/























































































































































































































































































































































Text
С?9
УДК 621.83 : 532.5
Стесин С. П., Яковенко Е. А. Гидродинамические
передачи. М., «Машиностроение», 1973, 352 с.
В учебнике излагаются основы теории гидродинами-
ческих передач. Описываются устройство, принцип
действия, характеристики гидродинамических муфт,
а также их совместная работа с двигателем. Приво-
дятся различные схемы и характеристики гидродинами-
ческих трансформаторов, их расчет и проектиро-
вание, испытание и доводка при производстве. Даются
рекомендации по применению гидродинамических
передач в тракторах, транспортных, строительных,
дорожных и других машинах.
Учебник может быть полезен также инженерам и
техникам конструкторских бюро и заводов, занятых
разработкой и производством гидродинамических пе-
редач. Табл. 16, ил. 189, список лит. 28 назв.
Рецензенты: Кафедра гидравлики и гидропривода
Волгоградского политехнического института
и канд. техн, наук Ф. А. ЧЕРПАК
С
336—024
038 (01)—73
24—73
© Издательство «Машиностроение», 1973.
ВВЕДЕНИЕ
Гидропривод состоит из трех основных элементов: гидропере-
дачи, устройства управления, обслуживающих устройств.
Гидропередача — силовая часть гидропривода — осуществляет
преобразование механической энергии двигателя в энергию потока
и затем преобразование энергии потока в механическую энергию
рабочего органа. При этом носителем энергии является рабочая
жидкость.
В качестве преобразователей энергии в гидропередачах при-
меняются насосы и гидродвигатели. Если в качестве насоса и дви-
гателя используются лопастные машины, то такие передачи назы-
ваются гидродинамическими; если в качестве преобразователя
энергии применяются объемные насосы или двигатели, то такие
передачи называются гидрообъемными. В результате объединения
гидродинамической и гидрообъемной передач можно получить
новую передачу, называемую турбообъемной.
Устройство управления служит для управления потоком рабо-
чей жидкости, связи звеньев гидропередач с двигателем, взаимной
связи звеньев и элементов гидродинамической трансмиссии.
К обслуживающим устройствам относятся системы охлаждения,
питания и очистки рабочей жидкости. Для привода гидропередачи
применяются двигатели различных типов. На строительных и
дорожных машинах, а также автомобилях, в качестве приводных
наибольшее распространение получили двигатели внутреннего
сгорания. Гидропередача в приводе с двигателем внутреннего сго-
рания существенно улучшает его характеристику.
Известно, что дизель имеет следующие основные недостатки.
1. Максимальная мощность соответствует определенной ча-
стоте вращения выходного вала двигателя в минуту (см. точку А
на рис. 1).
2. Неспособность преодолевать большие перегрузки, так как
крутящий момент, развиваемый двигателем, меняется в неболь-
ших пределах.
3. Максимальный момент в точке В больше момента в точке А
на 5—15% (при использовании турбонаддува на 30%). Расчет
привода ведут по моменту в точке А-
4. Несоответствие динамической и статической характеристик
двигателя при высокочастотных сравнительно больших по ампли-
туде колебаниях скоростей вращения двигателя.
5. Невозможность реверсирования коленчатого вала.
6. Сравнительно малый диапазон регулирования крутящего
момента.
Идеальная характеристика двигателя обеспечивает максималь-
ную мощность во всем скоростном диапазоне. Из формулы N =
= Л4ю = const видно, что графически мощность выражается ги-
перболической кривой (см. рис. 1, б). Применение механической
Рис. 1. Характеристики привода:
а — характеристика двигателя внутреннего сгорания; б — идеальная
характеристика привода;------------характеристика привода с ме-
ханической коробкой передач
коробки передач позволяет приблизить характеристику двигателя
к идеальной характеристике (см. на рис. 1, б пунктирную линию),
Однако, как видно из графика, это приближение ступенчатое.
Лучшими характеристиками (с точки зрения более полного исполь-
зования максимальной мощности двигателя) обладает передача,
осуществляющая бесступенчатое регулирование скорости и мо-
мента. К таким гидравлическим передачам относятся гидродина-
мические передачи.
Гидродинамические передачи, применяемые в приводах машин,
позволяют получить:
1. Хцубокое^ регулирование скорости, позволяющее получить
монтажные и «ползучие» скорости, которые важны для строитель-
ных и дорожных машин.
2. Улучшение пусковых качеств машины, так как гидродина-
мическая передача позволяет осуществить пуск машины под на-
грузкой,
4 - . Г.А
3. Повышение надежности основных узлов машины, так как
гидродинамическая передача:
а) предохраняет двигатель от перегрузки. При этом режим ра-
боты двигателя может нё зависеть--от режима работы ведомого
вала. Это в целом увеличивает моторесурс двигателя в некоторых
случаях на 50— 100% [3];
б}-нредехраняет от перегрузки также механизмы трансмиссии
и рабочие органы машины;, при этом существенно снижаются дина-
мичеекиеНагрузки, так как крутильные колебания от двигателя
и рабочего органа демпфируются в гидродинамической пере-
даче;
в) благодаря плавному увеличению момента повышает про-
ходимость транспортных машин; особенно на слабых грунтах.*
" 4. Упрощение механической части трансмиссии многих машин,
что ведет ^снижению их массь1_(например, масса тепловоза
с гидродинамической перёДЯчеина 30% меньше массы тепловоза
с механической трансмиссией).
5. Облегчение труда машиниста благодаря автоматизации ра-
бочего процесса. ' '----------———
На рис. 2 показана гидродинамическая передача, в которой
насос и двигатель связаны трубопроводами. Жидкость от насоса Н
поступает в турбину Т через трубопровод 2 и направляющие ап-
параты, а от турбины к насосу — по трубопроводу 1.
При протекании жидкости в трубопроводах 1 и 2 происходят
значительные гидравлические потери энергии жидкости, которые
зависят от вязкости и скорости жидкости, а также шероховатости
стенок и размеров трубопроводов.
В 1902 г. Г. Феттингер предложил объединить в одном корпусе
два основных элемента гидропередачи — насос и турбину, при
этом отпала необходимость в подводящем и отводящем трубопро-
водах. Передачу, в которой насос, турбина и реактор объединены
в одном корпусе, назвали гидротрансформатором. Жидкость в ра-
бочей полости гидротрансформатора движется по замкнутому кон-
туру.
Схема гидротрансформатора Г. Феттингера показана на рис.
3, а. Впервые гидродинамическая передача (по патенту Г. Феттин-
гера) была применена в 1907 г. в морском флоте. К этому времени
на морских судах были установлены быстроходные двигатели
внутреннего сгорания и паровые турбины вместо тихоходных паро-
вых двигателей. В приводе такой судовой установки был уста-
новлен гидротрансформатор Г. Феттингера, который имел макси-
мальный к. п. д. (85%).
Для повышения экономичности гидродинамической передачи
был изъят реактор. Так появилась новая гидродинамическая
передача, получившая название гидромуфты (рис. 3, б). Макси-
мальный к. п. д. гидромуфты достигает 97—98%. Однако из-за
отсутствияяреактора в гидромуфте не происходит преобразования
крутящего момента, как в гидротрансформаторе. Гидромуфта
5
(в сочетании с зубчатыми передачами) была применена также в при-
воде гребных винтов на судах с паровыми турбинами.
Достоинства гидродинамических передач способствовали их
широкому распространению в различных областях промышлен-
ности. Так, для гидравлических передач автобусов один из первых
гидротрансформаторов (фирма Лисхольм—Смит) был создан в Шве-
ции в 1928 г. В 1933 г. приступили к серийному изготовлению
таких передач в Англии. На серийных легковых автомобилях
гидротрансформаторы с механической передачей стали устанавли-
вать с 1947 г. (передача «Дайнафлоу», автомобиль «Бьюик» и др.).
Рис. 2. Принципиальная схема гидро-
динамической передачи:
Н — насос; Т — турбина; — направляю-
щий аппарат (реактор) насоса; Ру — направ-
ляющий аппарат (реактор) турбины; 1,2 —
трубопроводы
Q) б) J
Рис. 3. Гидродинамические передачи
Феттингера:
а — гидротрансформатор; б — гидро-
муфта (Н — насос, Т — турбина; Р —
реактор)
В СССР первая гидромуфта создана в 1929 г. проф. А. П. Куд-
рявцевым. Первый гидротрансформатор спроектирован и построен
в 1932—1934 гг. в МВТУ им. Н. Э. Баумана. Это был трехколес-
ный гидротрансформатор мощностью 44 кВт.
В настоящее время гидродинамические передачи применяются
в приводах транспортных, строительных, дорожных, горных и дру-
гих машин, имеющих переменные нагрузки на рабочих органах*
К недостаткам гидродинамических передач относятся сле-
дующие.
1. Более низкий к. п. д. гидротрансформаторов (90—83%) на
расчетном режиме по сравнению с к. п. д. механической передачи
(93—97%). Правда, гидромуфты имеют максимальный к. п. д.
97—98%, но из-за отсутствия реактора гидромуфты не трансфор-
мируют крутящий момент. Кроме этого к. п. д. гидродинамиче-
ской передачи изменяется в зависимости от режима работы.
2. Высокая стоимость и сложность изготовления по сравнению
с механическими передачами.
3. Необходимость систем питания и охлаждениям
6
ГЛАВА 1
ОСНОВЫ ТЕОРИИ
ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧ
§ 1. КЛАССИФИКАЦИЯ ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧ
В основу классификации гидродинамических передач поло-
жены те их свойства, которые представляют интерес для потреби
теля, а именно:
Рис. 4. Классификация гидродинамических передач
7
преобразует ли данная гидродинамическая передача круФЯ-
щий момент (гидротрансформатор или гидромуфта);
возможно ли неавтоматическое изменение извне характери-
стики турбины и каким способом (объемное регулирование измене-
нием объема жидкости в рабочей полости передачи; механи-
ческое регулирование перемещением какой-либо части или ор-
гана);
как изменяется (трансформируется) крутящий момент на ведо-
мом валу по сравнению с ведущим (одноступенчатые — изменение
момента в 1,5—4,5 раза; многоступенчатые, многотурбинные —
изменение момента в 3—11 раз при трогании с места рабочего
органа).
Классификация по приведенным выше признакам показана на
рис. 4.
§ 2. ОСНОВНЫЕ ПАРАМЕТРЫ
Параметры гидродинамических передач можно разделить на
два вида: внутренние и внешние. Внешними называют параметры
на валах гидродинамической передачи. К ним относятся: Л4Х и Л42—
крутящие моменты на ведущем и ведомом валах; пг и п2 — частота
вращения ведущего и ведомого валов или ©х, ю2 — угловые ско-
рости ведущего и ведомого валов; = юхЛ1х— мощность, по-
ступающая на ведущий вал; Af2 = ©2Л42— мощность, снимаемая
с ведомого вала; t = ---передаточное отношение; д = ---
коэффициент трансформации; т] = = Ki — полный к. п. д.
Внутренними параметрами гидродинамической передачи счи-
тают параметры потока рабочей жидкости, протекающей в рабо-
чей полости: расход Q и напор Н в проточной части, отнесенные
к соответствующему колесу.
Расходом Q называется объемное количество рабочей жидкости,
протекающей через лопастную систему в единицу времени.
Напором Н называется приращение энергии, сообщаемое каж-
дому килограмму массы рабочей жидкости, протекающей через
рабочее колесо, т. е. разность удельных энергий жидкости на
выходе из колеса и при входе в него.
Напор насоса Ни будем считать положительным, так как энер-
гия рабочей жидкости увеличивается за счет подводимой энергии
от двигателя; напор турбины Нт — отрицательным, так как энер-
гия жидкости уменьшается за счет передачи ее на рабочий
орган.
Из приведенных выше определений следует, что гидравличе-
скую мощность для каждого из рабочих колес можно определить
по формуле
Nr = PgHQ, (1)
где р — плотность рабочей жидкости.
8
§ 3. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА
И ОСНОВНЫЕ УРАВНЕНИЯ
Рассмотрим особенности рабочего процесса в гидротрансфор-
маторах и гидромуфтах. Абсолютная скорость с движения рабочей
жидкости в любой точке рабочего колеса представляет собой гео-
метрическую сумму относительной скорости движения вдоль ло-
патки w и окружной или переносной скорости вращения и вместе
с колесом (рис. 5, а). _
Абсолютную скорость с можно также разложить на две состав-
ляющие:
меридиональную составляющую ст или проекцию скорости с
на плоскость, перпендикулярную оси вращения колеса; _
окружную составляющую си или проекцию скорости с на на-
правление касательной к окружности (окружной скорости) в дан-
ной точке.
В основу расчета гидродинамических передач положена теория
лопастных гидромашин Л. Эйлера. Основные допущения этой
теории следующие.
1. Поток в области рабочего колеса представляет собой эле-
ментарные струи, разделенные поверхностями тока осесимметрич-
ного потока в меридиональном сечении.
2. Число лопаток принимается бесконечно большим, а тол-
щина их бесконечно малой.
3. Направление-потока на выходе из рабочего колеса зависит
от угла установки лопаток и не зависит от направления потока
на входе.
4. Идеальная жидкость имеет установившееся движение.
5. Меридиональная скорость с/п поперек потока не изменяется,
и поэтому все расчеты можно вести для средней линии тока.
6. Изменения момента количества движения жидкости в без-
лопаточном пространстве не происходит.
Уравнения моментов. Установим, какой крутящий момент
необходимо приложить к насосу или какой крутящий момент воз-
никает на турбине, если через них протекает жидкость, скорость
течения которой определяется треугольниками скоростей, пока-
занными на рис. 5.
По теореме о моменте количества движения секундное измене-
ние этого момента равно моменту внешних сил, действующих на
данное колесо. Секундное изменение момента количества движе-
ния жидкости в рабочем колесе
^Г = pQ(<W2 — (2)
где ----------секундное изменение момента количества движе
ния жидкости;
9
cui, cU2 — окружные составляющие абсолютной скорости
соответственно на входе в рабочее колесо и на вы-
ходе из него;
ri> г2 — радиусы соответственно входа и выхода для сред-
ней линии тока в рабочем колесе.
Рис. 5. Треугольники скоростей на рабочих колесах:
а — насос; б — турбина; в — реактор
Момент внешних сил на насосе 7ИН определяется силовым воз-
действием стенок каналов и лопаток, приводимых во вращение
от двигателя, на поток жидкости:
Мн = QP (сиН2ГН2 — hi)- (3)
10
Момент количества движения на насосе по мере йеремещений
потока от входа к выходу увеличивается, а крутящий момент
является величиной положительной. Момент количества движения
жидкости на турбине при этом уменьшается, а крутящий момент
является величиной отрицательной:
Л4Т = Qp (^T2rТ2 Т1)- (4)
Крутящий момент, возникающий на реакторе:
Л4Р = Qp (cup2^*p2 cupirpi)- (5)
Этот момент передается на корпус, с которым жестко связан
реактор, и может быть положительным или отрицательным.
п2 Мт /7, Мн п2 мт п, мн п2 мт rjj мн
а) б)
Рис. 6. Схема движения жидкости в гидроди-
намических передачах:
а — в гидротрансформаторах; б — в гидромуфте
Из уравнений (3), (4) и (5) следует, что, если внешний момент
равен нулю, то в общем случае ГгСи2 = ncui = = const, т. е.
при отсутствии передачи энергии и при отсутствии трения дви-
жение жидкости описывается законом: гс„ = const. По этому за-
кону происходит движение жидкости в межколесных зазорах
гидротрансформаторов и гидромуфт.
Движение жидкости в гидротрансформаторе и в гидромуфте
происходит по контуру, обозначенному на рис. 6, а и б стрелками.
Согласно приведенному выше закону можно записать (см. рис. 6, а):
СыН1Г Hl = СиР2ГР2» сиТ1ГТ1 = СиН2Г Н2> cuPlr Р1 = СиТ2Г Т2 (6)
и (см. рис. 6, б)
СиЦ1ГН1 = СиТ2ГТ21 CuTlrTl = С«Н2ГН2- (7)
С учетом уравнений (6) получим выражения моментов на ра-
бочих колесах гидротрансформатора (см. рис. 6, а):
Мн = Qp (СиН2ГН2 cuP2rPz)t Мт = Qp (сиТ2ГT2 — СиН2Гнг).
Л4р = Qp (соР2гр2 сыТ2гт2).
Складывая левые и правые части уравнений (8), получим
Мн + МР 4- Мт = 0. (9)
II
(8)
Для Гидромуфты с учетом уравнений (7) иМеёМ
MH = Qp(cuH2rH2 —Wb): Mx-Qp(cuTir^ — cuii2rHi). (10)
Складывая уравнения (10), получим
Л1н + Л1т = 0. (11)
Уравнения (9) и (11) называются уравнениями баланса момен-
тов в гидродинамических передачах.
Уравнения напоров. Обозначим Ht — теоретический напор
рабочего колеса. Тогда с учетом вышеизложенного имеем
= (12)
Используя выражения (8) и учитывая, что и = cor, имеем:
для насоса гидротрансформатора
_ сон
" /Н = (РиН2ГН2 — СиР2Грг) =
— ~Г | £иН2иН2-£«P2UH1 Г» (13)
S \ ГН1 )
для турбины
(0т
(^Т2ГТ2 £ыН2ГНг) “
= CuT2UT2 CuH2UTl ~~ | • (14)
« \ ГТ1 /
Аналогично для насоса гидромуфты с учетом выражений (10)
HtH — “у I СыН2«Н2--CuT2UHl ) > (15)
s \ ЛН1 /
для турбины
HfT = “У f C«T2^T2 С«Н2иТ1 | • (15)
6 \ ГТ1 /
§ 4. УЧЕТ ВЛИЯНИЯ КОНЕЧНОГО ЧИСЛА ЛОПАТОК
И СТЕСНЕНИЯ ПОТОКА ЛОПАТКАМИ
Принятые ранее допущения о бесконечно большом числе лопа-
ток предполагают, что течение жидкости характеризуется равно-
мерной эпюрой относительных скоростей w в межлопаточных кана-
лах. Однако в реальных условиях происходит нарушение подоб-
ного характера течения. Это связано, в частности, с возникнове-
нием во вращающихся колесах, кроме основного течения, так
называемого относительного вихря [13].
Рассмотрим движение идеальной жидкости, заполняющей круг-
лый закрытый сосуд, который движется по круговой траектории
12
Рис. 7. Возникновение относительного
вихря при вращении замкнутого ци-
линдра, заполненного жидкостью
ОТйОсйтёльйо toQkk О с угловой скоростью со (рис. ?). КажДаЯ
частица жидкости с координатами х'у' перемещается так, что оси
остаются все время параллельными самим себе. Сосуд же совер-
шает поворот относительно оси.
Сопоставляя при повороте сосуда положение координат х'у'
и точки А (Аь Ап, Ащ, Aiv) на стенках сосуда, видим, что жид-
кость получает относительно сосуда вращательное движение, на-
правленное в сторону, противоположную его переносному дви-
жению. Аналогичное враща-
тельное движение будем
иметь в каналах между ло-
патками рабочего колеса.
На рис. 8, а показано от-
носительное вихревое дви-
жение в закрытом канале
вращающегося рабочего ко-
леса. При наложении отно-
сительного вихря на основ-
ной (транзитный) поток
с равномерной ( эпюрой ско-
ростей w (рис. 8, б) в цент-
робежном насосе увеличи-
ваются относительные ско-
рости на тыльной стороне
лопатки и уменьшаются на
ее лицевой стороне (рис. 8, в).
Одновременно происходит
отклонение потока на вы-
ходе в сторону, противоположную направлению вращения ко-
леса, и на входе — по направлению вращения.
В центростремительной турбине (рис. 8, г) наложение относи-
тельного вихря на транзитный поток приводит к увеличению ско-
рости w на тыльной стороне лопатки и уменьшению ее на лицевой
стороне. Одновременно поток отклоняется по направлению вра-
щения на выходе и против направления вращения на входе
в колесо.
Особенности течения жидкости в каналах центробежной тур-
бины можно видеть из рис. 8, д. Характер течения при наложении
относительного вихря на транзитный поток соответствует харак-
теру течения в насосе. Однако в данном случае лицевой является
вогнутая сторона лопатки, поэтому в турбинах отклонение потока
всегда происходит по направлению вращения колеса [1, 10, 15].
Помимо относительного вихря, необходимо учесть также силовое
взаимодействие между потоком и лопатками рабочего колеса.
Силовое взаимодействие возникает вследствие циркуляции ско-
рости вокруг отдельных лопаток, которая направлена из области
повышенного давления (от лицевой стороны лопатки) в область
пониженного давления.
13
На рис. 8, в, г, д показано направление циркуляции вокруг
лопатки в колесах центробежного насоса, а также центростреми-
тельной и центробежной турбин. Для первых двух колес направ-
ление действия относительного вихря совпадает с направлением
циркуляции, что способствует увеличению перепада давлений на
лицевой и тыльной сторонах лопатки и увеличивает отклонение
потока.
Рис. 8. Распределение скоростей в межлопаточных каналах и отклонение по-
тока на выходе из колеса:
а — относительный вихрь в закрытом канале; б — распределение «транзитной» скорости
в центробежном насосе; в — суммарная эпюра скоростей и отклонение потока в центро-
бежном насосе; г — суммарная эпюра скоростей и отклонение потока в центростремитель-
ной турбине; д — суммарная эпюра скоростей и отклонение потока в центробежной тур-
бине
В центробежной турбине направления относительного вихря
и циркуляции вокруг лопатки противоположны. Как правило,
преобладающее действие оказывает циркуляция, и поток на выходе
из центробежного колеса отклоняется по направлению вращения.
Явления, связанные с вязкостью реальной жидкости, приводят
к дополнительным нарушениям кинематики потока идеальной
жидкости в колесе. При обтекании лопаток потоком вязкой жид-
кости возникает пограничный слой, который интенсивно нара-
стает в зонах с местной диффузорностью каналов, при этом про-
исходит уменьшение кинетической энергии частиц жидкости в по-
граничном слое. Эти частицы не способны проникнуть в область,
в которой давление возрастает вследствие движения основного
потока. Они затормаживаются, и это приводит к отрыву потока
от поверхности профиля.
Наибольшее нарастание пограничного слоя и отрыв потока
возможны на тыльной стороне лопатки при отклонении режима
работы передачи от расчетного. Интенсивное нарастание погра-
ничного слоя и, в еще большей степени, отрыв потока приводят
14
к изменению характера течения идеальной жидкости при беско-
нечном числе лопаток.
Если канал в целом является конфузорным, то возможность
возникновения отрывных течений уменьшается. Поэтому в тур-
бинах, в которых часто каналы выполняются конфузорными,
влияние вязкости жидкости на отклонение потока меньше, чем
в насосах. Однако в насосах влияние относительного вихря, цир-
куляции вокруг лопасти и отрывных течений приводит к откло-
нению основного потока на выходе в одну и ту же сторону — про-
тив направления вращения колеса.
Рис. 9. Треугольники скоростей с учетом конечного числа лопаток:
а — в реакторе; б — в насосе; в — в турбине
В неподвижных реакторах отклонение потока определяется
только наличием циркуляции вокруг лопатки и изменением по-
граничного слоя. Так как при работе изменяется знак момента на
реакторе, а также знак циркуляции жидкости вокруг лопатки, то
отклонение потока на выходе может происходить в любую сторону.
В гидромашинах отклонение потока учитывают на выходе из
рабочих колес коэффициентом [13]
и = (17)
Н2оо
где cU2, cU2ao — проекции абсолютной скорости на окружную
соответственно при конечном и бесконечном числе лопаток
(см. рис. 9, а, б, в). При расчете турбин, для которых скорость сиъ
может быть равна нулю, целесообразно учитывать отклонение
потока по формуле
где wuz, Wu2& — проекции относительной скорости на окруж-
ную соответственно при конечном и бесконеч-
ном числе лопаток.
Наличие отклонения потока в колесах от направления лопатки
приводит к несовпадению значений напоров Htoo и моментов Mt от,
рассчитанных при бесконечном числе лопаток, с опытными зна-
чениями Ht и Mt.
В гидромуфтах и гидротрансформаторах конечное число ло-
паток оказывает влияние как на параметры выхода (за счет данной
лопастной системы), так и на параметры входа (за счет выхода из
предыдущего колеса).
В теории гидродинамических передач нет универсальной фор-
мулы для определения коэффициента р,, так как его величина за-
висит от многих факторов (быстроходности рабочих колес, их
расположения, режима ра-
боты и т. д.). В связи
с этим часто пользуются
методикой расчета коэф-
фициента р для центро-
бежных насосов и ком-
прессоров. Так, исполь-
зуют график (рис. 10),
который составлен для
центробежных насосов
с радиальным входом и
определения поправки на
Рис. 10. График Кухарского
при скорости cwhi — 0 [13]. Для
отклонение в насосах гидропередач рекомендуется формула
К. Пфлейдерера [20]
1 +р ’
(18)
где
ФГ1
(19)
г — число лопаток;
г2 — радиус выхода из рабочего колеса;
s — статический момент линии тока:
Г2
s = J rd/m;
(20)
1т — длина линии тока в меридиональном сечении;
ф — опытный коэффициент.
Поданным, приведенным в работе [13],
ф = (0,55-0,65) + 0,6 sin р2. (21)
Опыт подтверждает пригодность этой формулы для расчетов
насосов с коэффициентами быстроходности ns = 70—150 и с ло-
патками, загнутыми назад. Для более быстроходных колес вели-
чина поправки увеличивается. Стоящий впереди выражения (21)
числовой коэффициент зависит от шероховатости поверхности
проточной части колеса. Для тщательно обработанных колес
можно принимать нижний предел этих значений.
Академик Г. Ф. Проскура рекомендует для насосов
= f [sln^+^ysinp,]. ' (22)
По методу Л. Стодолы, изложенному в работеЧ 10], для учета
влияния конечного числа лопастей рекомендуются следующие
зависимости:
^и2 ~ -^и2 ~ ^2 Р2
или после соответствующих преобразований
^и2 = ^т2 Ctg Р2» (23)
где kz — 1----— sin р2 для центробежных насосов, а для центро-
стремительных турбин
kz= 1 +-J-Sinp2.
Для любого колеса гидродинамической передачи может быть
также рекомендована формула Е. Шпанхаке
sin р2 =-------- "тг —-------------------
+ У (^)2 т 2т
где
2
i= f—
2л J ст
1
т = 0,6-5-0,8— опытный коэффициент;
w'2 = - С'П2_,
sin 02
(24)
(25)
(26)
02 — угол потока на выходе из колеса.
Из формулы (24) с учетом выражений (25) и (26) получим
Sin 02 =
sin 02
лт (cU2r2 — Cu^j) sin2 02
(27)*
2
2 f
m2J cm
Для насоса (соН2Гн2 — сиН1Гн1) > 0, поэтому 02 < 0г; для
турбин (СИТ2ГТ2 — СЫТ1ГТ1) <0 и 02 > 02-
Таким образом, для учета отклонения в гидропередачах ре-
комендуются формулы (18), (21), (22) для насосов, а формулы (24),
(27) для турбин и реакторов.
В некоторых случаях учитывают поправку на отклонение по-
тока Д02: для центростремительной турбины Д0Т2 = 1-5-7° [14];
для центробежной турбины Д0Т2 = 1-5-2,5° [7], а для реакторов
при переменной толщине лопаток Д0Р2 = 1-5-3° [15]. Результаты
* Знак плюс в знаменателе ставят при острых углах, минус — при тупых.
При углах 90° формулы (24) и (27) не имеют смысла.
§ Q. П. Стесин 17
получены экспериментально при замере скоростей на выходе из
рабочих колес при помощи зондов (см. далее гл. V, § 42).
Учет стеснения потока лопатками. При выводе предыдущих
выражений было сделано допущение, что лопатки бесконечно
тонкие. Толщина лопаток в реальных колесах выбирается из кон-
структивных и технологических соображений и колеблется в пре-
делах 0,7—6 мм. Поэтому при расчетах необходимо учитывать
изменение площади проходного сечения на входе и выходе для
каждого колеса, а следовательно, и изменение скоростей.
Рис. 11. Учет влияния стеснения потока лопатками:
а — основные геометрические параметры; б — треугольники .
скоростей
Меридиональная составляющая абсолютной скорости с учетом
стеснения потока лопатками
= = (28)
где сП1Ь — меридиональная составляющая абсолютной скорости
без учета стеснения потока лопатками:
bmQ~ 2лгЬ ’
х — коэффициент стеснения,
1 б
х = 1---о~;
t sin р
б — толщина лопаток;
, / . 2лг \
t — шаг лопаток (г =------\;
b — ширина колеса в меридиональном сечении.
С изменением скорости ст изменяются также треугольники
скоростей (рис. 11, а, б),
< о
§ 5. КЛАССИФИКАЦИЯ И ОПРЕДЕЛЕНИЕ ПОТЕРЬ
Передача энергии с ведущего вала на ведомый в гидродина-
мической передаче сопровождается потерями энергии на преодоле-
ние различных сопротивлений. Потери в гидродинамической пере-
даче можно разделить на три вида — гидравлическйе, механи-
ческие и объемные, которые учитываются соответствующими
к. п. д.: гидравлическим т]г; объемным г]0 и механическим т]мех.
Гидравлические потери учитываются как потери удельной энер-
гии или напора. Вязкость рабочей жидкости вызывает изменение
напоров и Я/т. Так, напор насоса
Ян = Я/н-йпот.н. (29)
где ЛПОт. н — гидравлические потери в насосе.
Напор турбины
Нт = HtT 4" ftnoT. т, (30)
где ^пот. т — гидравлические потери в турбине.
Из принципа действия гидродинамических передач следует, что
//н = Ят 4" ^пот. Р + ^пот>
где Лпот.р — гидравлические потери в реакторе;
h'nor. — гидравлические потери на межколесных безлопа-
точных участках.
С учетом выражений (29) и (30)
= Н(Т + ^пот. Н 4“ ^пот. T ~Ь ^пот. Р ^пот
ИЛИ
яж = я/т+Елпот. (31)
Формула (31) выражает баланс удельной энергии.
Совершенство элементов проточной части гидропередачи харак-
теризуется величиной гидравлических потерь или гидравличе-
ским к. п. д.
4. = ^=!-^. (32)
Рассмотрим основные виды гидравлических потерь, встречаю-
щихся в гидродинамических передачах.
а) Потери на трение в относительном движении могут быть
определены по формуле для потерь напора по длине трубопровода:
L
Лтр = ^тР 4/?гср ’
где L — длина средней линии лопатки в колесе;
/?г ср — средний гидравлический радиус межлопаточного ка-
нала;
куср — средняя относительная скорость движения жидкости
в канале;
Хтр — коэффициент потерь на трение.
2* 19
Коэффициент Хтр определяется по формулам И графикам, при-
меняемым для расчета круглых труб, с последующим уточнением
расчета для условий протекания жидкости в гидропередачах.
В общем случае коэффициент Хтр есть функция от числа Re и отно-
сительной шероховатости стенок канала. Для круглых труб с
естественной шероховатостью коэффициент Хтр может быть
получен по данным Всесоюзного теплотехнического института
им. Ф. Э. Дзержинского (ВТИ) (рис. 12).
Число Рейнольдса для гидротрансформаторов и гидромуфт
можно определить приближенно по формуле
Шср * ср
где v — кинематическая вязкость рабочей жидкости.
Значения коэффициента %тр, взятые по графику ВТИ (рис. 12),
для гидродинамических передач должны быть увеличены в 3,1—
%,7 раза [10]. Это объясняется изменением формы НопереННоГО
сечения по длине канала; неравномерностью распределения скоро-
стей w по поперечному сечению; кривизной межлопаточных кана-
лов; влиянием вращения каналов относительно оси колес.
б) Потери, зависящие от угла атаки. При натекании потока
на лопатки рабочего колеса в общем случае направление потока
не соответствует направлению лопатки на входе, т. е. натекание
происходит с некоторым углом атаки Друд (см. рис. 13). При боль-
ших углах атаки происходит отрыв потока от лопатки и обра-
зуются вихревые зоны. Это ведет к потерям энергии на вихре-
образование и трение при сужении потока вследствие уменьшения
Рис. 13. Натекание потока на входной элемент лопатки (индек-
сом * обозначены величины при натекании без угла атаки)
проходных стечений за счет вихревых зон. Различают положитель-
ный и отрицательный углы атаки Друд. За положительный при-
нимаем угол, образующийся при натекании потока на лицевую
сторону, а за отрицательный — при натекании потока на тыльную
сторону лопатки.
Потери напора зависят как от расхода- жидкости, так и от
величины и знака угла атаки Аруд:
с?
Луд = Фуд-щг, (34)
где фуд — коэффициент потерь, который зависит от угла
атаки Аруд
cs—потерянная скорость (см. рис. 13).
Для выбора величины фУд необходимы экспериментальные ис-
следования. В технической литературе рекомендуется фуд < 1
(фуд = 0,64-0,8) при малых углах атаки или при отрицательных
углах атаки (Аруд <0), а также фУд > 1 (фУд = 1,24-1,6) при
натекании потока с положительным углом атаки [10]. В первом
приближении для расчета рекомендуется принимать фУд = 1.
21
в) Потери на внезапное сужение и внезапное расширение
имеют место при входе в межлопаточные каналы и при выходе из
них в безлопаточное пространство. Эти потери определяются по
формулам гидравлики и зависят от квадрата расхода [9]:
t ____ (Cm2 ст бл)2 /оеч
“расш — 2g ’
^Уж=(С^^1)-Фсуж. (36)
где ст2 и ст1 — меридиональные составляющие абсолютной
скорости на выходе из колеса и входе в него,
взятые с учетом коэффициента стеснения;
с^бл — меридиональная составляющая абсолютной
скорости в безлопаточном пространстве;
<рсУж = 0,4-^0,5— коэффициент потерь на сужение.
г) Диффузорные потери обусловлены вихреобразованием при
отрыве потока от стенок расширяющегося канала и определяются
по формулам для расширяющегося трубопровода
L. __m (,ст нач — ст кон)2
*^диф ТдиФ 2g ’
где коэффициент <рдиф определяется по следующим зависимостям
при углах расширения диффузора аДиф до 25° [9]:
для диффузоров круглого сечения
Фдиф = 3,2 tg -^-j/tg-^; (37)
для квадратного и прямоугольного сечения
Фдиф = 6,2 tg |Ag-^-. (38)
д) Потери на поворот потока в межколесных каналах можно
учесть по формуле
с2
Чов = Впов-^-, (39)
где £пов = 0,1-^0,15— коэффициент сопротивления.
Гидравлические потери при расчете определяются по приведен-
ным выше формулам для всех рабочих колес и всех участков без-
лопаточного пространства, а затем суммируются.
Объемные потери. В качестве объемных потерь рассматри-
ваются внутренние утечки, т. е. перетекание жидкости через
уплотнения из области более высокого давления в область более
низкого. Объемные потери оцениваются величиной расхода утечек
&Q — Qh — Qt> на которую расход турбины меньше расхода на-
coca. Величина утечек в лопастной системе определяется объем-
ным к. п. д.
По =
QT
AQ
(40)
= 1
В гидродинамических передачах энергия утечек частично ис-
пользуется, поэтому формула (40) дает заниженное значение
к. п. д. т]0. А. Я. Кочкарев предлагает к. п. д. т)0 определять по
формуле [10]
„ I «•
Ло ~ <?Н Qh ‘
(41)
Из этой формулы видно, что при i > 0, когда диски насоса и
турбины вращаются в одну сторону, к. п. д. т}о увеличивается по
сравнению с тем, когда один из дисков неподвижен. При i < 0
объемный к. п. д. уменьшается по сравнению с тем, когда один
диск неподвижен. Для определения объемного к. п. д. т]0 необ-
ходимо знать величину утечек AQ. Расчет утечек AQ в общем
случае производится в зависимости от длины участков и их кон-
структивного оформления.
Так, для кольцевых щелевых уплотнений величина объемных
утечек может быть получена по формуле
AQ = <pyTF3/^,
где F3 — площадь зазоров;
Др — перепад давлений на уплотнении (разность давлений
до и после уплотнения); определяется в зависимости
от места утечки;
<рУт — коэффициент расхода утечек, зависящий от конструк-
ции уплотнений, а также зазоров.
Например, для_гладких зазоров [13]
1
<Рут =
1
где А.3 = 0,014-0,02 — коэффициент трения в зазоре;
63 — зазор на данном участке;
L — длина щели на данном участке;
п — число участков с малыми зазорами.
Механические потери. При передаче энергии от двигателя
к трансмиссии через гидродинамическую передачу часть энергии
тратится на трение в подшипниках и уплотнениях ведущего вала
АА^мех!. на трение в подшипниках и уплотнениях ведомого
вала ДЛГмех2, на трение наружной поверхности рабочих колес
о жидкость (дисковое трение) МдХ и NK,
V S^+1'2("*1)+1'5
23
Величины AAfMexl и ДЛ/'мехг определяются экспериментально
и зависят от типа подшипников (качения и скольжения), от кон-
струкции наружных уплотнений гидропередачи (уплотнительные
чугунные кольца, манжеты, лабиринты), от частоты вращения
валов.
Величины ЛЛ/д1 и АЛАД2 могут быть рассчитаны по полуэмпи-
рическим зависимостям для различных участков в зонах диско-
вого трения [15]:
= 2 (qP4 + С/р(Од2,5£/?4, (42)
где первое слагаемое определяет мощность дискового трения обеих
плоских сторон дисков с наружным радиусом R, второе—ци-
линдрической поверхности с длиной образующих L; <од — отно-
сительная скорость вращения; Cf — коэффициент дискового тре-
ния, который для гладких дисков можно определить по фор-
муле [22]
где s — ширина зазораТмежду дисками.
Для чисел Re = (2ч-3,5) 10б рекомендуется коэффициент Cf
принимать равным 0,0023—0,003, причем последнее значение соот-
ветствует шероховатостям поверхностей V1—V3.
При о)н = const можно записать
о)нт == &)н (1 WHP = ®тр
Если полости дискового трения имеют криволинейные очерта-
ния, следует применять интегрирование по участкам для опре-
деления мощностей дискового трения или заменить криволиней-
ные участки линейными, расположенными параллельно или пер-
пендикулярно оси вращения, и затем просуммировать мощности
дискового трения на каждом участке. Результаты эксперимен-
тальных исследований по определению моментов дискового трения
приведены, например, в работах [10], [22].
Механический к. п. д. гидропередач
Лмех Лмех 1Лмех 2» (43)
где
Чмех 1 —
И
^2
Лмех 2 — л/
гТ
Полный к. п. д. гидродинамической передачи
П = WW-
(44)
§ 6. ЗАКОНЫ ПОДОБИЙ
Для обобщения и анализа опытных исследований при созДанйй
и доводке гидродинамических передач пользуются общей теорией
подобия, которая предполагает:
а) геометрическое подобие линейных размеров, шероховатостей
натуры и модели и равенство сходственных углов установки вход-
ных и выходных элементов лопаток;
б) кинематическое подобие, т. е. пропорциональность и оди-
наковое направление скоростей в сходственных точках потока
жидкости для натуры и модели;
в) динамическое подобие, т. е. пропорциональность сил, дей-
ствующих на сходственные элементы натуры и модели.
Для соблюдения геометрического подобия необходимо, чтобы
при изменении некоторого характерного линейного размера все
размеры изменились во столько же раз. В качестве характерного
линейного размера в гидродинамических передачах чаще всего
выбирают максимальный диаметр рабочей полости Оа или, как
принято его называть, активный диаметр. При определении но-
вых геометрических размеров трудно соблюсти пропорциональ-
ность выступов шероховатостей натуры и модели, а также соот-
ношение зазоров уплотнений. Как правило, в этих случаях про-
порциональность нарушается. Но если абсолютные размеры на-
туры больше размеров модели, то такое нарушение, как правило,
приводит к улучшению характеристик, так как в этом случае
удается уменьшить относительные величины шероховатостей и
зазоров в уплотнениях, а следовательно, уменьшить потери и
утечки.
Кинематическое подобие обеспечивается при подобии треуголь-
ников скоростей в сходственных точках. Рассматривая модель М
и натуру Н, можем написать
Стм __ __ __ СШ __ им __
СтН 6Н СиН иН °Н^Н
Из теории лопастных машин известны соотношения для пере-
счета расхода Q и напора Н модели на расход и напор натуры при
изменении частоты вращения со и диаметра D [13]:
QH “н^нЛон
“н^нЛгН
Основными силами, действующими в потоке жидкости гидро-
динамических передач, являются силы вязкости и инерции, по-
этому основной критерий подобия — число Рейнольдса, представ-
25
ляюЩёё собой отношение сил ййерции к силам вязкости в данной
точке. Для соблюдения подобия необходимо, чтобы
ReH = ReM
или
..^Н^гН = ШМ^ГМ
VH VM
Если течение жидкости в каналах передачи происходит в об-
ласти автомодельности, где гидравлические потери определяются
не числом Re, а относительной шероховатостью, то для полного
подобия достаточно соблюдения условий геометрического и кине-
матического подобия.
При работе в области автомодельности и при соблюдении ука-
занных условий подобия т]оМ = т]оН, т]гМ = т]гН формулы (45)
и (46) упрощаются.
Можно получить также соотношение моментов и мощностей
в области автомодельности.
В соответствии с формулой (3) запишем
М ~ pQcuR
или
__ __ Рм°м^м
мн Рн^н^н^н Рн^н^н
Мощность N ~ соТИ, т. е.
Км _ Рм^м^м
Рн^н^н
(47)
(48)
Как правило, гидродинамические передачи работают в области
автомодельности и формулы (47) и (48) справедливы для пересчета.
Из уравнения (47) имеем
м
рсо2£Б
const = ХМг,
откуда
М = 4rP«2D5, (49)
где ХМг—коэффициент гидравлического момента.
Для мощности имеем
рОз/)5 “ const — Хдгг
или
N = kNrp<o3D5, (50)
где kNr — коэффициент гидравлической мощности.
26
Использование коэффициентов момента и мощности позволяет
сравнивать между собой различные гидродинамические передачи
по конструктивным, энергетическим и силовым показателям.
Коэффициентом быстроходности насоса гидропередачи ns назо-
вем частоту вращения насоса такой эталонной гидродинамической
передачи, которая будучи геометрически подобна данной и
имея те же гидравлический и объемный к. п. д., располагает на-
пором Hts = 1 м и полезной мощностью Ns = 1 вт.
Расход такой передачи определим по формуле
S Psgffts Psg
где ps — плотность рабочей жидкости в эталонной гидропередаче.
Выражение для коэффициента ns через подачу Q найдем, решив
совместно уравнения (45) и (46), заменив <в на п, а также принимая
Л он = Лоз и Т]гН = W-
Подставив значение Qs, имеем
ns = »/p5r-^-- (51)
Часто при расчете гидродинамических передач пользуются
выражением для нахождения ns через мощность (в соответствии
с определением). Поставив в уравнение (51) выражение для Q —
Nt
= П0ЛуЧИМ
ns = п — = п • (52)
Тащэй вид формулы позволяет по заданной при проектировании
мощности определить величину Н. Коэффициент ns выбирается
на основании имеющихся опытных данных.
27
ГЛАВА II
ГИДРОДИНАМИЧЕСКИЕ МУФТЫ
§ 7. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ
Гидродинамической муфтой называется передача, обеспечиваю-
щая гибкое соединение и передачу мощности с ведущего на ведо-
мый вал при взаимодействии рабочей жидкости с лопатками без
изменения крутящего момента.
а — без тора; б — с тором; в — фор-
мы меридионального сечения
Рис. 15. Рабочие колеса гидромуфт
Принципиальная конструктивная схема гидромуфты показана
на рис. 3, б. В общем случае гидромуфта состоит из насоса, свя-
занного с ведущим валом, который получает вращение от двига-
теля, и турбины, связанной с ведомым валом, передающим вра-
щение исполнительным механизмам. С насосом (или турбиной)
связан замыкающий кожух, который при помощи уплотнения гер-
метизирует рабочую полость передачи. Проточная часть гидро-
муфты образована двумя ограничивающими поверхностями: вну-
тренним и наружным торами. Между внутренним и наружным
торами расположены лопатки. Наибольший размер рабочей по-
лости называется активным диаметром £>а, а наименьший — вну-
тренним Do.
28
Гидромуфты могут быть как с тором, так и без него, а также
различаться формами лопаток колес. Конструктивная схема гидро-
муфт без тора показана на рис. 14, а ив. На рис. 15 показаны ра-
бочие колеса гидромуфт с тором и без тора.
Насос и турбина в указанных конструкциях гидромуфт чаще
всего выполнены симметричными. Но в настоящее время большое
распространение получили гидромуфты с несимметричными ра-
бочими колесами, конструкция и принцип действия которых будут
рассмотрены дальше.
§ 8. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА
И БАЛАНС ЭНЕРГИИ
В качестве объекта для изучения рабочего процесса гидромуфты
выберем простейший ее тип (рис. 16) и воспользуемся струйной тео-
рией. Расчетные радиусы (см. рис. 16, а) относим к средней линии
тока (средней струйке). Изобразим насосную и турбинную ре-
шетки на плоскости и построим треугольники скоростей для
движения рабочей жидкости на входе и выходе (рис. 16, б).
Рис. 16. Расчетная схема и треугольники скоростей в гидромуфте
Для рассматриваемой гидромуфты имеет место равенство углов
лопаток на входе в рабочие колеса и выходе из них, т. е. 0Hi —
— Рнг == ₽Т1 — Рта — 90°, а также равенство радиусов rHi =
= и г-н = гН2-
Как следствие этого, для данной гидромуфты будут справед-
ливы следующие равенства:
си hi = иш;
Си Н2 = «Н2>
Си T2 = ^Т2>
сн Т1 = «Т1;
Си Н1 = Си Т2>
СтН1 ~ ^Н1!
сп иг = дан2;
ст Т1 = ^ТЬ
(53)
ст Т2 — ^Т2-
29
Найдем для исследуемой гидромуфты функциональную зави-
симость расхода Q от режима работы i, или что то же самое, за-
висимость меридиональной составляющей абсолютной скорости ст
от режима работы I. Зависимость Q = f (i) или ст = f (t) опре-
деляется из уравнения баланса удельной энергии [см. уравне-
ние (31)].
Выразим составляющие уравнения (31) при помощи уравне-
ния Эйлера, зависимостей (53) и геометрических параметров гидро-
муфты:
=~~{г(си H2UH2 Си Н1ЫН1) = ~^~(иН2 ЫТ2ЫН1) =
-- —— /f2 i\ ——
g (шн'н2 шн'нг)
-.2
(0НГН2
ё
1-/
Ч 9
°НГН2
ё
(1 — ш2),
(54)
где а = .
ГН2
Аналогично напор турбины
= у (си tiuti си Т2итг) = —Н^Н * U Ля2), (55)
Определим далее гидравлические потери в гидромуфте, кото-
рые представим в виде потерь, зависящих от угла атаки, и потерь
на трение, т. е.
Лпот “ Луд 4“ ЛТр.
Потери, которые связаны с углом атаки, определим по фор-
муле (34) для насоса и турбины с учетом
= ^и! ^и2
и просуммируем
Луд = Луд< н + ЛуД. т- (56)
Для рассматриваемой гидромуфты потери на входе в насос
можно определить из выражения (рис, 17, а):
Луд. н == У2у(^ hi си тг)2 = (whi итг)2-
Потери на удар при входе в турбину (рис. 17, б)
Луд. т = (иН2 — uti)2-
30
Если принять, что коэффициенты потерь для насоса й турбины
равны, т. е. фуд/н — Фуд. т = Ф> выражение (56) будет иметь вид
^уд = К^н1 — итг)2 + (UH2 М2].
Исследования гидромуфт показали, что коэффициент потерь
в общем случае может значительно отличаться от 1. Однако для
получения качественных зависимостей с достаточной точностью
можно принять ф = 1.
Рис. 17. Определение потерь в гидромуфте, зависящих
от угла атаки:
а — на входе в насос; б — на входе в турбину
Принимая ф = 1 и проведя некоторые преобразования, по-
лучим
^уд ~ 1(«Н1 мтг)2 + (WH2 ЫТ1)2] =
= -^-(1-02 (1+«2). (57)
Потери на трение определяют при помощи опытного коэффи-
циента сопротивления I
= (58)
где £ — коэффициент сопротивления криволинейного вращаю-
щегося канала.
Для определения ст = f (0 подставим в уравнение (31) полу-
ченные соотношения (54), (55), (57), (58). После подстановки по-
лучим
ГЛ2 Г2 г.2 г2
(1 _ ia*) = - /а2) +
+ -^ф-(!-02 d+«2) +
31
Выразим скорость w через скорость ст‘
J2.
==^+“¥L(1_t’)2 (1+а2)>
умножим на 2g и разделим на сонГш каждый член уравнения.
Проведя некоторые преобразования, получим
р - со г 1/(1-^) О-в2) fCS91
ст — ^н^нг у • (Ру;
Формула (59) позволяет для каждого режима работы i опре-
делить значение скорости ст.
a=var
о) cmf
Рис. 18. Зависимость расхода в гидромуфте от режима работы:
а — (Q) = / (0 для а = const; б — ст = f (Z) для а = var
Исследование общих закономерностей функции ст — f (I).
Как известно, уравнение второй степени можно представить в виде
Ах2 + 2Вху 4- Су2 + Dx + Еу + F = 0. (60)
Для сравнения уравнений (59) и (60) уравнение (59) запишем
в виде
-^-c2m + i2(l-a2)-(l-a2) = 0. (61)
WHrH2
Особенностью уравнения (61) по сравнению с уравнением (60)
является равенство коэффициентов В, D, Е нулю. Для определе-
ния типа кривой, выраженной уравнением (60), воспользуемся
детерминантом уравнения (61)
6 = АС — В2 = -^-(1 — а2),
ШНГН2
который всегда будет больше нуля, так как а = - —1 < 1.
ГН2
32
Следовательно, уравнение (61) представляет собой эллипс.
Преобразуя это уравнение, приведем его к каноническому виду
»Н'И!
разделив все члены уравнения на (1 — а2), имеем
(ОоГио £2
(62>
На рис. 18 показана кривая, построенная по уравнению (62).
§ 9. РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ
В МЕРИДИОНАЛЬНОМ СЕЧЕНИИ ГИДРОМУФТЫ
Зависимость меридиональной составляющей абсолютной ско-
рости от передаточного отношения была нами установлена в фор-
муле (59). При i = 1 ст = 0, при i = 0 скорость ст достигает
своего максимального значения
_________ 1 Г1 — а2
Cm max —_у g
На рис. 18, б представлена эпюра изменения скоростей ст
= f (i) при изменении а.
Распределение скоростей поперек канала. В канале рабочего
колеса выделим элементарную частицу жидкости с размерами dn,
dh и dl, центр тяжести которой будет в точке О (рис. 19, а, б).
Рассмотрим динамическое равновесие частицы в направлении
оси п. Угловую скорость примем постоянной со = const. Будем
учитывать действие следующих сил:
а) силы давления на грань /
Fi-{p + ^-^dhdl-
3 С. П. Стесин 33
б) силы давления иа грань II
P*=(p—^'~Tdn)dhdl’
в) вследствие вращательного движения частицы вместе с ко-
лесом и движения ее вдоль радиуса по каналу на нее действует
сила Кориолиса Рк, направленная перпендикулярно относи-
тельной скорости в сторону, противоположную вращению.
В общем случае сила Кориолиса
= так,
где т — масса;
ак — ускорение Кориолиса.
Для рассматриваемого случая
Рк = 2a)wm = 2сошрУ = 2содор dn dh[dl,
где V — объем элементарной частицы.
Спроектируем силы на ось п — п:
— (р +4^-•-?[rdn}dldh-]-
у 1 дп 2 J 1
+ (р —-~£-dn\dldh — 2(£>wpdndldh = О,
откуда
_^ = 2^р. (63)
Найдем соотношение между давлением и относительной ско-
ростью. Для этого воспользуемся уравнением Бернулли для отно-
сительного движения
(64)
+ -5---s— = Const.
pg 1 2g 2g
Продифференцируем уравнение (64) по дп:
1 др . 2w dw 2и ди __q.
pg дп ""I” 2g дп 2g дп ’
_L ^ + JL(w^L-u^L\ = o.
Pg дп 1 g \ дп дп )
Заменим и через сог и получим
др [ dw д (cor) 1
—г- — р \ w -з— w *>
дп r L дп дп J
примем г = const, тогда
(65)
34
Приравняем правые части уравнений (63) и (65)
о dw
p2(dW = р Ш,
откуда
в результате
dw = 2adn.
Заменим dn = rd<p (см. рис. 19, а) и получим выражение
dw = 2®rdq>,
интегрируя которое, найдем скорость w:
w = 2© г<р +
Определяем коэффициент Сх из граничных условий: при ф = О
Ci = t0Cp = -£-• Тогда окончательно будем иметь
w = ®ср ± 2<огф. (66)
Из уравнения (66) видно, что изменение скорости w поперек
канала линейное (см. рис. 19, б). Минимальная скорость
= wcp — 2(0Г , (67)
максимальная скорость
wi = ^ср + 2®г ~.
Для случая, когда 2о>г > и-ср, на лопатке создается обрат-
ное течение, что приводит к появлению застойной области — источ-
ника вихреобразования. Обратные течения могут возникнуть при
малых расходах, когда ауср имеет небольшое значение. На созда-
ние застойных областей существенное влияние оказывает число
лопаток: чем больше число лопаток г, тем меньше неравномер-
ность скорости [см. выражение (67)1. Гидромуфты характери-
зуются на номинальном режиме работы сравнительно малыми
расходами, и при этом могут возникнуть обратные течения. Для
предотвращения обратных течений при прочих равных условиях
необходимо увеличивать число лопаток в рабочих колесах. Обычно
в гидромуфтах число лопаток составляет 30—40, что примерно
в 4 раза больше, чем у центробежных насосов.
3* 35
§ 10. ХАРАКТЕРИСТИКИ ГИДРОМУФТ
Перечислим те показатели, которые характерны для гидро-
муфт.
1. К кинематическим показателям относятся скорости враще-
ния пх и п2 ведущего и ведомого валов гидромуфты, передаточное
• По П] -
отношение t = —относительное скольжение s = —--------— =
п1 пг
= 1 — 1.
2. К силовым показателям относятся моменты на ведущем и
ведомом валах Мх и Л42; коэффициент трансформации К =
который для гидромуфты равен 1.
М2
Рис. 20. Внешняя характеристика гидромуфты:
а — структурная схема передачи (Дв — двигатель; ГМ — гидромуфта;
Р. О. — рабочий орган); б — внешняя характеристика на тяговом!
режиме
3. К мощностным или энергетическим показателям относится
мощность на ведущем и ведомом валах и N2.
4. Экономическим показателем является общий к. п. д. гидро-
муфты
ч = = « = <68)
Внешней характеристикой гидромуфты называется зависи-
мость к. п. д., моментов и мощности на валах от частоты вращения
ведомого вала, скольжения или передаточного отношения-При
постоянной частоте вращения ведущего вала, т. е. М19 A42,JVX,
ЛГ2 и т) = / (n2, s, i) при = const.
Внешняя характеристика гидромуфты (рис. 20, б) строится
с учетом уравнений (10) при постоянных nx, v и р. Внешняя харак-
теристика по моменту при изменении масштаба может быть пред-
ставлена как график мощности, так как ТИсо = N. К. п. д. гидро-
муфты— прямая линия [см. уравнение (68)], которая стре-
мится к 1.
Номинальный режим работы гидромуфты имеет место при
t* = 0,95-^0,98 в зависимости от конструкции. Таким образом,
гидромуфта является высокоэкономичной гидродинамической пере-
дачей.
33
В дальнейшем параметры, соответствующие номинальному ре-
жиму, будут иметь индекс *.
Гидромуфты могут работать в тяговом и тормозных режимах
работы.
Тяговый режим. Структурная схема передачи, работающей
в этом режиме, и внешняя характеристика представлены на
рис. 20, а, б. Характерными точками внешней характеристики
гидромуфты (см. рис. 20, б) являются: точка 1 — режим холо-
стого хода, т. е. такой режим, когда внешняя нагрузка отсутствует,
а Л1 г = Л42 = 0; s = 0; n£ = n2; i ~ 1; = М2 = 0; Л\епл = 0.
В точке 1 к. п. д. равен нулю, но в окрестности этой точки—
стремится к 1.
Точка 2 характеризует номинальный (расчетный) режим. Ха-
рактерным фактором, определяющим точку 2, является макси-
мальный к. п. д. т] *. В зависимости от типа машин, на которых
применяются гидромуфты, этот коэффициент задается в пределах
0,95—0,98. В среднем для автомобилей т] * = 0,97; для экскава-
торов т] * = 0,95-4-0,96.
Основной причиной, которая может вызвать снижение задан-
ного к. п. д. г] *, является увеличение энергоемкости гидромуфты,
так как на номинальном режиме гидромуфта передает сравни-
тельно малый момент. В связи с этим возникает вопрос о пере-
трузочной способности гидромуфты, критерием которой является
коэффициент перегрузки
is ___ Mmax
•'пер дл ’
т ном
где Л4шах — момент на валу гидромуфты при i = 0;
Мной — номинальный момент на валу гидромуфты.
Таким образом, параметрами номинального режима (точка 2
на рис. 20, б) являются:
П2 = пХ1* ^0,97пь
s^3%; A\ = Af* = A^B.H0M;
#2 = Л^епл = (1 — п’)
Q — Q — CmF >
Ян = Ян, Я*т = ЯнПгидр.
Точка 3 характеризует столовый режим работы, т. е. турбина
стоит, пг = 0. Параметры стопового режима:
М = Мтах; пТ = 0, i = 0, s = 100%, Ni = Ятах;
«н = const, т] = 0; N? = 0, Ятепл = Ягаах;
Q = Qtnax = Ст тах^> = ^тах» ^Т = 0-
Этот режим является самым напряженным в тепловом отно-
шении, так как вся мощность двигателя преобразуется в тепло.
37
Работа на стоповом режиме или близком к нему ведет к перегреву
передачи. Таким образом, зона режимов работы между точками 1
и 2 — зона нормальных нагрузок передачи. Двигатель работает
в режиме недогрузки или в номинальном режиме. Зона между
точками 2 и 3 — зона перегрузок.
Проследим связь режимов работы гидромуфты с условиями
движения машины. В качестве примера рассмотрим движение
автомобиля, в приводе которого установлена гидромуфта:
а) автомобиль остановлен, двигатель работает, сцепление вы-
ключено — холостой ход гидромуфты;
б) автомобиль движется с максимальной скоростью по ровной
дороге — номинальный режим работы гидромуфты;
в) автомобиль движется в гору — зона режимов между точ-
ками 2 и 3;
г) автомобиль попал в грязь, колеса не вращаются, двигатель
развивает максимальный момент — столовый режим работы гидро-
муфты.
Тормозными режимами называются такие режимы работы
гидромуфты, при которых мощность от рабочего органа передается
гидромуфте и при этом происходит замедление (торможение) ра-
бочего органа. Тормозные режимы работы гидродинамических
передач в настоящее время находят все большее применение. Раз-
личают три вида тормозных режимов: обгонный; режим динами-
ческого торможения (гидротормозной режим) и режим противо-
вращения.
Обгонным режимом работы гидромуфты называется такой
режим, при котором частота вращения турбины больше частоты
вращения насоса. На обгонном режиме гидромуфта, установленная
в приводе, работает при движении автомобиля под гору на пря-
мой передаче. При движении автомобиля по ровной дороге с боль-
шой скоростью с включением низшей передачи гидромуфта рабо-
тает также в обгонном режиме. В этом же режиме она работает
и на подъемных кранах при спуске грузов с включенным ревер-
сом и т. д.
На рис. 21, а показана схема гидромуфты, работающей в обгон-
ном режиме, при этом жидкость движется от турбины к насосу
(см. пунктирную линию на рис. 21, а). Турбина выполняет функ-
ции насоса, а насос работает в режиме турбины. Обратное движе-
ние жидкости в гидродинамических передачах называется обрат-
ным циклом, а явление, при котором происходит изменение на-
правления передачи энергии, называется обратимостью. В общем
случае обратимостью гидропередачи называют ее способность пере-
давать мощность на первичный вал. Гидромуфта также эффективно
передает мощность как в тяговом, так и в обгонном режимах.
Работа гидромуфты на обгонном режиме характеризуется уравне-
нием баланса удельной энергии
+ ^Т S ^пот — О»
(69)
38
где —Ян — напор^насоса; берется с отрицательным знаком, так
как фактически напор создается турбиной, а насос
создает «противонапор»;
S ^пот — суммарные потери энергии, которые определяются
аналогично потерям при тяговом режиме работы
гидромуфты.
Решив уравнение (69), мы получим выражение для определе-
ния скорости ст.
Рис. 21. Обгонный режим работы гидромуфты:
а направление циркуляции; б — внешняя характеристика
Рис. 22. Внешняя характе-
ристика гидромуфты на ре-
жиме гидродинамического
торможения
Жесткость характеристики гидромуфты
Г- —
dn2
на обгонном режиме будет несколько больше, чем на тяговом,
так как насос попадает в режим работы турбины. На рис. 21, б
показана внешняя характеристика гид-
ромуфты, работающей в обгонном ре-
жиме.
Режимом динамического торможения
или гидротормозным режимом работы
гидромуфты называется такой режим,
который имеет место при остановленном
насосе, т. е. при = 0. Этот режим
используется, например, при спуске
грузов на подъемных машинах. По
существу гидромуфта работает как гид-
ротормоз. Ее характеристика М = f (п2)
представляет собой квадратичную пара-
болу, наклон которой зависит от ло-
пастной системы и размеров гидромуфты (рис. 22). Гидротормоз-
ной режим является предельным случаем обгонного режима.
При этом турбина работает в режиме насоса, и расчет характе-
ристики производится аналогично расчету характеристики при
стоповом режиме для различной частоты вращения п2.
* 39
Режимом противовращения гидродинамической передачи назы-
вают такой тормозной режим, при котором турбина и насос вра-
щаются в противоположные стороны. На режиме противовраще-
ния автомобильная гидромуфта работает при движении автомобиля
задним ходом под гору при включенной передней передаче. На
подъемных механизмах гидропередача работает в режиме противо-
вращения при спуске грузов, когда реверс не включен. При этом
на подъемно-транспортных машинах применение режима противо-
вращения позволяет получить монтажные «ползучие» скорости.
На рис. 23, а, бу в показана схема гидромуфты и движение
потока при работе на режиме противовращения. На основной по-
Рис. 23. Режим противовращения:
а — направление движения; б — структурная схема; в — внешняя характеристика
на режиме противовращения; г — совместная характеристика гидромуфты и гидротор-
моза на режиме противовращения: / — характеристика гидромуфты на режиме противо-
вращения; 2 — характеристика гидротормоза; 3 — суммарная характеристика
ток Q, создаваемый насосом, действует противопоток Q', который
тормозит основной поток рабочей жидкости, т. е. уменьшает сум-
марный расход. В турбостроении этот режим называют «растрат-
ным». На рис. 23, б показана структурная схема передачи, рабо-
тающей на режиме противовращения. Насос работает в режиме
насоса. Турбина работает в особом тормозном режиме («растрат-
ном»), при котором энергия к ней подводится со стороны рабочего
органа и затрачивается на торможение движения основного потока.
На рис. 23, в показана внешняя характеристика гидромуфты,
работающей в режиме противовращения. Чем быстрее вращается
турбина, тем интенсивнее затормаживается основной поток, по-
этому расход Q И момент М уменьшаются. При некотором переда-
точном отношении jVi = Af2, Q = 0. Это передаточное отношение i
назовем критическим zKP. Однако при zKP, несмотря на то, что Q — О,
40
момент, как показали исследования, не равен нулю, а имеет мини-
мальное значение Л4т1п. Минимальный момент создается за счет
вихревых обменных течений между колесами при отсутствии
основного течения. При дальнейшем увеличении частоты вра-
щения турбины (до i > /кр) момент вновь начинает расти. Мо-
мент 7Hmin определяется экспериментально для каждой конструк-
ции гидромуфты.
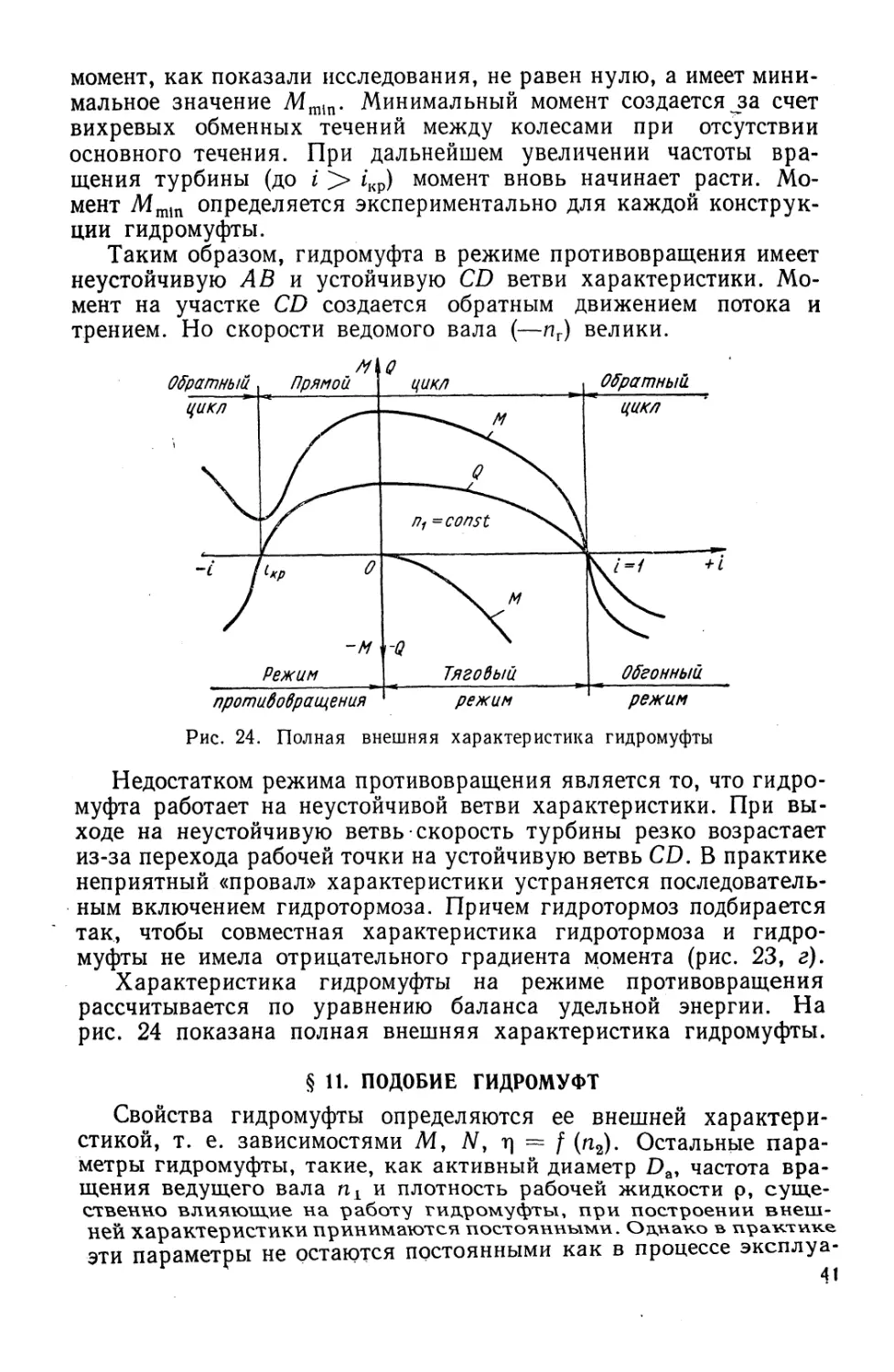
Таким образом, гидромуфта в режиме противовращения имеет
неустойчивую АВ и устойчивую CD ветви характеристики. Мо-
мент на участке CD создается обратным движением потока и
трением. Но скорости ведомого вала (—иг) велики.
Рис. 24. Полная внешняя характеристика гидромуфты
Недостатком режима противовращения является то, что гидро-
муфта работает на неустойчивой ветви характеристики. При вы-
ходе на неустойчивую ветвь скорость турбины резко возрастает
из-за перехода рабочей точки на устойчивую ветвь CD. В практике
неприятный «провал» характеристики устраняется последователь-
ным включением гидротормоза. Причем гидротормоз подбирается
так, чтобы совместная характеристика гидротормоза и гидро-
муфты не имела отрицательного градиента момента (рис. 23, г).
Характеристика гидромуфты на режиме противовращения
рассчитывается по уравнению баланса удельной энергии. На
рис. 24 показана полная внешняя характеристика гидромуфты.
§ 11. ПОДОБИЕ ГИДРОМУФТ
Свойства гидромуфты определяются ее внешней характери-
стикой, т. е. зависимостями Л4, Af, т] = f (п2). Остальные пара-
метры гидромуфты, такие, как активный диаметр £)а, частота вра-
щения ведущего вала и плотность рабочей жидкости р, суще-
ственно влияющие на работу гидромуфты, при построении внеш-
ней характеристики принимаются постоянными. Однако в практике
эти параметры не остаются постоянными как в процессе эксплуа-
тации гидропередачи, так и в процессе ее проектирования. Так,
при проектировании гидропередачи подбирают диаметр гидро-
муфты из условия обеспечения нужной энергоемкости, а в про-
цессе работы возможен переход с одной рабочей жидкости на дру-
гую. Поэтому необходимо выяснить зависимость внешней харак-
теристики гидромуфты от указанных параметров, т. е. выяснить
зависимости М, N и т] = f (пи D3n р). Уравнения связи, раскры-
вающие эти зависимости, выводятся на основании законов подобия.
Напишем выражение для отношения меридиональных состав-
ляющих абсолютных скоростей двух подобных гидромуфт, исполь-
зуя уравнение (59):
С'»н _ Ц2Н ~l/~ Ем
GnM W2M Г Ен
при
что справедливо только в области автомодельности
СтН _ U2H
СтЪ\ И2М
т. е. при работе гидромуфты в области автомодельности доста-
точно соблюдать только геометрическое и кинематическое подобие,
так как в этом случае динамическое подобие соблюдается автома-
тически.
Найдем выражение для гидравлического к. п. д. гидромуфты
при ее работе в области автомодельности:
///T Я*Н --- У| ^ПОТ J У» hnOT
С учетом выражений (55), (58) и (59) получим
2 2
^-Е + -^р(1-0г(1+а2)
МН2 (1 )
Запишем и преобразуем уравнение Эйлера для момента гидро-
муфты
М = pQ (сиП2г Н2 — сиТ2г Т2) =
= pf «и, (1 - й1) . (70)
где
СиН2 == WH2 = Н2>
Q = cmF.
* Индексы М и Н относятся соответственно к модели и к натуре.
42
Определим коэффициенты пропорциональности, С учетом урав-
нения (70) имеем
Мм Рм^м (®н)м (гнг)м (1 — »2) (1 — а2) 1н 0 — 1а2)
Рн^н (Шн)н (ГН2)н]/'0 — ‘2) 0 — “2) £м — ,а2)
Но = |н для области автомодельности работы гидромуфты.
Отношение площадей
Fm __ (^а)м
Fh ” (^а)н '
Тогда уравнение (71) можно записать в виде
Мм _ Рм (Мн)м (Да)м
Ми Рн (wh)h (°а)н
или
----/ 2^М/ 5 4 = ---Г2\Ч 5 4— = = COnSt> <72)
Рм (<Он)м (°а)м Рн (®н)н (°а)н
где Хм — коэффициент момента гидромуфты, т. е. момент, отне-
сенный к единице угловой скорости, единице активного
диаметра и единице плотности.
Умножив числитель и знаменатель уравнения (72) на сон» Для
коэффициента мощности получим
, _ М<он = N
N P®HDa®H PWHDa ’ .
Таким образом, окончательно получаем уравнения подобия:
2И = Лмр(ВнОа; М =
N — %туро>и7)а; N =
где %м и — безразмерные коэффициенты момента и мощности;
Хм и Xw — коэффициенты момента и мощности, имеющие раз-
мерность.
Приведенной характеристикой гидромуфты называется зави-
симость коэффициента момента и к. п. д. гидромуфты от переда-
точного отношения или скольжения при постоянных Da, и р.
На рис. 25, а показана приведенная характеристика гидромуфты.
Подобную характеристику часто условно называют безразмерной
характеристикой, хотя в действительности коэффициент момента Хм
[см. формулу (73)] имеет размерность с2/м. Для увеличения
численного значения ординат приведенной характеристики можно
приведение делать к £>а = 1 м, сох = 10 с-1 и р = 100 кгс/м8.
В этом случае коэффициент момента
4= Лм-ЮО-102 1,05 = Хм-104
43
и момент
М= Хм' 10~4-p-Da©H-
При помощи приведенных характеристик сравнивают свойства
нескольких гидромуфт, которые, например, при одинаковом к. п. д.
могут отличаться формой рабочей полости, геометрическими пара-
метрами, количеством лопаток и т. д.
На рис. 25, а показаны приведенные характеристики трех гидро-
муфт, которые имеют одинаковый к. п. д. График 25, а позволяет
сравнить указанные гидромуфты по энергоемкости, перегрузоч-
ным свойствам и т. д.
Рис. 25. Безразмерные характеристики гидромуфты:
а — приведенные; б — относительная
Относительная характеристика представляет собой зависи-
мость М = f (/) или М = f (s), где М — отношение текущего
крутящего момента к моменту при расчетном передаточном отно-
шении или скольжении к номинальному моменту. На рис. 25, б
показана относительная характеристика гидромуфты. Из графика
следует, что при увеличении скольжения [s> 0,1 (Z < 0,9) ] кру-
тящий момент гидромуфты резко возрастает, изменяясь сначала
почти по прямой. С дальнейшим увеличением скольжения s уве-
личение момента замедляется и при s ~ 1 момент достигает макси-
мального значения. При этом величина его для полностью запол-
ненной гидромуфты может быть в 20—25 раз и более выше номи-
нального момента при s^3%.
Пересчет характеристик при изменении частоты вращения.
Пусть задана внешняя характеристика гидромуфты М — f (и2)
при Пн = = const (см. рис. 26, а). Требуется по заданной харак-
теристике найти новую характеристику при новой частоте вра-
щения /1н = п{. Пусть п{ п\ = 1500 об/мин, =
= 750 об/мин.
Пересчет характеристики производится по точкам (см. рис. 26, а,
где точка 1 — точка холостого хода; 2 — точка стопового режима;
44
3— произвольная точка). Новый момент при измененной частоте
вращения п{ определим из уравнения подобия
м1 (n'i У
м - ’
откуда
Результаты вычислений занесем в табл. 1
Нанесем на рис. 26, а кривую М' = f (п2) и поставим на ней
точки Г, 2' и 3'. Заметим, что в точках 3 и 3' треугольники скоро-
стей подобны, так как эти точки принадлежат подобным режимам
работы, т. е. в этих точках к. п. д. гидромуфты равны между собой.
Найдем уравнение кривой равного к. п. д. Для этого запишем
уравнение подобия для момента, в котором nL выразим через n2i,
тогда получим
D\. (74)
Для любого i = const уравнение (74) можно представить в виде
М. = Ап1 (75)
где
А %мТ°5а
i2
Уравнение (75) представляет собой квадратичную параболу,
проходящую через начало' координат.
Теперь, задаваясь текущими значениями т] = /, через любую
точку внешней характеристики гидромуфты можно провести кри-
вую равного к. п. д. (см. кривую I на рис. 26, а). При этом ось
абсцисс будет являться частным случаем параболы при i = 1,
а ось ординат — при i = 0.
Универсальная характеристика гидромуфты представляет собой
зависимость крутящих моментов от частоты вращения турбины
при различной частоте вращения насоса (см. рис. 26, б). На универ-
сальную характеристику наносят также кривые, представляющие
собой зависимость моментов гидромуфты от частоты вращения
ведомого вала п2 ПРИ одинаковых г] = i = 0,1; 0,2; 0,3 и т. д.
Для построения универсальной характеристики гидромуфты
необходимо снять ее внешние характеристики на стенде при раз-
личной частоте вращения входного вала пх или при каком-то зна-
чении пг = const, затем пересчитать на другую частоту враще-
ния nv Для построения кривых моментов, соответствующих рав-
ным к. п. д., например, для т) = i = 0,1, отмечают на каждой кри-
вой точки т| = i = 0,1 и соединяют их между собой.
45
Пересчет характеристик гидромуфты при изменении активного
диаметра. Пусть задана внешняя характеристика гидромуфты,
имеющей активный диаметр Da (см. рис. 27, а). Требуется по-
Рис. 26. Пересчет характеристики гидромуфты при изменении
частоты вращения:
а — характеристика гидромуфты при лч и пр б — универсальная ха-
рактеристика
строить характеристику при другом активном диаметре D& при
пг = const, т. е. М' = f (п2). Пусть Da <*ОЛ.
Из уравнения подобия получим
/о' \5
. (76)
По этому уравнению строим новую характеристику (см.
рис. 27, а). При этом считаем, что к. п. д. рассматриваемых гидро-
муфт одинаковые.
Таблица 1
К пересчету параметров внешней характеристики гидромуфты
при изменении частоты вращения насоса
№ точек на рис. 26, а л X в об/мин п2 в об/мин i м в Н-м "1 в об/мин в об/мин It ' sT | е ? II
1 1500 1500 1 0 750 750 0
2 1500 0 0 М* 750 0
3 1500 1000 0,67 М* 750 500 , ч*м3
* м2 I и М3 — моменты в точках 2 и < 3.
46
Из уравнения (76) видно, что изменение активного диаметра
является эффективным способом повышения мощности гидромуфты.
Но при значительных пределах изменения активного диаметра
гидродинамические передачи не подчиняются уравнениям по-
добия. Это свойство гидродинамических передач называется мас-
штабным фактором.
Пересчет внешней характеристики гидромуфты при изменении
плотности рабочей жидкости. При переходе гидромуфты с работы,
например, на воде на работу на синтетическом масле (рм>рв)
Рис. 27. Пересчет внешней характеристики гидромуфты:
а — при изменении Da; б — при изменении р (рв — плот-
ность воды; рм — плотность масла)
происходит изменение внешней характеристики. Новый момент
можно подсчитать, пользуясь уравнением подобия
М ___ ^вРм
Рв >
где рм и рв — плотности масла и воды.
На. рис. 27, б показаны внешние характеристики гидромуфты,
работающей на масле и воде. Так как п1 = const, обе внешние
характеристики имеют одну точку холостого хода.
Однако необходимо отметить, что такой пересчет справедлив
при близких вязкостях, когда работа передачи происходит в об-
ласти автомодельности. Это объясняется тем, что различные вяз-
кости рабочих жидкостей определяют различную скорость
которая влияет на момент гидромуфты. Например, для холодного
и горячего масла Хгор< м =£ ХХОЛе м, так как коэффициенты сопро-
тивления £ различные.
§ 12. СОВМЕСТНАЯ РАБОТА ДВИГАТЕЛЯ
И ГИДРОМУФТЫ
Характеристика привода, который представляет собой ком-
плекс двигатель—гидромуфта, определяется их совместными па-
раметрами. На большинстве транспортных и строительно-до-
47
рожных машин применяются двигатели внутреннего сгорания,
а на подъемно-транспортных и горных машинах — электродви-
гатели. В связи с этим рассмотрим совместную работу гидромуфты
с двигателями внутреннего сгорания и с электродвигателями.
Работа гидромуфты с двигателем внутреннего сгорания. Для по-
строения характеристики совместной работы двигателя внутрен-
него сгорания и гидромуфты рассмотрим отдельно:
а) характеристику двигателя внутреннего сгорания (см.
рис. 28, а), которая строится в координатах М — пдв, где пдв —
частота вращения коленчатого вала двигателя.
На рис. 28, а — кривая 1 соответствует полному открытию
дроссельной заслонки, кривая 2 частичному открытию;
б) характеристику гидромуфты (см. рис. 28, б) в координатах
М—п2.
Для выявления нагружающих свойств гидромуфты строим ее
входную характеристику (см. рис. 28, г). Характеристикой входа
гидромуфты называется зависимость момента от частоты вращения
насоса при i = const. Характеристики входа мы строим для ряда
значений i = 0; 0,3; 0,5 и т. д. до по уравнению (75). При этом
требуется характеристику, представленную на рис. 28, б, пере-
строить в координатах = f (i), считая, что п1 = пдв (см.
рис. 28, в).
Построение характеристик входа (или нагрузочных характе-
ристик) гидромуфты выполняем следующим образом: задаемся
значением Z; затем по графику = f (f) находим соответствую-
щее значение Лм; вычисляем постоянную для данного i величину
А = и по уравнению (75) строим параболу М = f (пх).
Аналогично строим параболы для других значений i (см. рис. 28, г).
Совместив на одном графике характеристики, показанные на
рис. 28, а и г (см. также рис. 28, б), получаем точки /, 2, 5, 4
пересечения кривых моментов насоса с кривой крутящих моментов
двигателя. Эти точки являются точками совместной работы дви-
гателя и гидромуфты.
Строим выходную характеристику привода, т. е. кривую
изменения крутящего момента на валу турбины в зависимости от
частоты вращения турбины при полностью открытой дроссельной
заслонке двигателя (см. рис. 28, ё). Эту зависимость иногда назы-
вают деформированной характеристикой двигателя. Каждой точке
пересечения кривой нагрузки гидромуфты и кривой крутящего
момента двигателя (см. рис. 28, д) соответствуют определенный
крутящий момент М и частота вращения п1 = пдв. Соответствую-
щая частота вращения турбины составляет и2 =
С учетом изложенного построим кривую крутящих моментов
М = f (п2) на ведомом валу при совместной работе данного дви-
гателя и гидромуфты. Если построить характеристики, показан-
ные на рис. 28, д и е, в одинаковом масштабе и наложить одну на
другую, можно видеть, что все значения моментов (точки /, 2,
48
3, 4) сдвинутся влево по горизонтали, так как по оси абсцисс
отложена частота вращения n2 = где i < 1. Поэтому харак-
теристику, показанную на рис. 28, е, называют деформированной
характеристикой двигателя.
