант с максимальной апостериорной вероятностью реализации. Очевидно, общее число вариантов построения траектории в данном случае
л=П<1+^).
]' ss]
где — число отметок, отобранных в строб на j -м шаге наблюдения.
Число гипотез можно сократить за счет отбрасывания той части из них, которые имеют малую апостериорную вероятность. Далее можно объединить гипотезы, для которых на последних п’ тактах включены одни и те же измерения. Наконец, можно использовать алгоритм, в котором на каждом очередном такте все гипотезы объединяются в одну. В результате получаем субоптимальный байесовский алгоритм, пригодный для практической реализации [30].
При гауссовской аппроксимации оценок вектора состояния объекта субоптимальный алгоритм близок к оптимальному и называется алгоритмом вероятностной идентификации данных (АВИД). Этот алгоритм находит широкое применение в автоматизированных системах вторичной обработки радиолокационной информации при наличии помех и подробно рассматривается в настоящей главе.
Еще более сложной является проблема сопровождения маневрирующей цели в условиях помех. Дело в том, что при сопровождении маневрирующей цели одной из основных является задача обнаружения маневра. Для этого, как известно из предыдущей главы, используются результаты анализа невязок между ожидаемым (прогнозируемым) положением цели и обновляющей отметкой. Но используемые алгоритмы идентификации отметок, в том числе и субоптимальный алгоритм вероятностной идентификации, всем удаленным от центра строба отметкам приписывает малый вес, считая их ложными. Следовательно, совместное решение задачи вероятностной идентификации и обнаружения маневра становится проблематичной и подлежит подробному обоснованию.
До сих пор обсуждались задачи сопровождения в помехах одиночной цели, т. е. цели, траектория которой не пересекается с траекториями других сопровождаемых целей. При этом, при расчете гипотез происхождения отметок, попавших в строб сопровождаемой траектории, не учитываются возможности их принадлежности другой цели, расположенной в непосредственной близости от первой. Речь идет о сопровождении нескольких целей с пересекающимися или близко расположенными траекториями. Для решения такой задачи разработан ряд методов (алгоритмов), в том числе алгоритм совместной вероятностной идентификации данных (АСВИД), модифицированный алгоритм вероятностной идентификации данных (МАВИД), многогипотезного сличения данных и др., которые могут
быть использованы при сопровождении неманеврирующих и маневрирующих целей. Основные достижения в этом направлении подлежат рассмотрению в дальнейшем.
Для оценки качества процесса сопровождения целей в помехах целесообразно использовать такие показатели, как отношение числа (его среднего значения) сопровождаемых траекторий к общему числу М таких траекторий, находящихся в контролируемом пространстве за время наблюдения, точность оценивания параметров каждой сопровождаемой траектории, среднее число сопровождаемых ложных траекторий и др. При сопровождении траекторий групповых целей важнейшей характеристикой является вероятность перепутывания траекторий и среднеквадратическая оценка числа целей в группе.
Перечисленные характеристики зависят не только от траекторных параметров, но и от качества обработки сигналов, к которым относятся вероятность правильного обнаружения сигналов JL, вероятности ложной тревоги PF и ошибки измерения координат отметок, т. е. являются функциями показателей качества как первичной, так и вторичной обработки радиолокационной информации. Поэтому, для повышения качества сопровождения целей в помехах целесообразно, наряду с траекторными параметрами, при идентификации отметок использовать информацию об амплитуде и пространственном распределении сигналов. Один из предложенных в литературе способов использования информации об амплитуде сигнала для повышения качества сопровождения цели также рассматривается в данной главе.
9.2. Сопровождение одиночной неманеврирующей цели в помехах [11, 51, 52, 129, 130]
9.2.1, Алгоритм сопровождения с идентификацией отметок методом максимального правдоподобия
В соответствии с основными принципами автоматического построения траекторий целей при вторичной обработке радиолокационной информации, изложенными в п. 7.1, новая отметка может быть использована для продолжения сопровождаемой (обнаруживаемой) траектории, если ее отклонение от центра строба не превышает некоторой фиксированной величины, определяемой размерами строба, т. е. если
— вектор координат новой отметки;
0,5 VOT,
(9.1)
262
263
Х/Л-1 = 11 KtnA 0И/И-1 Еи/л-111 - вектор координат центра строба на n-м шаге обновления траектории;
Nsn = {ДГли, ДР^п, Абда } — размеры строба по координатам {г, р, е}. Поэтому первой из задач, возникающих в процессе продолжения траектории путем стробирования, является выбор формы и размеров строба на основе известных статистических характеристик ошибок измерения и экстраполяции координат. Элементарные расчеты, приведенные в [51, 107], показывают, что оптимальный строб представляет собой эллипсоид, величина и ориентация сопряженных осей которого относительно направления “РЛС—цель” зависит от погрешностей измерения координат, интенсивности маневра и направления вектора движения цели. Формирование такого строба практически нецелесообразно из-за большой трудоемкости вычислений. Поэтому при обработке в сферической системе координат обычно формируется простейший строб, задаваемый размером по дальности и двумя угловыми размерами: по азимуту Д0Л„ и углу места . Эскиз такого строба изображен на рис. 9.1.
Рис. 9.1. Эскиз строба в сферической системе координат
Задача идентификации отметок с траекторией сопровождаемой цели методом максимального правдоподобия может быть сформулирована как задача проверки для каждой из них двух конкурирующих гипотез и Нх • Гипотеза На состоит в том, что отметка с координатами rin, , 8/л (/ = 1, Л , где к — число
отметок, отобранных в строб) является ложной. Гипотеза Нх (альтернативная гипотеза) состоит в том, что эта отметка является истинной и принадлежит сопровождаемой траектории. Если известны функции
правдоподобия гипотез А(г1п,р,„,81П | Но) и A(z-„,p,„,g,„ | Нх ) , то решение задачи идентификации i-й отметки сводится к проверке условия (критерий Неймана-Пирсона)
264
Affin5Pi» j &ir>
где Zo — порог решения, выбираемый из условия минимума ошибки первого рода, т. е. минимума ошибки, состоящей в том, что принимается решение об истинности i-й отметки, когда на самом деле она ложная.
Применение такого подхода затруднительно из-за сложности формирования функций правдоподобия гипотез Но и Н, , а также из-за опасности получения неоднозначного решения.
Особенностью решения задачи идентификации при стробировании отметок является то, что здесь удобнее записывать функции правдоподобия гипотез не по координатам отметок, а по отклонениям координат отобранных в строб отметок относительно центра строба, которые получили название “невязок”. При этом легко учесть основные статистические отличия невязок для истинных и ложных отметок, состоящие в том, что закон распределения невязок для истинных отметок является гауссовским, а для ложных — равномерным [51]. Решение в этом случае можно принимать по максимуму функции правдоподобия невязок для отобранных в строб отметок.
Функция правдоподобия невязки для каждой из отобранных в строб отметок на и-ом шаге наблюдения записывается в виде
(9.2)
где: vra — вектор невязок i-й отметки по измеряемым координатам на n-ом шаге;
Рп/ — корреляционная матрица ошибок невязок (см. ниже). Отбор отметок для продолжения траекториии производится в данном случае по минимуму квадратичной формы Snj = (v^I^’v^) > что соответствует правилу идентификации по минимальному статистическому расстоянию отметки от центра строба. Далее, с учетом координат отобранной отметки, реализуется алгоритм фильтрации (обычно с применением фильтра Калмана) и вычисление корреляционной матрицы ошибок оценки параметров на п-м шаге. Структурная схема алгоритма сопровождения одиночной цели в рассматриваемом случае изображена на рис. 9.2 и особых пояснений не требует. '
Рассмотренный простейший алгоритм идентификации отметок удобен с точки зрения реализации на ЦВМ, однако качество идентификации при этом невысокое, что сказывается на качестве сопровождения, особенно в условиях помех.
265
Следующим шагом по совершенствованию алгоритмов идентификации отметок рассматриваемым методом является так называемый ветвящийся алгоритм, существо которого заключается в том, что при появлении более чем одной отметки в стробе сопровождения цели траектория разветвляется. Далее для каждого возможного продолжения траектории вычисляется функция правдоподобия, и за продолжение траектории принимается наиболее вероятная “ветвь”.
I Признаки
Координаты центра строба^ Формирование г строба
Сброс
Проверка критерия сброса
к= 1
Отбор i отметок < в строб
к “ О
п
Выдача ЭО в качестве измеренной
Вычисление
ni
Фильтрация и экстраполяция координат
Выбор отметки
Рис. 9.2. Структурная схема алгоритма сопровождения одиночной цели
Однако из-за сложности практической реализации и небольшим, по сравнению с рассмотренным выше алгоритмом максимального правдоподобия, улучшением эффективности такой алгоритм не нашел широкого распространения, т
9.2.2. Алгоритм сопровождения с вероятностной идентификацией данных по координатным признакам
Рассматриваемый ниже алгоритм относится к классу алгоритмов, в которых реализуется субоптимальный байесовский подход к решению задачи идентификации отметок, отобранных в строб сопровождения траектории. Такой алгоритм обеспечивает организацию процесса оценивания вектора состояния цели путем исполь-
266
зования всех отметок, отобранных в строб на последнем n-м шаге уточнения параметров траектории, и называется алгоритмом вероятностной идентификации данных.
Алгоритм вероятностной идентификации должен учитывать две гипотезы о происхождении отметок, попавших в строб сопровождения:
- гипотеза yni t состоящая в том, что из всех попавших в строб отметок только одна /-я (i - 1, 2,..., к) отметка является истинной, а остальные — 1 — ложные;
- гипотеза у^, состоящая в том, что все попавшие в строб отметки являются ложными.
Задача синтеза алгоритма фильтрации с вероятностной идентификацией новых отметок решается при следующих исходных пред
посылках:
1. Рассматривается случай сопровождения одиночной цели. Формирование строба и отбор отметок в строб производится в соответствии с правилами, изложенными в п. 9.2.1.
2. Число отобранных в строб отметок на n-м шаге обновления информации к > 0. Случай отсутствия отметок в стробе сопровож-
дения не рассматривается.
3, Число гипотез отождествления In e кп+ 1 ; из них кп гипотез Уш (г = 1, 2,..., Лп) о том, что i-я из попавших в строб отметок — истинная, а остальные (А>-1) — ложные, и одна гипотеза у„0 — о том, что все попавшие в строб отметки — ложные.
4. Вероятность PDn обнаружения новой отметки от цели и вероятность Рс попадания этой отметки в строб сопровождения
считаются известными.
5. Ложные отметки распределены в стробе равномерно с плотностью вероятности w(Yw/) =Хл »где объем строба сопровождений в относительных единицах.
6. Распределение истинных отметок относительно центра строба
описывается усеченным нормальным законом со средним значением
= нД/, и корреляционной матрицей ошибок
Р =н т ш п
+ R„.
7. Априорная вероятность принадлежности к цели каждой из попавших в строб отметок считается одинаковой.
8. Задача идентификации решается только по координатной информации.
Субоптимальный байесовский подход к решению задачи фильтрации параметров траектории сводится в данном случае к весовому усреднению условных оценок, полученных при принятии за истинную каждой из попавших в строб отметок. Веса гипотез находятся по
формуле
B„,=P(Y,JU„)
(9.3)
267
и представляют собой значения апостериорных вероятностей гипотез yw (/ = 1, 2» к») о принадлежности г-й отметки из совокупности
Uл = {¥„,}**! к сопровождаемой траектории.
В свою очередь Вл0 = Р(уи01UJ — априорная вероятность гипотезы ул0 об отсутствии среди отобранных в строб отметки, обновляющей траекторию сопровождаемой цели.
Очевидно, должно выполняться условие
кп
ВИО + Z ’
Пользуясь правилом Байеса, для весов гипотез записать
(9.4)
Вп/ можно
(9.5)
где: л =A(U„ |у„,)Л (у„,),
'и/
Л(11я | у„,) — функция правдоподобия выборки;
Д (уи/) — априорная вероятность гипотезы у„(.
Рассчитаем сначала вероятность 7ГУло для гипотезы у я0. С учетом предположения о равномерном распределении в стробе ложных отметок получим
Л(и.|Г.о) = ПЛ(¥»1^) = ^‘”, (9.6)
Г=1
где у — объем строба на n-м шаге.
Априорная вероятность гипотезы у„0, что все кп отметок являются ложными, определяются из выражения
(УлО ) “ (1 “ ^Dn ) + Ррп О Реп ) (1 РDri^Cn ) *
где PDn — вероятность обнаружения отметки, попадания отметки в строб.
Таким образом,
Я у “ Vjn (1 ” РрцРсп ) • Гло
вероятность
(9.7)
Для расчета л, i=l, 2, кп, когда i-я отметка принадлежит сопровождаемой траектории, функция правдоподобия выборки записывается в виде
268
Уя/) fcn^sn
= ^^+^(vw/>O,Pw), (9.8)
где N(-) — обозначение функции плотности нормального закона распределения вероятности с нулевым математическим ожиданием и корреляционной матрицей Pw.
Далее, так как при отборе в строб отметок не используется информация предыдущих наблюдений, то априорная вероятность гипотез уЯ1 одинакова для всех i и вычисляется по формуле
Л (Ув1) = 1 Р^1 = . (9.9)
кп кп
Таким образом, для вероятности я получим
л = • (9.10)
Y™ кп
Подставляя (9.8), (9.9) в (9.5), после преобразований получим
В_о =a.[a.+^ZMv,„0,P_,)r', (9.11)
/а=1
В„ = Pa'iV(v„0,P„)[a, + Ра‘ £ N(i, ,0, Р„)]-', (9.12)
где
*^PcfYsn
(9.12a)
Используя выражения (9.11), (9.12) и (9.12a), можно вычислить веса отобранных в строб отметок, которые характеризуют апостериорную вероятность их принадлежности к сопровождаемой траектории. При этом очевидным является тот факт, что веса отметок обратно пропорциональны их нормированному расстоянию от экстраполированной точки (центра строба).
В дальнейшем веса отметок используются при решении задачи фильтрации и обновления параметров траектории. При этом возможны два подхода.
1. При обновлении параметров траектории в качестве истинной (принадлежащей сопровождаемой траектории) выбирается отметка YjJP с максимальным весом, а остальные отбрасываются как ложные. Фильтрация параметров траектории осуществляется в этом случае с
269
помощью обычного фильтра Калмана
+К,(ХР-НД/Л.,)
а корреляционная матрица ошибок вычисляется по стандартной формуле
п!п~\
Если максимальный вес имеет гипотеза уп0 , то в качестве “обновленных” выдаются экстраполированные значения параметров
3^ и корреляционной матрицы ошибок 'Ря/иЧ
Рассмотренный вариант алгоритма сопровождения одиночной цели в помехах называется алгоритмом с поточечной вероятностной идентификацией данных (АПВИД). Структурная схема такого алгоритма изображена на рис. 9.3.
Г1ервична^{Уп} обработк сигналов
Рис. 9.3. Структурная
весов тметок
ор отметок в строб
Выбор отметки —>
С max
п/п-1
Фильтрация и экстра поляция параметров
я
схема алгоритма сопровождения с поточечной вероятностной идентификацией отметок
2. При обновлении параметров траектории используются все отобранные в строб отметки с учетом их весов. В этом случае с использованием формульной схемы фильтра Калмана сначала находятся частные оценки параметров
W =^+Kn(Y„,-HH^l) , <J = 1, .... k„) (9.13)
и одной для всех i корреляционной матрицы ошибок оценивания параметров
К TI Ш
а затем, по формуле
л/и-1
(9.14)
т,=т
определяется усредненная по всем гипотезам оценка параметров, а по формуле
270
к — —
_ А А А А
'F.=BA..l+£B„[>F,+(S»-S,)(S®-Sjr] - (9.15)
/3=1
усредненная корреляционная матрица ошибок оценки параметров. Как и прежде, в формулах (9-14) и (9.15) при i = О
Н,=У‘л/№4. 'Hi = Т„/и_1.
Процесс вычисления усредненных параметров можно упростить, представив выражение для усредненной оценки в виде
где
+K«v„,
(9.16)
(9.16а)
В этом случае отобранные в строб отметки используются для формирования эквивалентной отметки с весовыми коэффициентами, обратными к их нормированному смещению от экстраполированной точки.
Корреляционная матрица ошибок оценки параметров вычисляется в данном случае по формуле [129]
(9.17)
где Тй = Тя/И_! - KBHnTn/n_! - корреляционная матрица ошибок оценки параметров для случая, когда в стробе одна отметка. Последнее слагаемое в выражении (9.17) — положительно полуопределенная матрица, которая учитывает влияние посторонних (не обновляющих сопровождаемую траекторию) отметок на точность оценки параметров траектории сопровождаемой цели.
Как видим, в данном случае достоверность оценивания параметров является функцией числа отобранных в строб отметок.
Следовательно, оценка а является нелинейной функцией результатов наблюдения, связанных с коэффициентами Вл,.
Рассмотренный алгоритм получил название алгоритма групповой вероятностной идентификации данных (АГВИД). Этот алгоритм, так же как и алгоритм АПВИД, незначительно сложнее обычного фильтра Калмана, но с большей надежностью обеспечивает сопровождение целей в помехах.
На рис. 9.4 приведены заимствованные из [11] результаты сравнительной характеристики алгоритмов сопровождения с вероятностной идентификацией данных (АВИД) и алгоритма сопровождения с идентификацией по минимуму расстояния отметки от
271
центра строба (АИМР). Показателем сравнения выступает доля сброшенных ложных траекторий в зависимости от плотности помех. Плотность помех а„ характеризуется средним числом ложных отметок в стробе сопровождения траектории.
Рис. 9.4. Сравнительная характеристика алгоритмов АВИД и АИМР
Из графиков следует, что с ухудшением помеховой обстановки (с увеличением среднего числа ложных отметок в стробе) преимущество алгоритма вероятностной идентификации существенно возрастает.
Результаты исследований, опубликованные в [129], показали, что при наличии в стробе 4-х отметок трудоемкость алгоритма ВИД по сравнению с алгоритмом идентификации по минимальному расстоянию отметки от центра строба увеличивается примерно в 2 раза.
9.2.3. Алгоритм сопровождения с вероятностной идентификацией данных по координатным и сигнальным признакам
Задачи автоматического сопровождения целей в помехах решаются с помощью последовательно включенных подсистем (процессоров) сигнальной и траекторной обработки. Эффективность сигнальной обработки оценивается с помощью семейства рабочих характеристик обнаружения приемника, представляющих собой зависимость вероятности обнаружения полезного сигнала PD от вероятности ложной тревоги PF при различных отношениях сигнал—помеха. Причем, при автономном решении задачи обнаружения сигнала порог решения выбирается, исходя из рационального соотношения между вероятностью ложных тревог и вероятностью пропуска полезного сигнала от цели.
Поток отметок (истинных и (или) ложных) последовательно обрабатывается процессором вторичной (траекторной) обработки, 272
которая состоит в обнаружении траекторий целей и обновления их параметров в процессе привязки новых отметок. Задачи вторичной обработки решаются путем реализации процедур идентификации и фильтрации в пространстве (привязка новых отметок) и времени (фильтрация и экстраполяция параметров). Процедуры обработки данных существенно отличаются от процедур, реализуемых при обработке сигналов, а в качестве критериев их эффективности используются такие характеристики, как число истинных траекторий, обнаруженных на фоне общего числа целей, находящихся в контролируемом пространстве (зоне обзора РЛС), точность оценивания параметров каждой сопровождаемой цели, число обнаруженных и сопровождаемых ложных целей и др.
Легко видеть, что автономной (независимой) настройкой порога обнаружения в сигнальном процессоре и способом идентификации отметок при фильтрации данных нельзя достигнуть требуемого качества сопровождения целей, поскольку занижение порога обнаружения сигналов ведет к увеличению потока ложных отметок и, следовательно, к ухудшению качества идентификации сигналов от целей, а завышение — к пропуску слабо различимых целей. Эти обстоятельства позволяют сделать важный вывод о необходимости совместной оптимизации характеристик алгоритмов обработки сигналов и радиолокационных данных.
Ниже рассматривается пример алгоритма сопровождения цели, в котором для идентификации отметок, наряду с координатной, используется информация об амплитудах принимаемых сигналов, представленная рангом обнаруженных отметок [124, 130].
Ранжирование сигналов является процедурой, результаты которой не зависят от распределения ранжируемого случайного процесса, т. е. от распределения вероятностей амплитуд сигналов и помех. Процедуры ранговых преобразований и свойства ранговых статистик подробно рассмотрены в многочисленной литературе (см. гл. VI). Здесь мы ограничимся упрощенным вариантом формирования ранговой статистики с использованием бинарного квантования рангов [И, 124]. Для бинарного ранжирования принимаемых сигналов применяются следующие процедуры. В процессе каждого /-го зондирования анализируются амплитуды отраженных сигналов во всех j = 1, ..., М независимых ячейках строба по дальности и выбирается ячейка, в которой амплитуда сигнала принимает максимальное зна-
чение. Этой ячейке присваивается ранг г = 1, а остальным — нулевой ранг. Аналогичным образом ранжируются все L направлений в стробе по угловой координате. В результате получим карту ранжирования амплитуд принимаемых сигналов в стробе (см. рис. 9.5), на
которой точками обозначены ячейки строба с рангами г = 1.
273
В дальнейшем для каждого кольца дальности, обозначенного индексом j = 1, .... М образуется ранговая статистика, например, статистика Вилкоксона,
которая и используется для дальнейшего анализа при решении задач рангового обнаружения сигналов в стробе.
Рис. 9.5. Карта ранжирования амплитуд принимаемых сигналов в стробе
Анализ обнаружителя двоично-квантованных рангов несложен, поскольку ранговая статистика для всех элементов разрешения имеет биномиальное распределение
P(Rj = R) = ОД(1 -pj y-R, (9.18)
где р. — вероятность получения единицы в каждой ячейкеу'-го кольца строба.
В области помехи эта вероятность одинакова для всех ячеек строба и равна Pj- р0 — 1/(£+1), а выражение (9.18) имеет вид
P(R! =
L-R
Вероятность получения ранговой статистики Rj в области сигнала (j)j = р1)
P(R,/5+М = С?(1-р,)“-, У (9.19)
где р. — вероятность получения единицы в области сигнала, которая
274
может быть определена, если известно распределение смеси сигнала с помехой, что вызывает определенные затруднения.
Полученные ранговые статистики Rj сравниваются с порогом Ro и, если Rj > Ry , принимается решение о наличии сигнала, при этом вероятность обнаружения полезного сигнала
(9.20)
а вероятность ложного обнаружения
(9.21)
В дальнейшем все отметки с ранговой характеристикой амплитуды Rj > Rq принимают участие в процессе идентификации сопровождаемой траектории. При этом каждая из них имеет как координатную, так и амплитудную характеристики, которые статистически независимы.
Рассмотрим теперь принципы построения так называемого модифицированного алгоритма сопровождения с вероятностной идентификацией данных (МАВИД), в котором, наряду с координатной, используется информация об амплитуде сигнала, характеризуемая рангом обнаруженных отметок. В качестве меры дискриминационной способности ранговых характеристик естественно выбрать отношение правдоподобия рангов
P(Rt /S+N)
P(RI /N)
(9.22)
для каждой обнаруженной и отобранной в строб отметки (/ = к„ ) на и-м шаге.
В модифицированном алгоритме полученные на n-м шаге результаты отбора и обработки отметок в стробе объединяются с траекторией, как и прежде, по формуле
и/л-1 ' ’И ’
(9.23)
где = 5
ш — оценка усредненной невязки при условии, что г-я
отметка является истинной, а Вп/ — апостериорная вероятность того, что эта отметка является истинной. Однако теперь, с учетом статистической независимости амплитудных и координатных характеристик отобранных в строб отметок, вероятности принад
275
лежности этих отметок к сопровождаемой траектории записываются в виде (см. 9.11, 9.12)
В =f Х/(а +^f X.)
т т г \ п т i z,
/=1
(9.24)
(9.25)
где
fw/=^W(vwb0,Pw-),
^Сп^йгУп
Другие характеристики модифицированного алгоритма, в том числе точностные характеристики, определяемые корреляционной матрицей Ч* , не отличаются от соответствующих характеристик исходного стандартного фильтра (см. 9.17).
Рис. 9.6. Зависимость среднего времени сопровождения траектории от соотношения S/W: ------------------- с использованием ранговой информации; ------------------- без использования ранговой информации
Подробные исследования модифицированного алгоритма сопровождения с вероятностной идентификацией данных [130] показали, что при использовании сигнальных характеристик качество сопровож
276
дения траектории при понижении порога в сигнальном процессоре не ухудшается. Это связано с тем, что дополнительные данные (отметки), поступающие на вход алгоритма идентификации в данном случае, приводят к уменьшению весов ложных отметок. Таким образом, надежность сопровождения в данном случае становится функцией только PD, тогда как в стандартном алгоритме для повышения надежности необходимо выполнение двух противоположных требований — высокой вероятности PD и малой РР.
Кроме того, использование сигнальйых характеристик отметок делает возможным сопровождение модифицированным фильтром умеренно маневрирующих целей.
На рис. 9.6 приведены полученные методом моделирования графики зависимости среднего времени сопровождения траектории {Тс ) от отношения S/N (дБ) с учетом информации о ранге принимаемого сигнала (сплошные линии) и без учета ранговой информации (штриховые линии) при различном числе ложных отметок в стробе к„ . Из графиков следует, что использование ранговой информации позволяет уверенно сопровождать цели даже при наличии 10 ложных отметок в стробе.
9.3. Сопровождение одиночной маневрирующей цели в помехах [51, 52, 58, 123, 126, 132 и др.]
9.3.1. Адаптивный алгоритм сопровождения маневрирующей цели в помехах для бинарной модели траектории движения цели
В данном пункте рассматривается алгоритм сопровождения маневрирующей цели, объединяющий процедуры смешанной фильтрации для двух взаимодействующих фиксированных моделей и вероятностного отождествления данных в стробе сопровождения.
Для описания траектории цели в прямоугольной системе координат применяется двухгипотезная (бинарная модель), в которой модель 1 (М1) предполагает движение цели с почти постоянной скоростью, а модель 2 {М2) предполагает почти постоянной ускорение (модель маневрирующей цели). Использование байесовского подхода к организации вычислений предполагает: 1) различные комбинации предшествующих условных оценок для каждого фильтра; 2) объединение оценок состояния с использованием апостериорных вероятностей истинности моделей М1 и М2. Объединенная модель называется в этом случае бинарной взаимодействующей моделью (БВМ). Формульная схема такого алгоритма при сопровождении маневрирующей цели в условиях отсутствия помех рассмотрена в п. 8.4.2 (рис. 8.13).
277
Задача сопровождения цели в помехах, которая сводится к обновлению параметров траектории, решается в данном случае с использованием алгоритма вероятностной идентификации данных (АБИД), который описан в п. 9.2.2.
В целом, рассматриваемый ниже алгоритм сопровождения маневрирующей цели в помехах может быть назван алгоритмом (фильтром) с бинарной взаимодействующей моделью траектории и вероятностной идентификацией (БВМ+ВИД). При его описании основное внимание будет уделяться решению новых задач, связанных с обеспечением совместной работы составляющих алгоритмов.
Динамика цели моделируется в прямоугольной системе координат (рассматривается двухмерный случай)
ЭД> = ф(')ЭД) + Ч('), (9.26)
I где ЭД» — вектор состояния цели на n-м шаге для модели Mj (/ = 1,2):
д ля модели Ml :
ЭД> = X
для модели М2 :
эд} = х
4
У
Матрицы переходов для постоянного периода обновления данных То :
для модели Ml:
(9.27)
для модели М2:
п
(9.27а)
Переменная — белый гауссовский шум с нулевым средним значением и корреляционной матрицей
м[Ч“ЧЛГ]=о<Л.
Результаты измерения от радиолокационного двухкоординатного датчика моделируются в виде
Y» =Ь(Ял)+^, « = 1, 2, (9.28)
278
где: Yn — двухмерный вектор, содержащий дальность гп и азимут Р„ цели;
h(-) — оператор преобразования радиолокационных измерений из прямоугольной системы координат в полярную по формулам:
для азимута
(9.29)
для дальности
(9.30)
Случайный вектор — вектор независимых гауссовских ошибок измерения координат с нулевым математическим ожиданием и известной корреляционной матрицей
Особенностью представления входных данных является то, что результаты измерения представляются в полярной системе координат, а движение цели — в прямоугольной. Поэтому фильтрация параметров траектории должна осуществляться с применением расширенного фильтра Калмана.
Ниже, с учетом особенностей представления входных данных и полученных выше формульных схем составляющих алгоритмов, рассматривается и обсуждается последовательность операций объединенного алгоритма БВМ+ВИД при сопровождении маневрирующей цели в помехах (см. также структурную схему алгоритма на рис. 8.13).
1. Вычисление взвешенных значений параметров траектории, полученных на предыдущем шаге фильтрации для фильтра, согласованного с моделью Mj по формуле (см. п. 8.4.1):
где
(9.31)
(9.31а)
2. Вычисление корреляционных матриц ошибок оценки смешанных входных параметров для фильтра, согласованного с моделью Mj по формуле
279
= Е ^М-.[Ч"Й1 + (»'й - ЭЙХЭИ - Э‘/>У ]. (9.32) /=1
Результаты взвешивания (организации взаимодействия) параметров (9.31) и корреляционных матриц ошибок (9.32) используются теперь как входные данные для фильтров Ф1 и Ф2, настроенных на модели М1 и М2.
3. Расчет прогнозируемых параметров состояния моделей
-фСО^Л / = 1,2, ... (9.33)
и корреляционных матриц ошибок экстраполяции параметров
= Ф^^Ф^У + Qo), (9.34)
где определяются выражениями (9.27) и (9.27а).
4. Расчет вектора экстраполированных координат (в системе координат измерителя)
Yn(/L. = h(^U) <9-35)
и корреляционной матрицы ошибок невязки
где
рр=(ЯМу/)я-1Д,’+н»),
(9.36)
dr„ / dxn d$n ! dxn
0 drn I dy„ 0
0 dp„ / dy„ 0
С учетом очевидных соотношений
получим окончательно
cos
- sin Р„ / rn
0 sin P„ 0
0 cos рл / rn О
(9.37)
5. Отбор отметок, подлежащих отождествлению с сопровождаемой траекторией в соответствии с каждой из гипотез о маневре цели, по правилу
[*Й(РУ))‘1^|Г]£О,57,<'1.
280
где: = (Y — Y(P ,);
л \ л n/n-l/’
— размер строба сопровождения по соответствующей координате на п-м шаге, центр которого расположен в экстраполированной точке с координатами ?п!п-\, РиУ/и-1.
6. Оценка параметров траектории в каждом фильтре (для каждой гипотезы маневра) с использованием выражений для и
вектора Y„ измеренных значений координат на n-м шаге обновления параметров траектории. При этом непосредственно используется алгоритм вероятностного отождествления отметок, попавших в строб сопровождения. В простейшем случае усреднения невязок по всем кп попавшим в строб отметкам оценки параметров траектории для j-й модели находятся по формуле
S<ny) = j = 1, 2 , (9.38)
R-
где v0) = >B0)v0), K(7) =T(7? ,ЯЛР(Л)-1. П / J П! П 5 n П/П-Х n V n /
Корреляционная матрица ошибок вычисляется в этом случае по формуле (9.17), а веса гипотез отождествления в!77 (z=0, 1,к„) по формулам (9.11) и (9.12) соответственно.
4 Отметим еще раз, что фильтры Ф1 и Ф2 являются в данном случае нелинейными (расширенными) фильтрами Калмана, т. к. коэффициенты усиления этих фильтров являются нелинейными функциями измеряемых координат.
7. Корректировка апостериорных вероятностей моделей М1 и М2 по данным последнего (n-го этапа) обновления параметров траектории производится по формуле
1 2
^и)=^Лу(¥„)£-7Г^(п-,), = 2, (9.39)
J = 1
где: С ~~ нормирующий множитель;
Л (Yn) — функция правдоподобия выборки Yn на n-м шаге наблюдения дляу-й модели.
Вычисление этой функции является в данном случае новой, отличной от рассмотренных до сих пор, задачей.
281
При сопровождении в отсутствие помех функция правдоподобия для модели Mj имеет вид
Ay(Yn) = ^v<7),0,P<")), где — невязка в момент времени п, a Pjn) — корреляционная матрица ошибок невязки, которая вычисляется по формуле (9.36).
При сопровождении в помехах с использованием алгоритма вероятностной идентификации функция правдоподобия для модели Mj представляет собой функцию совместной плотности вероятности невязок, которая записывается в виде J
Ay{Yn}^ =A(vP(«),v(27\«),...^V\w)l^»,Y"'1) = ^"fe/a('y(„-o) +
(ГЙ>), (9.40)
/=1
где: Vsn — объем строба сопровождения;
Ра ()т')) ~ априорная вероятность того, что соответствующая (У„/) гипотеза о принадлежности отметок к траектории является правильной и определяется из соотношений
R (й’)
(9.41)
Подставляя выражение преобразований получим
Ра (У^Р) в (9.40), после элементарных
A,{Y,},‘- ^К;‘--, "" ''Ча,1 + /Х1|£л'(<’'"(П).0.И'')] (9.42)
ЛИ /г=1
В формуле (9.42) все обозначения сохранены как.в п. 9.2.2.
8. Комбинация (объединение) модельных оценок параметров и корреляционных матриц ошибок оценки параметров по формулам
= У В</1Р/(«).
П Л4—! J V z '
4
(9.43)
Тл=^Ру(и)ГУ^+(д(пЛ-
Таким образом, объединение алгоритма бинарной взаимодействующей модели (БВМ) траектории и алгоритма вероятностной идентификации данных (ВИД) позволяет построить один из возможных
282
вариантов адаптивного комплексного алгоритма сопровождения одиночной маневрирующей цели в помехах.
9.3.2. Адаптивный алгоритм сопровождения цели с многогипотезной разделенной моделью маневра и вероятностной идентификацией данных
Этот алгоритм реализует квазиоптимальный байесовский подход к идентификации измерений с учетом вероятностей гипотез о интенсивности маневра целей, полученных на основе результатов предыдущих шагов идентификации.
В качестве модели траектории в прямоугольной системе координат рассматривается динамическая система, описываемая уравнением состояния
.дл — Фл’З'д-! "1“ *
где: фп — переходная матрица, соответствующая линейной невозмущенной траектории;
gw — интенсивность разового преднамеренного маневра, ограниченная маневренными возможностями цели, т. е.
Т|п — составляющая непреднамеренного маневра с математи-
ческим ожиданием Мп»]=о и известной корреляционной матрицей Q„ (в дальнейшем принимается Т|л - 0);
В£ = 7?/2 Тп .
Уравнение измерения представляется в обычном виде (в прямоугольной системе координат)
Статистические характеристики ошибок измерения считаются известными.
Задача фильтрации решается в этом случае с помощью набора фильтров, настроенных на фиксированные значения интенсивности
маневра gMj (j’ = ~l, —, -1, 0, 1, I) из интервала ±gWmBX. Общее число фильтров т = 21 +1 (в дальнейшем нумерация фильтров — слева направо от 1 до т).
На очередном шаге обновления траектории исходными данными являются:
• матрица переходных вероятностей интенсивности маневра
283
7С11
7Г 21
7С12 ... Him
7122 ... 7t 21
* * I ♦*•»
ТС m2 •«• 7C mm
(9.45)
• апостериорные вероятности
состояний (дискретных значе-
ний) интенсивности маневра | Y”4), Лйчг | Y"4),..., Y”4) по
данным предыдущих (п-1) шагов идентификации, В дальнейшем, на очередном шаге эти вероятности обозначаются
^[и-1], ..., т>7-1];
ВМ) SM2 Sum
• вектор усредненных оценок параметров траектории на преды
дущем шаге А ;
• усредненная корреляционная матрица ошибок оценки параметров на предыдущем шаге идентификации;
• усредненная оценка интенсивности маневра gM[n-l] на п-1 шаге.
