


























































































































































































































































































Author: Яуре А.Г. Певзнер Е.М.
Tags: характеристика машин по способу привода детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка электроэнергетика электротехника электрооборудование справочник электропривод грузоподъемные машины
ISBN: 5-283-00508-9
Year: 1988




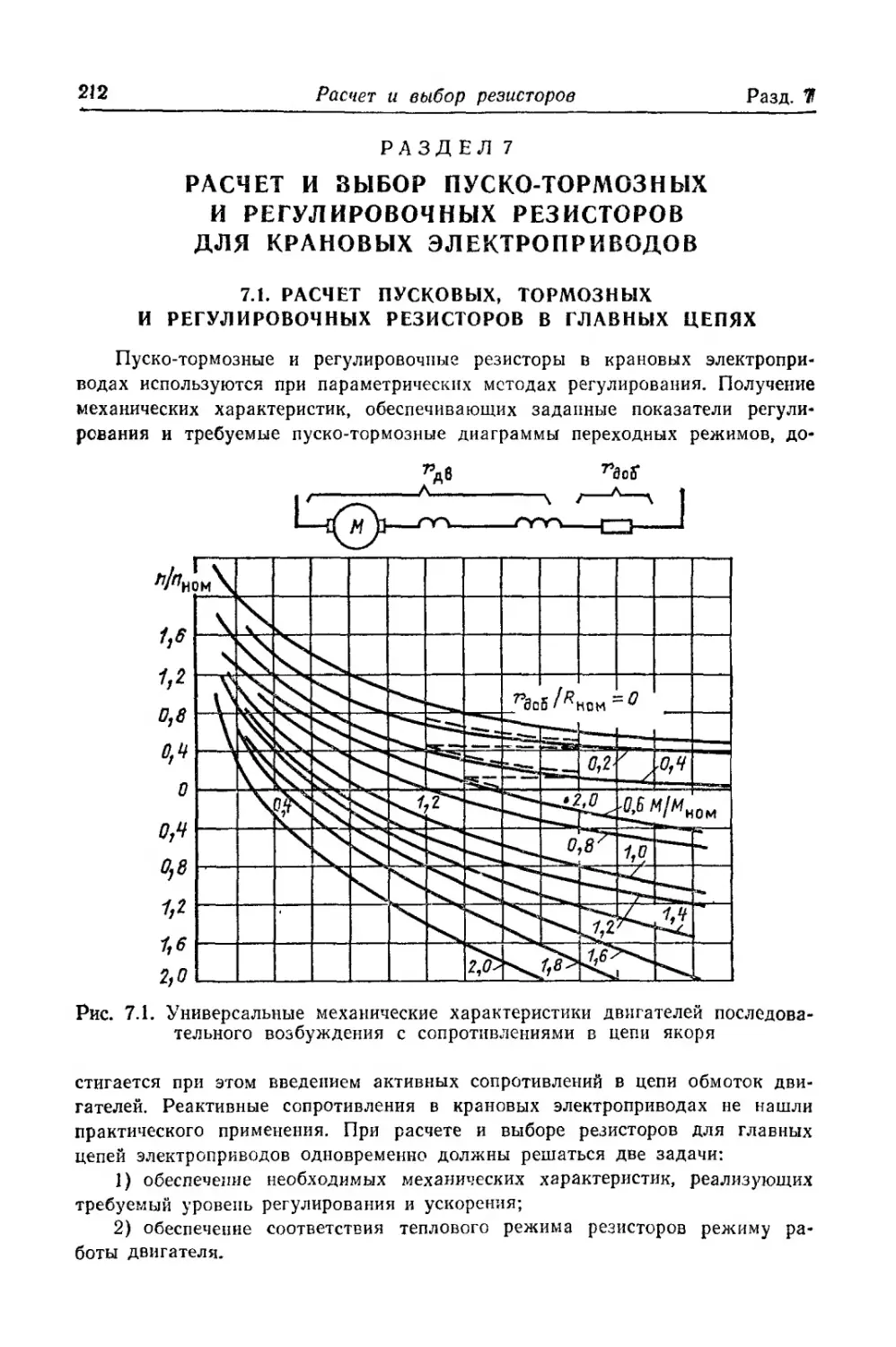
КРАНОВЫЙ
ЭЛЕКТРОПРИВОД
СПРАВОЧНИК
МОСКВА
ЭНЕРГО АТОМИЗДАТ
1988
ББК 31.291
Я88
УДК 62-83:621.873(035.5)
Рецензент В. Н. Иванов
Яуре А. Г., Певзнер Е. М.
Я88 Крановый электропривод: Справочник.— Мл
Энергоатомиздат, 1988.—344 с.: ил.
ISBN 5-283-00508-9
Содержится информация по всем видам крановых элек-
троприводов. Приводятся технические данные типовых ком*
плектов электроприводов и рекомендации по их примене-
нию, рассматриваются методы выбора и использования кра-
нового электрооборудования в зависимости от условий экс-
плуатации. Значительное внимание уделяется новым системам
тиристорных электроприводов.
Для инженерно-технических работников, связанных с экс-
плуатацией и конструированием крановых электроприводов.
2302050000-335
051(01)-88
195-88
ББК 31.291
Справочное издание
Яуре Андрей Григорьевич
Певзнер Ефим Маркович
КРАНОВЫЙ
ЭЛЕКТРОПРИВОД
Редактор А. В. Шинянский
Редактор издательства Л. А. Решмина
Художественные редакторы В. А. Гозак-Хозак,
Г. И. Панфилова
Технический редактор Г, С. Соловьева
Корректор 3. Б. Драновская
ИБ № 1411
Сдано в набор 1102 88. Подписано в печать 27.06.88. Т-15704. Формат
60Х90’/1в. Бумага типографская № 2. Гарнитура литературная. Печать
высокая. Усл. печ. л. 21,5. Усл, кр.-отт. 21,5. Уч -изд. л. 25,4. Тираж
28 600 экз. Заказ 918. Цена 1 р. 70 к.
Энергоатомиздат. 113114 Москва, М-П4, Шлюзовая наб., 10
Ленинградская типография № 2 головное предприятие ордена Трудо-
вого Красного Знамени Ленинградского объединения «Техническая
книга» им. Евгении Соколовой Союзполиграфпрома при Государ-»
ственном комитете СССР по делам издательств, полиграфии и книж-
ной торговли. 198052, г. Ленинград, Л-52, Измайловский проспект, 29.
ISBN 5-283-00508-9
© Энергоатомиздат, 1988
ПРЕДИСЛОВИЕ
Широкое внедрение комплексной механизации и автоматизации произ-
водственных процессов, неуклонное сокращение во всех отраслях численно-
сти работников, занятых ручным трудом, особенно на вспомогательных и
подсобных работах, являются одной из важных задач народного хозяйства.
Крановое оборудование при этом представляет собой одно из основных
средств сокращения тяжелого физического труда.
Подавляющее большинство грузоподъемных машин, изготовляемых оте-
чественной промышленностью, имеет электрический привод механизмов, и
поэтому эффективность действия и производительность этих машин в значи-
тельной степени зависят от качественных показателей используемого крано-
вого электрооборудования. Современный крановый электропривод за послед-
нее время претерпел существенное изменение в структуре и применяемых
системах управления.
Для наиболее массовых кранов общего назначения начинают широко
применяться электроприводы на основе короткозамкнутых двигателей, зна-
чительная часть кранов изготовляется с управлением с пола, а быстроходные
краны для тяжелых режимов работы комплектуются различными тиристор-
ными системами, обеспечивающими глубокое регулирование скорости, плав-
ность пуска и торможения при постоянно повышающихся требованиях к эко-
номии энергоресурсов.
Предлагаемый читателям справочник по крановому электроприводу до-
статочно полно освещает всю номенклатуру кранового электрооборудования,
изготовляемого предприятиями электротехнической промышленности, а также
странами-членами СЭВ (пульты управления), и позволяет правильно и на-
учно обоснованно увязать это электрооборудование в комплектные электро-
приводы крановых механизмов.
В справочнике приведены технические данные как вновь освоенных, так
и серийно изготовляемых электродвигателей, аппаратов и комплектных уст-
ройств, предназначенных для крановых электроприводов, при этом даны
конкретные рекомендации по использованию этого электрооборудования в
новых классификационных режимах кранов по ГОСТ 25546-82 и международ-
ным нормам ИСО 4301-80.
При отборе конкретных материалов для справочника авторы основное
внимание уделили наиболее массовым электроприводам, охватывающим по-
давляющее число грузоподъемных машин. Вместе с тем рассмотрены и слож-
ные специальные системы, но в несколько сокращенном виде. Большинство
предлагаемых в справочнике технических и конструктивных решений прошло
производственную проверку на заводах-изготовителях электрооборудования.
Авторы справочника, многие годы проработавшие в сфере создания кра-
новых электроприводов, достаточно широко осветили весь комплекс вопро-
сов современной техники этого направления и создали книгу, которая окажет
помощь специалистам различных отраслей промышленности в нахождении
оптимальных решений при конструировании новых подъемно-транспортных
машин и при модернизации имеющегося парка механизмов.
Главный конструктор крановой аппаратуры завода «Динамо» им. С. М. Кирова
В. И. ИВАНОВ
ОТ АВТОРОВ
Предлагаемый читателям справочник является результатом многолетнего
опыта, накопленного предприятиями краностроения и электротехнической
промышленности по созданию электроприводов разнообразных грузоподъем-
ных кранов, используемых во всех отраслях промышленности и на транспорте.
Справочник содержит информацию как по основным элементам крановых
электроприводов — электродвигателям, аппаратуре управления, резисторам,
различным выключателям, так и по комплектным электроприводам основных
механизмов кранов. В отличие от ранее издававшейся справочной литературы
по крановому электрооборудованию наибольшее внимание в данном спра-
вочнике уделено увязке параметров и характеристик кранового электрообо-
рудования с механизмами кранов, их эксплуатационными режимами и осо-
бенностями работы в составе грузоподъемных машин.
Большинство грузоподъемных кранов характеризуется постоянно меняю-
щимися условиями использования при переработке грузов, и поэтому меха-
низмы кранов, имеющие в своем составе электроприводы, должны быть
в максимальной степени приспособлены к постоянно видоизменяющейся ра-
боте с грузами, разнообразными по массе, размерам, форме, и в условиях
производственных помещений или на открытых грузовых площадках.
Чрезвычайно широкий диапазон изменения нагрузок практически любого
из крановых электроприводов является одним из главных факторов, тре-
бующих особого подхода к выбору расчетных параметров приводных элек-
тродвигателей, аппаратуры управления и защиты. Поскольку классические
методы определения среднеквадратичной нагрузки электродвигателей могут
быть применены лишь для малочисленной группы механизмов со стабильным
циклом работы, в справочнике приведены разработанные авторами и под-
твержденные многолетней практикой методы подбора электродвигателей и
аппаратуры, учитывающие все составляющие потерь в обмотках для широ-
кого диапазона изменения относительной продолжительности включения, сте-
пени загрузки и числа пусков за цикл. Этот способ, названный методом вы-
бора по эквивалентному КПД электропривода, в настоящее время принят
практически всеми предприятиями краностроения страны и утвержден в ка-
честве обязательного для предприятий тяжелого машиностроения.
В предлагаемом читателям справочнике приведены информационные дан-
ные по электрооборудованию, серийно изготовлявшемуся промышленностью
в 1987 г. или подготовленному к производству в 1988 г. Значительное вни-
мание уделено новым перспективным системам крановых электроприводов,
производство которых будет начато в 1988—1990 гг.
Работа между авторами была распределена следующим образом: раз-
делы 1—4 написаны А. Г. Яуре, разделы 5—10—Е. М. Певзнером.
Авторы выражают благодарность рецензенту главному конструктору
крановой аппаратуры завода «Динамо» им. С. М. Кирова В. II, Иванову
за ряд ценных советов и указаний, а также канд. техн, наук А. В. Шинян-
скому за большую работу по редактированию рукописи.
Все замечания и пожелания по содержанию книги следует направлять
по адресу: 113114, Москва, М-114, Шлюзовая наб, 10, Энергоатомиздат.
Авторы
РАЗДЕЛ 1
ОБЩИЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ГРУЗОПОДЪЕМНЫХ МАШИН
И ЭЛЕКТРООБОРУДОВАНИЯ
1.1. ОБЩИЕ СВЕДЕНИЯ О ГРУЗОПОДЪЕМНЫХ МАШИНАХ
Перемещение грузов в процессе хозяйственной деятельности осуществля-
ется с использованием гр'узоподъемных машин различного назначения.
Грузоподъемные машины по назначению объединяются в следующиз
группы:
1. Универсальные машины для подъема и перемещения груза с помощью
крюка на гибком подвесе (грузовом канате). К ним относятся различные
краны, краи-балки, лебедки, тали. Вариантом этой группы являются машины
со специальным грузозахватным органом на грузовом канате.
2. Различные грузоподъемные краны для перегрузки сыпучих грузов
с помощью грейфера.
3. Грузоподъемные машины для перемещения груза при помощи захвата,
перемещающегося по жестким направляющим. К ним относятся краны-шта-
белеры, технологические краны металлургии, штыревые краны цветной ме-
таллургии.
4. Специализированные краны для возведения зданий и сооружений.
К ним относятся строительные башенные краны, судосборочные краны и са-
моподъемные строительные краны.
5. Краны с несущими канатами (кабель-краны).
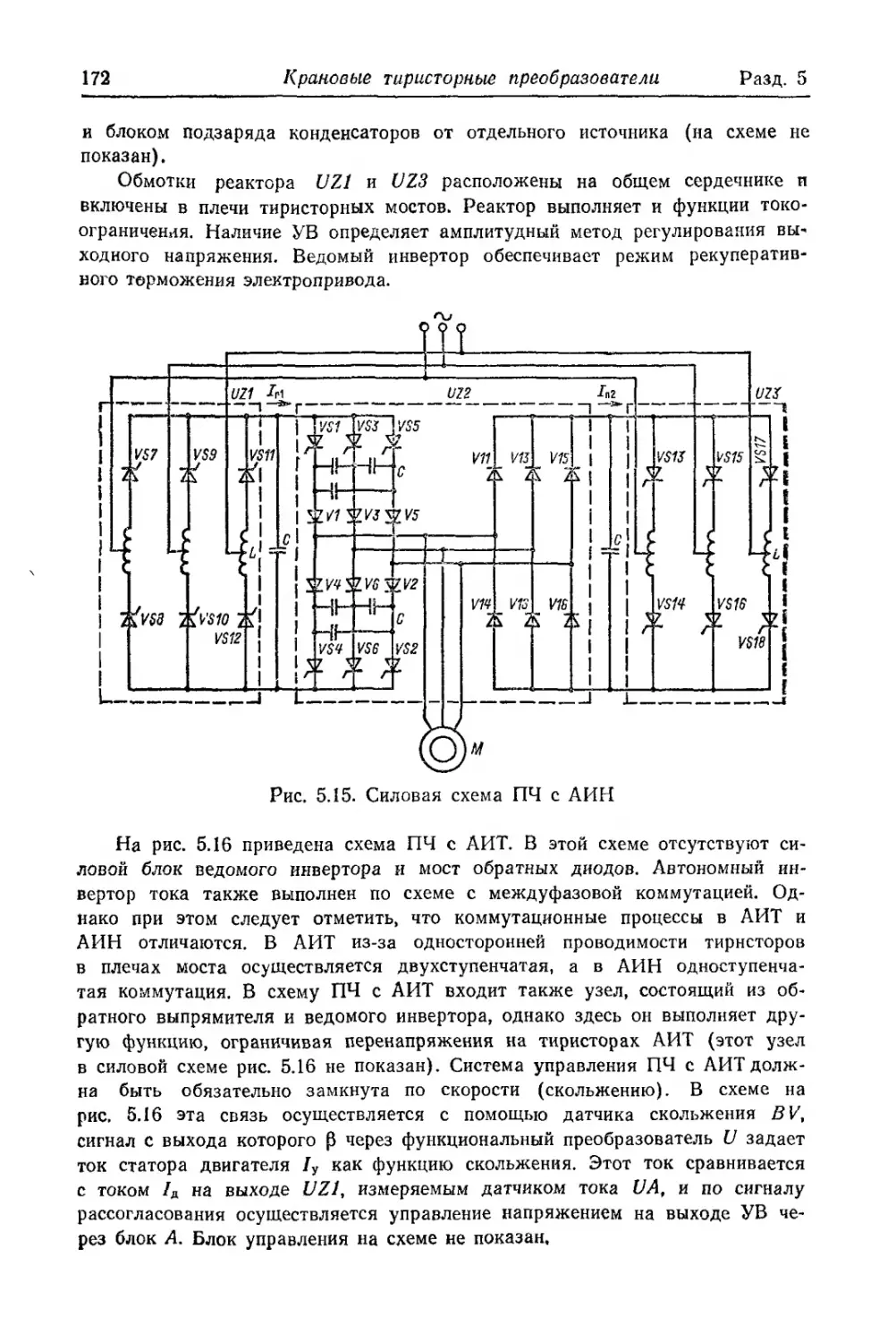
По условиям использования грузоподъемные машины объединяются
в следующие группы:
1. Машины универсального назначения, используемые для работы в по-
мещениях в одну-две смены в повторно-кратковременном режиме: кран-
балки, мостовые опорные и подвесные краны.
2. Машины универсального назначения, используемые для работы на от-
крытом воздухе в одну-две смены в повторно-кратковременном режиме:
козловые краны, портальные краны, поворотные стреловые краны, мостовые
Краны на эстакадах: грейферные и магнитно-грейферные крапы.
3. Машины для циклической перегрузки специализированных грузов
(контейнеров, пакетов, поддонов, связок лесоматериалов) в две-три смены
в повторно-кратковременном режиме: мостовые, козловые и портальные
краны.
4. Машины для выполнения технологических операций в металлургии,
термических и кузнечных цехах по вполне определенному комплексу пере-
грузочных работ круглосуточно в повторно-кратковременном режиме: маг-
нитные мостовые краны, литейные краны, ковочные крапы, стриппер-краны,
колодцевые краны и т. п.
5. Машины для выполнения разовых и эпизодических грузоподъемных
операций в помещениях и на открытом воздухе при кратковременном и
6
Технические характеристики грузоподъемных машин
Разд. 1
повторно-кратковременном режиме работы с общим годовым числом часов
работы до 500: козловые краны гидроэлектростанций, мостовые краны ма-
шинных залов, мостовые краны ремонтные, козловые и портальные краны
судосборки и т. п.
Грузоподъемные машины изготовляются для различных условий исполь-
зования по степени загрузки, времени работы, интенсивности ведения опе-
раций, степени ответственности грузоподъемных операций и климатических
факторов эксплуатации. Эти условия обеспечиваются основными парамет-
рами грузоподъемных машин.
Номинальная грузоподъемность Qhom, кг, — масса номинального груза на
крюке или грузозахватном приспособлении, поднимаемого грузоподъемной
машиной. Минимальная грузоподъемность машины определяется массой под-
нимаемой грузозахватной подвески qt кг. В процессе эксплуатации масса
поднимаемого груза может меняться от QH0M до 0.
Грузоподъемные машины характеризуются степенью загрузки. Прави-
лами устройства и безопасной эксплуатации грузоподъемных кранов, ут-
вержденных Госгортехнадзором СССР и в дальнейшем именуемых прави-
лами Госгортехнадзора, введено понятие коэффициента использования крана
по грузоподъемности
Лрр в Qcp/QhOm>
где QCp — среднее значение массы поднимаемого груза за смену, кг.
ГОСТ 25546-82 и 25835-83 установлен коэффициент нагружения кранов
(механизмов)
Cj
ст’
где — масса груза, перемещаемого краном с числом циклов С £ С? — число
циклов работы крана за срок его службы, == Сv
Масса перемещаемых конструкций кранов, крановых тележек 6, кг, рас-
пределяется на колеса опоры этих конструкций. Число приводных колес-опор
обозначается тк- Отношение числа приводных колес к общему числу колес-
опор обозначается а. В литературе этот коэффициент иногда называется
коэффициентом сцепной массы.
Режим работы грузоподъемной машины циклический. Цикл состоит из
перемещения груза по заданной траектории и возврата машины к исходному
положению для нового цикла. Число законченных циклов в час Сн входит
в понятие производительности крана. В цикле работы машины время вклю-
чения (работы) любого из его механизмов чередуется с временем пауз
/пауз этого механизма (пока включен другой механизм, происходит застро-
повка или расстроповка груза либо технологическая пауза). Максимальное
время законченного цикла работы машины (механизма) /Р + /Пауз, нормиро-
ванное ГОСТ 183-74, составляет 600 с. При продолжительности цикла более
600 с он условно разделяется на законченные составные части, например
движение в одном направлении и паузу после него общей продолжитель-
§ 1.1
Общие сведения о грузоподъемных машинах
ностью до 600 с. Условные циклограммы цикла работы грузоподъемной
машины (крана) приведены на рис. 1.1.
Краны могут иметь четко выраженный циклический режим работы, на«
пример перегрузочные краны штучных грузов, грейферные краны навалоч-
ных грузов, технологические краны металлургии, у которых повторяющиеся
циклы идентичны. Значительное число кранов универсального назначения не
имеет многократно повторяемых однотипных циклов. Краны машинострои-
тельных производств, монтажные краны и т. п., у которых циклы работы
$4 Операция с грузам Возврат к исходному
Время цикла.
Рис. 1.1, Типовая циклограмма работы мостового или козлового крана:
1 — обтягивание троса; 2 — подъем груза и крюка; 3 —спуск груза и крюка; 4 —
посадка груза и крюка; 5 — гашение раскачки; 6 •— горизонтальное движение; 7— на-
ведение крана в заданные координаты
постоянно меняются как по продолжительности, так и по составу последо-
вательно используемых механизмов, относятся к машинам с условно цикли-
ческой работой. Механизмы кранов характеризуются относительной продол-
жительностью включения, когда время включения и время пауз регулярно
чередуется. Относительная продолжительность включения е выражается от-
ношением времени включения механизма к общему времени цикла или в виде
отношения времени включения за определенный промежуток времени к вре-
мени этого промежутка.
Для кранов с четко выраженной цикличностью расчетная относительная
продолжительность включения механизма может быть выражена как в долях
единицы, так и в процентах
% = 1 - ^Лауз/3600-’
ПВ = (1 - Ся/пауз/3600) . 100.
(1.1)
8
Технические характеристики грузоподъемных машин
Разд. I
Для кранов с условно циклическим режимом работы расчетная относи-
тельная продолжительность включения, %,
Ср—2УПйуз)» 0*2)
где У* / — суммарное время включения механизма при нормированном про-
межутке времени 600 с; /пауз — суммарное время пауз при нормирован-
ном промежутке времени 600 с; + X ^пауз “ 600 с*
Расчетная средняя производительность кранов, т/ч, с четко выраженной
цикличностью представляет собой объем грузов, переработанных за 1 ч,
Q - КгрСнРнОмД Q00.
(1.3)
В свою очередь число циклов в час грузоподъемной машины определя-
йся из зависимости между траекторией движения груза, средней скорости
перемещения груза по траектории, наиболее вероятного совмещения опера-
ций, времени технологических пауз, времени точной установки груза, времени
разгона и торможения каждого из механизмов и числа включений в час
3600
3,5// — 0,02jV
Vn
83 — 0,1 TV f 20 — 0,05#
(1-4)
где H — расчетная высота подъема, м; — скорость подъема, м/с; vM —
скорость передвижения моста или линейная скорость поворота груза на под-
весе, м/с; ит — скорость передвижения тележки или скорость груза при из-
менении вылета стрелы, м/с; N — среднесменное число включений в час ме-
ханизма (см. табл. 1.1); ^всп вспомогательное время,
здесь /п — сумма времен пусков всех механизмов за цикл, с; У^ /т —
сумма времен торможений всех механизмов за цикл, с; У2 fper — сумма вре-
мен движения с малой скоростью за цикл всех механизмов, с,
У /всп принимает следующие значения:
Группа режимов по ГОСТ 25546-82 . . . ЗК 5К 7К 8К
У /всп, с........................................ 100 70 50 35
Для канатных систем подвеса грузов максимальное число циклов пере-
грузок в 1 ч не превышает 60, минимальное число циклов может составлять 6
по условиям наибольшей продолжительности цикла 600 с по ГОСТ 183-74.
В каждом цикле работы крана, как фактическом, так и условном, механизмы
имеют некоторое число включений для разгона, движения с желаемой ско-
ростью и торможения перед остановкой. При включении механизма может
происходить разгон как до номинальной скорости, так и до промежуточ-
ной — регулировочной — скорости. В среднем за цикл каждый механизм
имеет кроме обязательных включений с пуском до номинальной скорости
еще некоторое количество включений для точной установки груза, обтягива-
Технические характеристики грузоподъемных машин
9
ния грузового каната, гашения раскачки груза и т. п. (рис. 1.1). Число вклю-
чений механизмов за цикл составляет от 6 до 12, Среднее число включений
за цикл может быть принято равным 9. Можно также принять, что допол
нительные включения производятся до скорости 0,3 или 0,15 номинальной
причем числа включений до указанных скоростей равны между собой. При
ведение общего числа включений к числу пусков до номинальной скорости
производится по формуле
^вкл
2Z^(Z„Z]) 2
П7 [/^НОМ*
1 уп1*/ ~~ v Чп2*) J’
(1.5)
где Z — общее число включений за цикл; Zi — минимально необходимое чи-
сло пусков до номинальной скорости за цикл; пнош — относительное значе-
ние номинальной скорости механизма, принимается равным 1; уц1!^ —
относительные значения промежуточной скорости разгона при дополнитель-
ных включениях, принимаются равными 0,3 и 0,15.
Если в (1.5) подставить значения Z = 6 — 12 и Zi = 2 4, то значение
/гВК1 будет находиться в пределах 0,55 — 0,65, в общем случае /гнКл —0,6.
Расчетное число пусков в 1 ч до конечной (номинальной) скорости
ZC„^QfiZCf/
р вкл /1 ’ п’
(1-6)
Среднесменное число включений в 1 ч N = ZC}1 нормировано для кранов
различных режимных групп и является исходным показателем для расчетов
нагрузки крановых электроприводов.
Номинальной скоростью механизма цНОм, м/с, принято считать устано*
вившуюся наибольшую скорость при номинальной нагрузке и расчетных по-
стоянно противодействующих усилиях, приложенных к крапу (механизму).
Расчетное ускорение (замедление) цР, м/с2, обеспечивает разгон груза
(механизма) от неподвижного состояния до номинальной скорости
пр = у//п,
(17)
где /п — время пуска с неподвижного состояния до номинальной (конечной)
скорости движения.
1.2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГРУЗОПОДЪЕМНЫХ МАШИН
Основные параметры. Номинальная грузоподъемность кранов и других
подъемных машин регламентирована ГОСТ 1575-81 и представляет собой
ряд: 0,2; 0,25; 0,32; 0,4; 0,5; 0,63, 0,8; 1; 1,25; 1,6; 2; 2,5; 3,2; 4; 5; 6,3; 8;
10; 12,5; 1С; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160; 200; 250; 320; 400;
500; 630; 800; 1000; 1250; 1600 т.
У специализированных кранов средние массы поднимаемых грузов близ-
ки к номинальной грузоподъемности. У универсальных крюковых кранов
средние массы перемещаемых грузов составляют 30—50 % номинальной гру-
зоподъемности, а из всех подъемов грузы, близкие к номинальному, подни-
маются не чаще каждого десятого подъема.
10
Технические характеристики грузоподъемных машин
Разд. 1
Грузоподъемность, т, некоторых подъемных машин лежит в следующих
диапазонах:
Электрические тали , ..................... . . . 0,2—5
Краны:
мостовые....................................... 1 — 1000
специальные мостовые ..................... До 320
подвесные . , . ............ 1—25
козловые................................. 3,2—32
монтажные козловые . . ...................... До 500
перегрузочные портальные ..................... 5—32
монтажные портальные...................... . До 160
самоходные . . . ............... 3,2—250
плавучие . .................................. 5—300
специальные плавучие..........................До 2500
Перегружатели.................................. 16—40
Номинальные скорости движения рабочих органов грузоподъемных ма-
шин регламентированы стандартами на различные типы кранов, талей, кран-
балок и других грузоподъемных машин.
Скоростные параметры определяют производительность механизмов, их
энергоемкость и технологические условия работы. Для мостовых и козловых
кранов общего назначения практикой выработаны следующие скоростные
параметры, значения которых приведены в таблице.
Т а б л и ц а
Скорость, м/с
Наименование передви- передвижения
подъема жения
крана тележки
Краны, управляемые с пола, режимных 0,1-0,15 0,6—0,8 0,35-0,5
групп ЗК — 5К, а также краны, управ- ляемые из кабины, режимной группы ЗК 0,1-0,2 0,8-1 0,5-0,6
Мостовые и козловые краны режимных
групп 4К“5К, управляемые из кабины Мостовые краны режимных групп 6К— 7К, 0,3-0,4 1,2-1,5 До 0,7
управляемые из кабины Взрывобезопасные краны режимных групп 0,05—0,06 0,5—0,8 0,15-0,2
2К —ЗК Кран-балки, электротали режимных групп 0,1—0,15 До 0,8 До 0,2
до ЗК Магнитные и грейферные мостовые краны 0,5-0,7 До 2 0,8-1,2
режимных групп 7К — ЗК Рудно-угольные перегружатели 0,6—0,8 До 1 До 3
Портальные перегрузочные крюковые и 1-1,2 0,5 1,5 * об/мин
грейферные краны Грейферно-бункерные перегружатели 1,2-1,4 0,15—0,18 0,5 1,3-2
Козловые контейнерные перегружатели 1 —1,3 0,7—0,8
железнодорожные Штабелеры 0,15-0,2 1,2-1,5 0,2 **
* Скорость поворота.
** Скорость выдвижения захвата.
§ 1.2 Технические характеристики грузоподъемных машин 11
Указанные скорости установлены в- результате многолетней практики
использования грузоподъемных механизмов, причем повышение скорости
сверх указанных значений практически не приводит к увеличению произво*
дительности, если при этом принципиально не меняются технологические
приемы транспортировки грузов, например литейные краны традиционных
способов сталелитейного производства имеют скорость подъема 0,05 м/с, и
ее повышение не сказывается на процессе заливки изложниц. Применение
нового технологического процесса непрерывной разливки стали продиктовало
необходимость увеличения скорости в 3 раза — до 0,15 м/с, которая для
такого процесса является необходимой и оптимальной.
Для высокопроизводительных быстроходных кранов рекомендуемые ско-
рости установлены исходя из условий минимума затрат энергии на часовую
производительность крана данной грузоподъемности. И в этом случае повы-
шение скорости сверх рекомендуемой будет сопровождаться непропорцио-
нально большими и, следовательно, неоптимальными затратами энергии,
В некоторых случаях значение скорости ограничивается возможностями че-
ловека управлять процессом перегрузки (для кранов, управляемых с пола)*
Классификация. Режимы работы грузоподъемных кранов всех типов и
назначении (кроме судовых) установлены ГОСТ 25546-82. Этот стандарт
соответствует международному стандарту ИС04301-80. Основой классифи*
кации кранов являются параметры циклов работы кранов за срок службы
и степень усредненного нагружения крана, выраженная коэффициентом /Ср.
Все многообразие грузоподъемных кранов охвачено восемью режимными
группами 1К — 8К. Отнесение крана к той или иной режимной группе осу*
ществляется иа стадии проектирования и в дальнейшем указывается в его
паспортных данных. В свою очередь каждый рабочий механизм крана со-
гласно ГОСТ 25835-83 и СТ СЭВ 2077-80 классифицируется по группам
режимов работы. Классификация механизмов по группам режимов работы
осуществляется по параметрам суммарного времени работы механизмов за
срок службы и степени усредненного нагружения крана.
Однако принятыми ГОСТ 25546-82 и 25835-83, а также ИСО 4301-80
параметрами классификации кранов ие учитываются некоторые основные
условия выбора электрооборудования — относительная продолжительность
включения и число включений в час крановых механизмов.
Европейской классификацией режимов FEM 9.681 и 9.682 установлены
группы режимов, близкие как к международным условиям классификации,
так и к нормам правил Госгортехнадзора. В табл. 1.1 даны классификацией*
ные параметры, принятые для расчетов, и сравнительные классификацион-
ные обозначения FEM. В табл. 1.2 приведены данные по среднесуточному
времени работы механизмов кранов.
В соответствии с ГОСТ 25546-82 и 25835-83 установлены класифика*
ционные режимные группы кранов различного назначения и режимные
группы их механизмов. В табл. 1.3 приведено рекомендуемое отнесение кра-
нов и механизмов к соответствующим группам режимов работы.
Большинство крановых механизмов, имеющих рабочие скорости в пре-
делах значений, указанных выше, по характеру использования должны иметь
12
Технические характеристики грузоподъемных машин
Разд I
Таблица 1.1. Классификация механизмов и электрооборудования
Расчетные параметры механизмов крана,' принимаемые при конструировании и расчетах Классификация режима работы электрооборудования по правилам Госгортехнадзора Классификация по Европейским нормам FEM 9.681 и 9 682
1 Группа режимов < работы механиз- ма по ГОСТ 25835-83 пв, % Нормированное среднесменное число включений в час N Расчетное время работы в год не более, ч Ина енеивноегь использования, число включений за время 603 с наиболее интен- сивного исполь- зования Режим работы механизма или электрообору- дования Коэффициент использования крана по грузо- подъемности кгр пв, % Число включений в час, среднее за смену Группы режимов механизмов Максимальное число включений в час
1М 15 60 250 50 Л 0,25-1 15 60 IDm 60
2М 15 60 250 50 [Cm 90
зм 25 90 500 60 ^2 0,75 25 40 120 \Bm 120
4М 40 120 1000 80 lAm 150
2m 180
5М 40 240 2500 100 Т 0,7б— 1 40 240 3in 240
4m 300
6М 60 Свыше 360 4000 120 ВТ 1,0 60 300-600 5 m Свыше 360
Таблица 1.2. Режимы эксплуатации кранов
Группа режима
работы
по ГОСТ 25835-83
Коэффициент
сменности
работы крана
Среднесуточное
время работы
(включения)
механизма, ч
Время включения на малых,
установочных скоростях
или толчковых включении.
% среднесуточного времени
вклю ен ! 1
1М
2М
зм
4М
5М
6М
До 1
1-2
2-3
3—4
4-10
10-15
60
50
85
25
12
у
малые установочные и посадочные скорости для обеспечения остановки в за-
данных координатах с необходимой точностью, безопасной посадки грузов
или грузозахватных органов либо для снижения нагрузки на механические
тормоза в целях обеспечения необходимого уровня их износостойкости. Точ-
ность установки крана или тележки в заданных координатах зависит прежде
всего от скорости начала торможения, а также от разброса времени сраба-
Технические характеристики грузоподъемных машин
13
Таблица 13. Рекомендуемые группы режимов работы кранов и механизмов
Наименование кранов Группа режима работы крана Назначение кранов Группы режима работы механизма
главного подъема вспомога тельного подъема передни.<е ния моста передвиже ния тележки поворота 1 изменения 1 вылета •
Мостовые и коз- 1К Ремонтные 2М 2М 2x4 —
ловые с привод- ными подвесны- ми талями 2К Перегрузочные огра- ниченной интенсивно- сти, общего назначе- ния, вспомогательные в механических цехах ЗМ 1^» ЗМ ЗМ -
— зк Перегрузочные сред- ней интенсивности, ос- новные механических цехов с ограниченной интенсивностью 4М ЗМ ЗМ
Мостовые и коз- ловые с лебе- дочными грузо- выми тележка- 2К Монтажные для рабо- ты на строительных площадках и в ма- шинных залах 1М 1М 2М 2М — —*
ми, крюковые и с захватами зк Перегрузочные работы ограниченной интен- сивности (редкого ис- пользования) ЗМ ЗМ ЗМ ЗМ — -_«*
Мостовые и коз- вые с лебедоч- ными грузовыми тележками, крю- ковые и с за- хватами 5К Для работы в цехах и на складах промыш- ленных предприятий при средней интенсив- ности; на лесных скла- дах строительных ма- териалов 4М 4М 4М 4М •—
7К Для промышленных предприятий при круг- лосуточной работе; ли- тейные цехи; для пе- регрузки лесоматериа- лов 5М 4М 4М 5М —4
Мостовые с грей- ферами двухка- натного типа, магнитно-грей- ферные 6К Смешанные склады, работа с разнообраз- ными грузами, преиму- щественно сезонное ис- пользование 5М —• 5М 5М — ||
7К Склады насыпных гру- зов и металлолома, не- круглосуточная работа 5М 5М 5М
14
Технические характеристики грузоподъемных машин
Разд. 1
Продолжение табл, 1 3
» — Наименование кранов Группа режима работы крана Назначение кранов Группы режима работы механизма
главного подъема вспомога- тельного подъема передвиже- ния моста передвиже- ния тележки поворота изменения , вылета
Грейферные пере- 8К Склады насыпных гр у- 6М 6М 4М
Гружатели зов
Мостовые с грей- 8К Цехи и склады метал- 6М 4М 6М 6М 1—1
ферами двухка- лургических предприя-
натного типа, магнитно-грей- тий; крупные метал- лобазы, круглосуточ-
ферные ная работа
Металлургические:
траверсный 8К Основные цехи метал- лургических предприя- тий 5М 1 5М 6М 5М
то же с авто- матическим гру- зозахватом 6М 6М 6М 5М 1 |И1
с лапами 6М — 6М 6М 6М —"*
мульдомагнит- 6М — 6М 6М 4М —
ный кран мульдогрей- 6М 6М 6М
ф ер ный мульдозава- 6М —— 6М 6М 6М —*
лочный посадочный 6М 6М 6М 6М
для раздевания слитков 6М 5М 6М 6М 5М
колодцев ый 6М 5М 6М 6М 5М 1 <
шихтовый 6М 6М 5М 5М
копровый 6М 6М 6М — ——
штыревой 7К Цехи металлургиче- 6М 5М 5М 5М ——1
ковочный ских и машинострои- 5М 5М 5М 5М —
закалочный тельных предприятий 5М 5М 5М 6М — —
литейный 5М 5М 5М 5М — 1 *
Козловые контей- 5К Железнодорожные 4М - 4М зм 4М
нерные 6К станции, склады про- мышленных предприя- тий, перегрузка раз- ных грузов, в том чи- сле контейнеров Перегрузка только контейнеров 5М — 5М 4М 4М ——*“
Технические характеристики грузоподъемных машин
15
Продолжение табл. 1,3
Наименование кранов Группа режима работы крана Назначение кранов Группы режима работы механизма
- — . главного подъема вспомога- тельного подъема передвиже- ния моста передвиже- ния Тележки поворота изменения вылета
Штабелеры: управляемые из кабины и авто- матического действия управляемые с пола 6К 5К зк Склады автоматизиро- ванные 1о же Монтаж промышлен- ных зданий и соору- жений 5М 4М ЗМ ЗМ 5М 4М зм 5М 4М ЗМ 4М ЗМ ЗМ ЗМ
Башенные строи- тельные всех ти- пов и назначе- ний 4К 7К Домостроительные комбинаты; склады строительных деталей Строительство гидро- технических сооруже- ний 4М 5М ЗМ ЗМ ЗМ 4М ЗМ зм ЗМ 4М зм зм
Стреловые само- ходные 2К зк Монтаж промышлен- ного и энергетического оборудования Погрузочные и мон- тажно-строительные ра- боты 2М ЗМ 2М ЗМ —— — 2М ЗМ 2М ЗМ
Портальные крю- ковые перегру- зочные 6К Транспортные и склад- ские объекты 5М 4М м II* 4М 5М 5М
Портальные грей- ферные 7К 8К Склады и порты при сезонной работе Склады и порты при круглосменной кругло- годичной работе 5М 6М —— —* ЗМ 4М 4М 5М 4М 5М
Портальные мон- тажные зк Судостроение ЗМ 4М ЗМ 4М 4М
Портальные лесо- погрузчики с мо- торным грейфе- ром 6К Крупные лесные скла- ды 5М —— 5М 4М 5М 4М
16
Технические характеристики грузоподъемных машин
Разд I
Продолжение табл. 1.3
Наименование кранов Группа режима работы крана Назначение кранов Группы режима работы механизма
главного подъема вспомога- тельного подъема передвиже- ния моста гередвиже- 1ия тележки шворота [зменения , вылета
Краны с несущи- 1
ми канатами
(кабель-краны): крюковые мон- 2К Для обслуживания ЗМ — ЗМ ЗМ —•
тажпыс больших площадей
крюковые пе- регрузочные 5 К То же 4М — 4М ЗМ —
грейферные 7 К » » 6М 1 5М ЗМ —
Консольные перс- 4К Общего назначения 4М ЗМ — ЗМ *
движные 6К Литейные цехи 5М 4М 4М ЗМ —•
Настенные кон- ЗК Общего назначения ЗМ — ЗМ — ЗМ
сольные
Плавучие:
монтажные ЗК Монтажные работы ЗМ 4А4 ЗМ —— 4М ЗМ
грейферные 5К Для перегрузки сыпу- чих грузов 5М 4М 4М 4М
тывания коммутационных аппаратов и тормозов. Поскольку проектировщик
крана не может влиять на факторы разброса времени срабатывания элемен-
Рис. 1.2, Зависимость диапазона регу-
лирования от точности остановки меха-
низма крана
тов механизма, то единственным
фактором достижения неб ходи-
мой точности является выбор ско«
рости начала торможения, т. е. ма-
лой скорости движения.
Точность остановки характе-
ризуется наибольшим возможным
отклонением v. от заданной коор-
динаты. На рис. 1.2 для ряда
значений номинальной скорости
приведены зависимости необходи-
мого диапазона снижения скоро-
сти перед остановкой Dp от задан-
ных значений v. При задан-
ной точности остановки и извест-
ной номинальной скорости движения можно найти требуемый диапазон ре-
гулирования скорости Dp и избежать излишних дополнительных доводочных
включений механизмов.
§ L2
Технические характеристики грузоподъемных машин
17
Посадочные скорости механизмов подъема кранов выработаны на основе
многолетней практики эксплуатации и за последнее десятилетие практически
не претерпели изменений. В табл. 1.4 приведены рекомендуемые значения
посадочных и доводочных скоростей механизмов кранов различного казна*
чения.
Промежуточные скорости механизмов должны быть существенно отли*
чимы от номинальных скоростей и скоростей установки. Оператор средней
квалификации уверенно различает изменение скорости движения в 2 раза
против установившегося значения, поэтому значения промежуточных скоро-
стей следует выбирать из ряда
„ _ „ гя-1
где С — коэффициент; Н — порядковый номер фиксированного положения из
ряда чисел 1,2, 3 ...
Параметры ресурса механизмов кранов устанавливают следующим об-
разом: по табл. 1.3 для кранов заданной режимной группы определяют ре-
жимную группу механизма; для этой режимной группы механизма по
табл. 1.1 находят расчетное время работы в год и нормированное средне-
сменное число включений в час 7V. Для механизмов режимных групп 1М—ЗМ
установлен календарный срок службы до капитального ремонта 22 года.
Для механизмов режимных групп 4М, 5М календарный срок службы до
капитального ремонта составляет 11 лет. Для механизмов режимной груп-
пы 6М календарный срок службы до капитального ремонта обычно прини-
мается 7 лет. При этом ресурс механизмов по числу включений следующий?
Режимная группа
Число включений
1М-ЗМ............... . 1 . 10е
4М.................... 1,3-106
5М.................... 6,3-10б
6М.................... 10 • 10е
Время работы, КРч
11
11
27,5
27,5
Этим условиям должно отвечать электрооборудование механизмов до
списания (капитального ремонта).
Любой современный грузоподъемный кран в соответствии с требова-
ниями безопасности может иметь для каждого рабочего движения в трех
плоскостях следующие самостоятельные механизмы: механизм подъема-
опускания груза, механизм передвижения краиа в горизонтальной плоскости
и механизмы обслуживания зоны работы крана (передвижение тележки, по-
ворот тележки или всего крана, механизм изменения вылета для стреловых
Кранов, механизм поворота крюка или захвата, а для специальных кранов
Механизмы клещей, различных подхватов и т. п.).
В свою очередь механизмы подъема могут быть с одной или двумя ле-
бедками. Краны грузоподъемностью выше 10 т снабжают механизмами
вспомогательного подъема грузоподъемностью 1/4—1/5 основной грузоподъ-
емности. Механизмы передвижения имеют раздельный привод хода. Типич-
ная кинематическая схема механизма приведена на рис. 1.3. Кинематические
схемы механизмов передвижения и поворота приведены на рис. 1.4 и 1.5.
18
Технические характеристики грузоподъемных машин
Разд. I
Таблица 1.4. Расчетные ускорения и минимальные скорости
Расчетные
Л Минимальная скорость, ускорения
я» о о м/с. ар, м/с2,
Наименование кранов а режим ы крана и <и л fcf о е rt 2 к к Ж СЗ ниже' >ана, по- (груза) виже- !лежки, ения ВЫ" :трелы о Srf КЗ л S Ж f- X я о Л О. Q. виже-
с S о О S ? н к |=С X с Kf (3
г* V п, г-Г И 2 >> >. О. OI О. 9-и 2 н СХК О о. и
u, Н ё и — Я И IX ГО <3> с К S С жЗ Е И
Мостовые и козловые с 1К-2К 1—5 »" 0,04 0,25 0,25 0,15 0,1
подвесными талями
Мостовые и козловые ЗК-5К 5—16 0,05 0,25 0,2 0,25 0,2
с лебедочными те-
лежками
Мостовые с лебедочны- ЗК-5К 20—100 0,1 0,05 0,08 0,08 0,3 0,3
ми тележками 7К 10-50 — 0,1 0,15 0,1 0,3 0,3
Мостовые грейферные и 6К-7К 16—32 —- 0,15 0,25 0,2 0,4 0,4
магнитно-грейферные 8К 16—32 0,2 0,4 0,25 0,4 0,4 0,5
Мостовые специальные ЗК-4К 10-32 0,03 0,02 0,1 0,05 0,25 0,2
Закалочные 7К 10-40 * 0,07 0,25 0,2 0,3 0,3
Ковочные 7К 10-32 0,1 0,1 0,15 0,1 0,3 0,4
Литейные 7К 100—500 0,04 0,03 0,15 0,1 0,2 0,2
Козловые контейнерные 5К-6К 6-32 0,1 0,06 0,15 0,1 0,25 0,25
Штабелеры 5К-6К 2—12,5 0,05 0,1 0,1 0,3 0,3
Взрывобезопасные мо- ЗК-4К 5—50 — 0,05 0,4 0,2 0,15 од
стовые
Взрывобезопасные мо- ЗК 5—16 0,02 0,02 0,1 0,1 0,15 0,1
стовые специальные
Башенные строительные ЗК-4К 5—25 0,1 0,07 0,2 0,1 0,15 0,2
Портальные крюковые 6К 5—32 0,3 0,15 0,2 0,1 0,3 0,3
перегрузочные
Портальные грейфер- 6К-8К 8—16 — 0,2 0,3 0,2 0,4 0,4
ные
Портальные монтажные ЗК 5-100 0,05 0,03 0,1 0,08 0,25 0,2
Козловые судосбороч- ЗК 50—150 0,02 0,01 0,1 0,05 0,25 0,3
ные
Металлургические спе- 8К 10-50 0,15 0,1 0,2 0,1 0,5 0,5
циальные
Козловые лесопогруз- БК 8—32 0,06 0,04 0,2 0,1 0,25 0,23
чики
Мостовые для обслужи- 5К 100—400 0,03 0,02 0,05 0,03 0,25 0,25
вания реакторных за-
лов АЭС
Примечание. Значения расчетных ускорений указаны для наиболее применяемых
способов управления.
Технические характеристики грузоподъемных машин
19
Полиспастные системы механизмов подъема кранов общего назначения
имеют передаточные числа нп = 3; 4. При грузоподъемности кранов свыше
50 т передаточные числа полиспастов могут быть 6; 8. Диаметры ходовых
колес тележек выбирают из ряда 200, 250, 320, 400 мм; диаметры ходовых
Рис. L3. Кинематическая схе-
ма механизма подъема крюко-
вого крана.
1 — двигатель; 2— муфта; 3 — тор-
моз, 4 — редуктор; 5 — барабан;
Б — полиспаст; 7 — неподвижный
блок полиспаста
колес кранов DK — из ряда 320, 400, 560, 630, 710, 800 мм; диаметры гру-
зовых барабанов — из ряда 260, 335, 410, 510, 630, 750, 900, 1160, 1200,
1450 мм. Двухступенчатые редукторы могут иметь передаточные числа от
Рис. 1.4. Кинематическая схема
механизма передвижения:
$ — тормоз; 2 — двигатель; 3 — муфта;
4 — редуктор; 5 — ходовое колесо
Рис. 1.5. Кинематическая схема ме-
ханизма поворота крана:
/ — тормоз; 2 — двигатель; 3 — фрикцион-
ная муфта; 4 — редуктор; 5 — зубчатое
колесо опорно-поворотной части крана
8,32 до 50,94. Трехступенчатые редукторы могут иметь передаточные числа
от 16 до 125. Основные данные некоторых редукторов крановых механизмов
приведены в табл. 1.5.
Передаточное число редуктора можно выбрать, пользуясь формулой
пр — я£>пдв/(6(Ьип), (1.8)
где D — диаметр барабана с грузовым канатом для лебедок подъема или
диаметр ходового колеса, м; частота вращения вала электродвигателя,
20
Технические характеристики грузоподъемных машин
Разд. 1
Т а б лиц а 1.5. Технические данные редукторов Ц2 и ГК
Тип Частота вращения выходного вала, об/мин Максимальная мощность, кВт, на быстроходном валу для механизмов группы 4М при передаточном числе Масса,
редуктора 50,94 41,34 32,42 24,9 19,88 16,3 12,41 9,8 8,32 кг
Ц2-250 600 750 1000 1500 3,9 4,2 6 8,5 С£> -О СП 00 оэ ю 5,2 7,6 9,2 12 7 9,4 12 16 9,4 11 14 19 П 13 17 24 15 17 20 25 17 20 24 30 19 23 27,1 34 85
Ц2-300 600 750 1000 1500 5,6 7,4 10 12 6,8 8,3 12 14 8,3 10 15 19 13 16 18 21 15 18 21 26 18 22 25 31 25 29 31 40 29 36 40 43 34 40 44 55 136
Ц2-350 600 750 1000 1500 9,4 11 14 20 10 13 17 24 12 17 22 30 17 22 27 30 22 26 33 44 27 32 37 51 31 43 51 70 37 52 61 85 46 61 72 97 204
Ц2-400 600 750 1000 1500 16 20 24 31 20 26 30 37 25 29 34 37 36 39 44 49 44 46 49 64 48 54 54 81 48 54 54 81 55 59 68 91 63 63 73 102 317
Ц2-500 600 750 1000 1500 32 37 49 63 34 42 58 82 43 52 69 83 63 75 91 116 75 89 104 147 82 103 122 174 113 112 143 189 120 140 178 217 137 163 197 248 505
ГК 800 600 — 83 — — •— 2570
ГК 1000 600 80 100 — 168 1 I 256 *— —- 3550
соединяемого с редуктором, об/мин; о — скорость линейного перемеще-
ния, м/с.
Передаточное число редуктора механизма поворота определяется по
формуле
^р, в —
^дв/(^кри оп, у),
(1.9)
где гсКр — частота поворота крана, об/мин; ноп, у — передаточное число опор-
но-поворотного устройства. В соответствии с данными табл. 1.5 подбирается
передаточное число, ближайшее к найденному по (1.8) и (1.9).
Редукторы и блоки механизмов крана имеют переменные й постоянные
потери на трение и перемешивание смазки. Полные потери в передачах
определяются по значению КПД редуктора цном в номинальном режиме. При
этом доля постоянной составляющей потерь, не зависящих от нагрузки, со-
ставляет 40—50 % общих потерь в передачах. Момент на валу приводного
§ 1.3
Статика и динамика механизмов
21
двигателя в зависимости от степени загрузки механизма определяется по
формулам:
подъем груза и перемещение против ветра
М Q (Кп, П + 'Ином) + (1 Л ном)
Мном QНОМ 1 ^Сп, п
(1.10)
спуск груза и перемещение по ветру
М Q (2 + Кп, пЛяом)-(1 4“ Лном)
"Л4 = (2 Л ном 1) i t к
Л1ном Уном Ч-Лп.п
(1.Н)
где /(П1 п — коэффициент, определяющий долю постоянных потерь в меха-
низме при номинальной нагрузке. Значения т]ном и Кп, п Для различных типов
механических передач приведены в табл. 1.6.
Таблица 1.6. Значения i)HOM и коэффициентов постоянных потерь
в передачах для различных механизмов кранов
Узел передачи Механизмы с канатными барабанами Механизмы передвижения тележки, моста Механизм поворота
^ном ^П, п ^ном «п, п ^ном п
Блок канатной передачи 0,98—0,99 1
Канатоукладчик 0,98 1 — — — •—
Двухступенчатый редуктор 0,86 0,9 0,88 0,9 0,86 0,9
Двухступенчатый редуктор и 0,78-0,82 0,9 0,8-0,82 0,9 0,8—0,82 0,9
открытая передача Трехступенчатый редуктор 0,8-0,84 0,9 0,78—0,84 0,9 0,82—0,85 0,9
Червячная передача несамо- 0,7 0,85 0,65—0,7 0,85 0,65 0,85
тормозящаяся Самотормозящаяся 0,35—0,48 0,6 0,42—0,48 0,5 0,35-0,48 0,5
1.3. СТАТИКА И ДИНАМИКА МЕХАНИЗМОВ КРАНОВ
Нагрузки механизмов кранов изменяются как по абсолютному значению
от номинальных до холостого хода, так и по направлению в режимах тяги
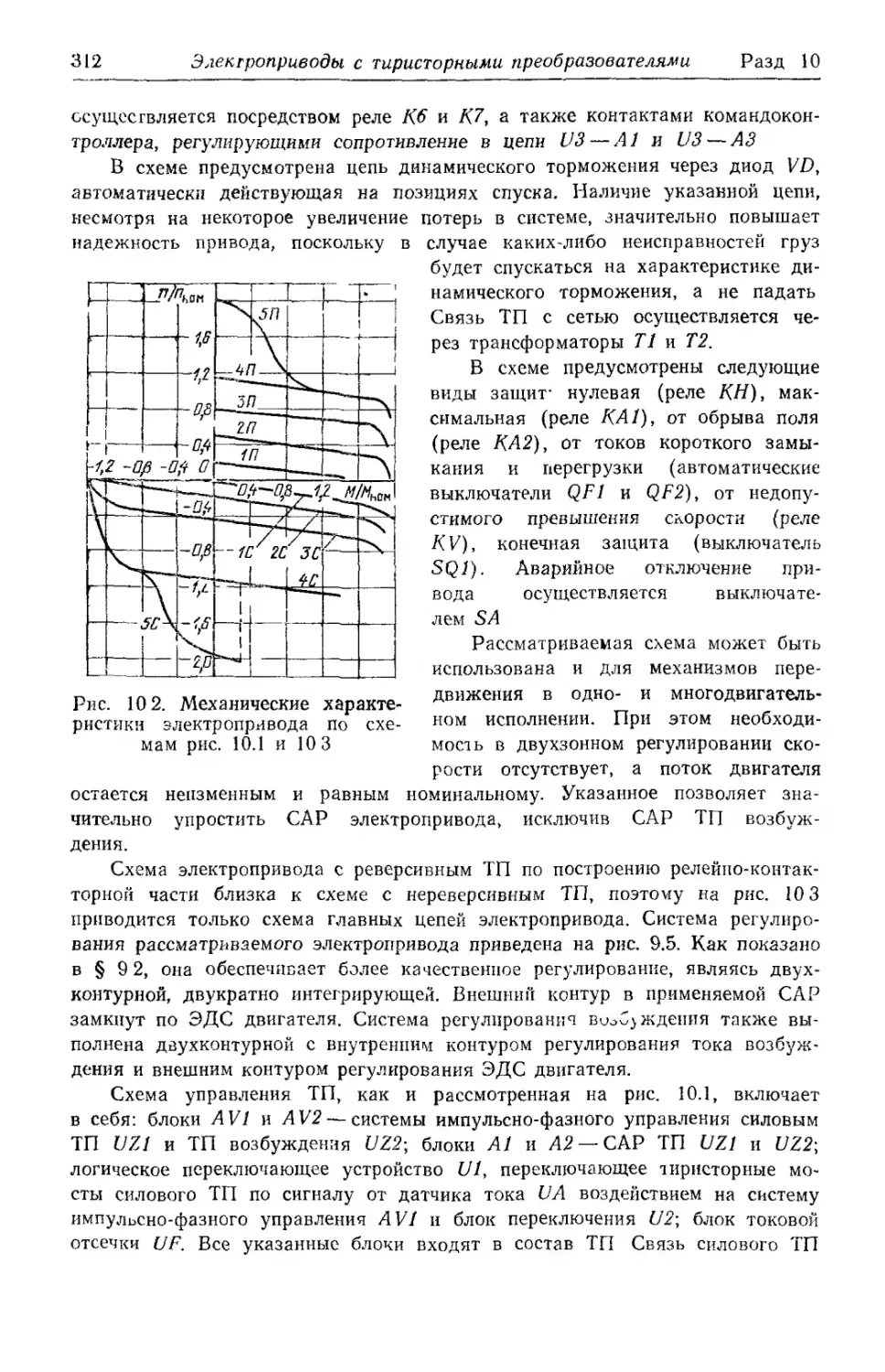
(подъема) и торможения (спуска). На рис. 1.6 представлены области изме-
нения нагрузок крановых механизмов. Заштрихованные области соответ-
ствуют статическим нагрузкам при установившемся движении; незаштрихо-
ванные области, ограниченные штрихпунктирными линиями, соответствуют
действию нагрузок в режиме разгонов и торможений. Более плотной штри-
ховкой ограничена область действия установившихся нагрузок механизмов,
не подвергающихся давлению ветра или движению под уклон. Более редкой
штриховкой обозначена зона действия нагрузок от попутного ветра.
Статические нагрузки. Нагрузки установившегося движения крановых
механизмов при подъеме, спуске и перемещении грузов принято называть
Разд. 1
______-а.
22
Технические характеристики грузоподъемных машин
статическими. Статическая мощность на валу электродвигателя подъемной
лебедки при подъеме груза, кВт, определяется по формуле
Рст, п —
9,81 (Q + ?)on
103/71пТ1
(1.12)
где Q — масса поднимаемого груза, кг; q — масса крюковой подвески, за*
хвата, спредера, грейфера или грузоподъемного магнита, кг; — номиналь»
ная скорость подъема груза, м/с; г; — КПД канатной системы и механизма
Рис. 1.6. Области нагрузок механизмов подъема (а) и передвижения (б)
при подъеме номинального груза; шп — коэффициент числа механизмов, под-
нимающих груз.
Для разных кранов коэффициент тп принимает следующие значения!
Крюковой кран с одной лебедкой подъема..........................1
Крюковой кран с двумя лебедками подъема и общим грузовым канатом
(контейнерные краны, краны со специальными захватами) .........2
Крюковой кран с двумя лебедками и двумя независимыми подъемными
канатами и общей траверсой....................................1,8
Грейферный кран:
для замыкающей лебедки в процессе замыкания грейфера.........1
при подъеме груженого грейфера совместно с замыкающей лебедкой 1,8
Статическая мощность на валу электродвигателя механизма горизонталь*
кого передвижения крана (тележки) определяется по следующим формулам!
механизм работает в помещении при отсутствии ветровой нагрузки
(G + Q + <?)
103/пкт)
(1.13)
где G — масса передвигающегося механизма (крана, тележки), кг; иг — ско-
рость передвижения груза, м/с; г; — КПД механизма; <рп — коэффициент тре*
ния в подшипниках ступиц колес, для подшипников качения <рп — 0,015;
—диаметр ходового колеса, м; dCT— диаметр ступицы ходового колеса,
м; обычно для расчетов принимается dCy/DK = 0,25; ц— коэффициент трения
качения, ц = 0,5 • 10-3 м; /Срб — коэффициент формы ходового колеса, учи-
тывающий трение реборд ходового колеса, /Срб = 1,3 4- 1,4; тк-~ число меха-
Статика и динамика механизмов
23
низмов передвижения; (3 — уклон рельсового пути тележки или крана, при рас-
чете мостовых кранов принимается р = 0,003, для строительных кранов
₽ = 0,01.
При подстановке в (1.13) приведенных усредненных значений парамет-
ров имеем:
Рст, г « 0>$ (G + Q + q) vr/(104mKn). (Ы 4)
Механизм работает на открытом воздухе
Р _____ + Q + Я) Vn ( Фп ^СТ + 2g „ . /1 1К\
Рст’г-------io¥^ I Di Лрб + Р J + Ю3АИкП ’ ( '
где WB— среднее усилие, воздействующее на механизмы крана и груза
от ветра.
В соответствии с ГОСТ 1451-77 ветровая нагрузка на кран опреде-
ляется по формуле
— pSK,
здесь SK — площадь парусности, м2; р — давление на конструкции крана
и груза, Па,
р =к=з qkQQC^ftij
где q — давление ветра на высоте 10 м; Лев — коэффициент высоты; с8 —
коэффициент лобового сопротивления; — коэффициент нагрузки;
fl = p^/2;
здесь р — плотность воздуха, р — 1,225 кг/м3; vв — скорость ветра у зем*
ли, м/с.
Для рабочего состояния кранов, используемых во всех зонах, кроме мор-
ских побережий, принимается q = 125 Па, соответственно коэффициенты
ЛвС == 1, 25; са — 1; щ = 1. Таким образом, расчетное давление от ветра
принимается р *= 160 Па.
Площадь парусности крана (тележки) с достаточной точностью можно
принять
SK1 = 0,8 и/G.
Площадь парусности груза может быть определена по формуле
^к2 == 0,2 д/ Q.
Подстановка значений р и SK в (1.15) дает
Рст>г = w [(G + Q + я) (.фпу_2Н. Лрб + р) +160 (0,8 +0,2 То)]
(1.16)
Эта формула может быть использована для определения мощности ме-
ханизмов кранов любого типа, кроме судовых или работающих в портах.
Для мостовых кранов грузоподъемностью 5—50 т общего назначения
д козловых кранов грузоподъемностью 5—20 т, работающих на открытом
24
Технические характеристики грузоподъемных машин
Разд. 1
воздухе, может быть использована простая, по достаточно верная формула
определения мощности статической нагрузки
Рст « 2,2 (G + Q + q) ог/(104ткт)). (1-17)
Для строительных башенных кранов наибольшая мощность статической
нагрузки при скорости ветра 15 м/с может быть определена по формуле
Рст « 2,5 (G + Q)i>r/( 104/пкГ|). (Ы8)
Статическая мощность на валу электродвигателя механизма поворота
стрелового крана в общем виде можно найти по формуле
/’ст, вр = 10/ п [0,бфврОКр (G + Q) + I (3,2 sin у ± ₽<?)], (1.19)
где G — масса поворотной части крана, кг; п— частота вращения крана,
об/мин; фвр — коэффициент трения поворотного круга, <рер = 0,01; DKP —
диаметр поворотного круга, м; I — вылет стрелы (размер от оси вращения
до оси подъемного каната), м; у — угол направления ветра к наветренной
площади груза; при определении максимальной мощности статической на-
грузки принимается sin у — 1, при определении среднеквадратичной нагрузки
sin у = 0,8; р — уклон пути крана, для портальных кранов р = 0,006, для
башенных кранов (3 = 0,01, для судовых кранов р = 0,04; твр— число ме-
ханизмов поворота; 3,2 — коэффициент, учитывающий давление ветра на груз
при скорости ветра 15 м/с.
Для механизмов поворота тележек специальных кранов или захватов
Лт, вр- n [O,5q>BpfeHDKp (6 + Q)]/(Ю3ц); (1.20)
здесь — коэффициент, учитывающий увеличение сопротивления поворота
от уклона тележки на путях, kH == 2,2.
Статическая мощность на валу электродвигателя механизма изменения
вылета стрелы в общем виде может быть определена по формуле
/’ст, С = ~~ (0,18vc> Г + 10«с, В + 0.08), (1.21)
где G — масса перемещаемых конструкций стреловой части крана, кг; ис, г —-
скорость горизонтального перемещения груза, м/с; vCt в — скорость вертикаль-
ного перемещения груза, м/с.
Статическая мощность на валу электродвигателя механизмов специаль-
ных захватов, толкателей, выдвижных устройств может быть определена по
формуле
Рст-Л^/(103П), (1.22)
где FCp — среднее усилие при перемещении рабочего органа, Н; v — скорость
перемещения, м/с.
При ЭТОМ F max механизма, работающего на упор, должно приниматься
не более 2Fcp.
Динамические нагрузки. Любое движение механизма происходит в усло-
виях разгона, установившейся скорости перемещения и торможения до ос га*
§ 1.3
Статика и динамика механизмов
25
новки. Разгон и торможение механизмов происходят при затрате к и нети че-
ской энергии на изменение скоростных параметров движущихся масс. Урав-
нение движения механизма с постоянным моментом инерции имеет вид
Al
da)
~dFf
(1.23)
где М — момент двигателя при ускорении или торможении; МСт — момент
статической нагрузки; J момент инерции электропривода; со — угловая ско-
рость двигателя; dw/dt — ускорение или замедление в процессе пуска или
торможения. Уравнение (1.23), разрешенное относительно конечной скорости
механизма при линейных механических характеристиках двигателя,
° 9,55 Мном
и — И
кон* 'чгач*
— JYI
нач* 2кон*
^нач* ^ст+
^кон* ^ст*
(1.24)
где о —• конечная скорость разгона (замедления), м/с; а — ускорение (замед-
ление) механизма, м/с2; пном — номинальная частота вращения вала электро-
двигателя, об/мин; Л/Ном — номинальный момент на валу электродвигателя
Н • м; янач$, лкон* — начальная и конечная частоты вращения электродвига-
теля при пуске (торможении) механизма в относительных единицах (п* «
= л/пном); Мнач*, Мкон# — начальный и конечный моменты при пуске (тор-
можении) в относительных единицах; Мст* — относительное значение мо-
мента статической нагрузки = Л1/Л11ЮМ).
Время пуска (торможения) может быть определено из (1.23) для кон-
кретных значений параметров пуска (торможения). При постоянном ускоре-
нии (замедлении)
==
Приведение моментов инерции масс элементов механической передачи
к валу электродвигателя производится по следующим формулам;
для вращающихся частей кранов
вр
—- 0,2/дв
<Мвр
0.7QZ2
Ч^ред^оп.у
(1.25)
для поступательно движущихся частей кранов
по/ , 91 (G + Я 4- 0,7Q) о2
-j ~
™ЛОМП
(1.26)
где /дв — момент инерции двигателя, кг-м2; 0,2 — коэффициент, учитываю-
щий момент инерции тормоза и первой шестерни редуктора; 6вр — масса
вращающихся частей крана, кг; /?вр — средний радиус вращающихся масс
крана; Q — масса груза, кг; I — расстояние от оси вращения механизма по-
ворота крана до оси грузового каната, м; G — масса перемещаемых кон-
струкций крана (тележки); q — масса подвески, кг; v — скорость линейного
перемещения, м/с; тк — число механизмов; пред, а0П1 у — передаточные числа
26 Технические характеристики грузоподъемных машин Разд. 1
редуктора и опорно-поворотного устройства; 0,7 — коэффициент, учитываю-
щий, что в цикле работы крана число пусков с грузом не превышает 60 %
общего числа пусков.
Поскольку у механизмов горизонтального перемещения грузов приведен-
ный момент инерции механизма и груза превышает момент инерции вращаю*
щихся частей электродвигателя в 10—30 раз, то время пуска, а следова-
тельно, и производительность крана в целом существенно зависят от дина-
мических возможностей этих механизмов.
В соответствии с основным уравнением движения механизма (1.23) по-
явление в системе электропривода избыточного вращающего момента
'(М — Мет) вызывает ускорение или торможение механизма. Для прямоли-
нейного движения ускорение выражается первой производной линейной ско-
рости движения по времени dv/dt. При постоянном избыточном моменте, раз-
виваемом электродвигателем, при пуске среднее ускорение определяется по
формуле
нср & Окон/^П>
где окон — конечная скорость пуска механизма; /п — время пуска до конеч-
ной скорости.
Для механизмов передвижения и поворота значения оптимальных сред-
них ускорений, являющихся исходными для установления необходимых сред-
них ускоряющих моментов, приведены в табл. 1.4.
При выборе ускорений следует укладываться в определенные граничные
условия: максимальное время пуска должно быть меньше 6 с для двигателей
постоянного тока и асинхронных двигателей с фазным ротором; для корот-
козамкнутых асинхронных двигателей всех типов максимальное время пуска
должно быть меньше 3 с. Максимальное ускорение не должно превосходить
значений, при которых нарушается сцепление колес с рельсами, а также про-
исходит недопустимое раскачивание груза. Рекомендации по выбору ускоре-
ния по условиям сохранения сцепления приведены в гл. 6.
Раскачивание груза при пуске и торможении механизмов передвижения
или поворота является нежелательным процессом, поскольку вызывает до-
полнительное нагружение конструкций, небезопасно для окружающего пер-
сонала и снижает производительность механизмов. Раскачивание груза на
канате возникает при ускорении или замедлении механизма. Раскачка груза
характеризуется углом отклонения грузового каната от вертикали
ар = -
F (1 — cos <о/)
g(G + Q)
(1.27)
где F — ускоряющее (замедляющее) усилие, действующее на механизм.
Наибольший угол отклонения имеет место при art = л. Максимальный
угол отклонения для механизма передвижения может возникнуть при значе-
нии усилия F на границе нарушения сцепления колес с рельсовым путем.
Если обозначить коэффициент трения ходовых колес по рельсам <р, то
§ 1.3
Статика и динамика механизмов
27
Период свободного качания груза определяется по формула
т = 2л -y/lTPG/[g (G + Q)L (1.28)
где /гр — высота подвеса груза, м.
Максимальное значение угла отклонения при качании имеет место, если
время разгона в 3—4 раза меньше периода качания груза,
Ду
Ир max = . < 2<Р, (1.29)
Vg/K(l+ Q/G)
где Ду — приращение линейной скорости механизма за время t «(1/3) Г»
Период свободного качания груза на подвесе может достигать от б
до 12 с. При таком большом периоде качания снижение угла отклонения
за счет снижения ускоряющего усилия, т. е. увеличения времени пуска, прак*
тически неосуществимо, так как даже небольшое изменение усилия, обуслов*
ленное разбросом значений пусковых моментов в пределах производственных
допусков, ведет к времени разгона в 2,5—3,5 раза меньше периода Т.
Радикальным средством снижения угла отклонения при раскачивании
согласно (1.29) является снижение приращения скорости До, т. е. увеличение
числа ступеней разгона или торможения. При этом наибольший эффект дает
четное количество ступеней приращения скорости при условии включения
каждой последующей ступени в момент времени, когда направление движе*
ния качания соответствует направлению пуска и груз находится в вертикаль*
ном положении. При двухступенчатом разгоне угол отклонения при таком
способе снижается в 3 раза, а при четырехступенчатом разгоне — в 9 раз
против максимального значения одноступенчатого разгона. Менее эффектна*
ным, но зато более простым способом гашения раскачки при пуске (тормо*
жении) является толчок механизма в тот момент времени, когда скорость
качания груза максимальна и совпадает с направлением пуска. При этом
способе эффективность гашения раскачки будет тем выше, чем ближе между
собой будут абсолютная скорость груза и скорость механизма.
Другими способами гашения раскачки являются способы поглощения
энергии качающегося груза в элементах привода после завершения процесса
движения, например создание специальной механической характеристики в
небольшими конечными скоростями и пусковым (тормозным) моментом, за*
висимым от усилия раскачки.
Ударные нагрузки в механизмах кранов. Рассмотрим максимальные уси*
лия, возникающие в канате в двух крайних случаях: при ограниченном, но
постоянном пусковом моменте двигателя, а также при идеально жесткой
механической характеристике электропривода. При постоянном пусковом мо*
менте и линейном законе упругого изменения длины грузового каната мак*
симальное усилие в канате определяется по формуле
28
Технические характеристики грузоподъемных машин
Разд* 1
где Fmax — максимальное усилие в канате при приращении скорости Дуо;
Гп — усилие в канате при пусковом моменте; FCT—усилие в канате при но-
минальном грузе; /гр — момент инерции груза, приведенный к двигателю;
/дв — момент инерции двигателя; £— модуль упругости каната; sK — сечение
каната; I — длина каната между барабаном и грузом.
При жесткой механической характеристике максимальное усилие в ка-
нате равно
Fmax ” Fст А /£$к/гр
* ст ’ ст
Для обычных грузоподъемных механизмов отношение /гр//дв не превы-
шает 0,2, и максимальная нагрузка в грузовом канате за счет введения огра-
ничения пускового усилия может быть снижена не более чем на 10 %,
Основная составляющая, которая создает ударные усилия в канате, зависит
от конечной скорости ступении разгона. Из (1.31) может быть получена за-
висимость усилия в канате от конечной скорости разгона
(£max Fст)/ст ” 14,3 Ду 0/л]I, (1.32)
Если полагать, что Fmax в канате не должно превышать 1,5FCT, а длина
каната не может быть менее 10 м, максимально допустимая скорость первой
пусковой ступени должна быть не выше 0,12 м/с. При обычно принятых
скоростях подъема 0,15 м/с и системах привода без малой скорости подъема
груза усилия в канате и редукторе при пуске могут достигать значения до
170 % номинальной нагрузки. Для механизмов со скоростями подъема свыше
0,2 м/с применение малой скорости подъема обязательно.
Максимальное усилие при торможении определяется по формуле
где FT — суммарное тормозное усилие от механического и электрического тор-
можения; знак «+» относится к торможению при подъеме, знак «—» — при
спуске.
Усилие при торможении во время подъема немного выше, чем во время
спуска, при одинаковых значениях FT. Для предотвращения недопустимых
ударов в механизмах необходимо, чтобы максимальное замедление не пре-
вышало g (9,8 м/с2). Скорость, соответствующая этому предельному усилию,
(1.34)
где Она», — начальная скорость торможения; с — жесткость каната.
Ударные нагрузки и меры по их ограничению для механизмов передви-
жения зависят от характера протекания процессов пуска и торможения в си-
стеме с учетом частоты собственных колебаний. Для механизмов, период
собственных колебаний которых находится в пределах от 0,1 до 0,4 с, мак-
симальные усилия в отдельных звеньях кинематической цепи практически не
зависят от характера возмущающей силы, поэтому уменьшение пускового
$ 1.3
Статика и динамика механизмов
29
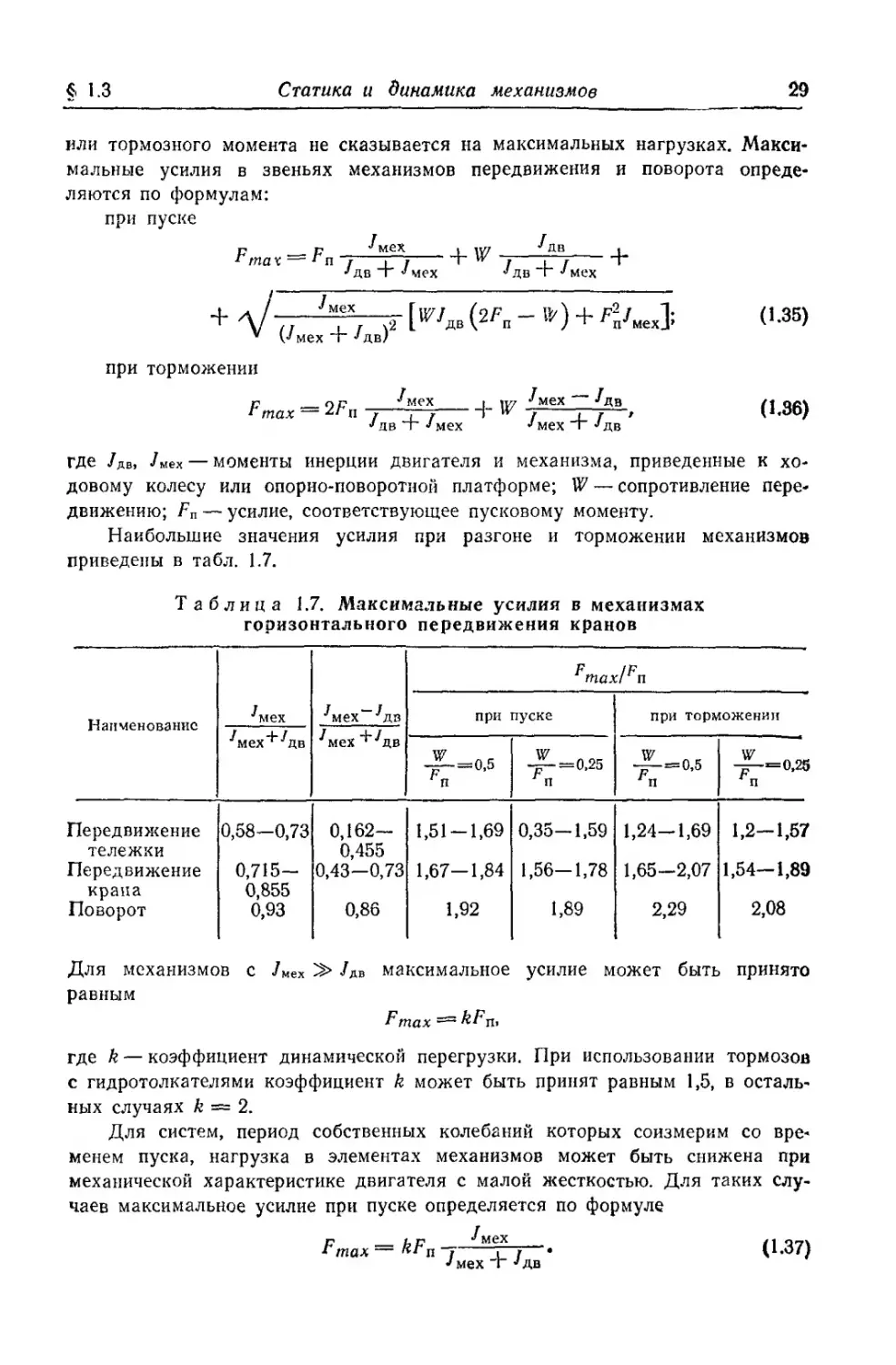
или тормозного момента не сказывается на максимальных нагрузках. Макси-
мальные усилия в звеньях механизмов передвижения и поворота опреде-
ляются по формулам:
при пуске
F max —F п
^дв
Лцв “Ь Jмех
мех
при торможении
Fmax = 2Fn ---+ W
J дв T J мех
(1.36)
где /дв, /мех — моменты инерции двигателя и механизма, приведенные к хо-
довому колесу или опорно-поворотной платформе; IT — сопротивление пере-
движению; Fn — усилие, соответствующее пусковому моменту.
Наибольшие значения усилия при разгоне и торможении механизмов
приведены в табл. 1.7.
Таблица 1.7. Максимальные усилия в механизмах
горизонтального передвижения кранов
Наименование ^мех •^мех ^дв Fmax!Fn
при пуске при торможении
г + J мехгдв ^мех +/дв
i=0,5 Fn W — =0,25 W “^=0,5 Fn -7г-=0,25 Fn
Передвижение 0,58—0,73 0,162- 1,51-1,69 0,35—1,59 1,24—1,69 1,2-1,57
тележки Передвижение 0,715— 0,455 0,43—0,73 1,67—1,84 1,56—1,78 1,65-2,07 1,54—1,89
крапа Поворот 0,855 0,93 0,86 1,92 1,89 2,29 2,08
усилие может быть принято
Для механизмов с /мех /дв максимальное
равным
Fmax kFп>
где k — коэффициент динамической перегрузки. При использовании тормозов
с гидротолкателями коэффициент k может быть принят равным 1,5, в осталь-
ных случаях k = 2.
Для систем, период собственных колебаний которых соизмерим со вре-
менем пуска, нагрузка в элементах механизмов может быть снижена при
механической характеристике двигателя с малой жесткостью. Для таких слу-
чаев максимальное усилие при пуске определяется по формуле
Fmax ~ kFп “Г I т ‘ • (1.37)
J мех "г J дв
во
Технические характеристики грузоподъемных машин
Разд. 1
Коэффициент k зависит от соотно-
шения между периодом собственных
колебаний Т и электромеханической по-
стоянной времени электропривода 7М.
Эта зависимость приведена на рис. 1.7.
Период собственных колебаний
электромеханическая постоянная време-
рис. 1.7. Зависимость коэффици-
ента динамической перегрузки от
параметров электропривода и ме-
ханизма
ни электропривода
7*м <— (7дВ + Jмех)
00
Мп'
(1.39)
где с — жесткость системы передачи механизмов; «о — синхронная угловая
скорость электродвигателя.
Так как механизмы передвижения и поворота обладают большим мо-
ментом инерции, то при выборе зазоров в передачах могут иметь место по-
вышенные усилия. Избыточные усилия в этом случае характеризуются дина-
мическим коэффициентом
или
где — приведенный зазор в передаче; <ок — угловая скорость в момент
Контакта (после выбирания зазора); МИЗб — избыточный момент двигателя;
анач — начальное ускорение при выбирании зазора. Для снижения коэффи-
циента КдИН основными мероприятиями являются ограничение скорости сок
и ограничение пускового момента, поскольку ограничение начального уско-
рения анач не всегда может быть реализовано.
Изменение нагрузок при перекосах и рассогласовании скоростей механиз-
мов передвижения. При центральном (общем) приводе ходовых колес мосто-
вых и козловых кранов возникновение разницы в линейных скоростях про-
тивопсложных опор крана возможно при неодинаковых диаметрах ходовых
колес. В этом случае неизбежно происходит упругое проскальзывание колес
той опоры, у которой реборды не имеют контакта с рельсовым путем. При
достаточно жесткой конструкции механизма данное явление ведет к некото-
рому дополнительному статическому нагружению, которое может быть оце-
нено в 10 % дополнительной нагрузки на центральный двигатель при пролете
до 25 м. При раздельном приводе правой и левой опор крана расхождение
линейных скоростей за счет угловых скоростей электродвигателей в 4—6 раз
выше, чем за счет неравенства диаметров ходовых колес. При достаточно
§1.4 Условия эксплуатации кранового электрооборудования 31
жестких механических характеристиках асинхронных электродвигателей в
конструкции механизма передвижения происходит перекос, связанный с Не-
одинаковыми усилиями, передаваемыми на ходовые колеса раздельными
электроприводами. Практикой установлено, что при наиболее неблагоприят-
ных механических характеристиках и наступивших явлениях перекоса зна-
чения усилий, передаваемых на ходовые колеса, могут составлять ±25 %
расчетной статической нагрузки при пролетах до 25 м. При пролетах свыше
25 м усилие может увеличиться до 35 %. Для короткозамкнутых двигателей,
у которых не может быть изменено скольжение, при определении расчетных
нагрузок должен быть принят коэффициент запаса 1,15 на возможное пре-
вышение фактического момента над расчетным.
При применении двигателей с фазным ротором и длине пролета до 25 м
рекомендуется оставлять невыключенный резистор в цепи ротора для реали-
зации скольжения 9—10 % при номинальных нагрузках электродвигателя.
При пролетах более 25 м скольжение следует оставлять соответственно
12—13 %. Для кранов с пролетами до 30 м возможный наибольший перекос
получается при отсутствии груза, причем он укладывается в допустимые
границы по отношению к ходовым частям кранов. Этот перекос существенно
не влияет на ресурс крана и нагрузки на электропривод. У кранов с особо
большими пролетами, 50 м и выше, перекос может вызвать нежелательные
напряжения в металлоконструкциях. Для таких кранов устанавливаются
датчики фиксации перекоса, а в схемах предусматриваются меры к его лик-
видации.
1.4. УСЛОВИЯ ЭКСПЛУАТАЦИИ КРАНОВОГО
ЭЛЕКТРООБОРУДОВАНИЯ
Грузоподъемные машины могут устанавливаться как непосредственно
в рабочих помещениях, так и на открытом воздухе. При работе в помещении
многие краны располагаются непосредственно над линиями технологических
механизмов в среде с высокой концентрацией пыли, газов, паров воды, кис-
лот и т. п. Ряд кранов в процессе эксплуатации передвигается из отапливае-
мого помещения на открытый воздух и обратно. Краны, работающие на от-
крытом воздухе, могут иметь суточное изменение температуры до 50°C. Это
приводит к выпадению на поверхности частей кранов конденсата, атмосфер-
ной влаги и соляного тумана. В смеси с производственной пылью конденсат
вызывает снижение поверхностной изоляции между токоведущими частями
и коррозию металлических деталей. Движение кранов с ударами по метал-
локонструкции на стыках рельсов, интенсивные разгоны и торможения меха-
низмов, собственные колебания металлоконструкций при нагружении машин
вызывают весьма интенсивные механические воздействия на электрооборудо-
вание, располагаемое на мостах и тележках кранов. Хотя вероятность совпа-
дения предельных условий невелика, для обеспечения необходимой надеж-
ности электрооборудования оно должно отвечать следующим основным тре-
бованиям.
Температура окружающей среды изменяется от —40 до +40 °C. В ме*
♦галлургических цехах температура изменяется от —10 до +60°Сг
32
Технические характеристики грузоподъемных машин
Разд. 1
Относительная влажность ьоздуха характеризуется средним уровнем
95 % при температуре окружающей среды +20 °C с выпадением росы. Воз-
душная среда для оборудования нормального исполнения: содержание паров
масел 10 мг/м3, содержание СО2 — 0,8 % (по объему). Воздушная среда
приморская: содержание соли (соляной туман) 40 мг/м3. Крановое электро-
оборудование должно удовлетворять обоим условиям. Воздушная среда в
металлургическом производстве: содержание графитовой пыли, паров кислот,
СО2, взвешенных частиц стальной окалины; постоянная концентрация 100,
единовременная концентрация 1000 мг/м3. Выпадение росы на изоляционных
поверхностях и металле в виде пленки слабых кислот.
/Механические воздействия — вибрация, удары. Вибрация с частотой
1—50 Гц с ускорением 0,5g. Одиночные повторяющиеся удары с ускоре-
нием 3g и частотой до 15 ударов в 1 мин. Указанные ускорения и частота
вибрации имеют место на пролетных и концевых балках. При консольном
креплении аппаратуры за нижнюю часть ускорения верхней части могут до-
стигать 0,7—0,8g
Эти условия характерны для использования электрооборудования общего
назначения в категориях размещения У1, У2, УЗ по классификации
ГОСТ 15150-69. При использовании кранового электрооборудования только
в странах с тропическим климатом, т. е. для категорий размещения Tl, Т2,
значения влажности и температур будут следующими. Температура окру-
жающей среды изменяется от +5 до +45 °C. В металлургических цехах
интервал изменения температур от +10 до +60 °C. Относительная влаж-
ность воздуха характеризуется средним уровнем 95 % при температуре
+35 °C с периодическим ежесуточным выпадением росы.
При использовании кранового электрооборудования специально в зонах
с холодным климатом, т. е. для категорий ХЛ1 и ХЛ2, интервалы измерения
температуры от —60 до +40 °C.
Для предохранения от воздействия неблагоприятных факторов внешней
среды крановое электрооборудование должно быть достаточно защищенным
либо размещаться в кожухах и оболочках с необходимой степенью защиты.
Степени защиты от воздействий внешней среды установлены ГОСТ 14254-80
и 14494-69. При размещении электрооборудования на кранах и других гру-
зоподъемных машинах следует обеспечивать степени защиты согласно
табл. 1.8.
При использовании кранов в химических производствах при перегрузке
химических продуктов должны учитываться следующие требования. Удобре-
ния, полуфабрикаты химических производств и другие агрессивные грузы
резко усиливают процессы корродирования металлоконструкций и оборудо-
вания. В связи с этим стальные металлоконструкции и чугунные узлы долж-
ны регулярно окрашиваться химостойкими лакокрасочными покрытиями. При-
менение алюминия и его сплавов должно быть исключено для всех узлов,
соприкасающихся с химическими веществами или их пылью.
Вся электрическая аппаратура должна размещаться либо в герметизи-
рованной кабине крановщика, либо в специальном аппаратном помещении
со степенью защиты IP55, Конечные выключатели должны иметь корпуса
Зак. 918
to
Таблица L& Степень защиты и категории размещения электрооборудования
Наименование Категория размещения крана
У1 У2 * УЗ ** ХЛ1 ХЛ2* Т1 Т2 У2 (метал- лургия) ОМ1 УЗ (по- жаро- опасные зоны)
Электрооборудование в каби- нах кранов УЗ УЗ УЗ хлз ХЛЗ Т2, ТЗ Т2, ТЗ У2, УЗ ОМ1, ОМ2, IP44, IP55 УЗ
IP31 IP31 IP31 1Р31 IP31 IP31 IP31 IP41 • IP31
Специальные аппаратные ка- бины УЗ УЗ УЗ хлз ХЛЗ тз тз УЗ ОМЗ УЗ
IP00 IP00 IP00 IPOO IP00 IP00 IP00 IP00 IP 00 IP00
Специальные аппаратные ка- бины с подогревом (охлаж- дением) —— — хлз IP00 ХЛЗ IP00 — —— УЗ IP00 —
Электрооборудование внутри шкафов кожухов на откры- тых частях кранов УЗ УЗ УЗ УЗ тз тз УЗ ОМЗ УЗ
IP00 IP00 IP00 IP00 IP00 IP00 IP00 IP00 IP00
Электрооборудование под на- весом У2 IP44 — — У2 IP44 М 1 Т2 IP44 —— *
Электрооборудование на от- крытых частях кранов У1 У2 УЗ ХЛ1 ХЛ2 Т1 Т2 У1 ОМ1 УЗ
1Р44 IP31 IP00 IP44 IP31 IP44 IP31 IP43 IP56 IP44
Шкафы, кожухи на откры- тых частях кранов У1 * — ХЛ1 Т1 Т2 У2 ОМ1 УЗ
IP43 IP43 IP43 IP22 1Р43 IP56 IP44
* Навесы, складские помещения неотапливаемые.
** Производственные помещения со станочным оборудованием, отапливаемые склады с температурой окружающей среды не ниже —10 °C-
со
Примечание. В числителе указали категория размещения электрооборудования) в знаменателе —степень защиты. со
Условия эксплуатации кранового электрооборудования
34
Технические характеристики грузоподъемных машин,
Разд. 1
из латуни или чугуна. Тормоза должны быть встроены в двигатель и гер-
метизированы. Электродвигатель с тормозом должен иметь степень защиты
IP55 с полным исключением алюминиевых деталей. Ввод кабелей и проводов
в двигатели и конечные выключатели — через сальники или трубы с газовой
резьбой.
При использовании грузоподъемных машин в условиях высокогорья не-
обходимо учитывать три фактора: уменьшение массы охлаждающего воз-
духа, повышение солнечной радиации и некоторое снижение температуры
окружающей среды. Первые два фактора ухудшают тепловое состояние из*
делия, третий фактор несколько облегчает условия эксплуатации. Поскольку
краны для высокогорья являются обычными машинами общего назначения,
ограничения, связанные с эксплуатацией в высокогорье, могут быть пало*
жены на грузоподъемность и режим работы. В табл. 1.9 указаны ограничи-
тельные условия использования кранов при высоте над уровнем моря свыше
1000 м.
Таблица 1.9. Ограничительные условия использования
электрооборудования кранов в условиях высокогорья
Группа режима работы механизма Высота над уровнем моря, м
1000 -2000 2000-3000 свыше 3000 до 4000
% номиналь- ной грузо- подъемности пв, % % номиналь- ной грузо- подъемности пв, % % номиналь- ной грузо- подъемности пв, %
1 м 100 15 100 10 80 10
2М 100 15 80 15 80 10
ЗМ 100 15 80 15 70 10
4М 80 15 80 15 60 15
5М 80 25 80 25 50 25
6М 80 40 80 25 50 25
Основными нормативными документами, регламентирующими требования
безопасной и надежной работы грузоподъемных машин, являются «Правила
устройства и безопасной эксплуатации грузоподъемных кранов» Госгортех*
надзора СССР, а также требования «Правил устройств электроустановок»
ПУЭ 76. В этих документах сформулированы требования к механизмам, тор-
мозам, электроприводам и отдельным аппаратам, являющиеся основой без-
опасной работы грузоподъемных машин и его электрооборудования.
В СССР практически все грузоподъемные механизмы аттестуются ин-
спекторами Госгортехнадзора при условии соблюдения изготовителями и
эксплуатацией упомянутых правил. К электроприводу и электрооборудованию
кранов относится свыше 40 пунктов этих правил. Все специализированные
крановые электрические аппараты и комплектные устройства, изготовляемые
промышленностью, полностью соответствуют требованиям правил.
