/















































































































































































































































































































































































Author: Соколов А.В.
Tags: электротехника радиолокация радиотехника
ISBN: 978-5-88070-246-6
Year: 2010


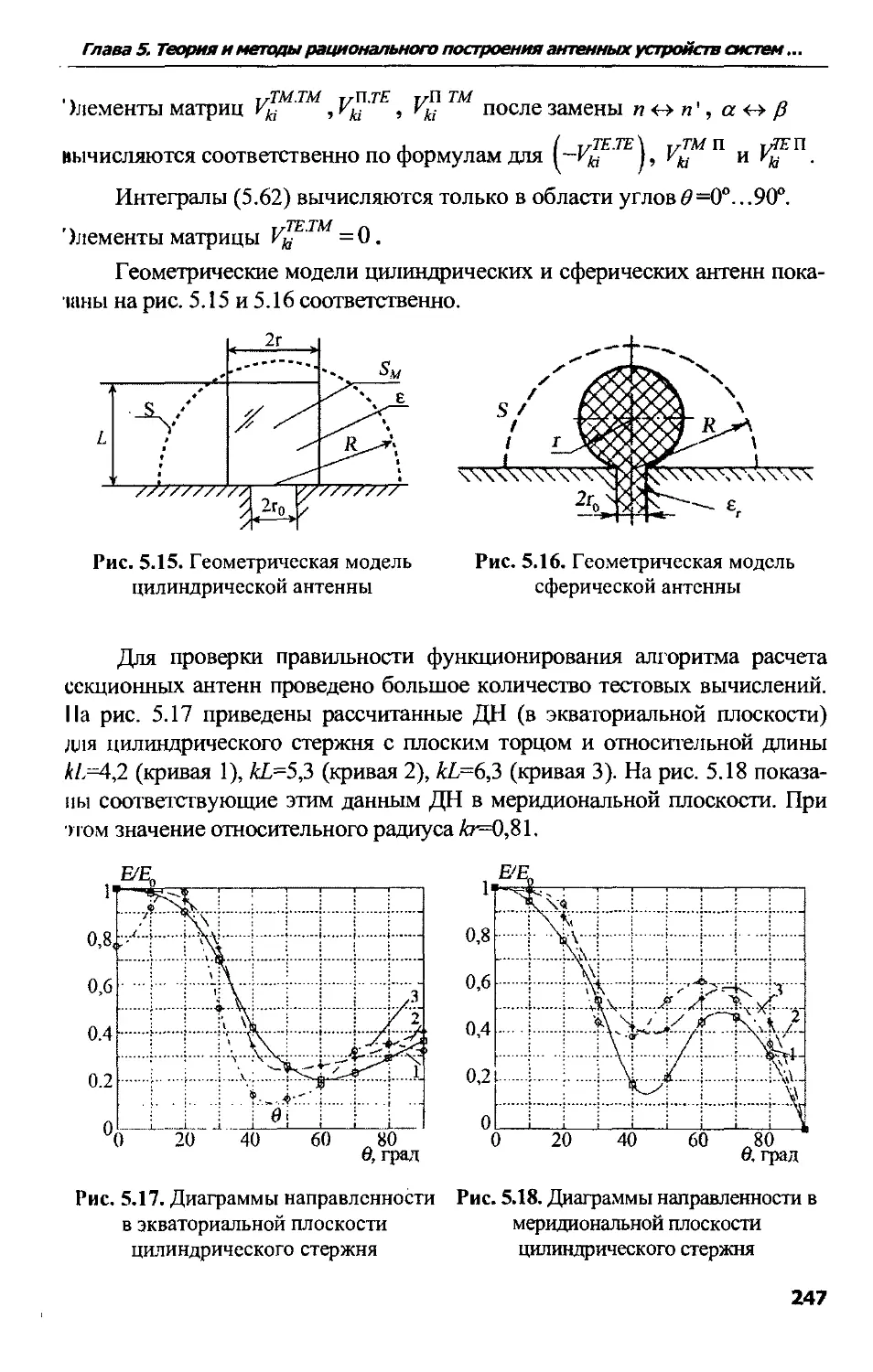
Text
1111ИП(с)(рАДИ0Л0КДЦИЯ
МИЛЛИМЕТРОВАЯ
РАДИОЛОКАЦИЯ
МЕТОДЫ
ОБНАРУЖЕНИЯ И НАВЕДЕНИЯ
В УСЛОВИЯХ
ЕСТЕСТВЕННЫХ И ОРГАНИЗОВАННЫХ
ПОМЕХ
МИЛЛИМЕТРОВАЯ
РАДИОЛОКАЦИЯ
МЕТОДЫ
ОБНАРУЖЕНИЯ И НАВЕДЕНИЯ
В УСЛОВИЯХ
ЕСТЕСТВЕННЫХ И ОРГАНИЗОВАННЫХ
ПОМЕХ
Издательство «Радиотехника»
Москва 2010
УДК 621.396.96
М60
ББК 32.95
Серия «Радиолокация»
Рецензенты:
доктор технических наук, профессор П.А. Бакулев
доктор технических наук, профессор В.А. Каплун
Борзов А.Б., Быстров Р.П., Засовин Э.А., Лихоеденко К.П.,
Муратов И.В., Павлов ГЛ., [Соколов А.В.|, Сучков В.Б.
М60 Миллиметровая радиолокация: методы обнаружения и на-
ведения в условиях естественных и организованных помех. -
М.: Радиотехника, 2010. - 376 с.: ил.
ISBN 978-5-88070-246-6
Рассмотрены теоретические вопросы синтеза и анализа радиолокационных сис-
тем миллиметрового диапазона длин волн. Уделено внимание особенностям
построения и функционирования бортовых радиолокационных датчиков целей,
головок самонаведения, а также особенностям селекции объектов локации в ус-
ловиях воздействия естественных и искусственных помех. Приведены методы
математического и цифрового моделирования характеристик рассеяния объек-
тов сложной геометрической формы и подстилающих поверхностей.
Для научных работников и инженеров, связанных с проектированием и
разработкой радиолокационных систем, а также для студентов и аспирантов,
специализирующихся в области радиолокации и проектирования средств по-
ражения и боеприпасов.
ISBN 978-5-88070-246-6
УДК 621.396.96
ББК 32.95
© ЗАО Издательство «Радиотехника», 2010
© Авторы, 2010
ОГЛАВЛЕНИЕ
Предисловие..................................................9
Глава 1. Перспективные направления развития
современной радиолокации.....................................13
1.1. Обзор радиолокационных систем
со сверхширокополосными сигналами...................14
1.2. Многопозиционные методы обнаружения..............22
1.3. Радиолокация в диапазонах метровых и дециметровых
радиоволн...........................................26
1.4. Радиолокация в диапазоне миллиметровых радиоволн.27
1.5. Сверхдальняя радиолокация в ионосфере............28
1.6. Пассивная радиолокация...........................28
1.7. Радиолокационные и оптоэлектронные системы
обнаружения объектов................................30
1.8. Методы обработки радиолокационных сигналов.......31
1.9. Способы цифровой обработки радиолокационной
информации..........................................35
Глава 2. Методы исследования полей рассеяния
электромагнитных волн на объектах сложной
электрофизической структуры и формы ........................41
2.1. Оператор рассеяния объекта локации как основной
элемент информационного канала......................42
2.2. Анализ основных факторов, влияющих
на распространение коротких электромагнитных воли...45
2.3. Анализ современных методов математического
моделирования процесса взаимодействия ЭМВ
с объектами сложной формы...........................50
2.4. Формализация процесса рассеяния ЭМВ на объектах
сложной пространственной конфигурации
на основе кусочно-аналитической модели..............54
2.4.1. Кусочно-аналитическая модель объекта локации.54
2.4.2. Анализ условий затенения и маскировки точки
на поверхности объекта............................59
2.4.3. Интегральное представление произвольной совокупности
источников вторичного излучения объектов
сложной формы.....................................63
3
Миллиметровая радиолокация: методы обнаружения и наведения...
2.5. Энергетические характеристики вторичных полей
излучения объектов сложной пространственной
конфигурации.............................................69
2.6. Анализ рассеивающих свойств малозаметного объекта
типа В2 на основе его кусочно-аналитической модели.......74
2.7. Математическое моделирование входных сигналов
радиолокационных систем на основе полигональных
моделей сложных целей....................................79
2.7.1. Полигональная модель объектов сложной пространственной
конфигурации...........................................81
2.7.2. Поляризационная модель электромагнитного поля рассеяния
объекта................................................91
2.7.3. Комплексные коэффициенты отражения элементов
полигональной модели цели..............................99
2.7.4. Математическая модель энергетических характеристик
входных сигналов РЛС и характеристик рассеяния объектов
в ближней зоне локации................................107
2.7.5. Сопоставление диаграмм ЭПР эталонного отражателя,
полученных на основе цифрового моделирования,
с результатами теоретических исследований.............113
2.7.6. Анализ результатов цифрового моделирования входных
воздействий РЛС и энергетических характеристик рассеяния
сложных объектов в ближней зоне локации...............118
Глава 3. Математические модели характеристик
рассеяния подстилающих поверхностей............................129
3.1. Анализ существующих методов математического
моделирования характеристик рассеяния подстилающих
поверхностей............................................130
3.1.1. Классификация земных покровов..................131
3.1.2. Электродинамические методы статистического
усреднения............................................132
3.1.3. Феноменологические и геометрические модели.....134
3.2. Анализ результатов экспериментальных исследований
характеристик рассеяния радиоволн различными
подстилающими поверхностями.............................137
3.3. Математические модели характеристик рассеяния
статистически шероховатой поверхности
на основе электродинамических методов статистического
усреднения..............................................147
3.3.1. Электродинамические параметры земных покровов..147
3.3.2. Статистические параметры и характеристики поверхностей
с хаотическими неровностями...........................152
4
Оглавление
3.3.3. Характеристики рассеяния статистически шероховатых
поверхностей........................................159
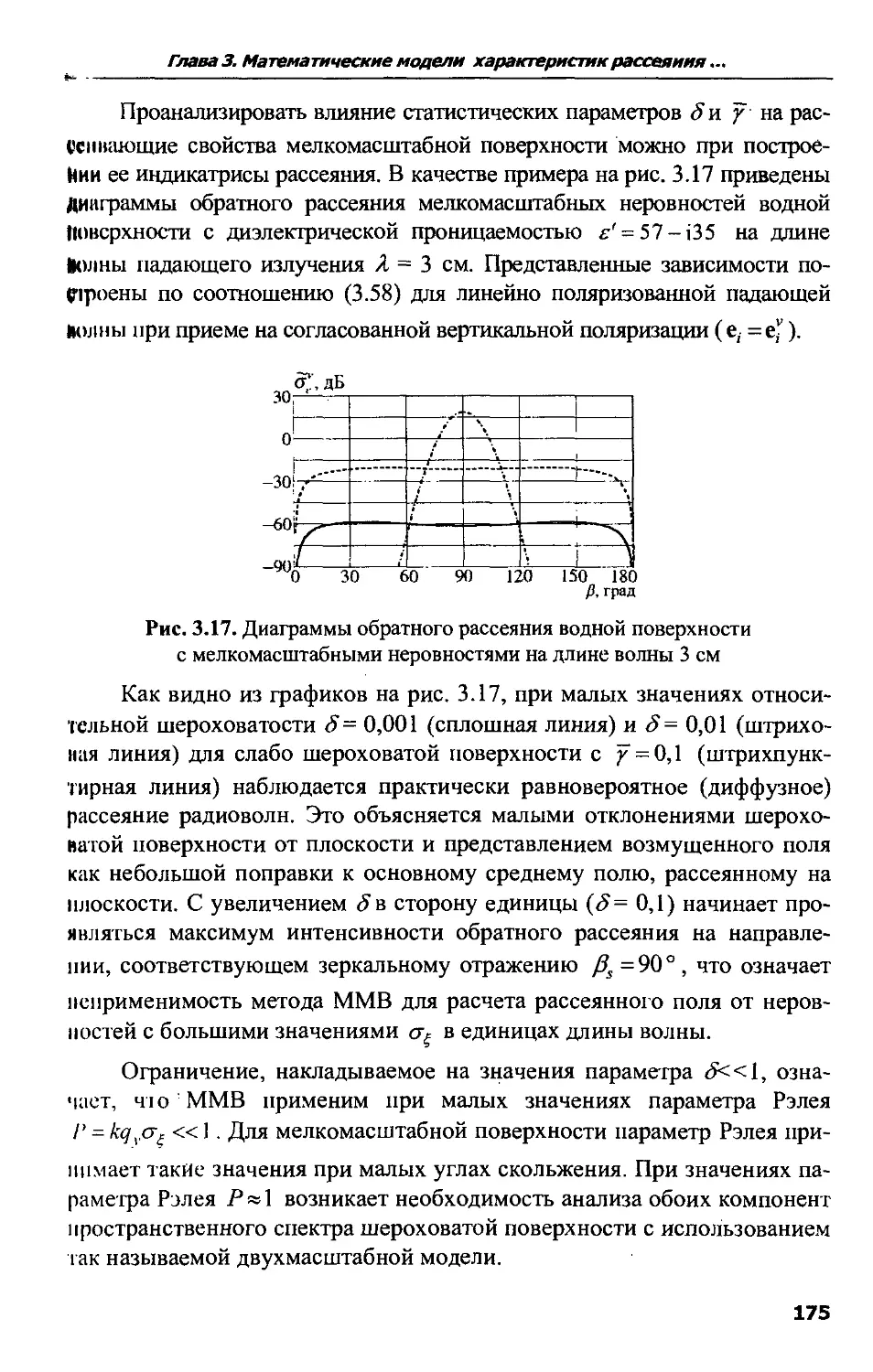
3.3.4. Анализ электромагнитного поля рассеяния шероховатой
поверхности методом касательной плоскости............165
3.3.5. Анализ электромагнитного поля рассеяния шероховатой
поверхности методом малых возмущений.................171
3.3.6. Анализ электромагнитного поля рассеяния
двухкомпонентной поверхности.........................176
3.3.7. Анализ результатов расчета диаграмм удельных ЭПР
типовых квазигладких и шероховатых поверхностей......180
Глава 4. Селекция радиолокационных целей
на основе экспериментальных данных об их отражающих
свойствах в миллиметровом диапазоне волн.....................183
4.1. Особенности функционирования систем селекции.....185
4.2. Анализ характеристик сигналов объектов техники
и помех..............................................192
4.2.1. Основные механизмы формирования вибрационного
портрета объектов техники............................194
4.2.2. Основные механизмы формирования помех естественного
происхождения........................................196
4.3. Получение априорной информации о характере
движения цели и вибрации корпуса с использованием
акселерометров.......................................197
4.4. Функциональная схема и тактико-технические
требования к стенду для экспериментальной оценки
радиолокационных характеристик и параметров
объектов бронетанковой техники и фонов...............202
4.5. Обработка сигналов и анализ полученных результатов
с использованием регрессионных аш оритмов
многоканальной системы обнаружения и распознавания ....210
Глава 5. Теория и методы рационального построения
антенных устройств систем ближней радиолокации
миллиметрового диапазона радиоволн...........................217
5.1. Условия функционирования и тенденции развития
современных систем ближней радиолокации...............218
5.2. Высоты срабатывания систем принятия решения
миллиметрового диапазона радиоволн....................220
5.3. Обоснование требований к диаграммам направленности
антенных устройств систем принятия решения
миллиметрового диапазона радиоволн...................221
5
Миллиметровая радиолокация: методы обнаружения и наведения...
5.4. Головодонная схема построения приемопередающих
модулей систем принятия решения......................222
5.5. Особенности конструкций и обоснование метода
расчета антенн систем принятия решения
миллимегрового диапазона радиоволн...................225
5.6. Использование проекционного метода для расчета
антенных устройств систем принятия решения...........227
5.6.1. Алгоритм расчета антенн с осевым излучением.230
5.6.2. Алгоритм расчета антенн с воронкообразными
диаграммами направленности..........................235
5.7. Вопросы сходимости решения задачи
электромагнитного возбуждения
металлодиэлектрических антенн........................238
5.8. Моделирование и результаты расчетов
направленных свойств металлодиэлектрических антенн
систем принятия решения миллиметрового
диапазона радиоволн..................................242
5.8.1. Направленные свойства металлодиэлектрических антенн
при возбуждении волной типа ТЕи................242
5.8.2 Направленные свойства металлодиэлектрических антенн
при возбуждении волной типа ТЕМ................251
5.9. Направленные свойства микрополосковых антенн....253
Глава 6. Методические основы построения
радиолокационных головок самонаведения
систем высокоточного оружия в миллиметровом
диапазоне радиоволн..........................................257
6.1. Особенности построения и тенденции развития
радиолокационных головок самонаведения...............258
6.2. Возможность использования в активных
радиолокационных головках самонаведения антенн
в виде фазированных антенных решеток.............263
6.3. Кинематический анализ возможностей носителя
при различных методах наведения радиолокационных
головок самонаведения................................266
6.3.1. Оценка потенциальных возможностей носителя
с неподвижным координатором цели
(метод простого преследования)................267
6.3.2. Оценка потенциальных возможностей носителя
со следящим координатором цели
(метод пропорциональной навигации).............270
6.4. Оценка возможных значений суммарных ошибок вывода
ракеты в зону самонаведения..........................271
6
Оглавление
6.5. Оценка ошибок пеленгации перспективной
радиолокационной головки самонаведения методом
математического моделирования.........................273
6.5.1. Радиолокационный центр объекта сложной формы..273
6.5.2. Математическая модель ошибок пеленгации объекта
сложной формы........................................280
6.5.3 Анализ ошибок пеленгации радиолокационных головок
самонаведения на основе полигональной модели
сложной цели..........................................282
Глава 7. Методы оценки помехозащищенности
радиотехнических систем управления............................286
7.1. Современное состояние и перспективы развития средств
и методов оценки помехозащищенности....................286
7.2. Модель радиоэлектронной обстановки и характеристики
радиоэлектронных средств...............................289
7.2.1. Основные положения концепций «радиоэлектронной войны».... 289
7.2.2. Организация радиоэлектронной борьбы
вероятным противником.................................293
7.2.3. Методы и алгоритмы радиоэлектронного подавления РЛС.295
7.2.4. Анализ естественных и случайных помех
в радиодиапазоне.....................................299
7.3. Анализ частотных диапазонов РЛС с точки зрения
помехозащищенности и скрытности.......................304
7.3.1. Сравнительная оценка помехозащищенности
миллиметрового и сантиметрового диапазонов волн........304
7.3.2. Особенности распространения волн миллиметрового
диапазона.............................................311
7.3.3. Оценка помехоустойчивости радиокомандных
дистанционных систем принятия решений
миллиметрового диапазона волн ........................315
7.4. Анализ возможностей средств радиоэлектронной борьбы
вероятного противника..................................317
7.4.1. Назначение, состав сил и средств радиотехнической
разведки и радиоэлектронной борьбы вероятного
противника............................................317
7.4.2. Возможности вероятного противника
по радиоэлектронному подавлению РЭС.........................319
7.5. Оценка помехоустойчивости шумовых
и импульсных РЛС......................................325
7.5.1. Система показателей помехозащищенности........325
7.5.2. Анализ критериев помехозащищенности РЛС.......326
7.5.3. Алгоритмы оценки помехозащищенности
и показателя скрытности РЛС..........................327
7
Миллиметровая радиолокация: методы обнаружения и наведения ...
Глава 8. Методы снижения радиолокационной
заметности объектов.......................................335
8.1. Анализ основных направлений но снижению
радиолокационной заметности перспективных
целей...............................................335
8.2. Анализ современных систем противодействия
радиолокационному обнаружению.......................338
8.3. Конструктивные меры по противодействию
эффективному обнаружению и распознаванию
объектов............................................341
8.3.1. Уменьшение величины ЭПР объектов путем выбора
их формы и размеров..............................342
8.3.2. Противодействие уверенному обнаружению
и распознаванию объектов путем имитации ложных
пассивных и активных излучателей.................343
8.3.3. Использование радиопоглощающих материалов.349
8.3.4. Использование радиопоглощающих экранов....354
Литература................................................358
8
ПРЕДИСЛОВИЕ
В настоящее время современная радиолокация в мире продолжает свое
бурное развитие и совершенствование: поднялись потенциалы радиоло-
кационных систем, возросли дальности обнаружения различных объек-
тов, повысились точности определения координат и скоростей их дви-
жения, а также увеличилась защищенность РЛС от активных и пассив-
ных помех. Значительных успехов радиолокация достигла и в России в
особенности в радиолокационных системах сверхдальнего и однолуче-
вого загоризонтного обнаружения, а также высокоточного наведения на
объекты снарядов и ракет [1-4].
Такие ведущие страны как США, Великобритания, Франция, Гер-
мания, Италия и другие проводят крупные исследовательские работы по
изысканию и созданию новых средств радиолокационных систем раз-
личного применения. Эти средства могут обеспечивать лидирующее по-
ложение этих стран в военных конфликтах [5, 6].
В мире значительные усилия ученых и инженеров направлены на
совершенствование радиолокационных систем, включая разработку эф-
фективных методов обнаружения, распознавания различных наземных,
воздушных и космических объектов типа «невидимок», обладающих в
широком диапазоне радиоволн ничтожно малыми эффективными по-
верхностями рассеяния (ЭПР). Низкие уровни ЭПР современных и осо-
бенно перспективных радиолокационных целей достигаются за счет из-
менения формы летательного аппарата, а также применением противо-
радиолокационных покрытий на частях, уменьшающих эффективное
рассеяние радиоволн в области носовых ракурсов.
Однако для любого объекта, выполненного по технологии
«Stealth», существуют такие условия локации, при которых его замет-
ность резко возрастает. К числу таких условий следует отнести системы
с разнесенным многопозиционным приемом, включая расположение
приемников или передатчиков на космических аппаратах. В качестве
развития этого подхода следует отметить технологию обнаружения ма-
лозаметных объектов путем локации на просвет, когда угол разнесения
передатчика и приемника составляет 180°.
К числу перспективных направлений в радиолокации относится
применение сложных широкополосных и сверхширокополосных зонди-
рующих сигналов. Использование сигналов на основе динамического
хаоса позволяет достичь практически наивысшей помехоустойчивости
РЛС к воздействию различных помех. Развитие техники дискретных
9
Миллиметровая радиолокация: методы обнаружения и наведения...
систем и цифровой обработки практически на частотах зондирующих
сигналов существенно расширяет границы применения современных
РЛС па основе фазированных решеток с адаптивным управлением их
режимами и совместной обработкой сигналов.
Большое внимание уделяется проблеме радиоэлектронного подав-
ления РЭС путем создания сверхмощных РЛС, генерации мощного
СВЧ- излучения и воздействия его на радиотехнические и биологиче-
ские объекты [7-9]. К числу новых относятся также средства и методы
деструктивного воздействия на электронные устройства систем радио-
связи, радиолокации, навигации.
Известны результаты экспериментов на частоте 9,413 ГГц по воз-
действию СВЧ-импульсов на интегральные схемы радиоэлектронных
устройств ЭВМ мощностью Г..20 МВт/см2 [10]. Представляет интерес
сообщение о том, что по заказу ценфа Маркони (Великобритания) в Рос-
сии был создан уникальный радиолокатор, излучающий короткие им-
пульсы сверхбольшой мощности на частоте 10 ГГц [2]. В качестве гене-
ратора излучения служила лампа бегущей волны (ЛБВ) релятивистского
типа, основанная на эффекте Черенкова, мощностью в импульсе 500 МВт
при длительности 5 нс. Эта система была успешно испытана и оказалась
пригодной для обнаружения небольших слабо конфастных целей.
Проблема раннего обнаружения мало конфастных воздушных и на-
земных объектов, в свою очередь, фебует систематического совершенст-
вования радиолокационных систем, разработки новых методов обработки
слабых радиолокационных сигналов и создания адекватных моделей объ-
ектов сложной геомефической формы для определения их полей рассея-
ния. Особое внимание уделяется методам геомефической оптики и физи-
ческой теории дифракции, сочетанию математического моделирования с
экспериментальными работами по изучению локальных полей рассеяния
в широком диапазоне радиоволн. Рассмафиваются современные методы
информационного противоборства и области применения последних дос-
тижений в науке и технологиях для создания эффективных радиолокаци-
онных систем обнаружения слабо заметных объектов.
В монографии нашли офажение работы авторского коллектива по
решению некоторых зафонутых проблем современной радиолокации.
Монофафия состоит из 8 глав.
В первой главе (авторы Р.П. Бысфов, Э.А. Засовин, А.В. Соколов)
проводится анализ методов современной радиолокации и способов обра-
ботки радиолокационных сигналов Значительное внимание уделяется рас-
смофению цифровой обработке информации. Рассмафиваются также ме-
тоды обработки широкополосных радиолокационных сигналов, исследу-
ются многопозиционные методы обнаружения объектов. Оценивается воз-
можность коротковолновой сверхдальней радиолокации и другие методы.
10
Предисловие
Во второй главе (авторы А.Б. Борзов, А.В. Соколов, В.Б. Сучков)
предложены методы исследования рассеяния электромагнитных волн на
объектах локации сложной электрофизической структуры и формы, ос-
нованные на широком использовании и развитии наиболее эффектив-
ных современных асимптотических методов электродинамики. Изложе-
ны основные положения математических моделей, алгоритмов и проце-
дур синтеза входных сигналов радиолокационных систем различного
назначения, анализ и синтез радиолокационных характеристик объектов
локации, их классификация и идентификация по рассеивающим свойст-
вам. Материал главы изложен на основе сравнения методов математи-
ческого моделирования характеристик рассеяния объектов с использо-
ванием двух способов описания их геометрического образа: кусочно-
аналитическая модель и полигональная модель.
В третьей главе (авторы А.Б. Борзов, А.В. Соколов, В.Б. Сучков) из-
ложены методы расчета радиолокационных полей рассеяния от статисти-
чески шероховатых поверхностей. Проведен анализ результатов экспери-
ментальных исследований удельных ЭПР подстилающих поверхностей и
математических моделей электромагнитных полей рассеяния. Приведены
основные теоретические положения электродинамических методов стати-
стического усреднения: метод касательной плоскости, метод малых воз-
мущений и модель двухкомпонентной поверхности.
В четвертой главе (авторы К.П. Лихоеденко, Г.Л. Павлов) рассмат-
риваются системы селекции типовых наземных целей в миллиметровом
диапазоне радиоволн. Приведены принципы повышения селективных
возможностей информационных каналов РЛС на основе использования
новых технологий, позволяющих существенно повысить их эффектив-
ность. Приведен стенд для экспериментальной оценки радиолокацион-
ных характеристик и параметров объектов бронетанковой техники и
фонов, программа и методика проведения экспериментов. Проведен
анализ результатов экспериментальных исследований информативных
признаков движущихся и неподвижных целей в миллиметровом диапа-
зоне волн (ММДВ), основные алгоритмы и методы распознавания.
В пятой главе (автор К.П. Лихоеденко) показаны особенности кон-
струкций и обоснован метод расчета малогабаритных антенн бортовых
систем принятия решений (СПР) миллимезрового диапазона радиоволн.
Приведены алгоритмы расчета электродинамических характеристик ан-
тенн с осевым излучением и воронкообразными диаграммами направ-
ленности (ДН) проекционным методом. Исследованы вопросы сходимо-
сти решения данной задачи при различных типах возбуждения. Показа-
на возможность учета влияния обтекателя СПР на формирование на-
правленных свойств антенн. Приведены результаты расчета электроди-
11
Миллиметровая радиолокация: методы обнаружения и наведения ...
намических характеристик стержневых, секционных сферических и
других типов антенн проекционным методом. Приведены результаты
расчетов микрополосковых конструкций антенн.
В шестой главе (авторы А.Б. Борзов, И.В. Муратов, В.Б. Сучков)
проведен анализ и оценка характеристик существующих и перспектив-
ных систем целеуказания и наведения перспективных противотанковых
ракетных комплексов и комплексов управляемого артиллерийского воо-
ружения. Проведен анализ методов оценки временных и вероятностных
характеристик обнаружения и сопровождения наземных целей борто-
выми радиолокационными системами управляемых боеприпасов. При-
ведены схемы наведения управляемых боеприпасов и обоснованы тре-
бования к характеристикам их составных частей.
В седьмой главе (авторы А.Б. Борзов, К.П. Лихоеденко, И.В. Му-
ратов, Г.Л. Павлов) предложена модель радиоэлектронной обстановки и
характеристики радиоэлектронных средств систем специального назна-
чения. Проведен анализ частотных диапазонов РЛС с точки зрения по-
мехозащищенности и скрытности. Приведены результаты моделирова-
ния помеховой обстановки при решении задач оценки скорости и фор-
мирования команд.
Восьмая глава (авторы Р.П. Быстров, Э.А. Засовин) посвящается
снижению радиозаметности радиолокационного наблюдения. Даны по-
нятия методов и способов радиоэлектронного противодействия. Под-
робно изложены конструктивные меры уменьшения величины ЭПР
объектов путем выбора их формы и способы противодействия уверен-
ному обнаружению объектов, путем имитации ложных пассивных и ак-
тивных излучателей. Анализируются свойства радиопоглощающих ма-
териалов и многослойных структур и методы применения поглощаю-
щих покрытий (радиопоглощающие материалы и экраны). Проведен
анализ работ по современным системам противодействия радиолокаци-
онному обнаружению.
Широкий круг теоретических и экспериментальных аспектов, свя-
занных с тематикой обнаружения слабо отражающих наземных и воз-
душных объектов, обусловил многоплановость монографии, где пред-
ставлены результаты многолетних исследований ученых и инженеров
вместе с предприятиями промышленности. Она рассчитана на научных
сотрудников и инженеров, занимающихся вопросами исследования и
проектирования радиолокационных систем обнаружения и наведения.
12
ГЛАВА 1
Перспективные направления развития
современной радиолокации
В настоящее время одним из решающих факторов, оказывающих влия-
ние на устойчивое развитие радиолокационной техники (РЛТ), а также
повышение эффективности радиолокационных систем, является прогноз
и обоснование их основных радиотехнических параметров. Создание
такой техники позволит обеспечивать успешную эксплуатацию РЛТ в
сложных условиях различного рода помех [1-11].
Основой же для успешной реализации перспективных РЛТ являет-
ся наличие опережающего научно-технического задела в этой области.
Такой задел сегодня формируется в рамках фундаментальных и поиско-
вых исследований. Достижения последних 50 лет в этой области позво-
лили создать не только принципиально новые виды РЛТ, но и привели к
появлению новых форм и методов их функционирования. К числу ос-
новных достижений следует отнести, например, создание активных и
пассивных радиолокационных систем дистанционного зондирования
земных покровов и обнаружения объектов с космических, воздушных и
наземных носителей, а также систем для высокоточного наведения ору-
жия: ракет, снарядов и торпед, располагающихся на летательных, на-
земных и надводных носителях [12-21].
Эти системы способны обеспечивать оперативное освещение на-
земной и воздушной обстановки, функционирование радиотехнических
средств засечки источников излучения и формирования направленных
помех в условиях радиоэлектронного противоборства.
Значительным достижением, несомненно, является создание ра-
диопоглощающих материалов для снижения отражающих свойств объ-
ектов, требующих скрытного функционирования, а также перспектив-
ных радиопрозрачных материалов для антенной техники.
Анализ результатов зарубежных и отечественных исследований
показывает, что основными направлениями совершенствования радио-
локационных систем является разработка новых эффективных методов
обнаружения, особенно, малозаметных воздушных и наземных (мор-
ских) объектов, а также разработка новых систем обработки сложных
радиолокационных сигналов.
Например, в последнее время в ведущих зарубежных странах ста-
ли уделять огромное внимание радиомаскировке функционирующих
13
Миллиметровая радиолокация: методы обнаружения и наведения...
объектов, особенно относящихся к военной технике. Кроме того, прово-
дятся интенсивные исследования но созданию малозаметных образцов
вооружения и военной техники (ВВТ). Разработанная в США известная
программа «Стеле» нашла свою реализацию как в средствах воздушно-
го нападения (СВН), так и в наземных образцах ВВТ (танки, броне-
транспортеры и т.п.) [22-24].
Министерство обороны США прогнозирует появление новых тех-
нологий типа «Стеле» в течение предстоящих 15 лет. Новые методы зна-
чительно усложнят задачу обнаружения целей с помощью РЛС при реа-
лизации концепции совместных операций родов войск. К 2015 г. ожида-
ется значительное увеличение объемов научных исследований, касаю-
щихся изменений сигнатур целей. Военно-воздушные силы США выпол-
нили анализ перспектив развития самолетов с точки зрения их оснащения
новейшими техническими достижениями. Основным направлениясм та-
кого развития является создание малозаметных самолетов новейшего по-
коления с мощным СВЧ и лазерным оружием. Использование беспилот-
ных аппаратов с уменьшенной величиной ЭПР на 25% приведет к значи-
тельному снижению вероятности их обнаружения. Внедрение новейших
технических достижений облегчает рабо ту пилота, который может в по-
лете пользоваться системой дистанционного управления.
Практика применения современных методов и техники противо-
действия радиолокационному обнаружению воздушных целей показы-
вает, что можно снизить ЭПР таких целей практически на порядок. Так,
например, самолеты без защиты имеют ЭПР: отечественный самолет
Миг-21 - <т= 20 м2, американский самолет F-16 — <т= 25 м2 и американ-
ский самолет «невидимка» F -117 - <т= 0,02 м2.
Однако следует отметить, что в целом к современным методам ра-
диолокации, позволяющим наиболее эффективно обеспечивать обнару-
жения любого класса объектов, остаются такие как:
использование в РЛС широкополосных или сверхширокополосных
сигналов;
применение методов многопозиционной радиолокации;
метод радиотепловой (пассивный) локации;
комплексирование активных и пассивных радиотехнических систем;
использование в системах различных диапазонов радиоволн, ранее
редко применяемых для данных целей и др. [24].
Остановимся более подробно на современных методах радиолокации.
1.1. Обзор радиолокационных систем
со сверхширокополосными сигналами
Практически всем современным пользователям радиолокационных сис-
тем требуется увеличение количества и повышение качества информа-
14
Глава 1. Перспективные направления развития современной радиолокации
ции, получаемой из наблюдаемого пространства. Однако традиционные
РЛС с шириной полосы, не превышающей 10% от несущей частоты,
имеют недостаточные информационные возможности. Одним из пер-
спективных направлений, позволяющих существенно увеличить ин-
формативность РЛС, является применение сверхширокополосных
(СШП) сигналов с шириной спектра, достигающих 1 ГГц и более. В ра-
диолокации с СШП повышение информативности происходит благода-
ря уменьшению импульсного объема РЛС по дальности. Так, при изме-
нении длительности зондирующего импульса с 1 мкс до 1 нс глубина
импульсного объема уменьшается с 300 м до 30 см [24-26].
Отличия РЛС с СШП от традиционных РЛС очень подробно осве-
щены в работах [27, 28], где показаны особенности генерации, излуче-
ния и обработки сигналов, которая в принципе, является обобщением
проведенных к настоящему времени работ в области применения СШП
сигналов в радиолокации. По мнению авторов, результаты проведен-
ных исследований и экспериментов, а также наличие вычислительных
средств (компьютерной техники), позволяют определить тип СШП ло-
катора, который может быть спроектирован уже в ближайшее время.
Дальность действия такого локатора может лежать в широких пре-
делах от 10 до 50 км. Его особенность - относительная простота конст-
рукции по сравнению с традиционной РЛС. В качестве передающего
устройства может быть использована активная решетка на основе полу-
проводниковых генераторов типа дрейфового диода с резким восста-
новлением запирающих свойств (ДДРВ), объединенных с излучателями
в единую конструкцию. Он создан в Физико-техническом институте им.
А.И. Иоффе (С.-Петербург). Он осуществляет коммутацию цепей с по-
мощью управляемого плазменного слоя и позволяет, по сравнению с
другими приборами, на 2-3 порядка увеличить коммутируемую мощ-
ность при наносекундной длительности импульса.
Возбудитель в таком передатчике отсутствует, его роль играет
устройство синхронного запуска генераторов с элементами задержки
для изменения положения луча в пространстве.
На прием используется также активная антенная решетка с мало-
шумящими усилителями на входе. Детектор также отсутствует. После
усиления сигнал оцифровывается, и вся его дальнейшая обработка, на-
чиная с согласования фильтрации, производится ЭВМ.
С 1996 г. научное направление применения СШП сигналов получает
всё более широкое развитие в радиолокации, в том числе и применительно
к РЛС миллиметрового (ММ) диапазона радиоволн. Так, например, в [29]
рассмотрена аппаратура измерения радиолокационной структуры для сис-
темы автоматического распознавания объектов, работающей в ММ диапа-
зоне радиоволн и применяющей широкополосные поляризованные сигна-
15
Миллиметровая радиолокация: методы обнаружения и наведения...
лы, обеспечивающие высокую разрешающую способность. Здесь же пред-
ставлены характеристики трех видов измерительной аппаратуры и двух ти-
пов излучаемых и отраженных сигналов ортогональных поляризаций;
предложены инструкции по пользованию автоматизированными програм-
мами измерений; приведены результаты некоторых измерений.
Другим направлением, способствующим развитию РЛС с СШП
сигналом, является так называемая подповерхностная локация. В на-
стоящее время создано много действующих промышленных локаторов,
решающих самые разнообразные задачи. Однако и в этой области ощу-
щается недостаток теории, особенно в области обнаружения и распо-
знавания объектов в слоистых средах и средах с большим числом кон-
креций. Тем не менее трудности такого характера со временем преодо-
леваются, и это направление получает достаточно широкое развитие.
Рассмотрим некоторые из иих.
Интересное практическое применение СШП сигналов получает
развитие РЛС для обнаружения закопанных мин [30]. Исследователь-
ская лаборатория Army Research Lab. (США) разрабатывает самолетные
системы обнаружения минных полей и автоматической идентификации
подвижных объектов, скрытых растительностью. Применение в радио-
локационных системах с синтезированной аппаратурой (РСА) с СШП
сигналами, установленной на 50-метровой штанге, закрепленной на
медленно двигающемся вертолете, позволяет определять положение
мин с точностью до 15 см.ТЗ рамках исследования создана база данных,
позволяющая учесть метеоусловия при определении параметров земной
поверхности и растительности. Скорость перемещения существующих
средств обнаружения мин не превышает 1 км/ч, обработка сигналов
проводится не в реальном масштабе времени, что не может удовлетво-
рить требованиям систем. Приведены и обсуждены параметры некото-
рых опытных образцов обнаружителей скрытых целей.
Международная конференция EUREL/IEE в октябре 1996 г. также
привлекла внимание общественности к использованию сверхширокопо-
лосных РЛС для подповерхностной локации и обнаружения противопе-
хотных мин. С минимальным количеством металлических деталей пла-
стиковые мины обнаруживаются с помощью коротких импульсов (не-
сколько наносекунд), спектр которых занимает полосу от десятков мега-
герц до нескольких гигагерц. Обычно спектральные характеристики им-
пульсов представляют собой ряд отдельных частот, излучаемых с задан-
ной частотой повторения и имеющих форму коротких волновых пакетов.
Излучаемая мощность составляет несколько микроватт на одну спек-
тральную линию, а отраженные сигналы на входе приемного канала со-
ставляют несколько нановатт. Антенна РЛС, размещаемая на дистанци-
онно управляемом аппарате, располагается в непосредственной близости
16
Глава 1. Перспективные направления развития современной радиолокации
от земной поверхности и позволяет получить на индикаторе (цветном или
черно-белом) в реальном времени картину исследуемого места (в виде
вертикального профиля на несколько сантиметров в глубину или в виде
плана). Длины волн излучаемых колебаний соизмеримы с размерами мин,
что определяет существенно большую разрешающую способность
сверхширокополосных РЛС по сравнению с оптическими приборами.
Фирма ELTA Electronics Industries (Израиль) получила от Турции
заказ на современный подповерхностный локатор (IGPR), разрабаты-
ваемый на основе модели EL/M-2190, имеющий высокую разрешаю-
щую способность [24]. Предполагается использование IGPR армией
Турции для обнаружения пластиковых и металлических мин. Локатор
устанавливается на транспортном средстве дистанционного управления,
способного передвигаться по пересеченной местности, обнаруживать и
отмечать места зарытых мин. Локатор 1GPR имеет малую магнитную и
акустическую сигнатуру, что позволяет проходить через минные поля.
Возможно использование IGPR для обнаружения неразорвавшихся ар-
тиллерийских снарядов. Испытания образца портативного статического
радиолокационного обнаружителя подтвердили возможность определе-
ния местонахождения подземных труб и других крупных зарытых объ-
ектов на глубине до 1,5 м.
В работе [31] приводятся результаты испытаний образца порта-
тивного статического радиолокационного обнаружителя. Испытания
подтвердили возможность определения местонахождения подземных
груб и крупных зарытых объектов на глубине до 1,5 м. Прибор способен
обнаруживать пластиковые и металлические предметы, определять на-
личие утечки воды из трубопроводов в песчаной почве при глубине до
0,3 м. Мощность сигнала РЛС около 200 мВт, рабочая час тота 2 ГГц.
По заказу МВД России разработан коммерческий прибор ’РАС-
КАН-1, дающий возможность получить радиоизображение среды на
глубину 200... 500 мм при разрешении не хуже 2 см [32]. Области при-
менения: выявление подслушивающих устройств, зондирование строи-
тельных конструкций в целях определения положения арматуры, пустот
и магистралей, зондирование особо ответственных строительных конст-
рукций в целях определения скрытых дефектов. Отображение информа-
ции производится в реальном времени на экране дисплея в виде полуто-
нового изображения, где каждому уровню принимаемого сигнала соот-
ветствует определенная градация яркости.
В США запатентована система определения положения подземных
электрических и телефонных кабелей, где координаты определяются с
использованием глобальной навигационной системы GPS [32]. Уста-
новка содержит катушку индуктивности, размещаемую на поверхности,
в которой наводятся токи под действием поля кабеля, приемник спутни-
17
Миллиметровая радиолокация: методы обнаружения и наведения...
ковой навигационной системы GPS и дополнительный дифференциаль-
ный индикатор для определения координат. Результаты измерения на-
веденного тока и координаты местоположения заносятся в регистри-
рующий блок, вычисляющий траекторию максимального тока на по-
верхности. Установка размещается на подвижном объекте, что позволя-
ет о тслеживать траекторию по показаниям прибора.
Другим интересным направлением применения РЛС с СШП явля-
ется создание систем обнаружения подвижных объектов. Как отмечает-
ся в [24], это новый класс с СШП сигналом маломощных систем обна-
ружения подвижных объектов. Они отличаются тем, что на частоту по-
вторения зондирующих сигналов или на частоты задержанных стробов
приемника накладывается одна или несколько дополнительных частот,
меньших частот повторения зондирующих сигналов. В системе преду-
смотрен ПЧ гомодинный прием, что обеспечивает реализацию ряда
преимуществ в сравнении с классическими РЛС. Дополнительные час-
тоты можно ввести с помощью фазовой, кодовой или амплитудной мо-
дуляции. Предложена и методом численного эксперимента продемонст-
рирована возможность для сжатия импульсов использовать длинные
линии, в которых с помощью внешнего воздействия или за счет интег-
рирующей нелинейности самой линии фазовая скорость волны увели-
чивается в процессе распространения сжимаемого импульса. При этом
для видеоимпульсов длительность уменьшается с квадратичным или
пропорциональным относительно его сжатия увеличением мощности, а
для импульсов с высокочастотным заполнением возникает ещё и про-
порциональное преобразование частоты заполнения вверх.
Результаты анализа проведенных за последние годы исследований
показывают, что применение СШП сигналов в РЛС позволяет [28,33]:
повысить точность измерения расстояния до объекта и разрешаю-
щую способность по дальности и угловым координатам, эффективность,
устойчивость РЛС к воздействию внешних и узкополосных электромаг-
нитных излучений и помех;
распознавать классы и типы объектов;
упростить аппаратуру защиты от всех видов пассивных помех;
устранить интерференционные провалы в ДН при наблюдении за
объектом под низкими углами места, а также лепестковую структуру
вторичных ДН облучаемых объектов.
Все перечисленные преимущества СШП достижимы, но для их реа-
лизации необходима теоретическая база, позволяющая рассчитать харак-
теристики РЛС с СШП сигналом. К сожалению, удовлетворительной и
систематизированной теории РЛС с СШП до сих пор не создано [28].
Перспективным направлением применения широкополосных (ШП)
сигналов в радиолокации является применение сигналов непрерывного
18
Глава 1. Перспективные направления развития современной радиолокации
излучения с большой базой (до 106) и минимальной пиковой мощно-
стью. Такие ШП сигналы получили название шумоподобных зонди-
рующих сигналов [24]. Радиолокационные системы с ШП сигналом об-
наружения наземных объектов обладают повышенными помехоустой-
чивостью и скрытностью работы.
Существует большое многообразие видов сложных сигналов, по-
зволяющих реализовать большую базу (до 10б). Вместе с тем высокие
требования к ширине полосы частот зондирующего сигнала (Д/рдс > 200
МГц) при одновременных ограничениях, накладываемых на массу, га-
баритные размеры и потребляемую мощность аппаратуры, затрудняют
возможность применения многих из них.
Так, например, большое распространение получили сигналы с фа-
зокодовой манипуляцией (ФКМ) [24, 34]. Примером практической реа-
лизации РЛС с ФКМ сигналом является РЛС разведки наземных дви-
жущихся целей (РНДЦ) ближнего действия СБР-3 (Д/рлс Т’а ~ 1000), ко-
торая обладает повышенной скрытностью работы и помехоустойчиво-
стью по сравнению с обычными импульсными РЛС. Однако возмож-
ность реализации в такой РЛС ФКМ сигнала с полосой частот более
200 МГц ограничивается из-за технических трудностей, которые возни-
кают при создании высокостабильных по фазе и частоте СВЧ-
генераторов, синхронизации их работы с фазовым модулятором, а также
связаны с увеличением потребляемой мощности при расширении поло-
сы частот зондирующего сигнала [34-36].
Требуемую полосу частот можно обеспечить при использовании
линейно-частотно-модулированных (ЛЧМ) сигналов. Известна РЛС
сантиметрового диапазона радиоволн, ширина спектра зондирующего
сигнала которой достигает 1000 МГц [24, 34].
Существенным недостатком ЛЧМ сигналов является невозмож-
ность разрешения целей, параметры движения которых (дальность, ско-
рость) соответствуют максимуму их функции неопределенности. Ины-
ми словами, при высоком разрешении по отдельным параметрам (по
дальности или по скорости) совместное разрешение по этим же пара-
метрам остается низким. Другой недостаток использования таких сиг-
налов связан с жесткими требованиями к линейности модуляции во всей
полосе частот, что приводит к необходимости применения специаль-
ных сложных устройств формирования зондирующего сигнала и его об-
работки и, соответственно, к увеличению массы и габаритных размеров
аппаратуры. Указанные недостатки ограничивают возможность исполь-
зования таких сигналов в РЛС.
Наиболее полно требованию одновременного разрешения по даль-
ности и скорости отвечают шумовые сигналы. Функция неопределенно-
сти шумовых сигналов имеет один узкий пик в начале координат на фо-
19
Миллиметровая радиолокация: методы обнаружения и наведения ...
не поля выбросов малой интенсивности [24]. На целесообразность ис-
пользования шумовых зондирующих сигналов в РЛС указывалось во
многих работах. Основными достоинствами шумовых сигналов по
сравнению с другими сложными сигналами являются следующие:
шумовой зондирующий сигнал подобен внутренним шумам при-
емника станции радиотехнической разведки, что обеспечивает сущест-
венное повышение скрытности работы РЛС, что затрудняет, во-первых,
зарегистрировать факт работы РЛС и, во-вторых, определить параметры
её зондирующего сигнала;
учитывая перспективность перевода РЛС малой дальности дейст-
вия в миллиметровый диапазон радиоволн, следует иметь в виду, что
РЛС с шумоподобным сигналом достаточно просто могут быть сопря-
жены с системами пассивной локации;
из общих положений теории информации следует, что усложнение
формы сигнала и увеличение его длительности позволяет повысить его
информативность.
Однако при использовании указанного режима в шумовых РЛС
(ШРЛС) возникают значительные трудности, связанные с просачиванием
энергии сигнала передатчика в приемный канал, в результате чего умень-
шается чувствительность и дальность действия РЛС. Кроме того, даже при
значительном снижении уровня мощности просачивающегося сигнала пу-
тем разнесения приемной и передающей антенн сигналы, отраженные от
местных предметов и участков земной поверхности, расположенных вбли-
зи антенн, могут маскировать слабые сигналы от объектов.
Для устранения указанных трудностей предлагается использовать
квазинепрерывный режим излучения и приема на основе использования
амплитудной модуляции зондирующего сигнала. Проведенные исследо-
вания показали, что применение в данном случае гребенчатых фильтров
(ГФ) позволяет повысить помехоустойчивость ШРЛС по сравнению с
последовательной спектральной обработкой сигнала на 30...40 дБ.
Результаты эксперимента макета ШРЛС с ГФ подтвердили работо-
способность такой РЛС, а результаты теоретических исследований по-
казывают на перспективность применения ШРЛС обнаружения объек-
тов в условиях радиоэлектронного противодейс твия [34].
Одним из перспективных методов в современной технике обнару-
жения малозаметных объектов, связанных также с широкополосным
сигналом, является моноимпульсный метод локации, когда применяют-
ся сверхкороткие и мощные СВЧ-импульсы [37-39].
Принципиальным отличием такого радиолокационного метода от
традиционных видов радиолокации является использование широкой поло-
сы зондирующего импульса и возможность относительно несложной час-
тотной перестройки генератора, что может быть использовано при реали-
20
Глава 1. Перспективные направления развития современной радиолокации
<ации ряда адаптивных процедур, таких как, например, подстройка спектра
излучаемого импульса под диапазоны, где ЭПР объекта обладает макси-
мальным значением. В этом случае можно значительно улучшить характе-
ристики обнаружения в сравнении с неадаптивными процедурами.
К таким радиолокационным системам в настоящее время предъяв-
ияется требование для обнаружения (разрешения) объекта, имеющего
малую ЭПР на фоне неподвижного (малоподвижного) объекта с боль-
шой ЭПР. Такая задача может возникать при локации небольших объек-
тов на земной и морской поверхностях, а также при обнаружении низ-
колетящих объектов. В традиционных РЛС с импульсами большой дли-
тельности разрешение но дальности достигается применением частот-
ной модуляции зондирующего импульса, существенно расширяющей
его эффективный спектральный диапазон. При этом отраженный сигнал
обрабатывается с помощью цифровых методов. В процессе обработки
отраженный импульс эффективно сжимается, что существенно увели-
чивает разрешение но дальности по сравнению по сравнению с немоду-
лированными сигналами. Однако в процессе цифровой обработки воз-
никают паразитные боковые полосы, через которые может осушеств-
ляться смешивание с выходным сигналом отраженных сигналов от
ближайших объектов. Таким образом, отраженный сигнал от объекта с
большой ЭПР может полностью маскировать сигнал от объекта с малой
ЭПР, находящегося вблизи большого объекта. Такой проблемы не су-
ществует для радиолокационных систем с короткими микроволновыми
импульсами, так как там не требуется использовать схемы сжатия им-
пульсов. Действительно, электромагнитное излучение распространяется
па 30 см за 1 нс, поэтому при использовании зондирующих импульсов с
длительностью несколько наносекунд может быть непосредственно
обеспечено метровое разрешение радиолокационных измерений. Таким
образом, может быть обнаружен слабо отражающий движущийся объ-
ект па фоне значительной стационарной помехи.
Однако уменьшение длительности зондирующего импульса при
прочих равных условиях сокращает максимальную дальность обнару-
жения объекта. Возможным способом исправления ситуации является
использование сверхмощных микроволновых импульсов. В этом случае
при переходе к более коротким импульсам посылки при сохранении
общей энергии сигнала максимальная дальность обнаружения объекта
остается неизменной, в то же время разрешение объекта по дальности
существенно возрастает. В данном случае проблема улучшения харак-
теристик обнаружения и сопровождения объектов естественным обра-
зом приводит к необходимости использования сверхкоротких (наноим-
пульсных) мощных импульсов микроволнового диапазона для моноим-
пульсной локации малозаметных объектов.
21
Миллиметровая радиолокация: методы обнаружения и наведения...
В работах [38, 39]) приводятся результаты расчетов максимальной
дальности обнаружения объекта при различных мощностях и видах зон-
дирующих импульсов. Для численных оценок использованы следующие
значения пара.метров: ЭПР - ст = 0,1 м2, длительность зондирующего им-
пульса - 5 нс, температура приемника - 300 К. Считалось, что приемная и
передающая антенны одинаковы. Для видеоимпульсов входную апертуру
антенны брали равной 50 а для радиоимпульсов 10 м2. Полученные
значения дальности обнаружения приведены в табл. 1.1.
Таблица 1.1. Максимальная дальность обнаружения объекта
при различных мощностях и видах зондирующих импульсов
Тип зондирующего импульса Максимальная дальность обнаружения объекта, км, при мощности импульса
0,5 ГВт 1 ГВт
Радиоимпульсы 550 655
Видеоимпульсы 260 310
В результате исследований было установлено:
использование наносекундных импульсов обеспечивает хорошее
разрешение по дальности, а также обнаружение и сопровождение дви-
жущихся объектов с малой ЭПР на фоне больших стационарных помех;
высокое разрешение позволяет производить идентификацию объ-
ектов по отраженному импульсу, что дает возможность классифициро-
вать объекты в реальном масштабе времени;
появляется перспектива улучшения характеристик моноимпульсного
определения радиолокационных характеристик за счет применения опти-
мальной адаптации спектров принимаемого сигнала, а также за счет при-
менения ограниченной пачки импульсов при обнаружении объектов слож-
ной пространственной конфигурации на расстояниях до 500.. .600 км.
1.2. Многопозиционные методы обнаружения
Одним из актуальных направлений дальнейшего совершенствования
радиолокационной техники в настоящее время является создание мно-
гопозиционных радиолокационных систем (МП РЛС) [40-42]. Такие ра-
диолокационные системы представляют собой комплекс разнесенных в
пространстве радиолокационных передающих и приемных устройств
или отдельных РЛС, в которых реализуется совместное радиолокацион-
ное наблюдение объектов и централизованная обработка информации.
Информация от отдельных приемных РЛС поступает в централь-
ный пункт обработки информации (ЦПОИ), где осуществляется ее
идентификация, совместная обработка и формирование управляющих
22
Глава 1. Перспективные направления развития современной радиолокации
команд для согласованной работы МП РЛС. Значительное расширение
исследований в области многопозиционной радиолокации с участием
ведущих фирм и научно-исследовательских организаций свидетельству-
ет о том, что данное направление рассматривается как перспективное
|24]. Многопозиционные РЛС в значительной степени лучше отвечают
фебованиям, предъявляемым к современным радиолокационным сред-
ствам, особенно по энергетическим характеристикам, информативности,
помехозащищенности и живучести. Однако такие системы имеют суще-
ственный недостаток - низкую мобильность.
Одной из успешно решаемых задач, например, применительно к
военной задаче, является обнаружение (распознавание) баллистических
объектов (снарядов, мин, ракет и т.д.), летящих с различных направле-
ний во время боевых действий (дуэльное огневое противоборство). Для
решения этих задач применяются специальные РЛС. Применение мно-
гопозиционной радиолокационной системы для решения подобных за-
дач предполагает существенно повысить скрытность, помехозащищен-
ность и живучесть РЛС.
Важнейшей характеристикой принимаемого от объекга сигнала,
входящей в основное уравнение радиолокации, при многопозиционной
радиолокации является ЭПР объекта. Известно, что значения ЭПР для
однопозиционных (моностатических) и многопозиционных радиолокаци-
онных систем отличаются из-за пространственного и частотно-времен-
ного разноса последних. К сожалению, к настоящему времени таких ис-
следований (особенно экспериментальных) по изучению ЭПР большого
класса наземных и воздушных объектов проведено недостаточно, что от-
рицательно влияет на решение ряда сложных задач в радиолокации.
В работах [25,40] даегся методическое и математическое представле-
ние особенностей характеристик ЭПР малоразмерного баллистического
объекта (артиллерийского снаряда) при многопозиционном радиолокаци-
онном наблюдении. Рассматриваются свойства ЭПР при многопозицион-
ной радиолокации в сравнении с ЭПР при моностатическом и бистатиче-
ском режимах работы РЛС. Приводятся примеры обоснования и оценки
характеристик ЭПР объектов при многопозиционной радиолокации.
Проведенные в работе исследования также показывают, что получен-
ные математические зависимости для МП ЭПР находятся в логической свя-
зи с существующими понятиями, определяющими отражающие характери-
стики малоразмерного баллистического объекта для случая многопозици-
онной системы. Если же каждый элемент матрицы МП ЭПР усреднять в
соответствии с выражениями для моностатической и бистатической ЭПР,
то можем получить интегральную характеристику МП ЭПР.
Практическая полезность предлагаемых в работе характеристик МП
ЭПР состоит в том, что в матричном виде предоставляется возможность
23
Миллиметровая радиолокация: методы обнаружения и наведения ...
проводить расчеты уровня сигнала на входе многопозиционной системы
и формировать радиолокационный портрет распознавания объекта. По-
этому решение таких задач является сложной научно-технической про-
блемой и требует проведения новых теоретических и экспериментальных
исследований для получения достоверных характеристик ЭПР объектов
различного класса применительно к многопозиционной радиолокации.
Несомненно, что внедрение МП РЛС в практику, требует дальней-
шего развития теории многоиозиционной радиолокации и широких экс-
периментальных исследований. В процессе исследований многопозици-
онной радиолокации определились также и некоторые интересные для
практики ее разновидности - фоновая радиолокация, радиолокация на
эффекте параметрического поглощения и радиолокация «на просвет».
Реализация фонового метода возможна, когда за областью обнару-
живаемого объекта образуется (проектируется) на условной поверхности
естественного фона (для наземных объектов, например, лес), так назы-
ваемая, теневая область перераспределенной энергии, получаемой за счет
излучения, поглощения и отражения радиоволн, что и определяет воз-
можность обнаружения малозаметных (слабо отражающих) объектов.
Выделение полезного сигнала основывается на обработке усредненного
по времени энергии когерентного сигнала подстилающего фона, ограни-
ченного площадью облучения ДНА и модулированного отраженным сиг-
налом от движущегося объекта с небольшими линейными размерами в
элементе разрешения по сравнению с размерами фоновой площадки.
Такой метод позволяет в значительной степени упростить процесс
обработки при приеме слабого сигнала, отраженного от объекта, при
наличии более мощного фонового отражения и обнаруживать слабо из-
лучающие и медленно движущиеся (менее 2...3 км/ч) объекты на фоне
помех [41]. Безусловно, представляет большой интерес и обнаружение
таких объектов с космических аппаратов, например, обнаружение летя-
щих самолетов на фоне морской поверхности.
Как уже указывалось выше, в основе теории фоновой локации ле-
жит теория радиолокации с разнесенным приемом, поэтому здесь ос-
новная роль отводится физике образования ЭПР при многопозиционном
расположении приемников РЛС и обнаруживаемых объектов. Из теории
электромагнитного поля известно, что если на пути распространения
волн поместить абсолютно черное тело (поглощающее всю падающую
на него энергию), размеры которого больше длины волны, то позади те-
ла появится поле рассеяния (теневое поле). При этом амплитудные ха-
рактеристики поля рассеяния не зависят от формы тела и определяются
только его поперечным сечением.
Эффективная поверхность рассеяния такого тела при рассеянии в
направлении распространения волны (вперед) определяется следующим
24
Глава 1. Перспективные направления развития современной радиолокации
уравнением (в некоторой литературе ее определяют как «теневую» ЭПР
с обратной стороны объекта [24]):
a* = 4л/—\
1 I Я J
। де 5об - площадь «теневой апертуры» объекта; л - длинна волны излу-
чения РЛС.
Следует отметить, что «теневую» ЭПР нельзя уменьшить путем
применения радиопоглощающих покрытий и других специальных мер,
которые эффективно снижают ЭПР объекта со стороны облучения.
11роведенные теоретические и экспериментальные исследования пока-
зали возможность обнаружения движущихся малоконтрастных, в том
числе не отражающих (поглощающих) электромагнитные волны, объек-
тов на фоне местности при использовании метода фоновой локации и
предлагаемого алгоритма обработки радиолокационных сигналов. Реа-
лизация возможности обнаружения малоконтрастных движущихся с
малой радиальной скоростью целей рассматриваемым методом не зре-
бует изменения параметров РЛС и связана только с внедрением алго-
ритмов обработки отраженных сигналов.
Результаты экспериментов с использованием РЛС по обнаружению
движущегося автомобиля вдоль кромки леса (в том числе и укрытого по-
глощающим слоем) подтвердили теоретические выводы. Обработка сиг-
нала по разработанному алгоритму приводит к сглаживанию флуктуаций
сигнала, отраженного от фона местности, что обеспечивает обнаружение
при малых значениях порога (2...3 дБ) и при практическом отсутствии
ложных тревог [24]. Отсутствие за объектом подстилающей поверхности
(фона) приводит к существенному уменьшению уровня принимаемого
сигнала и ограничивает возможность обнаружения объекта.
В нашей стране исследован метод радиолокации на эффекте пара-
метрического поглощения. Эффект параметрического поглощения энер-
гии электромагнитных волн материальными объектами создается вслед-
ствие взаимодействия электромагнитных полей и материальных объек-
тов с образованием поверхностных (приповерхностных) стоячих волн в
результате облучения таких объектов пачками сверхкоротких импуль-
сов с параметрами, связанными с характеристиками облучаемых объек-
тов. Физическая сущность такого процесса в настоящее время вполне
удовлетворительно описывается в рамках известных и применяемых
теорий и эффектов физики и электродинамики. В данном методе схема
радиолокации предусматривает в своей основе метод фоновой локации.
Только здесь в качестве фоновой поверхности предполагается исполь-
зование тропосферных неровностей.
25
Миллиметровая радиолокация: методы обнаружения и наведения...
Как разновидность предыдущего метода, отличающегоя тем, что
обнаружение объектов производится на фоне земной поверхности с
воздушных или космических аппаратов, получает развитие радиолока-
ционный метод «на просвет».
Следует заметить, что указанные методы радиолокации (на эффек-
те параметрического поглощения и «на просвет») требуют дополни-
тельных теоретических и экспериментальных исследований.
1.3. Радиолокация в диапазонах метровых
и дециметровых радиоволн
Низкочастотные РЛС (метровый и дециметровый диапазоны - 10...500
МГц), всегда рассматривались в качестве эффективных средств обнару-
жения малозаметных летательных аппаратов (с покрытиями по техноло-
гии «Стеле» - самолетов и крылатых ракет (КР)), замаскированных в
лесной местности наземных объектов, а также заглубленных мин. В на-
стоящее время потенциальные возможности низкочастотных РЛС с син-
тезированной апертурой существенно возрастают благодаря стреми-
тельному росту производительности вычислительных средств и появле-
нию «интеллектуальных» методов обработки информации, позволяю-
щих выявлять малейшие признаки наличия объектов в отраженных ра-
диолокационных сигналах [24]. Однако современные конкретные разра-
ботки этих РСА сопряжены с рядом научно-технических проблем, свя-
занных с обеспечением:
требуемой разрешающей способности (например, для частот ниже
70 МГц разрешение по дальности ограничивается ~2 м, а для частот
450...500 МГц трудно достичь разрешения менее 0,3 м);
эффективного подавления помех (в метровом и дециметровом
диапазонах волн сигнально-помеховая обстановка определяется нали-
чием большого количества источников непреднамеренных помех, соз-
даваемых навигационными системами, станциями телерадиовещания,
ретрансляторами и радиотелефонами и т.д.).
По мнению специалистов ожидается, что в период до 2010-2015 гг.
низкочастотные РЛС будут совершенствоваться в направлениях:
создания РСА воздушного базирования, позволяющих обнаружи-
вать под землей противопехотные и противотанковые мины (малораз-
мерные объекты) на глубине до 1 м;
развития принципов построения и технологий производства мно-
гоканальных приемо-передающих устройств и широкополосных
(10...500 МГц) антенн;
сокращения времени классификации и идентификации целей (до
1...3 с) на основе применения многопроцессорных и биомолекулярных
вычислительных сред;
26
Глава 1. Перспективные направления развития современной радиолокации
формирования адаптивных алгоритмов обработки сигнальной ин-
формации (формирования контрастного радиоизображения, обнаруже-
ния и классификации целей), обеспечивающих вероятность ложных
ipeBor менее 0,1 на площади лесистой местности ~ 1 км2;
сокращения времени синтезирования апертуры антенны (в 3...5
раз) при прохождении сигналов метрового и дециметрового диапазона
через лесную растительность.
1.4. Радиолокация в диапазоне миллиметровых радиоволн
Все более важную роль в области разработок систем радиолокации и свя-
1И начинает приобретать ММ-диапазон радиоволн [43, 44]. В работе [45]
изложены основные направления развития техники ММ-диапазона. Об-
разцы радиолокационной техники там сравниваются с аналогичными об-
разцами техники, работающими в длинноволновых (дециметровом и сан-
тиметровом) диапазонах радиоволн. Широкое применение ММ-радио-
волн вызвано тем, что в современной радиолокации и особенно в радио-
локационных системах наведения оружия при их разработке требуется
обеспечение высокой разрешающей способности как при обнаружении
(распознавании) объектов различного характера, так и при наведении по
ним управляемого оружия. Кроме того, проблема «тесноты» в эфире мо-
жет быть решена по мере перехода только на более высокие частоты из-
лучения, поскольку на миллиметровых и особенно субмиллиметровых
радиоволнах возникает возможность передачи практически неограничен-
ных объемов информации. Это и положило начало массовому использо-
ванию свойств миллиметрового диапазона радиоволн в реальных дейст-
вующих радиотехнических системах.
К системам военного назначения, использующих ММ-диапазон
радиоволн, можно отнести следующие:
радиолокационные системы (РЭС) обнаружения, распознавания
наземных и воздушных объектов (считается, что лучшим выходом для
повышения разрешающей способности по угловым координатам, поме-
хоустойчивости и скрытности РЭС целесообразно переходить к исполь-
зованию миллиметрового диапазона волн);
радиолокационные системы наведения управляемого оружия: го-
ловки самонаведения, всепогодные (наземные и вертолетные) противо-
танковые системы и др.;
РЛС но обеспечению скрытного преодоления системы ПВО и по-
иску стратегических целей, в том числе и на самолетах стратегической
авиации, а также для сопровождения объектов в наземных и морских
системах ПВО и др.;
радиотехнические системы в комплексах радиоэлектронной борь-
бы (РЭБ) в целях выявления и последующего радиоэлектронного подав-
27
Миллиметровая радиолокация: методы обнаружения и наведения...
ления (РЭП) радиотехнических средств и систем различного назначе-
ния, а также в целях радиоэлектронной защиты (РЭЗ) своих радиоэлек-
тронных средств и систем.
1.5. Сверхдальная радиолокация в ионосфере
Особое место в радиолокации на метровых волнах занимает метод заго-
ризонтной радиолокации [42, 46, 47]. В [48] показаны принципиальные
возможности но обнаружению (в том числе мало заметных объектов и с
использованием электромагнитных волн в диапазоне частот 1,5...25 МГц)
загоризонтной радиолокации через ионосферу. На этих частотах, как из-
вестно, радиопоглощающие материалы не ослабляют отражение радио-
локационных сигналов. Доказано, что характерной особенностью распро-
странения радиоволн по ионосферному каналу является множественность
траекторий. Поэтому для обнаружения малозаметных объектов и обеспе-
чения помехоустойчивой линии радиосвязи за пределами горизонта тре-
буется разработка оптимальных адаптивных радиотехнических систем с
пространственно-поляризационной обработкой электромагнитного поля.
Важными работами в рамках научно-исследовательских программ
современных исследований являются работы по разработке загори-
зонтных РЛС с целью создания корабельных систем противоракетной
обороны (ПРО), а также систем контроля полетов авиации. Разработки
РЛС этого класса ведутся в США, Великобритании, Австралии, Китае
[42, 46-48]. В ближайшей перспективе ожидается появление таких заго-
ризонтных РЛС для корабельной ПРО, которые будут обладать повы-
шенной (до 10 раз) разрешающей способностью и будут позволять об-
наруживать крылатые ракеты на расстоянии 40...60 км. Эти системы
будут основаны на принципах отражения радиоволн от ионосферы при
покрытии большой площади и обратного их рассеяния (при обнаруже-
нии целей и определении дальности).
1.6. Пассивная радиолокация
В НИИ ПФ РАН и ИРЭ РАН проведены исследования по оценке энерге-
тических соотношений при формировании и переносе контрастов от
слабо отражающих объектов, изготовленных с применением технологии
«Стеле». Показано, что оптимальные возможности обнаружения суще-
ствуют в окнах прозрачности миллиметрового диапазона волн, а именно
на длинах волн 8,6 мм, 3,3 мм и 2,2 мм. Дальность обнаружения объек-
тов сильно зависит от погодных условий и геометрии наблюдения. По-
казано, например, что в случае высоколетящих объектов и применения
апертуры на длине волны 3,3 мм обнаружение возможно в чистой атмо-
сфере с дистанций в 10... 15 км с превышением сигнал-шум в 14 дБ.
28
Глава 1. Перспективные направления развития современной радиолокации
Перспективно применение радиотенловых контрастов средствами наве-
дения на последних участках траекторий радиотехническими средствами
с малой (50...300 мм) апертурой [24, 45, 49-53]. При тех же условиях
дальность может составлять от 150 м до 1 км и более. На основе числен-
ных расчетов показана реальная возможность обнаружения малозамет-
ных воздушных объектов в приземном слое атмосферы на фоне неба,
1смной поверхности (морской поверхности) на расстоянии 20...25 км и на
частотах порядка 94 и 136 ГГц. В условиях космического пространства
на дальность может составлять 200...300 км. Поскольку уменьшение
' )11Р с помощью существующих радиопоглощающих материалов, со-
। ласно закону Кирхгофа, приводит к увеличению собственного теплово-
н> излучения объектов, предложено использование систем пассивной
цокании в миллиметровом диапазоне волн.
Исследования возможности создания новых систем пассивного об-
наружения проводятся в России, Чехии, США и других странах [45, 53].
В области создания систем радиотепловой (пассивной) локации на
новых (нетрадиционных) принципах в конце XX века наметился про-
рыв. В 1998-1999 гг. в США была разработана принципиально новая
система пассивной локации, созданная на основе технологии Passive
( oherent Location - PCL (официально система получила название Silent
Sentry System™). Разработку данной технологии осуществляла компа-
ния Lockheed Martin Mission Systems по заказу министерства обороны
США. Технология PCL позволяет получать трехмерные координаты
фаекторий движения воздушных целей (малозаметных («Стеле») и низ-
колетящих) на основе оценки изменений в сигнальной обстановке,
сформированной в результате функционирования обычных средств ра-
дио- и телевещания.
В состав РЛС Silent Sentry System входят: антенная и приемная
системы, разработанные Lockheed Martin; высокопроизводительные
(•родства обработки информации на базе компьютеров SG2000 Silicon
Graphics; программно-алгоритмическое обеспечение и средства визуа-
пнзации фирмы Autometric Edge Product Family. Общая стоимость РЛС
составляет ~ 3...5 млн долл. США. Предварительные оценки результа-
нт испытаний показали, что она может быть эффективно использована
даже в системах предупреждения о ракетном нападении. В начале 2000
। стало известно, что на аналогичных принципах создана новая РЛС в
Китае. Специалисты американского разведывательного управления за-
являют, что китайская РЛС позволяет достоверно обнаруживать и со-
провождать такие малозаметные самолеты как F-117 и F-22. Однако
достаточно полных сведений о научно-технических принципах техноло-
11П1 PCL пока нет. Как показали результаты экспресс-анализа, возмож-
ность создания систем, аналогичных технологии PCL, существует на
29
Миллиметровая радиолокация: методы обнаружения и наведения..,
основе использования сверхдлительного когерентного накопления сиг-
налов, методов спектрального анализа и прикладной теории фракталов
и детерминистского хаоса. Такие системы могут найти широкое приме-
нение при обнаружении малозаметных воздушных объектов.
1.7. Радиолокационные и оптоэлектронные системы
обнаружения объектов
Интеграцию (комцлексирование) радиолокационных средств обзора и
обнаружения целей с системами наблюдения видимого, инфракрасного
(ИК) и ультрафиолетового (УФ) диапазонов, в том числе комплексное
использование методов активной и пассивной локации, с одновремен-
ной работой во всем диапазоне радиоволн, можно привести на примере
совещания специалистов НАТО 22-23 апреля 2002 г. в Праге [45, 54].
Анализ научно-технических достижений по данным этого совеща-
ния указывает на ряд новых тенденций в развитии современной радио-
локации. Стремление получать данные об обнаруживаемых объектах с
все более высоким разрешением по дальности и углам места и азимуту
привели к реализации идеи о комплексировании микроволновых радио-
локационных систем с методами оптической локации.
В последние годы был сделан прорыв в создании новых комплек-
сированных систем, предназначенных для дистанционного получения
изображений объектов и местности высокого разрешения. В настоящее
время итогом исследований и разработок комплексированных систем
явилось создание (и испытание) системы ЛАДАР, представляющей со-
бой модуль, в котором размещены микроволновая РЛС и локатор ИК-
диапазона волн. Одна из таких систем создана для обнаружения препят-
ствий и обеспечения безопасности полетов вертолетов. Она обладает
следующими характеристиками. Передатчик на ЛПД диоде из InGaAs
работает на волне 1,54 мкм; мощность излучения его составляет в им-
пульсе 4 кВт, поляризация излучения - вертикальная и горизонтальная.
Частота повторения импульсов 2 и 4 Гц. Поле обзора 320x320. Даль-
ность действия при хорошей видимости - 1 км и более, при неблагопри-
ятных условиях - до 400 м. Система ЛАДАР обнаруживает сети прово-
дов линий электропередач с проводом диаметра 10 мм и более на рас-
стояниях 500...800 м, в неблагоприятных условиях дальность обнару-
жения уменьшается до 300 м; ЛАДАР имеет разрешение: по дальности
- 1 м, по углу места - 0,2; по азимуту - 0,350. Объем ее составил 36 дм3,
масса - менее 30 кг.
С точки зрения зарубежных военных специалистов ЛАДАР позво-
ляет решать ряд новых задач в области локации сверхвысокого разре-
шения, таких как:
30
Глава 1. Перспективные направления развития современной радиолокации
широкое использование в боевых условиях для получения разве-
дывательной информации о силах противника и управления огневыми
средствами;
определение дальности до объектов с точностью не хуже 0,5 м по
дальности, 0,20 по углу места и 0,30 по азимуту с использованием обеих
поляризаций излучения;
обнаружение активных и пассивных РЛС но внутренним и внеш-
ним источникам излучения;
одно-, двух, трех- и четырехмерное сопровождение целей;
распознавание типов целей и обнаружение мало заметных пре-
пятствий;
обеспечение контроля за ведением прицельного огня и разрывов
снарядов;
картографирование местности и сельскохозяйственных угодий;
обнаружение линий электропередач;
измерение скорости летательных аппаратов, углов атаки и крена, а
1акже скорости ветровых полей и потоков ветра у носа самолета;
обнаружение химических и биологических элементов в атмосфере
и контроль за загрязнениями атмосферы.
1.8. Методы обработки радиолокационных сигналов
Известно, что методы обработки сигнала - это составная часть получе-
ния радиолокационной информации (РЛИ), математическое описание
которых является достаточно сложным. Функции обработки РЛИ делят-
ся на этапы и операции, анализируемые отдельно. На основе этого ана-
лиза в последующем осуществляется синтез устройств и алгоритмов об-
работки. Считается, что процедура обработки радиолокационных сиг-
налов является одним из важнейших процессов выделения полезной
информации. Особое место отводится также аппаратуре, которая может
успешно применяться для решения задач построения радиоизображений
по данным отраженных сигналов от обнаруживаемых объектов.
В настоящее время и на ближайшую перспективу в качестве ос-
новных методов обработки сигналов применяются следующие [24,45]:
1. Методы синтеза оптимальных и квазиоптимальных алгоритмов
обнаружения полезного сигнала в локационных системах при известных
характеристиках полезного сигнала и помехи, которые достаточно разви-
। ы. Однако практическое использование таких алгоритмов о1раничено из-
за существенного ухудшения их характеристик при действии нестацио-
нарной помехи. Поэтому особый интерес представляет синтез алгорит-
мов, обладающих достаточно стабильными характеристиками при изме-
нении условий работы, т.е. робастных алгоритмов устойчивых [24,45];
31
Миллиметровая радиолокация: методы обнаружения и наведения...
2. Ранговая обработка сигналов, позволяющая построить непарамет-
рические устройства обнаружения сигналов. Использование при этом ме-
дианной фильтрации в обнаружителях позволяет улучшить разрешающую
способность РЛС с визуальной индикацией и построить устройства с адап-
тивным порогом, выделяющие сигналы определенной длительности на фо-
не неравномерных по интенсивности протяженных помех [55-60];
3. Применение зондирующих сигналов со значительной относитель-
ной шириной спектра - СШП-сигналов [61, 62]. Такие сигналы обеспечи-
вают высокую разрешающую способность, точность измерения дально-
сти, радиальной скорости и угловых координат, а также существенно по-
вышают возможности РЛС по обнаружению радиолокационных объек-
тов, что позволяет на качественно новом уровне решать задачи распозна-
вания и построения радиолокационных изображений объектов.
Одной из основных проблем анализа сложных изображений явля-
ется разработка эффективных алгоритмов их представления совокупно-
стью областей, удовлетворяющих некоторому критерию однородности.
Наиболее простым и широко распространенным методом решения та-
кой проблемы, так называемой проблемы сегментации (обработки не-
однородных по яркости радиолокационных изображений), является ме-
тод пороговой обработки;
4. Поляризационные методы обработки радиолокационных сигналов
в активных и пассивных РЛС [63]. Поляризационные методы обработки
радиосигналов широко используются для решения задач согласования,
подавления помех, распознавания радиолокационных объектов, разделе-
ния сигналов в системах с повторным использованием частот, например:
одним из перспективных направлений решения проблемы обна-
ружения и распознавания, особенно неподвижных, объектов РЛС мил-
лиметрового диапазона в условиях помех является использование поля-
ризационных методов обработки радиолокационных сигналов;
из-за случайного характера изменения параметров среды распростра-
нения поляризация принимаемой радиоволны оказывается также случай-
ной, отличной от поляризации переданной волны, поэтому в данном случае
для повышения эффективности поляризационных методов обработки сиг-
налов и помех используется динамический адаптивный подход.
Таким образом, эффективность поляризационных методов обра-
ботки радиосигналов определяется степенью поляризации принимае-
мых сигналов и помех, а также точностью оценки параметров и управ-
ления поляризационными базисами антенных систем;
5. Цифровая обработка сигналов [64-66]. Реализация цифровых ме-
тодов обработки сигналов за последние двадцать лет прошла два принци-
пиально важных этапа. На первом этапе цифровая обработка осуществля-
лась преимущественно с помощью универсальных ЭВМ и сводилась к
32
Глава 1. Перспективные направления развития современной радиолокации
профаммированию на основе заданных алгоритмов. Для него, с одной
стороны, характерны большая гибкость, т.е. возможность использования
одной ЭВМ для решения многих задач обработки, а с другой стороны,
невысокое быстродействие при работе в реальном масштабе времени.
Второй этап, являющийся в известной мере альтернативой перво-
му, связан с переходом к специализированным вычислительным средст-
вам, предназначенным для выполнения определенных алгоритмов циф-
ровой обработки сигналов на основе аппаратных методов реализации и
жесткой логики. Для этого этапа характерно существенное (на 2-3 по-
рядка) увеличение скорости работы в реальном масштабе, а в ряде слу-
чаев и сокращение аппаратных затрат по сравнению с вариантом, ис-
пользующим для этого универсальные ЭВМ. Дальнейшее повышение
|ехнико-экономической эффективности цифровой обработки сигналов
связывается с переходом к новому этапу, основанному на синтезе дос-
тоинств профаммного и аппаратного подходов; при этом профаммное
начало должно закладываться в алгоритмах обработки и реализоваться
в архитектуре вычислительных средств, а аппаратное - в параметрах и
архитектуре специализированных БИС;
6. Особое место в радиолокации стали занимать пассивные лока-
ционные системы и, соответственно, методы обработки радиотепловых
сигналов [24, 45, 67]. Это связано с проведением интенсивных исследо-
ваний пассивных локационных систем радиовидения, где обработка сиг-
налов, в основном, проводится на основе фазированных антенных реше-
ток, радиооптических систем с одним сенсором, а также систем с ре-
шетками сенсоров.
Новые подходы в радиовидении перспективны для радиоастроно-
мических исследований, а также в других прикладных областях. Необ-
ходимо отметить, что проведение таких исследований в миллиметровом
и субмиллимефовом диапазонах радиоволн. Обнаружение излучения от
объекта в субмиллиметровом диапазоне производится с использованием
сверхпроводящего малошумящего датчика. Получены интересные ре-
зультаты теоретических и экспериментальных исследований основного
распределения энергии излучения от объекта в различных субмилли-
мегровых диапазонах с использованием сверхпроводящего датчика;
7. Фрактальный метод обработки радиолокационных сигналов. В
настоящее время достаточно хорошо освещено современное состояние
нового бурно развивающегося направления в теории детерминированного
хаоса - теории фракталов в приложении к радиофизике и радиолокации
168,69]. Изучены диффузионные процессы во фрактальных пространст-
вах, исследованы методы решения задач дифракции волн на фрактальной
поверхности и во фрактальных средах. Применительно к радиолокации
обоснованы направления создания фрактальных антенн и решения про-
33
Миллиметровая радиолокация: методы обнаружения и наведения...
блем нетрадиционной фрактальной обработки изображений при различ-
ных отношениях сигнал-шум и обнаружения мало контрастных объектов.
В настоящее время поставлена цель и решается задача выявления
возможностей применения фрактальных методов для обработки радио-
локационных сигналов и изображений в сантиметровом и миллиметро-
вом диапазонах радиоволн. В итоге исследований в ИРЭ РАН впервые
был проведен анализ применяемости фрактальных методов в исследо-
вании радиолокационных изображений, представлены материалы изме-
рений фрактальных характеристик радиолокационных изображений, а
также результаты проведенных экспериментов по обнаружению слабо
отражающих объектов на фоне подстилающих поверхностей [68, 69].
Исследованы фрактальные характеристики как искусственно создан-
ных, так и реальных изображений местности.
Эксперименты, проведенные с изображениями реальных земных
поверхностей, полученных с помощью аэрофотосъемки и радиолокаци-
онного сканирования с помощью миллиметровых локаторов, показыва-
ют перспективность применения параметра фрактальной размерности
при реализации устройств вторичной обработки сигналов. Показана
возможность обнаружения фрактальными методами изображений мало-
заметных объектов в режиме реального времени с помощью предло-
женных алгоритмов при отношении сигнал-шум до - 40 дБ. Предло-
женный метод измерения фрактальной размерности прост в реализации,
т.е. не требует какой-либо дополнительной обработки и может быть
легко распараллелен;
8. Весовая обработка радиолокационных сигналов при дискретном
преобразовании Фурье. Развитие и совершенствование математических
методов цифровой обработки сигналов тесно связано с развитием кон-
структивной теории функций [24, 70, 71]. Последним достижением в
этой области является синтезирование нового класса финитных функ-
ций теории аппроксимации - атомарных функций (АФ).
Наиболее простой и в то же время фундаментальной в классе АФ
является функция ир(х) с носителем [-1; 1]:
up(x')--^— jF(j9)exp(-ij9x)<A,
Методы обработки с использованием весовых окон, полученных
на основе АФ, отличаются высокой точностью, гибкостью и эффек-
тивностью.
34
Глава 1. Перспективные направления развития современной радиолокации
Влияние вида весовой функции на результаты обнаружения мало-
контрастных целей рассмотрим на двух примерах, а именно, примени-
тельно к антенне с синтезированной апертурой и спектральному анали-
зу многочастотного сигнала. При оценке влияния вида весовой функции
па характеристики антенн с синтезированной апертурой (СА) в качестве
сравнения использовались следующие параметры: разрешающая спо-
собность по азимуту, уровень ближних и дальних боковых лепестков, а
также потери энергии сигнала, связанные с его весовой обработкой.
Анализ проведенных исследований позволил сделать следующие
основные выводы:
для определения атомарных функций разработаны более быстрые
методы их вычисления;
рассмотрено применение нового математического метода теории
аппроксимации АФ к задачам цифровой обработки сигналов;
получена общая закономерность при применении различных весо-
вых функций в антеннах с синтезированной апертурой, а именно, чем
выше результирующая разрешающая способность, тем выше уровень бо-
ковых лепестков и меньше энергетические потери и наоборот, чем ниже
уровень боковых лепестков, тем хуже разрешающая способность и боль-
ше энергетические потери. Окна, полученные с применением «fupn{x)-
функций», в принципе не уступают другим окнам, но сказать, что они
превосходят их однозначно нельзя. Полученные результаты можно
обобщить на все весовые функции, полученные с использованием АФ,
т.е. всякой весовой функции, полученной с использованием атомарных
функций можно найти близкий аналог из ранее известных функций, ко-
торые дают аналогичный результат.
1.9. Способы цифровой обработки радиолокационной
информации
Повышение технико-экономической эффективности цифровой обработ-
ки сигналов связано с переходом к новому этапу, основанному на син-
тезе достоинств программного и аппаратного подходов; при этом про-
фаммное начало должно закладываться в алгоритмах обработки и реа-
лизовываться в архитектуре вычислительных средств, а аппаратное - в
параметрах и архитектуре специализированных БИС.
Современный уровень цифровой техники позволяет практически
полностью оптимизировать характеристики обработки сигналов и одно-
временно кардинально уменьшить массу и габаритные размеры аппара-
туры, изъять из РЛС фомоздкую аппаратуру аналоговой обработки
сигналов [72-75]. Факторами, офаничивающими применение цифровой
обработки сигналов РЛС (ЦОС), являются высокие требования к быст-
родействию, динамическому диапазону (разрядности) и точностным ха-
35
Миллиметровая радиолокация: методы обнаружения и наведения ...
рактеристикам аналого-цифровых преобразователей (АЦП). Исходя из
результатов анализа характеристик радиолокационных сигналов в стан-
циях дозора, в указанных работах предлагается вариант построения ЦОС,
который достаточно эффективно может быть реализован на сверхболь-
ших интегральных схемах (СБИС) типа СнК.
Структурная схема канала цифровой обработки радиолокационной
информации приведена на рис. 1.1, где АЦП - аналого-цифровой преоб-
разователь; АС - аподизация в стробе; ЦФД - цифровой фазовый детек-
тор; ДИ - децимация и интегрирование; ЦРФ - цифровой режекторный
фильтр; ДПФ 128т - дискретный преобразователь Фурье (128 точек);
ВМ - вычислитель модуля; НО - некогерентная обработка.
Рис. 1.1. Структурная схема цифровой обработки радиолокационной информации
Аналого-цифровой преобразователь. Главной целью преобразова-
ния сигнала в цифровую форму непосредственно на промежуточной час-
тоте является возможность последующего выполнения цифрового разло-
жения сигнала на две квадратурные составляющие. При этом обеспечива-
ется полная идентичность квадратурных каналов по коэффициенту пере-
дачи и точность соблюдения фазового сдвига л/2 между квадратурами,
практически недостижимые при аналоговом исполнении на двух фазовых
детекторах. Ключевыми вопросами при аналого-цифровом преобразова-
нии являются допустимые ограничения разрядной сетки, величина экви-
валентных входных шумов устройства выборки-хранения (УВХ) и значе-
ние частоты дискретизации.
Разрядная сетка АЦП должна обеспечивать требование линейно-
сти преобразования в динамическом диапазоне входных сигналов, дос-
тигающим 90 дБ, над средним значением внутренних шумов приемного
тракта. Кроме того, цена младшего разряда и величина собственных
36
Глава 1. Перспективные направленна развития современной радиолокации
шумов АЦП должны обеспечивать снижение суммарного значения вно-
симых шумов (дискретизации и УВХ) после согласованной фильтрации
с выхода фазового де тектора, до уровня, не превышающего минус 10 дБ
относительно шумов приемного тракта.
Величина ослабления вносимых АЦП шумов после усредняющих
цифровых фильтров в квадратурах сигнала зависит от соотношения час-
тоты дискретизации и эквивалентной полосы частот фильтра по закону
квадратного корня. При использовании линейного накопителя выборок
в качестве усредняющего фильтра величина ослабления вносимых АЦП
шумов будет равна квадратному корню из числа эффективно накапли-
ваемых выборок. При использовании накопителя с взвешиванием ам-
плитуд выборок в пределах накапливаемой пачки (аподизации) по зако-
ну, близкому к Sin2, число эффективно накапливаемых выборок соста-
вит примерно половину от их полного числа.
Процедура накопления приводит к росту разрядной сетки и более
подробному представлению квадратур сигнала, что эквивалентно слу-
чаю преобразования после некоего «идеального аналогового фазового
детектора» с помощью АЦП с увеличенным числом разрядов (в сторону
младших разрядов с уменьшением их цены). Эквивалентное, с точки
зрения подробности описания входного сигнала, нарастание диапазона
линейного преобразования также равно квадратному корню из числа
эффективно накапливаемых выборок.
Аподизация в стробе. Входные сигналы представляют собой пе-
риодическую последовательность коротких импульсов с заполнением на
промежуточной частоте, приходящих на обработку с произвольной за-
держкой во времени. В этой связи обработка должна происходить неза-
висимо по квантам времени, согласованным с длительностью импульса.
Для снижения энергетических потерь сигнала при произвольном положе-
нии входного импульса относительно кванта обработки формируется две
последовательности квантов, сдвинутых на половину их ширины.
Разбиение на короткие временные кванты эквивалентно нелиней-
ной процедуре умножения входного сигнала на прямоугольную оги-
бающую (стробированию), что порождает ряд новых частотных состав-
пяющих в спектре сигнала. Если частота заполнения импульса не кратна
частоте их повторения, то, при нс очень высокой промежуточной часто-
le относительно длительности импульса, помимо истинной частоты
сигнала, в окне между гармониками частоты повторения появится так
называемая «зеркальная» составляющая.
Интерес также представляет и выбор частоты работы АЦП. Для
работы квадратурного фазового детектора частота квантования должна
(>ыть кратна 4z/)!p, где i = 1,2, ..., п. Для i > 1 может возникнуть пробле-
ма нечетных гармоник, зато увеличивается эффект накопления сигнала.
37
Миллиметровая радиолокация: методы обнаружения и наведения...
Цифровой фазовый детектор. Для подавления каждой sin-coc-
тавляющей и cos-составляющей в спектре, полученных в результате пре-
образования входного сигнала, и получения частоты выходных выборок,
соответствующих одному элементу дальности, используется разбиение
последовательности выборок на пачки по 2т выборок, аподизация выбо-
рок в пачке по закону: W(k) =sin\kn/2m), где W(k) - функция аподизации;
к - номер выборки в пачке; к = 0,.. .,2т’, входные выборки с частотой дис-
кретизации (разрядность - 14 р, включая знак). Выходом фазового детек-
тора являются sin-составляющая и cos-составляющая сигнала.
Цифровой режекторный фильтр. Для ослабления влияния мощ-
ных помех от подстилающей поверхности должен быть реализован ре-
жекторный фильтр, коэффициенты которого выбираются в зависимости
от характера подстилающей поверхности. Рекурсивный цифровой ре-
жекторный фильтр 4-го порядка построен на основе каскадного соеди-
нения двух фильтров 2-го порядка.
Дискретное преобразование Фурье. Оно осуществляется два раза
на каждой дальности с некоторым сдвигом относительно начала пачки
импульсов, чтобы в дальнейшем в обнаружителе выполнить критерий
два из двух. Производится вычисление 128-точечного БПФ. Для улуч-
шения качества спектрального анализа перед вычислением БПФ необ-
ходимо иметь возможность наложения на временные выборки весовых
функций. Функция аподизации может быть изменена в зависимости как
от параметров сигнала, так и от режима работы РЛС.
Обнаружитель состоит из вычислителя порога и схемы сравнения
с ним. Порог вычисляется для каждого частотного канала на основе i
выборок данного канала. Пороги соседних частотных каналов не корре-
лированы.
Исполнительный порог вычисляется по формуле:
n(f> К,
_ i-,0
п
где f- номер текущей составляющей БПФ [O....(/V-l)]; N=128; i - номер
текущей дальности [0....(£>-3)]; D - число обрабатываемых дальностей;
К„ - коэффициент порога.
Факт превышения амплитуды сигнала A(f,i) исполнительного по-
рога 17(f) происходит при выполнении условия: A(f,i) > 17(f). Управление
параметрами обработки проводится, как правило, в азимутальных стро-
бах по результатам предыдущего обзора. Приведенный алгоритм реали-
зован в виде экспериментального образца и прошел проверку как на
стенде РЛС, так и в натурных испытаниях. В работе также рассматри-
ваются особенности построения квадратурного фазового детектора,
фильтра низких частот и ДПФ обзорной РЛС с СДЦ, работающей на
фоне мощных отражений от подстилающей поверхности.
38
Глава 1. Перспективные направления развития современной радиолокации
Таким образом можно сделать следующие заключения.
В последние годы предприятиями радиопромышленности с участием ор-
ганизаций Российской академии наук и Высшей школы созданы новые техно-
логии и элементная база для радиолокационных сисгсм различного назначения,
позволяющие существенно расширить технические возможности радиоэлек-
тронной аппаратуры.
Выбор приоритетных направлений фундаментальных и поисковых ис-
следований осуществляется на основе комплексного научно-технического
прогнозирования развития науки и техники на долгосрочный период. Важно
отметить, что на современном этапе роль такого прогнозирования возрастает,
что вызвано, прежде всего, необходимостью рационального расходования
средств, выделяемых из федерального бюджета на НИОКР (концентрации ре-
сурсов на первоочередных задачах технического развития, исключения дуб-
лирования разработок, снижение «риска от НИОКР» и формирования эконо-
мически доступного комплекса высокоэффективных технологий).
В качестве фундаментальных и поисковых НИР на ближайшую перспек-
тиву могут бьпъ исследованы новые методы обнаружения малозаметных воз-
душных (в т.ч. низколетящих), движущихся и неподвижных малоразмерных
наземных (замаскированных и укрызых) и морских объектов на фоне помех с
помощью радиолокационных систем. Подводя итог анализа современным ме-
тодам радиолокации, можно с уверенностью сказать, что приоритетными фун-
даментальными и поисковыми НИР в области исследований методов совре-
менной радиолокации на ближайшую перспективу (2005-2010) остаются:
совершенствование и систематизация теории широкополосной и
сверхширокополосной радиолокации в полосе частот 0,1...10 ГГц с сигна-
лами большой мощности;
исследование технических путей повышения помехоустойчивости и
скрытности работы радиолокационных систем обнаружения наземных и над-
водных объектов за счет применения шумоподобных зондирующих сигналов;
исследование методов многопозиционной радиолокации (в т.ч. фоно-
вого и на эффекте параметрического поглощения) с целью разработки ра-
диолокационных систем с повышенными энергетическими характеристика-
ми, информативностью, помехозащищенностью и живучестью для обнару-
жения воздушных и наземных объектов;
исследование радиолокационных систем в метровом и дециметровых
диапазонах радиоволн с синтезированной апертурой с целью обнаружения ма-
ло заметных летательных аппаратов, замаскированных в лесной местности на-
земных объектов, а также заглубленных мин объектов;
исследование возможностей загоризонтной радиолокации через ионо-
сферу и обнаружения мало заметных объектов с использованием электро-
магнитных волн в диапазоне частот 1,5...25 МГц;
исследование радиолокационных систем в миллиметровом и даже суб-
миллимегровом (в длинноволновой части) диапазонах радиоволн с целью соз-
дания систем с высоким разрешением, в т.ч. систем радиовидения;
39
Миллиметровая радиолокация: методы обнаружения и наведения...
теоретические и экспериментальные исследования метода радиотештовой
(пассивной) радиолокации с целью разработки скрытных систем обнаружения
наземных объектов в миллиметровом диапазоне радиоволн, а также малозамет-
ных воздушных и баллистических объектов в космосе;
исследование методов комплексирования радиолокационных и оптико-
электронных систем с целью разработки технических средств разведки с повы-
шенным уровнем распознавания обнаруживаемых объектов.
Подводя итог анализа основных направлений, применяемых в настоя-
щее время методов обработки радиолокационных сигналов, можно заклю-
чить, что приоритетными направлениями по постановке фундаментальных
и поисковых работ в области исследований методов обработки радиолока-
ционной информации на ближайшую перспективу (2005 -2010) могут быть
следующие:
синтез алгоритмов (оптимальных и квазиоптимальных) обнаружения,
обладающих достаточно стабильными характеристиками при изменении
условий работы, т.е. устойчивых робастных алгоритмов;
исследование метода анализа сложных радиолокационных изображе-
ний (неоднородностей но яркости) методом пороговой обработки (путем
сегментации);
исследование поляризационных методов обработки радиолокацион-
ных сигналов в активных и пассивных РЛС;
исследование дальнейшего повышения технико-экономической эф-
фективности цифровой обработки сигналов;
исследование методов и способов обработки радиозепловых сигналов;
выявление возможностей применения фрактальных методов для обра-
ботки радиолокационных сигналов и изображений в сантиметровом и мил-
лиметровом диапазонах радиоволн;
исследование возможностей весовой обработка радиолокационных
сигналов при ДПФ с целью изучения вопросов, связанных с синтезом ново-
го класса весовых окон и фильтров в задачах цифровой обработки сигналов
различной физической природы.