Основные операции алгоритма фильтрации параметров траектории и идентификации отметок сводятся в этом случае к следующим:
1. Вычисление априорных вероятностей дискретных значений интенсивности маневра на n-м шаге по формуле
Р^ = ХКУР^}[П~11 = (946>
/^1
2. Вычисление экстраполированных параметров траектории для каждого значения gMj по формуле
ЗД/t-i ~ Ф A-i + (9.47)
и корреляционной матрицы ошибок экстраполяции, одинаковой для всех значений gMJ, по формуле
Уи/иЧ = Ф „Т^Ф?. (9.48)
3. Стробирование и отбор в строб новых (на n-м шаге) отметок для идентификации с сопровождаемой траекторией. Размеры строба по каждой координате выбираются с учетом возможного максимального ускорения при маневре, т. е. с учетом ьдаксимальной динамической ошибки.
284
4. По результатам стробирования и отбора в строб кп >0 отметок (случай &=0 не рассматривается) выдвигается M=fc,(w+1) гипотеза у у попарной идентификации i-й отметки (i =1, ..., £„) с каждой (/-и) экстраполированной точкой j = 1,m), т. е. гипотеза о том, что i-я отметка принадлежит сопровождаемой траектории, которая совершает j-й по интенсивности маневр. Отдельно рассматривается случай (гипотеза), когда все отобранные в строб отметки не принадлежат сопровождаемой траектории.
С вычислительной и понятийной точек зрения формирование и расчет весов гипотез целесообразно проводить в два этапа: сначала производится вероятностная идентификация отметок для каждого из вариантов фильтра (для каждого значения g^j \ а затем усреднение полученных оценок с использованием апостериорных вероятностей этих вариантов. Сущность такого подхода поясняется на рис. 9.7 для случая 772 — 3 (ускорения маневра: - £л/тах ) и кп =2 (в
стробе 2 отметки). Экстраполированные точки обозначены римскими цифрами, а полученные новые отметки — арабскими.
Число гипотез идентификации Nyij = т(кп +1) = 9. Из них:
Уоь Уоп» Уош — гипотезы об отсутствии истинных отметок в стробе (отметки 1 и 2 — ложные);
Уп> Уш» Упп — первая отметка принадлежит, соответственно: I, II или III экстраполированным точкам, а вторая отметка — ложная;
Угь Угп» Угш — вторая отметка принадлежит, соответственно: I, II или III экстраполированным точкам, а первая отметка — ложная.
V,-................ .
Рис. 9.7. Пояснение процесса вероятностной идентификации отметок в стробе
5. Для каждой гипотезы у у идентификацией отметок вычисляется условная оценка параметров траектории по формульной схеме фильтра Калмана
«эди +ВДгЙи (/>0),
где Кя = ’РП/Й.1НЦНПТЯ/Л_1Н?+ RB)-',
R „ - корреляционная матрица ошибок измерения.
285
Корреляционная матрица ошибок фильтрации параметров вычисляется в этом случае по формуле
W — Ш V пш
(при / = 0, \ i г ил/л—1“ ” у
6. Вычисление априорных вероятностей гипотез с учетом рассчитанных ранее (9.46) априорных вероятностей дискретных значений интенсивности маневра guj по формулам:
а) для гипотезы об отсутствии в стробе отметки, принадлежащей сопровождаемой цели (i = 0),
(1 - PDnPCn}P^{n\ j = ; (9.49)
J SMJ
б) для гипотез о принадлежности одной из кп отметок к ;-й экстраполированной точке сопровождаемой траектории
4O)[«] = Рс^х Д Р^)Р^{п)
(9.50)
п
1 ял , J — *
7. Вычисление весов гипотез по формулам
т
(9.51)
Bs М = /g,1 i А (»)
т
п
(9.52)
где
* Dn * Сп r sn
8. Безусловная оценка вектора параметров траектории вычисляется по формуле
(9.54)
286
а безусловная оценка корреляционной матрицы ошибок фильтрации вычисляется по формуле
9. Апостериорные вероятности дискретных значений gM. маневра цели находятся из выражения
(9.56)
10. Усредненная оценка интенсивности маневра на n-м шаге
_ т
&»[«]=£ g» w“ (”)
j=l 8mj
(9.57)
9.3.3. Адаптивный алгоритм сопровождения маневрирующей цели с использованием двух разнородных источников информации
Рассматриваемый ниже алгоритм сопровождения маневрирующей цели в помехах отличается от описанного в п. 9.3.1 тем, что в нем используются два источника входных данных: РЛС, измеряющая азимут Р j и дальность г цели, и другой (например, инфракрасный (ИК) датчик), измеряющий азимут р2 и угол места е цели. При этом предполагается, что оба датчика расположены в начале координат (в точке стояния РЛС) и работают одновременно. Предполагается также, что измерительная система работает в режиме устойчивого сопровождения (этап обнаружения траектории уже выполнен). Короче говоря, рассматривается алгоритм, отличающийся от описанного в п. 9.3.1 только тем, что одновременно с РЛ-датчиком, выдающим координаты р, , г, функционирует второй, ИК-датчик, выдающий координаты р 2, е . Очевидно, формульнай схема рассматриваемого адаптивного фильтра будет отличаться от прототипа только способом организации процесса идентификации данных, получаемых от двух датчиков. Этому вопросу и посвящается, в основном, дальнейшее описание рассматриваемого алгоритма.
1. Исходные данные.
1.1. Динамика цели моделируется в прямоугольной системе координат в соответствии с выражениями (9.26), (9.27) и (9.27а).
1.2. Результаты измерений от i-ro датчика (г - 1, 2) представляются в виде
¥и(0 = h('W ) + . (9.58)
287
где: xn — двухмерный вектор, включающий дальность и азимут для датчика 1, и азимут и угол места для датчика 2;
Си — вектор ошибок измерения для i-ro датчика;
hw(-) — оператор преобразования из декартовой системы координат в полярную для датчиков 1 и 2, соответственно.
Для датчика 1 формулы преобразования имеют вид:
Рп = arctg( у / х) ,
г = ^х2 + j2 + z2 , (9.59)
а для датчика 2 :
Р2 = arctg( у / х),
е = arctg( z/ ^х2 + у2). (9.60)
1.3. Ошибки измерения представляются независимыми случайными процессами с нулевым средним значением и известными статистическими характеристиками
где:
(9.61)
су ?, — дисперсии ошибок измерения координат первым
датчиком (’РЛС);
oi, дисперсии ошибок измерения координат вторым (ИК) датчиком.
2. Выходные данные (результаты фильтрации) представляются в местной декартовой системе координат (х, у, z) с центром в точке стояния датчиков:
для модели М1 (линейная траектория)
= х„
V П лл
Хм
а для модели М2 (квадратичная траектория)
&2) = Хм
Хм Хм уп Уп уп
Z„
zn
Zn
3. С целью упрощения алгоритма основные операции вероятностной идентификации данных от двух датчиков производятся последовательно: сначала от первого (РЛ-датчика), а затем от второго (ИК-датчика).
288
Последовательность операций двухэтапного алгоритма вероятностной идентификации данных для бинарной модели траектории движения цели сводится к следующим шагам (этапам):
3.1. Исходными для очередного (n-го) шага обработки являются операции вычисления по формулам (9.31) и (9.32) взвешенных значений параметров и корреляционной матрицы ошибок оценки параметров в соответствии с апостериорными вероятностями модели М1 и М2. В дальнейшем рассматриваются операции в фильтре, настроенном на модель М1 траектории цели (операции в фильтре, настроенном на модель М2, аналогичны).
3.2. Экстраполяция параметров и корреляционной матрицы ошибок на момент Тп очередного измерения координат первым датчиком (РЛС)
где
Л Л*1
ш(1)
1 л/л-1
3.3. Расчет экстраполированных значений полученных координат для первого датчика, что соответствует расчету координат центра строба, для этого датчика
В(1?
Р л/л-]
р(1) '»/л-1
(9.62)
3.4. Вычисление корреляционной матрицы ошибок экстраполяции измеряемых координат для первого датчика
1) _
где
d^/dx dfiw/dx drw I dx drm / dx
d^P/dy dfi^/dy drm / dy drw / dy
ф(,) / dz drm / dz
d$m!dz drm I dz
-sin p/r cos e 0 cos p/r cos e 0
cos e cos p 0 cos e sin p 0
sine 0|‘
(9.63)
289
3.5. Вычисление корреляционной матрицы ошибок “невязки” между координатами измеренной и экстраполированной отметок для первого датчика (РЛС)
в'1,’ -! = z‘‘L,+ (9.64)
3.6. Формирование строба для отбора результатов измерения первым датчиком, размер которого по каждой координате вычисляется по формуле
где: qx — коэффициент увеличения размеров строба, по сравнению со среднеквадратической ошибкой “невязок”, по каждой измеряемой координате;
— среднеквадратические значения “невязок” по координате
3.7. Отбор отметок в строб по правилу
А(1)(р(0 УЧ(1)Г < О 5К(1) vin \rn/n-lJ vin — u>-JFi(r,P) >
(9.65)
где: v<‘> =(Y® - XlJ — разность координат i-й отобранной в строб отметки и экстраполированной точки (центра строба) по данным первого источника; / = 1 кР ,кР — число отобранных в строб отметок.
3.8. Реализация алгоритма групповой вероятностной идентификации отобранных в строб отметок, включающего операции расчета весов отметок по формулам (9.11), (9.12), расчета частных оценок параметров и корреляционной матрицы ошибок этих оценок (формулы
9.13 и 9.13а), усредненных оценок параметров Я® и корреляционной матрицы ошибок по формулам (9.14) и (9.15). Вектор оценок 9® и корреляционная матрица используются в дальнейшем в качестве исходных (опорных) данных для идентификации отметок от второго датчика непосредственно, если измерения датчиками 1 и 2 производятся одновременно, или после их экстраполяции на момент измерения вторым датчиком. В дальнейшем предполагается, что измерения разнородными датчиками производится одновременно.
3.9. Вычисление ожидаемых (“экстраполированных”) координат цели для второго датчика
290
3.10. Вычисление корреляционной матрицы ошибок оценивания координат центра строба для второго датчика
2)_ тг(2)т(1) гт(2)Г ?д— П хп 17 ,
где
d^/dx d^/dx
dfim/dy
de™ /dx de.<2} /dx <fem / dy
d^/dy dpF>/dz dem / dy 4fe(2> / dz
<ф(2) /dz
<afe(2) / dz
sinp/rcosg 0 cosp/rcose 0 0 0
-sinecosp/r 0 -sinesinp/r 0 cosc/r 0
(9.67)
3.11. Вычисление корреляционной матрицы ошибок “невязки” координат измеренной и экстраполированной отметок для второго (ИК) датчика
р(2) _ у (2) , р (2)
гЕп — ^Еп **» •
3.12. Формирование строба для отбора результатов измерений вторым датчиком
3.13. Отбор отметок второго датчика в строб по правилу vg’fey V<?r S0,5K“,>,
™ ^!, = (y<2>-Y«).
Число отобранных в строб отметок обозначается (г = 1, .... fcP).
3.14. Реализуется алгоритм групповой вероятностной идентификации отметок, отобранных в строб , аналогично этапу 3.8. В частности, если в процессе вероятностного отождествления вычисляется усредненная невязка
(2)
то вектор усредненных по результатам измерении двумя датчиками параметров вычисляется по формуле
Ш2) = ^<1)+кте2).
где К$Р Нт№ — коэффициент усиления фильтра, а корреляционная матрица ошибок по формуле (9.17).
Перечисленные операции аналогичным образом реализуются и в фильтре, настроенном на модель М2 траектории цели. В дальнейшем,
291
в соответствии с вычисляемыми в схеме с двумя фильтрами апостериорными вероятностями моделей М1 и М2, производится объединение модельных оценок и корреляционных матриц ошибок оценки параметров по формулам (9.43) и (9.44).
На рис. 9.8. изображена структурная схема алгоритма совместной идентификации данных от двух источников (РЛС и ИК измерителя), расположенных на одной платформе. Операции алгоритма подробно описаны в формульной схеме, приведенной выше, а их взаимодействие легко прослеживается по схеме и особых пояснений не требует.
Расчет координат центра строба для D2
Экстраполяция параметров и КМО
Расчет координат центра строба для D,
и отбор отметок в строб
Рис. 9.8. Структурная схема алгоритма совместной идентификации данных от двух датчиков
В литературе [132] приведены результаты моделирования рассматриваемого алгоритма при фильтрации параметров траектории цели, совершающей полет на постоянной высоте со скоростью 400 м/с и выполняющей два маневра (разворота): первый — между 20 с и 35 с полета с интенсивностью 60 м/с2, а второй — между 55 с и 70 с полета с интенсивностью 40 м/с2. Датчик D1 (РЛС) измеряет координаты к и р j со среднеквадратическими ошибками аг =20 м по дальности и о р -7 мрад по азимуту. Датчик D2 (ИК измеритель) измеряет угловые координаты р 2, g 2 со среднеквадратической
292
ошибкой ^6)^2 мрад. В качестве исследуемых вариантов адаптивных алгоритмов рассматривались: алгоритм с двумя взаимодействующими моделями (ВМ-2) и алгоритм с тремя взаимодействующими моделями (ВМ-3).
Для фильтра с двумя взаимодействующими моделями: первая — кинематическая модель линейной траектории, а вторая — кинематическая модель квадратичной траектории со средним ускорением 20 м/с2. Матрица переходных вероятностей между моделями задается в виде
0,8 0,2
0,1 0,9
Для фильтра с тремя взаимодействующими моделями: первая кинематическая модель линейной траектории, вторая — кинематическая модель квадратичной траектории со средней интенсивностью маневра 7,5 м/с2, а третья — кинематическая модель квадратичной траектории со средней интенсивностью маневра 40 м/с2.
Матрица переходных вероятностей между моделями задается в виде
При эксперименте предполагалось: период поступления данных от обоих датчиков с, вероятность обнаружения и вероятность попадания в строб отметок PD = Рс -1.
Результаты вычислительного эксперимента приведены на рисунках 9.9а и 9.96 На рис. 9.9а (сплошные линии) приведены ошибки
250 -в
О .......। .j---------г—П----------Г ' t....... Г......I.....Г ’"'I 1
О 10 20 30 40 50 60 70 80 90 100
Рис. 9.9а. Ошибки фильтрации координаты маневрирующей цели:
___________фильтр ВМ-2
-----------фильтр ВМ-3
293
Рис. 9S6. Ошибки фильтрации скорости изменения координаты маневрирующей цели: ____________________________фильтр ВМ-2 ____________________________фильтр ВМ-3
оценки положения фильтром ВМ-2 в функции времени с учетом совершаемого целью маневра. Видно, что фильтр с двумя взаимодействующими моделями (ВМ-2) слабо отслеживает маневр большой интенсивности. Эту задачу значительно эффективнее решает фильтр ВМ-3 (пунктирные линии). Как следует из рис. 9.95, фильтрующие способности по скорости изменения координаты фильтров ВМ-2 и ВМ-3 примерно одинаковые.
9.4. Совместное сопровождение нескольких целей в помехах [11, 128, 131, 134, 136, 159, 160]
Очевидно, наиболее сложной проблемой в теории и технике обработки радиолокационной информации является совместное сопровождение нескольких целей, движущихся на небольших расстояниях друг от друга, что, в частности, имеет место при пересечении их траектории или при полете группой. В этих случаях стробы сопровождения перекрываются друг с другом, и полученные (отобранные в стробы) отметки могут коррелировать с несколькими траекториями. Задача еще больше усложняется, если некоторые отметки пропущены, т. е. вероятности обнаружения и попадания в строб отметок меньше единицы, или в стробы попали также ложные отметки, обусловленные естественными или искусственными помехами.
Задачи синтеза оптимальных и субоптимальных алгоритмов сопровождения целей при наличии в стробе отметок от близкорас-294
положенных целей обсуждались в многочисленной литературе [11, 128, 131, 135, 136 и др.]. В данном параграфе рассматриваются два алгоритма совместного сопровождения группы целей в помехах:
- алгоритм сопровождения на основе многогипотезной модели идентификации данных [52, 128];
- алгоритм сопровождения на основе модели совместной вероятности идентификации данных (СВИД) [135,136].
Первый из них является одной из версий метода максимального правдоподобия, а второй реализует квазиоптимальный байесов подход к решению поставленной задачи.
9-4.1. Алгоритм сопровождения группы целей на основе фильтра многогипотезной идентификации данных
Рассмотрим один из возможных вариантов решения задачи многогипотезной идентификации данных в перекрывающихся стробах при следующих предпосылках:
- стробы, образованные вокруг экстраполированных точек для каждой траектории, имеют размеры, обеспечивающие попадание в них истинных (принадлежащих данной траектории) отметок с вероятностью, близкой к единице;
- группы перекрывающихся стробов разделяются так, что каждую такую группу можно обрабатывать независимо от других;
- задача решается в двухмерном стробе.
Логическая схема алгоритма распределения и привязки отметок в изолированной группе (кластере) с перекрытыми стробами изображена на рис. 9.10. В блоке 1 выделяются изолированные группы (кластеры) целей с перекрывающимися стробами. В блоке 2
4
Отбор изолированных групп(кластеров) с перекрывающи мися стробами
i Априорная информация
Формирование вариантов привязки отметон к траекториям
2
3
Отбор наиболее правдоподобной: < варианта
Вычисление вероятностей сформированных вариантов привязки
Рис. 9.10. Логическая схема алгоритма распределения и привязки отметок в кластере
295
формируются возможные варианты привязки отметок с учетом вводимых априорных данных об источниках новых отметок, отобранных в группу. Относительно принадлежности каждой отметки принимается одна из следующих гипотез: она принадлежит или одной из входящих в кластер сопровождаемых траекторий цели, или вновь обнаруживаемой цели, или она ложная (образованная помехами). В блоке 3 вычисляются вероятности всех гипотез о привязке, после чего в блоке 4 выбирается (вычисляется) наиболее правдоподобный вариант привязки всех попавших в строб отметок.
Для примера рассмотрим простейший случай кластера с перекрытием двух стробов, изображенных на рис. 9.11а. В этом кластере имеется две экстраполированные точки траекторий I и II и три новых отметки (7, 2, 3), одна из которых находится в области перекрытия стробов. Относительно каждой новой отметки выдвигаются гипотезы о ее принадлежности: к сопровождаемым траекториям I или II, если она находится в стробе соответствующей траектории, либо она одна из новых, с номером 3 для отметки 1, номером 4 для отметки 2 и номером 5 для отметки 3, либо она ложная (условно принадлежит к траектории с нулевым номером).
отм. 3
огм. 1
отм. 2
Дерево вариантов привязки
Рис. 9.11. Возможные варианты (гипотезы) привязки отметок (2 траектории, 3 отметки)
Возможные варианты привязки отметок образуют дерево гипотез идентификации, изображенное на рис. 9.116. Каждая ветвь этого дерева представляет собой один из возможных вариантов идентификации отметок. Так, например, самая первая (слева) ветвь изображает гипотезу о том, что все попавшие в строб отметки являются ложными, а самая последняя — гипотезу о том, что все попавшие в строб отметки принадлежат вновь обнаруживаемым целям с номерами 3, 4 и 5, соответственно. Общее число гипотез (вариантов) в рассматриваемом случае равно 30.
296
Вероятности гипотез о принадлежности отметок к сопровождаемым, новым или ложным траекториям определяются следующим образом (для двух траекторий):
1. Вероятность принадлежности z-й новой отметки kj-й сопровождаемой траектории (при условии ее отбора в строб этой траектории) определяется вероятностью обнаружения новой отметки PDi и ее расстоянием до экстраполированной точки, т. е. от центра строба У-й траектории. Вероятность обнаружения отметки зависит от дальности до цели, ее эффективной поверхности рассеяния и энергетических характеристик РЛС. Для сопровождаемой цели все эти характеристики могут быть рассчитаны достаточно точно, поэтому вычисление вероятности PDi особых затруднений не вызывает.
Как и раньше, предполагается, что расстояние отметки, принадлежащей данной траектории, от центра строба по каждой координате подчиняется нормальному закону распределения вероятности с нулевым математическим ожиданием и дисперсией
[п] = а}[и/и-1] + о?
^ij ’
где — дисперсия ошибки экстраполяции координаты
у-й траектории, а а? — дисперсия ошибок измерения координаты z-й отметки. Поэтому функция правдоподобия гипотезы о принадлежности i-й отметки к у-й траектории (например, по координате х) равна
где: —измеренная координата z-и отметки;
х [wIn — 1] — координатау-й экстраполированной точки.
Аналогичным образом вычисляется функция правдоподобия АДл]), покоординатен
Таким образом, вероятность гипотезы о принадлежности гй отметки к j-й траектории в простейшем случае можно подсчитать по формуле
Ру .
2. Вероятность гипотезы о принадлежности z-й отметки вновь обнаруженной цели в простейшем случае вычисляется по формуле
Р —*• Р
2 w х Di* r яп > где; к — плотность новых отметок на единицу площади строба, К» - площадь строба в относительных единицах.
297
3. Вероятность гипотезы о том, что i-я отметка является ложной, определяется по формуле
Р = Р V 1 Fi 1 fa' sn ' где Pfa — вероятность ложной тревоги, характеризующая появление ложного сигнала в разрешаемом элементе (ячейке) строба.
После расчета вероятностей гипотез о принадлежности каждой новой отметки к сопровождаемым, новым или ложным траекториям можно рассчитать вероятности всех (из 30 в нашем случае) вариантов привязки отметок к сопровождаемым траекториям и выбрать в качестве правдоподобного тот из них, вероятность которого наибольшая.
Легко видеть, что даже для рассматриваемого простейшего случая эта задача достаточно трудоемка Ее подробное решение приведено в [128].
Задачу формирования и оценки вариантов привязки можно упростить, если взять за основу следующие очевидные соображения:
- к каждой сопровождаемой траектории должна быть привязана новая отметка;
- по каждой отметке, не привязанной к траектории, должна быть завязана новая траектория, независимо от вероятности ее принадлежности к новым или ложным. В этом случае сравниваться должны только те варианты, которые предусматривают привязку отметок к каждой траектории.
В рассматриваемом случае таких вариантов два: "привязать” первую отметку к первой траектории, а вторую — ко второй или привязать вторую отметку к первой траектории, а третью — ко второй. В этом случае третья отметка в первом варианте и первая отметка во втором считаются новыми, и по ним завязываются начальные точки новых траекторий.
9.4.2. Алгоритм сопровождения группы целей на основе фильтра с совместной вероятностной идентификацией данных (СВИД)
Представляемый здесь алгоритм отличается от рассмотренного в п. 9.2 настоящей главы алгоритма вероятностной идентификации данных для одиночной цели тем, что теперь вероятность принадлежности к конкретной траектории каждой отобранной в строб идентификации отметки рассчитывается с учетом ее возможной принадлежности и к другим, соседним, траекториям из группы (кластера) целей, стробы идентификации которых перекрываются.
Таким образом, в рассматриваемом случае идентификация измерений (отметок) с траекториями объединенных в кластер целей должна производиться на каждом шаге обновления данных совместно, с учетом координат как новых отметок, так и сопровождаемых целей. Соответствующий алгоритм идентификации получил название ал-
298
горитма совместной вероятностной идентификации данных (СВИД) [135, 136, 159, 160].
Отметим также, что относительно уравнений динамики целей и измерения, а также погрешностей состояния и измерения остаются те же предположения, что и в начале главы IX. Остаются, естественно, неизменными полученные в п. 9.2 формульные схемы алгоритма фильтрации параметров траектории и вычисление корреляционной матрицы ошибок оценки параметров.
Основное отличие алгоритма СВИД от алгоритма ВИД состоит в различном подходе к вычислению вероятностей того, что отобранная в строб j-я отметка (j! = 1, ..., т) получена от цели i и вероятности р > отсутствия отметки для продолжения i-й траектории (т. е. что отметка от г-й цели не обнаружена). Поэтому дальнейшее рассмотрение алгоритма СВИД сводится, в основном, к разработке и обоснованию способов вычисления этих вероятностей.
Возможные варианты идентификации отметок в кластере из L целей можно представить в виде матрицы
nt,
с двоичными элементами СО.,, обозначающими факт попадания ;-ой отметки в строб г-й цели. В дальнейшем, для иллюстрации будет рассматриваться пример сопровождения двух целей с перерывающимися стробами идентификации и тремя отобранными в эти стробы отметками, как показано на рис. 9.11а. Матрица £2 в этом случае имеет вид
(9.69)
В этой матрице колонка при i = 0 соответствует событию, когда все попавшие в строб отметки являются ложными или принадлежащими другим целям. Колонки с номерами 1 и 2 определяют возможность привязки к траекториям 1 и 2 двух из трех отметок в соответствии с конфигурацией ооласти идентификации.
Далее вводится понятие множества совместных событий X • характеризующих все возможные варианты идентификации отметок и траекторий, причем каждое возможное событие X из X в свою очередь может быть представлено матрицей
я(х)=|<Мх)
элементы которой содержат единицы, если событие % л ° привязке j-й отметки к г-й траектории (г = 1, ..., £) возможно, и нули —
299
в противном случае, т. е.
<»л (х)
если Ху/ возможно, в противном случае.
В
терминах матрицы £!(%) вводятся индикаторы индификации
L
(Х) = Z (%), 7=1, ...» W, /=1
(9.70а)
т
3,(х) = Е<Ы%)> / = 1, L, (9.706)
где т у(х) определяет число целей, с которыми может быть идентифицирована отметка j, и 8t (х) определяет число обнаруженных отметок, которые могут быть идентифицированы с целью под номером i > 0. Кроме того (при условии разрешимости всех попавших в строб отметок), устанавливаются следующие ограничения (правила):
1. Для продолжения траектории каждой цели может быть отобрано не более одной отметки (тДх) 1 )•
2. Источником каждой новой отметки может быть только одна цель, т. е. 5( (х) 1 •
Используя введенные соотношения и правила, можно получить матрицы возможных совместных событий, которые для рассматриваемого примера имеют вид (рис. 9.11а):
о о о о о о
о о о
о 1 о
(9.71)
1 о
1
о о о
300
Матрица £2. соответствует случаю, когда все попавшие в стробы отметки ложные, матрица £22 предполагает ложными отметки 1 и 2, а третья обновляет только вторую траекторию и т. д. При составлении этих матриц учитывалось располржейие отметок в индивидуальных стробах, образованных вокруг экстраполированных точек траекторий У и 2. Такой подход требует подробного анализа ситуации в стробах (расчет областей перекрытия, выделение отметок, попавших в перекрытые области и т. д.). С целью упрощения расчетов при вычислении совместных вероятностей событий каждую отметку, попавшую в объединенный строб, предполагать принадлежащей как к первой, так и второй траектории, независимо от их положения в индивидуальных стробах. В рассматриваемом примере число вариантов идентификации и число матриц возможных совместных событий при этом увеличивается практически вдвое. Однако процесс вычисления вероятности совместных событий существенно упрощается, а результат получается практически таким же [135].
Перейдем теперь к вычислению вероятности совместных событий. Для этого сначала, используя правило Байеса, запишем выражение для апостериорной вероятности совместных событий с учетом всех п измерений (на n-м шаге фильтрации)
/>(x|Y'1) = ^P(Y„ |X-.Y-')P(X.|Y"-'), (9.72)
где С — нормирующая константа, получаемая путем суммирования правой части выражения (9.72) по всем .
Первый сомножитель выражения (9.72) представляет функцию правдоподобия принадлежности новых отметок к сопровождаемым траекториям, которая по определению равна
т
P(Y„ | х„,У"4) = ПЛ<^ । Хд> Y"-1), /=1
(9.73)
где = (Y„, - Y„,) — невязка между ;-й отметкой и г-й траекторией.
Используя далее очевидное предположение о нормальном законе распределения невязок новых отметок относительно экстраполированных точек траекторий, полученных по данным у”’1 измерений, а также предположение о равномерном распределении ложных отметок в стробах, можно записать
*Лх) = 1. ^(х) = о.
(9.74)
301
1/2
; (9.75)
где: N(v<^fi,Pu ) = ехр - 1 / (2 г
4W I /
М — размерность вектора измерений Y" ;
Ру — корреляционная матрица ошибок невязки между г-й отметкой и j-й траекторией;
Р„- — определитель матрицы Ру ;
Vn — объем объединенной области идентификации отметок (в относительных к разрешаемому объему РЛС единицах). Таким образом, выражение (9.73) можно записать в виде
Xy. IZ.,Y")=^niM^AP,)r', (9.76)
где: т, “ 1, если j-я отметка назначена для продолжения траектории г-й цели;
Т|п — число отметок, определенных в качестве ложных.
Второй сомножитель выражения (9.72) определяет априорную (на момент п дискретного времени) вероятность совместных событий X по данным предыдущих и-1 измерений. Для его вычисления сначала запишем выражение для числа “ложных” (не привязанных к траекториям) отметок в событии в виде
m
'n»(x)eZf1-TXx-)b
j=i
(9.77)
Следовательно, число событий у„, в которых участвуют истинные отметки, определяется числом перестановок из тп (общее
число отметок) по »г - т|я (%), т. е. равно
(9.78)
т'-pm — __________
«-Мх) ~ •
С учетом (9.78) априорная вероятность совместных событий определяется выражением
^ГТ[РЧ1-Р
m\ V D' D' T]»(X)!
где: P — вероятность обнаружения i-й цели;
qn(x) — число ложных отметок, которое предполагается рас
302
пределенным по закону Пуассона с параметром X, характеризующим пространственную плотность потока ложных отметок.
Подставляя в (9.72) выражения (9.76) и (9.79), после несложных преобразований получим окончательное выражение для апостериорной вероятности совместных событий на n-м шаге в виде
ХПй L
/>(7.. 1 V") = F П Л'К ’°’Р’ Л ~ V’H (9.80)
j'.x у — 1 (=!
где С' — новая нормализующая константа.
Теперь, с учетом выражения (9.80) для апостериорной вероятности совместных событий, можно вычислить вероятность р<” того, что измерение (отметка) с номером у принадлежит цели с номером i. Эта вероятность получается путем суммирования всех возможных событий %и, для которых выполняется условие (О ,,(%) = 1, т. е.
7^(»)=DU I *”)&„.
j = 1, tn, / = 1, ...» L (9.81)
х«
Вероятность того, что от цели i не обнаружена отметка, вычисляется в этом случае по формуле
m
Ро)(и) = 1-2и^7,)^- (9.82)
Вероятности (9.81) и (9.82) используются далее для формирования усредненных обновляющих невязок для каждой цели по формуле
— m
= X ' 0-83)
J-1
При выводе соотношений (9.72)—(9.83) для фильтра с совместной вероятностной идентификацией данных предполагалось, что все отобранные в строб отметки разрешаются, т. е. каждая из них принадлежит только одной цели, и выполняется условие т; (х) < 1. На практике, особенно при невысокой разрешающей способности измерителя (РЛС), в процессе сопровождения близко расположенных целей возможно “слияние” отметок от двух и более целей в одну, которое известно как явление неразрешения целей. Решение задачи сопровождения группы близко расположенных целей возможно в этом случае с применением модифицированного алгоритма с совместной идентификацией данных (МСВИД) [136]. Подход к модификации алгоритма СВИД сводится в основном к включению в состав возможных совместных событий таких, которые обусловлены неразрешенном отметок. Например, в рассматриваемом выше слу-
303
чае двух целей и трех отметок, наряду с событием (матрицей) (см. 9.71), включаются совместные события
О О 1
1 О о
1 о о
или ft*
О
о о
1
о о о о 1 1
И т. д.
Такой подход существенно увеличивает число возможных
вариантов событий и, следовательно, повышает сложность алгоритма.
Однако эффективность МСВИД существенно выше алгоритма СВИД и тем более алгоритма ВИД. На рис. 9.12 приведены графики потерь (сбоев) в сопровождении целей тремя перечисленными алгоритмами идентификации в зависимости от разрешающей способности
измерителя.
Рис. 9.12. Среднее число сбоев при сопровождении целей алгоритмом ВИД (У), СВИД (2) и МСВИД (3) в зависимости от разрешающей способности измерителя
Аналогичные графики для среднеквадратических ошибок оценки параметров траектории приведены на рис. 9.13. Из этих графиков следует существенное преимущество алгоритмов МСВИД и СВИД, по сравнению с алгоритмами ВИД. Кроме того, алгоритм МСВИД значительно эффективнее алгоритма СВИД при малой разрешающей способности измерителя.
304
Существенное повышение точности сопровождения групповых маневрирующих и неманеврирующих целей может быть получено также за счет введения временной задержки, на один-два периода обновления информации, между моментами оценивания параметров
и моментом получения результатов последних измерений. Речь идет о получении оценки параметров траектории fy., по данным п наблюдений, где I ~ величина задержки. Такая Процедура называется
сглаживанием параметров траектории. Поэтому соответствующий алгоритм получил название алгоритма совместной вероятностной идентификации данных при сглаживании параметров траектории
Рис. 9.13.Среднеквадратические ошибки оценки параметров траектории алгоритмами ВИД (fj, СВИД (2) и МСВИД (3) в зависимости от разрешающей способности измерителя
Результаты моделирования, приведенные в [134], показывают, что применение сглаживания при I == 1, 2 позволяет существенно повысить качество сопровождения даже больших групп целей.
Таким образом, применение метода совместной вероятностной идентификации данных позволяет успешно решать задачу одновременного сопровождения целей в помехах, в том числе и на участках пересечения их траекторий. Однако соответствующие алгоритмы получаются достаточно сложными. Действительно, из анализа приведенных выше соотношений следует, что идентификация данных при многоцелевом сопровождении представляет собой задачу комбинаторного анализа. Вычислительная же сложность алгоритмов комбинаторного анализа возрастает по экспоненциальному закону с увели
305
чением числа целей L и идентифицируемых отметок т. Поэтому актуальными являются задачи разработки как экономичных алгоритмов идентификации, так и соответствующих средств их реализации.
Для решения этих задач возможны по крайней мере два подхода.
1. Разработка упрощенных (квазиоптимальных) алгоритмов идентификации с подробным анализом их эффективности.
2. Разработка быстрых алгоритмов идентификации и соответствующих средств их реализации.
При разработке упрощенных алгоритмов возможен, например, следующий подход [160].
Предполагается, что вероятность обнаружения PDi отметок от целей i - 1,..., L) равна единице. В этом случае все цели в очередном сеансе сканирования будут обнаружены, т. е. все g. в формуле (9.80) будут равны единице. В этом случае апостериорная вероятность обобщенных событий вычисляется по формуле
V” т
Р(Х. =
которая проще (9.80).
Результаты моделирования показали, что рассмотренный упрощенный алгоритм эффективен при небольших (порядка 2-3) значениях L и т.
Возможны, естественно, и другие упрощенные алгоритмы, в частности, алгоритм “ближайшего соседа”, при котором для каждой траектории выбирается отметка, ближайшая к ее экстраполированной точке. Как и предыдущий, алгоритм целесообразен для применения при небольших значениях L и т.
Второй подход к решению проблемы повышения эффективности алгоритмов совместной вероятностной идентификации данных сводится, в основном, к распараллеливанию алгоритмов идентификации и применению нестандартных вычислительных средств. Так, в [131] предложен и описан алгоритм с использованием для решения задач идентификации аналоговой нейронной сети, обладающей высокой степенью параллелизма и позволяющей решать эту наиболее трудоемкую задачу с большой скоростью.
В [159] предложен ряд алгоритмов для быстрого вычисления апостериорных вероятностей с применением специальных
вычислительных методов для формирования и проверки гипотез идентификации. Полученные алгоритмы предназначены для реализации в многопроцессорной вычислительной системе и могут быть успешно применены при относительно высокой интенсивности помех. Подробное рассмотрение этих алгоритмов выходит за рамки книги.
306
9 >4,3. Сопровождение групповой цели (боевого порядка) [107]
Для целей, осуществляющих полет в плотной группе (боевом порядке), перекрытие стробов наблюдается в течение многих периодов обзора РЛС. В этом случае сопровождение отдельных траекторий становится практически невозможным, по крайней мере, из-за чрезвычайно высокой трудоемкости вычислений. Выходом из положения является переход от сопровождения каждой цели в группе к сопровождению центра группы, который рассматривается как цель, имеющая самостоятельную траекторию. Координаты центра группы образуются путем усреднения координат отметок группируемых целей. При этом статистические характеристики шума измерения должны быть измерены таким образом, чтобы учитывать особенности распределения шума каждого источника в группе.
Центральная (групповая) траектория формируется и обновляется с помощью обычного фильтра Калмана, обрабатывающего усредненные отметки на фоне помех с обобщенными статистическими характеристиками.