Особенностью деформированной характеристики является то,
что она в отличие от характеристики двигателя имеет начало на
Рис. 28. Совместная работа гидромуфты с двигателем внутреннего сгорания:
а — характеристика двигателя; б — внешняя характеристика гидромуфты М — f (п2);
в — приведенная характеристика гидромуфты; г — характеристика входа гидромуфты;
д — совместная характеристика двигателя и входа гидромуфты; е — выходная характе-
ристика привода; ж — совмещение характеристики двигателя и выходной характеристики
привода; з — условие устойчивой работы двигателя с гидромуфтой
4 С. П. Стесин 49
оси ординат, т. е. привод с гидромуфтой позволяет получить любую
скорость вала трансмиссии, связанного с валом турбины, вплоть
до 0.
Как видно из рис. 28, ж, при наличии гидромуфты крутящий
момент на валу двигателя при малой частоте вращения п2 больше,
чем без гидромуфты. Это объясняется тем, что при наличии гидро-
муфты двигатель развивает большую частоту вращения и работает
на режиме большего крутящего момента. Таким образом, сдвиг
влево (деформация) кривой крутящих моментов вызван работой
двигателя при различной частоте вращения. Из рис. 28, ж следует
также, что двигатель может работать при остановленной турбине
и что момент при трогании с места (/г2 = 0) на ведомом валу при-
вода мало отличается от максимального крутящего момента дви-
гателя. Однако, если двигатель может работать при п2 = 0,
этого еще недостаточно для его нормальной эксплуатации. Не-
обходимо еще, чтобы двигатель с гидромуфтой работал устойчиво
при всех изменениях нагрузки. Для рассмотрения этого вопроса
воспользуемся характеристикой устойчивой работы двигателя
внутреннего сгорания с гидромуфтой (см. рис. 28, з).
Из рис. 28, з видно, что если при работе двигателя с гидромуф-
той при любом i > 0 по какой-либо причине возрастет нагрузка
на ведомом валу привода вплоть до его остановки, двигатель не
заглохнет, а будет устойчиво работать на режиме, определяемом
точкой В характеристики при частоте вращения п19 соответ-
ствующей I = 0. Если при этом крутящий момент двигателя по-
чему-либо, например вследствие падения давления при всасыва-
нии, уменьшится до значения, соответствующего точке Б, то
частота вращения двигателя также уменьшится и в связи с этим
уменьшится момент, нагружающий двигатель до значения, опре-
деляемого точкой С.
Как следует из рис. 28, з, нагружающий момент уменьшается
быстрее, чем момент двигателя, и поэтому вал двигателя снова
начнет увеличивать частоту вращения, пока не установится новый
равновесный режим работы.
Таким образом, работа двигателя с гидромуфтой будет устой-
чивой при условии, что тангенс угла наклона нагрузочной кривой
моментов в точке В будет больше тангенса угла наклона кривой
момента двигателя, т. е.
I tg Ср! |В> I tg фд |В.
Требования, предъявляемые к характеристике гидромуфты,
работающей совместно с двигателем внутреннего сгорания, сле-
дующие.
1. Для передачи номинальной мощности при максимальном
к. п. д. характеристика входа гидромуфты при i = 0,97 должна
проходить через точку А, в которой момент М = Мном (см.
рис. 28, а).
50
2. При миййМальйо устойчивой частоте вращения вала Дви-
гателя муфта должна нагружать двигатель моментом, не пре-
вышающим Л4ДВ при и1т1п. Это требование необходимо для того,
чтобы при остановке транспортной машины ее не «вело» при вклю-
ченном сцеплении, т. е. момент сопротивления передвижению
машины должен быть больше момента, развиваемого гидро-
муфтой.
3. Для использования максимального момента двигателя ха-
рактеристика входа гидромуфты при i = 0 должна проходить
через точку В, некоторой М = Мгаах.
Известно, что двигатели внутреннего сгорания запускают
вспомогательным оборудованием (например, стартером), и они
не могут работать при частоте вращения, меньшей определенной
минимальной пга1п. Гидромуфты позволяют осуществить разгон
ведомого вала с места под нагрузкой, не перегружая двигатель,
и обеспечить его устойчивую работу во всем диапазоне изменений
скоростей ведомого вала. Одновременно с этим гидромуфта ча-
стично предохраняет ведомый вал привода от передачи ему кру-
тильных колебаний вала двигателя и защищает двигатель от
передачи толчков со стороны ведомой части. Гидромуфта допу-
скает совместную работу нескольких двигателей в одной рабочей
машине.
Работа гидромуфты с электродвигателем переменного тока.
Асинхронные электродвигатели с короткозамкнутым ротором
являются наиболее надежными и дешевыми. К их недостаткам
относится малый пусковой момент, что требует применения спе-
циальных устройств для пуска их под нагрузкой и узкий диа-
пазон изменения рабочей частоты вращения и крутящего момента.
Существенного улучшения характеристик привода с асин-
хронным короткозамкнутым двигателем можно достигнуть при-
менением гидромуфт. При этом, например, решается проблема
привода больших инерционных масс, для разгона которых без
гидромуфты требуется глубокое и длительное по времени регу-
лирование скольжения двигателя.
На рис. 29 представлены характеристика асинхронного дви-
гателя с короткозамкнутым ротором и внешняя характеристика
гидромуфты.
Для работы с данным двигателем гидромуфту подбирают таким
образом, чтобы ее характеристика входа при i = 0 (парабола а)
пересекала характеристику двигателя в точке /, соответствующей
максимальному крутящему моменту, благодаря чему появляется
возможность при пуске использовать этот момент, а не пусковой
момент двигателя (точка 3), который значительно меньше Л4тах»
Соответствующая сила тока при пуске (точка Г) будет также зна-
чительно меньше пускового тока (точка 3'). Характеристика входа
гидромуфты для i = i* = 0,97 (парабола б) должна пересекать
характеристики Мдв и J в точках 2 и 2', где момент соответствует
М*.
4*
51
На рис. 29, а видно, что частота вращения вала может быстро
увеличиваться, так как электродвигатель заметно нагружается
уже в области сравнительно высокой частоты вращения. Бла-
годаря этому уменьшается время потребления большого пуско-
вого тока, а следовательно, уменьшается и нагрев двигателя.
Кроме того, для пуска рабочей машины используется максималь-
ный крутящий момент двигателя, развиваемый при уже умень-
шившемся потреблении тока и интенсивном охлаждении из-за
высокой частоты вращения. В связи с этим привод, состоящий из
короткозамкнутого электродвигателя с гидромуфтой, по пусковым
Рис. 29. Совместная работа гидромуфты с электродвигателем
переменного тока:
а — характеристика электродвигателя с короткозамкнутым ротором;
б — внешняя характеристика гидромуфты
свойствам не только не уступает, но даже превосходит асинхрон-
ный электродвигатель с контактными кольцами и пусковым рео-
статом. Так как мощность электродвигателя для пуска под на-
грузкой выбирают по пусковому моменту двигателя, то гидромуф-
ты позволяют снизить установочную мощность и при самых слож-
ных условиях пуска применять короткозамкнутые электродви-
гатели. Совместная характеристика привода, содержащего элект-
родвигатель и гидромуфту, имеет такой же вид, как и на
рис. 28, е.
§ 13. РЕГУЛИРОВАНИЕ ГИДРОМУФТ
Под регулированием гидромуфт следует понимать управляемое
изменение скорости выходного вала или его крутящего момента.
Известны следующие способы регулирования гидромуфт: измене-
нием частоты вращения вала двигателя: изменением количества
52
(77)
жидкости в рабочей полости гидромуфты — объемное регулиро-
вание; изменением формы проточной части или рабочей полости
гидромуфты— механическое регулирование. Гидромуфты, ко-
торые регулируются только при изменении частоты вращения
вала двигателя, называют нерегулируемыми, а гидромуфты,
которые регулируются при постоянной частоте вращения вала
двигателя, называют регулируемыми.
Таким образом, признаком регулируемости гидромуфты яв-
ляется наличие в конструкции управляемого извне устройства
регулирования. Регулировочные характеристики гидромуфт, по-
лучаемые за счет изменения частоты вращения нх, представляют
собой универсальную характеристику, т. е. это внешние характе-
ристики, снятые для разной частоты вращения насоса одного кон-
кретного типоразмера гидромуфты.
Важнейшим параметром гидромуфт является коэффициент
глубины регулирования Кр. Этот коэффициент представляет
собой отношение максимальных моментов на стоповом режиме при
разной частоте вращения двигателя:
js Мпах
max
Однако соотношение (77) отражает сущность работы гидро-
муфты теоретически. Фактически же коэффициент глубины регу-
лирования следует определять по формуле
1Z ____ Мном
Арфа«т — м' ,
7Ином
где Л4Ном и М'ном—номинальные моменты при различной ча-
стоте вращения двигателя.
Из универсальной характеристики видно, что фактический
коэффициент глубины регулирования имеет меньшие значения по
сравнению с теоретическим Кр.
Объемное регулирование. Работа гидромуфт с частичным
заполнением. При эксплуатации частично заполненных гидромуфт
было обнаружено неприятное явление: муфта при определенной
нагрузке начинала работать неустойчиво, наблюдался колеба-
тельный процесс, и неоднократно вся установка попадала в ре-
зонанс. Это явление оказалось тесно связанным с процессом объем-
ного регулирования.
Рассмотрим особенности рабочего процесса в гидромуфте при
объемном регулировании (см. рис. 30, а, б, в, г). Заполнение
гидромуфты на 50% представляет собой особенно опасный случай.
Радиусы гН2 и rHi соответствуют положению средней струйки на
номинальном режиме работы. При холостом ходе жидкость в ра-
бочей полости располагается на одном уровне. С увеличением
скольжения до номинального и затем более номинального (s~
= 5-^-10%) траектория движения частиц жидкости изменяется,
53
и частицы приближаются к оси вращения Гидромуфты, Однако
радиус гН1 на этих режимах работы почти не изменяется. При
дальнейшем увеличении скольжения (s = 304-35%) поток суще-
ственно перестраивается, и радиус rHi уменьшается до /нь При
скольжениях s >* 40^-45% происходит скачкообразная пере-
стройка потока с резким возрастанием крутящего момента. Это
явление было изучено впервые в ВУГИ [17]. Этот эксперимент
позволил наблюдать малый и большой контуры движения потока.
Для участка работы гидромуфты с малым контуром можно за-
писать
Л*МК = Р<2 (си ШГН2 Си Т2ГН1),
где
— const.
ГН1
Расход Q является величиной постоянной для данного пере-
даточного отношения. В случае регулирования гидромуфты при
повышенном скольжении поток в турбине опускается к оси вра-
Рис. 30. Циркуляция в гидромуфтах при частичном заполнении:
а — при s = 0; б — при s = 5 4- 10%; в — при s = 30 4- 35%; г при
s > 45%
щения и при некотором передаточном отношении переходит в на-
сос. Как только частицы жидкости попадают в насос, возникает
резкое увеличение крутящего момента на нем. Это происходит
из-за того, что радиус Гн1 изменяется на Гнь т. е. весь поток
резко переходит с малого на большой контур. Уравнение мо-
мента большого контура движения имеет вид
Л4вк = PQ(C«H2rH2 — ^Т2ГН1)-
Для данного i Л4Бц > Ммк, так как rHi > /'hi-
Каждый из контуров движения (рис. 30) является устойчивым
в определенной зоне передаточных отношений и только в диапа-
зоне критических передаточных отношений начинается неустой-
чивый режим работы. Изменение момента обусловлено не измене-
нием расхода, а изменением радиуса входа потока в насос,
На рис. 31 показана внешняя характеристика гидромуфты,
заполненной на 50%.
54
В общем случае переходные процессы внешне могут прояв-
ляться:
1. Когда имеют место жесткие характеристики без колебаний
скорости [при характеристике аб' (рис. 31) колебательного
процесса не будет]. Обычно переходные процессы при жестких
характеристиках без периодических колебаний происходят при
скольжении s 50% и наполнении q 50% (это примерно гра-
ничные условия перехода малого контура движения в большой
без колебательного процесса).
Рис. 31. Внешняя характеристика
гидромуфты при частичном запол-
нении
Рис. 32. Относительная характеристика
гидромуфты с областью переходных
процессов
2* Когда при скольжении s > 50% и наполнении q 50%
малый контур перестраивается в большой с колебательным про-
цессом. В этом случае под действием разности моментов, соответ-
ствующих точкам б и а (см. рис. 31), происходит ускорение ве-
домого вала (рис. 31, точка в), центробежные силы в турбине
увеличиваются, и большой контур переходит в малый в точке d.
Но момент сопротивления заставляет замедлиться ведомый вал,
и передаточное отношение i опять становится критическим. За-
тем процесс повторяется по аналогичному циклу.
На рис. 32 показана внешняя характеристика гидромуфты
с областью переходных процессов. Очевидно, что области с коле-
бательным процессом оказывают отрицательное влияние на ха-
рактеристики гидромуфт. Известны и применяются следующие
способы для борьбы с колебательными процессами в гидромуфтах:
а) работа при неизменном контуре движения. Опыт показы-
вает возможность такого способа, так как в гидромуфте всегда
есть свободное пространство;
б) увеличение жесткости переходного процесса.
Рассмотрим две принципиальные конструктивные схемы гидро-
муфт, обеспечивающие их работу без колебательного процесса.
55
° Гидромуфта с направляющим устройством (рис. 33, а, б).
Конструктивной особенностью этой гидромуфты является разви-
тый тор. На рис. 33, а схематично показано наличие двух конту-
ров движения потока, которые одновременно существуют на пере-
а — схема; б — характеристика
ходном режиме работы, а на рис. 33, б — внешняя характери-
стика таких муфт при различных наполнениях. В гидромуфтах
с направляющим устройством снижение жесткости характеристики
Рис. 34. Гидромуфта с по-
рогом
в переходном режиме до 5—7% проис-
ходит за счет наличия двух контуров
движения.
. Гидромуфта с порогом (рис. 34).
В регулируемых муфтах =0,55. Из-
за незначительной разницы радиусов
гн1 и гш характеристики таких гидро-
муфт практически не имеют области пере-
ходных процессов, но жесткость харак-
теристик у такой конструкции несколь-
ко больше, чем у гидромуфт, описанных
выше. Порог препятствует протеканию
колебательного процесса, так как он
увеличивает радиус входа в насос гш- В связи с тем, что порог
является более простым усовершенствованием, чем направляющее
устройство, в приводе строительных машин, например, он получил
преимущественное применение. Как мы увидим далее, характе-
ристики гидромуфт с объемным регулированием надежны и их
сравнительно просто обеспечить на практике.
Разберем некоторые конструктивные схемы гидромуфт с объем-
ным регулированием и способы управления ими.
Гидромуфта с поворотной черпательной трубкой и вращаю-
щимся резервуаром показана на рис. 35, а, б. К насосу гидро-
муфты присоединен наружный кожух. Он образует дополнитель-
ный резервуар, который всегда вращается. Рабочая жидкость
в резервуаре располагается в виде кольца. На оси, отстоящей
с эксцентриситетом е от оси вращения гидромуфты, расположена
черпательная трубка, которая неподвижна при данном устано-
вившемся режиме работы муфты. Черпательная трубка может
поворачиваться на 90° при помощи рычага (рис. 35, б). В замы-
кающем кожухе установлен жиклер (калиброванное постоянно
открытое отверстие), через который непрерывно вытекает жидкость
Рис. 35. Гидромуфта с поворотной черпательной трубкой
и вращающимся резервуаром:
1 — вращающийся резервуар; 2 — поворотная черпательная труб
ка; 3 — рычаг управления; 4 — жиклер
из рабочей камеры во вращающийся резервуар. Весь объем ра-
бочей жидкости такой гидромуфты можно разделить на два объема:
17 = V 4- у
у у р. к I v д. к>
гДе V?. к — объем жидкости в рабочей камере;
Уд. к — объем жидкости в дополнительной камере.
Если Ур. к = 0, то гидромуфта отключена и У — Уд к, если же
Уд.к = 0, то муфта передает максимальный момент и У = Урк.
Черпательная трубка предназначена для перераспределения объ-
емов жидкости в рабочей и дополнительной камерах. Так, если
трубка выведена из потока, то вся рабочая жидкость через жиклер
вытечет в дополнительную камеру. При введении трубки в поток
рабочая жидкость под действием скоростного напора — потечет
в рабочую камеру. А так как диаметр трубки значительно больше
диаметра жиклера, каждое фиксированное положение трубки при
ее повороте однозначно определяет наполнение рабочей полости
гидромуфты. Подобная конструктивная схема гидромуфты проста
и надежна в работе; отсутствие специального подпиточного или
отсасывающего насоса, а также специального бака для питания
рабочей полости гидромуфты является ее преимуществом. Кроме
57
этого, охлаждение гидромуфты осуществляется за счет естествен*
ного теплообмена. Однако эта схема имеет свои недостатки: уве-
личенный габаритный установочный размер по диаметру и боль-
шая инерционность.
Гидромуфта со скользящей черпательной трубкой и вращаю-
щимся резервуаром показана на рис. 36. Схема и принцип дей-
ствия этой гидромуфты во многом напоминают описанную выше.
Скользящая черпательная трубка позволяет уменьшить диаметр
муфты. Установка имеет подпиточный насос и бак. Однако эта г и д-
Рис. 37. Гидромуфта с непод-
вижной черпательной трубкой:
1 — рабочая полость; 2 — допол-
нительная камера; 3 — неподвиж-
ная черпательная трубка; 4 — кол-
лектор; 5 — подпиточный насос;
6 — бак
Рис. 36. Гидромуфта .со скользя-
щей черпательной трубкой и вра-
щающимся резервуаром:
1 — рабочая полость; 2 — вращающий-
ся резервуар; 3 — скользящая черпа-
тельная трубка; 4 — теплообменник;
5 — подпиточный насос; 6 — бак
ромуфта также обладаетболылой инерционностью, так как переход
жидкости из рабочей камеры в дополнительную также осуще-
ствляется через жиклер диаметром 2—3 мм, и скорость опорож-
нения поэтому невысокая. Оценка быстроты перехода с одного
наполнения на другое определяет маневренность, которая для
рассмотренных гидромуфт недостаточно высокая.
Рассмотренные гидромуфты полностью выключаемые, так как
после полного опорожнения^они практически не имеют остаточ-
ного момента, нагружающего трансмиссию. Правда, подобное
заключение можно делать с некоторой оговоркой: оно будет спра-
ведливо, если частота вращения насоса остается в пределах 1000—:
3000 об/мин.
Гидромуфта с неподвижной черпательной трубкой (рис. 37)
отличается простотой и удобством технического обслуживания,
ця
Так как черпательная трубка неподвижна, ее приемное отверстие
все время находится под напором. Рабочая жидкость поступает
в коллектор и затем в рабочую камеру. При установившемся
режиме работы количество жидкости, отобранное через черпа-
тельную трубку, равно количеству рабочей жидкости, посту-
пившей в камеру гидромуфты. Объемное регулирование в данной
схеме заключается в том, что часть жидкости отсасывается допол-
нительно насосом из коллектора в бак, а при наполнении гидро-
муфты насос нагнетает рабочую жидкость из бака в полость ра-
бочей камеры гидромуфты. Таким образом, насос работает
только в период изменения наполнения рабочей камеры гидро-
муфты. При частичном наполнении и установившемся режиме
работы насос не работает, т. е. маневренность гидромуфты пол-
ностью определяется производительностью насоса. Эта схема
легко автоматизируется, так как насос может работать по любой,
заранее разработанной программе.
Известны другие принципиально похожие схемы гидромуфт
с объемным регулированием [5]. Все эти схемы позволяют в
общих чертах сформулировать их преимущества и недостатки.
К преимуществам следует отнести относительно простую схему
регулирования и дешевую конструкцию, а также высокую чистоту
выключения, причем остаточный момент близок к нулю, так как
опорожненная муфта не передает крутящего момента. Однако это
справедливо для п 3000 об/мин.
Одним из основных недостатков некоторых конструкций гидро-
муфт с объемным регулированием является низкое быстродей-
ствие, которое составляет от нескольких секунд до нескольких
десятков секунд. Подобные конструкции гидромуфт неприменимы
там, где требуется высокое быстродействие.
Механическое регулирование гидромуфт. Помимо гидромуфт
с переменным наполнением, применяются механически регули-
руемые гидромуфты постоянного наполнения.
Создание подобных гидромуфт обусловлено стремлением повы-
сить их быстродействие. Рассмотрим некоторые принципиальные
конструктивные схемы.
Гидромуфтас шиберным регулированием показана на рис. 38, а.
При движении шиберного кольца в проточную полость умень-
шается площадь проходного сечения каналов. При полностью
вдвинутом шибере (канал перекрыт полностью), крутящий мо-
мент Мост, нагружающий двигатель при полностью остановленной
турбине, в несколько раз превосходит Мном. Большой остаточный
момент можно объяснить образованием кольцевых вихрей, ко-
торые создают обмен энергиями между колесами, и как резуль-
тат, передачу крутящего момента. Подобные гидромуфты находят
ограниченное применение, так как действующий момент сни-
жается незначительно. Их целесообразно применять в машинах,
где требуется плавное регулирование действующего момента в не-
большом диапазоне.
59
Особенностью гидромуфты с раздвижными колесами (рис. 38, б)
является то, что при работе турбина может перемещаться в осевом
направлении. Конструктивно это обеспечивается удлинением за-
мыкающего кожуха на величину перемещения е. При перемеще-
нии турбины изменяется крутящий момент, но, как показали
эксперименты, раздвижение колес не дает эффективного снижения
крутящего момента.
Так при сдвиге турбины на е = 1/3Da действующий мо-
мент меняется незначительно, достигая 70% от первоначального.
Насос гидромуфты с лопатками переменной ширины (рис. 38, в)
имеет обычную конструкцию. Турбина представляет собой две
Рис. 38. Гидромуфты:
а — с шиберным регулированием; б — с раздвижными колесами; в —
с лопатками переменной ширины
цилиндрические поверхности, между которыми помещаются ло-
патки. Задняя стенка наружного тора выполняется в виде диска
с приваренными к нему лопатками. Этот диск называют вытесни-
тельным. Он перемещается вдоль вала, изменяя ширину лопаток
турбины, т. е. изменяет глубину наружного тора. Минимальный
момент передается, когда диск полностью выдвинет лопатки. Если
момент при полностью открытых лопатках принять за 100%, то
момент при выдвинутых лопатках составит 20%, т. е. подобные
конструкции гидромуфт также обладают значительным остаточным
моментом, а при полностью открытых турбинных лопатках ха-
рактеристика данной гидромуфты совпадает с характеристикой
гидромуфты, имеющей коэффициент перегрузки /Спер = 15.
Гидромуфта с поворотными полулопатками насоса (конструк-
ция Лаборатории гидравлических машин АН УССР) показана
на рис. 39, а, а на рис. 39, б— ее внешняя характеристика. Насос
муфты состоит из поворотной и неповоротной частей.
Когда направление поворотной части насоса совпадает с на-
правлением неповоротной части, гидромуфта передает максималь-
ный момент. При повороте лопаток поворотной части закры-
ваются каналы, преграждая путь движению жидкости. Если
закрыть лопатки полностью, то максимальный момент при = 0
60
составит 0,75Л4НОМ. Для исключения утечки рабочей жидкости
между лопатками применяют специальные замковые устройства,
при этом остаточный момент при i = 0 можно уменьшить до
0,4Л4НОМ. Наличие значительного остаточного момента можно
объяснить тем, что при закрытых каналах остается местная цир-
куляция жидкости вокруг лопаток и имеет место дисковое трение.
Гидромуфты с механическим регулированием, обладающие вы-
сокой чистотой выключения (большой глубиной регулирования),
могут быть созданы только по схемам, в которых лопатки при
регулировании полностью выводятся из активной зоны действия
потока.
Рис. 39. Гидромуфта с поворотными полулопатками насоса:
а — конструктивная схема; б — характеристика
Рассмотрим несколько принципиальных конструктивных схем
гидромуфт с большой глубиной регулирования.
В гидромуфте со складывающимися лопатками (рис. 40, а)
лопатки турбины поворачиваются относительно оси, параллельной
оси муфты. Складывающиеся лопатки выполняются на турбине
для того, чтобы жидкость при выключенном состоянии гидро-
муфты образовывала кольцо на периферии и освобождала цен-
тральную часть, где находится ведомый вал со сложенными ло-
патками. Величина остаточного крутящего момента обусловли-
вается только трением в подшипниках и в механизме поворота
лопаток. Эта гидромуфта обеспечивает более чистое выключение,
чем гидромуфты с объемным регулированием, так как остаточный
момент в подобной гидромуфте составляет 0,02—0,005Мном.
Указанные гидромуфты имеют почти мгновенное быстродей-
ствие. Недостатком их является сложность конструкции ( и осо-
бенно сложность механизма привода поворота лопаток на вра-
щающемся валу), поэтому их целесообразно применять только
в специальных установках, где требуется особая чистота выклю-
чения и высокое быстродействие.
61
Гидромуфта с убирающимися лопатками конструкции ВНИИ-
Стройдормаша показана на рис. 40, б. Конструктивно гидромуфта
выполнена таким образом, что лопатки турбины могут повора-
чиваться относительно оси и одновременно смещаться вместе
с этой осью вдоль оси гидромуфты. При увеличенном скольжении
жидкость попадает в дополнительную камеру, уменьшая тем
самым коэффициент перегрузки. Следует отметить, что для гидро-
муфт, представленных на рис. 40, а, б, лопатки турбины не имеют
наружного тора, они открыты с двух сторон. В сложенном
(выключенном) состоянии ведомая часть не касается жидкости,
Рис. 40. Гидромуфты:
а — со складывающимися лопатками; б — с убирающимися лопатками
что ведет, как было отмечено ранее, к более чистому выключе-
нию. Количество лопаток в подобных гидромуфтах обычно вы-
полняется меньшим оптимального. Это объясняется конструк-
тивной сложностью их изготовления, поэтому указанные гидро-
муфты менее энергоемки, чем гидромуфты обычных конструкций.
Кроме того, внутренние кромки поворотных лопаток, соприка-
сающихся с торовыми поверхностями, подвержены интенсив-
ному износу и требуют термической обработки, что также увели-
чивает себестоимость изготовления подобных гидромуфт.
§ 14. ПРЕДОХРАНИТЕЛЬНЫЕ ГИДРОМУФТЫ
Гидромуфты, отвечающие условиям пуска рабочей машины
при наибольшем крутящем моменте электродвигателя, назы-
ваются пусковыми или разгонными. Эти муфты имеют мягкую
характеристику и малый коэффициент перегрузки, поэтому они
одновременно защищают двигатель от перегрузки и могут быть
названы также защитными или предохранительными.
Таким образом, гидромуфты, которые имеют специальные
устройства для снижения момента при больших скольжениях, на-
зываются предохранительными.
62
На рис. 41 показаны внешние характеристики непредохраии-
тельной и предохранительной гидромуфт. В предохранительных
гидромуфтах снижения моментов при больших скольжениях до-
биваются либо уменьшением количества жидкости в рабочей ка-
мере путем сброса ее в дополнительную камеру, либо установкой
на пути потока дроссельного устройства, участвующего в работе
при больших скольжениях. При этом сброс жидкости в дополни-
тельную камеру и включение в работу дроссельного устройства
должны происходить автоматически в зависимости от режимов
работы муфты. Поэтому подобные муфты получили название
муфт с внутренним самоопоражниванием.
Рис. 42. Принципиальная схема
гидромуфты со статическим са-
моопоражниванием:
1 — насос; 2 турбина; 3 — до-
полнительная камера; 4 — порог
Рис. 41. Сопоставление харак-
теристик обычной и предохра-
нительной гидромуфт:
1 — обычной гидромуфты; 2 —
предохранительной
Известны два основных типа таких конструкций:
а) гидромуфты со статическим самоопоражниванием имеют
симметричные колеса, порог на выходе из турбины и дополни-
тельную камеру на стороне турбины для сброса рабочей жидкости;
б) гидромуфты с динамическим самоопоражниванием имеют
несимметричные колеса и дополнительную камеру на стороне
насоса.
Рассмотрим принципиальную конструктивную схему и осо-
бенности гидромуфты со статическим самоопоражниванием (рис. 42).
При номинальном режиме (s-^0, в рабочей камере
возникает поток вокруг точки О. В точке М на частицу жидко-
сти действует центробежная сила Рцб вследствие переносного
движения. Вследствие относительного движения на ту же ча-
стицу жидкости действует другая центробежная сила Рцб1, за-
висящая от скорости ст. При больших скольжениях, когда s—► 1
и I —*0, центробежные силы Рцб в дополнительной камере умень-
шаются, так как турбина замедляет свое вращение, притормажи-
63
Бая жидкость. Давление со стороны рабочей камеры увеличи-
вается, а со стороны дополнительной камеры уменьшается. Под
действием разности гидростатических напоров жидкость пере-
текает из рабочей камеры в дополнительную до тех пор, пока не
установится равновесное состояние. При уменьшении скольжения
процесс идет в обратном направлении.
Одновременно с дополнительной камерой на турбине устанав-
ливают порог. При больших скольжениях жидкость, забрасываемая
насосом к порогу, уменьшает свой скоростной напор, и момент,
передаваемый муфтой, уменьшается. На этих режимах работы
кинетическая энергия жидкости превращается в тепловую. Как
дополнительная камера, так и порог способствуют уменьшению
коэффициента перегрузки /Спер до 3,5—5, так как при этом сни-
жается передаваемый гидромуфтой крутящий момент на больших
скольжениях. Расчет гидромуфт со статическим самоопоражнива-
нием для номинального режима работы ведется аналогично рас-
чету гидромуфт с постоянным заполнением, так как жидкость
на данном режиме не доходит до порога.
Подобные гидромуфты по своим характеристикам удовлетво-
ряют условиям применения их на транспортных машинах. Однако
эти гидромуфты имеют тот недостаток, что обладают невысоким
быстродействием. Процесс перетекания жидкости из рабочей
камеры в дополнительную происходит, как показали расчеты,
при небольшом перепаде давления, и в соответствии с этим ско-
рость перетекания невысокая. Поэтому эти муфты в динамике
имеют высокие коэффициенты перегрузки, которые возрастают
ДО 7<пер 9-^-10-
Гидромуфты с динамическим самоопоражниванием—это пре-
дохранительные гидромуфты с малыми коэффициентами пере-
грузки, работающие по принципу динамического самоопоражни-
вания. Слив (сброс) жидкости происходит под динамическим (ско-
ростным) напором. Благодаря этому подобные гидромуфты обла-
дают высоким быстродействием. Рассмотрим принципиальную
конструктивную схему и особенности такой гидромуфты (рис. 43, а).
Гидромуфты имеют обычный насос с жиклером для перетекания
жидкости из рабочей камеры в дополнительную. Турбина отли-
чается от насоса тем, что на выходной кромке имеется скос в сто-
рону колеса. При работе гидромуфту заливают не полностью. До-
полнительная камера жестко связана с наружным тором насоса.
При холостом ходе жидкость располагается по линии АВ, а при
скольжении вращается вокруг центра (точки О). Характер рабо-
чего процесса на режимах до i *(s 3%) для рассматриваемой
муфты не отличается от рабочего процесса гидромуфты со ста-
тическим самоопоражниванием и характеристики муфт тоже
совпадают (см. рис. 43, б). При повышении нагрузки (f < f*)
увеличивается скольжение и под действием скоростного напора
жидкость в турбине опускается все ниже. Происходит изменение
формы потока. Расход увеличивается, что приводит к увеличению
Л4
скорости сп1. Путь, пройденный частицами жидкости, зависит от
центробежных сил переносного и относительного движения. В пре-
дельном случае частица жидкости достигает скошенной части
лопатки турбины и переходит в дополнительную камеру. Начи-
нается сброс жидкости. Передаточное отношение, при котором
начинается сброс рабочей жидкости, называют критическим.
На линии ОС энергия частицы равна нулю, поэтому ее называют
линией нулевых напоров или нулевой линией.
Заметим, что поверхность лопатки турбины выше нулевой ли-
нии воспринимает давление потока и работает в режиме турбины.
Поверхность лопатки ниже нулевой линии отдает энергию жидкости
с динамическим самоопоражниванием:
а — схема: 1 — замыкающий кожух; 2 — турбина; 3 — насос; 4 — пред-
варительная камера; 5 — жиклеры; 6 — дополнительная камера; б — ха-
рактеристики; 1 — без предварительной камеры; 2 — с предварительной
камерой
и работает в режиме насоса. Таким образом, турбина имеет по-
верхности, работающие в разных режимах. Уравнение баланса
удельной энергии такой гидромуфты до начала слива жидкости
имеет вид
//н — Нт (турб) + Нт (нас) — 2 ^пот = О,
где Нт (турб) и Нт (нас) — напоры на соответствующих частях ло-
патки турбины.
В гидромуфтах с динамическим самоопоражниванием слив
рабочей жидкости начинается при s = 154-20%, что сопровож-
дается скачком (провалом) на внешней характеристике иногда
до момента Л4Н0М. Следовательно, при свободном выходе жидкости
в дополнительную камеру гидромуфта не обеспечивает устой-
чивой характеристики. Чтобы исправить характеристику (ликви-
дировать провал), приходится тормозить поток, сбрасываемый
с турбины. Известны два способа получения требуемой характери-
стики гидромуфты с динамическим самоопоражниванием.
5 С. П. Стесин 65
1. Установкой предварительной камеры перед входом в насос.
Причем схемы гидромуфт с предкамерой и дополнительной ка-
мерой принимают в качестве основных в типаже.
2. Установкой порога на выходе^из турбины. На рис. 43, а
показана конструктивная схема, а на рис. 43, б (кривая 2) внешняя
характеристика гидромуфты с предкамерой. Предкамера имеет
небольшое количество лопаток. В ней возникают обратные тече-
ния, поэтому она служит дополнительным сопротивлением. Ту же
роль играет и порог, применяемый в некоторых конструкциях
гидромуфт. В гидромуфтах с динамическим самоопоражниванием
коэффициент перегрузки /Спер =*1,84-2,0.
Однако для полной оценки предохраняющих качеств гидро-
муфт необходимо рассматривать, помимо статических нагрузок,
также и динамические, которые возникают при неустановившихся
режимах работы привода. Динамические нагрузки оцениваются
динамическими характеристиками, которые замеряют путем ос-
циллографирования моментов'и частоты вращения ведомого вала
при различном его ускорении. При этом указывают/за какой
отрезок времени снимали характеристики при;г = 14-0. Вели-
чина указанного отрезка колеблется в пределах t — 0,24-
1 сек.
Эксперименты, проведенные ВНИИСтройдормашем, ВНИИМет-
машем, ИГД им. Скочинского и другими организациями, пока-
зали, что, как правило, динамическая характеристика гидромуфты
всегда располагается выше статической. Те же эксперименты
выявили, что динамические характеристики зависят от конструк-
ции гидромуфт и в особенности от конструкции лопаток. Так,
лучшие динамические характеристики имеют гидромуфты с про-
фильными лопатками. В табл. 2 для сравнения приведены
основные свойства гидромуфт с внутренним самоопоражнива-
нием.
Таблица 2
Основные свойства гидромуфты с внутренним самоопоражниванием
Свойства гидромуфт Гидромуфты со стати- ческим самоопоражни- ванием Гидромуфты с динами- ческим самоопоражни- ванием
Коэффициент перегрузки Динамические свойства Быстродействие Энергоемкость Сложность изготовления 3—5 Удовлетворитель- ные Низкое Высокая 1,8—2 Хорошие Высокое Низкая (за счет камеры) Более высокая по сравнению с муфтами со статическим само- опоражниванием
66
§ 15. ГИДРОМУФТЫ С НАКЛОННЫМИ ЛОПАТКАМИ
Лопатки гидромуфт называют наклонными, если плоскости
лопаток расположены под углом к плоскостям меридиональных
сечений, а их кромки сохраняют радиальное положение.
На рис. 44, а—в показаны принципиальные конструктивные
схемы гидромуфт с наклонными лопатками, а на рис. 44, г — их
внешние характеристики (кривая 1 характеризует лопатки, на-
клоненные вперед; 2 — лопатки, наклоненные назад; 3 — радиаль-
ные лопатки).
При расположении кромок лопаток насоса сзади линий со-
единения их с наружным тором колеса по отношению к направле-
нию вращения лопатки будем называть наклоненными назад
a) led 1
6) Ь г)
Рис. 44. Гидромуфта с наклонными лопатками:
а — радиальные лопатки; б — лопатки, наклоненные назад; в —
лопатки, наклоненные вперед; г — внешние характеристики
(рис. 44, б). Если кромки лопаток располагаются впереди линий
соединения, их с наружным тором колеса, лопатки будем называть
наклоненными вперед (рис. 44, в). Наклон лопаток часто у насоса
и турбины выполняют одинаковым для получения подобных тре-
угольников скоростей.
На рис. 45, а показана решетка насоса, развернутая на пло-
скости, а на рис. 45, б — треугольник скоростей на входе в насос.
Все это иллюстрирует принцип действия гидромуфты с наклон-
ными лопатками. Как видно из рис. 45, б, при наклоне лопаток
меняется направление скорости u>Hi и, как следствие, скорость
сиН1, которая входит в уравнение момента гидромуфты.
Из рис. 44, г видно, как наклон лопаток влияет на характе-
ристики гидромуфты и ее размеры. Например, для увеличения
энергоемкости гидромуфты можно применять лопатки, накло-
ненные вперед. Гидромуфты с лопатками, наклоненными назад,
5* 67
применяются в реверсивных приводах и в приводах грузоподъем-
ных машин, работающих с переменными нагрузками на рабочих
органах.
При анализе работьпгидромуфт с наклонными лопатками не-
обходимо учитывать такие особенности, как работу их при полном
заполнении рабочей полости, несимметричность лопаток; разницу
между внешними характеристиками при прямом и обратном вра-
щении. В связи с этим гидромуфты не могут быть использованы при
одной рабочей полости для работы в передачах, требующих рав-
ноценного реверса.
Рис. 45. Схема расположения лопастей и треугольник скоростей
муфт с наклонными лопатками
Основными преимуществами гидромуфт с наклонными лопат-
ками являются высокая маневренность и стабильность характе-
ристик. Под стабильностью характеристик в данном случае сле-
дует понимать их независимость от эксплуатационных условий.
Так, например, характеристики гидромуфт с внутренним само-
опоражниванием зависят от количества жидкости в рабочей по-
лости, а для некоторых установок нужны характеристики, не
зависящие от недоливов и переливов рабочей жидкости и других
субъективных причин.
§ 16. ОСНОВЫ ПРОЕКТИРОВАНИЯ И РАСЧЕТА
ГИДРОМУФТ
Техническое задание на проектирование гидромуфты состав-
ляется на основании анализа и расчета привода с гидромуфтой.
В связи с этим задачей гидравлического расчета является опре-
деление геометрических параметров рабочих полостей, обеспе-
чивающих требуемую внешнюю характеристику. Для определе-
ния параметров привода производится тяговый расчет, опреде-
ляются динамические и пусковые характеристики, выявляются
необходимые предохранительные свойства гидромуфты.
В техническое задание обычно входят следующие параметры:
мощность, передаваемая двигателем; частота вращения двигателя;
желаемый или требуемый к. п. д. на номинальном режиме работы
(или скольжение); вид рабочей жидкости,
68
Эти параметры позволяют определить одну точку характери-
стики, соответствующую номинальному режиму работы. Вторая
точка характеристики соответствует режиму холостого хода и
определяется частотой вращения вала двигателя.
Кроме этого, техническое задание предусматривает определение
регулировочных свойств гидромуфты (коэффициентов глубины
регулирования по стоповому и номинальному режимам) и пере-
грузочной способности, предельных габаритных размеров и массы,
маневренности и быстродействия.
Гидромуфта должна быть рассчитана и спроектирована таким
образом, чтобы внутренние процессы обеспечивали требуемую
внешнюю характеристику. При проектировании ориентируются на
уже созданные и испытанные конструкции гидромуфт. При исполь-
зовании имеющихся конструкций необходимо тщательно анали-
зировать их характеристики с учетом поставленных требований.
Если, например, требуется предохранительная гидромуфта с наи-
более простой конструкцией и коэффициентом перегрузки /Спер =
= Зч-4, то в этом случае наиболее целесообразно применить
гидромуфту с порогом и дополнительной камерой, так как эта
схема обеспечивает наибольшую разность радиусов входа и вы-
хода, что позволяет при сравнительно небольших габаритных
размерах получить высокую энергоемкость.
Если требуется обеспечить малый коэффициент перегрузки
Кпер = 2 и высокое быстродействие, целесообразно применить
гидромуфту с дополнительной и предварительной камерой на
стороне насоса.
Если требуется при минимальных габаритных размерах полу-
чить очень высокую энергоемкость, целесообразно применить
гидромуфту с наклонными лопатками.
Гидромуфты с двумя рабочими полостями следует применять,
когда требуются облегченные опоры, так как осевые силы в по-
добных гидромуфтах взаимно уравновешиваются.
Расчет гидромуфты методом подобия заключается в сравне-
нии безразмерных характеристик образца и натуры. После этого
определяют активный диаметр натуры. Остальные размеры полу-
чают путем пропорционального пересчета всех линейных раз-
меров. Данный метод обусловливает достаточно точное совпадение
фактической и расчетной характеристик.
Активный диаметр определяют по формуле подобия
Da==l/?V
Коэффициент мощности kN приводится в справочниках и
монографиях в виде графиков [5].
В настоящее время для нормальных гидромуфт общепромыш-
ленного применения имеются графики подбора, которые пред-
ставляют собой графические зависимости активного диаметра от
69
частоты вращения и мощности двигателя, т. е. Da = f (п и N)
(см. рис. 46, б). Масштабы по осям п и N выбирают таким образом,
чтобы функция при постоянном диаметре изображалась прямой
линией.
По заданным мощности и частоте вращения вала двигателя
находим точку А (см. рис. 46) и по справочнику выбираем кон-
структивные размеры соответствующей гидромуфты. Если же,
получив техническое задание, не представляется возможным
подобрать гидромуфту по конструкции и характеристике близкую
к требуемой, приходится выполнять следующее.
Рис. 46. Расчетные графики для подбора гидромуфт по методу
подобия
1. Провести гидравлический расчет и спроектировать гидро-
муфту.
2. Изготовить модель и провести ее испытания.
3. Провести анализ испытаний, связанный с доводкой опытного
образца и уточнением в процессе испытаний расчетных коэффи-
циентов.
4. Выполнить уточненный расчет, заново спроектировать опыт-
ный образец и провести его контрольные испытания.
Для расчета гидромуфт пользуются несколькими методиками
[6], [27]. Рассмотрим методику расчета гидромуфты, предложен-
ную И. Ф. Семичастновым и А. П. Кудрявцевым [6].
1. По данным технического задания задаемся коэффициен-
том быстроходности насоса ns = 50-н70 об/мин, который с учетом
формулы (52) можно записать в виде
ns = nH
1/Ps
Г Р WH/< '
2. Задавшись плотностью ps = 1000 кг/м3, определяем на-
пор Нк:
WOONrf^ \ °-4
P'ls /
70
1Чри эТом считаем параметры Ян, «н. иР известными из тех-
нического задания.
3. Определяем расход из формулы (1)
п= Ун-.
4. Задаемся Do — l,5dH> где dH — диаметр вала насоса.
Эта зависимость экспериментальная и справедлива для гидромуфт
со статическим самоопоражниванием. Для гидромуфт с динами-
ческим самоопоражниванием диаметр Do определяется с учетом
размеров и объема предварительной камеры.
Рис. 47. Графики:
а— И.И.Куколевского для определения а; б — зависимость zH = f(£>a)
5. Определяем скорость
ст = а V 2gH№ (78)
где а — коэффициент входной скорости, определяемый по гра-
фику проф. И. И. Куколевского (рис. 47, а) [6].
Раскроем физическую сущность коэффициента а, входящего
в уравнение (78).
Напор Ян можно записать в виде
Ян=~ (иН2— ЫН11)>
НН1 = rHl®Fb ЫН2 = Г H2®H>
тогда
cm = Об 2g —g- (Uj]2 2(1 и l)
или
= (79)
Используя формулу (59), запишем следующее соотношение:
Ст = /' (1-а22_0-»2)
“Н2 К С
71
Сравнив его с выражением (79), получим
V £2(1—а3/) •
Из формулы (80) следует, что для данной конструкций гидро-
муфты и для каждого режима ее работы а = /(£), т. е. а — это
величина, эквивалентная коэффициенту сопротивления £.
6. Определяем площадь на входе в рабочее колесо и выходе
из него:
р — _2_ — р
1 ВЫХ г 1 вх»
7. Находим радиус выхода гН2 из выражения (54)
8. Определяем число лопаток рабочих колес, используя экс-
периментальные и теоретические зависимости (рис. 47, б).
Эффективные значения расчетных параметров гидромуфты.
Под эффективными параметрами понимают такие параметры, ко-
торые относятся к насосному
Рис. 48. Схема действующих мо-
ментов гидромуфты
и турбинному валам гидромуфты.
Эти параметры отличаются от
расчетных значений гидравличе-
ских моментов на рабочих колесах
гидромуфты. Рассмотрим принци-
пиальную схему действия эф-
фективных моментов для гидро-
муфты, изображенной на рис. 48.
Момент Mt можно записать
в виде суммы моментов: -
Mi = Мн + Мдиск Ц- Л1мех. н +
~Ь ^черп,
где Мдйск — момент дискового трения между ведущей и ве-
домой частями гидромуфты;
Л4Мех. н — момент механического трения в опорах и уплот-
нениях ведущей части;
Л4черп — момент сопротивления, возникающий при движении
черпательной трубки в потоке жидкости.
Соответственно, эффективный момент на ведомом валу
Л42 — Мт + Л4ДИСК Ммех. т,
где МмеХе т — момент механического трения в опорах и уплот-
нениях ведомой части.
72
Тогда эффективный коэффициент трансформации определится
соотношением
______Мт 4~ Мдиск М мех. Т < ।
Mi Л1н + МдИСК + Ммех> н -|“ ^черп
Соответственно эффективный к. п. д. также будет иметь зани-
женное значение.
§ 17. ОПРЕДЕЛЕНИЕ ОСЕВЫХ СИЛ В ГИДРОМУФТЕ
Надежность гидромуфт зависит от учета осевых сил, которые
могут привести к сдвигу рабочих колес, выходу из строя под-
шипников, и в конечномj счете, к аварии. Теоретическое
-I о i=l
а) б)
Рис. 49. Определение осевых сил в гидромуфте:
а — расчетная схема гидромуфты; б — изменение осевых сил
определение осевых сил в гидромуфте затруднительно в связи
с отсутствием теории рабочего процесса, которая позволила бы
точно находить закон распределения скоростей и давлений в по-
лости гидромуфты при различных режимах ее работы. Поэтому
точные данные о величине осевых сил в гидромуфте могут быть
получены только опытным путем.
Проведем предварительный расчет осевых сил для гидромуфты
с полным заполнением. На рис. 49, а показано распределение уси-
лий, действующих на основные рабочие части гидромуфты.
Из^рис. 49, а видно, что
где Рн и Рт
Pi
^н = Л + ^-^3;
(81)
з,
— результирующие осевые силы на насосе и тур-
бине;
— результирующая осевая сила, действующая на
наружный тор насоса и турбины со стороны ра-
бочей камеры;
73
Р2 — сила, возникающая во время работы гидромуфты,
как следствие изменения направления движения
потока рабочей жидкости на 180°;
Р3 —^сила, действующая на наружной тор турбины
или замыкающий кожух насоса со стороны до-
полнительной камеры от центробежной силы пе-
реносного движения.
Согласно третьему закону Ньютона можно записать
Рн = Рг или Рн — Рт = 0,
т. е. суммарные осевые силы на насосном и турбинном валах между
собой равны и направлены в противоположные стороны. Сле-
довательно, колеса гидромуфты будут либо сдвигаться, либо
раздвигаться под действием осевых сил.
Будем считать, что насос жестко связан с коленчатым валом
двигателя и определим значения Ри Р2 и Р3 для различных
режимов работы гидромуфты.
1. Режим холостого хода (i — 1). Жидкость в рабочей камере
находится в относительном покое, при этом все составляющие
осевой силы равны между собой и равны нулю, т. е.
Р± Р2 =: Р3 = Q и = Pj = 0.
2. При наличии внешней нагрузки турбина начинает затор-
маживаться (s + 0) и появляются силы, действующие по оси
гидромуфты.
Из определения силы Рг следует:
Pr = J p^nrdr,
где — давление от центробежных сил, действующих на наруж-
ный тор насоса и турбины:
Pl = Р®Т (---—
\
„ >
г — текущий радиус, на котором находится жидкость в по-
лости гидромуфты.
Тогда
«а
р /г2 Р2 \
J pfi>^f_Z^j.2nrdr = -|-fi>2T-f-(^-^)2. (82)
Яо
74
Аналогично находим выражение для составляющей Р3:
рз= f Pn.^nrdr,
*0
где рд. к — давление от центробежных сил в дополнительной
камере:
2 '2~Яо
Рд. к — Р«д. к 2 ’
где сод. к—скорость вращения жидкости в дополнительной ка-
мере.
Проделав преобразования, будем иметь
<83)
Составляющую Р2 находят из уравнения изменения количе-
ства движения. При этом полагают, что ст1 = ст2. Тогда
Р%= Qp^mi Qp ( Cmi) — 2pQcCT. (83a)
С учетом уравнений (81) и (83a). можно записать
р —_______М______2с
ЮНГН2 О 1а )
Зная, что ст = -у-, получаем
_____________________________м________
Р^шнгН2 (1 — ia2)
Тогда окончательно будем иметь
Р2 =---------—--------.
"У f®HrH2 0 — ia^
В этом выражении переменными величинами являются момент М
и передаточное отношение i, так как остальные параметры для
данной конструкции гидромуфты являются постоянными. Тогда
/>2 = (,М2 - 2.2 > (84)
2 ci(l— *а2)2-
где
с1 = “2~
Запишем выражение для результирующей осевой силы Рос =
= Рн = Рт- Для этого в уравнение (81) подставим выражения (82),
(83), (84),
75
После преобразований получим
Рос=Л + Л - Р3 = g (Rl - ЯоЖ - ®д. к) +
Л42
+ е, (-<->- <85)
Знак (направление) силы Рос зависит от знака выражения
(сот—сод. к). Раскроем этот двучлен, считая в первом прибли-
жении, что (Од. к есть среднее арифметическое угловых скоростей
насоса и турбины. Тогда
При i = 0 (столовый режим) со^ — со^ к —-----со^, т. е.
первое слагаемое в выражении (85) является отрицательной ве-
личиной. Как показывают расчеты, оно значительно больше по
абсолютной величине, чем второе слагаемое, поэтому на стоповом
режиме осевая сила будет стягивать рабочие колеса гидромуфты.
При i = 1 (холостой ход) первое и второе слагаемые осевой
силы равны нулю (Л4 = 0). На основании изложенного можно
представить следующую теоретическую зависимость величины
осевых сил (см. рис 49, б).
Из изложенного можно сделать следующие выводы:
а) осевая сила сближает (стягивает) рабочие колеса;
б) на номинальном режиме работы осевая сила незначительна
и расчет подшипников по данному режиму работы производить
нецелесообразно;
в) максимальное значение осевая сила имеет на стоповом
режиме и режимах противовращения, в связи с этим нужно про-
изводить расчет подшипников и упорных деталей;
г) при частичном наполнении гидромуфты осевая сила умень-
шается;
д) в гидромуфте с внешним питанием необходимо учитывать
дополнительную силу (статическую составляющую) от давления
подпитки, действующего на неуравновешенной площади;
е) осевые силы полностью уравновешиваются у сдвоенных
гидромуфт, однако эти муфты имеют увеличенные осевые габа-
ритные размеры и более сложную конструкцию.
§ 18. ТИПИЗАЦИЯ И УНИФИКАЦИЯ ГИДРОМУФТ
Номенклатура машин, в приводах которых устанавливаются
гидромуфты, составляет десятки типоразмеров. Поэтому, если бы
для каждой машины была изготовлена своя, индивидуальная
7fi
муфта, то это оказалось бы экономически нецелесообразным.
Массовое производство гидромуфт, которое существенно сни-
зило бы себестоимость и стоимость, требует широкой унификации
отдельных узлов и деталей гидромуфт и разработки на них
типажа.
Типажи гидромуфт создаются в основном по назначению с от-
ражением основных качеств, которые используются в машине.
Для транспортных, строительных и дорожных машин к основным
свойствам гидромуфт относятся предохранительные и регули-
ровочные свойства.
В связи с этим, учитывая главные свойства гидромуфт, можно
для перечисленных машин отобрать ограниченное число кон-
структивных типов гидромуфт. Затем каждый тип гидромуфты
представить параметрическим рядом, охватывающим значитель-
ный диапазон передаваемых мощностей.
Ограничение количества типов гидромуфт существенно облег-
чает научно-исследовательские и доводочные работы при их соз-
дании. Использование теории подобия позволяет распространить
высокие показатели, полученные для муфт одного типоразмера,
на весь ряд гидромуфт.
Проведенные исследования показали, что применение одного
типоразмера гидромуфты в возможно большем диапазоне мощно-
стей дает большой экономический эффект. В связи с этим возни
кает задача разработки рационального параметрического ряда
гидромуфт, т. е. определения рационального числа типоразмеров
гидромуфт, охватывающего заданный диапазон мощностей, ис-
пользуемый на транспортных и дорожно-строительных машинах.
При построении параметрического ряда в качестве основного па-
раметра принимают активный диаметр гидромуфт. Это обуслов-
ливается технологическими соображениями, так как оснастка и
технологический процесс в основном определяются этим пара-
метром.
Гидромуфта с определенным активным диаметром может иметь
различную энергоемкость (передавать различную мощность при
nr = const) при изменении ряда конструктивных элементов ее
лопастной системы (например, изменения числа лопаток, углов
лопаток рабочих колес, внутреннего диаметра и т. д.).
Кроме того, гидромуфты определенной конструкции могут
изменять энергоемкость при изменении их наполнения. Рас-
ширение используемого мощностного диапазона гидромуфты
может быть получено за счет выбора номинального момента
и коэффициента перегрузки. Диапазон перекрытия мощности
в данном случае зависит от типа двигателя. Рассмотрим этот
вопрос подробнее для случая работы гидромуфты с асинхронным
электродвигателем. Обычные электродвигатели имеют коэффи-
циент перегрузки ~тах = 2. Для привода он принимается рав-
'ИНом
ным 1,8.
77
Определим, в каком диапазоне мощностей возможно примене-
ние одного и того же размера гидромуфты без существенных из-
менений выходных параметров привода. Пусть для какой-то
гидромуфты имеет место номинальный момент ЛГном при $* = 0,97
и при этом коэффициент перегрузки Кпер = 2,5. Далее используем
эту же муфту с электродвигателем, имеющим мощность в 1,5 раза
большую, чем в первом случае. Тогда номинальный момент гид-
ромуфты Л1ном = 1,5Л1ном и к. п. д. т)* снизится до 0,94, а коэф-
2 5
фициент перегрузки Кпер — -ру =1,7.
Рассмотрим выходные характеристики приводов в обоих слу-
чаях. В первом случае гидромуфта будет перегружать двигатель и
частота вращения его вала начнет снижаться. При Л4гаах двига-
теля номинальная частота враще-
ния вала будет на 10—15% меньше
номинальной частоты вращения
вала гидромуфты. Столовый момент
гидромуфты при снижении частоты
вращения вала двигателя на 12%
•уменьшится до 0,852 Л4тах, где
0,85 получено, как 0,97—0,12.
Тогда коэффициент перегрузки
будет /Спер = 2,5х0,852 = 1,95.
Во втором случае гидромуфта
почти не снижает частоты вра-
щения вала двигателя и коэф-
фициент перегрузки Кпер = 1,7.
Таким образом, одна и та же гидромуфта может передать мощность
в диапазоне 1—1,5. При нижнем значении мощности т]* = 0,97
и К„еР — 1,95; при верхнем т|* = 0,94 и Кпер = 1,7. В этом слу-
чае коэффициент параметрического ряда определится как у 1,5,
так как
О
Рис. 50. График изменения мощ-
ностей параметрического ряда гид-
ромуфт
1 / тах
г км mln
(86)
где <7п — знаменатель параметрического ряда;
max, mm — соответственно максимальный и минималь-
ный коэффициенты мощности для данной
гидромуфты.
Параметрический ряд создается с учетом рядов предпочти-
тельных чисел по ГОСТу 8032—56. При этом в качестве базового
образца целесообразно применять серийную гидромуфту.
Для выбора гидромуфт строится номограмма, на которой ра-
бочее поле мощности для одного размера гидромуфты (для дан-
ного активного диаметра Da) заштриховано в определенную сто-
рону (рис, 50).
78
§ «9. КОНСТРУКЦИИ ГИДРОМУФТ
Нерегулируемые гидромуфты постоянного и переменного на-
полнения. На рис. 51, а показана литая конструкция нерегули-
руемой гидромуфты постоянного наполнения. Насос 5 соединен
с ободом маховика двигателя, а турбина 2 — с фланцем стакана,
расположенного во втулке насоса и соединенного внутренними
шлицами с ведомым валом. Насос и турбина имеют плоские ра-
диальные лопатки. Во избежание вибраций и шума при работе
Рис. 51. Нерегулируемые гидромуфты:
а — постоянного наполнения: 1 — полость; 2 — турбина; 3 — кожух; 4 — заливная
пробка; 5 — насос; б — гидромуфта фирмы Цельнер: 1 — насос; 2 — кожух; 3 — тур-
бина; 4 — ведомый вал; 5 — внешняя опора; 6 — ребра; в — гидромуфта со статическим
самоопоражниванием; 1 — насос; 2 — турбина; 3 и 4 — полости; 5 — канал;
6 — камера; 7— порог
гидромуфты количество лопаток насоса принимают на 5—8%
больше или меньше, чем у турбины. Между кожухом 3 и турбиной 2
имеется небольшая полость 1. Заливная пробка 4 располо-
жена так, что наполнить гидромуфту выше установленного пре-
дела невозможно. При больших скольжениях часть жидкости из
проточной полости перетекает в полость 1 через периферийный
зазор между насосом и турбиной. Следствием этого является умень-
шение наполнения проточной полости. Однако ввиду малого
объема полости 1 этим уменьшением наполнения можно пренебречь.
Поэтому рассматриваемая гидромуфта является гидромуфтой
постоянного наполнения, имеющей жесткую характеристику,
что ограничивает область ее применения.
На рис. 51, б показана конструкция нерегулируемой гидро-
муфты постоянного заполнения фирмы Цельнер (ФРГ). Насос /,
79
соединяемый с валом двигателя, жестко связан с вращающимся
кожухом 2. Турбина 3 соединена с ведомым валом 4, который
вращается в двух подшипниках и соединяется через зубчатую
муфту с валом рабочей машины. Ведущая часть гидромуфты имеет
внешнюю опору 5, расположенную на фундаменте. Рабочие ко-
леса выполнены с прямыми радиальными лопатками. Гидромуфта
имеет воздушное охлаждение. Для этого на наружной поверх-
ности гидромуфты имеются радиальные ребра 6, охваченные ко-
жухом. Кожух обеспечивает необходимое направление охлаждае-
мого воздуха. При работе гидромуфты воздух, попадая к вну-
тренним концам ребер, отбрасывается к периферии и обтекает
ребристую поверхность гидромуфты. Гидромуфта работает при
неизменном первоначальном количестве жидкости.
На рис. 51, в показана конструкция гидромуфты со статиче-
ским самоопоражниванием, с порогом и дополнительной камерой,
в которую вытесняется жидкость при больших скольжениях. Здесь
турбина 2 выполнена заодно с дополнительной камерой 6, соеди-
ненной каналами с полостью 4, образуемой тором гидромуфты.
По мере увеличения скольжения увеличивается разность давлений
от центробежных сил между давлением на выходе из насоса и
давлением на входе в турбину 2, в полости 4, а следовательно, в до-
полнительной камере бив полости 3. При этом часть жидкости
под действием указанных разностей давлений перетекает через
каналы 5 и полость 3 в дополнительную камеру 6, благодаря чему
уменьшается наполнение проточной полости гидромуфты. В ре-
зультате этого снижается передаваемый гидромуфтой крутящий
момент, чему одновременно содействует сопротивление движению
жидкости, создаваемое порогом 7. Таким образом, гидромуфта
работает при наличии жидкости в проточной полости, количество
которой уменьшается по мере увеличения скольжения, т. е. с пе-
ременным наполнением.
Рассмотрим конструкцию некоторых гидромуфт с динамиче-
ским самоопоражниванием. Для такой гидромуфты отношение
крутящего момента при s = 100% к моменту при s = 3% может
составлять 1,8—2.
У гидромуфты (рис. 52, а) «Фойт-Синклер» ведущий вал 1 через
промежуточные детали соединен с насосом 4, а ведомый вал 8 —
с турбиной 5. Во вращающемся корпусе 6 имеется отверстие для
наполнения гидромуфты, закрываемое пробкой 7. Лопатки тур-
бины выполнены несколько длиннее лопаток насоса. В гидро-
муфте имеется камера 9 предварительного наполнения и камера 2
замедления. Когда гидромуфта нагружена номинальным момен-
том, вся жидкость сосредотачивается в проточной полости гидро-
муфты и не попадает в камеру 9. При увеличении скольжения из-за
увеличения скорости потока часть жидкости попадает в камеру 9,
вследствие чего уменьшается наполнение проточной полости гидро-
муфты. После заполнения камеры 9 жидкость через ряд неболь-
ших отверстий 10 начинает перетекать в камеру 2 замедления, и
ЯП
при этом опоражнивание проточной полости гидромуфты за-
медляется. При пуске двигателя и его разгоне часть жидкости
задерживается в камерах 2 и 9 гидромуфты и под действием цен-
тробежных сил постепенно поступает в проточную полость гидро-
муфты. Продолжительность наполнения проточной полости за-
висит от величины отверстий 3.
На рис. 52, б показана гидромуфта ТМ-100, разработанная
институтом Гипроуглемаш для установки на скребковых конвей-
ерах, а на рис. 52, в показана характеристика этой гидромуфты
с различным числом лопаток в рабочих колесах.
Следует отметить, что при внезапной остановке приводимой
через гидромуфту рабочей машины защитная гидромуфта пре-
дохраняет двигатель от поломки, переходя на режим 100%-ного
скольжения. При этом вся подводимая к муфте мощность превра-
щается в тепло и идет на нагревание масла, температура которого
может достигнуть опасного предела. Поэтому необходима тепло-
вая защита гидромуфты, автоматически останавливающая при-
водной двигатель при достижении рабочей жидкостью заданной
температуры. Гидромуфта ТМ-100 снабжена подобной тепловой
защитой.
На рис. 53 показан промышленный образец гидромуфты с N =
= 400 кВт и n-i = 1480 об/мин конструкции ВНИИМетмаша
для привода крупных конусных дробилок.
Насос 1 жестко связан с ведущим валом 2, который имеет
опору и соединен с электродвигателем зубчатой муфтой. Тур-
бина 3 насажена на ведомый вал 4, который центрируется в ве-
дущей части двумя шарикоподшипниками и имеет также свою
опору. Рабочие колеса, кожух 5 и корпус дополнительной ка-
меры 6 выполнены из алюминиевого сплава. Подобная конструк-
ция ротора гидромуфты из алюминиевого сплава не только улуч-
шает теплоотвод, но за счет уменьшенного махового момента
ведущей части гидромуфты облегчает пуск приводного электро-
двигателя. Дополнительная камера соединена с рабочей полостью
и предкамерой гидромуфты сменными ниппелями с калиброван-
ными отверстиями. Во избежание опасного перегрева масла свыше
115° С, когда вал турбины застопорен при работающем электро-
двигателе, предусмотрен тепловой предохранитель 7. Предохра-
нитель при нагреве масла срабатывает и, воздействуя своим бой-
ком на конечный выключатель 8, отключает двигатель. Конструк-
ция^гидромуфты, имеющей свои опоры, облегчает частую сборку
при^ испытаниях и наладке опытного образца. Для серийного
выпуска подобных гидромуфт рекомендуется конструкция, под-
вешенная на редукторе и эластично связанная с электродвигателем.
Регулируемые гидромуфты переменного наполнения. Нор-
малью, разработанной в СССР, предусматривается изготовление
регулируемых гидромуфт мощностью 50—1000 кВт. В качестве
базовой была принята конструкция с вращающимся резервуаром
и со скользящей черпательной трубкой (рис. 54).
6 С. П. Стесин 81
1 2
d) 6)
в)
Рис. 52. Гидромуфты с динамическим самоопоражниванием:
а — фирмы Фойт-Синклер: 1 — ведущий вал; 2 — камера замедления; 3 и 10 — отвер-
стия- 4 — насос; 5 — турбина; 6 — корпус; 7 — пробка; 8 — ведомый вал; 9 — камера
предварительного наполнения; б — ТМ-100: 1 — турбина; 2 кожух; 3 отверстие
10 X 25; 4 — порог; 5 — ведомый вал; 6 — ведущий вал; 7 — насос; в — характеристика
гидромуфты ТМ-100
82
7/40
950
С*Э
Рис. 53. Гидромуфта с динамическим самоопоражниванием:
1 — насос; 2 — ведущий вал; 3 — турбина; 4 — ведомый вал; 5 — кожух; 6 — корпус дополнительного объема; 7 — предохранитель;
8 — конечный выключатель
К достоинствам гидромуфт этого типа относятся: отсутствие
масляного бака и длинного трубопровода, простота управления,
определенность задаваемой дозировки, способность черпательной
трубки легко преодолевать противодавление. Приведем основные
параметры, характеризующие гидромуфты указанного размерного
ряда.
В качестве главного параметра ряда гидромуфт выбран актив-
ный диаметр, определяющий эксплуатационные параметры гидро-
муфты — мощность и скольжение при заданной частоте вращения
ведущего вала, а также ее размеры.
Рис. 54. Регулируемая гидромуфта с вращающимся резервуаром и
скользящей черпательной трубкой:
1 — вращающийся резервуар: 2 — насос; 3 — ведомый вал; 4 — термометры;
5 — распределительный клапан; 6 — маслоохладитель; 7 — скользящая чер-
пательная трубка; 8 — ведущий вал; 9 — турбина; 10 — жиклер
Параметрическим рядом предусматривается определенная ин-
дексация гидромуфт. Обозначения отражают тип, исполнение
гидромуфты и значения главного параметра. Например, индекс
ГМРП-500 расшифровывается следующим образом: гидродина-
мическая муфта, регулируемая, исполнение II (с опорой ведомого
вала), активный диаметр Da = 0,5 м.
Помимо активного диаметра, основными параметрами гидро-
муфт являются номинальная передаваемая мощность, частота
вращения ведущего вала, к. п. д. или скольжение на номинальном
режиме, а также глубина регулирования. Значения основных пара-
метров для нормального режима приведены в табл. 3 и в номо-
грамме основных параметров (рис. 55).
Размерным рядом предусмотрено, что номинальное скольже-
ние меняется от s = 2-4-2,5 % до s = 3н-3,5% в зависимости от
выбора нагрузки (первое относится к Ут1п, второе—к Nmax).
Этот ряд учитывает, что в большинстве случаев привод гидромуфт
84
Таблица 3
Основные параметры регулируемых гидромуфт
Обозначение типоразмера Актив- Частота вращения ведущего вала п1 в об/мин
Исполнение 590 735 980 1480 2960
Без собствен- С опорой ведомого вала С опорами ный диа- метр в мм Мощность в кВт: Л rmin ПРИ s —2%: ^гпах при S = = 3%
них опор ведущего и ведомого валов ^min ^шах ^min ^шах ^min ^шах ^min ^тах ^mln 1 1 ^шах I
— — ГМРШ-355 355 — — — — — — — — 85 155
— — ГМРШ-400 400 — — — — — — — — 156 280
— — ГМРШ-450 450 — — — — — — — — 281 470
ГМР1-450 ГМРП-450 — 450 — — — — — — 50 60 — —
— — ГМРШ-500 500 — — — — — — — — 471 840
ГМР 1-500 ГМРП-500 — — — — — — — — 61 105 — —
— — ГМРШ-560 560 — — — — — — — -— 841 1000
ГМР1-560 ГМРП-560 — — — — — — — — 106 185 — —
ГМР1-630 ГМРП-630 — 630 — — — — 55 95 186 340 — —
ГМР1-710 ГМРП-710 — 710 — — 50 80 96 185 341 650 — —
ГМР 1-800 ГМРП-800 — 800 50 70 81 140 186 330 651 1000 — —
ГМР1-900 ГМРП-900 — 900 71 125 141 240 331 560 — •— — —
ГМРЫ000 ГМРП-1000 — 1000 126 210 241 410 561 970 — —— — —
ГМР1-1120 ; ГМРП-1120 1 — 1120 211 375 411 740 — — — — — —
Рис. 55. Номограмма основных парамет-
ров ряда регулируемых гидромуфт
осуществляется от асинхронных короткозамкнутых двигателей.
Поэтому частота вращения и мощность гидромуфт соответствуют
параметрам новой серии электродвигателей АО и АО2, а также
выпускаемых в настоящее время серий А и АТД. Пользуясь табл. 3,
можно подобрать электродвигатель и регулируемую гидромуфту
при заданных мощности и частоте вращения ведущего вала. Ос-
новные ориентировочные размеры, вес и маховые моменты гидро-
муфт ГМР1 и ГМРП приведены в табл. 4.
На рис. 56 показана гидромуфта ГМ-590-2 мощностью 2000 квт
при 3000 об/мин конструкции ВНИИМетмаша, созданная для
привода и регулирования скорости вращения питательного на-
соса 5Ц-10. Гидромуфта пред-
ставляет собой двухполост-
ную систему. Ротор насоса
состоит из ведущего вала /,
соединенного с электродвига-
телем, двух насосов 3 и 7,
связанных между собой ци-
линдрической частью, и по-
лого вала 8. Ротор насоса
опирается на внешние подшип-
ники скольжения 2 и 9, рас-
положенные в неподвижном
корпусе 13 гидромуфты. Смаз-
ка этих подшипников при-
нудительная, а их темпера-
тура измеряется термомет-
рами сопротивления. Камеры
подшипников удалены от
рабочей полости. Такое рас-
положение препятствует про-
никновению тепла от гидро-
муфты к подшипникам и этим улучшается их тепловой режим, Ро-
тор турбины состоит из ведомого вала 11, соединенного с приво-
димым насосом 5Ц-10, и двухполостной турбины 5. Ротор турбины
вращается в подшипниках качения 10, которые расположены
в специальных гнездах вала ротора насоса. Насос и турбина изго-
товлены из стальных поковок, а лопатки приварены. Корпус 13
имеет горизонтальный разъем, так что верхняя часть (крышка 4)
может быть снята при необходимости осмотра подшипников и дру-
гих деталей.
Гидромуфта регулируется изменением заполнения ее про-
точной части. Для этого имеется устройство со скользящей черпа-
тельной трубкой 12. Принцип регулирования заключается в сле-
дующем. В пространстве, образованном наружной стенкой колеса
насоса 7 и вращающимся наружным кожухом, установлена сколь-
зящая черпательная трубка. Указанное пространство сообщается
с проточной частью гидромуфты через каналы 6, проходные
86
Таблица 4
Основные параметры гидромуфт ГМР1 и ГМРП (размеры в мм)
Типоразмер гидромуфты 0Q oq <м «О О) eq Вес вращаю- щихся дета- лей в Н Общий вес муфты в Н Объем рабо- чей жидко- сти в м3 Маховой момент GD2 в Н-м2
ГМРП-450 ГМР1-450 785 270 НО 115 630 70 55 18 150 150 285 810 625 560 220 160 270 260 120 100 14,8 24,5 23,4 0,018 3,16
ГМРП-500 ГМР1-500 820 270 110 115 700 70 90 55 18 150 150 285 810 625 560 220 160 270 260 120 100 17,8 27,6 26,5 0,021 4,08
ГМРП-560 ГМР1-560 885 295 180 135 780 90 70 22 250 120 315 850 680 620 220 240 320 260 120 120 26,0 38,3 26,8 0,032 7,14
Рис. 56. Гидромуфта ГМ-590-2:
ведущий вал; 2 и 9 — подшипники скольжения; 3 и 7 — насосы; 4 — крышка; 5 — турбина; 6 — проточные каналы; 8 — полый вал;
10 — подшипник качения; 11 — ведомый вал; 12 — скользящая черпательная трубка; 13 — неподвижный корпус
сечения которых регулируются. Под действием статического на-
пора, создаваемого колесом насоса, рабочая жидкость из проточной
части протекает через каналы 6 в дополнительный объем и за-
полняет его. В результате вращения гидромуфты в дополнитель-
ном объеме образуется вращающееся масляное кольцо, причем
объем жидкости в дополнительном объеме уравновешивает объем
жидкости в проточной части гидромуфты. Таким образом, можно
считать, что уровень внутренней поверхности масляного кольца
в дополнительном объеме приблизительно соответствует уровню
внутренней поверхности масляного кольца в проточной части.
В масляное кольцо дополнительного объема введена черпатель-
ная трубка. Эта трубка загнута против вращения гидромуфты
так, что она, используя скоростной напор жидкости, прокачивает
ее через внешний маслопровод в бак. Черпательная трубка уста-
новлена в специальных направляющих и может передвигаться при
помощи колонки управления КДУ-1, управляемой автоматически.
Если черпательная трубка оттянута к валу, то дополнительный
объем весь заполнен маслом, а следовательно, заполнена и вся
проточная часть гидромуфты. Если трубка выдвинута из потока
вверх, она полностью «вычерпывает» жидкость из дополнитель-
ного объема, а следовательно, и из проточной части.
Промежуточные положения трубки соответствуют промежу-
точным значениям заполнения проточной части. Гидромуфты этой
серии имеют тепловую защиту. Две пробки из легкоплавкого ма-
териала ввернуты в насос. В случае нагрева масла в гидромуфте
свыше 150° С пробки выплавляются, а все масло из гидромуфты
выбрасывается в специальный кожух. Во время нормальной ра-
боты гидромуфты в нижнюю часть корпуса попадает только масло
из подшипников и зубчатых муфт. Сварной бак емкостью 2,4 м3
подвешен под гидромуфтой.
Для применения гидромуфт на кораблях характерным является
передача мощности от двух дизелей через две гидромуфты и ре-
дуктор на один гребной винт. Гидромуфты за счет автоматического
изменения скольжения позволяют компенсировать имеющуюся
всегда разницу в частоте вращения валов дизелей, что позволяет
передавать мощность от двух двигателей на один вал. Одновременно
гидромуфты частично защищают зубчатый редуктор и гребной
винт от крутильных колебаний, источниками которых служат
дизели. Кроме того, при пуске гидромуфты обеспечивают разъ-
единение вала двигателя от вала редуктора.
При маневрах корабля с прямого на обратный ход, и наоборот,
достаточно один из двигателей реверсировать один раз и попере-
менным наполнением одной или другой гидромуфты осуществлять
прямой или обратный ход корабля.
Одна из конструкций судовой регулируемой гидромуфты по-
казана на рис. 57. Мощность, передаваемая гидромуфтой, —
= 600 квт при п1 — 600 об/мин и скольжении s = 2,5%. Гидро-
муфта снабжена черпательной трубкой 1 скользящего типа и кла-
89
панной коробкой. К клапанной коробке присоединены две дуго-
образные трубки, концы которых направлены в противоположные
стороны, но находятся они на одной линии с пазом вращающегося
резервуара. В клапанной коробке расположен стальной закален-
ный шарик, который автоматически запирает тот или иной конец
трубки в зависимости от направления вращения гидромуфты.
В коллекторе 3 имеются каналы для прохода масла из черпатель-
ной трубки в маслоохладитель, из которого масло поступает
через кольцевую щель 2 и отверстия 4 в проточную полость гидро-
муфты, а по трубкам 5 — к пластинчатым клапанам 10, Три таких
клапана, расположенных под углом 120° один к другому, предна-
значены для быстрого опоражнивания гидромуфты, следова-
тельно, для быстрого снижения частоты вращения ведомого вала.
При подъеме черпательной трубки до упора происходит полное
опорожнение проточной полости и тем самым разъединение ве-
дущего и ведомого валов.
Как следует из рис. 57 (см. узел /), на верхнюю поверхность
90
пластинки клапана 9 действует давление жидкости, поступающей
из трубки 5, через отверстие 6. На нижнюю поверхность пластинки
клапана действует статическое давление жидкости, поступающей
через отверстие 12 из проточной полости. При вращении гидро-
муфты давление по обе стороны пластинки клапана приблизи-
тельно одинаково, но площадь, на которую действует давление
снаружи, больше, поэтому пластинка прижата к седлу и кла-
пан заперт. При этом небольшое количество масла, подаваемого
трубкой 5 через жиклер 7, все время вытекает во вращающийся
резервуар. При выходе черпательной трубки из жидкостного
кольца подача масла в трубку 5 прекращается. Небольшое коли-
чество масла, оставшегося в этой трубке, за короткий проме-
жуток времени выбрасывается через жиклер 7, вследствие чего
давление масла на поверхность 9 пластинки клапана падает до
нуля. В результате этого пластинка поднимается, и масло выбра-
сывается из проточной полости через ряд отверстий большого се-
чения, расположенных в корпусе клапана. Масло вытекает из
проточной полости во вращающийся резервуар до' погружения
черпательной трубки в жидкость и начала подачи масла в про-
странство над пластинкой клапана, вследствие чего пластинка
прижимается к своему седлу, и клапан закрывается.
При вращении гидромуфты плунжер 8 под действием центро-
бежной силы и собственной массы сжимает пружину и нахо-
дится в положении, показанном на рис. 57.
При остановке двигателя, а следовательно, и насоса пружина
прижимает плунжер 8 к пластинке и, таким образом, запирает
клапан, предотвращая попадание масла в проточную полость и
внутренний кожух через отверстие 11. Это необходимо потому, что
при опорожненной проточной полости и остановленной гидромуфте
все масло оказывается собранным в нижней половине масляного
резервуара, находящегося в это время в покое, и один или два
клапана будут затоплены.
При отсутствии указанного устройства в случае работы одного
двигателя при остановленном втором масло через незапертые
клапаны может пройти в гидромуфту остановленного двигателя и
создать в нем момент, тормозящий установку. Помимо жиклеров 7,
имеются жиклеры, расположенные между клапанами по перифе-
рии насоса. Они служат для непрерывного выброса во вращаю-
щийся кожух небольшого количества масла из проточной по-
лости в целях охлаждения.
§ 20. ДОСТОИНСТВА И НЕДОСТАТКИ ГИДРОМУФТ
Главными факторами, обусловливающими полезные свойства
гидромуфт, являются:
отсутствие жесткой связи между ведущим и ведомым валами,
так как передача мощности осуществляется через жидкостное
звено;
91
возможность получения желаемых характеристик гидромуфт
вследствие сравнительной несложности и простоты управления их
рабочим процессом.
Основные достоинства гидромуфт, благодаря которым повы-
шаются производительность и долговечность машин, следующие.
1. Предохранение двигателей от перегрузок.
2. Обеспечение работы двигателя в оптимальных режимах
(например, предотвращение работы двигателя при малой частоте
вращения вала с высокой нагрузкой и т. д.).
3. Возможность пуска двигателя при включенной трансмиссии.
4. Возможность остановки рабочего органа машины под на-
грузкой при работающем двигателе и включенной передаче.
5. Возможность быстрого разгона любых маховых масс при
любой передаче.
6. Плавное трогание с места и повышение проходимости машин
вследствие плавного приложения момента к колесам автомобиля.
7. Ограничение динамических перегрузок и крутильных ко-
лебаний.
8. Возможность глубокого бесступенчатого регулирования ско-
ростей исполнительных механизмов вплоть до отрицательных.
9. Хорошие тормозные характеристики при торможении дви-
гателем.
10. Возможность работы нескольких двигателей для привода
одного механизма.
11. Высокий к. п. д. на расчетном режиме.
12. Высокая энергоемкость при достаточно большой частоте
вращения.
13. Относительная простота изготовления и малая стоимость.
14. Возможность обеспечения ряда специальных требований
в соответствии с определенным технологическим процессом (ре-
гулировочные свойства, перегрузочная способность и т. д.).
15. Улучшение условий работы оператора и повышение про-
изводительности его труда.
К недостаткам гидромуфт следует отнести переменный к. п. д.
в зависимости от режима работы и уменьшение его при отклоне-
нии от номинального режима при сравнении с механической пере-
дачей, а также необходимость обеспечения охлаждения рабочей
жидкости.
ГЛАВА III
ГИДРОДИНАМИЧЕСКИЕ ТРАНСФОРМАТОРЫ
§ 21. ОСНОВНЫЕ СХЕМЫ И ПАРАМЕТРЫ
ГИДРОТРАНСФОРМАТОРОВ
Гидропреобразователем крутящего момента (гидротрансфор-
матором) называется энергетическая машина, обеспечивающая
гибкое соединение валов и передачу мощности с ведущего вала на
ведомый с преобразованием крутящего момента и изменением ско-
рости вращения ведомого вала по сравнению со скоростью враще-
ния ведущего вала.
Гидротрансформатор, у которого направление вращения веду-
щего и ведомого валов одинаковое, называется гидротрансформа-
тором прямого хода, а при вращении ведущего и ведомого валов
в разные стороны — гидротрансформатором обратного хода. В пер-
вом случае момент преобразуется как по величине, так и по знаку,
во втором — только по величине. Преобразование момента в ги-
дротрансформаторе происходит благодаря наличию третьего эле-
мента, а именно реактора. Следовательно, для гидротрансфор-
матора !•
Гидротрансформаторы можно разделить на следующие типы:
одноступенчатые, двухступенчатые и трехступенчатые — по ко-
личеству турбин в одной рабочей полости; по типу турбины —
гидротрансформаторы с центробежной, осевой или центростреми-
тельной турбиной. Одноступенчатые гидротрансформаторы со-
стоят из одного насоса, одной турбины и одного или двух реак-
торов.
На рис. 58, а—ж показаны одноступенчатые гидротрансформа-
торы с различным расположением рабочих колес. Тип турбины
определяется по протекающему в нем потоку рабочей жидкости.
При этом необходимо помнить, что движение рабочей жидкости
в основном осуществляется от центробежного насоса к турбине
и далее. Поэтому, например, гидротрансформатор, показанный на
рис. 58, а, имеет центробежную турбину, гидротрансформатор на
рис. 58, б — осевую, а гидротрансформатор на рис. 58, в — центро-
стремительную турбину.