Работа, посвященная вопросам модернизации алгоритмов обработки
сигналов обзорной РЛС с учетом современного уровня развития компо-
нентной базы, позволяет сделать выводы:
наличие быстродействующих - до 100... 120 МГц и многоразрядных -
до 12-14 разрядов АЦП позволяет начинать цифровую обработку РЛС-
сигналов с промежуточной частоты по принципам, реализуемым в цифро-
вых радиоприемниках;
существенное различие в соотношении промежуточной и видеочасто-
ты для радио и РЛС приемников, а также целей обработки требует в по-
следнем случае специального подхода.
40
ГЛАВА 2
Методы исследования полей рассеяния
электромагнитных волн на объектах
сложной электрофизической
структуры и формы
Радиофизика и радиолокация, как области естествознания, в современ-
ных условиях повсеместного распространения и использования инфор-
мационных технологий представляют собой научную, методическую и
। ихнологическую основу, на которой модернизируются существующие
и создаются принципиально новые системы радиосвязи, навигации,
дистанционного зондирования и локации. Именно здесь изучаются во-
просы распространения электромагнитных воли (ЭМВ) в пространстве
и их рассеяние на объектах локации (ОЛ) сложной электрофизической
структуры и пространственной конфшурации естественного и антропо-
генного характеров.
В силу своей сложности и многогранности решение этих проблем
исторически было ограничено исследованиями фундаментального харак-
тера, связанными либо с решением канонических задач дифракции на
объектах простой формы, либо с разработкой упрощенных эвристических
методов, не обеспечивающих необходимую точность результатов.
В настоящее время накоплен огромный научно-практический по-
тенциал в области вычислительных методов и средств, позволяющий
эффективно распространять результаты фундаментальных достижений
радиофизики и радиолокации при решении прикладных задач. Однако
формальные попытки непосредственного применения фундаментальных
методов электродинамики к решению задач рассеяния ЭМВ на реаль-
ных объектах локации сложной электрофизической структуры и про-
с!ранственной конфигурации с учетом влияния подстилающей поверх-
ности не только не эффективны, но и практически неразрешимы даже
на суперЭВМ. Поэтому разработка эффективных, универсальных и со-
временных методов анализа полей рассеяния ОЛ самого широкого клас-
са и ориентированных на широкое и рациональное использование со-
временных расчетных методов и средств является в настоящее время
актуальной и практически важной задачей.
В настоящей главе рассмотрены методы исследования рассеяния
ыектромагнитных волн на объектах локации сложной электрофизиче-
41
Миллиметровая радиолокация: методы обнаружения и наведения ...
ской структуры и формы естественного и антропогенного характеров,
основанные на широком использовании и развитии наиболее эффектив-
ных современных асимптотических методов электродинамики, развитии
и использовании современных вычислительных методов и средств.
Здесь рассмотрены также вопросы разработки методов, математических
моделей, алгоритмов и процедур синтеза входных сигналов радиолока-
ционных систем (РЛС) различного назначения, анализ и синтез радио-
локационных характеристик (РЛХ) ОЛ, их классификация и идентифи-
кация по рассеивающим свойствам.
2.1. Оператор рассеяния объекта локации
как основной элемент информационного канала
Явление взаимодействия электромагнитных волн с объектами сложной
пространственной конфигурации представляет одну из важнейших об-
ластей исследований прикладного и теоретического характеров [1]. Это
явление возникает всякий раз при взаимодействии первичного электро-
магнитного поля антенны как со средой распространения, так и с лю-
бым объектом или препятствием, представляющим собой неоднород-
ность этой среды. Поэтому под это определение попадают практически
все волновые явления. При этом при решении прикладных задач радио-
связи и радиолокации наибольший интерес представляют такие класси-
ческие волновые явления и процессы, как дифракция, отражение, пре-
ломление и затухание, а специфика радиотехнических систем проявля-
ется, например, в таких явлениях, как деполяризация волн и эффекты
многократного переотражения в условиях использования сложных зон-
дирующих сигналов.
Указанные классические явления достаточно подробно и всесто-
ронне изучены. Однако с точки зрения использования известных мето-
дических результатов для решения прикладных задач возникает необ-
ходимость в проведении комплекса исследований теоретического и экс-
периментального характеров, которые бы позволили решать фундамен-
тальные проблемы радиолокации, радионавигации и радиосвязи. В ча-
стности, в радиолокации к таким проблемам можно отнести вопросы,
связанные с радиолокационной заметностью объектов (их снижение —
это, например, программа Steilth в США, или их повышение - это соз-
дание эффективных радиолокационных отражателей), рациональное по-
строение и оценку параметров радиолокационных систем, определение
и исследование дополнительных селективных признаков целей на фоне
мешающих образований, подстилающих поверхностей и фонов.
Решение этих вопросов неразрывным образом связано с изучением
механизма возникновения полей вторичного излучения объектов лока-
ции, которые в некоторых приложениях называют электромагнитными
42
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
нолями рассеяния или просто полями рассеяния, которые несут инфор-
мацию о параметрах и характеристиках объекта локации. Поскольку
ноле возбуждения обычно представляет собой известный зондирующий
сигнал, анализ полей вторичного излучения позволяет определить пара-
метры объекта локации. В качестве измеряемых параметров служат ко-
ординаты объекта в пространстве, параметры его движения, а для со-
временных систем распознавания, классификации и идентификации -
его геометрические размеры и пространственная конфигурация [2, 3].
Следует сразу отметить, что условия локации и сложность про-
странственной конфигурации носят принципиальное значение для вы-
бора метода исследования. Этот факт обусловлен сложностью матема-
тческой формализации явлений для реальных локационных систем,
условий их применения и объектов локации.
Кроме того, рассматриваются радиолокационные зондирующиие
сигналы, которые конкретизируют соотношения между длиной волны
центральной частоты спектра и характеристическим размером объ-
L
екта локации £„ так, что — >1.
А)
При моделировании используется «частотный» метод анализа от-
раженных сигналов и полей, поэтому сигналы, если это не оговорено
особо, полагаются узкополосными. Однако основные положения мето-
дики являются справедливыми и для современных РЛ систем со сверх-
широкополосными сигналами, которые корректно допускают прямое и
обратное преобразования Фурье.
Под объектами сложной пространственной конфигурации здесь
понимается совокупность антропогенного (дома, механизмы, транс-
портные средства, ... ) и естественного характера (луг, пашня, горный
массив, ...), с известными геометрическими и электрофизическими ха-
рактеристиками. Для объектов локации должна быть априори известна
их форма. В случае антропогенных объектов - это чертежи общего ви-
да, а для естественных - карта рельефа местности.
Учитывая прикладной характер работы, в дальнейшем будем рас-
сматривать волновые процессы применительно к модели информацион-
ного радиолокационного канала (РЛК), функциональная схема которого
приведена на рис. 2.1, где - зондирующий сигнал; А, - оператор
передающего тракта и антенны; Аг - оператор приемного тракта и ан-
1сины. В данной модели устанавливаются функциональные соотноше-
ния между зондирующим сигналом Oj(r) и эхо-сигналом а,(т), содер-
жащим информацию об измеряемых параметрах объекта локации.
43
Миллиметровая радиолокация: методы обнаружения и наведения...
Рис. 2.1. Функциональная схема радиоканала
Взаимодействие элементов РЛК допускает математическую фор-
мализацию вида [2]
(0 = Ar [(^SF, + T„M„F„) АЛ (/) + N J
Здесь A, - оператор передающего тракта РЛС, соответствующий преоб-
разованию зондирующего сигнала в излучаемую электромагнитную вол-
ну, с заданной пространственно-временной структурой; Аг - оператор
преобразования электромагнитного поля от апертуры приемной антенны
до детектора; FS,F„ - операторы преобразования электромагнитного поля
на трассах «передатчик - объект локации» и «передатчик - подстилаю-
щая поверхность (метающее образование)» соответственно. Аналогично,
операторы Т5,ТЯ определяют преобразования электромагнитного поля на
трассах «объект локации - приемная антенна» и «подстилающая поверх-
ность (мешающее образование) - приемная антенна» соответственно; S -
оператор преобразования параметров ЭМВ на объекте локации, располо-
женном на подстилающей поверхности, а Мя - только на подстилающей
поверхности или мешающем образовании; N„ - аддитивный источник
ЭЛМ (обычно - активный помеховый сигнал).
Априорная информация об объектах локации S и мешающих об-
разованиях Мя является фундаментом оптимизации любой РЛС. В
44
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
ном смысле функционалы S и Мя являются операторами преобразо-
вания параметров пространства параметров падающей ЭМВ в простран-
ство параметров полей вторичного излучения или рассеяния.
Тогда совокупность характеристик, описывающих связи между
одноименными параметрами (энергетическими, фазовыми, частотными,
поляризационными и т. д.) поля возбуждения и поля рассеяния объекта
покации, с учетом его пространтсвенно-временного положения относи-
1сльно передатчика и приемника является РЛХ этого объекта. При этом
каждая характеристика является сечением оператора рассеяния в ин-
формативном пространстве параметров
a(xi) = S(x,,x2,..,x )|
v v д /lx^=var,x*x^=const
Таким образом, исследование оператора рассеяния представляет
научный интерес, с одной стороны, с точки зрения исследования меха-
низма взаимодействия электромагнитных волн радиолокационного диа-
пазона радиоволн с объектом сложной пространственной конфигура-
ции, а с другой - с точки зрения разработки и рационального построе-
ния РЛС различного назначения.
Как отмечалось ранее, для практического большинства радиосиг-
налов допустима его аппроксимация суммой непрерывных моногармо-
нических сигналов, поэтому общие теоретические положения будем
рассматривать для простейшего сигнала.
Однако с точки зрения общности проблемы кратко рассмотрим
вопросы, связанные с трассами распространения электромагнитных
волн, т.е. с функционалами FS,FB и Т5,ТЯ. Причем для определенности
ограничимся диапазоном электромагнитных волн 0,8-10-2...0,8 -1О3 , что
соответствует наиболее перспективному в радиолокации диапазону
миллиметровых радиоволн (ММДВ).
2.2. Анализ основных факторов, влияющих
на распространение коротких электромагнитных волн
При разработках РЛС вообще и РЛС ММДВ необходимо учитывать
большое число факторов, влияющих на их функционирование, которые
можно объединить термином - естественные внешние условия (ЕВУ). К
ним следует отнести атмосферу, в которой происходит затухание мил-
лиметровых волн, обусловленное кислородом, водяными парами. При-
чем последнее происходит как в чистой атмосфере, так и при наличии в
пей т умана, дождя, снега и т.п.
К ЕВУ необходимо также отнести и земную поверхность, чьи по-
кровы решающим образом влияют на распространение и отражение
ноли ММДВ.
45
Миллиметровая радиолокация: методы обнаружения и наведения...
В результате анализа установлено, что перечень факторов ЕВУ,
которые необходимо учитывать при оценке эффективности функциони-
рования РЛС, состоит из следующих групп факторов:
условий местности;
астрономических условий;
погодных условий.
Таким образом, под комплексом ЕВУ следует понимать совокуп-
ность условий местности, погодных и астрономических условий в за-
данном районе и времени.
Группа факторов условий местности состоит из следующих факто-
ров: рельефа местности, почвенно-грунтового (снежного) фона местно-
сти, растительного покрова.
Группа факторов астрономических условий формируется из есте-
ственных источников излучения: солнца, луны, совокупности звезд.
Группа факторов погодных условий характеризуется определен-
ным состоянием приземного слоя атмосферы: облачностью, дымкой,
туманами, дождями, снегопадами и др.
В [4-8] определены факторы ЕВУ, которые необходимо учитывать
в первую очередь. Там же разработаны типовые сочетания факторов -
типовые ситуации ЕВУ, характерные для центрального района России.
Как известно, основной особенностью распространения радиоволн
в атмосфере является затухание, обусловленное как молекулярным по-
глощением в атмосферных газах, так и поглощением в гидрометеорах.
В настоящее время распространение миллиметровых волн в атмо-
сфере достаточно хорошо изучено и поэтому приводятся только обоб-
щенные результаты, представленные, например в [4-8].
В табл. 2.1 приведены значения коэффициента затухания у30 для
«окон прозрачности» в ММДВ для «нормальной атмосферы» (температу-
ра воздуха +20°, давление 760 мм рт. ст., абсолютная влажность 7,5 г/м3).
Таблица 2.1. Значения коэффициента затухания
I 2, мм 8 3,2 2,2 1,24 0,98
1 yio, дБ/км 0,15 0,45 0,83 1,5 3...5
Определяющей характеристикой коэффициента затухания являет-
ся абсолютная влажность, т.е. количество водяного пара в единице объ-
ема воздуха. Значения величины коэффициента затухания связаны с аб-
солютной влажностью зависимостью
/3 =О,133/,ор = О,133О,8-ео
46
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
з 7L • Е
|де р - абсолютная влажность воздуха [г/м3]; е0 = jqq0<> - упругость
водяного пара (парциальное давление в миллибарах); 7?о - относитель-
ная влажность воздуха [%]; £00 - упругость паров, насыщающих про-
странство при данной t [°C] над плоской вершиной чистой воды:
7,6326/
/.00 = 6,1078 10241’9” .
Величина коэффициента затухания в водяном паре при изменении
температуры в пределах 0...40 °C изменяется не более, чем на ± 4% от
величины затухания при t = 20 °C.
Для минусовых температур затухание уменьшается в 2-3 раза, а
иногда и на порядок, что объясняется значительным уменьшением аб-
солютной влажности, т.е. количества водяного пара в атмосфере.
Наибольшее затухание в кислороде атмосферы за счет молекуляр-
ного резонанса имеет место на волнах 5 и 2,5 мм, соответствующим
максимумам линий молекулярного поглощения, где коэффициенты за-
тухания достигают значений 15 и 30 дБ/км соответственно. На осталь-
ных участках всего ММДВ значения коэффициентов затухания в кисло-
роде не превышает 0,05 дБ/км.
Затухание в туманах связано с длиной волны и метеорологической
дальностью видимости D,,, [м], соотношением:
у г= 500/(2 х Dm).
Значение коэффициентов затухания /т [дБ/км] для видимостей
200 и 500 м приведены в табл. 2.2.
Таблица 2.2. Затухание радиоволн в тумане
Метеорологическая видимость, м НГТГЛ..В 1 -1LII ±J Ы. XSMSSI я- 1 1 1ГГ Значения коэффициентов затухания /т, дБ/км, при длинах волны, мм
8 3,2 2,2 1,24 0,98
250 1,15 2,5 4,0 6,0 6,6
500 0,1 0,35 0,4 0,8 1,0 1
Следует отметить, что затухание электромагнитных волн диапазо-
на ММДВ в тумане меньше, чем в оптическом диапазоне. Так, напри-
мер, для волн длиной 0,6 мкм; 0,1мм; 1 мм; и 2 мм затухание в туманах
при видимости 100 м составляет соответственно 170; 11; 5 и 2,7 дБ/км.
)то является одним из преимуществ диапазона ММДВ перед видимым
и ИК диапазонами.
В литературе приводятся экспериментальные данные о распро-
странении радиоволн ММДВ в облаках. При оценке ослабления можно
пользоваться теоретическими расчетами работ [4-8], в которых показа-
47
Миллиметровая радиолокация: методы обнаружения и наведения...
но, что в целом ослабление во всех видах облачности не велико и не
превышает значений ослабления в туманах с одинаковой метеовидимо-
стью, максимальное значение не превышает 3...4 дБ/км. Кроме того, из-
вестно, что на указанных волнах величина ослабления в тумане и в об-
лаках примерно в 5... 10 раз меньше, чем в дождях [4-8].
Наибольшее влияние на распространение радиоволн ММДВ ока-
зывают дождь и снег. Затухание волн в дождях удовлетворительно опи-
сывается эмпирической зависимостью
/д =0,153-Э°'638 Л , дБ/км,
где J - интенсивность дождя, мм/ч.
Необходимо отметить, что в дальнейших расчетах используются
как расчетные значения уд, так и полученные экспериментально в ряде
работ. Это объясняется тем, что при расчетах не учитываются простран-
ственно-временные характеристики дождей, которые к настоящему
времени недостаточно изучены, хотя известно, что чем интенсивнее
дождь, тем меньшую область пространства он занимает.
Затухание в снеге, если измерять его интенсивность по количеству
растаявшей воды, примерно в 2 раза больше, чем в дожде той же интенсив-
ности. Однако известно, что интенсивность снегопадов в среднем значи-
тельно ниже, чем дождей. При этом установлено, что ослабление в сухом
снеге в ММДВ, когда размер снежинок меньше длины волны, меньше, чем
в дожде такой же интенсивности, а в мокром снеге, как правило, больше.
Таким образом, для приближенных расчетов можно пользоваться
зависимостями: для снега с дождем - ./с = 2ЭД ; для сухого снегопада -
= 0,ЗЭл.
Более точные значения Jc по результатам теоретических и экспе-
риментальных исследований приведены в [4-8]. Эти значения, исполь-
зуемые в дальнейших расчетах, приведены ниже.
Помимо атмосферных явлений, на распространение радиоволн в
приземном слое могут оказывать заметную роль такие факторы, как пы-
ледымовые смеси, связанные с ветреной погодой и, например, в услови-
ях пожаров.
Однако, оценивая в целом влияние внешних условий естественно-
го происхождения на функционирование РЛС ММДВ, следует отме-
тить, что при их разработке необходимо, в первую очередь, ориентиро-
ваться на нормальные погодные условия. Экстремальные погодные ус-
ловия с высокими значениями интенсивности дождя, снега, тумана все-
таки встречаются существенно реже.
Для западных районов нашей страны характерны следующие ти-
повые ситуации условий местности:
48
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
равнинный тип рельефа с лесостепным типом растительного
ландшафта;
холмистый тип рельефа с лесостепным типом растительного
ландшафта.
Вследствие того, что основные покровы местности (подстилающие
фоны) однозначно связаны с типом растительного ландшафта, необхо-
димо использовать следующие фоны:
для летнего периода - травяные покровы, посевы полевых куль-
। ур, кустарники и рощи с молодой и зрелой листвой, скошенные ноля,
луга и т.п.;
для переходного периода - желтые травяные покровы, сильно ув-
лажненные пашни, желто-коричневые и безлистные кустарники и рощи,
сильно увлажненная почва с остатками травы, прошлогодней или опав-
шей листвой;
для зимнего периода - сухой и влажный снежный покров.
В табл. 2.3 приведены названия типов характера рельефа и их ос-
новные морфометрические показатели: ЛН™ах - максимальная глубина
расчленения; /3^ - максимальная крутизна склонов рельефа; сгр - по-
казатель глубины расчленения; ар - среднее число экстремумов, при-
ходящихся на 1 км.
Таблица 2.3. Показатели типов рельефа
Характер рельефа Морфологические показатели
ДЯ™Х , м А» , град «р,КМ
Ьугристая равнина: пологосклонная 10 6 1,67 15,7
покатосклонная 10 15 1,67 40,0
крутосклонная 10 30 1,67 86,4
Слабохолмистая равнина: пологосклонная 25 6 4,17 6,3
покатосклонная 25 15 4,17 16,0
крутосклонная 25 30 4,17 34,6
Среднехолмистая равнина: пологосклонная 50 6 8,33 3,15
покатосклонная 50 15 8,33 8,0
крутосклонная 50 30 8,33 17,3
Высокохолмистая равнина: пологосклонная 100 6 16,7 1,57
покатосклонная 100 15 16,7 4,00
крутосклонная 100 30 16,7 8,64
49
Миллиметровая радиолокация: методы обнаружения и нааедения...
Анализ результатов, приведенных в табл. 2.3, показывает, что на
центральной и западной территории России присутствует достаточное
количество земных покровов, с которыми придется считаться при реше-
нии задачи обнаружения ОЛ на фоне подстилающей поверхности. Это та-
кие покровы, которые, например, за счет неровностей рельефа, высокого
травяного покрова способны эффективно рассеивать миллиметровые
волны в сторону приемника/передагчика даже при скользящих (малых от
горизонта) углах локации объекта. Сюда же следует отнести и многочис-
ленные кустарники, посевы культур, лесистые склоны и т.н.
Здесь мы умышленно не останавливаемся на многочисленных
фундаментальных работах теоретического характера, в которых приве-
дены достаточно интересные математические модели операторов ослаб-
ления и рассеяния ЭМВ в различных гидрометеорах. Вопросы, связан-
ные с исследованием механизмов рассеяния ЭМВ на рельефах сложной
формы, будут рассмотрены ниже.
2.3. Анализ современных методов математического
моделирования процесса взаимодействия ЭМВ
с объектами сложной формы
Вопросы проектирования и оценки эффективности современных систем
радиолокации практически невозможно решить без априорного знания
характеристик рассеяния объектов локации. Существует два основных
способа получения необходимой информации: это экспериментальные
исследования, связанные с измерениями полей рассеяния реальных объ-
ектов на полигонах, в безэховых камерах и т.н., и теоретические исследо-
вания, основанные на строгом или приближенном решении задачи ди-
фракции электромагнитных волн. Поскольку первый метод предполагает
наличие реального объекта рассеяния или его достаточно хорошего маке-
та, то этот метод, наряду со своими значительными экономическими, ор-
ганизационными и физическими затратами, практически неприменим на
ранних стадиях проектирования как новых аэродинамических объектов,
так и систем локации. Поэтому методы математического моделирования,
способные решить такую задачу, находят все большее применение.
Диаграмма основных расчетных методов и средств приведена на
рис. 2.2.
Основой математических моделей электромагнитного взаимодей-
ствия электромагнитных волн с ОЛ является строгая математическая
формулировка физического явления в виде системы дифференциальных
уравнений Максвелла. Градация математических моделей вытекает из
методологических различий в решении или использовании решений
уравнений Максвелла. Поскольку чисто аналитические решения (теоре-
тически точные - область 1 на рис. 2.2) удается получить лишь для су-
50
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
t v*>»> шраниченного класса простейших объектов, поверхность которых
уцисгся описать в специально выбранной системе координат [9-11], для
инипша нолей рассеяния на объектах сложной пространственной кон-
фигурации необходимо применять различные упрощения и допущения
при интегрировании системы уравнений. Сочетание этих математиче-
i к их допущений и достаточно очевидный физический смысл конкрет-
ных электродинамических процессов привело к появлению так назы-
вном ых физических моделей [12] в квазиоптическом диапазоне длин
ноли. Наибольший интерес из таких моделей составляют феноменоло-
। плеская и аналоговая модели.
Радподаюшяонмые
сцены как комнопшин
объектов сложной
фермы сстеетвеняшо
и аитрояогемиего
характера
Объекты сложной формы
с промтвольными
электрвлниамнческнмн
параметрам»
(Самолеты, спутники)
Эталонные отражатели
г особеиносгнмн формы
и хаекгролннямнческих
свойств
(Вершины ммогвграмммков.
простые нолостн)
Трехмерные объекты
ква »нка ионической
формы с небольшими
тлектрическимн размерами
(Тела врашеннв.
«рофкян спеннальиой
формы)
Двумерные
канонические структуры
со специальными ЭД
свойствами
(Клиновидные
структуры) и т. п.
'Ъалонные отражатели
канонической формы.
(Сферам параболоид).
С'пеиналъиые условия
вотбуждеив»
Рис. 2.2. Состав электродинамических методов анализа полей рассеяния
в квазиоптической области
51
Миллиметровая радиолокация: методы обнаружения и наведения...
Среди феноменологических моделей наибольшее распространение
получили модели, основанные на лучевых представлениях полей рас-
сеяния, и модели, базирующиеся на принципе Гюйгенса-Френеля, со-
гласно которому каждая точка волнового фронта рассеянного поля рас-
сматривается как источник вторичных волн. К этому типу моделей от-
носится модель локальных источников рассеяния. Несмотря на то, что
все эти модели имеют одни и те же методологические основы, они име-
ют особенности, которые проявляются при дополнительных упрощени-
ях и допущениях математического и физического характеров [13-15].
Аналоговой моделью [12] принято называть стохастическую модель
«блестящих» точек, получившую широкое распространение при анализе
рассеянных полей от объектов, которые представлены в виде совокуп-
ности локальных отражателей [16-20].
Современные математические модели и алгоритмы расчета полей
рассеяния на ОЛ сложной конфигурации можно объединить в две груп-
пы. В первую группу входят модели, основанные на теории Делано [16] и
развитые в работах Штагера [21]. Это модель локальных рассеивателей,
суть которой состоит в следующем. Из сложной модели определенным
образом выбираются наиболее «яркие» элементы из данного ракурса.
Оценивается или, если это возможно, вычисляется характеристика рас-
сеяния этого элемента и координаты фазового центра рассеяния [18], уг-
ловые координаты полагаются случайными величинами распределенны-
ми в соответствии с функцией «качки» Штагера и затем интегрируются.
Основной трудностью, которая присуща данному методу, является доста-
точный произвол в выборе «ярких» элементов и фазовых центров. По-
этому расчеты по этой модели носят грубый оценочный характер.
Во вторую группу входят модели, опирающиеся на геометриче-
ские модели цели, суть которых состоит в приведении аналитической
модели цели к фацетной, т.е. состоящей из совокупности плоских ячеек
с известной функцией рассеяния. Особенностями этой группы моделей
являются наиболее значительные ресурсы вычислительных средств для
достижения приемлемой точности вычислений, а также высокая квали-
фикация разработчика ЗО-модели ОЛ. Наиболее известной моделью
этого класса следует считать методику «RECOTA», приведенную в [22].
Однако ее существенные методические ограничения не позволяют в
полной мере считать ее пригодной для широкого круга радиолокацион-
ных задач. Поэтому рассматривается объектно-ориентированная .модель
вторичных полей рассеяния объектов сложной пространственной кон-
фигурации, также основанная на «фацетном» представлении геометри-
ческой модели (ГМ) объекта и значительно превосходящая по своим
функциональным возможностям указанную программу.
52
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
В качестве методологической основы используется наиболее уни-
версальный и поэтому наиболее эффективный метод анализа дифракци-
онных полей рассеяния коротких радиоволн - метод физической теории
дифракции (ФТД), разработанный П.Я. Уфимцевым. С помощью этого
метода удается учесть в общем поле рассеяния вклад от ребер и дву-
। ранных вогнутых структур. Универсальность этого метода достаточно
хорошо обсуждена в классических работах [23-25], в которых, в част-
ности, показано, что интеграл Кирхгофа по поверхности рассеивателя
соответствует геометрооптическому, т.е. нулевому приближению крае-
вой задачи дифракции [26]. Учет первой краевой волны методами
Франца [26], Браунбека [26], Уфимцева [27, 28] соответствует первому
члену асимптотически точного решения.
Наиболее полно связь асимптотических методов и методов ФТД
установлена в работах П.Я. Уфимцева [28]. В них анализируется поло-
жение геометрической теории дифракции (ГТД) Келлера [29-31] отно-
сительно токовых методов, где показаны неоспоримые преимущества
। оковых методов перед ГТД особенно в переходных каустических и фо-
кальных областях [32]. Асимптотически - итерационный характер ме-
юда ФТД особенно удобен с точки зрения дальнейшего развития в сто-
рону повышения точности оценки полей рассеяния ОЛ. Единая инте-
гральная форма волновых полей позволяет использовать единые алго-
ритмы и численные методы.
Общим недостатком всех физических моделей является неконтро-
лируемая точность моделирования нолей и при этом неизвестны преде-
лы изменения параметров электродинамической ситуации. Поэтому ос-
новными критериями адекватности таких моделей служат сопоставле-
ния результатов моделирования либо с результатами достоверного экс-
перимента [15, 18, 33, 34], либо с результатами точного (или асимптоти-
чески точного) аналитического решения, в котором погрешность вы-
числений является функцией относительной длины волны 1/2, где Л -
характеристический размер рассеивателя (радиус корреляции).
В основе каждой модели помимо электродинамических аспектов
лежат технологические расчеты объекта сложной пространственной
конфигурации. Так, например, для модели «блестящих» точек необхо-
димо знание их относительного расположения, а для лучевых моделей
необходима информация о нормали в каждой точке рассеяния. От уров-
ня сложности топологии объекта зависит выбор модели и ее реализация
н виде алгоритмической процедуры.
Современный уровень развития вычислительной техники открыва-
ет возможность применения универсальных методов ФТД к расчету по-
лей рассеяния объектов сложной технологии. При этом можно исполь-
ювать геометрическую модель цели достаточно точно апроксимируто-
53
Миллиметровая радиолокация: методы обнаружения и наведения...
щую реальный объект. В этом случае возникает потребность в решении
альтернативных проблем типа: какова необходимая степень детализа-
ции геометрического образа цели, чтобы вычислительные затраты и
объем занимаемой оперативной памяти ЭВМ были приемлемыми [35].
Результатом решения такой проблемы было построение удобной
аналитической модели объекта сложной топологии, состоящей из сово-
купности дискретных элементов, представляющих собой плоскости
двух типов и поверхностей 2-го порядка [36] или их частей, соответст-
вующим образом пристыкованных друг с другом. Эта модель оказыва-
ется очень удобной для решения прямых задач электродинамики, т.е.
при заданной геометрии рассеивающего объекта определить дифракци-
онное поле. Поскольку в лазерном диапазоне, где впервые была исполь-
зована модель, несущественны такие эффекты как рассеяние на ребрах
и двугранных вогнутых структурах, то для рационального применения
этой модели в задачах электродинамики необходима ее модернизация.
Использование такой аналитической модели позволяет полностью алго-
ритмизировать наиболее универсальный среди всех эвристических ме-
тод ФТД и сделать качественный шаг в исследовании полей рассеяния
коротких волн на ОЛ сложной формы.
Таким образом, алгоритмизация универсального электродинами-
ческого метода ФТД на основе кусочно-аналитической модели геомет-
рического образа объекта позволяет рассчитывать входные сигналы ра-
диолокационных систем любого класса и назначения.
2.4. Формализация процесса рассеяния ЭМВ
на объектах сложной пространственной конфигурации
на основе кусочно-аналитической модели
2.4.1. Кусочно-аналитическая модель объекта локации
В основу аналитической модели поверхности объекта положена удобная
кусочно-аналитическая модель. Более ранние модели, использованные в
работе [37], просты и не обладают достаточными возможностями и уни-
версальностью для описания геометрии объекта сложной просгранст-
венной конфигурации. В этой связи была использована геометрическая
модель, предложенная в работе [38], но дополненная рядом алгоритмов,
позволяющих учесть локальный характер рассеяния электромагнитных
волн и краевые дифракционные эффекты на ребрах и двугранных во-
гнутых структурах объекта.
Кусочно-аналитическая модель объекта образуется как совокуп-
ность БПЭ трех типов. Первые два типа БПЭ представляют собой участки
плоскостей. Плоские элементы первого типа ограничены произвольными
выпуклыми многоугольниками с числом вершин не более пяти, а второго
типа - в качестве одной из сторон включают кривую 2-го порядка.
54
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Моделью плоских БПЭ обоих типов является нормальное уравне-
ние плоскости
n\ -х‘ + n‘v -у' +«' -z‘ +ap = 0, (2.1)
|де n'x,n‘y,n‘z - направляющие косинусы внешней нормали (односторон-
няя поверхность) к плоскости в .
Для плоскостей первого типа (рис. 2.3) параметры нормального
уравнения (2.1) определяются через координаты трех вершин ограничи-
вающего контура в связанной с объектом системе координат
Рис. 2.3. Плоский базовый пространственный элемент 1-го типа
Для плоскостей второго типа, одна из сторон которых является
кривой 2-го порядка (рис. 2.4), параметры уравнения (2.1) определяются
из уравнений (2.2) при наличии трех и более вершин в ограничивающем
контуре. В противном случае в исходных данных модели задаются на-
правляющие косинусы n‘x,n‘v,nz и координаты произвольной точки
плоскости (обычно - вершины кривой). Уравнение квадратической кри-
вой в пространстве, входящей в состав плоскости 2-го порядка, опреде-
55
Миллиметровая радиолокация: методы обнаружения и наведения...
ляется как линия пересечения плоскости (2.1) с квадратической поверх-
ностью общего вида в системе координат Ч2':
•£=<>> (2-3)
у=1 k-\
где = 1,ajk (j,k = 1...4) - параметры общего уравнения поверхности
2-го порядка. При анализе используется проекция пространственной
кривой на одну из координатных плоскостей Ч2'. Используя теорию ин-
вариантов, плоская кривая 2-го порядка приводится к каноническому
виду в системе координат, связанной с вершиной данной кривой.
С точки зрения единого математического описания цилиндров, ко-
нусов, эллипсоидов, канонические уравнения поверхностей 2-го порядка
представлены в системе координат главных осей (СКГО) 4J<?; {xe,ye,ze,tf}
или , i = 1,2,2. В этой системе уравнения поверхностей 2-го порядка
можно представить в обобщенном виде:
ГП, , еч2 т7 , е)2 тт, , ех2
—Ц-(х ) +—Ц-(у ’ +—Ц-(ге) = т..
(«|) («2) («з)
Связь координатных систем Ч2' и Ч/С определяется параллельным
переносом Ч2' в центр 4>е (точка 0е) и ее последовательным поворотом
на углы Эйлера ае,Ре,уе вокруг осей у‘,z‘,х‘. Направление осей СКГО
выбирается так, чтобы условие инцидентности всегда проверялись в
проекции на плоскость хеОеуе системы Ч2<?.
56
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
Обеспечение стыковки БПЭ осуществляется системой условий, ог-
раничивающих области пространства, в пределах которых могут лежать
1очки поверхностей, аппроксимирующих отдельные участки цели. Ус-
ловия инцидентности (стыковки) плоскостей обоих типов проверяется в
проекции на ту из координатных плоскостей, которая составляет мини-
мальный угол с аппроксимирующей плоскостью.
Для плоскостей первого типа, например, в проекции на плоскость
/()'/ (см. рис. 2.3) анализируемая точка Р{х'р,у'р} будет находиться
внутри ограничивающего многоугольника, если все определители вида
Do =
5,
(2.4)
составленные по треугольникам, образованным точкой Р и вершинами
многоугольника, принадлежащими каждой из его сторон, имеют один и
ют же знак.
В случае плоскостей второго типа, помимо условия (2.4) проверя-
ются условия нахождения точки Р внутри кривой 2-го порядка. В соот-
ветствии с полярным уравнением квадратической кривой, которое легко
получить из канонического уравнения, условие попадания точки между
кривой и ее фокусом (рис. 2.4) имеет вид
г<р(<р) = ---——, (2.5)
1 + 8 COS(^>)
I де г - расстояние между точкой Р и фокусом/; р(<р) - полярный ради-
ус кривой, проходящей через точку Р под углом <р к оси 0е хс; /- фо-
кальный параметр кривой; е - ее эксцентриситет. Связь собственной
системы координат 4>с с кривой 2-го порядка с системой 4х' устанав-
ливается из соотношений, например, для плоскости x'0'z'
х' = (х' - ) cos 0С + (у' - Уо) sin 0С,
(2-6)
у‘р = ^Р ~ х‘<> ) sin + (у‘р - Уб )cos 0с.
|де {х'п,у'о} - координаты вершины кривой р(<р) в Ч"; угол поворота 0б
nt Ч7' в Ч/Г определяется также через инварианты уравнения кривой.
Условия инцидентности для поверхностей 2-го порядка проверя-
ю । ся аналогично условиям инцидентности для плоскостей первого типа.
Точка на поверхности будет принадлежать ее аппроксимирующей час-
in, если проекция точки находится внутри ограничивающего много-
VI ольника, заданного на плоскости хе,ое,уе (рис. 2.5).
57
Миллиметровая радиолокация: методы обнаружения и наведения...
Рис. 2.5. Базовый пространственный элемент - участок поверхности 2-го порядка
В ряде случаев при описании реальных объектов требуются по-
верхности 2-го порядка, ограниченные пространственным контуром
сложной конфигурации. В этом случае кроме условий инциндентности в
проекции на плоскость хе,ое,уе необходимо вводить дополнительные
ограничения. Для этого в состав модели введены экранирующие по-
верхности, обеспечивающие изъятие той части поверхности, которая не
участвует в описании объекта рассеяния.
Кусочно-гладкий характер аналитической модели геометрического
образа ОЛ определяет состав модели острых кромок на его поверхности
в виде совокупности N гладких кривых вида
Rc=£r(Q, (2.7)
И=1
r(t„) = {x(.t„),y(tn),z(t„)},tln<t„ <tln: (2.8)
Здесь Rc - радиус-вектор точек модели, образующих острые кромки;
г(/„) радиус-вектор точек и-й кромки, координаты которой являются
непрерывными функциями действительного api-умента и удовлетворяют
системе уравнений
Д(х,у,г) = О, Fy(x,y,z) = O, (п,,пу)>0, (2.9)
где Д(х,y,z) и Fj(x,y,z) - уравнения поверхностей базовых простран-
ственных элементов, образующих п-е ребро, в единой системе коорди-
нат, а п(,пу - векторы внешних нормалей к поверхностям в точке ост-
рой кромки.
58
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Координаты радиуса-вектора Rc непрерывны всюду за исключе-
нием /V+-1 точек, соответствующих граничным значениям аргументов т,„
в / . Эти точки являются вершинами острых многогранников модели и
ю'шо совпадают с координатами соответствующих точек ограничи-
ннющих многоугольников БПЭ, образующих данное ребро.
2.4.2. Анализ условий затенения и маскировки точки
на поверхности объекта
Псючники полей рассеяния радиоволн, распределенные на поверхности
пбьекта сложной формы, в приближении физической теории дифракции
(loKoBoro метода) имеют смысл лишь в областях на поверхности объек-
। н .V, которые освещены со стороны передатчика и не затеняются со сто-
роны приемника (область /Э). Поэтому алгоритмы анализа обобщенных
пупенчатых функций затенения и маскировки являются одним из клю-
чевых моментов данной геоме трической модели.
Определим функцию затенения точки Pq, принадлежащей поверх-
ности S, со стороны передатчика в виде
<у,(р0) = 1„р0 = а;, Ъ(РО) = О,РО*Ц (2.10)
пналогично: функцию маскировки точки Ps со стороны приемника
^(Ро)=1,ро=4, ^.(Po) = O,Po^4, (2.11)
где L~,L+S - области на поверхности S, освещенные со стороны передат-
чика и немаскируемые со стороны приемника. Очевидно, что в случае
моностатической локации области Ц ,Ц - кошруэнтны, а при бистати-
ческой локации общая освещенная и немаскируемая область определя-
ется как пересечение областей: L' = L.uL's . Тогда функцию затенения
маскировки можно записать в виде
<У(Р0)=ад).ад). (2.12)
Процедуры вычисления значений функций (2.10)—(2.12) алгорит-
мически идентичны относительно систем координат Ч'',ЧР соответст-
венно, поэтому в дальнейшем достаточно рассматривать только проце-
дуру вычисления, например, функции затенения З^Р0). Поскольку ис-
ходные данные геометрической модели задаются в целевой системе ко-
ординат, на первом этапе вычисления ступенчатых функций необходи-
мо преобразовывать параметры всех базовых элементов модели из свя-
занной с объектом системы координат Ч7' в систему координат, связан-
ную с передатчиком Ч7'(приемником Ч/У). Связь Ч*' с Ч*' и 4jS уста-
навливается матричными соотношениями:
59
Миллиметровая радиолокация: методы обнаружения и наведения ...
[^]T=[b!'Jx[^]T; [^]T=[b"„]x[^]T; (2.13)
[^Т=[ь-„]х[^]т; Ыт=К]х[^]т.
Здесь b^,b“„, т, п = 1,2,3, - ортогональные матрицы преобразования
базисов, элементы которых суть направляющие косинусы осей поверг
нутых систем координат 4х' и 4х5 в базисе 4х'; т - символ транспо-
нирования.
Направляющие косинусы внешней нормали в 4х' к аппроксими-
рующей плоскости вычисляются по формуле
||<«х|т=1К"ЦТ х1к”Х|Г (2Л4)
для плоскостей первого и второго типов.
Параметры amn , т,п = 1,... ,4, общего уравнения (2.3) аппроксими-
рующей поверхности 2-го порядка в 4х' образуются из параметров ка-
нонического уравнения путем их преобразования из СКГО Ч/е в систе-
му ЧХ'(Ч/5) по формуле [39]
[<„] = [<. ]Tx[<Jx[<J (2-15)
где , т,п = 1,...,4, - диагональная матрица с элементами
^A‘nr^ = mn/ап,А1А--тА,т = п , mtn, а элементы матрицы ^с'ти],
т,п = 1,...,4, определяются из соотношений
Г<]фуТх[ь"Лт,И = 1,2,3; [c44] = l,[c4n] = 0,« = l,2,3;
L J L J L J (Z. 1 О)
ы=е^=и,з.
Здесь , т,п = 1,..,4, - элементы матрицы связи Ч^ и 4х1;
т,п = 1,2,3, - элементы матрицы вращений Эйлера осей СКГО относи-
тельно осей 4х'; Р^, т = 1,2,3, - координаты центра квадратической
поверхности в целевой системе координат.
На рис. 2.6 приведена общая схема алгоритма проверки затенения
точки на поверхности объекта Ps элементами геометрической модели по
отношению к передатчику. Положительное значение скалярного произ-
ведения орта направления облучения г, и вектора нормали N(PS) к по-
верхности в анализируемой точке Ps определяет отсутствие самомаски-
ровки, т.е. угол облучения (наблюдения ) не превышает л/2.
60
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Рис. 2.6. Схема алгоритма проверки условия затенения маскировки точки
на поверхности кусочно-аналитической модели объекта локации
61
Миллиметровая радиолокация: методы обнаружения и наведения ...
На следующем этапе организуется цикл по всем элементам моде-
ли, что представляет собой последовательный перебор элементов гео-
метрической модели, которые могут затенять (маскировать) точку Ps.
При этом сначала определяется лучевая координата Psr точки Ps, кото-
рая определяет расстояние от этой точки до опорной картинной плоско-
сти по вектору г,. Затем в цикле производится сравнение этой коорди-
наты с лучевой координатой текущего (k-го) элемента модели Р£ . При
этом учитываются экранирующие элементы (они исключаются из рас-
смотрения). Выполнение условия Р{ <min{p(j, к = где К -
число элементов модели, является признаком отсутствия маскировки
точки Ps элементами геометрической модели объекта, т.е. одно значение
функции ^(PJ.
На рис. 2.7-2.9 приведены изображения трех наиболее типичных
моделей объектов военной техники сложной пространственной конфи-
гурации. На рис. 2.7 приведена упрощенная геометрическая модель ти-
пичного танка, состоящая из 77 базовых пространственных элементов
плоскостей первого типа, 63 базовых плоскостей второго типа, 60 базо-
вых пространственных элементов поверхностей 2-го порядка.
Рис. 2.7. Изображение линий видимого контура 3-D модели объекта типа танк
Рис. 2.8. Изображение линий видимого контура 3-D модели объекта
типа мобильная пусковая установка
62
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
На рис. 2.8 представлена геометрическая модель мобильной сис-
1смы «Тополь», состоящая из 62 базовых пространственных элементов
пиоскостей первого типа, 14 базовых плоскостей второго типа, 49 базо-
вых пространственных элементов поверхностей 2-го порядка. Модель
вниационной ракеты показана на рис. 2.9 и состоит из 134 базовых про-
ктранственных элементов плоскостей первого типа, 5-и базовых плос-
костей второго типа, 6-и - базовых пространственных элементов по-
верхностей 2-го порядка.
Рис. 2.9. Изображение линий видимого контура 3-D модели
объекта типа ракета
Рисунки позволяют качественно оценить степень адекватности ана-
литической модели геометрического образа цели ее фактическому анало-
гу, что является важнейшим фактором при сопоставлении результатов на-
турных измерений различных радиолокационных характеристик с анало-
। пчными результатами расчетов по разрабатываемым методикам.
2.4.3. Интегральное представление произвольной
совокупности источников вторичного излучения
объектов сложной формы
Реальный объект рассеяния сколь угодно сложной пространственной
конфигурации можно представить в виде совокупности поверхностей
,S'i, S2, ..., Sn, которые ограничивают произвольную однородную и изо-
|ропную области и, внутри которых определено произвольное распре-
деление источников возбуждения. Источниками поля, в общем случае,
являются как электрические токи Je и заряды ре, так и магнитные токи
./,„ и заряды рт. Все поля являются стационарными и гармоническими с
временной зависимостью вида exp(-iwr), a - круговая частота. Тогда
векторы напряженности электрического Е и магнитного Н полей в про-
извольной точке Р внутри области и являются решениями двух симмет-
ричных волновых дифференциальных уравнений:
rot rot Е - к1 • Е = ia>£ Je - rot Jm,
(2-17)
rot rot H - k2 • H = ioj/i J„ - rot Je,
63
Миллиметровая радиолокация: методы обнаружения и наведения...
где £,р — электрическая и магнитная проницаемости соответственно;
k = 1л)/. - волновое число; Я - длина волны.
Пусть S* освещаемая источником, находящимся в точке Р, и не за-
тененная поверхностями S,, S2,..., Sn часть внутренней поверхности сфе-
ры бесконечно большого радиуса гп ограничивающая объем и. Обозначим
совокупность освещенных (хотя бы частично) рассеивающих элементов
как L': S?,S±,...,S*_}. Для применения теоремы Грина образуем замкну-
тую область и+, ограниченную поверхностями S"n , L' и замыкающей
поверхностью S', которая образует конус геометрической тени. В силу
отсутствия источников возбуждения на поверхности 5 и в силу условий
узлучения на рассеянием на этих поверхностях можно пренебречь.
Тогда решения уравнений могут быть получены с помощью векторной
теоремы Грина [24,40,41] в обобщенном виде для замкнутой области (/
A₽=i'(2Л8)
р
понимая под вектором А либо Е, либо Н, в котором все компоненты
cikr
являются функциями координат. Здесь G =- - функция точечного ис-
г
точника Грина; N - единичный вектор внешней нормали к поверхности
L\ S, uS2 , при этом источниками возбуждения поля в интеграле
по объему являются сторонние источники Je,Jm,pe,pm , а в поверхност-
ных интегралах - индуцированные поверхностные источники возбужде-
ния, которые можно трактовать как и =[N,Es] - по-
верхностные электрический и магнитный токи; = и
сг = -£ • (N, Нт) - поверхностные электрические и магнитные заряды.
В общем случае интеграл (2.18) не удается вычислить и поэтому
целесообразно воспользоваться асимптотическими методами оценок
поверхностных интегралов первого рода. Учитывая линейность инте-
грала (2.18), представим интеграл по L' в виде суммы интегралов по ка-
ждой из поверхностей , компенсируя влияние сопряженных элемен-
тов использованием объемных интегралов, которые вырождаются в
контурные интегралы от краевых токов возбуждения У. Тогда интеграл
(2.18) можно представить в аддитивной интегральной форме по поверх-
ностям (/= 0,1,...,н-1) как [27,28]:
64
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
Ег
j~\
• 3ej + [Ky x grade] -gradGjdS +
-if [ f[(
li*
т jk H') grad С dl]] dS,
(2-19)
Hp=-iE J (-i^G-J^-[j:7 xgrade]-^grade^ +
/=> sj*
M
+^7£ J(Tд E') grad Gdl] • (2-20)
Здесь граничные линейные заряды сг1~(т,А/) удовлетворяют уравнению
непрерывности и являются источниками краевых волн, образованных
выпуклыми изломами поверхности; М- число сопряженных с элементом
I рассеивателей, образующих ребра ljk (к = 0,1,...,Л/), освещенная часть
которых обозначена как /д . Таким образом, остается определить источ-
ники возбуждения J1 и Js для полного описания системы (2.17).
Если определять компоненты Es и Hs эвристическим способом, т.е.
считать их равными суперпозиции падающих и отраженных волн, кото-
рые, в свою очередь, определяются из лучевых формул Френеля, то не-
посредственно придем к методу Кирхгофа. Однако в этом случае теря-
ются решения, обусловленные взаимодействием сопряженных элемен-
IIHI. Чтобы этого не произошло нужно учесть, что источники возбужде-
ния в (2.19), (2.20) в общем случае удовлетворяют интегральному урав-
нению Фока [9, 42, 43]
J(r) = J°+ J[]j(r)xgradG^r-rJ]dr , (2.21)
s'
i де Jo - соответствует компоненте тока, вычисленной в приближении
касательной плоскости (Кирхгофа); г, - радиус-вектор точки на по-
верхности, в общем случае сопряженной с текущей поверхностью. Та-
ким образом, в первом приближении, при учете лишь двукратных пере-
тражений источники возбуждения имеют аддитивный характер
м
JXr) = J50 + £jf(rt-r,.), (2.22)
к=\
65
Миллиметровая радиолокация: методы обнаружения и наведения...
где Jf - ток на поверхности j-го элемента обусловленный влиянием к-
го элемента. Представление (2.22) согласуется с известным методом по-
следовательных итераций Франца [44].
Поскольку реальные объекты рассеяния имеют сложную про-
странственную конфигурацию, то вычисление интегралов вида (2.19),
(2.20) возможно лишь с использованием численных методов и алгорит-
мических процедур. Однако в составе объекта могут присутствовать та-
кие эффективные рассеиватели, что применение даже численных мето-
дов оказывается либо не рационально, либо вообще невозможно. При-
мером таких элементов могут, например, являться лопатки двигателя
турбины реактивного самолета, антенны специальной формы и т.п. В
этом случае в качестве характеристики рассеяния элемента целесооб-
разно использовать пространственную диаграмму рассеяния, получен-
ную либо экспериментальным, либо специальными аналитическими ме-
тодами, которую можно представить в функциональном виде:
A, =O(R,r,)G, (2.23)
где R - вектор условий возбуждения; г, - радиус-вектор точек на по-
верхности элемента.
Учитывая (2.20), (2.23) поле рассеяния от совокупности источников)
на поверхности объекта имеет вид векторной суммы четырех компонент ;
Ар = А] + А2 + А2 + А4. (2.24)
На рис. 2.10 приведены диаграммы обратного рассеяния (ДОР)
танка, полученные методом математического моделирования на длине]
Рис. 2.10. Диаграммы обратного
рассеяния танка
при угле места р = 15°,0 < a < л
и р = 0°,л <а <2л
Рис. 2.11. Диаграммы обратного
рассеяния танка при когерентном
приеме р = 0° , 0<а<л
и некогерентном р = 0° , л < а < 2 л-
66
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Рис. 2.12. Компоненты общего поля
рассеяния танка
полны 8 мм и линейной вертикальной поляризации, для двух значений
VI ла места (угла подхода цели). В секторе 0-180° приведена ДОР, полу-
ченная методом когерентного суммирования элементарных сигналов
дня угла подхода 15°, а в секторе 0-180° - для угла подхода 0°. На
рис. 2.11 показана ДОР, представленная в секторе 0..180° полученная
при когерентном приеме, а в секторе 0-180° - при некогерентном.
В выражении (2.24) первая компонента поля соответствует вкладу
в общее рассеянное поле от гладких элементов поверхности. Она соот-
ве гствует векторной сумме интщралов Кирхгофа, которую можно пред-
(чавить в функциональном виде
А,=/2£ jFi/JpR.,>/i,^A,r,Gs)JS, (2.25)
|де F] - вектор поверхностных источников возбуждения;/]^ - в общем
случае комплексные ДН передающей и приемной антенн соответственно.
Анализ этой компоненты
приведен в [45], где, в частности,
показано, что для сильно искрив-
ленных поверхностей следует
использовать специальные адап-
швные алгоритмы, учитываю-
щие характер поведения функции
поверхностных источников воз-
буждения в окрестности элемен-
।арной ячейки интегрирования.
11а рис. 2.12 цифрой 1 обозначена
дщпраммы обратного рассеяния
компоненты рассеяния на глад-
кой поверхности танка, получен-
ные методом математического
моделирования на длине волны
8 мм, и линейной вертикальной
поляризации и угла места 0°.
Вторая компонента поля, как видно из (2.24), соответствует вкладу
о, ребер объекта
п-l М
A2=/2'XZ , (2.26)
। де функционал Р2д является следствием интерференции краевых волн
сопряженных элементов, образующих ребро //4.
67
Миллиметровая радиолокация: методы обнаружения и наведения ...
На рис. 2.12 зависимость 2 соответствует ДОР компоненты крае-
вых волн, образующихся на поверхности танка, полученных методом
математического моделирования на длине волны 8 мм, и линейной вер-
тикальной поляризации и значения угла р к цели 0°.
Третья компонента соответствует рассеянию на двугранных вогну-
тых структурах.
п I Л/
(2-27)
где S^k - часть поверхности Sj , которая возбуждается от индукцион-
ных токов поверхности Sk .
На рис. 2.12 зависимость 3 соответствует ДОР компоненты, обу-
словленной двукратным взаимодействием элементов конструкции танка,
полученные методом математического моделирования на длине волны
8 мм, и линейной вертикальной поляризации и значении угла места 0°.
Таким образом, используя методы статистического усреднения, ко-
торые будут рассмотрены ниже, можно оценить средний вклад отдельных
компонент в общем поле рассеяния при локации объекта в горизонталь-
ной плоскости в виде диаграммы, представленной на рис. 2.13.
1 - Переотраження
2 - Краевые волны
3 - От гладкой кожи
Рис. 2.13. Диаграмма вкладов отдельных компонент
в общее поле рассеяния танка при его локации
в горизонтальной плоскости
Четвертая компонента поля соответствует векторной сумме харак-
теристик (2.23):
т
А4 = ЕА'’ (2-28)
/-1
каждая, из которых определяется либо с помощью натурного моделиро-
вания, либо другим альтернативным методом.
68
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Таким образом, основываясь на принципах метода физической
। сори и дифракции (токового метода), удается получить решение ди-
фракционной задачи в виде суммы компонент, обусловленных различ-
ными дифракционными явлениями. Общей особенностью этих компо-
нент (2.24)-(2.28) в квазиоптическом диапазоне длин волн является их
аддитивная форма представления. При этом каждый член суммы явля-
йся интегралом от осциллирующих источников, распределенных на
финитных поверхностях произвольной пространственной конфигура-
ции. Следовательно, актуальной становится задача вычисления (оценки)
них интегралов с предписанной точностью, с минимальными вычисли-
юльными затратами. Именно разработка и алгоритмическая реализация
вычислительных процедур оценки компонент рассеяния дифракцион-
ных полей является одной из основных научных и практических задач
дайной работы.
2.5. Энергетические характеристики вторичных полей
излучения объектов сложной пространственной
конфигурации
Известно [12], что радиолокационные характеристики (РЛХ) объектов
сложной пространственной конфигурации можно разделить на две ос-
новные группы - статические и динамические. Статические РЛХ соот-
ветствуют случаю их измерения (моделирования) при фиксированных
(мгновенных) значениях параметров электродинамического взаимодей-
с гвия, а динамические получают в результате анализа процесса локации
объекта на частотном или временном интервале изменений параметров.
Поскольку практически всегда динамический процесс можно свести к
дискретной совокупности статических (стационарных) наблюдений, це-
лесообразно, не нарушая общности методики, рассмотреть лишь стати-
ческие РЛХ.
Рассеивающая способность цели для фиксированного ракурса и
поляризации объекта относительно приемной и передающей антенн на
фиксированной частоте может быть представлена комплексным коэф-
фициентом, имеющим размерность длины
£
7(^'2) = '2’V. (2-29)
। де г},г2 - расстояния от центра цели до передатчика и приемника соот-
ветственно; Es - нормированное к расстоянию г2 поле в точке приема;
/ j - поле возбуждения.
Комплексный характер коэффициента отражения несет информа-
цию как об амплитуде, так и о фазе рассеянного поля. Угловые зависи-
69
Миллиметровая радиолокация: методы обнаружения и наведения...
мости амплитуды Л(и) = |т;(и)| и фазы ф(у) = arg(7(v)) представленные в
виде диаграмм рассеяния характеризуют зависимость отражающих
свойств объекта от углового параметра v и являются простейшими ра-
диолокационными характеристиками объекта. В качестве иллюстрации,
на рис. 2.14 приведена диаграмма относительных фаз полей рассеяния
объекта типа танк, полученная при условиях, характерных для рис. 2.10.
Как видно из рисунка, диаграмма имеет практически стохастический
характер и участки регулярности наблюдаются лишь в угловых облас-
тях с доминантным отражателем.
Рис. 2.14. Диаграмма относительных фаз коэффициента отражения
от объекта типа танк
Комплексный коэффициент отражения функционально связан с
основной энергетической радиолокационной характеристикой ЭПР. По
определению, ЭПР представляет собой коэффициент пропорционально-
сти между плотностью потока мощности облучающей водны в точке
расположения цели и полной рассеянной мощностью в предположении,
что цель является изотропным точечным рассеивателем. Тогда диа-
грамму ЭПР объекта локации в дальней зоне можно определить в виде
cr(v) = Нт4лт22
Г|, г2 -> со.
(2.30)
Предельно допустимое расстояние до объекта в зависимости от
требуемой точности вычислений (измерений) полей рассеяния опреде-
ляется из условия [21]
г2
> ~дих_
'min — w ’
(2-31)
70
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
। де a = Lmax - максимальный размер проекции цели на картинную
плоскость. При малых расстояниях до объекта, когда соотношение
(2.31) не выполняется, сферическую волну в пределах диаграммы на-
правленности можно представить в виде обобщенного интеграла по
плоским волнам [12], интерполяционное вычисление которого приводит
к расчету ДОР для случая плоских волн. Поэтому базовой является за-
дача расчета РЛХ в дальней зоне.
Поскольку электромагнитные волны представляют собой попереч-
ные колебания и имеют ярко выраженный характер (обладают опреде-
ленной поляризацией), возникает необходимость анализа поляризаци-
онных характеристик рассеяния объекта. В этом случае наиболее удоб-
ными для анализа оказываются матричные представления, позволяю-
щие в единой форме представить энергетические, фазовые и поляриза-
ционные свойства объекта рассеяния.
Важным этапом анализа РЛХ является выбор систем координат
удобных для аналитического описания поверхности объекта рассеяния и
для определения источников возбуждения вторичных полей. Для анали-
за полей рассеяния введены три основные прямоугольные системы ко-
ординат (рис. 2.15).
Рис. 2.15. Основные системы координат, используемые для анализа
рассеивающих свойств целей сложной формы
Параметры БПЭ модели определяются в связанной с объектом спс-
1сме координат Т' :{х',у',z' ,0'} .Для удобства описания матричных опе-
раций целесообразно также использовать альтернативную форму пред-
ставления координат Т' в виде: , где / = 1,2,1. Центр системы Ч*' -
ючка 0' совмещается обычно с конструкционным центром модели объек-
ia, а выбор осей {х‘, у' ,z'} обусловлен удобством аналитического описа-
71
Миллиметровая радиолокация: методы обнаружения и наведения ...
ния поверхности цели. Так, например, для аэродинамических объектов ось
х‘ совмещается с его строительной осью, ось У - с плоскостью крыльев
(стабилизаторов), а ось z' - дополняет систему координат Ч7' до правой.
Для анализа поля рассеяния (ПР), помимо связанной с объектом
системы координат Ч7', используются еще две прямоугольные системы
координат. Первая - Ч7': {х‘, у',z‘,0'} связана с передающей антенной, а
вторая - Ч77: {xs,/,zs,О1} - с антенной приемника.
Система координат Ч7', связанная с передающей антенной, обра-
зована путем последовательного поворота системы Ч7' вокруг осей
y,x',z' на углы Эйлера ai,pj,yi соответственно. При этом орт х' на-
правлен по радиусу-вектору источника возбуждения г, (в случае пло-
ских волн - по нормали к волновому фронту падающей волны); орт у' -
по электрической компоненте вектора поляризации передающей антен-
ны е;, a z' - по магнитной h,. При таком построении системы коорди-
нат передатчика ориентация базиса Ч7' удовлетворяет векторному соот-
ношению локальной - плоской волны е, =[r,,h,]. Аналогично, для сис-
темы координат приемной антенны при замене термина «передающий»
на «приемный» а также индекса «/» на <«» соответственно.
В случае дальней зоны (плоских волновых фронтов) центры всех
трех систем координат совпадают с точкой О'. В случае ближней зоны
системы координат Ч7' совпадает с фазовым центром передающей ан-
тенны, а центр 4's - с центром приемной антенны.
Векторы г,,г( образуют с ортом £5 две плоскости вертикальной
поляризации v;, v, для передающей и приемной антенн, соответствен-
но. Обозначим горизонтальные плоскости поляризации, компланарные
векторам г,,г5 и ортогональные r;,rv, соответственно, как G, и Gv, а
проекции векторов Е,Н как Esv,Esg и E‘v,E'g, для полей рассеяния и
возбуждения соответственно.
Тогда задачу рассеяния в можно сформулировать как определение
функциональных элементов матрицы рассеяния [12, 34]
|>] = [7]х[£']; [Г''] =
(2.32)
Глава Z Методы исследования полей рассеяния электромагнитных волн...
1десь Ev, Eg - амплитуды компонент поля в соответствующих поляриза-
ционных базисах, а [т|] - матрица интегральных коэффициентов про-
порциональности между соответствующими электрическими компонен-
111ми падающего и рассеяного полей. Аналогичные зависимости спра-
ведливы и для магнитных компонент поля.
Каждый элемент матрицы рассеяния [т|] представляет собой ком-
плексную величину, зависящую от свойств объекта локации, его ориен-
пщии относительно передающей и приемной антенн, а также от рас-
сюяния между объектом и антенными системами. Индексы элементов
матрицы [т|] в (2.32) идентифицируют поляризационный способ лока-
ции объекта. Здесь Ф - значение фазовой функции, а ст - энергетическая
характеристика рассеяния (2.32).
Учитывая кусочно-гладкий характер представления поверхности
цели, напряженность поля в точке приема в общем случае можно пред-
с твить в виде аддитивной суммы парциальных сигналов, рассеянных
01 дельными элементами цели:
N
Е^^-Е,., (2.33)
И = 1
|де А - число элементов модели; т]п - комплексный коэффициент отра-
жения л-го элемента. Тогда величина ЭПР объекта локации может быть
определена в виде
(2.34)
|де <у„,Фп - значения энергетической и фазовой характеристик и-го
рассеивающего элемента цели соответственно. Такой способ суммиро-
вания сигналов соответствует случаю конкретного приема или метода
опюсительной фазы [22,45], а <тКО1. - когерентной ЭПР.
Максимальное значение ЭПР цели для данного ракурса соответст-
вует случаю, когда значения фазовых функций всех элементов равны,
। огда из (2.34):
<Тпах
(2.35)
При анализе сложных целей, состоящих из большого числа отра-
жателей, размеры которых значительно превышают длину волны, в ре-
альных условиях величина фазовой функции определяется с некоторой
погрешностью, которая вызвана флуктуациями фазового центра и-го
тражателя. В этом случае допускается аппроксимация распределения
фазовой функции от пространственного угла равновероятным законом.
73
Миллиметровая радиолокация: методы обнаружения и наведения...
Тогда энергетическая характеристика сложной цели определяется по
методу случайной фазы:
N
^КОГ=Е^ . (2.36)
и-1
что соответствует случаю некогерентного приема парциальных сигна-
лов. Энергетическая характеристика (2.36) в случае большого числа от-
ражателей дает значение средней ЭПР, а при наличии доминантного от-
ражателя характеристики сгког и сгнекО1. практически совпадают.
Величину среднеквадратического разброса (значение когерентно-,
сти) ЭПР относительно некогерентной энергетической характеристики!
можно определить как:
Г N Л2 N
d2= -Е^- (2-37>
\ И = 1 / И = 1 (
Таким образом, для цифрового моделирования РЛХ объектов
сложной формы при использовании метода физической теории дифрак-
ции необходима аналитическая аппроксимация внешнего облика цели.
2.6. Анализ рассеивающих свойств малозаметного
объекта типа В2 на основе его кусочно-аналитической
модели
Одним из наиболее интересных, с точки зрения радиолокационной за-
метности, является американский самолет В2, выполненный по техно-
логии Stealth, а изображение его кусочно-аналитической модели приве-
____дено на рис. 2.16. Для определен-
\ \\ ности, вначале рассмотрим ДОР в
\ \\ области передней полусферы
\—Ад ...планера малозаметного самолета
\ В2, полученную методом цифро-
\ /Оч/д ~ \ \ вого моделирования. При расче-
\ / ху \ \ тах полагалось, что зондирующий
\ сигнал является гладким моно-
хроматическим с длиной волны
Рис. 2.16. Кусочно
м ель В2 СМ’ 1|Ш1яРизания приемопере-
дающей антенны - вертикальная,
проводимость всех элементов объектов локации (ОЛ) полагалась иде-
альной. На рис. 2.17-2.20 энергетические РЛХ планера В2, полученные
для двух значений угла места (3, секторе азимутальных углов 90° > a > 0.
Шаг дискретизации ДОР по углу составил 0,05°.
На рис. 2.17 приведены диаграммы обратного рассеяния малоза-
метного самолета В2, полученные методом математического моделиро-
74
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
папия на длине волны 3,2 см и линейной вертикальной поляризации, для
двух значений угла места (угла подхода цели). В секторе 0...900 приве-
дена ДОР, полученная методом когерентного суммирования элементар-
.... сигналов (раздел 3) для угла подхода 15°, а в секторе 0...-900 при-
ведена ДОР для угла подхода -15°.
На рис. 2.18 приведены диаграммы обратного рассеяния компо-
ненты рассеяния на гладкой поверхности малозаметного самолета В2,
полученные методом математического моделирования на длине волны
1,2 см, и линейной вертикальной поляризации для двух значений углов
подхода к цели.
Рис. 2.17. Диаграмма обратного
рассеяния планера В2
(Л = 3,2 см, шаг 0,05°, a = -90°.. .0°,
0= -15° (снизу), а= 0°...90°,
+ (сверху))
Рис. 2.18. Диаграмма обратного
рассеяния компоненты рассеяния
на гладкой части планера В2
(Л = 3,2 см, а= -90°...0°, р= -15° (сверху),
а = 0°...90°,+15° (снизу))
Анализ показал, что влияние компоненты, обусловленной рассея-
нием на острых задних кромках модели вносит в формирование общего
поля рассеяния малозаметного самолета В2 менее 0,5%.
75
Миллиметровая радиолокация: методы обнаружения и наведения ...
Рис. 2.19. Диаграмма обратного рассеяния
компоненты от взаимодействий
элементов планера В2
(2 = 3,2 см, Д=+15°)
Зато существенный вклад в формирование энергетических харак-
теристик вносит компонента, обусловленная многократными взаимо-
действиями волн на элементах конструкции планера В2. На рис. 2.19
приведена диаграмма обратного
рассеяния компоненты, обу-
словленной двукратным взаи-
модействием элементов конст-
рукции планера В2, полученные
методом математического мо-
делирования на длине волны 3,2
см, и линейной вертикальной
поляризации для угла места 15°.
При локации объекта В2 снизу
при /? = -15° в общем поле рас-
сеяния эта компонента практи-
чески отсутствует.
Анализ приведенных на
рис. 2.17-2.19 диаграмм, без
учета четвертой компоненты,
показал, что все они имеют
существенно осциллирующий
характер при значительном
динамическом диапазоне изме-
нений ЭПР.
На рис. 2.20 приведена
диаграмма относительных фаз
0(r) = arg(^(r)) полей рассея-
ния радиоволн в переднюю по-
лусферу малозаметного самоле-
та В2 на длине волны 3,2 см при
угле места 15°.
Анализ показал что в сек-
торе носовых ракурсов при ази-
муте |а| < 30° ДОР модели В2
имеет существенно осциллиру-
ющий характер с динамическим
диапазоном ЭПР -63,4.. .-4,2 дБ.
При этом выбросы ДОР для ракурса /? = -15°,а =-1,5°;-24° обусловле-
ны аппроксимацией нижней части модели В2 плоскими отражателями с
острыми кромками, которые на реальном объекте отсутствуют. Наличие
на диа1рамме рассеяния В2 сверху (/? = 15°) в секторе боковых ракурсов
76
Рис. 2.20. Диаграмма относительных
фаз ПР на планере В2
(2 = 3,2 см, Д=+15°)
Глава Z Методы исследования полей рассеяния электромагнитных волн...
при a =35°...85° слабоосциллирующего участка определяется эффек-
1ПИНЫМ отражателем, образованным кабиной пилота (фюзеляжем) и на-
ружной частью силовых установок. Кроме того, использование средств
радиомаскировки значительно снижает уровень бокового рассеяния В2,
поэтому результаты, приведенные на рис. 2.17, нужно принимать как
верхнюю оценку.
Анализ ДОР планера малозаметного самолета В2 показал, что рас-
сеивающие свойства этого объекта обладают существенной динамикой
как по азимутальной (рис. 2.17-2.19), так и по угломестной координа-
1им. Однако каждой реализации присущи угловые и азимутальные об-
ласти в которых рассеивающие свойства достаточно однородны.
Поскольку динамика рассеивающих свойств ОЛ наблюдается не
пшько по одной угловой координате, для рационального построения РЛС
целесообразно рассмотреть двумерное поле ЭПР в заданном угловом сек-
lope. Однако расчет двумерных полей ЭПР во всем угловом секторе под-
хода В2 к радиотехническим средствам требует очень значительных за-
ipar машинного времени. Поскольку величина углового шага А <9 [град]
по угловой координате определяется из дифракционного критерия
N Ai max
। де N - число точек интерполяции одного полупериода осциллирующей
диаграммы; Ацпих - максимальная величина проекции цели на картин-
ную плоскость в единицах измерения длины волны Л. Откуда на длине
полны 3,2 см и величине Лцп1ах = 55 м и N= 5 шаг по углу должен быть
менее чем 0,05°, а число отсчетов двумерной матрицы поля ЭПР составит
It'
^тпах
= Int
^max ^inin 'max /Anin
Д5 Д5
Тогда, в частности, расчет двумерного поля ЭПР в угловом секто-
ре передней полусферы по азимуту 30°, а по углу места 10° потребует
вычисления 300x200 = 600.000 точек. Учитывая, что данная методика
рассчитывает одну точку на ЭВМ PentiumII-233 в среднем за 15...30 с,
io потребное время на рассчет двумерного поля ЭПР для данной реали-
ыции программы составит более 100 суток! непрерывного счета. Ясно,
•но такие затраты машинного времени недопустимы и поэтому целесо-
образно использовать упрощенные модели двумерных полей и/или за-
। рублять шаг вычислений с неизбежной потерей точности.
У разработчиков радиотехнических средств обнаружения малоза-
метных самолетов типа В2 наибольший интерес представляет область
носовых ракурсов, поэтому на рис. 2.21 приведено двумерное поле ЭПР,
77
Миллиметровая радиолокация: методы обнаружения и наведения ...
Азимут. а°
Рис. 2.21. Двумерное поле ЭПР модели В2
а на рис. 2.22 соответствую-
щая этому полю 3D диатрамма
ЭПР планера В2 размером
10°х10°, рассчитанное в экви-
дистантных точках на расстоя-
нии 0,5°. Здесь наиболее свет-
лым областям соответствуют
максимальные значения
<тА пт = -19,2 дБ, а наиболее
темным минимальные значения
- °* min =~55, 6 дБ .
Таким образом, анализ
энергетических РЛХ планера
В2, показал, что:
как суммарная ДОР так и отдельные ее компоненты имеют суще-
ственно осциллирующий характер, поэтому для практического ее ис-
пользования необходимо получения вероятностных характеристик об-
наружения;
динамический диапазон значений ЭПР для исследуемых реализа-
ций составил -45,6...+12 дБ, при этом динамика сигнала в пределах угла
1 ° достигает 40 дБ;
основное излучение для горизонтальной плоскости и угле подхода
15° сконцентрировано в боковом секторе 35...90° (рис. 2.22), а в осталь-
ных областях средняя (математическое ожидание) ЭПР меняется незна-
чительно и изменяется от 0,01 до 0,06 м2. Именно эти значения ЭПР мо-
гут быть приняты для оценки потенциала РЛС обнаружения.
Рис. 2.22. Трехмерная диаграмма ЭПР планера В2 в секторе
' носовых ракурсов
78
Гпава 2. Методы исследования полей рассеяния электромагнитных волн...
Однако непосредственное использование изложенного выше мето-
дического аппарата исследования механизма взаимодействия электро-
мш нитных волн радиолокационного диапазона, вызывает серьезные
фудности. Поэтому механизм взаимодействия электромагнитных волн
г совокупностью объектов в условиях их взаимодействия с окружающей
средой и подстилающей поверхностью представляет значительный на-
учный и практический интерес.
2.7. Математическое моделирование входных сигналов
радиолокационных систем на основе полигональных
моделей сложных целей
Одним из приоритетных направлений совершенствования принципов и
меюдов радиолокационного обнаружения объектов на фоне подстилаю-
щих поверхностей и при наличии помех является разработка новых более
совершенных методов математического и цифрового моделирования рас-
сеяния электромагнитных волн в ближней зоне локации. Особый интерес
представляет рассмотрение процесса излучения и приема ЭМВ в ближней
юпе локации, в которой функционируют бортовые радиолокационные
датчики. При этом основная научно-методическая задача состоит в созда-
нии универсальной методики расчета осаженных от целей сигналов, ко-
юрая могла быть использована как в дальней, так и в ближней зоне лока-
ции. Решение такой задачи может бы ть успешно выполнено с использо-
ванием полигональной или фацетной модели цели.
Современный уровень развития вычислительных средств и средств
автоматизированного проектирования позволяет использовать для реше-
ния задач математического моделирования отражательных характеристик
объектов геометрические модели, основанные на аналитических принци-
пах описания поверхности и представляющие внешнюю поверхность
объекта в виде совокупности плоских элементов (фацетов). Опыт исполь-
зования кусочно-аналитической модели показал, что в оптическом диапа-
юпе эта модель позволяет получить достаточно хорошие результаты. Од-
нако в диапазоне ультракоротких радиоволн, где требования к точности
аппроксимации внешнего облика объекта становятся определяющими,
данная модель в ряде случаев оказывается непригодной. К основным дос-
юинствам кусочно-аналитической модели следует отнести ограниченное
количество базовых пространственных элементов, аналитический харак-
icp поверхности, реализацию библиотеки «геометрических» функций,
специализированное программное обеспечение по генерации 3-D модели
сложного объекта. При этом основными недостатками кусочно-
апалитической модели являются ограниченные возможности в достиже-
нии высокой точности аппроксимации внешнего облика объекта. Кроме
loro, данная модель была изначально предназначена дня решения задач
79
Миллиметровая радиолокация: методы обнаружения и наведения ...
рассеяния линейно поляризованных электромагнитных волн от целей, на-
ходящихся в дальней зоне локации. Поэтому использование кусочно-
аналитической модели в задачах ближней радиолокации объектов слож-
ной формы нецелесообразно, поскольку затраты на модернизацию этой
модели к современным требованиям окажутся чрезмерными.
В настоящее время развитие мегодов математического моделирова-
ния электромагнитных полей рассеяния сложных объектов и радиолока-
ционных сцен в дальней и ближней зонах локации связано с использова-
нием так называемых полигональных моделей, формируемых в среде со-
временных систем автоматизированного проектирования (САПР) [46].
Именно использование САПР позволяет синтезировать геометрическую
модель объекта локации практически любой формы и конфш-урации на
основе чертежей общего вида или эскизных моделей. К числу наиболее
мощных САПР следует отнести такие системы как, Pro/Engineer,
UniGraphics, MatraDV и Catia. Поскольку эти системы используются для
формирования отдельных конструктивных элементов и всего сложного
объекта в целом, точность аппроксимации виртуальной модели объекта
ее оригиналу будет наивысшей. Для синтеза сложных рельефов земной
поверхности и фоновых сюжетов рационально использовать анимацион-
ные системы, например, такие как 3DStudioMax. В современных САПР
твердотельная ЗВ-модель объекта конвертируется в полигональную мо-
дель, представляющую собой конечную совокупность однотипных пло-
ских элементарных отражателей с определенным набором электродина-
мических и статистических свойств, количество и форма которых опре-
деляется разработчиком.
К современным разработкам электромагнитных полей рассеяния
сложных целей в ближней зоне локации следует отнести Cpatch technolo-
gy [47], использующую метод «флуктуирующих» лучей (shooting and
bouncing rays) на основе полигональных моделей 3-D объектов. В других
работах для решения задач рассеяния электромагнитных полей рассеяния
сложных объектов применяются точные методы, такие как быстрый мно-
гополюсный метод [48] и метод конечных элементов [49], основанные на
использовании пространственной триангулированной сетки внешней по-
верхности объекта. В работе [50] предложена модель, которая позволяет
вычислять характеристики рассеяния целей, заданных в виде полигональ-
ных моделей, в ближней зоне локации для идеально проводящих целей,
не учитывая при этом произвольного характера поляризации антенны. В
качестве других недостатков модели [50] следует отметить отсутствие
учета вкладов подстилающей поверхности и пассивных помех, а также
невозможность вычисления полей рассеяния целей в случае сложных не-
стационарных воздействий на траектории движения.
Для расчета электромагнитных полей рассеяния ЭО радиолокаци-
онной сцены в [2] были использованы методы физической оптики (ФО),
80
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
физической теории дифракции (ФТД) и метода краевых, волн (МКВ). В
соответствии с формализацией процесса рассеяния электромагнитных
волн на элементах радиолокационной сцены на основе метода ФТД век-
юр напряженности электрического поля рассеяния этих источников
может быть представлен как векторно-когерентная аддитивная компо-
IIIция трех компонент [2]:
Ерас = Е! + Е2 + Е3 >
где Е, соответствует вкладу в общее рассеянное поле от гладких эле-
ментов радиолокационной сцены (в том числе и от подстилающей по-
верхности); Е2 — вкладу от острых кромок элементов сцены; Е3 - рас-
сеянию при многократных переотражениях электромагнитных волн ме-
жду элементами сцены (в том числе между элементами объектов и под-
стилающих поверхностей).
В соответствии с принципом ФТД каждая из компонент результи-
рующего поля рассеяния характеризуется аддитивно-интегральной
формой представления:
S*
где F - вектор поверхностных источников возбуждения; КЛт’Ре’Рт _
источники электромагнитного поля рассеяния на поверхности сцены;
Л'1 - облучаемая часть поверхности объекта.
2.7.1. Полигональная модель объектов сложной
пространственной конфигурации
I еометрическое моделирование сложных целей для расчета входных сиг-
налов РЛС осуществляется в системе Pro/Engineer Wildfire 2.0. Процесс
। сомегрического моделирования сложных целей состоит в следующем:
1. Создание виртуальной ЗВ-модели цели в Pro/Engineer на основе
чертежей общего вида;
2. Создание сеточной модели цели в Pro/Engineer при заданных ог-
раничениях на размер треугольного элемента сетки;
3. Преобразование сеточной модели цели в текстовый файл форма-
ia «*.fhf» с использованием средств Pro/Engineer;
4. Преобразование текстового файла сеточной модели цели в циф-
ровую полигональную модель цели с использованием инструмента кон-
вертации модели в расчетных модулях предлагаемых программ.
Создание ЗВ-моделей целей в Pro/Engineer проводится с использо-
ванием инструментов твердотельного моделирования. На первом этапе
создаются геометрические модели основных деталей сложной цели. На
81
Миллиметровая радиолокация: методы обнаружения и наведения...
втором этапе формируется файл сборки объекта на основе созданным
моделей отдельных деталей. На третьем этапе рекомендуется объедине-Л
нять модели сборки объекта в одну деталь, которая в дальнейшем будет!
использована для создания сеточной модели. Основным достоинство^
применения пакета Pro/Engineer является очень высокая степень досто-*|
верности геометрической модели цели ее реальному прототипу. На рис.]
2.23 показаны фотография истребителя F-22 и его геометрической мо-
дели в Pro/Engineer. Как видно из рисунка геометрическая модель ис-|
требителя практически полностью соответствует его реальной моделиЛ
На рис. 2.24-2.26 приведены полигональные модели истребителей F-22,l
F-117 и ракеты АР-24, которые являются типовыми радиолокационны-1
ми целями для бортовых радиолокационных датчиков.
Рис. 2.23. Истребитель F-22 и его геометрическая модель
в Pro/Engineer
Рис. 2.24. Полигональная модель
истребителя F-22
Рис. 2.25. Полигональная модель
истребителя F-117
82
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
При создании сеточной модели
поверхности цели наибольшее значе-
Пне для дальнейших расчетов имеет ^^к
усшновка максимального размера
|рсугольного элемента сетки, который
выбирается из электродинамических
критериев. Максимальный размер ^^Я^к
1р угольника выбирается в ^^к
Pro/Engineer в тех единицах, в кото- ^^к
рых заданы размеры объекта. При
уменьшении размера треугольника по
равнению с размерами объекта коли-
чество треугольников, описывающих Рис’ 2’26’ Полигональная модель
с ракеты АР-24
его поверхность, будет резко возрас-
1ать, что приведет к увеличению времени создания сеточной модели и
потребует значительных вычислительных ресурсов компьютера. При
выборе размера треугольного элемента сетки рекомендуется использо-
вать локальные ограничения в отдельных поверхностях объекта, кото-
рые должны быть описаны наиболее точно. При создании сетки твердо-
тельных моделей в Pro/Engineer используется граничная сетка Boundary
Mesh. При создании сеточной модели текстовой файл сетки сохраняется
в рабочей директории Pro/Engineer в формате «*.fnf».
Для создания геометрических моделей подстилающих поверхно-
стей предусмотрено использование системы 3DStudioMax. Данный па-
кет изначально не предназначен для создания ЗБ-моделей объектов
сложной геометрии. Поэтому использовать его для решения таких задач
в рамках предлагаемой технологии не рекомендуется. Данный пакет
может применяться для создания геометрических моделей простых тел
(сфера, цилиндр, конус, двугранный уголок), а также моделей подсти-
лающих поверхностей. Созданная в 3DstudioMax поверхностная сетка
объекта экпортируется в текстовый ASCII формат в виде файла с рас-
ширением «*.ase».
Любой сложный объект, формируемый в САПР, может быть пред-
ставлен совокупностью отдельных элементов, каждый из которых наде-
лен вполне определенным набором электрофизических свойств. В еди-
ной структуре данных полигональной модели объекта каждому элемен-
ту присваивается свой индекс, который определяет свойственный толь-
ко этому элементу набор заданных электродинамических параметров. В
свою очередь, каждый элемент объекта сложной формы состоит из ко-
нечного числа базовых геометрических примитивов (полигонов).
Современные САПР (3DstudioMax и Pro/Engineer) описывают внеш-
нюю поверхность объекта в виде триангулированной сетки, т.е. в качест-
83
Миллиметровая радиолокация: методы обнаружения и наведения ...
ве базовых пространственных элементов полигональной модели исполь-
зуются плоские треугольные пластины, определенным образом состыко-
ванные друг с другом.
Плоский треугольный элемент описывается тремя вершинами
(рис. 2.27), лежащими на поверхности объекта (Pb Р2, Р2), и вектором
внешней нормали п к плоскости (рис. 2.28).
Рис. 2.27. Плоский треугольный
элемент полигональной модели
Рис. 2.28. Геометрическая модель
острой кромки полигональной модели
объекта
Уравнение плоскости треугольного полигона задается в виде из-
вестного соотношения nxx + nyy + n:z + ap =0, где nx,ny,nz - направляю-
щие косинусы внешней нормали, ар =-х^ пх -у, -п -z, -п. - расстояние
от начала системы координат до плоского треугольного элемента.
Параметры уравнения плоскости определяются через координаты
трех вершин шраничивающего полигона ,yt ,z,), P2^x2,y2,z2j,
(хз iУз >z3)> не лежащих на одной прямой при их «обходе» против часо-
вой стрелки, если смотреть с конца вектора нормали в следующем виде:
„ - (-V2 ~ ) (Z3 ~Z1) ~(гз ~У1) (Z2 ~Z1) п __ (z2 ~zl)(x3 ~Х1) ~(z3 ~Z1 )(~*2 ~)
D ’ ” D
п. = (*2-Г1). 5 D = J(n\2+(„\2+(„\2 .
Острые кромки объекта образуются в результате изломов на его
гладкой поверхности. В структуре полигональной модели острые кромки
образуются на основе образующих гладкую поверхность плоских тре-
угольников. Пространственная конфигурация острой кромки определяет-
ся взаимным расположением образующих ее треугольников (рис. 2.28). В
84
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
качестве параметра геометрической конфигурации кромки используется
внешний пространственный угол между треугольными пластинами, обра-
1УЮЩИМИ кромку <z = arccos(n] •п2) + л', где п1 , п2 - векторы нормали к
и носкости первого и второго треугольников соо тветственно.
Следует отметить, что современные системы САПР конвертируют
дна типа кромок. Первый тип представляет собой реальные кромки, об-
разуемые в результате действительно имеющего место излома гладкой
поверхности объекта. Другой тип кромок получается в результате на-
ложения плоской треугольной сетки на гладкую поверхность объекта и
образования так называемых «мнимых» изломов. Такие кромки назы-
ваются «мнимыми» («виртуальными») и при решении радиолокацион-
ных задач использоваться не должны.
Для эффективного применения полигональной модели при реше-
нии радиолокационных задач формируется универсальная структура
данных элементов полигональной модели. Описание элементов полиго-
нальной модели осуществляется на основе объектно-ориентрованных
пруктур, основных геометрических примитивов: структуры «point»,
«triangle» и «edge». В каждой структуре определяются параметры дан-
ного геометрического примитива.
Структура «point» описывает геометрический примитив, представ-
ляющий точку, принадлежащую поверхности объекта и, кроме того, яв-
ляющуюся вершиной плоского треугольного элемента. Внутренними
данными этой структуры являются три координаты точки Д,Д.,Д в
сис теме координат объекта:
struct point {vector Px;vector Py;vector Pz}.
Структура «triangle» описывает плоский треугольник, вершины
мнорого лежат на поверхности объекта. Элементами этой структуры
являются номера трех вершин треугольника в списке всех точек модели
(в массиве экземпляров структур «точка»), индекс, определяющий при-
надлежность треугольника к определенному конструктивному элементу
пели, и вектор нормали к плоскости треугольника:
struct triangle {int Npl;int Np2;int Np3;int index;vector n}.
Структура «edge» описывает острую кромку на поверхности объ-
ема. Первые два ее элемента представляют собой номера двух вершин,
лежащих на поверхности объекта и образующих ребро. По аналогии со
। (руктурой «triangle» номера вершин определяются в списке экземпля-
ров структуры «point». Другими элементами структуры «edge» являются
номера двух треугольных элементов, образующих кромку, в списке тре-
V I ольников модели (массиве экземпляров структуры «triangle»):
struct edge {int Np);int Np2;int Ntl;int Nt2}.
85
Миллиметровая радиолокация: методы обнаружения и наведения...
Единая цифровая модель объекта формируется из массивов экзем-1
пляров этих структур, которые сохраняются в соответствующих бинар-1
ных файлах. Размерность этих массивов определяет соответственно об-!
щее количество вершин, треугольников и кромок полигональной моде-j
ли объекта, а индекс элемента массива представляет собой порядковый
номер геометрического примитива в общем списке. j
Таким образом, в результате формирования цифровой полигональ-|
ной модели объекта образуются три списка экземпляров структур oc-j
новных геометрических примитивов: точка, треугольник и кромка.
Алгоритмы анализа обобщенных ступенчатых функций затенени^
и маскировки являются одним из ключевых моментов данной геометри-
ческой модели. Ступенчатая функция затенения со стороны треуголь-]
ника Tj (j - индекс треугольника в массиве треугольных элементов по--
лигональной модели), принадлежащего поверхности S, представляется
следующем виде:
<5,(7;.) = 1,7} еь;, <5,(7}.) = о,7’/ «ел;,
где - область на поверхности S, освещенная со с тороны РЛС.
Аналогично ступенчатая функция маскировки треугольника 7} вы4
глядит следующим образом:
^(Tj) = l,Tj^L+s, Ss(Tj) = 0,Tj^Vs,
где Ц - область на поверхности S, немаскируемая со стороны РЛС.
Очевидно, что в случае моностатической локации области Ц ,L~ -
конгруэнтны. Тогда функцию затенения и маскировки треугольного
элемента можно вычислить в виде:
<5гр=<5,.(7})-<Д7}). '
Функция затенения и маскировки острой кромки определяется 8
результате операции логического сложения функций затенения и мас-
кировки образующих ее плоских треугольников:
г>кр=й1р(7})Фйгр(т;.),
где Tj, Tk - треугольные элементы, образующие кромку.
Острая кромка считается незатененной и немаскируемой в том
случае, если незатененным и немаскируемым считается хотя бы один и:
образующих ее треугольников.
Анализ условий затенения и маскировки элементов полигонально?
модели осуществляется в цикле по всем треугольным элементам. Тре
угольный элемент считается видимым, если он удовлетворяет условик
несамомаскировки, а также условию незатенения другими элементами
86
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Дня видимого антенной треугольного элемента функция затенения и
маскировки = 1.
Алгоритм поиска несамомаскируемых треугольников модели пред-
ciявляет собой цикл по всем треугольным граням Tj цифровой модели
ибьекта локации. На каждой итерации цикла проверяется условие неса-
момаскировки треугольника Tj, и если данное условие выполняется, то
функция маскировки треугольника принимается равной <5Д7^.) = 1, в про-
IHBIIOM случае грань Tj считается самомаскируемой и убирается из списка.
Условие несамомаскировки треугольника (Рис- 2.29) отно-
си юльно фазового центра антенны РЛС Р определяется как гп<0, где
и вектор пормали к плоскости треугольника; г = М-Р - вектор,
проведенный из фазового центра антенны в среднюю точку треугольни-
ка М. Другими словами треугольник PlP2Ps не самомаскируется, если
уюл между векторами п и г не является острым (рис. 2.29).
Рис. 2.29. Условие несамомаскировки треугольника
Алгоритм поиска незатененных примитивов представляет собой
цикл по всем несамомаскируемым треугольникам Tj цифровой модели
обьекта локации. На каждой итерации цикла для треугольника Tj
ищется первый затеняющий его другой треугольник. Этот поиск реали-
|<>иан в виде внутреннего цикла по всем несамомаскируемым треуголь-
никам Тк, кроме Tj. Если затеняющий треугольник не найден, то тре-
уюльник Tj считается незатепенным и его функция затенения
87
Миллиметровая радиолокация: методы обнаружения и наведения...
3\Tj) = \, в противном случае треугольник Tj считается затененным и
пропускается.
Моделирование по данному алгоритму является самой трудоемкой
задачей, так как в нем имеется внузренний цикл, причем, для того, что-
бы убедиться, что треугольник Tj является незатененным, необходимо
пройтись по всем несамомаскируемым треугольникам Тк, кроме Д.,
поэтому чем больше незатененных треугольников среди несамомаски-
руемых, тем больше времени занимает процесс вычисления. С увеличе-
нием общего количества несамомаскируемых треугольников время мо-
делирования возрастает еще сильнее.
Алгоритм проверки на затенение треугольника Т} другим тре-
угольником Т2 выглядит следующим образом. На первом этапе прово-
дится вектор Г] = Мх - Р из фазового центра антенны ЛС в среднюю
точку первого треугольника Мх. На втором этапе вычисляется расстоя-
ние между фазовым центром антенны и треугольником Т\ Rx = |ЛД -Р|.
На третьем этапе осуществляется вычисление точки пересечения Рг
вектора г; с плоскостью второго треугольника Т2:
(П2 ’Г)
где п2 - вектор нормали к плоскости второго треугольника Т2;
г2 = Л/2 - Р - вектор, проведенный из фазового центра антенны в сред-
нюю точку второго треугольника.
На четвертом этапе осуществляется проверка принадлежности
точки пересечения Рг второму треугольнику Г2. Условие РГ^Т2 (при-
надлежности точки Р треугольнику РР2Р3) называется условием инци-
дентности. Данное условие заключается в том, что точка Рг принадле-
жит треугольнику Д Д Д в том случае, если (рис. 2.30)
(n2[pixP2]W ("г [Рг хРз]) °, (п2 [Рз ХР1]) 0
где р1 = Д - Рг; р2 = Р2 - Рг; р3 = Д - Д..
Очевидно, что обращение в нуль, например, первого неравенства бу-
дет означать, что точка Р лежит на отрезке РХР2. Если точка Д. принадле-
жит треугольнику Т2, то на пятом этапе вычисляется расстояние между фа-
зовым центром антенны и треугольником Т2 : R2 =|Д. -Р|. В заключение
88
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
ни шестом этапе осуществляется непосредственная проверка треугольника
па затенение путем сравнения расстояний 7?, и R2. Считается, что тре-
yi ельник Т2 затеняет треугольник 7], если R2> Rl. Схема затенения тре-
уипп.ника 7\ треугольником Т2 приведена на рис. 2.31.
Рис. 2.30. Определение условия инцидентности точки Р
(слева - точка принадлежит треугольнику, справа - точка за пределами треугольника)
При облучении объек-
|ц антенной между элемен-
|ими его поверхности могут
Потикать двукратные пере-
1*1 ражения электромагнит-
ных волн. При возникнове-
нии переотражения между
двумя треугольниками по-
нт опальной модели па-
дающая на треугольник Д
Поппа (Г] - вектор, прове-
денный из фазового центра
пн । сипы в среднюю точку
рсугольника Д), зеркально
Рис. 2.31. Схема затенения треугольника Г,
треугольником Т2
in рожается от его плоскости с нормалью ив направлении вектора г,2
кидает на треугольник Т2 (рис. 2.32). Структура каждого двукратного
переотражения между треугольниками содержит треугольники и Т2 и
пику пересечения вектора г12 с треугольником Т2. Для дальнейшего про-
недепия электродинамических расчетов необходимо осуществить вычис-
iriine пространственной конфигурации переотражений.
89
Миллиметровая радиолокация: методы обнаружения и наведения ...
Рис. 2.32. Схема возникновения двукратных переотражений волн
между треугольником Д и треугольником Т2
Алгоритм расчета переотражений представляет собой цикл п!
всем незатененным треугольникам Tj цифровой модели объекта лока
ции. На каждой итерации цикла для треугольника Г. вычисляется век
тор Гд , зеркально отраженный от него:
ГА
1 - 2 • п2 -2 пх-пу -2-пх-п.
-2-пх-пу 1 - 2 п2 -2-пу-пг
—2nxnz -2-ny-nz 1 — 2 • п2
Г;
где Гу = М - Р - вектор, проведенный из фазового центра антенны 1
среднюю точку треугольника Д; n — {nx,nv,nz} - координаты вектору
нормали к плоскости треугольника Г-.
Далее в направлении вектора r]k ищется отражающий треуголь
ник. Этот поиск реализован в виде внутреннего цикла по всем незате
ненным треугольникам Тк, кроме Г.. Для каждого треугольника Тк j
направлении вектора rJk вычисляется точка Рг их пересечения, после
чего проверяется условие инцидентности точки Рг по отношению i
треугольника Тк. При выполнении этого условия, в случае если точке
Рг оказывается ближайшей к треугольнику Т-, то эта точка и индекс
отражающего треугольника Тк запоминаются в специальном массиве
сохраняющем структуры переотражений.
90
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Таким образом, сформированные структуры данных двукратных
исрсотражений между элементами полигональной модели используются
* дальнейших расчетах при вычислении третьей компоненты поля рас-
1ЧЧШИЯ объекта.
2.7.2. Поляризационная модель электромагнитного поля
рассеяния объекта
Полигональная модель радиолокационной сцены позволяет представить
гфсрическую электромагнитную волну вблизи облучаемого участка сце-
ны в виде суперпозиции локально плоски^ волн (рис. 2.33). При этом
нросфанственная сетка внешней поверхности объекта формируется та-
ким образом, чтобы падающие на элементы полигональной модели элек-
1|>омагнитные волны можно было рассматривать как локально плоские.
Дня того чтобы падающую на элемент полигональной модели электро-
магнитную волну считать плоской, его линейный размер должен удовле-
пюрять критерию дальней зоны:
т- 2 •>
|дс Lm - характерный линейный размер т-го элемента полигональной
модели; Rm - расстояние между фазовым центром антенны РЛС и /и-м
1'ис. 2.33. Схема дискретизации сферического фронта электромагнитной волны
локально плоскими волнами
Облучающая элемент полигональной модели локально плоская
ыектромагнитная волна наводит на его поверхности электрический и
магнитный токи je,jm, которые являются вторичными источниками
>аектромагнитных волн, рассеянных в направлении приемной системы
91
Миллиметровая радиолокация: методы обнаружения и наведения...
РЛС. Задача рассеяния электромагнитных волн на элементе полиго-
нальной модели объекта решается отдельно для плоской волны с ли-
нейной поляризацией, вектор поляризации Ео которой определяется в
зависимости от поляризационной модели передающей антенны (линей-
ная, круговая, эллиптическая).
В соответствии с формализацией дифракционного электромагнит-
ного поля рассеяния сцены, заданной своей полигональной моделью,
величина результирующей напряженности поля рассеяния, принятого в
апертуре приемной антенны РЛС, представляется в виде суперпозиции
трех скалярных величин: ;
^расЕ = ^трЕ + -^крЕ + АгерЕ ’ (2.38)
Первая компонента в соотношении (2.38) представляет собой ве-
личину результирующей напряженности электрического поля рассеяния
всех плоских треугольных элементов, образующих полигональную мо-
дель объекта:
*л>-1
S (ET-EoJ’ (2-39)
т~0
где Етрт - вектор напряженности электрического поля рассеяния т-го
треугольника полигональной модели; Едот - вектор поляризации при-
емной антенны РЛС в направлении на треугольник; 7VTp — количество
облучаемых треугольников полигональной модели.
