/




























































































































































































Text
ДЛЯ ТЕХНИКУМОВ
ВЛ.Балашов
ГРУЗОПОДЪЕМНЫЕ
И ТРАНСПОРТИРУЮЩИЕ
МАШИНЫ НА ЗАВОДАХ
СТРОИТЕЛЬНЫХ
МАТЕРИАЛОВ
Допущено
Министерством промышленности
строительных материалов СССР
в качестве учебника для техникумов
промышленности строительных
материалов
БШЛИОТСКА
i? R И Ч Ч У Ь' а
Зч] МОСКВА
"МАШИНОСТРОЕНИЕ»
1987
ББК 39.9
Б20
УДК 621.86/87 : 691.006.3 (075.3)
Рецензенты: Цикловая комиссия механических дисциплин Воль-
ского технологического техникума и зав. отделом ВНИИЭСМ канд. экон, наук
М. Г. Кобрин
Балашов В. П.
Б20 Грузоподъемные и транспортирующие машины иа заво-
дах строительных материалов: Учебник для техникумов
по специальностям «Машины и оборудование промышлен-
ности строительных материалов» и «Машины и оборудова-
ние стекольно-ситалловой промышленности». — М.: Маши-
ностроение, 1987. — 384 с., ил.
(В пер.): 1 р. 10 к.
Описаны конструкции, даны основы теории и методы расчета грузоподъем-
ных н транспортирующих машин, подвесных и наземных колесных внутризавод-
ских транспортных средств, изложены особенности эксплуатации и техники без-
опасности. Уделено внимание вопросам механизации и автоматизации погрузочно-
разгрузочных и транспортно-складских работ в промышленности строительных
материалов.
3601030000-088
Б 038 (01)-87 88-87
ББК 39.9
© Издательство «Машиностроение», 1987
ВВЕДЕНИЕ
«Основными направлениями экономического и со-
циального развития СССР на 1986—1990 годы и на период до
2000 года», утвержденными XXVII съездом КПСС, предусмотрено
«существенное, увеличение производства средств механизации и ав-
томатизации/ подъемно-транспортных, погрузочно-разгрузочных
и складских' работ в целях значительного сокращения сферы
применения ручного, малоквалифицированного и тяжелого руч-
ного труда».
Современные грузоподъемные н транспортирующие машины
появились в результате их совершенствования в течение длитель-
ного времени. Простые грузоподъемные устройства — рычаги и
рычажные подъемники, подъемные вороты, полиспасты с блоками и
ковшовые водоподъемники — были известны в глубокой древности.
Например, при строительстве пирамиды Хеопса (XXVII в. до
и. э.) для подъема и перемещения каменных блоков массой до
30 т применялись рычаги, каткн и наклонные плоскости.
За первые 14 веков нашей эры были изобретены транспортиру-
ющие устройства, являющиеся прототипами современных скреб-
ковых, ковшовых н винтовых конвейеров, канатных подвесных
дорог. В летописях XI в. упоминается о применении на Руси
блоков и домкратов. В рукописных руководствах XV—XVI вв.
также имеются указания о применении различных грузоподъем-
ных устройств.
Ряд оригинальных тралспортнрующих устройств был создан
русскими мастерами в связи с развитием горно-заводского дела
во второй половине XVII в. — это многоковшовый цепной подъем-
ник для руды (Е. Г. Кузнецов), установка для подъема руды и
удаления воды из шахт (К- Д. Фролов).
В 1769 г. был доставлен в Петербург гранитный монолит мас-
сой более 1000 т для памятника Петру I. По суше монолит пере-
мещали на медных шарах по желобам, обшитым медными листами.
В эти же годы были построены межэтажные подъемники.
В 1830 г. с помощью канатных полиспастов и воротов были
установлены 48 гранитных колонн массой по 100 т на Исаакиев-
ском соборе в Петербурге, а в 1832 г. перед Зимним дворцом была
установлена гранитная колонна массой 600 т.
До революции начали выпускать краны на Брянском, Крама-
торском и Путнловском заводах. После революции в годы первых
I* 3
пятилеток стала развиваться отрасль подъемно-транспортного
машиностроения— появились заводы по производству различных
грузоподъемных кранов, конвейеров, погрузчиков, конструктор-
ские бюро по проектированию и научно-исследовательские инсти-
туты по исследованию грузоподъемных и транспортирующих
машин.
Современное производство грузоподъемных и транспортирую-
щих машин основывается на унификации конструкций и изготов-
лении блочных узлов, позволяющих повысить качество и получить
наибольший технико-экономический эффект при изготовлении
и эксплуатации. Принцип блочности конструкций позволяет мак-
симально унифицировать отдельные узлы и детали выпускаемых
машин, повысить серийность производства, изготовлять узлы
в законченном виде н соединять их между собой легкоразъемными
элементами. В блочной конструкции можно легко отсоединить от
машины узел, требующий ремонта.
Грузоподъемные и транспортирующие машины эксплуатиру-
ются в различных условиях. Поэтому при нх проектировании учи-
тывают следующие факторы:
1) микроклиматический район, зависящий от географического
положения: умеренный (У), холодный (ХЛ), тропический влажный
(ТВ), тропический сухой (ТС) н др. (ГОСТ 15150—69);
2) место расположения прн эксплуатации, характеризуемое
категориями размещения: на открытом воздухе (1 категория);
под навесами, в палатках н т. п. (2 категория); в закрытых поме-
щениях с пониженным воздействием внешних факторов (3 катего-
рия); в помещении с регулируемыми климатическими условиями
(4 категория); в помещениях с повышенной влажностью (5 ка-
тегория) (ГОСТ 15150—69);
3) температура окружающей среды: низкая от 0 до —60 °C;
нормальная от —20 до +20 °C; высокая от + 60 до 70 °C; очень’
высокая (вблизи источников тепла, горячие грузы);
4) климатические факторы внешней среды: влажность н дав-
ление воздуха, солнечная радиация, ветер, пыль, дождь
н др.;
5) характеристика среды: коррозионная, абразивная, взрыво-
опасная, биологически активная и др.
Указанные факторы влияют на условия труда, работу механиз-
мов и электрооборудования, изменяют свойства материалов, спо-
собствуют коррозии, поэтому их учитывают при проектировании
для обеспечения надежности и эффективной эксплуатации грузо-
подъемных и транспортирующих машин.
В нашей стране большое внимание уделяется комплексной ме-
ханизации погрузочно-разгрузочных, транспортных и складских
работ в пределах определенного участка производства, цеха,
склада и т. д. Экономическую эффективность комплексной механи-
зации оценивают стоимостными показателями, уровнем механи-
зации работ и степенью механизации труда.
4
Для промышленности строительных материалов требуется
большое количество сырьевых материалов, которые необходимо
транспортировать на предприятия, а при переработке — от
одной технологической машины к другой. Насыпные, а также не-
которые тарно-штучные грузы перемещают конвейерами различных
типов. Порошкообразные и зернистые грузы погружают и выгру-
жают с помощью пневматических и винтовых погрузчиков. Для
транспортирования этих материалов применяют различные виды
конвейеров, установки пневматического транспорта. Грузы, за-
таренные в мешки, транспортируют с помощью ленточных конвей-
еров. Для удобства применения средств механизации тарно-штуч-
ные грузы укладывают в тару, пакетируют на поддонах, загружают
в контейнеры, которые перемещают с помощью различных кранов,
конвейеров, грузовых лифтов, авто- и электропогрузчиков. На
складах применяют конвейеры, погрузчики и краны-штабелеры.
Для загрузки конвейеров тарно-штучными грузами и разгрузки
нх используют подъемно-транспортные роботы. Грузоподъемные
машины применяют в различных механических цехах, а также при
выполнении монтажных и ремонтных работ.
Грузоподъемные н транспортирующие машины, связывающие
в единую технологическую цепь рабочие агрегаты, являются тех-
нологическим звеном производственного процесса и к их надежно-
сти предъявляются повышенные требования.
Машины, применяемые для механизации подъемно-транспорт-
ных, погрузочно-разгрузочных и складских работ, можно отнести
к трем основным группам: грузоподъемные машины, транспор-
тирующие машины, наземный и подвесной внутризаводской
транспорт. Эти группы машин рассматриваются в соответствующих
разделах учебника.
РАЗДЕЛ ПЕРВЫЙ
ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
ГЛАВА 1.ОБЩИЕ СВЕДЕНИЯ
$ 1. КЛАССИФИКАЦИЯ И КОНСТРУКТИВНЫЕ
ОСОБЕННОСТИ
Грузоподъемными называют машины, которые пред-
назначены для’ подъема и перемещения грузов и люден.
Грузоподъемные машины можно разделить на трн основные
группы: 1) грузоподъемные устройства, к которым относят дом-
краты, лебедки, полиспасты и тали; 2) грузоподъемные краны,
главными из которых являются краны мостового типа, стрелового
типа, консольные, краны-штабелеры; 3) подъемники.
Домкраты реечные, винтовые и гидравлические (рис. 1, а—в)
перемещают груз только в вертикальном направлении с помощью
рейки 1, винта 4 и поршня 5, установленных в корпусах 2 и снаб-
женных приводом в виде рукояток 3.
Полиспаст (рис. 1, а) выполнен в виде неподвижной 6 и под-
вижной обойм 8 с крюками и роликами (блоками), которые охва-
тываются канатом 7. Неподвижная обойма закрепляется на ка-
кой-либо конструкции, а на крюк подвижной обоймы навешивает-
ся груз. К свободному концу каната прикладывается тяговое
усилие.
Лебедка имеет опорную конструкцию 11, на которой смонти-
рованы барабан 9, передаточный механизм (с зубчатыми переда-
чами) 10 и привод, который может быть ручным от рукоятки 12
(рис. 1, д) или электрическим. Канат 13 наматывается на барабан.
Его закрепляют иа грузе нли запаковывают в полиспаст.
Цепная таль (рис. 2, а) имеет корпус 1, в котором смон-
тирована звездочка для грузовой цепи с крюковой подвеской 2.
Привод звездочки осуществляется через зубчатые или червячные
передачи с тормозным устройством от тягового колеса 4 с помощью
тяговой цепи 3. Таль за крюк подвешивается к какой-либо кон-
струкции и может перемещать груз только вертикально. Эта же
таль подвешена к тележке 5 (рис. 2, б), установленной иа двута-
вре, и может перемещать груз в горизонтальном направлении
с помощью механизма передвижения тележки, приводимого
в действие тяговым колесом с помощью тяговой цепи.
Канатная таль (рис. 2, в) имеет корпус 1, в котором смон-
тированы барабан 6 для каната с крюковой подвеской 2, редуктор
с тормозным устройством 9 и приводной электродвигатель 7.
Таль может быть подвешена к тележке 5 механизмом передвиже-
ния или установлена стационарно. Управление механизмами
6
Рис. 1 Грузоподъемные устройства:
<х—в — соответственно реечный, винтовой и гидравлический домкраты; г — полиспаст;
& — лебедка с ручным приводом
подъема груза н передвижения тали осуществляется с помощью
подвесного пульта 8.
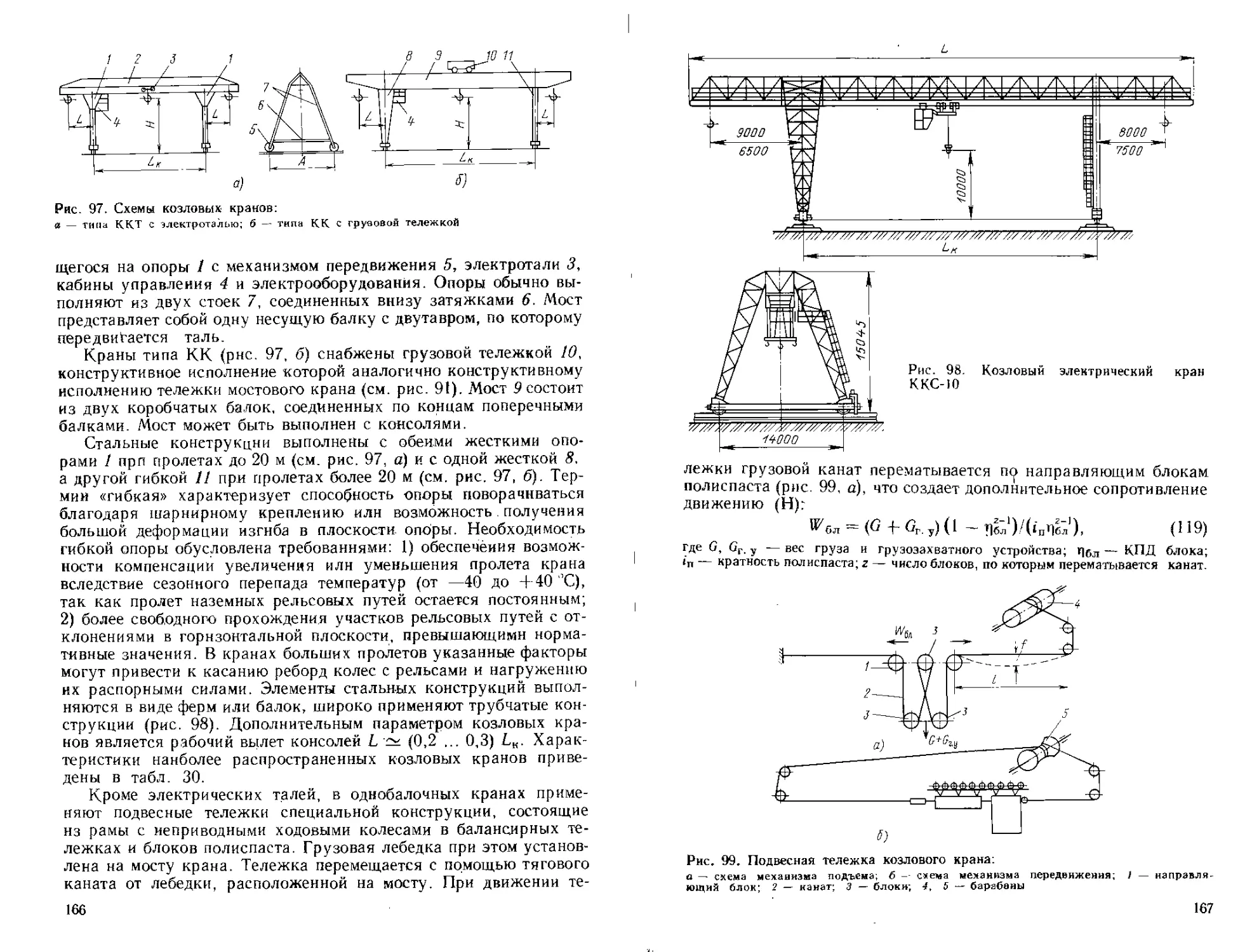
К кранам мостового типа относят мостовые (рис. 3, а) и
козловые (рис. 3, б) краны, которые включают несущую стальную
конструкцию (мост) 3 с ходовыми колесами / и механизм передви-
жения 2. Колеса опираются иа крановые рельсовые пути.
По мосту передвигается грузовая тележка 4, на раме которой
смонтированы механизм подъема груза с крюком и механизм
передвижения тележки. Благодаря трем механизмам груз имеет
три поступательных перемещения и передвигается в любую точку
обслуживаемого краном цеха, склада и др.
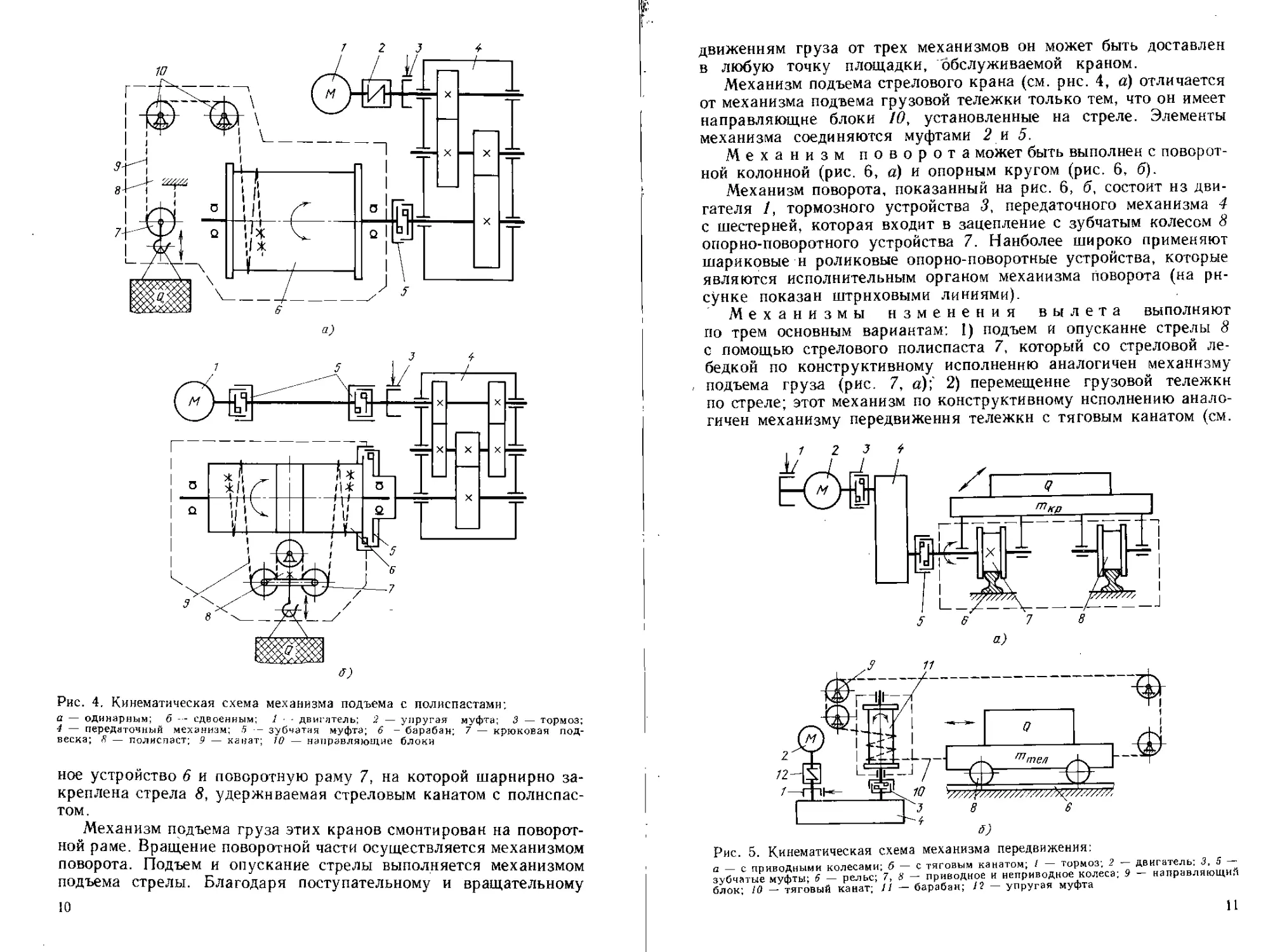
Типовой ме х а н н з м подъема груза (рис. 4, б) состоит из
двигателя 1, тормозного устройства 3, передаточного механизма 4
и барабана 6, которые соединены зубчатыми муфтами 5. На ба-
рабан намотан канат 9 полиспаста 8, который соединен с блоками
крюковой подвески 7. Груз с помощью строп подвешивается иа
крюк подвески. Двигатель может быть электрическим, гидравли-
ческим; при редкой работе краиа применяют ручной привод.
Тормозное устройстве предназначено для затормаживания меха-
7
a — стационарная цепная ручная; б — передвижная цепная ручная; в — передвижная
канатная электрическая
низма с грузом и удерживания поднятого груза в подвешенном
состоянии. Иногда тормозное устройство используется для регу-
лирования скорости опускания груза. Передаточный механизм
увеличивает крутящий момент, передаваемый от двигателя к ба-
рабану, и одновременно уменьшает частоту вращения барабана.
В качестве передаточного механизма применяют редукторы и от-
крытые зубчатые передачи. Исполнительным органом механизма
является барабан с полиспастом и крюковой подвеской (на ри-
сунке показан штриховыми линиями).
Механизм передвижения крана
(рнс. 5, а) состоит из двигателя 2, передаточного механизма 4,
тормозного устройства 1 и приводного 7 и неприводного 8 колес.
Элементы механизма соединены муфтами 3 и 5. Движение осу-
ществляется за счет сцепления приводного колеса 7 с рельсом 6.
Тормозное устройство предназначено для затормаживания краиа
на заданном пути торможения и удерживания его на месте при
воздействии внешних сил, например ветровой нагрузки. Испол-
нительным органом является опорно-ходовое устройство крана,
которое включает приводные и неприводные колеса (на рисунке
показан штриховыми линиями).
Механизм передвижения грузовой те-
лежки выполняют по двум схемам: первая — с приводными
колесами аналогична механизму передвижения крана (см. рис. 5, а),
8
вторая — с тяговым канатом (рис. 5, б). В последней схеме все
колеса 8 не при водные, а рама тележкн соединена тяговым кана-
том 10 с барабаном 11 тяговой лебедки, при этом канат поддержи-
вается направляющими блоками 9. Тяговая лебедка, кроме ба-
рабана, имеет передаточный механизм 4, тормозное устройство /,
двигатель 2 и муфты 3, 12. Исполнительный орган включает тя-
говый канат 10 с барабаном 11.
К кранам стрелового типа относят различные стреловые са-
моходные краиы (см. рис. 3, в), строительные башенные краны
(см. рис. 3, г) и портальные краны (рнс. 3, 0). Эти краны имеют
опорно-ходовую часть 5 различной конструкции, опорно-поворот-
Рис, 3. Грузоподъемные краны:
а — мостовой; 6 — козловой; в — автомобильный; г — башенный; д — портальный;
е — консольный; дат, з — соответственно мостовой и стеллажный краны-штабелеры
9
Рис. 4. Кинематическая схема механизма подъема с полиспастами:
а — одинарным; б - - сдвоенным; 1 двигатель; 2 — упругая муфта; 3 — тормоз;
4 — передаточный механизм; 5 - зубчатая муфта; 6 - барабан; 7 — крюковая под-
веска; 8 — полиспаст; У — канат; 10 — направляющие блоки
ное устройство 6 и поворотную раму 7, на которой шарнирно за-
креплена стрела 8, удерживаемая стреловым канатом с полиспас-
том.
Механизм подъема груза этих кранов смонтирован на поворот-
ной раме. Вращение поворотной части осуществляется механизмом
поворота. Подъем и опускание стрелы выполняется механизмом
подъема стрелы. Благодаря поступательному и вращательному
10
движениям груза от трех механизмов он может быть доставлен
в любую точку площадки, обслуживаемой краном.
Механизм подъема стрелового крана (см. рис. 4, а) отличается
от механизма подъема грузовой тележки только тем, что он имеет
направляющие блоки 10, установленные на стреле. Элементы
механизма соединяются муфтами 2 и 5.
Механизм поворота может быть выполнен с поворот-
ной колонной (рис. 6, а) и опорным кругом (рис. 6, б).
Механизм поворота, показанный на рис. 6, б, состоит нз дви-
гателя 1, тормозного устройства 3, передаточного механизма 4
с шестерней, которая входит в зацепление с зубчатым колесом 8
опорно-поворотного устройства 7. Наиболее широко применяют
шариковые н роликовые опорно-поворотные устройства, которые
являются исполнительным органом механизма поворота (на ри-
сунке показан штриховыми линиями).
Механизмы изменения вылета выполняют
по трем основным вариантам: 1) подъем и опускание стрелы 8
с помощью стрелового полиспаста 7, который со стреловой ле-
бедкой по конструктивному исполнению аналогичен механизму
подъема груза (рис. 7, a)f 2) перемещение грузовой тележкн
по стреле; этот механизм по конструктивному исполнению анало-
гичен механизму передвижения тележкн с тяговым канатом (см.
Рис. 5. Кинематическая схема механизма передвижения:
а — с приводными колесами; б — с тяговым канатом; I — тормоз; 2 — двигатель; 3, 5 —
зубчатые муфты; 6 — рельс; 7, 8 — приводное и неприводное колеса; 9 — направляющий
блок; 10 — тяговый канат; JJ — барабан; /2 — упругая муфта
Рис. 6. Кинематическая схема механизма поворота:
а — с поворотной колонной; б — с опорным кругом; 1 — двигатель; 2 — муфта; 3 —
тормоз; 4 — передаточный механизм: 5 — ОПУ с поворотной колонной; О — фрикцион-
ная муфта; 7 — ОПУ с поворотным кругом; 8 — зубчатое колесо
рис, 5, 6); 3) взаимное перемещение элементов стрелы, осуществля-
емое выдвижением телескопических секций стрелы 11 с помощью
гндроцилиндров 9 и подъемом и опусканием стрелы с помощью
гидроцилиндра 10 (рнс. 7, 6). Гндроцилнндры являются испол-
нительными органами механизма.
Консольные краны (рис. 3, е) тлеют стальную конструкцию,
представляющую собой колонну 9 с консолью 10. Краны могут
быть стационарными и передвижными, а консоль — поворотной.
По консоли перемещается грузовая тележка //, в качестве которой
часто используют ручные н электрические тали. Опорно-поворот-
ное устройство консоли выполнено в виде колонны 6 (см. рнс. 6, а),
установленной на радиальных 5 н упорном подшипниках. Зубча-
тое колесо, закрепленное на колонне, находятся в зацеплении
с шестерней механизма поворота, включающего двигатель /, тор-
мозное устройство 3, передаточный механизм 4 и муфту 2.
К раны-штабелеры разделяют на мостовые и стеллажные. Мос-
товые краны-штабелеры (рнс. 3, ж) по конструктивному исполне-
«2 у
Рис. 7. Кинематические схемы механизма изменения вылета:
а — с подъемной стрелой: б — с телескопической стрелой; 1 тормоз; 2 — передаточ-
ный мехайнзм; 3 — упругая муфта; 4 — двигатель; 5 — зубчатая муфта; 6 — барабан;
7 — стреловой полиспаст; 8 — стрела; 9 — гидроцнлиндр для выдвижения секции стрелы;
10 — гидроцнлиндр для подъема стрелы; 11 — секции стрелы
12
нию близки мостовым кранам. Отличие мостовых кранов-штабе-
леров состоит в том, что на грузовой тележке 12 закреплена по-
воротная колонна 13, по которой перемещается грузоподъемник 14
с вильчатым захватом 15 для груза. Этот кран-штабелер имеет
механизмы передвижения моста и тележкн, подъема грузоподъем-
ника и поворота колонны.
Стеллажные краны-штабелеры (рис. 3, з) выполнены с опор-
ной ходовой балкой 19 с колесами. На балке закреплена колонна
18, по которой перемещается грузоподъемник 16 с телескопиче-
ским захватом 17 для груза. Кран имеет механизмы передвижения,
подъема грузоподъемника и выдвижения телескопического захвата.
Управление кранамн-штабелерамн осуществляется нз кабины,
закрепленной на кране, с помощью кнопочного поста, подвешен-
ного к грузовой тележке, или дистанционно.
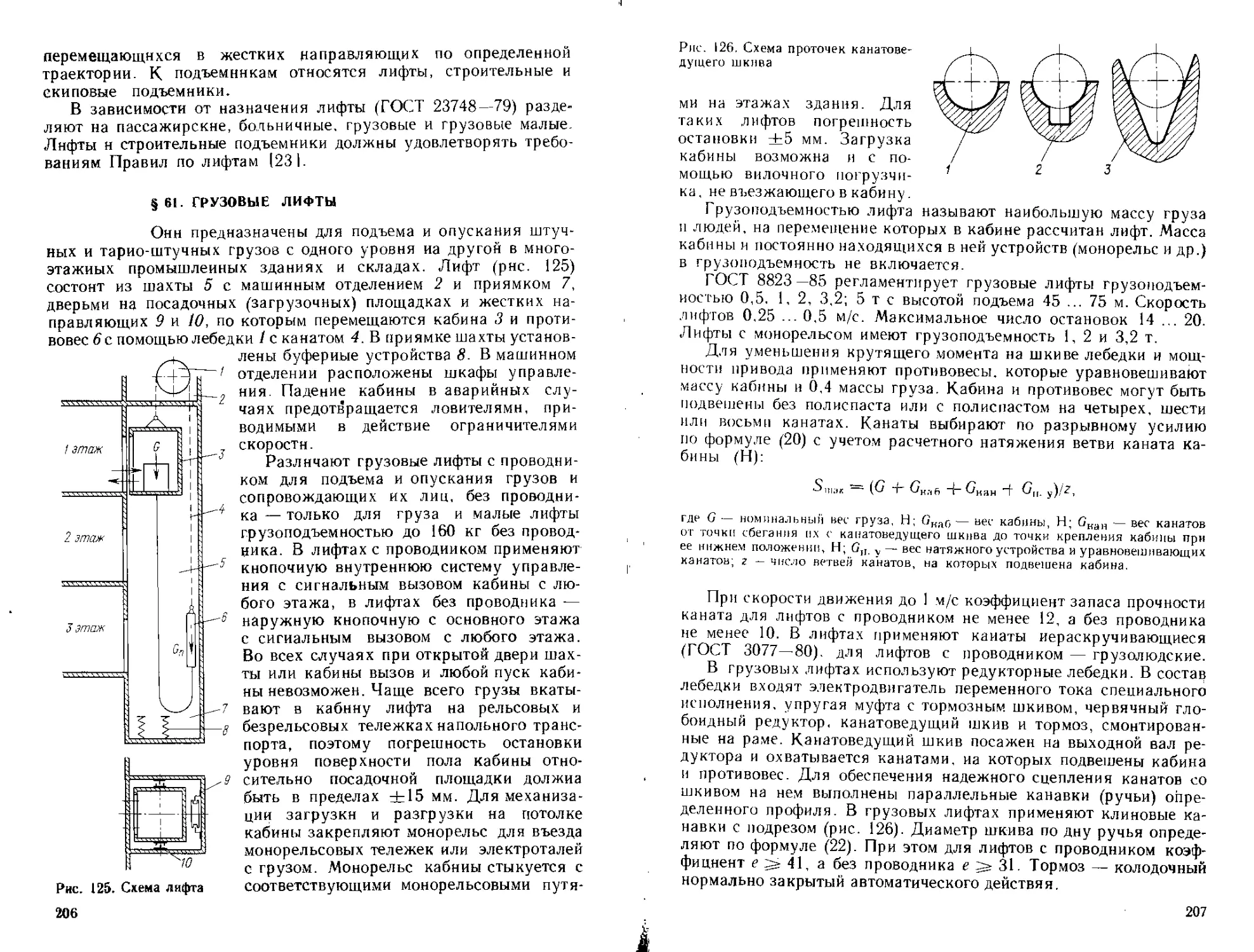
К подъемникам относятся лифты, строительные н скиповые
подъемники. Основная нх особенность заключается в-том, что они
стационарны, а кабина лифта, площадка строительного подъем-
ника и скип перемещаются с помощью канатов механизма подъема
в жестких направляющих.
Грузоподъемные машины являются машинами циклического
действия, работающими в повторно-кратковременном режиме.
Цикл 1Ц работы машины состоит из перемещения грузозахватного
устройства к грузу, подъема н доставки груза в заданное место,
освобождения грузозахватного устройства от груза и возвраще-
ния его без груза в исходное положение. За один цикл могут ра-
ботать (находится в действии) любые механизмы. Время работы
каждого механизма грузоподъемной машины состоит из периодов
разгона tp, установившегося движения н торможения /т.
Устройство элементов механизмов и кранов подробно рассмо-
трено в последующих главах.
§ 2. ОСНОВНЫЕ ПАРАМЕТРЫ И ОПРЕДЕЛЕНИЯ
К основным параметрам грузоподъемных машин»
можно отнести следующие.
Грузоподъемность Q (кг, т) — это наибольшая масса рабочего
груза, на подъем которой рассчитан кран в заданных условиях
эксплуатации. В грузоподъемность включают также массу съем-
ной траверсы и других съемных грузозахватных приспособлений,
а при наличии грейфера, электромагнита также нх массу. Эту
грузоподъемность называют номинальной.
Для унификации грузоподъемных машин ГОСТ 1575—81 рег-
ламентирует значения грузоподъемности от 0,01 до 100 т в виде
ряда чисел, представляющих собой геометрическую прогрессию
с коэффициентом 1,25 (0,01; 0,0125; 0,016; 0,025; 0,032; 0,4; 0,5;
0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,0; 10;
12,5; 16; 25; 32; 40; 50; 63; 80; 100), а свыше 100 до 1250 т —
аналогичный ряд с коэффициентом 1,125.
13
Грузоподъемность входит в обозначение кранов. В кранах гру-
зоподъемностью более 16 т для удобства работы с малыми грузами
предусмотрены два механизма подъема; главный, рассчитанный
на номинальную грузоподъемность, и вспомогательный, рассчи-
танный на меньшую грузоподъемность; грузоподъемность кранов
в этих случаях обозначают в виде дроби, например, 32/8 т (в числи-
теле приведена грузоподъемность главного, а в знаменателе —
грузоподъемность вспомогательного механизма подъема).
Вылет L (м) — расстояние по горизонтали от оси вращения
поворотной части крана до вертикальной оси грузозахватного
органа без груза при установке крана на горизонтальной плоско-
сти; различают максимальный £тах и минимальный вылеты
(см. рис. 3, в—е).
Грузовой момент — произведение грузоподъемности краиа на
вылет М = QL (т-м, кг-м). Грузовой момент считается постоян-
ным, поэтому грузоподъемность следует принимать в зависнмостн
от вылета (с- увеличением вылета грузоподъемность уменьша-
ется и, наоборот, с уменьшением вылета — увеличивается). Эту
зависимость представляют в виде графика, который называют
грузовой характеристикой крана (см. рнс. 106). Номинальной
считают грузоподъемность на минимальном вылете.
Колея LK (м) — расстояние между продольными осями, про-
ходящими через середину опорных поверхностей ходовых колес
крана нлн тележки. У кранов мостового типа колею называют
пролетом крана н она соответствует пролету кранового рельсового
пути (см. рис. 3, а, б, ж).
База К (м) — расстояние между вертикальными осями перед-
них и задних колес илн балансирных тележек крана (см. рис. 3, а,
г, з).
Высота подъема И (м) — расстояние по вертикали от уровня
стоянки или уровня пола до грузозахватного устройства, находя-
щегося в верхнем рабочем положении (см. рис. 3, б, е, е).
Глубина опускания h (м) — расстояние от уровня стоянки
или уровня пола до грузозахватного устройства, находящегося
в ннжнем рабочем положении.
Скорость подъема груза и (м/с, м/мии) — скорость вертикаль-
ного перемещения вверх груза, соответствующего номинальной
грузоподъемности, при установившемся движении.
Скорость передвижения крана укр, тележки щ (м/с, м/мии) —
скорость установившегося движения с грузом, масса которого
соответствует номинальной грузоподъемности.
Скорость изменения вылета vR (м/с, м/мин) — средняя скорость
горизонтального перемещения при изменении вылета от Lmvi
до Lmin с грузом, масса которого соответствует грузоподъемности
при максимальном вылете (см. рис. 3, а, е).
Частота вращения крана лкр (об/мин) — число оборотов за еди-
ницу времени прн установившемся вращении с грузом, масса кото-
рого соответствует грузоподъемности при максимальном вылете.
14
Время изменения вылета tB (с, мин) — время, необходимое
для изменения вылета от £inax До с грузом, масса которого
соответствует грузоподъемности при максимальном вылете. Ско-
рость подъема груза, скорость передвижения крана, скорость
изменения вылета, частота вращения и время изменения вылета
установлены при нахождении крана на горизонтальном пути и
скорости ветра не более 3 м/с на высоте 10 м.
Конструктивная масса тк (кг, т) — масса крана без учета
ма^сы балласта и противовеса, а также без учета массы запра-
вочных емкостей, т. е. емкостей без масла, топлива и смазочных
материалов и др.
Общая масса ткр (кг, т) — масса крана с учетом массы балла-
ста, противовеса и массы заправочных емкостей.
Нагрузка на колесо FK (Н, кН) — наибольшая вертикальная
нагрузка на ходовое колесо при работе крана от общей массы
крана и груза, соответствующего номинальной грузоподъем-
ности, а при транспортировании — наибольшая вертикальная на-
грузка от массы крана, находящегося в транспортном положе-
нии.
Режим работы — это обобщенный показатель, характе-
ризующий основные условия работы крана и его механизмов
(см. § 4).
Производительность Q4 — один из определяющих показателей
грузоподъемных кранов, который характеризуется массой грузов,
перемещаемых за час работы.
Производительность при перемещении грузов одинаковой массы
Q'J ~ 2ШГр,
при перемещении грузов различной массы
Q-i = *1^1 + * + ;;
при перегрузке насыпного груза
Q4 =
где тгр, тГр , — масса грузов, т; г, Zj — число циклов перемещений груза (ра-
боты крана) в час; V— вместимость грейфера, бадьи, ковша и т. п., м3; «> —
насыпная плотность груза, т/м”; ф — коэффициент заполнения (для грейферов
ф = 0,6 ... 1,0; для бадей и ковшей ф = 1,0).
Число циклов в час определяют как отношение z — 3600//ц
(здесь — время цикла работы машины, с).
Для характеристики кранов употребляются также следующие
понятия: нормальная эксплуатация, рабочее и нерабочее состояние
крана.
Нормальная эксплуатация — это эксплуатация крана, при
которой соблюдаются требования инструкций по эксплуатации.
Рабочим считается состояние, при котором кран полностью
смонтирован и может перемещаться, выполняя при этом функции
подъема и перемещения груза.
15
Нерабочим считается состояние, прн котором груз отсутствует,
кран отключен от источника энергии и установлен в положение,
предусмотренное инструкцией по эксплуатации; при монтаже и
демонтаже; при погрузке (выгрузке) и перебазировании краиа
в демонтированном виде; при испытаниях крана.
§ 3. ТЕХНИЧЕСКИЙ НАДЗОР ЗА ГРУЗОПОДЪЕМНЫМИ
МАШИНАМИ
Грузоподъемные машины являются машинами повы-
шенной опасности. В связи с этим установлен государственный тех-
нический надзор за качеством изготовления и безопасной эксплу-
атацией грузоподъемных машин. Этот надзор осуществляется Уп-
равлением по надзору за подъемными сооружениями Государст-
венного Комитета СССР по надзору за безопасным ведением ра-
бот в промышленности н горному надзору (Госгортехнадзор СССР).
Государственный технический надзор включает: 1) регистрацию
грузоподъемных машин; 2) выдачу разрешения на пуск их в ра-
боту; 3) выдачу разрешения иа изготовление кранов и ремонт
с применением сварки несущих стальных конструкций; 4) конт-
роль за содержанием в исправном состоянии находящихся в эк-
сплуатации грузоподъемных машин; 5) контроль за обеспечением
безопасного проведения работ и др.
Госгортехнадзором СССР утверждены «Правила устройства
и безопасной эксплуатации грузоподъемных кранов» (Правила
по кранам) [22], «Правила устройства и безопасной эксплуатации
лифтов» (Правила по лифтам) [23] и «Правила устройства и
безопасной эксплуатации грузовых канатных дорог» (Правила по
канатным дорогам) [241. Указанные Правила содержат: общие тех-
нические требования к грузоподъемным машинам; указания по
организации технического надзора; требования к устройству и
расчету; указания по эксплуатации; нормы браковки стальных
проволочных канатов; указания по расследованию несчастных слу-
чаев; образцы паспортов грузоподъемных машин. В Правила
по кранам включены указания по определению режимов работы
кранов и устойчивости свободностоящих стреловых кранов, а
также рекомендуемая для применения при перемещении грузов
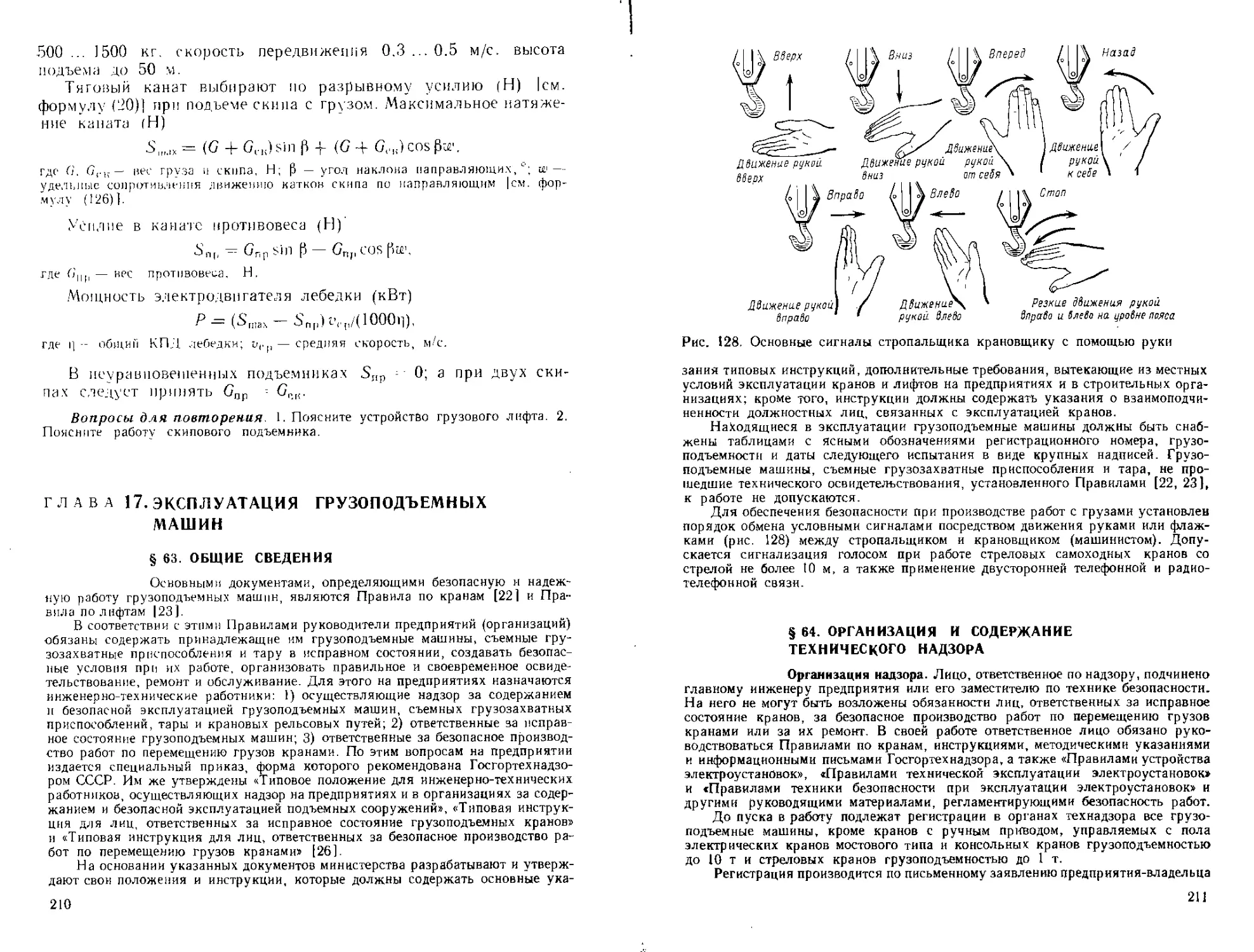
кранами знаковая сигнализация. Госгортехнадзором СССР утвер-
ждены типовые положения и инструкции по организации техни-
ческого надзора и эксплуатации. По отдельным вопросам издаю-
тся методические указания и информационные письма. Документы
Госгортехнадзора СССР обязательны для всех министерств и ве-
домств.
Каждая гр узо подъемы а я машина должна иметь паспорт уста-
новленного образца и вахтенный журнал, в который записываются
результаты осмотров, проведенные ремонты, замена канатов и
других элементов механизмов.
16
§ 4* РЕЖИМЫ РАБОТЫ КРАНОВ
И КРАНОВЫХ МЕХАНИЗМОВ
Краны и их механизмы эксплуатируют в различных
условиях и при действии разнообразных нагрузок, которые учи-
тываются комплексным показателем, называемым режимом ра-
боты. Благодаря классификации кранов и крановых механизмов
но режимам работы возможно выбрать кран с учетом конкретных
условий эксплуатации и установить исходные данные для проекти-
рования элементов крана с учетом условий эксплуатации, чтобы
обеспечить требуемый уровень безопасности и долговечности.
До последнего времени действовала классификация режимов
работы, приведенная в Правилах по кранам 122 ], согласно которой
были регламентированы следующие режимы работы крановых
механизмов: с ручным приводом — Р; с машинным приводом:
легкий — Л; средний - С, тяжелый — Т, весьма тяжелый —
ВТ. Режим работы механизма подъема устанавливался в зависи-
мости от сочетания следующих показателей (табл. 1): коэффициента
использования механизма по грузоподъемности Кгр — Qcp/Q
(здесь QCfJ — средняя масса поднимаемого за смену груза; Q —
номинальная грузоподъемность); коэффициента использования ме-
ханизма в течение года /\г « гаД1(/365 (здесь пДн — число рабочих
дней в году); коэффициента использования механизма в течение
суток К.С = «с/24 (здесь — число часов работы в сутки). Ре-
комендуемые режимы работы механизмов различных кранов при-
ведены в Правилах по кранам.
Режим работы крана в целом устанавливают по режиму ра-
боты механизма главного подъема. С учетом этого режима рассчи-
тывают стальную конструкцию крана.
С 1986 г. введена новая классификация по режимам работы
кранов (ГОСТ 25546—82) и их механизмов (ГОСТ 25835—83).
За основу классификации приняты два показателя: класс
использования (ха-
рактеризуется числом цик-
лов работы крана или об-
щим временем работы
механизма за срок службы
крана) и класс на-
гружения (характе-
ризуется коэффициентом
нагружения, определяе-
мым с учетом спектра на-
грузок, действующих в те-
чение срока службы кра-
на). В зависимости от
сочетания классов устанав-
ливается группа режима
«группа
Таблица 1. Режимы работы механизмов
подъема с машинным приводом согласно
Правилам по кранам
Режим работы механиз- ма Коэффициент использования механизма
по грузо- подъем- ности Кгр по времени
в тече- ние года Кг в тече- ние суток
л 0,25 ... 1,0 Нерегулярная
редкая работа
с 0,75 0,5 0,33
т 0,75 ... 1,0 1,0 0,66
ВТ 1,0 1,0 1,0
режима работы» отражает ту особенность классификации, что
каждой группе режима соответствуют несколько сочетаний клас-
сов использования и классов нагружения.
Режим работы кранов (ГОСТ 25546 — 82). Класс использо-
вания краиа определяют в зависимости от общего числа циклов
работы (см. стр. 13) за срок его службы (табл. 2):
ст = ссп^п1к, (1)
где сс — среднесуточное число циклов работы крана; лдн — число рабочих
дней в году (250—при двух и 300— при одном выходных днях; 360—при
непрерывном производстве); — срок службы крана до списания согласно
стандартам, год.
Класс нагружения крана находят в зависимости от коэффициен-
та нагружения (табл. 2), который вычисляют с учетом массы раз-
личных грузов, поднимаемых и перемещаемых за циклы работы:
/Ср = S KQ./Q)3 (С(/СТ)], (2)
где Q—номинальная грузоподъемность; Qj — масса груза (в том числе и Q),
перемещаемая с числом циклов массы грейфера, грузоподъемного магнита,
а также грузозахватных приспособлений учитываются в Qj и Q.
Группа режима работы крана определяется в зависимости
от сочетания классов использования и нагружения (табл. 2).