93
Двухступенчатые гидротрансформаторы состоят из одного
насоса и двух ступеней турбины при одном или двух реакторах
(см. рис. 59, а—д). Трехступенчатые гидротрансформаторы со-
стоят из одного насоса, трех турбин и двух-трех реакторов
(рис. 59, е, ж).
~ Гидротрансформаторы с большим числом ступеней, как пра-
вило, не изготовляют.
Гидротрансформаторы с одной турбиной, показанные на
рис. 58, а—г, относятся к первой принципиальной схеме, а пока-
занные на рис. 58,5—ж, ко второй принципиальной схеме (к этой же
принципиальной схеме относится гидротрансформатор, показанный
на рис. 59, 5).
Вторая принципиальная схема обеспечивает возможность полу-
чения вращения ведущего и ведомого валов в разные стороны,
что конструктивно обеспечивается установкой реактора после
насоса.
В гидротрансформаторах прямого хода, как правило, за насо-
сом устанавливается турбина. Все вышеприведенные схемы яв-
ляются одноциркуляционными, так как имеют одну рабочую по-
лость.
Двухциркуляционные и многоциркуляционные схемы гидропе-
редач включают в себя несколько рабочих полостей (рис. 60, а—г).
Многоциркуляционные схемы служат для обеспечения реверса
или для переключения скоростей в трансмиссии с целью полу-
чения ее необходимых характеристик, а также для параллель-
ной работы. Реверс или переключение скоростей осуществляется
за счет поочередного заполнения и опоражнивания рабочих по-
лостей.
Как видно из вышеприведенных схем, основными элементами
гидротрансформаторов являются насос, крепящийся к ведущему
валу, турбина, связанная с ведомым валом, и реактор, жестко свя-
занный с корпусом гидротрансформатора. Наибольший диаметр
рабочей полости гидротрансформатора, так же как и у гидромуфты,
называется активным диаметром Da, а наименьший внутренний
диаметр обозначается Do.
Основными параметрами гидротрансформатора являются: рас-
ход Q, напор Я, мощность Я, крутящий момент М, частота вра-
• ^Т « «
щения п, передаточное отношение t = —, коэффициент транс-
пн
формации К = и к. п. д. т],
Расход и напор являются внутренними параметрами и опреде-
ляют мощность, момент и частоту вращения валов, которые должны
быть всегда отнесены к соответствующему рабочему колесу. Пере-
даточное отношение, коэффициент трансформации и к. п. д. яв-
ляются безразмерными величинами и характеризуют экономиче-
ские, преобразующие и эксплуатационные качества гидротранс-
форматора в целом.
94
a) f) в) г)
д) е) ж)
Рис. 58. Варианты расположения колес в рабочей
полости одноступенчатых гидротрансформаторов
а) б) п б) г)
б) е) ж)
Рис. 59. Варианты расположения колес в рабочей полости
многоступенчатых гидротрансформаторов
Рис. 60. Варианты многоциркуляционных гидропередач
§ 22. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА
В ГИДРОТРАНСФОРМАТОРЕ
В основу расчета проточной части рабочих колес гидротранс-
форматора положим одномерную струйную теорию Эйлера, основ-
ные положения которой были сформулированы в § 3 гл. I. В до-
полнение к принятым в § 3 допущениям следует указать, что рабо-
чая полость гидротрансформатора находится под избыточным
давлением (отметим, что в большинстве ранее рассмотренных слу-
чаев гидромуфты имели атмосферное давление на свободной по-
верхности). Повышенное давление гарантирует формирование
потока лопатками, что обеспечивает высокие экономические пока-
затели.
Уравнения моментов для рабочих колес. При протекании
жидкости через лопастное колесо в результате взаимодействия
между потоком и лопатками создается крутящий момент на колесе.
Величина этого момента может быть найдена по уравнению Эйлера:
Мн — Qp (снН2ГН2 СиР2Грг)»
Л4Т = Qp (£аТ2г Т2 сиН2гнг);
Мр = Qp (сир2гр2 ^Т2Гтг)*
Основное уравнение баланса моментов гидротрансформатора
имеет вид
Мн + Мт + Л1р = 0.
Учитывая, что коэффициент трансформации гидротрансформа-
тора К = наличие момента на реакторе Мр обусловливает
разницу моментов насоса и турбины. Момент на насосе прини-
мается положительным, если он направлен в сторону вращения
ведомого вала, и отрицательным, если он направлен в противопо-
ложную сторону. Уравнение моментов не зависит от потерь на
трение и справедливо как для идеальной, так и для реальной жид-
кости.
Рассмотрим треугольники скоростей для каждого из рабочих
колес гидротрансформатора. Треугольники скоростей для входа
и выхода из насоса показаны на рис. 61, а.
Из уравнения (8) следует, что момент на насосе будет тем
больше, чем больше радиус выхода и меньше радиус входа. Ло-
патки насоса могут иметь различную форму. При лопатках, загну-
тых назад (угол рН2 < 90°), происходит уменьшение скорости
что ведет к уменьшению момента и к снижению энергоемкости
гидротрансформатора. При лопатках, загнутых вперед (РН2 >
> 90°), происходит увеличение скорости cwH2, следовательно,
увеличение момента насоса и энергоемкости трансформатора.
Момент на насосе также определяется направлением потока,
выходящего из реактора. При увеличении угла выхода из реак-
тора рР2 скорость смР2 увеличивается, а момент на насосе умень-
96
шается, при уменьшении этого угла момент увеличивается, так как
уменьшается скорость сиР2. Для турбины момент определяется
также из уравнения (8). Так как турбина в гидротрансформаторе
может быть осевой, центробежной и центростремительной, рас-
смотрим каждый случай отдельно.
Гидротрансформатор с осевой турбиной характеризуется тем,
что гТ2 гТ1, и при условии близкого расположения колес в ра-
бочей полости можно считать, что эти радиусы примерно равны,
т. е. гТ2 = гТ1 = гН2- У турбины поток на входе всегда направ-
лен по направлению вращения насоса.
Рис. 61. Треугольники скоростей в гидротрансформаторе:
а — для насоса; б — для турбины
Меняя изгиб лопатки, можно изменять момент на турбине. Чем
больше лопатка турбины загнута назад, тем меньше угол рТ2 и тем
больше момент на турбине [см. уравнение (8)]. Для того чтобы
CuT2rT2 > с«Н2гН2> необходимо чтобы саТ2 > cwH2, так как для
осевой турбины гТ2 гН2- При отрицательном значении этой
скорости момент на турбине возрастает. Предельно возможное
уменьшение скорости сиТ2 определяется минимально возможным
углом рТ2, который ограничивается допустимым стеснением по-
тока на выходе из колеса.
Для гидротрансформатора с центробежной турбиной /Т2 > гН2
(рис. 61, б). При выполнении неравенства сиТ2гТ2 > сиН2гИ2
получим cwT2 > спН2 Изгиб лопатки назад будет повышать
ГТ2
момент турбины Мт более эффективно, чем в гидротрансформаторе
с осевой турбиной, так как на момент влияет еще соотношение ра-
диусов. Гидротрансформаторы с центробежной турбиной могут
иметь меньший угол наклона лопаток на выходе, так как стеснение
потока здесь сказывается меньше, чем в осевой турбине.
7 С. П. Стесин 97
Для гидротрансформатора с центростремительной Турбиной
гТ2 < Неравенство cuT2rT2 > синггн2 может сохраняться,
____________ ^Н2
когда сиТ2 > сиН2 т. е. при одном и том же угле выхода и
ГТ2
прочих равных условиях момент на центробежной турбине будет
больше, чем у гидротрансформатора с центростремительной тур-
биной, так как > 1.
ГТ2
Для реактора момент определяется также из уравнения (12).
При увеличении угла рР2 увеличивается закрутка потока на реак-
торе, что приводит к повышению
момента Л4Р. На рис. 62 показана
диаграмма изменения момента
количества движения в рабочей
полости гидротрансформатора.
На графике (рис. 62) по оси ор-
Рис. 62. Диаграмма изменения момента
количества движения в рабочей полости
гидр отр ансформатор а
Рис. 63 Треугольники скоростей
в турбине при i = var
динат отложена длина лопаток по средней струйке, по оси абсцисс
отложены моменты количества движения. Кривая 1 построена для
случая, когда момент количества движения начал изменяться
от нуля. Гидравлический коэффициент трансформации равен отно-
шению момента на турбине к моменту на насосе или
К ~ МТ __ СиТ2ГТ2 ~ СиН2ГН2
Г Мн СиН2ГН2 ~~ СиР2ГР2
Как видно из этой формулы, повышение преобразующих
качеств гидротрансформатора зависит в основном от уменьшения
момента на насосе за счет положительной закрутки потока на реак-
торе. Однако, улучшая преобразующие качества гидротрансфор-
матора, мы уменьшаем его энергоемкость.
Автоматичность работы гидротрансформатора. Рассмотрим ско-
рости на турбине при различных режимах работы гидротрансфор-
матора. Как видно из рис. 63, изменение скорости турбины «р
может происходить от положительной величины до отрицательной,
причем изменение этой скорости происходит непрерывно под дей-
ствием нагрузки на ведомом валу гидротрансформатора. Момент
на турбине изменяется в связи с -этим от максимальной величины
до нуля. Способность гидротрансформатора непрерывно изменять
момент на ведомом валу в зависимости от нагрузки на нем назы-
вается автоматичностью.
Характер изменения крутящих моментов на колесах гидро-
трансформатора в зависимости от передаточного отношения.
Выведем и рассмотрим вышеуказанную зависимость отдельно для
насоса и турбины гидротрансформатора.
Для насоса с учетом треугольника скоростей можно записать
Мн = Qp (Синг^на — свРаГи) = Qp [гНг (иНа — <тпНг ctg ₽нз) —
ГР2 (ЫР2 СшР2 Ctg Ррз)]»
где
с„ = ы —cmctgP,
«Р2 = 0, так как реактор неподвижен.
Далее допустим, что стНг = стР2 = ст, тогда
Мн = Qp [©нгн2 + ст (ctg РР2Гр2 — ctg Рн2^на)]
или
]\л ___ m r2 I Г) ( Ррг r ctg Рнг - \ (Я7\
Л1н — Qp Н2 Q Гр2------------------------— Гн2/] * t°' )
Таким образом, мы получим уравне-
ние момента для насосного колеса,
выраженное через кинематические па-
раметры и расход Q. Анализируя урав-
нение (87), можно заключить, что:
а) момент Мн не зависит от передаточ-
ного отношения или скорости турбины;
б) момент Мн является квадратич-
ной функцией от расхода, но так как
функция Q — f (i) неизвестна, то пред-
лагаем частный случай ее значения,
а именно, постоянство расхода в рабо-
чей полости для любого i. В этом случае
Мн = const и также не зависит от i
(рис. 64) при данной частоте вращения
насоса.
Рис. 64. Зависимости ЛГн ==
= f (i) и МТ = f (0 для ©н
и Q = const
Таким образом, если необходимо создать гидротрансформатор
с постоянным моментом на насосе, то расход должен быть постоян-
ным для любых режимов его работы.
89
Для турбины аналогично получаем выражение для Л4Т, исклю-
чая из него скорость си, заменяя uT2 = coTrT2 = <oHirT2 и иН2 =
“ ^НГН2:
Мт = Qp <0НГт2* — wHrH2 + Q (~~^Н2 ГН2-------|^Т2 ГТ2^ * (88)
Анализируя это уравнение, можно сделать вывод, что момент
Мт является функцией расхода и зависит от передаточного отно-
шения f, причем эта зависимость очень сложная, так как расход
также зависит от Л Для частного случая, когда Q = const для
всех г, момент на турбине является некоторой функцией от пере-
даточного отношения при данной частоте вращения насоса. В урав-
нении (88) не учтен знак ctg 0Т2, а если его учесть, линия момента
пойдет так, как показано на рис. 64. При этом линия Мт будет пря-
мой, если расход в рабочей полости не будет изменяться.
Вышеуказанные выражения моментов и их анализ проведены
без учета отклонения потока за насосом и турбиной, которое зави-
сит от передаточного отношения I. Точка А, лежащая на оси орди-
нат, показывает момент Л4ТО при стоповом режиме (i = 0).
Из уравнения (88) видно, что
Л/f___J I г CtS0T2 Ч
Мто —- ЧР —wHrН2 + Ч —рГ^— ^Н2------— rT2^J ,
а передаточное отношение холостого хода х из уравнения (88)
с учетом Л4Т = 0:
о o(Ctg РН2Г CtgPTa \
ШНГН2 рНг"ГН2- fT2 rT2j
°НГТ2
^х. X
Анализ этого выражения показывает, что ix х может быть
меньше или больше единицы. Для современных гидротрансформа-
торов tx> х = 0,6-г-1,7 в отличие от гидромуфт, для которых Zx. х =
§ 23. ХАРАКТЕРИСТИКИ ГИДРОТРАНСФОРМАТОРОВ
Полная внешняя характеристика гидротрансформаторов пря-
мого хода, которая устанавливает зависимость моментов (Л4Н и Мт)
и к. п. д. т] от передаточного отношения при постоянной частоте
вращения насоса, показана на рис. 65. Эта характеристика, по-
строенная в трех квадрантах, относится к двум видам режимов,
зависящим от направления потока мощности в передаче.
Рассмотрим эти режимы.
1. Тяговый режим. На этом режиме работы обеспечивается
движение рабочих органов машины.
Мощность, затрачиваемая на тепловые потери, может быть под-
считана по формуле
^тепл “
1ПП
Тяговый режим характеризуется зависимостями
Л^2 — ^2^2 И А^тепл О*
При этом кривую момента Л42 на графике строят в зоне поло-
жительных моментов.
2. Тормозные режимы. Тормозными режимами называются
режимы, на которых происходит замедление рабочих органов ма-
шины, т. е. NT <0, и мощность подводится со стороны рабочего
органа. Работа совершается рабочими органами, и активными си-
лами являются силы тяжести и силы инерции.
Термины тяговой или тормозной режим характеризуют взаимо-
отношения рабочих органов машины с гидротрансформатором.
Рис. 65. Теоретическая полная внешняя характеристика
гидротрансформатора
В общем случае для тормозных режимов можно записать
—= ЛТрЮр*.
Если отрицательный знак стоит у Л4Т, т. е. Л4Т <0, режим
называют обгонным. Таким образом, обгонным называют такой
тормозной режим, который характеризуется отрицательным мо-
ментом Л4Т при положительном направлении вращения насоса и
турбины (пн и пт). Структурная схема передачи мощности на тор-
мозных режимах показана на рис. 23, б.
На тормозном режиме баланс мощности можно записать в виде
--^2±^1----^тепл = 0.
В общем случае для гидротрансформаторов /обг 1, т. е. на
обгонном режиме может быть случай, когда турбина не обгоняет
насос, й, наоборот, на тяговом режиме турбина может вращаться
быстрее насоса.
Режимом противовращения называют такой тормозной режим,
при котором турбина вращается в обратную сторону по сравнению
с насосом. Этот тормозной режим характеризуется условием сот <j
<0, и баланс мощности можно записать в виде
^2 + + ^тепл = 0.
101
Характерные точки тягового режима. Тяговый режим харак-
теризуется передачей потока мощности на ведомый вал при опре-
деленном значении к. п. д. для каждого режима работы гидротранс-
форматора.
О характере кривой к. п. д. можно получить представление,
составив выражение для л с учетом выражений (87) и (88):
' Qp ..... .« । j.
Л = тА= -г1' = I тт- (си 4- Ь) = а? 4- di,
Рис. 66. Характеристика на тяговом режиме:
а — характерные точки; б — баланс мощностей
где
2 .
U = (ОнГ Т2>
h- м Г2 ^.n/CtgPH2 . CtS ₽T2 f \.
U _ —(ОнГH2 + У I—р-- fH2----р---ГТ2 ,
\ ^Н2 ^Т2 /
c = aQP. d-b^-
с амн’ а-°мн-
Максимальное значение к. п. д. достигает при i = i*.
Построим внешнюю характеристику гидротрансформатора и отме-
тим на ней характерные точки тягового режима (рис. 66, а). Гра-
фическая диаграмма затрат мощности в гидротрансформаторе в ко-
ординатах N—i показана на рис. 66, б.
К характерным точкам (рис. 66, а) относится точка 1 — ре-
жим холостого хода, в которой Мт = 0; NH =1= 0; tx х 1; л = 0;
М2 = 0; М1 = МПОТ.
Из уравнения (8) для точки 1 следует, что Л4Т = 0 и cuT2rT2 =
— cunzrnn т- е.
СиТ2 _ ГН2
С«Нз ГТ2
1 ПО
Рис. 67. Режим работы гидротранс-
форматора при К = 1
Для осевой турбины; например, гН2 — ги и сиТ2 = Синг-
Таким образом, вектор скорости не меняет своего направления на
режиме холостого хода, т. е. отсутствует результирующее воздей-
ствие потока на турбину гидротрансформатора.
Для центробежной и центростремительной турбин скорость
си при холостом ходе должна меняться. Изменение си происходит
по закону свободного течения. Линии тока при свободном движе-
нии между параллельными стенками представляют собой логариф-
мическую спираль.
Точка 2 — режим равенства
моментов Мн и Мт: i = i'k=i;
Мн = Мт; Мр = 0, МР = Qp
(СиР2ГР2-CuT2rT2) = 0> Т- е-
условием равенства моментов
насоса и турбины является:
СиР2ГР2 = С«Т2ГТ2-
В гидротрансформаторе ра-
диусы гР2 =£ гтг> следовательно,
векторы абсолютных скоростей
на входе и выходе из колеса
всегда будут различными. Рас-
смотрим подробнее зону точки 2.
Сила Р (рис. 67) является равнодействующей пары сил, дей-
ствующих на реактор со стороны потока на режимах левее точки 2
(k > 1) и правее точки 2 (k < 1). В точке 2 меняется знак момента
на реакторе, правее ее момент на турбине будет меньше момента
на насосе. Это можно использовать для автоматического перевода
гидротрансформатора на режим гидромуфты, определенным обра-
зом воздействуя на реактор, что используется в комплексных ги-
дротрансформаторах.
Точка 3 — режим синхронного вращения: пн = мт; i = 1.
Этот режим существует у гидротрансформаторов, имеющих ix. х >>
5> 1. Режим синхронизации частоты вращения имеет большое прак-
тическое значение для блокировки насоса и турбины гидротранс-
форматора, так как на этом режиме обеспечивается плавное, т. е.
без рывков, соединение ведущего и ведомого валов гидротрансфор-
матора (двигателя и рабочего органа).
Точка 4 — режим максимального к. п. д. — это режим мини-
мальных потерь, но для данного конкретного гидротрансформа-
тора. Этот режим является расчетным, номинальным. Иногда он
совпадает с безударным входом потока на лопатки одного из рабо-
чих колес.
Точка 5 — столовый режим: I = 0; т] = 0; Л4Т0 = А4тах; Мн +
4= 0; Nh =£ 0.
Этот режим, например, соответствует троганию автомобиля
с места и является напряженным в тепловом отношении, так как
Л/^i Ni тах, а т] = 0.
ЮЗ
24. ОСОБЕННОСТИ ПРОЦЕССА ЭНЕРГООБМЕНА
И БАЛАНС ЭНЕРГИЙ В ГИДРОТРАНСФОРМАТОРЕ
Внутренней характеристикой гидротрансформатора называется
зависимость напора, расхода и гидравлических потерь от переда-
точного отношения //, Q, £ Апот = f (i), т. е. каждой точке внеш-
ней характеристики соответствует точка внутренней характери-
стики. Это взаимоотношение однозначно и позволяет рассматри-
вать внешнюю характеристику гидротрансформатора в зависимо-
сти от его внутренних параметров.
Уравнение баланса удельных энергий имеет вид
Я/н = Н/Т + S ^пот-
Это уравнение показывает, что напор, сообщаемый насосом
жидкости, только частично преобразуется турбиной в механиче-
скую энергию, а частично теряется на преодоление сопротивления
движению жидкости в гидротрансформаторе. Определим составля-
ющие уравнения (31).
Напорная характеристика насоса устанавливает связь между
количеством энергии, сообщаемой потоку, и количеством подавае-
мой им жидкости. Обычно характеристику насоса определяют при
постоянной частоте вращения. Теоретическую напорную характе-
ристику насоса (без учета потерь в самом колесе) устанавливают
следующим образом.
Увеличение напора жидкости, протекающей через насос, про-
исходит вследствие приращения энергии движения (кинетической
энергии), а также приращения энергии давления (потенциальной
энергии). Это изменение энергии может быть вычислено при по-
мощи уравнения Бернулли в виде разности энергии потока за на-
сосом и перед ним:
(2 2 \ / \
СН2оо сН1оо | / РН2 /ол\
—s-------+ (89)
Приращение потенциальной энергии объясняется двумя факто-
рами: действием центробежных сил и изменением относительной
скорости в межлопаточных каналах насоса.
Напор под действием центробежных сил изменяется на вели-
Mttq - tZrr-| V
чину —-----------, а из-за изменения относительной скорости на
IIloo ~~ ^Н2ор
2g
После подстановки этих величин в выражение (89) получим
тг (СН2 00 ~СН1 оо ) + (иН2~“ ^Н1 + WH1 оо ”ШН2) /ЛПХ
п ш оо = ------------------ЙТ-------------------•
"Из треугольника скоростей (см. рис. 5, а) следует:
®Н2 оо = UH2 4“ СН2 со — 2Uh2^H2 х COS ЙН2»
“’hi co = «ш + Chi со — 2uHiCHi со COSaHi,
где aH1 и aH2 — углы между абсолютной и окружной скоро-
стями на входе и выходе из колеса.
После подстановки значений скорости w в выражение (90) и
преобразований получим
ц иН2СН2оо COS ОН2 ~' “Н1СН1 со COS аН1
_ ЦН2^Н2со ~~ %1СыН1со
“ g
Это выражение представляет собой уравнение Эйлера. Из тре-
угольников скоростей можно установить также, что
£Н2оо COS 0&Н2 ^Н2 GnH2 Ctg Рн2 ^иН2°°»
CHloo cos aHi = ctg аш.
Значения ст, прямо пропорциональные величине расхода, опре-
деляют из соотношения (28). Тогда окончательно получим
- g [«Н2
Я/н
QctgM .. QcteaHi
Pm J Hl fH1
1 L2 /“H2Ctg₽H2 , «HlCtSaHl\nl
При n1 = const wH2 и whi = const, геометрические пара-
метры FH2 и Рщ также постоянны. Угол рН2» зависящий от ско-
рости доН2» на которую влияет в основном геометрия лопаток, также
можно считать постоянным. В гидротрансформаторах, у которых
перед насосом стоит реактор, значение угла aHi определяется на-
правлением скорости сН1 и зависит также от угла наклона лопаток
реактора на выходе. В большинстве конструкций направление
потока, уходящего с лопаток реактора, и соответственно направ-
ление скорости сН1 при входе на лопатки насоса также будет не-
измененным. Следовательно, угол сохраняется постоянным.
В уравнении (91) все величины, кроме Q, постоянны, поэтому
теоретическая характеристика насоса представляет собой прямую,
описываемую уравнением
Я/н со = А\п\ — (92)
где Аг и А 2 — постоянные коэффициенты.
На рис. 68, а представлена теоретическая напорная характе-
ристика насоса при бесконечном числе лопаток для различных
углов Рнг- Угол наклона характеристик на рис. 68 зависит от
знака выражения (91), стоящего в круглых скобках.
Внутренняя характеристика насоса гидротрансформатора пред-
ставляет собой прямую линию, параллельную оси пг.
Напорная характеристика турбины представляет собой зави-
симость величины преобразуемого ею напора Нп от количества
жидкости, протекающей через колесо в единицу времени. Физиче-
ский смысл напорной характеристики турбины может быть выяв-
лен при помощи основного расчетного уравнения.
Рис. 68. Теоретическая напор-
ная характеристика насоса при
бесконечном числе лопаток
[H/Hco = f(Q) прирн2=уаг]
По уравнению Бернулли преоб-
разованный напор
Г с2 с2 1
TJ t'Tl ОО СТ2 ~ ,
-------2Г] +
I / РТ1_РТ2^
\ ря pg)'
Уравнение Бернулли с учетом
преобразований, выполненных для
насоса, может быть записано в виде
основного расчетного уравнения для
турбины
мТ1СиТ1 00 пТ2СыТ2 00
Л / т оо = -------------------•
В гидротрансформаторах чаще всего турбина расположена за
насосом, и для простоты будем считать, что поток без изменения
поступает из насоса в турбину, его абсолютная скорость сТ1 и угол
наклона аТ1 те же, что и при выходе из насоса. В таком случае
с учетом треугольников скоростей можно записать (см. рис. 5, б):
£т1о° cos — Сн2 оо cosocjig — ^Н2 GnH2 ctg Рнг*
Ранее мы установили, что рН2 = const, пн = const, uH2 =
= const, скорость стН2 пропорциональна Q. Из треугольника ско-
ростей турбины для выхода следует также, что
сТ2 оо cos аТ2 = uT2 — cmT2 ctg рТ2.
Как показали экспериментальные исследования [10], при до-
статочно большом числе лопаток в турбине относительная скорость
доТ2 зависит только от формы лопаток, и поэтому угол рТ2 можно
считать неизменным. Скорость стТ2 определяется из выражения
(28). С учетом изложенного можно записать
Htr оо = ctg Риг
— &Т2 I
106
Так как uT2 и иТ1 пропорциональны п3, а остальные параметры
этого уравнения, кроме расхода, постоянны, то можно записать
Hti = Л1П2 — An? + AtftzQ. (92а)
На рис. 69, а показана напорная характеристика турбины, т. е.
На <» = f (Q) для различных режимов работы гидротрансформа-
тора.
Пользуясь уравнением (92а), можно установить зависимость
Нп и = f (п2), задаваясь законом изменения расхода Q. В реаль-
ных условиях расход меняется, но для выяснения общих свойств
Рис. 69. Теоретическая напорная характеристика турбины:
а — зависимость — f (Q) при п2 — var; б — внутренняя ха-
рактеристика турбины ~ f (nt); ----и------ возможные вари-
анты характеристик
характеристики турбины в первом приближении будем считать,
что расход через турбину постоянен. Тогда уравнение (92) можно
записать в виде
HiT оо = Л4М2 — Л2^2> (93)
где
Л4 = Л1 + А&
Кривая, построенная по уравнению (93) (рис. 69, б), представ-
ляет собой квадратичную параболу. При и2 = О и Пъ — п2х. х
напор Htj со == 0. Наибольший напор /Лтоотах реализуется при
п2 = 0,5п2х.х- Из рис. 69, б видно, что на некоторых режимах
полезная мощность, передаваемая гидротрансформатором на ведо-
мый вал, невысока. Положение кривой Я/т <*> = f (п2) зависит от
формы лопаток турбины и расположенного перед ней насоса. С из-
менением формы лопаток максимум кривой можно сместить в лю-
бую сторону (см. пунктирные линии на рис. 69, б). Но при этом
увеличение HtT при одной частоте вращения п2 вызывает его
уменьшение* при другой частоте п2. В реальных условиях расход
меняется, но параболический характер кривой = f (п2)
остается неизменным, т. е. кривая имеет точку HtTmmax и две точки
= 9.
107
Напорная характеристика гидротрансформатора показана на
рис. 70.
Гидравлический к. п. д. гидротрансформатора
______________________pgQfftT _ #/т
,г ~ PgQHtn “ Htn ’
т. е. кривая к. п. д. также представляет собой параболу (рис. 70, б).
Определение расхода Q в рабочей полости гидротрансформа-
тора. Из уравнения баланса энергии в гидротрансформаторе (31)
может быть получен расход Q для различных режимов работы.
Рис. 70. Напорная характеристика гидротрансформатора:
а — баланс напоров (Н тт и Н— теоретический напор насоса
t Ноо гТоо
и турбины; заштрихованная область — гидравлические потери в
гидротрансформаторе); б — гидравлический к. п. д.
С учетом выражения (17) для конечного числа лопаток можно
записать:
и
СиР2ГР2^Р
“Н2СИН2^Н-“Н1 —г------
W Н1
/7/н_----------------------
н"=------------------------
Выражения для напоров в развернутом виде:
н “н Гг2 Q
Н‘И=~Т[ Н2Ин
. 2
1/2 2 \
Ht? = ^(ГН2[*Н — Т2Нт) —
ИнгН2 ctg Рн2 Hp'ps ctg Рр8у
Гн2
(93а)
Q I ИнГН2 Ctg РН2 _ гТ2ИтС1Я Рт2'
°н \ ^Н2 ^Т2
108
Потери на трение в гидротрансформаторе определяют по выраже-
нию
/?HQ2 *TQ2 ApQ2
^tnp = ^тр. H “T ^тр. T "F ^тр. P = ~2^ F ~2^ I 2g ’
где k — коэффициент сопротивления соответствующего колеса,
k = k—
CP^ ср
Потери, зависящие от угла атаки в каждом колесе, опреде-
ляются по формулам:
с2
^уд = Фуд ~2^ *> — (^ш2 пред ст1) Н“(^и2пред си\) ,
где ст2 пред и си2 пред — меридиональная и окружная составляющие
скорости на выходе из предыдущего ко-
леса.
Как правило, допускается, что ст2 преД = cmV тогда
__ л г2 пред
"_^«2 пред
Из треугольников скоростей с учетом известных соотношений
преобразуем выражения для скорости cs и получим выражения для
потерь на каждом колесе:
^уд- н —
^уд- н
2g
/ ctgpp2 Гр2 ctg РН1
\ fP2 гН1Ир’Ь fHl )— “НГН1
, Фуд.тГ. . - / cfg₽Н2 ГН, ctgPTl \12
Луд. т = (^нГигИн — Wti) — <2 —т? Ин--------------------;
« L \ ГН2 f?1 ГТ1 /J
2
ФУД<РГ/тг II ^/CtgPT2If fT2 ct£Ppi
ЦонгТ2Нт ----Q —p-------Нт t-------p
Pl \ rT2 'Pl ГР1
После подстановки полученных выражений в общее уравнение
баланса энергий получим
“н Г 2 Q /' ctgpH2 ctgpp2
„ ИН2 Ин — — I —р 1 нгИн — —р
S L ШН \ ГН2 ГР2
Ctg РН2
FH2 'Н2ИН —
(®нРнгИн — 1®нгТ1) — Q —р—- гт, Ин
\ ГН2 1
^УД. р — 2g
Гр2Нр
— ~Y~ (ГН2ИН — ПТ2Ит)~
в L “н
фуд- т
2g
ctg₽T2
-р—1 ГТ2Нт
ГТ2
F /
rTl /.
2
* В первом приближении часто принимают <Руд. н = Фуд. т = Фуд. Р = !•
109
Фуд. Р
2g
^уд. н
2g
йл T2 ii О йРта
1®н —— Вт — Ч —р-----
'pi \ ГТ2
/ ctg Рр2 гр2
ЧI р - Bp т
L \ гра 'hi
, М2 , М2 ,
f 2g f 2g !
" 2
— Н1 +
Разделим все члены уравнения
степени Q и i. Получим уравнение
Q и i, которое может быть записано в общем виде
а + (b + ic) + (d 4- mi2 + 2fi) = О,
®н Н
/ ctg Рр2 Г ctgPHj у
а = ФУд.н -7 у^Вр--------------—Ч +
\ ГР2 ГН1 'Н1 )
, m /с1§₽н211 'на ct8₽TiV .
+ Фуд. т —р~— Вн -----------р---- +
\ гнг 'ti rTi /
, /ctgРТ2 'тг ctgpи V
+ Фуд. Р /?т2 7— Вт fpi j + kH + kT + kp}
д „ /ctg₽Ha .. ctgpp2 rp2 \
° = 'нг —p------Bh------p----Bp 7— —
\ rHa rpa 'Ha /
m Гн2 и r f Ctg ^H2 Гн2 u Ctg I
— Фуд. т 7— ВнгHa —7-------~r— Bh p--------- +
fTl \ rH2 'Tl rTl /
1 , „ ( ctg 0pa . rpa ctg Phi \ .
+ r Н1Фуд. н —p-----Bp 7--------p ’
\ Г P2 ГН1 rHl )
c — r ( с^Рта 'та . с*£Рна „ \ I
c — 'на I —p----7— Вт-------p----Bh +
\ гта 'на гна /
/ ctg PH2 ГН2 ctg PT \
+ фуд. t'ti —p^ Bh~--------------— ' —
\ на 'ti
'T2 ( ctg PTa rT2
— Фуд.Р7- -р-^-ВтТГ
rpi \ "та P1
ГТ2 Ctg Ри
,1г 'И КГ
cts Phi
fHl
kpQ*
2g
®н
на -5— и сгруппируем их по
^g
второй степени относительно
(94)
FT1 ;
ctg Рр1
^pi
j 2 2 2 2
“ = —2гН2НН + фуд.Н^Н! 4" Фуд. ТгН2Нн *»
г2
2 2 2 Т2 2
т — фуд. Т'Т1 — 2rТ2Р-Т + фуд. Р'Т2 -5— Вт>
'pi
₽ 2
/ — фуд. тгн2Рн^ti*
1 in
Решение уравнения (94) дает значение расхода при различных i:
Q _ -2 (b+ic) ±/4 (& + М8 - 4а (rf + тР + 2/0 (95)
2а ‘
Аналогично может быть составлено и решено уравнение для
гидротрансформаторов с любым расположением и любым числом
рабочих колес.
Например, для четырехколесного гидротрансформатора (см.
рис. 76, в) имеем:
напор на насосе
ТТ WH Г-2 Q (^HfH2 ₽Н2 ^PHrPII2Ct^PpiI2 ll.
н /н = Н2^н ЙГ F F I 1
£ L ЮН \ ГН2 ГРП2 / J
' напор на турбине определяется по приведенным выше уравне-
ниям;
потери на трение
Лтр = Лтр, н + ^тр. Т 4" ^тр. PI + ^тр. РП + ^тр. бл =
_ I । ^pi^2 . ^рп^2 । &бл<32
2g ' 2g 2g 2g ' 2g 9
где hTPt бл — потери на трение в безлопаточном пространстве;
^бл — коэффициент сопротивления безлопаточного про-
странства:
п
. \ 1 л Lfll бЛ /_______1______1______J____\ .
~ 2d 4 м" »><*" ‘Л, 51п’₽1вл + „А, Л* ) •
1
Lm6jI — длина средней линии в меридиональном сечении безло-
паточного пространства.
Индексы 1 и 2 соответственно обозначают начальное и конечное
сечения безлопаточного участка, причем направление потока в на-
чальном сечении соответствует направлению потока на выходе из
предыдущего колеса (Р1бл = Р2пред), а направление в конечном
сечении определяется из условия cur = const в безлопаточном про-
странстве:
ctgp2&1 = ^-^-ctg₽16jl.
' 2 бл г 1 бл
Потери, завися , Фуд.Н /Д- Н 2g h — ^УД- PI “уд. PI — 2g ' ^уд. РП щие от угла атаки, q{ CtgPpiI2 ГРП2 | CtgPHl - 1 . VI р г При 1 р / ШНГН1 ’ L \ ГРП2 'hi ГН1 / J 1® u Q ( Ctg ^тг и Гт2 ctgPpn 112 . г Нт V Нт г р > 'РИ \ 1 Т2 'РП rPU /J РП Г п ( ctg ftp*2 ГР12 ctePpm \ 1 2 4 НрГ" p • • g \ fPl2 PI11 pIU /
111
Анализ уравнения расхода Q = f (0 в общем виде. В урав-
нении Q = f (0 для большинства гидротрансформаторов коэффи-
циент f равен нулю, так как гН2 гТ1.
Коэффициент а всегда больше нуля, так как всегда существуют
потери на трение и йн, kT, kP > 0. Свободный член d <0, так как
Ин < 1- Таким образом, зависимость Q = f (0 может представлять
собой уравнение окружности, параболы, гиперболы или эллипса.
Для определения типа кривой [уравнение (94)] запишем инва-
рианты кривой второго порядка:
с
а
b
т
с
f
А -
Ь = — т(№ — ad) — di2 = — mb2 + d6;
d
m
c
-= ma — c2\
s = m + a.
Известно, что все кривые второго порядка разделяются на па-
раболические (б = 0) и центральные (б =^= 0). Если б >> 0, зависи-
мость Q = f (0 будет уравнением эллипса, если б < 0 — гипер-
болы.
Как видно из формулы, для коэффициентов уравнения (94)
знак б зависит от знака коэффициента m (а > 0 и с2 > 0).
Коэффициент т учитывает только радиусы входа и выхода на
турбине. Если гТ1 > гТ2 (турбина центростремительная), то т > 0;
6 > 0. В наиболее распространенных трансформаторах соотно-
шение радиусов и углов таково, что выполняется условие т >*
с2
>— [15]. Если гТ2 > rTi (турбина центробежная), то т <0
иб<0. При центростремительной турбине расход в зависи-
мости от передаточного отношения меняется, как правило, по
эллипсу, а при центробежной — по гиперболе.
112
Таким образом, т учитывает влияние типа турбины. С увеличе-
нием частоты вращения турбины усиливается центробежное воз-
действие на жидкость, которое совпадает с направлением циркуля-
ции и увеличивает расход в случае, если турбина центробежная, и,
наоборот, препятствует основному потоку в случае, если турбина
центростремительная. В последнем случае может возникнуть обрат-
ное движение жидкости — от турбины к насосу, что будет характе-
ризоваться кривой Q = f (t) для обратного цикла. На рис. 71
эллипс А соответствует прямой циркуляции жидкости, а эллипс
В — обратной. До точки inp происходит прямая циркуляция
жидкости, а от точки С обратная. Смена направления циркуляции
потока происходит в точке fQ=0 if далее в точке D.
Рис. 72. Возможные варианты изменения Q = f (i) для
различных гидротрансформаторов
Участок работы гидротрансформатора от Iq=o до гпр является
неустойчивым. Здесь возможны разные изменения расхода по ве-
личине и направлению и соответствующие изменения моментов
и Л42. Для гидротрансформатора с осевой турбиной гТ2 =
= гТ1 и т — 0. Если при этом с = 0, что возможно при РТ1 =
= ₽Р1, то Q = f (г) — будет прямая линия, параллельная оси /,
т. е. расход Q будет постоянным для любых i. Возможные варианты
изменения Q = f (0 показаны на рис. 72. Далее по известным фор-
мулам можно определить координаты центров кривых второго
порядка и углы наклона их осей по отношению к осям координат.
Так, для эллипса и гиперболы (рис. 71)
f q tg2a=—,
у о у о tn — а ’
где а — угол между осью гиперболы и осью L
8 С- П. Стесин 113
Таким образом, анализ зависимости Q = f (/) показывает, что
на характер изменения расхода влияет прежде всего тип турбины,
а также соотношение радиусов колес и значения углов лопаток.
Определение оптимального режима работы /* при Q = const.
Если Q = const, то Ян = f (0 = const, как следует из уравнения
(92) (см. рис. 70, а). Напор турбины связан квадратичной зависи-
мостью с передаточным отношением i [уравнение (93) ], и напорная
характеристика представляет собой параболу (см. рис. 69, б).
Как следует из уравнения баланса напоров, точка HtTmsx соответ-
ствует точке (£/1ПОТ)Ш1П.
Как известно, т]г = и режим работы при г)г max i* при Q =
= const совпадает с точкой режима На тах. Для определения
экстремума кривой Нп = f (i) продифференцируем уравнение
(93а) по I и приравняем первую производную к нулю.
Тогда
тг - ~г - 2< 4,Нт _£.х),
где
Ctg ₽Н2
Х= р ИнГН2
ГН2
cfg₽T2
—Нт'тг-
ГТ2
Вместо-^- подставим выражение (95). Тогда получим
гН2Нн — 2t р.т Гт2 —
_ _f_ (_ 6 _ j*c У (62 — ad) 4- (i*)a (с2 — та) + 2сЫ* = 0.
Сгруппируем члены по показателю степени i:
(^нгЦн "7Г — * (2гтгРт--=
= V (b* -ad)-]- (i*)2 (с2 — /па) 4- 2сЫ*.
Введем обозначения:
£i = Гнгр-н 4—— аз = 62 — ad;
в2 = 2гт2Цт----G е4 = С2— та.
После подстановки и возведения в квадрат обеих частей ураВ'
нения получим
(^-х’Ч)2 = (4гУ
Далее обозйачиМ
2 / X \2
/П1 = е2-Ц—) ;
т2 = ехе2 — cb
Тогда окончательно получим:
(i*)2mx — 2i*tn2 + /п3 = 0.
Откуда
t-* - Uh. + 1/ ( )2 тз
mt ~ V \mL) т^'
Указанный метод определения i* может быть рекомендован
для гидротрансформаторов с осевой турбиной, в которых Q незна-
чительно изменяется при изменении I [23].
§ 25. ПЕРЕСЧЕТ ПАРАМЕТРОВ
ГИДРОТРАНСФОРМАТОРОВ ПРИ ИЗМЕНЕНИИ ЧАСТОТЫ
ВРАЩЕНИЯ И АКТИВНОГО ДИАМЕТРА
Выясним зависимость Q, М, Н и N от пх. Пусть какому-то
значению пх соответствуют значения ux, wx, сх и п2. Пусть пх изме-.
няется до пХа. Рассмотрим режимы работы насоса, на которых
в каждом сечении его каналов величины и закон распределения
скоростей при возросшей частоте вращения сохраняются подоб-
ными первоначальным; направление скоростей при входе в насос
и выходе из него при этом также должны остаться прежними. Ука-
занные режимы работы принято называть изогональными или кине-
матически подобными режимами.
Скорости при неизменной проходной площади канала пропор-
циональны расходу, поэтому на кинематически подобных режимах
«1 _ _£j_ _
nia сха Qa
При кинематически подобном режиме для сохранения пропор-
циональности скоростей потока в турбине необходимо, чтобы в соот-
ветствии с величиной расхода изменились также окружные ско-
рости колеса. Следовательно, п2 также увеличивается пропорцио-
нально новому значению расхода, т. е.
пэ = Q .
л2а Qa
Отсюда можно установить, что на подобных режимах гидро-
трансформатора
^2 __ П2Д _
«1 п1а
8*
115
т. е. такие режимы характеризуются постоянным Передаточным
отношением Г, равным отношению частоты вращения ведомого и
ведущего валов гидротрансформатора. Зная эти зависимости, выяс-
ним закономерность изменения на подобных режимах.
Из уравнения (47) для активного диаметра Da = const следует
Mja __ / ^ia \2
Мх “ \ Hi )
Мощность, как известно, пропорциональна произведению Мп.
Учитывая вышеприведенную зависимость, можно получить на
ведущем валу гидротрансформатора отношение
Ml = \3
М.а \ Л1а /
на ведомом валу
^2 _ ( П1 У
Ма \ Л1а /
Так как напор Нг = а мощность Nr пропорциональна
чУ
(nJ3, расход Q пропорционален п19 то для подобных режимов ги-
дротрансформатора можно записать
Hia \ ^ia /
Такая же зависимость имеется на изогональных режимах между
напором Н2 и частотой вращения пг.
Из уравнения (47) для подобных гидротрансформаторов, пола-
гая ра = Р и П1а = Пь получим
Ml _ (Da) __ ъ
(^а)а ~ ‘
Аналогично для мощности из уравнения (48) следует
~ - •
Для ведомого вала зависимости Л42 и N2 от Da будут аналогич-
ными.
Приведенные и безразмерные характеристики гидротрансфор-
матора. Как было показано раньше
Mi =
Аналогично записываем
М2 = ^М2У^1^а>
где %М2 — коэффициент крутящего момента на ведомом валу. Мощ-
ность на ведущем и ведомом валах
7/1 = ^NiyniD^a
llfi
й
Л/г = hmynlDl.
Рис. 73. Приведенная характери-
стика гидротрансформатора
Коэффициенты Хм и размерные. Если в этих уравнениях
вместо подставить colt а их левую и правую части разделить на
постоянную величину — ускорение свободного падения g, то полу-
ченные в этом случае коэффициен-
ты и k'N будут безразмерные:
Л41 = %Mip(OiDa‘> Ni =
М2 = ^М2ра>1-Оа, Л/2 — A,w2Ptt>bDa*
Обычно в инженерной прак-
тике пользуются коэффициентами
Хм и hN, сравнивая и оценивая по
ним различные типы гидротранс-
форматоров.
Характеристика, показываю-
щая зависимость коэффициентов
Хм и hN от передаточного отношения, называется приведенной
(рис. 73). Приведенная характеристика гидротрансформатора отно-
сится и ко всем геометрически подобным ему образцам. Если ха-
рактеристика гидротрансформатора построена в координатах Хм
и Х^, она называется безразмерной. Необходимо иметь в виду, что
формулы подобия справедливы при и v, обеспечивающих авто-
модельные режимы работы передачи.
§ 26. ПРОЗРАЧНОСТЬ ГИДРОТРАНСФОРМАТОРА
Гидротрансформаторы, обеспечивающие постоянный режим
работы двигателя при изменении сопротивления движению, при-
нято называть непрозрачными. Нагрузочная характеристика не-
прозрачного гидротрансформатора изображается одной квадратич-
ной параболой (рис. 74, а).
Принципиальная особенность прозрачного гидротрансформа-
тора состоит в том, что частота вращения коленчатого вала двига-
теля, работающего совместно с гидротрансформатором, устанавли-
вается не только в зависимости от положения педали подачи топ-
лива, но и в зависимости от передаточного отношения в гидротранс-
форматоре. Таким образом, нагрузочная характеристика прозрач-
ного гидротрансформатора представляет собой семейство квадра-
тичных парабол, соответствующих различным значениям i
(рис. 74, б). Совместная работа двигателя с непрозрачным гидро-
трансформатором при неизменном положении педали подачи топ-
лива характеризуется постоянной частотой вращения коленча-
того вала. В случае использования двигателя совместно с прозрач-
ным гидротрансформатором по мере повышения передаточного
отношения и при постоянном положении педали подачи топлива
117
Частота вращения коленчатого вала может постепенно изменяться.
При постоянной частоте вращения п-^ прозрачность гидротранс-
форматора проявляется в изменении крутящего момента Мг.
Введем понятие о коэффициенте прозрачности гидротрансфор-
матора:
Г] _ Мц,
Л11(К=1)’
где Л410 — значение Мг при п2 = 0;
Mi (K=i)— значение Afi при К. = 1 (рис. 74, в).
Рис. 74. Прозрачность гидротрансформаторов:
а — нагрузочная характеристика непрозрачного гидротрансформатора; б — нагрузочная
характеристика прозрачного гидротрансформатора; в — внешняя характеристика гидро-
трансформатора: 1 — прямая прозрачность; 2 — обратная прозрачность
В общем случае, когда изменяется частота вращения ведущего
вала и крутящий момент на нем, коэффициент прозрачности опре-
деляется из соотношения
1
гг _ Ml max
11 — X ’
Ml mln
где 41 max И 4i mln — берутся соответственно по max и mln.
Коэффициент прозрачности П для данного типа гидротрансфор-
матора, независимо от его размеров и условий работы, есть вели-
чина неизменная. Гидротрансформаторы с коэффициентом П >1,2
считают прозрачными. У них изменяется примерно в 2 раза
и более. Непрозрачный гидротрансформатор имеетП = 1. При Л =
= 1-т-1,2 частота вращения пх изменяется незначительно, и гидро-
трансформаторы являются непрозрачными.
Гидротрансформаторы, для которых П > 1, называются гидро-
трансформаторами с прямой прозрачностью (кривая 1 на
рис. 74, в). Гидротрансформаторы, для которых П •< 1, называются
гидротрансформаторами с обратной прозрачностью (кривая 2 на
рис. 74, в). Так, на нагрузочной характеристике гидротрансформа-
торов с прямой прозрачностью (рис. 74, б) кривая 1 соответствует
большим i, и кривая 2 соответствует i — 0.
118
Полная внешняя характеристика гидротрансформатора зависит
от его типа. Рассмотрим полные внешние характеристики для наи-
более часто применяющихся одноступенчатых гидротрансформа-
торов (рис. 75).
В режиме противовращения напор турбины противодействует
напору насоса (рис. 75, а). Расход при увеличении напора турбины
с некоторого момента
уменьшается и принимает
нулевое значение, а затем
циркуляция жидкости из-
меняет свое направление.
Моменты насоса и турбины
в режимах противовраще-
ния знак не меняют. При
неизменном расходе или
малом его изменении мо-
мент турбины возрастает,
но вследствие того, что
расход затем резко па-
дает, момент турбины так-
же уменьшается. Момент
насоса по величине изме-
няется незначительно.
При расходе, близком
или равном нулю, момент
насоса и турбины не равен
нулю, так как имеет место
дисковое трение и местное
взаимодействие между ко-
лесами на границах колес
вследствие образования
кольцевых вихрей. При
отрицательном расходе мо-
менты насоса и турбины
знак не меняют, а числен-
ное значение их растет,
причем момент насоса бу-
дет больше момента тур-
бины.
Рис. 75. Полная внешняя характеристика
гидротрансформатора:
а — гидротрансформатор с центростремительной
турбиной; б — гидротрансформатор с осевой тур-
биной; в — гидротрансформатор с центробежной
турбиной
При положительных передаточных отношениях, больших та-
кого, при котором Мт = 0, начинается обгонный режим. Напор
турбины при определенном режиме, зависящем от лопастных
систем, становится больше напора насоса, и расход принимает
нулевое значение, а затем становится отрицательным. Жидкость
начинает циркулировать из турбины в насос. Момент турбины
меняет знак. Момент насоса уменьшается по величине, принимает
нулевое значение, затем меняет знак и увеличивается. Турбина
становится насосом, а насос — турбиной.
119
В режиме противовращения (рис. 75, б) турбина работает как
насос в том же направлении, что и основной насос. Следовательно,
в схеме работают два последовательно расположенных насоса.
Расход остается почти постоянным или несколько увеличивается.
Момент турбины возрастает почти прямо пропорционально Л
Величина момента насоса незначительно возрастает. Количествен-
ное изменение моментов и расхода зависит от лопастной системы.
В обгонном режиме работа гидротрансформатора, показанного
на рис. 75, б, аналогична работе трансформатора, показанного на
рис. 75, а. Отличительной особенностью является то, что расход
увеличивается до определенного значения, а затем практически
остается постоянным.
Как на режимах противовращения, так и на обгонных режимах
турбина (рис. 75, в) за счет подводимой со стороны механической
энергии работает как насос, установленный последовательно основ-
ному насосу. В режиме противовращения знак момента на тур-
бине сохраняется, а в обгонном режиме — изменяется на противо-
положный. Расход имеет минимальное значение на одном из режи-
мов (близких к расчетному) и увеличивается с изменением режимов
работы в обе стороны. Момент насоса при ^нггН2 GzHi^hi при-
нимает нулевое значение. При дальнейшем увеличении передаточ-
ного отношения насос начинает работать как турбина. Как в ле-
вой, так и в правой части характеристики нулевое значение
момента насоса наступает при одинаковом расходе. Таким образом,
для гидротрансформатора с центробежной турбиной, нет обрати-
мого режима.
§ 27. ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ
ЛОПАСТНЫХ СИСТЕМ ГИДРОТРАНСФОРМАТОРОВ
Задание на проектирование и расчет гидротрансформатора.
Для расчета и проектирования гидротрансформатора задается
характеристика двигателя, т. е. зависимость мощности Мдв и мо-
ментов 7ИДВ от частоты вращения /гдв; задается величина отбора
мощности на вспомогательные нужды Мвсп. Обычно задают также
ориентировочные габаритные размеры, а именно, максимальный
диаметр гидротрансформатора и минимальное значение внутрен-
него диаметра Do. В задании должны быть установлены рабочий
режим или рабочий диапазон (диапазон изменения передаточного
отношения, в пределах которого к. п. д. гидротрансформатора не
должен быть ниже определенной величины). В настоящее время
оптимальные передаточные отношения г* различных гидротранс-
форматоров в зависимости от геометрии их рабочей полости нахо-
дятся в пределах 0,15—0,8. В рабочем диапазоне сохраняется
к. п. д. т] 75%, а рабочий диапазон
d «2^^2-г-З,
*mln 75
Где *max 75 И *min 75 ~ СООТВеТСТВСННО МаКСИМЗЛЬНОе И МИНИ‘
Мальное передаточное отношение, при котором т] = 75%.
Потребители гидротрансформаторов часто обусловливают коэф-
фициент прозрачности П и коэффициент трансформации /Со на
0,123 Da
о,озша
в) г}
Рис. 76. Схемы меридиональных сечений гидротрансформаторов:
а — с осевой турбиной; б — с центростремительной турбиной и двумя реакторами; в —
с центробежной турбиной; г — с центростремительной турбиной и одним реактором
стоповом режиме. При работе на кранах и судовых установках
оговаривается вид характеристики в зоне противовращения, а на
транспортных машинах — в зоне обгонных режимов.
Выбор рабочей полости. Исходя из предъявленных требова-
ний, выбирают меридиональное сечение рабочей полости на основе
имеющихся образцов. Наиболее распространенные их формы пока-
заны на рис. 76.
121
Если по заданий необходимо иметь i* = 0,5-*- ОД то выбирают
одноступенчатый гидротрансформатор; если I* = 0,2-*-0,3, то
двухступенчатый; при меньших i* — трехступенчатый.
При выборе принципиально новой формы рабочей полости ее
необходимо довести до требуемых показателей экспериментально.
При выборе формы из имеющихся образцов при прочих равных
условиях надо стремиться к увеличению диаметра £)а и уменьше-
нию Do, так как в этом случае будет более широкий рабочий диа-
пазон. Ширина проточной части может быть предварительно
определена из условия [10]
ст = (0,14г*- 0,25) umax.
Выбор напора Н и расхода Q для расчета лопастных систем.
Напор Н и расход Q гидротрансформатора определяются при рас-
чете по заданной мощности Мдв. Соотношение между напором и
мощностью может быть получено из формулы для коэффициента
быстроходности ns [см. формулу (52)].
Мощность насоса Мн получаем с учетом мощности Мдв и затрат
мощности на вспомогательные нужды Мвсп. При этом, если Мвеп
не задано, его принимают в пределах Мвсп = (8-*-10%) МДв. Коэф-
фициент быстроходности насоса при высоком к. п. д. гидротранс-
форматора на основе существующих передач и опытных данных
может быть определен по формуле [10]
. 1.87 ,
lg«s = -5---------\-а,
V 1 +lgi*
•где а — поправка, зависящая от расположения колес и пере-
даточного отношения, обычно а — 0,02-*-0,4. Причем большие
значения а соответствуют многоступенчатым гидротрансформато-
рам и меньшим передаточным отношениям г*.
При известном значении напора Я/н определяется расход
Зависимость напора от расхода насоса приведена на рис. 68, а.
Момент насоса также является функцией расхода [см. формулу
(87)]. Исходя из формулы (87) для случая, когда перед насосом
расположен реактор, следует, что вид характеристики Мн = f (Q)
определяется знаком величины, стоящей в скобках:
с^Рр2 , c*sPh2 ,
р ГР2 р 'Н2-
ГР2 ГН2
Если принять допущение, что FP2 = /"нг = F (что справедливо
для большинства гидротрансформаторов), то зависимость Л4Н =
— f (Q) будет определяться углом поворота лопаток насоса
(рис. 77).
122
Продифференцируем выражение (87) для Л4Н по Q:
= р ^(0НГн2 + 2-у-(С^0р2Гр2 С^Рн2гН2)^ •
Обозначим (ctg pF2/p2 — ctg рН2гн2) = <7- в случае, если
<7 5» 0, то с увеличением Q всегда больше нуля. Если q < О,
(ОттГгт^/7
иметь максимум; следо-
то момент насоса при Q = —— будет
dMH _____________________________ -
вательно, до этого расхода > 0,
= 0 и при большем расходе
/ А
dQ '
В гидротрансформаторах зависи-
мость Q = / (0 может иметь различ-
ный характер (см. рис. 72). В гидро-
трансформаторе с высокими экономиче-
скими качествами с ростом i расход Q
уменьшается. В связи с этим гидро-
трансформатор с радиальными и загну-
тыми вперед лопатками будет иметь
всегда прямую прозрачность, так как
АМн :>о. Гидротрансформаторы с ло-
патками, загнутыми назад, могут иметь
любую прозрачность в зависимости от
при данном расходе —
Рис. 77. Зависимость Мн =
= f(Q):
/ — при q > 0; 2 — при q — 0;
3 — при q < 0
и и (/Мн (/Мн л
знака первой производной при —>0 — прямая про-
(/Мн л
зрачность; при = 0 — характеристика непрозрачная; при
<0 — обратная прозрачность.
Коэффициент мощности характеризует гидротрансформатор
по энергоемкости и, следовательно, позволяет сравнить гидро-
трансформаторы по габаритным размерам и массе при прочих рав-
ных условиях. Чем больше коэффициент мощности, тем большую
мощность может передать гидротрансформатор при тех же разме-
рах. Существуют два коэффициента мощности: X# — характери-
зует весь гидротрансформатор и отнесен к его активному диаметру;
^лгн — характеризует насос и отнесен к его диаметру выхода.
Коэффициент интересует потребителя, a XWH — проектиров-
щика гидротрансформатора.
Как видно из рис. 77, с ростом энергоемкости насоса угол ло-
патки на выходе увеличивается. Одновременно увеличивается на-
пор насоса (см. рис. 68).
В общем случае напор насоса зависит от коэффициента мощ-
ности Xjvh и коэффициента быстроходности /г5. Эту зависимость
123
можно получить из уравнений для коэффициента мощности и бы-
строходности.
Угол поворота лопатки на выходе из насоса рН2 “ 35^- 90° и
определяется соотношением коэффициентов мощности и быстро-
ходности [10]:
= 0,00025 -т- 0,0008.
”s
Большим расчетным значениям соответствуют большие значе--
ния и рН2. Для гидротрансформаторов коэффициент =
= 1,2^4,4, а = 2.4-11.
Гидротрансформаторы с = 2,2 4- 4 проектируются для
передаточных отношений i* = 0,6 4-0,8 и имеют малые значения
коэффициента быстроходности ns = 80 4-100 и центростремитель-
ную турбину.
Гидротрансформаторы с = 11 проектируются для Z* =
= 0,24-0,45 и имеют ns = 250 и центробежную или двух-, трехсту-
пенчатую турбину. При заданном коэффициенте мощности
можно определить активный диаметр гидротрансформатора
п _ 5/
а“]/ p4V
Для уменьшения габаритных размеров привода выбирают боль-
шие значения \N. Однако при больших значениях как показы-
вают исследования [24], имеет место уменьшение к. п. д. гидро-
трансформатора, что связано с чрезмерной нагрузкой лопастной
системы, отрывом потока от лопаток и интенсивным вихреобразо-
ванием.
Выбор числа рабочих колес и их взаимного расположения
в рабочей полости. В гидротрансформаторах насос один, а турбин
и реакторов может быть несколько. Количество турбин опреде-
ляется их коэффициентом быстроходности nsT. Если принять зна-
чения напоров и расходов на колесах одинаковыми (с точностью до
к. п. д.), то nsT будет меньше ns за счет того, что частота вращения
турбины на режиме максимального к. п. д. меньше. Можно счи-
тать, что nsT = nsi*.
С уменьшением отношения /*, необходимого потребителю,
коэффициент nsT уменьшается. Это происходит при том же рас-
ходе за счет увеличения напора HiT. Увеличение напора ведет
к увеличению нагрузки на отдельные лопатки турбины. Их при-
ходится выполнять очень изогнутыми, профилированными, что
ведет к увеличению диффузорности каналов, а следовательно,
и к увеличению потерь. Для получения более высоких эконо-
мических показателей турбину выполняют из двух-трех ступеней,
уменьшая таким образом напор на каждой ступени. Поэтому
можно рекомендовать при < 0,4 выбирать число турбин больше
124
одной. Количество реакторов выбирается в зависимости от числа
турбин. В одноступенчатых гидротрансформаторах чаще всего
имеется один реактор. При прямоугольной форме рабочей полости
с центробежной турбиной, как правило, устанавливают два реак-
тора. В многоступенчатых гидротрансформаторах число реакторов
равно числу ступеней или меньше его на одно колесо. Реакторы
устанавливаются после каждой ступени турбины. Насос у гидро-
трансформаторов обычно центробежный (п& 300 об/мин).
В последние годы в качестве насосов применялись и всесто-
ронне исследовались осевые и диагональные насосы. При этом они
были установлены в гидротрансформаторах с Z* = 0,1-г 0,2, где
было несколько турбин [5 ]. Исследования показали, что одновре-
менно с увеличением энергоемкости данного гидротрансформатора
несколько снижаются его энергетические показатели, так как рост
энергоемкости в основном происходит в результате увеличения
расхода Q [5]. Турбины могут быть центробежными, осевыми,
центростремительными, что существенно влияет на характер зави-
симости Q = f (0 и внешнюю характеристику гидротрансформатора.
Как было указано выше, могут быть получены гидротрансфор-
маторы прямого и обратного хода при любой последовательности
колес: насос—турбина—реактор или насос—реактор—турбина.
Однако для получения высоких экономических показателей реко-
мендуется последовательность колес: насос—турбина—реактор
для гидротрансформаторов прямого хода и насос—реактор—тур-
бина для трансформаторов обратного хода. В этом случае реактор
обеспечивает поворот потока и изменение знака циркуляции при
обратном ходе. Как правило, гидротрансформаторы обратного хода
выполняются с двумя реакторами — после насоса и после турбины
перед насосом.
Расчет лопастных систем гидротрансформатора. К расчету
лопастных систем гидротрансформатора приступают после выбора
меридионального сечения, числа колес и их взаимного расположе-
ния, а также после расчета напора и расхода. Ведется расчет ло-
пастных систем методом последовательных приближений. В коле-
сах гидротрансформатора рассчитывают радиусы гл и г2 на входе
и выходе из колес, углы Pj и рз, ширину каналов Ьг и и число
лопаток г. Расчет ведется для всех колес по средней линии тока.
При этом принимаются допущения, описанные выше (см. гл. I, § 3).
Расчет насоса. Рассмотрим параметры насоса на выходе.
Задаемся углом лопатки на выходе. На основании опытных данных
рекомендуется рН2 = 35 90°. При большей энергоемкости, т. е.
большем коэффициенте мощности, выбирают большие значения
углов рН2, которые соответствуют г* = 0,7-^- 0,8, а меньшие соот-
ветствуют Z* 0,4. Затем строят треугольник скоростей, в ко-
тором:
окружная скорость
WH2 = WHrН2 = "зо" ГН2>
125
меридиональная скорость без учета стеснения
Q
СтН20 - 2ягн.&н, •
Г1в пз
Величина ЬНг определяется из условия
Стнго = (0,144-0,25) «Н2-
Число лопаток определяется из условия
1тН = 15-т-2= гН1тН
ZH2 2nrH2
где 1тн — длина средней линии тока в меридиональном сечении
насоса;
/Н2 — шаг лопаток на выходе.
Толщина лопатки выбирается из прочностных и технологиче-
ских соображений. Штампованные лопатки имеют толщину 6Н =
= 0,7= 1,0 мм, а литые 6Н — 2 = 6 мм.
Коэффициент стеснения потока лопатками
х _ 1________6Н2
Н2 WMH2 '
Меридиональная составляющая скорости с учетом стеснения
потока лопатками
р _ СтН20
ьтН2 — Z •
ХН2
Окружная составляющая абсолютной скорости без учета откло-
нения потока
СиН2со = Мн2 — CmH2 Ctg 0Н2.
Относительная скорость без учета отклонения
sm ₽на
Угол наклона потока с учетом отклонения от лопатки и стесне-
ния
ИН2 CU Н2
Окружная составляющая с учетом отклонения потока лопат-
ками
^цН2 — Ин^иН2°о>
где |лн — коэффициент, определяемый по формуле (18).
Рассмотрим параметры насоса на входе:
окружная скорость
19Л
меридиональная скорость без учета стеснения
_ Q
ст НЮ — o3tr к >
2ЯГН1°Н1
а с учетом стеснения
„ Ст НЮ
ст Н1 = —---,
КН1
где
1_______^Н1
Н1 ^Н1 sin ₽Н1
Окружная составляющая абсолютной скорости на входе в насос
находится из основного уравнения гидромашин
__ МН2С« Н2с° Ноо
CU Н1СО — - ‘
UH1
Входной угол потока без учета угла атаки, но с учетом стесне-
ния определяем из соотношения
gmHl
WHl"”CaHloo
(/Н1 sin рн1 — 6Н1) (иш — си н1оо
Подставив соответствующие значения стНю и будем иметь
ст ни/н1sin Phi _ sin Phi
sin2 Phi
После преобразования получим квадратное уравнение относи-
тельно sin Phi:
(• + W ?н») sl"! ₽н. - 2'н.«н. sl" Рн. + (S! - ₽н> = о
или, вводя обозначения,
(1 + tg2 Рню) = А 2/Н1бН1 = В;
6hi — tg2 Рню = С,
получим A sin2 Phi & sln Phi + С = 0. (95а)
Толщина на входе 6Н1 штампованных лопаток принимается
такой же, как и на выходе; если лопатки литые, то их толщина
несколько больше, 6Н1 = 4-* 8 мм. Шаг лопатки на входе в насос
j 2яГН1
‘hi = —-— •
Для решения уравнения (95а) определяется tg рН10:
tgpH10 = -^--------
“Hi-сиН1со
127
Определив sin Рнь находят коэффициент стеснения на входе
в насос, меридиональную составляющую абсолютной скорости
с учетом стеснения c/nHi и угол потока Phi-
Относительная скорость на входе в насос
Если различие на входе и выходе между относительными ско-
ростями невелико или ^Н2 > то полученный входной угол
потока можно принять за окончательный. Если же и/Н2 то
имеет место диффузорность и, следовательно, потери возрастут.
Для исключения диффузорности увеличивают входной угол ло-
патки, задавшись некоторым углом атаки. В выполненных кон-
струкциях угол атаки ЛрН1 = 5 4- 20°, а угол рш = 304-90°. Этот
угол с учетом угла атаки Phi = Phi + ДРш- Затем определяют
хН1, C/nHi и строят треугольник скоростей.
Расчет турбины. Рассмотрим параметры турбины на входе.
По заданному передаточному отношению i* определяют частоту
вращения пт на режиме максимального к. п. д. т)тах:
п = I п
1 н
Окружная скорость
иТ1 — (oHi*r Т1.
Напор турбины
Нп = ^ЛнЛг-
Меридиональная скорость без учета стеснения
с ____________________________Q —
Чптю—• 2тгг Ь
Окружная составляющая абсолютной скорости
с —с Гн2
си Т1 — сиН2 г
Г11
Число лопаток турбины выбирается из условия
4^ = 4^= 1,75-нЗ.
/Т2 2пгТ2
Выбор толщины лопаток производится так же, как и у насоса.
Входной угол потока без учета угла атаки, но с учетом стеснения
определяется по формуле
. в + /в2 —4ДС
SinpT1 =-----24-----•
128
tg Рты —•
Угол наклона потока без учета стеснения
ст ТЫ
WT1 ~ Си 11
Коэффициент стеснения
х — 1_________6Т1
/Т1 sin РТ1
Меридиональная скорость с учетом стеснения
Как показали исследования, для увеличения коэффициента
трансформации Ло и к. п. д. необходимо задавать отрицательные
углы атаки
Д₽Т1 =-(7-20°).
Тогда угол лопатки на входе в турбину
РТ1 ~ Рт1 Арт1*
По углу РТ1 определяют хТ1, и строят треугольник скоро-
стей.
Рассмотрим параметры турбины на выходе:
окружная скорость
WT2 ~ С0Н/*Т2Г »
меридиональная скорость без учета стеснения
с Q •
т Т‘“° 2ПГТ26Т2 ’
окружная составляющая абсолютной скорости
г _ C»Tl“Tl+g/Z<T.
Си Т2 ~ и ’
WT2
выходной угол потока с учетом стеснения, но без учета откло-
нения потока
. В + Ув2 — 4АС
sin₽T2 = -^2----------
2А
коэффициент
стеснения
Х-р2 — 1
^Т2
^Т2 Р Т2
9 С. П. Стесин
129
Меридиональная составляющая с учетом стеснения
_ fmT20
cmT2 — “Т •
ХТ2
В существующих конструкциях из-за влияния конечного числа
лопаток поток на выходе из турбины отклоняется в сторону враще-
ния турбины, вследствие чего скорость сиТ2 увеличивается. При
этом момент Мт и напор Нп уменьшаются. В первом приближе-
нии можно принять ДрТ2 = 24-6°. На эту величину надо умень-
шить угол рТ2. Угол рТ2, как правило, лежит в пределах рТ2 =
= 104-30°. Меньшие углы допускаются в центробежной турбине.
Определив угол РТ2, опять находят коэффициент хТ2, скорость
стТ2 и строят треугольник скоростей.
Расчет реактора. Рассмотрим параметры реактора на входе.
Параметры входа должны быть согласованы с параметрами на
выходе из предыдущего колеса, например из турбины. Меридио-
нальная составляющая абсолютной скорости без учета стеснения
с - Q
С/ПРЮ - 2яГр16р1 •
Окружная составляющая абсолютной скорости перед входом на
лопатку
г —г Т2
cwPl — cuT2 r
Число лопаток и их толщина на входе в реактор и выходе из
него, коэффициент стеснения и меридиональная составляющая
абсолютной скорости с учетом стеснения определяются 'так же,
как и для турбины. Входной угол потока без учета угла атаки
и с учетом стеснения
. Qz B + Vb2 — 4АС
S1nplp = -^_L_--------
Угол рР10 без учета стеснения и его знак определяют из выра-
жения
tgPpio = — так как uP1 = 0.
СпР1
Так же, как и для турбины, учитывается угол атаки и по углу
рР1 определяют коэффициент стеснения, меридиональную состав-
ляющую абсолютной скорости с учетом стеснения и абсолютную
скорость на лопатке:
г —70, — ™ Р1
сР1-и>Р1_ —р-.
Выход из реактора должен быть согласован со входом в сле-
дующее колесо, например в насос, при расположении колес насос—
130
турбина—реактор. Тогда окружная составляющая скорости на
выходе из реактора сиР2 определяется по окружной составляющей
скорости на входе в насос
С и Р2 — Си Н1 г
'|>2
Дальнейший расчет составляющих абсолютной скорости и
углов выхода из реактора проводится так же, как и для турбины.
На основании проведенного расчета строят треугольники скоро-
стей (см. рис. 78).
Рис. 78. Треугольники скоростей в рабочих колесах гидротрансфор-
маторов:
а — в реакторе; б — в турбине; в — в насосе
§ 28. ПРОФИЛИРОВАНИЕ РАБОЧИХ КОЛЕС
ГИДРОТРАНСФОРМАТОРОВ
К профилированию приступают после того, как произведен
расчет основных геометрических параметров гидротрансформатора:
определены углы входа и выхода для средней линии тока, радиус г
9* 131
й ширина b колес в мерйдйойальном сейенйи йа входе й выходе,
выбрана форма меридионального сечения.
По этим известным размерам вычерчивают предварительно мери-
диональное сечение и наносят на него входные и выходные кромки
Рис. 79. Профилирование меридиональ-
колес; проверяют плавность
изменения площади межло-
паточного канала на всей
длине рабочих колес. С этой
целью проводят среднюю
линию тока и ортогонали
аа', bb' и т. д., т. е. кривые,
перпендикулярные к линиям
тока (рис. 79, а). Меридио-
нальную составляющую аб-
солютной скорости ст прини-
мают постоянной по всей
длине канала. Для выполне-
кого сечения:
а — нанесение линий ортогоналей; б — из-
менение площади проходного сечения (^х^х)
по длине средней струйки
ния этого условия размеры
меридионального сечения
должны отвечать требованию
bxDx = const для всех ор-
тогоналей. Строят график зависимости bxDx от длины 1т сред-
ней линии тока в меридиональном сечении (рис. 79, б).
Если кривая зависимости отклоняется от горизонтали, то раз-
меры меридионального сечения в соответствующем месте должны
Рис. 80. Распределение скоростей сП1 по ортогонали в ме-
ридиональном сечении:
а — потенциальное; б — равноскоростное; в — антипотен-
циальное
быть изменены. Форму меридионального сечения уточняют до
получения правильной геометрической формы канала.
Виды потока в меридиональном сечении. Лопастные системы
гидротрансформаторов обычно проектируются применительно к сле-
дующим видам потоков:
потенциальному потоку (рис. 80, а), когда в меридиональной
плоскости вдоль ортогонали скорость ст распределяется по закону
VK = const, где гк — радиус кривизны канала в данной точке;
132
равноскоростному (рис. 80, б), когда вдоль ортогонали ст —
= const;
антипотенциальному (рис. 80, в), когда ст возрастает с увеличе-
нием радиуса кривизны гк;
* смешанному с произвольным распределением ст в сечениях.
При потенциальном течении кромки лежат в одной меридио-
нальной плоскости и cur = const вдоль кромки рабочего колеса.
При равноскоростном течении равенство сцг вдоль кромки не обяза-
тельно, и кромки могут не лежать в одной плоскости.
При проектировании поверхности лопатки Исходят из равновё:
сия статических давлений по контуру лопатки в меридиональной
плоскости. Для потенциального потока, когда cur = const на вход-
ной и выходной кромках, приращения момента количества движе-
ния по отдельным струйкам одинаковы, и условие равенства стати-
ческих давлений выполняется. Для равноскоростного и других
видов потоков это условие можно соблюсти только при различных
геометрических размерах лопатки по разным струйкам (различные
углы входа и выхода, например, для внутреннего и наружного торов
и средней струйки).
Как показали экспериментальные исследования [24], в гидро-
трансформаторах на выходе из насоса (как правило, центробеж-
ного) эпюра скоростей ст близка к равноскоростной. На выходе
из турбины и реактора эпюра ст, как правило, приближается к по-
тенциальной (для цилиндрических радиальных колес) или яв-
ляется средней между равноскоростной и потенциальной.
При профилировании лопаток рабочих колес гидротрансформа-
тора задаются каким-либо видом потока из указанных выше. Как
показали исследования, выполнение условия cur = const приводит
к резкому искривлению лопаток и уменьшению радиусов кривизны.
Особенно это характерно для случаев, когда длина лопатки по
внутреннему и наружному торам резко различается (например, для
гидротрансформаторов, показанных на рис. 76, а, б). Целесооб-
разно построение лопаток по этому принципу для рабочих полостей,
вытянутых в радиальном направлении (см. рис. 76, в).
При профилировании лопастных систем большинства гидро-
трансформаторов наиболее целесообразно применять закон распре-
деления скоростей ст = const.
Как известно, лопатки в гидромашинах могут быть цилиндриче-
ские и двоякой кривизны. Цилиндрические лопатки могут быть
расположены на радиальных участках рабочей полости (например,
центробежная турбина), а также на осевых участках (например,
реактор, показанный на рис. 76, в). Цилиндрические лопатки
имеют форму поверхности, которая обеспечивает применение раз-
личных более дешевых технологических процессов для их обра-
ботки. Цилиндрические лопатки профилируют по средней линии
тока.
При коэффициенте быстроходности ns насосов до 80 об/мин
применяются цилиндрические лопатки. С увеличением п$ радиаль-
133
ный размер лопатки уменьшается, лопатка становится короче, а на-
грузка на лопатку возрастает. Поэтому лопатки выполняют двоя-
кой кривизны. Эти лопатки имеют большую поверхность и, следо-
вательно, меньшую удельную нагрузку. В гидротрансформаторах
также применяют лопатки двоякой кривизны для увеличения
энергоемкости. Для улучшения характеристик комплексных ги-
дротрансформаторов при работе на режиме гидромуфты распола-
гают реактор в нижней части рабочей полости и сближают кромки
выхода из насоса и входа в турбину. Лопатки рабочих колес в та-
ком гидротрансформаторе пространственные.
Лопатку двоякой кривизны профилируют по нескольким ли-
ниям тока. Минимально рассматривают три линии тока — по вну-
треннему и наружному торам и по средней струйке.
Профилирование лопаток по точкам. Межлопаточный канал
при данном методе профилируют таким образом, чтобы обеспечи-
вался заданный закон изменения скоростей ши ст [6]. Для гидро-
трансформаторов рекомендуется прямолинейная зависимость w
от 1т (рис. 81, а). В этом случае не будет участков с увеличенной
диффузорностью. Возможен и криволинейный закон изменения
скорости ш, показанный на графике. При этом будет меньше сред-
няя интегральная величина w и, следовательно, уменьшатся по-
тери по длине лопатки. Однако в мёжлопаточном канале будет
некоторая диффузорность.
Изменение толщины лопатки 6 также задается заранее. Уста-
новим связь текущего угла наклона лопатки 0 и толщины лопатки
S со скоростями.
Из треугольника скоростей следует, что
где
г — 2™.
к _ коэффициент стеснения потока лопатками.
Решив совместно уравнения
л “ 1 t sin р
и
Ст
W = ---:-7Г 9
и sm р
получим
Эта формула позволяет вычислить текущий угол наклона ло-
патки колеса по заданному закону изменения скорости и> и закону
1М
изменения б. Для удобства построения лопатки перейдем к поляр-
ным координатам. Из рис. 81, б следует, что
tgft = -^L.
ь р rdO
ИЛИ
4/0 = .
Г tg (3
Интегрируя выражение для dB в пределах от нуля (соответству-
ющего радиусу rj до 0 (соответствующего радиусу г2), получим
0= [ .
J rtgp
Обозначим
77Ь = в-
Тогда приращение центрального угла
Ае = -^-+Д‘41 Аг.
Расчет целесообразно вести в табличной форме. При расчете
среднюю линию тока делят на равные отрезки Д/т = Аг
Рис. 81. Профилирование лопаток рабочего колеса по точкам:
а — принятый закон изменения w = f (/); б — связь между параметрами в полярных коор-
динатах; виг — построение лопатки (точки 1—6 соответствуют рассматриваемым сече-
ниям лопатки)
(рис. 81, в) и вычисляют координаты точек 1—6 поверхности ло-
патки (рис. 81, г).
Этот метод профилирования применяется в основном для ци-
линдрических лопаток. Для пространственных лопаток необхо-
димо повторить расчет и построение на других линиях токаЖ^ФК-^!^*'
ность профилирования пространственных лопаток состоит,
что необходимо знать возможные законы распределещщИягаИИИ^И
по всем струйкам, а не только по средней линии
Профилирование лопаток рабочих колес методом конформных
отображений. Впервые этот метод был разработан и применен
для насосных колес акад. Г. Ф. Проскурой. Рассмотрим сущность
этого метода.
Конформными преобразованиями или отображениями в общем
случае называются геометрические преобразования, при которых
величины углов между линиями, содержащимися в преобразуемой
фигуре, не изменяются.
Пусть имеются две поверхности вращения (рис. 82). На одной
поверхности вращения имеется кривая АВ, которую мы хотим
конформно отобразить на другую поверхность. Чтобы кривую
Рис. 82. Метод конформных отображений
А'В' можно было назвать конформным отображением кривой АВ,
углы наклона а и а' этой кривой к окружностям должны сохра-
ниться неизменными. Поверхность с осью вращения О—О назовем
отображаемой, а поверхность с осью О'—О' — отображающей.
Рассмотрим криволинейные треугольники 1, 2, 3 и Г, 2', 3'. Для
равенства углов а и а' необходимо выдержать соотношения, выте-
кающие из подобия треугольников.
На рис. 82 обозначено: R и г — текущие радиусы отображаю-
щей и отображаемой поверхностей соответственно, центральный
угол Д<р выбран один и тот же для обеих поверхностей; ДЛ и Д / —
расстояние между секущими плоскостями, перпендикулярными
оси, для отображающей и отображаемой поверхностей.
Из подобия треугольников следует
откуда
-7- = = coost. (96)
Это уравнение назовем условием конформности отображения
кривой Лй? на кривую Л’В'. В качестве отображающей поверх-
ности целесообразно выбирать цилиндр или конус, поверхности
которых развертываются на плоскость без искажения.
Профилирование лопаток методом конформных отображений
на один цилиндр. Практически при профилировании строят линию
пересечения лопатки с боковыми ограничивающими поверхно-
стями вращения.
В качестве отображаемых выбираем поверхности вращения,
образующие которых являются линиями тока меридионального
сечения (aa'f бб', вв' на рис. 83, а). В связи с тем, что мы приняли
равномерный закон распределения скоростей (т поперек потока,
то линии аа', бб', вв' должны делить рабочее колесо на несколько
элементарных колес с одинаковыми расходами и с равными площа-
дями проходного сечения. Допускаем также, что эти поверхности
есть поверхности тока. Для цилиндрического колеса.все построе-
ния проводят лишь по средней линии тока [1 L
В качестве отображающей поверхности выбираем цилиндр.
Как правило, его радиус R равен максимальному радиусу колеса.
Из условия конформности (96) следует, что при R = const рас-
стояние ДА также постоянная величина. Выбираем ДА = 5~-
10 мм.
Для удобства профилирования наносим на обе поверхности
ортогональную сетку при помощи следов плоскостей, перпендику-
лярных оси вращения (/, 2, 3 и т. д.), и следов радиальных плоско-
стей (/, II, III и т. д.). Обозначим расстояние между плоскостями,
перпендикулярными оси, ДА = const на цилиндре и Д/ на линиях
тока. Между радиальными плоскостями угол Лф = const. Развер-
нув цилиндр на плоскость, получим конформную диаграмму с ор-
тогональной сеткой (рис. 83, г). Расстояние Д/ будет изменяться
с изменением радиуса г (г — радиус середины отрезков на линиях
тока) по условию конформности (96). Обозначим на меридиональ-
ном сечении точки делений 1, 2,3... на всех линиях тока. Им
будут соответствовать точки /, 2, 3. .. на конформной диаграмме.
Расстояние между точками I, II, III . . . на конформной диаг-
рамме равно 7?Дф, и этим точкам соответствуют точки I, II,
III ... на виде лопатки в плане (рис. 83, б).
При профилировании стремятся к получению плавной формы
поверхности лопатки (или плавных линий тока) по заданным вход-
ным и выходным углам. Если заданы (получены ранее) углы только
по средней линии тока, то углы для прочих линий определяют из
треугольников скоростей (см. рис. 83, д). Проводим на конформной
диаграмме прямые под углом и £2 Для всех линий тока из соот-
ветствующих горизонталей (6, 7, 9 на рис. 83). Угол охвата 0 каж-
дой лопатки в плане, следовательно, и число вертикалей 1, II, III
и т. д. задается в пределах 120—80° (большее значение 0 соответ-
ствует меньшим значениям ns и меньшему числу лопаток). Прямые
линии на конформной диаграмме плавно сопрягают в средней
части кривыми, оставляя на входе и выходе прямолинейные уча-
стки.
добиться плавности сопряжения, можно углы охвата
для разных линий тока (меньшие для внутреннего тора и большие
137
для Наружного) задать различными; отклонить входную и выход-
ную кромки от радиального положения, что будет соответствовать
смещению линий тока на входной и выходной кромках по различ-
ным вертикалям.