В ряде отраслей промышленности в производственных помещениях (зо-
нах), на открытом воздухе, а также в шахтах может возникнуть взрыво-
опасная ситуация. Поэтому для таких производств и зон изготовляют меха-
Условия эксплуатации кранового электрооборудования
35
низмы во взрывозащищенном исполнении. Классификация взрывоопасных
зон приведена в табл. 1.10. Рекомендациями Международной комиссии
МЭК 79-9' и ГОСТ 12.2.020-76 установлены классификация и маркировка
Таблица 1.10. Классификация взрывоопасных зон
Зона Уровень взрывозащиты Характер эоны Состояние взрывоопасных смесей и газов Примечание
BI Взрывобезо- пасное, уровень 1 Помеще- ние Постоянное выделение взрывоопасных газов и смесей —
В 1а Повышенной надежности против взрыва, уровень 2 То же Выделение взрыво- опасных газов и сме- сей только в резуль- тате аварий и неис- правностей
В 16 Без средств взрывозащиты, исполнениеIP44 » » То же Газы и смеси обла- дают резким запа- хом. Взрывоопас- ные смеси образу- ются вне зоны крана
В 1г Повышенной надежности против взрыва, уровень 2 Откры- тый воздух У наружных устано- вок, содержащих го- рючие газы и ЛВЖ. Открытые нефтело- вушки пруды-отстой- ники и т. п. Далее 3 м от закры- того аппарата или запорного клапа- на, далее 5 м от предохранительно- ного клапана, да- лее 8 м от резер- вуара с ЛВЖ, да- лее 20 м от от- крытого слива лвж
В II Взрывобезо- пасное, уровень 1 Поме- щение Опасная концентрация взрывоопасных пылей и волокон д
В Па Без средств взрывозащиты, исполнение IP 44 То же Появление взрыво- опасных концентраций пыли и волокон воз- можно в результате аварии
взрывозащищенного электрооборудования, уровни взрывозащиты электрооба-
рудоваиия:
2 — электрооборудование повышенной надежности против взрыва, такое
взрывозащищенное электрооборудование, в котором взрывозащита обеспечи-
вается только в нормальном режиме использования;
1 — взрывобезопасное электрооборудование, такое взрывозащищенное
электрооборудование, в котором взрывозащита обеспечивается как в нор-
мальном режиме использования, так и при признанных вероятных поврежде*
миях, кроме повреждений средств взрывозащиты;
2*
36
Технические характеристики грузоподъемных машин
Разд. I
О — особовзрывобезопасное электрооборудование, такое взрывозащищен-
ное электрооборудование, в котором по отношению к взрывобезопасному
электрооборудованию приняты дополнительные меры защиты.
Взрывозащищенное электрооборудование имеет следующие виды взры-’
возащиты:
d — взрывонепроницаемая оболочка;
р — продувка оболочки под избыточным давлением защитным газом;
i — искробезопасная электрическая цепь; q-*- кварцевое заполнение обо-
лочки с токоведущими частями; О — масляное заполнение оболочки с токо-
ведущими частями; s — специальный вид взрывозащиты; е — защита вида е.
Таблица 1.11. Взрывоопасные смеси
Группа взры- । । воопасности | Класс температуры
Т1 Т2 ТЗ Т4 Т5 Тб
ПА Ацетон, этан, этилацетат, ам- миак, бензол, оксид углерода, уксусная кислота, метан, метанол- метилхлорид, пропан, толуол Этиловый спирт, Н- амилацетат, Н-бутан, Н- бутиловый спирт, этилен- хлорид Бензины, Н- гексан, реак- тивное топли- во, мазут, сероводород Декан Ацетальде- гид, сложный этиловый спирт, эфир
II В Городской газ Этилен, ок- сид этила Топливо ди- зельное Диэтило- выЙ эфир —
ПС Водород, све- тильный газ Ацетилен — — Сероугле- род
Классификация взрывоопасных смесей приведена в табл. 1.11 В зави-
симости от области применения все взрывозащищенное электрооборудование
разделяется на две группы:
Группа I — рудничное, предназначенное для подземных выработок и руд*
ников. Рудничный газ. Безопасный зазор более 1 мм.
Группа II—промышленные установки. Промышленные пары, газы, пы-
левоздушные смеси:
НА — безопасный зазор более 0,9 мм;
ПВ — то же 0,5 мм;
ПС — то же, но менее 0,5 мм.
Электрооборудование группы II в зависимости от значения температуры
самовоспламенения взрывоопасной среды имеет шесть классов предельных
температур эксплуатации: Т1 — 450 °C; Т2 — 300 °C; ТЗ — 200 °C; Т4 — 135 °C;
Т5— 100 СС; Тб —85 °C.
Маркировка взрывозащищенного электрооборудования включает следую-
щие символы: уровень взрывозащиты (0; 1; 2), обозначение Ех; знак вида
защиты (d, р, i, q, о, s, е); группа области применения (I, II, ПА, ПВ, ПС);
§ L4 Условия эксплуатации кранового электрооборудования 37
температурный класс (Tl, Т2, ТЗ, Т4, Т5, Тб). Пример: маркировка
lExdIIAT3 — взрывобезопасное электрооборудование, имеющее взрывонепро-
ницаемую оболочку: группа ПА — температурный класс ТЗ.
Для классов помещений (зон) BI электрооборудование должно иметь
уровень взрывозащиты 1. Для классов помещений В1а и В1г электрооборудо-
вание должно иметь уровень взрывозащиты 2. Для класса помещений BI6
может быть применено электрооборудование без средств взрывозащиты, но
с оболочкой со степенью защиты IP44. Для класса помещений ВП электро-
оборудование должно иметь уровень взрывозащиты 1. Для класса помеще-
ний ВПа может быть применено электрооборудование без средств взрыво-
защиты, но с оболочкой со степенями защиты IP44, IP54.
К взрывоопасным жидкостям относятся легко воспламеняемые жидкости
(ЛВЖ). у которых температура вспышки не превышает 61 °C при темпе-
ратуре 20 °C и нормальном давлении. Горючие жидкости с температурой
вспышки выше 61 °C относятся к пожароопасным, но эти же жидкости, на-
гретые в условиях производства до температуры вспышки или выше, отно-
сятся к взрывоопасным. В зонах, взрывоопасность которых определяется го-
рючими жидкостями, имеющими температуру вспышки выше 61 °C, может
применяться любое взрывозащищенное электрооборудование с температурой
нагрева поверхности, не превышающей температуру самовоспламенения дан-
ного вещества.
Ряд кранов может эксплуатироваться в пожароопасных зонах внутри
помещений. Для электрооборудования этих кранов имеются определенные
ограничения и специальные требования. Пожароопасной зоной называется
пространство внутри и вне помещений, в пределах которого постоянно обра-
щаются горючие (сгораемые) вещества. Пожароопасные зоны имеют три
класса:
зоны класса П-I, расположенные внутри помещений, в которых обра-
щаются горючие жидкости с температурой вспышки выше 61 °C, допустимая
температура нагрева поверхностей 140 °C;
зоны класса П-П, расположенные внутри помещений, в которых выде-
ляются горючие пыль и волокна с нижним концентрационным пределом вос-
пламенения 65 г/м3 к объему воздуха, допустимая температура нагрева по-
верхностей 150 °C;
зоны класса П-Па, расположенные в помещениях, в которых обращаются
твердые горючие вещества, допустимая температура нагрева поверхностей
210 °C;
зоны класса П-Ш, расположенные вне помещения, относящегося к ка-
тегориям П-I, П-Па, допустимая температура нагрева поверхностей 240 °C.
Все электродвигатели и аппараты, устанавливаемые на кранах в пожа-
роопасных зонах, должны иметь степень защиты оболочки IP44. Электро-
двигатели постоянного тока и электродвигатели с фазным ротором должны
располагаться на расстоянии не менее 1 м от мест размещения горючих
веществ или должны быть отделены от них несгораемым экраном.
Температуры в рабочих режимах на поверхности оболочек не должны
превышать предельных значений, установленных для соответствующих
38
Технические характеристики грузоподъемных машин
Разд. 1
пожароопасных зон. Токопровод к кранам, используемым в зонах П-I и П-П,
должен осуществляться гибким кабелем. При использовании кранов в зо-
нах П-Па и П-Ш допускается применение троллейного токопровода при
условии, если он не проходит над местами размещения горючих веществ.
1.5. ОБЩИЕ РЕКОМЕНДАЦИИ ПО ПРОЕКТИРОВАНИЮ
И УСТАНОВКЕ ЭЛЕКТРООБОРУДОВАНИЯ НА КРАНАХ
На основе многолетней практики разработки и эксплуатации кранового
электрооборудования выработан ряд общих требований к нему.
1. Расстояние между находящимися под напряжением частями с раз-
ными потенциалами, а также между частями, находящимися под напряже-
нием, и заземленными металлическими частями выбирается в соответствии
с табл. 1.12.
Таблица 1,12. Изоляционные расстояния в крановом электрооборудовании
Наименование Расстояние, мм, в зависимости от напряжения
по воздуху по поверхности
До 60 В 61-500 В До 60 В 61-500 В
Электрические машины, распредели- тельные и комплектные устройства 6 14 8 20
Электрические аппараты и тиристор- ные устройства (кроме расстоя- ния между контактами) 6 14 8 18
Установочная арматура 3 8 4 10
Блоки электроники, имеющие защи- ту от пыли 3 6 4 8
2. Весь стационарный внутренний монтаж электрического оборудования
должен выполняться медным многожильным проводом сечением не менее
1,5 мм2.
3. Сопротивление изоляции электрооборудования между фазами (полю-
сами) и относительно заземленных частей должно быть не ниже указанных
в табл. 1.13.
4. Электрическая прочность изоляции электрических машин должна быть
не ниже 1800, а трансформаторов и аппаратов — не ниже 1500 В.
5. По коррозионной стойкости электрооборудование категорий У1, У2,
ХЛ1, ХЛ2 принадлежит к средней группе СЗ; электрооборудование катего-
рий Tl, Т2, ОМ1 принадлежит к жесткой группе ЖЗ. Толщина гальваниче-
ских покрытий для меди и ее сплавов должна быть не ниже 9 мкм для обеих
групп. Толщина цинкования стальных деталей должна составлять 15 мкм
для группы СЗ и 20 мкм для группы ЖЗ. При кадмировании толщина по-
крытия может быть снижена на 20—30 %.
6. Для обеспечения достаточной надежности контакта электрических це-
пей все контактные соединения должны иметь устройства, предохраняющие
§ 1.5 Рекомендации по проектированию электрооборудования
39
Таблица 1.13. Сопротивление изоляции
Наименование Минимальное сопротивление изоляции при 20 °C и относительной влажности воздуха не выше 85 %, МОм
при монтаже при эксплуатации
в холодном состоянии в нагретом состоянии перед началом работы
Электрические машины 5 2 1
Трансформаторы 5 2 2
Грузоподъемные магниты 10 1 0,3
Отдельные аппараты 10 3 1
Комплектные устройства 2 1 0,5
от самоотвинчивания, а также относительно высокие контактные нажатия;
нажатие на медные контакты главных цепей 0,2—0,3 Н, приходящееся на
1 А номинального тока; нажатие на серебряные контакты 0,1—0,15 Н на 1 А
номинального тока, но не менее 1,5 Н на контакт.
7. Контрольные лампы, измерительные устройства, катушки напряжения
аппаратов должны иметь защиту от коротких замыканий или устройства,
ограничивающие ток короткого замыкания. Эти приборы могут не иметь
своих устройств защиты, если защита предыдущей ступени питания рассчи-
тана на ток не более 25 А.
8. При оперативных размыканиях цепей постоянного и переменного тока
с индуктивностью максимальное напряжение в цепи не должно превышать
1400 В.
9. Комплектные устройства, устанавливаемые на подвижных частях кра-
нов, должны крепиться не менее чем в двух точках в верхней части для
того, чтобы обеспечить равномерную нагрузку на рамы при ускорениях
и замедлениях.
10. Оболочки аппаратов и комплектных устройств должны иметь такую
конструкцию, которая позволяет при открытых крышках (дверях) обеспе-
чить доступ ко всем токопереходам с одной (лицевой) стороны. Открытие
крышек (дверей) должно осуществляться без инструмента или в крайнем
случае с помощью отверток.
11. Максимальная высота комплектных устройств, устанавливаемых на
кранах, должна быть не более 1800 мм.
12. Нажатие, обеспечивающее контактные соединения в аппаратах, не
должно передаваться через изоляцию, в том числе изоляционные монтажные
доски. Исключение составляют фарфор, стеатит, кордиерит. Конструкции ка-
тушек и токопровода к ним должны быть такими, чтобы усилие от соедини-
тельных проводов не передавалось на витки катушки.
13. Выводные зажимы аппаратов и комплектных устройств должны со-
ответствовать табл. 1.14,
40
Т ехнические характеристики грузоподъемных машин
Разд 1
Таблица 1.14. Выводные зажимы
Номиналь- ный ток, А Сечение подводимых 2 проводов, мм Форма головки винтов и болтов Размеры резьбы, мм
контактных ВЫВОДОВ выводов заземления
6 1-2,5 Цилиндрическая со шлицем М3 М5
10 1—4 Цилиндрическая или шести- М4 М5
гранная со шлицем
16 1,5-6 То же М4 М5
25 2,5-10 » » М5 М5
40 2-16 » » М5 Мб
63 6-25 » » Мб Мб
100 10-50 » » Мб Мб
160 25—95 Шестигранная со шлицем М8 М8
250 70-150 То же без шлица мю М8
400 120-2X120 То же Ml 2 М8
630 150-2X185 » » М16 М8
14. Электрооборудование кранов электролитических цехов, рассчитанных
на подъем деталей, находящихся под напряжением до 800 В, должно иметь
дополнительные ступени изоляции по отношению к конструкциям кранов, на-
ходящимся под напряжением.
15. Металлические маховики и ручки должны быть электрически соеди-
нены с заземленными частями аппаратов. Допускается электрическое соеди-
нение осуществлять через металлические подшипниковые сочленения.
16. Установку аппаратов в комплектных устройствах, предназначенных
для эксплуатации в условиях повышенной запыленности, рекомендуется осу-
ществлять на изоляционных досках для того, чтобы снизить вероятность
возникновения дуги между аппаратами при эксплуатации. Материал изоля-
ционных досок не должен поддерживать горение.
1.6. ПИТАНИЕ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Питающие сети и качество электроэнергии. Грузоподъемные машины в
большинстве своем являются устройствами, от надежности работы которых
зависит нормальный ход производства, поэтому в соответствии с ПУЭ элек-
троприводы кранов относятся к категории потребителей не ниже второй, для
которой перерыв питания допускается только на время переключения пита-
ния с основной сети на резервную. Ряд кранов, такие, как литейные, пере-
грузочные для операций со взрывоопасными, ядовитыми или радиоактивными
грузами и некоторые другие, относится к приемникам первой категории, ко-
торые должны обеспечиваться питанием от двух независимых источников,
при этом перерыв питания может быть допущен только на время автомати-
ческого ввода резервного питания.
Крановые электроприводы могут получать питание от трехфазных сетей
переменного тока промышленного предприятия или специальных единых
общезаводских сетей постоянного тока. Основным напряжением для питания
§ 1.6
Питание крановых электроприводов 41
крановых механизмов является напряжение 380 В переменного тока. Наряду
с этим напряжением по согласованию с изготовителями крановое электро-
оборудование может изготовляться для следующих нестандартных напря-
жений:
1) постоянный ток 220 и 440 В;
2) переменный трехфазный ток 220 В, 50 Гц; 380 В, 60 Гц; 440 В, 60 Гц;
415 Н, 50 Гц; 500 В, 50 Гц.
На напряжение свыше 440 В постоянного тока и 500 В переменного
тока крановое электрооборудование не изготовляется. В перспективе наме-
чается использование для питания крупных кранов напряжением 660 В,
50 Гц. Качество электроэнергии переменного тока определено ГОСТ 13109-67.
Допуск на отклонение частоты от номинального значения составляет ±0,2 Гц.
Допустимые колебания напряжения сети, предназначенной для питания элек-
троприводов, от —5 до ±10%* Несимметрия фазных напряжений в трех-
фазной сети допускается в пределах до 2 % номинального значения. Несину-
соидальность формы кривой напряжения за счет высших гармоник не долж-
на превышать 5 % действующего значения напряжения основной частоты.
Падеже напряжения в крановом токоподводе и крановой сети не должно
превышать 10 % номинального напряжения при пуске двигателя наибольшей
мощности.
Питание грузоподъемных машин с электроприводом весьма разнообразно
в отношении как источников питания, так и числа потребителей, получаю-
щих питание от одной линии. Наименьшие мощности питающих сетей имеют
место для строительных кранов, наибольшие — в питающих сетях кранов
металлургического и химического производства, а также на Машинострои-
тельных заводах тяжелого машиностроения. В связи с универсальностью ис-
пользования большинства грузоподъемных машин общего назначения при
конструировании электрооборудования принято, что мощности питающих се-
тей, кВ-А, не превышают следующих значений:
Строительные башенные краны, используемые в жилищном строи-
тельстве . . . . . ................. ........................... 500
Мостовые и козловые краны общего назначения:
портальные краны . . . .................................. 500—1600
судовые грузоподъемные механизмы........................... 2000
Краны металлургического производства, перегружатели . ..... 5000
Под мощностью питающих сетей подразумевается установленная мощ-
ность трансформатора или генератора на линии, питающей кран.
Токи короткого замыкания. Надежная работа кранового электрооборудо-
вания во многом зависит от устойчивости всех элементов разветвленной сети
питания крановых электроприводов к токам короткого замыкания (КЗ). Ве-
роятность КЗ в цепях и элементах электрооборудования кранов значительно
выше, чем у стационарных механизмов, ввиду того что краны при работе
создают вибрацию, ударные сотрясения и ускорения, которых нет у стацио-
нарных установок. Расположение крановых механизмов в верхней части зда-
ний, где концентрация пыли и газов значительно выше, чем в стационарных
электротехнических помещениях, также ухудшает условия эксплуатации.
42 Технические характеристики грузоподъемных машин Разд. 1
С учетом этих обстоятельств электрооборудование кранов должно быть
в целом устойчиво к последствиям возможных КЗ в пределах электрической
сети крана.
Токи КЗ в стационарных сетях определяются в основном параметрами
сверхпереходных индуктивных сопротивлений питающих источников и элек-
трических машин потребителей. Для крановых механизмов с большим чис-
лом токопереходов, стальными троллеями или относительно длинными питаю*
щими кабелями токи КЗ в значительной мере определяются активными со-*
противлениями этих элементов.
Фазный ток КЗ в любой точке кранового электромонтажа после ввода
для электрической сети переменного тока к концу второго периода, т. е. при
tK, з = 0,04 с, с достаточной для практики точностью может быть определен
по формуле
U2
/к, з, ф == 12/ном + (lg р - I)2. (1.42)
где /ном — номинальный длительный ток кабеля в сети, где произошло КЗ, А;
Р — мощность трансформатора (или генератора) питающей сети, кВ-А; (7ном—
номинальное напряжение.
Ударный ток КЗ в момент времени tKt 3 == 0,01 с может составлять
150—200 % тока КЗ, определенного по (1.42). Для обеспечения стойкости
к КЗ аппаратура должна иметь электродинамическую устойчивость в преде-
лах тока КЗ по (1.42) и односекундную термическую стойкость к токам,
составляющим не менее 40 % тока, определенного по (1.42). Защитное уст-
ройство на линии, питающей кран, должно быть рассчитано на отключение
тока КЗ, а защита на кране, срабатывающая в течение времени, превышаю-
щего 0,06 с, должна быть рассчитана на отключение тока, составляющего
60 % значения, определенного по (1.42).
Монтажные провода в электрических аппаратах, а также все провода
внешнего монтажа в пределах механизма должны выбираться исходя из наи-
больших возможных в эксплуатации токов в получасовом максимуме на*
грузок данного участка электрической цепи. Эти нагрузки должны прини*
маться как продолжительные для монтажных проводов и кабельных сетей.
Учитывая, что крановые электроприводы эксплуатируются в повторно-крат-
ковременном режиме, медные провода и кабели сечением 10 мм2 и более
и алюминиевые сечением 16 мм2 и более могут быть нагружены током
в К раз больше номинального:
К « 0,875/VnB/lOO, (1.43)
где ПВ — продолжительность включения, %.
При температурах окружающей среды, превышающих 25 °C, допустимая
нагрузка проводов и кабелей с резиновой изоляцией снижается до следую-
щих значений:
При + 40 °C
При + 45 °C
При + 50 °C
При + 55 °C
0,76 /ном
0,66 /ном
0,54 /Ном
0,30 /ном
§ 1.7 Системы управления крановыми электроприводами 43
Общую защиту крановых электроустановок при суммарной мощности
электродвигателей до 250 кВт на переменном токе и 150 кВт на постоянном
токе следует осуществлять автоматическими выключателями с отключающей
способностью не ниже 10 кА. Для особо мощных кранов с токами питаю-
щих линий 1000 А и выше в качестве защитных устройств следует исполь-
зовать воздушные выключатели АМ8 — АМ15.
В отдельных цепях электроприводов при сечении отходящих проводов
до 2,5 мм2 можно применять установочные автоматические выключатели
с отключающей способностью не ниже 1200 А. Поскольку двигатели электро-
гидравлических толкателей тормозов получают питание от сравнительно мощ-
ных сетей, они должны иметь индивидуальную защиту с помощью автома-
тических выключателей с отключающей способностью не ниже 2500 А.
При выборе уставки электромагнитного расцепителя защитного автома-
тического выключателя в цепях электроприводов переменного тока нужно
учитывать его быстродействие. Современные выключатели срабатывают в те-
чение первого периода прохождения тока через нуль, поэтому они могут
реагировать на апериодическую составляющую пускового тока асинхронного
электродвигателя. С учетом отстройки от апериодической составляющей пус-
кового тока и допустимых разбросов пускового тока отсечку электромагнит-
ного расцепителя выключателя необходимо настраивать на ток
Л:р 2^ 1>8/п, дв + /с, дв/(0»3/п),
где /п, дв — расчетное значение пускового тока наибольшего по мощности
двигателя, защищаемого выключателем; 1с, дв — статические токи нагрузки
двигателей других механизмов в установившемся режиме; tn — число элек-
троприводов крана.
1.7. /СИСТЕМЫ УПРАВЛЕНИЯ КРАНОВЫМИ ЭЛЕКТРОПРИВОДАМИ.
ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ВЫБОРА
СИСТЕМ УПРАВЛЕНИЯ
Основные определения. Под системой управления электроприводом в
дальнейшем будем подразумевать комплекс, состоящий из преобразователя
электрической энергии (если таковой имеется), аппаратуры управления для
коммутации тока в цепи электродвигателя, органа ручного управления или
автоматического (программного) контроля, органа скоростного, путевого или
иного контроля, а также элементов защиты электрооборудования и меха-
низма, действующих в конечном счете на устройства отключения электро-
привода. Все электрические цепи подразделяются на:
1) главные цепи, через которые проходит основной поток энергии элек-
тропривода, а также осуществляется питание грузоподъемных магнитов;
2) цепи возбуждения, через которые проходит ток возбуждения элек-
трических машин постоянного тока, синхронных электрических машин пере-
менного тока или электромагнитов тормозных устройств, а также ток дви-
гателей электр ©гидравлических толкателей;
44
Технические характеристики грузоподъемных машин
Разд. 1
3) цепи управления, по которым осуществляется подача команд к ком*
мутационным устройствам главных цепей и цепей возбуждения от органов
управления; в цепях управления осуществляется также определенная после-
довательность выполнения команд и переключений по заранее заданной про-
грамме;
4) цепи сигнализации, которые передают оператору или контролирую-
щему устройству информацию о состоянии коммутирующих элементов глав-
ных цепей и цепей управления или о значениях конкретных параметров элек-
тропривода и механизма.
В крановых электроприводах применяют электромашинные и статические
преобразователи электрической энергии. В электромашинных преобразовате-
лях две (или более) электрические машины преобразуют электроэнергию,
потребляемую от питающей сети, в электроэнергию с регулируемыми пара-
метрами (напряжение, частота, ток). В статических преобразователях пре-
образование электрической энергии осуществляется путем бесконтактной
коммутации цепей постоянного или переменного тока с помощью управляе-
мых и неуправляемых полупроводниковых приборов.
Аппаратура управления электроприводом является комплексом, включаю*
щим контактные и бесконтактные устройства коммутации в цепях электро-
двигателя, преобразователей энергии и управления, а также элементы за-
щиты электрических цепей. Всю контактную аппаратуру в крановом электро-
приводе можно разделить на две группы:
аппаратура, управление которой осуществляется непосредственно опера-
тором или исполнительным механизмом (контроллеры, конечные выключа-
тели) ;
аппаратура с приводом контактов от электромагнитного устройства (кон-
такторы и реле).
Если контактные коммутационные элементы аппарата с непосредствен-
ным ручным приводом предназначаются для коммутации цепей главного
тока, то такое устройство называется силовым кулачковым контроллером,
s если эти элементы служат для коммутации цепей управления, то такой
аппарат называется командоконтроллером. Если контактные коммутацион-
ные элементы приводятся в действие через связь с механизмом, то такие
аппараты называются конечными или путевыми выключателями. Последова-
тельность замыкания и размыкания контактов, приводимых в действие от
вала с кулачковыми шайбами, в функции угла поворота вала называется
диаграммой включений. Диаграмма включений, изображенная в виде таб-
лицы, называется таблицей включений. Несколько контакторов и реле, а так-
же различные устройства защиты, объединенные в законченное комплектное
устройство для управления электроприводом, именуются магнитными кон-
троллерами. Магнитный контроллер, в котором процесс коммутации осуще-
ствляется без размыкания цепи под напряжением, называется магнитным
контроллером с бездуговой коммутацией.
Классификация систем управления. Системы управления крановыми меха-
низмами относятся к категории устройств, находящихся под непрерывным
контролем оператора, т. е. в этих системах выбор момента начала операции
§ 17,
Снеге мы управления крановыми электроприводами
45
скоростных параметров и момента окончания операции осуществляется ли*
цом, управляющим механизмом. В свою очередь система управления должна
обеспечивать необходимую последовательность переключения для реализации
желаемых скоростных параметров, предотвратить при этом недопустимые
перегрузки и обеспечить необходимую защиту.
Все многообразие различных систем управления может быть разделено
на следующие группы.
По способу управления:
1) управляемые непосредственно силовыми кулачковыми контроллерами?
весь процесс управления, включая выбор необходимых ускорений, осуще-
ствляется исключительно оператором;
2) управляемые кнопочными постами; возможности управления ограни*
чены конструктивными особенностями поста и заданной программой пуска
(торможения);
3) управляемые сложным комплектным устройством (магнитным кок*
троллером с использованием преобразователя энергии или без него), опера*
тор выбирает только необходимые скорости, а процессы разгона, торможения
и необходимые промежуточные переключения осуществляются автоматически.
По условиям регулирования:
1) с регулированием скорости ниже номинальной;
2) с регулированием скорости выше номинальной и ниже номинальной?
3) с регулированием ускорения и замедления.
В соответствии с приведенной классификацией в крановом электропри-
воде применяются следующие системы электроприводов:
электропривод постоянного тока с управлением при помощи силового
контроллера (К — ДП);
электропривод постоянного тока с управлением при помощи магнитного
контроллера (МК— ДП);
электропривод постоянного тока с питанием и управлением при помощи
тиристорного преобразователя (ТП — ДП);
электропривод постоянного тока по системе генератор — двигатель
(Г-Д);
электропривод переменного тока с асинхронным короткозамкнутым дви-
гателем, управляемым магнитным пускателем (МП — АДК);
электропривод переменного тока с асинхронным короткозамкнутым дви-
гателем, управляемым силовым контроллером (К — АДК);
электропривод переменного тока с двухскоростным асинхронным двига-
телем, управляемым магнитным контроллером (МК — АДД);
электропривод переменного тока: асинхронный двигатель с фазным ро-
тором, управляемый силовым контроллером (К — АДФ);
электропривод переменного тока: асинхронный двигатель с фазным рото«
ром, управляемый силовым контроллером с динамическим торможением спо-
собом самовозбуждения (КД — АДФ);
электропривод переменного тока: асинхронный двигатель с фазным рото-
ром, управляемый силовым контроллером с тиристорным импульсно-ключевым
регулированием (КИ — АДФ);
46
Технические характеристики грузоподъемных машин
Разд. 1
Таблица 1.15. Сравнительные технические данные
Обозначение системы
Электроприводы постоянного тока Элек
Наименование С 1 Е 1 £ тп-дп Г-д МП-АДЦ & К-АДД
Источник питания Сеть постоян- ного тока или автономный Сеть
источник
Способ управления Реостат в цепи якоря Изменением напряжения в главной цепи Прямое вклю- чение в сеть Реостат в цепи статора Пере- ключе- ние об- моток статора
к
S
Возможность регу- лирования скоро- сти: I—III квадрант II—IV квадрант Да Да Да Да Да Да Да Да Нет Нет Нет Нет Да Да
Регулирование ско- рости: в сторону умень- шения в сторону увели- чения 1:4 2: 1 1:6 2:1 1:20 3: 1 1:20 3:1 1:6
Регулирование пус- кового момента в 1:2 1:4 1:2 1:3 ' 1" 1:4 —
сторону уменьше- ния
Исполнительный двигатель Постоянного тока последо- вательного возбуждения Постоянного тока незави- симого возбуждения Асинхронный коротко- замкнутый Асин- хрон- ный двух- скорост- ной
Системы управления крановыми электроприводами
47
различных систем электроприводов
электропривода
троприводы переменного тока
переменного тока
Реостат в цепи ротора Реостат в цепи ротора, динами- ческое тормо- жение Тири- сторное импуль- сно-клю- чевое регули- рование Реостат в цепи ротора, проти- вовклю- чение Реостат в цепи ротора, динами- ческое тормо- жение Бестоко- ван комму* тация, динами- ческое тормо- жение Измене- ние на- пряже- ния в цепи статора Тири- сторное импуль- сно-клю- чевое регули- рование Регули- рова- ние часто* ты
Да Нет Да Да Да Нет ’ Да Нет Да Да Да Да Да Да Да Нет Да Да
1:3 1:7 1:20 1:3 1:8 1:8 1:10 1 :20 1 :49
1:4 1:2 1:3 1:4 1:2 1:2 1:4 1:3 ——
Асинхронный с ( разным ротором Асин- хрон- ный двух- ско- рост* ной
48
Технические характеристики грузоподъемных машин
Разд. 1
Наименование Обозначение системы
Электроприводы постоянного тока Элек
7 мк-дп тп-дп г-д МП-АДК К-АДК К—АДД
Возможность ис- пользования на взрывобезопасных крапах Нет Нет Нет Нет Да Нет Да
Возможность ис- пользования в ус- ловиях повышенной радиации Нет Нет Нет Нет Да Нет Да
Диапазон мощно- стей, кВт 3-15 10—120 50—300 20—300 0,7-10 1,5-10 7—25
Частота пусков в час 60 360 360 360 60 60 150
Ресурс по числу включений без тока 1 • 10е 20 • 106 10 - 10б 20 10s 5- 10* 2 - 10s 10 • 10б
Коммутационная из- носостойкость 0,1 .106 1,о. 10е 2.106 3 - 106 0,2 • 10й 0,5 • 10е 1 . 10*
Нагрузка механиче- ского тормоза, % кинетической энер- гии механизма 30 30 5 5 100 100 15
Коэффициент готов- ности к работе в пределах ресурса 1,0 0,7 0,6 0,9 1 1 0,8
Удельная масса ап- паратуры, кг/кВт 8 8 10 20 1,5 4 9
Системы упр&вления крановыми электроприводами
49
П родолжение
электропривода
троприводы переменного тока
। КД-АДФ 1 КИ-АДФ . i МКП-АДФ i МКД-АДФ . - МКБ-АДФ ТПН-АДФ МКИ-АДФ НПЧ-АДД
Нет Нет Нет Нет Нет Нет Нет Нет Да
Нет Нет Нет Нет Нет Нет Нет Нет Да
1,5—30 5-30 2—15 5-100 15—100 30-120 20-130 5-30 10-60
150 150 150 240 240 360 360 360 360
2,5 • 10е 2,5- 105 10 - 106 10 • 106 10 -10- 20-106 10 • 10е 10 • 10е 10 • 10е
0,5 • 106 0,5 • 106 1 • 106 1 • 106 1 . Ю6 5 - 10е 5- 10е 5-Ю5 5.10е
30 30 5 30 15 20 5 5 5
0,9 0,9 1 0,6 0,6 0,75 0,65 0,8 0,7
4 7 7 6 6 12 7 1 10 12
50
7ехнические характеристики грузоподъемных маишн
Разд. I
электропривод переменного тока: асинхронный двигатель с фазным ро-
тором, управляемый магнитным контроллером с торможением способом про-
тивовключения (МКП — АДФ);
электропривод переменного тока: асинхронный двигатель с фазным ро-
тором, управляемый магнитным контроллером с динамическим торможением
способом самовозбуждения (МКД — АДФ);
электропривод переменного тока; асинхронный двигатель с фазным ро-
тором, управляемый магнитным контроллером с без дуговой коммутацией
(МКБ — АДФ);
электропривод переменного тока: асинхронный двигатель с фазным ро-
тором, управляемый тиристорным преобразователем напряжения (ТИН—-
АДФ);
электропривод переменного тока: асинхронный двигатель с фазным ро-
тором, управляемый магнитным контроллером с тиристорным импульсно-
ключевым регулированием (МКИ —АДФ);
электропривод переменного тока: асинхронный двухскоростной коротко-
замкнутый двигатель, управляемый непосредственным преобразователем час-
тоты (НПЧ — АДД).
Технико-экономическое обоснование выбора систем управления электро-
приводами. Выбор системы управления для крановых механизмов осуществ-
ляется на основе анализа сравнительных технических данных табл. 1.15*
Таблица 1.16. Сравнительные экономические данные
системы электроприводов (стоимость электрооборудоования,
отнесенная к 1 кВт мощности двигателя, руб/кВт)
Наименование Интервал мощностей электропривода, кВт
0,7-2 2-5 5-12 12-30 30-70 70—150 Свыше 150
Электродвигатель: постоянного тока 120 72 38 28 26 25
с фазным ротором 50 28 17 15 13 11
двух-, трехскоростной ко- 70 60 40 28 25 —
роткозамкнутый Комплект магнитного пуска- 10 6 5 —
теля Аппаратура. силового кулачкового кон- 20 10 5,5 3 3
троллера магнитного контроллера 100 75 40 16 9 7,5 6,5
питания и управления си- 120 70 42 32 22 20
стемы Г — Д питания и управления си- —' 250 200 80 50 32 30
стемы ТП — ДП питания и управления си- —* 320 150 65
стемы НПЧ—АДД управления системы: ТПН — АДФ 200 80 45 32
МКИ — АДФ II 80 55 28 ——• «—• ч *
§ 2.1
Общие характеристики электрических двигателей
& именно: диапазона регулирования, способа управления, ресурса (уровня
износостойкости), диапазона возможных мощностей электроприводов, пока-
зателей энергетики и динамики, а также дополнительных данных, опреде-
ляющих условия эксплуатации электроприводов. Экономическая оценка си-
стем управления должна базироваться на принципе минимальных расходов,
связанных с первоначальными затратами по табл. 1.16, эксплуатационными
затратами на ремонт, а также затратами энергии, потребляемой из сети на
пуск и торможение крановых механизмов за период эксплуатации до капи-
тального ремонта (10 лет). Выбирается система, обладающая наилучшими
экономическими показателями. Если экономические показатели сравниваемых
систем близки, то производится дополнительная оценка по массогабаритным
показателям и условиям размещения электрооборудования. Ориентировочные
показатели массы различных систем управления приведены в табл. 1.17,
Т аблица 1.17, Сравнительные показатели массы электроприводов
Система электропривода Масса электропривода, кг/кВт. в интервале мощностей. кВт
0,7-2 2-5 5-12 12-30 30-70 70-150 Свыше 150
МП—АДК 18 12 10 — 1 и . II.
К—АДФ —* 30 20 16 —
МКД—АДФ —• 58 35 21 24 18 16
МК—АДД 60 52 42 30 —*•
Г-Д —- * 100 60 52 52 52
ТП-ДП 80 52 36 42 37
НПЧ-АДД * — —* 65 42 35
ТПН-АДФ —* 45 26 28 20
мк-дп — 70 48 38 37 36 35
МКИ-АДФ 80 65 40 27 ——
* Диапазон регулирования 1 : 30.
Учитывая, что размещение преобразовательных агрегатов или полупроводни-
ковых преобразователей на кранах сопряжено с определенными трудно-
стями, может оказаться необходимым применить систему, не обладающую
оптимальными экономическими показателями.
РАЗДЕЛ 2
ЭЛЕКТРОДВИГАТЕЛИ В КРАНОВОМ
ЭЛЕКТРОПРИВОДЕ
2.1. ОБЩИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
Технические требования к электрическим машинам. Номинальные пара-
метры электрических машин общего назначения относятся к температуре
окружающей воздушной среды 40, а электродвигателей металлургического
исполнения 50 °C. Номинальным режимом работы электрической машины
52
Электродвигатели в крановом электроприводе
Разд. 2
называется такой режим, для которого машина предназначена и который
указан на ее фирменном щитке.
Номинальный режим работы электродвигателей, используемых для кра-
нов, должен соответствовать одному из следующих стандартных режимов:
продолжительному S1; кратковременному S2 с длительностью работы при
неизменной номинальной нагрузке в течение *10, 30 60 и 90 мин; повторно-
кратковременному S3 с ПВ — 15, 25, 40 и 60 % при продолжительности
цикла 10 мин. Номинальные режимы SI, S2, S3 являются основными. До-
пустимые превышения температуры частей электрических машин приведены
в табл. 2.1.
Таблица 2.1. Допустимые превышения температуры частей
электрических машин, °C
Часть машины гост Класс нагревостойкости изоляции
Е в F И
Обмотка якоря 183-74 75 80 100 125
184-71 * 120
Обмотки возбуждения машин по- 183-74 75 80 100 125
сто я иного тока, компенсационные обмотки 184-71 — 11 120
Обмотки машин переменного тока 183-74 75 80 100 125
Стержневая обмотка ротора асин- 185-70 » — * 105 120
хронных машин 183-74 80 90 110 135
Сердечники и другие стальные ча- сти, соприкасающиеся с изолиро- ванными обмотками 183-74 75 80 90 100
Коллекторы и контактные кольца 183-74 70 80 90 100
184-71 " по
185-70 — II 95 105
Изоляция электрических машин относительно корпуса и между обмот-
ками рассчитывается на испытательное напряжение 2t/H0M + 1000 В, но не
менее 1500 В, в том числе обмотки крановых двигателей постоянного тока
1880 В, обмотки статора крановых двигателей переменного тока 1760 Б
Для обмоток фазного ротора асинхронных двигателей испытательное напря-
жение составляет 1000 Ч-4Z7P1 где — напряжение между кольцами затор-
моженного ротора. Время приложения испытательного напряжения 1 мин
§ 2.1 Общие характеристики электрических двигателей 53
Электрическая прочность межвитковой изоляции проверяется в течение 3 мин
напряжением на 30 % выше номинального.
По геометрии активного слоя, степени использования материалов, режи
мам работы, электромеханическим характеристикам, особенностям теплового
режима, конструкции, а также по условиям эксплуатации крановые электро-
двигатели значительно отличаются от двигателей общего назначения, поэтому
при использовании на кранах электродвигателей общего назначения их
основные параметры должны быть приближены к крановым.
Крановые электродвигатели обычно работают со значительными пере-
грузками по отношению к номинальному моменту при широком диапазоне
изменения частоты вращения, частых пусках и торможениях, в условиях
ударов, вибраций и других неблагоприятных факторов, приведенных в гл, 1,
поэтому конструкции узлов и деталей двигателей отличаются повышенной
прочностью и надежностью.
Основное исполнение крановых электродвигателей IP44. При этом тех-
нически и экономически целесообразно применять изоляционные материалы
классов нагревостойкости F и Н с допущением повышенных на 5—10° на-
гревов отдельных частей.
Для снижения расхода энергии при пусках и торможениях момент инер-
ции ротора (якоря) должен быть по возможности минимальным, а номи-
нальная частота вращения выбирается относительно небольшой. Для обеспе-
чения большой перегрузочной способности по моменту магнитный поток дви-
гателей относительно велик. В двигателях постоянного тока с учетом про-
должительного режима включения обмоток параллельного возбуждения и
необходимости уменьшения размагничивающего действия реакции якоря
отношение высоты оси вращения к диаметру якоря равно 0,92—1,05. Общая
тенденция в электромашиностроении к уменьшению высоты оси вращения
двигателей заданной мощности привела к тому, что расстояние между па-
кетом железа статора и опорной плоскостью лап в двигателях переменного
тока составляет только 12—15 % высоты оси вращения, а в двигателях по-
стоянного тока поперечная форма станины приближается к квадрату.
Получение повышенной частоты вращения двигателей постоянного тока
может достигаться как ослаблением поля, так и повышением напряжения
на якоре до двойного значения номинального. Вместе с другими перечислен-
ными факторами это усложняет требования к коммутации двигателей, изо-
ляции токоведущих частей, жесткости конструкции двигателей.
В крановых двигателях, переменного тока за номинальный режим принят
режим при ПВ = 40 %, а в двигателях постоянного тока режим 60 мин
(наряду е режимом ПВ = 25 %).
Основные исполнения электрических машин по способу монтажа при-
ведены в табл. 2.2.
Допустимые отклонения значений параметров электродвигателей. До-
пуски на высоту оси вращения, на отверстия и их расположение в лапах
для крепления электрических машин, на выступающий конец вала, на сопря-
гаемые размеры крепительного фланца, отверстия и их расположение на
крепительном фланце назначаются по ГОСТ 8592-79 для нормальной точно*
СП
►£*
Таблица 2.2. Основные, исполнения электрических машин по способу монтажа
Обозначение по ГОСТ 2479-79 Обозна- чение по ГОСТ 2479-65 ^Обозначение ряда зарубежных фирм Особенности монтажа Серия электрических машин Схематическое обозначение исполнения
IM1001 М101 вз На лапах для крепления к полу, ось вращения горизонтальная Все серии
я 7///Л т
IM1011—IM1071 —™ *" * На лапах для крепления к лю- бой плоскости 4А
я
£
и Р]
1М2001 М201 ВЗ/В5 На большом фланце для креп- ления к вертикальной стенке или на лапах для крепления к полу,, ось вращения горизонтальная Все серии
Lav*
IM2011 М202 V5/V1 На большом фланце для креп- ления к полу или на лапах для крепления к вертикальной стенке, ось вала вертикальная, конец вала направлен вниз Д, мт, 4А ’ '-'h ——
[г*
IM3011 М302 VI На большом фланце для креп- ления к полу, ось вращения вер- тикальная, конец вала направлен вниз Д, 4А W/. 1 * №' 7^
Электродвигатели в крановом электроприводе Разд. 2
Общие характеристики электрических двигателей
55
сти исполнения. Допустимые отклонения от номинальных значений парамет-
ров электрических машин должны быть не выше значений, указанных в
табл. 2.3.
Таблица 2.3. Допустимые отклонения параметров машин
от номинальных значений
Параметр
Допустимое отклонение
Коэффициент полезного действия машин
мощностью: до 50 кВт
свыше 50 кВт
Общие потери машин мощностью свыше
50 кВт
Коэффициент мощности (cos (р) асинхрон-
ных двигателей
Частота вращения двигателей постоянного
тока при номинальной нагрузке, рабо-
чей температуре и отношении номиналь-
ной мощности, кВт, к номинальной час-
тоте вращения, об/мин:
с параллельным и независимым воз-
буждением:
менее 0,67
от 0,67 до 2,5
от 2,5 до 10
10 и более
с последовательным возбуждением:
менее 0,67
от 0,67 до 2,5
от 2,5 до 10
10 и более
Скольжение асинхронных двигателей
Начальный пусковой ток асинхронных
двигателей с короткозамкнутым ротором
Начальный пусковой момент асинхронных
двигателей с короткозамкнутым ротором
Максимальный момент двигателей пере-
менного тока
Минимальный вращающий момент в про-
цессе пуска асинхронных двигателей с
короткозамкнутым ротором
Момент инерции
—0,15(1 — п)
—0,10(1—1П
+ 10 % полных потерь
(1 — coscp)/6, но не менее
0,02 и не более 0,07 по аб«
солютному значению
+ 15%
+ 10%
+7,5 %
-4-5 %
±20 %
+ 15%
+ 10 %
+7,5 %
±20 % номинального значе*
ния (знак «—» относится
только к двигателям с по-
вышенным скольжением)
+20 % (нижнего предела нет)
—15 %
-Ю %
-20 %
±20 %
Мощность и допустимые превышения температуры указываются при тем-
пературе окружающей среды 40 °C и высоте над уровнем моря до 1000 м.
При увеличении высоты выше 1000 м необходимо снижать номинальную
мощность либо снижать температуру охлаждающей среды при сохранении
номинальной мощности согласно рис. 2.1, При температуре окружающего
56 Электродвигатели в крановом электроприводе Разд. 2
Рис. 2.1. Зависимость номинальной
мощности и допустимой температуры
окружающей среды от высоты над
(Уровнем моря для соответствующих
классов изоляции
Валы и подшипники крановых электродвигателей. Вал
воздуха выше 40 °C (но не более
60 °C) предельно допустимые превы-
шения температуры уменьшаются на
разность между температурой охла-
ждающей среды и температурой 40 °C
для всех классов изоляционных ма-
териалов. Снижение номинальной
мощности двигателей при этом мож-
но установить по графикам рис 2.2.
Допустимые отклонения сопротив-
ления обмоток якорей, роторов, ста-
торов, полюсных катушек от номи-
нальных значений составляют ±6 %'
для прямоугольной меди и круглой
меди с диаметром более 1,7 мм;
±7 % для круглой меди диаметром
0,7—1,6 мм; ±8 % для круглой меди
с диаметром менее 0,7 мм. Разница
между сопротивлениями отдельных
фаз статора (ротора) не должна
превышать 2 %
двигателя рассчи-
при наиболее тяжелых условиях
тан на передачу максимального момента
Рис. 2 2. Зависимость номиналь-
ной мощности электродвигателя
от температуры окружающей
среды:
1 —- двигатель постоянного тока по-
вторно-кратковременного режима ра-
боты; 2 — двигатель переменного тока
повторно кратковременного режима;
3 — двигатель постоянного тока крат-
ковременного режима, 4 — двигатель
переменного тока кратковременного
режима
зубчатой шестерне на конце вала. Минимальный диаметр делительной окруж-
ности шестерни D? в зависимости от диаметра конца вала d, мм:
di 28 32 36 40 50 70 80 90 100 120 140
Dz 75 80 90 95 115 145 165 180 200 240 290
§ 2.1 Общие характеристики электрических двигателей W
Для шестерни с углом зацепления as = 20° усилие на зуб
Nmax == 2Mmax/(Dz cos Ctg) 2,№Mmax!&zt
где Mmax — максимальный вращающий момент, развиваемый двигателем.
Вал должен быть проверен на прогиб, обусловленный силой тяжести
ротора, силой Nmax и силой одностороннего магнитного притяжения. Для
эластичной втулочно-кольцевой муфты радиальное усилие на конец вала
определяется по формуле
N max =
здесь Da — средний диаметр расположения втулок (пальцев) муфты.
Второй конец вала часто используется для присоединения тормоза, ма-
ховика или другого привода. При этом допустимое радиальное усилие, при-
веденное к середине длины конца вала, может быть вычислено по эмпири-
ческой формуле Nmax — 0,4rf|, Н (d{ принято в миллиметрах).
Диаметр вала под подшипник в крановых двигателях примерно на 12 %
больше диаметра конца вала. Подшипники крановых двигателей имеют рас-
четную долговечность не менее 10 000 ч. Шариковые подшипники легкой и
средней серий применяются для диаметров вала под подшипник 60—70 мм,
а при больших диаметрах вала используются роликовые подшипники сред-
ней узкой серии с одним бортиком на внутреннем кольце. Все подшипники
нормального класса точности — с повышенным радиальным зазором, что
особенно важно для двигателей, работающих в условиях вибраций, ударов
и значительных перепадов температур между внутренним и наружным коль-
цами (15—20 °C).
В табл. 2.4 приведены типы подшипников, применяемых в крановых дви-
гателях. В конструкции подшипниковых узлов применяется унифицирован-
ная система с двумя одинаковыми незапертыми в осевом направлении под-
шипниками. При этом ротор имеет осевой разбег 0,6—2,4 мм в зависимости
от длины двигателя /so < 950 мм; 1,2—2,5 мм при /зо = 950™ 1400 мм;
1,5—3,2 мм при /30 > 1400 мм.
Угол наклона двигателей относительно продольной оси при работе прак-
тически не ограничен. Необходимо обратить лишь внимание на возможность
слива конденсата из внутренних полостей двигателей. Для двигателей с дву-
мя роликовыми подшипниками угол наклона относительно продольной осн
ограничен 15е и допустим только для кратковременных и повтор но-кратко-
временных режимов работы. Угол наклона до 30° допускается как исключе-
ние и при кратковременной работе с общим числом часов работы за срок
службы не более 50.
Для смазывания подшипников крановых двигателей наиболее предпоч-
тительна смазка марки ВНИИНП 220 с присадкой дисульфата молибдена,
снижающей износ подшипников в режимах реверсов. Применяемые марки
смазок указаны в табл. 2.5. Допустимо применение смазки и других марок,
при этом старая смазка должна быть тщательно удалена. При традицион-
ных конструкциях подшипниковых узлов срок замены (пополнения) смазки
Электродвигатели в крановом электроприводе
Разд. 2
Т а б л иц а 2.4. Подшипники крановых электродвигателей
Тип двигателя Обозначение подшипника при исполнении
горизонтальном вертикальном
Д12 60307 60307
Д21, Д22 60309 60309
Д31, Д32 312 312
Д41, Д806 42314 314
42314
Д808 20-42317Л1 70-417
70-32317
даю 20-42320М *
Д812 • 70-322
20-42322Л М 20-32322
8226
Д814 20-42324М
Д816 70-326
20-42326М 20-32326
8230
Д818 20-42328Л1
MTF011, 012 60206 60206
MTF/H/111, 112 60208 60208
MTF/H/211 70-60309К 70-60309К
MTF/H/311, 312 60311 60311
MTF/H/411, 412 60314 60314
МТН511, 512 20-42616 *
МТН611, 612, 613 20-42620 —
МТН711, 712, 713 20-42326М
4MT1I2 70-60208 —*•
4МТ132 70-60309 —•
4МТ160 70-60311 —-
4МТ200 70-60314
4МТ225 20-42316 —W
4МТ280 20-42320М ——
4МТ355 20-42326М “-
составляет от 2000 до 4000 ч работы электродвигателя. При малых нара-
ботках календарный срок службы смазки составляет 5—10 лет. Большие
сроки службы относятся к малоиспаряемым смазкам типа ЦИАТИМ 221,
Таблица 2.5. Технические данные смазок подшипников
крановых электродвигателей
Марка смазки ГОСТ или ТУ на смазку Диапазон рабочих температур, °C Температура каплепадения, °C Рекомендуе- мое климати- ческое испол- нение двига- телей
ВНИИНП 220 ТУ 38-101. 475-74 —60-? 4-150 200 Т, ХЛ, У
ЦИАТИМ 221 ГОСТ 9433-80 —60-Н 4-150 200 Т, ХЛ, У
1 — 13 —404- 4-80 120 У
ЦИАТИМ 203 ГОСТ 8773-73 —45-г 4-100 150 У
Крановые электродвигателя постоянного тбкй
2.2. КРАНОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Основные соотношения. Связь электрических и механических параметров
в машинах постоянного тока описывается выражениями
Е «= (2.1)
М = (2.2)
где п — частота вращения электродвигателя, об/мин; Е — ЭДС якоря двига-
теля, В; /я — ток якоря; А; Ф — магнитный поток главных полюсов, Вб; М —
электромагнитный момент на валу двигателя, Н-м; се— электрическая по-
стоянная, сЕ = рА7(60 а); см— механическая постоянная, см = pN/(2na);
N — число активных проводников якоря; р — число пар полюсов; а —число
параллельных ветвей обмотки якоря.
Мощность на валу двигателя, кВт, выраженная через механические па-
раметры,
Р2 = М п/9550; (2 3)
мощность на валу двигателя, выраженная через электрические параметры,
р2 = £//яП . 10“3. (2.4)
Момент на валу двигателя, Н-м,
М = 9,5567яп/п. (2.5)
Магнитный поток Ф создается МДС обмоток главных полюсов. С учетом
(2.1) и (2.2) получаем выражение для механической характеристики элек-
тродвигателя 4
60а ( U 2ла гя
П ~~ ~pN кФ- ~ pN Ф2
(2.6)
где Гя сопротивление цепи якоря двигателя, Ом.
Из (2.6) следует, что частота вращения электродвигателя зависит от
подведенного напряжения Z7, магнитного потока Ф и момента на валу дви-
гателя М.
Полезный магнитный поток двигателя даже при постоянной МДС по-
люсов несколько меняется в зависимости от тока якоря, особенно при боль-
ших токах. Это явление, называемое размагничивающим действием реакции
якоря, уменьшает магнитный поток главных полюсов, поэтому при расчете
механических характеристик необходимо пользоваться не характеристикой
намагничивания машины, а нагрузочными характеристиками, которые по-
строены для зависимостей Ф = f (F), где F —МДС якоря.
Мощность электрической машины постоянного тока, выраженная через
геометрические размеры, определяется по формуле
Р2 = -i. • 10 3, (2.7)
где £>я — диаметр якоря, см; /я — эффективная длина пакета якоря, см; А —
линейная нагрузка, А/см: Bq— индукция в воздушном зазоре, Тл; а/—ко-
эффициент расчетной полюсной дуги двигателя, — 0,6 4- 0,68,
Электродвигатели в крановом электроприводе
Разд. 2
Рис, 2 3. Коэффициент для
расчета потерь в стали якоря
двигателей постоянного тока
му важно знать потери и их
Для крановых электродвигателей опти-
мальное отношение 1п/Оя == 0,85 4- 1,15. Од-
нако по соображениям унификации на
одном диаметре двигателей малой мощ-
ности строятся две длины, тогда для
более коротких двигателей отношение
1Я/ОЯ = 0,65 4- 0,8.
Линейная нагрузка якоря в зависимо-
сти от режимов работы принимается 260—
370 А/см.
Рекомендуемые значения индукций при
конструировании электродвигателей: в воз-
душном зазоре = 0,6 4- 0,8 Тл; в зубцах
якоря Вг1/з = 1,7 4 2 Тл.
Потери энергии в электродвигателях.
Потери энергии, интенсивность охлажде-
ния и режим работы определяют мощность
конкретной электрической машины, поэто-
распределение по отдельным элементам дви-
гателя. Потери в стальном пакете ДРСт в значительной степени лимитируют
мощность закрытых двигаетелей в повторно-кратковременном режиме, осо-
бенно при высокой частоте вращения. Пересчет потерь ДРСТ номинального
режима к любым другим состояниям работы производят по формуле
АР ст
К СТ АРСТ, НОМ^*
Р ном (п/Пном)2
(2.8)
где коэффициент /Сст определяется по графику рис. 2.3; АРСт, Ном опреде-
ляется по данным табл. 2.6; F и FHOm — МДС (или ток катушки) главного
Т аблица 2.6. Потери, Вт, в двигателях серии Д
параллельного возбуждения при ПВ = 40%
Тип двигателя Обмотки парал- лельного воз- буждения Обмотки якоря и добавочных полюсов ДР„ м Стали якоря ДР ст Добавочные потери
Д12 140 400 100 30
Д21 230 500 150 45
Д22 260 510 210 60
Д31 330 750 240 85
Д32 350 1050 280 120
Д41 450 1150 450 180
Д806 550 1000 700 190
Д808 700 970 900 250
Д810 750 1000 1300 350
Д812 950 1150 1600 420
Д814 1000 1400 2300 600
Д816 1250 1470 2800 930
Д818 1500 1550 3400 1000
§ 2.2
Крановые электродвигатели постоянного тока 61
полюса в рассчитываемом и номинальном режимах; п и пном — частота вра-
щения в рассчитываемом и номинальном режимах.
Электрические потери в обмотках якоря, добавочных и главных полюсах
(потери в меди) ДРЫ находят по формуле
“ ^ягкат» (2.9)
где 7Я — ток в обмотке в рассчитываемом режиме, А; гкат — сопротивление
обмотки и катушки, приведенное к температуре 115°С, Ом. Прочие потери,
влияющие на нагрев обмоток и катушек, могут быть приняты равными
0,01/я{7 или взяты по табл. 2.6.
Для кратковременных режимов работы (менее 30 мин) вентиляция илй
другие виды охлаждения малоэффективны, а при очень коротких периодах
работы (менее 15 мин) нагрев обмоток практически определяется только
их теплоемкостью и плотностью тока. Для режимов работы до 60 с превы-
шение температуры обмотки может быть определено по формуле
т =/2//250, (2.10)
где J — плотность тока в обмотке, А/мм2; t — время прохождения тока, с«
Для режима длительностью 60—200 с коэффициент в знаменателе фор-
мулы (2,10) равен 300; при / = 5—10 мин — 450; при t = 15 мин — 550.
Значение допустимого тока при кратковременных режимах продолжи-
тельностью свыше 3 мин может быть определено по формуле
/доп = 0,4/hom/V^V7^ (2.11)
где Дом — номинальный ток в режиме ПВ = 40 %, А; Тц— постоянная вре-
мени нагрева, с.
Т а б л иц а 2,7. Постоянные времени нагрева
крановых электрических машин постоянного тока
Режим нагрева, мин Масса электрической машины, кг Постоянная времени нагрева, с
5 50—100 100—300 300—1000 1000—4000 600 1200 1800
10-20 50-100 100—300 300-1000 1000—4000 900 1100 2200 4000
20—60 50—100 100—300 300—1000 1000—4000 2000 2800 4000 6000
62 Электродвигатели в крановом электроприводе Разд. 2
В табл. 2.7 приведены постоянные времени нагрева крановых электро-
двигателей.
Важнейшим фактором, ограничивающим максимально допустимый ток,
максимальный момент, диапазон регулирования частоты вращения в маши*
нах постоянного тока, является коммутационная способность коллектора.
Сущность процесса коммутации заключается в переключении секций обмотки
якоря с одной параллельной ветви в другую при изменении направления
тока в ней во время перемещения коллектора под щеткой. Коммутация тока
при вращении якоря вызывает искрообразование под щетками, которое ве-
дет к обгоранию коллектора и щеток, а в некоторых случаях может вызвать
круговой огонь. Интенсивность искрообразования зависит от ряда парамет-
ров двигателя, тщательности изготовления коллектора, подбора марки щеток
и многих других факторов. Оценка степени искрения ведется под сбегающим
Таблица 2.8. Оценка степени искрения при коммутации
Степень искре- ния Характеристика степени искрения Состояние коллектора и щеток
Шкала ГОСТ 183-74 Бук- венная шкала
1 а Отсутствие искрения Отсутствие почернения на коллекторе и следов нагара на щетках
»7« ь Отдельное точечное слабое искрение под небольшой частью края щетки
с
172 d Слабое искрение под боль- шой частью края щетки Появление следов почерне- ния на коллекторе и следов нагара на шетках, легко устраняемых протиранием по- верхности коллектора бен- зином
—* е Равномерное точечное ис- крение по всей длине края щетки
2 /
g Крупные искры звездчато- го характера, треск Появление следов почерне- ния на коллекторе и следов нагара на щетках, не устра- няемых протиранием поверх- ности коллектора бензином
h
3 i Искры брызгающего ха- рактера, треск, значительное искрение под всем краем щетки Значительное почернение на коллекторе, не устраняемое протиранием поверхности кол- лектора бензином, а также подгар и частичное разруше- ние щеток
j Местные дуги под щеткой, языкообразные выбросы
k
I
§ 2.2 Крановые электродвигатели постоянного тока 63
краем щетки (табл. 2.8). При номинальном режиме степень искрения должна
быть не выше 172-
Степень искрения 2 допускается только при кратковременных толчках
нагрузки или перегрузки. Степень искрения 3 допускается только в режимах
интенсивного торможения с большой скорости при отключенном от сети
двигателе, если при этом коллектор и щетки остаются в состоянии, пригод-
ном для дальнейшей работы.
Двигатели серии Д исполнений 12—32 при номинальном напряжении
в течение 30 с, а двигатели исполнений 41, 806—818 в течение 60 с должны
выдерживать ток перегрузки, указанный в табл. 2.9, причем искрение на
коллекторе не должно достигать степени 3.
Таблица 2.9. Кратность максимального момента
и перегрузка по току двигателей серии Д
Вид возбуждения Кратность максимального момента в часовом режиме Отношение тока к номинальному, со- ответствующему часовой мощ- ности, при номинальном напряжении, В
при номиналь- ном. напряже- нии, В при трогании с места двигателей и номинальном напряжении, В
220 440 220 440 220 440
Последовательное 4 3,2 5 4 3,2 2,55
Смешанное 3,5 2,8 4,2 3,4 3 2,4 '
Параллельное со стабилизиру- 3 2,4 3,5 2,8 3 2,4
ющей обмоткой Параллельное 2,7 2,15 3 2,4 2,8 2,25
Коммутационную устойчивость электродвигателей целесообразно прове-
рять по следующим соотношениям:
среднему межсегментному напряжению на коллекторе, В,
Еср = 2pU/k < 20, (2.12)
где k — число коллекторных пластин на коллекторе;
максимальному межсегментному напряжению на коллекторе при умень-
шении МДС главных полюсов и большом токе, В,
£Ср
Енгах = ~~ С1 + 0.45Fp, Я/Гв) < 35,
и;
(2.13)
где di — коэффициент полюсного перекрытия; FPt я — МДС реакции якоря;
FB— МДС главных полюсов (возбуждения).
Работа крановых электродвигателей при питании от статических выпря-
мителей. Питание двигателей постоянного тока от статических выпрямителей
находит все большее применение. Двигатели допускают питание от регу-
лируемых статических выпрямителей, соединяемых по трехфазной мостовой
схеме, без применения сглаживающих реакторов. При этом за счет пульса-
ции тока якоря нагрев двигателей возрастает на 2—3 % при коэффициенте
64
Электродвигатели в крановом электроприводе
Разд. 2
пульсации 15 %, на 5—7 % при коэффициенте пульсации 25 %, на 15—22 %
при коэффициенте пульсации 35 %.
Коэффициент пульсации, %, определяется по формуле
ki = hnax^Z fjnin юо, (2.14)
’max ~Ь Itnin
где Imax, Imin — максимальное и минимальное значения тока в цепи якоря
при питании от выпрямителя.
Аналогично подсчитывается коэффициент пульсации по напряжению
Для наиболее распространенной трехфазной мостовой схемы уровень пуль-
сации тока ниже 7 % Для диапазона мощностей двигателей 20—200 кВт,
поэтому дополнительный нагрев от пульсаций можно не учитывать. У дви-
гателей мощностью до СО кВт собственная индуктивность двигателя суще-
ственно снижает пульсации тока. При мощностях двигателей свыше 60 кВт
собственная индуктивность якорной цепи меняется несущественно, и сниже-
ния пульсаций следует добиваться максимальным приближением мощности
преобразователя и двигателя, коэффициент пульсаций тока резко снижается.
С ростом нагрузки на двигатель искрение на щетках может даже умень-
шиться вследствие снижения пульсации тока.
Шихтованные сердечники добавочных полюсов дают существенное улуч-
шение коммутации двигателей, особенно при ki = 25 — 35 %.
Преобразователь следует выбирать так, чтобы номинальное напряжение
двигателя было близко или равно напряжению верхнего предела регулиро-
вания на выходе преобразователя. Недоиспользование преобразователя по
мощности вызывает увеличение пульсации выходного тока и напряжения,
что отрицательно влияет на процесс коммутации двигателя. При ослаблении
поля двигателя возрастают коэффициенты пульсаций тока и напряжения,
что несколько ухудшает коммутационные возможности двигателя в сравне-
нии с возможностями при питании от сети с постоянным напряжением.
Серия крановых электродвигателей Д построена на 10 диаметрах яко-
рей, имеет 13 исполнений по основным параметрам, причем 3 исполнения
имеют по 2 длины. Двигатели предназначены для работы в электроприводах
грузоподъемных машин, в том числе металлургических. Для механизмов
с большим числом включений (до 1000 в час) группы 6М в целях повыше-
ния динамических показателей приводов и уменьшения расхода энергии на
пуск якоря используются тихоходные двигатели с относительно невысокой
поминальной частотой вращения. Для механизмов с числом включений в час
120—240 (групп 4М, 5М) предусмотрены быстроходные двигатели типов
Д21 — Д808, имеющие частоту вращения на 30—50 % большую, чем двига-
тели группы 6М. Двигатели характеризуются повышенной кратностью пус-
ковых и максимальных моментов.
Номинальное напряжение двигателей 220 и 440 В. Способ возбуждения:
последовательное, параллельное, параллельное со стабилизирующей последо-
вательной обмоткой и смешанное.
Для всех обмоток двигателей применяется только изоляция класса Н.
Крановые электродвигатели постоянного тока
65
Т аблица 2.10. Технические данные электродвшателей серии Д
при номинальном режиме 60 мин
Тип Номинальная мощность, кВт, при Макси- мально допусти- мая частота враще- ния, об/мин Последовательное возбуждение Параллельное возбуждение
Ток, А, при Частота враще- ния, об/мин, при Ток, А, при Частота враще- ния, об/мин, при
220 В 440 В 220 В 440 В 220 В 440 В 220 В 440 В 220 В 440 В
Тихоходное исполнение
Д12 2,5 3600 16 — 1100 —* 15 —* 1180 —
Д21 4,5 4 3600 28 13 900 1050 26 12 1030 1220
Д22 6 * 3600 37 850 — 33 —< 1100 •—»
Д31 8 6,7 3600 47 20 800 800 44 19 840 875
Д32 12 3300 69 675 65 —* 770
Д41 16 15 3000 89 43 650 660 86 40 690 710
Д806 22 — 2600 120 575 — 116 — 650 —1
Д808 37 37 2300 200 100 525 525 192 96 575 575
Д810 55 55 2200 204 145 500 510 282 141 550 560
Д812 75 75 1900 390 180 475 500 380 176 515 520
Д814 ПО 110 1700 565 280 460 460 550 273 500 500
Д816 150 150 1600 765 380 450 460 745 370 480 499
Д818 185 185 1500 935 467 410 410 920 460 450 459
Быстроходное исполнение
Д21 5,5 3600 33 — 1200 — 31 ** 1440
Д22 8 7 3600 46 21 1200 1180 44 20 1510 1460
Д31 12 1 3600 68 1100 —* 64 —* 1360 —
Д32 18 17 3300 98 47 960 970 94 45 1190 1190
Д41 24 3000 130 ' 970 — 124 ' 1100
Д806 32 32 2600 170 85 900 900 165 82 1000 1000
Д808 47 * * 2300 248 —* 720 — 238 800 ИИ-М
Таблица 2.11. Технические дачные электродвигателей
серии Д при режиме работы ПВ = 40 %
Тип Мо щность при ПВ=40 %, кВт, при Последовательное возбуждение Параллельное возбуждение Мощность при ПВ=25 %, кВт, при
Ток, А, при Частота вра- щения, об/мин, при Ток, А, при Частота вра- щения, об/мин, при
220 В 440 В 220 В 440 В 220 В 440 В 220 В 440 В 220 В 440 В 220 В 440 В
Тихоходное исполнение
Д12 2,4 15 -—. 1150 — 14 — 1230 — 3 —•
Д21 3,6 3,1 22 10 1040 1230 21 10 1080 1300 4,5 4
Д22 4,8 — 28 970 — 26 — 1150 6
Д31 6,8 5,2 39 16 900 900 37 15 880 910 8,5 7,5
Д32 9,5 — 53 1 760 ' 57 — 800 12 —
Д41 13 12,5 21 35 730 760 20 34 720 720 16 15
Д806 17 92 — 640 — 84 710 20 —
Д808 24 24 125 63 615 615 112 56 630 630 30 30
Д810 35 35 182 91 610 610 148 74 600 600 40 40
Д812 47 45 242 115 560 590 192 92 565 570 53 51
Д814 70 66 356 168 550 565 280 138 560 560 80 80
Д816 85 85 430 215 540 540 350 175 535 540 97 97
Д818 106 100 530 250 500 515 415 205 470 470 130 130
3 Зак. 918
66
Электродвигатели в крановом электроприводе
Разд. 2
Продолжение табл. 2.11
Тип Мощность при ПВ=40 %, кВт. при Последовательное возбуждение Параллельное возбуждение Мощность при ПВ=25 %, кВт, при
Ток, А, при Частота вра- щения, об/мин, при Ток, А, при Частота вра- щения, об/мин, при
220 В 440 В 220 1 | 440 В 220 В 440 В 220 В 440 В 220 В 440 В 220 В 440 В
Быстроходное исполнение
Д21 4,4 26 —г 1340 25 1500 5,5
Д22 6,5 5,6 37 17 1300 1300 34 16 1570 1550 8 7
Д31 9,5 1 53 1190 51 * 1420 12
Д32 13,5 12,6 72 34 1100 1200 68 32 1240 1240 16 15
Д41 18 96 —* 1060 91 —« 1160 — 22
Д806 23 23 120 60 1010 1010 110 55 1060 1060 27,5 27,5
Д808 30 155 —— 850 —— 134 825 35
По способу монтажа основным исполнением является исполнение 1М100Г
с двумя свободными концами вала. Кроме того, двигатели типов Д12 — Д32
имеют исполнение IM2011, типов Д12 — Д808— IM2001. Вертикальное испол-
нение IM3011 имеют двигатели всех габаритов. При этом в их типовое обо-
значение вводится буква В (например ДВ812). Степень защиты основных
исполнений крановых двигателей IP33, а кожуха над выводами IP 10.
Станины двигателей исполнений до 808 включительно неразъемные. Ста-
нины двигателей Д810 — Д818 разъемные.
Формально номинальными данными являются параметры кратковремен-
ного режима 60 мин (для обеспечения соответствия зарубежным аналогам).
Однако, поскольку двигатели предназначаются для грузоподъемных меха-
низмов, равноправным номинальным режимом является повторно-кратковре-
менный с ПВ = 40%, наиболее характерный для подавляющего числа элек-
троприводов, в которых могут применяться двигатели постоянного тока.
Работа двигателей при ПВ =15, 25 и 60 % возможна лишь в отдельных
случаях. Технические данные электродвигателей в режиме работы 60 мин
и ПВ = 40 % приведены в табл. 2.10 и 2.11. Кроме того, в табл. 2.11 при-
ведены данные по мощностям электродвигателей при ПВ = 25 %,
Параллельные обмотки возбуждения рассчитаны на работу в режиме
ПВ =100 %. Эти обмотки состоят из двух групп, рассчитанных на питание
от сетей 220 и ПО В. При включении на 220 В группы соединяются после-
довательно, а при включении на 110 В — параллельно. При напряжении сети
440 В последовательно с обмотками должен быть включен резистор с сопро-
тивлением, равным сопротивлению обеих групп.
Двигатели рассчитаны на регулирование частоты вращения ослаблением
магнитного потока или изменением напряжения на якоре. Тихоходные дви-
гатели параллельного возбуждения со стабилизирующей обмоткой допускают
увеличение частоты вращения в 2,5 раза по отношению к номинальной путем
уменьшения тока возбуждения, При максимальной частоте вращения вра-
Крановые электродвигатели постоянного тока
67
Таблица 2J2. Основные размеры, мм, и масса электродвигателей
серии Д
Тип 6з1 + &32 die Z1 110 /зо 1з1 h hsi Масса, кг Момент инер- ции, КГ-М1
Д12 280 345 28 19 60 220 561 115 160 323 130 0,05
Д21 300 400 35 19 80 194 665 170 180 373 200 0,125
Д22 300 400 35 19 180 239 710 170 180 373 225 0,15
Д31 390 475 50 26 100 250 752 173 225 453 310 0,3
Д32 390 475 50 26 100 320 822 173 225 453 365 0,425
Д41 430 560 65 32 105 299 910 209 250 508 540 0,8
Д806 420 560 65 32 105 533 930 165 250 508 635 1
Д808 476 625 80 32 130 628 1097 159 280 562 885 2
Д810 520 800 90 32 130 660 1114 178 315 635 1250 3,65
Д812 570 860 100 35 165 724 1220 172 340 690 1770 7
Д814 636 935 120 42 165 813 1362 200 375 762 2240 10,2
Д816 686 980 130 42 200 890 1502 212 400 810 2860 16,3
Д818 760 1080 140 48 200 990 1579 201 450 910 3745 27,5
Таблица 2.13. Обмоточные данные двигателей
последовательного возбуждения
Тип Число активных проводни- ков якоря N Число парал- лельных ветвей якоря 2а Сопро- тивление якоря и добавоч- ных полюсов, Ом Число витков на главный полюс Сопро- тивление последо- вательной обмотки, Ом Магнитный поток на полюс, режим 60 мин, 10 2 Вб Магнитный поток на полюс, режим ПВ=40 %. 10~2 Вб — *
Напряжение 220 В, Тихоходные двигатели
Д12 990 2 1,63 83 0,59 0,47 0,45
Д21 920 2 0,94 92 0,28 0,62 0,57
Д22 696 2 0,57 82 0,26 0,9 0,83
Д31 738 2 0,42 67 0,11 0,94 0,86
Д32 558 2 0,28 48 0,097 1,45 1,34
Д41 492 2 0,16 40 0,049 1,8 1,65
Д806 372 2 0,11 36 0,052 2,7 2,5
Д808 278 2 0,054 30 0,031 3,96 3,53
Д810 234 2 0,035 24 0,016 5,06 4,31
Д812 210 2 0,023 21 0,01 6,02 5,28
Д814 608 8 0,013 15 0,007 8,7 7,5
Д816 504 8 0,0091 12 0,005 11 9,26
Д818 505 8 0,0066 И 0,003 11,9 9,77
68
Электродвигатели в крановом электроприводе
Разд. 2
Продолжение табл. 2.13
Тип Число активных проводни- ков якоря Число парал- лельных ветвей якоря 2а Сопро- тивление якоря и добавоч- ных полюсов, Ом Число витков на главный полюс Сопро- тивление последо- вательной обмотки, Ом Магнитный поток на полюс, режим 60 мин, 10”2 Вб Магнитный поток на полюс» режим ПВ = 40 %, 10” 2 Вб
Напряжение 220 В, Быстроходные двигатели
Д21 690 2 0,53 92 0,28 0,66 0,61
Д22 522 2 0,32 63 0,19 0,89 0,85
Д31 492 2 0,19 67 0,11 1,01 0,95
Д32 372 2 0,12 39 0,05 1,64 1,47
Д41 310 2 0,072 40 0,05 1,96 1,85
Д806 246 2 0,047 26 0,03 2,72 2,48
Д808 210 2 0,029 24 0,02 3,96 3,47
Напряжение 440 В. Тихоходные двигатели
Д21 1610 2 3,8 210 1,8 0,61 0,55
Д31 1476 2 1,13 142 0,63 0,93 0,85
Д41 894 2 0,7 76 0,24 1,77 1,58
Д808 556 2 0,21 60 0,14 4,03 3,59
Д810 468 2 0,14 48 0,06 5,01 4,3<
Д812 418 2 0,1 40 0,04 5,81 5,01
Д814 310 2 0,052 29 0,024 8,6 7,38
Д816 504 8 0,035 24 0,018 10,6 9,32
Д818 504 Hai 8 пряжение 0,026 440 В. Bi 22 ястроходн 0,013 ые двига? 12 'ели 9,82
Д22 1044 2 1,69 140 0,96 0,89 0,84
Д32 738 2 0,53 82 0,27 1,62 1,36
Д806 492 2 0,2 50 0,1 2,73 2,49
Таблица 2.14. Обмоточные данные двигателей параллельного
возбуждения
Тип Число витков на полюс парал- лельной обмотки Сопро- тивление парал- лельной обмотки, Ом Ток парал- лельной обмотки, А Магнитный поток на полюс. 10“2 Вб Число витков на полюс стаби- лизирующей об- мотки при 1 Магнитный поток на полюс при ПВ-40 %, 10”2 Вб
Тихоход- ные дви- гатели Быстро ходные двига- тели 220 В 440 В Тихоход- ные дви- гатели Быстро- ходные двига- тели
Д12 1800 260 0.7 0,48 — 6,5 5,5 0,49 0,49
Д21 1790 142 1,2 1,35 0,58 0,59 5,5 0,6 0,6
Д22 1480 130 0,75 0,76 4,5 It 0,77 0,78
Д31 1870 120 1,45 0,93 0,83 4,5 4,5 0,95 0,87
Д32 1470 94 1,85 1,35 1,37 4,5 —• 1,4 1,81 1,42
Д41 1480 70 2,5 1,76 1,81 3 3 1,87
Д806 1400 65 2,7 3,93 2,5 2,52 2 —• 2,55 2,58
Д808 1250 44 3,81 3,72 2 2 3,86 3,85
Д810 1500 46 3,9 4,76 — 2 3 4,82 ~t
Д812 1350 34 5,3 5,71 1 2 5,68
Д814 1300 31 5,5 8,22 '-М 1 2 8,33
Д816 1140 26 7,1 10,4 ™ 1 2 10,5 “*
Д818 1210 22 8,3 11,1 1 2 п,3 *—
Крановые электродвигатели переменного тока
69
Рис. 2.4. Типовая нагрузочная харак-
теристика электродвигателей серии Д
щающий момент не должен превышать 0,8 номинального (режим 60 мин)
при 220 В или 0,6 номинального при 440 В.
Двигатели на 220 В допускают увеличение частоты вращения в 2 раза
против номинальной за счет повышения напряжения. При этой частоте вра-
щения и номинальном возбуждении максимальный момент не должен пре-
восходить 1,5 номинального (режим 60 мин). Максимальное напряжение на
выводах двигателей по отношению
к заземленным частям не должно
превосходить 600 В.
Двигатели всех систем возбу-
ждения допускают в двигательном и
генераторном режимах увеличение
частоты вращения до максимальной
по табл. 2.10. При этом ток якоря
не должен быть выше 0,7 номиналь-
ного (режим 60 мин) для тихоход-
ных двигателей и 1,2 номинального
для быстроходных.
Основные размеры двигателей
приведены в табл. 2 12. Данные об-
моток двигателей последовательного j
в табл. 2.13 и 2.14. Все двигатели имеют по четыре главных и четыре доба-
вочных полюса. Двигатели параллельного возбуждения и параллельного со
стабилизирующей обмоткой имеют одинаковые катушки возбуждения. Все
сопротивления обмоток даны для температуры 20 °C. Для расчета механи-
ческих характеристик двигателей в различных условиях использования на
рис. 2.4 приведены усредненные нагрузочные характеристики серии в отно-
сительных единицах. Способы расчета механических характеристик приве-
дены в [33].
ллельного
2.3. КРАНОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Основные соотношения. Основные соотношения параметров для асинхрон-
ных двигателей можно получить из схемы замещения, приведенной на
рис. 2.5, а.
Рис. 2.5. Схема замещения асинхронного двигателя (а) и преобразованная
схема замещения (б)
Построение круговой диаграммы упрощается, если цепь намагничивания
(условно отнести к первичным выводам. Из нескольких способов преобразо-
вания схемы замещения метод М. П. Костенко наиболее точно отражает пер-
воначальную схему замещения, В преобразованной схеме рис, 2.5лб привет
70
Электродвигатели в крановом электроприводе
Разд. 2
//
денный к статору т<к вторичной цепи /2 является геометрическом разностью
тока статора Ц и тока намагничивания 10 (при скольжении s = 0) основной
схемы замещения.
Полное эквивалентное сопротивление главной цепи будет иметь вид
z = е~М Я г1+(г2/s) °1 ] + !(Xlai +х2°1+ 'lAo)} (2Л5)
где 2ф — угол поворота линии центра tg 2ф ж 2 tg ф = 2ri/(Xj + *о)* $ —
скольжение двигателя; Oi — первичный коэффициент рассеяния, о*! == 1 4- zJzq
(zi — полное сопротивление цепи статора; г0 — полное сопротивление цепи
намагничивания); гъ Xi — активное и индуктивное сопротивления статора;
// //
г2 ; х2 — приведенные активное и индуктивное сопротивления ротора в пре-
образованной схеме замещения.
Диаметр круговой диаграммы
»а = ^1ф/(4
(2.16)
где х" — индуктивное сопротивление короткого замыкания, х" = XjOj +
+ *2 а1-
Обычно rf значительно меньше х0, поэтому отношением т\/х^ можно
пренебречь. При повороте осей координат окружности круговой диаграммы
на угол 2ф против часовой стрелки на этот же угол поворачиваются по
отношению к вектору напряжения фазы все линии и отрезки круговой
диаграммы. Угол щ наклона линии моментов к линии центра определяют по
формуле
Угол а2 наклона линии полезной мощности к линии центра находят из
выражения
гк
tg а2 = tg as=1 = -g———,
хк + г1/хо
где rK = <riq + r2 Op
Полагая, что отношение rjxq -> 0, получаем
^as=oamrjr"- ^as^r"!x". (2.18)
Для построения круговой диаграммы определяют значения основных ее
отрезков: ток холостого хода /0, активную составляющую тока холостого
хода /ол и диаметр круговой диаграммы Da, Длину отрезка, мм, определяют
делением соответствующего параметра, выраженного в амперах, на масштаб
тока гпА (А/мм). Активная составляющая тока холостого хода
;0а = (ДРст + //г170г1)/(от4С'ф)>
(2.19)
где АРст — потери в стали статора, Вт; гщ — число фаз.
§ 2.3 Крановые электродвигатели переменного тока 71
На рис, 2.6 показано построение круговой диаграммы. Треугольник хо-
лостого хода О О"/п строят по ранее найденным значениям, причем о'о"—
= Линию центра круговой диаграммы строят под углом 2ф, который
может быть найден из формулы
(И2ф^2/оп/^ф.
(2.20)
мощности и механическим
Рис. 2.6. Построение круговой диа
граммы
Радиус круговой диаграммы О'О" = £>аД2гПд). Линию электромагнитных
моментов проводят под углом as=s0O к линии центра, а линию полезной мощ-
ности из точки О' под углом к линии центра.
На круговой диаграмме отрезок ab соответствует максимальному мо-
менту; cd — пусковому моменту; ef — полезной
потерям; fg— потерям в роторе; eg,
проводимый перпендикулярно линии
центра, — электромагнитному момен-
ту; eh, проводимый перпендикулярно
оси абсцисс, — потребляемой из сети
мощности. Масштаб мощности
Шр = Вт/мм. Масштаб мо-
ментов == 9,55mp/n0, Н • м/мм,
где — синхронная частота вра-
щения.
Построение механических харак-
теристик по круговым диаграммам
производят следующим образом:
точку е на окружности круговой диа-
граммы для мощности р2х определяют
дикуляре к линии центра мощности откладывают отрезок, равный
kq = (Р2 + ДРмех + 0,005/»,)/^. (2.21)
Через точку k проводят прямую ke, параллельную линии мощности, до пере-
сечения с окружностью. Точка пересечения является исходным параметром
мощности Р2Х\ затем графически определяют ток статора /, приведенный ток
ротора cos ф:
I = Оет^ 1" = О'етА cos <р = eh(Ое,
следующим построением: на перпен-
(2.22)
Далее аналитическим путем находят все остальные параметры: потребляе-
мую из сети мощность Рг, электрические потери в обмотке статора ДРэг,
электрические потери в обмотке ротора ДР3г; КПД; дополнительные потери
ДР доп*
Pt соэф; ДРэ = т1г1/^;
ДРЭ2 = » &Рдоп = 0,005Рр
Действительное значение тока ротора
Z2 “ 1/(ш2^об 2)» (2.23)
где ©1, о2> &обь &062” числа витков и коэффициенты обмоток статора и
ротора.
72
Электродвигатели в крановом электроприводе
Разд. 2
Скольжение двигателя
s = (ЛРэ2 + 1,272)/(Р2 + ЛРэ2 + 1,2/2).
Вращающий момент на валу двигателя
Мх = 9550Р2х//г,
где
60/ ,
п = —- (1 —s) = n0(l — s);
Р
здесь f — частота сети.
Максимальный (критический) момент
Mmax - 0,079 —---- ф------=
f (л+V'i+*0
где хк = Xj + Х]/*о х2 •
Мощность двигателя, потребляемая из сети,
Р = л/И171Ф/(01^об 1 cos ф,
где Ф — магнитный поток двигателя, Вб;
cos ф = 7?экв/^экв! &об 1=== 0,8 ~т- 0,88;
<oi — число витков фазы статора.
Магнитный поток двигателя
Ф = — /1Г1/(4>44/со1^об О-
(2.24)
(2.25)
(2.26)
(2.27)
(2.28)
(2.29)
Мощность двигателя, выраженная через геометрические размеры, опре-
деляется по формуле
Pi = —tD2 1пАВъ • 10~3,
-у 2 60
(2.30)
где D — диаметр ротора, см; I — длина пакета ротора, см; А — линейная
плотность тока, А/см; — индукция в воздушном зазоре, Тл.
Магнитная индукция в воздушном зазоре крановых двигателей нахо-
дится в пределах 0,8—0,95 Тл. Линейная плотность тока для статора состав-
ляет 300—400, а для ротора 170—300 А/см. Плотность тока в обмотках дви-
гателей переменного тока при изоляции класса Н составляет 9—11 А/мм2
для статора и 6—8 А/мм2 для ротора. При изоляции класса F плотность
тсжа снижается на 10—15 °/о.
Потери энергии. Потери энергии определяют электропотребление и КПД
электродвигателя. От распределения потерь в двигателе зависит равномер-
ность нагрева различных его частей.
Электрические потери в обмотке статора и ротора
ДРЭ1=З^Г1; (2.31)
ДРэ2 = з/|г2; (2.32)
дрэ3» Mrtcs/9,55, (2.33)
§ 2.3
Крановые электродвигатели переменного тока
73
Потери энергии в щеточном аппарате
ДР ш = 1,2/2*
Дополнительные потери
Л/^доп:== 0,01cos (р.
(2.34)
(2.35)
Потери в стали статора на перемагничивание и вихревые токи могут
быть определены по табл. 2.15.
Постоянные времени нагрева Т обмоток статора и ротора закрытых
двигателей близки между собой и сильно зависят от внешнего обдува дви-
гателей (табл. 2.16). Без внешнего обдува значения Т уменьшаются в
2,5—3 раза.
Для кратковременных режимов работы длительностью менее 60 мин
допустимая нагрузка обмоток двигателей может быть определена по (2.11)
с использованием значений постоянных времени нагрева, приведенных в
табл. 2.16. Для режимов работы со временем включения не более 30 с можно
воспользоваться формулой (2.10).
С 1970 по 1987 г. на кранах устанавливались электродвигатели се-
рии MTF, МТН000-713. Три четверти всех крановых механизмов в стране
оснащены этими двигателями. Их технические данные приведены в [33, 43]
и регламентированы ГОСТ 185-70.
В настоящее время эти электродвигатели заменяются на новую се*
рию 4МТ, по основным размерам и параметрам унифицированную с обще-
союзной серией 4А.
Станины электродвигателей 4МТ всех типов, кроме 4МТ112, изготовля-
ются из чугуна с ребрами для охлаждения и коробкой выводов (клеммной),
расположенной наверху. Станины электродвигателей 4МТ112 выполняются
из алюминиевого сплава, щиты всех двигателей — из чугуна, а крышки
подшипников большинства двигателей — из алюминиевого сплава. Сердеч-
ник статора набирают из покрытых лаком штампованных листов электро-
технической горячекатаной стали марки 1213 или холоднокатаной марки 2011
толщиной 0,5 мм. Сердечник ротора имеет относительно небольшие потери
в стали, и поэтому листы его обычно не лакируют. Обмотка статора рассчи-
тана на механизированный способ укладки с использованием изоляции типа
пленкосинтокартона и эмалированного нагревостойкого провода ПЭТ200М.
Двигатели 4МТ355 имеют жесткие формованные катушки статора, за-
кладываемые в открытые пазы. В остальных двигателях пазы полузакрытые*
Всыпные обмотки роторов двигателей с высотой оси вращения 112—225 мм
в пазовой части закрепляются клиньями из стеклопластика. Лобовые части
обмоток закрепляются на внутреннем стальном изолированном кольце стек*
лобандажной лентой. В двигателях с высотой оси вращения 280—355 мм
применяется стержневая обмотка, закрепляемая в пазах стеклотекстолито-
выми клиньями. Лобовые части этих двигателей закрепляются стеклобандаж-
ной лентой.
Контактные кольца выполняются из спеченных медных композиций или
из профильной меди (медных труб), Бо избежание скопления щеточной
74
Электродвигатели в крановом электроприводе
Разд 2
Таблица 2.15. Электрические потери, Вт, в двигателях серии 4МТ
при режиме работы ПВ—40 %
Электрические потери, Вт
т. в меди в меди в стали в меди в меди в стали в меди в меди
Тип в стали статора ротора статора ротора статора ротора
2р—6 2р=8 2р—10
4MT112L 120 460 205 — — — . —* - —
4MT112LB 150 585 260 * I- 1 •"*-* —'I *
4MT132L 200 700 367 - '"» — ——
4MT132LB 310 675 385 Я —-
4MT160L 430 1070 362 370 900 340 —• — — *
4MT160LB 560 1080 510 580 1140 440 —• * 11
4MT200L 780 1490 800 720 1350 685 —— — •—л
4MT200LB 1020 1440 665 1120 1970 960 * —— —
4МТН225М 1240 1830 1320 1330 2300 1220 <—* ——
4MTH225L 1800 2090 1640 1420 2280 1230 —
4MTH280S 1900 2650 2360 1600 2540 2280 1540 2700 1770
4МТН280М 2750 4700 2280 2320 2860 2360 1970 3050 1810
4MTH280L 2800 3180 2700 2570 3050 2660 2520 3600 2310
4MTH355S —- — —• — — 1700 3200 2720
4МТН355М 1 —- * " * 2400 3230 2540
4MTH355L » 3000 3410 2570
Таблица 2.16. Постоянные времени нагрева закрытых обдуваемых
крановых электродвигателей переменного тока
Режим нагрева, мин Масса электродвигателя, кг Постоянная времени нагрева, с
До 3 50—100 200
100—220 300
220—600 500
600—2000 800
50-100 600
100—220 1000
10—20 220—600 1600
600—2000 2700
50—100 1000
100—220 1800
20—60 220-600 3000
600—2000 4800
§ 2.3 Крановые электродвигатели переменного тока 75
пыли между кольцами остается свободное воздушное пространство. На изо*
ляционную втулку кольца напрессовываются с достаточным натягом.
Для двигателей с высотой оси вращения 112—280 мм применяются
щетки марки Ml.
Щетки марки Ml имеют следующие размеры:
Высота оси вращения двигателя, мм Размеры щеток, мм
112—132 8X12,5X32
160 10X25X32
200—225 12,5X32X40
280 16X40X50
355 16X50X50 *
* Щетки марки МГ.
Так как все двигатели рассчитываются для эксплуатации в условиях
открытого воздуха и имеют степень защиты IP44, то крышки коллекторных
люков и коробок выводов выполняются плоскими с соответствующим у плот*
нением. В выводных отверстиях вставлены резиновые уплотнения для про*
пуска кабелей и обеспечения брызгонепроницаем ости внутренних полостей.
В коробках выводов располагаются панели выводных зажимов. По желанию
потребителей электродвигатели снабжаются встроенной тепловой защитой^
Охлаждение двигателей производится снаружи с помощью вентилятора
на валу. Крепление вентилятора к валу — на шпонке с болтовым зажимом.
Роторы двигателей балансируются с помощью специальных приспособлю*
ний — балансировочных колец.
Обмотка роторов короткозамкнутых исполнений электродвигателей вы*
полняется литой из алюминиевого сплава повышенного сопротивления. Двй*
гатели, рассчитанные для условий эксплуатации при температуре окружаю*
щей среды не выше 40 °C, имеют изоляцию класса F и типовое обозначение
4MTF, 4MTKF. Двигатели, рассчитанные для эксплуатации в тропиках и при
температуре окружающего воздуха до 50°C и выше (металлургия), имеют
изоляцию класса Н. Их типовое обозначение 4МТН, 4МТКН. Двигатели
с высотой оси вращения свыше 200 мм изготовляются только с изоляцией
класса Н.
Основное конструктивное исполнение двигателей горизонтальное на ла*
пах с одним концом вала (IM1001), однако по требованию потребителей
двигатели могут поставляться с двумя свободными концами вала. Двига*
тели с высотами оси вращения 112—225 мм имеют также конструктивное
исполнение IM2001 —горизонтально-фланцевое на лапах. При этом креп*
ление двигателей может осуществляться либо за фланец, либо за лапы.
Двигатели с высотами оси вращения 112—160 мм имеют вертикальное флан*
цевое исполнение (IM3001).
Все двигатели рассчитаны на две группы напряжений 220/380 и 380/660 В,
50 Гц и имеют в коробке выводов шесть выводных концов для включения
обмоток соответственно в треугольник или звезду. Кроме того, двигатели
изготовляются на нестандартные напряжения и частоты, а именно: 500 В,
50 Гц; 440 В, 60 и 50 Гц; 415 В, 50 Гц; 380 В, 60 Гц.