Наряду с групповой траекторией формируются и сопровождаются (индивидуально) траектории целей, находящихся на флангах боевого порядка. Сопровождением боковых траекторий облегчается обнаружение факта выхода целей из группы. Контроль выхода основан на сравнении переменных состояния центральной и боковых траекторий. Сопровождение отделяющихся целей осуществляется с помощью ветвящихся алгоритмов, которые начинают функционировать при удалении цели на определенное расстояние от группы.
Сопровождение одиночной цели
Алгоритм обнаружения групповой цели
Сопровождение групповой цели
Алгоритм обнаружения отделяющихся целей
Боковые траектории
Центральная траектория
Рис. 9.14. Упрощенная структурная схема алгоритма сопровождения групповой цели
307
Упрощенная структурная схема алгоритма сопровождения групповой цели с использованием рассмотренного подхода изображена на рис. 9.14. Основными в этой схеме являются алгоритмы обнаружения факта образования групповой цели и обнаружения отделяющихся целей. Однако подробное рассмотрение этих алгоритмов и схема алгоритма сопровождения групповой цели в целом также выходит за рамки содержания данной книги.
308
Глава X
СТАТИСТИЧЕСКИЙ АНАЛИЗ ПРОЦЕССОВ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ
10.1. Показатели качества вторичной обработки радиолокационной информации
Одним из условий успешного решения задачи проектирования системы вторичной обработки радиолокационной информации является наличие возможностей оценивать эффективность выбранных методов и алгоритмов обработки данных и технических средств их реализации, В общем случае обеспечение такой возможности сводится к выбору соответствующих показателей качества (эффективности) функционирования и способов их количественной оценки.
При решении вопроса о выборе показателей качества функционирования алгоритмов и устройств обработки радиолокационных данных обычно исходят из следующих соображений:
• используемые показатели должны отражать основное назначение алгоритмов (устройств), а также соответствовать цели анализа;
• используемые показатели должны быть критичными по отно-
шению к варьируемым параметрам;
• используемые показатели должны быть наглядными и, по воз
можности, просто определяемыми.
В соответствии с перечисленными соображениями, при сравнительном анализе алгоритмов обнаружения и сопровождения (обновления параметров) траектории используются следующие группы показателей эффективности [46]:
1. Показатели, определяющие возможности алгоритмов по полноте отображения обстановки в зоне обзора РЛС. Полнота отображения обстановки характеризуется, в конечном счете, вероятностью обнаружения траектории каждой цели в зоне ответственности РЛС.
В процессе синтеза (выбора) алгоритмов для сравнения различных критериев обнаружения траектории обычно используется показатель, характеризующий зависимость вероятности правильного обнаружения от дальности до обнаруживаемой цели при фиксированных энергетических характеристиках РЛС, ЭПР цели и параметрах внешней среды.
При натурных испытаниях для оценки эффективности алгоритма обнаружения траектории можно использовать показатель средней длительности времени обнаружения истинной траектории, вычис-
ляемой по формуле
Z(S) ‘оТ
_(S) ’ Пот
309
где: — суммарное время, затраченное на обнаружение траекто-
рий всех участвующих в испытаниях целей;
— суммарное число обнаруженных траекторий целей.
Аналогично, для оценки эффективности алгоритма сопровождения траектории может быть использован показатель средней длительности непрерывного сопровождения цели
/(I) - «с *сТ “ (S) ,
Т|с
где: — суммарное время сопровождения всех целей;
Т|сЕ) — суммарное число отрезков сопровождения целей.
2. Показатели, определяющие возможности алгоритмов по достоверности отображения обстановки в зоне обзора РЛС. В системе цифровой обработки радиолокационных данных достоверность отображения характеризуется числом ложных траекторий, обнаруживаемых и передаваемых на сопровождение в каждом периоде обзора РЛС или в единицу времени. При обнаружении траектории на фоне внутренних шумов приемной аппаратуры соответствующие оценки числа передаваемых на сопровождение ложных траекторий легко рассчитать аналитически. В условиях же преднамеренных помех, отражений от подстилающей поверхности и местных предметов такие расчеты крайне затруднительны.
При натурных исследованиях (испытаниях) для оценки достоверности получаемых решений может быть использован показатель, называемый коэффициентом ложных траекторий
f(S)
где: ~ суммарное время сопровождения всех ложных траекторий;
— суммарное время сопровождения траекторий истинных целей.
3. Показатели, определяющие динамические характеристики алгоритмов и соответствующих им цифровых фильтров. Среди динамических характеристик основное значение имеют точностные характеристики получаемых оценок параметров траектории. Наиболее общей точностной характеристикой алгоритмов обработки радиолокационных данных является корреляционная матрица ошибок оценки параметров траектории на рубежах выдачи информации.
Точностные характеристики фильтрации и экстраполяции параметров траектории подробно рассматривались в гл. VII, VIII и IX.
310
Таким образом, в главе X подлежат рассмотрению только основные задачи статистического анализа алгоритмов обнаружения траектории и сопровождения целей в шумах.
10.2. Статистический анализ процесса обнаружения траектории цели в режиме обзора [51, 52]
10.2.1. Основные операции алгоритма обнаружения траекторий
В соответствии с общими принципами, изложенными в п. 7.1, процесс обнаружения новой траектории начинается с образования вокруг одиночной отметки строба первичного захвата, размеры которого выбираются исходя из возможного перемещения цели за период обзора. Если в следующем обзоре в строб первичного захвата попала одна или несколько отметок, то по каждой из них “завязывается” новая траектория. При отсутствии отметок в стробе первичного захвата начальная отметка или сбрасывается как ложная (критерий завязки “2 из 2”), или оставляется для подтверждения в следующих обзорах, при этом соответственно увеличиваются размеры строба первичного захвата (дробные критерии “2 из т”, т > 2). После того, как траектория завязана, определяется направление и скорость движения предполагаемой цели, что позволяет экстраполировать и стробировать ее положение на следующие обзоры. При попадании в эти стробы новых отметок принимается окончательное решение об обнаружении траектории.
Таким образом, процесс обнаружения траектории разбивается на два этапа: на первом осуществляется завязка траектории по критерию “2 из т", а на втором производится подтверждение завязанной траектории, т. е. окончательное обнаружение траектории по критерию “l/n” (I из п). В частных случаях второго этапа обнаружения траектории может и не быть.
Алгоритм завязки траектории по критерию “2/т” совместно с алгоритмом подтверждения (окончательного обнаружения) траектории по критерию l/п” образуют объединенный алгоритм обнаружения траектории по критерию “2/т +1/п”.
Основными вычислительными операциями, выполняемыми в процессе обнаружения траектории, являются экстраполяция координат и стробирование отметок. Относительно этих операций в дальнейшем принимаются следующие предпосылки:
1. Экстраполяция координат производится в соответствии с гипотезой о равномерном и прямолинейном движении цели (гл. VII).
2. Стробы на всех этапах обнаружения траектории имеют форму элемента сферического слоя (рис. 9.1). Размеры стробов Ars , ДРг, AEs выбирают исходя из суммарных ошибок измерения и экстраполяции координат на соответствующем этапе обнаружения траектории.
311
3. За единицу объема строба принимается разрешающая способность РЛС по соответствующим координатам. В этом случае размеры стробов не зависят от дальности и, кроме того, распределение ложных отметок в зоне обзора можно принять равномерным, так как вероятность появления ложной отметки в каждом элементарном объеме строба одинакова.
Качество процесса обнаружения траектории можно оценивать следующими характеристиками: вероятностью обнаружения траектории истинной цели; средним числом ложных траекторий, передаваемых на сопровождение в единицу времени; требуемой производительностью ЦВМ, используемой для реализации алгоритма обнаружения траекторий.
В дальнейшем рассматриваются основные результаты анализа алгоритмов обнаружения траекторий применительно к обзорным РЛС (кругового или секторного обзора) или к РЛС с ФАР (ЦАР), функ-цйонирующих в режиме обзора.
10.2.2. Статистический анализ алгоритма “2/т + 1/п” при обнаружении ложных траекторий
Сначала рассмотрим простейший алгоритм, реализующий критерий "2/т + 1/п". Последовательность работы этого алгоритма при обнаружении ложных траекторий можно проиллюстрировать с помощью графа со случайными переходами (рис. 10.1).
Рис. 10.1. Граф функционирования алгоритма “2/т + 1/п" при обнаружении ложной траектории
Начало работы алгоритма совпадает с переходом графа из состояния а0 в состояние происходящим при появлении с вероятностью Р( одиночной отметки, принимаемой за начальную точку обнаруживаемой траектории. В дальнейшем проверяется попадание новых отметок в стробы V, (г =1, 2, ..., т-1) первичного захвата. При попадании хотя бы одной отметки в один из т-1 стробов первичного захвата граф переходит в состояние ат, соответствующее принятию решения об обнаружении начала траектории. В противном
312
случае граф из состояния атЛ переходит в состояние а0 (начальная точка предполагаемой траектории сбрасывается как ложная).
После получения второй отметки (при выполнении критерия “2/т”) начинается второй этап обнаружения траектории. На этом этапе проверяется попадание новых отметок в стробы V (j =1, 2,..., п-1). Положение центра строба на следующий обзор определяется путем экстраполяции координат по двум отметкам, а размеры стробов — исходя из погрешности измерения и ошибок экстраполяции координат.
При попадании новой отметки в один из п стробов второго этапа граф переходит в поглощающее состояние ат_^, что соответствует принятию окончательного решения об обнаружении траектории. В противном случае граф из состояния переходит в исходное состояние а0 (завязанная траектория сбрасывается как ложная).
Объем стробов первичного захвата, выраженный числом элементарных (разрешаемых) объемов РЛС, вычисляется по формуле [51]:
8v Vo v
pr(l) у -3, у r max ртах б max
(10.1)
где: Vrmax, Vpmax, vema — максимальная скорость цели по соответствующей координате;
5г,Зр,8Е — разрешающая способность РЛС по соответствующим координатам;
То —период обзора.
Объем стробов на втором этапе обнаружения траектории вычисляется по формуле
tz(2) _ оьз а°s/Pст2Л
V ~8* 5,8,8.
где: — суммарное среднеквадратическое отклонение
отметки от центра строба по соответствующей координате;
к к 3 — коэффициент увеличения размеров строба по сравнению с суммарными среднеквадратическими отклонениями отметок от центра строба.
Подчеркнем, что каждому состоянию графа (от 1 до zn+n-1) соответствует строб определенных размеров.
Для определения вероятности обнаружения ложной траектории необходимо прежде всего найти условную вероятность 7Т] того, что случайная точка, начиная движение из состояния ай, когда-нибудь достигнет состояния ат^ и останется в нем. Эта вероятность находится из выражения [51]:
313
(10.3)
где: — вероятность непопадания ложных отметок в стробы
первичного захвата;
qjj — вероятность непопадания ложных отметок в стробы подтверждения.
Выражение (10.3) можно представить также в виде
Л4 = ЛаЛ, , (10.4)
где: Ла условная вероятность завязки начала траектории;
л, “ условная вероятность подтверждения завязанной траектории.
Безусловная вероятность обнаружения ложной траектории /гТ=Рл1, (10.5)
где “ вероятность появления одиночной ложной отметки, принимаемой за начало новой траектории.
Для общего случая критерия подтверждения “l/т” получить формулу для Л/ в общем виде не представляется возможным, поэтому такие критерии анализируются каждый в отдельности [51].
Фильтрующую способность алгоритма обнаружения траекторий можно характеризовать средним за период обзора числом ложных траекторий , передаваемых на сопровождение. Это число связано с вероятностью л i следующим соотношением:
, (10.6)
где ~ среднее за период обзора число одиночных отметок, принимаемых в качестве начальных точек ложных траекторий в установившемся режиме работы. Таким образом, для расчета Npr необходимо сначала получить формулу для . Вывод этой формулы производится ниже для простейшего алгоритма, реализующего критерий “2/т + 1/и”.
Число одиночных отметок, становящихся начальными точками новых ложных траекторий, после (г+1)-го обзора можно подсчитать по формуле
_ т+л-1
М(г+1) = ^(г+1)-£^.(г), у = 1, 2, .... т+п-\, (Ю.7)
314
где: NF(r+l) — число ложных отметок, поступающих на вход подсистемы вторичной обработки за (г+1)-й период обзора;
Рд — вероятность попадания ложных отметок в строб объемом Vj (число таких стробов равно лг+п-1);
Nj(r) — число стробов Vj , образованных в r-м обзоре.
Вычитаемое в формуле (10.7) представляет собой число ложных отметок текущего обзора, попавших в стробы всех находящихся в процессе обнаружения ложных траекторий, при условии, что эти стробы не перекрываются. В свою очередь,
Л'Дг) = ± N, (f)Pfrn , (10.8)
где: jVj (/) — число начальных точек ложных траекторий, образованных в i-м обзоре;
Р^г~^ — вероятность перехода системы (рис. 10.1) из исходного состояния 1 в состояние j за r-i шагов.
При расчете по формуле (10.8) необходимо дополнительно предположить
М(0)=^(0); J=}
[0, />1.
Перейдем в выражении (10.8) к новой переменной суммирования s=r—i, что соответствует переносу начала отсчета на момент окончания r-го обзора. Переменная 5 представляет собой число шагов (обзоров), необходимых для перехода графа алгоритма из исходного состояния а{ в состояние а . Для алгоритма обнаружения типа “2/т +1/я° максимальное значение 5 соответствует максимальному числу шагов, необходимых для перехода из состояния ах в состояние ат+я.Р и равно 5тад= т+я-2. В этом легко убедиться, если в графе алгоритма (рис. 10.1) выделить самую длинную ветвь. С учетом приведенных выше преобразований получим
Nj(r) = (10.9)
j=0
В формуле (10.9) неравными нулю будут только слагаемые, для которых Р/р # 0. Дальнейшая задача состоит в вычислении вероятностей переходов Pfp. Система рекуррентных уравнений для определения вероятности Р№ записывается в виде:
315
р«=Р’ S = Q> 11 (0, s > 0,
№ = ,
D(J) — p(5-1)/7 *13 ~*12 4f2>
Pfjn-\
p(s)
*l,m+l
Im
p(s) — D(^-l) n
* l,m+w-l •* 1,т+л-2Ч /,да+м-2*
(10.10)
Теперь представим формулу (10.7) с учетом формулы (10.9) в виде
ЛГ,(г+1)=ЛМг+1)- £ р, (io.ll)
_М 5=0
В установившемся режиме работы (г->оо) можно положить
Ni (г+И)=Ц (r)=^ (r-l)=:..=M[r-(m+«-2)]=jVi •
Тогда получим
NF (г+1)=Nf (г )=...=NF [г - (т+п - 2)]=NF,
__ лН-rt-l лн-л-2
N,=NF-Nt
или окончательно
ти+и-1 лн-л-2
J=1 5=0
(10.12)
Формула (10.12) с учетом системы уравнений (10.10) позволяет рассчитать среднее за обзор число начальных точек_ложных траекторий в установившемся режиме работы. Зная Nx и условную вероятность тС], можно по формуле (10.6) рассчитать зависимость среднего числа передаваемых на сопровождение ложных траекторий от среднего числа ложных отметок на входе N .
316
Для алгоритмов, в которых критерий подтверждения отличается от “1/п”, формула (10.12), естественно, остается справедливой. Необходимо только уточнить верхние пределы суммирования по j и 5. Верхний предел суммирования по 5 определяется общим числом стробов, образуемых в процессе реализации алгоритма. Для алгоритма с критерием подтверждения “l/ri' (/>1) это число больше m+n-1. Поэтому в общем случае верхний предел по j равен m+v-1, где v > и. Верхний предел суммирования по s определяется максимальным числом шагов, которые могут быть сделаны при переходе из состояния а{ в состояние, предшествующее поглощаемому. Легко показать, что это число не зависит от значения / в критерии “//и” и всегда равно т+п-2.
Таким образом, в общем виде формула для определения числа одиночных отметок, принимаемых за начало ложных траекторий, при использовании алгоритма с критерием “2/т+1/п” имеет вид
m+v-l m+w-2
У=1 jssQ
(10.13)
где v — число, определяемое из графа алгоритма.
Для сравнения фильтрующей способности некоторых алгоритмов рассматриваемого типа на рис. 10.2 приведены результаты расчета среднего числа передаваемых на сопровождение ложных траекторий в зависимости от среднего за обзор числа ложных отметок, поступающих на вход подсистемы вторичной обработки информа
ции. Из анализа графиков следует: 1) фильтрующая способность алгоритмов, реализующих критерий серийных испытаний "2/m+Z/n”, увеличивается с уменьшением типи увеличением Z; 2) увеличение I на единицу приводит к более существенному повышению фильтрующей способности, чем соответствующее уменьшение тип.
Указанные свойства необходимо учитывать при выборе алгоритма, предназначенного для практической реализации.
Если в системе ограничено допустимое число ложных траекторий, передаваемых на сопровождение, то совместный выбор и критериев алгоритма серийных испытаний позволяет предъявить обоснованные
Рис. 10.2. Графики среднего числа передаваемых на сопровождение ложных траекторий
317
требования к уровню помех на входе подсистемы вторичной обработки радиолокационных данных.
При проектировании загрузки ЦБК вторичной обработки радиолокационной информации необходимо знать среднее число ложных траекторий, находящихся в процессе обнаружения в установившемся режиме работы. Обозначим это число через NoFT Очевидно, что в процессе обнаружения находятся все ложные траектории, по которым не приняты окончательные решения о передаче на сопровождение или о сбросе. Число таких траекторий в установившемся режиме работы равно
Ш+У-1
Noft= , (10.14)
J=1
где, в соответствии с выражением (10.9), в установившемся режиме
т+п-2
s—0
(10.15)
Подставляя в (10.14) выражение (10.15), получаем
m+v-1 /и+л-2
<5=0
и с учетом выражения (10.13) окончательно имеем
m+v-1 т+л-2
oFT в
5==0 m+v-1 m+rt-2 (s) •
(10.16)
10.2.3. Статистический анализ алгоритмов “2/т + 1/п” при обнаружении истинных траекторий
Сначала, как и ранее, рассмотрим алгоритм “2/т+1/п”. Функционирование алгоритма, реализующего критерий “2/m+l/n” при обнаружении истинных траекторий, поясняется с помощью графа на рис. 10.3.
Особенностью этого графа, по сравнению с графом на рис. 10.1 (обнаружение ложных траекторий), является наличие не равных нулю вероятностей переходов в исходное состояние aQ из любого промежуточного состояния.
318
Вероятность возвращения в исходное состояние ай из промежуточного состояния at (i = 1, 2...т—1) равна вероятности одновременного наступления двух событий, первое из которых состоит в том, что в соответствующем стробе первичного захвата истинная отметка не обнаружена, а второе — в том, что в этот строб попала хотя бы одна ложная отметка, т. е.
7t/oW = [l-Po('')]P/i, (10.17)
где: pD(r) — вероятность обнаружения истинной отметки в r-м обзоре (не зависящая от объема строба V(); pfi — вероятность обнаружения хотя бы одной ложной отметки в стробе V.
^тт+п
Рис. 10.3. Граф функционирования алгоритма “2/m+l/n“ при обнаружении истинных траекторий
Вероятность возвращения схемы в исходное состояние а0 из промежуточного состояния a (j = т, т+1, ..., т+п-1) равна сумме вероятностей двух несовместимых событий Аг и Вг;
7С;0(г)=РДА)+/’(Л),
(10.18)
где
Pj (Аг) = [1 - pD (r)]pf;
PJ(Br) = pD(r)pjll[l-psel(yj)],
(10.19)
Psei^Vj) — вероятность правильной селекции истинной отметки среди ложных в стробе Vj-
Теперь, исходя из общих принципов работы алгоритма и с учетом выражений (10.17)—(10.19), можно определить вероятности перехода Tty (г) графа на рис. 10.3 (или элементы соответствующей матрицы переходных вероятностей). Эти вероятности равны:
319
(r) = l-pD(r),
*oi(r) = Po(r), ^o(r) = p- pD(r)\ TCj2(r) = (1 - pn)(l - p D(r)), = p D{r),
7Im-i.o(r) = (l-pc('-))> = pD(r),
*m0(r) = 0 - PD^Pfin + Po^Pfin^ - PsJVm ))» (H = О - PD (0)0 “ P fin )»
O') = РД(Г)(1- P>)+ Po(r)PjA(Pm)>
Ли+л_1,оО') = О “ МГ ))£>+„-! + МГ)Р>+и-10 “ P'"l(Vm+B-l))>
m+n~l,m+n 0) = MHO - P>+„-i)+ МИр^-Л/О^-Д 7tm.nm+n(r) = 1. (10.20)
/И+Л,ШЧ*Л V z x
Выражения для Яу(г) системы уравнений (10.20) определяют элементы матрицы П(г) переходных вероятностей на r-м шаге. Поэтому вектор-строка Р(г) вероятностей состояния алгоритма “2/m+t/n” при обнаружении траектории цели представляется в виде
Р(г) =
Ро (,г)Ру (г)...Рт+п(г) =Р(г-1)П(г), (10.21)
где: Р(г-1) — вектор-строка вероятностей состояний на предыдущем (г-1) шаге;
П(г) — матрица переходных вероятностей на r-м шаге.
В соответствии с выражением (10.21) и с учетом формул (10.20), определяющих элементы матрицы переходных вероятностей, система уравнений для определения составляющих вектора Р(г) может быть представлена в виде
320
Po (f)=P0 (r-lXo(r)+/J (r-^)+-+4M(»’)W(r)= джь-1
= ZZ (r-iX/oW,
^55]
Р«(Г) = 7? (Г-1>1Л,(Г)+Р2 (r-lKm(O+ "+^-l(^-l)^l,m(',) = m+n-1
= & hkw-
y®i
(r) = Pm (r-1)71^! (r),
дНл~1
Рт+п(г) = ^jPj (r-\yjljim»,(r)+Pm¥n(r-\) = PD(r). j=m
(10.22)
Последнее уравнение системы (10.22) определяет суммарную вероятность обнаружения истинной траектории на r-м шаге, нарастающую от обзора к обзору.
В общем случае критерия "2/m+Z/n” получить формулы для нарастающей вероятности
обнаружения истинной траектории при произвольном I >1 не представляется возможным. Анализ необходимо производить отдельно по каждому конкретному алгоритму [51].
С целью сравнения различных критериев типа "2/т+1/п” при обнаружении истинных траекторий на рис. 10.4 приведены рассчитанные по изложенной методике зависимости нарастающей вероятности обнаружения траектории от нормиро
Рис. 10.4. Графики нарастающей вероятности обнаружения траектории цели
ванной дальности dr / г/ти •
В соответствии с принятыми обозначениями на рис. 10.4: е/max — максимальная горизонтальная дальность действия РЛС; dr — текущая горизонтальная дальность действия РЛС;
dr = t/max - rbd(Ta ), где AJ(T0 ) — изменение координаты дальности
321
за период обзора То . Вероятность обнаружения отметки от цели на r-м шаге определялась по формуле [51]:
Ро(Г) = еХр[-0,68(<7, / Jmax)4] .
Вероятность правильной селекции истинных отметок в стробах подтверждения принималась постоянной и равной рс = 0,95. Плотность ложных отметок = 10"* на единицу объема зоны обзора. Из анализа и сравнения кривых следует, что с точки зрения уменьшения числа шагов при обнаружении истинной траектории целесообразно применять критерии "2/m+l/n”, причем небольшие изменения m и п не приводят к существенному изменению числа шагов для обеспечения близкой к единице вероятности обнаружения истинной траектории. Высокая (порядка 0,98) вероятность обнаружения истинной траектории по указанным критериям достигается на дальности, соответствующей 0,75 от максимальной дальности действия РЛС.
10.3. Статистический анализ процесса сопровождения цели в режиме обзора [51, 52]
10.3.1. Структурная схема алгоритма автосопровождения цели в режиме обзора
В процессе сопровождения цели решаются две основные задачи: стробирование и отбор новых отметок для продолжения траектории; фильтрация параметров траектории и построение функции (уравнения состояния), описывающей изменение этих параметров во времени. Причем состав и содержание этих задач одинаковы как для сопровождения цели в режиме обзора, так и для режима активного сопровождения. Отличие, по существу, состоит только в том, что в режиме обзора обновление параметров траектории производится с постоянным темпом, обусловленным периодом обзора То для РЛС кругового (секторного) обзора, тогда как в режиме активного сопровождения темп обновления параметров траектории переменный, зависящий от особенностей траектории сопровождаемой цели и ее важности для потребителей информации.
Упрощенная структурная схема алгоритма сопровождения траектории цели изображена на рис. 10.5.
В блоке 1 алгоритма решается задача отбора и идентификации отметок для продолжения траектории. Алгоритмы отбора и идентификации отметок в стробе подробно рассмотрены в гл. VIII и гл. IX. Отобранные для продолжения траектории отметки (одна или более) передаются на вход алгоритма фильтрации параметров траектории (блок 2).
322
В блоке 2 алгоритма решается задача фильтрации параметров траектории в соответствии с одним из алгоритмов, рассмотренных в предыдущих главах. Результаты фильтрации используются для подготовки (формирования) информации, выдаваемой потребителям радиолокационной информации (блок 6), а также для выполнения операций преобразования и экстраполяции координат цели в интересах стробирования новых отметок в следующем периоде обновления информации, которые реализуются в блоке 3 алгоритма.
|Улр
Л *
Фильтрация A w параметров траектории “ng
Подготовка ин~ формации для -► потребителя
О
Стробирование и отбор новых отметок
Сброс
Формирование строба на п~й обзор
5
Yn/h-1 Уп
роверка
критерия
Преобразование и экстраполяция координат
3
3
Рис. 10.5. Упрощенная структурная схема алгоритма сопровождения траектории
В блоке 4 алгоритма решается задача формирования строба для отбора отметок в следующем n-м обзоре. Координаты центра строба в системе координат измерителя поступают из блока 3. При вычислении размеров строба Vn используются точностные характеристики измеренных и экстраполированных координат, а также информация о пропуске отметок в стробе на предыдущем шаге обновления информации.
В блоке 5 реализуется алгоритм проверки критерия сброса траектории с сопровождения при отсутствии на очередном шаге новой отметки для продолжения траектории (в простейшем случае, если в строб не отобрано ни одной отметки). При выполнении критерия сброса сопровождение траектории прекращается, а предыдущая информация о ней “сбрасывается”. Если же критерий сброса не выполняется, то в качестве координат новой отметки используются координаты экстраполированной точки и производится новый цикл вычислений для продолжения траектории по экстраполированным данным.
Таким образом, все основные операции алгоритма сопровождения траектории цели, кроме операции сброса траектории с сопровождения, являются известными (см. гл. VII, VIII, IX). Критерий сброса траектории с сопровождения рассматривается в следующем пункте.
323
10.3.2. О критериях сброса траектории с сопровождения
В общем случае, при принятии решения о сбросе траектории с сопровождения, наряду с пропусками отметок для ее продолжения, должен учитываться целый ряд тактических факторов, таких как важность цели, текущие координаты, направление полета и др. Однако учет тактических факторов чрезвычайно сложен как по существу, так и из-за ограниченной производительности вычислительных средств для обработки радиолокационной информации. Поэтому основным признаком принятия решения о сбросе траектории с сопровождения является появление некоторой пороговой комбинации пропусков отметок в стробах сопровождения.
При выборе порога сброса можно исходить из некоторого эквивалента количества информации, накопленной в процессе текущего сопровождения траектории цели. Это количество информации можно характеризовать, например, точностными характеристиками экстраполяции положения цели на следующий обзор по данным предыдущих измерений. С увеличением числа пропусков отметок неопределенность предсказания положения цели в следующем обзоре увеличивается, что приводит к необходимости увеличивать размеры строба. При некотором числе пропусков подряд (или при некоторой комбинации наличия и пропусков отметок) размеры строба сопровождения достигают размеров строба первичного захвата, что соответствует максимальной неопределенности в положении цели, когда параметры ее движения неизвестны. Дальнейшее увеличение размеров строба сомнительно считать целесообразным.
Таким образом, в качестве критерия сброса траектории с сопровождения можно выбрать условие
у(2) > уЮ г max г ,
где: И(1) — размер строба первичного захвата;
02) — размер строба сопровождения.
Представим дисперсию суммарного отклонения отметки от центра строба сопровождения в виде
где
— дисперсия ошибки
измерения координаты.
Обозначим О? /О2 — К2 / У»
и выберем в качестве порога некоторое
число К%- Тогда, при выполнении неравенства К2 К^, траектория должна быть сброшена с сопровождения. Будем называть этот критерий точностным критерием сброса.
324
Расчет K}h может быть произведен, исходя из упомянутого выше условия равенства объемов строба первичного захвата и последнего перед сбросом траектории строба сопровождения, что дает
Решая это уравнение относительно Kfh, получим выражение для значения порога сброса через известные характеристики РЛС и цели:
• 6 • У7’
ЛпахрmaxEmaxTo I
(10.23)
А? О/-СУ
В выражении (10.23):
Лпах,ртах,ётах — максимальные значения скорости сопровождаемых целей по измеренным координатам;
с г, Ср, се — среднеквадратические ошибки измерения координат;
X — коэффициент увеличения размеров строба {X = 2,5 - 3). Кроме порога сброса, в алгоритме сопровождения может быть установлен порог устойчивого сопровождения, выбор которого также связывается с точностью экстраполяции координат. Например, можно условиться порог устойчивого сопровождения устанавливать на уровне достижения точности экстраполяции, близкой к точности единичного измерения координаты, т. е. на уровне К} « 1.
Теперь, с учетом двух выбранных порогов, процесс сопровождения траектории можно представлять как процесс блуждания случайной точки между двумя экранами, один из которых (при сбросе) является поглощающим, а другой — отражающим. Этот процесс характеризуется следующими возможными состояниями:
1. При экстраполяции координат достигнута точность, близкая к точности единичного измерения. Случайная точка, характеризующая процесс блуждания, достигла отражающего экрана и находится вблизи него. Траектория находится в состоянии устойчивого сопровождения.
2. Неопределенность ожидаемого положения цели, выраженная величиной ошибок экстраполяции координат, настолько велика, что ее дальнейшее сопровождение нецелесообразно. Траектория сбрасывается с сопровождения (случайная точка поглощается экраном).
3. Случайная точка находится в одном из промежуточных положений между отражающим и поглощающим экранами, что соответствует режиму неустойчивого сопровождения траектории.
Пусть, например:
- порог сброса = 7;
325
- порог устойчивого сопровождения К} = 0,9;
- дисперсия ошибок измерения ст2 = 1;
- обнаружение траектории производится по двум отметкам подряд.
С учетом перечисленных исходных данных, а также имея в виду, что дисперсия ошибок экстраполяции на р периодов обзора вычисляется в данном случае по формуле (см. п. 7.4):
(п - 1)(2я -1)+6р(п -1)+6р2 ст**п/. =2--------------------------п2
п+р1п . п Л
(10.24)
можно рассчитать график блуждания случайной точки, отображающий процесс сопровождения траектории. Такой график приведен на рис. 10.6, где сплошными линиями обозначены переходы (изменения К2 ) при наличии отметок в стробах сопровождения, а пунктирными линиями — переходы при пропуске отметок в этих стробах.
Порог устойчивого сопровождения ______I______I______I_____I______I------
О 2 4 6 8 10 кт
Рис. 10.6. Графики блуждания точки, отображающей процесс сопровождения траектории
Из рис. 10.6 следует, что порог сброса достигается при различном числе пропусков отметок, в зависимости от накопленной о траектории
326
информации на предыдущих обзорах. Так из исходного состояния (сразу после передачи траектории на сопровождение) сброс производится по двум пропускам отметок подряд. После достижения порога устойчивого сопровождения, сброс возможен только после 7 пропусков. Каждому узлу графика соответствует определенный уровень точности, выраженный величиной А?, а следовательно, и размер строба сопровождения. Если график рассчитан заранее и все его узлы пронумерованы, то размер строба может быть выбран по номеру узла.
Количество узлов графика можно значительно сократить, если объединить узлы, близкие по уровню точности, число переходов из которых до порогов одинаковое [51].
Кроме рассмотренного, возможно также применение простейшего критерия сброса, в соответствии с которым сброс траектории с сопровождения производится при появлении пороговой серии из кт пропусков отметок подряд. Такой критерий прост в реализации, однако не учитывает накопленную точность сопровождения к моменту появления серии пропусков отметок.
При выборе kj- необходимо исходить из следующих соображений. Чем больше кт, тем меньше вероятность принятия ложного решения о сбросе с сопровождения истинной траектории. С другой стороны, с увеличением увеличивается число находящихся на сопровождении ложных траекторий и их средняя продолжительность. Поэтому при выборе кт необходимо учитывать статистические характеристики пропусков (необнаружений) истинных отметок. (Окончательный выбор значения кт обычно производится при испытании системы обработки).
С учетом критерия сброса по кт пропускам подряд процесс сопровождения траектории описывается графом со случайными переходами (рис. 10.7).
Рис. 10.7. Граф функционирования алгоритма сопровождения траектории со сбросом по критерию кт пропусков подряд
327
Характер состояний и переходов этого графа позволяет выделить следующие режимы сопровождения:
1) режим устойчивого сопровождения, характеризующийся тем, что граф находится в исходном состоянии ат+п (впервые это состояние достигается при выполнении критерия обнаружения траектории);
2) режим неустойчивого сопровождения, соответствующий одному из промежуточных состояний графа a (j = т+п-1, .... т+п+кТ~1)',
3) режим сброса траектории с сопровождения, свидетельствующий о том, что число пропусков отметок подряд достигло порогового уровня к = кт, и граф перешел в поглощающее состояние а
1033. Среднее число ложных траекторий, находящихся на сопровождении в установившемся режиме работы
При статистическом анализе алгоритмов сопровождения основной интерес представляет среднее время существования ложной траектории и связанное с этим временем среднее число ложных траекторий, находящихся на сопровождении в установившемся режиме работы. Кроме того, интересным является определение вероятности сброса с сопровождения истинной траектории при заданном значении вероятности обнаружения отметок. Установим здесь только зависисмость между средним числом ложных траекторий, передаваемых на сопровождение в каждом обзоре, и средним числом ложных траекторий, находящихся на сопровождении в установившемся режиме работы. Для этого необходимо, прежде всего, определить вероятность окончания процесса сопровождения ложной траектории точно на Ц -м шаге (обзоре) после передачи ее на сопровождение в момент ц = 0. В случае критерия сброса по кТ пропускам подряд вероятность окончания сопровождения ложной траектории точно на ц -м шаге равна вероятности перехода графа (рис. 10.7) из состояния в состояние за М шагов:
Ф). (10.25)
Для вычисления
рекуррентные формулы: ..."г
Рп+п (Р*) “ (Ц "* DPj? 9 Л»+л(0) = 1,
У=ои+п
^т+л+1 (Н) Рт+п (Ц 1)^fin+n ’
вероятности Р (ц) применимы следующие
(10.26)
328
Средняя длительность ложной траектории, выраженная числом обзоров, определяется теперь по формуле
(10.27)
Далее, если известно среднее число передаваемых на сопровождение ложных траекторий, то среднее число находящихся на сопровождении ложных траекторий определяется из выражения
(10.28)
Среднее число находящихся на сопровождении ложных траекторий учитывается при расчетах загрузки ЭВМ, на которой реализуются алгоритмы сопровождения траекторий.
10.3.4. Статистические характеристики объединенного алгоритма обнаружения и сопровождения траекторий
Если заданы критерий завязки начала траектории “2/т”, критерий подтверждения “l/п" и критерий сброса траектории с сопровождения, например по критерию кт пропусков подряд, то объединенный критерий обнаружения и сопровождения траектории можно символически записать в виде u2/m+l/n - ”. Граф объединенного
алгоритма при обнаружении и сопровождении ложных траекторий по критерию “2/m+//n - Ду” приведен на рис.10.8.
Рис. 10.8. Граф объединенного алгоритма обнаружения и сопровождения траектории ложной цели
Граф объединенного алгоритма позволяет анализировать процесс обнаружения и сопровождения траекторий в целом вместо анализа по частям, проведенного выше. Не повторяя рассуждений и выводов
329
предыдущих разделов гл. X, уточним полученные там результаты. В частности, уточнению подлежит полученное в п. 10.2 выражение (10.13) для числа начальных точек ложных траекторий, образующихся в установившемся режиме работы.