На рис. 83, г пунктиром показаны линии тока на конформной
диаграмме при положении входной и выходной кромок в радиаль-
Рис. 83. Построение лопатки методом конформных отображений на один цилиндр:
а — меридиональное сечение с отрезками Д/ между точками 1, 2, 3. . б — вид ло-
патки в плане (-------—линии модельных срезов); в — радиальные срезы I — / и
т. д. и плоскости модельных срезов; г — конформная диаграмма (расстояние между
точками 0, 2. 4. . . равно 2AL); д — определение углов входа по трем линиям тока
ной плоскости. Угол охвата 0 одинаков для всех линий тока,
а длина этих линий различна. Сплошными линиями на рис. 83, г
показаны линии тока для случая, когда входная кромка не лежит
в радиальной плоскости, а на выходе кромка смещена от осевого
направления.
1.4R
Для построения поверхности лопатки в плане находим на кон-
формной диаграмме горизонтали, соответствующие точкам пере-
сечения вертикальных прямых 1,11... и т. д. с линиями тока
(например, К, L, М на рис. 83, б). Определяем радиусы, на которых
расположены эти точки, по меридиональному сечению (рис. 83, а)
и на виде лопатки в плане (рис. 83, б) проводим окружности до
пересечения с линиями I, II, III. . . Таким же образом переносим
точки пересечения других линий с линиями тока-.
Далее строим радиальные срезы лопатки на меридиональном
сечении. Для этого переносим точки пересечения радиальных пло-
скостей I, II, III ... с линиями тока с вида лопатки в плане
(рис. 83, б) на соответствующие линии тока в меридиональном сече-
нии (рис. 83, в) и соединяем их. По двум проекциям и по радиаль-
ным срезам может быть изготовлена лопатка. По плавности семей-
ства кривых, являющихся радиальными срезами, судят о форме
лопатки.
Могут быть построены также так называемые модельные срезы.
Для их построения проводим на меридиональном сечении следы
плоскостей А, В, С, D........ перпендикулярные оси колеса
(рис. 83, в). Расстояние между плоскостями выбирается произ-
вольно, минимальное расстояние — в области двоякой кривизны
лопатки. На меридиональном сечении находят точки пересечения
следов плоскостей А, В, С, D. . . с линиями тока аа', бб', вв' и
кромками; переносят эти точки на вид лопатки в плане и соеди-
няют (рис. 83, б пунктирные линии). Линии ВВ, DD, ЕЕ и т. д.
(см. рис. 84) называются модельными срезами. По модельным сре-
зам изготовляют деревянную или металлическую модель профиля
лопатки в последовательности, показанной на рис. 84, а—г.
Как правило, полученную при профилировании поверхность
лопатки принимают за рабочую сторону, а тыльную сторону полу-
чают соответствующим смещением всех поверхностей на толщину
лопатки. Модельные или радиальные срезы для тыльной стороны
вычерчивают отдельно аналогично соответствующим срезам для
рабочей стороны.
В зависимости от типа гидротрансформаторов лопатки колес
выполняются постоянной или переменной толщины. При построе-
нии лопаток переменной толщины пользуются размерами какого-
либо известного симметричного профиля, принимая в этом слу-
чае спрофилированную лопатку за среднюю линию профиля [21 ].
Профилирование лопаток методом конформного отображения
на плоскость (на цилиндры). Этот метод предложен проф.
А. П. Кудрявцевым и состоит в следующем. Линии тока раз-
бивают на отрезки А/ = AL, тогда из условия конформности (96)
R — г, т. е. каждый элементарный отрезок линии тока отобра-
жается на цилиндр ;в натуральную величину, но для каждого
отрезка выбирается отображающий цилиндр своего радиуса/? =
= г. При развертке конформных цилиндров на плоскость на
конформную диаграмму наносят только их горизонтальные сече-
139
ния на расстоянии AL = А/. Расстояния между радиальными
сечениями 7?Аф будут различны для разных отрезков линии тока
и на диаграмму не наносятся.
Практически построение лопатки по этому методу осуществ-
ляется следующим образом. Откладываем на меридиональной
проекции по линиям тока (например, по внутреннему и наруж-
ному торам), отрезки 0—/, 1—2, 2—3 и т. д., равные А/ = AL =
= 10 мм (рис. 85, а).
Рис. 84. Изготовление модели профиля лопатки
Конформную диаграмму вычерчиваем в виде горизонтальных
прямых с расстоянием между ними AL = А./ и нумеруем соответст-
венно 0, 1,2,,, по числу отрезков на меридиональной проекции
(рис. 85, 6). Под углами и р2, известными из расчета, проводим
отрезки из точек, лежащих на горизонталях с номером, соответ-
ствующим выходной и входной кромкам меридионального се-
чения (в нашем случае 0 и 6). Полученную ломаную линию за-
меняем плавной кривой. Смещение точек аг и g± по горизонтали
одна от другой выбираем так, чтобы линия ag получалась плав-
ной, а на входе и выходе отображенной линии были бы прямоли-
нейные отрезки достаточной длины. Из точек а, b и т. д. на кон-
формной диаграмме опускаем перпендикуляры на горизонтальные
прямые и получаем на них отрезки. Ап ь Ап2 и т. д., которые со-
ответствуют отрезкам J?Acp при. R — van . Для построения
проекции лопатки в плане проводим ряд окружностей радиусами,
равными расстоянию от оси вращения до точек О, 1,2... на ме-
ридиональном сечении (см. рис. 85, в). Соединяем точку а с цент-
ром окружностей, откладываем по дуге следующего радиуса отрезок
Дих, получаем следующую точку и т. д. Соединяем полученные
точки плавными кривыми, которые представляют собой проекции
линий тока в плане. Далее
следует, как и в предыду-
щем случае, построить
тыльную сторону лопатки,
задавшись ее толщиной,
или «одеть» полученные
проекции известным про-
филем.
Для изготовления ло-
патки, кроме имеющихся
проекций, необходимо по-
строить радиальные или
модельные срезы, анало-
гично тому, как это вы-
полнено в описанном выше
методе профилирования, о
Следует отметить, что f
рассмотренные методы про-
филирования при помощи 2
конформных отображений
применимы для всех колес
гидротрансформаторов (на- 4
сосов, турбин' и реакто- 5.
ров). Первый способ от-
ображения на один кон-
формный цилиндр являет-
7
8
9
ю
и
ся более наглядным и по-
зволяет контролировать
Рис. 85. Профилирование лопаток по методу
проф. А. П. Кудрявцева:
плавность поверхности ло-
патки и форму каналов
а — меридиональное сечение рабочего колеса;
б — конформная диаграмма; в • — вид. лопатки
в плане
между лопатками.
Аналитический способ построения лопатки по средней линии
тока. В основу этого способа положен метод конформных отобра-
жений. Но в отличие от предыдущих способов конформное ото-
бражение средней линии тока задается аналитически. При этом
известными являются размеры меридионального сечения, углы
входа и выхода по средней линии тока и соотношение входного
и выходного участков на конформном отображении.
Рассмотрим рис. 86, на котором изображен криволинейный
участок средней линии тока. На входе и выходе располагаются
также прямолинейные участки, где углы и р2 не меняются.
Однако прямолинейные участки в аналитическом выражении не
рассматриваются.
....'....‘...................................... ’ 141
На рис. 86 обозначено: h — высота развертки конформного
отображения средней линии тока;
к—ширина развертки конформного отоб-
ражения средней линии тока.
Из геометрических соображений можно
записать
_ г m cosp2 + cos Pi
m sin p2 + sin P1 ’
где tn — отношение длин входного и вы-
ходного участков (т — 1 ч- 0,6).
Представим среднюю линию тока в ви-
де кривой, описанной уравнением третьей
степени. Уравнение этой кривой в общем
Рис. 86. Аналитический виде
метод построения средней „ _ дхз i _i_ £х 4- D. (97)
линии тока s
Из граничных условий определим
коэффициенты уравнения (97). При х = 0 у = 0 и, следова-
тельно, D = 0; при х = к у = h. Получаем уравнение
h = Ак3 + + Ск.
Продифференцируем уравнение (97) по х:
= ЗДх2 + 2Вх + С.
ЛУ 1 1
При х = 0 = tg Pj, откуда с = tg Pf, при х = к
= tg р2,
tg р2 = ЗАк2 + 2Вк + С.
Решая систему уравнений, найдем коэффициенты Л, В, С:
К3 ’ к2 '
С - tg рг
Подставив эти коэффициенты в уравнение (97), получим ана-
литическое выражение для конформного отображения средней
линии тока
хЗ+ 3/t-2Ktgp -Ktgp2 X2,t 8
Воспользовавшись этим уравнением, строим среднюю ли-
нию тока на конформной диаграмме и поверхность лопатки в плане
по известному меридиональному сечению и конформной диаграмме.
Наиболее целесообразно применять этот метод при экспери-
ментальном исследовании влияния отдельных параметров кон-
142
t
Рис. 87. Параметры решетки слабо
изогнутых профилей
струкции лопастной системы на внешнюю характеристику, когда
приходится изготовлять несколько вариантов рабочих колес,
отличающихся лишь одним из параметров (например, при различ-
ных углах входа или выхода).
Профилирование прямых решеток профилей. Наиболее целе-
сообразно применять этот метод при построении цилиндрических
и плоских круговых решеток. В прямых решетках профилей мо-
гут применяться либо слабо, либо сильно изогнутые профили.
Решетки со слабо изогну-
тыми профилями имеют малую
кривизну «скелетной» линии,
очерчиваемой в большинстве
случаев круговой дугой. На
рис. 87 указаны основные гео-
метрические параметры решетки
профилей: f — стрела прогиба;
0 — угол охвата профиля (Ощах^
= 45°); I—хорда профиля; а —
расстояние точки максималь-
ного прогиба от передней
кромки; t— шаг решетки; у—
угол наклона хорды (или угол
установки профиля); i — угол
атаки и 6р2 — угол отставания — углы между направлением
потока и касательной к профилю на входе и выходе; Pi, Р2—кон-
структивные углы профиля; рп р2 — углы потока на входе
и выходе.
Для профилей установлены следующие зависимости (см.
рис. 88, а—г):
1. Коэффициент р, учитывающий влияние конечного числа
лопаток, в функции от и угла у (рис. 88, а).
2. Коэффициент А, используемый для определения отклоняю-
ного, в функции от -у- и угла у (рис. 88, б).
3. Оптимальное отношение при различных углах 0Г и 02
(рис. 88, в).
4. Угол отклонения средней линии профиля Ду1э учитываю-
щий толщину лопаток Ду = f и yj, где s—- максимальная
толщина лопатки (рис. 88, г).
Порядок профилирования следующий. Заданными являются
углы 01 и 02- Определяют параметры решетки. Принимаем в пер-
вом приближении безударный вход потока на лопатки без учета
143
О* | о
стеснения потока, т. е. Р* — pi и р* = р2. Тогда у* = • 1 2
угол поворота потока Др* — | р*—р’|.
I
Определяем по графику (рис. 88, в) значение — при заданных
углах рх и р2. Кроме того, / = —. Зная I, определяем по со-
/ , Y
отношению — величину t н число лопаток:
/
7 ---- ------- .
Рис. 88. Результаты экспериментального исследования решеток профилей
По отношению — можем определить р (рис. 88, а) для у*.
Величина угла поворота потока связана с углом охвата: 0р =
= Др, откуда определяем угол 0 и угол отклонения потока за
рабочим колесом при безударном входе:
144
Вычисляем радиус круговой дуги профиля р =---—.
2 sin -j-
Затем вычерчиваем дугу профиля. Для этого задаемся углом
атаки i = 0-5-4° и находим Pi = ₽i + i, а также
р2 = Р1 + рб-д(р1-т:р-|е),
где А — определяем по графику (рис. 88, б), знак «минус» со-
ответствует конфузорной решетке, а знак «плюс» — диффузорной.
Учет влияния конечной толщины профиля сводится к повороту
средней линии профиля на угол Лу = Дух (~)2, где А?х взято
с графика (рис. 88, г).
Для построения профиля сечения вычисляют длину средней
линии профиля
Полученную скелетную линию «одевают» одним из известных
профилей, зная его координаты у = f (/) для верхней и нижней
поверхности профиля. Полученная решетка является решеткой
осевого колеса. Для по-
строения профиля решет-
ки радиального колеса не-
обходимо принять ее за
конформное отображение
искомой решетки на ци-
линдре, развернутом на
плоскость, и затем пере-
нести ее размеры с кон-
формной диаграммы на
нужную поверхность, как
это было описано для про-
филирования с помощью
конформных отображе-
ние. 89. Решетки сильно изогнутых профи-
лей:
а — типы профилей; б — схема определения угла
выхода из решетки
ний.
Решетки с сильно изогнутыми профилями трудно рассчитать
с помощью аналитических выражений, поэтому их конструируют
на основе опытных данных. На рис. 89, а показаны типы сильно
изогнутых профилей решеток, встречающихся в гидротрансфор-
маторах, и на рис. 89,6 приведена схема для определения вы-
годного угла потока для решетки.
Выходной угол потока из такой решетки может быть определен
по формуле
— * а
2 COS(32a t
Методика профилирования таких решеток нами не рассматривается.
10 С. П. Стесин 145
§ 29. РАСЧЕТ ВНЕШНЕЙ ХАРАКТЕРИСТИКИ
ГИДРОТРАНСФОРМАТОРОВ
Расчет внешней характеристики производится после расчета
лопастной системы и выбора конструкции для выявления соот-
ветствия основных параметров характеристики (таких, как М,
N, т), /,* П, dn и т. д.) параметрам, указанным в задании на
проектирование гидротрансформатора. Подобные расчеты при-
ходится часто выполнять при доводке гидротрансформаторов
с известной конструкцией, когда исследуется влияние геометри-
ческих параметров отдельных элементов лопастной системы (уг-
лов входа и выхода, радиусов колес, числа лопаток в рабочих
колесах и т. д.) на преобразующе-нагружающие свойства гидро-
трансформатора.
Расчету внешней характеристики предшествует расчет вну-
тренних параметров гидротрансформатора Q и Н для различных i.
Расход определяется по уравнению (95). Для определения коэф-
фициентов уравнения (95), связанных с геометрическими пара-
метрами лопастной системы гидротрансформатора, необходимо
сначала определить следующие расчетные величины: FH2, FT2,
FP2 — площади поперечного сечения потока, нормальные к на-
правлению скорости ст> на выходе из соответствующих рабочих
колес.
Площади определяются с учетом стеснения потока лопатками
по формуле
F = 2nrbn.
Кроме этого, определяют коэффициент сопротивления колеса
где X — опытный коэффициент сопротивления, принимается
в пределах 0,06—0,08;
Rr ср — средний гидравлический радиус канала;
F^cp — средняя площадь каналов колеса, нормальная к на-
правлению относительной скорости потока.
Расчет коэффициента к для каждого колеса ведется для не-
скольких сечений (см. рис. 90). На рис. 90 обозначено Д/т — рас-
стояние по средней линии в меридиональном сечении между выбран-
ными точками; А/ = — действительное расстояние вдоль
средней линии тока между выбранными точками; Р — текущий
угол наклона лопатки в точке (снимается с конформной диаграммы);
/ = £ А/ — длина средней линии профиля лопатки; t = ---
текущий шаг лопаток на данном радиусе г; а = t sin Р — 6 —
ширина канала между лопатками; 6 — толщина лопатки в дан-
ной точке; f = ab — площадь канала между лопатками, нормаль-
146
ная к направлению скорости w (b — ширина канала на данном
радиусег в меридиональной плоскости); /„,cd= г ^П— —
средняя площадь канала (п — число выбранных расчетных то-
чек); Fa)cp = fWCpz— средняя площадь каналов колеса, нормаль-
ная к направлению относительной скорости; 4/?г = — учет-
веренный гидравлический радиус канала в данной точке; 4/?гср ==
= — среднее значение учетверенного гидравли-
ческого радиуса.
Рис. 90. Расчет коэффициента сопротивления к (точки 1—7 соответст-
вуют рассматриваемым сечениям лопатки)
Расчет величины к целесообразно вести в табличной форме.
Подсчитав геометрические параметры, определяем коэффициенты а,
6, с и т. д. по уравнениям, приведенным на с. 110, а расход Q по
уравнению (95) при различных значениях i. По известным вели-
чинам расходов определяют значения напоров Я/Н = f (0 и
Я/т — f (0 [по уравнениям (93а)] и подсчитывают гидравличе-
ские моменты на рабочих колесах:
“н т шн‘
Определяют гидравлический к. п. д. т|г. = = f (i).
Определение моментов дискового трения и общего к. п. д.
Общий к. п. д. гидротрансформатора подсчитаем, приняв т]0 =
= 0,95-^0,97 и определив моменты дискового трения и механи-
ческих потерь.
Момент дискового трения смежных поверхностей Мд —
= . Обозначим At i мех и М 2 мех — соответственно моменты
механических потерь в уплотнениях и подшипниках ведущей
и ведомой частей гидротрансформатора.
10* 147
Для тяговых режимов работы гидротрансформаторов переднего
хода при i < 1 (рис. 91):
Л41 — Мн -f- Мд ыт + 7ИдНр AIMexi; 1
А42 = /Ит 4-Л4дНТ — МдТР— А4мех2. J
При i > 1 перед 7ИдНт ставят знак минус.
Для обратимых режимов работы:
М1~ Мн + Л1д нт — Мднр — Ммех1;)
М2 — мт 4- Мд нт мдТР 4- Ммех2, j
где Мднт» МДТР, Мднр — соответственно моменты
трения между рабочими
(98)
(99)
ДИСКОВОГО
колесами.
Для тормозных режимов работы Мг определяется по уравне-
нию (98), а момент М2— по уравнению (99).
Если опоры гидротрансформаторов выполнены в виде подшип-
ников качения, а уплотнения лабиринтные, то Ммех х = Л4мех 2 =
0. Если же есть уплотнитель-
ные чугунные кольца или манжеты
на валах, то моменты 7Имех х и
Ммех 2 должны определяться экс-
периментально для каждого типа
гидротрансформатора. С учетом
изложенного определяем общий
к. п. д.
Рис. 91. Схема действия моментов
дискового трения в гидротрансфор-
маторе
м2
4= лГ
”2
и строим внешнюю характери-
стику гидротрансформатора М19
Л42, Л = f (0 при Hi = const.
В случае несоответствия рассчи-
проводим уточнение геометрии ло-
танных параметров заданным
пастных систем теоретическим или опытным путем.
§ 30. ПРИМЕНЕНИЕ ЭЦВМ ДЛЯ РАСЧЕТА
ГИДРОТРАНСФОРМАТОРОВ. ОБЗОР СУЩЕСТВУЮЩИХ
МЕТОДИК РАСЧЕТА
Как видно из предыдущего, расчет гидротрансформаторов гро-
моздок, требует больших затрат времени и труда. Для ускорения
процесса расчета целесообразно применять ЭЦВМ. Программа
й блок-схема, отлаженные для одного варианта расчета, могут
быть использованы для расчета других вариантов или других
типов гидротрансформаторов. При этом в машину должны быть
заложены новые исходные данные. В МАДИ, НАМИ, ВНИИ-
Метмаше составлены блок-схемы и программы для расчета харак-
теристик гидротрансформаторов соответственно при изменении
какого-либо геометрического параметра,
148
Программа, составленная в МАДИ, позволяет при изменении
углов 0 всех колес в широких диапазонах выбрать при помощи
ЭЦВМ «Минск-22» углы 0, обеспечивающие требуемые значения
максимального к. п. д. и энергоемкости ХМ1. Ниже приведена
блок-схема расчета характеристик на ЭЦВМ «Минск-22» при из-
менении углов 0 на входе в рабочие колеса и выходе из них
(рие. 92). Применение ЭЦВМ позволяет сократить время, необ-
ходимое для расчетов, провести сравнение и анализ большого
числа вариантов параметров лопастной системы.
Программа для ЭЦВМ «Минск-1», составленная во ВНИИ-
МеТмаше, позволяет решить прямую задачу, т. е. задачу рас-
чета лопастной системы вновь проектируемого гидротрансфор-
матора [5].
Краткий обзор существующих методик расчета. Существую-
щие методы расчета гидротрансформаторов отличаются в основ-
ном методикой определения гидравлических потерь в рабочей
полости. Гидравлические потери, возникающие в каналах' рабо-
чих колес, определяются двумя принципиально отличающимися
методами:
методом использования расчетных формул и зависимостей,
полученных при расчете трубопроводов [1, 10, 21];
методом теории решеток, основанным на использовании резуль-
татов продувки плоских пакетов профилей П, 5, 13].
В изложенном выше расчете гидротрансформатора гидравли-
ческие потери определены по первому методу, который в настоя-
щее время является наиболее распространенным. При использо-
вании этого метода возникают следующие трудности. Гидравли-
ческие потери могут быть определены как сумма потерь от мест-
ных сопротивлений и потерь по длине канала (см. гл. I, § 5),
причем коэффициенты местных сопротивлений и коэффициент Л,
определяются так же, как для трубопроводов. Однако слож-
ность процессов, происходящих в рабочей полости гидротран-
сформатора, кривизна каналов (в отличие от трубопроводов),
незначительные расстояния между отдельными сопротивления-
ми— все это вызывает неточность расчетов по формулам для
трубопроводов. С другой стороны, все потери, возникающие
в колесах, могут быть вычислены при помощи объединенного
коэффициента сопротивления данного колеса к (см. гл. III, §24);
Коэффициент сопротивления к определяется. по формуле, при-
веденной нас. 146, причем значениях должны быть определены
опытным путем. Вычисленный таким образом, коэффициент к
может быть использован только для расчета гидротрансформато-
ров тех типов, на основании испытания которых он дается, Ре-
комендации для вычисления коэффициента %, приведенные в § 5,
являются наиболее общими и могут быть использованы для пред-1
варительных. расчетов. В обоих случаях потери,-зависящие от
угла атаки, определяются отдельно, причем значения <рУд, полу-
ченные опытным путем, также могут быть использованы только..
1______________ ___________________1
Перевод в 2 с/с 1 ‘f- ai 12
I
1
fwj = ajbj 13
Печать начальных данных по кл. 1
2 I
1 4Я . = .^L Г' aj + bj 14
Перевод углов в рад 3
I
1
Ij по средней струйке 15
Печать начальных углов 4
I
FCP= z 16
SiTl₽n 5
1 I
Ctg ₽„ 6 4Ягср = 1& 17
I
z K_1 t sing 1
7 Zcp — S lj 18
I
F = 8 vr ср 0УСР 19
I
Печать по ключу 2 блоков 5, 6, 7, 8 9 I
Печать по ключу 2 блоков 16, 17, 18, 19 20
I
1
СП определения по средней струйке
10 Печать по ключу 4 блоков 10, 11, 12, 13, 14, 15 21
1
sin Ру; ctg Ру
11 ctg $n!Fmn 22
Рис. 92. Блок-схема расчета характеристик гидротрансформатора на ЭЦВМ «Минск-22»
Г.П — гпрттияль
[и —индекс колеса (Я, Т, Р); / — индекс промежуточного сечения на лопатке;
ная программа]
для определенных типов гидротрансформаторов. Наиболее часто
рекомендуется принимать сруд = 1 с достаточной точностью для
всех гидротрансформаторов 115]. Второй метод—метод теории
решеток предусматривает следующие виды гидравлических по-
терь: профильные и концевые. Остановимся более подробно на
этом методе расчета' потерь.
Профильные потери. При обтекании профиля потоком вязкой
жидкости на поверхности профиля возникает пограничный слой,
в котором скорость потока изменяется от 0 до w. В пограничном
слое происходит трение слоев жидкости. Возникающие при этом
потери и составляют большую часть профильных потерь. Если
число Рейнольдса потока возрастает, то толщина пограничного
слоя уменьшается, и шероховатость начинает влиять на потери
трения.
Толщина выходной кромки оказывает существенное влияние на
величину потерь, поэтому потери, связанные с конечной толщи-
ной выходной кромки, называют кромочными.
Если межлопаточный канал диффузорный, то может произойти
отрыв потока от стенок с образованием вихревой зоны. Это вызо-
вет потери при отрывном обтекании.
Коэффициент профильных потерь
^проф *5Тр 4“ ^зкром*
При отрывном обтекании
^проф = ^тр 4“ ^отр»
Существенно на величину £отр влияет величина падения дав-
ления вследствие диффузорности и место расположения точки
минимального давления pmin. Чем больше величина падения дав-
ления и чем ближе к концу профиля расположена точка pmin,
тем коэффициент £отр больше. Профильные потери зависят от
относительной толщины выходной кромки 6 = где х — хорда
профиля. Коэффициент £проф определяется при продувке пря-
мых или кольцевых решеток в аэродинамических трубах, как
отношение потерь полного давления в среднем сечении к скорост-
ному напору
* —
эпроф
Концевые потери связаны с кривизной межлопаточных кана-
лов и неравномерностью распределения давления поперек канала,
что вызывает дополнительное вихревое движение в пограничных
слоях от вогнутой поверхности по плоским стенкам к выпуклой
поверхности. Величина концевых потерь зависит от относитель-
ной высоты лопатки, угла поворота потока в решетке, конфузор-
ности канала, шага, угла выхода и числа Re.
152
Коэффициент |конц определяется при продувке плоских реше^
ток как разность между коэффициентами суммарных и профиль-
ных потерь.
Однако эти данные требуют поправок в случае их использо-
вания для расчета гидротрансформаторов, так как:
имеются данные только для прямых и круговых решеток про-
филей, а в гидротрансформаторах, как правило, лопатки двоя-
кой кривизны;
данные, приведенные в литературе о коэффициентах £сум,
£пРоФ, соответствуют безударному натеканию потока. При угле
атаки изменяется их величина, а значения углов атаки при рас-
чете, как правило, неизвестны;
имеющиеся характеристики получены для определенной сте-
пени турбулентности (Ео = 0,005-^0,15). Под степенью турбулент-
ности подразумевается отношение средней квадратичной пульса-
ционной скорости к средней скорости течения w. При изме-
нении степени турбулентности величина потерь изменяется, что
учитывается соответствующими поправками. Но эксперименталь-
ные данные о турбулентности потока в гидротрансформаторах
отсутствуют, и поправки не могут быть учтены.
Характеристики решеток, приведенные в литературе, полу-
чены для сжимаемых жидкостей (газов). Переход к практически
несжимаемым жидкостям (воде, маслу) связан с введением по-
правки на число Маха, равное отношению относительной ско-
рости потока на профиле к скорости звука. Установлено различ-
ными авторами, что коэффициенты потерь не зависят от числа
Маха М при М 0,3—0,4, и поэтому для гидротрансформаторов
поправку вводить не требуется.
Метод теории решеток, таким образом, применительно к ги-
дротрансформаторам имеет ряд неточностей и не нашел пока ши-
рокого применения вследствие громоздкости и сложности рас-
четов.
§ 31. РАСЧЕТ ПОЛЯ СКОРОСТЕЙ И ДАВЛЕНИЙ
В ГИДРОТРАНСФОРМАТОРЕ
Расчет и проектирование гидротрансформаторов ведется в на-
стоящее время по средней линии тока с применением одномерной
струйной теории Эйлера. Основное допущение этой теории, что
движение потока по любой струйке лопастного колеса аналогично
движению по средней струйке, является приближенным. В связи
с этим ставится задача теоретического определения поля скоро-
стей в гидротрансформаторе.
Поставленная задача может быть решена с учетом следующих
допущений [25]:
. число лопаток во всех рабочих колесах гидротрансформатора
бесконечно большое (это позволяет пренебречь неравномерностью
поля скоростей вдоль любой окружности с центром на оси и в пло-
153
скости, перпендикулярной к оси, с учетом этого допущения опре-
делено осредненное поле скоростей);
гидравлические потери поперек канала, т. е. в направлении
ортогонали h (см. рис. 93), не меняются;
линии (поверхности) тока в меридиональном сечении опреде-
ляются методом последовательных приближений.
Проводим ортогонали, нормальные к стенкам, и делим их
на участки с учетом уравнения неразрывности, принимая ст =
Рис. 93. Схема для расчета поля скоростей в гидротранс-
форматоре
= const поперек канала (определив действительное распреде-
ление ст, необходимо сделать уточнение положения линий тока
и повторить расчет).
Для решения задачи о расчете поля меридиональных скоро-
стей запишем условие отсутствия движения жидкости в направ-
лении ортогонали h. Для этого выделим элементарный объем жид-
кости, ограниченный смежными ортогоналями длиной dh и смеж-
ными линиями тока длиной ds. Размер в направлении, перпенди-
кулярном плоскости чертежа, обозначим dl. На выделенный эле-
мент действуют силы:
вследствие разности давлений по обе стороны элемента
dFp = — dh ds dl = — -g- dV,
p ah dh ’
где dV = dh ds dl;
знак «минус» в этой формуле обозначает, что при положитель-
ном градиенте давления направление силы совпадает с отрицатель-
ным направлением ортогонали h;
154
центробежные силы вследствие криволинейной траектории
движения
с2 с2
dF^^pdV-f-; dFam=pdV-^-,
гnt '
где г — расстояние от элемента dV до оси вращения;
гт — радиус кривизны линий тока в меридиональном сече-
нии.
Условие отсутствия движения в направлении h требует, чтобы
сумма проекций всех сил в этом направлении равнялась нулю,
т. е.
dFw + dFp — dFpm cos у = О,
где у — угол между направлением h и вертикальной осью ма-
шины (см. рис. 93).
С учетом указанных параметров получим дифференциальное
уравнение равновесия
2 9
* ^COST = 0,
rm Р dh г '
(100)
которое будет положено в основу расчета поля скоростей в рабо-
чих колесах.
Как указывалось выше, гидротрансформатор представляет
собой замкнутую систему лопастных колес, условия входа на ко-
торые определяются условиями выхода с предыдущего колеса.
Поле скоростей в гидротрансформаторе можно рассчитать при
помощи системы дифференциальных уравнений, число которых
будет соответствовать числу рабочих колес.
Выведем основные расчетные уравнения для одноступенчатого
трехколесного гидротрансформатора с заданными геометрическими
размерами.
Для сечения на выходе из насоса уравнение (100) имеет вид
с2 Ст Н2 __ С<и Н2 C0SVH2 а₽Н2 = 0. (101)
ГтН2 ГН2 Р ^ЛН2
Для сечения на выходе из турбины
с2 Ст Т2 CuT2COSYT2 1 _£₽Т2_ = 0. (101а)
Гт Т2 ГТ2 Р д/гТ2
Для сечения на выходе из реактора
с2 СтР2 с2 р2 cos уР2 1 дрР2 = 0. (Ю2)
ГтР2 ГР2 Р dhp2
Для определения величин воспользуемся уравнениями
энергий в соответствующих колесах.
155
Уравнение энергии в реакторе
^Р2 -^Т2 Ер пот»
С2
। СР2
где £Р2 = рР2 + Р —2----удельная энергия жидкости на выходе
из реактора;
2
^Т2
£Т2 = Рт2 + Р ~2-----удельная энергия жидкости на вы-
ходе из турбины;
Врпот—гидравлические потери энергии в ре-
акторе.
Уравнение энергии в турбине
£т2 = — HtT — Ет пот ,
г- I Н2
где ЕН2 = риг + Р —2-----удельная энергия жидкости
на выходе из насоса;
= Р (c«H2^ti — cwT2^T2) — теоретический напор тур-
бины;
Ет пот — гидравлические потери энер-
гии в турбине.
Уравнение энергии в насосе
£н2 = £р2 + #Ш — £нпот, * (ЮЗ)
где 77/н = Р (с«Н2^Н2 — С«Р2^Н1) — теоретический напор насоса;
£нпот—гидравлические потери в насосе.
Рассмотрим параметры выхода из насоса. В развернутом виде
уравнение (103) запишется так:
2 с2
РН2 + Р = Рр2 4" Р -------h Р (^H2WH2 £«P2UH1)-Ецпот .
Выразим с2 = с2п + с2и и продифференцируем это уравнение
по h:
1 дрнг । г дС/пНг I г дсин2 __ 1 дрр2 dhp2 ,
Р <^н2 тН2 д/1Н2 “Н2 ^н2 Р ^н2 <^Р2
। d£/nP2 dhp2 ] дсмр2 dhp2 । д (c«H2wH2)
"i"t/n?2 dhH2 dhP2 ’Г' C«P2 dhH2 dfiP2 Э/1Н2
d (cnp2^Hi) dhp2 пот /1 л
dh^2 dh^~~ dhH2 9
где ^£|in0T.. = 0 (см. второе допущение).
156
dpH2 dpp2
Подставим в уравнение (104) выражение для — и для
иПН2 иПР2
из уравнений (101) и (102). Получим уравнение, связывающее
параметры
стН2 ,
выхода из насоса:
cwH2cosYh2 I dcmH2 • r дсыНг ____________r d^H2
гн2 'nH2 д/гн2 wH2 dhh2 mH2 dhH2
___ дСуИ2 __ д/1р2 I CmP2 CwP2COSYp2
^2 d/iii2 \ rtnP2
ГР2
Г Эцн-.
с“рг dhP2
। дстр2 । дсир^
+С,П‘2 <9ЛР2 айр2 “H1 dhP2
Проводя аналогичные преобразования и учитывая, что иТ1 =
= т. е. —= i —'~2-^Н2/ получим дифференциаль-
d/7H2 d/lH2
ные уравнения, связывающие параметры выхода из турбины:
dhp2 I cmV2 CuV2cos YT2 . дстт2 । г dgnTa
d/iH2 \ fznT2 ГТ2 ' 77172 dhp2 "* wT2 dhT2
fT2
___„ дата ,, dc»T2 I
C“Ta dhT2 Ur2 dhT2 / /-mH2
I „ дсин2 • / ^WH2 । .. dc^H2 \ .
+ UH2 MH2 V “H2 ^'H2 + H2 <^H2 ) ’
СшН2 fnH2COSYH2 I д<тпН2
ГН2 + ШН2 ^П2
для реактора:
2
С/пР2
гтР2
cu P2c0SYp2 i dcmp2 । dcup2 _
rPi "г С,прг dhp2 dhP2
— d/*T2 I C^T2 __ СцТ2C0S Yt2 I dctnT2 дСцТг I
— dhp2 \ rtnT2 rT2 *“ dhT2 ‘ “T2 dhT2 ] *
Для решения полученной системы дифференциальных урав-
нений необходимо в этих уравнениях выразить скорость си в виде
Си = И — Ст ctg р.
Окружная скорость и = сог, где г — радиус данной линии
тока на входной или выходной кромке. Если известен радиус R
линии тока на поверхности тора, то г = R — h cos у (см. рис. 93)
и, следовательно,
д“_________________________r d ctg ft
dh — ю cos у, dh dh cm dfi ctgp gh .
Обозначим
dctgft _ n. cosy _
dh ' /? —Aeosy- ’
157
— 4-Bctgp —actgap =A;
rm
1-f-ctg2p =£>.
После подстановки и преобразований получим систему
уравнений
СтюАю + £дпН2 dhH2 ^Н2 4~ CmH2^UH2 С^?Н2аН2 ~
= _^нГ [С",Р2Лр2 + СтР2 ^S^Dp2~ C'nP2(WHCtgpP2COSTp2 —
«Ш^рг)] + Уйр2г" Pp2«hi;
C/nH2-^H2 4* СтН2~^~~ Dh2 4* 4~ 0 UH2<4g Рн2 4~
)• GnH2 {UH2 [^Н2 (1 + 0 + 2 Ctg Рн2ЯН2] + WH ctg Рн2 COS Ун2 (1 -01 4"
+ “Н2 [<°Н cos Ун2 (2i — 1) — ан2Ин2] =
= ' [С/пТ2^Т2 + С/пТ2 £>Т2 + C/nT22UT2 Ctg Рт2^Т2^ 5
С/пР2^Р2 C/nP2 ^Р2 = ffi2 Г^Т2^Т2 + GnT2 ~ч?Т2~ Dt2 +
U/IP2 С'Лрз L (/Лт2
+ CznT2 (ctg Ртг^т cos уТ2 — г/Т2ВТ2 + 2^тг ctg Рт2%2) —
^Т2 — 2uT2cot cos yT2J . (105)
Определение скоростей cm = f (h) проводится по уравнениям
(105) в следующей последовательности.
1. Выбираем начальные условия так, чтобы выполнялось
F
уравнение неразрывности Q = j cmdF. Считаем, что скорость
по средней линии тока равна среднерасходной скорости и опре-
Q п
деляем ее из выражения стср=-у-, где F — площадь проход-
ного сечения на выходе из соответствующего колеса.
2. Принимаем в первом приближении
dh^ hj2 ,
dhp2 hp2 '
dhy2 /гтз .
d/*H2 ^H2
dhp2 hp2
dhH2 ^H2
158
3. Подставляем
значения известных
неизвестные -ч-Г --;
где йТ2, Лр2, hH2 — длины ортогоналей в соответствующих се-
чениях.
в дифференциальные уравнения численные
величин и определяем из системы уравнений
dgmT2 . ^SnP2
^^Т2 ^^Р2
4. Определяем приращения \ст меридиональных скоростей
между средней линией тока и соседней:
д _ _ дСпг_ дЛ
Ctn ” dh '
где Д/г — расстояние по ортогонали между соседними линиями
тока.
5. Определяем значения сп1 на соседних линиях тока
Ст = С тер ~ Д^п-
После вычислений строим графики зависимости ст = f (Ji).
Зная ст в выходных сечениях, можно определить закон изменения
ст в любом сечении колеса. По рассчитанному закону ст = f (Ji)
можно определить зависимость си = f (Ji).
Из уравнения (100) путем интегрирования определим зависи-
мость р = f (Ji):
Р = J Р ~^dh + J Р -у-COS V dh + Ро.
. о о
где р0—учитывает избыточное давление, создаваемое подпиточ-
ным насосом.
При проектировании нового гидротрансформатора расчет за-
конов изменения ст = f (Ji) и си = f (h) должен способствовать
наиболее правильному выбору углов р на разных линиях тока,
т. е. таких углов р, чтобы обеспечивался безударный вход не
только по средней линии тока, но и по всей входной кромке ло-
патки.
§ 32. ВЛИЯНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ
ЛОПАСТНОЙ СИСТЕМЫ ГИДРОТРАНСФОРМАТОРА
НА ЕГО ТЕХНИКО-ЭКОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ
Как показали теоретические и экспериментальные исследо-
вания, наибольшее влияние на характеристики гидротрансфор-
матора оказывают выходные и входные углы, число лопаток в ра-
бочих колесах, конструкция лопаток рабочих колес. При изме-
нении названных геометрических параметров лопастной системы
изменяются такие важные показатели гидротрансформаторов,
как энергоемкость расчетное передаточное отношение г*,
к. п. д., прозрачность и коэффициент трансформации. В прак-
159
тике изготовления и эксплуатации гидротрансформаторов кон-
структору часто приходится изменять энергоемкость гидро-
трансформатора в определенных пределах, и при этом остальные
показатели его внешней характеристики (г*, т], /7 и 7<0) должны
отвечать определенным техническим требованиям, которые зави-
сят от условий применения гидротрансформатора в приводе.
Рассмотрим влияние перечисленных выше геометрических факто-
ров на параметры гидротрансформатора.
В качестве объекта изучения используем гидротрансформатор
с осевой турбиной типа У358011А, который серийно изготовляется
для привода строительных и дорожных машин. Рассмотрим тео-
ретическую характеристику насоса и турбины в координатах
(Н—Q). Запишем напор насоса, используя уравнение (93а),
Н Гм г- м О ( ГН2НН I ZP2 \1
'Лн — -г- <0нгшНН — Ч I ~р----TZR---Г ----T7~r-) •
S L \ ГН2 tg РМ2 Cp2tgpp2/J
Для наглядности изложения угол рГ2 отсчитан между на-
правлениями скоростей иН2 и Дор2, т. е. рассматривается угол
(180° — |3Р2) и представим полученное выражение как
= <106>
где Л, Сь С2 в первом приближении считаем постоянными.
Аналогично для напора турбины [см. уравнение (93а)] имеем
или
(,07)
где В, Dx, i также считаем постоянными.
Момент насоса, как известно, изменяется в зависимости от
расхода Q по параболическому закону, т. е.
(108)
где Ci и Ci — постоянные величины.
Сделаем допущение, что в рабочеи точке М1Н - 10ГДа
с учетом выражений (106) и (107) получим
откуда
А —В
Q = "dTTZSZTSEo’
tg РТ2 "Г tg РР2 РНг
Из этого уравнения видно, что с увеличением выходных углов
расход гидротрансформатора будет возрастать. Причем, при уве-
личении угла рН2 расход будет возрастать незначительно, так
как величина ——
₽Н2
мала по сравнению с двумя другими сла-
гаемыми знаменателя. Помня о том, что прямая напора Htii бу-
дет располагаться выше при увеличении угла 0Н2 [см. выражение
(106) и рис. 94, а], а также, что парабола Мн будет лежать выше
параболы Мн [см. выражение (108)], мы можем сделать вывод
о том, что при увеличении угла 0Н2 увеличение энергоемкости
и при
происходит в основном за счет возрастания напора насоса
Рис. 94. Теоретические напорные и^моментные характеристики гидро-
трансформатора наД2 — var
этом расход увеличивается незначительно. При возрастании угла
РР2 характеристика турбины не меняется [см. выражение (107)
и рис. 94, б], а характеристика насоса переместится из положе-
ния, соответствующего в положение Ящ. Рабочая точка пере-
местится из положения /’ в положение 2. При этом, в точке 2
значение расхода значительно больше, чем в точке 1. Таким об-
разом, при увеличении угла 0Р2 энергоемкость возрастает в ос-
новном за счет увеличения]расхода, а также в меньшей степени
за счет увеличения напора Я/н. Поэтому при изменении угла 0Р2
значительно изменяется энергоемкость гидротрансформатора.
Для сравнения влияния -углов и РР2 на энергоемкость до-
пустим, что при одинаковом их изменении прямая Н(н повернется
на один и тот же угол. Тогда при увеличении угла ₽На энергоем-
кость гидротрансформатора (кривая Мн) будет определяться
точкой 2 (рис. 94, а), расход в которой мало
в точке 1. При увеличении угла
форматора будет определяться точкой;.
торой больше, чем в точке 1. Поэтому
мы получаем более интенсивное изменение^таМИ^^М
при изменении угла Vcm. выражение (Д08) ь
11 С. П. Стесин '
' жшЯИ
угла рТ2 характеристика насоса не изменится [см. выражение
(106) и рис. 107, в], а напор турбины HtT уменьшится. Рабочая
точка из положения 1 переместится в положение 2. Расход также
значительно возрастает (как и при увеличении угла рР2), но
энергоемкость увеличивается менее интенсивно при изменении
угла рТ2 в тех же пределах, что и углов рН2 и ₽р2 [см. выражение
(108)1.
Однако указанные соображения относительно угла рТ2 спра-
ведливы в основном для гидротрансформаторов, значения углов
РГ2 которых соизмеримы со значениями углов рН2 и РР2. Это
Рис. 95. Изменение параметров характеристик гидротрансформатора при
Р2= var
можно отнести к гидротрансформаторам с центростремительной
турбиной. Если же РТ2 < Рнг и Р₽2 (как это бывает у гидротранс-
форматоров с осевой и центробежной турбинами), то расход уве-
личивается более интенсивно, так как существенно уменьшается
напор Нт (см. рис. 94, в).
На рис. 95, а, б, в показано, как изменяются внутренние и
внешние параметры гидротрансформатора типа У358011А при
изменении углов рН2, рР2 и рТ2. Как видно из графиков (рис. 95),
при изменнии выходных углов одновременно с энергоемкостью
изменяются такие параметры гидротрансформатора, как к. п* д. т]*
и передаточное отношение i*.
При изменении углов выхода из рабочих колес потери на
удар при входе в лопастные системы в оптимальном режиме
работы остаются практически постоянными, а изменяются потери,
пропорциональные квадрату расхода. Поэтому для случая, когда
162
увеличивается угол рН2 (рис. 95, а), расход возрастает медленно,
а коэффициент сопротивления колес к убывает более интенсивно.
В связи с этим произведение kQ2 убывает, а к. п. д. возрастает.
При увеличении угла рР2 (рис. 95, б) расход увеличивается более
интенсивно по сравнению с уменьшением коэффициента сопроти-
вления колес, и произведение kQ2 увеличивается, поэтому к. п. д.
уменьшается.
При изменении угла выхода из турбины рТ2 (рис. 95, в) для '
малых углов рТ2 = 8ч-10° коэффициент сопротивления колес
резко падает, что приводит к увеличению к. п. д. при минималь-
ном значении «Q2, но с увеличением угла рТ2 произведение kQ2
возрастает и к. п. д. уменьшается.
Из рис. 95 видно также, что с увеличением углов 0Н2 и рР2
передаточное отношение i* увеличивается, а при увеличении угла
Ртг — оно уменьшается. Причем более интенсивное увеличение i*
происходит при увеличении угла Рнг> так как при этом увеличи-
вается скорость сын2, что при сохранении прежней окружной
скорости турбины мТ1 приводит к удару в рабочую сторону ло-
паток турбины. Потери на входе в турбину возрастают, и поэтому
передаточное отношение i* должно сдвинуться в сторону боль-
ших i по характеристике гидротрансформатора. При возрастании
угла рР2 вследствие значительного возрастания расхода на входе
в турбину будет иметь место удар в тыльную сторону лопатки.
Для- уменьшения потерь i* должно было бы уменьшиться, но на
входе в реактор происходит удар в вогнутую сторону лопатки,
и для уменьшения этих потерь I* должно было бы возрасти.
Поэтому i* при увеличении рР2 незначительно возрастает. При
увеличении pT2i* уменьшается, так как минимум потерь, пропор-
циональных Q2, лежит обычно при больших i*.
На рис. 96 показана номограмма изменения оптимальных пара-
метров внешней характеристики гидротрансформатора У358О11А
при изменении углов Рнг'-’Ррг. а также при 0Т2 = const.
На номограмме в координатах 0нг и рР2 нанесены кривые Хд?,
i*, г]* = const. Известная совокупность указанных параметров
позволяет для заданного двигателя с достаточной точностью вы-
брать гидротрансформатор с требуемой характеристикой. При-
чем для каждого двигателя (рис. 96) может быть только одно оп-
тимальное решение.
Из рис. 95 и 96 видно, что наиболее целесообразно (с точки
зрения к. п. д.) увеличивать энергоемкость гидротрансформатора
за счет увеличения угла рН2, а уменьшать — за счет уменьше-
ния углов рР2 и рТ2. Но с увеличением угла рР2 энергоемкость
увеличивается быстрее, чем при увеличении угла Риг! в то же
время передаточное отношение i* увеличивается интенсивнее
с увеличением угла Рнг, что приводит к увеличению к. п. д. при i,
близких к 1, и к уменьшению к. п. д. — при i, близких к 0,5,
что отрицательно сказывается на работе гидротрансформатора
в приводе машины. В связи с этим целесообразно, оставляя угол
11* 163
выхода из турбины рТ2 постоянным и равным 16—25° (большие
значения угла рТ2 рекомендуются для центростремительной тур-
бины), изменять энергоемкость гидротрансформатора совместным
изменением углов рН2 и 0Р2. При этом угол выхода из насоса
Рис. 96. Номограмма изменения параметров гидротранс-
форматора при р2 = var:
------ изменение к. п. д.;------изменение коэффициента
мощности; изменение оптимального передаточного отно-
шения
целесообразно выбирать в пределах 40—75°, а угол выхода из
реактора — в пределах 30—60°. При этом энергоемкость гидро-
трансформаторов может быть изменена в «^1,8 раза без существен-
ных изменении параметров его
внешней характеристики (i*,
Л*, Ко и 77).
Однако известно, что при
Таблица 5
Параметры гидротрансформатора
У358011А
Значения Зр2 в градусах Значения л* при
87° 79°
44 0,85 0,86
50 0,83 0,846
60 0,80 0,82
изменении углов выхода из
колес желательно изменять так-
же соответствующие углы вхо-
да в последующее колесо для
уменьшения потерь, связанных
с углом атаки на данном ре-
жиме'работы. Теоретические и
экспериментальные исследова-
ния [23] показали, что в пер-
вую очередь требуется согласовать углы выхода из реактора и
входа в насос Phi- Это сделать возможно, так как реактор непо-
движен, а для большинства гидротрансформаторов = const.
Экспериментальные исследования позволили для гидротрансфор-
матора типа У358011А рекомендовать следующее соотношение:
£₽Й = 12О’-£ГРЙ.
164
В табл. 5 приведены экспериментальные данные об изменении
максимального к. п. д. гидротрансформатора типа У358011А при
различных углах pHi-
Влияние и выбор числа лопаток рабочих колес в гидротрансфор-
маторах. Рассмотрим влияние числа лопаток рабочих колес, их
шага, формы меридионального сечения и расчетных радиусов на
параметры гидротрансформаторов. В качестве объекта исследо-
ваний выберем гидротрансформаторы с осевой и центростреми-
тельной турбинами.
Меридиональная составляющая абсолютной скорости в гидро-
трансформаторе должна оставаться постоянной при переходе ра-
бочей жидкости из одного рабочего колеса в другое. Для этого
необходимо, чтобы коэффициент стеснения потока
v _ I - = 1 б‘
1 ndi sin р(- ti sin Р/
имел при выходе из предыдущего колеса и при входе в последующее
одно и то же значение. Руководствуясь значением коэффициента х£
для размещения рабочих колес в гидротрансформаторах (см.
рис. 76, б), можно записать:
_ _ _ ^T2rfpn sin Ррп .
PI T ®PI1^T2 S'n Pj2
_ _ _ вр12^рЦ1 sin PpHl .
Zpji zPI <. . о ,
°PHlaPl2 S1“ "PI2
- _ _ врП2^н1 sln Phi
ZH zpii r д sin В
°Н1аРП2 Sln PpiI2
и для гидротрансформатора, показанного на рис. 76, а,
_ _ - ^Н2^Т1 5in Pti .
Н ®Т1^Н2 sin Рн2
~ _ - ^T2rfPl Si° Ppi .
Р Т ®рАг sin Ртг
_ _ _ sin Phi
Н" Р W₽2SinPP2 ’
(НО)
где z — число лопаток;
dx и d2 — диаметры входной и выходной кромок;
Р — угол наклона кромки лопатки;
i — любой возможный индекс рабочего колеса.
165
Использовать системы уравнений (109) и (ПО) полностью не-
возможно, так как решения должны быть дискретны (z — целые
числа), а значения z должны лежать в определенных пределах.
Для каждого рабочего колеса, особенно для насоса, увеличе-
ние zH при заданном размере канала и толщине лопаток умень-
шает площадь проходного сечения и гидравлический радиус
(увеличивает потери), но до определенного предела увеличивает
энергоемкость, в том числе за счет увеличения значения коэффи-
циента отклонения потока рн.
Если число лопаток zH будет больше допустимого, произойдет
заметное падение к. п. д. Расчет числа лопаток в связи с этим
начинают с выбора гн, а остальные числа лопаток определяют
при помощи первых уравнений систем (109) и (ПО). При таком
способе расчета трудно добиться совпадения значений хТ2 =
= хР11 для гидротрансформаторов, показанных на рис. 76, б,
или хР2 = хН1 для гидротрансформаторов, показанных на
рис. 76, а. Это заставляет несколько изменить ширину выходной
кромки лопасти реактора или ширину входной кромки лопасти
насоса.
Значения zH, zT, zPI и zPIi, принимаемые для гидротрансфор-
маторов (см. рис. 76, а, б), приведены в табл. 6. Для гидротранс-
форматоров с низкими преобразующими свойствами при коэф-
фициенте трансформации на стоповом режиме Ко < 3 приме-
нение системы уравнений (109) дает zH > zT >zpl > zPII. Это
вынуждает выбирать большие значения zH, чтобы число лопаток
реактора второй ступени не оказывалось чрезмерно малым.
При Ко >3, когда zH < zT < zPI < zPI1, значение zH вы-
бирается меньшим. При больших значениях Ко коэффициенты
хН2 и хТ2 меньше, а поэтому число лопаток zH и гт уменьшается.
Когда хР12 и хРП2 увеличиваются, число лопаток гР1 и zPI1
также возрастает. Кроме этого при прочих равных условиях боль-
шие значения г выбирают при больших d и меньших 6, имея в виду,
что в этом случае коэффициенты х также будут больше.
С увеличением числа лопаток zH энергоемкость гидротранс-
форматора возрастает главным образом за счет повышения на-
пора На, создаваемого насосом в рабочей полости, поскольку
увеличение zH до определенных пределов практически не меняет
расход Q = const, а влияние конечного числа лопаток существенно
только для этого колеса. Аналитическую зависимость между zH
и |хн можно получить, обращаясь к известному коэффициенту р
в виде дробно-л иней ной подстановки:
и — 1 — Н‘н — _Zh л 1П
Нн- 1+р - нта> - гн + А- (111>
По К. Пфлейдереру [10]
_ 0,15(1 + sin РН2)_ 1,2(1 + sin РН2) (112)
Р~ szH - zH(l—а2) ’
166
Нескольку
_ 4i2 Г < / dHl \
8 L HhJ J
Подставляя уравнение (112) в уравнение (111), получим
Л=1.21+^. (112а)
Пользуясь уравнением Эйлера для записи напоров H(ii и HiT,
получим уравнение гидравлического к. п. д. гидротрансформа-
тора в виде
^/т
П1Н
“Н2Ин42 - «»н/т2 + 2Q ( + FT2 tg2pT2 )
и и d2 -20 ( Ин*Н2 -4- - dp2
ИниН2аН2 F ter В F ter В
\ГН2 РН2 ГР2 РР2 /
Таблица 6
Параметры гидротрансформаторов
Участки меридионального сечения рабочей полости Литые рабочие колеса 6- =0,002 -5- 0,003 м Лопасти, штампованные из листовой стали, = 0,0008-5-0,0012 м
Zi 1 2‘- 1
Насос: входной участок 14—25 0,86—0,92 25—38 0,87—0,94
выходной участок Турбина: входной участок 15—25 0,93—0,97 0,93—0,96 23—25 0,96-0,98
выходной участок Реактор первой ступени: входной участок 14—37 0,81—0,87 0,81—0,87 0,84—0,90
выходной участок Реактор второй ступени: входной участок 13—31 0,83—0,88 0,8—0,88
выходной участок 0,81—0,87
Считая, что при изменении zH меняются только FH2 и Ин,
можно получить зависимость т)г = f (zH). Зависимость площади
проходного сечения от числа лопаток zH можно получить подста-
новкой выражения для х в соотношение
FH2 — Л^Н2^Н2ХН2 = & — CzH, (И4)
где
В = «^^Н2^Н2>
С = ^Н2^Н2
Sin ₽Н2 ’
167
Обозначив
D — Z«H2^H2»
Е = Z2Wh2^T2
______Ф*Т8 . р _ .
2^Т2 ^Т2 ’ 1£ ?Н2 *
К = ~ Uh2^H2> Е
Q*P2
2f Р2 tg Pps
й подставив уравнения (111), (112) и (114) в уравнение (113),
окончательно получим:
mzL + nz„ 4- е
Т)г =---н ^ _ , (115)
/7iiZH + niZH + ех
где
т = ЕС — DC; т1 = LC — КС;
п = DB — ЕВ + АСВ — F;
пг = КВ —LB — LAC — F;
е — EAB; ех — LAB.
Уравнение (115) позволяет определить влияние zH на т]г.
Приравняв производную от т]г по zH нулю, получим оптимальное
число лопаток
(П6)
где а — тпг — т^п; b = т^е — те^ с = пхе — пех.
Для гидротрансформатора типа У358011А (см. рис. 76, а)
параметры уравнения (116): а = 3-10~6; 5 = 1,6-Ю"4; с —
= —3,3-10-®.
На рис. 97 показаны результаты теоретических и эксперимен-
тальных исследований (пунктирные линии) о влиянии zH на Л*»
Г и для гидротрансформатора У358011А. Из рис. 97 следует,
что при увеличении zH с 13 до 20 при 0нг = 50° энергоемкость
возросла на 6%, a i* — всего на 1,5%. Проведенные исследова-
ния подтвердили рекомендуемое для центробежных насосов зна-
чение [22]
несмотря на то, что угол ₽Н2 для гидротрансформаторов значи-
тельно больше. Экспериментальными исследованиями для этого же
гидротрансформатора было установлено, что при zT > 24 к. п. д.
гидротрансформатора уменьшается. При zp < 12 прозрачность
характеристики увеличивается примерно на 6% для каждой уда-
168
ленной лопатки, а при гр > 12 уменьшаются как прозрачность,
так и к. п. д. Для получения более прозрачной характеристики
при высоком к. п. д. необходимо изменять расположение рабочих
колес в меридиональном сечении.
Это не имеет, однако, особого зна-
чения для гидротрансформаторов
с непрозрачной характеристи-
кой, которые применяются на
экскаваторах, кранах и других
машинах со сравнительно кратко-
временным циклом работы, по-
скольку в этом случае инерцион-
ные свойства двигателей не могут
увеличить период цикла. При ра-
счете переходных процессов ги-
дротрансформатора с характери-
стикой, обладающей определенной
долей прозрачности, нужно обра-
щаться к уравнению Эйлера.
Исследованиями установлено,
что число лопаток в гидротранс-
форматорах целесообразно зада-
вать величиной «густоты» гидро-
динамической решетки рабочего
колеса
t _
Im lmz ’
Рис. 97. Влияние на характе-
ристики гидротрансформатора:
------ теоретические зависимости;
------экспериментальные за-
висимости
где 1т — длина средней линии лопатки в меридиональном сечении.
Для насосов центробежного типа можно принимать
-^- = -^- = 0,4н-0,6,
mH 1тНгН
причем меньшее чениям Риг- значение /нг^тн соответствует большим зна-
Для турбины можно принимать t rrn -H_=--^L~0,43, ltnT l'm'TzT
а для реактора -Г1-=-7^7--°’55- W SnP Р
§ 33. КОМПЛЕКСНЫЕ ГИДРОТРАНСФОРМАТОРЫ
Гидротрансформатор имеет максимальное значение к. п. д.
только на одном режиме. Если уменьшение к. п. д. в зоне малой
частоты вращения турбины можно допустить, так как улучшаются
169
тяговые качества машины, то уменьшение к. п. д. с увеличением
частоты вращения турбины является неоправданным, потому что
условия работы машины будут хорошими благодаря снижению
сопротивления на ведомой части. Исключить эту зону с низкими
значениями к. п. д. можно, например, за счет блокирования тур-
бины с насосом.
Рис. 98. Комплексный гидротрансформатор:
а — сравнение характеристик гидротрансформатора и гидромуфты; б — идеальная внеш-
няя характеристика комплексного гидротрансформатора; в — реальная характеристика
комплексного гидротрансформатора; г — характеристика комплексного гидротрансфор-
матора с двумя реакторами: 1 — момент насоса; 2 — момент турбины при ripj = Прц =
= 0; 3 — момент турбины при npj =# 0; Прц = 0
Гидротрансформаторы, у которых осуществляется автомати-
ческий переход с режима гидротрансформатора на режим гидро-
муфты и наоборот, в зависимости от условий работы называются
комплексными.
Для гидротрансформатора сумма моментов всех колес должна
быть равна нулю: 7ИН + Мт + Мр = 0, поэтому в точке А
(рис. 98, а) момент на реакторе равен нулю. Слева от точки А
момент Л4Р будет положительным, справа — отрицательным.
Если реактору конструктивно дать возможность свободно вра-
щаться и предположить, что момент сопротивления при его вра-
щении равен нулю, то гидротрансформатор будет работать как
гидромуфта. При этом, слева от точки А реактор будет вращаться
в направлении, противоположном направлению вращения тур-
170
бины й насоса, а справа от точки А — в том Же направлении,
что турбина и насос. Слева от точки А к. п. д. гидромуфты меньше,
чем к. п. д. гидротрансформатора (рис. 98), а момент на насосе
будет равен моменту на турбине, что может вызвать перегрузку
двигателя. Следовательно, желательно, чтобы в этих режимах
гидротрансформатор работал на режиме гидротрансформатора
(т. е. когда момент насоса меньше момента турбины), а реактор
должен быть жестко закреплен.
Справа от точки А к. п. д. гидромуфты больше к. п. д. гидро-
трансформатора, момент на турбине меньше, чем момент на насосе
и, таким образом, освобождение реактора и обеспечение свободного
вращения является желательным. При этом двигатель не перегру-
жается, так как момент мал, и в то же время увеличивается к. п. д.
Рис. 99. Конструктивная схема комплексного гидротрансформатора:
а — с одним реактором; б — с двумя реакторами: / — внутренняя обойма; 2 —
наружная обойма; 3 — ролик; 4 — пружина; 5 — реактор
системы. Характеристика комплексного гидротрансформатора
имеет вид, показанный на рис. 98, б (сплошные линии). Пунктир-
ные линии характеризуют работу гидротрансформатора и гидро-
муфты.
Представленная на рис. 98, б характеристика является идеаль-
ной, так как она получена в предположении, что момент сопротив-
ления при вращении реактора равен нулю. В реальных условиях
имеют место потери при вращении реактора, и действительная
характеристика комплексного гидротрансформатора имеет вид,
показанный на рис. 98, в. Момент сопротивления при вращении
реактора определяется в зависимости от режима работы и на-
ходится в заштрихованной области. Вследствие этого к. п. д.
комплексного гидротрансформатора будет несколько меньше
к. п. д. гидромуфты, и при Мт = 0 он будет тоже равен нулю.
Для обеспечения автоматического заклинивания реактора и
его освобождения применяются различные конструкции муфт
свободного хода, одна из которых вместе со схемой комплексного
трехколесного гидротрансформатора представлена на рис. 99, а.
Неподвижная, жестко закрепленная на полом валу реактора,
внутренняя обойма 1 охватывается наружной обоймой 2, которая
жестко связана с реактором 5. Наружная обойма имеет пазы
171
с наклонными плоскостями; между обоймой 1 и наклонными пло-
скостями обоймы 2 установлены ролики 3, которые поджимаются
пружинами 4.
При наличии на реакторе положительного момента 4-МР
реактор с обоймой 2 стремится вращаться слева направо, и на-
клонные плоскости обоймы находят на ролики. Так как угол
наклона плоскости меньше угла трения, то происходит заклини-
вание, и наружная обойма с реактором останавливается. При
этом передача работает на режиме гидротрансформатора.
При наличии на реакторе отрицательного момента —Мр
реактор с наружной обоймой вращается справа налево. Этому
ничто не препятствует, так как наклонные плоскости наружной
обоймы стремятся отойти от роликов, и реактор может свободно
вместе с обоймой вращаться. При этом передача работает на ре-
жиме гидромуфты.
Требования, которые предъявляются к гидропередаче и транс-
миссии в целом, иногда не удовлетворяются из-за значительного
снижения к. п. д. на участке от оптимального режима работы
гидротрансформатора с максимальным к. п. д. до перехода на
режим гидромуфты (рис. 98, б). Для устранения этого провала
применяют комплексный гидротрансформатор с разрезным ре-
актором, каждая из частей которого поставлена на свою муфту
свободного хода (рис. 99, б).
Для более наглядного представления о работе комплексного
гидротрансформатора с одним и двумя реакторами рассмотрим
треугольники скоростей на входных и выходных кромках.
Лопатка неразрезного реактора показана на рис. 100, а. Для
простоты полагаем, что расход не зависит от режима работы и
оптимальный режим совпадает с безударным входом в реактор.
При уменьшении передаточного отношения i жидкость подходит
к реактору с положительным углом атаки. При этом скорость си
будет иметь, как правило, отрицательный знак. При увеличении i
жидкость подходит к реактору с отрицательным углом атаки,
при этом отрицательная скорость си уменьшается, принимает
положительное значение и растет с увеличением i. Учитывая,
что момент на реакторе
МР = Qp (сиР2гР2 cuP1rР1),
можно определить, что при сиР2гР2 — сиР1гР1 — 0 момент равен
нулю и при сцР1гР2 — сиР1гР1 <0 он будет отрицательным.
Следовательно, начиная с режима работы i — iA, на котором
С«Р2ГР2 — cupirpi — 0, с увеличением передаточного отношения
реактор будет вращаться.
Последовательность расположения лопаток разрезного ре-
актора и треугольники скоростей для входа и выхода показаны
на рис. 100, б. Когда на оба реактора действует положительный
момент, они неподвижны, и гидротрансформатор работает как бы
с одним реактором обычного размера (рис. 100,6). Выходной угол
172
первого реактора Ppi2 = 90й или близок к нему И спР2 0.
Если угол наклона потока на входе равен 90°, то момент на первом
реакторе равен нулю, а при увеличении угла наклона потока мо-
мент становится отрицательным, и первый реактор начинает вра-
щаться. При этом он уже не участвует в преобразовании момента,
и гидротрансформатор работает с новой лопастной системой, вклю-
чающей второй реактор. В этом случае суммарные ударные по-
тери на режимах с большими i уменьшаются и к. п. д. возрастает.
Для увеличения к. п. д. гидротрансформатора наклон ло-
патки второго реактора на входе делается несколько большим,
чем 90°. При дальнейшем изменении режима работы в сторону
Рис. 100. Схема обтекания лопаток реактора:
а — неразрезного; б — разрезного
увеличения i наступает такое состояние, когда cwPll2rpIl2 =*
= ^рпГрц, и момент на втором реакторе равен нулю. Затем
он станет отрицательным, и второй реактор начнет также вра-
щаться, а гидротрансформатор будет работать как гидромуфта.
Характеристика четырехколесной комплексной передачи по-
казана на рис. 98, г. Она как бы составлена из характеристик двух
гидротрансформаторов и одной гидромуфты, причем переключе-
ние с одного режима на другой происходит автоматически. На
участке О—А мы имеем гидротрансформатор с очень искривлен-
ным реактором. На участке А—Б исключается из работы первый
реактор, и мы имеем гидротрансформатор с малоискривленным
реактором. На участке Б—1 из работы исключается второй ре-
актор, и мы имеем гидромуфту.
Рассмотрим некоторые особенности расчета комплексного ги-
дротрансформатора по сравнению с расчетом обычного гидротранс-
форматора. При расчете обычного гидротрансформатора все пара-
метры, определяющие его размеры, берутся из условия получе-
ния максимального к. п. д. и заданного коэффициента трансфор-
мации для расчетной точки. Так как пл = const, рабочая точка
173
определяется частотой вращения /г2. Это достигается как правиль-
ным выбором входных углов лопаток, так и профилированием
лопаток, создающим благоприятные условия для формирования
потока на данных режимах. Всякое отклонение от Z* влечет за
собой изменение поля скоростей, появление потерь при входе на
лопатки и снижение к. п. д. Расчет гидромуфты ведут для ре-
жима максимального к. п. д. При этом /*м близко к единице.
Отсюда ясно, что при расчете комплексной передачи существуют
противоречия, вызванные принципом действия передачи, имею-
щей два режима работы. Например, входные углы обычно вы-
бирают так, чтобы обеспечить в рабочей точке безударный вход
потока на лопатки. Выполнить это в комплексном гидротрансфор-
маторе нельзя, так как входные углы лопаток, выбранные для
рабочей точки гидротрансформатора, не будут удовлетворять
аналогичным условиям работы гидромуфты, потому что в первом
случае реактор является неподвижным элементом, во втором —
он вращается, а кроме того, на режиме гидромуфты возрастает
окружная скорость турбины. На характеристику гидротрансфор-
матора наибольшее влияние оказывают выходные углы лопаток
рабочих колес (на К, П). В то же время более высокий к. п. д.
можно получить на режиме гидромуфты. Поэтому при расчете
комплексной передачи следует задаваться выходными углами
применительно к рабочей точке гидротрансформатора, а вход-
ными — применительно к рабочей точке гидромуфты. Из выше-
изложенного следует, что комплексная передача при каждом ре-
жиме будет работать с меньшим к. п. д., чем отдельный гидро-
трансформатор или отдельная гидромуфта. При переходе ком-
плексного гидротрансформатора на рфким гидромуфты Мн =
= 7ИТ, момент реактора
Мр = Qp (сР2Гр2 cos аР2 — cT2rT2 cos аТ2) = 0.
Отсюда следует, что
£p2rР2 COS аР2 ~ ^T2fT2 COS аТ2-
Тогда выражение для момента насоса в точке перехода на
режим гидромуфты при условии, что гР2 гНь примет вид
Л1Н = Qp (cH2rH2 cos аН2 — сР2гН1 cos аР2)
ИЛИ
Мн = Qp (<WH2 cos аН2 — cT2rT2 cos аТ2).
Проследим, как при этих условиях будет работать насос ком-
плексной передачи. Как известно, с уменьшением скольжения
гидромуфты расход падает. С другой стороны, увеличение ско-
рости в реакторе приводит к возрастанию величины сиР2 так, что
выражение rH1czzP2 после перехода передачи на режим гидромуфты
и все дальнейшее время будет больше выражения rT2cwT2, соот-
ветствующего моменту перехода. Эти два фактора ведут к пони-
174
жению момента насоса, так как возможное незначительное увели-
чение скорости спН2 недостаточно для нейтрализации их действия.
Следовательно, в этих условиях передача может работать как
гидромуфта только при понижении передаваемого момента, т. е.
при неполном использовании подводимой мощности. Это пониже-
ние мощности происходит при режиме наибольшего к. п. д., что
во многих случаях нежелательно.
Итак, работа комплексного гидротрансформатора на режиме
гидромуфты, начиная с точки перехода, происходит при неизбеж-
ном понижении момента насоса. Этого можно избежать увеличе-
нием скорости cWH2- Незначительное увеличение скорости епН2
при углах рН2 < 90° происходит за счет уменьшения расхода, т. е.
скорости стН. Однако более быстрое увеличение г//Н2 происходит
при увеличении частоты вращения пх. Отсюда следует, что по-
нижение момента насоса будет незначительным, если с переходом
на режим гидромуфты возрастет частота вращения. Исходя из
вышеизложенного, рекомендуют расчет комплексной передачи
при работе ее на режиме гидротрансформатора производить при
несколько пониженной (на ^20%) частоте вращения насоса [5].
§ 34. РЕГУЛИРУЕМЫЕ ГИДРОТРАНСФОРМАТОРЫ
Для гидротрансформаторов единственным параметром, опре-
деляющим частоту вращения ведомого вала при постоянной ча-
стоте вращения ведущего вала, является нагрузка на ведомом
валу. По мере увеличения нагрузки частота вращения ведомого
вала уменьшается вплоть до полной остановки. В некоторых
случаях возникает необходимость изменения частоты вращения
ведомого вала при неизменной его нагрузке и постоянной частоте
вращения ведущего вала. Так бывает, например, при применении
гидротрансформатора с электродвигателем переменного тока или
при групповом приводе от дизеля, когда отдельные ведомые валы,
приводимые в движение через гидротрансформаторы, требуют
независимого регулирования скорости вращения.
Изменение выходной мощности гидротрансформатора может со-
вершаться следующими способами: изменением частоты вращения
вала двигателя, изменением степени заполнения рабочей полости
гидротрансформатора, изменением формы проточной части гидро-
трансформатора, комбинацией первого способа с другими двумя.
Первый способ имеет наибольшее значение для транспортных
средств (автомобили, тепловозы), применительно к которым такое
регулирование хорошо изучено. Известно, что при таком регули-
ровании экономичность передачи (ее к. п. д.) оказывается тем
выше, чем ближе закон изменения нагрузки М2 при изменении п2
к квадратичной параболе. В случае, если 2И2 = kill, то теорети-
чески во всем диапазоне регулирования к. п. д. передачи изме-
няется мало. Наблюдающееся изменение к. п. д. передачи при
таком регулировании и названном выше характере зависимости
175
М2 = f (п2) объясняют снижением числа Re потока в рабочей
полости передачи.
Однако такой способ регулирования во многих случаях имеет
недостаточный диапазон регулирования. Так, для дизелей строи-
тельных и дорожных машин обычно ПДв шах^дв min =24-3.
Кроме того, этот способ не пригоден для тех случаев, когда опре-
деленное изменение выходных характеристик необходимо обеспе-
чить при N2 = const. Регулирование мощности N2 за счет изме-
нения заполнения рабочей полости гидротрансформатора сопро-
вождается, как правило, уменьшением его к. п. д. Во ВНИИ-
200 б О О 600
пг об/пин
Рис. 101. Характеристики гидротрансформаторов при объемном регу-
лировании:
а — изменением наполнения; б — дроссельной заслонкой; 1—4 — кривые,
соответствующие различным положениям регулирующего органа
Метмаше, ВНИИСтройдормаше и других организациях были
исследованы экспериментально гидротрансформаторы, в ко-
торых регулирование мощности N2 осуществлялось за счет из-
менения количества жидкости в рабочей полости. При этом было
установлено, что любой режим работы тем менее экономичен,
чем больше момент нагрузки в этом режиме отличается от мо-
мента на турбине при полном заполнении рабочей полости.
Характеристики передачи при таком регулировании имеют
такой же вид, как и в случае регулирования передачи изменением
частоты вращения вала двигателя. На рис. 101 приведены харак-
теристики регулируемых гидротрансформаторов при помощи из-
менения наполнения и при помощи дроссельной заслонки. Же-
сткость статических выходных характеристик передачи при этом
остается для всех величин заполнения примерно одинаковой.
176
Это обеспечивает возможность устойчивого регулирования по
частоте вращения при постоянном моменте в диапазоне изменения
частоты вращения а — 5н- 6, где а = -/?-2П1а~. Регулирование на-
^2 min
полнением обладает из всех способов наименьшим быстродей-
ствием и наихудшими следящими свойствами, поэтому оно мало
применяется даже в тех случаях, когда можно было бы пренебречь
уменьшением к. п. д. Подобный способ регулирования можно
применять, например, в судовых установках с дизелями, где на
передачу, как правило, возлагается задача включения и выклю-
чения.
Регулирование изменением формы проточной части может осу-
ществляться при помощи различных шиберных устройств, пере-
гораживающих поток на выходе из насоса, или за счет поворота
лопаток одной или нескольких решеток рабочих колес гидро-
трансформатора. Регулирование гидротрансформаторов при по-
мощи шиберных устройств по своим характеристикам (моментным
и к. п. д.) напоминает регулирование изменением заполнения
рабочей полости передачи. По сравнению с этим способом регули-
рования шиберное регулирование отличается значительно более
высокой маневренностью. Однако при таком способе регулирова-
ния отключить двигатель от приводимой машины не удается.
Наиболее экономичным способом регулирования, особенно
если речь идет о стационарных машинах, т. е. машинах, работаю-
щих с нерегулируемыми по частоте вращения вала двигателями,
является регулирование поворотом лопаток рабочих колес пере-
дачи. Этот способ был предложен применительно к поворотно-
лопастным гидравлическим турбинам. По сравнению с приводами
постоянного тока эти приводы не только более дешевы, но, что
самое главное, требуют меньше места, так как имеют вспомога-
тельное оборудование небольших габаритных размеров и могут
изготовляться любой мощности при любой частоте вращения.
Так, например, если осуществление привода постоянного тока мощ-
ностью 5000 квт при частоте вращения 1500 об/мин является про-
блемой, то привод, состоящий из синхронного двигателя и
регулируемого гидротрансформатора большей мощности, может
быть сравнительно просто осуществлен.
На рис. 102 показаны некоторые схемы поворота лопаток ги-
дротрансформаторов. Наиболее часто в регулируемых гидротранс-
форматорах осуществляется поворот лопаток реактора вокруг
поперечной оси (рис. 102, б) или лопаток насоса вокруг попереч-
ной (рис. 102, а) и продольной (рис. 102, в) осей.
На рис. 103 приведены характеристики регулируемых гидро-
трансформаторов с поворотными вокруг поперечных осей лопат-
ками насоса и реактора. Для получения высоких параметров Ко,
т]* лопатки турбины должны иметь при 0Т2 < 45° максимальную
изогнутость, т. е. разницу между углами входа и выхода. По-
этому поворот лопаток турбины нерационален и затруднителен.
12 С. П. Стесин 177
Кроме того, изменение углов лопаток турбины не влияет на изме-
нение прозрачности. Лопатки реактора должны иметь максималь-
ную изогнутость для получения предельно высоких значений про-
зрачности и коэффициента Ко, и малую изогнутость — для полу-
оси; в — поворот лопаток насоса
вокруг продольной оси
д-д
Выход
насоса
чения высоких значений максимального к. п. д. При меньшей
изогнутости лопатки ее можно повернуть на больший угол. Оп-
тимальной изогнутостью для поворотных лопаток реактора можно
считать угол 30—40°, но при этом трудно получить Ко>2.
При повороте лопаток насоса вокруг поперечной оси^удается
Рис. 103. Характеристики регулируемых гидротрансформаторов:
а — гидротрансформатора фирмы Крупп; б — гидротрансформатора фирмы Фонт
получить высокие значения к. п. д. в широкой зоне регулирова-
ния. Исследования, проведенные на ЗИЛе, показали возможность
значительного изменения параметров гидротрансформатора при
малом угле поворота лопаток насоса вокруг продольной оси [15].
Следует отметить, что при повороте лопаток, расположенных
между двумя криволинейными поверхностями вращения, возможна
разная интенсивность изменения углов входа и выхода при одном
178
и том же изменении угла оси поворота лопатки. Изменение углов
входа и выхода а равно изменению угла х оси поворота, умножен-
ному на коэффициент пропорциональности т, который имеет раз-
личные значения от 0 до 1 в зависимости от положения кромки
лопатки. Если оси поворота лопаток направлены не поперек ло-
патки, а вдоль (рис. 102, в) потока жидкости в средней части ло-
патки при расположении входной и выходной кромок в рабочей
полости по одну, а не по обе стороны от оси поворота,то изменение
углов входа и выхода различно по знаку; если угол входа увели-
чивается (+«i), то угол выхода уменьшается (—а2) и наоборот.
Следовательно, в этом случае при повороте лопаток изменяются
не только углы входа и выхода, но п кривизна развертки лопаток,
хотя лопатка при этом не изменяет своей формы. Отметим некото-
рые ограничения для расчетов и проектирования, неизбежные
при повороте лопаток:
угол поворота ограничен из-за увеличения зазоров между бо-
ковыми кромками лопаток и корпусом колеса при повороте ло-
паток между цилиндрическими, тороидальными и другими по-
верхностями;
при любой схеме поворота лопаток можно получить опре-
деленное и ограниченное изменение характеристик. При этом
для каждой лопастной системы можно определить пределы изме-
нения характеристик;
для схемы поворота лопаток насоса с продольной осью угол
поворота 40—50° можно считать допустимым по величине зазоров
между боковыми кромками лопаток и корпусом колеса и доста-
точным для различных случаев применения. При этом рацио-
нально выбирать угол рН2 в диапазоне 136—44° [15]..
При поворотных лопатках реактора имеется единственное оп-
тимальное значение углов входа и выхода. Поворот лопаток ре-
актора позволяет значительно изменять энергоемкость при не-
значительном изменении коэффициента трансформации. Поворот
лопаток насоса не имеет жестких ограничений параметров полу-
чаемых характеристик, как при повороте лопаток реактора, и
в частности, можно получить очень высокие значения коэффи-
циента обеспечивая более интенсивное изменение характеристик
и большую экономичность, чем при повороте лопаток реактора.
Сравнительную оценку способов регулирования проводят по
регулировочным характеристикам, учитывая дополнительные тре-
бования. Например, изменение момента Мг в 2 раза возможно
для регулирования наполнением при уменьшении к. п. д. tj*
в 3 раза, а при повороте лопаток — в 1,5 раза. Выбор способа
регулирования определяется типом машины и задачами, которые
необходимо решить при помощи регулирования гидротрансфор-
матора. Исследование особенностей и пределов изменения харак-
теристик при регулировании производится обычно после выбора
типа и оптимальных геометрических параметров гидротрансфор-
матора в нерегулируемом исполнении.
12* 179
§ 35. БЛОКИРУЕМЫЕ ГИДРОТРАНСФОРМАТОРЫ
Из внешней характеристики некомплексного гидротрансфор-
матора следует, что при малых нагрузках (при i > i*) к. п. д.
гидротрансформатора резко падает и при М2 = 0 также стано-
вится равным пулю. Для увеличения к. п. д. в зоне высоких пере-
даточных отношений применяют комплексные гидротрансфор-
маторы. Однако исследования, проводимые различными органи-
зациями, показали, что наилучшие энергетические показатели
на режиме гидромуфты имеет комплексная передача с симметрично
Рис. 104. Блокируемый гидротрансформатор У358011А:
а — механизм свободного хода: 1 — обойма; 2 — звездочка; 3 — ролик;
4 — толкатель; 5 — пружина; 6 — ведомый вал; б — характеристика бло-
кируемого гидротрансформатора
расположенными насосом и турбиной [15]. К таким типам гидро-
трансформаторов, как правило, относятся гидротрансформаторы
с центростремительной турбиной. Попытки выполнить комплекс-
ную передачу с центробежной и осевой турбинами были неудач-
ными, так как на режиме гидромуфты для них были получены ха-
рактеристики с к. п. д. значительно меньшими, чем у комплекс-
ных гидротрансформаторов с центростремительной турбиной.
Поэтому, чтобы уменьшить зону низких к. п. д. при высоких пе-
редаточных числах i в указанных гидротрансформаторах, ко-
торые широко применяются в приводах строительных и дорожных
машин, а также на автомобилях, устанавливаются муфты сво-
бодного хода между насосом и турбиной (рис. 104, а). Муфта
свободного хода по конструкции и принципу действия аналогична
муфте комплексных гидротрансформаторов, но в отличие от по-
следних срабатывает автоматически при i = 1 (/i2 = пг), не
позволяя тем самым турбине обгонять насос.
На рис. 104, б показана характеристика блокируемого гидро-
трансформатора типа У358011А московского машиностроитель-
ного завода им. М. И. Калинина. К. п. д. блокируемого гидро-
180
трансформатора при малых нагрузках выше, чем у обычного ги-
дротрансформатора, так как гидротрансформатор превращается
в один жесткий вал. При увеличении нагрузки на ведомом валу
гидротрансформатора до i < i = 1, муфта свободного хода авто-
матически расклинивается, и гидротрансформатор начинает транс-
формировать момент. Применение муфты свободного хода между
насосом и турбиной существенно снижает потери мощности при
холостом ходе, что, в свою очередь, позволяет на машинах иметь
менее емкие теплообменники. Блокирование насоса и турбины
может также осуществляться при помощи фрикционных муфт,
управляемых извне или в зависимости от режима работы гидро-
трансформаторов. Для этих целей часто применяют центробежные
регуляторы, установленные на ведомом валу гидротрансформа-
тора. Подобный блокируемый гидротрансформатор типа ТБ-325
(рис. 105) успешно прошел испытания на тракторе. Блокирование
гидротрансформатора при помощи фрикциона лучше производить
181
в зоне малых нагрузок (при i 0,8—0,85) во избежание резких
толчков и ударов вследствие мгновенного возрастания момента.