Группа режима работы кранов, транспортирующих нагретый
свыше 300 °C груз, расплавленный металл и шлак, ядовитые и
взрывчатые вещества и другие опасные грузы, должна быть не
менее ЗК для стреловых самоходных кранов и не менее 6К для
остальных кранов. Если отсутствуют данные для определения ст
[см. формулу (1)] и Хр [см. формулу (2)], то группу режима ра-
Таблица 2. Группы режима работы кранов (ГОСТ 25546—82)
Классы нагружения
Q0 Ql 1 Q2 | Q3 Q4
Коэффициенты нагружения
Классы
исполь- крана за срок службы
зовання 4т « lA lA
* pl 1Л о ©
О О ““ ем io то
о oo О о о© о —
о a 0 а о ж о и о
О Ч ич и ч о ч
со До 1,6-10* 1К 1К 2К
С1 Св. 1,6-104 до 3,2-104 —- IK 1К 2К зк
С2 » 3,2’10* » 6,3-104 1К IK 2К зк 4К
СЗ » 6,3-104 » 1,25-105 1К 2K зк 4К 5К
С4 » 1,25-10s » 2,5-10= 2К ЗК 4K 5К 6К
С5 » 2,5-10s » 5- 10й ЗК 4K 5К 6К 7К
С6 .> 5-10й » 1.10е 4К 5K 6К 7К 8К
С7 » 1-Ю6 » 2-10е 5К 6К 7К 8К 8К
С8 а 2- 106 » 4. 10в 6К 7К 8К 8К —
С9 > 4- 10е 7К 8К 8К — —
18
Таблица 3. Группы режима работы крановых механизмов
(ГОСТ 25835 83)
Классы нагружений
В1 B2 вз В 4
Классы Общее время работы Коэффициенты нагружения К
ИСПОЛЬ- механизма Граб, я
зовання До 0,125 Св. 0,125 Св. 0,25 Св. 0,50
до 0,25 до 0,50 ДО 1.0
Группа режима работы
АО До 800 1М 1М 1М 2М
А1 Св. 800 до 1 600 1М 1М 2М ЗМ
А2 » 1 600 » 3 200 1М 2М ЗМ 4М
АЗ » 3 200 » 6 300 2М ЗМ 4М 5М
А4 » 6 300 » 12 500 ЗМ 4М 5М 6М
А5 » 12 500 » 25 000 4М 5М 6М
А6 » 25 000 » 50 000 5М 6М —
боты краиа устанавливают по приложению, приведенному в
ГОСТ 25546—£2. Показатели ст и Лр могут учитываться в рас-
четах элементов стальных конструкций на сопротивление уста-
лости (см. § 5).
Показатели классификации режимов работы кранов, принятые
в Правилах по кранам и ГОСТ 25546—82, существенно различа-
ются, поэтому между режимами работы по этим источникам может
быть принято следующее примерное соответствие: Р (1К); Л (1 К,
2К, ЗК); С (4К, 5К); Т (бК, 7К); ВТ (8К).
Режимы работы крановых механизмов (ГОСТ 25835—83).
Класс использования механизма принимается по табл. 3 в зависи-
мости от общего дремеии работы механизма до капитального ре-
монта или до списания краиа (ч):
Т'раб — (3)
где С — среднесуточное время работы, ч; пдн — число рабочих дней в году;
— срок службы механизма до капитального ремонта или до списания крана,
год.
Класс нагружения механизма определяют по данным табл.З
по коэффициенту нагружения, который вычисляют в зависимости
от действующих на механизм нагрузок:
X =£[(/<//»»)’а./Трао)), (4)
где Ftnax — наибольшая нагрузка (сила или момент), определяемая с учетом
всех факторов, действующих иа механизм в наиболее неблагоприятных условиях
работы крана; Г; — нагрузка (в том числе и Fmax)» действующая в течение
времени
В формуле (4) учитываются внешние нагрузки, действующие
на исполнительные органы механизма, которыми являются
барабаны с полиспастами в механизмах подъема груза; тяги, гид-
роцилиидры и др., с помощью которых осуществляется изменение
положения стрелы; обод приводного колеса в механизмах передви-
19
O.U
fi/^тах
Класс нагружения
tr Рис. 8. Типовые графики нагружения крановых
q Q3 1Q механизмов
жения кранов и грузовых тележек; опорно-поворотные устройства
в механизмах поворота (см. рис. 4—7).
Группа режима работы механизма определяется в зависи-
мости от сочетания класса использования и класса нагружения
(табл. 3). Группа режима работы механизма подъема груза и ме-
ханизма изменения положения стрелы кранов, транспортирующих
нагретый свыше 300 °C нли расплавленный металл, шлак, ядови-
тые, взрывчатые вещества и другие опасные грузы, должна быть
не менее ЗМ для самоходных стреловых кранов, а для остальных
кранов — не менее 5М. Если отсутствуют исходные данные для
определения Граб [см. формулу (3) ] и X [см. формулу (4) ], то
группу режима работы механизма устанавливают по приложению,
приведенному в ГОСТ 25835—83. Показатели Тра6 и Л могут учи-
тываться в расчетах элементов механизмов на сопротивление
усталости, износ и нагрев (см. § 5). Для определения значений К
по формуле (4) и при показателях степени больше или меньше трех
могут быть использованы типовые графики нагружения механиз-
мов (рис. 8).
Показатели классификации режимов работы крановых меха-
низмов, принятые в Правилах по кранам и ГОСТ 25835—83, су-
щественно различаются между собой, поэтому для режимов по
этим источникам может быть принято следующее примерное со-
ответствие: Р (IM); Л (IM, 2М, ЗМ); С (4М); Т (5М); ВТ (6М).
§ 5. ОСОБЕННОСТИ РАСЧЕТА ЭЛЕМЕНТОВ
ГРУЗОПОДЪЕМНЫХ МАШИН
Элементы грузоподъемных машин рассчитывают иа
прочность и устойчивость при однократном действии наибольших
нагрузок; сопротивление усталости, нагрев и износ при многократ-
20
ном действии нагрузок различного значения за общее число цик-
лов или время работы при заданном сроке службы с учетом коэффи-
циентов нагружения (4) (см. § 4); деформации (прогиб моста крана
и др.); достаточность сцепления приводных колес с рельсами,
уровень вибраций и др. В расчетах учитываются следующие ха-
рактерные для грузоподъемной машины нагрузки.
Весовые нагрузки, зависящие от массы груза, крана или его
элементов и действующие на кран в вертикальной плоскости, и
испытательная нагрузка.
Номинальный вес груза (Н) связан с номинальной грузоподъ-
емностью крана следующим соотношением:
G = Qg, (5)
где Q—грузоподъемность, кг; g — 9,81 м/с2—ускорение свободного падения.
Нагрузки, зависящие от массы груза крана, могут быть по-
стоянными и переменными относительно стальной конструкции.
Динамические нагрузки, действующие в периоды разгона и
торможения крановых механизмов; при наезде крана, тележки,
поворотной части и других подвижных элементов на упоры;
от центробежных сил при вращении крана; при прохождении не-
ровностей пути (иапример, зазоров в стыках крановых рельсов);
при внезапном снятии нагрузки (обрыв каната с грузом) и др.
Эти нагрузки действуют в вертикальной и горизонтальной плоско-
стях. Их рассчитывают по соответствующим формулам механики.
Нагрузки, действующие в вертикальной плоскости, определяют
как произведение весовых нагрузок на динамический коэффи-
циент.
Нагрузки, обусловленные метеорологическими факторами —
ветровые, от снега и обледенения, при изменении температуры
окружающей среды, учитываются для грузоподъемных машин, ра-
ботающих на открытом воздухе или в неотапливаемом помещении.
Ветровые нагрузки, действующие на кран в рабочем и нера-
бочем состояниях (ГОСТ 1451—77). Ветровая нагрузка на кран
в рабочем состоянии (разрешена работа крана) учитывается при
расчете сопротивлений передвижению крана и вращению его по-
воротной части, выборе мощности, двигателя, определении тор-
мозного момента тормозов, расчете прочности стальной конструк-
ции и устойчивости крана. Ветровая нагрузка на кран в нерабо-
чем состоянии учитывается в расчетах прочности стальных конст-
рукций, устойчивости и противоугонных устройств крана.
Ветровая нагрузка на кран должна быть определена как сумма
статической и динамической составляющих.
Статическая составляющая ветровой нагрузки, действующая
на элемент крана или груз (Н),
= И. (6)
где р — распределенная ветровая нагрузка на единицу расчетной площади
элемента крана или груза, Па; А —расчетная площадь элемента крана пли
груза, м2.
21
Распределенная ветровая нагрузка (Па)
р = qkcn, (7)
где q — динамическое давление ветра, Па; k — коэффициент, учитывающий из-
менение динамического давления по высоте (fe = 1 при высоте до 10 м: fe- 1,25
при высоте от 10 до 20 м; fe- 1,55 при высоте от 20 до 40 м); с — коэффициент
аэродинамической силы (его значения изменяются от 0,1 до 2,0 в зависимости
от формы наветренной поверхности, указания по определению коэффициента
приведены в ГОСТ 1451—77); п—коэффициент перегрузки, учитывающий
применяемый метод расчета; п = 1,1 при расчете по методу предельных состоя-
ний; л= 1,0 по методу допускаемых напряжений для ветровой нагрузки на
кран в нерабочем состоянии; при обоих методах расчета п = 1,0 для ветровой
нагрузки на кран в рабочем состоянии.
В зависимости от иазиачеиий крана установлены три значения
динамического давлеиня q ветра иа краиа в рабочем состоянии:
150 Па —для строительных, монтажных и технологических кра-
нов, а также стреловых самоходных кранов общего назначения;
250 Па — для кранов речных и морских портов; 500 Па — для
кранов, устанавливаемых иа объектах, исключающих возмож-
ность перерыва в работе. Динамическое давление ветра на кран
в нерабочем состоянии регламентировано для семи районов тер-
ритории СССР (карта приведена в ГОСТ 1451 —77)
Районы СССР ........... I п III IV V VI V1I
Динамическое давление ветра. Па 270 350 450 550 700 850 1000
Если район установки крана точно неизвестен, то допускается
принимать q = 450 Па.
При определении мощности двигателей крановых механизмов
учйтывается 70 % ветровой иагрузки на край в рабочем состоянии,
так как регламентированная ветровая нагрузка действует от-
носительно редко.
- Нагрузки, обусловленные удлинением или укорочением элемен-
тов стальных конструкций, определяют в интервале температур
±40 °C, нри этом начальной считается температура, прн которой
изготовлялся кран или производился его монтаж (ориентировочно
+ 10 °C).
Технологические нагрузки учитываются при выполнении краиом
специфических технологических операций, например поддержка
деталей, при обработке и др.
Транспортные нагрузки на кран и его отдельные элементы
зависят от способа перевозки, мест установки и крепления элемен-
тов крана на транспортных средствах. Эти нагрузки определяют
согласно нормативным документам соответствующих транспортных
средств.
Монтажные нагрузки действуют при монтаже крана и их оп-
ределяют с учетом технологии монтажных работ.
Нагрузки на площадки, лестницы, перила от веса обслужива-
ющего персонала с учетом веса инструмента и запасных деталей
считаются сосредоточенными подвижными нагрузками и их при-
нимают равными:
22
3000 Н — вертикальная нагрузка на площадки, на которых
могут размещаться материалы; 1300 Н — горизонтальная нагруз-
ка иа поручни и перила; 1200 Н — нагрузка на элементы лестниц.
Нагрузки разделены на три основные группы: 1) норматив-
ные FH. которые характеризуются предельными (наибольшими)
значениями, и устанавливаются иа основании характеристик
крана, его элементов, приводов механизмов, предполагаемых ус-
ловий эксплуатации и места расположения краиа; 2) случайные
нагрузки, которые превышают нормативные и учитываются коэф-
фициентом перегрузки п (случайно поднят груз, масса которого
превышает грузоподъемность крана); 3) эквивалентные F3KB,
отражающие особенность нагружения многократными перемен-
ными по значению нагрузками за определенный срок службы;
эквивалентной считается постоянная нагрузка, которая вызывает
такое же повреждение элемента в течение рассматриваемого срока
службы (за число циклов или за машинное вре*мя работы), как и
фактически действующие нагрузки (переменные по значению и
времени действия).
Применяют два метода расчета: по допускаемым напряжениям
и предельным состояниям.
По методу допускаемых напряжений рассчитывают, как пра-
вило, элементы крановых механизмов. При расчете должно выпол-
няться одно из следующих условий:
Fp с [FJ; ор (о); п > (я), (8)
где —расчетная нагрузка (сила, момент) или другие расчетные величины
(деформация, температура, срок службы, износ и др.); ор—расчетное напря-
жение при действии расчетных нагрузок; п — расчетный коэффициент запаса
прочности, устойчивости, сцепления и пр.; [FJ, [al, [nJ—соответственно до-
пускаемые нагрузки или другие величины, напряжение и коэффициент запаса.
Для напряжений условие (8) имеет вид
0Р = Fp/Л с (а]; [о) = а0/[л), (9)
где А — геометрический фактор, характеризующий расчетное сечение (площадь,
момент сонротивления сечения и др.); о0 — предел текучести (прочности) мате-
риала; [п] - 1,4 ... 1,7—допускаемый коэффициент запаса прочности, при-
нимаемый в зависимости от назначения и условий работы крана и механизма.
Расчетные нагрузки определяют по следующим формулам:
при расчете на прочность и деформацию
= ^н; (10)
при расчете на сопротивление усталости, нагрев и износ
Fp = F3KB - XQFH, (11)
где у К—коэффициент переменности нагрузки; т—показатель сте-
пени кривой усталости, в расчетах на сопротивление усталости при контактной
прочности т = 3, на прочность при изгибе т — 9, на нагрев и износ т — 2;
X— коэффициент нагрузки; X [см. формулу (5)1 должен быть определен нри
соответствующих показателях степени т по фактическим графикам нагрузки,
а при их отсутствии — по типовым графикам классов нагружения (см. рис. 8).
23
Расчет по методу предельных состояний наиболее полно раз-
работан для стальных конструкций кранов и является более прогрес-
сивным, так как позволяет полнее учесть действующие нагрузки
и свойства материалов. При расчете должно выполняться следу-
ющее условие:
с Ф, (12)
где Fp — расчетные нагрузка (сила, момент), напряжение или другие величины
(деформация, температура и пр,); Ф — расчетная несущая способность с учетом
силовых факторов, деформаций и других величин.
Для напряжений условие (12) принимает вид:
Qp = F9/A^mR^ /?р ----- RjkM, (13)
где А — геометрический фактор, характеризующий расчетное сечение (площадь,
момент сопротивления и пр.); т = 0,5 ... 1,0— коэффициент условий работы,
учитывающий особенности расчета,, изготовления и эксплуатации рассчитывае-
мого элемента; —расчетное сопротивление материала; /?н—нормативное
сопротивление материала для расчета на прочность, выносливость (предел
текучести, прочности и пр.); kM = 1,05 1,1 — коэффициент безопасности
материала; в случае определения характеристик материала при непосредствен-
ных испытаниях /ги = 1,0.
В расчетах на прочность расчетная нагрузка
= nF„, (14)
где п — коэффициент перегрузки.
При расчетах деформаций принимается расчетная нагрузка,
определяемая по формуле (10), на выносливость, нагрев и износ,
определяемая по формуле (И).
Для расчета грузоподъемных машин устанавливаются расчет-
ные случаи, например, кран в рабочем состоянии —однократно
действуют наибольшие нагрузки; кран в нерабочем состоянии —
однократно действуют наибольшие нагрузки; кран в рабочем со-
стоянии — многократно действуют различные по значению нагруз-
ки за срок службы при нормальных условиях эксплуатации. В
зависимости от конкретной конструкции крана (положение тележ-
ки в пролете мостового крана, угол наклона стрелы и др.) воз-
можны варианты расчетных случаев. Для каждого расчетного
случая устанавливаются виды учитываемых нагрузок и одновре-
менность их действия, например, при совмещении рабочих опера-
ций. Расчетные случаи, виды нагрузок и их сочетания для кон-
кретных кранов регламентируются нормативно-технической доку-
ментацией. Аналогичные методы применяют в расчетах транспор-
тирующих машин с учетом их конструктивных особенностей.
По мере изложения материала приведены расчеты элементов
механизмов подъема и передвижения грузовой тележки мостового
крана грузоподъемностью Q — 5000 кг (номинальный вес груза
G — Qg = 5000X9,81 — 49 050 Н); высота подъема Н 12 м;
скорость механизмов подъема v = 0,2 м/с, передвижения vT =
24
= 0,5 м/с, группа режима работы механизмов 4М (АЗ X ВЗ);
масса тележки лчт — 1800 кг (вес тележки GT - m.vg = 1800Х
X 9,81 = 17 660 Н). Кинематическая схема механизма подъема
показана на рис. 4, б.
Вопросы для повторения. 1. По каким признакам классифицируют грузо-
.шдъемные машины? 2. Какими параметрами характеризуют краны? 3. Как
шределяют производительность крана? 4. Какие основные механизмы имеются
ча кране, определите их назначение и из каких элементов они состоят? 5. Кем
осуществляется технический надзор за кранами и каковы его основные функции?
6. Что называется режимом работы крана и механизма? 7. По каким пока-
зателям устанавливают группы режима работы кранов и крановых механизмов?
8. Какие виды нагрузок учитывают при работе грузоподъемных машин? 9. Как
определяются расчетные нагрузки?
ГЛАВА 2. ГРУЗОЗАХВАТНЫЕ УСТРОЙСТВА.
ТАРА, ПОДДОНЫ И КОНТЕЙНЕРЫ
§ в. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ
Грузозахватные устройства предназначены для зах-
вата, подхвата или подвешивания на них груза. Различают две
группы грузозахватных устройств: первая — постоянно соединена
с грузоподъемной машиной и является элементом механизма подъ-
ема — это грузозахватные органы (крюки и др.), вторая — неза-
висима от грузоподъемных машин; эти грузозахватные устройства
навешивают на грузозахватные органы для облегчения и удобства
захватывания груза или автоматизации этой операции — это
грузозахватные приспособления (стропы, захваты и др.).
Грузозахватные устройства различают: по конструкции —
универсальные и специальные; по виду захватываемого груза —
для штучных грузов, насыпных грузов и контейнеров; по
способу захвата грузов — с помощью строп, зажимные, подхваты-
вающие, зачерпывающие, притягивающие; по виду привода —
механические и ручные; по способу управления — ручные, дистан-
ционные, полуавтоматические и автоматические.
§ 7. ГРУЗОВЫЕ КРЮКИ И ПЕТЛИ
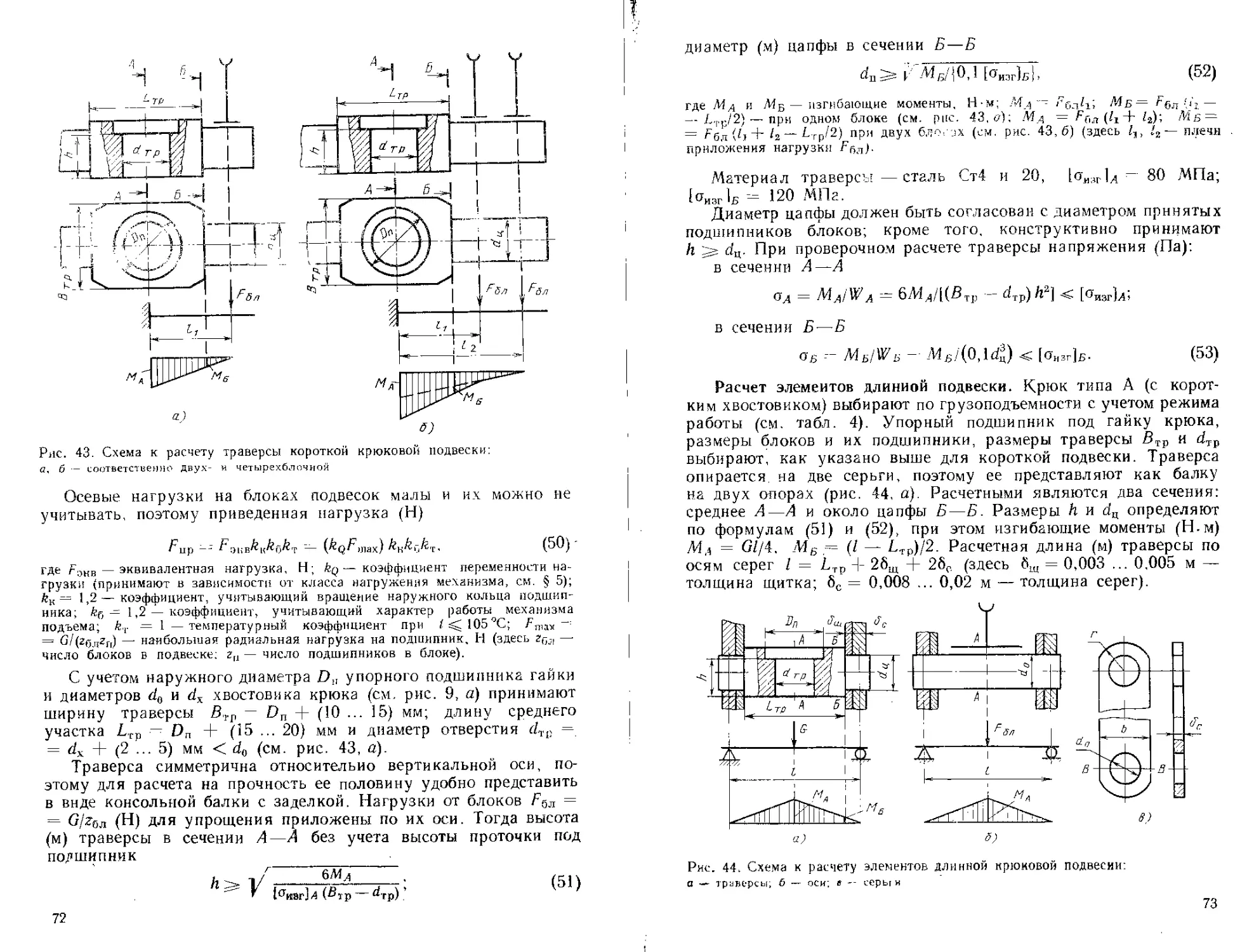
Грузовые крюки и петли являются универсальными
грузозахватными органами. К крюкам груз может подвешиваться
непосредственно за проушины, скобы, цапфы, рымы или с помощью
грузозахватных приспособлений, например, строп. К петлям груз
подвешивается, как правило, с помощью строп. По форме крюки
разделяют на однорогие и двурогие. Крюки могут быть выполнены
коваными (штампованными) и пластинчатыми.
Однорогие кованые (штампованные) крюки (ГОСТ 6627—74)
имеют грузоподъемность от 0,25 до 100 т. Однорогий кованый
25
Рис, 9. Грузовые крюки:
а, б — соответственно однорогий и двурогий кованые (штампованные) крюки; в — Дву-
рогий пластинчатый
крюк (рис. 9, о) состоит из цилиндрического хвостовика с резь-
бой на конце и изогнутой части с рогом, образующим зев, размеры
которого обеспечивают размещение звеньев двух ветвей цепных
строп (см. § 8) при подъеме груза массой, соответствующей грузо-
подъемности. Изогнутая часть крюка работает на растяжение и
изгиб. Для обеспечения равнопрочности и уменьшения массы
крюка она имеет трапецеидальное сечение. Однорогие кованые крю-
ки выбирают в зависимости от грузоподъемности и режима работы
механизма подъема (табл. 4). Для предотвращения выпадания из
зева крюка съемных грузозахватных приспособлений предусмат-
ривают предохранительные скобы, закрепляемые на хвостовике
крюка (см. рис. 42).
Двурогие кованые (штампованные) крюки (ГОСТ 6628-78)
имеют грузоподъемность от 5 до 100 т, Выбирают двурогие крюки
аналогично однорогим крюкам. Двурогие кованые крюки (рис. 9, б)
удобны для транспортирования крупногабаритных грузов, так как
они не допускают выскакивание из зевов канатных строп при
ослаблении нх натяжения.
Однорогие и двурогие крюки изготовляют двух типов: А —
с коротким хвостовиком; Б —с удлиненным хвостовиком. Тип А
применяют для длинных крюковых подвесок, тип Б — для корот-
ких (см. § 26). Крюки изготовляют из стали 20 (ГОСТ 1050—74)
или 20Г.
Пластинчатые крюки (ГОСТ 6619—75) изготовляют следую-
щих типов: 1 - однорогие грузоподъемностью от 40 до 315 т
26
Таблица 4. Техническая характеристика грузовых однорогих крюков
(ГОСТ «627—74)
Грузоподъем-
ность, т,
при режимах
работы
Размеры, мм (рис. 9, а)
ие менее
2,5
3,2
4,0
5,0
6,3
8,0
10,0
12,5
16,0
20,0
2,0
2,5
3,2
4,0
5,0
6,3
8,0
10,0
12,5
16,0
1,6
2,0
2,5
3,2
4,0
5,0
6,3
8,0
10,0
12,5
50
55
60
65
75
85
95
НО
120
130
38
40
45
50
55
65
75
85
90
100
145
165
180
195
250
280
310
340
415
550
180
200
300
375
410
475
520
580
600
630
М2 7
МЗО
МЗЗ
М36
М42
М48
М52
М56
М64
Трап
70X70
30
30
35
40
45
50
55
60
70
75
35
35
40
45
52
56
62
68
80
85
45
52
55
65
75
82
90
100
115
130
30
34
38
40
48
54
60
65
75
80
70
85
90
95
105
120
135
150
165
180
40
45
50
55'
СО
70
75
80
90
95
для литейных кранов; 2 — двурогие грузоподъемностью от 80
до 320 т (рис. 9, в) для кранов общего- назначения. Пластинчатые
крюки выполняют из нескольких пластин из стали ВСтЗсп4
(ГОСТ 380 71), стали 20 (ГОСТ 1050—74) и стали 16МС
(ГОСТ 6713—75), которые соединены заклепками. Для равномер-
ного распределения нагрузок между пластинами на изогнутой
части крюка имеются накладки.
Грузовы нетли. Для строповки грузов больших размеров
применяют грузовые петли, которые могут быть коваными
(рис. 10, а) или составными из шарнирно-соединенных элементов
(рис. 10, б).
Правила эксплуатации и безопасной работы. Грузовые крюки должны быть
снабжены предохранительными замками, предотвращающими самопроизволь-
Рис. 10. Грузовые петли;
а — цельнокованая; б — со-
ставная
27
ное выпадение съемного грузозахватного приспособления. При применении
гибких строп, когда исключено выпадение их из зева крюка, допускается приме-
нение крюков без предохранительных замков. Износ крюка в зеве не должен
превышать 10 % первоначальной высоты сечения h. На крюках и петлях не
должно быть остаточных деформаций, трещин, надрывов и других дефектов.
Пример. Выбор крюка. С учетом группы режима работы механизма 4М
при Q 5000 кг принят крюк № 13 типа Б (см. табл. 4)1, так как крюковая
подвеска короткая (см. рис. 9).
§ 8. СТРОПЫ
Стропы предназначены для подвешивания груза
к крюку крана. Различают стропы канатные, цепные и ленточные.
Канатные стропы изготовляют из стальных проволочных
канатов крестовой свнвкн, которые не раскручиваются при сво-
бодном подвесе груза (см. § 15). Различают стропы простые в виде
отрезка каната (рис. 11, а), универсальные в виде кольца
(рнс. 11, б), а также одно-, двух-, трех- и четырехветвевые, на кон-
цах которых образованы петли илн закреплены крюки, кольца н
другие концевые элементы (рнс. 11, в, г, е).
Петли канатов, соприкасающиеся с концевыми элементами,
снабжены стальными втулками-коушами (ГОСТ 2224—72) для
предохранения проволок каната от изнашивания н резкого пере-
гиба (см. рис. 11, г, д). Конец каната после образования петли
на коуше соединяют с канатом путем заплетки его прядей, уста-
новки зажимов (не менее трех), а также с помощью зажимных вту-
лок из цветного металла.
В) г)
Рис. 11. Стропы:
а — простой отрезок канату; б — универсальный канатный с соединенными занлеткой
концами; в, Z — одноветвеаой с петлями н крюками; й — двухветвевой цепной; е —
четырехветвевой канатный
28
Для строповки грузов с чистой и
гладкой поверхностью применяют простые
и универсальные стропы из пеньковых н
капроновых канатов (см. § 16).
Цепные стропы изготовляют из иека-
либроваиных круглозвенных сварных це-
пей (см. § 17). Эти стропы по конструктив-
ному исполнению аналогичны канатным
стропам (рис. 11, д). Цепные стропы
предназначены для подъема грузов с ос-
трыми кромками без подкладок, а также
грузов, нагретых до высокой темпера-
туры.
Усилие натяжения строп S при подъеме
Рис. 12. Схема подвеса
груза зависит от их числа и угла наклона груза на стропах
относительно вертикали. Для строп обще-
го назначения расчетным является угол 45е (рис. 12). Наи-
большее усилие натяжения в ветви стропа (Н)
= G/г cos а = l,45G/z, (15)
где G — вес груза, Н; <х — угол между осью стропа п вертикалью, °; г — число
ветвей.
Стропы выбирают при наибольшем усилии натяжения аналогич-
но стальным проволочным канатам 1см. формулы (20) и (21)].
При этом коэффициент запаса прочности п 6 для стальных ка-
натов; п 8 для пеньковых канатов; п 5 для сварных цепей.
Правила эксплуатации и безопасной работы. При строповке грузов с острыми
краями должны быть применены прокладки для предупреждения резких переги-
бов канатов. Стропы следует подвергать испытаниям на прочность. При этом
масса груза должна быть равной 1,25 грузоподъемности. Канаты и цепи для
строп должны иметь сертификат за вода-изготовителя. При отсутствии серти-
фиката разрывное усилие устанавливают испытанием на разрыв. Стропы должны
иметь бирку с указанием их грузоподъемности с учетом угла наклона 45° и
даты испытания.
Стропы из стальных канатов бракуют, если число обрывов проволок на
шаге свивки каната, поверхностный износ проволок и коррозия превышают нор-
мативные (см. § 15). Цепные стропы бракуют, если износ звена цепи превысит
10 % диаметра или будет повреждено 30 % звеньев цепи.
§ 9. ЗАХВАТЫ ДЛЯ ШТУЧНЫХ ГРУЗОВ
Эти захваты предназначены для быстрого захвата
штучных грузов, в том числе пакетов на поддонах. По способу
взаимодействия с грузом различают клещевые захваты опорно-за-
жимные (рис. 13, а), которые охватывают груз с ннжней стороны
и незначительно его сжимают; фрикционно-зажимные, сжимающие
боковые поверхности груза (рис. 13, б). В последних поднимаемый
груз удерживается силами трения между боковыми поверхиостямн
груза и башмаками захвата. По способу управления захваты могут
быть ручными, полуавтоматическими (имеется управляемая стро-
29
пальщиком защелка для удержания захвата в раскрытом поло-
жении) и автоматическими, имеющих механизмы фиксации поло-
?кений захвата.
Фрикционно-зажимные захваты применяют для снятия штабеля
силикатного кирпича с запарочной вагонетки. Захват подвеши-
вают к крюку крана. По мере натяжения грузового каната ры-
чаги сдвигаются и плотно зажимают нижний слой кирпичей.
При ослаблении иатяжения грузового каната тяги зажимного ме-
ханизма под действием силы тяжести опускаются, рычаги раз-
водятся и освобождают штабель кирпича. Захват застопоривают,
возвращают к месту загрузки и цикл повторяется.
К фри кционио-зажимным захватам относятся также эксцентри-
ковые захваты (рис. 13, в), предназначенные для захвата плоских
металлических листов с твердой поверхностью. Для длинномер-
ных грузов применяют траверсу с несколькими подвешенными
к ней эксцентриковыми захватами. Эксцентриковый захват состоит
из вилки корпуса 2, на одной стороне вилки шарнирно на оси за-
креплен эксцентрик 3. Другая сторона вилки является опорной
стенкой. Верхняя часть вилки снабжена кольцом 1 нлн скобой
для навешивания на крюк. Эксцентрик может быть выполнен
с рукояткой для его поворота.
Для повышения коэффициента трения и надежности удержи-
вания груза рабочую поверхность эксцентрика снабжают насеч-
кой, а угол эксцентрика а принимают не менее 10°, так как при
меньшем значении этого угла возможно заклинивание (захват
трудно освободить от груза).
Клещевые фрикционно-зажимные захваты (рис. 14, а) состоят
из двух шарнирно закрепленных рычагов-клещей 2, нижние концы
которых, снабженные башмаками 1, взаимодействующими с гру-
зом, а верхние —с помощью тяг 3 и кольца 4 подвешиваются к
крюку крана. При шарнирном креплении башмаков обеспечива-
ется более равномерное прижатие их к грузу. Шарниры могут
39
непосредственно соединять оба рычага (см. рис, 14, а) — захваты
с совмещенным шарниром или быть разнесены с помощью попереч-
ной планки 5 — захваты с разнесенным шарниром (рис. 14, б).
Тягн обеспечивают открытие н закрытие клещей и по конструкции
могут быть стягивающими или распорными. Угол наклона тяг а
оказывает влияние на усилие зажатия башмаков рычагов.
Клещевые захваты с совмещенным шарниром предназначены
для захвата однотипных грузов. Расчет клещевого захвата с сов-
мещенным шарниром (см. рис. 14, а) сводится к определению
размеров рычагов и тяг, при которых сила трения, возникающая
между клещами и поверхностью груза, удерживала бы груз
с соответствующим коэффициентом запаса сжимающего усилия.
Для удержания груза (вес G) должно выполняться условие
XG = 2FTp = 2/Fllp,
откуда необходимая сила прижатия (Н) башмака
F„„ = KG/(2/), (16)
где К = 1,25 ... 1,6 — коэффициент запаса сжимающего усилия; 7тр— сила
трения между башмаком и поверхностью груза, Н; f—коэффициент трения.
На кольцо, соединяющее тяги, действует вес груза G и вес
захвата G3ax. Усилия (Н) в тягах
FTnr = (G + G3ax)/(2cos а).
Из условия равновесия рычага относительно оси шарнира О
определяется создаваемая сила прижатия:
Fnf> = (РтягС + 0,5Ga)/b, (17)
где а, Ь, с — плечи рычагов и тяги, м.
йУ б)
Рис. 14. Схема к расчету захвата для штучных грузов:
а, б — соответственно с совмещенным и разнесенным шарнирами
31
Подставляя значения из формулы (16) в формулу (17),
получаем зависимость для определения размеров рычагов и тяг:
-7- = -^— + "Г +-г-2—• (18)
I b cos ct о G b cos ct !
Задаваясь размером b рычага по формуле (18), находим раз-
мер плеча тяги с.
При захвате грузов большой ширины захватами с совмещен-
ным шарниром угол наклона тяг а увеличивается, в результате
уменьшаются cos а и сила прижатия. Учитывая этот фактор, мо-
жно сделать вывод о том, что захваты с совмещенным шарниром
следует применять для груза установленного типоразмера.
Захваты с разнесенными шарнирами (см. рис. 14, б) могут
быть применены для грузов различных типоразмеров благодаря
изменению положения шарниров на поперечной планке и сохра-
нению постоянными угла и и силы прижатия. Расчет этих захва-
тов аналогичен расчету захвата с совмещенным шарниром.
Правила эксплуатации и безопасной работы. Захваты должны быть снабжены
клеймом или прочно прикрепленной металлической биркой с указанием номера,
грузоподъемности и даты испытаний. Захваты должны применяться только для
тех грузов, для которых они предназначены.
§ 10. ГРУЗОПОДЪЕМНЫЕ ЭЛЕКТРОМАГНИТЫ
Электромагниты предназначены для захвата и транс-
портирования грузов из ферромагнитных материалов (проката
черных металлов, чугунных чушек, стального металлолома и
стружки). Номинальная грузоподъемность электромагнита со-
ответствует поднимаемой наибольшей массе груза в виде спло-
шной плиты. Прн других видах груза грузоподъемность состав-
ляет: 40 % номинальной грузоподъемности при подъеме рельсов
и труб; 15 % — при подъеме стальных листов; 2,5 % — при подъ-
еме размельченной стальной стружки; 1,5 % — при подъеме обыч-
ной стальной стружки. Допускается работа электромагнитов с гру-
зами, имеющими температуру до 500 °C, так как при более высокой
температуре у стали и чугуна уменьшаются магнитныесвойства.
Достоинства электромагнитов: удобство работы и простота управ-
ления, быстрая смеиа и на крюке крана. К недостаткам относятся
переменная грузоподъемность, невозможность подъема грузов,
нагретых до температуры более 800 °C. Выпускают две серии элект-
ромагнитов по ГОСТ 10130—79Е: М — круглой формы (грузо-
подъемность 6 ... 20 т) и ПМ — прямоугольной формы (грузоподъем-
ность 7 ... 17 т) с питанием постоянным током напряжением 220
и НО В от двигатель-генераториой или выпрямительной уста-
новок.
Круглый электромагнит серии М (рис. 15, а) состоит из сталь-
ного корпуса 3 с высокой магнитной проницаемостью, у которого
с нижней стороны имеются два полюса в виде наружного и внутрен-
32
Рис. 15. Грузоподъемные электромагниты:
а — серии М; 6 — серии ПМ
него колец. Между ними помещена катушка 5, закрытая немагнит-
ными шайбами 4. Концы обмотки катушкн закреплены в коробке
выводов 6 на корпусе магнита. Концы обмотки и питающего кабеля
соединены разъемным соединением, которое обычно установлено
на крюковой подвеске (см. § 23). Кабель намотан на кабельный
барабан, получающий вращение от редуктора механизма подъема
посредством зубчатой или цепной передач, передаточные числа
которых подобраны так, чтобы скорость подъема крюка и ка-
беля были одинаковыми. Корпус 3 электромагнита подвешен
к кольцу 1 тремя цепями 2, которые обеспечивают горизонтальное
положение шайбы электромагнита. Круглые электромагниты при-
меняют для транспортирования грузов относительно небольших
размеров и неопределенной формы (плиты, болванки, чушки, стру-
жка, рулоны листа и т. д.).
Магниты серии ПМ (рис. 15, б) по конструктивному исполне-
нию аналогичны круглым магнитам, только корпус имеет прямо-
угольную форму. Эти магниты применяют для транспортирования
длинномерных грузов (рельсы, прокат, трубы, листовая сталь
и др.). Для транспортирования грузов большой длины используют
два и более магнитов, подвешенных к траверсе. С помощью маг-
нитов допускается кантование грузов. Быстрое освобождение груза
от электромагнита обеспечивается размагничиванием, которое до-
стигается тем, что в схеме управления после отключения магнита
предусмотрено на короткое время включение обмотки на обратную
полярность.
2 Балашов В. П.
33
Правила эксплуатации и безопасной работы. Не следует бросать электро-
магнит на груз, а также включать его до касания Груза. После включения перед
подъемом необходима выдержка в течение 3 ... 10 с, так как за это время
происходит нарастание магнитного поля. Не допускается нахождение людей и
какие-либо работы в зоне действия магнитных кранов, так как возможно падение
отдельных грузов, а в случае отключения питания всего груза. Не следует до-
пускать чрезмерный перегрев катушек при непрерывной работе.
§11. ВАКУУМНЫЕ ЗАХВАТЫ
Принцип действия захватов заключается в том, что
в установленной на поверхности груза вакуумной камере созда-
ется разрежение воздуха (вакуум). С помощью вакуумных захва-
тов перемещают изделия из различных материалов (металла,
камня, бетона, дерева, пластмассы, стекла), а также листы с риф-
леной, волнистой, сильно корродированной поверхностью. Наи-
более распространены насосные захваты, которые включают
(рис. 16, а) насос с двигателем /, ресивер 3, коллекторы 4; трех-
ходовые электромагнитные клапаны 2 и вакуумные камеры 5.
Корпус ресивера часто используют в качестве элемента рамы зах-
вата, Камеры выполнены в виде выпуклой тарелки или по форме
перемещаемого изделия. По краям камер закреплены уплотнения
нз губчатой или мягкой резины (рис. 16, б). Насос создает необ-
ходимый вакуум в ресивере (при этом клапан закрыт), камеры опу-
скаются на изделие, включают электромагнитный клапан, который
соединяет магистраль ресивера с камерами, в результате изделие
34
за 3 ... 5 с притягивается к захвату. При неработающем насосе
можно удержать изделие в течение 20—30 мии благодаря наличию
в ресивере вакуума с определенным запасом. Для освобождения
изделия камеры соединяют с атмосферой. Управление захватами
может быть ручным или дистанционным. Сила притяжения ва-
куумной камеры (Н)
(19)
где Д 2±0,2 ... 0,4 м2— геометрическая площадь камеры, ограниченная ее
внутренним контуром; Кр — 0,8 ... 0,9 — коэффициент, учитывающий умень-
шение площади камеры вследствие деформации и изменение атмосферного дав-
ления; ря ~ 9- 10й Па — атмосферное давление; рв = 2-106 Па — минимальное
давление внутри камеры.
Сила притяжения по формуле (19) должна удовлетворять усло-
вию
F kG/z,
где б—вес груза, Н; k= 2—коэффициент запаса; г—число вакуумных
камер.
На рис. 16, б показана траверса с вакуумными захватами для
перегрузки листового стекла. Коллектор 7 одновременно является
траверсой захвата и снабжен подвеской 8. Камеры 12 установлены
на прикрепленных к коллектору балансирах 14 иа сферических
опорах 15 с пружинами 11. Каждая камера соединена с коллекто-
ром 7 вакуум-проводом 6. Для ориентирования захват имеет
обрезиненные ручки 10. Контроль давления осуществляется с по-
мощью вакуумметра 9. Шлангом 13 коллектор 7 соединен с реси-
вером.
§ 12. ГРЕЙФЕРЫ
Грейфер представляет собой самозачерпывающий
захват для сыпучих материалов, скрапа и стружки, крупнокуско-
вых каменных и волокнистых материалов, а также длинномерных
лесоматериалов.
В значение грузоподъемности грейферного крана включены
массы груза и грейфера. От соотношения этих масс зависит зачер-
пывающая способность грейфера. В связи с этим перегружаемые
грейфером сыпучие грузы разделены по насыпной плотности на
следующие группы: весьма легкие р = 0,4 ... 0,63 т/м3 (известь-
пушонка, угольная пыль); легкие р — 0,8 ... 1,0 т/м3 (сухие по-
рошкообразные глиноземы и мел, сухой шлак, мелкий и средний
щебень, уголь всех марок); средние р = 1,25 ... 2,0 т/м3 (мелко-
кусковый гипс, алебастр, сухая мелкокусковая глина, гравий,
среднекусковый известняк, битый кирпич, цемент, крупный
щебень); тяжелые р= 2,5 ... 3,2 т/м3 (клинкер, твердые породы).
Масса грейфера для зачерпывания весьма легких грузов
должна составлять 0,37Q (здесь Q — грузоподъемность крана, т),
легких — 0.4Q, средних 0,42Q, тяжелых O,45Q.
2* 35
Рнс. 17. Схемы работы грейферов:
а. б — соответственно двух- и одноканатного
По конструкции грейфера делят на .три группы: двухканатные,
одникаиатные и приводные (моторные).
Двухканатный грейфер (рис. 17, а) имеет челюсти 8, которые
шарнирно соединены с нижней траверсой 7 и с помощью тяг 6
с головкой 5. Подъемный канат /, закрепленный на головке 5,
предназначен для подъема и опускания грейфера с помощью подъ-
емной лебедки 2. Замыкающий канат 4, соединенный с нижней
траверсой 7, проходит через отверстие в головке 5 и закрепляется
на барабане замыкающей лебедки 3. Этот канат предназначен для
открывания и закрывания челюстей грейфера. Для увеличения
усилия резания на кромках челюстей и лучшего зачерпывания
материала замыкающий канат 4 запасовывают в полиспаст, обоймы
с блоками которого закреплены на нижней траверсе и головке
(на рис. 17 ие показаны). Лебедки имеют независимое управле-
ние.
Достоинства двухканатных грейферов — автоматическая ра-
бота и большая производительность. Недостатки — необходи-
мость иметь две лебедки и невозможность быстрой замены грей-
фера другим грузозахватным устройством.
36
Четырехканатиыегрейферыогиосят к группедвухканатных.Они
выполнены с двумя подъемными и двумя замыкающими канатами.
Рабочий цикл двухканатного грейфера включает следующие
операции (см. рис. 17, а).
I. Исходное положение — грейфер открыт и подвешен на подъ-
емном канате; замыкающий канат ослаблен; обе лебедки затор-
можены.
II. Опускание грейфера на груз — грейфер открыт, обе ле-
бедки работают на спуск.
III. Зачерпывание груза — грейфер касается поверхности
груза, подъемный канат ослаблен и его лебедка заторможена;
замыкающая лебедка включается на подъем и головка с траверсой
сближаются, челюсти поворачиваются относительно шарниров
траверсы и их кромки внедряются в груз. Если продолжать рабо-
тать замыкающей лебедкой после закрывания челюстей, то грей-
фер вместе с грузом будет подниматься на одном замыкающем
канате, который при этом будет перегружен. Подъем грейфера на
одном замыкающем канате запрещен, так как это приводит к бы-
строму изнашиванию каната.
IV. Подъем грейфера с грузом — в момент окончания закры-
вания челюстей грейфера включается подъемная лебедка; обе
лебедки работают на подъем и усилия в подъемном и замыкаю-
щем канатах выравниваются.
V. Разгрузка груженого грейфера — замыкающая лебедка ра-
ботает на спуск, при этом нижняя траверса под действием силы
тяжести груза и челюстей отходит от головки; челюсти раскрыва-
ются и груз высыпается.
Для исключения перегрузки замыкающего каната применяют
полуавтоматическое управление грейфером, при котором в момент
закрывания челюстей автоматически включается подъемная ле-
бедка. Вместимость грейферов 2 ... 20 м3.
Одноканатные грейферы (рис. 17, б) являются сменными грузо-
захватными приспособлениями и могут быть навешены на крюк
любого крана соответствующей грузоподъемности. Этот грейфер
по конструктивному исполнению аналогичен двухканатному грей-
феру, но отличается от него только тем, что канат одновременно
является подъемным и замыкающим. Основная особенность одно-
канатного грейфера — наличие замка 10, который соединяет обой-
му 9 с траверсой 7 (у двухканатных блоков эти узлы имеют неразъ-
емное соединение). Обойма и траверса могут быть выполнены
с блоками полиспаста (на рисунке не показаны). Вместимость грей-
феров 0,5 ... 2,0 м3.
Рабочий цикл работы одноканатного грейфера включает
следующие операции.
I. Исходное положение — грейфер открыт и висит на канате /,
обойма 9 и головка 5 приближены, замок 10 открыт.
II. Опускание грейфера на груз — грейфер открыт, лебедка
работает на спуск.
37
Ill, Срабатывание замка — грейфер опущен на груз, лебедка
работает на спуск, обойма опускается вниз и с помощью замка
соединяется с траверсой,
IV. Зачерпывание груза и подъем грейфера — лебедка работает
на подъем; с помощью каната обойма сближается с головкой, че-
люсти поворачиваются, их кромки внедряются в груз и зачерпы-
вают его; после закрытия грейфер вместе с грузом поднимается
канатом,
V, Разгрузка груженого грейфера — груженый грейфер опус-
кается на грунт; канат натянут; с помощью тросика размыкается
замок, лебедка работает на подъем, нижняя обойма поднимается
к головке до упора в нее; грейфер поднимается и открывается под
действием силы тяжести груза и челюстей. Открытый грейфер за-
висает на канате. Грейфер может быть открыт н в подвешенном со-
стоянии, но при этом возникают сильные удары челюстей об
упоры, ограничивающие их раскрытие.
Достоинства одноканатных грейферов — быстрая смена и
возможность работы на любом кране. Недостатки — сильные
удары об упоры прн раскрытии челюстей; уменьшение высоты подъ-
ема, так как длина выбираемого из полиспаста каната достигает
2,5 м; ручное управление раскрытием челюстей грейфера.
Приводные грейферы могут быть навешены на крюк любого
крана соответствующей грузоподъемности. Грейфер имеет верх-
нюю головку, в которой смонтирован привод, и шарнирно зак-
репленные челюсти. Грейфер соединен с краном кабелем, по кото-
рому передается электроэнергия к-приводу замыкания челюстей.
Приводы имеют различные исполнения (электроталь с полиспас-
том, рычажные устройства, гидроцилиндры). Достоинства при-
водных грейферов — компактность конструкции и сохранение вы-
соты подъема крана.
Правила эксплуатации и безопасной работы. На грейфере должна быть таб-
личка с указанием завода-изготовителя, его массы, вместимости, а также насып-
ной плотности груза, для которого предназначен грейфер. При износе зубьев
менее 30 % первоначальной длины нх наплавляют, а при большем износе
заменяют. В зоне работы грейферов запрещается нахождение людей,
§ 13. ТАРА, ПОДДОНЫ И КОНТЕЙНЕРЫ
Штучные грузы укладывают в тару, пакетируют, за-
гружают в контейнеры, что позволяет лучше использовать грузо-
подъемность подъемно-транспортных машин и всех видов тран-
спорта, а также создает большое удобство для механизации по-
грузочно-разгрузочных, транспортных и складских работ.