Вторая составляющая в соотношении (2.38) является результи-
рующей напряженностью поля рассеяния острых кромок полигональной
модели:
*4,-1
Ё^ = Е (ЕлД. <2-4°)
/п--О
где Е - вектор напряженности электрического поля рассеяния щ-й
острой кромки полигональной модели; - количество облучаемых
острых кромок полигональной модели
Составляющие (2.39), (2.40) определяются на основе интегрирова-
ния токов, возбуждаемых основным полем облучения антенны РЛС на
треугольниках и острых кромках соответственно. При этом третья ком-
понента поля (2.38) определяется в результате суперпозиции полей рас-
сеяния треугольников, для которых источники возбуждения вторичных
поли наводятся за счет многократных переотражений от других тре-
угольников полигональной модели:
92
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
(2.41)
т=0
В соотношении (2.41) Е представляет собой вектор напряжен-
ности поля рассеяния треугольника, токи возбуждения которого наведе-
ны за счет переотражения от другого треугольника, a N — количество
I реугольников, участвующих в переотражениях.
В дальнейших рассуждениях буд^..раесматривать, все элементы
полигональной модели (треугольники и..кромки) как элементарные от-
ражатели (ЭО). Поэтому не теряя общности рассуждений, можно пред-
ставить величину напряженности результирующего поля рассеяния
объекта (2.38) в виде суперпозиции полей рассеяния всех ЭО полиго-
нальной модели сцены:
-1
= Е > (2.42)
т=0
। де m - индекс ЭО; Ё!т = EImE('lm - величина напряженности электриче-
ского поля рассеяния т-го ЭО принятого в апертуре приемной антенны
I’JIC; = N^ + NKp + - общее количество ЭО, принимающих уча-
стие в рассеянии электромагнитных волн.
Таким образом, получены расчетные соотношения для вычисления
неяичины напряженности поля рассеяния сцены, находящейся в ближней
tone локации. Для более детального анализа процесса электромагнитного
итаимодействия РЛС и сцены необходимо рассмотреть математическую
модель излучения антенны в ближней зоне локации и методы расчета
шектромагнитных полей рассеяния элементов полигональных моделей.
Для анализа процесса электромагнитного взаимодействия РЛС и
сцены следует сформировать математическую модель антенны РЛС с
требуемой диаграммой направленности и поляризационной характери-
стикой. Одним из важнейших параметров антенны РЛС является ее век-
торная нормированная характеристика направленности [51] F, полно-
стью определяющая угловое распределение и все поляризационные и
фазовые свойства электромагнитного поля в дальней зоне антенны. В
самом общем случае векторная комплексная характеристика направлен-
ности состоит из произведения трех сомножителей, описывающих соот-
не т ственно амплитудную, фазовую и поляризационную структуру даль-
него ноля антенны [51]:
F = F exp(i Ф)Е0 , (2.43)
। де F - амплитудная характеристика поля; Ф - фазовая характеристи-
ка поля; Ео - поляризационная характеристика поля; i = .
93
Миллиметровая радиолокация: методы обнаружения и наведения ...
Для описания характеристик антенны, входящих в соотношение
(2.43) вводится система координат антенной системы (рис. 2.34), вклю-
чающая три вектора единичной амплитуды: г - вектор, определяющий
направление на максимум излучения (приема) антенны; ej,e2 - векторы
поляризационного базиса антенны. Считается, что все три вектора взаим-1
но ортогональны, причем вектор г соответствует оси х системы коордич
нат антенны, вектор е, - оси у данной системы координат, а вектор е2 -
оси z (рис. 2.34). Ориентация осей системы координат в пространстве оп-
ределяется для1 заданного йЩЖйия антенны РЛС относительно объекта,
Считается, что плоскость системы координат антенны хоу - угломестная
(меридианальная), а плоскость xoz - азимутальная (экваториальная). По-
ляризационный базис антенны лежит в плоскости yoz. Угол 02 отсчиты-
вается в азимутальной плоскости, а угол ву - в угломестной плоскости.
При этом характеристики поля антенны (2.43) задаются в системе коор-
динат антенны в зависимости от углов (0v, 0.).
Вещественный сомножитель в (2.10) F(0y,02) представляет собой
амплитудную характеристику (диаграмму) направленности по полю,
нормированную таким образом, что max(F(6,v,6,„))=l. Диаграмма на-
правленности антенны (ДНА) может быть получена как расчетным, так
и экспериментальным путем. Векторный сомножитель Ео в (2.43) пред-
ставляет собой единичный вектор поляризации с двумя компонентами,
ориентированными по направлениям единичных базисных ортов ej и
е2 в системе координат антенны (рис. 2.34):
94
Глава Z Методы исследования полей рассеяния электромагнитных волн...
EQ = AMexp(iy/)ei+Ae2e2,
(2.44)
/1ri, Ае2 - компоненты вектора поляризации, причем ре||2 +|^2|2 = 1 >
показывающие относительное содержание вертикальной и горизонталь-
ной составляющих вектора напряженности электрического поля в даль-
ней зоне антенны, а цг определяет фазовый сдвиг между этими компо-
нентами. Предполагается, что ось z (составляющая по е?) соответствует
1лавной поляризации антенны РЛС. Второй, компонент вектора поляриза-
ции, ортогональный главному компоненту, считается кроссполяризацион-
ной составляющей поляризации антенны. Компонента главной поляриза-
ции полагается вещественной с амплитудой Д2, а компонента кросспо-
ляризационной составляющей считается комплексной Ael exp(i у/).
Антенная система РЛС способна излучать и принимать электромаг-
нитные волны трех типов поляризаций: эллиптическая, круговая, линей-
ная. В зависимости от типа поляризации компоненты Ае1, Ае2 будут вы-
числяться по-разному. Тип поляризации зависит от значений геометри-
ческих параметров эллипса
поляризации (рис. 2.35), а
именно от коэффициента
эллиптичности г, который
представляет собой отно-
шение малой и большой
главных осей эллипса и уг-
ла ориентации 0 большой
оси эллипса в поляризаци-
онном базисе. Эллипс поля-
ризации представлен на
плоскости, касательной к
сферическому фронту вол-
ны в окрестности выбран-
ной точки наблюдения.
Для эллиптической
поляризации коэффициент
эллиптичности может при-
Рис. 2.35. Поляризационный базис
антенны РЛС
нимать любое значение в диапазоне {г 0 , -1 < г < 1}, а угол поворота
ограничен значениями 0°<Д<180°. Принято приписывать величине г
знак плюс при правом вращении Ео, а минус - при левом. Для эллип-
тической поляризации компоненты вектора (2.11) вычисляются из сле-
дующих соотношений [51]:
95
Миллиметровая радиолокация: методы обнаружения и наведения ...
cos2(/7) + r2sin2(/7)
ГТТ2 ,А(
4
<2 I 2г ]
1е2 ,;/ = arctg ---------------- ,
Ц1 — r2)sin(2/7) )
Для правой круговой поляризации коэффициент эллиптичности
должен принимать значение г = 1, а для левой - соответственно г = — 1,
Угол поворота при этом должен лежать в пределах 0° < р <180° . В слу-
чае круговой ( поляризации .компоненты вектора (2.44) определяются
следующим образом: - ./гл
V 1 + г
Для формирования линейной поляризации электромагнитной вол-
ны коэффициент эллиптичности должен принимать значение г=0. При
этом угол р определяет ориентацию вектора напряженности электриче-
ского поля в поляризационном базисе антенны (рис. 2.35). Угол поворо-
та р для линейной поляризации может принимать любое значение из
диапазона -360° < р <360°. При линейной поляризации составляющие
вектора (2.44) зависят только от угла р и определяются из соотноше-
ний: 4i = sin(/7), у/ = 0 , 4г = cos(/7).
Соотношение для вектора поляризации антенны (2.44) справедливо
лишь для дальней зоны локации и соответствует направлению на макси-
мум ДНА, когда углы поворота сферической системы координат
ву=в.=0. В ближней зоне локации возникает эффект трансформации
поляризационного базиса антенны (см. рис. 2.35). При этом в боковом на-
правлении излучения (приема) возникает локальный поляризационный
базис {е°,е2} в направлении локального направляющего вектора г0. Век-
тор е®(4>^) характеризует поляризацию антенны в меридианальной
плоскости системы координат (см. рис. 2.34), а вектор е2(Д) - в эквато-
риальной плоскости. По аналогии с основным поляризационным базисом
антенны вектор е°(4) определяет направление главной поляризации в
локальном базисе, а вектор е®(#,„#..) - кроссполяризационной компонен-
ты. Представление вектора поляризации антенны в локальном поляриза-
ционном базисе связано с перераспределением амплитуд составляющих
основного поляризационного базиса антенны по боковым направлениям
излучения (приема) и выглядит следующим образом:
Е0(4,Я) = 4е?(4,4) + 4е®(4), (2.45)
96
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
А = Ai exp(i;/),
(2.46)
^2 - Л2,
(2-47)
। де Af, А2 - составляющие ортов локального поляризационного базиса
шггенны.
При вычислении напряженности поля рассеяния ЭО считается, что
падающая на отражатель и отраженная от него электромагнитные волны
считаются плоскими, а излучение и прием ведутся на линейной поляри-
1ации. Для вычисления напряженности поля рассеяния отражателя не-
обходимо сформировать ортогональный базис падающей на отражатель
плоской волны и локальный базис приемной антенны, соответствующий
приему плоской волны, рассеянной отражателем. В соответствии с по-
ияризационной моделью антенны (2.45)-(2.47) структура базиса пло-
ской волны содержит единичный вектор в направлении на данный ЭО и
дна ортогональных единичных вектора, которые характеризуют поляри-
зацию волны = {rm,e°m,e°m}. В соответствии с (2.45) вектору линей-
ной поляризации е°т соответствует амплитуда А}т, а вектору е2т -
компонента А2т.
В соответствии с общепринятыми представлениями [52] вектор
напряженности поля плоской электромагнитной волны, падающей на
ЭО, находящийся на расстоянии Rim от передающей антенны, опреде-
ляется следующим образом:
IP/D/Zq exp(i(/7?,m + м))
Г,. — _ I---- - ' г.
/т ~ г> im ’
V 2тг
(2.48)
। де Р, - мощность сигнала, излучаемого передающей системой; £>, - КНД
передающей антенны в направлении максимума излучения, Zo = 120 л
|()м] - волновое сопротивление воздуха; Rlm - расстояние между фазо-
вым центром антенны и началом системы координат ЭО; га = 2л/ - кру-
говая частота электромагнитных колебаний; Fzm - векторная характери-
стика направленности передающей антенны в направлении на ЭО.
Учитывая представление векторной характеристики направленности
ан тенны в виде произведения трех сомножителей, а также соотношение для
вектора поляризации падающей на ЭО плоской волны (2.45) напряжен-
ность поля (2.48) вблизи ЭО удобно записывать в матричном виде:
II/. II = lPiDiZo cxP^kR:m +^ + Ф))F Ik'J /249)
у kJ
97
Миллиметровая радиолокация: методы обнаружения и наведения...
где Fim - значение функции направленности передающей антенны в на
правлении на /и-й ЭО; Ф - начальная фаза передающей антенны.
Вектор напряженности поля, рассеянного ЭО, в точке расположи
ния приемной антенны РЛС также определяется в матричном виде:
Z’O/o exp(i(^,m + cot + Ф)) ц ц
Р;м
_ _--------im iirintll
где ||Дт| _ поляризационная матрица рассеяния (ПМР) ЭО; Це^Ц -
вектор-столбец компонент вектора напряженности рассеянного поля Я
направлении поляризационных ортов е°т и e°m ; Rsm - расстояние меж-
ду ЭО и фазовым центром приемной антенны.
Поляризационная матрица рассеяния описывает рассеивающий
свойства ЭО в зависимости от поляризационных характеристик пере-
дающей и приемной антенн. При этом считается, что индекс z соответ-
ствует облучающей волне, as- вектору поляризации приемной антен-
ны. Каждый элемент ПМР (2.51) представляет собой комплексный ко-
эффициент отражения ЭО [12], который определяется из следующего
соотношения:
Д' (2.52)
где Ё°т - величина напряженности поля рассеяния ЭО, которая вычисляет-
ся для случая, когда излучение и прием ведутся на линейной поляризации.
В соответствии с (2.52) комплексный коэффициент отражения ЭО
выражается в метрах и не зависит от амплитуды электромагнитной вол-
ны, падающей на ЭО, а также от расстояния до фазового центра пере-
дающей антенны. При этом комплексный коэффициент отражения на-
ходится в функциональной зависимости от геометрических размеров
ЭО, его электродинамических параметров, а также от его ориентации в
пространстве относительно передающей и приемной антенн РЛС. В за-
висимости от типа ЭО (треугольник или острая кромка), а также от про-
исхождения источников электромагнитного поля на поверхности ЭО
комплексный коэффициент отражения (2.52) будет вычисляться с ис-
пользованием различных методов.
Величина напряженности поля рассеяния /и-м ЭО, принятого в
апертуре приемной антенны, определяется в результате скалярного про-
изведения вектора напряженности рассеянного поля вблизи приемной
98
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
пигенны (2.50) на вектор поляризации приемной антенны (2.45) в на-
правлении на данный ЭО:
Esm = (EjmEom) = . (2.53)
После подстановки в (2.20) выражений для составляющих вектора
напряженности рассеянного поля вблизи антенны получим окончатель-
ное выражение для вычисления величины напряженности поля рассея-
ния m-го ЭО, принятого в апертуре приемной антенны РЛС:
Р _ IPfiiZ0 ехра(^,.и + юг + Ф))
\ ;---- imPsm--------—----------> (2-54)
Psm ~ (Plm-^lm + P2mZ2m^\m + (Plm\m + Р2тАт)-^2т • (2-55)
С использованием соотношения (2.54), для каждого ЭО вычисля-
ется величина напряженности поля рассеяния, принятого в апертуре
приемной антенны, а затем подставляется в (2.42) для получения вели-
чины напряженности результирующего дифракционного поля рассеяния
псей радиолокационной сцены:
yv_i ------Ут-1
А = У Г = PiDiZ0 V F П еХР(’(^/И+^ + Ф))
^расЕ / . ^sm о / . ^imPsm D D • (2.56)
m=0 ’ RimRsm
На основе поляризационной модели поля рассеяния радиолокаци-
онной сцены, заданной своей полигональной моделью, получено соотно-
шение для расчета величины результирующей напряженности электриче-
ского поля рассеяния, принятого в апертуре приемной антенны РЛС.
2.7.3. Комплексные коэффициенты отражения элементов
полигональной модели цели
В соот ветствии с формализацией процесса рассеяния электромагнитных
волн квазионтического диапазона на объектах сложной пространствен-
ной конфигурации в качестве методологической основы при вычисле-
нии полей рассеяния объектов наиболее рационально использовать ме-
тл ФТД применительно к полигональной модели геометрического об-
раза целей. Использование дифференциальных зависимостей уравнений
Максвелла не удобно для решения практических задач, поскольку они
устанавливают количественные соотношения между компонентами
>лектромагнитного поля и их источниками в дифференциально-малой
области пространства (времени). Наибольший интерес представляет оп-
ределение компонент электромагнитного поля в любой точке простран-
ства (времени) как суммарного (интегрального) воздействия первичных
п вторичных нолей источников, распределенных по поверхности эле-
ментов полигональной модели объекта.
99
Миллиметровая радиолокация: методы обнаружения и наведения...
В качестве источников электромагнитного поля на поверхности
элемента (ЭО) полигональной модели рассмафиваются сторонние элек-
трические токи и заряды:
je=[nxHr], jm=-[nxEs], ре =-£-(п Ех), pm=/z (n-H£), (2.57)
где Ее,Н^ - напряженность суммарного электрического и магнитного
полей на поверхности ЭО; п - вектор нормали к поверхности ЭО; £,р -
диэлектрическая и магнитная проницаемости ЭО.
Напряженность электрического и магнитного полей рассеяния ЭО,
которое возбуждается источниками (2.57), определяется на основе инте-
грала Стрегтона-Чжу:
Е,=-/- (2.58)
4*/l £ J
Hp=-L fJZ^jm+[jexV^]+^V^p5, (2.59)
4л- J [ A J
где к = 2 л- / Л - волновое число; S - площадь поверхности ЭО полиго-
нальной модели.
Для определения поля вторичного излучения (2.58), (2.59) необхо-
димо найти источники вторичных волн (2.57), которые образуются на
поверхности ЭО при его облучении первичным полем. Эти источники
вторичного излучения можно определить различными методами, кото-
рые условно разделяют на точные, асимптотические и эвристические.
В соответствии с методом физической оптики напряженность ди-
фракционного ноля рассеяния плоского треугольника (рис. 2.36) опре-
деляется с использованием интеграла Стреттона-Джу:
Е^ =— J(zA:^[nx Ну] + [[пхЕу]х V^] + ((nEj-)V^))<5S , (2.60)
1 s
где S - площадь треугольного элемента; ф - векторная функция Грина;
Еу, - электромагнитное поле на поверхности треугольника.
При вычислении дифракционного поля рассеяния треугольника
используется понятие векторной функции Грина. В теории электромаг-
нитного поля под векторной функцией Грина понимается напряжен-
ность магнитного поля от источника с единичным дипольным момен-
том. При этом выражение для функции Грина и ее градиента в направ-
лении приема электромагнитного излучения г5 (рис. 2.36) имеет сле-
дующий вид:
^exp(i^-pr;)), (261)
Rsm
100
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Уф = -\кг,ф, (2.62)
|де Л5т - расстояние от начала системы координат m-vo треугольника
до фазового центра приемной антенны (рис. 2.36).
Рис. 2.36. Схема радиолокации плоского треугольного элемента
полигональной модели
После подстановки соотношения для градиента функции Грина
(2.62) в (2.60) интеграл Стреттона-Джу для дифракционного поля рас-
сеяния треугольника определяется следующим образом:
ik г
Кр= — [([nxH^-nnxEslxrJ-an^k^WS. (2.63)
S
В соответствии с представлением суммарного электромагнитного
ноля на поверхности треугольника в виде векторной суммы падающего
на плоскость треугольника поля и поля, отраженного от плоскости тре-
угольника по законам геометрической оптики, интеграл Стреттона-Чжу
(2.63) удобно представить в виде:
Е=^[Т£О^5, (2.64)
р 4л- J
s
T = [nxHI]-[[nxE£]xrJ = Tp+Th, (2.65)
Tv =[nxHj]-[[nxEy]xrJ, (2.66)
Th =[nxH^]-[[nxE^]xrJ . (2.67)
101
Миллиметровая радиолокация: методы обнаружения и наведения ...
где слагаемое (пЕ^)г5, имеющее место в (2.63), исключено из рассмот-.
рения, так как для плоской волны (rses) = 0.
После подстановки выражений для суммарного поля [52] в форму-'
лы (2.65)-(2.67) соотношения для вертикально и горизонтально поляри-
зованных составляющих вектора Т будут иметь следующий вид:
Tv = (1 + Fv)• ([г, хе,]-z0)(z0 • t) • р - (1 - Fv) • (е, • у0) • (у0 • р)• [г, хt], (2.68)
Th = (Fg -1) • ([г,- х е, ] • у0Хуо р) • t - (1 + Fh) (е; • z0) • (z0 t) • [p x r5 ]. (2.69)
С учетом выражения для функции Грина (2.61) интегральное соот-
ношение для дифракционного поля рассеяния плоского треугольника
(2.64) имеет вид:
Е = г expW^ + ^-qp))^
Р 4^J RimRsm
где q = rs - г, - разностный направляющий вектор; р = {х, 0, z} - радиус-
вектор, проведенный в точку на плоскости треугольника (рис. 2.36).
Для оценки интеграла (2.70) используется метод стационарной фа-
зы, сущность кторого заключается в том, чтобы вычислить интеграл в
точке, для которой показатель экспоненты (i^(^,m+7?im)-itqp) в по-
дынтегральном выражении (2.70) изменяется значительно медленнее,
чем в других точках. Такая точка носит название точки стационарной
фазы. Применение метода стационарной фазы к интегралу (2.70) озна-
exp(it(7?,„ + R^m))
чает, что множитель Т--------—---—— можно вынести за знак инте-
грала, взяв его значение в точке стационарной фазы. Если при этом до-
пустить, что размеры треугольника значительно превышают расстояния
до источника и приемника излучения, то погрешность, которая получа-
ется при использовании этого метода, является незначительной. Таким
образом, с учетом метода стационарной фазы интеграл Стреттона-Джу
приобретает следующий вид:
(2.71)
В результате умножения вектора напряженности электрического
поля рассеяния треугольника (2.71) на один из поляризационных ортов
приемной антенны, спроектированных в направлении на данный тре-
угольник, получим величину напряженности поля рассеяния в зависи-
мости от поляризационных соотношений при излучении и приеме:
102
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
Espj =АехР^^ + JJexpf—iZrqp)cZ«/z, (2.72)
t,s=T-es, T?=(jv}+tb})-e°, T'=(tv2+tK)-^,
t? = (tvl + Tgl) • e“, Г22 = (Tv2 + th2) • e2,
Tvi = (1 + Fv) • ([r,. xe“] z0)(z0 • t) • p -(1 -Fv) • (e“ • y0) • (y0 p) • [r, xt],
Tv2 =(! + /;)• ([r; x e2] • z0)(z0 • t) p - (1 - Л) ’ (e“ • Уо) • (У0 • P) к,x 4,
th|=(Fh-l)-([r,xe?]-yo)(yop)-t-(l + Fh)-(e“-zo)-(zo-t)-[pxrJ,
Th2 =(Fh-l)-([r,xe2]-yo)(yo-p)-t-(l + Fh)-(e2-zo)-(zo-t)-[pxrJ,
i де t\s - проекция вектора (2.65) на поляризационный орт приемной ан-
leinibi; е“,е2 - векторы локального поляризационного базиса в направ-
лении на треугольник; /’v,Fh - коэффициенты отражения от плоскости
треугольника для вертикальной и горизонтальной поляризаций.
Коэффициенты отражения Fv,Fh вычисляются на основе метода
геометрической оптики (ГО) для треугольника, покрытого многослойным
радиопоглощающим покрытием (РПП). Алгоритм расчета Fv,Fh органи-
зуется на основе ступенчатого пошагового вычисления коэффициента от-
ражения, начиная с последнего слоя покрытия [53]. При этом если по-
верхность треугольника не содержит РПП, то Fv,Fh представляют собой
коэффициенты отражения Френеля для треугольника из однородного ма-
1ериала. Выражение (2.24) получено с использованием метода Гордона,
согласно которому поверхностный интеграл источников на плоскости
феугольника заменяется криволинейным интегралом по контуру, огра-
ничивающему треугольник.
Вычисление двойного интеграла в соотношении (2.72) осуществ-
ляется с использованием метода Гордона [52]:
[exp(-iAqp)c75 = -—У Д , (2.73)
S |Ч1| 'к /л
(к
sin -(q^(a,ti-a,.)) ,
Д = (q*i(a,+i -а,.))—£------------~ехр -i-(qi(a/4j + а;)) , (2.74)
— (Ч1(а/+|-а,)) 2 7
ai = {7]х,0,0} > а2 = {7^,0,P2z}, а3 = {/^,0,P2z}, а4 = й], (2.75)
103
Миллиметровая радиолокация: методы обнаружения и наведения ...
чества полигональной сетки, описывающей поверхность сцены.
В случае если плоский треугольный элемент полигональной моде-
ли сцены является частью подстилающей поверхности, то его ком-
плексный коэффициент отражения определяется из соотношения:
Pt = exp(i(^im + фт)),
где сгудт - удельная ЭПР элемента подстилающей поверхности; Rsm -j
расстояние от центра треугольника до приемной системы РЛС; фт ;
случайная фаза рассеянного поля, распределенная равномерно в преде*
лах [0.. .2л]; Sm - площадь треугольника.
Методы вычисления удельной ЭПР различных типов подстилам»
щих поверхностей подробно изложены в [55]. !
Для вычисления полей рассеяния острых кромок элементов сцену
используются методы краевых волн и ФТД. Комплексный коэффициент
отражения острой кромки (рис. 2.38), полученный на основе примена
ния этих методов, представлен в следующем виде [52]:
ft =----ехР(‘^)— TsL sm(£) ехр(_j ,
2^sin(y,)sin(y5) £
Т’ = (е;t)([г5 х [г5 х t]] • е5 )F + ([г,, х е,. ] • t)([r, х t] • es )G ,
где % = kqxL/2\ yj,}'s - пространственные углы между направляющим]
векторами г, , г, и вектором t = {1,0,0}; е, (е5)-вектор локального по
ляризационного базиса передающей (приемной) антенны.
Рис. 2.38. Схема радиолокации острой кромки полигональной модели объекта
106
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
В [27] показано, что при моностатической локации амплитуды кра-
сных источников возбуждения F и G рационально определять через ко-
эффициенты дифракции в форме Уфимцева.
Для обобщения перечисленных математических моделей ком-
плексных коэффициентов отражения элементов полигональных моде-
нец в рамках единой методики цифрового моделирования используется
разработанный ранее объектно-ориентированный метод исследования
1лектромагнитных полей рассеяния ЭО [56-58]. Применение объектно-
ориентированной технологии для цифрового моделирования процесса
рассеяния электромагнитных волн на ЭО полигональной модели пре-
доставляет значительные преимущества в универсальности и эффектив-
ности методики расчета по сравнению с уже известными методами.
В соответствии с концепцией объектно-ориентированного про-
граммирования методы расчета электромагнитного поля рассеяния каж-
дого элемента (треугольник, кромка) представляются в форме объектно-
ориентированных классов. Каждый класс содержит приватные данные,
представляющие собой параметры данного типа отражателя и методы
оценки его поля рассеяния. В соответствии с описанными выше матема-
। ическими моделями рассеяния радиоволн на различных типах огража-
юлей формируется два класса-метода, характеризующие рассеивающие
свойства этих отражателей: класс-метод треугольного элемента и класс-
метод острой кромки. Все классы-методы являются наследниками двух
базовых классов, в которых формируются векторы базисов падающей и
отраженной волн, а также электродинамические параметры элемента
полигональной модели в зависимости от длины волны £-(Я),Д(Я). Объ-
ект класса-метода создается на этапе расчета и представляет собой про-
цесс взаимодействия плоской электромагнитной волны с элементарным
отражателем, обладающим определенной совокупностью электродина-
мических параметров. Созданный объект класса-метода позволяет вы-
числить комплексный коэффициент отражения соответствующего ЭО в
процессе суммирования полей от всех элементов данного типа.
2.7.4. Математическая модель энергетических характеристик
входных сигналов РЛС и характеристик рассеяния объектов
в ближней зоне локации
В качестве энергетической характеристики входного сигнала РЛС ис-
пользуется его мощность, выделяемая в согласованной на1рузке прием-
ной антенны. При этом основной задачей является построение матема-
тической модели для вычисления мощности сигнала, отраженного от
сцены, заданной своей полигональной моделью. Методологической ос-
новой такой модели является формализация процесса рассеяния элек-
фомагнитных волн от радиолокационной сцены в виде (2.56). Для РЛС,
работающей в непрерывном режиме излучения радиоволн мощность
107
Миллиметровая радиолокация: методы обнаружения и наведения ...
входного сигнала, выделяемая в согласованной нагрузке антенны, опре«
деляется из следующего соотношения [51]:
P = pBXf/(2Za), (2.78J
где Свх - амплитуда напряжения входного сигнала РЛС; Za - сопро»
тивление излучения антенны. '
Результирующее напряжение в нагрузке приемной антенны f7BXl
возникающее от воздействия всех ЭО, образующих полигональную мо-
дель сцены, определяется по аналогии с (2.56) в результате когерентно-
го суммирования парциальных напряжений, возникающих в нагрузке
антенны от воздействия каждого ЭО:
,VZ-I
£>»х = ’ (2-79),
т=0
где Um - напряжение, возникающее в нагрузке антенны от воздействия,
т-го ЭО.
Напряжение в согласованной нагрузке приемной антенны, полу-
ченное от воздействия /и-го ЭО, определяется произведением величины
напряженности его электрического поля рассеяния на модуль дейст-
вующей высоты антенны:
Id 7
Um = Esmha; \ (2.80); (2.81)
V 4л-И0
где /га - модуль действующей высоты приемной антенны; Fsm - значе-
ние функции направленности приемной антенны в направлении на т-й
ЭО; Ds - КНД приемной антенны в направлении максимума излучения.
С использованием соотношений (2.56), (2.79)-(2.81) результирующее
напряжение возникающее в нагрузке приемной антенны РЛС от воздей-
ствия сцены в ближней зоне локации, определяется следующим образом:
^~| I рпП7
Um =Уит= exp(i(tar + Ф)) t;, (2.82)
т=о '
jVy-l
2/ = У FbFp ; (2.83)
/ /^1 till Mrtf afTt п п ' X /
m-0 KimKsm
где £ - результирующий коэффициент рассеяния объекта, выражен-
ный в [ 1/м]; psm - комплексный коэффициент отражения ЭО.
В результате подстановки выражения для расчета действующего
значения входного напряжения (7ВХ (2.82) в (2.78) мощность входного
108
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
гш пала РЛС, работающей в непрерывном режиме излучения, будет вы-
•11Н ПЯться на основе следующего соотношения:
о_ wviitd2
Р~ (W И
(2.84)
Энергетические характеристики входных сигналов РЛС напрямую
пинаны с энергетическими характеристиками рассеяния радиолокаци-
онных сцен. В классической теории радиолокации в качестве энергети-
ческой характеристики рассеяния используется понятие ЭПР, которая
определяется в дальней зоне излучения антенны. Очевидно, что для
о(н.екта, находящегося в ближней зоне излучения антенны, когда пре-
дел R -> со не выполняется, классическое соотношение не может быть
использовано для вычисления ЭПР объекта. В этом случае ЭПР объекта
будем определять из уравнения дальности радиолокации [59]:
Р =
PjDjD^F^F^
(4л-)3/?4
(2.85)
где Р - мощность входного сигнала РЛС; R - расстояние между условной
ючкой сцены и фазовым центром антенны; Д. (Fv) - значение функции
нпправленности передающей (приемной) антенны в направлении на ус-
ловную точку сцены.
Из уравнения (2.85) ЭПР объекта будет определяться мощностью
и сраженного от него сигнала, расстоянием до антенны и значениями
функций направленности передающей и приемной антенн в направле-
нии на объект:
<т = (4л-)3/?4
Р
PiDiDsA2Fi2F^ '
(2.86)
В случае если облучаемый участок сцены имеет такой линейный
рпзмер L, что на расстоянии R до фазового центра антенны не выполня-
йся критерий дальней зоны, то соотношение (2.86) будет определять
ЭПР сцены в ближней зоне локации. После подстановки в (2.86) соот-
ношений для вычисления мощности входного сигнала РЛС получим для
расчета ЭПР в ближней зоне локации следующее выражение:
2
_ 4л-/?4 I • s|2 4л-/?4 FimFsmpsm exp(ikRim)
--^2 L jtr
1 I 1 s ri rs m=0
Из соотношения (2.87) наблюдается зависимость ЭПР в ближней
tone от расстояния до антенны и от функции направленности передаю-
щей и приемной антенн.
Для участка сцены, находящегося в дальней зоне излучения антен-
ны, когда расстояние от условной точки сцены до фазового центра при-
109
Миллиметровая радиолокация: методы обнаружения и наведения ...
емной антенны удовлетворяет критерию дальней зоны выполняют^
следующие условия:
расстояния от всех ЭО до фазового центра антенны совпадают
расстоянием до условной точки сцены, т.е. Rlm = Rsm ® R ;
значения функции направленности передающей (приемной) антен!
ны в направлении на все ЭО полигональной модели совпадают с знача
нием функции направленности в направлении на условную точку сц$
ны.т.е. .
С учетом перечисленных условий получим из (2.87) ЭПР сцень|
заданной своей полигональной моделью, в дальней зоне локации:
2
/ j rsm
m-0
(2.8$
В отличие от ЭПР в ближней зоне, ЭПР сцены, находящейся :
дальней зоне (2.88) не зависит от расстояния и от функции направлен^
ности антенны. Модуль напряженности электрического поля рассеяний
радиолокационной сцены в дальней зоне локации можно записать |
следующем виде:
|£ |= Wp Ъ
I расх| У 2л R2
(2.89J
Величина модуля напряженности электрического поля, облучак)|
щего сцену в направлении на ее условную точку, определяется из выра(
жения:
1 'I У 2л R
(2.90;
После подстановки выражения (2.90) в (2.89) получим величин)
квадрата модуля результирующей суммы комплексных коэффициенте!
отражения элементов сцены в следующем виде:
_ д2 Impact|
wz-i
", Psm
m=0
Очевидно, что после подстановки (2.91) в (2.88) выражение для рас
чета ЭПР в дальней зоне локации приобретает вид, аналогичный класси-
ческой формуле:
Л
ст = 4л'« J--------т1-
|£.|
Таким образом, показано, что при переходе из ближней зоны в
дальнюю зону локации, выражение для расчета ЭПР сцены в ближней
(2.91;
(2.92^
110
Глава Z Методы исследования полей рассеяния электромагнитных волн...
зоне (2.87) приводится к классической формуле ЭПР точечного объекта
и дальней зоне локации.
Отдельной проблемой является вычисление мощности отраженно-
н> о г сцены сигнала для РЛС, работающей в импульсном режиме излу-
чения. Рассмотрим формирование отраженного от цели сигнала при им-
пульсном воздействии передатчика. Единичный импульс колебаний, ге-
нерируемых передатчиком, представляется в виде:
+ 0<г<ги,
' [о, ги</<Т,
(2.93)
I де Um = ^60Р, - амплитуда зондирующего импульса, постоянная в каж-
дом периоде повторения; - частота несущего колебания; ги - дли-
|сльность импульса; ф(. - начальная фаза колебания; t - время, отсчиты-
наемое от начала периода повторения; Т- период повторения импульсов.
Последовательность N импульсов, излучаемых передатчиком, оп-
ределяется по аналогии с (2.93) в следующем виде:
+ nT<t<nT + Tn,
U,(/)=( ,
[О, nT+ ти <t<(n + 1)Т,
(2.94)
где п = О, - номера излучаемых импульсов.
Для общности рассуждений будем рассматривать отраженный
сигнал только для одного импульса (2.94), принимая во внимание, что
импульсная последовательность может быть представлена как совокуп-
ность одиночных импульсов.
Величина напряжения одиночного импульса, отраженного от /и-го
ЭО, принятого на входе приемника, имеет вид:
М0 =
|t/m|cos((®0 + a>am)t + фй + О tm < t < ги + tm,
О, rK+tm<t<T, ’
(2-95)
где амплитуда отраженного импульса |(7т| находится из (2.80), началь-
ная фаза отраженного импульса определяется как аргумент комплекс-
ной функции фт =arg((/m); tm =(Rim + Rsm)/c - временная задержка им-
пульса с учетом его распространения от передатчика до ЭО и от ЭО к
приемнику.
Значение частоты Доплера, возникающее от эффекта взаимного
перемещения передатчика, приемника и ЭО, определяется в общем слу-
чае разнесения передатчика и приемника в следующем виде:
( (^рцГда) + (Vplirim)')
= 2л- —----------—£----- , (2.96)
I Л. J
111
Миллиметровая радиолокация: методы обнаружения и наведения...
где Vpu - относительная скорость ракеты и цели; rim - направляющи!
вектор из характерной точки m-го ЭО в фазовый центр антенны nepq
датчика (приемника).
Для преобразования спектра принятого сигнала в область видеочаЛ
тот используется классическое представления аналитического сигналя
действительной частью которого является сам принятый сигнал, а мни|
мой - соответственно преобразование Гильберта (Н?) самого сигнала:
%тр(О = Ч-е W + Чи(О = МО + ^(МО) •
Один из вариантов преобразования отраженного радиосигнала
комплексную огибающую состоит в том, что сигнал um(t) (2.95) пода
ется на два фазовых детектора, опорные напряжения которых I
и"п(0 сдвинуты по фазе на тг/2 друг относительно друга, а в оскаль
ном с точностью до амплитуды являются копиями излучаемого сигнал»
(2.39). В простейшей конструкции фазовых детекторов процесс преоб«
разования включает умножение входных сигналов и низкочастотную
фильтрацию результирующего сигнала. При этом на выходе фильтров
нижних частот в полосе ожидаемых доплеровских частот формируются
следующие сигналы от m-го ЭО:
^40
pm|sin(ft>^ + ^ + фт),
О,
lm Ги + /т>
(2.97)
«Г(0 =
Сигналы (2.97) можно рассматривать как действительную и мни-
мую составляющие комплексной огибающей отраженного сигнала.
|Ст| ехр(Кй>д„/ + ф0 + фт)), tm<t<TK+tm,
О, ги+/„</< Г,
МО = ^(0 + ^(0 = -
где t = О,...,Т - время, отсчитываемое от начала импульса.
Результирующие составляющие сигналов, принятых от всей цели,
определяются в результате суммирования отдельных импульсов (2.97)
принятых в разные интервалы времени t т по всем ЭО цели
О, г, + / < Z < Г,
. . . (2.98)
О, гн+Гот</<Г.
У£-1
«Ёе(о=£-
w=0
Л^-1
т=0
112
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
В соответствии с соотношением (2.78) модуль комплексной огибаю-
щей единичного импульса, отраженного от всей цели с учетом локальных
шдержек импульсов от отдельных отражателей, имеет следующий вид в
единицах мощности:
(иЕе(0) +{и£п(/))
(2.99)
Поскольку реализовать расчет огибающей мощности отраженного
(in пала по формулам (2.97)-(2.99) в аналоговой форме не имеется воз-
можности, представим зондирующий и отраженный импульсы в виде
набора дискретных отсчетов, для которых значения времени определя-
Ю1СЯ из соотношения:
tuJ=^- + lT, (2.100)
1дс u = 0,...,Nsig -1 - номер отсчета в пределах каждого одиночного им-
пульса; I = 0,...,W( -1 - номер периода повторения; Nsi - количество
in счетов в пределах импульса; - количество импульсов повторения
пн траектории движения цели.
В соответствии с (2.100) величины напряжения квадратурных сиг-
налов и огибающей мощности входного сигнала представляют собой
двумерные массивы данных:
Pxu.1 = Ш ’ «£./ =«“4./) . =4m('«./) (2.101)
В каждой из двумерных матриц (2.101) в столбцах хранятся значе-
ния квадратурных напряжений и мощности для каждого одиночного
импульса, а номер столбца определяет номер периода повторения /.
2.7.5. Сопоставление диаграмм ЭПР эталонного отражателя,
полученных на основе цифрового моделирования,
с результатами теоретических исследований
Дня идентификации ДОР, полученных в результате цифрового модели-
рования, с точными решениями задачи дифракции, представленными в
виде аналитических соотношений, наиболее рационально использовать
обьскты простой геометрической формы, которые носят название эта-
лонных отражателей. В ряде работ [15, 27] для таких объектов получены
hi пиитические соотношения для вычисления ЭПР. Результаты расчета
ДОР с использованием таких соотношений имеют достаточно высокую
। шпень совпадения с результатами экспериментальных исследований
для эталонных отражателей. В связи с этим на основе сравнительного
113
Миллиметровая радиолокация: методы обнаружения и наведения...
анализа ДОР эталонных отражателей, полученных в результате цифр!
вого моделирования и на основе общеизвестных аналитических cool
ношений, можно сделать вывод о правильности вычисления характер!
стик рассеяния методами цифрового моделирования. ,|
Наиболее простым с точки зрения пространственной конфигураця
объектом является сфера, поверхность которой не имеет изломов. Пол1
тональная модель сферы радиус
г = 25,4 см приведена на рис. 2.3
Данная модель была сформиров
на в среде 3DStudioMax и образ
вана из 32000 плоских треугол
ных элементов. Максимальнь
размер треугольного элемента 1
превышает / = 8,6 мм. Кроме тог
полигональная модель сферы £
содержит острых кромок, а межд
треугольниками не возника<
Рис. 2.39. Полигональная модель сферы
радиусом г = 25,4 см
(32000 треугольников)
двукратных переотражений вол
В связи с этим результируюгщ
напряженность поля рассеяни
принятого в апертуре приемно
антенны, определяется в результате когерентного суммирования поле
*гр-1
рассеяния плоских треугольников Ер1 = Ё^у = Ётр1 .
МО
Схема радиолокации сферы приведена на рис. 2.40. В качестве рае
стояния R до сферы будем принимать расстояние от ее центра масс до фа
зового центра антенны. Предполагается, что антенна РЛС совершает об
у ▲ лет вокруг сферы на расстоянии j
Рис. 2.40. Схема радиолокации
сферы
в плоскости YOZ таким образом
что направляющий вектор антец
ны г направлен в центр сферу
Вектор напряженности излучае
мого передающей антенной элек
трического поля Е, ориентирован
в плоскос ти YOZ на каждом ракурс
се траектории ее движения, т.е]
поляризация вертикальная. Угол
в задает положение антенны I
плоскости YOZ и определяется кам
угол между вектором г и осью А
системы координат сферы. В связи
114
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
г 1см, что сфера представляет собой симметричный в пространстве объект,
при вычислении ДОР азимутальный угол был принят равным ф = 0.
В результате ДОР сферы в зависимости от угла в, причем шаг по
у|лу был принят равным Д# = 1°. На каждом ракурсе траектории дви-
жения антенны РЛС вычислялась ЭПР сферы методом цифрового моде-
лирования. При вычислении ЭПР считалось, что вектор поляризации
приемной антенны РЛС ориентирован в направлении вектора поляриза-
ции передающей антенны Е, , т.е. поляризация при приеме - согласо-
иипная вертикальная.
В соответствии с общепринятыми представлениями [15] выраже-
ние для ЭПР идеально проводящей сферы в дальней зоне, полученное
аналитическим путем, запишем следующим образом:
^теор = • (2.102)
На рис. 2.41 приведены ДОР идеально проводящей сферы, причем
штриховой кривой показана зави-
симость сгтеор(Д), вычисленная с
использованием соотношения
(2.102), а сплошной линией обо-
значена зависимость сграсч(Д),
полученная в результате цифро-
вого моделирования на основе по-
лигональной модели сферы. При
вычислении ЭПР методом цифро-
вого моделирования длина волны
падающего излучения 2 = 3 см, а
величина расстояния от антенны
до сферы R = 500 м. При таких
условиях локации максимальный
размер объекта, удовлетворяю-
щий критерию дальней зоны со-
Угол 0,град
Рис. 2.41. Диаграммы обратного
рассеяния идеально проводящей сферы
на длине волны 3 см
ставляет Z.max = JrAJ2 = 1,9 м. Таким образом, сфера с диаметром d -
- 2г = 50,8 см на расстоянии 500 м находится в дальней зоне по отноше-
нию к антенне, так как d < Tmax. Как видно из графиков, флуктуации
расчетного значения ЭПР сферы (штриховая линия) относительно тео-
ретического значения не превышают 0,001 дБ, что может быть обуслов-
лено лишь погрешностью вычислений ЭПР. Теоретическое значение
ЭПР сферы, вычисленное с помощью соотношения (2.102), составляет
величину <гтеор = 202,683-10 Зм2. В результате цифрового моделирова-
ния получено усредненное по диаграмме значение ЭПР сферы
115
Миллиметровая радиолокация: методы обнаружения и наведения...
Л'-!
'V л w расч/
= 202,668 10“3м2 ,
гдеУ=91.
Таким образом, результирующая погрешность расчета ЭПР по
всей ДОР составила
Стеоп - ^пасч ' 1 00
s = ---P^I----= о, 015% ,
^теор
что свидетельствует о достаточно высокой степени совпадения резульЧ
татов цифрового моделирования с результатами теоретических вычис-
лений.
В случае, если материал сферы не является идеально проводящим,
а представляет собой диэлектрик с заданными электродинамическими
параметрами, то ЭПР сферы вычисляется по аналогии с (2.102) из сле-
дующего соотношения:
(2.103)
где с = e-iffyAg - комплексная диэлектрическая проницаемость мате-
риала сферы.
Диаграмма обратного рассеяния диэлектрической сферы с пара-
метрами материала г = 2,5, g = 0,5 См/м приведены на рис. 2.42. Зави-
симость ЭПР, изображенная на рисунках сплошной линией вычислялась
с помощью цифрового моделирования на основе когерентного сумми-
рования полей рассеяния треугольных элементов, с известными пара-
Угол 0, град
Рис. 2.42. Диаграммы обратного
рассеяния идеально проводящей сферы
на длине волны 3 см
метрами материала. Сплошной
линией изображена зависимость
ЭПР, вычисленная с использова-
нием аналитического соотноше-
ния (2.103). Условия локации
принимались такими же как и
для идеально проводящей сферы,
ДОР которой приведены на рис.
2.41, 2.42. По аналогии с рис.
2.41 и 2.42 наблюдается высокая
степень совпадения ЭПР, вычис-
ленной в результате цифрового
моделирования, с ЭПР, получен-
ной из аналитического соотно-
шения. Флуктуации расчетной
ЭПР относительно теоретической
116
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
кривой (рис. 2.42) не превышают 0,0025 дБ. Теоретическое значение
ЭПР сферы, вычисленное из соотношения (103) оказалось равным
(> = 13.146-10“3м2 . Величина ЭПР, вычисленной в результате цифро-
ного моделирования и усредненной но диаграмме (рис. 2.42), составила
w-i
1 r..ue4 = У, РаСЧ' = 13,151 10~3 м2 , где N = 91. Погрешность вычисления
i=o N
ЭПР диэлектрической сферы методом цифрового моделирования по
сравнению с теоретическим результатом составила
О’ “^расч 1*00
Л' -1-----ь—-----= 0,04%, что говорит о высокой точности вычисле-
^теор
пни характеристик рассеяния для диэлектрических объектов.
На рис. 2.43 приведены зависимости ЭПР идеально проводящей
сферы радиуса г = 25,4 см от расстояния R между центром сферы и фа-
ювым центром приемной антенны. При вычислении зависимостей ЭПР
были заданы следующие условия локации:
угол визирования 0 = 0 (антенна находится на оси х);
угол, задающий ориентацию вектора поляризации передающей и при-
емной антенны (5 = 90° (поляризация - согласованная вертикальная);
функция направленно-
сти антенны F = 1 по всем
направлениям излучения и
приема;
диапазон изменения
расстояния между сферой и
антенной R е (0,3...2,5) м;
шаг изменения рас-
стояния АЛ = 1 см.
В заданном диапазоне
дальностей сфера радиусом
I ~ 25,4 см находится в
ближней зоне локации по
Рис. 2.43. Зависимость ЭПР идеально
проводящей сферы от расстояния до антенны
in ношению к антенне. В
>гом случае электромагнит-
ная волна, облучающая сфе-
ру имеет сферический фронт.
На рис. 2.43 сплошной кривой обозначена зависимость ЭПР, полу-
чеиная в результате цифрового моделирования на основе полигональ-
ной модели сферы; штриховая линия обозначает зависимость ЭПР сфе-
ры того же радиуса при тех же условиях локации, которая получена в
результате теоретических вычислений, приведенных в [50]. В дальней
117
Миллиметровая радиолокация: методы обнаружения и наведения...
зоне ЭПР данной сферы вычислялась с использованием соотношений
(2.102) и показана на рисунке точками. Как видно из приведенных гра-
фиков, зависимости ЭПР, полученные в результате цифрового модели,
рования и на основе аналитических соотношений практически совпада-
ют между собой, что свидетельствует о правильности вычислений ха-
рактеристик рассеяния объектов в ближней зоне локации. В соответст-
вии с уменьшением расстояния между антенной и сферой ЭПР сферы
начинает резко увеличиваться по сравнению с ЭПР в дальней зоне.
В результате сравнительного анализа результатов цифрового мо,
делирования ЭПР сферы и соответствующих вычислений с использова-
нием аналитических соотношений показана высокая точность опреде-
ления характеристик рассеяния сферы с различными электродинамиче-
скими параметрами и при различных условиях локации.
2.7.6. Анализ результатов цифрового моделирования
входных воздействий РЛС и энергетических характеристик
рассеяния сложных объектов в ближней зоне локации
Для решения задачи цифрового моделирования входных воздействи)
РЛС в [56-58] был разработан комплекс алгоритмов и прикладных про-
грамм, позволяющий вычислять мощность отраженного от сцены сигна-
ла, а также характеристики рассеяния при различных условиях локации
В разработанной пршрамме инициализируются параметры РЛС, условии
локации радиолокационной сцены, а также параметры траектории отно<
сительного движения РЛС относительно элементов сцены. Кроме того, в
структуру программы входят блоки формирования полигональных моден
лей сцены и анализа затенений и маскировки элементов полигональный
моделей. Расчетный блок про1раммы обеспечивает непосредственное вьи
числение мощности отраженного от сцены сигнала на каждом кадре тран
ектории движения РЛС. При этом вычисление комплексных коэффициен-
тов отражения элементов полигональных моделей осуществляется на ос-
нове рассмотренного выше объектно-ориентированного метода. ’
Представляет большой интерес оценка характеристик рассеяния це-|
лей как в дальней, так и ближней зонах локации. Кроме того, представляет-?
ся возможным провести сравнительный анализ результатов цифрового мод
делирования на ЭВМ с аналогичными результатами экспериментальных
исследований, полученных для различных типов целей. В качестве пример®
были исследованы характеристики рассеяния таких радиолокационных це-ji
лей, как ракета АР-24, истребитель F-14 и истребитель F-117. Вычисление;
характеристик рассеяния целей проводилось на основе их полигональных?
моделей, которые были сформированы в различных САПР.
Полигональная модель ракеты АР-24, сформированная в среде;
Pro/Engineer, приведенная на рис. 2.26, образована из 143000 треуголь-
ников и 7820 острых кромок. Максимальный размер треугольного эле-
118
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
мента не превышает 1,5 см. Результирующее поле рассеяния ракеты оп-
ределяется в результате когерентного суммирования полей рассеяния
। реугольников (в том числе за счет переотражений) и острых кромок.
Ракета АР-24 представляет собой симметричный с точки зрения про-
странственной формы объект, причем длина ее боковой поверхности
составляет 4,2 м, а размах крыльев соответственно 1 м. Схема радиоло-
кации ракеты приведена на рис. 2.44, где показано, что ось х проведена
вдоль оси ракеты, ось у - по нормали к плоскости крыльев ракеты, а ось
z - дополняет систему координат до правой тройки. Начало системы ко-
ординат расположено на расстоянии 2 м от ее передней точки.
Рис. 2.44. Схема радиолокации ракеты АР-24 (Ло = 2 м)
В результате цифрового моделирования на ЭВМ были получены
ДОР ракеты, находящейся как в дальней, так и в ближней зонах по отно-
шению к антенне, при различных условиях локации. Вычислении всех
ДОР ракеты проводилось в плоскости хоу (рис. 2.44), т. е. ф = 0°, в диапа-
зоне углов места <? = {0...90}° с шагом по углу Д<9 = 0,1°. На основе вы-
численных ДОР методом скользящего среднего определялись усреднен-
ные значения ЭПР в каждом угловом секторе шириной Д# = 15°. С ис-
пользованием усредненных значений ЭПР проводился сравнительный
анализ рассеивающих свойств ракеты при различных условиях локации.
На рис. 2.45 и 2.46 приедставлены ДОР ракеты АР-24, вычисленные
для случая, когда ракета находится в дальней зоне по отношению к ан-
тенне (расстояние от антенны до ракеты R = 1000 м). На рис. 2.45 в левой
полусфере приведена ДОР, полученная на согласованной вертикальной
поляризации, когда Д = Д, =90°, на длине волны Л = 3 см, а в правой
ДОР, вычисленная на ортогональной линейной поляризации, когда поля-
ризация передающей антенны принималась вертикальной (Д = 90°), а
119
Миллиметровая радиолокация: методы обнаружения и наведения ...
приемной антенны соответственно горизонтальной ( Д = 0°). В табл. 2.‘
приведены результаты сопоставления усредненных ЭПР, вычисленных н!
согласованной и ортогональной поляризациях. Средняя ЭПР на согласо-
ванной поляризации принимает значения в диапазоне ст = {0,03...51} м2,1
то время как кроссполяризационная составляющая ЭПР не превышав]
0,03 м2. В соответствии с рис. 2.45 и табл. 2.4 кроссполяризационньк
свойства ракеты в сильной степени зависят от ракурса ее облучения, I
диапазон изменения величины разности значений ЭПР на разных поляри-
зациях составляет (0,6.. .45) дБ.
Рис. 2.45. Диаграммы обратного рассеяния ракеты АР-24
в дальней зоне на длине волны Л = 3 см
Рис. 2.'46. Диаграммы обратного рассеяния ракеты АР-24
в дальней зоне на длине волны Я = 3 см
120
Глава 2. Методы исследования полей рассеяния электромагнитных волн ...
Таблица 2.4. Сопоставление усредненных расчетных значений ЭПР
ракеты АР-24 на согласованной вертикальной и ортогональной
поляризациях
Сектор усреднения, град Средняя ЭПР, м2 Разность значений, дБ
VV-поляризация VG-поляризация
0...15 0,069 0,017 6,05
15...30 0,036 0,031 0,59
30...45 0,032 0,0029 10,39
45...60 0,037 0,0022 12,29
60...75 0,131 0,0039 15,21
75...90 51,3 0,0016 45,03
В табл. 2.5 представлены результаты сопоставления усредненных
шачений ЭПР на согласованной вертикальной поляризации (рис. 2.45),
вычисленных методом цифрового моделирования и полученных в ре-
|ультате натурных измерений при тех же условиях локации. Как следу-
ет из данных, приведенных в табл. 2.5, величина относительной по-
грешности расчета ЭПР ракеты по сравнению с измеренными величи-
нами не превышает 4,3 дБ, что является удовлетворительным результа-
том при паспортной погрешности измерений не хуже 2 дБ.
Таблица 2.5. Сопоставление усредненных значений ЭПР ракеты АР-24
(согласованная вертикальная поляризация) полученных
в результате вычислений и натурных измерений
Сектор усреднения, град. Средняя ЭПР, м2 Погрешность, дБ
Расчет Измерения
0...15 0,069 0,08 0,62
15...30 0,036 0,08 3,5
30...45 0,032 0,05 1,9
45...60 0,037 0,1 4,3
60...75 0,131 0,19 1,6
На рис. 2.46 приведены ДОР ракеты АР-24, вычисленные на кру-
। овой поляризации, когда Д = Д. = 0° , а коэффициент эллиптичности
принимает значения г = ±1. В левой полусфере приведена диа1рамма,
вычисленная для случая, когда передающая антенна имеет правую по-
ляризацию (г = 1), а приемная - левую (г = -1). В этом случае считается,
чю РЛС работает в режиме согласованной круговой поляризации. Дли-
на волны падающего излучения Л - 3 см. Вычисленная на ортогональ-
ной круговой поляризации ДОР ракеты, когда г = 1 как для передаю-
щей, так и для приемной антенн, приведена в правой полусфере. Ре-
121
Миллиметровая радиолокация: методы обнаружения и наведения ...
зультаты сопоставления усредненных ЭПР, вычисленных на осно!
диаграмм, приведенных на рис. 2.46 приведены в табл. 2.6. На осно!
приведенных данных можно сделать вывод о том, что наибольшая д
поляризация ракеты АР-24 наблюдается при ее облучении на угла
близких к нормали к боковой поверхности. При этом диапазон измен
ний величины разности значений ЭПР на согласованных и ортогонал:
ных круговых поляризациях составляет (0,9...28) дБ.
Высокие значения кроссполяризационной составляющей ЭПР р
кеты объясняются эффектами двукратных переотражений электрома
нитных волн между различными элементами конструкции, а така
вкладами острых кромок, что говорит о необходимости учета этих я
лений при формировании результирующего рассеянного поля цели. Г
Таблица 2.6. Сопоставление усредненных расчетных значений
ЭПРракеты АР-24 на круговых поляризациях
Сектор усреднения Средняя ЭПР, м“ Разность значений, дБ
Ортогональная круговая поляризация Согласованная круговая поляризация
0...15 0,018 0,022 0,95
15...30 0,018 0,035 2,92 :
30...45 0,0067 0,016 3,72
45...60 0,0073 0,032 6,42
60...75 0,024 0,208 9,34
75...90 0,106 75,048 28,48
На рис. 2.47 приведена зависимость ЭПР ракеты от расстояния Д
фазового центра антенны. При вычислении этой зависимости были 3S
даны следующие условия локации:
угол визирования в = 90° (облучается боковая поверхность ракеты);
угол, задающий ориентацию вектора поляризации передающей ;
приемной антенны /3 - 90° (поляризация - согласованная вертикальная);
полуширина ДНА передающей и приемной антенн в обоих шкх
костях ДЯ0’5 = Д00'5 = 5°;
длина волны 2= 3 см;
диапазон изменения расстояния между ракетой и антенна
Я е (10000...1) м;
шаг изменения расстояния является динамическим: ДЯ = 1000 м
интервале значений R е (10000... 1000) м; ДЯ = 100м в интервале значе
ний R е (1000... 100) м; ДЯ = 0,1 м в интервале значений R е (100...1) м.
122
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Рис. 2.47. Зависимость ЭПР ракеты АР-24 от расстояния до антенны
(штриховая линия - значение ЭПР в дальней зоне, длина волны Л = 3 см)
Предельное расстояние, на котором ракету еще можно считать на-
ходящейся в дальней зоне по отношению к антенне, определяется из со-
отношения:
Л,„1П
47? 4-4,2
= 2363л/.
Л 0,03
Как видно из рис. 2.47, на расстояниях до антенны R > ЭПР
ракеты практически не изменяется, в то время как в области ближней
зоны, когда R < Rmin, ЭПР начинает уменьшаться с приближением ан-
1снны к ракете. Зависимость на рис. 2.47 показывает, что на расстояни-
ях R = {1...10} м ЭПР ракеты уменьшается на 30...35 дБ по сравнению с
соответствующим значением в дальней зоне.
На рис. 2.48 в правой полусфере приведена ДОР ракеты, вычис-
ленная при ее локации одиночным радиоимпульсом длительностью
г = 7 нс с частотой несущего колебания f0 = 10 ГГц. Как известно, при
локации объектов короткими импульсами длительность отраженного
импульса увеличивается по сравнению с зондирующим. В этом случае
величина ЭПР объекта при импульсной локации (левая полусфера)
должна быть меньше, чем при зондировании непрерывным сигналом.
Импульсная ЭПР на каждом ракурсе наблюдения определялась в ре-
зультате усреднения огибающей ЭПР в пределах длительности отра-
женного импульса. Как видно из рис. 2.48, импульсная ЭПР ракеты в
1,5...4 раза меньше, чем ЭПР, вычисленная для непрерывного сигнала.
При этом величина импульсной ЭПР снижается на тех ракурсах, где
увеличивается длительность отраженного импульса.
123
Миллиметровая радиолокация: методы обнаружения и наведения...
0. град
Рис. 2.48. Диа1раммы обратного рассеяния ракеты АР-24
в ближней зоне на длине волны Л = 3 см
Полигональная модель истребителя F-14 (рис. 2.49) была сформиро-
вана в пакете 3DStudioMax и образована из 50000 треугольников. По ана-
логии с АР-24 и ракетой «Пчела» ось х направлена вдоль оси самолета,
ось у - перпендикулярно плоскости крыльев, а ось z дополняет систему
координат до правой тройки. Центр системы координат самолета распо-
ложен на расстоянии 9м от его передней точки. Вычисление ЭПР осуще-
ствляется в плоскости крыльев самолета, т.с. в плоскости xoz. При вычис-
лении ДОР F-14 принимались следующие условия локации:
расстояние между антенной и центром самолета R = 100000 м
(дальняя зона);
поляризация излучения и приема - согласованная вертикальная
(Д=Д=90°);
длина волны 2=3 см;
диапазон изменения угла азимута ф = {0...90}0, шаг по углу
Д(^ = 0,01°.
Рис. 2.49. Схема радиолокации истребителя F-14 (Lo = 9 м)
124
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
На рис. 2.50 приведены ДОР истребителя F-14, вычисленные при за-
шитых условиях его локации методом цифрового моделирования на
•НМ. В правой полусфере приведена ДОР, полученная для идеально
проводящего самолета, а в левой - для самолета, покрытого диэлектриче-
ским однослойным покрытием. В качестве параметров покрытия были
приняты следующие значения: толщина слоя h = 5 мм, относительная ди-
шектричсская проницаемость s = 6, удельная проводимость g = 1 См/м,
ошоситсльная магнитная проницаемость и = 1.
Как видно из рис. 2.50, при наличии на поверхности идеально про-
водящего самолета однослойного диэлектрического покрытия с указан-
ными выше параметрами наблюдается уменьшение его ЭПР в среднем
ни (3,5...3,8) дБ в зависимости от ракурса наблюдения.
Полигональная модель другого истребителя F-117 (см. рис. 2.25)
была сформирована в среде Pro/Engineer и образована из 20000 тре-
укыьников. Схема радиолокации F-117 приведена на рис. 2.51. По ана-
Иогии с F-14 ось х направлена вдоль оси самолета, ось у - перпендику-
<Р, град
Рис. 2.50. Диаграммы обратного рассеяния ис гребителя F14
на длине волны Л = 3 см
Рис. 2.51. Схема радиолокации истребителя F-117 (Lo = 10 м)
125
Миллиметровая радиолокация: методы обнаружения и наведения...
лярно плоскости крыльев, а ось z дополняет систему координат до пра
вой тройки. Центр системы координат самолета расположен на расстоЯ
нии 10 м от его передней точки. Вычисление ЭПР осуществляется как?
угломестной (хоу), так и в азимутальной (тот) плоскостях. При вычис|
лении ДОР F-117 принимались следующие условия локации: d
расстояние между антенной и центром самолета R = 100000 1
(дальняя зона); j
поляризация излучения и приема - согласованная вертикальна
(Д=Д=90°);
длина волны 2 = 3 см; '1
диапазон изменения угла азимута в плоскости xoz ф = {0... 180}°*
шаг по углу \ф = 0,010; '
диапазон изменения угла визирования в плоскости хо
0 = {0...360}°, шаг по углу Д# = 0,01°. (
На рис. 2.52, 2.53 представлены ДОР истребителя F-117 соответст;
венно в угломестной и азимутальной плоскостях. В связи с тем, что па
раметры материала F-117 не известны, расчет проводился для идеальн!
проводящего материала.
Рис. 2.52. Диаграммы обратного рассеяния истребителя F117
на длине волны 2 = 3 см в плоскости хоу
126
Глава 2. Методы исследования полей рассеяния электромагнитных волн...
Рис. 2.53. Диаграммы обратного рассеяния истребителя F117
на длине волны Л = 3 см в плоскости xoz
В табл. 2.7 приведены результаты усреднения значений ЭПР F-117
н угловых секторах азимутальной плоскости (рис. 2.53). В соответствии
с рис. 2.52 максимальные значения ЭПР в угломестной плоскости F-117
наблюдаться при его локации по нормали к плоскости крыльев. При ло-
кации F-117 в передней полусфере угломсстной плоскости (диапазон
углов $={0...45}°) средняя ЭПР F-117 составляет ст= 0,02м2, а при его
локации в здней полусфере угломестной плоскости (диапазон углов
t) 1135...180}°) средняя ЭПР принимает значение сг= 0,01 м2.
Таблица 2.7. Усредненные значения ЭПР истребителя
F117 в плоскости xoz
Сектор усреднения, град. Средняя ЭПР, м2
0...15 0,0027
15...30 0,0035
30...45 0,005
45...60 0,032
60...75 0,0035
75...90 0,2
90...105 0,9
105...120 0,03
120...135 0,02
135...150 0,0045
150...165 0,01
165...180 0,001
127
Миллиметровая радиолокация: методы обнаружения и наведения ...
В соответствии с рис. 2.53 и данными табл. 2.7 средняя ЭПР ио
требителя F-117 в области носовых ракурсов азимутной плоскости со
ставляет ст - 0,003...0,005 м2, причем максимальное значение ЭПР 1
этой области не превышает значения ст= 0,02 м2. Наибольших значени!
в азимутальной плоскости средняя ЭПР достигает при облучении боко
вой поверхности истребителя (ст = 0,2.. .0,9 м2).
Таким образом, ЭПР истребителя F-117 даже без учета его радио
поглащающих покрытий составляет в среднем ст=0,003...0,02 м2, чт<
свидетельствует о достаточно низкой степени его радиолокационно!
заметности в сантиметровом диапазоне длин волн. Такие низкие значе
ния ЭПР F-117 обусловлены фасеточной формой образующих его по
верхностей (особенно это относится к фюзеляжу, имеющему пирам»
дальную конструкцию).
128
ГЛАВА 3
Математические модели характеристик
рассеяния подстилающих поверхностей
( оврсменные бортовые РЛС работают в сложной помеховой обстановке в
сити с чем оценка их помехозащищенности является одним из важнейших
напов отработки и испытаний. Испытания по оценке помехозащищенно-
с । н, учитывая современные алгоритмы обработки сигналов на борту, жела-
।еиьно проводить при условии поступления на вход РЛС всей совокупно-
CIH сигналов как полезного эхосигнала, так и помехового.
Для общности перечислим основные сигналы, приходящие на вход
РЖ’, которые необходимо воспроизводить в имитационной аппаратуре
комплексов полунатурного моделирования:
1. Полезный сигнал, отраженный от лоцируемой цели;
2. Сигналы, наводимые бортовыми станциями помех на вход
бортовой РЛС;
3. Сигналы на входе бортовой РЛС за счет отражения от под-
сшлаюшей поверхности.
Одним из приоритетных направлений совершенствования принци-
пов и методов проектирования современных РЛС, обладающих высокой
вероятностью обнаружения целей на фоне подстилающих поверхностей и
при наличии искусственных и естественных помех, является разработка
новых более совершенных методов математического и цифрового моде-
лирования рассеяния электромагнитных волн в ближней зоне локации.
Известно, что совокупность объектов сложной пространственной
конфигурации и подстилающая поверхность образуют радиолокацион-
ную сцену [1]. Анализ процессов облучения, рассеяния и приема элек-
|ромагнитных волн следует проводить применительно к модели инфор-
мационного радиолокационного канала (РЛК), элементами которого яв-
1ЯЮТСЯ передающая система РЛС, трасса распространения зондирующего
i ni нала, радиолокационная сцена, трасса распространения отраженного
сигнала, приемная система РЛС. Элементами радиолокационной сцены
могут быть: радиолокационная цель (самолет, вертолет, ракета); подсти-
лающая поверхность (морская поверхность, грунтовая поверхность, зра-
ка, кустарник, лес, местные предметы), а элементами РЛК на трассах рас-
пространения зондирующего и отраженного сигналов облако источников
пассивных помех для РЛС (дипольные отражатели, пыледымовые обра-
юпания); облако гидромегеообразований (дождь, снег, град, туман).
129
Миллиметровая радиолокация: методы обнаружения и наведения...
В качестве оператора рассеяния радиолокационной сцены Sf 1
данном случае будем рассматривать характеристику рассеяния подсп^
лающей поверхности, как один из помеховых сигналов, поступающий
на вход РЛС одновременно с полезным сигналом от цели. Для расчет!^
входного сигнала РЛС от подстилающей поверхности проведем сравни-
тельный анализ существующих методов расчета с учетом оригинальны!
современных концепций, базирующихся на использовании передовы!
компьютерных технологий и передовых математических методов. Вы-
бор конкретного метода расчета входного сигнала РЛС от подстилаю»
щей поверхности должен быть обусловлен, прежде всего, максимально!
адекватностью результатов расчета с данными экспериментальных ис-
следований от реальных земных покровов.
3.1. Анализ существующих методов математического
моделирования характеристик рассеяния
подстилающих поверхностей
За последние 50 лет было разработано множество теоретических моде-
лей, а также проведены многочисленные экспериментальные исследо-
вания по изучению рассеяния электромагнитных волн подстилающей
поверхностью. Результаты экспериментов характеризуются больший
разбросом значений, что связано с различиями в используемой при из-
мерениях аппаратуре, методике эксперимента и типами поверхности,
Основу большинства теоретических методов составляет решение клас-
сической задачи дифракции электромагнитной волны на участке по-
верхности. При разработке теоретических моделей рассеяния основной
проблемой является математически точное описание геомефической
формы подстилающей поверхности и идентификация ее свойств.
Основная характеристика поля рассеяния от реальной поверхности
- удельная ЭПР сгуа , которая определяется как отношение потока энер-
гии, рассеянной единичной площадью поверхности в направлении ни
антенну, к плотности потока при изотропном рассеянии. Однопозици-
онная удельная ЭПР поверхности для узкополосного зондирующегс
сигнала определяется из соотношения:
I# |2
сгуд = lim Дл'Т?21—, (3.1)
фпал! °обл
где R - дальность от приемной антенны до облучаемого участка, Е^ - на-
пряженность поля рассеяния облучаемого участка, Епял - напряженность
поля рассеяния падающей волны, - площадь облучаемого участка.
130
Глава 3. Математические модели характеристик рассеяния ...
В случае широкополосной радиолокации необходимо рассматри-
иагь величину удельной ЭПР как функцию частоты сигнала, т.е.
-> Студ(®) •
Существенной новизной информационного содержания обладают
РЛИ местности, которые интерпретируются как карта удельных ЭПР или
портрет (сигнатура) зондируемого объекта в случае высокого разрешения.
11рименение фрактальной концепции к таким задачам широкополосной
радиолокации позволяет сформировать адекватные модели радиолокаци-
онного канала и снизить потери априорной неопределенности.
Известные методы расчета характеристик рассеяния подстилаю-
щих поверхностей могут быть разделены на три класса: электродинами-
ческие методы статистического усреднения, феноменологические и
геометрические методы.
3.1.1. Классификация земных покровов
Учитывая многообразие реальных земных ландшафтов возникает необ-
ходимость в их классификации. В настоящее время существует целый
ряд вариантов классификации реальных поверхностей [2,3]. В качестве
признаков классификации могут выступать происхождение поверхно-
сти, подверженность турбулентностям атмосферы, геометрическая
форма, собственный закон распределения поверхности и т. д. С точки
зрения происхождения различают естественные и антропогенные (под-
верженные влиянию человека) ландшафты. Другим важным признаком
классификации является влияние на подстилающую поверхность турбу-
лентностей атмосферы. Это влияние проявляется в динамическом пове-
дении участков поверхности при воздействии климатических и погод-
ных условий, что приводит к изменению спектра рассеянного сигнала. К
поверхностям, подверженным турбулентностям атмосферы, относятся
иодные поверхности и растительные покровы. Не подвержены турбу-
лентностям атмосферы все виды грунтовых поверхностей, не покрытые
растительностью. В свою очередь, грунтовые поверхности можно клас-
сифицировать по степени их шероховатости [3] как квазигладкие (бе-
юн, асфальт, солончаки), шероховатые (поля, пашни, пустыни) и пере-
сеченные (холмы, барханы, обломки скал).
В зависимости от типа подстилающей поверхности различают и
методы анализа полей рассеяния. В соответствии с приведенными вари-
антами классификации земных покровов следует выделить основные
ины поверхностей, для которых разработаны модели рассеяния корот-
ких волн:
грунтовые поверхности, не покрытые растительностью, т.е. ста-
ционарные поверхности с хаотическими неровностями (асфальт, бетон,
пашня, песок, снег);
131
Миллиметровая радиолокация: методы обнаружения и наведения...
—;--------------------------------------------------------J
водные поверхности, различной природы, т.е. нестационарные]
поверхности с хаотическими неровностями (морская поверхность, по»
верхности рек и озер, локальные водные образования на поверхнос i it
земли);
растительные покровы (трава, лес лиственный, лес хвойный).
В дальнейшем при выборе моделей для расчета входных сигналри *
от подстилающей поверхности будем исходить из приведенной класси-
фикации земных покровов. При разработке моделей рассеяния следует'
учесть, что в теории радиолокации подстилающая поверхность опредЯ
ляется как совокупность участков земной поверхности естественного и
антропогенного происхождения, находящихся в поле наблюдения ра-
диолокационной системы и служащих в качестве фона при обнаруже-
нии системой сложного объекта.
3.1.2. Электродинамические методы статистического
усреднения
Для оценки дифракционных полей рассеяния от грунтовых поверхностей,
не покрытых растительностью, а также водных поверхностей был разра-
ботан ряд моделей, дающих удовлетворительное соответствие с экспери-
ментом. В основе этих моделей лежит представление геометрической
формы шероховатой поверхности в виде случайной функции координат!
При этом решается задача определения вероятностных характеристик
рассеянного поля по известным статистическим характеристикам поверх-
ности. Другими словами, теория рассеяния коротких волн шероховатою
поверхностью представляет собой синтез метода физической оптики и
теории вероятностей. В соответствии с данной концепцией высота неровЛ
ностей трактуется как случайная переменная. При этом подразумевается
два способа статистического описания поверхности — в виде непрерыв-1
ных и дискретных случайных процессов, одинаково применимых для!
представления сложных отражающих рельефов.
Впервые решение задачи дифракции плоской электромагнитной
волны на локальном участке идеально проводящей поверхности со слу-
чайными неровностями, которые описываются непрерывным случай-
ным процессом, было предложено Исаковичем в [4] с использованием
метода касательной плоскости (МКП), а с использованием метода ма-
лых возмущений (ММВ) в работах Басса [5] и Фукса [6]. При этом в ка-
честве критерия выбора конкретного метода служил параметр, пред-
ставляющий собой отношение характерного размера шероховатостей
поверхности к длине падающей волны. Для крупномасштабных неров-
ностей, размер которых значительно превышает длину волны, был ис-
пользован метод МКП, а для мелкомасштабных шероховатостей с раз-
мерами меньше длины волны - метод возмущений. В дальнейшем была
разработана так называемая двухмасштабная модель рассеяния (модель
132
Глава 3. Математические модели характеристик рассеяния...
диухкомпонентных неровностей) [7], сочетающая в себе методы оценки
Нолей рассеяния как крупномасштабных (МКП), так и мелкомасштаб-
ных (ММВ) неровностей поверхности. В работах Г. А. Андреева [8,9] и
А, II. Жуковского [10] разработанная Бассом и Фуксом двухмасштабная
Модель неровностей использовалась для оценки рассевающих свойств
Щнолнованной морской поверхности и сложных грунтовых поверхно-
стей (асфальт, бетон, пашня, снег) при наличии соответствующих экс-
периментальных данных. Кроме того, за последние 15 лет Бассом и
Фуксом были разработаны новые математические методы, такие как ме-
тод малых наклонов (ММН), метод интегрального уравнения и метод
Локальных возмущений (МЛВ) [11]. При этом метод МЛВ позволяет
Получать решение для рассеянного поля применительно к одномас-
ПНабной модели шероховатых неровностей, а в предельных случаях -
Для поля рассеяния в приближении методов МКП и ММВ. В связи со
Стат истическим характером шероховатой поверхности с использовани-
ем перечисленных методов невозможно получить точное решение для
рассеянного поля и их применение ограничивается вероятностными
Оценками характеристик рассеяния. Вместе с тем перечисленные мето-
ды (МКП и ММВ) являются наиболее распространенными в теории рас-
сеяния волн хаотическими поверхностями.
Другим альтернативным методом является метод машинного веро-
ятностного моделирования или метод Монте-Карло. В работе [12] метод
Монте-Карло обобщен на случай трехмерной рассеивающей геометрии.
Это позволяет имитировать реальную картину рассеяния. Расчеты за-
ключались в построении траектории луча, отраженного от каждой дис-
кретной точки поверхности, представленной двумерной матрицей чи-
сел-высот неровностей. Практическая реализация вычислительных про-
цессов открывает возможности для получения индикатрис рассеяния в
двух случаях: 1 - синтезированная машинным способом поверхность с
тиданным распределением высот, 2 - реальный земной покров. При
•том снимаются ограничения, существующие в аналитических методах
решения задач рассеяния.
Моделирование луча в методе Монте-Карло осуществляется по
методу МКП. Статистически изотропная поверхность заданного типа
синтезируется на основе авторегрессионной модели [12], позволяющей
учитывать корреляцию высот неровностей. Для получения матриц вы-
сот неровностей использовались стереопары выбранного участка почвы
г последующей фотограмметрической обработкой. Матрица высот раз-
мером 40 х 40 элементов затем была расширена с помощью авторегрес-
сионной модели до трех матриц 80x80 элементов. Суммирование от-
раженных лучей производится в телесном угле, размеры которого опре-
деляются по азимуту и углу места. Полученные результаты [12] показа-
133
Миллиметровая радиолокация: методы обнаружения и наведения...
--------------------------------------------------------------V
ли достаточно хорошее совпадение результатов вероятностного моде*
лирования процесса отражения радиоволн шероховатой поверхностью в
результатами аналитических решений, что позволяет применять мете
Монте-Карло в расчетах характеристик рассеяния реальных земных ik>-
кровов в широком диапазоне углов падения.
3.1.3. Феноменологические и геометрические
модели
Кроме рассмотренных методов получили распространение так называв!
мые феноменологические модели. Основу всех феноменологическим
моделей составляет синтез модели подстилающей поверхности на осно-
ве экспериментальных данных о ее характеристиках рассеяния. С этой
точки зрения поверхность представляется в виде большого числа незЯ
висимых отражателей. Соотношения феноменологических моделей npo-J
сты по форме и включают в себя одну или две произвольные постоям
ные, которые являются функциями характеристик рассматриваемых по-
верхностей и определяются посредством согласования модели с резуль-1
татами измерений. Данные модели получены из предположения рассея-1
ния электромагнитных волн по хорошо известному закону Ламберта и
его обобщения. Затем с целью объяснения возрастания величин удель-
ных ЭПР при нормальном падении волны были предложены комбина-
ции таких моделей с учетом явления зеркального отражения.
Если на участке земной поверхности имеется п рассеивающих
элементов, то величина средней мощности отраженного от облучаемого
участка сигнала определяется в результате суммирования локальных^
мощностей рассеяния от каждого из рассеивателей с учетом его локаль-
ных рассеивающих свойств:
р _ V1 ^зл^изл^пр^л^пр^2<Туд/^1 ~ J
“tr (4о3я;* ’ ( ]
где Р^ - мощность излучения, Dm( } - КНД передающей (приемной!
антенны; Еим(пр) - функция направленности передающей (приемной)]
антенны; Д - дальность до локального рассеивателя; cryai - удельнаЯ
ЭПР г’-го рассеивателя; 5, — площадь г-го рассеивателя.
При этом конкретное значение удельной ЭПР площади г-го рассеива-1
теля сгуд/ может быть определено из эксперимента с использованием за-
данного вероятностного распределения удельной ЭПР. Таким образом, ис-
пользование феноменологической модели позволяет определить среднюю
величину мощности отраженного от поверхности сигнала с максимально!^
степенью соответствия результатам экспериментальных исследований.
134
Глава 3. Математические модели характеристик рассеяния...
В геометрических моделях поверхность представляется в виде со-
вокупности элементов простой конфигурации (сфера, цилиндр, точеч-
ные элементы и др.), расположенных произвольно на плоскости. Так как
рассеивающие свойства элементов известны, то обычно анализ прово-
дится методами многократного рассеяния или с помощью других мето-
дов. Эти модели позволяли упростить аналитическое решение сложной
Проблемы. Однако часто бывает затруднительно установить связь тео-
ретических параметров с непосредственно наблюдаемыми свойствами
Местности. Наиболее известные модели, представляющие поверхность в
виде совокупности простых геометрических объектов, относятся к по-
верхностям, имеющим травяной покров.
При анализе отражений от поверхности земли, имеющей травяной
покров, можно предположить, что отдельные составляющие этого по-
крова рассеивают падающее на них излучение как тонкие длинные ци-
линдры. Материал таких цилиндров обладает конечной комплексной
диэлектрической проницаемостью, а отдельные рассеивающие элемен-
ты расположены хаотически на отражающей поверхности и имеют не-
которое определенное распределение направлений своих осей [13].
Кроме того, диаметры рассеивающих цилиндров малы по сравне-
нию с длиной волны падающего излучения, тогда как форма площади
их поперечного сечения может быть произвольной, а длина цилиндров -
много больше длины волны. Поскольку материал рассеивающих эле-
ментов обладает конечной проводимостью, это приводит к большим по-
терям в энергии поля падающего излучения и до земной поверхности
поток излучения практически не доходит. Поэтому сама земная поверх-
ность оказывает очень малое влияние на процесс формирования отра-
женного сигнала. Таким образом, ослабление энергии поля падающего
излучения происходит благодаря двум факторам: поглощению излуче-
ния, обусловленному проводимостью цилиндров, и рассеянию излуче-
ния на этих цилиндрах. Первая из этих составляющих рассчитывается
довольно просто, в то время как учет рассеяния приводит к значитель-
ным затруднениям. Но рассеяние излучения можно исключить из рас-
смотрения, так как вклад в полное отраженное поле рассеянной компо-
ненты, определяемой по методу возмущений, зависит от отношения
диаметра цилиндров к длине волны падающего излучения и стремится к
пулю при неограниченном уменьшении этого соотношения.
Получили развитие также фацетные модели, когда поверхность
представляется набором плоских сегментов или граней с произвольным
наклоном. Поверхность, состоящая из произвольных граней, описывает-
ся марковским процессом с конечным числом состояний и дискретными
моментами перехода. Данная модель была обобщена в [13] на конечную
трехмерную поверхность с непрерывными радиусами кривизны.
135
Миллиметровая радиолокация: методы обнаружения и наведения...
Одной из современных разновидностей фацетных моделей являсгв
разработанная в МГТУ им. Н.Э.Баумана полигональная модель [1], фоц»
мируемая в среде современных систем автоматизированного проектири
вания (САПР) или в одном из пакетов анимационного 3D моделироваЛ
(3StudioMax) [1]. Именно использование САПР позволяет синтезировав
геометрическую модель подстилающей поверхности практически люби|
формы. В современных САПР твердотельная ЗО-модель объекта конвЛ
тируется в полигональную модель, представляющую собой конечную Л
вокупность однотипных плоских элементарных отражателей с опрел*
ленным набором электродинамических и статистических свойств, коли*
чество и форма которых определяется разработчиком. В качестве прим*
ра на рис. 3.1 приведена виртуальная модель сложного рельефа подо и*
лающей поверхности, синтезированная в 3D StudioMax.
Рис. 3.1. Виртуальная модель рельефа в 3D StudioMax2.0
На основе полигональной модели радиолокационной сцены [1
предложена новая математическая модель электромагнитных полей рао>
сеяния подстилающей поверхности и входных сигналов РЛС в ближней
зоне локации. Основные методические положения этой модели электро-
магнитных полей рассеяния сложных сцен на основе полигональных мо
делей приведены в [1]. Данная модель основана на формализации резуль-
тирующего рассеянного поля на основе суперпозиции локальных поле»
рассеяния отельных элементов поверхности. В качестве рассеивающи!
элементов рассматриваются плоские элементы гладкой части сцены.
136
Глава 3. Математические модели характеристик рассеяния...
1.2. Анализ результатов экспериментальных
Исследований характеристик рассеяния радиоволн
различными подстилающими поверхностями
Экспериментальные исследования удельных ЭПР земных покровов по-
дучены в результате проведения специальных исследований, начиная с
40-х годов прошлого века. Тем не менее среди них сравнительно редко
встречаются данные, в которых значения удельной ЭПР можно легко
'допоставить с достаточно полным и точным описанием особенностей
||ц»дсгилающей поверхности, формировавшей рассеянные сигналы,
большинство методов получения экспериментальных данных основаны
Ни самолетных и наземных измерениях. В настоящее время наиболее
Полные обзоры экспериментальных зависимостей удельной ЭПР в зави-
симости от ракурса наблюдения, типа поверхности, частоты излучения,
Поляризации волны содержатся в работах [3,12]. Приведем некоторые
Дивные, касающиеся рассеивающих свойств типовых земных покровов
| епптиметровом диапазоне радиоволн.
Наиболее слабым отражением характеризуются квазигладкие по-
верхности типа бетонных или асфальтовых дорог (кроме углов падения
^близких к вертикальному). Достаточно полные данные по рассеянию
(>Гими поверхностями приведены в [3]. Из угловых зависимостей удель-
ной ЭПР для этих поверхностей прослеживается сильная зависимость
удельной ЭПР от угла скольжения. Полученные в [3] эксперименталь-
ные зависимости удельной ЭПР от рабочей частоты для различных ви-
дов квазигладких поверхностей при горизонтальной поляризации излу-
чения и приема представлены в табл. 3.1. В табл. 3.2 приведены величи-
ны удельных ЭПР квазигладких поверхностей на длине волны 3 мм для
Вертикальной поляризации при различных углах скольжения [12]. На-
личие водяной пленки заметно снижает значения удельной ЭПР, что
Объясняется сглаживанием неровностей поверхности водой. При малых
углах скольжения это уменьшение достигает примерно 10 дБ.
Твблица 3.1. Частотная зависимость
удельной ЭПР некоторых квазигладких поверхностей
Частота, ГГц Удельная ЭПР, дБ, при угле скольжения /3 = 10° и разном покрытии
Бетонное Асфальтовое Асфальтово- гравийное Шлако- гравийное
10 -30...-54 -26...-46 -25...-41 -25...-44
15,5 -29...-45 -25...-39 -2O...-33 -18...-34
35 -20...-43 -I8...-33 -15...-29 -18...-28
137
Миллиметровая радиолокация: методы обнаружения и наведения ...
Таблица 3.2. Величины удельных ЭПР антропогенных
образований на длине волны 3 мм для вертикальной поляризации
Вид покрова Удельная ЭПР, дБ, при углах скольжения, град
10 30 50 70 90
Асфальт сухой/мокрый -27/-30 -18/-22 -12/-13 3/0 12/13 ]
Бетон сухой/мокрый -33/- -31/- -26/-33 -10/-20 14/17 '
Гравий сухой/мокрый - - -23/-20 -20/-10 20/17
Весьма заметны для квазигладких поверхностей проляризациоЛ
ные различия. При углах скольжения менее 30° величина удельной ЭПи
при вертикальной поляризации на 8... 10 дБ выше, чем при горизонт,
ной. В то же время перекрестная поляризационная составляющая проЛ
тически отсутствует.
Несколько большие значения удельной ЭПР имеют пустыни с б.м
ханами и мелкими гладкими неровностями. При углах скольжения мм
нее (50...60)° в сантиметровом диапазоне волн рассеяние от этих вида]
поверхностей является практически диффузным и угловая зависимое^
удельной ЭПР может быть аппроксимирована выражением <туд ® sin(/7) .1
Наибольшее отражение создЛ
ют почвы с неровной поверхности
с большим содержанием влаги. II*
рис. 3.2 [3] верхняя граница удел*!
ной ЭПР пашни на волнах 1...3 о]
соответствует содержанию влая
30 %, в то время как нижняя - соД
ветственно 4,3 %, т.е. удельная Э1II
уменьшается на 5...7 дБ за счет по>
нижения влагосодержания.
В отличие от квазигладких дл]
шероховатых поверхностей пракся
чески исчезает различие межЯ
удельной ЭПР при вертикальной]
горизонтальной поляризациях. Пи
углах скольжения менее 60° оно
Рис. 3.2. Экспериментальные
зависимости удельной ЭПР пашни
от угла скольжения в зависимости
от влагосодержания почвы
на длинах волн 1...3 см
превышает 2...3 дБ. Соотношение ЭПР согласованной и перекрестно!*
поляризаций для шероховатых поверхностей без растительного покрсЛ
составляет 7... 12 дБ [3], причем это значение падает с уменьшением yfl
ла скольжения и длины волны.
138
Глава 3. Математические модели характеристик рассеяния...
i Сравнительно мал объем накоп-
। Денных экспериментальных данных о
| рассеянии радиоволн снежным покро-
! Лом. Согласно работам [3] при изме-
। Мени и частоты в диапазоне 10...35 ГГц
удельная ЭПР снега возрастает при-
мерно на 10 дБ, причем удельная ЭПР
Мокрого снега на 7... 12 дБ ниже, чем
Сухого. Зависимость удельной ЭПР
Cltcia от рабочей частоты для угла
Скольжения /? = 40° представлена на
рис. 3.3. Угловую зависимость удель-
ной ЭПР снега на длине волны 3.6 мм
(рис. 3.4), взятую из [3], можно аппрок-
симировать выражением <туд « sin(/7),
что позволяет отнести эту поверхность
К классу шероховатых уже в длинно-
волновой части ММДВ. Некоторые
данные об экспериментальных значе-
ниях удельной ЭПР снежной поверх-
ности приведены в табл. 3.3 и 3.4, ко-
торые получены в [12]. На рис. 3.3
и 3.4, сплошные линии - сухой снег,
штриховые - мокрый снег.
Рис. 3.3. Экспериментальные
зависимости удельной ЭПР
снега от частоты излучения
Рис. 3.4. Экспериментальные
зависимости удельной ЭПР
снега от угла скольжения
Таблица 3.3. Величины удельных ЭПРрастительных
покровов и снежной поверхности (отечественные исследования)
Вид подстилающей поверхности Удельная ЭПР, дБ, для длины волны, мм, при различных углах скольжения, град
8,15 4,1 1,3
1 2...5 1 2...5 I
Луговая трава (высота стеблей <0,2 м) -25,7 - -30 -21,2 -
Луговая трава (высота стеблей <0,5 м) -20,8 -13,5 -22,5 -13,2 -
Степная трава (высота стеблей <0/2 м) -23,9 -14,6 -23,2 -17 -
Кустарник -21,1 - -21,5 - -
Лиственный лес -8,2 - -9,6 - -
Заснеженная местность - - -25,8 - -16,8
139
Миллиметровая радиолокация: методы обнаружения и наведения...
Таблица 3.4. Величины удельных ЭПР растительных
покровов и снежной поверхности (зарубежные исследования)
Вид подстилающей поверхности Удельная ЭПР, дБ, для длины волны, мм, при различных углах скольжения, град.
8,6 V 11
2 8 15 2 8 15
Листва .-22 -19 -15 -22 -14
Трава -28 — — — —
Мокрый снег — -20 -18 — — -10 ]
Сухой снег — -8 -8 — — -10
Для земных поверхностей, покрытых растительностью, наимень-
шую удельную ЭПР имеют слабые растительные покровы, для которых
отражение главным образом обусловлено поверхностью почвы. Поэто-
му при углах скольжения больше (50...60)° удельная ЭПР таких покро-
вов сравнима с удельной ЭПР без растительности. При углах скольже-
ния менее 10° вклад растительного покрова более существенен и удель-
ная ЭПР может увеличиваться примерно на 7... 12 дБ по сравнению с
полем без растительности.
Наибольшую удельную ЭПР имеют густые лесные покровы, что|
позволяет говорить о приблизительной пропорциональности интенсив-'
ности отражений биомассе растительного покрова. Для этого типа по-4
Рис. 3.5. Экспериментальные
зависимости удельной ЭПР
лиственного леса от угла
скольжения на частоте 35 ГГц
верхностей сравнительно устоявши^
мися являются взгляды на угловую
зависимость удельной ЭПР. При ма-
лых углах скольжения ее можнц
представить в виде студ ~sin(/?) I
практически для всех углов сколь-1
жения менее 30°, что согласуется с
выводами теории о закономерностях
рассеяния при затенениях. На
рис. 3.5 представлены эксперимен-
тальные зависимости удельной ЭПР
лиственного леса на частоте в диапа-
зоне углов скольжения (0...30)0, по-
лученные различными авторами [3].
Следует отметить большой разброс
экспериментальных данных, полученных разными авторами [3], что
может быть связано с различиями в методике измерений и районами их
проведения. В среднем угловая зависимость удельной ЭПР согласуется
с законом ОуД « р . Аналогичный вид угловой зависимости удельной
140
Глава 3. Математические модели характеристик рассеяния...
'МП’ получен для поверхностей, поросших травой (луга, поля с сельско-
до1яйственными культурами). В сантиметровом диапазоне отмечено
возрастание удельной ЭПР при уменьшении угла скольжения для ft < 10°.
Зависимость удельной ЭПР растительного покрова от длины вол-
ны выражена очень слабо во всем миллиметровом диапазоне волн. В
рнботе [3] приведена зависимость <туд ® 2“", где показатель степени на-
ходится в пределах 0,5 < п < 1. Другие оценки [3] показали, что наилуч-
щей аппроксимацией как для леса, так и для травяного покрова является
функция вида <туд=в2~°’6, дающая удовлетворительные результаты во
Нем диапазоне сантиметровых и миллиметровых волн. Но при углах
цкольжения /?<1° экспериментальные данные [3] не позволяют обна-
ружить даже такую частотную зависимость (табл. 3.5).
Таблица 3.5. Удельная ЭПР поверхностей с растительным покровом
При Д<1°
Тип покрова Удельная ЭПР поверхностей с растительным покровом, дБ, при X, равных
3 см 1,25 см 8,6 мм 8,15 мм 4,1 мм
Трава луговая -27 -30 -15 -25,5 -30
Трава степная (неровности до 0,5 м) -23 -23 -23 -24 -23
Трава редкая (сухой луг) -20 -20 -27 -21 -22,5
Редкий лес, кустарник -22 -20 -23 -21 -21,5
1 устой лиственный лес -12 -14,5 -11 -8 -9,5
Таблица 3.6. Значения коэффициента А для некоторых типов
поверхности
Тип покрова Значение А, дБ
Лиственный лес летом -20
Лиственный лес зимой -40
Хвойный лес -20
Луг с травой высотой более 0,5 м -20
Луг с травой высотой менее 0,5 м -25...-30
На основании данных об угловой и частотной зависимости удель-
ной ЭПР растительного покрова, для расчетов сгуд в диапазоне рабочих
'шстот 10ГГц< f <100ГГц может быть предложена эмпирическая фор-
мула следующего вида [3]:
141
Миллиметровая радиолокация: методы обнаружения и наведения ...
СТуд(Д) = Л + 101ё^-61ё[-^-|, (31|
где коэффициент А определяется типом поверхности и сезоном (табв
3.6), р - угол скольжения, град, Я - длина волны, мм.
На рис. 3.6 приведена зависимость удельной ЭПР травяного но
крова от угла скольжения на длине волны 3 см, вычисленная по эмпи
рическому соотношению (3.3) ДЛ
Рис. 3.6. Эмпирическая зависимость
удельной ЭПР травяного покрова от
угла скольжения на частоте 10 ГГц
Рис. 3.7. Экспериментальные
зависимости удельной ЭПР травяного
покрова от угла скольжения
для разных длин волн
ставляется как суперпозиция
значения коэффициента А = 20 дБ. I
Данная зависимость будет исполь* I
зована в дальнейших расчетах дляЯ
оценки входного сигнала РЛС dH
травяной поверхности. На рис. 3 J
приведены экспериментальные змI
висимости удельной ЭПР травяной
поверхности для различных длим!
волн, приведенные в [12]. Как вид«|
но из рис. 3.6 и 3.7 эмпирическая J
зависимость достаточно хороши
согласуется с результатами экспс*
риментальных исследований. Вид-1
но, что с укорочением длины волЛ
ны удельные ЭПР возрастают на
миллиметровых волнах на 6... 15 дБ I
по сравнению с длиной волны 3 см.
Теоретические и эксперимент!
тальные исследования удельных'
ЭПР морской поверхности позво!
лили в настоящее время выяви! J
механизм этого явления и создан,
математическую модель отраж'
ния. Наиболее приемлемым оказали
ся метод, являющийся комбинащм
ей теории возмущений и прибли-J
жения физической оптики, при к«
тором морская поверхность пред-
неровностей с резко различающими|я(
масштабами шероховатостей - крупных гравитационных волн и мелкой
ряби [14]. В СВЧ-диапазоне для всех углов скольжения, кроме близкихЯ
к нормальным, рассеивателями являются волны мелкой ряби. Двухма<Я
штабная модель морской поверхности достаточно хорошо объясняет
экспериментальные зависимости удельной ЭПР морской поверхности
от угла скольжения, поляризации, длины волны, причем наилучшее J
142
Глава 3. Математические модели характеристик рассеяния...
совпадение результатов достигается в дециметровом и длинноволновой
чисти сантиметрового диапазонов. В то же время в коротковолновой
части санти- и миллиметрового диапазонов при малых углах скольже-
ния экспериментально обнаружены некоторые особенности обратного
рассеяния, необъяснимые в рамках этой модели (большее значение
удельной ЭПР при горизонтальной поляризации по сравнению с верти-
кальной, большее центральное смещение частоты доплеровских частот
при горизонтальной поляризации и др.). Данное обстоятельство потре-
бовало проведения широкого комплекса экспериментальных исследова-
ний для определения характеристик рассеяния морской поверхности сиг-
налов сантиметрового и миллиметрового диапазонов волн. При этом наи-
большее внимание уделялось менее изученным особенностям обратного
рассеяния при малых углах скольжения, так как в этом диапазоне углов
максимально различаются теоретические и экспериментальные данные.
В качестве основного параметра, определяющего состояние мор-
ской поверхности, выбрана скорость ветра U. Это обусловлено двумя
обстоятельствами. Во-первых, существованием для развитого волнения
простой связи между скоростью ветра и параметрами морской волны.
11оказательная высота морской волны Н и ее период Т связаны со ско-
ростью ветра следующими соотношениями: Я = 7,2-10~3П2,5,
T = 0,56U . Во-вторых, преобладающим влиянием ветра на интенсив-
ность отражений от морской поверхности. Эксперименты, проведенные
в санти- и миллиметровом диапазонах радиоволн, показали, что устано-
вившиеся значения отраженного сигнала достигаются через 1... 1,5 ч по-
сле начала развития волнения и могут практически полностью характе-
ризоваться скоростью ветра [14].
Измерения радиолокационных отражений от поверхности моря
проводились многими исследователями на различных частотах в диапа-
зонах от дециметровых до миллиметровых волн при самых разных ус-
ловиях. Однако даже при предположительно идентичных условиях они
не всегда хорошо согласовались друг с другом. Большие расхождения
частично объясняются трудностями измерения или описания состояния
моря и окружающих условий. На отражение сигнала от морской по-
верхности влияют скорость и направление ветра у поверхности воды,
его продолжительность, протяженность области разгона, океанские те-
чения и т.д. Все эти показатели трудно измерить при проведении экспе-
риментов в натурных условиях. Поэтому следует обсудить лишь типич-
ные, усредненные экспериментальные данные об удельной ЭПР мор-
ской поверхности и о ее изменениях в зависимости от параметров РЛС и
состояния моря. Такие данные могут быть в дальнейшем использованы
при идентификации результатов математического моделирования с ис-
пользованием двухмасштабной модели.