76
Электродвигатели в крановом электроприводе
Разд. 2
При колебаниях напряжения в сети от —5 до +10 % номинального
значения двигатели должны сохранять номинальную мощность. Основным
номинальным режимом работы является повторно-кратковременный режим
ПВ =а 40 %. В табл. 2.17 и 2.18 приведены основные данные двигателей для
этого режима. Кроме того, двигатели могут использоваться при режимах
работы ПВ = 25 и 60 % и кратковременных режимах 30 и 60 мин непре-
рывной работы.
Таблица 2.17. Технические данные электродвигателей
с фазным ротором, ПВ —40%, 380 В, 50 Гц
Тип Число полю- сов Мощ- ность, кВт Частота враще- ния, об/мин Ток ста- тора, А COS ф Ток ротора, А Напря- жение ротора, В Макси - мальный момент, Н-м
4MTF(H)112L4 4 3,7 1370 10,5 0,82 57
4MTF(H)112LB4 4 5,5 1390 15 0,81 — —— 94
4MTF(H)132L4 4 7,5 1400 19 0,84 " * 126
4MTF(H)132LB4 4 И 1410 28 0,86 ——- 205
4MTF(H)112L6 6 2,2 810 7,2 0,76 11 144 55
4MTF(H)112LB6 6 3,7 900 11,2 0,79 13,8 190 88
4MTF(H)132L6 6 5,5 915 14,8 0,74 18,3 213 135
4MTF(H)132LB6 6 7,5 935 18,2 0,77 20,7 242 190
4MTF(H)160L6 6 И 910 32 0,76 41 179 325
4MTF(H)160LB6 6 15 930 39 0,77 48 213 460
4MTF(H)200L6 6 22 935 55 0,79 60 235 638
4MTF(H)200LB6 6 30 935 75 0,78 73 235 932
4MTF(H)225M6 6 37 965 78 0,818 77 293 1000
4MTH225L6 6 55 970 115 0,9 115 290 1530
4MTH28GS6 6 75 970 142 0,89 178 270 2160
4MTH280M6 6 ПО 975 205 0,89 160 420 3490
4MTF(H)l60L8 8 7,5 695 25 0,73 22 227 248
4MTF(H)160LB8 8 И 705 38 0,74 39 185 400
4MTF(H)200L8 8 15 710 42 0,71 48,8 206 569
4MTH200LB8 8 22 715 57 0,7 59 241 800
4MTH225M8 8 30 720 74,6 0,72 71 252 1030
4MTH225L8 8 37 725 87,4 0,74 79 302 1390
4MTH280S8 8 55 720 112 0,84 170 196 2160
4MTH280M8 8 75 725 154 0,82 165 277 2940
4MTH280L8 8 90 730 179 0,84 162 355 3470
4MTH355S8 8 132 710 270 0,85 — •—• —
4MTH355M8 8 160 715 320 0,87 — ——
4MTH355L8 8 200 730 400 0,86 —— —-
4MTH280S10 10 45 576 103 0,76 146 181 1940
4MTH280M10 10 60 580 124 0,76 135 239 2670
4MTH280L10 10 75 582 166 0,77 142 308 3480
4MTH355S10 10 ПО 584 266 0,7 250 272 4560
4MTH355M10 10 132 585 315 0,68 250 327 5690
4MTH355L10 10 160 586 392 0,61 245 408 7310
Крановые электродвигатели переменного тока
77
Таблица 2Л8. Технические данные электродвигателей
с короткозамкнутым ротором, ПВ = 40%, 380 В, 50 Гц
Тип Число полю- сов Мощ- ность, кВт Частота враще- ния, об/мин Ток ста- тора, А COS ф Макси- маль- ный мо- мент, Н-м Пус- ковой мо- мент, Н-м Пус- ковой ток, А Плот- ность номи- наль- ного тока, А/мм’
4MTKF(H)112L4 4 3,7 1390 10,5 0,83 56 56 41 8,8
4MTKF(H)112LB4 4 5,5 1400 15,2 0,82 91 85 61 8,5
4MTKF(H)132L4 4 7,6 1390 18,5 0,85 131 121 87 8,3
4MTKF(H)132LB4 4 11,0 1410 27,5 0,87 215 195 152 8
4MTKF(H)112L6 6 2,2 880 6,8 0,73 64 62 22,7 8,5
4MTKF(H)112LB6 6 3,7 5,5 870 10,6 0,75 114 114 37,2 8,7
4MTKF(H)132L6 6 900 13,6 0,75 155 145 57 8,6
4MTKF(H)132LB6 6 7,5 900 18,3 0,7 225 216 79 8,3
4MTKF(H)160L6 6 11 910 29 0,76 39,5 340 148 7,8
4MTKF(H)160LB6 6 15 930 36,5 0,78 560 480 203 7,4
4MTKF(H)200L6 6 22 935 51 0,79 760 706 275 7,5
4MTKF(H)200LB6 6 30 935 70 0,78 980 932 380 7,6
4MTKF(H)160L8 8 7,5 690 24 0,71 310 260 91,5 7,3
4MTKF(H)160LB8 8 11 700 33,5 0,74 500 420 141 7,4 7,5
4MTKF(H)200L8 8 15 695 40 0,71 657 638 185
4MTKF(H)200LB8 8 22 700 60 0,69 981 932 295 6,9
4MTKH225M8 8 30 700 68 0,77 1128 1128 336 7
4MTKH225L8 8 37 710 86 0,78 1470 1390 460 7
Серия двигателей построена на семи диаметрах и имеет соответственно
высоты оси вращения 112, 132, 160, 200, 225, 280, 355 мм. На каждой высоте
оси вращения имеются два-три исполнения по длине. В типовом обозначении
первые три знака 4МТ — порядковый номер серии; буква К — короткозамк-
нутое исполнение; буквы F и Н — тип изоляции; три цифры — высота оси
вращения; буквы S, М, L, LB — условный размер двигателя по длине; циф-
ра — число полюсов; последняя группа знаков — климатическое исполнение:
соответственно У1, Т1 или ХЛ1.
Обмоточные данные электродвигателей 4МТ приведены в табл. 2.19. Не*
которые расчетные данные и основные габаритные размеры приведены в
табл. 2.20—2.22. Для электроприводов с частотным управлением разработаны
специальные типы электродвигателей, отличающихся от серийных нестан-
дартным напряжением, сниженным индуктивным сопротивлением ротора и
измененными обмоточными данными.
Технические данные специальных двигателей приведены в табл. 2.23,
а их основные габаритные размеры — в табл. 2.27.
Широкое применение систем динамического торможения в крановом
электроприводе позволило решить проблему опускания грузов с малой ско*
рсстью, однако при легких грузах, составляющих менее 25 % номинального^
спуск может не начаться из-за потерь на трение. Для электроприводов, в ко-
торых спуск с малой скоростью легких грузов обязателен, в дополнение
к обычному крановому двигателю с фазным ротором применяется вспомо^
78
Электродвигатели в крановом электроприводе
Разд. 2
Таблица 2.19. Обмоточные данные электродвигателей серии 4МТ
Тип (4MTKF, 4МТКН, 4MTF, 4МТН) Число полю- сов Число пазов Всего прово- дов в пазу Число парал- лельных прово- дов Число парал- лельных цепей на фазу Число ВИТКОВ в катуш- ке Диаметр провода, мм Сопротив- ление фа- зы Г\ при 20 °C, Ом
Обмотки статооа фазных и короткозамкнутых двигателей
112L6 6 54 31 1 tow 31 1 2,97
112LB6 6 54 20 20 1,25 1,55
132L6 6 54 36 2 18 1 1,07
132LB6 6 54 28 2 1 14 1,18 0,68
160L6 6 54 32 — 1 3 32 1,25 0,35
160LB6 6 54 32 4 8 1,25 0,236
200L6 6 72 30 2 2 15 1,3 0,235
200LB6 6 72 42 2 4 21 1,12 0,132
225М6 6 72 56 3 3 56 1,32 0,1
225L6 6 72 38 2 6 38 1.4 0,053
280 S 6 6 72 40 3 6 40 1,32 0,041
280 Мб 6 72 26 4 6 26 1,32 0,025
16QL8 8 48 48 3 в 16 1,18 0,48
160LB8 8 48 44 2 2 22 1,25 0,265
200L8 8 72 30 2 2 15 1,3 0,235
200LB8 8 72 42 2 4 21 1,12 0,14
225М8 8 72 63 2 4 63 1,25 0,14
225L8 8 72 48 2 4 48 1,4 0,1
280S10 10 75 48 2 5 48 1,4 0,06
280М10 10 75 54 3 5 54 1,3 0,047
280L10 10 75 42 3 5 42 1,5 0,031
35? S10 10 105 12 5 6 2,5X3,75 0,019
J55MI0 10 105 10 — 5 5 2,8X4 0,014
355L10 10 105 16 2 5 4 1,8X3,75 0,012
Обмотки ротора фазных двигателей
112L6 6 36 19 w—мн 19 1,4 0,565
112LB6 6 36 32 2 — 16 1,12 0,462
132L6 6 36 32 2 16 1,25 0,306
132LB6 6 36 42 3 —* 14 1,12 0,3
160L6 6 36 46 2 3 23 1,25 0,072
160LB6 6 36 42 2 3 21 1,32 0,073
200L6 6 36 42 2 3 21 1,5 0,054
200LB6 6 36 51 3 3 17 1,4 0,04
225М6 6 54 45 3 3 15 1,4 0,048
225L6 6 54 40 4 3 10 1,5 0,026
280 S 6 6 90 2 1 1 —• 2,8X10 0,019
280М6 6 90 2 1 1 Мм 2,8X10 0,024
160L8 8 36 56 2 2 28 1,12 0,095
16ЛТВ8 8 36 48 3 2 16 1,18 0,096
20‘ L8 8 48 39 3 2 13 1,3 0,082
200L В8 8 48 33 3 2 11 1,45 0,068
22" 48 8 48 44 4 2 11 1.4 0,051
fe2aL8 8 48 40 4 2 10 1,5 0,049
28OS1O 10 . 90 2 1 1 —• 2,8X10 0,017
28 W0 10 90 2 1 1 » ' * 2,8X10 0,021
280L10 10 90 2 1 1 2,8X10 0,024
§ 23
Крановые электродвигатели переменного тока
79
Продолжение табл. 2.19,
Тип (4MTKF, 4МТКН, 4MTF, 4МТН) Число полю- сов Число пазов Всего прово- дов в пазу Число парал- лельных прово- дов Число парал- лельных цепей на фазу Число витков в катуш- ке Диаме гр провода, мм Сопротив- ление фа- зы rj при 20 °C, Ом
335S10 10 90 2 - - - - 3,05X16,8 0,012
335М10 10 90 2 * 3,05X16,8 0,014
335L10 10 90 2 ||< 3,05X16,8 0,015
Примечание, Для упрощения записи в первом столбце опущены первые знаки
типозого обозначения двигателей
гательный многополюсный короткозамкнутый двигатель, либо навешиваемый
на второй конец вала двигателя с фазным ротором, либо устанавливаемый
непосредственно на редукторе. Сложение характеристик этого двигателя
с характеристикой динамического торможения позволяет получить характе-
ристику двигателя на малых скоростях работы во всем диапазоне грузов.
Двигатель ТМ4А может использоваться вместе с двигателями 4МТ200
и 4МТ225 для электроприводов мощностью 22—55 кВт для получения ма-
лых скоростей при спуске груза. Основные параметры двигателя ТМ4А:
Относительная продолжительность включения, % ..... 25
Число полюсов . . . ................................ 24
Пусковой момент, Н-м............................... 100
Максимальный момент в тормозном режиме, Н-м..........220
Двигатель может работать в режиме ПВ = 15 % как при пусковом мо-
менте, так и на холостом ходу при п0 = 250 об/мин.
Рис. 2.7. Габаритные размеры тор«
мозного электродвигателя ТМ4А
Габаритные размеры двигателя приведены на рис. 2.7.
Максимальная рабочая частота вращения электродвигателей 4МТ с чио?
лом полюсов 2р = 4 и 2р — 6, а также ТМ4А — 2500 об/мин, с 2р ~ 8 —а
1900 об/мин, с 2р = 10—
1500 об/мин.
Двухскоростные крановые элект-
родвигатели переменного тока. Двух-
скоростные короткозамкнутые элек-
тродвигатели переменного тока яв-
ляются конструктивной модифика-
цией короткозамкнутых крановых дви-
гателей основного ряда. Конструктив-
но и технологически односкоростные
и двухскоростные электродвигатели
идентичны. В них используются
одинаковые узлы и детали. Такими
ны, короткозамкнутые роторы в сборе, щиты и подшипниковые узлы. Отли-
чительными особенностями двухскоростных двигателей являются в основном
одинаковыми узлами являются станш»
обмотки статора,
80
Электродвигатели в крановом электроприводе
Разд. 2
Т а б л и ц а 2.20, Расчетные данные электродвигателей серии 4МТ
с фазным ротором, 380 В, 50 Гц
Тип (4MTF, 4МТН) '0. А СОЗф0 хГ Ом Х2 , Ом Коэффици- ент приве- дения соп- ротивления
112L6 5,51 0,135 3,11 1,084 3,95 5,9
1I2LB6 7,7 0,125 1,95 1,073 3,2 3,84
132L6 8,96 0,13 1,3 1,056 2,1 2,82
132LB6 11.1 0,11 0,98 1,053 1,44 2,22
160L6 23,5 0,12 0,59 1,087 1,01 4,31
160LB6 25,6 0,1 0,42 1,051 0,67 2,89
200L6 39,7 0,08 0,27 1,052 0,55 2,37
200LB6 37,3 0,077 0,33 1,049 0,34 1,96
225М6 37,2 0,069 0,23 1,076 0,31 1,45
225L6 55,9 0,07 0,14 1,084 0,197 1,21
280 S 6 51,1 0,052 0,13 1,071 0,125 1,38
280М6 70 0,05 0,08 1,076 0,083 1
160L8 19,2 0,118 1,08 1,1 1,53 2,37
160LB8 29,9 0,101 0,67 1,1 1,02 3,5
200L8 29,8 0,083 0,51 1,074 0,725 2,96
200LB8 37,3 0,08 0,31 1,076 0,47 2,03
225М8 46,7 0,07 0,23 1,052 0,42 1,65
225L8 52,3 0,08 0,17 1,04 0,31 1,42
280S10 57,8 0,08 0,21 1,06 0,24 3,72
280М10 70,6 0,06 0,15 1,06 0,19 2.1
280L10 89,5 0,06 0,11 1,06 0,146 1,26
355S10 155 0,042 0,078 1,06 0,134 1,74
355М10 183 0,044 0,064 1,06 о,11 1,21
355L10 247 0,042 0,048 1,06 0,085 0,78
Примечание. См. примечание к табл. 2 19.
Таблица 2.21, Расчетные данные короткозамкнутых электродвигателей
серии 4МТК 380В, 50 Гц
Тип (4MTKF, 4МТКН) Ток ХОЛОСТОГО хода /0, А Данные короткого замыкания, Ом Коэффициент приведения сопротив- лений
Активное сопро- тивление 14 Индуктивное со- противление хк
U2L6 4,81 9,66 5,87 5,9
112LB6 7,97 5,7 3,34 2,44
132L6 8 3,36 2,87 1,97
I32LB6 10,1 2,37 1,91 1,2
160L6 20,4 1,15 1,18 0,695
160LB6 22,7 0,81 0,864 0,39
200L6 31,3 0,5 0,63 0,319
200LB6 42,1 0,36 0,455 0,173
160L8 16,4 1,81 2,24 1,67
160LB8 25,2 1,1 1,43 0,79
K00L8 25,4 0,77 0,9 0,546
200LB8 43,3 0,47 0,58 0,293
В25М8 38,8 0,45 0,57 0,386
Примечания: 1. См. примечание к табл 2.19.
2. Значения сопротивления фазы статора и приведены в табл. 2.19-
Крановые электродвигатели переменного тока
81
Таблица 2.22. Основные размеры, мм, и масса электродвигателей
серии 4МТ
Тип bio fen di h Лз1 Zi Ао /зо фаз- ный Lo корот- козам- кнутый 1з1 Масса, кг Момент инер- ции, КГ‘М^
2р—6 2р=3 2р=1О
112L 190 240 32 112 301 80 159 620 495 70 51 0,035
112LB 190 240 32 112 301 80 159 620 495 70 63 0,045 —W
132L 216 270 42 132 341 НО 203 692 556 89 104 0,09
132LB 216 270 42 132 341 ПО 203 692 556 89 115 0,11 —-
160L 254 310 48 160 424 ПО 254 254 599 108 165 0,23 0,23
160LB 254 310 48 160 424 ПО 254 824 669 108 194 0,28 0,29
200L 318 380 65 200 500 140 305 880 742 133 270 0,57 0,62
200LB 318 380 65 200 500 140 305 955 817 133 320 0,68 0,74
225М 356 435 70 225 545 140 311 960 797 149 420 0,9 1,07
225L 356 435 70 225 545 140 356 1070 907 149 500 1,02 1,43
280S 457 540 90 280 740 170 368 1100 —-» 190 750 3,3 4,3
280М 457 540 90 280 740 170 419 1180 190 850 4,1 5,2
280L 457 540 90 280 740 170 457 1270 —* 190 1000 5,1 6,3
355S 610 700 ПО 355 888 210 500 1423 *— 254 1545 '* 10,2
355М 610 700 ПО 355 888 210 560 1493 1 254 1695 — 12,8
355 L 610 700 ПО 355 888 210 630 J 1573 — 254 1895 — 15
Примечание. См примечание к табл. 2 19
Таблица 2 23. Технические данные электродвигателей
для систем электроприводов с частотным управлением
Показатель Тип
МАП521 МАП422 МАП622
Частота, Гц Число полюсов Напряжение фазное, В Мощность, кВт ПВ, % Частота вращения, об/мин Ток статора, А cos (р Максимальный момент, Н-м Пусковой момент, Н-м Пусковой ток, А Момент инерции, кг-м2 50 4 140 50 40 1440 140 0,93 1080 735 1000 0,6 50 4 220 10 40 1410 21 0,86 235 210 143 0,2 50 12 220 3,5 15 445 17 0,54 215 215 40 0,2 50 4 220 52 40 1380 102 0,93 882 795 550 1,5 50 8 220 30 40 690 84 0,69 1050 905 340 1,5 20 8 127 8,5 25 210 29 0,8 834 795 75 1,5
82
Электродвигатели в крановом электроприводе
Разд. 2
Таблица 2.24. Технические данные двухскоростных
крановых электродвигателей 380 В, 50 Гц
Тип Число полю- сов Мощ ность, кВт ПВ, % Частота вратце- ния, об/мин Ток стато- ра, А Пуско- вой ток, А Пуско- вой мо- мент, Н-м Макси- мальный момент, Н-м
4MTKH160L6/16 6 3,5 40 920 9,3 42 85 98
16 1,1 15 305 9 14 69 69
4MTKH160LB6/16 6 5 40 925 14 70 142 162
16 1,8 15 305 12,3 22 108 108
4MTKH200L6/16 6 7,5 40 930 17,5 93 196 215
16 2.4 15 300 14 25 167 167
4MTKH200LB6/16 6 11 40 940 27 145 353 383
16 3,5 15 295 20 37 226 226
4МТКН225М6/20 6 16 40 925 38 195 422 490
20 3,4 15 235 25 40 314 314
4MTKH225L6/20 6 22 40 925 49 265 630 690
20 4,5 15 225 33 52 470 470
4MTKH225LB6/20 6 30 40 910 61 320 850 890
12 6 15 650 42 68 540 540
MTKF2114/12 4 4 25 1385 10 47 63 73
12 1 15 395 7,3 12,5 52 52
MTKF4104/24 4 7 25 1370 12,5 60 108 108
24 0,8 15 200 9,2 17 84 85
MTKF4114/24 4 10 25 1300 20 100 176 176
24 1,2 15 165 13,4 18 118 118
MTKF4124/24 4 15 25 1365 29,5 160 240 285
24 1.5 15 175 13,8 19 147 145
MTKF5114/24 4 22 25 1395 41 250 392 432
24 2 15 175 20 26 225 236
MTKF5124/24 4 30 25 1400 59 310 495 520
24 3 15 180 28 36 290 300
В крановом электроприводе могут применяться только двигатели с двумя
независимыми обмотками на статоре, поэтому при намотке таких двигате-
лей в пазах размещаются две обмотки. Обмотки с малым числом полюсов
располагаются в глубине паза, а обмотки с большим числом полюсов —
ближе к выходу из паза. Между обмотками помещается изоляционная про-
кладка. Обмотка с малым числом полюсов соединяется в звезду, а обмотка
с большим числом полюсов имеет шесть выводов и может включаться либо
последовательно с малополюсной обмоткой, либо независимо при соедине-
нии в звезду. При последовательном включении обмоток отключение обмотки
с малым числом полюсов осуществляется путем замыкания между собой ее
выводов, а обмотки с большим числом полюсов — шунтированием каждой
фазы.
Технические данные двухскоростных крановых электродвигателей при-»
ведены в табл. 2 24.
Основные габаритные размеры крановых электродвигателей всех испол-*
нений приведены в табл. 2.22.
§ 2.4 Двигатели единых серий и взрывобезопасного исполнения 83
- .1.1 “ ... ~ 11 ... , ,
2.4. ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
ЕДИНЫХ СЕРИЙ И ВЗРЫВОБЕЗОПАСНОГО ИСПОЛНЕНИЯ
В КРАНОВОМ ЭЛЕКТРОПРИВОДЕ
Электродвигатели переменного тока серии 4А. Для грузоподъемных кра-
нов режимных групп 1К — 4К, электрических талей, а также для отдельных
типов кранов режимных групп 5К во все более широких масштабах начи-
нают применяться электродвигатели единых серий 4А различных модифика-
ций. Прежде всего эти электродвигатели применяются для привода меха-
низмов подъема и передвижения электрических талей. При группе режимов
электрических талей 1М — ЗМ с небольшими ускорениями, невысоким числом
включений в час (до 120) и сравнительно небольшим ресурсом по числу
включений за срок службы короткозамкнутые двигатели единых серий хо-
рошо зарекомендовали себя при многолетней эксплуатации на этих механиз-
мах. Начиная с 1980 г. двигатели единых серий широко применяются в ка-
честве приводов передвижения строительных башенных кранов и кран-балок
режимной группы ЗМ.
Наилучшими параметрами применительно к крановому электроприводу
обладают двигатели с повышенным скольжением серии 4АС. По параметрам
механической прочности, степени защиты от воздействия окружающей среды,
условиям работы с частыми пусками и торможениями электродвигатели
этого исполнения соответствуют имеющимся на кранах условиям эксплуата-
ции. Если для механизмов подъема кранов применение таких двигателей еще
недостаточно обосновано, то для механизмов передвижения режимных
групп ЗМ, 4М с числом включений в час до 120 эти двигатели вполне при-
годны.
В табл. 2.25 приведены основные технические данные электродвигателей
серии 4АС со встроенными тормозами. В табл. 2.26 приведены обмоточные
данные этих двигателей, а в табл. 2.27 даны основные габаритные размеры.
Как и крановые двигатели, двигатели серии 4АС рассчитаны на питание
от сетей с напряжением 220, 380 и 660 В. Кроме того, они могут получать
питание от источников с нестандартными напряжениями 440 В, 60 Гц; 415 В,
50 Гц и 380 В, 60 Гц.
Учитывая относительно высокие пусковые плотности тока электродвига-
телей серии 4АС, целесообразно для механизмов с временем пуска до 3 с
применять двигатели 660 В, включаемые в сеть 380 В. Для механизмов пе-
редвижения режимных групп ЗМ, 4М не следует допускать плотность пуско-
вого тока выше 30 А/мм2.
Механические тормоза двигателей 4АС не рассчитаны на частые тормо-
жения механизмов с большим приведенным моментом инерции, поэтому про-
цесс торможения должен по возможности осуществляться самим двигателем,
В этом случае наилучшими энергетическими характеристиками будут обла-
дать двухскоростные электродвигатели серии 4А с двумя отдельными обмот-
ками. В табл. 2.28 приведены технические данные ряда перспективных двух-
скоростных электродвигателей 4А для крановых механизмов. Эти электро-
двигатели допускают до 100 пусков и торможений механизмов передвиже-
84
Электродвигатели в крановом электроприводе
Разд. 2
Т а б л иц а 2.25, Технические данные электродвигателей
серии 4АС, ПВ = 40 %, 380 В, 50 Гц
Тип (4АС) Число полю- сов Мощность, кВт Частота вра- щения, об/мин [ Номинальный ток, А Плотность пускового тока, А/мм2 Пусковой ток, А Максималь- ный момент, Н-м Пусковой момент, Н*м COS ф Допустимое число пусков . в час вхоло- стую Тормозной момент тор- моза* Н-м
71АЕ4 4 0,6 1380 1,8 34 8,1 9 8,2 0,73 5600 6
71ВЕ4 4 0,8 1370 2,4 40 10,8 12 11 0,75 6900 6
80АЕ4 4 1,3 1410 3,6 40 18 19,4 17,6 0,82 7800 12
80ВЕ4 4 1,7 1420 4,6 42 23 25 22,8 0,82 7800 12
90LE4 4 2,4 1410 5,8 50 35 36 32,6 0,82 7900 16
100SE4 4 3,2 1440 7,8 41 47 46 42,2 0,82 7800 30
100LE4 4 4,3 1440 10 40 60 63 57 0,82 7800 30
112МЕ4 4 5,6 1420 14,4 55 100 83 75 0,83 7300 40
90LE6 6 1,7 930 5,1 31 20,5 37 33 0,72 9300 16
100LE6 6 2,6 940 6,9 42 42 55 50 0,76 7800 30
112МАЕ6 6 3,2 920 9,2 42 55 69 63 0,74 8800 40
112МВЕ6 6 4,2 910 10,8 51 70 92 83 0,79 8800 40
132SE6 6 6,3 930 15,2 54 100 134 122 0,8 7100 80
132МЕ6 6 8,5 940 20,5 49 134 182 165 0,8 7100 80
160SE6 6 12 920 26 45 170 260 235 0,85 4700 150
160МЕ6 6 16 920 35 43 230 350 315 0,85 4300 150
Примечание. Минимальный момент в процессе пуска не менее 0,8 пускового*
Т а б л и ц а 2.26, Обмоточные данные электродвигателей
серии 4АС, 380/660 В, 50 Гц
Тип (4АС) Число полю- сов Число пазов стато- ра Число эффек- тивных провод- ников в пазу Число парал- лельных провод- ников Число парал- лельных цепей на фазу Число витков на фазу Диаметр провода, мм Сопро- тивление фазы при 20 °C, Ом
71А4 4 24 192 1 1 770 0,44 34,9
71В4 4 24 164 1 1 660 0,44 27,3
80А4 4 36 97 1 1 580 0,51 19,9
80В4 4 36 78 1 1 468 0,59 13,2
90L4 4 36 69 1 1 414 0,67 9,7
100S4 4 36 57 1 1 342 0,9 4,8
100L4 4 36 45 I 1 270 1 3,44
112М4 4 36 40 1 1 240 1,08 2,68
90L6 6 36 182 1 1 492 0,64 11,8
100L6 6 36 69 1 1 414 0,83 6,42
112МА6 6 54 45 1 1 404 0,86 5,66
112МВ6 6 54 38 1 1 340 0,96 4,25
132S6 6 54 33 1 1 246 1,12 2,78
132ЛА6 6 54 24 1 1 216 1,32 1,64
160S6 6 54 25 2 1 224 1Д2 1,37
160М6 6 54 18 2 1 162 1,32 0,825
§ 2.4 Двигатели единых серий и взрывобезопасного исполнения
Таблица 2.27. Основные размеры, мм,и масса электродвигателей
серии 4АС, МАП
Тип h ^31 ^30 без тор- моза 110 h Ью Ьц &31 dt Масса, кг Момент инерции, кг-м? /зо с тор- мозом
4А(С)71А 40 45 285 90 71 112 135 201 19 15,1 0,0017 405
4А(С)71В 50 45 285 90 71 112 135 223 19 15,1 0,002 405
4А(С)80А 50 50 300 100 80 125 155 218 22 17,4 0,0031 440
4А(С)80В 50 50 320 100 80 125 155 240 22 20,4 0,0046 460
4А(С)90 50 56 350 125 90 140 175 260 24 28,7 0,0073 505
4А(С)100 60 63 365 112 100 160 200 265 28 36 0,009 520
4А(С)100 60 63 395 140 100 160 200 280 28 42 0,013 580
4А(С)112 80 70 452 140 112 190 230 310 32 56 0,017 630
4А(С)112 80 70 472 140 112 190 230 320 32 62 0,021 650
4А(С)132 80 89 480 140 132 216 265 350 38 77 0,04 690
4А(С)132 80 89 530 178 132 216 265 350 38 93 0,058 740
4А(С)160 110 108 624 178 160 254 304 430 48 135 0,14 790
4А(С)160 по 108 667 210 160 254 304 430 48 160 0,18 850
МАП521 160 806 400 225 380 — 415 65 435 0,6 1072
МАП422 90 641 380 170 280 330 45 215 0,2 850
МАП622 222 1020 500 280 440 — 624 70 790 1,45 1285
Т аб л иц а 2.28. Технические данные двухскоростных
электродвигателей серии 4А талевого и кранового исполнения
с двумя отдельными обмотками, 380 В, 50 Гц
Тип (4А) Число полю- сов ПВ, % Мощ- ность, кВт Частота враще- ния, об/мин Пуско- вой момент, Н-м Макси- мальный момент, Н-м Плот- ность пусково- го тока, А/мм2 Тормоз* ной момент, Н-м
Х71В12/4ЕЭ 4 40 0,25 1400 3,6 3,5 35 6
12 15 0,08 450 3,0 3 40
Х80В12/4ЕЭ 4 40 0,37 1420 4,5 5 35 12,5
12 15 0,12 455 4,0 4 40 1
90Ы2/4ЕЭ 4 40 0,55 1430 6,6 7,5 37 17,5
12 15 0,18 460 5,2 5 40
100L12/4E 4 25 0,9 1430 10 13 40 32,5
12 15 0,37 460 7,0 7 42 *11 IM
112МВ12/4Е 4 25 1,8 1440 18 25 40 45
12 15 0,65 460 13 13 37
132М4/12 4 25 3,5 1430 35 45 40 80
12 15 1 460 25 25 40
160М4/16 4 40 5,5 1440 55 70 40
16 15 1 350 35 35 40
180М4/16 4 40 7,5 1440 75 90 40
16 15 1,5 350 55 55 40 — —1
86
Электродвигатели в крановом электроприводе
Разд. 2
ния с моментом инерции до 20/дв и могут быть применены для значительного
числа механизмов кранов общего назначения режимных групп ЗК — 5К. Ис-
пользование двух независимых обмоток позволяет путем комбинаций их
включения обеспечить регулирование пусковых и тормозных моментов*
Структура типовых обозначений двигателей аналогична обозначениям кра-
новых. В типовом обозначении буква Е перед климатическим исполнением
обозначает наличие тормоза с электромагнитным приводом. Степень защиты
электродвигателей от окружающей среды IP54, IP44, поэтому они могут ис-
пользоваться и практически используются на открытом воздухе, хотя фор-
мально маркируются для категорий размещения У2, Т2 и ХЛ2.
По способу монтажа на механизмах двигатели, используемые на кранах,
имеют исполнения IMI001, IM2001, IM3001 и IM3011 для всех габаритов,
включенных в табл. 2.25.
Ввод кабелей в коробку выводов осуществляется через сальниковые
уплотнения. Расчетная наработка подшипников 14 000 ч.
Электродвигатели переменного тока взрывобезопасного исполнения. Грузо-
подъемные механизмы, эксплуатирующиеся во взрывоопасных зонах, долж-
ны комплектоваться электродвигателями взрывозащищенного исполнения.
Как указано в разд. 1, все взрывозащищенное электрооборудование объеди-
няется в две группы по условиям использования во взрывоопасных зонах
с соответствующими параметрами. В СССР и за рубежом для комплектации
взрывобезопасных подъемно-транспортных машин (ПТМ) в качестве при-
водных электродвигателей применяются только односкоростные или двухско-
ростные асинхронные короткозамкнутые двигатели со степенью защиты от
внешней среды IP54 и соответствующими средствами взрывозащиты.
В СССР до 1986 г. на взрывобезопасных кранах применялись только од-
носкоростные короткозамкнутые двигатели. В целях повышения скоростей
кранов намечено начать применение для них также и двухскоростных дви-
гателей с регулированием скорости 1 :4. Двигатели первого поколения се-
рии БАКР, отвечающие всем современным требованиям взрывозащиты, из-
готовлялись до 1980 г. В настоящее время для использования на ПТМ
взрывобезопасного исполнения используются либо специальные электродви-
гатели кранового исполнения ВТ и 2ВКр, либо электродвигатели общего
назначения серии В. По своим электромеханическим характеристикам элек-
тродвигатели серий ВТ, 2ВКр и В близки к электродвигателям серии 4А
и отличаются от них лишь спецификой обеспечения взрывозащиты и усло-
виями работы во взрывоопасных зонах. Поскольку взрывобезопасные ПТМ
относятся в основном к режимным группам 2М, ЗМ, то электродвигатели
взрывозащищенного исполнения имеют номинальные параметры, относя-
щиеся к режиму ПВ = 15 и 25 %.
Для расширения области использования взрывозащищенные электродви-
гатели ВТ, 2ВКр и В маркируются по степени взрывозащиты 1ЕхбПАТ4 и
соответственно могут эксплуатироваться в помещениях BI, ВП или более
легких при максимально допустимых температурах поверхностей электро-
оборудования 135 °C. Так как взрывозащищенных механических тормозов
температурной группы ниже Т1 промышленность не изготовляет, то электро-
§ 2,4 Двигатели единых серий и взрывобезопасного исполнения 87
Таблица 2.29. Технические данные взрывозащищенных
электродвигателей 380 В, 50 Гц
Тип Мощ- ность, кВт ПВ, % Частота враще- ния, об/мин Номи- нальный ток, А Пуско- вой ток, А Макси- маль- ный момент, Н-м Пуско- вой момент, Н-м Число пусков в час вхоло- стую Тормоз- ной момент тормо- за, Н-м
Вт63А4 0,25 15 1350 1,7 6,8 4,0 4,0 4000 4,4
Вт63В4 0,37 15 1350 2,1 8,4 6,7 6,7 4000 6,9
Вт71А4 0,55 15 1390 2,8 11 8,2 6,6 4000 7,4
Вт71В4 0,75 15 1390 3,2 13 11,2 9,2 4000 9,8
Вт80В6 и 15 930 5,0 20 28 19 4000 23,5
2BKp90L6 1.5 25 930 4,5 20 35 32 4000 26
2BKpl00L6 2,2 25 950 5,8 32 53 44 3800 36
2ВКрН2МА6 3 25 950 7,8 47 80 60 3000 50
2ВКрИ2МВ6 4 25 955 9,2 55 ПО 80 3000 66
2ВКр132М6 5,5 25 960 10,8 67 150 120 2000 99
2BKpl32L6 7,5 25 965 15,8 100 200 175 2000 123
В112МА6 3 100 950 7,2 43 80 60 6000
В112МВ6 4 100 955 9,3 50 120 80 6000 1 »
B132S6 5,5 100 960 12,1 75 160 120 6000
В132М6 7,5 100 960 16,5 108 210 165 6000
B160S6 11 100 965 23 143 290 260 4000 1 *
В180М6 15 100 965 30 180 380 300 4000
В180М6 18,5 100 970 37,5 225 480 400 3000 » «МТ
В200М6 22 100 980 41,5 260 530 460 2000
Примечание. Минимальный момент в процессе пуска двигателей типов ВТ
и ВКр не менее 0,8 пускового.
Т а б л и ц а 2.30. Основные размеры, мм, и масса электродвигателей
взрывозащищенного исполнения
Тип h /зо без тор- моза /зо с тор- мозом /10 h &10 й 31 rfl Масса, кг Момент инерции, кг • м2
ВТ63А 30 40 370 80 63 100 - 235 14 28 0,0008
втбзв 30 40 * |И^ 370 80 63 100 *1 235 14 30 0,0015
ВТ71А 40 45 •—• 400 90 71 112 230 19 36 0,0015
ВТ71В 40 45 •-П 400 90 71 112 —р 230 19 37 0,002
ВТ80В 50 50 — 450 100 80 125 271 22 50 0,006
2ВКР90 50 56 530 125 90 140 175 355 24 70 0,0075
2ВКр100 60 63 — 605 140 100 160 205 375 28 93 0,02
2ВКр112МА 80 70 820 140 112 190 255 415 32 148 0,027
88
Крановая контактная аппаратура
Разд. 3
Продолжение табл. 2.3)
Тип Л Ди /зо без тор- моза /зо с тор- мозом Ао п дп ^31 rfi Масса, кг Момент инерции, КГ'М2
2ВКрИ2МВ 80 70 820 140 112 190 255 415 32 154 0,035
2ВКр132М 80 89 855 178 132 216 275 460 38 196 0,085
2ВКр132 80 89 •— 855 178 132 216 275 460 38 206 0,085
В112МА 80 70 596 140 112 190 255 430 32 100 0,025
В112МВ 80 70 596 * 140 112 190 255 430 32 НО 0,035
В132 80 89 600 140 132 216 275 472 38 135 0,075
В132М 80 89 635 1 *ч 178 132 216 275 472 38 145 0,1
В160 ПО 108 690 178 160 254 315 530 48 240 0,25
В160М ПО 108 740 —— 210 160 254 315 530 48 270 0,31
В180М НО 121 795 И 1 241 180 279 340 580 55 340 0,36
В200М ПО 133 860 267 200 318 390 620 60 420 0,8
двигатели серии В без встроенных тормозов могут применяться либо для
температурной группы Т1, либо при условии, что в процессе торможения
нагрев фрикционных поверхностей не будет превышать ни при каких уело-*
виях 135 °C.
Технические данные взрывозащищенных электродвигателей приведены
в табл. 2.29, а их основные габаритные размеры — в табл. 2.30. Двигатели
рассчитаны на питание от стандартных напряжений 220, 380 и 660 В, 50 Гц,
а также от сети с напряжением 440 В, 60 Гц и 415 В, 50 Гц. Электродви-
гатели рассчитаны для механизмов режимных групп 2М, ЗМ и допускают
до 60 пусков в час при внешнем моменте инерции 2,5/дв. Соответственно
тормоза рассчитаны на соответствующую нагрузку. Встроенные механические
тормоза обеспечивают работу при колебаниях напряжения сети 85—110%
номинального.
По способу монтажа электродвигатели серии ВТ и ВКр имеют испол<
нение IM1001, а двигатели серии В — исполнения IM1001 и IM2001. Встроен-
ные тормоза рассчитаны на 60 торможений в час с номинальной частотой
вращения и внешним моментом инерции J — 2,5/дв.
РАЗДЕЛ 3
КРАНОВАЯ КОНТАКТНАЯ АППАРАТУРА
3.1. ОБЩИЕ СВЕДЕНИЯ И ТРЕБОВАНИЯ К АППАРАТУРЕ
Назначение. Электрические контактные аппараты — это электротехниче-
ские устройства, предназначенные для коммутации тока в электрических це-
пях и изменения за счет этого параметров тока и напряжения в обмотках
двигателей. Электрические аппараты классифицируются по принципу дей*
ствия, назначению и выполняемым функциям. По принципу действия раз ли-
§31 Общие сведения и требования к аппаратуре 89
чаются аппараты ручного включения, электромагнитного включения, индук-
ционные, тепловые, электромашинные и контактно-механические. По назна-
чению и выполняемым функциям контактные аппараты подразделяются на
две группы: осуществляющие оперативное управление электроприводом путем
выполнения определенных, заранее обусловленных программ включения и
отключения в цепях электропривода и выполняющие функции защиты, кон*
троля и сигнализации.
Контактная аппаратура предназначается для коммутации тока в глав-
ных цепях электроприводов, цепях управления н цепях сигнализации. При
редких коммутациях и в особенности при малоиндуктивной нагрузке комму*
тируемых цепей размыкание тока не вызывает существенного изменения фи*
зического состояния контактных поверхностей и размеры коммутирующих
аппаратов определяются целиком их возможностью пропускать электриче*
ский ток без недопустимых нагревов. Режим коммутаций тока в силовых
цепях крановых электроприводов характеризуется сравнительно частыми
включениями и отключениями, высокой индуктивностью размыкаемых цепей
и частыми кратковременными перегрузками контактов пусковыми и тормоз-
ными токами. С точки зрения коммутационных условий крановая аппаратура
может быть отнесена к категории аппаратов с наиболее неблагоприятным
режимом работы.
Включение и отключение двигателей. В процессе пуска асинхронного ко-
роткозамкнутого двигателя ток в период первой полуволны может превы-
сить расчетный пусковой ток двигателя. Амплитудное значение тока первого
полупериода после включения может достигнуть 12-кратного значения номи-
нального тока двигателя. Такие кратности при номинальных токах свыше
40 А вызывают относительно большие усилия на контакты в направлении их
размыкания. Одновременно при соударении включающихся контактов про-
исходит их ударная вибрация. Продолжительность вибрации контактов
I—3 мс при прохождении 10—12-кратного тока вызывает основной комму-
тационный износ контактов, поскольку отключение вращающегося двигателя
происходит при коммутации номинального тока и напряжении между рас-
ходящимися контактами менее 10 % номинального. Однако это справедливо
лишь для электроприводов общего назначения. В крановых электроприводах
процесс пуска растягивается на 2—3 с, поэтому для этих приводов высока
вероятность размыкания цепи разгоняющегося двигателя со значением ком-
мутируемого тока 80 % пускового при напряжении между расходящимися
контактами 50—70 % номинального. Таким образом, для крановых электро-
приводов даже простое включение или отключение короткозамкнутого дви-
гателя может быть отнесено к тяжелым условиям коммутации.
Двигатели переменного тока с фазным ротором при включении в сеть
даже при разомкнутом роторе имеют в первый период ток, равный 10-крат-
ному номинальному, и явление включения практически аналогично включе-
нию короткозамкнутого двигателя. Большая часть отключений двигателя
с фазным ротором происходит при скорости, близкой к нулю, т. е. при вклю-
ченных в цепь ротора резисторах; ток отключения равен номинальному при
напряжении отключения также номинальном и cos <р =» 0,6. Этот режим
90
Крановая контактная аппаратура
Разд. 3
несколько легче коммутации короткозамкнутого двигателя в пусковом ре-
жиме, но также достаточно тяжелый.
При включении двигателя постоянного тока ток в главной цепи нара*
стает по экспоненте z==(l—1п, стремясь в пределе к значению
(2,6 “ 3,2) /ном» поэтому при вибрации контактов, включающих постоянный
ток, износ контактов незначительный, и, наоборот, при размыкании цепи
постоянного тока с индуктивной нагрузкой время горения дуги даже при
мощных средствах дугогашения занимает 25—50 мс, и основная часть ком-
мутационного износа происходит при размыкании тока. В крановом приводе
примерно половина всех размыканий происходит при напряжении на расхо-
дящихся контактах не менее 70 % номинального, поэтому условия комму-
тации двигателей постоянного тока являются весьма тяжелыми.
Таким образом, для большинства режимов коммутаций цепей электро-
двигателей в крановых электроприводах наиболее характерным режимом
являются условия тяжелой коммутации, связанной со значительным дуто*
образованием, относительно высокой длительностью горения дуги и, следо-
вательно, высокой степенью разрушения поверхности контактов при каждой
коммутации.
Коммутационная износостойкость. Коммутационной износостойкостью
контактных устройств называется число циклов включения — отключения
(В — О) электрической цепи с заданными параметрами до достижения
70—90 % износа рабочего объема контактов. При конструировании ком-
мутационных аппаратов принимаются разнообразные средства сниже-
ния степени разрушения контактных поверхностей в процессе коммута-
ции.
Для аппаратов переменного тока это прежде всего снижение вибрации
контактов при включении. Для этого применяется пружинная или иная амор-
тизация подвижных и неподвижных контактов с максимальным сближением
масс соударяющихся элементов. Сокращение скорости соударения осуще-
ствляется за счет максимального уменьшения раствора контактов. Для аппа-
ратов переменного тока весьма существенным также является наиболее ра-
циональный подбор состава материала контактов. Так, металлокерамические
композиции, состоящие из прессованных мелкодисперсных порошков серебра
и оксида кадмия, существенно повышают коммутационную износостойкость
контактов по сравнению с серебряными контактами.
Для аппаратов постоянного тока, наоборот, главной задачей является
максимально быстрое удаление дуги с контактов на дугогасительные рога
путем повышения раствора контактов, выдувания дуги за счет эффективного
поперечного магнитного поля дугогашения и охлаждения дуги массивными
контактными деталями и стенками дугогасительных камер.
Для современных коммутационных аппаратов коммутационная износо-
стойкость составляет 10—15 % механической износостойкости при коммута-
ции номинальных токов. Механической износостойкостью контактных систем
называется полное число циклов В — О без коммутации тока в пределах
износа основных узлов: контактов, осей, пружин, опорных поверхностей
и т. п. Механическая износостойкость является одним из важных показа*
§3.1 Общие сведения и требования к аппаратуре 91
телей пригодности коммутационного аппарата к использованию по назначе-
нию. Бее современные коммутационные аппараты переменного тока рассчи-
таны на использование в цепях переменного трехфазного тока с напряже-
нием до 660 В. Коммутационные аппараты постоянного тока рассчитаны на
использование в цепях постоянного тока с напряжением до 320 Б, некоторые
аппараты при снижении основных показателей могут использоваться в сетях
постоянного тока напряжением 440 В.
Главным показателем коммутационных аппаратов является номинальный
ток длительного или часового режима, пропускаемый контактами при на-
греве их и окружающих изоляционных деталей в пределах норм. Поскольку
в крановом электроприводе коммутационные аппараты используются в по-
вторно-кратковременном режиме с определенной относительной продолжи-
тельностью включения (см. табл. 1.1) и при числе законченных пусков
в час допустимое значение тока /ДОп, проходящего по контактам при
повторно-кратковременном режиме, может быть определено по формуле
_ '20
допв , ,
у Лт, в 275бр
(3.1)
где /дл— номинальный ток длительного или часового режима аппарата, А;
/п т — время одного пуска или торможения, при котором по контактам про-
ходит ток, с.
Ток /доп определяется только условиями теплового равновесия. При вы-
боре аппаратов должны учитываться и другие факторы, о которых сказано
далее.
Основные параметры электрических аппаратов. Значение нажатия на
контакты в коммутационных аппаратах является одним из важнейших пара-
метров, определяющих износостойкость, усилия включения и значения номи-
нального тока аппарата. Оптимальные значения нажатий па контакты, Н/А,
выработанные на основе многолетней практики с учетом термической н ди-
намической стойкости, приведены ниже:
Тип аппарата
Серебряные
или металло-
керамические
контакты
Реле постоянного и переменного
тока . . . ...................
Контакторы:
постоянного тока , ..............
переменного тока . ...........
Вспомогательные контакты контак-
торов ...........................
Медные
контакты
12
18
• Но не менее 0,2 Н/А на контакт.
Допустимые превышения температуры, °C, токоведущих частей и смеж-
ных изоляционных частей при номинальном режиме работы аппарата при
температуре окружающей среды 40 °C указаны ниже:
92
Крановая контактная аппаратура
Разд. 3
Наименование частей аппарата
Повторно-кратковремен-
ный режим ПВ-15 4-100 %;
кратковременные режимы
30 И 60 мин
Коммутирующие контакты главной цепи:
из меди .............................................. 65
из серебра или металлокерамики....................... 100
Коммутирующие контакты цепей управления из сере-»
бра или металлокерамики ............................... 80
Винтовые и болтовые контактные соединения:
из меди, алюминия или их сплавов без защитных
покрытий............................................. 55
то же, но с защитными гальваническими покры-
тиями цинком, кадмием, оловом ,.............. . 65
то же, но с защитным гальваническим серебрением 95
Гибкие соединения из меди . .............................. 65
Многослойные катушки с изоляцией классов:
Е . . . 100
В . . . ’.............................................. ПО
F . . ,............................................... 135
Н.................................................... 160
Рукоятки и маховички:
металлические......................................... 15
из пластмассы........................................... 25
Примечание Превышения температуры катушек измеряются методом сопро-
тивлений, остальных элементов — методом термоэлектрического термометра.
Сопротивление изоляции аппарата фиксируется между токоведущими
частями разной полярности или разных фаз, а также между токоведущими
частями и заземленным корпусом. Сопротивление изоляции отдельного аппа-
рата в состоянии поставки должно быть не ниже 10, а в условиях эксплуа-
тации— не ниже 1 МОм. Сопротивление изоляции комплектного устройства
должно быть соответственно 1 и 0,2 МОм. Термическая стойкость аппарата
определяется прохождением в течение 1 с через его токоведущие части тока,
равного (10 4-15)/ном, без повреждений узлов и приваривания контактов.
Динамическая устойчивость аппарата определяется прохождением через ап-
парат, находящийся во включенном состоянии в течение 0,1 с, тока 20/НОм.
При этом не должны наблюдаться искрение на контактах и в токопереходах,
сваривание контактов или механических повреждений от электродинамиче-
ских сил.
Электрическая прочность изоляции крановой аппаратуры проверяется
переменным синусоидальным током частотой 50 Гц. Напряжение приклады-
вается между токоведущими частями разной полярности, между разомкну-
тыми контактами и между токоведущими частями и заземленным корпусом.
Аппаратура должна выдерживать без повреждений в течение 1 мин следую-
щее испытательное напряжение:
гт Испытательное напря*
Номинальное напряжение аппарата жение, действующее
(главные цепи), В значение, В
До 24 .......................................... 500
Свыше 24 до 60..................... • 1000
Свыше 60 до 300 ................................ 2000
Свыше 300 до 660 ............................... 2500
§ 3 1 Общие сведения и требования к аппаратуре 93
Механическая износостойкость крановых коммутационных аппаратов
выбирается из стандартного ряда 3; 6,3; 10; 16; 25 млн. циклов В — О. При
этом аппараты ручного или контактно-механического включения должны
иметь механическую износостойкость не ниже 3 млн. циклов (предпочти-
тельно 6,3 млн. циклов), а различные реле, контакторы должны иметь меха-
ническую износостойкость не ниже 6,3 млн. циклов. Для механизмов режим-
ной группы 6М механическая износостойкость контакторов и реле должна
быть не ниже 10 млн. циклов.
Коммутационная способность контактных аппаратов характеризует воз-
можность многократной коммутации ими цепей с параметрами, приведен-
ными в табл. 3 1. В редких случаях при срабатывании защиты аппараты
должны коммутировать токи на 50 % больше указанных в табл. 3,1ч
Таблица 3.1 Условия нормальных коммутаций главных
и вспомогательных контактов
Категория коммутации Род тока Назначение коммутиру ю- щих контактов Характер нагрузки Включение Отключение
Е 2 S 2 е- ф о о Е Е О я S о к 5. S Е> <л О (J j мс
АС2 Пере- менный Главные контакты Пуск двигателя с фаз- ным ротором, тормо- жение противовключе- нием 2,5 1 0,65 — 2,5 1 0,65 —<
АС4 То же То же с короткозамк- нутым ротором, отклю- чение медленно вра- щающегося двигателя 6 1 0,35 6 1 0,35
ДСЗ Постоян- ный То же параллельного возбуждения, тормо- жение противовключе- нием 2,5 1 2 2,5 1 ’— 2
ДС5 То же То же последователь- ного возбуждения, торможение противо- включением 2,5 1 — 2,5 2,5 1 7,5
> Пере- менный Контакты цепи управ- ления. Нагрузка ин- дуктивная 10 1 0,7 " — 1 1 0,4
Постоян- ный То же 1 1 50 1 1 50
В табл. 3 1 приняты следующие обозначения: 1 — ток, включаемый и отклю-
чаемый контактами; /Ном — номинальный ток контактов; U — напряжение,
восстанавливающееся после полного размыкания контактов; t/FOM — номи-
нальное рабочее напряжение; L]R — отношение индуктивности цепи к ее со-
противлению, мс; cos ф соответствует сдвигу фаз при прохождении устано-
вившегося тока.
94 Крановая контактная аппаратура Разд. 3
Конструктивные требования к аппаратуре. Оболочки аппаратов и комп-
лектных устройств следует выполнять таким образом, чтобы при открытых
крышках или дверях части аппаратов были доступны для наблюдения и
ухода без разборки соседних изделий. Дверцы должны открываться без
применения специального инструмента, если не предусмотрен специальный
ключ. Нажатие, обеспечивающее постоянное контактное соединение, не
должно передаваться через изоляцию. Характеристики выводов аппаратов,
комплектных устройств и внутренних соединений приведены в табл. 1.14.
Таблица 3.2. Усилия управления командоаппаратами, Н, не более
Частота включения Способ управления
Рукояткой посредством пальцев Рукояткой или маховиком посредством рук Кнопкой посредством пальцев Кнопкой посредством ладони
До 10 в день 50 350 100 150
До 30 в час 25 100 50 100
Свыше 30 в час 10 70 30 50
Усилие управления рукояткой, маховиком или кнопкой должно соответство-
вать данным табл. 3.2. Направление движения ручных приводов аппаратов
должно быть таким, чтобы включение соответствовало повороту по часовой
стрелке или движению вверх. Механически обработанные поверхности изо-
ляционных материалов рекомендуется покрывать лаком, образующим проч-
ную пленку. Предохранители разных фаз и полюсов одной цепи должны
находиться рядом, предохранители плюсового полюса справа. Предохрани-
тели трехфазных сетей размещают в порядке чередования фаз слева на-
право или сверху вниз. Провода для внутренних соединений должны иметь
изоляцию из трудносгораемых изоляционных материалов. Для внутреннего
монтажа рекомендуется использовать провода марок УВГ, УВГТ, НРШМ,
ПС. Длина свободновисящих проводов соединения с аппаратами не должна
превышать 150 мм между точкой присоединения и креплением в пучке,
3.2. СИЛОВЫЕ КОНТРОЛЛЕРЫ НЕПОСРЕДСТВЕННОГО
РУЧНОГО УПРАВЛЕНИЯ
Назначение. Силовые кулачковые контроллеры относятся к категории ап-
паратов непосредственного ручного управления. Они предназначаются для
управления крановыми электродвигателями постоянного и переменного тока
механизмов режимных групп 1М — 4М. Силовые контроллеры являются ком-
плектными устройствами, которые служат для обеспечения включения цепей
обмоток электродвигателей по заранее заданной программе, заложенной в
конструкции кулачкового барабана контроллера. Простота конструкции, без-
отказность в работе и малые габаритные размеры снискали силовым кон-
троллерам широкую популярность. При правильном выборе и использовании
силовых контроллеров в соответствии с их коммутационными возможностями
контроллеры являются самыми надежными и удобными в эксплуатации
комплектными устройствами управления крановыми электроприводами, так
§ 3.2 Силовые контроллеры непосредственного управления ‘ 95
как в этих устройствах полностью исключены нарушения заданной програм-
мы, а включение и отключение, зависящие от намерений оператора, обеспе*
чивают 100 %-ную готовность привода к работе.
Специфическими недостатками работы этого комплектного устройства
являются низкая износостойкость, низкая коммутационная способность и
принципиальное отсутствие автоматизированного пуска или торможения.
С учетом сказанного силовые кулачковые контроллеры могут успешно при*
меняться для управления механизмами режимных групп 1М — ЗМ кранов
общего назначения, а также отдельных малонагруженных механизмов ре
жимных групп 4М, 5М при зна-
чительно ограниченной мощности
исполнительных электродвигате-
лей.
Конструкция и технические
данные. Для управления электро-
двигателями крановых механизмов
применяются контроллеры двух
серий: ККТ60А на переменном
токе и КВ 100 на постоянном токе.
Габаритные размеры контролле-
ров ККТ60А приведены на рис. 3.1.
Рис. 3.1. Габаритные размеры кулачко*
вых контроллеров ККТ60А
Контроллеры обеих серий изготовляются в защищенных корпусах с крыш-
ками и степенью защиты от внешней среды IP44. Принципиально конструк-
ции контроллеров однотипны. В корпусе размещается кулачковый барабан—»
вал на двух шариковых подшипниках с набором из щести пластмассовых ку-
лачковых шайб, имеющих определенный профиль, соответствующий заданной
диаграмме замыканий контактов. По обе стороны барабана размещаются
контактные коммутационные элементы по шесть штук с каждой стороны,
В контроллерах ККТ60А коммутационные элементы размещаются в виде
единого блока на пластмассовой рейке сложной конфигурации. В контролле-
рах КВ 100 коммутационные элементы индивидуальные: крепятся на стальных
рейках. На кулачковых барабанах кроме изоляционных шайб размещается
также устройство фиксации рабочих положений и нулевого положения.
В каждом рабочем положении кулачкового барабана обеспечивается его
устойчивая фиксация. При этом нулевое положение фиксируется с большим
усилием. Угол между нулевым и первым рабочими положениями ка/кдого
направления движения 19°, угол между соседними рабочими положениями
13,5°. Поскольку одна кулачковая шайба связана с двумя коммутационными
элементами противоположных рядов, угол поворота кулачкового барабана
может быть менее 180°. Таким образом, при пяти рабочих положениях в
каждую сторону поворот барабана осуществляется на угол 2 X 73°. Остаю-
щиеся 2 X 17° используются для установки упоров крайних рабочих поло-
жений контроллеров.
Принцип действия кулачковых контроллеров следующий. Коммутацион-
ный элемент, представляющий собой двуплечий рычаг с опорой оси, несет
на одной своей стороне подвижный контакт с узлом притирания и обеспече-
96 Крановая контактная аппаратура Разд. 3
ния контактного давления, а на другой стороне рычага расположен ролик;
в районе ролика рычаг подперт включающей пружиной. Эта пружина пово-
рачивает рычаг до полного замыкания подвижного и неподвижного контак-
тов элемента. Таким образом, при отсутствии контакта между кулачковым
барабаном и контактными элементами все контакты контроллера замкнуты.
При этом давление на контакты обеспечивается контактной пружиной, уси-
лие которой несколько меньше усилия включающей пружины. Если изоляци-
онная кулачковая шайба выступающим профилем давит на ролик рычага
контактного элемента, происходит принудительное размыкание контактов.
Таким образом, определенный порядок замыкания и размыкания контактов
определяется профилем шайб кулачкового барабана. Поворот барабана кон-
троллеров ККТ60А осуществляется рукояткой, а поворот барабана кон-
троллеров КВ 100 — с помощью маховичка.
Принципиальное различие между контроллерами ККТ60А и КВ 100 за-
ключается в конструкции контактной части. В контроллерах ККТ60А подвиж-
ный и неподвижный контакты выполнены из кадмиевой меди и не имеют
устройств принудительного дугогашения, если не считать перегородки из
дугостойкой пластмассы, разделяющей контактные элементы в зоне образо-
вания дуги. Гашение дуги в этих контроллерах естественное при переходе
переменного тока через нулевое значение.
В контроллерах КВ 100 имеется сложная система дугогашения постоян-
ного тока, состоящая из дугогасительной катушки на неподвижных контак-
тах, дугогасительной камеры с узкой зигзагообразной щелью и магнитопро-
вода дугогашения. Контакты контроллеров КВ 100 выполнены из серебросо-
держащей металлокерамической композиции КМК-А31М. При размыкании
цепи постоянного тока дуга, образующаяся на расходящихся контактах, взаи-
модействует с магнитным полем, создаваемым дугогасительной катушкой,
и, перемещаясь по контактам, втягивается в дугогасительную камеру из ду-
гостойкой пластмассы. Там она охлаждается о стенки камеры, происходит
интенсивный процесс деионизации, и дуга гаснет. Время горения дуги даже
при токе около 200 А не превышает 100 мс.
В кулачковых контроллерах узлами, ограничивающими уровень меха-
нической износостойкости, являются гибкие соединения подвижных контак-
тов, оси контактных рычагов, ролики кулачков и поверхности кулачковых
шайб. Путем оптимального подбора свойств материалов, усилий и размеров
элементов можно получить механическую износостойкость контроллеров, рав-
ную 3,2*10G циклов В — О. Уровень коммутационной износостойкости цели-
ком зависит от коммутируемого тока. При номинальном токе он составляет
около 0,3*106 циклов В — О, а при токе 50 % номинального можно ожидать
износостойкости, равной примерно 0,8* 106 циклов В — О.
Обе серии контроллеров имеют номинальный ток 63 А при режиме ра-
боты ПВ — 100 %, но их коммутационная способность невысока, что и
накладывает значительные ограничения на возможности использования кон-
троллеров в тяжелых условиях коммутации. Номинальное напряжение кон-
троллеров переменного тока 380 В, 50 Гц, Номинальное напряжение
§ 32
Силовые контроллеры непосредственного управления
97
•контроллеров постоянного тока 220 В. Использование контроллеров при на-
пряжении выше 440 В, 60 Гц недопустимо по соображениям электробезопас-
ности. Ввод кабелей и проводов в контроллеры рекомендуется осуществлять
в трубе. Технические данные силовых контроллеров приведены в табл. 3 3<
Таблица 3 3. Технические данные силовых кулачковых контроллеров
Параметр KBI00 ККТ60А
Номинальный ток режима ПВ = 100 %, Л 63 63
Расчетный номинальный повторяющийся ток включе- ния, А 200 200
Наибольший повторяющийся коммутируемый ток при заторможенном двигателе, А 200 160
Ток термической стойкости, А 900 900
Механическая износостойкость, 106 циклов В — О 3,6 3.6
Коммутационная стойкость при токе включения 2,4/НОм. токе отключения /НОм и напряжении отключения (Лом, 106 циклов В — О 0.2 0.2
Коммутационная стойкость при токе включений InOMt токе отключений 0,5/НОм и напряжении отключения (/ном, 106 циклов В — О Наибольшее допустимое число фиксированных поло- жений 0,5 0.8
6—0—6 5—0—5
Усилие на рукоятке (маховике), Н 60 50
Наибольшее число включений в час 240 240
Масса, кг 45 13
Особенности использования и выбора. Контроллеры постоянного тока
предназначаются для управления электродвигателями серии Д последователь-
ного или параллельного возбуждения и имеют два исполнения по диаграмме
замыкания контактов. Первое исполнение КВ 101 для управления электродви-
гателями механизмов передвижения. Диаграмма замыкания контактов этого
контроллера симметричная для обоих направлений движения и обеспечивает
включение якоря двигателя в двух направлениях вращения и пуск с четырь-
мя-пятью ступенями резисторов, включенных последовательно с якорем, и
малую скорость движения за счет шунтирования якоря на первых положе-
ниях одной ступенью резисторов. При этом может быть достигнуто регули-
рование частоты вращения при нагрузке ниже номинальной до 1:4. Второе
исполнение КВ 102 предназначается для механизмов подъема и применимо
при двигателях последовательного возбуждения. Диаграмма замыкания кон-
тактов этого контроллера несимметричная. На положениях подъема якорь
двигателя и его последовательная обмотка получают питание через четыре
ступени резисторов, а на положениях спуска последовательная обмотка со
своими ступенями резисторов включается параллельно якорю электродвига-
теля по схеме потенциометрического включения. При таком способе включе-
ния реализуется диапазон регулирования частоты вращения до 1:5 как
3 двигательном, так и в тормозном режиме.
4 Зак. 918
98
Крановая контактная аппаратура
Разд. 3
Контроллеры переменного тока предназначаются для управления крано-
выми электродвигателями с фазным ротором, а также короткозамкнутыми
односкоростными двигателями небольшой мощности. Контроллеры имеют
Шесть исполнений по диаграммам замыкания контактов.
Первое исполнение — контроллер ККТ61А — предназначается для управ*
ления электродвигателями с фазным ротором при коммутации в цепях об*
моток статора и ротора. Он имеет симметричную схему включения контак-
тов для обоих направлений движения и служит для управления приводами
подъема небольшой мощности, а также для однодвигательных приводов
передвижения. Возможное регулирование частоты вращения неустойчивое
до 1:3.
Второе исполнение — контроллер ККТ68А — предназначается для управ-
ления электродвигателями с фазным ротором при коммутации резисторов
в роторных цепях. Кроме того, этот контроллер управляет катушками кон-
такторного реверсора ТР160, коммутирующего цепи обмоток статора, схема
замыкания контактов симметричная. Контроллер служит для управления
приводами подъема, не требующими регулирования скорости. Возможное
неустойчивое регулирование частоты вращения около 1 :2.
Третье исполнение — контроллер ККТ62А — предназначается для управ-
ления двумя электродвигателями с фазным ротором при коммутации ро-
торных цепей этих двигателей. Он имеет симметричную схему замыкания
контактов и служит для управления приводами передвижения. Возможное
неустойчивое регулирование частоты вращения до 1:3. Контроллер управ-
ляет также катушками контакторного реверсора ТР60 или ТР160, коммути-
рующего цепи обмоток статоров обоих двигателей.
Четвертое исполнение — контроллер ККТ65А — предназначается для ком-
мутации цепей ротора и статора крановых электродвигателей механизмов
подъема и используется в схемах с динамическим торможением способом
самовозбуждения. При этом цепи постоянного тока коммутируются контак-
торами панели ТРД-160. Контроллер имеет несимметричную схему замыка-
ния контактов и на положениях спуска обеспечивает устойчивое регулиро-
вание частоты вращения до 1:7.
Пятое исполнение — контроллер ККТ63А — предназначается для комму-
тации обмоток статора небольших короткозамкнутых электродвигателей ме-
ханизмов подъема без регулирования скорости. Он имеет симметричную
схему замыкания контактов.
Шестое исполнение — контроллер ККТ66А — предназначается для комму-
тации обмоток и резисторов в цепях статоров короткозамкнутых электро-
двигателей механизмов передвижения. Он обеспечивает регулирование пуско-
вого момента электродвигателей в диапазоне от расчетного до 30 % расчет-
ного и имеет симметричную схему включения контактов.
Условия использования контроллеров в электроприводах крановых ме-
ханизмов приведены в табл. 3.4. Подробное описание схем и характеристик
электроприводов с использованием силовых кулачковых контроллеров при-
ведено в разд. 8. При выборе контроллеров следует руководствоваться ре-
комендациями табл. 3.4 и не превышать указанных там мощностей исполь*
§ 3.3 Крановые пульты управления и командоаппараты 99
Таблица 3.4. Условия использования силовых кулачковых
контроллеров
Тип контроллера Число рабочих положений Номи- нальное напряже- ние, В , II г Наибольшая мощность используемого двигателя кВт, при режимной группе
Назад спуск Вперед подъем 2М ЗМ 4М 5М
КВ101 6 6 220 22 15 10
КВ 102 5 5 220 22 15 10 » "
ККТ61А 5 5 380 30 22 15 7,5
220 22 15 11
ККТ68А 5 5 380 55 37 22 15
220 37 30 15 1
ККТ62А б 5 380 2X22 2X15 2ХН 2X5
220 2X15 2XU 2X7,5 а—•
ККТ65А 5 5 380 30 22 15 —
ККТ63А 1 1 380 15 11 7,5
220 11 7,5 5
ККТ66А 3 3 380 15 11 7,5 5
220 11 7,5 5
зуемых двигателей.
В этом случае контроллеры будут работать надежно
и безотказно.
3.3. КРАНОВЫЕ ПУЛЬТЫ УПРАВЛЕНИЯ И КОМАНДОАППАРАТЫ
Пульты управления. В соответствии с правилами Госгортехнадзора все
вновь проектируемые и строящиеся грузоподъемные краны должны осна-
щаться рабочим местом машиниста крана — пультом управления. С 1977 г.
мостовые краны, а вслед за ними также и другие краны стали комплекто-
ваться крановыми пультами управления фирмы EVIG (ВНР), а затем также
пультами фирмы RADE CONCAR (СФРЮ). Эти пульты в течение двух
пятилеток поставляются в СССР в рамках кооперации СЭВ. На последую-
щие периоды вплоть до 2000 г. указанная кооперация также планируется.
Конструкция и технические характеристики. Крановый пульт управления
представляет собой рабочее кресло со спинкой, регулируемое по высоте по-
садки на 60—70 мм и расположенное на несущей площадке. Справа и слева
от кресла устанавливаются колонки управления, в которых размещаются
необходимые органы управления краном, а также располагаются подлокот-
ники для опоры рук при управлении краном. Кресло пульта откидывается
в сторону для прохода машиниста к своему рабочему месту. В колонках
управления размещаются аппараты. В правой колонке устанавливаются два
контроллера управления механизмами главного и вспомогательного подъемов
с двумя независимыми рукоятками управления, амперметр, вольтметр, пере-
ключатель амперметра, четыре сигнальные лампы, две из которых указывают
на включение механизмов подъема, а две другие могут использоваться по
мере необходимости в схеме крана, выключатель питания цепей управления
4*
100 Крановая контактная аппаратура Разд. 3
с приводом от индивидуального ключа, кнопка аварийной остановки с ла-
донным приводом. В левой колонке устанавливаются два контроллера управ-
ления механизмами горизонтального передвижения, например мостом и те-
лежкой или поворотом и стрелой, привод контроллеров от одной рукоятки,
которая может перемещаться в двух плоскостях, телефон для оперативной
связи с цеховым персоналом или руководителем грузовых операций, четыре
сигнальные лампы, из которых две указывают на включение механизмов
горизонтального перемещения, две лампы для использования в схеме крана.
Б колонках помимо указанных аппаратов размещаются сборки с выво-
дами от всех контактов и приборов, а также два трансформатора цепей
управления напряжением 380/20 В, мощностью по 100 В-А для питания це-
пей сигнализации и цепей аварийного освещения на кранах. Пульт фирмы
EVIG имеет типовое обозначение DVP15. Пульт фирмы RADE CON CAR
имеет типовое обозначение UP35/I. Степень защиты пультов от внешней
среды IP40. Подвод проводов и кабелей снизу через основание пульта. Ло-
лонки пульта имеют съемные боковые щиты для обеспечения доступа к ап-
паратуре, сборкам с выводами и приводам контроллеров.
Габаритные размеры крановых пультов DVP15 и UP35/I приведены на
рис. 3.2 и 3.3. По своим электрическим параметрам, схемам и условиям
использования оба пульта идентичны и различаются лишь конструктивным
оформлением. Масса пультов обоих типов 100 кг. Усилие на рукоятках со-
ставляет 50 Н. Механический ресурс приводов пультов поставки до 1987 г.
2,5-106 циклов В — О, после 1987 г. ресурс должен составлять не менее
3,2-106 циклов В — О каждого привода.
Технические данные контроллеров, встраи-
ваемых в пульты:
Тип контактов . . , . ...................
Номинальный ток в режиме ПВ = 40 %, А
Рабочий ток включения, А..............
Коммутируемый переменный ток, А:
цепь заторможенного асинхронного
двигателя с фазным ротором при на-
пряжении 380 В ............... ,
при 10 % всех коммутаций . . . .
при cos <р = 0,4 и напряжении 380 В,
50 Гц.............................
Коммутируемый постоянный ток при
L/R = 0,05 с и напряжении 220 В, А
Коммутационная износостойкость, циклы
В —О:
при нормированных номинальных па-
раметрах ................ . . . .
при токах включения и отключения,
сниженных вдвое...................
на переменном токе при нагрузке
10 А, 380 В, cos <р ~ 0,4.........
Наибольшее число включений в час . . .
Наибольшее число рабочих положений . .
Мостиковые с метал-
локерамическими
напайками
35
70
35
70
25
1.5
0,25 • 10е
0,5 • 10е
1 • 10»
360
5-0-5
§ 33
Крановые пульты управления и командоаппараты
101
Выбор пультов. С учетом указанной выше коммутационной способности
контроллеры пультов могут быть использованы в качестве как силовых кон-
троллеров непосредственного управления электроприводами, так и командо-
аппаратов для дистанционного управления посредством магнитных контрол-
Рис, 3 2. Габаритные размеры пульта управления DVP15
леров. При использовании пультов для непосредственного управления элек-
тродвигателями переменного тока с фазным ротором в табл. 3.5 приведены
предельные мощности двигателей, которые могут быть использованы для
Рис. 3.3. Габаритные размеры пульта управления UP35/I
режимных групп механизмов. По возможным компоновочным схемам пульты
DVP15 и UP35/I имеют 14 вариантов. В табл. 3 6 приведены данные по
компоновочным вариантам.
Командоконтроллеры. Командоконтроллеры являются аппаратами руч-
ного управления. Они предназначаются для дистанционного управления кра-
новыми и другими автоматизированными электроприводами. Контакты
102
Крановая контактная аппаратура
Разд. 3
Т аб л иц а 3.5. Использование контроллеров пультов
для непосредственною управления двигателями
переменного тока
Группа режимов
работы механизмов
Наибольшая мощность управляемого двигателя.
кВт, при напряжении 380 В
при непосредственном
управлении
при использовании
реверсора для коммутации
цепей статора
2М
ЗМ
4М
5М
18,5
15
11
7,5
30 или 2X15
22 или 2XU
15 или 2X7,5
11 или 2X5,5
Таблица 3.6. Исполнения по схемам крановых пультов управления
Вариант пульта Правая колонка, привод спаренный Левая колонка, привод индиви- дуальный
Схема первого контроллера Схема второго контроллера Схема первого контроллера Схема второго контроллера
1 ККТ61А ККТ62А ККТ61А ККТ61А
2 ККТ61А ККТ62А ККТ68А ККТ68А
3 ККТ61А ДТА ТСА ККТ68А
4 ТА ДТА ТСА ТСА*
5 ДТА ККТ68А ТСА ТСА
6 ККТ61А БОК6502 тсд ККТ68А
7 БОК6511 БОК6502 тсд ККТ61А
10 ККТ61А ККТ62А тсд ККТ68А
13 ККТ66А ККТ62А — ККТ61А
15 БОК6501 БОК6501 тсд ККТ61А
• Грейферный вариант.
командоконтроллеров рассчитаны на коммутацию цепей катушек контакто-
ров и реле постоянного или переменного тока, а также цепей управления
преобразователями, тиристорными регуляторами и подобными им устрой-
ствами. Командоконтроллеры являются многоцепными аппаратами с задан-
ной программой замыкания контактов на определенных положениях руко-
ятки управления. По принципу действия командоконтроллер аналогичен
силовым кулачковым контроллерам или контроллерам крановых пультов управ-
ления. В отличие от силовых контроллеров контактная система командо-
контроллеров мостикового типа с серебряными контактами, кулачковый
барабан и два набора контактных элементов по шесть элементов в наборе
компонуются в контактный блокл который вместе с подшипниками и фикса-
§ 3.3 Крановые пульты управления и командоаппараты 103
тором положений является самостоятельным изделием, допускающим исполь-
зование в различных комплектных устройствах управления. Этот блок раз-
мещается в корпусе из алюминиевого
сплава, закрываемом крышкой из такого
же сплава. Привод кулачкового бара-
бана осуществляется от рукоятки. Упо-
ры крайних рабочих положений кулач-
кового барабана также устанавлива-
ются на фиксаторе.
Начиная с 1986 г. промышленно-
стью организовано производство коман-
доконтроллеров серии ККПЮОО. Габа-
ритные размеры этого командоконтрол-
лера приведены на рис. 3.4. Наиболь-
шее число положений команд ©контрол-
лера — по пять в каждую сторону от
нулевого положения. Защита от внеш-
ней среды IP40. За счет удачной
конструкции контактных узлов — непод-
вижные контакты возвышены над пласт-
массовым основанием и имеют массив-
ком а ндоконтролл ер а ккпюоо
ное теплоотводящее кольцо — командоконтроллер имеет высокую коммута-
ционную износостойкость на постоянном токе.
Основные технические данные командоконтроллеров
серии ККПЮОО:
Йоминальное напряжение, В:
переменный ток 50 и 60 Гц....................... 440
постоянный ток.................................220 и 440
Ток продолжительного режима, А....................... 16
Включаемый ток постоянный или переменный, А . . . 25
Отключаемый ток, А:
переменный при 380 В, cos ф == 0,4......... . 16
постоянный при 220 В, L)R ~ 0,05 с.............. 1,5
постоянный при 440 В, LjR = 0,05 с.............. 0,5
Механическая износостойкость, циклы В — О . . . . 5 • 10е
Коммутационная износостойкость, циклы В — О:
при коммутации постоянного тока 0,8 А, напря-
жении 220 В, L/R = 0,05 с...................... 1 • 106
при коммутации переменного тока: включение тока
10 А, отключение тока 5 A, cos ф = 0,4.........1,5 • 10е
Частота включений в час . ........................ 600
Усилие на рукоятке при переключений, Н............... 30
Масса ком андоконтролл ер а, кг....................... 9
Исполнения по схемам и диаграммам замыканий контактов командо-
контроллеров серии ККПЮОО приведены в табл. 3.7. Командоконтроллеры
ККПЮОО заменяют ранее изготовлявшиеся командоконтроллеры КШ000 и
по основным показателям, ресурсу и коммутационной способности превосхо-
дит их в 2—3 раза.
Таблица 3.7 Исполнения командоконтроллеров серии ККП1000
Тип командо- контроллера Число рабочих положе- ний Тип магнитного контроллера (панели) Диаграмма включения Рукоятка Примечание
ККП1102 5—0—5 П600 Рис. 8.6 Поворот, передвиже- ние
ККП1104 2-0-2 ПОК6505 То же
ККП1108 4—0—4 П160—П250 Рис. 8.6
ККП1109 5-0-5 ПС600 Рис. 8.3 Подъем
ККП1Ш 5—0—5 ПС160—ПС250 Рис. 8.3
ККП1120 4—0—4 КС160-КС400 Рис. 8.10 »
ККП1124 5—0—5 ТСД60—ТСД400 Рис. 8.17 »
ККП1125 5—0—5 КСДБ160—КСДБ250 Рис. 8.19 »
ККП1126 5-0-5 ПОК6504 — Нормальная фиксация в каж- »
ККП1127 5—0—5 ПОК6504 дом положении »
ККП1128 5-0-5 ПОК6505 »
ККП1129 5—0—5 ПОК6505 —— »
ккппзо 4—0—4 ТА60-ТА250 К61-К250 Рис. 8.13 Рис. 8.13 Передвижение
ККП1131 2-0-2 1ЮК6504 — Стрела
К КП 1138 5-0-5 ТТ3160—ТТ3250 Рис. 10.4 —
ККП1139 2—0—2 ТСН160 —
ККП1146 5—0—5 ДТ3160 —р —
ККП1164 5-0-5 ТАИ, ДТАИ. БОК Рис. 8.23 Передвижение
К КП 1206 К КП 1207 О о 1 1 ТСА КС Рис. 8.10 Для грейферного привода, фик- сация в каждом положении Грейферный вариант
ККП1319 1-0-1 - С самовозвратом —
ККП1423 ПСМ80 Сельсинный командоконтрол- лер
К Панова контактная аппаратура Разд. 3
§ 3.3 Крановые пульты управления и командоаппараты
105
Кроме контактных командоконтроллеров в серии ККП1000 имеется также
сельсинный командоконтроллер ККП1423. Этот сельсинный командоконтрол-
лер имеет шесть контактных элементов, в том числе один замкнутый только
в нулевом положении и два других — замкнутые на всех положениях каж-
дого из направлений движения. Сельсин типа БД404А, механически связан-
ный с кулачковым барабаном, работает в режиме поворотного трансформа-
тора. Однофазная статорная обмотка (рис. 3.5, а) с выводами S1— S2 полу-
чает питание от сети переменного тока 50 Гц, ПО В. При угле поворота,
Рис. 3.5, Схема сельсинного командоконтроллера
равном 0, напряжение на выводах трехфазной обмотки Р1 — Р2 — РЗ рав-
но 0. При угле поворота в любую сторону на угол 60° напряжение на вы-
ходе 2 возрастает до 43 В, внешняя нагрузка при этом должна иметь со-
противление 11 Ом или выше, что соответствует мощности внешней нагрузки
15 Вт. Изменение напряжения на выходах 1 и 2 видно на характеристиках
сельсина рис. 3 5, б. Выход 2 может быть использован в схемах бесконтакт-
ного реверсирования, а выход 1 — в схемах с питанием от сельсина обмоток
управления магнитными усилителями или реле.
Кроме командоконтроллеров в управлении механизмами кранов исполь-
зуются педальные выключатели НВ701, которые конструктивно подобны ко-
нечным выключателям КУ 701, но вместо рычага имеют одну-две педали.
Кнопочные посты управления. Подвесные кнопочные посты управления
предназначаются для управления кранами различного типа с пола или опре-
деленного места выполнения погрузочных работ. Пост управления подвеши-
вается на стальном тросике под краном и располагается при движении кра-
на на высоте 1200—1300 мм от пола. Пост соединяется с устройством управ-
ления краном многожильным кабелем в гибкой резиновой оболочке. Пост
выполняется со степенью защиты IP30. Типовое обозначение подвесного
кнопочного поста ПКТ. Габаритные размеры поста приведены на рис. 3.6.
Масса поста 0,45—0,65 кг. В подвесном посте управления размещаются до
шести кнопочных коммутационных элементов и один коммутационный эле-
мент с приводом от индивидуального ключа. Коммутационные элементы в
постах имеют два типа: одноходовые кнопки с одним включающим и одним
106
Крановая контактная аппаратура
Разд. 3
размыкающим контактами, двухходовые кнопки, при нажатии которых вна-
чале замыкается один замыкающий контакт и размыкается один размыкаю-
щий контакт, а затем при дальнейшем нажатии кнопки замыкается второй
замыкающий контакт.
В краностроении используются следующие типы постов:
Тип поста
ПКТ 40
ПКТ 44
ПКТ 60
ПКТ 62
ПКТ 64
ПКТ 66
Число одноходовых кнопок Число двухходовых кнопок
4 —
— 4
6 —
4 2
2 4
—• 6
Пост управления предназначается для коммутации катушек контакторов
или магнитных пускателей устройств управления кранами. Номинальное на-
пряжение цепей управления до 660 В, 50 Гц или постоянный ток 220 В.
356 50
Рис. 3.6. Габаритные размеры кнопочного поста ПКТ60 (в скобках даны
габаритные размеры поста ПКТ40)
Ток включения кнопочных элементов 6 А, ток размыкания 1,5 А при cos <р = 0,4
или постоянный 0,7 А. Уровень коммутационной износостойкости коммута-
ционных элементов пульта НО0 циклов В — О, механическая износостой-
кость 4-106 циклов В — О. В целях повышения электробезопасности корпус
пульта выполнен из высокопрочной пластмассы АГ4, а между токоведущими
частями и штифтами кнопок имеется изоляция повышенной прочности» ис-
пытываемая на электрическую прочность напряжением 2500 В.
Конечные выключатели. Защита от перехода механизмами предельных
положений осуществляется конечными выключателями. Эта защита обяза-
тельна к применению для всех механизмов подъема, а также для всех ме-
ханизмов передвижения башенных, портальных и козловых кранов. Для
мостовых, подвесных поворотных кранов установка конечных выключателей
в механизмах передвижения обязательна при номинальных скоростях пере-
движения свыше 0,5 м/с. В СССР конечные выключатели изготовляются
только для коммутации цепей управления. На некоторых особо ответствен-
ных зарубежных кранах применяются конечные выключатели, размыкающие
в подъемных механизмах главную цепь и автоматически переводящие элек-
тродвигатель в режим динамического торможения. Если учесть неуклонное
повышение рабочих скоростей механизмов, то и на отечественных кранах,
в первую очередь металлургических, имеется нужда в применении таких
выключателей.
§ 3.3 Крановые пульты управления и командоаппарсЯы 107
В крановом электроприводе конечные выключатели имеют две основные
конструкции: рычажные с приводом от рычага и шпиндельные с приводом
от вала. Контакты конечных выключателей включаются либо в цепь катушки
линейного контактора защитной панели крана (см. схему рис. 3.13), либо
в цепь нулевой защиты магнитных контроллеров соответствующих меха-»
низмов.
Рычажные конечные выключатели действуют на размыкание контактов
путем механического поворота кулачкового барабана; единственным узлом,
который должен постоянно проверяться и контролироваться, является под-
шипниковый узел кулачкового барабана выключателе Не должно иметь
место какое бы то ни было заедание вала в подшипниках, т. е. должно
исключаться образование коррозии вала в подшипниковых гнездах. Выклю-
чатели с приводом кулачкового барабана от вала, соединенного с редукто-
ром, называемые также шпиндельными, являются весьма надежными аппа*
ратами, и заедания в их механической части маловероятны.
Рычажные выключатели серии КУ 700 имеют контактный узел с двумя
контактными элементами мостикового типа. Привод контактных элементов
осуществляется от кулачкового барабана, шайбы которого могут перестраи-
ваться потребителем для любой таблицы замыканий в пределах рабочих
положений 1—0—1. Выключатели типа КУ 701 имеют рычажный привод
с самовозвратом в нулевое положение и используются в основном в качестве
ограничителей горизонтального перемещения. Их модификацией со степенью
защиты от внешней среды IP56 являются аппараты КУ 741.
Выключатели КУ 703 имеют на кулачковом валу двуплечий рычаг. На
одном плече постоянно навешен груз, достаточный для поворота барабана
в сторону размыкания контактов. Ко второму плечу рычага на тросике при*
креплен груз с массой, заведомо большей, чем масса груза на рычаге. Гру*
зовой трос механизма подъема пропускается сквозь скобу на подвижном
грузе, и при подтягивании подвески крюка к опасной зоне крана подвеска
поднимает подвижной груз, рычаг кулачкового вала контроллера поворачи-
вается под действием своего груза и выключатель срабатывает на ограни*
чение подъема.
Выключатели КУ 704 и их модификация КУ 744 со степенью защиты
IP56 имеют на валу кулачкового барабана рычаг в виде трилистника, а ба-
рабан фиксируется в каждом положении. Выключатели этого типа могут
являться путевыми переключателями типа этажных, т. е. поворот рычага не
только ведет к срабатыванию, но при этом разрешается движение в проти*
воположном направлении. Рычаги выключателей КУ 701, КУ 741 и КУ 704,
КУ 744 могут устанавливаться через 90° на валу. Рычаг выключателя КУ 703
устанавливается только в одном рабочем положении. После срабатывания
выключателя у него еще имеется ход 30—40 мм для пропуска линейки во
время выбега механизма. Выключатель КУ 703 может ограничить только
движение крюка вверх.
Ограничение движения крюка в двух направлениях может быть осуще*
ствлено выключателем, жестко связанным с редуктором или барабаном ме*
ханизма подъема. Вал выключателя через встроенный червячный редуктор
108
Краносая контактная аппаратура
Разд 3
с передаточным числом 1 :50 поворачивает кулачковый вал. На кулачковом
валу располагаются включающие и отключающие кулачки контактных эле-
ментов. При этом размыкание или включение контактов происходит мгно-
венно при освобождении защелки отключающим кулачком. Момент отклю-
чения регулируется установкой отключающего кулачка. Габаритные размеры
рычажного конечного выключателя КУ 701, КУ 741 приведены на рис. 3.7.
Рис. 3.7. Габаритные размеры ко-
нечных выключателей КУ 701, КУ 741
Рис. 3 8. Габаритные размеры шпин
дельных выключателей В У 250
Габаритные размеры шпиндельного конечного выключателя серии ВУ 250
приведены на рис. 3.8. Технические данные конечных выключателей приве-
дены в табл. 3.8.
При установке конечных выключателей на механизмах следует учиты-
вать выбег механизма после срабатывания выключателя. В общем виде вы-
бег определяется по формуле
AS = v
7 общ^ном
18,5 (Л4Т ± Мст)
(3.2)
где AS — выбег при торможении, м; /а — время срабатывания контактной
аппаратуры, с; tT — время от момента отключения тормоза до начала тор-
можения, с; /Общ — суммарный момент инерции, приведенный к валу TopMO3at
КГ’М2; Пном — номинальная частота вращения тормозного шкива, об/мин; Л1г,
Мст — момент тормоза и момент статической нагрузки, Н-м; и — скорость
механизма при начале торможения, м/с. В частности, при торможении тор-
мозом ТКТГ и типовой контроллерной схеме
AS = и
0,5 +
/ общ^ном
18,5 (Мт ± Мст)
(3.3)
Крановые магнитные контроллеры
100
Таблица 3.8. Технические данные конечных выключателей
Тип выклю чателя Привод Скорость механизма, м/с Категория размеще- ния Степень защиты от внешней среды Масса, кг
КУ 701 Рычажный с самовоз- вратом 0,03—2 У1 IP44 2,7
КУ 741 То же 0,03—2 ОМ1 IP56 4,5
КУ 703 От груза 0,01 — 1 У1 IP44 10,3
КУ 704 Рычажный с фиксиро- ванным положением 0,02—1,5 У1 IP44 2,7
КУ 744 То же 0,02-1,5 ОМ1 IP56 4,5
ВУ 150 Шпиндельный Без ограни- чений У2 1Р44 3
ВУ 250 » То же У2 IP44 4
УБ 250 2> х> ОМ1 IP56 9
Примечания: 1. Механическая
В-О.
2 Коммутационная износостойкость
L/R = 0,05, 220 В — 0,2 10е циклов В—О.
3. Рабочее напряжение, переменный
440 В
износостойкость выключателей 1 • 10е циклов
при коммутации постоянного тока 0,7 А,
ток до 500 В, 50 Гц; постоянный ток до
Для снижения выбега AS следует использовать системы привода с ма*
лыми установочными скоростями.
34. КРАНОВЫЕ МАГНИТНЫЕ КОНТРОЛЛЕРЫ
Назначение, классификация. Общие условия использования. Магнитные
контроллеры представляют собой сложные комплектные коммутационные
устройства для управления крановыми электроприводами. В магнитных кон-
троллерах коммутация главных цепей осуществляется с помощью контак-
торов с электромагнитным приводом. По схеме магнитные контроллеры пред-
ставляют собой законченные комплектные устройства, обеспечивающие ряд
программ переключений в главных цепях по выбору оператора и посредством
подачи оператором соответствующих команд по цепям управления. Команды
в цепях управления подаются командоконтроллерами или кнопочными по-
стами управления. Магнитные контроллеры предназначаются для пуска, ре-
гулирования скорости, торможения и отключения приводных крановых элек-
тродвигателей постоянного и переменного тока. По сравнению с силовыми
кулачковыми контроллерами магнитные контроллеры имеют целый ряд
преимуществ:
для управления магнитными контроллерами независимо от мощности
двигателя используются командоконтроллеры, требующие минимальной за-
траты энергии оператора;
при интенсивной работе срок службы магнитных контроллеров, их изно-
состойкость в 5—8 раз выше, чем у кулачковых контроллеров, в связи с тем,
что коммутация осуществляется контакторами;
по
Крановая контактная аппаратура
Разд, 3
магнитные контроллеры обладают значительным запасом по коммута*
ционной способности. В предельном случае магнитные контроллеры размы-
кают токи до 10/ном и в то же время могут пропустить без повреждений
токи 157ном на время срабатывания защиты;
в связи с заранее запрограммированной системой пуска и торможения
возможность недопустимой перегрузки механизма сведена к минимуму.
Изготовляемые промышленностью крановые магнитные контроллеры
объединяются в две группы: крановые магнитные контроллеры постоянного
тока и крановые магнитные контроллеры переменного тока. В свою очередь
каждая из групп магнитных контроллеров по схемным признакам подразде-
ляется на магнитные контроллеры механизмов подъема и передвижения. По
конструктивным признакам магнитные контроллеры переменного тока под-
разделяются на две группы:
с аппаратурой, монтируемой на стальных каркасах, — каркасно-реечная
конструкция;
с аппаратурой, монтируемой на изоляционных негорючих досках, — ме-
таллургическое исполнение.
Все магнитные контроллеры, кроме тропического исполнения, изготов-
ляются в открытом исполнении IP00 для категорий размещения УХЛЗ и
при конкретном размещении на кранах различного назначения либо устанав-
ливаются в состоянии поставки, либо размещаются в оболочках согласно
табл. 1.8. Магнитные контроллеры тропического исполнения пригодны для
категорий размещения Т2 и имеют шкафы со степенью защиты IP42. Все
крановые магнитные контроллеры имеют обслуживание с одной передней
стороны, что позволяет получить минимальную площадь обслуживания. Маг-
нитные контроллеры каркасно-реечной конструкции имеют одну ступень изо-
ляции между токоведущими частями и корпусом и поэтому рекомендуются
для использования в условиях обычной производственной среды. Магнитные
контроллеры панельной конструкции имеют две ступени изоляции и исполь-
зуются в основном для кранов металлургического производства, крупных
литейных, кузнечных и термических цехов с высокой концентрацией в воз-
духе токопроводящей пыли.
Аппаратура, применяемая в магнитных контроллерах. Крановые магнит-
ные контроллеры являются комплектными устройствами с высокой механиче-
ской и коммутационной износостойкостью. Поэтому они комплектуются ап-
паратами соответствующего назначения, рассчитанными, во-первых, на усло-
вия коммутации ДСЗ — ДС5, АС2 — АС4 и имеющими наиболее высокие
показатели механической и коммутационной износостойкости. В магнитных
контроллерах применяются коммутационные аппараты с параметрами, при-
веденными в табл. 3.9, и разнообразные реле с параметрами, приведенными
в табл. 3.10. Кроме коммутационных аппаратов в магнитных контроллерах
широко применяются как отдельные полупроводниковые приборы, так и
блоки из этих приборов, а также максимальные и тепловые реле защиты,
технические данные которых приведены в § 3.5.
Коммутационная износостойкость магнитных контроллеров. Условия ком-
мутации главных цепей крановых электроприводов весьма разнообразны и.