Блокируемые гидротрансформаторы не имеют обгонного режима,
так как в этом случае нагрузка через муфту свободного хода жестко
передается на двигатель. В то же время наличие этого механизма
между насосом и турбиной позволяет осуществлять запуск ма-
шины «с буксира», что бывает важно для работы машин в зимнее
время.
§ 36. РЕВЕРСИВНЫЕ ГИДРОДИНАМИЧЕСКИЕ ПЕРЕДАЧИ
При рассмотрении способов реверсирования приводов с при-
менением гидродинамической передачи можно выделить три ха-
рактерных случая: реверсирование после гидропередачи; ревер-
сирование до гидропередачи и реверсирование при помощи гидро-
передачи.
В первом случае реверсирование осуществляется при помощи
механического реверса. Существенных особенностей в работе
гидродинамической передачи не возникает. Во втором случае
направление вращения насоса гидротрансформатора (или гидро-
муфты) изменяется на обратное (/гх < 0). Такой гидротрансфор-
матор назовем реверсируемым.
Исследования, проведенные во ВНИИСтройдормаше, повзо-
лили установить условия получения одинаковой энергоемкости
при условии реверсирования до гидротрансформатора [15]. Пол-
ная идентичность характеристик т] = f (i) и Xi = f (i) на тяговых
режимах при >0 и п1 < 0 обеспечивается в том случае, если
лопатки колес при > 0 будут симметричны лопаткам при <\
< 0 относительно плоскости, проходящей через ось вращения
рабочих колес.
Наибольший интерес представляет третий случай реверсиро-
вания при помощи самой гидродинамической передачи. В настоя-
щее время известны следующие способы реверсирования при по-
мощи гидродинамической передачи:
двухциркуляционные передачи с использованием гидротранс-
форматора (или гидромуфты) переднего хода и гидротрансфор-
матора обратного хода;
реверсирование заменой рабочих колес;
реверсирование изменением соединения рабочих колес с вы-
водными валами.
Двухциркуляционные гидропередачи в настоящее время ши-
роко применяются в судовых силовых установках для реверса
гребного винта (рис. 106, а). При заполнении полости гидро-
трансформатора переднего хода 5 ведомый вал вращается с п2 >*0
в одном направлении. При реверсе происходит опорожнение по-
лости гидротрансформатора переднего хода и одновременное за-
полнение гидротрансформатора обратного хода 1. При этом на-
правление вращения ведомого вала изменяется, /г2 < 0.
182
Так как при данной схеме реверсирования гидротрансформа-
тор обратного хода выполнен в виде отдельного агрегата, то может
быть получен наибольший к. п. д. на обратном ходе. Известно,
что у современных гидротрансформаторов обратного хода к. п. д.
tj* достигает 66—73% [1]. К недостаткам двухциркуляционной
реверсивной передачи следует отнести ее большие габариты;
значительное время переключения, связанное с опорожнением и
заполнением рабочих полостей; значительные вентиляционные
потери при вращении колес отключенного гидротрансформатора.
При выполнении реверса во втором и третьем случаях гидро-
передача является одноциркуляционной. Известны следующие
случаи реверсирования заменой рабочих колес в рабочей полости;
заменой реактора (рис. 106, б); заменой турбины в тепловозной
передаче (рис. 106, в). В первой схеме имеем для прямого и об-
ратного хода гидротрансформатор II класса типа НРТ; во второй
схеме — гидротрансформатор I класса типа НТР. Исследованиями
установлено, что гидравлический к. п. д. гидротрансформаторов
обратного хода при последовательности колес насос — турбина—
реактор (НТР) значительно ниже, чем при последовательности
НРТ, и аналогично для переднего хода к. п. д. гидротрансфор-
матора — ниже при последовательности колес НРТ, чем при по-
следовательности НТР. Это ухудшение к. п. д. т) объясняется
необходимостью применять малые углы (РТ2 < 15° или РР2 >
> 165°). В связи с изложенным очевидно, что при замене колес
в рабочей полости невозможно добиться больших значений к. п. д.,
поэтому в настоящее время такие передачи не используются.
Рассмотрим схему реверсирования путем замены соединения
рабочих колес с валами (рис. 106, г). В схеме, показанной на
рис. 106, г, для обеспечени&прямого хода турбина 3 гидротранс-
форматора I класса типа Присоединена с ведомым валом 6 пере-
дачи. В данном случае соединение осуществляется через пара-
зитные шестерни 5 и муфту свободного хода 7. При этом реактор 2
заторможен тормозом 1. Для обеспечения обратного хода турбина
затормаживается тормозом 4 и становится реактором обратного
хода PQ. Реактор 2 соединяется с ведомым валом через механизм
свободного хода и становится турбиной 7%. Получаем в резуль-
тате гидротрансформатор II класса типа НР0Т0. Таким образом,
при прямом и обратном ходе используется наиболее целесообраз-
ная последовательность расположения колес в рабочей полости.
Теоретические исследования показали, что при применении
для реверсирования серийного гидротрансформатора У3580НА
может быть получен к. п. д. i]* = 40% на режимах обратного
хода (при т)* = 85% на прямом ходу).
При использовании меридионального сечения серийного гидро-
трансформатора У358С11А, но при изменении углов входа и вы-
хода на рабочих колесах, числа лопаток и т. д. было получено
значительное повышение гидравлического к. п. д. обратного хода
при незначительном снижении к. п. д. на прямом ходу (рис. 107).
183
184
Для подобных схем К0ох
= К Опх 1» ГДе К оох И К Опх
соответственно коэффициенты
трансформации для обратного и
переднего хода. Как видно из
графика (рис. 107), происходит
одновременное изменение прозрач-
ности П характеристик.
Рассмотренная схема реверси-
рования в настоящее время не
используется, но является пер-
спективной для машин челночного
действия.
Рассмотрим некоторые схемы
гидротрансформаторов обратного
хода и особенности их расчета.
Г идротрансформаторы обрат-
ного хода. Как было указано
выше, гидротрансформаторы об-
ратного хода — это, как правило,
гидротрансформаторы II класса
с последовательностью колес НРТ
или НРТР. Развертка лопаток
в колесах гидротрансформатора
НРТ показана на рис. 108, где
также построены треугольники
скоростей в характерных точках
(угол 02 на чертеже соответствует
углу р2 в формулах). Крутящий мо-
мент на турбине является положи-
тельным, так как его направление
противоположно направлению
вращения насоса. Напор на тур-
бине отрицательный, так как
удельная энергия жидкости умень-
шается.
Расчет гидротрансформаторов
обратного хода ведется анало-
гично расчету гидротрансформа-
торов прямого хода. Основными
уравнениями являются: уравне-
ние баланса моментов ±Л4Н ±
± Мт ± Мр = 0 и уравнение
баланса удельной энергии Нт =
~ #/Т S ^пот-
Запишем основные уравнения
для трехколесного гидротранс-
форматора обратного хода.
185
Напор насоса
Я,Н = "^"(^Н2^Н2ЙН —
Напор турбины
Я/Т G/T2UT2Ht)-
На основании уравнений (см. с 11) мы можем записать
Рис. 107. Теоретические харак-
теристики гидротрансформато-
— euT2rT2llTf
^Т2
СиН1 ~ ^Т2 ~Z Рт
ГН1
С»Т1ГТ1 = cuP2rP2Hp!
f”₽2
СиТ1 ~ СиР2 Рр«
ЛТ1
треугольников скоростей из-
соотношение
си = и — спгсХ&{\
Q
с1П = -у; и = cor.
ров при реверсировании заме-
ной соединения рабочих колес
с валами (пх = 1700 об/мин):
------прямой ход;-----_ _ _
обратный ход
С
НИЙ
напоров:
для насоса
учетом указанных соотноше-
преобразуем выражения для
2
г Н
/Н
(^Н2Р-Н--- ГТ2рТ 0 ---
Q /ct£pH2
(0Н \ ^Н2
ГН2РН
ctg РТ2
-----'ЪРт
ГТ2
(П7)
для турбины
И
_ 211 f Ctg РТ2
g I J \ ^T2
/ГтгНт
ctg Pp2 .
“7-----"p2Hp
ГГ2
•2 ^2
--- НТ f T2
(H8)
186
В уравнениях (117) и (118) передаточное отношение гидро-
трансформаторов обратного хода
i -----
ют
ын
Все гидравлические потери в гидротрансформаторах разделим
на два вида: потери, пропорциональные квадрату расхода
[см. уравнение (33)], и потери на входе в рабочие колеса.
Рис. 108. Треугольники скоростей рабочих колес гидротрансформа-
тора обратного хода:
а — турбины; б — реактора; в — насоса
Потери на входе в насос
"уд.Н = Фуд-Н “2^~
ГТ2
гТ2Фт 7“ —
Q/ctgPT2 ГТ2 CtgpH1\-|
(О I F Ит г р
Н \ ГТ2 ГН1 ГН1 I
Аналогично для реактора
^уд.р — Фуд.р 2g
#-11 ГН2
^НгИн-т—
ЛР1
X
Q ( Ctg Рн2 п ЛН2 Ctg Ppi \
0н \ ^Н2 Н ГР1 ^Р1 У
2
187
для турбины
ЙУД Т Фуд Т “ЩГ X
х/ :r Q / Ct£ Рр2 ГР2 С^Рт1\]2
/X ИТ1--— —р - - Рр-----------р
Н \ ГР2 Т1 ГТ1 /
Запишем уравнение баланса напоров с учетом полученных
соотношений:
Нш + HtT + S кпот = 0;
°н Г/ о о Л Q (ctg Рн2 ctg РТ2 I
Op- ^ЪН'тО С0 \ F ^НгПн р Нт^Т2 I 4"
zb L Н \ rH2 ГТ2 /J
Q ( Ctg . .. Ctg Рр2 .. ,9.. .9 1 ,
йн \ ^Т2 ГГТ2Нт *ГР2Нр у 1 НтГТ2 4“
. ФудН^Н [7 . ГТ2
4 2F- L\ Т2 Ит77Г— Н1У ~
Q f ctgPT2 rT2 ctgpH1^]2
O) I p Нт r p /
WH \ ГТ2 ГН1 ГН1 / J
1 ^УД р “н Г rH2 Q ( Ctg Рн2 ГН2 Ctg Рр1 \12 нгНн ы -р- Ин 7 р + ЛР1 шн \ ГН2 ЛР1 ГР1 /J q (ctg Ррг ГР2„ с{еРтЛГ ,
1 2g । Ч’ул т“н /
1 2g гг'Г1 to F 7" Ир р ~Г L ШН \ ГР2 'Т1 Т1 1 J + ^<+^< + ^<=0.
Относительно расхода получим уравнение
-Д- а0 + —Д- (b0 -j- ic0) -|- (то^2 4~ 2foi 4" ^о) = О*
«н н
Откуда
Q = — (Ьр Ч- ic0) ±У(Ь0 + ic0)2 — а0 (moi2 + 2foi + d0)
сон а0
где
/ Ctg Pqp2 Лр2 Ctg Pjjl \2
ао — ФудН —р-----Нт 7--------р------ 4-
\ rT2 'Н1 ГН1 /
। / Рн2 ГН2 Ppi \2 ।
+ <РудР ------+
\ ГН2 ЛР1 ГР1 )
। / ctg Рр2 Гр2 Ctg Pti \2
+ Фудт р ~— Ир-------р--- + + ^т 4" ^р;
\ 1 Р2 'ti 1T1 /
188
h /Ctg₽H2 r ..
V0 — —p------ rh2Hh
\ ГН2
I / r , Ct2 Pt2 rT2
+ rHi —p-------гт ~—
\ ГТ2 ГН1
f_r -.9 CtgPH2 fH2 , , „ JH2
+ фудР^ ГН2Ин FH2 г2, +ГН2Ин rni
ctg ₽T2
Co = p — /Т2НТ
1 T2
1 ( 2 Pt2
+ Фуд H I — ГТ2НТ /?T2
I ( Ct£ Pp2
+ Фудт ГТ1 —p
\ ГР2
Ctg ^T2 \ i
p-----Рт'тг ч
rT2 /
ctg ₽H1 \ I
''Hl —p---- <Рудн +
rHl J
ctg ₽P1 \ .
F ) ’
Pl ” 'Pl л Pl /
Ctg PP2 ,
;-----Г p2HP + '
P2
7 T2 । ct& Phi rT2 I
2 I ' T2^T F r I •
Hl hi hi /
fP2 Ctg ₽T1 \
HP -p- - 'Ti —;
'ti ti /
/ f \ 2
• 7ZT ) ^УДН + ГТ1<РудТ’
\ hi j
fo~ ГТ2Нт ФудНГТ2Нт НтГТ2 О Фудн)»
+ Гй1ФудН Ьфудр'шНн r2
ГР1
Определив расход гидротрансформатора, рассчитываем мо-
менты на рабочих колесах. Для гидротрансформатора обратного
хода (см. рис. 106, г) запишем:
крутящий момент на насосе
Мно = PQ (£«Н2ГН2Нн — СмТ2ГТ2Рт) —
— PQ (гн2Нн '’ггН'тО
Q / ctg ₽н ctg рт
” ГН2Ин - 1VT2
ШН \ ГН2 ГТ2 )
на турбине
МТо = pQ (си Т2г Т2р,т — caP2r ргНр) =
п Г Q / Ctg ₽Т2 Ctg Рр2
— pQ^H ( р ^тгР'т р ^ргНр
_ н \ Г Т2 ГР2
Фт^тг ’
на реакторе
= PQ<oH
•^Ро— pQ(^P2rP2Hp ^нНгРн^Нг) —
Q / ctg Рр2 ctg рН2 \
(О F ГР2^Р 4" F ГН2Нн rH2HH •
Н \ Р2 Н2 /
Н2
Дальнейший расчет характеристик гидротрансформаторов не
отличается от аналогичных расчетов гидротрансформатора Iкласса,
изложенных в § 29. Следует отметить, что гидротрансформаторы
189
обратного хода имеют меньшие к. п. д. по сравнению с гидротранс-
форматорами прямого хода. Это связано в первую очередь с боль-
шими потерями на дисковое трение и внутренними утечками [10].
Как показывают теоретические и опытные исследования, наилуч-
шие характеристики имеет гидротрансформатор с двумя реакто-
рами (т. е. четырехколесный) [1]. Такие трансформаторы приме-
няются в реверсивных передачах судовых установок.
§ 37. СОГЛАСОВАНИЕ РАБОТЫ ДВИГАТЕЛЯ
И ГИДРОТРАНСФОРМАТОРА
Согласование работы двигателя и гидротрансформатора осу-
ществляется за счет ступенчатой коробки передач, изменения
геометрических параметров гидротрансформатора, его лопастной
системы или изменения его активного диаметра. Двигатель
и гидротрансформатор образуют единую систему, равновесное
состояние которой определяется энергетическим балансом
т. е. равенством мощности двигателя (с учетом мощности, отво-
димой на вспомогательные нужды) и мощности насоса гидро-
трансформатора. Поскольку N = /И со, необходимо соблюдать сле-
дующее условие:
Л4дб)д — А4н(он.
Если (од = сон, то равновесное состояние будет тогда, когда
Мд = Мн. Если между валом двигателя и валом насоса гидро-
трансформатора стоит какая-либо передача, то тогда момент
двигателя, приведенный к валу насоса без учета механического
к. п. д., будет равен
М' = М„ = Мп = Мп -4-. (119)
Д н д сон д 1П V 1
Из закона подобия следует, что
Следовательно, в зависимости от частоты вращения вала
двигателя момент насоса для определенного режима работы гидро-
трансформатора графически можно представить’в виде квадратич-
ной параболы, пересечение которой с характеристикой двигателя
дает режим, удовлетворяющий условию энергетического баланса.
Рассмотрим это на отдельных примерах.
а) Работа двигателя с гидротрансформатором, имеющим непро-
зрачную характеристику. Двигатель имеет характеристику Мд =
= / (/гд) и Nд = f а гидротрансформатор — непрозрачную
характеристику при пи = const и v = const (рис. 109, а, б).
Найдем режимы совместной работы двигателя и гидротрансфор-
матора.
Так как характеристика гидротрансформатора приведена для
постоянной частоты вращения насоса и определенного диаметра,
190
а характеристика двигателя — для различной частоты вращения
вала, по формулам подобия найдем изменение момента насоса
гидротрансформатора в зависимости от частоты вращения вала
двигателя:
Эта зависимость представляет параболу Л1н = f (нд), пересе-
чение которой с характеристикой двигателя 7ИД = f (пд) в точке А
* Рис. 109. Согласование работы двигателя внутреннего сгорания и
гидротрансформатора с непрозрачной характеристикой:
а — характеристика двигателя; б — характеристика гидротрансформатора;
в — совместная характеристика; г — изменение точки совместной работы при
изменении D ; д — изменение точки совместной работы при изменении п
(рис. 109, а) и дает режим совместной работы с частотой
вращения вала двигателя /гА. Для полученной частоты враще-
ния /гА характеристика гидротрансформатора перестраивается
(рис. 109, в), причем полагают, что при изменении частоты вра-
щения насоса гидротрансформатора к. п. д. его остается неизмен-
ным. Это можно принять, если гидротрансформатор работает
191
в области автомодельности. Следовательно, момент насосаМн будет
равен моменту Л4дЛ, а момент турбины определится из выражения
мт = мнк= мн 4-,
причем частота вращения турбины пт = Пц1.
Если полученная точка совместной работы А не удовлетворяет
условиям работы и ее желательно перенести, например, на режим
Л^дшах или МД1Пах, то это можно сделать за счет изменения диа-
метра Da гидротрансформатора с соответствующим пропорцио-
нальным изменением всех его линейных размеров, установки
соответствующей передачи, понижающей или повышающей час-
тоту вращения насоса по сравнению с частотой вращения вала
двигателя, изменения геометрических параметров лопастной сис-
темы гидротрансформатора при Da = const или нескольких из
перечисленных выше способов.
Из формулы подобия видно, что с увеличением диаметра Da
парабола Мн пойдет круче и переместится влево, а точка сов-
местной работы — в сторону режима Мдтах; с уменьшением
диаметра Оа парабола Мн пойдет более полого и переместится
вправо, а точка совместной работы — в сторону режима A^max
(см. рис. 109, г). Так как диаметр (в формуле подобия) имеет
показатель степени, равный 5, то небольшое его изменение
значительно смещает точку совместной работы.
Из формулы подобия следует, что с увеличением частоты
вращения вала насоса ин парабола Мн пойдет круче и переме-
стится влево (пунктирная кривая на рис. 109, д), а при умень-
шении пн пойдет более полого и переместится вправо (пунк-
тирная кривая на рис. 109, д), Кроме того, здесь необходимо
момент двигателя привести к валу насоса по формуле (119). При
увеличении частоты ин момент двигателя, приведенный к валу
насоса, уменьшится (пунктирная кривая на рис. 109, д), и режим
совместной работы будет соответствовать точке Б. При умень-
шении частоты /гн момент двигателя, приведенный к валу насоса,
увеличится (штрихпунктирная кривая на рис. 109), и режим
совместной работы будет отвечать точке В. Здесь не принимался
во внимание к. п. д. промежуточной передачи. Для приведения
точки совместной работы к валу двигателя момент на валу насоса
приводится к валу двигателя по формуле
Мд = MHin.
На характеристике это будут точки Б' и В'. Для согласования
работы на частичных характеристиках двигателя необходимо
построить параболу
б) Работа двигателя с гидротрансформатором, имеющим про-
зрачную характеристику. Рассмотрим согласование работы дви-
192
гателя и гидротрансформатора, имеющего определенный актив-
ный диаметр п непосредственную связь вала его насоса с валом
двигателя. Зависимость момента насоса от частоты вращения
имеет вид
Для гидротрансформатора с прозрачной характеристикой мо-
мент на валу насоса зависит от режима работы и, следовательно,
для каждого из режимов работы существует своя парабола и своя
Рис. НО. Согласование работы двигателя внутреннего сгорания и гидротрансфор-
матора с прозрачной характеристикой:
а — характеристика двигателя; б — характеристика гидротрансформатора; в — измене-
ние точки совместной работы при изменении D Г); г — совместная характеристика; д —
перестроенная характеристика гидротрансформатора для == лд; Му, н ц, —
~ / (/1гр)
точка совместной работы двигателя и гидротрансформатора,
например точки О, Д, Б, В (рис. 110, б). Двигатель будет работать
на каком-то участке характеристики (рис. 110, а), величина
которого будет определяться прозрачностью характеристики гид-
ротрансформатора (рис. 110,6) и заключаться между двумя
крайними параболами Afz==o и М/==в.
Смещение по характеристике участка совместной работы дви-
гателя и гидротрансформатора может быть выполнено за счет
изменения активного диаметра гидротрансформатора или за счет
введения дополнительной передачи между валом двигателя и его
насосом, или за счет изменения геометрических параметров лопаст-
ной системы, причем переместится весь пучок парабол. Сказанное
ранее относительно непрозрачной характеристики остается спра-
13 С. П. Стесин 193
ведливым и для гидротрансформатора с прозрачной характерис-
тикой.
На рис. НО, в показано перемещение парабол за счет изме-
нения диаметра Da так, что режим 7Wt=o соответствует макси-
мальному моменту на двигателе, а режим М[=в с наименьшим
допустимым к. п. д. — режиму работы двигателя с максималь-
ной мощностью.
На основании характеристики двигателя с окончательными
точками совместной работы (рис. ПО, в) строится характеристика
гидротрансформатора при работе с двигателем (рис. ПО, г).
На оси ординат откладывают 7ИН, пн, Мт и т], а на оси абсцисс —
передаточное отношение /, затем производится перестройка дан-
ной характеристики к виду, показанному на рис. НО, д, где по
оси абсцисс отложена частота вращения турбины, на основании
которой можно производить тяговый расчет и выбор числа пере-
дач в трансмиссии. Частота вращения турбины определяется
из выражения nT =nHi.
Согласование работы двигателя и любой гидропередачи может
быть произведено аналитически. При согласовании удобно поль-
зоваться приведенными величинами. Рассмотрим согласование
на основе коэффициента момента
МН^ ИХ?
Если примем во внимание, что момент двигателя, приведенный
к валу насоса и согласованный с ним:
МдА=--Мн = Мд-^т]п,
шн
а сон = оэдгп и подставим эти выражения в уравнение коэффициента
момента, то получим
__ ^дЛп
ЛМН 2 -3 гл5 ’
РСОд1п^Н2
где т|п—к. п. д. механической передачи.
Выбрав желаемые значения Хмн и Л4Д, которые необходимо
согласовать, и диаметр ПН2, найдем передаточное отношение про-
межуточной передачи /п:
i = /у
V ^МнР°д^Н2
Известно, что дизели имеют жесткую характеристику: час-
тота вращения вала при холостом ходу отличается от частоты
вращения вала при полной нагрузке на ^10%, а момент Л4п1ах
превышает момент при Л/\пах тоже на ^10—20%. У карбюратор-
194
ного двигателя момент изменяется в большом диапазоне, поэтому
с карбюраторным двигателем целесообразно применять гидро-
трансформатор с большой прозрачностью характеристики, а с ди-
зелем—с малой прозрачностью или с непрозрачной характеристи-
кой (рис. 111, а).
Гидротрансформаторы с непрозрачной характеристикой при-
меняют на строительных и дорожных машинах (краны, экскава-
торы), на буровых установках, в гидропередаче дизельных локо-
мотивов для полного использования мощности двигателя при
наивысшем к. п. д.
Рис. 111. Влияние степени прозрачности гидротрансфор-
матора на совмещение характеристик:
а — характеристик» дизельного (/) и карбюраторного (2) дви-
гателей и характеристики входа непрозрачного и прозрачного
гидротрансформаторов: б — внешняя характеристика гидропе-
редачи с тремя гидротрансформаторами
Гидротрансформаторы с прозрачной характеристикой приме-
няют в автомобилестроении, где требуется максимальное исполь-
зование момента двигателя в широком диапазоне. Но, например,
для тепловозов не удается получить во всем диапазоне скоростей
их движения максимальную мощность при максимальном к. п. д.
Поэтому в этих передачах применяются двух- и трехциркуля-
ционные передачи.
На рис. 111, б показана внешняя характеристика передачи,
имеющая три гидротрансформатора, работающих последовательно.
Работа гидротрансформатора с электродвигателем переменного
тока. На рис. 112, а показана внешняя характеристика асинхрон-
ного электродвигателя, на которой нанесены кривые моментов
насоса гидротрансформатора с прозрачной характеристикой при
различных передаточных числах i. Из графика следует, что дви-
гатель при и2 = 0 может работать. Внешняя характеристика
совместной работы асинхронного электродвигателя с гидротранс-
форматором показана на рис. 112,6. Если по условиям работы
агрегата неизбежна длительная работа в зоне Мг > Мном, то
это может повести к перегреву двигателя; в этом случае необхо-
13* 195
димо применять гидротрансформатор с непрозрачной характе-
ристикой.
Из рис. 112,6 следует, что характеристика асинхронного
электродвигателя при совместной работе с гидротрансформатором
напоминает сериесную, что электротехническими средствами дос-
Рис. 112. Согласование характеристики гидротрансформатора с харак-
теристикой электродвигателя переменного тока:
а — характеристика двигателя с нагрузочной характеристикой прозрачного
гидротрансформатора; б — характеристика совместной работы: 1 — гидро-
трансформатор с непрозрачной характеристикой; 2 — гидротрансформатор
с прозрачной характеристикой
тигается при помощи двух машин постоянного тока, равноценных
по мощности асинхронному двигателю. Таким образом наличие
гидротрансформатора позволяет использовать короткозамкнутый
электродвигатель для тяговых целей. Это обстоятельство делает
возможным применять подобные агрегаты, например, для строи-
тельных и монтажных кранов.
ГЛАВА IV
ГИДРОМЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
§ 38. ОБЩИЕ СВЕДЕНИЯ
Гидромеханическими передачами называют передачи, у которых
мощность ведущего вала передается ведомому валу двумя путями:
одна часть мощности — через гидродинамическую передачу, дру-
гая — через механическую передачу. Для разветвления мощности
ведущего вала и суммирования ее на ведомом валу служат плане-
тарные дифференциальные передачи. Более высокий к. п. д.
ветви, по которой мощность передается через механическую
передачу, по сравнению с ветвью, по которой мощность передается
через гидродинамическую передачу, приводит к более высокому
к. п. д. гидромеханической передачи по сравнению с гидродина-
мической. Перечисленные элементы (гидродинамическая и меха-
ническая передачи) составляют силовую часть передачи. В пере-
дачу входят также обслуживающие и управляющие системы:
система охлаждения и питания и система управления. Назначение
системы охлаждения и питания заключается в охлаждении цирку-
лирующей внутри гидродинамической передачи рабочей жидкости,
а также в компенсации утечек жидкости через уплотнения. Кроме
того, система питания, создавая повышенное давление в рабочей
полости гидротрансформатора, препятствует возникновению кави-
тации. Система управления обеспечивает управление ступенчатой
коробки передач, если она применяется в качестве механической
передачи. Если коробка автоматизированная, то в систему управ-
ления включается автомат.
Схемы гидромеханических передач с разветвлением силового
потока могут выполняться с разветвлением силового потока
в механической (внешнее разветвление) и гидродинамической
(внутреннее разветвление) передачах. Характеристики таких пере-
дач подобны характеристикам гидродинамических передач, хотя
и претерпевают существенные изменения.
Учитывая то, что в гидромеханических передачах в большин-
стве случаев применяются планетарные дифференциальные меха-
низмы, рассмотрим кратко их принципиальные свойства. Известно,
что элементарный зубчатый механизм составляется из двух нахо-
дящихся в зацеплении зубчатых колес и водила, причем зацепле-
197
ние может быть как внешним (рис. 113, а), так и внутренним
(рис. 113,6). Любой сложный зубчатый механизм составляется
из элементарных механизмов жестким соединением их отдельных
звеньев. Из двух элементарных зубчатых механизмов можно
составить двухрядные трехзвенные дифференциалы (рис. 113, в, г).
Для уравновешивания усилий, возникающих в полюсах зацеп-
лений трехзвенного дифференциала, обычно устанавливают не-
сколько равнорасположенных по окружности сателлитов, не
меняющих кинематику механизма.
Рис. 113. Простейшие планетарные механизмы:
а — с внешним зацеплением; б — с внутренним зацеплением; в и г — двухрядные трех-
звснные дифференциалы
Трехзвенный дифференциал имеет три основных звена, одно-
временно являющихся и главными, причем два из них являются
основными шестернями (I и II на рис. 113, а—г), а третье— води-
лом III. На рис. 113,в показана схема трехзвенного дифферен-
циала, составленного из двух элементарных зубчатых механизмов
с разноименными зацеплениями. При использовании элемен-
тарных зубчатых механизмов только с внутренними зацеплениями
получается иная конструктивная схема трехзвенного дифферен-
циала (рис. 113, г), так же как и при использовании механизмов
только с внешними зацеплениями. Все три типа трехзвенных
дифференциалов нетехнологичны из-за необходимости точного сог-
ласования размещения зубьев на двух рядах сателлитов. Только
первый механизм (рис. 113) может быть сделан однорядным в слу-
чае, если шестерни обоих рядов сателлита будут одинаковыми
(рис. 113, г). В этом случае механизм будет технологичным при
изготовлении.
Отличие трехзвенного дифференциала первого типа также
в том, что суммирование моментов (в арифметическом смысле)
у него происходит на водиле, тогда как в трехзвенном дифферен-
циале второго типа моменты суммируются на меньшей основной
шестерне (солнечной), а для третьего типа — на большой основ-
ной шестерне (коронной). Кроме того, первый тип трехзвенного
198
дифференциала представляет наибольшие возможности соедине-
ния любых соосных валов при помощи трехзвенного дифферен-
циала, так как вал водила может быть выполнен охватывающим
или охватываемым по отношению к любому из валов двух основных
зубчатых колес трехзвенного дифференциала (рис. 113 и 114, а, б).
Рис. 114.
Трехзвенные дифференциалы
В трехзвенном дифференциале второго типа при разносторон-
нем выводе валов основных зубчатых колес (рис. 114, в) вал
водила может быть только охватываемым первыми двумя валами,
а при одностороннем выводе тех же валов водило не может раз-
делять эти валы (рис. 114, а). В трехзвенном дифференциале
третьего типа при разностороннем выводе валов основных зуб-
Рис. 115. Дифференциал с составным водилом:
а — компоновка с внешним зацеплением; б — компоновка
с внутренним зацеплением
чатых колес (рис. 114, д) вал водила может быть только охваты-
ваемым первыми двумя, а при одностороннем выводе тех же
валов вал водила также не может разделять эти валы (рис. 114, е).
Указанное ограничение может быть устранено только при
составном водиле (рис. 115), что усложняет конструкцию, так как
требует дополнительных двухслойных опор, сложных и дорогих
в изготовлении и особенно в ремонте [18]. Так как механический
элемент передачи выбирается из числа дифференциальных зуб-
чатых механизмов, составляемых из трехзвенных дифференциа-
лов, то наибольшие возможности соединения трех соосных валов
при помощи трехзвенного дифференциала первого типа являются
199
существенным обстоятельством при выборе именно этого меха-
низма в качестве составляющего элемента. В этом случае удается
составить такие кинематические схемы дифференциальных меха-
низмов, которые оказались бы неосуществимыми при использо-
вании трехзвенных дифференциалов других типов. Технологич-
ность конструкции плоского трехзвенного дифференциала является
вторым, не менее важным обстоятельством при выборе именно
этого типа механизма.
Геометрические параметры плоского трехзвенного дифферен-
циала определяются числом а, представляющим собой отношение
числа зубьев большой основной шестерни к числу зубьев малой
основной шестерни. Это число называется параметром трехзвен-
ного дифференциала. Параметр а может меняться в пределах
от положительной 1 до бесконечности, но конструктивно целесооб-
разные формы плоских трехзвенных дифференциалов ограничивают
его значения пределами 1,3—1,7 и 2,3—5. Нижний предел может
быть уменьшен до 1 применением двухрядных дифференциалов
второго и третьего типов. Однако следует иметь в виду, что при-
менение конических зубчатых колес менее желательно, чем исполь-
зование цилиндрических. Внутри указанных выше пределов
имеются ограничения для значения параметра а трехзвенных
дифференциалов, вызванные тем, что этот параметр представляет
собой отношение чисел зубьев, т. е. целых чисел, поэтому а должно
быть рациональным числом. Кроме того, возможность сборки
трехзвенного дифференциала, в котором число сателлитов равно
двум и более, накладывает дополнительные ограничения на воз-
можные значения параметра а.
Однако соответствующим выбором чисел зубьев всегда можно
подобрать такое рациональное значение параметра а, которое
будет сколь угодно близко к любой заданной величине, хотя это
может потребовать очень больших чисел зубьев. Замена зубча-
тых колес фрикционными может позволить реализовать в указан-
ных выше пределах любое действительное значение, в том числе
и иррациональное, параметра а.
Условия равновесия трехзвенного дифференциала при устано-
вившемся режиме работы
Xi М, ~ ' /И и -j- /Иш = О,
где ТИр Мп, Мш — моменты, приложенные извне к соответствую-
щим трем основным звеньям.
Совершенным трехзвенным дифференциалом называется такой,
в котором отсутствуют потери энергии. Для такого трехзвенного
дифференциала
Mj-Л/?; Мп — аРп/?;
(120)
200
где /? — радиус начальной окружности малой основной
шестерни;
Pi = Рп — окружные усилия на сателлите (рис. 113, г);
Рш = —2РТ — усилие на пальце водила.
Уравнение энергии для этого трехзвенного дифференциала
имеет вид
или
S л/. = Nl + Л/„+^ш = О'
AfjtOj = AljjCOjj AfnIa>in
(121)
Подставляя в уравнения (121) моменты из выражений (120),
получим уравнение связи между угловыми скоростями трех
звеньев этого дифференциала:
(Dj -|— cxcOj j — (1 ос) (О J J J — 0.
Уравнения связи между нагрузочными показателями режима
трехзвенного дифференциала получаются из выражений моментов
1 :сс: — (1 +а).
(122)
Следовательно, трехзвенный дифференциал обладает двумя
кинематическими степенями свободы и одной нагрузочной, при-
чем нагрузка любого из трех основных звеньев означает одновре-
менную разгрузку и остальных двух, как это следует из уравне-
ния (122). Основные теоретические положения, необходимые для
создания трехзвенного дифференциала, изложены в работе [18].
Отметим основные особенности схем гидромеханических передач
с внешним разветвлением силового потока [18]. Задачей расчета
обычно является выбор схемы и передаточных чисел механичес-
кой передачи при определенной характеристике гидротрансформа-
тора. В связи с этим расчет производится с использованием без-
размерной характеристики гидротрансформатора и уравнений
связи между кинематическими со и силовыми М параметрами
механической передачи.
Рассматривая гидротрансформатор как механизм с двумя ва-
лами (реактор жестко соединен с неподвижным корпусом), можно
представить различные способы соединения этих валов с плане-
тарными механизмами (рис. 116, а—е). Причем схемы, приведен-
ныё*‘натрис. 116, а—е, являются частными случаями схемы, изо-
браженной^на рис. 116, а.
Схема, показанная на рис. 116, б, представляет собой последо-
вательное соединение гидротрансформатора и механической пере-
дачи, в другой схеме (рис. 116, в) механический редуктор устанав-
ливает постоянное передаточное отношение между насосом и тур-
биной, а схема, показанная на^рис. 116, е, представляет собой
передачу с гидротормозом. В большинстве случаев применяются
схемы (рис. 116, а) с разветвлением потока на выходе и с развет-
влением на входе (рис. 116, д).
201
Разберем две последние схемы более подробно. На рис. 117, а
и б показаны указанные гидромеханические передачи.
В схеме на рис. 117, а мощность подводится одновременно к
насосу гидротрансформатора и к солнечной (главной малой)
шестерне 3 планетарной передачи. Солнечная шестерня нахо-
а)
г)
Рис. 116. Конструктивные схемы гидромеханических передач:
а — общий случай; б — последовательная; в — кинематически замкнутая;
г — с разветвлением на выходе; д — с разветвлением на входе; е — с гид-
ротормозом; М — механическая передача; Г — гидротрансформатор; Д —
двигатель; П — потребитель
дится в зацеплении с сателлитом 4. Мощность турбины гидро-
трансформатора передается тому же сателлиту через коронную
(большую главную) шестерню 5. Таким образом, сателлит 4
Рис. 117. Наиболее распространенные конструктивные схемы гидромеханиче-
ских передач:
а — суммирующий планетарный ряд; б — разделительный планетарный ряд: 1 — веду-
щий вал; 2 — ведомый вал; 3 — солнечная шестерня; 4 — сателлит; 5 — коронная ше-
стерня; 6 — водило
суммирует обе мощности и через водило 6 передает суммарную
мощность ведомому валу 2.
202
В схеме на рис. 117, б мощность подводится к водилу 6 сател-
лита 4. Сателлит передает мощность одновременно насосу гидро-
трансформатора (через коронную шестерню 5) и ведомому валу 2
через солнечную шестерню 3. Мощность турбины гидротрансфор-
матора передается также ведомому валу 2. Составим уравнения
для определения коэффициента трансформации, передаточного
отношения и к. п. д. передачи (см. схему на рис. 117, а).
Для упрощения к. п. д. планетарной передачи примем равным 1.
При установившемся движении передачи окружные усилия от
солнечной и коронной шестерен одинаковы и равны Р, поэтому
момент на ведомом валу 2
М2 - 2Р7?В;
момент на солнечной шестерне 3
Мс = РРС;
соответственно момент на коронной шестерне 5
MK = PRK-,
момент на насосе
где К—коэффициент трансформации гидротрансформатора.
Так как момент на турбине равен моменту на коронной шестерне
Мт = 7ИК, то
Момент ведущего вала равен сумме моментов, передаваемых
насосу и солнечной шестерне:
Коэффициент трансформации
к -мг
Лгмп -дг-
2/?в
Так как расстояние RB до осей сателлитов
п ________________________ RK 4~ Rc
RB =
Rk
где a = ~.
ac
J L Rc «
т • я; ~k
203
Определим зависимость между передаточным отношением гид-
ротрансформатора i и передаточным отношением передачи ггмп.
Так как окружная скорость оси сателлита равна полусумме
окружных скоростей коронной и солнечной шестерен
о Wl< +
то, заменяя окружные скорости через соответствующие значения
пгп
—, имеем
2 (^к^к 4” ^1).
Разделив обе части уравнения на п1 и имея в виду, что пк =
= пт, получим
‘•гмп = -2^(Як* + Яс) (123)
или
. _ ai -I- 1
£гмп - г >
откуда
* “ *гмп (1 + ----- • (124)
Имея внешнюю характеристику гидротрансформатора, можно
построить внешнюю характеристику передачи. Задаваясь последо-
вательным рядом значений ггмп, по уравнению (124) находим i
и по характеристике гидротрансформатора — соответствующее
значение Д’. Таким образом, получаем зависимость Д = f (гГмп)-
Затем по уравнению находим Дгмп и получаем зависимость
Дгмп = f Огмп)-
Зависимость Лгмп = f (*гмп) определим по уравнению
Лгмп = Лгмг^гмп
или
Лгмп — г •
J_________L. _
К 1 а
Для гидродинамической передачи, показанной на рис. 117, б,
имеем:
момент на ведущем валу
М± = 2РДВ;
момент на солнечной шестерне
Мс = PRC]
204
момент на коронной шестерне
мк = PRK;
момент на насосе
Л1Н = Мк;
момент на турбине
Мт = КМН.
Момент на ведомом валу равен сумме моментов на солнечной
шестерне и турбине:
М2 = Мс + Мт = PRC + кмк = Р (Лс -|- ЛЯК).
Тогда получим коэффициент трансформации
к _ _ Rc -I- RRk.
Лгмп — М1 - 2/?в
Подставляя в выражение для Лгмп значение RB, получим
К —
/г ___RRk~\~ Rc а
Лгмп - 7^ + /^ - [ _1_ •
а
Затем находим произведение
= ~2~ С^1Л< + ^с^т)*
Разделив обе части этого уравнения на п2 и имея в виду, что
n Rc “I-
пк — Пн, ят = п2, а также учитывая, что 7<в = ———-, получаем
^ГМП ,
i. 1 а
откуда
„_____________________________ггмп______
1 ^’"а" 0 ~ *гмп)
и
• . . 1
1] +-1 —
а
Лгмп-------------------------------г~ •
Mi-
tt
Предположим, что гидравлическим звеном гидродинамичес-
кой передачи является гидротрансформатор с непрозрачной харак-
теристикой, коэффициент трансформации которого К — fr (i)
и к. п. д. т| = /2 (г) показаны соответственно на рис. 118, а и б.
Пусть а = 2. Определяем Кгмп = f3 (fmn) и т]Гмп = (ггмп)
(см. схему на рис. 117, а и б). Соответствующие значения Лгмп
205
и Лгмп показаны на рис. 118, а и б в виде кривых 2 иЗ.Из графика
следует, что при i *<0,5 (i = 0,5 соответствует 1]* гидротранс-
форматора) коэффициенты трансформации и к. п. д. для обеих
схем передач меньше, чем для гидротрансформатора, а при
i >> 0,5 — больше.
Таким образом, рассмотренные гидромеханические передачи
имеют большие значения коэффициентов трансформации и к. п. д.
по сравнению с соответствующими значениями для гидротранс-
форматора в зоне повышенных передаточных отношений, но имеют
Рис. Н8. Внешняя характеристика гидромеханической передачи:
а — зависимость коэффициента трансформации от i\ б — зависимость к. п. д.
от i : 1 — для гидродинамической передачи; 2 — для гидромеханической пере-
дачи (см. рис. 117, п); 3 — для гидромеханической передачи (см. рис. 117, б)
передаточных отношений. Следовательно, в зависимости от предъ-
являемых требований гидромеханические передачи могут оказаться
более или менее целесообразными, чем гидродинамические пере-
дачи.
Схемы передач с внутренним разветвлением силового потока
в настоящее время изучены мало. Расчет подобных схем должен
производиться как для отдельного гидротрансформатора, но с уче-
том дополнительных связей между рабочими колесами. В отличие
от схем с внешним разветвлением силового потока, где гидро-
трансформатор рассматривается как двухвальный механизм и ис-
пользуется его безразмерная характеристика, правда, в более
широком диапазоне передаточных отношений, в схемах с внутрен-
ним разветвлением силового потока гидротрансформатор рассмат-
ривается как многовальный механизм (обычно трех- или четырех-
вальный), причем благодаря зависимому вращению рабочих
колес существенно изменяются условия обтекания лопаток.
В результате применение обычных гидротрансформаторов
в подобных схемах во многих случаях может оказаться неприем-
лемым, поэтому задачей расчета подобных схем является выбор
206
схемы расположения рабочих колес, их основных геометрических
параметров и передаточных чисел механических передач, устанав-
ливающих дополнительные связи между рабочими колесами.
Примеры применения подобных схем приведены на рис. 119, а б,
а на рис. 119, виг показаны их внешние характеристики. ^4
На рис. 119, а показана гидромеханическая передача «Трилок»
(ФРГ), а ее внешняя характеристика — на рис. 119, в, на рис. 119, б
передача «СРМ» (Швеция), а ее внешняя характеристика —
на рис. 119, г.
Рис. 119. Гидромеханические передачи с внутренним разветвлением
силового потока:
а и б — конструктивные схемы передачи «Трилок» (ФРГ), «СРМ» (Швеция); в
иг — внешние характеристики; Ф ь Ф2 — фрикционные тормоза
На рис. 120, а показана передача, состоящая из трехтурбин-
ного гидротрансформатора и двух планетарных рядов. В данном
гидротрансформаторе за насосом 1 расположены три независимые
турбины 2, 3 и 4. из которых турбина 4 соединена с ведомым
валом 13. а турбины 2 и 3 передают вращение ведомому валу 13
через два планетарных ряда. Турбина 2 соединена с солнечной
шестерней 9. находящейся в зацеплении с сателлитом 8. обкаты-
вающим неподвижную коронную шестерню 7. Водило 6 сателлита
изготовлено как одно целое с ведомым валом 13. Из плана ско-
ростей (рис. 120, б) следует, что угловая скорость соа турбины 2
больше угловой скорости ведомого вала со2. Таким образом,
207
планетарный ряд шестерен 7, S, 9 является понижающей механи-
ческой ступенью; при этом момент, передаваемый первой турбиной,
достигает значительной величины, но лишь при малой частоте
вращения ведомого вала.
Турбина 3 связана с коронной шестерней 10, находящейся
в зацеплении с сателлитом 11, обкатывающим неподвижную
солнечную шестерню 12. Сателлит 11 расположен на водиле 6,
б) б)
Рис. 120. Гидромеханическая передача с трехтурбинным гидротрансформатором:
а — гидротрансформатор и планетарные ряды; б — план скоростей первого планетарного
ряда; в — план скоростей второго планетарного ряда; / — насос; 2, 3 и 4 — турбины;
5 — реактор; 6 — водило; 7 — 12 — шестерни; 13 — ведомый вал; г — внешняя характе-
ристика
представляющем одно целое с ведомым валом 13. Планетарный
ряд, образованный шестернями 10, 11 и 12, является также пони-
жающей ступенью (рис. 120), но с меньшим передаточным числом,
чем предыдущий планетарный ряд.
Угловая скорость сов турбины 3 больше угловой скорости со2,
но меньше скорости соа, поэтому крутящий момент турбины 3
передается ведомому валу также увеличенным. На рис. 120, г
приведена характеристика передачи с трехтурбинным гидротранс-
форматором. Пунктирными линиями показаны кривые крутящих
моментов соответствующих турбин, а сплошной линией — сум-
марная кривая крутящего момента М2.
§ 39. АВТОМАТИЧЕСКОЕ ПЕРЕКЛЮЧЕНИЕ СКОРОСТЕЙ
В ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧЕ
Автоматическое переключение скоростей в гидромеханической
передаче производится или в коробке передач или в гидротранс-
форматоре (при помощи блокирования насоса и турбины). Для
208
правильного использования совместной работы двигателя и гидро-
трансформатора в гидромеханической передаче переключение
скоростей необходимо производить в определенные моменты.
Наибольшее распространение получили автоматические системы,
в которых переключение осуществляется в зависимости от двух
факторов: от скорости движения машины и угла открытия дрос-
сельной заслонки (для дизеля — от перемещения рейки топлив-
ного насоса). Такие автоматические системы обеспечивают пере-
крытие передач, назначение которого состоит, во-первых, в том,
чтобы после перехода на прямую передачу, когда гидротранс-
форматор сблокирован, он снова не включился бы в работу на ре-
жим трансформации момента и, во-вторых, чтобы иметь некоторый
запас сильи тяги, необходимый для поддержания постоянной
скорости движения при переключении передач.
Рассмотрим в качестве примера конструкцию гидромеханичес-
кой передачи ЗИЛ-111 с гидравлической системой автоматического
переключения передач [11]. Передача (рис. 121, а) содержит
комплексный четырехколесный гидротрансформатор, работаю-
щий совместно с двухступенчатой планетарной коробкой передач.
Передаточное число первой передачи 1,72, второй 1,00 и заднего
хода 2,39. Главная передача автомобиля имеет передаточное
отношение 3,54. В передаче использована та же принципиальная
схема планетарной коробки передач, что и в передаче Пауэрфлайт
(рис. 121, б). При включенной понижающей передаче тормоз 7
включен, а сцепление 6 и тормоз 14 выключены. Вращение от
турбины 1 гидротрансформатора передается через вал 5 коронной
шестерне 8. Шестерня 8 обкатывает сателлит 9 по неподвижной
солнечной шестерне 10,
Замедленное вращение с водила первого планетарного редук-
тора передается на водило второго планетарного редуктора.
Водило обкатывает сателлит 12 по солнечной шестерне 11 и пере-
дает вращение коронной шестерне 13, причем шестерня 11, жестко
соединенная с валом 5, вращается с той же угловой скоростью,
что и шестерня 8, Второй планетарный ряд так же, как и первый,
работает в качестве понижающей передачи. В определенный момент
движения автомобиля автоматически блокируется понижающая
передача, после чего начинает работать прямая передача. При этом
включается ленточный тормоз 7 и включается сцепление 6 (тор-
моз 14 остается выключенным). Крутящий момент через сцепле-
ние 6 передается солнечной шестерне 10 и через вал 5 — коронной
шестерне 8. Обе шестерни вращаются с одинаковой угловой
скоростью, в результате чего первый планетарный ряд блоки-
руется, и каретка сателлитов вращается с той же угловой скоро-
стью, что и шестерни 8 и 10, Ко второму планетарному ряду
вращение передается от каретки сателлитов и от шестерни 11,
Каретка и шестерня 11 вращаются с одинаковой угловой скоро-
стью, в результате чего и второй планетарный ряд оказывается
блокированным.
14 с. П. Стесин 209
210
Рис. 121. Гидромеханическая передача ЗИЛ-111:
а — конструктивная схема; б — схема трансмиссии «Пауэрфлайд»: 1 — турбина; 2,3 — реакторы; 4 — насос; 5 — вал; 6 — сцепление:
7 — ленточный тормоз; 8 — коронная шестерня; 9, 12 — сателлиты; 10, 11 — солнечные шестерни; 13 — шестерня; 14 — тормоз; 15 — вал
При заднем ходе включается тормоз 14 (тормоз 7 и сцепле-
ние 6 выключены). Работает только второй планетарный редуктор.
Шестерни первого планетарного редуктора вращаются вхолостую.
Шестерня 11 приводит во вращение сателлит 12, ось которого
неподвижна. В связи с этим шестерня 13 вращается в обратную
сторону с меньшей угловой скоростью, чем шестерня 11.
В передаче применено кнопочное управление гидравлической
системой. Блок кнопок, расположенный на щите приборов, имеет
четыре кнопки: П(понижающая передача), Д (движение), Н (нейт-
ральное положение) и ЗХ (задний ход). От кнопок через трос
движение передается к рычажному механизму, укрепленному
Рис. 122. Характеристики гидромеханической передачи ЗИЛ-111:
а — безразмерная характеристика; б — характеристика передачи
на картере передачи и связанному с гидросистемой. При нажатии
на левую кнопку ранее включенная кнопка возвращается в исход-
ное положение. Кнопка П включается на крутых спусках и в тяже-
лых дорожных условиях. В этом случае автоматического перехода
на прямую передачу не происходит. При движении вперед со
скоростью выше 16 км/ч передача заднего хода не включается.
Включение стартера возможно только при нажатой кнопке Н,
которая соединена с электрическим выключателем.
На рис. 122, а показана безразмерная характеристика гидро-
трансформатора ЗИЛ-111, а на рис. 122, б—характеристика
гидромеханической передачи, отнесенная к ее выходному валу.
Максимальный коэффициент трансформации гидротрансформа-
тора равен 2,45, а с учетом понижающей передачи трансформация
крутящего момента возрастает до 4,2. Активный диаметр гидро-
трансформатора £>а = 0,328 м. Скольжение на режиме гидро-
муфты при равномерном движении с высокой и средней скоростью
составляет 3%.
Гидравлическая система переключения передач (рис. 123)
питается двумя насосами — передним 4 и задним 11, имеющими
212
20
18 №
1
Рис. 123. Гидравлическая
система переключения пе-
редач:
1 — гидротрансформатор;
2 — радиатор; 3 — масло-
заборник; 4 — передний насос; 5 —
редукционный клапан; 6—клапан
гидротрансформатора; 7 — дроссель-
ный клапан; 8 — клапан; 9 — кла-
пан понижающей передачи; 10—пере-
ключатель передач; // — задний насос;
12, 13, 15 — контрольные клапаны;
14 — клапан плавного включения;
16 — клапан сервоцилиндров; 17 —
распределитель ручного управления; 18 — центробежный регулятор; 19 — сцепление; 20 — сервоцилиндр заднего хода; 21 — сервоцилиндр
тормоза понижающей передачи
213
шестерни с внутренним зацеплением. Передний масляный насос
приводится от насоса гидротрансформатора, а задний — от вывод-
ного вала передачи. Задний насос имеет приблизительно в 2 раза
меньшую производительность, чем передний. Задний насос питает
систему при пуске двигателя буксиром, в случае остановки дви-
гателя на ходу автомобиля, а также при высокой скорости дви-
жения, разгружая тем самым передний насос. Масло поступает
к насосам через общий заборник 3, расположенный в масляном
картере передачи.
Система гидравлического управления содержит редукционный
клапан 5, клапан 6 гидротрансформатора, дроссельный клапан 7,
распределитель 17 ручного управления, центробежный регуля-
тор 18, переключательпередач 10. Указанные приборы являются ос-
новными — они необходимы для того, чтобы система могла работать.
Кроме этих приборов имеются еще три клапана, используемые
для обеспечения большей четкости работы. К ним относятся:
клапан 14 плавного включения, ограничительный клапан 16
сервоцилиндров и клапан 9 форсированного включения понижаю-
щей передачи.
В процессе переключения передач гидравлическая система
управляет многодисковым сцеплением 19 и сервоцилиндрамн 21
тормозов понижающей передачи и 20 — заднего хода.
Редукционный клапан 5 и клапан 6 гидротрансформатора рас-
положены между передним шестеренчатым насосом и картером
(рис. 121). Остальные клапаны расположены в панели управления,
укрепленной в нижней полости картера. Центробежный регуля-
тор укреплен на выводном валу передачи. Подвод масла к центро-
бежному регулятору осуществляется через корпус заднего мас-
ляного насоса и фланец регулятора. Уплотнение между указан-
ными деталями осуществляется чугунными разрезными коль-
цами.
Редукционный клапан 5 (рис. 124, а) при нейтральном
положении, включенной прямой и понижающей передачах соз-
дает в системе давление (7,05—7,35) • 105 н/м2 и при заднем ходе
(19,6—21,07) -105 н/м2. От переднего насоса 4 масло под давле-
нием поступает к полостям А, Б и Д редукционного клапана
(рис. 124, а).При поступлении к полостям А и Б масло проходит
через контрольный клапан переднего насоса 12, причем в полость Б
масло поступает, пройдя через распределитель 17 ручного управ-
ления. В те же полости А и Б масло подается от заднего насоса
через контрольный клапан 13. Из полости А через отверстие
в золотнике масло подводится в полость В. Давление масла в по-
лостях Б и В оказывает воздействие на неуравновешенную поверх-
ность золотника и нагружает пружину.
Когда в главной системе управления давление поднимается
до (7,05—7,35) • 105 н/м2, редукционный клапан направляет масло
в гидротрансформатор. Дальнейшее повышение давления вызы-
вает дополнительное перемещение золотника, вследствие чего
214
масло от магистрали давления переднего насоса через полости Д п Г
подается ко всасывающей полости насоса.
Если вследствие работы заднего насоса давление возрастает,
золотник еще переместится, и все масло, подаваемое передним
насосом через полости Д и Г, начнет поступать к магистрали
всасывания. После этого система будет снабжаться маслом,
поступающим только от заднего насоса. Скорость автомобиля,
при которой выключается передний насос, примерно равна 55 км/ч.
Рис. 124 Конструктивные элементы гидравлической си-
стемы переключения передач:
а — редукционный клапан; б — центробежный регулятор;
в — сервоцплиндр тормоза понижающей передачи: 1, 2, 3 —
каналы; г — сервоцилиидр тормоза заднего хода; д — переклю-
чатель передач; 1 — 7 — каналы; А, Б, В, Г — калиброван-
ные отверстия
При работе заднего насоса излишнее количество масла на слив
поступает из полости А, которая через дросселирующее сечение
между золотником и корпусом сообщается с полостью Г. При
включении заднего хода распределитель 17 ручного управления
закрывает доступ масла в полость Б, в результате чего регулятор
устанавливает в системе повышенное давление. Масло, поступаю-
щее от редукционного клапана к гидротрансформатору 1 (рис. 123),
проходит через клапан гидротрансформатора 6. При выходе из
гидротрансформатора масло проходит через калиброванное
215
отверстие. С увеличением подачи масла постепенно повышается
давление в гидротрансформаторе. Когда давление достигает
4,41 • 105 н/м2, контрольный клапан на входе в гидротрансфор-
матор начинает регулировать давление масла, поступающего от
редукционного клапана. Вследствие этого давление в гидротранс-
форматоре никогда не превышает указанной величины.
В рабочую полость гидротрансформатора масло подается через
зазор между вторым реактором и колесом насоса (рис. 121).
Из гидротрансформатора масло выходит через зазор между пер-
вым реактором и турбиной и через кольцевой канал между ва-
лами реакторов и турбины. От гидротрансформатора масло по-
ступает к радиатору 2 (рис. 123) водо-масляного типа, установлен-
ному в передней части двигателя. К радиатору подводится вода
из системы охлаждения двигателя. Если температура масла ниже
температуры воды в двигателе, то масло подогревается, а следо-
вательно, его вязкость и потери в гидропередаче снижаются.
Если температура масла выше температуры воды в двигателе,
то масло охлаждается.
Из радиатора масло под давлением 1 кгс/см2 поступает для
смазки шестерен и подшипников. Дроссельный клапан 7 регули-
рует давление масла в зависимости от степени открытия дроссель-
ной заслонки. При закрытой дроссельной заслонке давление
составляет 0,64 • 105 н/м2 и при полностью открытой 6,08-105 н/м2.
Масло, поступающее под определенным давлением от дроссель-
ного клапана, выполняет две функции: оно изменяет усилие на тор-
мозах и сцеплении и определяет скорость автомобиля, при кото-
рой происходит переключение на высшую передачу при заданном
положении педали подачи топлива. Дроссельный клапан устроен
сравнительно просто. С одной стороны золотник этого клапана
нагружен пружиной; натяжение пружины зависит от угла откры-
тия дроссельной заслонки. С другой стороны золотник нагружен
давлением масла, которое подается к торцевой его поверхности
через отверстие в золотнике. Излишнее количество масла посту-
пает на слив через левое крайнее отверстие в корпусе кла-
пана.
Центробежный регулятор 18 создает давление, пропорциональ-
ное квадрату скорости автомобиля. Давление центробежного регуля-
тора совместно с давлением дроссельного клапана определяет в
зависимости от угла открытия дроссельной заслонки и скорости
автомобиля момент, при котором происходит переключение с низ-
шей передачи на прямую. При переключении с прямой передачи
на низшую давление центробежного регулятора совместно с дав-
лением челночного клапана, рассмотренного ниже, используется
для облегчения плавности переключения.
Центробежный регулятор (рис. 124, б) состоит из корпуса,
золотника, двух грузиков и соединительного стержня (грузики
находятся один в другом). Корпус установлен на выводном валу
передачи таким образом, что грузики находятся по одну сторону
216
вала, а золотник—по другую. Грузики и золотник соединены
между собой стержнем. Когда выводной вал вращается, центро-
бежной силе грузиков противодействует гидравлическое давление,
действующее на золотник. Кривая зависимости давления от час-
тоты вращения регулятора имеет форму параболы. Для полу-
чения требуемой кривой применяется комбинированный грузик.
При скорости движения меньше 40 км/ч действуют на стержень
оба грузика, а кривая зависимости давления от скорости круто
поднимается. При скорости выше 40 км/ч наружный грузик пере-
мещается к периферии и останавливается у стопорного кольца,
а в действии остается лишь внутренний грузик, нагруженный,
кроме центробежной силы, также и силой пружины. Результи-
рующая кривая давления в этом случае будет более пологая.
Ограничительный клапан сервоцилиндра 16 (см. рис. 123)
содержит пружинную пластинку, которая закрывает проход масла
при поступлении его к сервоцилиндру 21 понижающей передачи.
На эту пружину одним концом действует двухступенчатый золот-
ник. Другой конец золотника (с большей торцовой поверхностью)
находится под давлением масла, поступающего от дроссельного
клапана.
Таким образом,только при прикрытой дроссельной заслонке пру-
жинная пластинка закрывает проход масла к сервоцилиндру. При
большем открытии дроссельной заслонки золотник отжимает пру-
жину, которая не мешает поступлению масла к сервоцилиндру.
На рис. 124, в показан сервоцилиндр тормоза понижающей
передачи. Ступенчатый поршень, находящийся в цилиндре, воз-
действует через рычаг с передаточным отношением 4:1 на тор-
мозную ленту. По каналу 1 масло подается к сервоцилиндру от
дроссельного клапана, а по каналу 2 — от основной магистрали
насосов под давлением (7,05—7,35) • 105 Н/м2. Эти давления,
воздействуя на поршень, обеспечивают включение тормоза. Так
как масло под давлением по каналу 1 подается от дроссельного
канала, то сила, воздействующая на ленту тормоза, зависит от
угла открытия дроссельной заслонки. Так как автоматическая
система производит переключение с прямой передачи на понижен-
ную передачу при определенной скорости автомобиля 15—20 км/ч,
то при включении тормоза усилие на ленту пропорционально
крутящему моменту двигателя. Этим достигается плавное пере-
ключение передач.При переключении на прямую передачу масло под
давлением подается по каналу 3. Это давление совместно с давле-
нием пружины преодолевает давление, воздействующее на пор-
шень в двух верхних полостях сервоцилиндра, и осуществляет
выключение тормоза. Канал 3 выключения тормоза соединен
с магистралью включения сцепления прямой передачи.
Таким образом при подаче масла по этому каналу одновременно
включается сцепление и выключается тормоз, что соответствует
прямой передаче. При нейтральном положении или включенном
заднем ходе масло по каналу 3 не подводится. В этих положениях
217
тормоз выключается при помощи нижней пружины. Верхняя
пружина сервоцилипдра служит для смягчения включения тор-
моза при переводе рычага управления из нейтрального положения
в положение, соответствующее движению вперед.
На рис. 124, г показан сервоцилиндр заднего хода. В этом
цилиндре находится поршень, на который надета втулка. Масло
подводится к цилиндру под давлением (19,6—21,07)-105 Н/м2
от золотника ручного управления. При выключенном тормозе
шток клапана, находящегося в поршне, упирается в корпус
цилиндра и сообщает цилиндр с полостью между поршнем и втул-
кой. Первоначально затяжка ленты тормоза осуществляется
поступающим в эту полость маслом. Усилие от втулки в тормозной
ленте передается через рычаг с передаточным отношением 5,5:1.
После того, как втулка поршня осуществит частичное выключение
тормоза, перемещается главный поршень, полностью затягиваю-
щий ленту. Масло, заключенное между втулкой и поршнем, вы-
талкивается наружу через два калиброванных отверстия, что
смягчает включение.
Автоматическое включение прямой и понижающей передач
производится переключателем передач (рис. 123). Отдельно пере-
ключатель показан на рис 124, д. По каналу 1 через калиброван-
ное отверстие А к переключателю подводится давление от основ-
ной магистрали. Канал 2 соединен с линией включения сцепле-
ния и выключения тормоза понижающей передачи. На схеме
переключатель показан в положении включенной понижающей
передачи.
Одним из основных требований, предъявляемых к любому
переключателю передач, как указывалось, является следу-
ющее: если золотник начал перемещаться, то он должен быстро
достигнуть нового крайнего положения. Задержка золотника
вызывает повышенное буксование и выход сцепления из строя.
В частности, ход золотника должен быть завершен до начала
включения или выключения сцепления, т. е. подачи или отвода
от него масла. Существует несколько способов осуществления
быстрого перемещения золотника. Одним из распространенных спо-
собов является обеспечение разности давлений в начале пере-
мещения золотинка. Этот принцип быстрого переключения исполь-
зован в рассматриваемом переключателе.
Предположим, что нужно произвести переключение на пря-
мую передачу. Для этого золотник должен занять правое край-
нее положение и соединить основную магистраль с магистралью
включения сцепления и выключения тормоза. К правой стороне
переключателя передач по каналу 4 поступает масло под давле-
нием от дроссельного клапана. К левой стороне переключателя
передач ио каналу 7 подходит масло от центробежного регулятора.
Если переключение передач происходит при полном откры-
тии дроссельной заслонки, то давление масла, действующего на
правую сторону золотника переключателя, равно 6,08-105 Н/м2;
218
давление масла, действующего на левую сторону золотника пере-
ключателя передач, преодолевает давление дроссельного клапана
и усилие пружины, расположенной с правой стороны переклю-
чателя. Как только золотник начнет перемещаться вправо,
сейчас же приоткроется сливное отверстие, позволяя маслу,
поступающему от калиброванного отверстия Г и далее через
отверстие в золотнике, выходить наружу через калиброванное
отверстие Б. При открытии сливного отверстия давление между
отверстиями Г и Б уменьшается в 2 раза и становится равным
3,04 -105 Н/м2.
При воздействии на правую сторону золотника переключа-
теля передач давления, уменьшенного до 3,04• 105 Н/м2, равно-
весие золотника нарушается, и он толчком перемещается вправо,
включая прямую передачу. После переключения передач золо-
тник закрывает отверстие, через которое подводится масло от
дроссельного клапана, в связи с чем давление масла на правый
конец становится равным нулю.
Таким образом, давление в процессе переключения передач
изменяется от полного давления, обеспечиваемого дроссельным
клапаном, затем до половины этого давления и до нуля. Так как
при включенной понижающей передаче на золотник переключа-
теля действует давление от центробежного регулятора и дроссель-
ного клапана, то момент перехода на прямую передачу зависит
от скорости автомобиля и открытия дроссельной заслонки. При
положении дроссельной заслонки, соответствующем холостому
ходу двигателя, переключение на прямую передачу происхо-
дит при скорости 22—30 км/ч; при малом открытии дроссель-
ной заслонки, соответствующем предельно низким ускорениям
на горизонтальной дороге, переключение происходит при скоро-
сти 28—40 км/ч, а в случае полностью открытой дроссельной за-
слонки — при скорости 90—95 км/ч.
Переключение с прямой передачи на понижающую про-
исходит при помощи пружины, воздействующей на золотник
переключателя с правой стороны. Силе пружины противодействует
давление, обеспечиваемое центробежным регулятором, действую-
щее на золотник с противоположной стороны. В процессе пере-
ключения передач давление с правой стороны на золотник уве-
личивается от нуля до половины величины давления, устанавли-
ваемого дроссельным клапаном, и затем до полной величины
этого давления.
Как видно, переключения с прямой передачи на понижающую
не зависят от открытия дроссельной заслонки и происходят при
скорости 15—20 км/ч.
Автоматическая система позволяет при нажатии до отказа на
педаль подачи топлива осуществлять переключение с прямой пере-
дачи на понижающую, начиная со скорости 60—70 км/ч, не дожи-
даясь, пока скорость автомобиля снизится до 15—20 км/ч. При
этой скорости переключение происходит независимо от величи-
219
ны открытия дроссельной заслонки. Форсированный переход на
понижающую передачу осуществляется при помощи клапана
6 (рис. 124, д'). При нажатии на педаль подачи топлива дальше
пружинного упора плунжер нажимает на шарик клапана 6,
в результате чего от дроссельного клапана масло через калиб-
рованное отверстие В и отверстие в золотнике переключателя
передач подводится под давлением к правому концу золот-
ника.
При скорости автомобиля 60—70 км/ч и ниже это давление
превышает давление со стороны центробежного регулятора,
и золотник, перемещаясь влево, включает понижающую пере-
дачу. При освобождении педали масло к правому концу золот-
ника переключателя передач подводится от дроссельного кла-
пана через калиброванное отверстие Г, в результате чего пони-
жающая передача остается включенной.
Система переключения передач содержит контрольный кла-
пан 15 (см. рис. 123) дроссельного давления. Этот клапан обес-
печивает включение понижающей передачи вручную. Когда ры-
чаг на рулевой колонке устанавливают в определенное положе-
ние, капал 5 (рис. 124,5) соединяется с основной магистралью
давления и через контрольный клапан 3 масло под давлением
подается от насосов к правой стороне золотника переключателя
передач. Для плавного включения прямой передачи при крат-
ковременном освобождении педали подачи топлива, а также
для плавного включения понижающей передачи при резком
нажатии па педаль, в систему гидравлического управления
введен клапан плавного включения 14 (см. рис. 123).
Проследим взаимодействие основных элементов гидравли-
ческой системы при различных положениях рычага ручного управ-
ления. Нейтральное положение обычно применяется для пуска
двигателя (см. рис. 123). Золотник 17 ручного управления, пере-
двигаемый кнопками, подает масло только к редукционному кла-
пану и клапану гидротрансформатора. Сцепление и сервоци-
линдры тормозов выключены. Давление в системе устанавлива-
ется (7,05—7,35) • 105 Н/м2. Гидротрансформатор находится под
давлением; масло поступает в систему смазки. Работает только
передний насос, приводимый в действие от двигателя.
Для трогания автомобиля с места нажимают на кнопку Д,
соответствующую движению вперед (рис. 125). Распределитель
ручного управления подает масло к контрольным клапанам
и к сервоцилиндру 21 тормоза понижающей передачи. Дроссель-
ный клапан устанавливает давление (0,64 — 6,08) • 10б Н/м2,
пропорциональное открытию дроссельной заслонки. Масло под
этим давлением подводится к правому концу переключателя
передач и к соответствующей полости сервоцилиндра понижа-
ющей передачи. Когда скорость автомобиля достигнет величины,
при которой давление на золотник переключателя передач со
стороны центробежного регулятора превысит силу пружины
220
и давление со стороны дроссельного клапана, включится прямая
передача. От переключателя масло поступает к магистрали
включения сцепления и выключения тормоза понижающей пере-
дачи. Когда давление повышается, тормоз постепенно освобож-
дается, а сцепление в то же самое время постепенно включается,
и таким образом происходит плавный переход от работы тормоза
к работе сцепления.
В то время как поршень сервоцилиндра понижающей пере-
дачи перемещается из включенного положения в выключенное,
заканчивается включение сцепления и переход на прямую пере-
дачу. Обратное переключение происходит независимо от поло-
жения дроссельной заслонки при скорости 15—20 км/ч, когда
пружина переключателя передач, воздействуя на золотник, пре-
одолевает давление центробежного регулятора. Золотник пере-
ключателя соединяет магистраль включения сцепления и выклю-
чения сервоцилипдра тормоза со сливной. Одновременно с выклю-
чением сцепления выключается тормоз понижающей пере-
дачи.
При нажатии на кнопку ЗХ, соответствующую заднему ходу,
масло поступает только к гидротрансформатору и к сервоци-
линдру 20 заднего хода. Для обеспечения высокой нагрузки
на тормоз полость противодавления редукционного клапана
сообщается со сливной магистралью. Вследствие этого давление
в системе повышается до (19,6—21,07) • 105 Н/м2-. Для предотвра-
щения случайного включения передачи заднего хода на вы-
сокой скорости автомобиля в системе управления имеется огра-
ничительный клапан, соединенный с магистралью давления
центробежного регулятора. При увеличении скорости автомо-
биля до 16 км/ч под действием давления жидкости поршень
клапана поднимается, что препятствует перемещению золотника 17
ручного управления (рис. 125) в положение заднего хода.
При нажатии на кнопку /7, соответствующую понижающей
передаче, автоматический переход на прямую передачу не про-
исходит. От распределителя ручного управления через клапан
плавного включения и контрольный клапан масло под давле-
нием подводится к правой стороне переключателя и обеспечивает
включение понижающей передачи. При скорости свыше 85 км/ч
на кнопку П нажимать не рекомендуется.
В заключение кратко перечислим основные преимущества
и недостатки гидромеханических передач по сравнению с меха-
ническими передачами (зубчатыми).
1. Главное преимущество — это непрерывность и автоматич-
ность регулирования крутящего момента двигателя, что является
основным требованием, предъявляемым к силовым передачам
транспортных машин.
2. Управление машиной значительно упрощается и сводится
к двум операциям: управлению подачи топлива и управлению
механизмом поворота.
222
3. Гидротрансформатор (основная часть гидромеханической
передачи) конструктивно прост и надежен в работе. Износу в нем
подвергаются лишь подшипники качения, воспринимающие осевые
нагрузки, уплотнения и механизм свободного хода. Рабочие
органы (лопастная система) не изнашиваются. Гидротрансфор-
матор обладает высокой энергоемкостью, так как передаваемая
им мощность является функцией его диаметра в пятой степени.
4. Поток мощности, идущий от двигателя к ведущим колесам
машины, при изменении скорости ее движения не претерпевает
разрыва, как это имеет место в зубчатых силовых передачах,
что обеспечивает плавное движение машины и отсутствие удар-
ных нагрузок в гидромеханической передаче, а также в двига-
теле. Гидротрансформатор при этом работает бесшумно.
5. Машины с гидромеханической передачей обладают лучшей
проходимостью на мягких грунтах, а также на крутых подъемах.
6. В машинах с этой передачей меньше динамические на-
грузки, вызванные крутильными колебаниями, так как гидро-
трансформатор является демпфером, который гасит эти колебания.
7. Испытания показали, что при прочих равных условиях
средние скорости движения машин с гидромеханической пере-
дачей выше, чем со ступенчатой коробкой передач.
Некоторые недостатки машин с гидромеханической переда-
чей, вытекающие из принципа их действия:
1. Максимальный к. п. д. механической силовой передачи
составляет примерно 0,85—0,9, а гидромеханической передачи
он равен 0,75—0,85. Это вызывает некоторый перерасход топлива,
составляющий в среднем 5—8%.
2. Гидромеханическая передача требует специальной си-
стемы питания и охлаждения, что, в свою очередь, приводит
к некоторому усложнению машины.
ГЛАВА V
ИСПЫТАНИЯ И ДОВОДКА
ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧ
В гл. III было отмечено, что существующие методики расчета
лопастных систем гидродинамических передач не позволяют, как
правило, создать образец, который бы полностью удовлетворял
предъявляемым к нему требованиям по техническим параме-
трам. Практика создания гидродинамических передач показала,
что изготовленные по расчетам опытные образцы в большинстве
случаев нуждаются в доводке. Под доводкой опытного образца
следует понимать комплекс опытно-конструкторских работ с целью
выявления и ликвидации несоответствия реальных технических
параметров передачи запроектированным. При доводке опытных
образцов решающая роль принадлежит их испытаниям, которые
позволяют выявить реальные технические показатели и наметить
пути их изменения, если это требуется.
§ 40. СТЕНДЫ И МЕТОДИКА ИСПЫТАНИЙ
Как известно, у гидромуфт моменты на ведущем и ведомом
валах равны между собой, а у гидротрансформаторов отличаются
из-за наличия третьего колеса — реактора, который может быть
неподвижен (связан с корпусом) или вращаться на муфте сво-
бодного хода (комплексная передача). Особенности описанных
выше гидродинамических передач определяют требования к их
испытаниям. Так, при испытании гидромуфт достаточно измерять
момент только на одном рабочем колесе, а при испытаниях гидро-
трансформатора необходимо измерять моменты на двух рабочих
колесах. Исходя из этих требований, проектируются стенды для
испытания гидромуфт и гидротрансформаторов.
Стенд для испытания гидромуфт показан на рис. 126. Насос
гидромуфты 2 соединен с приводным двигателем /, а турбина
с нагрузочной установкой 5. Изменяя тормозной момент уста-
новки 3, производят испытания гидромуфты на различных режи-
мах ее работы. В качестве приводного двигателя стенда для
224
Рис. 126. Схема стенда для
испытания гидромуфт:
1 — приводной двигатель; 2 —
гидромуфта; 3 — нагрузочная
установка
испытаний гидромуфт регулируемого и предохранительного типов
рекомендуется применять электродвигатель мощностью, в 2—
3 раза превышающей поминальную мощность гидромуфты [17].
Причем для испытания регулируемых гидромуфт желательно
иметь электродвигатель постоянного тока с регулируемой часто-
той вращения выходного вала, а для испытания предохранитель-
ных гидромуфт можно применять электродвигатели переменного
тока с частотой вращения, соответствующей номинальной частоте
вращения вала гидромуфты.
Во всех случаях, когда гидромуфта предназначена для работы
с двигателем внутреннего сгорания, турбиной и т. д., всегда
проще испытать гидромуфту с электродвигателем и затем, анали-
зируя полученные характеристики и
сопоставляя их с характеристиками
двигателя рабочей машины, установить
пригодность данной гидромуфты для
привода машины. После доводки гид-
ромуфты и деформации ее характери-
стик в соответствии с требованиями,
предъявляемыми к приводу данной
рабочей машины, на стенде с двигате-
лем повышенной мощности можно при-
ступить к следующему этапу испыта-
ний. При этих испытаниях исполь-
зуется двигатель, который применяется
с гидромуфтой на рабочей машине. Такие исследования необхо-
димы, чтобы достоверно определить внешние характеристики
привода при перегрузке и аварийном режиме, а также маневрен-
ность привода.
После выбора двигателя для стенда необходимо определить
тип и характеристики нагрузочной установки. Тормозная уста-
новка должна полностью обеспечивать условия нагружения,
запланированные при испытаниях, устойчиво поддерживать тор-
мозной момент, быть легкой в управлении и надежной в эксплуа-
тации.
Кроме того, для испытаний передачи в режиме противовраще-
ния и обгонном режиме нагрузочное устройство должно позволять
использовать его в качестве двигателя. Указанным требованиям
полностью удовлетворяет электротормоз, характеристики п элек-
тросхема установки которого подробно описаны в литературе [17].
Момент при помощи электротормоза поддерживается устой-
чивым и легко регулируется. Однако создавать экстренные пере-
грузки (большая скорость возрастания момента) при помощи
электротормоза невозможно, и поэтому для таких испытаний
рационально применять фрикционные тормоза. Таким образом,
нагрузочную установку рекомендуется комплектовать из не-
скольких тормозных установок различного назначения и с раз-
личными характеристиками.
15 С. П. Стесни 225
На рис. 127 показан стенд для испытания гидромуфт, разра-
ботанный в И ГД им. Скочинского, с нагрузочной установкой,
состоящей из гидравлического 3, электрического 5 и фрикцион-
ного 4 тормозов. Гидромуфта 2 приводится во вращение электро-
двигателем 7, который балансирно установлен на опорах и свя-
зан статором с весовым устройством. При испытаниях электро-
тормоз (генератор постоянного тока) может полностью заменить
гидротормоз, так как поле его характеристик перекрывает характе-
теристики гидротормоза. Однако при снятии характеристик гидро-
муфты в тяговом режиме работы удобнее пользоваться гидротор-
мозом, поскольку его характеристики (квадратичная зависимость
Осцалпогриф
Показы-
си tot ци е
приборы
Рис. 127. Схема стенда
для испытания гидромуфт:
1 — электродвигатель; 2 —
гидромуфта; 3 — гидротор-
моз; 4 — фрикционный тор-
моз; 5 — электрический тор-
моз; 6 — маховик со смен-
ными дисками
момента 7ИТ от частоты вращения ит) определяют их наиболее
устойчивую совместную работу. Кроме того, гидротормоз рабо-
тает бесшумно и легко регулируется, поэтому рекомендуется
во всех возможных режимах использовать гидротормоз, а в тех
зонах, где испытания с ним невозможны (режимы тормозные и ма-
лых /), использовать электрический тормоз.
Для точного снятия внешних характеристик рационально при-
менять приводной двигатель и тормозную установку в балансир-
ном исполнении. При исследовании режима работы гидромуфты
для разгона больших маховых масс стенд имеет маховик 6 с из-
меняемым моментом инерции.
Аппаратура, примененная на стенде, позволяет производить
визуальный отсчет исследуемых параметров, а также записывать
их осциллографом (измерительные каналы на рис. 127 обозначены
цифрами в кружках). При снятии внешней характеристики мо-
мент, передаваемый гидромуфтой, определяется по весовому меха-
низму 1 приводного электродвигателя в балансирном исполнении.
Частота вращения ведущего 2 и ведомого 7 валов измеряется
при помощи специальных дистанционных тахометров. Темпера-
тура рабочей жидкости контролируется термометром 5. При ис-
следовании переходных режимов, снятии динамических характе-
ристик и т. д., осциллографируют параметры п± и записывая
напряжение якоря тахогенератора, и М2 при помощи спе-
226
циальных тензодатчиков сопротивления и токосъемных устройств.
Кроме того, на осциллографе записывается время при помощи
специального отметчика или напряжение сети переменного тока.
При испытании гидромуфт, для которых Мг = М2 и =
= при исследовании внешних характеристик достаточно
1
построить зависимость Л1х = f (/i2), чтобы полностью определить
свойства гидромуфты. При снятии внешней характеристики
для п1 = const устанавливается определенная нагрузка на ведо-
мом валу и измеряются: Мх (или Л12), п19 температура рабо-
чей жидкости, которую при снятии внешней характеристики сле-
дует поддерживать постоянной с точностью ±5° С, так как при
значительном ее колебании вязкость жидкости в рабочей полости
изменяется, что влияет на передаваемый гидромуфтой момент.
Особенно большое значение имеет поддержание постоянной темпе-
ратуры при испытании предохранительных гидромуфт. Увели-
чение температуры рабочей жидкости и уменьшение ее вязкости
повышает критическое скольжение, что вызывает рост максималь-
ного момента, передаваемого гидромуфтой. В связи с этим харак-
теристика гидромуфты (особенно предохранительной) должна сни-
маться при рабочей температуре, иначе достоверность полученных
данных снижается. В гидромуфтах с внешним протоком рабочей
жидкости постоянство температуры поддерживается пропуском
жидкости через холодильник. В замкнутых гидромуфтах (без
внешнего протока) охлаждение происходит при работе муфты
на режиме холостого хода. Для построения внешней характе-
ристики достаточно измерить режим в 10—12 точках, причем
наиболее точно следует определить скольжение при номинальном
моменте. В связи с этим измерение скорости вращения ведущего
и ведомого валов может производиться при помощи тахометров,
имеющих класс точности 0,5—1,0 при всех режимах, кроме номи-
нального, на котором следует пользоваться приборами, дающими
ошибку измерения не более 0,1—0,2%.
Внешние характеристики гидромуфты снимаются при различ-
ных, заполнениях рабочей полости, что в гидромуфте, регулируе-
мой заполнением, позволяет построить поле регулировочных
характеристик, а для предохранительной гидромуфты выбрать
наполнение, при котором гидромуфта имеет наилучшие характе-
ристики. В случае применения гидромуфт с механическим управ-
лением (например, поворотные лопатки) внешние характеристики
определяются при различных положениях органа управления.
При необходимости испытания проводятся с различной частотой
вращения nt.
По результатам измерений характерных параметров гидро-
муфты при различных режимах ее работы, кроме характеристик
в координатах 714 — п2, могут быть построены универсальные
характеристики. При снятии внешней характеристики регули-
руемой гидромуфты одновременно определяется устойчивость
15* 227
работы на регулировочных характеристиках, отсутствие колеба-
ний скорости на всех режимах заполнения и скольжения, темпе-
ратурный режим.