Тарой называют изделия, которые служат для хранения грузов.
Согласно ГОСТ 14681—74 предусмотрена тара ящичная с опо-
рами, без опор, с наклонной боковой стенкой, каркасная и стоеч-
ная (рис. 18). Тара выполнена обычно металлической, но может
быть и пластмассовой; складируют ее в штабели высотой 5 ...
10 ярусов посредством напольных погрузчиков или мостовых
38
Рис. 18. Тара:
а—в — ящичная соответственно с опорами, без опор н с наклонной боковой стенкой;
г — каркасная; д — стоечная
кранов, а также укладывают в стеллажи погрузчиками и кранами-
штабелерами. Масса тары с грузом от 0,1 до 6 т.
Транспортным пакетом является укрупненная грузовая еди-
ница, сформированная из более мелких штучных грузовых еди-
ниц в таре или на поддоне.
Плоский деревянный поддон (ГОСТ 9078—84) состоит из верх-
него настила 1, который опирается на бруски 2 или шашки 4,
расположенные так, что образуются проемы для возможности зах-
вата их с двух или четырех сторон вилочными захватами
(рис, 19). Снизу шашки могут закрепляться на сплошном нижием
настиле 3 или на планках 5 в виде полос. В поддонах, предназна-
ченных для перемещения грузов в подвешенном состоянии, верх-
ний настил выполнен с выступами для захвата стропами. Размеры
поддонов 800x1200, 1000x1200, 1200x1600 и 1200x1800 мм.
Рис. 19. Плоские поддоны:
а — однонастильный двухзаходный; б — однонастильный четырехзаходный; в — двух-
настильный четырехзаходный; г — двух настильный двухзаходный с выступами
39
Нагрузка на поддоны 10,0; 12,5; 20,0 и 32,0 кН в зависимости
от типоразмера.
Тарно-штучные грузы, образующие пакет на поддоне, должны
быть скреплены между собой с помощью металлической скрепки,
стальной, капроновой и клейкой ленты и др. Пакеты могут быть
сформированы без поддонов путем закрепления штучных грузов
стальной или полимерной лентами, а также помещением грузов
в термоусадочную пленку, ио и в этих случаях снизу пакетов ос-
тавляются углубления с боковой стороны для вил погрузчиков.
Транспортируют пакеты электро- и автопогрузчиками или кра-
нами, на крюки которых навешивают различные грузозахватные
приспособления.
Универсальные и специальные поддоны широко применяют
в промышленности строительных материалов. Глиняный (красный)
кирпич пакетируют в основном иа деревометаллических поддонах
(ГОСТ 18343—80) массой 25 кг и грузоподъемностью 0,75 т.
На поддон укладывается «елочкой» 200 шт, условного кирпича.
Поддоны перевозят транспортными средствами, погрузку их вы-
полняют краном с помощью четырех ветвевых строп. Поддоны с по-
перечными брусьями перевозятся автомобильным и железнодорож-
ным транспортом и перегружаются с помощью автоматического
захвата-футляра, который подвешивается иа крюк крана на пяти
канатах, из которых средний канат / является несущим, а боко-
вые 2 предназначены для раскрытия захвата после установки
его иа место (рис, 20, а).
Силикатный кирпич укладывают в пакеты в виде пирамиды
на автоклавную вагонетку в количестве 900 ... 920 шт. (масса до
3 т). Навешенный на кран раскрытый захват рамой устанавливают
иа пакет кирпича, при этом освобождается фиксирующее устрой-
ство и боковые рамы подхватывают пакет. При подъеме захвата
вследствие взаимодействия тяг и коленчатых рычагов концы боко-
вых рам сжимают нижний ряд кирпичей и за счет сил трения па-
кет поднимается вместе с захватом. После установки пакета на
транспортные средства подвеска крюка опускается вниз, в ре-
зультате чего, боковые рамы раскрываются и освобождают пакет.
Затем боковые рамы закрепляют в открытом положении фикси-
рующим устройством.
Силикатный кирпич можно также укладывать на поддон
с гибким ограждающим элементом (отрезок конвейерной леиты),
которым охватываются боковые стороны пакета с последующим
прижимом посредством натяжного механизма (рис. 20, б).
Асбестоцементные волнистые листы перевозят в кассетах
(рис. 21) на транспортных средствах или в закрытых железнодо-
рожных вагонах. При сборке кассеты рамы 3 устанавливают на
торцы стопы листов, уложенных на деревянный пол / кассеты,
и соединяют цепными стяжками 2, которые стягиваются ключом
и закрепляются замками 5. Масса кассеты 83 кг, грузоподъем-
ность 2,5 т (72 ... 98 листов). Кассеты перегружаются за специаль-
40
Рис. 20. Поддон для транспортирования пакетов кирпича:
а — красного с помощью захват-футляра; б — силикатного с гибким ограждающим
элементом
ные приспособления (рымы) 4 с помощью четырехветвевых строп
кранами или автопогрузчиками. При хранении кассеты уклады-
вают в три яруса, при транспортировании — в два яруса. Плоские
листы транспортируют в аналогичных кассетах массой 200 кг
и грузоподъемностью 4 т.
Экструзионные панели транспортируют в виде пакетов на
стоечных поддонах размерами 6200 x 850 x 906 мм (рис. 22). Масса
поддона 360 кг, грузоподъемность 2 т. Торцы поддонов закрывают
откидными щитами. На верхней раме поддона имеются петли для
строп. Допускается установка пакетов в три яруса.
Рис. 21. Кассета для транспортирования волнистых плит
41
Рнс. 22, Пакеты тля транспортирова-
ния экструзионных панелей
Грузовой контейнер являет-
ся единицей транспортного обо-
р удова ния, он дол жен соот-
ветствовать следующим требо-
ваниям: обладать достаточной
прочностью для многократного
использования; применяться
прн перевозках одним или не-
сколькими видами транспорта
без промежуточной выгрузки
груза; иметь приспособлен и я
для быстрой погрузки, разгруз-
ки и перегрузки с одного вида
транспорта на другой; внутрен-
ний объем его должен быть не
менее 1 м3. Основными харак-
теристиками контейнеров яв-
ляется масса брутто (масса контейнера и максимальная масса гру-
за), грузоподъменость, полезный внутренний объем и размеры.
Различают контейнеры универсальные, в которых могут раз-
мещаться различные тарно-штучные грузы, и специализирован-
ные. Универсальные контейнеры (ГОСТ 18477—79) по массе
брутто делят на малотоннажные (до 2 т), среднетоннажные (от 2
до 10 т) и крупнотоннажные (более 10 т). Малотоннажные контей-
неры являются неуиифнцированными и они предназначены для пе-
ревозок в основном иа автомобильном транспорте. Средне- и круп-
нотоннажные являются унифицированными, их можно перево-
зить на всех видах транспорта. В обозначениях универсальных кон-
тейнеров указывается масса брутто.
Универсальные малотоннажные неунифицированные контейнеры
типов АУК-1,25 и АУК-0,625 соответственно массой брутто 1,25
и 0,625 т предназначены для перевозки мелких штучных грузов.
Контейнер выполнен с двухстворчатой дверью на одной боковой
стенке. В нишах крыши предусмотрены два рыма для захвата
крюками строп.
Среднетоннажные унифицированные контейнеры типов У УК-2,5
(рис. 23, а), УУК^5У, УУК-5 (рис. 23, б) имеют металлические
рамы со стойками, обшитые стальным листом. Одностворчатые
двери установлены на одной боковой стейке. Контейнеры снаб-
жены утопленными в нишах крыши четырьмя рымами, за которые
они захватываются крюками строп или автоматическими контей-
нерными захватами. Индекс «У» означает, что контейнер выполнен
усиленной конструкции, поэтому при массе брутто 5 т его размеры
соответствуют размерам контейнера УУК-2,5.
Крупнотоннажные унифицированные контейнеры ID, 1С
и 1А массой брутто соответствен ио 10, 20 и 30 т пригодны для
международных перевозок (рис. 23, в). Контейнеры состоят из
верхней и нижней стальных рам, соединенных стойками. Боковые
42
стенки, верх и дно обшиты металлическим листом. В торцах
контейнеров имеются двухстворчатые двери с защелками. Пол
выполнен деревянным. По углам верхней и нижней рам размещены
стальные угловые пустотелые фитинги, имеющие по трем наружным
плоскостям продольные пазы. Фитинги используют в качестве опор
при штабелировании контейнеров. Пазы фитингов предназначены
для захвата контейнеров с помощью строп с крюками или поворот-
ными штырями контейнерных захватов. Пазы нижней рамы ис-
Рнс. 23. Универсальные унифицированные контейнеры:
а, б — среднетоннажные типа УУК-2,5 и УУК-5; 9 — крупнотоннажный
43
Рис. 24. Специализированные контейнеры
для строительных материалов:
а — извести; б — цемента
пользуются для закрепления контейнеров на транспортных сред-
ствах (автопр ицепах, железнодорожных платформах и др.).
На нижней раме предусмотрены проемы для захвата вилочными
погрузчиками. Контейнеры загружают вручную или с помощью
электропогрузчиков, которые вместе с грузом въезжают внутрь
контейнера по наклонным площадкам. После загрузки допуска-
ется смещение центра масс груза от центра контейнера по продоль-
ной н поперечной осям на расстояние не более 10 % соответственно
длины и ширины. Контейнеры можно устанавливать в штабели
по шесть ярусов по высоте.
Специализированные контейнеры (СК) предназначены для
перевозки или временного хранения одного или группы однород-
ных по свойствам изделий и материалов (сыпучих, зернистых,
штучных и др.). По виду перевозимых грузов различают контей-
неры групповые (Г) и индивидуальные (И) (для материалов и
изделий со специфическими свойствами).
Конструкция контейнера обусловлена видом перевозимого
груза — они могут быть закрытыми, открытыми, в виде плат-
форм. Специализированные контейнеры широко применяют для
доставки материалов и изделий с предприятий промышленности
строительных материалов на центральные склады, склады под-
собных предприятий строительных организаций и баз комплекта-
ции, а также на объекты строительства.
Контейнер КИ-5 (рис. 24, а) предназначен для извести н
других сыпучих материалов. Корпус его выполнен сварным с верх-
ним загрузочным и боковыми разгрузочными люками.
Контейнер ЦНИИСа, показанный иа рис. 24, б, имеет вме-
стимость 2,2 м:‘; массу брутто 3 т. Этот контейнер предиазиачеи
для перевозки цемента, гипса и других сыпучих материалов;
он может быть применен в качестве временного склада. Сварной
корпус установлен на опорное кольцо. В верхней части корпуса
имеется загрузочный люк, а в нижней части — фланец и выходной
44
патрубок. Аэрация материала внутри контейнера осуществляется
с помощью аэрационной камеры, закрепленной на фланце. Воздух
в камеру подается через патрубок от компрессора. Полученная
в результате аэрации смесь материала с воздухом вытекает через
выходной патрубок и рукав-материалопровод в мерное устрой-
ство, из которого пересыпается в ковш потребителя. Загрузка
контейнера осуществляется через люк пневматическим или грави-
тационным способами.
Контейнеры ПКС-2,85, применяемые для перевозки листового
стекла (рис. 25), имеют жесткий металлический каркас с деревян-
ной обшивкой. Внутри контейнера установлена деревянная опора
с наклонными плоскостями, к которым с двух сторон прикреплено
листовое стекло. Две боковые наклонные стенки в иижней части
шарнирно соединены с полом, а в верхней части скреплены с кры-
шей контейнера с помощью замков. На стенках имеются по две
продольные прижимные доски с винтами. Эти Доски прижимают
стопу стекла к опоре. Пол контейнера покрыт резиной, а прижим-
ные доски — войлоком. Боковые стенки снабжены металличе-
скими полосами с серьгами. В контейнер укладывают 470 м2
листового стекла толщиной 2 мм или 345 м2 стекла толщиной 3 мм.
Максимальные размеры стекла 1300X1700 мм.
Стеклопосуду упаковывают в коробки нли ящики, которые
формируют в пакеты и помещают в контейнеры. Применяют также
упаковку в термоусадочную пленку предварительно сформирован-
ных пакетов на поддоне или без него. Помещенные в лленку па-
кеты нагревают до температуры 80 ... 100 °C; пленка дает усадку
и плотно обжимает пакеты.
Правила эксплуатации поддонов и контейнеров. С 1980 г. действует «Поло-
жение о порядке обращения многооборотных средств пакетирования в народном
хозяйстве», которое является обязательным для всех предприятий и организа-
ций. В случае просрочки возврата средств пакетирования грузополучатель,
не являющийся их владельцем, уплачивает грузоотправителю штраф в следу-
ющих размерах от оптовой цены: при нарушении сроков до 10 дней— 100%;
Рнс. 25. Контейнер для перевозки листового стекла
45
от 11 до 20 дней —200%; свыше 20 дней получатель уплачивает отправителю
грузов штраф в размере пятикратной оптовой цены средств пакетирования,
а также возмещает стоимость последних по оптовой цене. Предусмотрены также
санкции за утрату и приведение арендуемых средств пакетирования в непригод-
ное для дальнейшего использования состояние.
Вопросы для повторения. 1. Для чего предназначены и как классифици-
руют грузозахватные устройства? 2. Какие типы грузовых крюков применяют в
грузоподъемных машинах и как их выбирают? 3. Что называется стропами и как
их рассчитывают? 4, Назовите условие удержания груза клещевым захватом?
5. Где применяют грузоподъемные электромагниты, каковы их достоинства
и недостатки? 6. Как определяется сила притяжения вакку у мной камеры? 7, По
каким признакам классифицируют грейферы? Каковы основные операции их
работы? 8. Каковы преимущества транспортирования штучных грузов в таре,
на поддонах и контейнерах? 9. Приведите примеры применения поддонов н
контейнеров в промышленности строительных материалов.
ГЛАВА 3. ГИБКИЕ ЭЛЕМЕНТЫ
§ 14. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ
К гибким элементам относятся канаты из стальной
проволоки, раститедыц&С и синт^кческйх. волокон и грузовые
цепи (сварные круглозвениые и пластинчатые). Стальн ые проводо-
чные канаты применяют в к а мест венгру зовы х для подвешивания
поднимаемых грузов в кранах (см. рис. 4) и лифтахДтяговых для
передвижения грузовых тележек (см. рис. 5, б) д^на подвесных
канатных дорога х’^стреловыхдля подвеса стрел (см. рис. 7, а);
. несущих, по которым перемещаются вагонетки подвесных канатных
дорог, а также для изготовления строп. Цепи применяют в ка-
честве грузовых и тяговых. Из круглозвенных цепей изготов-
ляют стропы.
§ 15. СТАЛЬНЫЕ ПРОВОЛОЧНЫЕ КАНАТЫ
Проволочные канаты изготовляют из высокоуглеро-
дистой проволоки, которую получают из заготовки-катанки путем
многократного холодного волочения с промежуточными химиче-
ской и термической обработки. В результате этих процессов про-
волока имеет предел прочности 1400 ... 2400 МПа. На пряде-
вьющих машинах проволоки свивают относительно центральной
проволоки в пряди. Затем на канатовьющих машинах пряди сви-
вают в канат относительно сердечника. Количество и диаметр про-
волок в прядях, а также количество прядей в канате зависят от
конструкции каната. В процессе свивки пряди и канат смазывают
антикоррозионными и антифрикционными смазками. Изготов-
ленные канаты наматывают на барабаны или укладывают в
бухты.
Канат характеризуется диаметром dK и шагом свивки t
(см. рис. 29).
46
д)
Рис. 26. Канаты:
а — одинарной свивки с точечным касанием проволок; б, в — двойной свивки с линей-
ным касанием проволок соответственно типа ЛК-0 н ЛК-Р; г — двойной свивки с ли-
нейным касанием проволок типа ЛК-3 с металлическим сердечником; д — типа ПК;
е — односторонней свивки; ж — крестовой свивки
По назначению канаты разделяют на грузовые (Г) и грузолюд-
ские (ГЛ) (кйиатиые дороги, лифты, краиы-ш'табеперы, подвес-
ные строительные площадки и др.).
Канаты разделяют по следующим конструктивным признакам.
1. По виду касания проволок в прядях — точечное (ТК),
линейное (ЛК), лииейно-точечиое (ЛТК) и полосовое (ПК). В
канатах с точечным касанием проволоки в прядях перекрещиваются
(рис. 26, а), так как онн свиваются с различными шагами;
при таком положении проволок происходит их повышенное изна-
шивание и увеличивается жесткость прядей. В канатах с линей-
ным касанием проволоки свиваются в прядях с одним шагом, что
обеспечивает линейное касание между проволоками соседних слоев
и, как следствие этого, — уменьшение изнашивания, повышение
долговечности и гибкости; чтобы обеспечить линейное касание,
для пряди подбирают проволоки разного диаметра по слоям и
внутри слоя и свивают прядь за одну технологическую операцию
(рис. 26, б, в, е). Канаты с полосовым касанием получают путем
силового обжатия каната При его изготовлении, при этом круглые
проволоки приобретают фасонное сечение; полосовое касание по-
вышает долговечность канатов (рис. 26, д).
2. По поперечному сечению каната — круглые и плоские.
Круглые канаты могут быть выполнены спиральными открытыми
и закрытыми; закрытые канаты свивают многослойными нз круг-
лых и фасонных проволок X- и Z-образиых; наружная поверхность
закрытых канатов гладкая, что уменьшает давление на одну про-
волоку и соответственно их изнашивание.
47
3, По количеству свивок — одинарной свивки (канат пред-
ставляет собой одну прядь, рис. 26, а), двойной свивки (проволоки
свиваются в пряди, затем пряди свиваются в канат, рис. 26, б—<?).
4. По поперечному сечению прядей в канате — круглые
(рис. 26, б—д), трехгранные, овальные, плоские.
5. По виду свивки — нераскручивающиеся (Н) и раскручи-
вающиеся обыкновенной свивки (Р). Нераскручивающиеся канаты
получают из прядей, которые перед свивкой предварительно
деформируют для получения формы в виде спирали, соответству-
ющей форме пряди после свивания в канат. В этих канатах сняты
внутренние напряжения, поэтому пряди не раскручиваются при
отсутствии перевязки; канаты обладают повышенной износостой-
костью.
6. По степени крутимости — крутящиеся и малокрутящиеся
(МК); малокрутящиеся изготовляют многопрядными и многослой-
ными с разным направлением свивки отдельных слоев прядей.
7. По направлению свивки проволок в прядях, а прядей
в канат — односторонней (О), крестовой и комбинированной (К)
свивки. Одностороннюю свивку имеют канаты (рис. 26, е), у
которых направление свивки проволок верхнего слоя в прядях
и прядей в канате одинаково; эти канаты имеют хорошую гиб-
кость и большое сопротивление истиранию; существенный не-
достаток — раскручиваются под нагрузкой. Канаты крестовой
свивкн (рис. 26, ж) получают, когда направление свивки про-
волок прядей не совпадает с направлением свивки прядей в ка-
нат; проволоки прядей на наружной поверхности каната располо-
жены параллельно его оси; канаты имеют повышенную жесткость.
8. По направлению свивкн прядей в канат — правой
(рис. 26, е, ж) и левой (Л).
9. По виду проволок в наружном слое навивки прядей; ка-
наты с проволокой одинакового диаметра [в обозначение каната
вводится буква О, например, ЛК-0 (рис. 26, б)] и различных диа-
метров [в обозначение канате вводится буква Р, например, ЛК-Р
(рис. 26, в)], с проволоками заполнения, которые создают опору
для проволок наружного слоя [в обозначение каната вводится
буква 3, например, ЛК-3 (рис. 26, г)).
10. По виду покрытия поверхности проволок: из светлой про-
волоки (без покрытия), с оцинкованным покрытием для агрессив-
ных условий работы средних (С), жестких (Ж) и особо жестких
(ОЖ); с покрытием полимерными материалами (капрои, полиэти-
лен н др.).
11. По материалу сердечника—из органических волокон
(о. с) (рис. 26, б, в, д), искусственных материалов (и. с), сплош-
ной металлический (м. с), металлический из проволоки (м. с. м)
(рис. 26, г). Канаты с металлическими сердечниками применяют
при многослойной навивке на барабанах и высокой температуре
окружающей среды.
Механические свойства канатов характеризуются:
48
Таблица 5. Характеристика стальных проволочных канатов двойной
свивки типа ЛК-Р конструкции 6X19(14-6+6/6) 1 о. с. (ГОСТ 2688—80)
Диаметр каната dK, мм Расчетная площадь сечении всех про- волок, мм1 Масса 1000 м каната со смазочным материалом, кг Маркировочная группа, МПА
1568 1764 I960
Разрывное усилие канат Н. не менее а в целом.
11 47.19 461,6 62 850 68 800 75 150
12 53,87 527 71 750 78 550 85 750
13 62 596,6 81 250 89 000 97 000
14 74,4 728 98 950 108 000 118 000
15 86,28 844 114 500 125 500 137 000
16,5 104,61 1025 139 000 152 000 166 000
18 124,73 1220 160 000 181 500 198 000
19,5 143,61 1405 191 000 209 000 228 000
21 167,03 1635 222 000 243 500 265 500
22,5 188,78 1850 251 000 275 000 303 500
24 251,49 2110 287 000 314 000 343 000
25,5 244 2390 324 500 355 500 388 500
маркировочной группой, численно соответствующей среднему
временному сопротивлению разрыву всех проволок каната
(МПа); установлено 10 маркировочных групп от 1470 до 2554 МПа;
суммарным разрывным усилием всех проволок каната, Н;
разрывным усилием каната в целом, Н,
Характеристики проволочных канатов приведены в стан-
дартах (табл, 5),
Каждый барабан или бухта для каната должна иметь сертифи-
кат, в котором указаны: наименование или товарный знак завода-
изготовителя, диаметр каната, назначение, вид покрытия про-
волоки, направление, способ и вид свивки, длина каната, масса
брутто, условное обозначение, маркировочная группа, суммарное
разрывное усилие всех проволок в канате, разрывное усилие
каната в целом, номер стандарта или ТУ,
В механизмах подъема мостовых и козловых кранов рекомен-
дуются канаты с линейным касанием проволок в прядях, кресто-
вой нли односторонней свивки, нераскручивающиеся:
1) канат двойной свивки типа ЛК-РО конструкции 6 X 36 (1 4-
+ 7 + 7/7 -Н 14) Ч- 1 о, с, (ГОСТ 7668—80) — в механизмах
подъема всех кранов при однослойной навивке каната на барабан,
за исключением кранов, работающих с расплавленным и раска-
ленным металлом и жидким шлаком;
2) канат двойной свивки типа ЛК-Р конструкции 6 X 19 (1 4-
4- 6 + 6/6) 4- 1 о. с. (ГОСТ 2688—80) — в механизмах подъема
всех кранов при однослойной навивке каната на барабан, за
исключением кранов, работающих с расплавленным и раскален-
ным металлом и жидким шлаком (рис, 26, в, табл, 5);
3) канат двойной свивки типа ЛК-РО конструкции 6 X 36 (1 4-
4 7 + 7/7) + 7 х 7 (14-6) (ГОСТ 7669—80) с металлическим
49
Таблица 6. Наименьшие допускаемые значения коэффициента
запаса прочности стальных канатов [л]
Канаты Привод Группа режима работы ы
Грузовые и стреловые Ручной 1М 4,0
Машинный IM, 2М, ЗМ 5,0
а 4М 5,5
5М, 6М 6,0
Грузовые для подъема и транспортиро- вания расплавленного металла, жидкого шлака, ядовитых и взрывчатых веществ » Любая 6,0
Стреловые для подъема и опускания • стрелы в диапазоне нерабочих вылетов Грейферные: 3,5
для грейферов с раздельным двухдви- гательным приводом (полагая^ что вес грейфера с материалом равномерно рас- пределен на все канаты) 6,0
для других грейферов £ 5,0
Тяговые канаты, применяемые на кра- нах » 4,0
Канаты, используемые при монтаже кра- нов » 4,0
Канаты' лебедок, предназначенных для подъема людей Любой » 9,0
сердечником — в механизмах подъема при многослойной навивке
на барабан и кранах, работающих с расплавленным и раскален-
ным металлом и жидким шлаком (рис, 26, г),
В грузоподъемных машинах рекомендуется применять прово-
локу марок В и 1 с временным сопротивлением разрыву от 1764
до 1960 МПа, канаты диаметром от 11 до 26 мм,
Применение канатов типа ТК в качестве грузовых нежела-
тельно, так как их срок службы в 1,5 ... 2 раза меньше, чем ка-
натов типа ЛК-
Выбор и расчет канатов. При проектировании крановых ме-
ханизмов канаты выбирают по стандарту по расчетному разрыв-
ному усилию (Н) каната в целом
Sp = Sm„[n)<S„, (20)
где Sniax — максимальное натяжение каната, Н; [п] — минимальный допускае-
мый коэффициент запаса прочности согласно Правилам по кранам (табл. 6);
SK—разрывное усилие каната в целом по стандарту, Н (см. табл. 5).
Перед установкой на край канат должен быть проверен по
фактическому коэффициенту запаса прочности
Л = SK/Smax [^1* (21)
Если в сертификате указано суммарное разрывное усилие
всех проволок, то разрывное усилие каната в целом Зк определяют
50
1 \
\ умножением указанного суммарного разрывного усилия на коэф-
фициент 0,83 или соответствующий коэффициент, указанный
I в стандарте на канат.
Повышенные коэффициенты запаса прочности канатов объяс-
няются тем, что при эксплуатации исключена возможность визу-
ального контроля за обрывом внутренних проволок, а также
имеются труднодоступные места для оперативного контроля
। обрыва наружных проволок. Эти факторы создают предпосылки
'для внезапного обрыва каната при подъеме груза массой, пре-
вышающей номинальную грузоподъемность.
Пример. Выбор стального каната. Необходимое разрывное усилие каната
[см. формулу (20)]
5Р = 3П!ЭХ [п] = 12 390-5,5 = 68 150 Н,
где Smax = 12 390 Н — максимальное натяжение каната, (см. с. 62); [п ] =
= 5,5—минимальный коэффициент запаса прочности при группе режима ме-
ханизма 4М (см. табл. 6).
По ГОСТ 2688—80 (см. табл. 5) принят канат dK = 11 мм, ств -- 1764 МПа,
SK = 68800 Н. Фактический коэффициент запаса прочности каната п =
= *SK/SmaJe = 68 800/12 390 = 5,55 > [л ] = 5,5.
§ 16. КАНАТЫ из ОРГАНИЧЕСКИХ
и СИНТЕТИЧЕСКИХ МАТЕРИАЛОВ
Эти канаты применяют в качестве строп для обвязкн
грузов, масса которых ие превышает 1 т. Канаты свивают из
органических волокон — пеньковых (ГОСТ 483—75), сизаль-
ских (ГОСТ 1088—71), искусственных волокон — капроновых
(ГОСТ 10293—77). Канаты обладают сравнительно малой проч-
ностью. Срок службы их ограничен вследствие повреждений воло-
кон. Канат изготовляют из трех или четырех прядей эллиптиче-
ского сечения, причем пряди свиты из отдельных волокон (ка-
болок). Имеется две разновидности канатов из органических
волокон: бельные, которые наиболее прочные, но подвержены
разрушающему действию влаги (их применяют в сухих помеще-
ниях), и смольные, пропитанные смолой. Канаты выбирают по
разрывному усилию 1см. формулу (20)1 или проверяют на проч-
ность [см. формулу (21) 1, при этом коэффициент запаса прочности
должен быть не менее 8.
§ 17. ГРУЗОВЫЕ ЦЕПИ
Круглозвеиные сварные цепи. Они могут быть при-
менены в качестве подъемных на барабанах и талях, а также
в качестве тяговых при ручном приводе механизмов и для строп.
Цепи изготовлены из сварных овальных звеньев (рис. 27, а),
выполненных из стали круглого сечеиия Ст2 и СтЗ. Основными
размерами цепи являются шаг t и диаметр (калибр) d прутка стали.
В грузоподъемных машинах применяют короткозвенные цепи
51
Рис. 27, Цели:
а — сварная круглозвенная: б — пластинчатая
(ГОСТ 2319 81), шаг которых t 2,8d. Имеются две разно-
видности круглозвенных цепей: калиброванные, для которых
допускается отклонение шага до 2,5 %; они работают в зацепле-
нии со звездочками и цепными колесами (см. § 19) при скоростях
до 0,5 м/с; некалиброваиные с увеличенным отклонением шага
до 3,5 %, которые могут работать на гладких барабанах (см. § 21)
со скоростью до 1,5 м/с; некалиброваиные цепи могут быть при-
менены для строп.
Цепи выбирают по разрывному усилию 1см. формулу (20)1
или проверяют фактический коэффициент запаса прочности по
формуле (21). Коэффициент запаса прочности для грузовых цепей:
при ручном приводе \п I 3; при машинном приводе 1л I 6
для некалиброванных цепей, используемых на гладком барабане,
и lnl^8 для калиброванных цепей. Концы цепи соединяют
с помощью соединительных звеньев. К элементам крана конец
цепи присоединяют посредством концевых звеньев, а к цепному
барабану — с помощью крючков.
Пластинчатые цепи. Этн цепи применяют в качестве грузовых
и тяговых совместно со звездочками. Пластинчатые цепи
(ГОСТ 191—75) состоят из пластин с отверстиями,'соединенных
между собой валиками (рис. 27,6). Детали цепи изготовляют
из стали 40 илн 45. Основной эксплуатационный недостаток этих
цепей — гибкость только в плоскости, перпендикулярной к осям
шарниров. Цепи выбирают по разрывному усилию 1см. формулу
(20)1 или проверяют фактический коэффициент запаса прочности
по формуле (21). Коэффициент запаса прочности In I 3 при руч-
ном приводе и In I 5 при машинном приводе. Для правильной
работы цепи число зубьев звездочки должно быть восемь и более
(см. § 19).
Сравнительный анализ канатов и цепей. Рассмотренные гиб-
кие органы существенно различаются между собой механическими
и эксплуатационными свойствами — гибкостью, относительной
прочностью, надежностью, характером износа, размерами сеченнй,
Г массой, приходящейся на 1 м длины. Сравнение показывает, что
С стальные канаты имеют^наименыпую массу на 1 м длины,э^бла-
дают достаточной гибкостью во всех направлениях, " бесшумно
52
работают при любых скоростях/рбладают достаточной долговеч-
ностью,5йе обрываются внезапно, так как обрыв отдельных про-
волок является предупреждением о начинающемся усталостном
разрушении. Недостатком проволочных канатов является необ-
ходимость’применения барабанов большого диаметра, что увели-
чивает грузовой момент и нагруженность элементов кинематиче-
ской цепи механизма.
Сварные цепи обладают значительной массой по сравнению со
стальными канатами. Однако они менее надежны в работе, так как
может возникнуть их внезапный обрыв, если своевременно не
обнаружены дефекты сварки звеньев. Сварные цепи имеют наи-
большую гибкость во всех направлениях. В этих цепях звенья
соприкасаются по наибольшей площадке, что способствует их
интенсивному изнашиванию. Бесшумная работа цепей обеспечи-
вается при скоростях до 0,1 м/с. Главное достоинство цепей —
возможность работы со звездочками с малым числом зубьев, что
позволяет создавать компактные подъемные механизмы.
Масса пластинчатой цепи близка массе сварной цепи. Гиб-
кость пластинчатой цепи обеспечена только в одной плоскости,
перпендикулярной осям шарниров. Даже небольшое искривление
цепи в этой плоскости приводит к одностороннему нагружению
ее н перенапряжению пластин. Надежность пластинчатых цепей
по сравнению со сварными выше, так как они изготовлены из
более качественной стали. Пластинчатые цепи работают со звездоч-
ками, имеющими малое число зубьев, что позволяет применять их
в цепных талях н механизмах, к которым предъявляются'требова-
ния компактности и малой массы. Пластинчатые цепи используют
иа кранах для подвеса нагретых грузов.
Таким образом, по эксплуатационным свойствам канаты имеют
существенное преимущество по сравнению с цепями, поэтому
они находят широкое применение на грузоподъемных машинах.
Основные правила эксплуатации и безопасной работы со стальными канатами.
Приемка. При приемке проверяется наличие сертификата или акта об испы-
таниях и проводится внешний осмотр барабана с канатом или бухты.
Испытание каната. Испытания каната в целом на разрыв с определением
разрывного усилия проводят при отсутствии сертификата. Результаты испытаний
оформляют актом, в котором указывают данные о прочности каната.
Разматывание. Канат следует разматывать с бухты на специальной пло-
щадке во избежание попадания грязи и песка. Канат следует сматывать с ниж-
ней стороны катушки и одновременно ее притормаживать (рис, 28). Можно раз-
матывать канат перекатыванием бухты вручную. Для предотвращения возник-
новения заломов или «жучков» случайно образовавшиеся петли должны быть вы-
прямлены постепенным раскручиванием свободного конца каната. В процессе
размотки проводится внешний осмотр каната: обращается внимание на наличие
выступающих из каната проволок или прядей, заломов, чрезмерный зазор между
прядями и др.
Резание канатов. Перед резанием по обеим сторонам предполагаемого места
разреза канат должен быть обвязан мягкой проволокой, чтобы не распускались
пряди. Канаты можно резать с помощью аппаратов газового нли электрического
резания металлов. Нельзя резать (рубить) канаты диаметром более 16 мм зубилом,
так как нарушается правильное расположение прядей и отдельных проволок.
53
Правильно
Рис. 28. Схема перематывания каната (вверху — правильно, вни*
зу — неправильно)
Запасовка каната. Перед навешиванием на кран для уменьшения внутрен-
них напряжений желательно канат размотать с бухты и разложить прямолинейно,
оберегая от загрязнения. Новый канат можно протягивать через блоки вручную.
Более удобно предварительно срастить навешиваемый канат со вспомогательным
легким канатом, например, пеньковым. Затем конец этого каната при оди-
нарном полиспасте пропускают через блоки подвески и верхней обоймы полиспаста
и закрепляют на барабане. Механизм включают на подъем, и вспомогательный
канат наматывается на барабан, причем навешиваемый канат при этом посте-
пенно проходит через все блоки. Когда конец нового каната дойдет до барабана,
его временно закрепляют; вспомогательный канат отсоединяют от нового ка-
ната и сматывают с барабана. Конец нового каната закрепляют окончательно
на барабане н наматывают при включении механизма на подъем.
Пуск в эксплуатацию. Вновь установленный канат необходимо подвергнуть
вытяжке, при которой происходит перераспределение натяжений в проволоках
каната. Вытяжка должна выполняться с постепенным увеличением нагрузки на
грузозахватном устройстве до номинальной. Первоначальная нагрузка не должна
превышать 50 % номинальной. Должно быть проведено не менее 20 ... 30
нагружений. Только после вытяжки каната производят статические и дина-
мические испытания кранов (см. $ 64).
Основные требования к эксплуатации канатов. 1. Необходимо следить за
тем, чтобы витки каната правильно укладывались (без перекосов) на барабан
и блоки. 2. Не допускается работа механизма в случае схода каната с блока
или с барабана (при этом может произойти перерезание канатом оси и повреж-
дение каната). 3. Необходимо один раз в 10 суток смазывать канат смазкой Тор-
сиол-55 (ГОСТ 20458—75), канатной мазью 39 У и др. Перед нанесением смазки
следует удалить оставшийся старый смазочный материал и грязь с поверхности
каната. Промывка керосином запрещена. Канатные смазки — тугоплавкие,
поэтому их наносят на канат в расплавленном виде при температуре 85 ... 100 °C.
4. При проведении профилактического ремонта с остановкой крана грузовые
и стреловые канаты желательно снять с крана, очистить от грязн и пропитать
горячей смазкой. В это же время шаблоном проверяют геометрию желоба блока,
5. Ежемесячно измеряют диаметр каната через 10—12 м, проверяют наличие об-
рывов проволок и их расположение на участках каната, определяют степень
поверхностного износа каната. Проволоки, вышедшие из прядей в результате
обрыва, можно откусывать кусачками на расстоянии 10 мм от каната, а остав-
шиеся концы заправлять внутрь прядей.
Контроль состояния и браковка канатов. Даже при соблюдении всех правил
эксплуатации проволоки в канате все-таки изнашиваются в наружных и вну-
54
Рис. 29^ Схема для определения шага свивки и диаметра каната:
1— 6 — номера прядей
тренних слоях каната, обрываются в результате нагрузки и многочисленных
повторных перегибок на блоках н барабане. Для обеспечения безаварийной
работы канаты должны ежедневно осматриваться крановщиком, особое внима-
ние при этом обращается на места крепления концов каната.
Основными признаками, по которым определяют необходимость замены
канатов, являются обрывы проволок в наружных слоях прядей, поверхностное
изнашивание и коррозия проволок. Нормы браковки канатов (табл. 7) уста-
новлены Правилами по кранам [22 ]. Если отсутствует поверхностное изнашива-
.ние проволок, то браковка каната производится по числу обрывов проволок на-
ружного слоя на длине одного шага свивки (рис. 29). Для определения шага
свивки на поверхности какой-либо пряди наносят метку J, от которой отсчиты-
вают вдоль центральной оси каната столько прядей, сколько их имеется в на-
ружном слое каната (например, шесть в шестипрядном канате), и на следу-
ющей после отсчета пряди наносят метку /; расстояние между этими метками
принимают за шаг свивки. Число обрывов проволок не следует смешивать с чис-
лом концов оборванных проволок, которых в 2 раза больше. Если в наружном
слое пряди расположены проволоки различных диаметров (канат типа ЛК-Р),
то их браковку производят по данным табл. 7, но при условном числе обры-
вов проволок: обрыв тонкой проволоки принимается за 1, а обрыв толстой про-
волоки — за 1,7. Канаты грузоподъемных машин, предназначенных для подъ-
ема людей, а также транспортирующих расплавленный или раскаленный металл,
взрывчатые, огнеопасные и ядовитые вещества, бракуют, если число обрывов
проволок на одном шаге свивки будет в 2 раза меньше по сравнению с числом
обрывов проволок в табл. 7. В случае подвеса груза на двух и более фанатах
(например, грейферы, сдвоенный полиспаст с коромыслом) каждый канат бра-
куется отдельно и допускается замена одного каната. Канат с одной оборван-
ной прядью бракуется.
Основные правила эксплуатации и безопасной работы цепей. При отсут-
ствии свидетельства завода-изготовителя цепи должны, подвергаться испытанию
Таблица 7. Число обрывов проволок на длине одного шага свивки
каната, при котором канат должен быть забракован
Первоначальный коэф- фициент запаса прочности при установленных Правилами по кранам соотношениях D6/dH > (е - 1) Канат
6x19=514 и I о. с. 6X37=222 и 1 О. С. 6X61=366 н 1 о. с. 18x19 = 342 И I О. с.
До 6 Св. 6 до 7 » 7 Примечания: 1 сто вой, а в знаменателе — — диаметр каната. 12/6 14/7 16/8 В числитед односторон н 22/11 26/13 30/15 е приведены ей свивки. 2 36/18 38/19 40/20 данные для — дийме 36/18 38/19 40/20 канатов кре- тр барабана;
55
для определения разрушающей нагрузки и соответствия стандарту. Допускается
сращивание звеньев цепи сваркой или специальными соединительными звеньями.
Если износ звеньев цепи составит более 10% первоначального диаметра (ка-
либра) и будут наблюдаться трещины, то цепь заменяют. В пластинчатых цепях
контролируют увеличение шага, который не должен превышать установленной
нормы. При износе пластин, пальцев, наличии трещин звенья цепи подлежат
замене.
Вопросы для повторения. 1. По каким конструктивным признакам раз-
личают стальные проволочные канаты? 2. Какие типы стальных канатов приме-
няют для кранов общего назначения? 3. Как выбирают стальные канаты? 4. Ка-
кие признаки характеризуют износ стального каната?. Что является основанием
для браковки каната и каковы нормы браковки?
ГЛАВА 4. ЭЛЕМЕНТЫ, С КОТОРЫМИ
ВЗАИМОДЕЙСТВУЮТ КАНАТЫ И ЦЕПИ
§ 18. БЛОКИ
Блоки (рис. 30) служат для изменения направления
канатов и круглозвенных цепей (отклоняющие блоки). Кроме того,
они также являются элементами полиспастов. Блок имеет обод
с желобом. Профиль желоба (рис. 31) должен быть таким, чтобы
^обеспечивалось плавное набегание и сход каната с блока под
допускаемым углом^охраненце положения каната в желобе при
ослаблении его натяжения г$а также не допускалось расплющи-
вания или заклинивания кайата. Ступицы блоков устанавливают
на подшипниках скольжения илн качения. Блоки выполняют
литыми из чугуна СЧ 15 н СЧ 18 (ГОСТ 1412—85) для групп режи-
ма работы механизмов 1М ... 4М или стали 25Л1 (ГОСТ 977—75)
для групп режимов работы механизмов 5М и 6М.
Рис. 30. Канатный блок
56
Таблица 8. Наименьшие значения коэффициента е
Грузоподъемная машина и механизм Привод механизмов Группа режима работы е
Механизм подъема кранов всех ти- Ручной 1М 18
пов, за исключением стреловых Машинный . IM, 2М, ЗМ 20
4М 25
5М 30
6М 35
Стреловой кран:
механизм подъема груза и стрелы Ручной 1М 16
Машинный IM. 2М, ЗМ 16
4М 20
5М 20
6М 25
механизм для монтажа крана Машинный — 16
Электрические тали Грейферные лебедки: Машинный Машинный — 22
для кранов всех типов, за исклю- — 30
чением стреловых для стреловых кранов Машинный — 20
Блоки грейферов Лебедки Для подъема: — 18
груза Ручной — 12
Машинный — 20
людей Ручной 16
Машинный — 25
Для уменьшения перегиба каната и увеличения его долговеч-
ности Правилами по кранам 122] установлены минимальные
допускаемые отношения диаметра блока к диаметру каната,
поэтому диаметр блока по дну желоба (м) у
D6a^d„(e- 1), = ! ^‘^(22)
где dH—диаметр каната, м; е — коэффициент, принимаемый.в зависимости
от типа грузоподъемной машины, вида привода и группы режима работы ме-
ханизма (табл. 8).
Диаметр уравнительного блока полиспаста и отклоняющего
блока допускается принимать на 20 % меньше, чем диаметр
блока по формуле (22), а диаметр тех же блоков электроталей
и стреловых кранов — на 40 %.
Диаметры блоков выбирают из ряда предпочтительных чисел;
160, 200, 250, 320, 400, 500, 630, 710, 800 мм. Размеры стандартных
блоков приведены в табл. 9. В расчетах используют диаметр блока
по центру оси каната Dl/rf '
~ ^бл I- - />'•
Частота вращения блока, ось которого закреплена на элементе
конструкции крана (об/мин) < - ; • - ""
Лол (24)
где ик — скорость канала, м/мин.
57
Таблица 9. Основные характеристики блоков (рис. 31)
(ОСТ 24.191.05 -82)
Вбл "и D в В, в2 в. Г Г1 Масса, кг
250 290 J90 10 45 ‘ 28 40 14 2 9; 10 8
336 380 250 10 53 32 45 16 2 11; 14 13
406 460 360 12 58 36 53 16 2 11; 14; 16,5 20
500 560 460 14 65 40 58 16 3 И; 14; 16,5 30
630 690 580 18 75 42 75 20 4 14; 18 56
710 800 650 20 100 56 85 25 5 18; 23 98
Для прохождения каната по блоку необходимо преодолеть
сопротивления трения в подшипниках ступицы и жесткость каната
при его изгибе. Эти сопротивления оцениваются общим КПД
блока (рис. 32):
Дбл = *5Нб/5Сб, (25)
где 5Нб и 5сб — натяжения ветвей каната, набегающих и сбегающих с блока
(5Нб<5Сб). Принимают Цбл = 0,98 при подшипниках качения; Лбл — 0,96
при подшипниках скольжения.
Блоки для некалиброванных цепей выполняют с соответству-
ющим профилем желоба, причем их диаметр должен быть в 20 раз
больше диаметра звена цепи при ручном приводе и в 30 раз диа-
метра звена цепи при машинном приводе.
Правила эксплуатации и безопасной работы. Блоки периодически осматри-
вают и проверяют в работе. Блок должен свободно проворачиваться на оси.
Если обнаружены трещины, отколотая часть стенки желоба, износ желоба на
величину более 25 % диаметра каната или износ стенки желоба до 20 % перво-
начальной толщины, то блок подлежит замене.
Пример. Определение размеров блока (см. рис. 31). Диаметр блока крюковой
подвески по дну желоба по формуле (22)
Рбл >dK (е - - 1) = 11 (25 — 1) - 264 мм
[здесь е = 25 — коэффициент при группе режима работы механизма 4М (табл. 8)
для мостовых кранов]. По табл. 9 принят £>бл — 336 мм. Диаметр блока по
центру оси каната согласно формуле (23):
Рис. 32. Схема к опреде-
лению КПД блока
Oft — £?бл + dx — 336 + 11 — 347 мм.
Используя формулу (32), определяем частоту
вращения блока
пал = у (in — 1)/(лБ>0) “ 0,2-60 (2 —
— 1)/(л-0,347) => 11 об/мин.
Диаметр уравнительного блока полиспаста
£>бл. уР + 0,8Обл = 0,8-264 = 211 мм. По
табл. 9 принят £>бл. ур = 250 мм.
58
§ 19. ЗВЕЗДОЧКИ И ТЯГОВЫЕ КОЛЕСА
Звездочки применяют в качестве грузовых (аиало-
гичио барабанам) в цепных талях, для отклонения цепей и в цеп-
ных полиспастах. Для грузовых сварных калиброванных
цепей (ГОСТ 2319—81) звездочка имеет пять и более гнезд
(рис. 33, а). Угол обхвата этой звездочки цепью должен быть не
менее 180°. Достоинство звездочек для круглозвенных цепей —
малый диаметр, а, следовательно, крутящий момент, передава-
емый на механизм.
^Тяговые колеса, применяемые для калиброванных тяговых
цепей, пр конструктивному исполнению аналогичны звездочкам.
Различаются они между собой только тем, что тяговое колесо
имеет 12 гнезд и более. Диаметр колеса составляет до 700 мм,
благодаря чему возможно получить больший крутящий момент
при заданном рабочем усилии цепи (см. §25). Диаметр (м) началь-
ной окружности звездочки и тягового колеса
D«- о ]г \ sin 90°/z ) cos 90°/2 / ’
где t~ шаг цепи, м; г — число гнезд; d — калибр цепи, м.
Материал звездочек и тяговых колес для круглозвенных це-
пей — сталь 25Л1 или чугун СЧ 15 и СЧ 18.
Звездочки для пластинчатых цепей (рис. 33, б) представляют
собой зубчатые колеса, зубья которых входят между пластинами
цепи, а пальцы цепи — во впаднны между зубьями. Минимальное
число зубьев принимают в зависимости от натяжения цепи SH!;1X
(кН):
Smax 30 30—200 Св. 200
Z.............8 9 10
Рис. 33. Звездочки для цепей:
а — сварной круглозвенной; б — пластинчатой
59
Диаметр (м) начальной окружности звездочки для пластинча*
той цепи
£>н.о = //(sin 180».
Материал звездочек для пластинчатых цепей — сталь Ст4,
Ст5, 20 и 25Л1. КПД звездочек н тяговых колес т|зв = 0,94 ...
0,96.
Правила эксплуатации и безопасной работы. Тяговые колеса должны иметь
предохранительную скобу, исключающую возможность выскакивания цепи.
Износ гнезд для цепи не должен превышать 10 % первоначальных размеров.
§ 20. ПОЛИСПАСТЫ
Полиспастом называют механизм, состоящий нз двух
обоим с блоками, которые охватываются канатом или цепью.
Одна обойма закреплена неподвижно иа какой-либо конструкции,
а вторая — подвижная и снабжена крюком или петлей. Один конец
каната закреплен на обойме, а свободный соединен с приводом.
Полиспасты могут быть использованы как самостоятельный меха-
низм (см. § 41) или рии являются элементом механизма подъема
груза илн стрелы. В механизмах подъема неподвижную обойму
закрепляют на раме крановой тележки или головке стрелы, а по-
движную обойму снабжают крюком (крюковая подвеска)
(см. § 23).
Полиспасты предназначены для получения выигрыша в силе,
уменьшения крутящего момента на барабане и передаточного
числа передаточного механизма, что позволяет получить механизм
подъема груза или стрелы меньших размеров, массы и стоимости.