§ 3.4
Крановые магнитные контроллеры
Т а б л иц а 3.9. Технические данные коммутационных аппаратов
крановых магнитных контроллеров
Наимено- вание аппарата Назначение аппарата Диапазон номи- нальных токов,А Наибольшее напряжение главной цепи, В Типы аппаратов Механическая износостойкость, 10s циклов В—О Коммутационная стойкость, 10ь циклов В—О Категория коммутационной стойкости
Постоянный ток
Кон- тактор Кон- Коммутация главных цепей Коммутация 100—630| 220 КПВ602—КПВ605 КПВ623-КПВ624 20 10 1 1 ДС2 ДС2
160—250 220
тактор цепей электри- ческого тормо- жения
Кон- тактор Коммутация цепей высокой индуктивности 25—63 Перс 220 гменн КПД110Е-КПД121Е ый ток 10 1 ДС2
Кон- тактор Коммутация главных цепей 100—250 660 КТ6012Б—КТ6032Б КТ6013Б—КТ6033Б 10 0,5 АСЗ
Кон- тактор То же 400 660 КТП6042 10 0,5 АСЗ
Кон- тактор 100-250 380 КТПВ622-КТПВ624 20 1 АСЗ
Кон- тактор 63 380 КТП121Е 10 1 АСЗ
Магнит- ный пуска- тель 63 380 ПМА4000 16 2,5 АСЗ
Магнит- ный пуска- тель Коммутация цепей тормо- зов, гидротол- кателей и т. п. 10—25 380 ПМЛ110-ПМЛ210 16 2,5 АСЗ
как правило, не соответствуют нормированным стандартным режимам ком-
мутации (см. табл. 3.1). В повторяющихся циклах грузовых операций ком-
мутации, связанные с включением неподвижных и отключением вращаю-
щихся двигателей, чередуются с операциями включения вращающихся и
отключением неподвижных двигателей, и, наконец, происходят коммутации
в условиях, промежуточных между этими крайними значениями. В общем
числе коммутаций главных цепей значительная часть приходится на комму-
тацию при вполне определенных условиях, которые можно заранее предви-
деть. К ним относятся: включение электродвигателя при пусковом токе /п;
отключение вращающегося электродвигателя при токе нагрузки, равном рас-
четному ZP; отключение электродвигателя в процессе пуска при токе 0,8/п;
включение и отключение неподвижного электродвигателя при токе, близком
к расчетному току нагрузки /Р, для обеспечения толчкового регулирования.
П2 Крановая контактная аппаратура Разд. 3
Таблица 3.10. Технические данные реле, используемых в крановых
магнитных контроллерах
Наименование аппарата Назначение в схемах Тип Диапазон пара- метров срабаты- вания, % номи- нального Механическая износостойкость, 10б циклов В—О
Постоянный ток
Реле времени * Контроль времени пу- ска и торможения РЭВ811 —РЭВ818 60 10
Реле напряжения Контроль напряжения срабатывания РЭВ821 — РЭВ825 35-80 10
П ромежуточное реле Блокировка в схемах, реле контроля тока в цепях, максимальное реле Переменный т РЭВ822 — РЭВ826 РЭВ816 РЭВ510 —РЭВ570 ок 65 70—300 70—200 10 10
Промежуточное реле Блокировки в схемах РПЛ14 —РПЛ23 80 16
Контактная при- ставка к проме- жуточному реле То же ПКЛ40 — ПКЛ04 16
Приставка вы- держки ** вре- мени Контроль времени пу- ска и торможения ПВЛ11 — ПВЛ21 80 5
* Диапазон выдержки времени 0,4—3,8 с.
** То же ОД-4-30 с.
Исходя из этого связь между номинальным током коммутационного
аппарата 7Н0М, обладающего нормированной коммутационной износостой-
костью Пи одного из стандартизированных режимов в миллионах циклов
В—О, и током /р при требуемой фактической износостойкости также в мил-
лионах циклов В — О может быть определена выражением
где /р — ток, соответствующий расчетной мощности выбираемого двига-
теля; Np — требуемая расчетная износостойкость, млн. циклов В—О; /Ун —
нормированная коммутационная износостойкость аппаратов контакторов
главной цепи в режимах коммутаций АСЗ-ДС4; Ai — доля числа включений
тока /р в общем числе циклов В—О; Аг — доля тока отключения Zp при на-
пряжении 0,1 UHOM в общем числе циклов В—О; Ki—Nq/Nh по характери-
стикам рис. 3.9 для постоянного тока и рис. 3.10 — для переменного тока
при включении тока, равного номинальному ZH0M; Kz — Np/Na при отключе-
§ 34
Крановые магнитные контроллеры
113
нии тока /ном при напряжении С/откл =» (Уном, Мр/^н при включении тока
^п» К4“^р/Ун при отключении тока /ном при напряжении отключения
0,1 Ь^номГ Лз —Wp/Mi при отключении тока 0,8/п при напряжении отключения
0,5 t/HOM
Рис. 3.10. Электрическая износостой-
кость магнитных контроллеров пере-
менного тока
Рис 3 9. Электрическая износостой-
кость магнитных контроллеров по-
стоянного тока
Коэффициенты и А2 в зависимости от системы
управления принимают
следующие значения:
Система управления А а2
мк-дп 0,3 0,65
МК-АДД, ТП-ДП, Г-Д 0 0,95
МКП—АДФ, МКИ—АДФ 0,65 0,3
А1КД—АДФ 0,3 0,65
МКВ—АДФ, ТРИ—АДФ 0 0,5
С учетом (3.4) и параметров режимных групп механизмов и необходи-
мой ком мутационной износостойкости для межремонтного срока эксплуата-
ции номинальный ток магнитного контроллера в зависимости от тока
находится по формуле
^HOM = ^pK£fe, (3.5)
где Kik определяется по табл. 3.11 для режимных групп механизмов и при-
нятых систем управления.
Магнитные контроллеры постоянного тока. Магнитные контроллеры по-
стоянного тока предназначены для управления крановыми электродвигате-
лями серии Д800 последовательного возбуждения при питании кранов от
общезаводских сетей постоянного тока. В связи с применением таких элек-
троприводов только в металлургии магнитные контроллеры этой серии
Н4 Крановая контактная аппаратура
Разд. 3
Таблица 3.11. Значения коэффициента Kik для различных
систем управления электроприводами
Система эле ктро привода Группы режимов работы
IM, 2М ЗМ 4М 5М 6М
мк-дп 0,75 0,85 1 1,2 1,6
МК-АДД 0,8 0,9 1
МКП-АДФ МКИ-АДФ 0,75 0,85 1 1,3 1,8
МКД-АДФ 0,7 0,82 1 1,2 1,7
МКБ—АДФ * 1 ™ 0,85 1 1,2
ТРН-АДФ 0,7 0,82 0,9 1 1,5 1,3
тп-дп, г-д 0,7 0,82 0,9 1
Таблица 3.12. Технические данные магнитных контроллеров
постоянного тока
Тип магнит- ного контрол- лера Наибольший ток включения, А Номинальный ток при ПВ«в100 %. А Напряжение, В Наибольшая расчетная мощность двигателя, кВт, при режимной группе механизма Назначение
ЗМ 4М 5М 6М
П160 450 160 220 38 30 25 20 Механизмы пе-
440 60 50 40 30 редвижения.
П250 800 250 220 75 60 50 36 Один двигатель
440 НО 90 75 55
П630 2000 630 220 150 125 100 80
ДП63 2X200 63 220 2X13,5 2XU 2X9,5 2X7 То же. Два дви*
ДП160 2X450 2X160 220 2X38 2X30 2X25 2X20 гателя
440 2X60 2X50 2X40 2X30
ДП250 2X800 2X250 220 2X75 2X60 2X50 2X36
440 2Х1Ю 2X90 2X75 2X55
ДП630 2X2000 2X630 220 2X150 2X125 2ХЮ0 2X80
ПС 160 450 160 220 38 30 25 20 Механизмы
440 60 50 40 30 подъема. Один
ПС250 800 250 220 75 60 50 36 двигатель
440 110 90 75 55
ПС630 2000 630 220 150 125 100 80
ДПС 160 2X450 2X160 220 2X38 2X30 25 2X20 То же. Два дви-
440 2X60 2X50 40 2X30 гателя
ДПС250 2X800 2X250 220 2X75 2X60 2X50 2X36
440 2ХН0 2X90 2X75 2X55
ДПС630 2X2000 2X630 220 2X150 2X125 2ХЮ0 2X80
§ 3.4
Крановые магнитные контроллеры
115
изготовляются в конструктивном исполнении с расположением аппаратуры на
изоляционных досках. Климатическое исполнение магнитных контроллеров
УЗ и ТЗ, степень защиты IP00. При монтаже на кранах они должны размен
щаться в шкафах со степенью защиты не ниже IP22. Напряжение цепи
управления для всех исполнений 220 В. Технические данные магнитных кон-
троллеров приведены в табл. 3.12, а габаритные размеры — в табл. 3.13.
Таблица 3.13. Габаритные размеры, мм, и масса магнитных
контроллеров постоянного тока
Тип магнитного контроллера L В, В3 Масса, кг
П160 700 200 350 150
П250 800 260 420 230
П630 1000 380 600 410
ДП160 1300 200 350 280
ДП250 1600 260 420 400
ДП630 2000 380 600 560
ПС 160 700 200 350 175
ПС250 800 260 420 200
ПС630 1000 380 600 350
ДПС 160 1400 200 350 260
ДПС250 1600 260 420 430
ДПС630 2000 380 600 780
Примечание. Для всех типов магнитных контроллеров Н=1700 мм,
При использовании магнитных контроллеров для управления электро-
двигателями мощность последних в режиме ПВ — 25 % не должна быть
выше значений, рекомендованных в табл. 3.12. При соблюдении этого усло-
вия обеспечивается необходимая коммутационная износостойкость, соответ-
ствующая требованиям по ресурсу ГОСТ 25835-83 (СТ СЭВ 2077-80).
Магнитные контроллеры типов П и ДП предназначаются для управ-
ления элетроприводами механизмов передвижения кранов и имеют иден-
тичные схемы соответственно для управления одним и двумя электродви-
гателями. Магнитные контроллеры типов ПС и ДПС предназначаются для
управления электроприводами механизмов подъема также со схемами двух
исполнений — для одного и двух приводных двигателей. В целях резервиро-
вания при двухдвигательном управлении схемами предусматривается возмож-
ность работы с одним двигателем, для чего в схему введены соответствующие
116
Крановая контактная аппаратура
Разд. 3
переключатели в главных цепях. Магнитные контроллеры рассчитаны на при-
менение тормозов с приводом постоянного тока, имеющих катушки последо-
вательного возбуждения. Магнитные контроллеры имеют в целом механиче-
скую износостойкость (10 4-16) • 106 циклов В — О и конструктивно, а также
по схеме являются высоконадежными комплектными устройствами. При этом
схемами обеспечивается устойчивый диапазон регулирования скорости до
1:5с высоконадежным' электрическим торможением. Для повышения комму-
тационной износостойкости цепей управления для магнитных контроллеров
ДП, ДПС на токи 250 и 630 А предусмотрено использование дополнительной
коммутационной панели цепей управления. Магнитные контроллеры снаб-
жены аппаратурой максимально-нулевой защиты для использования с двига-
телями соответствующей мощности.
Магнитные контроллеры переменного тока общего назначения. Магнитные
контроллеры переменного тока общего назначения служат для управления
асинхронными крановыми электродвигателями с фазным ротором, исполь-
зуемыми иа грузоподъемных кранах машиностроительных предприятий,
строительной индустрии, энергетики, лесопереработки, транспорта и других
отраслей, характеризующихся состоянием среды, обычным для промышлен-
ных предприятий, или на открытом воздухе без содержания морского ту-
мана. К таким условиям эксплуатации относится большинство грузоподъем-
ных механизмов. С учетом этих условий рассматриваемые магнитные кон-
троллеры изготовляются в виде панелей каркасно-реечной конструкции с уста-
новкой аппаратов и сборок выводов непосредственно на металлические рейки
или рамы.
Монтажные провода цепей управления внутреннего монтажа группи-
руются в пучки и прокладываются в пластмассовых коробах. Эти провода
не касаются металлических заземленных частей магнитных контроллеров.
В главной цепи короткие соединения между аппаратами выполняются мед-
ными шинками или отрезками проводов соответствующего сечения, а внеш-
ний подвод осуществляется с помощью кабелей внешнего монтажа кранов
непосредственно к зажимам аппаратов.
Поскольку магнитные контроллеры этой серии предназначены для
эксплуатации в условиях категорий УЗ, ХЛЗ, ТЗ и имеют степень защиты
IP00, то на кранах они должны устанавливаться с учетом требований
табл. 1.8, т. е. в открытом исполнении магнитные контроллеры могут исполь-
зоваться только на кранах, работающих в производственных помещениях*
закрытых от проникновения атмосферных осадков, и в условиях нормальной
влажности по ГОСТ 15150-69. Во всех остальных случаях магнитные кон-
троллеры должны размещаться в шкафах или специальных помещениях.
Магнитные контроллеры данной серии предназначаются для управления
механизмами режимных групп 1М — 5М при напряжении главной цепи 220,
280 и 415 В, 50 Гц или 380 и 440 В, 60 Гц. Напряжение цепи управления
соответствует напряжению главной цепи. Типовые обозначения магнитных
контроллеров: ТА, ДТА, ТСА, ТСД, ДТД, ТД, БОК, ДТАИ. Технические
данные и габаритные размеры магнитных контроллеров переменного тока
общего назначения приведены в табл. 3.14, 3.15.
Таблица 3.14. Технические данные магнитных контроллеров переменного тока общего назначения
Система управления Механизм Макси* мальная нулевая защита Число упра- вляемых двига- телей Диапазон регули- рования скорости Тип магнитного контроллера Номи- нальный ток режима 11 В = 100 %, А Нан боль ший ток вклю- чения, А Наибольшая расчетная мощность двигателя, кВт, при 380 В и режик ной группе механизмов
1М-ЗМ 4М 5М
МКП-АДФ Подъем крюковой Нет 1 Нет ТСА160 160 700 85 70 55
Подъем грейферный » 1 » Т САГ 160 160 700 85 70 55
Передвижение 1 » ТА63 63 250 37 30 22
» 2 » ДТА63 63 250 2X18,5 2X15 2ХН
1 » ТА160 160 700 85 70 55
2 » ДТА160 160 700 2X37 2X30 2X22
МКД-АДФ Подъем крюковой Нет 1 1:8 ТСД60 60 200 37 30 25
Есть 1 1 :8 ТСД160 160 700 85 70 58
1 1:8 ТСД250 250 1100 140 ПО 90
1 1:8 ТСД400 400 1700 250 200 160
Подъем грейферный » 1 1:8 ТСДГ160 160 700 85 70 58
МКИ-АДФ Передвижение 1 1 : 10 БОК6511 63 250 37 30 22
2 1: 10 БОК6502 63 250 2X18,5 2X15 2ХП
» 2 1: 10 ПОК6502 100 400 2X37 2X30 2X22
ТПН-АДФ Передвижение 1 1 : 10 ТТ3160 160 700 85 78 70
2 1: 10 ДТТ3160 160 700 2X42 2X37 2X30
Подъем крюковой 1 1: 10 ТТ3250 250 1100 140 120 по
МКД-АДФ Передвижение » 2 1:8 ДТД63 63 250 2X18,5 2X15 2ХИ
2 1:8 ДТД160 160 700 2X37 2X30 2X22
Примечание. Новое обозначение магнитных контроллеров ДТАИ63 — ПОК6501, ДТАИ160 — ПОД6502, ТАИ63 — БОК.6501.
Крановые магнитные контроллеры
со
118
Крановая контактная аппаратура
Разд. 3
Таблица 3.15. Габаритные размеры, мм, и масса магнитных
контроллеров переменного тока
Тип магнитного контроллера и L А Л в( В2 Масса, кг
ТА63 1200 400 125 145 190 230 50
ДТА63 1200 400 125 145 190 230 60
ТА150 1700 400 125 145 190 260 60
ДТА160 1700 400 125 145 190 260 85
ДТА161 1709 400 125 145 190 260 85
ДТА162 1700 400 125 145 190 260 80
TCAI60 1700 800 125 145 190 260 100
ТТ363 1200 1000 125 145 320 400 195
ТТ3160 1700 1000 125 145 375 400 245
ТТ3250 1700 1100 125 145 450 500 325
ДТТ3160 1700 1000 125 145 375 400 250
ДТТ363 1200 1100 125 145 320 400 230
ТН63 1700 1300 125 145 190 230 220
К63 1520 700 180 200 195 195 160
К160 1520 1000 180 200 200 350 310
К250 1520 1400 180 200 260 430 345
ДК63 1520 1000 180 200 195 195 200
ДК160 1520 1700 180 200 200 350 450
ДК250 1520 2500 180 209 260 430 800
КС160 1520 1000 180 200 200 350 285
КС250 1520 1500 180 200 260 430 370
КС400 1520 1700 180 200 320 340 475
ДКС25Э 1520 2600 180 200 260 430 900
ДКС400 1520 2900 180 200 320 340 935
Б КП 1000 636 * 50 265 43
ТСД60 1100 650 125 145 190 230 100
ТСД160 1700 800 125 145 190 260 160
ТСД250 1700 1050 125 145 190 260 300
ТСД400 1700 2000 125 145 190 260 500
КС ДБ 160 1520 1600 180 200 200 350 550
КСДБ250 1520 2000 180 200 260 430 700
КСДБ400 1520 2000 180 200 320 340 1000
БОК5501 1200 400 125 145 190 290 40
Б5701 1200 400 125 145 190 290 40
БОК6511 1200 500 125 145 200 300 60
БОК6502 1200 750 125 145 200 300 100
ПОК6502 1700 650 125 145 200 300 120
§34 Крано&ые магнитные {ЮНТббллеры I
-----------------------------------------------------------------------
Магнитные контроллеры ТСД обеспечивают регулирование скорости 1 :8.
Магнитные контроллеры ТА, ДТА, 1*СА, не имеющие гарантированного ре-
гулирования скорости, при использовании способа переключения между ра-
бочими положениями и положением отключения могут обеспечить фактиче-
ское регулирование скорости до 1 :3 по отношению к номинальным значе-
ниям. Магнитные контроллеры без встроенной максимальной защиты ТА,
ДТА, ТСА должны защищаться максимальными реле, устанавливаемыми на
общей защитной панели крана. При использовании в схемах электроприво-
дов передвижения более двух двигателей в дополнение к основному маг*
нитному контроллеру типов ДТА 160, ДТА250 должен применяться соответ-
ственно магнитный контроллер ДТА161—по 1 шт. на каждых два дополни-
тельных приводных двигателя. Эти магнитные контроллеры используются
для коммутации резисторов роторных цепей приводных двигателей.
Основными коммутационными аппаратами магнитных контроллеров об-
щего назначения являются контакторы серии КТ6000 и пускатели ПМА4000.
Магнитные контроллеры переменного тока для механизмов режимных
групп 6М и металлургических кранов. Для механизмов с высокой интенсив-
ностью использования режимной группы 6М, а также кранов, используемых
в металлургическом производстве, в том числе крупных литейных цехах ма-
шиностроительных предприятий, применяются магнитные контроллеры се-
рий К, ДК, КС, ДКС, КСДБ. Основными особенностями этих магнитных
контроллеров являются применение контакторов с электромагнитным при-
водом постоянного тока и расположение всей аппаратуры на изоляционных
досках из негорючего нагревостойкого материала. Монтаж цепей управления
осуществляется пучками проводов с нагревостойкой изоляцией, проклады-
ваемых в пластмассовых коробах. Монтаж главных цепей осуществляется
медными шинами. Магнитные контроллеры для категорий размещения
У2 — УЗ должны монтироваться на кранах в шкафах, имеющих при режим-
ной группе 6М степень защиты IP22, а для кранов в металлургическом про-
изводстве степень защиты шкафов должна быть не ниже IP42. Магнитные
контроллеры тропического исполнения поставляются в шкафах со степенью
защиты IP43. Напряжение главных цепей 380 и 415 В, 50 Гц; 380 и 440 В,
60 Гц Напряжение цепей управления 220 В постоянного тока от отдель-
ного источника.
Основными коммутационными аппаратами являются контакторы типов
КТПВ600, КТП121, а также контакторы постоянного тока КПВ600. Техни-
ческие данные магнитных контроллеров этих типов приведены в табл. 3.16,
габаритные размеры — в табл. 3.15.
Магнитные контроллеры типов К, КС, ДК, не имеющие гарантирован-
ного регулирования скорости переключений рабочих положений и положений
отключения, могут обеспечить фактическое регулирование скорости до 1:3
по отношению к номинальным значениям. Магнитные контроллеры КСДБ
обеспечивают устойчивое регулирование скорости до 1 :8 при спуске груза.
Все магнитные контроллеры этих типов имеют встроенную максимально-ну-
левую защиту. Магнитные контроллеры КСДБ имеют высокий уровень ком-
мутационной износостойкости за счет тиристорной бездуговой коммутации
Таблица 3.16. Технические данные магнитных контроллеров К, ДК, КС, ДКС, КСДБ
Система управления Механизм Число упра- вляемых двига- телей Тип магнитного контроллера Номи- нальный ток режима ПВ=100%, А Наиболь- ший ток включе- ния, А Механи- ческая износо- стойкость, 106 циклов В-О Коммута- ционная износо- стойкость, Ю6 циклов В-О Наибольшая расчетная мощность двигателя, кВт, при 380 В и режиме
4М 5М 6М
МКП-АДФ Подъем крюко- 1 КС 160 160 700 10 2,5 70 55 40
вой 1 КС250 250 1100 10 2,5 НО 80 60
2 ДКС160 2X160 2X700 10 2,5 2X70 2X55 2X40
2 ДКС250 2X250 2ХИ00 10 2,5 2ХН0 2X80 2X60
Передвижение 1 К63 63 200 10 2,5 30 22 15
1 К160 160 700 10 2,5 70 55 40
1 К250 250 1100 10 2,5 110 80 60
Передвижение 2 ДК63 63 200 10 2,5 2X15 2ХН 2X8,5
2 ДК160 160 700 10 2,5 2X37 2X30 2X22
2 ДК250 250 1100 10 2,5 2X55 2X40 2X30
2 ДК250 2X250 2Х1Ю0 10 2,5 2ХН0 2X80 2X55
МКБ-АДФ Подъем крюко- 1 КСДБ160 160 700 16 6,3 85 70 55
вой и грейфер- ный 1 КСДБ250 250 1100 16 6,3 130 110 90
1 КСДБ400 400 1800 16 6,3 230 200 160
Крановая кон/аКтная аппаратура Разд
§ 3.4 Крановые магнитные контроллеры 121
цепей статора и ротора двигателя и торможения методом динамического
торможения с самовозбуждением при спуске.
Магнитные контроллеры для управления кранами с пола. В связи с рас-
ширением зон обслуживания рабочими основных технологических процессов
все большее число мостовых кранов различного назначения режимных групп
1К— ЗК и частично даже 5К переводится на управление с пола, т. е. функ-
ции машиниста крана передаются рабочему основного технологического про-
цесса производства. При этом уже невозможно применить традиционные
системы управления кранами, так как необходимо либо значительно снизить
рабочие скорости всех механизмов крана в 2—3 раза, либо иметь у каж-
дого механизма по две фиксированные скорости: установочную и номиналь-
ную. В первом случае для привода механизмов применяются обычные асин-
хронные короткозамкнутые двигатели для обеспечения необходимой плав-
ности пуска, включаемые через резисторы в статорной цепи. Однако в целях
повышения производительности кранов начинают все более широко исполь-
зоваться двухскоростные короткозамкнутые двигатели с двумя обмотками
на статоре. Эти двигатели коммутируются магнитными контроллерами с кно-
почным управлением. Для систем первой группы используются магнитные
контроллеры типа ТС с двумя ступенями резисторов в каждой фазе ста-
тора. Для систем второй группы используют магнитные контроллеры Б5701
и ТСН. Магнитные контроллеры этой группы предназначаются для механиз-
мов режимных групп 1М — 4М с невысокой коммутационной износостой-
костью. Их механическая износостойкость составляет 6,3-106 циклов В — О.
Конструктивное исполнение — реечное с использованием в качестве комму-
тационных аппаратов магнитных пускателей ПМА4000, контакторов КТП121
и КТ6012. Технические данные магнитных контроллеров для управления
с пола приведены в табл. 3.17, габаритные размеры — в табл. 3.15. Магнит-
ные контроллеры имеют встроенную тепловую защиту короткозамкнутых
электродвигателей.
Комплектные устройства управления кранами режимных групп ЗК—5К-
В последнее время для мостовых кранов машиностроительных предприятий,
работающих в условиях, соответствующих режимным группам ЗК — 5К, и
в то же время участвующих в грузоподъемных операциях повышенной точ-
ности, связанных с монтажно-сборочными работами, было начато производ-
ство комплектных устройств управления кранами грузоподъемностью 10—20 т.
Эти устройства управления при обеспечении глубокого регулирования ско-
рости механизмов и высокой точности их остановки в заданных координатах
обладают большой простотой, постоянной готовностью к действию и удоб-
ством в обслуживании. Комплектное устройство для мостовых кранов грузо-
подъемностью 10—20 т имеют высоту 1200, ширину 1800 и глубину 230 мм.
В состав комплектного устройства входят магнитный контроллер ТСД60
для управления электроприводом подъема мощностью до 30 кВт с диапа-
зоном регулирования 1 :8, панель защиты с линейным контактором и ком-
плектом максимальных реле и две панели управления приводами моста
мощностью до 2ХИ кВт и тележки мощностью до 7,5 кВт. Эти электро-
приводы управляются силовыми кулачковыми контроллерами кранового
М2
Крановая контактная аппаратура
Разд. 3
Таблица 3.17. Технические данные магнитных контроллеров ТС, Б, ТСН
Система управления Механизм Тип двигателя Диапазок регулирования скорости Тип магнитного контроллера Номинальный ток режима ПВ —100 %, А Наибольший ток вклю- чений, А Механическая износо- стойкость, 10е циклов В-0 Наибольшая расчетная мощность двигателя, кВт, при 380 В и режиме Степень защиты от окру- жающей среды
1М-ЗМ 4М
МП—АДК Подъем и передви- жение Односкорост- ной коротко- замкнутый Нет ТС25 25 ПО 5 11 8,5 IP42
МК-АДД Подъем Двухскорост- ной коротко- замкнутый с двумя от- дельными об- мотками 1 :6 Б5701 63 200 5 22 18,5 IP00
1:6 ТСН 160 160 500 5 40 30 IP00
Передви- | жение 1 1:3 Б5701 63 200 5 22 2ХН 18,5 2X8,5 IP00
пульта с использованием тиристорного блока импульсно-ключевого регули-
рования. Диапазон регулирования скорости электроприводов передвиже-
ния 1:10. Механическая износостойкость комплектного устройства 5* 10s,
а коммутационная износостойкость 0,5-106 циклов В — О. При этом для
кранов режимных групп ЗК обеспечивается срок службы до ремонта 7—8 лет.
Комплектные устройства предназначены для эксплуатации в помещениях
групп У2-«—УЗ и выпускаются в открытом исполнении IP00.
3.5. ЗАЩИТНЫЕ ПАНЕЛИ И ВВОДНЫЕ УСТРОЙСТВА
Общие условия защиты электрических цепей. Краны являются движу-
щимися установками, подверженными вибрациям и ударам в процессе дви-
жения. Поэтому возможность повреждения кабелей и проводов на кранах
выше, чем при стационарной прокладке. Кроме того, на большинстве кранов
токопереход к тележкам осуществляется с помощью гибких шланговых ка-
белей, повреждение которых полностью исключить невозможно. С учетом
этого первой задачей электрической защиты является защита от токов КЗ
(см. § 1.5). Токи КЗ в пределах схемы крана будут тем меньше, чем меньше
сечение монтажных проводов и кабелей этих цепей и меньше размеры раз-
личных токопереходов и токоразъемов. Максимальные токи КЗ в цепях
управления при сечении проводов 2,5 мм2 составляют менее 2000 А. При
этом для защиты цепей возможно применение как низковольтных предохра-
нителей серии ПР, так и любых установочных автоматических выключате-
лей АП50, АК63, АСТ25 и др. Токи КЗ в цепях электродвигателей ориенти-
ровочно можно определить по формуле
Ас, з, дв
5 VSn,
14
(3.6)
§35 Защитные панели и вводные устройства
где /к, s, ф определяется по (1,42); 5О — сечение провода в защищаемой
цепи, мм2.
Так как ток КЗ не должен до его отключения разрушать аппараты*
находящиеся в данной цепи, то необходимо соблюдать определенное
ношение между сечением подводящих проводов и номинальным током
ратов:
соот-
аппа*
(3.7)
линии
где 7ном — номинальный ток аппарата.
Это соотношение показывает, в частности, что при возможных в
токах КЗ 8000 А аппараты с номинальным током 25 А устанавливать нельзя,
аппараты на токи 40—63 А могут устанавливаться при сечениях кабелей
не более 6 мм2, а аппараты с номинальным током 100 А — при сечениях
кабеля не более 16 мм2. Таким образом, для кранов, получающих питание
от линий особо большой мощности, необходимо либо устанавливать аппа*
раты с номинальными токами 100—160 А, либо ограничивать сечения про-
водов к этим аппаратам в целях снижения возможных токов КЗ.
Максимальная нулевая и тепловая защиты. В соответствии с требова-
ниями правил Госгортехнадзора каждый кран должен оборудоваться устрой-
ством, предназначенным для подачи питания к электроприводам механизмов
и его отключения, причем включение, т. е. подача питания, может осуще-
ствляться после отпирания включающего устройства с помощью индивиду-*
ального ключа-марки. В свою очередь ключ не может быть вынут без опе-
рации отключения. Такая блокировка позволяет гарантировать приведение
крана в рабочее состояние только лицом, владеющим ключом маркой. На
всех типах промышленных кранов с электроприводом индивидуальный ключ-
марка применяется в защитной панели, а на кранах с пультами управления
он дублируется ключом-маркой пульта. У строительных башенных кранов
указанный ключ используется для блокирования главного рубильника на
вводе крана.
Защитная панель крана является комплектным устройством, в котором
расположен общий рубильник питания крана, линейный контактор для обес-
печения нулевой защиты и автоматического размыкания цепи при срабаты-
вании любого вида защиты, комплект максимальных реле защиты цепей
отдельных электроприводов, кнопка включения и пакетный переключатель
цепей управления. Защитная панель крана обеспечивает: максимальную за-
щиту для отключения схемы крана от сети при возникновении перегрузки
в одной из цепей крана, нулевую защиту для отключения электропривода
при прекращении или перерыве в подаче питания от источника электроэнер-
гии. Важной задачей системы защиты является предотвращение недопусти-
мых перегрузок в цепях крановых электроприводов, связанных с неисправ-
ностью схем управления, заклиниванием механизмов, обрывом цепи тормоза
и т. п.
В связи с неопределенностью нагрузки крановых механизмов, работы
при затяжных пусках и торможениях обеспечение эффективной тепловой за-
124
Крановая контактная аппаратура
Разд. 3
щиты весьма проблематично. Единственным действенным условием пре-
дотвращения тепловых церегрузок кранового электрооборудования является
его правильный выбор с учетом заранее рассчитанных любых возможных
в эксплуатации режимов работы. В последнее время в двигателях перемен-
ного тока кранового типа встраивается тепловая защита. Однако задача
этой защиты — предотвратить эксплуатацию механизмов в режимах, не со-
ответствующих заданной режимной группе кранов и механизмов.
Защита электроприводов от перегрузок сводится к контролю пускового
тока при ступенчатом пуске и защите от заклинивания короткозамкнутых
двигателей. При правильно организованном ступенчатом пуске пусковой ток
Рис. 3.11, Схема защитной панели при управлении от кранового пультам
ГП — главный подъем; ГС — главный спуск; ВП — вспомогательный подъем, ВС —
вспомогательный спуск; ТВ — тележка вперед; TH — тележка назад, МВ—мост вперед,
МН — мост назад; FU1, FU2 = предохранители; SB/ — кнопка включения, SQ/ — кон-
такт люка кабины; QF1 — аварийный выключатель или ключ-марка, КМ — линейный
Контактор; FR1, FR2 — контакты максимальных реле, SQ2—SQ7 — конечные выключа-
тели; К12 — нулевые контакты контроллеров
не должен превышать 230 % тока, соответствующего расчетной мощности.
Поэтому защита, как правило, настраивается на ток срабатывания 250—-
275 % тока, соответствующего расчетной мощности. Защита от обрыва фазы
на кранах не применяется. Анализ последствий обрыва фазы вне крана и
приемлемой системы защиты от обрыва фазы показал, что, с одной стороны,
в настоящее время нет удовлетворительного технического решения по при-
менению надежного и дешевого простого аппарата контроля напряжения на
фазах, а с другой стороны, обрыв фазы в пределах крана и вне его мало-
вероятен в связи с тем, что применение плавких предохранителей в главной
цепи не рекомендуется. Широко применяемая на механизмах подъема си-
стема динамического торможения с самовозбуждением взамен ранее прак-
тиковавшегося торможения способом противовключения сводит к минимуму
опасность падения груза при обрыве фазы питающей сети.
Защитные панели и ящики ввода. Большинство кранов комплектуется
защитными панелями трех типов: ППЗБ160 для кранов, получающих питание
от сети постоянного тока, ПЗКБ250 и ПЗКБ400 для кранов, получающих
питание от сети переменного тока. Технические данные защитных панелей
приведены в табл. 3.18. Схема цепей управления защитных панелей приве-
§ 3.5
Защитные панели и вводные устройства
125
Таблица 3.18. Технические данные защитных панелей
Тип панели Номинальный ток ввода при ПВ=^100 %, А Номинальный ток контактора при ПВ = 100 %, А Ток контак- тора при ПВ=60 %. А Макси- мальный коммута- ционный ток, А Ток терми- ческой стойкости, А Число макси- мальн ых реле РЭО401
ПЗКБ250 250 160 200 1600 3000 8
ПЗКБ400 400 250 320 2500 4500 8
ППЗБ160 160 160 200 1600 3000 4
Примечание. Номинальные напряжения защитных панелей ППЗБ160 — 220
и 440 В; ПЗКБ — 220, 380, 415 В, 50 Гц; 380, 440 В, 60 Гц.
депа на рис. 3.11. Защитные панели рассчитаны на эксплуатацию в катего-
рии У2, Т2 и имеют степень защиты от окружающей среды IP22. Конструк-
тивно защитная панель представляет собой металлический шкаф с установ-
ленными в нем на задней стенке аппаратами и соответствующим монтажом.
Шкаф закрыт дверью, на которую навешивается замок. Рукоятка рубиль-
ника и привод кнопки выведены нару-
жу. Общий вид с габаритными разме-
рами защитной панели ПЗКБ250 при-
веден на рис. 3.12. В защитной панели
устанавливаются максимальные реле
типа РЭО401 для защиты цепей крано-
вых электроприводов. Там же могут
быть установлены тепловые реле для
защиты короткозамкнутых двигателей и
контактное устройство тепловой пози-
сторной защиты двигателей вместо реле
РЭО401. Технические данные макси-
мальных реле РЭО401 приведены в
табл. 3.19.
Начиная с 1988 г. для кранов вво-
дится новая система комплектования
Рис. 3.12. Габаритные размеры
защитных панелей
электрической защиты.
От главных токосъемников или кабельного барабана питающий кабель
при суммарной мощности приводов до 125 кВт поступает в кабину управ-
ления, где расположен блок защиты: ящик типа Я8501 с автоматическим
выключателем на 160—250 А, снабженный индивидуальным ключом-маркой.
Этот ключ выполняет также роль кнопки для восстановления защиты. Да-
лее от блока защиты в кабине могут получать питание все приводы крана.
Если кран имеет приводы только с помощью силовых контроллеров (суммар-
ная мощность приводов до 80 кВт), последовательно с блоком защиты вклю-
чается ящик Я8901 с линейным контактором со степенью защиты IP42, раз-
мещаемый либо на посадочной площадке кабины, либо на мосту. В этом
126
Крановая контактная аппаратура
Разд, 3
Таблица 3.19. Технические данные максимальных реле РЭ0401
Каталожный номер Ток катушки, А Пределы регулиро- вания тока, Выводы катушки
Реле РЭО401 Электромагнит реле РЭО401 при ПВ—100 % при ПВ —40 %
2Т Д.304.096-2 6ТД.237.004-1 320 480 400—1300 М12
2ТД.304.096-4 6ТД.237.004-2 250 375 320—1000 М12
2Т Д.304.096-6 6Т Д.237.004-3 160 240 200-600 М10
2Т Д.304.096-8 6ТД.237.004-4 100 150 130—400 М8
2ТД.304.096-10 — 63 95 80—250 М8
2ТД.304.096-12 6 ТД.237.004-6 40 60 50-160 Мб
2ТД.304.096-14 6ТД.237.004-7 25 38 30-100 Мб
2ТД.304.096-16 1 16 24 20—60 Мб
2ТД.304.096-18 6Т Д.237.004-9 10 15 12—40 Мб
2ТД.304.096-20 6Т Д.237.004-10 6 9 8—25 Мб
2ТД.304.096-22 4 6 5-16 Мб
Примечание. Четные рубрики каталожных номеров
имеют длину крепежных шпилек 42 мм, нечетные 1—21 —16 мм.
реле 2ТД.304.096-2 -г 22
ящике устанавливаются^ линейный контактор на 160 А и группы реле за-
щиты, состоящие из шести реле РЭО401 или четырех реле РЭО401 и два
тепловых реле ТРТ. От него получают питание отдельные электроприводы
крана. Если один или несколько приводов кранов имеют собственную за-
щиту в схеме магнитного контроллера (панели управления), их главные
цепи могут получать питание непосредственно от автоматического выклю-
чателя в кабине управления, а цепи управления — от ящика с линейным
контактором.
Для кранов с суммарной мощностью приводов свыше 125 кВт каждый
привод мощностью свыше 80 до 125 кВт должен получать питание от своего
ящика с автоматическим выключателем. В этом случае они устанавливаются
вблизи соответствующего магнитного контроллера, В кабине размещается
ящик с автоматическим выключателем, через который питаются все цепи
управления, а также электроприводы с суммарной мощностью до 80 кВт.
Для защиты цепей питания электроприводов кранов мощностью свыше 125
до 200 кВт (электродвигатели 4MT355L10) следует применять автоматиче-
ские выключатели на 400 А типа А3730 и располагать их вблизи магнитных
контроллеров этих электроприводов.
Таким образом, защита проводов от главных токосъемников до ящи-
ка Я8501 на кране осуществляется автоматическим выключателем питания
крана. Провода от блока защиты на кране до линейного контактора каждого
из приводов защищаются автоматическим выключателем ящика Я8501. За-
щита проводов, отходящих от линейного контактора, осуществляется макси-
мальными или тепловыми реле в ящике Я8901 или магнитном контроллере.
Учитывая, что от автоматического выключателя в кабине могут отхо-
дить две группы проводов (к линейному контактору магнитного контроллера
и линейному контактору остальных приводов), сечение этих проводов еле-
§ 3.6 Аппаратура управления для взрывозащищенных кранов 127
дует выбирать по току уставки этого выключателя. Таким образом, все си-
ловые цепи крана защищаются двумя специальными блоками, ящиком с ав-
томатическим выключателем на ток до 250 А и ящиком линейного контактора
на ток 160 А, а также линейными контакторами самих магнитных контрол-
леров. Ящик Я8501 имеет габаритные размеры 450 X 300X 200 мм и степень
защиты IP20. Ящик Я8901 линейного контактора имеет габаритные раз-
меры 550 X 520 X 290 мм и степень защиты IP42. У кранов, работающих на
открытом воздухе, ящик линейного контактора следует устанавливать под
навесом, защищающим ящик от попадания вертикальных дождевых струй.
Схему цепей управления ящика линейного контактора см. на рис. 3.11.
3.6. АППАРАТУРА УПРАВЛЕНИЯ ДЛЯ ВЗРЫВОЗАЩИЩЕННЫХ
КРАНОВ
Краны взрывозащищенного исполнения, устанавливаемые в зонах BI
и ВП, в соответствии с рекомендациями МЭК 79-9 и ГОСТ 12.2.020-76 ком-
плектуются взрывозащищенным электрооборудованием уровня I группы II
с предельными значениями температур эксплуатации Т1—Т4 в зависимости
от условий применения взрывоопасных веществ. При этом контактная элек-
трическая аппаратура должна иметь следующие виды взрывозащиты: обо-
лочка взрывонепроницаемая — d; электрические цепи искробезопасные — ц
Маркировка аппаратуры таких зон должна быть lE^dillTl — Т4. Как указы-
валось в разд. 2, для кранов подобного назначения используются специаль-
ные короткозамкнутые крановые двигатели взрывозащищенного исполнения.
Управление этими электродвигателями производится коьтплектом специаль-
ной взрывозащищенной аппаратуры. Краны взрывозащищенного исполнения
относятся к режимной группе ЗК, а механизмы этих кранов соответственно
к режимным группам 2М — ЗМ. Режим использования механизмов кранов
должен быть таким, чтобы не превышались значения следующих пара-
метров:
Продолжительность включения, % . ................ 25
Число включений в час............................ 60
Скорость механизма подъема, м/с, не более ..... 0,06
Скорость механизма передвижения моста, м/с, не более 0,7
Скорость передвижения тележки, м/с, не более ... 0,3
При таких параметрах нет необходимости применения для кранов об-
щего назначения двухскоростных электродвигателей, поэтому описываемая
ниже аппаратура предназначается только для управления односкоростными
короткозамкнутыми электродвигателями.
Аппаратура мостовых кранов. Для управления мостовыми и козловыми
кранами грузоподъемностью 5—50 т с подъемными лебедками кранового
типа используются взрывозащищенные магнитные станции серии СКВ. Стан-
ции рассчитаны для эксплуатации в категории У2, Т2 и имеют степень за-
щиты от окружающей среды IP54. Напряжение питания 220, 380, 415 В,
50 Гц или 380, 440 В, 60 Гц, режим работы ПВ = 25%, Станции могут
128
Крановая контактная аппаратура
Разд. 3
YB1 М1
YB2 М2
Квспомо-^
'Sameль -
ним цепям
Рис. 3.13. Типовая схема взрывозащищенной станции СКВ5:
1QF1, IQF2, 2QF1, 2QF2—автоматические выключатели механизмов; 1МК1~1МКГ
точные включения контакторов, ГТ1—1ТЗ, 2Т1—2ТЗ — трансформаторы искробезо*
управления механизмами; SQ1~SQ6 — конечные включатели, SQ7, SQ8 — выключатели
двигатель и тормоз вспомогательного подъема; Л13, М4, YB3,
использоваться для механизмов режимных групп 2М — ЗМ. Технические
данные станции СКВ2 приведены в табл. 3.20, типовая схема — на
рис. 3.13.
Управление кранами кнопочное от кнопочных постов обычного невзры-
возащищенного типа. Включение двигателей осуществляется реверсивными
магнитными пускателями. В цепи двигателей каждого механизма установлен
автоматический выключатель с токо-временной и электромагнитной токовой
Аппаратура управления для взрывозащищенных кранов
129
2МК1—2МК4 — контакторы направления, 1MK10—1MKJ4, 2MK10—2MKJ4 — реле промежу-
пасные./В/—1ВЗ, 281—2ВЗ — блоки искробезопасные (см. рис 3 14), SB/— SB9 — кнопки
двери и люка, V — диоды; М/, YB1— двигатель и тормоз главного подъема; М2, YB2 —
YB4 — двигатели и тормоза моста; Л15, YB5 — двигатель и тормоз тележки
отсечкой. Управление катушками пускателей осуществляется от блоков ис-
кробезопасной коммутации.
Блок искробезопасной коммутации (один на каждый механизм) имеет
схему, изображенную на рис. 3.14. От специального искробезопасного транс-
форматора цепи управления, понижающего напряжение с 380 до 24 В, по-
лучает питание схема, состоящая из источника стабилизированного напря-
жения постоянного тока 15 В и двух промежуточных реле KV1 и KV2t
5 Зак. 918
130
Крановая контактная аппаратура
Разд. 3
Таблица 3.20. Технические данные станций СКВ
Параметр СКВ1, СКВ2 СКВЗ, CKF4 СКВ5 СКВ6
Номинальный ток контак- тора, А: главного подъема 20 30 63 100
вспомогательного —• 20 63 63
подъема передвижения 30 63 20 100
тележки главного 20 20 20 20
подъема тележки вспомогатель- 20
кого подъема Диапазон мощностей дви- гателей, кВт: главного подъема 3,5—8,5 5,0-11 11-22 22-38
вспомогательного — 3,5-8,5 11-22 11—22
подъема передвижения крана 2X2,2-2X5 2Х5-2ХП 2X2,2-2X5 2Х5-2ХИ
передвижения тележки 0,4—1 0,4—1,5 0,8-2,2 0,8-2,2
главного подъема передвижения тележки *— 0,4-1,5 ——*
вспомогательного подъема Число включений в час: подъемов 120 120 120 120
передвижений 60 60 60 60
Примечания: I. Коммутационная износостойкость, 10s циклов В—О.
2. Относительная продолжительность включений ПВ = 25 %.
Рис. 3.14. Схема блока искробезопасной коммутации:
/? —балластный резистор; VD1, VD2 — стабилитроны; VD3— VD18 — диоды; VT1—VT2 —
транзисторы; Т — искробезопасный трансформатор цепи управления; SBi, SB2 — кнопки
направления движения искробезопасные, KV1, KV2 — реле направления движения;
КЛН0а КЛШ — реле промежуточные включения контакторов направления; С/—С2 —
конденсаторы
§ 3.6 Аппаратура управления для взрывозащищенных кранов
131
получающих питание от транзисторных усилителей. Кнопочные элементы
пнешнего невзрывозащищенного поста управления включают и коммутируют
токи 0,05 А, 15 В без образования взрывоопасной искры. Этот сигнал уси-
ливается блоком искробезопасной коммутации и на выходе реле KV1 и KV2
включает ток 2,5 А и коммутирует ток 0,3 А, 24 В, достаточный для управ-
ления магнитными пускателями. Магнитные пускатели имеют по два сво-
бодных замыкающих вспомогательных контакта, используемых в схеме
крана.
Рис. 3.15. Схема блока БДЗ-З:
QF1 — разъединитель; QF2 — автоматический выключатель с токовой защитой и ну-
левым расцепителем; КМ1 — линейный контактор; КМ2, КМЗ — контакторы направле-
ния движения моста; Т — искробезопасный трансформатор; БУИ—блок искробезопас-
ный коммутации; КМ4—КМб—промежуточные реле включения контакторов; Ml — дви-
гатель передвижения крана; YB1 — обмотка тормоза; SB1, SB2 — кнопки управления}
SQ1, SQ2 — конечные выключатели: SB3— контактный замок; SQ3, SQ4 — выключа-
тели двери и люка
Вся перечисленная аппаратура помещена во взрывозащищенную обо-
лочку, рассчитанную для группы II. Питание крана осуществляется от взры-
возащищенного блока защиты БДЗ-2, имеющего взрывозащищенную обо-
лочку и степень защиты IP54. В состав блока БДЗ-2 входят разъединитель
с наружной рукояткой, автоматический выключатель на 100 А номинального
тока с токовой отсечкой 400 и 630 А и нулевым расцепителем. Управление
нулевым расцепителем при управлении с пола осуществляется от кнопоч-
ного поста кнопкой «Стоп» через блок искробезопасной коммутации. Для
подготовки схемы к действию необходимо включить автоматический выклю-
5*
132
Крановая контактная аппаратура
Разд. 3
чатель, одновременно нажимая на кнопку восстановления защиты. Блок
БДЗ-2 при управлении с пола устанавливается вне крана, а при управлении
из кабины этот блок размещается в кабине.
Аппаратура подвесных кранов. На подвесных взрывозащищенных кранах
в качестве механизмов подъема и передвижения тележки используются
взрывобезопасные электрические тали, имеющие и своем составе взрывоза-
щищенную аппаратуру с искробезопасными цепями, поэтому для таких кра-
нов необходимо иметь устройство ввода и комплект аппаратуры управления
двигателями передвижения моста. Таким комплектным устройством является
взрывозащищенный блок БДЗ-З. Исполнение блока IP54 с искробезопасными
цепями управления. Блок устанавливается вне крана. Схема блока представ-
лена на рис. 3.15. Блок БДЗ-З имеет следующие технические данные:
Номинальное напряжение частотой 50 Гц, В . ... 380
Номинальный ток, А........................... 50
Номинальный ток контактора, А . . . ....... 25
Суммарная наибольшая мощность управляемых двига-
телей, кВт .... ......... 9
Коммутационная износостойкость, циклы В — О . . . 1 - \05
Габаритные размеры коммутационных и защитных аппаратов приведены
в табл. 3 21
Т а б л и ц а
3.21. Габаритные размеры, мм» и масса станций
взрывозащищенного исполнения
Типы станций L В п Масса, кг
СКВ1, СКВ2 580 1300 390 260
СКВЗ, СКВ4, СКВ5 580 2000 390 400
СКВ6 1100 2700 390 550
СОК1 1110 548 400 260
БДЗ-2 910 280 348 103
БДЗ-З 910 280 348 110
При наличии искробезопасных устройств коммутации конечные выклю-
чатели и посты управления на взрывозащищенных кранах могут быть обыч-
ного исполнения. В частности, в посты управления обычного исполнения
§4.1 Классификация и выбор параметров тормозных устройств
133
типа ПКТ для взрывозащищенных систем добавляются только диоды для
контроля токопрохождения. Посты этого исполнения имеют типовые обозна-
чения ПКТИ4К для четырех кнопочных элементов и ПКТИ6К — для шести
кнопочных элементов.
РАЗДЕЛ 4
ПРИВОДЫ ТОРМОЗНЫХ УСТРОЙСТВ
4.1. КЛАССИФИКАЦИЯ ТОРМОЗОВ
И ВЫБОР ПАРАМЕТРОВ ТОРМОЗНЫХ УСТРОЙСТВ
Крановый механизм должен иметь устройство для его остановки в за-
данном положении или ограничения пути торможения при выбеге после от-
ключения приводного электродвигателя, и исключение составляют механизмы
передвижения кранов со скоростью движения не более 0,5 м/с. Такими
устройствами являются тормоза, обеспечивающие остановку механизма крана
за счет сил трения между вращающимся шкивом или диском и неподвижной
тормозной поверхностью, связанной с механизмом.
Существуют разнообразные конструкции тормозных устройств с фрик-
ционными элементами дискового типа (дисковые тормоза), коническими по-
верхностями торможения (конические тормоза) и с цилиндрическими поверх-
ностями торможения, которые в свою очередь делятся на колодочные и
ленточные тормоза.
Дисковая система торможения применяется в тех случаях, когда тормоз
является частью приводного электродвигателя. При этом габаритные раз-
меры тормоза определяются размерами электродвигателя. Такие тормоза
могут эффективно работать при тормозных моментах от 30 до 1000 Н-м.
Конические тормозные устройства находят применение в специальных меха-
низмах небольшой мощности при тормозных моментах до 300 Н-м. Наиболь-
шее распространение для большинства крановых механизмов находят коло-
дочные тормоза. Эти тормоза используются в механизмах, в которых необ-
ходимые тормозные моменты могут достигать 10 000 Н-м. Для создания
тормозных моментов свыше 10 000 Н-м применяются ленточные тормозные
устройства.
Механические тормоза фрикционного действия могут иметь два кон-
структивных исполнения: 1) нормально разомкнутый тормоз, когда тормоз-
ные поверхности не контактируют между собой при отсутствии внешней
силы и торможение происходит путем приложения внешней силы от привода
тормоза; 2) нормально замкнутый тормоз, когда тормозные поверхности кон-
тактируют между собой с необходимым давлением при отсутствии внешней
силы от привода за счет силы сжатия пружины или рычажно-грузового
устройства. Освобождение такого тормоза происходит под действием его
привода, преодолевающего действие пружин или груза.
Все перечисленные тормоза могут иметь привод, выполняющий работу,
равную произведению силы, необходимой для создания тормозного эффекта,
134
Приводы тормозных устройств
Разд. 4
на путь перемещения поверхности трения, достаточный для выполнения га-
рантированной операции (торможения или растормаживания). Тормоза на
кранах могут быть с непосредственным воздействием оператора (ручные или
ножные) и с механическим приводом. В настоящее время в большинстве
крановых тормозов с механическим приводом используются либо электро-
магниты, либо электрогидравлические толкатели и только мощные ленточные
тормоза имеют гидравлические или моторные приводы.
Приводы тормозов могут иметь два исполнения: короткоходовой, у ко-
торого рабочий ход равен или близок к пути перемещения тормозных по-
верхностей, и длинноходовой, у которого рабочий ход в несколько раз больше
пути перемещения тормозных поверхностей. Естественно, что усилия, разви-
ваемые приводами короткоходовых тормозов, должны быть одного порядка
с суммарным усилием, действующим на фрикционные поверхности, а усилие
длинноходовых приводов может быть настолько меньше необходимого усилия
торможения, насколько ход привода тормоза больше зазора между поверх-
ностями торможения.
В грузоподъемных машинах тормоз является важнейшим элементом,
обеспечивающим безопасность эксплуатации, поэтому наиболее важные усло-
вия выбора, установки и функционирования тормозов регламентированы дей-
ствующими правилами безопасной эксплуатации кранов, утвержденных Гос-
гортехнадзором, В соответствии с этими правилами каждый подъемный ме-
ханизм грузоподъемной машины должен снабжаться нормально замкнутым
тормозом, расположенным на таком участке кинематической схемы, который
имеет неразъемную под нагрузкой связь с выходным валом передаточного
механизма. Подъемные механизмы, которые служат для перемещения жид-
кого металла или взрывоопасных грузов, должны иметь два нормально за-
мкнутых независимых тормоза. Наличие в кинематической цепи двух тормо-
зов обязательно также для двух двигательных механизмов при аварийном
механическом отключении одного из двигателей.
Основным параметром тормоза является гарантированно развиваемый
им тормозной момент. Тормозной момент определяется усилием на измери-
тельном рычаге, при котором начинается проскальзывание шкива или дисков
тормоза.
Согласно правилам Госгортехнадзора каждый из установленных на ме-
ханизме механических тормозов должен удерживать груз, составляющий
125 % номинального, при его остановке только с помощью этого тормоза.
С учетом того что коэффициент трения асбестовых материалов может ме-
няться в зависимости от температуры поверхности до 30 %, тормоз в холод-
ном состоянии должен развивать тормозной момент, составляющий не менее
150 % номинального, т. е. коэффициент запаса тормозного момента должен
быть не ниже 1,5 расчетного момента, который определяется формулой
Р 1=3 Т» (4.1)
где Мт.р — расчетный момент тормоза, Н-м; QHOm — номинальная грузоподъ-
емность, кг, у механизмов подъема или максимальное тяговое усилие в ка-
нате лебедки механизма стрелы; vH0M — номинальная скорость подъема или
§4.1 Классификация и выбор параметров тормозных устройств
135
скорость каната лебедки стрелы, м/с; nHOM. т — номинальная частота враще-
ния тормозного шкива, соответствующая скорости Г7Яом, об/мин; rj — КПД
механизма при номинальной нагрузке.
С учетом режимов работы механизмов различного назначения тормозные
моменты тормозов должны быть равны
= К3, т^т, р» (4.2)
где К3, т — коэффициент запаса тормоза (табл» 4.1).
Т аблица 4.1. Коэффициенты запаса тормозов
Группа режимов Механизм подъема Механизм изменения вылета стрелы
один тормоз два тормоза
1М —ЗМ 1.5 1,25 1,5
4М 1,75 1,25 1,5
5М 2 1,25 1,5
6М 2,5 1,25 1,5
Примечания: !. При двух тормозах на каждом приводе и двух приводах
я более у механизма коэффициент запаса каждого тормоза должен быть не менее 1,1,
2. Если применяются два тормоза и более, то запас торможения устанавливается
в предположении, что весь груз удерживается одним тормозом.
Выбег при торможении механизма подъема, по которому устанавли-
вается предельное положение грузового крюка по отношению к настилу те-
лежки или верхнему блоку с учетом требований правил Госгортехнадзора,
Smin —
^дв^о^ном
16МТ
4“ ^ном^^м 4" 0,2,
(<3)
где УДв — момент инерции электродвигателя, кг-м2; nQ — синхронная частота
вращения электродвигателя, об/мин, или частота вращения холостого хода;
— установленный тормозной момент тормоза; Д/м — время от момента
срабатывания конечного выключателя до начала механического торможения,
— 0,12 + здесь G — время срабатывания тормоза, определяется по
табл. 4.10, 4.12.
Тормозной момент тормозов, устанавливаемых на механизмах горизон-
тального перемещения, определяется исходя из условий обеспечения удер-
жания механизма при наибольших внешних статических нагрузках (ветре,
уклоне и т. п.) с учетом задаваемого выбега и отсутствия нарушения сцеп*
ления колес с рельсами
5,5 (G + Q) v? 94<paGyrT)
Мт’ Р = (S - игД/м) m/ip ± Мст max <
(4.4)
где MCTtnax — максимальный момент статической нагрузки, Н-м, для проверки
выбега, действующий в направлении движения (—); для проверки по сцеп-
лению (4-) на один двигатель; S — установленный допустимый выбег, м;
vB — номинальная скорость горизонтального передвижения, м/с; т — число
136
Приводы тормозных устройств
Разд. 4
механизмов с тормозами; пр — расчетная частота вращения электродвигателя,
соответствующая пг, об/мин; ср — коэффициент трения, в помещении ср = 0,2,
на открытом воздухе ср = 0,12; а — отношение числа тормозящихся колес
к общему числу колес.
При несоблюдении неравенства должны быть увеличены либо устанав-
ливаемый выбег S, либо отношение числа тормозящихся колес к общему
числу колес.
При применении нормально разомкнутых тормозов для механизмов го-
ризонтального перемещения условия выбора тормозного момента аналогич-
ны. Важным параметром, определяющим работоспособность тормоза, является
соответствие его режима работы фактической продолжительности включения.
Привод нормально замкнутого тормоза в течение всего времени работы ме-
ханизма должен быть включен. Таким образом, должно соблюдаться соот-
ветствие по времени включения и режиму работы между приводным электро-
двигателем и тормозом. Это относится к тем механизмам, у которых нало-
жение тормоза происходит одновременно с отключением электродвигателя.
У ряда механизмов, имеющих свободный выбег после отключения элек-
тродвигателя, наложение тормоза должно происходить только при срабаты-
вании защиты или по команде оператора-крановщика. Приводы таких тор-
мозов должны быть рассчитаны на продолжительное включение. В табл. 4.2
приведены рекомендуемые значения продолжительности включения приводов
тормозов для различных крановых механизмов. Приводы тормозов перемен-
ного тока, гидротолкатели, а также приводы тормозов постоянного тока па-
раллельного возбуждения при рекомендованных в табл. 4.2 продолжитель-
ностях включения должны обеспечивать тяговые усилия, достаточные для
растормаживания при питающем напряжении не менее 85 % номинального
в установившемся тепловом режиме.
Таблица 4.2. Рекомендуемые режимы работы приводов тормозов
Механизм Продолжительность включения при режимной группе механизма, %
IM-—3M 4М 5М 6М
Подъем крюковых крапов 25 * 40 40 60
Подъем грейферных кранов — — 60 100
Изменение вылета стрелы 25 25 40 40
Поворот портальных кранов 100 100 100 100
Поворот стреловых кранов, в том числе самоходных 25 25 40
Горизонтальное передвижение мо- стовых и козловых кранов и пе- регружателей со свободным вы- бегом 100 100 100 100
Горизонтальное перемещение кра- нов с точной остановкой 25 * 40 40 40
Передвижение башенных и порталь- ных кранов 25 25 25
♦ Привод должен допускать непрерывное включение в течение 30 мин.
§4.1 Классификация и выбор параметров тормозных устройств
137
При применении приводов тормозов постоянного тока последовательного
возбуждения необходимо учитывать, что растормаживание механизма долж-
но происходить на первых рабочих положениях схем управления крановыми
электроприводами, т. е. при токах, составляющих 40—60 % номинального
тока катушки тормоза при расчетной продолжительности включения, по-
этому при выборе приводов тормозов последовательного возбуждения необ-
ходимо определить номинальный ток катушки, используя данные табл. 4.2,
а усилия привода тормоза установить с учетом минимального тока включе-
ния тормоза, составляющего 40—60 % номинального тока катушки.
Теплоотдача при торможениях осуществляется со всех поверхностей тор-
мозного шкива и колодок, но при этом более интенсивный нагрев происхо-
дит в зоне тормозных колодок. По результатам экспериментов установлено,
что при сложном характере нагрева в качестве расчетной теплоотдающей
поверхности можно принять наружную поверхность тормозного шкива. Мак-
симальная рабочая температура фрикционных поверхностей при торможении
не должна превышать 150 °C, так как при большей температуре резко па-
дает коэффициент трения поверхностей. Этой температуре соответствует теп-
лоотдача с поверхности периодически вращающегося шкива около 0,2 Вт/см\
При стабильной геометрии тормозных элементов допустимая мощность
потерь на трение, Вт, которая может быть рассеяна колодочными тормозами
при температуре т 150 СС, может быть определена по формуле
ДРдоп = 360DT (1CZ) +1).
(4.5)
где D? — диаметр тормозного шкива, м.
В свою очередь действительная мощность потерь, Вт, при торможении
с помощью механических тормозов может быть вычислена по формуле
ЛР =
1.52 £ /общп2р,УтМт
2 • IO5!)’
где У, /Общ — суммарный момент инерции всех элементов системы, прнве-
денный к валу тормоза, кг-м2; NT— число торможений в час, равное для
режима работы механизма 4М—120, для режима 5М — 240, для режима
6М— 360; DP — диапазон регулирования системы электропривода, характе-
зующий, с какой средней частоты вращения начинается торможение.
Значение фактически рассеиваемой мощности, определенной по (4.6),
должно быть ниже допустимой мощности, вычисленной согласно (4.5). При
несоблюдении этого условия необходимо либо увеличить размер тормоза,
либо снизить скорость начала торможения, т. е. обеспечить повышение диа-
пазона регулирования скорости. Приведенный выше тепловой расчет отно-
сится к открытым тормозам. Допустимая мощность закрытого тормоза мо-
жет быть меньше приведенной на 25—50 %.
При применении пристроенных к двигателю дисковых тормозов их теп-
ловая проверка обязательна, так как теплоотдача дисковых тормозов благо-
138
Приводы тормозных устройств
Разд. 4
даря особенностям их конструкции не превышает 0,1 Вт/см2. Данные по
допустимым значениям рассеиваемой мощности дисковых тормозов приве-
дены в [32] и каталогах.
4.2. ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ ПОСТОЯННОГО ТОКА
Одним из наиболее надежных и универсальных приводов крановых тор-
мозов являются короткоходовые электромагниты постоянного тока. Для тор-
мозов с диаметром шкива 100, 200 и 300 мм применяются электромагниты
серии МП, представляющие собой самостоятельную конструкцию с прямо-
ходовым перемещением якоря до 4,5 мм.
Общий вид электромагнита серии МП и его габаритные размеры даны
в табл. 4.3. Для более крупных тормозов с диаметрами шкива от 400 до
800 мм магнитопровод электромагнита с поворотным якорем представляет
собой часть механической конструкции тормоза. В магнитопровод вклады-
вается катушка, представляющая собой самостоятельное изделие в виде
тороида, заформованного эпоксидным компаундом (табл. 4.4).
Т а б л и ц а 4.3. Габаритные размеры, мм, и масса
электромагнитов серии МП
Тип электро- магнита D1 £>2 D3 Нг Масса, кг
МП 101 70 14 126 132 32 135 9
МП 201 110 18 170 178 60 180 20
МП 301 140 24 214 223 90 220 36
Электромагниты МП, а также электромагнитная часть тормозов ТКП
имеют степень защиты от внешних воздействий IP44, кроме выводов, кото-
рые должны защищаться путем установки на тормозе соответствующей пе-
реходной коробки.
Технические данные тормозов серии ТКП с приводом от электромагни-
тов МП приведены в табл, 4,5, а технические данные тормозов ТКП 400 —
§ 4.2 Тормозные электромагниты постоянного тока 139
_________________________________ 1*5
Таблица 4.4. Габаритные размеры, мм, и масса катушек
тормозов ТКП
Тип тормоза в2 н. н2 Di Dz Масса, кГ
ТКП 400 105 90 94 287 161 230 16
ТКП 500 125 95 86 366 186 300 27
ТКП 600 158 100 88 428 221 360 38,5
ТКП 700 158 140 88 504 256 435 52
ТКП 800 220 155 88 572 311 500 81
Примечав I и е. Для всех типов тормозов Bi *= 1,5 мм.
ТКП 800 и их электромагнитов — в табл. 4 6. Габаритные размеры серийных
тормозов ТКП и ТКТ даны в табл. 4 7 и 4.8. Гарантированное растормажи-
вание обеспечивается при 80 % номинального напряжения и нагретой катушку
для электромагнитов параллельного возбуждения и при токах 60 или 40 %*
номинального; катушки для электромагнитов последовательного возбуждения
серии МП выпускаются на напряжение ПО или 220 В соответственно для
режимов ПВ = 25, 40 и 100 %. Катушки тормозов ТКП имеют только одно
исполнение: ПО В, ПВ == 25 %. Для других режимов и напряжений последо-
вательно с катушкой должен включаться резистор (табл. 4.9).
Для ускорения срабатывания электромагнитов МП катушки их следует
включать через добавочный резистор, применяя катушку ПО В для сети 220(
440 В. Дальнейшее снижение времени срабатывания может быть достигнуто
за счет форсировки, т. е. кратковременного включения электромагнита на
двукратное напряжение. Ориентировочное время срабатывания электромаг-
нитов МП и ТКП приведено в табл. 4.10. В целях снижения времени отпада-
ния электромагниты не имеют разрядных резисторов, и их катушки рассчи-
таны на возникающие при отключении перенапряжения. Номинальные токи
катушек электромагнитов МП и ТКП последовательного возбуждения при-
ведены в табл. 4.11.
Если при использовании электромагнита последовательного возбуждения
минимальный ток электропривода окажется меньше значения, указанного
140
Приводы тормозных: устройств
Разд. 4
Т аблица 4.5. Технические данные тормозов серии ТКП
с электромагнитами серии МП
Электромагнит Тормоз
Тип Параллельное возбуждение Последовательное возбуждение Тип i Диаметр шкива, мм Расчетный ход, мм Максимальный ход, мм Тормозной момент, Н-м
Режим рабо- ты, ПВ, % Тяговое уси- лие, Н — Потребляемая мощность, Вт Режим рабо- ты, ПВ, % Тяговое уси- лие, Н, при 0,6/ ’ z ном Тяговое уси- лие, Н, при О’^ном
25 280 95 - 1 1 ТКП 100 100 1.2 3 20
МП 101 40 230 65 — * 16
100 95 23 * 8
ю сч 280 95 1 .1 W — ТКП 200/100 200 1,2 3 40
МП 101 40 230 65 — 32
100 95 23 * 16
25 960 180 25 900 ТКП 200 200 2,0 4 160
МП 201 40 780 130 40 600 125 120
100 320 45 —* ” 300 54
25 960 180 25 900 ж * * ТКП 300/200 300 2,0 4 240
МП 201 40 780 130 40 600 190 145
100 320 45 40 300 80
25 2000 285 25 2000 ТКП 300 300 2,5 4,5 500
—— — 25 — 1350 340
МН 301 40 1650 170 40 1650 - 420
— i 40 — 1050 250
100 700 70 — *— 170
Примеча н и е. Ресурс тормозов ТКП — 4 • 10е торможений.
в табл. 4.11, то следует учесть, что при сниженном токе для обеспечения уве-
ренного растормаживания необходимо снизить усилие пружины и тормозной
момент пропорционально снижению тока по отношению к указанному в таб-
лицах значению. При этом минимальный ток электропривода должен соответ-
ствовать возможному снижению напряжения сети до 85 % номинального.
Все типы электромагнитов МП и ТКП могут быть изготовлены в исполнении
У2, Т2, ХЛ2.
Тормоза серии ТКП с короткоходовыми электромагнитами постоянного
тока обладают наивысшей надежностью среди всех типов колодочных тор*
Тормозные электромагниты постоянного тока
141
Таблица 4.6. Технические данные тормозов серий
ТКП 400 — ТКП 800
Электромагнит Тормоз
Параллельное возбуждение Последовательное возбуждение Тип ТКП 400 g Диаметр шкива, мм Расчетный год, мм оэ Максимальный ход, мм 3 35 О 3 о и СП О Ms НЕ 1500 1200 550
о ю ..с Й S' о. SCQ sC * . <u 3 Ь н 25 40 100 S о й) О н-м ГО О - Он си К S н ч 9600 7800 3600 g g О® Потребляемая ид о о мощность, Вт 4^ Фх ю Режим рабо- о о сл ты, пв, % <j о Тяговое уси- I <2° о лие, н, при 8 § О-6 'ном оо Тяговое уси- I 1 лие, Н, при 8 0.4'ном
25 40 100 12 900 9800 4500 960 690 395 25 40 40 12 900 9800 5400 ТКП 500 500 1,7 3,5 2500 1900 1000 850
25 40 100 25 40 100 21 500 15 200 6900 29 400 21 100 10 300 1260 890 520 1770 1290 750 25 40 40 25 40 40 21 500 15 200 29 400 21 100 12 000 12 000 ТКП 600 ТКП 700 600 700 2 2,2 4 4,5 5000 3550 2050 1550 8000 5750 3250 2800
25 40 100 40 300 29 400 14 100 2320 1680 965 25 40 40 40 300 2Э 400 16 200 ТКП 800 800 2,5 1 5,0 1 12 590 9100 5050 4400
Примечания: 1 Потребляемая мощность относится к напряжению 110 В.
2, Сопротивление катушек тормоза, Ом
ТКП 400 . ............... • • 14>2
ТКП 500 .............., 12 6
ТКП 600 .................. . . 9.6
ТКП 700 918
ТКП 800 5,2
142
Приводы тормозных устройств
Разд. 4
1 аб л иц а 4.7. Габаритные размеры, мм, и масса тормозов
серий ТКП, ТКТ с диаметром шкива до 300 мм
Тип 1 h н h А «1 В Ь S D d Масса, кг
ТКТ 100 398 300 195 218 100 110±0,5 40 130 70 4 100 13 13
ТКП 100 353 300 223 274 100 110± —0,5 40 132 70 4 100 13 16
ТКТ 200/100 546 394 255 356 170 175 ±0,5 60 130 90 7 200 18 25
ТКТ 200 660 394 322 367 170 175 ±0,5 60 177 90 7 200 18 35
ТКП 200/100 501 394 283 414 170 175 ±0,5 60 -132 90 7 200 18 30
ТКП 200 546 394 328 437 170 175 ±0,5 60 178 90 7 200 18 37
ТКТ 300/200 796 550 389 507 240 250 ±0,5 80 177 120 9 300 22 70
ТКП 300/200 681 550 396 577 240 250 ±0,5 80 178 120 9 300 22 75
ТКП 300 718 550 436 J 600 240 250 ±0,5 80 223 120 9 300 22 90
мозов благодаря высокой надежности и износостойкости их электромагнит-»
ных приводов и достаточному запасу хода, компенсирующему износ колодок.
При правильном выборе и хорошей профилактике может быть реально до-
стигнута вероятность безотказной работы приводов тормозов 0,99 за год
эксплуатации.
Износостойкость электромагнитов, равная 5-Ю6 циклов В — О, несколько
выше износостойкости остальных элементов конструкции тормоза, что также
позволяет рассчитывать на высокую надежность конструкции в целом. Тор*
моза ТКП могут устанавливаться как с горизонтальной осью шкива, т. е.
в нормальном положения, так и с вертикальной осью шкива. В настоящее
время ведутся работы по повышению износостойкости электромагнитов МП
до 10* 10е циклов В —О и улучшению корпусной изоляции катушек, что
позволит довести срок службы электромагнитов без ремонта до выработки
полного ресурса крановым механизмом.
§ 4.3 Тормозные электромагниты переменного тока
143
Талбица 4.8. Габаритные размеры, мм, и масса тормозов ТКП
с диаметрами шкива свыше 300 мм
Недостатками электромагнитов является относительно высокое время
срабатывания (в основном для крупных тормозов), необходимость иметь ис-
точник питания постоянного тока и тяжелые условия коммутации цепей
крупных тормозов. Поэтому для коммутации цепей тормозов ТКП 400 —
ТКП 800 целесообразно применять специальные контакторы с дугогаситель-
ными катушками, рассчитанными на токи 5—25 А, например контакторы
КПД 111, КПД 121. Необходимо иметь также в виду, что в связи с возра-
станием усилия электромагнита по мере движения якоря происходит удар
якоря о магнитопровод при растормаживании тормоза(
4.3. ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ ПЕРЕМЕННОГО ТОКА
Одним из самых распространенных приводов крановых тормозов явля-
ются короткоходовые электромагниты переменного тока. В настоящее время
промышленностью изготовляются короткоходовые электромагниты с одно-
фазным питанием переменного тока двух типов: МО 100 — для тормозов со
шкивами диаметром 100 и 200 мм в исполнении У2, Т2 и ХЛ2; МО 200—«
для тормозов со шкивами диаметром 200 мм в исполнении У2 и ХЛ2, Элек-
144
Приводы тормозных устройств
Разд. 4
Таблица 4.9. Технические данные добавочных резисторов
к электромагнитам и тормозам постоянного тока
Тип электро Магнита и тормоза Напряжение се- ти постоянного тока, В Режим работы, ПВ, % Добавочное соп- ротивление, Ом Ток добавочного сопротивления, А Тип ящика резисторов Каталожный номер ящика резисторов
МП 101 220 100 600 0,35 ПЭВ 100-570
МП 201 220 100 300 0,7 ПЭВ 100—150 (2 шт.) —*
МП 301 220 100 200 1 ПЭВ 100—65 (3 шт.) 1
ПО 40 6 4,6 ИРАК 434.331.003.01
но 100 20 3 ИРАК 434.331.003.30
ТКП 400 220 25 20,7 6 БК12У2 ИРАК 434.331.003 30
220 40 30 4,6 ИРАК 434.331.003 30
220 100 60 3 ИРАК 434.331.003 36
НО 40 5 5 ИРАК 434.331.003.01
110 100 18 3,2 ИРАК 434.331.003.01
ТКП 500 220 25 17,6 7 БК12У2 ИРАК 434.331.003.30
220 40 30 5 ИРАК 434.331 003 30
220 100 55 3.2 ИРАК 434 331.003 30
ПО 40 4 7 ИРАК 434.331.003 01
ПО 100 14 4,5 ИРАК 434.331.00130
ТКП 600 220 25 13,6 9 БК12У2 ИРАК 434 331.003 36
220 40 20,2 7 ИРАК 434 331.003 30
220 100 40,5 4,5
ПО 40 2,55 10 ИРАК 434.331.003 01
НО 100 9,35 7 ИРАК 434.331.003 30
ТКП 700 220 25 9,5 12,5 БК12У2 ИРАК 434.331.003 01
2’20 40 14,3 10 ИРАК 434.331.003 30
220 100 27,6 7 ИРАК 434.331.003.30
110 40 2 12 ИРАК 434 331.003 01
по 100 7,35 8 ИРАК 434.331.003.30
ТКП 800 220 25 8 15 БК12У2 ИРАК 434.331.003 30
220 40 12,2 12 ИРАК 434.331.003 01
220 100 24 8 ИРАК 434.331.003 01
Примечание. Резисторы ПЭВ 100 рекомендуется устанавливать на асбоцемент-
ных панелях толщиной 15—20 мм,
Тормозные электро магниты переменного тока
145
Таблица 4.10, Время срабатывания электромагнитов серии МП
и тормозов серии ТКП
Тип электро- магнита и тормоза Время включения, с Время отпадания, с
без добавоч- ного резис- тора с добавочным резистором с форсиров- кой при питании от сети постоянного тока при питании от выпрями- теля
МП 101 0,25 0,15 0,1 0,1 0,2
МП 201 0,4 0,25 0,15 0,15 0,3
МП 301 0,5 0,35 0,25 0,25 0,5
ТКП 400 1,3 0,8 0,5 0,3 0,6
ТКП 500 1.8 1,3 0,6 0,3 0,6
ТКП 600 2,0 1,4 0,7 0,4 — —
ТКП 700 2,3 1,5 0,9 0,5
ТКП 800 2,5 1,6 1,0 0,6 —«
Таблица 4.11. Номинальные токи катушек последовательного
возбуждения электромагнитов серии МП и тормозов серии ТКП
Тип электро- магнита и тормоза Номинальный ток, А Тип электро- магнита и тормоза Номинальный ток, А
ПВ==25 % ПВ = 40 % ПВ —25 % ПВ*=40 %
МП 201 13 20 32 50 10,3 15,8 25,3 39,5 ТКП 500 156 245 383 123 193 302
ТКП 600 162 233 395 490 600 128 184 312 387 475
МП 301 41,5 52 65 81,5 97,5 119 163 194,5 226 32,8 41 51,4 64,4 77 94 129 153,5 179
ТКП 700 234 555 910 705 185 458 720 555
КП 4 00 75 108 149 179 208 268 59 85,5 118 141 164 212
ТКП 800 460 1050 363 830
146
Приводы тормозных устройств
Разд. 4
тромагниты имеют шихтованный магнитопровод из электротехнической стали
и поворотный якорь, который при включении электромагнита нажимает на
приводной шток тормоза, обеспечивая растормаживание. Катушка электро-
магнита укреплена на неподвижной части магнитопровода. Она имеет пласт-
массовый каркас и намотана из алюминиевого эмалированного провода.
Общий вид и габаритные размеры электромагнитов МО 100Б и МО 200Б
приведены на рис. 4.1. Электромагниты используют в качестве привода унифи-
Рис. 4.1. Электромагниты МО 100Б и МО 200Б (в скобках указаны размеры
МО 200Б)
цированных тормозов ТКТ, габаритные размеры которых приведены в
табл. 4.7. Тормоза могут устанавливаться как с горизонтальной осью шкива,
т. е. нормально, так и с вертикальной осью шкива. Технические данные тор-
мозов ТКТ и их электромагнитных приводов приведены в табл. 4.12.
Из-за отсутствия демпфера при включении электромагнитов возникает
сильный удар якоря о магнитопровод, передающийся на элементы крепления
электромагнита и ось якоря. С увеличением размеров магнита усилия на-
столько возрастают, что не могут быть обеспечены надлежащая прочность и
износостойкость магнита. Последнее обстоятельство ограничивает возмож-
ность применения короткоходовых электромагнитов переменного тока только
для тормозов со шкивами до 200 мм.
Электромагнит МО 100Б является наиболее надежным из этой группы.
Его износостойкость составляет до 2,5-106 циклов В —О. Электромагнит
МО 200Б имеет несколько более низкую износостойкость — до 1,5-106 цик-
лов В—О. Электромагниты МО допускают в час до 600 включений, однако
5 4.4
Электрогид рае лические толкатели
147
Таблица 4.12. Технические данные тормозов серии ТКТ
с приводом от электромагнитов серии МО
Тормоз Электромагнит
Тип Диаметр шкива, мм Тормозной мо- мент, Н*м Тип Режим работы, ПВ, % Полная мощ- ность. В* А Потребляемая мощность, Вт Момент электро- магнита, Н*м Угол поворота якоря Момент от веса якоря электро- магнита, Н’М
в момент включе- ния во вклю- ченном состоянии
ТКТ 100 100 20 11 МО 100Б 40 100 2000 1100 400 190 140 70 5,5 3 7°30' 0,5 0,5
ТКТ 200/100 200 40 22 МО 100Б 40 100 2000 1100 400 190 140 70 5,5 3 7°30' 0,5 0,5
ТКТ 200 200 160 80 МО 200Б 40 100 6800 4000 1350 650 450 225 40 20 5°30' 3,6 3,6
ТКТ 300/200 300 240 120 МО 200Б 40 100 6800 4000 1350 650 450 225 40 20 5°30' 3,6 3,6
учитывая их ограниченную износостойкость, применение этого вида привода
следует ограничивать случаями, когда число включений не более 300 в час
для электромагнитов МО 100Б и не более 150 в час для электромагнитов
МО200Б. При этих режимах работы и колебаниях напряжения сети, не вы-
ходящих за пределы 85—105 % номинального, электромагниты имеют вероят-
ность безотказной работы около 0,95 за 1 год эксплуатации. Собственное
время включения электромагнитов около 0,03 с, время отпадания 0,02 с,
cos ф около 0,35. Катушки электромагнитов имеют исполнения на напряже-
ние 220 и 380 В, 50 Гц, при этом для каждого из напряжений имеются
исполнения для режимов работы ПВ = 40 и 100 %. Для использования при
напряжениях 440 В, 60 Гц или 380 В, 60 Гц необходимо применять специ-
альные исполнения электромагнитов. Тормозные устройства с длинноходовыми
электромагнитами в настоящем справочнике не рассматриваются ввиду ред-
кого их использования. Сведения по ним имеются в [52].
4.4. ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ ТОЛКАТЕЛИ
Электромагниты переменного тока обладают рядом недостатков, глав-
ными из которых являются:
1) относительно малая износостойкость, достаточная лишь для тормозов
малого размера;
2) сильные удары при включении, не полностью амортизируемые даже
специальными демпфирующими устройствами;
148
Приводы тормозных устройств
Разд. 4
3) значительные токи включения, в 7—30 раз превышающие значение
номинального тока в замкнутом состоянии;
4) быстрый и трудно контролируемый выход из строя катушки при
случайном заедании системы в разомкнутом состоянии.
В связи с этим уже много лет назад было начато широкое внедрение
длинноходовых электрогидравлических тол-
для привода крановых тормозов
Рис. 4.2, Электрогидравлический
толкатель
кателей. Электрогидравлический толка-
тель представляет собой комплектное
устройство, включающее электродвига-
тель, центробежный насос и гидроци-
линдр с поршнем. Последний обеспечи-
вает поступательное движение штока с
определенным усилием при вращении
рабочего колеса насоса с помощью
электродвигателя. Общий вид электро-
гидравлического толкателя приведен на
рис. 4.2. Изготовляемые в настоящее
время серийно одноштоковые электро-
гидравлические толкатели с тяговыми
усилиями от 160 до 800 Н подобны
друг другу и отличаются лишь отдель-
ными конструктивными элементами. Как
видно из рис. 4.2, в нижней части
электрогидравлического толкателя раз-
мещен асинхронный короткозамкнутый
электродвигатель, на вал которого на-
сажено колесо центробежного насоса.
При вращении вала электродвигателя
давление, развивающееся в наполненной
маслом камере насоса, перемещает
поршень со штоком вверх до тех
пор, пока не откроются каналы в ци-
линдре и масло не будет перетекать в
нижню часть. Все устройство гермети-
зировано уплотнениями, а обмотка элек-
тродвигателя пропитана маслостойкими
лаками. Более мощные двухштоковые
электрогидравлические толкатели состоят из тех же основных элементов.
Существенным отличием их конструкции является верхнее расположение
электродвигателя и вынужденное поэтому применение двух штоков.
Электродвигатели толкателей имеют обмотки на напряжение 220 или
380 В, 60 Гц. Специальные исполнения толкателей изготовляются для сетей
с частотой 60 Гц и напряжением 440 или 415 В. Электрогидравлические
толкатели рассчитаны на продолжительное непрерывное включение и до-
пускают при этом до 100 включений в час. При снижении ПВ до 60 % тол-
катели допускают 600 включений в час.
Элрктрогцдравлические толкатели
149
Таблица
4.13. Технические данные тормозов ТКГ с приводом
от электрогидравлических толкателей
Тормоз
Тип Диаметр шкива, мм Отход коло- док, мм Тормозной момент, Н-м
ТКГ 160 160 1,2 100
ТКГ 200 200 1,2 300
ТКГ 300 300 1,5 1,8 800
ТКГ 400 400 1500
ТКГ 500 500 1,5 2500
Тип
Электрогидравлический толкатель
ста»
ТЭ 16—2М 160 25 0,35 0,28 0,11 2850 0,46 1Л
ТЭ 25 250 32 0,35 0,3 0,13 2850 0,46 1,8
ТЭ 50 500 50 0,5 0,37 0,2 2850 0,7 3,5
ТГМ 80 800 50 0,55 0,37 0,2 2850 0,7 5
ТГМ 80 800 50 0,6 0,4 0,2 2850 0,7 5
Т аблица
4.14. Габаритные
размеры, мм, и масса тормозов ТКГ
Тип L I h н h А Ai В Bi S D d Масса* кг
ТКГ 160 490 230 415 144 200 72 50 201 116 70 6 160 13 25
ТКГ 200 608 397 436 170 350 175 60 213 130 90 7 200 18 35
ТКГ 300 772 560 550 240 500 250 80 232 130 140 12 300 22 80
ТКГ 400 940 630 330 620 320 340 170 68 232 130 180 ПО 400 22 120
ТКГ 500 1160 710 400 735 400 410 205 85 232 130 200 70 500 27 155
150
Приводы тормозных устройств
Разд, 4
Технические данные тормозов серии ТКТ с приводом от электрогидрав-
лических толкателей приведены в табл. 4.13, габаритные размеры —
в табл. 4.14. Тормоза могут устанавливаться только с горизонтальной осью
шкива. Общее максимальное время подъема и опускания штока толкателя
приведено в табл. 4.13. При этом у одноштоковых толкателей около 0,1 с
при подъеме затрачивается на разгон электродвигателя. Остальное время
идет на движение штока. При опускании штока около 0,2 с идет на снижение
давления при неподвижном штоке, а остальное время затрачивается на дви-
жение штока. Таким образом, при сокращении пути движения штока общее
время подъема и опускания штока может быть снижено на время, пропор-
циональное изменению длины хода, но подготовительное время при этом
сохраняется. Снижение противодействующего усилия на шток вдвое также
сокращает вдвое время движения штока при сохранении подготовительного
времени.
Нормальное положение электрогидравлического толкателя — вертикаль-
ное штоком вверх. При этом допускается наклон при работе в любую сторону
на 15—20°. Внешним элементом обеспечения надежной работы электрогид-
равлических толкателей является применение масляного наполнения необхо-
димой чистоты и соответствующего сорта. При отгрузке с завода-изготови-
теля толкатели заполняются трансформаторным маслом по ГОСТ 982-80,
которое обеспечивает нормальную эксплуатацию при температурах окружаю-
щей среды от —15 до +50 °C. Для эксплуатации толкателей при температу-
рах от —40 до +15 °C должно применяться масло АМГ-10 согласно
ГОСТ 6794-75. Электрогидравлические толкатели не могут эксплуатироваться
без периодической смены масла. Они также непригодны для категории ХЛ2.
Эксплуатация в категории Т2 допускается, но при температуре не выше
+45 °C.
Износостойкость толкателей в основном определяется целостностью
уплотнения и соответствием подшипников. Срок службы электрогидравличе-
ских толкателей составляет 10 лет при числе циклов В — О около 4-10в.
Однако при этом требуются контроль и замена уплотнений, а также регу-
лярный контроль чистоты масла и его объема.
Вероятность безотказной работы электрогидравлических толкателей ко-
леблется в весьма широких пределах: от 0,93 при эксплуатации в катего-
рии УЗ и постоянной положительной температуре и нормальной влажности
до 0,85 за 1 год эксплуатации на открытом воздухе в категории У2. Наибо-
лее предпочтительными условиями эксплуатации электрогидравлических тол-
кателей является категория УЗ или ТЗ.
Поскольку основным рабочим элементом электрогидравлических толка-
телей является короткозамкнутый электродвигатель, то обеспечение его на-
дежной работы может быть достигнуто только при надлежащей защите. Наи-
более опасным для толкателей режимом является обрыв одной фазы, про-
изошедшей перед включением. При однофазном включении электродвигатель
будет стоять под током, что в результате перегрева может привести к возго-
ранию масла, поэтому при применении толкателей каждый из них необходимо
защищать либо автоматическими выключателями с мгновенной и тепловой
Тиристорные преобразователи постоянного тока
151
защитой, либо защитой в двух фазах тепловыми реле, причем номинальный
ток тепловой защиты должен быть не более 1,2 номинального тока электро*
гидравлического толкателя.
РАЗДЕЛ 5
КРАНОВЫЕ ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
5.1. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО ТОКА
Назначение. Принцип действия. Тиристорные преобразователи (ТП) по-
стоянного тока являются устройствами, преобразующими напряжение пере-
менного тока в постоянное регулируемое напряжение посредством фазоим-
пульсного управления тиристорами. В крановых электроприводах ТП осу-
ществляют питание якорных цепей двигателей постоянного тока и их обмоток
возбуждения. Преобразователи для крановых электроприводов выполняются
однофазными и трехфазными. На рис. 5.1 приведены схема /и-фазного нуле-
вого ТП, подключенного на якорную обмотку двигателя, и диаграммы изме-
нения токов и напряжения в системе для трехфазного нулевого ТП.
Преобразователь включает в себя трансформатор Т с напряжением на
вторичных обмотках — Um или токоограничивающий реактор на стороне
переменного тока, выпрямительные блоки VI — Vm, сглаживающий реак-
тор Тн в цепи якоря двигателя, а также элементы систем управления и
защиты ТП. Регулирование среднего значения выпрямленного напряжения
осуществляется путем изменения угла управления тиристоров ос или р. По-
казанный на диаграммах угол коммутации у характеризует период времени,
в течение которого ток проходит одновременно по двум тиристорам.
Тиристорный преобразователь обеспечивает работу в двух режимах: вы-
прямительном и инверторном. В выпрямительном режиме двигатель потреб-
ляет энергию из сети, а в инверторном, наоборот, энергия передается в сеть.
В выпрямительном режиме ЭДС ТП и ток направлены согласно, в инвертор-
ном — встречно. Источником тока в инверторном режиме является ЭДС
якоря машины или индуктивность обмотки возбуждения. Перевод ТП из вы-
прямительного режима в инверторный достигается изменением полярности
на нагрузке посредством увеличения угла а сверх л/2.
Для обеспечения режима инвертирования необходимо, чтобы закрываю-
щийся тиристор успел восстановить свои запирающие свойства в течение
времени приложения к нему отрицательного напряжения, т е. в пределах
угла ф (рис. 5.1,г). В противном случае возможно опрокидывание инвертора,
при котором возникает аварийный ток, поскольку ЭДС ТП и двигателя со-
впадут по направлению. Для исключения опрокидывания необходимо выпол-
нение соотношения р — у = ф >> б, где р = л — а — угол опережения от-
крывания тиристоров; б — угол восстановления запирающих свойств тири-
сторов.
J52
Крановые тиристорные преобразователи
Разд, б
Преобразователи могут выполняться в нереверсивном и реверсивном ис-
полнениях соответственно с одним и двумя выпрямительными группами ти-
ристоров. Нереверсивное исполнение ТП обеспечивает одностороннюю прово-
димость тока в главной цели, а реверсивное — двустороннюю проводимость
в в этом смысле аналогично силовой цепи системы генератор — двигатель*
Рис. 5.1. Схема /n-фазного нулевого
ТП (а) и диаграммы изменения тока
и напряжения трехфазпого нулевого
ТП в выпрямительном (б, в) и ин-
верторном (г, (?) режимах
Рис. 5.2. Схемы ТП постоянного тока:
а—однофазная симметричная мостовая;
б— трехфазная симметричная мостовая;
в — трехфазная симметричная мостовая
оеверсивная; г — трехфазная симметрич-
ная мостовая с контакторным реверсом
Управление группами тиристоров реверсивных ТП возможно совместное или
раздельное. При совместном управлении сигналы управления подаются од-
новременно на обе группы тиристоров. В этом случае одна из групп работает
в выпрямительном, а другая подготовлена к работе в инверторном режимах
либо наоборот. При раздельном управлении импульсы подаются только на
ту группу тиристоров, которая в данный момент должна проводить ток.
Преобразователи с совместным управлением группами тиристоров обла-
дают большим быстродействием и более простой системой управления, од-
нако требуют установки уравнительных реакторов для ограничения уравни-
тельных токов, возникающих в замкнутом контуре, образуемом тиристор-
§5.1 Тиристорные преобразователи постоянного тока 153
ными группами. Поэтому в крановых электроприводах в основном применя-
ются ТП с раздельным управлением, несмотря на усложнение схемы управ-
ления, вызванное необходимостью введения в схему специального устрой-
ства, переключающего группы вентилей при равенстве нулю тока ТП.
Схемы ТП, применяемых для крановых электроприводов, приведены на
рис. 5.2. Однофазные ТП (рис. 5.2, а) наряду с трехфазными (рис. 5.2,6)
используются для управления током в обмотке возбуждения двигателей.
Реверсивные трехфазные мостовые ТП по схемам 5.2, ваг применяются
для управления якорными цепями двигателей. Связь ТП с сетью может осу-
ществляться или с использованием трансформаторов, или через токоограни-
чивающие реакторы. При этом габаритные размеры токоограничивающего
реактора существенно меньше, чем габаритные размеры трансформатора,
поэтому трансформатор следует использовать только при необходимости со-
гласования напряжения двигателя с напряжением питающей сети.
Схема рис. 5.2, г отличается от схемы рис. 5.2, в наличием контактного
реверсора в цепи якоря. Управление реверсором выполняется таким обра-
зом, что переключение его контакторов производится по сигналу от переклю-
чающего устройства при отсутствии тока в цепи якоря. Электроприводы, вы-
полненные с использованием такого ТП, наиболее просты. Однако из-за боль-
шого времени переключения реверсора — от нескольких сотых до десятка
долей секунды в зависимости от исполнения — они имеют сравнительно не-
высокое быстродействие. Такие электроприводы целесообразно применять
при мощностях до 1ЭО кВт и частоте включений, не превышающей 300 вклю-
чений в час. При мощностях выше 100 кВт, когда время переключения кон-
тактного реверсора становится относительно большим, а также для меха-
низмов с частотой включений свыше 300 в час следует применять электро-
приводы с реверсивными ТП с двумя встречно включенными группами вы-
прямительных мостов по схеме рис. 5.2, в. Как было уже отмечено, ТП, ис-
пользуемые для крановых электроприводов, имеют раздельное управление
выпрямительными мостами, вследствие чего в схеме отсутствуют уравнитель-
ные реакторы.