143
Миллиметровая радиолокация: методы обнаружения и наведения ...
Степень волнения .моря (в соответствии с градациями, приведении!
в (табл. 3.7) можно определить по данным показательной высоты воля
Для описания волнения на море существуют три цифровые шкалы [1<
Достаточно широко используется шкала Дугласа, однако предполагает!
что ее теперь нужно заменить кодом всемирной метеорологической opj
низации (ВМО). Шкала Дугласа в своей полной форме состоит из двух |
дов цифр: один ряд служит для характеристики волн, другой для харак!
ристики зыби. Третья система - это шкала Бофорта, которая характеризу
скорость ветра (табл. 3.8) в зависимости от баллов Бофорта. <
Таблица 3.7. Шкалы Дугласа и ВМО для описания волнения и зыби на море]
Баллы волнения и зыби Высота волн по коду ВМО, м Шкала Дугласа j
Высота Характеристика 1
0 0 0 Штиль
1 0...0,1 <0,3 Спокойное 4 3
2 0,1...0,5 0,3...0,9 Легкое волнение
3 0,5... 1,2 0,9... 1,5 Умеренное волнение
4 1,2...2,4 1,5...2,4 Бурное —1
5 2,4...3,9 2,4...3,6 Очень бурное
6 3,9...6 3,6...6 Высокие волны
7 6-9 6...12 Очень высокие волны
8 9...13,5 Более 12 Крутые волны
9 Больше 13,5 - Беспорядочные волны
Таблица 3.8. Ветровая шкала Бофорта
Баллы по Бофорту Характеристика ветра Скорость ветра, м/с
0 Штиль <0,5
1 Тихий 0.5...1,5
2 Легкий 2...3
3 Слабый 3,5...5
4 Умеренный 5,5...8
5 Свежий 8,5...10,5
6 Сильный И...13,5
7 Крепкий 14...16,5
8 Очень крепкий 17...20
9 Шторм 20,5...23,5
10 Сильный шторм 24...27,5
11 ' Жесткий шторм 28...31,5
12 Ураган 32
144
Глава 3. Математические модели характеристик рассеяния...
Процент повторяемости волн разной высоты следующий:
высота волн, м: 0...0,9; 0,9. ..1,2; 1,2. ..2,1; 2,1. ..3,6; 3,6. ..6; >6
чистота повторяемости, %: 20 25; 20; 15; 10; 10
Таким образом, 45 % океанских волн имеют высоту менее 1,2 м,
К()% - менее 3,6 м и только 10 % волн имеют высоту более 6 м. Струк-
тура морского волнения образована из ветровых волн, гравитационных
Волн, капиллярных волн, зыби, описание которых подробно приводится
в [14]. Приведенные данные будут использованы в дальнейшем при мо-
делировании отражении сигналов от морской поверхности и описания
ее геометрии.
На рис. 3.8 приведена усредненная зависимость удельной ЭПР моря
пг угла скольжения, полученная зарубежными исследователями на длине
волны 3 см [14] (сплошная ли-
ния - вертикальная поляриза-
ция, штриховая - горизонталь-
ная). Эти данные не отражают
какой-либо конкретный ряд ис-
следований, но выражают об-
щие тенденции. Разброс экспе-
риментальных данных по отра-
жению сигнала от морской по-
верхности достаточно велик и
не соответствует той точности,
с которой построен данный
график. Погрешность графика
составляет как минимум +3 дБ.
Рис. 3.8. Экспериментальные зависимости
удельной ЭПР усредненной морской
поверхности от угла скольжения
на длине волны 3 см
I 'рафик, представленный на
рис. 3,8, построен с использова-
нием специальных данных, которые собирались при скоростях ветра от 5
до 10 м/с. И хотя это сравнительно широкий диапазон скоростей ветра,
определяющих состояние волнения на море, изменчивость полученных
Данных не позволила привязать их к более узким значениям этих пара-
метров. В соответствии с данным графиком для скоростей ветра от 5 до
10 м/с состояние волнения на море характеризуется баллами от 2 до 4.
Таким образом, данные, представленные на рис. 3.8, можно рассматри-
1«пь как описывающие отражение для некоторого среднего состояния
волнения моря, характеризующегося в 3 балла.
В соответствии с рис. 3.8 можно четко разграничить три области.
В области квазизеркального отражения, когда угол скольжения близок к
9(1° отраженный сигнал достаточно большой (0... 10 дБ). Большой отра-
145
Миллиметровая радиолокация: методы обнаружения и наведения...
--------------------------------------------------------------1
женныи сигнал при таких углах скольжения называется высотным oN
ражением и обусловлен рассеянием за счет зеркальных отражений oi
гранеподобных поверхностей — фацетов, ориентированных в направлен
нии РЛС. Высотные отражения важно учитывать при проектировании
РЛС, так как отраженный сигнал при вертикальном падении может бьп i
настолько велик, что энергия может поступать даже через боковые ле-1
пестки диаграммы антенны.
Наклон поверхности волн на воде может достигать значительной
величины без того, чтобы волны не разрушились и не превратились fl
брызги. Поэтому при углах скольжения меньше некоторой величины
вероятность существенного зеркального отражения от фацетов, обра-
зующих поверхность волнения, невелика. Минимальный угол скольжм
ния для квазизеркального отражения составляет 60°. Область, где вели-
чина угла скольжения меньше той, которая дает квазизеркальное отра-
жение от фацетов, называется областью плато или областью диффузно-
го отражения. В области плато удельная ЭПР слегка уменьшается в
уменьшением угла скольжения. Обратное отражение от морской по-
верхности в области плато сходно с обратным рассеянием от шерохова-
той поверхности. Основными рассеивающими элементами являются т,
элементы, размеры которых сравнимы с длиной волны. При очень ма-
лых углах скольжения, составляющих несколько градусов или менее,
удельная ЭПР быстро снижается с уменьшением угла. В этой области
прямая волна интерферирует с отраженной волной практически также,
как при распространении над ровной поверхностью Земли, поэтому эч,
область называется областью интерференции.
Влияние ветра и волнения моря на отражение сигнала РЛС экспо*
риментально измерить трудно. Такие измерения требуют значительна в
времени для того, чтобы получить данные, характеризующие различны,
состояния моря и скорости ветра. Поскольку волнение моря зависит у г
ветра, не всегда легко определить какой фактор влияет на отражение. В
сантиметровом и миллиметровом диапазонах волн наиболее важным па-
раметром, с которым нужно коррелировать отражение от морской по-
верхности, является ветер. Если море спокойно, не взволновано ветром^
отражение сигнала не велико (за исключения облучения по нормали). Ко-
гда возникает ветер и его скорость превышает 2.5 м/с, отражение сигнала
от морской поверхности быстро возрастает. Капиллярные и короткие гра-
витационные волны зарождаются в течение нескольких секунд, и поэтому!
обратное рассеяние на высоких частотах с появлением ветра возникал
очень быстро. Из наблюдений за отражением сигнала от морской поверхч
ности при наличии ветра следует, что отражение сигналов диапазона 3 см|
связано с капиллярными волнами. Длина этих волн сравнима с длиной]
волны радиосигнала.
146
Глава 3. Математические модели характеристик рассеяния...
На рис. 3.9 приведены ре-
зультаты наблюдения отра-
женного радиолокационного
сигнала от водной поверхности
и зависимости от скорости вет-
ра на длине волны 3,2 см [14]
(сплошная линия - скорость
Истра 2,5-5 м/с, штриховая ли-
ния - скорость ветра 5-7,5 м/с)
При скоростях ветра ме-
не 2,5 м/с отражение незначи-
тельно, за исключением углов
скольжения, близких к нор-
мальному. При углах сколь-
Рис. 3.9. Экспериментальные зависимости
удельной ЭПР морской поверхности от угла
скольжения на длине волны 3,2 см
жения, близких к 90°, удельная ЭПР уменьшается при появлении ветра.
При углах скольжения менее 80° удельная ЭПР с появлением ветра уве-
личивается.
3.3. Математические модели характеристик рассеяния
статистически шероховатой поверхности
на основе электродинамических методов
статистического усреднения
3.3.1 Электродинамические параметры земных покровов
Электродинамической характеристикой среды в зависимости от частоты
падающего излучения является комплексная диэлектрическая прони-
цаемость среды, которая зависит от относительного параметра е, удель-
ной проводимости g и частоты со (длиной волны А.):
E'(cw) = E-i—— = £-i60Ag = £-is’. (3.4)
При этом следует отметить, что относительная диэлектрическая
проницаемость £, относительная магнитная проницаемость р и удельная
проводимость g [См/м] являются непосредственными характеристиками
вещества. Полная диэлектрическая проницаемость определяет процесс
взаимодействия электромагнитной волны, распространяющейся по гар-
моническому закону с частотой со с веществом, имеющим параметры £
и g. Действительная часть полной диэлектрической проницаемости оп-
ределяет наличие токов смещения в среде, а мнимая - токов проводимо-
сти. Вещества, для которых мнимая часть е" -> 0, называются идеаль-
ными диэлектриками, а если е’ -> со, то среда - идеально проводящая.
147
Миллиметровая радиолокация: методы обнаружения и наведения ...
К средам с малыми значениями е* относятся сухие грунтовые породе!
Большие значения е" обычно имеют водные поверхности, растительна^
покровы. Кроме того, если учесть тот факт, что среди земных покрона
редко встречаются ферромагнитные среды, то для рассматриваемым
дальнейшем поверхностей значение относительной магнитной прони
цаемости принимается равным единице pL = 1.
Относительный параметр е и удельная проводимость g [См/м] ян
ляются исходными данными для построения электродинамической мо.
дели взаимодействия электромагнитной волны с веществом с такими
параметрами. Кроме того, параметры е и g всегда определяются из экс-
периментов. При этом процесс взаимодействия электромагнитной вол-
ны с веществом определяется электродинамической моделью среды.
Такая электродинамическая модель определяет конкретный вид выра-
жения в зависимости от типа электромагнитной среды. Различают сле-
дующие основные типы веществ, входящих в состав поверхностей: поч-
вогрунты, вода, снег, лед, растительная биомасса. Для каждой из этих
сред с помощью прямых или косвенных измерений определяются пара*
метры, конкретизирующие выражение для полной диэлектрическо!
проницаемости.
Для получения частотной зависимости диэлектрической прони-
цаемости воды используется теория Дебая, в основе которой использу!
ется представление воды в качестве полярного диэлектрика. В молеку-
лах полярных диэлектриков центры противоположных по знаку зарядов
находятся на определенном расстоянии. При этом комплексная диэлек-
трическая проницаемость дистиллированной воды определяется при ус-
ловии наличия релаксационных процессов среди полярных молекул
переменном электромагнитном поле:
g>) = g + ig^-^-+-ft,^. + i<g” ~g^r, (3.5)
1 + со т 1 + сот
где g(?T =limg'(<y) - диэлектрическая проницаемость воды в постоянном
поле {со = 0); е^ = limg'(<y) - диэлектрическая проницаемость воды в оп-
Ш—>00
тическом поле; г - время релаксации молекул воды после действия
электромагнитного поля.
Для минерализованной воды, при наличии ионной проводимости g
[См/м] мнимая часть в (3.1) определяется с учетом дополнительного
слагаемого 60/lg:
е" = (g”~gc2T^r + 60 Ag. (3.6)
1 + со т
148
Глава 3. Математические модели характеристик рассеяния...
Рис. 3.10. Зависимости
диэлектрической проницаемости
воды от длины волны
Относительные параметры воды
। , и £х определяются эксперимен-
iHHiiio [15] и зависят от многих фак-
1пров, таких как температура воды,
Лпнцснтрация солей и других веществ
Mi д. В [15] показано, что для прак-
шчсского применения возможно ис-
нниьзование значений ест = 80,
к. 1,8, г = 10-10...10~15с. Нарис. 3.10
Н|м1 педены зависимости от длины
цшпы действительной и мнимой составляющих диэлектрической про-
ницаемости пресной воды, построенные с использованием соотношений
ДсЬая для времени релаксации г = 10-,1с. Действительная часть
(сплошная линия) диэлектрической проницаемости увеличивается с
|)»<10м длины волны и достигает предельного значения £= 80. Мнимая
(Икчавляющая (штриховая линия) имеет релаксационный максимум на
Длине волны 2 см, уменьшаясь при этом для остальных длин волн. Для
Морской воды с ненулевой ионной проводимостью g мнимая состав-
«иошая с уменьшением длины волны не уменьшается.
Для почвы используется модель четырехфазной смеси, компонен-
iumh которой являются грунт, воздух, свободная и связанная вода. То-
I til комплексная диэлектрическая проницаемость почвы определяется
in формулы Улаби-Фанга [8]:
£">=e4r(J-p) + p+p№-pm, (3.7)
1ДС £г =4,73 — экспериментальная диэлектрическая проницаемость кри-
«I пллической породы; £w — диэлектрическая проницаемость воды, оп-
ределяемая по формуле Дебая (3.6), рт — объемная влажность почвы
X г Р
(характеризует содержание в почве связанной воды); р = 1-----— по-
Рг
(нпность грунта (характеризует объемное содержание воздуха в грунте);
/> - плотность сухого грунта, рг — плотность твердой основы грунта; q
пр- эмпирические параметры.
Все параметры формулы (3.7) за исключением дебаевской диэлек-
цтческой проницаемости воды определяются экспериментально для
каждого конкретного типа почвы. При этом считается, что плотность
г
сухого грунта как правило принимает значения р = (1,1...1,7)—z-, а
см3
149
Миллиметровая радиолокация: методы обнаружения и наведения...
г
плотность твердой основы рг =(2,65...2,75)—-. На основе проведен!
см3
ных в [8] экспериментальных исследований в качестве аппроксимаций
онных эмпирических параметров в формуле (3.7) принимают следую-
щие значения /7 и <?: </=0,65, р = 1,09-0,11П + 0,18Г, где П и Г опреЛ
ляют процентное содержание в почве песка и глины соответственно, со-
ставляющих в совокупности с удобрениями 100 %.
Определение комплексной диэлектрической проницаемости расти!
тельных покровов сопряжено с трудностями построения их единой элек-
тродинамической модели. Это объясняется сложной физико-химическоЯ
структурой растений и их многообразием в природе. Вместе с тем в [13]
проведен сравнительный обзор некоторых зарубежных моделей, поз^Д
ляющих на основе экспериментальных данных с помощью эмпирических
зависимостей оценить электродинамические параметры некоторых тигк.»
растительности. В основе этих моделей лежит понятие эффективной ди»
электрической проницаемости растительного покрова, с помощью котороЯ
определяются коэффициенты отражения по соотношениям для однородншХ|
диэлектрических сред:
^эфф ^"эфф^ ®Ш^эф) •
При построении электродинамических моделей растительное™
вводится понятие о так называемых биометрических показателях растЛ
ний, которые находятся в зависимости от климатических и погодная
условий, времени года. К основным биометрическим показателям рас-
тительности относятся вес растений [~Дг], высота [м], влагосодержа-
см3
ние [%], количество стеблей [ см3 ], сечение стебля [ см2 ]. Все перечис-
ленные параметры определяются экспериментально. Другим фактором,!
влияющим на значение диэлектрической проницаемости, является col
держание влаги в клетчатке. Следует отметить, что прямые измерения
эффективной диэлектрической проницаемости растений не проводи-
лись. В связи с этим оценку осуществляют на основе теории би-
нарных смесей, когда растительность представляется по аналогии с
почвой и снегом в виде многофазной смеси.
Так, в основе одной из моделей лежит представление растительно-!
го покрова в виде смеси воздуха и клетчатки. На основе эксперимеН-1
тальных измерений электрических характеристик растений на частоте)
8,6 ГГц было получено эмпирическое соотношение для диэлектриче-1
ской проницаемости листьев растений:
150
Глава 3. Математические модели характеристик рассеяния...
где £'ъ,£[ - составляющие диэлектрической проницаемости воды, wp -
01 посительное влагосодержание растений.
Согласно другой модели состав вещества растительного покрова
Образует смесь слабодисперсного диэлектрика и водного диэлектриче-
ского раствора. При этом диэлектрическая проницаемость оценивается
Из соотношения: =0,5М^я +г’ц , где М - относительное весовое со-
держание влаги в элементе растения, £' - диэлектрическая проницаемость
Моды, £а - относительная диэлектрическая проницаемость целлюлозы.
Для изотропных растительных покровов в [8] получено следующее
Соотношение диэлектрической проницаемости:
=1 + ВсКм ’
где В - эмпирический параметр (0,3 - для хвойного леса и 0,6 - для ли-
ственного); d - масса рассеивающих элементов в единице объема; -
диэлектрическая проницаемость воды; М - относительное содержание
нлаги в элементе растительности.
В качестве изотропных растительных покровов могут выступать
лесные массивы, в то время как различные полевые культуры, травяные
покровы и кустарники обладают различной степенью анизотропии.
Перечисленные электродинамические модели растительных по-
кровов носят оценочный характер и область их применения для различ-
ных частотных диапазонов и типов растительности сильно ограничена.
Поэтому в настоящее время для получения значений диэлектрической
проницаемости растений пользуются результатами экспериментов, про-
водимых на рабочей частоте излучения. В качестве примера в табл. 3.9
приведены экспериментальные значения диэлектрической проницаемо-
сти различных земных покровов [12].
Таблица 3.9. Средние электродинамические характеристики различных сред
Тип покрова А, мм £' =£-!£’ t,°C Объемная влаж- ность p, г/см3
Асфальт 3,2 4,3-i0,l 18 1,3
8,6 2,5-i0,6
2,2 2,25-i0,18
Бетон 32 6,5-11,5 18 1,73
8,6 5,5-10,5
2,2 5,55-i0,36
Песок 32 2,5-i0,03 18 1,4
32 4-i0,7 20 1,7
8,6 2,5-i0,03 18 1,4
8,6 4-i0,4 18 1,4
2,2 2,5-i0,06 18 1,4
151
Миллиметровая радиолокация: методы обнаружения и наведения ...
Продолжение табл. 3.9
Глина 8,6 6-i3 20 1,67
2,2 2,5-i0,09 20 1,67
Снег 8,6 2-i0,004 -3,8 0,47
2,2 l,4-i0,008 -39 0,33 j
3.3.2 Статистические параметры и характеристики
поверхностей с хаотическими неровностями
Встречающиеся в природе реальные поверхности всегда являются шерш
ховатыми. При разработке математических моделей рассеяния таких шм
верхностей определяющим параметром является степень их шероховапи
ста по отношению к длине волны падающего излучения. Среди груши
вых поверхностей не покрытых растительностью выделяются квазиглцл
кие (асфальт, бетон) и слабошероховатые (пашня, песок, снег) поверх®»-
ста, для которых наиболее просто разработать математическую модой
рассеяния. Оценить степень шероховатости конкретной поверхносп
можно на основе ее статистических параметров, которые в общем случае
представляют собой усредненные геометрические размеры неровностей и
для реальных поверхностей определяются из эксперимента.
При моделировании статистических характеристик шероховатой
поверхности с ней связывается трехмерная система координат {y,x,z)j
представленная на рис. 3.11. В основе вероятностной модели шерохова-
той поверхности [7] лежит ее представление в виде случайной функции
координат у = ^(x,z). При этом функции
£ определяет значение отклонения рас-
сматриваемой поверхности от плоское®
у = 0 в каждой точке (х, z) данной систе-
мы координат. В общем случае случай-
ная функция £ зависит и от времени
y = £(x,z,l). Предполагается также, чт»
рассматриваемая случайная функция од-
нозначная и дифференцируема необхо?
димое число раз. Реализация случайно^
функции представляет собой
реализацию случайной поверхности из
ансамбля поверхностей. При этом под ансамблем понимается совокуп-
ность поверхностей с общим набором свойств. Иными словами для ка-
ждой исследуемой поверхности снимается набор реализаций функции
^(x,z,t), который представляет собой случайный процесс. Задачей ис-
следователя является оценка статистических параметров такого случай-
ного процесса.
152
Рис. 3.11. Система координат
поверхности с хаотическими
неровностями
Глава 3. Математические модели характеристик рассеяния...
Анализ случайного процесса осуществляется с использованием
Методов теории вероятностей и статистической радиотехники. Счи-
1йстся, что каждая случайная величина Е, имеет свою функцию рас-
пределения вероятностей F(y,x,z,t) и плотность распределения ве-
роятностей W(y,x,z,t). Функция распределения вероятностей слу-
чайного процесса %(x,z,t) представляет собой вероятность того, что
величина Е, в точке (х, z) для момента времени t не превосходит у:
1’\у, х, z, Г) = Р{£(х, Z, /) < у}.
Плотность распределения вероятностей W(y,x,z,t) определяется
Через производную функции распределения вероятностей:
. 8F(y,x,z,t)
JT(y,x,z,t) =
Зу
Плотность распределения вероятностей имеет смысл того, что ве-
личина Е, в точке (х, z) для момента времени t находится в интер-
вале высот у < <^(х, z, f) < у + dy.
При построении вероятностной модели шероховатой поверхности
Предполагается ее стационарность и пространственная однородность.
Кроме того, если плотность распределения вероятностей пространст-
венно однородной поверхности зависит только от расстояния между
Точками поверхности, вне зависимости от их взаимного расположения в
пространстве, то такая поверхность считается статистически изотроп-
ной. Как будет отмечено далее, в природе существуют как изотропные,
так и анизотропные поверхности. Степень анизотропии каждой кон-
кретной поверхности можно определить при экспериментальном иссле-
довании ее статистических характеристик.
В общем случае нет необходимости в статистически полном опи-
сании случайной поверхности. Основной целью исследований является
анализ параметров поверхности, усредненных по ансамблю реализаций
случайной функции £ К таким параметрам и характеристикам относят-
ся среднее значение, дисперсия поверхности, корреляционная функция
поверхности и ее энергетический спектр. Для оценки этих величин бу-
дем использовать одномерную плотность распределения вероятностей
высот поверхности, не зависящую от времени W(y,p), где p = {x,z} -
радиус-вектор, проведенный из начала системы координат в данную
ючку поверхности.
Среднее значение случайной функции ^(x,z) имеет смысл усред-
ненного значения высоты поверхности над плоскостью у=0 и определя-
30
с гея как первый момент £(x,z): £(р) = Л7,(^(р)) = I £ИД£,р)г/£.
153
Миллиметровая радиолокация: методы обнаружения и наведения ...
При этом система координат поверхности на рис. 3.11 всегда и 1^
бирается так, что среднее значение £(р) = 0.
Другой важной характеристикой поверхности является ее диспгр '
сия относительно среднего уровня. Согласно теории случайных проидИ
сов дисперсия поверхности определяется как центральная моменшЛ
функция 2-го порядка:
00
= т}((£(р) - £(р))2) = Jp)d£ . (3
Дисперсия поверхности имеет смысл разброса высот поверхносм
относительно среднего уровня у = 0. Квадратный корень из диспереЛ
характеризует среднеквадратическую высоту неровностей сг^ и выр^
жается в метрах.
Корреляционная функция поверхности определяется как смешцЯ
ная моментная функция 2-го порядка, т.е. является средним значением
от произведения ординат ^(pj), £2(Рг) в ДВУХ различных пространств
венно разнесенных точках поверхности pj и р2
^(Р1,Р2) =^((^1(P1)-^(P1)X^2(P2)-^(P2))) =
00 00
= f f , (3
где ^(Pi) = ^(P2) = 0 — средние значения в точках рх и р^.
Учитывая пространственную однородность рассматриваемой Л
верхности, корреляционная функция (3.9) будет определяться разит
стью аргументов р = р1 - р2 : ЧХРр Р2) = ^(р)
Как известно из теории вероятностей, значение корреляционш
функции при нулевом аргументе есть дисперсия 'Р(О) = сг|. Тогда
мированную корреляционную функцию можно определить как коэфм
циент корреляции поверхности:
*(р) = ^. (З.К
Для пространственно однородной поверхности, которой являе11|
g(x,z), всегда существуют такие значения координат x0,z0, при кол|
рых величины £(x,z) и £(x + x0,z + z0) можно считать практически и*
коррелированными в том смысле, что при х> x0,z> z0 абсолютное зм
чение коэффициента корреляции остается меньше заданного |2?(р)]<Лг
причем Sr—>0. Величины x0,z0 называют радиусами корреляции
154
Глава 3. Математические модели характеристик рассеяния ...
JWpx пости вдоль направлений х и z соответственно. Одним из способов
Вычисления радиусов корреляции поверхности является интегрирование
•В коэффициента корреляции вдоль направлений х и z:
х0 = rx(0),rx(z) = R(x,z)dx,
(З.П)
-ос
CO
z0 = rz (0), rz (x)= J R(x, z)dz .
(3-12)
Различные значения x0 и z0 свидетельствуют об анизотропных
вИойствах поверхности. Если интервалы корреляции вдоль осей х и z
равны между собой, что означает независимость в направлении интег-
рирования в (3.10), (3.11), то такая поверхность называется статистиче-
Оки изотропной. Радиус корреляции изотропной поверхности определя-
ется из соотношения:
Ро=^(О)> 5>(Р)= |^(Р)Ф-
(3-13)
Обычно в качестве радиуса корреляции принимают расстояние, на
Котором корреляция точек поверхности убывает в е = 2,7182818 раз. Но
значение параметра Sr в соотношении |2?(р)| < Sr может быть выбрано
разработчиком модели шероховатой поверхности в зависимости от воз-
никшей ситуации. При этом, для статистически изотропной поверхно-
сти радиус корреляции (3.13) является радиусом круга [7], внутри кото-
рого отклонения поверхности от среднего уровня у = 0 коррелируют.
Перечисленных статистических характеристик достаточно для
описания поверхности с нормальным законом распределения случайных
высот неровностей £ Поверхность с таким законом распределения на-
зывается гауссовской. При нулевом среднем значении £и заданной дис-
персии высот неровностей <т^ плотность распределения вероятностей
отклонений поверхности y = £(x,z) от среднего уровня у = 0 определя-
ется известным соотношением:
(3-14)
v2/rer_. 2сг# у
Аналогично двумерная плотность распределения вероятностей с
заданным коэффициентом корреляции 7?(р) имеет вид:
^2-27?(р)^2+^
2<т2(1-^(р))
(3.15)
155
Миллиметровая радиолокация: методы обнаружения и наведения...
При этом для гауссовской поверхности в качестве коэффициеш•
корреляции используют следующее выражение:
( о2
А(р) = ехр 1-^2 > (3.16).
I Ро J
где р0 - радиус корреляции поверхности, р — абсолютное значение р. 1
Дополняет вероятностную модель случайной поверхности у = £(х,1)
анализ статистических характеристик производных этой функции
, , (8^(x,z) 8^(x,z')'\
Y = (/x,/z ) = ----,------- , которые являются тангенсами углов нм
V 8х 8z )
клона поверхности относительно плоскости у=0. Дисперсии градиент#
случайной функции определяются в виде:
00 00 00 00
/х="г1(Гх)= f \^W{yx,yz)dyxdyz, y2x=ml{y2z)= J j/z^(/x,/2)rf/x<7/z|
где W{yx,yz) — плотность распределения вероятностей углов наклон»!
случайной поверхности.
Для статистически изотропной поверхности дисперсии углов на-
клона вдоль осей системы координат х и z совпадают у* = yf = у2. Квад!
ратный корень из дисперсии углов наклона у = у[у2 носит название
среднеквадратического тангенса угла наклона статистически шерохова-
той поверхности и определяется ее статистическими свойствами.
Корреляционная функция углов наклона для однородной случай-
ной поверхности определяется как:
00 00
^/(Гх>Гх) = И1/(/х/г)= f J/x/z^C/x./zM/x^/z • (3-171
Значение корреляционной функции (3.17) при нулевых производ-
ных yx=O,yz=O определяется произведением среднеквадратических
тангенсов углов наклона поверхности вдоль осей х и z: iP(0,0) = yxyz.
При условии изотропности поверхности, когда у2 = у2 = у2, корреля-
ционная функция при нулевом аргументе имеет смысл дисперсии тан-
генса угла наклона поверхности: Ч'(0) = у2. С другой стороны, как из-
вестно из теории случайных процессов, связь между коэффициентом
корреляции случайной функции и корреляционной функцией ее произ-
водной определяется соотношением:
HY=V^(x,z)) = -<T^’(p), (3.18)
156
Глава 3. Математические модели характеристик рассеяния...
Me - дисперсия высот неровностей поверхности; А"(р) - вторая
Производная коэффициента корреляции поверхности.
Тогда с учетом соотношения (3.18) дисперсия тангенсов углов на-
клона связана с дисперсией высот неровностей изотропной поверхности
|Лсдующим соотношением:
у2 = <Р(0) = -сг?Г(0). (3.19)
В частности, для гауссовской изотропной поверхности с коэффи-
( о2
ЦИснтом корреляции Л(р) = ехр -!—? значение среднеквадратического
I Ро)
Тангенса угла наклона определяется из (3.19):
7 = 7F = \р=0 = 4~2^, (3.20)
Ро
Где ро - радиус корреляции поверхности.
Кроме того, для гауссовской поверхности с нормальным законом
распределения тангенсы углов наклона также распределены по нор-
мальному закону:
^(Ух> У г) =- ех₽| -т:, 2.-----------fГх)44 +4Т| ’
2^tFj/-¥'2(/r,r2) I 2(1-4' Ух Ух Уг ))
Ч'(т ,У )
где ПГх.Г-)=—_ _ г---нормированная корреляционная функция.
УхУх
Перечисленные статистические параметры и характеристики опре-
деляются путем экспериментального исследования реальных шерохова-
тых поверхностей. Основной целью большинства экспериментов явля-
ется оценка корреляционных свойств поверхности, а также определение
среднеквадратической высоты и радиуса корреляции случайных неров-
ностей. Экспериментальные данные для различных типов земных по-
кровов, получены в [12].
Кроме того, на основе экспериментальных данных [12] была пред-
ложена двухкомпонентная модель случайной поверхности. Согласно
пой модели статистически шероховатая поверхность образована сово-
купностью крупно- и мелкомасштабных неровностей. Результаты изме-
рений статистических параметров обоих компонент неровностей для
поверхности асфальта и бетона приведены в [12]. Кроме того, на базе
рассмотренной модели для крупно- и мелкомасштабных неровностей
асфальта были измерены экспериментальные коэффициенты корреля-
ции. Для математического описания экспериментальные коэффициенты
157
Миллиметровая радиолокация: методы обнаружения и наведения...
корреляции должны быть аппроксимированы подходящим аналитя
ским выражением. При этом предполагаемая теоретическая модель
эффициента корреляции должна удовлетворять эксперименту и nf
ставлять собой несложное аналитическое выражение, удобное при
числении энергетического спектра поверхности. Многочисленные ’
периментальные исследования распределений наклонов и высот пат
взволнованной морской поверхности [10] показывают, что они под
няются гауссовской статистике. Кроме того, в результате экспериме
[8] показана статистическая изотропность асфальта, пашни, бетона, п
ка, снежного покрова, морской поверхности (за исключением «мери
зыби»). Поэтому при аппроксимации экспериментальных коэффициен
корреляции будем использовать гауссовское приближение изотроп!
поверхности, для которой Я(р)=ехр| —1. Как видно из [8], для неров
I А)
стей асфальта такая статистика приблизительно справедлива. В дальн
шем статистические параметры крупномасштабных неровностей обоз
чим с индексом «1», а мелкомасштабных - с индексом «2». В табл. 3.
приведены экспериментальные статистические характеристики неров!
стей различных земных покровов, которые будут использованы в да!
нейшем при расчете удельных ЭПР таких поверхностей [12].
Таблица 3.10. Статистические параметры земных покровов .
Тип покрова , мм <7^2 , ММ Poi, ММ Ро2 » 1
Асфальт 0,4 - 2,24
0,36 0,08 2,2 0,12
1,5 - 5 -
Бетон - 0,16 - '>4 1
0,3 0,16 90 1,2
0,5 - 4 4
Песок 0,9 5
2-6 0,2 6-25 0,3-1 <
2 - 10
Снег 1-3 0,3-2 <2000 2-25
Следует также заметить, что рассмотренная вероятностная моде^
шероховатой поверхности применима лишь для анализа статистически
характеристик грунтовых поверхностей и некоторых типов морской по
верхности. Использование данной модели по отношению к случайно!
поверхности образованной растительным покровом лишено смысла, J
связи с иным характером ее геометрической формы. г)
158
Глава 3. Математические модели характеристик рассеяния...
J.3.3 Характеристики рассеяния статистически шероховатых
Поверхностей
При построении электродинамической модели рассеяния шероховатой
Поверхности ее исходными параметрами являются комплексная диэлек-
трическая проницаемость г'(со) и статистические характеристики
(Ti, р0 и у , рассмотренные ранее. При этом система координат случай-
ной поверхности y = £(x,z) выбирается так, что у = £=0 (см.
рис. 3.11). Очевидно, что при моделировании процесса рассеяния элек-
1ромагнитных волн шероховатой поверхностью в такой системе коорди-
нат должны быть представлены источник и приемник электромагнитного
излучения с указанным направлением излучения и приема радиоволн.
С учетом этих рекомендаций система координат случайной поверх-
ности приводится к виду, пред-
ставленному на рис. 3.12. Предпо-
лагается, что источник излучения
радиоволн находится в т. А на рас- h(
стоянии Rj от начала системы ко-
ординат, а приемник рассеянных
поверхностью электромагнитных
волн - в т.В, расположенной от на-
чала координат на расстоянии Rs.
Направление распространения па-
дающей волны определяется с по-
мощью единичного направляюще-
Рис. 3.12. Схема радиолокации
участка поверхности
с хаотическими неровностями
го вектора г,-, проведенного из
точки А в начало системы коорди-
нат и образующего с осью х плоскость падения излученной волны. Угол
Д между направляющим вектором г,, и осью х носит название угла
скольжения падающей волны. Совмещение плоскости падения электро-
магнитной волны с плоскостью z=0 в рассматриваемой системе коорди-
нат сделано в предположении о статистической изотропности шерохова-
той поверхности. Плоскость отражения образована направляющим векто-
ро.м рассеянной волны rs, проведенным из начала координат в точку В, и
его проекцией на плоскость у=0, составляющей с осью х азимут as. При
этом угол Д, который направляющий вектор рассеянной волны г, со-
ставляет в плоскости отражения с плоскостью у=0, называется углом мес-
та рассеянной волны. Рассмотренный случай разнесенных в пространстве
точек облучения и приема электромагнитного излучения носит название
бистатической радиолокации. Если же точки А и В на рис. 3.12 совмеще-
159
Миллиметровая радиолокация: методы обнаружения и наведения...
ны, что возможно при условии, когда азимут рассеянной волны as = п, <i
угол места рассеянной волны равен углу скольжения падающей волки
Ps = то такая радиолокация называется моностатической (радиолокв
ционный случай). Поляризационная структура падающей электромагнит
ной волны на рис. 3.12 представлена совокупностью двух единичных но-
ляризационных ортов е, и h,, где е, - определяет направление электрии
ческого вектора Е,- падающей электромагнитной волны, a h; — направив
ние магнитного вектора Н,-. Поляризационные орты приемной системы
обозначены на рис. 3.12 как es и hs соответственно. Радиус-вектор В
проведен из начала координат в точку на поверхности y = ^(x,z) с нор»
малью п и носит случайный характер: p = (x,£(x,z),z).
Предполагается, что на поверхность падает сферическая электро»!
магнитная волна, которая излучается узконаправленным точечным iri»
лучателем, расположенным в т. А и распространяется по гармоническо-
му закону с единичной амплитудой:
Е = exp(i(69Z + kRi+k-(p-rj)))
' Ri *’
(3 21)
ехрС^+йЛ.+Мр-Г;))) <
Н, =----------------------п,,
R,
, 2л
где к =-----волновое число.
А
При выводе формул считаем, что поляризация падающей волны
линейная. Рассмотрим два типа поляризации: вертикальную и горизон-
тальную. Поляризация волны считается вертикальной, если вектор элем
трического поля лежит в плоскости падения волны е, =е*, а горизон-
тальной, если вектор электрического поля ортогонален плоскости паде-
ния е, =ef . При этом вектор поляризации магнитного поля определяет-
ся из соотношения h, = г; х е;.
Основу электродинамической модели рассеяния шероховатой по-
верхности составляет задача дифракции сферической волны (3.21) на
ограниченном участке облучаемой поверхности. При этом линейный
размер L (рис. 3.12), ограничивающий локальный участок поверхности,
значительно превышает расстояния до источника и приемника излуче-
ния L» Rj,L>> Rs, а также размеры случайных неровностей, находя-
щихся в пределах рассматриваемого участка L»cr^,L»p0. Это по-
зволяет считать точки А и В на рис. 3.12 в дальней зоне по отношению к
160
Глава 3. Математические модели характеристик рассеяния...
Облучаемому участку L. Задача дифракции сферической волны на ло-
щильном участке таких размеров решается с использованием метода фи-
1ической оптики. Сущность метода основана на том предположении,
Мю падающая на участок поверхности сферическая волна возбуждает в
Пределах этого участка электрические и магнитные токи, которые со-
гласно принципу Гюйгенса являются вторичными источниками элек-
тромагнитных волн. Плотности этих токов определяются из следующих
векторных соотношений: jm = -[nх Еу], je = [пх Ну], где п - нормаль к
Понерхности; Еу,Ну - электромагнитное поле, сконцентрированное
вблизи облучаемого участка поверхности.
При этом, согласно методу физической оптики, нет необходимости
* отыскании точного-решения задачи дифракции сферической волны
участком поверхности произвольной формы. Основной целью является
Определение дифракционного поля рассеяния в дальней зоне путем ин-
тегрирования вторичных источников поля на локальном участке по-
верхности. Данная задача решается с использованием известного соот-
ношения Стреггона-Чжу, которое является точным математическим
Описанием принципа Гюйгенса и представляет собой аналог интеграла
Кирхгофа для скалярного поля:
ЕРас (rs) = J(iM> х Ну ] + [[n X Еу] X v^] + ((n Еу) V(p))dS, (3.22)
' s
2
где S x L - площадь облучаемого участка поверхности; <р - векторная
функция Грина.
Электромагнитное поле вблизи обучаемого участка Еу,Ну опреде-
ляется в зависимости от геометрической и электродинамической структу-
ры поверхности. При этом, если облучается локальный участок идеально
гладкой плоскости, то поле Еу,Ну определяется как векторная сумма
падающего на плоскость поля и поля, отраженного от плоскости, по зако-
нам геометрической оптики: Еу = Е, + Е5, Ну = Н, + Н5, где Е5, Н5 - от-
раженное от плоскости электромагнитное поле.
В случае падения на плоскость линейно поляризованной волны с
кортикальной или горизонтальной поляризацией модули падающей и
отраженной волн связаны известными коэффициентами Френеля, опре-
деляющими модуль отраженного поля в приближении геометрической
оптики:
(Es-eJ s'cos#--7 s'-sin2 в (Es'ef) cos#--7 s'-sin2 в
, — -====:^=^ 2* xx--------= -
(Е,- • ej) s' cos 0 + \/s'-sin2# S (Е,- • ef) cos в + Jr'-sin2 0
161
Миллиметровая радиолокация: методы обнаружения и наведения...
где £? = £ + i6foAg - комплексная диэлектрическая проницаемость миЯ
риала плоскости; 0 = arccos(-r; п0) - угол падения волны на плоскост к
с нормалью По = (0,1,0).
В общем случае, когда вектор поля произвольно ориентирован Я
пространстве, суммарное поле на плоскости определяется из соотношм
ний [16]:
Ех =(1 + Fg)E, + (1 -^(1 + Л)(п0 • Е,^п0 -г;
Hx=V^[Exxn0].
Поскольку поверхность y = g(x,z) образуется случайными отклЯ
нениями от плоскости у=0 (рис. 3.12), решение для поля на плоскосв
относительно нормали п0 =(0,1,0) может быть использовано в далы|
нейшем при разработке моделей рассеяния случайной поверхноспИ
При этом нормаль п к случайной поверхности в точке с радиуссЛ
вектором p = (x,£(x,z),z) (рис. 3.12) определяется через тангенсы углЯ
наклона поверхности в этой точке:
( 8%(x,z) j
п= Д Sx ” & J (з.2|
/Г + ( 8£(х,г)^ + J у]Гх + +1
Sx J V dz )
Дифракционное поле рассеяния от случайной поверхности (3.22)
нормалью n(yx,yz) также имеет случайный характер и представляет с<1
бой функционал от £ Epac(£(x,z)). Ансамбль реализаций этой случайно
функции представляет собой совокупность электромагнитных полей ра
сеяния, возникающих при дифракции на каждой реализации случайна
поверхности y = £(x,z): {Е^^/рОХЕрасг^г^г^-Ерасл^лСРи))}• Г1П
этом в рассматриваемых электродинамических моделях рассеяния I
участке статистически шероховатой поверхности не ставится задач
анализа такой функциональной зависимости. Основной целью являет^
установление связи между статистическими характеристиками шерои
ватой поверхности и рассеянного на ней электромагнитного поля. Ес|
считать, что рассеянное поле формируется в результате многократно
интерференции независимых парциальных полей, то его распределен!
вероятностей можно считать нормальным. Случайное поле с таким ра«
пределением адекватно описывается с помощью первых двух моментИ
Моментные функции вычисляются для каждой из проекций вектоМ
162
Глава 3. Математические модели характеристик рассеяния...
рассеянного поля Ерас на поляризационный орт приемной системы. Для
Плоской волны рассеянное поле образует ПМР, элементами которой яв-
ляются комплексные поля рассеяния участка шероховатой поверхности при
Различных направлениях поляризации падающей и рассеянной волн:
н IIЕ^' Ё"11 ||(Ёоас(еП еГ) (E_ac(ef)-еГ)11
Ед. = . / = , (3.24)
11 раМ ||Е« Е||| |(Epac(e,v)-ef) (Epac(ef)-ef)|
Где элементы главной диагонали Ё*,Ё* представляют собой поля рас-
рем ния на согласованной поляризации падающей волны и приемной
системы, а боковые элементы матрицы Ё*,Ё* - поля рассеяния на ор-
тогональных поляризациях; Epac(e‘’),Epac(ef) - векторы поля рассеяния,
определяемые из интеграла Стреттон а-Чжу.
Дальнейший анализ поля рассеяния осуществляется в терминах
IIMP. При этом считается, что статистические характеристики рассеян-
ного поля также образуют матрицу вида (3.24). Первый момент случай-
ного поля рассеяния имеет смысл усредненного по ансамблю реализа-
ций случайной поверхности y = £(x,z) элемента матрицы Ёрас.(£(р)) и
Носит название среднего поля рассеяния:
Ё5Рас( =/П1(Ё^(^(р))), (3.25)
где i - характеризует направление вектора поляризации падающей вол-
ны, а 5 - вектора поляризации приемной системы.
Второй момент рассеянного поля определяется как усредненное по
Ансамблю реализаций поверхностей значение произведения комплексно
сопряженных полей рассеяния в двух пространственно разнесенных
точках случайной поверхности:
Ч (i'paC/ (£(p))^Cj (^(P')>), (3.26)
где p' = {x',z'} - радиус-вектор, проведенный в точку поверхности
у = £(x,z), * - знак комплексного сопряжения.
Другими словами второй момент (3.26) представляет собой интен-
сивность пространственных флуктуаций рассеянного случайной по-
верхностью поля и по аналогии с (3.24) образует поляризационную мат-
рицу, которая достаточно полно описывает все явления, связанные с по-
ляризацией и энергетическими характеристиками поля.
Таким образом, в первом приближении поле, рассеянное статисти-
чески шероховатой поверхностью, описывается средним значением и
интенсивностью флуктуаций (3.26), анализ которых лежит в основе
163
Миллиметровая радиолокация: методы обнаружения и наведения...
—
электродинамических методов статистического усреднения. При этом,
конкретный вид этих соотношений определяется, исходя из статистик
поверхности и законов ее распределения.
Анализ рассеивающих свойств шероховатой поверхности принято
проводить с использованием относительных характеристик рассеянною
поля. В качестве такой характеристики используется ЭПР локально! tj!
участка шероховатой поверхности, которая образует поляризационную
матрицу и определяется из известного соотношения:
сг;=4л-7?/^, (3.27 jj
где ./,— 1/Д? — интенсивность падающего поля; Jp\cZ — интенсивность
флуктуаций рассеянного поля (3.26).
Учитывая пространственную однородность большинства шерохю
ватых поверхностей, на практике обычно используют понятие удельной
ЭПР, т.е. ЭПР приходящейся на единицу поверхности и определяемой
отношением ЭПР (3.27) облучаемого локального участка поверхности и
его плошади S:
<т*=^. (3.28)
Удельная ЭПР представляет собой безразмерную величину и явля-
ется наиболее универсальной характеристикой рассеяния земных по-
кровов. Кроме однородных шероховатых поверхностей эта характерца
стика также используется для описания отражений от заведомо неодно-
родных поверхностей, таких как растительные покровы, антропогенные
образования, но пользоваться такими данными следует с определенной
осторожностью. Удельная ЭПР определятся свойствами поверхности и
расположением в пространстве передающей и приемной систем
(рис. 3.12). В теоретических моделях рассеяния для расчета удельно!
ЭПР задаются электродинамическими e,g и статистическими <т^,р0
параметрами поверхности, длиной излучаемой волны 2 и углами
Pt,Ps,as, характеризующими положение передающей и приемной сис«
тем в системе координат поверхности. При этом уникальное значение
удельной ЭПР не несет в себе информации о качественных характери-
стиках рассеивающих свойств шероховатой поверхности. Представляем
интерес функциональная зависимость удельной ЭПР от положения в
пространстве источника и приемника излучения, т.е. от углов Д, ps,as.
На практике, как правило, задаются значением угла Д, определяющим
положение в пространстве источника излучения, и азимутом as, кото
164
Глава 3. Математические модели характеристик рассеяния ...
рый определяет положение плоскости, в которой находится приемник
(рис. 3.12). При этом графическая зависимость удельной ЭПР от угла
Места приемника Д при бистатической радиолокации называется ин-
дикатрисой рассеяния, а при моностатической радиолокации - диа-
фиммой обратного рассеяния подстилающей поверхности.
Таким образом, рассмотрены общие положения теории дифракции
Плоской электромагнитной волны на участке шероховатой поверхности,
составляющие основу для построения электродинамических моделей
Статистического усреднения полей рассеяния. При этом за основу клас-
сификации этих моделей принимается соотношение между характерны-
ми размерами случайных неровностей и длины волны падающего излу-
чения. Если размер неровностей значительно превосходит длину волны,
То применим метод касательной плоскости, а сами неровности являются
Крупномасштабными. Если же высота и наклоны неровностей малы
(мелкомасштабные неровности), то используется теория резонансного
рассеяния, в основе которой лежит метод малых возмущений. Для по-
верхностей с широким пространственным слектром неровностей в каче-
стве приближения для оценки рассеянного поля используется двухмас-
Штабная модель (модель двухкомпонентных неровностей), основанная
На совмещении методов МКП и ММВ.
3.3.4. Анализ электромагнитного поля рассеяния
шероховатой поверхности методом касательной
плоскости
Модель случайной поверхности, для которой применим МКП, предпо-
лагает, что характерные размеры неровностей значительно превышают
длину волны Я. В качестве таких характерных размеров принимаются
среднеквадратическая высота неровностей ст, и радиус корреляции по-
верхности р0. Кроме того, вводится понятие радиуса кривизны случай-
ной поверхности, который определяется отношением квадрата радиуса
2
корреляции к : /? = — . Случайная поверхность считается крупно-
масштабной, если ее р0 » Я и R*p » Я . При этом, на среднеквадрати-
ческую высоту неровностей такое ограничение не накладывается, т.е.
нгпосительная шероховатость поверхности может быть произвольной:
СТ, >
- 1. Случайная поверхность должна быть при этом достаточно глад-
А <
кой, т.е. значение среднеквадратического тангенса угла наклона неров-
ностей у «1. Модель крупномасштабной поверхности может приме-
165
Миллиметровая радиолокация: методы обнаружения и наведения...
няться для описания больших волн морской поверхности, невспаханным
полей, холмистой местности.
В основе МКП лежит представление электромагнитного поля Ej-, 11.
вблизи поверхности y = £(x,z) в виде векторной суммы падающего поле
Ej.H, и поля ES,HS, отраженного по законам геометрической оптики (и
плоскости Ч7, касательной к поверхности в точке с радиусом-векторсм
p = {x,£(x,z),z} и случайной нормалью n(yx,yz) (рис. 3.13):
EZ=E, + ES, Hr = H,+Hs.
Рис. 3.13. Электромагнитное поле вблизи
поверхности с крупномасштабными
неровностями
Рис. 3.14. Локальный базнс
крупномасштабной поверхности
Суммарное поле Ej-, 11,
удобно представлять в локально!
системе координат {n,p,t} iw
плоскости 'Р, где единичн|>1|
вектор р находится в плоскоспы
образуемой случайной норма»
лью п и направляющим векпи
ром падающей волны г,, а вея*
тор t ортогонален этой плоско^
сти (рис. 3.14):
t [Чхп] p=[nxt], (3.29)
где нормаль п определяется со*
отношением (3.23).
Учитывая произвольна!)
характер поляризации падал!
щей волны, суммарное поле н
локальном базисе на KacaTejfc-
ной плоскости определяется с
использованием коэффициентом
Френеля, представляющих собой коэффициенты отражения от
сти линейно поляризованной плоской волны:
=
Hi
(1 + FV)(E,. n) n + (1 - FV)(E, p) p + (1 + Fg)(E; t) -1
(1 + Fg )(H,- n) n + (1 - Fg )(H,. • p) p + (1 + ГДН, t) • t ’
плоскв
(3.3$
где коэффициенты Френеля определяются для угла падения
-arccos(r, п) (между направляющим вектором падающей волны и слу>
чайной нормалью); t,p - векторы локального базиса.
166
Глава3. Математические модели характеристик рассеяния ...
Используя модель падающей волны, суммарное поле (3.30) запи-
шется с учетом направлений поляризационных ортов е,. и h,:
Ех ехр(Д(Д+(p-rf))) f Те
Нх Д It ’
Те = ( (l + Fv)(e,. n) n + (l-Fv)(e,.-p) p + (l + F?)(e,. t)-t
ТЛ |(l + /'g)(h/-n)n + (I-/’g)(h,-p)-p + (l + /;)(h,.-t)-t’
Поле рассеяния в дальней зоне определяется с использованием ин-
тшрала Стретгона-Чжу, причем задача дифракции решается для огра-
ниченного участка крупномасштабной поверхности с линейным разме-
ром L. Размеры этого участка должны значительно превышать длину
полны падающего излучения, а также характерные размеры неровностей
в пределах этого участка. После подстановки выражений для суммарно-
го поля (3.31)-(3.32) в интеграл Стретгона-Чжу, напряженность поля
рассеяния представляется в следующем виде:
Е_(г.) =- . (3.33)
рас ' 4л J RiRs
T = [nxTA]-[[nxte]xr,]-(n te)-rs,
где 5 - площадь локального участка шероховатой поверхности;
q = rs - г, - разностный направляющий вектор; п - нормаль к поверхно-
сти; р = {x,^(x,z),z} - радиус-вектор, проведенный в точку случайной
поверхности; Те,ТА - определяются из соотношения (3.32).
Для оценки интеграла (3.33) используется метод стационарной фазы
[17]. Условием точки стационарной фазы для интеграла Jexp(-iJt(q • p))dS
s
является равенство нулю градиента показателя экспоненты:
grad(q • р) = grad(qzx + q.z + qy^(x,z)) = 0 . (3.34)
Значения частных производных случайной функции, которые
представляют собой тангенсы углов наклона поверхности, выражаются
из (3.34) через составляющие разностного вектора q = {,<7v.,}:
Zx = a^z)=_^ r_^(x,z)^ (3 35)
dx qy - dz qy
Принимая во внимание, что нормаль к случайной поверхности оп-
ределяется значениями тангенсов углов наклона (3.23), с учетом соот-
ношений (3.35) значение нормали в точке стационарной фазы представ-
ляет собой нормированный разностный вектор:
167
Миллиметровая радиолокация: методы обнаружения и наведения ...
_q
Jrl+rz+l ?
где <z=|q| - модуль разностного вектора.
Кроме того, дифференциал площади случайной поверхности dS fl
интеграле (3.33) для точки стационарной фазы также определяется проч
изводными случайной функции:
+ +y^(]xdz=—dKdz. (3.37^
Цу
Используя соотношение (3.37), интегрирование осуществляется и!
по случайной поверхности Е,, а на средней плоскости у = £ = 0. Таким
образом, с учетом метода стационарной фазы, интеграл Стреттона-Чжу
при приеме на один из поляризационных ортов приемной антенны при
обретает следующий вид:
Ё = ifcexp(^(^ +J?5))77g f Lxp(_1/c(q. p))dxdz (3.ЗЯ)
4jrRJRsqy "
t- =[nxTA]e5 -[[nxTJxrJe,, (3.39)
где e5 - поляризационный орт приемной системы; Т? — множитель, зна-
чение которого зависит от поляризации падающей волны и приемной
системы, а также от электродинамических параметров поверхности; 50 Л
площадь проекции локального участка поверхности на плоскость у=0.
Оценку случайного поля рассеяния осуществляют путем вычисле-
ния его первых двух моментов: среднего поля и усредненной интенсив|
носги флуктуаций рассеянного поля. Среднее поле вычисляется усред-
нением поля рассеяния (3.38) по ансамблю реализаций поверхностей с
учетом гауссовского закона распределения высот неровностей £
й s ikexp(ik(R.,+Ry)T‘q ff , ... чч,. ., ,
Ep^a =-----. ‘ '—— yy^-^q^ + q^f^qydxdz, (3.40)
Л(9Л) = j exp(-ify/yK(£)c^ = exp
, P = kqycT^,
(3.41)
где — гауссовская плотность распределения вероятностей; ft(qy) -
эффективный коэффициент отражения шероховатой поверхности; Р —
параметр Рэлея.
Среднее поле представляет собой постоянную составляющую рассе-
янного поля, когерентную излученному полю. Как видно из соотношений
(3.40), (3.41), с увеличением среднеквадратической высоты неровностей
168
Глава 3. Математические модели характеристик рассеяния...
И<> сравнению с длиной волны падающего излучения коэффициент отра-
жения когерентной составляющей поля экспоненциально убывает. Пара-
метр Рэлея Р определяет критерий применимости метода МКП по от-
ношению к облучаемой шероховатой поверхности, одновременно соче-
ТНкнций в себе такие параметры, как ракурс облучения и наблюдения
= sin Д + sin Д участка поверхности, длину волны падающего излу-
чения к=— и среднеквадратическую высоту неровностей ст,.
Л
Интенсивность флуктуаций случайного рассеянного поля опреде-
ляется произведением комплексно сопряженных полей (3.38), взятых в
двух пространственно разнесенных точках поверхности р-{x,c(x,z),z},
/>' = {x',£'(x,z''),z’} с помощью операции повторного интегрирования:
к2\т*\2 q2 гг гг
(££') = 2d1d2~~2 |fexp(-i£q (р - p'y)dxdzdx'dz'. (3.42)
Усредненная интенсивность флуктуаций определяется как первый
Момент от (3.42) усреднением по ансамблю реализаций случайных
функций £и имеющим гауссовское распределение [17]:
_ФР_ f q2l+q2}
рас‘ 8,тД2^уеД 2/^,
где у=у2—- - среднеквадратическии тангенс угла наклона гауссов-
Ро
ской поверхности.
С учетом приведенных соотношений получим выражение для
удельной ЭПР крупномасштабной поверхности в приближении МКП:
4/гД2
So Jt
^2У}
(3.44)
Очевидно, что в случае моностатической локации поверхности, ко-
гда разностный вектор q = {2со5(Д),0,25ш(Д)} поляризационная матри-
ца удельной ЭПР в точке стационарной фазы определяется следующим
образом:
|<ф ,1.
II II 2/2 sin4 Д
|Д(0 = О)|2
О
О
|Д(0 = О)|2
ехр
(3.45)
Из соотношения (3.45) следует, что в радиолокационном случае со-
ставляющие рассеянного поля при приеме на ортогональных поляризаци-
169
Миллиметровая радиолокация: методы обнаружения и наведения ...
ях отсутствуют, а при приеме на согласованных поляризациях опрел
ются значениями коэффициентов Френеля при нулевом угле падения fl
Поскольку точка стационарной фазы представляет собой точку зеркала
ного отражения падающего поля, значение локального угла падения в >ifl
кальном базисе (рис. 3.14) при совмещенных точках излучения и прием
оказывается равным нулю, так как нормаль к касательной плоскости и
направляющий вектор падающей волны г,- являются коллинеарными.
Анализ влияния шероховатости поверхности на ее рассеивающий
свойства удобно проводить путем построения индикатрисы рассеянияв
Д град
Рис. 3.15. Диаграммы обратного рассеяния
водной поверхности с крупномасштабными
неровностями на длине волны 3 см
зависимости от углов меив
приемника. На рис. 3.15 пры
ведены диаграммы обратном,
рассеяния, построенные Н
формуле (3.45) для линей»
поляризованной падающей
волны при приеме на верни
калькой поляризации. При
этом длина волны падающс|в(
излучения принималась pan
ной 2=3 см. Предполагал»^»
также, что облучается водим
поверхность, диэлектрическая проницаемость которой из формулы Дм
бая для условий рис. 3.15 на длине волны 3 см принимала значенН
£,=57-135. Значения среднеквадратического тангенса угла наклона см
ставляли значения у =0,08, у =0,3 и у =0,8 соответственно. Из rpJ
фиков видно, что для очень пологой поверхности с у = 0,08 (сплоил А
линия) происходит почти зеркальное рассеяние радиоволн, причем мм
симум рассеянного излучения приходится на угол места Д =90°, cooiJ
ветствующий в радиолокационном случае направлению зеркального <л
ражения волны от гладкой плоскости. С увеличением степени шерохм
ватости до значений у =0,3 (штриховая линия) и у =0,8 (штрихпунш
тарная линия) угловой спектр рассеянного поля расширяется, что свя*ш
но с перераспределением интенсивности излучения по направлениям
отличным от зеркального. Так, при у =0,8 рассеяние происходит по1пи
по диффузному закону, т.е. равновероятно по всем направлениям.
Метод МКП хорошо применим для оценки рассеивающих свойств
некоторых квазигладких поверхностей в сантиметровом диапазоне волн
на направлениях приема, близких к зеркальному отражению, где влиЯ
ние мелкомасштабных неровностей, на рассеянное поле невелико. Пн
более коротких волнах при малых углах скольжения возникает сов^
шенно иная ситуация, когда мелкомасштабные неровности вносят ом
170
Глава 3. Математические подели характеристик рассеяния...
Рис. 3.16. Профиль поверхности
с мелкомасштабными
неровностями
9- —— . ... . .....
Ионной вклад в рассеянное поле, для определения которого использует-
0N метод малых возмущений.
9.3.5. Анализ электромагнитного поля рассеяния
Шероховатой поверхности методом малых возмущений
(' помощью ММВ описывается поле рассеяния от мелкомасштабных не-
ровностей, модель которых представляет собой другой предельный слу-
Чнй по сравнению с крупномасштабными. Для мелкомасштабных неров-
ностей поверхности значения среднеквадратической высоты неровностей
И радиуса корреляции значительно меньше длины волны падающего из-
лучения ст, «Л, р0 «Л, а сама поверхность - слабошероховатая с
у «1. Данной моделью могут быть описаны такие поверхности, как ас-
фальт, бетон, спокойная водная поверхность с мелкой рябью.
В основе ММВ лежит решение
|раничных условий для плоской элек-
тромагнитной волны на случайной по-
верхности с мелкомасштабными не-
ровностями, обладающей диэлектри-
ческой проницаемостью s'. При этом
Комплексная диэлектрическая прони-
цаемость вещества поверхности оп-
ределяется электродинамической мо-
делью среды и зависит от длины вол-
ны падающего излучения. Граничные
условия на такой поверхности записываются относительно случайной
нормали n(yx,yz) (рис. 3.16) для результирующих полей над поверхно-
стью и в среде поверхности [7]:
[пх^-Ё^^О, (п(Е£-£^))уЧ(х.г)=0> (Н£-Нг)^(х>г)=0, (3.46)
где п - нормаль к мелкомасштабной поверхности в точке с радиусом-
вектором р ; Е^,Н^ - результирующее электромагнитное поле над по-
верхностью; - электромагнитное поле в среде поверхности с
диэлектрической проницаемостью s'.
Предполагается, что результирующее поле над поверхно-
стью y = g(x,z) и в среде поверхности Ej.Hj- в граничных условиях
(3.46) представляет собой векторную сумму среднего Е^0,Н^0 и флук-
уационного ES1,Hj-j полей:
Ее = Е.£0 + Ej-,, Ё2 =Ё2о+Ё21, (3.47)
171
Миллиметровая радиолокация: методы обнаружения и наведения ...
= Н£о + Н£1 ’ = ^£0 + , (3 И
где Е^о = Е,- + Es, Нj-0 = Н( + Hs - результирующее поле на плоскости,
представляющее собой векторную сумму падающего и отраженного нс
законам геометрической оптики от плоскости у = 0 поля, a Ey-0,Hj-0 1
поле, преломленное от плоскости у = 0; Е^Н^, (Ej-pHj-,) — флуктЯ
ционное поле над плоскостью у = 0 (в среде поверхности), возникающей
за счет неровностей поверхности.
Результирующее поле над поверхностью Е^, представляет ин го-
рес с точки зрения его последующего использования в интеграле СтретпI
на-Чжу. Учитывая представление суммарного поля над мелкомасштаб1»Я
поверхностью (3.47), (3.48), дифракционное поле рассеяния от участка ши
верхности с мелкомасштабными неровностями также представляется век
торной суммой среднего и флуктуационного полей рассеяния:
Epac(rJ = Epac0(rJ + Epacl(rJ, (3.4<^
Ёрас0(и=-^ |([п0хНЕ0]-[[п() xEM]xrs])^S, (3.50)
5
Epac/(rJ =— I ([По * Нп]-[[По хЕй]х rJtydS, (3.51)
чд •>
S
где Epac0(rs) - поле рассеяния от локального участка на плоскости у -
EpaC|(rs) — составляющая общего поля рассеяния, вызванная флуктми-
циями случайной поверхности; п0= (0,1,0) - нормаль к плоскости у = 0.
Источником среднего поля E^fo) является результирующее поле ни
плоскостиу = 0 Е^о.Н^о, а поля E^^rJ — флуктуационное поле Е^рНЛ
Если при этом учесть, что для мелкомасштабной поверхности отклонена
случайной функции невелики по сравнению с длиной волны, то поле
рассеяния Epacl(rs) представляет собой небольшую поправку к основно-
му полю Ep^ofo) и носит название случайного поля возмущения.
Случайное дифракционное поле возмущения от мелкомасштабной^
поверхности в направлении на поляризационный орт приемной антенны
определяется в виде [16]:
-s fc2exp(ifc(2?j+2? ))(Т е,) гг .
£pach- =------- ' ----— Jp(x,z)exp(-iA(qp0))Jx<*, (3.52}]
' 5 X»
172
Глава 3. Математические модели характеристик рассеяния...
где
—aa^£ 1} , (Т, + Т2+Т3+Т4)
(b + as')(b0 + a0£') 1 2 3 47
•ь (1 - s') (b0 + OgS’) _.ч_ (Z? + flf')(^0+fl0^')„
11 “ ' (С; ’ Г- J ’ Пл , In — . С; ,
(а + й) («о+^о) (a+b) (a0+b0)
,i, (s'-1) (b + as') r 4 , fte'-l) (г.-г )
1 ’ = • no)•г/; т4 = (1 - s') -1 (e,. • n0).n0;
(я + й) (a0+M Ця + Z?) (o0+Z>0) )
>S'O - площадь локального участка на плоскости у = 0; p = {x,z,0} - ра-
диус-вектор, проведенный в точку на плоскости у = 0 в пределах ло-
кального участка; Т - векторный множитель, зависящий от поляриза-
ции падающей волны и электродинамической модели поверхности.
В радиолокационном случае, когда г,. = -г,, выражение для векто-
pit Т приобретает следующий вид:
«о Y е + 2n02Z?0(g'-l)
°о+М ' (ао+Ь^+а^')2
Т = (^'-1)
(п0-е,) п0 .
Интенсивность флуктуаций рассеянного поля возмущений опреде-
ляется произведением комплексно сопряженных полей рассеяния (3.52)
и двух пространственно разнесенных точках на плоскости у = 0
р = {х, z, 0}, р' = {х', z, 0}:
Jipacl' = л-2/?2/?2 JJехР(-^(Ч• (Р-f>')))dxdzdx'dz'. (3.53)
1 s Sq Sq
Среднее значение интенсивности определяется усреднением (3.53)
ио ансамблю реализаций поверхностей с учетом двумерного закона
распределения вероятностей W(£,g,p) и с использованием соотноше-
ний для статистических характеристик поверхности:
*ЧН2 гг
Jpac/' = д-2/?2/?2 ]]^(Др)ехр(-1^(<7хДх + <7.А2))£/Дха'А2, (3.54)
^(Др)= J р(р)^(рЖ(^,^Др)^' = а|Я(Др), (3.55)
-00 -ОС
где Ч/(Д/?),7?(Д/?) - корреляционная функция и коэффициент корреля-
ции поверхности; Ьх = х-х,t^z = z-z - переменные интегрирования;
173
Миллиметровая радиолокация: методы обнаружения и наведения...
( 8x2+8z2
=ехр------j—
I Р>
Др = >/Дх2 + Az2 - модуль разностного радиуса-вектора Др = р-р' и
плоскости у = 0.
При условии гауссовской статистики поверхности с коэффициенте
Др2
2
\ А)
ляется как прямое преобразование Фурье коэффициента корреляци!
А(Др) и представляет собой энергетический спектр поверхности:
корреляции А(До)=ехр
интеграл в (3.54) опредв
6(<?±) = J jA(Ap)exp(-i£(<7rAx+<7.Az))JA«7Az = 75C>o exp
,2
, (3.5*0
где р0 — радиус корреляции изотропной поверхности; q± = ^q2 + q2 I
модуль разностного направляющего вектора на плоскости у = 0.
После подстановки (3.56) в (3.55) с учетом (3.54) получим окончи*
тельное выражение для усредненной интенсивности флуктуаций расоН
янного поля возмущения:
г4 с
= 0
рас И
2 „2
ст<Ро
, 1-----ехР
л7?,2Я2
(3.57)
После несложных преобразований в (3.57) находим удельную ЭПР
мелкомасштабной поверхности в приближении ММВ:
4^27;с1/ 128^4|г|2
= ^ — =------------2 " еХР
о0 •*,-
У2
2д282д2>
У2
(3.58)
-
где у = >12 —— среднеквадратический тангенс угла наклона шероховм
Ро
той поверхности; 8 = - относительная шероховатость мелкомас»
штабной поверхности.
В соотношении для удельной ЭПР (3.58) введен новый статистиче-
ский параметр Д представляющий отношение среднеквадратической вы»
соты мелкомасштабных неровностей к длине волны падающего излуче-
ния. Поскольку при постановке задачи предполагалось, что для мелко!
масштабных неровностей значение сг^ « Л, 8 представляет собой крито»
рий применимости ММВ при анализе рассеивающих свойств шерохова»
той поверхности. При этом очевидно, что значения относительной шеро-
ховатости 8должно быть значительно меньше единицы: 8 << 1.
174
Глава 3. Математические модели характеристик рассеяния...
Проанализировать влияние статистических параметров 8 м у на рас-
сеивающие свойства мелкомасштабной поверхности можно при построе-
нии ее индикатрисы рассеяния. В качестве примера на рис. 3.17 приведены
диаграммы обратного рассеяния мелкомасштабных неровностей водной
Поверхности с диэлектрической проницаемостью £7 = 57-135 на длине
Волны падающего излучения 2=3 см. Представленные зависимости по-
кроены по соотношению (3.58) для линейно поляризованной падающей
Полны при приеме на согласованной вертикальной поляризации (е, =e;v).
Рис. 3.17. Диаграммы обратного рассеяния водной поверхности
с мелкомасштабными неровностями на длине волны 3 см
Как видно из графиков на рис. 3.17, при малых значениях относи-
тельной шероховатости 8= 0,001 (сплошная линия) и 8= 0,01 (штрихо-
вая линия) для слабо шероховатой поверхности с у =0,1 (шгрихпунк-
тирная линия) наблюдается практически равновероятное (диффузное)
рассеяние радиоволн. Это объясняется малыми отклонениями шерохо-
ватой поверхности от плоскости и представлением возмущенного поля
как небольшой поправки к основному среднему полю, рассеянному на
плоскости. С увеличением 8 в сторону единицы (£=0,1) начинает про-
являться максимум интенсивности обратного рассеяния на направле-
нии, соответствующем зеркальному отражению Д =90°, что означает
неприменимость мегода ММВ для расчета рассеянного поля от неров-
ностей с большими значениями егт в единицах длины волны.
Ограничение, накладываемое на значения параметра £<<1, озна-
чает, ню ММВ применим при малых значениях параметра Рэлея
/’ = kq,c>£ «1. Для мелкомасштабной поверхности параметр Рэлея при-
нимает такие значения при малых углах скольжения. При значениях па-
раметра Рэлея Р «1 возникает необходимость анализа обоих компонент
пространственного спектра шероховатой поверхности с использованием
гак называемой двухмасштабной модели.
175
Миллиметровая радиолокация: методы обнаружения и наведения...
3.3.6. Анализ электромагнитного поля рассеяния
двухкомпонентной поверхности
Как следует из экспериментальных данных [8], пространствен11ы||
п спектр любой реальной поверхир-
Рис. 3.18. Профиль неровностей
двухкомпонентной поверхности
сти может быть представлен ком
бинацией двух типов неровностей;
крупномасштабных и мелкому
штабных, а сама поверхность но-
сит название двухкомпонентной,
Вероятностная модель двухком
понентной поверхности предстал
ляет собой случайную функцией
координат ^(x.z) в виде адди-
тивной суммы £}(x,z) и £2(x,z)
(рис. 3.18): ^(x,z) = ^(x,z) + ^2(x,z),
где ^(x,z) и £2(x,z) - случайные функции, описывающие соответш
венно крупномасштабные и мелкомасштабные неровности двухком1*>
нентной поверхности, причем среднее значение ^2(x,z) = £;(x,z).
Если считать неровности обоих компонент поверхности статистике*
ски изотропными и распределенными по гауссовскому закону, то их стань
этическими параметрами являются среднеквадратическая высота неровно-
стей (ст^2 ), радиус корреляции неровностей /^(/fo) и среднеквадри»
- — /-Т — Ft i Л
тическии тангенс угла наклона у, =у2—— , у2 =у2——, где индекс 1 от
Pm Ай
носится к крупномасштабным неровностям, а 2 - к мелкомасштабным
Кроме того, предполагается, что неровности обоих компонент относитель-
но гладкие: «1, у2 «1, причем для крупномасштабных неровностей
выполняется условие » 2, а для мелкомасштабным
<т^2 « Рог « > гДе _ Длина волны падающего излучения.
В основе электродинамической модели рассеяния на двухкомпо-»
нентной поверхности лежит модифицированный метод малых возмуще!
ний [8]. Рассмотренный в предыдущем параграфе ММВ применялся для
расчета характеристик рассеяния случайной поверхности, образованной
наложением мелкомасштабных неровностей на идеально гладкую плос-
кость у=0. При этом результирующее поле рассеяния локального участк:|
такой поверхности принималось равным векторной сумме поля, рассеян-
ного на плоскости, и флуктуационного поля, вызванного мелкомасштаб-
176
Глава 3. Математические модели характеристик рассеяния...
Ними неровностями. В модели двухкомпонентной поверхности в качест-
ве базовой для мелкомасштабных неровностей выступает не плоскость
у 0, а крупномасштабная поверхность (х, z), причем отклонение по-
верхности <^(x,z) от крупномасштабной ^(x,z) рассматривается как
небольшая поправка. Поэтому, по аналогии с ММВ, результирующее по-
ле рассеяния от участка двухкомпонентной поверхности также определя-
йся в виде векторной суммы среднего и флуктуационного полей:
EpacZ (г,) = ЕраС, (г,) + Ёрас2 (г5) , (3.59)
Epac.(rs) = ^f([n1xHEI]-[[n1xEE1]xrJ])^S1, (3.60)
S1
Ёрас2(Г,) = Г([П,ХН12]-[[П, ХЁЕ2]ХГ,])^2 , (3.61)
427 J
S1
где Ёрас|(г5) - поле рассеяния от локального участка крупномасштаб-
ной поверхности <^(x,z); Ёрас2(г5) - поле возмущения, вызванное
флуктуациями мелкомасштабной поверхности <f2(x,z), располагающей-
ся на крупномасштабной; и, - нормаль к крупномасштабной состав-
ляющей поверхности.
Представление полного поля рассеяния в виде (3.59) основано на
том предположении, что результирующее поле вблизи двухкомпонент-
ной поверхности определяется векторной суммой электромагнитного
ноля Ё^-рН^], создаваемого крупномасштабными неровностями, и
электромагнитного поля Ё£2,Н^-2, вызванного флуктуациями мелко-
масштабной составляющей: Ej- = Е^-, + Е^-2 , НЕ = Hj-, + Hj-2. При этом
нормаль к крупномасштабной составляющей поверхности п, определя-
ется производными случайной функции <^(x,z) из соотношения (3.23).
Поле рассеяния крупномасштабной составляющей поверхности (3.60), а
также его первые два момента определяются с помощью МКП. Поле
возмущения (3.61) определяется с использованием ММВ, изложенного в
предыдущем параграфе, с той лишь разницей, что в модели двухкомпо-
нентных неровностей граничные условия переносятся не на плоскость
г - 0, а на плоскость, касательную к крупномасштабной поверхности
5)(x,z) со случайной нормалью п,. Вычисленное таким образом поле
возмущения представляется в следующем виде:
177
Миллиметровая радиолокация: методы обнаружения и наведения
я/?,/?5
^pac2,-^eXP(1„f,+/?5)) f^(n1)^(x,z)exp(-i^(qp))JSJ
где - интегрируемая площадь на плоскости, касательной к поверхшр |
сти £i(*,z); p = {x,4:I(x,z),z} - радиус-вектор, проведенный из начиМ
координат в точку крупномасштабной поверхности с нормалью и,,
^5(п,) = Г(п1)е5 — комплексный множитель, который определяется рнЛ
лярным произведением вектора Т(п,) относительно случайной нормам
п1 на поляризационный орт приемника.
Следует отметить, что случайный характер поля возмущения (З.бЯ
определяется как мелкомасштабной составляющей случайной повсрм
ности ^2(x,z) , так и функцией крупномасштабных неровностей £(х, !
производные которой определяют случайную нормаль nt. Поэтому да
определения статистических характеристик поля возмущения (3.62) нМ
обходимо проводить статистическое усреднение по ансамблю реали ы
ций как мелкомасштабных, так и крупномасштабных поверхностей. <
Среднее значение интенсивности рассеянного поля возмущен»
(3.62) осуществляется в два этапа. На первом этапе проводится усред>
нение произведения Двух комплексно сопряженных полей возмущен»»
в двух пространственно разнесенных точках на плоскости, касательно
к крупномасштабной составляющей поверхности. Проводя усреднение г
учетом того, что дифференциал площади на касательной плоскости он
dxdz
ределяется как dSt =---, получаем выражение для удельной ЭПР мел»
П1у
комасштабной поверхности, располагающейся на крупномасштабной,
зависимости от случайной нормали п,:
_S( ч ^^„(П,) 128^4|^(п7)|2
йо
т\у = cos(6»')
(З.«в
2л282д\
, (ЗбЗ|
I-------------2-----еХ₽
6 П1УП ‘
проекция случайной нормали на ось I
/2
где
д± = 72(1-(r/ri»-(4ni)2 — проекция разностного направляющего!
вектора на плоскость, касательную к крупномасштабной поверхности
точке с нормалью п, [9].
На втором этапе осуществляется усреднение (3.63) по ансамбля
реализаций крупномасштабной поверхности ^(x,z). Поскольку слу-
чайный характер (3.63) проявляется в зависимости от нормали
178
Глава 3. Математические модели характеристик рассеяния ...
»=--------------------------------------------------------------
B|(/d,/г1) к крупномасштабной поверхности, усреднение проводится в
(Мнем случае с учетом двумерной плотности распределения вероятно-
ficii тангенсов углов наклона поверхности :
128л-4<?4
V, =—~ч—
1л232д2'
Г2 ,
Где tV(/xn/zi) - двумерный гауссовский закон распределения тангенсов
углов наклона крупномасштабной поверхности.
В [9] получено соотношение для совместной плотности распреде-
ления углов О' и а' в следующем виде:
IV(О', а') = -^--2tgg-fl, ехР
2л- у, cos 0
tgM
2/,2 J '
(3.64)
Принимая во внимание, что положение случайной нормали п, к
Крупномасштабной составляющей поверхности определяется углами О'
И а' (рис. 3.18): n, = (sin 0 cos a',-sin 0 sin a', cos 0), усреднение удель-
ной ЭПР мелкомасштабной поверхности (3.63) для случая бистатиче-
Ской радиолокации осуществляется по этим случайным углам с учетом
Их совместного закона распределения (3.64) и при наличии взаимных
ипенений участков крупномасштабной поверхности:
,, 64л-3г>4 2г , Л f tg20'^ f 2л-2529Н
У2Г1 j 0J cos30' 2/,2J r22 J
В радиолокационном случае, когда =-г/, as = л, $= , т.е. ис-
точник и приемник излучения совмещены и находятся в плоскости z ~ О
(рис. 3.18), случайную поверхность можно рассматривать как двумерную
реализацию случайной функции <^(x,z) в плоскости z=0. При этом для
статистически изотропной поверхности £i(x,z) нормаль к крупномас-
штабной поверхности также лежит в плоскости z=0: П| = (sin 0,0, cos 0), а
плотность распределения вероятностей азимутального угла а' принима-
ется равномерной, т.е. W(a) = \l 1л. Максимальный тангенс угла накло-
на такой случайной поверхности определяется частной производной слу-
.. -ж 5£(х)
чайной функции ft =-----= tg# и распределен по гауссовскому закону:
179
Миллиметровая радиолокация: методы обнаружения и наведения...
1 ( у2 > —
^(Г;) = -7т=^ехР-~г-
л/2л-/; 2yt )
Проводя преобразования, получаем из (3.66) плотность распреД
ления вероятностей угла 0 = arctg/j:
W(0) =
1
; _-----5—-exp
cos 0
tg2#'^
2/i2 )
(3.611
Таким образом, в радиолокационном случае удельная ЭПР мелко-
масштабных изотропных неровностей (3.65) усредняется по ансамбли'
реализаций двумерной крупномасштабной поверхности в плоско»
сти z=0 с учетом закона распределения угла 0' (3.67):
_5 128лЛ54
2
(3.68)
где 7*(П|) = 7J5(nl)es - проекция векторного множителя на поляризацн
онный орт приемника.
Результирующее значение индикатрисы рассеяния (удельной ЭПР)
определяется суммой двух слагаемых: индикатрисы рассеяния крупиц»
масштабной поверхности и индикатрисы рассеяния мелкомасштабный
неровностей, располагающихся на крупномасштабной поверхности:
(3.69J
где of] - индикатриса рассеяния (удельная ЭПР) крупномасштабной по-
верхности, определяемая соотношениями МКП; <rj2 “ индикатриса рас-
сеяния (удельная ЭПР) мелкомасштабной поверхности, расположенной
на крупномасштабной, определяемая соотношениями модифицирован--!
ного ММВ (3.68).
3.3.7. Анализ результатов расчета диаграмм удельных ЭПР
типовых квазигладких и шероховатых поверхностей
Соотношение (3.69) позволяет оценить индикатрису рассеяния (удельную
ЭПР) некоторых квазигладких поверхностей на всем диапазоне измене-
ния углов места приемника. При этом необходимым условием является,
наличие электродинамической модели среды поверхности и вероятност-
ной модели ее шероховатостей, т.е. достаточно полно должны быть опи-
саны ее электродинамические и статистические параметры.
180
Глава 3, Математические модели характеристик рассеяния...
В качестве примера были вычислены зависимости удельной ЭПР от
yt ин места приемника для поверхности бетона на длине водны 8 мм, ко-
Ivpi.ie приведены на рис. 3.19, 3.20. Диэлектрическая проницаемость бе-
fonit была получена экспериментально и составила на длине волны 8 мм
д' - 5,5 -10,4. Статистические параметры поверхности бетона по резуль-
flliiM усреднения различных данных, приведенных в многочисленных
Црючниках составляют следующие значения для крупно- и мелкомас-
штабной составляющих поверхности: ^=0,12, /2=0,18, 5 = 0,02 [12].
Сплошной линией на рис. 3.19 и 3.20 обозначены диаграммы удельной
SIIP, вычисленные с использованием соотношения (3.69), а штриховой
Дипией обозначены экспериментальные диаграммы удельной ЭПР для
Поверхности бетона на длине волны 8 мм [12].
Рис. 3.19. Диаграммы обратного
рассеяния поверхности бетона
на длине волны 8 мм
для вертикальной поляризации
Рис. 3.20. Диаграммы обратного
рассеяния поверхности бетона
на длине волны 8 мм
для горизонтальной поляризации
В диапазоне изменения углов места приемника Д =(70...90)° до-
минирующий вклад в рассеянное поля вносят крупномасштабные не-
ровности, а удельная ЭПР в этом диапазоне углов составляет величину
5 ={-15...10}дБ на обеих поляризациях. При малых углах места
Д < 10° удельная ЭПР вычисляется с помощью обычного ММВ и со-
ставляет <ТуД v = {-35...-60}дБ на вертикальной поляризации и af =
j-50...-70}дБ на горизонтальной поляризации. В промежуточной об-
иисти углов места Д=(10...70)° в области резонансного рассеяния
удельная ЭПР ДЛ1, = {-35...-15}дБ на вертикальной поляризации и =
)-50...-20}дБ на горизонтальной поляризации. Как видно из графи-
ков на рис. 3.19 и 3.20 расчетные и экспериментальные кривые доста-
ючно хорошо совпадают между собой для обеих поляризаций, а по-
181
Рис. 3.21. Диаграммы обратного
рассеяния поверхности песка
на длине волны 3 см для
вертикальной поляризации
Миллиметровая радиолокация: методы обнаружения и наведения...
------------------------------------------------------—
грешность вычислений не превыина!
(5...7) дБ.
Кроме поверхности бетона, в р*
зультате расчета по формуле (3.60)
была получена диаграмма уделыки!
ЭПР песка на длине волны 3 см, прв
веденная на рис. 3.21. Диэлектрик
ская проницаемость песка была пол*
чена экспериментально и составим
на длине волны 3 см £< = 2,5 —iO.OJg
Статистические параметры поверхно-
сти песка по результатам усредни i ng
различных данных, приведенных
многочисленных источниках, составляют следующие значения для
крупно- и мелкомасштабной составляющих поверхности: /1=0,21
/2 =0,3; 8 = 0,02 [12]. Сплошной линией на рис. 3.21 обозначены дни*
граммы удельной ЭПР, вычисленные с использованием соотношения
(3.69), а штриховой линией экспериментальная диаграмма уделы ю!
ЭПР для поверхности песка на длине волны 3 см [12].
Как видно из графиков, в диапазоне углов Д =(10...50)° расчел ин
и экспериментальная зависимости практически не отличаются, в то врем|
как при углах места, близких к вертикальным, погрешность расчета и«>
сравнению с экспериментом достигает 15 дБ. Такой результат может быв
связан как с большим разбросом экспериментальных данных удельной
ЭПР песка в данном частотном диапазоне, так и объективными трудно*
стями в выборе адекватных статистических параметров сильно шероховн*
той песчаной поверхности, которые соответствовали бы реальной струж
туре поверхности.
Таким образом, на основе модели двухкомпонентной поверхности
получены соотношения, позволяющие установить связь между электЛ
динамическими и статистическими характеристиками шероховатой по-
верхности и ее удельной ЭПР. Расчетные зависимости удельной Э11Р
морской поверхности и поверхности бетона достаточно хорошо корм
лируют с данными экспериментальных измерений и могут быть испоА-
зованы при расчете входных сигналов РЛС как характеристики рассея»
ния локальных участков соответствующих земных покровов.
182
ГЛАВА 4
Селекция радиолокационных целей
На основе экспериментальных данных
об их отражающих свойствах
в миллиметровом диапазоне волн
К современным РЛС, предназначенным для селекции движущихся це-
лей на фоне подстилающих поверхностей, предъявляются следующие
основные требования: всепогодность, всесуточность, автономность
Принятия решений, высокая разрешающая способность, высокая поме-
хозащищенность. Перспективные комплексы должны обеспечивать на-
дежное обнаружение и распознавание различных типов целей в слож-
ных помеховых условиях.
В настоящее время при разработке перспективных РЛС ММДВ
основные усилия направлены на повышение селективных возможностей
Информационных каналов существующих и перспективных радиолока-
ционных комплексов на основе использования характерных особенно-
стей спектрально-поляризационной структуры сигналов, отраженных от
объектов и фонов различных типов.
Одним из главных направлений совершенствования современной ра-
диолокационной техники является обеспечение надёжной селекции и рас-
познавание типовых наземных целей на подстилающем фоне. В настоящее
время в ходе проведения ряда работ получен большой объём новых экспе-
риментальных данных, обработка которых на новой информационно-
технологической базе, включающей современные вычислительные средст-
ва и новые алгоритмы, позволяет рассчитывать на качественное повышение
селективных возможностей техники ММДВ, что, в свою очередь, приведёт
к существенному повышению уровня эффективности комплексов.
Последние достижения в области вычислительной техники, матема-
шческих методов обработки и анализа многомерных данных, на основе
которых созданы системы автоматического распознавания объектов тех-
ники по сигналам их акустических и сейсмических полей []], создали
объективные предпосылки для повышения селективных возможностей
информационных радиолокационных каналов и построения в перспекти-
ве на их основе образцов и систем вооружения, у которых функции полу-
чения, преобразования и представления информации о целях в интересах
поддержки принятия решения на применение оружия будут осуществ-
ляться автоматически. Эти системы условно можно называть «интеллек-
|уальными», понимая под этим использование для обработки информа-
183
Миллиметровая радиолокация: методы обнаружения и наведения... _
ции о целях алгоритмов автоматической селекции (классификации), оГмш
печивающих обнаружение, «обучение» и распознавание заданных обь у
тов в масштабе реального времени.
Разработка таких алгоритмов особенно актуальна для информации
ных каналов, функционирующих в условиях неопределенной (быстро м!
няющейся) фоно-помеховой и обьектово-целевой обстановки. Эффекте
ное решение задач автоматического обнаружения и целеуказания движж
щихся объектов заданных классов в таких условиях возможно, если ал Л
ритмы автоматической классификации систем распознавания будут обИ
печивать:
адаптацию к априорно неопределенной фоно-помеховой обстановке; I
адаптацию к априорно неопределенной объектово-целевой обсЛ
новке или «обучение» алгоритма (построения эталона) на любой клав
объектов, а также селекции (распознавания) объекта неизвестного каш-
са (так называемого «прочего класса»);
«обучение» алгоритма в масштабе времени, близком к реальному,
и возможность его реализации при ограничениях на массогабаритщЯ
характеристики и энергопотребление.
В настоящее время существует значительное количество методе!,
решения задач автоматической классификации [2, 3]. Однако в услоши
ях, когда спектральное отношение сигнал-помеха не превышает 12 дБ, 4
также нет точной информации о составе классов объектов разведки, и*
эффективность низка. По этой причине разработка методического оба
печения для решения задач распознавания объектов заданных классе!
при малых соотношениях сигнал-помеха в условиях априорно неопре-
деленной фоно-помеховой и объектово-целевой обстановки являегс!
актуальной научной задачей.
В общем случае уровень вероятности распознавания объектов опре-
деляется эффективностью реализуемых в системе автоматической селекции]
(САС) информационных каналов методов обработки информации об объ-
екте на всех этапах ее прохождения, начиная от момента преобразовали
параметров физического поля объекта в электрический сигнал, до принязпи
решения о распознавании (классе объекта). Такими этапами являются:
предварительная обработка сигнала, в результате которой получи
ют признаки распознавания (спектры сигнала, поляризационная струя
тура и т.п.);
формирование обучающей выборки и построение эталона (отбор
информативных, с точки зрения решения задачи распознавания, элемеи
тов и построение на них эталона класса объекта);
сравнение входных образов с эталонами, при котором определяем
ся степень отличия («расстояние») между значениями их многомерны»
признаков;
184
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
принятие решения о принадлежности входного образа одному из
*1 плонов - распознавание класса объекта.
В силу высокой изменчивости амплитудно-временной структуры
•и гнала и его частотно-временного представления (признаков распозна-
|й1шя), вызываемого изменениями фоно-помеховой и объектово-
целевой обстановки, системы автоматической селекции для своего эф-
фективного функционирования должны обеспечивать адаптацию к ва-
риациям структуры анализируемой информации на всех этапах ее про-
хождения. Это означает, что методы обработки информации, реализуе-
мые в САС, должны обеспечивать учет неопределенности, обусловлен-
ной постоянными изменениями параметров анализируемых сигналов и
втруктуры многомерных признаков (текущих спектров, параметров
движения, ЭПР и т.п.).
Важное значение имеет анализ состава и структуры фоно-целевых
данных, поступающих от радиолокационных средств для использования в
ОИстемах селекции наземных объектов на фоне помех с точки зрения опе-
ритивно - тактических схем и построений. Результаты анализа в виде по-
тенциальных технических характеристик радиолокационных средств (типы
белекгируемых целей, дальность до них, расстояние между ними, скорости
И т. д.) проецируются на конкретные макетные образцы РЛ датчиков.
Рациональное построение современных и перспективных радиоло-
кационных систем приводит к необходимости проведения комплекса
исследований поискового характера по выявлению и выделению новых
Информативных признаков различных объектов в миллиметровом диа-
пазоне длин волн. В связи с этим были поставлены и решены следую-
щие основные задачи:
разработка радиолокационного стенда для исследования селектив-
ных свойств движущихся целей в ММДВ на основе анализа их полной
поляризационной матрицы рассеяния (ППМР);
проведение экспериментальных исследований и анализ их резуль-
татов на основе различных алгоритмов обработки с целью выявления
информативных признаков объектов радиолокации.
4.1. Особенности функционирования систем селекции
К системам селекции, применяемым в системах обнаружения и распо-
знавания и в высокоточном оружии (ВТО), предъявляются следующие
основные требования: всепогодность; всесуточность; возможность ав-
юномной работы (в т.ч. реализация принципа «выстрелил» - «забыл»);
большая дальность действия; хорошая разрешающая способность по
координатам; высокая помехоустойчивость и помехозащищенность.
В наибольшей степени таким требованиям удовлетворяют системы
с радиолокационным принципом действия, работающие в ММДВ. Вместе
185
Миллиметровая радиолокация: методы обнаружения и наведения...
с тем системы селекции, функционирующие на других принципах дейЯ
вия и в других частотных диапазонах, могут использоваться как дополнив
тельные информационные каналы. Такое комплексирование дает шЛ
можности для расширения функциональных возможностей и качества > I
лекции современных и перспективных комплексов вооружения.
В качестве дополнительных каналов могут использоваться CJM
дующие:
оптические (в том числе ИК и телевизионные): активные, полупЦ
тивные, пассивные при селекции объектов бронетанковой технии)
(ОБТТ) и летательных аппаратов (ЛА);
радиометрические, использующие отрицательный температурим*
контраст ОБТТ на фоне подстилающей поверхности;
акустические (в том числе сейсмические и гидроакустические) при
селекции наземных (ОБТТ) и надводных целей (корабли);
магнитоэлектрические, использующие изменения магнитного пил*
при относительном движении системы селекции (боеприпаса) с целм
(ОБТТ);
электростатические, использующие изменение электростатичесмЯ
поля при относительном движении системы селекции (ВТО) с целью (ЛЛ),
Недостатком многоканального построения систем является сушм
ственное усложнение и удорожание аппаратуры. Поэтому помимо мин
гоканальной обработки поступающей информации в системах селекции,
использующих радиолокационный принцип, может также применятся
многодиапазонность (например, совместная работа РЛС в 2-мм и 8-м м
диапазонах). Такое построение позволяет унифицировать ПЧ-тракты *
тракты обработки, что дает выигрыш в массогабаритных и стоимостпья
параметрах систем при одновременном улучшении их функциональны*!
характеристик.
Радиолокационные системы селекции могут применяться в стым
циях разведки, станциях обнаружения и целеуказания, в бортовых РЛС
В зависимости от системы стабилизации координат РЛС они могут быть
как стационарными, так и бортовыми. Области применения РЛ селся
ции различного назначения схематично приведены на рис. 4.1.
На функционирование алгоритма работы РЛ системы селекции
оказывают влияние следующие основные факторы:
поляризационный базис приемной и передающей антенн;
матрица рассеяния цели;
матрица рассеяния помех на подстилающей поверхности;
матрица рассеяния элементов подстилающей поверхности;
матрица рассеяния среды распространения;
принимаемое и формируемое напряжение сигнала;
шумы (тепловые и т.п.);
активные помехи.
186
00
Рис. 4.1. Области применения РЛ систем селекции
’’лава 4. Селекция радиолокационных целей на основе экспериментальных...
188
Миллиметровая радиолокация: методы обнаружения и наведения...
Рис. 4.2. Структура взаимодействия РЛ системы селекции с щеяыо
Глааа 4. Селекция радиолокационных целей на основе экспериментальных...
Структура взаимодействия РЛ системы селекции с целью в усло-
виях помеховой обстановки представлена на рис. 4.2. В процессе функ-
ционирования РЛ системы селекции могут решать задачи, связанные с
обнаружением цели, измерением основных параметров ее местополо-
жения во времени и распознаванием (рис. 4.3).
Анализ функционирования РЛ систем селекции и информации, при-
веденной на рисунках 4.2 и 4.3, показывает, что в структуре алгоритма не-
обходимо учитывать поляризационную селекцию и селекцию по типу сиг-
налов. Поляризационную селекцию можно осуществлять при различном
•СИпе поляризаций излучаемого и отраженного сигналов (рис. 4.4).
Рис. 4.3. Задачи, решаемые РЛ системами селекции
Рис. 4.4. Поляризационная селекция
189
190
Селекция по типу сигналов
Узкополосные сигналы
Миогочастотные сигналы
Широкополосные сигналы
Временные методы
(изменение статист.свойств ЭПР):
за счет движения цели;
за счет движения носителя.
По виду изменения
импульсной характеристики
(во временной области):
за счет движения цели;
за счет движения носителя.
Частотные методы
(модуляция спектра):
1) за счет движения цели
н носителя:
доплеровское смещение;
расширение спектра (сложный
характер рассеяния);
фазовая модуляция (вибрация
цели);
2) за счет сигнала:
узкополосная ЧМ;
узкополосная ФМ.
___________________________
По виду модуляции сигнала
(в частотной области):
частотная модуляция-
фазовая модуляция.
Миллиметровая радиолокация: методы обнаружения и наведения...
Рис. 4.6. Функциональная схема ППМ
Миллиметровая радиолокация: методы обнаружения и наведения...
Селекцию по типу сигналов можно производить различными №
тодами (временными и частотными) при использовании узкополосный
многочастотных и широкополосных сигналов (рис. 4.5).
Существующие макеты основных компонентов радиолокационный
устройств перспективных систем ВТО и специализированные измерив
тельные стенды, разработанные в рамках различных НИОКР в перлы
очередь для решения только задач обнаружения объектов военной техн)
ки для специальных систем ВТО и как следствие — для достаточно спецм
фических условий локации. Поэтому для успешного решения задач алн»
матизированной и автоматической селекции различных классов
объектов военной техники в сложных помеховых условиях необходим
модернизация макетов и стендов в части функциональных решений
основных потенциальных характеристик, анализ которых приведен в ни-
стоящем отчете. В общем виде функциональная схема модернизиронша
ного макета приемопередающего модуля РЛ устройства, использовано
которого позволит формировать совокупность образов (изображений) ц»
лей во всем пространстве селективуемых параметров, приведена на рн»
4.6. Среди наиболее информативных для систем ВТО следует отметит
спектральные (спектральный и вибрационный портреты), поляризациям
ные (исследования полной поляризационной матрицы рассеяния объо
тов), энергетические (контраст) параметры и их комбинации.
4.2. Анализ характеристик сигналов объектов
техники и помех
Для того чтобы сформулировать основные требования к методам обри-
ботки информации в радиолокационных трактах комплексов ВТО, соон
ветственно и к задачам их разработки, необходимо рассмотреть в каки»
условиях происходит получение исходной информации о функциониро-
вании объектов и фоно-помеховой обстановке.
Известно, что источником полезной информации, на основе кош-
рой может быть решена задача автоматической классификации движу<
щихся объектов техники по радиолокационным доплеровским сипы
лам, являются вибрации корпуса, его частей, перемещения элементе
конструкции, например, движителя, и т.п. Далее будем называть сошм
купность этих вибраций вибрационным портретом объекта.
Частота и амплитуда колебаний конструктивных элементов объек-
та техники, содержащихся в его вибрационном портрете, определяют! )!
механическими резонансами конструкции этих элементов. В сигналь*
ном отображении (с вибродатчика) этот портрет представляется в вид»
шумоподобного сигнала с выраженными узкополосными частотными
составляющими, структура которых (набор значений амплитуд часто!»
ных составляющих) является структурно устойчивой информацией, ко-
192
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
1<|рая собственно и является исходной базой для решения задачи распо-
ншвания, по крайней мере, в системах акустической и сейсмолокации.
II задачах радиолокации исходная база устойчивой информации должна
быть расширена в части новых (специальных) информационных при-
нтов, к числу которых могут относиться: поляризационный контраст,
щносительная ширина снекзра, энергетический контраст, фазовая мо-
дуляция отраженного сигнала и т.п.
Поэтому одним из основных условий успешного решения задачи
автоматической селекции является наличие такого информационного
Пинала (канала получения информации об объекте), который обеспечи-
ипе г получение данных об информационном портрете объекта техники с
минимальными потерями и искажениями.