Различают полиспасты одинарные (рис. 34, а) и сдвоенные
(рис. 34, б), в последних совместно работают два одинарных
полиспаста, в которых, как правило, запасоваи один отрезок
каната. У сдвоеииых полиспастов в месте перехода каната с одного
одинарного полиспаста на другой установлен уравнительный блок,
который служит для выравнивания иатяжеиий и длнны канатов.
При работе уравнительный блок не вращается, поэтому, как уже
отмечалось, допускается уменьшать его диаметр.
Основным параметром полиспаста является кратность
»п = 2K/Z6)
где — число канатов, на которых подвешен груз; — число канатов, набе-
гающих на барабан.
Для одинарного полиспаста tn = zK.
Потери при работе полиспаста от сопротивлений на блоках
оценивают КПД, который определяется отношением (см.
рнс. 34, а)
'Пп = (26)*
где St(IH, Sj - натяжения свободной ветви каната, сбегающей с блока поли-
спаста, в идеальных условиях без потерь и фактическое в реальных условиях
работы.
«0
7
Рис. 34. Схемы полиспастов:
а >— одинарных кратностью in = 2, 3 и 4; б — сдвоенных кратностью i’n = 2 н 3;
1 — барабан; 2 — отклоняющий блок; 3 — крюковая подвеска; 4 — блоки неподвижной
обоймы полиспаста; 5 — уравнительный блок
Рассмотрим определение КПД одинарного полиспаста с ia =
— 4 (см. рис. 34, а). Исходным для решения этой задачи является
уравнение
Sj + S2 4- S, 4- S4 = G, (27)
где Sf, S3 и S4— натяжения ветвей каната полиспаста.
В идеальных условиях натяжения ветвей каната равны между
собой
ид — Ха нд — Х3 ид = Х4 ид ~ G//a ~ G/4. (28)
Фактические натяжения ветвей каната различаются между
собой Хг > S3 > Х3 > S4.
Зависимость между натяжениями ... Х4 определяется со-
отношением между натяжениями набегающей и сбегающей ветвей
61
у блоков полиспаста 1см. формулу (25)], поэтому при одинаковых
КПД блоков иатяжеиия ветвей каната S2 » S3 — =
= 5р]бЛ, S4 = *$;{Т|[)Л — 5гТ|бл.
Подставив значения натяжений S2, S3 и S4 в формулу (27),
получим
Si 4- *$1Т]бл 4- 5|Т]бл = Sj (1 4* Лбл 4~ “Лбл 4- "Пбл) = G,
откуда
S, = G/(1 4- Лбл 4" “Пбл 4~ Лбл)- (29)
Согласно определению КПД полиспаста по формуле (26)
с учетом выражений (28) и (29) имеем
т]п = S] ид/Si = (1 + Чбл 4* Ябл 4- Лбл)/4.
В общем виде КПД полиспаста
Лп — (1 4“ Лбл 4~ "Пбл 4- • • 4- 11бл ) / in ==
= (1 — Пбл)‘п/»и(1 — *1бл)- (30)
Различное натяжение ветвей каната предопределяет смещение
равнодействующей относительно оси подвески. Так как крюк
с грузом располагается по оси подвески, возникает момент,
который вызывает перекос подвески. Этот перекос будет тем зна-
чительнее, чем больше кратность полиспаста и ниже КПД его
блоков. Для устранения этого перекоса применяют сдвоеииые
полиспасты.
В расчетах гибких органов на прочность [см. формулы (20)—
(21)1, при определении крутящего момента на барабане [см. вы-
ражение (43)1 и других показателей используют наибольшее
натяжение ветви каната, набегающей на барабан (см. рис. 4)
при подъеме груза:
Smax = (G 4- 0Гу)/(щп1ЪПбл)( (31)
где G — вес груза, Н; Gry — вес грузозахватного устройства; а — число оди-
нарных полиспастов; г — число отклоняющих блоков между полиспастом и
барабаном.
Наибольшую частоту вращения имеет блок нижней обоймы
полиспаста, с которого направляется на барабан канат {об/мин):
= v (ia — l)/(nD0). (32)
Пример. Определение максимального натяжения ветви каната, набегающей
на барабан (см. рис. 4,6) при подъеме груза.
Максимальное натяжение по формуле (31) без учета веса крюковой подвески
Sinax — G/(ainT]n) = 49050/(2 2 0,99) = 12390 Н,
62
где а = 2 — для сдвоенного полиспаста; хп = 2; Чп= О + Лбл)^ = (1+
4- 0,98)/2 = 0,99 - КПД полиспаста [см. формулу (30)] при Нбл = 0,98 на
подшипниках качения.
Правила эксплуатации и безопасной работы. Уравнительный блок и ось его
крепления должны быть в исправном состоянии. Заедание блока приводит к не-
равномерному натяжению ветвей каната и интенсивному изнашиванию каната
на блоке.
§ 21. БАРАБАНЫ
Барабаны предназначены для преобразования вра-
щательного движения привода лебедки в поступательное движение
каната или цепн. Барабан представляет собой полый цилиндр
с двумя стенками и "цапфами, которые установлены на оси или
валу в зависимости от направления передачи крутящего момента.
Барабаны изготовляют литыми из чугуна СЧ 15 и СЧ 18 при
группе режима работы механизмов 1ДО ... 4М или стали Л25 и Л35
или свариыми из листовой стали СтЗ и стальных толстостенных
труб при группе режима работы механизма 5М и 6М.
Поверхность барабана может быть гладкой (рис. 35) или с на-
резанными по винтовой линии канавками. Барабаны с гладкой
поверхностью применяют в лебедках с ручным приводом и при
многослойной навивке каната. При одинарных полиспастах,
барабаи имеет одну нарезку - - левую или правую (рис. 35, а).
Для сдвоенного полиспаста необходимы барабаны с двумя нарез-
ками — левой и правой и гладкой частью между ними
(рис. 36, б). Нарезка улучшает работу каиата иа барабане, так как
канат не расплющивается и укладывается без отклонений в. ка-
навки. Различают нарезки мелкую (рис. 37) с глубиной h 0,3dK
для обычных условий работы при постоянном натяжении каната
и глубокую с глубиной /г « 0,5dK, если возможно регулярное
ослабление натяжения каната, например, при работе с грейфером
(табл. 10).
Канатоемкость барабана должна быть такой, чтобы при низшем
возможном положении грузозахватного органа на б'арабане оста-
вались навитыми не меиее 1,5 витков каната или цепи, не считая
витков, находящихся под креплением каната к барабану..Бара-
бану с одиостороиней нарезкой и гладкие должны иметь по бокам
фланцы-реборды, предохраняющие канат от соскакивания с ба-
рабана в случае ослабления его натяжеиия
(канат образует петли). Со стороны креп-
ления каиата прижимными иакладками
можно не выполнять реборду, так как ка-
нат предохраняет от соскакивания это
крепление.
Диаметр барабана по дну нарезки или
гладкого определяют так же, как н диа-
метр блока по дну желоба [см. выражение.
(22)], но допускается уменьшать диаметр
Рис. 35. Гладкий барабан
с многослойной навивкой
63
Рис, 36. Барабан нарезной:
а — Для одинарного полиспаста; б Для сдвоенного полиспаста
барабана на 15 %, учитывая лучшие условия работы каната на
барабане. Поэтому диаметр барабана (м)
D6^0,85dK(e-1). (33)
Окончательно диаметр барабана рекомендуется принимать
из нормального ряда, аналогично диаметрам блоков (см. § 18).
Диаметр барабана по центру оси каната при однослойной навивке
каната
D. = D6 + 4- (34)
Реборды должны выступать относительно оси навитого каната
не меиее чем на два диаметра каната, поэтому диаметр реборд (м)
4" 6dK. (35)
Длина барабана (м):
с односторонней нарезкой (см. рис. 36, а)
Рис. 37. Профиль нормальной нарезки
64
Lq — Lx + Ц + 2£3; (36)
с двусторонней нарезкой
(рис. 36, 6)
Лб — 2Lj -|- 2Лг Н- 2L3 £0,
(37)
где Li — длина нарезанной части
барабана; La~3t — участок для
крепления каната; L3~l,5f —
Таблица 10. Размеры канавок барабанов, мм (рис. 37)
Диаметр каната R Канавка
нормальная глубокая
“к ММ
t Г h t Г h
Св. 10 до 12 6,5 13 1 3,5 15 1 7,5
12 » 14 7.5 16 1,5 4,5 17 I 9,0
14 » 16 9,5 18 1,5 5,0 20 1 10
» 16 » 18 10 20 1,5 5,5 23 1,5 11
» 18 » 20 11,5 23 2,5 6 25 2 12
20 » 23 12,5 25 2,5 7 29 2 14
ширина реборды или свободного участка барабана; Ьй — расстояние между
нарезками, м.
Длина нарезанной части барабана
й = (граб + гя) t = [(Hin/n£>0) + 1,5] t, (38)
где ?раб — число рабочих витков, которые должны быть навиты на барабан при
заданной высоте подъема груза; zH '> 1,5—число неприкосновенных витков,
которые никогда не должны сматываться с барабана; они предназначены для
уменьшения натяжения каната в месте его крепления к барабану; Н — высота
подъема, м; / — шаг нарезки (/l,ldK, для гладкого барабана t = dH), м.
При многослойной навивке каната формулы (34), (35) имеют
вид:
Do = Dq Н- (2^ — 1) dK: Dp Df) Д (2z 4) dYi,
где г — число слоев навивки каната.
Для нормальной укладки каната в желоб блока и на барабан
без резких перегибов угол между осью каната и осями желоба
блока или нарезки барабана должен быть у < 6° для блоков
и барабанов с нарезкой; у -.<.1 для гладких барабанов. С учетом
этих требований определяют:
расстояние (м) между осями барабана и отклоняющего блока
(см. рис. 36, а):
Z Li ctg y/2; (39)
длину (м) неиарезанного участка барабана (см. рис. 36, б)
Ьо = А ± 2/т1л tg у, (40)
где А — расстояние между осями блоков подвески грузозахватного органа или
осями отклоняющих блоков, с которых ветви каната наматываются на бара-
бан, м; /min — минимальное расстояние между осями барабана и блоков, м.
В обечайке барабана при наматывании каната с натяжением
Smax 1см. формулу (31) J возникают напряжения сжатия, кручения
и изгиба. У барабанов, длина которых L6 < 3D6, напряжение
изгиба и кручеиия малы и их не учитывают. Поэтому барабан
рассчитывают как трубу, нагруженную внешним давлением.
Толщина стенки барабана (м)
б Smax/(Z [Осж]), (41)
3 Балашов В. П. 65
где t—шаг нарезки, м; [асж]— допускаемое напряжение сжатия, Па; для
чугунных барабанов (осж] = ов,взг/5; для стальных [осж] = от/2 (здесь ов.изг—
предел прочности чугуна при изгибе; от — предел прочности стали при растя-
жении).
Толщина стенки барабана должна удовлетворять следующим
требованиям: 6 -10 мм для чугунных барабанов; 2 мм
для стального литья.
Частота вращения барабана (об/мин)
лб = гпи/(яО0), (42)
где v — скорость подъема груза, м/мин; — диаметр барабана, м.
Барабаны для цепей выполнены с винтовыми мелкими канавка-
ми при крестообразном расположении звеньев цепи или с глубо-
кими канавками, когда одно звено входит в эту канавку, а другое
расположено на поверхности барабана. Диаметры таких барабанов
определяют как диаметры блоков по формуле (22).
КПД барабана т]б принимают равным т]бл. Крутящий момент
на барабане (Н-м)
Л16 = aSmax£>0/2 = (G + Gry) £>о/(2*ип'Пп'Пбл)’ (43)
Правила эксплуатации и безопасной работы. При осмотре барабана прове-
ряют крепление каната. Не допускается работа, когда износ стенки барабана
более 20 % первоначальной толщины, а гребешков винтовой канавки — 30 %.
При осмотре проверяют также нагрев подшипников опор и подачу в них смазки.
Запрещается сматывать с барабана неприкосновенные витки каната, так как
это может привести к нарушению крепления каната.
Пример. Определение размеров барабана (см. рис. 36,6).
Диаметр барабана по дну нарезки по формуле (33):
Рб >0,85dK(c - 1)- = 0,85-11 (25— I) 224 мм.
Из нормального ряда диаметров (см. стр. 57) принят Од 250 мм. Диаметр
барабана по центру оси каната согласно формуле (34):
До = Dq dK = 250 + 11 — 261 мм.
Длина части барабана с нормальной нарезкой шагом t ~ 13 мм (см. табл, 10)
для навивки одной ветви каната [см. формулу (38)]:
[Htn/(jiD0)+ 1,5] /- [ 12 000-2/(л-261) + 1,5)] 13 - 400 мм.
Минимальная длина барабана по формуле (37):
Lo —2L1-\-2L2 +2L3+ Ьй 2Ьг 4-2-3/ -ф 2-1,5/ -ф =
— 2-400 4- 2-3- 13 ф 2-1,5-1,3 + 200 1117 мм
(здесь Lo = 200 мм — расстояние между нарезками барабана).
Толщина стенки барабана
5таХ/(/ [осж]) = 12 390/(0,013-64-10») —0,014 м,
где допускаемое напряжение сжатия барабана из чугуна СЧ 15
[ос-/К] — ов- и3/5 — 320/5 = 64 МПа — 64-10» Па. Принята 6 — 15 мм.
Чаетота вращения барабана по формуле (42):
пб = oin/(nP0) = 0,2- 60- 2/(л- 0,261) — 29,27 об/мин.
Вопросы для повторения. 1. Как определяют диаметры блока по дну же-
лоба и центру оси каната? 2. Что такое КПД блока? 3- Что такое полиспаст;
66
It-
I назовите его функцию в крановых механизмах? 4. Как определяют кратность
1 полиспаста? 5. Что такое КПД полиспаста? 6. Как определяют максимальное
натяжение ветви каната, набегающей на барабан при подъеме груза? 7. Как опре-
деляют диаметр барабана по дну винтовой канавки и центру осн каната? 8. Для
чего на барабане предусматривают неприкосновенные витки?
ГЛАВА 5. СОЕДИНЕНИЯ КАНАТОВ
И ЦЕПЕЙ С ЭЛЕМЕНТАМИ КРАНА
И ГРУЗОЗАХВАТНЫМИ УСТРОЙСТВАМИ
§ 22. СОЕДИНЕНИЯ КОНЦОВ КАНАТА И ЦЕПИ
С ЭЛЕМЕНТАМИ КРАНА И БАРАБАНОМ
Конец каната соединяют с помощью петель с коушем
или клиновых и конусных втулок, например, с оголовком стрелы,
корпусом электротали и т. д. Конец каната петли закрепляется
с рабочей ветвью каната посредством зажимов, заплетки прядей
(рис. 38, а, б). На канатах диаметром 7 ... 16 мм должны быть
установлены три зажима, диаметром 19 ... 27 мм — четыре за-
жима и т. д. Клиновую втулку выбирают по диаметру каната;
она состоит из корпуса с пазом для клина и двух серег с отвер-
стиями (рис. 38, в). Конец каната должен быть оплетен проволо-
кой или для заделки его используют зажим. После запасовки ка-
ната его ось должна совпадать с осью отверстия в серьге. В кони-
ческой втулке проволоки расплетенного конца каната загибают
и заливают легкоплавким металлом (рис. 38, г).
Конец каната на барабане закрепляют с помощью различных
прижимных деталей, из которых наиболее распространенными
Рис. 38. Способы заделки конца каната:
" ;,^жкмамн: 6 - t коушем и заплеткой прядей каната; в, г - соответ
<тяенно конической и клиновой втулками т
являются прижимные накладки (рис. 39, а). В барабанах с много-
слойной навивкой применяют клиновые крепления, по конструк-
тивному исполнению аналогичные клиновой втулке, причем втулка
выполнена литой в корпусе барабана (рис. 39, б). С помощью
клина закрепляют канаты малых диаметров.
Крепление с помощью накладок происходит за счет снл трения
между накладкой, канатом и барабаном. Расчет такого крепления
выполняют в следующем порядке: 1) по диаметру каната выби-
рают накладку (табл. 11); 2) по диаметру отверстия в накладке
принимают болт или шпильку (см. рис. 39, а), последняя пред-
почтительнее в случаях частой замены каната, так как выверты-
вание болтов приводит к изнашиванию резьбового соединения
Рис. 40. Прижимная на-
кладка
в чугунных барабанах; 3) определяют
расчетное натяжение (Н) каната в месте
крепления
•Sp Smax/ef,x (44)
Таблица II. Основные размеры накладки для
крепления каната на барабанах, мм (см. рис. 40)
Диаметр каната d(< d а ь С 1 if Г
От 10 до 12 13 40 40 12 13 1,5 10
Св. 12 » 14 13 45 45 14 15 2,0 II
14 » 17 17 55 50 16 18 2,5 12
17 » 20 22 65 ” 5b 22 3,0 14
20 » 23 26 75 60 22 25 3.5 16
23 >, 26 26 85 65 26 28 4,0 18
68
(здесь Smax — максимальное натяжение каната (см. формулу
(31)1, Н; е = 2,72 — основание натуральных логарифмов; / =
= 0,1 — коэффициент трения между канатом и барабаном; а =
Зл — регламентированный угол обхвата барабана неприкосно-
венными витками, рад); 4) рассчитывают необходимое усилие
прижатия каната накладками (Н)
F = &0,85£р/щ (45)
(здесь k — 1,25 — коэффициент запаса; 0,85 — коэффициент,
учитывающий уменьшение натяжения каната вследствие обхвата
барабана крепежными витками; w = 0,35 — коэффициент сопро-
тивления выдергиванию каната из накладки); 5) определяют
допускаемое усилие растяжения болта (шпильки), создающее
усилие нажатия на накладку (Н):
Fo = [оР] nd2jA (46)
(здесь dA —внутренний диаметр резьбы, м; (ор( = 80 МПа —
допускаемое напряжение растяжения для стали СтЗ); 6) находят
необходимое число накладок:
z = F/Fb. (47)
Согласно Правилам по кранам 1221 должно приниматься не
менее двух накладок. Иногда для уменьшения длины каната под
накладками его конец загибают петлей (см. рис. 39, а). В этом
случае при определении усилия прижатия каната в формуле (45)
не должен учитываться коэффициент 0,85.
Основные правила эксплуатации и безопасной работы. Канаты должны быть
правильно заделаны во втулках н на коушах. Крепления канатов периодически
осматривают, особое внимание следует обращать на исправность каната в месте
его выхода из крепления. Не допускается ослабление резьбы для болтов прижим-
ных накладок.
Пример. Расчет крепления каната на барабане. Конец каната закрепляется
прижимными накладками со шпильками (см. рис. 39, а). По диаметру каната
dK — 11 мм принята накладка (рис. 40) с отверстием диаметром 13 мм (см. табл. 11)
и соответствующая шпилька М12 (dj - 9,6 мм), [о,,] 80 МПа,
Расчетное натяжение каната в месте крепления (см. формулу (44)] при
/=0,1 и а = Зл (гн- 1,5 витка)
= Smax/efa = 12 39О/ео,1'зп ~ 4828 Н.
Необходимое усилие нажатия прижимными накладками по формуле (45):
F ~ M,85Sp/a>-- 1,25-0,85-4828/0,35 14 650 Н.
Допускаемое усилие растяжения одной шпильки по формуле (46):
Л)=[%] ^[/4 =80-106л-0.00962/'4 5787 И.
Необходимое число накладок согласно формуле (47): г~ Г/Го =
— 14 650/5787 = 2,53. Принято z= 3 шт.
69
§ 23. КРЮКОВЫЕ ПОДВЕСКИ С БЛОКАМИ
И ЗВЕЗДОЧКАМИ
Различают подвески короткие и длинные. В корот-
ких подвесках крюк 3 и блоки 1 смонтированы на одной детали,
называемой траверсой 2 (рис. 41, а, б); эти подвески применяют
в сдвоенных полиспастах четной кратности (см. рис. 4, б), когда
канаты с полиспаста набегают непосредственно на барабан. Длин-
ные подвески (рис. 42) отличаются от коротких тем, что на тра-
версе 4 закреплен только крюк 5, а блоки / смонтированы на
отдельной оси 2, которая соединена с траверсой с помощью двух
серег 3. Такие подвески применяют в одинарных полиспастах
(см. рис. 4, а) и сдвоенных полиспастах нечетной кратности,
у последних средний блок является уравнительным (см. рис. 34, б).
Блоки устанавливают на подшипниках качения для умень-
шения сопротивления трению и закрывают кожухом, который
предохраняет канат от выскакивания из желоба блока. Хвосто-
вики крюков закрепляют на траверсе с помощью гайки
(см. рис. 41, в), стопорение которой обязательно с помощью болта
или шплинта, а при грузоподъемности более 3 т только накладной
планкой 4. Для облегчения поворота крюка с грузом под гайку
помещают шайбу при грузоподъемности до 3 т, а более 3 т —
упорный подшипник качения.
Расчет элементов короткой подвески (рис. 43). Крюк типа Б
(с длинным хвостовиком) выбирают по грузоподъемности с учетом
Z
кратного; в — узел крепления гайки
70
Рис. 42. Длинная крюковая подвеска одинарного полиспаста
группы режима работы механизма (см. табл. 4). Крюк вращается
редко, поэтому упорный подшипник под гайку выбирают по ста-
тической грузоподъемности (Н) с учетом диаметра хвостовика
крюка
Со - 1,250 с 1С0 ], (48)
где [Со]—допускаемая статическая грузоподъемность подшипника, Н.
Диаметры блока определяют по формулам (22) и (23), а профиль
желоба принимают для соответствующего диаметра каната (см.
табл. 9). Блоки устанавливают, как правило, на двух шарико-
подшипниках, а при большой грузоподъемности — на ролико-
подшипниках. Блок подвески, с которого канат набегает на бара-
бан или отклоняющий блок, вращается с большей скоростью,
поэтому радиальные подшипники этого блока выбирают по дина-
мической грузоподъемности (Н):
C = Fnp(60n6„LA/10’)‘/“<[C], (49)
где Fnp—приведенная нагрузка на подшипник, Н; пел — частота вращения
блока [см. формулу (32)], об/мин; Lh — требуемый срок службы подшипника, ч
(принимают в зависимости от класса использования механизма по данным
табл. 3); 1/а = 0,33 — для шарикоподшипников; 1/а = 0,3 — для роликовых
подшипников.
71
Рис. 43. Схема к расчету траверсы короткой крюковой подвески:
с, б — cooiBeiCTEeinio двух- и четырехблочной
Осевые нагрузки на блоках подвесок малы и их можно не
учитывать, поэтому приведенная нагрузка (Н)
Fпр -- ^энв^к^б^т — шах) (50)
где /фкв — эквивалентная нагрузка, Н; kq— коэффициент переменности на-
грузки (принимают в зависимости от класса нагружения механизма, см. § 5);
feK = 1,2— коэффициент, учитывающий вращение наружного кольца подшип-
ника; — 1,2 — коэффициент, учитывающий характер работы механизма
подъема; k.v = 1 —температурный коэффициент при Z^105 °C;
= С/(20ЛгГг) — наибольшая радиальная нагрузка на подшипник, И (здесь Zn.7[ —
число блоков в подвеске; га — число подшипников в блоке).
С учетом наружного диаметра D„ упорного подшипника гайки
и диаметров dt> и dx хвостовика крюка (см. рис. 9, а) принимают
ширину траверсы Втр — Dn + (10 ... 15) мм; длину среднего
участка LTp — Dn + (15 ... 20) мм и диаметр отверстия dTI, =
= dx + (2 ... 5) мм < dQ (см. рис. 43, а).
Траверса симметрична относительно вертикальной оси, по-
этому для расчета на прочность ее половину удобно представить
в внде консольной балки с заделкой. Нагрузки от блоков =
= б/гбл (Н) для упрощения приложены по их оси. Тогда высота
(м) траверсы в сечении А—А без учета высоты проточки под
подшипник
1Д-----—-j-r; (51)
’ (<Ги8Г] А (ВТр “ ^тр)
72
диаметр (м) цапфы в сечении Б—Б
(52)
где Мд и Л1Б — изгибающие моменты, Нм; Мд-- ГбпА; Мд= Н?л'А —
— Лтг,/2) — при одном блоке (см, рис. 43,<>); Л4д = F^a (/t + /2); ЛЬз =
= бл (5 + /2 —£тр/2) при двух б.г -JX (см. рис. 43,6) (здесь 13> 1г — плечи
приложения нагрузки F^a).
Материал траверсы —сталь Ст4 и 20, IgwIa — 80 МПа;
(^изгЬ — 120 МПа.
Диаметр цапфы должен быть согласован с диаметром принятых
подшипников блоков; кроме того, конструктивно принимают
h Рг du. При проверочном расчете траверсы напряжения (Па):
в сечении А — А
Од = Л1д/1Уд — 6Л4д/[(ВТр dTp)/г3] [Оизг]л»
в сечении Б—Б
ае -- Мь/lFj, - Mfi/(0,14) < [а„зг]в.
(53)
Расчет элементов длинной подвески. Крюк типа А (с корот-
ким хвостовиком) выбирают по грузоподъемности с учетом режима
работы (см. табл. 4). Упорный подшипник под гайку крюка,
размеры блоков и их подшипники, размеры траверсы Втр и г/тр
выбирают, как указано выше для короткой подвески. Траверса
опирается на две серьги, поэтому ее представляют как балку
на двух опорах (рис. 44, а). Расчетными являются два сечения:
среднее А—А и около цапфы Б—Б. Размеры h и определяют
по формулам (51) и (52), при этом изгибающие моменты (Н-м)
Л1д = /Ие /= (/ — Ьтр)/2. Расчетная длина (м) траверсы по
осям серег I = £тр 2бщ + 2бс (здесь = 0,003 ... 0,005 м —
толщина щитка; 6С = 0,008 ... 0,02 м — толщина серег).
Рис. 44. Схема к расчету элементов длинной крюковой подвески:
а — траверсы; б — оси; в — серьги
73
После нахождения dn рассчитывают среднее давление между
цапфой и серьгой (Па), так как это соединение подвижное
р = G/(26c^) < [р], (54)
где [р] = 30 МПа — допускаемое давление для стали.
Ось блока рассчитывают как балку на двух опорах, нагрузку
от блока прикладывают по его оси. Диаметр (м) оси в среднем
сечении А—А
4, 3/Л1Л/(0,1 [аизг]), (55)
где Л4д — изгибающий момент, Н-м; МА = (рис. 44,6).
Материал оси —сталь Ст5 и 40, [оизг1 = 120 МПа.
Для унификации dc — dl{. Для серег принимают 6 (1,8 ...
2,0) d0 и г ~ 0,66 (рис. 44, в). Серьги проверяют на напряжения
растяжения в сечении В—В\
(5В=В = G/[2 (b - d) бс] < [Стр] - 120 МПа. (56)
Основные правила эксплуатации н безопасной работы. При осмотрах прове-
ряют исправность серег, щитка, блоков, закрепления оси и траверс, стопорение
гайки крюка. Регулярно смазывают подшипники блоков и крюка.
Пример. Расчет элементов короткой крюковой подвески (см. рис. 41, а).
Подшипник крюка. По статической грузоподъемности Со =
= 1,250= 1,25-49 050= 61 310 Н с учетом диаметра хвостовика крюка dx =
= 45 мм (см. табл. 4) принят упорный подшипник 8209 (dn = 45 мм, Dn = 73 мм,
На = 20 мм), [Со] = 90 500 Н > Со = 61 310 Н.
Подшипники блоков. Приведенная нагрузка на один подшипник
[см. формулу (50)]
Fnp •= 6рО6к£б&т/(2бл2П) = 0,8-49050-1,2-1,2-1,0/(2-2) = 14 130 Н.
Необходимая динамическая грузоподъемность подшипника при L-t, =
== Гмаш= 6300 ч согласно классу использования крановых механизмов АЗ
(см. табл. 3)
С = Fnp (бОпблЬл/Ю6)0-33 -= 14 130 (60- 11 -бЗОО/Ю6)0’83 = 60 620 Н.
Принят подшипник 312 (dn = 60 мм, £>п = 130 мм, Нп = 31 мм), [С] =
= 64 100 Н > С = 60 620 Н.
Траверса (см. рис. 43, а). Размеры: Втр = Dn 12 = 73 + 12 —
= 85 мм; £.тр = Оп -ф 17 = 73 4~ 17 = 90 мм; dTp = dx -ф 3 = 45 Н- 3 =
= 48 мм < d0 = 52 мм; = 90 мм.
Высота траверсы в сечении А—А [см. формулу (51)1
h > ]А6Л4л/{[ои3г].д (Втр — dTp)} = Уб-2207/80-10* (0,085 -0,048) = 0,066 м,
где МА = Gld2=- 49 050-0,09/4= 2207 Н-м.
Диаметр цапфы в сечении Б —Б [см. формулу (52)]
dH^V.'Vl£/jO,l [оизг]Б}- у 1103/(0,1-120-10е) -0,045 м,
где Мб = Бел (G - W2) G УР/2)/2 = 49 050 (0,09 — 0,09/2)72 =
= 1103 Н-м.
С учетом dn = 60 мм установленного подшипника принят du -- 60 мм.
Вопросы для повторения. 1. С помощью каких устройств конец каната
соединяют с элементами крана? 2. Какие имеются виды крюковых подвесок
и в каких случаях их применяют?
74
ГЛАВА 6. ПРИВОД МЕХАНИЗМОВ
§ 24. ОБЩИЕ СВЕДЕНИЯ
Для приведения в движение механизмов исполь-
зуется либо ручной привод, либо различные двигатели - электри-
ческие, внутреннего сгорания, гидравлические, пневматические,
паровые (машинный привод). Выбор типа привода обусловли-
вается обеспечением заданного режима работы механизма, тре-
бованиями к диапазону регулирования скорости, возможностью
использования вида энергии, удобством управления, возмож-
ностью совмещения работы несколькими механизмами и особен-
ностью рабочей среды.
Основным видом привода является электрический, достоин-
ства которого следующие: не требуется подготовка его перед
работой, легко и удобно включается, выключается и реверси-
руется, допускает широкий диапазон регулирования скорости
механизма, может использоваться в качестве тормоза, не загряз-
няет окружающую среду, имеет высокий КПД. К недостаткам
электропривода относятся: необходимость устройств для подачи
электроэнергии к передвижным кранам, большие размеры аппара-
туры управления, относительно большая масса на единицу мощ-
ности .
Привод от двигателей внутреннего сгорания применяется в кра-
нах, работа которых предопределяет их независимость от источ-
ника энергии. Недостатки этого привода: невозможность пуска
под иагрузкой, трудность реверсирования, сложность управления,
необходимость подготовки к работе, загрязнение окружающей
среды, усложнение механической части привода - трансмиссии.
Чтобы исключить отмеченные недостатки, применяют комбини-
рованный дизель-электрнческнй привод, в котором дизель соеди-
нен с генератором, вырабатывающим ток для питания электро-
двигателей механизмов.
В последнее время начал применяться гидропривод, достоин-
ствами которого являются: бесступенчатое в широком диапазоне
регулирование скорости, возможность выполнения механизмов
без дополнительных тормозов, более высокая мощность по сравне-
нию с электроприводом при одинаковой массе, меньшие размеры.
§ 25. РУЧНОЙ ПРИВОД
Ручной привод применяют в мало нагруженных
и редко работающих механизмах, использование в которых ма-
шинного привода нецелесообразно, а также во вспомогательных
механизмах. Привод осуществляют с помощью рукоятки радиусом
0,2 ... 0,4 м (рис. 45, а) или тягового колеса диаметром 0,2 ... 0,7 м
с цепью.
Тяговые колеса (см. § 19) применяют в тех случаях, когда меха-
низмы иаходятся на большой высоте от пола (рис. 45, б). В каче-
75
Рис. 45. Ручной привод:
а — от рукоятки; б — от цепного колеса; в — от рычажной системы
стве тяговых используют сварные круглозвенные калиброванные
цепи (см. § 17).
Системы управления компонуют с рукояткой нли педалью,
которые соединяются тягами с рычагами (рис. 45, в).
Расчетное рабочее усилие Fpas при длительной работе на
рукоятке 80 ... 100 Н, тяговой цепи 120 ... 160 Н, рукоятке
управления 80 Н и педали 120 Н; при кратковременной работе
продолжительиостью не более 5 мин — расчетное рабочее усилие
на рукоятке до 200 Н, тяговой цепи 300 ... 400 Н, рукоятке управ-
ления до 120 Н и педали до 250 Н. Расчетный рабочий момент
(Н-м)
Мраб — 2<рРрадГ, (57)
где г— число одновременно работающих рабочих; <₽ — коэффициент, учитыва-
ющий неодновременность приложения усилия рабочими (при двух рабочих
Ф = 0,8); г — радиус вращения (плечо) рукоятки для тягового колеса, м.
Для систем управления в формуле (57) вместо длины рукоятки г
принимают длину рукоятки управления I илн педали и не учи-
тывают г и (р. е
По расчетному моменту определяют необходимое передаточное
число
н = Л4мех/(Л1рабТ]), (58)
где Ммех — момент исполнительного органа механизма — барабана [см. фор-
мулу (43)], ходового колеса, опорно-поворотного устройства или элемента систе-
мы управления, Н м; т| = 0,9 — общий КПД механизма.
С учетом передаточного числа (58) компонуют передаточный
механизм. Размеры элементов рычажной системы (см. рис.- 45, в)
находят из выражения: и — Ila х b-Jax к bja^. Расчетный угол
поворота педали должен быть не более 60°, а рычага 30°, при этом
ход педали не должен превышать 250 мм, а рычага - 400 мм.
Ходы педалей и рычагов должны использоваться не более чем
76
на 75—80 %, учитывая возможный «мертвый ход» системы управ-
ления (не более 10 %). В расчетах на прочность принимают макси-
мальные усилия: на рукоятке и цепи соответственно 800 и 1200 Н,
на рукоятке управления н педали соответственно 600 и 800 Н.
§26. МАШИННЫЙ ПРИВОД
Электрический привод
Наиболее распространен электрический привод
переменного (более 90 %) и реже постоянного тока. Электрообору-
дование (электродвигатель, аппараты управления и контроля)
должно удовлетворять требованиям Правил по кранам [22] и
Правил устройства электроустановок (ПУЭ) Мииэнерго СССР
1321. Условия эксплуатации электрооборудования характери-
зуются относительной продолжительностью включения (ПВ). сред-
ним числом включений в час, диапазоном регулирования скорости
и режимом работы механизма.
Относительная продолжительность включения (%) характе-
ризует использование электрооборудования за один час работы
механизма при условии, что время его непрерывного включения
не превышает 10 мин:
ПВ : [/раб/(граб + /пауз)] 100% 6100%, (59)
где %аб—суммарное время работы (включение) двигателя, мин; /пауз—
суммарная продолжительность пауз, мин.
Продолжительность включения может изменяться от 0 до
100 %. Для двигателей переменного тока номинальной является
ПВ = 40 %, а для двигателей постоянного тока ПВ - 25 %.
Кроме номинальных регламентированы значения ПВ 15; 25;
40 и 60 %, а также режимы непрерывной работы в течение 30
и 60 мин. Вместо ПВ (%) применяют также обозначение е = 0,15;
0,25; 0,40; 0,60.
Число включений в час принимают равным среднему числу
разгонов механизмов до номинальной скорости и последующей
остановки после каждого разгона; Регламентированы 60, 120,
240, 360 и более включений в час.
Диапазон регулирования характеризуется отношением макси-
мальной скорости механизма к устойчивой наименьшей скорости,
например, 3:1.
Характеристикой асинхронных двигателей переменного
тока является синхронная частота вращения ротора (об/мин)
= 60fl(2p) (здесь f = 50 Гц — частота тока сети; 2р — число
пар полюсов статорной обмотки). Для двигателей постоянного
тока аналогичной величиной является частота вращения холо-
стого хода двигателя.
Каждому двигателю свойственна механическая характери-
стика, представляющая зависимость частоты вращения от момента
нагрузки. Различают естественные характеристики и искусствен-
77
ные. Последние получают путем регулирования с помощью систем
управления изменением напряжения питания, введением дополни-
тельных резисторов в обмотки якоря или ротора, изменением
частоты тока и др.
Электропривод должен обеспечить разгон механизма под на-
грузкой за допустимое время (например, подъем груза в подвешен-
ном состоянии); преодолеть в процессе работы возможные пере-
грузки (например, ветровую нагрузку) и надежно работать в по-
вторно-кратковременном режиме. Этим требованиям удовлетво-
ряют крановые двигатели (ГОСТ 185—70), которые отличаются
от общепромышленных двигателей увеличенным пусковым момен-
том, повышенной перегрузочной способностью и большей проч-
ностью.
А синхронные крановые электродвигатели с фазным ротором
серии MTF предназначены для привода крановых механизмов,
металлургические двигатели серии МТН (рис. 46, а) предназна-
чены для привода механизмов кранов и металлургических агре-
гатов.
Буквы F и Н означают класс нагревостойкости изоляции.
Класс F допускает нагрев обмоток до 120 °C, класс Н — до 150 °C.
Двигатели серий MTF и МТН"заменили ранее выпускавшиеся
двигатели соответственно серий МТБ и МТМ.
Основное конструктивное исполнение электродвигателей —
со станиной на лапах, с горизонтальным валом, имеются также
фланцевые электрические двигатели. Кроме того, предусмотрено
исполнение электродвигателей с двумя одинаковыми концами
валов. Двигатели рассчитаны на напряжение 380/220 и 500 В
частотой 50 Гц, причем для напряжений 380 и 220 В исполь-
зуют один двигатель при соединении обмоток статора соответст-
венно звездой или треугольником (табл. 12).
Номинальный момент (Н-м) двигателя при ПВ - 40 %:
ЛД = 955ОРн//гн, (60)
где Рн — номинальная мощность, кВт; пн — номинальная частота вращения,
об/мин.
Данные по мощности и частоте вращения при ПВ = 15, 25,
60 н 100 % указаны в каталогах. Особенность кранового двига-
теля — использование его при меньшей ПВ с большей мощностью,
а при большей ПВ с меньшей мощностью.
На естественной механической характеристике 1 (см. рис. 46, а)
имеются характерные точки со значениями номинального _ИН
1см. формулу (60) I, пускового /Ип и максимального /Ик моментов.
Отношение Л/п = Л4П/М(, называется кратностью пускового
момента, отношение Кк = -И([/.ИП — кратностью максимального
момента. Для регулирования скорости и ускорения используют
искусственные характеристики 2, которые получают путем вве-
дения в цепь ротора дополнительных резисторов. Чем больше
сопротивление резистора, тем более крутая (более мягкая) искус-
78
Рие. 46. Крановые двигатели:
а - серии MTF с механической характеристикой; б - серии MTKF с механической характеристикой
79
ц а 12. Характеристика крановых электродвигателей серий MTF и MTKF (рнс. 46, а, б)
«1 сс £ № L- * * 1-0 гр СО со СО о Т- I'- СО о СО СО 120 110 о <л r~- ио 210 195
-а со 04 28 35 I 35 40 S S
•Т S О 1 80 НО 110 НО
-с 112 04 132 132 091 081 081
та Г- г- Г- 04 04 О) 04
О 150 190 190 irt 243 260 320
= 081 180 220 о St'S 280 280
СО СО 134 134 157 180 081
5 302 302 342 1 342 , 385 444 444
kJ иО со 1Л S Го 583 485 СО UQ С9 04 О сО 700 586; ч / 748 637 823 715
р- % 1- X to со со со о о о 0,115 0,11 S СО о о 0,270 0,26 0,460 ; 0,44 ; 0,900 0,85 1 1,25 1,20
к - И 39 41 со СО 1Д со 85 103 1 137 172 191 216 314 382 471 589
R ® < Г 1 СО 102 170 1 1 373 579
о - 33 'о to irt со г- со х> О о CD со □о оо lO lO О СО СО СО о СО 04 ос 930 880 О СТ) СТ) 955 930
пв (В оГ 'Г'* гт гт 3.5 3,5 о о L-O LO 7,5 7,5 11,0 11,0 КОШ
э сТЗ MTF 011-6 MTKF 011-6 MTF 012-6 MTKF 012-6 MTF 111-6 MTKF 1И-6 MTF 112-6 MTKF 112-6 MTF 211-6 MTKF 211-6 MTF ЗИ-6 MTKF 311-6
ственная характеристика. Сопротивления резисторов подбирают
так, чтобы получить типовой и оптимальный по ускорению график
разгона двигателя, при котором значения моментов и М2
искусственных характеристик при переключениях находились
в пределах от 1,1 Л1И до 2,3 Л1И. Для каждого типоразмера дви-
гателя с учетом системы управления в каталогах предусмотрены
комплекты резисторов.
В условиях эксплуатации крановщик может нарушить типовой
график разгона. Если при переключениях будут большие пуско-
вые моменты, а следовательно, и сила тока, то должна сработать
токовая защита. При расчете времени разгона механизмов для
упрощения принимают средний пусковой момент двигателя (Нм):
Мор.п = 1,7МН. (61)
Кроме двигательного режима двигатель может использоваться
для торможения механизма противовключением, при котором
двигатель быстро переключается иа противоположное направление
вращения по соответствующей искусственной характеристике,
а также динамическим торможением, когда двигатель отключается
от сети, а затем в две фазы статора подается постоянный ток.
В последнее время начали выпускать крановые электродвига-
тели новой серии 4МТ, которые должны заменить двигатели
серии MTF и МТН.
Асинхронные крановые электродвигатели с короткозамкнутым
ротором серии MTKF (заменили двигатели серии МТКВ) и метал-
лургические серии МТ КН (заменили двигатели серии МТКМ)
имеют повышенное скольжение и рассчитаны на непосредственный
пуск при полном напряжении сети (рис. 46, б). Для этих электро-
двигателей кратность пускового момента ЛД ~ 2,9, а максималь-
ного АД ~ 3,0. Средний пусковой момент (Н-м)
Мср, п z_-. 0,5 (Мп + МД - 0,5Мн (/Д + КД. (62)
Для регулирования ускорения и замедления используются
искусственные механические характеристики, которые получают
путем уменьшения напряжения на обмотках статора или измене-
ния частоты тока питающей сети. Возможно также динамическое
торможение двигателем.
А синхронные электродвигатели общего назначения серии 4 А
применяют для привода лебедок, электроталей и механизмов
передвижения однобалочпых кранов. Механические характери-
стики этих двигателей аналогичны характеристикам двигателей
серии MTKF, но они имеют меньшие значения кратности пускового
момента Кп = 1,2 ... 2,0 и максимального Кк = 2,2.
Асинхронные электродвигатели многоскоростные с коротко-
замкнутым ротором серий MTKF и МТКН предназначены для
точной остановки механизмов. Двигатель имеет 2—3 обмотки
иа статоре с разным числом полюсов, которые позволяют получить
диапазон регулирования до 6 : 1.
81
80
Асинхронные электродвигатели с короткозамкнутым ротором
взрывозащищенного исполнения ВКр выполнены со встроенным
электромагнитным тормозом. Отношение момента тормоза к номи-
нальному моменту двигателя составляет 1,5.
Крановые двигатели постоянного тока серии Д (взамен се-
рии ДП) применяют в наиболее ответственных крановых механиз-
мах при режимах работы 5М и 6М, с большим числом включений
в час и значительными перегрузками, диапазоном регулирования
10 : 1 и выше. Имеются двигатели тихоходного исполнения с но-
минальной частотой вращения 700 об/мин и быстроходного с но-
минальной частотой вращения 1200 об/мин. Двигатели изготов-
ляют на напряжения 220 и 440 В с параллельным, смешанным
и последовательным возбуждением. Частота вращения регули-
руется изменением напряжения возбуждения и введением рези-
сторов в цепь якоря.
Управление двигателями механизмов осуществляется следу-
ющими системами управления.
1. Кнопочными постами для управления асинхронными дви-
гателями с короткозамкнутым ротором.
2. Кулачковыми контроллерами, которые управляются
вручную крановщиком и коммутируют цепи обмоток статора,
а также цепи резисторов в якорях двигателей постоянного тока
или роторе двигателей переменного тока (эту систему управления
применяют для простого электропривода с диапазоном регулиро-
вания 3 : 1 до 60 включений в час).
3. Магнитными контроллерами, в которых для коммутаций
цепей применяют контакторы с электромагнитным пр'иводом
постоянного или переменного тока, реле напряжения, времени
и тока, резисторы и другие устройства. Управление осуществляют
с помощью командоконтроллеров крановщиком. Магнитные кон-
троллеры применяют для управления двигателями постоянного
и переменного токов с диапазоном регулирования 6 : 1 до 240
включений в час.
4. Сложными системами, например, генератор-двигатель, с ти-
ристорным регулятором напряжения переменного тока и дп.
Эти системы применяют при диапазонах регулирования более
6 : 1, как правило, в специальных кранах 131].
Выбор двигателей механизма подъема груза. Для механизмов
при группе режима работы 1М ... 4М (мощность двигателя до
30 кВт) асинхронные многоскоростные крановые электродвигатели
с короткозамкнутым ротором предпочтительно использовать с диа-
пазоном регулирования от 4 : 1 до 6 : 1, а при группе режима
работы 5М и 6М рекомендуются асинхронные крановые электро-
двигатели с фазным ротором при диапазоне регулирования от
6 : 1 до 8 : 1. При мощности 30 кВт и более предпочтительно при-
менять асинхронные электродвигатели с фазным рОтором, а в от-
дельных случаях двигатели постоянного тока. Выбранный двига-
тель должен иметь достаточный пусковой момент для того, чтобы
82
обеспечивался необходимый разгон при подъеме груза массой,
равной 1.1Q | /?гг. у (здесь Q— грузоподъемность крана; тг, у—
масса грузозахватного устройства), причем напряжение сети
должно составлять 0,9 номинального. Кроме того, выбранный
двигатель не должен нагреваться сверх допустимой температуры
при заданном режиме работы (ПВ и числе включений в час).
Статическая мощность (кВт) на валу двигателя при подъеме
груза с заданной скоростью
- (G i 6Г у) u/lGOOnz. (63)
где Gноминальный вес груза, Н; Gr. у— вес грузозахватного устройства:
у — скорость подъема, м/с: ч — общий КПД механизма: 2 — число двигателей.
Расчетная мощность двигателя (кВт)
КЖЛеКггрЛ-т. (64)
где — коэффициент использования номинальной грузоподъемности; для
крюкового крана Ки - - 0,7; грейферного Ки - 0,8; магнитного 0,75;
контейнерного Ки _ 0,65; Кр — коэффициент, учитывающий применяемую
систему регулирования скорости; Кр — 1,15 для группы режима работы 1М ...
4М; Кр — 1,05 для группы режима работы 5М и 6Й; Kt-— коэффициент, учиты-
вающий фактическую продолжительность включений; Ле — 0,82 при е — 0,25
для группы режима работы 1М ... ЗМ; Kt- ~ 0,95 при е — 0,40 для группы ре-
жима работы 4frV Kt- = 1.05 при е -- 0,40 для группы режима работы 5М;
Kf1.2 при F - 0,60 для группы режима работы 6М; КПр — коэффициент
пусковых потерь; Кщ> — 1.0 Для группы режима работы I М ... ЗМ;. КлР 1,1
для группы режима работы 4М; К«р " 1,35 для группы режима работы 5М;
Кнр~ Кб для группы режима работы 6М.
По расчетной мощности 1см. формулу (64) I выбирают двигатель
равной или большей мощности при ПВ — 40 % (двигатели пере-
менного тока) или при ПВ -- 25 % (двигатели постоянного тока).
Для обеспечения надежного пуска должно быть удовлетворено
следующее условие:
.М!;,'МСГ^ 1,7КР, (65)
где Мг;— максимальный момент двигателя; Л4СГ — статический момент на-
грузки; Кр - коэффициент, учитывающий вид механической характеристики,
Кр -- 1,08 для асинхронных электродвигателей с фазным ротором; Кр — 1,22
для двигателей постоянного тока.
Статический момент (Нм) нагрузки при подъеме груза
Мс, (1,10 -Gr.y) D„/(2i„ui|). (66)
где и — передаточное число механизма; q — общин КПД механизма.
При удовлетворении условия (65) проверяют температуру
пагревз двигателя методом эквивалентного КПД |31 1. Если
температура двигателя нагрева не соответствует нормам, то вы-
бирают следующий типоразмер двигателя или снижают значение
поминальной скорости подъема.
Выбор двигателей механизмов передвижения кранов и грузо-
вых тележек. Для механизмов передвижения группы режима
работы 1М ... 5М тележек мостовых кранов общего назначения
83
со скоростью до 0,7 м/с и грузоподъемностью до 16 т рекомен-
дуется применять асинхронный электродвигатель с короткоза-
мкнутым ротором и с регулированием пускового момента путем
включения резисторов в цепь статора. Эти же двигатели рекомен-
дуют для механизмов передвижения мостовых кранов группы
режима работы 1М ... 4М, работающих в помещении со скоростью
до 0,85 м/с и имеющих общую массу крана и номинальную массу'
груза до 30 т.