Расчетные соотношения, характеризующие работу ТП, зависят от схемы
выпрямления, характера нагрузки и режима работы ТП. Преобразователь
может работать в двух основных режимах: прерывистого и непрерывного
тока. В табл. 5.1 приведены основные расчетные соотношения, определяющие
среднее значение выходного напряжения ненагруженного ТП £7П, значения
токов и напряжений тиристоров, а также токов обмоток трансформатора.
При этом максимальное значение среднего выходного напряжения ТП опре-
делится выражением
t/no sin-^j-, (5.1)
где пг — число тактов выпрямления; U& — действующее значение фазного на-
пряжения питания.
Основными характеристиками ТП являются его регулировочная и внеш-
ние характеристики, Регулировочная характеристика — это зависимость сред-
154
Крановые тиристорные преобразователи
Разд. 5
Т а б лиц а 5.1. Расчетные соотно
Режим
Схема
выпрямления
при активной нагрузке
Непрерывный ток Прерывистый ток
^по
Однофазная
симметричная
мостовая
Трехфазная
нулевая
— Z7n0 cos а
при а < л/6
sin
при а > л/6
Трехфазная
симметрич-
ная мостовая
Un = £7ПО cos а
при а < л/3
Un = t/no
л
—---а
л
Примечание. В таблице приняты обозначения: STp — полная мощность транс
вателя (ток нагрузки).
него значения выходного напряжения ненагруженного ТП от угла управ-
ления а. Внешние характеристики ТП представляют собой семейство зави-
симостей среднего выходного напряжения от тока нагрузки Ua ~ f(Jn) при
различных углах управления а. Внешние характеристики ТП существенно
зависят от режима его работы. В режиме непрерывного тока регулировоч-
ная характеристика при углах коммутации у = я/3, соответствующих ре-
жиму переключения тиристоров, когда в проводящем состоянии оказываются
две фазы ТП, представляется выражением
Un — Uпо cos ct -f-
п,
(5.2)
где ДС\о — падение напряжения на тиристорах; и — индуктивность
рассеивания и активное сопротивление трансформатора или токоограничиваю-
щего реактора, делителей и соединительных проводов (на стороне перемен-
ного тока); соо — круговая частота питающего напряжения.
Знак «—» относится к выпрямительному, «+» — к инверторному режи-
ш
мам. Величина -z—<ооДф определяет падение напряжения из-за перекрытия
тиристоров в процессе коммутации и проявляет себя как эквивалентное ак-
тивное сопротивление. В соответствии с (5.2) внешние характеристики ТП
в зоне непрерывных токов представляются в виде прямых с постоянным на-
§5.1 Тиристорные преобразователи постоянного тока
155
шения в ТП постоянного тока
работы Среднее значение выпрям- ленного напряже- ния при а=0 "по/^ф Максимальное значение обратного напряжения на тиристорах ^обр тпах/^ио Среднее значение тока тиристора *т, срАп Действую- щее значение тока тиристора /т//п Действующее (линейное) значение тока трансформа- тора (реактора) Коэффи- циент типовой мощности трансфор- матора ^тр/^дв, нои
при индуктив- ной нагрузке
^1/Лт '2/'п
0,9 1,57 0,5 0,707 1 0,707 1,11
С7П"^ПО COSCC 1.17 2,09 0,33 0,58 0,82 0,58 1,345
2,34 1,045 0,33 0,58 0,82 0,82 1,045
форматора; Рдв ном —номинальная мощность двигателя; /п—выходной ток преобразо-
клоном. При углах коммутации у л/3, соответствующих нагрузкам, зна-
чительно превышающим номинальную, характер работы ТП изменяется н
жесткость внешних характеристик резко падает.
Угол коммутации определяется выражением
у = arccos
ТС СОоАф/п\
COS СС--------77---- I — а*
m с/п0 /
(5.3)
В зоне инвертирования выражение (5.3) справедливо в диапазоне углов
управления
а л — (у + д), (5.4)
где б — угол запаса при инвертировании, соответствующий времени полного
восстановления запирающих свойств тиристоров после их закрывания.
В соответствии с (5.4) предельный режим инвертирования характери-
зуется выражением
/7П — — Uno cos + *2^
(5.5)
Переход в режим прерывистых токов происходит при относительно малых
нагрузках, когда из-за ограниченной индуктивности поддержание непрерыв-*
ного тока становится невозможным. Внешняя характеристика ТП теряет
156
Крановые тиристорные преобразователи
Разд. 5
свою жесткость и при /п, стремящемся к нулю, Un стремится либо к ампли-
туде питающего напряжения Vmax при а а/m, либо к значению мгновен-
ного напряжения питания в момент выключения тиристора, если а > л/т.
Между режимами непрерывного и прерывистого тока существует граничный
режим, когда к концу периода проводимости тиристора ток спадает до нуля,
т, е. Хгр == 2л/т. Этот режим описывается уравнениями
Uп, гр — ^по cos сс — At/то»
Л1, гр —
С/По sin а
О>0 (Ан + ^ф)
(5.6)
(5.7)
где Ln — индуктивность в цепи нагрузки.
Ifl
ЧП
Un! Umax
0,826
08 У
0,675
0.6
09775
09
02519
02
-02
09
0.8
ор
50
❖У
60
75
90
95
135
150
30
—0,2319
-0,9775
105
120
75
60
—0,675
—0,826
0.9
«и
to
-08
§
'max
08
Об
09
02
О
-02
-09
-06
IS
60
75
О
90
60 Ц
-0318
120
уз
43/
95 i
30___]<
0,55
0999
0,318
0,163
30
-0999
—055
135
150
06 Ofi
Оп f ^нг ^ф \
Рис. 5 3. Универсальные характеристики ту------=- f (--ту---Id ] в зоне
и max \ vn /
прерывистых токов для мостовых трехфазных (а) и однофазных (б) преоб-
разователей
Уравнения (5.6) и (5.7) представляют собой параметрические уравне-
ния эллипса, дуга которого является геометрическим местом точек внешних
характеристик ТП в граничном режиме. Эти уравнения справедливы лишь
до определенного значения а, меньше которого возможен лишь прерывистый
режим Указанные значения а равны 32° 20' при m — 2; 20° 40' для m = 3
И 10° 05' для m — 6.
Аналитический расчет внешних характеристик ТП в области прерыви-
стых токов весьма сложен, поэтому в инженерной практике обычно исполь-
Un ( La £ф \
зуются универсальные характеристики 77----= И—ту-------<о0/п I построен-
Umax
ные для различных углов управления а. На рис. 5.3 приведены универсаль-
§5.1 Тиристорные преобразователи постоянного тока 157
ные характеристики ТП с т = 6 (рис. 5.3, а) и с т = 2 (рис. 5.3,6), а на
рис. 5.4, а и б показаны внешние характеристики для этих же ТП —1
Un/Umax = f(/n).
Выбор силовых элементов преобразователей. Выбор тиристоров произво-
дится по значениям токов и обратных напряжений, приведенных в табл. 5.1.
Приведенные там соотношения позволяют также выбрать питающий транс-
Рис. 5.4. Внешние характеристики мостовых трехфазных (а) и одиофаз
ных (б) преобразователей
форматор или токоограничивающий реактор. При этом индуктивность токо-
ограничивающего реактора рассчитывается исходя из соотношения
= Umax!Iк тах> (5.Ь)
где /к max — допустимый ударный ток короткого замыкания.
Более сложным является выбор сглаживающего реактора, который осу*
ществляется исходя из двух условий: ограничения до допустимого для дви-
гателя уровня пульсаций тока; ограничения зоны прерывистых токов. Пуль-
сации тока неблагоприятно сказываются на работе двигателей, ухудшая их
коммутацию и увеличивая нагрев.
Расчет проводится по основной гармонике пульсаций с учетом того, что
влияние высших гармоник значительно меньше. Допустимое значение пуль-
саций тока для крановых двигателей серии Д составляет 5—10 % номиналь-
ного тока двигателя. Необходимое значение индуктивности якорной цели
158
Крановые тиристорные преобразователи
Разд. 5
с учетом допустимого уровня пульсаций /пульс составляет
•Tj =s £Лтульс тах7(^^оЛгульс)>
где
^пульс max — ^по cos & 2__1 tg2
• IL X
(5.9)
(5.Ю)
Причем J/пульстах соответствует максимальному значению угла а. Индук-
тивность сглаживающего реактора Др определяется как разность La — ЬЛ
где Дя — индуктивность обмотки якоря, которая может быть найдена по
формуле
Д-ном-------, (5.11)
ЗТ/я, ном^номР
где k = 0,5 4- О’,в для некомпенсированных и k = 0,25 для компенсирован-
ных машин; р — число пар полюсов.
Ограничение зоны прерывистых токов вызвано ухудшением статических
и динамических характеристик электропривода при работе ТП в этом ре-
жиме. Расчет индуктивности реактора по этому условию проводят исходя
из принятого допустимого значения граничного тока. Индуктивность якорной
цепи при этом рассчитывается по формулам:
для трехфазной нулевой схемы
/ с/ф \
I 0,46-у-----sin а — ха J;
х I п, гр /
(5.12)
для трехфазной мостовой схемы
La = —— (0,126 sin а — 2ха^,
\ /п, гр /
(5.13)
где ха — индуктивное сопротивление фазы анодной цепи; (7Л— линейное на-
пряжение питания.
Сглаживающие реакторы не нужны для цепи возбуждения, их можно не
применять и для якорных цепей, когда индуктивность двигателя оказывается
достаточной для ограничения пульсаций тока.
Для крановых электроприводов до 1985 г. серийно выпускались ревер-
сивные ТП типа АТРК, а также по индивидуальным заказам нереверсивные
ТП типа АТК. С 1985 г. начат выпуск реверсивных ТП типа ТПЕ, имеющих
улучшенные массогабаритные показатели. Технические данные ТП типов
АТРК и АТК приведены в табл. 5.2, а ТПЕ —в табл. 5.3.
Преобразователи получают питание от сети 380 В, 50 Гц через индиви-
дуальные трансформаторы (при выпрямленном напряжении 230 В) или токо-
ограничивающие реакторы (при выпрямленном напряжении 460 В). Схема
выпрямления трехфазная мостовая с двумя встречно-параллельными груп-
пами для реверсивных и одной группой для нереверсивных ТП. Управление
группами раздельное. В состав ТП входит также регулируемый выпрямитель
для цепей возбуждения, собранный по однофазной мостовой схеме, Конструк-
§ 5.1 Тиристорные преобразователи постоянного тока 159
Т а б л иц а 5.2. Основные технические данные тиристорных
преобразователей серии АТРК и АТК
" Тип преобразователя Номинальное выпрямленное напряжение, В Номинальный выпрямленный ток при ПВ^ЮО %, А Максимальный выпрямленный ток, А Тип силового трансформатора Габаритные размеры преобразователя, мм Масса преобра- зователя, кг
АТРК 100/230 230 100 200 ТСЗР-40/0,5 480
АТРК 100/460 460 100 200 — 510
АТРК 160/230 АТРК 160/460 230 460 160 160 320 320 ТСЗР-63/0,5 800X750X1700 480 510
АТРК 250/230 230 250 500 ТСЗР-100/0,5 520
АТРК 250/460 460 250 500 600
АТРК 500/230 230 500 1000 ТСЗР-200/0,7 2000X750X1700 1000
АТРК 500/460 АТРК 1000/460 460 460 500 1000 1000 2000 —• (2Х2000)Х750Х1700 1000 2000
АТК 100/230 230 100 200 ТСЗР-40/0,5
АТК 100/460 460 100 200 •—•
АТК 160/230 230 160 320 ТСЗР-63/0,5 2000X750X1700 900
АТК 160/460 460 160 320 —*
АТК 250/230 230 250 500 ТСЗР-100/0,5
АТК 250/460 460 250 500
Примечания: 1. Номинальное выпрямленное напряжение возбуждения ТП
типа АТРК — 230, типа АТК —115 В.
2. Максимальное выпрямленное напряжение возбуждения ТП типа АТРК*- 350,
типа АТК — 165 В.
3. Номинальный выпрямленный ток возбуждения ТП типа АТРК — 15, типа АТК —
10 А, за исключением АТК 160/460 и АТК 250/460, номинальный выпрямленный ток
возбуждения которых 25 А.
Таблица 5.3. Технические данные тиристорных
преобразователей серии ТПЕ
Тип преобразователя Номинальный выпрямленный ток, А Максимальный выпрямленный ток, А Габаритные размеры, мм Масса, кг
ТПЕ-100/100-460 100 200 800X750X1000 280
ТПЕ-200/200-460 200 400 800Х750ХЮ00 280
ТПЕ-400/400-460 400 800 800X775X1637 580
ТПЕ-630/630-460 630 1260 1000X775X1650 660
Примечания: 1. Номинальное выпрямленное напряжение 460 В
2. Номинальное и максимальное выпрямленное напряжение возбуждения соответ-
ственно 230 и 330 В.
3. Номинальный выпрямленный ток возбуждения 15 А.
160
Крановые тиристорные преобразователи
Разд. 5
тнвно ТП выполнены в виде шкафа с односторонним обслуживанием. Сило-
вая часть ТП и система управления имеют блочную конструкцию, причем
блоки системы управления расположены в выемных кассетах. Преобразовав
тели на 460 В комплектуются токоограничивающими реакторами, которые
размещаются внутри шкафа. Силовой трансформатор устанавливается вне
шкафа. Преобразователи на 500 А при необходимости могут поставляться
также с фильтровым реактором типа ФРОС-500/0,5Т, расположенным вне
шкафа.
5.2. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
ПЕРЕМЕННОГО НАПРЯЖЕНИЯ
Тиристорные преобразователи переменного напряжения (ТПН) являются
устройствами, преобразующими напряжение питающей сети в регулируемое
переменное напряжение той же частоты. Через эти преобразователи может
осуществляться питание асинхронных
Рис. 5.5. Диаграммы изменения
тока и напряжения в одной фазе
нагрузки в схеме с ТПН
двигателей. Такой способ регулирования
называется фазным и относится к
параметрическим способам регули-
рования. В связи с большими поте-
рями скольжения в крановых элек-
троприводах ТПН в основном приме-
няются для управления двигателями
с фазным ротором. Использование
ТПН в электроприводах с коротко-
замкнутыми двигателями возможно
только для формирования пуско-тор-
мозных режимов.
На рис. 5.5 показаны кривые
тока i, его первой гармоники А и на-
пряжения и в одной фазе при работе
ТПН на активно-индуктивную нагруз-
ку, в качестве которой в первом приближении может быть представлен асин
хронный двигатель. На рис. 5.5 а—угол управления; ф— фазовый угол на-
грузки (между напряжением и первой гармоникой тока); X — угол проводи-
мости. Регулирование напряжения может производиться при изменении ос
в пределах ф < ос <; л. При а < ф к двигателю приложено номинальное
напряжение сети, а по его статорным обмоткам проходит синусоидальным
непрерывный ток. При увеличении угла а искажается форма кривой напря-
жения, приложенного к статору, снижается среднее значение выходного на-
пряжения; таким образом, получается семейство регулировочных характе-
ристик.
Электроприводы с ТПН могут выполняться как с замкнутой, так и с ра-
зомкнутой системой регулирования. Электроприводы с разомкнутой системой
не обеспечивают жестких механических характеристик. Их применяют при
формировании пуско-тормозных режимов короткозамкнутых двигателей. Для
обеспечения жестких механических характеристик замкнутая система авто-
матического регулирования выполняется обычно с обратной связью по ско-
§ 5.2 Тиристорные преобразователи переменного напряжения 161
рости (см. § 9.3). Тиристорные преобразователи напряжения могут выпус-
каться в реверсивном или нереверсивном исполнении. Схема реверсивного
ТПН значительно сложней нереверсивного ТПН. Реверсивный ТПН состоит
из большого числа силовых блоков, поэтому в крановых электроприводах
в основном применяются нереверсивные ТПН. Реверс же выполняется от*
дельным контакторным реверсором, установленным в панелях управления,
причем система управления электроприводом обеспечивает бестоковую ком*
мутацию контакторов реверсора.
Рис. 5.6. Силовые схемы ТПН
Рис. 5.7. Зависимости первой гармо-
ники напряжения на выходе ТПН от
углов а и ф
Основные силовые схемы ТПН и их характеристики. Силовые схемы при-
меняемых ТПН приведены на рис. 5.6. Это схемы со встречно-параллельными
тиристорами соответственно во всех трех (рис. 5 6,а), в двух (рис. 5.6,6)
и в одной (рис. 5.6, в) фазе, а также тиристорного треугольника (рис. 5.6, г) f
включенного в концы фазных обмоток двигателя. Включение тиристоров
в две или одну фазу значительно ухудшает гармонический состав выходного
напряжения и приводит к его асимметрии. Поэтому такие схемы применя-
ются редко. Основное применение в приводах с регулированием скорости
нашла симметричная шеститиристорная схема (рис. 5.6, а). В системах с ре-
гулированием момента применяется схема треугольника (рис. 5.6,г).
Основную роль в формировании механических характеристик электро-
привода с ТПН играет первая гармоника выходного напряжения. Ее значе-
ние представляет собой сложную функцию от углов а и ср, выражаемую
семейством регулировочных характеристик ТПН. На рис. 5.7 приведены ука-
занные характеристики для симметричного ТПН, выполненного по схеме
рис. 5.6, а
6 Зак. 918
162
Крановые тиристорные преобразователи Разд, б
Для выбора тиристоров в схемах ТПН с включением тиристоров в линию
питания двигателя справедливы выражения
Ij — 7Н/
Лг, cp = V^ /нМ;
^обр max ~
(5.14)
(5.15)
(5Д6)
где А и 1н—действующее значение тока через тиристор и ток нагрузки;
А, ср — среднее значение тока через тиристор; Uo$pmax— максимальное обрат-
ное напряжение на тиристорах. При применении ТПН, выполненного по
схеме рис. 5.6, г, токи тиристоров удваиваются.
Для крановых электроприводов промышленностью серийно выпускаются
ТПН серии РСТ на длительные токи 100, 160 и 320 А. Эти ТПН выполнены
по симметричной схеме рис. 5.6, а. Они обеспечивают регулирование частоты
вращения двигателя в замкнутой системе регулирования в диапазоне 1:10,
а также регулирование момента двигателя в пуско-тормозных режимах.
Таблица 5.4. Технические данные тиристорных
преобразователей серии РСТ
Тип преобразователя Ток, А Габаритные размеры (высотахширина X глубина), мм Масса, кг
при ПВ=Ю0 % максимальный
РСТ 100 100 200 905X600X305 102
РСТ 210 160 320 975X600X365 120
РСТ 310 320 640 1380X600X450 215
П римечание. Номинальное напряжение 380 В.
Технические данные ТПН типа РСТ приведены в табл. 5 4. Конструктивно
они представляют собой собранные на общей раме три силовых блока, на
которых установлены тиристоры, блок датчиков тока и блок автоматики.
В силовых блоках используются таблеточные тиристоры с охладителем.
Охлаждение естественное воздушное. Тиристорные преобразователи напря-
жения выполнены в открытом исполнении и предназначены для установки
на стандартные рамы крановых панелей типа ТТЗ, в состав которых также
входит релейно-контакторная часть системы управления. Применяемый в ТПН
блок автоматики является единым для всех типов РСТ. В ТПН предусмот-
рена система ограничения тока. Уровень токоограничения для защиты тири-
сторов от перегрузок и для ограничения момента двигателя может изме-
няться в диапазоне от 0,65 до 1,5 номинального тока ТПН, Одновременно
может изменяться уровень токоограничения для максимально-токовой защиты
в пределах от 0,9 до 2 номинальных токов ТПН. Такой широкий диапазон
изменения уставок токоограничения обеспечивает работу ТПН с двигателями
нескольких типоразмеров, отличающихся по мощности примерно в 2 раза.
§ 5.3 Непосредственные тиристорные преобразователи частоты 163
5.3. НЕПОСРЕДСТВЕННЫЕ ТИРИСТОРНЫЕ
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
Непосредственные преобразователи частоты НПЧ выполняют преобра-
зование напряжения питающей сети частотой fi в напряжение меньшей час-
тоты f2 при помощи тиристоров с фазоимпульсным управлением, коммутируе-
мых напряжением силовой сети. В соответствии с принципами частотного
управления НПЧ должен обеспечить регулирование по определенному закону
как частоты, так и напряжения. На рис. 5.8, а показана структурная схема
НПЧ с m [-фазным входом и трех фазным выходом, питающим асинхронный
короткозамкнутый двигатель М Одна фаза НПЧ по существу представляет
Рис. 5.8. Структурная схема НПЧ (а) и осциллограммы выходного напря-
жения и тока (б)
собой реверсивный ТП постоянного тока. На рис. 5.8, б показаны осцилло-
граммы фазного напряжения и тока НПЧ. Если управляющие импульсы по-
даны на группу UZ1, то напряжение на нагрузке ия положительно и в те-
чение времени t\ происходит нарастание тока нагрузки tH- Для обеспечения
отрицательного участка напряжения сначала группа тиристоров UZ1 пере-
водится в инверторный режим, а после снижения тока /п до нуля в момент
времени /2 включается группа тиристоров UZ2. Эта группа переводится в ин-
верторный режим в момент времени /з-
Частота выходного напряжения определяется длительностью пропуска-
ния тока обеими группами тиристоров. Регулирование выходного напряже-
ния осуществляется изменением угла открывания тиристоров. Поскольку по-
лупериод выходного напряжения формируется из отрезков синусоид питаю-
щего напряжения и гашение тиристоров происходит в момент смены поляр-
ности на них, выходная частота — ниже частоты питания, а их отношение
зависит от схемы НПЧ. Благодаря одноразовому преобразованию энергии
в НПЧ сравнительно просто решается вопрос обеспечения рекуперации энер-
гии и циркуляции реактивной мощности. При этом, как и для ТП постоян-
ного тока, возможно или раздельное, или совместное управление группами
тиристоров. При раздельном управлении в любом временном интервале
6*
164
Крановые тиристорные преобразователи
Разд 5
импульсы поступают только на одну группу тиристоров при запирании другой
группы. При совместном управлении импульсы поступают на обе группы,
причем одна из групп работает в выпрямительном, а другая в инверторном
режимах. Преобразователи с совместным управлением из-за необходимости
установки уравнительных реакторов
Рис. 5.9. Силовые схемы НПЧ:
й — нулевого типа; б — мостового
типа
в крановых электроприводах не приме-
няются Применяются НПЧ с раздель-
ным управлением, выполняемым для
электроприводов большой мощности с
помощью датчиков тока, а для приво-
дов малой и средней мощности вклю-
чением тиристорных групп по про-
грамме.
Основные силовые схемы НПЧ, ис-
пользуемые для крановых электроприво-
дов, приведены на рис. 5 9.
Непосредственный преобразователь
частоты с наиболее простой нулевой
18-тиристорной схемой по рис. 5 9, а ис-
пользуется для электроприводов мощ-
ностью от 5 до 75 кВт и выполняется
с раздельным программным управле-
нием и трансформаторной связью Мо-
стовая схема на 18-тиристорах по
рис 5 9, б применяется для НПЧ с раз-
дельным непрограммным управлением и
реакторной связью в электроприводах
мощностью 50—100 кВт. Силовые схе-
мы обоих НПЧ отличаются только на-
личием или отсутствием нулевого при-
вода. Однако мостовая схема имеет
число тактов выпрямления m — 6, в то
время как для нулевой схемы m — 3,
соответственно система управления мос-
товой схемой значительно сложней Для
электроприводов мощностью более
100 кВт применяются мостовые 6-пульс-
ные НПЧ на 36 тиристорах. Преобразователи по такой схеме не выпу-
скаются, и для ее реализации можно использовать два 18-тиристорных
НПЧ. От силовой схемы зависит не только мощность, но и максималь-
ное значение выходной частоты НПЧ. При отсутствии паузы между работой
групп тиристоров максимальная частота НПЧ определяется выражением
(5.17)
где п — число участков синусоид питающего напряжения в полупериоде вы-
ходного напряжения.
§ 5.3 Непосредственные тиристорные преобразователи частоты 165
В соответствии с (5.17) максимальное значение выходной частоты со-
ставляет f2max“0»43fi для трехфазного нулевого НПЧ (m==3; nm/a==3)
и f2“0,6fi для трехфазного мостового НПЧ (m==6; ит/п = 3).
Параметры НПЧ зависят от формы кривой выходного напряжения, ко-
торая при заданном числе фаз и отношении частот входа и выхода опреде-
ляется законом модуляции угла открывания тиристоров НПЧ. В применяе-
мых НПЧ используется либо прямоугольная (при постоянных углах откры-
вания), либо синусоидная модуляция (при арккосинусоидальной фазовой ха-
рактеристике).
В табл. 5.5 приведены основные выражения, определяющие выходные
характеристики НПЧ при прямоугольной и синусоидальной модуляциях
в зависимости от входного напряжения CJlt угла управления а, отношения
выходной и входной частот числа тактов выпрямления для
нулевой и m = 2tni для мостовой схем, mj — число фаз входа), времени
пауз /пауз (угол пауз фцауз = сМпауз, где «г — угловая частота выходного
напряжения) при программном управлении, параметра регулирования v и па-
раметров нагрузки: эквивалентного сопротивления Z и угла нагрузки ф2.
Параметр регулирования v~UyIUQmax, Uy и UQmax — амплитудное зна-
чение напряжения управления и опорного. Коэффициент А в формулах
табл. 5.5 принимает значения 1 и Уз соответственно для нулевой и мосто-
вой схем. Внешние характеристики НПЧ определяются по следующим выра-
жениям соответственно для действующего выходного напряжения и его
первой гармоники:
V2д = ^2д, х-------g------~ sin Uх cos ф2; (5.29)
тт гт m . п тт г ,к
Ы = U2x - -5— — Sin — и I cos q>2, (Ь.ЗО)
J v «IL f f
где Uzi, x — действующее значение напряжения холостого хода НПЧ, опре<
делаемое по (5.18) и (5.19) при прямоугольной модуляции и по (5.23) —
(5.26) при синусоидальной модуляции (см. табл. 5.5);
U2I2
tn .
— sin
л
И 1^2НОЧ
^2 НОМ
г/к;
(5.31)
(5.32)
/2 и /гном — соответственно текущее и номинальное значения тока на выходе
НПЧ; И к — напряжение короткого замыкания трансформатора или токоогра-
ничивающего реактора.
Выражения (5.29) и (5.30) показывают, что жесткость внешних харак-
теристик существенно зависит от пульсности схем, увеличиваясь в трехпульс-
ных схемах в о/% раза по сравнению с 60-пульсными.
В кривой выходного напряжения НПЧ содержится широкий спектр гар-
моник, зависящих от режима работы НПЧ. Порядок высших гармоник
1S6
Крановые тиристорные преобразователи
Разд 5
Таблица 5.5 Расчетные формулы для определения
характеристик НПЧ
Расчетные формулы при модуляции
Наименование
прямоугольной
синусоидальной
Действующее
значение вы-
ходного напря-
жения
Действующее
значение пер-
вой гармоники
выходного на-
пряжения
Действующее
значение пер-
вой гармоники
тока
Активная мощ-
ность
Реактивная мощ-
ность
^2Д, X
/и
4л
ч . . 2л Фпауз
X sm-----cos 2а cos------
m 2
Г7 ——
tfax- „2
. л
sin —
tn
Фпауз
Т -
/ад 2
327 гд^зд cos Фз
2
arcsin v4
arcsin v
(5.18)
(5.19)
(5.20)
(5-21)
(5.22)
при V —О
£7гд, х ~ AUi
1^2л, X ==3
! 1 , mt . 2 л
2 4л tn
(5.23)
при v =* 1 (5.24)
sin ~~ vUi (5.25)
£. Ш, . Jb <-> 1 ч л
----sin— -j- cos ф2 cos а X
Л "
1 -exp(-«ctg<p2)
:—;--“7----< 1ь ф2
(5.26)
Р = 3Uгд72д cos <р2 (5.27)
v2 sin24p2+
Sin Ф2 . . <
----1— arcsin v sm Фг т*
V
1 —
+ I cos Фа I —2v— X
[(cos Ф2 l+VF— V2 Sin Фг]2
1 — v2
(5.28)
§ 5.3
Непосредственные тиристорные преобразователи частоты
167
относительно частоты сети при участке проводимости Л 2л//?г
£ — I 1
Пг = km — =F J; (5.33)
при Л < л/m
п2 = km * =F 4-, (5.34)
6 I
где k — 1,2,3 ...
Амплитуды высших гармоник
*41 2 1
- яот , f (v; Ф2)! (5.85)
U 2 П{н1 zt 1
^п2 2 1
4^-«----------f (ч ф2), (5.36)
U2 п2пг + '
причем f (v, <р2) < h
При прямоугольной модуляции амплитуду высших гармоник ориентиров
вочно можно определить по выражению
<7n2/Z/2 - 1Я
(5.37)
в котором значение первой гармоники находится -по формуле (5.19), приве-
денной в табл. 5.5. При этом
При синусоидальной
модуляции высшими гармониками можно пренебречь.
Гармоники, частота которых меньше частоты основной гармоники, со-
ставляют ряд субгармоник. Наличие субгармоник в кривой выходного напря-
жения крайне нежелательно, поскольку сопротивление двигателя для них
мало. Для исключения субгармоник следует обеспечить определенные соот-
ношения между входной и выходной частотами числом тактов выпрям-
ления схемы m и числом периодов q/m напряжения сети в периоде выходной
частоты. Это соотношение представляется формулой
| = m/(2q).
(5.38)
Ряд частот в зависимости от т, при котором исключаются субгармо-
ники, приведен в табл. 5.6.
Выбор силовых элементов НПЧ осуществляется так же, как и для ТП
постоянного тока, однако следует учитывать некоторые особенности их ра-
боты. К этим особенностям относятся возможность неравномерной загрузки
по току однотипных элементов силовой схемы, а также появление при опре-
деленных условиях субгармоник в кривой выходного напряжения и посто-
янной составляющей тока, подмагничивающей питающий трансформатор илй
токоограничивающий реактор. Усредненные токовые нагрузки тиристоров по
средним и действующим значениям равны соответственно
7т, ср, у — 72 ср/(2^) — 2/2/(лт);
7т, Д, У в 72д/Сл/2/и )•
(5.39)
(5.40)
Т68
Крановые тиристорные преобразователи
Разд. 5
Т аблица 5.6. Рекомендуемые значения выходных частот НПЧ
при дискретном регулировании
Неравномерность загрузки тиристоров зависит от соотношения
На рис. 5.10 и 5.11 приведены коэффициенты загрузки тиристоров по сред-
нему ^т, ср = 4, сР/Л, ср, у и действующему токам д = Л*, д/А-, д, у ПРИ пря-
моугольной и синусоидальной модуляциях. Из этих кривых видно, что при
£ < 1,5 почти весь ток нагрузки проходит через один тиристор группы. При
Рис. 5.10. Коэффициент загрузки ти-
ристоров по среднему току при пря-
моугольной 1 и синусоидальной 2
модуляциях
Рис. 5.11. Коэффициент загрузки ти-
ристоров по действующему току при
прямоугольной 1 и синусоидальной 2
модуляциях
увеличении £ коэффициенты загрузки стремятся к единице. Появление суб-
гармоник напряжения и тока также связано с отношением Все эти неже-
лательные явления могут быть исключены при выполнении условия (5.38),
т. е. при выборе частот из ряда табл. 5.6, что особенно важно при выходных
частотах выше 20 Гц. Неравномерность загрузки обмоток питающего транс-
форматора или реактора учитывается графиками, приведенными на рис. 5.12.
Напряжение вторичной обмотки трансформатора необходимо выбирать
с учетом возможности компенсации отклонения напряжения сети и его по-
Непосредственные тиристорные преобразователи частоты
169
тери при перегрузках двигателя по току в соответствии с выражением
__ sin (n/m)ku
Ы ip 2 Ыдо,
где для трехпульсной нулевой схемы
ku 0,9(0,9848 — 5,71 UK) ’
для шестипул ьсной схемы
k — - ----- - - *
и 0,9 (0 9848 — 1,74Z7K) ’
— напряжение короткого замыкания трансформатора*
По (5.42) и (5.43) на рис. 5.13 построены кривые С/трг/^дв
(5.42)
(5.43)
Рис. 5.12. Коэффициент загрузки об-
моток силовых реакторов и вторич-
ных обмоток трансформаторов по
току при прямоугольной 1 и сину-
соидальной 2 модуляциях
Рис. 5.13. Зависимость ^трй/^дв от
напряжения короткого замыкания
для трехфазной нулевой 1 и для мо-
стовой 2 схем
Для крановых электроприводов выпускаются НПЧ типа ТТС на мощ-
ность 40 и 100 кВ-А и в стадии проектирования находятся преобразователи
ТТС на мощность 16 кВт. Технические данные НПЧ приведены в табл. 5.7,
Т аблица 5.7. Технические данные непосредственных
преобразователей частоты
Тип преобра- зователя Схема преобра- зователя Диапазон регулирования Ток, А Габаритные размеры (высотах ширинах глубина), мм Масса, кг
напряжения первой гармоники, В выходной частоты, Гц в режиме ПВ = 40 % макси- мальный
ТТС100 Мосто- вая 25—230 с выходом на напряжение сети 3—30 180 360 1615X770X365 270
ТТС40 ТТС16 Нулевая 25—150 3-20 135 63 270 135 1175X770X365 1155X770X292 175 120
170 Крановые тиристорные преобразователи Разд. 5
— . - - 1 — I— — . — A.. .j.
Преобразователи типов ТТС16 и ТТС40 обеспечивают плавный частот-
ный пуск, торможение и реверс двигателя. Они выполнены по 18-тиристорной
нулевой схеме с раздельным программным управлением и трансформаторной
связью с сетью (см. рис. 5.9, а). Управление НПЧ от командоконтроллера
двухканальное по каналам частоты и напряжения. Система регулирования
поддерживает при этом с определенной точностью заданные значения выход-
ных частот и напряжения (см. § 9.3).
Преобразователь типа ТТС100 выполнен по мостовой схеме на 18 тири-
сторах с раздельным управлением с помощью датчиков тока и реакторной
связью с сетью (см. рис. 5.9,6). Кроме плавного частотного пуска, торможе-
ния и реверса НПЧ типа ТТС100 обеспечивают режим бестоковой коммутации
цепи при переводе питания двигателя на напряжение сети. Управление НПЧ
одноканальное. Принятый закон частотного управления обеспечивает работу
двигателя с IR-компенсацией падения напряжения на сопротивлении ста-
тора двигателя.
Конструктивно НПЧ представляют собой закрытый шкаф с естественным
охлаждением. Система управления выполнена на микроэлектронике и распо-
ложена в кассетных блоках. Автоматический выключатель в НПЧ не преду-
смотрен и должен устанавливаться в панели управления, входящей в ком-
плект электропривода.
5.4. ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
С АВТОНОМНЫМИ ИНВЕРТОРАМИ
Тиристорные преобразователи частоты (ПЧИ) с автономными инверто-
рами осуществляют преобразование напряжения питающей сети последова-
тельно в напряжение постоянного тока, а затем в трехфазное напряжение
регулируемой частоты с отношением | = fs/fi как меньшим, так и большим 1
(двухзонное регулирование). К основным элементам таких ПЧИ относятся
управляемый выпрямитель (УВ) и автономный инвертор (АИ). Неотъемле-
мой частью АИ являются устройства принудительной конденсаторной ком-
мутации тиристоров.
Преобразование постоянного напряжения на входе АИ в трехфазное
напряжение нужной частоты осуществляется переключением тиристоров
VS1 — VS6 в плечах моста с определенной частотой и последовательностью
(рис 5.14, а). По принципу работы АИ разделяются на инверторы напряже-
ния (АИН) и инверторы тока (АИТ). В АИН ток на входе (в звене посто-
янного тока) изменяется как по значению, так и по направлению, поэтому
тиристоры в плечах моста должны обладать двусторонней проводимостью.
На рис. 5.14,б,в приведены принципиальная схема н диаграмма выходных
токов и напряжений, поясняющие работу одной фазы АИН. Двусторонняя
проводимость обеспечивается встречно-параллельным включением тиристо-
ров и неуправляемых диодов. Диоды проводят ток в промежутки времени,
когда выходное напряжение и ток нагрузки имеют противоположные знаки.
При этом обеспечивается периодический обмен энергией между индуктив-
ностью цепи нагрузки и конденсатором С в звене постоянного тока. Тири-
§ 5.4 Тиристорные преобразователи частоты инверторного типа 171
сторы должны быть снабжены коммутирующим устройством, обеспечиваю-
щим их запирание в нужный момент (на схеме не показано). В АИТ, схема
и диаграмма работы которых приведены на рис. 5.14, г, д, ток входа остается
постоянным по значению и направлению. При этом обратные диоды не нуж-
ны. Для этого индуктивность нагрузки должна быть скомпенсирована вклю-
чением параллельно (как показано на схеме) или последовательно нагрузке
конденсатора С, обеспечивающего также коммутацию тиристоров, а на яходе
АИТ должен быть включен сглаживающий реактор. При этом выходной ток
(’вых = i'h + ic имеет прямоугольную форму.
Рис. 5.14. Схемы и диаграммы, поясняющие работу ПЧ с АИ
В электроприводах с рекуперацией энергии в сеть в состав АИН должен
быть включен ведомый инвертор, обеспечивающий двустороннюю проводи-
мость источника питания. В системах с АИТ передача энергии в сеть происхо-
дит при неизменном направлении тока за счет поворота вектора напряжения
по отношению к вектору тока, и ведомый инвертор для этих целей не нужен*
Регулирование выходного напряжения в ПЧ с АИ для крановых элек-
троприводов осуществляется амплитудным способом, посредством изменения
угла управления тиристоров УВ. Принципиально возможны и другие методы
регулирования, однако ввиду сложности реализации их применение весьма
ограничено.
Силовые схемы ПЧ с АИ, применяемых для крановых электропризодов,
строятся на основе как АИН, так и АИТ. Их построение существенно зависит
от принятого способа коммутации тиристоров АИ. Из известных способов
коммутации —междуфазной, общей и индивидуальной — первый имеет наи-
более простую схему, и именно этот способ применяется в ПЧ с АИ для кра-»
новых электроприводов. На рис. 5.15 приведена силовая схема ПЧ с АИН*
В состав ПЧ входят: управляемый выпрямитель UZ1 с LC-фильтром (УВ),
инвертор напряжения UZ2 с группой тиристоров прямого (слева от двига-
теля) и обратного (справа от двигателя) тока, ведомый инвертор UZ3
с LC-фильтром. Входящее в состав АИН устройство междуфазной коммута-
ции состоит из анодной и катодной групп конденсаторов, соединенных в тре-
угольник, отделенных от силовой схемы отсекающими диодами VI — V6
172
Крановые тиристорные преобразователи
Разд. 5
и блоком подзаряда конденсаторов от отдельного источника (на схеме не
показан).
Обмотки реактора UZ1 и UZ3 расположены на общем сердечнике и
включены в плечи тиристорных мостов. Реактор выполняет и функции токо-
ограничения. Наличие УВ определяет амплитудный метод регулирования вьь
ходкого напряжения. Ведомый инвертор обеспечивает режим рекуператив-
ного торможения электропривода.
Рис. 5.15. Силовая схема ПЧ с АИН
На рис. 5.16 приведена схема ПЧ с АИТ. В этой схеме отсутствуют си-
ловой блок ведомого инвертора и мост обратных диодов. Автономный ин-
вертор тока также выполнен по схеме с междуфазовой коммутацией. Од-
нако при этом следует отметить, что коммутационные процессы в АИТ и
АИН отличаются. В АИТ из-за односторонней проводимости тиристоров
в плечах моста осуществляется двухступенчатая, а в АИН одноступенча-
тая коммутация. В схему ПЧ с АИТ входит также узел, состоящий из об-
ратного выпрямителя и ведомого инвертора, однако здесь он выполняет дру-
гую функцию, ограничивая перенапряжения на тиристорах АИТ (этот узел
в силовой схеме рис. 5.16 не показан). Система управления ПЧ с АИТ долж-
на быть обязательно замкнута по скорости (скольжению). В схеме на
рис, 5.16 эта связь осуществляется с помощью датчика скольжения BV,
сигнал с выхода которого р через функциональный преобразователь U задает
ток статора двигателя /у как функцию скольжения. Этот ток сравнивается
с током /д на выходе UZ1, измеряемым датчиком тока UA, и по сигналу
рассогласования осуществляется управление напряжением на выходе УВ че-
рез блок А. Блок управления на схеме не показан.
<3 5.4 Тиристорные преобразователи частоты инверторного типа 173
Процессы, протекающие в ПЧ инверторного типа, зависят прежде всего
от типа АИ и принятого закона коммутации тиристоров, определяющего
интервал проводимости плеч АИ. В АИТ интервал проводимости тиристо-
ров X = л, АИН может выполняться с Л — л. и Л = 2я/3. Основные расчет-
ные соотношения, определяющие выходные параметры ПЧ с АИ, приведены
в табл. 5.8. Здесь приняты следующие обозначения: £72д и U2— соответ-
ственно действующие значения выходного напряжения и его первой гармо-
ники: /Зд и /2 — действующие значения выходного тока и его первой гармо*
Рис. 5.16. Силовая схема ПЧ с АИТ
ники; Un и /п — средние значения напряжения и тока на входе инвертора
(на выходе управляемого выпрямителя); Yi— угол одновременной работы
тиристоров основной и обратной групп в АИН:
4а ~ 5
у2 = л/3 — Yii
а = ехр (— л/3 tg ф);
Gj = exp (— Yi/tg<p);
а2 = exp (— Y2/tg ф);
(5.44)
(5.45)
(5.46)
(5.47)
(5.48)
ср— угол сдвига первых гармоник напряжения и тока нагрузки; Z — сопро-
тивление нагрузки; ku — коэффициент изменения напряжения,
,-----------------------------
ku = а/2 — — (5 cos Y1 + д/з sin буЗ ; (5.49)
/?к и фк — соответственно полное и активное сопротивление двигателя
при коротком замыкании и коэффициент мощности в этом режиме; #] —ак-
тивное сопротивление двигателя для первой гармоники тока; #экв =
==/?> — эквивалентное сопротивление.
174
Крановые тиристорные преобразователи
Разд. 5
Т а б ли ц а 5.8. Расчетные формулы для определения выходных
величин ПЧ с АИТ и АИН
Определяемая величина Расчетные формулы для преобразова- теля частоты с инвертором
напряжения тока
Действующее
значение вы-
ходного на-
пряжения
Действующее
значение пер-
вой гармо-
ники выход-
ного напря-
жения
Действующее
значение вы-
ходного тока
Ui=~kuUn (5.51)
Jv
2,34/Л (14-0,095^/^1)
Действующее
значение пер-
вой гармо-
ники тока
Среднее значе-
ние постоян-
ного тока на
входе инвер-
тора
(5.57)
Jv
(R3 + 0,095/?к)
я
(5.58)
§ 5.4 Тиристорные преобразователи частоты инверторного типа
175
Расчет внешних характеристик ПЧ с АИ может оказаться необходимым
только для систем с АИН, поскольку системы с АИТ, как было сказано, вы-
полняются замкнутыми и характеристики ПЧ задаются схемой управления.
Для ПЧ с АИН внешние характеристики определяются выражением
U2 = kuUniX/[l+k& ₽)].
(5.59)
где р)—нелинейная функция от параметров относительной частоты и
скольжения.
Анализ (5.59) показывает, что внутреннее сопротивление ПЧ с АИН
существенно влияет на выходные характеристики. Поэтому в целях его ком-
пенсации, а также стабилизации выходного напряжения целесообразно в
схему управления вводить обратную отрицательную связь по выходному на-
пряжению.
Учет влияния высших гармонических напряжения и тока в ПЧ с АИ.
Гармонический состав кривых выходного напряжения и токов рассчитыва-
ется известными методами и содержит только не кратные трем гармоники
высших порядков. Напряжение и ток на выходе ПЧ могут быть представ-
лены как сумма первой и высших гармоник. При этом действующие значе-
ния суммы высших гармоник тока и напряжения находятся по выражениям
й>1
(5.60)
(5.61)
Высшие гармоники в кривых выходного напряжения приводят к увели-
чению потерь в двигателе и пульсациям момента. Двигатель для них нахо-
дится в режиме короткого замыкания при скольжении, близком к единице.
Поэтому потери в двигателе могут быть определены по найденным значе-
ниям высших гармоник и параметрам двигателя в режиме короткого замы-
кания. Расчеты показывают, что увеличение потерь в двигателе от высших
гармоник составляет 5—10 %.
Пульсации момента приводят к появлению шагового режима двигателя.
При этом для рассматриваемых ПЧ с АИ и допущении пульсации частоты
вращения двигателя на уровне 0,1 граничная выходная частота ПЧ с АИ
определяется из выражения
(5.62)
где Гм = /(ОномРном/АГном — электромеханическая постоянная; рноч — номи-
нальное значение параметра абсолютного скольжения; он ном — номинальная
синхронная угловая скорость двигателя при
176
Крановые тиристорные преобразователи
Разд 5
В отличие от НПЧ силовые элементы ПЧ с АИ загружены равномерно,
средние и действующие значения токов определяются по выражениям
Лф •— ^р, сре’>
— 7р, д8,
(5.63)
(5.64)
где 7р,ср и /р1Д — среднее и действующее значения расчетного тока нагрузки;
е — относительная продолжительность протекания тока через тиристор.
При выборе тиристоров УВ любого тира П*Ч и тиристоров АИТ е = 0,33;
/р,срв/ш /р,д = /г и токовые нагрузки тиристоров такие же, как в трех-
фазном преобразователе постоянного тока. Для тиристоров и отсекающих
диодов АИН е = 0,33, а 7р,ср == Лт U + cos <р); /р,д~/2. Для диодов обрат-
ного моста и тиристоров ведомого инвертора в —yjn; /р,ср—/ц(1 — cos qp);
Л),д = Уз/П(1 — cos qp).
При выборе класса тиристоров расчетные значения напряжений опреде-
ляются через напряжения выхода с учетом формул табл. 5.8. При этом не-
обходимо учитывать перенапряжения на тиристорах в процессе коммутации.
Выбор тиристоров АИ, особенно АИН, необходимо производить с учетом
высоких требований к их динамическим параметрам: время восстановления
управляющей способности тиристоров, определяющее емкость коммутирую-
щих конденсаторов, должно быть не более 25—50 мкс, а допустимые скоро-
сти нарастания тока и напряжения — соответственно di/dt > 50 А/мкс и
duldt > 500 В/мкс. Выбор элементов ДС-фильтра в ПЧ с АИН осуществля-
ется исходя из трех условий, обеспечения требуемого коэффициента сглажи-
вания выходного напряжения при его регулировании, минимальных пульса-
ций напряжения при колебаниях тока питания и защиты тиристоров от
токов короткого замыкания в случае, если индуктивность фильтра выполняет
также функции токоограничения.
Исходя из первого условия получаем
LC = 1 + sft/(^2m2co2),
(5.65)
где k и tn — кратность основной гармоники выходного напряжения выпря-
мителя по отношению к частоте сети и пульсность схемы выпрямления (для
мостового трехфазного выпрямителя /г = ш = 6); to — угловая частота пи-
тающего напряжения; Sfe = qxklQik — коэффициент сглаживания; q^k и q2k —
коэффициенты пульсации напряжения на входе и выходе фильтра, причем
q'k ОМ2—1
д/1 4- (km)2 tg2 а , а значение q2k следует принимать равным
0,15 — 0,3 при максимальной выходной частоте ПЧ с АИТ; а —угол управ-
ления при минимальном выходном напряжении.
В соответствии со вторым условием
L/C = (3 4-5) • 10 4
(5.66)
Для удовлетворения .третьего условия индуктивность реактора должна
соответствовать (5.8),
§54 Тиристорные преобразователи частоты инверторного типа 177
Сглаживающий реактор в ПЧ с АИТ рассчитывается только из условия
ограничения пульсаций напряжения в цепи постоянного тока по соотноше-
ниям § 5.1.
Технические данные ПЧ с АИ для крановых электроприводов. Серийное
производство ПЧ с АИ для крановых электроприводов еще не освоено. Пре-
дусматривается выпуск ПЧ с АИ на мощности 30 и 63 кВт на основе АИТ
и на мощность 100 кВт на основе АИН. Схемы ПЧ с АИ приведены на
рис. 5.15 и 5.16. Диапазон выходных частот ПЧ с АИТ от 3 до 75 Гц, а ПЧ
с АИН от 3 до 100 Гц. При этом в диапазоне частот до 50 Гц регулирова-
ние скорости производится при постоянстве момента, а далее при постоян-
стве мощности.
Управление ПЧ с АИ осуществляется от командоконтроллера с разде-
лением каналов управления частотой и напряжением системой автоматиче-
ского регулирования, входящей в состав ПЧ с А И. Системы автоматического
регулирования электроприводов ПЧ с АИ приведены в § 9.3.
Конструктивно ПЧ с АИ размещают в шкафах блочной конструкции. Тех-
нические данные ПЧ с АИ приведены в табл. 5.9.
Т а б л и ц а
5Д. Технические данные крановых преобразователей
частоты с автономными инверторами
Тип Преобра- зователя Схема шэе- обра- зова теля Диапазон регулирования выходной частоты, Гц Ток, А Состав комплекта Г абаритные размеры (высота X ширинах глубина), мм — 1 ( Масса, кг
в режиме ГТВ = 40 % макси- мальный
ТПТС100 ПЧ с АИН 3—50 (под нагрузкой) 3-100 (холостой ход) 180 360 Силовой шка^) Шкаф управле- ния Шкаф защиты Реактор 1615X770X365 1615X770X365 1155X770X295 685X675X500 37) 27) 120 55 300 85 170 55
ТПТС63 тптсзо ПЧ е АИТ 3—50 (под нагрузкой) 3—75 (холостой ход) 135 270 Силовой шкаф с блоками управ ления Реактор фильтра 1615X770X365 885X675X500
63 ;i35 Силовой шкаф с блоками у прав- ления Реактор фильтра 1175X770X365 685X675X503
'Примечание. Диапазон регулирования ^напряжения первой гармоники 20-34) В.
178
Энергетика электроприводов и их производительность Разд б
РАЗДЕЛ 6
ЭНЕРГЕТИКА КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
И ИХ ПРОИЗВОДИТЕЛЬНОСТЬ.
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ. ОПТИМИЗАЦИЯ
ПАРАМЕТРОВ ЭЛЕКТРОПРИВОДОВ
КРАНОВЫХ МЕХАНИЗМОВ НА ОСНОВЕ
УЧЕТА ПОТЕРЬ ПРИ РЕГУЛИРОВАНИИ
6.1. ЭНЕРГЕТИКА КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
И ИХ ПРОИЗВОДИТЕЛЬНОСТЬ
Потери энергии в крановых электроприводах. Энергетика крановых элек-
троприводов как систем повторно-кратковременного режима работы харак-
теризуется двумя основными особенностями: 1) необходимостью учета по*
терь пуско-тормозных режимов, составляющих значительную часть в общем
балансе потерь; 2) повышенными по сравнению с электроприводами продол*
жительного режима работы постоянными потерями, определяемыми необхо*
димостью обеспечения высоких динамических моментов. В связи со сказан-
ными суммарные потери энергии в крановом электроприводе Лсум целесооб-
разно разделить на три составляющие: постоянные потери ДПост> переменные
потери, определяемые статической нагрузкой и называемые статическими по-
терями, Дст и переменные потери, обусловленные пуском и торможением
електропривода и называемые динамическими потерями Дд. Таким образом
Динамические потери могут быть найдены непосредственно исходя из по-,
терь, затрачиваемых на пуск и торможение ротора или якоря приводного
двигателя. При этом суммарные переменные потери в обмотках двигателей
асинхронных или постоянного тока как в статике, так и в динамике рассчи-
тываются по потерям в роторе (якоре) через коэффициент приведения Апр
по соотношению
(6.2)
Э1 —• э2^пр 4“ AZ5Э0>
где ДРэ1 и ДРэг — соответственно суммарные электрические потери мощности
в обмотках и потери мощности в роторе или якоре двигателей; ДРэ0 — по-
тери мощности в обмотке статора от тока намагничивания, которые явля-
ются одной из составляющих постоянных потерь. Для асинхронных двига-
телей Лпр определяется по формуле
ь — Г1
«пр —
2—
DK
(6.3)
где и —активное сопротивление статора и приведенное общее внешнее
и внутреннее сопротивление цепи ротора; для короткозамкнутых двигателей
сопротивление равно приведенному сопротивлению обмотки ротора г2;
Zo и DK — ток холостого хода и диаметр круговой диаграммы двигателя.
Энергетика крановых электроприводов
179
Для двигателей постоянного тока в обмотке возбуждения выделяются
только постоянные потери и &пр = 1-
Общая формула для расчета динамических потерь энергии в роторе иля
якоре двигателя имеет вид
г
Л, * общ кон ' нач г Л /с
Д, р — т Qi 2 2 * — ^д^до» (6.4)
где ^«он и Пнач ”~ конечная и начальная частоты вращения двигателя! —*
отношение динамических потерь под нагрузкой к динамическим потерям на
холостом ходу Ддо. Для асинхронных электроприводов
А1Ст ($ -*" $ст)
dst
(6.5)
Уравнение (6.5) в общем случае не имеет аналитического решения и мо-
жет быть рассчитано по механическим характеристикам электропривода в
Рис. 6.1. Зависимости коэффициента дина-
мических потерь для электроприводов при
параметрическом регулировании:
— 1 — — асинхронный двигатель с короткозам-
кнутым ротором;-----------асинхронный дви-
гатель с фазным ротором
А 2
0,Ц
Рис. 6.2. Зависимость коэффи-
циента динамических потерь
для частотно-управляемого
электропривода
функции момента статической нагрузки. Эти зависимости для электроприво-
дов с параметрическим управлением короткозамкнутыми двигателями с раз-
личным числом полюсов обмоток и с фазными двигателями приведены на
рис. 6.1, где Мтах — максимальный момент двигателя.
Для частотно-управляемых электроприводов зависимость (6 5) имеет
аналитическое решение, которое может быть представлено в виде
/Ед == ^пгах (1 + (6.6)
где
^пгах Мтах/Мао1л}
Mmax “ Мст 4 q J? allot
a “ dtjdt — относительное ускорение поля двигателя; g = ///ном — относи-
тельное значение частоты преобразователя; п0 — частота вращения поля дви-
гателя, соответствующая /ноч.
18) Энергетика электроприводов и их производительность Разд 6
Графически выражение (6.6) представлено на рис. 6 2. Для двигателей
постоянного тока (6.4) преобразовывается к виду
лд=улА; (6.7)
здесь Гм —/Общ/2НСМ/(9,55Л1НОМ) — электромеханическая постоянная: Рэкв
эквивалентное активное сопротивление в главной цепи двигателя, определяе-
—
ч,о
V
М
~0,3 Мст/мюы=-0,1
\\\
-0,6 0,8
^5” z
~о,$
-1,2 3 -0, 0
~1 '
0,6
0,15
^Ст/^Н0М~ / 0,^6/
о,4 "^2 / ^я/лном
ш —я* * 1 —
Рнс. 6.3. Зависимость коэффициента динамические потерь для электропри-
вода постоянного тока:
------пуск; — --------торможение
мое схемой электропривода; /иом — номинальный ток двигателя. Коэффи-
циент динамических потерь при этом определяется выражением
Г M2f2 (М, п) dn
д“ J м - мст
(6.8)
где f (Л1, п)— функция, определяющая относительное значение тока двига-
теля ///ном при моменте М и известной схеме подключения двигателя. Вы-
ражение (6.8), как и (6 5), не имеет общего аналитического решения и рас-
считывается по механическим характеристикам электропривода.
Графические зависимости коэффициента для электроприводов постоян-
ного тока с параметрическим регулированием приведены на рис. 6.3. Со-
гласно (6.2) и (6.4) суммарные динамические потери в обмотках двигателей
^4д 1=1 (6.9)
здесь /гПр, д — коэффициент приведения потерь в динамическом режиме ра-
боты привода.
Энергетика крановых электроприводов
181
Для асинхронных короткозамкнутых двигателей коэффициенты приве-
дения потерь в статике и динамике одинаковы и определяются (6.3). Для
асинхронных двигателей с фазным ротором и двигателей постоянного тока
при параметрическом рег>лировании коэффициенты &пр представлены на
рис. 6.4 и определяются эквивалентным значением регулировочного сопро-
тивления, т. е. механическими характеристиками электропривода, являясь
функцией максимального момента и
Мощность переменных потерь в об-
мотках двигателей с учетом коэффи-
циентов приведения потерь определя-
ется следующими соотношениями:
для асинхронных двигателей
Л4 ч м
А п экв, СТ°ЭКВ, ст с .
АРет =------------------- /?пр, ст, (6.10)
Рис. 6 4. Зависимость k„p, sJkaPf Ст
для электроприводов с асинхронны-
ми двигателями с фазным ротором
валентный момент статической нагруз-
ки, определяемый из условия равенства
терь реальной мощности по участкам нагрузочной диаграммы
соответствующей ему мощности по-
с момен-
тами 7ИСТ1 и временем /L; 5ЭКВ> ст — скольжение двигателя на характеристике
статического режима при моменте Мэкв>ст; &Пр, ст— коэффициент приведения
потерь в статическом режиме работы привода, определяется по (6.3) (для
частотно-управляемого двигателя в (6.10) следует подставлять параметр
абсолютного скольжения рЭкв, ст)1
для двигателей постоянного тока
АР ст
НОМ^СТ^ЭКЗ, СТ^ЭКВ, СТ
(6.11)
здесь Рст — сопротивление в цепи якоря двигателя на характеристике ста-
тического режима; f3KB, ст (М; п) — функция, определяющая относительное
значение тока двигателя /ЭКв, ст/Люм при МЭКВ| ст и известной схеме подклю-
чения двигателя.
Мощность постоянных потерь двигателя
АРпост = АРС + АРмех + АРдоб + АРэ0, (6.12)
где АРС, АРмех, АРдоб — соответственно потери в стали машины, механи-
ческие и добавочные; ДРэо — электрические потери на намагничивание дви-
гателя.
Расчетные формулы для определения отдельных составляющих потерь
для асинхронных электроприводов с параметрическим и частотным управле-
нием, а также электроприводов постоянного тока крановых механизмов при-
ведены в табл. 6.1.
Суммарные потери энергии в двигателе за один цикл в соответствии
с (6.1) определяются соотношением
^сум == АРпост^р^ц “Ь АРcTj уст®уст^ц dr ^до^ц ^д&пр, д» (6.13)
182
Энергетика электроприводов и их производительность Разд. 6
Таблица 6.1. Расчетные формулы для
Система электропривода Мощность постоянных потерь
Электроприводы с асинхронными двигателями с фазным ротором и параметрическим регулированием (6.12)
Элетроприводы с асинхронными многоскоростными короткозамкну- (6.12)
тыми двигателями
Электроприводы с частотно-управ-
ляемым односкоростным коротко-
замкнутым двигателем
(6.12), причем
^экв, ст^с, ном ^cS^
9,55 3cJ j ном
(6.12)
Электроприводы постоянного тока
Примечание. В формулах приняты обозначения: «с ном—синхронная частота
£ — относительное значение пустоты питания двигателя; — обмоточная постоянная дви
ные частоты вращения при различных числах пар полюсов обмоток многоскоростного
где ДРСТ находится по (6.10) для асинхронных электроприводов и по (6.11)
для электроприводов постоянного тока; /ц — время цикла; ер и еуст — про-
должительность включения суммарная, расчетная и установившегося движе-
ния; Л/ц — число включений электропривода в цикле.
Энергетические свойства кранового электропривода могут быть харак-*
теризованы эквивалентным КПД т^кв, определяемым как отношение полез*
ной работы перемещения груза к потребляемой электроприводом энергии за
цикл или за определенный промежуток времени, При условии полного ис-
§ 6.1
Энергетика крановых электроприводов
183
определения составляющих потерь
Мощность статических Динамические потери за одно включение
потерь электропривода
(6.10) и (6.3)
(6.9), /?д определяется по рис. 6.1,
&пр, д — по рис. 6.4
(6.10) и (6.3)
где &д>п и ^д, т определяются
по рис. 6.1, &Пр,д -“ по (6.3)
*ЭКВ, ст ==
^экв, стРэкв, ст^с, ном f
пр, ст
(6.6), (6.9)
9,55
(6.11)
(6.7), &д определяется по рис. 6.3
вращения при номинальной частоте питающей сети; kc—коэффициент потерь в стали;
гателя; —номинальная частота питающего напряжения; п п «, п —синхрон-
1 ИОМ. К» 1 V-af V<*r
двигателя.
пользования двигателя 1]экв определяется выражением
р Р
_________ 0 дв. ном________
*^эк EqPдв, ном 4- 71СуМ//ц
(6.14)
где Рдв> ном — номинальная мощность двигателя при номинальной относи-
тельной продолжительности включения во! /4сум — суммарные потери
в электроприводе.
184
Энергетика электроприводов и их производительность Разд. 6
Подставляя в (6.14) зависимости для отдельных составляющих потерь
и при равенстве еР и ео, получаем
Пзкв-1/(А'4-В'/Ув),
(6.15)
где А' = 1/т]экв> б — относительные потери (по отношению к ном) в ста-
тических режимах при номинальной скорости и регулировании, определяемые
эквивалентной нагрузкой двигателя и соотношением между продолжитель-
ностями включения общей ер и при регулировании ePj р; т)Экв, б — КПД при-
вода при числе включений Л/в = 0; B'N„— относительные потери в системе
в пускотормозных режимах; NB— число пусков в час (см. разд. 1). Значе-
ния А’ и В' могут быть рассчитаны по следующим соотношениям:
?еР, р Л
е0 \
(k — mtn)
3600еном ’
(6.16)
где m и q — отношение мощности потерь в электроприводе соответственно
в номинальном установившемся режиме и при регулировании к номинальной
Рис. 6.5. Графики т]экв = /(нв) для раз-
личных электроприводов:
1 — двухскоростной короткозамкнутый двигатель
при 2р — 4/24; 2 — параметрическое регулирова-
ние двигателей с фазным ротором и торможе-
нием противовключением; 3 — трехскоростные ко-
роткозамкнутые двигатели при 2р = 4/8/24; 4 —
параметрическое регулирование двигателей по-
стоянного тока, короткозамкнутых двигателей с
2р = 6 и двигателей с фазным ротором при ди-
намическом торможении; 5 — трехскоростные ко-
роткозамкнутые двигатели при 2р •» 6/12/24; 6 —
с ограниченной зоной частотного управления двух
скоростных короткозамкнутых двигателей; ? —
тиристорный привод постоянного тока. 8 — ча-
стотно-управляемые односкоростные короткозам-
кнутые двигатели
мощности двигателя; k и tn — соответственно эквивалентный коэффициент
потерь в системе при пусках и торможениях и время пуско-тормозных ре-
жимов, приведенные к одному включению.
Эквивалентный КПД зависит от еР1 р при неравенстве потерь на харак-
теристике номинального режима и при регулировании, т. е. при q =/= m.
Значения А' и В' и, следовательно, Т|экв полностью определяются струк-
турой кранового электропривода и применяемыми методами регулирования.
На рис. 6.5 приведены зависимости Т]экв от числа включений Яэкв==/(^в)
при учете только момента инерции двигателя и тормоза (/общ =* 1»2/дв) при
базовом еР}Р==0,05 для основных типов применяемых крановых электро-
приводов.
Увеличение маховых масс системы, так же как и максимальной частоты
вращения двигателя, приводит к более резкому снижению КПД в связи
с пропорциональным ростом динамических потерь. Зависимость яЭкв от сум-
Энергетика крановых электроприводов
185
марного момента инерции механизма и двигателя и максимальной частоты
вращения двигателя выражается формулой
“Пэкв —
_________________^экв, б____________________
И — 'll J / /2
'экв, б ’экв N общ I max
п 1,27 \ 1000
’экв N дв
(6.17)
где т) м — эквивалентный КПД, определяемый по графикам рис. 6.5 при
числе пусков NB. Для асинхронных двигателей птак — синхронная частота
вращения.
Эквивалентный КПД дает количественную оценку энергетических
свойств крановых электроприводов. Как видно из приведенных на рис. 6.5
зависимостей, эквивалентный КПД крановых электроприводов с параметри-
ческим регулированием довольно мал. Так, для наиболее массовых крановых
асинхронных электроприводов с регулированием сопротивления в цепи ро-
тора и торможением противовключением г]ЭКв составляет 60—65 % для ре-
жима 4М и снижается до 45—-55 % для режима 5М. Улучшения энергетиче-
ских свойств таких электроприводов можно достигнуть переходом на фор-
мирование тормозных - режимов методами регулируемого динамического
торможения, что позволяет увеличить т]экв на 10—12 %* Наиболее высокие
энергетические показатели имеют системы с преобразователями энергии и осо-
бенно частотно-управляемые электроприводы с односкоростными коротко-
замкнутыми двигателями. Благодаря оптимальному регулированию в стати-
ческих и динамических режимах и снижению моментов инерции приводного
двигателя такие системы имеют т]экв = 0,9 -ь 0,85 во всех практически ис-
пользуемых режимах.
Производительность крановых механизмов. Расчет времени переходных
режимов. Производительность кранового механизма определяется числом гру-
зовых операций в единицу времени и выражается числом циклов в час
Jcm (1.4)]. Если отдельные участки грузовой траектории известны, то время
установившегося режима на этих участках
= (6.18>
где I — длина участка; v — скорость движения груза на участке. Время пе-
реходного режима определяется исходя из уравнения движения электронри
вода
м - Мст _ 9>55 dt
по выражению
пкон*
Sdn
К - Мст
пнач*
(6.19)
(6.20)
где п* и М* — относительные значения частоты вращения и моментов дви-
гателя, причем для асинхронных двигателей п* — п/пс» для двигателей по-
стоянного тока п. = п/пном; М, = М/Мном; Мст. = М СТ/Л7„ОИ; Ти =
= 7общпиом/(9,55Л'11юм) — электромеханическая постоянная времени.
186
Энергетика электроприводов и их производительность Разд. 6
Рис. 6.6. Зависимости fAo == f (Мст/Л1Ном) для асинхронных электроприводов
с короткозамкнутыми двигателями*.
-------пуск;----------торможение
[С. 6.7. Зависимости /д0 = f(MCr/MHOVl) для электроприводов с асинхрон*
ними двигателями с фазным ротором;
-----— пуск; — — ------торможение
Энергетика крановых электроприводов
187
Выражение (6.20) может быть также представлено в виде
/ — т t
*д 1 м*дО*«
(6.21)
пкон*
где /д0# = — Л/ста) — относительное значение времени переход-
ная*
него режима, определяемое как функция момента статической нагрузки по
механическим характеристикам электропривода.
Рис. 6.8. Зависимости /до — f (Мст/Л< НОм) для электроприводов с двигателями
постоянного тока последовательного возбуждения. М^гх — максимальный
момент при пуске:
•----- г-пуск до номинальной скорости; —пуск до фактической скорости^
„ —.------торможение
На рис. 6.6 — 6.8 представлены графики зависимостей /яо =»
1
= йпЦМ* — ^ст*)> рассчитанные для пуска и торможения крановых электро-
о
приводов переменного и постоянного тока по типовым механическим харак-
теристикам и позволяющие в соответствии с (6.21) найти время переходного
режима.
В регулируемых электроприводах осуществляется формирование пере-
ходных режимов при постоянстве либо максимального пускового и тормоз-
ного моментов, либо динамического момента. Расчет времени переходного
режима при этом значительно упрощается и может быть выполнен по фор-
муле
‘ Гм
^кон* ^нач*
^Д*
где Мтах* Л4СТФ.
(6.22)
188
Энергетика электроприводов и их производительность Разд. 6
Как и в рассмотренных выше случаях, время переходного режима при
постоянстве Мтах является функцией момента статической нагрузки. Зави-
симости /до = f (Мст/Мном) приведены на рис. 6.9. При постоянстве динами-
ческого момента /д не зависит от статического момента и пуско-тормозные
режимы протекают при постоянных ускорениях. Графики рис. 6.6—6.8 опре-
деляют время пуска привода до номинальной частоты вращения. Если пуск
ведется не до номинальной частоты вращения, то время переходного режима
можно рассчитать, учитывая, что при использовании типовых панелей управ-
ления привод достигает частоты вращения соответственно 0,6пном и 0,9пНОм
Рис. 6.9. Зависимости /д0 = /(Л1Ст/Л1Ном) для электроприводов с постоянным
максимальным моментом при пуске (сплошные линии) и торможении
(штриховые линии)
за время, равное 1/2 и 3/4 времени пуска. При расчете времени пуска элек-
троприводов постоянного тока с двигателями последовательного возбужде-
ния по графикам рис. 6.8 следует различать пуск до номинальной скорости
(на рис. 6.8 сплошные линии) и до фактической рабочей скорости, соответ-
ствующей нагрузке, меньшей номинальной (штрихпунктирные линии на
рис. 6.8).
Время переходных режимов оказывает существенное влияние на произ-
водительность крановых механизмов. Его значение непосредственно связано
с допустимыми ускорениями (замедлениями), которые выбираются из тех-
нологических требований и возможностей крана (см. табл. 1.4).
Рост требований к производительности обусловил необходимость увели-
чения ускорений. Однако увеличение ускорений приводит к повышению мощ-
ности двигателя, иначе двигатель недопустимо долго работает с динамиче-
скими нагрузками. Практически время пуска находится в пределах 1—6 с.
Продолжительность пуска, предусмотренная типовыми панелями управления,
составляет 4—5 с. Обеспечение другого времени переходных режимов может
быть выполнено только применением тиристорных регулируемых электропри-
водов.
Расчет производительности кранового механизма по (1.3), (1.4) может
быть выполнен только в некоторых частных случаях, когда точно известны
§ 6.1
Энергетика крановых электроприводов
189
параметры диаграммы работы механизма. В общем случае расчет произво-
дительности выполняется по средней скорости перемещения крюка
С = 3600/(Л/пср + *пауз)> (6.23)
где L — длина пути, проходимого краном за цикл, состоящая из отдельных
участков пути [см. (1.4)]; /ПаУЗ ~ время пауз; Уср —средняя скорость, она
функционально зависит от ряда параметров, основными из которых являются
номинальная или максимальная скорость механизма, плавность регулирова-
ния (число промежуточных скоростей), число включений привода в цикле
и время протекания переходных режимов, продолжительность включения при-
вода при регулировании. При этом число пусков привода до полной скорости
в цикле также зависит от технологических факторов и регулировочных
свойств электропривода: диапазона и плавности регулирования и жесткости
механических характеристик. Таким образом, отношение средней скорости
к номинальной полностью определяет регулировочные свойства привода и
может служить показателем регулировочных свойств.
Расчет значений иср и NB выполняется по эмпирическим формулам, по-
леченным на основании обработки статистических данных работы крановых
электроприводов.
Расчетная формула для средней скорости на участке грузовой
рии имеет вид
траекто*
(6.24)
для числа включений
(6.25)
где &v/vном максимальный относительный перепад скорости между двумя
соседними механическими характеристиками электропривода (показатель ста-
тической плавности регулирования); Li — путь перемещения груза; kTt т —
коэффициент, характеризуемый технологическими особенностями работы ме-
ханизма; р — жесткость доводочной механической характеристики, %; —
длительность переходного режима, приведенная к одному пуску и опреде-
ляемая по формулам, рассмотренным ранее.
На рис. 6.10 представлены графики vcp/vUOM = рассчитанные
в соответствии с приведенной методикой для крановых перегрузочных ме-
ханизмов. Эти кривые наглядно иллюстрируют влияние регулировочных
свойств системы электропривода на практически реализуемые скоростные пара-
метры. Снижение средней скорости и, следовательно, производительности
в малорегулируемых системах связано с увеличением времени переходных
190
Энергетика электроприводов и их производительность Разд. 6
режимов из-за увеличения числа включений. В то же время пропорцио-
нально скорости увеличиваются мощность и момент инерции двигателя.
Вследствие указанного резко повышаются динамические потери в электро-
приводе, поэтому показателем эффективности крановых электроприводов яв-
ляется обеспечение максимума производительности при минимальных затра-
Рис. 6.10. Зависимости исрЛ?Ном =
= f(^ном)•
1 — контакторно-контроллерные системы
параметрического регулирования при тор-
можении противовключением; 2 — систе-
мы с трехскоростными двигателями; 3 —
контакторно-контроллерные системы пара-
метрического регулирования при динами-
ческом торможении; 4 — системы с непол-
ной зоной частотного регулирования; 5 —*
фазоимпульсное регулирование; 6 — тири-
сторные электроприводы постоянного тока
и асинхронные с частотным управлением
Рис. 6.11. Зависимость Рпол
f(PcT, ном).'
1 — контакторно-контроллерные системы
параметрического регулирования при тор-
можении противовключением; 2 — систе-
мы с трехскоростными двигателями; 3 —•
контакторно-контроллерные системы пара-
метрического регулирования при динами-
ческом торможении; 4 — фазовое регули-
рование; 5 — импульсное регулирование;
6 — системы с неполной зоной частотного
управления; 7 — тиристорные электропри-
воды постоянного тока; 8 — частотно-
управляемые электроприводы с односко-
ростными двигателями
тах энергии. Математически такая постановка задачи приводит к определе-
нию максимума функциональной зависимости
^Лэкв----f (уном)-
(6.26)
Умножением обеих частей уравнения (6.26) на значение номинальной стати
ческой нагрузки приводим его к виду
ПОЛ f (Рст)»
(6.27)
где Рпол. Лэкв^срФст, ном — реализуемая мощность; Рст ^homQct, ном ™ уста-
новочная мощность электропривода.
В результате оптимальная по критерию получения максимальной произ-
водительности при минимальных потерях энергии скорость кранового меха-
низма определится по значению установочной мощности электропривода, со-
ответствующей максимуму реализуемой мощности. Рассчитанные таким обра-
зом зависимости РПол = /(Рст) для крановых перегрузочных механизмов
приведены на рись 6.11. Они позволяют произвести сравнение крановых
§6.2 Выбор крановых электродвигателей
электроприводов по критерию эффективности. Они показывают, что увеличе-
ние эффективности использования крановых систем возможно только на осно-
ве улучшения энергетических и регулировочных свойств электроприводов.
6.2. ВЫБОР КРАНОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Исходными данными при выборе электродвигателей крановых механиз-
мов являются: статические и динамические нагрузки, приведенные к валу
двигателя; параметры режима работы, определяемые в соответствии с изло-
женными в разд. 1; время приложения статической и динамических нагру-
зок, а также технологические особенности работы механизмов, определяющие
число грузовых циклов.
В задачу выбора двигателя кранового механизма входят предваритель-
ный выбор двигателя, расчет его на удовлетворение теплового режима,
а также проверка на обеспечение заданных ускорений (обеспечение пуско-
вого режима и запаса сцепления для механизмов передвижения).
Наибольшую сложность представляет расчет теплового режима двига-
теля. Общепринятые методы теплового расчета по эквивалентным парамет-
рам нагрузки (току, моменту, мощности) или средним потерям дают досто-
верные результаты только тогда, когда достаточно точно известна нагрузоч-
ная диаграмма работы электродвигателя. Для крановых электроприводов
в большинстве случаев характерным является неопределенность режима ра-
боты, что при специфических особенностях крановых машин закрытого ис-
полнения с повышенными постоянными потерями и ухудшенными условиями
теплоотдачи приводит к большим погрешностям при традиционных методах
расчета.
Авторами разработан метод выбора крановых двигателей, учитывающий
приведенные выше особенности работы крановых электроприводов. Этот ме-
тод, дополненный традиционными методами выбора по эквивалентным вели-
чинам при заданной диаграмме грузового цикла, рекомендован к примене-
нию при расчетах и выборе кранового электрооборудования.
Определение расчетной мощности. Предварительный выбор электродви-
гателя. Понятие расчетной мощности определяется как мощность, на кото-
рую должен рассчитываться крановый двигатель по условиям обеспечения
пускового режима. При определении расчетной мощности используется вы-
ражение для ускорения механизма, имеющее согласно уравнению (6.20) дви-
жения электропривода вид
___ 9,55Л4д ^ном
**------
•’общ ^ном
в котором динамический момент двигателя при пуске
Л4д = &пУпА1ном> (6.2 Э)
здесь Лп, уп — соответственно коэффициенты использования двигателя по
пусковому моменту и кратность отношения максимального пускового момен-
та к номинальному моменту двигателя. Значения kn и уп для различных си-
стем электроприводов приведены в табл, 6.2,
192
Энергетика электроприводов и их производительность Разд 6
Таблица 6 2. Значения коэффициентов уп и fen
для различных систем электропривода
Система упоявления *п /гп
Релейно-контакторная: 2,5 0,7
с асинхронным двигателем с фазным ро- тором
с асинхронным короткозамкнутым двига- телем 2,3 0,8
с двигателем постоянного тока 2,8 0,65
Пуск двигателей от ТП постоянного или пере- менного тока 2 0,9
Подставляя в (6.29) значение суммарного момента инерции, выражен-
ное через момент инерции поступательно движущихся частей [см. (1.25) и
(1 26)] и используя зависимость между максимальным моментом двигателя
и его номинальной мощностью
м ______Л 9550РНом
Мтах— -----'» (o.oU)
ЯцОМ
а также зависимость между относительным моментом статической нагрузки
и мощностью, затрачиваемой на перемещение поступательно движущихся
частей,
Л4ст/Мном = Рст/^р = пг (G + Qn) ^ном/(Ю3Рр)» (6 3
из (6.28) и (6.29) можно получить следующее выражение для определения
расчетной мощности:
D______1 Г (G + Qn) Рном д'а , ’ _
Р &nVn L Ю3Пмех CTJ
== !(Д+ЛП - о«ом (а'а+т}' (6-32)
/спгпЧмех
не G — масса перемещаемого механизма; Q^ —масса груза с подвеской для
механизмов передвижения и поворота, для механизмов подъема G в фор-
муле отсутствует; а' = /общ/^пост', Люст — момент инерции поступательно
движущихся масс; т = PCT/[(G + Qn) ^ном] — параметр статической нагрузки,
характеризующий условия работы механизмов, усредненные значения кото-
рого приведены в табл. 6.3.
В частном случае для механизмов подъема кранов общего назначения
Д* р == РСт, гь
где Per, п определяется по (1.12).
Для механизмов горизонтального передвижения и поворота (6.32) в боль
шинстве случаев можно преобразовать к виду
0,66 (G Qn) б^ном । Per
Ю’Пмех 1.75 ’
(6.33)
§ 6.2
Выбор крановых электродвигателей
193
Таблица 6.3
Условия работы
Краны, работающие в помещении при уклоне путей
0,003
Краны, работающие на открытом воздухе при уклоне
путей или крене 0,003
Краны, работающие на открытом воздухе при уклоне
путей или крене 0,01
Поворотные краны, работающие на открытом воздухе
при крене до 5°
т, м/с’
0,4
0,55- 0,65
где Цмех — КПД механизма передвижения; Рст— мощность статической на-
грузки установившегося движения, определяемая по одной из формул
(1.13) —(1.19).
В (6.33) учитываются особые условия нагрузки при ветре, крене, укло-
нах путей и других противодействующих факторах. Расчетная мощность
полностью определяется параметрами механизма и требуемыми средними
ускорениями и позволяет предварительно выбрать двигатель исходя из
условия
Рном > (6.34)
где Рном — номинальная мощность двигателя по каталогу при ПВ == 40 %.
Для механизмов подъема Р? = Рст, ном и двигатель можно выбрать не-
посредственно по мощности статической нагрузки.
Производя предварительный выбор двигателя, следует помнить, что
время t = v/a строго ограничено, поскольку в течение этого времени двига-
тель работает с предельной нагрузкой. Практически время пуска электро-
приводов механизмов подъема составляет 1—1,8 с, а механизмов передвиже-
ния или поворота не должно превышать 6 с (для приводов с короткозамкну-
тыми двигателями 3 с).
Проверка выбора двигателя по тепловому режиму при известной нагрузоч-
ной диаграмме. При проверке выбора двигателя по тепловому режиму исход-
ным является уравнение баланса потерь в электрической машине
3600^0еном Р ном Г “ 1 > ЗбООвр ДР пост 4- 3600ер ДР экв, ст 4~ N (6.35)
в котором левая часть представляет допустимые за 1 ч потери в двигателе,
имеющем номинальную мощность Рном при номинальной продолжительности
включения Вном и КПД ?]ном при условиях вентиляции, учитываемых коэффи-
циентом ko\ правая часть представляет потери мощности двигателя, выделяе-
мые в течение 1 ч. Расчет потерь в левой части (6 35) может быть произ-
веден по формулам табл. 6.1, в которых время переходных и установив-
шихся режимов, число включений и значения нагрузок определяются нагру-
зочной диаграммой рабочего цикла. Если известно, что фактическая продол-
7 Зак. 918
194
Энергетика электроприводов и их производительность Разд. 6
жительность включения
то проверка двигателя
жет быть выполнена по
не превышает номинальною, т. е. ер =» \ еНОм,
на нагрев при известной нагрузочной диаграмме мо-
эквивалентному току исходя из условия
ном
(6.36)
в в тех случаях, когда ток двигателя пропорционален вращающемуся мо-
менту или мощности, — по уравнениям эквивалентного момента
Чом > м9КВ=<6-37)
или мощности
Люм > ^экв = VE Z (6-38)
При возможности непосредственной оценки потерь можно применить ме-
тод средних потерь
Л^ном > Д^ср = X Е ч- (6.39)
В (6.37) — (6.39) Pt, — соответственно ток, момент, мощность,
потери мощности в двигателе на t-м участке грузовой траектории в течение
времени tL.
Универсальный метод выбора двигателей с использованием эквивалент-
ного КПД. Неопределенность режима работы крановых механизмов в боль-
шинстве случаев не позволяет использовать изложенные методы расчета кра-
новых двигателей на нагрев. В связи с этим авторами была разработана
универсальная методика выбора мощности крановых двигателей, учитываю-
щая как параметры режима работы механизмов, так и энергетические свой-
ства конкретных систем регулирования, которая применима для всех типов
крановых механизмов и всех используемых в настоящее время типов элек-
троприводов. Параметры режимов работы определяют среднестатистические
нагрузочные диаграммы работы электроприводов и характеризуются норми-
рованными значениями следующих величин: фактической продолжительностью
включения электропривода еР; продолжительностью включения при регулиро-
вании ер, Р; эквивалентным моментом статической нагрузки МЭкв, ст и эквива-
лентным числом включений двигателя за 1 ч. Под эквивалентным числом пус-
ков понимают число пусков двигателя до номинальной частоты вращения,
эквивалентное по нагреву реальному числу пусков NB под нагрузкой Л4ЭКВ) с?
с реальным моментом инерции электропривода. Эквивалентный момент ста-
тической нагрузки связан с номинальным коэффициентом k3KB:
Мэкв, ст ” ^экв^ном, ст- (6.40)
Нормализованные параметры режимов работы в соответствии с данными
ГОСТ 25835-83 и правилами Госгортехнадзора приведены в табл. 6.4.
Исходной для расчета является формула (6.35) баланса потерь в двига-
теле. При этом потери в двигателе непосредственно определяются через эк-
вивалентный КПД т]ЭКв в принятой системе регулирования, значения кото-
рого находятся по графикам рис. 6.5 и по (6,17),
§ 6.2
Выбор крановых электродвигателей
195
Т а б л и ц а 6.4. Параметры режимов работы
Группы электро- приводов Механизмы подъема при ^общ/(1,2^дв) передвижения и поворота при Лзбщ/О’^дв)
ЕР ^экв ер,р k3 в 1 2/ ’г/ДВ
1М, 2М 0,15 0,63 0,15 1 до 60
ЗМ 0,25 0,63 0,15 1 60—100
4М 0,4 0,63—0,75 0,1 1 100-150
5М 0,4 0,75—0,8 0,075 1 150—300
6М 0,6 0,8 0,05 1,15-1,25 400-690
Механизмы передвижения и поворота при ^оби1/(1,2Лтв)>5
Группы
электро- приводов Ер ъ экс ер,р k3 N —/об1Д В 1,2/
’ дв
IM, 2М 0,15 0,63 0,15 1 До 800
ЗМ 0,25 0,63 0,15 1 800—1000
4М 0,4 0,63—0,75 0,1 1 1000—1500
5М 0,4 0,75—0,8 0,075 1 1500—3000
6М 0,6 0,8 0,05 1,15-1,25 4000-6000
Кроме того, должны быть учтены следующие факторы:
1) влияние на нагрев обмоток двигателя отдельных составляющих по-
терь при изменениях соотношений между ними и условий вентиляции при
ер
2) степень влияния динамических потерь на нагрев двигателя, так как
в зависимости от системы регулирования часть потерь, определяющих т)экй,
выделяется не в машине, а в других элементах привода;
3) зависимость постоянных потерь от питающего напряжения в систе-
мах со статическими преобразователями;
4) увеличение потерь на регулировочных характеристиках в системах
с параметрическим регулированием.
Условия влияния первого из этих факторов в общем случае нельзя вы-
разить аналитически вследствие того, что нагрев обмоток двигателя зависит
не только от потерь, определяемых режимом работы, но и от конструктив-
ных особенностей двигателей различных исполнений с различными условиями
вентиляции. Поэтому учет указанных условий производится посредством экс-
периментально полученных зависимостей коэффициента kOt определяющего
изменение допустимой мощности потерь в функции фактической продолжи-
тельности включения еР. Зависимости k0 — f(sp) для крановых двигателей
различных исполнений приведены на рис. 6.12. Влияние динамических потерь
на нагрев двигателя учитывается коэффициентом kA, который определяется
по отношению пусковой мощности к номинальной; &д=^_4 для систем пара-
196
Энергетика электроприводов и их производительность Разд. 6
метрического регулирования короткозамкнутых двигателей, и kA ~ 1,25 для
электроприводов других типов. Зави- 'мость постоянных потерь от напряже-
ния на выводах двигателя учитывается коэффициентом
^ном
^НОМ (1 + ер/еном)
(6.41)
где Оф и }ф — фактические значения напряжения и частоты на выводах дви-
гателя; для систем постоянного тока ^ф//ном === 1.
Увеличение потерь на регулировочных характеристиках систем парамет-
рического управления учитывается с помощью коэффициента
kp — 1 — 1,2 (еп, р -- ер, р, б)»
(6.42)
где еР1 р, о — базовая продолжительность включения при регулировании, при-
нятая при расчете зависимости цэкв от числа включений на рис. 6.5. В ре-
зультате общая расчетная формула для выбора мощности двигателя по
тепловому режиму имеет следующий вид;
^ном, г
&3&ЭКВ л/®р/®ном б
Яэкв, б (Лэкв, б Лэкв)
СТ, НОм
(6.43)
В (6.43) все коэффициенты определены в соответствии с вышеизложен-
ным, а &з — коэффициент, учитывающий запас мощности, закладываемый при
Рис. 6.12. Зависимости feo = f (ер)
для крановых двигателей:
J — невентилируемые асинхронные; 2
постоянного тока; 3 и 4 — вентилируе-
мые соответственно тихоходные и быст-
роходные с фазным ротором; 5 — венти-
лируемые быстроходные короткозамкну-
тые
проектировании электропривода, ис-
ходя из требований к его надежно-
сти; значения приведены в табл. 6.4.
Для нормализованных режимов ра-
боты коэффициенты в (6.43), стоя-
щие перед РСт, ном, могут быть точно
подсчитаны и объединены в один об-
щий коэффициент £т, зависящий от
режима работы и выбранной системы
электропривода. Значения этого ко-
эффициента приведены в табл. 6.5
и могут быть использованы для
предварительного выбора двигателя
по условиям нагрева исходя из выра-
жения
Рном, ст, номА-г- (6.44)
Таким образом, расчет выполняется в два этапа: на первом этапе пред-
варительно выбирается двигатель по большей из мощностей, определяемых
формулой (6.32) и другими для расчетной мощности или (6.44) по тепловому
режиму для принятой системы электропривода и известного режима работы;
на втором этапе выбранный двигатель проверяется по (6.43) на обеспечение
теплового режима для конкретных параметров режима работы. Если двига-
тель не удовлетворяет условию (6.43), то следует принять двигатель боль-
шей мощности и повторно проверить правильность его выбора, Выбранный
Таблица 6.5. Значения k? для выбора различных систем электропривода
Система электропривода ^экв, б ka Подъем при /общ/(1-2/д)<’'5. Передвижение и поворот при 7общ/(1-2/дв)>5 для режимов
передвиженш при Лэбщ/О'^дв) 3 и поворот С5 для режимов
1М—зм 4М 5М 6М ЗМ 4М 5М 6М
Асинхронный электропривод:
двухскоростной при 2р = 4/24 0,83 4 0,7 - — —— —— —— — -
односкоростной при 2р == 6 0,81 4 1,3 1 0,65 0,3 0,2 1 1
с фазным ротором при тормо- жении противовключением 0,76 1,25 1,4 1,2 0,95 0,75 0,75 0,65 0,35 0,2
с фазным ротором при динами- ческом торможении 0,81 1,25 1,45 1,3 1,1 0,9 0,9 0,85 0,5 0,3
двухскоростной при 2р = 4/6 с неполной зоной частотного уп- равления 0,9 1,25 1,4 1,15 1 0,7 0,55 0,2 —
односкоростной в системе час- тотного управления 0,94 1,25 1,45 1,3 1,15 1,05 1,15 1,1 0,85 0,7
Тиристорный электропривод по- стоянного тока 0,94 1.25 2 1,3 1,15 0,85 1,4 1 0,75 0,5
Электропривод постоянного то- ка с параметрическим регули- рованием 0,81 1,25 2 ! 1,25 1,1 ! 0,8 ! 1 1,25 i । 0,85 1 1 0,5 0,3
Выбор крановых электродвигателей
сг>
ы>
198
Энергетика электроприводов и их производительность Разд 6
«таким образом двигатель удовлетворяет и условиям пуска, поскольку мощ-
ность двигателя не меньше расчетной.
Факторы, ограничивающие предельные нагрузки двигателей. При выборе
двигателей должны учитываться факторы, ограничивающие их предельные
нагрузки. Это связано с тем, что кратковременные перегрузки, незначительно
сказываясь на эквивалентной нагрузке, в то же время резко повышают тем-
пературу обмоток. Причиной указанного является то, что, с одной стороны,
при нагрузках, близких к максимальным, потери возрастают в степени, боль-
шей квадратичной, а с другой — ухудшается теплоотдача от обмотки к стали
сердечника при выделении большого количества тепла. Так, при номинальной
нагрузке температура статора и ротора асинхронных машин повышается со
скоростью 0,2°/с, что соответствует колебаниям температуры примерно 30 °C
Ь течение стандартного 10-минутного испытательного цикла. При нагрузке же,
равной 0,8 максимальной, скорость повышения температуры увеличивается
е 30 раз. В результате возможен недопустимый нагрев обмоток в пусковых
режимах при больших моментах инерции механизма. Учитывая сказанное,
следует ограничивать предельные нагрузки на уровне 1,7 номинальной для
асинхронных двигателей с фазным ротором и 2 номинальных для двига-
телей постоянного тока (при еНом == 0,4) при максимальном пусковом мо-
менте не более 2,5Л1ном для асинхронных двигателей и ЗЛ4ЫОМ— для двигате-
лей постоянного тока. Вопрос о предельных нагрузках короткозамкнутых
двигателей рассматривается в § 6.3.
Проверка выбора электродвигателей приводов механизмов передвижения
и поворота по обеспечению запаса по сцеплению и максимально допустимому
ускорению. Электропривод механизмов передвижения необходимо проверить
по запасу сцепления при пуске и торможении для наиболее неблагоприятных
условий работы. При этом должны удовлетворяться следующие условия со-
ответственно для пуска и торможения:
&сц, п = "Р (И° + > 1,1 4- 1,2; (6.45)
Г ст max т м
йсц,, « £.?Р ~Л»*») > 1,1 -ь 1,2, (6.46)
~ д гст min,
где Гпр — усилие давления на приводные колеса; Цо — коэффициент сцепле-
ния ходового колеса с рельсом; f0 min *" минимальный коэффициент трения
качения, приведенный к диаметру колеса; FCt max и ^ст min “ максимальное
и минимальное усилия сопротивления движению крана; FK==(G + Qn) a/g —
динамическое усилие.
Условия сцепления определяют верхний предел ускорений. Выражения
(6.45) и (6.46) можно представить в виде
ЛЛ ЛЛ 1 9’81 + Qn) fa /А 47\
- Л4СТ тах- ЛпЛ4р < 2. J Оэ^— kw> (6.47)
где DK — диаметр приводных колес; f — общий приведенный к диаметру ко-
леса коэффициент трения; а — отношение числа приводных колес к общему
числу колес; * и т)мед — передаточное число и КПД механизма,
§ 6.2 Выбор крановых электродвигателей 199
Используя соотношение
£)к/i == 60vHom/ (ялном) (6.48)
и переходя к мощностям, можно записать следующее выражение, определяю-*
щее условия сцепления:
9,81аф (G -р Qn) ^нрм
Ю3ЛпЛмех
(6.49)
где (р = f/бсц — коэффициент сцепления, который может быть принят рав-
ным 0,2 при работе крана в помещении и 0,12 — на открытом воздухе (ко-
леса по мокрым рельсам). Откуда, используя формулу (6.32) для расчетной
мощности, можно записать выражение для максимального ускорения
&тах — 9,81
/гпфа
а'
— т.