В объединенном алгоритме, реализующем критерий “2/тп+1/п-к.”, число стробов равно m+v+£_-l. Поэтому верхний предел суммирования по; в формуле (10.13) будет ;max = m + n+kT -1 Верхний предел суммирования по 5 будет теперь ^тах = <ю, так как число шагов при переходе из состояния at в состояние am+„+ir-t в данном случае может быть сколь угодно большим. т
Таким образом, в объединенном алгоритме среднее число ложных отметок, принимаемых за начальные точки новых траекторий, определяется по формуле (см. для сравнения выражение (10.13))
(10.29)
Если критерий подтверждения имеет вид 1/п, то v = п.
Среднее число передаваемых на сопровождение ложных траекторий теперь будет
N'fT (10.30)
т. е. меньше чем для случая раздельной реализации, так как число начальных точек уменьшилось. Соответственно, уменьшится и число ложных траекторий, находящихся на сопровождении.
330
Глава XI
РАДИОЛОКАЦИОННОЕ РАСПОЗНАВАНИЕ
ВОЗДУШНЫХ ЦЕЛЕЙ
11.1. Формулировка задач радиолокационного распознавания целей
Распознавание принадлежности радиолокационных целей определенному, из априори известных, классу является едва ли не самой сложной проблемой современной радиолокации. В настоящее время, в связи с широким внедрением широкополосных зондирующих сигналов, интерес к этой проблеме существенно возрос, о чем свидетельствуют многочисленные публикации в монографической [27, 28] и периодической печати [67, 79, 114, 115, 116, 137, 138, 140, 148].
В главе XI обобщаются основные опубликованные результаты и новые разработки по теории и моделированию радиолокационных методов распознавания одиночной цели. Особое внимание уделяется анализу и разработке алгоритмов и математических моделей распознавания воздушных целей при зондировании пространства широкополосными импульсными сигналами.
Разработка методов и алгоритмов радиолокационного распознавания связана с решением ряда специфических задач. К ним относятся:
1. Задача подробного изучения и классификации объектов, для распознавания которых предназначена проектируемая система. Необходимость объединения распознаваемых объектов в классы обусловлена, главным образом, практической потребностью оперировать более общими понятиями, чем понятие индивидуального объекта (цели).
2. Задача составления (разработки) словаря признаков, используемых как для априорного описания классов, так и для апостериорного представления принадлежности каждого распознаваемого объекта к определенному классу.
Признаки объектов распознавания делятся на логические (детерминированные) и вероятностные (возможностные). В качестве логических используются признаки, представляющие собой суждения качественного характера, т. е. не имеющие количественного значения (тип двигателя — винтовой, турбовинтовой, реактивный; особенности конструкции фюзеляжа и др.) Вероятностные признаки — это количественная мера, характеризующая вероятность принадлежности распознаваемого объекта к тому или иному классу или типу из этого класса.
Более широкий подход к выбору признаков распознавания радиолокационных целей позволяет выделить независимые группы
331
сигнальных и траекторных признаков, которые могут использоваться по отдельности или совместно.
3. Задача разработки алгоритмов распознавания, определяющих процедуру отнесения распознаваемого объекта к тому или иному классу или типу объектов рассматриваемого класса.
Алгоритм распознавания определяет формульно-логическую схему вычисления решающей статистики, характеризующей некоторую меру близости (сходства) распознаваемого объекта и эталона. Соображения, которыми следует руководствоваться при принятии решения о классе (типе) наблюдаемого объекта, должны учитывать возможные потери, связанные с правильными и ошибочными решениями. Для случая использования вероятностных признаков решающее правило строится с использованием теории статистических решений, а для оценки потерь могут быть использованы статистические критерии, в том числе критерии среднего риска [114, 115, 116].
4. Задача разработки алгоритмов объединения результатов распознавания, полученных от различных, в том числе разнесенных в пространстве, источников информации. При этом необходимо иметь в виду, что некоторые из этих источников производят распознавание в различных, в общем случае не совпадающих, алфавитах классов.
5. Задача разработки специальных алгоритмов управления системой распознавания, для обеспечения в определенном смысле оптимальных условий ее функционирования и достижения экстремальных значений показателей эффективности. При этом должны быть учтены некоторые ограничивающие условия, например, ограничение на время решения задачи.
Упрощенная структурная схема распознающей системы изображена на рис. 11.1. На вход системы поступают реализации X(t,S) сигналов (данных), полученных от распознаваемых объектов. Функцией обрабатывающего устройства является преобразование входных сигналов с целью выделения признаков распознавания на фоне мешающих воздействий помех. Предъявляемые к этому устройству требования сводятся к обеспечению необходимой точности, разрешающей способности и быстродействия.
Блок ормировани признаков
Блок сравнения
Блок решающего устройства
Блок памяти эталонов
Рис. 11.1. Упрощенная структурная схема распознающей системы
Устройство (блок) сравнения в общем случае вычисляет вероятностные меры совпадения выделенных (сформированных) признаков распознавания объектов с эталонами, хранимыми в блоке памяти эталонов. Результаты работы этого блока могут быть представлены распределением апостериорной вероятности Pap(Ak) принадлежности распознаваемого объекта к предъявленным эталонам.
Решающее устройство, в соответствии с принятым правилом решения (критерием распознавания), осуществляет сравнение предъявленной реализации с эталонами и выдает номер (А) класса распознаваемой цели или отказ в распознавании, если результаты сравнения не удовлетворяют критерию распознавания.
11.2. Классы и признаки классификации при распознавании воздушных целей
11.2.1. Алфавит классов воздушных целей
Классом называется множество предметов или явлений, объединенных некоторыми общими свойствами. Различимые классы характеризуются определенными алфавитами. Состав алфавита признаков определяется с одной стороны требованиями потребителя информации, а с другой — возможностями средств распознавания обеспечить выполнение установленных требований к качеству распознавания по этим признакам.
При радиолокационном распознавании все обнаруженные объекты можно классифицировать на космические (орбитальные спутники Земли), баллистические (движущиеся вне атмосферы по баллистическим траекториям), воздушные, наземные, надводные и Др. Каждый из перечисленных классов в свою очередь разбивается на подклассы (типы). Например, в системе ПВО для класса воздушных целей подклассами (типами) целей можно считать самолеты-бомбардировщики, самолеты-истребители, вертолеты, противорадиолокаци-онные (ПРР) и противокорабельные (ПКР) ракеты, дистанционно управляемые летательные аппараты (ДУЛА). Каждый из перечисленных типов в свою очередь делится на несколько подтипов, которые в принципе также могут являться объектом распознавания.
В системе управления воздушным движением классификация объектов распознавания может быть несколько другой, например, по типам самолетов, выполняющих рейсы на международных и внутренних линиях.
В таблице 11.1, по опубликованным данным [78], приведены основные типы воздушных целей и их усредненные характеристики, которые могут быть использованы при распознавании.
Таблица 11.1 в определенной степени может служить примером обобщенного описания класса воздушных целей, подлежащих
332
333
распознаванию, т. е. примером алфавита распознаваемых объектов в классе воздушных целей.
Таблица 11.1
Класс Тйп v^, м/с Прак-тич. потолок h, м Вид двигат. Число двигат. Ср. ЭПР в см диап. О-р м2
цели Бомбард. <Б> (FB-111A) 750 18000 Турбо-реакт. (ТР) 2 15
Истр. <И> (F-15A) 750 21000 ТР 2 9
Вертол. <В> (АН-64А) <100 2400 Винт. 1 5
Беспилотн. лет. aim. (БПЛА) 200 15000 Винт. 1 0,05
Ракета<Р> (ПРР, ПКР) 1000 30000 Рак. 1 № . — 0,1 -
Возможны, естественно, и более подробные алфавиты. Расширение алфавита типов рассматриваемых объектов повышает информативность распознавания, однако при этом, как правило, снижается достоверность получаемой информации.
112,2. Признаки распознавания воздушных целей
Как уже отмечалось, информация, используемая для радиолокационного распознавания целей, содержится в совокупности принимае-мых радиолокационных сигналов. При этом, если для распознавания используются частотно-временные параметры отраженных от цели сигналов, формируются так называемые сигнальные признаки распознавания. При использовании для распознавания координатных и траекторных параметров цели формируются траекторные признаки распознавания.
Отличительными признаками воздушных целей при их сигнальном распознавании являются: эффективная площадь рассеяния (ЭПР), архитектура (конструктивные особенности корпуса, тип и расположение двигателей). Возможности активного распознавания
334
по этим признакам непосредственно связаны с шириной полосы применяемых при этом зондирующих сигналов. В связи с этим различают [114]:
• сигнальные признаки при зондировании узкополосным сигналом;
• сигнальные признаки при зондировании широкополосным сигналом со сплошным спектром;
• сигнальные признаки при зондировании широкополосным сигналом с дискретным спектром (многочастотным сигналом).
Сигналы в данном случае считаются широкополосными, если они обеспечивают согласованное разрешение элементов зондируемой цели по дальности.
Сигнальные признаки пассивной локации содержатся в структуре сигналов, характеризуемых собственное излучение цели и, в первую очередь, сигналов ее радиоэлектронного оборудования. Распознавание по сигнальным признакам пассивной локации в дальнейшем не рассматривается.
Траекторные признаки — это параметры траекторий целей, характеризующие ее тактико-технические характеристики. Для воздушных целей такими параметрами являются: скорость, дальность, высота полета, направление полета. Но основными здесь являются не сами эти параметры, а их “носители”: самолет это или вертолет, самолет большого размера (стратегический бомбардировщик или транспортный самолет), среднего размера (истребитель) и др. Возможным является выделение признаков низколетящих целей, беспилотных летательных аппаратов, авиационных управляемых ракет. Траекторные признаки основных типов воздушных целей приведены в таблице 11.1.
11.3. Сигнальные признаки распознавания воздушных целей
11.3.1. Сигнальные признаки при зондировании узкополосными сигналами
При узкополосном зондировании в качестве сигнальных информационных признаков могут быть взяты:
• эффективная площадь рассеяния (ЭПР) цели ог[М2] (энергетический признак);
• спектры сигналов, отраженных от вращающихся лопаток компрессора турбореактивного двигателя или от винта турбовинтового (винтового) двигателя (модуляционные признаки);
• составляющие поляризационной матрицы рассеяния отраженных от цели сигналов (поляризационные признаки).
335
Среднее значение ЭПР цели определяется из соотношения (основного уравнения радиолокации) [117]:
q2 /2гг4у
(111)
где: q2/2 — энергетическое соотношение сигнал-шум;
гт — дальность до цели;
У — поправка на текущие условия;
П = EG(p,e)A(P,E)/47t2N0,
(11.2)
Е — энергия зондирующего сигнала (с учетом потерь в среде и системе обработки);
No — спектральная плотность мощности шума;
G (Р, s) А (Р, е) — коэффициент усиления передающей и эффективная поверхность приемной антенны, соответственно, зависящие от углов отклонения луча относительно нормали к апертуре.
На рис. И.2 изображены графики разброса оу в дБ (ог[дБ] = 101§ог[М2]) для целей больших (график 7), средних (график 2) и малых (график 3) размеров в отсутствие противорадио-локационной маскировки и имитации. Пунктирными линиями обозначены возможные пределы расширения этих областей за счет влияния нестабильностей.
—30
-20 -10 0 10 20 30
Рис. 11.2. Области разброса су г, дБ при отсутствии противорадиолокационной маскировки и имитации
дБ
Флюктуации эффективной поверхности целей и, соответственно, амплитуды отраженных сигналов в большой степени зависят от размеров и конфигурации цели, направления ее движения и частоты зондирующих сигналов. На рис. 11.3 приведены заимствованные из [114] графики нормированных корреляционных функций флюктуаций амплитуд принимаемых сигналов, обусловленных изменением курсового угла 50 в процессе движения самолета большого (график 1)
336
размера, самолета среднего (график 2) размера и крылатой ракеты (график 3). Из сравнения этих графиков видно, что чем меньше цель, тем шире корреляционная функция флюктуаций отраженных сигналов, т. е. тем шире лепестки диаграммы вторичного излучения. На рис. 11.4 показаны аналогичные графики в функции от изменения частоты зондирующего сигнала. Из этих графиков также следует, что с уменьшением размера и упрощением формы цели основной лепесток корреляционной функции расширяется.
Рис. 11.3. ps = ф(80)
Влияние флюктуаций ЭПР может быть существенно уменьшено за счет усреднения результатов нескольких зондирований цели. Данные, опубликованные в [114], показывают, что при усреднении ЭПР по N=8...1O зондирований среднеквадратическое отклонение ЭПР цели, по сравнению с единичным измерением, уменьшается в
Р^«7
1
Рис. 11.4. Рд = <р(8/)
337
3-4 раза и в дальнейшем, с увеличением N, остается примерно постоянным. Учитывая, что в процессе обнаружения и оценки параметров отраженных от цели сигналов обычно применяется зондирующий сигнал пачечной структуры, получение усредненного значения ЭПР возможно практически без дополнительных затрат, связанных с распознаванием цели. Это позволяет считать, что распознавание цели по усредненному значению ЭПР целесообразно, по крайней мере, на начальном этапе ее сопровождения.
Таким образом, в случае узкополосного зондирования в качестве эталонов при распознавании целей по сигнальному признаку должны быть использованы средние значения о т эффективной поверхности целей. Для этого путем натурного эксперимента или методом моделирования предварительно должны быть определены и записаны в блок памяти эталонов средние значения ЭПР для основных типов распознаваемых целей или, по крайней мере, для часто используемых усредненных типов целей: большая, средняя и малая цель.
Поскольку средняя ЭПР существенно зависит от_направления полета (ракурса) цели, целесообразно иметь эталоны <у т для набора ракурсов по каждому типу целей. Это обеспечит, в свою очередь, повышение качества распознавания по рассматриваемому признаку.
Как уже отмечалось, при узкополосном зондировании в качестве сигнальных признаков, наряду с ЭПР, могут быть использованы модуляционные и поляризационные признаки.
Информация о модуляционных признаках вторичного излучения цели обусловлена, в основном, взаимным перемещением ее элементов. В зависимости от типа цели при приеме отраженного сигнала можно выделить признаки пропеллерной или турбинной модуляции, связанные с вращением лопастей винтов (пропеллеров) вертолетов, турбовинтовых и винтомоторных самолетов, а также с вибрациями планеров при вращении винтов и роторов турбин.
Выявляются они при облучении цели протяженными сигналами, поволяющими разрешать соответствующие элементы спектра доп-
плеровских частот. £
Результаты исследования [79] показали, что признаки турбинной (пропеллерной) модуляции являются достаточно информативными признаками. Однако их использование, особенно в сантиметровом диапазоне волн, затрудняется из-за необходимости применения зондирующих сигналов большой длительности, снижения дальности наблюдения признака по отношению к дальности обнаружения цели, эффекта затенения лопаток компрессора воздухосборниками при ракурсах наблюдения > 50°...60° и др.
Информация о поляризационных свойствах целей, являющаяся признаком ее распознавания, содержится в поляризационной матрице вторичного излучения
А = || А,71| = || JoT expOVtf) II <11 '3)
где а и и — ЭПР цели и сдвиг фазы сигнала при отражении от цели для l-й поляризации приемной антенны и /-й поляризации передающей антенны (/ , / = 1,2). Использование поляризационной информации дает наибольший эффект на метровых волнах, а на дециметровых и сантиметровых волнах принимаемый сигнал имеет эллиптическую поляризацию, интерпретация которой при узкополосном зондировании затруднена.
В дальнейшем распознавание по модуляционным и поля-ризационным признакам не рассматривается
11.3.2. Сигнальные признаки при зондировании непрерывными широкополосными сигналами
широкополосном зондировании в интересах распознавания целей обычно используются непрерывные сигналы с полосой частоты от 30 до 10 МГц, обеспечивающие разрешающую способность по дальности от 5 до 0,15 м и, таким образом, позволяющие разрешать конструктивные элементы цели. Многочисленные исследования показали, что в этом случае наиболее простой и быстрый путь выделения некоторого характерного “образа” цели — это формирование радиолокационного дальностного профиля (РЛДП) цели, который является одномерным радиолокационным ее портретом. РЛДП может быть представлен как одномерная проекция пространственно-распределенных рассеивающих центров цели—самолета, на линию визирования, как показано на рис. 11.5 [138].
В каждый конкретный момент времени зондирующий импульс облучает только один элемент (слой) D ., , „
разрешения по дальности, располо- ИС' 115 П₽ирлД11Ф°₽ми₽оваю,я женнои на одинаковом расстоянии от РЛС. При этом принимаемый сигнал состоит из суммы отражений от точек цели, расположенных в соответствующем элементе § разрешения РЛС по дальности и характеризует суммарную ЭПР цели в этом элементе разрешения. В совокупности по всем элементам разрешения цели отраженный сигнал характеризует ЭПР “разреза” цели в направлениях, перпендикулярных направлению зондирования. Получаемая при этом плоская фигура и называется радиолокационным дальностным портретом.
338
339
Естественно, конфигурация РЛДП каждой конкретной цели отличается от РЛДП других целей. На рис. 11.6 изображены полученные методом моделирования дальностные портреты самолетов больших (рис. 1.6, а, Ь, с), средних (рис. 11.6, а, е, f) размеров и крылатых ракет (рис. 11.6, g, h, k) при зондировании (с одинаковым ракурсом) непрерывными сигналами с полосой Д/^ = 80 МГц, 30 МГц и 10 МГц. Из сравнения приведенных РЛДП следует, что с уменьшением &fs они сближаются по форме и размерам. Четко различить размеры и конфигурацию РЛДП можно только при достаточно большой ширине спектра зондирующих сигналов (по крайней мере при isfs > 30 МГц).
А(г) А
АЩ А—
Рис. 11.6. Дальностные портреты самолетов больших (а, Ь, с), средних (d, е, f) размеров и крылатых ракет (g, h, к)
Если ракурс цели в процессе формирования РЛДП меняется, то изменяется и относительная дальность ее точек. В результате наблюдается относительное дальностное смещение рассеивающих центров, что приводит к флюктуациям РЛДП, которые называются спеклом [138]. Чтобы избежать таких флюктуаций необходимо, чтобы ракурс цели изменялся на угол, не превышающий величины
де«х/4/пии> (11.4)
340
где /тах — максимальное расстояние между отражающими точками цели.
Естественно, достичь такого соотношения практически невозможно. Поэтому спекл-флюктуации РЛДП присутствуют всегда, что затрудняет распознавание воздушных целей, особенно в коротком (5, С, X) диапазоне волн. Однако для заданного типа целей в ограниченном диапазоне ракурсов, определяемым из выражения А 0 < 8 г /, распределение рассеивающих центров по дальности сходно (например, при 8Г = 0,5 м, Zmax s 10 м, ДО 3°). Следовательно, соответствующий РЛДП должен отражать общий признак (конфигурацию РЛДП), хотя амплитуды их флюктуируют от портрета к портрету. Исследования [114] показали, что и вообще (без учета спекла) конфигурация РЛДП в диапазоне коротких волн сильно зависит от ракурса цели. Показано, что изменение ракурса цели большого размера на 0,1°, цели среднего размера — на 0,5° и цели малого размера — на 2,5е заметно изменяет вид портрета. Однако при заданной полосе частот сигнала A f5 наблюдается и определенная повторяемость формы портретов через некоторые интервалы курсовых углов. Это позволяет сократить число требуемых эталонных портретов при распознавании.
Создание банка эталонных РЛДП воздушных целей является сложной и трудоемкой задачей. При ее решении возможно использование методов моделирования, полунатурных методов и непосредственных натурных замеров.
Кроме одномерных могут быть получены и использованы в интересах распознавания двухмерные портреты, в том числе: двухмерные дальностно-поляризационные портреты (ДПП), дальностно-частотные портреты (ДЧП) и дальностно-угловые портреты (ДУП).
Простейшие ДПП при однополяризационном зондировании — это совокупность двух ДП, полученных при ортогональных поляризациях. Реализуемый в этом случае двухканальный прием позволяет извлечь не только амплитудные, но и фазовые признаки, связанные с поляризационными особенностями элементов цели. Простейший ДЧП — это двухмерный портрет, характеризуемый высоким разрешением по дальности за счет широкополосности когерентного зондирующего сигнала и высоким разрешением по доплеровской частоте за счет его протяженности. Примером зондирующего сигнала, обеспечивающего получение ДЧП, является когерентная пачка широкополосных ЛЧМ импульсов с высокой частотой повторения их следования.
В качестве дальностно-угломерных портретов рассматриваются обычно дальностно-азимутальные портреты (ДАП), которые рассчитаны на высокое разрешение по дальности и еще более высокое, чем для ДЧП, разрешение по частоте за счет широкополосности и протяженности когерентного сигнала. Для получения высокого разрешения по азимуту используется способ инверсного (обратного)
341
синтеза апертуры антенны, который получает в настоящее время все большее распространение.
Краткое изложение метода инверсного синтеза апертуры имеется в [114]. Там же можно познакомиться со списком литературы по применению этого метода при распознавании радиолокационных целей.
1133. Формирование радиолокационного дальностного портрета при многочастотном зондировании
Многоимпульсный зондирующий сигнал со ступенчатым изменением частоты от импульса к импульсу называется частотно-мани-пулированным сигналом (ЧМС). В целях решения задачи распознавания по сигнальному признаку находят применение так называемые разомкнутые ЧМС, у которых моменты излучения импульсов с различной частотой разнесены во времени на период Т повторения зондирующих сигналов. При этом используется закон частотной манипуляции в виде линейной числовой последовательности (линейная частотная манипуляция).
Возможны, по крайней мере, два типа разомкнутых ЧМС:
• сигнал пачечной структуры с парциальными составляющими в виде импульсов одинаковой длительности с неизменной частотой заполнения и с изменением этой частоты от импульса к импульсу по линейному закону;
• сигнал пачечной структуры с линейным изменением частоты в пределах импульса и от импульса к импульсу.
Достоинством как первого, так и второго вариантов ЧМ сигнала является наилучшая совместимость режима распознавания целей с другими режимами работы РЛС, в частности с режимом получения координатной информации при сопровождении цели. Их недостатком является большая протяженность во времени, необходимая для набора требуемой полосы частот, а значит и существенное влияние нестабильностей движения цели на качество распознавания.
Рассмотрим теперь основные соотношения при зондировании цели сигналом пачечной структуры с изменением частоты от импульса к импульсу по линейному закону.
Потенциальная разрешающая способность зондирующего сигнала РЛС по дальности определяется из выражения
5r “ 2ДС ’
где: с = 3 10 м/с — скорость света;
Д/: — эффективная ширина спектра сигнала, определяемая в рассматриваемом случае из соотношения
342
Af, = bf(m-V)T , (11.6)
где: 8/ — шаг перестройки частоты от импульса к импульсу;
т — число импульсов в пачке;
Т — период посылок зондирующих импульсов.
При выборе шага перестройки частоты следует иметь в виду, что для обработки многочастотных сигналов необходимо применение дискретного спектрального анализа, отличительной особенностью которого является множественность, т. е. возможность перекрытия соседних спектров. Для того, чтобы избежать наложения соседних спектров, необходимо, чтобы “окно” наблюдения по дальности превышало максимальный линейный размер распознаваемой цели.
Так как размер “окна” определяется из выражения
Д^=с/25/, (11.7)
то шаг перестройки частоты между соседними импульсами не должен превышать величину
8/max <c!2Lmax » (11.8)
где Lmax — максимальный радиальный размер для всех типов распознаваемых целей.
Например, если Zmax «60 м (средний бомбардировщик), то перестройка частоты между соседними импульсами не может быть больше 2,5 МГц.
Число импульсов в пачке для обзорных РЛС определяется из
Фо SF
выражения т =——, (11.9)
би
где: фо,5 — ширина диаграммы направленности антенны по половинной мощности;
п — скорость вращения антенны, в об/мин;
F = \!Т — частота посылок зондирующих сигналов.
Например, для совокупности параметров РЛС ф0 5 = 1,2°;
F=0,9-16’ Гц; п= 3 об/мин, получим из (11.9) т~60.
Следовательно, в рассматриваемом случае при 5/ = 2,5 МГц, эффективная ширина спектра сигнала
\fs »2,5-60-103 -150 МГц, что обеспечивает при распознавании потенциальную разрешающую способность порядка 1 м.
В табл. 11.2 приведены результаты расчета по формуле (11.9) чисел импульсов в пачке для конкретного набора параметров зондирования и сканирования РЛС:
• ширина диаграммы направленности в горизонтальной плоскости Фо,5 ~ ^’2 >
343
• частота повторения зондирующих сигналов Т = 0,9; 1,8; 3,0; 5,0 КГц;
• скорость вращения антенны п = 3, 6, 12, 30 об/мин.
Из табл. 11.2 следует, что практически во всех режимах выбором соответствующих п и F можно получить пачку частотно-мани-пулированных сигналов, обеспечивающую высокую (порядка 1 м) потенциальную разрешающую способность при распознавании цели.
Таблица 11.2
П, (об/мин) л F (Гц)
0,9 103 1,8 103 3,0 103 5,0 103
30 6 12 29 33
12 18 36 50 82
6 30 60 100 164
3 60 120 200 328
Отметим, что параметры F и п режима распознавания не обязательно должны совпадать с аналогичными параметрами при функционировании РЛС в основном режиме.
Полученные результаты относятся к случаю распознавания цели с нулевой радиальной скоростью, т. е. без учета доплеровской частоты сигнала. Между тем, рассматриваемому сигналу, как сигналу с линейной частотной модуляцией, свойственна так называемая скоростная ошибка, определяемая выражением
8т v = -tsFd / Afs , (11.10)
где: Fd — доплеровская частота, обусловленная движением цели;
X, — длительность сигнала.
Выражение (11.10) можно преобразовать к виду
8rv
D ! Afs
(11.11)
где: — скоростная ошибка по дальности;
V — радиальная скорость цели. Для многочастотного сигнала тs = тТ = тп/F, поэтому вместо
(11.11) получаем сту
8г =--------—
(11.12)
344
Используя выражение (11.12), можно оценить степень ухудшения потенциальной разрешающей способности рассматриваемого сигнала, обусловленную движением цели. Среднее значение величины Дг, характеризующей ухудшение разрешающей способности за счет скоростных ошибок вычисляется по формуле
cmVr
(Чах "4W,
(11.13)
Таким образом, при распознавании движущейся цели с использованием пачки сигналов со ступенчатым изменением частоты по линейному закону, потенциальная разрешающая способность по дальности будет равна
(1114)
с с тТ
“ 2ДЛ F
Напомним, что в радиолокации для компенсации скоростных ошибок обычно применяются результаты траекторной (вторичной) обработки радиолокационных данных [117]. Эти методы могут быть применены и в рассматриваемом случае.
Для обработки когерентного многочастотного сигнала может быть применена схема, изображенная на рис. 11.7 [117].
УВЧ
СМ
ФД
УПЧ
АПЦ
ПЧ гетеродин
СФ и взвешивание
етеродин
Ьтробирующее вторичной обработки!устройство
от системы
ОБПФ и взвешивание
Вычисление модуля
Рис, 11.7. Структурная схема устройства приема и обработки многочастотного когерентного канала
345
В этой схеме каждый отраженный сигнал после усиления в широкополосном УВЧ преобразуется в смесителе (СМ), усиливается усилителем промежуточной частоты (УПЧ), подается на фазовые детекторы (ФД) квадратурных каналов и после стробирования подвергается аналого-цифровому преобразованию (АЦП), согласованной фильтрации и взвешиванию для подавления боковых лепестков. В совокупности на стробируемом участке последовательность выходных сигналов СФ представляет собой результат дискретного преобразования Фурье пачки отраженных от распознаваемой цели сигналов. Эта последовательность подвергается обратному дискретному преобразованию Фурье (ОДПФ), по результатам которого формируется дискретный радиолокационный дальностный портрет распознаваемой цели. В качестве гетеродинного напряжения
U 0,8
..... ) .. и. ,----1--------1—
20 40 60 80 100 120 140
U а
Рис. 11.8. Примеры радиолокационных дальностных портретов, полученных при зондировании многочастотным сигналом: а) самолет Б-52,6) самолет МиГ-21, с) крылатая ракета
346
используется протяженный стабилизированный и сомкнутый по времени частотно-манипулированный сигнал. Стробирование осуществляется системой вторичной обработки радиолокационной информации.
Примеры радиолокационных дальностных портретов, полученных по данным РЛС кругового обзора при <р05 = 2, F= 1,0 КГц, и =6 об/мин., 5/ = 2,5 МГц, приведены на рис. 11.8, а, Ь, с для моделей типов Б-52, МиГ-21 и крылатой ракеты GLCM, соответственно. На графиках по оси абсцисс отложены номера дискрет дальностных портретов, а по оси ординат — условные амплитуды соответствующих дискрет. Эти портреты по форме аналогичны РЛДП, полученным с применением для распознавания одиночных широкополосных ЛЧМ сигналов со сплошным спектром.
Главное, что эти портреты существенно отличаются друг от друга и, таким образом, могут представлять при распознавании соответствующий тип воздушных целей.
11.4. Алгоритмы распознавания воздушных целей по сигнальным признакам
11.4.1. Критерий эффективности алгоритмов распознавания
Алгоритм распознавания определяет процедуру принятия решений по одному или совокупности признаков. По степени использования при распознавании статистических характеристик признаков различают лингвистические и статистические алгоритмы распознавания. Лингвистические алгоритмы [28] не учитывают статистические характеристики признаков. Основой распознавания в этом случае является описание признаков на языке алгебры логики. Статистические алгоритмы основаны на непосредственном учете статистических характеристик сформированных признаков и делятся на параметрические (байесовские и небайесовские), непараметрические и нейрокомпьютерные. Байесовские параметрические алгоритмы учитывают не только статистику помех, флюктуаций сигналов и признаков, но и известные (или полученные в процессе предыдущих экспериментов) данные об априорных вероятностях Ра различных элементов алфавита классов. Статистические характеристики признаков распознавания получаются при этом путем натурных экспериментов или методом моделирования. Непараметрические алгоритмы распознавания синтезируются эвристически, без учета предположений о конкретных статистических распределениях сигналов и помех. В частности, при их синтезе могут быть использованы непарамет-рйческие ранговые алгоритмы формирования признаков, различные методы голосования при отнесении цели к одному из известных
347
классов и др. [28]. Нейрокомпьютерные алгоритмы радиолокационного распознавания отличаются своей заранее заданной универсальной структурой с большим числом неизвестных параметров, уточняемых в процессе адаптации (обучения) [114]. Для разработки алгоритмов распознавания привлекаются также ряд нетрадиционных методов и математических теорий, в частности, теория нечетких множеств и теория возможностей, о чем речь пойдет ниже. В дальнейшем, в основном, будут рассматриваться статистические байесовские и непараметрические алгоритмы распознавания.
Эффективность алгоритмов радиолокационного распознавания (РЛР) в общем случае должна оцениваться по достигнутому повышению эффективности системы высшего порядка за счет использования информации распознавания в соответствии с общим системотехническим критерием “эффективность—стоимость”. Например, применительно к зенитно-ракетному комплексу (ЗРК) численно эффективность распознавания можно оценить выражением [34]:
Е = (N(p) - N)/N , (11.15)
где N, N(/,) — число целей, уничтоженных типовым ЗРК без систе-мы РЛР и снабженного системой РЛР, соответственно.
Величина Е будет увеличиваться только в том случае, когда полученная информация о типах или классах воздушных целей используется, например, при организации целераспределения или в назначении специальных режимов функционирования ЗРК. Однако использование такого общего критерия при разработке систем распознавания оказывается неудобным и малоэффективным.
Для сравнительной оценки эффективности разрабатываемых алгоритмов распознавания может быть использована матрица условных вероятностей распознавания в различных условиях наблюдения. Например, для М-го элемента алфавита классов эта матрица имеет вид
i9 к-\>М,
где P(k/i)=F- (k)~Pik — условная вероятность принятия решения о классе цели к при условии ее принадлежности к классу г.
Если кроме того известны априорные вероятности Р. классов и матрица стоимостей ошибок распознавания ||CJ|, то в качестве критерия эффективности можно взять средний риск, как среднюю стоимость ущерба
м м
гр(к 1V • г=\ Д=1
(11.16)
В качестве ориентировочной, но удобной характеристики эффективности алгоритмов распознавания может быть взята полная вероятность ошибки распознавания при равновероятном появлении объектов различных классов
348
mr
(1117)
где Рц — условная вероятность правильного распознавания.
В [67] предложен информационный критерий эффективности распознавания. В этом случае эффективность процедуры распознавания определяется приростом информации в результате распознавания, который определяется по формуле
1 = Н-Н', (11.18)
где: Н — априорная энтропия, определяемая по формуле (при распознавании М классов)
н = 2 ) log°
к=1 )
(11.19)
в которой Р(хк) — априорная вероятность появления цели класса к, а;
Н' —апостериорная энтропия, определяемая по формуле
= —7’ (1120)
tTZr P{xk/yt)
в которой Р(хк1у,) — вероятность наличия цели класса к, если система распознавания приняла решение i, а Р(хк,у) — совместная вероятность наличия цели класса к и принятия решения о классе цели i. В частности из информационного критерия следует, что при увеличении числа М распознаваемых классов вероятность правильного их распознавания уменьшается.
11.4.2. Алгоритмы распознавания по признаку, характеризующему ЭПР цели при узкополосном зондировании
Задачу распознавания по сигнальному признаку, характеризующему ЭПР цели, целесообразно решать на этапе обнаружения ее траектории, когда направление на цель зондируется пачкой из т импульсов, которая обеспечивает на входе измерителя координат отношение сигнал—шум, достаточное для получения оценок с заданной точностью. В этом случае в качестве эталонного признака для распоз
навания типа цели можно использовать расчетное значение энергетического отношения сигнал—шум qj /2 при фиксированной ЭПР цели-
эталона, равное
(11.21)
349
где: стп — эффективная поверхность цели-эталона;
г; — расстояние до цели-эталона;
П, у — параметры РЛС (см. 11.1).
Таблица значений<з?/2=срлО; ,d„) приП = const для всех i = 1 ...М, где М — число распознаваемых типов в классе воздушных целей, запоминается и используется при статистической оценке результатов распознавания.
Распознавание обнаруженной цели производится в этом случае по накопленной сумме нормированных отраженных от цели сигналов, т. е. на основе решающей статистики
=
где: Usni — амплитуда огибающей ;'-го импульса пачки (считается, что обнаруживаемая отметка целевая);
т — число импульсов пачки к моменту принятия решения о достижении требуемой точности измерения координат распознаваемой цели.
Известно [102], что при любом т > 2 распределение иг можно
А*
аппроксимировать нормальным законом с математическим ожиданием
(11.22)
и дисперсией
(11.23)
— вырожденная гипергеометрическая функция
своих параметров.
Таким образом, по результатам наблюдений и измерений (т, г), сначала по таблице эталонов находится q}j2, (г=1,А/). а затем с учетом ^/2 и т вычисляются предполагаемые значения и для всех типов распознаваемых целей.
В дальнейшем задача распознавания сводится, во-первых, к вычислению функции правдоподобия каждого предполагаемого типа по формуле
350
(i = l,M). (11.24)
Очевидно, если статистика иг принадлежит цели i-го класса, соответствующее значение функции правдоподобия будет максимальным. Тогда оценка к = i номера типа цели находится из соотношения
k = arg max Л(м£ / i). (11.25)
Воспользовавшись далее формулой Байеса можно вычислить апостериорные вероятности классов
> Гл_ Ра (?)Л(ц£ / О
арх*) А/ 9
£ р„ (,)Л(и£ / О
(11.26)
где Ра (i) — априорная вероятность г-го типа, и может принимать решение по максимальному значению Pap(i);
к = arg max Р (z).
(11.27)
' , н,_
Алгоритм (11.27) называется алгоритмом максимума апостериорной вероятности. Для его реализации необходимо знание априорных вероятностей типов распознаваемых целей, которые могут быть
получены от других (в частности нерадиолокационных) источников.
Для нестрогого определения априорных вероятностей на первом шаге могут быть использованы траекторные признаки целей (см. п. 11.5).