Для механизмов передвижения кранов группы режима работы
1М ... 5М со скоростью более 1 м/с при грузоподъемности более
Юти для механизмов передвижения тележек группы режима
работы 5М ... 6М при скорости более 0,7 м/с рекомендуется при-
менять асинхронный электродвигатель с фазным ротором с регу-
лируемым пусковым моментом путем включения резисторов в цепь
ротора и обеспечением стабильной малой скорости передвижения,
равной 10—15 % номинальной скорости. При необходимости
обеспечения точной остановки крана или тележки применяют
асинхронный многоскоростной электродвигатель с короткозамкну-
тым ротором.
Выбранный двигатель должен отвечать следующим требова-
ниям: 1) иметь достаточный пусковой момент для приемлемого
времени разгона (до 6 с для асинхронного электродвигателя
с фазным ротором и двигателей постоянного тока; не более 3 с
для асинхронного электродвигателя с короткозамкнутым ротором)
по условиям нагрева при максимальном пусковом моменте; 2) не
нагреваться сверх допустимой температуры при работе в заданном
режиме (ПВ и числе включений в час).
Статическая мощность (кВт) на валу двигателя при передви-
жении груза номинальной массы с заданной скоростью
Р„ - (№„, + «'укл -I- 0.7F,. р) окр/( IOOOtr), (67)
где Гтр, ^у, — сопротивления передвижению от сил трения, уклона рель-
совых путей (см. § 47) и ветровой нагрузки (см. § 5), Н; икр — скорость пере-
движения, м/с; г] — общий КПД механизма; г— число двигателей.
Расчетная мощность (кВт) двигателя для обеспечения прием-
лемого времени разгона механизма
= 0.66 (ткр + (?) ивр0/( 1000л) + Рст/1.75. (68)
где ткр — масса крана, кг; Q — грузоподъемность крана, кг; а — среднее
ускорение; а = 0(15 м/с3 — для монтажных кранов и их тележек; а — 0,3 м/с2
для мостовых кранов общего назначения к их тележек.
По расчетной мощности, определяемой по формуле (68), вы-
бирают двигатель с номинальной мощностью при ПВ — 40 %
(переменный ток) или ПВ = 25 % (постоянный ток), которая
должна быть равна или больше расчетной мощности. Номинальная
мощность принятого двигателя должна быть такой, чтобы обеспе-
84
чивалось сцепление приводных колес с рельсами при работе
крана без груза:
Лц = /сца6КрОКр/( 10001]) 0,5Рн, (69)
где /сц—коэффициент сцепления (/сц = 0,2—при работе в помещении;
/сц == 0,12 — при работе на открытом воздухе); а — отношение числа приводных
колес к общему числу колес крана; 0,5 — коэффициент, учитывающий минималь-
ный пусковой момент по типовым механическим характеристикам; Рп — номи-
нальная мощность принятого двигателя [см. формулу (60), кВт.]
При удовлетворении требования (69) двигатели с фазным
ротором проверяют на нагрев методом эквивалентного КПД [31 L
Если двигатель не соответствует допустимой температуре нагре-
вания, то выбирают двигатель большего типоразмера с последу-
ющей проверкой обеспечения сцепления колес крана с рельсами.
Двигатели с короткозамкнутым ротором проверяют по допусти-
мому числу пусков и ускорению [31 ]. Если двигатели не удовлет-
воряют числу пусков, то уменьшают значения ускорения или
скорости.
Пример. Выбор электродвигателя механизма подъема. Статическая мощ-
ность при подъеме груза [см. формулу (63)]
Рст = Gy/( 1000ц) = 49 050-0,2/( 1000-0,92) = 10,66 кВт (здесь —
= 0,99-0,98-0,96-0,99 0,92— общий КПД привода).
Расчетная мощность по формуле (64):
Рр = КиКрКеКГ1рРСт — 0,7-1,15-0.82-1,1 10,66 = 7,74 кВт.
По табл. 12 принят электродвигатель типа MTF 311-6; Ра — 11 кВт; пн~
= 940 об/мин; Мн = 9550Рн/пн = 9550-11/940 = 111 Н-м; Мк = 314 Н-м;
Jp = 0,9 кг- м2. .
Проверка двигателя по обеспечению надежного разгона по формуле (65):
Мк/Мст = 314/144 -2,18 > 1,7Кр = 1,7-1,22 = 2,02,
где Мст= 1,lG£J„/(2Zn«Pn) = 1,1-49 050-0,261/(2-2-32,42 0,92) = 144 Н-м —
статический момент на валу двигателя при подъеме груза массой, равной 1,1Q;
Кр~ 1,22 —для двигателей с фазным ротором.
Выбор двигателя механизма передвижения грузовой тележки. Статическая
мощность по формуле (67):
Рет («7тр+ Гукл)ут/(1000т]) = 1117-0,5/( 1000-0,9) - 0,62 кВт.
[здесь U7Tp Д- = 1117 Н (см. с. 174)]-
Расчетная мощность для обеспечения разгона согласно формуле (68) при
а = 0,3 м/с2:
Рр= 0,66 (тт -|- Q) vTa/(l000-q) Ч-Рст/1,75 =
= 0.66 (1800 4- 5000) 0,5-0,3/(1000 0,9) + 0,62/1.75 = 1.1 кВт.
По табл. 12 принят электродвигатель типа MTF 011-6: Рн =- 1,4 кВт; нн =
= 885 об/мин; M,,= 9550Рн/пн — 9550-1,4/885 — 15,1 Н-м; Мк = 39 Н-м;
/р— 0,085 кг-м2.
Проверка двигателя по обеспечению условия сцепления приводных колес
тележки без груза по формуле (69):
/citaGTyT/(l000i]) = 0.2 0.5-17 660 0,5/(1000-0,9) =
= 0,98 кВт> 0.5Рн= 0,5-! .4 = 0.7 кВт;
[здесь /сц= 0,2— коэффициент сцепления; я — 0,5 — отношение числа при-
водных колес (2 шт.) к общему числу колес (4 шт.)|.
85
Гидравлический привод
Гидропривод применяют в автомобильных и гусенич-
ных кранах, авто- и электропогрузчиках и различных грузо-
захватных устройствах. Гидропривод имеет приводной двигатель,
иасос, подающий рабочую жидкость, исполнительный механизм
и систему трубопроводов и клапанов управления. Гидронасос,
получающий вращение через коробку отбора мощности от двига-
теля внутреннего сгорания или электродвигателя, передает поток
рабочей жидкости в гидродвигатель, который энергию потока
рабочей жидкости преобразует в механическую энергию, приводя
в действие исполнительный орган механизма непосредственно
или через механическую передачу.
В грузоподъемных машинах применяют шестеренные и акси-
ально-поршневые насосы постоянной подачи, поэтому регулиро-
вание подачи жидкости в гидродвигатель и соответственно регули-
рование скорости механизма осуществляют изменением частоты
вращения приводного двигателя гидронасоса или изменением
подачи жидкости с помощью регулирующих гидроаппаратов;
имеются два вида гидродвигателей — гидромоторы, осуществля-
ющие вращательное движение, и гидроцилиндры, осуществляющие
поступательное перемещение.
Гидропривод состоит из гидронасоса 2 с приводом 1, соеди-
ненного всасывающей линией 12 с гидробаком 11. Насос подает
рабочую жидкость по напорной линии 3 к гидрораспределителю 4.
Последний может находиться в одном из трех положений; ней-
тральном — рабочие линии 5 и 9 закрыты и жидкость по сливной
линии 10 поступает в гидробак 11; в положении рабочего хода —
жидкость направляется по рабочей линии 5 в гидромотор 13
(рис. 47, в) или полость 6 гндроцилиидра 7 со штоком 8 (рис. 47, а),
затем по линиям 9 и 10 поступает в гидробак; в положении ревер-
сивного хода — жидкость направляется по рабочей линии 9 в гидро-
Рис. 47. Схема гидропривода:
Д1 б - сгидроцилнндром при прямом и обратном ходе; в. г — с гидромотором при прямом
и обратном ходе
86
мотор (рис. 47, г) или гидроцйлиндр (рис. 47, б), а затем возвра-
щается по линиям 5 и 10.
Шестеренный насос (рис. 48, а) имеет корпус 3 с расположен-
ными в нем ведущей 1 и ведомой 2 шестернями. При вращении
шестерен жидкость поступает из полости всасывания во впадины
между зубьями и стенкой корпуса и перемещается в нагнетатель-
ную линию; при зацеплении шестерен происходит выдавливание
жидкости из впадины, в результате создается давление. Шесте-
ренные насосы имеют давление 10 МПа.
Аксиально-поршневой насос (рис. 48, б) состоит из блока
цилиндров 3 с гильзами 8 для поршней 7. Блок цилиндров при-
жимается пружиной 6 к крышке 5 с пазами. Поршни 7 с помощью
штоков 9 шарнирно соединены с диском 1, который вращается
с приводным валом 10. Блок цилиндров получает вращение от
вала 10, который соединен с ним с помощью универсального
шарнира 2. Благодаря наклону осей приводного вала и блока
цилиндров друг относительно друга под углом 25° каждый поршень
за один оборот вала совершает возвратно-поступательное движе-
ние, при этом последовательно засасывая жидкость из полости В
головки 4 (соединена со всасывающей линией), а затем нагнетая
ее в полость Г (соединена с напорной линией). Насосы имеют рабо-
чее давление 25 МПа.
Аксиально-поршневые насосы применяют в качестве гидро-
моторов. При этом всасывающая линия гидронасоса становится
нагнетательной.
1
Рис. 48. Гидравлические насосы:
вой шестеРенный; б — аксиальио-поршне-
87
я?
Гидроцплиндры могут быть
одно- и двустороннего действия
(рис. 49). Шток или плунжер
гидроцилиидров односторонне-
го действия движется под дейст-
вием рабочей жидкости только
в одном направлении. Обрат-
ное движение шток (плунжер)
получает под действием силы
Рис. 49. Гидроцилиндры:
а, б — соответственно одно- и двусторон-
него действия; I — поршневой; 2 — плун-
жерный; 3 — плунжерный телескопиче-
ский; 4 — с односторонним штоком; 5 —
с двусторонним штоком; 6 — телескопи-
ческий
тяжести элементов крана или
пружины. В гидроцилиндрах
двустороннего действия шток и
поршень перемещаются в обоих
направлениях под действием
рабочей жидкости.
Основными параметрами гидроцилиндра являются внутрен-
ний диаметр гильзы, ход поршня и рабочее давление. Типоразмеры
гидроцилиндров регламентирует ГОСТ 6540—68. Гидроцилиндры
снабжены гидрозамками, которые обеспечивают свободное пере-
мещение потока рабочей жидкости в одном направлении, в резуль-
тате чего исключается самопроизвольное перемещение штока
вследствие утечек в гидроаппаратах привода в случае прекращения
подачи рабочей жидкости. Гидроцилиндры выбираются по необхо-
димому усилию и ходу штока. Рабочая жидкость поступает из гид-
робака. Для очистки жидкости от примесей применяют фильтры.
Управление гидродвигателями осуществляется с помощью
гидрораспределителей вручную от рукояток или дистанциЬнно
с помощью электромагнита. В гидросистеме предусматривают
гидроклапаны, ограничивающие повышение давления жидкости
более допустимого предела, чем защищают механизмы и элементы
гидропривода от перегрузок. Переход гидромагистрали с не-
подвижной части крана к подвижной осуществляют с помощью
гибких шлангов, а к поворотным частям посредством центральных
коллекторов.
Вопросы для повторения. 1. Какие виды приводов применяют в кра-
новых механизмах? 2. С какой целью выполняют кинематические расчеты при
ручном приводе механизмов? 3. Какие типы электродвигателей и системы уп-
равления применяют в крановых механизмах? 4. Что такое механическая харак-
теристика электродвигателя? 5. Как выбирают электродвигатели механизмов
подъема груза и передвижения крана? 6. Из каких основных элементов состоит
гидропривод?
ГЛАВА?. ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ
§ 27. ПЕРЕДАЧИ И РЕДУКТОРЫ
Передачи и редукторы предназначены для уменьше-
ния частоты вращения двигателя и соответственно увеличения
крутящего момента иа исполнительном элементе механизма (ба-
рабане, приводном колесе и др.).
88
Рис. 50. Крановые редук-
торы:
а — горизонтальный типа
Ц2' G -- вертикальный типа
ВК
В крановых механизмах применяют горизонтальные крановые
редукторы типа РМ. Ц2 (рис. 50, а) и редукторы общего назначе-
ния типа Ц2У, а также вертикальные типа ВК (рис. 50, б). ЦЗвк,
ЦЗвкФ.
В обозначении редукторов РМ, Ц2 и В К указывают их тип
и общее межосевое расстояние, например, РМ-650, В К-475. У ре-
I дукторов Ц2У и ЦЗвк в обозначении содержится тип редуктора
и межосевое расстояние тихоходной ступени. Тихоходный вал
редукторов ЦЗвк и ЦЗвкФ выполнен полым со шлицами. При
сборке он насаживается на вал приводного колеса. Такой редук-
тор называют навесным, от поворота его фиксируют специальным
\ упором, который также воспринимает реактивный момент лри-
. водного колеса.' КПД редукторов РМ, Ц2, Ц2У т)р - 0,96, редук-
торов В К. ЦЗвк =- 0,92. Находят применение и другие типы
редукторов — червячные и коническо-цилиндрические. Возможны
. также комбинации исполнений редукторов с открытыми пере-
дачами.
Каждый тип редуктора имеет несколько исполнений, отлича-
ющихся друг от друга передаточными числами в результате
изменения числа зубьев у зубчатых колес передач и несколькими
сборками в зависимости от числа концов быстроходных и тихо-
ходных валов и их взаимного расположения (табл. 13, 14),
89
Т абл и ц а 13 Значения номинальных крутящих моментов (Нм)
на тихоходном валу редукторов типа Ц2 при частотах вращения быстроходного
вала 750 и 1000 об/мин
Передаточное ЧИСЛО Up Редуктор
Ц2-250 Ш-300 Ш-350 Ш-4 00 Ц2-500 J12-650
8.29 (3,95) 9,97 (3.95) 12Л0 (3,95) 750 1200 1800 3300 6000 16 000
16.30 (5,19) 19.88 (5,19) 24,91 (5,19) 32,42 (5,19) 750 1180 1600 3100 5450 16 000
41,31 (6,61) 50,88 (6,61) 650 950 1550 3000 5151 15 000
При м е ч а н и е. В скобках указаны передаточные числа иг тихоход-
ных ступеней редуктора.
У редукторов типа РМ, Ц2, Ц2У предусмотрено исполнение
конца тихоходного вала в виде зубчатой полу муфты с гнездом для
подшипника для соединения с барабаном. Наличие различных
сборок и исполнений позволяет компоновать с одним типоразмером
редуктора механизмы с различными кинематическими схемами
и параметрами.
Диаметр валов редукторов Ц2 следующий:
Редуктор Ц2-250 Ц2-300 Ц2-350 Ц2-400 Ц2-500 Ц2-650
Диаметр вала, мм; быстроходного d3 30 35 40 50 60 70
тихоходного dT . . 65 75 85 95 110 140
Диаметр d гнезда для подшипника, мм . . 72 80 110 110 150 160
Таблица 14. Значения номинальных крутящих моментов (Нм)
на тихоходном валу редуктора типа ВК
Ч астота вращения быстроходного вала, об/мин Редуктор
ВК-475 ВК-550
Передаточное число
19,59 28,93 52,73 109.31 17,67 32,80 68,20 126,5
750 1000 5150 4800 6300 6000 7400 7100 7780 7500 8500 7750 10 900 10 600 11 200 11 200
Примечание. Передаточное числе тихоходной ступени ит •= 3,61
у редукторов типа ВК-475 и ит - 4,0 у редукторов типа ВК-550
90
Редуктор выбирают в следующем порядке,
1. Определяют необходимое передаточное число
« -= пяв/п, (70)
где Пдв — частота вращения двигателя, об/мин; п — частота вращения испол-
нительного элемента — барабана механизма подъема [см. формулу (42)], при-
водного колеса механизма передвижения [см. формулу (109)], опорно-поворот-
ного устройства.
По каталогу принимают передаточное число редуктора ир,
близкое к передаточному числу, вычисленному по формуле (70).
Затем проверяют отклонение передаточного числа редуктора
= («р — и) 100/и < [Ли], (71)
где [Ли]—допускаемое отклонение передаточных чисел механизмов, которые
принимают равными отклонениям скоростей механизмов, заданным в стандартах
на краны; если отклонение не задано, то принимают [Ли] -~= ±15 %.
2. Вычисляют расчетный эквивалентный момент (Н-м) на тихо-
ходном валу редуктора
- КдМр, (72)
где Кд — коэффициент долговечности; Мр — расчетный крутящий момент на
тихоходном валу, Н-м.
Коэффициент долговечности
K* = KQKt<l, (73)
где Kq= У К — коэффициент переменности нагрузки [здесь Д' — коэффи-
циент нагружения согласно заданному классу нагружения механизма (см.табл. 3)];
Kt — коэффициент срока службы, определяемый с учетом общего времени ра-
боты механизма при заданном классе использования (см. табл. 3).
Твердость рабочих поверхностей зубьев зубчатых колес и
шестерни одинакова. Однако вследствие того, что шестерня имеет
меньшее число зубьев и соответственно большую частоту вра-
щения, ее зубья чаще находятся под нагрузкой, чем зубья зубча-
того колеса. Поэтому для шестерни определяют коэффициент срока
службы
. к, = VuTN/N„. 0 , (74)
где иТ—передаточное число тихоходной ступени редуктора; /VH. 0 — базо-
вое число циклов контактных напряжений (/Ун. о = 125-10® — для редук-
торов РМ, Ц2, Ц2У, ВК; /VH. о~ 63-10® для редукторов типа ЦЗвк, ЦЗвкф);
/V —суммарное число циклов шестерни за общее время работы механизма.
В механизмах подъема груза крутящий момент в передачах
имеет постоянное направление; работает Только одна поверхность
зубьев, поэтому число циклов нагружения
N = Траб60пт, (75)
где пг — частота вращения тихоходного вала, об/мин; Граб — машинное (общее)
время работы механизма, ч (см, табл. 3),
91
В механизмах передвижения крутящий момент изменяет знак
при изменении направления движения крана; работают обе по-
верхности зубьев, поэтому число циклов нагружения
= 0,5Траб60пт. (76)
Если задана группа режима работы механизма (см, табл. 3),
то для выражения коэффициента долговечности можно принимать
соответствующие группам режима работы комбинации классов
использования и нагружения, так как зубья передач рассчиты-
вают на контактные напряжения, для которых показатель степени
кривой усталости т — 3 совпадает с показателем степени коэф-
фициента нагружения [см, формулу (4) L
Для обеспечения прочности зубьев при изгибе введены ограни-
чения минимального значения коэффициента долговечности:
0,5 для редукторов механизмов подъема; 0,63 для редук-
торов механизмов передвижения и поворота, а также червячных
редукторов.
Расчетный крутящий момент (Н м) механизма подъема
ЛТр = (6 + Gr, у) Do/(2intt6T|), (77)
где up —• передаточное число открытой передачи между барабаном и тихоходным
валом редуктора; ц —- КПД кинематической цени механизма от грузозахватного
устройства до тихоходного вала редуктора;
J Т1 = ПпЛблЛбПмПпер (78)
^здесь дп, цб, дм, дпер — КПД соответственно полиспаста, направляющих
блоков, барабана муфты, передач между барабаном и редуктором; г — число бло-
ков.)
Расчетный крутящий момент (Н м) механизма передвижения
= Мкцрцр, (79)
где — максимальный момент двигателя согласно каталогу, Н-м.
3. По эквивалентному моменту [см. формулу (72)] выбирается
типоразмер редуктора при условии
МЭ<МН, . (80)
где Мн — номинальный крутящий момент редуктора на тихоходном валу по
каталогу, Н-м.
4. Если на тихоходный вал действует радиальная нагрузка
Fr шах (Н), то должно выполняться условие
Лэ - - K^Fr ш < Ргн, (81)
где FrH — номинальная радиальная нагрузка на тихоходный вал по каталогу, Н.
5. Проверяют пригодность редуктора по общему межосевому
расстоянию (м)
а(Л > 0,5Do 4 ,, (82)
где Ь31 — ширина двигателя (см. рис. 46 и табл. 12), м.
92
Основные правила эксплуатации и безопасной работы. Открытые передачи
следует регулярно смазывать; в редукторе должен быть установленный уровень
масла (зубья тихоходного колеса должны быть погружены в масло на глубину,
равную половине их высоты). Периодически следует проверять износ зубьев
и зазоров в зацеплении. Температура редуктора не должна превышать 50 °C.
Пример. Выбор редуктора механизма подъема. Необходимое передаточное
число по формуле (70):
и - п^/пег~- 940/29,27=- 32.11.
Этому передаточному числу соответствует редуктор типа Ц2 с ир = 32,42
(см. табл. 13). Проверка передаточного числа по формуле (71): Ли — (и„ — и) X
X 100 %/и - (3&42 - 32,11) 100 %/32,l I - 0,1 % < [ А«] = + 15 % .
Расчетный крутящий момент на тихоходном валу
/Ир - G£>n/(2inr|n)]6) - 49 050-0,261/(2-2-0,99-0,98) = 3298 Н-м.
Коэффициент долговечности по уравнениям (73)—(75) при пт =
Кд -= KqKt — у /С у иТТраббОПт/Л/ц, 0 —
3/0?5 3/5,19-6300+0-29,26/(125-106) = 0,59.
Эквивалентный момент на тихоходном валу по формуле (72):
Мэ КдМр =0,59-3298 = 1946 Н-м,
По табл. 13 принимают редуктор типа 1Д2-400, у которого /Ин = 3100 Н-м >•
> Л+ = 1946 Н -м.
Общее межосевое расстояние редуктора проверяют следующим образом:
= 400 мм > (0,5D6 + t>31) = (0,5-250+ 180) -= 305 мм,
где ft31 = 180 мм—ширина двигателя (см. табл. 12).
Выбор редуктора механизма передвижения. Необходимое передаточное число
по формуле (129) при — 47,7 об/мин (см. с. 126):
и — пъ1пк — 885/47,7 = 18,55.
Этому передаточному числу соответствует редуктор типа ВК-475 с ир =
= 19,59 (см. табл. 14).
Отклонение передаточного числа по формуле (71):
\и = («р —и) 100%/и = (19,59— 18,55) 1ОО%/18,55 = 5,6% < [Ли] = ±15%.
Расчетный крутящий момент на тихоходном валу согласно выражению (79):
Мр= МкИрфр = 39-19.59-0,92= 703 Н-м.
Коэффициент долговечности по формулам (73)—(75) при пт -= пк:
/Сд = KqKt — 'у7 К \ раб60пн/Л/н_ q —
= У'Дб У0,5-3,61 -6300-60-47,7/(125- 10е) = 0,516.
Должно выполняться условие Кд;>0,63, поэтому в расчетах принимают Кп =
= 0,63.
Эквивалентный момент на тихоходном валу согласно выражению (72):
Мэ = КдМр 0,63-703 - 443 Н-м.
По данным табл. 14 при nt-, = 1000 об/мин принят редуктор типа ВК-475,
у которого Л4Н = 4800 Н-м> М9 — 443 Н-м.
93
§ 28. МУФТЫ
Муфты применяют для соединения валов, двигате-
лей, редукторов, барабанов, колес и др., а также для передачи
крутящего момента.
Зубчатые муфты состоят из зубчатых втулок 2, закрепленных
на соединяемых валах /, и зубчатых обойм 4, которые находятся
в зацеплении со втулками. Обоймы соединены между собой бол-
тами. Обоймы по боковым сторонам закрыты крышками с уплот-
нениями 3. Фланец обоймы имеет отверстие для смазочного мате-
риала. При вращении смазочный материал благодаря центробеж-
ным силам распределяется по окружности внутренней полости
обоймы, в результате чего зубья муфты всегда покрыты слоем
смазочного материала. ГОСТ 5006—83 регламентирует следующие
тины зубчатых муфт: тип I — с разъемным!' обоймами для соеди-
нения рядОхМ расположениьих концов валов (рис. 51, ау, ранее эта
муфта относилась к типу М3; тип 2 — с промежуточным валом 5
для соединения концов валов, находящихся на некотором рассто-
янии (рис. 51. в), при этом обоймы соединены с фланцевыми полу-
муфтами 7, ранее эта муфта относилась к типу МЗП; тип 3 — с не-
разъемной обоймой 6. которая имеет малые габариты и удобна для
соединения валов редуктора и фланцевого двигателя (рис. 51, б).
Зубчатые муфты отличаются высокой несущей способностью
и надежностью; кроме того, они допускают угловое смещение
осей соединяемых валов (а не более 1,5'').
Находят применение также зубчатые муфты с тормозным
шкивом 8 (рис. 51, а), который выполнен с фланцевой муфтой.
Рис. 51. Зубчатые муфты:
д — с разъемной обоймой; б — с неразъемной обоймой; о - с промежуточным налом;
е — с тормозным шкивом
94
Табл и ца 15. Характеристики зубчатых муфт (рис. 51)
Общего назначения (ГОСТ 5006 — 83}
С тормозным шкивом
Мн. D D, I i ; т Ь Мас- са, кг С
Нм ММ 2 1). кг- мм Масса ’"пр * 3 й
1 000 1 600 /0 <5.0 145 170 105 125 60 80 82 174 2,5 12 15 30 38 6,7 9,2 0,05 0,06 200 200 95 95 13 18 0.1 0,15
2 500 4 000 60 65 185 200 135 150 85 96 105 220 3.0 20 36 40 10,2 15,2 0,08 0,15 300 300 145 145 30 50 0.6 0,8
6 300 10 000 80 100 230 270 175 200 115 145 130 165 270 340 "2fT 48 56 22,6 36,9 0,25 0,50 400 500 185 210 68 122 1,75 3,75
Соединяемые концы валов могут быть цилиндрическими или кони-
ческими, поэтому зубчатые втулки и фланцевые полумуфты
должны иметь соответствующие отверстия. На конических валах
втулки и фланцевые полумуфты должны быть надежно закреплены
гайкой со стопорной шайбой. На цилиндрических валах они
закреплены с иатягом. Размеры муфт приведены в табл. 15.
Упругие втулочно-пальцевые муфты (ГОСТ 21424—75) без
тормозного шкива (рис. 52, а) применяют для соединения рядом
расположенных концов валов механизмов группы режима работы
1М ... ЗМ. Муфта состоит из двух фланцевых втулок /, которые
соединены с помощью пальцев с резиновыми втулками 2, компен-
сирующими небольшие отклонения соосности и угловые смещения
осей валов. Благодаря втулкам уменьшаются динамические на-
грузки валов. Кроме описанного (основного) исполнения, имеются
втулочно-пальцевые муфты с фланцевой втулкой 3, выполненной
с тормозным шкивом (рис. 52, б). Размеры этих муфт приведены
в табл. 16.
Муфты выбирают по расчетному крутящему моменту (Нм):
Л4р = ^*1*2*3
Таблица 16. Характеристики упругих втулочно-пальцевых муфт
(рис. 52)
Общего назначения (ГОСТ 21424—75)
С тормозным шкивом
Л4 а ° L L / J
Н.м мм кг- мг гпм, кг ММ кг* м2 тш, кг
500 45 170 82 170 0,0175 7,9 200 95 0,125 25
710 56 190 82 170 0,0188 8,5 200 95 0,14 32
1000 70 220 140 216 0,072 20 300 145 0,6 60
2000 90 250 170 218 0,090 22 300 145 0,7 70
4000 95 320 170 270 0,162 28 400 185 1,25 125
95
Рис. 52. Упругие втулочно-пальцевые муфты:
а — без тормозного шкива (ГОСТ 21424—75); б — с тормозным шкивом
где Мпг;., — максимальный крутящий момент, передаваемый муфтой, Н-м;
Л\— коэффициент, учитывающий степень ответственности механизма (табл. 17);
/С3 — коэффициент, учитывающий группу режима механизма (табл. 17); К3 —
коэффициент для зубчатых муфт; /С3 — 1,25 при а — 0,5°; К3 — 1,5 при а — 1°;
/С3 - 1,75 при а 1,5°; Мн — номинальный момент муфты согласно стандарту,
Н-м.
Муфта должна быть проверена по диаметру соединяемых ва-
лов, Если предельный диаметр отверстия втулки муфты меньше
диаметра вала, то принимается следующий типоразмер муфты»
Основные правила эксплуатации и безопасной работы. Отклонение от соос-
ности и угловые смещения осей соединяемых валов не должен превышать допу-
скаемых значений. Периодически следует проверять надежность затяжки гаек
и натяг пол у муфт и втулок. В зубчатую муфту следует подавать масло в объеме,
указанном в паспорте. Масло должно при работе покрывать полную высоту
зубьев; температура масла должна соответствовать температурным условиям,
в которых она применяется; масло ТС-10-ОТП (ГОСТ 23652—79) может быть
применено при температуре от —15 до —40 °C; масло МТ-8П — при температуре
96
Таблица 17. Значения коэффициентов К] и К.
Привод Механизм Группа режима работы Ki лз
Ручной Подъема груза 1М 1.2 1,0
Прочие 1М 1.0 1.0
Подъема груза кранов:
Машинный крюковых 2М; ЗМ 1.3 1,0
4М 1.3 1,1
5М 1.3 1,2
магнитных в грейферных 4М 1.2 1,1
5М 1.2 1.2
Передвижения кранов и те- 2М; ЗМ 1.2 1,0
лежек 4М 1.2 1,1
5М 1,2 1,2
Поворота 2М; ЗМ 1,2 1,2
4М; 5М 1,3 1,3
Изменения вылета 2М; ЗМ 1,3 1,2
4М; 5М 1,3 1,3
Все механизмы 6М 1,3 1,3
от —15 до -}-20сС; масло ИТП-300 — при температуре от —20 до +80 °C. Уве-
личение диаметра отверстий в полумуфте и износ резиновых втулок не должен
превышать 2 мм. При монтаже должны совпадать контрольные метки на парных
втулках и обоймах. Муфты должны быть ограждены кожухами.
Пример. Выбор муфты механизма подъема. Для соединения вала двигателя
с валом редуктора использована зубчатая муфта типа 2 с тормозным шкивом
(см. рис. 51, а, а).
Расчетный крутящий момент при — 314 Н-м
Мр= = 314-1,3-1,1 1,25 = 561 Н-м,
где Kt ~ 1,3 (см. табл. 17); К2 — 1,1 (см. табл. 17); К3 — 1,25 при угловом сме-
щении муфты 0,5°.
С учетом диаметров валов двигателя Дц = 50 мм и редуктора dp = 50 мм
принята муфта с Мн = 1600 Н-м (см. табл. 15).
Выбор муфты механизма передвижения. Для соединения вала двигателя
с валом редуктора использована зубчатая муфта типа 1 (см. рис. 51, а). Расчет-
ный крутящий момент при = 39 Н-.м
Мр= MkKjK2K3= 39-1,2- 1,1-1,75= 90 Н-м,
где /Д = 1,2 (см. табл. 17); К2 — 1,1 (см. табл. 17); К3~ 1,75 при угловом сме-
щении муфты 1°. С учетом диаметров валов двигателя dn = 28 мм и редуктора
dp = 40 мм принята муфта с Мн = 1000 Н-м (см. табл. 15); JM =
= 0,05 кг- м2.
Вопросы для повторения. 1. Какие типы редукторов применяют в кра-
новых механизмах? 2. Как выбирают редуктор? 3. Какие имеются типы муфт и в
каких случаях их применяют?
4 Балашов В. П,
97
ГЛАВА 8. ТОРМОЗНЫЕ УСТРОЙСТВА
§ 29. ОБЩИЕ СВЕДЕНИЯ
Тормозные устройства разделяют на два вида:
1) остановы, предназначенные для стопорения неподвижного меха-
низма; 2) тормоза, предназначенные для затормаживания движу-
щегося механизма и его стопорения после остановки. Процесс
торможения представляет собой преобразование кинетической
энергии вращающихся масс механизма н поступательно движу-
щихся масс крана с грузом в работу сил трения тормоза.
Тормоза в механизме подъема груза и стрелы не только за-
тормаживают, но и способствуют удерживанию груза или стрелы
с грузом в подвешенном состоянии. Тормоза в механизмах пере-
движения кранов (тележек) и поворота должны обеспечить оста-
новку механизма на заданном пути торможения, а при действии
внешних факторов — ветровой нагрузки, уклонов рельсового
пути — удерживать кран илн его поворотную часть от пере-
мещения.
Тормоза установлены на валу механизма, при этом обеспечи-
вается надежная кинематическая связь этого вала с исполнитель-
ным органом (см. рис. 4—7). В случаях транспортирования рас-
каленного и расплавленного металла и шлака, ядовитых и взрыв-
чатых веществ механизмы подъема груза и изменения
вылета оборудуются двумя независимо действующими тормозами.
В механизмах подъема с ручным приводом тормоз может быть
заменен самотормозящей червячной передачей. Тормоза меха-
низмов передвижения кранов (тележек), работающих на открытом
воздухе, должны обеспечивать их удерживание прн действии
ветровой нагрузки на кран в рабочем состоянии, а также плавное
торможение при отсутствии ветровой нагрузки. Эти требования
можно обеспечить, если применить комбинированное торможение
электродвигателями при работе без ветровой нагрузки и с неболь-
шой ветровой нагрузкой и механическими тормозами при действии
ветровой нагрузки, близкой к нормативному значению ветровой
нагрузки на кран рабочего состояния.
§ 30. ОСТАНОВЫ
Остановы допускают свободное вращение вала меха-
низма в одном направлении и препятствуют его вращению в обрат-
ном направлении.
Храповый останов (рис. 53, а) состоит из храпового колеса
(храповика) 1, установленного на затормаживаемом валу 2 меха-
низма, и собачки 3, шарнирно закрепленной на оси 4, установлен-
ной на неподвижном элементе механизма, например, корпусе.
В механизме подъема груза собачка входит в зацепление с храпо-
вым колесом таким образом, чтобы не допускалось вращение вала
98
в)
Рис. 53. Остановы:
а — храповой; б — расчетное положение собачки; в роликовый
в направлении опускания груза. Перед опусканием застопорен-
ного груза собачка должна быть выведена из зацепления с храпо-
вым колесом. Для этого вал необходимо повернуть на небольшой
угол в направлении подъема и отвести собачку от храпового колеса
вручную. При подъеме груза собачка проскальзывает по зубьям
и возникает характерный шум трещотки.
Усилие между зубьями храпового колеса н собачкой (Н)
- 2MKP/DH- 2MKP/(mz),
где — крутящий момент на валу, Н-м; Dit- наружный диаметр храповика,
м; m — модуль, м; г — число зубьев.
Угол профиля рабочей поверхности зуба храпового колеса
а = 20°, благодаря чему обеспечивается вхождение собачки в за-
цепление с зубом даже тогда, когда собачка упирается рабочей
4* 99
кромкой в вершину зуба; этот случай и является расчет-
ным (рис. 53, б). Линейная нагрузка на кромке зуба (Н/м)
q = Fjb < [<?],
где Ь- ширина зуба, м; [<71 1510е Н/м для чугуна СЧ 15; (Д == 30 X
X 106 Н/м для стали 35Л.
Напряжение изгиба зуба (Па)
СТизг = Мизг/Г = Ff/l/W < [СТизгЕ
где D7 = М2/6 — момент сопротивления сечения основания зуба изгибу, м3
(здесь b — ширина, м; а — длина, м); h — высота зуба, м; {ояэг] = 80 МПа
для стали 35Л; [оизг ] = 120 МПа для стали 45.
Собачка обычно выполнена изогнутой формы, поэтому она
работает на сжатие и изгиб. Суммарное напряжение сжатия (Па)
О — *^С1К *^ИЗГ = -|- /VIизг/ W '-Z- [0изг1>
где Л== 8б—площадь сечения собачки, м2 (здесь 8— ширина, м; 5 — высота, м);
Л4ИЗГ = Foe — изгибающий момент, Н-м (е — плечо действия силы Fo, м);
W = 663/6 —- момент сопротивления сечения изгибу, м3; [аи3|. j — 60 МПа для
стали 40.
Основным недостатком храповых остановов является нагру-
жение вала усилием р0.
Роликовый останов (рис. 53, в) имеет втулку 6 с пазами, которая
закреплена на затормаживаемом валу 11, и корпус в виде кольца 5,
соединенного с неподвижным элементом 8 механизма. Между
кольцом и пазами втулки расположены цилиндрические ролики 7.
Прн движении втулки против часовой стрелки ролики под дей-
ствием сил трения перемещаются в широкую часть паза втулки,
при этом образуется зазор и происходит вращение втулки отно-
сительно кольца. При движении втулки по часовой стрелке ро-
лики перемещаются в узкую часть паза, заклиниваются и не
допускают вращения втулки относительно кольца. Быстрее за-
клинивание происходит, если ролики поджимать штифтами 9
с пружинами 10. Для обеспечения заклинивания необходимо
выдержать а-<: 7.
§ 31. ТОРМОЗА
Тормоз состоит из опорной конструкции с тормоз-
ными колодками, устройства для затормаживания и привода для
растормаживания. Торможение механизма происходит в резуль-
тате создания сил трения между тормозным шкивом, закреплен-
ным на валу механизма, и тормозной колодкой.
Тормоза классифицируют по следующим признакам: 1) форме
тормозных колодок: колодочные, ленточные, дисковые, конусные;
2) по назначению: стопорные (затормаживают механизм и удержи-
вают его в неподвижном состоянии после остановки); спускные
подтормаживают механизм и уменьшают скорость движения,
100
например, опускание груза; регуляторы скорости (срабатывают
в случае превышения скорости сверх допускаемой); 3) по положе-
нию колодок относительно тормозного шкнва: нормально закрытые
(колодки прижаты к шкиву посредством затормаживающего уст-
ройства — пружины или груза с рычагом, растормаживание с по-
мощью привода тормоза); нормально открытые (колодки не при-
жимаются к шкиву, для затормаживания прикладывается внешнее
усилие); 4) по конструкции устройства для затормаживания:
пружинные, грузовые (груз на рычаге), грузоупорные (с помощью
силы тяжести поднятого груза); 5) по принципу действия: авто-
матические (затормаживают и растормаживают шкив без участия
человека); управляемые с помощью каких-либо устройств; 6) по
исполнению приводов: короткоходовые (рабочий ход затормажива-
ющего устройства привода равен или близок пути перемещения
тормозных колодок), длинноходовые (рабочий ход устройства
в несколько раз больше пути перемещения колодок).
Согласно Правилам по кранам в механизмах подъема груза
и изменения вылета должны применяться автоматические нор-
мально закрытые тормоза. Управляемые тормоза допускают
в механизмах передвижения и поворота.
Для получения большего тормозного момента колодки вы-
полняют с обкладками из материалов с повышенным коэффициен-
том трення. Значения коэффициента трения для трущихся поверх-
ностей из различных материалов без смазочного материала (чис-
литель) и со смазочным материалом (знаменатель) следующие:
Сталь но стали.................................................... 0,15.0,06
Сталь fio чугуну................................................. 0,17/0.06
Вальцованная лента 6KB-I0 по чугуну и стали ..................... 0,42/0,12
Широкое применение получил материал ЭМ-2 (ГОСТ 15960—79)
(вальцованная лента 6КВ-10), хорошо работающий в паре с чу-
гунными или стальными шкивами при твердости поверхности
трения не менее НВ 250. Этот материал имеет высокую износо-
стойкость, стабильный коэффициент трения при нагреве шкива
до температуры 200 °C, К тормозным колодкам обкладки крепятся
с помощью заклепок нз мягких цветных металлов. Заклепки
утоплены на половину толщины обкладки, поэтому допускается
ее износ только на эту толщину. Касание заклепок со шкивом
приводит к интенсивному изнашиванию поверхности шкива в ви-
де кольцевых канавок. Допускаемые значения давления при раз-
личных материалах колодок и тормозов рекомендуется принимать
по данным табл. 18.
Расчетные крутящие тормозные моменты определяют на валу
механизма, на котором установлен тормоз. Такими обычно яв-
ляются быстроходный вал редуктора или вал двигателя, так как
на ннх тормозной момент наименьший.
Расчетный тормозной момент (Н-м) механизма подъема груза
МТ>КТМС, (83)
101
Таблиц а 18. Допускаемые средние значения |р| (МПа)
Материал трущихся поверхкостей Тормоз
ленточный и ICO лодочный Дисковый и конусный
стопорный спускной
Сталь но стали 0,4 0,2 0.3/0,8
Сталь но ч\туну 1,5 1,0 0.4/0,8
Вальцованная лепта 6 Кб-10 по чу супу и стали 0.6 0.3 0,6'1.2
П р и м е ч а н и е. В числителе приведены Данные для трущихся поверх-
ностей без смазочного материала, а в знаменателе — для трущихся поверхно-
стей со смазочным материалом.
где К г — регламентированный Правилами по кранам коэффициент запаса тор-
мошен и я (табл. 19).
Приведенный к быстроходному валу редуктора статический
момент от веса груза G и грузоподъемного устройства 6Г, у
Мс =2 (G 1 Gr. у) Ogt)/(2i1(wp). (84)
Т а б л и ц а 19. Значения коэффициента запаса торможения /Ст
Привод Г рунпа режима работы дт
Ручной 1М 1.5
Один маш пипыи (один тормоз) IM. 2М, ЗМ 4М 5М 6М 1,5 1,75 2.0 2,5
Один машинный (два или более тормозов! - 1,25 (Для каждого тормоза)
Два машинных (на каждом приводе один тормоз) — 1.25 (для каждого тормоза)
Два и более машинных (на каждом приводе по два тормоза) 1.10 (для каждого тормоза)
Один машинный: для автоматического тормоза для грузоупорного тормоза — 1,25 1,10
102
Расчетный тормозной момент механизма изменения вылета
определяют также по формуле (83), при этом Лф/Д' 1,5. Статиче-
ский момент находят по выражению (84), в котором вместо (G
ф- Gr, у) должно быть принято наибольшее усилие /ф [см. фор-
мулу 132)] на тяге, соединяющей стрелу с обоймой стрелового
полиспаста (см. рис. 7, а).
Расчетный тормозной момент (Н м) механизма передвижения
крана вычисляют при движении крана по направлению действия
ветра и наличии уклона рельсовых путей с учетом заданного
времени торможения:
Mt — /Ид, ц ф- /Ид. Вр ф- Мв. р ф- /ИуКЛ /Итр. (85)
Входящие в формулу (85) моменты приведены к быстроходному
валу редуктора (двигателя):
динамический момент поступательно движущихся масс крана
с грузом
/Ид. п — (^1кр ф~ Q) ^к^двЛ/(38,5ир^т), (86)
динамический момент вращающихся масс механизма
Ид. вр = 6*Мдв/(9,55ф); (87)
момент от ветровой нагрузки на кран в рабочем состоянии Лц р
1см. формулу (6) I с грузом
/Ив. р = Fв. pZ9Kt]/(2up); (88)
момент (Н*м) от составляющей веса крана и груза UZyKJ1
[см. формулу (127)1 при уклоне рельсовых путей
Мукд — 1^уГ(Л£>кт]/(2нр); (89)
момент сопротивления (Н-м) от сил трении 1Т’тр [см. формулу
(125)1 ходовой части крана
Мтр = 1^тр£>кг]/(2пр), (90)
где DK — диаметр колеса, м; пдв = пп—частота вращения двигателя, об/мин;
т] — общий КПД механизма; ир—передаточное число редуктора; ./ — момент
инерции масс, расположенных на быстроходном валу, кг-м2; J — ^р+./м +
+ (здесь Jр, /м п Ущ— моменты инерции соответственно ротора, муфты н
тормозного шкива); 1,2—коэффициент, учитывающий моменты инерции
остальных вращающихся масс механизма.
Время торможения (с) задается или определяется по необхо-
димому пути торможения или рекомендуемому замедлению:
/т — 2s.r/wKpi (91)
где а — замедление, м/с2; к1(р — скорость перед началом торможения, м/с;
sT — тормозной путь, м; минимальные значения тормозного пути при условии
сохранения сцепления приводных колес с рельсами: sr|. ч® /5000 при торможе-
нии половины колес; s.|h > и2 у 1 000 при торможении всех колес (здесь и в м/мин).
Тормозное усилие, приведенное к ободу колеса
' Тт = МтирОк/21].
103
Колодочные тормоза
Наибольшее распространение в крановых механиз-
мах получили автоматические нормально закрытые двух колодоч-
ные тормоза переменного и постоянного тока.
Колодочные тормоза переменного тока серии ТК Г- Эти тормоза
применяют для механизмов группы режима 1М ... 4М (рис. 54, а).
4 13 12 5 8
а)
а — с электромагнитом типа МО; б — электромагнит типа МП
104
Тормоз состоит из подставки 14. на которой при помощи пальцев
шарнирно закреплены рычаги 10 и 15. На рычаге 10 болтами за-
креплен магнит типа МО, состоящий из неподвижной части —
ярма 6 с катушкой 9 однофазного питания и поворотной части —
якоря 8. Около шарнира рычага 10 имеется регулировочный
винт 11. У якоря предусмотрен упор 7 для штока 5 тормоза.
В средней части рычагов также шарнирно подвешены колодки 16
с обкладками. Верхние концы рычагов стягиваются пружиной
сжатия 4, которая установлена на шток 5 и помещена между
опорной частью скобы 3 и установочной гайкой 13 на штоке.
Имеется отжимная гайка 12. Скоба 3 шарнирно закреплена на
рычаге 10.
Между скобой 3 и рычагом 15 установлена вспомогательная
пружина 2. служащая для отвода этого рычага при расторма-
живании тормоза. Один конец штока касается упора 7 якоря 8
магнита, а другой закреплен гайкой 1 со сферическими шайбами
на конце рычага 15. Этот конец штока выполнен в виде квадрат-
ного хвостовика под ключ. В автоматическом режиме работы
тормоза катушка магнита подключается к сети параллельно
с обмотками фаз статора электродвигателя привода механизма.
В нерабочем состоянии механизма электромагнит обесточен и
якорь откинут, пружина через рычаги прижимает колодки к тор-
мозному шкиву.
Растормаживание тормоза. Прн включении тока одновременно
с началом вращения электродвигателя якорь электромагнита
поворачивается и притягивается к ярму. При повороте упор 7
якоря давит на конец штока 5, который перемещается вместе
с установочной гайкой 13 и сжимает пружину 4. Рычаг 10 под
действием момента от веса магнита поворачивается вместе с ко-
лодкой, которая отходит от тормозного шкива до тех пор, пока
регулировочный винт И не упрется в ребро подставки. После
этого под действием вспомогательной пружины 2 поворачивается
другой рычаг 15 с колодкой. Время растормаживания до 0,05 с.
Затормаживание тормоза. После выключения тока сжатая
пружина освобождается от воздействия якоря магнита, через
шток и скобу поворачивает рычаги, колодки прижимаются к тор-
мозному шкиву. В заторможенном состоянии якорь магнита отки-
нут, а между ребром подставки 14 и регулировочным винтом 11
Имеется зазор. Время затормаживания до 0,02 с.
Колодочные тормоза постоянного тока серии ТКП. Эти тор-
моза применяют в механизмах группы режима 4М ... 6М. Меха-
ническая насть этих тормозов та же, что и у тормозов серии ТКТ.
На рычаге болтами закреплен постоянный электромагнит типа МП
(рис. 54, б), состоящий из стального корпуса 18, являющегося
магнитопроводом, внутри которого помещена катушка 19. В цен-
тральном отверстии корпуса перемещается штырь 17, соединенный
с якорем 20. имеющего форму плоского диска. В центральное
отверстие входит шток тормоза 5, который воздействует на штырь
105
Таблица 20. Характеристика тормозов серии ТКТ (рис. 54, а, б и 55)
Тормоз (электромагнит) М Н- м, при ПВ = 40 % Отход КО- ЛОД- КИ £, мм Момент электро- магнита Мэ, Н- м Угол поворота якоря [а], 0 Ход я ко- ря, ММ Масса тор- моза кг
ТКТ-100 (МО-ЮОБ) 10 . . 20 0,6 5,5 7е 3' 5.5 11.2
ТКТ-200'100 (МО-ЮОБ) 25 . . 40 0,6 5,5 7° 3' 5,5 25.4
ТКТ-200 (МО-200Б) 60 . . 160 0,8 40 5’ 3' 7.0 37,5
ТКТ"300/200 (МО-200Б) 180 . . 240 0.8 40 5е 3' 7.0 75
Тормоз (электромагнит) L и 1 h в 6 е
ММ
ТКТ-100 (МО-ЮОБ) ТКТ-200/100 (МО-ЮОБ) ТКТ-200 (МО-200Б) ТКТ-300/200 (МО-200Б) 398 546 660 786 280 420 605 620 268 328 443 515 100 170 170 240 130 130 177 177 70 135 135 190 100 170 170 240 22 22 40 40 70 90 90 140
н отжимает его вместе с якорем от корпуса на определенный
зазор Б. При включении тока диск якоря притягивается к кор-
пусу н перемещает штырь со штоком и растормаживает тормоз.