(6.50)
Для реальных средних значений коэффициентов, входящих в выражение
'(6.50), максимальные значения средних ускорений, м/с2, должны быть не
больше:
для помещений
^тах “ L4a — 0,09;
(6.51)
для открытого воздуха
a max = 0,85а — 0,2.
(6.52)
Минимальное ускорение определяется максимально возможным временем
пуска
atnin ^номЛ/nax*
(6.53)
Заданное значение ускорения всегда находится в пределах, определяе-
мых выражениями (6.50) — (6.53). Поэтому проверка выполнения условий
сцепления заключается в выяснении обеспечения условий (6.50) — (6.53) для
реального ускорения, реализуемого выбранным двигателем. Это ускорение
находится из (6.32) при замене Рр на РНОм
103 [^пУпЛиех^ном ‘.-Рст*) мех] ь, 1
((? + Qn) ^ном а
Ю3^пУп'Пмех/3црм
(6.54)
Примеры расчета выбора двигателей.
Пример 6.1. Выбрать двигатель механизма подъема крана, имеющего сле-
дующие параметры: грузоподъемность 16 т, номинальная скорость подъема
0,35 м/с, масса подвески 0,5 т, диаметр барабана с канатом 0,52 м, переда-
точное число 44, КПД механизма 0,84, число включений в час 400. Режим
работы электропривода 5М. Используется электропривод с фазным двига-
телем при динамическом торможении самовозбуждением.
Расчетная мощность в соответствии с (1.12)
Рр = Рст, ном — 9,81Сп^ном/(Ю311мех) =
₽ 9,81 (16 000 + 500)/(103 • 0,84) « 67,8 кВт.
200
Энергетика электроприводов и их производительность Разд. 6
Частота вращения двигателя
п i= 60/оном/(лР) = 60 • 44 • 0,35/(3,14 • 0,52) = 565 об/мин.
Исходя из режима работы и принятой системы электропривода по
табл. 6,5, находим значение коэффициента kr — 1,1. Тогда согласно (6.44)
Рном, т = ^ст, ном/& г =“ 67,8/1,1 = 61,5 кВт.
Так как Рном, т < предварительный выбор двигателя следует осу-
ществлять по Рр. Выбираем двигатель 4MTH280L10 мощностью 75 кВт при
ПВ = 40%, лпом = 575 об/мин, имеющий момент инерции 6,25 кг • м2. Опре-
деляем суммарный момент инерции по (1.26)
г юг । 91(5п^2 , о 9Ы6500-0,352 2
Аэбщ “— 1,2/дв 4 “* 1,2 * 6,25 -| р-т(-2 — 8,05 кг • м »
Эквивалентный КПД определяем по (6.17) и графикам рис. 6.5
'Пэкв —
0,81
0,81—0,73 8,05
0,73 1,2-6,25
= 0,77.
Проверяем двигатель по тепловому режиму по (6.43)
0,81
1,2 • 0,8 У0,6/0,4 ______________________етч-оао в
ном’т 0,86 • 1 0,81 — 1,25 (0,81 — 0,77) ’ ’ К Т'
В;тесь значения коэффициентов &3 = 1,2; ер = 0,6; ^Экв = Д8 приняты согласно
табл. 6.4; Лр = 1; т)ЭКв, б “ 0,81 согласно табл. 6.5; т]ЭКв = 0,73 при NB = 400
согласно рис. 6.5; &о = О,86 согласно рис. 6.12. В данном случае Рнт > РНом,
т. е. двигатель не проходит по тепловому режиму. Выбираем двигатель сле-
дующего габарита 4MTH355S10, имеющий мощность 100 кВт в режиме
ПВ==40%; «ном = 583 об/мин; /дв = 10,25 кг • м2. При этом суммарный мо-
мент инерции равен 12,3 кг • м2, эквивалентный КПД Лэкв==0,78,
_ 1,2 • 0,8 У0,6/0,4 _______0,81 _
ном’т 0,86 • 1 0,81 — 1,25 (0,81—0,78) ’ У/ КВт*
Поскольку Рном > Рвом, т» окончательно выбираем двигатель 4MTH355S10.
Пример 6.2. Выбрать двигатель механизма передвижения моста крана
грузоподъемностью 10 т, имеющего следующие параметры: масса крана
13,2 т, скорость крана 1,25 м/с, статическая мощность передвижения 3,6 кВт,
ускорение 0,25 м/с2, диаметр ведущего колеса 0,4 м, передаточное число ре-
дуктора 16, КПД механизма 0,9, отношение числа ведущих колес к общему
числу колес а = 0,5, число включений в час 180. Кран работает в помеще-
нии. Режим работы электропривода 5М. Используется электропривод с фаз-
ным двигателем и торможением противовключением. Расчетная мощность
по (6.32)
п 1 Г (13 200 4-10 000) • 1,25 • 1,15 • 0,25 , 1
-1^07 1 ---------* 103.0,9----------------+ 3’61 = 7’6 Вт-
Особенности выбора короткозамкнутых двигателей
201
Частота вращения двигателя
Л 60 • 16 • 1,25/(3,14 * 0,4) == 955 об/мин.
По табл. 6.5 для данных условий равно 0,35, и РНом, т ~ 3Х6/О,35 =
= 10,3 кВт.
Так как Рном, т > Рр» то предварительный выбор двигателя следует осу-
ществлять по Рном,т. Выбираем, два двигателя 4MTF132L6 мощностью 5 кВт
в режиме ПВ = 40 %, пном=930 об/мин, момент инерции двигателя 0,0675 кг • м2
Суммарный момент инерции, приведенный к валу одного двигателя,
, 91 (13 200 4- 10 000). 1,252 . Ао, 2
•?сбш — 1,2 • 0,0675 -] >. 9302 — 1,98э кг • м .
Эквивалентный КПД по (6.17) и графикам рис. 6.5
0,76
0 76 — 0,68 1,985
0,68 1,2-0,0675
= 0,322.
Проверяем двигатель по тепловому режиму:
1 • 0,75 V0,4/0,4 • 1 0,76 3,6
1 • 0,94 0,76 — 1,25 (0,76 — 0,322) 2
Здесь значения коэффициентов согласно табл. 6.4 равны &э=1; ер==0,4;
&экв = 0,75; kp = 0,94 по (6.42); kQ — 1 по рис. 6.12; 'ПЭКв = 0,72 при AfB = 180
согласно рис. 6.5.
Двигатель удовлетворяет тепловому режиму. Проверяем двигатель по
условиям сцепления. С этой целью определяем обеспечиваемое им ускорение
из (6 54):
а =— Ю3 [^пУпЛмехРном —‘ Рст, ном]
(G 4“ Q) ^ном®
__ 4040,7.2,5.0,9.7,6-3,6-0,9] 2
(13 200 4- Ю000) 1,25- 1,15 ’ М/С ’
Это ускорение меньше допустимого, равного согласно (6.51)
втах == 1,4 • 0,5 — 0,09 = 0,61 м/с2.
Таким образом, двигатель удовлетворяет также условиям сцепления и
может быть использован для рассматриваемого электропривода.
6.3. ОСОБЕННОСТИ ВЫБОРА
КОРОТКОЗАМКНУТЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
В СИСТЕМАХ ПАРАМЕТРИЧЕСКОГО РЕГУЛИРОВАНИЯ
Общие вопросы. В электроприводах с короткозамкнутыми двигателями
все потери, связанные с регулированием и пуско-тормозными режимами, вы-
деляются непосредственно в машине. В результате мощность короткозамкну-
того двигателя при параметрическом регулировании в значительно большей
202 Энергетика электроприводов и их производительность Разд. 6
степени зависит от режима работы и диапазона регулирования, чем это имеет
место при применении двигателей других типов. Зависимость допустимого
момента короткозамкнутого двигателя от диапазона регулирования легко
установить из равенства потерь при регулировании допустимым потерям
Мдоп$р V ер, р/еР -^hom^homJ
(6.55)
допустимый момент при скольжении sP, соответствующий продолжительности
включения при регулировании еР, р
Л1дОП = Мном у/ , (6.56)
«С • вр1 Р
где пр — частота вращения на регулировочной характеристике. На рис. 6.13
построены зависимости ЛГдоп/Мном === f (и/пс) для двигателя с 51Юм —0,07 и
вр = 0,4 при 8PjP = 0,05; 0,1; 0,15 и 0,25 рассчитанные по (6.56). Из приведен-
ных характеристик видно, что даже при малом значении еР1 р увеличение
Рис, 6.13. Зависимости допустимого
момента асинхронного короткозамк-
нутого двигателя от частоты вра-
щения:
1 — естественная характеристика; 2—5 —
При епп = 0,0о; 0,1; 0,15; 0,25
гателя с фазным ротором, т. е. ие
зовании для крановых электропривс
димо применять специальные меры
диапазона регулирования связано с
резким снижением момента машины,
и регулирование выше 1 ; 2 практи-
чески невозможно.
Другой особенностью работы ко-
роткозамкнутых двигателей является
необходимость ограничения времени
пускового режима из-за больших
пусковых токов, приводящих к бы-
строму росту температуры обмоток.
Поскольку скорость нарастания тем-
пературы пропорциональна квадрату
плотности тока, то допустимое вре-
мя пуска короткозамкнутого двига-
теля в 2—2,5 раза меньше, чем дви-
должно превышать 3 с. При исполь-
дов двигателей единой серии необхо-
для ограничения плотности тока. Все
указанные особенности энергетики рассматриваемых электроприводов приво-
дят, с одной стороны, к ограничению области их применения, а с другой—•
к тому, что при одинаковых параметрах механизма установленная мощность
короткозамкнутых двигателей значительно выше мощности двигателей с фаз-
ным ротором. Поэтому для электроприводов механизмов передвижения с ко-
роткозамкнутыми двигателями значительно сложнее решается вопрос обеспе-
чения запаса сцепления. В то же время эксплуатационные свойства коротко-
замкнутых двигателей и их массогабаритные параметры значительно лучше,
чем двигателей других типов. Следовательно, использование короткозамкну-
тых двигателей целесообразно во всех случаях, когда это возможно по усло-
виям работы механизма. Особенно эффективно их применение для кранов
облегченной конструкции, а для крановых механизмов взрывозащищенного
исполнения их применение оказывается вообще единственно возможным,
Особенности выбора короткозамкнутых двигателей
203
Общие методы выбора крановых двигателей, рассмотренные в § 6.2,
полностью справедливы и для короткозамкнутых двигателей. Однако ука-
занные выше специфические свойства рассматриваемых электроприводов опре-
деля ют ряд особенностей выбора крановых короткозамкнутых двигателей,
которые и рассматриваются далее.
Особенности определения расчетной мощности и тепловой проверки ко*
роткозамкнутых двигателей. По условиям тепловой нагрузки время пуска
короткозамкнутых двигателей не должно превышать 3 с. С учетом этого
(6.32) для выбора расчетной мощности короткозамкнутых двигателей пре-
образуется к виду
(G Н~ Qn) ^ном
Ю^пУпЛмех
(.°/рном
к 3
(6.57)
+ m
Для механизмов передвижения взрывобезопасных кранов, как правило,
m ж 0; тогда (6.57) имеет вид
' : ^ном 8фсс (G ~4~ Qn) ^НОМ
Р Ю3г)мех
(6.58)
После предварительного выбора двигателя по (6.57) или (6.58) может
быть осуществлена тепловая проверка по (6.43). Однако, учитывая, что для
рассматриваемых электроприводов фактическая продолжительность включе-
ния не выше номинальной еР е0, более простым методом является тепло-
вая проверка выбранного двигателя по потерям в роторе путем определения
допустимого числа включений. Допустимое число включений
Л^доп — (Лдоп, р Ат, р)Мд, р»
(6.59)
где Лдоп, р> Ат, р и ДД1 р — потери в роторе двигателя допустимые, стати-
ческие и динамические.
Используя (6.59) и выражения, приведенные в § 6.1 для потерь в дви-
гателе, можно привести расчетную формулу, определяющую допустимое число
включений, к следующему виду:
для односкоростных двигателей
. _ (^ИОМ^НОМеНОМ^0 ^ЭКВ, СТ^ЭКВ, СТ6р) * 0*068 * 1Q6
ДОП ' ’ у „ \ о-, *
[1 + a(“^r)j/o6l«n^
(6.60)
где о — коэффициент, характеризующий условия торможения, о —0 — без
торможения двигателем, о= 1,65 — при торможении противовключением при
начальной частоте вращения 0,25пНоМ; о = 0,85 — при динамическом тормо-
жении;
для двухскоростных крановых двигателей при генераторном торможении
с промежуточной синхронной скоростью тихоходной обмотки п1с
(Мном$нОМеНОМ^0 Мэкв, ст^экв, стер) ’ 0,068 • 10б
1,3 (ftic/rtc)2 4“ 2,5 [(/Ze — Ас)/А]2
(6.61)
204
Энергетика электроприводов и их производительность Разд. 6
Найденное при этом допустимое число пусков должно быть не менее
фактического, определяемого по (6.25) или заданного в соответствии с ре-
жимом работы.
Для односкоростных двигателей механизмов передвижения, используя
вышеприведенные формулы и учитывая, что о/ < 1,15, a m < 0,4, можно
установить однозначную зависимость между допустимым числом включений
и параметрами механизма — скоростью ином и ускорением а. Эта зависимость
имеет следующий вид:
38 (6,6д + ОД)
(1 + о) Ином
kB • Vl — 0,06m/(6,6a + 0,6),
(6.62)
где kB — коэффициент, учитывающий конструктивные особенности двигателей,
связанные с ухудшением условий вентиляции и кратностью токов в пуско-
тормозных режимах, ks == 1 для двигателей крановой серии и &в = 0,75 для
электродвигателей серии 4АС.
На рис. 6.14 и 6.15 приведены кривые, рассчитанные по (6.62) для дви-
гателей соответственно крановой серии и двигателей 4АС. Минимальное
число включений даже для наиболее легкого режима работы должно быть
Рис. 6.14. Зависимости предельного
числа включений крановых коротко-
замкнутых двигателей от скорости
механизма
Рис. 6.15. Зависимости предельного
числа включений короткозамкнутых
двигателей единой серии от скорости
механизма
не ниже 40—60 включений в час. В соответствии с этим из приведенных ри-
сунков следует, что максимально возможная скорость, при которой еще мо-
гут быть применены электроприводы с короткозамкнутыми двигателями при
параметрическом управлении, не превышает 1,25 м/с для машин крановой
серии и 1 м/с для двигателей 4АС. Реализация необходимых скоростей меха-
низма связана со значением среднего ускорения, которое должно возрастать
с увеличением скорости. Однако рост ускорения в механизмах передвижения
приводит к снижению запаса по сцеплению.
Особенности выбора короткозамкнутых двигателей механизмов передви-
жения по условию обеспечения сцепления. В § 6.2 были определены предель-
ные ускорения механизмов передвижения по условиям обеспечения сцепле-
ния при номинальной грузоподъемности. Однако при неблагоприятном рас-
положении груза на кране условия сцепления изменяются, что приводит
§ 6.3
Особенности выбора короткозамкнутых двигателей
205
к необходимости ограничения ускорения и, следовательно, начального мо-
мента при пуске двигателя. В электроприводах с фазными двигателями при
типовой диаграмме пуска никаких сложностей, связанных с обеспечением
условий сцепления, не возникает при ускорениях механизма, находящихся
в пределах допустимого (6.51) и (6.52). Для короткозамкнутых двигателей
ограничение пускового момента нежелательно, если это связано с усложне-
нием аппаратуры управления, поэтому правильный выбор двигателя с уче-
том условий сцепления является особо важным. Условие обеспечения сцеп-
ления в начальный момент пуска может быть записано в виде
9,81 фасоном. > Ц
Лмех ^пУп^мех
* (G + Qti) ином (<Х О + ш),
(6.63)
где ц = Л1нач? п/^ном — относительное значение начального пускового мо-
мента.
Принимая knyn = 1,75, по данным табл. 6.2 и m = 0,12 для помещений
и m = 0,35 на открытом воздухе можно записать следующие выражения для
Рис. 6.16. Зависимости v=f(G/(G-j-
+ Qn)) для механизмов передвиже-
ния кранов с короткозамкнутыми
двигателями, работающими в поме-
щении
Рис. 6.17. Зависимости u = f(G/(G~[-
+ Qn)) для механизмов передвиже-
ния кранов с короткозамкнутыми
двигателями, работающими на откры-
том воздухе
максимальных ускорений механизма передвижения при применении коротко-
замкнутых двигателей:
для помещений
а<3~7ГГо--°-09-> (6.64)
И и т Чи
на открытом воздухе
сс G
а < 1,75— п------------------------0,21. (6.65)
Н О + Qn
Учитывая, что максимальное время пуска короткозамкнутых двигателей
составит не более 3 с, по (6.64) и (6.65) на рис. 6.16 и 6.17 построены
зависимости vHOm = За = f (G/(G -f- Qn)) при различных значениях р, и сс.
Из этих зависимостей следует, что скорости и ускорения механизмов с ко-
роткозамкнутыми двигателями без ограничения пускового момента значи-
тельно ниже, чем при применении двигателей с фазным ротором, а для ме-
ханизмов, работающих на открытом воздухе, применение этих двигателей
206
Энергетика электроприводов и их производительность Разд. 6
может оказаться невозможным. Поэтому в ряде случаев приходится вводить
ограничение пускового момента, осуществляемое с помощью регуляторов на-
пряжения, пусковых резисторов или установкой двигателя с номинальным
напряжением, большим напряжения сети.
Особенности применения для крановых электроприводов короткозамкну*
тых двигателей единой серии. Двигатели единой серии по сравнению с кра-
новыми имеют большие кратности пусковых токов и значительно большие
плотности токов как в номинальном, так, тем более, в пуско-тормозных
режимах. Это приводит, во-первых, к увеличению динамических потере
а во-вторых, к росту скорости нарастания температуры в процессе пуска.
Учет изменения составляющей динамических потерь при выборе двигателя
по тепловому режиму может быть произведен посредством увеличения коэф-
фициента Ьд в (6.46) пропорционально отношению кратностей пусковых то-
ков двигателей общего назначения и крановых. При этом для одного и
того же режима работы мощность двигателя единой серии значительно пре-
вышает мощность кранового двигателя.
Рост плотности тока в пуско-тормозных режимах приводит к тому, что
температура обмоток двигателя достигает недопустимых значений уже в про-
цессе одного-двух включений. Время пускового режима значительно меньше
постоянной времени нагрева двигателя, и для превышения температуры об-
мотки статора справедливо выражение
т = /%т/200, (6,66)
где Лг— время пуско-тормозного режима; У — плотность тока, А/мм2.
Для примера укажем, что плотность пускового тока двигателей единой
серии повышенного скольжения 4АС мощностью от 1 до 10 кВт составляет
40—54 А/мм2 при допустимом превышении температуры 80 °C. При этом со-
гласно (6.66) время /пт составляет от 10 до 5,5 с, что в 3—5 раз меньше,
чем для крановых машин. В соответствии с (6.66) допустимая плотность
тока не должна превышать 36—30 А/мм2 соответственно для электроприво-
дов с отношением моментов инерции 7обш/(1,2Удв) 2,5 (подъем и тележки
кранов) и Уобщ/(1,2УДв) > 10 (передвижение кранов). Снижение плотности
пускового тока связано со снижением пускового момента согласно выра-
жению
., . . *^П, НОМ
= Л4П1 ном "7 '» (6.67)
J п, доп
где Льном и Лт, доп — пусковые номинальная и допустимая плотности токов.
Снижение плотности пускового тока до допустимых значений может
быть обеспечено при снижении пускового момента по условиям сцепления.
Из изложенного следует, что к применению двигателей общего назначения
на крановых механизмах следует подходить с большой осторожностью. При-
менение двигателей с кратностью пусковых токов больше шести вообще недо-
пустимо. Практически на крановых механизмах находят применение двига-
тели с повышенным скольжением 4АС при числе включений не более
40—50 в час*
§ 6.3
Особенности выбора короткозамкнутых двигателей
207
Особенности выбора двигателей для взрывоопасных кранов. На таких
кранах можно устанавливать только электрооборудование в специальном
взрывозащищенном исполнении. В этом исполнении промышленностью вы-
пускаются только короткозамкнутые двигатели. При выборе взрывозащи-
щенных двигателей, учитывая высокую степень ответственности, необходимо
исключить любую возможность перегрузки. Поэтому необходимо стремиться
к более точному определению эквивалентных нагрузок, увеличивая их в со-
мнительных случаях. С учетом указан-
ного замечания осуществляются пред-
варительный выбор двигателя по (6.58)
и расчет допустимого числа включе-
ний по (6.60) при тепловой проверке
выбранного двигателя. Допустимое чис-
ло включений взрывозащищенных дви-
гателей Л^доп, ном регламентировано для
определенного коэффициента инерции
k} ном — /общ/(1,2/дв). Поэтому найден-
ное по (6.60) допустимое число включе-
ний должно быть не меньше регламен-
тированного с учетом реальных
Рис. 6.18. Зависимости и =»
«== f(G/(G 4- Qn)) для механизмов
передвижения взрывозащищенных
кранов
меха-
значений коэффициента инерции
низма, т. е. должно выполняться условие
NДОП Nдоп, ном
ном
(6.68)
При проверке двигателей механизмов передвижения необходимо обеспе-
чить повышенный запас сцепления при коэффициенте сцепления 1,5. В элек-
троприводах взрывозащищенного исполнения устройства для регулирования
момента отсутствуют, и условия, определяющие предельные скорости меха-
низма, в соответствии с (6.63) представляются в виде:
для помещений
v < 3,76а VT ------0,32; (6.69)
G -f- Qn
для наружных установок
v < 2,3а 7, в-т;--0,8. (6.70)
G + Qn
Из этих выражений следует, что для работы вне помещений имеются
значительные ограничения применения такого электропривода. На рис. 6.18
приведены графические зависимости v f(G/(G + Qn)), определяющие со-
гласно (6.69) и (6.70) допустимые скорости механизмов, обеспечиваемые не-
регулируемыми взрывозащищенными электроприводами с короткозамкнутыми
двигателями.
Скорости механизмов передвижения взрывозащищенных кранов, как сле-
дует из представленных графиков, значительно меньше, чем у кранов общего
назначения. Для обеспечения условий сцепления эти краны имеют повышен-
ное число приводных колес. Из методов ограничения момента для них наибо-
208
Энергетика электроприводов и их производительность Разд. 6
лее часто применяют установку двигателей с паспортным напряжением»
большим напряжения сети.
Пример 6.3. Выбрать двигатель механизма передвижения тележки крана
грузоподъемностью 10 т, имеющего следующие параметры: масса тележки
2,5 т, скорость тележки 0,67 м/с, статическая мощность 0,8 кВт, диаметр
ведущего колеса 0,25 м, передаточное число 18,5, КПД механизма 0,9, число
включений в час 50. Режим работы электропривода ЗМ. Используется элек-
тропривод с параметрическим управлением короткозамкнутым двигателем.
Расчетная мощность по (6 57)
(10 000+ 2 500)-0,67 ( 1,15-0,67 0,8-103
103 • 2,3 - 0,8 - 0,9 \ 3 + 12 500-0,67-0,9
Частота вращения двигателя
60 - 18,5 - 0,67
3,14-0,25
= 947 об/мин.
Предварительный выбор двигателя производим по Рр без расчета РНоч,т
согласно (6.44), так как неизвестно отношение /<?б1ц/(1ЛАдв). Выбираем дви-
гатель 4MTKF112L6, 2,2 кВт, ПВ — 40 %, /гном 880 об/мин, имеющий мо-
мент инерции 0,0275 кг*м2.
Суммарный момент инерции
г ю 0097- - 91 (10 000 4-2 500) • 0,672 ,
/обгц •—’ 1>2 • 0,027а 4“ — 0,6 кг • м .
Допустимое число включений по (6.60)
(24-0,12-0,4.1 — 8,2-0,06-0,4)-0,068-106
Ыдоп =----Г--------z 700" \2 1-------------------= 52’1 цикл/4-
[1 4- !,65 (“Tow") J • 0,6 - 1 000 - 1,15
При этом
Мной == 9550.2,2/880 = 24 Н • м;
Мс = 9550 - 0,9/947 = 8,2 Н • м;
5ном = 0,12: 5ЭКВ, ст ~ 0,С6; &0 = 1; при торможении противовключением при-
нимаем ганач — 700 об/мин.
Двигатель удовлетворяет тепловому режиму. Проводим проверку по
сцеплению. Определяем фактическое значение ускорения по (6.54)
103 [0,8 - 2,3 - 0,9 - 2,2 — 0,8 - 0,9]
[10 000 4-2500]-0,61 - 1,15
= 0,3035 м/с2.
Всходя из условий (6 50) и (6.53) максимальное ускорение при использова-
нии короткозамкнутого двигателя должно находиться в пределах
0,67 / ^9 81 °’8 *°’2’°’5 0,8-103
3 <а< ’* 1,15 (12500+ 2500).0,67 '
или 0,223 < 0,3035 < 0,6, т. е. условия сцепления в номинальном режиме
выдержаны.
§ 6.4 Выбор параметров крановых электроприводов 209
Условия обеспечения сцепления в начальный момент определяются вы-
ражением (6.64)
0,5
М
2,5
10 + 2,5
— 0,09.
В соответствии с этим условием определяем относительное значение пус-
кового момента
р = 3 • 2,5 • 0,5/[ 12,5 (0,3035 + 0,09)] == 0,762.
Пример 6.4. Длля условий примера 6.3 выбрать двигатель серии 4АС.
По найденной в примере 6.3 расчетной мощности выбираем двигатель
4AC100L6 мощностью 2,6 кВт, ПВ = 40 °/о, 920 об/мин, имеющий момент
инерции 0,056 кг-м2. Допустимое число включений по (6.62)
38 (6,6 - 0,3035 + 0,6)
(1 4- 1,67) *0,67 * °
А / °’06 -S’
V 1 6,6 - 0,3035 + 0,6 — 41,5 вкл/4-
откуда видно, что двигатель 4AC100L6 обеспечивает меньшее число включе-
ний, чем двигатель 4MTKF112L6, хотя мощность его выше. Для использова-
ния двигателя заданное число включений необходимо ограничить до 40 в час.
Плотность пускового тока двигателя 4AC100L6 равна 40 А/мм2. Учитывая
высокую кратность отношения /Общ/( 1,2/дв), следует ограничить пусковую
плотность тока до 30 А/мм2. При этом пусковой момент снизится в (30/40)2 =
= 0,56 раза, т. е. пусковой момент должен быть снижен в большей степени,
чем по условиям начального сцепления.
6.4. ВЫБОР ПАРАМЕТРОВ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
НА ОСНОВЕ УЧЕТА ИХ ЭНЕРГЕТИЧЕСКИХ
И РЕГУЛИРОВОЧНЫХ СВОЙСТВ
Общие сведения. Энергетические и регулировочные свойства крановых
электроприводов играют существенную роль при расчете параметров крано-
вых механизмов, как это было показано в § 6.1 и при расчете параметров
самих электроприводов. Первостепенное значение при этом имеет соотноше-
ние между потерями в статических и динамических режимах работы крано-
вого электропривода. Чем хуже энергетические и регулировочные показатели
системы регулирования, напряженнее режим работы и больше моменты инер-
ции, тем значительней часть в общем балансе потерь, приходящаяся на долю
динамических потерь. В результате снижается реализуемая мощность кра-
нового двигателя, а в ряде случаев для электроприводов, работающих в тя-
желых условиях эксплуатации режимов выше 5М, применение простых си-
стем, обладающих низкими энергетическими и регулировочными свойствами,
становится или невозможным, или нецелесообразным.
Здесь рассматриваются вопросы, связанные с определением параметров
крановых электроприводов, зависящих от их энергетических и регулировоч-
ных свойств. К ним относятся реализуемая мощность, номинальная и макси-
210
Энергетика электроприводов и их производительность Разд. 6
мальная частота вращения исполнительного двигателя, расчет предельно воз-
можных мощностей электроприводов с короткозамкнутыми электродвига-
телями.
Полезно реализуемая мощность. Выбор номинальной и максимальной ча-
стот вращения крановых двигателей. Преобразованием уравнения (6.35) для
баланса потерь в крановом двигателе можно получить следующее выраже-
ние для реализуемой мощности:
(6.71)
где b и с — коэффициенты, определяемые энергетическими свойствами элек-
тропривода; РГ — габаритная мощность двигателя.
На рис. 6.19 построены зависимости Рр/^Ном = f [7общ^в/(1,2/дВ)] для
различных крановых электроприводов, которые наглядно иллюстрируют
Рис. 6.19. Зависимости Рр/Рг = /[Л^в7общ/(1,27дВ)] для различных электро-
приводов:
1 — с короткозамкнутыми двигателями при 2р = 4/8/24; 2 — с короткозамкнутыми двига-
телями при 2р = 6/12/24; 3 — с фазными двигателями при динамическом торможении;
4 — с двигателями постоянного тока; 5 — с короткозамкнутыми частотно-управляемыми
двигателями
влияние энергетических показателей электропривода на реализуемую мощ-
ность двигателя. Графики также показывают, что возможности применения
короткозамкнутых двигателей при параметрическом регулировании крановых
механизмов ограничены. Оптимальное значение номинальной частоты враще-
ния можно найти, исследуя на максимум зависимость (6.71). Наличие мак-
симума следует из того, что, с одной стороны, при увеличении частоты вра-
щения растет мощность двигателя, а с другой — растут динамические потери.
На рис. 6.20 приведены рассчитанные указанным способом зависимости
уОПтв «оптМбаз “f [#в7общ/(1,27дв)1 для различных типов крановых электро-
приводов при Пбаз = ЮОО об/мин. Как видно из рисунка, vOnT зависит от
свойств системы регулирования, напряженности режима работы и момента
инерции системы. Для механизмов тяжелого режима работы при больших
§ 6.4 Выбор параметров крановых элекчроприводов 211
моментах инерции частота вращения двигателя составляет 600—1000 об/мин.
И, наоборот, для механизмов легкого режима целесообразно применение
двигателей с номинальной частотой вращения 1500 об/мин, Асинхронные дви-
гатели, выпускаемые отечественной промышленностью, имеют синхронные
частоты вращения 600, 750 и 1000 об/мин. Номинальные частоты вращения
двигателей постоянного тока при мощности свыше 30 кВт также не превы-
шают 1000 об/мин. Частоту вращения 1500 об/мин имеют только отдельные
типы асинхронных короткозамкнутых двигателей мощностью до 30 кВт, в том
Рис. 6.21. Зависимости DB
t“—1 f (пном) при различных чис-
лах включении
Рис. 6.20 Зависимости VonT — /[Л/ В/ общ/
(1,2/дВ)1:
1 — частотно-управляемые электроприводы; 2 —
электроприводы с фазными двигателями и дви-
гателями постоянного тока; 3 — электроприводы
С полюсно-переключаемыми короткозамкнутыми
двигателями
числе двухскоростные двигатели с 2р = 4/24 и маломощные двигатели
постоянного тока. Отсутствие быстроходных машин объясняется недостаточ-
ной эффективностью применяемых в традиционных системах методов регу-
лирования и торможения. Внедрение новых систем регулирования открывает
перспективы перехода на быстроходные машины для целого ряда крановых
механизмов. Задача определения оптимальных значений максимальных частот
вращения двигателей крановых электроприводов и, следовательно, диапазона
регулирования скоростей механизмов в верхней зоне решается методами ва-
риационного исчисления. Критерием оптимизации при этом является получе-
ние максимальной производительности механизма при заданной мощности
электродвигателя и известных параметрах режима работы. Полученнные в
результате такого подхода графические зависимости диапазона регулирования
в верхней зоне £>в = /(Пном) приведены на рис, 6.21. Из рисунка видно, что
с утяжелением режима работы эффективность двухзонного регулирования
снижается, и для электроприводов напряженного режима целесообразно при-
менение однозонного регулирования.
212
Расчет и выбор резисторов
Разд. 1F
РАЗДЕЛ 7
РАСЧЕТ И ВЫБОР ПУСКО-ТОРМОЗНЫХ
И РЕГУЛИРОВОЧНЫХ РЕЗИСТОРОВ
ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
7.1. РАСЧЕТ ПУСКОВЫХ, ТОРМОЗНЫХ
И РЕГУЛИРОВОЧНЫХ РЕЗИСТОРОВ В ГЛАВНЫХ ЦЕПЯХ
Пуско-тормозные и регулировочные резисторы в крановых электропри-
водах используются при параметрических методах регулирования. Получение
механических характеристик, обеспечивающих заданные показатели регули-
рования и требуемые пуско-тормозные диаграммы переходных режимов, до-
Рис. 7.1. Универсальные механические характеристики двигателей последова-
тельного возбуждения с сопротивлениями в цепи якоря
стигается при этом введением активных сопротивлений в цепи обмоток дви-
гателей. Реактивные сопротивления в крановых электроприводах не нашли
практического применения. При расчете и выборе резисторов для главных
цепей электроприводов одновременно должны решаться две задачи:
1) обеспечение необходимых механических характеристик, реализующих
требуемый уровень регулирования и ускорения;
2) обеспечение соответствия теплового режима резисторов режиму ра-
боты двигателя.
§ 7.1 Расчет пусковых, тормозных и регулировочных резисторов
213
В данном параграфе рассматривается первая из указанных задач. Рас-
чет резисторов по тепловому режиму рассматривается в § 7.2. Приводимые
методы расчета в первую очередь необходимы при проектировании новых
электроприводов. Однако часто необходимо выбрать типовой комплект элек-
трооборудования. Расчет ступеней резисторов при этом значительно упро-
щается и выполняется по таблицам разбивки сопротивлений, рекомендуемой
заводами-изготовителями серий-
ного электрооборудования приме-
нительно к типовым схемам пане-
лей управления в соответствии с
режимами работы электроприво-
да, Эти вопросы также будут
рассмотрены далее.
Расчет пускорегулировочных
сопротивлений электроприводов с
двигателями постоянного тока.
В крановых электроприводах по-
стоянного тока с параметриче-
ским регулированием в основном
применяются двигатели последо-
вательного возбуждения, сопро-
тивления при этом включаются
последовательно с обмотками дви-
гателей или параллельно по по-
тенциометрическим схемам. Во
всех этих схемах сопротивления
наиболее просто рассчитываются
при помощи семейства универ-
сальных характеристик, приве-
денных на рис. 7.1—7.4. На этих
характеристиках значения сопро-
Рис. 7.2. Универсальные механические
характеристики двигателей последова-
тельного возбуждения в режиме дина-
мического торможения с самовозбуж-
дением
тивлений приводятся в долях номинального сопротивления двигателя /?НОм
в принятом режиме работы
— ^номДном»
(7.1)
где t7HOM — напряжение питания двигателя; 1ЯОК — номинальный ток двига-
теля в принятом режиме работы или расчетный ток двигателя [см. (7.28)].
При расчете пусковых сопротивлений используют характеристики рис. 7.1,
при этом строят необходимую диаграмму пуска двигателя исходя из отно-
сительных значений максимального момента и момента переключений, числа
ступеней пуска и момента статической нагрузки. На рис. 7.1 это показано
штриховыми линиями. Сопротивления, соответствующие пусковым характери-
стикам, равны
R г *^?НОМ ГДВ» (7.2)
где г* — сопротивление цепи якоря, определяемое по универсальным харак-
теристикам; /дв — сопротивление обмоток двигателя.
214
Расчет и выбор резисторов
Разд. II
Расчет сопротивлений противовключения на каждой из ступеней тормо-
жени я производится по формуле
^?пр == 4" Едв)Цпр -ГДВ» (7.3)
где £дВ — ЭДС двигателя, при которой производится переключение; 7пр —
ток двигателя при противовключении.
При расчете общего сопротивления противовключения 7ПР в (7.3) прини*
мается равным допустимому току двигателя при максимально возможной
Рис. 7.3. Универсальные механические характеристики двигателей последо*
вательного возбуждения в схеме шунтирования якоря и обмотки возбуждения
частоте вращения птах в двигательном режиме, предшествующем режиму
противовключения. Соответствующая этому режиму £дв равна
£дв = IIном — 7допгцВ. (7.4)
Расчет сопротивлений двигателя в режиме динамического торможения
производят по универсальным характеристикам, приведенным на рис. 7.2.
При этом, так же как и для режима противовключения, определяют допу*
стимое значение тока 7доп при частоте вращения Птах> предшествующей тор*
можению. Затем для тока /доп по естественной характеристике находят до*
пустимый момент и по универсальным характеристикам и выражению г =
== гх/?ном — относительные и абсолютные значения сопротивлений.
Расчет регулировочных сопротивлений выполняют непосредственно по
универсальным характеристикам, приведенным на рис. 7.3 и 7.4.
Расчет пусковых и регулировочных сопротивлений в цепи ротора асин*
хронных двигателей. Сопротивления в цепи ротора асинхронных двигателей
включаются по симметричным и несимметричным схемам. Симметричное
включение сопротивлений применяется в системах с панелями управления,
а несимметричное — с кулачковыми контроллерами для уменьшения числа
используемых при переключениях контактов. При расчете пусковых сопро-
тивлений, включенных по симметричной схеме, предварительно для заданного
§ 7.1 Расчет пусковых, тормозных и регулировочных резисторов
215
режима работы строят диаграмму пускового режима (рис. 7.5). Условия
пуска характеризуются максимальным Л12 и минимальным Л4] моментами
переключений, определяемыми по заданным ускорениям. В зависимости от
условий пуска выбирают одно из двух значений указанных моментов: момент
переключений выбирают при необходимости снижения ускорений; при фор-
сированном пуске, наоборот, следует задаваться значением пускового мо-
мента. Предельным случаем форсированного пуска является М2 = Мкр. Рас-
Рис. 7.4. Универсальные механиче-
ские характеристики двигателей по-
следовательного возбуждения в схе-
ме шунтирования обмотки возбуж-
дения
Рис. 7.5. Пусковая диаграмма асин-
хронного двигателя с фазным ро-
тором
чет выполняется в абсолютных или относительных величинах, при этом но-
минальное сопротивление двигателя с фазным ротором
^ном = £р/(Уз 7р, ном)> (7.5)
где £₽ и /Р, ном — линейное значение ЭДС заторможенного ротора и номи-
нальный ток ротора. С учетом того, что при одинаковом моменте двигателя
скольжения на искусственной и естественной характеристиках соответственно
при сопротивлениях R2 и г2 связаны соотношением
«и = «е 4я • (7.6)
отношение скольжений, соответствующих моментам Л11 и М2 на каждой сту-
пени пуска, является постоянным и равным Л,
или
П /----
(7.7)
(7.8)
где sa и Si — скольжения на характеристике установившегося движения
с сопротивлением га, соответствующие моментам и Л12; п — число пуско-
вых ступеней,
216
Расчет и выбор резисторов
Разд. 7
В практических расчетах при выборе стандартного электрооборудования
число ступеней обычно известно из условий работы механизма или конструк-
иии панели управления. При найденном Л сопротивления пусковых ступеней
pdBHbl
...» Rn = rakn, (7.9)
где га — сопротивление невыключаемой ступени; га = r2t если невыключае-
мая ступень отсутствует.
При определении к расчет проводят по (7.7) или (7.8) в зависимости
от выбираемого момента. Общее пусковое сопротивление определяется при
заданном моменте переключений Мi
/?п = (гаМа)п'("+1); (7.10)
при заданном максимальном моменте М2
Яп = го/$1. (7.11)
С достаточной для практических расчетов точностью из допущения пря-
молинейности пусковых характеристик можно принять, что
Тогда при заданном числе ступеней п и моменте Мх можно найти
п
Х= Л ----------г|-7Т7--, (7.12)
V Sa ном^г/^ном
а при форсированном пуске
я+1
л - А/ --------j^-TTj--, (7.13)
V Sa ном^Ъ/Д^ном
Где Sa ном скольжение при номинальном моменте на характеристике с вы-
веденными пусковыми сопротивлениями.
Если заданными являются моменты и М2, то число пусковых ступе-
ней сопротивлений
__I 1/($а hom^i/^hom)
n“lg---------------------• <714>
Невыключаемое сопротивление предусматривается в тех случаях, когда
необходимо уменьшить число ступеней пуска, а также для снижения жест-
кости механических характеристик в многодвигательных электроприводах
для равномерного разделения нагрузок. Следует отметить, что введение со-
противления га при заданном числе ступеней сближает моменты М2 и Mt
и делает пуск более плавным, однако наличие невыключаемой ступени уве-
личивает потери энергии и снижает скорость установившегося движения при-
водного механизма.
Аналогично пусковым рассчитывают и сопротивления ступеней противо-
включения. Если осуществляется переход с двигательного режима работы
§ 7.1 Расчет пусковых, тормозных и регулировочных резисторов
217
в тормозной и задана точка Л1ПР и 5цР на характеристике противовключения*
то сопротивление, обеспечивающее эту характеристику,
— ^а5пр/$а* (7-15)
Обычно для крановых механизмов сопротивление противовключения рас-
считывают из условия ограничения момента значением 2Л1Ном при переходе
в тормозной режим. В этом случае характеристике противовключения соот-
Рис. 7.6. Универсальные механические характеристики асинхронных дари-
телей с введенными сопротивлениями в цепь статора
ветствует сопротивление /?пр = А’ном- Иногда в крановых приводах подъема
требуется увеличить скорость спуска за счет введения добавочного сопро-
тивления при работе двигателя в режиме генераторного торможения на сверх-
синхронной скорости. Значение указанного сопротивления при этом можно
найти по формуле
R = ra
п — пс
Пс Па
(7.16)
здесь Пс, п и па — соответственно синхронная, заданная сверхсинхронная час-
тоты вращения и частота вращения на характеристике с невыключаемой
ступенью.
При найденных сопротивлениях механические характеристики электро-
привода легко могут быть рассчитаны с помощью универсальных характери-
стик, приведенных на рис. 7.6. и построенных в координатах Л//Л4кр ==/($/$кр)
с параметром q = 2 —sKp по уточненной формуле Клосса. При этом кри->
218
Расчет и выбор резисторов
Разд. 71
тическое скольжение на искусственной и естественной характеристиках свя-
заны между собой соотношением
5кр, и 5кр, e-JT-* (7.17)
При расчете несимметричных сопротивлений в фазах ротора используется
выражение, устанавливающее зависимость между указанными несимметрич-
ными сопротивлениями в фазах Ra, Rt>t Rc и эквивалентным симметричным
сопротивлением
•^экв — (RaRb + RbRc + RcRa)/(Ra 4“ Rb 4“ Rc)-
(7.18)
При этом сначала рассчитывают эквивалентные симметричные сопротив-
ления, как было показано выше, а затем определяют сопротивления отдель-
ных фаз исходя из найденного по пусковой диаграмме значения X = М2/М^
Из трех сопротивлений фаз среднее принимается равным эквивалентному,
а меньшее и большее соответственно в X раз меньше и больше среднего.
Указанное соотношение выполняется на каждом положении контроллера,
причем меньшее сопротивление равно симметричному предыдущему, а боль-
шее — симметричному последующему.
При применении несимметричных схем следует избегать большой несим-
метрии, приводящей к повышенным потерям энергии и большому провалу
момента на механических характеристиках.
Расчет добавочных сопротивлений в цепи статора асинхронных коротко-
замкнутых двигателей. Для цепей статора сопротивления также могут быть
включены по симметричным и несимметричным схемам. Включение сопротив-
лений в цепь статора обычно применяют для обеспечения требуемых пуско-
вых режимов. Для снижения пускового тока в i раз по сравнению с током
в естественной схеме добавочное сопротивление определяется выражением
гдоб = V(2к/1)2 - хк - ГЮ (7-19)
где zK, Гк и хк — полное, активное и индуктивное сопротивления двигателя
в режиме короткого замыкания.
При снижении в р раз пускового момента расчет сопротивления произ-
водят по выражению
Гдоб Д/^к/р Gr (7.20)
Для серийных крановых электроприводов принята типовая разбивка со-
противлений в долях номинального сопротивления статора
^ном
— £^c/(V8 /ном)»
где Лом — номинальный ток статора.
На рис. 7.7 приведены характеристики электроприводов с асинхронными
короткозамкнутыми двигателями при типовой разбивке сопротивлений:
л/нс = f WMn, ном)» где Мп, ном — номинальный пусковой момент двигателя.
§7.1 Расчет пусковых, тормозных и регулировочных резисторов
219
При однофазном включении добавочное сопротивление, соответствующее сни-
жению пускового тока в i раз, определяют из формулы
Ат, и ___ /____________________9_____________________
^п, е ” V 4 (Гдоб/^к)2 + 12 (Гдоб/^к) COS фк + 9 ’
(7.21)
а при снижении момента в р раз — выражением
гдоб 3 Г 1 — 2ц , Л I( 1 — 2,и V 9 , /'mm
=~2 Hr-cos <рк+л/ (-2Г")cos +—1’ (7-22)
где cos (рк — коэффициент мощности двигателя в режиме короткого замы-
кания.
По (7.21) и (7.22) на рис. 7.8 построены зависимости гДОб/гк = f (р) и
i=s:f(p,) при различных cos срк. Эти кривые позволяют определить пусковые
Рис. 7.7. Механические характери-
стики асинхронных короткозамкну-
тых двигателей с типовой разбивкой
сопротивлений в цепи статора
Рис. 7.8. Зависимости относительных
сопротивлений и пускового тока от
пускового момента при включении
сопротивлений в одну фазу статора
короткозамкнутого двигателя
сопротивления и токи в фазе статора с добавочным сопротивлением. Следует
отметить, что мощность резисторов в схеме однофазного включения в
1,5 раза меньше, чем в схемах симметричного трехфазного включения, в тоже
время потери в двигателе в 3 раза больше.
Расчет сопротивления динамического торможения асинхронных двигате-
лей с фазным ротором. В крановых электроприводах режим динамического
торможения используется по схеме с независимым возбуждением и по схеме
с динамическим торможением самовозбуждением (рис. 7.9). Расчет сопро-
тивлений динамического торможения в обоих случаях проще всего произво-
дить по семейству универсальных механических характеристик. На рис. 7.10
и 7.11 приведены универсальные характеристики крановых двигателей соот-
ветственно в режиме динамического торможения с отдельным источником
питания и в режиме динамического торможения самовозбуждением1 Харак*
220
Расчет и выбор резисторов
Разд. 1
Рис. 7.9. Схемы динамического торможения:
а — с питанием от отдельного источника; б — в режиме самовозбуждения
D 0,5 1,0 1,5 г,0 M/Mq
20
JjO
SO
Рис. 7.10. Универсальные механические характеристики крановых двигателей
с фазным ротором в режиме динамического торможения с отдельным источи
ником питания.
-при /п//0==з.
при /п//0=2,5; -0-0------при /п^/0=2; -Х-Х---------при
§71 Расчет пусковых, тормозных и регулировочных резисторов
221
теристики рис. 7.10 построены в координатах s/sg = [(M/Mg) с параметри-
ческой зависимостью от относительного тока возбуждения /п/70 (/п — посто-
янный ток питания статора двигателя, /0 — ток намагничивания). Характе-
ристики рис. 7.11 построены в тех же координатах, но с параметрической
Рис. 7.11. Универсальные механические характеристики крановых двигателей
с фазным ротором в режиме динамического торможения с самовозбуждением:
-------при ------при /гт=Д,6, —о-о при /г.г=1,4; -X —X при /?т = 1,3
зависимостью от коэффициента возбуждаемости kc двигателя. При этом
Г2 .
5б — ~ »
*0 ном
Л*б ^п, ном^2*^1
L ___ &экв к ь
кс-----г кткп, с>
^сх
(7.23)
где х0 ном ” индуктивное сопротивление контура намагничивания двигателя
в номинальном режиме; k3<в — коэффициент приведения постоянного тока
возЗуждения к эквивалентному, для схемы рис. 7.9, б Лэкв —0,816; #сх — ко-
эффициент «схемы выпрямления, для трехфазной мостовой схемы &сх —0,816;
kT — коэффициент трансформации; kn, с — коэффициент, определяемый схемой
подключения выпрямительного моста к гп, с- При потенциометрической схеме
подключения, приведенной на рис. 7.9,6, с = 'п, с/(^п, с + п), причем
Г1—сопротивление фазы статора, гп, с— внешнее сопротивление роторной
цепи, параллельно которой подключен выпрямительный мост (последня i сту-
При расчете сопротивлений по универсальным характеристикам выби-
рается наиболее благоприятная диаграмма торможения с необходимым чис-
лом ступеней при заданном моменте статической нагрузки. При расчете со-
222
Расчет и выбор резисторов
Разд. 7
противлений динамического торможения необходимо иметь в виду их влия-
ние на форму механических характеристик, от которой существенно зависят
время и путь торможения. Особенно это влияние проявляется при примене-
нии динамического торможения с независимым возбуждением. Для таких
систем на рис. 7.12 приведены графические зависимости времени t и пути S
Рис. 7.12. Зависимость времени и
пути торможения от сопротивления
и момента статической нагрузки в
режиме динамического торможения
торможения в функции сопротивле-
ния ступени динамического тормо-
жения и относительного момента
статической нагрузки при номиналь-
ной начальной скорости. Согласно
рис. 7.12 наиболее благоприятными
по этим параметрам являются ха-
рактеристики с /?доб — (0,2 4-0,4) X
X ^ном(10Мст/Л1б—1), причем мень-
ший предел соответствует меньшему
времени, а больший — меньшему тор-
мозному пути.
Учитывая указанное, при по-
строении схем динамического тормо-
жения с независимым возбуждением
необходимо иметь минимум хотя бы
две характеристики: для торможе-
ния под полной нагрузкой и на холостом ходу. Первой соответствует
Ядов = (1,8 4 1,6)2?ном, а второй — 2?ДОб = (0,3 4-0,5)/?ном; при применении ди-
намического торможения с самовозбуждением с учетом жесткости харак-
теристик число ступеней определяется только ограничением максимального
момента в переходном режиме. Обычно применяются три-четыре ступени.
7.2. ВЫБОР РЕЗИСТОРОВ ПО ТЕПЛОВОМУ РЕЖИМУ
Общая методика выбора резисторов по тепловому режиму. Выбор ре-
зисторов по тепловому режиму состоит в определении общего количества
ящиков резисторов по расчетному току и продолжительности включения
каждой ступени и в составлении набора резисторов каждой ступени, исходя
из разбивки сопротивлений и токовой нагрузки по техническим данным эле-
ментов. Технические данные отдельных элементов и ящиков резисторов, вы-
пускаемых промышленностью для крановых электроприводов, приведены
В § 7.3.
Токовая нагрузка ступеней определяется при расчете механических ха-
рактеристик. При этом расчетное значение тока на регулировочных характе-
ристиках принимается равным наибольшему установившемуся при любых
возможных интервалах изменения статической нагрузки, а в переходных ре-
жимах его можно определить из условия линейного изменения тока во вре-
мени от значения 1кач до 1Ков по формуле
ст, р
(7.24)
§ 7.2 Выбор резисторов по тепловому режиму 223
Относительная продолжительность включения ступени складывается из
продолжительностей включения при регулировании еР и в пуско-тормозных
режимах епт; еР составляет от 0,05 до 0,15 и в зависимости от режима ра-
боты электропривода приводится в табл. 6.4; епт находится по выражению
®пт — (^П + М Л73600,
(7.25)
где и tf — соответственно время одного пуска и торможения, рассчитывае-
мые по формулам разд. 6; W — число пусков и торможений.
При выборе блоков резисторов определяется суммарная мощность всех
ступеней, приведенная к режиму ПВ « 100 %, Робщ, кВт, и число блоков —
соответственно по формулам
1 V I2 Р р •
общ Ю3 Z-f СТ^СТ СТ’
U =» Робщ/Рящ»
(7.26)
(7,27)
где Лт и Рст — значения токов и сопротивлений ступеней; ест — относитель-
ная продолжительность работы данной ступени резистора; РЯщ — допустимая
мощность одного блока (ящика) в длительном режиме.
Выбор по токовой нагрузке элементов, составляющих ступени резисто-
ров, производится по допустимому току элементов с учетом разрешаемой
перегрузки в повторно-кратковременном режиме. Рассчитанные таким обра-
зом резисторы должны быть проверены на обеспечение кратковременной ра-
боты под максимальной нагрузкой. Для электроприводов механизмов подъ-
ема резисторы должны выдерживать ток, соответствующий максимальному
моменту статической нагрузки в течение 60 с. Для электроприводов меха-
низмов передвижения резисторы должны выдерживать ток, превышающий
в 1,3 раза соответствующий расчетной мощности при выборе двигателей
этих механизмов из условия обеспечения требуемого ускорения (см. разд. 6).
Резисторы должны выдерживать при этом пять пусков подряд длительностью
6 с. При расчете резисторов может оказаться, что фактические значения
ступеней резисторов будут отличаться от расчетных. Максимальные допусти-
мые отклонения фактических значений от расчетных приведены в табл. 7.1.
Таблица 7.1. Допустимые отклонения сопротивлений резисторов
от расчетных значений
Наименование ступени сопротивления Расчетное значение, % Допуск на отклонение от расчет^, %
4- —
Общее сопротивление 80—150 5 5
Невыключаемое сопротивление 4—10 50 20
Ступень противовключения 60—100 10 10
Пуско-тормозные и регулировочные 5—10 30 20
ступени 10—30 20 15
30-50 20 10
224
Расчет и выбор резисторов
Разд 7
При этом следует учесть, что производственный допуск на суммарное сопро-
тивление резистора составляет ±10 % его расчетного значения, а на отдель-
ные ступени ±15 %.
Расчет и выбор резисторов для типовых крановых электроприводов.
При применении серийных панелей управления и контроллеров расчет рези-
сторов осуществляется в соответствии с обеспечиваемыми ими типовыми ме-
ханическими характеристиками, определяющими разбивку сопротивлений по
ступеням и их нагрузку. Типовые механические характеристики приведены в
соответствующих параграфах разд. 8. Эти характеристики рассчитываются
и строятся в относительных единицах, что позволяет при сохранении необ-
ходимых параметров регулирования использовать их для различных режимов
работы Механическим характеристикам, построенным в относительных еди-
ницах, соответствуют и разбивки отдельных ступеней резисторов также в
относительных единицах. Поэтому для получения указанных механических
характеристик достаточно установить соответствующие базовые значения,
принятые за 100 %* по которым затем находятся абсолютные значения со-
противлений и токов и осуществляется набор элементов. За базисный при-
нимается расчетный момент, соответствующий расчетной мощности, рассчи-
тываемой по формулам § 6 2. По расчетным моменту или мощности, прини-
мая, что в интервале моментов или мощностей на валу электродвигателей
постоянного и переменного тока от 0,5 до 1,3 номинального их значения они
приблизительно пропорциональны току ротора или якоря, можно найти рас-
четный ток резисторов
Л/р Я ном Р р
/р /ном ' Q /ном Г) • (7.28)
v оэиг'ном г нсм
Определение номинальных сопротивлений производится по формулам
(7-1) и (75), в которых /ном принимается равным /б. Сопротивление ступе-
ней, Ом,
*ст = *но,А/100'
(7.29)
где R % — сопротивление ступеней, %.
Для типовых схем крановых электроприводов разбивка ступеней в про-
центах номинального сопротивления при базовой нагрузке приведена в
табл 7 2—7.4. После определения сопротивления ступеней необходимо найти
их токовую нагрузку. Среднее значение нагрузки резисторов крановых элек-
троприводов, так же как и двигателей, не может быть однозначно установ-
лено в связи с неопределенностью режима работы, поэтому, как и для дви-
гателей, нагрузку резисторов следует устанавливать исходя нз классифика-
ционных режимов работы крановых электроприводов по параметрам, харак-
теризующим средние условия регулирования, потери в пуско-тормозных ре-
жимах и предполагаемые числа включений. На базе общей теории расчета
нагрузок и выбора крановых электродвигателей (см. разд. 6) средняя мощ-
ность потерь в крановых резисторах в схемах постоянного и переменного
тока с торможением противовключением определяется по выражению
аРст Г О Яда) (1 ®р) (Лэкв, б Лэкв)
Рр' Р = МэквПдв 1ПдВ ~ Т)ЭКВ +
(7.30)
§ 7.2
Выбор резисторов по тепловому режиму
225
и в схемах с динамическим торможением
аРст Г
Т’р. р — т— - I 1»25т)дв Лэкв 0,2от1эквт]дв Д*
ЯтПэквчДв L
[ (1 'Пдв) (1 + 6р) (Лэкв, б “Лэка) 1
'Цэкв, б J
(7.31)
где Рст — мощность статической нагрузки, кВт; ks — коэффициент нагрузки
определяемый по табл, 6.5 в зависимости от режима работы; а — коэффи-
циент использования (а — 1,3 для металлургических кранов, а — 1 для прочих
кранов); ti1B — номинальный КПД двигателя; т]экв — КПД электропривода,
определяемый по графикам рис. 6.5 и (6.17); Пэкв, б базисный КПД электро-
привода (см. табл. 6.5); ka — коэффициент использования в системе электро-
привода (&а™1 для переменного тока и ka — 0,5 для постоянного тока).
Относительные значения нагрузок ступеней резисторов типовых схем
крановых электроприводов установлены на основе опыта эксплуатации и
приведены в табл. 7.2—7.4 в процентах расчетного тока. Расчетный тепловой
ток продолжительного режима работы резисторов
(7.32)
где /?0/о и /(^ — относительные значения сопротивления ступени и токи на-
грузки, %, определяемые по табл. 7.2 — 7.4.
Ток продолжительной нагрузки ступеней резисторов
ст
• 100.
(7.33)
Таким образом, в результате расчета установлены общая мощность ре-
зисторов и параметры отдельных ступеней. После этого по техническим дан-
ным нормализованных блоков резисторов и отдельных элементов, приведен-
ных в § 7.3, выбирают конкретные блоки и выполняют схемы их соединений.
Отклонения выбранных сопротивлений ступеней от расчетных не должны
превышать допустимых значений, приведенных в табл. 7.1. Рассчитанные ре-
зисторы должны быть проверены на обеспечение кратковременного режима,
как это было сказано выше.
Для серийных электроприводов осуществляется комплектная поставка
резисторов, заранее рассчитанных для всех крановых двигателей в зависи-
мости от режимов работы, причем для наиболее массовых электроприводов
сопротивления компонуются в специальные ящики. Поскольку номинальная
статическая нагрузка конкретных механизмов в общем случае отличается от
номиналов двигателей, то при применении серийных комплектов возможны
существенные отличия действительных параметров регулирования в статике
и динамике от требуемых расчетных. Технические данные резисторов, постав-
ляемых для комплектных электроприводов, приводятся в § 7.4. Там же на
примере расчета будут показаны эти отличия при выборе резисторов по при-
веденной в настоящем параграфе методике при применении типовых ком-
плектов.
8 Зак. 918
226
Расчет и выбор резисторов
Разд. 7
Т а б л иц а 7.2. Сопротивления и токи ступеней для электроприводов
постоянного тока с панелями управления и кулачковыми контроллерами
Кулачковые контроллеры Панели управления
Ступени КВ101 КВ 102 П63, П160, П250, П400, П600 ПС 160, ПС25О, ПС400, ПС600
Р01 — Р1 10 42 10 30 *— •—•
Р1 -Р2 18 42 30 30 100 30 100 50
Р2-РЗ 22 42 60 37 26 42 42 50
РЗ- Р4 20 50 40 37 22 50 25 61'
Р4-Р5 16 50 27 46 15 59 30 44
Р5-Р6 14 59 18 46 —
Р6 —Р7 50 30
Р6 - РС6 —* 10 46
Р7-Р8 40 135 30 126
Р4-Р6 60 39
Р5-Р7 » я 6 •—. 41
Р8-Р9 WK f 22
33
Р10-Р11 —* — t 45
28
Примечания: 1. В числителе указаны относительные значения сопротивле^
ний, %; в знаменателе — токовая нагрузка, %.
2. Маркировка выводов ступеней показана на схемах § 8.1 и в каталогах
жрановое электрооборудование,
§7.2 Выбор резисторов по тепловому режиму
Т а б лиц а 7.3, Сопротивления и токи ступеней резисторов для
электроприводов переменного тока с кулачковыми контроллерами
Тип контроллера
KKI61, ККТ62 ККТ68 КДТ65
Ступени Сопротивление 0, Ступени Сопротивление ы Ступени Сопротивление а
ГуЛ » /<J Ток Ток ' /о Ток ’ ‘
Р1-Р5 29 65 Р1-Р4 9 54 Р1-Р4 Р2—Р5 ГЗ-Р6 10 84
Р5-Р61 170 19 Р4-Р7 31 35 Р4-Р7 30 55
Р61—Р6 75 19 Р7-Р71 60 35 Р5-Р8 30 61
Р2—Р4 9 59 Р71-Р10 40 35 Р6—Р9 74 41
Р4-Р62 87 35 Р1-Р11 17 29
Р62—Р6 35 35 PH—Р14 76 Р7-Р10 Р8-Р10 Р9-Р10 61 44
РЗ-Р6 61 50 17,5 j
Примечания: 1. См. прим, к табл. 7.2.
2. Маркировка выводов ступеней показана на схемах кулачковых контроллеров,
приведенных в § 8 2 и 83, ив каталогах на крановое электрооборудование.
Таблица 7.4. Сопротивления и токи ступеней резисторов для
электроприводов переменного тока с панелями управления
Ступени Тип панели
ТА, К ТСА, КС тсд ТА, к ТСА, КС тсд ТА, К ТСА, КС тсд
Ток ротора не более 60 А Ток ротора не более 160 А Ток ротора не более 160 А
Р1-Р4 Р4-Р7 15 83 20 59 6,5 83 13 59 5 83 10 59 5 83 10 59 5 83 10 59 8 50 14 59 14 52
8*
228
Расчет и выбор резисторов
Разд. 7
Продолжение табл. 7.4
Тип панели
Ступени ТА. К ГСА, КС гсд ТА, К ICA КС гсд ТА, К ТСА, КС тсд
Ток ротора не более 60 А не Ток ротора более 160 А не Ток ротора более 160 А
Р7-Р10 40 50 * 26 50 20 50 20 59 20 59 — n 1 II
РЮ—Р13 120 90 40 27 27 86
21 30 42 50 50 22,5
Р13-Р16 —— 120 21 76 42 76 42 — 76 42
Р4-Р10 42 39 39
42 50 17,7
Р10-Р16 — — —* — 146 35 86 25
Р1-Р7 — — —— — 24 59 23 42 со| ьо
Р7-Р13 100 92 92
30 25 17,7"
Р16-Р19 — * ——• 72 30 — — 72 30 —*
Примечание. См. прим, к табл. 7.3.
7.3. КОНСТРУКЦИЯ И ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ
КРАНОВЫХ РЕЗИСТОРОВ
Общие сведения. Крановые резисторы компонуются из отдельных эле-
ментов, объединенных в самостоятельное устройство, называемое резистор-
ным блоком.
Элементы и блоки резисторов характеризуются следующими парамет-
рами:
1) активным сопротивлением, Ом,
R = p//s, (7.34)
где р — удельное сопротивление активного материала резисторов, Om-mm2/mj
I — общая длина проводника из активного материала, м; s— площадь сече-
ния проводника, мм2;
2) мощностью резистора в установившемся режиме, Вт, т. е. количв'*
ством тепла Q, выделяемого за 1 с при предельно допустимом превышении
температуры резистора Ттах,
Р = Q = /*„/?, (7.35)
где /уст — ток, протекающий по резистору при мощности Р\
§73 Конструкция а технические данные кранозых резисторе £29
3) максимальным превышением температуры ту активного материала
в установившемся режиме над температурой окружающей среды при про?!
хождении по резистору тока /уст
Q К. 1ГЧ О/'Ч
Ч'уст ^уст ~/1 ’ * '
где А — теплоотдача, т. е. количество тепла, отдаваемого поверхностью рс*
зистора в 1 с при разнице температур между поверхностью и окружающей
средой I °C.
В технических данных приводятся значения токовых нагрузок как в про-
должительном, так и в следующих стандартизованных режимах работы кра-
новых резисторов: повторно-кратковременном режиме с ПВ — 6,25; 8,8; 12,5;
17,7; 25; 35; 50 и 70 % при длительности цикла 60 с; кратковременном ре*
жиме с длительностью 10; 20; 30 с и 1, 3 и 5 мин.
Соотношения между нагрузками длительного и других режимов работы
определяются из общей закономерности изменения температуры резистора
во времени
т = Густ (1 - e~t,T) ч- тое~“т, (7.37)
где t — время нагрева; то — начальное превышение температуры; Т — по-
стоянная времени нагрева,
Т =* С/Л; (7.38)
С — теплоемкость резистора, т. е. количество тепла, необходимого для изме-
нения его температуры на 1 °C.
В соответствии с (7.37) токи повторно-кратковременного и кратковре-
менного режимов работы связаны с током длительного режима соответственно
соотношениями
VI „ е-60/Г
1 _ е-60е/Г •
4р = а/~ <7-4°)
где 7е — ток повторно-кратковременного режима, вызывающий при относи-
тельной продолжительности включения е и времени цикла 60 с превышение
температуры туст; /кр — ток кратковременного режима, вызывающий за
время t превышение температуры ту.
Если постоянная времени Т значительно больше времени включения ре-
зисторов при повторно-кратковременном режиме работы, то (7.39) принимает
вид
== ^уст/л^в (7.41)
На рис. 7.13 и 7.14 приведены графические зависимости коэффициентов
перегрузки резисторов по току для стандартизованных повторно-кратковре-
менного — и кратковременного /гКр == Лср/f уст режимов при
£30
Расчет и выбор резисторов
Разд. 7
различных постоянных времени. Указанные коэффициенты вместе с техниче-
скими данными резисторов, приведенными далее, являются исходными при
выборе резисторов.
Конструкция и технические данные элементов и блоков резисторов. В кра-
новых электроприводах применяются элементы резисторов трех конструктив-
ных исполнений:
1) с рассеиваемой мощностью 25—150 Вт и сопротивлением от 1 до
30 000 Ом типа ПЭВ, представляющие собой фарфоровые цилиндры, на ко-
торые навита нихромовая проволока и которые покрыты нагревостойкой
стекловидной эмалью;
2) с рассеиваемой мощностью 250—400 Вт и сопротивлением от 0,7 до
96 Ом, выполненные в виде плоских элементов с константановой, фехралевой
Рис. 7.13. Коэффициенты перегрузки
резисторов при повторно-кратковре-
менном режиме
Рис. 7.14. Коэффициенты перегрузки
резисторов при кратковременном
режиме
или нихромовой проволокой диаметром от 0,5 до 1,6 мм, намотанной на
фарфоровые изоляторы, закрепленные на металлическом держателе;
3) с рассеиваемой мощностью 850—1000 Вт и сопротивлением от 0,078
до 0,154 Ом из фехралевой ленты размерами от 0,8X6 до 1,6 X 1,5 мм, на-
мотанной на ребро. Лента в виде спирали надета на фарфоровые изоляторы,
опирающиеся на металлический держатель коробчатого сечения.
Выводы от активного материала трубчатых элементов резисторов при-
паяны тугоплавким припоем. Выводы от проволочных элементов резисторов
выполнены в виде петель из активного материала. Выводы к ленточным эле-
ментам резисторов приварены латунным припоем к ленте. Элементы рези-
сторов не рассчитаны на непосредственное крепление к заземленным метал-
лическим частям, и поэтому при их установке в блоки применяется вторая
ступень изоляции. Элементы резисторов, собранные в блоки, рассчитаны на
эксплуатацию при потенциале по отношению к заземленным частям 800 В.
Проволочные элементы могут использоваться при частоте переменного тока
или импульсов постоянного тока до 600 Гц, а ленточные элементы — при
частоте, не превышающей 100 Гц. Активные материалы резисторов допускают
весьма высокие рабочие температуры, однако в конкретных конструкциях
эти температуры значительно снижены для исключения значительного нагрева
§7.3 Конструкция и технические данные крановых резисторов 231
Таблица 7.5. Нормы превышения температуры частей резисторов
Части элементов резисторов и их ограждений Допустимые превышения температуры, °C. в режимах
прерывисто- продолжи- тельном, (ПВ=100 %) кратковре- менном, повторно- кратковре- менном кратковре- менном, аварийном
Активный материал:
фехраль 350 400 600
нихром 350 400 600
константан 250 300 ——
фарфоровые изоляторы 300 320 320
Выводные зажимы на элементах 200 250 400
Выводные зажимы внешнего мон- 60 70 80
тажа
Кожух 120 130 —
Ограждения, доступные для при- 50 50 50
косновения
Воздух, выходящий за ограждения 100 100 100
Примечание. Для
шения температуры.
фарфоровых изоляторов указаны средние значения превы-*
7.6. Технические данные проволочных
константановых элементов
Т аблица
№ элемента Ток продол- жительного режима Постоянная времени, с Ток, повторно- кратковременного режима, А, при ПВ, % Ток, А, при дли- тельности кратко- временного режима, мин Общее соп- ротивление, Ом Сопротивление сту- пеней элементов, Ом
12,5 25 35 0,5 1 3 А Б В Г
1 1,7 70 4 3 2,5 2,9 2,2 1,8 96 мча
2 2 80 4,9 3,5 3,3 3,7 2,8 2,1 68 —а ———
3 2,3 Ч ™ — ' * •— — 48 •— — —• —#
4 2,6 120 6,5 4,7 4 5,6 4,2 3,0 37 — •—- ' *
5 3 ПО 7,5 5,5 4,7 6 4,5 3,2 27,8 6,9 7,0 13,9 *
6 3,8 100 9,8 7 6 7,4 5,6 4,2 18 4,5 4,5 9
7 4,6 200 12 8,6 7,4 И,1 8,5 5,8 12 1,5 1,5 3 6
8 5,7 100 14,6 10 9 11,1 8,4 6,3 8 1 1 2 4
9 6,6 180 17 12 10 16,2 12 8,2 5,8 0,7 0,7 1,5 2,9
10 7,2 200 18,5 13 11 18,3 13,2 9 5 0,62 0,62 1,25 2,5
11 7,6 210 20 14 12 20,5 14,5 9,8 4,4 0,55 0,55 1,1 2,2
J2 8,6 210 23 16 14 25 18,2 11,8 3,5 0,43 0,43 0,9 1,74
13 9,6 280 26 19 16 30 22 14 2,8 0,34 0,34 0,72 1.4
14 12 150 31 22 19 26,5 17,8 13,2 1,95 0,49 0,49 0,97
15 13 150 34 24 21 32 23,5 16 1,45 0,36 0,36 0,73 —
16 14 150 38 26 22,5 36 26 18 1,26 0,32 0,32 0,62 —ч»
17 15 150 40 28,5 24 40,5 29 19,3 1,1 0,28 0,28 0,54 —4
18 17 150 45,7 32 27,5 49 36 23,3 0,9 0,23 0,23 0,44 —-4
19 19 280 47,5 36 31 60 43,5 28 0,7 0,18 0,18 0,34 —*
232
Расчет и выбор резисторов
Разд. 7
Т аблица 7.7, Технические данные проволочных
фехралевых элементов
№ элемента Ток продол- жительного режима Постоянная времени, с Ток повгорно- кратковременного режима, А, при ПВ, % Ток, А, при дли- тельности кратко- временного режима, мин , Общее соп- ротивление, Ом Сопротивление сту- пеней элемента,, Ом
12,5 25 35 0,5 1 3 А Б В Г
1 2,2 90 —— —* —— 94 23,5 20,7 23,5 20,7 47 20,7 32
2 2,55 120 — — — 72 18 11,5 18 11,5 36 11,5 37,5
3 2,8 120 — “ i— 69 15 9,2 15 9,8 30 10,4 31,2
4 3,4 120 — 38,5 9,6 6,3 9,6 6,3 19,3 6,3 19,6
5 3,75 140 7 6,3 5,5 7 5,2 4,5 32,8 8,2 5,25 8,2 5,25 16,4 5,25 17
6 4,1 180 7,6 6,9 6 7,6 5,8 5,1 27,6 6,9 4,6 6,9 4,6 13,8 4,6 13,8
7 4,7 180 8,5 7,6 6,8 8,5 7 5,7 20 5 3,33 5 3,33 10 3,33 10
8 5,4 180 9,5 8,6 7,8 9,5 7,8 6,4 16 3,9 2,6 4,1 2,6 8 2,8 8
9 5,8 180 10 9,5 8,5 10 9 7 13,8 3,45 2,15 3,45 2,15 6,9 2,15 7,35
10 6,5 180 13 12 10,5 13 10,5 7,5 10,4 2,6 1,73 2,6 1,73 5,2 из 5,2
11 7,5 200 14 12,5 10,8 14 11 8,5 8,4 2,2 1,35 2,0 1,35 4,2 1,35 4,4
12 8,1 210 14,8 14 11,2 14,8 12 9,1 7,05 1,85 1,17 1,85 1,17 3,35 1 3,7
13 9,3 280 18,5 16,5 14 18,5 14 10,5 5 1,34 0,84 1,34 0,84 2,35 0,84 2,5
14 10,8 280 19 18 15 19 14,5 12 4 0,98 0,65 0,98 0,65 2.04 0,65 2,05
15 Н,7 280 20 19 17 20 15 13 3,4 0,85 0,54 0,85 0,54 1,7 0,54 1.8
16 13 280 21,5 20,8 19 21,5 16 14 2,6 0,64 0,425 0,64 0,425 1,28 0,425 1,28
Т аблица
7.8. Технические данные ленточных элементов
V? элемента Постоянная вре- мени Гок продолжи- тельного режима Ток повторно- кратковремен- ного режима, А, при ПВ, % Ток, А, при длительности кратковре- менного ре- жима, мин Сопротивление. Ом Сопротивление сту- пеней с двумя про- межуточными выво- дами, Ом Сопротивле- ние ступеней с одним про- межуточным выводом, Ом
12,5 25 35 0,5 1 3 А Б В А Б
1 265 107 305 215 181 335 245 156 0,078 0,0195 0,0335 0,0215 0,0215 0,037 0,023 0,055 0,041 0,023 0 037
2 365 91 255 181 152 307 223 140 0.1 0,0268 0,0482 0,0214 0,0214 0,0518 0,0305 0,0695 0,0412 0,0305 0,0518
Конструкция и технические данные крановых резисторов
233
Продолжение табл. 3.4
№ элемента . 1 ! Постоянная вре- меня Ток продолжи- тельного режима Ток повторно- кра гковремен- ного режима, А. при ПВ, % Ток А, при длительности кратковре- менного ре- жима, мин Сопротивление, Ом Сопротивление сту- пеней с двумя про- межуточными выво- дами, Ом Сопротивле- ние ступеней с одним про- межуточным выводо л, Ом
12,5 25 35 0,5 1 3 А 5 В А Б
3 300 76 215 152 128 255 185 116 0,15 0,04 0,072 0,032 0,032 0,078 0,046 0,104 0,072 0,046 0,078
4 330 64 181 128 107 228 165 102 0,23 0,062 0,112 0,052 0,052 0,М8 0,065 0,165 0,112 0,065 0,118
5 270 54 152 107 91 172 125 98 0,31 0,081 ОД 52 0,07 0,07 0,158 0,088 0,222 0,152 0,088 0,158
6 350 46 128 91 76 165 120 74 0.41 0,1 0,202 0,102 0,102 0,208 0,106 0,304 0,202 0,106 0,208
7 240 39 107 76 64 118 86 55 0,6 0,145 0,295 0,15 0,15 0,305 0,155 0,455 0,295 0,155 0,305
8 220 33 91 64 54 96 70 45 0,82 0,2 0,404 0,304 0,304 0,416 0,212 0,608 0,404 0,212 0,416
9 140 29 76 54 46 67 50 34 1,09 0,285 0,533 0,248 0,248 0,557 0,31 0,78 0,533 0,31 0,557
10 170 24 64 46 39 61 45 30 1,38 0,333 0,678 0,345 0,345 0,702 0,358 1,02 0,678 0,358 0,702
11 500 76 215 152 128 315 225 138 0,154 0,04 0,075 0,035 0,035 0,079 0,044 0,11 0,075 0,044 0,079
и растрескивания отдельных деталей, а также повышения пожаробезопасно-
сти конструкций, расположенных рядом. Допустимые нормы превышения
температуры отдельных узлов резисторов приведены в табл. 7.5, технические
данные элементов резисторов проволочного типа из константановой прово-
локи — в табл. 7.6, из фехралевой проволоки — в табл. 7.7, ленточного типа
из фехраля — в табл. 7.8.
В соответствии с компоновкой отдельных элементов промышленностью
выпускаются два вида блоков резисторов: нормализованные универсального
назначения и специальные, заранее рассчитанные для использования в опре-
деленной схеме электропривода для определенных мощностей электродвига-
телей с учетом режима работы Выбор комплектов специальных блоков и их
номенклатура приведены в § 7.4. Нормализованные блоки могут быть ском-
понованы в любом сочетании и позволяют получить требуемые параметры
в разных схемах электроприводов. Блоки резисторов компонуются из ленточ-
ных или проволочных элементов. Соответственно типы блоков имеют наиме-
нование БФ6 и БК12. Ряд специальных блоков выпускается в комбиниро-
ванном исполнении типа БФК. В нормализованных блоках типа БФ6 уста-
навливаются шесть ленточных элементов, а в блоках БК12— двенадцать
фехралевых или константановых проволочных элементов Количество элемен-
тов в специальных блоках определяемся расчетом и обычно меньше указан-
ного выше допустимого числа.
ьо
оэ
Таблица 7.9. Нормализованные блоки резисторов типа БФ6
Каталожный номер Ток про- должи- тельного режима. А Общее сопротив- ление, Ом Сопротивление ступеней, Ом Число ВЫВОДНЫХ зажимов
1-2 2-3 3-4 4-5 5 “*6 6-7 7-8 8-9
ИРАК 434332.004-01 228 0,115 0,0215 0,017 0,017 0,0215 0,019 0,019 - 7
ИРАК 434332.004-02 204 0,142 0,026 0,0215 0,0215 0,026 0,0235 0,0235 — 7
ИРАК 434332.004-03 160 0,216 0,036 0,036 0,036 0,036 0,036 0,036 — 7
ИРАК 434332.004-04 128 0,37 0,0615 0,0615 0,0615 0,0615 0,0615 0,0615 — 1 7
ИРАК 434332.004-05 114 0,474 0,079 0,079 0,079 0,079 0,079 0,079 —• 7
ИРАК 434332.004-06 102 0,58 0,096 0,096 0,096 0,096 0,096 0,096 —- 7
ИРАК 434332.004-07 80 0,88 0,146 0,146 0,146 0,146 0,146 0,146 — 7
ИРАК 434332.004-08 64 1,5 0,25 0,25 0,25 0,25 0,25 0,25 — 7
ИРАК 434332.004-09 57 1,92 0,32 0,32 0,32 0,32 0,32 0,32 *— 7
ИРАК 434332.004-10 51 2,4 0,4 0,4 0,4 0,4 0,4 0,4 — 7
ИРАК 434332.004-11 40 3,5 0,44 0,435 0,435 0,44 0,44 0,435 0,435 0,44 9
ИРАК 434332.004-12 36 4,8 0,6 0,596 0,596 0,6 0,6 0,596 0,596 0,6 9
Таблица 7.10. Нормализованные блоки резисторов типа БК12
Каталожный номер Ток продол- жительного режима, А Общее сопротивле- ние, Ом сопротивление ступеней. Ом Число ВЫВОДНЫХ зажимов
1-2, 2-3 3-4, 4-5 5-6, 6-7 а> 1 00 СО 9-10. 10-11 11-12
ИРАК 434331.003-01 8,5 52,8 4,4 4,4 4,4 4,4 4,4 8,8 12
ИРАК 434331.003-02 21,2 8,4 0,7 0,7 0,7 0,7 0,7 1,4 12
ИРАК 434331,003-03 18,3 11,7 0,975 0,975 0,975 0,975 0,975 1,95 12
ИРАК 434331.003-04 14,5 17,4 1,45 1,45 1,45 1,45 1,45 2,9 12
ИРАК 434331 003-05 13 23,4 1,95 1,95 1,95 1,95 1,95 3,9 12
ИРАК 434331.003-06 2,8 33,6 2,8 2,8 2,8 2,8 23 5,6 12
Расчет и выбор резисторов Разд. 7
§ 7.4 Типовые резисторы для крановых электроприводов 235
- — - - . -- - -- - • ---*-------Г—
Следует отметить, что блоки БФ6 и БК 12 поставляются промышлеи*
костью с 1983 г., до этого времени поставлялись блоки НФ-1А, а также
НФ-11 А и НК-ПА соответственно с пятью ленточными и одиннадцатью про*
водочными фехралевыми или константановыми элементами. Соответственно
мощности новых блоков БФ6 и БК 12 на 20 и 10 % превышают мощности
ранее выпускавшихся.
Конструктивно блоки представляют собой две металлические боковины,
соединенные между собой тремя стальными рейками П-образного профиля.
На двух рейках крепятся элементы, третья рейка несет на себе выводные
зажимы. Блоки БФ12 на токи 51—
228 А имеют от четырех до семи вывод-
ных зажимов. Те же блоки на токи
31—41 А имеют от шести до девяти
зажимов. Проволочные блоки БК 12
имеют до двенадцати выводных зажи-
мов. Габаритные размеры как новых,
так и ранее выпускавшихся блоков
одинаковы и приведены на рис. 7.15.
Этим достигается взаимозаменяемость
резисторов. Масса блоков 22 кг.
При установке блоков резисторов
необходимо обеспечить хороший есте-
ственный теплоотвод. Для этого рас-
стояние блоков от пола должно быть
не менее 100 мм, а при установке бло-
Рис. 7.15. Габаритные и устано«
вочные размеры резисторов
ков друг над другом через каждые три
этажа следует оставлять свободный промежуток 50—70 мм. Основными от-
личием резисторов кранового исполнения является их использование при вы-
соких значениях часто повторяющихся перегрузок по току. Учитывая эти
особенности, отдельные токоведущие детали, в частности выводы, внутренний
соединительный монтаж выполняются из меди более массивными, чтобы
предотвратить местные недопустимые нагревы. Выводные зажимы нормали-
зованных блоков резисторов не маркированы, поскольку все ступени рези-
сторов имеют приблизительно равные сопротивления. При необходимости
произвести электрическое разделение ступеней в пределах одного блока до-
статочно снять соответствующую перемычку между ступенями. Технические
данные нормализованных резисторов БФ6 и БК 12 приведены в табл. 7.9
и 7.10.
7.4. ТИПОВЫЕ РЕЗИСТОРЫ
ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Выбор и таблицы типовых резисторов для крановых электроприводов.
Для наиболее широко применяемых крановых электроприводов с асинхрон*
ными фазными двигателями и двигателями постоянного тока последователь-
ного возбуждения промышленностью выпускаются типовые комплекты кра«
новых резисторов отдельно для механизмов подъема и передвижения,
£36
Расчет и выбор резисторов
Разд. 7
Как было показано в § 7.2, расчет резисторов должен производиться по но^
минальным параметрам привода. При расчете типовых комплектов такими па-
раметрами могут быть только номинальные данные двигателя, привязанные
к определенному стандартному режиму работы. При этом должны быть
обеспечены как типовые характеристики электропривода, так и соответствие
теплового режима работы резисторов режиму работы двигателей.
Наиболее полно можно удовлетворить указанные требования выполне-
нием типовых комплектов для всех трех нормализованных режимов работы
двигателей при ПВ = 25, 40 и 60 %, соответствующих легкому ЗМ, сред-
нему 4М и тяжелому 5М режимам работы. Однако это противоречит другой
важной задаче — снижению номенклатуры резисторов и особенно номенкла-
туры специальных блоков, выпускаемых для наиболее массовых электропри-
водов переменного тока мощностью до 40 кВт легкого и среднею режимов
работы, поэтому для этих электроприводов выпускается один ряд комплек-
тов резисторов, при расчете которого за базовые значения момента и тока,
определяющих номинальное сопротивление и разбивку сопротивлений по сту-
пеням, приняты параметры двигателя в режиме работы ПВ = 25 %, а рас-
четный ток теплового режима принимается равным току двигателя при
ПВ = 40 %.
Для электроприводов подьемных механизмов при некотором допустимом
для них увеличении динамических моментов обеспечивается надежная работа
системы при предельных моментах статической нагрузки, соответствующих
режиму ПВ = 25 %, и тепловом режиме при ПВ == 40 %. Для механизмов
передвижения увеличение динамических моментов, особенно в тормозных
режимах, нежелательно. Поэтому при построении резисторов электроприво-
дов этих механизмов первая ступень сопротивлений, определяющая началь-
ный динамический момент при пуске и торможении, имеет отдельные выводы
для механизмов легкого и среднего режимов работы, В остальном расчеты
резисторов электроприводов механизмов передвижения и подъема анало-
гичны.
Для механизмов тяжелого режима работы выпускается другой ряд ком-
плектов резисторов, в котором за базовые величины приняты параметры
двигателя в режиме ПВ = 60 %. Этот ряд строится только с применением
нормализованных блоков резисторов. Основные ряды комплектов резисторов
для электроприводов переменного тока механизмов передвижения, а также
механизмов подъема при торможении противовключением и динамическом
торможении с самовозбуждением легкого и среднего режимов приведены
соответственно в табл. 7.11, 7.12. Комплекты резисторов для электроприводов
постоянного тока приведены в табл. 7.13.
Примеры расчета по выбору резисторов для кранового электропривода.
Пример 7.1. Рассчитать резисторы для двухдвигательного электропривода
механизма передвижения моста крана среднего режима работы, для кото-
рого выбраны двигатели 4MTF160LB6. Управление панелью ДТА160. Масса
крана 76 т, номинальная скорость передвижения крана 1 м/с, ускорение
0,4 м/с2, число пусков в час 150. Суммарный момент инерции, приведенный
к валу одного двигателя, 3,75 кг-м2. Момент статической нагрузки 60 Нмв
§ 7.4 Типовые резисторы для крановых электроприводов 237
Таблица 7.11. Комплекты резисторов для электроприводов
переменного тока с кулачковыми контроллерами для режимов
работы ПВ = 25 и 40 %
Тип кулачкового контроллера
Расчетное номиналь- ное сопро- тивление, Ом KKT6I, ККТ62 ККТ68 ККТ65
Расче тая мощность двига геля, кВт Тип блока Рубрика обо- значения блока Количество блоков Тип блоков Рубрика обо- значения б чока Количество блоков Тип блоков Рубрика обо- значения блока Количество блоков
1,4—5,8 5,5—6 БК12 07 1 а — — — Ml —
5,8-9 5,5—6 БК12 08 1 — — — —— *11*
9—13 1,8-2,2 Б6 26 27 1 1 — —- —— —•
13-17,5 1,8—2,2 Б6 26 27 1 1 11 1 — — Б6 БФК 44 21 1 1
17,5—27 1,8—2,2 Б6 26 27 1 1 -—— — — Б6 БФК 43 39 1 1
27—36 1,8-2,2 Б6 22 23 1 1 Б6 11 6 Б6 БФК 42 38 1 1
36—45 1,8—2,2 —- * " Б6 11 6 — — *
45—53 0,6—0,65 —- Б6 16 3 — —
53-65 1,7-1,8 — —— * — Б6 11 6 —- — —
53-65 1,2- 1,3 *— — Б6 08 11 3 3 —
Примечания: 1. Для упрощения записи б таблице дается только рубрика
каталожного обозначения резистора. Каталожный номер резисторов Б6 — ИРАК.434332.004, *
ЬК12 — И РАК.434331.003, БФК — ИРАК 434334.001.
2 Для контроллеров К.КТ62 количество блоков резисторов удваивается.
Т аблица 7.12. Комплекты резисторов для электроприводов
переменного тока с панелями управления для режимов работы
с ПВ —25 и 40 %
Расчетная мощность двигателя, кВт Расчетное номиналь- ное сопро- тивление, Ом Тип панели управления
ГА, ДТА, К, ДК iCA, КС 1СД
Тип блока Рубрика обо- значения блока Количество блоков Тип блока Рубрика обо- значения блока Количество блоков Тип блока Рубрика обо- значения | блока Количество блоков
1,4-9 5,5—6 БК12 12 13 1 1 БК12 19 20 1 1 -
9-13 i 1.8-2,4 |Б6 19 1 3 | Б6 21 3 —•
о 05 ел СП
о о 1 о СП 00 05
^>4 1 с© со 05 05
о о о СП сл
to
о
** о о
о СИ СП 00 65
* о о н<—
м *♦
о 00 00 оо 00
СЯ СП
ОТ от 0^
05 05 05 05
— О (О •—» о* >— (О ]
О СП — од О СП
1 05 00 со со со со со w 1
от 0^ от от ОТ
05 05 05 05 05 05
о о о о — О О (***> о о — О О ООО 0 — 0
00 -Ч 05 05 О -Ч СП 00 -Ч 4^ 0 401 Оо О -U 0DQ4
Ю 00 СО 00 н- 00 со 00 00 00 — СО 00 >— 00 со н- 05 00
СП от от от ОТ
ЯОТ сисл Z1OT ОТ т^от отот Я от от ^отот ОТ от
— 05 05 05 — 05 05 <—1 05 05 05 — 05 05 — 05 05
to ю ьо 65 го 65
О <О —* С5 юоо О О *—ь о 60 0 0 to о о о •— О
65 *4 — О 00 05 сл to 00 — -ч 00 00 4^ 00 00 ф- ел — -ч
•— to 00 00 — 00 — to 00 •— — со оо — 00 оо — Ю 05
45-53 00 О сл 27—36 ел to 13-17,5 Расчетная мощность двигателя, кВт
0,6—0,65 СО to фь 00 1 to 4^ 00 1 to Расчетное номиналь- ное сопро- тивление, Ом
еп сг> S 01 01 СП Тип блока ТА, ДТА, К
о о СО СП ьо о со СО СО Рубрика обо- значения блока
СО 00 to 00 00 со 00 Количество блоков , ДК
СП СП а> ел СП S ©1 о Тип блока ип пане,
— о о оч д 06 11 to СО to со to Рубрика обо- значения блока СА, К< ли \ пр
и-* ОО 00 00 00 00 оо оо Количество блоков С J а влепи оь о 3:
Б6 Б6 БК12 61)19 99 99 | БФК БФК S Тип блока
ю о о 00 -4 ЬО *— О 00 — -ч ю О to 00 оо оо -4 О Рубрика обо- значения блока тсд S Оч
W оо >—1 to оо 00 оо Количество блоков г. 7.12
Расчет и выбор резисторов Разд. 7
§7,4 Типовые резисторы для крановых электрозаводов 239
_____ - - - ——- ------------- - * - ---------------------
Продолжение табл. 7J2
расчетная мощность двигателя, кВт Расчетное номиналь- ное сопро- тивление, Ом Тип панели управления
ТА, ДТА, К. ДК ТСА, КС тсд
Тип блока Рубрика обо- значения блока , Количество блоков Тип блока Рубрика обо- значения блока Количество блоков Тип блока Рубрика обо- значения блока Количество блоков
100—125 0,5—0,55 Б6 06 3 Б6 03 3 Б6 03 3
07 9 05 3 Б6 04 3
06 6 Б6 08 3
09 3 БК12 28 1
125-140 1,4-1,5 Б6 04 3 Б6 03 3 Б6 11 2
08 3 06 3 12 3
11 2 08 3 09 3
09 2 12 1
140—155 0,6—0,65 Б6 03 3 Б6 03 3 ' —м— *
04 3 04 3
05 6 06 6
07 3 08 3
155—180 0,8—0,85 »— Б6 04 6 — » «
06 6
07 6
Примечания: 1. См. прим. 1 к табл. 7.11.
2. Для панелей управления ДТА, ДК количество блоков резисторов удваивается.
Т а б л и ц а 7.13. Комплекты резисторов для электроприводов
постоянного тока с силовыми контроллерами и панелями управления
Расчетная мощность двигателя, кВ г Расчетное номиналь- ное сопро- тивление, Ом Тип кулачкового контроллера и панели управления
КВ 101 П, дп КВ102 ПС, ДПС
Тип блока Рубрика блока Количество блоков Тип блока Рубрика блока : Количество , блоков Тип блока Рубрика блока Количество блоков Тип блока Рубрика блока Количество блоков
До 2,8 10-9 БК12 03 04 1 1 — —- 11 * БК12 04 05 1 1 — । :
2,8-4 <е Jo БК12 02 03 1 1 БК12 04 06 1 1 БК12 03 04 1 1 —• —*
4,0—5,6 8—7 БК12 02 2 БК12 02 04 1 1 БК12 04 2 "
to
to
о
СП
— to
CH
СТ)
сЗ 1 10-13 00 F** О 5,6—8 Расчетная мощность двигателя, кВт 240
со 1 to 3,5—3,1 СЛ CO СП 7—4,5 номиналь' ное сопро- тивление, Ом Расчетное
СП С75 а Ст) СП СТ> БК12 СП о БК12 Тип блока Я &
О со •—* =S о 4^ Р-* и—» о 1'0 Рубрика блока В101 н S я 7? ja со JS е» л
СО •—* F— 1ММЙ 1"^* F*^ Количество блоков я □>
ет о 01 сп^: СП ►— to си о БК12 БК12 Тип блока □ О я о о я о ж тз о* г-— Oi О пз тз о R Г> О тз
о ь- (£> о о со ю — о to со to о Рубрика блока Ja д
to — — to F-— — 1—* Количество блоков о ь !з
СП о ст о СП СТ СП ст БК12 Тип блока X о Я К я я о <3)
08 10 11 — о to о »— о to о О to Рубрика блока о № а л> ь ж о СЬ О
Р“ Р— to — to F—Ь Количество блоков ж тз Ь» £
S СП от^: СТ) ►-* to 1 1 Тип блока ПС, CJ я го я я X 'ние табл. 7 НО
• <— о о * О <£> 00 F^ to *- о *— to 1 1 Рубрика блока ID# р> W
• 1—“ — to «-» Г—“ 1 1 Количество блоков о • Со
Типовые резисторы для крановых электроприводов
241
Продолжение табл. 7,1?