В реальных условиях при обнаружении траектории цели исполь-
зуется несколько (3-4) сигнальных отметок. По каждой новой обнаруженной отметке вычисляется функция правдоподобия Л(г^./г), а
затем производится уточнение оценок, в процессе которого в качестве априорных используются результаты предыдущей апостериорной оценки. Формула для вычисления апостериорной вероятности в этом
случае имеет вид
tn, "° (0Л„ (w£ / О
р(я) /Л _ ар v £ '
(11.28)
Если представляется возможность учесть неодинаковую значимость различных ошибок и правильных решений для потребителей информации, при распознавании применяется алгоритм минимума среднего риска
351
k = arg max[^ , Pap (/')], (11.29)
где Rj — неодинаковые в общем случае “премии” за правильные решения.
Таким образом, рассмотренный подход и полученные формулы, по крайней мере в теоретическом плане, позволяют получить опта-мальное статистическое решение задач распознавания по сигнальному признаку, используя чисто параметрические методы обработки принимаемых сигналов.
Известно [97,101], что статистические характеристики сигналов, отраженных от реальных воздушных целей сложной формы, сильно зависят от условий наблюдения. Поэтому, вместо параметрических, имеет смысл рассмотрение возможности применения непараметрических, например, ранговых, алгоритмов обработки выборок сигналов при распознавании цели по сигнальному признаку. При этом первичной операцией обработки является ранжирование выборки сигналов в “стробе”, содержащем п элементов разрешения по дальности и т строк при зондировании направления т раз подряд (пачкой из т сигналов).
Основными операциями рангового алгоритма обработки сигналов в nm-стробе являются: ___
• формирование рангов Rk(k = \,ri) отсчетов сигнала хк относительно опорной выборки у, у2,..., у» сигналов в стробе, т. е.
Rk = £h(xk -yj) +1, 7?tel,n + l, (11.30)
где
h(Xk ~ Уj) =
0
• формирование вектора рангов для каждого к -го элемента дальности по результатам т зондирований (наблюдений) в виде
•вычисление ранговой статистики (например, статистика Вилкоксона)
(11.31)
и выбор статистики с максимальным Sk (к = 1, и)
Относительно распределения ранговой статистики Sk принимаются следующие предположения [101,102].
352
Если на входе принимается только помеха (гипотеза Но ), распределение рангов является равновероятным
и(Я/Я0) = -^- (11.32)
а статистика Sk приближенно аппроксимируется гауссовским распределением
w0 (S* )=A(St //f0) =
___1
у2ло„
(11.33)
,, /ли „
где: М =— — математическое ожидание статистики ;
12
тп.
— (т+2) — дисперсия статистики 50 .
м0
При поступлении на вход смеси нефлюктуирующего сигнала с помехой (гипотеза fy ) статистика Sk с большой степенью надежности аппроксимируется гауссовским распределением
wi(Sk) = /^Sk/fy) = —r==^—exp
\'2лсг
с параметрами
= тп 1 -
(11.34)
i = l,M,
(11.35)
_ При известном потенциале РЛС П и принятых значениях ЭПР ап распознаваемых типов целей, отношение сигнал—шум ^,?/2 вычисляется заранее для ряда дискретных значений дальности г и хранится в запоминающем устройстве (ЗУ) эталонов. В процессе эксперимента сначала по измеренному значению дальности для каждого значения cTi из ЗУ выбирается число д?/2, а затем по значению
353
qt/2 и m вычисляются параметры Ms и ®2S решающей статистики Sk- Эти параметры используются в дальнейшем для вычисления функции правдоподобия гипотез о типе распознаваемых целей и других вероятностных характеристик распознавания.
Таким образом, реализация непараметрического подхода к решению задачи распознавания целей по сигнальному признаку отличается от аналогичного параметрического только процедурой формирования и расчета статистических параметров рангов для вычисления функции правдоподобия. Операции вычисления и уточнения функции правдоподобия и апостериорных вероятностей типов целей остаются неизменными.
11.4.3. Алгоритм распознавания целей по дальностному радиолокационному портрету (ДРЛП)
Задача распознавания цели по ДРЛП решается путем сравнения полученного портрета с эталонами, характеризующими РЛДП рассматриваемых типов целей, т. е. относится к классу задач на распознавание образов. В качестве эталонов используются РЛДП всех типов подлежащих распознаванию целей. Эталоны формируются и запоминаются предварительно, в процессе обучения системы методами математического (физического) моделирования или натурного эксперимента. При этом надо иметь в виду, что в рассматриваемом диапазоне волн форма ДРЛП в сильной степени зависит от ракурса распознаваемой цели. Поэтому эталонов по каждой цели должно быть столько, чтобы учесть вариации РЛДП с изменением ее ракурса относительно распознающей системы. В частности, как показано в [138], удовлетворительные результаты можно получить при двадцатиградусной градации эталонов по ракурсу. При этом, естественно, в процессе распознавания должен учитываться и ракурс распознаваемой цели, рассчитанный по результатам оценки траекторных параметров.
Изменения (флюктуации) формы ДРЛП происходят не только за счет изменения ракурса, но и вследствие интерференции отраженного сигнала, а также из-за вибрации корпуса и наличия открытых движущихся частей. В связи с этим РЛДП цели, полученные даже через малые интервалы времени (порядка единиц миллисекунд) существенно отличаются друг от друга. По данным, полученным в [138], эти отличия на порядок превышают амплитуду шумов системы.
При распознавании исходят из того, что, несмотря на сущесвен-ные флюктуации РЛДП, для заданного типа цели в ограниченном диапазоне ракурсов, распределение рассеивающих центров по дальности, будет сходным, что обеспечивает их статистическую устойчивость. Следовательно, для решения задачи распознавания необходимо определить степень (коэффициент) корреляции между РЛДП распознаваемой цели и РЛДП эталонов, а решение о принадлежности
354
цели к одному из эталонов принимать по максимальному значению этого коэффициента. Алгоритм распознавания в этом случае сводится к решению задачи фильтрации ДРЛП распознаваемой цели с помощью так называемого корреляционного фильтра, в качестве импульсной характеритики которого выступает выбранный эталонный портрет. Совокупность (последовательность) полученных результатов фильтрации (свертки) сравнивают между собой, и в качестве решения выбирается цель (эталон), коэффициент корреляции с РЛДП которой принимает максимальное значение.
Формульная схема алгоритма (для выбранного ракурса цели) включает следующие операции:
1. Считается заданной библиотека импульсных характеристик корреляционных фильтров (Л(1), й(2),.... Z/*^), где М — число типов распознаваемых целей.
Для г-го корреляционного фильтра ИХ имеет вид:
где k — число дискретных элементов РЛДП, одинаковое для распознаваемых целей и эталона.
Чтобы избежать потерь, обусловленных неодинаковыми масштабами амплитуд импульсных характеристик эталонов, составляющие вектора должны быть нормированы.
Нормировка производится в соответствии с выражением
2(А(,)(5))2 = 1. (И.36)
S—1
2. Импульсная характеристика РЛДП распознаваемой цели (ее дискретный дальностный портрет) записывается в виде:
т7=[р(1)> А2), АЭД-
3. Для всех i = iji вычисляется дискретная функция корреляции между векторами и р, определяемая выражением
Z(i)(s) = 2s), j, s = \,k. (11.37)
4. Определяются значения корреляционных пиков (для всех г)
Qw =pich[Z(,)(j)]. (11.38)
5. Выбирается номер фильтра г, для которого
Q(i) = maxpich[Z(0(s)]. (11.39)
6. Принимается решение о принадлежности распознаваемой цели к классу i.
355
В статье [138] приведены результаты распознавания с использованием кореляционного алгоритма. Показано, что для большинства ракурсов шириною 20° правильное распознавание по одному даль-ностному портрету составляет от 71 до 100%.
11.5. Распознавание воздушных целей по траекторным признакам
Траекторные признаки учитывают закономерности и характеристики движения воздушных целей. При распознавании аэродинамических целей (самолетов, вертолетов, ракет, беспилотных летательных аппаратов и др.) используют их текущие коордитнаты и параметры движения, такие как высота h, скорость V и, может быть, другие параметры цели в системе координат измерительного прибора (РЛС). При распознавании групповых целей может быть использована информация об их числе, интервалах по фронту и в глубину рассматриваемого тактического подразделения. Тогда говорят о распознавании по траекторным и тактическим признакам. На рис. 11.9 приведены области возможных значений высот h и скоростей V воздушных целей различных типов: 1 — ракета (7' — крылатые ракеты АЛКМ); 2 — самолеты больших размеров; 3 — самолеты средних размеров; 4 — вертолеты. Как видно из рис. 11.9,
h, км
30
20
10
1000
500
Рис. 11.9. Области возможных значений высот и скоростей воздушных целей
V, м/с
в некоторых случаях (графики 1 и 4) одни только траекторные параметры могут дать достоверную информацию о типе цели. Однако, в большинстве случаев области признаковых пространств h и V воздушных целей существенно перекрываются, что приводит к
356
необходимости использовать траекторные признаки только в совокупности с сигнальными признаками.
11.5.1. Траекторные параметры и траекторные признаки распознавания воздушных целей
Как уже отмечалось, для формирования траекторных признаков распознавания цели должны быть, в первую очередь, определены (оценены) параметры ее траектории.
Достаточно эффективные оценки параметров траектории могут быть получены только на этапе ее устойчивого сопровождения, т. е.
значительно псзже, чем решается задача распознавания по сигналь
ным признакам. Это подчеркивает некоторую второстепенность этой
операции.
Далее предполагается, что в алгоритме фильтрации предусмотрена оценка наблюдаемыхлкоординат цели на момент дискретного времени п наблюдения — f„, Р„, s„- В этом случае параметры траектории цели, необходимые для ее распознавания, вычисляются по формулам:
1. Текущее значение высоты цели
, . А Гл2
л = Гл SIH g„ +-----,
2RE
(11.40)
где Re — эффективный радиус Земли с учетом рефракции радиоволн в атмосфере.
2. Текущее значение горизонтальной дальности цели
dn = f„ - sin2 Ел . (11.41)
3. Текущее значение горизонтальной скорости цели
(11.42)
где Nin и N — оценки скорости цели по координатам х и у соответственно, получаемые в алгоритме фильтрации параметров траектории.
4. Текущее значение курса цели
C»=0„-i+tf»> (11.43)
где qn — оценка курсового угла цели, вычисляемая с помощью специального алгоритма, приведенного ниже [50].
Курсовым углом q называется угол, отсчитываемый по часовой стрелке между направлением “РЛС—цель” и направлением вектора скорости цели. Для вычисления курсового угла после очередного
357
п-го обзора сначала определяется несколько вспомогательных величин (рис. 11.10):
ап = rn_{ - rn cos 5 h = г' sinS
(11.44)
п
В зависимости от знаков ап и Ь„ курсовой угол цели находится из табл. 11.3.
Рассчитанные по формулам (11.40)—(11.44) параметры траектории цели используются далее для формирования признаков ее распознавания. При этом для непосредственного распознавания целесообразно использовать не все, а только часть траекторных параметров, объединенных в смысловые группы (признаки) определяющие основные характеристики рассматриваемого класса целей. В этом смысле, очевидно, наиболее существенными являются высотноскоростные траекторные признаки, которые могут быть сведены, например, в следующие подклассы (типы):
1. Сверхскоростная высотная (ССВ) цель со скоростью до 2000 м/с и высотой до 30 км, что соответствует характеристикам оперативно-тактических баллистических ракет (БР) и противорадио-локационных ракет (ПРР).
2. Скоростная высотная (СВ) цель со скоростью до 1000 м/с и высотой до 20 км, что соответствует характеристикам современных бомбардировщиков и истребителей.
3. Скоростная маловысотная (СМВ) цель со скоростью до 500 м/с , высотой — десятки и единицы метров, что соответствует характеристикам противокорабельных ракет (ПКР), крылатых ракет (КР) и низковысотных самолетов-истребителей.
4. Малоскоростная средневысотная (МССВ) цель с высотой до 5—6 км и скоростью от 0 до 100 м/с, что соответсвует, в основном, характеристикам вертолетов и дистанционно управляемых летательных аппаратов (ДУЛА).
Таким образом, по высотно-скоростным признакам воздушные цели можно условно разделить на следующие типы: ССВ, СВ, СМВ, МССВ.
Легко видеть (рис. 11.9), что обычно полученные высотно-скоростные признаки сильно перекрываются и, кроме того, при распознавании цели по этим признакам трудно ввести какую-либо статистическую меру оценки качества распознавания, что делает их, по существу не количественными, а качественными. Кроме того, алфа
358
вит траекторных признаков, вообще говоря, не совпадает с алфавитом признаков сигнального распознавания (<Б>, <И>, <В>, <Р>, <ДУЛА>), что исключает возможность объединения результатов распознавания по сигнальным и траекторным признакам традиционными статистическими методами.
Рис. 11.10. К вычислению курса цели
Таблица 11.3
sign att sign bB const ± у
w4l"№ л—у
«^1 Yv
жв 2я-у . _ - , * V
7C+yv
В дальнейшем намечается нетрадиционный подход к представлению и оценке результатов траекторного распознавания с
359
использованием нечетких множеств, суть которого состоит в следующем [77], Сначала по результатам траекторных расчетов вычисляются высотно-скоростные признаки обнаруженной цели, а затем, сравнивая эти признаки с соответствующими характеристиками распознаваемых классов целей принимается нестрогое решение о принадлежности обнаруженной цели к одному из приведенных в табл. 11.1 типов воздушных объектов. В этом случае элементы алфавита траекторных признаков удобно относить к так называемому нечеткому множеству Ак, а отношение между классами выражать в виде нечеткого сходства, определяемого мерой условной возможности п у, характеризующей возможную степень принадлежности г-го воздушного объекта из алфавита А сигнальных признаков к j-му элементу алфавита траекторных признаков Ак. При этом классу (типу) К, воздушных целей, которому отдается преимущество, присваивается № 1 и условная возможность п (К j ) = 1. Далее индексы классов алфавита воздушных объектов расставляются с выполнением условия
) = 1 > п(К2 )>...> п(Кп ) > лСКй+1) = 0. (11.45)
Таким образом, если по результатам траекторных расчетов по признаку “скорость—высота" распознаваемая цель вероятнее всего относится к классу (СВ), то оператор (эксперт), используя свой опыт и имеющиеся дополнительные сведения, может присвоить этой цели, например, следующие относительные возможности о принадлежности к установленным классам воздушных объектов по сигнальным признакам (табл. 11.4).
Таблица 11.4
К К=<Б> к2=<и> Кл=<Р> О К =<БПЛА> 4
*(К,) 1 0,9 0,4 0
Как видим, сумма условных возможностей
п
2\(К,.)>1. Поэ-/=1
тому полученные качественные оценки с нестатистической неопреде-ленностью не могут быть непосредственно использованы при объединении с результатами сигнального распознавания, представленными вероятностными оценками.
11.6. Объединение разнородной информации
при радиолокационном распознавании целей
Для сокращения времени и повышения качества распознавания воздушных целей целесообразно использование разнотипных
360
источников информации, обеспечивающих как можно более широкий спектр признаков, взаимно дополняющих друг друга. В качестве источника, производящего предварительное распознавание целей на основе наблюдения некоторых специфических признаков (особенно тактических), может выступать человек-оператор или лицо, принимающее решение (ЛПР).
Полученная от различных источников и на различных этапах обработки принимаемых сигналов информация является разнородной, как по содержанию, так и по форме представления. Основным фактором разнородности является различие признаков по роду их неопределенности. Для сигнальных признаков неопределенность является статистической и определяется вероятностной мерой, а для траекторных ~ нестатистической, определяемой мерой возможности. Далее в качестве основной характеристики информации распознавания, поступающей от разнородных источников (режимов) будем понимать распределение вероятности р(к) или возможности п(к) на классах К некоторого алфавита Ак.
11.6.1. Согласование способов представления информации, задаваемой вероятностями и возможностными распределениями
Объединение разнородной информации распознавания можно производить после согласования способов ее представления. Как показаноо в [32], согласование вероятностных и возможностных
распределении можно производить путем введения в рассмотрение так называемой весовой функции m(<Ei ), определенной на базовых элементах Ej =<&17, k2j, knj > алфавита As и удовлетворяющей аксиомам нечеткой т-меры:
т(0) = 0,
= (11.46)
Известно [77], что если распределение т построено по вероятностному распределению, то базовые элементы £ образуют множество непересекающихся (независимых) элементов, совпадающих с классами алфавита As, т. е.
w(£ =< к. >) = р(к.). «я
Например, пусть известно распределение вероятности: р(кх ) - 0,6; р(к2 ) - 0,25; р{к3 ) = 0,15 . Тогда ему будет соответствовать весовая функция вида:
Wj (Ех =< кх >) = 0,6;
361
тх (Е2 =< к2 >) = 0,25;
(Е3 =< к3 >) = 0,15.
При этом
ml (Ej) = l.
При выполнении условий (11.46) между распределением возможностей itfkj') и весовой функцией m(Ej) также имеется однозначное соответствие, если дополнительно потребовать, чтобы с Ег с ... с Ер , где Е — самый большой базовый элемент, а знак с между элементами £ и £у+1 означает вложенность элемента в элемент £’7+|. Базовые элементы Е] образуют в этом случае множество упорядоченных по вложенности подмножеств классов алфавита Ак, а распределение весовой функции определяется по формуле
т2(£у) = я(*у)-л(*у+1). (11.47)
Так, если для предыдущего примера известно распределение возможностей:
Tt(£j ) = 1,0; л(Л2) = 0,9; л(Л3) = 0,4 ?[(£,) > 1
то ему будет соответствовать весовая функция вида: т2 (£, =< Л, >) = п(ку) - п(к2) = 0,1;
(Е2 =< к, ,к2 >) = п(к2) - п(к3) = 0,5;
w2(£3 =<к1}к2,к3 >) = я(к3)-п(кА) = 0,4.
При этом \ т2 (Ej ) = 1 • /-1
Таким образом, введение понятий базового элемента и весовой функции позволяет согласовать вероятностные и возможностные распределения классов по данным разнотипных источников и обеспечить таким образом применение аналитических методов объединения разнородной информации радиолокационного распознавания воздушных целей, т. е. объединения весовых функций т} и т2.
362
11.6.2. Объединение весовых функций при распознавании цели по сигнальным и траекторным признакам
В общем случае алгоритм объединения весовых функций двух источников должен обеспечивать получение несмещенных обобщенных оценок путем определения апостериорного распределения т12 по априорному и очередному текущему пг2 распределениям.
Если оценки т, и т2 заданы распределениями вероятности, обобщенная оценка получается по формуле Байеса
W12 (*/ ) = Рп ) =
(11.48)
где kj — классы некоторого алфавита А. Если же оценки /и, и т2 заданы распределениями возможностей, то получение обобщенной оценки сводится к построению пересечения оценок, заданных априорным и текущим распределениями с последующей нормировкой полученного результата в соответствии с выражением [63]:
m12(fc, ) = л12(£, ) =
min(n,(^ ))
Sup min (л, (кj )(n2(kj)) kJeA
(11.49)
Однако эти методы объединения являются неприемлемыми, если оценки представлены вероятностями (например ) и возмож-ностными (т2 ) распределениями, т. е. при объединении вероятностной и возможностной информации.
Несмещенная оценка апостериорного распределения при объединении вероятностной и возможностной информации может быть получена на основе применения правила Демпстера-Шафера [32]. Это правило позволяет производить объединение распределений базисных вероятностей m}(Ej) и т2(Ег ), построенных по распределениям р. и р2 и/или возможности л! и л 2. Получаемая при этом апостериорная функция т12(Е\) удовлетворяет аксиомам нечеткой меры (11.46) и вычисляется по формуле
S Wj (£у >2(Ег). (Ц.50)
Е. f>Er —El. j f Л
Формула (11.50) верна, когда функции и т2 согласованы между собой. Оценить несогласованность этих функций можно по значению коэффициента несогласованности mQ{Ej,Er), который вычисляется по формуле
363
m0 (EJ >Er) = >2(Er ) •
Eу r\Er -Q
(11.51)
Условие EnE^=0 отражает тот факт, что в части базовых элементов (свидетельствах) Ej и Ег отсутствуют общие классы. При полной согласованности распределений коэффициент т0 = 0, а при полной их противоречивости — т0 = 1.
С учетом возможной частичной несогласованности распределений формула Демпстера-Шафера записывается в виде
Ч2(Ек) =
(Е,)т2(Ег)
Ejr\Er^Ek
1-т0(ЕгЕг)
тг2(Ек)
1-/и0
(11.52)
Правило Демпстера-Шафера ассоциативно и коммутативно, что позволяет производить попарное объединение нескольких распределений, полученных от различных источников информации.
Положительным свойством рассматриваемого метода объединения информации является возможность объединения возможност-ных и вероятностных распределений. При этом, если объединяются два распределения вероятности, то результирующим будет также распределение вероятности; если объединяются два согласованных распределения возможностей, то результирующим распределением будет распределение возможностей; если же одно из объединяемых распределений является вероятностным, а другое — возможностным, то результирующим будет распределение вероятностей.
Продемонстрируем применение правила (формулы) Демпстера-Шафера на примере объединения распределения вероятностей классов, полученного в результате распознавания по сигнальным признакам и распределения возможностей, полученного в результате распознавания по траекторным признакам. Пусть, в результате распознавания цели по сигнальным признакам, получено:
тх (Ех =< Б >) = 0,6; /ц (Е2 =< И >) = 0,25;
т1 (Е3 =< В >) = 0,1; щ(£4 =<₽>) = 0,05•
Предполагается, что вероятность завязки и предварительного сопровождения ложной цели пренебрежимо мала, т. е.
(Е5 = < ЛЦ>) = 0.
Пусть далее, по результатам траекторных расчетов, относительные возможности принадлежности распознаваемой цели к установленным классам воздушной цели задаются таблицей 11.5.
364
Таблица 11.5
^1 <Б> <И> <р> <в>
1 0,3 0,09 0,01
Тогда при расчете весовых функций /и, получим (см. формулу 11.47):
Е5=<Б>, Еб=<Б,И>, Е7=<Б,И,Р>, Ея =<Б,И,Р,В>,
m2(E5) = 0,7; m,(E6) = 0,21; ти, (£7) = 0,08; т2(Ея) = 0,01;
£^(£,> = 1
Расчеты по правилу Демпстера-Шафера дают:
тХ2(Е, =< Б >) = w, (£, =< Б >)[/я2(Е5 =< Б >) + т2(Е6 =< Б, И >) +
+ т2 (Е2 =< Б, И, Р >) + т2 (Es =< Б, И, Р, В >)] = ти, (Е} =< Б >);
тх2(Е2 =<И>) = тх (Е2 =<И>)[«2(£6 =<Б,И>) + т2(Е2 =<Б,И,Р>) +
+ m2(£s =< Б,И,Р,В >)];
ю12(£3 =< В >) = (£3 =< В >)/и2(Е8 =< Б> И, Р, В >);
п\2(Е4 =<?>) = /«( (Е4 =<Р>)т2(Е1 =<B,H,P>)+m2(2^ =<Б,И,Р,В>).
Подстановки численных значений весовых функций дают:
mi2(Ei =<Б>) = 0,6; т12(Е2 =< И >) = 0,75;
м,г(£э =<В>) = 0,001; «г12(£4 =< Р >) = 0,0045 ;
£т}2(Ек) = 0,6805.
*=i
Как видим, из-за наличия несогласованности функций тх и 4
т2 сумма < 1. Степень несогласованности функций тх и
4=1
т, в данном случае равна
365
т0 = тх (Е2 =< И >)т2 (£5 =< Б >) + тх (Е3 =< В >)т2 (£5 =< Б >) + + тх (Е3 =< В >)т2 (Е6 =< Б, И >) + тх (Е3 =< В >)/и2 (£, =< Б, И, Р >) +
+ тх (Е4 =< Р >)т2 (Е} =< Б >) + т, (Е4 =< Р >)т2 (Е6 =< Б, И >).
Подстановка численных значений весовых функций дает:
т0 =0,ЗМ5; 1-т0 = 0,6855 .
Исправленные с учетом степени несогласованности значения апостериорных вероятностей классов по данным сигнального и траекторного распознавания целей находятся по формуле (11.52). Подстановка в эту формулу полученных выше численных значений дает
т!2(<Б>) = 0,875 ; ти12(<И>) = 0,109 ;
/и12(< В >) = 0,0014 ; т12(<Р>) = 0,0066 .
4
При этом (Ек ) «1.
£=1
Приведенные анализ и расчеты показывают, что за счет одноразового объединения результатов сигнального и траекторного распознавания классов воздушных целей можно существенно уточнить вероятностные характеристики непосредственного распознавания классов целей по сигнальным признакам за счет использования качественных (возможностных) характеристик распознавания по траекторным признакам.
Упрощенная структурная схема алгоритма объединения весовых функций распознавания по сигнальным и траекторным признакам изображена на рис. 11.11.
армирован и
ор мирован и тг(Ег)
Расчет
Расчет то
^12
Принятие решений
От базы знаний
о
Рис. 11.11. Упрощенная структурная схема алгоритма объединения весовых функций сигнального и траекторного распознавания
366
В этой схеме конкретно объединению подлежит информация двух разнотипных источников. При объединении информации нескольких (У>2) источников (однородных или разнородных) объединение осуществляется сначала попарно с последующим объединением пар и одиночных (непарных) источников. В общем случае, такое объединение информации носит название пространственного (в пространстве источников) объединения информации.
11.63. Рекурсивное объединение пространственно-временной информации при распознавании цели по данным нескольких независимых источников
Рассмотренный выше способ объединения информации двух источников с применением правила Демпстера-Шафера может быть с успехом использован для пространственно-временного объединения информации нескольких источников (сенсоров), по данным которых решается задача распознавания целей [137].
Структурная схема распределенной системы пространственно-временного объединения информации в интересах распознавания целей представлена на рис. 11.12. В этой схеме совокупность оценок
[ Пространство распознаваемых целей «
ПОИ
т^п]
Рис. 11.12. Структурная схема распределенной системы пространственно* временного объединения информации в интересах распознавания целей
весовых функций т'п, полученных на n-м шаге обновления информации от каждого г-го (г = 1, N) источника информации, сначала рекуррентно объединяется с соответствующими оценками весовых функций полученными в результате объединения на (я-1)
367
предыдущих шагах итерации. Полученные таким образом оценки весовых функций nfyn) подлежат далее объединению по совокупности N датчиков (каналов) информации, т. е. объединению в пространстве источников информации. В результате получается объединенная оценка шу(п) по данным п шагов измерения во времени и с использованием N датчиков информации в пространстве.
Сокращенные обозначения на рис, 11,12,
...,CN — датчики информации, на которые возложена задача определения текущих значений т\ (у = 1, п);
ВОИ-г — подсистема временного объединения информации г-го источника;
ПОИ — подсистема пространственной обработки информации всех источников (сенсоров).
Рассмотрим теперь кратко алгоритмы решения задач временного и пространственного объединения базовых весовых функций тjn с применением правила Демпстера-Шафера.
а) Временное рекурсивное объединение информации i-го измерителя.
Предположим, что для i-го измерителя (С,) в (п-1) периоде обновления информации имеется (рассчитана) объединенная весовая функция
т‘(п-1) = [wj(п-1), т'2(п-Г), /я^(и-1)],
где М — число распознаваемых классов (типов целей). Кроме того, имеется обобщенная на этот же момент времени оценка неопределенности (ненадежности) объединенной весовой функции, которая задается в виде
А/
0'(и-1) = 1-^т'(и-1) (11.53)
Пусть далее по результатам расчета в n-м периоде обновления информации получена оценка весовой функции
Ч =["4> ... m‘jn, т'Мп]
и “степень” ее неопределенности
м
(11.54)
Новые объединенные оценки могут быть рассчитаны с использованием таблицы 11.6, в левой колонке которой приведена обобщенная на (п-1) шаге информация, а в нижней строке — новые, полученные на n-м шаге, результаты расчетов для i-ro источника.
Используя таблицу 11.6 и правило Демпстера-Шафера, новые объединенные значения базовых весовых функций т’Ап) рассчитываются по формуле
368
m'(n-V)nif +0/ nw'„ +m'(w-l)O'
J V J Jft ) jn J \ у И
(11.55)
где m'o = 7 , m‘j(n — l)m-„ — коэффициент неопределенности (не-/#/ h
согласованности) функций w' (л -1) и т’.„.
Таблица 11.6
Обновленный объединенный коэффициент неопределенности полученных оценок вычисляется по формуле
. 0'(п-1) .
е-(„)=_Д_^0/. (Ц.56)
1“7И0
Процесс объединения повторяется с получением новых результатов измерений.
б) Пространственное объединение информации N источников.
После каждого цикла временного объединения информации всех источников решается задача попарного пространственного объединения информации z-ro и fc-ro источников.
С применением правила Демпстера-Шафера и таблицы, аналогичной 11.6, объединенная пространственно-временная информация от двух источников получается из выражения
где
(п)т* (ri)
1-X
(11.57)
(11.58)
ntf (п) =
369
а обобщенная пространственно-временная неопределенность из выражения
0'*(и) =
9'(я)9*(«) 1-<
(11.59)
При необходимости объединения информации от большого (N>2) числа источников сначала объединяется информация каждой пары, затем — между парами и т. д., т. е. используется известная схема сдваивания вычислений.
В статье [137] приведены результаты вычислительного эксперимента по применению алгоритмов рекурсивного объединения пространственно-временной информации для распознавания типов воздушных целей. В качестве распознаваемых типов целей рассматривались: бомбардировщик, легкий истребитель, гражданский (коммерческий) самолет. В систему распознавания включались датчики трех типов: система опознавания целей “свой—нейтральный—чужой”, система радиолокационного обнаружения и измерения (РЛС), инфракрасный канал поиска и сопровождения. Предполагалось, что все датчики работают в условиях умеренных помех, так что каждый отдельный источник не дает исчерпывающей информации о принадлежности цели к определенному (из предполагаемых) типу.
Результаты вычислительного эксперимента показали, что достаточно устойчивые оценки качества распознавания целей в рассматриваемом случае можно получить в результате рекуррентного объединения 50-и и более последовательных измерений всех датчиков, используемых в модели.
370
Глава XII
УПРАВЛЕНИЕ РЕСУРСАМИ
В МНОГОФУНКЦИОНАЛЬНОЙ РЛС
С АНТЕННЫМИ РЕШЕТКАМИ
12.1. Задачи и структурная схема системы управления МФРЛС
Оптимизация процесса функционирования МФРЛС достигается за счет управления ее параметрами. При этом гибкость структуры МФРЛС обеспечивает возможность получения за этот счет значительной экономии энергетических и временных ресурсов без ухудшения ее тактических характеристик.
В общем случае управление параметрами МФРЛС осуществляется путем изменения ее технических характеристик (рабочей частоты, частоты повторения зондирующих сигналов, времени обзора, способа и частоты обновления информации при сопровождении целей, способов применения средств РЭБ), а также применением специальных алгоритмов обработки информации.
Таким образом, эффективность МФРЛС в большой степени зависит от системы ее управления, под которой в дальнейшем будем понимать все необходимые алгоритмы обработки информации и выработки управляющих решений, предназначенных для достижения заданных целей управления. При этом слово “управление” будет использоваться как для обозначения процесса достижения поставленных целей, так и в смысле целенаправленного воздействия на параметры и структуру устройств МФРЛС.
Общие принципы построения систем управления изложены в многочисленной литературе [7, 31, 46, 76, 92, 93, 111, 147]. Здесь подчеркнем только, что для повышения оперативности и уменьшения трудоемкости решения задач управления МФРЛС, соответствующую систему управления целесообразно строить по иерархическому принципу [52]. Иерархическая структура управления характеризуется наличием нескольких подчиненных друг другу уровней, на которые поделена общая задача управления, причем решения, принимаемые на вышестоящих уровнях, определяют и координируют работу подчиненных им уровней.
Специфика построения МФРЛС позволяет организовать управление режимами ее функционирования поэтапно во времени и построить многоуровневую иерархическую систему управления, упрощенная структурная схема которой приведена на рис. 12.1.
Первым уровнем этой системы является управление параметрами РЛС и подсистемы обработки информации в процессе зондирования предварительно выбранного направления в зоне обзора РЛС с учетом функционального режима работы (поиск, активное сопровождение и др.). Целевой функцией управления на этом уровне является
371
обеспечение минимального расхода энергии для получения заданного эффекта от просмотра выбранного направления (заданной вероятности правильного обнаружения PD, заданной точности измерения угловых координат Oj ит. д.). Ограничениями являются допустимые значения технических параметров РЛС и способы их комплексирования. Управление на первом уровне осуществляется прямой перестройкой (выбором) управляемых параметров РЛС и устройств первичной обработки принимаемых сигналов в реальном масштабе времени.
мт
Орга низа ционное руководство МФРЛС
Ра определение ресурсов МФРЛС
Оптимизация функциональных режимов МФРЛС
Прямое управление устройствами МФРЛС
РПрУ
ЭВМ
4 уровень
3 уровень
2 уровень
1 уровень
Рис. 12.1. Многоуровневая иерархическая схема управления МФРЛС
Вторым уровнем управления является оптимизация функциональных режимов МФРЛС. Для МФРЛС поиска и активного сопровождения оптимизации подлежат режим поиска новых целей и режим слежения за обнаруженными целями. Управляемыми в данном случае являются способ просмотра (обзора) зоны наблюдения при поиске новых целей и темп обновления информации по сопровождаемым целям, а целевой функцией оптимального управления — минимизация удельного расхода энергетического ресурса РЛС на обнаружение цели в режиме поиска, обновление информации и оценку параметров траектории цели в режиме сопровождения. Ограничениями являются, главным образом, технические параметры РЛС и требования системы более высокого уровня иерархии. Управление на втором уровне осуществляется путем составления оптимальных расписаний последовательности просмотра ячеек зоны обзора в режиме поиска и обновления информации по каждой цели в режиме сопровождения.
372
Периодичность перестройки (выдачи команд) управления на этом уровне, в основном, определяется динамикой изменения обстановки в зоне обзора РЛС (числом и важностью целей, помеховой обстановкой и т. п.).
Третьим уровнем управления является распределение ограниченных энергетических ресурсов МФРЛС между функциональными режимами (режимом поиска и режимом активного сопровождения для двухфункциональных РЛС). В качестве целевой функции оптимального управления на этом уровне могут быть приняты максимизация критерия эффективности системы более высокого уровня иерархии, в которой РЛС выполняет функции обнаружения и сопровождения, и максимизация числа обрабатываемых целей с учетом их важности для той же системы. Управление на третьем уровне осуществляется путем перераспределения долей энергетических и временных ресурсов, предназначенных на реализацию режимов поиска и сопровождения. Периодичность управления зависит от априорных и апостериорных характеристик обстановки в зоне действия МФРЛС, состояния средств непосредственного обслуживания целей и др.
Наконец, четвертым уровнем управления является организационное руководство по поддержанию МФРЛС в требуемом рабочем состоянии с учетом информации о качестве работы его элементов, складывающейся обстановки, информации от соседей и команд от вышестоящих систем. На этом уровне осуществляется, в основном, ситуационное руководство функционированием МФРЛС.
Таким образом, в схеме, изображенной на рис. 12.1, иерархия управления определяется последовательной выдачей управляющей информации от подсистем высшего уровня к подсистемам низшего уровня. При этом в качестве основы для принятия решений на высшем
уровне используются результаты решения частных задач на ниже
стоящих уровнях. Так, в результате решения задач первого уровня в
подсистему второго уровня выдается информация о расходе энергии на зондирование каждого направления и числе обнаруженных целей,
а также о расходе ресурсов на зондирование в режиме сопровождения. В результате решения задач второго уровня в подсистему третьего уровня передается информация о числе сопровождаемых целей №. их важности, а также о периоде обзора зон поиска новых целей. Одновременно подсистемы второго и третьего уровней управления передают информацию о состоянии средств и качестве выполнения своих задач в подсистему четвертого уровня, где осуществляется руководство МФРЛС в целом.
373
12.2. Оптимизация функциональных режимов МФРЛС
Под функциональными режимами МФРЛС в дальнейшем понимается совокупность правил (норм), определяющих взаимодействие устройств и алгоритмов для решения каждой из основных функциональных задач, к которым относятся: поиск целей в зоне обзора, завязка и обнаружение траекторий целей, сопровождение траекторий обнаруженных целей. При организации многофункциональной работы МФРЛС с АР основной проблемой является оптимальное распределение ее ограниченных энергетических и временных ресурсов между режимами поиска и активного сопровождения целей, обеспечивающее требуемые характеристики качества выдаваемой информации.