Время затормаживания н растормаживания до 0,3 с.
Проверочный расчет тормозов ТКТ и ТКП. Исходные данные —
расчетный тормозной момент механизма ЛТГ по формулам (83)
и (85) и расчетная схема тормоза (рис. 55. табл. 20).
Окружное усилие на ободе тормозного шкива (Н)
F„ = 2МТ/РШ. (92)
где Dju — диаметр тормозного шкива, м (рис. 56, табл. 21).
106
Таблица 21. Характеристики тормозных шкивов (рис. 56)
Ош О вш в Масса Момент инерцнн /ш, кг-м1
ММ кг
100 85 50 60 50 1,8 0,0002
160 140 80 80 70 6.0 0.0017
200 180 70 НО 95 9.2 0,004 1
300 275 90 145 145 25 0,025
400 370 140 185 145 48 0.086
Сила прижатия тормозных колодок (Н)
Л. = W (93)
где f— коэффициент трения (см. с.101).
Среднее давление между обкладкой и тормозным шкивом (Па)
р - F„lА < [р|, (94)
где Ip I — допускаемое среднее давление (см. табл. 18), Па; А — площадь каса-
ния обкладки со шкивом, м2, А — jtDuBk(W360o (здесь бк — ширина обкладки, м;
(J — угол сектора обхвата обкладкой шкива, °).
Усилие на концах рычагов (Н)
= FM + (95)
где /1( 12 — размеры рычага, м.
Расчетное усилие пружины (Н)
Лпр = 1.1 Fp, (96)
где 1,1 — коэффициент, учитывающий влияние вспомогательной пружины и
потери в шарнирах рычажной системы.
Необходимый момент электромагнита (Н-м)
M3 = V<0,9[M9], (97)
где (Л4Э] — номинальный момент электромагнита, Н-м (см. табл. 20); е — рас-
стояние от оси поворота якоря до оси штока, м.
Ход штока тормоза (м)
S - 1,1-28 (Zx + /2)//2, (98)
где е — рекомендуемый отход колодок, м (см. табл. 20).
Необходимый угол поворота якоря (°)
а — 18О'Улс с 0,9 [а 1, (99)
где (а] — номинальный угол поворота якоря,0 (см. табл. 20); s — ход штока, м.
Колодочные тормоза переменного тока серии ТКГ. Эти тор-
моза применяют в механизмах группы режима работы 4М ... 6М
(рис. 57). Тормоз состоит из подставки 9, на которой шарнирно
закреплены рычаги 3 и 6. В средней части рычагов шарнирно
107
Рис. 57. Колодочный тормоз серии ТИТ с электрогндравлическим толкателем
подвешены колодки 7 с обкладками. В нижней части рычага 6
имеется кронштейн с винтом 8 для регулирования отхода колодок.
На рычаге <7 установлен двуплечий рычаг /, большее плечо кото-
рого соединено со штоком электрогидравлического толкателя 10
и тягой пружины 2, меньшее плечо - с тягой 4. Другой конец
тягн снабжен резьбой и закреплен иа верхнем конце рычага 6
с помощью гаек 5 и подвижного пальца.
Одноштоковый электрогидравлнческий толкатель (рис. 58).
В основании корпуса / толкателя размещена трехфазная об-
мотка 2 двигателя. Короткозамкнутый ротор 3 установлен в под-
шипниках. На валу ротора закреплено колесо 4 центробежного
насоса с прямыми радиальными лопатками, что обеспечивает
работу насоса в обоих направлениях вращения ротора. Корпус 8
соединен с основанием корпуса /. Внутри корпуса 8 размещен
цилиндр 6 для поршня 5 со штоком 7 и уплотнением 9. Между
корпусом и цилиндром предусмотрены каналы 12 для перемеще-
ния масла. Конец штока выходит наружу через отверстие с уплот-
нением крышки. Отбойник масла // расположен снизу крышки.
В верхней части крышки имеется пробка 10 для заливки рабочей
108
Рнс. 58. Электрогидравлнческий толкатель
109
жидкости, а с нижней стороны основания корпуса — пробка для
ее слива. С боковой стороны основания корпуса расположена
клеммная коробка 13. В качестве рабочей жидкости применяется
трансформаторное масло (ГОСТ 982—80) при температуре окру-
жающей среды от — 15 до [ 50 “С, масло АМГ-10 (ГОСТ 6794—75)
ири температуре окружающей среды от - 40 до 15 °C. а также
заменяющие их жидкости ПМС-20 и ПГ-271А при работе при
низких температурах.
В автоматическом режиме работы обмотки электродвигателя
подключаются параллельно с обмотками статора двигателя ме-
ханизма.
Растормаживание тормоза. При включении тока одновре-
менно начинают вращаться электродвигатели толкателя и меха-
низма. Центробежный насос перекачивает жидкость и поднимает
поршень со штоком, который поворачивает двуплечий рычаг;
шток перемещается и разводит рычаги с колодками до тех пор, пока
регулировочный винт не коснется основания подставки. Время
растормаживания 0,4 ... 1,5 с. За время включения двигателей
насос работает так, что поддерживается давление жидкости под
поршнем.
Затормаживание тормоза. После выключения тока оба дви-
гателя останавливаются, поршень со штоком опускается под
действием усилия пружины, колодки прижимаются к тормозному
шкиву. В заторможенном состоянии шток находится в Нижнем
положении, между регулировочным винтрм и основанием под-
ставки имеется зазор. Время затормаживания 0,3 ... 1,2 с.
Проверочный расчет тормоза ТКТ. Расчет этого тормоза
(рис. 59; табл. 22) выполняется аналогично расчету тормоза
ТКТ 1см. формулы (92)—(95) I.
Рис. 59. Расчетная схема тормоза серии ТКГ
НО
Таблица 22. Характеристика тормозов серии ТКГ (рис. 57 и 59)
Тормоз (электрогидраили ческни толкатель} м.,., Н м Отход колодки мм Усилие на штоке ИщГ н Ход што- ка sH мм Рабочий ход што- ка s. мм о Г-; 0J * (О - с 3! О и * Масса тормоза, кг
ТКГ-160 (ТЭГ-16) 40 .. 100 0,8 160 25 15 1,4 21,2
ТКГ-200 (ТЭГ-25) 100 .. 250 1.0 250 32 22 Г8 38
ТКГ-300 (ТГМ-50) 300 .. 800 1,2 500 50 30 3.5 100
ТКГ-400 (ТГМ-80) 500 .. 1500 Г4 800 50 30 5,0 1,30
Тормоз L h В ' 1 ' и ь С
(элсктрогидравл и- чсский толкатель) мм
ТКГ-160 (ТЭГ-16) 490 415 144 201 - 70 „
Т К Г-200 ( ТЭГ-15) 603 436 170 213 135 170 90 19 60 170
ТКГ-300 (ТГМ-50) 772 526 240 227 190 240 140 28 75 210
ТКГ-400 (ТГМ-80) 940 620 320 227 250 275 180 22 75 210
У тормоза ТКГ усилие пружины действует на двухплечиый
рычаг, из условия равновесия которого находится расчетное
усилие пружины (Н):
Л]1р = k\a!b. (ЮО)
где Fp — усилие на конце рычага [см. формулу (95)], Н; а, b — размеры плечей
рычага, м.
Необходимое усилие на штоке толкателя (Н)
Г’,,, = ГпрЬ/с < 0,9[FflIL (101)
где [Fm| — номинальное усилие на штоке толкателя, Н (см. табл. 22); Ь, с —
размеры плечей рычага, м.
Угол поворота двуплечего рычага (’)
а2,2е (/х 4- /2)//та, (102)
где е—рекомендуемым отход колодок, м (см. табл. 22).
Необходимый ход штока (м)
s = ас с 0,9sH, (103)
где sH — номинальный ход штока, м (см. табл. 22).
Ленточные тормоза
Тормоз (рис. 60) состоит из основания 2 и за-
крепленной на нем гибкой ленты 5, которая охватывает
тормозной шкив 6. Лента снабжена обкладкой из фрнкцион-
111
Рис. 60. Ленточный простой тормоз
ного материала. Свободный конец
ленты соединен с тягой 4, кото-
рая закреплена на двуплечем
рычаге 1. Между упором основа-
ния и одним концом рычага
установлена пружина 3. Второй
конец рычага связан со штоком
гидроразмыкателя 8. Отход ленты
регулируется винтом 7. Заторма-
живание шкива происходит при
затягивании ленты пружиной 3, а
растормаживание при подаче жид-
кости под давлением в гидрораз-
мыкатель 8.
Для затормаживания могут быть применены грузы на рычагах,
а для растормаживания — электромагниты, связанные с тем же
рычагом.
В расчетах тормозов используют формулу Эйлера, выража-
ющую зависимость между натяжениями набегающей 5нб на шкив
и сбегающей Sc6 со шкива ветвей ленты (рис. 61, а):
«ко =
(Ю4)
где е = 2,72 — основание натуральных логарифмов; / — коэффициент трения
между обкладкой ленты и шкивом; а — угол обхвата лентой тормозного шкива,
рад.
Окружное усилие (Н) на ободе тормозного шкива при расчет-
ном Л4Т определяют по формуле (92). В то же время окружное
усилие (Н)
= 2МТ/ГШ = Sh6 - Sc6. (105)
При решении уравнений (105), (104) находят усилия в ветвях
леиты (Н)
5нб = -п----ъ5сб = -р— —р (106)
е' — 1 ^ш е; — 1
Рис. 61. Схемы к расчету ленточных тормозов:
а — простого; б -- дифференциального; в — суммирующего
112
Ширину ленты определяют с учетом допускаемого давления
В 25нб/(£)ш[р]),
где fpj — допускаемое давление, Па (см, табл. 18).
В зависимости от способа крепления ленты к рычагу разли-
чают тормоза — простые, дифференциальные и суммирующие.
В простом ленточном тормозе (см. рис. 61. а) один конец леиты 1
закреплен на оси шарнира А рычага, а другой конец 2 на ры-
чаге 3. В зависимости от направления вращения шкива изменяется
положение усилий Shq и Sce 1см. формулу (106)1. Следовательно,
для обеспечения расчетного тормозного момента ,МТ необходимо
изменить усилие затормаживания F на рычаге. Если это усилие
постоянно, то будут различаться между собой тормозные моменты
в зависимости от направления вращения шкива. Поэтому простой
ленточный тормоз применяют в тех механизмах, в которых не
требуются одинаковые тормозные моменты при вращении шкива
в обе стороны. Простой ленточный тормоз применим, например,
в механизмах подъема груза и стрелы, но его устанавливают
так, чтобы он действовал с большим тормозным моментом в случае
опускания груза или стрелы. Тогда для торможения поднима-
ющегося груза достаточным будет меньший тормозной момент.
В дифференциальном ленточном тормозе (рис. 61, б) концы
ленты 1 и 2 закреплены на рычаге 3 по обе стороны от его шар-
нира, но при этом плечи действия сил SirG и 5сб не равны между
собой. Усилие затормаживания на рычаге определяется разностью
моментов указанных сил. причем оно значительно меньше усилия
простого ленточиого тормоза. Поэтому дифференциальный лен-
точный тормоз можно применять с ручным управлением.
В суммирующем ленточном тормозе (рис. 61, в) оба конца
ленты 1 и 2 прикреплены к тормозному рычагу 3 так. что усилия
113
Знб и 5Сб создают на рычаге момент одного знака. При одина-
ковых плечах рычагов затормаживающее усилие, а следова-
тельно, и тормозной момент не зависят от направления вращения
тормозного шкива, поэтому эти тормоза находят применение
в реверсивных механизмах передвижения и поворота.
Недостатки ленточных тормозов: неравномерное давление
ленты на шкив, радиальное усилие на вал в месте закрепления
тормозного шкива. Возможный обрыв ленты уменьшает надеж-
ность ленточных тормозов.
Тормоза с осевым нажатием
Дисковые тормоза применяют в электроталях, элек-
тродвигателях со встроенным тормозом (см. § 26) и в качестве
элемента грузоупорных тормозов с замыканием от массы груза
(см. § 32). Дисковый тормоз (рис. 62, а) имеет несколько ди-
сков 2, посаженных иа шпонку 4 или шлицы затормаживаемого
вала 3. Между этими дисками расположены диски 6, которые
закреплены в неподвижном корпусе 1 и имеют возможность осе-
вого перемещения. Фрикционные обкладки могут быть установ-
лены на подвижных дисках. Тормозной момент создается в резуль-
тате сжатия дисков внешним осевым усилием Fn (усилием пру-
жины или усилием ручного привода с рычагом 5). Растормажива-
ние может осуществляться с помощью электромагнитов, якоря
которые закреплены на крайнем неподвижном диске, а сердечник
с катушками — на корпусе. Для обеспечения стабильного тормоз-
ного момента диски могут быть помещены в масляную ванну.
Зазор между трущимися поверхностями не менее 0,5 мм при
фрикционных накладках и 0,2 мм для работающих поверхностей
в масляной ванне. Наружный диаметр £)н == (1,25 ... 1,5) £>вн,
а разность — £)вн<0,12 м. Расчетным является средний
диаметр поверхности трения (м)
Оср ~ (^Н ^Вн)/2.
Необходимое осевое усилие нажатия дисков (Н)
Fa - 2Мт/(/)ср/г),
где / — коэффициент трения (см. с. 101); г — число пар трущихся поверхностей
дисков,
Среднее давление на трущихся поверхностях (Па)
p = 4F„/[n(D2B-D2,H)]«|p],
где [р] — допускаемое среднее давление, Па (см. табл. 18).
Конусные тормоза применяют вместо дисковых в тех случаях,
когда необходимо иметь уменьшенное осевое усилие нажатия Лп,
а также в качестве элемента грузоупорных тормозов (см. § 32).
Конусный тормоз (рис. 62, б) состоит нз конуса 8, закрепленного
114
на шпонке 4 на затормаживаемом валу 3, и неподвижной чашки 7
с конической расточкой, размеры которых £>н — (1,2 ... 1,6) £)вн.
Для предотвращения заклинивания конусов должно быть соб-
людено условие
а/2 р - arctg l,2f или tg а/2 l,2f,
где р — угол трения; / — коэффициент трения; а = 40 ... 50° — угол конуса.
Необходимое осевое нажатие (Н)
Fn = 2MTsina/2/(Dcp/=).
Среднее давление на трущихся поверхностях (Па)
р ~ 2Лп/[лВ (£>н -ф- £>BH)sin a/2] < [р],
где [р] — допускаемое среднее давление, Па (см. табл. 18); В — ширина поверх-
ности трения, м.
Правила эксплуатации и безопасной работы. Тормоза регулярно осматривают
для проверки надежности крепления деталей, правильности их взаимного по-
ложения и состояния трущихся поверхностей. Мертвый ход системы рычагов
и тяг, приведенный к якорю электромагнита [см. формулу (99)] или штока тол-
кателя [см. формулу (103)], не должен превышать 10 % их- хода.
Крепления электромагнита н толкателя с тормозом должны обеспечивать
свободные перемещения подвижных- частей тормоза. В включенном положении
якорь должен плотно соприкасаться с ярмом, так как наличие зазора вызывает
увеличение силы тока в катушке и ее нагрев. Шум магнита МО устраняется
равномерной затяжкой гаек крепления и установкой прокладок между ярмом
магнита и рычагом тормоза. Крепление толкателя должно допускать его пока-
чивание. При заполнении толкателя маслом должен быть полностью удален
воздух из его полостей.
Работа тормозных обкладок при равномерном изнашивании допускается
в пределах 0,5 первоначальной толщины.
Пружины тормозов должны иметь сертификат с указанием их фактических
характеристик.
Рабочая поверхность тормозного шкива должна быть ровной, гладкой и
чистой. Не допускается использовать шкивы с сквозными трещинами и при ослаб-
ленных посадках на валах.
Регулирование тормозов серий ТКТ и ТКП производят при выключенном
токе в следующем порядке (см. рис. 54, а):
1) устанавливают нормальный ход якоря магнита, для чего установочную
гайку 1 удерживают гаечным ключом, а шток 5 вращают за квадратный хвосто-
вик; под нажимом штока отходит якорь магнита; у магнита МО измеряют зазор А
между якорем и ярмом по линии, соединяющей заклепки (см. рис. 54, а); у ма-
гнита МП измеряют зазор В между якорем и корпусом (см. рис. 54, б); зазор А
должен соответствовать рекомендуемому (см. табл. 20); зазор В — 3 ... 4’мм;
2) проверяют отход колодок от тормозного шкива, для чего ключом вращают
отжимную гайку 12 до упора в рычаг 70, удерживают ключом гайку 13\ ква-
дратный хвостовик штока 5 вращают до тех пор, пока якорь 8 магнита не кос-
нется ярма 6 (или якорь магнита МП 20 корпуса 18) — тормоз расторможен;
вращением регулировочного винта 1! устанавливают по щупу одинаковый отход
колодок в их средней части; если зазор не соответствует рекомендуемому (см.
табл. 20), то вращением гайки 1 рычага 15 его уменьшают или увеличивают;
окончательное положение колодок фиксируют контргайкой винта 11\ шток воз-
вращают в начальное положение, отжимную гайку 12 отводят от рычага /0;
колодки прижаты к тормозному шкиву;
3) регулируют пружину на расчетный тормозной момент, для чего вращением
установочной гайки 13 изменяют длину /пр пружины 4 так, чтобы она соответ-
ствовала расчетному тормозному моменту; положение установочной гайки 13
фиксируют отжимной гайкой 12,
115
Регулирование тормозов серии ТКГ производят при выключенном токе в сле-
дующем порядке (см, рис. 57):
() устанавливают начальное положение штока поршня толкателя, для чего
вращением гайки 5 тяги 4 поднимают двуплечий рычаг 1 на полную высоту хода
поршня $н (см. табл. 22), а затем опускают на длины s и фиксируют гайкой 5
в этом полосе ни и;
2) проверяют отход колодок от тормозного шкива, для чего поднимают
вручную или с помощью рычага шток толкателя в верхнее положение и помещают
под рычаг 1 подкладку; вращением регулировочного винта 8 устанавливают по
щупу одинаковый отход колодок в их средней части; если зазор не соответствует
рекомендуемому, то вращением гаек 5 штока его уменьшают или увеличивают;
окончательное положение колодок фиксируют затяжкой этих гаек; вынимают
подкладки из-под рычага; колодки прижаты к тормозному шкиву,
3) регулирую^ пружину на расчетный тормозной момент, для чего враще-
нием установочной гайки 11 изменяют длину /пр пружины так, чтобы она соот-
ветствовала расчетному тормозному моменту; положение установочной гайки
фиксируют стопорной гайкой.
Регулирование ленточных тормозов включает: 1) установку нормального
хода якоря электромагнита; 2) проверку равномерного отхода ленты от шкива
и зазора между лентой и шкивом; 3) регулирование тормозного момента изме-
нением усилия затормаживания.
Пример. Выбор тормоза механизма подъема. Расчетный тормозной момент
по формулам (83)—(84) при установке тормоза на быстроходном валу редуктора
(см. рис. 4, б)
Мт> КТМС KTGD0ii/(2iHUp) = 1,75-49 050-0,261 -0,92/(2-2-32,42) -= 190 Н-м,
где — 1,75— коэффициент запаса торможения при группе режима работы
4М (см. табл. 19). Принят тормоз типа ТКГ-200 с Л4Т ~ 100 ... 250 Н м (см.
табл. 22).
Выбор тормоза механизма передвижения тележки (см рис, 91. а} при за-
медлении а 0,3 м/с2. Время торможения tT = и^/а = 0,5 0,3 ==- 1.7 с.
Необходимый тормозной момент по формулам (85) —(90) для затормаживания
тележки без груза
гг + Л1Д. вр НИукл-Мгр ~ /лтП^н7]/(38,2ц^т) -
-ф б (Jр -I- Jтл -I- 7Ш) Мц/(9,55/тЦ-^ук(^Up) — 7(2wр) —
= 1800-0,23 885/(38,2 19,592 1,7) ф- 1,2 (0,085 + 0,05 + 0,011) 885/(9.55-1,7) +
+ 35 0,2-0,9/(2-19.59) — 130-0,2-0,9/(2-19,59) ^11,4 Н-м,
где Ц7укл — 35 Н, Ц7Г|/ = 130 Н — для тележки без груза и при — 1 (см.
с. 174). Принят тормоз типа ТКТ-100 с Мг = 10 ... 20 Н-м (см. табл 21).
§ 32. АВТОМАТИЧЕСКИЕ ТОРМОЗА,
замыкаемые силой тяжести ПОДНЯТОГО груза
Имеются две разновидности тормозов — с размы-
каемыми и неразмыкаемыми поверхностями трения. Первые при-
меняют в лебедках с ручным приводом, в талях и безопасных ру-
коятках; вторые — в червячных талях. Эти тормоза называют
также грузоупорными.
Тормоз с размыкаемыми поверхностями трения (рис. 63, а)
имеет диск 2, закрепленный на приводном валу /; свободно наса-
женный храповик 3; шестерню 6 с фланцем 5, соединенную с зуб-
чатым колесом 8. Перемещение шестерни ограничивается упо-
ром 7. Собачка 4 закреплена на корпусе. Грузовой момент Т?гр
П6
Рис. 63. Тормоза, замыкаемые силой тяжести поднятого груза с поверхностями
трения:
а — размыкаемыми: б — неразмыкаемыми
от зубчатого колеса 8 передается шестерне 6. Направление резьбы
выбрано таким, чтобы под действием грузового момента ше-
стерня 6 перемещалась к храповику, а возникающее осевое уси-
лие F зажимало его между диском 2 и фланцем 5 шестерни. При
подъеме груза под действием грузового момента фланец 5 с ше-
стерней перемещается по резьбе в сторону храповика и прижи-
мается к нему усилием F. Диск, храповик и фланец вращаются
с одинаковой скоростью. После остановки собачка стопорит
храповик от вращения, а сжатые осевым усилием детали создают
тормозной момент, удерживающий поднятый груз.
Для опускания груза валу 1 сообщается принудительное
вращение также в сторону опускания груза, при этом шестерня
перемещается по резьбе и фланец 5 отходит от храповика, поверх-
ности трения размыкаются и груз начинает свободно опускаться
с ускорением, при этом частота вращения шестерни 6 становится
больше частоты вращения вала 1. в результате шестерня по резьбе
перемещается к храповику, поверхности трения замыкаются
и груз затормаживается.
При дальнейшем вращении вала шестерня снова отходит от
храповика и процесс опускания груза (в виде чередующихся
свободного опускания и торможения) продолжается. Для обеспе-
чения плавности опускания груза положением упора 7 регули-
руют отход шестерни с фланцем таким образом, что происходит
непрерывное скольжение поверхностей трения. Груз опускается
со скоростью, соответствующей частоте вращения вала 1.
Тормоз с неразмыкаемыми поверхностями трения (рис. 63, б)
имеет конический диск 11, обычно изготовленный литым вместе
с червяком, чашку 9 с конической расточкой и храповым венцом
на наружной поверхности, собачку 10, закрепленную на корпусе.
117
Зубья храповика имеют -такое направление, что обеспечивается
свободное вращение чашки при подъеме груза и ее стопорение
в случае опускания. Поверхности трения всегда прижаты осевым
усилием червяка; тормоз остается закрытым при подъеме и опу-
скании груза.
Вопросы для повторения 1. Для чего применяют остановы? Поясните
принцип их действия. 2. Для чего применяют тормоза в крановых механизмах?
3. Как определяют расчетные тормозные моменты тормозов механизмов подъема
груза, стрелы и передвижения крапа? 4. Как устроены колодочные тормоза?
ГЛАВА 9. ОПОРНЫЕ ЭЛЕМЕНТЫ КРАНОВ
§ 33. КРАНОВЫЙ РЕЛЬСОВЫЙ ПУТЬ
В качестве крановых и тележечных рельсов исполь-
зуют железнодорожные рельсы с закругленной головкой широкой
колеи типов Р43, Р50 (ГОСТ 7175—75), узкой колеи типов Р24
и Р38 (рис. 64, а); крановые рельсы типа КР (рис. 64, б); горяче-
катаный квадрат (рис. 64, в) с закругленными кромками
(ГОСТ 2591—71).
Типы рельсов (табл, 23) и диаметры колес (рис. 65) выбирают
по максимальной статической нагрузке на колесо (см. § 44 и 46)
от масс крана и груза (табл. 24),
В качестве путей для подвесных кранов и талей используют
двутавровые балки № 12 ,.. 30 (ГОСТ 8239—72) при грузоподъ-
емности не более 2 т и пролетах до 6 м; при большей грузоподъ-
емности--двутавровые балки № 24 М ... 45.4 (ГОСТ 19425—74)
(см. рнс. 64, г).
Надземный опорный рельсовый путь состоит из следующих
элементов (рис. 66): подкрановых балок /, которые установлены
на выступы 4 колонн 3 здания, рельсов 2 и деталей крепления
рельсов к балкам и соединения рельсов между собой, Основные
требования к креплениям рельсов: они должны надежно удержи-
Та б л и Ц а 23. Характеристика рельсов типа Р и КР (рис. 64, а, 6)
Рельс h в ь i'l h. R Г s Масса
мм 1 м, кг
Р24 107 92 51 200 13 10,5 24,14
Р38 135 114 68 —- — 300 13 13 38,4
Р43 140 114 70 — — 300 13 14,6 44,7
Р50 152 132 70 —. — 500 14 16 51,6
КР70 120 120 70 76,5 32,5 400 6 28 52,8
КР80 130 130 80 87 35 400 8 32 63,7
К.Р100 150 150 100 108 40 450 8 38 89,0
118
Рис. 64. Крановые рельсы:
а — железнодорожный типа Р; б — крановый
тавр
типа КР; в —катаный квадрат; а — дву-
Рис. 65. Крановые колеса:
а — беэребордные с боковыми
ребордные цилиндрические
роликами; б — одноребордные конические; в — двух-
Таблица 24 Размеры рельсов и диаметров колес в зависимости
от максимальной нагрузки на колесо
Максимальная статическая нагрузка FK, кН Диаметр колеса D к, мм Тип рельса с закругленной головкой Ширина квадрата Ь^, мм
До 50 200, 250 Р24, Р38 40, 45, 50
Св. 50 до 100 320, 400 Р38, Р43. КР70 50. 55, 60
Св. 100 до 200 400, 500 Р38, Р43, Р50. КР70 50, 55, 60, 65. 70
Св. 200 до 250 500, 560, 630 Р43, Р50, КР70, КР80 60, 65, 70
Св. 250 до 320 630, 710 Р43, Р50 КР80, КРЮ0 70, 75, 80
119
вать рельсы от продольных и поперечных смещений, допускать
возможность выверки их положения (рихтовки) и быстрой замены
изношенных рельсов. Наиболее распространены крепления с по-
мощью накладок с болтами (ГОСТ 24741—-81) (рис. 67, а) и изог-
нутых скоб с гайками (рис. 67, б). Квадрат закрепляют с помощью
уголков (рис. 67, в).
Рельсы для грузовых тележек закрепляют непосредственно
на пролетных балках мостов кранов. Концы рельсов стыкуются
с помощью двусторонних накладок, стягиваемых болтами, или
свариваются. Отклонения рельсов в стыке в вертикальной и го-
ризонтальной плоскостях должно быть не более 1 мм; зазор в стыке
должен составлять 2 мм по головке рельса. Стыки располагают
в шахматном порядке со смещением не менее 3 м.
Наземный крановый путь (рис. 68, а) состоит из верхнего и
нижнего строений. В состав верхнего строения входят рельсы 3,
детали для их соединения 4. шпалы 5, детали крепления рельсов
к шпалам 6, элементы заземления и балластный слой 7 (песок.
щебень и др.).
Нижнее строение состоит из земляного полотна 2 и устройства
для отвода воды /. Рельсы укладываются на полушпалы длиной
1375 мм. пропитанные антисептическими веществами. При на-
грузке на колесо до 150 кН допускаются укороченные шпалы
Рис. 67. Крепление рельсов:
а — наклейками; б — скобгмн; в — уголками
120
?’
1750
5)
Рис. 68. Наземный рельсовый путь:
а — верхнее и нижнее строение пути; б — концевой упор
длиной 900 мм. Между рельсами и шпалами укладывают плоские
подкладки.
Рельсы закрепляют путевыми шурупами с прижимными план-
ками или костылями для железнодорожных рельсов. Стыкование
рельсов осуществляют с помощью накладок с болтами. После
укладки рельсов пути обкатывают краном без груза (до 15 раз)
вдоль всего пути, а затем краном с номинальным грузом
121
(10 раз) при наибольшей нагрузке на колесо с последующей
подбивкой балластного слоя.
Для ограничения движения кранов и тележек на концах
путей на каждом рельсе устанавливают упоры (рис. 68. б), вы-
полненные в виде стойки 10 с подкосом 11 и опорными балками,
которые надежно соединены с подкрановыми балками и рельсами.
В верхней части упоры снабжены демпфирующими накладками 9
из резины или дерева, на которые воздействуют буферные устрой-
ства кранов и тележек. Упоры предназначены также для оста-
новки кранов в аварийных случаях при отказе концевых выклю-
чателей и тормозов механизмов передвижения кранов. Поэтому
упоры рассчитаны на нагрузку, которая возникает при наезде
крана с номинальной скоростью. Перед упорами устанавливают
направляющие линейки 8, которые, взаимодействуют с концевыми
выключателями механизмов передвижения, отключают привод,
вследствие чего при исправных тормозах исключается наезд
крана на упоры с номинальной скоростью.
Правила эксплуатации и безопасной работы. Должны быть выдержаны допу-
ски на разность отметок головок рельсов в одном поперечном сечении и на со-
седних колоннах; на расстояние между осями рельсов (пролет крана); на взаим-
ное положение торцов и зазор в стыке рельсов; на смещение рельса от прямой
линии, установленные Правилами по кранам. Рельсы должны быть надежно
закреплены, чтобы исключалось их боковое и продольное смещение при передви-
жении кранов, и заземлены. При работе на открытом воздухе головки рельсов
не должны быть закрыты просыпанным материалом, снегом и льдом. Рельсы
подлежат замене, если головка имеет износ составляющий 10 % толщины с каж-
дой стороны. Тупиковые упоры и отклоняющие линейки должны быть исправ-
ными и надежно закрепленными.
§ 34. КОЛЕСА И КАТКИ
Различают колеса приводные (ведущие) и непривод-
ные (ведомые). Приводные колеса получают вращение от привода
механизма и благодаря сцеплению поверхности обода с рельсом
осуществляют передвижение крана или тележки. Колеса снаб-
жены фланцами-ребордами, которые предохраняют их от схода
с рельсов и воспринимают боковые силы, действующие при каса-
нии реборд с боковыми гранями головок рельсов. По форме обода
различают колеса цилиндрические, конические и бочкообразные.
По наличию реборд колеса могут быть безребордиыми, одно-
ребордиыми и двухребордными (см. рис. 65, а—в). Безребордные
колеса (см. рис. 65, а) обязательно имеют боковые ролики, кото-
рые выполняют функции реборд. Одноребордные конические и боч-
кообразные колеса (см. рис. 65, б) применяют в механизмах
передвижения мостовых подвесных кранов и электроталей. Такие
колеса в опорно-поворотных устройствах называют катками.
Колеса являются наиболее изнашиваемыми элементами меха-
низмов передвижения кранов: происходит изнашивание обода
122
Таблица 25, Характеристика материалов крановых колес
Заготовка Сталь Вид термообработки, твердость обода [W МПа
Поковка 45 (ГОСТ 1050—74) Нормализация НВ 200 610
50 (ГОСТ 1050-74) Закалка-отпуск НВ 240 700
75 и 65Г (ГОСТ 14959-791 Закалка-отпуск НВ 300 НВ 330 НВ 350 800 860 890
Прокат 75 и 65Г (ГОСТ [4959—79) Закалка-отпуск НВ 350 920
Отливка 55..Т (ГОСТ 977—65) 35Л (ГОСТ 977 — 65; Отжиг НВ 190 Отжит НВ 210 560 600
и интенсивное изнашивание реборд. В связи с этим для повыше-
ния долговечности колеса изготовляют из сталей, которые под-
вергаются термообработке до твердости обода и реборд НВ 250 ...
350 на глубину до 15 ... 30 мм с плавным переходом к незакален-
пому слою (табл. 25).
Размеры ободов крановых колес (см. рнс. 65, а) регламенти-
рованы ОСТ 24.090.77—84 (табл. 26). Диаметры колес выбирают
по максимальной статической нагрузке с соответствующим типом
рельса (см. табл. 24). Ширину колеса принимают такой, чтобы
зазор между головкой рельса и ребордой с каждой стороны был
не менее 15 ... 20 мм для кранов и 5 ... 10 мм для тележек. Обод
стального колеса рассчитывают на смятие в зоне контакта с рель-
Таблица 26. Характеристика крановых колес (рис. 65)
°Р В, Масса, кг ° к DP Bi Масса, кг
мм. мм
200 230 90 60 15 1 500 550 150 150 90 100 145 150
250 290 110 70 30 1 1 560 600 130 150 90 100 100 210
320 360 110 120 70 80 45 50 | 630 680 140 150 90 100 220 250
400 450 130 140 150 80 90 100 80 85 90 -
123
сом, Напряжения смятия рельса с плоской головкой при линей-
ном контакте (см. рис, 65, в)
асм = 42 104 /f „/(()D„) « [асм); (107)
с полукруглой головкой при точечном контакте (см. рис. 65, а, б)
ас„ = 7.10»’/ТЖ s (Ю8)
где FK — максимальная статическая нагрузка, Н; DK — диаметр колеса, м;
b — рабочая ширина головки рельса, м; [осм ] — допускаемое напряжение смя-
тия (см. табл, 25),
Частота вращения колеса (об/мин)
= Ц<р/(я£>к), (109)
где Укр ~ скорость передвижения крана, м/мин; DK в м.
Валы и оси колес устанавливают, как правило, на подшип-
никах качения, смонтированных в отъемных или разъемных
буксах. Чаще применяют сферические роликовые подшипники,
которые обеспечивают самоустанавливание колес и хорошо вос-
принимают осевые нагрузки, В кранах мостового типа широко
используют угловые отъемные буксы (рис. 69), закрепляемые на
опорной конструкции так, что их положение фиксируются пла-
тинами. Такая установка обеспечивает взаимозаменяемость букс,
а также позволяет при ремонтах выкатывать колеса вместе с бук-
сами, что значительно облегчает работу н сокращает трудоем-
кость при замене колес благодаря исключению выверки нх поло-
жения, Каждому диаметру колес соответствует типоразмер угло-
вых букс (табл, 27). Применяют также отъемные буксы, выпол-
ненные в виде стаканов с фланцами, и разъемные с крышками.
В кранах с ручным приводом и машинным группы режима 1М,
2М, ЗМ применяют редуктор и открытые зубчатые передачи, при
этом зубчатое колесо закреплено иа торце колеса с помощью болтов.
А~А
Рис. 69, Установка колеса на угловых буксах
124
Таблица 27. Характеристика крановых колес на угловых буксах
(см. рис. 69) (ОСТ 24.090.09—75)
L i-i а а( tn S 1 е d i Подшип- ник
мм
200 80 150 353 150 68 20 30 4 13 152 40 82 3609
250 ПО 185 376 175 75 20 30 5 17 167 45 82 3610
320 120 130 200 414 200 88 20 30 5 17 172 55 82 3612
400 130 150 230 491 270 120 30 40 5 22 210 80 130 3618
500 150 265 542 330 150 46 50 6 26 220 100 165 3622
560 130 300 631 350 160 50 50 6 26 255 110 165 3624
630 150 180 280 614 400 180 50 60 8 33 255 110 165 3626
При выборе подшипников учитывают осевые нагрузки, обус-
ловленные боковыми силами, которые действуют между ребордами
и ободом колеса с головкой рельса. Максимальная боковая сила
fgmar 6,1 (GKp G) учитывается в расчетах статической гру-
зоподъемности подшипников. При определении необходимой ди-
намической грузоподъемности подшипника учитываются экви-
валентная нагрузка Ff}i3KB = 0,1 FK. ср (здесь FK. ср—на-
грузка на колесо при положении тележки с грузом посередине
пролета).
Основные правила эксплуатации и безопасной работы. В случае интенсивного
изнашивания реборд должны быть выявлены причины (перекосы колес, неудов-
летворительное состояние рельсовых путей, нарушение в электроприводе) и
приняты меры к их устранению- При износе реборд, составляющем половину нх
толщины, колесо подлежит замене. В механизмах с центральным приводом (см.
§ 44) разность диаметров приводных колес не должна быть более 0,1 мм. При
раздельном приводе разность может быть допущена до 2 мм. Обязательным усло-
вием долговечности колес является обеспечение рекомендуемой твердости обода
(см. табл. 25).
Пример. Расчет колеса. Нагрузка от массы груза и тележки при равно-
мерном распределении ее на колеса
FK (G -|- GT)/4 - (49 050 + 17 660)/4 *= 16 680 Н = 16,68 кН,
По табл. 24 принято колесо диаметром Ог( = 200 мм с размером обода по
табл. 26 и железнодорожный рельс узкой колеи типа Р24 (см. табл. 23). Материал
колеса сталь 45; НВ 200, [осм 1 = 610 МПа (см. табл. 26). Напряжение смятия
обода колеса по формуле (108):
осм = 710° fy' = 7-10“ V 16 680/0,2- = 523- 10fi Па =
-.523 МПа <; fO(.M] = 610 МПа.
125
Колесо устанавливают в откатных буксах на сферических роликоподшип-
никах 3609 (см. табл. 27), da — 45 мм. Частота вращения колеса по формуле
(109):
t,>T/(nDK) --- 0,5'60/(л-0,2) - 47,7 об/мин.
Вопросы для повторения. 1. Из каких элементов состоит надземный кра-
новый рельсовый путь? 2. Как устроен наземный рельсовый путь? 3. Как выби-
рают и рассчитывают крановые колеса? 4. Какие типы рельсов применяют для
крановых путей?
Г Л А В А 10. УСТРОЙСТВА БЕЗОПАСНОСТИ
§ 35. ОБЩИЕ СВЕДЕНИЯ
Устройства обеспечивают безопасную эксплуатацию
грузоподъемных машин и способствуют повышению их произ-
водительности. Требования к ним определены Правилами по
кранам [22 |, Правилами по лифтам (23[, Правилами по канатным
дорогам [24 ] и СТ СЭВ 725—77.
Устройства безопасности можно разделить на следующие
основные группы: 1) предохранительные, к которым относятся
ограничители перемещения, массы груза и грузового момента,
противоугонные устройства, буфера и концевые упоры; 2) сигна-
лизационные — указатели крена крана,вылета стрелы, перекоса
крана; приборы, регистрирующие скорость ветра и предупреж-
дающие о близком нахождении проводов линии высокого напря-
жения; звуковая и световая сигнализация; 3) дополнительные,
например, устройства для уменьшения раскачивания груза на
канатах; приспособления, не допускающие выпадения строп из
зева крюка; предохранительные щитки перед колесами кранов
н тележек; выносные опоры стреловых кранов; 4) защита элек-
трооборудования; токовая, предохраняющая от перегрузки то-
ком, превышающим номинальное значение в 2 ... 2,5 раза; тепло-
вая, не допускающая перегрев обмоток двигателей свыше опре-
деленной температуры; нулевая, которая позволяет включать
двигатели только с нулевого положения контроллера в случае
отключения питания сети, а также различные блокировки; 5) за-
земление крана, предохраняющее от поражения током обслужи-
вающий персонал. Ниже рассмотрены устройства безопасности,
обязательные для каждого крана.
§ 36. ОГРАНИЧИТЕЛИ ПЕРЕМЕЩЕНИЙ И БУФЕРА
Ограничители предназначены для автоматической
остановки механизмов в случаях достижения установленных
крайних положений, например, крюковой подвеской, тележкой,
стрелой или краном, и состоят из двух основных элементов:
датчика положения, выполненного в виде упоров, и выключателя,
126
контакты которого коммутированы в схему управления двигате-
лем механизма.
Механизмы подъема всех грузоподъемных машин оснащены
ограничителями высоты подъема, которые контролируют верхнее
положение крюковой подвески или другого грузозахватного
устройства. В типовой конструкции применяется рычажный
выключатель типа КУ-703 (рис. 70, а), имеющий корпус У, в ко-
тором помещены валик с кулачком, воздействующим на кон-
такты. На валике закреплен двуплечий рычаг. На одном плече
имеется груз-противовес 2, который поворачивает валик так, что
кулачок размыкает контакты. На втором плече рычага с помощью
тросика 3 подвешен груз 4, момент отвеса которого больше мо-
мента от веса груза-противовеса. Поэтому в нормальном положе-
нии валик поворачивается под действием веса груза так, что
контакты находятся в замкнутом положении. При подходе к край-
нему верхнему положению крюковая подвеска упором или ры-
чагом 5 приподнимает груз, натяжение тросика ослабевает и ва-
лик поворачивается под действием груза-противовеса, контакты
размыкаются и двигатель выключается. После остановки меха-
низма между крюковой подвеской и элементом конструкции
грузоподъемной машины должен быть зазор не менее 50 и 200 мм
соответственно для электроталей и кранов. Последующее движе-
ние механизма возможно только в направлении опускания крю-
ковой подвески.
В другой конструкции ограничителя (рис. 70, б) используется
конечный выключатель ВУ, снабженный редуктором и срабаты-
вающий после поворота его вала на определенное число оборотов.
Вал выключателя 9 соединен муфтой 8 со свободным концом ба-
рабана 7. По достижении крюковой подвеской верхнего крайнего
положения, которое соответствует расчетному числу оборотов
барабана, срабатывает выключатель. Этот же ограничитель может
быть применен и для контроля глубины опускания крюковой
Рис. 70. Ограничители высоты подъема:
а — с рычажным выключателем КУ-703; б — со шпиндельным выключателем ВУ
127
Рис. 71. Ограничители движения крана:
а, б — соответственно при малом и большом путях торможения
подвески, не допуская при этом сматывания с барабана неприкос-
новенных витков.
Ограничители передвижения крана (тележек) прн малом пути
торможения состоят из выключателя типа КУ-701 и воздейству-
ющей на него линейки со скосом или концом, изогнутым под
углом 10° (рис. 71, а). В случае подхода к конечному положению
скос линейки 2 набегает на ролик и поворачивает рычаг выклю-
чателя 7, при этом размыкаются контакты, двигатель отключается
и механизм затормаживается. В таком положении рычаг удержи-
вается линейкой в наклонном положении. При обратном движении
линейка сходит с ролика и рычаг занимает первоначальное поло-
жение. Если путь торможения большой, то применяют выклю-
чатели КУ-704 с фиксированным положением рычага 3 (рис. 71, б).
В этом случае при подходе к крайнему положению посредством
упора 4 рычаг поворачивается на угол 30°, размыкая контакты,
и остается в таком положении. Возвращение рычага в исходное
положение осуществляется тем же упором при движении крана
в обратном направлении. У грузовых тележек линейка закреплена
на ее раме, а выключатели установлены на пролетных балках
моста крана.
На концах крановых (тележечных) рельсовых путей устанав-
ливаются тупиковые упоры, а на кране-(тележке) буфера (рнс. 72),
Рис. 72. Буфер:
а — резиновый; б — пружинный
128
Рис. 73. Схема ограничителя
массы груза
которые могут быть пру-
жинными (рис. 72, б),
резиновыми (рнс. 72, а)
илн гидравлическими.
Буфера являются амор-
7 2
тизаторами и уменьшают динамические нагрузки в случаях наезда
крана (тележки) на упоры. Буфера рассчитывают на поглощение
кинетической энергии масс крана (тележки), при этом массу груза
при гибком подвесе (на канатах) не учитывают. Максимальное
усилие, действующее на буфер F6 (Н), определяют из уравнения
mKp<?2/2 = (U7Tp -L KT)s ф- zkFGs,
где ткр — масса крана (тележки) без учета массы груза или с учетом массы
груза, кг; v = 0,5 — скорость в момент наезда на упор, м/с; — сопро-
тивление передвижению от сил трения в ходовой части, Н (см. § 47); FT — тор-
мозное усилие тормоза, приведенное к ободу приводных колес, Н (см. '§ 31);
s— ход (осадка) буфера, м; г — число буферов; k— коэффициент, учитыва-
ющий особенности устройства буфера.
Конструкция буфера должна быть такой чтобы замедление
крана не превышало 4 м/с2, что достигается соответствующим
устройством буфера (учитывается коэффициентом k) и его хода s.
§ 37. ОГРАНИЧИТЕЛИ ГРУЗОПОДЪЕМНОСТИ
В зависимости от грузовой характеристики краиа
ограничители грузоподъемности разделяют на два типа: ограни-
чители грузового момента для кранов с постоянным грузовым
моментом; ограничители массы груза для кранов с постоянной
грузоподъемностью.
Краны мостового типа во избежание поломок снабжены огра-
ничителями массы груза, если по условиям работы возможна
регулярная их перегрузка (магнитные, грейферные, работающие
в зимнее время на открытом воздухе). Ограничитель массы груза
должен автоматически отключать механизм подъема при пере-
грузке его более чем на 25 %.
Стреловые краны для предупреждения их опрокидывания
оборудованы в зависимости от грузовой характеристики ограни-
чителями массы груза или грузового момента. Ограничитель
массы груза должен автоматически отключать механизм подъема,
если масса поднимаемого груза тгревышает номинальную грузо-
подъемность более чем на 10 %. Ограничитель грузового момента
должен автоматически отключать механизмы подъема груза и
изменения вылета в случаях подъема груза или увеличения вы-
лета с поднятым грузом, масса которых превышает грузоподъем-
ность на соответствующем вылете согласно грузовой характери-
стике более чем на 10 %; для портальных кранов перегрузка
допускается до 15 %.
5 Ьалашов В. П. 129
Для стреловых кранов, имеющих две или более грузовые
характеристики, должен применяться ограничитель грузового
момента, имеющий устройство для переключения его на работу
в соответствии с выбранной характеристикой. После срабатыва-
ния ограничителей грузоподъемности электросхема должна до-
пускать работу механизма подъема на опускание, а механизма
изменения вылета — в сторону уменьшения вылета.
Ограничитель массы груза состоит из следующих основных
элементов (рис. 73): датчика усилия I (воспринимает усилия,
пропорциональные массе поднимаемого груза); передаточного
механизма ' 2 (передает усилие уравновешивающему органу);
уравновешивающего органа 3 (создает противодействие датчику
усилия и осуществляет соответствующее этому усилию переме-
щение); датчика перемещения 4 (воздействует непосредственно
на выключатель или формирует сигнал в схеме управления меха-
низмом) и выключателя 5. В ограничителях грузового момента
предусмотрен датчик вылета, который корректирует датчик пере-
мещения в зависимости от вылета крана.
§ 38. ПРОТИВОУГОННЫЕ УСТРОЙСТВА
Краны, работающие на открытом воздухе и пере-
мещающиеся по рельсовым путям, снабжают противоугонными
устройствами, которые удерживают их от угона ветром в нерабо-
чем состоянии. Различают три группы устройств: стопоры, захваты
ручные и приводные.
С помощью стопоров кран прикрепляют к специальным не-
подвижным якорям, установленным па участке-стоянке рельсо-
вого пути. Захваты удерживаются на рельсах силами трения
между их губками и боковыми поверхностями головок рельсов.
Захваты могут быть самозатягивающимпся и с принудительным
зажимом головки рельса губками. Коэффициент трения 0,12 ...
0,15 для гладких губок и 0,3 для губок с острой насечкой.
Крепления захватов к конструкции крапа должны обеспечи-
вать возможность их самоустанавлпванпя относительно крановых
рельсов, а также работоспособность при износе головок рельсов
по ширине 8 ... 10 мм.
Усилие угона крапа без учета действия тормозов (Н)
+ №т„).