Расчетная мощность двигателя, кВт Расчетное номиналь- ное сопро- тивление, Ом Тип кулачкового контроллера и панели управления
КВ101 п, дп КВ102 ПС, ДПС
Тип блока Рубрика блока Количество блоков Тип блока 1 Рубрика блока Количество блоков Тип блока Рубрика блока Количество блоков i Тип блок# Рубрика блока Количество блоков
48-60 0,9-0,7 — — Б6 02 03 06 1 2 3 — —• —— Б6 02 03 04 12 3 5 1 1
60-89 0,7—0,55 — - — — — — —• —• — Б6 01 02 03 11 7 4 2 1 6
80—96 0,55—0,45 — " — Б6 02 03 04 1 5 1 — — Б6 05 06
96-110 0,45—0,4 — — Б6 01 02 03 1 2 5 — —— «—
110—152 0,4-0,3 '11" —— — —— — - - — Б6 01 02 03 05 4 13 6 1
152-185 0,3—0,25 — 1" —- —— —— — — —* Б6 01 02 03 12 S 5
Примечания; (. См. прим. I к табл. 7.11
2 Для панелей управления ДП и ДПС количество блоков резисторов удваиваето
Определяем расчетную мощность привода по (6 34)
1
fenYn-10’
(G 4- Q) v (а'а + пг) =
76 000
2,5-0,7.. 103 • 2
1 (1,1-0,4+ 0,155) = 12,9 кВт,
где kn = 0,7; уп = 2,5 согласно данным табл. 6.2; m определяется из соот-
ношения (6.33)
тогда
Л7ст/Л/НОм — + Q) * Ю3/Рном»
_ 60 15. Ю3
m 156 76 000 ' •
542
Расчет и выбор резисторов
Разд. 7
Расчетный ток резистора
Л>в Люм-и' ® 46 “ПГ“=* 39>9 А-
“ном 10
Номинальное сопротивление
Яном — £р, ном/(л^3 /р) — 219/(д/3 • 39,9) = 3,2 Ом.
Согласно табл. 7.4 для панели управления ТА находим разбивку сопро*
тивлений ступеней резисторов и определяем сопротивление каждого рези-
стора (в одной фазе):
Обозначение ступени ^ступ’ р хс?уп’
Р1-Р4 15 0,48
Р4-Р7 20 0,64
Р7—Р10 40 1,28
Р10—Р13 /20 3,86
Общее 195 6,3
Находим по (7.30) тепловую расчетную мощность резисторов в трех
фазах:
аР ст
Р*т ^тПэкбЛдв
( \ । (1 (I ’ ер) (Лэкв, б ’Пэкв) *1
(Пдв — Пэкв) +-----------------—----------------------- ,
Пэкв. б J
в которой
Рст А4стппом/9550 = 60 • 955/9550 = 6 кВт;
_____________'Пэкв, б________________________0,763___________
'Пэкв Т1экв, б — "Пэкв 7общ । . 0*76 0,72 375
1+ Т27^ °>72 1,2-0,31
где Лэкв, б == 0,76 по данным табл. 6.5; т)экв ~ 0,22 согласно рис. 6.5; а =» 1;
kx =s 0,65 по табл. 6.5.
Окончательно имеем
1,6
р»т 0,65 • 0,48 • 0,82
0,82 — 0,48 +
(1 - 0,82) (1 — 0,4) (0,763 - 0,48)
0,763
= 11,5 кВт.
На одну фазу приходится 11,5/3 = 3,83 кВт.
Находим расчетный тепловой ток резистора по (7.32). Токовые нагрузки
по ступеням определяются из табл. 7.4
1,1-Ю11-3^83
3,2 • 195 (832 • 15 + 592.20 + 502 • 40 + 212. 120) ~ 43 А*
Типовые резисторы для крановых электроприводов
243
Значения расчетных токов по ступеням:
Обозначение ступени Лггуп, % Лггуп. А
Р1—Р4 83 35,6
Р4—Р7 59 25,4
Р7—Р10 50 21,5
Р10-Р13 21 9
В соответствии с табл. 7.10 на нормализованные блоки БК12 выбираем
для одной фазы блок резисторов ИРАК.434331.003-03. Схема соединения
блока для одной фазы приведена на рис. 7.16. Сравнивая фактические зна-
чения сопротивлений с расчетными, убеждаемся, что отклонения не превы-
Рис. 7.16. Схема соединения блока резистора
тают допустимых пределов. Резисторы по току недогружены. Таким обра-
зом, резисторы выбраны правильно. Проверка по кратковременному режиму
не требуется, так как длительный допустимый ток резисторов превышает
расчетный.
Пример 7.2. Выбрать типовой комплект блоков резисторов для электро-
привода, параметры которого приведены в примере 7.1, и сравнить пусковую
диаграмму, обеспечиваемую комплектом резисторов, выбранным в при-
мере 7.1, и типовым комплектом.
В соответствии с табл. 7.12 выбираем комплект резисторов, состоящий
из трех блоков ленточных резисторов типа Б6, —ИРАК.434332.04-19. Опре-
деленная в предыдущем примере расчетная мощность Рр 12,9 кВт соот-
ветствует мощности двигателя 15 кВт в режиме ПВ — 40 %. Омическая
разбивка типовых комплектов выполняется по параметрам двигателя в ре-
жиме ПВ = 25 %. При этом резисторы имеют выводы для первой ступени
по режиму ПВ == 40 %. Исходя из этого получаем расчетное номинальное
сопротивление
Яном = 219/Уз • 54 = 2,36 Ом,
В результате моменты двигателя на пусковой диаграмме (см. рис. 7.5)
будут в 3,2/2,36 == 1,35 раза превышать рассчитанные по реальной расчетной
мощности. Для снижения динамического момента в начальный момент пуска
и в тормозном режиме целесообразно использовать первую ступень по ре-
жиму ПВ = 40 %, в котором
/?НОМ = 219/(Уз • 46) = 2,75 Ом.
При этом пусковой и тормозной моменты будут превышать обеспечивае-
мый специально рассчитанными в примере 7.1 резисторами в 3,2/2,75 ==]
1,16 раза, что можно считать вполне допустимым,
244
Электроприводы с контакторно-контроллерным управлением Разд 8
РАЗДЕЛ 8
ТИПОВЫЕ КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С КОНТАКТОРНО-КОНТРОЛЛЕРНЫМИ СИСТЕМАМИ
УПРАВЛЕНИЯ
8.1. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Общие вопросы. Область применения. Относительно высокие рсгулировоч-
ные свойства рассматриваемых электроприводов при простоте и высокой
надежности релейно-контакторной аппаратуры постоянного гока определяют
достаточно широкое их применение для крановых механизмов металлурги-
ческого производства, электрооборудование которых работает в режимах
Рис. 8.1. Схема электропривода механизма подъема с кулачковым контрол-
лером КВ 102
4М, 5М. В отдельных случаях эти электроприводы применяются и для кра-
новых механизмов общего назначения при электроснабжении на постоянном
токе. Электроприводы строятся на основе применения двигателей постоян-
ного тока серии Д с последовательным возбуждением, управляемых от па-
нелей при мощностях двигателей от 2,5 до НО кВт, и кулачковых контрол-
леров при мощностях до 10 кВт отдельно для механизмов подъема и пе-
редвижения. Для построения серийных электроприводов выпускаются два
исполнения кулачковых контроллеров и 13 типов панелей управления. При
этом для механизмов подъема использованы кулачковый контроллер КВ101
и панели ПС и ДПС (сдвоенные) на токи 160, 250 и 630 А, а для механиз-
мов передвижения — контроллер КВ 102 и панели управления П и ДП (сдво-
енные) на токи 63, 160, 250 и 630 А. Все электроприводы с панелями управ-
Электроприводы постоянного тока
245
ления имеют индивидуальную защиту, а для силовых кулачковых контрол«
леров используется отдельная защитная панель.
Рассматриваемые электроприводы обеспечивают двухзонное регулирова-
ние скорости в диапазоне 1 :6 при работе с номинальным грузом и 1 : 12
при работе с малыми грузами. Кроме двухзонного регулирования особен-
ностью электроприводов постоянного тока является большая кратность пуско-
вого момента, ограничиваемого только условиями коммутации машины.
Схемы электроприводов механизмов подъема. Электроприводы механиз-
мов подъема строятся по несимметричным схемам. Необходимые механиче-
ские характеристики обеспечиваются
путем соответствующего соединения
якоря, обмотки возбуждения двига-
теля и пускорегулирующпх резисто-
ров. При этом на характеристиках
подъема, за исключением режима до-
водочной скорости, используется по-
следовательное соединение обмоток
и резисторов. Характеристики спуска
осуществляются переводом двигателя
в режим динамического торможения,
а также путем потенциометрическо-
го включения якоря и обмотки воз-
буждения двигателя. При потенцио-
метрическом включении каждая из
характеристик имеет участок, на ко-
тором возможен силовой спуск крю-
ка и легких грузов и участок для
тормозного спуска грузов. Указан-
ное соединение используется и для
получения характеристики доводоч-
ных скоростей в режиме подъема.
Схема электропривода подъема с
Рис. 8.2. Механические характери-
стики электропривода по схеме
рис. 8.1
кулачковым контроллером КВ 102 при-
ведена на рис. 8.1, а соответствующие ей механические характеристики —
на рис. 8.2. Схема предусматривает ступенчатый пуск, торможение и регу-
лирование скорости. Контроллер имеет по пять фиксированных позиций
в каждом из направлений и нулевое положение. Указанные выше переклю-
чения силовых цепей, необходимые для получения требуемых механических
характеристик, определяются приведенной на схеме диаграммой замыкания
контактов контроллера SM1 — SM14, Схемой предусмотрена возможность
применения тормозного электромагнита с катушкой последовательного YB2
или параллельного YB1 возбуждения (включение показано штриховой ли-
нией).
Применение электромагнита последовательного возбуждения повышает
надежность работы электропривода, однако требует специального выбора со-
противлений из условия обеспечения надежного срабатывания и удержания
тормоза на всех положениях контроллера. Схема предусматривает наряду
Рис. 8.3. Схема электропривода механизма подъема с панелью управления ПС
Электроприводы постоянного тока
247
с механическим также электрическое динамическое торможение с самовоз*
буждением. Защита электропривода вынесена на защитную панель, на кото-
рой расположены контактор включения механизмов КМ2М (для механизмов
подъема), линейный контактор КМ1М, вводный рубильник QS, максимальные
реле КА1 и КА2. При этом обеспечивается конечная защита конечным вы-
ключателем SQ, максимальная и нулевая защиты.
Схема электропривода с панелью ПС приведена на рис. 8.3, а обеспечи-
ваемые ею механические характеристики — на рис. 8.4. Электропривод имеет
четыре фиксированных позиции на
подъем и пять на спуск. Включение
силовой цепи двигателя выполняется
линейными контакторами КМ1М и
КМ2М после включения рубильника
QS/ и контакторами направления
КМ1В и КМ2В. Контакторы ускоре-
ния КМ IV— KM4V, а также контак-
торы торможения КМ1— КМ4 вы-
полняют набор схемы соединения
обмоток двигателя и резисторов для
обеспечения требуемых механических
характеристик. При этом характери-
стикам подъема соответствует: пер-
вой — шунтирование обмотки якоря
посредством контактора КМ2 В, а
последующим — шунтирование рези-
сторов контакторами ускорения под
контролем реле времени КТ1 — КТЗ.
Для обеспечения характеристик спу-
ска применено потенциометрическое
Рис. 8.4. Механические характери-
стики электропривода по схеме
рис. 8.3
соединение обмоток двигателя и ре-
зисторов. Схемой предусмотрено применение тормоза с последовательным
включением обмотки. При переводе рукоятки командоконтроллера в нулевое
положение обесточивается катушка тормоза YA и собирается цепь динамиче-
ского торможения. Контроль переходных режимов при торможении с пози-
ций спуска выполняется с помощью реле КТ4. Показанное на схеме штрихо-
выми линиями распараллеливание сопротивлений в шунтирующей якорь дви-
гателя цепи используется только в панелях ПС = 630, Показанная также
штриховой линией цепь с контактором КМ4 используется только для пане-
лей на 440 В. Эта цепь необходима для ограничения тока якоря в процессе
торможения. В схеме предусмотрены все необходимые виды защит, вынесен-
ные на реле КН: максимальная (реле КА1 и КА2), нулевая и конечная
(выключатели SQ1 и SQ2).
Схемы электроприводов механизмов передвижения. В отличие от элек-
троприводов подъема электроприводы механизмов передвижения строятся
по симметричным схемам. Схема электропривода с кулачковым контролле-
ром КВ 101 проще рассмотренной для механизма подъема с КВ 102 и здесь
248
Электроприводы с контактерно-коптроллерным управлением Разд. 8
-О/ О 0,4 7,2 м/Мм«
Рис. 8.5. Механические характери-
стики электропривода с кулачковым
контроллером KBIOl
не приводится. Принципы ее построения видны из механических характери-
стик, приведенных на рис. 8.5. На характеристике 1 предусмотрено шунтиро-
вание якоря двигателя резисторами, а на характеристиках 2—6 — последова-
тельное включение резисторов, якоря и обмотки возбуждения двигателя.
На рис. 8.6 приведена схема электропривода механизма передвижения
с панелью П, а на рис. 8.7 — обеспечиваемые ею механические характери-
стики. Число фиксированных позиций в зависимости от мощности двигателя
может быть четыре или пять. (На
схеме рис. 8.6 показана четырехпо-
зиционная панель, а характеристики
соответствуют пятипозиционному
электроприводу.) Набор силовой схе-
мы осуществляется контакторами:
линейным КММ, направления
КМ1В — КМ4В, торможения КМЗ и
ускорения КМIV—KM4V, а также
рубильником SQL При переводе ру-
коятки командоконтроллера (контак-
ты SA1—SA14) схема обеспечивает
характеристики с плавным увеличе-
нием момента, осуществляемым под
Двигатель при этом включается по
контролем реле времени КТ1— КТЗ.
схеме с последовательными сопротивлениями в главной цепи.
Для получения плавного торможения при переводе рукоятки команда*
контроллера из крайних положений в первое предусматривается характери-
стика получаемая шунтированием якоря при включении контакторов КМЗ
и KM4V. Для остановки привода используется характеристика противовклю-
чения 1Т при включенных контакторах КМIV—KM3V под контролем реле
КН1 н КН2. Тормоз УД в рабочих режимах не участвует и накладывается
только в аварийных режимах при срабатывании защиты или отключении
кнопки SB. В схемах передвижения применяется в основном тормозной элек-
тромагнит параллельного возбуждения с форсировкой напряжения, осуще-
ствляемой контактором КМ2 под контролем реле КТ4. Схемой панелей П
предусмотрены те же виды защит, вынесенные на реле КПЗ, что и на па-*
8.1. Технические данные комплектных электроприводов
постоянного тока подъемных механизмов
Т аблица
Тип панели управления или кулачкового контроллера Допустимая мощность статической нагрузки, кВт, двигателя в режимах работы Тип командо- контрол- лера
2М ЗМ 4М 5М 6М
КВ102 До 22 До 15 До 10 — ill
ПС 160, ДПС 160 До 45 До 38 До 30 До 25 До 16 ккпин
ПС250, ДПС250 45—85 38—75 30—60 25—50 16-36 ккпин
ПС630, ДПС630 85—185 75-150 60—125 50-100 36-80 ККПИ09
Рис 8 6 Схема электропривода механизма передвижения с панелью управ-
ления П
250 Электроприводы с контакторно-контроллерным управлением Разд. 8
Таблица 8.2. Технические данные комплектных электроприводов
постоянного тока для механизмов передвижения
Тип панели Допустимая мощность статической нагрузки или расчетная мощность двигателя, кВт, в режимах работы Тип ко манд о» контрол* лера
2М ЗМ 4М 5М 6М
КВ101 п 14 До 22 д°4 п 5,6 До 10 •—-
П60 П160, Па 10’5 Д° 16,5 10,5-28 п, 6,5 Д 13,5 6,5—18 Па 4Л До п 4,1-13,5 П. 3,7 Д 9,5 3,7-12,5 До-у- 3-9,5 ККП1108 ККП1108
ДП160 П250, 16,5-45 28—50 13,5—38 18—37,5 11—30 13,5-26,25 9,5—25 12,5—24 7—16 9,5—20 ККП1108 ККП1102
ДП250 П630 45—80 50—100 38—75 37,5—64,2 30—60 26,85—54,8 25—50 24—49 5-7 20—40
80—160 75-130 60-125 50—100 36-80
Примечание. В числителе указаны значения мощности статической нагрузки,
в знаменателе — расчетной мощности двигателя.
нели ПС, При этом контакты конечных выключателей SQ1 и SQ2 шунти-
руются реле КТ4 на нулевой позиции и реле КН1 и КН2 на ходовых по-
зициях. Это позволяет вывести механизм из зоны конечной защиты и дви-
Рис. 8.7. Механические характеристики
электропривода по схеме рис. 8.6
гаться в этой зоне по характери-
стике /' толчками при понижен-
ной скорости в течение времени
выдержки реле КТ4. Аналогично
схеме панели П строятся схемы
дуплексных панелей ДП.
Технические данные комплект-
ных электроприводов постоянного
тока. В табл. 8.1 и 8.2 приве-
дены технические данные электро-
приводов постоянного тока соот-
ветственно механизмов подъема и
передвижения: типы панелей и
силовых кулачковых контролле-
ров, статической для электропри-
водов подъема и расчетной для электроприводов передвижения мощностей
двигателей в режимах работы 2М — 6М и типы командоконтроллеров к пане-
лям управления. Нагрузки двигателей для каждого из устройств управления
рассчитаны в соответствии с методами, изложенными в разд. 6. Технические
данные панелей управления и кулачковых контроллеров приведены в разд, 3.
Пускорегулировочные резисторы выбираются по таблицам разд. 7. В резуль-
тате по мощности статической нагрузки согласно методам, изложенным в
разд, 7, выбирается двигатель для заданного режима работы и определяются
§ 82
Электроприводы с асинхронными фазными двигателями
251
технические данные всех элементов электропривода. Технические данные
в табл. 8.1 и 8.2 относятся к двигателям и панелям управления с номиналь-
ным напряжением 220 В. При напряжении 440 В мощности двигателей, соот-
ветствующие определенному типу панелей управления, повышаются на 60 %«
Для дуплексных панелей мощности, указанные в таблицах, удваиваются.
8.2. ЭЛЕКТРОПРИВОДЫ
С АСИНХРОННЫМИ ФАЗНЫМИ ДВИГАТЕЛЯМИ
И ТОРМОЖЕНИЕМ ПРОТИВОВКЛЮЧЕНИЕМ
Общие вопросы. Область применения. Рассматриваемые электроприводы
до последнего времени благодаря простоте реализации находят наиболее ши-
рокое применение для крановых электроприводов, особенно для механизмов
передвижения. В механизмах подъема эти электроприводы все в большей
степени вытесняются системами с динамическим торможением самовозбужде-
нием, рассматриваемыми в § 8 3. Комплектные электроприводы выполняют
на основе применения асинхронных крановых двигателей с фазным ротором
при управлении от силовых контроллеров ККТ60 и панелей управления ТА,
ДТА, ТСА, К, ДК, КС. Электроприводы с силовыми кулачковыми контрол-
лерами и панелями ТА, ДТА (для механизмов передвижения) и ТСА (для
механизмов подъема) с цепями управления на переменном токе применяют
для кранов общего назначения, а с панелями К, ДК (передвижение) и КС
(подъем) — с цепями управления на постоянном токе для кранов металлур-
гического производства. Особенности использования определяют и некоторые
различия в построении указанных панелей. Панели К и КС имеют индивиду-
альную защиту, в то время как для панелей ТА и ТСА основной является
схема с общей защитой, вынесенной на отдельную защитную панель; в па-
нелях ДК для двух- и многодвигательных электроприводов предусмотрено
разделение силовых цепей двигателей для повышения надежности работы
системы, имеются также и другие различия.
Диапазон мощностей, охватываемый электроприводами и силовыми ку-
лачковыми контроллерами, составляет от 1,7 до 30 кВт и увеличивается
до 45 кВт при добавлении контакторного реверсора, а с панелями управле-
ния— от 3,5 до 100 кВт для механизмов передвижения и от 11 до 180 кВт
для механизмов подъема (мощности указаны для режима работы 4М при
ПВ = 40 %). Применяемые в рассматриваемых электроприводах методы
регулирования скорости и осуществления тормозных режимов определяют их
невысокие регулировочные и энергетические свойства. Характерным для та-
ких систем является отсутствие устойчивых посадочных и промежуточных
скоростей и большие потери в пуско-тормозных резисторах. В целом диапа-
зон регулирования этих электроприводов не превышает 3:1, а эквивалент-
ный КПД для режима 4М составляет около 65 %.
Схемы электроприводов механизмов подъема. Схема электропривода с
кулачковым контроллером ККТ61 приведена на рис. 8.8. Близка к ней по
построению и схема электропривода с контроллером ККТ68, в которой в цепи
статора применен контакторный реверсор, а освободившиеся контакты
252
Электроприводы с контакторно-контроллерным управлением Разд. 8
контроллера использованы для параллельного соединения сопротивлений
в цепи ротора. Механические характеристики электропривода с кулачковыми
контроллерами приведены на рис. 8.9.
Рис. 8.8. Схема электропривода подъема с кулачковым контроллером ККТ61
При построении механических характеристик рассматриваемых электро-
приводов важным вопросом является выбор значения начального пускового
Рис. 8.9. Механические
стики электропривода
рис. 8.8
характери-
по схеме
момента (характеристики / и Г)»
С одной стороны, в плане снижения
толчка момента при разгоне и обес-
печения посадочных скоростей при
спуске легких грузов желательно
уменьшить пусковой момент. С дру-
гой стороны, чрезмерное снижение
начального пусковою момента мо-
жет привести к опусканию тяжелых
грузов на позициях подъема и воз-
никновению чрезмерных скоростей
при их спуске. Для исключения это-
го начальный пусковой момент дол-
жен составлять около 0,7Л4Ном-
На рис. 8.9 в качестве номинального принят момент двигателя при
ПВ = 40 %. Тогда в режиме ПВ = 25 % первой позиции контроллера будет
соответствовать характеристика 1' с пусковым моментом, равным при
ПВ = 40 %, соответственно второй позиции — характеристика 2Г. Для обес-
печения этого пускорегулирующие резисторы имеют отпайки, позволяющие
шунтировать часть сопротивления последней ступени.
Рис. 8.16. Схема электропривода подъема с панелью ТСЛ
254 Электроприводы с контакторно -контроллерным управ гением Разд. 8
Рис. 8 11. Механические
стики электропривода
рис. 8.10
На схеме рис. 8.8 контакты SM2, SM4, SM6 и SM8 контроллера выпол-
няют реверс двигателя, контакты SM7 и SM9 — SM12 коммутируют ступени
резисторов, контакты SMI, SM3 и SM5 использованы в цепях защиты. Од-
новременно с двигателем включается катушка тормоза YA. В схеме с кон-
троллером ККТ61 в целях уменьшения числа используемых кулачков приме-
нено несимметричное включение сопротивлений, а в схеме с ККТ68 число
контактов контроллера позволяет выполнить симметричное включение.
Защита электропривода осуществляется защитной панелью, на которой
находятся линейный контактор КММ, силовой рубильник QS, предохрани-
тели FUlt FU2 и блок максималь-
ных реле КА. Конечная защита осу-»
ществляется выключателями SQ2 и
SQ3. В цепь катушки контактора
КММ включены контакты кнопки
включения SB, аварийного выключа-
теля SA и контакты блокировки
люка SQL
На рис. 8.10 приведена схема
электропривода подъема с панелью
управления ТСА. По тем же прин-
ципам строятся электроприводы и
с панелями КС. Отличия заключа-
характери-
по схеме
ются в том, что в них цепь управле-
ния выполнена на постоянном токе,
а защитные аппараты, включая ли-
нейный
КА, предохранители
и защита является
контактор АЛ1Л1, рубильник
FV1, FU2, находятся непо-
индивидуальной, а в элек-
защитная панель. Следует
QS/f максимальные реле
средственно на панели,
троприводах с панелями ТСА используется
отметить, что для ответственных электроприводов также выпускалась моди-
фикация панелей с управлением на переменном токе типа ТСАЗ. Схемы элек-
тропривода с панелями управления обеспечивают автоматический пуск, ре-
версирование, торможение и ступенчатое регулирование скорости на рео-
статных характеристиках двигателя. На схеме рис. 8.10 приняты обозна-
чения: КММ — линейный контактор; КМ1В и КМ2В — контакторы направ-
ления; КМ1 -—контактор тормоза УД; KM1V — KM4V — контакторы
ускорения; KM5V — контактор противовключения. Защита воздействует на
реле КН.
Механические характеристики электропривода приведены на рис. 8.1 1<
На позициях подъема пуск осуществляется под контролем реле времени КТ1
и КТ2, при этом характеристика 4'И является нефиксированной. На положе-
ниях спуска производится регулирование на характеристиках противовклю-
чения 1С и 2С и характеристике ЗС, на которой в зависимости от массы
груза двигатель работает в режиме или силового спуска или генераторного
торможения. Переход на характеристику ЗС осуществляется по характери-
стикам З'С и 3"С под контролем реле времени.
§ 8.2 Электроприводы с асинхронными фазными двигателями
255
В схемах панелей, выпускавшихся до 1979 г., для опускания малых гру*
зов применялся режим однофазного торможения, осуществляемый с помощью
дополнительных контакторов. Этому режиму на рис. 8,11 соответствует ха*
рактеристика О. После освоения панелей с динамическим торможением, рас*
сматриваемых далее, этот режим в панелях ТСА и КС был исключен. Для
спуска груза на характеристиках противовключения 1С и 2С оператор дол*
жен нажать педаль SP при установке рукоятки командоконтроллера на со*
Рис. 8.12. Схема двухдвигательного электропривода механизма передвиже-
ния с кулачковым контроллером ККТ62
ответствующую позицию. Управление педалью является вынужденным при
мягких механических характеристиках из-за возможности подъема груза
вместо спуска.
Электропривод переводится в режим противовключения не только при
опускании грузов, но и при торможении с положений спуска, причем на
первой и второй позициях это осуществляется нажатием педали. При этом
за время выдержки реле КТ2 наряду с механическим торможением обэспе*
чивается и электрическое на характеристике 2С. Помимо указанного реле КТ2
контролирует также правильность сборки схемы. В схеме панелей ТСА ка-
тушка тормоза YA через контактор КМ1 подключена к сети переменного
тока. В панелях КС могут использоваться тормозные магниты как перемен-
ного, так и постоянного тока. В последнем случае выполняется форсирозка
включения тормоза, как это показано ниже при рассмотрении панелей ДК.
2f6
Электроприводы с контакторно-контроллерным управлением Раъ- о
Рис. 8.13. Схема двухдв ига тельного электропривода
На схеме рис. 8.10 наряду с обычным включением резисторов показано
также их параллельное включение, применяемое в тех случаях, когда на-
грузка превышает допустимую для контакторов ротора.
Схемы электроприводов механизмов передвижения. Схемы электропривод
до в механизмов передвижения с кулачковыми контроллерами выполняются
в одно- или двухдвигательном исполнении. Схема однодвигательного испол-
нения с контроллером ККТ61 полностью аналогична схеме рис. 8.8. Схема
§82 Электроприводы с асинхронными фазными двигателями 257
КН1
\КН1
= 220В
КН2
КМЧМ
XM21V
КН2
KM1V
KM11V
КММ1
tttt 1Ш
-------«.
КМ2 I
__KMW
KM11V^
КМ1
к
♦
♦
♦
SA5
KM4W
KM1V
КТ1
КТ2
КТ1
KM11V
ф—'
KM1V
КН2 ~№
ВАЗ
SAB
SA11
YA1
КА2
YA11
КТ1
КТ2
КМ2
КА2
КМ1
—------- >
КМ 1В
КМ11В
КМ2В
КМ21В
I.I ! J М И f
КМ Ml
КММ11
—-----Hi
К MW
1 KM41V
I——
KM1V
KV11V
KM2V
KM3V
KM3W
KMW
Ч I
i ।
М I
механизма передвижения с панелью ДК
двухдвигательного электропривода с контроллером ККТ62 приведена на
рис. 8.12. Принципы работы схем, с контроллерами ККТ61 и ККТ62 одина-
ковы контакты SM контроллера регулируют сопротивления в цепи роторов
двигателей, защита вынесена на отдельную защитную панель. Отличие со-
стоит в том, что в схеме с ККТ62 реверс осуществляется контакторами
КМ1В и КМ2В, Механические характеристики обоих электроприводов иден-
тичны и приведены на рис. 8 9.
9 Зак 918
258 Электроприводы с контакторно-контроллерным управлением Разд. 8
Таблица 8.3. Технические данные комплектных электроприводов
с асинхронными фазными двигателями и торможением
противовключением для подъемных механизмов
Тип панели управления или кулачкового контроллера Допустимая мощность статической нагрузки двигателя, кВт, в режимах работы Тип команде* контроллера
2М ЗМ 4М 5М 6М
ККТ61 До 30 До 22 До 15 До 7,5 * — •
KKT68 До 55 До 37 До 22 До 15 —“
ТСА160 КС 160 До 90 До 85 До 70 До 50 До 30 ККП1120
ТСА250 КС250 90—140 85—130 70-110 50-75 30—45 ККП1120
ТСА3400 КС400 140—210 130-200 110-176 75—120 45-72 ККП1120
Таблица 8.4. Технические данные комплектных электроприводов
с асинхронными фазными двигателями с торможением
противовключением для механизмов передвижения
Тип панели управления Допустимая мощность мощность двигателя статической нагрузки и расчетная ^ст/^р’ кВТт в Режимдх работы Тип команде*
или кулачкового контроллера 2М ЗМ 4М 5М 6М контрол- лера
ККТ61, ККТ62 17 Д°30 Лп 12-3 Д 22 п 6 До 15 —*
ДТА60 До 20 Па 10’5 Д° ' 18,5 Пп 7J5 До 15 п 3’8 Д° 8,5 ккппзо
ТА60, К60, ДК60, ТА 160 (с контакте- 11—22 10,5-21 7,5—15 4,7-9,4 3,8—7,6 ккппзо
20-40 18,5-37 15-30 11-22 8,5—17
рами ротора 60А)
ДТА160 с кон- 11—36,6 10,5—30 7,5—18,75 4,7-13,4 3,8-6 ккппзо
такторами ро- тора на 160 А 20—55,5 18,5—49,3 15—45 • 11—27,5 8,5—23,6
ТА 160, К160, 22,2—58,5 21—47,8 15—29,2 9,4—24,3 7,6—10,2 ККП1130
ДК160 40—90 37-85 30—70 22—50 17—30
К.250, ДК250 58,5—74,7 47,8—73,4 29,2—44 24,3-31,1 10,2—13 ккппзо
90-140 85—130 70-110 50-75 । 30—45
§ 8.2 Электроприводы с асинхронными фазными двигателями 259
Схема электропривода механизма передвижения с управлением от па-
нели рассматривается на примере двух двигательного электропривода с па-
нелью ДК краново-металлургического исполнения, приведенной на рис. 8.13.
Схема обеспечивает симметричные механические характеристики, приведен-
ные на рис. 8.14. В схеме: КММ! и КММ!!—линейные контакторы; КМ1В*
1КМ11В, КМ2В, КМ21В— контакторы направления; KM1V—KM4V9 KMllV^
КМ2 —- контакторы тормозов YA1
'KM41V— контакторы ускорения; КМ1,
и YA1L Управление осуществляется от
командоконтр оллера (контакты SA1 —
’SA11) с обеспечением плавного пуска
под контролем реле времени КТ 1
и КТ2. Для торможения использу-
ется режим противовключения на ха-
рактеристике /, осуществляемый под
контролем реле КН2. Катушка реле
КН2 включена на разность напряжений,
пропорциональных выпрямленному диод-
ным мостом UZ напряжению ротора
одного из двигателей, и опорного на-
пряжения сети. Регулированием потен-
циометров R1 и R2 достигается задерж-
ка двигателя на характеристике 1 до
нулевой скорости, после чего разреша-
ется пуск двигателя в обратном направ-
лении. В схеме предусмотрены все не-
обходимые виды защиты, вынесенные
Рис. 8.14. Механические характе-
ристики электропривода по схеме
рис. 8.13
на реле напряжения КН1. Цепь управления питается от сети постоян-
ного тока 220 В через переключатель QS2 и предохранители FU3 —
FU4.
Технические данные комплектных электроприводов. Технические данные
электроприводов механизмов подъема и передвижения представлены в
табл. 8 3 и 8 4 Указанными таблицами определяются мощности нагрузок дви-
гателей, управляемых от силовых контроллеров и панелей в зависимости
от режима работы и рассчитанные согласно методам, излагаемым в разд. 6,
Технические данные контроллеров и панелей управления приведены в
разд. 3. Пускорегулировочные резисторы выбираются по таблицам разд. 7,
Технические данные в табл. 8.3 и 8.4 относятся к двигателям и панелям
управления с номинальным напряжением питающей сети 380 В. При других
напряжениях необходимо пользоваться информационными материалами за-
вода-изготовителя. Для дуплексных панелей указанные в табл. 8.4 мощности
двигателей удваиваются. Панели ТСА3400 и KC40Q в настоящее время на
выпускаются, но в эксплуатации еще находятся электроприводы с этимд
цанелями. Для режима работы 6М следует применять только панели К*
ДК и КС.
9*
260
Электроприводы с контакторно-контроллерным управлением Разд. 8
8.3. ЭЛЕКТРОПРИВОДЫ МЕХАНИЗМОВ ПОДЪЕМА
С ДИНАМИЧЕСКИМ ТОРМОЖЕНИЕМ
САМОВОЗБУЖДЕНИЕМ ДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОхМ
Общие вопросы. Область применения. Электроприводы с динамическим
торможением самовозбуждением имеют значительно более высокие регули-
ровочные и энергетические показатели» чем рассмотренные выше электропри-
воды с торможением противовключением. Эти электроприводы выполняются
только для механизмов подъема, и их применение целесообразно во всех
случаях, когда предъявляются повышенные требования к регулированию
крановых механизмов с приводом переменного тока. Комплектные электро-
приводы охватывают все крановые асинхронные двигатели с фазным рото-
ром при управлении от кулачковых контроллеров ККТ65 в комплекте с па-
нелью ТРД160 и панелями управления ТСД. Эти электроприводы выпуска-
ются только для механизмов общего назначения. Для крановых механизмов
металлургического производства выпускается специальная серия электропри-
водов, рассматриваемых в § 3.4, с режимом динамического торможения са-
мовозбуждением и тиристорными узлами без дуговой коммутации.
Электроприводы с силовыми контроллерами имеют мощность привода от
11 до 30 кВт, а с панелями управления — от 11 до 150 кВт в режиме работы
4М при ПВ = 40 %. Электроприводы с кулачковыми контроллерами имеют
отдельную панель защиты, электроприводы с панелями управления имеют
только индивидуальную защиту. Панели управления по построению схемы
выпускаются двух типов соответственно для возбуждаемых и невозбуждае-
мых электродвигателей. Первые из этих панелей применяются для двигате-
лей, напряжение на кольцах ротора которых не превосходит 300 В при на-
пряжении сети 380 В, вторые — при напряжении ротора свыше 300 В. При-
менение режима динамического торможения самовозбуждением позволяет
получить устойчивые посадочные скорости при диапазоне регулирования до
4 : 1 в системе с кулачковыми контроллерами и до 8:1 — с панелями управ-
ления. Эквивалентный КПД привода в режиме 4М до 75 %. Следует также
отметить, что, обладая повышенными регулировочными и энергетическими
свойствами, рассматриваемые электроприводы позволяют значительно улуч-
шить использование двигателей и повысить надежность работы контакторной
аппаратуры благодаря снижению числа включений привода при осуществле-
нии доводочных операций.
Схемы электроприводов. Схема электропривода с силовым кулачковым
контроллером ККТ65 и дополнительной панелью ТРД160 приведена на
рис. 8.15, а соответствующие ей механические характеристики — на рис. 8 16.
Такой электропривод применяется только для возбуждаемых двигателей.
В схеме контакты кулачкового контроллера SM1 — SM12 обеспечивают ре-
верс двигателя, регулирование сопротивлений, управление релейно-контактор-
ной аппаратурой, вынесенной на панель ТРД, и аппаратами защиты на за-
щитной панели. На панели ТРД расположены: выпрямительный блок UZ,
механически сблокированные контакторы силовой КМ1 и динамического тор-
можения КМ2* контактор ускорения KA1V с реле времени КД реле коп-
Электроприводы механизмов подъема
261
Рис. 5.15. Схема электропривода ме-
ханизма подъема с кулачковым кон-
троллером ККТ65 и панелью управ-
ления ТРД
троля КН и КТ2, а также диоды, необходимые для подпитки статора дви-
гателя постоянным током в целях обеспечения начального возбуждения и
питания реле. Защитная панель та же, что и для систем с противовключе-
нием, и состоит из линейного контактора /СЛШ, силового рубильника QS,
блока максимальных реле КА и предохранителей цепи управления FUit
PV2,
В режиме подъема схема работает аналогично системе с контроллером
ККТ61, соответственно одинаковы и механические характеристики. В направ-
лении спуска на позициях 1С — 4С двигатель переводится в режим
262 Электроприводы с контакторно-контроллерным управлением Разд 8
динамического торможения самовозбуждением. При этом в статор двигателя
включением контактора КМ2 подается выпрямленный выпрямителем UZ ток
ротора, и осуществляется подпитка обмоток статора выпрямленным током
для начального возбуждения двигателя. Подпитка осуществляется по цепи;
сеть, две фазы двигателя, контакт контактора КМ2, вывод 3„ размыкающий
контакт КМ К резистор, диод, реле КТ2. Реле КН осуществляет с помощью
разделительных диодов VI, V2 контроль моста UZ, получая питание от
сети через выводы 1 и 2 и срабатывая при пробое любого из силовых диодов.
Тормозной электромагнит YA подклю-
чен непосредственно за контактами ре-
верса контроллера.
Электроприводы с панелями управ-
ления ТСД рассматриваются на при-
мере привода с невозбуждаемыми дви-
гателями. Схема с возбуждаемыми дви-
гателями отличается от рассматривае-
мой построением узла подпитки и от-
сутствием контура динамического тор-
можения на нулевом положении коман-
^доконтроллера. Узел подпитки при
этом для систем с возбуждаемыми
двигателями аналогичен принятому
в схеме с ККТ65. Отключение кон-
Рис. 8.16. Механические характе- тура динамического торможения в схе-
ристики электропривода по схеме ме с невозбуждаемыми двигателями
рис. 8.15 связано с увеличенным током под-
питки.
Схема электропривода приведена на рис. 8.17, а соответствующие ей
механические характеристики, одинаковые для электроприводов с возбуж-
даемыми и с невозбуждаемыми двигателями, — на рис. 8.18. В схеме реверс
осуществляется контакторами КМ1В и КМ2В, динамическое торможение —
контактором КМ2, механически сблокированным с силовым контактором КМК
Подпитка двигателя в режиме динамического торможения осуществляется
от сети через контакт контактора КМ2, параллельный КМ1, две фазы дви-
гателя, контакт КМ2 цепи подключения выпрямителя UZ4, реле контроля
КА2, диод, резистор. Регулирование скорости осуществляется контакторами
КМ1V — КМ4 V,
При подъеме и спуске предусматривается автоматический пуск под кон-
тролем реле времени КТ1— КТЗ. Режим динамического торможения реали-
зуется на всех положениях спуска, кроме последнего, на котором двигатель
работает от сети с минимальным невыключаемым сопротивлением в роторе.
При остановке привода со спуска в течение времени выдержки реле КТ4
остается включенным контактор КМ2 и осуществляется динамическое тормо-
жение, что необходимо для облегчения работы тормоза YA. В схемах для
самовозбуждаемых двигателей контур динамического торможения, как уже
было сказано, в нулевом положении не отключается. При торможении с
Рис. 8Л 7. Схема электропривода механизма подъема с панелью у правления ТСД
264
Электроприводы с контакторно-контроллерным управлением Разд. 8
подъема тормоз накладывается сразу. Вся защита вынесена непосредственно
на панель управления. Защита является типовой и включает в себя: нулевую
Рис. 8.18. /Механические характеристики
электропривода по схеме рис. 8.17
— реле КА1, конечную — выключа-
тели SQ1 и SQ2t от пробоя дио-
дов — реле KHJ.
Технические данные комплект-
ных электроприводов. Техниче-
ские данные электроприводов
подъемных механизмов с динами-
ческим торможением самовозбуж-
дением приведены в табл. 8.5.
Электроприводы с динамическим
тор можем не м с а м о воз б у ждени ем
выполняются только на напряже-
ние 380 В. Как и для электропри-
водов других типов, приведенные
в табл. 8 5 данные позволяют
выбрать полный комплект элек-
тропривода, исходя из мощностей
нагрузки Технические данные
входящей в комплект аппаратуры управления приведены в разд. 3. Пуско-
регулирующие резисторы выбираются по таблицам разд. 7.
Таблица 8.5 Технические данные комплектных электроприводов
с асинхронными фазными двигателями и динамическим
торможением самовозбуждением
Тип панели управления или кулачкового контроллера Допустимая мощность статической нагрузки двигателя, кВт, в режимах работы Тип командо* контрол- лера
2М зм 4М 5М * 6М
ККТ65, ТРД160 До 30 До 22 До 15 1 W — — —
тсдбо До 40 До 37 До 30 До 25 До 18 ККП1124
ТСД160 40—100 37-85 30—70 25-58 18—43,5 ККП1124
ТСД250 100-150 85—140 70—110 58—90 43,5—67,5 ККП1124
ТСД400 150—210 140—200 110—180 90—140 67,5-108 ККП1124
8.4. ЭЛЕКТРОПРИВОДЫ
С ИМПУЛЬСНО-КЛЮЧЕВЫМИ КОММУТАТОРАМИ
В ЦЕПИ РОТОРА АСИНХРОННЫХ ФАЗНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Общие вопросы. Принцип импульсно-ключевого управления. Рассмотрен-
ные ранее электроприводы с контакторно-контроллерной аппаратурой управ-
ления благодаря своей простоте и невысокой стоимости занимают превали-
§84 Электроприводы с импульсно-ключевыми коммутаторами
265
рующее место в промышленном производстве Однако повышение требова-
ний к крановым приводам массового применения ставят задачи значитель-
ного улучшения их технико-экономических показателей без существенного
увеличения стоимости и усложнения эксплуатации. Основным направлением
решения указанных задач является применение средств полупроводниковой
техники в традиционных системах в целях повышения коммутационной устой-
чивости контакторно-контроллерной аппаратуры и реализации более рацио-
нальных режимов регулирования и торможения Простым примером такого
решения являются приведенные в § 83 электроприводы с динамическим тор-
можением самовозбуждением, в которых применен неуправляемый диодный
мост.
В настоящем параграфе рассматриваются электроприводы с импульсно-
ключевыми коммутаторами (ИКК) в цепи ротора фазных двигателей, по-
зволяющие обеспечить в тех случаях, когда это необходимо, наряду с по-
вышением диапазона регулирования скоростей на уровне не ниже 10:1
бестоковую коммутацию контакторов с доведением их коммутационной изно-
состойкости до уровня механической Такие электроприводы уже внедрены на
ряде кранов массового производства, и их область применения непрерывно
расширяется Принцип импульсно-ключевого управления заключается в ком-
мутации силовой цепи ротора асинхронного двигателя тиристорным ком-
мутатором, собранным по мостовой или треугольной схеме При этом
включение тиристоров коммутатора осуществляется по сигналу, пропорцио-
нальному ЭДС ротора, при превышении скольжением двигателя заданного
уровня, а отключение — в момент их естественной коммутации на частоте
скольжения ротора. При и мя\ л ьсно-ключевом управлении фактически автома-
тически реализуется режим включения — отключения электропривода с мягкими
механическими характеристиками, осуществляемый оператором для получе-
ния требуемой установочной скорости. Однако получаемый при этом диапазон
регулирования скорости в несколько раз превышает достигаемый в тради-
ционных системах Формирование пуско тормозных характеристик при этом
не осуществляется, и управление электропривод эм во всех остальных режи-
мах не отличается от обычных систем.
Электроприводы с ИКК разработаны как для подъемных механизмов,
так и для механизмов передвижения в одно- и двухдвигательном исполне-
нии. Для механизмов подъема на нх основе выпускаются панели типа КСДБ
для кранов металлургического производства с мощностями двигателей от
40 до 200 кВт с бестоковой коммутацией и более простые панели общепро-
мышленного назначения типа ТСДИ. Для механизмов передвижения такие
электроприводы выпускаются как с кулачковыми контроллерами, так и с па-
нелями управления только для целей регулирования на те же мощности, что
и традиционные электроприводы, рассмотренные в § 8 2. Разработаны также
схемы с бестоковой коммутацией для краново металлургических панелей, од-
нако они еще не освоены промышленностью
Схема электропривода подъема с панелью КСДБ. На рис. 8 19 приведена
схема электропривода с панелью КСДБ, в которой применение тиристорного
коммутатора в цепи ротора и контакторов с бездуговой коммутацией в цепи
Электроприводы с контактор но-ко нт роллер ним управлением Разд. 8
£66
г —
Рис, 8.19, Схема электропривода механизма подъема с панелью управления
КСД54
статора при совмещении традиционных методов регулирования с импульсно-
ключевым управление?*! позволило создать высокоэффективную систему. Ме-
ханические характеристики электропривода приведены на рис. 8.20. ИКК в
этой схеме используется для получения характеристики 1П и обеспечения
бестоковой коммутации контакторов ускорения КМ IV—KM4V и динамиче-
ского торможения КМ1 в цепи ротора. Характеристики 2П—4П и 4С— обыч-
ные реостатные характеристики двигателя! а на характеристиках 1С—ЗС
§84 Электроприводы с импульсно-ключевыми коммутаторами
267
268 Электроприводы с контактерно-конт роллерным управлением Разд. 8
Рис. 8.20. Механические характеристики
электропривода по схеме рис. 8.19
двигатель работает в режиме динамического торможения самовозбуждением.
Бездуговая коммутация цепей статора достигается применением линейного
контактора RMM с тиристорными блоками. При этом контакторы направле-
ния КМ1В и КМ2В отключаются с задержкой по отношению к контактору
КММ, а при отключении контактов RMM ток переходит на шунтирующие их
тиристоры, которые закрываются при переходе тока через нуль. Управление
тиристорами осуществляется реле KHL Управление тиристорами моста ИКК
VZ1 в режиме бестоковой коммутации контакторов роторной цепи произво-
дится по цепи, состоящей из раз-
мыкающих контактов контакторов
роторной цепи и контролирую-
щих их реле КГ/, КТ 2 и КТ5,
При этом отключение этих кон-
такторов происходит после отклю-
чения тиристоров моста.
Питание цепи управления
ИКК производится от трансфор-
матора Т2 и выпрямителя UZ4.
Реле КТ6 осуществляет контроль
этой цепи. Для облегчения ком-
мутации контактора КЛ1/ мост
ИКК шунтируется силовым дио-
• дом. Для обеспечения характери-
стики Ш управление ИКК осу-
ществляется от ЭДС ротора дви-
гателя по иепи: выпрямитель VZ3,
выполняющий роль ключевого эле-
резисторы К2 и R3, стабилитрон VD,
мента, резисторы R7 — R9, управляющие электроды тиристоров. Наличие
цепи обратной связи по ЭДС позволяет также исключить аварийный режим
разрыва роторной цепи, вероятность создания которого возможна из-за
большого числа контактов в цепи управления тиристорами. При этом в слу-
чае несрабатывания какого-либо контакта увеличение скорости двигателя
выше допустимой приводит к включению стабилитрона и открытию моста
ИКК.
Подпитка двигателя в режиме динамического торможения выполнена
от трансформатора Т1 и моста UZ2. Эта щепь контролируется реле КНЗ.
Помимо обычных видов защиты в схеме имеется защита от превышения
скорости, выполненная с помощью центробежного реле KV. В остальном
работа панели КСДБ аналогична работе панели ТСД, рассмотренной в § 8.3,
На рис. 8.21 приведена схема электропривода с панелью ТСДИ. По прин-
ципам построения рассматриваемая схема отличается от электропривода
с панелью ТСД наличием узла импульсно-ключевого регулирования, позво-
ляющего получить малую стабильную скорость в направлении подъема (ха-
рактеристики аналогичны приведенным на рис. 8.20, за исключением отсут-
ствия характеристики 4П). Узел ИКР включает в себя тиристоры VS1— VS3,
формирователь импульсов на оптроне VS4, распределитель импульсов на
SA1
КМ18
КН2 т- КТ1
KMIB'b
SA2
SA4
1 1 1 > И____
IHLr&t
SA6
SA7
КТ1
SA9
ММ
Я10
КМЧ fiMZ
--V. I Ч. Г““*
КН1
КМ2
КМ1
КМ1
SQ2a км КПЗ КА1
КН2
-----<
-КМ1В
кш
КМЗ
гМ1
т
КМ28
г
KM1V
KM3V
R18
£
Ч
KM3V
КТЗ ч
KM2V
KM4V
R!9
9
т 8
KM3V
— |>
mv
RA2
1т У
№ кмч
СЧ R21
КА2
R17
КМ2
КТ1
И I I иш
111 ин 111
№
И
Рис. 8.21. Схема электропривода механизма подъема с панелью ТСДИ
SM9
цщ^Гшг
j 1 и ujaw >
tmnitnt
\KM2B
SM3
М2
UZ2
Ittt+lttttl
KM1V
KM1V
л .
-Н«
w 'т
К гп&рмозу
КЗ
^8
/-Х
=3---fW
VS3
SM1
FV2
KM2V
\КММ I I I и I И I I I
SQJ
9 HM1V КА
♦
КМ2В
1111ЦИМП, ЖУ
I I I | I I 5Л«
тпГиш
—— ।
I'MW
кмв
КМ2В
КН
KMW
KMW
VS1
fif
—----
ys^1
KM2V
KM2V
jSMS 1
кг
КН
KM2V
КТ
У№ Ц
УМ
22^_ ш
vse
кг
гаг
Рис. 8.22. Схема двухдвигательного электро-
привода механизма передвижения с импульс-
но-ключевым регулированием и управлением
от кулачкового контроллера
§ 8.4 Электроприводы с импульсно-ключевыми коммутаторами
271
резисторах R2— R4, измерительный мост UZ2, подключенный к цепи ротора
через конденсаторы С1 с выходом на резисторы R7 и R8, стабилитроны VD1
и VD2. В схеме применены полупроводниковые реле времени КТ2— КТ4,
условно показанные в цепи управления блоками, схема которых приведена
отдельно.
Выдержка времени на включение контактора скорости определяется вре-
менем заряда конденсатора С2 до значения напряжения, открывающего од-
нопереходной транзистор VT. Срабатывание VT приводит к открыванию ти-
ристора KS5, подающего питание на катушку контактора. Резисторы
R17— R19 входят в цепь заряда конденсаторов соответствующих реле через
диоды моста UZ3. Реле КНЗ осу-
ществляет контроль работы схе-
мы в режиме ИКР, выключая кон-
тактор КМ2 при превышении
скоростью определенного значе-
ния. В остальном работа схемы и
обозначения аппаратов аналогич-
ны работе и обозначениям в схе-
ме с ТСД.
Схемы электроприводов меха-
низмов передвижения. Для меха-
низмов передвижения электропри-
воды с использованием импульс-
Рис. 8.23. Механические характеристики
электропривода по схеме рис. 8.22
но-ключевого управления строятся по различным схемам в зависимости от
предъявляемых требований. На рис. 8.22 приведена схема двухдвигатель-
ного электропривода с управлением от силового кулачкового контроллера
ККТ62, применяемая для кранов облегченного типа. В этой схеме импульс-
но-ключевое управление использовано для получения доводочных скоростей
механизмов при диапазоне регулирования 10:1. Механические характери-
стики электропривода показаны на рис. 8.23. За исключением режима малых
скоростей, работа схемы аналогична управлению от кулачкового контрол-
лера, рассмотренному в § 8.1.
Контакты кулачкового контроллера SA1 выводят ступени резисторов
в цепи ротора, а реверс двигателя осуществляется контакторами реверсора
КМ1В и КМ2В. Импульсно-ключевые коммутаторы обоих двигателей выпол-
нены по треугольным схемам на тиристорах VS1— VS6. В состав узла управ-
ления коммутатором входят измерительные мосты ЭДС двигателей UZ1, UZ2,
элемент с регулируемым порогом срабатывания, выполненный на стабили-
троне VD, формирователь импульсов, выполненный на оптроне IAS5, распре-
делители импульсов на диодах Vi— V3 и V7— V9 и резисторах R1 и R2,
выпрямляющие диоды V4 — V6 и V10 — V12, делитель напряжения на рези-
сторе R3 и потенциометре R4, Из-за встречного включения выпрямителей на
диодах V4—V6 и V10—V12 сигнал управления поступает на тиристоры
коммутатора того двигателя, скольжение которого выше, а встречное
включение мостов UZ1 и UZ2 обеспечивает и управление коммутатором
до скольжению того же двигателя. Благодаря этому в определенной
Рис. 8.24 Схема электропривода механизма передвижения с панелью управления и импульсно-ключевым регулированием
§84 Электроприводы с импульсно-ключевыми коммутаторами 273
степени достигается выравнивание частот вращения и нагрузок дви*
гателя
Для получения характеристики 2 часть сопротивления потенциометра R4
закорачивается контактом контроллера SM1R и тем самым изменяется
уставка скольжения двигателя Контроллер обеспечивает пятипозиционное
управление При переводе рукоятки контроллера с любой позиции в пози-
цию 1 механизм тормозится на свободном выбеге. На нулевом положении
накладывается механический тормоз, катушка электромагнита которого под-
ключена к входным выводам обмоток статора двигателей. При необходимо-
сти возможно осуществить торможение в режиме противовключения пере-
водом рукоятки командоконтроллера
на положение 1 противоположного
направления. При быстром переводе
рукоятки контроллера в крайнее по-
ложение схемой предусмотрен авто-
матический пуск по реостатной ха-
рактеристике 2't благодаря задержке
включения контакторов КАНУ и
КМ2У, выполняемой с помощью реле
времени КТ. При этом элемент с ре-
гулируемым порогом срабатывания
шунтируется контактом реле КН и
сигналы управления на тиристоры
коммутатора подаются постоянно,
пока коммутатор не будет зашунти-
рован контакторами. Защита привода,
Рис 8 25. Механические характерп-
ci ики электропривода по схеме
рис. 8 24
конечная и максимальная, вынесена
на линейный контактор КММ. Контакторы и реле расположены в общей
панели управления краном.
Схема электропривода механизма передвижения с ихшулъсно-ключевыь
управлением посредством панели в двухдвигательном исполнении, разрабо-
танная для кранов общего назначения, приведена на рис. 8.24, а соответ
ствуюшие ей механические характеристики — на рис. 8.25. В отличие от схемы
рис. 8 22 здесь автоматизированы режимы пуска и торможения и обеспе
чена доводочная скорость в тормозном режиме.
Схема управления коммутатором аналогична рассмотренной схеме с ку-
лачковым контроллером и включает в себя коммутаторы на тиристора!
VS1 — VS6, измерительные мосты UZ1— UZ2 с фильтром R5— С1, дели»
тель напряжения на резисторе R3 и потенциометре R4, элемент с регулируе*
мым порогом срабатывания на стабилитроне VD, формирователь импульсоа
на оптроне VS8, распределитель импульсов на диодах Vl~ УЗ, V7—VI
н резисторах R1 и R2. В цепь статора кроме линейного контактора КММ
включены контакторы КМПВ и КМ2В. Управление скоростью осуществляете!
Контакторами ускорения 1KMV1 — 1KMV4 и 2KMV1—2KMV4. На позиции/
командоконтроллера привод не включается, а на позициях 2 и 3 работает
в импульсно-ключевом режиме, причем для получения характеристики j
включается контактор 1КМУ4, выводящий часть сопротивления ротора
Рис. 8.26. Схема электропривода передвижения для кранов тяжелого режима работы и импульсио-ключевым
регулированием
§8.4 Электроприводы с импульсно-ключевыми коммутаторами
275
и перестраивающий уставку скольжения изменением сопротивления потенцией
метра R4. На остальных позициях командоконтроллера осуществляется пуск
двигателя по реостатным характеристикам 4—5 при закороченном контакте*
рами 1KMV2 и 2KMV2 коммутаторе. При обратном переводе рукоятки ко-
мандоконтроллера в положение 1 включается реверсивный контактор про-
тивоположного направления, и двигатель переводится в режим противовклю-
чения на характеристику импульсно-ключевого регулирования 1Т. На этой
характеристике привод работает с установившейся скоростью при наличии
тормозного момента или останавливается при его отсутствии. На нулевой
позиции контроллера отключается контактор КМ1 и накладывается тормоз*
Автоматизация пуско-тормозных режимов выполняется с помощью реле вре-
мени КТ1 и КТ2. Защита электропривода типовая и осуществляется макси-
мальным реле КА и конечными выключателями SQ1 и SQ2 в цепи катушки
линейного контактора КММ
-0,6 -0,6-0,4-0,2 О D,Z 0,4 0,6 0,8 1,0 1,2 1,4 1,6М1ММЛ
Рис. 9.27. Механические характеристики электропривода по схеме рис. 8.26
Схема электропривода механизма передвижения для систем тяжелого
режима работы металлургического производства приведена на рис. 8.26,
а соответствующие ей механические характеристики — на рис. 8.27. В схеме
контакторы используются только в цепях статора — линейный К AIM и ревер-
сора— КМ1В и КМ2В, а также тормозной КМ1 в цепи электромагнита
тормоза YA. Коммутатор выполнен в виде полууправляемого моста на ти-
ристорах VS1 — VS3 и диодах VI — V3. Изменение ступеней резисторов
ротора R7 осуществляется тиристорами VS5 — VS7. Импульсно-ключевой
коммутатор обеспечивает при этом не только регулирование частоты враще-
ния двигателя, но и коммутацию тиристоров в цепи постоянного тока в мо-
мент закрывания моста.
Управление ИКК осуществляется по тем же принципам, что и в рассмот-
ренных выше схемах, однако схемные решения отличаются. Основное отли-
чие состоит в применении в качестве элемента с регулируемым порогом ера*
батывания однопереходного транзистора VT. Транзистор подключается
таким образом, что потенциал между эмиттером и первой его базой опреде-
ляется выпрямленными диодами VI—V6 напряжением на резисторе R8>
пропорциональным скольжению ротора, а потенциал между первой и второй
базой — выпрямленным мостом UZ1 напряжением сети. Такое включение
©лемента с регулируемым порогом срабатывания позволяет обеспечит^
276
Электроприводы с контакторно контроллерным управлением Разд 8
стабильность механических характеристик при колебаниях напряжения сети.
При срабатывании транзистора VT включается формирователь импульсов, в ка-
честве которого использован тиристор VS4, и через распределитель импуль-
сов на диодах V7 — V9 и резисторах R1—R3 сигнал управления поступает
на управляющие электроды тиристоров коммутатора. Уровень поддержи-
ваемого на характеристиках /—3 скольжения задается контактами командо-
контроллера SM7 — SM9. Пуск двигателя на характеристику 4 происходит
под контролем реле времени КТ] и КТ2 через промежуточную характери-
стику 4'. При этом сигналы на включение тиристоров подаются от выпря-
мителя UZ1 и через контакты реле КТ1, КТ2 и КН1. На последнем поло-
жении командоконтроллера цепи управления ИКК шунтируются реле КН1
и контактом командоконтроллера SM5 При этом ИКК работает как не-
управляемый выпрямитель. При обратном переводе рукоятки командокон-
троллера снижается напряжение управления транзистора VT1/, ИКК закры-
вается, что и позволяет производить коммутацию тиристоров V55— VS7.
При установке рукоятки командоконтроллера в нулевое положение электро-
привод работает в режиме свободного выбега, поскольку контактор тор-
моза КМ1 находится на самоподхвате. Торможение электропривода произ-
водится в режиме противовключения на характеристике Т под контролем
реле КН2, которое через реле КН1 отключает цепи управления тиристоров
VS5 — VS7. Реле RH2 включается тиристором VS8 при скольжении, боль-
шем единицы. При снижении скорости двигателя до нуля тиристор VS8
закрывается и реле КН2 и КН1 позволяют выполнить пуск в обратном на-
правлении.
Защита электропривода типовая: максимальная (реле КА) и конечная
(выключатели SQ1 и SQ2), воздействующие на цепь катушки линейного
контактора. Защита цепей управления осуществляется предохранителями
FV1 и FU2, а их отключение—-рубильником QS1
Технические данные комплектных электроприводов. Комплектные элек-
троприводы с применением импульсно-ключевою регулирования разработаны
для механизмов подъема как в общепромышленном (панели ТСДИ), так
и в краново-металлур!ическом исполнении (панели КСДБ).
Серийное производство электроприводов передвижения начато только
для механизмов общепромышленного производства. Такие электроприводы,
как уже было сказано, выпускаются как с кулачковыми контроллерами, так
и с панелями управления.
Технические данные электроприводов подъемных механизмов с панелями
КСДБ и ТСДИ приведены в табл. 8.6, а электроприводов механизмов пере-
движения — в табл, 8.7.
Интересно сравнить электроприводы с панелями КСДБ и ТСДИ, Как
видно из табл. 8 6, диапазон мощностей двигателей, управляемых от пане-
лей КСДБ, благодаря бездуговой коммутации в 1,2—1,3 раза выше, чем при
управлении от панелей ТСД и ТСДИ. Это находится в полном соответствии
с методами выбора коммутационной аппаратуры для крановых приводов,
приведенными в разд. 6. Технические данные панелей КСДБ, ТСДИ, ТАИ
И ДТАИ приведены в разд. 6.
§8.4 Электроприводы с импульсно-ключевыми коммутаторами
277
Таблица 8.6. Технические данные комплектных электроприводов
с асинхронными фазными двигателями и панелями
управления типа КСДБ# ТСДИ
Тип панели управления Допустимая мощность статической нагрузки, кВт, двигателя в режимах работы Тип команде- контроллера
2М ЗМ 4М 5М 6М
КСДБ160 —— -—> 30-85 25—70 18-50 ККП1115
КСДБ250 •— > 85—130 70-110 50— 76,5 ККП1Н5
КСДБ400 —• 130—230 110-200 76,5-136 ККП1115
ТСДИ-160 40—100 37—85 30—70 25-32 18—43,5 ККП1100
ТСДИ-250 100—150 85—140 70—110 58-90 43,5—67,5 ккпиоо
ТСДИ-400 150-210 140—200 110—180 90—140 67,5—108 ккпноо
Таблица 8.7. Технические данные комплектных электроприводов
с импульсно-ключевым регулированием
для механизмов передвижения
Тип панели управления или кулачкового контроллера Допустимая мощность статической нагрузки и расчет£(ая мощность двигателя ^*ст/^р в режимах рабэты Тип командо- контрол- лера
2М ЗМ 4М 5М 6М
ДТАИК60 гт 17 Д° 30 П 12’3 До 22 п 6 Д° 15 п 3 Д 7,5 • > Ч|
ДТАИ60 Д° 20 П 10’5 До 18,5 и 7‘5 До 15 Пл 417 Д° 11 П 3-8 До 8,5 ккппоо
ТАИ60, ТАИ160 11—22 10,5-21 7,5—15 4,7-9,4 3,8-7,6 ккппоо
(с контакто- рами рото- ра 60 А) 20—40 18,5—37 15—30 11—22 8,5-17
Д ТАИ 160 с кон- 11 -36,6 10,5-30 7,5—18,75 4,7-13,4 3,8-6 ККППОО
такторами ротора 160 А 20—55,5 18,5-49,3 15—45 11—27,5 8,5—23,6
ТАИ160 22,2-58,5 21—47,8 15—29,2 9,4—24,3 7,6— 1<Х2 ККППОО
40-90 37-85 30—70 22—50 17—30
278 Электроприводы с контакторно-контроллерным управлением Разд. 8
8.5. ЭЛЕКТРОПРИВОДЫ КРАНОВ, УПРАВЛЯЕМЫХ С ПОЛА
Схемы и особенности защиты. В машиностроении при транспортно-склад*
ских работах невысокой интенсивности, в машинных залах и лабораторных
помещениях используется большое число мостовых кранов, работающих либо
эпизодически, либо с числом грузоподъемных циклов 6—10 в час. Для та-
ких кранов использовать штатных машинистов экономически нецелесооб*
разно. Поэтому все большее число мостовых кранов имеют управление
с пола. По прогнозам к 1990 г. почти половина всех мостовых кранов, изго-
товляемых краностроительными заводами, будет иметь управление с пола.
Это позволит высвободить несколько тысяч машинистов кранов.
При управлении с пола любыми из существующих способов ответствен-
ность за грузовые операции возлагается на соответствующего работника
основного технологического процесса данного участка. Хотя этот работник
аттестовывается на право работы с грузами, он не является профессиона-
лом-крановщиком, поэтому краны, управляемые с пола, должны иметь опре-
деленные ограничения рабочих скоростей и, как правило, системы с гаран-
тированным регулированием скорости для обеспечения достаточно точного
вывода груза на место установки даже лицом с недостаточным опытом управ-
ления грузоподъемными средствами. В соответствии с п. 17 правил Госгор-
технадзора рабочие скорости передвижения кранов должны быть не выше
0,83 м/с, скорости передвижения тележки — не выше 0,52 м/с. По условиям
безопасности установки грузов краны без систем регулирования скорости
должны иметь скорость подъема — спуска не выше 0,06 м/с. Однако при
этом резко снижается производительность кранов, поэтому предпочтительной
является наибольшая скорость подъема — спуска 0,11—0,15 м/с с регулиро-
ванием в диапазоне 1 : 4—1 : 6.
Особенностью кранов, управляемых с пола, является возможность до-
ступа на кран для ремонта и контроля только в специально отведенных
местах, снабженных соответствующими площадками осмотра механизмов и
электрооборудования. Поэтому вся система защиты электрооборудования
крана должна быть построена таким образом, чтобы кран в аварийных
условиях мог быть доведен до ремонтной зоны при управлении с пола и при
отсутствии в схеме крана коротких замыканий и замыканий на землю
В связи с этим на кранах, управляемых с пола, автоматические выключатели
не устанавливаются. Защита главных цепей осуществляется автоматические
выключателем питания главных троллеев, а защита цепей управления —
плавкими предохранителями на токи 15 А, 380 В при сечении проводов це
пей управления 2,5 мм2. Защита от перегрузок электроприводов механизме!
осуществляется тепловыми реле в главных цепях двигателей. Для возмож
ности движения крана после срабатывания тепловой защиты контакты рел
шунтируются кнопкой на пульте управления. На кране устанавливаютс
сигнальные лампы наличия напряжения на входе, напряжения после линей
кого контактора защиты и сигнальная лампа срабатывания тепловой защиты
Механизмы передвижения. На рис. 8.28 представлена схема электропри
вода передвижения при управлении короткозамкнутым односкоростным дви
§ 8.5
Электроприводы кранов, управляемых с пола
279
Рис, 8.28. Схема электропривода (с од-
носкоростным короткозамкнутым двига-
телем) механизма передвижения крана
при управлении с пола:
Л</, М2 — электродвигатели; YBi, YB2 —<
электромагниты тормозов или электрогидрав-
лические толкатели; КМ1, КМ 2 — контакто-
ры направления движения; КМ4, КМ5 —
контакторы резисторов в цепи статоров;
КМЗ контактор тормозов; КТ — реле кон-
троля времени пуска; FR1, FR2 — тепловые
реле; SQ1, SQ2 — конечные выключатели;
SBI, SB2 — кнопки направления движения
(двухходовые); SB11, SB21—кнопки пуска;
SB3 — кнопка прекращения свободного вы-
бега; SB4 — кнопка шунтирования тепловой
защиты; ХА1—ХД9 — контакты токопереход-
ных троллеев
гателем. Эта схема предназначается
для приводов тележек кранов грузо-
подъемностью 3—20 т и приводов мос-
тов кранов грузоподъемностью 2—5 т.
Обмотки статора короткозамкнутого
двигателя получают питание от сети
через две ступени резисторов. Механи-
ческие характеристики электропривода
приведены на рис. 8.29, а. Управление
электроприводом — от подвесных кно-
почных постов. В управлении участвуют
две основные двухходовые кнопки SB1
и SB 2, дающие команду на движение
в двух направлениях. Переход на по-
ложение без регулирующих резисто-
ров осуществляется при подаче команд
кнопками SB11, SB21. При включении
двигателя через контакты контакторов
КМ1, КМ2 подается питание на привод тормоза YB через контакты КМЗ,
После отключения электродвигателя привод тормоза продолжает полу-
чать питание и механизм имеет свободный выбег. Для отключения тор-
моза используется кнопка SB3, общая для механизма тележки и моста. При
срабатывании конечных выключателей SQ1 и SQ2 происходит отключение
линейного контактора защиты и накладывается механический тормоз. Для
обеспечения электрического торможения противовключением после свобод-
ного выбега используется реле времени КТ с выдержкой времени 2—3 с,
задерживающее привод на положении с минимальным пусковым (тормозным)
моментом.
На рис. 8.30 представлена схема электропривода передвижения крана
^тележки) с использованием двухскоростных короткозамкнутых электродви-
гателей. Электродвигатель имеет две отдельные обмотки с соотношением
числа полюсов 2/? — 4/12, 2р 4/16 и ~ 6/1& Кнопкой SB1 или SB2
280 Электроприводы с контакторно-контроллерным управлением Разд 8
включаются контакторы направления КМЦ КМ2. а также контактор малой
скорости КМ4. После подачи питания к тихоходной обмотке двигателя че*
рез контактор КМЗ получает питание привод тормоза YB1. YB2 Для пере-
хода на большую скорость двухходовыми кнопками SB замыкаются кон-
такты SBH, SB21 (второе положение) и включается контактор КМ6. Об-
мотка большой скорости подключается к сети через резистор одновременно
с тихоходной обмоткой. Затем тихоходная обмотка отключается. По истече-
нии выдержки времени реле КТ (2—5 с) включается контактор КМ5 и дви-
гатель выходит на свою естественную характеристику быстроходного режима
(рис. 8.29, б).
Рис. 8.29. Механические характеристики к схемам рис. 8 28, 8 30
При отключении двигателя от сети привод тормоза продолжает полу-
чать питание и имеет место свободный выбег. Электрическое торможение
может быть осуществлено при переходе с большой скорости на малую. Для
отключения тормоза достаточно нажать кнопку SB3. При срабатывании ко-
нечной защиты за счет размыкания линейного контактора защитной панели
происходит отключение электродвигателя и наложение механического тормоза.
Механизм тормозится с максимальной интенсивностью. Благодаря приме-
нению резисторов в цепи быстроходной обмотки осуществляется сравнительно
плавный пуск под контролем реле времени КТ. однако тормозной момент
тихоходной обмотки не ограничивается, и в этом случае плавность торможе-
ния может быть достигнута несколькими импульсными включениями кнопки
SB1 или SB2
На рис. 8.31 представлена схема механизма передвижения с использова-
нием двухскоростного двигателя без свободного выбега. Схема отличается
от рассмотренной последовательным включением тихоходной и быстроходной
обмоток и некоторым ограничением тормозного момента при последователь-
ном включении обмоток. Схема рекомендуется для кранов, эксплуатирую-
щихся на открытом воздухе.
Механизмы подъема. На рис. 8.32 представлена схема управления элек-
троприводом подъема с использованием двухскоростного короткозамкнутого
электродвигателя с двумя независимыми обмотками с соотношением чисел
полюсов 4/24 и 6/16. Схема построена по принципу двойного разрыва двумя
независимыми аппаратами главной цепи обмоток электродвигателя и цепей
нривода тормоза, что обеспечивает необходимую надежность привода подъема.
§ 85
Электроприводы кранов, управляемых с пола
281
М1
Рис. 8.30. Схема электропривода (с двухскоростпым короткозамкнутым дви-
гателем) механизма передвижения крана при управлении с пола:
Л4/, Л12— электродвигатели; YB1, }В2— приводы тормозов, КМ1, КМ2—контакторы
направления движения, КМЗ—контактор тормозов, /VAN — контактор малой скорости;
К М 5 — контактор большой скорости, КМ 6 — контактер резисторов в цепи статора;
FR1, FR2, FR3— тепловые реле; К1 — реле времени контроля пуска; SQ1, SQ2 — ко-
нечные выключатели; SB/, SB2 — кнопки направления движения (двухходовые); SB/Г,
SB21— кнопки большой скорости (второе положение кнопок SBI, SB2)\ SB3 — кнопка
прекращения свободного выбега, SB4 — кнопка шунтирования тепловой защиты;
ЛЛ/—Л Л11 — контакты токопереходных троллеев
282
Электроприводы с контакторно-контроллерным управлением Разд 8
Тихоходная обмотка электродвигателя получает питание через контакты
линейного контактора КМ1, контакты контакторов направления KM2t КМЗ
и размыкающие контакты контактора КМ4 после нажатия соответствующей
кнопки SB1, SB2 (первое положение). При нажатии кнопки SB11 (5В21\
Рис. 8.31. Схема электропривода (с двухскоростным короткозамкнутым дви*
гателем) механизма передвижения крана при управлении из кабины:
— электродвигатель, YB — привод тормоза, КМ1, КМ2 — контактрры направления
движения, КМЗ — контактор малой скорости, КМ4 — контактор большой скорости;
КМ5 — контактор резистора большой скорости, КТ — реле контроля времени пуска, FRt^
FR4 — тепловые реле, SQ1, SQ2— конечные выключатели, SB/, SB2 — кнопки направлен
кия движения, SB//, SB21 — кнопйп большой скорости, SB3— кнопка шунтирования теп-
ловых реле, XAl—ХА/О— контакты токопереходных троллеев
получает питание катушка контактора КМ.4, происходит переключение с ма*
лой скорости на большую при минимальном перерыве питания. При этом но
может быть положения, когда быстроходная и тихоходная обмотки отклю*
чены. Переход с тихоходной обмотки на быстроходную происходит под кон-
тролем реле времени КТ, При срабатывании конечной защиты происходит
двойное отключение обмоток двигателя и тормоза.
На рис. 8.33 представлена схема электропривода механизма подъема
с двумя короткозамкнутыми электродвигателями, соединенными между со-
Электроприводы кранов, управляемых с пола
283
Рис. 8.32. Схема электропривода (с
двухскоростным короткозамкнутым
двигателем) механизма подъема при
управлении с пола:
М — электродвигатель; YB — обмотка тор-
моза; КМ1 — линейный контактор, КМ2—
КМЗ— контакторы направления движе-
ния; КМ4 — контактор переключения ско-
ростей; FRI—FR3 — тепловые реле; КТ —*
реле контроля разгона; SQ1, SQ2 — ко-
нечные выключатели; SB1, SB2 — кнопки
направления (двухходовые); SB3 — кноп-
ка шунтирования тепловых реле; SBllt
SB21 —- кнопки большой скорости (второе
положение кнопок SB1, SB2); ХА1—
ХАЮ — контакты токопереходных трол-
леев
Рис. 8.33. Схема микропривода меха-
низма подъема при управлении
с пола:
Ml — электродвигатель большой скорости;
М2 — электродвигатель малой скорости;
YB1 — обмотка тормоза большой скоро
сти; YB2 — обмотка тормоза двигателя
малой скорости; КМ1 — линейный контак-
тор, КМ2—КМЗ — контакторы направле-
ния большой скорости; КМ4, КМ5 — кон-
такторы направления малой скорости;
КМ6 — контактор тормоза большой ско-
рости; КТ — реле контроля времени пу-
ска; SQ1, SQ2 — конечные выключатели;
FR1—FR4— тепловые реле; SB/, SB2—
двухходовые кнопки направления; SB11,
SB21 — кнопки большой скорости (второе
положение кнопок S81, SB2); ХА/—
ХАЮ — контакты токопереходных троллеев
бой и с редуктором через планетарную передачу с передаточным числом
5—8. Электродвигатель малой скорости Л12 включается на все время работы
механизма. Электродвигатель большой скорости включается на время работы
большой скорости. Электродвигатель малой скорости имеет встроенный
284 Электроприводы с контакторно-контроллерным управлением Разд. 8
тормоз. Электродвигатель большой скорости имеет отдельный тормоз с приво-
дом от электрогидравлического толкателя. При нажатии кнопки направле-
ния SB1(SB2) получает питание катушка контактора КМ4(КМ5) и вклю-
чается электродвигатель малой скорости. Одновременно включается общий
линейный контактор KML При нажатии кнопки SB1(SB2) до упора замы-
каются контакты SB 11 (SB21)* получают питание катушки контактора
КМ2(КМЗ) и КМ6, но после того как истечет время пуска на малой ско-
рости под контролем реле ЛГ, включается двигатель большой скорости. При
замедлении подъема или спуска после отключения двигателя большой ско-
рости затормаживание до малой скорости осуществляется тормозом YBL
После срабатывания конечных выключателей SQ1 и SQ2 происходит отклю-
чение электропривода с двойным разрывом цепи двигателя и приводов тор-
мозов.
Все описанные схемы в соответствии с требованиями Госгортехнадзора»
п. 198 обеспечивают включение механизмов крана при управлении с пола
только при постоянном нажатии на кнопку. При отключении любого вида
защиты механизм останавливается вне зависимости от состояния кнопочного
аппарата управления.
Рассмотренные схемы рис. 8.27, 8.29—8.32 могут быть скомпонованы
из стандартных магнитных пускателей типа ПМА, ПМЛ и реле времени
РЭВ811. Исключение составляет схема рис. 8.29, в которой в качестве кон-
Таблица 8.8. Технические данные электро
Грузо- подъем- ность крана, т Механизм подъема Механизм
Система привода Мощность, кВт Диапазон регулиро- вания Схема Система привода
2 Односкоростной короткозамкну- тый двигатель 5,5 — — Двухскоростной короткозамкну- тый двигатель
5 То же 10 —— То же
5 ; Двухскоростной короткозамкну- тый двигатель 10 1:6 Рис. 8.31 Односкоростной короткозамкну- тый двигатель
12,5 i Двухдвигатель- ный 22 1 : 10 Рис. 8.32 Двухскоростной короткозамкну- тый двигатель
16 Двухскоростной короткозамкну- тый двигатель 15 1:6 Рис. 8.31 То же < ч
20 То же 15 1:6 Рис. 8.31 » »
-32 То же 22 1:6 Рис. 8.31 » »
Электроприводы кранов режимных групп ЗК—5К
285
тактора переключения скоростей используется контактор постоянного тока
МК1-22, 40 А, 380 В, катушка 220 В. Основные технические данные элек-
троприводов приведены в табл. 8.8. По указанным схемам разрабатываются
панели управления для двигателей передвижения мощностью от 0,8 до
2 X 8,5 кВт и панели управления для двигателей подъема мощностью от
10 до 22 кВт. Производство этих панелей пока еще не начато.
8.6. ЭЛЕКТРОПРИВОДЫ ОБЛЕГЧЕННЫХ КРАНОВ
РЕЖИМНЫХ ГРУПП ЗК—5К
Исходные условия. Мостовые грузоподъемные краны, управляемые из ка-
бины, режимных групп ЗК — 5К по сложившейся традиции имеют системы
управления на основе использования силовых кулачковых контроллеров. Это
объясняется известной простотой и надежностью силовых контроллеров. Од-
нако системы с силовыми контроллерами практически не имеют устойчивого
регулирования скорости, в связи с чем при современных требованиях к кра-
нам возникла необходимость в новых системах управления, в которых тра-
диционные схемы сочетаются с новыми конструктивными решениями. Для
кранов режимных групп ЗК — 5К общего назначения грузоподъемностью
12,5—32 т, называемых облегченными, начато производство комплектных
(устройств для управления электроприводами механизмов подъема и пере
приводов кранов, управляемых с пола
передвижения крана Механизм певедвижения тележки
Мощность, кВт Диапазон pei улиро- Вг1НИЯ Схема CncieMa привода Мо’ЦносТЬ, кЗг Диапазон регулиро- вания Схема
0,9 1 :2 Рис. 8.30 Односкоростной короткозамкну- тый двигатель 0,55 ——
2X0,9 1:2 Рис. 8.30 То же 0,8 -—- —•
2X1,8 Рис. 8.28 » » 0,8 ** Рис. 8.28
2X1,8 1 :3 Рис. 8.33 » » -—- ^| Рис. 8.28
2X3,5 1:3 Рис. 8.30 » » 1,8 — ,и Рис. 8.28
2X3,5 1:3 Рис. 8.3Э Двухскоростной короткозамкну- тый двигатель 1,8 1:3 Рис. 8.30
2X5 1:4 Рис. 8.30 То же 3,5 1:3 Рис. 8.30
Электроприводы с контакторно-контроллерным управлением Разд. 8
движения с обеспечением современных параметров регулирования. Комплект*
ное устройство БОК6501 включает четыре независимых блока, объединенных
в общую схему управления механизмами. Для механизма подъема исполь-
зуется панель ТСД60, предназначенная для управления двигателями с фаз-
ным ротором мощностью до 30 кВт 4MTH200LB6 или 4MTH225L8. Для
механизма передвижения крана используется схема двухдвигательнрго им-
пульсно-ключевого регулирования скорости, а для механизма передвижения
тележки — такая же однодвигательная схема. Кроме того, в состав ком-
плектного устройства входит панель защиты, состоящая из линейного кон-
тактора на 160 А и группы максимальных реле. Устройство БОК6501 ком-
плектуется крановым пультом управления DVP15, вариант 15 и совместно
с этим пультом и ящиком ввода ЯОК8801 представляет собой законченную
электросхему крана.
Комплект для облегченных мостовых кранов грузо-
подъемностью 12,5—32 т имеет следующие техниче-
ские данные:
Режим работы механизмов .........................
Относительная продолжительность включения, % . * ,
Число включений в час . .........................
Ресурс циклов В — О без тока ...........
Степень защиты от окружающей среды .......
Категория размещения . . . . .............. .
Степень защиты комплектного устройства, размещаю-
щегося в шкафу, от окружающей среды не ниже . •
Номинальный ток линейного контактора, А..........
Напряжение сети, В . . ..........................
Габаритные размеры, мм ,........................
Масса, кг................................... . . .
Основные технические данные электропривода подъ-
ема:
Мощность используемых двигателей при 380 В, 50 Гц,
кВт . . . . ................................ .
Диапазон регулирования скорости на спуске , . . .
Система регулирования (динамическое торможение
способом самовозбуждения двигателя с фазным ро-
тором, магнитный контроллер ТСД60, схема — см.
рис. 8.17).......................................
Основные технические данные электропривода передви-
жения крана:
Мощность используемых двигателей, кВт , . . . . .
Диапазон регулирования скорости .................
Система регулирования (импульсно-ключевая в цепи
двигателя с фазным ротором^ силовой кулачковый
контроллер) . . , .........................
Основные технические данные электропривода передви-
жения тележки:
Мощность используемого двигателя, кВт t , , , , ,
Диапазон регулирования скорости , .
Система регулирования (импульсно-ключевая в цепи
двигателя с фазным ротором, силовой кулачковый
контроллер) ж и 4 ................ .
ЗМ-4М
40
120
5-106
IP00
УЗ, ТЗ
IP22
160
380
1100X650X3154-
+850X1200X315
100+80
15-30
1:8
МКД ~ АДФ
2X2,34-2X7,5
1:10
КИ - АДФ
1,4-7,5
1:10
КИ - АДФ
§ 9.1 Принципы построения систем подчиненного регулирования 287
Схема электропривода передвижения, используемая в комплектном уст*
ройстве БОК6501, показана на рис. 8.22. Механические характеристики элек-
тропривода приведены на рис. 8.23.
РАЗДЕЛ 9
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ
9.1. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ
ЭЛЕКТРОПРИВОДОВ
Общие вопросы. Система автоматического регулирования (САР) должна
обеспечить требуемые механические характеристики электропривода в era*
тике и динамике, высокое качество протекания переходных процессов и оп-
тимизацию работы электропривода по заданным показателям в различных
режимах работы механизма. Обеспечение высоких показателей регулирова-
ния возможно только при построении замкнутых САР, которые в основно»
и будут рассматриваться ниже. Обычно
задача формирования качественных пе-
реходных процессов состоит в обеспе-
чении минимально возможного для дан-
ной системы времени переходного про-
цесса /п (рис. 9.1)* какого-либо выход-
ного параметра у при заданном допу-
стимом перерегулировании Зна-
чению /\Утах соответствует время tmax>
Время /п соответствует вхождению пе-
ререгулирования в 5%-ную зону.
Известно, что характер переходного
процесса определяется соотношением
Рис. 9.1. График переходного про*-
цесса t/ = f(O
постоянных времени элементов систе-
мы. Поэтому формирование высококачественных переходных процессов свя-
зано с обеспечением необходимых значений указанных соотношений путем
введения корректирующих регуляторов. Общий подход к построению САР
независимо от типа электропривода состоит в составлении структурных схем
исходя из выражений для отдельных звеньев и введении в систему соответ-
ствующих регуляторов. В практике построения САР электроприводов, в том
числе и крановых, основное применение нашли системы подчиненного регу-
лирования параметров. В этих системах используется принцип компенсации
основных инерционностей объекта управления включением последовательно
с ним регулятора. Число последовательно включенных регуляторов, таким
образом, равно числу регулируемых параметров, а каждый контур САР
структурно состоит из двух звеньев; объекта регулирования и регулятора.
288
Электроприводы с тиристорным управлением Разд. 9
На рис. 9.2 приведена структурная схема многоконтурной системы под-
чиненного регулирования. На вход каждого регулятора подаются сигналы
задания и действительные значения регулируемого параметра, причем пре-
дыдущий регулятор вырабатывает сигнал задания для последующего. Опти-
мизация каждого контура заключается в выборе передаточной функции и
параметров регулятора, обеспечивающих с учетом возможных ограничений
требуемые показатели настройки
Рис. 9.2. Структурная схема многоконтурной САР с подчиненным регулиро-
ванием параметров
Расчет регуляторов. Принципы оптимизации систем подчиненного регули-
рования. Исходя из схемы рис. 9.2 передаточная функция i-ro регулятора
W.(p)W. .(p)W ,(р)==1Г. я (р), (9.1)
pz ' z t —I o, pz i разX!' 4 '
где W\-i*—суммарная передаточная функция замкнутых внутренних конту-
ров; IFo. р i — передаточная функция объекта регулирования, подлежащая
компенсации; №<раз(р)—желаемая передаточная функция t-ro разомкнутого
контура регулирования.
Если бы удалось подбором передаточной функции регулятора полностью
компенсировать инерционности объекта регулирование то передаточная
функция разомкнутого контура была бы представлена коэффициентом про-
порционального усиления. Однако полная компенсация не может быть про-
изведена из-за снижения помехозащищенности, ухудшения энергетических
показателей и прочих причин. Поэтому V/tpa3(p) представляется в более
сложном виде, зависящем от критерия оптимизации. Практическое примене-
ние нашли два критерия: технический (модульный) и симметричный опти-
мумы. При техническом оптимуме желаемая передаточная функция разо-
мкнутого контура с единичной обратной связью имеет вид
Граз (р) = -2Г(1р(Гцр+ 1) ’ (9’2)
где — эквивалентная малая нескомпенсированная постоянная времени.
При переходе к каждому последующему внешнему контуру нескомпен-
сированная постоянная времени удваивается. Передаточной функции (9.2)
разомкнутой системы соответствует логарифмическая амплитудно-частотная
характеристика (ЛАЧХ) вида /—2 (обозначение ЛАЧХ связано с наклоном
ее отдельных линейных участков: 1 — 20 дБ/дек, 2— 40 дБ/дек) и переда-
точная функция замкнутой системы
"/з (Р) = 2Ги(р) (Гцр+О+Г (9'3)
§ 9.1 Принципы построения систем подчиненного регулирования
289
Переходный процесс при этом характеризуется коэффициентом демпфи-
рования g = V2/2 при запасе устойчивости по фазе 63° со следующими по-
казателями регулирования: перерегулирование с = 4,3 %; время достижения
первого максимума tmax = 4,7 Тр,; время регулирования (вхождения в зону
погрешности ±2%) /р==8,4Гц. В связи с наличием в контуре интегрирую-
щего звена он имеет астатизм первого порядка и называется однократно
интегрирующим. В общем случае для t-ro контура замкнутой многоконтур-
ной системы, оптимизированной по техническому оптимуму, передаточная
функция имеет вид
При этом показатели качества регулирования аналогичны вышеприве-
денным при суммарной нескомпенсированной постоянной времени 2*~17’ц.
Передаточная функция i-ro регулятора в соответствии с (9.1) представляется
выражением
Wpt (р) -
1 _
— 2 (21—pi (Р) kt ’ 9*5
где и ki — коэффициенты обратных
связей (/ — 1)-го и Z-го контуров.
Оптимизация по симметричному оп-
тимуму применяется, если предъявля-
ются повышенные требования к точно-
сти регулирования. При указанной опти-
мизации передаточная функция разо-
мкнутой системы
1 + 1
wva3(p)~ 2ГцР(ГцР+1) 4Гц/,
(9.6)
Рис. 9.3. Переходные функции
контуров, настроенных на техни-
ческий оптимум симметричный
оптимум 2, симметричный опти-
мум с инерционным фильтром в
канале задания 3
и имеет ЛАЧХ вида 2—1—2.
Передаточная функция (9.6) отличается от (9.2) добавлением пропор-
ционально-интегрального звена с коэффициентом усиления пропорциональной
части К = 1 и постоянной времени 47’ц. Наличие в контуре двух интегри-
рующих звеньев обеспечивает астатизм второго порядка, и контур назы-
вается двукратноинтегрирующим. Переходная функция контура характери-
зуется следующими показателями: 0 = 43,4%; tmax = 6,37^; /р = 16,5ТЦ
Запас по фазе равен 37°. Передаточная функция многоконтурной системы,
оптимизируемой по симметричному оптимуму,
4-2‘‘“1Г|хр + 1
W3 (Р) = 8 (2'-%)3 р3 + 8 (2<~%)2 р2 + 4.2‘~%р + 1 ’ (9'7)
При расчете t-ro регулятора пропорциональная часть определяется по
(9.5), а при расчете пропорционально-интегральной части постоянная времени
V2IO Зак. 918
ьэ
с©
Таблица 9.1. Схемы и передаточные функции типовых регуляторов
Электроприводы с тиристорным управлением Разд
§ 9 1 Принципы построения систем подчиненного регулирования
291
V210*
to
Продолжение табл. 9.1
Электроприводы с тиристорным управлением Разд.
tO
САР тиристорных электроприводов постоянного тока
293
Т — 2‘ Для улучшения параметров регулирования можно ввести в ка-
нал задания фильтр (инерционное звено с постоянной времени 4*2*-1Гц).
При этом перерегулирование уменьшается до а = 8,1 %, а £р = 13,37^. На
рис. 9.3 приведены переходные функции контуров регулирования, настроен-
ных по указанным критериям оптимизации.
Для реализации регуляторов в системах подчиненного регулирования
применяются операционные усилители. Расчет параметров регуляторов про-
изводится в соответствии с приведенными выражениями по передаточным
функциям объекта регулирования и исходя из передаточных функций, обес-
печиваемых типовыми регуляторами. Схемы и передаточные функции типо-
вых регуляторов представлены в табл. 9.1.
9.2. ТИПОВЫЕ СТРУКТУРНЫЕ СХЕМЫ САР
ТИРИСТОРНЫХ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА
Общие вопросы. Передаточные функции основных звеньев электропривода.
Крановые тиристорные электроприводы постоянного тока строят на базе
реверсивных ТП с раздельным управлением или нереверсивных с контактор-
ным реверсом. Такие системы имеют одноканальное управление. При по-
строении САР двигатель постоянного тока как объект управления, на вход
которого подается напряжение ТП t/H, а выходным параметром является
частота вращения при токе нагрузки 7Ст, представляется двумя звеньями по
главной цепи: апериодическим по якорю двигателя с передаточной функцией
(Р)
ЭКВ (рТЯ) экв 4-1)
(9.8)
и интегральным по механической части двигателя
^Я, ЭКВ
рТмгФ *
(р) =
(9.9)
где Яя, экв и Гя, эк» — суммарные эквивалентные активное сопротивление и
электромагнитная постоянная времени; Тм — электромеханическая постоян-
ная времени; Ф — магнитный поток машины; с — конструктивная постоянная
В ряде случаев, когда при синтезе САР необходимо учесть влияние из-
менения ЭДС двигателя ЕАВ, указанные звенья замыкаются обратной связью
по ЭДС. Цепь возбуждения двигателя представляется звеном с передаточной
функцией
(р) =
Ав
(ГкР4-1)
(Гв ч- гк) р 4- I ’
(9.10)
где /?в— сопротивление цепи обмотки возбуждения; Тк — суммарная постоян-
ная времени контура тока возбуждения, равная сумме постоянных времени
основного потокосцепления Тк осн и потокосцепления рассеивания Ts; Тк —
постоянная времени контура вихревых токов.