В частности, в радиолокационных каналах средств ВТО СВ полу-
чение информации о вибрационном портрете объекта осуществляется с
помощью систем СДЦ, которые позволяют получить данные о величи-
нах и скоростях радиальных составляющих перемещений отражающих
Поверхностей облучаемого объекта Vhob o6 относительно РЛС. Связь этой
величины с частотой доплеровского сигнала, вырабатываемого систе-
мой СДЦ, определена в известной формуле
Аоч= 2 И1юво6 /Я, (4.1)
Которая является формальным выражением эффекта Доплера. Получе-
ние этих величин осуществляется путем измерения параметров допле-
ровского сигнала (/|0„) на данной длине волны Я и последующего расче-
IU Кюв. об- Таким образом, доплеровская РЛС обеспечивает получение
информации о вибрационном портрете движущегося объекта. Резонанс-
ные вибрации являются генератором совокупности также всех акусти-
ческих шумов объекта техники, что позволяет на слух однозначно опре-
делять класс объекта - источника шума. Соответствие структуры спек-
ipa акустического и радиолокационного доплеровского сигналов воз-
душных объектов позволило дать определение радиолокационному до-
плеровскому сигналу - радиоакустический.
Однако, как показывают результаты исследований, распознавание
обьектов с заданным уровнем эффективности может быть достигнуто
при использовании как можно более полной информации о вибрацион-
ном портрете объекта, т.е. при условии использования информации, со-
держащейся в малых значениях амплитуд вибраций.
Отсюда вытекает общее требование к парамезрам зондирующего
i ni пала РЛС и характеристикам тракта и методам обработки ее допле-
ровского сигнала, которое можно сформулировать как требование ми-
нимального искажения структуры исходного сигнала (вибрационного
портрета).
193
Миллиметровая радиолокация: методы обнаружения и наведения.. _
4.2.1. Основные механизмы формирования вибрационного
портрета объектов техники
Основными механизмами формирования вибрационных портретов jiiiiri
жущихся гусеничных и колесных объектов, являются работа их двмА
телей и вибрации конструкций, вызываемые как работой двигательикк
установок, так и взаимодействием элементов конструкции со средой,V
которой перемещается объект. Структура вибрационных сигналов об и
ектов наглядно проявляется в их частотно-временном представлений
(текущих спектрах), которое несет информацию об источнике возбум
дения той или иной его частотной составляющей.
По отношению к заданным объектам распознавания сигналы дцв
гих колеблющихся источников являются помехами, которые можни.
разбить на следующие группы:
а) помехи, длительность которых много больше, чем интерн*
времени полезного сигнала;
б) помехи, длительность которых примерно равно интервалу ш
лезного сигнала;
в) помехи, длительность которых много меньше, чем интерн*
времени полезного сигнала.
Необходимость такой классификации помех по временному при-
знаку обусловлена различными подходами к решению задачи адаптацно
САС к условиям неопределенной фоноцелевой обстановки в ходе обил •
ружения и селекции объектов. Источники помеховых сигналов Moi"yi
быть естественного или техногенного происхождения.
Приведем основные механизмы возбуждения вибраций объекМо*
техники и помех и основные характеристики их сигналов. Механизмами
возбуждения вибраций объектов техники являются:
1. Работа двигателя, которая вследствие вращения неуравном
шейных частей механизмов двигателя, а также процессов ударного его»
рания топливной смеси в цилиндрах двигателя [4-6] приводит к вибрЯ
циям корпуса объекта и его элементов. Для дизельных и карбюраторный
двигателей спектр вибраций содержит гармоники основной частоты
вращения коленчатого вала, значение которой лежит в диапазоне частот
50...200 Гц. Цикл работы всех цилиндров находит отражение на часто*
тах, соответствующих тактам цикла (в диапазоне частот 40...50 Гц) и id
гармоникам. Положение спектральных линий меняется в зависимое') и
от числа оборотов двигателя, а поэтому - и от скорости движения обь«
екта. Для газотурбинных двигателей спектры вибраций не содержат яр-
ко выраженных дискретных компонент;
2. Движение по неровностям трассы без отрыва от ее поверхноспя
приводит к появлению вибраций, которые зависят от формы простраИ
ственного спектра неровностей дороги, собственных колебательных ха«
194
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
|Иктеристик объекта как механической системы, скорости движения и
Типа грунта. Составляющая спектра, связанная с действием этого фак-
тора, имеет сплошной вид с локальными максимумами, обусловленны-
ми амплитудно-частотными характеристиками подвески ходовой части
Объекта и характеристиками грунта. Некоторым из возбуждаемых при
Этом колебаний удается поставить в соответствие собственные колеба-
ния подрессорной массы на подвеске и колебания колеса на шине или
Нитка на бандаже. Резонансные частоты подвески у тяжелых и легких
Гусеничных объектов составляют соответственно 1,1 и 1,4 Гц. Для гусе-
ничной техники характерны также вибрации, возбуждаемые при движе-
нии катков по неровностям трассы, сосредоточенные в диапазоне частот
2O...6O Гц [4]. При движении колесной техники по неровностям трассы
Вибрации возбуждаются [5] за счет колебаний: кузова в диапазоне час-
тот 1...2 Гц; мостов в диапазоне частот 5...13 Гц; двигателя на подвеске
В диапазоне частот 5...30 Гц. Основная энергия сигнала при движении
Колесной техники по неровностям дороги приходится на диапазон час-
то!' 1...20 Гц, а максимум спектральной плотности - на диапазон частот
6...12 Гц [6];
3. Удары при отрыве ходовой части объекта от поверхности
трассы движения возбуждает колебания с частотами, равными едини-
цам герц;
4. Вибрации, связанные с наличием гусеничного движителя,_вознн-
кают за счет движения опорных катков по профилированной гусенице и
Возбуждают излучение на так называемой "траковой" частоте и ее гар-
мониках. Спектр этого излучения зависит от скорости движения объек-
та, а значение "траковой" частоты можно определить из соотношения:
>2И/£,
где L - длина гусеницы, м; V - скорость объекта, м/с.
При скоростях движения 3...15 м/с значение частоты "траковой"
составляющей в спектре находится в диапазоне 15...60 Гц [6]. Достаточ-
но интенсивное излучение возбуждается в диапазоне 16...20 Гц за счет
многополярности подвески гусениц. Значения частот колебаний, возбу-
ждаемых вследствие нецентрированности колес и катков, можно опре-
делить из соотношения
Л2И/Д,
। де Г - скорость движения, м/с; d - диаметр катка, м.
Как видно из соотношения, спектр колебаний зависит от скорости
движения. При движении со скоростями 3...15 м/с он сосредоточен в
диапазоне частот от 0,5 до единиц герц [6}. Удары траков гусениц о до-
рогу с твердым покрытием приводят к возбуждению колебаний, значе-
ние частоты которых зависит от скорости движения и лежит в диапазо-
не от 10 до 60 Гц;
195
Миллиметровая радиолокация: методы обнаружения и наведения... _
5. Неравномерность движения объекта* связанная с изменением
скорости движения объекта по величине или направлению, привод! i •
силовым воздействиям на грунт и, соответственно, к возбуждению се
ответствуюгцих вибраций. Эти воздействия носят кратковременный х*
рактер (по времени они равны длительности маневра) и выражаю геи
виде всплесков энергии вибраций.
Из проведенного анализа следует, что механизмы возбуждения нит-
раций объектов техники различных классов, определяют структуру чщ
тотных спектров их сигналов и несут информацию о конструктивна
особенностях и, следовательно, классах объектов. При этом парамо! м
механизмов возбуждения, связанных со скоростью движения, режимом
работы двигателей объектов и степенью неровности поверхности двнжг
ния, изменяют свои значения в довольно широких пределах, что находи
свое отражение в вариациях структур спектров доплеровских сигналов. I
4.2.2. Основные механизмы формирования помех
естественного происхождения
К основным механизмам возбуждения помеховых сигналов можно
нести следующие:
колебания поверхностного слоя грунта, вызванные воздействии
атмосферных явлений (гром, дождь, град, сильный ветер), волнением
моря (океана), быстрым течением рек;
метеоосадки;
колебания растительности (травы, кустов, деревьев) под воздев* i
вием ветра;
проявление жизнедеятельности биологических объектов.
Характер распределения энергии помех естественного происхожу*
ния в частотном спектре можно оценить по спектру их акустически!!
сигнала. Так, максимум спектра фоновых помех, вызываемых колебав ши
ми растительности, находится, как правило, в области частот 5...40 ГцД
его уровень зависит от метеоусловий (скорость и направление ветра,
наличие осадков) и характера растительного покрова местности.
Проведенное рассмотрение позволяет утверждать, что на проявим
ние признаков объектов ВТО, с использованием которых приходи м
решать задачу их селекции, влияют следующие факторы:
изменения положения объекта в пространстве и ракурса по oi r|i
шения к РЛС, вследствие его движения по пересеченной местности;
изменения параметров его движения;
помехи различной природы.
Все эти факторы, в конечном итоге, приводят к существенным
флуктуациям сигналов РЛС, поступающим из лоцируемого объема про
странства.
196
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
4.3. Получение априорной информации
О характере движения цели и вибрации корпуса
С использованием акселерометров
К числу информативных признаков, позволяющих распознавать цели,
щпосятся параметры их доплеровского спектра. Доплеровское смеще-
ние спектра может быть обусловлено
собственным поступательным движением цели,
вращением или колебаниями вокруг осей системы координат, свя-
шшюй с целью,
движением отдельных элементов цели (так называемый «турбин-
ный» эффект),
собственными вибрациями корпуса цели (работающий двигатель,
Выстрел).
Проведение серий экспериментов в ряде частотных диапазонов и
при различных условиях движения и эксплуатации целей является тру-
доемким и неоправданно дорогим процессом. В то же время проведение
экспериментов такого рода необходимо для получения входных реали-
заций и последующей разработки алгоритмов распознавания.
Поэтому наиболее рационально выполнить измерения в одном
диапазоне частот, например, в диапазоне 92...95 ГГц или 35 ГГц с по-
следующим пересчетом в другие диапазоны частот по известным пара-
метрам движения цели.
Параметры движения цели могут быть получены различными спо-
собами. Наиболее перспективным и дающим наибольший объем инфор-
мации представляется способ с использованием датчиков ускорения - ак-
селерометров. Используя информацию об ускорении цели, имеется воз-
можность получить значение скорости ее линейного движения, вибро-
скорости от работы двигательной установки. Для оценки угловых ско-
ростей вращения целесообразно применять гироскопы, в настоящее
время они так же существуют в твердотельном исполнении.
Для исследуемых объектов характерны приведенные в табл. 4.1
значения ускорений и их частотного диапазона. В настоящее время ши-
рокое распространение получили твердотельные акселерометры фирмы
Analog Device ADXL150 и ADXL250. Это - акселерометры третьего по-
коления (±50g) с микрообработанной поверхностью. Эта улучшенная
Таблица 4.1. Характеристики объектов по перегрузкам и частотам
Тип объекта Диапазон перегрузок, g Частота колебаний, Гц
Автомобиль 3...5 1...20
Гусеничная техника 2...15 1...400
197
Миллиметровая радиолокация: методы обнаружения и наведения...
замена акселерометра ADXL50 обеспечивает более низкий шум, более
широкий динамический диапазон, сокращает потребляемую мощное i ь |
улучшает напряжение при нулевом ускорении. Акселерометр ADXLIM
- одноосевое устройство; ADXL250 полностью интегрированный дн«
осевой акселерометр с согласованием сигнала, состоящий из единсгнет
ной монолитной ИС. Две чувствительные оси ADXL250 ортогоналыи
друг другу. Чувствительные оси обоих устройств лежат в одной и ini
же плоскости кремниевой пластины.
Акселерометры ADXL150/ADXL250 обеспечивают более низки|
шум и лучшее ОСШ, чем ADXL50. Стандартное ОСШ составляет 80 дк,
что делает возможным разрешение таких малых ускорений как 10 mg, м|
еще обеспечивая полномасштабный диапазон ±50. Масштабный факкч
устройства может быть увеличен с 38 мВ/g до 76 мВ/g при установке не
ремычки между и выводом нулевого смещения. Смещение при нуля
вом ускорении не превышает 0.4 g в промышленном температурном дни
пазоне, что в 10 раз лучше, чем у ранее выпускаемых изделий. Потрв
ляемая мощность не велика - 1,8 мА на каждую ось. Масштабный коэЯ
фициент и выходной уровень нулевого ускорения являются логометри'И
скими по отношению к питающему напряжению, что исключает необхЩ
димость в источнике опорного напряжения при управлении логометричЯ
скими АЦП, такими как в большинстве микропроцессоров. Шунтируй»
щий конденсатор источника питания —• это единственный внешний ком
понент, необходимый для нормальной работы.
Акселерометры ADXL150/ADXL250 выпускаются в герметичном ке-
рамическом корпусе поверхностного монтажа с 14 выводами, специализя
рованном для коммерческого (от 0 до +70°С) и промышленного (от -40 дв
+85°С) температурных диапазонов (рис. 4.7). Имеется возможность приоФ
ретения аналогов, работающих в
томобильном и военном диапазонах
температур. Следует отметить, что
падение на твердые поверхности мо-
жет стать причиной показаний до
2000 g или превышения абсолютного
максимума диапазона работы устроW
ства. Необходимы меры предостЯ
рожности при эксплуатации во избе-
Рис. 4.7. Внешний вид
акселерометров в исполнении
для температур -40.. ,+70°С
жание повреждений.
Акселерометры ADXL150 и
ADXL250 изготовлены с использо-
ванием процесса микрообработки,
поверхности, который в современной литературе получил аббревиатуру]
iMEMS. Технология изготовления использует стандартные методы про-
198
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Рис. 4.8. Структура сенсора
И'нюдства ИС, позволяющие совмещать схемное решение обработки сиг-
налов с сенсором на одной плате.
Сенсор, подвергшийся поверхностной микрообработке, изготавли-
вается путем осаждения поликремния на защитный оксидный слой, ко-
торый после вытравливания составляет подвесной сенсорный элемент.
Ни рис. 4.8 упрощенно показана
Втруктура сенсора. В действитель-
ности сенсор имеет 42 ячейки для
Измерения ускорения. Дифферен-
циальный емкостной сенсор со-
Вгнвлен из фиксированных плат и
Подвижных плат, связанных пере-
мычками, которые двигаются при
Наличии ускорения. Движение пе-
ремычек изменяет дифференци-
альную емкость, которая измеря-
ется в схеме. Сенсор имеет в своем
составе 12 емкостных ячеек для
электростатического воздействия
на перемычку в процессе самотестирования, которое запускается поль-
зователем путем установки соответствующего входа в высокий логиче-
ский уровень. В то время, когда на вход подается логическая единица,
электростатическое воздействие эквивалентно 20% от максимального
входного ускорения, и, таким образом, пропорциональное изменение
напряжения появляется на выходе. Во время запуска характеристики
тестирования применяются для всей механической структуры и для
электрической цепи.
Все схемные решения, необходимые для управления сенсором и
преобразования изменения емкости в изменение потенциала, объедине-
ны в плату, не требующую никаких внешних компонентов, за исключе-
нием стандартного независимого источника питания. И чувствитель-
ность, и значение нулевого ускорения измеряются по отношению к пи-
ппощему напряжению, поэтому логометрические устройства, стоящие
после акселерометра (такие как АЦП и т.д.) будут влиять на акселеро-
метр при изменении питающего напряжения. Выходное напряжение
пых) является функцией обоих входов (а) и напряжения источника (/с):
V
= VJ"L- (Sensitivity х^х а).
И ADXL150, и ADXL250 имеют двухполюсный фильтр Бесселя на
переключаемых конденсаторах. Отметим, что фильтры Бесселя, иногда
называемые линейными фазовыми фильтрами, имеют шаг отклика с
минимальными отклонениями и максимально точной трупповой за-
199
Миллиметровая радиолокация: методы обнаружения и наведения...
держкой. Частота полюсов на уровне -3 дБ устанавливается при irung
товлении равной 1 кГц. Эти фильтры полностью изолированы и анта
номны, не требуют никаких внешних компонентов.
Акселерометры ADXL150/ADXL250 требуют только шунтируюшцв
конденсаторов к источнику питания д ля измерения ускорений менее ±50
Для измерения ускорения порядка ±50 g акселерометр может напрямую fl
единиться с АЦП. Устройство также можно просто модифицировать дня
измерения сигналов меньше одного g путем увеличения выходного мне-
штабного коэффициента. Масштабный коэффициент акселерометра пол 4»
стью определяется изменением выходного напряжения на один g.
Отличие масштабного коэффициента от разрешения состоит в сл<
дующем. Разрешение устройства — это наименьший уровень, которА
акселерометр способен измерить. Разрешение определяется шумом уш-
ройсгва и полосой измерений. Нулевое ускорение соответствует уровшф
прямого выходного тока, когда на акселерометр не воздействует ни ус
корение, ни сила гравитации.
Выбор масштабного коэффициента программируемого вывода опре-
деляется следующими факторами. В своем нормальном состоянии буфл.'р
усилителя ADXL150/ADXL250 обеспечивает на выходе масштабный ко»
эффициент 38 мВ/g, который устанавливается внутренним напряжением
делителя. Это дает диапазон измерений ±50 g и полосу частот 1 кГц.
Отметим, что эта частотная полоса и диапазон перегрузок полно-
стью перекрывают диапазоны вибраций целей. Удвоенный коэффици-
ент, увеличивающий чувствительность, может быть получен соедипе»
нием вывода Гвь|х с выводом нулевого смещения, полагая, что для эт<м о
не нужна регулировка смещения. Такое соединение ослабляет внутрен-
нюю обратную связь вдвое, повторяя коэффициент передачи буфер!
Это увеличивает выходной масштабный коэффициент до 76 мВ/g' и
обеспечивает диапазон ±25 g.
Вместе с тем соединение этих двух выводов также увеличивает ве-
личину внутренней выходной фильтрации, ослабляя уровень шума и
изменяя номинальную полосу частот на уровне 3 дБ до 500 Гц. Отми
тим, что в квадратурном канале уровень выходной фильтрации также
будет уменьшаться в корень из двух раз: от 0,58 (бесселевский отклик)
до 0,41. Основной эффект этих изменений в квадратурном канале про»
является только в двух частотных октавах на частотах излома; выше
крутизны двух фильтров изменений нет. В приложениях, где требуется
плоская АЧХ больше 500 Гц, лучше работать с коэффициентом 38 мВ/g
и использовать внешнюю выходную фильтрацию. Отметим также, чю
соединение ГВЬ|Х с выводом смещения требует установки 30 кОм нагруз-
ки между Гвых и Г$/2. При смещении ±2 В на ГВЬ1Х эта нагрузка будет по-
треблять ±60 мА из 100 мА (стандартно) управляющего тока.
200
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Для идентификации по спектру в экспериментах необходимо оцени-
Ингь не собственно ускорение, а скорость, или точнее виброскорость. В
згой связи встает вопрос о необходимости интегрирования результатов
измерения ускорений. Возможны два варианта построения инте1ратора -
аналоговый и цифровой. В аналоговом варианте в качестве инте1рирую-
И1СГО устройства используется как правило операционный усилитель (ОУ)
с конденсатором в цепи обратной связи. При этом полоса этой схемы (по-
стоянная времени интегрирования) должна изменяться в зависимости от
типа объекта. Это существенно усложняет схемное построение и не дает
козможности в последствии изменить условия интегрирования. Более
перспективным представляется регистрация непосредственно ускорения с
пкселерометра в цифровом виде с записью в оперативную память син-
хронно с измерениями доплеровского смещения частоте. При цифровой
регистрации имеется возможность последующего интегрирования с прак-
тически любыми временами интетрирования (постоянными фильтра).
Акселерометры микросхем ADXL150/ADXL250 спроектированы для
управления известными АЦП напрямую. В приложениях, где требуется
полномасштабная область измерений ±50 g, так и ширина полосы 1 кГц,
выход акселерометра непосредственно подключается ко входу АЦП. Заво-
дское (номинальное) значение масштабного коэффициента акселерометра
12,5 В ±38 мВ/g позволяет управлять входом преобразователя в пределах
*2,5 В ±1,9 В при измерении полномасштабного 50 g сигнала (38 мВ/g * 50
g - 1,9 В). Как было отмечено выше, использование выходной фильтрации
замет но улучшит нижнее разрешение акселерометра.
Разрешение АЦП для использования с таким акселерометром
должно быть выше, чем измерительное. Для большинства приложений
подходит 8- или 10-битный преобразователь. Добавление усиления ме-
жду акселерометром и АЦП уменьшит полномасштабный входной диа-
пазон цепи, но сильно уменьшит требования к разрешению (следова-
тельно, и цену) АЦП. Например, использование усилителя с коэффици-
ентом усиления 5,3 приведет к изменению коэффицинта преобразования
акселерометра с 38 до 200 мВ/g. Так как сигнал усилен, динамический
диапазон измерений уменьшается на 5,3.
Принципиально важным для проведения экспериментов является
разрешение. Поэтому применяется 12-разрядный АЦП. При питании 5 В
разрешение на один бит составит 1,2 мВ. Непосредственное подключение
Л ЦП к выходу акселерометра позволит получить разрешение 0,03 g. В
принципе этой точности достаточно. Можно повысить разрешение путем
подключения масштабирующего усилителя между выходом акселеромет-
ра и входом АЦП. Тогда при коэффициенте 2 получим разрешение 0,02 g,
однако при этом диапазон измеряемых ускорений сокращается до ±25g и
полоса измерений до 500 Гц. Для большинства целей это приемлемо.
201
Миллиметровая радиолокация: методы обнаружения и наведения...
----------------------------- -----------------------------—
Схема включения акселерометра при использовании АЦП для pcii»|
страции виброускорений в цифровом виде приводится в фирменном рум»
водстве на акселерометр. Использование акселерометров для определена
параметров движения и местоположения объектов в ходе эксперименту
достаточно сложно по следующим причинам. Длительное время накопи
ния (интегрирования) приводит к накоплению ошибки из-за наличия, но
грешности постоянного тока как в акселерометрах, так и в интеграторе
электрического сигнала. Двойное интегрирование еще больше увеличивай
погрешность (Г2). При отсутствии какого-либо средства «переустанавлв
вать» время от времени действительное положение, погрешность опрели
ления координат будет очень велика. Эго аналогично случаю, когда делаеч
ся интегратор на ОУ с помощью конденсатора в цепи обратной связи. ДьМ
если точность акселерометра будет увеличена в десятки и сотни раз по
сравнению с имеющейся сегодня, ошибка все равно будет огромной, про*
сто она будет накапливаться за несколько большее время.
Акселерометры для определения координат могут использовать^
в совокупности с другой измерительной системой, например, системой
навигации GPS или гироскопическими датчиками.
Применение гироскопов на твердом теле (датчиков угловых скорл
стей) позволит полностью охарактеризовать движение объекта и испоЛь*
зовать эти данные в модели формирования сигнала для распознавания.
Отметим, что интегрирование за небольшой период времени (по»
рядка одной минуты) дает приемлемые по погрешности результаты. Cofl
ственно длительность реализаций, используемых в экспериментах, суще»
ственно меньше этого интервала времени. При проведении эксперимент
тов по опыту предыдущих работ и по предполагаемой схеме проведении
экспериментов длительность отдельных реализаций не превысит 10-15 с.
4.4. Функциональная схема и тактико-технические
требования к стенду для экспериментальной оценки
радиолокационных характеристик и параметров
объектов бронетанковой техники и фонов
В настоящее время известны результаты многочисленных исследований
информативных признаков радиолокационных целей. Особенностью
проведенных исследований [7] является то, что они инвариантны к типу
РЛС ММДВ и позволяют сформировать все элементы ППМР целей ин
промежуточной частоте в векторной форме. При этом обеспечиваете!
синхронная запись видеоизображения.
Такой подход обусловливает функциональное РЛК. Функционала
ная схема стенда для проведения экспериментальных исследований по-
казана на рис. 4.9.
202
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Видеокамера
ClickSmart
420
+58
ВЧ-блок
прпемо-
передающего
модуля СИО
лч
Гет.
Смеситель
AD8247
-12В
*12В
+308
Драйвер
p-i-n-диодов ^-i
RipGirno пркчхжювяяи
171.
Устройство
синхронизации
п управления на
11ЛИС Spartan 3
LVTTL
12В(-5В) §
1
1m
Выход АРУ
Рис. 4.9. Функциональная схема стенда
В состав РЛК входят следующие основные блоки.
Приемопередающий модуль (ППМ) обеспечивает функционирова-
ние в непрерывном и импульсном режимах.
Передающая часть ППМ формирует зондирующие импульсы с из-
меняемыми длительностью и периодом повторения.
Приемная часть ППМ построена по схеме с двойным преобразова-
нием частоты, причем второй смеситель является активным квадратур-
ным, что позволяет регистрировать с точностью до фазы сигналы на
промежуточной частоте с верхней частотой полосы пропускания до 25
МГц. Активные фильтры формируют необходимые частотные полосы
пропускания при работе в различных режимах.
Антенный блок ППМ, имеющий в своем составе четыре рупорно-
линзовых антенны, обеспечивает излучение и прием электромагнитных
сигналов на согласованных и перекрестных поляризациях и разрешаю-
щую способность по угловым координатам до 5°. Поляризационный ко-
эффициент эллиптичности - 21 дБ.
Для возможности получения составляющих ППМР отраженных
сигналов в антенном блоке осуществляется коммутация каналов pin-
диодными ключами. Имеется возможность программного управления
ключами и, соответственно, видом временных диаграмм (см. рис. 4.2)
для разных условий эксперимента. В соответствии с временными диа-
граммами принятые сигналы на всех поляризациях усиливаются и реги-
стрируются в одном сквозном канале. Благодаря этому во всех каналах
203
Миллиметровая радиолокация: методы обнаружения и наведения...
удается получить одинаковые уровни шумов гетеродина и равные хл
рактеристики усиления сигналов. На рис. 4.10 цифрами 1, 2, 3, 4 обо ши
чены рабочие точки, в которые подается напряжение для управления
передачей и приемом сигналов горизонтальной (ГП) и вертикальной |
(ВП) поляризаций.
Передатчик
Приемник
Рис. 4.10. Временная диаграмма работы ППМ
Многовариантное управление ключами обеспечивается за счет нй!
пользования программируемой логической интегральной схемой (ПЛИ(‘)1
с тактовой частотой 50 МГц. Это позволяет выполнить жесткие требоиИ
ния по стабильности и величине временных параметров. Узел на ПЛИС 4
устройство синхронизации и управления - позволяет обеспечить рабоц
стенда в импульсном и непрерывном режимах функционирования.
Использование коротких зондирующих импульсов для достижения
высокой разрешающей способности по дальности (не более 3 м) приис-
ло к необходимости применения высокоскоростных АЦП и накоплении
больших массивов экспериментальных данных.
Выполнение этих требований обеспечивается блоком сбора инфор-
мации на основе базового модуля АМВРСМ с 14-разрядным субмодулем
ADM414x60M и 1 Гбит оперативной памяти. Такой объем памяти дас!
204
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Жыможность записывать реализации импульсных и непрерывных сигна-
лов длительностью до 5 с для составляющих ППМР в двух квадратурах.
Дтя правильной интерпретации условий эксперимента и повышения
информативности результатов в составе стенда используегся видсокон-
|ролыюе устройство ВКУ, позволяющее синхронно с радиоканалом запи-
сывать визуальную информацию о ходе эксперимента. Оптическая ось
НКУ юстируется с осью диаграммы направленности антенной системы.
Функционирование ВКУ синхронизировано по времени с работой АЦП.
Синхронизация работы всех устройств, входящих в состав стенда,
обеспечивается управляющей ЭВМ. Практически все используемые в
ciенде устройства имеют стандартные интерфейсы и не требуют допол-
ни тельных модулей согласования.
Разработанное специальное программное обеспечение (ПО) для
программирования ПЛИС обеспечивает формирование временных диа-
1рамм управления приемопередатчиком.
Сервисное ПО имеет удобный и понятный в работе интерфейс
(рис. 4.11), позволяющий оперативно управлять ходом эксперимента и
обеспечивать надежность работы стенда. Сервисное ПО позволяет про-
изводить:
юстировку радиолокационного канала и канала видеоизображения;
выбор параметров сигналов и режимов работы АЦП;
выбор параметров записи информации в ОЗУ устройства регист-
рации и ее последующей распаковки и хранении в памяти ЭВМ;
выбор параметров записи и хранения видеоинформации.
аапцмиит
*141*1
Открыть устройство I
квн4яыА!Л1 Диела*» Д
2 • и канал f"7
3•n канал р-
л • и канал р"
• нктролиАЦЯ (/стройстео закрыто) •
ЧастотааиоретизамЦМГи) ро
Число отсмотоа на канал
время намерения (мс) |о Ю24
• Канвра - ' ' ’ :
Coagwwt» ларыфветиа | перекрестив | •
Ьймгчкянвлы |з-йи<Н»канавы|
Рис. 4.11. Интерфейс сервисного ПО
205
Миллиметровая радиолокация: методы обнаружения и наведения...
Внешний вид стенда в целом показан на рис. 4.12, внешний iql
ППМ - рис. 4.13, а поляризационные параметры антенной сишсмш
ППМ - на рис. 4.14.
Рис. 4.12. Внешний вид стенда
Рис. 4.13. Внешний вид ППМ ММДВ
206
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Приемная антенна
горизонтальной
поляризации (3)
Передающая антенна
горизонтальной
поляризации (1)
Приемная антенна
вертикальной
поляризации (4)
Передающая антенна |
вертикальной
поляризации (2)
Рис. 4.14. Поляризационные параметры антенной системы ППМ
Экспериментальные исследования были проведены в средней по-
лосе России на горизонтальных и наклонных трассах в различных есте-
ственных метеоусловиях (сухая и влажная погода, дождь, снег).
Типовые цели: гусеничная и колесная техника (в т.ч. автотранс-
порт), человек.
Природные объекты: травяной покров, песчаный покров различно-
ю рельефа, кустарник, отдельные лиственные и хвойные деревья, сме-
шанный лес.
Искусственные образования: бетонная площадка, каменное здание,
дорога.
Настройка экспериментальной установки РЛС была произведена в
пнбораторных условиях. Временная синхронизация работы приемного и
передающего каналов выполнялась на ЭВМ с использованием паспорт-
ных данных на узлы трактов и разработанного сервисного ПО. Развязка
каналов трактов составляет величину не хуже - 20 дБ; погрешность вре-
менной привязки радиолокационных трактов 10 нс; погрешность времен-
ной синхронизации видео- и радиоканалов составляет 17 мс.
207
Миллиметровая радиолокация: методы обнаружения и наведения
Юстировка видео- и радиоканалов проводилась по лазерному
чу. На дальности 50 м погрешность не превышает 5 см.
Балансировка квадратурных каналов с входной полосой 2,5 lit
осуществлялась по фазе и амплитуде в каждом радиолокационном кп на-
ле. Линейность динамического диапазона блока преобразования сигиюш
составляет 69 дБ, разбаланс фаз — менее 1, дисбаланс амплитуд - не Сип
лее 0,3 дБ.
В качестве эталонных радиолокационных объектов использовал null
трехгранный и двугранный уголковые отражатели (УО). Для контршЦ
функционирования приемопередающих трактов при локации движущим
ся целей использовалась вращающаяся система из трех трехгранных У О
Абсолютные значения ЭПР УО в главных плоскостях на согласи
ванных поляризациях равны между собой и оцениваются величинами!
370 м2 — для трехгранного, 620 м2 — для двухгранного УО. Фазы oipm
женных сигналов для трехгранного УО в главных плоскостях на верни!
калькой и горизонтальной поляризациях совпадают, а для двухгран нш *
— сдвинуты на тг друг относительно друга.
Вращающаяся система из трех трехгранных УО формирует сцЛ
женный сигнал, расчет которого осуществляется методом математи’ш
ского моделирования. Поверхность системы отражателей аппроксимм
руется полигональной моделью. Составляющие ППМР каждого элемсп
та модели вычисляются на основе методов физической оптики и фи ш
ческой теории дифракции, которые на большинстве ракурсов наблюди
ния цели составляют основной вклад в компоненту отраженного сигни*
ла при согласованной поляризации. Составляющая отраженного ш
уголков сигнала на перекрестной поляризации образуется в основном
счет многократных переотражений электромагнитных волн между сИ|
дельными элементами цели.
При проведении расчетов характер поляризации задавался углом
расположения вектора поляризации передатчика и приемника othociM
тельно плоскости опоры — соответственно у и ys. Расчеты проводи-
лись для следующих трех случаев: вертикальная согласованная полярн*
зация ( yi = ys = 0°), горизонтальная согласованная поляризаций
( у = уг = 90°) и перекрестная поляризация ( у = 45°, у = —45°).
На рис. 4.15 приведена временная реализация одной из квадраЧр
входного сигнала, отраженного от системы вращающихся У О. ИнтервиЙ
времени соответствует полному обороту. Участок 1 соответствует oi*
ражению от нижней грани уголка, 2 — двукратные переотражения от бо
ковых граней, 3 — трехкратные переотражения от всех трех граней, вы-
бросы 4 - когерентное сложение напряжений от задней части нижнеп
грани УО и от трехгранной структуры.
208
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Рис. 4.15. Временная реализация сигнала, отраженного
от вращающихся УО на вертикальной поляризации
На рис. 4.16 представлены диа-
Граммы ЭПР системы уголков на
Кортикальной, горизонтальной и пе-
рекрестной поляризациях (сплошная
Кривая и точки - согласованные по-
ляризации, штриховая - пере-
крестная поляризация). На согласо-
Иппных поляризациях ЭПР уголков
практически совпадают между со-
бой. Кроссполяризационная состав-
ляющая ЭПР уголков имеет сущест-
Иснный вклад лишь на тех ракурсах,
|де наблюдаются только двухкрат-
ные переотражения, т.е. в случаях,
когда трехгранный уголок отражает
как двухгранный. На этих ракурсах
угол визирования, град.
90
270
Рис. 4.16. Зависимость ЭПР
от угла визирования
наблюдения ЭПР уголка на согласованной поляризации практически
совпадает с перекрестной поляризацией и соответствует теоретическо-
му значению crj2’ = <т1(2) = 4л S2 /А2 =0,79 м2, где S - площадь грани
VO, Л - длина волны. В области трехкратных переотражений кросспо-
няризационная составляющая ЭПР практически отсутствует, а расчет-
ная ЭПР УО соответствует известному теоретическому значению
= 8л №/ЗА2 = 0,52 м2.
209
Миллиметровая радиолокация: методы обнаружения и наведения...
4.5. Обработка сигналов и анализ полученных
результатов с использованием регрессионных алгоритм*
многоканальной системы обнаружения и распознавания
В процессе проведения исследований для выявления информатишц
признаков реальных целей были получены зависимости изменения чя
тотных характеристик отраженных сигналов от времени (спектро! pi
мы). Выборки спектров производились после низкочастотной фи ii.i
ции импульсных последовательностей по 1024 отсчетам времени. Р*
четным путем получены спектрограммы для всех типов целей.
Примеры спектрограмм отраженных сигналов составляющих м
ментов ППМР целей приведены на рис. 4.17 - для объекта на гусеин
ном ходу и на рис. 4.18 — для объекта на колесном ходу.
На рисунках введены обозначения: В - вертикальная поляризаш
Г — горизонтальная. Первая буква в заголовках рисунков означает nojif
ризацию передатчика, вторая буква - поляризацию приемника.
Рисунки иллюстрируют качественные и количественные отлив
параметров отраженных сигналов. Характер графиков поясняет физнч#*
ский смысл получения разделяющей информации по классам целей, кя|
торый может быть основан на анализе отсчетов спектральной плотнее *и
мощности (СПМ) составляющих элементов ППМР.
В-Г
В-В
6000
й 4000
g
2000
Время, с
Время, с
0
Рис. 4.17. Спектрограммы сигналов, отраженных от движущейся
цели на гусеничном ходу
210
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
В-Г
1 2 3 4 5
Рис. 4.18. Спектрограммы сигналов, отраженных от движущейся цели
на колесном ходу
Время, с
Г-Г
12 3 4 5
Время, с
в-в
°0 0,2 0,4 0,6 0,8 1
Рис. 4.19. Спектральные составляющие
сигнала, отраженного от бегущего
человека
В качестве примера на рис. 4.19 приведены нормированные отно-
сительно максимума оценки математического ожидания Sm и средне-
квадратического отклонения <т
спектра сигнала, отраженного от
бегущего человека, на согласован-
ной вертикальной поляризации.
Па рисунке обозначено: f0 - часто-
та, соответствующая максималь-
ному значению СПМ. Рисунок ил-
люстрирует характерные спек-
1ральные особенности отраженно-
го сигнала, которые являются ин-
формативными признаками кон-
кретного класса цели.
При анализе полученных
данных было учтено следующее. В соответствии с теоремой взаимности
должно выполняться равенство напряженностей поля на входах прием-
ных антенн каналов стенда для перекрестных поляризаций при условии
равенства напряженностей на выходах передающих антенн. Поэтому
211
Миллиметровая радиолокация: методы обнаружения и нааедения... I
все отличия отраженных сигналов на ортогональных поляризациях ойу
словлены относительными погрешностями балансировки каналов и>
фазочастотным характеристикам и различным уровнем помех и сини
венных шумов приемопередающей аппаратуры.
Анализ показал, что в качестве информативных признаков класив*
целей в одном стробе дальности и скорости можно использовать отсчв
ты СПМ сигнала. При этом важным условием правильного функции) m
рования алгоритмов селекции классов целей является инвариантное» 1.1
дальности и относительной скорости. Это может обеспечиваться лн>и>
соответствующей нормировкой информативных признаков, либо ин
пользованием инвариантных алгоритмов.
Принятие решений о принадлежности целей определенному KJuii
су осуществляется на основе обработки сигналов по всем информация!
ным признакам элементов ППМР с учетом их корреляционных связей '
Теория проверки гипотез базируется на байесовской схеме прин*
тия решений, в соответствии с которой априорные вероятности нояип#*
ния на входе системы классов сигнала Р(о>с) и помехи Р(гуп) полит
ются известными. В соответствии с байесовским критерием, минимнпп
рующим ошибку решения, решающее правило имеет вид [3]
(/(X)>-^=>Xe0t, /(Х)<^^ХеЧ , (41
I Р(о>с) Р{^с) п’ ™
где X — вектор наблюдений; a>c, а>п — классы сигнала и помехи, соЛ
ветственно; 7(Х) — отношение правдоподобия, определяющееся черс|
условные плотности вероятности классов сигнала р(Х/о>с) и помехи
р(Х/ о>п) по соотношению
/(Х)=*^>
р(Х/Ч)
(4..1|
В случае распознавания М классов апостериорную вероятное!»?
принадлежности объекта к каждому классу можно определить в со
ответствии с формулой Байеса
,(Ц/Х> Г(4.<
£р,Ч)р(х)
1-1
Одним из способов получения байесовых оценок многомерных
плотностей распределения, характеризующих случайный характер изме-
нения информативных признаков для целей различного типа, являе!си
использование гистограмм, рассчитанных по экспериментальным дан
212
Рис. 4.20. Гистограмма отсчетов сигна-
ла на согласованной поляризации,
отраженного от типовой
цели на гусеничном ходу
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
пым. Гистограммы распределения
рассчитаны для отраженных сиг-
налов от всех типов целей. На
рис. 4.20 приведен пример гисто-
|раммы распределения нормиро-
ванных спектральных отсчетов
сигнала по одному из признаков
на согласованной вертикальной
поляризации для типовой цели на
|усеничном ходу. На рисунке обо-
ншчсно Uo - нормированное на-
пряжение, N - количество случай-
ных отсчетов признака, попавших
и интервал квантования.
Для устранения корреляционных связей между признаками и воз-
можности сокращения размерности признакового пространства прове-
дена ортогонализация ковариационных матриц. При этом каждый но-
вый признак представляет собой линейную комбинацию множества ис-
ходных признаков, что приводит к нормализации законов распределе-
ния признаков в новом пространстве.
С целью анализа возможностей селективной избирательности рас-
смотрены несколько алгоритмов обнаружения и распознавания классов
целей. При попарном сравнении сигнал от одной из целей относится к
классу полезных, от другой - к помехе.
При использовании статистического подхода для решения задач
обнаружения и распознавания нормально распределенного полезного
сигнала па фоне помех квазиоптимальные алгоритмы имеют вид [8]:
77ДГ X Х1 “ 7 X Е 4 U• - Д)(*4 - /4) , (4.5)
27в^0 4-1 4 /-1 4-1
-If Z4U -о** - a )+|f 14U -х'х^ - ап /2 (4.6)
|дс So — спектральная плотность шума в полосе 0...^; х, xt - оценки
случайных параметров принятого сигнала; д., - математические
ожидания случайных параметров xi, - элементы матрицы, об-
ратной ковариационной матрице С = [Сй] = [(х, - pi)(xi -)]; N - раз-
мерность вектора информативных признаков; /,, /2 _ пороговые уров-
ни в алгоритмах обнаружения и распознавания, соответственно; верхние
индексы сип обозначают принадлежность параметров сигналу или по-
мехе, соответственно.
213
Миллиметровая радиолокация: методы обнаружения и наведения ...
Регрессионные алгоритмы обнаружения и распознавания реалии
ются с помощью множественной начальной регрессии
N ___
& = У РиЛ . » =
(4.7)
где — коэффициенты множественной начальной регрессии.
Коэффициенты множественной начальной регрессии рассчитьцщй
ются из условия минимума среднего значения квадрата ошибки мнояем
ственных начальных регрессионных представлений [8]
N
- У /Ъъ
-- N
*1=Е У
(4 8)
где £[•] - оператор математического ожидания.
Алгоритмы работы многоканальной регрессионной системы обна-
ружения и системы распознавания соответственно имеют вид:
N
У, /V*
I N 1 N
—
2/BS0tr' 4%
(4.9)
I2 1 "
N
У, дл
1 N
N
~ У Рахь
2
(4.10)
где / , / — пороговые уровни в регрессионных алгоритмах обнаружен
ния и распознавания, соответственно; , Л," - элементы матрицы
Л = К', обратной матрице корреляционных моментов.
Регрессионные алгоритмы многоканальной системы обнаружения
и распознавания можно также реализовывать на основе использования
множественной центральной регрессии. При этом в формулах (4.9)
(4.10) входящие в них величины должны быть центрированы.
На рис. 4.21 приведены результаты расчетов величин превышения
порога распознавания по квазиоптимальному (rpm) алгоритму для объемI
тов колесной техники типа 1 (цель) и гусеничной техники (помеха) на со-
гласованных (В-В и Г-Г) и перекрестной (В-Г) поляризациях. На рис. 4.221
приведены результаты вычислений превышения порога распознавания lio
регрессионному (грю) алгоритму для объектов гусеничной техники (цель)
и колесной техники типа 2 (помеха). Модели целей и помех построены ио»
четырем ракурсам наблюдения при движении объектов на различных,
скоростях. Инвариантность к скорости движения обеспечивается норми-
ровкой спектра по частоте, соответствующей максимуму СПМ на интер-
вале времени анализа.
214
Глава 4. Селекция радиолокационных целей на основе экспериментальных...
Рис. 4.21. Результаты расчета rpm
по квазиоптимальному алгоритму
Рис. 4.22. Результаты расчета грЛ
по регрессионному алгоритму
Из рисунков видно, что на различных поляризациях разделитель-
ные свойства объектов существенно различаются. Аналогичные резуль-
таты получены для всех типов целей. Поэтому имеется возможность
улучшения разделительных свойств алгоритмов за счет расширения
признакового пространства при совместной обработке полной поляри-
зационной матрицы рассеяния.
Принятые технические решения по построению РЛК обладают
следующими важными особенностями, имеющими конкретный практи-
ческий смысл.
215
Миллиметровая радиолокация: методы обнаружения и наведения...
Синхронизация по времени радиолокационной информации и пн
деоинформации позволяет проводить визуальный контроль за фони
целевой обстановкой и осуществлять привязку временных отсчсгцЯ
сигналов к изображению цели.
Информация о синхронизированных с передатчиком квадратурпыН
составляющих отраженного импульсного сигнала на ПЧ дает возможное-tj. I
выделять любые стробы дальности из временных реализаций I
проведения анализа и последующей обработки;
формировать последовательности с фазокодовой манипуляцией на
проведения имитационного и физического моделирования соответ-
вующих трактов обработки;
проводить моделирование воздействия на тракты обработки ах
тивных и пассивных помех различного типа, например нестационарных,!
импульсных, узкополосных и широкополосных.
Информация о полной поляризационной матрице рассеяния в век
торной форме как функции времени позволяет осуществлять:
инвариантные преобразования относительно угла поворота плос
кости поляризации;
формирование последовательностей импульсов с поляризационной
модуляцией сигнала для проведения имитационного и физического мо-
делирования соответствующих трактов обработки;
моделирование воздействия на тракты обработки естественных и
организованных поляризационных помех (случайного и детерминиро-
ванного характера).
Кроме того, полученные данные позволяют проводить анализ п
имитационное моделирование влияния шумовых параметров трактов
обработки на выходные характеристики систем селекции.
Полученные результаты экспериментальных исследований дали воз-
можность провести оценку энергетических, спектральных и поляриза-
ционных характеристик сигналов, отраженных от типовых наземных
движущихся целей на фоне различных подстилающих поверхностей. I
Использование нормированных отсчетов спектральной плотное! и
мощности отраженных сигналов на различных поляризациях в качест-
ве отличительных признаков позволило провести селекцию целей по
классам. При этом обеспечивается инвариантность к дальности и от-
носительной скорости.
Проведенные исследования позволяют использовать их результат
при построении алгоритмов автоматической классификации целей и
при проектировании радиолокационных информационных систем се-
лекции миллиметрового диапазона волн.
216
ГЛАВА 5
Теория и методы рационального
построения антенных устройств систем
ближней радиолокации миллиметрового
диапазона радиоволн
Н настоящее время в нашей стране и за рубежом ведутся работы по повы-
шению устойчивости радиолокационных трактов систем принятия реше-
ний (СПР) к воздействию активных и пассивных помех и точности сраба-
тывания. Одним из основных факторов, влияющих на эффективность дей-
ствия боеприпасов (БП), является точность срабатывания неконтактных
датчиков цели, в качестве которых могут использоваться СПР. Для дости-
жения высокой точности неконтактные датчики цели должны обеспечивать
решение задачи обнаружения и распознавания с высокими вероятностными
характеристиками, обладать повышенной помехоустойчивостью и надеж-
ностью. При этом повышение тактико-технических требований к парамет-
рам СПР и расширение их области применения приводят к необходимости
освоения новых часто тных диапазонов.
Использование миллиметрового диапазона радиоволн при проек-
тровании радиолокационных трактов СПР позволяет реализовать ряд
преимуществ этого диапазона но сравнению с метровым диапазоном
ноли (МДВ), к которым можно отнести увеличение точности по дально-
сти и углу места, улучшение устойчивости к воздействию активных и
пассивных помех, возможность существенного уменьшения антенно-
фидерных трактов. Кроме того, в отличие от датчиков цели инфракрас-
ного диапазона, СПР ММДВ обладают повышенной надежностью в за-
пыленной и задымленной атмосфере, что характерно для условий функ-
ционирования БП массового применения.
Последние достижения в области технологии дают техническую
возможность по созданию СПР ММДВ для управляемых снарядов с
точным наведением, противокорабельных ракет, самонаводящихся ра-
кет класса «воздух-воздух» и «воздух-поверхность», артиллерийских
БП, инженерных мин с широкой областью поражения, систем активной
защиты танков и др.
Большинство новых классов БП функционирует у земной поверх-
ности. Сигналы, отраженные от земной поверхности, оказывают влия-
ние на работу приемных трактов СПР. Это влияние в первую очередь
необходимо учитывать при выборе характеристик направленности их
217
Миллиметровая радиолокация: методы обнаружения и наведения ...
антенн, которые при дистанционном зондировании являются свячую
щим звеном между объектом локации и датчиком цели.
Таким образом, одной из основных задач, которые необходим!
решить при разработке СПР ММДВ, является обоснование требовании t
направленным свойствам их антенн, реализующих эти требования в cfl
временных СПР.
Принципиальная возможность решения поставленных задач выж
кает из анализа свойств ММДВ, связанных с поглощением, отражениеч
и рассеянием радиоволн. Кроме этого, при переходе в ММДВ в связи i
резким уменьшением длины волны зондирующего излучения появля»!^
ся реальная возможность использования в СПР новых типов антеи и i
высокими направленными свойствами и диаграммами направленное ш
(ДН) специального вида. Применение известных разработок из области
антенной техники сантиметрового и миллиметрового диапазонов да»
систем дальней радиолокации не представляется возможным в сипу
специфических особенностей системы ближней радиолокации (CBPJI)J
Антенны СПР для артиллерийских БП должны быть конструкта нив
просты, обладать малыми габаритными размерами и массой, иметь ны
сокую технологичность и низкую стоимость.
Таким требованиям в наибольшей степени удовлетворяют koiiciS
рукции антенн, занимающие весь объем, отведенный под них. Это си»
зано с тем, что для создания высоких характеристик направленности
требуется определенное амплитудно-фазовое распределение излучаю
щих токов. По этим показателям объемные излучатели превосходя;
продольные и апертурные антенны в одних и тех же СПР.
5.1. Условия функционирования и тенденции
развития современных систем ближней радиолокации
В последнее время при проектировании радиолокационных трактии
СПР диапазона метровых волн основное внимание уделяется повыше-
нию их устойчивости к воздействию активных помех. Это связано с не-
прерывным совершенствованием и развитием средств радиоэлектрон Ии
го противодействия потенциального противника. Так, наземные и пе-
реносные станции заградительных радиопомех в диапазоне метровых
волн обладают спектральной плотностью мощности помех выше 100
Вт/МГц и могут создавать помеховый сигнал в полосе приемника СПР,
превышающий полезный на несколько десятков децибел.
В этом плане перспективным представляется переход в миллиме! •
ровый диапазон волн, основными достоинствами которого являются по-
вышенное затухание в атмосфере и возможность использования в СПР
направленных антенн. В отличие от метрового и дециметрового диапа-
зонов, где затухание в чистой атмосфере не превышает 0,01 дБ/км, и
218
Глава 5. Теория и методы рационального построения антенных устройств систем...
ММДВ на длине волны X = 5 мм поглощение составляет величину по-
рядка 16 дБ/км, что существенно затрудняет постановку активных по-
мех в этом частотном диапазоне. Кроме того, в ММДВ можно исполь-
ювать те же методы повышения помехоустойчивости, что и при ис-
пользовании других частотных диапазонов [1].
При построении СПР ММДВ приходится решать те же задачи, что
И при проектировании подобных систем МДВ. Это, прежде всего, выбор
И пользу гетеродинного или автодинного построения приемопередаю-
IHMX модулей (ППМ) СПР, а также целесообразность введения частот-
ной модуляции (ЧМ) зондирующего сигнала. Эти факторы, а также ра-
циональный выбор ДН антенн, оказывают влияние на отношение сиг-
нал- шум в приемнике и на точность в определении высот срабатывания
//ср. Точностным характеристикам СПР, функционирующих у земной
поверхности, всегда уделяется большое внимание.
Как известно, разброс высот срабатывания Яср зависит от большо-
го числа факторов, в первую очередь, от особенностей электродинами-
ческого взаимодействия СБРЛ с земной поверхностью. При традицион-
ном построении СБРЛ с линейной частотной модуляцией (ЛЧМ) точ-
ность радиолокационного измерения высоты зависит от девиации час-
тоты зондирующего сигнала. В ММДВ потенциально возможно дости-
жение очень высокой точности в определении высот срабатывания.
Следует заметить, что повышение точности в СПР подобного типа все-
гда связано с ухудшением отношения сигнал-шум, что приводит к не-
возможности достижения больших высот срабатывания.
Обеспечение требуемых высот срабатывания становится еще более
актуальной задачей при освоении ММДВ. Это связано с тем, что мощ-
ность отраженного сигнала на входе приемника СПР зависит от поверх-
ностной шющади приемной антенны. При переходе в ММДВ эффек-
тивная площадь антенны падает пропорционально А2, что резко ухудша-
ет отношение сигнал-шум на входе приемника.
Другим фактором, влияющим на величины высот срабатывания и
их разброс, является особенность формирования отраженного сигнала в
ММДВ [2, 3]. В отличие от МДВ, где практически все виды земных по-
кровов отражают зеркально, в ММДВ (в диапазоне частот 30...95 ГГц)
имеются поверхности с диффузным и смешанным отражением. В рабо-
тах [4, 5] исследуются характеристики сигналов метрового и децимет-
рового диапазонов, отраженных от земных поверхностей. Однако среди
результатов этих работ отсутствуют количественные оценки помехо-
устойчивости, потенциалов при наличии ЛЧМ и без нее и, как следст-
вие, практически достижимых высот срабатывания и их разброса. По-
этому необходим анализ особенностей функционирования СПР ММДВ
при различных вариантах их построения.
219
Миллиметровая радиолокация: методы обнаружения и наведения ...
Г
5.2. Высоты срабатывания систем принятия решения
миллиметрового диапазона радиоволн
Для определения высот срабатывания СПР ММДВ необходимо пронос-
ти вычисление уровней отраженных от земной поверхности сигналок,1
Расчет уровней отраженных сигналов в приемнике проводится на оспя
ве известных коэффициентов отражения земных покровов в широком
диапазоне углов подхода.
Пусть в данный момент произвольный БП с СПР ММДВ, приблп-
жающийся к земной поверхности под углом у, находится на высоте //
Рис. 5.1. Приближение БП с СПР
к земной поверхности
Рис. 5.2. Формирование
воронкообразной ДН антенной
решеткой
(рис. 5.1). При этом отражающие
свойства земной поверхности ха-
рактеризуются угловой зависимо-
стью удельной ЭПР оь(а). HanptOMl
ленные свойства приемопередцю
щей антенны описываются про
странственной ДН F(0,<p).
Мощность отраженного сигни
ла, принятого приемником, находи к-
ся интегрированием по всей облу-
чаемой площади 5 по формуле:
Рпр
raoF4(0,<p)
(4^)3 J А4 (а)
где - мощность зондирующего]
сигнала; G — коэффициент усиления
приемо-передающей антенны; A(tf)
— расстояние от СБРЛ до отражаю-
щего элемента облучаемой поверх-
ности; А - длина волны зондирую»
щего сигнала в свободном про-
странстве.
Используя тригонометрическЯ
соотношения, можно записать:
dS=H2^^-di//da, R(a)=H/cosa.
cos а
Для вращающихся БП, не спк
билизированных по крену, целесо-
образно ограничиться рассмотрением осесимметричных ДН двух видок!
традиционной ДН воронкообразной формы (рис. 5.2) и ДН осевого из-
лучения стержневой формы. Если реальная ДН антенны не описывае if я
аналитической функцией, то ее можно аппроксимировать рядом Фурм
по присоединенным функциям Лежандра [6-9].
220
Глава 5. Теория и методы рационального построения антенных устройств систем..
При разложении электромагнитного поля по сферическим гармо-
никам члены ряда содержат именно эти функции, поэтому такая ап-
проксимация представляется естественной и удобной. Для приближен-
ных расчетов можно воспользоваться более простым представлением
F(6>) = cos"(0-0O),
где Оо - угол отклонения ДН от оси; п - показатель степени.
Если под высотой срабатывания Hcv СПР понимать высоту, на ко-
торой при приближении БП к земной поверхности уровень отраженного
сигнала в антенне достигает определенного значения, то для ее вычис-
ления можно воспользоваться выражением
। де П= Рпр - потенциал СПР;
J Я4(«)
Для проведения анализа уровней отраженных сигналов в антенне
СПР следует выбирать такие разновидности 'земных покровов, которые
обладают всеми характерными особенностями отражения в ММДВ. Уг-
ловые зависимости <?о(«) могут быть получены как из теоретических мо-
делей, так и экспериментально. С помощью приведенных выше формул
можно сразу перейти к расчету высоты срабатывания Яср СПР ММДВ.
5.3. Обоснование требований к диаграммам
направленности антенных устройств
систем принятия решения миллиметрового
диапазона радиоволн
11ри построении СПР ММДВ необходимо учитывать специфические осо-
бенности этого частотного диапазона, связанные, в первую очередь, с рас-
пространением и отражением миллиметровых радиоволн. При разработке
СПР для БП, функционирующих у земной поверхности, основное внима-
ние уделяется обеспечению необходимой устойчивости к воздействию ак-
тивных помех и точности в определении высот срабатывания, что обычно
достигается усложнением трактов передачи и обработки сигналов.
В СПР метрового диапазона для повышения точности часто ис-
пользуется ЧМ-зондирующий сигнал. При этом предполагается, что в
формировании отраженного сигнала в антенне СБРЛ принимает участие
юлько та часть облучаемой площади земной поверхности, которая рас-
положена нормально или под углами, близкими к нормальным. В этом
случае высота совпадает с дальностью до отражающей поверхности и
возможно ее точное определение радиолокационным зондированием.
()днако в действительности из-за обилия разнообразных земных покро-
221
Миллиметровая радиолокация: методы обнаружения и наведения...
вов и сложного характера отражения такое предположение не всегЛ
оказывается верным. Это является одной из причин значительного put
броса высот срабатываний БП, который может составлять 2...24 м.
При рациональном выборе ДН антенны СБРЛ следует стреми гьсш
к достижению минимального разброса и максимального уровня oipib
женного сигнала. Следует также заметить, что повышение направлен*
ных свойств антенны СБРЛ приводит к повышению устойчивости «я
воздействия активных помех. Поэтому именно эти три фактора необм!
димо учитывать при обосновании требований к параметрам направлен*
ности антенн. Кроме того, на ДН накладываются физические ограни***
ния, связанные с реализацией необходимого амплитудно-фазового рш
пределения поля в СПР.
С энергетической точки зрения наибольшими преимуществами обли-
дают ДН стержневого вида. При ширине ДН по уровню половинной минь
ности Д^о.5= —22°...30° высоты срабатывания могут достигать значений ем»
лее 10 м. Но такая форма ДН слабо удовлетворяет требованиям по точек
сти. С этой точки зрения, наряду с введением ЛЧМ с большой девиациеШ
целесообразно использовать воронкообразные формы ДН с шириной но
уровню половинной мощности Д0о,5 — 22°.„28° и с углом раскрыва Воронин
Д^оз = -25°...40°. Следует учитывать, что при этом, вследствие низких Инн
чений КНД антенн, высоты срабатывания снижаются в 2.. .3 раза.
В этом плане компромиссным вариантом является использована*
антенн со специальной формой ДН (стержневого вида с боковым лена
стком). По величине КНД такие антенны незначительно уступают ам
теннам со стержневой формой ДН, а СБРЛ с такими антеннами имени
удовлетворительную точность срабатывания.
Для обнаружения воздушных целей практически единственно npji
емлемой является воронкообразная форма ДН.
5.4. Головодонная схема построения приемопередающих d
модулей систем принятия решения
Как известно, импульсные системы могут быть построены по когереш
ной и некогерентной схемам. Обеспечение селекции по скорости во н
можно лишь в когерентных системах, поэтому именно их следует рас
сматривать в первую очередь.
Хорошо известным недостатком импульсных систем, в особенности
работающих в ближней зоне, является необходимость закрывать прием-
ник на время излучения. Для дистанций срабатывания, начиная с нуле-
вой дальности, возникающая мертвая зона имеет принципиальное зил»1
чение (как известно, временному интервалу 10 нс соответствует дистан-
ция 1,5 м). Генерация коротких импульсов наносекундной длительности
при существенном дефиците энергии оказывается сложной задачей.
222
Глава 5. Теория и методы рационального построения антенных устройств систем...
Одним из возможных путей решения задачи развязки приемной и
передающих антенн может служить головодонное построение СПР. При
ном передающую часть целесообразно разместить в носовой части БП,
п в донной части расположить приемник, схему обработки и предохра-
нительно исполнительный механизм. Такая компоновка уже при калиб-
ре 100 мм позволяет обеспечить развязку до 90 дБ на согласованных по-
ляризациях. Применение ортогональных поляризаций, очевидно, увели-
чит величину развязки.
Одной из основных трудностей при такой компоновке является
обеспечение связи между передатчиком и приемником для когерентной
схемы построения. Предлагается выполнять такую связь в виде полого
или заполненного диэлектриком волновода, проходящего через ось БП.
В ряде случаев установка СПР в головной части БП оказывается
неприемлемой из-за особенностей действия боевого снаряжения. При-
мером могут служить осколочно-пучковые снаряды с готовыми пора-
жающими элементами. В этих случаях целесообразно располагать СПР
и донной части. При этом, с точки зре-
ния формирования области срабатыва-
ния и, соответственно, ДН антенны, воз-
никает целый ряд проблем. При разме-
щении антенн в донной части для фор-
мирования ДН в передней полусфере
могут быть использованы линейные фа-
зированные решетки (рис. 5.3). Реальные
размеры донной части (за ведущим поя-
ском) снарядов среднего калибра не пре-
нышают одного калибра. Следовательно,
размеры апертуры антенны не должны
превышать этого значения.
Оценочный расчет геометрических
параметров печатной антенной решетки
с резонансными прямоугольными излу-
чателями показывает следующее. В
ММДВ при угле наклона оси ДН от оси
снаряда 20°, расстоянии между излуча-
1елями, равным половине длины волны,
необходимый фазовый угол сдвига ф при
питании отдельных излучателей для угла
наклона ДН 20°:
Ф
2л<1
------COS <2
Л
Рис. 5.3. Размещение элементов
антенной решетки
223
Миллиметровая радиолокация: методы обнаружения и наведения ...
где Я - длина волны; d— расстояние между излучателями; а - угол наклоне
от оси снаряда. Значение угла ф при выбранных параметрах состанли
0,943ж
Для создания ДН с шириной по половинному уровню 45° (т.е. 90я М
всей передней полусфере при размещении пары таких решеток в донноН
части) требуется шесть излучателей. Таким образом, размер апертуры Л
ставит менее 4 длин волн. При увеличении количества элементов ан i ein кМ|
решетки ширина ДН соответственно уменьшится.
Очевидно, что предлагаемое донное размещение требует прира-
ботки конструкторских решений, связанных с размещением антенн п«
боковых стенках донной части, выбора диэлектрического материала он
текателя, выполнения прочностных и тепловых расчетов.
Еще одним преимуществом донного построения является возмоц»
ность передачи информации на борт снаряда с использованием раджи
локационного или оптического канала. При этом в донной части снпрм-
да размещается приемник сигнала, а источник информации располшф
ется на артиллерийском орудии. На борт представляется целесообраи
ным передавать расчетное время встречи с целью, расчетную относи*
тельную скорость в окрестности цели.
Расчетное время встречи дает возможность включить радиоблок |
непосредственной близости от точки встречи и тем самым снизить м-
роятность срабатывания на траектории по помехам. Оценка относите! ь
ной скорости позволяет заранее настроить фильтры скоростной селек-
ции на заданную относительную скорость. Для импульсно-доплеров
ских систем это особенно актуально.
Одной из актуальных задач является обеспечение стабильной вы-
соты срабатывания. Решение этой задачи может быть обеспечено высш
коточным измерителем дальности или следящим измерителем с боль
шей погрешностью единичного измерения.
Высокоточные единичные измерения возможны при применении ши
рокополосных сигналов, обеспечивающих одновременно и хорошую рам
решающую способность. Для обеспечения точности один метр и погрей!
ности срабатывания того же порядка полоса сигнала должна составлять 3(H)
МГц. Формирование такого сигнала на борту снаряда и его корректная об
работка представляют на сегодняшний день известные затруднения.
В качестве альтернативы может быть предложен следящий изме-
ритель на основе когерентно-импульсной системы. При этом оценивп
ется дальность до преграды и скорость сближения с ней, а экстраполн
рующий фильтр определяет момент срабатывания. Следует признан.,
что данный алгоритм требует значительных вычислительных затрат и
является сложным. Вместе с этим он реализуется на низкой частоте, чш
значительно упрощает его применение.
224
Глава 5. Теория и методы рационального построения антенных устройств систем...
Е-- . .. , -----
*.5. Особенности конструкций и обоснование метода
расчета антенн систем принятия решения
Миллиметрового диапазона радиоволн
И результате проведенного анализа влияния отражающих свойств земной
Поверхности на параметры антенн входных трактов СПР можно сформу-
лировать требования к их характеристикам направленности. Практиче-
ская реализация этих требований приводит к необходимости создания в
СПР антенн двух видов:
осевого излучения с ДН шириной 20°...30° по уровню половинной
мощности;
антенны с ДН воронкообразной формы с углом раскрыва
м, -25°...40°.
Формирование таких ДН в ММДВ возможно с помощью металло-
диэлектрических антенн, которые по своим электродинамическим па-
раметрам, прочности, массе и габаритным размерам в значительной
с тепени удовлетворяют предъявляемым требованиям.
При электродинамических расчетах антенных систем, как правило,
ставятся следующие задачи: вычисление ДН и КНД антенной системы;
расчет согласования с трактом питания; определение потерь в приемном и
передающем трактах; расчет развязки приемного и передающего тракгов.
В структуре математической модели также обязательно должен
учитываться обтекатель, который является неотъемлемой частью антен-
ных систем СПР. Возбуждение антенн может осуществляться волнами
различных типов с помощью волноводов, коаксиальных или микропо-
лосковых линий.
Такое разнообразие задач, стоящих перед разработчиками, приво-
дит к необходимости единого подхода для расчета всех электродинами-
ческих параметров любой выбранной конструкции.
На антенные системы СПР ММДВ для артиллерийских БП наклады-
ваются довольно жесткие ограничения по габаритным размерам. Характер-
ные размеры антенн в этом случае, как правило, должны быть значительно
меньше калибра БП. В связи с этим применение в СПР ММДВ для таких
БП апертурных антенн (например, рупорно-параболических) весьма за-
труднительно и нецелесообразно). Представляет интерес использование та-
ких конструкций, которые могут конформно сопрягаться с обтекателем и с
ППМ. Наибольший интерес в этом плане представляют металлодиэлекгри-
чсские и микрополосковые антенны (МПА).
Микрополосковые антены изготавливаются по технологии инте-
гральных схем, с чем и связаны их основные преимущества: высокая
повторяемость размеров, низкая стоимость, малые металлоемкость и
масса, небольшие габаритные размеры, возможность объединения эле-
ментарных излучателей в фазированные антенные решетки.
225
Миллиметровая радиолокация: методы обнаружения и наведения ...
К достоинствам металлодиэлектрических антенн следует отпся
большую широкополосность и возможность создания ДН шириной
рядка 25°...30° по уровню половинной мощности при малых размв
самой антенны. Кроме того, такие антенны имеют хорошие аэродц
мические параметры, что позволяет в некоторых случаях размещав
за пределами обтекателя.
На рис. 5.4 представлены некоторые возможные варианты
строения антенных систем, где в качестве излучателей использукп
диэлектрические антенны.
В микрополосковом исполнении на рис. 5.5 для примера покаци
варианты антенных систем СПР, где в качестве излучателей испод)
ются антенные решетки.
Рис. 5.4. Варианты построения антенных систем СПР ММДВ
(7 - диэлектрик, 2 - металл)
Рис. 5.5. Варианты построения антенных решеток СПР ММДВ
в микрополосковом исполнении
Рис 5.6. Эскиз конструкции
модулятора на квадратурном мосте
Вх.
Вых.
M, 100 Ом
~^| . 777777 50 °M
Lzzzzzl. TJ
M. 30 Ом Kn°4-
—7ZZZT м°ду~
гЛ/4. JOOOmI шпору
< . fZZZZZT
OH-zzzz
A/4<I<AZ2
Рис 5.7. Схема модулятора
на квадратурном мосте
226
Глава 5. Теория и методы рационального построения антенных устройств систем...
На рис. 5.6 изображен эскиз модулятора на квадратурном мосте в
Цикрополосковом исполнении, а на рис. 5.7 - его схема. Анализ электро-
динамических характеристик таких конструкций возможен численными
Не одами. Методика расчета таких конструкций будет изложена ниже.
Методы расчета микрополосковых и диэлектрических антенн опи-
лим в литературе [10-46]. Как показывает анализ, приближенные мето-
ды расчета антенн СПР ММДВ обладают существенными недостатками,
^о-первых, при их реализации приходится вводить серьезные допущения
И упрощения. Во-вторых, они связаны с необходимостью описания рас-
пределения поля либо вдоль излучателя, либо в поперечной плоскости.
Кроме того, эти методы не учитывают влияние обтекателя на формирова-
ние ДН и на согласование антенной системы с трактом питания.
Это приводит к тому, что при расчете металлодиэлектрических ан-
тенн приходится прибегать к строгим математическим методам. Оче-
|идно, что из-за большого разнообразия и сложности возможных конст-
рукций использование аналитических методов практически невозмож-
но. Что касается методов решения электродинамических задач с по-
мощью интегральных уравнений первого и второго родов, то их основ-
ным недостатком является малая универсальность.
Для осуществления единого подхода при численном расчете элек-
тродинамических характеристик возможных вариантов металлодиэ-
лектрических конструкций антенных систем (с учетом обтекателя) це-
лесообразно использовать проекционный метод. Этот метод позволяет
описывать поле в любой точке пространства с заданной точностью,
причем изменение геометрической структуры антенной системы сказы-
вается лишь на конечном этапе реализации алгоритма.
При таком подходе антенна с обтекателем представляется некото-
рым ограниченным объемом с заданным металлодиэлектрическим за-
полнением и заданным распределением возбуждающих токов. Матема-
тическая модель такой обобщенной металлодиэлектрической структуры
нключает в себя питающий волновод (либо коаксиальную линию), ме-
тпллодиэлектрический излучатель и диэлектрический обтекатель.
5.6. Использование проекционного метода
для расчета антенных устройств
систем принятия решения
Задача возбуждения тела ограниченных размеров формулируется сле-
дующим образом [37]. Пусть в бесконечном однородном непроводящем
изотропном пространстве, характеризуемым постоянными скалярными
параметрами - диэлектрической и магнитной проницаемостями £0, До,
имеется тело ограниченного объема Vx с £?$0, д=д0 • Кроме того, имеет-
ся проводящее (металлическое) тело объемом Им , а в объеме V задано
227
Миллиметровая радиолокация: методы обнаружения и наведения ...
распределение сторонних электрических и магнитных токов с плош ►
стями j301 и jMcT (рис. 5.8). Во всем пространстве требуется определи I»
поле (Е,Н), удовлетворяющее уравнениям Максвелла:
rot H = itaeE+j3cr, rot E=-iry/yH-jMcT (5 I)
с обычными краевыми условиями на границах раздела сред и условиями
излучения в бесконечности. Такой задаче эквивалентна задача для урн»
нений (5.1), рассматриваемых только в сферическом объеме V, окр>
жающем возбуждаемые тела (как показано на рис. 5.8). При этом и<
границе сферы 5 ставится некпк>
рое точное импедансное краешЯ
условие в операторной форме, к*
торое есть неасимптотическая мо
дификация условия излучения.
В области V, ограничении!
сферой 5 радиуса R (рис.
Н,м I
Рис. 5.8. Задача возбуждения
диэлектрического тела
с металлическим включением
Е3
вводятся базисы
Е 3
. Н,м
, построенные и.
собственных функций красно*
задачи
rot Н,э = Е,э
Е1ГЭ =0 на 5,
(5.J!
rot Е,э = -ita,3^ Н,э
rotHyM=i«a/%E>M
rotE/=-i®/%HyM
, Н м=0 на5,
где - собственные частоты сферического резонатора, индекс 3
означает тангенциальные составляющие соответствующих функций.
Здесь функции Е^,Н^ являются собственными функциями крае-
вой задачи для магнитного сферического резонатора, а функции Е311 1
соответствуют электрическому сферическому резонатору.
Установим ортогональное нормирование введенных базисов:
foJ
v
228
]Н3Н3 dv = 8ik,
v
(5.4|
Глава 5. Теория и методы рационального построения антенных устройств систем...
£о |е7меГ^и=Ао |h7mh^v=8ik,
к к
|де 8jk - символ Кронекера, * - знак сопряжения.
Внутри объема Vрешение уравнений (5.1) записывается в виде
E=f>A- Н=£й,Н,э, (5.5)
;=1 , -1
|дс aj,bi - неизвестные коэффициенты:
Вне объема V искомое решение Е,Н есть совокупность расходя-
щихся сферических волн e/,h/, удовлетворяющих однородным уравне-
ниям Максвелла и условиям излучения в бесконечности. Поэтому вне
объема V используются представления
E = 2Lc'e'’ H = Sc'h'’ (5-6)
Z=1 /=1
где с, - неизвестные коэффициенты, причем справедливо равенство
e,r=^ h,r0
(5-7)
IT, - волновые сопротивления этих волн; г0 - радиус-вектор к сфере 5.
Проведя ортогональное нормирование, получаем
<f е'.ы
(5-8)
s
где - показатель фазы волнового сопротивления.
Построенные базисы используются для проецирования на них век-
торных уравнений Максвелла. Проецируя первое уравнение в (5.1) на
Ej4 (т.е. умножая его на Е^1 и интегрируя по Е), а второе уравнение -
на Н4 , после интегрирования по частям получаются два уравнения:
i J (^EEf-®АмА)НЩм’)^ + (^[ЕАм’Л]г« = -рЭстЕГй?Г, (5.9)
К-Км 5 К
i j (щрННГ-^0EE^)67K + ^[E3f]tS = -|jMcTHfjr . (5.10)
И-Г.м S и
Из условия непрерывности тангенциальных компонент полей Е и
Н на сфере S’ к ним добавляется третье уравнение
(J[E,h’jdS = ei2^(J[ei,H]dS. (5.11)
5 S
229
Миллиметроваярадиолокация: методы обнаружения и наведения...
Теперь в поверхностные интегралы из (5.9), (5.10) вносятся разлоЧ
жения (5.6), а в объемные интегралы из (5.9) и (5.10) - представления
(5.5). Это приводит к системе линейных алгебраических уравнений (ос«
новной алгебраической форме), которая записывается в следующем виде'
( J £Е7меГ^)«-(чмао f нэн^ич^/[ЕГ,н,эда>-
К-Гм Г-Ум 5м
- (- ([ЕГ,Ь,]^)С=- [ГстеГ^,
СО J СО
S V
(fi? J Е*^^+(- J
УУм У-Ум
([нГ,е,И>)С = 1 |?СТНГ^,
й) J СО
(5.||
(-- [[Er,h/]rfS)’aW2*'^ft(-- [[нГ,е,]б«)‘б = 0,
ГУ J СО J
S S
где <о*М =<л^*/бо.со* = ci% /о>. Неизвестные векторы составлены из коэффн
циентов представлений (5.5) и (5.6): a={a^,a2,..MN),b=(f>l,b2,b3..Jb ),
c = (c1,c2,c3..xw).
Как известно [38], базисные функции сферического резонатор»
имеют вариации по меридиональной (0), азимутальной (<р) и радиальной
(г) координатам, количество которых обозначается индексами п, пг и р
соответственно. Волновые сферические функции имеют вариации толи
ко по координатам 6 и <р (что соответствует индексам п и пг). В основной
алгебраической форме линейных уравнений (5.12) сохраняются лишь те
матричные элементы, которые соответствуют условиям возбуждения.
Так, при возбуждении антенны волной типа ТЕМ, сохраняются элемен-
ты с индексом w=0,a при возбуждении волной ТЕп - с индексом те«1.|
Поэтому, такие случаи следует рассматривать отдельно, чтобы матрицд
не оказалась вырожденной.
5.6.1. Алгоритм расчета антенн с осевым излучением
Для формирования ДН стержневого типа можно использовать возбужч
дение металлодиэлектрической структуры с помощью раскрыва волно-
вода, в котором распространяется волна типа ТЕ\\. Возможные вариан-
ты построения таких конструкций приведены на рис. 5.4.
Электрическое поле в раскрыве волновода задается в виде структуры:
£r=-i2£0^^cos^, £_=i2£0[J1(Zr)-^^]sin^, (5.13)
Xr Xr
230
Глава S. Теория и методы рационального построения антенных устройств систем...
где J0(/r) и J, (/г) - функции Бесселя 0-го и 1-го порядков соответст-
венно; х = 2л / . Подставляя эти выражения в (5.9) и учитывая
jMCT=jMcT(r,^)ij(0-^), (5.14)
г 2
получаем интефалы, выражающие компоненты правых частей алгеб-
раических уравнений Галеркина-Ритца (5.12). Они находятся численно.
При построении базисных функций используем следующие обо-
значения:
D = 1 И^(2и + 1), Е.=-----, . .....
«(« +1) V л {kR)^](kpR)2 - n{n + \)jn(kpR)
2 (W/2J„ .(М)’ 2«|^2)(W?)||[^2)(W?)]'|’
где к = cDyj^So, Wo = / £0 = \20л,)п(крЯ) - сферические функции Бессе-
ля и-го порядка, hJ2\kR) - сферические функции Ханкеля и-го порядка,
кр о)р - резонансная частота типа колебаний с индексами пир.
В покомпонентной форме системы функций имеют следующий
вид [38].
Для расходящихся волн свободного пространства
er
h™
= 0,
р?'
Л“,
1
wn
-DE-, sin ®1 1 , -
— P,!(COS^>r),
DE3 cos<p J sin 6
(eTE
h™
\ f 7
1
wa
DE, cos®] d ,
DE3 sin q> J dd
.hTE ,
DE3cos(p\ i h2(kr}
. Mn + l)Pn(cos0)-*5—
DE3 sin (p J kr
(5.15)
A A
ev
hTE
\ <p J
-£)£\sin6/l 1 , \krh2(krVl
DE3 cos$? J sin# kr
(e™\
hTE
^c°s4A[;i(cosg)]l^.(W
DE3sin^>] d0 kr
1
i
1
Wn
231
Миллиметровая радиолокация: методы обнаружения и наведения...
где ^(COS0)] - присоединенные полиномы Лежандра.
Для волновых сопротивлений волн всех типов на 5 из (5.14) попу,
чаются выражения: ’
W™ = AW0[kRh^\kR)]/[kRh^\kR)J,
=-iW0[kRh^\kR)]/[kRh^\kR)]
Поперечно электрические поля записываются в следующем виде:
Р „ТЕ \ '
|£Эг
ТЕ
трМ
= 0.
гчГЕ \
F3
n <P
rvE
E o> J
„ТЕ \
н r
„мТЕ
n »-
„ТЕ \
J
,ATE
-M
r ,TE \
F3
0
E e J
DE2 sin <p
-DEjCOs^J sin#
—P„'(.cos#)j„(Z:r),
cin f-l r
DE-,cc&(p\ d i
k^cos^UtVb
DEI sin <p J <5#
i ] DE2 cos <p
Wo [DEi sin $9
п(п + l)P„’(cos #)
V
FF0 [D^sin^J л kpr
i f-DE2 sin тр
WG [DEt cos<p
—Up; (cos
sin и крг
( ^.ТЕ \
Н\
„Мге
<р 7
Собственные значения кр получаются из граничных условий ин
сфере 5. Для электрического резонатора кр есть решение следующею
трансцендентного уравнения:
j„(^P) = 0, (5.17)
для магнитного резонатора:
где штрих означает дифференцирование по аргументу.
Поперечно-магнитные поля записываются в виде:
/ „ТЕ \
Е г
р^ТЕ
\Е г )
DExcos<p
DE2 sin тр
1 /„(#„г)
n(n + l)P,!(cos<9) " р
к„г
r^TE A
F3
G
pMre
,E e J
DE, cos c?l d i [knrj„ (^nr)T
J CTp"(cosg)1 i —
D£2sm^J kpr
232
Глава 5. Теория и методы рационального построения антенных устройств систем...
рПТЕ
гМТЕ
Е <р )
-DE{ sin pl 1 , [ЛprJ„(k г)]'
пг Г—tI^(cos6,)1 , —.
DE2 cos (р J sin в kpr
(5-19)
/ X Н г имТЕ \Н г J = 0, Й Ф к® о S й: й: <. _ i ~*о [-DE, sin <»1 1 . L —[p;(Cos0)]a(V) (DE2 costp J sin 0
( ^ТЕ \ н \ i [-DE, cos pl O e 1
„мтг- <р > = *о [£>E2sinp J —[P^(cos0)]jn(kr). OU
Собственные значен из (5.18), а для магнитног Для потенциальных Г£э" ия для электрического резонатора получаются о резонатора из (5.17). полей имеем следующие выражения: DE2 cos р
Г „ =-у]п(п + 1)< [нмг J ( rJ! \ Еэг , —DE2sinp l^o J DE2 cos р z пг (5-20) —£>E2sinp ов к г wo -DE2 sin p 1 ГОС г nr ’ • n [pn (c°s £)] , • —DE2cosp sin# к r J ия этих функций определяются из (5.17). DEX cos p
= -<Jn(n + l) г/М" \н © 7 (Еэ"
^7 =-7И(« + 1)< мм <р J Собственные значен Г£м"^
rn =-7"("+i) /7Э V2 г / f£M"> ±DE^V J DEX cos p ' nr (5-2!) — £>E]Sinp 90 k r Ло -DE. sirup 1 r»i/ 1 nr ’ n[/«(cos6')] , • — DE{ cos <p sin 6* k„r Ло J P ия этих функций определяются как (5-22) 233
“ =->ln(n + !) KeJ f Ем")
=-Jn(n + l)- ) Собственные значен ШМГи=о.
Миллиметровая радиолокация: методы обнаружения и наведения...
Для упрощения записи можно ввести следующие обозначения: и ц
a = kpR - меридиональный индекс и собственное значение базиснойI
функции, стоящей на первом месте под знаком интеграла в (5.12); п' ।
P = kp.R - меридиональный индекс и собственное значение базис!н|Щ
функции, стоящей на втором месте под знаком интеграла в (5.12),
Систему алгебраических уравнений (5.12) можно представить
более удобном матричном виде
Una+(Ul2+V)b+Utf=f3, U2la+U22b+U2f=fM, Z>=0, (5.2Jfj
где знак * означает сопряженную матрицу, а смысл остальных ввсдс»|< j
ных обозначений ясен из сопоставления (5.23) и (5.12). Учитывая, что •1
данном случае возбуждение задано фиктивными магнитными токам*.
(5.14), получаем /э=0. Для потенциальных полей a>k=0. Поэтому пос*
подстановки выражений для базисных функций в (5.23), учитывая Л
ортогональность, следует, что часть матричных элементов отличил «н
нуля только при п=п’ и вычисляется при помощи выражений:
/г г .ТЕТЕ „j .тмтм _ 2a2 р
kj kR(a2 — р2)^р2—п(п + \)
)Тмтм,и .те ТЕ =__________2a2
21 kJ П *' kR(a2 - p2)Ja2 -n(n + l) ’
(t/21)™ n = (C12)Ifn = -—I 2 и(и + 9-..... , (5.24
21 *Л\[а2-и(и + 1)][Д2-и(и + 1)] ’
(Цз)« TE = ~W23)TUM ™ = al 2P' -eip,
13/и 23,w ^ЛЯр[а2-и(и + 1)]
(C13)™ ™ = -(C23)If TE =
у kRp
(Ц3)£ ™ = (^2з)В = J 2pH(«+t)~eip,
в,и 23,w у kRp'[a2 -и(и + 1)]
^=-'¥™=<р-<Р-я12.
При А = Д) (С22) =-^ .Элементы матриц Иц и V приходится пи»]
ходить численными методами.
Таким образом, система уравнений Галеркина-Ритца в алгебраи-
ческой форме (5.12) полностью определена. Решая её, находим нсш
вестные векторы а,Ь,с. После подстановки их в уравнения (5.5), (5.М
234
Глава 5. Теория и методы рационального построения антенных устройств систем...
Определяется электромагнитное поле в окружающем пространстве. Для
описания ДН удобно использовать асимптотическое разложение функ-
Unii Ханкеля при г -> оо , которое имеет следующий вид:
e~ikr
h{n2\kr) =--е 2 4 . (5.25)
кг
Коэффициент отражения от антенной системы определяется с по-
мощью вычисления электромагнитного поля (а именно составляющей
'ГЕ]]) в раскрыве возбуждающей апертуры по уравнениям (5.5).
1.6.2. Алгоритм расчета антенн с воронкообразными
диаграммами направленности
Как известно [34, 39], воронкообразные ДН можно формировать с по-
мощью длинных диэлектрических антенн. При этом довольно затрудни-
тельным является снижение уровня излучения в осевом направлении до
нуля. Кроме того, при этом сложно удовлетворить конструктивным тре-
бованиям к СПР.
Для синтеза антенн с воронкообразными ДН целесообразно воз-
буждать металлодиэлектрическую структуру волной типа ТЕМ с помо-
щью коаксиальной линии [43]. Поскольку алгоритм расчета при этом
упрощается, надо записать расчетные соотношения для этого случая.
Коаксиальная линия с размерами внутреннего и внешнего провод-
ников R] и Т?2 соответственно, допускающими существование осесиммет-
ричных волн только типа ТЕМ (Л > 2(R2 - R,), оканчивается бесконечным
плоским идеально проводящим металлическим фланцем с Ег = 0 . Линия
питается от генератора монохроматических колебаний частоты а>. В
верхнем свободном полупространстве, характеризуемом параметрами
, находится неоднородное тело вращения произвольной формы с не
зависящей от азимутальной координаты диэлектрической проницаемо-
стью £. Требуется определить электромагнитное поле (Е, Н ) в верхнем
полупространстве, которое удовлетворяло бы уравнениям Максвелла и
условиям излучения в бесконечности.
Таким образом, фактически рассматривается задача электромаг-
нитного возбуждения диэлектрического тела объема V}, заданным сто-
ронним магнитным током с распределением
jMCT=-r0ErCTl^-^), (5.26)
г 2
где Го - единичный радиус-вектор, или сторонним полем
Е" =г0Е7,
235
Миллиметровая радиолокация: методы обнаружения и наведения ...
где Е”- радиальная составляющая вектора напряженности электричФ
ского поля волны ТЕМъ раскрыве коаксиальной апертуры, определи-
мая для волн единичной амплитуды выражением
z S1/4 z 4-1/2
Е=| —I Ьг1п— (5.211
- диэлектрическая проницаемость заполнения линии.
На основе проекционного метода [35, 36] рассматриваемая краеш<
задача сводится к системе линейных алгебраических уравнений Галеркип*
Ритца (5.12). Искомое поле представляется разложениями (5.5) и (5.6).
В анализируемом случае осесимметричного возбуждения тела вран*
ния волной типа ТЕЛ/базисные функции имеют следующую структуру [38)
Функции свободного пространства (ez,hz)
е™ =4,n(n + l)P„(cos^)—h^(kr\
kr
е™=<5-4
du кг
h™ A[Pn(C0S^(2)(M
ттg 0(7
с нормирующим множителем
Ат__________*W0(2n + l)________
" ~ 4/rn(n +1) | kRh^\kR} || [kRh^XkRJJ I ’
где Pn(cos6) - полином Лежандра; h@\kR) - сферические Функции
Ханкеля второго рода.
Функции магнитного резонатора (Е^,Н^) имеют следующий вид
для поля типа ТМ:
ЕМ™ =4ip«(« + 1)^(cos^-^-;„(A г),
V
£м™ = Лр^[^(со80)]-^-[^;(^г)]', (5.М!
дв крг
.,ТМ 1 д
Нмр =-—Лр—[P„(COS0)V„(V)’
rfg d(J
где нормирующий множитель
236
Глава S. Теория и методы рационального построения антенных устройств систем...
л к\2п + \)
"Р Z^n + ^k^jlSkpR)'
и собственные частоты определяются уравнение (5.17);
для потенциальных функций
Ем" =-ЛрР„(со5^ (крг),
,,п d 1
ЕМ@ =-^—[P„(COs0)]—J„(kpr),
н 00 кг р
(5.30)
п .,п
Е\ =Н\ =0,
где собственные частоты определяются уравнением (5.22), а норми-
рующие коэффициенты имеют вид
2 =____________**(2и + 1)_________
Лр 2^0(kpR)[(kpR)2 -n(n + 1)]У'ХЛ) ’
В функциях электрического резонатора (Е*,Н?) составляющие
Э7Л/ ЭТЛ/
ноля типа (£ , ,Н t ) описываются (5.29), однако нормирующие
множители для этих функций определяются как:
2 =_____________**(2» + 1)_____________
"Р 2^0н(и + \)kpR[(kpR)2 -n(n + I)],2 (kpR) ’
а собственные частоты - уравнением (5.18).
Компоненты потенциальных функций Ej имеют вид (5.30), но
собственные частоты определяются уравнением (5.17), а нормирующие
множители формулируются как
^(2» + 1)
"Р 2ft£n(kpR')3j2_,(kpR') ’
В формулах (5.28) - (5.30) из граничного условия Ег = 0 на метал-
лической плоскости следует и=1, 3, 5... . Из приведенных соотношений
можно вывести расчетные формулы для вычисления элементов матриц,
которые аналогичны формуле (5.24).
Запишем расчетные соотношения для элементов правых частей в
уравнении (5.12):
(5.31)
237
Миллиметровая радиолокация: методы обнаружения и наведения...
—------------------------------------—----------------------------
которые после подстановки в выражений (5.26), (5.27) и соответствии
щих базисных функций (5.12) приобретают вид
Я2/ R
fik = Dk f j„(kpRy)dy, (5 4)
«1/я
где у = г / R,
1/2
А—и
2(2п + 1)
j"kPR J^nfri + l)[(fcpRf -n(n + l)]A7?/n(—)
Ri
Интеграл (5.32) вычисляется численными методами.
Осесимметричное поле в дальней зоне с использованием асимпкь
тики сферических функций Ханкеля при г —> оо после нахождения V
неизвестных коэффициентов разложения поля во внешней области рн»
считывается по формуле
—ikr 22V-1
Е@{0) =-----£ i"+2B„C™P„'(cos0),
г
(5.3Л
где В„ =
30й>(2и +1)
n(n +1) I kRh^(kR) II [kRh<2\kR)]' I
Излучаемая антенной мощность определяется выражением
1 22V-1
^=у£|с„|2. (5.34)
Z Л=1
Таким образом, описанный алгоритм позволяет проводить рас* 1 Л
электродинамических характеристик металлодиэлектрических антенн,
возбуждаемых коаксиальной линией.
5.7. Вопросы сходимости решения задачи
электромагнитного возбуждения
металлодиэлектрических антенн
Краевую задачу для области V (рис. 5.8) можно сформулировать в виде
операторного уравнения
AU=f, (5.35)
где А - некоторый оператор, связывающий систему векторных функций
Unf.
238
Глава 5. Теория и методы рационального построения антенных устройств систем...
Пусть в рассматриваемом функциональном пространстве имеется
полная ортонормированная система {С7Я}. Так как (AU-f) есть нулевой
элемент пространства, то он ортогонален ко всем Un , т.е. их скалярное
произведение равно нулю [40]:
(AU-f,Uk) = 0, к = \, 2, ...оо . (5.36)
Если построить приближенное решение в виде линейной комбинации
(5.37)
Л=1
с неопределенными коэффициентами, которое подчиняется затем ана-
логичным условиям ортогональности
(AUN-f,Uk) = 0, k = l, 2, ...оо, (5.38)
то возникает система N линейных уравнений относительно коэффици-
ентов а„, которую можно записать в матричной форме:
Aa=f. (5.39)
Уравнение (5.39) есть не что иное, как другая запись (5.23). Можно
составить разностную функцию решения U и его приближенного пред-
ставления if
rj = U-UN.
n = l,2,...,N,
Из (5.36) и (5.38) следует
О,
-(AUN-f,U„), n = N + l,N + 2,...,x.
(5.40)
(5.41)
При разложении функции tj в ряд Фурье по получается сле-
дующее выражение:
n-Y(bn-a„)U„+ b„U„, (5.42)
л=1 л=Л^+1
где а„ - коэффициенты представления (5.37); Ь„ - коэффициенты ряда
Фурье решения
и = Хь„ип • (5.43)
П = 1
Если умножить обе части (5.41) на коэффициенты Фурье из (5.42)
и составить бесконечную сумму, то можно записать
(An,n) = -(Alf -М, (5.44)
239
Миллиметровая радиолокация: методы обнаружения и наведения ...
где rN = bnUn - бесконечный остаток рядов (5.42) и (5.43). Hcnoiih
n=W+l
зуя неравенство Коши-Буняковского [45], можно записать
где введено обозначение нормы ||(7|| = . Поэтому
|(^,7)|<|pC7JV-/|-Ы|. (5.1*4
Если предположить, что для первого сомножителя справа в (5.41)
можно установить ограниченность по N, т.е. указать такое не завися ни*
от ./V число С, что для всех ./V выполняется неравенство
Поскольку остаток ряда Фурье rN с ростом N становится скопи
угодно малым по норме, то
(Ат],т]) —> О, А —> оо. (5.4Т)
Для коэффициентов Фурье имеются оценки убывания порядки
[40]. Так, для вихревых и потенциальных функций электрического поле
и для потенциальных функций магнитного поля в общем случи*
bn=O(kp'), а для вихревых функций магнитного поля bn=O(k~2), i.c
имеются выражения вида
fe„=(g,{/„)/< (5.48)
где - собственные значения задачи (5.39) при A = L-Aq, L — линей*
ный оператор, q - весовые функции. Тогда
Ы= Z Z IteM. cd
nN+l Лп ЛЛМ n=N+l
и после применения неравенства Бесселя [45] получим
Лн+1 )'
Поэтому, для оценки точности решения требуется знание собсг
венных значений операторного уравнения (5.39), что соответствуег I
рассматриваемой задаче возбуждения корням характеристических уран
нений (5.17), (5.18) и (5.22). Корни уравнения (5.17) представлены ин
рис. 5.9 и 5.10, корни уравнения (5.18) - на рис. 5.11 и 5.12, а кор^и
уравнения (5.22) - на рис. 5.13 и 5.14.
240
Глава 5. Теория и методы рационального построения антенных устройств систем...
kpR
kpR
Рис. 5.10. Корни характеристического
уравнения jn(kpR) = 0
Рис. 5.9. Корни характеристического
уравнения J„(kpR) = 0
Рис. 5.12. Корни характеристического
уравнения jn(k R) = 0
Рис. 5.11. Корни характеристического
уравнения [j„(kpr)' |г=я=0
18
14
10
6
2'
Рис. 5.14. Корни характеристического
уравнения [ул(Арг)]' |г=д=0
Рис. 5.13. Корни характеристического
уравнения [kprj„(kpr]' |г=я= 0
241
Миллиметровая радиолокация: методы обнаружения и наведения...
Значения корней на рис. 5.9; 5.11; 5.13 приведены в зависимости Щ
меридионального индекса п при различных индексах р (где обозначен*.
□-р=1, * - р=2, о - р=3). Зависимости от радиального индекса р на м
5.10; 5.12; 5.14 даны для различных значений меридионального индене
п (где обозначено: □ -«=!,*-« = 2, о-п =3).
Таким образом, при возбуждении металлодиэлектрических ашеня
волной типа ТЕц для получения оценки точности решения по норма
Ы2 <1,5% базис должен содержать более 30 функций. При необходп
мости увеличения точности по норме до 0,5% количество функций
щественно увеличивается (до 100), что приводит к значительному yw»
личению времени счета и требуемой оперативной памяти ЭВМ. С н|мм
тической точки зрения вычисления с такой точностью целесообра im
проводить лишь при контрольных расчетах.
5.8. Моделирование и результаты расчетов
направленных свойств металлодиэлектрических
антенн систем принятия решений
миллиметрового диапазона радиоволн
5.8.1. Направленные свойства металлодиэлектрических антенн
при возбуждении волной типа ТЕц
При обосновании направленных свойств антенн СПР ММДВ было по-
казано, что их ДН должны иметь стержневую либо воронкообразную
форму. При возбуждении металлодиэлектрических антенн волной 7/
(например, с помощью волновода) формируется ДН стержневого типа
Показано, что большинство элементов матричной формы алгебраиче-
ских уравнений (5.12) вычисляется в аналитическом виде. OcHOBiiufi
трудности связаны с расчетом элементов Ut । и V.
Алгоритм вычисления (7ц для аксиально-симметричного тела
вращения следующий формулу для вычисления 17ц из (5.12) можно
представить в виде:
(С/п)^=4 + J E^e-^jdV. (5.51)
Трехмерный интеграл по К£>Л/ после интегрирования по азиму-
тальной координате (р сводиться к двумерному. Представляем диэлек-
трическое тело в виде сферически радиальной среды, состоящей из /'
областей, в каждой из которых справедливо r = r'-ir" = const. Тогда
двумерный интеграл по площади поперечного сечения представляется и
виде двукратного по сферическим слоям с координатами в и г.
242
Глава 5. Теория и методы рационального построения антенных устройств систем...
По переменной в используем следующие выражения:
Io.= J^(x)^(xH,
1 •> 1-х ах ах
(5.52)
Где
= f (x)^^ + P^x)^kdx,
J J ax ax
xp
X = cos#.
Можно сказать, что
1-х2
и(и + 1)-иХи'+1) dx dx
-7 у (-l/t;(W + fc)!(W'+/)!
--------(l-x)*+*+1----—(\-x)k+t
L* + / + l к + Г
7*
,П п'
р"
(5.53)
рк
9п-п\
рн
X
I х-*2
02 и(и + 1)-и'(«'+1)
n(n+1)^ (X)^^ - n\n'+ l)Pn'(x)^^
ax ax
(х>| .
/ж
При интегрировании по координате г имеем:
Гр Гр
I ь = \j„(ay)jn-(0y)y2dy,
гр
1 Г4= Ijn^y^y—^lJAPy^dy,
Yp
Y} d(ay)1 d(J}y)
Tp
Р"
(5.54)
243
Миллиметровая радиолокация: методы обнаружения и наведения...
i^ayJ-(ay^^M-(/)y^y-
гр
1 г,=
1 Ч= \-J7-\{ayj^ay}}jAfiy}dy^
J d(ay)
*р
где y = kr/kR. Тогда будем иметь следующие выражения для ({7,
(f7n)^re = % + А"^Р = е/е0, (5.Ц
p=i
где
лп=____________2«jg_________| (2n + l)(2n'+l)
и(и + 1)и'(и'+1)У„(а)Л-(^) \[а2-и(и + 1)][/72-и'(и'+1)]’
(Ц,)™™=+^22Е(^ ]; (5.