Стенды для испытаний гидротрансформаторов строятся по
той же принципиальной схеме, что и для испытаний гидромуфт
(см. рис. 128). Однако оборудование этих стендов имеет свои
особенности. Для построения внешней характеристики гидро-
трансформатора необходимо измерять два момента на рабочих
Рис. 128. Стенд для динамических испытаний гидротрансформатора:
1 — приводной двигатель; 2 — механическая передача; 3 — гидротрансформатор; 4 —
фрикционный тормоз; 5 — электрический тормоз; 6 — маховик; 7 — золотник управле-
ния; 8 — холодильник; 9 — вентиль; 10 — бак; 11 — предохранительный клапан; 12 —
фильтр; 13 — насос (цифры в кружках обозначают измерительные каналы)
колесах. По известным крутящим моментам на двух колесах
крутящий момент на третьем колесе вычисляется по уравнению
баланса моментов.
Точность определения внешней характеристики в значитель-
ной степени зависит от выбранной схемы измерения крутящих
моментов. Так, момент на ведущем валу гидротрансформатора
можно замерять непосредственно (приводной двигатель сбаланси-
рован), либо косвенно, с помощью момента на реакторе (реактор
жестко связан с корпусом, который установлен балансирно и свя-
зан с весовым механизмом). В последнем случае Л41 = 7И2±Л13.
Для обоих случаев мы считаем, что нагрузочное устройство свя-
зано с ведомым валом гидротрансформатора и сбалансировано.
Наибольшая точность измерения может быть достигнута, когда
при испытаниях гидротрансформатора замеряются моменты непо-
средственно на ведущем Мг и ведомом М2 валах. Рассмотрим
228
схему действующих моментов на колесах гидротрансформатора
и на его валах (см. рис. 129).
Для каждого из валов гидротрансформатора можно записать:
Л11 = /Ин Ц- Л4дН_т ^мех!»
М2 — 7ИТ 4" ^дН-Т — МдТ-Р — ^мех2»
(125)
Л43 — Л4р - Л4дТ_р -Л^мехЗ»
где Л4мехз — механические потери при балансирной установке
гидротрансформатора.
Теперь, если момент определять через моменты М2 и 7И3,
получим
М, = М2 - М3 - Л4Н + Л1дН_т - Л1мех2 + Л4мех3. (126)
Сравним выражения (125) и (126) для Мг. Если считать с доста-
точной точностью, что Л4мех 1 Ммех з, то для второго случая
(когда Мг определяется через М2 и Л43) мы получаем заниженное
значение момента Мг и. как
следствие, завышенное значение
к. п. д. и заниженное значение
энергоемкости испытуемого гид-
ротрансформатора. Поэтому
обычно стремятся оборудование
стенда подбирать таким обра-
зом, чтобы при снятии внеш-
ней характеристики гидротранс-
форматора моменты Mi и М2
замерялись непосредственно.
Если же по каким-либо причи-
нам этого сделать не удается и
приходится замерять момент
через М2 и М3 (в качестве
приводного двигателя приме-
няется дизель), то при опреде-
лении к. п. д. и энергоемкости
гидротрансформатора необхо-
Рис. 129. Схема действующих момен-
тов на колесах гидротрансформатора:
/ — насос; 2 — турбина; 3 — реактор
димо в полученное выражение
для Mi вводить поправку, ко-
торую можно определить экс-
периментально.
Как и при испытании гидромуфт, наиболее полные исследо-
вания гидротрансформатора могут быть произведены с приводным
электродвигателем постоянного тока в балансирном исполнении.
В этих случаях характеристики могут быть сняты при различной
частоте вращения Мощность приводного электродвигателя
можно выбирать без запаса при испытании гидротрансформатора
с непрозрачной характеристикой, а с прозрачной характеристи-
кой— в соответствии с максимальным возможным моментом на
229
ведущем валу. При необходимости испытаний гидротрансформа-
тора в тормозных режимах необходимо в качестве приводного дви-
гателя и тормозной установки применять устройства, которые
автоматически переходят из тягового режима работы в тормозной
и наоборот (например, балансирная машина постоянного тока).
Гидрообъемиый привод в качестве двигателя и нагрузки также
удовлетворяет условиям работы стенда, но оборудование стенда
при этом значительно усложняется, и поэтому подобные устрой-
ства применяются сравнительно редко. При определении динами-
ческих характеристик гидротрансформатора стенд оборудуется
тензоустановками для измерения моментов на ведущем и ведомом
валах, а также момента на реакторе. Стенд также должен иметь
фрикционный тормоз для создания экстренных перегрузок. Иногда
такой стенд имеет дополнительный маховик для имитации момента
инерции машины.
На рис. 128 показан стенд для испытания гидротрансформато-
ров, отвечающий перечисленным выше требованиям. Испытыва-
емый гидротрансформатор 3 приводится от балансирной машины
постоянного тока 1. Нагрузочная установка состоит из фрикцион-
ного 4 и электрического 5 тормозов. Кроме того, нагрузочная
часть стенда имеет маховик 6 с измененным моментом инерции.
Для питания и охлаждения применена насосная установка,
содержащая насос 13, имеющий привод от ведущего вала гидро-
трансформатора через передачу 2. Жидкость всасывается насосом
через фильтр 12 и подается через холодильник 8, трубопровод
с вентилем 9 к золотнику управления 7. Из гидротрансформатора
жидкость сбрасывается в бак 10. Давление в гидросистеме контро-
лируется предохранительным клапаном 11.
Стенд оборудован приборами, которые позволяют измерять
все требуемые параметры. Моменты и М2 измеряются по
показаниям весов балансирных машин. Частота вращения п1
и п2 замеряется дистанционными специальными тахометрами.
Одновременно с исследованием работы гидротрансформатора про-
изводится измерение режима работы питательной установки.
При этом измеряются давление питания рпод, температура
жидкости Т, уровень Н жидкости в баке, а в случае необходи-
мости по расходомеру можно определить расход установки.
Во время испытаний гидротрансформатора при переходных режи-
мах осциллографом записываются моменты Мг и М2 от тензо-
датчиков сопротивления, наклеенных на валы и соединенных
через токосъемники с усилителем и осциллографом. Частота
вращения пх и п2 записывается осциллографом при7 помощи
тахогенераторов или импульсным методом. Кроме того, осцилло-
графируются давление питания рпод (тензоманометр) и темпера-
тура на сливе из гидротрансформатора Т2 (термопара). При снятии
внешней характеристики на основании замеренных величин
вычисляются: К, i, rj, Хм, и строятся внешние характеристики.
Если необходимо определить регулировочные внешние характе-
ра
ристики при различных заполнениях рабочей полости или при
поворотных лопатках реактора и т. л., снимается серия внешних
характеристик, каждая из которых соответствует различному
значению регулируемого параметра.
При испытаниях гидропередач необходимо помнить о погреш-
ностях при замере таких параметров, как 7Иг, Л/2, /Ц, 11 т- Д-,
и учитывать влияние этих погрешностей на оценку преобразую-
щих свойств трансформатора. Предельные абсолютные погреш-
ности при замерах величии зависят от цены деления шкал измери-
тельных приборов и от способа отсчета. Как правило, абсолютная
погрешность принимается равной 0,5 цены деления прибора.
Зная абсолютную погрешность, можно вычислить относительную
погрешность при измерениях. Так, относительная погрешность
при определении к. п. д. гидротрансформатора равна сумме
относительных погрешностей величин к. и. д. или
Ai) _АЛ12 . A/Vlt । A/i2 . А/?г
1] /VI2 Ml ^2 ’
где Д — абсолютная погрешность.
При снятии внешней характеристики гидротрансформатора
измерительные приборы должны быть выбраны такими, чтобы
суммарная относительная погрешность при к. п. д. не превышала
± 1%.
§ 41. ГИДРАВЛИЧЕСКИЕ ТОРМОЗА
Гидротормозом называют такое тормозное устройство, в кото-
ром создание тормозного момента осуществляется при помощи
жидкости. Применяются гидротормоза:
в стендах для испытаний различных машин (двигателей внутрен-
него сгорания, гидропередач, турбин и 1. д.);
в машинах, в которых имеет место работа в тормозных режи-
мах (транспортные машины, автомобили и тягачи, где гидро-
тормоза используют при длительных спусках; подъемно-транс-
портные машины, буровые установки и т. д.).
Широкое распространение гидротормоза получили благодаря
сравнительно низкой стоимости и большой энергоемкости при
прочих равных условиях. Так, например, по сравнению с электро-
тормозом при одинаковой энергоемкости габариты гидротормоза
почти в 2 раза меньше.
Принцип действия и основные схемы гидротормозов. Гидро-
тормоза делятся на тормоза гидродинамического и гидрообъемного
типов. Создание тормозного момента в гидротормозе гидродинами-
ческого типа возможно за счет циркуляционного потока, вихре-
вого трения или дискового трения.
В зависимости от наличия или преобладания одного из ука-
занных выше факторов гидротормоза делятся на лопастные,
штыревые и дисковые.
231
Лопастной тормоз (как и любой гидродинамический тормоз)
работает по тому же принципу, что и гидромуфта, т. е. является
прототипом гидромуфты. Работа гидротормоза происходит на
одном режиме скольжения s = 1, т. е. при заторможенной турбине,
но имеющей возможность свободно качаться между ограничи-
тельными упорами.
Изменение тормозного момента (как и для любого гидро-
тормоза) может осуществляться за счет изменения заполнения,
поворота лопаток или введения шибера (перегородки) между
насосом и турбиной. Из ранее приведенных характеристик видно,
что в зависимости от заполнения, поворота лопаток или перекры-
тия капала меняется величина момента. При неподвижной
турбине изменение момента определяется также вышеуказанными
условиями, и работа гидротормоза происходит от минимального
момента при опорожненной или перекрытой рабочей полости
до максимального момента при полностью заполненной или от-
крытой полости. В этих пределах может быть получено любое
значение тормозного момента.
Шиберное регулирование тормозного момента предпочтитель-
нее, поскольку оно более устойчиво и менее инерционно, чем
объемное. Однако остаточный момент при шиберном регулирова-
нии выше, и этот способ приходится сочетать с объемным. Изме-
рение тормозного момента производится по реактивному моменту
статора (турбины) при помощи весового механизма.
Наиболее характерным лопастным тормозом является тормоз
Фруда (рис. 130). Основными элементами такого тормоза являются
вал с насаженным па него ротором (насосом); заслонки, входящие
с боков между рабочими элементами; качающийся статор (турбина);
весовое устройство.
Усилие, действующее на статор, через рычажную систему
передается на динамометр. При нереверсивном исполнении гидро-
тормоз обычно имеет наклонные лопатки, что снижает его габа-
риты, а при реверсивном исполнении устанавливают радиальные
лопатки. Из назначения гидротормоза ясно, что основной задачей
его является возможно большее преобразование мощности в тепло,
т. е. для гидротормоза баланс мощности можно записать в виде
Nh — N пот
или
(Р^)н = Р£<Жот
ИЛИ
(PSQH)h ^торм^торм-
Если /7И = const, то мощность N = f (Q).
Штыревые тормоза нашли широкое распространение благо-
даря простоте конструкции, легкости регулирования и неболь-
шим габаритам. К ним относится, например, тормоз Юнкерса.
На рис. 131, а показан штыревой тормоз типа ЕЧ. Тормоз состоит
232
4
2з;
a)
Рис. 131. Гидротормоза:
а —- гидротормоз Юнкерса: 1 —
вал; 2 и 3 — масленки; 4 —
вращающийся ротор; 5 — ста-
тор; 6 и 7 — штыри; 8 — золо-
тник; 9 — тахометр; 10 — вен-
тиль; 11 — весовой механизм;
12 — демпфер; б — дисковый
из вращающегося ротора с четырьмя рядами штырей 7. Ротор
закреплен на валу 1. На статоре 5 установлено два ряда штырей 6,
между которыми проходят штыри ротора. При заполнении полости
гидротормоза водой сопротивление ее перемещению штырей
и вихреобразование на них определяют величину тормозного
момента. Тормозной момент зависит также от заполнения рабочей
полости, поэтому заполнение регулируется количеством подава-
емой в гидротормоз воды вентилями 10 и золотниками на сливе 8.
Кроме того, можно совсем отключать одну из камер тормоза.
Тормозной момент измеряется весовым механизмом маятникового
типа 11, который связан с балансирным статором. Для повышения
устойчивости регулирования гидротормоз снабжен демпфером 12,
который представляет собой поршень с отверстием, перемещаю-
щийся в цилиндре с маслом. Частота вращения гидротормоза
контролируется механическим стационарным тахометром 9. При-
вод тахометра и основные подшипники ротора смазываются через
масленки 2 и 3.
Дисковый тормоз является простейшим типом гидравличе-
ского тормоза (рис. 131, б). Тормозной момент в нем создается
за счет трения дисков о воду, причем вода подается через карманы
к оси вала, увлекается вращающимся диском и отбрасывается
на периферию. Для обеспечения одинакового уровня воды кар-
маны соединены между собой, а вращающиеся диски у оси имеют
отверстия, что способствует более равномерному распределению
жидкости внутри тормоза. Для улучшения работы вода должна
подаваться с постоянным напором. Регулирование наполнения
гидротормоза водой осуществляется кранами на подводящем
и отводящем трубопроводах. Энергоемкость дискового тормоза
почти в 10 раз меньше, чем у лопастного при тех же габаритах,
но он проще по конструкции и дешевле в изготовлении, и поэтому
часто применяется на испытательных стендах.
Недостатком всех гидродинамических тормозов является ма-
лый тормозной момент при малой частоте вращения, что можно
видеть из уравнений
М - XM(o2pD5
и
W - X;Vp(o3D5.
Таким образом, характеристика гидротормоза представляет
собой квадратичную параболу М — / (/г), проходящую через на-
чало координат. Область работы гидротормоза, как видно из
рис. 132, а, определяется кривой 1, соответствующей тормозной
мощности, обуславливаемой воздухом, при полностью опорожнен-
ном тормозе, кривой 2 — при тормозе, заполненном полностью
водой или при открытой заслонке; прямой 3, ограничивающей
работу тормоза по прочности (из условий наибольшего момента,
принятого при расчете тормоза на прочность); прямой 4, ограни-
чивающей работу тормоза по наибольшей выходной температуре
воды; кривой 5, ограничивающей работу тормоза по наибольшей
235
допустимой частоте вращения, что вытекает из прочности вращаю-
щегося ротора.
На рис. 132, б показана характеристика испытываемой гидро-
муфты и область работы гидротормоза. Точка А — точка наиболь-
шего момента, который тормоз может обеспечить. При меньшей
частоте вращения тормоз уже не может обеспечить дальнейшее
затормаживание, так как момент на ведомом валу гидромуфты
больше момента, развиваемого гидротормозом. Точка Б ограничи-
вает снятие характеристики вследствие того, что рабочая машина—
двигатель (турбина гидромуфты) за этой точкой не может пре-
одолеть остаточный момент тормоза. Зона снимаемой характерис-
тики ограничивается частотой вращения на участке /zmin — zzmax.
Рис. 132. Характеристика гидротормоза:
а —- области работы гидротормоза; б — совместная работа гид-
ротормоза и гидромуфты
Для того чтобы снять всю характеристику, необходимо ставить
комбинированный гидравлическо-механический тормоз. Для уве-
личения диапазона работы гидротормоза можно применить про-
межуточную коробку передач.
В качестве обычного гидротормоза может быть использована
любая гидромашнна объемного действия, способная работать
в насосном режиме. Схема нагрузочного устройства такого типа
показана на рис. 133. Вал испытываемой гидропередачи 1 соеди-
нен с объемной гпдромашиной 2, работающей в режиме насоса.
Подаваемая тормозной гидромашиной жидкость проходит через
регулируемый дроссель 3, настройка которого определяет дав-
ление, а следовательно, и тормозной момент на валу гидромашины.
Жидкость охлаждается в теплообменнике 4 и направляется в
бак 5. Поскольку сопротивление дросселя 3 зависит от расхода
жидкости, а следовательно, от частоты вращения испытываемой
передачи, часто вместо дросселя применяют предохранительный
клапан, который поддерживает нагрузку более стабильно.
Гидротормоза объемного типа обладают быстродействием и по-
этому применяются для испытания с нагрузками, имитирующими
236
Рис. 133. Гидротормоз объем-
ного действия:
/ — привод; 2 — объемная гидро-
машпиа; 3 — регулируемый дрос-
сель; 4 — теплообменник; 5 — бак
работу машины, для которой предназначена гидропередача. Для
этого изготовляется специальный кулачок, приводящийся во вра-
щение от отдельного привода. Кулачок воздействует на дроссель
и изменяет его проходное сечение по заданной программе. Это
обусловливает испытание гидропередачи с силовым режимом,
подобным режиму реальной машины. Задающий кулачок (или
другое программное устройство) может воздействовать также
на пружину предохранительного клапана в случае применения
его для нагружения тормозной гидромашины пли изменять удель-
ный расход тормозной регулируемой гидромашины. Тормозная
характеристика объемной гидромашины Л/ ~ f (п) определяется
прямой, проходящей через начало координат. Наклон характе-
ристики зависит от объемного
к. п. д. гидромашины, который для
серийных насосов объемного дейст-
вия составляет 0,9—0,95. Поэтому
с нагрузочным устройством в виде
гидромашины объемного действия
практически можно испытывать гид-
ропередачу при всех необходимых
режимах нагружения.
Кроме серийных насосов, в ка-
честве нагрузочных устройств иног-
да применяют специальные гидро-
тормоза объемного действия. Это
объясняется либо отсутствием гпдромашипы необходимой мощ-
ности, либо желанием сократить расходы на приобретение тор-
мозной машины. Насосы объемного действия для уменьшения
утечек изготовляются с минимальными зазорами в рабочих эле-
ментах. Вследствие этого повышаются требования к применяемым
материалам, термообработке, технологии изготовления. Все это
приводит к значительной стоимости изделия. Между тем, при
использовании их как гидротормозов пет необходимости предъ-
являть к ним жесткие требования. Некоторое увеличение утечек
уменьшает жесткость характеристики объемного гидротормоза,
но при этом значительно уменьшается его стоимость. В связи
с этим бывает рационально разрабатывать специальные простые
и недорогие гидротормоза, которые может изготовить любой
машиностроительный завод. Примером может служить гидро-
тормоз шестеренчатого типа конструкции ИГД. им. Скочинского.
Гидротормоз имеет такую же конструкцию, как шестеренчатые
насосы, однако в связи с большей объемной постоянной может
развивать момент до 1000 Н-м при давлении 2-10°Н/м2. Частота
вращения гидротормоза 200—800 об/мин. Таким образом, про-
стыми технологическими средствами удается создать доста-
точно эффективные гидротормоза и при их помощи снимать харак-
теристики гидропередачи или испытывать их с различными изме-
няющимися нагрузками.
237
§ 42. СПЕЦИАЛЬНЫЕ ИСПЫТАНИЯ ПРИ ДОВОДКЕ
ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧ
Если при снятии внешней характеристики передачи выявлено
отличие реальных параметров от запроектированных, требуется
доводка опытного образца, т. е. изменение каких-то параметров
его лопастной системы, конструкции и т. д. Испытания с целью
снятия внешних характеристик позволяют судить об эксплуата-
ционных свойствах гидропривода, однако они не дают представ-
Рнс. 134. Стенд с прозрачной моделью гидромуфты
ления о процессах, происходящих во внутренних полостях пере-
дач, управляя которыми можно деформировать их характеристики.
Поэтому основной задачей специальных испытаний является
изучение физики потока циркулирующей в рабочей полости
жидкости. Визуальное изучение потока жидкости во многих
случаях может помочь установить причину того или иного явле-
ния и наметить способы ликвидации его нежелательных проявле-
ний. Так, например, при испытании регулируемых заполнением
гидромуфт с обычной рабочей полостью, как указывалось ранее,
при заполнении менее 50% и скольжении больше 50% были обна-
ружены устойчивые колебания момента и скорости на ведомом
валу. Для выяснения причин этого явления и их устранения
в ИГД им. Скочннского была испытана прозрачная модель гидро-
муфты с активным диаметром Da = 0,200 м.
Стенд для испытания прозрачной модели гидромуфты (рис. 134)
состоит из приводного электродвигателя постоянного тока,
238
который вращает гидромуфту, изготовленную из органического
стекла. Турбина гидромуфты связана со шкивом фрикционного
тормоза, рычаг которого опирается на чашу весов. По показа-
нию весов определяется момент, передаваемый гидромуфтой.
Изменение скорости вращения ведущего и ведомого валов и мо-
мента, передаваемого гидромуфтой, позволяет установить ее
внешнюю характеристику при различном наполнении рабочей
полости.
Одновременно со снятием внешней характеристики изучается
режим движения жидкости в рабочей полости. Для этого стенд
оборудуется электростробоскопом, импульсная лампа которого
освещает прозрачную гидромуфту. Число вспы-
шек импульсной лампы при помощи ручной ре-
гулировки или от специального синхронизатора
устанавливается равным одной вспышке за один
оборот вала гидромуфты. Таким образом, пере-
носное движение потока (вращение гидромуфты)
как бы останавливается, п относительное движе-
ние жидкости в рабочей полости хорошо прос-
матривается.
Во время этих испытаний, кроме визуального
изучения потока, можно производи гь его фото-
и киносъемку. Исследование потока движения
рабочей жидкости позволяет установить, как при
частичном заполнении режим циркуляции устана-
вливается в зависимости от нагружения и сколь-
жения. Режим циркуляции в рабочей полости
гидротрансформатора можно также исследовать
на прозрачной модели по методике, изложенной
выше для гидромуфт.
При исследовании проточной части гидро-
трансформаторов широко применяется изучение скоростного ре-
жима потока при помощи цилиндрических и шаровых насадок,
шаровых зондов. Такие исследования позволяют определить по-
грешности аналитического расчета и создать более совершенные
конструкции лопастных колес. Методика исследования поля ско-
ростей при помощи цилиндрических трехканальных трубок под-
робно освещена в литературе [10]. В настоящее время появились
более совершенные шаровые пятиканальные зонды. Кроме того,
предложены новые способы измерения скорости потока с исполь-
зованием термисторов или полупроводниковых сопротивлений
[17].
Электрическое сопротивление полупроводника зависит от его
температуры. Используя это свойство, можно создать датчик для
измерения скорости потока жидкости. Датчик (рис. 135) в виде
шарика полупроводниковой массы диаметром не более 0,5 мм
помещается в исследуемый поток и нагревается электрическим
током. Фактическая температура датчика зависит от величины
239
Рис. 135. Дат-
чик для замера
скорости пото-
ка:
/ — трубка; 2 —
полупроводнико-
вая масса; 3 —
стержень из эпок-
сидной смолы;
4 — провода
тока и охлаждающего действия потока жидкости, которое про-
порционально скорости потока. Каждый датчик должен быть
предварительно тарирован по скорости и температуре. Диапазон
тарировки зависит от предстоящих измерений [17]. Полупро-
водниковые датчики имеют небольшие размеры, и их конструкция
допускает определение скорости потока при отклонении оси
датчика до ±40° от истинного направления потока, поэтому
такие датчики могут применяться для измерения скорости потока
жидкости даже во вращающихся колесах. Поскольку датчики
имеют большое сопротивление, для соединения их с усилителем
могут быть использованы обычные щеточные токосъемники. Малая
инерционность полупроводниковых датчиков позволяет проводить
измерения даже при неустановившихся процессах, определять
вихревые зоны и места отрыва потока.
При исследовании скоростного потока в неподвижных колесах
или в межколеспом пространстве, где габаритные размеры тари-
рованных трубок или насадок не влияют на параметры процесса,
применение таких трубок иногда предпочтительней в связи с про-
стотой использования. Сравнительные исследования скорости
жидкости в рабочих колесах при помощи полупроводниковых
датчиков и шаровых зондов позволили установить точность заме-
ров обоими методами. При этих испытаниях исследовался непроз-
рачный трехколесный трансформатор с центробежной турбиной,
приспособленный для измерения при помощи зондов (рис. 136, а).
Измерение зондами проводилось в пяти сечениях: перед входом
в насос (/—/), между выходом из насоса и входом в турбину
(II—II), за турбиной (III—III), перед входом в реактор (IV—IV)
и за реактором (V—V). Измерение шаровыми зондами осуще-
ствлялось при постоянной частоте вращения насоса (/г2 =
— 1000 об/мин) и передаточных числах i = 0,3; 0,61; 0,8.
Для измерений применялись наиболее совершенные шаровые
пятиканальные зонды с диаметром шарика 5 мм и диаметром
канала 0,7 мм (рис. 136, б). Центральное отверстие 1 зонда через
трубку Г соединялось с ртутным дифференциальным манометром /,
отверстие 2 через трубку 2' — с манометрами I и II, отверстие 3
через трубку 3' — также с манометром II, отверстия 4 и 5 —
с манометром III. При измерении зонд поворачивался вокруг
оси до тех пор, пока перепад давления по показаниям манометра II
не обращался в нуль. По показаниям манометров I и II можно
определить безразмерный коэффициент
а по лимбу координатника, связанного с зондом, угол ср между
проекцией абсолютной скорости с на плоскость, нормальную
к оси державки зонда, и меридиональной плоскостью. Зная коэф-
фициент /гп, по характеристике зонда определяют угол 6 между
направлением абсолютной скорости с и плоскостью, нормальной
240
к оси зонда, а также значение с. По этим данным рассчитывают
меридиональные составляющие скорости
си = с sin б и ст = с cos б cos ср.
Исследование потока по приведенной выше методике позво-
ляет определить поле скоростей и выявить совершенство конструк-
Рис. 136. Зондирование потока в рабочей полости гидротрансформатора:
а — схема установки зондов; 1,2,3 — положения шарового зонда (полупроводникового
датчика); А—А, Б~Б, В~В — радиальные плоскости размещения полупроводниковых
датчиков в насосе; V — половина угла раскрытия канала; б— схема соединения шарового
зонда с манометрами; в — эпюры относительных скоростей потока на выходе из насоса:
1 — в плоскости А—А; 2 — в плоскости Б—Б', 3 — в плоскости В—В
ции лопастной системы гидротрансформатора. Разница в опре-
делении поля скоростей потока при зондировании и с помощью
полупроводниковых датчиков составляет почти 2%. Полупро-
водниковыми датчиками можно также замерить относительные
скорости потока w.
На рис. 136, а показан способ замера скорости на выходе
из насоса. Датчики установлены в межлопаточных каналах
16 С. П. Стесин 941
колеса иод углом 20 — 30 к лопаткам в сторону, обратную направ-
лению вращения насоса. Расположение датчиков в меридиональ-
ном сечении и на развертке насоса в радиальных плоскостях
А—А; Б—Б; В—В показано на рис. 136, а. Питание датчиков
осуществляется через обычный токосъемник, установленный на
валу насоса. Эпюры относительных скоростей w в трех сечениях
от лопатки к лопатке для различных i свидетельствуют о том,
что возможен отрыв потока у тыльной стороны лопаток, что,
например, трудно обнаружить при зондировании шаровыми зон-
дами (рис. 136, в).
При исследовании гидромуфт и гидротрансформаторов было
обнаружено, что их колеса нагружены осевыми силами, которые
Рис. 137. Стенд для замера осевых сил
гидр од и 11 а м ически.х пер едач :
/ — датчик частоты вращения; 2 — приводной
двигатель; 3 — муфта; 4 — гидротрансфор-
матор; 5 — тормоз; 6 — шарнирная опора;
7 — двуплечий рычаг; 8 — индикаторный ди-
намометр
на некоторых режимах рабо-
ты (например, на противо-
вращении) достигают значи-
тельной величины. Осевые
силы на колесах гидромуфты
достаточно замерить на одном
колесе, так как осевая сила
второго колеса будет по ве-
личине одинаковой с первой
и иметь противоположное
направление. Измерение осе-
вых сил гидротрансформато-
ра необходимо вести на двух
колесах. Для замера осевых
сил в конструкцию гидро-
передачи необходимо ввести
изменения, которые позво-
ляют рабочим колесам вместе
с валами под действием осевых сил свободно перемещаться в осе-
вом направлении (например, шарикоподшипники качения заме-
няют роликовыми подшипниками). Стенд также имеет некото-
рые особенности: муфты, соединяющие валы гидропередачи с агре-
гатами стенда, должны быть гибкими, т. е. не должны препят-
ствовать осевым перемещениям валов.
На рис. 137 показан стенд для замера осевых сил на рабочих
колесах гидродинамической передачи. Стенд состоит из привод-
ного двигателя 2, гидротрансформатора 4 и тормозной установки 5.
В качестве двигателя и тормоза применены балансирные машины
постоянного тока, позволяющие проводить испытания как на
тяговом, так и на тормозных режимах работы. Валы гидропере-
дачи соединены с валами агрегатов стенда муфтами, выполненными
из гибких пряжек, изготовленных из транспортерной ленты
6 = 6 мм. На валах передачи крепятся шарнирные опоры 5,
с которыми жестко связаны рычаги 7, поворачивающиеся при
перемещении валов вокруг жесткой оси 6. При этом противо-
положные концы рычагов воздействуют на соответствующий
242
Рис. 138. Турбина экс-
периментального гид-
ротрансформатор а
динамометр, снабженный индикатором 8. По показанию инди-
катора (который предварительно тарируется) для каждого режима
работы передачи можно определить осевую силу, действующую
на рабочие колеса. Замер осевых сил следует производить, меняя
режим работы через Аг = 0,1-4- 0,2. При этом температура рабо-
чей жидкости и давление подпитки при данных испытаниях под-
держиваются постоянными. Для этого стенд должен иметь систему
питания и охлаждения передачи такую, которая позволяла бы
менять температуру рабочей жидкости (холодильник в схеме)
и давление подпитки (например, при помощи изменения расхода
насосной установки). После испытаний для данных Т° С,
Рподп строят графические зависимости Рос =
= f (г) для различных колес передачи.
По результатам проведенных испытаний
опытного образца передачи часто требуется
изменить его характеристику (например,
Я,-г* и т. д.). Подобное изменение харак-
теристики связано с изменением геометри-
ческих параметров какого-то элемента ло-
пастной системы (углы лопаток, число ло-
паток и т. д.).
Большинство серийных гидродинамиче-
ских передач имеет литые рабочие колеса.
Для них изменение какого-либо элемента
вызывает значительные трудности, так как каждый раз требуется
вносить изменение в сложную и дорогостоящую оснастку для
их изготовления. Кроме того, в этом случае процесс доводки
занимает очень длительное время. Как показал опыт изготовления
гидропередач, наиболее часто требуется при доводке менять
углы лопаток рабочих колес при сохранении остальной геометрии
лолатки постоянной. При этом углы изменяются от номинальных
(полученных расчетом) значений на небольшую величину (±5°).
При такой доводке можно рекомендовать метод, разработанный
кафедрой гидравлики МАДИ.
На рис. 138 показана турбина гидротрансформатора, изго-
товленная по описываемому методу. Колесо изготовляется из
трех составляющих: средней части /, которая при изменении
углов лопаток в пределах ±10° остается неизменной; входного
участка колеса 2 и выходного участка колеса 3. При этом входные
и выходные участки колеса также состоят из трех составляющих:
торового сепаратора 4, лопатки 5 и чашевого сепаратора 6. Вход-
ной и выходной участки колеса собираются отдельно. Лопатка
может быть изготовлена из мягкого сплава. При этом она может
быть изогнута в нужном направлении. Кромка также может
иметь любой наклон. Лопатка к сепараторам крепится жестко
(штифтами или упорами). Входные и выходные участки жестко
крепятся к колесу. В этом случае можно для одного колеса про-
верить несколько вариантов углов, наклон кромок, толщину
16* 243
кромок и т. д. В месте соединения входного и выходного концов
лопаток со средней частью для плавности можно рекомендовать
покрытие бакелитовым лаком с последующей сушкой колеса.
Входные и выходные кромки колеса обрабатываются после сборки
колеса так же; как и для обычных гидротрансформаторов.
Исследование динамических свойств гидродинамических пере-
дач. При выборе привода для машин, работающих в условиях
переменных нагрузок, необходимо знать динамические свойства
привода, которые характеризуются передаточной функцией или
амплитудно-частотной характеристикой элементов привода.
Оценка привода по его динамическим свойствам и его влиянию
на динамику системы позволяет определить долговечность и на-
дежность работы машины при использовании различных при-
водов в условиях переменной нагрузки. Долговечность машин,
испытывающих динамические нагрузки колебательного харак-
тера, обычно определяется усталостными явлениями в узлах
и деталях машин. В связи с этим применение гидропередач для
этих машин дает наибольший эффект, так как позволяет снизить
амплитуду колебаний действующих усилий и надежно предохра-
нить их от перегрузок. Передаточные функции, амплитудно-
частотные пли амплитудно-фазовые характеристики привода необ-
ходимы не только для определения действующих в системе нагру-
зок, по и анализа и синтеза систем автоматического регулирования,
которые все шире применяются для управления машин с гидро-
приводом. При исследовании динамических свойств гидромашин
необходимо иметь в виду, что амплитудно-частотные и амплитудно-
фазовые характеристики полностью описывают свойства только
линейных систем. Однако ни один из известных приводов
не имеет линейных характеристик, но проведенные исследования
показали, что характеристики гидромашин в рабочей зоне практи-
чески линейны, и поэтому методика оценки их динамических
свойств по амплитудно-частотным и амплитудно-фазовым характе-
ристикам правомерна [6].
Исследование динамики привода обычно ведется аналити-
ческим и экспериментальными методами. Для определения амп-
литудно-частотной характеристики входной вал гидропривода
приводится во вращение, а на выходном валу возбуждаются
синусоидальные колебания момента с постоянной частотой и
амплитудой. При осциллографировании этого режима записы-
ваются моменты j и ТИ2, а также частота вращения пг и п2.
Отношение амплитуды колебания момента /И2 к амплитуде коле-
бания момента Л4 j дает ординату амплитудно-частотной характе-
ристики, соответствующую определенной частоте колебаний, а
сдвиг по фазе— ординату фазовой частотной характеристики. Опыты
по получению частных отношений амплитуд и сдвига фаз про-
водятся на ряде частот и по этим данным могут быть построены
амплитудно-частотные и фазо-частотные характеристики привода.
По полученным данным путем исключения частоты строится
244
Рис. 139. Динамические испытания
гидромуфт:
а — общий вид стенда; б — вращающийся
золотник в плане; в — диски I и // для
фиксации скорости ведущего и ведомого
валов гидромуфты; 1 — жидкостный та-
хометр; 2 — прерыватель; 3 — весовой
механизм; 4 — приводной двигатель; 5 —
токосъемное устройство; 6 — предохрани-
тельная гидромуфта; 7 — токосъемное
устройство; 8 — маховик; 9 — прерыва-
тель; 10 — насос регулируемой произво-
дительности; 11 — манометр: 12 — жидко-
стной! тахометр; 13 — датчик давления;
14 — вращающийся золотник; 15 — дви-
гатель; 16 — прерыватель; г — динамиче-
ская характеристика гидромуфты ТМ-25:
1 — статическая характеристика (Q =
=0,010 л/3); 2 — динамическая характери-
стика при v = 3 гц; 3 — при v = 5 гц;
4 — при V — 10 гц; 5 — при V = 15 гц;
6 — при v = 25 гц .
амплитудно-фазовая характеристика, которая показывает зави-
симость сдвига фаз колебаний моментов Л41 и ТИ2 от усиления
(отношение амплитуд моментов). На амплитудно-фазовой характе-
ристике указывается частота, при которой получены экспери-
ментальные точки.
Таким образом, при создании стенда для исследования амп-
литудно-частотных характеристик привода необходимо выбрать
нагрузочное устройство, способное создавать устойчивые колебания
момента на выходном валу испытываемой передачи в широком
диапазоне частот. При исследовании амплитудно-частотных харак-
теристик приводов обычно используют электрические, механи-
ческие или гидравлические источники колебаний момента. На
рис. 139 показан стенд для исследования амплитудно-частотных
характеристик гидромуфт, а па рис. 139, г представлена внешняя
динамическая характеристика гидромуфты ТМ-25. Испытываемая
гидромуфта 6 установлена на измерительных валах с токосъем-
ными устройствами 5 и 7. Стенд имеет приводной двигатель 4
в балансирном исполнении с весами 3. Нагрузочное устройство
состоит из насоса 10 регулируемой производительности, который
трубопроводами соединен с вращающимся золотником 14. В зави-
симости от регулировки вращающегося золотника и производи-
тельности (удельного расхода) насоса в системе устанавливается
определенное давление. При исследовании статических характе-
ристик в гидравлической системе насоса устанавливается давле-
ние, контролируемое манометром //, при этом замеряют Mlf
М2, Hj и п2. При динамических испытаниях вращающийся золот-
ник приводится от двигателя 15, скорость которого определяется
по показанию жидкостного тахометра 12. Замер моментов М±
и М2 производится при помощи тензодатчиков и токосъемных
устройств 5 н 7, а скорость вращения записывается при помощи
прерывателей 2, 9 и 16. Для исследования систем привода с раз-
личными маховыми массами ведомой части на стенде установлен
маховик 8 с регулируемым моментом инерции. Давление изме-
ряется при помощи датчика 13. При испытаниях можно
менять частоту вращения пг, так как применяется двигатель
постоянного тока.
§ 43. СИСТЕМА ПИТАНИЯ И ОХЛАЖДЕНИЯ
ГИДРОТРАНСФОРМАТОРОВ
Для нормальной работы гидродинамической передачи необ-
ходимыми условиями являются:
полное заполнение рабочей полости жидкостью;
отсутствие зон с давлением ниже давления парообразования
рабочей жидкости при данной температуре, что необходимо для
предотвращения кавитации;
температура рабочей жидкости не должна быть выше допуска-
емой как по условиям вспышки и разложения, так и по обеспе-
чению смазывающих свойств.
246
Если давление во всех точках рабочей полости выше давления
парообразования жидкости при данной температуре без подвода
давления со стороны и обеспечивается охлаждение рабочей
жидкости внутри рабочей полости за счет естественного тепло-
обмена с корпусом гидропередачи охлаждаемым воздухом, то
такую гидропередачу можно делать без системы принудительной
подпитки и охлаждения. При этом необходимо ставить надежные
уплотнения для уменьшения протечек и периодически дополнять
рабочую жидкость в рабочую полость.
В большинстве же случаев, и особенно в гидропередачах
с большой мощностью, нужна принудительная циркуляционная
система для обеспечения расхода, необходимого для охлаждения
рабочей жидкости, восполнения объемных протечек и для под-
держания давления в рабочей полости в пределах, обеспечиваю-
щих бескавитационную работу гидропередачи.
При неправильно спроектированной системе питания воз-
можно ухудшение тяговых качеств гидротрансформатора на неко-
торых режимах работы, наиболее опасных в кавитационном отно-
шении.
Подобное ухудшение тяговых свойств можно объяснить
снижением давления подпитки рп (давления на входе в насос)
до критической величины.
На других режимах работы гидротрансформатора давление
подпитки может достигнуть высокого значения, что нежелательно
по двум причинам. Во-первых, потому что увеличиваются затраты
мощности на привод вспомогательного насоса подпитки и умень-
шается общий к. п. д. установки; во-вторых, увеличиваются
нагрузки на уплотнительные узлы рабочей полости и на под-
шипниковые опоры гидротрансформатора, что отрицательно ска-
зывается на долговечности их работы.
Исходя из этого при проектировании системы питания необ-
ходимо стремиться получить стабильный п одновременно мини-
мально допустимый запас давления подпитки на всех режимах
работы гидротрансформатора. Таким образом, характер зависи-
мости рп = f (/) во многом определяет экономичность, надеж-
ность и долговечность работы гидротрансформатора.
Для подпитки гидротрансформаторов применяется система
питания, схема которой показана на рис. 140, а. На рис. 140, б, в, г
показаны возможные конструктивные схемы подвода и отвода
рабочей жидкости в рабочую полость.
Определим влияние места расположения точек подвода и отвода
жидкости на зависимость рп = f (i). Для решения указанной
задачи на основе уравнения Бернулли проанализируем движение
рабочей жидкости подпитки от точки А (вход в гидротрансформа-
тор) до точки D (слив рабочей жидкости в бак).
Примем следующие допущения:
1) наружные утечки рабочей жидкости из рабочей полости
достаточно малы по сравнению с расходом подпитки Qn;
247
2) в связи с тем, что расход подпитки Qn значительно меньше
расхода циркуляции рабочей жидкости Qu, влияние Qn на поле
скоростей в рабочей полости гидротрансформатора не учиты-
вается.
Тогда при равных диаметрах магистралей в точках А и D
давление в точке А может быть вычислено из выражения
Рвх ~ (^вх "4" ^ВС “Ь ^вых)»
Рис. 140. Схема питания гидротрансформа-
тора при различных точках отвода и под-
вода рабочей жидкости:
1 — гидротрансформатор; 2 — золотник; 3 — ма-
нометр; 4 — теплообменник; 5 — кран; 6 — пре-
дохранительный клапан; 7 — подпиточный на-
сос; 8 — фильтр; 9 — бак
где Лвх — гидравлические потери на участке АВ;
hBC — разность напоров рабочей жидкости в рабочей полости
между точками В и С;
ЛШ)|Х — гидравлические потери на участке CD,
Если расход подпитки и температура рабочей жидкости по-
стоянны, то независимо от режима работы гидротрансформатора
/гвс в общем случае будет
переменной, так как она
определяется внутренней
характеристикой гидро-
трансформатора, которая
изменяется при изменении
режима его работы. Учи-
тывая, что ЛВЬ1Х const,
статическое давление в то-
чке отвода рабочей жидко-
сти рс можно считать при-
близительно постоянным
и независимым от I.
Действительно, если
предположить, что на не-
котором режиме работы
статическое давление в точ-
ке отвода рабочей жидко-
сти возросло, то это долж-
но привести к увеличению
расхода рабочей жидкости
через отводную магист-
раль. Последнее невоз-
можно, так как расход Qn, определяемый производительностью
подпиточного насоса, практически не зависит от Z, особенно для
гидротрансформаторов, которые имеют непрозрачную характери-
стику.
Рассмотрим наиболее распространенные способы подвода и
отвода рабочей жидкости.
1. Для схемы, показанной на рис. 140, б (подвод рабочей
жидкости перед насосом Н, отвод — за турбиной Т), имеем
!1вс + ^св =•' 0,
где hBC н hCB — разность напоров между точками В и С, С и В,
248
Поскольку hCB — hP, получим
ll-ВС ~ ^Р’
Рвх= РЛх+Лых —М- (127)
Принимая во внимание, что
Рп = Рвх PS^BX?
получим
А, = Р£(Лвых — hp). (128)
2. Аналогично для схемы, показанной на рис. 140, в (подвод
рабочей жидкости за турбиной, отвод — перед насосом), имеем
Рвх ~ Pg (^ВХ ‘h ^ВЫХ + ^р)> 1 . .
Рп = Рс = Р^вых const. J а)
3. Для схемы, показанной на рис. 140, г (подвод и отвод рабо-
чей жидкости перед насосом), имеем
Лвс = 0; Рвх = Р^(^х + Лвых)^ const; Pn^pgh^^ const. (129
Таким образом, характер изменения зависимостей рвх =
= f (z) и рп = f (/) для первых двух схем подпитки определяется
характером изменения hP. Как известно, величина /гР для изо-
гональных режимов пропорциональна п~. В то же время при
различных z основную долю 1гР составляют потери на удар (hP
^hy^p). Минимальное значение АудР имеет в оптимальном ре-
жиме и в режиме, при котором расход в рабочей полости равен
нулю. Максимального значения /гудР достигает на режимах, близ-
ких к стоповому (zi2 = 0), и на режимах противовращения
(«2 < 0).
Таким образом, величина hP меняется при изменении пЛ и п2.
Это приводит к тому, что при различных способах подвода жидко-
сти в рабочую полость и отвода из нее зависимости рпх =
= f (z) и рп = f (z) имеют различный характер при неизменном
расходе Qn.
Проведенные экспериментальные исследования позволили по-
лучить количественные зависимости рвх = / (z) и рп = f (z) для
различных способов подвода и отвода рабочей жидкости. Были
испытаны два типа гидротрансформаторов для строительных
и дорожных машин: с осевой (У358011А) и центростремительной
турбиной (У358015). Для каждого гидротрансформатора были
приняты три способа подвода и отвода рабочей жидкости.
Из графика, приведенного на рис. 141, а, для случая под-
вода рабочей жидкости перед насосом и отвода за турбиной
(см. рис. 140, б), видно, что характер изменения кривых рвх =
= f (z) и pn = f (z), полученных экспериментально, согласуется
с характером этих кривых, подсчитанных по уравнениям (127)
и (128). Недостатком этого способа является то, что в стоповом
режиме, который наиболее опасен в отношении кавитации,
249
давление подпитки падает тем более резко, чем больше пг. Если
давление подпитки недостаточно, то на режимах, близких к сто-
повому, будет наблюдаться уменьшение коэффициента транс-
формации /<0 вследствие кавитации.
С другой стороны, на режимах, близких к оптимальному,
давление подпитки имеет завышенное значение и на поддержание
его затрачивается дополнительная мощность, что приводит к уве-
личению нагрузок па уплотнительные узлы рабочей полости
и па подшипниковые опоры.
Рис. 141. Характеристики гидротрансформатора при различных схе-
мах подвода и отвода жидкости в рабочую полость (t = 90° С, Qn =
= 0,001 м3/с):
_ гидротрансформатор У358015;------гидротрансформа-
тор У35801 1А
На рис. 141, б представлены результаты испытаний схемы,
показанной на рис. 140, в. При использовании данной схемы
давление подпитки постоянно и не зависит от z, хотя величина рвх
существенно меняется при изменении i [см. выражение (128а)].
Результаты испытаний схемы третьего варианта (рис. 140, г)
представлены па рис. 141, в. В этом случае рвх и рп постоянны
и не зависят от z [см. выражение (129)].
•д. Такая схема обеспечивает наиболее экономичную подпитку
и стабильность давления подпитки. Однако в этом случае, чтобы
не нарушалась эффективность охлаждения рабочей жидкости
в рабочей полости, необходимо смещать точки подвода и отвода
одну относительно другой по окружности на 90—180°, а при нали-
чии боковой полости между насосом и реактором — делать ее
по возможности короче в радиальном направлении. Подобная схема
подвода и отвода рабочей жидкости использована в гидротранс-
форматоре с осевой турбиной (У358011А), серийно выпускаемом
Московским машиностроительным заводом им. Калинина для
крана К-161.
250
При выборе мест расположения точек подвода и отвода рабо-
чей жидкости необходимо учитывать еще один фактор. В процессе
длительной эксплуатации гидротрансформатора изнашиваются
контактные уплотнения рабочей полости и трущиеся детали под-
питочного насоса, в результате чего увеличиваются утечки рабо-
чей жидкости из системы. Это приводит к уменьшению расхода
подпитки Qn через магистраль отвода рабочей жидкости, гидравли-
ческие потери в которой, как было показано выше, фактически
и определяют величину избыточного давления в рабочей полости.
Важно установить, насколько давление рп чувствительно
к изменению расхода Qn и как это связано с расположением точек
подвода и отвода рабочей жидкости.
Если предположить, что движение жидкости в подводящей
и отводящей магистралях происходит в зоне автомодельности,
где гидравлические потери пропорциональны расходу Q2, то при
отводе рабочей жидкости перед насосом для некоторого определен-
ного режима i
Рп ” Мп,
где kr — коэффициент пропорциональности.
Для расчетных значений р* и Q*
Рп= (Qn) '•
При отводе рабочей жидкости из зоны повышенного давления
ра + Др = £2q2; А, + Др = /гч (<Х)2, (1зо)
где k2 — коэффициент пропорциональности;
Др — разность между давлением в точке отвода рабочей
жидкости и давлением подпитки.
Из уравнений (130) после преобразований получаем зависи-
мость рп = f (Qn) для общего случая:
Рп _ /' -I ( Ар \ / Qn \2 Др
~ — 11—“ ту----*"
Рп ( Рп
(131)
Дифференцируя это уравнение и переходя к конечным прира-
щениям, получим
|132)
Из уравнений (131) и (132) следует, что при прочих равных
условиях с увеличением Др, т. е. с удалением точки отвода рабо-
чей жидкости из зоны минимального давления, величина рп ста-
новится более чувствительной к изменению расхода Qn. В таких
случаях необходимо назначать относительно больший запас
давления подпитки рп или вводить в систему питания дополни-
тельные устройства, стабилизирующие это давление, что нежела-
тельно.
251
В качестве теоретического параметра, характеризующего кави-
тационные качества колес гидротрансформатора, можно принять
коэффициент кавитации
АЯ5
а ~ О2 »
где а — коэффициент кавитации;
Л/Д = ----относительный располагаемый напор под-
О,5рг/н2
питки;
рп — давление подпитки;
pt — давление насыщенных паров рабочей жидко-
сти при данной температуре;
q = . 5.^----коэффициент расхода.
WH2
Коэффициент о для условий кавитации, только что начав-
шейся в некоторой точке рабочего колеса, обозначим окр и назо-
вем критическим коэффициентом кавитации:
Рп кр Pt
где ДЯ5кр
_ АЯ<?кр
икр ф >
— критический относительный распола-
гаемый напор подпитки.
Для насоса
*HKP=^4[(^-Ct&a₽s)2+ Ф <133>
* L \ Ч / J
0,
для турбины
__ 0,5i|)2 ~~ sin2aT2 * L Хт2 J РТ2
2 0,5 О
— 0,5<pyfli|?(ctgaT2-|- ctgpP1) — s-n-2 — k' O,5ipo; . (134)
для реактора
кр = 0,62 + 0,905 (ctg aT2 + ctg ₽Р1) —
— —-------0,5 А', (135)
sin2ap2 ’ ’ 7
где X — коэффициент, характеризующий форму входной
кромки насоса;
/?н — относительный радиус насоса;
q*— расчетный коэффициент расхода;
ф0 — отношение меридиональных площадей за и перед
насосом;
252
У358011А У358015
Рис. 142. Влияние режима ра-
боты иа кавитационные качест-
ва колес гидротрансформатора
фР1 = 90°; хТ2 = 0,85; рТ2 =
= 20°; 0,6; аР2= 30°)
aT2, аР2 — углы потока на выходе из турбины и реактора со-
ответственно, отсчитанные между скоростями с и и;
хТ2 — коэффициент стеснения на выходе из турбины;
ф — отношение меридиональных площадей перед на-
сосом и за трубиной;
Фуд — коэффициент потерь, зависящих от угла атаки;
k' — коэффициент трения в каналах реактора.
Уравнения (133)—(135) связывают кавитационные качества
рабочих колесе геометрическими параметрами потока и лопастной
системы гидротрансформатора.
На рис. 142 показаны зависимо-
сти коэффициентов аНкр, аТкр ноРкр
от угла потока на выходе из турбины
аТ2, который характеризует режим
работы гидротрансформатора. Из
графика видно, что наилучшими ка-
витационными качествами обладает
турбина. Во всем возможном диапа-
зоне изменения величины аТ2 ка-
витация невозможна. На режимах,
близких к оптимальному (/ = 0,75),
зона минимального давления нахо-
дится в насосе гидротрансформа-
тора (онкр > ар кр)> а на режимах,
близких к стоповому (Z = 0), и на
режимах противовращения (/ < 0)
зона минимального давления переме-
щается в реактор, так как оРкр >
> аН кр •
На рис. 143 представлены резуль-
таты замера распределения статиче-
ского давления по входному участку
тыльной стороны лопатки насоса гидротрансформатора У358011А
(на рис. 143 и в дальнейшем рн, рт, рР — статическое давле-
ние на лопатке при давлении подпитки, равном нулю). Из
рис. 143, а видно, что статическое давление на лопатке насоса
в оптимальном режиме (Z = 0,75) имеет минимальное значение
Рнтш на средней линии тока у входной кромки.
При изменении режима работы гидротрансформатора в сто-
рону стопового статическое давление на тыльной стороне лопатки
насоса возрастает. Непосредственно на стоповом режиме и режи-
мах противовращения при замерах были получены значения вели-
чины рн min> близкие к нулю и даже положительные (рис. 143, б),
т. е. разрежение на тыльной! стороне лопатки насоса отсутство-
вало. Замеры статического давления на лицевой стороне лопатки
насоса на режимах — 0,5 < i < 1 дали положительные значения.
Полученные результаты можно объяснить следующим обра-
зом. Большинству гидротрансформаторов свойственно увеличение
253
расхода рабочей жидкости в рабочей полости на режимах работы,
близких к стоповому по сравнению с номинальным режимом.
Увеличение расхода на этих режимах одновременно приводит
к искажению треугольника скоростей на входе в насос. Вектор
относительной скорости направлен на тыльную сторону лопатки
с некоторым отрицательным углом атаки —ЛрудЫ. Это приводит
к перераспределению статического давления по поверхности вход-
ного участка лопаток насоса. Давление на тыльной стороне воз-
растает, а па лицевой падает. Замер вектора абсолютной скоро-
сти на входе в насос подтвердил это предположение.
Рис. 143. Изменение статического давления на тыльной стороне лопатки
насоса гидротрансформатора У358011А
На рис. 143, б приведены значения углов атаки, которые соот-
ветствуют замеренным величинам рнтш- Как видно из рис. 143, б,
на режимах, близких к стоповому, небольшие отрицательные
углы атаки (в данном случае до 20°) приводят к улучшению обте-
кания входной кромки насоса с точки зрения кавитации.
Для турбины наиболее опасным в кавитационном отношении
является сечение, близкое к выходным кромкам. Измерить стати-
ческое давление на вращающейся турбине сложно, поэтому при
исследовании кавитационных качеств турбины можно измерять
статическое давление за турбиной в зазоре между ней и реактором.
Статическое давление в этом зазоре будет отличаться от давления
на выходных кромках турбины на величину, обусловленную
стеснением потока, которое в первом приближении можно не учи-
тывать.
На рис. 144 показаны результаты замера статического давле-
ния по средней струйке за турбиной гидротрансформаторов
У358011А и У358015. Эти данные показывают, что статическое
давление за турбиной во всем исследуемом диапазоне / — поло-
жительное (рт >0), причем к стоповому режиму величина рт
возрастает, т. е. увеличивается кавитационный запас турбины.
254
Таким образом, исключается возможность возникновения кавита-
ции в турбине.
Особенностью работы реактора является постоянное измене-
ние в широких пределах угла входа в него потока рабочей жидко-
сти при изменении режима работы гидротрансформатора При
углах входа в колесо, отличающихся от расчетных, возможен
отрыв потока от входных кромок с последующим прилипанием
его в некоторой точке поверхности лопаток. В отрывной зоне
основной поток сжимается. За счет этого скорость рабочей жидко-
сти возрастает, а статическое давление падает. Следовательно,
и в реакторе может иметь место
На рис. 145, а показана эпюра
распределения статического давле-
ния по средней струйке тыльной
стороны лопатки реактора гидро-
трансформатора У358011А. Ана-
лиз кривых показывает, что на
входном участке лопатки реак-
тора в зависимости от режима
работы i имеет место искажение
эпюры распределения статиче-
ского давления по сравнению
с эпюрой, соответствующей обте-
зона пониженного давления.
~0,6~0Л~0Л О ол ол 0,6 0,8 w I
канию лопатки на расчетном ре- Рис> 144> Il3MeiieiIIle статического
жиме без угла атаки (z = 0,75). давления за турбиной по средней
С увеличением угла атаки, что со- линии тока
ответствует перемещению режима
работы гидротрансформатора к стоповому, на входном участке
лопатки с тыльной стороны образуется зона с пониженным давле-
нием (pPmln < 0). Причем, чем больше угол атаки, тем ниже па-
дает статическое давление в этой зоне. Такая закономерность
наблюдалась и для гидротрансформатора У358015.
На рис. 145, б показаны кривые изменения минимального ста-
тического давления р? min в реакторе гидротрансформаторов
У358011А и У358015 в зависимости от режима работы z. Давле-
ние рр 1П1П для каждой линии тока определялось по минимальному
давлению эпюры распределения давления на тыльной стороне
лопатки реактора. Сравнивая результаты исследования минималь-
ного статического давления в колесах, можно заметить, что на
режимах малых передаточных отношений и режимах противовра-
щения реактор исследуемых гидротрансформаторов находится
в худших условиях в кавитационном отношении по сравнению
с другими рабочими колесами.
На рис. 146 показана кавитационная характеристика гидро-
трансформатора У358015, снятая на стоповом режиме при п1 =
= 1800 об/мин. Начало кавитации на кавитационной характери-
стике отмечено стрелкой. Для этого момента, соответствующего
началу кавитации рп = рп кр, характерна стабилизация минималь-
255
ного статического давления в реакторе (по наружному тору),
при достижении критического давления начала кавитации неза-
висимо от понижения давления подпитки рп. Однако при этом,
как видно из рис. 146, не на-
блюдается изменения коэффи-
циента трансформации Ко.
Рис. 145. Пзмсне1111е*’'стат11ческого”давления;по тыльной стороне лопатки
реактора:
---------гидротрансформатор У358015; --------гидротрансформатор У358011А
Явление, при котором начавшаяся кавитация не приводит
к искажению внешней характеристики, называют скрытой кави-
тацией. Уменьшение коэффициента /<0 наступает после дальней-
-0^-0^ о
— л-02
--------02
--------0,6
-------~0,8
---~'~0
Ppmln^'V
0,2 02 0,6 0,8 Рп-10'5Н/м2
Средняя линия
кавитации.
Рис. 146. Кавитационная характери-
стика гидротрансформатора У358015
(/li = 1800 об/мин; 1= 0; /=70°С)
шего снижения давления рп, ког-
да кавитационная область значи-
тельно расширит свои границы.
В данном случае (рис. 146) это
происходит приблизительно в тот
момент, когда критического зна-
чения достигает минимальное
статическое давление на средней
струйке лопатки реактора (рп =
= 0,1 кгс/см2). Резкое падение
коэффициента Ко происходит еще
при более глубоком понижении
давления рп, в данном случае да-
же ниже атмосферного рп = —0,4
(где рп — давление, избыточное
и ад атмосфер ным).
Из литературных источников
[6] известны характеристики гид-
ротрансформаторов, которые по-
казывают, как изменяется мо-
мент на валах или коэффициент трансформации в зависимости
от давления подпитки. При этом часто рекомендуют завышенное
значение рп для некоторых типов гидротрансформаторов (напри-
256
мер, для гидротрансформаторов с центростремительной турбиной
типа ГТК, ТТК, Л Г и др.), объясняя эту необходимость опасностью
возникновения кавитации. Экспериментальные исследования, про-
веденные в МАДИ, позволили сделать вывод, что в большин-
стве случаев (в том числе и для гидротрансформаторов У358015
с центростремительной турбиной) уменьшение моментов на валах
при уменьшении рп связано с подсосом воздуха через уплотне-
ния рабочей полости, а не с началом кавитации. Поэтому в на-
стоящее время конструкция уплотнений гидротрансформаторов
У358011А и У358015 выполнена таким образом, чтобы исклю-
чить возможность подсоса воздуха.
Допустимая температура рабочей жидкости гидротрансформа-
тора зависит от применяемой жидкости. Для стандартного мине-
рального масла (трансформаторного, веретенного и т. д.) нормаль-
ная эксплуатационная температура должна быть в пределах 80—
90° С. Кратковременное повышение температуры указанных масел
может быть допущено до ПО—120° С. Для специальных рабочих
жидкостей допустимые температуры могут быть выше.
На автобусах, грузовых автомобилях, танках, экскаваторах,
кранах для охлаждения применяют масляно-воздушные радиа-
торы, на тепловозах и в судовых установках — масляно-водяные
холодильники.
При определении количества протекающей жидкости для обес-
печения ее охлаждения в рабочей полости гидропередачи необхо-
димо определить режим наиболее длительной работы. Из харак-
теристики гидротрансформатора следует, что наиболее неблаго-
приятным режимом с точки зрения охлаждения является режим
при i = 0. Если имеются режимы противовращения, то тепла
будет выделяться еще больше, так как на этих режимах в тепло
превращается как мощность, подводимая от двигателя, так и мощ-
ность, подводимая к турбине от рабочей машины. Поэтому, если
вышеуказанные режимы являются длительными, то систему
охлаждения необходимо рассчитывать на самый напряженный
режим в тепловом отношении. Если система работает на этих ре-
жимах кратковременно, а основная доля приходится на режим
i = 0,4/*, где, как правило, требуют, чтобы к. п. д. не был меньше
75—80%, то расчет ведется из условий наименьшего допускаемого
к. п. д. Количество тепла, которое необходимо отвести от гидро-
передачи,
R = N, (1 - п).
Весовой расход рабочей жидкости, необходимый для обеспе-
чения охлаждения, предварительно можно определить по формуле
G = —R- ,
(/ВЫХ------- 1вх)
где ск — удельная теплоемкость рабочей жидкости,
/Вых — температура рабочей жидкости на выходе из гидро-
трансформатора;
17 С. П. Стесни 257
Z)1X ~ температура рабочей жидкости на входе в гидро-
трансформатор.
Общую поверхность радиатора, соприкасающуюся с охлаждаю-
щей средой, предварительно определяют по формуле
S — я
/{At ’
где А/ = /ж — /с — разность между температурами охлаждаемой
жидкости и охлаждающей среды на входе
в радиатор в °C (принимается —80° С);
/г — коэффициент теплопередачи; например, для
радиатора с тремя рядами трубок при диапа-
зоне скоростей рабочей жидкости в трубах
/г = 0,39 — 0,92 м/сек (k = 17,4tA45tA«
где vB — средняя скорость воздуха перед
радиатором, принимается —10 м/сек, иж —
средняя скорость рабочей жидкости в труб-
G г
ках радиатора, vlK = —-—, F — пло-
р 1
щадь радиатора или площадь проходного
сечения для рабочей жидкости в радиаторе).
Рабочие жидкости, применяющиеся в гидротрансформаторах.
При расчете, а следовательно, и при проектировании гидродина-
мической передачи очень важно выбрать рабочую жидкость,
которая в значительной степени влияет на проектные размеры
гидротрансформатора, его нагружающую способность и к. п. д.
При расчете гидротрансформаторов пользуются таким физическим
параметром рабочей жидкости, как кинематическая вязкость v,
представляющая собой частное от деления динамической вяз-
кости р, на плотность р: ц
V ~ .
р
От кинематической вязкости v зависит мощность, теряемая
на трение AfTp в рабочей полости гидротрансформатора, при этом
чем меньше v, тем меньше Таким образом, чтобы получить
гидротрансформатор малых размеров и с хорошими преобразую-
щими свойствами, необходимо применять рабочую жидкость
с большим объемным весом и малой кинематической вязкостью.
В качестве рабочей жидкости в гидротрансформаторах применяют
минеральные масла, дизельное топливо, а в гидротрансформато-
рах, устанавливаемых на судах — забортную воду. Минеральные
масла могут быть различных сортов в зависимости от того,
является ли система подпитки и охлаждения гидротрансформа-
тора изолированной или она одновременно обслуживает и систему
смазки и охлаждения вспомогательных зубчатых механизмов,
входящих, например, в гидромеханическую передачу. В послед-
нем случае применяются более вязкие масла.
Система питания и охлаждения может быть единой с системой
питания двигателя, если в качестве двигателя на машине приме-
258
няется дизель. В этом случае рабочей жидкостью может являться
дизельное топливо.
Использование рабочей жидкости для смазки подшипников
гидротрансформатора и шестерен зубчатых механизмов весьма
выгодно, так как это упрощает конструкцию уплотнений, умень-
шает количество сортов масел, необходимых для эксплуатации
машин и т. д. Если система подпитки и охлаждения изолирована,
то в качестве рабочей жидкости могут применяться менее вязкие
жидкости, такие, как дизельное топливо, смесь минерального
масла с керосином, нитроглицериновые смеси и т. д. При выборе
той или иной системы подпитки и охлаждения следует учитывать
требования, предъявляемые к рабочим жидкостям гидротрансфор-
маторов:
масло (или смесь масел и дизельного топлива) должно иметь
возможно более низкую вязкость и более высокий объемный вес;
при этом желательно, чтобы вязкость масла незначительно изме-
нялась с изменением температуры. При этом вязкость масла должна
находиться в пределах 2—3° Е при 50° С;
Таблица 7
Физико-химические свойства некоторых масел, изготовляемых в СССР
и употребляемых для гидропередач
Физико-химические свойства Турбинное 22 (Л) АУ АМГ-10
Плотность в кг/м3 Вязкость при 20° С: кинематическая в м2/сек«106 условная в РЕ Вязкость при 50° С: кинематическая в м2/сек-106 условная в РЕ 901 20—23 2,9-3,2 888—896 49 6,68 12—14 2,05—2,26 Не менее 10
Физико-химические свойства Индустриальное АТ-1 Трансфор- маторное
12 20 30
Плотность в кг/м3 Вязкость при 20° С: кинематическая в м2/сек-106 условная в РЕ Вязкость при 50Q С: кинематическая в м2/сек-106 условная в РЕ 876—891 10—14 1,86— 2,26 881—901 17—23 2,6—3,3 886—916 27—33 3,81— 4,59 892—895 5,0-6,5 805 Не более 30 Не более 9,6 Не более 1,8
17*
259
масло должно обладать удовлетворительной смазывающей
способностью, необходимой для смазки подшипников гидротранс-
форматора;
при работе гидротрансформатора в масле не должна образовы-
ваться устойчивая пена, являющаяся следствием наличия в масле
мылообразующих жиров, так как пенообразование приводит
к снижению к. и. д. гидротрансформатора и передаваемой им
мощности;
температура вспышки масляных паров от открытого пламени
должна быть не ниже 160° С, что необходимо для соблюдения по-
жарной безопасности;
температура застывания масла при работе машины в условиях
Крайнего Севера и Заполярья должна быть не выше — 50° С,
а в остальных районах — не выше —30° С;
масло должно обладать хорошими антикоррозионными свой-
ствами, которые определяются отсутствием в масле водораствори-
мых кислот и щелочей, вызывающих коррозию;
масло не должно содержать смолистых веществ (асфальта),
которые могут закупоривать проходные сечения, узкие щели,
нарушая нормальную циркуляцию масла.
В табл. 7 приведены основные физико-химические свойства
некоторых сортов масел, наиболее часто применяющихся в ка-
честве рабочих жидкостей в гидротрансформаторах (в чистом виде
или в составе смеси). Для придания физико-химическим свойствам
масел соответствующих качеств, в них иногда вводят присадки.
Так, например, гидрохинол и анилин служат антиокислительными
присадками трансформаторных и турбинных масел. Имеются
также синтетические масла с высокой плотностью (больше еди-
ницы).
ГЛАВА VI
КОНСТРУКЦИИ ГИДРОТРАНСФОРМАТОРОВ
И ИХ ПРИМЕНЕНИЕ
§ 44. ГИДРОТРАНСФОРМАТОРЫ ДЛЯ СТРОИТЕЛЬНЫХ
И ДОРОЖНЫХ МАШИН
В зависимости от назначения машины и условий эксплуатации
различные свойства гидротрансформаторов могут использоваться
по-разному. При этом требования к характеристикам гидротранс-
форматоров различные для машин различного назначения.
На строительных и дорожных машинах наибольшее распро-
странение получили гидротрансформаторы, в которых турбина
расположена за насосом. Схемы расположения колес в этих гидро-
трансформаторах показаны на рис. 147. Гидротрансформаторы
делятся на одноступенчатые (рис. 147, а—л), многоступенчатые
(рис. 147, м, н), комплексные (рис. 147, б, в, а), блокируемые
(рис. 147, з) и регулируемые (рис. 147, а, л).
Кроме заданных параметров: максимального к. п. д. т]*,
расчетного режима г*, коэффициента трансформации /<0 при
п2 = 0, прямой и обратной прозрачности П1 и П2 при проекти-
ровании приводов машин используются также следующие па-
раметры [3].
Рабочая зона передаточных отношений гидротрансформатора d
равна отношению максимального передаточного отношения к ми-
нимальному при заданном к. п. д. Например, при т) 75%
___ *75 max
75 — : •
*75 mln
Коэффициент потерь в гидротрансформаторе при М2 = О
или при малых его значениях:
(Мг0), (136)
М
где X* — коэффициент момента на ведущем валу при максималь-
ном к. п. д.
Максимальный к. п. д., рабочая зона и коэффициент потерь
характеризуют экономичность гидротрансформатора.
261
Коэффициент ограничения по моменту Км равен отношению
момента на ведомом валу при i = 0 к моменту на ведомом валу
при максимальном к. п. д.
Коэффициент ограничения по скорости /<, равен частному от
деления передаточного отношения при М2 = 0 на передаточное
отношение при М*, т. е.
JZ _ lX. X
*4 •— *
Коэффициенты ограничения по моменту /<м и по скорости Kt
позволяют оценить динамические свойства машины с гидротранс-
форматором.
Рис. 147. Схемы расположения колес в
гидротрансформаторах
строительных и дорожных машин
Критическое передаточное отношение гкр соответствует точке
перегиба графика функции К2 = / (i), т. е. = 0, что имеет
место для гидротрансформаторов с центростремительной турбиной
на режиме противовращения.
Жесткость G характеристики при г > 1Х. х определяется
по формуле
g=4^--
at
262
Критическое передаточное отношение /кр и жесткость G ха-
рактеризуют тормозные свойства гидротрансформатора.
Отечественной промышленностью изготовляются одноступен-
чатые гидротрансформаторы со схемами расположения колес, по-
казанными на рис. 147, в, з. Кроме того, разработаны гидротранс-
форматоры, схемы расположения колес в которых показаны на
рис. 147, а, б, к, л.
Гидротрансформаторы с центростремительной турбиной при-
меняются на погрузчиках, скреперах, пиевмошинных катках.
Гидротрансформаторы с осевой турбиной используются на раз-
личных строительных и дорожных машинах (табл. 8).
На рис. 148, а, б показана конструкция гидротрансформатора
с осевой турбиной типа ТР-325 (У358011А) Московского машино-
строительного завода им. М. И. Калинина, а также его приведенная
внешняя характеристика. Гидротрансформатор заключен в разъ-
емный литой корпус 1 с крышкой 5. Ведущая часть состоит из
насоса 9 и ротора 2. Ротор и насос 9 вращаются на шарикопод-
шипниках 6 и 15. На периферии ротора расположены два жик-
лера 4, необходимые для опоражнивания рабочей полости гидро-
трансформатора в момент отключения двигателя от трансмиссии.
Ведомая часть состоит из турбины 3 и ведомого вала 14, на шлицы
Таблица 8
Примеры применения гидротрансформаторов в приводах
строительных и дорожных машин
Параметры двигателя Параметры гидротрансформатора
Наименование ж S S к я Е о • о с $ « СО
машины ч (V д ю в об/ S m в об/ д я и ема р «ения : (см. )
О Е (У <1) с к СО е * 1—1 * О О Ч Ч <-<
Экскаватор Э-10011А Д-108 80 1050 2,5 0,500 1050 73,6±2,2 3
Кран К-161 грузоподъем- ностью 16 т СМД-14 55 1700 2,5 0,325 1700 40±2,2 3
Моторный каток Д-553 весом 13 т СМД-7к 37 1500 2,5 0,325 1500 27,2± 1,5 3
Погрузчик Д-561 А грузо- подъемностью 1,8 т СМД-14 55 1700 3,5 0,340 1700 48 в
Погрузчик Д-538 грузо- подъемностью 2,6 т ЯАЗ-204А 81 2000 3,5 0,340 2450 132 в
П невмошинный каток Д-624 весом 16 т АМ-01 81 1600 3,5 0,340 1960 73,6 в
263
которого насажен диск 11, соединенный неподвижно с колёсок!
турбины. Ведомый вал 14 вращается на двух подшипниках 8 и 16.
К стакану подвода питания 19 жестко крепится реактор 10.
От вращения в крышке 5 реактор и стакан удерживаются шпон-
кой 7. Гидротрансформатор установлен на раму силовой уста-
новки и прикреплен болтами и штифтами. При работе гидротранс-
Рис. 148. Гидротрансформатор У358011А:
а — конструкция: 1 — корпус; 2 — ротор; 3 — турбина; 4 — жиклер; 5 — крышка;
6, 8, 15, 16 — подшипники; 7 — шпонка; 9 — насос; 10 — реактор; 11 — диск; 12 —
обойма; 13 — ролик; 14 — вал; 17 — хвостовик ротора; 18 — звездочка; 19 — стакан;
б — приведенная характеристика
264
форматора подпиточный насос, связанный с коленчатым валом дви-
гателя (или ведущим валом гидротрансформатора), подает жидкость
через нагнетательную полость в крышке 5 и внутренние отверстия
стакана 19 на лопатки насоса 9. Из рабочей полости жидкость
постоянно вытекает через другие отверстия стакана 19, входящие
в сливную полость крышки 5, и далее по трубопроводам в бак.
Когда момент на ведомом валу гидротрансформатора меньше
момента, развиваемого двигателем, имеют место повышенная
скорость на рабочих органах машины и низкий к. п. д. гидро-
трансформатора. Для улучшения работы гидротрансформатора
в этих условиях между ведущими и ведомыми частями (ротором 2
и ведомым валом 14) установлена обгонная муфта, состоящая из
обоймы 12, звездочки 18 и роликов 13 с пружинными толкателями,
которая срабатывает при i = 1, т. е. когда п2 = /4.
На всем диапазоне изменения нагрузок при работе машины до
тех пор, пока частота вращения ведомого вала меньше частоты
вращения вала двигателя, ролики обгонной муфты прижаты к тол-
кателям, и ведомая и ведущая части гидротрансформатора вра-
щаются отдельно. При уменьшении нагрузок на трансмиссию,
когда частота вращения ведомого вала окажется больше частоты
вращения вала двигателя, ролики под действием пружины при-
жимаются к узкой части скошенных пазов звездочки и заклини-
вают ведомую и.ведущие части гидротрансформатора (см. рис. 148).
Для отключения трансмиссии от двигателя служит двухпози-
ционный золотник управления, установленный в системе питания
гидротрансформатора. Перемещение плунжера золотника в поло-
жение, при котором рабочая жидкость поступает в рабочую полость
гидротрансформатора, осуществляется давлением воздуха. Воз-
врат плунжера золотника в исходное положение происходит под
действием пружины. При этом подача воздуха в золотник прекра-
щается, и рабочая жидкость поступает в бак. Жидкость из ра-
бочей полости удаляется через жиклеры в течение 30—40 с.
Для охлаждения рабочей жидкости в системе питания пред-
усмотрены масляно-воздушные радиаторы. Гидротрансформатор
работает летом на масле Индустриальное 20, а зимой — на масле
Индустриальное 12.
Зарубежные трансформаторы. На одноковшовых одномотор-
ных экскаваторах, одномоторных самоходных кранах, погрузчи-
ках, тягачах, бульдозерах, скреперах', катках и других строитель-
ных и дорожных машинах зарубежных фирм широко применяются
гидротрансформаторы. Ведущими в области проектирования и
производства гидротрансформаторов являются фирмы Твин-Диск,
Аллисон и Кларк (США), Гинар (Франция), Селф-Чаигинг
(Англия) и Эльба-Верке (ФРГ). В табл. 9 показаны основные
фирмы — изготовители гидротрансформаторов и схемы расположе-
ния колес последних.
Фирма Гинар (Франция) рекомендует гидротрансформаторы
для погрузчиков, экскаваторов, кранов, автогрейдеров и других
Таблица 9
Типы гидротрансформаторов, изготовляющихся зарубежными фирмами
Фирма Тип гидротрансформатора Расположе- ние колес (см. рис. 147)
Кларк (США) Гинар (Франция) Селф-Чангинг (Анг- лия) Брокхауз (Англия) Борг-уорнер (Англия) Фойт (ФРГ) - Аллисон (США) Трехколесный с центростреми- тельной турбиной. Расположение насоса и турбины симметричное а и б б б д б п г
Твил-Диск (США) Пауэр (Бельгия) Трехколесный с центростреми- тельной турбиной. Расположение на- соса и турбины несимметричное е и ж
Аллисон (США) Окамура (Япония) Двухреакторный с центростреми- тельной турбиной. Расположение на- соса и турбины симметричное в
Эльба-Верке (ФРГ) Фойт (Австрия) Трехколесный с центробежной турбиной и к, л
Твип-Диск (США) Ролс-Ройс (Англия) Трехступенчатый м
Аллисон (США) Двухтурбинный н
строительных и дорожных машин. Фирма изготовляет трехколес-
ные гидротрансформаторы с центростремительной турбиной 12
типоразмеров. Конструкция гидротрансформаторов фирмы ана-
логична конструкции гидротрансформаторов, изготовляемых фир-
мой Кларк (США). Такие же гидротрансформаторы изготовляются
в Англии фирмой Селф-Чангинг.
Максимальный к. и. д. гидротрансформатора фирмы Гинар т)*
изменяется в пределах 0,84—0,9. При этом к. п. д. т)* с увеличе-
нием диаметра £>а увеличивается и при работе на режиме гидро-
муфты достигает значения ~86—88%. Из данных фирмы следует,
что за счет изменения углов лопаток колес можно уменьшить
энергоемкость до 10%.
Фирма изготовляет две модификации: автономные, индустриаль-
ные гидротрансформаторы (для экскаваторов, кранов, дробилок,
насосных агрегатов), которые кроме колес имеют питательный
насос, бак для масла, фильтрующие элементы;
индустриальные гидротрансформаторы стандартного типа
(рис. 149) с валом отбора мощности после насоса. Применяются
они в основном на погрузчиках, автогрейдерах, катках, тягачах,
266
to
о
Рис. 149. Гидротрансформатор фирмы Гинар (модель С-270):
1 — полумуфта маховика двигателя с ведущим валом; 2 — турбина; 3 — насос; 4 — реактор; 5 — картер; 6 — подпиточный насос
В некоторых конструкциях при наличии вала отбора применяется
зубчатая пара колес на ведомой части гидротрансформатора, при
этом ось ведомого вала смещается по отношению к оси ведущего
вала.
Все гидротрансформаторы монтируются в корпусах трех моди-
фикаций. Большинство гидротрансформаторов изготовляется с не-
подвижным реактором (рис. 150). Это основная модификация
Рис. 150. Гидротрансформатор «Гинар» (тип Д)
7 — турбина; 2 — насос с ведущим колесом; 3 — реактор; 4 — деталь крепления
к трансмиссии; 5 — ведомый вал
обозначается фирмой буквой D, но изготовляются также гидро-
трансформаторы с реактором на муфте свободного хода (модифи-
кация DF).
По требованию потребителей фирма устанавливает муфту
свободного хода между насосом и турбиной; привод от ведомого
вала к устройству, стабилизирующему частоту вращения этого
вала; корпус гидротрансформатора крепят к картеру маховика
двигателя, а ведущую часть гидротрансформатора центрируют
по коленчатому валу. При этом мощность двигателя передается при
помощи зубчатой муфты.
Полумуфта, крепящаяся к маховику двигателя (с внутренним
зубом), изготовляется из текстолита.
Фирма, кроме этого, изготавливает гидротрансформаторы, кор-
пусы которых монтируются на картерах коробок передач.
Фирма Твин-Диск (США) изготовляет гидротрансформаторы
трехступенчатые (тип 3 на рис. 151), одноступенчатые с центро-
бежной (тип 4) и центростремительной турбинами (типы /, 6, 7
и 8). Во всех гидротрансформаторах, в том числе и с центростреми-
тельной турбиной, применяются цилиндрические лопатки. Для
268
гидротрансформаторов с центростремительной турбиной благодаря
использованию несимметричных насоса и турбины были получены
характеристики, у которых rXtX < 1 (тип /) при М2 = 0 и ixx >
>1 (тип 6). При симметричных колесах и М2 = 0 /х. х = 1
(типы 7 и 8). Эта фирма разработала параметрические ряды одно-
ступенчатых и трехступенчатых гидротрансформаторов. За счет
изменения углов лопаток колес, их числа, радиусов выхода и входа
при Da = const, цилиндрических лопатках и nx = const можно
получить изменение энергоемкости до 2 раз.
Характеристики гидротрансформаторов при изменении энер-
гоемкости изменяются в незначительных пределах (табл. 10).
Фирма изготовляет одноступенчатые гидротрансформаторы с цен-
тростремительной турбиной в комплексном (тип 8) и некомплекс-
ном исполнениях (типы /, 6, 7). Характеристики*этих гидротранс-
форматоров на режиме противовращения (при отрицательных i)
Рис. 151. Характеристики гидротрансформаторов «Твин-Дпск»:
1 — ведущий вал; 2 — ведомый вал
-1,0 -0,5 0 0,5 1,0 1,51
протекают так, что значения М2 = f (—i) практически постоянны
до i = —1 (типы 6 и 8) или уменьшаются (тип /, см. рис. 151).
На обгонном режиме работы (при i > 1) эти гидротранс-
форматоры передают очень малые крутящие моменты. Значения
М2 = f (—i) в трехступенчатых гидротрансформаторах все время
увеличиваются; на обгонном режиме эти гидротрансформаторы
передают крутящие моменты значительно большие, чем одно-
ступенчатые.
Одноступенчатые гидротрансформаторы (рис. 152) представ-
ляют собой агрегаты, в которых, кроме колес и питательного
269
Таблица 10
Параметры гидротрансформаторов фирмы Твин-Диск (США)
Тил гидротранс- форматора (см. рис. 151) Про- зрач- ность Ко Г)* dio Ц. X Потери при М2 — 0 в %
Трехступен- чатый Одноступенча- тый (тип 6) Одноступенча- тый (тип 1) Одноступенча- тый (тип 4) * В числителе 2,5 1,3 1,28 * 1,28 1,2 1,1 ! — Пр ЯК 5 2,75 2,2 2,7 4,7 <ая про; 0,81— 0,83 0,88 0,87 0,8 фачность, 3—3,5 2,63 2,1—2,5 3,02 в знаменат! 0,8 1,15 0,85 1,1 еле — оС 75 (при i — 0,8) 5 (20 при 1 = 1 и муфте свобод- ного хода между насосом и турбиной) 5 35 (при i — 1 и муфте свобод- ного хода между насосом и турби- ной) >ратная.
насоса, расположен масляный бак, фильтры на всасывании и на-
гнетании, контрольная аппаратура, а также механизм для вы-
ключения гидротрансформатора. Кроме того, на ведомом валу
гидротрансформатора имеется привод к устройству, стабилизи-
рующему частоту вращения этого вала независимо от нагрузки на
нем. Чаще всего в качестве такого устройства используется цен-
тробежный регулятор.
В качестве выключающего механизма фирма применяет сухое
фрикционное сцепление (модель С).
В трехступенчатых гидротрансформаторах (рис. 153) фирма
в целях устранения дефекта, связанного с большими потерями
мощности при малых сопротивлениях, применяет в качестве вы-
ключающего механизма двойное фрикционное сцепление, одно
из которых отключает насос, а второе жестко соединяет двигатель
с ведомым валом гидротрансформатора.
Фирма изготовляет также гидротрансформаторы без выклю-
чающего механизма (модель S —для одноступенчатых и модель F—
для трехступенчатых гидротрансформаторов). Для снижения по-
терь в трехступенчатых гидротрансформаторах при малых сопро-
тивлениях фирма рекомендует применять центробежный регуля-
тор на ведомом валу, ограничивающий частоту вращения вала
двигателя. Центробежный регулятор настраивается так, чтобы пг
при М2 = 0 была 1200 вместо 1800 об/мин. При этом потери мощ-
ности снижаются с 75 до 22%.