где Fи н — ветровая нагрузка па кран в нерабочем состоянии, Н; №укл —
составляющая веса крана от уклона рельсовых путей. Н, lt'Tp — сопротивление
передвижению от трения ходовых частей крана без учета трения реборд, Н.
Краны общего назначения с малыми наветренными поверх-
ностями оборудуются ручными захватами, из которых наиболее
просты и эффективны клещевые самозатягивающиеся (рис. 74, а).
Основными элементами такого захвата являются рычаги / и 2,
губки которых охватывают головку рельса. Рычаги соединены
130
нажимным винтом 4, снабженным рукояткой 3. В рычагах имеются
вертикальные пазы для пальца 5, закрепленного на кронштейнах
рамы ходовой тележки. В нерабочем состоянии рычаги разведены,
повернуты губками вверх и закреплены на кронштейнах, При
установке захват (при разведенных рычагах) опускают на рельс
и вращением винта поджимают губки к головке рельса. Если
кран под действием ветра начнет перемещаться, то захват под
воздействием пальца поворачивается вследствие имеющихся за-
зоров. Силы трения, возникающие в местах контакта губок с рель-
сом, удерживают от перемещения захват, а вместе с ним и кран.
Рассмотрим условие, которое должно выполняться для обеспе-
чения самозатягивания захвата. Пусть сила угона Еуг. 3, дей-
ствующая на один захват, равномерно воспринимается обоими
рычагами. Тогда реакция между губками одного захвата и рель-
сом (Н)
R FyF. Ji/(2b),
где fi, b — размеры рычага, м.
Сила трения между губками рычага и головкой рельса (Н)
Етр 2fR.
Удерживание захвата будет обеспечено при условии
Fy[,_ 3 < 27<FTp - 2R2fR - 2RfRFyFi 3h/b.
Из этой формулы определяют необходимое соотношение между
размерами рычага, обеспечивающее самозатягивание захвата:
h/b => \H2Rf),
где К — коэффициент запаса; / — коэффициент трения; при К = 1, 2 и [ = 0,12
отношение h!b^3,5.
Разновидностью самозатягивающихся захватов являются экс-
центриковые, у которых в качестве губок используются снабжен-
ные насечками эксцентрики. Эти захваты срабатывают при кон-
такте эксцентриков с боковой поверхностью головки рельса и
последующем смещении крана.
В кранах с большой наветренной поверхностью и пролетом
более 50 м применяют захваты принудительного действия, на-
пример, клещевой захват с ползуном (рис. 74, б). Корпус захвата
закреплен с помощью вертикальных шарниров на ходовой те-
лежке крана и центрируется относительно головки рельса с по-
мощью боковых роликов 9. В направляющих корпуса посредством
винта 13 и пружины 6 перемещается ползун 7 с коробкой для
пружины. В ползуне имеются наклонные пазы. Верхние концы
рычагов 8 снабжены роликами, входящими в пазы ползуна. В не-
рабочем положении ползун поднят вверх, при этом верхние концы
рычагов находятся в нижией части паза и сведены, а между губ-
ками нижних концов рычагов и рельсом имеется зазор. Ход
ползуна вверх ограничен выключателем 10. Для срабатывания
132
захвата включается двигатель 11, который через редуктор 12
вращает винт 13. Гайка винта через пружину воздействует на
коробку и опускает ползун. Верхние концы рычагов при этом рас-
ходятся, а нижние концы с губками прижимаются к рельсу.
Ганка продолжает опускаться и сжимать пружину до тех пор,
пока ее сила сжатия станет равной расчетной, после чего срабаты-
вает концевой выключатель 14, двигатель останавливается и за-
хват надежно удерживает головку рельса. Освобождение захвата
происходит при включении двигателя на подъем ползуна. Удер-
жание захвата будет обеспечено при условии
^уг.з <
где Fn— усилие прижима губки к рельсу, Н; К = 1,2— к0ЭФФиииент запаса.
Необходимое усилие пружины ползуна (Н)
^пр = 2Fn (tg 0 tg р) п/(£п]),
где а, b — плечи рычага; р — 1 ... 3° — приведенный угол трения, учитываю-
щий сопротивления роликов клещей; Ц = 0,9—КПД шарниров клещей; р =
= 4 ... 8° — угол между рабочей поверхностью паза и вертикалью.
Захват снабжают ручным приводом на случай прекращения
электропитания.
Вопросы для повторения. 1. Изобразите схему ограничителя массы
груза. 2. Как определяют усилие угона крана ветром?
ГЛАВА 11. ГРУЗОПОДЪЕМНЫЕ УСТРОЙСТВА
§ 39. ДОМКРАТЫ
Для подъема груза на высоту до 500 мм или бокового
перемещения при монтажных и ремонтных работах применяют
винтовые, реечные и гидравлические домкраты.
Винтовой домкрат (рнс. 75, а) состоит из стального или
чугунного корпуса 1, в верхней части которого закреплена брон-
зовая или чугунная гайка 2, стального винта 3 и головки с на-
садкой 4, свободно установленной на винте. Нагрузка передается
на винт через головку. Резьба винта может быть самотормозя-
щейся трапециевидной (ГОСТ 9484 —81), упорной (ГОСТ 10177—82)
илн прямоугольной. Осуществляя качательные движения ру-
кояткой 5 с трещоткой, вииту сообщают вращение. Рукоятка
имеет ручку 8, храповое колесо 6, охватывающий винт хомут 7,
двустороннюю собачку 11 на оси 10. Храповое колесо 6 закреплено
на вннте. Собачка фиксируется подпружиненным стопором 9,
что позволяет после установки собачки в соответствующее поло-
жение вращать рукояткой винт на подъем или опускание.
При подъеме груза (рис. 75, б) необходимо преодолеть.
133
1, Момент (Н-м) на винте от веса груза и сил трения в резьбе:
= G tg (a J р) d3/2, (ПО)
где d2 — средний диаметр резьбы, м; о. = arctg [t'(nd2)J — угол подъема вин-
товой линии, 0 (здесь t — шаг резьбы, и); р— arctg f — угол трения, & (здесь
f — коэффициент трения витков гайки и винта; при стальном винте и бронзовой
гайке f — 0,08; при стальном винте и чугунной гайке / = 0,12).
2, Момент трения (Н-м) в опорной поверхности головки винта
Л13 - GW2t (Н1)
где f= 0,15 — коэффициент трения стали по стали; d0 — средний диаметр по-
верхности трения, м.
Необходимое рабочее усилие на рукоятке (Н)
ер.« = (ЛЬ мг)/1р. (П2)
где /р - рабочее плечо рукоятки, м,
134
Винт работает на сжатие от веса груза и кручение от мо-
мента Приведенное напряжение сжатия и кручения (Па)
а = И Ос, + 4ткР = ]/[40/К)Г + 4 < [аск], (113)
где — внутренний диаметр резьбы м; №р“ 0,2d? — полярный момент со-
противления сечения винта, м^; [оР1К] = 50 МПа — допускаемое напряжение
для сталей 35 и СтЗ.
Длинные винты рассчитывают на сжатие с учетом устойчи-
вости при продольном изгибе (Па).
Для обеспечения износостойкости резьбу гайки проверяют
на давление (Па)
р = 4G/[ n(d2 - d?)z] [р], (114)
где d—наружный диаметр резьбы, м; z 10 — число витков резьбы по вы-
соте гайки; [р] — допускаемое давление для стали по чугуну; [р ] 50 МПа;
для стали по бронзе [р] = 10 МПа.
Грузоподъемность винтовых домкратов 5, 10, 20 и 25 т, высота
подъема до 350 мм, масса 17 ... 60 кг. Некоторые домкрать! снаб-
жены поперечными салазками с горизонтальным приводным вин-
том, с помощью которого можно смещать груз в сторону до 300 мм.
Реечный домкрат (рис. 76, а) состоит из корпуса 6, в направ-
ляющих которого перемещается рейка 5, в верхней части рейка
имеет поворотную головку 4 для опирания груза, а в нижней —
лапу 7 для подъема низко расположенных грузов. Рейка пере-
мещается в корпусе с помощью реечной шестерни, получающей
вращение от рукоятку 1 через зубчатые передачи. Для удержания
Рис. 76. Реечный домкрат:
а — общий вид; б — рукоятки с грузоупорньгм тормозом
135
поднятого груза на приводном валу установлен грузоупорный
тормоз 2 с размыкаемыми поверхностями трения, элементом ко-
торого является безопасная рукоятка (рис. 76, б).
При подъеме груза собачка 3 проскальзывает, после остановки
она заходит за зуб храповика 8 и удерживает поднятый груз.
Для опускания груза рукоятка должна вращаться в направлении
опускания (см. § 32).
Грузоподъемность домкратов 3, 5 и 6 т; на лапе грузоподъем-
ность в 2 раза меньше. Высота подъема до 380 мм, масса 35 ...
70 кг.
Гидравлический домкрат (рис. 77) состоит из корпуса /, в ко-
тором размещены цилиндр с поршнем 2, плунжерный насос с ру-
кояткой 5, всасывающий 7 и нагнетательный 8 клапаны, резер-
вуар для рабочей жидкости 6 и спускной клапан 3. Поршень
в цилиндре уплотняется манжетами. Качанием рукоятки влево
цилиндр 4 насоса через всасывающий клапан из резервуара запол-
няется рабочей жидкостью. При ходе рукоятки вправо поршень
насоса через нагнетательный клапан подает жидкость в рабочий
цилиндр, и поршень с грузом поднимается. Для опускания груза
открывают сливной клапан, и жидкость из рабочего цилиндра
перетекает в резервуар; изменением отверстия клапана регули-
руют скорость опускания груза. В качестве рабочей жидкости
применяют минеральные масла — индустриальные
(ГОСТ 20799—75), а в зимнее время смесь глицерина с водой.
Рабочее давление жидкости 40 МПа.
Рис, 77. Схема гидравлического домкрата
136
Давление в рабочем цилиндре при подъеме груза (Па) р
= 16(л£)2) (здесь D —диаметр поршня, м); усилие (Н) на плун-
жере насоса Гпл = рлД2 4 (здесь d — диаметр плунжера, м).
Необходимое рабочее усилие (Н) на рукоятке Драб =
(здесь /р --= 500 ... 800 мм — рабочее плечо рукоятки, м; I ~
0,05/р — плечо рычага плунжера, м; q - 0,8 — КПД дом-
крата).
Грузоподъемность домкратов от 5 до 100 т и более, высота
подъема 75 ... 150 мм, масса 3 ... 80 кг. Для подъема груза на
большую высоту применяют домкраты двойного действия, кото-
рые поднимают груз ступенчато, используя при этом клетку из
деревянных брусьев, наращиваемую по мере подъема груза.
Основные правила эксплуатации и безопасной работы. Каждый домкрат
должен быть снабжен паспортом, а на его корпусе должны быть указаны номер
и грузоподъемность. Наружный осмотр домкратов проводится не реже одного
раза в год. Домкраты, покрытые антикоррозийной смазкой, следует хранить
в сухом помещении.
Винтовой домкрат подлежит ремонту при следующих дефектах: забиты
витки резьбы винта, имеется кривизна винта, витки резьбы гайки и винта изно-
шены более 20 %, отсутствует насечка на головке, изношены зубья храповика
трещотки.
У реечного домкрата недопустимы: кривизна рейки, поломка безопасной
рукоятки, перекос зубчатых колес, отсутствие насечки на головке и лапе.
Гидравлический домкрат нельзя использовать, если на цилиндре и поршне
имеются трещины, зазор между поршнем и цилиндром превышает 1 мм, плохо
подается жидкость насосом; жидкость не удерживается клапаном цилиндра, не-
исправен вентиль спускного насоса, имеются утечки рабочей жидкости из резер-
вуара. Между грузом и головкой, а также между корпусом домкрата и опорной
поверхностью обязательны деревянные подкладки; положение оси домкрата
должно быть перпендикулярно основанию. Головка или лапа домкрата должны
упираться в прочные узлы поднимаемого груза. Подъем груза несколькими домкра-
тами необходимо выполнять равномерно, по команде и контролировать его поло-
жение с помощью уровня. Гидравлический домкрат должен иметь исправный
манометр, по которому необходимо следить за давлением, чтобы оно не превы-
шало номинального значения. Под поднятый груз необходимо подкладывать
деревянные брусья с клиньями или стальными подкладками во избежание удара
в случае прорыва манжеты или отказа клапана. Для этого можно закладывать
предохранительные кольца под реборду поршня. Запрещается находиться
напротив отверстия с пробкой, служащей для завинчивания манометра. Рабочая
жидкость должна применяться с учетом температуры окружающей среды.
Пример. Определить размеры винтового домкрата (см. рис. 75, б) при Q =
= 3000 кг (G = Qp ~ 3000-9,81 = 29 430 Н), Н = 250 мм. Винт из стали 35,
1стсж1 = 50 МПа. Гайка из бронзы БрАЖ9-4Л, [р] = 10 МПа. Коэффициент
трения стали по бронзе / = 0,08, угол трения р = 4° 33'.
1. Предварительно определяют параметры винта при работе его на сжатие.
Внутренний диаметр винта
Д > V4С/([осж] л) - - /4-29 430/(50- 10е л) - 0,027 м.
Принята прямоугольная резьба: dx = 36 мм; d = 44 мм; — 40 мм; I =
= 8 мм. Угол подъема резьбы
а = arctg [//(л^)] = arctg [0,008/(л -0,04)] = 3°38' < р,
2. Момент от сил трения гайки с винтом при подъеме груза по формуле (НО):
5^ = G tg (а + р) ^/2-- 29 430 • tg (3 38'4~ 4° 35')-0,04/2 =
= 85,13 Н-м.
137
3. Момент от сил трепня в опорной поверхности головки винта при /=» 0,15
по формуле (111):
Ma= Gfd0/2 = 29430 0,15-0,04/2 = 88,29 Н-м.
4. Приведенное напряжение сжатия и кручения винта по формуле (ИЗ):
о = К14С/(л^)р + 4|М,/(0,2^)р =
= /[4 29 430,/( л-0,0363)]2 -ф 4 [85,13/(0,2-0,0363) |2 =
= 28,93-10е Па = 28,93 МПа < ]осж) = 50 МПа.
5. Проверка винта на устойчивость при полной высоте подъема. Радиус
инерции сечения винта г= (^/4= 3,6/4= 0,9 см. С учетом жесткого защемления
концов винта в гайке и головке под грузом расчетная длина его 2Н =
= 2-25 = 50 см. Гибкость винта Z— 1р/ г ~ 50/0,9= 55,5. Соответствующий
гибкости коэффициент уменьшения допускаемого напряжения (р= 0,7:
= 4G/(ndf) = 4-29 430/(л-0,0362) =
= 28,9-10° Па = 28,9 МПа < [оеж| ср 50 0,7 = 35 МПа.
6- Необходимое число витков резьбы гайки по формуле (114):
г>4С/{л (d2 — d?) [р]} = 4-29 430/[ л (0,0442-0,0362) 10- 10е] - 5,85 < |z| = 10.
7. Размеры опорной поверхности домкрата. Внутренний диаметр DBH —
= 0,07 м. Наружный диаметр
£>«> / 4G/[л [осм]J -f dLi = /4-29 430/(л-2- 10е ф 0,072) =0,15 м,
где [осм] = 2 МПа — допускаемое напряжение смятия деревянной доски, кото-
рую подкладывают под опорную поверхность корпуса домкрата.
8, Число оборотов винта для подъема груза на высоту Н = 0,25 м:
n = H/t =0,25/0,008 = 31,2.
9. Необходимая длина рукоятки при усилии рабочего ГРаб ~ 200 Н (см.
§ 25):
= (Лф + M2)/Fpa6 = (85,13 + 88,29)/200 =0,86 м.
§ 40. ЛЕБЕДКИ
Лебедки применяют для подъема грузов через не-
подвижные блоки или с помощью полиспастов, закрепленных на
каких-либо конструкциях, а также для горизонтального переме-
щения грузов при монтажных, ремонтных н других работах.
Основными характеристиками лебедок являются тяговые усилия
каната н канатоемкость барабана. По роду привода лебедки бы-
вают ручные и электрические.
Ручные однобарабанные лебедки (рис. 78, а) имеют станину /,
состоящую из двух боковых щитов, соединенных распорными
стяжками. В щитах закреплены подшипниковые опоры валов зуб-
чатых передач 6 и барабана 2. Привод осуществляется от одной
или двух съемных рукояток <?, На быстроходном валу установлен
автоматический винтовой грузоупорный тормоз 4 (см. § 32). Для
лебедок предусмотрены две скорости, которые получаются путем
138
Рис. 78. Однобарабанные лебедки:
а — с ручным приводом; б — электрическая
переключения вручную блока шестерен 5. Барабан гладкий с ре-
бордами, навивка каната многослойная без канатоукладчика.
Грузовой момент на барабане (Н-м)
Мб - S.D./2,
где З.ц — тяговое усилие лебедки, Н; Do — диаметр барабана по центру оси ка-
ната последнего слоя навивки [см. формулу (34)], м.
Необходимо рабочее усилие (Н) на рукоятке РраГ) —
— M6/(«LzaT]) [здесь и — передаточное число лебедки; т] —
общий КПД; /р — рабочее плечо рукоятки, м; г — число рабочих;
a — коэффициент неравномерности приложения усилий рабочими
(см. § 25) ].
Ручные лебедки типа ЛР-1,25, ЛР-3,2, ЛР-5 и ЛР-8
(ГОСТ 7014—74) имеют тяговые усилия, соответственно, 12,5;
32; 50; 80 кН на первой передаче. Канатоемкость первых двух
лебедок 50, а других 75 м. Масса лебедок 160 ... 900 кг.
139
Таблица 28. Характеристики электрических одиобарабанных лебедок
(ГОСТ 2914—80)
Параметр Лебедка
ЛЭ-0,32 ЛЭ-0,5 ЛЭ-1,25 ЛЭ-3,2 ЛЭ-5,0 ЛЭ-8,0 1 ЛЭ-12,& j
Тяговое усилие, кН 3,2 5.0 1,25 3.2 5,0 8.0 12,5
Скорость навивки каната, м/с 0.32 0,2 0,15
Расчетная канатоемкость ба- рабана, м 80 250 500 1000
Диаметр каната, мм 6.8 7,7 11,5 18,5 22 28 34
Масса лебедки (без каната), кг 270 560 2300 2600 5650
Электрические однобарабанные лебедка (рис, 78, б) имеют
раму 12, на которой смонтированы электродвигатель 10, редук-
тор 8 и барабан 7. Муфта, соединяющая валы двигателя и редук-
тора, выполнена с тормозным шкивом, на котором установлен
автоматический нормально закрытый тормоз 9. На раме установ-
лен шкаф с аппаратурой управления 11. Барабан гладкий с ре-
бордами и рассчитан на многослойную (3—5 слоев) навивку
каната/Чтобы обеспечить равномерную укладку каната на бара-
бане, иногда применяют канатоукладчики. Для удобства пере-
мещения продольные балки рамы выполнены в виде салазок.
Характеристики лебедок (ГОСТ 2914—80) приведены в табл. 28.
Основные правила эксплуатации и безопасной работы. На лебедки распро-
страняются требования Правил по кранам [22], поэтому они подлежат освиде-
тельствованию и испытанию (см. § 64). Лебедка должна иметь паспорт и таблицу
е указанием ее номера и тягового усилия каната. Перед каждой установкой
электрической лебедки проверяют техническое состояние ее узлов, в том числе
н электрооборудование.
Лебедки должны быть закреплены так, чтобы усилие закрепления превы-
шало тяговое усилие каната в 1,5 раза. Рама электрической лебедки должна быть
надежно заземлена. Вращающиеся детали закрывают кожухами. Необходимо
следить за равномерной укладкой каната.
§ 41. ПОЛИСПАСТЫ
Полиспасты применяют при монтажных и ремонтных
работах совместно с лебедками для подъема груза или переме-
щения его по плоскости. Полиспаст (рис. 79, а) собирают из мон-
тажных блоков /, 3 и каната 2. Неподвижный блок закрепляют
к опорной конструкции, а к подвижному блоку присоединяют
груз. Монтажный блок (рис. 79, б) состоит из ролика 6, уста-
новленного на оси 7, закрепленной на двух щеках 8. По концам
щеки соединены болтом 5, на котором находится серьга 4 для
140
Рнс. 79. Полиспасты:
а — отводной ролик и схемы образования полиспастов; б — однорольный ролик
крепления свободного конца каната, и траверсой крюка 9 (или
петли). Однорольные блоки могут быть применены как отводные
(рис. 79, а), поэтому для удобства запасовки каната одна щека
может быть выполнена откидной. Блоки характеризуются числом
роликов и их размерами (£)бл 12dK) и профилем желоба для
каната. Для подъема груза весом G с учетом тягового усилия
принятой лебедки определяют необходимую кратность полиспаста
in = G/S„. Затем это значение кратности округляют до целого
числа и устанавливают схему запасовки каната. При этом должно
соблюдаться правило: свободный конец каната закрепляется
на серьге неподвижного блока при четной кратности полиспаста
и серьге подвижного блока при нечетной кратности.
Наибольшее натяжение каната определяют по формуле (31),
по разрывному усилию [см. формулу (20)] выбирают канат или
имеющийся канат проверяют на прочность по формуле (21).
Коэффициент запаса прочности каната К 3,5 при D^id^ от 12
до 15; Л Дз 3,0. при D6/dK свыше 15. Далее выбирают подходящие
монтажные блоки и собирают полиспаст, для чего канатом последо-
вательно огибают ролики подвижных и неподвижных блоков,
начиная с ролика, с которого канат направляется к лебедке. Один
конец каната закрепляют на серьге ролика, а другой -на ба-
рабане лебедки.
Основные правила эксплуатации и безопасной работы. Ролики должны сво-
' бодно вращаться на осях, а крюки и петли — в траверсе. Стопорные планки
необходимо надежно закреплять. Смазочный материал должен свободно про-
ходить через смазочные отверстия. Блоки следует хранить смазанными в сухом
помещении. Каждый блок должен иметь паспорт и таблицу с указанием грузо-
подъемности. Не реже одного раза в год блоки должны проходить испытания:
статические с 25 %-ной перегрузкой подвешенного блока в течение 10 мин; ди-
намические с 10%-нон перегрузкой и вращением каждого ролика. Результаты
испытаний заносят в паспорт.
141
§ 42. ТАЛИ
Талями называют компактные смонтированные в од-
ном корпусе лебедки, состоящие из привода, тормоза, редуктора,
барабана (или звездочки), шкафа управления и крюковой под-
вески. Тали широко применяют для механизации погрузочно-
разгрузочных, транспортных и складских работ со штучными
грузами. По виду привода тали могут быть ручные и электриче-
ские и по виду гибкого элемента — цепные и канатные.
Ручные цепные тали применяют при монтажных и ремонтных
работах. Тали подвешивают за крюк к треногам, перекрытиям
цехов, балкам, а также к тележкам, которые могут перемещаться
по двутавровым балкам.
Червячная таль (рис. 80, а) имеет обойму, в верхней части
которой закреплен крюк /. Подъемный механизм состоит из тяго-
вого колеса 4 с круглозвенной калиброванной цепью 5, грузо-
упорного тормоза 9, червяка <5, червячного колеса 2, выполненного
литым со звездочкой 2, грузовой цепи 7 (пластинчатой или круг-
лозвенной калиброванной) и крюковой подвески 6. Тормоз ди-
сковый с неразмыкаемыми поверхностями трения. Он состоит из
свободно посаженного на вал червяка храповика, который по-
стоянно зажат между фланцами червяка и втулкой подшипника.
Собачка закреплена на обойме тали. Для подъема груза тяговому
колесу сообщают вращение с помощью цепи. Собачка проскаки-
вает по храповику и не препятствует подъему груза. После оста-
новки собачка упирается в зуб храповика и удерживает груз на
весу. При опускании груза тяговое колесо вращают в обратном
направлении, храповик неподвижен, поэтому преодолевается
момент от сил трения между сжатыми поверхностями храповика
и фланца червяка. ГОСТ 1106—74 регламентирует следующую
грузоподъемность для червячных талей: 0,25; 0,5; 1,0; 2,0; 3,2;
5,0; 8,0 и 12,5 т.
Шестеренная таль (рис. 80, б) имеет корпус 12 с крюком //.
Подъемный механизм состоит из тягового колеса 18 с цепью 17,
грузоупорного тормоза 10, планетарного редуктора 13, звез-
дочки 14, грузовой цепи 15 (пластинчатой или круглозвекной ка-
либрованной) и крюковой подвески 16. Тормоз дисковый с размы-
каемыми поверхностями трения. Храповик свободно посажен на
втулку и замыкается между фланцем втулки и торцовой поверх-
ностью тягового колеса. Собачка закреплена на корпусе тали.
При подъеме груза тяговое колесо, вращаемое цепью, навинчи-
вается на резьбу ступицы, сжимает храповик и за счет сил трения
приводит во вращение фланец со втулкой и валом редуктора.
Собачка не препятствует подъему. После остановки тягового
колеса собачка упирается в зуб храповика и удерживает груз
на весу. Для опускания груза необходимо вращать тяговое колесо
в обратном направлении, прн этом происходит взаимодействие
элементов тормоза, рассмотренное в § 32. ГОСТ 2799—75 регла-
142
Рис. 80. Ручные тали:
а — червячная; б — шестеренная
143
ментирует следующую грузоподъемность для шестеренных та-
лей: 0,25; 0,5; 1,0; 2,0; 3,2; 5,0 и 8 т.
Электрические тали нашли широкое применение благодаря
компактности конструкции, удобству и безопасности эксплуатации,
надежности и долговечности, наличию ряда исполнений для раз-
личных условий эксплуатации, малой массе по отношению К гру-
зоподъемности. У стационарных электроталей имеются на кор-
пусе лапы для крепления к опорной конструкции или отверстия
в верхней части корпуса для подвески с помощью пальцев. Такие
тали применяют как самостоятельные лебедки или они являются
механизмом подъема крановой грузовой тележки, кранов-штабе-
леров и лифтов. Передвижные электротали подвешены к непрн-
водным и приводным тележкам; их используют в качестве тележек
монорельсовых транспортных средств, грузовых тележек кранов.
Кроме того, неприводные и приводные тележки используют в ка-
честве механизмов передвижения подвесных однобалочиых мо-
стовых кранов и кранов-штабелеров. По виду гибкого элемента
различают электротали цепные и канатные.
Электрические канатные тали выполняют по различным схе-
мам, которые обусловлены взаимным расположением в корпусе
электродвигателя Д, редуктора Р, тормоза Т, барабана Б и шкафа
аппаратуры Ш (рис. 81).
Электротали типа ТЭ согласно ГОСТ 25584—83 имеют грузо-
подъемность 0,25; 0,5; 1,0; 2,0; 3,2 и 5,0 т; высоту подъема 6, 12
и 18 м; скорость подъема 8 м/мин, передвижения 20 и 32 м/мин.
Тали устанавливают на двутавры 18М.—45М (ГОСТ 19425—74).
Предусмотрено восемь исполнений талей, различающихся ме-
жду собой следующими особенностями: продольным или попереч-
ным расположением барабана относительно оси кранового пути
(двутавровой балки); наличием или отсутствием механизма пере-
движения; конструктивным исполнением ходовых тележек, ко-
торые могут быть жесткими четырехколесными, шарнирными двух-
Я ш
144
или четырехколесными, неприводными и приводными. Указан-
ные исполнения дополнительно характеризуются высотой подъема
крюка, напряжением питания и цепей управления, наличием
тормоза на механизме передвижения и канатоукладчика на ме-
ханизме подъема. Базовым является пятое исполнение с про-
дольным расположением барабана, на шарнирных двухколесных
тележках и с механизмами подъема и передвижения, выполнен-
ными одно- или двухскоростными. Электротали грузоподъем-
ностью 0,25 т скомпонованы но схеме 111 (см. рис. 81) с привод-
ным блоком (в нем установлены двигатель, тормоз и редуктор),
размещенным в полости барабана. Тали другой грузоподъемности
выполнены по схеме /V (см. рис. 81), при которой двигатель
встроен в барабан.
Электроталь ТЭ пятого исполнения (рис. 82) состоит из кор-
пуса, подвешиваемого к тележкам, мотор-барабана, двухступен-
чатого редуктора, тормоза, шкафа аппаратуры.
В барабан 5 встроены статор //и ротор 12 электродвигателя
механизма подъема. На наружной поверхности барабана имеется
винтовая канавка, по которой навивается канат и перемещается
канатоукладчик как по направляющей. Один конец каната за-
креплен в лазу правого фланца барабана тремя стопорными вин-
тами. Второй конец каната фиксируется в клиновой втулке на
корпусе тали. Полиспаст одинарный двукратный, крюковая под-
веска 10 одноблочная (длинная). Редуктор соединен с барабаном
зубчатой полумуфтой 14, а с двигателем шлицевой втулкой 13.
На быстроходном валу редуктора закреплен шкив 17 колодоч-
ного автоматического нормального закрытого тормоза 16. На
промежуточном валу смонтирован автоматический грузоупорный
тормоз 15. упорный диск которого зафиксирован на валу, а зуб-
чатое колесо может перемещаться по винтовой нарезке. Храповое
колесо с фрикционными накладками, расположенное между диском
и зубчатым колесом, взаимодействует с собачкой, которая4'уста-
новлена на корпусе редуктора. К тормозному шкиву прикреплена
крыльчатка для обдува редуктора и отвода теплоты, выделяемой
грузоупорным тормозом при опускании груза. Пусковая аппара-
тура, размещенная в шкафу 9, состоит из реверсивных магнитных
пускателей механизмов подъема 7 и передвижения 8.
При подъеме груза двигатель преодолевает крутящий момент,
создаваемый весом груза на барабане, поворачивает зубчатое
колесо, которое, смещаясь по винтовой нарезке, прижимает хра-
повое колесо к диску, после чего благодаря наличию фрикционной
связи перечисленные детали как единое целое вращаются вместе
с валом, передавая крутящий момент двигателя на барабан. По
окончании подъема двигатель выключается. Вследствие запазды-
вания наложения колодочного тормоза груз после остановки
начинает двигаться вниз, собачка входит в зацепление с храповым
колесом (к этому моменту колодочный тормоз наложен), и меха-
низм подъема затормаживается.
145
Рнс. 82. Электрическая таль
типа ТЭ пятого исполнения.
146
Рис. S3. Приводная тележка
При опускании груза колодочный тормоз открывается, дви-
гатель, вращая зубчатое колесо, раскрывает грузоупорный тор-
моз, но крутящий момент, создаваемый весом груза на барабане,
стремится замкнуть его (тормоз). Храповое колесо не вращается
и удерживается собачкой. Раскрытие тормоза двигателем и его
замыкание крутящим моментом от веса груза является непре-
рывным процессом, при котором осуществляется плавное опу-
скание груза.
Для остановки груза при опускании следует выключить
двигатель. Колодочный тормоз при этом остановит его вращение
и одновременно опускание груза. Благодаря наличию двух тор-
мозов на механизме подъема тали становятся весьма надежными
при эксплуатации.
Механизм передвижения (см. рис. 82) состоит из приводной 1
и пеприводной 5 тележек, которые шарнирно соединены с травер-
сой 2. Это позволяет тали свободно проходить по криволинейным
участкам пути. Траверса присоединена к корпусу тали с помощью
серег 4.
Приводная тележка (рнс. 83) снабжена двумя катками 5,
приводимыми в движение фланцевым электродвигателем <3 через
два вертикальных редуктора 4. Вращение от одного редуктора к дру-
гому передается шлицевым валиком 6. Боковые ролики 2 служат
для направления катков относительно кранового пути (двутав-
ровой балки). Резиновые буфера / смягчают удары в случае столк-
новения с концевыми упорами. Расстояние между ребордами
147
катков изменяют в зависимости от размеров кранового пути
(двухтавровон балки) установкой регулировочных колец, закреп-
ленных на стяжках.
Питание электродвигателей осуществляется от сети перемен-
ного тока напряжением 380 В с помощью гибкого кабеля, присо-
единенного к корпусу тали, или с помощью жестких троллеев
через токосъемник скользящего типа, закрепленный на жесткой
тележке (к статору питание подводится через кольцевой токо-
приемник). Управление осуществляется вручную с пола через
подвесной кнопочный пост управления. Включение механизма
возможно только при непрерывном нажатии на кнопку. Преду-
смотрены ограничители крайних верхнего и нижнего положений
груза, которые через систему рычагов воздействуют на концевые
выключатели.
Основные правила эксплуатации и безопасной работы. На ручные и элек-
трические тали распространяются требования Правил по кранам [22], поэтому
тали подлежат освидетельствованию и испытаниям (см. § 64). Перед установкой
тали на монорельс необходимо ее тщательно осмотреть и проверить соответствие
напряжения электрооборудования тали напряжению на месте установки, а также
соответствие расстояния между направляющими роликами тележки номеру
двутавровой балки. Монорельс должен быть надежно заземлен, а токоподвод
выполнен в соответствии с Правилами устройства электроустановок [32 |. Пост
управления должен быть подвешен на стальном канатике. Движения механизмов
должны совпадать со стрелками на корпусе кнопочного поста. Запрещается
работать с одним исправным тормозом. Техническое обслуживание должно пре-
дусматривать ежедневный осмотр несущих элементов механизмов, а также пе-
риодический осмотр и ремонт согласно рекомендациям инструкции по эксплуа-
тации.
Вопросы для повторения, i. Назовите основные типы домкратов. В каких
случаях их применяют? 2. Какими параметрами характеризуются ручные и
электрические лебедки? 3. Как определяют кратность полиспаста при подъеме
заданного груза с учетом тягового усилия принятой лебедки? 4. Как выполнена
червячная таль? 5. Как устроена электрическая канатная таль?
ГЛАВА 12. КРАНЫ МОСТОВОГО ТИПА
§ 43. ОБЩИЕ СВЕДЕНИЯ
Краном мостового типа называют кран с грузозахватным
устройством, подвешенным' к грузовой тележке или тали, кото-
рые перемещаются по подвижной стальной конструкции (мосту).
К ним относятся мостовые краны, мост которых непосредственно
опирается на надземный рельсовый путь сверху (опорные краны)
или подвешивается к нижним полкам рельсового пути (подвесные
краны), н козловые краны с мостом, установленным на наземный
рельсовый путь посредством двух опор. Различают краны общего
назначения с крюком специальные с грейфером, магнитом, захва-
тами для контейнеров и металлургические. При грузоподъем-
ности более 12,5 т могут быть два механизма подъема —
148
главный и вспомогательный. Привод механизмов, как
правило, электрический, но может быть и ручным. Управление
механизмами осуществляют с пола, из кабины и дистанционно.
Исполнения кранов нормальное, взрывобезопасное, а также раз-
личные климатические. По грузоподъемности краны условно
разделены на три группы: первая — до 5 т; вторая — от 5 до
50 т и третья — свыше 50 до 320 т.
§ 44. ОПОРНЫЕ МОСТОВЫЕ КРАНЫ
Основными параметрами крана являются: пролет LK,
база Лк, длина крана L, ширина по буферам В, высота от головки
рельса ft, расстояние от оси крюка в верхнем положении до го-
ловки рельса ftr высота подъема крюка //, скорость механизмов,
конструктивная масса крана шкр, масса тележки т.{., наиболь-
шая нагрузка на колесо Ак, группа режима работы крана и его
механизмов. Краны используют в закрытых помещениях, но
они могут быть применены и на открытом воздухе на эстакадах.
Краны ручные крюковые однобалочиые (ГОСТ 7075 — 80).
Они предназначены для подъема и перемещения грузов при вы-
полнении периодических работ, отсутствии силового токоподвода
на складах, в монтажных н ремонтных цехах, в машинных залах
электростанций.
Мост крана (рис. 84) состоит из несущей двутавровой балки 2,
опирающейся на коицевые балки / из швеллеров, в которых смон-
тированы ходовые колеса 9 и 10. Для увеличения жесткости моста
в горизонтальной плоскости пролетная и концевые балки соеди-
нены подкосами 8. Колеса 10 приводятся во вращение через от-
крытую зубчатую передачу и трансмиссионный вал //от цепного
тягового колеса 7 с цепью 6. Усилие на цепи 100 ... 150 Н.
Рис. 84. Мостовой ручной однобалочный кран
149
Рис. 85. Мостовой электрический однобалочный
В качестве механизма подъема используют червячную таль 4
(см. § 42), рабочее усилие цепи 5 —650 ... 750 Н. Таль передви-
гают с помощью поводковых цепей 5 с усилием 180 ... 250 Н.
Грузоподъемность этих кранов 3,2; 5 и 8 т, пролет от 4,5 до 16,5 м,
высота подъема от 3 до 12 м.
Краиы ручные крюковые двухбалочные (ГОСТ 7075—80).
Назначение этих кранов аналогично назначению однобалочных.
Грузоподъемность их составляет 12,5 и 20 т, пролеты от 7,5 до
16,5 м, высота подъема до 20 м. Мост выполнен из двух пролет-
ных балок, которые опираются на концевые балки из швеллеров.
Механизм передвижения крана выполнен с цепным колесом,
тяговое усилие на цепи 340 ... 470 Н. Тележка имеет раму с ко-
лесами, которые опираются па подтележечные рельсы, уложен-
ные на верхних полках пролетных балок. Тележка передвигается
с помощью цепного колеса. На раме смонтирован механизм подъ-
ема с грузоупорным дисковым тормозом и цепными колесами на
приводном валу. Усилие на цепях 340 ... 470 Н. Крюковая под-
веска подвешена на канатах сдвоенного полиспаста.
Краны электрические крюковые однобалочные (ГОСТ 7890 83).
Эти крапы (рис. 85) предназначены для подъема и перемещения
грузов в цехах и на складах. В качестве грузовых тележек при-
меняют канатные электрические тали 6 (см. § 42). Мост состоит
из балки 3 двутаврового сечения, которая опирается на коробча-
тые концевые балки /. Для увеличения жесткости концы балки
усилены раскосами 4. На концевых балках смонтированы колеса
с угловыми буксами 5. Механизм передвижения 2 выполнен
с приводом на каждое колесо. Такой привод называют раздельным.
150
Каждый привод состоит из фланцевого двигателя с коротко-
замкнутым ротором и навесного редуктора. Тормоз отсутствует
вследствие малой скорости передвижения. Питание двигателей
тали осуществляют с помощью кабеля 8, подвешенного на коль-
цах на проволоке, которая натянута и закреплена на крон-
штейнах концевых балок. Управление краном с пола от подве-
шенного к тали поста управления 7 или из кабины 9, закрепляе-
мой к мосту крана.
Грузоподъемность этих кранов 1; 2; 3,2 и 5 т, пролет 3 ...
15 м, высота подъема 6, 12 и 18 м. Скорость механизмов подъема
8 м/мин, передвижения тали 20 м/мин, крана 30 м/мин. Группа
режима работы крана ЗК, механизмов ЗМ.
Краны электрические крюковые двухбалочные. Они предназна-
чены для перемещения различных грузов в цехах, на складах
и открытых площадках. Кран (рис. 86) состоит из моста / с меха-
низмом передвижения 5, колеса которого установлены на угло-
вых буксах, грузовой тележки 2 со смонтированными на ней ме-
ханизмами подъема груза 3 и передвижения 4, кабины управ-
ления 7 и вспомогательной кабины 6 для обслуживания токо-
съемников цеховых троллей. Управление может быть с пола,
из кабины или дистанционным. Грузоподъемность крана 5; 10;
12,5; 16; 16/3,2; 20/5; 32/5 и 50/12,5 т, пролет 10,5 ... 34,5 м (шаг
3 м) и высота подъема до 20 м. Скорости механизмов принимают
в зависимости от группы режима механизма, а также от грузо-
подъемности (табл. 29).
Мост крана (рис. 87) состоит из двух пролетных балок 4,
соединенных с концевыми 5 и 5. Бдлки коробчатого сечения вы-
полнены из двух вертикальных стенок 7, верхнего 6 и нижнего 8
горизонтальных поясов. На верхнем поясе пролетной балки за-
креплен подтележечный рельс, на концах которого установлены
упоры для ограничения крайних положений тележки. Для обеспе-
чения прямоугольной формы сечения и устойчивости вертикаль-
ных стенок внутри пролетной балки приварены большие диаф-
Таблица 29. Скорость механизмов мостовых кранов, м/с
Механ ичм Группа реж има работы механизма
ЗМ 4М F>M
Подтема груза: главнын 0,04 0.13; 0,17 0,25; 0,33
вспомогательный 0,17; 0,22 0,33 0,33
Передвижения: тележки 0.33, 0.5 0,67 0,67
крапа 0,83 1.33 1,66: 2
Примечание. Меньшие значения скоростей имеют краны Полыней
грузоподъемности.
151
4
Рис. 86. Моста ио Г, члек-
гр и чес к ин дну х бал очини"!
кран
рагмы /. Кроме того, имеются малые диафрагмы 2 для более рав-
номерной передачи нагрузки от подтележечного рельса на верти-
кальные стенки. Пролетные балки соединены с концевыми сты-
ковым соединением с дополнительными накладками или высоко-
прочными болтами. На боковых стенках пролетных балок обычно
предусмотрены площадки с перилами для обслуживания грузовой
тележки и механизмов передвижения крана, а также для разме-
щения жестких троллей (стойки с уголковым прокатом).
Рис. 87. Схема моста двухбалочного мостового крана
152
Рис. 88. Кинематические схемы механизмов передвижения крана:
о — с центральным приводом и тихоходсшым валом; б — с центральным приводом и
среднеходовым валом; в — с центральным приводом и быстроходовым валом; я — с раз-
дельным приводом
Механизмы передвижения кранов с цилиндрическими колесами
выполнены но различным схемам с приводом (центральным) от
одного двигателя .6 с тормозом 5 и редуктором 4 на два колеса
или с приводом на каждое колесо (раздельным). В механизме
с центральным приводом тихоходный трансмиссионный вал 3
соединяет приводные колеса 1 (рис. 88, а) и передает большой
крутящий момент. Вал состоит из нескольких секций, соединенных
муфтами 2 и выполненных из круглого проката или труб боль-
153
того диаметра. Вал вращается в подшипниках, установленных на
площадке. Недостаток этого механизма — большая масса, а также
необходимость иметь прочные площадки.
В механизме со среднеходовым валом 8 (рис. 88, б) вращение
колесам передается через открытую зубчатую передачу 7, что
позволяет создавать упрощенные конструкции узла ходовых колес.
Крутящий момент, передаваемый среднеходным валом, меньше
крутящего момента тихоходного вала; соответственно умень-
шается и масса механизма.
Рассмотренные схемы механизмов применяют в кранах с не-
большой скоростью перемещения, в том числе с ручным приводом.
Механизмы с быстроходным трансмиссионным валом 9
(рис. 88, в) получили распространение благодаря малой массе
и легкой конструкции поддерживающих площадок. Однако на-
личие двух редукторов 4 усложняет конструкцию механизма.
Для механизмов с центральным приводом (рис. 88, a—в)
требуется тщательный монтаж трансмиссионных валов при изго-
товлении крана и техническое обслуживание в процессе эксплуа-
тации. Кроме того, диаметры приводных колес должны мало раз-
личаться между собой. Если различие диаметров приводных колес
будет большим, то концевая балка с колесом большего диаметра
начнет двигаться быстрее, в результате происходит забегание этой
балки относительно другой и образуется перекос крана на рель-
совых путях. Такое явление нежелательно, так как оно приводит
к касанию реборд колес с рельсами и их интенсивному изнашива-
нию, увеличению сопротивлений передвижению вследствие тре-
ния реборд колес с головками реЛьсов. Для уменьшения переко-
сов крана разность диаметров приводных колес не должна пре-
вышать значений, указанных в § 34.
В механизмах с раздельным приводом колес (рис. 88, г) дви-
гатели включают в цепь независимо (параллельно) без специаль-
ного подбора их параметров. Эти механизмы позволяют созда-
вать блочные приводные агрегаты и самоходные концевые балки,
которые подают на сборку как готовые узлы.
Наиболее компактными являются механизмы с фланцевым
двигателем и навесным редуктором (рис. 89). К особенностям
этих механизмов следует отнести следующие: работа приводов
при различных нагрузках'вследствие разных положений тележки
с грузом в пролете крана и-различия механических характеристик
двигателей, что может привести к образованию перекоса крана.
Перекос может возникнуть также в случаях отказа двигателя или
тормоза одного из приводов. Различие в диаметрах приводных
колес практически не сказывается на работе двигателя, так как
оно компенсируется скольжением роторов двигателей. Механизмы
с раздельным -приводом широко распространены и являются
основным типом механизма в современных кранах.
Цилиндрические двухребордные колеса устанавливаются в уг-
ловых буксах (см. рис. 69). В зависимости от конструкции меха-
154
Рис. 89. Механизм передвижения с фланцевым двигателем и навесным редук-
тором
низмы комплектуются редукторами типов РМ, Ц2, Ц2У и ЦЗвк,
тормозами типов ТКТ, ТКП и ТКГ. Элементы механизма соеди-
нены зубчатыми муфтами. Главным недостатком механизмов
передвижения является быстрое изнашивание реборд колес в ре-
зультате касания их с головкой рельса. Долговечность колес
можно увеличить применением термообработки колес (см. § 34),
содержанием рельсовых, путей в исправном состоянии и разра-
боткой новых конструктивных схем механизмов.
Находят применение механизмы передвижения с коническими
колесами. Приводные конические колеса этих механизмов при
центральном приводе установлены вершиной конуса в наруж-
ную сторону (рис. 90, а). Благодаря связи колес трансмиссионным
валом происходит непрерывное выравнивание положения крана
на рельсовых путях, так как при забегании одной концевой
балки коническое колесо контактирует с рельсом на меньшем
диаметре поверхности качения, а это автоматически приводит
к уменьшению скорости этой концевой балки.
У механизмов с раздельным приводом приводные конические
колеса устанавливают вершиной конуса в наружную сторону.
155
я) ff)
Рис. 90, Схема механизма передвижения крана с коническими колесами:
а — с центральным приводом; б — с раздельным приводом
а неприводные — во внутреннюю сторону (рис. 90, б). Такая
установка колес (схема с обратным конусом) центрирует кран
на рельсовых путях и, кроме того, качение приводных колес
при прохождении искривленных участков рельсовых путей не
вызывает забегания концевой балки и перекос крана, так как
различие в диаметрах колес компенсируется скольжением рото-
ров двигателей. Указанные особенности механизмов с кониче-
скими колесами снижают (и даже исключают) вероятность каса-
ния реборд колес с рельсами. Гарантией хорошей работы меха-
низмов с коническими колесами являются применение рельсов
с полукруглой головкбй (см. рис. 64, б) и сохранение в процессе
эксплуатации конической поверхности колес путем придания
необходимой твердости их ободу (см. табл. 25).
Максимальную нагрузку на колесо определяют при положении
тележки с грузом около концевой балки:
F„^(G + GT+0,5GH)/zK, (115)
где G, GTr GM — аес груза, тележки и моста, Н; гк— число колес у одной кон-
цевой балки.
Грузовая тележка (рис. 91, а) состоит нз рамы, на которой
из унифицированных узлов собраны механизмы подъема груза
и передвижения тележки. Рама выполнена из опирающихся на
ходовые колеса двух продольных балок, соединенных попереч-
ными балками и покрытых сверху листом настила.
При проектировании тележки должны выполняться следу-
ющие требования; обеспечение небольших габаритов — высоты
(чтобы не увеличивать высоту крана и, соответственно, высоту
цеха) и длины (уменьшает площадь необслуживаемых зон у стен
цеха); обеспечение равномерной нагрузки на колеса при подъеме
груза, так как она является расчетной для колес и пролетных
балок мостов.
На тележке предусмотрены ограничители высоты подъема
крюковой подвески, линейка для выключателей ее крайних поло-
жений на мосту крана, буфера и перила ограждения. Масса те-
лежки составляет 0,3 ... 0,4(?.
У крапов группы режима IK, 2К, ЗК в качестве механизмов
подъема применяют электротали, стационарно закрепленные на
156
157
раме тележки (рис. 91, б), масса таких тележек 0,2 ...
... 0.25Q.
Краны электрические магнитные. Эти краны предназначены
для подъема и перемещения изделий из черных металлов, обла-
дающих магнитными свойствами. Устройство этих кранов ана-
логично устройству крюковых кранов. Магнит (см. рис. 15)
навешен на крюк, а клеммный разъем кабеля закреплен на серьге
крюковой подвески. Питание магнита осуществляют постоянным
током напряжением 220 В от установленного на площадке моста
выпрямителя через кабель, намотанный на кабельный барабан,
в котором предусмотрен токосъем, К неподвижным щеткам токо-
съема подключены провода от выпрямителя, а с вращающими
кольцами соединены провода кабеля, намотанного на кабельный
барабан, который кинематически связан с барабаном механизма
подъема зубчатой или цепной передачами так, что скорости подъ-
ема магнита с крюковой подвеской и питающего кабеля одина-
ковые. Грузоподъемность кранов 10; 16; 20/5 т, пролеты 10,5 ...