Р=1
где Л22 2л/(2и + 1Х2и'+1) Л22_ 1
1 И(И + 1)и'(«'+1)’
1
a/3
язз
где A =—--------------
(2n + l)(2n'+1)_______________
Л(«)Л0») V«(« + 1)и'(и'+1)[«2 -и(и + 1)][^2 -и’(и'+1)]’
{и^™ = АХ2^р-\)1в21,
(5.58)
где
_______________la_______________ /(2и + 1)(2и'+1)
n(n + l)n\n'+Y)j„(_a)jn._i(fi)fi у a2-n(n+l)
(ип)^=А13^(ёр-1)1^,
p=i
(5.5Я
244
Глава 5. Теория и методы рационального построения антенных устройств систем...
________la_______ I (2и + 1)(2и'+1)
«(« + 1)Л(«)Лг(Д) v n\n'+1 )[а2 -п(п +1)][/З2 -п'(«'+1)]’
(5.60)
|де
Л23 2 | (2и + 1)(2и'+1)
«/П-1(«)Л'(У?) V n\n'+1)[Д2 -n\n'+1)]
Элементы матриц (t/n)^17E и (ЦД™11 после пои, а о р
вычисляются соответственно по формулам для (Un)™” и
(Ц1)";ГЛ/ • Интегралы (5.51) берутся только в области углов 0=0°...90°. Для
определения значений интегралов (5.52) используется численное интегри-
рование по формуле Симпсона с заданной степенью точности.
В секционной диэлектрической антенне металлическая перегород-
ка располагается параллельно вектору поляризации электрического по-
ля. Элементы матрицы И*,- вычисляются численно по формуле:
и,,. = -~-j f(EM; НЭЛ. - Ем;к Нэ„)г sin Odddr, (5.61)
г 0
юМ* ттЭ
где компоненты векторов Е к и Н z вычисляются для плоскости
ip = л / 2
Двумерный интеграл по г и в можно представить аналогично пре-
дыдущему случаю в виде двукратного. По переменной 0 используем
следующие выражения:
jVl-X2
1в1 = \4^p'n{x)^^-]dx, (5.62)
2 •» ах
х
I* =
х
где x = cos0
При интегрировании по координате г имеем
245
Миллиметровая радиолокация: методы обнаружения и наведения...
--------------------------------------------------------««
Ц = (л(ау)Л-(АУ)Ф> -{jAayy\jn<Py)dy,
Л4 = p„(«y)^[m-(^y)]^, 1
cd 1
h = |-Т"—Tla^(«y)]A(^)-<fy. 1
5 }d(ay) у
in - р^Л/. /, - <SJ
= zno = [}n{ay}-^-[jn<Py)\ydy.
* }d(ay) J d(0y) xJ
где у = kr I kR . Тогда будем иметь следующие выражения для Kfa: 'I
^.7Е=_лп^^> (5>1
где А" ^ + ^2п'+1) .
Р TckRn(n +1)7«2 - п(п +1)уя (a)jn,_x(P) 1
=^3[Vr2- <5-«
где лзз _ 7(2н + 1)(2ИЧ1) _________. *
лкЛ^п(п + 1)п'(п'+ 1)[а2 - и(и +1)]-\р2-п\п'+ 1)]/я(а)j„.(Д) '
Кй ~А L«(«+i)03 rs 02 r4J’ 1
где Л21 7(2» + 1)(2^'+») ;
я-АЯа/?и'(п'+ 1)Л-1 («)•/»•-!(/?) ’ j
Кьгеп=Л%/По> (5,в-
где лв=___________ а^(2и’+1Х2И + 1) _________.
jtkRn(n +1)7 п \п'+ 1)[а2 -п(п +1)][/?2 - п \п'+1)]/, (а)
,ГЛ/.П ^23zr , п(п + \) .-
=~А -----р-Щт)’ (5-®
где л22 =-ё- I <2и + 1)<2”’+1) 1
я-kRa \ п \п'+1)[/?2 - п \п'+1)] j„_x (а) ;„<(Р)
246
Глава 5. Теория и методы рационального построения антенных устройств систем ...
,. ггТМ.ТМ тгП.ТЕ Т/П ТМ
)лементы матриц , rki , vkj после замены non', a <-> р
вычисляются соответственно по формулам для {j-V^ETE^, V™ п и .
Интегралы (5.62) вычисляются только в области углов#=0о...90°.
„ТЕ.ТМ a
Элементы матрицы = U.
Геометрические модели цилиндрических и сферических антенн пока-
чаны на рис. 5.15 и 5.16 соответственно.
Рис. 5.15. Геометрическая модель
цилиндрической антенны
Рис. 5.16. Геометрическая модель
сферической антенны
Для проверки правильности функционирования алгоритма расчета
секционных антенн проведено большое количество тестовых вычислений.
Па рис. 5.17 приведены рассчитанные ДН (в экваториальной плоскости)
дня цилиндрического стержня с плоским торцом и относительной длины
А/.=4,2 (кривая 1), kL=5,3 (кривая 2), kL=6,3 (кривая 3). На рис. 5.18 показа-
ны соответствующие этим данным ДН в меридиональной плоскости. При
ном значение относительного радиуса fo=0,81.
Рис. 5.18. Диаграммы направленности в
меридиональной плоскости
цилиндрического стержня
Рис. 5.17. Диаграммы направленности
в экваториальной плоскости
цилиндрического стержня
247
Миллиметровая радиолокация: методы обнаружения и наведения ...
Для иллюстрации влияния обтекателя на направленные свойства iH
ких антенн на рис. 5.19, 5.20 показаны их ДН в соответствующих плоскщ
стях при толщине обтекателя kh=3,0 и относительной диэлектрической
проницаемости е=2,1 (кривая 1 - без обтекателя, кривая 2 - с обтекателем)
Обтекатель имеет сферическую форму с внешним радиусом kR“T,4
Анализ ДН показывает, что происходит их существенное искажение ос«Н
бенно в области боковых лепестков. Это, очевидно, связано со сложным
распределением токов на поверхности цилиндрических антенн.
На рис. 5.21 приведены ДН секционной диэлектрической антенны
в //-плоскости (кривая 1) и Е-плоскости (кривая 2) при следующих дан
ных: Z=l,72, л=0,46Я, ег=2,6. На рис. 5.22 приведены зависимости шири
Рис. 5.19. Влияние обтекателя
на диаграмму направленности
в экваториальной плоскости
цилиндрического стержня
Рис. 5.20. Влияние обтекателя
на диаграмму направленности
в меридиональной плоскости
цилиндрического стержня
Рис. 5.21. Диаграмма направленности
секционной диэлектрической антенны
в //-плоскости (кривая 1) и Е-плоскости
(кривая 2) при £=1,72, г=0,462, сг=2,6
Рис. 5.22. Зависимости ширины Д1 i I,
ДЕздб(0 и уровня боковых лепестков!/»
от отношения 1/А и диаметра d
248
Глава 5. Теория и методы рационального построения антенных устройств систем...
ны ДН АЛздБ(0 и уровня боковых лепестков h от отношения //л и диа-
метра d. Сравнение этих данных с ДН диэлектрических антенн показы-
вает, что наличие металлического экрана существенно улучшает на-
правленные свойства таких антенн.
На рис. 5.23 показаны ДН сферической антенны (с=2,6) с радиусами
/ X (кривая 7), г = 1,5Х (кривая 2)
и /• = 2,5Х (кривая 3). Из приведен-
ных на рис. 5.23 графиков видно,
что такие конструкции антенн по-
зволяют сформировать ДН стерж-
невого типа. При радиусе сфериче-
ской антенны г более 22 ширина
Д11 по уровню половинной мощно-
сти составляет менее 30°.
Использование в возбуж-
дающей структуре антенной сис-
темы перехода волновода в сфе-
рический экран позволяет улуч-
шить направленные свойства ди-
Рис. 5.23. Диаграмма направленности
сферической антенны
электрических антенн. При этом расчетные соотношения для всех мат-
ричных элементов из (5.23), за исключением V, сохраняются. Для вычисле-
ния элементов матрицы V используются следующие соотношения:
,,ТМ.ТМ 722 1 /Т22 ,22,
Vki ~ Л Г-,-----------,, ,, , U 1 )’
у]п(п+})п (п + 1)
(5.69)
, де А22 = __________________^х/(2» + 1)(2»'+1)__________________.
« kR2^n(n + 1)п'(н'+ 1)(Д2 -п'(п'+ !));„_! («);„.(/?)
122 = /[/;'(х)]'уя.(^ / Л)х(1 - x2){-[P„’(x)]'[«r / Rj„(ar / Я)]'х -
X 9
-и(и +1) р' (x)j„(ar / R)}dx;
. х2
Z22 = [-----TP^(x)j„.(fir / R)[ar / RJn(ar / R)]'P^,(x)dx;
xl~x
V™TE = АИ/11, (5.70)
где
i = _£___________2Rulyl(2n + \)(2n'+1)________
kR2 jn(n + \)n\n'+\)(a2 -и(н + 1))у„(a) (Д)
In = j{[pr/Rjn^r/R)]’x(-^P^x)j„(ar/R)P^x)-
249
Миллиметровая радиолокация: методы обнаружения и наведения...
-(1 - х2)[Рл1(х)]’Л(аг / Л)[Рл*.(х)]'- (1 -х2)[Д'(х)]’х
хул(аг / R)n\n'+ \)P\\x)jn\Pr I R)}dx;
Kn ™ = A32—.-------!----=(7 32 -132),
^n(n + \)n\n'+\)
где Я32 =_______________^ctflR ш>/(2и + 1)(2и'+1)__________
kR24n\n'+ l)[a2 - n(n +1)][Д2 -«'(«'+ l)l/„(«)y„-(ZO ’
732 = |[^(*)ГЛ W / R) I a+^x)[jn(ar / Д)]'|.б|
X
I32= [-^Ц-Р„(х)ул(аг IR)/ aP^(x)jn.(flr / R)dx, x=r/R.
J I — V
Рис. 5.24. Диаграмма направленности
сферических антенн
с металлическим экраном (г=л)
Элементы матриц VTE п ны
числяются по формулам для I411
после замены п <-> п',
Результаты расчетов ДН сч|м
рических диэлектрических антенн i
металлическим экраном (при
представлены на рис. 5.24 (r=A) i
5.25 (г =1,52). Графики: 1 соотвспя
вуют антенне с металлизацией, >
без металлизации, а 3 на рис. 5.251
открытому концу волновода. Видна
что использование полусферичесм
го экрана улучшает направленна
свойства антенн.
В некоторых случаях введение в антенную структуру антенны 1ме»
таллического экрана ухудшает указанные характеристики, что связано i
изменением амплитудно-фазового распределения поля в объеме антеинщ
Это доказывает необходимость аккуратного выбора параметров при 1фМ
ектировании указанных типов антенн.
Как было указано выше, в некоторых случаях антенны могут шр>
иться конформно с обтекателем.
При этом электродинамические параметры существенно изменниц»!
ся. Проекционный метод при расчетах позволяет учесть такое влиянна.
На рис. 5.26 приведены рассчитанные ДН по данным, соответствуют!ill
рис. 5.25, при наличии обтекателя (е=2,5, Л=0,4А), выполненного кон
формно со сферической антенной (кривая / — с обтекателем, 2 — без ooic
кателя). Как видно из рисунка, в области боковых лепестков наблюдаеги
изменение амплитуды поля.
250
Глава 5. Теория и методы рационального построения антенных устройств систем...
Рис. 5.25. Диаграмма направленности
сферических антенн с металлическим
экраном (r=/,5z)
Рис. 5.26. Влияние обтекателя
на ДН сферической антенны
5.8.2. Направленные свойства металлодиэлектрических антенн
при возбуждении волной типа ТЕМ
Возбуждение осесимметричных металлодиэлектрических антенн вол-
ной типа ТЕМ применяется для формирования воронкообразных форм
ДН. При наличии металлического сферического экрана направленные
свойства таких антенн изменяются. С математической точки зрения это
влияние учитывается в уравнениях (5.23) с помощью матрицы V , для
которой получено следующее выражение:
уп™=732Г32, (5.72)
причем формулы для множителей Л32 и Z32 приведены в (5.71), но при
ном следует произвести замены Т*(х)^Рп(х), [^(х)]'^Р„'(х). Для
ыементов матрицы
уГЛ/ ТМ _ ^22у22
коэффициенты А22 и 122 вычисляются по формуле (5.69) при анало-
гичной замене.
Для сравнения различных вариантов конструкций на рис. 5.27 приво-
дятся результаты расчета поля излучения цилиндрической диэлектриче-
ской антенны, геометрическая модель которой показана на рис. 5.15, при
фиксированных длине (kL=4) и радиусе (kr = 1,57) стержня и переменных
значениях е. Кривая 1 на рис. 5.27 соответствует е - 2,5,2 - s = 5,3 - е = 7,5.
Анализ рис. 5.27 показывает, что цилиндрическая антенна при £=5
формирует излучение вперед, так что максимум поля получается при О=А(Т
. Более существенно повышение направленности действия цилиндрической
антенны в продольном направлении при £=7,5. Максимум главного лепест-
ка формируется в направлении 0=42° и появляется боковой лепесток.
251
Миллиметровая радиолокация: методы обнаружения и наведения...
На рис. 5.28 показаны ДН для диэлектрической сферической *
тенны диаметром d=)., возбуждаемого коаксиальной апертурой. Ди »ло <
трическая проницаемость равна е=5 (кривая 1) и с=7,5 (кривая 2). 1<щ|<
но, что такие антенны сильнее отклоняют поле излучения в продольно*)
направлении, причем ширина ДН по уровню половинной мощное i и I
этом случае менее 30°.
Интересно рассмотреть влияние на формирование ДН обтек;ис||
сферической формы с центром, лежащим на пересечении коаксиалы в 4|
апертуры и оси симметрии линии питания.
На рис. 5.29 показано влияние на ДН сферической антенны сеч
(кривая 1) при полностью закрытой антенне (<7о=1,52, кривая 3) и кокй*
формном исполнении обтекателя (<7() = 0,52, кривая 2). При этом толщи
на обтекателя h = 0,42, а диэлектрическая проницаемость £=2,1. Ни
рис. 5.30 приведены аналогичные
зависимости при диэлектрически!
Рис. 5.28. Диаграмма направленное!и
сферической антенны
при возбуждении коаксиальной
апертурой
Рис. 5.30. Влияние обтекателя на Д11
сферической антенны с £=7,5
Рис. 5.27. Диаграмма направленности
цилиндрической антенны
при возбуждении коаксиальной
апертурой
Рис. 5.29. Влияние обтекателя на ДН
сферической антенны с с=5
252
Глава 5. Теория и методы рационального построения антенных устройств систем...
проницаемости сферической антенны с = 7,5- Как видно из рис. 5.29 и
5. 10, конформное исполнение оказывает меньшее влияние на искажение
формы ДН, при этом слабее всего оно для антенн с наибольшей диэлектри-
ческой проницаемостью.
Таким образом, проведенные расчеты показывают, что при опреде-
ленных размерах антенн и определенных значениях диэлектрической про-
ницаемости электродинамические характеристики в значительной степени
удовлетворяют требованиям, предъявляемым к антеннам СПР ММДВ.
5.9. Направленные свойства микрополосковых
антенн
Для формирования ДН антенн СПР ММДВ могут также использоваться
МИЛ различных конструкций [11-30]. С помощью МПА возможно
формировать ДН стержневого и воронкообразного типов различной по-
ляризации. Для численного расчета направленных свойств и согласова-
ния с линией питания таких антенн можно использовать различные мо-
дификации метода моментов, которые применяются во многих совре-
менных САПР для электродинамических расчетов [6, 46]. Проведено
большое количество расчетов направленных свойств различных малога-
баритных микрополосковых структур. В качестве примера ниже приве-
дены следующие результаты моделирования.
Па рис. 5.31-5.35 показаны геометрическая модель и результаты рас-
четов МПА, формирующей ДП стержневого типа. Относительная диэлек-
трическая проницаемость подложки е=2,2, толщина подложки /г=0,5 мм,
размеры ячейки 0,125x0,125 мм2, диапазон частот 56...60 ГГц. Возбужде-
ние МПА производится сквозным портом с волновым сопротивлением
50 Ом. Параметры согласования при гаком способе возбуждения можно
изменять, смещая точку питания вдоль линии симметрии МПА.
На рис. 5.31 приведена геометрическая модель, используемая при
расчете, цифрой 1 обозначен порт возбуждения; рис. 5.32 иллюстрирует
рассчитанную плотность токов, текущих по поверхности МПА. Видно,
что токи - синфазны, антенна - резонансная. На круговой диаграмме
(рис. 5.33) показана зависимость коэффициента 5ц от частоты, из которой
следует, что наилучшее согласование обеспечивается на частоте 58 ГГц.
На рис. 5.34 показаны рассчитанные ДН в плоскости ^=0° (где
обозначено: РРС EPhi [0,1] - компонента Ev поля для данной плоскости,
РРС ETheta [0,1] - компонента Ео поля для данной плоскости, РРС TPwr
|(),1] - суммарное ноле для данной плоскости).
На рис. 5.35 даны рассчитанные ДН в плоскости ^=90 (где обо-
значено: РРС EPhi [90,1] - компонента Ev поля для данной плоскости,
/7?С ETheta [90,1] - компонента Еп поля для данной плоскости, РРС
TPwr [90,1] - суммарное поле для данной плоскости).
253
Миллиметровая радиолокация: методы обнаружения и наведения
Рис. 5.32. Поверхностная 1
Рис. 5.33. Зависимость коэффициента
,S’ii от частоты на диаграмме Смита
плотность токов
DN в
Рис. 5.34. Диаграмма направленно^
МПА при </>=0° I
Рис. 5.35. Диаграмма направленности
МПА при ^=90°
Рис. 5.36. Геометрическая модел!
МПА
254
Глава 5. Теория и методы рационального построения антенных устройств систем...
Анализ рис. 5.34 и 5.35 показывает, что такая конструкция МПА
имеет слабые направленные свойства и не может использоваться во
иходных трактах СПР для артиллерийских БП. Однако, учитывая малые
шбаритные размеры таких антенн, их можно использовать в качестве
элементов фазированных антенных решеток (ФАР), что даст возмож-
ное ib значительно улучшить параметры ДП.
На рис. 5.36-5.40 показаны геометрическая модель и результаты
расчетов МПА, формирующей ДН воронкообразного типа. Относитель-
ная диэлектрическая проницаемость подложки е - 2,2, толщина под-
ложки h = 0,5 мм, размеры ячейки 0,125x0,125 мм2, диапазон рабочих
Частот 56...60 ГГц. Возбуждение МПА производится сквозным портом
г пол новым сопротивлением 50 Ом. Параметры согласования при таком
способе возбуждения можно изменясь, смещая точку питания по диаго-
нали МПА.
На рис. 5.36 представлена геометрическая модель, используемая
при расчете, цифрой 1 обозначен порт возбуждения, а на рис. 5.37
рассчитанная плотность токов, текущих по поверхности МПА. Видно,
чю соки - противофазны, антенна - резонансная. На круговой диатрам-
мс (рис. 5.38) показана зависимость коэффициента .S'H от частоты, из
которой следует, что наилучшее согласование обеспечивается на часто-
I с 60 IТц.
Рис. 5.37. Поверхностная плотность Рис. 5.38. Зависимость коэффициента
токов б',! от частоты
На рис. 5.39 приведены рассчитанные ДН в плоскости </>=0: (где
обозначено: РРС EPhi [0,1] компонента Ev поля для данной плоскости,
РРС ETheta [0,1] - компонента Ео поля для данной плоскости, РРС TPwr
[0,1] суммарное поле для данной плоскости).
На рис. 5.40 даны рассчитанные ДН в плоскости </>=90 (где обо-
значено: РРС EPhi [90,1] - компонента Ev ноля для данной плоскости,
РРС ETheta [90,1] - компонента Ео поля для данной плоскости, РРС
TPwr [90,1 ] - суммарное поле для данной плоскости).
255
Миллиметровая радиолокация: методы обнаружения и наведения ...
DNO
Рис. 5.39. Диаграмма направленности
МПА при <р=0°
DN К
Рис. 5.40. Диаграмма направленное)и
МПА при ^=90°
Анализ рис. 5.39 и 5.40 показывает, что такая конструкция MIL
имеет удовлетворительные направленные свойства и может исполья
ваться во входных трактах СПР в широком диапазоне углов подходи
подстилающей поверхности.
256
ГЛАВА 6
Методические основы построения
радиолокационных головок
самонаведения систем высокоточного
оружия в миллиметровом диапазоне
радиоволн
Н настоящее время основными высокоточными средствами поражения в
оперативно-тактической зоне являются противотанковые ракетные ком-
плексы (ПТРК) и корректируемые артиллерийские боеприпасы (управ-
ляемые артиллерийские снаряды - У АС). При этом особое место среди
систем ВТО нового поколения должны занять ПТРК, способные пора-
жать объект бронетанковой техники (ОБТТ) с закрытых позиций, реали-
зующие принцип «выстрелил и забыл» в любых погодных условиях и в
любое время суток.
Сейчас во всем мире общепризнано, что такие образцы высоко-
точных боеприпасов (ВТБ) должны обладать автономной головкой са-
монаведения (ТСН), способной размещаться в калибрах от 120... 150 мм,
обнаруживать типовую цель (танк на фоне земной поверхности) на
дальности не менее 1200... 1500 м. Работы по созданию ТСН с указан-
ными параметрами ведутся в СМ- и ММ- диапазоне длин радиоволн, в
оптическом диапазоне с использованием ИК и видимых участков спек-
тра. Однако сравнение основных потенциальных характеристик ММДВ
с СМДВ и электронно-оптическим диапазоном, как показывают резуль-
таты, приведенные в [1-6], оказывается явно в пользу ММДВ.
Кроме того, в сравнении с СМДВ диапазон ММДВ обладает рядом
преимуществ:
при одинаковых размерах апертуры антенн переход в коротковол-
новую часть ММДВ позволяет на порядок улучшить угловую разре-
шающую способность;
применение сигналов с более широкой полосой частот (единицы
гигагерц) позволит повысить разрешающую способность по дальности,
что необходимо для обнаружения радиолокационными методами мало-
размерных объектов на фоне рассеяния земными покровами;
уменьшение средних коэффициентов зеркального отражения за счет
возросшего влияния неровностей поверхности приводят к уменьшению
глубины интерференционных минимумов поля при расположении пере-
датчика и приемника на небольших высотах над поверхностью земли, по-
257
Миллиметровая радиолокация: методы обнаружения и наведения ...
этому ММДВ представляет, пожалуй, единственную возможность фун»
ционировать радиолокационным, связным и другим системам на дагц.нщ
стях порядка нескольких километров вблизи поверхности земли, воды и
других, сильно отражающих границ раздела с хаотическими неровное! ямп
Задача создания ГСН ММДВ с приведенными выше параметрнмь
чрезвычайно сложна, поэтому периодически появляющиеся на протяж^Л
последних 15 лет сообщения в нашей стране и за рубежом о разрабо1кн«
подобных ГСН ММДВ, на практике оказываются далекими от желаемое
Более чем двадцатилетний опыт разработки систем ближней радиолокацЩ
ММДВ военного и мирного назначения показывает, что сложнейшая задц
ча создания радиолокационной ГСН ММДВ в габаритах артиллерийской
снаряда или ПТУР может быть решена при ее комплексном решении с уче
том выбора: метода наведения; частотного диапазона; типа зондирующий
сигнала; комбинации различных видов зондирующих сигналов на различ
ных полетных дальностях до цели; единого приемопередающего модули
(ППМ), работающего в различных режимах; единого алгоритма обрабО№1|
сигналов, способного выделять информативные признаки цели; блока <Л
работки сигналов, реализующего этот алгоритм.
В качестве информативных признаков ОБТТ на фоне земной по
верхности можно использовать как энергетический контраст, так и сив»
трально-корреляционные отличия отраженных от целей и фонов сигнаД
и различия в деполяризующих свойствах свойства целей и подстилаю!]
поверхностей.
6.1. Особенности построения и тенденции развития
радиолокационных головок самонаведения
Работы по созданию радиолокационных головок самонаведения (1‘Л
ГСН) были начаты в СССР в конце 1950 годов, которые вначале рацъ»
батывались исключительно для управляемых ракет класса «воздух воч.
дух» и «поверхность воздух». Естественно, создание боеприпасов, ос-
нащенных РЛ ГСН, для поражения наземных целей представляет собоН
гораздо более сложную задачу в связи с наличием мощных мешающих
отражений от подстилающих поверхностей. Однако при проектирс^И
нии радиолокационных систем для ракетных комплексов класса «воздух
воздух» и «поверхность воздух» и для перспективных ПТРК и У АС
имеется много общих задач и схожих методов их решений.
В первый период создания РЛ ГСН (с середины 1950-х до середины
1970-х годов) для ракет средней и большой дальности разрабатывал®, i.
полуактивные РЛ ГСН, работавшие в режиме приема радиолокационною
сигнала, отраженного от цели, облучаемой наземным, корабельным пли
самолетным радиолокатором. Примером такой РЛ ГСН может служить
полуактивная головка, созданная в начале 1960-х годов для ракеты 31*в
258
Глава 6. Методические основы построения радиолокационных головок...
«Куб». Для обеспечения ее работы в состав РЛС сопровождения цели был
введен специальный канал подсвета цели непрерывным сигналом.
Однако к началу 1970-х годов стало ясно, что полуактивные РЛ
ГСН в дальнейшем не смогут удовлетворять требованиям, предъявляе-
мым к системам управления ракетами при борьбе с перспективными
воздушными и наземными целями. Эти требования могла бы выполнить
вктивная РЛ ГСН.
Большие тактические преимущества ракет с активной РЛ ГСН (реа-
лизация принципа «выстрелил и забыл», лучшие возможности наведения
на одну из целей в плотной группе и т.д.) вынуждали разработчиков этих
видов вооружения как в наиболее развитых западных странах, так и у нас,
прилагать максимальные усилия к их созданию. В результате этих усилий
в последние годы прошлого столетия появились ракеты класса «воздух -
воздух» и «поверхность - воздух» с активной РЛ ГСН: «АМРААМ»
(США), «Мика», «Астер» (Франция), РВВ-АЕ (СССР). Успехи в создании
аналогичных боеприпасов для поражения наземных целей гораздо скром-
нее, но работы в этом направлении ведутся очень активно.
Основными проблемами, которые необходимо решать при созда-
нии активных РЛ ГСН, являются:
реализация максимальных дальностей обнаружения целей;
обеспечение высокой помехозащищенности;
обеспечение высокой точности наведения ракеты на цель;
выполнение требований по минимизации массогабаритных харак-
теристик;
минимизация стоимости ГСН.
Выполнение перечисленных выше проблем требует оптимизации
структуры и параметров антенных и приемопередающих СВЧ- и ВЧ-
устройств головки и устройств первичной и вторичной обработки с ис-
пользованием новейших достижений радиоэлектроники в областях сис-
темо- и схемотехники, включая цифровую обработку сигналов.
Требуемую дальность обнаружения целей и помехозащищенность
в современных ГСН может обеспечить ряд новых схемотехнических и
конструкторско-технологических решений.
Важнейшими из них являются:
использование в качестве зондирующего сигнала когерентных им-
пульсных последовательностей с высокими частотами повторения им-
пульсов и кодированием по фазе;
применение в качестве антенны РЛ ГСН плоских решеток с раз-
мещением на антенне многоканального СВЧ-модуля, что обеспечивает
максимальное (при данном диаметре апертуры) значение коэффициента
усиления антенны и позволяет свести до минимума потери на прием;
259
Миллиметровая радиолокация: методы обнаружения и наведения...
использование в приемном устройстве малошумящих твердою uir
ных СВЧ-устройств, позволяющих реализовать коэффициент шума при
емных каналов (совместно с устройством защиты) менее 5 дБ во iut|
условиях применения;
применение цифровой обработки сигналов для фильтрации сшил
лов целей и помех для реализации адаптивных алгоритмов обнаружстнп
и сопровождения сигнала цели в сложных помеховых ситуаций и
уменьшения потерь на обнаружение сигнала.
Достижение необходимой точности наведения в значительной степ»
ни определяется стабилизацией антенны ГСН в пространстве и особенно'
стями прохождения сигнала через систему «антенна — обтекатель».
Поскольку ГСН находится на подвижном корпусе ракеты, сииср
шающем в полете угловые колебания (как в ортогональных плоские ИЙ
управления, так и по крену), а управляющие сигналы, передаваемые в р»
кету, формируются измеренными угловыми скоростями линии визирок»
ния «ракета - цель», очевидно, что антенна головки должна быть сгаСян
лизирована в пространстве («развязана» от угловых колебаний ракеты).
Аналогичную роль (источника ложных сигналов) играют искаже*
ния луча антенны РЛ ГСН в пространстве за счет прохождения луча
рез обтекатель, защищающий её от аэродинамического воздейспии
Ошибки, вносимые за счет неполной стабилизации антенны и искаже
ний луча обтекателем, называемые «синхронными ошибками», Moiyl
очень сильно влиять на точность наведения ракеты на цель.
В настоящее время разработаны различные способы компенсаций
ошибок обтекателя как в процессе изготовления (вставки, проточки, пп>
пыления), так и в процессе полета ракеты. Наиболее перспективнйм
способом компенсации ошибок обтекателя является параметрический.
Этот метод компенсации заключается в том, что в каждый момеш
времени определяется матрица измеряемых параметров, с помощью киш
рой и формируется сигнал, нейтрализующий влияние ошибки обтекателя, J
Параметрический метод практически не имеет временной задерат
ки, и, несмотря на присущие ему недостатки (не учитываются условий
конкретной работы - температура, поляризация сигнала и т. п.), его пер
спективность не вызывает сомнений.
Наряду с требованиями повышения дальности, точности и помех!»
защищенное™ РЛ ГСН выдвигаются не менее жесткие требования ш
минимизации её массогабаритных характеристик. Выполнение лн*
требований сопряжено со значительными трудностями, так как решен»*
задач по повышению ТТХ ГСН неизбежно приводит к повышении
уровня сложности ее конструкции.
Тем не менее задача снижения массы и габаритных размеров пер
спективных РЛ ГСН для ракет класса «воздух-воздух» успешно решае тся
260
Глава 6. Методические основы построения радиолокационных голоаок...
Так, разработанные в МНИИ
«Агат» активные головки самопа-
иедения имеют массу порядка
8... 15 кг при диаметре 150...350
мм (рис. 6.1). Эти достижения ста-
ли возможны в основном благода-
ря применению малогабаритных
быстродействующих процессоров,
малогабаритных низковольтных
многолучевых электровакуумных
приборов с высоким КПД, мало-
шумящих многоканальных СВЧ-
модулей, волоконно-оптических
датчиков угловой скорости, мало-
Рис. 6.1. Фазированная антенная
решетка активной РЛ ГСН
ракеты класса «воздух - воздух»
габаритных электродвигателей с полым ротором и малым напряжением
грогания, достижениям в конструировании антенных гиростабилизирован-
иых подвесов и щелевых волноводных решеток и т. п.
Требования к разрабатываемым РЛ ГСН в значительной степени оп-
ределяются характеристиками и тактикой использования будущих пер-
спективных целей и помех. Вероятнее всего, цели станут все более малоза-
метными, высокоскоростными, способными выполнять быстрые маневры.
В некоторых случаях, например, при поражении современных и
перспективных ОБТТ, понадобится такая точность наведения, при кото-
рой необходимо будет обеспечивать выбор наиболее уязвимой точки на
цели, в которой вероятность поражения будет максимальной.
Средства радиопротиводействия будущего станут все более совер-
шенными. Поэтому для успешного обнаружения и сопровождения пер-
спективных целей в сложных условиях противодействия РЛ ГСН должны
будут использовать самые современные средства защиты от помех.
Все вышесказанное позволяет заключить, что будущие ГСН долж-
ны будут иметь:
радикально увеличенную дальность обнаружения целей;
высокое разрешение по угловым координатам, скорости и дальности;
высоко интеллектуальную адаптивную обработку сигналов и по-
мех, при которой они будут способны выбирать нужные цели из широ-
кого диапазона типов целей на фоне мощных отражений от подстилаю-
щей поверхности и других мешающих сигналов.
Эти задачи может решить применение радиолокационных сигна-
лов с разрешением по дальности. Простейшими из таких сигналов яв-
ляются квазиненрерывные (КПП) сигналы со средней частотой повто-
рения (СЧП) и средней скважностью, однако возможно также примене-
ние периодических КНИ-ФКМ сигналов с небольшой базой.
261
Миллиметровая радиолокация: методы обнаружения и наведения...
При этом важным фактором является способность изменять парам«и«
ры сигнала в широких пределах. Это позволяет улучшить работу ГСМ (и
фоне отражений от земной поверхности, осуществлять селекцию целей *
группе, а также обеспечивает непрерывное сопровождение цели.
Возможность применения радиолокационных сигналов с разрецм*ни«
ем по дальности и гибко изменяемыми параметрами приближает РЛ I’CI 1|
наземным радиолокационным станциям. Сравнительный анализ структуцм
приемных каналов РЛ ГСН и РЛС показывает, что как сами каналы, так м
алгоритмы первичной обработки сигналов в них имеют много общего.
Различия между РЛ ГСН и РЛС в данном случае чисто количосп
венные. Общий объем массива данных на выходе первичной обрабогм
(произведение числа элементов дальности на число элементов разрецм
ния по доплеровской частоте и количество пространственных канал он) |
РЛС достигает 104 элементов, в то время как в ГСН при сопоставимы®
параметрах обработки сигнала, объем этого массива не превышют
100-200 элементов.
Обусловливается это тем, что РЛ ГСН принципиально является цд-
ноцелевым радиолокатором, работающим по предварительному целеук*
занию, что дает возможность часть задач, решаемых в РЛС цифронмЦ
процессором, в РЛ ГСН решить хотя и в цифровой форме, но аппаратно.
Таким образом, использование небольшого числа элементов даль-
ности, сужение диапазона анализируемых доплеровских частот и aimta
ратная реализация некоторых элементов приемного устройства попки
ляют в 50... 100 раз снизить требования к производительности проца*
сора обработки сигналов, что, в свою очередь, позволяет решить трм
буемые задачи в габаритных размерах ГСН.
Возможности цифровой обработки позволяют решить в ГСН ®
другие задачи, ранее доступные для решения только в РЛС. К таким зн
дачам относится компенсация помех от вынесенных источников.
Для уверенного обнаружения и сопровождения наземных целей,
также наличия достаточного времени для коррекции траектории упран«
ляемого боеприпаса требуется радикальное увеличение дальности дейс i •
вия РЛ ГСН. Эволюционные методы, связанные с дальнейшим уменыц>
нием коэффициента шума приемных устройств и наращиванием мощно-
сти передатчиков, конечно, должны применяться, но они не дают сущее i-
венного увеличения потенциала, в частности, из-за ограничений массо/и-
баритного характера. Задача может быть решена только при применении
специальных режимов работы радиопередающих устройств, которые мо»
гут повысить энергетический потенциал РЛ ГСН на 8... 10 дБ.
Еще одной возможностью повышения эффективности функциони-
рования активной ГСН является электронное сканирование луча. В су*
шествующих головках используются антенны с механическим' подвесом
262
Глава 6. Методические основы построения радиолокационных головок...
и отдельное радиопередающее устройство. Механика подвеса ограни-
чивает быстродействие, с которым радиолокационный луч может пере-
мещаться в пространстве.
В отличие от антенн с механическим подвесом, антенны в виде фа-
зированных антенных решеток (ФАР) обладают рядом преимуществ: от-
сутствие дорогостоящей механики, высокая скорость перемещения луча,
адаптивное формирование диаграммы направленности, позволяющее оп-
тимизировать прием полезных сигналов в условиях воздействия органи-
зованных помех. Фазированные антенные решетки обладают также воз-
можностью компенсации ошибок обтекателя путем изменения амплитуд-
но-фазовых соотношений отдельных элементов решетки.
6.2. Возможность использования в активных
радиолокационных головках санонаведения антенн
в виде фазированных антенных решеток
Применение ФАР для построения сканирующих остронаправленных ан-
тенн позволяет реализовать высокую скорость обзора пространства и спо-
собствует увеличению объема информации о распределении источников
излучения или отражения электромагнитных волн (ЭМВ) в окружающем
пространстве. Современные устройства СВЧ с электронными приборами и
электрически управляемыми средами позволяют не только создать управ-
ляемое фазовое распределение в антенной решетке (т. е. осуществить элек-
трическое сканирование), но и первоначально обработать поступающую
информацию (просуммировать поля, преобразовать частоты, усилить сиг-
нал и т. д.) непосредственно в СВЧ- тракте антенны.
Дальнейшее улучшение характеристик радиотехнических систем с
ФАР, таких как разрешающая способность, быстродействие, пропускная
способность, дальность обнаружения, помехозащищенность и др., можно
обеспечить, совершенствуя методы обработки (в общем случае простран-
ственно-временной) сигналов, излучаемых и принимаемых антенной. При
этом антенна служит первичным звеном обработки и в значительной мере
определяет основные характеристики всей системы.
В зависимости от расположения излучателей в пространстве принято
выделять выпуклые антенные решетки, к которым кроме конических, ци-
линдрических и сферических относятся также АР, размещаемые на задан-
ной выпуклой поверхности носителя [7], например летательного аппарата.
11оследние называют еще конформными, подчеркивая связь между их ха-
рактеристиками сканирования и размещением излучателей в пространстве.
К выпуклым можно отнести и многогранные АР, представляющие про-
с гранственную систему шюских решеток, располагаемых на гранях выпук-
лых многогранников (пирамид, призм, икосаэдров и т.д.). Плоские АР
имеют ограниченный сектор электрического сканирования, не превышаю-
263
Рис. 6.2. Геометрические соотношения
гибридной ФАР с куполообразной
линзой с расширенным сектором
сканирования
Миллиметровая радиолокация: методы обнаружения и нааедения...
щий ±(40...50°), и являются узконо
лосными. Широкоугольное эле*
трическое сканирование, в юм
числе и круговой обзор, при работе
в широкой полосе вынуждает перш
ходить от плоских к более ело*
ным выпуклым решеткам. Следуг!
заметить, что гибридная ФАР с ку-
полообразной линзой (рис. 6.2) по-
зволяет расширить сектор сканиро-
вания плоской решетки.
Размещение излучателей Д
решетке можно описать матемаш*
чески с помощью системы, в узлах
координатной сетки которой рас
полагаются излучатели. Так км
размещение излучателей в плоских
и выпуклых решетках может 6i.riw
эквидистантным, неэквидистантным, разреженным по определенному за
кону, случайным, то для описания его используют различные ортогональ
ные и неортогональные координатные системы. На практике размещен и*
излучателей в решетке жестко ограничивается возникновением побочных
максимумов (дифракционных максимумов высшего порядка), допустимым
уровнем боковых лепестков (УБЛ) и падением коэффициента усиления ап
тенны, конструкцией отдельных элементов и всего полотна, устройствами
возбуждения и управления луча. Наиболее распространены эквидистай!
ные решетки, у которых все излучатели размещаются с постоянным шагом
по каждой координате плоского раскрыва или в отдельных ее частях - мо»
дулях решетки. Применяют также неэквидистантные решетки, шаг у ко1о
рых меняется в определенных пределах. Это актуально при использовании
отдельных элементов с поперечными размерами, не обеспечивающими ре
жим однолучевого сканирования, при уменьшении УБЛ путем разрежении
решетки к краям раскрыва и при размещении модулей (подрешеток) по по-
лотну антенны из-за конструктивных причин.
Антенные решетки классифицируют по способу возбуждения. Ра i
личают так называемый пространственный способ возбуждения (рЛ
пределитель оптического типа), при котором антенная решетка, как и
зеркальная или линзовая антенна, возбуждается облучателем. В эгом
случае возможны два варианта ФАР: проходной (рис. 6.3,а) и отражп-
тельный (рис. 6.3,6).
Второй способ возбуждения — фидерный (распределитель закрьпх»
го типа), при котором решетку возбуждают системой линий передач
264
Глава 6. Методические основы построения радиолокационных головок...
СВЧ. При этом возможны следующие схемы питания излучателей ФАР:
последовательная (рис. 6.4,а), параллельная (рис. 6.4,6), и двоично-
этажная (рис. 6.4,в).
Рис. 6.3. Схемы антенных решеток с делителями
мощности оптического типа
Рис. 6.4. Схемы делителей мощности в виде закрытого тракта
Применяют различные комбинации параллельно-последовательного,
пространственного и фидерного способов возбуждения элементов ФАР.
Каждый способ возбуждения имеет свои преимущества и недостатки, вы-
бор способа составляет одну из задач проектирования решеток.
Дальнейшим совершенствованием активных РЛ ГСН может стать
использование широкополосных зондирующих сигналов. В настоящее
время в действующих радиолокационных системах начинают применять-
ся новые прогрессивные методы модуляции зондирующих сигналов и они
могут быть реализованы в ГСН следующего поколения, что позволит до-
биться значительных преимуществ по сравнению с широко используе-
мыми сегодня сигналами и, в том числе, получить сверхразрешение но
дальности, повысить скрытность работы и помехозащищенность.
При большой полосе частот зондирующих сигналов как со сплош-
ным, так и с дискретным спектром (многочастотные сигналы) удается
разрешать элементы сложных целей вдоль линии визирования и наблю-
дать их радиолокационные дальностные портреты (профили). При по-
лосах зондирующих сигналов порядка 30...500 МГц можно обеспечить
265
Миллиметровая радиолокация: методы обнаружения и наведения...
согласованную разрешающую способность по дальности 5...0,3 м, «пн
позволяет получать далыюстные портреты широкого класса целей раз»
личной протяженности.
Обеспечения большей точности и лучшей помехозащищеннос I и
по сравнению с однодиапазонными головками самонаведения можно
добиться путём применения ГСН, работающих в двух далеко отстояния
друг от друга диапазонах длин волн, что делает задачу срыва наведены
ракеты для противника значительно более трудной.
При рассмотрении видов комбинированных РЛ ГСН следует указа п<
на комплексирование пассивного, полуактивного и активного каналов.
Главная проблема, которая должна быть решена разработчиками
двухдиапазонной ГСН — создание двухдиапазонных антенны и обтека-
теля с требуемыми радиотехническими характеристиками. С наймет.»
шими трудностями проблема совмещения рабочих частот комплекса
руемых каналов решается при работе на кратных частотах. При исполь»
зовании обтекателей с многослойными стенками со слоями различно*1
толщины и диэлектрической проницаемости возможна работа каналов а
на некратных частотах.
Комплексирование каналов (датчиков) в интересах повышении
эффективности системы в целом может быть существенно облегчен»»
при модульном построении головок самонаведения для одной и той МВ*
ракеты, например варианты использования ракет с полуактивным, пае»
сивным и активными головками самонаведения, включая варианты t
использованием ПК наведения.
6.3. Кинематический анализ возможностей носителя
при различных методах наведения радиолокационных
головок самонаведениия
Метод наведения и, как следствие этого, параметр рассогласования, яв-
ляющийся входным воздействием системы наведения [8], определяем
структуру координатора цели. При наведении ракет на движущиеся ц«>
ли в большинстве случаев траектория движения ракеты оказывается
криволинейной. Движение ракеты по криволинейной траектории лоз»
можно при определенных ускорениях, которые обратно пропорю к*
нальны радиусу кривизны траектории:
W = И21р
и.р. Р
где Vp — скорость ракеты; рт - радиус кривизны траектории.
Таким образом, чем больше кривизна требуемой траектории дли»
жения ракеты, тем большие нормальные ускорения должна она разни
вать в процессе полета.
266
Глава 6. Методические основы построения радиолокационных головок...
Вместе с этим при ограниченной энергетике ракеты увеличение
кривизны траектории приводит к уменьшению дальности стрельбы, ко-
торая при некотором постоянном радиусе кривизны снижается.
Иными словами, большая кривизна траектории движения ракеты при-
водит к нерациональному расходу энергетики ракеты и снижению точ-
ности наведения.
Отмеченные выше положения позволяют сформулировать основ-
ные требования, предъявляемые к методам наведения:
наименьшая кривизна траектории движения ракеты, в том числе и
при стрельбе по маневрирующим целям;
наиболее простая приборная реализация;
заданная дальность стрельбы.
Методы наведения обычно делят на две большие группы: двухто-
чечные и трехточечные. Каждая из этих групп содержит несколько ме-
тодов, отличающихся своей сущностью.
Двухточечные методы находят применение в системах самонаве-
дения, трехточечные - в системах телеуправления.
Наибольшее распространение из двухточечных методов наведения
получили методы прямого наведения (простого преследования), прямо-
го наведения с постоянным углом упреждения, наведения по кривой по-
гони, параллельного и пропорционального сближения.
6.3.1. Оценка потенциальных возможностей носителя
с неподвижным координатором цели (метод простого
преследования)
Наиболее простым по своему аппаратурному решению является метод
простого преследования пере-
мещающейся в пространстве це-
ли. На рис. 6.5 показана схема
формирования сигнала управле-
ния по одному из каналов. Коор-
динатор цели располагается в
носовой части ракеты, и сигнал
ошибки после соответствующего
усиления (блок УС) направляет-
ся на рулевую машину автопи-
лота (АП), которая поворачивает
руль на угол 8f так, чтобы
строительная ось ракеты и, сле-
довательно, оптическая ось ГСН
были направлены на цель. При
этом первоначально предполо-
Рис. 6.5. Схема формирования
сигнала управления по одному
из каналов ракеты
267
Миллиметровая радиолокация: методы обнаружения и наведения...
Рис. 6.6. Геометрические соотношения
для носителя с неподвижным
координатором цели
dr 17 <7
— = -VM+Vrcos#.
at
dq .
r—j- = -vTsmq.
жим, что вектор скорости ракеты
Ум также направлен на цель, г.е.
угол атаки а = 0. Если счит;п|>
вектор VM скоростью абсолютно-
го движения ракеты, V7 — скоро-
стью переносного движения и г
скоростью относительного движе-
ния, то можно записать кинема hi
ческое соотношение (рис. 6.6).
V = V + г
т М т 1 .
Проецируя это векторное рп
венство на направления линии ни
зирования и нормаль к ней, полу
чаем систему дифференциальных
уравнений 1-го порядка:
(6.11
Система (6.1) может быть проинтегрирована до конца. Раздело
верхнее уравнение на нижнее и обозначив р = NM/ Vr , получаем
dr _ dq dq _ r(0) sin q(0) (tan q 12)p
r ? smq tan#’ (tan #(0) / 2)₽ sin#
При интегрировании были сделаны допущения о постоянстве вен
тора скорости цели (цель не маневрирует) и о постоянной величине мо
дуля вектора скорости ракеты
Заметим, что по результату (6.2) нельзя построить траектории про-
стого преследования. Это объясняется тем, что при получении (6.2) бы
ло исключено время t. Ввести время обратно можно, если в сисл
(6.1) умножить верхнее уравнение на cos#, нижнее - на sin # и вычесп»
из первого результата второй:
dr dq ,7 ,7 ,, ,,
—cos#——rsin# = -Vwcos# + V7.. (6.3)
dt dt
Далее из первого равенства (6.1) видно, что
1 (dr I7 А я
cos#=— — + VM . (6.4)
4 VT\dt м) 1
268
Глава 6. Методические основы построения радиолокационных головок...
Подставив (6.4) в правую часть (6.3) и перенеся все слагаемые с
производными влево, получим
^-\r (р + cos q)] = Vr - pNu.
at
Отсюда находим
r(0) [p + cos q (0)] - r(p + cos q)
Z“ pv,,-vr
(6-5)
Формулы (6.2) и (6.5) позволяют построить траекторию простого
преследования, а так как начальные условия - г(0) и <у(0), то началь-
ная точка траектории известна. Далее для произвольного значения угла
</ - «у, по формуле (6.2) вычисляем соответствующее значение г,. По
формуле (6.5) находим значение t,. Вдоль прямой, по которой движется
цель, откладываем отрезок УД . Это новое положение цели. Из этой
точки под углом 7, проводим отрезок длиной г, и получаем новое по-
ложение ракеты. Повторяя эту процедуру, можно построить траекторию
простого преследования с любой точностью [9].
Ввиду ограниченности располагаемых перегрузок после достиже-
ния предельно допустимого значения (рули «встают в упор») полет ра-
кеты по траектории преследования прекращается и дальнейшая траек-
тория представляет собой окружность с максимально допустимой кри-
визной. Цель вскоре покидает поле зрения координатора цели, и даль-
нейший полет будет неуправляемым. Необходимо определить момент
достижения максимальной перегрузки ракетой, построить траекторию
движения ракеты после этого события и определить минимально дос-
тижимое расстояние между ракетой и целью.
В реальных условиях промах при таком методе наведения может
достигать такой величины, что поражение цели обычным боевым заря-
дом не представляется возможным. В связи с этим метод простого пре-
следования не применяется для скоростных и маневрирующих целей.
Однако ввиду простоты аппаратурной реализации он всё же нашёл при-
менение при наведении на неподвижные объекты, имеющие к тому же
большие размеры. Как правило, по этому принципу наводятся авиаци-
онные управляемые бомбы, предназначенные для поражения промыш-
ленных объектов, узлов коммуникации, мостов, тоннелей, бетонных ук-
рытий и других подобных целей. Практически координатор цели всё же
нуждается в некотором усовершенствовании по сравнению со схемой,
приведённой на рис. 6.5. При движении по траектории преследования
из-за её кривизны неизбежно возникают углы атаки и скольжения, и оп-
269
Миллиметровая радиолокация: методы обнаружения и наведения...
тическая ось не совпадает с вектором скорости, что приводит к наруше-
нию основного принципа - вектор скорости должен проходить чере i
цель. Для устранения влияния углов атаки и скольжения координан>р
помещается в карданов подвес с двумя степенями свободы относит»*
но корпуса ракеты. Координатор снабжается собственным оперением
(флюгерный координатор). Флюгер выносится вперёд настолько, чтобы
устранить влияние потока, обтекающего собственно корпус ракеты. Об
наруженные недостатки метода простого преследования заставляют нс
кать другие принципы формирования сигнала управления, однако иод
купающая простота реализации данного метода наведения оставляет его
в ряду потенциально возможных решений.
6.3.2. Оценка потенциальных возможностей носителя
со следящим координатором цели
(метод пропорциональной навигации)
Уравнения метода пропорциональной навигации отличаются от (6.1)
присутствием угла упреждения (рис. 6.7):
dr
— =VTcosq-VMcos(q-0),
at
dq dt
r— = sm(^ - 0) - Vr sin q,
dt
Рис. 6.7. Геометрические соотношения
для носителя со следящим
координатором цели
В этой системе параметр •
называется постоянной навигации»
В отличие от системы уравнений
прямого наведения она не интс!
рируется до конца за исключением
некоторых частных значений па-
раметра а. Численный резулщв
всегда может быть получен с лм
бой необходимой точностью. Од»
нако вначале проведём качествен»
ное исследование системы (6.6 X
Интегрируя последнее уравнение,
получаем 6 = 60 + a(q - qQ ). Здесь
нулевые индексы обозначают п*»
чальные значения переменных при Z=0. Разность углов в двух остальных
уравнениях запишем в виде
q - 0 = 9(1 - a) - 0О + aq0 = -{a - 1)(? - Eq ),
где Eq =
a-1
270
Глава 6. Методические основы построения радиолокационных головок...
(6-7)
Система (6.6) приобретает после этого вид:
4- = Vr {cos q - р • cos((a -l)(q - £0))} = Vrfl(q),
at
= _vr {sin<7 + p • sin((a -1)(<7 - £0))} = -VrQ(q).
at
Докажем, что если начальное значение q0 является любым корнем
q( уравнения Q(q)=0, то траектория полёта носителя не будет отличаться
от прямой. В самом деле, в этом случае система (6.7) имеет решение вида
г = г0 + И7Я(я,)Б q = qr (6.8)
Это решение удовлетворяет начальным условиям и является един-
ственным, поскольку система (6.7) удовлетворяет условиям теоремы о
существовании и единственности решения (правые части системы (6.7)
непрерывны по q и имеют ограниченную производную). Нарушение
единственности может иметь место при г=0, т.е. в точке встречи бое-
припаса с целью. Уравнение (6.8) является единственным решением.
Утверждение доказано. Если начальное значение q, * q0, то невозмож-
но равенство q(f) = </, ни в какой момент времени за исключением
t - /nw,, при котором ) = 0 . Допустим, в самом деле, что найдётся
момент t-, при котором q(ti) = qi. Тогда, принимая этот момент за на-
чальный, согласно доказанному, дальнейшее движение будет по пря-
мой. Этим доказано, что траектория сближения по методу пропорцио-
нальной навигации не может иметь точек перегиба [9].
6.4. Оценка возможных значений суммарных ошибок
вывода ракеты в зону самонаведения
Суммарные ошибки вывода ракеты в зону самонаведения определяют-
ся, в основном, двумя фуппами ошибок: ошибками целеуказания и
ошибками стрельбы.
При исследовании систем самонаведения под системой целеуказа-
ния будет пониматься система, обеспечивающая при участии оператора
автоматизированный процесс обработки и передачи информации от
системы обнаружения комплекса либо непосредственно к системе са-
монаведения, либо к системе самонаведения, работающей на начальном
участке полета ракеты.
Исходными данными для целеуказания являются прямоугольные
координаты позиций боевой машины (БМ) и машины управления, по-
ступающие от системы автоматического сопровождения.
271
Миллиметровая радиолокация: методы обнаружения и наведения...
По исходным данным бортовая ЭВМ определяет данные целеука-
зания, которые через радиостанцию автоматически в виде кодограммы
передаются на БМ, назначенную для поражения данной цели. Ochoii-
ными характеристиками системы целеуказания для систем самонаведе-
ния ПТУР являются время (Тцу) и ошибка (Оцу) целеуказания по одиноч-
ной или групповой (несколько единиц) цели.
Время t определяется аппаратурным оснащением комплекса и ран •
няется времени от момента окончания определения координат цели до
момента пуска ракеты - не более 10 с, что достижимо только при авн>
матизации процессов съема координат со средства разведки, вычисле-
ния данных ЦУ для БМ, их передачи и отработки БМ.
При этом суммарное время от окончания сопровождения цели до
достижения ракетой района цели составляет порядка 15 с для дальнее i и
стрельбы 5 км и 25...30 с — для 10 км. Увеличение данного интервала
времени либо за счет снижения уровня автоматизации процесса цедФ
указания, либо за счет увеличения полетного времени приводит к вш-
растанию погрешности целеуказания, поскольку возрастают ошибки,
связанные с движением цели. Так, увеличение рассматриваемого времс
ни с 15 до 30 с при стрельбе на 5 км повышает ошибку определения уп-
режденной точки с 11 до 20 м в случае вариативного движения цели п с
13 до 26 м при сильно вариативном движении цели и, соответственно,
возрастает суммарная погрешность ЦУ.
Следует отметить, что курсовой угол и тип движения цели (слабо ни
риативный, вариативный или сильно вариативный) оказывают существен-
ное влияние на суммарную погрешность целеуказания. Для упрощай к
расчетов можно принять, что цель движется вариативно, под средним yi
лом к наблюдателю 30°. Изменение курсового угла с 30° до 90° увеличишь
ет погрешность ЦУ в среднем на 10-15% при равных условиях.
Основные составляющие ошибки системы целеуказания:
ошибки измерения координат цели;
ошибки взаимной привязки и ориентирования;
ошибки, связанные с движением цели;
ошибки отработки данных ЦУ.
Конкретные значения этих ошибок зависят от аппаратурной реалп
зации системы ЦУ.
Вторая группа ошибок, влияющая на точность вывода ракеты
район цели, состоит из ошибок, связанных с точностью работы пришь
дов пусковой установки, случайных ошибок, допущенных боевыми pm
четами, а также суммарных ошибок полета ракеты на участке, предше
ствующем участку самонаведения.
В соответствии с известными зависимостями теории вероятное) сП
для нормального закона распределения случайной величины верон i •
272
Главе 6. Методические основы построения радиолоквционных головок...
ность попадания в интервал ±2ст составляет величину 0.95. Отсюда оче-
видно, что для дальности захвата цели 700... 1500 м и интервала, соот-
ветствующего ошибкам целеуказания по азимуту и точности вывода ра-
кеты в район цели по уровню ±2ст (160...200 м) потребный угол обзора
для ГСН составит не более +5°.
6.5. Оценка ошибок пеленгации перспективной
радиолокационной головки самонаведения
методом математического моделирования
Решение задачи повышения эффективности РЛ ГСН невозможно без оп-
ределения вероятностных характеристик процессов самонаведения раке-
ты на поражаемую цель. Для получения необходимых харакгеристик не-
обходимо в рамках модельных задач синтезировать процесс самонаведе-
ния ракеты на цель. При этом необходимо учесть реальную конфигура-
цию цели, ее расположение на фоне подстилающей поверхности и усло-
вия ее локации с заданной траектории. Фактически, речь идег об опреде-
лении реализаций мгновенных ошибок самонаведения реальной ПТУР на
сложную радиолокационную цель, расположенную на подстилающей по-
верхности. Обработка полученных результатов позволит получить усред-
ненные и предельные значения ошибок самонаведения, которые являются
входными параметрами алгоритмов оптимизации параметров систем
ПТУР. Для решения данной задачи наиболее рационально использовать
сквозное математическое моделирование ГСН на участке самонаведения
с учетом особенностей процесса отражения радиоволн от целей и фонов.
6.5.1. Радиолокационный центр объекта сложной
формы
Не нарушая общности, положим, что сигнал от сложной цели представ-
ляет совокупность парциальных сигналов (отражений) от группы то-
чечных целей, характеризующих основные отражающие элементы цели.
Остальные участки цели не учитываются. Так как результаты анализа не
зависят от конфигурации расположения точек, то они могут быть при-
менены и к другим случаям, если выбрать необходимое число точек.
В большинстве работ такая модель используется для статистиче-
ского описания цели. При этом предполагается, что цель совершает
случайные перемещения.
Различные фазовые соотношения между сигналами, отраженными
от отдельных элементов, приводят к появлению в РЛ ГСН так называе-
мых шумов цели.
При статистическом исследовании предполагается, что цель мож-
но представить в виде совокупности достаточно большого количества
случайных отражателей с независимыми амплитудами и фазами отра-
273
Миллиметровая радиолокация: методы обнаружения и наведения ...
женных от них сигналов. В частности, при этом достаточно наложи^,
условие независимости сигналов по фазе. Это приемлемо уже при 5 d
отражателях, имеющих примерно равные ЭПР.
Однако такая модель не полностью соответствует цели, наприм*)*
танку, так как все особенности отраженного сигнала можно отобрази и
моделью из большего числа отражателей, чем 5. Амплитуды отражен.!
ных сигналов в этом случае могут быть и не равными.
Шумы в радиолокационной системе сопровождения цели раз;и*||*>
ют на шумы в системе слежения (дрожание), шумы приемного устрой
ства, шумы из-за амплитудных флуктуаций отраженного сигнала, шуми
из-за колебаний направления прихода сигнала.
В данном случае полагается, что здесь не дается статистическое
смотрение проблемы. Предполагается, что цель находится в квазистапвф!
ском состоянии, т.е. система слежения ГСН является достаточно быс1|»'
действующей, чтобы осуществлять слежение за «точкой равновесия» цели
В системе слежения ГСН не создаются какие-либо электрически!
шумы. В этих условиях рассматриваемая задача сводится к исследоим
нию положения точки равновесия.
Особенностью результатов, полученных в данном разделе, являс*
ся то, что они могут быть положены в основу для дальнейшего yrjiylk
ленного рассмотрения проблемы. Например, становится возможным он
ределить предел в величине ошибки наведения в значениях относите и.
ной амплитуды сигнала. Кроме того, можно показать, что получен in.it
здесь результаты справедливы не только для пеленгаторов с коническим
сканированием но и для моноимпульсных систем.
Формула для оценки положения точки равновесия в РЛС с коничфи
ским сканированием получена для случая сопровождения «-точечной
цели. Аналогичная геометрия цели и начальные условия могут быЩ,
применены и для исследований в других случаях.
Не нарушая общности, будем считать пока, что точки, которые ofl
разуют радиолокационную цель, располагаются в пределах малого уч*
стка пространства так, что линии визирования от РЛС, находившейся и.»
расстоянии R, к точкам цели примерно параллельны.
Опорная, или картинная, плоскость (рис. 6.8) размещается перщчк
дикулярно линии, соединяющей антенну ГСН и некоторую опорную
точку О в этой плоскости. Опорная точка в общем случае может и Иг
совпадать с какой-либо конкретной точкой цели. Каждая точка цели /’,
проектируется на картинную плоскость. Проекцию точки Р, обозначим
как P'j. Картинная плоскость пересекает ось антенной системы РЛС
точке Р. Проекции Г”, имеют в картинной плоскости координаты », II
у,.Ось х размещена горизонтально. Точка Р, цели отражает часть 311141
гии облучения от РЛС.
274
Глава 6. Методические основы построения радиолокационных головок...
Точкой равновесия (радиолокационным центром цели - РЦЦ) на-
зовем точку в области сложной цели, в которую направлена ось антен-
ной системы РЛС. Сигнал ошибки при этом равен нулю.
Рассматриваем только ту часть отраженной энергии, которая про-
ходит через точку Р'„ т.е. распространяется в направлении на РЛС. От-
раженный сигнал от точки Ph рассматриваемый в точке проекции Р'„
имеет амплитуду Л, и фазу
где — Р\ - расстояние между точками Р, и Р' (рис. 6.8); 2 - длина
волны.
При вращении луча, смещенного относительно оси антенны, на
выходе РЛС создается амилитудно - модулированный сигнал. Для то-
чечной цели этот сигнал имеет вид
5 = ^[l + wsin(<asZ+^)]cos(<aoZ + 0),
где &>s - частота сканирования; m - коэффициент модуляции, пропор-
циональный углу рассогласования; <р - фазовый угол; <о0 - несущая час-
тота; 0- фаза отраженного сигнала.
Для случая «-точечной цели суммарный сигнал равен
Д [1 + да, sin(«7 + <pt)]cos(&V + 0t), (6.9)
275
Миллиметровая радиолокация: методы обнаружения и наведения ...
где <pt — определяется положением линии, соединяющей Р и Р,-; /и,- - ко-
эффициент модуляции, пропорциональный малому углу § между in
ниями визирования, соединяющими РЛС и точки Р и Р,.
Этот угол должен быть достаточно малым для того, чтобы вынол
нялось условие о параллельности линий визирования, проходящих чсрс i
район расположения «-точечной цели.
Так как m пропорционально малому углу то получаем
К, \ К
mt sin = — (У, - у ), лг, cos <p.t = —
R R
(6.HU
где К — постоянный коэффициент, зависящий от крутизны характери-
стики направленности в равносигнальном направлении, которое совии
дает с осью сопровождения; R — расстояние.
Соотношение (6.10) получено при условии, что характеристику ни
правленности в пределах углов, соответствующих расположению цели,
можно считать линейной функцией углов отклонения. Путем разложвнщ
характеристики направленности по сферическим функциям и оценки
влияния членов высшего порядка показано, что при применении форму-
лы (6.10) ошибка в расчетах не превышает 10%. Если, например, p»v
смотреть случай нахождения цели на дальности 1000 м с отклонением oi
оси сканирования на 30 м при ширине луча 12°, то ошибка составит 10%
Разлогая sin(<Bs/+<p) в соотношении (6.9) и учитывая (6.10), получаем
я £
ST = 2*^4 cos(<y0z + ^) + — X
м К
— х) sin CDst + (У; - у) cos COS (filoz + ^ ) - (6.11)
i=l
Если S определить так, чтобы можно было представить ST как
ST = Re[Sei<4>'], (6.12)
то соотношение (6.11) запишем в виде
S = +тЕ4U -х)е’4 sin<y/+^^4(у,. -у)е’4 cost»/. (6.11
i=i R i=i R i=i
Положение равновесия (т. е. отсутствие сигнала ошибки в РЛС)
соответствует таким значениям х и у, когда коэффициенты при sinaij и
cosd)sZ в соотношении (6.13) равны нулю. Коэффициент при sin®sZ pain и
нулю, если
^хД.е'4 =х^4е,<5.
1=1 1=1
276
Глава б. Методические основы построения радиолокационных головок...
Соответствующее этому значение х обозначим х :
ХМ6'9,
х = ^-------.
»-]
(6.14)
Аналогично имеем
Xz-4-eiS'
у=^----------. (6.15)
i=l
Ясно, что уравнения (6.14) и (6.15) не могут быть всегда справед-
ливыми, так как координаты не могут иметь мнимой части. Введем обо-
значение
A^'° =£Aie'ff‘
(6.16)
Тогда получим для соотношений (6.14) и (6.15) соотвегственно
Ахе'° = ^х^.е'в‘, Ауе'° = ^у(Де'в‘
(6.17); (6.18)
Соотношение (6.13) с учетом (6.16) равно
S = Ae'e +—(x - x) Ae'° sin a>st +—(y - y) Ae'e cos a>j.
R R
Из (6.12) следует, что:
ST =Re|Seiffl°'| = 4cos(®o/ + 0)x
х
К
Sin CDJ +--
R
К
----A sin (a)ot + 0) [Im {x} sin a>st + Im {у} cos a>st}
R
(6.19)
(6.20)
Для учета действия линейного детектора уравнение (6.20) перепи-
шем в виде:
277
Миллиметровая радиолокация: методы обнаружения и наведения...
[Re {х} - х] sin 0}st + [Re {у} - у] cos cust +
ST
[Re { х} - х] [Re {у} - у] sin a>st cos a>st +
(6.21)
где 0’=^+^.
Величину в фигурных скобках разложим в ряд. Так как —«1, го
членами высоких порядков можно пренебречь. Тогда получаем
К
sin <ost +—(Re {у} - у) cos cost +
R
ST
где только второй и третий члены имеют основную гармонику частот
сканирования.
Если точку равновесия Хо, Уо определить как точку, соответствую-
щую нулевому значению коэффициентов при sineV и cos&/, то из вы
ражения (6.22) получим
= Re{x} = Re
/=1
To = Re{y} = Re
i=i
(6.23), (6.24)
Поскольку в тракте обработки сигналов ГСН применяется линей-
ный детектор и полосовой фильтр на частоту a>s, то
•Sdet «^{[Re{x}-x]sin<y/ + [Re{y}-y]cos<»/}. (6.23j
278
Глвва б. Методические основы построения радиолокационных головок...
Для рассмотрения действия квадратического детектора соотноше-
ние (6.21) возведем в квадрат и получим
S} = | UA2 [1 + cos 2 (®0/ + 0')],
(6.26)
। де U - множитель в скобках в (6.21).
После прохождения сигнала полосового фильтра, настроенного на
частоту <os, имеем:
STdei « —{[Re{x}-x]sin6»5/ + [Re{y}-y]cos6»s/|.
Коэффициенты при sinay и cos a>st равны нулю соответственно при
условии [см. уравнения (6.23) и (6.24)]
x = x0=Re{x}, y = y0=Re{y}
Заметим, что единственное различие в сигналах для рассмотрен-
ных двух случаев состоит в том, что амплитуда радиолокационного
сигнала в выражениях для линейного детектора входит в первой степе-
ни, а для квадратического во второй.
Хотя представление цели в виде совокупности отражающих точек
общепринято, но нужно иметь в виду, что отражение сигналов происхо-
ди! обычно не от точки, а от некоторого элемента поверхности. Поэто-
му амплитуду А, более правильно представить как
4 = А^Ау,. (6.27)
где AxAyk - эффективная площадь отражателя.
Фаза 0jk сигнала, отраженного от элемента поверхности Ах,.ДуЛ,
постоянна по всему этому элементу при условии, что AxtAyk достаточно
мало. Тогда соотношение (6.13) будет выглядеть как
N N К N N
s=2Е4*Лг/дле,б’л -*)+
ун *=1 & у=1 А-1
+ — С05 0)^ХАЛ^У^ (л-т)-
К j=l А-1
Если N—>оо таким образом, что и Аук стремятся к нулю, то
суммы переходят в интефалы
lim S = (x*,y*)c'^v 1 ^dx'dy' — sina)st 'y ’ (x* - x^dy'dx* +
tVo S R s
>0
+ —cos<wsZ j4(x*,y *)cl<,('' ’(y‘-y^dy'dx’,
279
Миллиметровая радиолокация: методы обнаружения и наведения...
где пределы интегрирования соответствуют границам цели, х*, у* - нс
ременные интегрирования.
Производя математические выкладки так же как и для случая мно-
готочечной цели, получаем следующее соотношение для координаты
точки равновесия:
U (х*Ах*е'в2^ ^dx
х0 = Re{x} = Re----------j-ц---; (6.28)
р2(/)е’^х^
Уо = Re{y}=Re
рз (/ р'е10'^ Ь/
рз(/)е'^ ^У
(6.29)
Звездочки в уравнениях (6.28) и (6.29) можно опустить, так как пе-
ременные интегрирования уже нельзя перепутать с координатами.
Соотношения (6.28) и (6.29) можно получить непосредственно нт
(6.23) и (6.24), переходя к пределу при суммировании. В результате
получаем
= Re-!
|хЛ(х)е,й<х)б/х
p(x)eiewrfr Г
(6 30)
(6.31)
Эти выражения для координат радиолокационного центра цели
аналогичны формулам (6.28) и (6.29). Это указывает на то, что результп
ты, полученные для «-точечной цели, достаточно общие.
6.5.2. Математическая модель ошибок пеленгации
объекта сложной формы
Среднюю точку равновесия (xd,yd) определим как точку равновесия к
случае, когда сигналы от всех отражателей находятся в фазе. В этом случае
1x4 1x4
*d =—„—; yd=—n—- (6.32),(6.33)
Z4 Z4
/=|
Ясно, что эта средняя точка или радиолокационный центр цели
сравнительно мало подвижна и всегда находится в пределах цели, хо-
рошо определяя ее положение. Ошибка наведения оценивается относи
тельно значений (6.32) и (6.33) как
280
Глава 6. Методические основы построения радиолокационных головок...
Xe=Xb~Xd’’ Уе=Уь~Уа-
(6.34), (6.35)
В общем случае хе и уе включают члены с Re х, Im х и Im у. Най-
дены пределы для этих величин в значениях относительной величины
сигнала Е. Эта величина определяется соотношением
Ее"^-^-------. (6.36)
/-1
Предел ошибки наведения, который определяется величиной Re х,
равен
а вследствие влияния Im х
где го - протяженность цели в направлении оси х.
В системе с коническим сканированием и в фазовой моноимпульс-
ной системе x4=Rex, и предел для ошибки наведения определяется фор-
мулой (6.37).
К
В амплитудной моноимпульсной системе хь = Rex----— Imx , но
если К = я— = 0, то предел для ошибки определяется также соотноше-
Л
нием (6.37).
Для обеспечения равенства нулю величины Кр применяют общий
раскрыв с двумя облучателями. Это может быть или параболический
отражатель с облучателями, смещенными на равные величины из фоку-
са, или линза Люнеберга с двумя раздельными облучателями.
В частности, в фазоамплитудной моноимпульсной системе
К
x6=Rex + —- Im у, y4=Rey-----Imx.
Кр К°
В этом случае предельные значения для ошибки наведения равны
---1 +—°-. —5—1-,
£-О V \\ Г2 л-»
О)
К„ I 1 . h |л
2К \Е2 a h
р
Е
a
где со — протяженность цели по оси х, a h - по оси у.
281
Миллиметровая радиолокация: методы обнаружения и наведения...
Целесообразно выбрать параметры системы таким образом, чтобы
Ка=Кр. При этом каналы будут иметь равную чувствительность, как ни
видно из соотношения (6.39).
В упомянутом соотношении нельзя сравнивать два предельных
значения непосредственно, даже если эти величины определены. Обь
ясняется это тем, что пределы зависят от конфигурации цели. Прице-
ленные соотношения позволяют получить границы для ошибок наведе-
ния для случая Ка= Кр. Заметим, что ошибка наведения по каналу у inn
чительно больше, чем по каналу х.
Алгоритм расчета ошибок пеленгации следующий:
1. Для текущего направления антенны пеленгатора, максимум ДН
которой ориентируется на радиолокационный центр цели (РЛЦЦ) ирс
дыдущей итерации (шага коррекции) определяются координаты РЛЦЦ
данного шага;
2. Для этого РЛЦЦ (этой точки) определяется вектор направления
перемещения координатора цели (траектория движения фазового цен г|Ш
антенны). Величина перемещения определяется из начальных услопнЙ
на количество шагов итераций (точек коррекции) и начальных и koiicmJ
ных координат точек траектории коррекции (пеленгации);
3. Проводятся оценки мгновенных значений ошибки пелешацкн
как абсолютное значение разности координат проекции на мгновенную
картинную плоскость точки РЛЦЦ и мгновенного среднего центра рав-
новесия. Здесь формируются необходимые данные для их отображения,
4. Если количество итераций больше заданного, то выход из алп>-
ритма, если нет - продолжить вычисления с первого шага;
5. Для полученных реализаций ошибок наведения, которые имени
стохастический характер, рассчитываются их средние и дисперсии в днуя
ортогональных плоскостях пеленгации. Именно эти значения использу-
ются для оптимизации собственно траектории перспективной ПТУР;
6. Для каждой точки траектории повторить вычисления, начинд| с
пункта 1;
7. Заключительный этап. Если точка на траектории последняя, ш
выход из алгоритма.
6.5.3. Анализ ошибок пеленгации радиолокационных головок
самонаведения на основе полигональной модели
сложной цели
Для оптимизации параметров ракеты на участке наведения должна бы 11>
решена проблема определения направления, в котором устанавливается Л. ь
антенной системы РЛ ГСН при сопровождении сложной стационарнон пе-
ли. С электрофизической точки зрения сигнал от сложной цели предскшпи
ет собой совокупность парциальных сигналов от группы однотипных ик
ментов, образующих поверхность цели. В [9] показано, что для расчета oi
282
Глава 6. Методические основы построении радиолокационных головок...
раженных от цели сигналов наиболее рационально использовать полиго-
нальную модель, которая характеризуется описанием внешней поверхности
цели в виде массива плоских треугольных элементов, состыкованных друг
с другом. При этом сама геометрическая модель объекта создается в одной
из современных САПР и конвертируется в текстовый формат для после-
дующего использования в расчетах ошибок пеленгации.
На рис. 6.9 приведена схема наведения ракеты на танк на фоне под-
стилающей поверхности, причем как цель, так и фон заданы своими поли-
гональными моделями. Результирующее напряжение, поступающее на
вход приемной антенны ГСН, определяется в результате суперпозиции
комплексных парциальных напряжений от всех треугольников модели [9]:
F . ехрОАЛ.,,)
,nP ‘ \ q 2 /т smrsm D D 9
ет-0 V K,mKsm
(6.40)
где psm - комплексный коэффициент отражения треугольника, Fj(s}m -
значение функции направленности передающей (приемной) антенны в
направлении на /и-й треугольник, Dils) - КНД передающей (приемной)
антенны в направлении максимума излучения, - расстояние меж-
ду треугольником и фазовым центром передающей (приемной) антенны,
Л - длина волны.
Рис. 6.9. Схема взаимного расположения ракеты
с РЛ ГСН и полигональной модели БМП
283
Миллиметровая радиолокация: методы обнаружения и наведения...
Для определения ошибок наведения ГСН на цель будем полагать, чк
цель находится в квазистатическом состоянии, т.е. ГСН является доснпич-
но быстродействующей, чтобы осуществлять слежение за точкой равнине
сия цели. Точкой равновесия (радиолокационным центром цели - РЛЦ) бу
дем считать точку в области сложной цели, в которую направлена ось ли
тенной системы ГСН. Сигнал ошибки при этом равен нулю. Для определ('
ния РЛЦ цели вводится опорная (картинная) плоскость (рис. 6.9), когорт
размещается перпендикулярно линии, соединяющей антенну ГСН и гео
метрический центр цели, на которую наводится ГСН ПТУР. Каждая точки
цели и подстилающей поверхности {x^y^Zj} проектируется на картинн)4<
плоскость {Х0,У0}. В соответствии с определением картинной плоскосЛ
координаты мгновенного РЛЦ {Хо, Уо} цели будут определяться в сооти0
ствии с (6.23,6.24) из следующих соотношений:
Y Dp. X. У um т т=1 41
Ао ~ ке zo ке Nr.
м м
1 т\ m~i
где {ХОт,УОт} _ координаты проекции средней точки п?-го треугольник
полигональной модели на картинную плоскость, Um — напряжение возни
кающее от п?-го треугольника в нагрузке приемной антенны ГСН (6.40).
Средний РЛЦ цели {А'о,^)} определяется как точка равновесия |
случае, когда сигналы от всех треугольников полигональной модели пи
ходятся в фазе. Очевидно, что средний РЛЦ сравнительно мало подви
жен и всегда находится в пределах цели, хорошо определяя ее положе-
ние. По аналогии с (6.32, 6.33) выражения для оценки координат сред-
него РЛЦ имеют вид:
IX Ы _ IX W
, Уо=^---------- (6.42)
IXI
ml ml
Ошибка наведения ГСН на цель оценивается как разность значс
ний координат мгновенного РЛЦ (6.41) и среднего РЛЦ (6.42) в сие
дующем виде:
ДХ = Х0-Х0, АУ = У0-У0. (6.43)
Для оценки ошибок пеленгации цели сложной формы на фоне под-
стилающей поверхности (6.43) разработан алгоритм, позволяющий полу
чить значения этих ошибок в антенной системе координат с учетом реаль
284
Глава 6. Методические основы построения радиолокационных головок...
Рис. 6.10. Распределение проекций
мгновенного РЛЦ БМП на фоне
грунтовой поверхности
ных направленных характеристик антенн
ГСН, который приведен в предыдущем
параграфе. С использованием данного ал-
горитма и формул (6.41)—(6.43) были
проведены расчеты мгновенного и сред-
него РЛЦ броневой машины пехоты
(БМП), расположенной на фоне фунто-
вой поверхности, при се локации сзади в
верхнюю полусферу при угле подхода
ракеты $ = 30° (рис. 6.9). При расчетах
длина волны принята равной 7=3 мм, а
ширина ДН передающей и приемной ан-
тенн ГСН Д# = 2,5. Траектория движе-
ния ПТУР была принята прямолинейной
при постоянном угле подхода 0 = 30° с
начальной дальностью до БМП Д,=250м
и конечной дальностью Rk =50 м.
Па рис. 6.10 показано распределение проекций мгновенного РЛЦ БМП на
фоне грунтовой поверхности при приеме на согласованной поляризации
приемной антенны.
Проекции мгновенного РЛЦ имеют хорошую кучность и практи-
чески не выходят за пределы БМП на больших дальностях до цели
(/?= {250.. 150} м). В этом случае абсолютная величина ошибки пеленга-
ции не превышает значения 10 м. Иная ситуация возникает при при-
ближении ПТУР к БМП на расстояниях (7?={ 150..50} м), когда величина
абсолютной ошибки пеленгации увеличивается до значения 18 м.
Таким образом, показано, что полигональная модель объекта
сложной формы расположенного на фоне подстилающих поверхностей
различного типа является эффективным средством анализа пространст-
венных угловых флуктуаций («углового шума») ГСН. Разработанная
модель радиолокационных центров рассеяния позволяет дать количест-
венную оценку ошибок пеленгации объектов сложной формы на фоне
подстилающей поверхности.
285
ГЛАВА 7
Методы оценки помехозащищенности
радиотехнических систем управления
7.1. Современное состояние и перспективы развития
средств и методов оценки помехозащищенности
Оценка помехозащищенности радиотехнических систем управлени»
(РТСУ) включает в себя оценку скрытности функционирования такиц
систем и их помехоустойчивость. Под скрытностью понимается веройi
носгь того, что за время боевого функционирования РТСУ противник иг
сможет обнаружить, распознать параметры сигналов РТСУ и организо-
вать постановку того или иного вида помех. Под помехоустойчивости» >
РТСУ понимается эффективность боевого функционирования в услови
ях воздействия помех.
Структурно-функциональная схема методики оценки помехота
щищенности представлена на рис. 7.1.
Данная методика разработана с целью обеспечения оценки поме
хозащищенности (ПЗ) по показателям, учитывающим одновременно как
скрытность, так и помехоустойчивость РТСУ.
За частные показатели помехозащищенности принимаются част
ные показатели эффективности систем с РТСУ в помехах: ДО, APIwll,
ДА. Их критериальные значения (допустимые уровни снижения), cooi
ветствуюшие граничным значениям общего показателя помехозащи
щенности Рб.з позволяют проводить экспериментальную оценку помехо-
защищенности средств с РТСУ на соответствующих этапах разработки
В число основных мероприятий в области радиоэлектронной борь
бы (РЭБ) противник включает радиоэлектронное противодействие пу-
тем создания помех, а также подавление радиоэлектронных среде, и
(РЭС) противорадиолокационными ракетами, снарядами и другими oi
невыми средствами.
Применительно к рассматриваемым типам РЛС их подавление oi
нем артиллерии (обычными боеприпасами) малоэффективно, так как
сопряжено с расходом сотен снарядов в обычном снаряжении. Против»
радиолокационные ракеты (ПРР) могут быть эффективным средством
борьбы с РЛС. Однако высокая направленность излучения РЛС ограни
чивает возможности наведения ПРР по основному лепестку диаграммы
направленности антенны (ДНА) РЛС, а малый уровень излучения но
286
Глава 7. Методы оценки помехозащищенности радиотехнических ...
боковым лепесткам - возможность пуска ПРР класса “воздух - поверх-
ность” с расстояний, превышающих зону поражения средств ПВО. По-
этому в настоящее время в основных зарубежных странах активно про-
водятся работы по совершенствованию средств радиоэлектронного про-
тиводействия (РЭП) РЛС сухопутных войск.
Рис. 7.1. Структурно-функциональная схема методики оценки
помехозащищенности
287
Миллиметровая радиолокация: методы обнаружения и нааедения...
По взглядам командования сухопутных войск США в период до
2020 г. стратегическим направлением развития систем разведки и РЭП
будет создание многоуровневых систем с открытой архитектурой, по-
зволяющих расширить область их применения за счет многофункцио-
нальности и модульного принципа их построения, а так же в кратчай
шие сроки проводить их модернизацию при появлении у противники
новейших радиоэлектронных средств. Создание систем будущего пла-
нируется вести по пути интеграции систем разведки и РЭБ с системами
связи, управления войсками и оружием. Они будут обладать высокой
степенью автоматизации и управления и способностью к самоадаптации
к складывающейся электронной обстановке.
Вопрос защиты РЛС от активных помех сводится к решению ком
плекса задач по определению характеристик и способов применении
средств РЭП противника, оценке их возможностей по воздействию и»
РЛС, разработке способов повышения помехозащищенности РЛС
Принципы решения проблемы защиты от преднамеренных помех ис-
следовались в целом ряде работ [1—14]. Однако целесообразные спосо
бы защиты, их эффективность и практическое применение существенно
отличаются для РЛС различных классов.
По условиям боевого применения, решаемым задачам, конструк-
ции и дальности действия РЛС разведки наземных целей (РНЦ) как у
нас, так и за рубежом подразделяются на два класса:
РЛС разведки огневых позиций (РЛС РОП) стреляющих систем но
выстрелу (пуску): минометов, артиллерии, реактивных систем залпоно-
го огня (РСЗО) и тактических ракет;
РЛС разведки наземных движущихся целей (РЛС РНДЦ).
Важность и сложность решения задачи по защите РЛС РНДЦ oi
помех обусловлена следующими факторами:
для обеспечения прямой видимости целей позиции наземных PJK'
должны располагаться на небольшом удалении от ЛЕС на участках ме-
стности, открытых в сторону противника;
требования к непрерывности разведки соответственно требую!
продолжительной работы РЛС на излучение без смены позиции.
В результате указанные факторы, во-первых, не обеспечиваю!
требуемой скрытности работы и, во-вторых, позволяют противнику со i
дать относительно высокие уровни помех у антенны РЛС, прицелыи.и’
по частоте и направлению.
Жесткие ограничения по массе и габаритным размерам аппарату-
ры (особенно переносных) РЛС не позволяют реализовать такие эффек-
тивные способы защиты, как перестройка частоты излучения от им-
пульса к импульсу в широком диапазоне частот, компенсационные мс
тоды и ряд других.
288
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Для подавления РЛС активными помехами и для их уничтожения с
помощью ПРР и другими огневыми средствами противнику необходимо
в первую очередь разведать и определить координаты позиции РЛС. В
связи с этим при разработке перспективных РЛС РНДЦ целесообразно,
наряду с изысканием технических путей повышения помехоустойчиво-
сти, разрабатывать и способы повышения скрытности их работы. Одним
из возможных и перспективных путей одновременного решения указан-
ных проблем является использование в РЛС сложных и, в частности,
шумовых зондирующих сигналов [9-14].
В современных условиях радиолокационные станции разведки на-
земных движущихся целей (РЛС РНДЦ) являются одним из основных, а
порой и единственным средством в системе технических средств раз-
ведки сухопутных войск, обеспечивающим ведение разведки независи-
мо от времени суток и погодных условий.
Вместе с тем анализ состояния и перспектив развития средств ведения
РЭБ наиболее развитых стран показывает, что вероятный противник спосо-
бен оказывать эффективное радиоэлектронное противодействие РЛС, в том
числе и существующим РЛС РНДЦ. Поэтому помехозащищенность РЛС
РНДЦ является одной из важнейших характеристик РЛС, а разработка и
создание РЛС РНДЦ, эффективно работающих в условиях радиоэлектрон-
ного противодействия - важнейшей и актуальной задачей.
В число основных мероприятий в области РЭБ вероятный против-
ник включает радиотехническую разведку (РТР), радиоэлектронное
противодействие путем создания помех, а также подавление радиоэлек-
тронных средств противорадиолокационными ракетами и снарядами.
Для подавления РЛС активными помехами и для их уничтожения
противорадиолокационными снарядами вероятному противнику необ-
ходимо в первую очередь разведать РЛС. В связи с этим при разработке
перспективных РЛС РНДЦ целесообразно наряду с изысканием техни-
ческих путей повышения помехоустойчивости разрабатывать пути и
способы повышения скрытности их работы. Одним из возможных путей
одновременного решения указанных проблем является использование в
РЛС сложных и, в частности, шумовых зондирующих сигналов [2,4].
7.2. Модель радиоэлектронной обстановки
и характеристики радиоэлектронных средств
7.2.1. Основные положения концепций
«радиоэлектронной войны»
Все ведущие страны мира значительное внимание уделяют развитию
средств РЭБ, форм и способов ведения радиоэлектронного противодейст-
вия и даже «радиоэлектронной войны».
289
Миллиметровая радиолокация: методы обнаружения и наведения...
В последнее время содержание, используемые силы и средства, и
также задачи радиоэлектронной борьбы и радиоэлектронной войны
армиях наиболее развитых стран перестают бьггь адекватными. Осно*
ные отличия радиоэлектронной войны (РЭВ) от РЭБ сводятся к сл>
дующему:
1. РЭВ стала основной силой борьбы с системами боевого упран
ления (БСБУ);
2. Содержанием РЭВ стали радиоэлектронная атака (ЕА), радио-
электронная защита войск (ЕР) и радиоэлектронное обеспечение боевик
действий (EWS);
3. Средствами радиоэлектронной атаки, кроме средств радиоэл®<
тронного подавления и радиоэлектронной дезинформации, стали: огне-
вые средства, самонаводящиеся на излучения различных радиоэлек-
тронных устройств (например, излучения РЭС, систем зажигания авто-
мобилей, БТР, танков, электропривода орудий и др.); средства излуче-
ния новых видов направленной энергии; ложные цели и другие средсфп
пассивных помех;
4. Средства радиоэлектронной атаки имеют задачу воздействия Jic
только на РЭС, но и на боевую технику, системы оружия, на экипажи
РЭС, боевой техники и на личный состав штабов, участвующий в под-
готовке, принятии решений, планировании операций, руководстве бос
выми действиями;
5. Радиоэлектронная защита стала включать в себя: средства, схе-
мы и способы защиты от РЭП и случайных помех технических среде! и,
автоматизацию процесса приема, обработки и распределения информа-
ции; оповещение личного состава об облучении объекта радиолокацп
онной (РЛ), инфракрасной (ПК), ультрафиолетовой (УФ) и лазерной!
техникой и системами оружия с ГСН; контроль излучения РЭС и нч
ЭМС; радиоэлектронную маскировку; перепрограммирование среде: и
радиоэлектронной атаки;
6. Радиоэлектронное обеспечение боевых действий имеет задачу
информационно-разведывательного обеспечения принятия решении,
планирования операций, и руководства боевыми действиями; обеспечс
ние сил и средств БСБУ в наступательных, оборонительных и спецп
альных информационных операциях.
Поэтому при рассмотрении вопросов организации и ведения РЭИ
ВС США и ОВС НАТО представляется целесообразным использован,
термин РЭВ.
Анализ развития теории и практики РЭВ за рубежом, ее новые со-
держание, цели и задачи дают обильную пищу для поиска новых nyivil
развития РЭБ в XXI веке. Новыми задачами РЭБ, помимо срыва функ-
ционирования РЭС, могут стать: разрушение программного обеспечения
290
Глава 7. Методы оценки помехозащищенности радиотехнических...
АСУ войсками и оружием противника; защита АСУ войсками и оружием
своих ВС, снижение эффективности преднамеренных помех и радиоэлек-
тронной дезинформации противника; воздействие на системы оружия,
боевую технику и личный состав противника и др., а РЭБ может стать од-
ним из основных элементов информационного противоборства и состав-
ной частью боевых действий.
Следует ориентироваться на то, что, как уже отмечалось, РЭБ так-
же повысит свой уровень значимости. Из вида, обеспечивающего бое-
вые действия в войнах четвертого поколения, она превратится в новый
самостоятельный род войск и будет проводить свою форму оперативно
- стратегических действий - операцию РЭБ. По своим целям, задачам,
привлекаемым силам и средствам эта операция будет весьма тесно пе-
реплетаться и в полной мере согласовываться по всем направлениям с
действиями как стратегических ударных, так и стратегических оборони-
тельных сил и средств.
Под операцией РЭБ в вооруженной борьбе будущего будет пони-
маться комплекс мероприятий и действий по радиоэлектронному по-
давлению противника и защите своих войск (сил) и систем оружия от
радиоэлектронного подавления. Составными частями операции РЭБ бу-
дут: радиоэлектронные удары с целью подавления всей системы радио-
электронных средств противника; радиоэлектронная оборона (защита)
объектов и средств; мероприятия по обеспечению операции РЭБ.
Радиоэлектронные удары (РЭУ) будут представлять собой меро-
приятия и действия, проводимые войсками (силами) по прицельному и
общему подавлению и дезинформации всей системы РЭС противника
энергией электромагнитных (акустических) излучений. В вооруженной
борьбе будущего для подавляющего воздействия на РЭС противника со-
вместно со средствами РЭП найдут широкое применение и различные
средства огневого поражения, главным образом высокоточные и самона-
водящиеся на источники электромагнитного (акустического) излучения.
Дезинформация в операции РЭБ также будет применяться для вве-
дения противника в заблуждение путём ложной работы РЭС своих
войск (сил), изменения режимов и характеристик их работы и имитации
работы РЭС противника. Основными способами дезинформации сохра-
нятся: управляемая демонстрация ложных демаскирующих признаков
РЭС, объектов и обстановки; преднамеренное квалифицированное вхо-
ждение в радиосети и радионаправления противника, передача в них
ложной информации и команд, искажение сведений, сигналов и позыв-
ных; повышение (имитация) интенсивности работы РЭС на второсте-
пенных и ложных направлениях при сохранении режима работы на
главном. Следует отметить, что дезинформация в операции РЭБ будет
иметь успех только при одновременной и комплексной работе средств,
291
Миллиметровая радиолокация: методы обнаружения и наведения...
имитирующих наличие и движение целей, а также средств, маскирую-
щих передаваемые сигналы для введения в заблуждение РЭС противни-
ка. Радиодезинформация будет проводиться в сочетании с такими меро-
приятиями, как агентурные данные, распространение слухов, физиче-
ская имитация переброски сил и средств, реальная загрузка дорожной
сети, подвоз или вывоз грузов, сооружение ложных объектов, демоне i •
рация занятия ударными средствами исходного положения, соответс!
вующая активность и перегруппировка авиации и т.п.
Радиоэлектронная оборона (защита) (РЭО) в операции РЭБ будс!
представлять собой комплекс мероприятий по радиоэлектронному при
крытию обороняемых объектов, объектов экономики, ударных и оборо*
нительных войск и средств, а также обеспечению эффективного и ус-
тойчивого функционирования своей системы РЭС в условиях воздейс'1 •
вия на них средств РЭП противника. Она будет достигаться сокрытием
РЭС и объектов экономики от радиоэлектронной разведки (РЭР) и ia
щитой от их радиоэлектронного подавления, а также контролем за hi-
лучением РЭС своих войск (сил) и систем оружия.
Мероприятия по обеспечению операции РЭБ (радиоэлектронное
обеспечение операции) будут включать поиск, перехват и анализ из лучей
ний, опознавание и определение местоположения РЭС и систем противен
ка, оценку создаваемой ими угрозы для нанесения по ним последующих
радиоэлектронных ударов (подавления) или выдачи целеуказания средсЛ
вам поражения, а также управление своими силами и средствами РЭП.
Действия, проводимые в ходе операции РЭБ , в сочетании с огнём
и манёвром будут также проводиться в соответствии со складывающей
ся обстановкой. В связи с резким увеличением масштабов применения
высокоточных средств поражения в вооруженной борьбе будущего bo i-
можности и роль РЭУ и РЭО значительно возрастают. Необходимо бу
дет осуществлять непрерывный перехват, анализ электромагнитных и
акустических излучений и радиопеленгование их источников с помо
щью наземных, воздушных надводных и космических разведыватель
ных систем.
В течение всей операции РЭБ будет сохраняться исключительно
высокая спектральная плотность мощности излучаемых прицельных и
заградительных помех (несколько тыс. Вт/МГц), создаваемых группи-
ровкой РЭБ, что исключит возможность использования противником
радиолокационных станций (РЛС), средств связи и других радиоэлек
тронных средств и систем практически во всех частотных диапазонах, j
С целью реализации концепции РЭВ проводится ряд мероприятий,
в частности средствами РЭБ оборудуются самолеты и вертолеты огне-
вой поддержки.
292
Глава 7. Методы оценки помехозащищенности радиотехнических...
Так, например, при переделке самолета AC-130U помимо монтажа
собственно вооружения и системы хранения и подачи боеприпасов ус-
танавливается комплекс средств РЭБ и разведки, а также система
управления огнем. Стоимость самолета AC-130U составляет 190 млн.
долларов, экипаж 13 человек. Комплекс РЭБ самолета AC-130U вклю-
чает следующие средства: станцию направленных активных помех ИК-
диапазона AN/AAQ-24; ИК-приемник предупреждения AN/AAR-44;
станцию предупреждения о ракетной атаке AN/AAR-47; устройство вы-
броса расходуемых средств РЭП AN/ALE-47; станции активных помех
AN/ALQ-172 и AN/ALQ-196; приемник предупреждения о радиолока-
ционном облучении AN/ALR-69; панорамный приемник РТР AN/APR-
146А; систему оптикоэлектронного противодействия QRC-84-02.
7.2.2. Организация радиоэлектронной борьбы
вероятным противником
В настоящее время во всех армиях развитых стран происходит интен-
сивное наращивание возможностей сухопутных войск (СВ) по ведению
радиоэлектронной борьбы за счет разработки новых приемов и методов
РЭБ, формирования новых частей и подразделений разведки и РЭБ, раз-
работки и принятия на вооружение целого ряда новых комплексов и
средств радиоэлектронной борьбы. Отчетливо наметилась тенденция к
созданию для различных формирований СВ структурно-ориентирован-
ных систем, объединяющих совокупность наземных, самолетных и вер-
толетных комплексов и средств РЭБ.
Организационно - штатная структура РЭБ включает:
группы военной разведки и РЭБ армейского корпуса;
батальоны военной разведки и РЭБ дивизии;
роты РЭБ полков (отдельных бригад).
Группа военной разведки и РЭБ армейского корпуса предназначе-
на для ведения воздушной и наземной радио-, радиотехнической раз-
ведки и создания помех КВ, УКВ, радиорелейным и тропосферным ли-
ниям связи, РЛС, а также для обеспечения скрытого управления вой-
сками в интересах армейского корпуса.
На вооружение группы военной разведки и РЭБ приняты автома-
тизированные системы радиотехнической разведки и постановки помех.
Радиотехническая разведка наземных радиолокационных станций
(РЛС) и систем управления оружием ведется наземной системой типа
AN/TSQ-109, станциями радиотехнической разведки типа AN/MLR-8 и са-
молетными комплексами радиотехнической разведки типа AN/ALQ-133.
Эти средства могут обеспечить ведение радиотехнической развед-
ки в диапазоне частот до 40 ГГц (в перспективе - до 100 ГГц) на даль-
ностях в 50... 100 км, а также определение координат источников излу-
чения с точностью до 50 м.
293
Миллиметровая радиолокация: методы обнаружения и наведения ...
1
Объектами разведки из состава подразделений рассматриваемых
объектов могут быть средства радиолокационной разведки, радиолою!
ционные прицельные комплексы и линии радиотелеуправления.
Радиоразведку линий связи в армейском корпусе США будет вести
наземная система разведки и радиоэлектронного подавления «Таком-!»,
стоящая на вооружении передовой роты батальона РЭБ корпуса. «Гн
комз» состоит из разведовательной системы «Таселиз» (типа AN/TSQ-
112) и комплекса постановки помех «Такджам» (типа ANZMLQ-34).
Данная система обеспечивает ведение радиоразведки в диапазоне чж
тот 0,5...500 МГц и радиоэлектронное подавление в диапазоне 20... 15(1
МГц. При этом система способна одновременно осуществлять разведку и
наблюдение за 23 радиосетями и подавлять до трех радиостанций.