Насос и турбина изготовляются из алюминиевого сплава.
За счет наличия цилиндрических лопаток при отливке колес ис-
270
g
&
w
m
Рис.
тый
152. Одноступенча-
г идр отр а н сфор м атор
«Твин-Диск»:
фрикционные диски;
ведущий вал; 3 — ве-
диск;
2 —
дущий
5 — турбина;
— реактор;
— шестерня
центробежному регуля-
тору; 10 — ведомый вал
4 — картер;
6 — насос;
8 ~ корпус;
привода
Мод утечек ротрансформатор «Твин-Диск»
271
пользуется центральный стержень. Углы лопаток колес после
отливки не припиливаются; шероховатость поверхности каналов
соответствует V5. Благодаря указанной точности (отклонение по
наружному диаметру лопаток в отливке до 0,006 м; точность рас-
положения по шагу ±0,0014 м) и шероховатости в насосах и тур-
бинах обрабатываются только посадочные места.
Реактор гидротрансформатора сварной, состоит из штампован-
ных деталей. В некоторых конструкциях применяются подшип-
ники скольжения. Так как одноступенчатые гидротрансформаторы
с центростремительной турбиной имеют малые значения Л42
при i >1, Д^я возможности использования тормозных свойств
двигателя в некоторых конструкциях используется муфта свобод-
ного хода между насосом и турбиной (модель СО). Обычно такие
модели гидротрансформаторов применяются на кранах.
Гидротрансформаторы обычно крепятся к картеру маховика
дизеля, при этом корпус центрируется по картеру маховика, а
ведущая часть — по коленчатому валу. Одновременно с этим в кор-
пусе имеются приливы для крепления гидротрансформатора на
опорах. Для передачи мощности используется зубчатая муфта.
При этом зубчатый венец, крепящийся к маховику, изготовляется
из текстолита. Ведомый вал гидротрансформатора рассчитывается
из условия консольного съема мощности. Рекомендуемые режимы
эксплуатации приведены в табл. И.
Таблица И
Эксплуатационные режимы гидротрансформаторов,
рекомендуемые фирмой Твин-Диск (США)
Серия гидро- транс- форма - торов "irnax в 1/с ^imax в Н-м в °C мзсл а Давление подпитки в Н/м2 Система охлажде- ния Производитель- ность насоса в м3 на 100 об/мин
рабо- чая мини- маль- ная макси- маль- ная
1500 230— 272 586 80— НО —70 — 120 (14,65— 43,9)Х X 104 Тепло- обмен- ник 2,2-10-3
1300 314 473 0,84-10-3
1100 367 317 0,84-10-3
Фирма Аллисон (США) изготовляет семь серий гидротранс-
форматоров: 200, 300, 400, 500, 600, 800 и 900. Серии 200 и 300
рекомендуются для работы с двигателем мощностью 29,5—НО квт,
серия 500 от НО до 258 квт и серия 800—900 от 184 до 295 квт.
Для серий 200—300; 400—600; 800—900 имеются соответствующие
три размера корпуса. Обозначаются гидротрансформаторы ТС.
Фирма изготовляет пять конструктивных модификаций гидро-
трансформаторов.
1. Базовая—с ведомым валом автомобильного типа (имеет
на конце ведомого вала карданную полумуфту, рис. 154, а) и
272
с ведомым валом индустриального типа, предназначенную для
консольного съема мощности (рис. 154, б),
2. С приводом от ведомого вала к центробежному регулятору
(обозначается ТСА).
3. Блокируемая, в которой оператором производится блоки-
ровка ведущей и ведомой частей. В качестве блокирующего уст-
ройства применяют фрикционную муфту, работающую в масле
(обозначается ТС).
Рис. 154. Гидротрансформаторы фирмы Аллисон:
а — ТСА-855; б - ТСА-955
4. Выключаемая. В этом случае оператор отключает гидро-
трансформатор либо за счет сухого фрикционного сцепления,
расположенного между двигателем и гидротрансформатором,
(тип ТСД), либо за счет удаления жидкости из рабочей полости
(тип ТСНД).
5. С гидротормозом на ведомом валу.
Эта фирма изготовляет четырехколесные одноступенчатые гид-
ротрансформаторы с центростремительной турбиной. Оба реактора
установлены на муфтах свободного хода. За счет изменения угла
₽рп 1 изменяется коэффициент /<0 от 3,6 до 2,6, а энергоемкость —
за счет изменения углов рН2 и РРИ 2 в 2,4 раза. Так, при одном
диаметре Da в серии 500 фирма изготовляет гидротрансформаторы
четырех энергоемкостей. Прозрачность колеблется в пределах
П = 1,28-1,78.
Особенности конструкций гидротрансформаторов: 1. Все моди-
фикации гидротрансформаторов имеют крепление к картерам ма-
ховиков двигателей. При этом ведущая часть гидротрансформа-
торов жестко соединяется с маховиками двигателей, а между
маховиком и коленчатым валом двигателя имеется гибкое соеди-
18 С. П. Стесин 273
пение из стальных пластин, которое служит для передачи мощ-
ности двигателя. Благодаря этому достигаются минимальные осе-
вые габаритные размеры гидротрансформатора.
2. Внутренний диаметр рабочей полости DQ увеличен за счет
увеличения ее осевых габаритных размеров. За счет этого можно
увеличить диаметры ведомого вала и подшипников, а также увели-
чить диаметры роликов в муфте свободного хода. Благодаря этому
может быть достигнута необходимая долговечность деталей при
стандартных материалах.
Фирма Окамура (Япония) изготовляет гидротрансформаторы
типа «Аллисон», но с несимметричными реакторами. Параметры
гидротрансформатора FRM-22 (рис. 155) приведены ниже:
Тип гидротрансформатора.....................Одноступенчатый
четырехколесный
Ко ........................................ 3,2
т|*........................................0,86; т]гм = 0,9
Емкость в м:! 0,040
Масса в Н........................................ 2250
Активный диаметр в м............................ 0,526
гн.......................................... 27
гт.......................................... 28
zpi.................................. ' 17
грп......................................... 20
Фирма для некоторых модификаций устанавливает муфты сво-
бодного хода между насосом и турбиной. Подпиточный насос гидро-
трансформатора состоит из двух секций: большая — служит для
подпитки, малая—для откачки рабочей жидкости из поддона
гидротрансформатора. Реакторы гидротрансформатора смонти-
рованы между опорными шарикоподшипниками.
Фирма Эльба-Верке (ФРГ) рекомендует свои гидротрансфор-
маторы для строительных и дорожных машин и тепловозов. Фирма
изготовляет одноступенчатые трехколесные гидротрансформаторы
с центробежной турбиной, у которых коэффициент Ко — 5,8 ~
9,3 и 3 4-4,7. Кроме этого, фирма разработала параметрический
ряд из пяти типоразмеров. Условное обозначение размеров: 20,
30, 40, 50 и 60. Максимальный размер 20.
Для каждого размера гидротрансформатора разработано девять
модификаций колес, за счет чего при п1 = const достигнуты диа-
пазоны изменения энергоемкости от 1,8 до 2,6. Основные пара-
метры гидротрансформаторов приведены в табл. 12.
Каждый гидротрансформатор обозначается шестью цифровыми
группами, отражающими тип, размер, лопастную систему (нагру-
жающие качества), конструкцию первичного и ведомого валов,
а также конструкцию корпуса.
Фирма изготовляет гидротрансформаторы, у которых ведомый
и ведущий валы соосны и ведомый вал располагается ниже веду-
щего. В последнем случае внутри гидротрансформатора приме-
няется редуктор.
274
Принципиальные схемы однопоточных гидромеханических при-
водов показаны на рис. 156 [3]. Гидротрансформатор устанавли-
вается за валом приводного двигателя и служит для привода сле-
дующих механизмов: подъемного и напорного (П и Н) на одномо-
торных одноковшовых экскаваторах; гр узо подъемного (Г) на
кранах и экскаваторах; ходового (X) («ходовой механизм на по-
грузчиках, скреперах, бульдозерах, автогрендерах и катках
используется не только для передвижения машины, но и для осу-
ществления рабочего процесса); реверсивного (РМ).
На зарубежных кранах получили распространение схемы, в ко-
торые входят два гидротрансформатора при одном двигателе
18* 275
Таблица 12
Параметры гидротрансформаторов фирмы Эльба-Верке (ФРГ)
Группа гидро- транс- форма - торов ^70 п* 'Пк=1 Прямая прозрачность До
'шах и £min Обратная прозрачность
1 4,6 0,85 0,7 1,12 7,8
0,7 и 0,152 1,44
2 3 0,8 0,6 1,17 8,8—9,3
0,55 и 0,18 1,45
з 4,7 0,86 0,8 1,1 5,8
0,87 и 0,185 1,26
(рис. 156, в) и два гидротрансформатора при двух двигателях
(рис. 156, г). Для всех самоходных землеройных машин важным
показателем является максимальное использование сцепного веса
во время резания и набора грунта. На машинах, имеющих малую
базу [например, погрузчиках (рис. 156, <?)], это достигается за
счет механического привода обеих осей. На машинах с большой
базой, у которых между осями расположен ковш (например, на
скреперах), а также на тягачах с прицепами, осуществить такое
решение невозможно. На таких машинах за рубежом часто при-
меняется двухдвигательный привод (рис. 156, е).
ВНИИСтройдормашем рекомендуется электромеханический
привод, в который входят генератор переменного тока и асин-
хронные электродвигатели с гидротрансформаторами, встроен-
ными в колеса, гидромотор колеса (рис. 156, з). При наличии на
тягаче гидромеханического привода рекомендуется активизация
задней оси при помощи асинхронного электродвигателя с гидро-
трансформатором, расположенным вне оси (рис. 156, ж) [3].
Все расчеты, связанные с установкой гидротрансформаторов
в приводах машин, могут быть проведены, если известны расчет-
ные или фактические значения нагрузок на исполнительные меха-
низмы во время выполнения следующих операций: разработки,
резания и набора грунта; разгона и реверсирования масс; подъема
и опускания грузов; передвижения машины в порожнем и груже-
ном состоянии.
В настоящее время наиболее полно исследованы нагрузки на
исполнительные механизмы экскаваторов во время разработки
и отсыпки грунтов, на механизмы катков статического действия во
время укатки грунтов и покрытий. В значительно меньшей степени
исследованы нагрузки на исполнительные механизмы погрузчиков,
скреперов, автогрейдеров и других машин.
На основании проведенных исследований ВНИИСтройдор-
машем были сформулированы следующие основные технические
требования к проектируемым гидроприводам [3]: максимальное
276
Использование мощности двигателя и высокий к. п. Д. передач при
переменных нагрузках н различных режимах нагружения; огра-
ничение динамических нагрузок в узлах трансмиссии; сокраще-
ние до минимума работы буксования фрикционных муфт при раз-
гоне и реверсировании машин; получение оптимальной частоты
вращения поворотной платформы экскаватора при работе с зем-
леройным оборудованием (7—9 об/мин) и минимальной при грузо-
подъемных работах (0,5 об/мин); получение минимальных ускоре-
е)
Рис. 156. Кинематические схемы гидромеханических однопоточных передач
строительных и дорожных машин:
а — одноковшового универсального экскаватора; б — одномоторного крана с одним гид*
ротрансформатором; в — одномоторного крана с двумя гидротрансформаторами; г —
крана с двумя двигателями и двумя гидротрансформаторами; д —- погрузчика; е — скре-
пера с двумя двигателями; ж — скрепера с активной задней осью; з — скрепера с турбо-
моторколесами; и — моторного катка; Г — грузовой механизм; П, Н - подъемный
и напорный механизмы; МОМ — механизм отбора мощности; РМ — реверсивный меха-
низм; X — ходовой механизм; Д — двигатель; ГТ — гидротрансформатор; Р — редук-
тор постоянного зацепления; РД — двухступенчатый редуктор; РГ — редуктор привода
генератора; PC — согласующий редуктор; КП — коробка передач; С Г — синхронный
генератор; АД — асинхронный двигатель; ГТв — гидротрансформатор вспомогательного
привода; ГТР — реверсируемый гидротрансформатор
ний в процессе перемещения и остановки груза; обеспечение бес-
ступенчатого регулирования скоростей подъема и опускания гру-
зов, независимости скоростей грузоподъемного и поворотного
механизмов, минимальных динамических нагрузок при переходе
с подъема на опускание грузов; обеспечение минимальных рабочих
скоростей передвижения машины (до 0,9 км/ч) и максимальных
транспортных скоростей (40—45 км/ч); обеспечение безопасного
переключения передач на ходу.
В соответствии с этими требованиями’ были сформулированы
требования к конструкции, нагружающим и преобразующим свой-
ствам гидротрансформаторов для строительных и дорожных машин:
для совместной работы с дизелями тракторного типа наиболее
277
целесообразно использовать гидротрансформаторы с малой проз-
рачностью П 1,3; характеристика гидротрансформатора должна
обеспечивать наиболее широкую зону высоких значений к. п. д.
на тяговом режиме работы. При этом для одномоторных одноков-
шовых экскаваторов, самоходных кранов и катков допустимо ис-
пользовать характеристики, у которых диапазон d15 2,2, коэф-
фициент ограничения по моменту Км 2, а коэффициент ограни-
чения по скорости /<£ =<1,5.
Характеристика гидротрансформатора должна обеспечить воз-
растание момента на ведомом валу при работе на режимах противо-
вращения (I < 1) до i —1 (для кранов); при этом жесткость
характеристики на обгонном режиме должна быть максимальной
(G 1,5-10“G). Потери в гидротрансформаторе при отсутствии
нагрузки па ведомом валу не должны превышать 25% от номи-
нальной мощности дизеля для экскаваторов, кранов и катков,
и не более 15% —для остальных машин.
Конструкции гидротрансформаторов должны обеспечивать: для
крапов — регулирование нагрузочных характеристик насоса при
постоянной частоте вращения, сопровождающееся уменьшением
моментов на турбине до 20 раз и уменьшением частоты вращения
турбины не менее чем в 2 раза; для катков, кранов и экскавато-
ров — привод к устройству, стабилизирующему частоту вращения
ведомого вала, и выключение, т. е. разъединение ведущей и ведомой
частей гидротрансформатора.
В табл. 13 приведены технические данные основных типов гидро-
трансформаторов, применяющихся на строительных и дорожных
машинах. Анализируя параметры этих гидротрансформаторов,
можно сделать вывод, что они в основном отвечают требованиям,
предъявляемым к их характеристикам и конструкциям.
Так, анализ гидротрансформаторов, работающих в приводе
катка Д-553 статического действия с главными вальцами, устано-
вил необходимость применения центробежного регулятора или
другого устройства для обеспечения постоянства частоты вращения
вала турбины в процессе укатки. Наиболее целесообразным для
катков статического действия следует считать трехколесный гидро-
трансформатор в комплексном исполнении.
Анализ, проведенный ВНИИСтройдормашем, показал, что,
не оказывая существенного влияния на время рабочего цикла
(производительность), конструкция гидротрансформатора может
значительно влиять па расход топлива и максимальные нагрузки
в трансмиссии. В частности, в трехступенчатых гидротрансформато-
рах типа «Твип-Диск» и в гидротрансформаторах с центробеж-
ной турбиной фирмы Эльба-Верке при работе в приводе экска-
ватора могут быть потери примерно в 2 раза большие, чем в гидро-
трансформаторах с центростремительной турбиной, что влечет
за собой увеличение расхода топлива почти на 15%. Максимальные
нагрузки в трансмиссии при этих гидротрансформаторах и непро-
буксовывающих фрикционах также увеличены на —40% [3].
278
Таблица 13
Технические данные гидротрансформаторов, применяющихся
в приводах строительных и дорожных машин
Модель гидротранс- форматора п Т)* В % /\о ^76 А’м Потерн при М 2 = 0 в %
Тип Д (фирма Гинар, Франция) Тип 6 (фирма Твин-Диск, США) TCLA-855 (фир- ма Аллисон, США) FRM-22 (фирма Окамура, Япония) Трехступенча- тый (фирма Твин- Диск, США) Группа 3 (фир- ма Эльба-Верке, ФРГ) У358011А (за- вод им. Кали- нина, СССР) У35808 (ВНИИ- Стройдормаш, СССР) ЛГ-340-35 (НАМИ, СССР) 1,18 1,3 1,6 1,3 2,5 1,18 1,05 1,1 1,28 83—89 88 87 85 84 85 85 87 92 2,9—3,1 2,75 3,5 3,2 5 5,8 2,5 2,7 3,1 2,07— 2,06 2,2 2,25— 2,95 2,2—2,55 2,9 3,6 2,1 2,3 2,54— 2,9 2—1,6 2,5 3,5 3,2 9 2,9 2,2 2,2 2,3 5 5 (20) МСХ 5 5 75 75 30 (МСХ) 20 (МСХ) 5
Модель гидротранс- форматора Возраста- ние М2 на режиме i < 0 di для i > 1 Регули- рование Выключение
Тип Д (фирма Гинар, Франция) Тип 6 (фирма Твин-Диск, США) TCLA-855 (фир- ма Аллисон, США) FRM-22 (фирма Окамура, Япония) Трехступенча- тый (фирма Твин- Диск, США) Группа 3 (фир- ма Эльба-Верке, ФРГ) У358011А (за- вод им. Кали- нина, СССР) У35808 (ВНИИ- Стройдормаш, СССР) ЛГ-340-35 (НАМИ, СССР) Нет » Есть Есть » » 1,2 2 (25) МСХ 25 (МСХ) 25 (МСХ) 7,5 Нет » » Нет » » Есть Нет Нет Есть фрик- ционное сцепление Нет Есть Есть (удаление жидкости) То же » Нет 1,45 1,53 (1,33) МСХ 1,43 1,33 2,2 2,1 1,38 1,4 1,5
ОТ Л
Для опускания грузов па режиме двигателя в приводе само-
ходного крапа предпочтительнее блокируемые гидротрансфор-
маторы, обладающие тормозными свойствами, а для опускания
грузов па режиме противовращения, гидротрансформатор должен
иметь возрастающий момент М2 при малой прозрачности.
Имея в виду, что трехступенча-
тые гидротрансформаторы слож-
ны, можно рекомендовать односту-
пенчатые гидротрансформаторы
a)
Рис. 157. Гидротрансформатор У358015:
а — конструкция; б — характеристика
с центробежной турбиной, имеющие 30% 0,7).
Более полно, чем зарубежные, этим условиям удовлетворяет
гидротрансформатор У358011А, применяемый на кране К-161.
Для экскаваторов, катков статического действия и ковшовых
погрузчиков ВНИИСтройдормаш рекомендует трехколесные
гидротрансформаторы с центростремительной турбиной, имеющие
симметричные насос и турбину, обладающие минимальной энер-
гоемкостью для исключения нежелательного влияния прозрач-
ности П при совместной работе с дизелями тракторного типа.
Конструкция базового образца подобного гидротрансформатора и
его внешняя характеристика показаны на рис. 157, а, б.
§ 45. ГИДРОТРАНСФОРМАТОРЫ ДЛЯ ТРАНСПОРТНЫХ МАШИН
В силовых передачах автомобилей различных типов широкое
применение получают гидромеханические коробки передач, одним
из основных элементов которых является гидротрансформатор.
Введение гидротрансформатора облегчает управление автомобилем,
повышает комфортабельность движения и в значительной мере
защищает звенья силовой передачи от ударных нагрузок, что спо-
собствует увеличению срока службы двигателя и трансмиссии.
Особенно Широкое распространение гидромеханические ко-
робки передач получили в США. Так, например, в 1970 г. более
90% выпускавшихся там легковых автомобилей имели автомата*
ческие и гидромеханические коробки передач. Гидропередачами
снабжается значительная часть городских автобусов. Кроме того,
гидромеханические коробки передач устанавливаются на тяжелых
автомобилях и самосвалах, автомобилях высокой проходимости.
Главными изготовителями гидропривода в США являются фирмы
Аллисон, Кларк и Твин-Диск.
В европейских странах, где выпускаются более дешевые лег-
ковые автомобили, гидромеханические коробки передач менее
распространены. На наиболее дорогих машинах используются
гидромеханические трансмиссии, производимые по лицензиям США.
Вместе с тем в Англии, Франции, ФРГ появились гидромеханиче-
ские коробки передач, предназначенные для использования на
легковых автомобилях с двигателями рабочим объемом 1,0—
2,5 л, а также на городских автобусах. В ЧССР совместно с НАМИ
(СССР) разработана гидропередача «Прага 2М-70» для городского
автобуса большой вместимости.
В СССР также гидромеханические передачи получили большое
распространение. Так, подобные передачи применяются на легко-
вых автомобилях «ЗИЛ» и «Чайка». Для серийного производства
подготовляется созданная для городского автобуса гидромеха-
ническая коробка передач ЛАЗ-НАМИ. Кроме того, разработана
и выпускается гидромеханическая коробка передач для автомо-
билей особо большой грузоподъемности типа БЕЛАЗа. В НАМИ
разработаны унифицированные гидротрансформаторы для гру-
зовых автомобилей и городских автобусов, предназначенные для
работы с двигателями 35 до 383 кВт.
Из известных типов гидротрансформаторов особенно большое
распространение в автомобилестроении получили комплексные
гидротрансформаторы типа «Аллисон», которые отличаются ши-
рокой зоной высоких к. п. д., относительно большой энергоем-
костью, компактностью и минимальным весом.
Для гидротрансформаторов, применяющихся в автомобилях,
кроме общеприменяемых режимных точек характеристики (/<0,
/*, т]*), используют точку i = 1м (/< = 1), а также понятие «ра-
бочий коэффициент трансформации /<р», который соответствует
минимально допустимому значению к. п. д. 1]р на основных ре-
жимах работы автомобиля. Передаточное число, соответствующее
т]Р, обозначим ip [14].
В автомобилестроении обычно применяется коэффициент транс-
формации /<р80, который соответствует т) = 80% и, таким образом,
определяет силовой диапазон, в котором к. п. д. выше 80%.
При равных условиях наиболее целесообразно устанавливать
гидротрансформаторы, у которых величина /<Р80 достигает наи-
больших значений, так как при этом удается уменьшить диапазон
механической коробки передач, работающей вместе с гидротранс-
281
форматором (под диапазоном механической коробки передач по-
нимается отношение передаточных чисел низшей и высшей передач).
Уменьшение диапазона, как правило, значительно снижает
вес коробки передач, способствует уменьшению числа передач,
облегчает работу фрикционных элементов. Кроме того, увеличе-
ние /<Р 80 способствует уменьшению числа переключений, что по-
вышает надежность и долговечность трансмиссии, а также ком-
фортабельность езды. Одно из важных требований, предъявляемых
к гидротрансформаторам, — это высокий к. п. д. в рабочей зоне
(при 0,4 4-0,8) и передаточное отношение, соответствующее
iM, не менее 0,84—0,85. Этим требованиям наиболее полно отве-
чает гидротрансформатор с центростремительной турбиной и сим-
метричным расположением насоса и турбины, что характерно для
комплексных автомобильных гидротрансформаторов. В гидро-
трансформаторах с центробежными и осевыми турбинами переда-
точное отношение обычно не превышает 0,65—0,8, это приводит
к «провалу» кривой к. п. д. и таким образом вынуждает блокиро-
вать насос и турбину при сравнительно малом значении iM =
- 0,65 -0,8.
Кроме этого, в одноступенчатых гидротрансформаторах с цен-
тробежной и осевой турбинами трудно получить высокоэкономич-
пую работу на режиме гидромуфты. Между тем, в большинстве
случаев для автомобильных гидропередач даже при наличии
блокировки необходимо предусматривать возможность использо-
вания режима гидромуфты. Зона с к. п. д. 80% у гидротранс-
форматоров с центростремительной турбиной шире, чем у гидро-
трансформаторов других типов.
Одно из важных требований, предъявляемых к автомобильным
гидропередачам, состоит в уменьшении их габаритов. Сравнение
гидротрансформаторов различных типов показывает, что это
требование наиболее легко осуществляется в комплексных гидро-
трансформаторах с центростремительной турбиной, так как в них
выход из насоса находится на возможно большем диаметре рабочей
полости. Поэтому коэффициент момента (при прочих равных
условиях) у гидротрансформаторов с центростремительной тур-
биной значительно выше, чем у гидротрансформаторов других
типов. Таким образом, гидротрансформаторы данного типа в наи-
большей степени отвечают основным требованиям, предъявляемым
к автомобильным гидротрансформаторам.
Рассмотрим особенности выбора параметров одноступенчатых
комплексных гидротрансформаторов для автомобилей различных
типов. Для достаточно эффективной работы гидромеханической
трансмиссии необходимо использовать гидротрансформатор на тех
режимах работы, где к. п. д. его достаточно высок. Длительная
работа гидротрансформатора на режимах с низким к. п. д. сопро-
вождается снижением топливной экономичности. Кроме того,
в этом случае возникают трудности с отводом тепла, выделяюще-
гося при работе гидропередачи. По указанным причинам пара-
282
метры гидромеханической коробки передач и режимы переключе-
ния следует выбирать так, чтобы исключить работу гидротранс-
форматора в области, где к. п. д. его низок. Ниже приведены дан-
ные, характеризующие диапазон механических коробок передач
для грузовых автомобилей, городских автобусов и легковых авто-
мобилей:
Тип автомобиля
Диапазон механи-
ческих коробок
передач
Легковые .................................. 2,8—3,5
Автобусы .................................. 3—5
Грузовые средней грузоподъемности.......... 5,5—8,5
Тяжелые грузовые и тягачи ................. 7—12
Высокой проходимости ................ .... 12—16
Чтобы гидромеханическая трансмиссия работала достаточно
эффективно, необходимо использовать силовой диапазон, который
соответствует диапазону механических коробок передач, причем
к. п. д. в указанном силовом диапазоне должен быть не ниже
80%. При проектировании гидромеханической трансмиссии обычно
считается заданным силовой диапазон /<сд, в котором к. п. д. гидро-
трансформатора должен быть не ниже 80%, т. е. должно быть
выполнено условие т| г)р.
Как следует из определения, силовой диапазон
*сД = КР8(Ак, (137)
где DMK — диапазон механической коробки передач, установлен-
ной за гидротрансформатором.
С учетом введенных параметров можно заключить, что для
работы гидротрансформатора в зоне высоких к. п. д. необходимо
выполнить условие
Кроме того, необходимо, чтобы при переходе на режим гидро-
муфты к. п. д. гидротрансформатора был выше 1]Р80. В комплекс-
ных гидротрансформаторах это условие выполняется, так как
iu = 0,84 ч-0,88.
Соотношение (137) показывает, что при заданном общем си-
ловом диапазоне диапазон механической коробки передач опре-
деляется коэффициентом трансформации /<Р80. Уменьшение диа-
пазона механической коробки особенно важно для тяжелых гру-
зовых автомобилей, тягачей, а также для автомобилей высокой
проходимости, так как при £>мк > 5 вследствие больших
относительных скоростей во фрикционных элементах значительно
увеличиваются потери в гидромеханической коробке передач.
Кроме того, увеличение коэффициента /<Р80 способствует умень-
шению числа переключений, что повышает долговечность транс-
миссии. Наибольшие значения /<Р80 = 1,8 4-2,0 имеют мало-
прозрачные гидротрансформаторы с П = 1,35 4-1,5. Поэтому для
283
трансмиссий грузовых автомобилей и городских автобусов наи-
более целесообразно использовать малопрозрачные гидротранс-
форматоры, имеющие наиболее высокие коэффициенты /<Р80.
Указанным значениям коэффициента трансформации соответ-
ствуют/<0 - 2,8 4-3,5 для четырехколесных гидротрансформаторов
и /Со 2,6-т-3,0 для трехколесных. Высказанные соображения
о выборе преобразующих свойств гидротрансформаторов под-
тверждаются зарубежным опытом. Так, например, в трансмиссиях
фирм Кларк, Аллисон и других, предназначенных для тяжелых
машин, /<0 = 2,6 4-3,5. Опыт проектирования гидромеханических
трансмиссий для тяжелых грузовых автомобилей высокой про-
ходимости показал, что для них наиболее целесообразно исполь-
зовать комплексные гидротрансформаторы с /<Р80 = 1,7 4-2, ра-
ботающие в сочетании с четырех-, шестиступенчатой коробкой пере-
дач. Для городских автобусов возможно применение комплекс-
ного гидротрансформатора с двух- или трехступенчатой коробкой
передач. Для повышения топливной экономичности рационально
блокировать насос и турбину на высшей передаче.
При выборе совместных режимов работы двигателя и гидро-
трансформатора, а следовательно, и активного диаметра необ-
ходимо учитывать следующие обстоятельства. Как известно, ука-
занные режимы выбираются из компромиссных соображений.
Это связано с тем, что условия, соответствующие лучшему исполь-
зованию мощности двигателя, не соответствуют условиям, при
которых достигается высокая топливная экономичность. Так,
например, для малопрозрачных гидротрансформаторов (П1 =
— 1,35 4-1,5) с целью максимального использования мощности на
режимах трансформации моментов его активный диаметр не-
обходимо выбирать так, чтобы /г10 = (0,8 4-0,9) nN, где п10 — ча-
стота вращения вала двигателя при полной подаче топлива на
режиме i ~ 0; nN — частота вращения, соответствующая макси-
мальной мощности двигателя.
Для получения высокой топливной экономичности на режиме
гидротрансформатора частоту вращения п10 следует выбирать
значительно ниже, так, чтобы /г10 = (0,8-^ 1) пд, где пд—частота
вращения вала двигателя, соответствующая минимальному удель-
ному расходу топлива. Для дизельных двигателей, например,
ЯМЗ /гд = 1200-^- 1500 об/мин и соответствует (0,6н-0,75) nN [14].
Для двигателей типа ЗИЛ-130 частота вращения пд = 1900-4-
2000 об/мин, что соответствует (0,6-4-0,65) rtN.
Кроме указанных выше основных соображений, касающихся
выбора совместных режимов работы двигателя и гидротрансфор-
матора, следует учитывать некоторые дополнительные факторы.
Так, например, для снижения шума двигателя и повышения ком-
фортабельности автобуса желательно снижать частоту вращения
вала /г10. Некоторое снижение целесообразно также для умень-
шения скольжения на режиме гидромуфты, а также для умень-
шения количества тепла, выделяемого гидропередачей. Для го’
284
родских автобусов и грузовых автомобилей частоту вращения /z10
рекомендуется применять в пределах (0,5-4-0,75) nN. Для грузо-
вых автомобилей, самосвалов и городских автобусов, обладающих
менее высокой частотой вращения, рекомендуется принимать
/г10 = (0,75-4-0,85) nN [14]. Для повышения экономичности авто-
мобиля целесообразно введение блокировки гидротрансформатора
на высших передачах.
Выбор параметров гидротрансформатора для легкового авто-
мобиля отличается некоторыми особенностями. Легковой автомо-
биль в противоположность грузовому большую часть времени
работает на высших передачах без преобразования момента, т. е.
на режиме гидромуфты. С учетом этого следует выбирать пара-
метры гидротрансформатора и его размеры. Кроме того, на лег-
ковых автомобилях обычно устанавливаются двигатели с большой
частотой вращения вала (nN = 4000-4-5000 об/мин).
При использовании малопрозрачного гидротрансформатора
для лучшего использования мощности пришлось бы выбирать
частоту вращения на входе п10 = 2500-4-3500 об/мин. Однако это
привело бы к снижению комфортабельности из-за шумной работы
двигателя при трогании автомобиля, а также сопровождалось бы
снижением топливной экономичности вследствие увеличенного
скольжения на режиме гидромуфты. По этим причинам, как пока-
зывает опыт, на легковых автомобилях целесообразно использо-
вать прозрачные гидротрансформаторы с относительно малым
коэффициентом Ко = 2,0-4- 2,5 и с частотой вращения входного
вала = 1500-4-1900 об/мин, что соответствует п10 = (0,3-4-
4-0,4) nN [14]. Более низкая частота вращения позволяет умень-
шить скольжение на режиме гидромуфты, что способствует повы-
шению топливной экономичности. Одновременно для повышения
последней, на легковых автомобилях (например, в США) пере-
даточное число главной передачи уменьшают на 15—20% по сравне-
нию с его значением при использовании механической ступенчатой
коробки передач. Возможность уменьшения передаточного числа
главной передачи на автомобилях с гидропередачей обусловлена
следующим.
При использовании уменьшенного числа главной передачи
на автомобилях с механической коробкой значительно увеличивает-
ся число переключений, что усложняет труд водителя и увеличивает
износ агрегатов автомобиля. В случае применения комплексного
гидротрансформатора при увеличении сопротивления движению
происходит переход с режима гидромуфты на режим гидротранс-
форматора. В результате этого отпадает необходимость в увели-
чении числа переключений.
В случае блокировки насоса и турбины можно несколько уве-
личить частоту вращения входного вала, так как в этом случае
режим блокировки отсутствует. Вместе с тем при увеличенной
частоте вращения достигается лучшее использование мощности
двигателя, поэтому применение блокировки более целесообразно
285
па легковых автомобилях со сравнительно меньшей удельной
мощностью. На легковых автомобилях производства США, обла-
дающих сравнительно высокой удельной мощностью двигателя,
блокировка гидротрансформатора отсутствует.
В табл. 14 приведены данные, характеризующие современный
опыт применения одноступенчатых комплексных гидротрансформа-
торов на автомобилях различных типов. Многоступенчатые ком-
плексные гидротрансформаторы, выполненные по схемам, пока-
занным на рис. 158, не получили практического применения. Это
объясняется тем, что при достаточно сложной конструкции они
обеспечивают сравнительно незначительное расширение зоны
с высоким к. п. д. Между тем, при условии дальнейшего совер-
шенствования их характеристик можно считать возможным при-
менение этих гидротрансформаторов на городских автобусах
с достаточно большой удельной мощностью. В этом случае можно
было бы применять гидротрансформатор без механического ре-
дуктора, что привело бы к упрощению трансмиссии. Однако уста-
новка этих гидротрансформаторов на дорожно-строительных ма-
шинах и на промышленных тракторах некоторых типов возможна.
Многотурбинные гидротрансформаторы (рис. 159) получили
также ограниченное распространение. Они используются главным
образом па легковых автомобилях, обладающих относительно
большой удельной мощностью, и строительных погрузчиках (США).
Положительное свойство этих передач — полное отсутствие толч-
ков при разгоне (повышенная комфортабельность) в связи с тем,
что у них не применяется переключение передач при помощи фрик-
ционных элементов. Кроме того, упрощается система управления
трансмиссией по сравнению с известными гидромеханическими
коробками передач, где для переключения имеется сложная авто-
матическая система.
Многотурбинные гидротрансформаторы можно было бы ис-
пользовать и на городских автобусах некоторых типов, обладаю-
Таблица 14
Нагружающе-преобразующие свойства гидротрансформаторов,
применяющихся в приводах автомобилей
Тип автомобиля Ко «10 в об/мин Число пере- дач Диапазон механи- ческой коробки передач Примечание
Легковые автомобили 2,1—2,7 1,9—2,2 1400— 1900 2—3 1,8—2,5 Гидротрансфор- матор обычно не блокируется
Автобусы 2,6—3,5 1,4—1,6 1600— 2000 2-3 1,8—2,5 Гидротрансфор- матор блокирует- ся
Грузовые автомобили 2,6—3,5 1,2—1,6 1700— 2200 4—6 5—7 То же
286
щих достаточной удельной мощностью, в том случае, если пре-
образующие свойства окажутся достаточными без применения до-
полнительного механического редуктора. К недостаткам много-
турбинных гидротрансформаторов следует отнести значительную
сложность конструкции. Так, фирмы Бюпк и Шевроле прекра-
тили выпуск гидромеханических трансмиссий «Флюит-Питч» и
«Турбоглайд» с многотурбинными гидротрансформаторами. Вместо
Рис. 158. Многоступенчатые комплексные гидротрансформаторы:
а — гидротрансформатор с муфтой свободного хода внутри круга циркуляции; б — гидро-
трансформатор с колесами реакторов, соединенными жестко и установленными на одной
муфте свободного хода; в — гидротрансформатор с тремя реакторами и турбинами, соеди-
ненными через муфту свободного хода: 1 — насос; 2 — турбина первой ступени; 3 — пер-
вое колесо реактора; 4 — турбина второй ступени; 5 — второе колесо реактора; 6,7 —
муфты свободного хода; 8 — третье колесо реактора
них выпускаются гидромеханические коробки передач «Тур-
бина-300» и «Турбина-400», включающие трехколесный гидротранс-
форматор с двух-или трехступенчатой коробкой передач. Таким
образом, сложность конструкций многотурбинных гидротранс-
форматоров и недостаточно высокая экономичность на данном
этапе развития не позволяют им успешно конкурировать с гидро-
механическими коробками передач, выполненными по обычной
схеме. Несмотря на это, дальнейшее совершенствование много-
турбинных гидротрансформаторов и развитие их конструкций
представляет интерес, как одно из возможных направлений,
связанных с созданием бесступенчатой трансмиссии для автомо-
билей и строительно-дорожных машин.
В качестве примера конструкции комплексного автомобиль-
ного гидротрансформатора рассмотрим гидротрансформатор Л Г-340
(рис. 160), разработанный в НАМИ совместно с ЛАЗом и пред-
назначенный для городских автобусов ЛАЗ и ЛИАЗ с двигателями
мощностью 36,8—132,5 кВт и крутящим моментом 343—490 Н-м.
Рабочие колеса выполнены литыми из алюминиевого сплава.
Насос через пальцы, вставленные в резиновые втулки, которые
располагаются в корпусе маховика, приводится во вращение от
коленчатого вала двигателя. Ступица насоса соединяется с его
корпусом при помощи болтового соединения и опирается на роли-
ковый подшипник. С другой стороны насос опирается через за-
287
слушку на выточку, имеющуюся в Маховике. Осевые силы, дей-
ствующие иа насос, передаются на передний шарикоподшипник 3,
который закреплен на валу турбины. Турбина устанавливается
при помощи шлицев на валу 13, передней и задней опорами ко-
торого являются шарикоподшипники 3 и 14. Подшипник 14 фик-
сирует вал турбины от осевых перемещений. Первое и второе
колеса реактора при помощи роликовых муфт свободного хода
устанавливаются на неподвижный вал 8. Благодаря наличию
Рис. 159. Многотурбинные гидротрансформаторы:
а — двухтурбинные; б — трехтурбинные; в — двухтурбинные с колесом реактора между
первой и второй турбинами; г — двухтурбинные, выполненные по вальной схеме: 1 —
насос; 2 — первая турбина; 3 — вторая турбина; 4 — первое колесо реактора; 5 — муфта
свободного хода для отключения турбин; 6 — муфта свободного хода для отключения
реактора; 7 — выходной вал; 8 — второе колесо реактора; 9 — третья турбина; 10 —
сцепление переднего хода
муфт свободного хода колеса реакторов могут вращаться только
в одном направлении (по часовой стрелке), от вращения в противо-
положную сторону колеса удерживаются роликами. При вращении
колес реакторов относительно неподвижной втулки бронзовые
шайбы 10 выполняют роль упорных подшипников. Перемещение
роликов в осевом направлении ограничивается промежуточной
шайбой. Слева и справа на колесах реакторов установлены брон-
зовые упорные шайбы 11, выполняющие функции упорных под-
шипников. В крышке гидротрансформатора установлено сцепле-
ние, блокирующее насос и турбину на определенных режимах
работы (при I = 0,85).
Трехколесный гидротрансформатор (рис. 161) ЛГ-340 по ос-
новным деталям унифицирован с четырех колесным. Реактор уста-
новлен на муфтах свободного хода. Осевые усилия, действующие
на реактор, воспринимаются бронзовыми шайбами 2 и 3. В целом,
гидротрансформаторы грузовых автомобилей и городских автобу-
сов имеют значительные габаритные размеры в связи с исполь-
зованием шариковых и радиально-упорных подшипников, фик-
сирующих насос и турбину. Бронзовые шайбы применяются глав-
288
ным образом для восприятия осевых усилил!, действующих па
реактор. Однако реактор опирается не па вращающийся насос,
как у легковых автомобилей, а на неподвижную шайбу. В гидро-
трансформаторах, применяемых на тяжелых автомобилях н трак-
торах, где нагрузки особенно велики, шарикоподшипники ис-
пользуются также для восприятия осевых усилий, действующих
па колеса реактора.
Одной из особенностей гидротрансформаторов грузовых авто-
мобилей и автобусов является увеличение параметра т ~,
ыа
характеризующего отношение внутреннего размера рабочей по-
лости к наружному. Это связано с тем, что детали гидротрансфор-
маторов грузовых автомобилей и автобусов более нагружены,
поэтому для размещения валов, муфт свободного хода и подшип-
ников требуется больше места, чем на легковых автомобилях.
У гидротрансформаторов легковых автомобилей параметр т =
= 0,3-:-0,32; у гидротрансформаторов грузовых автомобилей и
городских автобусов т = 0,35ж0,44. Однако следует иметь
в виду, что при tn >0,4 показатели комплексных гидротрансфор-
маторов на режиме гидромуфты снижаются [14].
На грузовых автомобилях и городских автобусах более широко
применяется блокировка гидротрансформатора на режимах работы,
когда преобразование момента не требуется, что связано главным
образом с желанием избежать дополнительных гидравлических
потерь и улучшить топливную экономичность. Так, например,
почти на всех грузовых автомобилях с передачей «Аллисон» пре-
дусмотрена блокировка гидротрансформатора. В конструкциях
большинства отечественных автомобильных гидротрансформаторов
также предусмотрена блокировка насоса и турбины. Конструкции
дисковых фрикционных муфт, блокирующих насос и турбину,
показаны на рис. 160 и 161. Так, в гидротрансформаторе ЛГ-340
ступица сцепления установлена на шлицах вала турбины, с на-
ружной стороны она также имеет шлицы, на которых находятся
два металлокерамических диска, расположенных между сталь-
ными дисками, которые на периферии имеют выступы, входящие
в пазы корпуса переднего фрикциона, выполняющего одновре-
менно функцию крышки гидротрансформатора.
Для включения сцепления полость слева соединяется со слив-
ной магистралью. Поршень под действием избыточного давления
справа перемещается влево и сжимает диски. Для выключения
сцепления полость, расположенная слева от поршня, соединяется
с нагнетающей магистралью и жидкость через сверление в валу
турбины поступает в эту полость. В гидротрансформаторе «Алли-
сон» блокировка выполнена по иной схеме. Для включения сцеп-
ления поршень перемещается вправо иод действием избыточного
давления в полости слева от него. Преимущество схемы, исполь-
зованной в гидротрансформаторе ЛГ-340, заключается в том,
что отсутствует необходимость установки опорного диска, в ре-
19 С. II. Стесни 289
7 8
9 // 12
Рис. 160. Гидротрансформатор ЛГ-340 (четырехко-
лесный):
1 ~ крышка гидротрансформатора; 2 — сцепление; 3,
14 — шарикоподшипники; 4 — заглушка; 5 — турбина;
6 — первое колесо реактора; 7 — насос; 8 — неподвиж-
ный вал реактора; 9 — неподвижная втулка; 10, И —
бронзовые шайбы; 12 — ступица насоса; 13 — вал тур-
бины; 15 — второе колесо реактора
Рис. 161.^Гидротрансформатор Л Г-340 (трехколес-
ный):
1 — колесо реактора; 2,3— бронзовые шайбы
зультате чего конструкция упрощается и делается более компакт-
ной.
Гидротрансформаторы грузовых автомобилей и городских
автобусов работают в более тяжелых условиях, чем легковых,
причем значительную часть времени па режиме преобразования
момента. В связи с этим количество выделяющегося тепла, а сле-
довательно, и размеры системы охлаждения в этом случае зна-
чительно больше. Давление подпитки также обычно выше, чем
у гидротрансформаторов легковых автомобилей. Это связано с не-
обходимостью пропустить через гидротрансформатор и далее
через радиатор значительное количество рабочей жидкости, чтобы
обеспечить удовлетворительный отвод тепла, которое выделяется
при работе гидротрансформатора. Давление на входе в гидро-
трансформатор зависит также и от размеров: с увеличением актив-
ного диаметра повышается давление, необходимое для предотвра-
щения'кавитации. В гидропередаче ЛАЗ-НАМИ (Ад = 110,4-е-
н-132,5 кВт) для городского автобуса давление на входе в гидро-
трансформатор равно (3,43—=-4,41) • 105 Н/м2, а расход жидкости,
проходящей через гидротрансформатор, составляет 0,0005 м3/с.
В гидротрансформаторах, предназначенных для использования
на тяжелых грузовых автомобилях и самосвалах с двигателями
значительной мощности (184—368 кВт), давление на входе в гидро-
трансформатор равно (3,9-=-7,8) • 105 Н/м2, а расход через гидро-
трансформатор составляет от 0,001—0,007 м3/с.
На легковых автомобилях «Чайка», как и в гидромехани-
ческой коробке передач городского автобуса ЛАЗ-695-Ж, в ка-
честве рабочей жидкости используется масло ВНИИ-НП-1. На
грузовых автомобилях особо большой грузоподъемности рабо-
чей жидкостью служит масло Л1АЗ, которое представляет собой
смесь масел веретенного АУ и МТ-16 в соотношении 7 : 3. Из
трех типов масел ВНИИ-НП-1, МАЗ и веретенного АУ наиболее
вязким является масло ВНИИ-НП-1.
На вязкость рабочей жидкости значительное влияние оказы-
вает ее температура. Так, у масла ВНИИ-НП-1 с изменением
температуры от 50 до 90° С вязкость уменьшается примерно в 3 раза
[14]. Как известно, температура рабочей жидкости в реальных
условиях эксплуатации автомобиля изменяется в довольно ши-
роком диапазоне. Обычно рекомендуется поддерживать темпера-
туру рабочей жидкости в пределах 90 ± 5° С. Зимой температура
рабочей жидкости в гидромеханической коробке передач несколько
ниже, а летом выше. Так опыт эксплуатации автобусов ЛАЗ по-
казал, что зимой температура рабочей жидкости равна 70—80°,
летом 80—110° С, а в напряженных условиях эксплуатации крат-
ковременно может достигнуть и более высоких значений (100—
120° С). Исследования гидротрансформатора Л Г-340, проведенные
в НАМИ, показали, что при изменении температуры рабочей
жидкости (масло ВНИИ-НП-1) с 70 до. 90° С момент А4 х изме-
няется от 27,4 до 24 Н-м [14].
19* 291
Гидродинамнческие передачи тепловозов можно раздел пть
на две основные группы: многоциркуляцпонные п одноциркуля-
ционные.
Многоциркуляциопная передача состоит из нескольких гид-
равлических машин-гидротрансформаторов и гидромуфт, объеди-
ненных одним общим приводным валом и работающих поочередно
в определенном интервале скоростей движения тепловоза. Пе-
реключение ступеней скорости происходит гидравлическим путем
(рис. 1G2).
Одпоцпркуляцпонпая передача состоит из одного гидротранс-
форматора и механической коробки передач, ступени скорости
которой переключаются при помощи специальных муфт или лен-
точных тормозов.
К первой группе относятся, например, передачи тепловозов
ТГМ1, ТГ102 и передачи немецкой фирмы Фойт; ко второй —
передачи тепловозов ТП\, ТГМЗ и передачи немецкой фирмы
Майбах (рис. 163).
Основным качественным показателем многоциркуляционных
передач является исключительная плавность и устойчивая надеж-
ность переходных процессов, обусловленная равномерным перете-
канием рабочей жидкости из одной рабочей полости в другую.
Однако масса, а следовательно, и стоимость передачи в среднем на
30/овыше,чем гидропередач второй группы. Так, лучшие образцы
многоциркуляцпонных передач имеют удельный вес —21,6 Н/кВт,
в то время как удельный вес одноциркуляционных передач не пре-
вышает 40 Н/кВт [21]. Кроме того, непроизводительные расходы
энергии па вращение незаполненных гидроаппаратов в среднем
на 3—5% понижают тягово-экономические показатели теплово-
зов, оборудованных многоциркуляционными передачами. Доволь-
но большая величина этих потерь объясняется тем, что гидро-
аппараты при опоражнивании работают в режимах весьма малых
значений к. н. д., и поэтому, несмотря на замену жидкой среды
воздухом, энергия интенсивно расходуется на его нагревание
(отсюда высокая температура в аппаратах холостого хода). При
двух-трех ступенях скорости в многоциркуляцпонных передачах
диапазон регулирования по скорости равен 6, в то время как в одно-
циркуляциопных с коробкой передач на три-четыре ступени ско-
ростной диапазон достигает высокого значения (10—12).
В последние годы была создана конструкция, объединяющая
достоинства обеих групп гидропередач. Целесообразное сочета-
ние в одной передаче гидравлического принципа переключения
ступеней скорости, присущего многоциркуляционной передаче,
и компактности при высоких тягово-экономических показателях,
свойственных одноциркуляционной передаче, позволяет получить
комбинированную гидропередачу, обладающую достаточно вы-
сокими технико-экономическими показателями.
Впервые конкретные схемы комбинированных гидропередач
для тепловозов были разработаны и испытаны в СССР. На рис. 164
292
293
Рис. 162. Гидропередача тепловоза ТГМ-1:
1, 2, 4, 6, 8, 9, 10, 13, 17, 19, 25, 26, 27, 28 — шестерни; 3 — корпус режимной коробки и реверса; 5 — вал; 7 — воронка;
1'1 — центробежный регулятор; 12 — вторая гидромуфта; 14 — первая гидромуфта; 15 — корпус гидравлических агрегатов;
/6 — гидротрансформатор; 18 — упругая муфта; 20 — вал насосов; 21 — средняя часть корпуса; 22 — вал; 23 — питательный
насос; 24 — картер корпуса; 29 — тяговый вал; 30 — отвод
Рис. 163. Гидропередача тепловоза ТГМ-3:
1 — карданный вал; 2, И, 12, 14, 15, 18, 19, 22, 23, 24, 25, 27, 28, 29, 30, 31 —
шестерни; 3 — турбина; 4,5 — реакторы; 6 — насос; 7 — сателлиты; 8 — солнечная
шестерня; 9 — вал передачи; 10, 13 — дисковые фрикционные муфты; 16, 17, 20, 21 —
муфты; 26 — вал
показана принципиальная схема такой передачи, разработанная
в МИИТе. Особенность передачи заключается в том, что насос 3
гидромуфты кинематически связан
с турбиной 2 гидротрансформа-
тора, а турбина гидромуфты 4 —
с выходным валом передачи.
Переключение ступеней ско-
рости в этой передаче происходит
без разрыва силы тяги при пере-
менном заполнении синхронизи-
рующей гидромуфты. Постепен-
ное плавное снятие нагрузки
с кулачковой муфты при заполне-
н и и г и др ом у фты - с и 11 х р о и и з ато р а
и такое же плавное повышение
нагрузки на кулачки после пе-
реключения за счет опорожне-
ния муфты-синхронизатора создает
благоприятные условия для дли-
тельной и надежной работы меха-
Рис. 164- Комбинированная гидро-
передача тепловоза с синхронизи-
рующей гидромуфтой:
1 — гидродинамический трансформа-
тор; 2 — турбина трансформатора; 3
и 4 — насос и турбина гидромуфты; 5
и 7 — зубчатые колеса; 6 — коробка
передач; 8 — синхронизирующая гид-
ромуфта
294
ййческих муфт сцепления. При этом гидромуфта в схеме может
быть также использована для тяги и гидродинамического тормо-
жения. Фирма Майбах создала комбинированную гидромехани-
ческую передачу К184В со входной мощностью 1400 кВт с двумя
гидротрансформаторами и четырьмя ступенями скорости.
§ 46. ТЯГОВО-ЭКОНОМИЧЕСКИЕ КАЧЕСТВА МАШИН
С ГИДРОТРАНСФОРМАТОРОМ В ПРИВОДЕ
При совмещении характеристик двигателя и гидротрансформа-
тора решается задача определения оптимального совмещения,
обеспечивающего наилучшие эксплуатационные качества данного
типа машины: тяговые, разгонные, топливно-экономические, тепло-
вые (количество тепла, выделяемого в систему охлаждения си-
лового агрегата).
Тяговые качества. Характеристики Л4Д --- f (/гд) или Мд =
= f (/гд) всех видов двигателей можно разделить (целиком или
по участкам) на следующие типы (рис. 165) [15|:
1) Мд = const, Мд = f (пд) — гипербола в зоне /гм„ < /?д<
<C^Amax£zJ характеристики, приближающиеся к этому типу,
имеют паровые машины, паровые и газовые турбины (индекс и
обозначает «идеальная»);
2) Мд = const — условная характеристика;
Рис. 165. Характеристики двигателей и гидротрансформаторов:
а — характеристики двигателей; б — типовые характеристики гидро-
трансформаторов
3) Л4Д = f (Ид) — промежуточная между первым и вторым
типами, имеет максимум при //м; эту характеристику имеют дви-
гатели внутреннего сгорания (карбюраторные и дизели безрегу-
ляторная ветвь);
295
4) /Ид—характеристика, возрастающая с увеличением лд;
б//Лп dA4 н
для этого типа зоны с режимами работы не пригодны
для совместной работы с гидродинамическими передачами;
5) /Ид — характеристика, резко убывающая с увеличением
71д—регуляторная ветвь характеристики дизеля или рабочая
ветвь характеристики асинхронного двигателя, причем в послед-
нем случае /Идном < /Ид 1Пах.
Необходимость применения гидротрансформатора, как и лю-
бой передачи, определяется несоответствием характеристик при-
водящего двигателя эксплуатационным требованиям; в частности,
недостаточным силовым DIA=—^^— и кинематическим Dn =
Ми шах
= диапазонами. Качества гидротрансформатора как
передачи определяются в основном его преобразующей К = =
— f (/), энергетической (к. п. д.) т] = f (z) и нагружающей
f (0 характеристиками.
Для идеальной бесступенчатой передачи = const = 1 и
Ки представляет гиперболу, расположенную в интервале fmin и «С
zйиах/z (рис. 165, б). Оптимальной нагружающей характе-
ристикой для обеспечения наилучших тяговых качеств при лю-
бом типе характеристики /Ид = f (/гд) может быть = const
при точке совместной работы, соответствующей /Удгпах, так как
в этом случае выходная характеристика силового агрегата Мт =
= Л4д/< = f (/iT) = f (vP. 0) представляет собой гиперболу,
расположенную в интервале и i fmax и при любой ха-
рактеристике двигателя (здесь иР. 0 — скорость рабочего органа,
которая определяется с учетом передаточного числа механической
передачи через пт).
Реальные характеристики гидротрансформаторов существенно
отличаются от идеальных. Эти отличия заключаются в следующем.
Кривая т) =--= f (Z) имеет параболическую форму (рис. 165, б)
с т] = 0 при i — 0 и i = /х>х, причем т|П1ах < 1 (обычно т)тах =
= 0,85 4-0,9). Существенно отличается от гиперболы и кривая
К = / (0-
Если для рабочего диапазона принять минимально допусти-
мую величину к. п. д. (для транспортных машин обычно прини-
мают т)э = 0,8), то DK = = tfP80.
A min э 1 min э
Обычно /<р80 = 2=2,5. Для устранения зоны низких к. п. д.
при высоких значениях i применяют блокируемые (или отклю-
чаемые) либо комплексные гидротрансформаторы. Анализ выход-
ных характеристик силового агрегата с непрозрачным некомплекс-
ным гидротрансформатором (рис. 166) позволяет отметить сле-
дующее.
1. При идеальной характеристике 1 двигателя (см. рис. 165)
применение гидротрансформатора нерационально, так как при
296
этом сужается рабочий диапазон, если > Z?K и Dn > Dif
и уменьшается момент М2 в рабочем диапазоне из-за 1]<1.
Идеальная бесступенчатая передача не обладает этими недо-
статками и может способствовать улучшению (при Xi = const)
топливно-экономических, разгонных и других качеств силового
агрегата, но не тяговых (под тяговой характеристикой мы пони-
маем зависимость удельной силы тяги пли момента на выходном
валу силового агрегата от скорости движения машины или ско-
рости выходного вала силового агрегата).
2. При характеристиках 2, 4 и 5 (см. рис. 165) двигателя для
получения наибольших моментов М2 при любой частоте вращения
Рис. 166. Выходные характеристики гидротрансформатора при различных ха-
рактеристиках двигателей:
1а1 /
а — типа 1; б — типа 2; в — типа 3; г — типа 4; д — типа 5; 1 — М 2 для П = - - с 1 I -~-
\12 \ Л'аб
для типа 5); 2 — соответствует i 1п
пт необходим гидротрансформатор с const и совмещением
Пн = Пы-
Если принять во внимание, что наибольшие значения момента
7ИТ необходимы только в рабочем диапазоне, а увеличение сто-
пового момента до /Ито > (1,1 -т-1,3) 7Ит/1Шпэ нежелательно из-за
увеличения нагрузок на детали трансмиссии при нерабочих
кратковременных режимах, тогда для уменьшения стопового мо-
мента Л1то целесообразно применение гидротрансформаторов,
обладающих при i < э и характеристиках 5 (см. рис. 165) —
обратной (П <С 1), а при характеристиках 4 — прямой прозрач-
ностью. При характеристике 5 двигателя (дизель со всережим-
ным регулятором) уменьшение момента /Ито соответствует также
работе на частичных характеристиках.
Выясним, при каком отличии характеристик двигателя от
кривой 1 (см. рис. 165) становится целесообразным применение
гидротрансформатора для улучшения тяговых качеств машины.
На графике Л4Д = f (пд) (рис. 167) найдем точку б (пли б'), по-
строив гиперболу Л4дпд = = const, а также точку
в (или в') по соотношению Л4Д = — Д-ТЛХ...? = =
L)[y3 Ь'Кэ \
297
Если /!б' -С /?в', применение гидротрансформатора нецеле-
сообразно, если /?г,' > п./, необходимо построить график ТИ2 =
7 f 0*т) (рис. 167, б) и оценить целесообразность применения
гидротрансформатора в приводе данной машины, так как в этом
случае обеспечивается улучшение тяговых качеств при пд <^п6
или при пЛ > пб (см. кривые 1" и 3 на рис. 167, б). Кроме
Рис. 167. Определение нагружающих свойств гидротранс-
форматоров:
а — выбор точек совмещения; б — сравнение характеристик
МЛ / (пд) 1для кривой 1 Л4дюд = const = А/дтах; для кри-
Nлпих^э
вой 2 М = —; для кривой 3 Мп = f (нт); А —
Д (0 2 1
улучшение и Б — ухудшение тяговых качеств по сравнению
с кривой /"]
того, необходимо сравнить силовые и кинематические диапа-
зоны.
Следует отметить, что основное влияние на величину требуемой
Англах БЫ «
прозрачности оказывают не значения и а форма кри-
вой ТИд г.-: f как показано на рис. 168, а. Для работы с дви-
гателем, характеристика которого соответствует кривой /, не-
обходимы прозрачность гидротрансформатора 27э = 1 и совме-
щение характеристик двигателя и гидротрансформатора в точке
а, для кривой 2 — требуется совмещение этих характеристик
в зоне бв. Области значений прозрачностей, обеспечивающих
значительное улучшение тяговых качеств, показаны на рис. 168, б.
Из вышесказанного можно сделать следующие выводы.
1. Прямая прозрачность обеспечивает значительное улучше-
ние тяговых качеств только при характеристиках двигателя
ЛТд = f (л.д), располагающихся между 7ИД = ^ах и Мд =
СОд
298
диапазона, что осооенно важно,
0 , n„ nN пд 0 пн П$
а) б)
Рис. 168. Влияние прозрачности гидротранс-
форматора на работу привода:
а — формы кривой Мд = f (л^); б — области
/—/7=1; 2 — /7 /7 > 1; 4 ~ /7=1
= 1,04 MN, причём для характеристик, близких к Л4Д = —-—,
<Од
целесообразность применения гидротрансформатора значительно
зависит от его к. п. д. в рабочем диапазоне и значений силового
диапазона DK. При остальных типах характеристик двигателей
значительное улучшение тяговых качеств обеспечивается непро-
зрачным гидротрансформатором с загрузкой двигателя на режиме
максимальной мощности. Прямая прозрачность обеспечивает
расширение кинематиче
например, для транс-
портных машин при лю-
бых характеристиках
двигателей, кроме ха-
рактеристик 5 (см.
рис. 165).
2. Зону загрузки
двигателя и величину
требуемой прямой проз-
рачности гидротранс-
форматора Пэ целесо-
образно определять по
значениям 0,96Л4П]ах и
0,96Afraax, нанесенным
на характеристику дви-
гателя. При этом зона
загрузки двигателя и
величина П3 определя-
ются в основном формой характеристики Мд = f (/?Л).
3. Для изменения тяговых характеристик в желаемом направ-
лении с учетом имеющихся ограничений могут оказаться целе-
сообразными решения, отличающиеся от приведенных выше.
Например, для обеспечения Л12 const (при Мл =£- const) в не-
котором диапазоне изменения частоты вращения /1т необходим
гидротрансформатор, обладающий обратной прозрачностью.
4. Для схем с независимым отбором мощности выбор коэф-
фициента прозрачности гидротрансформатора зависит от типа
характеристик двигателя и величины отбираемой мощно-
сти.
Разгонные качества. Рассмотрим процесс разгона от началь-
ных условий сон и сот = 0. Весь процесс разгона системы с гидро-
трансформатором можно разделить на следующие основные пе-
риоды [15]:
пуск и разгон двигателя до момента начала вращения ведо-
мого вала;
разгон двигателя до его внешней характеристики;
разгон ведомого вала до конца разгона системы, определяе-
мого условием равенства крутящих моментов—разгоняющего
и сопротивления на ведомом валу.
299
Особенности разгона систем с гидротрансформатором в основ-
ном заключаются в следующем:
I) начало вращения ведомого вала происходит при сравни-
тельно низкой угловой скорости ведущего вала, определяемой
характеристикой нагружения Следовательно, в начале разгона
ведомого вала не может быть использована значительная кине-
тическая энергия вращающихся масс ведущего вала.
При отсутствии гидротрансформатора разгон двигателя про-
исходит при выключенном сцеплении, и значит, без сопротивления.
Начало разгона ведомого вала происходит при использовании
значительной кинетической энергии вращающихся масс ведущего
вала. Следовательно, разгон ведомого вала в начальный период
при механической трансмиссии должен происходить значительно
интенсивней и менее плавно, чем при гидротрансформаторе;
2) интенсивность разгона ведомого вала в третьем периоде
(с использованием внешней ха-
рактеристики двигателя) за-
висит от прозрачности гидро-
трансформатора. Так, при проз-
рачном гидротрансформаторе
не затрачивается энергия на
разгон маховых масс ведущего
вала, что способствует более
Рис. 169. Расчетная схема к опреде-
лению времени разгона интенсивному разгону, чем при
механической трансмиссии;
3) при значительных ускорениях ведомого вала, если расход
в рабочей полости зависит от i, а также при значительных уско-
рениях ведущего вала характеристики гидротрансформатора мо-
гут отличаться от статических.
Разгонные характеристики
Л-1л, Л4С, <ои, (138)
можно определять в следующей последовательности.
1. Система приводится к предельной эквивалентной системе,
а при последовательном соединении гидротрансформатора с при-
водящим двигателем и трансмиссией — к двухмассовой системе
(рис. 169).
2. Составляются дифференциальные уравнения равновесия
для валов насоса и турбины. При этом должны быть известны
приведенные моменты инерции и J2, а также действующие
моменты Мд = f (сод), момент сопротивления Мс = f (сот) и харак-
теристика гидротрансформатора:
Ма = М,-{ (139)
-= КМ, — Л • (140)
300
3. Решая уравнения равновесия, можно найти уравнения
движения валов сон = f (0 11 = f затем Л1д = f (/) и
Що, г Що.,.
Мс = f (/), а также - [ (z) и - f (t).
4. Определяется времен разгона Т (при условии М2 Л4С),
полное время разгона Т0, а при разгоне поступательно движущихся
масс, например, автомобилей, путь разгона S.
5. Кроме этого, для теплового расчета можно определить
количество энергии, перешедшей в тепло в гидротрансформаторе
за время разгона, а определив угловые ускорения звеньев транс-
миссии и зная моменты инерции вращающихся звеньев, можно
определить динамические нагрузки и по ним провести расчет
на прочность валов и шестерен.
Приведенные моменты инерции можно определить из равен-
ства кинетической энергии вращающихся и поступательно-дви-
жущихся масс:
°тк,да ««>
Подставляя уравнение (139) в выражение (140) и принимая
во внимание, что крутящий момент на валу турбины Л4Т равен
моменту сопротивления Л4С, приведенному к валу турбины, по-
лучим для вала турбины:
(142)
где представляет собой моменты инерции маховика, насоса,
рабочей жидкости, заполняющей насос и т. д.; a J2 — моменты
инерции турбины, рабочей жидкости, заполняющей турбину,
приведенные моменты инерции деталей, жестко соединенных
с турбиной.
Обозначим через коэффициент инерции вращающихся масс:
б — 1 _l.2l “ ~ ! Л Д </wT ’ тогда Аот Л!д/< — Мс dt ^2^(0 и время разгона системы <°б (,)б т = Г-Д- -d<or = Г I / Ci (0^. \ 1 /11 п — J \ dF J (.<),, (О., (143) ц; Ло.г. (144)
301
В тех случаях, когда происходит разгон поступательно
движущихся масс со скоростью v, при связи между ними и валом
турбины через постоянные i0 и переменные /1<п передаточные
числа, производится приведение не к валу турбины, а к послед-
нему звену, например, колесам автомобиля или ведущей звез-
дочке трактора.
Тогда уравнение для определения ускорения автомобиля
(или трактора), имея в виду, что
1 . _ dv *кп*о . __ dv
IZ ’ dt dt r.r ’ dt dt
1\ 1\
получим аналогично уравнению (143)
dv P]^ — Pc
dt ~ mdtn ’
db3K
dt
dv
dt
КГГ0
fK
(145)
dcoT ’ ’
(146)
где PK — сила тяги на колесах;
Рс —сила сопротивления,
и время разгона автомобиля (или трактора)
dv = f dv’
'б
(147)
где
ГОЧмс
/7Zrr>
Ь,п - 1 4
/2 js ^(,)H , Л^оЛмех
*КИЛ -----*-----9--
G
m — —,
g
mrK ’
где G—вес разгоняемой массы автомобиля (или трактора);
JK — суммарный момент инерции всех колес автомобиля
или приведенный момент инерции гусеничного дви-
жителя с учетом моментов инерции катков и т. д.
Для анализа можно принять [15]
0 dtorr
6m.-= 1,04 + О.ОЗГкпК^,
причем для высшей передачи /кп = 1.
Из уравнения (147) следует, что время разгона тем меньше,
чем
выше тяговые качества Л1д/< = f (сот) или = f (и);
меньшая часть энергии затрачивается на разгон дополни-
тельных вращающихся масс, т. е. чем меньше бсо или 6/?г;
меньше разгоняемые массы J2 или т;
меньше момент Мс или сила Рс сопротивления.
Для заданной системы и известных условий ее работы заданы
J2 (или tn) и Мс (или Рс). В этом случае разгонные качества опре-
302
деляются только произведением МЛК (или Рк) и 6(1) (или 6,„).
При любой характеристике двигателя, кроме типа 3 (см. рис. 165),
прозрачность П = 1 и совмещение характеристик при частоте вра-
щения nN обеспечивают наивысшие тяговые качества одновременно
с наивысшими разгонными качествами, так как - = 0 при
/7=1.
На рис. 170 приведен
график тягового баланса
для автомобилей, причем
все силы являются безраз-
мерными и отнесены к пол-
ному весу автомобиля. Рас-
полагаемая сила тяги ог-
раничивается условиями
сцепления с грунтом,
удельной мощностью—&—
и максимальной скоростью.
Для легковых автомо-
билей с ведущей задней
осью 0,4 при
коэффициенте " сцепления
ср = 0,7. Тогда при раз-
гоне автомобиля с иде-
альной трансмиссией
Г f = const и бш =
= 1,04] до скорости
50 км/ч на горизонтальном
участке шоссе получим
= 0-38£; =
•. uf / шахи
= 3,7 сек; Su = 26 м.
Таковы предельные воз-
можности разгона легко-
вых автомобилей высшего
Рис. 170. График тягового баланса автомо-
билей:
1 — G = 1,255’104 В; 2 — G = 1,84-10‘ В; 3 —
G = 3,07* 104 H (при kF = 0,063 и Д1п1ах); а —
«Москвич-407»; б — «Волга»; в — ЗВЛ-111
класса с гидромеханичес-
ким приводом. Однако применяемые в настоящее время транс-
миссии не обеспечивают условий (-7^) = (-7^-) max = const и
<5/п = 1,04, поэтому обычно для разгона до скорости 50 км/ч Т =
= 6-т-8 с и 3 = 50 ч-80 м [15]. Время разгона первого и второго
периодов (до момента сон = соно по внешней характеристике
двигателя можно определить, если допустить, что разгон ведомого
вала при любых J 2 в начальный период не оказывает влияния
на разгон ведущего вала. Такое допущение близко к действитель-
303
пости, что подтверждено экспериментами при /7>1,так как при
(он 0,95g>IJ(> достигается i 0,08 -:-0,1 (не более). Кроме того,
примем Л'1Д - Л4Д|1|.1Ч. const. Из уравнения (139) получаем
так как
Л1„ .
wiio
Приняв пределы интегрирования 0 и 0,95соно, что обычно ис-
пользуется для расчета разгона систем, так как Т —> оо при
о)н —>(оно, получаем, решая уравнение (138):
9 ().П5(1)П0 0,95й)но
г --Л2119 С (М)Н 1П ^нр-Н^н _
7’z,%iur< j 0)Г1О'~(,)11 2/,’ДП1.т< 0)HO~WH
()' о
-],83-У-’- (148)
;'-дп1ах
Из уравнения (148) следует, что время первого и второго пе-
риодов разгона прямо пропорционально приведенному моменту
инерции ведущего вала п частоте вращения вала при трогании
и обратно пропорционально крутящему моменту двигателя. На
основании изложенного можно сделать следующие выводы.
1. Использование гидротрансформатора в приводе обеспечи-
вает повышение плавности разгона и уменьшение времени разгона
в третьем периоде (работа по внешней характеристике двигателя).
2. Плавность разгона в первом и втором периодах до выхода
па совместную работу гидротрансформатора с двигателем по
внешней характеристике двигателя обеспечивается при меньшей
интенсивности разгона, чем с механическим приводом. Однако
время первого и второго периодов обычно мало по сравнению
с третьим периодом (например, для автомобиля ЗИЛ-НО при
/7но * - 1200, 1700 и 2400 об/мин 7\ „ - 0,46, 0,65 и 0,92 с)
[151.
3. Время разгона в третьем периоде при использовании гидро-
трансформатора может быть существенно уменьшено особенно
в начале и середине периода, а также при относительно высоких
Л1С и J 2 за счет того, что гидротрансформатор обеспечивает более
высокие значения реализуемой мощности и меньшие ускорения
ведущего вала, а следовательно, меньшие значения мощности,
затрачиваемой па разгон масс ведущего вала в процессе разгона
в третьем периоде.
4. Наивысшие разгонные качества обеспечиваются при не-
прозрачном гидротрапсфюрматоре и совмещении его характеристик
с режимом максимальной мощности двигателя. Следовательно,
наивысшие разгонные качества обеспечиваются при тех же усло-
виях, что и наивысшие тяговые качества.
301
§ 47. ПАРАМЕТРИЧЕСКИЙ РЯД ГИДРОТРАНСФОРМАТОРОВ
Необходимость создания параметрического ряда обусловли-
вается дальнейшим развитием отечественных машин и теми преиму-
ществами, которые обеспечивают применение в их приводах опре-
деленных типов гидротрансформаторов.
Благодаря особенности рабочего процесса и, в частности,
существованию для каждого размера гидротрансформатора с за-
данными геометрическими параметрами определенных нагружа-
ющих свойств, необходимо для обеспечения оптимальных эксплуа-
тационных качеств каждой машины определенного назначения и
размерности изготовлять свой гидротрансформатор. Однако вы-
полнение этого требования при большой номенклатуре машин и
двигателей (которые часто «форсируются», т. е. при той же частоте
вращения коленчатого вала увеличивается передаваемая ими
мощность) привело бы к увеличению количества различных моде-
лей выпускаемых гидротрансформаторов. Но расширение произ-
водства гидротрансформаторов может быть достигнуто в основном
за счет уменьшения трудоемкости их изготовления и себестоимости.
Как известно, одним из самых мощных факторов при снижении
себестоимости продукции является се унификация, которая,
кроме снижения себестоимости, одновременно ведет к улучшению
качества выпускаемых изделий. Поэтому становится очевидной
необходимость создания параметрического ряда максимально
унифицированных гидротрансформаторов с минимальным коли-
чеством их типоразмеров, одновременно находящихся в произ-
водстве, для различных отраслей народного хозяйства.
В настоящее время разработаны и внедряются в производство
параметрические ряды гидротрансформаторов с осевой и центро-
стремительной турбинами для строительных и дорожных машин;
гидротрансформаторов с центростремительной турбиной — для
грузовых автомобилей и городских автобусов. Зарубежные фирмы
Гинар, Твин-Диск, Эльба-Верке и другие также для промышлен-
ного использования предлагают параметрические ряды выпускае-
мых ими гидротрансформаторов. Параметрический ряд строится
по следующему принципу.
Известно, что для гидротрансформаторов переднего хода с рас-
положением рабочих колес в рабочей полости: насос—турбина—
реактор можно обеспечить изменение энергоемкости примерно
в 2—2,2 раза для данного типоразмера за счет изменения входных
и выходных углов лопаток рабочих колес, числа лопаток в рабо-
чих колесах, изменения выходных радиусов рабочих колес
и т. д.
Однако для каждого типа гидротрансформатора пределы изме-
нения энергоемкости устанавливаются в соответствии с определен-
ными техническими требованиями (т]*, тр^.0,5, dso и т. д.),
которым должен он отвечать, работая в приводе той или иной
20 С. П. Стесни 305
машины. Поэтому в общем случае знаменатель параметрического
ряда
где и Х;п1.и —соответственно, максимальное и минимальное
значения коэффициентов мощности в оптимальном режиме работы,
которые могут быть достигнуты для данного типа гидротрансфор-
матора.
За главный параметр ряда лучше всего принимать активный
диаметр гидротрансформатора, который в большей степени ха-
рактеризует его свойства. Определив знаменатель ряда, округ-
ляют его до ближайшего значения коэффициента для «ряда пред-
почтительных чисел», установленного ГОСТом 8032—56. Выбрав
конструкцию базового образца гидротрансформатора ряда, для
требуемого диапазона мощностей двигателей (при определенной
частоте вращения коленчатого вала) с учетом знаменателя ряда
определяют число типоразмеров гидротрансформаторов, перекры-
вающих требуемый диапазон мощностей.
На рис. 171 показано изменение мощности для параметриче-
ских рядов гидротрансформаторов типа ТРЭ, «Твин-Диск» и
«Эльба-Верке». Из графиков видно, что, например, для строитель-
ных и дорожных машин с диапазоном мощностей двигателей 29,5—
295 кВт необходимо всего четыре типоразмера гидротрансформато-
ров типа ТРЭ (с осевой турбиной) с активными диаметрами
Da - 0,360, 0,400, 0,450 и 0,500 м [23].
В каждом типоразмере указанного ряда энергоемкость гидро-
трансформатора изменяется в 1,8 раза (q = 1,12) за счет изменения
выходных углов лопаток рабочих колес, т. е. технологически
изменение энергоемкости достигается только за счет переделки
стержневых ящиков, при помощи которых образуются лопатки
данных рабочих колес. Все остальные детали гидротрансформа-
тора (включая и кокильную оснастку для изготовления внутрен-
него и наружного торов рабочих колес) не изменяются, т. е.
в этом случае достигается практически полная унификация от-
дельных деталей и узлов машины. Однако в каждом случае при
использовании гидротрансформатора с максимальным коэффи-
циентом энергоемкости необходимо провести поверочный расчет
на прочность основных, наиболее «опасных» деталей (муфты сво-
бодного хода, шлицев, подшипников и т. д.). Таким образом,
параметрический ряд имеет конструктивно один базовый образец,
размеры которого для каждого типоразмера подчиняются зако-
нам геометрического подобия, что позволит иметь при серийном
изготовлении гидротрансформаторов подобного ряда единую тех-
нологию и однотипную оснастку, т. е. в данном случае возможна
унификация технологического процесса, позволяющая тщательно
отработать его отдельные элементы и дополнительно снизить
себестоимость машины.
306
В табл. 15 приведены основные показатели технической ха-
рактеристики гидротрансформаторов с осевой турбиной для рас-
сматриваемого параметрического ряда. При оценке целесообраз-
ности внедрения параметрического ряда необходимо остановиться
на следующих обстоятельствах.
Рис. 171. Графики мощностей параметрических рядов:
а — гидротрансформаторы типа ТРЭ; б — гидротрансформатор «Твин-Диск» одно-
ступенчатый; в— то же, трехступенчатый; г — гидротрансформаторы «Эльба-Всркс»
Во-первых, необходимо принимать во внимание излишний
расход материалов при применении гидротрансформаторов с низ-
кой энергоемкостью (на нижнем пределе по передаваемой мощ-
ности), увеличение габаритов силовой установки машин, в при-
20* 307
Таблица 15
Показатели параметрического ряда гидротрансформаторов
дорожных и строительных машин
водах которых применяются гидротрансформаторы параметриче-
ского ряда.
В каждом конкретном случае указанный перерасход должен
быть учтен особо.
Во-вторых, из данных табл. 15 видно, что при изменении энер-
гоемкости гидротрансформаторов ряда в 1,8 раза меняются зна-
чения их к. п. д.
На первый взгляд может показаться, что в данном случае мы
искусственно изменяем производительность машин за счет изме-
нения к. п. д. гидротрансформаторов. Однако в действительности
производительность машин в данном случае практически не изме-
няется, так как средний к. п. д. гидротрансформатора в зоне
наиболее частой его работы (Z = 0,5-4-1) остается без изменения.
Действительно, из данных табл. 15 для гидротрансформаторов
с Z* 4,4 средний к. п. д. в зоне нагрузок i = 0,5-4-1 будет
^=0,5 Hl* -I - 4,-1 _ 0,75 п -0,84-г 0,75 п _о
^Icpi ’ —0,/о,
а для гидротрансформаторов с X* — 3,1
т. е. средний к. п. д. гидротрансформатора в зоне его работы от
i = 0,5 до i = 1 при изменении энергоемкости в 1,8 раза не из-
меняется.
§ 48. НЕКОТОРЫЕ СВЕДЕНИЯ ОБ ЭКСПЛУАТАЦИИ
ГИДРОТРАНСФОРМАТОРОВ
Широкому внедрению гидродинамических передач в народное
хозяйство способствует правильная эксплуатация машин с гидро-
передачами. При этом часто определяющую роль в работоспособ-
ности машины играет не собственно гидротрансформатор, а обслу-
живающие системы питания и охлаждения.
Гидротрансформатор, изготавливаемый серийно заводом, дол-
жен быть опломбирован и без представителя завода-изготовителя
30S
не может быть разобран. Каждый гидротрансформатор должен
иметь паспорт и инструкцию по монтажу и эксплуатации. Паспорт
гидротрансформатора должен содержать следующие данные:
назначение;
краткую техническую характеристику;
спецификацию применяющихся подшипников и шестерен;
ведомость комплектации;
ведомость запасных частей (запасные части можно заменять
в гидротрансформаторе в течение гарантийного срока службы,
но в присутствии представителя завода-изготовителя);
гарантийный срок службы;
ведомость сведений о ремонте.
Указанные данные паспорта должны соответствовать подоб-
ным разделам «Технических условий на изготовление и приемку
изделия», согласованным заводом-изготовителем с заказчиком —
отраслевым институтом и утвержденным отраслевым министерством.
Инструкция по монтажу и эксплуатации должна содержать
следующие разделы:
работа гидротрансформатора (с соответствующими иллюстра-
циями, включающими общий вид, отдельные узлы и механизмы,
внешнюю характеристику и т. д.);
монтаж гидротрансформатора (включая распаковку и раскон-
сервацию);
условия эксплуатации;
разборку и сборку;
техническое обслуживание;
технику безопасности;
возможные неисправности и способы их устранения;
порядок предъявления рекламаций.
В разделе «Монтаж» необходимо указать, как крепится гидро-
трансформатор (например, на собственных опорах болтами М20
и т. д.). Крутящий момент с вала приводного двигателя на веду-
щий вал гидротрансформатора должен передаваться при помощи
соединительной муфты, допускающей несоосность валов и перекос
осей двигателя и гидротрансформатора. При этом должны быть
заданы допускаемые несоосность и перекос. На большинстве кон-
струкций несоосность находится в пределах 0,1—0,4 мм; а перекос
в пределах 0,3—0,5 мм на 100 мм длины. Соблюдение соосности,
как правило, обеспечивается набором стальных прокладок, уста-
навливаемых под опоры гидротрансформатора, или технологически
при помощи заточки в картере маховика двигателя, по которой
центрируется гидротрансформатор (в последнем случае гидро-
трансформатор крепится к картеру маховика двигателя или к кар-
теру трансмиссии). Гидротрансформатор к опорным деталям
крепится болтами (или шпильками) и стопорится штифтами.
Система питания гидротрансформатора должна быть согласо-
вана заводом-изготовителем с заказчиком. При работе она должна
поддерживать температуру рабочей жидкости в пределах 70—
309
100° С. Для обеспечения свободного слива рабочей жидкости из
корпуса гидротрансформатора верхний уровень жидкости в масля-
ном баке должен располагаться ниже уровня сливного отверстия,
но при этом высота всасывания насоса, питающего гидротрансфор-
матор, не должна превышать 0,2 м. В масляном баке должен быть
предусмотрен пеногаситель. Фильтр должен обеспечивать очистку
рабочей жидкости от посторонних включений с частицами разме-
ром более 25 мкм. Конструкция и монтаж системы питания должны
исключать подсос воздуха и утечки рабочей жидкости.