12.2.1. Организация и оптимизация режима поиска новых целей
В данном пункте решаются задачи организации и оптимизации режима поиска целей в ограниченной зоне обзора в МФРЛС с вращающейся и неподвижной АР.
Предварительно кратко рассмотрим общую постановку задачи оптимизации управления поиском при обнаружении неизвестного числа целей. В качестве модели обстановки рассматривается некоррелированный поток целей, которые появляются и перемещаются в зоне обзора независимо друг от друга. В этом случае, для решения задач управления обзором могут быть непосредственно использованы статистические методы оптимизации. Так, например, для “ячеечной” модели зоны обзора задача оптимального распределения по ячейкам энергетических затрат на поиск в этой зоне может быть решена по критерию максимума математического ожидания числа обнаруженных целей за фиксированное время То [7]:
N
M(NT) = max.YPa(i)PD(Ei), (12.1)
0 (.Е,) ~Т
N
при 22 Е, = Ео ,
|=1
где: Ео — энергия, отводимая на обзор;
N — число ячеек в зоне;
Раг(г) —априорная вероятность наличия цели в г-й ячейке;
Е — “поисковое усилие” (доля энергии), затрачиваемое на осмотр г-й ячейки;
PD(Et) — вероятность обнаружения цели в г-й ячейке при условии, что затрачено поисковое усилие Е, .
374
Формула (12.1) проста по смыслу, однако ее непосредственное применение связано с большими трудностями как методического, так и вычислительного характера. Кроме того, ячеечная модель зоны обзора, вообще говоря, не применима в радиолокации.
В инженерной практике, при проектировании систем управления обзором МФРЛС, целесообразно исходить из упрощенных предположений о пространстве поиска и распределении целей в этом пространстве. Предполагается, например, что пространство поиска состоит из ряда однородных зон, в которых целевая обстановка однотипна. Состав и интенсивность потока целей в каждой зоне можно априори оценить, исходя из назначения МФРЛС и условий ее применения. Вероятность наличия целей в каждом направлении выбранной зоны считается одинаковой, а области помех — локализованными. Поэтому нет преимущественных направлений поиска, и обзор г-й зоны производится последовательно и равномерно, с периодом Та. Задача управления обзором состоит в этом случае в минимизации времени обзора каждой зоны и оптимизации периодов обзора зон, например, по критерию минимизации среднего времени, прошедшего от влета цели в зону до ее обнаружения, при ограничении на временные и энергетические ресурсы, выделяемые на поиск и обнаружение новых целей.
Один из возможных вариантов построения модели зоны поиска по рассматриваемому принципу сводится к следующему.
1. Область поиска в вертикальной плоскости предполагается разделенной на несколько неодинаковых и, возможно, частично перекрывающихся частей (зон), размеры и конфигурация которых определяются тактико-техническими характеристиками целей, подлежащих “обслуживанию” в этих зонах.
2. Априорные вероятности наличия целей в любом направлении каждой i-й зоны считаются одинаковыми. Поэтому равномерный по угловым координатам поиск целей в каждой зоне производится с постоянным периодом обзора Ты.
В дальнейшем, в качестве примера, рассматривается формирование зоны обзора МФРЛС в вертикальной плоскости для двух режимов работы: режима с вращением плоской антенной решетки для поиска и сопровождения целей в круговой относительно точки стояния МРЛС области обзора и для режима с неподвижной АР для поиска и сопровождения целей в секторе ± 45’.
В качестве исходных данных принимаются (табл. 11.1):
а) по типам целей, подлежащих обнаружению и сопровождению:
• самолеты-бомбардировщики с высотой =20—30 км, скоростью vr =(2—3) М и средней эффективной отражающей поверх; ностью (ЭОП) ® 15 м2;
• самолеты-истребители с hj- =20—30 км, vr =(2—3) М и с ЭОП сзТ * 7,5 м2;
375
• ракеты класса “воздух—поверхность” с А. = 20—30 км, vr = = (4-5) М и ЭОП аг «0,5 м2;
• ракеты, движущиеся по навесным траекториям (с углом падения > 50°) с hj. <30 км, vr = (4—5) М, ЭОП «0,1 м2;
• маловысотные цели (самолеты и ракеты) с А. < 50 м, vT = = (2-3) М, ЭОП ат «0,05 м2;
б) по параметрам многофункциональной РЛС [119]:
• назначение: раннее предупреждение, наведение своих самолетов в процессе перехвата, выдача целеуказания для систем управ
ления оружием;
• максимальная дальность по цели типа “бомбардировщик” г =375 км;
ПИИ ’ ,
• время одного оборота антенны в режиме вращения ТА = 6 с, что соответствует скорости вращения антенны пА =10 об/мин.,
• ширина диаграммы направленности антенны в режиме поиска 0 ₽«0е=1,6°;
• энергетические характеристики МФРЛС (мощность передат-
чика, длительности зондирующих импульсов, чувствительность приемных устройств и др.) обеспечивают одноимпульсное mz = 1 зондирование направлений в режиме поиска во всех зонах, кроме зоны низколетящих целей, для которой m = 3.
С учетом принятых исходных данных в таблице 12.1 приведен вариант формирования зоны обзора в вертикальной плоскости в режиме вращения АР. В этом режиме механическое вращение антенны по азимуту совмещается с электрическим (фазовым) сканированием
Таблица 12.1
Наименование зон Обнаружения и сопровождения НЛЦ Раннего предупреждения Сопровождения и наведения самолетов Обнаружения и сопровождения ракет "В-3" Обнаружения и сопровождения БР Примечания
№ ЗОН S2 S3 S4 S5
Дг~, км 2-30 250-375 120-250 2—120 2-45
Де2° 0,8- 5,6 0,8—5,60 5,6-15,2 15,2-34,4 34,4— 7 5
Де7° W, =—4- Ze Q 0 е 4 4 12 27 без учета расширения луча
Г, мс 0,2 2.5 1.5 0,8 0,3
mz 3 1 1
tz, мс 2,4 10 10,5 9,6 8,1 t^MI ,6 МС
376
луча диаграммы направленности по углу места. При этом обзор по углу места осуществляется дискретным перемещением луча в вертикальной плоскости с учетом изменения его ширины при отклонении от оси антенны.
В рассматриваемом варианте пространство обзора в вертикальной плоскости условно разбивается на 5 зон по принципу обеспечения рационального обслуживания разнотипных целей с заданными характеристиками качества. Так зона 1 (S, ), с границами по углу места Де. = (0,8°—5,6°) и по дальности Дгг = от 2 до 30 км, предназначена для обнаружения с заданной вероятностью и за минимальное время низколетящих целей (самолетов и ракет). Зона S2 с границами по углу места, совпадающими с границами зоны 5^, и по дальности Дгг = от 250 до 375 км, предназначена для обнаружения с заданной вероятностью в основном аэродинамических целей, летящих на высоте до 30 км, и называется зоной раннего предупреждения. Зона S, в границах по углу места =(5,6°—15,2°) и по дальности Дгг = от 120 до 250 км, предназначена для обнаружения, сопровождения и обеспечения перехвата целей-самолетов, выполняющих налет на обороняемые объекты. Зона предназначена для обнаружения и сопровождения ракет “воздух—поверхность”, главным образом противорадиолокационных ракет (ПРР), в диапазоне углов места от 15,2° до 34,4° и по дальности от 2 км до 120 км. Наконец, зона предназначена для обнаружения и сопровождения целей, движущихся по “навесным” траекториям под углами места до 75° и на дальностях от 2 км до 45 км.
На рис. 12.2 условно обозначены границы формируемых зон обслуживания целей в рассматриваемом случае. Из этого рисунка видно, что границы зон S2... по углу места и дальности выбираются также с учетом обеспечения на всех дальностях возможности обнаружения и сопровождения целей на высотах до 30 км.
h, км
Рис. 12.2. Зоны обнаружения и сопровождения целей различных типов
В режиме вращения АР, естественно, ограничивающим фактором в организации управления обзором является время углового перемещения антенны по азимуту на угол, равный ширине ее диаграммы направленности по этой координате, которая, в соответствии с принятыми исходными предпосылками, равна = 1,6°.
377
Элементарные расчеты показывают, что при скорости вращения АР Пр = 10 оо/м это время равно * 27 мс. Приведенные в табл. 12.1 расчеты показывают, что даже в простейшем случае, когда на зондирование в режиме поиска большинства направлений затрачивается один импульс, общее время однократного обзора всех зон по углу места составляет =41,6 мс, т. е. почти в 2 раза больше, чем время /р перемещения антенны по азимуту на ширину ее диаграммы направленности по этой координате. Следовательно, организовать обзор всех зон с периодом вращения антенны ТА = 6 с не представляется возможным, не говоря уже о необходимости выделения части временного ресурса для активного сопровождения целей.
Принципиальным подходом для решения проблемы управления обзором в режиме с вращением АР является организация обзора выделенных зон с неодинаковым темпом. Для этого сначала выбираются приоритетные зоны, в которых обзор должен производиться с максимальным темпом, т. е. в каждом периоде вращения антенны. Во всех других зонах обзор производится с разрежениями, кратными периоду вращения антенны.
В рассматриваемом примере в качестве приоритетной, очевидно, должна быть выбрана зона 5. обнаружения и сопровождения низколетящих целей. В этой зоне устанавливается период обзора = Тл = 6 с. Поиск в других зонах можно организовать попеременно, с темпом ТО(2'5> «12с. При этом попарное объединение поиска в зонах £ ...Ss целесообразно выполнить так, чтобы общее время обзора пар было примерно одинаковым. В нашем случае целесообразно организовать пары: S2 + S4 и S3 + . При этом расход временного ресурса на поиск в 2-х соседних тактах составляет:
Г® =2,4 мс + 10 мс + 9,6 мс = 22 мс,
=2,4 мс + 10,5 мс + 8,1 мс = 21 мс.
Таким образом, при рассматриваемом способе распределения временного ресурса между зонами, на поиск в каждом такте затрачивается примерно одинаковое время 21—22 мс из имеющегося ресурса «27 мс, т. е. примерно 76% ресурса. Остающийся ресурс в каждом такте может быть использован на обнаружение отметок от целей в режиме активного сопровождения, что свидетельствует о возможности в данном случае сведения временного баланса при поиске и сопровождении целей.
Обзор пространства поиска в режиме кругового обзора может быть в данном случае организован либо путем поочередного обзора зон 5,+ 54 и зон S3 + , либо путем осмотра этих зон в каждом обзоре в разреженном через один интервал сканирования по углу места и переключением номеров зондируемых ячеек с четных на нечетные в соседних тактах. Очевидно, более целесообразным является второй способ организации обзора.
Рассмотренный пример позволяет только пояснить один из наиболее целесообразных подходов к организации режима поиска в МФРЛС с вращающейся АР. В реальных же условиях ситуация, особенно в части обеспечения баланса временных и энергетических ресурсов в этом режиме, является значительно более сложной. Например, почти невозможно и часто нецелесообразно осуществлять поиск при одноимпульсном зондировании. Применение же сигналов пачечной структуры существенно увеличивает время однократного обзора зоны поиска по углу места узким лучом диаграммы направленности АР. Для сведения временного баланса в этом случае потребуется либо существенно уменьшить скорость вращения антенны, что в принципе может оказаться недопустимым в реальной целевой и помеховой обстановке, либо резко усложнить процедуру поиска, вводя целый ряд градаций для периодов обзора зон.
Не все так просто и с организацией зон обслуживания как по их числу, так и по размерам. Здесь существенно иметь достоверные сведения о составе, характеристиках и способах применения объектов (целей), подлежащих обслуживанию на основе информации, выдаваемой МФРЛС.
Рассмотрим теперь кратко организацию режима поиска при неподвижной АР. Этот режим является одним из основных и используется, главным образом, в тех случаях, когда с применением МФРЛС решаются задачи обслуживания опасных (важных) целей в ограниченном секторе и требуется чрезвычайно высокий темп (порядка долей секунды) выдачи данных потребителям.
Рассматриваемый режим характеризуется большой гибкостью выбора возможных вариантов распределения времени и энергии для поиска и сопровождения целей. В данном случае рассматривается пример, когда обзор зоны поиска производится способом, аналогичным рассмотренному выше способу обзора в режиме с вращением АР. Обзор производится по столбцам слева направо с дискретностью по азимуту, равной ширине диаграммы направленности антенны (0₽ « 1,6°) в диапазоне углов 0°±32° от направления оси антенны и с дискретностью 0р «2,6° в диапазоне углов от +32° до ±45° от оси антенны. Общее число просматриваемых азимутальных направлений «р = 50, а общее число зондируемых направлений по углу места в каждом азимутальном направлении ие — 54. В качестве базового (для зоны 5, ) можно выбрать период обзора =3 с. Если теперь определить и для всех других зон такой же период обзора, то при общем числе положений луча по углу места пе = 54 (табл. 12.1) на осмотр одного азимутального направления будет затрачено =41,6 мс, а на осмотр всех 50 направлений в зоне поиска —
То = n^z - 0,0416 -50 « 2,0 сек.
В этом случае из базового 3-секундного интервала (периода обзора) на активное сопровождение можно потратить ta «1,0 с, т. е. треть временного ресурса МФРЛС.
378
379
В ряде случаев, особенно при полуактивном наведении ракет, потребуется существенное увеличение- доли временного ресурса, затрачиваемого на сопровождение. В этом случае, как и в режиме с вращением АР, можно в зонах от S2 до S, установить периоды обзора, в два или более раза превышающие период обзора зоны 5] • Возможны, естественно, и другие программы организации поиска, которые обосновываются в каждом конкретном случае проектирования.
Часто при распределении временного и энергетического ресурсов МФРЛС между функциональными режимами поиска и активного сопровождения в качестве одного из ограничивающих условий выбирают минимально необходимый ресурс на поиск цели с известной ЭПР при заданной кумулятивной вероятности ее обнаружения на заданном рубеже. В основу расчетов кладется требование, чтобы кумулятивная (накопленная) вероятность обнаружения цели на заданном рубеже (рубеж уверенного обнаружения) превышала, например, Р^ >0,95. Такой подход позволяет рассчитывать предельно допустимый период обзора при поиске целей в неприоритетных (буферных) зонах. Пример таких расчетов приведен в [119].
12.2.2. Организация и оптимизация процесса обнаружения траекторий целей
Как известно (см. гл. X), процесс обнаружения траекторий цели включает два этапа: на первом из них осуществляется “завязка”
траектории по критерию “2/т", а на втором — подтверждение завязанного начала траектории, т. е. ее окончательное обнаружение по критерию “1/п". Алгоритм завязки траектории по критерию
“2/т” совместно с алгоритмом подтверждения завязанного начала по критерию “1/п” образуют объединенный алгоритм обнаружения траектории по критерию "2/m+Z/n”. Простейшим из алгоритмов этого класса является алгоритм “2/т+1/п”.
Основными показателями качества режима обнаружения тра-
ектории являются среднее время tDT (и, соответственно, энергетический ресурс), затрачиваемое на обнаружение истинной траектории, и среднее число ZV^. обнаруживаемых ложных траекторий. Пара-
метрами, от которых зависят эти показатели, являются:
• вероятность обнаружения PD отметки от цели;
• вероятность ложного обнаружения PF отметки в элементе разрешения РЛС;
• критерий (алгорим) обнаружения траектории КОг •
Оптимизация процесса обнаружения траектории ооычно производится за счет выбора алгоритма К™., обеспечивающего минимальное значение среднего времени обнаружения траектории tDT
при условии, что среднее число ДГ передаваемых на сопровождение
380
ложных траекторий не превосходит заданной величины а. При этом считается, что для отдельно взятой зоны ответственности МФРЛС
объема V показатели PD и PF являются постоянными.
Сформулированная оптимизационная задача записывается в
виде:
mintDT(PD,PF,KDT), при N^P^K^a. (12.2) лрг
Очевидно, для ее решения необходимо получить зависимость iDT и от параметров алгоритма обнаружения KDT для ряда фиксированных значений PD, PF и размера строба V.
Для простейших из рассматриваемых для обнаружения траектории алгоритмов "2/m+l/n” среднее время обнаружения траектории равно среднему времени блуждания случайной точки в графе со случайными переходами (рис. 10.3) до ее попадания в поглощающее (т+п)-е состояние, исходя из нулевого начального состояния. Это время, выраженное числом шагов (переходов), вычисляется по формуле [66]:
»|+н-4
у«о
(123)
где n0J — элементы фундаментальной матрицы цепи Маркова, представляющей алгоритм “2/т+1//”.
Вычисления по формуле (12.3) являются достаточно трудоемкими. Поэтому чаще аналитические расчеты заменяются математическим моделированием.
Среднее число обнаруженных и передаваемых на сопровождение ложных траекторий определяется по формуле (см. (10.6)):
(12.4)
где N — среднее за период обзора число одиночных отметок, принимаемых в качестве начальных точек ложных траекторий, вычисляемое по формуле (см. (10.13)):
(12.5)
в которой:
Pfp — вероятность перехода системы (алгоритма “2/m+l/ri") из состояния о.! в состояние а. за s шагов.
В формуле (12.4) 7^ — вероятность того, что случайная точка, начиная движение из состояния а,, когда-нибудь достигнет состояния ат+л и останется в нем. Эта вероятность вычисляется по формуле (см. (10.3)):
381
m+M-1
(12.6)
где: ?Я(7) - (1 рРцЛ);
Pfuj) ~ вероятность попадания ложной отметки в стробы первичного захвата (подтверждения) траектории.
Таким образом, формулы (12.4), (12.5) и (12,6) позволяют
подсчитать среднее число или удельное среднее число Npr[V на единицу площади строба V, ложных траекторий, передаваемых на сопровождение, в установившемся режиме работы для каждого из возможных (выбираемых) типов алгоритмов обнаружения траектории класса “2/m+l/n”. Очевидно, такие расчеты могут быть сделаны и для алгоритмов класса "T./m+l/ri' [51].
Для практического применения целесообразно воспользоваться результатами статистического эксперимента, отражающими некоторые общие тенденции изменения контролируемых параметров в зависимости от “жесткости” выбранного алгоритма обнаружения траектории.
Критерий обнаружения траектории Рис. 12.3. Графики NfTlV=f(KDT)
382
Причем, под жесткостью алгоритма здесь понимается, в основном, требуемое для обнаружения траектории число единиц (2+Z) на (m+n) смежных позициях. Например, алгоритм “2/3+1/1”, требующий получения 3-х единиц на 4-х смежных позициях, “жестче” алгоритма “2/3+1/2”, требующего получения 3-х единиц на 5 смежных позициях. Аналогично, алгоритм “2/2+1/1”, требующий получения 3-х единиц на 3-х смежных позициях, значительно “жестче” алгоритма “2/2+1/2”, требующих 3-х единиц на 4-х смежных позициях. При определении жесткости алгоритмов обнаружения траектории играет роль и положение пропусков в последовательности (m+и) позиций.
На рис. 12.3 приведены полученные моделированием графики удельного среднего числа передаваемых на сопровождение ложных траекторий для ряда фиксированных значений Л. в функции от типа алгоритма KDT. Алгоритмы, в основном (без учета расположения пропусков), упорядочены по “жесткости”.
Аналогично, на рис. 12.4 приведены графики среднего числа обзоров (обращений к траектории), затрачиваемого на обнаружение траектории при ряде фиксированных значений PD и PF в функции от “жесткости” используемого алгоритма.
Критерий обнаружения траектории
Рис. 12.4. Графики nDT = f{KDT)
383
Изображенные на рис. 12.3 и 12.4 графики позволяют наметить подход к оптимизации режима обнаружения траектории при многофункциональной работе РЛС. При этом необходимо исходить из следующих предпосылок.
Задание на множестве критериев обнаружения траектории двух показателей качества nDT и К приводит к необходимости выделить из множества критериев KDT такого, для которого оба показателя имеют меньшее значение. В рассматриваемом случае выделение множества критериев оказывается практически линейно упорядоченным по “жесткости” критериев, т. е. переход к более жесткому критерию увеличивает nDT и уменьшает N .
В результате, решение задачи сводится, прежде всего, к нахождению наименее “жесткого” критерия обнаружения траектории, обеспечивающего N <а- Например, если исходя из соображений защиты от перегрузки вычислительной системы МФРЛС допустимое удельное число передаваемых на сопровождение ложных траекторий установлено величиной ЛГ/т/К=1О-в, а вероятность ложного обнаружения PF = 10-4, то для обнаружения траектории может быть выбран алгоритм “2/2+1/3”, который при Л, =0,7 обеспечивает среднее время обнаружения траектории nDT периодов обновления информации.
Аналогичным образом ставится и решается задача выбора алгоритма обнаружения траектории, если по каким-либо соображениям вместо критерия “2/m+l/n” выбирается критерий “2/m+//m” при />1.
12.2.3. Организация и оптимизация режима активного сопровождения целей
Как уже отмечалось, гибкость формирования и управления лучом ДН АР позволяет разделить функции поиска и сопровождения целей. Поэтому в многофункциональных РЛС наряду с сопровождением цели в режиме обзора (СРО) может быть успешно реализовано, так называемое, активное сопровождение (АС), при котором скорость обновления данных по каждой сопровождаемой цели назначается и изменяется в зависимости от характера ее движения, или при изменении требований к качеству выдаваемой по ней информации. Поскольку скорость обновления информации по каждой цели в данном случае не фиксируется, появляется возможность обеспечить оценивание параметров траектории каждой цели в соответствии с выбранным критерием оптимальности ее сопровождения (например, по критерию обеспечения требуемой точности оценок параметров траектории на заданном рубеже выдачи информации, по критерию сопровождения с одинаковой точностью на определенном отрезке траектории и др.).
384
Однако необходимо иметь в виду, что если при сопровождении в режиме обзора энергия РЛС на его реализацию не расходуется, то активное сопровождение непосредственно требует расхода временного и энергетического ресурсов РЛС. Поэтому управление процессом обновления информации в режиме активного сопровождения оптимизируется по критерию минимизации затрат временных и энергетических ресурсов для достижения заданного качества выдаваемой информации на установленном рубеже или в ограниченной зоне обзора МФРЛС. В качестве управляемых параметров выбираются:
• число зондирующих сигналов mi в пачке при обнаружении и оценке параметров каждой i-й цели;
• число обновлений информации п. по каждой траектории для достижения требуемой точности оценки параметров на заданном рубеже.
При этом должны быть введены следующие ограничения:
• энергетическое отношение сигнал—шум q2 при однократном зондировании цели не должно быть меньше порогового (q,h), при котором справедливы соотношения, связывающие потенциальную точность измерения параметров сигналов с энергетическим соотношением сигнал—шум [103];
• период обновления информации Т01 по каждой траектории должен быть ограничен сверху допустимыми ошибками экстраполяции параметров траектории на это время (TOj ^TOlxr).
Рассмотрим сначала упрощенный алгоритм управления наблюдением при решении задачи обеспечения заданной точности оценки одного параметра (например, координаты х) на рубеже выдачи информации за счет оптимального выбора mf и пе Траектория фильтруемого параметра предполагается линейной.
Критерий оптимизации в этом случае записывается в виде (индекс i опускается):
(12.7)
при q2 > q,h, То < ТОрег.
Дисперсия ошибки оценивания координаты при /и-кратном зондировании вычисляется по формуле [117]:
(12.8)
2
где а2 (1) = —гг — дисперсия ошибки оценивания координаты х по
одиночному импульсу длительностью ;
m — число импульсов в пачке.
385
С учетом (12.8) дисперсия ошибки фильтрации координаты для линейной траектории имеет вид [52]
(12.9)
где Кп = —------- — множитель фильтрации (см. (7.49));
«(и + 1)
п — число измерений координаты с периодом То ^TQper. При и 8... 10 можно допустить
(12.9а)
(12.10)
В этом случае критерий (12.7) записывается в виде ч 4с£(1) 2 4сг*(1)
Ст4(т,л) =----^СТхрег> ИЛИ ------э •
mn хрег
Таким образом, выражение (12.10) связывает требуемые затраты времени и энергетического ресурса РЛС для достижения заданной точности фильтрации координаты линейной траектории. Обычно, при необходимости получить заданную точность на известном (отстоящем на известное расстояние от сопровождаемой цели) рубеже не составляет труда подсчитать требуемое для этого число измерений п фильтруемой координаты. Тогда из выражения (12.10) легко подсчитать требуемое число импульсов в пачке m при зондировании цели. При этом желательно учитывать возможные изменения энергетического отношения сигнал—шум qf в процессе движения цели до рубежа, о чем речь пойдет ниже.
Критерий (12.7) не регламентирует учет временных затрат, обеспечивающих сопровождение множества целей с разделением по времени обращения к каждой из них. Кроме того, в МФРЛС должно быть предусмотрено сопровождение целей с заданной (постоянной) точностью фильтрации не одного, а нескольких параметров движения целей в течение всего интервала времени ее нахождения в зоне обслуживания. Поэтому для управления процессом наблюдения за целями целесообразно использовать критерий, который учитывает как точность фильтруемых параметров, так и расходуемый временной ресурс.
Точность, как и прежде, будем характеризовать среднеквадратической ошибкой оценки координаты 7, = а(/л, п), а временные затраты — величиной 12 = (тТ)л, где — период посылок зондирующих импульсов в режиме активного сопровождения.
Таким образом,
I = IX+I2=ai(mri)+(mT<cy)n. (12.11)
386
Так как составляющие, входящие в суммарный критерий, должны иметь одинаковую размерность, произведем нормировку первого слагаемого допустимой среднеквадратической ошибкой фильт-
рации скорости изменения координаты сь, т. е. Г,
оДти)
Кроме того, для учета в общем случае неодинакового вклада в обобщенный критерий каждого слагаемого, введем весовые коэффициенты: а — по точности, р — по временному ресурсу. При этом а + р = 1.
Таким образом, обобщенный (суммарный) критерий имеет вид
/(m«) = a^^ + p(»iT(c))w. (12.12)
По
хрег
Можно показать [93], что при вариациях тип функция (12.12) имеет экстремум типа минимума.
Оптимальные значения тип находятся теперь путем дифференцирования (12.12) по этим параметрам с последующим приравниванием результата нулю и решением полученной таким образом системы уравнений.
В результате, с учетом (12.9), получаем следующую систему уравнений
астл<Д =
хрег
= ^тт
хрег
Решая эту систему уравнений, получим:
/и „. = С2/3 /п„„,, opt / opt '
где
др х (1) а, рт(с)
(12.13)
(12.14)
(12.15)
При этом оптимальный временный ресурс
*opt "*opt^opt“* *
а выражение для среднеквадратической ошибки оценивания координат имеет вид (с учетом lz.9a):
(12.16)
- 2а,(1) , ' = 2a,(l)C-w
yWopt%t
(12.17)
387
Таким образом, при выборе оптимальных значений »?ор, и п наступает установившийся режим сопровождения с постоянной среднеквадратической ошибкой фильтрации координаты. Эти ошибки определяются ошибками одиночных измерений ох(1), заданной ошибкой оценки скорости изменения координаты и соотношением между коэффициентами аир. х
О влиянии весовых коэффициентов а и ₽ на затрачиваемый временной ресурс и точность фильтрации координаты можно судить из анализа выражений (12.16) и (12.17). Если требуется повысить точность оценивания, увеличив а, то величина требуемого ресурса увеличится. Наоборот, если надо экономить ресурс, увеличивая р, то текущая точность фильтрации уменьшится (среднеквадратическая ошибка aio t увеличится).
Необходимо, в заключение, отметить, что рассмотренный подход и полученные результаты подразумевают постоянство отношения сигнал—шум на всем интервале изменения дальности между целью и РЛС, что в действительности не имеет места. Кроме того, темп обращения к различным целям зависит от их важности (опасности). Поэтому при разработке комплексного алгоритма управления процессом активного сопровождения необходимо учитывать целый ряд дополнительных условий и данных.
Одним из возможных путей решения проблемы управления расходом временного и энергетического ресурсов МФРЛС в процессе активного сопровождения множества разнородных целей является переход к так называемому ступенчатому алгоритму управления.
В качестве простейшего ступенчатого алгоритма управления режимом активного сопровождения рассмотрим алгоритм управления зондированием с учетом изменения отношения сигнал—шум за счет перемещения цели (целей) относительно точки стояния РЛС. Задача, как и прежде, состоит в обеспечении оптимального расходования энергетического и временного ресурсов МФРЛС для достижения заданного режима обслуживания множества (потока) движущихся целей на соответствующих рубежах. Что касается количества и назначения промежуточных рубежей, на которых необходимо обеспечить соответствующее количество выдаваемой информации, то для большинства типов МФРЛС в качестве таковых можно, например, назвать следующие:
• рубеж определения опасности цели, на котором решаются задачи определения (опознавания) государственной принадлежности, радиолокационного распознавания типа целей и др.;
• рубеж перехвата, на котором решаются задачи наведения на цель самолетов-истребителей или ракет;
• рубеж применения по цели наземных ЗРК на ближних подступах к обороняемым объектам и др.
В процессе реализации алгоритма по каждой сопровождаемой цели выполняются следующие операции (см. рис. 12.5).
388
от алгоритма w управления МФРЛС /
Определение рубежей обслуживания j-й цели
от алгоритма
оценки опасности цели
Расчет изменения с^до рубежей
Разбиение траектории сопровождаемой цели на участки с
5
Расчет времени!} полета цели на i-м участке зоны
Выбор J»)
fT-1/kTA 6
Расчет n(-f,ft <
Неподв./В
<7/
Расчет m
8
Формирование I
таблицы П( I 9
Рис. 12.5. Алгоритм управления зондированием с учетом изменения отношения сигнал—шум
1. С учетом оценок координат и параметров траектории обнаруженной цели и результатов ее распознавания вычисляются (назначаются) рубежи обслуживания цели, на которых должны быть достигнуты требуемые вероятность обнаружения и точность оценивания параметров ее траектории (бл. 7).
2. На основе оценки алгоритмом классификации вероятного значения эффективной отражающей поверхности вычисляется оценка энергетического отношения сигнал—помеха q1 2 3 4 в начальной и конечной (на последнем рубеже обслуживания) точках траектории цели (бл. 2).
3. Если эти оценки существенно отличаются, производится разбиение траектории цели на межрубежные участки с примерно одинаковыми значениями q2 (бл. 5). Рассчитываются временные интервалы Tj движения цели на этих участках (бл. 4).
4. Определяется частота ft обращения к цели на г-м участке наблюдения. Если МФРЛС работает в режиме с вращением АР, частота обращения определяется из выражения (бл. 6)
389
fW=\jkTA, (12.18)
где: ТА — период вращения антенны;
к = 1, 2 ... — коэффициет, учитывающий возможное увеличение, по сравнению с ТА, периода обращения к цели в процессе ее сопровождения.
Для МФРЛС, работающей в режиме с остановленной АР, /<Я) определяется, исходя из предполагаемых маневренных возможностей цели, а также с учетом других характеристик цели, определяющих ее опасность (бл. 5).
5. Определяется необходимое число обращений к цели на i-м участке траектории (бл. 7):
(12.19) для достижения требуемой точности на i-м рубеже.
6. Рассчитывается (бл. S) необходимое число mt импульсов в пачке на i-м участке траектории по формуле (12.10):
т,
4п*(1), , %per j
где су*(1); — дисперсия ошибки оценки координат на i-м участке при однократном зондировании в случае использования упрощенного критерия (12.7), или по формуле (12.14)
при использовании критерия (12.12).
7. На основании произведенных расчетов для каждой j-й сопровождаемой цели составляется таблица 12.2, в которую заносятся оптимальные значения n/Jopl и на всех к участках траектории (i = 1 к ).
Таблица 12.2
Т1! T2J * < < T4
qll % % « < qkj
Иц opt *пти f 2j T2j * * •
^ор. C’2/3(q1t)/n C‘2/3(q2))/n2j в a 4 С'2/Ч)/П1Я
Таблица 12.2 является расписанием адаптивного к изменению отношения сигнал-шум обновления данных для каждой сопровождаемой цели. В процессе сопровождения эта таблица корректируется
390
по результатам анализа характера движения целей, изменения их опасности, маневра и др.
12.3. Распределение временных и энергетических ресурсов МФРЛС между режимами поиска и активного сопровождения целей
При работе МФРЛС в совмещенном режиме активного сопровождения важных целей с одновременным поиском и обнаружением новых целей возникает задача оптимального распределения ограниченных временных и энергетических ресурсов МФРЛС между этими режимами. Критерий оптимальности распределения ресурсов между режимами должен, в первую очередь, учитывать качество и количество обслуживаемых целей в каждом из режимов, например, максимизировать число сопровождаемых целей с заданными точностными характеристиками на рубежах выдачи информации с одновременным обеспечением обнаружения новых целей с заданной вероятностью и на заданных рубежах.
В простейшем случае, когда в пространстве обзора МФРЛС не выделяется зона с повышенной априорной вероятностью появления новых целей, единственным приоритетным режимом считается режим активного сопровождения и, следовательно, все заявки от этого режима на расходование временного и энергетического ресурсов удовлетворяются в первую очередь.
Пусть в режиме активного сопровождения находится М целей. Обозначим icj — средний временной ресурс (выраженный временем зондирования направления), затрачиваемый на однократное измерение координат )-й (j =1, 2, ..., М) сопровождаемой цели, а 71 — период обновления информации по j'-й цели. Тогда доля ресурса МФРЛС, затрачиваемая на сопровождение всех целей, определяется выражением
м ^а=^/Т^- (12.20)
у=1
На поиск новых целей затрачивается в этом случае ресурс, оставшийся после обеспечения режима сопровождения ранее обнаруженных целей, т. е. &Ео-1-ДЕс. При этом для режима поиска устанавливается ограничение на допустимый период обзора Г0доп, например, исходя из условия обеспечения заданной вероятности обнаружения целей на установленных рубежах (см. п. 12.1).
До тех пор, пока целей на сопровождении мало, весь ресурс МФРЛС тратится на обнаружение новых целей, обеспечивая при этом высокие показатели качества режима поиска. По мере увеличения числа сопровождаемых целей расход ресурса на обеспечение этого
391
режима увеличивается и при определенной целевой обстановке может достичь такого значения, когда остаток ресурса, предназначенный на поиск новых целей, не обеспечивает выполнение условия То < ТОрег. С этого момента должен начинаться процесс перераспределения энергии между основными режимами МФРЛС. Сначала, например, ограничивается область поиска новых целей до некоторого допустимого размера, что высвобождает часть энергии и способствует сокращению периода обзора То . Далее, если таким образом остановить рост периода обзора зоны поиска не удается, приходится снимать с активного сопровождения (переводить на сопровождение в режиме обзора) часть менее важных целей или еще более сужать область поиска новых целей.
Пусть теперь в пространстве поиска выделены L приоритетных зон обслуживания целей (ПЗр П32,..., П3£), для которых установлены жесткие периоды обзора 7^, То2, ..., ToL и есть еще хотя бы одна (£+1)-я зона, для которой установлено только ограничение на период обзора в виде to i+1 < Торег. Сопровождение, как и прежде, обладает высшим (нулевым) приоритетом. Приоритеты зон поиска определяются в соответствии с опасностью целей, которые ожидаются в этих зонах. Низший приоритет присваивается поиску в (£+1)-й зоне. Заявки с высшим приоритетом прерывают обслуживание менее приоритетных зон.
В рассматриваемом случае доля временного ресурса МФРЛС, затрачиваемая на поиск в к -й приоритетной зоне в г-м обзоре
(12.21)
где: Ток — установленный (постоянный) период обзора к -й зоны;
” среднее время, затрачиваемое на поиск в к -й приоритетной зоне в z-м периоде обзора, вычисляемое по формуле
й =W -МьК =Nkxn +Мк&, -Т„), (12.22)
в которой: Nk — число направлений в к -й зоне поиска;
— число целей в к -й зоне поиска в г-м обзоре;
— среднее время анализа направлений, где нет целей;
т — среднее время анализа “целевого” направления (предполагается, что на каждом направлении поиска находится не более одной цели).