В интересах армейского корпуса наряду с системой «Таселиз» ра-
диоразведка в УКВ диапазоне ведется комплексом типа «Гардейд-5»
(AN/VLQ-16), данные от которого поступают в систему «Такомз».
Объектами радиоразведки и подавления могут быть радиосети и на-
правления, организуемые для управления боевыми действиями объектов.
Радиоэлектронная борьба в интересах дивизии осуществляется ба-
тальоном РЭБ дивизии, на вооружении которого находятся модернизи-
рованные станции типа «Тимпак» (AN/MSQ-103). Характеристики ос-
новных комплексов вероятного противника приведены в табл. 7.1. Ос-
Таблица 7.1. Характеристики основных комплексов РТР
Характеристики Средства РТР вероятного противника
Существующие Перспективные
AN/MSQ- 103 AN/PSS-10 AN/TSQ-109 AN/ALQ-133 2005-2010 2010-2015
Тип носителя наземный порта- тивный приемник наземно- воздушный наземно- воздушный наземно- воздушный
Диапазон, ГГц 0,5...40 8,5...40 0,5...40 до 100 до 160
Дальность, км 50 - 100 - -
Чувствитель- ность, дБ/Вт-Гц -ПО - -130 -150 -200
Сектор, град. 100 - до 180 - -
Число каналов 1 - 2—4 до 100 100
Точность, град. 1 10...15 0,5...1 0,05...0,1 0,05
Время измерении», с 0,02...0,1 50 0,05...0,1 103...102 1О~’...1О'2
294
Глава 7. Методы оценки помехозащищенности радиотехнических...
новным средством радиоэлектронного подавления радиоэлектронных
средств в СВЧ- диапазоне волн будет вертолетный комплекс типа
«Мальтьюз» (AN/ALQ-143). В состав батальона разведки и РЭБ дивизии
входят три такие комплекса. Комплекс отличается высоким уровнем ав-
томатизации, достигаемой за счет применения цифровых синтезаторов
частот и микропроцессоров, обеспечивающих адаптацию комплекса к
текущей обстановке, определение им приоритетности в подавлении в
соответствии со степенью угрозы со стороны разведанных РЭС и опти-
мальное управление ресурсами противодействия.
Некоторые характеристики существующих, разрабатываемых и
перспективных средств РЭП приведены в табл. 7.2.
Таблица 7.2. Характеристики РЭП
Характеристики Наземные комплексы РЭП Вертолетные
существующие и разрабатываемые перспективные
1995-2000 2000-2005 2005-2010 2005-2010 2010-2015
Вид помех маскирующие, имитирующие маскирующие, имитирующие
Диапазон, ГГц 1...40 1...40 1...100 1...40 1...100
Импульсный по- тенциал, Вт 1О5...1О6 1О5...1О7 Ю5...1О7 1О4...1О5 1О5...1О6
Непрерывный по- тенциал, Вт 5-Ю5... 105 1О5...1О6 105... 106 5103...104 1О4...1О6
Число диапазонов 2...4 3...8 3...8 3...8 3...8
Количество излу- чаемых сигналов 5...10 10...15 10...15 5...10 10...15
Масса, кг 50...150 50...200 50...200 50...200 50...200
Энергетические характеристики средств РЭП позволяют создать в
районе действия объекта спектральные плотности потока мощности и
напряженности поля помех в пределах следующих уровней:
- 10“9 - -10“8 Вт/МГц-см2 - для РЛС;
- 10'3 - • 10'2 Вт/м - для средств КВ и УКВ связи.
7.2.3. Методы и алгоритмы радиоэлектронного
подавления РЛС
В области развития радиотехнических средств функционального подавле-
ния (средств РЭП) объектов ВВТ (преимущественно РЛС) на перспективу
295
Миллиметровая радиолокация: методы обнаружения и наведения ...
как минимум до 2020 г. наметился существенный прогресс в рамках грех
классов защиты: групповой, коллективной и индивидуальной.
При этом развитие систем РЭП характеризуется постоянным по-
вышением требований, предъявляемых к приемным устройствам.
В настоящее время такие требования к приемникам СМ- и ММ-
диапазонов радиоволн обоснованы. Для обеспечения эффективно! о
противодействия систем РЭБ современным РТС параметры приемных
устройств должны быть следующие:
Диапазон частот, ГГц.......................................- 0,5... 10(1
Мгновенная полоса частот, ГГц...................................... I
Тип сигналов - непрерывные и импульсные,
длительностью..............................................более 50 m
Чувствительность в режиме, дБ:
непрерывном....................................................... /0
ИМПУЛЬСНОМ .......................... <10
Динамический диапазон, дБ:
мгновенный........................................................ 5н
с переключением....................... 90
Разрешение по частоте в режимах, МГц:
непрерывном........................................................ I
импульсном..............................5
Точность измерения амплитуды, дБ................................... |
Точность измерения пеленга, град....................................5
Разрешение по длительности импульса, нс .......................... 25
Точность измерения времени прихода, нс............................ 50
Вероятность перехвата сигнала, % ..............................- 100,
Эффективность систем радиоэлектронного противодействия завишп
от качества активных имитационных помех. Поскольку такие помехи
создаются преимущественно тогда, когда информация о параметрах сш
нала средств противника отсутствует на входе системы противодействия
выполнить эту задачу помогают устройства, запоминающие ВЧ-сигналы
средств противника. Рассматриваются методы и средства запоминании
несущей частоты подавляемой РЛС - основного параметра, требующею
запоминания в системах радиоэлектронного противодействия.
Создание научно-технических предпосылок к появлению mhiiii.i
тюрных БПЛА (микро-ЛА) существенно расширило область возможных
технологий подавления РЛС. В США появились перспективные концсп
ции применения микро-ЛА в качестве носителей миниатюрных станции
активных помех малой мощности. Применение таких аппаратов в труп
повом составе может легко обеспечить эффективное подавление РЭС
тактического звена. Внешний вид наиболее перспективных конструкций
микро-ЛА — носителей станций активных помех представлен на рис. 7.2. ’ J
296
Глава 7. Методы оценки помехозащищенности радиотехнических...
В научно-технической литературе отмечаются следующие направ-
ления в совершенствовании систем РЭП радиолокационным устройст-
вам обнаружения и наведения ВТО (в т.ч. радиовзрывателям).
Микро-ЛА
Разработчик -
Intelligent Automation 1нс.
(по заказу DARPA)
Масса 90 г
Длина: 15 см
Может бып. оснатси микро-
стаииисй активных помех
Микро-ЛА "Kolibri"
Разработчик - Lutrvnix
(по заказу DARPA)
: Масса 320г
Режимы:
зависаимс.'псрсмстенис
Имеет еистсмуавюнило1
: и приемник GPS
• Может быть есиашсн мик-
ростанцисй активных помех
мощностью 1X0-200 мВт
Микро-ЛА
"Micro Tactical
.jjf| Expandable - MITE"
(no заказу Управления
научных исследований
BMCCIUA-ONR)
Масса-40 -65г. Длина: 15 см: Размах крыльев- 15 см;
Скорость полета: 10 xvc; Оснащен мшфослашшеП
акгинных помех (масса 8 ..12 i. мощность 142 мВ Г)
Радиоэлектронное подавление РЛС
Требования к станциям активных тягх
Рис. 7.2. Перспективные конструкции микро-ЛЛ - носителей
станций активных помех и концепция их боевого применения
Постановщик помех для РЛС, имеющий дополнительную антенну
для когерентного подавления боковых лепестков ДН. Принцип дейст-
вия такого постановщика базируется на трех факторах: наличии за-
держки между приемом сигналов основной и дополнительной антен-
нами РЛС; зависимости коэффициента усиления боковых лепестков
от поляризации сигнала помехи; ограниченности ресурсов РЛС по
помехоподавлению. Реализация постановщика помех предполагает
использование в нем передатчика, сигнал которого поступает в два
канала, каждый с усилителем и антенной, но с разными видами поля-
ризации излучения. При этом в одном из каналов с помощью управ-
ляемой ЛЗ производится более быстрое по сравнению с указанной за-
держкой изменение параметров излучения во времени.
Другой метод, основан на подавлении прямого сигнала в много-
частотных доплеровских РЛС непрерывного излучения. Предлага-
ется использовать в многочастотных доплеровских РЛС непре-
рывного излучения метод квадратурной компенсации и подавле-
ния проникающего в приемник прямого сигнала. Суть метода со-
стоит в том, что формируется компенсирующий ВЧ-сигнал, рав-
ный по амплитуде и фазе проникающему прямому сигналу. Этот
297
Миллиметровая радиолокация: методы обнаружения и наведения ...
компенсирующий сигнал вычитается из поступающего на вхо,
приемника суммарного сигнала. Для формирования компенси-
рующего сигнала определяются квадратурным методом амплиту
ды и фазы прямого сигнала, что осуществляется при помощи фи
зового детектирования в синфазном и квадратурном каналах. В ки
честве опорного напряжения на фазовые детекторы подается час и
излучаемого сигнала. Полученные значения квадратурных cociun
ляющих используются для формирования компенсирующего сш
нала. В результате вычитания проникающего сигнала на дальней
шую доплеровскую обработку подается только сигнал, отражен
ный от цели. Полоса подавления может быть порядка 0,01% от нс
сущей, что достаточно для разделения доплеровского сигнала
Степень подавления прямого сигнала может быть более 40 дБ.
Метод реализации активных помех РЛС при введении в отражен-
ный сигнал ложного доплеровского смещения, приводящего к по-
явлению на мониторе метки движущейся цели. Используется фи
зовращатель (ФВ), обладающий широкой полосой пропускания и
обеспечивающий значительные фазовые сдвиги. Фазовращатель
основан на использовании фотонного управления фазой и включр
ет в себя два источника излучения на лазерных полупроводники
вых генераторах с интерферометрами Фабри-Перо. Сигнал излу
чаемый передатчиком, делится на синфазную и квадратурную со
ставляющие, которые используются для модуляции света. Такая
структура обеспечивает получение доплеровского смешения и
диапазоне частот 2... 18 ГГц при фазовом сдвиге до 90°.
Комплексы средств РТР и РЭП вероятного противника будуг, п
основном, групповыми и в первую очередь воздушного базировании
(вертолетными и самолетными), предназначенными для непосредствен
ной поддержки войск
Анализ имеющихся информационных материалов по средствам
радиотехнической разведки, активного и пассивного радиопротиводей-
ствия позволяет спрогнозировать динамику изменения их основных хи
рактеристик на период 2015—2020 гг.
В этот период возможно появление станций РТР воздушного бати
рования, обладающих следующими ТТХ:
Эквивалентная мощность шумов в полосе 1 МГц, мВт.................10 11
Точность пеленгования (СКО) на частоте 3 ГГц, град ...............0,1
Верхняя граница частоты разведки, ГГц............................50(1
Время анализа параметров одного РЭС, мс ........................ 0,01
Количество одновременно сопровождаемых РЭС, ед .................. »)0
Точность определения частоты, % от несущей ................... 0,0005
298
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Ширина диапазона частот, октав .................................... 16
Количество РЭС в памяти, ед..................................... 10000
Основными направлениями обеспечения снижения заметности
объектов военной техники противника (в том числе ОБТТ) с целью
снижения вероятности их обнаружения и распознавания на период до
2020 г останутся конструктивные меры и применение специальных по-
глощающих покрытий.
Следует ожидать достижения коэффициента отражения покрытий
(в диапазоне 1...100 ГГц) порядка минус 30...40 дБ независимо от на-
правления зондирования и поляризации сигнала.
Станции активных помех к указанному моменту могут иметь сле-
дующие характеристики:
Ширина диапазона частот, октав ................................... 14
Энергетический потенциал в непрерывном режиме, кВт................350
Энергетический потенциал в импульсном режиме, кВт................ 1000
Верхняя граничная частота, ГГц....................................300
Количество одновременно подавляемых РЭС, ед........................25
Масса, кг.......................................................... 150
В период 2015-2020 гг. будут развиваться методы и технические
средства активной и пассивной маскировки, найдут широкое примене-
ние комплексы по установке аэрозольных завес, эффективных в ИК, ви-
димом и радио диапазонах. Получат дальнейшее развитие аэрозольные
рецептуры с ферритовыми добавками и электрически заряженными час-
тицами, будут разработаны методы для управлениями свойствами аэро-
зольных образований.
Ожидается, что в перспективе время реакции комплексов РЭП РЛС не
будет превышать 2-5 периодов следования импульсов РЛС, причем они
смогут обеспечить одновременное подавление до 40 РЛС в секторе 90°.
7.2.4. Анализ естественных и случайных помех
в радиодиапазоне
Известно, что основной особенностью распространения радиоволн СМ- и
ММ- диапазона длин волн является затухание, обусловленное молеку-
лярным поглощением в атмосферных газах и поглощением в гидрометео-
рах, для коротковолновой части ММ-диаиазона существенным может
быть и отражение радиоволн от гидрометеоров (дождевых объемов).
Для нормальных метеоусловий коэффициент затухания радиоволн
составляет от 0,15 до 0,5 дБ/км для длины волны 8 мм и от 0,4 до 1,0
дБ/км для длины волны 3 мм; в сложных метеоусловиях: 1,5-2,0 и
3.0-3,5 для 8-мм и 3-мм соответственно.
299
Миллиметровая радиолокация: методы обнаружения и наведения...
Удельные ЭПР дождевых объемов составляют от КУ4 до 10“5 м2/м3 дд^
диапазона 8 мм, возрастая более, чем на порядок для диапазона 3-мм.
Имеются многочисленные экспериментальные данные о зависимо
сти удельной ЭПР земных покровов от многочисленных природных и ап
тропогенных факторов, зависимости эти достаточно сложны, вследсгвп»
чего флуктуации удельной ЭПР могут быть весьма значительными. Од
нако общие тенденции, позволяющие аппроксимировать эксперимеп
тальные данные для типовых покровов и углов наблюдения, следующие:
снежный наст имеет наибольшую ЭПР в ММДВ;
возрастание удельной ЭПР имеет место при увеличении углов па
блюдения (на 10... 15 дБ при изменении углов от 0 до 90°);
влажный растительный покров отражает более интенсивно, чем
сухой;
снежные покровы увеличивают удельную ЭПР независимо от у г
лов наблюдения на 5... 10 дБ.
Основной характеристикой целей при их радиолокационном пц
блюдении является ЭПР. Анализ многочисленных экспериментальна»
данных показывает, что для движущихся целей в диапазоне волн короче
3 см ЭПР слабо зависит от частоты и с вероятность порядка 0,9 будет >
менее 10 м2 при углах наблюдения от 0 до 45°.
На РЛС и ГСН, применение которых возможно в перспективны»
комплексах, а также на используемые средства связи, в том числе пер
спективные сверхширокополостные, могут воздействовать искусством
ные случайные радиопомехи.
Электромагнитные поля в районе боевых действий могут созди
ваться двумя основными группами радиотехнических средств:
штатными РЭС (современными и разрабатываемыми) образцом
вооружения, стоящих на вооружении;
штатными РЭС, имеющимися в составе подразделений и формц
рований наступающего противника; специальными средствами тип»
систем активной защиты (САЗ) танков на основе использования высо
коэнергетических ЭМП.
Проведем анализ параметров ЭМП, создаваемых РЭС СВ в полос»
обороны. Ожидаемая радиоэлектронная обстановка будет формирова л!
ся примерно двадцатью типами РЭС, представляющими собой РЛС об
наружения и наведения средств ПВО, РЛС наземной разведки, РЭС мс
теообеспечения, средствами радиоэлектронного подавления.
Характеристики РЭС, их расположение относительно линии бое-
вого соприкосновения и противотанковых средств определяют возмож
ные уровни ЭМП, которые могут воздействовать на РЛС объекта.
Основные параметры ЭМП, возникновение которых возможно во
время боевого применения ПТС в районе расположения боевых поряд
ков, представлены в табл. 7.3.
300
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Таблица 7.3. Основные параметры ЭМП
Диапазон частот Минимальное расстояние до объекта, м Максимальный уровень плотности потока ЭМП, Вт/м2
2...3 ГГц 100 6,3-10“'
до 5 ГГц 500 7,64
5...7 ГГц 1000 4,9-10-3
12...13 ГГц 100 3,2
13...20 ГГц 1000 3-10-2
35...40 ГГц 1000 2-Ю-’
Примечание: значение плотности потока ЭМП, создаваемого каждым
РЛС, определялось на оси главного луча и без учета затухания в атмосфере.
Расчет уровней ЭМП проводился для известных образцов РЭС,
размещенных в полосе боевого применения объектов в обороне, и, сле-
довательно, на минимально возможных удалениях РЭС от объектов.
Необходимо отметить, что при расчетах РЭС не учитывались по-
тери, которые неизбежны в ходе работы РЭС по оперативно-
тактическим соображениям.
Следовательно, фактически оценена наиболее тяжелая из возмож-
ных ситуаций - воздействие одного или несколько близко расположен-
ных к объекту РЭС но главному лепестку диаграммы направленности
антенны.
Для оценки уровня случайных помех необходим также анализ па-
раметров ЭМП, создаваемых РЭС противника в боевых порядках обо-
роняющихся общевойсковых подразделений сухопутных войск.
Радиоэлектронная обстановка в боевых порядках наступающего
противника создается большим количеством типов и классов РЭС. Од-
нако, учитывая специфику применения объектов, из них можно выде-
лить группы РЭС, оказывающих наибольшее влияние на их РЛС в силу
их функционального назначения и расположения в боевых порядках.
На этом основании из рассмотрения исключены радиорелейные
системы связи АСУ войсками, спутниковые системы связи, тропосфер-
ные станции связи, системы обнаружения воздушных целей ЗРК боль-
шой дальности, РЛС определения высоты воздушных целей.
Основные характеристики используемых РЭС представлены в
табл. 7.4. и 7.5, там же приведена их удаленность от линии боевого со-
прикосновения.
301
Миллиметровая радиолокация: методы обнаружения и наведения...
Таблица 7.4. РЛС обнаружения движущихся целей
и засечки огневых позиций
Наименование Диапазон, ГГц Длитель- ность импульса, мс Мощность, кВт Добн., КМ человек/ танк Возможное удаление от ЛБС, км
AN/PPS-6 9-9,5 - 0,12 1,5 0,1
AN/PPS-4 8,0-9,4 0,2 0,5 1,5/7,0 0,1
«Разура-2», Фр. 8,0-10 - 2 5,0/8,0 0,1
AN/TPS-21 9,4 0,4 7 2,7/18,0 5,0
AN/TPS-25 9,4 0,5 3 4,5/18,0 5,0
AN/TPS-33 9,4 0,4 7 6,5/18,0 5,0
«Разит», Герм. 9,5-9,7 - 3 14,0/20,0 5,0
«Орфей-П», Герм. - - - 7,0 -
«Разура», Герм. 8,0-10 - - 8,0/15,0 5,0
GS 14МК1 10 0,4 2-3 6,0 -
AN/MPQ-4A До 16 0,25 50 10,0 5,0-6,0
AN/TPQ-36 5,2-10,9 - - 20,0 5,0
AN/TPQ-10A 2,75 0,8 200 18,4 5,0
AN/TPQ-37 6,0 - - 50,0 5,0
TA-S-15M 9,5-9,7 - 100 20,0 5,0
Таблица 7.5. Основные характеристики используемых РЭС
Наиме- нование Диапазон, ГГц Период, мкс Длитель- ность, мкс Мощ- ность, кВт Даль- ность, км При- надлеж- ность Воз- можное удаление от ЛБС, км
импульса
MPS-12 2,45 1400 1 16 10-15 ЗРК «Ге- пард» 0,3...0,5
AN/YPS-2 9,2...9,5 50 0,28 1,4 * * *
AAN7MK4 5,2... 10,9 250 0,25 50 * * *
В табл. 7.6 приведены значения уровней ЭМП, создаваемых npe>
ставительными образцами приведенных РЭС противника на минималь
но возможных удалениях от объекта в соответствии с тактикой их ис
пользования.
302
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Таблица 7.6. Расчетные уровни плотности потока мощности ЭМП,
создаваемых зарубежными представительными
образцами РЛС сухопутных войск
Диапазон частот, ГГц Уровень плотности потока мощности ЭМП, Вт/м2
2,45 0,4
2,7 0,025
8...10 1,6
12...16 0,03
При расчете уровней полей учитывалось суммарное воздействие
нескольких наиболее близко распложенных РЭС на РЛС объекта. В таб-
лице приведены максимально возможные уровни, создаваемые либо
группой близко расположенных между собой средств, либо одним сред-
ством, имеющим высокий энергетический потенциал, или расположен-
ными в непосредственной близости от объекта.
Для несвязных РЭС зоны излучения определяются известными
формулами:
для параболических антенн
<££. >£
63 162’ 162 Л'р' 2’ " 2’
где d - диаметр параболической антенны, в метрах; R^, R^,, R,, -
радиусы ближней, промежуточной и дальней зон действия соответст-
венно:
для усеченных параболических антенн
где ab - линейные размеры усеченной параболической антенны в метрах,
4Р Р G Р G
П =—2-' п = ср---• п =
б'3' 8л-/?2 ’ л’3’ 8л-/?2 ’
эфф
Др - средняя мощность излучения, в ваттах; G - коэффициент усиле-
G22
ния антенны; Л.,фф =---- - эффективная площадь раскрыва антенны в
4 л-
кв. метрах.
Необходимо отметить, что при расчетах РЭО не учитывались потери,
которые неизбежны в ходе боевых действий, а также ограничения, накла-
дываемые на режимы работы РЭС по оперативно-тактическим соображе-
ниям. Следовательно, фактически оценена наиболее тяжелая из возможных
303
Миллиметровая радиолокация: методы обнаружения и наведения ...
ситуаций — воздействие одного или несколько близко расположенных g
ПТС РЭС по главному лепестку диаграммы направленности антенны.
7.3. Анализ частотных диапазонов РЛС
с точки зрения помехозащищенности и скрытности
7.3.1. Сравнительная оценка помехозащищенности
миллиметрового и сантиметрового диапазонов волн
Оценка помехозащищенности частотного диапазона является первоочс
редной задачей при разработке любого РЭС. Применительно к пред
ставленным классам РЛС необходимо рассматривать сантиметровый
(СМДВ) и миллиметровый (ММДВ) диапазоны волн.
Сравнительная характеристика указанных диапазонов волн принс
дена в табл.7.7. Нетрудно видеть, что по своим свойствам миллиметро-
вый диапазон занимает промежуточное положение между волнами сан
тиметрового и оптического диапазонов.
Таблица 7.7. Сравнительная характеристика диапазонов волн
Характеристика Уровень характеристики
СМДВ ММДВ
Точность сопровождения средняя выше средней
Способность классифицировать и идентифицировать цели низкая высокая
Скрытность работы низкая высокая
Поисковые характеристики высокие средние
Работа в сложных условиях высокая средняя
Применение миллиметровых волн в радиолокационных системах
по сравнению с аналогичными системами сантиметрового диапазона
при одинаковых апертурах антенн позволяет получить более узкие диа-
граммы направленности и большие коэффициенты усиления антенн,
повысить разрешение и точность измерения угловых координл
уменьшить влияние эффекта многолучевого распространения и сопро-
вождать цели при малых углах места. Радиолокационные средства, ра-
ботающие в ММДВ, характеризуются меньшей уязвимостью к элек-
тронному подавлению и большей скрытностью работы, более высокой
электромагнитной совместимостью с другими средствами. Они обеспе-
чивают более высокую по сравнению с РЛС СМДВ вероятность обна-
ружения низкоскоростных или даже маневрирующих на месте целей и
улучшение возможности их классификации и идентификации за счет
анализа тонкой структуры отраженного сигнала.
304
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Значения погонного затухания радиоволн сантиметрового и мил-
лиметрового диапазонов в окнах прозрачности и зонах резонансного по-
глощения при горизонтальном распространении в атмосфере на при-
земной трассе и на высоте 4 км приведено в табл. 7.8.
Таблица 7.8. Погонное затухание радиоволн
Погонное затухание радиоволн при распространении, дБ/км
,/:ггц 10 15 35 22,5 60 95 120 140 170 220 320
/гая0км 0,019 0,03 0,1 0,15 15 0,3 2 1,5 20 4 22
/га=4км 0,005 0,007 0,015 0,02 4 0,1 0,7 0,15 4 0,17 4,1
Из таблицы видно, что в обычных условиях с ростом высоты зату-
хание радиоволн как сантиметрового, так и миллиметрового диапазонов
уменьшается. При этом существенное изменение затухания соответст-
вует радиоволнам миллиметрового диапазона в зонах резонансного по-
глощения.
На суммарное затухание радиоволн влияет также и угол относи-
тельно горизонта, под которым фронт волны распространяется в атмо-
сфере. Проведенные измерения показали, что в нормальных условиях
при распространении под углом 10° суммарное затухание в атмосфере
для волн 8-миллимитрового диапазона равно 1 дБ, при распространении
под углом 30 - 0,3 дБ, а под углом 90 - 0,16 дБ.
В сложных условиях при наличии дождя, тумана, снега и т.д. при
распространении наблюдаются эффекты допоинительного затухания и
переотражения радиоволн, которые маскируют сигнал, отраженный от
цели. Количественно указанные эффекты характеризуются погонным
затуханием и удельной ЭПР. Графики зависимости погонного затухания
при распространении и удельной ЭПР дождя от интенсивности для ра-
диоволн 2-сантиметрового (сшюшная линия), 8-миллимитрового (пунк-
тирная линия), 3-миллимитровог
метрового (штрихпунктирная ли-
ния) диапазонов показаны на
рис. 7.3 и 7.4.
Из рис. 7.3 видно, что погон-
ное затухание для коротковолно-
вой части миллиметрового диапа-
зона радиоволн (3 мм и 2 мм) на
приземной трассе (/га » 1 м) даже
при дожде с малой интенсивно-
стью (менее 1 мм/ч) может превы-
шать 1 дБ/км, а при интенсивности
дождя 4 мм/ч составляет 3,8 дБ/км
(штриховая линия) и 2-милли-
Рис. 7.3. Затухание радиоволн
в дожде в зависимости
от интенсивности и длины волны
305
Миллиметровая радиолокация: методы обнаружения и наведения ...
Рис. 7.4. Удельная ЭПР дождя
в зависимости от его интенсивности
и длины волны
погон
ин ген
0,2 и
для 3-миллиметрового и 5,9 дБ/км
для 2-миллиметрового диапазон).
Для 2-сантиметрового и 8-миллп-
метрового диапазонов волн
ное затухание при дожде с
сивностью 4 мм/ч равно
1,47 дБ/км соответственно.
Из анализа рис. 7.4 следуо,
что удельная ЭПР дождя при рас*
пространении радиоволн 2-сан
тиметрового диапазона почти ин
два порядка меньше, чем при ржа
пространении миллиметровых волн. Из рисунка также видно, что при ми-
лой интенсивности дождя его удельная ЭПР применительно к 8-миллн
метрового диапазону примерно на 5...6 дБ меньше, чем для коротковол-
новой части ММДВ. При интенсивности дождя больше 1 мм/ч удельная
ЭПР дождя для всего ММДВ примерно одинаковая.
Для оценки дальности действия РЛС, использующих рассматри-
ваемые диапазоны радиоволн, примем следующие исходные данные:
размеры антенны: — ширина 0,6 м, высота - 0,4 м;
скорость сканирования - 8 град/с;
период ложной тревоги — 1 в час;
разрешающая способность по дальности - 30 м;
коэффициент шума приемной системы - 10 дБ;
максимальная скорость движения цели - 60 км/ч;
энергетические потери на передачу, прием и обработку - 10 дБ.
На рис. 7.5 приведены зависимости требуемой мощности передав
чика от максимальной дальности действия РЛС при вероятности обил*
ружения не менее 0,8 и различной интенсивности дождя, рассчитанные
с использованием графика, приведенного на рис. 7.3, по известным
формулам радиолокации. На рис. 7.5 и далее РЛС 2-х СМДВ соответщ
вуют сплошные, 8-ММДВ - пунктирные, 3-ММДВ - штриховые и РЛС
2-ММДВ — штрихпунктирные линии.
На рис. 7.6 приведены те же графики, нормированные по отноше-
нию к мощности передатчика РЛС 2-сантиметрового диапазона.
Из рис. 7.5 и 7.6 видно, что в нормальных условиях при отсутствии
дождя РЛС ММДВ, за исключением РЛС 2-миллиметрового диапазона,
имеют энергетический выигрыш перед 2-сантиметровым диапазоном
на всей рассматриваемой дальности действия (до 12 км). Радиолока-
ционное средство 2-миллиметрового диапазона имеет энергетический
выигрыш только при дальности действия до 5 миллиметрового.
306
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Рис. 7.5. Зависимости требуемой мощности передатчика
от дальности действия
307
Миллиметровая радиолокация: методы обнаружения и наведения ...
Дождь с интенсивностью 1 мм'ч
Дождь с интенсивностью 3 мм/ч
Рис. 7.6. Зависимость отношения требуемой мощност и передатчика РЛС
ММДВ к мощности передатчика 2-сантиметрового диапазона
от дальности действия
308
Глава 7. Методы оценки помехозащищенности радиотехнических ...
При наличии дождя с интенсивностью 0,1 мм/ч преимущество на всей
рассматриваемой дальности сохраняет только РЛС 8- миллиметрового
диапазона. С дальнейшим ростом интенсивности дождя дальность дей-
ствия, при которой сохраняется энергетический вымрыт рассматри-
ваемых РЛС ММДВ, быстро уменьшается и при дожде 4 мм/ч составля-
ет км.
На рис. 7.7 приведены т-рафики изменения требуемой мощности
передатчика Рпср в зависимости от интенсивности дождя при дальности
действия РЛС 10, 5 и 3 км и те же трафики, нормированные по отноше-
нию к мощности передатчика 2-сантиметрового диапазона. Из рисунка
следует, что для обеспечения заданной дальности действия РЛС 7?тах=10
км при работе в дожде с интенсивностью 4 мм/ч при использовании 8-
миллиметрового диапазона необходимо иметь среднюю мощность пе-
редатчика примерно на 2 порядка больше, чем при использовании 2-
сантиметрового диапазона. Применительно к рассматриваемым РЛС с
выбранными исходными данными эта мощность должна быть порядка
60 Вт. Для РЛС 2-сантиметрового диапазона указанная мощность равна
0,4 Вт. Для РЛС 3- и 2-миллиметровых диапазонов необходимо обеспе-
чить среднюю мощность передатчика более 100 Вт.
При максимальной дальности действия Rmax=5 км в условиях дож-
дя с интенсивностью 4 мм/ч энергетический проигрыш 3- и 8-миллимет-
ровых РЛС относительно 2-сантиметровой РЛС соответственно состав-
ляет 20 и 10 дБ. Однако с учетом того, что средняя мощность передат-
чика при этом должна быть порядка 10 и 0,1 Вт, при необходимости по-
лучения высоких точностей и разрешения по угловым координатам,
указанные диапазоны могут быть использованы в РЛС (например, в об-
зорно-прицельных РЛС).
Как видно из рис. 7.7, в РЛС с дальностью действия 3 км, несмотря
на энергетический проитрыш, может быть использован любой из рас-
сматриваемых диапазонов, так как требуемый уровень средней мощно-
сти передатчика может быть реализован в приемлемых массе, габарит-
ных размерах и с малым энергопотреблением.
Особенностью обнаружения наземных целей является наличие
мешающих отражений от подстилающей поверхности и гидрометеоров.
Мощность сигнала, обусловленного этими отражениями, зависит от
ширины ДП антенны, типа поверхности и длины волны зондирующего
сигнала.
Проведенные измерения показали, что для большинства типов по-
верхности изменение ее удельной ЭПР обратно пропорционально изме-
нению длины волны. При одинаковых размерах антенны ширина ее ДН с
изменением длины волны пропорционально изменяется как в азимуталь-
ной, так и в угломсстной плоскостях.
309
Миллиметровая радиолокация: методы обнаружения и наведения ...
Рис. 7.7. Зависимость энергетических потерь РЛС ММДВ
по отношению к РЛС 2-сантиметрового диапазона
от интенсивности дождя
310
Глава 7. Методы оценки помехозащищенности радиотехнических ...
При этом изменяется и площадь элемента разрешения. В связи с
этим, казалось бы, за счет использования ММДВ в РЛС разведки назем-
ных целей можно было бы повысить радиолокационный контраст целей
по сравнению с РЛС СМДВ. Однако при распространении вдоль земной
поверхности или под малыми углами к горизонту на величину площади
элемента разрешения влияет разрешение по дальности и ширина ДН ан-
тенны в азимутальной плоскости. Поэтому с изменением длины волны
пропорционально изменяется облучаемая площадь, обратно пропорцио-
нально изменяется ее удельная ЭПР, а мощность мешающих отражений
практически не изменяется. При этом радиолокационный контраст прак-
тически не зависит от длины волны. При облучении поверхности Земли
под большими углами размер облучаемой площади зависит от ширины
ДИА в двух плоскостях и с изменением длины волны изменяется пропор-
ционально квадрату относительного изменения длины волны. В этом слу-
чае уменьшение длины волны позволяет во столько же раз уменьшить
мощность мешающих отражений и соответственно повысить радиолока-
ционный контраст цели.
Таким образом, проведенные оценки показывают, что всепогодные
наземные РЛС разведки наземных целей с дальностью действия более 5...6
км могут быть реализованы только в сантиметровом диапазоне радиоволн.
Диапазон радиоволн 8 мм может быть использован в РЛС с дальностью
действия до 5.. .6 км, а коротковолновая часть миллиметрового диапазона в
РЛС и ГСН с дальност ью действия не более 2...3 км.
7.3.2. Особенности распространения волн
миллиметрового диапазона
При распространении миллимет-
ровых волн в атмосфере про-
исходят потери энергии, которые
вызываются, в основном, газами
атмосферы, тучами, осадками. За-
тухание электромагнитных воли в
атмосфере при горизонтальном
распространении имеет ярко вы-
раженную зависимость от часто-
ты, что показано на рис. 7.8. Из
рисунка видно, что в этом диапа-
зоне помимо так называемых
«окон прозрачности» (на длинах
волн 8,6; 3,2; 2,1; 1,3 мм) сущест-
вуют и области затухания, кото-
рые соответствуют линиям резо-
Рис. 7.8. Зависимость затухания
электромагнитных волн в атмосфере
от частоты
311
Миллиметровая радиолокация: методы обнаружения и наведения ...
коэффициент ослабления (дБ/км).
нансного поглощения воды и кислорода в атмосфере. Поглощение элек-
тромагнитной энергии в этих областях обусловлено наведенными изме-
нениями энергетических уровней молекул, каждому из которых соотве w
ствует дискретная частота. При низких давлениях кривые резонансною
поглощения очень узкие, однако, на уровне моря резонансные участки
расширяются и затухание становится существенным в широком диапазо
не частот.
По отношению к длине волны различаются гидрометеообразова-
ния с малыми (туман, облака, моросящий дождь и т.п.) и крупными
(осадки) частицами. Для волн длиной Л = 0,5... 10 см коэффициент ос
лабления радиоволн уо в гидрометеообразованиях, состоящих из малых
частиц, можно определить эмпирической формулой
/0 =0,4831Kg/22,
где Wg - водность метеообразования (г/м3); Л - длина волны (см), у() -
На рис. 7.9 графически пока-
заны результаты вычислений ко
эффициента ослабления для дож-
дей при температуре 18°С. Как
видно из рисунка, зависимость ко
эффициента ослабления у0 от ин-
тенсивности /д при больших сС
значениях имеет почти линейный
характер. На рис. 7.10 сопосгавлс
но ослабление радиоволн в дождях
(сплошные линии) и в туманах ил в
облаках (штриховые линии). Кри-
вая 1 соответствует интенсивное i и
дождя 0,25 мм/ч, 2—1,0 мм/ч, .1 -
4 мм/ч и 4 - 16 мм/ч. Графики за
висимости у0(Л) для туманов сот-
ветствуют разной водности: 0,032 (кривая 5), 0,32 (6) и 2,3 г/мЗ (7). И i
графиков следует, что ослабление в густом тумане и «мощных» облаках
(кривая 7) превышает ослабление в умеренном дожде (кривая 3).
На ослабление радиоволн оказывает также влияние природа дож-
дей. На рис. 7.11 — рис. 7.13 представлены результаты расчетов ослаб
ления в дождях, образованных вследствие таяния крупы, обзерненною
и необзерненного снега, соответственно. Из рисунков видно, что и
ММДВ наблюдается меньшее различие в значениях у0 по сравнению с 3-
сантиметровым диапазоном.
7о. дБ/км
20 40 60 80/д>мм/ч
Рис. 7.9. Зависимость коэффициента
ослабления у0 от интенсивности
дождя/д
312
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Рис. 7.10. Ослабление радиоволн
в дождях и в туманах или облаках
Рис. 7.11. Результаты расчетов
ослабления в дожде, образованном
вследствие таяния крупы
Рис. 7.12. Результаты расчетов
ослабления в дожде,
образованном вследствие таяния
обзерненного снега
Рис. 7.13. Результаты расчетов
ослабления в дожде, образованном
вследствие таяния необзерненного
снега
313
Миллиметровая радиолокация: методы обнаружения и наведения ...
Экспериментальными исследованиями установлено, что в сантиме(Ч
ровом диапазоне ослабление радиоволн в сухом снеге на порядок меньше,
чем в дожде с той же интенсивностью. С уменьшением длины волны ос
лабление в снеге возрастает. В обводненном или мокром снеге ослабление
радиоволн миллиметрового диапазона сравнимо с ослаблением в дожде той
же интенсивности и даже может его превышать. Это показано на рис. 7.14 и'
7.15, на которых приведены усредненные экспериментальные значения ко-
эффициента ослабления при различных интенсивностях двух типов снихх
падов на длине волны 8 мм и дождя.
Рис. 7.14. Экспериментальные Рис. 7.15. Экспериментальные
значения коэффициента ослабления значения коэффициента ослабления
при различных интенсивностях при различных интенсивностях
мокрого снега и дождя дождя и обводненного снега
Теоретическое исследование затухания в граде представляет зна-
чительные трудности, так как уо в этом случае зависит не только от дли •
ны волны, закона распределения частиц по размерам и расстояний меж-
ду ними, но и от формы, состояния поверхности, плотности и структуры
градин. Поверхность градин может быть сухой и влажной, а сама градн»
на - сплошной и пустотелой, со слоями разной плотности и другими
геометрическими и физическими особенностями.
В зависимости от толщины пленки воды рассеяние на градинах
может происходить эквивалентно рассеянию на равновеликих частицах
сплошной воды или сплошного льда, но может и отличаться от этих
314
Глава 7. Методы оценки помехозащищенности радиотехнических ...
предельных случаев. На рис. 7.16 и 7.17 для указанных предельных слу-
чаев и разных z приведены зависимости у0 от среднекубического диа-
метра частицы J3. Из рисунков видно, что в области крупных сфериче-
ских частиц градовые осадки обладают большими значениями уо •
Рис. 7.16. Зависимости у0
от среднекубического диаметра
частицы воды d3
104
I02
10°
кг2
I0'4
1(Уб
0 1 2 3 4,
СМ
Рис. 7.17. Зависимости у0
от среднекубического диаметра
частицы льда <73
7.3.3. Оценка помехоустойчивости радиокомандных
дистанционных систем принятия решений
миллиметрового диапазона волн
При оценке потенциальной помехоустойчивости радиокомандных дис-
танционных систем (РКДС) принятия решений ММДВ можно ограни-
читься рассмотрением функционирования их высокочастотных трактов
в условиях активных помех.
Известно, что очень сильный помеховый сигнал на входе прием-
ника РКДС делает проблематичным подавление помехового сигнала в
его трактах обработки. Такую мощность помехового сигнала можно
считать предельно допустимой, полагая, что при меньшем уровне поме-
ховый сигнал может быть подавлен в трактах обработки РКДС.
Для оценки помехозащищенности РКДС ММДВ, функционирую-
щих у земной поверхности, рассмотрим одну из возможных тактиче-
ских ситуаций (рис. 7.18).
Станция активных помех, прикрывающая боевую позицию, распо-
лагается от нее на удалении R„. К боевой позиции под углом у прибли-
жается боеприпас (БП) с РКДС ММДВ, начинающим функционировать
на высоте Н. Антенна РКДС обладает ДН, которая описывается функ-
цией Дспр(#^), имеет коэффициент направленного действия GCnp и ко-
эффициент полезного действия z/сир- Для расчета плотности мощности
315
Миллиметровая радиолокация: методы обнаружения и наведения...
активной помехи на входе приемника, приводящей к срыву нормально I
работы, можно воспользоваться соотношением
Q _ ю«Я/104 р ।
4/11 4ttR2 ’ 4 ‘ 1
где R = у/н 2 + (Ял + Hcig^)2 (м); - дальность до постановщика но
мех; Рп — мощность сигнала постановщика помех [Вт], Gn, Fn(0,(p) - ко
эффициент усиления и ДН его антенны, соответственно; а - коэффицн
ент затухания радиоволн в атмосфере [дБ/км].
Рис. 7.18. Взаимное расположение станции заградительных
радиопомех и системы с РКДС
Используя определение поверхностной площади антенны РКДС’ и
соотношение (7.1), получим основное соотношение для плотности мош
ности помехи Рп, создающей на входе приемника предельно допусти
мую мощность Рср:
р = (4я)2РсрТ?21О^104
” GDF^)GCUfTjCUfFcnf(0,^A2 ’
где А — длина волны в свободном пространстве (м).
316
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Результаты расчетов показывают следующее. Организация актив-
ного противодействия в ММДВ на длине волны 2=8 мм чрезвычайно
затруднена. В самом деле, использование переносных станций типа PLQ
с полупроводниковыми генераторами не дает заметного эффекта,
так как потенциально возможный уровень излучаемой мощности
(несколько десятков киловатт в импульсе) становится недостаточным
уже при удалении станции на несколько сотен метров от защищаемой
боевой позиции. Наземные передвижные станции типа GLQ или VLQ
мало эффективны для РКДС ММДВ при большом удалении от защищае-
мой позиции.
Следует подчеркнуть, что создание мощных генераторов с уровнем
мощности в импульсе порядка 1 МВт в ММДВ вообще является пробле-
матичным. Таким образом, проведенные расчеты доказывают исключи-
тельно высокую помехоустойчивость РКДС ММДВ. Воздействие естест-
венных метеообразований повышает скрытность и помехоустойчивость
РКДС ММДВ до 12... 16 дБ/км по сравнению с чистой атмосферой.
7.4. Анализ возможностей средств радиоэлектронной
борьбы вероятного противника
7.4.1. Назначение, состав сил и средств
радиотехнической разведки и радиоэлектронной борьбы
вероятного противника
Известно, что в общем случае помехозащищенность РЭС определяется
помеховой обстановкой, мерами, принятыми при разработке для повы-
шения скрытности и помехоустойчивости РЭС, а также допустимым
уровнем снижения эффективности их боевого использования в условиях
радиоэлектронного противодействия.
Основные характеристики средств РЭБ зарубежных стран на пери-
од до 2015 г. приведены в табл. 7.9, 7.10 и 7.11. Боевое применение сил
разведки и РЭБ осуществляется четырьмя способами: непосредственная
поддержка, общая поддержка, усиление, усиление общей поддержки.
При этом подразделения РЭБ в зависимости от способа их боевого при-
менения могут развертываться как в непосредственной близости от ли-
нии соприкосновения (ЛСВ) в боевых порядках бригад и батальонов,
так и в глубине оперативного построения.
На направлении главного удара в тактическом звене на силы РЭБ
возлагается осуществление массированного подавления работы средств
разведки. При этом РЛС РНДЦ, в том числе и танковые РЭС, будут по-
давляться с помощью активных радиопомех на избранных направлени-
ях на глубину 15...20 км.
317
Миллиметровая радиолокация: методы обнаружения и наведения...
Таблица 7.9. Наземные и воздушные комплексы РЭП несвязных РЭ
Характеристики Разрабатываемые Перспективные
Год принятия иа вооружение 2000...2010 2005...2015
Диапазон частот, ГГц 1...40(100) 1...100
Вид помех маскирующие, имитационные
Энергетический потенциал в импульсном режиме, Вт 1О5...1О7 1О5...1О6 1О5...1О7 1О5...1О6
Энергетический потенциал в непрерывном режиме, Вт 5-105—5-106 5-104...5-105 1О5...1О7 1О4...1О6
Число поддиапазонов 3...8 3...8
Число помеховых сигналов, одно временноизлучаемых на разных частотах до 10...15 до 10...15
Примечанием знаменателе приведены значения энергетического по-
тенциала для вертолетных комплексов.
Таблица 7.10. Наземные средства РТР и средства РТР,
размещаемые на воздушных носителях
Характеристики Разрабатываемые Перспективные
Год принятия на вооружение 2000...2010 2005-2015
Диапазон частот, ГГц 0,1...40 0,5... 100 0,1-100 0,5-160
Эквивалентная реальная чувствительность, дБ/Вт -128...-100 -128...-120 -130—-110 -130...-125
Точность пеленгования (СКО), град. 0,1 ...0,3 0,05-0,3 0,05-0,1 0,05-0,1
Количество одновременно разведываемых РЭС 20...40 до 100
Количество РЭС, параметры которых хранятся в памяти 200 300
Примечание: в знаменателе приведены данные для наземных средств РТР.
Таблица 7.11. Малогабаритные передатчики помех
одноразового использования
Характеристики Разрабатываемые Перспективные
Год принятия на вооружение 2000-2010 2005-2015
Диапазон частот, ГГц 0,3-50 0,3...50
Излучаемая мощность, Вт 10-20 10...20
Время работы, мии 10-30 10...30
Масса, кг 0,5-1 0,5-1
318
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Одним из основополагающих принципов применения сил и
средств РЭБ в ходе боевых действий является максимальное задейство-
вание частей и подразделений РЭБ СВ для воздействия на РЭС против-
ника, расположенных вблизи ЛСВ (до 30 км без учета средств авиаци-
онного базирования). Одновременно предписывается комбинированное
применение наземных и авиационных средств РЭБ для надежного по-
давления РЭС систем управления, ПВО и разведки группировки войск
противника непосредственно перед началом проведения оборонитель-
ных и наступательных операций своих войск.
Непосредственно перед началом боевых действий все усилия час-
тей и подразделений РЭБ и РЭП направляются на выявление отдельных
РЭС группировки войск противоборствующих сторон, определение их
принадлежности и вскрытие на основе анализа их характеристик и ха-
рактера работы состава группировки войск противника и возможного
характера их боевых действий и, главное, системы управления войсками
и оружием противостоящих соединений и частей. Подразделения РТР,
как правило, развертываются на удалении до 5 км от ЛСВ.
Подразделения РЭП, назначенные для выполнения задач способом
непосредственной поддержки, находятся в постоянной боевой готовно-
сти к выполнению задачи по РЭП РЭС противника в интересах того со-
единения (части, подразделения), которое они поддерживают (обеспе-
чивают). Поэтому выбор позиционного района для их развертывания
осуществляется в полосе соответствующего соединения (части), а уда-
ление их от ЛСВ при этом должно обеспечивать выполнение плана опе-
рации (боя) объединением (соединением, частью).
Анализ приведенных данных показывает, что при организации
РЭБ вероятный противник может использовать как воздушные, так и
наземные средства РТР, а для радиоэлектронного подавления РЭС - на-
земные многоцелевые станции активных помех, бортовые средства
РЭП, размещаемые на воздушных носителях, или забрасываемые пере-
датчики помех одноразового действия. При этом многоцелевые станции
могут создать наибольший уровень помех.
7.4.2. Возможности вероятного противника
по радиоэлектронному подавлению РЭС
При оценке возможностей вероятного противника по РЭП РЭС рас-
сматриваются РЭС, обеспечивающие стрельбу осколочно-шрапнель-
ными снарядами с электронным дистанционно-контактной СПР с уста-
новкой времени подрыва по радиокоманде,
При этом обзорная РЛС предназначена для обнаружения и опреде-
ления координат наземных целей, РЛС комплекса активной защиты
(КАЗ) - для измерения скорости полета снаряда на начальном участке
319
Миллиметровая радиолокация: методы обнаружения и наведения...
траектории, а запросчик аппаратуры опознавания — для передачи ко-
манды на подрыв (с соответствующей задержкой) боевой части снаряда.
В настоящее время на вооружении зарубежных армий отсутствую»
средства РЭП, которые могут быть использованы для подавления РЭС в
5- и 3-миллиметровых диапазонах радиоволн.
Однако анализ основных направлений работ по созданию перспек-
тивных средств РЭП основных зарубежных стран показывает следующее?
Одной из основных задач РЭБ в период 2005-2015 гг. будет обес-
печение защиты автобронетанковой техники и других объектов воору-
жения от поражения оружием, в том числе с радиолокационными сис-
темами наведения. При этом основным требованием вооруженных сил
при создании перспективных средств РЭБ является обеспечение груп-
повой, коллективной (взаимной) и индивидуальной защиты средствами
РЭБ танков, БМП и другой бронетанковой техники при комплексном
использовании средств разведки, активных и пассивных помех.
Как показали исследования, для создания помех танковым РЭС и
перспективе могут использоваться станции помех, устанавливаемые па
специальных носителях (наземных, воздушных) — комплексах группе--
вой защиты (КГЗ), которые могут придаваться танковым подразделени-
ям противника из расчета один комплекс для прикрытия роты танков.
Наиболее вероятно нахождение КГЗ сзади прикрываемого подраз-
деления вне досигаемости огня противотанковых (ПТ) пушек и ПТРК
на удалении до 6500 м от ЛСВ. Вместе с тем не исключена возможноеЯ
нахождения КГЗ в боевых порядках наступающих танков. Взаимное
удаление СП и танковых РЭС в этом случае будет изменяться по мере
приближения танков противника к боевой позиции наших танков.
Одним из эффективных средств защиты бронетанковой техники за
рубежом считаются комплексы индивидуальной защиты (КПЗ). В со-
став КПЗ входят: приемники предупреждения об облучении прикры-
ваемого объекта электромагнитным сигналом; передатчики активных
помех с достаточно высокой степенью адаптации к электромагнитно!!
обстановке; средства воздействия на среду распространения радиоволн
(например, многоствольные и аэрозольные гранатометы).
При создании перспективного КПЗ широко используются имею-
щиеся заделы для создания подобных средств для авиации.
К числу новых технологических решений относится также КПЗ,
предназначенный для оповещения экипажа о радиолокационном облу-
чении и постановке помех.
Это все позволяет сделать следующий вывод: для прикрытия своей
бронетанковой техники противник в основном, по видимому, будет ис-
пользовать дополнительно к КГЗ еще и КПЗ.
320
Глава 7. Методы оценки помехозащищенности радиотехнических ...
Радиоэлектронные средства танка могут ставиться разные виды
помех. Работающим в режиме обнаружения (ОП РЛС и РЛС КАЗ) РЭС
могут ставиться шумовые (прицельные и заградительные по частоте) и
импульсные помехи. Импульсные помехи могут использоваться при ра-
диоэлектронном подавлении канала автосопровождения цели и опозна-
вания. Наиболее эффективными являются шумовые помехи.
Прицельные по частоте шумовые помехи с наибольшим эффектом
могут применяться для подавления танковых РЭС, в которых отсутствует
перестройка частоты или разнос частот отдельных РЭС, так как в этом слу-
чае влияние будет оказываться на все однотипные РЭС, входящие в состав
роты танков. В противном случае указанные помехи будут влиять лишь на
те РЭС, несущая частота которых совпадает с частой передатчика СП.
Поскольку по условиям электромагнитной совместимости одно-
типные РЭС из состава роты (взвода) танков должна работать на своей
частоте, то наиболее вероятной помехой для них будет являться загра-
дительная по частоте шумовая помеха.
Энергетический потенциал СП (£), равный произведению мощно-
сти передатчика на коэффициент усиления антенны, оценивался на ос-
нове информационных данных с учетом тактики применения танковых
подразделений обеих сторон.
Уровень помех у антенны РЭС обычно оценивается спектральной
плотностью потока мощности (5П), которая может быть рассчитана по
формуле
Е • 1 0 "(О’1 Лсп
(7-3)
где 7?сп - расстояние между СП и РЭС танка; Efn - ширина спектра по-
мехи; £сп - коэффициент затухания радиоволн при распространении,
дБ/км; Е=РП Gn - энергетический потенциал станции помех; Рп - мощ-
ность передатчика помех; Gn - коэффициент направленного действия
антенны станции помех; L - коэффициент, учитывающий затухание
сигнала помехи в волноводных фактах СП.
В табл. 7.12 приведены значения спектральных плотностей потока
мощности помеховых сигналов, создаваемых СП КГЗ у антенн танко-
вых РЭС, для различных диапазонов радиоволн при взаимном удалении
6,5 и 3 км.
При проведении расчетов учитывалось затухание сигнала помехи в
волноводных фактах СП (Л=5дБ) и на фассе распросфанения в нор-
мальных условиях. Коэффициенты затухания для длин волн 3, 5 и 8 мм
принимались соответственно равными 0,3; 15 и 0,1 дБ/км.
321
Миллиметровая радиолокация: методы обнаружения и наведения ...
Таблица 7.12. Спектральные плотности потока мощности помеховых
сигналов, создаваемых СП КГЗ у антенн танковых РЭС
Расстояние между СП и РЭС, км Спектральные плотности потока мощности помеховых сигналов при длине волны, мм
3 5 8
6 (од-.р-кг6 (2,4...3,2)-10"* (2,2...2,б)-1016 (6,7...8,9)-10“18 (1,1„. 1,3)-10~* (3,2...4,3)-10"8
3 (AS-SJl-lO"6 (1,4... 1,9)-10"7 (1,9...2,2)-1О~10 (5,6...7,4) • 1(Г12 (5,5...6,6)- 10"6 (1,6...2,2)-10'7
Примечанием числителе приведены значения для случая прицельно!
помехи, в знаменателе - для заградительной.
На рис. 7.19 приведены зависимости спектральной плотности потока
мощности помехи у антенны РЭС от взаимного удаления между РЭС тап-
ка и СП КГЗ.
Рис. 7.19. Зависимость спектральной плотности мощности помех
у антенны РЭС от дальности до СП КГЗ
Из приведенных на рис. 7.19 и в табл. 7.12 данных видно, что уровень
помех в 3- и 8-миллиметровых диапазонах примерно одинаковый и в зави-
симости от взаимного удаления между РЭС танка и СП КГЗ может состав-
лять 5- КГ6 Вт/МГц-м2 для прицельной помехи и 2- К)-7 Вт/МГц-м2 для
заградительной помехи при удалении от СП на 3 км. Уровень помех в 5-
миллиметровом диапазоне волн достаточно низкий и вероятность поста-
новки помехи в этом диапазоне мала.
В случае нахождения СП КГЗ в боевых порядках наступающих
танков она должна иметь ширину ДНА, обеспечивающую перекрытие
полосы занимаемой ротой танков и по мере сближения с РЭС соответ-
ственно увеличиваться. Для примера на рис. 7.20 приведена зависимость
322
Глава 7. Методы оценки помехозащищенности радиотехнических...
требуемой ширины ДНА для пе-
рекрытия полосы, равной 800 м,
от взаимного удаления между
центральной РЭС и СП, а на
рис. 7.21 зависимость спектраль-
ной плотности мощности помехи
(Л = 3 и 8 мм) от взаимного уда-
ления для этого случая (сплош-
ная линия). Для сравнения на
этом же рисунке приведена за-
висимость СПМ помехи для
фиксированной ширины ДНА
(штриховая линия). Из рис. 7.19
и 7.20 видно, что уменьшение
коэффициента усиления антен-
ны из-за расширения ДНА при-
водит к снижению энергетиче-
ского потенциала СП примерно
в 10 раз.
При неизменной ДНА СП
по мере приближения к позициям
танков ширина полосы, прикры-
ваемая КГЗ, будет сужаться, и он
практически обеспечит прикры-
тие только самого себя.
Рис. 7.20. Зависимость требуемой
ширины ДНА СП от дальности до РЭС
Рис. 7.21. Зависимость спектральной
плотности мощности помех
у антенны РЭС от дальности до СП КГЗ
Таким образом, из приведенных материалов следует:
при ведении боевых действий противник будет активно применять
средства РЭБ для подавления РЭС танков;
в настоящее время на вооружении вероятного противника отсутст-
вуют средства, которые могут быть использованы для радиоэлектронного
подавления танковых РЭС, работающих в коротковолновой части милли-
метрового диапазона радиоволн (3 и 5 мм), однако уже в ближайшей пер-
спективе они могут быть созданы;
в силу особенностей применения танковых РЭС для их подавления в
перспективе могут использоваться СП, устанавливаемые на специальных
носителях - комплексы групповой защиты, принципиально возможна ус-
тановка станции РТР и СП непосредственно на танке для обеспечения
индивидуальной защиты;
основным видом помех для танковых РЭС будут заградительные по
частоте шумовые помехи;
при ведении РЭП противник может создать у антенн танковых
РЭС, работающих в 3- и 8-миллимитровых диапазонах волн, загради-
323
Миллиметровая радиолокация: методы обнаружения и наведения ...
тельную шумовую помеху со спектральной плотностью потока мощно-
сти 2-10'7 Вт/МГц-м2 и прицельную с плотностью потока мощности
5 • ПУ6 Вт/МГц-м2;
в связи с очень большим затуханием радиоволн 5-миллимитрового
диапазона при распространении (15 дБ/км) эффективная постановка по-
мехи в этом диапазоне практически невозможна.
Анализ возможностей средств РЭБ вероятного противника показан
следующее:
1. При организации РЭБ вероятный противник может использовать
как наземные, так и воздушные средства РТР и РЭП. Средства РТР и
РЭБ будут развертываться на следующих удалениях от ЛСВ :
наземные средства РТР (типа AN/TLQ-22) - до 5 км,
воздушные средства РТР (типа «Квик Лук») - до 30...50 км,
наземные средства РЭП (типа AN/ULQ-14) - 2...7 км,
воздушные средства РЭП (типа AN/ALQ-143) - 5... 15 км при высо-
те полета 60...180 м и 30...40 км при высоте полета 1,5...2 км;
2. Эквивалентная чувствительность приемных устройств может
достигать к 2010г. для наземных средств РТР - 130... 125 дБ/Вт, для воз-
душных средств РТР - 130...110 дБ/Вт;
3. При ведении боевых действий противник будет активно приме-
нять средства РЭБ для подавления РЭС танков, в том числе и обеспечи-
вающих стрельбу осколочно-шрапнельными снарядами с электронным
дистанционно-контактной СПР с установкой времени подрыва по ра-
диокоманде, включающие в себя следующие системы: обзорная РЛС,
РЛС комплекса активной защиты танка, аппаратура опознавания и при-
емный радиоканал снаряда;
4. В настоящее время на вооружении вероятного противника от-
сутствуют средства, которые могут быть использованы для радиоэлек-
тронного подавления танковых РЭС, работающих в коротковолновой
части миллиметрового диапазона радиоволн (3 и 5 мм), однако уже в
ближайшей перспективе они могут быть созданы;
5. В силу особенностей применения танковых РЭС для их подав*
ления в перспективе могут использоваться СП, устанавливаемые на
специальных носителях - комплексы групповой защиты, принципиаль-
но возможна установка станции РТР и СП непосредственно на танке дл<
обеспечения индивидуальной защиты;
6. Основным видом помех для танковых РЭС будут являться за-
градительные по частоте шумовые помехи, при этом противник может
создать у антенн танковых РЭС, работающих в 3- и 8-миллимитровых
диапазонах волн, заградительную шумовую помеху со спектральной
плотностью потока мощности 2-10’7 Вт/МГц-м2 и прицельную - с
плотностью потока мощности 5 • 10‘6 Вт/МГц • м2.
324
Глава 7. Методы оценки помехозащищенности радиотехнических...
7. В связи с большим затуханием радиоволн 5-миллимитрового
диапазона при распространении (15 дБ/км) эффективная постановка по-
мехи РЛС КАЗ в этом диапазоне практически невозможна.
7.5. Оценка помехоустойчивости шумовых
и импульсных РЛС
7.5.1. Система показателей помехозащищенности
Известно, что под помехозащищенностью понимается способность
нормально функционировать (сохранять определенный уровень эффек-
тивности боевого использования) в условиях радиоэлектронного проти-
водействия (РЭП).
В общем случае помехозащищенность РЛС определяется её поме-
хоустойчивостью, скрытностью работы и допустимым снижением эф-
фективности в условиях воздействия преднамеренных и непреднаме-
ренных помех.
Наиболее полно помехозащищенность РЛС характеризуется веро-
ятностью выполнения своих задач в условиях ведения противником ра-
диоэлектронного противодействия, которая определяется следующей
формулой
Р = Р Р + (1-Р )Р ,
где Рт - вероятность воздействия на РЛС специально организованных
помех; Роц и Ро- вероятности успешного решения своих задач РЛС при
условии, что на нее наряду с полезным сигналом воздействуют организо-
ванные и естественные или только естественные помехи соответственно.
Вероятность РД11 характеризует скрытность работы РЛС и эффек-
тивность системы разведки противника, а РО11 и Ро являются основными
количественными показателями помехоустойчивости РЛС при наличии
и отсутствии помех.
Достаточно точное теоретическое исследование работоспособности
действующей или вновь разрабатываемой РЛС в условиях РЭП с помо-
щью приведенной выше формулы часто наталкивается на практически
непреодолимые трудности. Это связано с необходимостью анализа слож-
ной ситуации, например, с учетом характера подстилающей поверхности
и рельефа местности, а также решения чисто радиотехнических задач
прохождения различных, как правило сложных по структуре, сигналов и
помех не только через линейные, но и большое количество нелинейных
преобразователей как с постоянными, так и переменными во времени па-
раметрами. В связи с этим часто для оценки помехозащищенности РЛС
используют частные показатели скрытности и помехоустойчивости, не-
посредственно или косвенно связанные с основными показателями.
325
Миллиметровая радиолокация: методы обнаружения и наведения...
Анализ работ, связанных с методологией оценки эффективности
обзорных РЛС показывает, что наиболее часто в качестве основного по-
казателя помехозащищенности в них используется отношение количе-
ства своевременно разведанных целей за определенный период боевых
действий в условиях РЭП (А„) к количеству разведанных целей при от-
сутствии помех (А):
Данные о характере воздействия помех на такие РЛС показывают,
что в условиях помех в основном снижаются возможности по обнару-
жению целей. Влияние помех на точность определения координат целей
проявляется в значительно меньшей степени.
В общем случае эффективность работы РЛС в условиях РЭБ будет
определяться как скрытностью, так и помехоустойчивостью РЛС. Однако
учесть одновременно оба этих фактора при оценке W достаточно трудно.
Поэтому при оценке помехозащищенности рассматриваемых РЛС пред-
лагается раздельно оценивать скрытность и помехоустойчивость РЛС.
Для примера все оценки проведем для обзорных РЛС, объектами
разведки которых являются наземные цели (РЛС РНЦ).
При этом в качестве показателя скрытности работы РЛС использу-
ем относительную скрытность, численно равную отношению
где 7?б - минимальное расстояние между РЛС и станцией РТР, опреде-
ляемое из тактики применения указанных средств; 7?р- потенциальна!
дальность разведки излучения РЛС соответствующими средствами РТР.
В качестве показателя помехоустойчивости РЛС возьмем относи-
тельную площадь разведки в условиях воздействия помех Sn/S3 в преде-
лах которой сохраняются заданные в ТТЗ характеристики обнаружения
РЛС, где S,, - площадь разведки в условиях помех, S, - площадь развед-
ки, заданная из тактических соображений.
Данный показатель характеризует снижение потенциальных воз-
можностей РЛС по обнаружению элементарных объектов в заданном
секторе при воздействии активных шумовых помех и для случая, когда
все цели равномерно распределены по площади в секторе поиска и на-
ходятся в зоне видимости, достаточно точно отражает снижение эффек-
тивности работы РЛС РНЦ в условиях помех.
7.5.2. Анализ критериев помехозащищенности РЛС
Важной задачей при оценке помехозащищенности РЛС является обос-
нованный выбор критерия оценки, который определяет при каком зна-
чении показателя уровень защиты от РЭП можно считать достаточным.
326
Глава 7. Методы оценки помехозащищенности радиотехнических ...
При оценке скрытности работы РЛС определяется дальность ра-
диотехнической разведки её излучения Rr и расстояния между станцией
РТР и РЛС 7?6. В качестве критерия скрытности в данном случае являет-
ся условие, при котором отношение указанных дальностей RfJRv равно
или больше 1.
При оценке дальности РТР излучения РЛС необходимо учитывать
возможности станции РТР вести разведку по главному, ближнему и
дальнему боковым лепесткам. В случае если РЛС обладает абсолютной
скрытностью, т.е. не разведывается станцией РТР по главному лепестку
ДНА РЛС, то оценку помехоустойчивости такой РЛС проводить неце-
лесообразно.
Более сложно определить нормированные значения для показателя
Sn/Ss, Это обусловлено тем, что взаимосвязь данного показателя с эф-
фективностью работы РЛС неоднозначна, так как в общем случае сни-
жение эффективности работы РЛС может быть непропорционально
снижению площади разведки из-за неравномерного распределения це-
лей и распределения зон видимости по площади.
Однако в силу того, что все оценки сравнительные и проводятся
применительно к обычным РЛС и РЛС с шумовыми широкополосными
сигналами, работающими в одинаковых условиях, можно сформулиро-
вать следующие количественные критерии, позволяющие вынести за-
ключение о помехозащищенности РЛС РНЦ. Критерии формулируются
5
как С > 1 или -°- > a .
7.5.3. Алгоритмы оценки помехозащищенности
и показателя скрытности РЛС
При оценке показателя скрытности в соответствии с типом оцениваемо-
го образца первоначально определяются типы средств РТР, которые мо-
гут вести разведку данной РЛС, и определяются минимально возмож-
ные расстояния между РЛС и станцией РТР
7?б = 7?РТР + 7?РЛС ,
где 7?ргр - минимальное удаление станции РТР /-го типа от ЛСВ; 7?РЛС -
минимальное удаление РЛС от ЛСВ.
Дальность радиотехнической разведки излучения РЛС при извест-
ных характеристиках станции РТР при отсутствии помех можно опре-
делить, воспользовавшись формулой
„ /Л '^РЛС (а, £,)-^рТр/р7рдс Д/ртр
А — I ——— — • 9
N 4/рлс
где Л, - мощность передатчика РЛС; GP;ic(ar,£) - коэффициент усиления
антенны РЛС в направлении на станцию РТР; ЛРТР - параметр станции
327
Миллиметровая радиолокация: методы обнаружения и наведения...
РТР; ур - множитель потерь мощности сигнала РЛС при распростране-
нии от РЛС до станции РТР; т^>лс - множитель потерь мощности на пе-
редачу в РЛС; Д/ртр - полоса пропускания приемника РТР; Д/[>;|С - ши-
рина спектра зондирующего сигнала.
Параметр станции РТР определяегся выражением
GprpA 7ртг/8 Я2
Р
^‘Чпт'шГТГ ПЛ11КВ
где GpTP - коэффициент усиления антенны станции РТР в направлении
на РЛС; Я - длина волны сигнала РЛС; т/ртр - коэффициент потерь мощ-
ности сигнала в приемнике РТР; /п - коэффициент поляризационных
потерь; <7РТР - коэффициент различимости в приемнике РТР; Р,„ртр -
q . р
мощность шумов приемника РТР; Р1кв = ргр шРГР - эквивалентная
СрТр7ртр/п
чувствительность приемника РТР.
Показатель скрытности РЛС определяется как отношение RdRv.
Таким образом, для оценки показателя скрытности РЛС необходи-
мо знание следующих исходных данных:
/?6 - минимально возможное расстояние между станцией РТР и
РЛС; Р„ - мощность излучения РЛС; &’Рлс(аг, е) - коэффициент усиления
антенны РЛС; /р и /рлс - множители потерь мощности сигнала при
распространении и на передачу; Д/ртр и Д/рлс - полоса пропускания при-
емника РТР и ширина спектра зондирующего сигнала РЛС; Р)кв экви-
валентная чувствительность приемника станции РТР.
При расчете относительной площади разведки в условиях помех
воспользуемся общепринятой аппроксимацией, согласно которой ДНА
разбивается на области главного, ближнего и дальних боковых лепест-
ков. Далее зададимся условием, что область ближних боковых лепест-
ков равна ±5Д0 (ДО - ширина ДНА по уровню мощности 0,5); область
главного лепестка равна ДО.
Будем полагать, что ДНА симметрична относительно своего мак-
симального значения, а в приемнике РЛС осуществляется стабилизация
уровня ложных тревог за счет адаптации порогового уровня к уровню
сигнала помехи.
Тогда площадь разведки, в пределах которой обеспечиваются за-
данные в ТТЗ характеристики обнаружения в условиях отсутствия (5тах)
и наличия (Sn) помех будут равны:
ят»Д0/ 2 2 х
‘^тах 360 ' 'тах 'min )
s" = )+1 - R- ) + (” -12)(RL)J,
328
Глава 7. Методы оценки помехозащищенности радиотехнических ...
где Ртах и 7?rnin - максимальная и минимальная дальности действия РЛС;
Рр1, /?Р2 и 7?рз - дальности действия РЛС при воздействии помехи соот-
ветственно по главному, ближнему и дальним боковым лепесткам; п -
целая часть отношения ширины сектора разведки и А0.
Отношение Sn/Smax можно записать в виде:
sn -^) + 10(^2-^п) + (»О2)(/?р23-С)] (74)
Если РЛС имеет дальность действия Ртах больше заданного в ТТЗ
значения Р3, то в качестве показателя помехоустойчивости необходимо
с/С С ^П^&(в2 в2 \
использовать отношение Sn/S-3, где 53 =--1лз -Pmin I.
Чтобы получить выражение для вычисления отношения S„/Ss ум-
ножим числитель и знаменатель левой части выражения (7Л) на множи-
тель S,. Тогда получим
<г S’ V
5 = Дп_= Р™ (7.5)
Р 5, S3 SmM
о / n2 _ n2 X
ГДС ^тах __ x7Vniax \nin /
5, " (RL-K.) '
Подставив в выражение (7.4) выражение Smax/S3 и произведя ряд
алгебраических преобразований, выражение для Sp можно записать в
виде
Л\Л3 ЛШ1пЬ-|
где ^=1, Л2=10, *з=(«-12), м - .
1
Следует учитывать, что при Pp,<Pmin М,=0. Для расчета показателя
Sp необходимо определить значения Яр,. Указанные дальности можно
получить, если определить значения Лр,/Ртах. Отношение Рр,/Лтах харак-
теризует относительное снижение дальности действия РЛС в условиях
помех. Воспользовавшись уравнением радиолокации, можно показать,
что в нашем случае это отношение
А.
gp,
“iiiP.IC
где Рр и Рщрлс - мощности помехи и внутренних шумов на входе прием-
ника РЛС; *Д011 - суммарный коэффициент подавления помехи дополни-
тельными средствами; G, - относительный коэффициент усиления ан-
тенны в направлении постановщика помех; ggl и gp, - множители зату-
329
Миллиметровая радиолокация: методы обнаружения и наведения ...
хания зондирующего сигнала при распространении на максимальную
дальность при воздействии и отсутствии помех; gg/= 10 0 2АЯ"“,
_ . n-O^dzRp,
gPi — io , dz - коэффициент затухания при распространении.
Мощность помехи на входе приемника рассчитывается по формуле:
р _ ^4/pjic-^2gmaJ< (7.6)
р 4л-
где В - спектральная плотность потока мощности помехи у раскрыва
антенны; Д/рдс _ входная полоса пропускания приемника РЛС; X - рабо-
чая длина волны РЛС.
Таким образом, для оценки показателя относительной площади
разведки в условиях помех необходимы следующие исходные данные:
В — спектральная плотность потока мощности помехи у раскрыва
антенны;
Д/рлс - входная полоса пропускания приемника РЛС;
X - рабочая длина волны РЛС;
Gpjic - максимальный коэффициент усиления антенны РЛС;
Д0 - ширина ДПА РЛС в азимутальной плоскости по уровню 0,5;
Q - сектор поиска;
/?тах, 7?min, &> - потенциальная (максимальная), минимальная и за-
данная в ТЗ дальности действия РЛС;
G\, G2, G2 - средние значения коэффициента усиления антенны
РЛС главного, ближнего и дальних боковых лепестков в пределах сек-
тора поиска;
dz - погонное затухание зондирующего сигнала дБ/км;
Ршрлс ~ мощность шума приемника РЛС, приведенная к его входу.
В соответствии с изложенными методиками были проведены рас-
четы показателей скрытности и помехоустойчивости для обычных им-
пульсных РЛС с когерентным накоплением и шумовых РЛС с широко-
полосным зондирующим сигналом одинаковой дальности действия.
Диапазон дальности действия РЛС /?тах принимался равным от 1 до 20
км. Выбор указанного диапазона дальностей обусловлен тем, что ои
включает в себя практически все радиолокационные системы ближнего
действия (активные головки самонаведения, противотанковые и танко-
вые системы) и РЛС разведки наземных целей ближней и малой дально-
сти действия.
Предварительно были рассчитаны требуемые мощности передат-
чиков РЛС. При этом для расчета импульсной мощности передатчика
использовалась формула
330
Глава 7. Методы оценки помехозащищенности радиотехнических ...
где Рши - мощность шумов приемника, приведенная ко входу; кр - ко-
эффициент различимости (минимальное отношение сигнал-шум при ко-
тором обеспечивается заданная вероятность обнаружения); стс=1О м -
эффективная поверхность рассеяния цели; = 0,03 дБ/км; Л = 2 см; /п =
= 0,2 - коэффициент потерь на прием и передачу; ) - число ко-
герентно накапливаемых импульсов в зависимости от дальности
3 • 108
Расчет средней мощности передатчика шумовой РЛС проводился
по этой же формуле, где вместо числа импульсов вводилось значение
базы сигнала, численно равной произведению времени анализа сигнала
7^ 10 мс и ширины спектра зондирующего сигнала Д/рЛС=300 МГц.
Кроме того, если в первом случае коэффициент различимости опреде-
лялся применительно к флуктуирующему сигналу, то применительно к
шумовой РЛС - применительно к нефлуктуирующему сигналу. Указан-
ные отличия вызваны тем, что разрешающая способность по дальности
импульсных РЛС принималась равной 50 м (что выше большинства га-
баритных размеров большинства наземных целей), а шумовых -1м.
Расчет проводился для периода ложной тревоги РЛС, равного
Тлт=900 с и вероятности обнаружения - не менее 0,8. При этом учиты-
валась разница в количестве дальномерных каналов рассматриваемых
РЛС. Вероятность ложной тревоги в каждом дальномерном канале рас-
считывалась по формуле
(п _ у? )
где NR =---——— • 0,5 - число каналов по дальности с максимальным
усилением приемного тракта (при фиксированном пороге) или с мини-
мальным порогом (при фиксированном коэффициенте усиления приемного
тракта РЛС); AR - разрешающая способность РЛС по дальности.
Требуемые коэффициенты различимости определялись на основе
выражений для расчета вероятностей обнаружения для случаев нефлук-
туирующей цели
р = —
онф 2
и флуктуирующей цели
р =Д(1+”-']
*оф ^лт
331
Миллиметровая радиолокация: методы обнаружения и наведения...
Другие параметры, необходимые для расчетов, принимались рав-
ными: Nni=5 - коэффициент шума приемника; Т’-ЗООК - шумовая тепе-
ратура антенны; 1с=\,38-10-23 - постоянная Больцмана
Результаты расчета требуемой мощности передатчика для рас-
сматриваемых РЛС в зависимости от дальности действия приведены на
Рис. 7.22. Зависимости требуемой
мощности передатчиков импульсных
и шумовых РЛС от дальности действия
__________импульсные РЛС м
--------— шумовые РЛС
Рис. 7.23. Зависимость дальности
разведки РЛС средствами РТР от
дальности действия РЛС
км от РЛС, способны обнаруживать по
рис. 7.22. Из рисунка видно, что
средняя мощность импульсных
РЛС примерно в 6 раз (или на 7
дБ) больше, чем средняя мощ-
ность шумовых РЛС, что обу-
словлено в первую очередь тре-
буемыми значениями коэффи-
циента различимости при обна-
ружении флюктуирующего и
нефлюкгуирующего сигнала.
На рис. 7.23 представлены
зависимости дальности развед-
ки РЛС средствами РТР от
дальности действия РЛС при их
разведке по главному, ближним
и дальним боковым лепесткам
ДНА РЛС.
Из рисунка следует, что
при одинаковых дальности дей-
ствия, секторе поиска и скоро-
сти сканирования дальность
разведки импульсных РЛС
средствами РТР существенно
больше, чем шумовых РЛС.
Так, в нашем случае импульс-
ная РЛС с дальностью действия
5 км обнаруживается средства-
ми РТР, удаленными от нее на
30 км, даже по дальним боко-
вым лепесткам. Средства РТР,
расположенные на удалении 5
дальним боковым лепесткам им-
пульсные РЛС с дальностью действия 2 км.
При удалении на 30 км от шумовых РЛС средства РТР обнаружи-
вают их по главному лепестку, если дальность действия последних пре-
вышает 6 км, по ближним - если дальность действия превышает 16 км и
по дальним - если дальность действия больше 25 км. При удалении
332
Глава 7. Методы оценки помехозащищенности радиотехнических ...
средств РТР на 5 км от шумовых РЛС, аналогичные значения соответст-
венно составляют 2,8; 8,3 и 16 км.
Следует отметить, что для определения координат позиции РЛС не-
обходимо обнаружить ее сигнал и идентифицировать его как минимум
хотя бы с двух направлений. При этом, для идентификации сигнала РЛС
после его обнаружения или одновременно определяют параметры сигнала
(длину волны, частоту повторения, длительность импульса или ширину
его спектра). 11ри обнаружении импульсных РЛС у средств РТР проблем
не возникает.
Что же касается шумовых РЛС, то при их обнаружении по главно-
му или ближним боковым лепесткам, реализации принятых каждым из
постов РТР сигналов будут некоррелированны между собой, что прак-
тически исключает возможность их идентификации на фоне шумов
приемника РТР даже в дуэльной ситуации.
Для примера в табл. 7.14 приведены значения показателя скрытности
для импульсной и шумовой РЛС с дальностью действия 15 км. Из таблицы
видно, что при удалении средств РТР от РЛС на 5...30 км шумовая РЛС не
обнаруживается ими по дальним лепесткам ДНА. Импульсная РЛС обна-
руживается указанными средствами РТР во всех случаях.
Таблица 7.14. Показатели скрытности для импульсной и шумовой РЛС
Тип лепестка ДН Значения показателя скрытности С
Шумовая РЛС Импульсная РЛС
Ярлс-ртр-5к.м ^рлс-рт р~ 3 0км ЯрЛС-РТР^КМ /?рлс-ртр~3 0км
Главный лепесток 0,012 0,072 3,4-10 5 2,02-10 4
Ближний лепесток 0,215 1,287 6-10 4 3,6-10 ’
Дальний лепесток 1,206 7,238 3,4-10'’ 0,02
Рис. 7.24. Зависимости дальности действия РЛС от угла отклонения
ДНА РЛС от направления на станцию помех
333
Миллиметровая радиолокация: методы обнаружения и наведения...
Для сравнения помехоустойчивости рассматриваемых РЛС были рас*
считаны относительные площади разведки двух РЛС (импульсной и шумо-
вой) с дальностью действия 15 км, при воздействии активных помех с оди-
наковой мощностью на входе. При этом предполагалось, что станция помех
находится в центре сектора разведки на удалении 30 км от РЛС.
При расчете принималось, что энергетический потенциал станция
помех равен 105 Вт, коэффициент усиления - 1000.
Полученные значения относительной площади разведки состави-
ли: для импульсной РЛС - 0,168; для шумовой РЛС 0,589.
Из полученного результата видно, что по эффективности работы
условиях помех шумовая РЛС примерно в 3,5 раза превосходит им-
пульсную РЛС. Для наглядности на рис. 7.24 приведены графики даль-
ности действия рассматриваемых РЛС в зависимости от угла отклоне-
ния ДНА РЛС от направления на станцию помех.
334
ГЛАВА 8
Методы снижения радиолокационной
заметности объектов
8.1. Анализ основных направлений по снижению
радиолокационной заметности перспективных целей
Основной задачей данной главы является рассмотрение одной из важ-
нейших проблем, решаемых в настоящее время в радиолокации - это
обнаружение, распознавание и классификация слабо отражающих (или
малозаметных) объектов.
Сейчас поглощающие покрытия, известные под общим названием
“Стеле” (“Stealth”), находят применение не только в авиации, но в сред-
ствах воздушного нападения (СВН), в наземных образцах ВВТ (танки,
бронетранспортеры, морские военные корабли и т.п.) [1-7] поскольку
снижение заметности объектов является одним из основных способов
противодействия системам разведки и нападения противника.
Проблема снижения радиолокационной заметности обнаруживае-
мых объектов в условиях их применения образует центр сосредоточения
научных, конструктивных и технологических проблем. При этом к ус-
ловиям применения защиты относятся и различные средства создания
активных и пассивных помех, фоновые мешающие образования естест-
венного и антропогенного характера.
Термин “радиолокационная заметность” в настоящее время стано-
вится одним из основных параметров, характеризующих уровень осна-
щенности и боевых качеств современных, в основном, объектов воен-
ной техники (ОВТ) и определяется относительной величиной вторично-
го излучения объекта при его зондировании современными радиолока-
ционными средствами обнаружения и сопровождения.
Основными направлениями обеспечения снижения заметности
ОВТ (противодействия их обнаружению и распознаванию) на ближай-
шую перспективу остаются конструктивные меры (активные и пассив-
ные методы) и применение специальных поглощающих покрытий, ко-
торые обязательно обосновываются при разработке каждого конкретно-
го проектируемого образца.
Активные методы создания помех (противодействия) включают:
постановку маскирующих шумовых помех, имитацию большой ЭПР ма-
лоразмерными целями, имитацию спектральных характеристик реальных
целей, имитацию временной структуры радиолокационных портретов ре-
335
Миллиметровая радиолокация: методы обнаружения и наведения ...
альных целей и комплексную имитацию излучений (ИК, оптического, ра-
диолокационного). Имитация спектральных характеристик реальных це-
лей может включать имитацию различных летательных аппаратов или
имитацию гидрометеообразований и турбулентных неоднородностей ат-
мосферы. Активные методы применяются в условиях РЭП.
Пассивные методы создания помех (противодействия) включаю!:
постановку маскирующих помех (дипольные отражатели), уменьшение
ЭПР целей и искажение диаграммы обратного вторичного излучении
целей. Уменьшение ЭПР целей производится путем выбора соответст-
вующей формы цели, путем применения слабо отражающих компози-
ционных материалов и поглощающих покрытий.
Заметность летательных аппаратов в радиолокационном диапазоне
в настоящее время является одним из главных факторов, влияющих на
их живучесть. В частности, уменьшение уровня радиолокационной за-
метности истребителя ведёт к снижению дальности его обнаружения
радиолокационными станциями наземных средств ПВО и самолётов
противника, а в сочетании с применением активных и пассивных систем
радиоэлектронного противодействия (станций помех и устройств вы*1
броса дипольных отражателей) может сделать его практически невидим
мым для радиолокационных станций и радиолокационных головок са-
монаведения ракет.
Уровень вторичного излучения и связанная с ним основная радио-
локационная характеристика - ЭПР определяют основной показатель ра-
диолокационной заметности, который находится у современных самолё-
тов - истребителей в пределах 5... 15 м2, у истребителей 5-го поколения
она может снизиться почти на порядок и достичь 0,5...3 м2. Основным
направлением снижения ЭПР считается придание летательному аппарату
специальных форм, обеспечивающих переотражение и рассеивание й
пространстве электромагнитных волн, генерируемых облучающей РЛС,
применение специальных радиопоглощающих покрытий, широкое ис-
пользование композиционных материалов, экранирование радиолокаци-
онно-контрастных элементов конструкции самолёта и его вооружения.
Последние касаются таких «заметных» агрегатов, как компрессоры реак-
тивных двигателей, ракеты на внешней подвеске, антенны бортовых ра-
диолокационных станций; при облучении самолёта из передней полусфе-
ры они дают наибольший вклад в его ЭПР. На перспективных боевых са-
молётах двигатели будут «прятать» за искривлёнными каналами воздухо-
заборников, а вооружение - во внутрифюзеляжных отсеках, причём
внутренняя подвеска ракет и бомб, бывшая ранее прерогативой бомбар-
дировщиков, теперь найдёт применение и на истребителях.
Одним из первых самолётов, который воплотит все достижения в
области снижения радиолокационной заметности, оптимизации летных
336
Глава 8. Методы снижения радиолокационной заметности объектов...
качеств и мощного вооружения, должен стать американский перспек-
тивный тактический истребитель F-22 «Raptor» (рис.8.1), создаваемый
по программе ATF (Advanced Tactical Fighter) [8-15].
Рис. 8.1. Перспективный истребитель F-22 - «Raptor»
Отправными моментами в концепции самолёта F-22 являются ма-
лозаметность (технология Stealth), возможность выполнения крейсер-
ского полёта на сверхзвуковой скорости на бесфорсажпом режиме рабо-
ты двигателя и элементы технологии сверхманевренности за счет от-
клонения вектора тяги силовой установки. Весь запас топлива и штат-
ный комплект вооружения (управляемые ракеты класса «воздух-воздух»
AIM-9 «Сайдуиндер» и AIM-120A/C AMRAAM, а так же встроенная
пушка М61А-2 «Вулкан») для уменьшения аэродинамического сопро-
тивления и снижения радиолокационной заметности размещаются во
внутрифюзеляжных отсеках самолёта. На самолёте применяется много-
функциональная радиолокационная станция AN/APG-77 с ФАР. Серий-
ные истребители будут несколько отличаться от демонстрационных YF-
22: при сохранении площади крыла и горизонтального оперения их
форма немного изменится (размах крыла возрастёт на 450 мм, а угол
стреловидности по передней кромке уменьшится с 48 до 42°.); площадь
вертикального оперения сократится на 18%, а длина и высота самолёта -
соответственно на 640 и 360 мм.
К числу перспективных летательных аппаратов относятся мало-
размерные беспилотные летательные аппараты (БЛА), к которым следу-
ет отнести мини БЛА «Стриж-М". Конструкция БЛА выполнена из ком-
позиционных материалов и обеспечивает многократное применение
БЛА при низкой стоимости изготовления. Низкая акустическая, визу-
337
Миллиметровая радиолокация: методы обнаружения и наведения...
альная, тепловая и радиолокационная заметность обеспечивает возмож-
ность скрытного применения.
Однако следует особо отметить, что проблема снижения РЛЗ ста*
новится актуальной не только для аэродинамических целей. Так, в част-
ности, все последние разработки Ярославского судостроительного заво-
да спроектированы на основе технологии Stealth. Достижение малой ра-
диолокационной заметности удается добиться за счет нетрадиционной
конструкции корпуса кораблей. Такие корпуса уже имеют находящиеся
в разработке ударный корабль "Беркут" (водоизмещение 650 тонн, ско-
рость хода 40 узлов), патрульные корабли "Коршун" (водоизмещение
650 тонн, скорость хода 30 узлов) и "Стерегущий» (водоизмещение 435
тонн, скорость хода 32 узла). Малая радиолокационная заметность но-
вых кораблей подтверждена в ходе многочисленных модельных испы-
таний и практической эксплуатации на Черном море экспериментально-
го катера "Сокол", созданного с учетом упомянутой технологии. К чис-
лу наиболее перспективных зарубежных разработок следует отнести се-
рию многоцелевых корветов типа «Висбю» (Швеция), выполненных по
программе YS-2000.
В процессе конструирования и постройки корабля были макси-
мально использованы новейшие технологии с целью снижения радио-
локационной, акустической, визуальной и инфракрасной заметности,
снижения собственных физических нолей корабля, а также уменьшения
возможности обнаружения корабля с помощью лазерных средств, ПО
кильватерному следу и гидростатическому давлению. В целом, по рас-
четам специалистов, корвет типа «Висбю» может быть обнаружен кора-
бельными радиолокационными средствами при волнении моря 2-3 бал-
ла с дистанции до 7 миль, а при штиле - до 12 миль. В случае постанов-
ки корветом помех дальность обнаружения сокращается до 4,3 и 6 миль
соответственно.
8.2. Анализ современных систем противодействия
радиолокационному обнаружению
В научно-технической литературе за последние годы много внимания
уделяется методам активного и пассивного противодействия радиоло-
кационному распознаванию. Особое внимание уделяется анализу тон-
кой структуры сигнала, его спектру флуктуаций ЭПР с ракурсом целей,
поляризационных характерно гик и т.д.
В [16] исследуются характеристики рассеяния и излучения антенн
при диэлектрическом покрытии с металлическими включениями. Уста-
новлено, что ЭПР антенн ракет и управляемых снарядов с диэлектриче-
ским теплозащитным покрытием уменьшается в ближней зоне при внесе-
нии в него металлических включений различной формы. Численными ме-
338
Глава 8. Методы снижения радиолокационной заметности объектов...
тодами решена система уравнений для наведенных токов на поверхности
этих включений. Показано, что при расширении диаграммы направленно-
сти антенны на 3-5° по половинной мощности ЭПР падает на 10 дБ.
Для снижения ЭПР используются специальные поглощающие ма-
териалы. Массивные и громоздкие традиционные поглощающие мате-
риалы неудобны для уменьшения радиолокационных отражений от
объектов на низких частотах (в М- и ДМ-диапазонах). Наиболее эффек-
тивен метод уменьшения отражений с помощью импедансной линии
или струны, который представляет собой двухмерную версию одномер-
ного экрана Salisbry [17]. Характеристики струны как средства подавле-
ния радиолокационных отражений от тел элементарной формы исследо-
ваны методом моментов. Исследования показали, что оптимальное рас-
стояние между струной и телом всегда меньше расстояния, требуемого
одномерным экраном. Можно получить эффективное подавление отра-
жений в рабочей полосе частот 80%.
В [18] представлена интерпретация, составленная с помощью по-
лей поляризации и намагничивания в виде идеально согласованного
слоя Berenger’a интерпретации радиопоглощающего материала, удовле-
творяющего уравнениям Максвелла. Таким материалом является пас-
сивная электромагнитная среда с потерями, отличающаяся высокой
проводимостью и характеристиками рассеяния Дебая. Отмечается, что в
условиях физической нереализуемое™ среды со свойствами идеально
согласованного слоя предложенная интерпретация позволяет опреде-
лять необходимые характеристики радиопоглотителя с идеальными по-
глощающими свойствами. Разбирается пример проектирования подоб-
ного широкополосного поглотителя с коэффициентом поглощения им-
пульсной электромагнитной волны 70... 110 дБ в широком диапазоне
углов её падения.
В [19] проведено исследование возможностей применения анало-
говых цепей для формирования структуры поглощающих материалов,
используемых для улучшения характеристик отражения при воздейст-
вии плоской падающей волны с Е-поляризацией. Показано, что включе-
ние индуктивной сетки в материал поглощающего покрытия сущест-
венно увеличивает входной импеданс поглотителя. Приведена методика
выбора параметров индуктивной сетки. Получен образец спроектиро-
ванного покрытия, подтверждающий возможность улучшения парамет-
ров поглощения.
В [20] описываются свойства и принципы конструирования двух
новых видов поглощающих материалов и структур для радиодиапазона
электромагнитных волн: пирамидальные структуры поглощения ТМ се-
рии и плоские поглощающие структуры типа FP и Emfader. В настоящее
время имеются в наличии поглощающие материалы и структуры для
339
Миллиметровая радиолокация: методы обнаружения и наведения...
всего практически используемого диапазона радиоволн от частот по-
рядка мегагерц до миллиметровых волн. Приводятся данные о свойст-
вах поглощающих материалов в зависимости от степени наполнения
материала ферритовыми или углеродными элементами. Показана зави-
симость коэффициента поглощения от угла падения радиоволн на ту
или иную структуру и также от частоты облучающего электромагнитно-
го колебания.
В [21] предполагается способ нанесения на стенки объектов за-
щитного радиопоглощающего покрытия, представляющего собой ме-
таллическую пленку толщиной от 5 до 1000 мкм. Способ эффективен
для радиоволн длиной от 0,8 до 1000 мм. Предлагаются различные ва-
рианты нанесения этого покрытия: напыление, наклейка металлизиро-
ванных пленок и т. д. В отличие от аналогов способ обеспечивает ми-
нимальный уровень отражений СВЧ-излучения от покрытия из-за по-
глощения радиоволн.
В [22] рассмотрена конструкция широкополосного СВЧ-
поглотителя. Поглотитель состоит из набора полосок из индуктивного
поглощающего материала. Полоски содержат магнитные частицы, свя-
занные органическим веществом (смола). Ширина, толщина и компози-
ция полосок выбрана таким образом, что каждая полоска поглощает оп-
ределенный участок спектра. Полоски размещены в суппорте, в котором
имеется ряд канавок с различной глубиной и шириной. Крепящий по-
глощающую структуру торцевой лист прозрачен для СВЧ-энергии.
В [23] получена новая форма дисперсионного соотношения для ко-
эффициента отражения от расположенной на металлической подложке
магнитодиэлектрической многослойной структуры, связывающего ин-
теграл от логарифма коэффициента отражения по длине волны в преде-
лах от нуля до бесконечности с общей толщиной структуры и ее усред-
ненной статической магнитной проницаемостью. Из полученного соот-
ношения выведено ограничение, связывающее ширину рабочего диапа-
зона и толщину радиопоглощающих покрытий.
Работы но снижению ЭПР в настоящее время ведутся очень интен-
сивно. Подтверждением к сказанному могут служить литературные ис-
точники, опубликованные за последние несколько лет. Наиболее инте-
ресными являются работы, приведенные ниже.
По заданию ВВС США были проанализированы перспективы раз-
вития самолетов с точки зрения их оснащения новейшими технически-
ми достижениями [24]. Основными направлениями такого развития яв-
ляются создание малозаметных самолетов новейшего поколения с мощ-
ным СВЧ и лазерным оружием, а также использование беспилотных ап-
паратов с уменьшенными на 25% ЭПР, что приведет к снижению веро-
ятности их обнаружения. Внедрение новейших технических достиже-
340
Глава 8. Методы снижения радиолокационной заметности объектов...
ний облегчает также работу пилота, который может в полете пользо-
ваться системой дистанционного управления.
В [25] сообщается о выполнении в КНР разработок многоцелевого
истребителя с покрытиями типа "Стеле". Окончательный вариант дол-
жен быть принят на вооружение к 2015 г. Кроме того, в КНР разрабаты-
вается локатор для наведения на цель ракет класса "воздух-воздух", ис-
требителя FC-1, истребителя F-7MG (предназначенного для экспорта) и
перехватчика типа F-8IIM. В настоящее время на вооружении ВВС КНР
имеется около 4 тыс. истребителей, из которых не более 100 можно счи-
тать вполне современными.
Контроль качества радиолокационной маскировки наземных объек-
тов чаще всего проводится с помощью специальных портативных прибо-
ров. В [26] перечислены причины, диктующие необходимость контроля
качества маскировки в радиолокационном диапазоне. К параметрам, оп-
ределяемым в процессе контроля, относятся среднее значение интщраль-
ной эффективной поверхности рассеяния объекта, эффективная поверх-
ность рассеяния локальных участков, среднее значение эффективной по-
верхности рассеяния фона. Предложены способы измерения названных
параметров непосредственно в местах дислокации объектов.
Необходимо отметить, что не все обнаруживаемые объекты явля-
ются “невидимками” за счет используемых современных методов и
средств противодействия распознаванию. Например, существует аппа-
ратура, с помощью которой обнаруживаются “невидимки”, - это радар-
ная система “Тамара” [27].
В этом направлении ведутся работы и сейчас, и очевидно, что го-
ворить о полной невидимости объектов сейчас преждевременно.
8.3. Конструктивные меры по противодействию
эффективному обнаружению и распознаванию объектов
Под термином “конструктивные меры” понимается совокупность меро-
приятий (методов и технических способов), обеспечивающих:
уменьшение величины ЭПР объектов техники путем выбора их
формы, исключающей наличие “блестящих точек”, которые образуются
стыками, острыми кромками, уголковыми отражателями и большими
участками малой кривизны;
противодействие уверенному обнаружению и распознаванию объ-
ектов путем имитации больших ложных (в т.ч. и “отводящих”) ЭПР с
помощью пассивных отражателей и активных излучателей (СВЧ-
генераторов).
Объекты военной техники представляют собой большое разнооб-
разие вооружения воздушного, морского и наземного базирования и
имеют самые разнообразные геометрические формы. Проблема конст-
341
Миллиметровая радиолокация: методы обнаружения и наведения...
руирования ОВТ требуемой формы с малым значением ЭПР для каждо-
го образца является достаточно сложной и требует разработки в каждом
конкретном случае индивидуальных технологий.
8.3.1. Уменьшение величины ЭПР объектов путем
выбора их формы и размеров
Исследования по снижению заметности обнаруживаемых объектов на
ближайшее будущее сконцентрированы в рамках следующих основных
направлений.
1. Оптимизация формы объекта и отдельных его элементов. Это
обеспечивает наибольшее рассеяние падающей волны в направлениях,
отличных от направления локации. При этом основными задачами яв-
ляются:
уменьшение количества участков внешней поверхности элементов,
у которых нормаль к поверхности или к линии излома совпадает с на-
правлением локации, что достигается путем замены участков двойной
кривизны на конические, цилиндрические и плоские поверхности и от-
клонения нормалей к ним;
выбор схемы компоновки элементов и узлов, исключающих
ретрансляцию волн через поверхности соседних элементов;
исключение взаимной перпендикулярности и острых углов распо-
ложения относительно друг друга цилиндрических и плоских поверхно-
стей различных элементов;
ориентация в одном направлении нормалей к плоским и цилинд-
рическим поверхностям, если невозможно отклонить их за пределы сек-
тора локации;
сглаживание изломов поверхностей и стыков элементов, исключе-
ние выступов, углублений, щелей.
исключение взаимной параллельности противоположных стенок
полостей путем изменения формы сечения и изгиба канала вдоль оси.
2. Экранирование в направлении локации сильно отражающих
элементов объекта.Оно достигается размещением на пути распростра-
нения волны слабо отражающего в обратном направлении устройства,
снижающего напряженность падающего поля у сильно отражающего
элемента объекта.