В разделе «Эксплуатация» следует оговорить минимальную
и максимальную температуры окружающего воздуха, при которых
допускается работа гидротрансформатора (например, —40° С и
+50° С). Кроме того, оговаривается вид рабочей жидкости для
работы в летнее и зимнее время и выдвигаются требования к экс-
Таблица 16
Возможные неисправности гидротрансформаторов
и способы их устранения
Возможна я нспсправ пость Причины неисправности / Способ устранения
При работе внутри Вышла из строя муф- Перебрать гидротранс-
гидротрансформатора та свободного хода, форматор, устранить де-
слышатся стуки, посто- ронний шум, отдельные части корпуса (особен- но в месте опор) нагре- ваются) подшипник или какая- либо другая деталь фект
При работающем дви- а) Давление воздуха а, б) Разобрать и про-
гателе и включенном золотинке (рабочая жидкость поступает в рабочую полость) гид- ротрансформатор не в системе управления золотником меньше не- обходимого б) Золотник заклини- ло мыть золотник
передает полную мощ- в) Подсос воздуха во в) Проверить уровень
ность всасывающей магистра- лн г) Наличие задеваний внутри гидротрансфор- матора д) Не работает подпи- точный насос или на- рушена настройка пре- дохранительного кла- пана масла в баке; герметич- ность всасывающей маги- страли г) Перебрать и устра- нить неисправность д) Разобрать насос и устранить неисправность
При работающем дви- гателе и выключенном а) Заклинило золот- ник а) Перебрать золотник
золотинке (рабочая б) Засорились жик- б) Прочистить жикле-
жидкость не поступает леры ры
в рабочую полость) ве- в) Есть задевание ве- в) Перебрать гидро-
домый вал вращается домой части за веду- щую трансформатор
Утечка масла через уплотнения Вышли из строя уп- лотнения Заменить уплотнения
310
плуатирующей организации (рабочая и максимально возможная
температура масла, давление подпитки па входе в гидротрансфор-
матор, уровень рабочей жидкости в баке, давление воздуха в си-
стеме управления, требования, связанные с особенностями кон-
струкции данного гидротрансформатора).
В разделе «Разборка и сборка» необходимо указать, как в усло-
виях эксплуатации разобрать и собрать гидротрансформатор.
В этом разделе кроме последовательности сборки и разборки ука-
зывается инструмент, оговариваются специальные условия и т. д.
В разделе «Техническое обслуживание» оговаривается пере-
чень работ, необходимых для обеспечения нормальной работы
гидротрансформатора в течение гарантийного срока и далее.
Так, Московский машиностроительный завод им. М. И. Калинина
для серийных гидротрансформаторов, эксплуатирующихся на
строительных и дорожных машинах, рекомендует три вида тех-
нического обслуживания.
1. Ежедневно перед пуском двигателя проверить:
уровень рабочей жидкости в баке; герметичность трубопро-
водов; крепление гидротрансформатора; исправность и показания
манометра и термометра.
2. Через каждые 100 ч работы (по работомеру двигателя)
дополнительно к техническому обслуживанию № 1 необходимо:
промыть фильтр на всасывающей магистрали; прочистить
жиклеры проволокой (гидротрансформаторы типа ТРЭ, выклю-
чаемые за счет удаления рабочей жидкости через жиклеры).
3. Через каждые 300 ч работы дополнительно к техническому
обслуживанию № 1 и 2 произвести смену рабочей жидкости.
В разделе «Техника безопасности» содержатся следующие
сведения.
1. К обслуживанию гидротрансформатора должны допускаться
лица, знающие его устройство, работу и изучившие инструкцию
по монтажу и эксплуатации.
2. Запрещается производить какую-либо разборку и ремонт
гидротрансформатора при работающем двигателе.
3. Все выступающие вращающиеся части гидротрансформа-
тора должны быть закрыты прочными защитными кожухами.
4. Запрещается работа машины при наружных утечках рабо-
чей жидкости гидротрансформатора.
Возможные неисправности гидротрансформаторов и способы
их устранения приведены в табл. 16.
ГЛАВА VII
РАСЧЕТ ОСНОВНЫХ ДЕТАЛЕЙ
ГИДРОТРАНСФОРМАТОРА
§ 49. РАСЧЕТ МУФТЫ СВОБОДНОГО ХОДА
Муфта свободного хода — один из наиболее нагруженных
элементов в блокируемых и комплексных гидротрансформаторах.
От нее в значительной степени зависит надежность и работоспо-
собность гидропередачи в целом. Наряду с надежностью и высокой
работоспособностью муфта должна обладать компактностью,
а также иметь минимальные потери на режиме свободного хода
для увеличения к. и. д. передачи. На отечественных гидротранс-
форматорах большее распространение получили роликовые муфты,
как более надежные.
На рис. 172, а и б показаны применяющиеся на отечественных
гидротрансформаторах муфты свободного хода. Муфта, показан-
ная на рис. 172, а, устанавливается на блокируемом гидротранс-
форматоре У358011А между ведущей и ведомой частями и сраба-
тывает при i 1. Ее тихоходная звездочка жестко связана со
ступицей турбины, а. быстроходная обойма при помощи шлицевого
соединения связана с ротором, приводящим насос. Ролики раз-
мером 15 х25 (8 шт.) прижимаются к обойме подпружиненными
толкателями. Муфта, показанная на рис. 172, б, устанавливается
па комплексных гидротрансформаторах между реактором и не-
подвижным картером и срабатывает при К = 1. В этой муфте
наружная звездочка с пазами выполнена вращающейся. Обойма
механизма — неподвижная, цилиндрическая жестко связана с кор-
пусом. Выступы наружной звездочки опираются на внутреннюю
обойму, которая является по отношению к ней подшипником.
Чтобы уменьшить потери на трение и предотвратить возможность
задиров, выступы наружной звездочки покрываются специаль-
ными антифрикционными материалами (омедняются, или зали-
ваются баббитом). Контактные поверхности муфты (так же, как
и на рис. 172, а) и ролики имеют повышенную твердость HRC
56—62 и шероховатость V8—V 10-
Как показал опыт эксплуатации гидропередач, для надежной
работы муфты свободного хода необходимо соблюдать отношение
312
е = ~~ = 1,8—2,8, где I — длина ролика, d— его диаметр.
При больших значениях возникает опасность перекоса ролика
в обойме. Стремление увеличить длину ролика обычно связано
с желанием уменьшить контактные напряжения. Однако в этом
случае правильнее применять двухрядную муфту, что и делают
в отдельных случаях для сильно нагруженных гидротрансфор-
маторов [14].
Одним из важных конструктивных элементов муфты свободного
хода является прижимное устройство, прижимающее ролик
к поверхностям звездочки и обоймы. Пружины прижимают ролики
Рис. 172. Муфты свободного хода:
а — блокируемого гидротрансформатора; б — комп
лексного гидротрансформатора
через толкатели или без них. Пружины могут быть цилиндриче-
ские или пластинчатые. Величина прижимного усилия в раз-
личных конструкциях муфты свободного хода колеблется в пре-
делах 3,9—7,8 Н.
Для увеличения долговечности муфты свободного хода целе-
сообразно центрировать звездочку относительно обоймы. Лучше
это делать при помощи подшипника. При этом конструкция
муфты для комплексного гидротрансформатора должна позволить
DQ
увеличить отношение т = что может Оыть достигнуто
вынесением этой муфты из колес. Центрирование звездочки и
обоймы позволяет значительно снизить касательные напряжения
нерабочих поверхностях, так как при этом обеспечивается более
равномерная нагрузка на ролики. Кроме центрирования вводят
принудительную постоянную смазку муфты, так как в процессе
работы ролики не только проворачиваются, но и проскальзывают
на рабочих поверхностях, что вызывает значительный нагрев
в месте контакта и износ.
Расчет муфты свободного хода производится на контактную
прочность. Этому предшествует проверка угла заклинивания
ролика а (см. рис. 172, а) по соотношению
С -!- г
cos а — •
— г
313
Затем определяется минимальная, номинальная и максималь-
ная величина угла заклинивания с учетом допусков на размеры С,
г и /?. Угол заклинивания должен находиться в пределах 5—8°.
Проверка ролика на контактную прочность производится
по выражению
^=0,418)/^, (149)
где Е— модуль упругости [обычно Е = 19,6 -1010 Н/м2 (2 х
><10° кгс/см2)];
/ — длина ролика;
Q — усилие, определяемое по выражению
Q________ДГ_____,
г (/? — г) sin а
/Ир — расчетный момент;
z — число роликов.
Расчетный момент муфты (рис. 172, а) можно определять по
выражению
где М j н /И 2 — моменты на ведущем и ведомом валах гидро-
трансформатора (берутся из внешней характе-
ристики при i = 1);
Лди,, — динамический коэффициент рекомендуется при-
нимать —2.
Для муфты, показанной на рис. 172, б, расчетный момент
при одном реакторе
Мр - М (До - 1)
и
при двух реакторах.
Для муфты, показанной на рис. 172, а, рекомендуемое допу-
скаемое напряжение [о]см =-- 19,6-108 Н/м2 (20 000 кгс/см2), а для
муфты, показанной па рис. 172, б, можно принимать [о]сМ =
= (25,5-ь 28,4) К)8 Н/м2 (26 000^ 29000 кгс/см2) для гидротрансфор-
маторов грузовых автомобилей и городских автобусов и [о ]см =
= (28,4^-31,4)108 Н/м2 (29 000-^32 000 кгс/см2) для гидротранс-
форматоров легковых автомобилей.
С учетом реальных нагрузок, действующих на муфту свобод-
ного хода, можно проверить внутренний диаметр обоймы по выра-
жению
D 16,6 ,
314
а минимальную толщину обоймы (рис. 172, а) по выражению
/7 1 /30/Мр (Рг -I- D) с/ч-
11Г1П Г ' DBfc [а]изг
где Di — наружный диаметр обоймы;
е — коэффициент, учитывающий влияние количества ро-
ликов на деформацию обоймы
В — ширина обоймы;
fc— коэффициент трения (—0,008-4-0,01);
kt — коэффициент, учитывающий влияние радиуса кри-
визны обоймы на ее деформацию (—1,05-4- 1,08);
[сИизг— допускаемое напряжение на изгиб для стали 20Х
[сг]пзг = 1,96-10s Н/м2 (20 кгс/мм2).
§ 50. РАСЧЕТ ОСЕВЫХ СИЛ В ГИДРОТРАНСФОРМАТОРЕ
Осевые силы для конкретных конструкций гидротрансформа-
торов определяются аналитически и проверяются эксперимен-
тально. Они обусловливаются силами, возникающими вследствие
воздействия рабочей жидкости на колесо. Если эти силы спроекти-
ровать на ось вращения гидротрансформатора, то их можно раз-
делить на силы, действующие на наружную и внутреннюю поверх-
ности колеса. Составляющая осевого усилия в первом случае
может быть определена интегрированием по отдельным участкам:
Л.аР1- = f pdf cos а,
/ i
где PHapf— составляющая наружного усилия на t-м участке
поверхности колеса;
р — текущее давление, действующее па элементарную
площадку df\
а — угол между внешней нормалью к площадке df и
осью вращения гидротрансформатора;
fi — площадь участка, на котором определяется состав-
ляющая осевой силы.
Эта составляющая складывается из двух сил. Одна из них
зависит от гидродинамического давления и его распределения:
^нарх [ pdf cos сс [ 2txRpdR,
где R — текущий радиус.
315
Вторая сила этой составляющей определяется давлением пи-
тания р„ п величиной так называемой неуравновешенной площади
/о, т. е. площади, только с одной стороны омываемой рабочей
жидкостью и подверженной давлению питания. Эта площадь
всегда перпендикулярна осп вращения п осевая сила, обусловлен-
ная давлением питания
^парг Рп/о-
Полная осевая сила, действующая на наружную поверхность
рабочего колеса
/?2
Рпар — ^нар2 ~1~ 2 ^нар! ~ Pnf о 4“ J ^TlRp dR.
Знак суммы перед знаком интеграла говорит о том, что необ-
ходимо суммировать значения интегралов по отдельным поверх-
ностям колеса.
Составляющая осевых сил, действующих на внутреннюю по-
верхность колеса, интегрированием не может быть получена,
так как неизвестен закон распределения давлений. Но при исполь-
зовании закона о моменте количества движения величина ее
может быть определена по формуле:
Рт = ?Q (cni2 C0S а2 — Cml COS OCj)
ИЛИ
2 ( cos а2 cos а1 \
\ Рm2 Рmi )
Угол а находится между осью вращения и направлением ме-
ридиональной скорости на входе в колесо и выходе из него по
средней струйке (рис. 173). Тогда суммарная осевая сила, дей-
ствующая на колесо:
р - PM -I- PQ2 (- Т4 + S f211 RP dR.
\ г т2 Г mi /
Выразив давление через статический напор, получим
R2
р - \ I -I- 2лр4 H„R dR. (150)
В уравнении (150) первый член pgHJQ пропорционален ква-
драту линейных размеров и заданному давлению питания рп,
второй и третий члены пропорциональны pgn2D*. Следовательно,
исключив составляющую осевой силы, обусловленную давлением
питания, можно записать
/’д1,н = /<осР^\ (151)
где 7\ое — постоянный коэффициент пропорциональности.
316
Из вышесказанного можно заключить, что осевая сила на
колесах гидротрансформатора зависит от давления питания, не-
уравновешенной площади, распределения давлений в полости
гидротрансформатора, площадей, на которые действуют эти
давления, и расхода в рабочей полости.
Распределение давлений и расход в рабочей полости зависят
от режима работы гидротрансформатора, следовательно, это же
относится и к осевым силам. Пользуясь формулой (151), можно
Рис. 173. Определение осевых сил на рабочих колесах гидротрансформаторов:
а — расчетная схема для определения сил па одном колесе; б — рабочая полость гидро-
трансформатора У358011 А; в — зависимость к — f (1)для гидротрансформатора У35801 1А;
г _ расчетная зависимость Q = f (г) для гидротрансформатора У358011А; д — расчетные
напоры на рабочих колесах; е — зависимость напора за турбиной = f (i)
выразить коэффициент осевого усилия, который принят по ана-
логии с другими приведенными величинами, в виде
Рассмотрим пример определения осевых сил в гидротрансфор-
маторе типа У358011А (рис. 173, б). Расчет начинаем с определения
внутренних характеристик гидротрансформатора Q = f (0 и ста-
тических напоров в зазорах между рабочими колесами и в поло-
стях I и II гидротрансформатора.
Для расчета известны внешняя характеристика гидротранс-
форматора в виде К ~ f (0 и геометрические параметры его
меридионального сечения.
317
Расход определяем через известные параметры внешней ха-
рактеристики, пользуясь соотношением
#/т - W/н.
Выразив Н/т и /7/и через геометрические параметры гидро-
трансформатора, окончательно получим выражение:
Q - -- f (К, Pi-I, I, Рн2> Рт2> Р|'2> ГН2> ГТ2’ ГР2’ ^Н2» Т2> FРг)>
из которого для каждого наперед заданного I однозначно опреде-
ляем расход Q (см. рис. 173, г). Напор насоса определяем по
уравнению (13) для определенных i (рис. 173, д), а напор турбины
Я/т по приведенному выше уравнению. Затем строим треуголь-
ники скоростей для средней струйки по трем составляющим:
по двум скоростям и и с,п и углу р потока, предварительно для
Q с
всех i определив сП1 = где Fm — площадь сечения с учетом
г т
стеснения. По треугольникам скоростей для насоса и турбины
определяем скорости с, ctn w.
Далее определяем ударные потери по уравнению (34), прини-
мая фуд = 1 па всех режимах, и потери, пропорциональные Q2
по уравнению (33).
Полный напор за турбиной
ЯТ2 = Ян И/Т — Лудт — АТрт
для всех i (см. рис. 173, е).
Кинетическая энергия жидкости на выходе из насоса опреде-
ляется по соотношению
где сН2 — абсолютная скорость, взятая из соответствующего
треугольника скоростей для всех i.
Статический напор за насосом определяется как разность
полного напора колеса /7Н и динамического (кинетической энер-
гии £Н2), т. е.
#ст.Н = #Н — ’
Полученные величины статических напоров относятся к сред-
ней струйке. Статические напоры наружного и внутреннего торов
будут иными. Учитывая то, что основную долю в статическом на-
поре составляет напор от центробежной силы, вызванной враще-
нием жидкости вокруг оси гидротрансформатора, внесем поправку
в выражение для статических напоров за насосом, учитывая
разницу между центробежными напорами этих струек.
Поправку запишем в виде
318
где кси найдем, исходя из предположения, что поток за на-
сосом потенциальный.
Для расчета статического давления но наружному тору
/АСц — С//Н2 —j 1 |;
для расчета статического давления по внутреннему тору
М/ = [(у^) — 1 •
Тогда статические напоры за насосом по наружному и вну-
треннему торам:
Нн = Н„. н -Ь -1|;
где г' — радиус выходной кромки насоса по наружному тору;
г" — радиус выходной кромки насоса по внутреннему тору.
Аналогично статический напор за турбиной
ЯСТ.Т = ЯТ2-ЕГ2.
Определяем статический напор перед насосом, учитывая то,
что полная энергия перед насосом при расчете принята равной
нулю, и что статический напор будет равен динамическому напору
на входе в насос, взятому с противоположным знаком, т. е.
ЯН1 = ^ст1Н + £hi — О,
откуда
^ctih — Em = у (1^2)
где сН1 — берем из треугольника скоростей.
Знак минус в выражении (152) указывает на то, что на всех
режимах работы гидротрансформатора при условии отсутствия
подпитки на входе в насос будет иметь место давление ниже
атмосферного.
После определения статических напоров переходим к расчету
осевых сил. При этом принимаем = 1750 об/мин и р =- 900 кг/м3.
1. Определяем осевую силу на насосе.
а) Осевая сила, действующая на внутреннюю поверхность
колеса,
Рв.п PQ^mHaCOSOC., —^„щсоза,),
где «j = 25°; а2 = 15°, а скорости с,„н 2, с„,н, были получены
ранее при построении треугольников скоростей (см. рис. 174,
кривая /).
319
б) Осевые силы в боковых полостях насоса. Для определения
осевых усилии, действующих со стороны жидкости на боковую
стенку в полости II между насосом и турбиной, необходимо
знать распределение давлении по отдельным участкам поверх-
ности в полости. Известно, что па участках между вращающимися
дисками, имеющими разные
угловые скорости, жидкость также
получает вращение. Причем ее угло-
вая скорость
сож 0,46 (сои сот) О,46сон (1 + 0-
(153)
Вследствие этого статический на-
пор в полости
Я^Ян-^^-Д), (154)
где Н — статический напор в бо-
ковой полости на радиу-
се 7?;
Ни — статический напор в за-
зоре между насосом и
турбиной, взятый по ли-
нии тока, примыкающей
к боковой полости;
Т?Н2 — наружный радиус диска
в полости насоса;
R — текущий радиус.
С учетом выражений (153) и (154)
получаем
Н — ---------(/?Н2 — R)-
Если в боковой полости между насосом и турбиной выделить
элементарное кольцо толщиной dR, осевая сила, действующая
на это кольцо:
dP
иг на pl
РЯ Яи~—— R') 2MR. (154а)
Определим осевую силу, проинтегрировав данное выражение
от RJ до R2. После интегрирования и алгебраических преобразо-
ваний получим выражение для определения осевой силы в общем
виде:
рау я,,
(1 ,-)'-«;>1(^-/?{)
9,5g2
(Rj
Ri)-
320
Используя это выражение, определяем составляющую Рпар1
(см. рис. 174, кривая 2) для всех i.
в) Определяем осевую силу Рнар. 2 в торцевом зазоре между
насосом и турбиной (см. рис. 173, б):
-^нар2 — # Н
где Ян — статический напор за насосом по внутреннему
тору;
Т?2 и 7?i' — соответственно максимальный и минимальный
радиусы поверхности внутреннего тора.
Зависимость Рнар 2 = f (0 показана на рис. 174, кривая 3.
г) Определяем осевую силу, действующую на внутреннюю
неуравновешенную площадь на выходе из насоса:
Лэн 2= pg4 - RR - Я'2") + (R~ + RR-2R-')].
о
Зависимость Рвн 2 = / (0 показана на рис. 174, кривая 4.
д) Определяем осевую силу, действующую на внутреннюю
неуравновешенную площадь на входе в насос:
•^внЗ ~ Яст.нР^л(/?1 )>
где Яст> н = Ян = Ян — статический напор на входе в насос.
Зависимость Рвн3 = f (z) показана на рис. 174, кривая 5.
Суммарная осевая сила на насосе подсчитывается как алге-
браическая сумма составляющих осевых сил, действующих на
отдельные участки колеса:
i=п
Н Zj /Н -^нар! ^nap2 -^bhI ^вн2 ^впЗ*
z = l
Зависимость Р2Н = f показана на рис. 174, кривая 6.
2. Осевые силы на турбине (см. рис. 175).
а) Определяем осевую силу- Янар3 в боковой полости 1 между
турбиной и реактором.
Так как реактор неподвижен, жидкость в полости 1 будет
вращаться с угловой скоростью
ж 2,18 2,18*
По аналогии с выражением осевой силы насоса выражение
для определения осевой силы, действующей в полости между
турбиной и реактором, имеет вид
Л.зрз = Р^
где R2 и — соответственно максимальный и минимальный
радиусы турбинного диска в боковой полости.
21 С. П. Стеспн 321
Зависимость Рпар3 = f (z) показана на рис. 175, кривая 1.
б) Определяем осевую силу в полости внутреннего тора между
реактором и турбиной Рпар4 по уравнению (154, а), заменив
в нем Н'т статическим напором за турбиной у тора Яу.
Зависимость Рпар4 = / (z) показана на рис. 175, кривая 2.
в) Определяем осевую силу от давления поперек потока за
турбиной Рвн4 (аналогично на-
сосу) .
Зависимость Рв;14 = f (z) по-
казана на рис. 175, кривая 3.
Определяем суммарную осе-
вую силу на турбине
Рис. 175. [Изменение осевых
сил на турбине
Р ST — Лт — Лзн2 + Л<ар2 +
। р _______ р ______ р ______ р
I нарЗ 1 вн4 гнар4 гнар1-
Зависимость т = f (z) по-
казана на рис. 175, кривая 4.
Рис. 176. Изменение стати-
ческих составляющих осе-
вой силы на рабочих колесах
Таким образом, в результате вышеизложенного можно опреде-
лить динамические составляющие осевых сил на насосе и турбине.
Для определения статических составляющих по рабочим чертежам
определяем неуравновешенные площади для насосной и тур-
бинной частей гидротрансформатора и определяем величину ста-
тических составляющих в зависимости от давления подпитки
(рис. 176). Окончательно полная осевая сила равна сумме ста-
тической и динамической составляющих для каждого из рабочих
колес. Осевую силу на реакторе можно определить из условия
Р% н + Р% т ~h Р% р — 0 •
На рис. 177 показано изменение определенных эксперимен-
тально осевых сил для различных типов гидротрансформаторов.
322
S)
Рис. 177. Экспериментально замеренные силы на рабочих ко-
лесах гидротрансформаторов:
а —для гидротрансформатора У358011А; б — для гидротрансфор-
матора У358015А; -----без разгрузочных отверстий; — — — — —
с разгрузочными отверстиями F = 0,000226 м2
21
<32;
Из графика видно, что осевые силы достигают значительной
величины и их необходимо учитывать при создании новых гидро-
трансформаторов. В практике применяют различные методы для
снижения осевых сил. Чаще всего применяют разгрузочные от-
верстия в диске турбины или реактора. Разгрузочные отверстия
вызывают перераспределение давлений в полостях рабочих колес,
что приводит к снижению осевых сил. Однако влияние разгрузоч-
ных отверстий еще недостаточно изучено.
На рис. 177, б показано изменение замеренных осевых сил
для гидротрансформаторов типа ЛГ-340, изготовленных ВНИИ-
СТРОЙДОРМАШем, без разгрузочных отверстий и с разгрузоч-
ными отверстиями в диске турбины. Влияние разгрузочных отвер-
стий на характеристику осевых сил подробно рассмотрено в ра-
ботах [6, 10].
§ 51. РАСЧЕТ ВАЛОВ
В большинстве конструкций современных гидротрансформа-
торов валы насоса и турбины являются полностью разгружен-
ными от радиальных усилий, так как мощность подводится и
снимается с ведомого вала соосно.
В таких конструкциях гидротрансформаторов (например,
ЛГ-340) на валах действуют только крутящие моменты. Возни-
кающие при работе осевые усилия воспринимаются подшипни-
ками и передаются на корпус. Их учитывают при работе подшип-
ников. Радиальные усилия, возникающие от действия рабочей
жидкости на лопатки, взаимно уравновешиваются, а силы, обус-
ловленные весом вращающихся деталей, незначительны, и ими
можно пренебречь. Однако валы некоторых типов гидротрансфор-
маторов нагружены значительными радиальными нагрузками
(съем мощности с ведомого вала осуществляется консольно).
К таким типам машин относятся серийные гидротрансформаторы
ТРЭ (в том числе и У358011А), которые в основном применяются
на строительных и дорожных машинах.
Расчет валов для этого случая (вал нагружен изгибающим
и крутящим моментами) производится по известным соотношениям.
Суммарный момент в опасном сечении после построения эпюр
<ум = j/~^изг 4“ Ж<Р .
Момент сопротивления в опасном сечении
и напряжение
g _МСум
324
Предел текучести стали 40Х, которая наиболее часто при-
меняется для валов гидропередач стт = 7,85- 108Н/м2 (8000 кгс/см2).
Предел прочности ов = 9,8- 108Н/м2 (10000 кг/см2); степень пластич-
ности = 0,8 и коэффициент запаса прочности с учетом сте-
°в
пени пластичности (полученные в результате расчета реальные
напряжения делят на коэффициент пластичности) п = 1,7-4- 2,2.
После поверочного расчета целесообразно проделать уточнен-
ный расчет вала на усталость. В этом случае общий коэффициент
запаса прочности определится из соотношения
4 = 4 + 4-
1Г /г п-
Т (7
Для стали 40Х пределы прочности при расчетах на усталость:
= 0,43ав = 4,21 • 108Н/м2 (43 кгс/мм2);
г., = 0,58а.! = 2,45-108Н/м2 (25 кгс/мм2).
Амплитуда нормальных напряжений от изгиба
Л1 из г
(7 — (Т — —
~ ,пах ’
где — момент сопротивления сечения нетто.
Коэффициент запаса прочности по нормальным напряжениям
а “ /?„ ’
—Ср-; тМш.
где
А^-1; ^=0,2;
4
Рос — осевая сила;
— напряжение растяжения (сжатия).
Полярный момент сопротивления кручению
<^рн = 0,2d3.
Амплитуда и среднее значение касательных напряжений
т __ т __ Тщах _ Мкр _ Мкр
" - - 2 - 2аУрН - •
Коэффициент запаса прочности по касательным напряжениям
^-1; 4ч=о,1.
325
Общий коэффициент запаса прочности
п -
Г -U /Г
0 1 т
Расчет шлицевых соединений. В большинстве конструкций
современных гидротрансформаторов ступицы рабочих колес с ва-
лами и валы соединяются с валами двигателя и трансмиссии
при помощи шлицевых соединений, обеспечивающих взаимозаме-
няемость, простоту демонтажа и передающих значительный по
величине и знакопеременный момент. Наибольшее распростра-
нение имеют эвольвентные и прямобочные шлицы с центрирова-
нием по наружной поверхности. Причем эвольвентные шлицы
с модулем 0,0035—0,005 м рекомендуется ставить на наиболее
н а г р ужен н ые дета л и.
Расчет шлицев производится на смятие:
<*см
где Р — окружное усилие на один шлиц;
Р-^ м
-г ’
М — действующий момент;
z — число шлицев;
D — наружный диаметр;
d — внутренний диаметр;
ф — коэффициент неравномерности работы шлицев, равный
0,75;
г — радиальный зазор в соединении;
f — длина фаски по внешнему диаметру;
/ — рабочая длина шлицев.
Для сталей с термообработкой [о]см = (1,275-*- 1,47) • 108Н/м2
(1300-*- 1500 кгс/см2); для нетермообработанных сталей [а]см =
- (0,785ч- 1,08). 108Н/м2 (800'ч-1100 кгс/см2).
В гидротрансформаторах имеются и другие соединения (за-
клепочные, шпоночные, резьбовые), которые также рассчиты-
вают на прочность по общеизвестным формулам. При расчетах
требуется правильно определить расчетную нагрузку, что произ-
водится после выбора схемы действующих усилий и анализа ха-
рактера нагрузки; учитывать, что в зависимости от нагрузки
меняются моменты на валах и деталях гидротрансформатора,
поэтому при расчете подшипников, например, более целесообразно
выбирать нагрузки на расчетном режиме, а при расчетах на
прочность — нагрузки на режиме противовращения (если таковые
326
имеются) или на стоповом режиме. В любом случае при расчете
на прочность ведущих узлов и деталей гидротрансформатора
(связанных с двигателем) необходимо учитывать динамический
фактор и вводить коэффициент нагрузки £дпп = 1,5^2.
§ 52. УПЛОТНЕНИЯ В ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧАХ
Надежность и ресурс работы гидродинамической передачи
во многом зависят от совершенства конструкции уплотнительных
устройств и свойств материалов, из которых они изготавливаются.
Из всего многообразия созданных уплотнений и материалов
для них рассмотрим особенности только тех из них, которые
нашли наиболее широкое практическое применение или пред-
ставляют интерес для гидродинамических передач. Основными
требованиями, которые предъявляются к уплотнениям гидроди-
намических передач, являются:
герметичность, которая определяется конкретными условиями
работы агрегата;
длительность срока службы без проведения профилактических
работ, связанных с разборкой пли демонтажом агрегата, включая
срок хранения на складах;
стабильность работы в течение всего ресурса в широком диа-
пазоне температур рабочей жидкости;
минимальное трение и минимальный износ контактных поверх-
ностей при уплотнении вращающихся деталей;
компактность и минимальный вес;
технологичность изготовления и сборки.
По назначению уплотнения гидродинамических передач можно
разделить на уплотнения вращающихся деталей и уплотнения
неподвижных соединений.
Уплотнения вращающихся деталей можно подразделить на
контактные, бесконтактные и комбинированные. Контактные
уплотнения применяют в тех случаях, когда необходимо обеспе-
чить высокую степень герметичности. Уплотнение в них дости-
гается за счет контакта поверхностей вращающейся и неподвижной
деталей. Контактные уплотнения должны обеспечивать минималь-
ный износ контактных поверхностей при длительных сроках
службы и небольшие затраты мощности на трение. Степень гер-
метичности контактных уплотнений зависит от перепада давле-
ний, плотности контакта уплотняющих поверхностей, свойств и
температуры рабочей жидкости, материалов уплотнения и вра-
щающейся детали, формы и чистоты поверхности уплотняемых
деталей. Контактное уплотнение препятствует проникновению
рабочей жидкости для смазки трущихся поверхностей. Это спо-
собствует нагреву и износу деталей уплотнения. Повышенные
давления на контактной поверхности и окружные скорости при-
водят к более интенсивному износу.
Оптимальное давление на контактной поверхности опреде-
ляется экспериментально для конкретного типа уплотнения или
327
на основании экспериментальных данных удовлетворительно ра-
ботающих аналогичных конструкций контактных уплотнений.
Следует отметить, что ни одна из известных конструкций контакт-
ного уплотнения не может надежно работать без смазки и охлажде-
ния, которые необходимо обеспечить в процессе эксплуатации
агрегата, допуская даже утечку через уплотнение в дренаж.
С целью уменьшения износа контактных поверхностей необходимо
располагать их на минимально возможных диаметрах, что обеспе-
чит минимальные окружные скорости.
Наиболее широкое распространение для уплотнения валов
гидродинамических передач в месте их выхода из корпуса полу-
чили манжетные уплотнения.
На рис. 178, а, б, в показаны наиболее часто применяемые
манжеты и способы их установки в агрегатах. Изготавливаются
манжеты в специальных пресс-формах из резины различных марок
и не требуют последующей механической обработки. Для увели-
чения прочности и жесткости манжеты армируют металлическими
кольцами. В тех случаях, когда демонтаж манжет из агрегата
затруднен, применяется манжета, показанная на рис. 178, а.
Такая манжета свободно, без натяга, устанавливается в корпус
по центровочному диаметру и фиксируется в нем специальной
гайкой или фланцем. При демонтаже она легко вынимается из
корпуса.
В остальных случаях применяется манжета (рис. 178,vб),
которая запрессовывается в корпус или в специальную крышку
и фиксируется в них, например, стопорным кольцом. При повы-
шенных давлениях (>2,94-104 Н/м2) целесообразно разгружать
уплотнение при помощи дренажных отверстий или устанавливать
на опорный корпус, который предотвращает ее выворачивание и
ограничивает поверхность прилегания ее к валу. Установка ман-
жеты на вал производится с предварительным натягом, поддержа-
ние которого в процессе работы обеспечивается браслетной пру-
жиной, представляющей собой спиральную пружину, свернутую
в кольцо (рис. 178, в). Недостаточный натяг по контактным поверх-
ностям приводит к негерметичности манжетного уплотнения,
а чрезмерный натяг к интенсивному износу уплотняемых поверх-
ностей, перегреву и разрушению манжеты. Загрязненные рабочие
жидкости увеличивают износ манжетного уплотнения. Вследствие
конструктивных особенностей указанные типы манжет создают
уплотнение только с одной стороны.
В гидродинамических передачах в качестве уплотнений ра-
бочей полости получили большое распространение уплотнитель-
ные кольца. Устройство уплотнительных колец вращающихся
деталей аналогично устройству компрессионных колец поршней
двигателя; однако в их работе имеется принципиальное различие.
Компрессионное кольцо, совершая вместе с поршнем возвратно-
поступательное движение, прижимается к поверхности цилиндра
и к одной из стенок канавки поршня, создавая таким образом
328
уплотнение. Кольцо вращающегося вала прижимается под дей-
ствием сил упругости только к поверхности втулки (цилиндра);
между боковыми плоскостями канавок и колец, как правило,
имеются зазоры, величина которых часто определяется обработ-
кой. Чем больше этот зазор, тем меньше герметичность кольца.
Пружина согнута 6 кольцо
Канси 4 вернут 6 кон ей Б до у пор l
Место стыка опаяно
Рис. 178. Уплотнения гидродинамических передач:
а — манжета, свободно устанавливаемая в корпус; б — манжета,
запрессованная в корпус; в — браслетная пружина
Таким образом, чтобы уплотнительное кольцо создавало
большое сопротивление перетеканию жидкости, необходимо обес-
печить:
плавное прилегание кольца к поверхности втулки и минималь-
ный зазор между боковыми поверхностями кольца и канавки
(10—15 мкм);
329
герметичность замка кольца;
отсутствие заедания кольца в канавках на любых режимах
работы гидротрансформатора.
Одновременное выполнение всех этих условий связано со слож-
ной технологией изготовления кольца.
Расчет уплотнительных колец для вращающихся валов может
быть произведен по формулам, применяющимся для расчета порш-
невых колец. В большинстве случаев размеры и геометрия кольца
выбираются из конструктивных соображений на основании име-
ющихся стандартных конструкций. Стыки уплотнительных колец
(замки) выполняются прямыми, косыми или ступенчатыми. Мате-
0,0015^0002
Рис. 179. Уплотнительные
чугунные кольца
риалом для колец чаще всего служит
чугун перлитной группы (например,
СЧ 21-40).
Кольца, как правило, выполняют
прямоугольного сечения (рис. 179).
Чтобы добиться хорошей герметично-
сти, применяют в одном уплотнении
несколько колец (чаще два). Расстоя-
ние между кольцами обычно равно
ширине кольца. Опытами установлено,
что выгоднее применять большое ко-
личество узких колец. Уплотнительные
кольца следует применять без ограни-
чения по давлению и температуре ра-
бочей жидкости при высоких относительных скоростях вращения
(14 м/сек и более). Однако следует иметь в виду, что кольца
являются дорогим уплотнением.
В последнее время все более широкое применение получают
торцовые уплотнения, обеспечивающие высокую степень гер-
метичности в течение длительного срока службы. Они более при-
годны для работы в широком диапазоне как низких, так и высоких
температур, при больших давлениях уплотняемой среды и при
высоких окружных скоростях.
Герметичность в торцовых уплотнениях достигается контак-
том противолежащих торцовых поверхностей колец, из которых
одно неподвижно, а другое вращается. Конструкций торцовых
уплотнений очень много, некоторые из них связаны с конструк-
цией агрегата, для которого они предназначены, а другие пред-
ставляют законченный самостоятельный конструктивный узел,
который может быть применен в широком диапазоне конструктив-
ных решений агрегатов.
На рис. 180, а показана конструктивная схема торцового
уплотнения, представляющего собой самостоятельный конструк-
тивный узел. Уплотнение состоит из корпуса, фигурного уплот-
нительного кольца, изготовляемого из антифрикционного ма-
териала, упорного кольца, уплотнительного эластичного кольца,
пружины и шпонки. Весь узел уплотнения монтируется в корпус
330
и уплотняется в нем эластичным уплотнительным кольцом, уста-
новленным в проточке корпуса. Кольцевая торцовая поверхность
фигурного диска контактирует с торцовой поверхностью вала.
Плотность контакта между ними обеспечивается пружиной уплот-
нения. Фигурный диск имеет возможность осевого перемещения
для обеспечения необходимой первоначальной плотности приле-
гания контактирующих поверхностей и сохранения плотности
контакта по мере износа трущихся поверхностей в процессе ра-
боты. Закрепленная на корпусе уплотнения шпонка предотвра-
щает возможность проворачивания фигурного кольца. Фигурное
Рис. 180. Уплотнения гидродинамических передач:
а — торцовое уплотнение: 1 — неподвижная деталь; 2 — вращающаяся деталь; 3 — пру-
жина; 4 — эластичное уплотнение; б — уплотнение с мембраной: 1 — корпус уплотнения;
2 — мембрана; 3 — стальное кольцо; 4 — бронзовое кольцо; в — уплотнение с сильфоном:
1 — кольцо из бронзы; 2 — стальное кольцо; 3 — сильфон; 4 — пружина
кольцо установлено в корпусе уплотнения с зазорами, обеспечива-
ющими компенсацию возможных перекосов и биений деталей,
благодаря чему достигается надежный контакт трущихся поверх-
ностей по всему периметру.
Для равномерного распределения контактного давления по
всей поверхности контакта при больших диаметрах уплотнения
устанавливается не одна пружина, а несколько равномерно рас-
положенных по периметру фигурного диска. Качество и долго-
вечность уплотнения зависят от правильного выбора материалов
трущейся пары.
Как правило, одна из деталей трущейся пары изготовляется
из антифрикционного материала, а другая — из материала с по-
вышенной поверхностной твердостью (например, бронза и сталь).
Также в гидродинамических передачах некоторое распростране-
ние получили уплотнения с мембраной и сильфоном — гофриро-
ванным металлическим стаканом. Устройство этих уплотнений
показано на рис. 180, б, в [2].
331
Бесконтактные уплотнения применяются в качестве уплотне-
ний колес в рабочей полости во избежание утечек из полостей
высокого давления в полости более низкого давления и иногда
в качестве уплотнений рабочей полости гидродинамической пере-
дачи. Реже бесконтактные уплотнения применяются вместо ман-
жетных уплотнений для вращающихся валов. Бесконтактные
уплотнения работают без трения деталей между собой, а следова-
тельно, и без износа.
К подобным уплотнениям относятся щелевые, лабиринтные и
гидродинамические винтового и центробежного типов. Щелевые
уплотнения представляют собой кольцевую щель между цилиндри-
ческими, коническими пли торцевыми поверхностями неподвиж-
ной и вращающейся деталей.
Рис. 181. Щелевые уплотнения:
а — коническая и цилиндрическая щели; б и в — коническая, торцовая
и цилиндрическая щели
На рис. 181 показаны схемы щелевых уплотнений некоторых
типов: гладкие кольцевые последовательно расположенные кони-
ческая и цилиндрическая щели (см. рис. 181, а); гладкие кольце-
вые последовательно расположенные коническая, торцевая и ци-
линдрическая щели (см. рис. 181, б). Утечки в таких уплотнениях
меньше, чем в предыдущих, из-за дополнительных потерь на пере-
ходах из щели в щель. Уплотнение, показанное на рис. 181, в,
создает более благоприятные условия для смешивания утечек
с основным потоком при входе в рабочее колесо.
При прочих равных условиях коническая щель более эффек-
тивна, чем цилиндрическая, так как в жидкости, находящейся
в конической щели, одна из составляющих центробежной силы
стремится вернуть жидкость в уплотняемую полость. Однако
во всех случаях утечки через щелевые уплотнения значительные.
Поэтому в тех гидротрансформаторах, в которых для уплотнения
рабочей полости используются бесконтактные уплотнения, для
ограничения утечек и обеспечения необходимого давления под-
питки обычно используют длинные лабиринты с большим числом
разгрузочных канавок. При этом значительно увеличиваются
габаритные размеры уплотнительного узла, что нежелательно.
Гидротрансформаторы строительных и дорожных машин имеют
конструктивную особенность, отличающую их, например, от гидро-
трансформаторов автомобилей, тепловозов и других машин. Они
«выключаются», когда происходит нарушение гидравлической
332
связи между насосом и турбиной. Выключение гидротрансформа-
тора происходит за определенное время (~60—90 сек) путем
удаления жидкости из рабочей полости через два калиброванных
отверстия (жиклера) диаметром 3 мм. При этом жиклеры устанав-
ливаются в роторе насоса. Они постоянно открыты, и, следова-
тельно, имеет место постоянная утечка рабочей жидкости в кор-
пус гидротрансформатора.
Разработанная новая конструкция системы питания указанных
гидротрансформаторов, основной особенностью которой является
использование в качестве уплотнения рабочей полости бескон-
тактных уплотнений, обеспечивает необходимое давление под-
питки и одновременно гаранти-
Рис. 182. Новая конструкция уплотнений рабочей полости
гидротрансформаторов для строительных п дорожных машин
Принципиальная конструктивная схема новой системы пита-
ния показана на рис. 182. Рабочая жидкость из бака 1 от под-
питочного насоса 2 поступает в теплообменник 3. Из теплообмен-
ника 3 через канал 4 в корпусе, каналы 5, 6 и 7 в стакане реак-
тора она подается в рабочую полость в зазор между насосом 8
и реактором 9. Отвод рабочей жидкости для охлаждения осуще-
ствляется через кольцевые щели 10 и 11 на валах насоса и тур-
бины, за которыми расположена разгрузочная камера 12. В этой
камере статическое давление ниже статического давления перед
щелями 10 и 11 на величину потерь давления в этих щелях. Из раз-
грузочной камеры 12 большая часть рабочей жидкости через
канал в корпусе 13 поступает в бак 1. Утечки рабочей жидкости
в корпус гидротрансформатора ограничиваются кольцевыми ще-
лями 14 и 15.
Таким образом, бесконтактные уплотнения на валах насоса
и турбины располагаются в виде двух последовательных ступеней
333
(двух каскадов). Причем первая ступень одновременно служит
для отвода рабочей жидкости подпитки на слив, так как про-
пускает полный расход подпитки Qn, поэтому на первой ступени
срабатывается значительный статический напор. Это приводит
к тому, что, во-первых, создается необходимое давление под-
питки и, во-вторых, значительно уменьшается статическое давле-
ние в камере за первой ступенью. Следствием этого является не-
большой перепад статического давления на второй ступени уплот-
нительного узла и небольшие утечки в корпус гидротрансфор-
матора.
Ограничения утечек в корпус гидротрансформатора связаны
с тем, что корпус соединен трубопроводом с баком системы пита-
ния, поэтому возможно пенообразование в баке, и как следствие,
снижение тяговых свойств гидротрансформатора. Кроме того, при
переполнении корпуса, когда ротор насоса «купается» в масле,
имеют место большие дисковые потери, которые снижают к. п. д.
гидротрансформатора на 2—3% и одновременно увеличивают его
энергоемкость.
Влияние геометрических параметров щелей уплотнений на
величину давления подпитки при определенных i можно уста-
новить из формул:
н =—к-
" но
при Р ==/= 1;
77 _______Р
11 ” //о “ Яо
(155)
)
где Нц ---------относительный напор подпитки;
'' о
Яп — напор подпитки;
2£!-1т1/т1
(156)
Qn — расход подпитки;
р, — коэффициент расхода щели;
f — площадь сечения щели;
дТ1
бри» 6Т1 — радиальные зазоры в щелях уплотнения первой
ступени насоса и турбины;
Д/гР — перепад статического напора на реакторе;
Як — статический напор в полости между первой
и второй ступенями уплотнительного узла.
334
По полученным уравнениям (155) была построена графически
зависимость относительного напора подпитки Нп в функции от
режима работы гидротрансформатора i при различных значе-
ниях Р (рис. 183). Необходимо отметить, что величина i не входит
в уравнения (155). Однако в эти уравнения входит величина
Д/ip, которая зависит от i. Из графика (рис. 183) видно, что р
влияет на характер кривой Нп = f (О-
С точки зрения получения постоянного давления подпитки
желательно выбирать большие значения Р (Р > 2). Однако жела-
ния иметь большие значения р огра-
ничиваются, с одной стороны, мини-
мально допустимым с технологичес-
кой и конструктивной точки зрения
зазором в щели первой ступени на
валу турбины и, с другой стороны,
минимально допустимой с точки зре-
ния бескавитационной работы вели-
чиной Нп. На величину зазора бТ1
большое влияние оказывает также
требование выключения гидротранс-
форматора.
Как показали результаты экспе-
риментальных исследований, гидро-
трансформатор с щелевыми уплотне-
ниями, по сравнению с гидротранс-
форматором с контактными уплот-
Рис. 183. Изменение статиче-
ского напора в разгрузочной
камере в зависимости от гео-
метрических параметров уплот-
няющего узла:
нительными кольцами, может отклю-
чаться без применения жиклеров.
В этом случае при отключении золот-
ника управления 16 (см. рис. 182)
жидкость из рабочей полости уда-
ляется через кольцевую щель на валу---------------экспериментальные
турбины. Причем, чем больше ра- данные
диальный зазор щели, тем быстрее
отключается гидротрансформатор. С этой точки зрения жела-
тельно, чтобы радиальный зазор бТ1 щели первой ступени на
валу турбины был больше. В данном случае с учетом проти-
воречивых требований к величине зазора 6Т1 приходится прини-
мать компромиссное решение, основываясь на результатах экспе-
риментальных исследований.
При выборе длины щелей первой ступени необходимо принять
во внимание, что кольцевая щель в отличие от обыкновенных
отверстий имеет большую поверхность трения, и поэтому она более
чувствительна к изменению вязкости рабочей жидкости. В связи
с тем, что вязкость рабочей жидкости в процессе работы гидро-
трансформатора может изменяться в широких пределах (при
изменении температуры), то сопротивления щелей первой ступени,
335
а следовательно, и давление подпитки в рабочей полости также
будет изменяться в широких пределах, что нежелательно. Поэтому
длина щелей первой ступени должна быть как можно короче и
иметь вид местного сопротивления.
Исходя из вышесказанного, для серийного гидротрансформа-
тора были выбраны следующие размеры щелей первой ступени:
6Т] -'0,002 м; бИ1 - 0,004 м (р - 2); /Н1 - 0,004 м; /Т1 -
— 0,010 м. Характер экспериментальной кривой Яп = f (i) по-
казан пунктиром на рис. 183.
При анализе двухступенчатой схемы уплотнительного узла
гидротрансформатора был рассмотрен вопрос о соотношении
расходов рабочей жидкости подпитки, сливаемого в корпус и от-
водимого из рабочей полости в бак. Это соотношение характери-
зует герметичность предложенной системы питания гидротранс-
форматора.
Установим связь статического напора в камере между первой
и второй ступенями Як с расходом подпитки Qn, размерами щелей
второго каскада и отводных каналов. Запишем баланс этих расхо-
дов в виде
Qn = Q™ + Qh2 + Qt2, (157)
где QCJ] — расход рабочей жидкости, отводимой из рабо-
чей полости в бак;
Qh2 и Qt2 — расходы рабочей жидкости, сливаемые через
щели второй ступени на валах насоса и турбины.
Подставив значения QCJ1, QH2 и QT> в уравнение (157), получим
Qn
Нк ’ (158)
где |i — коэффициент расхода соответствующего отводного ка-
нала;
f — площадь отводного канала.
Из уравнения (158) видно, что величина Нк не зависит от
величины НТ1 и размеров щелей первой ступени, а определяется
только расходом подпитки, размерами щелей второй ступени б2
и размерами сливного канала DCJI.
При большой частоте вращения вращающихся деталей эф-
фективны гидродинамические уплотнения винтового и центробеж-
ного типа. Уплотнение в них достигается возвратом жидкости из
уплотняемого зазора в уплотняемую полость. Эти уплотнения
работают как насосы со свойственными им затратами мощности
на перемещение жидкости и на преодоление дискового трения.
На рис. 184, а показано винтовое уплотнение, выполненное
в ступице насоса. Винтовые уплотнения выполняются обычно
в виде многозаходиых винтовых поверхностей на вращающихся
деталях или на неподвижных или на тех и других. На неподвижной
детали направление винтовой поверхности должно быть противо-
336
положно направлению, принятому на вращающейся детали.
Профиль винтовых поверхностей выполняется прямоугольным,
трапециевидным, внешние края канавок делаются острыми.
Зазор между деталями делается минимально возможным по кон-
структивным и технологическим соображениям.
На рис. 184, б показано центробежное уплотнение, выполнен-
ное в виде радиальных лопастей на тыльной стороне наружного
тора центробежного рабочего колеса. Центробежное уплотне-
ние располагается на валу таким образом, чтобы жидкость, пере-
текающая из уплотняемой полости повышенного давления в по-
лость пониженного давления, проходила через межлопастные
Рис. 184. Гидродинамические уплотнения:
а — винтовое уплотнение; б — центробежное уплотнение
каналы уплотнения, поступая в них снаружи. В этом уплотнении
перетеканию жидкости препятствуют центробежные силы, которые
развиваются при вращении жидкости, находящейся в межлопаст-
ных каналах.
Степень герметичности центробежного уплотнения тем выше,
чем больше окружная скорость на его внешнем диаметре. Центро-
бежное уплотнение эффективно используется для разгрузки от осе-
вых сил в передачах, так как осевая сила, возникающая в центро-
бежном уплотнении (рис. 184), вследствие повышения давления
в его межлопаточных каналах направлена в сторону, обратную
осевой силе, возникающей от повышенного давления в межло-
паточных каналах рабочего колеса.
Комбинированные уплотнения представляют собой комбина-
цию нескольких видов уплотнений. Чаще всего такая комбинация
состоит из поршневых колец п манжет или лабиринтных уплотне-
ний и манжет и т. д. Выбор типа уплотнений в этом случае опре-
деляется требуемой герметичностью, габаритными размерами,
надежностью и долговечностью в работе.
При использовании различных видов уплотнений их распо-
лагают в следующем порядке: там, где имеются большие давле-
ния, ставят уплотнение более герметичное, затем — менее герме-
тичное и т. д. Все рассмотренные типы уплотнений независимо
22 с. П. Стесни 337
от их конструкции при работе необходимо смазывать, что увели-
чивает их надежность п срок службы. Смазка уплотнений обычно
производится рабочей жидкостью гидропередачи.
Уплотнения неподвижных соединений. К уплотнениям непо-
движных соединений в большинстве случаев предъявляется тре-
бование обеспечения абсолютной герметичности в широком диа-
пазоне температур и давлений уплотняемой среды. Наиболее
Рис. 185. Уплотнения неподвижных соединений:
а — уплотнения эластичными кольцами; б — уплотнения плоскими прокладками
широкое распространение для уплотнения неподвижных соедине-
ний в гидродинамических передачах получило уплотнение при
помощи эластичных колец круглого, а иногда и прямоугольного
сечения. Уплотнительное действие эластичных колец обусловлено
сжимающим усилием, создаваемым в материале колец вследствие
первоначального сжатия их при монтаже. В дальнейшем проис-
ходит усиление плотности контакта в результате действия давле-
ния жидкости и в ряде случаев в результате набухания материала
в рабочей жидкости.
На рис. 185, а приведены некоторые варианты конструктивных
схем применения этих уплотнений. Для размещения уплотни-
338
тельных колец в основном применяются прямоугольные и угловые
канавки. Размеры канавок и колец, чистота обработки уплотняе-
мых поверхностей, а также материалы колец в зависимости от
уплотняемой среды, ее температуры и давления регламентированы
отраслевыми нормалями.
В некоторых случаях, особенно для уплотнения фланцевых
соединений, имеющих форму, отличающуюся от круглой, приме-
няются плоские прокладки. Материал прокладок должен быть
достаточно эластичным, так как для обеспечения надежной гер-
метичности он должен заполнять неровности на контактных по-
верхностях. Прокладки должны быть достаточно прочны, чтобы
выдерживать давление не только уплотняемой среды, но и уплот-
няющее давление от затяжки фланцев. Материал прокладок
должен быть абсолютно герметичен по своим физико-химическим
свойствам в уплотняемой среде.
На рис. 185, б показаны некоторые конструктивные схемы
уплотнений при помощи плоских прокладок. Уплотняющее кон-
тактное давление во всех случаях применения плоских прокладок
достигается затяжкой болтов или других крепежных деталей.
Усилие затяжки обуславливает герметичность уплотнения и выра-
жается алгебраической суммой внешних и внутренних сил, дей-
ствующих на уплотняющие поверхности. Для равномерного рас-
пределения контактного давления по всей поверхности прокладки
необходимо обеспечивать достаточную и равномерную жесткость
фланцев, а также равномерное распределение крепежа по пери-
метру уплотнения. При недостаточной жесткости фланцевого
соединения оно деформируется под действием давления уплот-
няемой среды, что приводит к изменению формы и размеров дета-
лей уплотнения и к нарушению герметичности. Следует особо
отметить, что выполнение кольцевых канавок на контактной по-
верхности фланцев затрудняет перемещение эластичных прокла-
док и позволяет повысить надежность уплотнения. Для уплотне-
ния плоскими прокладками применяют паронит, фибру, фторо-
пласт, медь, алюминий и другие материалы. Изготавливают про-
кладки механической обработкой, штамповкой или специальными
просечками.
Для уплотнительных деталей разрабатываются различные
материалы на основе полимеров. К таким материалам относится
капрон, тефлон (политетрафторэтилен), силиконовые резины и т. д.
Эти материалы часто не только заменяют резину и другие мате-
риалы уплотнений, но и значительно превосходят их по износо-
устойчивости, химической стойкости и другим показателям.
22*
ГЛАВА VIII
НЕКОТОРЫЕ ТЕНДЕНЦИИ
СОВЕРШЕНСТВОВАНИЯ И ПРИМЕНЕНИЯ
ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧ
В настоящее время как в СССР, так и за рубежом накоплен
значительный опыт по созданию и эксплуатации гидродинамиче-
ских передач. Применение гидромуфт и гидротрансформаторов
в приводах строительных и дорожных машин, автомобилей, тепло-
возов, горных машин стало производственной необходимостью.
Передачи претерпели существенные изменения, как в части их
конструкции, так и в части технико-экономических показателей.
Рассмотрим основные тенденции совершенствования конструкции
и технической характеристики гидродинамических передач и
перспективы их применения.
Основной тенденцией современного этапа развития передач
является значительно возросшее число машин, в приводах кото-
рых гидромуфты и гидротрансформаторы прочно завоевали себе
место. Расширение производства машин выдвигает перед отече-
ственной промышленностью важные и качественно новые задачи
по созданию унифицированных (не только для одной, но и для
нескольких отраслей) гидропередач, обладающих высокой долго-
вечностью, энергоемкостью, преобразующе-нагружающими пока-
зателями при сравнительно невысокой себестоимости изготовления.
Показатели промышленных образцов часто уступают (осо-
бенно по к. п. д.) опытным образцам. Это можно объяснить откло-
нениями, которые связаны с серийным изготовлением передач,
и особенно — изготовлением рабочих колес, которые для боль-
шинства гидромуфт и гидротрансформаторов выполняются ли-
тыми. Таким образом, в совершенствовании технологии изготов-
ления заложен резерв повышения технико-экономических показа-
телей серийных машин.
Одновременно с увеличением количества передач упрощается
их конструкция. Это связано в первую очередь с необходимостью
получения долговечных агрегатов, соответствующих (или пре-
вышающих) по ресурсу машины, в приводах которых они при-
меняются.
340
Наиболее слабыми узлами гидродинамических передач яв-
ляются муфта свободного хода и уплотнения.
В перспективных гидротрансформаторах строительных и до-
рожных машин отсутствует обгонный механизм, который лимити-
рует длительную работу передачи. Отсутствие муфты свободного
хода компенсируется изменением геометрических параметров ло-
пастной системы гидротрансформатора.
Однако часто невозможно изменением лопастной системы ком-
пенсировать действие муфты свободного хода. Это относится
к блокируемым гидротрансформаторам автомобилей и теплово-
зов, причем указанные передачи имеют часто два и более меха-
низма (комплексные и блокируемые). Некоторые специальные
передачи также имеют муфты свободного хода (реверсивные,
многотурбинные и т. д.), поэтому совершенствование конструк-
ции и технологии изготовления этого механизма является также
важной и актуальной задачей. Основными мероприятиями в этом
направлении являются обеспечение центрирования звездочки и
обоймы, совершенствование прижимных устройств, обеспечение
постоянной смазки. Конструкцию муфты свободного хода можно
изменить, приблизив ее к подшипнику. Тогда станет возможной
централизованная его поставка в сборе. При таком подходе к из-
готовлению МСХ последние будут так же надежны и дешевы,
как подшипники, и даже при выходе из строя замена механизма
в условиях эксплуатации не вызовет значительных трудностей.
Во многих передачах заменяют контактные уплотнения бескон-
тактными, что одновременно с долговечностью увеличит механи-
ческий, а следовательно, и общий к. п. д. агрегата.
Ведутся опытно-конструкторские работы по созданию более
совершенных контактных уплотнений — торцевых и манжетных.
При этом необходимо совершенствовать их конструкцию (форму)
и материал. Манжетные уплотнения широко применяются в ка-
честве концевых на отечественных муфтах и трансформаторах.
Концевые манжеты должны быть эластичными, но одновременно
прочными, выдерживать температуру —50-ь + 140° С, не раз-
рушаться от контакта с рабочей жидкостью. Уплотнения и уплот-
няющие узлы для гидродинамических передач унифицируются
во всех отраслях промышленности. При этом для гидродинамиче-
ских передач, часто работающих в трудных условиях (вибрация,
запыленность, резкая смена температуры и т. д.), создаются,
в отдельных случаях, специальные типы уплотнений.
Все соединения выполняются взаимозаменяемыми и более
надежными в эксплуатации. Так, для гидропередач в местах
сопряжений, передающих крутящий момент, применяются эволь-
вентные шлицы с центрированием по наружной поверхности. Там,
где это возможно, следует применять гидротрансформаторы
с наименьшим числом рабочих колес: трехколесные гидротрансфор-
маторы с центростремительной турбиной (если надо — в комплекс-
ном исполнении) вместо четырехколесных; двухступенчатые вместо
341
трехступенчатых и т. д. Во всех этих случаях для сохранения
высоких технико-экономических показателей агрегатов необ-
ходимо вносить изменения в их лопастную систему, что неиз-
бежно повлечет за собой дополнительные затраты, которые, однако,
быстро окупятся при серийном изготовлении передач с более
простой конструкцией.
При создании унифицированных передач перспективным на-
правлением является разработка агрегатированного узла, вклю-
чающего, кроме гидротрансформатора, емкость для рабочей жид-
кости, распределитель, предохранительный клапан, подпиточ-
ный насос, теплообменник. Создание и отработка такой пере-
дачи ускорит внедрение гидродинамического привода, так как
освободит заводы-потребители гидромуфт и гидротрансформато-
ров от изготовления, монтажа и отладки вспомогательных систем
и их элементов. На машинах возможно будет уменьшить вес
и габариты силовой установки.
Следующая тенденция современного этапа связана с созда-
нием принципиально новых конструкций гидродинамических пере-
дач. Создание таких передач стало возможным благодаря более
глубокому изучению и использованию внутренних процессов,
происходящих в рабочей полости. В настоящее время созданы
прозрачные модели, совершенные зонды, позволяющие изучить
физику процесса и получить количественные оценки его пара-
метров в режимах функционирования гидромуфт и гидротрансфор-
маторов.
Имеется возможность научно обоснованного управления
внутренними процессами передач, а следовательно, и их внеш-
ними характеристиками. Так, используя свойства гидромуфт
при их работе на частичном наполнении, в ИГД им. Скочинского
была создана принципиально новая конструкция гидромуфты
с отнесенной рабочей полостью (рис. 186), предназначенная для
горных машин, и на ее базе ряд агрегатов с определенными ха-
рактеристиками. Предложенная конструкция проста, имеет по
сравнению с известными меньшие вес и габаритные размеры,
обладает высокими технико-экономическими показателями.
В МАДИ была создана принципиально новая комплексная
передача (рис. 187), которая имеет лучшие пусковые характери-
стики, чем гидромуфта, при малых передаточных числах работа-
ющая как гидротрансформатор и не уступающая по энергетиче-
ским показателям гидромуфте, а на режимах больших переда-
точных чисел работающая как гидромуфта. В то же время пред-
ложенная гидропередача имеет меньший вес и более простую кон-
струкцию, чем комплексный гидротрансформатор. Работа передачи
состоит в следующем. Рабочая полость заполняется не более
чем на 60—70%. При разгоне до определенного i (—0,4ч-0,5)
жидкость циркулирует по большому контуру циркуляции, захва-
тывая реактор, передача работает как гидротрансформатор.
При дальнейшем уменьшении скольжения, в том числе на номи-
342
нальном режиме, жидкость циркулирует по малому контуру цир-
куляции, минуя реактор,— передача работает как гидромуфта.
Изучая физику процесса передачи па тормозных режимах
(например, режиме противовращения), стало возможным за счет
изменения лопастной системы «исправить» внешнюю характерис-
тику гидротрансформаторов с центростремительными турбинами
(передвинуть в сторону больнних I провал характеристики на
режиме противовращения).
Рис. 186. Предохрани-
тельная гидромуфта И ГД
им. Скочинского:
1 — насос; 2 — турбина;
3 — порог; 4 — вытесни-
тельный диск
Рис. 187. Комплексная гид-
родинамическая передача
МАДИ:
МКЦ — малый контур цирку-
ляции; БКЦ — большой кон-
тур циркуляции
Известны гидротрансформаторы, в которых лопатки выпол-
няются самоустанавлпвающимпся по потоку, со специальной
формой кромок, с различными соотношениями меридионального
сечения и т. д.
В заключение необходимо отметить еще одно важное направле-
ние в исследованиях машин с гидродинамическими передачами
в приводе. Это касается изучения их характеристик на неустано-
вившихся режимах работы. При этом современные технические
средства, такие как полупроводниковые датчики, устанавливае-
мые в рабочих полостях колес, ЭЦВМ и аналоговые машины позво-
ляют замерить внутренние параметры потока при работе передач
на неустановившихся режимах работы, смоделировать работу
передачи в приводе той пли иной машины и быстро и качественно
обработать полученную информацию.
В настоящее время ставится задача о научно обоснованном
применении гидродинамических передач в приводах различных
машин с определенными, наперед заданными статическими и ди-
намическими характеристиками. Решение этой задачи, так же
как и других, рассмотренных в настоящей главе, позволит увели-
чить надежность и производительность машин, в приводах кото-
рых применяются гидродинамические передачи.
343
ПРИЛОЖЕНИЕ
ПРИМЕР РАСЧЕТА ВНЕШНЕЙ ХАРАКТЕРИСТИКИ
ГИДРОТРАНСФОРМАТОРА
При расчете внешней характеристики (см. гл. III, § 29) заданными являются
параметры лопастной системы и размеры меридионального сечения.
В качестве примера рассчитаем внешнюю характеристику гидротрансформа-
тора У358011А (см. рис. 148, а) с осевой турбиной диаметром Da= 0,325 м.
Характеристику рассчитываем при = 1700 об/мин. Рабочей жидкостью яв-
ляется масло Индустриальное 20 (р = 900 кг/м3, при рабочей температуре t~
— 70° С). Основные параметры лопастной системы приведены в табл. 1, там же
. г ctg В
приведены некоторые расчетные величины /, х, г, ———. Размеры колес зада-
г
ны для средних линий тока.
Для насоса определяем по формуле К- Пфлейдерера поправку на конечное
число лопаток:
Нн= г~°-875-
Для турбины и реактора принимаем Цт — Цр = 1-
Определим расход Q при различных передаточных отношениях i из уравнения
(95).
В первом приближении задаемся величиной фуд = 1 для всех рабочих колес.
Принимаем коэффициент Л = 0,065. Рассчитываем коэффициенты сопротивления
колес кн» кт» кр по зависимостям, приведенным на стр. 146. Предварительно
среднюю линию тока в меридиональном сечении каждого колеса разбиваем на
отрезки Д/ш. и определяем в каждой точке 1,2, 3, . . ., п величины г, b, р, fw, Rr
(как показано па рис. 90). Зная их, подсчитываем F^cp, /?гср> средней линии,
т. е. те величины, которые входят в формулу для определения коэффициента к.
Расчеты сведены в табл. 2, 3, 4 соответственно для насоса, турбины и реактора.
Для коэффициентов уравнения (94) формулы при фуд = 1 упрощаются.
Определяем:
а = ( — 82,9^^- И.вУ +(36,8-0,875.1 + 4,003)2 +
\ U, (Jo / о у
0 144 \ 2
-|- (237Ю.6J + 972+ 3728,8+ 1319 = 68037;
b = 0,149 (зб,8-0,875 + 82,9 у^) — 1-0,875-0,149 (36,8-0,875-1 +
+ 4,003) + 0,0675 (-82,—11.18) = -0,675;
71 \ 0,0675 /
с = 0,149 (237 - 36,8-0,875) + 0,149 (36,8-0,875 + 4,003) —
О 149
d = — 2-0,1492-0,875 -J- 0,06752 0,149-0,8752 = —0,0174,
0 1432
т = 0,1492 — 2 - 0,1432 0,1432 = 0,00182; f = 0.
' 344
Параметры лопастной системы гидротрансформатора
Таблица 1
Колесо г в м 3 в градусах b в м Z д в м t В м | X 1 F в м2 ctg0 ctgp/F в 1/м2
н Вход Выход 0,067 0,149 81 55 0,037 0,022 15 0,004 0,004 0,0283 0,0625 0,857 0,922 0,0141 0,0190 0,1584 0,7000 11,18 36,8
т Вход Выход 0,149 0,143 94 15 0,021 0,022 24 0,006 0,002 0,0390 0,0374 0,846 0,793 0,0174 0,0156 —0,0698 3,7320 —4,003 237
р Вход Выход 0,140 0,068 78 139 0,024 0,039 12 0,004 0,004 0,0736 0,0357 0,944 0,829 0,020 0,0138 0,2125 —1,150 10,6 —82,9
Таблица 2
Определение коэффициента сопротивления насоса
Параметры Номера сечений (см. рис. 90)
/ 1 2 3 1 4 1 5 б 1 7 1 8
R В М 0,0675 0,0767 0,0873 0,1 0,113 0,127 0,138 0,149
Д/т в м 0,0131 0.0131 0,0131 0,01314 0,01314 0,01318 0,01318
t в м 0,0283 0,0322 0,0366 0,0418 0,0473 0,0532 0,0578 0,0615
b в м 0,0370 0,0351 0,0330 0,0318 0,030 0,027 0,0237 0,022
Р в градусах 81 81 75,8 70,6 65,4 60,2 55 55
sin р 0,987 0,987 0,969 0,943 0,909 0,867 0,8191 0,8191
а в м 0,0245 0,0278 0,0315 0,0355 0,039 0,042 0,0439 0,04626
fw в м2 0,000908 0,000975 0,00104 0,00113 0,00117 0,0113 0,0104 0,0102
4/?г в м 0,0295 0,031 0,0322 0,0336 0,0339 0,033 0,0308 0,0298
Д/ в м — 0,0133 0,0136 0,0139 0,0145 0,0152 0,0161 0,0161
Примечание. Fw Ср J-J ~ 0 »0156 м2; 4/?г Ср == 0,0317 м; I = 2Л1 = 0,1027 м; = 972 1/м4.
345
346
Определение коэффициента сопротивления турбины
Таблица 3
R в м ^‘т в м t ь в м 13 в граду- сах sin р а в м 1 в м2 ! 1 4ЯГ ! в м । д/ в м
1 0,149 0,0390 0,021 94 0,997 0,0334 i I 0,000702 0,0258 I
2 0,151 0,0072 0,0397 0,020 94 0,997 0,0337 0.000690 0,0254 0,0072
tj 0,152 0,0072 0,0399 0,02 80,9 0,987 0,0334 0,000668 0.0250 0,0729 i
4 0,152 0,0720 0,0399 0,02 67,6 0,Г925 0,0309 0.000618 0,0242 0.0077 i
5 0.1о2 0.00718 0,0398 0,021 53,7 0,806 0,0261 0,000547 0,0232 0,0089 i
6 0,150 0,00708 0,0394 0,022 40,3 0,647 0,0195 0,000430 0,0206 0,0111 i
7 0.149 0,00716 0,0387 0.022 27,1 0,456 0,0137 0,000304 0,0169 0.0157 i
$ 0,143 0,00718 0.0370 0,022 1 0 0,257 0,00/7 0.000175 0,0115 0,0279
Примсч а н п е. Fw ср Т = , 00867 м2: I Ср у == 0,0859 м; 4/?г ср у = 0,02162 м; к у = 3728,8 1/м4 .
Определение коэффициента сопротивления реактора
Таблица 4
Ko сечений R в м в м t в м ь в м 3 в градусах sin |3 а в м в м2 4ЯГ в м д/ в м
1 0,140 0,0736 0,0245 78 0,978 0,0661 0,00162 0,0357
2 0,128 0,011 0,0672 0,0261 98 0,990 0,0626 0,00163 0,0367 0,0111
3 0,1168 0,011 0,0612 0,0281 107 0,956 0,0545 0,00153 0,0370 0,0115
4 0,1060 0,011 0,0555 0,0300 118° 30' 0,878 0,0447 0,00134 0,0369 0,0125
5 0,0947 0,011 0,0497 0,0320 128° 48' 0,779 0,0347 0,00111 0,0333 0.0141
6 0,0852 0,011 0,0446 0,0328 137° 51' 0,671 0,0268 0,00087 0,0293 0,0164
7 0,0764 0,011 0,0400 0,0371 139 0,656 0,0222 0,00082 0,0278 0,0167
8 0,0682 0,011 0,0357 0,0390 139 0,656 0,0200 0,00078 0,0265 0,0167
Прим e ч а н и е. Fw ср. р = 0,0128 м«; Zcp р = = 0,099 м; 4/?г ср р = 0,0328 м ; кр = 1319 1/м4.
К расчету параметров внутренней характеристики
Таблица 5
i Q в м3/сек в м Н t т в м Afjj в Н-м и 'Нг в % ^тр в м луд- н в м А’уд. Т в м пуд- Р в м
0 0,0917 45,5 0 206 499 0 2,58 0,595 20,25 22,2
0,1 0,0910 45,6 11,43 205 469 25 2,55 0,618 15 16,7
0,2 0,0904 45,7 19,53 204 437 42,6 2,518 0,64 11,08 12,1
0,3 0,0896 45,9 27,2 203 402,5 59,2 2,462 0,658 7,35 8,25
0,4 0,0887 46,0 33,4 202 368 72,52 2,425 0,691 4,5 5,01
0,5 0,0877 46,2 38,2 200 333 82,6 2,37 0,735 2,34 2,86
0,6 0,0867 46,4 41,5 199 298 89,4 2,32 0,765 0,885 1
0,7 0,0855 46,7 43,4 198 263 92,9 2,26 0,844 0,121 0,116
0,8 0,0842 46,9 43,8 194 229 93,3 2,18 0,865 0,0582 0,0441
0,9 0,0828 47,2 42,7 193 194,2 90,4 2,08 0,925 0,692 1 | 0,905
1,0 0,0814 47,5 40,0 190 161 84,3 2,04 0,98 2,02 | 2,54
Таблица 6
К расчету внешней характеристики
i Mpi в Н-м М у в Н-м ^мех 1 в Н-м ^мех 2 в Н-м мдн-т в Н-м уИдТ-Р в Н-м Л1х в Н-м м2 в Н-м К П в %
0 206 499 0 20,3 0 230,42 519,3 2,24 0
0,1 205 469 0,0392 14,7 0,00686 223,8 483,66 2J 6 21,6
0,2 204 437 0,157 10,4 0,588 218,5 447,18 2,08 41,6
0,3 203 402,5 0,353 6,96 0,183 214,2 408,92 1,9 57,0
0,4 202 368 0,628 4,38 0,432 210,5 371,22 1,76 70,4
0,5 200 333 4,12 0,981 2,53 0,844 206,7 333,7 1,615 80,8
0,6 199 298 1,41 . 1,29 1,46 204,4 296,42 1,44 86,4
0,7 198 263 1,92 0,55 2,32 202,7 259,31 1,28 89,5
0,8 194 229 2,5 0,157 3,48 198,28 223,18 1,12 89,5
0,9 193 194,2 3,18 0,0196 4,95 197,14 186,09 0,939 84,5
1,0 190 161 3,92 0 6,8 194,12 150,28 0,774 0.774
Дальнейший расчет ведем по форму-
лам (12), (93а), (94). При расчете внешней
характеристики задаемся величинами
44мех 1 и Л4мех2 па основании опытных
данных. Величины Л4Д (н~т) и ^д (Т—Р)
определяем по формуле (42), Л4Д (Н—р)
^0 для данного гидротрансформатора,
и Л42 определяем по формулам (98)
и (99). Принимаем т]0 = 1.
ская характеристика гидро-
трансформатора У358011А
Рис. 188. Дисковые потери в гид-
ротрансформаторе У358011А
Результаты расчетов приведены в табл. 5 и 6. На рис. 188 приведены дисковые
потери в гидротрансформаторе У358011А, на рис. 189 представлена расчетная
характеристика этого гидротрансформатора.
СПИСОК ЛИТЕРАТУРЫ
1. А л е к с а п о л ь с к и й Д. Я- Гидродинамические передачи. М.,
Машгиз, 1963, 271 с.
2. А р и н у ш к и н Л. С. и др. Авиационные центробежные насосные
агрегаты, М., «Машиностроение», 1967, 255 с.
3. Брацлавский X. Л. Гидротрансформаторы в приводах отечествен-
ных и зарубежных строительных и дорожных машин. М., Цниистройдоркоммун-
маш, 1968, 74 с.
4. Вольф М. Гидродинамические муфты и трансформаторы. Пер. с нем.
М., «Машиностроение», 1967, 320 с.
5. Г а в р и л е н к о Б. А. и др. Гидравлический привод. М., «Машино-
строение», 1968, 503 с.
6. Гавриленко Б. А., Семичастнов И. Ф. Гидравлические
муфты и трансформаторы. М., «Машиностроение», 1969, 392 с.
7. Г о р д е е в А. С. Исследование проточной части гидродинамических
трансформаторов. Труды МИИТ, № 175, М., «Транспорт», 1963, с. 5—35.
8. Д з я д ы к М. Н. и др. Гидромеханическая передача автобуса. М.,
«Транспорт», 1968, 111 с.
9. И де л ь ч и к Н. Е. Справочник по гидравлическим сопротивлениям.
М.—Л., Госэнергоиздат, 1960, 464 с.
10. К о ч к а р е в А. Я- Гидродинамические передачи. М.—Л., «Машино-
строение», 1971, 336 с.
И. Лапидус В. И., П е т р о в В. А. Гидродинамические передачи авто-
мобилей. М., «Машиностроение», 1961, 495 с.
12. Л а п т е в Ю. Н Автотракторные одноступенчатые гидродинамические
трансформаторы. М., Машгиз, 1963, 220 с.
13. Л о м а к и н А. А. Центробежные п осевые насосы. М-—Л., «Машино-
строение», 1966, 364 с.
14. М а з а л о в Н. Д., Т р у с о в С. М. Гидродинамические коробки
передач. М., «Машиностроение», 1971, 294 с.
15. Н а р б у т А. Н. Гидротрансформаторы. М., «Машиностроение», 1966,
215 с.
16. О с и п о в К. Г. Турбопередачи буровых установок. М., Гостоптехиз-
дат, 1960, 180 с.
17. Пономаренко Ю. Ф. Испытание гидропередач. М., «Машинострое-
ние», 1969, 291 с.
18. П р о к о ф ь е в В. Н. Основы теории гидромеханических передач. М.,
Машгиз, 1957, 424 с.
19. П р о к о ф ь е в В. Н. Гидравлические передачи колесных и гусеничных
машин. М., Оборонгиз, 1960, 300 с.
20. П ф л е й д е р е р К. Лопаточные машины для жидкостей и газов.
Изд. 4-е перераб. Пер. с нем. М., Машгиз, 1960, 684 с.
21. Семичастнов И. Ф. Гидравлические передачи тепловозов. М.,
Машгиз, 1961, 332 с.
22. С т е п а н о в А. И. Центробежные и осевые насосы. Пер. с англ. М.,
Машгиз, 1960, 464 с.
349
23. С т е с и н С. П. и др. Гидротрансформаторы для строительных и дорож-
ных машин. М., ЦБГИ НИИОМТП Госстроя СССР, 1967, 39 с.
24. Терентьев О. А. Экспериментальные исследования внутренних
процессов в комплексных гидротрансформаторах. «Гидропередачи и гидроавто-
матика», серия III. 4. 11. М-, ЦИНТИАМ, 1963, с. 122—128.
25. Трусов С. М. иШерстюк А. Н. Расчет поля скоростей в гидро-
трансформаторе. Труды НАМИ, вып. 40, 1961, 32 с.
26. Хурдшудян Г. М. Гидравлические преобразователи крутящего
момента. Ленинград, Судпромгиз, 1963, 267 с.
27. Э т и н г о ф М. М. Теория и расчет турбомуфты. Труды ЦИАМ № 128,
М., Оборонгиз, 1963, 10 с.
28. Яременко О. В. Ограничивающие гидродинамические муфты , М.,
«Машиностроение», 1970, 224 с.
ОГЛАВЛЕНИЕ
Введение .............................................................. 3
Глава I. Основы теории гидродинамических передач....................... 7
§ 1. Классификация гидродинамических передач ................... 7
§ 2. Основные параметры.......................................... 8
§ 3. Особенности рабочего процесса и основные уравнения .... 9
§ 4. Учет влияния конечного числа лопаток и стеснения потока
лопатками...................................................... 12
§ 5. Классификация и определение потерь......................... 19
§ 6. Законы подобия............................................. 25
Глава II. Гидродинамические муфты................................. 28
§ 7. Устройство и принцип действия........................ 28
§ 8. Особенности рабочего процесса и баланс энергии............ 29
§ 9. Распределение скоростей в меридиональном сечении гидро-
муфты ........................................................ 33
§ 10. Характеристики гидромуфт ................................. 36
§ 11. Подобие гидромуфт......................................... 41
§ 12. Совместная работа двигателя и гидромуфты.................. 47
§ 13. Регулирование гидромуфт................................... 52
§ 14. Предохранительные гидромуфты.............................. 62
§ 15. Гидромуфты с наклонными лопатками......................... 67
§ 16. Основы проектирования и расчета гидромуфт ................ 68
§ 17. Определение осевых сил в гидромуфте . . . ............... 73
§ 18. Типизация и унификация гидромуфт.......................... 76
§ 19. Конструкции гидромуфт..................................... 79
§ 20. Достоинства и недостатки гидромуфт ..................... 91
Глава III. Гидродинамические трансформаторы .......................... 93
§ 21. Основные схемы и параметры гидротрансформаторов .... 93
§ 22. Особенности рабочего процесса в гидротрансформаторе . . 96
§ 23. Характеристики гидротрансформаторов..................... 100
§ 24. Особенности процесса энергообмена и баланс энергий в
гидротрансформаторе ......................................... 104
§ 25. Пересчет параметров гидротрансформаторов при изменении
частоты вращения и активного диаметра........................ 115
§ 26. Прозрачность гидротрансформатора ....................... 117
§ 27. Основы расчета и проектирования лопастных систем гидро-
трансформаторов ............................................. 120
§ 28. Профилирование рабочих колес гидротрансформаторов ... 131
§ 29. Расчет внешней характеристики гидротрансформаторов . . . 146
§ 30. Применение ЭЦВМ для расчета гидротрансформаторов. Обзор
существующих методик расчета ................................ 148
§ 31. Расчет поля скоростей и давлении в гидротрансформаторе 153
351
§ 32. Влияние геометрических параметров лопастной системы гид-
ротрансформатора на его технико-экономические показатели 159
§ 33. Комплексные гидротрансформаторы......................... 169
§ 34. Регулируемые гидротрансформаторы........................ 175
§ 35. Блокируемые гидротрансформаторы . v..................... 180
§ 36. Реверсивные гидродинамические передачи ................. 182
§ 37. Согласование работы двигателя и гидротрансформатора . . 190
Глава IV. Гидромеханические передачи................................ 197
§ 38. Общие сведения ......................................... 197
§ 39. Автоматическое переключение скоростей в гидромеханиче-
ской передаче ................................................ 208
Глава V. Испытания и доводка гидродинамических передач.............. 224
§ 40. Стенды и методика испытаний ............................ 224
§ 41. Гидравлические тормоза.................................. 231
§ 42. Специальные испытания при доводке гидродинамических
передач ...................................................... 238
§ 43. Система питания и охлаждения гидротрансформаторов . . 246
Глава VI. Конструкции гидротрансформаторов и их применение . . 261
§ 44. Гидротрансформаторы для строительных и дорожных машин 261
§ 45. Гидротрансформаторы для транспортных машин........... 280
§ 46. Тягово-экономические качества машин с гидротрансфор-
матором в приводе ............................................ 295
§ 47. Параметрический ряд гидротрансформаторов ............... 305
§ 48. Некоторые сведения об эксплуатации гидротрансформаторов 308
Глава VII. Расчет основных деталей гидротрансформатора ... 312
§ 49. Расчет муфты свободного хода............................ 312
§ 50. Расчет осевых сил в гидротрансформаторе ................ 315
§ 51. Расчет валов............................................ 324
§ 52. Уплотнения в гидродинамических передачах................ 327
Глава VIII. Некоторые тенденции совершенствования и при-
менения гидродинамических передач ................................. 340
Приложение. Пример расчета внешней характеристики гидротрансфор-
матора ............................................................. 344
Список, лутературы..........•....................................... 349
Савелий Павлович СТЕСИН, Елена Андреевна ЯКОВЕНКО
ГИДРОДИНАМИЧЕСКИЕ ПЕРЕДАЧИ
Редактор издательства А. Н. Саверина
Технический редактор А. Ф. Уварова Корректор Н. И. Шарунина
Сдано в набор 3/XI 1972 г. Подписано к печати 29/VIII 1973 г. Т-14055
Формат G0X 90716 Бумага № 2 Усл. печ. л. 22. Уч.-изд. л. 22,7. Ти]
Заказ № 2203. Цена 1 р. 03 к.
Издательство «МАШИНОСТРОЕНИЕ», Москва, Б-78, 1-й Басманный пер., 3
Ленинградская типография № 6 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
но делам издательств, полиграфии и книжной торговли
193144, Ленинград, ул. Моисеенко, 10