Доля временного ресурса МФРЛС, затрачиваемая на обзор всех приоритетных зон в г-м обзоре
~ У • (12.23)
fc—1
В результате, доля энергетического ресурса, остающаяся на поиск в (£+1 )-й (неприоритетной) зоне в z-м обзоре, будет равна
392
L
&EOt,L+l = 1 ~ zL ~ •
*=1
В свою очередь
(12.24)
Д^см,Л+1 oitL+\ j ^oitL+\ » (12.25)
где: toj L+l — время, затрачиваемое на поиск в (£+1)-й зоне в i-м обзоре;
Гш>л+1 ~ период г-го обзора (£+1)-й зоны. Таким образом, в данном ’случае, с учетом (12.20), (12.23), (12.24), период обзора 7V £+1 может быть вычислен из соотношения
от,Л+1
(12.26)
При Toi
,£+1 потребуется перераспределение временного ресурса за счет снятия части целей с активного сопровождения и передачи их на сопровождение в режиме обзора.
В соответствии с рассмотренным подходом, упрощенная схема алгоритма управления режимами функционирования МФРЛС приведена на рис. 12.6. В блоке 1 этой схемы формируется, а в блоке 2 реализуется жесткая программа последовательного во времени обслуживания всех зон поиска, состоящая в выборе направлений и продолжительности зондирования каждого направления зоны. Результаты зондирования каждого j-ro направления в t-й зоне (блок 3) обрабатываются в соответствии с заранее установленными алгоритмами, а затраты на поиск А/о, фиксируются и накапливаются ( AZ™ ) в блоке 5. После завершения зондирования очередного j-ro направления в г-й зоне поиска реализуется обращение к временной диаграмме приоритетных режимов (обнаружение траектории, сопровождение цели, распознавание и др.). При наличии заявок на обслуживание в этих режимах реализуется зондирование в установленных стробах (блок 4), а результаты обрабатываются соответствующими алгоритмами.
Может быть также реализован непосредственный подсчет затрат ресурса на сопровождение целей (например, для текущего контроля).
Дальнейшее взаимодействие блоков 1,2,3 и 4 легко проследить на схеме 12.6. Затраты на поиск и сопровождение (включая и обнаружение траектории) за определенный период времени tm, который называется периодом управления, связаны соотношением
(12.27)
Отношение т|?и = A/w/tm характеризует долю временного ресурса, затрачиваемого на поиск новых целей. Предельное значение г|0 этого
393
Рис. 12.6. Упрощенная схема алгоритма управления режимами функционирования МФРЛС
394
отношения устанавливается, как правило, заранее, на основании технических и тактических соображений. По результатам вычисления коэффициента Л, организуется управление распределением временного (а значит, й энергетического) ресурса между режимами поиска и активного сопровождения. Если И, - Ло — затраты на поиск не меньше допустимых, и в следующем такте управления перестройка алгоритмов обработки не требуется. При Л, <Ло затраты на поиск новых целей меньше установленных, и на следующем такте управления потребуется перераспределение временного ресурса. Для этого сначала
проверяется, имеется ли возможность сократить дальность гвг в буферной зоне, и за этот счет увеличить время на обзор остальных
зон. При выполнении условия rBZ r5Zmin изменяются параметры буферной зоны (блок 8). Если же выделить дополнительный ресурс на поиск за счет буферной зоны невозможно (rBZ <rBZmia), про
веряется соответствие числа сопровождаемых в активном режиме целей установленному при проектировании МФРЛС или другими документами. Если Nc. > Nctd, часть целей переводится на сопровождение в режиме обзора, и за этот счет высвобождается часть ресурса для режима поиска (блок 9). Наконец, если за счет сокращения буферной зоны, или числа сопровождаемых целей в активном режиме, обеспечить увеличение ресурса на поиск новых целей невозможно, решение о корректировке алгоритмов в сложившейся ситуации должны принимать (блок 10) лица оперативного состава (ЛОС).
12.4. Оценка предельной пропускной способности МФРЛС
Одним из основных интегральных показателей эффективности МФРЛС является ее пропускная способность, под которой понимается интенсивность потока обслуженных целей с показателями качества, не ниже требуемых. Показателями качества обслуживания могут являться, например, точностные характеристики оценивания параметров траектории на рубежах выдачи информации [118].
Очевидно имеет смысл анализ и максимизация пропускной способности МФРЛС, главным образом, в режиме активного сопровождения, так как в этом режиме все этапы обслуживания целей (обнаружение сигнала, обнаружение траектории, сопровождение) связаны с затратами временных, энергетических и вычислительных ресурсов МФРЛС, которые ограничены.
При проектировании МФРЛС задача оценки пропускной способности решается обычно в два этапа. На первом этапе (начальный этап проектирования) исследуется и оптимизируется предельная пропускная способность собственно РЛС и предполагаемых методов обработки информации без учета пропускной способности вычислительных средств, предназначенных для реализации алгоритмов
395
обработки и управления РЛС. Исследование производится, главным образом, аналитическими методами с применением теории массового обслуживания, а также методами вычислительного эксперимента на математических моделях. На втором этапе (заключительный этап проектирования) с учетом разработанных (внедренных) алгоритмов и программ обработки информации и управления, состава и архитектуры вычислительного комплекса оценивается пропускная способность МФРЛС в целом. На этом этапе основным методом исследования является смешанное моделирование, при котором используются математические модели входной помехо-целевой обстановки, имитация сигналов в приемном тракте РЛС и штатная аппаратура вычислительного комплекса и рабочих мест (пультов). В книге второй этап проектирования не рассматривается.
12.4. 1. Аналитический расчет предельной пропускной способности МФРЛС [150]
Для анализа предельной пропускной способности МФРЛС представляется в виде трехфазовой системы массового обслуживания (СМО), так как поток поступающих на ее вход “заявок” (поток целей) проходит последовательно три этапа (фазы) обслуживания:
• поиск и обнаружение сигналов от целей в зоне обзора;
• обнаружение траекторий целей;
• сопровождение целей.
Модель функционирования МФРЛС, как трехфазовой СМО, представлена на рис. 12.7. На этой схеме первая фаза обслуживания — поиск целей — включает L+1 каналов, предназначенных для обнаружения отметок от целей в четко ограниченных зонах области обзора РЛС. Каждый /-й канал (I = 1...Z+1) первой фазы характеризуется относительной пропускной способностью Ри , численно равной накопленной вероятности обнаружения отраженного от цели сигнала за время пролета этой целью /-й зоны поиска (или части этой зоны до заданного рубежа).
I
1-я фаза Поиск цели
2-я фаза
3-я фаза
Зона1
1М Обнаружение
Зона L+1
траектории цели
Сопровождение цели
Рис. 12.7. Модель функционирования МФРЛС, как системы массового обслуживания
396
На входы каналов первой фазы обслуживания поступают потоки заявок с интенсивностью Xz. Интенсивность потока является параметром закона распределения времени между соседними заявками, который обычно моделируется экспоненциальным распределением с плотностью Р> (t) = Л, ехр(—X/).
Выходящий поток первой фазы
Д+1
\oul='ZJKPu. (12.28)
/=1
В выражении (12.28) накопленная вероятность обнаружения цели
ри (12.29)
где: Ри — вероятность обнаружения отметки от i-й цели в Z-й зоне;
nt — число циклов (периодов обращения к /-й зоне поиска) в процессе обнаружения отметки от цели.
Относительные временные затраты на обзор зоны поиска определяются выражением
1
Т\ (12.30)
/=1 1 ol
где: — время, затрачиваемое на зондирование направления в /-й
зоне пространства обзора;
пи — число зондируемых направлений в /-й зоне;
То1 — период обращения к /-й зоне.
В дальнейшем считается, что при решении задач обнаружения сигналов в МФРЛС обеспечивается вероятность ложных тревог порядка PF <10“6 и, следовательно, потоком ложных отметок на выходе первой фазы обслуживания можно пренебречь.
Выходящий поток первой фазы является входящим для второй фазы - фазы обнаружения траектории.
Время, затрачиваемое на зондирование направления в режиме обнаружения траектории, определяется выражением
^2 ~ ’ (12.31)
где: — число импульсов в пачке зондирующих сигналов;
Тог —период следования зондирующих сигналов при обнаружении траектории.
Для простоты здесь критерий обнаружения траектории выбирается типа "п2/п2", т. е. для принятия решения об обнаружении траектории нужно получить щ отметок в соседних зондированиях.
397
Плотность потока обнаруженных траекторий, т. е. плотность потока на выходе второй фазы обслуживания, определяется выражением
«2
^2out I Id $2j
(12.32)
где: P2 — относительная пропускная способность второй фазы обслуживания;
q2J — вероятность срыва процесса обнаружения траектории на j-м шаге из-за пропуска (необнаружения) отметки.
Срыв процесса обнаружения траектории происходит при появлении одиночного пропуска отметки на одной из п2 смежных позиций. Это приводит к дополнительным непроизводительным временным затратам, определяемым из выражения
Т2 — т2Х1оШ 2^ /л2j ,
(12.33)
где Л2 — вероятность того, что срыв процесса обнаружения траектории произойдет после j из и2 — 1 циклов ее зондирования.
Поэтому общие относительные затраты времени на обнаружение траектории представляются в виде
7*2 ~ и2т2Х1оыГ 4-2"2 —т2Х1оиГ
«2^2 . (12.34)
/«1
Для обслуживания в режиме сопровождения плотность входящего потока определяется выражением (12.32). Сброс с сопровождения не полностью обслуженной цели происходит при появлении к пропусков отметок подряд на интервале из п3 — 1 позиций (обзоров), необходимых для полного обслуживания (получения информации требуемого качества) сопровождаемой цели.
Общие относительные затраты на сопровождение целей определяются выражением, аналогичным (12.34)
Т3
(12.35)
где: Т3 — среднее время, затрачиваемое на зондирование направления в режиме сопровождения;
п3 — среднее число точек обновления информации по целям для получения заданной точности оценки параметров траектории;
398
Р3 “ относительная пропускная способность третьей фазы обслуживания;
я з j ~ вероятность того, что срыв процесса сопровождения цели произойдет после j циклов (периодов) обновления координат.
Исходя из условий баланса времени, должно выполняться соотношение
(12.36)
Введем обозначения:
л2-1
w2^2 + Jn2j ~ _ среднее число зондирований при обна-
>1
ружении траектории;
и3-1
пз*з + у - ^3 — среднее число зондирований при сопровождении.
С использованием выражений (12.30), (12.34), (12.35) и (12.36) после несложных преобразований получим выражение для плотности выходящего потока (пропускной способности) рассматриваемой системы в виде
(12.37)
Так как вторая и третья фазы обслуживания обладают абсолютным приоритетом, то с увеличением плотности входящего потока
Л+1
= Zu время на поиск целей сокращается, стремясь к нулю. /=1
Поэтому предельная пропускная способность МФРЛС, когда весь временной и энергетический ресурс расходится на решение задач обнаружения траекторий и сопровождения целей, определяется выражением
А
^2 Д
(12.38)
Однако, для нормального функционирования РЛС необходимо, чтобы часть временного и энергетического ресурса была выделена на
399
поиск целей. Поэтому для оценки предельной (с ограничением) пропускной способности МФРЛС используется выражение
(11.39)
где qT < 1 — доля временного ресурса, выделенная для обнаружения траекторий и сопровождения целей.
Отметим в заключение, что полученные здесь соотношения позволяют производить лишь предварительную оценку пропускной способности проектируемой МФРЛС, так как в них не учитывается влияние целого ряда важных факторов, в частности ложных отметок, обусловленных шумами и внешними помехами. (Учет ложных отметок см. [118]).
12.4.2. Исследование пропускной способности МФРЛС методом математического моделирования
Исходя из специфики функционирования МФРЛС как системы массового обслуживания, математическая модель для исследования ее пропускной способности должна включать (см. рис. 12.8):
Рис. 12.8. Блок-схема математической модели для исследования пропускной способности МФРЛС
400
1. Канал формирования потока заявок на обслуживание, в состав которого входят:
♦ блок имитации исходных данных для моделирования режима поиска, включающий модели формирования целевой и помеховой обстановки на входе МФРЛС, модель расчета энергетических соотношений для каждой цели, модель привязки первичных заявок к единому (модельному) времени;
• блок программ управления диаграммой направленности МФРЛС в режиме поиска;
• блок программ имитации процесса обнаружения сигналов от целей в режиме поиска, который является генератором потока заявок на обслуживание.
2. Канал обслуживания потока заявок, включающий фазы обнаружения траекторий и сопровождения целей, в состав которого входят:
• блок программ имитации процесса обновления информации о целях, обслуживаемых в режиме обнаружения траекторий и сопровождения (блок имитации временной диаграммы управления указанными режимами);
• блок программ имитации процесса функционирования МФРЛС при обнаружении траекторий и сопровождении целей.
Фазы обнаружения траектории и сопровождения цели объединяются в модели в одном канале, так как временная диаграмма управления этими режимами должна быть общей.
3. Блоки расчета и накопления затрат времени в каждом канале.
4. Блок вычисления и отображения результатов моделирования.
5. Блок программного управления моделью, имитирующий систему программного управления МФРЛС и позволяющий осуществлять перераспределение временных ресурсов между режимами поиска и сопровождения целей при моделировании.
Характерными особенностями рассматриваемой модели являются:
• все операции обработки сигналов и данных имитируются (подыгриваются) с конечной целью определения временных затрат на выполнение каждой операции обслуживания;
• алгоритмы и программы управления МФРЛС (прерывания, приоритетное обслуживание режимов и целей, управление лучом ДН, управление перераспределением ресурсов МФРЛС между режимами поиска и сопровождения) воспроизводятся в модели полностью и в установленной временной последовательности;
• выдаваемые результаты моделирования являются усредненными по множеству вариантов входящего потока и затрат на их обслуживание.
С использованием изображенной на рис. 12.8 схемы модели можно проводить исследования процессов управления распределением временного ресурса МФРЛС между режимами поиска цели
401
в зоне обзора и режимом активного сопровождения обнаруженных целей. В качестве основного исследуемого критерия эффективности управления, естественно, выступает зависимость предельной пропускной способности или эквивалентного этому понятию числа одновременно сопровождаемых целей от способа управления временными ресурсами МФРЛС. В простейшем случае таких способов два: либо путем четкого (количественного) определения максимальной доли ресурса qTmBX, затрачиваемого на сопровождение, либо путем выбора максимально допустимого периода обзора Т^тах в режиме поиска. Возможны, естественно, различные комбинации этих способов в зависимости от текущей целевой и помеховой обстановки в зоне ответственности МФРЛС.
Ниже приведены некоторые результаты вычислительного эксперимента по исследованию этих двух способов управления ресурсами МФРЛС при следующих исходных данных [61, 62]:
• максимальная дальность рубежа входа целей в зону обзора ^пих ~ 250 км;
• вероятность обнаружения цели на рубеже PD = 0,995 ;
• вероятность ложного обнаружения PF = 10 "6... 10 " ;
• критерий обнаружения траектории “5/5”;
• критерий сброса траектории с сопровождения — два пропуска отметки подряд (к =2);
• входящий поток целей — простейший с плотностью А,еи, = 2 ц/с.
Предполагается, что при заданном значении рр временные затраты на завязку и сопровождение ложных траекторий пренебрежимо малы, и их можно не учитывать.
На рис. 12.9, а, b изображены полученные на модели графики долей расхода временного ресурса q, затрачиваемого на поиск целей (график 1), обнаружение траекторий целей (график 2) и сопровождение целей (график 3). В совокупности, на каждом такте модельного времени сумма затрат ресурса на поиск, обнаружение траекторий и сопровождение целей должна быть равна единице. График 4 обозначает число одновременно сопровождаемых целей.
При этом в процессе моделирования каждая цель сопровождается до выхода из зоны обзора. Поэтому число одновременно сопровождаемых целей устанавливается на определенном уровне только за счет баланса количества передаваемых на сопровождение и покидающих зону обзора МФРЛС целей.
В варианте, изображенном на рис. 12.6, а, затраты на сопровождение целей не ограничиваются ( qT = 1), т. е. управление распределением ресурса отсутствует. При этом уже при tM » 160 с поиск новых целей прекращается, т. к. весь ресурс МФРЛС расходуется на сопровождение ранее обнаруженных целей (напомним, что режим сопровождения целей обладает высшим приоритетом). Число сопровождаемых целей сокращается теперь только за счет постепенного их выхода из зоны обзора МФРЛС. В момент модельного
402
времени tM « 300 с за счет естественного сокращения числа сопровождаемых целей освобождается некоторый ресурс, позволяющий возобновить процесс поиска новых целей. Число сопровождаемых целей фиксируется на уровне NcT « 190.
Рис. 12.9. Результаты моделирования процесса управления расходом временных ресурсов МФРЛС: а) без ограничения расхода ресурса, затрачиваемого на поиск; б) с ограничением снизу доли ресурса, затрачиваемого на поиск
403
На рис. 12.9, Ь представлен тот же вариант целевой обстановки, но с установленным порогом доли ресурса на сопровождение целей на уровне qT ^0,88. Из рисунка видно, что в момент tm «120 с доля расхода ресурса на поиск новых целей фиксируется на уровне 1 — qT «0,12 и остается в среднем на этом уровне все оставшееся время сеанса моделирования.
Из сравнения рис. 12.9, а и b видно, что доля расходуемого ресурса на сопровождение в установившемся режиме во втором варианте сокращается с 1 до 0,85. Однако при этом увеличивается доля ресурса, затрачиваемого на обнаружение траекторий новых целей, что в конечном счете приводит к увеличению числа одновременно сопровождаемых целей в установившемся режиме работы с 190 до 250 (см. график 4 на рис. 12.9, а и 12.9, Ь).
Рассмотренный подход к организации управления распределением ресурса МФРЛС между режимами поиска и активного сопровождения прост в реализации и позволяет осуществлять перераспределение ресурсов с малым периодом управления, например, с темпом просмотра самой приоритетной зоны обзора. Однако при таком подходе не контролируется важнейший параметр процесса поиска — период обзора 7ql+i неприоритетной (буферной) зоны, который во всех случаях не должен превышать некоторую установленную максимальную величину ГОтах .
С этой точки зрения вариант алгоритма управления, обеспечивающий То д+1 < ТО пая , является, по сравнению с рассмотренным выше, более информативным, хотя задача управления этим параметром в процессе функционирования системы является более сложной, чем задача управления долей ресурса, затрачиваемого на поиск целей.
На рис. 12.10 приводятся усредненные результаты вычислительного эксперимента, иллюстрирующего решение задачи управления временным ресурсом МФРЛС, конечной целью которого является не допустить Го L+1 > TOmax.
На этом рисунке график 1 представляет долю ресурса, затрачиваемого на поиск, а график 2 — долю ресурса, затрачиваемого на обнаружение траекторий и сопровождение целей. Отдельным графиком (график 5) представлен период обзора в режиме поиска при заранее установленном пороге Тп тах = 12 с.
Из анализа результатов вычислительного эксперимента, изображенных на рис. 12.10, следует:
• примерно на 80-ой секунде модельного времени среднее значение периода обзора достигает уровня Ти «12 с (см. правую шкалу времени) и остается на этом уровне в продолжении всего эксперимента (график 3);
• коэффициент затрат на поиск (график 1) в установившемся режиме составляет примерно 0,45 общего временного ресурса;
• коэффициент затрат на обнаружение и сопровождение траекторий устанавливается на уровне 0,55 (график 2) общего временного ресурса.
404
Таким образом, в рассматриваемом случае затраты на поиск новых целей составляют примерно половину временного ресурса МФРЛС.
Рис. 12.10. Результаты моделирования процесса управления временными ресурсами МФРЛС при ограниченном периоде обзоров буферной зоны
График 4 на рис. 12.10 определяет число целей, обслуженных с требуемыми точностными характеристиками на заданных рубежах.
В заключение отметим, что в результате моделирования не вычисляется непосредственно пропускная способность МФРЛС. Однако все необходимые данные для расчета предельной пропускной способности (по формуле (12.39)) здесь имеются (фиксируются в модели).
405
ЗАКЛЮЧЕНИЕ
В настоящее время, в связи с широким внедрением в радиолокации антенных решеток с электрическим (электронным) управлением диаграммой направленности антенны на передачу и прием, появилась возможность создания многофункциональных РЛС (МФРЛС), в которых обеспечиваются и реализуются адаптивно управляемый поиск целей в зоне обзора, активное сопровождение множества разнотипных целей, формирование и передача команд управления, наведение средств воздействия (например, самолетов или ракет) и выполнение других функциональных операций.
Основным системным элементом МФРЛС является информационно-вычислительная система (ИВС), объединяющая РЛС с АР и специализированный ЦВК высокой производительности, которая ориентируется для решения всех задач приема сигналов, цифровой обработки информации и управления МФРЛС. Такая ИВС имеет свои специфические показатели качества, которые, как правило, выше показателей качества отдельно взятой РЛС. При этом появляется возможность решать, кроме традиционных, ряд новых задач цифровой обработки радиолокационной информации, в том числе задачи редукции принимаемых сигналов к выходу с гипотетического прибора с разрешающей способностью, превышающей потенциальную разрешающую способность отдельно взятой РЛС.
Проблематика построения и применения МФРЛС в различных условиях функционирования, оценка их эффективности в системах высшего порядка, структурный синтез и анализ функциональных устройств МФРЛС, теория и техника цифровой обработки радиолокационной информации с применением традиционных статистических и сугубо вычислительных (парето-оптимальных) методов оптимизации составляет предмет и содержание новой прикладной дисциплины “Цифровая радиолокация”.
На современном этапе первоочередными задачами, подлежащими решению, в цифровой радиолокации являются задачи организации и алгоритмизации функционирования МФРЛС в целом, задачи оптимального управления ресурсами МФРЛС, задачи организации и оптимизации ее функциональных режимов.
Среди базовых задач цифровой радиолокации принципиальное значение имеют задачи пространственной фильтрации принимаемых сигналов на фоне внешних мешающих излучений (активных помех). Как показали многочисленные исследования, решение этих задач аналоговыми средствами не дает удовлетворительных результатов. Хотя статистическая теория адаптивной пространственной обработки сигналов разработана достаточно подробно, практическое применение соответствующих аналоговых устройств компенсации активных помех оказалось затруднительным. С внедрением цифровых антенных
решеток, естественно, стал вопрос о применении цифровых адаптивных фильтров для компенсации активных помех путем образования глубоких провалов в диаграмме направленности приемной ЦАР в направлениях на источники внешних излучений. Непосредственное решение этой задачи путем оцифровывания известных адаптивных алгоритмов пока под вопросом по причине чрезвычайно высоких требований к производительности соответствующих цифровых адаптивных фильтров.
На современном этапе статистические методы адаптивной пространственной фильтрации сигналов могут быть эффективно использованы только в так называемых частично адаптивных ЦАР, в которых для формирования диаграммы направленности с провалами в направлениях на источники мешающих излучений используется небольшая часть приемных элементов АР. Естественно, эффективность частично адаптивной ЦАР меньше, чем полностью адаптивной. Однако их реализация доступна с использованием современной элементной базы цифровой, вычислительной техники. В книге приведен подробный алгоритм частично адаптивной пространственной фильтрации сигналов и сделана оценка требуемого быстродействия при его непосредственной и параллельной реализации.
Здесь отметим, что исследования методов и оптимизация алгоритмов частично адаптивных ЦАР должны стать одним из важнейших направлений развития теории и техники цифровой радиолокации.
По рассматриваемому направлению цифровой пространственной фильтрации сигналов в книге намечен нетрадиционный (нестатистический) подход к решению задач цифровой пространственной обработки сигналов на выходе ЦАР при воздействии мешающих излучений, при котором для формирования ДН с провалами вместо традиционного статистического метода оптимизации применен сугубо вычислительный подход, основанный на идеях математической редукции принимаемых сигналов и парето-оптимальной интерполяции результатов измерений. Полученные предварительные результаты позволяют констатировать широкие возможности нового подхода по обеспечению требуемой разрешающей способности при оценке координат постановщиков помех с последующей компенсацией мешающих сигналов не только в области боковых лепестков основной диаграммы направленности ЦАР, но и при воздействии помех по основному лепестку этой диаграммы.
Естественно, даже без специальных оценок, является очевидной высокая вычислительная сложность реализации соответствующих алгоритмов. Поэтому глубокая проработка метода редукции ДН ЦАР к диаграмме направленности заданной формы как с целью упрощения алгоритмов, так и с целью синтеза структуры соответствующих вычислительных комплексов, для их реализации также является одной из основных задач цифровой радиолокации и требует тщательной теоретической проработки.
406
407
Традиционной проблемой современной радиолокации является цифровая время-частотная обработка принимаемых радиолокационных сигналов, включающая решение задач когерентной (и некогерентной) фильтрации сигналов на фоне собственных шумов, отражений от подстилающей поверхности, местных предметов и искусственно создаваемых пассивных помех, а также решение задач обнаружения и оценки параметров принимаемых сигналов на фоне помех. Достижения в этой области цифровой обработки радиолокационной информации общеизвестны, а публикации в монографической литературе и периодической печати чрезвычайно многочисленны. В книге сделано краткое обобщение результатов как опубликованных автором, так и по результатам других источников, в части систематизации и выбора единого подхода к решению задач фильтрации сигналов на фоне пассивных помех, цифрового обнаружения двоичноквантованных сигналов и оценки параметров (координат) сигналов с помощью одноканальных и многоканальных (моноимпульсных) измерителей. В частности, уточнено применение моноимпульсного метода пеленгации в многофункциональных РЛС с ЦАР (ФАР).
В дальнейшем, в процессе развития теории и техники цифровой радиолокации, должны быть существенно расширены исследования методов цифровой робастной время-частотной обработки сигналов, а также вопросы применения быстрых алгоритмов ЦОС, в том числе с использованием теоретико-числовых преобразований.
Также традиционными и широко освещенными в специальной, главным образом, иностранной литературе, являются теория и техника цифровой вторичной обработки радиолокационных данных, основным содержанием которой является идентификация новых отметок и фильтрация параметров траектории при сопровождении неманеврирующих и маневрирующих целей в помехах как с применением традиционных статистических методов, так и с применением методов парето-оптимальной интерполяции.
За последние годы это направление цифровой обработки радиолокационной информации обогатилось рядом новых разработок, к которым относятся усовершенствование методов идентификации отметок при сопровождении маневрирующих одиночных и групповых целей, разработка новых алгоритмов фильтрации параметров маневрирующих целей и др. Основными задачами автора книги в рассматриваемом направлении развития цифровой радиолокации явились систематизация и обобщение многочисленных публикаций в периодической печати по проблемам фильтрации и идентификации радиолокационных данных.
В последнее время возрос интерес, и получили широкое теоретическое развитие методы радиолокационного распознавания целей. Известно, что удовлетворительное решение этой проблемы возможно при использовании сверхширокополосных зондирующих сигналов и современных средств цифровой вычислительной техники. В книге 408
рассмотрены основные известные подходы к решению этой проблемы на основе, главным образом, формирования радиолокационных дальностных портретов (профилей). Кратко рассмотрены методы радиолокационного распознавания воздушных целей по траекторным признакам.
Основным вкладом автора книги в решение проблемы радиолокационного распознавания является разработка алгоритмов неформального объединения результатов распознавания, полученных от различных источников, а также разработка специальных алгоритмов управления системой распознавания для обеспечения оптимальных условий ее функционирования.
Переходя к вопросу об организации управления МФРЛС в целом, естественно взять за основу решение задач управления ее параметрами в динамическом режиме многофункциональной работы. При этом гибкость структуры МФРЛС обеспечивает возможность получения за этот счет значительной экономии ее энергетических и временных ресурсов без ухудшения тактических характеристик.
Задачи управления функционированием радиолокационными средствами, и тем более МФРЛС, разработаны пока недостаточно подробно и слабо освещены в технической литературе. В книге, с учетом предыдущих разработок автора [51], предложен ряд методов и алгоритмов управления и распределения временных ресурсов МФРЛС между режимами поиска и активного сопровождения целей по критерию максимизации ее пропускной способности. Очевидным является тот факт, что в этом важном направлении развития цифровой радиолокации сделаны только первые шаги и потребуются дальнейшие существенные разработки по теории и технике управления параметрами радиолокационных систем.
Таким образом, в книге, с разной степенью проработки, затронуты все основные направления исследований, которые, на взгляд автора, составляют предмет цифровой радиолокации. Ни одно из этих направлений не получило в книге законченного оформления как по составу решаемых задач, так и по содержанию полученных решений. Поэтому книгу надо рассматривать только как “введение в теорию цифровой радиолокации”, что и обозначено в названии книги.
409
СПИСОК ЛИТЕРАТУРЫ
1. Антенны (Современное состояние и проблемы) / Под ред. Л. Д. Бахтияра и Д. И. Вознесенского. — М.: Сов. радио, 1979. — 208 с.
2. О. И. Абрамович. К анализу эффективности адаптивных алгоритмов, использующих обратные связи // Радиотехника и электроника. —1979. — № 2. — С. 302—308.
3. В. И. Алексеев, В. П. Лернер, С. К. Орехов, В. И. Серебрянников Энергетические потери квантования при цифровой согласованной фильтрации сложных сигналов // Радиотехника и электроника. -1989. - № 10. - С. 2118-2124.
4. Н. Ахмед, К. П. Рао Ортогональные преобразования при обработке цифровых сигналов / Пер. с англ. — М.: Связь, 1980. — 240 с.
5. Г. Д Бахтияров Цифровая обработка сигналов: проблемы и основные направления повышения эффективности // Зарубежная радиоэлектроника. — 1975. — № 18. — С. 48—64.
6. Д. Бартон, Г. Вард Справочник по радиолокационным измерениям / Пер. с англ. — М.: Сов. радио, 1978. — 392 с.
7. П. А. Бакут, Ю. В. Жулина, Н. А. Иванчук Обнаружение движущихся объектов. — М.: Сов радио, 1980. — 288 с.
8. В. А. Бураков, Л. А. Зорин, М. В. Рытинский, Б. В. Шишкин Адаптивная обработка сигналов в антенных решетках (обзор) // Зарубежная радиоэлектроника. — 1976. — № 8. — С. 35—55.
9. К. Браммер, Зиффлинг Фильтр Калмана-Быоси. Детерминированное наблюдение и статистическая фильтрация / Пер. с немецк. — М.; Наука, 1982 — 200 с.
10. В. И. Бибика, С. В. Утемов Фильтр сопровождения маневрирующих малозаметных целей // Радиотехника. — 1994. — № 3. — С. 11-13.
11. А. М. Бочкарев, А. Н. Юрьев, М. Н. Долгов, А. В. Щербинин Цифровая обработка радиолокационной информации при сопровождении целей / Зарубежная радиоэлектроника. — 1991. — № 3. — С. 3-22.
12. 77. А. Бакулев, В. М. Степин Методы и устройства селекции движущихся целей. — М.: Радио и связь, 1986. — 286 с.
13. П. А. Бакулев, В. И. Кошелев, В. В. Гладких Оптимальное многоканальное обнаружение сигналов на фоне коррелированных помех // Известия высших учебных заведений. Радиоэлектроника. — 1987. - Т. 30. - № 4. - С. 4-7.
14. Р. Блейхут Быстрые алгоритмы цифровой обработки сигналов /Пер. с англ. — М.: Мир, 1989. — 448 с.
15. П. А. Бакулев, Ю. А. Басистов, В. Г. Тугуши Обработка сигналов с постоянным уровнем ложных тревог (обзор) // Известия
высших учебных заведений. Радиоэлектроника. — 1989. — Т. 32. — № 4. — С. 4—15.
16. Г. Д. Бахтияров Цифровая обработка сигналов. Проблемы и основные направления повышения эффективности // Зарубежная радиоэлектроника. — 1984. —№ 12. — С. 48—64.
17. ТО. А. Басистов, В. Г. Тугуши Регуляризованные алгоритмы обнаружения радиолокационных сигналов // Известия высших учебных заведений. Радиоэлектроника. — 1987. — Т. 32. — № 4. — С. 8-16.
18. Ю. А. Басистов Регуляризация по Тихонову задачи различения гипотез при неопределенности // Автоматика и телемеханика. — 1981. - № 9. - С. 49-59.
19. В. В. Воеводин, Ю. А. Кузнецов Матрицы и вычисления. — М.: Наука. Главная редакция физико-математической литературы, 1984. - 320 с.
20. В. А. Ворошилов, И. С. Ляпин Защита радиолокационных станций от преднамеренных помех // Зарубежная радиоэлектроника. — 1990. - № 5. - С. 3-21.
21. М. М. Гельман Аналого-цифровые преобразователи для информационно-измерительных систем. — М.: Изд. стандартов, 1989. - 320 с.
22. В. В. Глушко, Л. М. Осинский Микропроцессорные средства для построения систем цифровой фильтрации // Управляющие системы и машины. — 1982. — № 1. — С. 73—76.
23. Л. М. Гольденберг, Б. Д. Матюшкин, М. Н. Поляк Цифровая обработка сигналов. Справочник. — М.: Радио и связь, 1989. — 472 с.
24. В. И. Гвоздев, Г. А. Кузаев, Н. В. Назаров Проблемы повышения быстродействия обработки цифровой информации // Зарубежная радиоэлектроника. — 1986. — № 6. — С. 19—30.
25. Гейбриел Введение в теорию адаптивных антенных решеток // ТИИЭР. - 1976. - Т. 64. - С. 55-95.
26. Н. С. Гриценко, В. П. Логинов, В. И. Мальцев, К. К. Севастьянов, И. Г. Тихомирова Определение параметров движения объектов в статистически неопределенных ситуациях //Зарубежная радиоэлектроника. — 1988. — № 2. — С. 3—29.
27. А. Л. Горелик, В. А. Скрипник Методы распознавания. — М.: Высшая школа, 1977. — 222 с.
28. А. Л. Горелик, Ю. Л. Барабаш, О. В. Кривошеев, С. С. Эн-штейн Селекция и распознавание на основе локационной информации. — М.: Радио и связь, 1990. — 240 с.
29. Э. Я. Гаек, 3. Шидак Теория ранговых критериев / Пер. с англ. — М.: Наука, 1967 — 375 с.
30. Н. С. Гриценко, А. А. Кириченко, Т. А. Коломиец, В. П. Логинов, И. Г. Тихомирова Оценивание параметров движения маневрирующих объектов // Зарубежная радиоэлектроника. — 1983. — № 4. - С. 3-26.
410
411
31. В. В. Дружинин, Д. С. Контаров Системотехника. — М.: Радио и связь, 1985. — 200 с.
32. Д. Дюбуа, А. Пред Теория возможностей / Пер. с англ. — М.: Радио и связь, 1990. — 220 с.
33. Д. Э. Даджон Основы цифровой обработки сигналов в решетках // ТИИЭР. - Т. 65. - 1977. - № 6. - С. 99-107.
34. В. П. Ермоленко, Д. Г. Митрофанов, Н. Н. Коваленков Учет вида зондирующего сигнала и архитектурных особенностей радиолокационных целей при определении потенциальных возможностей их распознавания // Зарубежная радиоэлектроника. — 1996. — № И. — С. 73-76.
35. А. А. Елисеев, Л. И. Окатов, Л. И. Прусова Сравнительная эффективность использования адаптивных систем селекции движущихся целей при подавлении отражений от гидрометеоров // Вопросы радиоэлектроники. Серия ОВР. — 1983. — Вып. 12.
36. А. Л. Ершов Стабильные методы оценки параметров (обзор) // Автоматика и телемеханика — 1978. — № 8. — С. 66—99.
37. Н. Ю. Жубуртович Возможности компенсации помеховых сигналов, принимаемых по боковым лепесткам диаграммы направленности ФАР // Радиоэлектроника — 1980. — Т. 35. — № 10. — С. 15—26.
38. А. К. Журавлев, А. П. Лукошкин и др. Обработка сигналов в адаптивной антенной решетке. — Л.: изд. ЛГУ, 1983. — 240 с.
39. А. К. Журавлев, В. А. Хлебников, А. П. Родимое и др. Адаптивные радиотехнические системы с антенными решетками. — Л.: Изд. ЛГУ, 1991. - 544 с.
40. С. Я. Жук, П. А. Евланов Совместная фильтрация параметров движения цели и вида ее маневра // Радиотехника. — 1990. — № 2. - С. 12-16.