Экраны подразделяются на рассеивающие, поглощающие и преоб-
разующие спектр зондирующего сигнала. Рассеивающие экраны пред-
ставляют собой металлические устройства, переизлучающие падающее
поле в направлениях, отличных от направления локации.
Эффективность экранировки зависит от размеров и формы экрана
и объекта, расстояния между ними и от величины переотражения от
объекта. В качестве таких экранов наиболее часто используются:
специальные щитки с определенных направлений локации;
342
Глава 8. Методы снижения радиолокационной заметности объектов...
узкополосный металло-диэлектрический обтекатель для экрани-
ровки антенн;
токопроводящее стекло перед объективами фоторегистрирующей
и телевизионной аппаратуры;
металлические сетки;
линейная решетка для экранировки зеркальных антенн бортовых
РЛС от сигналов с другой поляризацией.
3. Поиск эффективных методов кратковременного или периоди-
ческого изменения величины ЭПР сильно отражающего элемента (мо-
дуляция во времени). Такие методы используются для периодического
снижения ЭПР во времени ряда элементов, обнаруживаемых объектами,
функционирование которых допускает возможность их перевода в не-
рабочее состояние в отдельные промежутки времени (бортовые антен-
ны, фотообъективы и т.д.). Характер и время модуляции осуществляется
с учетом требований функционирования прикрываемых элементов пу-
тем изменения положения этих элементов, установки временных зате-
няющих экранов и изменения электрических характеристик устройства.
Например, для летательных аппаратов это может быть достигнуто пу-
тем уменьшения ЭПР штыревой антенны или путем размещения ее
внутри слабо отражающего отсека или изменения ориентации поверх-
ности отсека в нерабочее время.
Зарубежные военные специалисты считают, что внутренняя струк-
тура объектов, например, корпуса и крыльев ЛА, разрабатываемых по
программе «Стеле» должна проектироваться по принципу, аналогично-
му “безэховым камерам”. При этом сами покрытия элементов крыла и
фюзеляжа изготовляются из композиционных материалов.
Таким образом, одним из путей решения проблемы снижения ЭПР
на перспективу может быть разработка ОВТ в виде особой формы с
“обтекающими” углами и кромками стыков. Осуществление такого ре-
шения в каждом конкретном случае должно проводиться по индивиду-
альной технологии.
8.3.2. Противодействие уверенному обнаружению
и распознаванию объектов путем имитации ложных
пассивных и активных излучателей
Противодействие уверенному обнаружению и распознаванию ОВТ, как
правило, достигается путем имитации ложных (в т.ч. и “отводящих”)
ЭПР с помощью пассивных отражателей и активных излучателей (СВЧ-
генераторов) [6].
Другими направлениями, связанными с имитацией больших зна-
чений “ложных” ЭПР, значительно превышающих величины ЭПР обна-
руживаемых объектов и также относящихся к конструктивным мерам,
343
Миллиметровая радиолокация: методы обнаружения и наведения ...
которые могут войти в разряд фундаментальных и поисковых исследо-
ваний на перспективу, будут:
исследование методов получения с помощью ложных малоразмер-
ных целей, ЭПР значительно превышающей уровень ЭПР реальных
объектов (имитация “большой” ЭПР);
разработка и исследование способов имитации спектральных ха-
рактеристик реальных объектов;
исследование возможностей и эффективности имитации ложных
целей естественного происхождения;
разработка и исследование имитация комбинированных ложных
целей (оптических и пассивных радиолокационных).
На примерах последних публикациях научно-технических источ-
ников коротко остановимся на каждом из названных направлений.
1. Имитация “большой" ЭПР малоразмерными ложными целями.
Прежде всего необходимо отметить, что в радиолокации, использующей
рабочие частоты ниже 1 ГГц, при имитации реальных целей больших
размеров (самолеты, корабли) малоразмерными “ложными” целями
(ЛЦ), например, такими широко используемыми пассивными средства-
ми, как уголковые отражатели, последние должны иметь также большие
размеры, что в значительной мере О1раничивает их применение.
Поэтому для имитации крупноразмерных целей в радиолокации в
области частот 50... 1000 МГц предполагается применение активных
средств имитации, т.е. передатчиков ответных помех с сигналами, по-
добными отражаемым от реальных целей.
В качестве ЛЦ для имитации объектов с большой ЭПР (кораблей) в
[38] предложено устройство, которое конструктивно представляет собой
летательный аппарат - синтетический баллон из майлара, заполненный
легким газом. На его поверхности равномерно расположены дипольные от-
ражатели по типу антенной решетки Ван-Атта. Они выполнены в виде пе-
чатных схем и соединены кабелями связи. Подобная ЛЦ вследствие своей
цилиндрической формы является всенаправленной. За счет ортогонального
расположения диполей не создается помеха между самими диполями.
Достоинством такой ЛЦ по сравнению с обычными пачками ди-
польных отражателей является также то, что время ее развертывания
гораздо меньше времени разлета облака диполей.
Известны и другие конструкции, например, надувные резиновые
армированные стеклотканью ЛЦ в форме головной части баллистиче-
ской ракеты, на которых для увеличения ЭПР установлены коронооб-
разные отражатели из медной проволоки [39], а также устройство для
создания ЛЦ, уводящих по дальности [30].
2. Имитация спектральных харакргеристик реальных целей. В каче-
стве цели, имитирующей большую ЭПР, которая изменяется в полете по
344
Глава 8. Методы снижения радиолокационной заметности объектов...
закону, близкому к реальному, предлагается использовать специальную
ЛЦ [31]. Для ее запуска применяется дистанционно пилотируемый лета-
тельный аппарат-носитель (ДИЛАН), состоящий из нескольких ложных
радиолокационных целей. В исходном состоянии ЛЦ на ДПЛАН укрыты
съемными радиопоглощающими кожухами, которые удаляются перед
пуском. Это исключает их преждевременное обнаружение. На хвосте ЛЦ
устанавливаются направляющие стабилизаторы со скошенными плоско-
стями, которые обеспечивают ее продольное вращение вокруг оси для
изменения ЭПР в полете. Внутри ЛЦ расположены крестообразные угол-
ковые отражатели из алюминия, которые ограничены в продольном на-
правлении поперечными круглыми дисками. Вращение таких отражате-
лей обеспечивает изменение величины ЭПР во время полета ЛЦ.
В [32] предложена пассивная ЛЦ в виде ракеты для имитации бом-
бардировщика, которая движется со скоростью бомбардировщика. Она
имитирует: рысканья, вращения, линейные продольные размеры имити-
руемого бомбардировщика.
В [33] дано описание ЛЦ с рулевыми и несущими винтами, букси-
руемой вертолетом с помощью троса. Цилиндрический корпус обычно
выполняется из армированного пенопласта, покрытого стекловолокном.
В результате отражения от корпуса очень малы по сравнению с отраже-
ниями от винтов.
Применение беспилотных дистанционно-пилотируемых ЛА
(ДПЛА) в качестве ЛЦ, имитирующих средства постановки помех, про-
тиворадиолокациопные ракеты и другие реальные воздушные цели, по-
зволит, по мнению зарубежных специалистов, противодействовать ра-
диолокационному распознаванию и отвлечь значительную часть актив-
ных средств ПВО для борьбы с ЛЦ. Это подтвердил опыт войн на
Ближнем Востоке, Южной Атлантике и на Балканах [34].
Для имитации таких целей, как бомбардировщики, Moiyr использо-
ваться специальные беспилотные ЛЦ дальнего и ближнего радиуса дейст-
вия. По мнению зарубежных специалистов, требуется 3-5 ложных целей-
ловушек, имитирующих бомбардировщик. Такое количество ЛЦ вынужда-
ет рассредоточивать истреби тели-перехватчики вдоль рубежа перехвата.
Анализа данных современной научно-технической литературы по-
казывает, что ЛЦ могут иметь различные модификации и большинство
из них является малоскоростными (скорость вертолета).
Находят также применение ЛЦ, имитирующие сигналы, отраженные
от гидрометеообразований и турбулентных неоднородностей атмосферы.
3. Имитация ложных целей естественного происхождения. По
мнению иностранных специалистов спектр сигналов ЛЦ естественного
происхождения (отражения от земной поверхности, гидрометеообразо-
ваний, «ангелов», птиц) находится в диапазоне частот AF=0...500 Гц.
345
Миллиметровая радиолокация: методы обнаружения и наведения ...
В [35] дана структурная схема генератора радиолокационных це-
лей естественного происхождения (рис. 8.2).
Выход на антенну
Рис. 8.2. Структурная схема генератора радиолокационных
объектов естественного происхождения
Генератор шума формирует шум в диапазоне от “нулевой” частоты
до нескольких мегагерц. С выхода фильтра низких частот с полосой
пропускания М7 сигнал поступает на усилитель низкой частоты УНЧ с
регулируемым коэффициентом усиления. При этом коэффициент уси-
ления УНЧ подбирается в соответствии с результатами визуального
контроля спектра шума но анализатору спектра, подключенного с выхо-
да усилителя мощности на ЛБВ. Иа второй вход ЛБВ поступает СВЧ-
сигнал, который модулируется по частоте так, чтобы на выходе ЛБВ
имитировались сигналы ЛЦ естественного происхождения. Предполага-
ется использовать данное устройство для срыва наведения ракет. Из-
вестно аналогичное устройство, отличающееся тем, что через ФНЧ-2
пропускаются только частоты в диапазоне AF = 0...5 кГц, создавая
спектр, плотность распределения спектральных составляющих которого
изменяется но случайному закону.
В [34,36] описаны устройства для имитации реальных отражатель-
ных сигналов, имитирующие сигналы от атмосферных осадков.
4. Комбинированная ложная цель (оптическая и пассивная радио-
локационная). Известны комбинированные ЛЦ, содержащие, в частно-
сти, источник видимого света для противодействия оптическим систе-
мам обнаружения и распознавания и металлический светопрозрачный
отражатель для радиолокационной имитации цели - противодействия
радиолокационным системам [37]. Радиолокационный отражатель вы-
полнен из проволочной сетки с плотностью восемь ячеек на 2,54 см2,
т.е. с размерами ячеек 0,1 X. Величина ЭПР отражателя
<т = 4я(а2)2 /Зд2,
где а - размер ребра тетраэдра радиолокационного отражателя; д - дли-
на волны РЛС.
346
Глава 8. Методы снижения радиолокационной заметности объектов...
Ширина главного лепестка диаграммы обратного вторичного излуче-
ния отражателя как в вертикальной, так и в горизонтальной плоскостях со-
ставляет ± 20°. Вместо пассивного излучателя в подобной ЛЦ может ис-
пользоваться активный переизлучатель в виде ретранслятора на ЛБВ.
При имитации ИК излучения для более достоверной имитации
бомбардировщика предлагается использовать сжигание топлива для ре-
активных двигателей. Пламя может быть и невидимым, так как оно мо-
жет нагревать поверхность с высокой эмиссионной способностью, на-
пример, нержавеющую сталь.
5. Имитация временной структуры радиолокационных портретов
реальных целей. Один из способов имитации реальных целей предлага-
ется в [38]. Он позволяет имитировать радиолокационные портреты
объектов по дальности для РЛС с широкополосными сигналами, в кото-
рых осуществляется сжатие сигналов по длительности.
На рис. 8.3,а показана структурная схема устройства, реализующе-
го этот способ, на рис. 8.3,6 - вариант размещения нескольких антенн (в
точках А, В, С, D, Е) для имитации заданного контура цели (самолета).
Рис. 8.3. Устройство для имитации радиолокационных портретов реальных
объектов (а), контур имитируемого объекта с антеннами А, В, С, D, Е (б)
347
Миллиметровая радиолокация: методы обнаружения и наведения ...
Зондирующий импульс от РЛС, для которой создается имитируе-
мый радиолокационный портрет, поступает через приемную антенну,
усилитель, устройство 1рубой задержки на устройство точной задержки.
Устройство грубой задержки обеспечивает задержку по времени t, соот-
ветствующую расстоянию R до ближайшей блестящей точки имитируе-
мой цели: t = 2 R/c, где с - скорость распространения электромагнитных
волн. Линия задержки с отводами обеспечивает имитацию остальных
блестящих точек цели. Амплитудная и фазовая модуляции обеспечива-
ются с помощью модулятора, на вторые входы которых через цифроам-
плитудные преобразователи поступают соответствующие управляющие
напряжения из блока эталонов характеристик целей, где записаны коды
радиолокационных дальностных портретов имитируемых целей на всех
ракурсах от 0 до 360°. С выхода модуляторов сигналы, имитирующие
соответствующие блестящие точки, поступают на сумматор и затем с
помощью передающих антенн излучаются в направлении на РЛС.
Считается, что данное устройство позволяет имитировать не только
одномерные, по и двумерные, а также трехмерные радиолокационные
портреты целей. Для этого необходимо иметь на платформе несколько
разнесенных в пространстве антенн (например, в точках А, В, С, D, Е).
Компенсация отраженного от ЛА сигнала может также осуществ-
ляться за счет установки на ЛА активного ретранслятора или специаль-
ного пассивного отражателя, а также соответствующего изменения
структуры поверхности ЛА. Для максимального снижения ЭПР ЛА до-
полнительный отраженный сигнал должен быть равен по амплитуде и
противоположен по фазе сигналу, отраженному от ЛА. Метод компен-
сации может использоваться на ЛА с небольшой изрезанностью по-
верхности, размеры которой не больше полуволны. Учитывая трудности
формирования в широком диапазоне углов и частот локации дополни-
тельного компенсирующего сигнала, можно ожидать, что этот метод
найдет применение в целях уменьшения ЭПР в узком секторе углов ло-
кации и узкой полосе частот и преимущественно на длинных волнах. В
качестве дополнительных пассивных отражателей могут использоваться
штыри, канавки, отверстия, ребра, требенчатые кромки и т.д. Надежные
методы проектирования дополнительных отражателей (расчет размеров
и их размещения относительно минимизируемой сильно отражающей
области) в настоящее время отсутствуют.
Таким образом, в области снижения заметности функционирова-
ния радиотехнических систем, целесообразно проводить исследования в
рамках следующих основных направлений:
снижения спектральной плотности мощности сигналов (в перспек-
тиве до уровня ниже уровней шумов);
348
Глава 8. методы снижения радиолокационной заметности объектов...
поиска возможностей применения нетрадиционных форм сигналов
и принципов их излучения;
противодействия радиолокационному зондированию за счет прие-
ма зондирующего сигнала и переизлучения его в виде множества эхо-
сигналов с характеристиками, идентичными объектам с соответствую-
щими признаками: скорость движения, ускорение, направление, эффек-
тивная поверхность рассеяния в различных диапазонах волн и др.
Ожидается, что в перспективе будут развиты технологии, обеспе-
чивающие вышрыш в скрытности радиотехнических систем и их ус-
тойчивости к воздействию современных средств подавления более чем
на 10. ..30 дБ.
8.3.3. Использование радиопоглощающих
материалов
Радиопоглощающие материалы (РПМ) широко применяются в измери-
тельной и контрольной технике, технике связи, радиолокации, медицине
и других областях науки и техники. Во многих областях применений
одним из определяющих требований к РПМ является их широкополос-
ность. Широкое применение РПМ получили для уменьшения радиоло-
кационной заметности объектов военной техники.
В последнее время появились принципиально новые классы мате-
риалов, такие как проводящие полимеры, наноструктурные магнитные
композиты, углеродные нанотрубки, позволяющие добиться заметных
успехов при разработке тонких и легких широкополосных поглотителей
элекзромагни гной энергии. При разработке радиопоглощающих покры-
тий (РПП) их радиотехнические характеристики должны обеспечивать-
ся при условии, что толщина и масса материала минимальны.
Невозможно одновременно снижать оба эти параметра при сохра-
нении рабочего диапазона частот. Если более важной задачей является
снижение массы, то целесообразно использовать материалы с диэлек-
трическими потерями; если же более важным является уменьшение
толщины поглотителя, то предпочтительно использовать материалы с
магнитодиэлекфичсскими потерями.
Для разработки широкополосных РПП с диэлектрическими поте-
рями перспективны однослойные материалы со специальными частот-
ными зависимостями комплексной диэлектрической проницаемости
(для широкополосных покрытий интерференционного типа), а также
многослойные и фадиентные материалы.
Теоретический анализ с использованием модели эффективной сре-
ды, модифицированной для случая наполнителя вытянутой формы [39]
и экспериментальные исследования показали, что при соблюдении ряда
условий необходимыми частотными зависимостями комплексной ди-
электрической проницаемости обладают композиты с элсктропроводя-
349
Миллиметровая радиолокация: методы обнаружения и наведения ...
щими волокнами. В [40] разработаны различные варианты однослойно-
го поглощающего покрытия на основе композитных электропроводя-
щих волокон. Эти волокна представляют собой диэлектрическую осно-
ву с нанесенными на нее последовательно электропроводящим и изоли-
рующим слоями Прочная диэлектрическая основа и наличие изоли-
рующего слоя позволяют сохранить длину волокна в композите.
Ожидается, что при создании РПП перспективным наполнителем
волоконного типа окажутся углеродные наногрубки. Диаметр этих ми-
ниатюрных электропроводящих волокон не превышает нескольких на-
нометров, длина составляет от десятых долей до нескольких микромет-
ров. В зависимости от размеров и структуры их электропроводность
варьируется в широких пределах от 1 до 103 (Ом-см)-1.
В последнее время для создания РПМ все чаще используются прово-
дящие полисопряженные полимеры, такие как полианилин, полипирол и
политиофен. В исходном состоянии эти полимеры не являются проводни-
ками, однако, в результате допирования они приобретают проводимость на
уровне 1...100 (Ом-см) ', а в некоторых случаях - 106 (Ом-см)1. Действи-
тельная часть диэлектрической проницаемости этих материалов в СВЧ об-
ласти меняется в зависимости от степени от нескольких единиц до не-
скольких десятков, а мнимая часть - от ~10-1 до 102. Как следует из анализа
литературы, проводящие полимеры используются в основном в много-
слойных РПП. Однако возможность варьирования частотной зависимости
диэлектрической проницаемости этих материалов дают основание надеять-
ся на создание на их основе широкополосного однослойного интерферен-
ционного экрана. Кроме того, разработаны технологии, позволяющие по-
лучить градиент концентрации проводящего полимера по толщине поли-
мер-полимерной смеси и создать однослойное градиентное РПП.
Номенклатура магнитодиэлектрических РПМ включает однослой-
ные поглотители со специальными законами дисперсии £* и р*, много-
слойные и градиентные поглотители, а также материалы с близкими
значениями г* и /г*, обеспечивающими согласование характеристиче-
ских сопротивлений материала и свободного пространства. Использова-
ние магнитодиэлектрических материалов позволяет уменьшить толщи-
ну широкополосных РПП до 2 мм.
В ряде работ [41, 42] теоретически и экспериментально обоснована
высокая эффективность магнитотекстурованных материалов при разра-
ботке широкополосных РПП. Показана возможность создания на их ос-
нове поглотителей с регулируемой полосой рабочих частот.
К наиболее перспективным следует отнести гранулированные
магнитные материалы, представляющие собой наноструктурный ком-
позит, в котором металлические ферромагнитные наночастицы (грану-
лы нанометрового размера с аморфной или кристаллической структу-
350
Глава 8. Методы снижения радиолокационной заметности объектов...
рой) расположены в диэлектрической матрице [43, 44]. В настоящее
время с помощью различных методов получены гранулированные
структуры на основе кобальта, железа, никеля, аморфных сплавов Со с
добавками Fe, Та, Nb и других металлов, ферритов, диспергированных
как в неорганических средах - А12О3, SiO2, TiO2, так и в органических
матрицах - аморфном гидрогенизированном углероде (а-С:Н), полипа-
раксилилене. Свойства фанулированных нанокомопозитов существен-
но отличаются от свойств традиционных магнитных. В ходе исследова-
ний установлено существенное влияние технологии изготовления на
структуру и свойства гранулированных композитов. Показано, что на их
основе возможно создание магнитных материалов с близкими значе-
ниями р* и е* при величине магнитных потерь, в несколько раз превы-
шающих р" традиционных магнитных материалов. Гранулированные
нанокомпозиты могут быть основой для нового поколения эффективных
широкополосных РПП толщиной порядка миллиметра и даже менее.
Одним из традиционных путей получения широкополосных ПЭВ
является создание многослойных структур. Однако этот метод не по-
лучил распространения в случае наноструктурных магнитных компози-
тов. Это связано с тем, что для таких систем существует критическая
толщина, выше которой происходит уменьшение магнитных потерь
вследствие изменения эффективной .магнитной анизотропии материала.
Таким образом, актуальной является задача сохранения в многослойных
структурах уровня магнитных потерь, характерных для тонких пленок.
В последнее время с целью уменьшения толщины многослойного
ПЭВ в его структуру вводятся частотно-селективные поверхности
(ЧСП) [45]. Использование ЧСП дает возможность управлять эффек-
тивными толщинами поглощающих слоев за счет реализации в структу-
ре ПЭВ процессов дифракции и интерференции электромагнитной вол-
ны [46]. Частотно-селективные поверхности могут быть изготовлены
методом ионно-плазменного напыления металлов, аморфных сплавов
или магнитных нанокомпозитов.
Таким образом, для получения многослойных ПЭВ на основе маг-
нитных наноструктурных композитов и ЧСП в едином технологическом
процессе требуется проведение исследований с целью получения:
магнитных наноструктурных композитов на основе магнитных
аморфных сплавов CoFeB, CoFcZr, CoTaNb, образующих гранулы на-
нометрового размера в диэлектрической матрице SiO2, А12О3, полимер;
частотно-селективных поверхностей в виде двумерных решеток из
проводящих элементов различной формы; многослойных широкополос-
ных ПЭВ на основе указанных выше материалов и структур.
Для проведения указанных работ потребуется решение следующих
задач.
351
Миллиметровая радиолокация: методы обнаружения и наведения ...
1. При разработке магнитных наноструктурных композитов основ-
ными задачами являются увеличение уровня магнитных потерь в СВЧ-
диапазоне и снижение величины диэлектрических СВЧ-иотерь до уров-
ня, сопоставимого с ц". Увеличение магнитных потерь будет осуществ-
ляться за счет увеличения размера ферромагнитных гранул и управле-
ния величиной эффективной магнитной анизотропии композита путем
изменения ориентации вектора спонтанной намагниченности 1ранул.
С целью увеличения размера гранул планируется оптимизация
температурного режима напыления и отжига, напыление и отжиг в маг-
нитном поле, импульсная фотонная обработка.
Для управления величиной эффективной магнитной анизотропии
планируется напыление и отжиг в магнитном поле, напыление тонких
магнитных слоев (1...2 мкм) чередующихся со слоями диэлектрика
(SiO2, А12О3, полимер) или магнитодиэлектрика (ферриты различных
типов). Толщина диэлектрической прослойки будет выбрана достаточно
большой, чтобы исключить магнитное взаимодействие между магнит-
ными слоями, но, вместе с тем, достаточно малой, чтобы свести к ми-
нимуму переогражение электромагнитной волны на границе слоев.
Снижение величины £" до уровня магнитных потерь будет осуществ-
ляться за счет использования при напылении нанокомпозита реактивных
газов и выбора оптимальных режимов температурной обработки.
2. Частотно-селективные поверхности будут изготовлены в виде
двумерной решетки из периодически расположенных проводящих либо
резистивных элементов (островков). В ходе работы будет проведена оп-
тимизация структуры ЧСП (выбор формы, размеров элементов и перио-
да структуры) с целью получения заданных частотных характеристик в
диапазоне от 1 до 40 ГГц и выше. Это позволи т разработать ЧСП, вы-
полняющие в ПЭВ следующие функции:
управление эффективными толщинами слоев в многослойной
структуре с целью лучшего согласования этой структуры со свободным
пространством в широкой полосе часто т;
внесение фазовой коррекции с целью создания условий для эффек-
тивного поглощения энергии в тонких (0,05 длины волны и менее) сло-
ях радиопоглощающих материалов.
3. С учетом результатов исследования частотных зависимостей ди-
электрической и магнитной проницаемост ей магнитных нанокомпози-
тов и частотных характеристик (коэффициентов отражения и прохожде-
ния электромагнитной волны) ЧСП будет проведен поиск глобального
минимума коэффициента отражения многослойных структур в диапазо-
не частот от 2 до 40 ГГц и выше. В качестве варьируемых параметров
будут выступать £*, //*, толщины слоев магнитных нанокомпозитов, а
также форма, размеры элемен тов и период структуры ЧСП.
352
Глава 8. Методы снижения радиолокационной заметности объектов...
На основе проведенных исследований в едином технологическом
процессе методом ионно-плазменного напыления ожидается получить
ульгратонкие многослойные широкополосные ПЭВ со следующими ха-
рактеристиками:
Коэффициент отражения - менее (-10) дБ;
Рабочий диапазон частот - 2.. .40 ГГц;
Толщина ПЭВ - не более 1 мм.
В настоящее время интересным и общепринятым в мировой прак-
тике является путь (метод, способ) разработки и создания РПМ, бази-
рующийся на теоретическом представлении о силовом (лоренцевом)
механизме взаимодействия электрической составляющей электромаг-
нитного поля (ЭМП) со свободными и связанными зарядами вещества
(среды), поглощающего энергию из ЭМП.
Создание спиновых бестоковых радиопоглощающих материалов
(БРПМ) и покрытий на их основе (БРПП), дает возможность решения
двух проблем, связанных с защитой как военных, так и гражданских на-
земных и аэрокосмических объектов от их поражения с применением
высокоточного оружия.
При этом защита объектов будет обеспечиваться за счет создания
всенаправленного (на ±180°) сверхвысокоэффективного уменьшения
заметности объектов на окружающем их фоне (уменьшение на
50...80дБ разностной мощности сигналов, отраженных от объектов и
фона), а также за счет осуществления электромагнитной защиты совре-
менных полупроводниковых элементов радиоэлектроники, применяе-
мых на этих объектах, т.е. от их поражения (вывода из рабочего режи-
ма) мощными мегаваттными и сверхмощными гигаваттными спектрами
импульсных электромагнитных полей.
Указанные проблемы должны решаться одновременно (одним
конструктивным решением) в метровом, сантиметровом, миллиметро-
вом, ПК и оптическом диапазонах электромагнитных волн.
Но этот путь создания радиомаскировки сегодня требует, в первую
очередь, разработки новых теоретических основ, позволяющих перейти
от применения традиционного силового (токового с фазой) механизма
«взаимодействия» ЭМП с нелокализованными в «точках» среды (веще-
ства) параметрами к применению параллельно существующего в приро-
де энергетического (бестокового и бесфазового) механизма взаимодей-
ствия ЭМП со спиновыми («точечными») центрами поглощения и излу-
чения среды [47-50].
Сопоставления отличительных особенностей силового лоренцева (ре-
зистивного, токового с фазой) и квантового энергетического (спинового,
бестокового) механизмов взаимодействия ЭМП со средой приводятся в ра-
ботах профессора Л.К. Михайловского с его коллективом (табл. 8.1).
353
Миллиметровая радиолокация: методы обнаружения и наведения...
Таблица 8.1. Сопоставление отличительных особенностей
силового (с фазой) и энергетического (бесфазового) механизмов
взаимодействия ЭПМ со средой
Лоренцево силовое взаимодействие Квантовое энергетическое (спиновое) взаимодействие
Отличительная особенность модели (теории) Токовое с фазой силовое взаимодействие электриче- ской напряженности ЭМП со свободными зарядами электронов Бестоковое квантовое (энер- гетическое) взаимодействие ЭМП со спинами элекгронов
Электромагнитные свойства сред, по- глощающих энер- гию ЭМП Проводящие среды (не ди- электрики). Отбор энергии из ЭМП проводящей средой описывается законом Ома I2R. Поглощение энергии из ЭМП диэлектриком, напри- мер с tg5 к 4. ..10, принци- пиально невозможно Спиновые среды. Количество поглощенной ими энергии из ЭМП (при ФМР) определяет- ся числом нескомпенсирован- ных спиновых магнитных моментов среды при возмож- ных для среды значениях tg<5« 1ОЛ..1О’В * 10
Математические подходы (модели) к описанию взаимодействия Векторный формализм. Век- торная алгебра и векторный анализ в непрерывном про- странстве и времени (в кон- тинууме) Векторный формализм в не- прерывном пространстве-вре- мени в квантовой теории и в феноменологических уравне- ниях движения вектора намаг- ниченности. Гировекторный формализм в дискретном про- странстве-времени в «точках» суперпространства Уилера
В [49,50] показано, что для разработки и создания новых РПМ на
основе метода квантового механизма энергетического взаимодействия
ЭМП с локализованными в среде спиновыми центрами поглощения и
излучения (ЦПИ), требуется осуществлять дальнейшие научные работы,
и на основе уже разработанных создавать новые экспериментальные об-
разцы БРПМ и покрытий на их основе, имеющих собственное всена-
правленное согласование поверхностных импедансов (их поверхностей)
со свободным пространством на уровне (-40...-50) дБ в диапазоне час-
тот 30 МГц... 100 ГГц.
8,3.4. Использование радиопоглощающих экранов
Поглощающие экраны снижают напряженность падающего поля у
сильно отражающего участка за счет преобразования электромагнитной
энергии, проходящей через них, в тепловую или другой вид энергии.
В качестве поглощающих экранов применяются радиопоглощаю-
щие покрытия, радиопоглощающие решетки, а также ионизированные и
354
Глава 8. Методы снижения радиолокационной заметности объектов...
аэрозольные образования. К настоящему времени создано огромное ко-
личество типов и конструкций РПП.
Поглощающие решетки могут находить применение в качестве эк-
ранов в каналах воздухозаборников, сопл и использоваться для сниже-
ния ЭПР зеркальных антенн на частотах и поляризациях, отличных от
рабочих параметров бортовых РЛС. Ожидается, что исследования по
разработке этих устройств будут существенно расширяться.
Поглощающие ионизированные образования перед объектом или
его отдельными элементами могут создаваться с помощью электронных
пушек, электрических разрядов, радиоактивных изотопов, пиротехниче-
ских смесей и т.д. В результате создается плазменный экран, маски-
рующий объект от радиолокационного и инфракрасного обнаружения.
Особым преимуществом этого метода является возможность создания
требуемого распределения электронов: высокая плотность у поверхно-
сти объекта и постепенное снижение ее (по экспоненте) при удалении от
этой поверхности. Это обеспечивает хорошее согласование плазменного
экрана со свободным пространством и сводит к минимуму коэффициент
отражения радиоволн от границы раздела двух сред. Однако создание и
поддержание необходимых параметров ионизированного образования в
атмосфере требуют значительных затрат энергии и рабочего вещества,
причем с уменьшением высоты полета эти затраты растут.
Для летательных аппаратов поглощающие аэрозольные образова-
ния могут создаваться с помощью специальных компонентов, рассеи-
ваемых на высотах их полетов в виде облаков. Радиомаскировка может
осуществляться в течение короткого времени, что обусловлено ограни-
чением рабочего вещества на борту ЛА и быстрым оседанием его. Эк-
раны, преобразующие спектр зондирующего сигнала, в настоящее время
находятся в стадии теоретических и экспериментальных разработок.
Совершенствуются технологии производства неметаллических кон-
струкционных материалов (радиопрозрачных и радиопоглощающих).
Традиционно при разработке радиопрозрачных материалов ис-
пользуются пенопласт, плексиглас, стекло, боропластики и др. Неме-
таллические конструкционные материалы с поглощающими свойствами
разрабатываются преимущественно на основе углено- и саженаполнен-
ные стеклопластиков. Внешний вид и характеристики перспективных
радиопрозрачных и радиопоглощающих материалов, разработанных в
России, представлены в табл. 8.2.
Таким образом, при создании средств снижения радиолокацион-
ной заметности локационных объектов требуются материалы с широ-
ким спектром электромагнитных характеристик. Основными характери-
стиками здесь являются комплексные диэлектрическая и магнитная
проницаемости. Измерение указанных характеристик в магнитодиэлек-
355
Миллиметровая радиолокация: методы обнаружения и наведения...
триках всегда было сопряжено с определенными сложностями. Так, ши-
роко применяемые резонаторные методы позволяют измерять в отдель-
ности как диэлектрическую, так и магнитную проницаемости, но не в
непрерывном спектре частот, а только на отдельных частотах, на кото-
рые настроены измерительные резонаторы. Так называемые рупорные
методы, в которых для определения указанных выше характеристик из-
меряются коэффициенты прохождения в плоских образцах материалов,
имеют существенные ограничения по точности.
Таблица 8.2. Внешний вид и характеристики перспективных
радиопрозрачных и радиопоглощающих материалов
Внешний вид Диапазон длин волн, см Модуль коэффициента отражения, дБ
0,8...500 20...55
0,001...15 20...40
0,3... 0,4 >12
0,3... 0,8 0,8...4,0 4,0... 10,0 >20 >23 >8...10
0,3...4,0 >17
Для примера новых изысканий в области разработки радиопогло-
щающих материалов можно привести новые возможности в области из-
мерений параметров материалов, открывающих возможность создания
рефлектометров квазиогпичсского типа [51].
356
Глава 8. Методы снижения радиолокационной заметности объектов...
Применение таких рефлектометров в комплекте с векторным ана-
лизатором цепей может позволить кардинально увеличить точность из-
мерения коэффициента отражения и тем самым повысить точность из-
мерения комплексных диэлектрической и магнитной проницаемостей.
Разрабатываемые в этом направлении методы и средства позволяют из-
мерять одновременно и с достаточной точностью комплексные диэлек-
трическую и магнитную проницаемости в диапазоне частот от 2,0 до
18,0 ГГц. Аналогичные средства для измерения диэлектрической и маг-
нитной проницаемостей могут быть созданы также и для диапазона час-
тот от 18,0 до 100,0 ГГц.
Анализируя общие представленные материалы тенденций разви-
тия технологий по разработке и созданию новых радиопоглощаю-
щих материалов, можно отметить, что созданные современные по-
глощающие материалы позволят в ближайшей перспективе обес-
печить:
коэффициент отражения электромагнитного излучения (в диапазо-
не 1...100 ГГц)--30...-40 дБ независимо от направления зонди-
рования и поляризации сигнала;
коэффициент отражения в ультрафиолетовом, видимом и инфра-
красном диапазонах менее 0,1 дБ, причем отражение будет носить
диффузионный характер.
Можно также прогнозировать, что в ближайшей перспективе все
же будут созданы многофункциональные маскировочные покры-
тия, работающие одновременно в радиолокационном, ультрафио-
летовом, оптическом и инфракрасном диапазонах волн.
357
Литература
Литература к введению.
1. Бункин Б.В., Реутов А.П. Направления развития радиолокационных систем.
Вопросы перспективной радиолокации. Коллективная монография / под.
ред. А.В. Соколова. М.: Радиотехника. 2003. С. 12—19.
2. Быстров Р.П. Радиолокационные системы обнаружения наземных объек-
тов в короткой части миллиметрового диапазона волн. В 2-х томах. Том 2.
М.: Технология. 2002. 240 с.
3. Борзов А.Б., Быстров Р.П., Дмитриев В,Г, Засовин Э.А., Потапов А.А., Со-
колов А.В., Чусов И.В. Научно-технические достижения и проблемы разви-
тия техники миллиметрового диапазона радиоволн // Зарубежная радио-
электроника. 2001. № 4. С. 18~80.
4. Борзов А.Б., Быстров Р.П, Дмитриев В.Г., Засовин Э.А., Потапов А.А., Со-
колов А.В., Чусов И.В. Научно-технические достижения и проблемы разви-
тия техники миллиметрового диапазона радиоволн // Зарубежная радио-
электроника. 2001. № 5. С. 3-49.
5. Бортовые радиолокационные станции военной авиации зарубежных стран.
(Аналитический обзор по материалам открытой печати) под ред. В.С. Вер-
бы и С.В. Яголъникова. И 2 ЦНИИ МО РФ. 2005. 310 с.
6. Иностранная печать об экономическом, научно-техническом и военном по-
тенциале государств - участников СНГ и технических средствах его выяв-
ления. Сер. Технические средства разведывательных служб капиталистиче-
ских государств // ВИНИТИ. 2006. № 2.
7. Средства радиоэлектронной борьбы США и других западных стран. Ин.
печать об экон., науч.-техн, и воен, потенциале государств - участи. СНГ и
техн, средствах его выявления. Сер. Техн, средства развод, служб зарубеж.
государств // ВИНИТИ. 2004. № 5. С. 11-21.
8. Кулагин В.В., Соколов А.В., Черепенин В.А. Моноимпульсная радиолокация
объектов с использованием мощных импульсов наносекундной длительно-
сти. Вопросы перепективной радиолокации. Коллективная монография /
под ред. А.В. Соколова. М.: Радиотехника. 2003. С. 188-205.
9. Комплекс контроля радиоэлектронной обстановки и выявления средств не-
гласного съема информации ОМЕГА. Проспект НТЦ «НЕЛК». - 2005. /
Иностр, печать об эконом., научн.-техн. и военном потенциале гос. -
участи. СНГ и техн, средствах его выявления. Серия «техн, средства развед.
служб заруб. Государств», № 2, 2006.
10. Радиоэлектронные войны в информационных и компьютерных сетях. Net-
work Wars. Fulghum David A. Aviat. Week and Space Technol. 2004. V.161,
№ 16. C. 90-91.
Литература к главе 1.
1. Бункин Б.В., Реутов А.П. Направления развития радиолокационных систем.
Вопросыперспективной радиолокации. Коллективная монография. / под
ред. А.В. Соколова. М.:Радиотехника. 2003. С. 12-19.
358
Литература
2. Верба В.С., Дод В.Н., Трофимов А.А., Чернышов М.И. Применение сверхко-
роткихимпульсов в радиолокационных системах авиационных комплексов
дозора // Материалы I международной конференции «Сверхширокополос-
ные сигналы и сверхкороткие импульсы врадиолокации, связи и акустике».
Суздаль. 2005. М.: Труды РНТОРЭС им. А.С. Попова. 2005. Вып. 1.
3. Верба В.С., Кутуза В.С., Калинкевич А.А., Крылов В.Ю., Манаков В.Ю.,
Плющев В.А. Применение авиационного PC А комплекса, работающего в
широком диапазоне частотдля поверхностного и подповерхностного зон-
дирования // Материалы I международнойконференции «Сверхширокопо-
лосные сигналы и сверхкороткие импульсы в радиолокации, связи и аку-
стике». Суздаль. 2005. М.: Труды РНТОРЭС им. А.С. Попова. 2005. Вып.1.
4. Иммореев И.Я. Сверхширокополосные радары: новые возможности, не-
обычные проблемы, системные особенности // Вестник МГТУ. Сер. Прибо-
ростроение. 1998. №4. С.25-56.
5. Бункин Б.В, Реутов А.П.. Направления развития радиолокационных систем
// Наукоемкие технологии. 2002. № 4. С.8-12.
6. Пожидаев В.Н. Возможности применения терагерцевого диапазона радио-
волн // Радиотехника. 2006. № 5. С.5-8.
7. Быстров Р.П., Соколов А.В. Распространение короткой части миллиметро-
вого и субмиллиметровых волн: возможные области их применения // Ра-
диотехника. 2006. № 5. С. 11—18.
8. Быстров Р.П., Соколов А.В., Чесноков Ю.С. Методы современной военной
радиолокации // Вооружение. Политик. Конверсия. № 5. 2004. С. 36-40.
9. Быстров Р.П., Кузнецов Е.В., Соколов А.В., Чесноков Ю.С. Методы совре-
менной радиолокации и системы обработки сигналов // Успехи современ-
ной радиоэлектроники 2005. № 9. С.11—29.
10. Борзов А.Б., Быстров Р.П., Дмитриев В.Г., Засовин Э.А., Потапов А.А., Со-
коловА.В., Чусов И.В. Радиолокационные системы: научно-технические
достижения и проблемыразвития техники миллиметрового диапазона ра-
диоволн // Успехи современной радиоэлектроники 2001. № 4. С. 18—80.
11. Борзов А.Б., Быстров Р.П., Дмитриев В.Г., Засовин Э.А., Потапов А.А., Со-
коловА.В., Чусов И.В. Радиолокационные системы: научно-технические
достижения и проблемыразвития техники миллиметрового диапазона ра-
диоволн // Успехи современной радиоэлектроники. 2001. № 5.С. 3—49.
12. Ин. печ. об эконом, науч.-тех. и военн. потенц. гос. участи. СНГ и техн, средст-
вахего выявления. Сер. Вооруж. силы, и воен,- пром, потенц. 1996. N 3. Р 5—7.
13. Ин. печ. об эконом, науч.-тух. и военн. потенц. гос. участи. СНГ и техн,
средствахего выявления. Сер. Вооруж. силы, и воен.- пром, потенц. 1996.
N 4. Р. 42-43.
14. Ии. печ. об эконом, науч.-тух. и военн. потенц. гос. участи. СНГ и зехн. средст-
вахего выявления. Сер. Вооруж. силы, и воен,- пром, потенц. 1996. N 3. Р. 7—10.
15. Ин. печать об экономии., научно-техническом и воен, потенц. гос. - участи.
СНГ итехн. средствах его выявления. Сер. Техн, средства развед. служб
кап. гос. / ВИНИТИ. 1996. №6. С. 14-16.
359
Миллиметровая радиолокация: методы обнаружения и наведения...
16. Сер. Техн, средства развед. служб кап. гос./ВИНИТИ. 1997. № 10. С. 29-38.
17. Сер. Техн, средства развед. служб кап. гос. / ВИНИТИ. 1997.- № 10. С. 46-47.
18. Collard В. // Rev. techn./ Serv techn. navig. aer. 1997. № 52. C. 3-20.
19. Jane’s Def. Syst. Mod. 1997. 10. № 3. C. 4-5.
20. Dual-polarization radar to identify drizzle, with applications to aircraft icing
avoidance /Reinking Roger F., Matrosov Sergey Y., Martner Brooks E., Kropfli
Robert A. // J.Aircraft.- 1997.-34, № 6.- C. 778-784.
21. APAR - Ein Technologiespnmg in der Radartechnik / Laufis H. // Schiff und Hafen.
See-wirt., Kommandobrucke [Schiffund Hafen Seewirt.].- 1998.- 50, № 4,- C. 53-54.
22. 8 Межд. школа-семинар, Охотино, 26 авг.-7 сект. 1996 г, Электродинамика
и техника СВЧ и КВЧ .-1996.-С 177.
23. Geile H.J. / Schiffund Hafen: Seewirt., Kommandobruke [Schiffund Hafen See-
wirt.]. 1997. V.49. №9.C. 88-91.
24. Быстрое Р.П., Дмитриев В.Г., Потапов А.А., Соколов А.В. Вопросы пер-
спективной радиолокации. Коллективная монография / Под ред. А.В. Соко-
лова. М.: Радиотехника. 2003. С. 20-48.
25. Radar patent skirmish ripples through industry / Scott W. B. // Aviat. Week and
SpaceTechnoL. 1998. V.148. № 24. C. 26-27.
26. Phase coded, micro-power impulse radar motion sensor: Пат. 5519400 США,
МПК6 G 01 S 13/58 / McEwan T. E.; The Regents of the University of Califor-
nia. № 486171; Заявл. 6.6.95; Опубл. 21.5.96; НПК 342/28.
27. Верба В.С., Дод В.Н., Трофимов А.А., Чернышев М.И. Применение сверхко-
роткихимпульсов в радиолокационных системах авиационных комплексов
дозора // Материалы I международной конференции «Сверхширокополос-
иые сигналы и сверхкороткие импульсы врадиолокации, связи и акустике».
Суздаль. 2005. М.: Труды РНТОРЭС им. А.С. Попова. 2005. Вып. 1.
28. Имморев И.Я. Сверхширокополосные радары: новые возможности, не-
обычные проблемы, системные особенности / Вестник МГТУ. Сер. Прибо-
ростроение. 1998. № 4. С. 25-56
29. Кашин В.А., Леманский А.А., Митяшев М.Б., Скосырев В.Н., Созинов П.А.
Проблемы создания активных ФАР сантиметрового диапазона для мобиль-
ных многофункциональных радиолокаторов зенитных ракетных комплек-
сов // Наукоемкие технологии. 2002. № 4. С. 1-8.
30. Volada Jones King and Bruce Preiss,USA Air Force Reasearch Laboratory The
Potentialand Limitation of Modem MilitaryRadar. // Report on Simposium Sen-
sor & Electronic TechnologyPanel, Praugu, Czech Rerpublie, 22-23 april 2002.
31. Radar keeps its earto the ground // Eureka. 1998. 18. № 5. C. 44, 45.
32. Спец. техн. / НИИ спец. техн. МВД России [Спец. техн.]. 1998. № 1 С. 9-10.
33. Potential military space activities / Johansen Marc C., Simpson Theodore R. //
Aerosp.Amer. 1998. 36, №7. C. 42-45.
34. Кузьмичев B.E., Хачевский В.А. Шумовые РЛС со спектральной обработкой
сигналов гребенчатыми фильтрами. // XII международная конференция по
спиновой электронике и гировекторной электродинамике. Россия, Фирса-
новка, 19-21.12. 2002. С. 521-522.
35. Virtual noise radar waveform for reduced radar detectability: Пат. 5861834 США,
MITK6G 01 s 7/38 / Sauer Mark P., Kremer Larry R., Ziegler John A.;Esco Electron-
ics Corp. № 24ООЗ;Заявл. 14.2.98; Опубл. 19.1.99: НПК 342/13.
360
Литература
36. Cao Zhiguo, Zhang Zhiyong, Zhang Tianxu // Huazhong ligong daxue xuebao=J.
Huazhong Univ. Sci. and TechnoL. 1998. V.26, № 6. C. 13-14, 17.
37. Безлюдько В.Я., Волосюк В.К., Сокольников А.В., Фалькович С.Е. Исследо-
ваниеприменимости фазоманипулированных шумоподобных сигналов в
космических РСА с неоднозначными отсчетами дальности // Электромаг-
нитные волны и электронные системы. 1998. Вып. 3. С. 12-15.
38. Кулагин В.В., Соколов А.В., Черепенин В.А. Моноимпульсная радиолокация
объектов с использованием мощных импульсов наносекундной длительно-
сти. Вопросы перепективной радиолокации. Коллективная монография /
под ред. А.В. Соколова. М.: Радиотехника. 2003. С. 188-205.
39. Кулагин В.В., Черепенин В.А. Некоторые возможности моноимпульсной ло-
кациидля обнаружения малозаметных объектов // Труды YII Всероссийской
щколы-семинара "Физика и применение микроволн". Т.2. 24-30 мая 1999.
Красновидово: Моск обл., С. 188-189.
40. Быстров Р.П., Самойлов С.И., Соколов А.В. Эффективная площадь рассея-
ния объектов при многопозиционном радиолокационном наблюдении. Во-
просы перспективной радиолокации. Коллективная монография / под ред.
А.В. Соколова. М.: Радиотехника. 2003. С. 226-239.
41. Быстров Р.П., Лапаев Н.Г., Самойлов С.П., Соколов А.В. Обнаружение сла-
боотражающих наземных объектов на основе метода фоновой радиолока-
ции. Вопросы перспективной радиолокации. Коллективная монография
/Под ред. А.В. Соколова. М.: Радиотехника. 2003. С. 119-131.
42. A system jf signal detection and estimation for ground wave over-the-horizon ra-
dar. / Wang Wei, Liu Youngtan //High TechnoL Lett. 1997. V. 3. №1. C 70-83.
43. Cold war to counter drug / Ferraro Ellen, Ganter Drew // Microwave J. 1998. 41.
№3.C. 82, 84, 86, 88,90-92.
44. Maximum likelihood coordinate registration for over-the-horizon radar / Krolik
Jeffrey L.,Anderson Richard H. // IEEE Trans. Signal Process. [IEEE Trans.
Acoust, Speech, and SignalProcess.], 1997. V. 45. № 4. C. 945-959.
45. Акимов В.Ф., Евстратов Ф.Ф. Результаты исследований влияния ионо-
сферных ипомеховых условий на работу коротковолновых загоризонтных
радиолокаторов. Вопросыперспективной радиолокации. Коллективная мо-
нография / под ред. А.В. Соколова. М.: Радиотехника. 2003. С. 333-357.
46. Быстров Р.П., Соколов А.В., Чеканов Р.Н. Миллиметровая РЛС обнаруже-
ния, сопровождения самолетов в условиях плохой оптической видимости //
Труды Y11 Всероссийской щколы-семинара "Физика и применение микро-
волн". Т.2. 24-30 мая 1999. г. Красновидово. Московской обл., С.519-520.
47. Clifford A., Miccioli William F. И IEEE Trans. Microwave Theory and Techn.
1997. V. 45. №12. Pt.2. C. 2444-2453.
48. Быстров Р.П. Радиолокационные системы обнаружения наземных объек-
тов в короткой части миллиметрового диапазона волн, в 2-х т. М.: Техноло-
гия. РАРАН. 2002. Т.2. 240с.
49. Yanglin, Zhou Yiyu, Sun Zhongkang // Guofang keji daxue xuebao=J. Nat. Univ.
Def.Technol. 1998. V. 20. № 2. C. 4953.
50. Зражевский А.Ю., Голунов В.А., Гапонов C.C., Новичихин Е.П., Терентьев
Е.Б., Чернушич А.П. Особенности и возможности поляризационного стерео-
радиовидения в ММ-диапазоне волн // Радиотехника. 2006. № 5. С. 19-29.
361
Миллиметровая радиолокация: методы обнаружения и наведения...
51. Lu Jun, Guo Wei, Zhang Zuyin, Wen Guanghua // Huazhong ligong daxue xu-
ebao=I.Huazhong Univ. Sci. and Technol. 1998. 26. Suppl. nl.—• C. 54-57.
52. Xiao Huai-Tie, Zhuang Zhao-Wen, Guo Xiu-Huang, He Song-llua, Ji Ke-Feng,
Xu Feng // Hongwai yu haomibo xuebao=J. Infrared and Millimeter Waves
[Хунвай яньцзю]. 1998. V. 17. №4. С. 262-266.
53. Голунов В.В., Загории F.K., Зражевский А.Ю., Розанов Б.А., Соколов А.В.,
Черная Л.Ф. Пассивная радиолокация на миллиметровых волнах. Вопросы
перспективной радиолокации. Коллективная монография / под ред. А.В.
Соколова. М.: Радиотехника. 2003. С. 393-463.
54. Конференция специалистов НАТО, 22-23 апреля 2002 Прага.
55. Influence of coupled environmental features on propagation characteristics for an
RF andlR multisensor radar system / Goldhirsh Julius IJ Radio Sci. 1997. V. 32.
№4. C. 1445-1453.
56. Zhang Q., Mikhael W.B. И Electron. Lett. 1997. 33. №5. C. 419-420.
57. МКИ6 G 01 S 7/292 / Беляев Б. Г.; НИИ измерит, приборов,- № 96113391/09;
Заявл. 1.7.96, Опубл. 10.3.98. Бюл. № 7.
58. The degradation of higher order spectral detection using narrowband processing /
GarthLee M, Bresler Yoram // IEEE Trans. Signal Process. [IEEE Trans. Acoust,
Speech, and SignalProcess.]. 1997. 45. №7. C. 1770-1784.
59. Пат. 2112992 Россия, МПК6 G 01 S 13/02/ Беляев Б. Г., НИИ измерит, при-
боров,-№96109522/09:Заявл. 12.5.96: Опубл. 10.6.98. Бюл. № 16.
60. Li Yue-Hua, Li Xin-Guo, Ning Jun, Wang Min // Hongwai yn haomibo xuebao=J.
Infrared and Millimeter Waves [Хунвай яньцзю].— 1998. V. 17. № 4. С. 247-254.
61. Le-TienT., TalhamiH., NguenD. T. I Electron. Lett. 1997. V. 33. №1. C. 89-91
62. Пат. 2114440 Россия, МПК6 G 01 R 23/00 / Захарченко В. Д.; Волгогр. гос.
ун-т,—№95107448/09; Заявл. 12.5.95; Опубл. 27.6.98, Бюл. № 18.
63. Акиншин Н.С., Румянцев В.Л., Процкж С.В. Поляризационная селекция и
распознавание радиолокационных сигналов // Тула: Лидер, 2000. 3 15 с.
64. Гуров И. И, Шейнихович Д. В. И Сб. науч. ст. / СПб, ГИТМО. 1997. № 97.
С. 151-164.
65. Stathaki Т. Root moments: A digital signal-processing perspective / IEE Proc.
Vision. Image and Signal Process. 1998. V. 145. № 4. C. 293-302.
66. Gao Meiguo, Gao Qingyu // Beijing ligong daxue xuebaoAJ. Beijing Inst. Tech-
nol. 1999. V. 19. №2. C. 229-233.
67. Zhao Zhiqin, Wang Jianguo, Huang Shunji // Dianzi keji daxue xuebao=J. Univ.
Electron,and Technol. China. 1998. V. 27. № 3. C. 225-230.
68. Потапов А.В., Герман B.A., Соколов А.В. Фрактальная классификация и
кластеризация оптических и радиолокационных изображений поверхност-
ных и подповерхностныхобъектов. Вопросы перспективной радиолокации,
Коллективная монография / под ред. А.В.Соколова. М.: Радиотехника. 2003.
С. 103-118.
69. Опаленов Ю.В., Потапов А.А. Фрактальные и радоновские преобразования
в радиолокаторах нового поколения с обработкой на несущей частоте. Во-
просы перспективной радиолокации. Коллективная монография / под ред.
А.В. Соколова. М.: Радиотехника. 2003. С. 148-177.
70. Кравченко В.Ф., Кузьмичев В.Е., Лапаев Н.Г. Оптимальная весовая обра-
ботка радиолокационных сигналов дискретным преобразованием Фурье.
362
Литература
Вопросы перспективной радиолокации. Коллективная монография. / под
ред. А.В. Соколова. М.: Радиотехника. 2003.
71. Кравченко В.Ф., Потапов А.А., Масюк В.М. Атомарно-фрактальные функ-
ции в задачах синтеза антенн. / Зарубежная радиоэлектроника. 2001. № 6.
С. 4-40.
72. Горбунов Ю.Н. Технология цифрового запоминания пространственных час-
то DRFM-S и перспективы её внедрения в авионику нового поколения И
Радиотехника. 2003. № 1. С. 67-72.
73. Верба В.С., Сергеев В. В., Чернышев М.И. Канал цифровой обработки сиг-
нала обзорной РЛС / Сборник докладов ХХХ11 международной научно-
технической конференции«Информационные технологии в науке, образо-
вании, телекоммуникации и бизнесе». Украина, Крым, Ялта-Гурзуф, 2005.
74. Верба В.С., Гандурин В.А., Трофимов А.А. Бортовая РЛС для перспективно-
го многофункционального авиационного комплекса разведки, оповещения
и управления (МАК РОУ) с цифровой АФАР // Наукоемкие технологии.
2004. № 8, 9. Т. 5. С. 1 10-1S6.
75. Силкин А. Т. , Чернышев М. И., Янушевский Г. Д. , Тарасов В. Л. , Сергеев В В.
Перспективы применения систем на кристалле в радиолокационных комплек-
сах. Наукоемкие технологии 2004. Т. 5. № 8,9. С. 60- 65.
Литература к главе 2.
1. .Волосюк В.К,.Кравченко В.Ф Математические методы моделирования
физических процессов в задачах дистанционного зондирования Земли //
Зарубежная радиоэлектроника. 2000. №8. С. 3-80.
2. Борзов А. Б. и др. Математическая модель рассеяния электромагнитных
волн на объектах сложной формы // Электромагнитные волны & Электрон-
ные системы. 1998. № 10. С. 39-54.
3. Андреев Г.А. Отражение и рассеяние миллиметровых волн земными
покровами // Зарубежная радиоэлектроника. 1980. №9. С. 3-32.
4. Займан. Дж. Электроны и фононы / пер. с англ. под. ред. В. Л. Бонч-
Бруевича. М.: ИЛ, 1962.
5. Андронов А., Леонтович М. А., К теории молекулярного рассеивания света
на поверхности жидкостей. Собр. трудов А. А. Андронова. М.: Изд-во АН
СССР. 1956. С. 5—18.
6. Gans, Die moleculare Rauhigketteineneben en Quecksilberflache. Ann. Physik
V. (1924). 74. № II. C. 231—251.
7. Gans, Lichtzerstrenung infolge der molecularen Rauhigkeit de Trennung-flache
zweier durchsichtiger Medien. Ann. Physik. 1926. V. 79. № 3. C. 204—226.
8. Фейнберг Л., Распространение радиоволн вдоль реальной поверхности. Сб.
Исследования по распространению радиоволн, вып. 2 / под ред. Б. А. Вве-
денского. М.: Изд-во АН СССР. 1948.
9. Фок В.А. Проблемы дифракции и распространение электромагнитных волн.
М.: Сов. радио. 1970. 520с.
11. Хейл X., Мауэ А., Вестпфаль К. Теория дифракции: пер. с нем. / под ред.
Г.Д.Малюжинца. М.: Мир. 1964. 428с.
12. Фелсен Л., Маркувиц Н. Излучение и рассеяние волн: пер. с англ / под ред.
М.Л.Левина. М.: Мир. 1978. Т.1, 2.
363
Миллиметровая радиолокация: методы обнаружения и наведения...
13. Тучков Л. Т. Радиолокационные характеристики летательных аппаратов. М.:
Радио и связь. 1985. 236с.
14. Боровиков В.А., Кинбер Б.Е. Геометрическая теория дифракции. М.: Связь.
1978. 245с.
15. Перевода В.П. Радиолокационная видимость морских целей. —Л.:
Судостроение. 1961. 160с.
16. КобакВ.О. Радиолокационные отражатели. М.: Сов. радио, 1975. 244с.
17. De Lano R.H. A Theory of Target Glint or Angular Scintillation in Radar Track-
ing// Proc.IRE. 1953. V.41. N4. P.61-63.
18. Копилович Л.Е., Чаевский E.B., Чурилов В.П. О статической модели
отраженных радиосигналов от объектов сложной формы // Укр.физ.журнал.
1968. Т.13. N5. С. 721-727.
19. Peters L., Weimer F.S. Tracking radars for complex targets // Proc.IEE. 1963.
V.110.N12. P.2149-2162.
20. Сергиевский Б.Д. Определение угловых координат совокупности излучате-
лей // Радиотехника. 1967. Т.22. N4. С. 83-89.
21. Островитянов Р.В., Басалов Ф.А. Статическая теория радиолокации
протяженных целей. М.: Радио и связь. 1982. 232с.
22. Штагер Е.А. Рассеяние радиоволн на телах сложной формы. М.: Радио и
связь. 1986. 184с.
23. Юсеф Н.Н. Эффективная площадь отражения сложных радиолокационных
целей // ТИИЭР. 1989. Т.77. N5. С. 100-112
24. Боровиков В.А., Кинбер Б.Е. Геометрическая теория дифракции. М.: Связь.
1978. 245с.
25. Стреттон Дж. А. Теория электромагнетизма: пер. с англ. / под ред. СМ.
Рытова. М.: Гостехиздат. 1949. 539с.
26. Борн М., Вольф Э. Основы оптики: пер. с англ. / под ред. Т.П. Мотулевича.
М.: Наука. 1970. 719с.
27. Хейл X., Мауэ А., Вестпфаль К. Теория дифракции: пер. с нем. / под ред.
Г.Д.Малюжтнца. М.: Мир. 1964. 428с.
28. Уфимцев П.Я. Метод краевых волн физической теории дифракции. М.: Сов.
радио. 1962. 243с.
29. Уфимцев П.Я. Краевые волны в теории дифракции: Дисс. ... докт. физ.-мат.
наук:№9123/ЦНИИРТИ. Горький. 1969. 439с.
30. Keller J.B., Lewis R.M., Secler B.D. Asymptotic solution of some diffraction
problems // Comm. Pure and Appl. Math. 1956. V.9. N2. P.207-265.
31. Keller J.B., Bushal R. V. Boundary layer problems in diffraction theory // Comm.
Pure and Appl. Math. 1960. V.8. N1. P.85-114.
32. Keller J.B. Geometrical theory of diffraction // Joum. Optic Soc. of America.
1962. V.52. N2. P.116-130.
33. Фелсен Л., Маркувиц H. Излучение и рассеяние волн: пер. с англ. / под ред.
М.Л.Левина. М.; Мир. 1978. Т. 1,2.
34. D. D. Crombie. Doppler Spectrum of Sea Echo at 13,56 Mc/s, Nature 175. №
4459. 681-682(1955).
35. Майзельс E.H., Торгованов В.А. Измерение характеристик рассеяния
радиолокационных целей. М.: Сов. радио. 1972. 232с.
364
Литература
36. Miller Е.К., Poggio A.J. A Case for an EM Metodology // IEEE International Sympo-
sium on Elektromagnetic Compatibility. Washington: D.C., 1976. P.45-47.
37. Мусьяков М.П.,Лабунец JI.В.,Решетка А.Д. Цифровая модель характеристик
отражения лазерного излучения объектами бронетанко- вой техники //
ВСМ.Сер.1. 1984. Вып. 2(117). С. 33-41.
38. Криспин Дж., Маффет А. Оценка радиолокационного поперечного сечения
рассеяния тел сложной формы // ТИИЭР. 1965. Т. 53. N8. С. 1123-1126.
39. Каратычин В.А., Розов В.А. Метод стационарной фазы для интеграла в
конечных пределах с произвольно расположенной стационарной точкой //
ЖВМ и МФ. 1970. Т. 10. N2. С. 300-312.
40. Крылов В.И., Шульгина Л.Т. Справочная книга по численному
интегрированию. М.: Наука. 1966. 372с.
41. Потехин А.И. Некоторые задачи дифракции электромагнитных волн. М.:
Сов. радио. 1948. 265с.
42. Виноградова М.Б., Руденко О.В., Сухоруков А.П. Теория волн. М.: Наука.
1979.383с.
43. Басс Ф.Г., Фукс И.М. Рассеяние волн на статически неровной поверхности.
М.: Наука. 1972. 424с.
44. Петрунькин В.Ю. О распределении тока на проводящей поверхности под
действием электромагнитного поля // Труды ЛПИ.-1955. N181. С. 78-83.
45. Блексмит В. Введение в методы измерения радиолокационного
поперечного сечения цели // ТИИЭР. 1965. Т.53. N8. С. 1035-1040.
46. Сеньор Т.Б.А. Обзор аналитических методов оценки поперечных сечений
рассеяния // ТИИЭР. 1965. Т.53. N8. С. 948-959.
47. Борзов А. Б., Засовин Э. А., Соколов А. В., Сучков В. Б. Методы синтеза гео-
метрических моделей сложных радиолокационных объектов. Электромаг-
нитные волны & электронные системы. 2003. Т.8. №5. С. 55-63.
48. Lee S. W., Baldauf J.E., and Kipp R.A., Cpatch overview, description of capability
of code Cpatch developed by DEMACO, 1994.
49. SongJ.M., Lu C.C. and Chew W.C. Multilevel fast multipole algorithm for elec-
tromagnetic scattering by large complex objects // IEEE Trans, on Antennas and
Propagation. 1997. V. 45. № 10. P. 1488-1493.
50. Volakis J., Chatterjee A., and Kempel L., Finite Element Method for Electro-
magnetics, Piscataway, NJ, IEEE Press., 1998.
51. Shyh-Kang Jeng. Near-field scattering by physical theory of diffraction and
shooting and bouncing rays // IEEE Trans, on Antennas and Propagation. 1998.
V. 46. №4. P. 551-558.
52. Марков Г.Т., Сазонов Д.М. Антенны. M.: Энергия. 1975. 528 с.
53. Борзов А.Б., Соколов А.В., Сучков В.Б. Цифровое моделирование входных
сигналов систем ближней радиолокации от сложных радиолокационных
сцен // Успехи современной радиоэлектроники. 2004. № 9-10. С. 38-61.
54. Антифеев В.Н., Борзов А.Б., Сучков В.Б. Физические модели радиолокаци-
онных полей рассеяния объектов сложной формы. М.: Изд-во МГТУ им.
Н.Э.Баумана. 2003. 61 с
55. Ling Н., Chou R.C. and Lee S.W., Shooting and bouncing rays: Calculating the
RCS of an arbitrarily shaped cavity, IEEE Trans. Antennas and Propagation.
1989. V. 37. P. 194-205. Feb.
365
Миллиметровая радиолокация: методы обнаружения и наведения...
56. Антифеев В.И., Борзов А.Б., Сучков В.Б. Основы теории рассеяния элек-
тромагнитных волн поверхностями с хаотическими неровностями. М.: Изд-
во МГТУ им. Н.Э.Баумана. 2003. 80 с.
57. Антифеев В.Н., Борзов А.Б., Соколов А.В., Сучков В.Б. Объектно-
ориентированная модель рассеяния коротких радиоволн элементами слож-
ных радиолокационных сцен // Труды 5-й международной научно-
технической конференции “Радиолокация, навигация, связь”. Воронеж:
1999. Т.2. С. 1081-1092.
58. Борзов А.Б., Сучков В.Б. Объектно-ориентированный метод анализа радио-
локационных полей рассеяния объектов. // Тезисы докладов научно-
технической конференции “170 лет МГТУ им. Н.Э. Баумана”. Москва.
2000. Ч. 1. 167. с.
59. Борзов А.Б., Ноздрачев Д.А., Сучков В.Б. Модель входных сигналов авто-
номных бортовых радиолокационных систем // Оборонная техника. 2000.
№1-2.0.66-71.
60. Справочник по радиолокации: в 4 т. / под ред. М. Сколника'. пер. с англ. М.:
Сов. Радио. 1976. Т.1: Основы радиолокации.
Литература к главе 3.
1. Борзов А.Б., Соколов А.В., Сучков В.Б. Цифровое моделирование входных
сигналов систем ближней радиолокации от сложных радиолокационных
сцен // Успехи современной радиоэлектроники. 2004. № 9-10. С. 38-61.
2. Красюк Н. ГТ., Коблов В. Л., Красюк В. Н. Влияние тропосферы и подсти-
лающей поверхности на работу РЛС. М.: Радио и связь. 1988. 216 с.
3. Кулемин Г. П., Разсказовский В. Б. Рассеяние миллиметровых радиоволн
поверхностью Земли под малыми углами. Киев: Наукова думка. 1987. 230 с.
4. Исакович М. А. Рассеяние волн от статистически шероховатой поверхности
//ЖЭТФ. 1952. Т. 23. № 3 (9). С. 305.
5. Басс Ф. Г. К теории комбинационного рассеяния волн на неровной поверх-
ности // Изв. вузов. Сер. Радиофизика. 1961. Т. 4. № 1. С. 59.
6. Фукс И М. К теории рассеяния радиоволн на взволнованной поверхности
моря // Изв. вузов. Сер. Радиофизика. 1966. Т. 9. № 5. С. 876.
7. Басс Ф. Г., Фукс И. М. Рассеяние волн на статистически неровной поверх-
ности. М.: Сов. радио. 1972. 424 с.
8. Андреев Г. А., Годунов В. А., Соколов А. В. Рассеяние и излучение милли-
метровых радиоволн природными образованиями И Итоги науки и техники.
Сер. Радиотехника. 1980. Т. 20. С. 3.
9. Андреев Г. А., Куковкин А. Г, Черная Л. Ф. И Радиотехника и электроника.
1988. Т. 33. №7. С. 1352.
10. Жуковский А. П., Оноприенко Е. И., Чижов В. И. Теоретические основы ра-
диовысотометрии. М.: Сов. радио. 1979. 320 с.
11. Басс Ф. Г, Брюховецкий А. С., Пузенко А. А., Фукс И. М. Теоретические ис-
следования рассеяния волн статистически неровной поверхностью // Элек-
тромагнитные волны & электронные системы. 1997. Т. 2. № 3. С. 3-26.
12. Быстров Р.П., Потапов А.А., Соколов А.В. Миллиметровая радиолокация с
фрактальной обработкой / Под ред. Быстрова Р.П., Соколова А.В. М.: Ра-
диотехника. 2005. 368 с.
366
Литература
13. Орлов Р.А., Торгашин Б.Д. Моделирование радиолокационных отражений
от земной поверхности. ЛГУ Изд-во. 1978. 148 с.
14. Справочник по радиолокации: в 4 т. / под ред. М. Сколника/ пер. с англ. М.:
Сов. радио. 1976. Т.1: Основы радиолокации. 455 с.
15. Финкельштейн М. И., Мендельсон В. Л., Кутев В. А. Радиолокация слои-
стых земных покровов. М.: Сов. радио. 1977. 176 с.
16. Антифеев В.Н., Борзов А.Б., Сучков В.Б. Основы теории рассеяния элек-
тромагнитных волн поверхностями с хаотическими неровностями. М.: Изд-
во МГТУ им. Н.Э.Баумана. 2003. 80 с.
17. Семенов Б. И. Рассеяние электромагнитных волн ограниченными участка-
ми неровных поверхностей с конечной проводимостью И Радиотехника и
электроника. 1965. Т. 10. № 11. С. 1952.
Литература к главе 4
1. Ананьев С.Н. Модель алгоритма автоматического распознавания объектов
техники по сигналам их акустических и сейсмических полей // Сборник
трудов конференции ВАУ. 2003.
2. Айвазян С.А., Бухштабер В.М., Енюков И.С., Мешалкин Л.Д. Прикладная
статистика. Классификация и снижение размерности. М.: Финансы и стати-
стика. 1989. 606 с.
3. Патрик Э. Основы теории распознавания образов. М.: Сов. радио. 1980.408 с.
4. Подвеска автомобиля. Сборник статей. М.: Академия Наук СССР. 1951.275 с.
5. Силаев А.А. Спектральная теория подрсссоривания транспортных машин.
М.: Машиностроение. 1972. 192 с.
6. Вопросы статистической обработки в специальных задачах атмосферной аку-
стики и сейсмологии / Труды НИРФИ. Вып. 12. Горький: НИРФИ. 1989. 161с.
7. Борзов А.Б., .Лихоеденко K.IL, Муратов И.В., Павлов Г.Л., Сучков В.Б. Се-
лективные признаки моторизованных наземных целей в миллиметровом
диапазоне длин волн // Оборонная техника. 2008. № 1-2. С. 54-63.
8. Хохлов В.К. Обнаружение, распознавание и пеленгация объектов в ближней
локации. М.: МГТУ им. Н.Э.Баумана. 2005. 336 с.
Литература к главе 5
1. А.Б.Борзов, И.Ф.Горюнов, К.П.Лихоеденко и др. Полупроводниковый ими-
татор активных помех РЛС миллиметрового диапазона волн // Оборонная
техника. 1997. №9-10. С.13-16.
2. Антифеев В.Н., Лихоеденко К.П., Муратов И.В. Радиотехнические характери-
стики датчика миллиметрового диапазона волн с непрерывным фазоманипули-
рованным зондирующим сигналом // Боеприпасы (М.). 1994. №3-4. С.40-43.
3. Антифеев В.Н., Лихоеденко К.П., Муратов И.В. Использование датчика
миллиметрового диапазона волн с непрерывным фазоманипулированным
зондирующим сигналом в системах высокой точности // Вопросы защиты
информации. 1995. № 3 (30). С. 57-59.
4. Финкельштейн М.И, Мендельсон В.Л., Кужев В.А. Радиолокация сложных
земных покровов. М.: Сов. радио. 1977. 176 с.
5. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы ра-
диовысотометрии / под ред. А.П.Жуковского. М.: Сов. радио. 1979. 320 с.
367
Миллиметровая радиолокация: методы обнаружения и наведения...
6. Бахвалов Н.С. Численные методы. М.:Наука. 1975. 365с.
7. Колтон Д„ Кресс Р. Методы интегральных уравнений в теории рассеяния /
пер. с англ. М.: Мир. 1987. 311с.
8. Степанец А.И. Классификация и приближение периодических функций.
Киев: Наукова думка. 1987. 268с.
9. Мартыненко М.А., Пустылышков Л.М. Конечные интегральные преобразова-
ния и их применение к исследованию систем с распределенными параметрами:
Справочное пособие / под ред. А.Г.Бутковского. М.: Наука. 1986. 304с.
10. Васильев В.Н. Возбуждение тел вращения. М.: Радио и связь. 1987. 272с.
11. Demeryd A.G. A theoretical investigation of rectangular microstrip antenna element //
IEEE Trans, on Antennas and Propagation. 1978. V.AP-26. №4. P.532-535.
12. Коваленко Ю.Ф., Нефедов Е.И., Советов В.Н. Микрополосковые антенны
СВЧ. Тбилиси: 1979. 150с.
13. Bailey М.С., Deshpande М.О. Integral Equation Formulation of Microstrip Antennas
// IEEE Trans, on Antennas and Propagation. 1982. V.AP-30. №4. P.651-656.
14. Chatterjee R., Ganesan N.G. Microstrip antenna // Proc. 6 th collog.: Microwave
Commun.- Budapest, 1978.-V.l. P.3-10.
15. Чебышев В.В. Интегральное уравнение Фредгольма 1-го рода для тока уз-
кого полоскового вибратора и численный метод его решения //Машинное
проектирование устройств и систем СВЧ. М.: 1979. С.204-215.
16. Alexopoulos N.G., Rana I.E. On the solution to Poclingtones equation for anten-
nas printed on grounded Substrates // Int. Symp. Dig.-Ant. And Propag.- Seattle
(Mash.). 1979. V.l. P.171-174.
17. Rana I.E., Alexopoulos A.G. Current distribution and input impedance of printed di-
poles// IEEE Trans, on Antennas and Propagation. 1981. V.AP-29. №1. P.99-105.
18. Панченко Б.А., Нефедов Е.И. Микрополосковые антенны. М.: Радио и
связь. 1986. 144с.
19. Harrington R.F. Time-harmonic electromagnetic waves.- New York: McGrow-
Hill, 1961,- P.480.
20. Nakaoka K., Itoh K., Matsumoto T. Input characteristics of slot antenna for
printed array antennas // Trans. Institute Electronics and Communications Engi-
neering Jap. 1977. B. 60. №5. P.335-342.
21. Shahani D.T., Bhat B. Radiation characteristics of printed slot antenna with a
switch able parasitic slot// Antennas and Propag. 1978. V.l. P.435-437.
22. Yoshimura Y.A. A microstripline slot antenna // IEEE Trans, on Antennas and
Propagation. 1972. V.MMT-20. №11. P.760-762.
23. Панченко Б.А. Внешние проводимости отверстия в плоском экране // Изв.
вузов. Радиофизика. 1964. №2. С.343-351.
24. Oliner A.A. The impedance properties of narrow radiating slots in the broad face
of rectangular wave guide //IEEE Trans, on Antennas and Propagation. 1957.
V.AP-5. №1. P.4-12.
25. Lo Y.T., Solomon D., Richards W.F. Theory and experiment on microstrip antennas
//IEEE Trans, on Antennas and Propagation. 1979. V.AP-27. №2. P. 137-145.
26. Carver K.R. A modal expansion theory for the microstrip antenna //Antennas
Propag. 1979. №1. P. 101-104.
27. Wood C. Analysis of microstrip circular patch antennas //Proc. IEE. 1981. V. 128.
№2. P.69-76.
368
Литература
28. Yano S., Jhimaru A. A theoretical study of input impedance of a circular micro-
strip disk antenna //IEEE. Trans, on Antennas and Propagation.- 1981. V.AP-29.
№1. P.77-83.
29. Araki K, Itoh T. Hankel transform domain analysis of open circular microstrip struc-
tures //IEEE Trans, on Antennas and Propagation. 1981. V.AP-29. №1. P.84.
30. Hahashy T.M., AH S.M., Kong J.A. Impedance parameters and radiation pattern
of two coupled circular microstrip disk antennas //J. Appl. Phys. 1983. V.54. №2.
P.493-506.
31. Иванов E.A. Дифракция электромагнитных волн на двух телах. Минск:
Наука и техника. 1968. 80с.
32. Марков Г.Т., Чаплин А.Ф. Возбуждение электромагнитных волн. М.: Энер-
гия. 1967. 186с.
33. Хенл X., Мауэ А., Вестфаль К. Теория дифракции. М.: Мир. 1961.360с.
34. Васильев Е.Н., Седельникова З.В., Серегина А.Р. Строгое решение задачи
возбуждения диэлектрической антенны // Радиотехника и электроника.
1981. Т.26. №1. С.53-58.
35. Никольский В.В. Метод Галеркина-Ритца для внешних задач электродина-
мики // Радиотехника и электроника. 1969. Т.14. №2. С.201-205.
36. Никольский В.В. Проекционный метод для незамкнутых электродинамиче-
ских систем // Радиотехника и электроника. 1971. Т. 14. №8. С. 1342-1351.
37. Никольский В.В., Малушков ГД. Проекционный метод в задаче возбужде-
ния диэлектрической антенны // Изв. вузов. Сер. Радиофизика. 1973. Т. 16.
№7. С.1045-1054.
38. Стрэттон Дж.А. Теория электромагнетизма. М.: Гостехиздат. 1948. 565с.
39. Антенны и устройства СВЧ /под ред. Д.И.Воскресенского. М.: Сов.радио.
1972. 320с.
40. Никольский В.В. Вариационные методы для внутренних задач электроди-
намики. М.: Наука. 1967. 460с.
41. Raj Mittra, Yun-Li Нои, Vahraz Jamnejad. Analysis of Open Dielectric Wave-
guides Using Mode-Matching Technique and Variational Methods //IEEE Trans-
actions on Microwave Theory and Techniques. 1980. V. MTT-28. № 1. P.36-43.
42. Horton C.W., Karal F.C.Jr., McKinney C.M. On the Radiation Patterns of Di-
electric Rods of Circular Cross Section the TM0j Mode // Journal of Applied
Physics. 1950. V. 21. December. P.1279-1283.
43. Малушков Г.Д. Диэлектрические излучатели, возбуждаемые коаксиальной
апертурой // Изв. вузов. Сер. Радиофизика. 1978. Т.21. №3. С.430-443.
44. Chatterjee J.S., Croswell W.F. Waveguide Excited Dielectric Spheres as Feeds
//IEEE Trans, on Antennas and Propagation. 1972. V. AP-19. March. P. 206-208.
45. Владимиров B.C. Уравнения математической физики. M.: Наука. 1988. 512с.
46. Численные методы теории дифракции / перев. с англ. / под ред.
В.А.Боровиков. М.: Мир. 1982. 198 с.
Литература к главе б
1. International Defense Review. 1996. V.29. Febr. P.36-37.
2. Armada. 1996. V.20. №1. P.28-31
3. Jane’s Defense Weekly. 1996. V. 18. №22.
4. Military Procurement International. 1997. V.7. №1. P.4
369
Миллиметровая радиолокация: методы обнаружения и наведения...
5. Jane’s Defense Weekly. 1996. V.20. №3.
6. Jane’s Defense Weekly. 1995. V.24. №1.
7. Воскресенский Д.И.,. Грановская P.A,. Давыдова H.C и др. Антенны и уст-
ройства СВЧ (Проектирование фазированных антенных решеток) / под ред.
Д.И. Воскресенского. М.: Радио и связь. 1981.432с.
8. ЛоккА.С. Управление снарядами. М.: ГИТТЛ. 1957. 775 с.
9. Астапов Ю.М. Теория управления летательными аппаратами. М.: МАТИ.
2006. 278 с.
10. Борзов А.Б., Соколов А.В., Сучков В.Б. Цифровое моделирование входных
сигналов систем ближней радиолокации от сложных радиолокационных
сцен // Успехи современной радиоэлектроники. 2004. № 9-10. С. 38-61.
Литература к главе 7
1. Петряков В.Б. Фазовые радиотехнические системы. Изд-во "Сов. радио".
1968. стр. 306.
2. Варакин Л.Е. Теория сложных сигналов. Изд-во "Сов.радио". 1970.
3. Есипов Б.А. Синтез сигналов по автокорреляционной функции // Изв. вузов.
Сер. Радиоэлектроника. 1972. т. ХУ, С. 1335-1343.
4. Кук Ч., Бернфельд М. Радиолокационные сигналы. Теория применения. М.:
Сов. радио. 1971.
5. Котельников В.А. Сигналы с максимальной и минимальной вероятностями
обнаружения. Радиотехника и электроника. 1954. Вып. 3. Т. 4.
6. Карпентье М. Современная теория радиолокации. М.: Сов. радио. 1965. С.
74. С. 114.
7. Радиотехнические системы / под ред. Ю.М. Казаринова М.: Сов. радио.
1968. с. 80.
8. Фадеев А.М. Шумовые радиолокационные системы (Обзор) // Зарубежная
радиоэлектроника. 1968. №4.
9. Poirier J.L. Quasi monochromatic scattering and some possibl radar application
// Radio Scince .1968. V. 3. № 9.
10. Forest I.R., Meason I,R. Solid-State microwave noise radar // Electron. Lett..
1976. V. 12. № 15.
11. Forest I.R., Price D.I. Digital correlation for noise radar systems // Electron.
Lett. 1978. V. 14. № 18.
12. Грант, Купер, Камаль. Класс шумовых радиолокационных систем // ТИИ-
ЭР. 1963. т.51. №7.
13. Гусинская Т.В. Обработка шумового радиолокационного сигнала методом
анализа спектра// Изд-во ВУЗов Радиоэлектроника. 1971. Т. 14. № 8.
14. Пат. США № 3657738.
Литература к главе 8.
1. Материалы 8 Межд. школы-семинара // Электродинамика и техника СВЧ н
КВЧ. Охотино, 26 авг.-7 сент. 1996. С. 177.
2. Geile H.J. / Schiffund Hafen: Scewirt., Kommandobruke [Schiffund Hafen See-
wirt.J. 1997. 49. №9. C. 88-91.
3. Быстрое Р.П., Дмитриев В.Г, Потапов А.А., Соколов А.В. Проблемы ра-
диолокационного обнаружения малоконтрастных объектов. Вопросы пер-
370
Литература
спективной радиолокации. Коллективная монография / под ред. А.В. Соко-
лова. М.: Радиотехника. 2003. С. 20-48.
4. Сер. Техн, средства развед. служб кап. гос./ ВИНИТИ. 1997. № 10. С. 29-38.
5. Сер. Техн, средства развед. служб кап. гос. / ВИНИТИ. 1997. № 10. С. 46-47.
6. Быстров Р.П. Радиолокационные системы обнаружения наземных объек-
тов в короткой части миллиметрового диапазона волн, в 2-х т. М.: Техноло-
гия. РАРЛН. 2002. Т.2. 240с.
7. Верба В.С., Бандурин В.А., Трофимов А.А. Бортовая РЛС для перспективно-
го многофункционального авиационного комплекса разведки, оповещения
и управления (МАК РОУ) с цифровой АФАР // Наукоемкие технологии.
2004 Т. 5. №8, 9. С. 1 10-1S6.
8. Бортовые радиолокационные станции военной авиации зарубежных стран.
(Аналитический обзор по материалам открытой печати) / под ред. В.С. Вер-
бы и С.В. Ягольникова / Тверь:2 ЦНИИ МО РФ. 2005. 310 с.
9. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных бор-
товых радиолокационных систем. Возможности и ограничения. М.:
ИПРЖР. 2002.
10. Седой И. Испытания РЛС ASTOR на британском самолете / Зарубежное во-
енное обозрение. 2006. № 2. С. 36.
11. Соколов А. Военно-воздушные силы Королевства Саудовская Аравия / За-
рубежное военное обозрение. № 4. 2006. С. 38-46.
12. Попов А., Федутинов Д. Тенденции развития систем передачи данных при
использовании БЛА // Зарубежное военное обозрение. 2006. № 4. С. 47-51.
13. Рюриков Д, Васильев А. Применение беспилотных летательных аппаратов и
систем в ВМС США / Зарубежное военное обозрение. 2006. № 4. С. 53-63.
14. Воронихин Е., Кашин В., Яблонский Д. Геоинформационное обеспечение воо-
руженных сил США // Зарубежное военное обозрение. 2005. № 10. С. 6-15.
15. Заяц В. Применение авиации США на активной фазе операции в Ираке. За-
рубежное военное обозрение. 2005. № 10. С. 37-44.
16. 8 Межд. школа-семинар. Охотино. 26 авг.-7 сент. 1996. Электродинамика и
техника СВЧ и КВЧ. 1996. С. 177.
17. Knott E.F. Suppression of efge scattering with impedance strings // IEEE Trans.
Antennas and Propag. 1997. V. 45. no. 12. P. 1768-1773.
18. Ziolkowski Richard. The desing of maxwellian absorbes fomumerical boundary
condicions and for practical applications using engineered artificial materials //
IEEE Trans. Antennas and Propag. 1997. V. 45. no. 4. P. 656-671.
19. Gao Zhengping, Rao Li // Dianzi keji daxue xuebao=J. Univ. Electron, and
Technol. China. — 1998. 27. № 2. C. 136-139.
20. Kudo T, Mitsui T, Kariya T. // Mitsubishi densen kogyo jiho=Mitsubishi Cable
Ind. Rev. 1998. № 94. C. 48-57.
21. Пат. 5543796 США, МПК6 H 01 L 17/00
22. Розанов К. Н. // Радиотехника и электроника. 1999. 44. №5. С. 526-530.
23. Aviat. И Week and Space Technol. 1996. V. 114. N 6. P 26-28.
24. Jane’s Def. Weekly. 1997. V.27. № 9. C.3.
25. Докл. науч, семин. "Средства и способы защиты техн, и инф. систем." / Мо-
сква. 1996/МалайИ. М. //Вопр. защиты инф.— 1997. № 1-2. — С. 53-54.
371
Миллиметровая радиолокация: методы обнаружения и наведения...
26. Быстрое Р.П. Радиолокационные системы обнаружения наземных объек-
тов в короткой части миллиметрового диапазона волн, в 2-х т. М.: Техноло-
гия. РЛРЛН. 2002. Т.2. 240 с.
27. Пат.3938151 /США/. НКИ 343/18.
28. Пат.4115775/США/. НКИ 343/18.
29. Пат.3852747 /США/. НКИ 343/18.
30. Пат.3866226/США/. НКИ 343/18.
31. Пат.4199166 /США/. НКИ 343/18.
32. Пат.3010103 /США/. НКИ 343/18.
33. Пат.4005424/США/. НКИ 343/18.
34. Пат.3774208 /США/. НКИ 343/18.
35. Пат.3832712 /США/. НКИ 343/18.
36. Пат.4037228/США/. НКИ 343/18.
37. Пат.2134740 /Великобритания/. НКИ Н4Д.
38. Lagarkov A. N., Sarychev, А. К., И Phys.Rev.B. 1996. V. 53. No. 10. Р. 6318.
39. работе [13 V. G. Shevchenko, А. Т. Ponomarenko, Carl Klason, I. A. Tchmutin,
N. G. Ryvkina//J. Electromagnetics. 1997. V. 17. No. 2. P. 157-170.
40. Пономаренко В. И., Бержанский В. Н„ Мировицкий Д. И. И Радиотехника и
электроника. 1989. Т. 34. № 8. С. 67.
41. Kazantsev, N. Е., Ponomarenko, А. Т., Shevchenko, V. G., Klason, С. И Electro-
magnetics. 2000. V. 20. No. 4. Р. 139.
42. Kazantsev N. Е„ Ponomarenko А. Т., Kalinin Yu. Е., Sitnikov А. V., et al. П Ex-
tended Abstracts of Euro-Fillers'01 Conference. 2001. P. 200.
43. Луцев Л. В., Яковлев С. В., Сиклицкий В. И. И ФТТ. 2000. Т. 42. выл. 6. С. 1105.
44. Chacravarty S., Mittra R„ Williams N.R. Application of a microgenetic algorithm
(MGA) to the design of broad-band microwave absorbers using multiple fre-
quency selective surface screens buried in dielectrics. // IEEE Trans. Antennas
Propagat. 2002. V.50. N3. P. 284.
45. Kazantsev Y. N., Mal'tsev V. P„ and Shatrov A. D. Plane wave transmission
through a pair of capacitive gratings // IEE Proc. Microw. Antennas Propagation.
2000. V.147. N.6. P.455.
46. Михайловский Л.К. Логика построения и основные положения математического
формализма квантовой гировекторной электродинамики (гиромодель). // XII
Международная конференция по спиновой электронике и гировекторной элек-
тродинамике. Москва (Фирсановка). 19-21 декабря 2003. С. 70-89.
47. Михайловский Л.К. Анализ поля поверхностных волн в присутствии конечного
числа параллельных металлических полосок на поверхности пьезоэлектрика. //
XII Международная конференция по спиновой электронике и гировекторной
электродинамике. 19-21 декабря 2003 г. Москва (Фирсановка). С. 102-109.
48. Михайловский Л.К. Бестоковое и бесфазное «точечное» энергетическое
взаимодействие электромагнитного поля с собственным динамическим по-
лем спиновых центров поглощения-излучения гиромагнитной среды. И XII
Международная конференция по спиновой электронике и гировекторной
электродинамике. Москва (Фирсановка). 19-21 декабря 2003. С. 129-134.
49. Михайловский Л.К. Бестоковая радиоэлектроника (квантовая механика для
инженеров) // XIV Международная конференция по спиновой электронике
н гировекторной электродинамике. Москва. 2005-2006. С. 39-68.
50. Аплеталин В. И., Зубов А. С., Казанцев Ю. Н., Солосин В. С. И Поляризаци-
онный рефлектометр И Радиотехника. 1998. Т. 43. № 12. С. 4.
372
Перечень принятых сокращений
БЛА - беспилотный летательный
аппарат
БП - боеприпасы
БРПМ - бестоковое радиопоглощение
материала
БРПП - бестоковое радиопоглощение
покрытия
ВВТ вооружение и военная техника
ВКУ - видеоконтрольное устройство
ВМО Всемирная метеорологическая
организация
ВП - вертикальная поляризация
ВТБ - высокоточные боеприпасы
ВТО - высокоточное оружие
ГО - геометрическая оптика
ГП горизонтальная поляризация
ГСН - головка сомонаведения
ГТД геометрическая теория
дифракции
ГФ - гребенчатый фильтр
ДН - диаграмма направленности
ДОР - диаграмма обратного
рассеяния
ДПЛАН дистанционно пилотируе-
мый летательный аппарат-носитель
ЕВЦ естественные внешние
условия
ЗРК зенитно-ракетный комплекс
ИК инфракрасное
ИС Hinerpniibiiaii схема
КАЗ комплекспкiпипой iinitiin.i
КГЗ- комннекс ।pviiiioinilt uiimiu.i
КИЗ комплекс индивидуальной
защиты
КНД - коэффициент направленного
действия
ЛА - летательный аппарат
ЛПД - лавинно-пролетный диод
ЛСВ - линия соприкосновения
ЛЦ линия цели
ЛЧМ - линейная частотная
модулящия
МКВ метод краевых волн
МКП метод касательной плоскости
МЛВ - метод локальных возмущений
ММВ - метод малых возмущений
ММДВ - миллиметровый диапазон
воли
ММН - метод малых наклонов
МПА микрополосковые антенны
ОБТТ - объект бронетанковой
техники
ОВТ объект военной техники
ОЗЦ - оперативное запоминающее
устройство
ОЛ - объект локации
ОУ операционный усилитель
ПЗ - помехозащищенность
ПЛИС программируемая
логическая интегральная схема
ПМР поляризационная матрица
рассеяния
ПО программное обеспечение
НИМ приемопередающий модуль
III IMP полная поляризационная
ма।рпца расссиппя
373
Миллиметровая радиолокация: методы обнаружения и наведения ...
ПР - поле рассеяния
ПРО - противоракетная оборона
ПРР - противорадиолокационная
ракета
ПТРК - противотанковый ракетный
комплекс
ПЧ - промежуточная частота
РКДВ - радиокомандное дальнее
возведение
РЛИ - радиоэлектронная
информация
РЛК - радиолокационный канал
РЛТ - радиолокационная техника
РЛХ - радиолокационная характери-
стика
РНДЦ - разведка наземных движу-
щихся целей
РНЦ - разведка наземных целей
РОП - разведка огневых позиций
РПМ - радиопоглощающие
материалы
РПП - радиопоглощающие
покрытия
РТР - радиотехническая разведка
РТСУ - радиотехническая система
управления
РЦЦ - радиолокационный центр
цели
РЭБ - радиоэлектронная борьба
РЭВ - радиоэлектронная война
РЭЗ - радиоэлектронная защита
РЭО - радиоэлектронная оборона
РЭП радиоэлектронное подавление
РЭР - радиоэлектронная разведка
РЭУ - радиоэлектронные удары
САПР - система автоматизированного
проектирования
САС - система автоматической
селекции
СБРЛ - система ближней
радиолокации
СВ - сухопутные войска
СВН средства воздушного
нападения
СДЦ - селекция движущихся целей
СКГО система координат
главных осей
СП - станция помех
СПМ - спектральная плотность
мощности
СПР - система принятия решения
СЧП - средняя частота повторения
СШП сверхширокополосные
ТВД - театр военных действий
УАС - управляемые артиллерийские
снаряды
УВХ - устройство выборки-хранения
УО - уголковый отражатель
ФВ - фазовращатель
ФКМ - фазокодовая манипуляция
ФО физическая оптика
ФТД - физическая теория дифракции
ЦОС - цифровая обработка сигналов
ЦПИ - центр поглощения и излучения
ЦПОИ - центральный пункт
обработки информации
ЧСП - частотно-селективная
поверхность
ШП - широкополосность
ЭМП - электромагнитное поле
ЭО - элементарный отражатель
ЭПР - эффективная площадь
рассеяния
374
Сведения об авторах
Борзов Андрей Борисович - докт. техн, наук, профессор, зам. директора НИИ специально-
го машиностроения МГТУ им. Н.Э.Баумана, зав. кафедрой автономных информационных
и управляющих систем МГТУ им. Н.Э.Баумана. E-mail: wave@sm.bmstu.ru
Область научных интересов: системы ближней радиолокации.
Быстров Рудольф Петрович - докт. техн, наук, профессор, заслуженный деятель науки РФ,
действительный член Академии военных наук, чл.-корр. Российской Академии естественных
наук им. В.И. Вернадского и Российской Академии инженерных наук им. А.М. Прохорова,
советник Российской академии ракетных и артиллерийских наук, вед. научи, сотрудник ИРЭ
РАН и 3 ЦНИИ МО РФ, член экспертного совета ВАК РФ и РФФИ, почетный радист РФ.
E-mail: rudolf@cplire.ru
Область научных интересов: радиотехнические и оптико-электронные системы специ-
ального назначения.
Засовин Эдуард Анатольевич - докт. техн, наук, профессор, зав. кафедрой радиотехниче-
ских устройств и систем Московского государственного института радиотехники, элек-
троники и автоматики (технического университета). E-mail: zasovin@mirca.ru
Область научных интересов: оптоэлектроника, волоконная оптика, радиолокация.
Лихоеденко Константин Павлович - канд. техн, наук, доцент кафедры автономных инфор-
мационных и управляющих систем МГТУ им. Н.Э. Баумана. E-mail: wavc@sm.bmstu.ru
Область научных интересов: радиолокационные системы селекции миллиметрового и
субмиллимстрового диапазонов волн.
Муратов Игорь Валентинович- канд. техн, наук, доцент кафедры автономных информа-
ционных и управляющих систем МГТУ им. Н.Э.Баумана. E-mail: wavc@sm.bmstu.ru
Область научных интересов: бортовые радиолокационные системы управления милли-
метрового и субмиллимстрового диапазонов волн.
Павлов Григорий Львович канд. техн, наук, доцент кафедры автономных информацион-
ных и управляющих систем МГТУ им. Н.Э. Баумана. E-mail: wave@sm.bmstu.ru
Область научных интересов: бортовые радиолокационные системы траекторных
измерений.
[Соколов Андрей Владимирович — докт. техн, наук, профессор, действительный член Ака-
демии инженерных наук РФ и Международной Академии информатизации, вед. научн.
сотрудник ИРЭ РАН. Лауреат двух государственных премий СССР и премии СМ СССР.
Сучков Виктор Борисович канд. техн, наук, доцент кафедры автономных информаци-
онных и управляющих систем МГТУ им. Н.Э. Баумана. E-mail: wavc@sm.bmstu.ru
Область научных интересов: математическое моделирование характеристик рассеяния
сложных радиолокационных целей и подстилающих поверхностей
Научное издание
МИЛЛИМЕТРОВАЯ РАДИОЛОКАЦИЯ:
методы обнаружения и наведения
в условиях естественных и организованных помех
Авторы
Андрей Борисович Борзов
Рудольф Петрович Быстров
Эдуард Анатольевич Засовин
Константин Павлович Лихоеденко
Игорь Валентинович Муратов
Григорий Львович Павлов
[Андрей Владимирович Соколов!
Виктор Борисович Сучков
Зав. редакцией: Л.А. Разум
Изд. №21. Сдано в набор 27.11.2009.
Подписано в печать 12.07.2010. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Таймс.
Печать офсетная.
Печ. л. 23,5. Тираж 500 экз. Зак. № 0462.
ЗЛО Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6
тел./факс: (495) 621-48-37; 625-78-72, 625-92-41.
e-mail: info@radiotec.ru
www.radiotec.ru
Отпечатано в ордена Трудового Красного Знамени
типографии им. Скворцова-Степанова ФГУП Издательство «Известия»
Управления делами Президента Российской Федерации.
Генеральный директор Э.Л. Галумов
127994, ГСП-4, г. Москва, К-6, Пушкинская пл., д. 5.
Контактные телефоны: (495) 694-30-20, 694-36-36
e-mail: izd.izv@ru.net
Рассмотрены теоретические вопросы синтеза и анализа
радиолокационных систем миллиметрового диапазона длин
волн. Уделено внимание особенностям построения и
функционирования бортовых радиолокационных датчиков
целей, головок самонаведения, а также особенностям селекции
объектов локации в условиях воздействия естественных и
искусственных помех. Приводятся методы математического и
цифрового моделирования характеристик рассеяния объектов
сложной геометрической формы и подстилающих поверхностей.
Для научных работников и инженеров, связанных с
проектированием и разработкой радиолокационных систем, а
также для студентов и аспирантов, специализирующихся в
области радиолокации и проектирования средств поражения и
боеприпасов
ISBN 978-5-88070-246-6