294
Электроприводы с тиристорным управлением
Разд. 9
Структурные схемы якорной цепи и цепи возбуждения двигателя пред-
ставлены на рис. 9.4. Тиристорный преобразователь представляется аперио-
дическим звеном
Гп (р) = -г~-
1 + р
(9.11)
где Кя, Тп — коэффициент усиления и эквивалентная постоянная времени,
характеризующие ТП с СИФУ.
Рис. 9.4. Структурные и принципиальные схемы якорной цепи и цепи воз-
буждения двигателя
При таком представлении двигателя и ТП в зависимости от требований
к формированию механических характеристик при построении крановых
электроприводов применяются в основном следующие структурные схемы
САР:
1. Двухконтурная одно- или двукратно интегрирующая система управ-
ления напряжением силовой цепи электропривода с обратной связью по ЭДС
двигателя для электроприводов с реверсивным ТП, дополненная двухкон-
турной системой управления потоком при двухзонном регулировании или
без указанной системы при бднозонном регулировании соответственно для
механизмов подъема и передвижения. Такая система обеспечивает качествен-
ное регулирование частоты вращения в диапазоне не ниже (10-=- 15) : 1 в
нижней зоне и (20 Ч- 25) : 1 при двухзонном регулировании, что является
достаточным для большинства крановых электроприводов.
2. Для электроприводов с невысокими требованиями к регулировочным
показателям применяются САР по главной цепи с двумя внутренними кон-
турами: напряжения ТП и тока двигателя. При двухзонном регулировании
к этой системе добавляется одноконтурная система регулирования потока
Типовые структурные схемы САР. Структурная схема двухконтурной
двукратно интегрирующей САР с обратной связью по ЭДС электропривода
с двухзонным регулированием частоты вращения приведена на рис. 9.5.
Система состоит из двух взаимосвязанных каналов — САР напряжения на
якоре и САР изменения тока возбуждения с использованием в качестве свя-
§92
САР тиристорных электроприводов постоянного тока
295
злющей координаты напряжения двигателя U При построении САР по глав-
ной цепи для получения сигнала обратной связи по напряжению двигателя
его структурная схема (см рис 9 4) преобразуется к звеньям, показанным
на рис 9 5 Это позволяет учесть матое влияние ЭДС на переходные про-
цессы При этом для компенсации форсирующего звена /?я(Тяр+1) двига-
теля вводятся фильтрующие звенья с постоянной времени Тя в канал обрат-
ной связи по напряжению через звено н/(7'яр+1) и на вход системы
Рис 9 5 Двухконтурная САР электропривода постоянного тока с обратной
связью по ЭДС с двухзонным регулированием скорости
Для компенсации падения напряжения в якорной цепи при реализации об-
ратной связи по ЭДС на вход регулятора напряжения 1ГР Н(э)(р) кроме
обратной связи по напряжению вводится обратная связь по току якоря че-
рез звено т В двухконтурной САР главной цепи внутренним является
контур регулирования тока с ПИ-регулятором, а внешним—контур регули-
рования ЭДС с ПИ-регулятором В двухконтурной САР тока возбуждения
внутренним является контур регулирования тока возбуждения с ПИ-регу-
лятором т в(р), а внешним — контур регулирования ЭДС с ПИ-регуля
тором WP э(р) Звенья АпДТ’прР + О и в/(^п, ър + 1) представляют пере-
даточные функции систем управления ТП главной цепи и цепи возбуж-
дения
При скорости ниже номинальной напряжение задания ЭДС U3 э по
каналу регулирования возбуждения выше напряжения обратной связи
и поток сохраняется постоянным При достижении напряжением U* на
296
Электроприводы с тиристорным управлением
Разд 9
выходе ТП UZ1 номинального значения регулирование производится с под-
держанием постоянства ЭДС двигателя, в результате чего в верхней зоне ре-
гулирования обеспечивается регулирование с постоянной мощностью. Для
компенсации форсирующего звена в контуре регулирования тока возбужде-
ния устанавливается фильтрующее звено с постоянной времени Тк в цепи
обратной связи указанного контура
В контур главной цепи могут быть введены задатчик интенсивности и
компенсирующее звено, которые на рис. 9.5 не показаны. Введение задатчика
Рис. 9.6. Двухконтурная САР электропривода постоянного тока с обратной
связью по напряжению с двухзонным регулированием скорости
интенсивности целесообразно в тех случаях, когда по условиям работы же-
лательно обеспечить постоянство динамического момента. Введение в САР
компенсирующего звена связано с изменением коэффициента передачи объ-
екта регулирования контура напряжения при изменении тока возбуждения.
В однозонных электроприводах ток возбуждения постоянен и нет необходи-
мости в компенсационном звене. Использование ПИ-регулятора несколько
усложняет настройку электропривода, поэтому в ряде случаев в контурах
регулирования ЭДС применяются П-регуляторы. Расчет регуляторов произ-
водится по формулам, приведенным в § 9.1.
На структурной схеме рис. 9.5 приведена также силовая цепь системы
ТП — Ди цепь возбуждения для того, чтобы показать, как реально выпол-
няются обратные связи в электроприводе
Структурная схема САР с обратной связью по напряжению ТП и кон-
туром регулирования тока приведена на рис. 9.6. В качестве регулятора на-
пряжения н применен П-регулятор, а для контура регулирования тока —
§ 9-2
САР тиристорных электроприводов постоянного тока
297
ПН-регулятор. Обозначения звеньев аналогичны схеме рис. 9.5. В приведен-
ной системе электромеханическая постоянная двигателя не компенсируется
и регулировочные показатели привода невысоки. Такая САР может приме-
няться для электроприводов с диапазоном регулирования скорости до 8:1.
Для двухзонных электроприводов в систему вводится одноконтурная си-
стема тока возбуждения с ПИ-регулятором тока возбуждения. При замкну-
том контакте командоконтроллера 5Л1 сигнал U3r в обеспечивает полный
поток возбуждения, а при разомкнутом — сигнал U3t в вместе с сигналом от
тока якоря двигателя UT обеспечивает ослабление поля двигателя при сни-
жении его нагрузки.
Рис. 9.7. Система с подчиненным контуром регулирования напряжения ТП
Учет особенностей работы ТП при построении САР электропривода. Осо-
бенностью применяемых для крановых электроприводов реверсивных ТП
с раздельным управлением или нереверсивных с контакторными реверсорами
является наличие зоны нечувствительности при работе групп тиристоров или
аппаратной паузы при переключении контакторов реверсора. Другая особен-
ность связана с возникновением режима прерывистого тока при малых на-
грузках. Влияние зоны нечувствительности приводит к замедлению переход-
ных режимов, а также к броскам динамического тока в системах с задатчи-
ком интенсивности из-за размыкания контура регулирования тока. Режим
прерывистого тока характеризуется резким увеличением эквивалентного со-
противления якорной цепи, стремящегося к бесконечности при приближении
к пулю среднего тока. При этом изменяются параметры объектов регулиро-
вания и, следовательно, ухудшаются динамические свойства системы.
Для устранения отрицательного влияния указанных особенностей ТП
в контур регулирования тока вводят подчиненный контур регулирования на-
пряжения ТП, а также системы с адаптивным регулятором тока. Схема СЛР
с подчиненным контуром регулирования напряжения ТП приведена на
рис 9.7 с обозначениями, принятыми для схемы рис. 9.5. В схеме контура
напряжения используется П-регулятор с коэффициентом усиления /<г ч, а в
цепь обратной связи по напряжению включено инерционное звено с посто-
янной времени якорной цепи Тя В результате передаточная функция объекта
регулирования для регулятора тока якорной цепи в режиме непрерывного
тока имеет вид
Г°> р (р) = Ки/?я(рГ|А+ 1) (9Л2)
Ц Зак. 918
298
Электроприводы с тиристорным управлением
Разд. 9
В режиме прерывистого тока вследствие размыкания якорной цепи об-
ратная связь по напряжению оказывается включенной на ЭДС двигателя,
как показано на схеме штриховой линией. В связи с медленным изменением
ЭДС этот контур может считаться разорванным. При этом изменяется пере-
даточная функция объекта регулирования
о. Р (Р) =
КПХР, н
(9.13)
< (р^+1) ’
где — эквивалентное сопротивление якорной цепи в режиме прерывистого
тока, значительно превышающее /?я.
Поскольку ~ 71', то выбором коэффициента усиления регулятора на-
пряжения из условия IFO (р) = IFq р (р) можно обеспечить сохранение ди-
намических свойств привода в режимах прерывистого и непрерывного токов.
При этом /<р н = ЛнМ* а РегУлят0Р тока имеет интегральную
характеристику (см. рис. 9.7). Быстрое прохождение зоны нечувствительно-
сти достигается высоким быстродействием внутреннего контура напря-
жения.
Такая же задача решается применением адаптивных регуляторов. Прин-
ципиально при наличии бестоковой паузы при отсутствии внутреннего кон-
R2
Рис. 9 8. Схема с изменяемой струк-
турой регулятора тока
Рис 9 9. Схема с изменяемой струк-
турой регулятора скорости
тура напряжения необходимо изменять регулятор тока с ПИ-типа на И-тип,
соответствующим образом меняя коэффициент усиления регулятора ско-
рости.
На рис. 9.8 приведена схема регулятора тока, в котором с помощью
управляемого ключа 5Л осуществляется изменение структуры регулятора.
В режиме непрерывного тока ключ 5Л разомкнут и реализуется ПИ-регуля-
тор. При этом на усилителе реализуется И-регулятор, а на усили-
теле W2 — ПД-регулятор. В режиме прерывистого тока ключ З’Л замыкается,
и передаточная функция регулятора становится интегральной.
Улучшения динамики электропривода можно добиться и изменением
структуры регулятора скорости. Поскольку при переходе в режим прерыви-
стого тока растет инерционность токового контура и увеличивается колеба-
тельность системы, то для стабилизации скорости в этом режиме можно ре-
§93 САР асинхронных тиристорных электроприводов 299
лепным способом уменьшить коэффициент усиления регулятора скорости
или перевести его с ПИ-типа на П-ъип.
На рис 9.9 приведена схема, выполняющая указанные функции. В схему
регулятора скорости IV'p, с введен дополнительный узел, состоящий из рези-
сторов Rci и RC2 и обратной связи из встречно включенных диодов VI
и V2. В режиме прерывистого тока, пока выходное напряжение регулятора
мало, диоды закрыты и обратная связь шунтируется резисторами Rci и /?с2
При переходе к режиму непрерывного тока возрастает выходное напряжение
регулятора и один из диодов в зависимости от знака напряжения откры-
вается. В результате Rci и /?с2 становятся соответственно дополнительными
нагрузочными и входными сопротивлениями. Сопротивления /?С1 и RC2 под-
бираются таким образом, чтобы не снижать передаточную функцию регуля-
тора в режиме непрерывного тока и в то же время обеспечить существенное
воздействие на цепь обратной связи регулятора в режиме прерывистого
тока.
9.3. ТИПОВЫЕ СТРУКТУРНЫЕ СХЕМЫ САР
АСИНХРОННЫХ ТИРИСТОРНЫХ ЭЛЕКТРОПРИВОДОВ
Общие вопросы. В настоящем параграфе рассматриваются САР асинхрон-
ных тиристорных электроприводов в параметрических и частотных системах
управления. Подход к построению САР тиристорных асинхронных электро-
приводов такой же, как и для автоматизированных электроприводов посто-
янного тока: строят структурные схемы по уравнениям переходных процес-
сов в двигателе, к которым добавляются регуляторы, синтезируемые на ос-
нове принципов подчиненного регулирования параметров. При построении
этих систем используется та же элементная база, регуляторы на основе
операционных усилителей, различные датчики, функциональные преобразо-
ватели и т. п В то же время имеется ряд специальных устройств, специфи-
ческих для асинхронных электроприводов и связанных с особенностями пред-
ставления двигателя как объекта управления
Оптимизация динамических характеристик электроприводов может быть
выполнена только с учетом переходных процессов в двигателе Асинхронный
двигатель в общем случае описывается нелинейной системой дифференциаль-
ных уравнении, привязанных к определенной системе координат Это и при-
водит к введению в САР асинхронных электроприводов специальных уст-
ройств, а именно устройств моделирования переходных процессов и устройств
преобразования координат. В то же время для электроприводов, к качеству
регулирования которых не предъявляются сложные требования, возможно
значительное упрощение САР, если использовать представление асинхронного
двигателя по уравнениям статики на основе известных схем замещения. По-
строенные таким образом САР обеспечивают формирование требуемых ме-
ханических характеристик привода без оптимизации переходных процессов
и используются, как правило, при построении электроприводов с парамет-
рическим управлением и упрощенных электроприводов с частотным управ-
лением
11*
300
Электроприводы с тиристорным управлением
Разд 9
При построении сложных частотно-управляемых электроприводов пред-
ставление асинхронного двигателя существенным образом зависит от ме-
тода управления, а также типа и режима работы преобразователя В рас-
сматриваемых электроприводах с НПЧ и АИН преобразователи работают в
режиме источника напряжения, а с АИТ — в режиме источника тока
Обобщенная структурная схема
Рис. 9.10. Структурная схема
асинхронного двигателя
ние Й1 и момент р,. Второе звено
гателя с моментом инерции /, вход
мент р — Цст, а выходом — угловая
асинхронного двигателя приведена на
рис 9.10. Здесь асинхронный двигатель
ЛД представлен звеном, на вход кото-
рого поступают параметры управления:
обобщенный вектор напряжения щ или
тока статора ч, относительная частота
§ = filfном и параметр абсолютного
скольжения р, а выходными парамет-
рами являются ток q или напряже-
представляет механическую часть дви-
ом которого является динамический мо-
скорость со. Конкретные представления
двигателя приводятся при рассмотрении типовых структур.
Рис. 9.11. Структурная схема САР
асинхронного электропривода с ТПН
Схемы САР электроприводов с параметрическим управлением. На
рис. 9.11, а приведена схема САР электропривода с тиристорным преобразовав
телем напряжения в цепи статора асинхронного двигателя с фазным ротором,
а на рис. 9 11,6 условно показана схема силовой части электропривода. В этой
схеме асинхронный двигатель представлен звеньями, пропорциональным
^р, дв, ) сганавливающим связь между напряжением питания и моментом
двигателя М, и интегральным 1/(рТмр), замкнутым обратной связью по абсо-
лютному скольжению с параметром р Эти звенья эквивалентны апериодиче-
§93 САР асинхронных тиристорных электроприводов 301
скому звену, выходом которого является отклонение Лео угловой скорости
от заданной
Тиристорный преобразователь напряжения U представляется апериоди-
ческим звеном Кп1(ТпрА-1) с постоянной времени ТП системы управления.
В связи с таким представлением асинхронного двигателя и силового регу-
лятора в САР вводится ПИ-регулятор напряжения и П-регулятор скорости,
т. е. САР является двухконтурной, однократно интегрируемой.
Рис. 9.12. Структурная схема САР асинхронного электропривода при им-
пульсном регулировании
В схемах с регулятором напряжения должна осуществляться тахометри-
ческая обратная связь по скорости с выходным фильтром для ослабления
пульсаций напряжения тахогенератора. Поэтому звено обратной связи по
скорости в схеме представлено инерционным звеном с постоянной времени
фильтра Тф Обратная связь по напряжению представляется безынерционным
звеном с коэффициентом усиления КД1 и Введение подчиненного контура ре-
гулирования напряжения преобразователя в определенной степени компен-
сирует ухудшение динамических свойств электропривода из-за наличия бес-
токовой паузы контакторного реверсора.
При расчете системы следует помнить, что коэффициенты усиления
звеньев, представляющих двигатель и преобразователь, не являются постоян-
ными, а зависят от скольжения двигателя Поэтому параметры регуляторов
должны определяться исходя из наихудшего сочетания указанных коэффи-
циентов, что в общем случае не позволяет оптимизировать качество переход-
ных процессов Из-за указанного для рассматриваемых систем, как и для
электроприводов постоянного тока, при высоких требованиях к показателям
регулирования может оказаться целесообразным применение адаптивных ре-
гуляторов.
Схема САР асинхронного электропривода с импульсным регулятором со-
противления в цепи выпрямленного тока ротора приведена на рис 9.12, а
(на рис. 9.12, б условно показана схема силовой части электропривода) При
302
Электроприводы с тиристорным управлением
Разд 9
таком регулировании скольжение двигателя пропорционально ЭДС ротора
двигателя и необходимость в тахометрической обратной связи отсутствует.
В рассматриваемом электроприводе асинхронный двигатель как объект регу-
лирования может быть представлен звеньями с передаточными функциями,
близкими к передаточным функциям двигателя постоянного тока в системе,
замкнутой по его ЭДС. Соответственно*и САР такого электропривода близка
к САР регулирования контура напряжения двигателя постоянного тока, при-
веденной на рис. 9.5. При этом в звеньях, представляющих двигатель, экви-
валентное сопротивление является сопротивлением в цепи ротора RP, а по-
стоянная времени 7Р значительно меньше, чем у двигателя постоянного тока
Поэтому регулятор ЭДС 1СР э выполнен пропорциональным, а система яв-
ляется двухконтурной однократно интегрирующей. Остальные обозначения
звеньев аналогичны принятым для схемы рис. 9.11.
Представленная на рис 9.12 САР построена применительно к электро-
приводам подъемных механизмов, имеющих жесткие механические характери-
стики. Для электроприводов механизмов передвижения необходимым яв-
ляется регулирование момента н контур регулирования ЭДС отсутствует
Учитывая малое значение Гр, при расчете САР можно исключить инерцион-
ность в цепи обратной связи по ЭДС и апериодическое звено на входе
В то же время для многодвигательных электроприводов система должна
быть дополнена контурами выравнивания токов двигателей. При необходи-
мости обеспечения высококачественного регулирования во всех четырех квад-
рантах механических характеристик структура САР должна перестраиваться,
поскольку изменяется режим работы двигателя. Поэтому для рассматривае-
мых систем в ряде случаев также необходимо предусматривать применение
адаптивных регуляторов.
Схемы САР частотно-управляемых электроприводов. Рассмотрим три ос-
новные схемы САР для крановых частотно-управляемых электроприводов,
степень сложности которых увеличивается с повышением требований, предъ-
являемых к качеству регулировочных характеристик электропривода. Схема
наиболее простой САР, применяемой для электроприводов с НПЧ, приведена
на рис. 9.13, а, а на рис. 9.13,6 показана схема силовой части электропри-
вода. В рассматриваемой схеме двигатель представлен инерционным зве-
ном W\B с функциональной зависимостью между параметрами входа и вы-
хода двигателя, и, следовательно, САР обеспечивает требуемые показатели
регулирования только в статике.
Система регулирования реализует заданный закон частотного управле-
ния в статике, устанавливающий связь между напряжением и частотой НПЧ,
и обеспечивает компенсацию большой инерционности звена, представляющего
двигатель. Принятый закон частотного управления обеспечивает поддержа-
ние постоянства потока двигателя, т. е. компенсацию падения напряжения на
сопротивлениях статора двигателя. Это достигается путем введения обрат-
ных связей по току и напряжению двигателя на вход регулятора напряже-
ния WPt н. Разделение задания по каналам регулирования частоты и напря-
жения осуществляется с помощью нелинейного элемента U2 Для повышения
плавности регулирования в САР введен задатчик интенсивности U1. Системы
§ 93
САР асинхронных тиристорных электроприводов
303
Рис 9 13. Структурная схема САР частотно-управляемого электропривода
с НПЧ
304
Электроприводы с тиристорным управлением
Разд. 9
фазоимпульсного управления НПЧ по каналам регулирования частоты и
напряжения представлены блоками AU и AV.
Регулятор напряжения имеет ПИ-характеристику, а введение обратной
связи по напряжению компенсирует ухудшение динамических свойств при-
вода при применении преобразователей с раздельным программным управ-
лением. В схеме апериодические звенья Ку/(ТЛ, нР 4- 1) и чР + О
представляют передаточные функции НПЧ по каналам управления напря-
жения и частоты с коэффициентами усиления Ку и В системе частот-
ного управления параметры двигателя, характеризующие его как объект
управления, изменяются в значительно меньшей степени, чем при параметри-
ческом регулировании, и при расчете регуляторов их можно принять посто-
янными.
Схема САР электропривода с ПЧ на основе АИН приведена на рис. 9.14.
В этой схеме двигатель также представлен инерционным звеном с коэффи-
циентами усиления, определяемыми функциональной зависимостью между
входными (напряжением и частотой питания) и выходными (моментом и
током) параметрами двигателя. Соответственно и показатели регулирования
в динамике, обеспечиваемые рассматриваемой САР и приведенной на рис. 9.13,
близки. Обе САР реализуют одинаковый закон частотного управления е раз-
делением сигналов задания по частоте и напряжению с помощью нелиней-
ного элемента U2 и введением обратных связей по напряжению и току
двигателя на вход регулятора напряжения. Однако свойства ПЧ вносят ряд
существенных отличий в построение САР. Преобразователь по каналу регу-
лирования напряжения представлен четырьмя звеньями: инерционным с по-
стоянной времени характеризующим систему управления; инерционным
по цепи постоянного тока с постоянной времени Та, определяемой индуктив-
ностью L фильтрового реактора; интегральным с постоянной времени Тс,
определяемой емкостью С конденсаторов фильтра; пропорциональным с ко-
эффициентом усиления Ку, определяющим связь между напряжением входа
и выхода АИН. Кроме того, структурная схема ПЧ с АИН дополняется
обратными связями по напряжению через звено Wb дв и по току через
звено Wj дВ, связывающими функционально токи ПЧ с АИН и двигателя.
По каналу регулирования частоты ПЧ с АИН представлен одним инерцион-
ным звеном системы управления с постоянной времени ТП, ч. В связи с таким
представлением ПЧ с АИН для компенсации инерционностей фильтра в САР
по каналу регулирования напряжения введен подчиненный контур регули-
рования тока выпрямителя с П-регулятором тока с обратной связью, реали-
зуемой звеном Кд, т, в, а также пропорциональным выполняется регулятор
напряжения. Для обеспечения двухзонного регулирования в состав САР по
каналу частоты введен блок увеличения частоты U3, осуществляющий управ-
ление по сигналу о? тока двигателя при достижении номинального значения
выходной частоты. Для повышения плавности регулирования в систему вве-
ден задатчик интенсивности UL Остальные обозначения те же, что и в схеме
рис. 9.13
На рис. 9 15, а и б приведены схема САР и силовая схема электропри-
вода кранового механизма подъема с инвертором тока, в котором оптимиза-
Рис. 9 14 Структурная схема САР частотно-управляемого электропривода с ПЧ на основе АИН
Рис. 9.15. Структурная схема САР частотно-управляемого электропривода с ПЧ на основе АИТ
§93 САР асинхронных тиристорных электроприводов 507
ция переходных процессов проводится с учетом электромагнитных явлений
в двигателе. Для рассматриваемого электропривода в ортшопальной системе
координат, ось х которой ориентирована по направлению результирующего
вектора потокосцепления ротора ТР, справедливы выражения
¥р Lo
di +"77 T\tsx’ <9,14)
: <9-151
Л1=4рт^'^’ (9лб)
где *РР—модуль результирующего вектора потокосцепления ротора; isx и
— проекции тока статора на направление потокосцепления ротора; Л1—
электромагнитный момент; свР— угловая частота скольжения ротора отно-
сительно поля ротора; Тр ~ Lpjrp— электромагнитная постоянная времени
ротора; Ц,— индуктивность обмотки ротора; р — число пар полюсов обмотки
статора
Оптимизация переходных процессов достигается при поддержании по-
токосцепления ротора на уровне, соответствующем максимальному моменту
при заданном значении тока статора. При этом в соответствии с (9.14),
(9 15) должны выполняться условия
IS —
(р = arctg (<йрТр),
а момент согласно (9 16) Судет определяться выражением
3 1тг2
м = Т р ту ^РШР-
(9.17)
(9.18)
(9.19)
В рассматриваемой системе реализуется так называемый частотно-токо-
вый принцип управления, при котором задающим является сигнал по сколь-
жению а контролируемыми параметрами являются ток статора и угло-
вая скорость двигателя. При этом САР осуществляет контроль как за модулем
результирующего вектора тока статора, так и за его положением отно-
сительно вектора потокосцепления ротора В схеме на рис. 9 15 реализация
соотношения (9 17) выполняется функциональным преобразователем U1
Выполнение условия (9.18) производится с помощью функционального пре-
образователя U2 и фазосдвигающего устройства AU, входящего в состав
системы управления инвертором UZ и осуществляющего сдвиг импульсов
управления инвертором на угол ф. Внешний контур регулирования скорости
включает импульсный датчик скорости ВЯ, частотно-аналоговый преобразо-
ватель U3 и регулятор скорости с передаточной функцией IFP с- Сигнал 6%
снимаемый с выхода 1ГР с, после преобразования в U1 поступает в качестве
задающего в контур регулирования тока. Выходной сигнал регулятора тока
поступает в фазосдвигающее устройство управления выпрямителем А V
308
Электроприводы с тиристорными преобразователями
Разд. 10
преобразователя Контур регулирования частоты разомкнутый Сигнал управ-
ления частотой Z7| образуется как алгебраическая сумма сигналов, пропор-
циональных угловой скорости ротора и заданной частоте скольжения
снимаемой с выхода генератора частоты скольжения G.
При синтезе регуляторов объект регулирования тока инвертора пред-
ставляется апериодическим звеном с эквивалентной постоянной времени Т3
системы управляемый выпрямитель — двигатель, охваченный отрицательной
обратной связью через л в ено 1ГдВ. Управляемый выпрямитель представлен
линейным безынерционным звеном Кв, при этом система фазового управле-
ния выпрямителем считается безынерционной с /?С-фильтром на входе и по-
стоянной времени Гц. При таком представлении как регулятор скорости,
так и регулятор тока САР выполняются в виде ПИ-регуляторов.
РАЗДЕЛ 10
КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ
10.1. КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОЮ ТОКА
Тиристорные электроприводы постоянного тока (система ТП — Д) при-
меняются для крановых механизмов при необходимости обеспечения высоко-
качественного регулирования при мощностях привода свыше 60 кВт 1Ъ
своим регулировочным показателям система ТП — Д близка к системе Г — Д
Обладая при этом рядом преимуществ перед этой системой, тиристорный элек-
тропривод практически вытеснил электроприводы по системе Г — Д на кра-
новых механизмах В настоящее время тиристорные электроприводы посто-
янного тока устанавливаются на мощных мостовых литейных кранах, пере-
гружателях. бетоноукладчиках, высокопроизводительных башенных кранах
высотного строительства и ряде других уникальных крановых комплексов.
ЛТощность электроприводов таких комплексов может достигать -400- - С00 кВт
Тиристорные электроприводы, несмотря на некоторое различие в по
строении отдельных узлов автоматики и защиты, выполняются на основе
общих типовых' схем, связанных с исполнениями применяемого ТП. К ним
относятся схемы с реверсивными ТП серий АТРК и ТПЕ и е нереверсивными
ТП серии АТК и контакторным реверсом Данные ТП приведены в § 5 1
Применение нереверсивных ТП целесообразно при мощностях привода до
100 кВт и небольшом числе включений для режима работы не выше 4М
Для электроприводов более напряженных режимов и при мощностях свыш?
100 кВт следует применять схемы с реверсивными ТП
Для получения высоких регулировочных показателей в статике и дина-
мике в электроприводах используются двухконтурные САР скорости, по
дробно рассмотренные в § 9 2, поэтому в описании типовых схем электро
§ 10.1 Электроприводы с тиристорными преобразователя^/ тока
309
приводов структуры построения САР не приводятся, а даются только ссылки
на соответствующие схемы § 9.2. Тиристорные электроприводы в зависимости
от назначения и исполнения крановых механизмов могут быть одно- и мно-
годвигательными. Многодвигательными обычно выполняются электроприводы
механизмов передвижения кранов. Для механизмов подъема многодвигатель-
ные (обычно двухдвигательные) электроприводы применяются при большой
мощности системы При этом схемы электроприводов в одно- и мн эго двига-
тельном исполнениях не имеют существенных отличий.
Схемы типовых электроприводов. Схема электропривода с нереверсивным
ТП, применяемая для механизмов подъема кранов с двухзонным регулиро-
ванием скорости, приведена на рис. 10.1. При двухзонном регулировании
в зоне до номинальной скорости регулирование осуществляется изменением
напряжения ТП, а в верхней зоне — изменением тока возбуждения двига-
теля. Система регулирования частоты вращения двигателя приведена на
рис. 9.6 и подробно описана в § 9.2. По силовой цепи двигателя САР яв-
ляется двухконтурной однократно интегрирующей с внутренним подчинен-
ным контуром регулирования тока и внешним контуром, замкнутым по на-
пряжению двигателя. Система регулирования по цепи возбуждения — одно-
контурная с подчиненным контуром регулирования тока возбуждения и
регулированием потока в верхней зоне при подаче сигнала обратной связи
по току главной цепи. Для компенсации бестоковой паузы, вызванной пере-
ключением контакторов КМ1В и КМ2В реверсора, в САР введен подчинен-
ный контур регулирования напряжения ТП, как это показано на рис. 9.7.
Механические характеристики, обеспечиваемые рассматриваемым электропри-
водом, приведены на рис. 10.2.
В схеме рис. 10.1 приняты следующие обозначения: AV1 и AV2— си-
стемы импульсно-фазового управления силового ТП UZ1 и ТП возбуждения
UZ2, U1—логическое переключающее устройство; К2— релейный элемент
для переключения контакторов реверсора; Л/, А2 — САР по силовой цепи
и цепи возбуждения; АЗ — блок управления логическим переключающим уст-
ройством; И?—блок токовой отсечки. Сигнал по току снимается датчи-
ком UА. Указанные блоки вместе с силовыми тиристорными блоками глав-
ной цепи и цепи возбуждения входят в состав комплектного ТП. Вся ре-
лейно-контакторная аппаратура, включая силовой реверсор, располож’ена на
отдельной панели.
Управление электроприводом осуществляется командоконтроллером SA1
с контактами SM1—SM12. На положении 1 контроллера включается один из
контакторов реверсора и контактор тормоза КМ1 включает тормозной элек-
тромагнит YA. Одновременно подается задающее напряжение на вход САР
А1 (узел U3 — А1) и на вход блока АЗ узел (U3 — АЗ). Двигатель при этом
работает при минимальном напряжении питания и номинальном токе воз-
буждения. На последующих положениях командоконтроллера увеличиваются
выходное напряжение ТП и частота вращения двигателя. На положении 5
подъема САР ТП возбуждения UZ2 формирует механическую характери-
стику 577, близкую к характеристике постоянной мощности, полученной путем
ослабления поля двигателя при постоянной его ЭДС.
310
Электроприводы с тиристорными преобразователями
Разд 10
Рис 10 1 Схема электропривода механик
На положении 5 спуска также ослабляется поле двигателя и увели
вается его частота вращения, однако это происходит только для малых Г]
зов. Для обеспечения указанного в схему введено дифференциальное реле□
имеющее две обмотки, токовую и напряжения. При увеличении массы гр1
отключается дифференциальное реле и через реле К5 подается задаюи
напряжение в САР ТП возбуждения (узел ИЗ — А2). При постановке ком
§ 10.1 Электроприводы с тиристорными преобразователями тока
311
доконтроллера из любого положения в нулевое осуществляется электриче-
ское торможение электропривода в течение выдержки времени реле КТг
и КТ2 или КТ1, через контакты которых получают питание контакторы ре
версора и реле направления КЗ и К4. После отключения контактора КМ1.
осуществляемого реле направления, накладывается электромагнитный тормоз
YA. Управление узлами задания САР силового ТП и ТП возбуждения
312
Электроприводы с тиристорными преобразователями
Разд 10
осуществляется посредством реле Кб и /\7, а также контактами командокон-
троллера, регулирующими сопротивление в цепи U3— А1 и U3— АЗ
В схеме предусмотрена цепь динамического торможения через диод VD,
автоматически действующая на позициях спуска. Наличие указанной цепи,
несмотря на некоторое увеличение потерь в системе, значительно повышает
надежность привода, поскольку в случае каких-либо неисправностей груз
Рис. 10 2. Механические характе-
ристики электропривода по схе-
мам рис. 10.1 и 10 3
будет спускаться на характеристике ди-
намического торможения, а не падать
Связь ТП с сетью осуществляется че-
рез трансформаторы Т1 и Т2.
В схеме предусмотрены следующие
виды защит* нулевая (реле /(//), мак-
симальная (реле КА1), от обрыва поля
(реле КА2), от токов короткого замы-
кания и перегрузки (автоматические
выключатели QF1 и QF2), от недопу-
стимого превышения скорости (реле
KV), конечная защита (выключатель
SQ1). Аварийное отключение при-
вода осуществляется выключате-
лем SA
Рассматриваемая схема может быть
использована и для механизмов пере-
движения в одно- и многодвигатель-
ном исполнении. При этом необходи-
мость в двухзонном регулировании ско-
рости отсутствует, а поток двигателя
остается неизменным и равным номинальному. Указанное позволяет зна-
чительно упростить САР электропривода, исключив САР ТП возбуж-
дения.
Схема электропривода с реверсивным ТП по построению релейно-контак-
торной части близка к схеме с нереверсивным ТП, поэтому на рис. 10 3
приводится только схема главных цепей электропривода. Система регулиро-
вания рассматриваемого электропривода приведена на рис. 9.5. Как показано
в § 9 2, она обеспечивает более качественное регулирование, являясь двух-
контурной, двукратно интегрирующей. Внешний контур в применяемой САР
замкнут по ЭДС двигателя. Система регулирования возбуждения также вы-
полнена двухконтурной с внутренним контуром регулирования тока возбуж-
дения и внешним контуром регулирования ЭДС двигателя.
Схема управления ТП, как и рассмотренная на рис. 10.1, включает
в себя: блоки AV1 и AV2 — системы импульсно-фазного управления силовым
ТП LJZ1 и ТП возбуждения UZ2-, блоки А1 и А2— САР ТП UZ1 и L7Z2;
логическое переключающее устройство U1, переключающее тиристорные мо-
сты силового ТП по сигналу от датчика тока UA воздействием на систему
импульсно-фазного управления AV1 и блок переключения U2\ блок токовой
отсечки UF. Все указанные блоки входят в состав ТП Связь силового ТП
10,1 Электроприводы с тиристорными преобразователями тока
3U
О сетью осуществляется посредством токоограничивающего реактора L, а ТП
возбуждения получает питание через трансформатор Т.
Различия схем рис. 10 1 и 10 3 в релейно-контакторной части связаны
о отсутствием контакторов реверсора, несколько иным построением узла ди*
Рис. 10 3. Схема главных цепей электропривода с реверсивным ТП
намического торможения и отсутствием двухкатушечного реле К/, поскольку
в электроприводе с реверсивным ТП все функции регулирования потока
возложены на САР возбуждения. В схеме рис. 10.3 цепь динамического тор*
можения собирается только на нулевом положении командоконтроллера и
при срабатывании любой из защит. Такой вариант включения динамического
торможения требует высокого быстродействия системы и возможен только
12 Зак. 918
314
Электроприводы с тиристорными преобразователями Разд. 10
Таблица ЮЛ. Типовые комплекты электроприводов
с тиристорными преобразователями постоянного тока
Тип преобразователя Суммарная мощность двигателя. кВт Панель управления Резисторы динамического торможения типа Б 6, шт.
Тип Габаритные размеры, мм (ширинах глуби- нах дли на) Масса, кг
ТПЕ 100/100-460 45 1
АТК 250/230 60 5
5
АТРК 250/230 60 ПС 250 ИЛИ 790X390X1700 170 5
ТПЕ 200/200-460 60-100 П 250 1
АТК 250/460 60—100 1
АТРК 250/460 100—120 2
АТРК 500/230 100—120 10
ТПЕ 400/400-460 160-180 ПС 630 или 1000X630X1700 350 3
АТРК 500/460 200—240 П 630 3
ТПЕ 630/630—460 260—280 4
Примечания: 1. Для управления электроприводами применяются командокон*
троллеры типа ККП1200.
2. Количество пускорегулировочных резисторов указывается на один двигатель. Для
многод вига тельных электроприводов количество блоков резисторов увеличивается про-
порционально числу двигателей.
в электроприводах с реверсивными ТП. Электроприводы с реверсивными ТП
также могут быть применены для механизмов передвижения с теми же осо*
бенностями построения, о которых было сказано выше.
Технические данные крановых электроприводов по системе ТП — Д при*
ведены в табл. 10.1. Комплект в зависимости от исполнения привода вклю-
чает в себя один или несколько крановых двигателей серии Д независимого
возбуждения с суммарной мощностью, указанной в табл. 10.1, ТП, панель
управления, командоконтроллер и блоки резисторов цепи динамического тор*
можения. Данные ТП приведены в § 5.1. Панели управления выполнены на
рамах серийных панелей серии П (см. § 3.4).
10.2. КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ НАПРЯЖЕНИЯ
В ЦЕПИ СТАТОРА И ИМПУЛЬСНЫМИ РЕГУЛЯТОРАМИ
СОПРОТИВЛЕНИЯ В ЦЕПИ РОТОРА
АСИНХРОННОГО ДВИГАТЕЛЯ
Общие вопросы. Электроприводы с параметрическим регулированием
скорости, выполняемым посредством ТПН в цепи статора и ротора асин-
хронных двигателей, применяются для механизмов, предъявляющих высокие
§ Ю2
Электроприводы с преобразователями напряжения
315
требования к диапазону или плавности регулирования скорости. В связи
с выделением потерь скольжения эти электроприводы выполняются в основ-
ном с применением двигателей с фазным ротором при однозонном регулиро-
вании скорости в диапазоне не ниже 8:1. Преобразователи в цепи статора
короткозамкнутых двигателей применяются относительно редко и только для
формирования пусковых режимов. Такие электроприводы имеют простые
схемы управления и здесь не рассматриваются. В настоящем параграфе
рассматриваются освоенные промышленностью электроприводы с ТПН типа
РСТ (см. § 5 2) в цепи статора асинхронных двигателей» а также находя-
щиеся в стадии разработки электроприводы с импульсными регуляторами
сопротивления в цепи ротора асинхронных двигателей. Все эти электропри-
воды обеспечивают высокий — не ниже 8:1 — диапазон регулирования ско-
рости, но характеризуются различными технико-экономическими показа-
телями.
Электроприводы с преобразователями напряжения позволяют формиро-
вать механические характеристики во всех четырех квадрантах регулирова-
ния со снижением потерь холостого хода машины, однако требуют установки
тахометрического датчика скорости и имеют ухудшенные по сравнению
С обычным реостатным регулированием энергетические показатели. Это свя-
зано не только с тем, что регулирование момента, осуществляемое сниже-
нием потока, приводит к увеличению потерь в меди обмоток, но и с необ-
ходимостью применения для формирования тормозных характеристик нера-
ционального режима противовключения, ухудшением cos ф системы, а также
наличием высших гармонических в кривой питающего двигатель напряжения.
Указанное особенно отчетливо проявляется в различных схемах с регулято-
рами напряжения, выполненными по несимметричным схемам. Именно по-
этому такие схемы, несмотря на свою простоту, не получили широкого при-
менения для крановых электроприводов.
Электроприводы с импульсным регулированием обладают наиболее опти-
мальными из всех параметрических систем энергетическими и регулировоч-
ными показателями и не требуют установки тахогенератора. Однако их
реализация сопряжена с необходимостью использования высокочастотных ти-
ристоров и коммутирующих конденсаторов, а также сложной системы управ-
ления. Поэтому электроприводы с импульсным регулированием все еще не
вышли на стадию промышленного производства. Однако перспективность
указанных электроприводов не вызывает сомнения, что и определяет целесо-
образность их рассмотрения.
Схемы электроприводов с тиристорными преобразователями напряжения.
Электроприводы с ТПН применяются для механизмов как подъема, так и
передвижения. Принципы построения схем при этом одинаковы, отличия
имеются только в выполнении отдельных узлов в цепях управления. Типовая
схема электропривода подъема с ТПН типа РСТ приведена на рис. 10.4. Ме-
ханические характеристики электропривода с ТПН приведены на рис. 10.5.
Штриховые линии относятся к механизму передвижения. В состав ТПН
входят следующие блоки: AV1 — система импульсно-фазного управления,
А1 — система автоматического регулирования; U1— блок переключения
12*
Рис 10 4 Схема электропривода механизма подъема с ТПН
§ Ю.2
Электроприводы с преобразователями напряжения
317
системы импульсно-фазного управления; U2— блок логики; (73— блок зада-
ния скорости; U4 — датчик напряжения; U5 — датчик нуля тока; U6—блок
слежения за током; UF— блок токовой отсечки; А2— система управления
блоком логики; К1 — К5 — реле управления. Тиристорный преобразователь
напряжения вместе с релейно-контакторной аппаратурой, не входящей в его
состав, встроен в единую панель управления электроприводом. Система ре-
гулирования электропривода показана на рис. 9.11 и описана в § 9.3. Си-
стема является двухконтурной, однократно интегрирующей с внутренним
контуром регулирования напряжения
ТПН и внешним контуром регулирова-
ния скорости. Обратная связь по току
осуществляется с помощью тахогенера-
тора BR.
Управление электроприводом про-
изводится командоконтроллером SM
с контактами SM1— SM12, имеющим
четыре положения на подъем и три на
спуск. Для механизмов передвижения
применяется симметричная схема с че-
тырьмя положениями командоконтрол-
лера в каждом направлении движе-
ния. Сигналы управления от SM посту-
пают на блок КЗ, после чего сравни-
Рис. 10 5. Механические характе-
ристики электропривода по схе-
мам рис 10 4 и 10 6
ваются с сигналами от тахогенератора BR на входе А1— системы импучьс-
но-фазового управления. На вход А1 поступает также от датчика напряже-
ния U4 сигнал обратной связи по напряжению ТПН Наличие обратной связи
по скорости, обеспечивающей жесткие механические характеристики, преду-
смотрено на всех позициях командоконтроллера, за исклкнением последних,
на которых двигатель работает на обычных характеристиках с малым псвы-
ключаемым сопротивлением. Реверсирование двигателя производится контак-
торами направления КМ1В и КМ2В, включаемыми реле /</ и К2 в зависи-
мости от состояния логического устройства U2
Переключения контакторов направления связаны с изменением режима
работы, поскольку в тормозных режимах двигатель работает на характери-
стиках противовключения. Контакторы переключаются при отсутствии тока
в главной цепи под контролем блока U6, При этом контактор КМ 1В вклю-
чен в I и IV квадрантах механических характеристик, а КМ2В— во II и
III квадрантах. Для снижения потерь в двигателе предусмотрены две выклю-
чаемые контакторами KM1V и KM2V и одна невыключаемая ступени рези-
сторов. Контактор КМIV включается на позициях 1П, 1С и 2С непосред-
ственно командоконтроллером, а контактор KM2V— на остальных позициях
через реле /(5, управляемое блоком U3. Ограничение динамических моментов
в приводе в пуско-тормозных режимах достигается посредством блока то-
ковой отсечки UF, сигнал с которого поступает на А VI.
Управление контактором КМ1 тормозного электромагнита YA произво-
дится реле КЗ под контролем блока U6. При этом контактор тормоза
318
Электроприводы с тиристорными преобразователями Разд. 10
Рис. 10.6. Схема главных цепей
двухдвигательного электропривода
механизма передвижения с ТПН
включается при наличии тока во всех трех фазах двигателя и отключается на
рабочих положениях с выдержкой времени, достаточной для переключения
контакторов реверсора, при исчезновении тока хотя бы в одной из фаз. Схема
предусматривает электрическое торможение при переводе командоконтрол-
лера на снижение скорости или в нулевое положение. Торможение происхо*
дит на характеристике противовключения с полностью введенным сопротив-
лением в роторе. Тормоз накладывается
на нулевом положении командоконтрол-
лера по истечении выдержки времени
реле КЗ, Для механизмов подъема
электрическое торможение в режиме
подъема может не применяться. Для
его исключения контакты реле К1 шун-
тируются контактами реле времени
КТ 1, благодаря чему торможение осу-
ществляется только под действием мас-
сы груза.
Достоинством такой схемы являет-
ся уменьшение количества переключе-
ний контакторов направления, недостат-
ком— увеличение времени торможения
легких грузов. Электропривод имеет все
необходимые виды защиты: нулевую,
максимально-токовую и конечную, а
а также защиту тиристоров от пере-
напряжений и токов короткого замы-
кания. Максимально-токовая защита
выполняется с помощью блока U6, воз-
действующего на реле К4 и через него
на линейный контактор КММ, на кото-
рый одновременно выносится и нулевая защита. Срабатывание максималь-
ной защиты вызывает не только отключение линейного контактора, но и
снятие импульсов управления тиристорами. Конечная защита выполняется
выключателями SQ1 и SQ2, В схеме также предусмотрен контроль правиль-
ной работы реле К1 — КЗ, осуществляемый с помощью реле времени КТ%9
Это реле включается на всех рабочих положениях командоконтроллера, и
при неисправности выходных контактов реле К1 — КЗ реле КТ 2 отключает
линейный контактор.
При построении многодвигательных электроприводов с ТПН для меха-
низмов передвижения принципы построения схемы не изменяются. Схема
главных цепей показана на рис. 10.6. Она выполняется с одним ТПН и од-
ним тахогенератором.
Технические данные электроприводов с ТПН приведены в табл. 10.2«
Эти электроприводы выполняются на мощность от 7 до 125 кВт и включают
в себя двигатель, панель управления, на которой установлен ТПН типа РСТ
соответствующей мощности и релейно-контакторная аппаратура, а также ко*
§ 10.2
Электроприводы с преобразователями напряжения
319
Таблица 10.2. Крановые комплекты электроприводов с тиристорными
преобразователями напряжения
Тип регулятора Суммарная мощность двигателей, кВт Панель управления Пускорегули- ровочные резисторы типа Б6, шт.
Тип Г абаритные размеры (ширинах глубинаХвысота), мм Масса, кг
РСТ по 7-15 15—22 22-28 ТТЗ 160 1000X475X1700 200 2 3 3
РСТ 210 28—37 37—45 45-60 ТТЗ 160 1000X475X1700 200 3 5 6
РСТ 310 60—75 75—100 100—125 ТТЗ 250 1ЮОХ475ХИОО 300 6 8 12
Примечания: 1. Для управления электроприводами применяются командо-
контроллеры типа ККП1100.
2. Количество блоков пускорегулирующих резисторов указывается на один двига-
тель Для многодвигательных электроприводов количество блоков резисторов увеличи-
вается пропорционально числу двигателей.
мандоконтроллер и блоки резисторов. Данные ТПН типа РСТ приведены
в § 5.2. Панели управления имеют тип ТТЗ и конструктивно унифицированы
с серийными панелями типов Т и ТСА.
Схемы электроприводов с импульсными регуляторами. Импульсные регу-
ляторы (ИР) обеспечивают плавное регулирование активного сопротивления
в цепи выпрямленного тока ротора путем включения и отключения с задан-
ной скважностью тиристоров, шунтирующих указанное сопротивление. В от-
личие от схем с ТПН, в которых формирование тормозных режимов произ-
водится на характеристиках противовключения, в схемах с ИР благодаря
наличию цепи выпрямленного тока ротора использован режим динамического
торможения самовозбуждением. Это позволяет значительно повысить энер-
гетические показатели электропривода.
На рис. 10.7 приведена схема электропривода подъема с ИР, а на
рис. 10.8 — обеспечиваемые ею механические характеристики. Силовая часть
ИР включает в себя основной тиристор VSZ с обратным диодом VP/, ком-
мутирующий тиристор VS2, тиристоры узла заряда коммутирующего конден-
сатора VS3, VS4 и диод VD2, коммутирующий конденсатор С2, а также
конденсатор фильтра СЗ, разрядные резисторы R3, R4 и R5. Подпитка узла
коммутации осуществляется от трансформатора Т1 и выпрямительного мо-
ста UZ3. В роторную цепь двигателя М включен неуправляемый мостовой
выпрямитель UZ1, выход которого замкнут на силовой резистор R6 и сило-
вую активно-емкостную цепь из конденсатора С1 и резисторов R1 и R2t
J' J Л
br- \ Aaf
Рис. 10.7. Схема электропривода механизма
подъема с импульсным регулированием
§ 10.2 Электроприводы с преобразователями напряжения 321
шунтируемых тиристорами ИР. Применение /?С-цепи и резистора R6 позво-
ляет получить пределы регулирования момента на характеристиках устано-
вочных скоростей 1П и 1С в пределах от 0 до 1,25Л1Ном
Управление ИР осуществляется следующими блоками: AVJ — блок рас-
пределения и формирования импульсов управления; [// — блок переключения
режимов работы AVI; U2 — блок слежения за током; UF—блок токовой
отсечки; (ЛЗ—блок задания скорости; U4 — датчик напряжения; U5 — блок
переключения режимов; U5— блок датчика тока; А1 — САР электропривода.
Система электропривода с импульсным регулированием рассмотрена в § 9.2,
а схема ее приведена на рис. 9 12.
Система является двухконтурно •,
однократно интегрирующей с внут-
ренним контуром тока и внешним
контуром ЭДС.
Управление электроприводом
производится от командоконтроллера
SA1, имеющего несимметричную схе-
му с четырьмя положениями в каж-
дом направлении Обмотка статора
подключается к сети рубильником
Q1, реверсивными контакторами
КМ1В и КМ2В, а также контакто-
ром КМ1. Тормозные режимы осу-
ществляются переводом двигателя
Рис. 10.8. Механические характери-
стики электропривода по схеме
рис. 10.7
в режим динамического торможения
самовозбуждением при включении контактора КМ2, механически и элек-
трически сблокированного с контактором RM1. Необходимая для форми-
рования механических характеристик скважность работы ИР устанав-
ливается САР в результате совместного действия сигнала задания от коман-
доконтроллера и действия обратных связей по току и напряжению в цепи
постоянного тока ротора двигателя.
При подъеме груза на положении 1 командоконтроллера SM разомкнуты
контакты КМЗ и двум крайним состояниям ИР — открытому и закрытому —
соответствуют механические характеристики с /?ДОб — R6 и оо. При этом ИР
формирует жесткую характеристику 1П. Положениям SM2 и 3 соответствуют
характеристики 2П и ЗП, причем слева граничной является характеристика
с Лдоб = R1 (штриховая линия на рис. 10.8) при замкнутом контакторе КМЗ.
Па характеристике 4П ИР постоянно открыт, и характеристика близка к ес-
тественной механической характеристике двигателя. Участок токоограниче-
ния на характеристиках 2П — 4П формируется блоками UF и U1.
При спуске груза первым трем положениям SA1 соответствуют характе-
ристики динамического торможения самовозбуждением двигателя. Подпитка
двигателя при этом осуществляется от выпрямителя UZ2 через добавочный
резистор R7. На положении / командоконтроллера SM в направлении спуска
груза в зависимости от значения момента сопротивления на валу двигателя
привод может работать на характеристике 1С в IV квадранте (в режиме
822
Электроприводы с тиристорными преобразователями Разд. 10
динамического торможения) либо на характеристике 1С в III квадранте
(в режиме силового спуска с пониженной частотой вращения).
Рис. 10.9. Схема двухдвигательного электропривода
Управление переключением режима работы производится блоком U2,
воздействующим через блок 1/5 на САР и через реле К/ на контакторы
в силовых цепях статора двигателя. Аналогично происходит работа привода
на позиции 1 подъема. При переводе рукоятки командоконтроллера из ну-
левого или первого положения в последующие, как при подъеме, так и при
спуске, привод работает в режиме токоограничения под контролем блока UFt
блокирующего блок снижения скорости U5. После пуска привода до задан-
§ 102
Электроприводы с преобразователями напряжения
323
ной частоты вращения блок (75 разблокируется и ИР формирует механиче-
ские характеристики в соответствии с изложенным.
механизма передвижения с импульсным регулированием
При переводе 5Л1 из положений 4П — 2П в нулевое по сигналу блока U2
при нулевом токе ротора срабатывает реле К К отключаются контакторы си-*
левого режима КМ К КМ1В (или КМ2В) и включается контактор КМ2. При
этом привод тормозится в режиме динамического торможения самовозбужде-
нием с ограниченным динамическим моментом. Аналогично осуществляется
работа привода и при спуске малых грузов в Ш квадранте механических
характеристик. При протягивающих грузах торможение происходит без
324
Электроприводы с тиристорными преобразователями
Разд. 10
переключений в силовой цепи. Тормоз накладывается при отключении его
электромагнита YA, осуществляемом после электрического торможения под
контролем реле времени АТ/.
Включение в цепь катушки реле КТ1 контактов реле К1 исключает про-
садку груза, поскольку тормоз не включится, пока ток ротора двигателя не
нарастет до значения, достаточного для удержания груза. Защита привода —<
нулевая, максимальная (реле КД), конечная (выключатели SQ1 и SQ2)
вынесена на реле Л7/. В цепь реле КН введен также вспомогательный кон-
такт автоматического выключателя QFL защищающего вентильные элементы
Рис. 10 10. Механические характери-
стики электропривода по схеме
рис., 10.9
в цепи ротора двигателя. Защита це-
пей управления от короткого замы-
кания осуществляется автоматиче-
ским выключателем QF2.
Весьма перспективным является
применение импульсного регулирова-
ния для электроприводов механиз-
мов передвижения. При этом обес-
печивается как регулирование скоро-
сти, так и регулирование момента,
что позволяет оптимизировать рабо-
ту указанных механизмов в статике
и динамике в широком диапазоне
изменения нагрузок.
На рис. 10.9 приведена схема двух двигательного электропривода меха-
низма передвижения крана, а на рис. 10.10—обеспечиваемые ею механиче-
ские характеристики. Построение ИР и обозначения его элементов те же,
что и на схеме рис. 10 7, поэтому на рис. 10.9 ИР показан условно в виде
отдельного блока UR. Отличия заключаются в выполнении САР электропри-
вода и релейно-контакторной схемы управления и связаны с видом реализуе-
мых механических характеристик. При формировании всех характеристик,
за исключением IB и 1Н, контур ЭДС в САР блокируется. Схема обеспечи-
вает пятипозиционное управление по симметричной диаграмме. Регулирова-
ние обоих двигателей выполняется одним регулятором. Выпрямительные мо-
сты UZ1 и UZ2 связывают роторные цепи двшателей в общую цепь постоян-
ного тока. Благодаря этому достигается в определенной степени выравнива-
ние частот вращения обоих двигателей. Аналогично могут быть построены
как однодвигательные, так и многодвигательные приводы. При этом для вве-
дения каждого последующего двигателя нужно добавлять выпрямительный
мост, подключенный к его роторной обмотке.
На положении / командоконтроллера двигатель работает на характери-
стиках 1В или ///, которые формируются так же, как для электропривода
подъема. На последующих положениях SM. характеристики электропривода
вертикальны, что достигается блокированием блока снижения скорости в
схеме управления ИР и регулятора ЭДС в САР. При снижении скорости
в пределах одного направления вращения двигателя работа схем электро-
приводов подъема и передвижения одинакова и производится на характери-
§ 10.3 Электроприводы с тиристорными преобразователями частоты 325
стиках II и IV квадрантов переводом двигателя в режим динамического тор*
можения самовозбуждением включением контактора КМ2 посредством
реле К/.
При реверсировании же работа схемы электропривода передвижения от-
личается от схемы подъема из-за характера нагрузки. В этом режиме при
переводе рукоятки командоконтроллера через нулевое положение и под кон-
тролем блока слежения за током U2 срабатывает реле реверса К2. Реле К2
отключает включенный до этого контактор направления, например КМ1В,
и включает контактор КМ2, переводя привод в режим динамического тор-
можения. Однако в этом режиме привод будет находиться только в течение
времени работы блока токоограничения. После этого реле К2 отключается
и включается контактор КМ2В, реверсируя привод. В остальном работа схем
подъема и передвижения одинакова.
10.3. КРАНОВЫЕ ЭЛЕКТРОПРИВОДЫ
С ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
Крановые электроприводы с НПЧ и ПЧИ применяются для механизмов
с высокими требованиями к регулированию или производительности, в кото-
рых по условиям эксплуатации необходимо или экономически оправдана
целесообразность установки асинхронных короткозамкнутых двигателей.
Электроприводы с НПЧ обеспечивают однозонное регулирование скорости
и в зависимости от режима работы и требований к регулировочным пока-
зателям выполняются в системе с полюсно-переключаемыми (обычно двух-
скоростными) или односкоростными двигателями. Электроприводы с ПЧИ
выполняются с односкоростными двигателями и обеспечивают двухзонное
регулирование скорости. Применение НПЧ с полюсно-переключаемыми дви-
гателями позволяет значительно увеличить мощность двигателя в тех же
габаритах при одновременном увеличении диапазона регулирования скоро-
сти. В таких системах осуществляется комбинированное управление с час-
тотным управлением в области малых скоростей и переключением обмоток
двигателя, а также переводом питания на напряжение сети в остальной зоне
регулирования. В соответствии с этим в зависимости от функций, возлагае-
мых на НПЧ, применяются два варианта построения электропривода: с ис-
пользованием НПЧ только для получения малых скоростей и с использова-
нием НПЧ также в качестве бестокового коммутатора. В первом варианте
мощность НПЧ может быть значительно меньше мощности двигателя в соот-
ветствии с выражением
= С10-1)
где fzmaxlfi — отношение максимальной выходной частоты НПЧ к частоте
сети; DP — диапазон регулирования, обеспечиваемый переключением числа
лар полюсов двигателя.
826 Электроприводы с тиристорными преобразователями Разд. 10
Рис. 10.11. Схема комбинированного электропривода механизма подъема с
§ 10.3 Электроприводы с тиристорными преобразователями частоты 327
двухскоростным двигателем и преобразователем ТТС40
328
Электроприводы с тиристорными преобразователями Разд. 10 -
Общий диапазон регулирования электропривода при этом
Do6m — DHmDpf Л 2max' (10’2)
где ОНПЧ — диапазон регулирования выходных частот НПЧ.
Согласно (ЮЛ) и (10.2) Рнпч «(0,1 ч-0,3) Рдв прн Ро61Ц = (6 Ч-15): 1.
В результате в первом варианте целесообразно использование наиболее
простых НПЧ типов ТТС 16 и ТТС40, выполненных по нулевой схеме с про-
граммным управлением группами тиристоров, простой САР и с согласующим
трансформатором. При этом, однако, значительно усложняется релейио-кон-
Рис. 10.12. Механические характери-
стики электропривода по схеме
рис. 10.11
такторная схема электропривода, вы-
полняющая необходимые переключе-
ния в силовых цепях двигателя.
Во втором варианте НПЧ дол-
жен быть рассчитан на полную мощ-
ность двигателя, усложняются так-
же требования к схеме управления
преобразователя и САР электропри-
вода. Однако релейно-контакторная
часть системы становится проще и
надежнее. Для таких электроприво-
дов используются НПЧ типаТТСЮО,
выполненные по мостовой 18-тири-
сторной схеме с раздельным управ-
лением группами тиристоров и то-
коограничивающими реакторами.
Электроприводы с ПЧИ в зави-
симости от мощности привода стро-
ятся с АИТ на базе ТПТСЗО и
ТПТС63 и с АИН на базе ТПТС100. Диапазон регулирования скоростей
в таких электроприводах составляет 10:1 в нижней зоне регулирования,
а в верхней зоне 1,5: 1 в системах с АИТ и 2:1 — с АИН.
Схемы типовых частотно-управляемых электроприводов с НПЧ. Схема
комбинированного электропривода с двухскоростным двигателем и исполь-
зованием НПЧ только для функций регулирования приведена иа рис. 10.11,
а соответствующие ей механические характеристики — на рис. 10.12 при со-
отношении числа пар полюсов двигателя 4/6. Диапазон регулирования ско-
ростей при этом составляет 15:1. В систему управления НПЧ UZ входят
блоки управления напряжением AV и частотой НПЧ AU и соответствующие
им блоки задания напряжения U2 и частоты UL Управление от командокон-
троллера SA1— двухканальное посредством реле задания КЗ— Кб. Эти реле
переключают цепи, состоящие из потенциометрически включенных резисто-
ров R1—R18 и диодов, образующих логическую схему ИЛИ. При этом
включение каждой последующей цепи запирает сигнал задания предыдущей
цепи
Преобразователь имеет упрощенную САР без подчиненного регулирова-
ния параметров и обеспечивает поддержание заданного блоком U2 напря-
§ 10.3 Электроприводы с тиристорными преобразователями частоты 320
жения выхода НПЧ, соответствующего заданной выходной частоте. При этом
обратная связь по напряжению поступает в систему от трансформатора TV
через блок V3. Блок UF осуществляет сеточную защиту по сигналу от токо-
вых трансформаторов ТА. Схема обеспечивает частотный пуск и торможение
при работе двигателя от НПЧ, а также двухступенчатый пуск и торможение
при переводе на естественную характеристику быстроходной обмотки дви-
гателя.
Темп пуска в зоне частотного управления определяется задатчиком ин-
тенсивности, входящим в состав САР. Для увеличения диапазона регулиро-
вания скорости в схеме выполняется поочередное подключение НПЧ к тихо-
ходной обмотке (характеристики 1П и 1С) и к быстроходной обмотке (ха-
рактеристики 2П, 2С и 3/7, ЗС). Характеристики 4П, 4С и 5/7, 5С — есте-
ственные характеристики двигателей. Управление электроприводом осуще-
ствляется от командоконтроллера SM через промежуточные реле. При этом
реле К/, К2 и KV1 — KV4 управляют переключениями в силовых цепях,
а реле КЗ — Кб — в цепях управления НПЧ. Соответственно реле К1 и К2
осуществляют реверс в зоне электромашннного регулирования, воздействуя
на контакторы направления КМ1В и КМ2В, а реле КЗ и К4— в зоне час-
тотного управления, изменяя порядок коммутации тиристоров НПЧ. Реле
KV1—KV4 управляют контакторами КМIV — KM2V, осуществляющими пе-
реключения в силовых цепях при регулировании скорости, а реле К5 и Кб
задают скорость при питании двигателя от НПЧ, воздействуя, как было ска-
зано, на логическую схему ИЛИ и через нее на блоки U1 и U2 Время пуска
и торможения в зоне частотного управления задается задатчиком темпа
в САР НПЧ, а вне этой зоны — реле времени КТ4. Электромагнитный тор-
моз YA накладывается после частотного торможения до малой скорости при
отключении контактора КМ1 под контролем реле времени КТ2. При этом
для исключения просадки груза частота снижается быстрее напряжения.
В схеме осуществляются следующие виды защиты: тепловая с помощью
реле КК1—КК4, установленных в силовых цепях обмоток двигателя, конеч-
ная— через выключатели SQ1 и SQ2, от коротких замыканий — автомати-
ческими выключателями QF1 и QF2, от превышения скорости — центробеж-
ное реле KV Тепловая защита вынесена на реле КТ1, которое осуществляет
также функции нулевой защиты. Конечная защита воздействует па контак-
торы КМ1В, КМ2В Кроме указанных видов защиты правильность работы
НПЧ контролируется реле КН, включаемым от блока U3 при достижении
напряжением минимального уровня. Реле КН и KV воздействуют на контак-
тор тормоза. Непосредственно в НПЧ входит блок сеточной защиты (JF,
осуществляющий снятие импульсов с тиристоров при превышении током до-
пустимого значения
Схема электропривода с двухскоростным двигателем, в которой НПЧ
выполняет также функции бестокового коммутатора, приведена на рис. 10.13.
Поскольку двшатель получает питание только от НПЧ, то реверс осуще-
ствляется изменением последовательности переключения тиристоров НПЧ,
поэтому в схеме отсутствуют контакторы реверса, а также контакторы, пе-
реключающие двигатель на напряжение сети. Расширение функций НПЧ
330 Электроприводы с тиристорными преобразователями Разд. 10
приводит к усложнению схемы управления НПЧ и САР. Кроме аналогичных
со схемой рис. 10.11 блоков AU, AVt Ult U3 и UF в состав НПЧ входят:
блок задания режима работы U2, блок датчика тока U4, блок САР — U5
и блок логики U6, осуществляющий переключение групп тиристоров при ну*
левом токе.
Управление производится от командоконтроллера SAL На первых трех
позициях ЭМ осуществляется частотное управление электроприводом, а на
Гис. 10.13. Схема электропривода механизма подъема с двухскоростным дви
гателем и совмещением на НПЧ функции бестокового коммутатора
332 Электроприводы с тиристорными преобразователями Разд. 10
четвертой и пятой позициях переключаются обмотки двигателя, при этом
блок U2 переводит НПЧ UZ в режим бестокового коммутатора. Система
регулирования такого электропривода приведена на рис. 913 и рассмотрена
в § 9.3. Она реализует управление по закону компенсации падения напря-
жения на сопротивлениях статора двигателя с одноканальным управлением
НПЧ от командоконтроллера. Связь НПЧ с сетью осуществляется через ре-
актор L — Л4 и линейный контактор КММ. Переключение обмоток двигателя
выполняют контакторы KM1V и КМ2 К Управление электроприводом произ-
водится через реле KV1—KV4, воздействующие на реле скорости К4 и А5
при частотном управлении и на контакторы КМ IV и KM2V при переключе-
нии обмоток двигателя.
На первой позиции SM1 к НПЧ с минимальными значениями напря-
жения и частоты подключается тихоходная обмотка двигателя, а в поло-
жениях 2 и 3— быстроходная обмотка при одновременном повышении час-
тоты и напряжения НПЧ. Затем тихоходная и быстроходная обмотки по-
очередно подключаются на напряжение сети. Механические характеристики
электроприводов по схемам рис. 10.11 и 10.13 приведены на рис. 10.12 и
отличаются только характеристиками малой скорости 1П и 1С Д,ля рас-
сматриваемого электропривода они жестче и имеют одинаковый с естествен-
ной характеристикой быстроходной обмотки двигателя пусковой момент (на
рис. 10.12 они показаны штриховыми кривыми). Управление реверсом осу-
ществляется через реле А/ и К2. Время частотного пуска и торможения, как
и в схеме рис. 1011, задается задатчиком темпа САР НПЧ, а при электро-
машинном регулировании — реле времени КТ2 — КТ4. Узлы защиты в обоих
рассматриваемых схемах частотно-управляемых электроприводов с НПЧ оди-
наковы.
Схема крановых частотно-управляемых электроприводов с ПЧ и АИ,
Схема кранового электропривода мощностью свыше 60 кВт на основе ПЧ
типа ТПТС100 с АИН приведена на рис. 10.14, а соответствующие ей меха-
нические характеристики — на рис. 10 15 (на рис. 10.15 £ — относительная
частота выходного напряжения). Силовая часть ПЧ включает в себя управ-
ляемый выпрямитель VZ1, ведомый инвертор VZ2, АИН с тиристорным мос-
том прямого тока VZ3 и диодным мостом обратного тока UZ4, индуктивно-
емкостные фильтры в звеньях постоянного тока выпрямителя и ведомого
инвертора (соответственно сглаживающие реакторы L — М3, L — М4 и кон-
денсаторы Cl, С2) и токоограничивающие реакторы L — Ml, С — М2. В со-
став силовой схемы ПЧ входит также узел принудительной конденсаторной
коммутации, условно представленный блоком U5 Система управления вклю-
чает в себя блоки управления напряжением AV и частотой ПЧ AU, блок
задания VI при одноканальном управлении от сельсинного командоконтрол-
лера ВС, блоки обратных связей по напряжению и току двигателя соответ-
ственно U2 и U3 с входными сигналами от трансформатора напряжения TV1
и тока ТА2, САР ПЧИ — блок U4, блоки обратных связей по токам U6
и напряжениям U7 выпрямителя и обратного инвертора, блок логики U8
и блок токовой отсечки UF Блок задания U1 формирует сигнал, знак кото-
рого зависит от направления поворота рукоятки командоконтроллера, что
834
Электроприводы с тиристорными преобразователями Разд. 10
позволяет обеспечить реверс двигателя, не вводя контактных элементов в
схему. При этом реверс осуществляется изменением порядка включения ти-
ристоров АИН.
Система регулирования электропривода приведена на схеме рис. 9.14
и подробно рассмотрена в § 9.3. При этом показанному на схеме рис. 9.14
сигналу обратной связи по току в звене постоянного тока на рис. 10.14 со-
ответствует суммарный сигнал по токам выпрямителя и обратного инвер-
тора, поступающий в САР через блок
U6, В системе регулирование до но-
минальной скорости осуществляется
изменением выходной частоты в диа-
пазоне 3—50 Гц и соответственно
напряжения ПЧ, а в верхней зоне —
изменением частоты от 50 до 100 Гц
при номинальном напряжении В ниж«
ней зоне регулирования САР обес*
печивает реализацию закона частот*
кого управления с компенсацией па-
дения напряжения на сопротивле-
ниях статора двигателя. Переход на
повышенные частоты происходит на
последнем положении командокон-
троллера при малых нагрузках по
сигналу от блока U3. В
предусмотрено согласованное
ление выпрямителем UZ1 и
ным инвертором HZ2. При
САР ПЧ поддерживает выходное на-
-J5Z7Z7I.......... 1-1
Рис. 10.15. Механические характери-
стики электропривода по схеме
рис. 10.14
системе
управ*
обрат*
этом в
целях снижения уравнительных токов
пряжение UZ2 несколько большим напряжения UZ1, что выполняется с по-
мощью блоков U7 и U8,
Плавность пуска и торможения обеспечивается задатчиком темпа изме-
нения частоты и напряжения, входящим в состав САР. Тормозной электро-
магнит УА или двигатель гидротолкателя тормоза подключается к выводам
двигателя, поскольку соотношение между частотой и напряжением ПЧ обес-
печивает достаточный для растормаживания тормоза ток УА. При реверсе
САР выполняет сначала частотное торможение электропривода с заданным
темпом, а затем пуск в обратную сторону. Защита электропривода — конеч-
ная (выключатели SQ1 и SQ2) и нулевая — вынесены на реле КТ1, вклю-
чающее линейный контактор КММ. Для выполнения этих защит командо-
контроллер имеет три контактных элемента SM1— SM3. В цепь реле КТ1
введен также контакт реле КН, контролирующего правильную работу ПЧ
по значению его минимального напряжения. Защита от короткого замыка-
ния в главной цепи осуществляется автоматическим выключателем QF1,
а в цепях управления — выключателем QF2. В самом ПЧ с АИН предусмот*
рена защита, снимающая сигнал управления, осуществляемая с помощью
блока UF. Аварийное отключение в схеме производится выключателем
SA1,
§ 10.3 Электроприводы с тиристорными преобразователями частоты 335
Схема электропривода мощностью от 30 до 60 кВт с ПЧ на основе АИТ
типа ТПТС60 приведена на рис. 10.16. Силовая часть ПЧ включает управ-
ляемый выпрямитель UZlt автономный инвертор UZ2 с узлом коммутации,
условно показанный в виде блока U5, ведомый инвертор UZ3 ограничения
обратного напряжения, сглаживающий реактор L — М2 в цепи постоянного
тока ПЧ с АИТ и токоограничивающий реактор L — Ml. Система управле-
ния ПЧ с АИТ состоит из блока управления напряжением AV и частотой АС/,
блока задания U1, блока обратной связи по частоте вращения двигателя U2
с входным сигналом от датчика скорости BR, блока обратной связи по
току U3 с входным сигналом от датчика тока UAt САР электропривода,
представленной блоком U4, и блока токовой отсчетки UF, связанного с транс-
форматором тока ТА.
Силовая схема электропривода с ПЧ на основе АИТ и его схема управ-
ления значительно проще, чем электропривода по схеме рис. 10.14 с инвер-
тором напряжения. Однако САР, форхМируюшая не только статические, но и
динамические характеристики электропривода с учетом электромагнитных
переходных процессов в системе, значительно сложней. Система регулиро-
вания такого электропривода рассмотрена в § 9.3 и приведена на рис. 9.15.
Электропривод имеет двухзонное регулирование скорости, однако мак-
симальная скорость в системах с инверторами напряжения обычно не пре-
вышает 1,5 номинальной. Это вызвано перенапряжениями при коммутациях
тока. Для ограничения перенапряжений в систему вводится нерегулируемый
336
Электроприводы с тиристорными преобразователями
Разд. 10
Таблица 10.3. Комплекты крановых частотно-управляемых
электроприводов
Дв 1гатель Преобразователь Габаритные размеры панелей управления (высотах ши- ринах глуби- на), мм Тип командоконтроллера Параметры электропривода
Мощность, кВт Число пар полюсов Тип Связь с питающей сетью Максимальная синхрон- ная частота вращения, об/мин Диапазон регулирования- частоты вращения Зона частотного регули- рования относительно номинальной скорости
Д' 16 6/12 ТТС40 Трансформатор 5=5 кВ-А 1175X770X355 КП 1200 КБС 1000 20 : 1 0,065 —0,4
16-го 4/6 ТТС40 То же, 5=10 кВ-А 1175X770X355 1500 20:1
3J-45 4/6 ТТС40 То же, 5 = 16 кВ-А 1615X770X365 1500 15:1
45-60 4/6 ТТС4Э То же 1175X770X355 1175X 770X 355* 1500 15:1
ТТС100 Токоограничи- вающий реак- тор 1175X770X355
60-75 4/6 ТТС40 Трансформатор 5=25 кВ-А 1615X770X365 1175X770X 355* 1500 15: 1
ттсюэ Токоограничи- вающий реактор 1175X770X355
25-30 4 ТПТСЗО То же 1155X770X292 1500 10: 1 15: I 0,1-1,5
30-60 ТПТС60 1175X770X355* 1500 10 : 1 15 : 1
60—100 4 ТПТС100 » 1175X770X355 1500 10: 1 20 ; 1 0,1-2
* Две панели.
Примечание. В числителе указан диапазон регулирования под нагрузкой^
в знаменателе — на холостом ходу.
§ 10 3 Электроприводы с тиристорными преобразователями частоты 337
ведомый инвертор UZ3. Механические характеристики электропривода при-
ведены на рис 10.17 и имеют участок ограничения момента во всех квадран-
тах регулирования. Тормозной электромагнит (или двигатель гидротолка-
теля), так же как и в схеме рис. 10.14, может быть подключен непосред-
ственно на выводы двигателя. В обеих схемах одинаково выполняется за-
щита электропривода (одинаковыми являются и обозначения аппаратов)«
Отличие заключается во введении в рассматриваемую схему реле макси-
мальной скорости KV вместо реле напряжения КН в схеме рис. 10.14.
Технические данные электроприводов с НПЧ и ПЧ с АИ приведены
в табл. 10 3. Серийно выпускаются только электроприводы с НПЧ. Типовые
ксмплекты таких электроприводов включают в себя двухскоростные двига-
тели с соотношением числа пар полюсов обмоток 4/6 для подъемных меха-
низмов и 6/12 для механизмов передвижения, НПЧ, панель управления и ку-
лачковый командоконтроллер. Разрабатываемые комплекты с ПЧ с АИ
предполагаются к использованию только для подъемных механизмов и
включают в себя односкоростные четырехполюсные двигатели, ПЧ с АИ,
панель управления и сельсинный командоконтроллер.
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович И. И., Котельников Г. А. Козловые краны общего назна-
чения. М.: Машиностроение, 1983.
2. Автоматизированные электроприводы контейнерных кранов/А. Н. Но-
виков, 3. Е. Шафиров/Тр. ВНИИПТМАШ 1984. Вып. 1. С. 3—20.
3. Александров М. П. Подъемно-транспортные машины. М.: Высшая
школа, 1979.
4. Александров М. П. Подъемно-транспортные машины. М.: Машино-
строение, 1984.
5. Андреев А. Ф. Грузоподъемные устройства с автоматическим и ди-
станционным управлением. М.: Стройиздат, 1979
6. Асинхронные электродвигатели серии 4А: Справочник/A. Э. Кравчик,
М. М. Шлаф, В. И. Афонин и др. М.: Энергоатомиздат, 1982.
7. Борисов Ю. М., Соколов М. М. Электрооборудование подъем но-транс-
портных машин. М.: Машиностроение, 1971.
8. Вешеневский С. Н. Характеристики двигателей в электроприводе. М.з
Энергия, 1977.
9. Грузоподъемные краны: Пер. с нем./Под ред. М. П. Александрова.
М.: Машиностроение, 1981
10. Герасимяк Р. П., Параил В. А. Электроприводы крановых механиз-
мов. М.: Энергия, 1970.
И. Зерцалов А. И. Краны с жестким подвесом грузов. М.: Машинострое-
ние, 1979.
12. Зерцалов А. И., Певзнер Б. И. Краны-штабелеры. М.: Машинострое-
ние, 1974.
13. Ключев В. И., Терехов В. М. Электропривод и автоматизация обще-
промышленных механизмов: Учебник для вузов. М.: Энергия, 1980.
14. Краново-металлургические электродвигатели/Н. М. Баталов, В. А. Бе-
лый, А. Б. Иоффе и др. М.. Энергия, 1967.
15. Ланг А. Г., Мазовер И. С., Майзель В. С. Портальные краны. Л.:
Машгиз, 1962.
16. Мышкин В. Г. Автомобильные краны. М.: Машиностроение, 1967.
17. Основы автоматизированного электропривода/М. Г. Чиликин, М. М. Со-
колов, В. М. Терехов и др. М.: Энергия, 1974.
18. Петров Г. Н. Электрические машины Ч. I. М.: Энергия, 1974. Ч. II.
М.-Л.: Госэнергоиздат, 1963. Ч. III. М.: Энергия, 1968.
19. Правила устройства и безопасной эксплуатации грузоподъемных
кранов. М: Металлургия, 1981.
20. Правила устройства электроустановок. М.: Энергоатомиздат, 1986.
21. Рапутов Б. М. Электрооборудование металлургических кранов. М.з
Металлургия, 1977.
22 Ревякин А. И., Кашелкин Б. И. Электробезопасность и противопо-
жарная защита в электроустановках. М.: Энергия, 1980.
23. Разработка и испытание систем автоматического управления ПТМ
и перспективы их использования/М. И. Воронин, 3. Е. Шафиров и др.//Тр.
ВНИИПТМАШ. 1968. Вып. 7. С. 3—12.
24. Сандлер А. С., Гусяцкий Ю. М. Тиристорные инверторы с широтно-
импульсной модуляцией. М.: Энергия, 1968.
25. Сандлер А. С., Сарбатов Р. С. Частотное управление асинхронными
двигателями. М : Энергия, 1966.
26. Системы тиристорного управления судовыми электромеханизмами/
А. П Богословский, Е. М. Певзнер, М. С. Туганов, А. Г. Яуре. Л.: Судо-
строение, 1978.
Список литературы
339
27. Соколов М. М., Масандилов Л. Б. Измерение динамических момент
тов в электроприводах переменного тока. М.: Энергия, 1975.
28. Соколов М. М. Автоматизированный электропривод общепромышлен*
ных механизмов. М.: Энергия, 1976.
29. Соколов М. М. Электрооборудование общепромышленных механизм
мов. М.: Энергия, 1969.
30. Справочник по кранам. Т. I и П/Под ред. А. И. Дукельского. Л.|
Машиностроение, 1971.
31. Справочник по автоматизированному электроприводу/Под ред,
В. А. Елисеева, А. В. Шинянского. М.: Энергоатомиздат, 1983.
32. Судовые электроприводы: Справочник. Т. I и П/А. П. Богословский,
Е. М. Певзнер, И. Р. Фрейдзон, А. Г. Яуре. Л.: Судостроение, 1983.
33. Крановое электрооборудование: Справочник/Ю. В. Алексеев, А. П. Во
гословский, Е. М. Певзнер и др. М.: Энергия, 1979.
34. Тиристорные электроприводы с реверсорами/ Я. Ю. Солодухо,
А. П. Богословский, С. Н. Плеханов и др, М.: Энергия, 1977.
35. Тормозные устройства: Справочник/Под ред. М. П. Александрова,
М.: Машиностроение, 1985.
36. Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизиро*
ванного электропривода. М.: Энергия, 1979.
37. Шабашов А. ГЕ, Лысяков А. Г. Мостовые краны общего назначения»
М.: Машиностроение, 1980.
38. Шеффлер М., Пайер Г., Курт Ф. Основы расчета и конструирования
подъемно-транспортных машин: Пер. с нем./Под ред. И. И. Абрамовича»
М.: Машиностроение, 1980.
39. Шафиров 3. Е., Балашов В. П. Точность остановки крановых ме*
ханизмов//Тр. ВНИИПТМАШ. 1972. Вып. 1. С. 11—55.
40. Шафиров 3. Е. О нормах проектирования подъемно-транспортных
машин и оборудования для работы во взрывоопасных и пожароопасный
помещениях//Тр. ВНИИПТМАШ. 1975. Вып. 3. С. 3—17.
41. Шафиров 3. Е., Быкова И. Г. Опыт эксплуатации электрооборудо*
вания кранов во взрывозащищенном исполнении с искр о безопасным и схе*
мами управления//Тр. ВНИИПТМАШ. 1978. № 2. С. 61—85.
42. Шафиров 3. Е. Современные крановые приводы: Обзор. Мл
ЦНИИТЭИТЯЖМАШ, 1983.
43. Электрооборудование кранов/А. П. Богословский, Е. М. Певзнер
и др. М.: Машиностроение, 1983.
44. Электропривод и автоматизация управления строительными башен-»
ными кранами/И. И. Петров, А. П. Богословский и др. М.: Машин острое*
ние, 1979.
45. Яуре А. Г., Богословский А. П., Певзнер Е. М. Электроприводы су*
довых грузоподъемных механизмов. Л.: Судостроение, 1971.
46. Яуре А. Г. Крановая электрическая аппаратура. М.: Энергия, 1974»
47. Яуре А. Г., Певзнер Е. М. Выбор кранового электродвигателя с уче-
том режима работы и системы электропривода//Электротехника. 1977. № 9,
С. 3—7.
48. Яуре А. Г., Шафиров 3. Е. Применение асинхронных короткозамкну-
тых электродвигателей для механизмов передвижения грузоподъемных кра*
нов//Электротехника. 1984. № 8. С. 29—30.
49. Яуре А. Г. Электроприводы контейнерных кранов: Обзор. Мд
ЦНИИТЭИТЯЖМАШ, 1985.
50. Яуре А. Г. Выбор электродвигателей передвижения для серии облег*
ченных мостовых кранов//Тр. ВНИИПТМАШ. 1984. Вып. 1. С. 23—30.
51. Яуре А. Г., Богословский А. П., Певзнер Е. М. Особенности выбора
коммутационной аппаратуры для управления крановыми электро двигате-
ля ми//Электричеств о. 1979. № 4. С. 59—61.
52. Яуре А. Г. Современные электроприводы кранов, управляемых
с пола. М,: ЦНИИТЭИТЯЖМАШ, 1986.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автономный инвертор напряжения
170
----тока 170
Аппаратура взрывозащищенная 127
Асинхронные двигатели 77, 83, 86,
206
----двухскоростные 79, 82
Бестоковая коммутация контактов
205
Блок защиты взрывозащищенный 131
«— искробезопасной коммутации 129
резисторный 228, 233
Ветровая нагрузка 23
Взрывозащищенная станция управле-
ния 128
Взрывозащищенное электрооборудо-
вание 35
Вибрация контактов 89
Включение сопротивлений несиммет-
ричное 214, 218, 254
-----симметричное 214, 218
Внешняя характеристика ТП 154
Вращающий момент двигателя асин-
хронного 72
.— — — постоянного тока 59
Время пуска (торможения) 25
Вспомогательный двигатель 79
Выбег механизма 108
Выбор двигателей 191
-----взрывозащищенных 207
----- предварительный 193
-----с короткозамкнутым ротором
201
— резисторов 212
— — по тепловому режиму 222
— частоты вращения 210
Грузоподъемность крана номиналь-
ная 6, 9
Группа режимов работы крана 11,
13
— механизма П, 13
Двигатель постоянного тока 59. 64.
66
Диаграмма включений контактов 44
— пуска двигателя 213, 215
Динамическое торможение с само-
возбуждением 260
Допустимые отклонения параметров
55
Допустимый ток кратковременного
режима 61
Запас сцепления 198, 205
Защита максимальная 123
— нулевая 123
— тепловая 124
Защитная панель 123, 124, 247, 254
Износостойкость комапдоконтролле-
ров 103
— коммутационная 90
— комплектного устройства 122
— конечных выключателей 109
— контроллеров 96
— магнитных контроллеров 109,
111—113, 116, 121
— механическая 90
— постов управления 106
— электрогидравлического толкателя
150
— электромагнитов тормозных 142,
146
Изоляционное расстояние 38
Импульсно-ключевой коммутатор 265
Импульсный регулятор сопротивле-
ния 301, 319
Индукция в воздушном зазоре 72
Категория размещения электрообо-
рудования 32, 33
Классификационные параметры 11
Командоконтроллер 44, 101, 103
— сельсинный 105
Коммутационная способность маг-
нитных контроллеров 110
Комплексное \стройство управления
121
Комплектный электропривод постоян-
ного тока 250
----с асинхронными двигателями
251, 264, 276
Предметный указатель
341
Конечный выключатель 106
— — рычажный 107
— — шпиндельный 107
Контроллер силовой 44, 94, 97
Коэффициент динамических потерь
179, 180
— динамической перегрузки 30
— использования по грузоподъемно-
сти 6
— нагружения 6
— перегрузки резисторов 228
— полезного действия передач 21
------- эквивалентный 182
— пульсаций 64
— сцеппой массы 6
Крановые электродвигатели 53
— электроприводы с импульсным
управлением 319, 322
-------НПЧ 328
-------ПЧ АИН 332
----------АИТ 335
-------ТП 308
-------ТПН 315
Критический (максимальный) момент
72
Линейная плотность тока 72
Магнитный контроллер 44, 109
— —- для управления с пола 121
•----переменного тока 116, 119
-----постоянного тока 113, 115
Метод выбора двигателя универ-
сальный 194
Момент инерции 25
— максимальный при пуске 213, 215
— переключений при пуске 213, 215
Мощность полезноиспользуемая 210
— расчетная 191
— резистора 223, 226
— статическая 22—24
Нагрузочная характеристика двига-
теля 69
Напряжение питания 40, 41
Невыключаемая ступень сопротивле-
ния 216
Номинальная скорость механизма 9,
10
Номинальное сопротивление двигате-
ля 213, 215, 218
Номинальный режим двигателя 51,
53
Обеспечение условия сцепления 208
Объект регулирования 287
Определение расчетной мощности
191, 192
Оптимум модульный (технический)
288
— симметричный 289
Относительная продолжительность
включения 7, 8
Педальные выключатели 105
Передаточная функция регулятора
*----системы 288, 289
Передаточное число полиспаста 19
----- редуктора 19, 20
Подшипники двигателей 57
Полиспаст 19
Постоянная времени нагрева маши-
ны 61, 73
----- электромагнитная 293
-----электромеханическая 293
Пост управления кнопочный 105
Потери энергии в двигателях 60, 72,
73
-------- электроприводе 178
-----динамические
— — переменные 181
-----постоянные 181
Превышение температуры двигателей
61
----- резисторов 233
Привод тормоза последовательного
возбуждения 137
— тормозного устройства 133, 134
Принцип компенсации инерционности
287
Проверка выбора двигателя 193
Производительность крана 8
— крановых механизмов 185
Пульт управления 99
Пуск форсированный 215
Раскачивание груза 26
Расчет регуляторов 288
— резисторов 212
•----для асинхронных двигателей 215
—-------двигателей постоянного то-
ка 213, 214
— сопротивлений несимметричных 218
Регулировочная характеристика
ТП 153
Регулятор 287
Ресурс механизма 17
Система подчиненного регулирования
параметров 287
— управления 43
342
Предметный указатель
Скорость посадочная 12, 17
— промежуточная 17
* - установочная 12
Сопротивление изоляции 39
* - добавочное в статоре 218
Степень защиты 32, 33
— искрения 62
Тепловой расчет тормоза 137
Типовой комплект резисторов 235
Типовые регуляторы 290—292
— структурные схемы 293, 295, 299
Тиристорный преобразователь 151
-----переменного напряжения 160
•----частоты непосредственный 163
•-------с автономным инвертором
170
Ток короткого замыкания 41, 42
Токовая нагрузка резисторов 224
Тормозное устройство 133
----- колодочное 133
—• — ленточное 133
Тормозной момент тормоза 137
— электромагнит 138, 143
Точность остановки 16
Ударные нагрузки 27, 28
Ударный ток 72
Универсальные характеристики дви-
гателей 212, 215, 217, 220, 221
Управление краном с пола 278, 284
Ускорение 18, 26
Условия коммутации контактов 93,
110
Число включений за цикл 9
-----допустимое 203, 204
----- среднесменное 9
— пусков в час эквивалентное 194—
196
— ступеней пуска 213, 215, 216
— циклов в час 8
Электрогидравлический толкатель
148
Электрические контактные аппараты
88
СОДЕРЖАНИЕ
Предисловие . , • . ................................................ 3
От авторов ....... ................................................. 4
Раздел 1. Общие технические характеристики грузоподъемных машин
и электрооборудования............................................ 5
1.1, Общие сведения о грузоподъемных машинах .....................5
1.2. Технические характеристики грузоподъемных машин..............9
1.3. Статика и динамика механизмов кранов................... . 21
1.4. Условия эксплуатации кранового электрооборудования .... 31
1.5. Общие рекомендации по проектированию и установке электро-
оборудования на кранах...........................................38
1.6. Питание крановых электроприводов............................40
1.7. Системы управления крановыми электроприводами. Технико-
экономическое обоснование выбора систем управления .... 43
Раздел 2. Электродвигатели в крановом электроприводе.................51
2.1. Общие характеристики электрических двигателей ..............51
2.2. Крановые электродвигатели постоянного тока . ...............59
2.3. Крановые электродвигатели переменного тока..................69
2.4. Электродвигатели переменного тока единых серий и взрывобез-
опасного исполнения в крановом электроприводе.....................83
Раздел 3. Крановая контактная аппаратура .......................... 88
3.1. Общие сведения и требования к аппаратуре....................88
3.2. Силовые контроллеры непосредственного ручного управления „ 94
3.3. Крановые пульты управления и командоаппараты 99
3.4. Крановые магнитные контроллеры............................ 109
3.5. Защитные панели и вводные устройства...................... 122
3.6. Аппаратура управления для взрывозащищенных кранов . . .127
Раздел 4. Приводы тормозных устройств...............................133
4.1. Классификация тормозов и выбор параметров тормозных уст-
ройств ......................................................... 133
4.2. Тормозные электромагниты постоянного тока f ..............138
4.3. Тормозные электромагниты переменного тока . » ..... . 143
4.4. Электрогидравлические толкатели..............*.............147
Раздел 5. Крановые тиристорные преобразователи . ...... 151
5.1. Тиристорные преобразователи постоянного тока , *...........151
5.2. Тиристорные преобразователи переменного напряжения f . . . 160
5.3. Непосредственные тиристорные преобразователи частоты . . . 163
5.4. Тиристорные преобразователи частоты с автономными инверто-
рами * 9 t 170
344
Содержание
Раздел 6. Энергетика крановых электроприводов и их производи-
тельность. Выбор электродвигателей. Оптимизация параметров элек-
троприводов крановых механизмов на основе учета потерь при ре-
гулировании ...................................................... 178
6.1. Энергетика крановых электроприводов и их производительность 178
6.2. Выбор крановых электродвигателей........................ . 191
6.3. Особенности выбора короткозамкнутых эдектродвигателей для
крановых электроприводов в системах параметрического регу-
лирования ......................... . .............. . 201
6.4. Выбор параметров крановых электроприводов на основе учета
их энергетических и регулировочных свойств t . .... 209
Раздел 7. Расчет и выбор пуско-тормозных и регулировочных рези-
сторов для крановых электроприводов.......................... .212
7.1. Расчет пусковых, тормозных и регулировочных резисторов в
главных цепях ................................................. 212
7.2. Выбор резисторов по тепловому режиму.......................222
7.3. Конструкция и основные технические данные крановых рези-
сторов ....................................................... 228
7.4. Типовые резисторы для крановых электроприводов.............235
Раздел 8. Типовые крановые электроприводы с контакторно-контрол-
лерными системами управления..............................244
8.1. Электроприводы постоянного тока............................244
8.2. Электроприводы с асинхронными фазными двигателями и тор-
можением противовключением . ... . ... 251
8.3. Электроприводы механизмов подъема с динамическим торможе-
нием самовозбуждением двигателей с фазным ротором .... 260
8.4. Электроприводы с импульсно-ключевыми коммутаторами в цепи
ротора асинхронных фазных электродвигателей.....................264
8.5. Электроприводы кранов, управляемых с пола..................278
8.6. Электроприводы облегченных кранов режимных групп ЗК — 5К 285
Раздел 9. Системы автоматического регулирования крановых элек-
троприводов с тиристорным управлением . . . .... 287
9.1. Основные принципы построения систем подчиненного регулиро-
вания параметров электроприводов . ...................... 287
9.2. Типовые структурные схемы САР тиристорных электроприводов
постоянного тока ..................... . . ... 293
9.3. Типовые структурные схемы САР асинхронных тиристорных
электропр-гводов . •. .......................... . 299
Раздел 10. Крановые электроприводы с тиристорными преобразова-
телями .................... .... ...... 308
10.1. Крановые электроприводы с тиристорными преобразователями
постоянного тока . . ...................... 308
10.2. Крановые электроприводы с тиристорными преобразователями
напряжения в цепи статора и импульсными регуляторами со-
противления в цепи ротора асинхронного двигателя . 314
10.3. Крановые электроприводы с тиристорными преобразователями
частоты..........................................................325
Список литературы 338
Предметный указатель .............................................. 340