41. М. 3. Згурский, В. Н. Подладчиков Аналитические методы калмановской фильтрации для систем с априорной неопределенностью. — Киев: Наукова думка, 1995. — 283 с.
42. Т. В. Зинченко, С. 3. Кузьмин Об одном алгоритме измерения угловых координат в РЛС с дискретным сканированием // Вопросы судостроения. Сер. общетехн. — 1984. — Вып. 82. — С. 3—8.
43. Т. В. Зинченко, С. 3. Кузьмин Авторское свидетельство № 220461 (СССР), 1985 с приоритетом от 20.08.1984.
44. Н. К. Игнатьев Дискретизация и ее приложения — М.: Связь, 1980. — 264 с.
45. Ю. В. Иванов, А. Ю. Ильин, Ю. В. Родимое Радиолокационные системы селекции движущихся целей: принципы построения, состояние разработок и перспективы развития (обзор) // Зарубежная радиоэлектроника. — 1983. — № 7. — С. 28—52.
46. Д. С. Контаров, Ю. С. Голубев-Новожилов Введение в радиолокационную системотехнику. — М.: Сов. радио, 1980. — 368 с.
47. А. Кассам, Г. В. Пур Робастные методы обработки сигналов. Обзор // ТИИЭР. - 1985. - Т. 73. - № 3. - С. 54-110.
48. А. В. Каляев Микропроцессорные системы с программируемой архитектурой. — М.: Радио и связь, 1984. — 240 с.
49. В. Н. Кокин, А. В. Пономарев, 3. В. Фединин Использование текущей оценки обратной корреляционной матрицы помех в адаптивном обнаружителе // Радиотехника и электроника. — 1984. — № 1. - С. 30-42.
50. С. 3. Кузьмин Цифровая обработка радиоэлектронной информации. — М.: Сов. радио, 1967. — 400 с.
51. С. 3. Кузьмин Основы теории цифровой обработки радиолокационной информации. — М.: Сов. радио, 1974. — 432 с.
52. С. 3. Кузьмин Основы проектирования систем цифровой обработки радиолокационной информации. — М.: Радио и связь, 1986. - 352 с.
53. С. 3. Кузьмин, С. С. Костина Применение значимой выборки для исследования сигналов методом имитационного моделирования // Известия высших учебных заведений. Радиоэлектроника. — 1984. - Т. 27. - № 9. - С. 8-13.
54. С. 3. Кузьмин, С. С. Костина Оценивание характеристик обнаружения сигналов методом моделирования с использованием модифицированной входной выборки // Известия высших учебных заведений. Радиоэлектроника. — 1985. — Т. 28. — № 5. — С. 46—50.
55. С. 3. Кузьмин, В. П. Медведев Алгоритм оценивания количества источников сигналов по информации многоканального приемника // Известия высших учебных заведений. Радиоэлектроника. - 1983. - Т. 26. - № 12. - С. 12-16.
56. С. 3. Кузьмин, С. С. Костина, И. С. Грицук Когерентная ранговая обработка узкополосных сигналов на фоне шума // Известия высших учебных заведений. Радиоэлектроника. — 1990. — № 11. — С. 25-29.
57. А. В. Колосов, С. 3. Кузьмин, И. Ф. Цапков Статистическая оценка быстродействия и объема памяти ЦВМ в автоматизированных системах управления / Сб. Применение ЦВМ для автоматизации обработки информации. — Л.: Судостроение, 1975. — С. 19—30.
58. И. П. Коврижных, С. 3. Кузьмин Переключающийся алгоритм фильтрации параметров траектории маневрирующей цели / Сб. Применение ЦВМ для автоматизации обработки информации. — Л.: Судостроение, 1975. — С. 31—44.
59. С. 3. Кузьмин, Т. В. Барингольц, В. И. Романюк Оценивание параметров движения маневрирующих объектов // Судостроительная промышленность. — 1992. — № 31. — С. 83—89.
60. С. 3. Кузьмин, С. А. Касьянюк Комплекс “РЛС с АР + СЦВМ”: новые возможности радиолокации объектов // Труды МНТК “Современная радиолокация” — Киев, 1994. — С. 43—52.
61. С. 3. Кузьмин, Т. В. Барингольц, Ю. В. Даценко Стратегия распределения энергетических ресурсов МРЛС с ФАР / Доклад на МНТК “Современная радиолокация” — Киев, 1994. — Отд. выпуск.
412
413
62. С. 3. Кузьмин, Т. В. Барингольц, Ю. В. Даценко Исследование пропускной способности многофункциональной РЛ С методом математического моделирования // Судостроительная промышленность. - 1992. - № 31. - С. 122-129.
63. Д. Ж. Клир Системология. Автоматизация решения системных задач / Пер. с днгл. — М.: Радио и связь, 1990. — 544 с.
64. В. Ф. Кравченко, А. М. Крот Методы и микроэлектронные средства цифровой фильтрации сигналов и изображений на основе теоретико-числовых преобразований // Успехи современной радиоэлектроники. — 1997. — № 6. — С. 3—31.
65. Н. Кутъев Принципы построения многофункциональных РЛС ЗРК // Вестник ПВО. - 1988. - № 2. - С. 75-79.
66. В. А. Казаков Введение в теорию марковских процессов и некоторые радиотехнические задачи. — М.: Сов. радио, 1973. — 230 с.
67. С. П. Лещенко Информационные показатели качества систем радиолокационного распознавания // Зарубежная радиоэлектроника. -1996. - № И. - С. 64-66.
68. А. И. Леонов, К. И. Фомичев Моноимпульсная радиолокация. — М.: Радио и связь, 1984. — 312 с.
69. В. А. Лихарев Цифровые методы и устройства в радиолокации. — М.: Сов. радио, 1976. — 288 с.
70. В. В. Лосев Микропроцессорные устройства обработки информации. Алгоритмы цифровой обработки. — Минск: Высшая школа, 1980. - 132 с.
71. Б. Р. Левин, В. Шварц Вероятностные модели и методы в системах связи и управления. — М.: Радио и связь, 1985. — 312 с.
72. Д. И. Леховицкий, В. Н. Кокин, И. Д. Раков, Б. Т. Свердлов Особенности защиты приемных устройств с ФАР общей системой компенсации // Радиотехника. — 1987. — № 12. — С. 6—9.
73. В. П. Левшин, В. Ф. Стручев Адаптивные фазированные антенные решетки с ограниченным числом степеней управления // Зарубежная радиоэлектроника. — 1982. — № 1. — С. 31—42.
74. Р. А. Мезинго, Т. У. Миллер Адаптивные антенные решетки. Введение в теорию / Пер. с англ. — М.: Радио и связь, 1986. — 425 с.
75. С. Л. Мерпл-мл. Цифровой спектральный анализ и его приложения /Пер. с англ — М.: Мир, 1990. — 584 с.
76. И. А. Морозов, Ю. В. Сныткин, С. А. Гнатюк Оптимизация длительности цикла обзора при многоканальном обнаружении // Радиоэлектроника. — 1992. — № 8. — С. 3—8.
77. Нечеткие множества в моделях управления и искусственного интеллекта / Под ред. Д. А. Поспелова. — М.: Наука, 1986. — 312 с.
78. Ф. К. Неупокоев Противовоздушный бой. — М.: Воениздат, 1989. - 262 с.
79. В. Г. Небабин, В. К. Гришин Методы и техника радиолокационного распознавания: современное состояние, тенденции развития, перспективы // Зарубежная радиоэлектроника — 1992. — № 10. —
80. А. В. Оппенгейм, Р. В. Шафер Цифровая обработка сигналов / Пер. с англ. — М.: Связь, 1979. — 426 с.
81. Обработка сигналов в радиотехнических системах / Под ред. Л. П. Лукошкина. — Л.: Изд. ЛГУ, 1987. — 400 с.
82. А. Пелад, Б. Лиу Цифровая обработка сигналов. Теория, проектирование, реализация / Пер. с англ. — Киев: Высшая школа, 1979. - 270 с.
83. Д. И. Попов Синтез цифровых адаптивных режекторных фильтров // Радиоэлектроника. — 1981. — № 10. — С. 53—57.
84. Д. И. Попов, В. А. Федоров Эффективность рекурсивных фильтров селекции движущихся целей // Известия высших учебных заведений. Радиоэлектроника. — 1975. — № 3. — С. 65—68.
85. Применение цифровой обработки сигналов / Пер. с англ. — М.: Мир, 1880. - 552 с.
86. Проблемы антенной техники / Под ред. Л. Д. Бахраха, Д. И. Вознесенского. — М.: Радио и связь, 1989. — 386 с.
87. И. В. Панфилов, Л. М. Половко Вычислительные системы. — М.: Сов. радио, 1980. — 352 с.
88. Ю. П. Пытьев Математические методы интерпретации эксперимента. — М.: Высшая школа, 1989. — 351 с.
89. Ю. П. Пытьев, А. И. Чуличков Рекуррентный метод редукции измерений // Математическое моделирование. — 1989. — № 8. — С. 13-21.
90. А. И. Перов Адаптивная фильтрация при коррелированных шумах наблюдения // Радиотехника. — 1995. — № 11. — С. 92—94.
91. А. А. Писталькорс, О. С. Литвинов Введение в теорию адаптивных антенн. — М.: Наука, 1991. — 220 с.
92. Л. А. Расстригин Современные принципы управления сложными объектами. — М.: Сов. радио, 1980. — 232 с.
93. Г. Рекпайтис, А. Рейвиндран, К. Регсдел Оптимизация в технике. — Т. 1. / Пер. с англ. — М.: Мир, 1986. — 350 с.
94. С. Дж. Рабиновитц, Ч. X. Гайджер, Э. Брукнер, Ч. Э. Мюэ, Ч. М. Джонсон Цифровые методы в радиолокации // ТИИЭР. — Т. 73. - № 2. - С. 182-198.
95. Э. Сейдж, Дж. Меле Теория оценивания и ее приложение в связи и управлении /Пер. с англ. — М., 1976. — 496 с.
96. Ю. Г. Сосулин Теоретические основы радиолокации и радионавигации / Учебное пособие. — М.: Радио и связь, 1992. — 304 с.
97. Ю. Г. Сосулин Теория обнаружения и оценивания стохастических сигналов. — М.: Сов. радио, 1978. — 330 с.
98. Ю. Г. Сосулин, М. М. Фишман Теория последовательных решений и ее применение. — М.: Радио и связь, 1985. — 330 с.
99. Р. Л. Стратонович Принципы адаптивного приема. — М.: Сов. радио, 1973. — 144 с.
414
415
100. Справочник по радиолокации / Под ред. М. Сколника. Пер. с англ. — Т. 1—2. — М.: Сов радио, 1976. — 406 с.
101. Теория обнаружения сигналов /Под ред. П. А. Бакута. — М.: Радио и связь, 1984. — 440 с.
102. Теория обнаружения сигналов / Под ред. А. А. Колосова. — М.: Радио и связь, 1989. — 288 с.
103. Теоретические основы радиолокации / Под. ред. Я. Д. Шир-мана. — М.: Сов. радио, 1970. — 560 с.
104. Д. И. Тихонов, В. Я. Арсенин Методы решения некорректных задач. — М.: Наука, 1979. — 285 с.
105. В.. Уиороу, С. Стирнз Адаптивная обработка сигналов. / Пер. с англ. — М.: Радио и связь, 1989. — 386 с.
106. А. М. Федотов Некорректные задачи со случайными ошибками в данных. — Наука. Сибирское отделение, 1990. — 280 с.
107. А. Форина, Ф. Студер Цифровая обработка радиолокационной информации. Сопровождение целей / Пер. с англ. М.: Радио и связь, 1993 — 340 с.
108. Ю. И. Фельдман, Ю. Б. Гидастов, В. Н Гомзик Сопровождение движущихся целей. — М.: Сов. радио, 1978. — 288 с.
109. П. Хьюбер Робастность в статистике /Пер. с англ. — М.: Мир, 1984. — 303 с.
110. Ф. Хэррис Использование окон при гармоническом анализе методом дискретного преобразования Фурье // ТИИЭР — 1978. — Т. 66. - № 1. - С. 60-96.
111. В. В. Хуторцев Оптимальное управление частотно-временными режимами работы многоканальных РЛС // Радиотехника. - 1991. - № 8. - С. 37-41.
112. Н. М. Царьков Многоканальные радиолокационные измерители. — М.: Сов. радио, 1980 — 192 с.
ИЗ. Ю. А. Шишов, В. А. Ворошилов Функционирование РЛС с ФАР // Зарубежная радиоэлектроника. — 1981. — № 5. — С. 32—50.
114. Я. Д. Ширман, С. А. Горшков и др. Методы радиолокационного распознавания и их моделирование // Зарубежная радиоэлектроника. — 1996. — № И. — С. 3—82.
115. Я. Д. Ширман О некоторых алгоритмах классификации объектов по совокупности признаков // Радиотехника и электроника. - 1995. - Вып. 7. - С. 1095-1102.
116. Я. Д. Ширман, С. А Горшков Проблемы теории радиолокационного распознавания // Труды МНТК “Современная радиолокация”. — Вып. 1. — Киев, 1994. — С. 30—36.
117. Я. Д. Ширман, В. Н. Манжос Теория и техника обработки радиолокационной информации на фоне помех. — М.: Радио и связь, 1981. - 416 с.
118. Ю. А. Шишов, В. А. Ворошилов Многоканальная радиолокация с временным разделением каналов. — М.: Радио и связь, 1987. - 144 с.
I
119. Д. А. Этингтон, П. Дж. Карплас, Дж. Д. Райт Многофункциональные вращающиеся РЛС с электронным сканированием для обзора воздушного пространства / ТИИЭР. — 1985. — Т. 73. — № 2. - С. 199-217.
120. Е. Hanle. Report on Multi-function Operation and Signal Processing whis Electronically Steered Radar Sistems. // ’’Radar — 79" International Colloquium / — Paris. —1979. — P. 545—550.
121. R. A. Singer, К. IV. Behnke. Real Time Tracking Filter Evaluation and Selection for Tactical Opplication. // IEEE Trans, on AES. — Vol. 7. - № 1. - 1971. - P. 100-110.
122. Y. Bar-Shalom, K. Birmiwal. Variable Dimention Filter for Maneuvering Target Tracking. // IEEE Trans, on AES. — Vol. 18. — № 5. - 1982. - P. 621-629.
123. Y. Bar-Shalom, К. C. Chang, H. A. P. Blom. Tracking a Maneuvering Target Using Input Estimation Versus the Interacting Multiple Model Algorithm. // IEEE Trans, on AES. — Vol. 25. — № 2. - 1989. - P. 296-300.
124. V. Nagarajan, R. M. Sharma, M. R. Chidamihara. An Algorithm for Tracking a Maneuvering Target in Clatter. // IEEE Trans, on AES. - Vol. 20. - № 5. - 1984. - P. 560-572.
125. P. L. Bogler. Tracking a Maneuvering Target Using Input Estimation. // IEEE Trans, on AES. — Vol. 23. — № 3. — 1987. — P. 298-310.
126. T. C. Wang, P. K. Varshnev. A Tracking Algorithm for Maneuvering Targets. // IEEE Trans, on AES. — Vol. 29. — № 3. — 1993. - P. 910-924.
127. P. I. Costa. Adaptive Model Architecture and Exstended Kalman-Bucy Filters. // IEEE Trans, on AES. —Vol. 30. — № 2. — 1994. - P. 525-533.
128. Donald B. Read. An Algorithm for Tracking Multiple Targets. // IEEE Trans, on Automatic Control. — Vol. 24. — № 6. — 1979. — P. 843-854.
129. Y. Bar-Shalom. Tracking Methods in a Multitarget Environment. // IEEE Trans, on Automatic Control. —Vol. 23. — № 4. — 1978. - P. 618-626.
130. P. Lerro, F. Bar-Shalom. Interacting Multiple Model Tracking whis Target Amplitude Feature. // IEEE Trans, on AES. — Vol. 29. — № 2. - 1993. - P. 494-509.
131. D. Sengupta, R. A. litis. Neural Solution to the Multitarget Tracking Date Association Problem // IEEE Trans, on AES. — Vol. 25. - № 1. - 1989. - P. 96-108.
132. A. Houles, Y. Bar-Shalom. Multisensor Tracking of a Maneuvering Target in Clatter. // IEEE Trans, on AES. — Vol. 25. — № 2. — 1989. - P. 178-188.
133. K. Bermival, Y. Bar-Shalom. On Tracking of a Maneuvering Target in Clatter. // IEEE Trans, on AES. - Vol. 20 - № 5. - 1984. - P. 635-644.
416
417
134. A. К. Machalanabis, В. Zhou, N. К. Bose. Improved MultiTarget Tracking in Clatter by PDA Smoothing. // IEEE Trans, on AES. - Vol. 26. - № 1. - 1990. - P. 113-121.
135. T. E. Fortmann, Y. Bar-Shalom, M. Scheffe. Sonar Tracking of Multiple Targets Using Joint Probabilistic Date Association. // IEEE Journal of Oceanic Engineering. — Vol. 8. — № 3. — 1983. — P. 173—193.
136. Kuo-Chu Chang, Y. Bar-Shalom. Join Probabilistic Date Association for Multitarget Tracking whis Possibly Unresolved Measurements and Maneuvers. // IEEE Trans, on AC. — Vol. 29. — № 7 - 1984. - P. 585-594.
137. Lang Hong, Andrew Lynch. Recursive Temporal-Spetial Information Fusion whis Applications to Target Identification. // IEEE Trans, on AES. - Vol. 29. - № 2. - 1993. - P. 435-445.
138. A. Zyweck, R. F. Bogner. Radar Target Classification of Commercial Aircraft. // IEEE Trans, on AES. — Vol. 32. — № 2. — 1996. - P. 598-606.
139. 5. Hudson, D. Psaltis. Correlation Filters for Aircraft Identification From Radar Range Profiles. // IEEE Trans, on AES. — Vol. 29. - № 3. - 1993. - P. 741-748.
140. 1. G. Teti, R. P. Gorman, W. A. Berger. A Maltifeature Decision Space, Approach to Radar Target Identification. // IEEE Trans, on AES. - Vol. 32. - № 1. - 1998. - P. 480-487.
141. P. Barton. Digital Beam Forming for Radar. // IEEE Proc. — Vol. 127 PtF - № 4. - 1980. - P. 266-276. >
142. G. Galati, P. Lombardi. Desision and Evaluation of an Adaptive MTI Filter. // IEEE Trans, on AES. - Vol. 14. - № 6. - 1976. -P. 899-905.
143. R. R. Kelly, S. Charton. A Programmable Digital Signal Processor Evaluated for Radar Applications. / Microwave. Journal, 1979. - № 2. - P. 62-66.
144. Janrence A. Klein. A Boolean Algebra Approach to Maltiple Sensor Voting Fusion. // IEEE Trans, on AES. — Vol. 29. — № 2. — 1993. - P. 317-327.
145. Y. T. Chan, A. G. G. Hu, J. B. Plant. A Kalman Filter Based Traking Scheme whis Input Estimation. // IEEE Trans, on AES. — Vol. 15. - № 2. - 1979. - P. 237-243.
146. J. A. Roecker, C. D. McGillem. Target Tracking in Manenver-Centered Coordinates. // IEEE Trans, on AES. — Vol. 25. — № 6. — 1989. - P. 836-842.
147. G. Van Keuk, S. S. Blackman. On Phased-Arrey Radar Tracking and Parameter Control. //IEEE Trans, on AES. — Vol. 29. — № 1. — 1993. - P. 186-193.
148. Qing Li, E. I. Rothwell, Kun-Mu Chen, D. P. Nyquist. Radar Target Discrimination Schemes Using Time-Domain and Frequency-Domain Methods for Reduced Date Storage. // IEEE Trans, on AP. — Vol. 45. - № 6. - 1997. - P. 995-1000.
418
149. E. D’Addio, A. Farina, F. A. Studer. Perfomance Comparision of Optimum and Conventional MTI and Doppler Processors. // IEEE Trans, on AES. - Vol. 20. - № 6. - 1984. - P. 707-714.
150. T. Л. Caamu Элементы теории массового обслуживания и ее приложения /Пер. с англ. — М.: Сов. радио, 1965. — 510 с.
151. D. R. Morgan. Partially Adaptive Array Techniques. // IEEE Trans, on AP. - Vol. 26. - № 6. - 1978. - P. 823-833.
152. В. А. Морозов Регулярные методы решения некорректно поставленных задач. — М.: Наука. Редакция физико-математической литературы, 1987. — 240 с.
153. Е. Hanle. Report on Multi-Function Optration and Signal Processing whis Electronically Steered Radar Sistem Radar-79 // International Colloquium on Radar. — 1979. — P. 545—550.
154. Ю. П. Пытьев Задачи редукции в экспериментальных исследованиях // Математический сборник 120 (162). — № 2. — 1983. - С. 240-272.
155. Ю. А. Белов, В. С. Касьянюк Математические модели и вычислительный эксперимент в задачах восстановления функций — сигналов по конечному множеству данных // Журнал вычислительной математики и математической физики. — 1986. — Т. 26. — № 11. — С. 1605-1616.
156. И. А. Ибрагимов, Ю. В. Линник Независимые и стационарно связанные величины / Пер. с англ. — М.: Наука, 1965. — 524 с.
157. В. Л. Ван дер Варден Математическая статистика / Пер. с нем.: Изд. Иностранная литература, 1960. — 434 с.
158. R. L. Moose, Н. G. Vanlandingham, D. Н. Me Cabe. Modeling and Estimation for Tracking Maneuvering Targets. // IEEE Trans, on AES. - Vol. 15. - № 3. - 1979.
159. B. Zhou, N. K. Bose. Multitarget Tracking in Clatter: Fast Algorithms for Date Association. // IEEE Trans, on AES. — Vol. 29. — № 2. - 1993. - P. 352-363.
160. J. A. Roecker, G. L. Phillis. Suboptimae Joint Probabilistic Late Association. // IEEE Trans, on AES. — Vol. 29. — № 2. — 1993. - P. 510-517.
419
ОГЛАВЛЕНИЕ
Предисловие............................................ 3
Глава I
Предмет и проблематика цифровой радиолокации.........8
1.1. Состояние и перспективы внедрения цифровых методов и устройств в радиолокации......................8
1.2. Математическая модель измерительно-вычислительной системы “АР+ЦВК”................................12
1.3. Проблемы совершенствования методов и алгоритмов цифровой обработки радиолокационных сигналов и данных...15
1.3.1. Проблемы цифровой фильтрации и обнаружения сигналов и траекторий...................................15
1.3.2. Проблемы оценивания параметров сигналов и траекторий............................................17
1.4. Проблемы повышения быстродействия вычислительных средств для цифровой обработки информации.......18
Глава II
Многофункциональная РЛС с ЦАР как прототип информационно-вычислительной системы в цифровой радиолокации...............................21
2.1. Определение и назначение многофункциональной РЛС (МФРЛС)........................................... 21
2.2. Принципы построения и структурная схема многофункциональной РЛС с АР............................24
2.3. Формирование и управление диаграммой направленности АР на передачу...........................27
2.4. Аналого-цифровой приемный модуль............29
2.5. Цифровое формирование ДН АР на прием........30
2.6. Принципы построения системы цифровой обработки информации в многофункциональной РЛС..........33
Глава III
Адаптивная пространственная обработка сигналов в цифровой антенной решетке................38
3.1. Постановка задачи. Модели сигналов и помех.....38
3.2. Адаптивная антенная решетка. Принципы построения и функционирования.......................... 41
3.3. Оптимизация пространственной обработки сигналов в адаптивной антенной решетке. Статистический подход 44
33.1. Алгоритм формирования весовых коэффициентов по критерию минимума дисперсии ошибки...................45
420
33.2. Алгоритм формирования весовых коэффициентов по критерию минимума дисперсии помехи на выходе ААР..............47
333. Особенности адаптации ЦАР в режиме активного сопровождения......................................... 49
3.4. Методы оценивания вектора весовых коэффициентов в частично адаптивной АР...........................51
34.1. Оценивание вектора весов по выборке сигналов АР на конечном интервале наблюдения..............................51
34.2. Рекуррентное оценивание вектора весовых коэффициентов....................................................53
3.5. Цифровая реализация рекуррентных алгоритмов оценивания вектора весовых коэффициентов на последовательных и параллельных вычислительных структурах.......................................................57
Глава IV
Применение методов математической редукции и парето-оптимальной интерполяции для пространственной обработки сигналов в помехах...............63
4.1. Математический аппарат оптимальной редукции как методическая основа алгоритмизации задач цифровой пространственной обработки информации в радиолокации...................................................63
4.2. Пространственная цифровая обработка сигналов на выходе ЦАР методом оптимальной редукции.......................69
4.2.1. Постановка задачи....................................69
4.2.2. Оптимальная редукция принимаемых сигналов к выходу ЦАР с диаграммой направленности заданной формы............71
4.23. Обнаружение, разрешение и оценка координат источников излучения.............................................75
4.3. Формирование диаграммы направленности ЦАР с провалами в заданных направлениях..............................80
4.4. Принципы построения алгоритма пространственной обработки сигналов в ЦАР методом оптимальной редукции............84
Глава V
Цифровая когерентная фильтрация и накопление импульсных сигналов.........................................88
5.1. Канал временной когерентной фильтрации сигналов 88
5.2. Статистические характеристики случайного процесса на выходе канала временной когерентной обработки сигналов...............................................89
5.3. Цифровая согласованная фильтрация когерентных импульсных сигналов..............................................92
53.1. Исходные предпосылки................................................................ 92
421
532. Цифровые согласованные фильтры для свертки сигналов во временной области.............................................................95
5.4. Цифровая селекция движущихся целей ..........................................108
54.1. Принципы построения и показатели эффективности
цифровой селекции движущихся целей (ЦСДЦ) ................................. 108
54.2. Цифровые режекторные фильтры СДЦ ........................... 110
543...........ЦСДЦ в РЛС с переменной частотой повторения импульсов............................................................................ 118
54.4. Адаптивные цифровые режекторные фильтры (АЦРФ) 119
54.5. Цифровые когерентные накопители сигналов на выходе ЦРФ............................................................................123
54.6. Процессор когерентной межпериодной обработки сигналов на фоне пассивных помех............................................................ 128
Глава VI
Цифровое обнаружение и измерение координат принимаемых радиолокационных сигналов.............................................131
6.1. Оптимальные цифровые обнаружители сигналов на фоне помех с известными параметрами...................................................131
6.1.1. Постановка и методика решения задачи оптимального обнаружителя сигналов ...................................................... 131
6.1.2. Оптимальный обнаружитель пачки оцифрованных сигналов ...........................................................................134
6.13. Оптимальный обнаружитель пачки двоичноквантованных сигналов ................................................................................... 136
6.14. Цифровые программные обнаружители пачек двоично-квантованных сигналов.................................................................. 137
6.2. Цифровые обнаружители сигналов на фоне помех с неизвестными параметрами............................................................. 144
6.2. 1. Исходные предпосылки.................................................... 144
6.2. 2. Адаптивные цифровые обнаружители................................ 146
6.23. Непараметрические цифровые обнаружители ................ 152
6.24. Адаптивно-непараметрические обнаружители................. 158
6.3. Цифровые измерители параметров сигналов ..............................161
63 .1. Постановка и методика решения задачи
оптимального оценивания параметров сигналов................................... 161
632. Оценивание времени задержки и доплеровской частоты сигнала..........................................................................163
633. Оценивание угловой координаты при
равномерном сканировании антенны........................................................ 166
634. Одноканальные измерители угловых координат при автосопровождении одиночных целей .............................................. 172
63.5 . Моноимпульсные измерители угловых координат ........... 174
63.6 . Алгоритм оптимального моноимпульсного
измерения угловых координат в многофункциональной РЛС с АР.................................................................................178
422
Глава VII
Фильтрация и экстраполяция параметров траектории неманеврирующей цели.............................................183
7.1. Общая характеристика этапов и операций вторичной обработки радиолокационной информации.......................183
7.2. Представление фильтруемого процесса...................185
7.2.1. Модель траектории цели.................................. 185
7.2.2. Модель процесса измерения.................................185
7.3. Оптимальная фильтрация параметров состояния динамической системы..................................................189
7.4. Оптимальная линейная фильтрация и экстраполяция параметров траектории по фиксированной выборке данных................193
7.4.1. Алгоритм оптимальной фильтрации параметров траектории по критерию максимального правдоподобия (общий случай)........................................................195
7.4.2. Алгоритмы экстраполяции параметров траектории.......199
7.5. Рекуррентные алгоритмы фильтрации параметров невозмущенной траектории.............................................200
7.5.1. Формульная схема оптимального алгоритма рекуррентной фильтрации..............................................200
7.5.2. Рекуррентная фильтрация параметров линейной траектории............................................................204
7.53. Расширенный фильтр Калмана................................207
7.6. Применение методов оптимальной редукции при решении задач фильтрации параметров траектории........................213
7.6.1. Применение метода оптимальной редукции при оценке параметров траектории по фиксированной выборке измерений.............................................................213
7.6.2. Применение метода рекуррентной редукции для фильтрации параметров траектории......................................................... 215
Глава VIII
Фильтрация параметров траектории маневрирующей цели.............................................................218
8.1. Способы описания динамики маневрирующей цели...............218
8.1.1. Статистические модели маневра воздушной цели.............218
8.1.2. Моделирование маневра по результатам оценивания входного воздействия..................................................221
8.2. Применение фильтра Калмана и его модификаций для фильтрации параметров слабоманеврирующих целей...................223
8.3. Фильтрация параметров траектории маневрирующей цели адаптивным фильтром с обнаружителем маневра......................226
83.1. Переключающийся фильтр Калмана с обнаружителем маневра.................................................................................................................. 228
423
8.3.2 . Модифицированный адаптивный фильтр с обнаружителем маневра.................................................. 238
8.4. Адаптивная байесовская фильтрация параметров маневрирующей цели.........................................................248
8.4.1. Адаптивный байесовский алгоритм фильтрации параметров траектории цели с бинарной моделью маневра......................249
8.4.2. Адаптивный байесовский алгоритм фильтрации параметров траектории маневрирующих целей с применением раздельных фильтров...........................................253
8.5. Адаптивное управление темпом обновления данных
при активном сопровождении цели МФРЛС с ФАР (ЦАР)..........................259
а-
Глава IX
Идентификация отметок и фильтрация параметров траектории при сопровождении целей в помехах..........................261
9.1. Постановка и классификация задач.................................261
9.2. Сопровождение одиночной неманеврирующей цели в помехах...................................................................263
9.2.1. Алгоритм сопровождения с идентификацией отметок методом максимального правдоподобия ................................263
9.2.2. Алгоритм сопровождения с вероятностной идентификацией данных по координатным признакам .................... 266
9-2.3- Алгоритм сопровождения с вероятностной идентификацией данных по координатным и сигнальным признакам...................................................................272
9.3. Сопровождение одиночной маневрирующей цели в помехах...................................................................277
9.3.1. Адаптивный алгоритм сопровождения маневрирующей цели в помехах для бинарной модели траектории движения цели................................................. 277
9.3.2. Адаптивный алгоритм сопровождения цели с многогипотезной разделенной моделью маневра и вероятностной идентификацией данных............................................ 283
9-3.3- Адаптивный алгоритм сопровождения маневрирующей цели с использованием двух разнородных источников информации .....................................................287
9.4. Совместное сопровождение нескольких целей в помехах................................................................. 294
9.4.1. Алгоритм сопровождения группы целей на основе фильтра многогипотезной идентификации данных............................ 295
9.4.2. Алгоритм сопровождения группы целей на основе фильтра с совместной вероятностной идентификацией данных (СВИД)................................................................................................. 298
9-4.3. Сопровождение групповой цели (боевого порядка)..........................................................307
424
Глава X
Статистический анализ процессов обнаружения и сопровождения параметров траектории воздушной цели...............................................................309
10.1. Показатели качества вторичной обработки радиолокационной информации.............................................................310
10.2. Статистический анализ процесса обнаружения траектории цели в режиме обзора.....................................................311
10.2,1. Основные операции алгоритма обнаружения траекторий..........................................................................311
10.2.2. Статистический анализ алгоритма “2/т + 1/п” при обнаружении ложных траекторий.................................................... 312
10.2.3. Статистический анализ алгоритмов “2/т + 1/п” при обнаружении истинных траекторий.................................................318
10.3. Статистический анализ процесса сопровождения цели в режиме обзора................................................................322
103.1. Структурная схема алгоритма автосопровождения цели в режиме обзора................................................................322
10.3.2 . О критериях сброса траектории с сопровождения............................................................................................... 324
10.3.3 . Среднее число ложных траекторий, находящихся на сопровождении в установившемся режиме работы.....................................328
10.3.4 . Статистические характеристики объединенного алгоритма обнаружения и сопровождения траекторий............................329
Глава XI
Радиолокационное распознавание воздушных целей..............................331
11.1. Формулировка задач радиолокационного распознавания целей........................................................... 331
11.2. Классы и признаки классификации при распознавании воздушных целей.......................................................333
11.2.1. Алфавит классов воздушных целей......................................333
11.2.2. Признаки распознавания воздушных целей .................... 334
11.3. Сигнальные признаки распознавания воздушных целей 335
11.3.1. Сигнальные признаки при зондировании узкополосными сигналами ..........................................................335
11.3.2. Сигнальные признаки при зондировании непрерывными широкополосными сигналами .......................................... 339
1133. Формирование радиолокационного дальностного портрета при многочастотном зондировании......................................... 342
11.4. Алгоритмы распознавания воздушных целей по сигнальным признакам.............................................................347
11.4.1. Критерий эффективности алгоритмов распознавания ...................................................................................................... 347
425
1142. Алгоритмы распознавания по признаку, характеризующему ЭПР цели при узкополосном зондировании........................................................................349
11.4.3. Алгоритм распознавания целей по далъностному радиолокационному портрету (ДРЛП) ................................................... 354
11.5. Распознавание воздушных целей по траекторным признакам ........................................................................ 356
115.1. Траекторные параметры и траекторные признаки распознавания воздушных целей ................................................................. 357
11.6. Объединение разнородной информации при радиолокационном распознавании целей................................................360
11.6.1. Согласование способов представления информации, задаваемой вероятностями и возможностными распределениями ....................................................................361
11.6.2. Объединение весовых функций при распознавании цели по сигнальным и траекторным признакам.................................... 363
11.6.3. Рекурсивное объединение пространственно-временной информации при распознавании цели
по данным нескольких независимых источников ................................... 367
Глава XII
Управление ресурсами в многофункциональной РЛС с антенными решетками....................................................371
12.1. Задачи и структурная схема системы управления МФРЛС............................................................................. 371
12.2. Оптимизация функциональных режимов МФРЛС.............................374
122.1. Организация и оптимизация режима поиска новых
целей ........................................................................................................................ 374
1222. Организация и оптимизация процесса обнаружения траекторий целей ................................................................380
122.3. Организация и оптимизация режима активного сопровождения целей 384
12.3. Распределение временных и энергетических ресурсов МФРЛС между режимами поиска и активного сопровождения целей............................................................... 391
12.4. Оценка предельной пропускной способности МФРЛС.................................:........................................... 395
12.4.1. Аналитический расчет предельной пропускной способности МФРЛС.................................................................. 396
12.42. Исследование пропускной способности МФРЛС методом математического моделирования............................... 400
Заключение...................................................................... 406
Список литературы............................................................ 410
426
Научно-производственное издание
Сергей Захарович Кузьмин
ЦИФРОВАЯ РАДИОЛОКАЦИЯ
ВВЕДЕНИЕ В ТЕОРИЮ
Директор издательства В. В. Воробей Руководитель проекта Е. В. Писъмак Корректор С. П. Обедникова
Дизайн обложки Л*. С. Косъмин
Верстка и компьютерный набор Л. В, Манченко Иллюстрации: С. Е. Письмах, В. В. Манченко, Ю. С, Урбанский Оригинал-макет и печать КВЩ
Передано в набор 14.01.2000 г. Подписано в печать 10.04.2000 г. Формат 60x84/J/)e. Бумага офсетная. Гарнитура литературная. Печать офсетная. Усл. печ. л. 26,75. Тираж 300 экз.
К о м п ь ю т е р н о - и з д а т е л ь с к и й, инфо рм а ционный центр (ПИК)
04080, Киев, ул. Фрунзе. 19—21, тел.: 417-21-72. 462-48-51
428