34,5 м. Скорость подъема 18 ... 20 м/мин, передвижение тележки
40 м/мин, крана 120 м/мин. Группа режима работы крана 6К,
7К и 8К, механизмов 5М и 6М. После снятия магнита кран может
работать как крюковой.
Электрические грейферные краны. Они предназначены для
подъема и перемещения насыпных грузов. Устройство кранов
аналогично устройству крюковых кранов за исключением те-
лежки, на которой имеются два механизма подъема: один для
замыкающих канатов грейфера, а другой для подъемных. Грей-
феры двухчелюстные четырех канатные.
Грузоподъемность кранов 5; 10; 15 и 20 т (соответственно вме-
стимость грейферов 1,6; 2,5; 3,1 ... 8; 4 ... 10 м3); пролеты 10,5 ...
34,5 м; скорость механизмов подъема и замыкания грейфера
40 ... 50 м/мин; передвижения тележки 40 ... 70 м/мин, крана
100 ... 120 м/мин, высота подъема до 24 м. Группа режима работы
крана 6К, 7К и 8К, механизмов 5М и 6М.
Мостовые электрические крюковые краны большой грузоподъ-
емности. Эти краны предназначены для перемещения грузов
большой массы в механических и сборочных цехах. Кроме того,
они могут быть использованы для монтажных н ремонтных работ.
Параметры крапов регламентирует ГОСТ 6711—81: грузоподъ-
емность от 80/20 до 320/32 т; пролеты 9,5 ... 33,5 м; высота подъема
до 32 м; скорость главного подъема 1,25 ... 2,5 м/мин, вспомога-
тельного подъема 8 ... 12 м/мнн; передвижения тележки 12,5 ...
32 м/мин; передвижения крана от 32 до 63 м/мин. Группа режима
работы кранов ЗК и 5К, механизмов 2М, ЗМ и 4М. Устройство
этих кранов аналогично устройству крюковых двухбалочных
крапов. Учитывая большую массу крана и груза, а также с целью
уменьшения нагрузки на колеса мост должен опираться на во-
семь колес при грузоподъемности крана 80 и 125 т и на шестнад-
цать колес при большей грузоподъемности. Колеса попарно
158
Рис. 92. Схемы установки колес:
а — в балансирных тележках; б — в балансирных
5)
тележках с балансирными балками
объединены в балансирные тележкн 2, которые при наличии
восьми колес шарнирно закреплены на концевых балках 1 моста
(рнс. 92, а), а при наличии шестнадцати колес—с помощью балан-
сирных балок 3 (рис. 92» а).
Вследствие возможного поворота в шарнирах обеспечен кон-
такт колес с рельсами, имеющими отклонения в вертикальной
плоскости, а следовательно, и одинаковые нагрузки FK --=
на колеса балансирных тележек. Механизм передвижения вы-
полнен с раздельным^ приводом: при восьми колесах — привод-
ными являются два колеса, при шестнадцати колесах — четыре.
Дистанционное управление. Мостовые электрические краны
могут быть оснащены дистанционным управлением в цехах с не-
взрывоопасной окружающей средой, не содержащей агрессивных
газов и концентраций паров, разрушающих металлы и изоляцию;
в цехах с загазованной и запыленной средой, не насыщенной
токопроводящей пылью.
Аппаратура управления механизмами размещена на площадке
моста крана.
Имеются установки дистанционного управления трех моди-
фикаций.
Модификация 1 с управлением по однопроводной ли-
нии связи со стационарно установленного пульта. Установки
управления этой модификации находят применение в цехах, в ко-
торых длина участков зоны обслуживания кранов не более 50 м
(рнс. 93, а). Управление механизмами осуществляется от мало-
габаритного пульта с соответствующими командоаппаратами,
с помощью которых сигналы управления подаются на провод 12,
натянутый вдоль кранового пути. Через съемник команд, уста-
новленный на стойке, закрепленной на мосту, сигнал поступает
в блок приемников 3. Каждый блок управления принимает строго
определенные командные частоты из передаваемого диапазона,
предназначенные для управления только данным механизмом, и
преобразует их в командные сигналы, которыми осуществляется
включение н отключение коммутирующих элементов блока ком-
мутации 5. Последний управляет магнитными контроллерами или
силовыми контакторными блоками 5, с помощью которых осуществ-
159
Рис. 93. Схема установок дистанционного управления нраиамя:
а — по однопроводной линии связи со стационарно установленного пульта; 6 — по
однопроводной линии связи с переставляемого пульта; е — по радиоканалу с переносного
пульта; 1 — колонка; 2 — пульт управления; 3 — блок приемников; 4 — блок питдиня
и переключения; 5 — блок коммутации; 6 — звуковая сигнализация; 7 — световая
сигнализация; 8 — силовые блоки коммутации; 9 — блоки реверсов; 10 — магнитные
контроллеры; И — блок усиления сигналов; 12 — линия связи; 13 —съемник сигналов
управления; 14 — груз натяжения линии связи; 15 — посты подключения; 16 — пере-
ставной пульт управления; 17 — радиоприемник команд управления; 18 —пульт управ-
ления по радиоканалу
160
ляется включение электродвигателей механизмов. В установке
предусмотрены защитные средства от помех, кратковременного
исчезновения напряжения питания и нулевая блокировка. На
пульте находятся аварийная кнопка (для немедленной остановки
всех работающих механизмов), кнопка звуковой сигнализации
и кнопка защиты.
Модификация 2 также с управлением по однопровод-
ной линии связи, ио с переставляемого пульта /6 (рис. 93, б).
Установки управления этой модификацией применяют в цехах,
в которых длина участков зоны обслуживания кранов составляет
до 100 м при наличии свободных проходов. В этих случаях опре-
деляют необходимое число постов (разъемов) для подключения
переставляемого пульта.
Модификация 3 с управлением по радиоканалу
(рис. 93, в). Ее целесообразно применять на участках цеха с не-
свободными проходами. Сигналы команд с переносимого кранов-
щиком пульта управления 18 принимаются радиоприемником
команд управления /7, а затем также передаются в блок прием-
ников 3.
Перекосы кранов. Прямолинейное движение кранов возможно
только при соблюдении определенных условий, главными из ко-
торых являются: начальное положение краиа, при котором ось
крана параллельна рельсовым путям; хорошее состояние рель-
совых путей; равные диаметры приводных колес н установка их
параллельно оси крана; одинаковые сопротивления передвижению
опор (концевых балок); сохранение сцепления приводных колес
с рельсами. В реальных условиях эксплуатации эти условия, как
правило, не соблюдаются, поэтому при движении крана одна
из опор опережает другую (забегает) и образует перекос крана.
Различают два вида перекоса — свободный и упругий.
Свободный перекос (рис. 94, а) образуется постепенно на срав-
нительно большом пути движения крана в пределах зазоров
Рис, 94, Виды перекосов крана:
и — свободного; б — упругого
6 Балашов В. П.
161
между ребордами колес и рельсами. Наибольший перекос огра-
ничивается касанием реборд колес с рельсами; действующие при
этом силы прижатия реборд (боковых роликов) к головкам рель-
сов называют боковыми (поперечными) силами. Эти силы обус-
ловливают силу трения реборд колеса с рельсом и, как следствие
этого, дополнительное сопротивление передвижению крана и
интенсивное изнашивание реборд н боковых поверхностей голо-
вок рельсов. Для уменьшения перекосов ходовая часть крана и
рельсовые пути должны быть всегда в исправном состоянии.
Для этой же цели применяют конические ходовые колеса.
При упругом перекосе происходит забегание одной опоры
крана относительно другой вследствие упругой деформации сталь-
ной конструкции крана под действием избыточной движу/цей
силы одного приводного колеса — силы перекоса (рис. 94, б).
Наибольшие упругие перекосы имеют место в периоды разгона
и торможения крана в случаях положения тележки с грузом около
опоры (концевой балки), так как при этом сопротивления пере-
движению опор различаются в 1,5 н более раз. Менее нагруженный
двигатель развивает большую частоту вращения и эта опора
забегает, вызывая упругую деформацию стальной конструкции
крана в горизонтальной плоскости. При этом сила упругой де-
формации для этого двигателя одновременно является дополни-
тельной нагрузкой, что приводит к снижению его частоты вра-
щения. Для двигателя отстающей опоры сила упругой деформа-
ции проявляется как дополнительная движущая сила (помогает
ему), поэтому этот двигатель частично разгружается и его частота
вращения возрастает. Таким образом, через стальную конструк-
цию крана происходит взаимодействие двигателей приводов опор,
результатом которого является выравнивание их нагрузок. Кран
продолжает движение, но при этом стальная конструкция нагру-
жена силой перекоса, которая численно равна силе упругой
деформации. В условиях эксплуатации оба вида перекоса —
свободный и упругий — проявляются одновременно.
Различают статическую силу перекоса при установившемся
движении крана и динамическую в периоды разгоиа и торможения.
При райных диаметрах приводных колес и одинаковых меха-
нических характеристиках двигателей статическая сила пере-
коса
FnCT = 0,5(tt71 - 1Г2), (116)
где IFi, —полные статические сопротивления передвижению опор, Н [см.
формулу (123) J.
При тех же условиях максимальная динамическая сила пере-
коса (Н)
^п.д -- 0,5 [(ttK h ^mil) - (^з + ^инз)} 0 № - т.2), (117)
где ^'ин]- И^ин2 — сила инерции масс т1 ит2, приведенных к концевым балкам, Н;
а — наибольшее ускорение при разгоне или торможении, м/с3.
162
Динамические силы перекоса по формуле (117) значительно
больше статических по формуле (116), поэтому нх учитывают при
расчете элементов стальной конструкции. В практических рас-
четах принимают (кг)
= т. = £ F^/g.
где У Т1(Ь У — суммарные нагрузки на колеса опор (концевых балок)
крана, Н: g = 9,У1 м/с-.
Наибольшая возможная сила перекоса может быть в случае
заклинивания (кратковременной остановки) стороны крана, на
которой расположена тележка с грузом. При этом предпола-
гается, что приводное колесо другой стороны пробуксовывает.
С учетом динамического характера действующая при этом сила
перекоса (Н)
f,,™ = 2A,uf„mI„ = 2-0. l5fK m,n = 0.3fKmln, (118)
где /’си = 0,15 — коэффициент сцепления колеса с рельсом; F[t llliH — мини-
мальная нагрузка на пробуксовывающее колесо, Н.
Рассмотренные силы перекоса по формулам (116)—(118) могут
нагружать стальные конструкции всех кранов мостового типа.
Заметим, что при положении тележки посередине пролета V/,
~ W2\ №ин 1 Я7инг и силы перекоса равны нулю.
§ 45, ПОДВЕСНЫЕ МОСТОВЫЕ КРАНЫ
Краны могут быть одно-, двух и трехпролетными
(рис. 95, а, б). Главные достоинства этих кранов — малые габа-
риты по высоте, возможность установки на отдельных участках
цеха (рис. 95, в), перекрытие больших пролетов, возможность сты-
ковки кранов, находящихся в одном или разных пролетах
(рис. 95, г), и перемещение тележки с одного крана на другой
(рис. 95, д), а также на монорельсовый путь, идущий в другие
производственные помещения (рис. 95, е). Взаимное положение
кранов при стыковке фиксируется стыковым замком.
Краны ручные однобалочные однопролетные (ГОСТ 7413 -80).
Назначение этих кранов аналогично назначению опорных одно-
балочных кранов. Мост крана представляет собой несущую дву-
тавровую балку, которая прикреплена к нижним частям концевых
балок. В качестве колес применяют тележки электроталей (см.
рис. 83). Механизмом подъема служит передвижная ручная таль.
Грузоподъемность этих кранов 0,5; I; 2; 3,2 и 5 т, пролет 3 ...
9 м, длина консолей 0,3 ... 1,2 м. Усилия на цепях механизма
подъема 300 ... 750 Н, передвижение тали 100 ... 200 Н, передви-
жения крана 60 ... 200 Н. В зависимости от грузоподъемности для
несущих балок кранов и крановых путей применяют двутавры
№ 18 ... 40 (ГОСТ 19425-74).
Краны электрические однобалочные однопролетные
(ГОСТ 7890—83). Этн краны предназначены для подъема и пере-
6* 163
Рис. 95. Схемы мостовых подвесных кранов:
в — одкопролетный; б — двух пролетный; в — однопролетный па участке цеха; г — не-
посредственная стыковка двух кранов в пролете; д - стыковка кранов с переходной
площадкой; е — стыковка крана с монорельсовым путем
мещеиия грузов в крытых производственных и складских помеще-
ниях (рис. 96, а). Допускается применение кранов для транспорти-
рования раскаленного и жидкого металла, жидкого шлака при
уменьшении грузоподъемности на 25 % и выполнении требований
Правил по кранам (установка отражающих экранов и наличие
двух тормозов на механизме подъема). Мосты состоят из несущей
балки 5, прикрепленной с нижней стороны к концевым балкам 1
и 4 из швеллеров и усиленной подкосами 2 для увеличения жест-
кости .
Механизмом передвижения служат приводные 11 и непрнвод-
иые 5 тележки электроталей. В качестве механизма подъема ис-
пользуют электроталь 5.
Грузоподъемность кранов 1; 2; 3,2 и 5 т, пролет 3 ... 15 м. длина
консолей 1,5 ... 3 м.
Краны могут быть изготовлены без стыковых замков и с кабе-
лем 5 для литания электротали, а также с одним или двумя стыко-
выми замками н троллеями.
Для повышения сроков службы ходовых колес и подвесных
путей соединение несущей балки с одной концевой балкой выпол-
няют подвижным (рис. 96, б). Верхняя полка двутавра Попирается
на ролики 7 опорной скобы 8 концевой балки 6. Подвижное соеди-
нение допускает возможность изменения пролета крана, что об-
легчает самоустановку крана на путях при прохождении искрив-
ленных участков подвесных путей (уменьшаются боковые силы,
действующих на боковые ролики).
Колеса 10 и 11 ходовых тележек крана безреборные. а боковые
ролики 12 установлены на торцах концевых балок и контактируют
164
Рис. 96. Кран мостовой электрический однобалочный подвесной однопролет-
ный :
а — общий вид; б — подвижное соединение несущей и концевой балок; в — ходовая
часть концевой балки
с боковыми поверхностями стенок двутавровых балок подвесного
пути (рис. 96, в).
Краны электрические однобалочные двухпролетиые. Эти краны
отличаются от однобалочных однопролетных тем, что несущая
балка прикреплена к трем поперечным балкам, две нз которых
(концевые) являются приводными. Грузоподъемность этих кра-
нов 1 ... 5 т, пролет 7.51 7,5; 9+9 и 10,5+10,5 м. Остальные
параметры соответствуют параметрам однопролетных кранов.
Краны грузоподъемностью более 5 т выполняют двухбалочнымн
со специальными подвесными тележками.
§46. КОЗЛОВЫЕ КРАНЫ
Козловые краны разделяют на три основные группы:
общего назначения (перегрузочные), строительно-монтажные и
специальные. К последним относят краны для перегрузки контей-
неров.
Перегрузочные краны использумугна открытых складах и пере-
грузочных площадках, которые обслуживаются средствами назем-
ного рельсового и безрельсового транспорта. Перегрузочные
краны (ГОСТ 7352—81) изготовляют двух типов: ККТ —с элек-
трической талью грузоподъемностью 3,2 и 5 т и КК — с грузовой
тележкой грузоподъемностью 8; 12,5; 20 и 32 т. Кран типа ККТ
(рис. 97, а) состоит из стальной конструкции — моста 2, опираю-
165
Рис. 97. Схемы козловых кранов:
а — типа К.К.Т с электроталью; б — типа К.К. с грузовой тележкой
щегося на опоры / с механизмом передвижения 5, электротали 3,
кабины управления 4 и электрооборудования. Опоры обычно вы-
полняют из двух стоек 7, соединенных внизу затяжками 6. Мост
представляет собой одну несущую балку с двутавром, по которому
передвигается таль.
Краны типа КК (рнс. 97, б) снабжены грузовой тележкой 10,
конструктивное исполнение которой аналогично конструктивному
исполнению тележки мостового крана (см. рис. 91). Мост 9 состоит
из двух коробчатых балок, соединенных по концам поперечными
балками. Мост может быть выполнен с консолями.
Стальные конструкции выполнены с обеими жесткими опо-
рами 1 прп пролетах до 20 м (см. рис. 97, а) и с одной жесткой 8,
а другой гибкой // при пролетах более 20 м (см. рис. 97, б). Тер-
мин «гибкая» характеризует способность опоры поворачиваться
благодаря шарнирному креплению илн возможность. получения
большой деформации изгиба в плоскости, опоры. Необходимость
гибкой опоры обусловлена требованиями: 1) обеспечения возмож-
ности компенсации увеличения илн уменьшения пролета крана
вследствие сезонного перепада температур (от —40 до 4 40 Ц1С),
так как пролет наземных рельсовых путей остается постоянным;
2) более свободного прохождения участков рельсовых путей с от-
клонениями в горизонтальной плоскости, превышающими норма-
тивные значения. В кранах больших пролетов указанные факторы
могут привести к касанию реборд колес с рельсами и нагружению
их распорными силами. Элементы стальных конструкций выпол-
няются в виде ферм или балок, широко применяют трубчатые кон-
струкции (рис. 98). Дополнительным параметром козловых кра-
нов является рабочий вылет консолей L (0,2 ... 0,3) LK. Харак-
теристики наиболее распространенных козловых кранов приве-
дены в табл. 30.
Кроме электрических талей, в однобалочных кранах приме-
няют подвесные тележки специальной конструкции, состоящие
нз рамы с иеприводными ходовыми колесами в балансирных те-
лежках и блоков полиспаста. Грузовая лебедка при этом установ-
лена на мосту крана. Тележка перемещается с помощью тягового
каната от лебедки, расположенной на мосту. При движении те-
166
лежки грузовой канат перематывается направляющим блокам
полиспаста (р л с. 99, а), что создает дополнительное сопротивление
движению (Н)г
К'ол = (6 +- 6Г„)(1 - (119)
где G, Gr. у вес груза и грузозахватного устройства; Пбл — КПД блока;
(п кратность полиспаста; г — число блоков, по которым перематывается канат.
Рис. 99. Подвесная тележка козлового крана:
а — схема механизма подъема; б — схема механизма передвижения;
ющий блок; 2 — канат; 3 — блоки; 4, 5 — барабаны
направдя-
167
30. Характеристика перегрузочных козловых кранов
Механизм передви-
жения с тяговым кана-
том выполнен по двум
основным схемам: 1) с
жестким креплением
тягового каната на ба-
рабане лебедки, при
этом одна чГасть каната
сматывается с барабана,
а другая — наматывает-
ся; 2) с канатоведущим
шкивом, рабочая по-
верхность которого оче-
рчена по кривой
(рис, 99, б). Шкив охва-
тывается тремя витками
каната так, что рабочая
ветвь каната набегает на
шкив большого диамет-
ра. Под действием со-
ставляющей натяжения
каната намотанные вит-
ки непрерывно сдви-
гаются к середине шкива
меньшего диаметра. Для
обеспечения сцеплений
каната со шкивом долж-
но быть определенное
натяжение ветви каната,
сбегающей со шкива.
Канат выбирают по
разрывному усилию 1см.
формулу (20) 1 с коэффи-
циентом запаса прочнос-
ти не менее 4 (см. табл. 6).
Механизмы передви-
жения кранов выпол-
няют с раздельным при-
водом (см. рис. 88, г).
Наибольшую нагрузку
на колесо (рнс. 100)
определяют при поло-
жении тележки с гру-
зом на консоли (Н):
fK -H(G HGT)(L h
+ С,) GMb|;L„z„, (120)
где zK - число колес опоры
крана.
168
При выборе колес нагрузку
на них ограничивают предела-
ми 200 ... 250 кН, так как кран
перемещается по наземным пу-
тям с гравийно-щебеночным
балластом. Диаметр колес не
менее 400 мм, что способствует
уменьшению толчков при про-
хождении стыков рельсов. Чис-
ло приводных колес выбирается
фициент запаса сцепления [см
Рис. 100. Схема определения нагрузки
на ходовые колеса козлового крана
таким, чтобы был обеспечен коэф-
формулу (131)]. При выборе
двигателя учитывают ветровую нагрузку на кран в рабочем со-
стоянии (см. § 26).
Тормоза должны удерживать кран на рельсах при ветровой
нагрузке на кран в рабочем состоянии. Ветер с нормативным дав-
лением действует относительно редко. Прн меньшем давлении
ветра или его отсутствии работа с тормозами, отрегулированными
на тормозной момент с учетом ветровой нагрузки, затруднена
вследствие больших замедлений крана, вызывающих его колеба-
ния и увеличенное раскачивание груза. Поэтому в козловых кра-
нах применяют комбинированное торможение: плавное с помощью
электродвигателей при малой ветровой нагрузке н механическими
тормозами при большой ветровой нагрузке и в аварийных случаях.
Краны снабжают устройствами безопасности: концевыми вы-
ключателями, буферами, сигнализаторами давления ветра, про-
тивоугонными устройствами с ручным приводом (см. рис. 74, а)
и с машинным при пролетах более 40 м (см. рис. 74, б).
Подвод напряжения к крану осуществляется преимущественно
с помощью гибкого шлангового кабеля по трем схемам: 1) с уклад-
кой кабеля на землю или в деревянный лоток и непосредственным
креплением его к опоре крана; 2) наматыванием кабеля на кабель-
ный барабан, который выполнен с токосъемным устройством; 3) со
шторной подвеской кабеля иа кольцах или каретках, которые пере-
мещаются по поддерживающей проволоке, натянутой вдоль путей
на опорах. Подвод напряжения к тележке осуществляют шторной
подвеской кабеля на каретках.
Краны в зависимости от конкретных условий работы управ-
ляются с пола, из кабины и дистанционно.
Устойчивость козловых кранов от опрокидывания в попереч-
ном направлении относительно рельсовых путей проверяют для
того, чтобы обеспечить условия безопасности при работе и дейст-
вии ветровой нагрузки на кран в рабочем состоянии. Ребром опро-
кидывания считают линию контакта колес с головкой кранового
рельса. Тележка расположена на консоли жесткой опоры или на
длинной консоли. Устойчивость крана оценивается коэффициен-
том устойчивости
^уСТ — Мвос/^опр [^уст]’
(121)
169
Рис. 101. Схема к определению устойчивости козлового крана
где ЛТВ0С — восстанавливающий момент, который препятствует опрокидыванию
крана; Л10Пр — опрокидывающий момент; ] — коэффициент запаса устой-
чивост и.
Коэффициент устойчивости козловых кранов в рабочем состоя-
нии (рнс. 101)
Куст = вос/(/ИГр -f- К1т Л1В> р) [Куст] = 1j>25,
где моменты Л1ВОС = бма — момент от веса стальной конструкции крана; Л1гр =
= GL — момент от веса груза; Л/т = Ст1. момент от веса тележки; 7ИВ. р =
= FB рйв — момент от ветровой нагрузки на кран в рабочем состоянии, те-
лежку и груз.
Особенности монтажа. Практически перегрузочные козловые
краны поднимают в проектное положение путем стягивания стоек
опор (рнс. 102). Мост 4 укладывают на шпальные клетки (козлы)
5 в поперечном направлении относительно рельсовых путей. Стоики
опор 2 шарнирно соединены с мостом, при этом колеса ходовых
тележек 1 опираются на рельсы. К основаниям стоек или к ходо-
вым тележкам прикрепляют монтажные блоки (см. § 41), затем
на каждой опоре запасовывают в полиспаст монтажные канаты,
Рис. 102. Схема монтажа козлового крана
170
концы которых закрепляют на барабанах лебедок, установленных
около рельсовых путей. При одновременном стягнваннн полиспа-
стов основания стоек с тележками сближаются и происходит подъем
моста до проектного положения, после чего стойки соединяют
стяжками 6. Начальный угол наклона стоек 20 ... 30°, что соот-
ветствует высоте шпальной клетки 3,5 ... 4,5 м для кранов с вы-
сотой подъема крюка 9 ... Юм. Перед подъемом крана выполняют
все монтажные работы, производят окраску, закрепляют кабину
и устанавливают тележку.
В процессе подъема моста должны быть обеспечены одинако-
вые углы наклона а стоек опор. Это требование соблюдается, если
шарниры Укрепления стоек к мосту расположены на одной оси или
достаточно близко к ней. Если расстояние между шарнирами уве-
личено, то получается четырехзвенный механизм и система может
оказаться неустойчивой; стягивание стоек опор в этом случае по-
влечет за собой поворот моста относительно его продольной осн,
причем наклон одной из стоек будет уменьшаться, а другой увели-
чиваться. Такой процесс может привести к разрушению элементов
конструкции моста. Устойчивость шарнирной четырехзвенной
системы проверяют расчетом. Если возможна потеря устойчиво-
сти, то устанавливают ограничительные упоры нли выравниваю-
щие механизмы, обеспечивающие одинаковые углы поворота стоек
опор.
Усилие в стягивающем полиспасте (Н)
F + GM/2 tg а, (122)
где , р — сопротивление передвижению тележек опоры [см. формулу (125)], Н;
GM — вес моста п других элементов, приходящийся на опору, Н; а — угол на-
клона стоек, °.
По усилию подбирают кратность полиспаста, диаметр каната и
монтажную лебедку (см. § 40, 41).
§ 47. ОСНОВЫ РАСЧЕТА КРАНОВ
Механизм подъема груза. Исходными данными для
расчета являются: грузоподъемность Q, кг; высота подъема Я,
м; скорость подъема v, м/с; группа режима, ПВ и число включений
в час; тип полиспаста и кинематическая схема механизма. Реко-
мендуется следующий порядок расчета.
1. Выбор крюка с учетом Q и группы режима (см. § 7).
2. Определение наибольшего натяжения каната по формуле
(31), необходимого разрывного усилия по выражению (20) и выбор
каната (см. § 15).
3. Определение размеров блока (см. § 18).
4. Определение размеров барабана (см. § 21).
5. Расчет элементов крюковой подвески. Во избежание обра-
зования слабнны каната при опускании крюковой подвески, когда
грузовая лебедка расположена цне грузовой тележки (см. рис. 99,
171
а), вес крюковой подвески должен быть больше сопротивления
передвижению каната на блоках, поэтому масса крюковой под-
вески должна удовлетворять условию
/Пг. у S& 1,5д/2(пПп'Пбл/[/:Ь
где q — линейная масса каната, кг/м; I — расстояние между опорными
блоками, м; т]п, т]бл — КПД полиспаста и блока; г — число отклоняющих бло-
ков; |/J = 1 ... 1,5 м — допускаемое провисание каната, м (см. рис. 99, а).
6. Выбор электродвигателя по формулам (63) -(64).
7, Выбор редуктора (см. § 27),
8. Выбор муфт (см. § 28).
9. Определение расчетного. тормозного момента' по формуле
(83) и выбор тормоза (см. § 31).
Механизм передвижения. Исходными данными для расчета
являются: грузоподъемность Q, кг; масса крана ткр (тележки тт),
кг; скорость передвижения крана укр (тележкн ут), м/с; группа
режима, ПВ и число включений в час; кинематическая схема ме-
ханизма крана (тележки), Рекомендуется следующий порядок
расчета.
1. Определение наибольшей нагрузки на колесо по формулам
(115), (120) н выбор диаметра колеса н типа рельса (см. § 38).
2. Проверка обода колеса по напряжениям смятия и выбор
размеров колеса (см. § 34).
3. Выбор подшипников колес.
4. Определение статического сопротивления передвижению
при установившемся движении.
Полное статическое сопротивление передвижению крана
Г = Гт„ I (123)
где №тр — сопротивление от трения в ходовой части крана; — сопротив-
ление от уклона рельсовых путей; р — сопротивление от действия ветровой
нагрузки на кран в рабочем состоянии.
Сопротивление от трения в ходовой части обусловлено трением
в подшипниках колес, трением качения колес по рельсам, трением
реборд колес о головки рельсов. Рассмотрим движение одного
колеса. Момент от трения в подшипниках колеса (рис. 103, а)
(Н-м)
М'п = F^d/2 = FKfd/2, (124)
где 7тр = 7К/ - сила трения в подшипниках, Н; FK — нагрузка на колесо, Н;
d— диаметр цапфы, м; /— коэффициент трения подшипников (для шариковых
н роликовых /=0,015; конических /=0,02; скольжения / = 0,1).
Соответствующее моменту /Ип сопротивление передвижению
колеса (Н)
К'й = 2M;/DK = FJdK/DK.
где DK — диаметр колеса, ,ч.
172
Рис. 103. Схемы к определе-
нию сопротивления движе-
нию колеса:
а — при трении в подшипнике;
б — при трении качения колес
по рельсу
Момент (Н м) от трения качения колеса по рельсу (рис. 103, б)
Мк = F кР ?
где р — коэффициент трения качения, зависящий от диаметра колеса и типа
рельса, м.
Диаметр Ko.iecaj мм .............. 200 ... 320 400 ... 500 6.30 .. 710
Коэффициент [1 для рельса:
плоского...................... 0,0003 0,0005 0,0006
с закругленной головкой ....... 0,0004 0.0006 0.0008
Соответствующее моменту Л1к сопротивление передвижению
колеса (Н)
W^ = 2M^/Dh. = 2F^/DK.
Сопротивления передвижению колеса W'n и WK действуют
всегда,, поэтому их называют основными.
Сопротивление движению от трения реборды колеса Гр зави-
сит от значения боковой силы, с которой реборда прижимается
к головке рельса, положения точки контакта рельса на реборде
и коэффициента трения скольжения реборды по рельсу. Первые
два фактора переменные и не поддаются точному определению,
поэтому в практических расчетах значение учитывается иа ос-
новании экспериментальных данных как увеличение основных
сопротивлений с помощью коэффициента 7(р > 1, т. е. Гр =
== (/(р — 1) (W^i'i -г Гк). Тогда сопротивление передвижению (Н)
колеса от трения
^;Р = Г;, С Гк - Г₽ ----- Яр (Гп Г') = ЛР5К (fd -- 2р)/ок.
Сопротивление передвижению крана от трепня в ходовой части
равно сумме сопротивлений передвижению колес, при этом коэф-
фициенты трения / и (1 для всех колес принимаются одинаковыми.
Нагрузка на колеса крана равна (G 4- GKp) и сопротивление (Н)
движению от треиия в ходовой части
rTp=Kp(G + GKP)(M ;-2p)/DK, (125)
где Кр — коэффициент, учитывающий дополнительное сопротивление передви-
жению от трения реборд колес, боковых роликов, токосъемников и др.; для
опорных кранов с цилиндрическими колесами на подшипниках качения Кр =•
173
= 1,5; для- тех же кранов с коническими н безребордными колесами Кр — 1,1;
для подвесных кранов и груздвых тележек Кр 2.
Ориентировочно среднее значение сопротивления (Н) передви-
жению кранов от трения в ходовой части по формуле (125) может
быть определено по следующей зависимости:
rTp-(Q -mKp)w, (126)
где Q, mKp — грузоподъемность и масса крана, г; tc — 70 ... 100 Н/т — удель-
ное сопротивление передвижению, полученные экспериментальным путем (мень-
шие значения принимают для кранов с коническими и безребордными коле-
сами).
Сопротивление (Н) от уклона рельсовых путей
№укл — (С -ф GKp) а, (127)
где а — уклон рельсового пути (мостовых кранов а — 0,001; козловых кранов
а = 0,003; грузовых тележек на мосту крана а — 0,002).
Сопротивление (Н) от ветровой нагрузки на кран в рабочем
состоянии
F в. [I __ Pl^l Ргр-^гр, (128)
где Pt, Ргр— распределенная ветровая нагрузка на элементы крана и груз
[см. формулу (7)j, Па; А[, Лгр— наветренные площади элементов крана п
груза, м2.
Сопротивления передвижению грузовой тележки находят по
формулам (125), (127) и (128), подставляя в них вес тележки GT
вместо веса крана GKp и значение наветренной площади тележки
вместо наветренной площади крана.
Пример. Определение сопротивлений передвижению грузовой тележки. Со-
противление от трения в ходовой части по формуле (125):
Ц7тр /Ср (G GT) (fd _ 2p),Di;
= 2 (49050 4- 17 660) (0,015-0,045 + 2 0,0004) 0,2 = 984 H.
где /Ср — 2; / — 0,015; р, — 0,0004 м для колеса £), — 200 мм; d = 0,045 м
(диаметр цапфы подшипника).
Сопротивление от уклона рельсовых путей по формуле (127):
Ц7укл (G + GT)a - (49050 4- 17660) 0,002 = 133 Н.
Полное статическое сопротивление по формуле (123):
1С Ц7Тр -у 1Гукл _ 984 + 133 = 1117 Н.
5. Выбор электродвигателя по формулам (67)—(69).
6. Выбор редуктора. Определяют необходимое передаточное
число
U — ^дв/^к — ^дв^Ок/^кр (129)
и выбирают редуктор с учетом показателей группы режима (см.
§ 27, табл. 13, 14). Проверяют отклонение передаточного числа
редуктора от расчетного по формуле (71).
7. Определение расчетного тормозного момента по выражению
(85) и выбор тормоза (см. § 31) с тормозным шкивом при работе
174
на открытом воздухе тормоза должны удерживать кран на рельсах
при ветровой нагрузке на кран в рабочем состоянии, поэтому рас-
четный момент одного тормоза (Н-м)
I. 2(Г„ ,, + »'тп)£>„/(2Ирг), (130)
где г — число тормозов; ыр — передаточное число редуктора.
8. Проверяют достаточность сцепления приводных колес при
разгоне крана без груза, которую оценивают коэффициентом
запаса сцепления:
/<сд = р + Лд ~ Гп) [/UL (131)
где Лец = £ FK пр/сц — сила сцепления приводных колес, Н (здесь £ FK пр —
нагрузка на приводные колеса, Н; /С|Ц — коэффициент сцепления колеса с рель-
сом; при работе в помещении /сц — 0,2;~на открытом воздухе /С1| — 0,12); гд =
— сила инерции, Н (здесь a — ускорение, м/с2); lFn = L FK. upfd!DK—
сопротивление передвижению от трения в подшипниках приводных колес, Н
(эти сопротивления приводных колес преодолеваются непосредственно движущей
силой привода); | А\ц I — допускаемый коэффициент запаса сцепления; при
работе в помещении [Дсц1 = 1,2, на открытом воздухе [Дсц] = 1,1.
Если при выборе двигателя сцепление учитывалось, то про-
верка запаса сцепления может не проводиться.
Рама грузовой тележки мостового крана (см. рнс. 91. в). Рама
внешне один раз статически неопределима, так как опирается на
четыре колеса (опорных реакций четыре, а уравнений статики
для нх определения только три). Каждый замкнутый контур, об-
разованный продольными и поперечными балками, создает вну-
треннюю статическую неопределимость, равную трем (на рис. 91, в
имеются два таких контура, поэтому внутренняя статическая не-
определимость рамы равна шести). Точный расчет балок рамы
представляет большие вычислительные трудности. На практике
применяют упрощенную методику расчета, при которой балки
представляют шарнирно опертыми и рассчитывают их как двух-
опорные статически определимые, но при этом допускаемые на-
пряжения снижаются до 100 ... 120 МПа (для стали СтЗсп).
Стальные конструкции кранов. Прочность стальной конструк-
ции мостового крана рассчитывают при одновременном действии
нагрузок в вертикальной н горизонтальной плоскостях в двух
основных расчетных случаях.
Случай первый (рис. 104, а) — тележка с грузом находится
посередине пролета — проверяют прочность пролетных балок
моста. В вертикальной плоскости на схеме /, учитывают вес груза
и тележкн (нагрузка FK), балок моста (распределенная нагрузка
q) и других элементов, установленных на мосту, и динамические
при разгоне и торможении груза и прохождении стыков рельсов.
Пролетные балки считаются шарнирно опертыми на концевые
балки. В горизонтальной плоскости по схеме // учитываются на-
грузки динамические от массы груза, тележки (нагрузка Гин) и
моста (распределенная нагрузка ^ин) при разгоне н торможении
крана. Мост рассматривают как плоскую раму с консолями.
175
Рис. 104. Схемы к расче
ту стальной конструкции
мостового крана:
а — тележка посередине
пролета; б - тележка около
концевой балки; I — II — со-
ответственно нагружение в
вертикальной и горизон-
тальной плоскостях
<2>
Случай второй (рис. 104, б) — тележка с грузом расположена
около концевой балки — проверяют прочность концевой балки
и узла соединения ее с пролетной балкой. В вертикальной пло-
скости по схеме / учитывают нагрузки первого случая при таком же
шарнирном опирании пролетных балок на концевые. В горизон-
тальной плоскости по схеме II мост нагружается динамической
силой перекоса Fa по формуле (117) и рассматривается как плоская
рама с консолями.
По эпюрам изгибающих моментов находят опасные сечения
балок и определяют суммарные напряжения от нагрузок в вер-
тикальной и горизонтальной плоскостях. Расчет выполняют по
методу предельных состояний по формуле (13). В качестве мате-
риала применяют горячекатаную листовую сталь толщиной 3 ...
16 мм для стенок и 8 ... 20 мм для поясов деталь ВС Зсп4
(ГОСТ 380—71) при температуре окружающей среды до минус
40 'С и сталь 09Г2, 09Г2С (ГОСТ 19281—73) при температуре до
минус 50<JCL
176
На выносливость рассчитывают наиболее нагруженные сече-
ния пролетных и концевых балок мостов кранов группы режима
5К, 6К, 7К.
Пролетные балки при положении тележки с номинальным
грузом посередине пролета проверяют на статический прогиб (м)
f-(G + GT) U/(48EJxz),
где Е - 2• 105 Па— модуль упругости стали; Jx— момент инерции сечения
балки относительно горизонтальной оси х—х (см. рис. 87); z — число пролетных
балок моста.
Регламентировано относительное значение прогиба //LK —;
= 1/500 ... 1/700 в зависимости от группы режима работы крана
н его типа.
Прочность стальной .конструкции козлового крана рассчиты-
вают в трех основных случаях: тележка с грузом расположена
посередине пролета, около опоры и на консоли [1]. Регламенти-
рованы относительные прогибы моста посередине пролета и рабо-
чего вылета консоли.
§ 48. ОСНОВНЫЕ ПРАВИЛА ЭКСПЛУАТАЦИИ
И ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ ОБСЛУЖИВАНИИ
МОСТОВЫХ И КОЗЛОВЫХ КРАНОВ
Эксплуатация кранов и надзор за ними должны проводиться
согласно требованиям Правил по кранам [22] (см. гл. 17) и инструкциям по
эксплуатации. При осмотрах крана выявляют изношенные и поврежденные
детали и производят их ремонт или замену. Проверяют состояние и надежность
всех креплений наиболее ответственных узлов — крюковых подвесок, канатов
блоков и барабанов, муфт и передач, подшипников. Правила эксплуатации и
безопасной работы указанных элементов приведены в соответствующих главах.
В механизмах передвижения кранов с раздельным приводом должно быть обра-
щено особое внимание на исправность двигателей, пусковых резисторов и аппа-
ратуры управления, так как неисправности приводят к различию механических
характеристик двигателей и, как следствие этого, к увеличению динамических
сил перекоса.
Если реборды ходовых колес интенсивно изнашиваются, то необходимо
выяснить причину и принять меры к ее устранению. При этом в первую очередь
следует проверить правильность установки ходовых колес крана. Режим смазы-
вания и применяемые сорта масел с указанием точек для смазывания приводятся
на карте и типовой схеме смазки крана в инструкции по эксплуатации.
Кроме осмотров механической и электрической части крана должны произ-
водиться регулярно его ремонты. Для средних условий работы крана рекомен-
дуется следующая периодичность ремонтов. Средний ремонт — один раз в год,
капитальный ремонт — один раз в 2—3 года. При среднем ремонте производится
разборка всех механизмов и электрооборудования, тщательная его очистка и
смена износившихся деталей.
Вопросы для повторения 1. Как устроены мостовые опорные и подвиж-
ные краны? 2. Назовите особенности конструкции тележек грейферного и магнит-'
ного мостовых кранов? 3. Как производят монтаж козлового крана способом
стягивания стоек опор? 4. Какие сопротивления имеют место при передвижении
крана? 5. Как оценивают достаточность сцепления приводных колес крана?
6. Перечислите последовательность расчета механизмов подъема груза и пере-
движения крана? 7. В каких случаях рассчитывают стальную конструкцию
мостового крана?
177
Г Л А В A 13. ПЕРЕДВИЖНЫЕ СТРЕЛОВЫЕ КРАНЫ
§ 49. ОБЩИЕ СВЕДЕНИЯ
Стреловым называют кран со стрелой, закрепленной
на поворотной платформе (рис. 105). Кран состоит из ходового
устройства 1 с опорной рамой 6 и выносными опорами 7, поворот-
ной платформы 4 со стрелой 3 и механизмами подъема груза и стре-
лы, опорно-поворотного устройства 5 с механизмом поворота.
Стреловые краны различают по виду ходового устройства: авто-
мобильные—на автомобильном шасси; на специальном шасси
автомобильного типа; гусеничные — на гусеничном ходовом уст-
ройстве; пневмоколесные — на пневмоколесном шасси; трактор-
ные— иа шасси трактора; железнодорожные—на платформе,
предназначенной для движения по железнодорожным путям.
Краны Могут быть с гибкой подвеской стрелы посредством стрело-
вого полиспаста 2 (рис. 105, а) и с жесткой подвеской (рис. 105, б),
при которой стрела удерживается гидроцилиндрами 8.
Различают краны с приводами механическими от двигателя
внутреннего сгорания, электрическими и гидравлическими.
Основными параметрами крана являются номинальная грузо-
подъемность Q и грузовой момент М. Последний можно предста-
вить грузовой характеристикой 1 (рис. 106). Кроме основной гру-
зовой характеристики, могут быть и дополнительные, если для
крана предусмотрены стрелы различной длины и работа без вы-
_ носных опор. Имеется также вы-
а.) б)
Рис. 105. Стреловые краны с подвеской
стрелы:
а — гибкой; б — жесткой
сотная характеристика 2 (зави-
симость высоты подъема крюка
от вылета).
вылет
Рис. 106. Грузовая 1 и высотная 2 ха-
рактеристики стрелового крана
178
Рис, 107. Структурная схема индексации стреловых кранов
Каждой модели стрелового крана присваивают индекс, в ко-
тором зашифрованы конструктивные особенности крана и его
основные характеристики. Индекс кранов заводов Минстройдор-
маша состоит из букв КС (кран стреловой) и нескольких цифр
(рис. 107). Индексы кранов, выпускаемых другими заводами,
также состоят из букв и цифр, например СМК-10 (специальный
монтажный кран грузоподъемностью Ют).
Стреловые краны являются свободно стоящими, поэтому долж-
на быть обеспечена их устойчивость против опрокидывания в ра-
бочем состоянии при перемещении груза (грузовая устойчивость
и без груза (собственная устойчивость) относительно ребра опро-
кидывания, за которое принимают одну из линий опорного кон-
тура выносных опор или ходового устройства крана в наиболее
неблагоприятном положении стрелы относительно опорного кон-
тура при ветровой нагрузке на кран в рабочем состоянии и на-
клоне площадки под углом 3° (рис. 108). Коэффициент грузовой
устойчивости по формуле (125):
КуСТ. гр = ^кр/(К1гр ’Мв. Гр М в Кр -у Мд) 1,15,
где Мкр — момент от веса крана; Мгр — момент от веса груза; Мв. гр — мо-
мент от ветровой нагрузки на груз; Л1в. кр — момент от ветровой нагрузки
на кран; Мд — момент от динамических нагрузок, действующих в периоды раз-
гона или торможения механизма подъема крана.
Разрешается упрощенно определять коэффициент грузовой
устойчивости
Куст, гр ~ Мкр/Л4Гр 1,4.
Коэффициент собственной устойчивости рассчитывают для
крана без груза
Куст, с — Л^кр/Л^в. кр 2^ 1 >15.
17 9
Рис, 108, Схемы к определению устойчивости стрелового крана:
а — грузовой: б — собственной
Расчет механизма подъема выполняют по методике, изложен-
ной на с. 171.
Сопротивления передвижению пневмоколесных и гусеничных
кранов зависят от состояния грунта площадки и вида покрытия
дороги и их определяют по формуле (126), в которой удельное со-
противление передвижению w = 140 ... 700 Н/т для лневмоколес-
ного хода и да =- 300 ... 700 Н/т для гусеничного хода. Характер-
ными для стреловых кранов являются механизмы подъема стрелы
(см. рнс. 7) и поворота (см. рис. 6, б). Отметим особенности их
расчета.
Механизм подъема стрелы. При гибком подвесе стрелы опре-
деляется усилие в элементе крепления стрелы к обойме стрелового
полиспаста из условия равновесия сил относительно шарнира
крепления стрелы (рис. 109)
S Мо Glc 4- G,a 1 FB> грАгр f в. chc — Sb — Fck 0,
откуда искомое усилие (Н)
Fc - ' (La . Fv„ грАгр + F^ cftc - Sb)fk, (132)
где Gc — вес стрелы, H; FB гр, FB< с — ветровая нагрузка на кран в рабо-
чем состоянии на груз и стрелу, Н; S — натяжение грузового каната, Н; /с —
вылет стрелы, и; a, h,.p, hc, b, k — плечи соответствующих нагрузок, м.
Если известна кратность стрелового полиспаста /п, то натяже-
ние набегающей на барабан ветви каната (Н)
sc = MwiU О33)
где Ди, дбл — КПД полиспаста и отклоняющих блоков; z — число блоков.
180
Если задано усилие в канате, то определяют необходимую крат-
ность полиспаста in = Fc/Sc.
Усилия Fc и Sc по формулам (132) н (133) зависят от угла на-
клона стрелы, поэтому их значения определяют при нескольких
вылетах, принимая при этом массу груза с учетом грузовой ха-
рактеристики. Наибольшие усилия действуют обычно при макси-
мальных вылетах. Канат выбирают при наибольшем усилии по
формуле (133) с учетом коэффициента запаса прочности [см. вы-
ражение (20)1, который принимают в зависимости от группы ре-
жима работы (см. табл. 6). Расчеты остальных элементов анало-
гичны расчетам механизма подъема груза. Коэффициент запаса
торможения тормоза должен быть не менее 1,5 независимо от
группы режима работы механизма.
При подъеме стрелы от крайнего иижнего положения до край-
него верхнего расстояния между осями обойм блоков полиспаста
h = /ц — Л2, поэтому может быть определена средняя скорость
каната, навиваемого на барабан (м/с): = hijt (здесь hia —
длина каиата, навитого на барабан, м; t — время изменения вы-
лета, с). В расчетах учитывается средняя скорость изменения вы-
лета (м/с)
^ср = (^[пах i'min)//*
По усилию по формуле (132) или натяжению каната Sc по
формуле (133) при вылетах от Ьпих до LmiI1 строят диаграмму на-
грузки привода, которую учитывают при выборе электродвига-
теля (см. § 26).
В случае жесткого подвеса стрелы аналогично находят усилия,
действующие иа шток гндроцилиндра. По наибольшему усилию
и средней скорости подбирают параметры элементов гидропривода.
Механизм поворота. Шариковые и роликовые опорио-пово-
ротные круги выбирают в зависимости от вертикальной Fv и горн-
Рис. 109. Схема к расчету усилий при подъеме стрелы стрелового крана
181
зонтальной FH нагрузок (Н) и опрокидывающего момента Моп
(Н-м) поворотной части крана. В расчете механизма поворота
учитывают следующие .моменты.
Момент сопротивления вращению опорного круга от сил тре-
ния (Н-м)
Мтр - fFvDcp/(2 sin у),
где [— приведенный коэффициент сопротивления; [— 0,01 — для шариковых
кругов; f =- 0,012 — для роликовых; Fv — вертикальная нагрузка на опорный
круг, Н; Оср — средний диаметр по дорожке катания шариков или роликов, м;
у 45е — угол наклона к горизонтали сил, действующих на шарики или ро-
лики опорного круга.
Момент сопротивления вращению от ветровой нагрузки (Н-м)
Мв ~ (Fu ^pL. Fкр^в. кр) sin ф,
где Fr. гр> FB. кр — ветровая нагрузка на груз и суммарная на кран, На-
вылет крана, м; /в. кр — плечо действия ветровой нагрузки на кран, м; (р —
угол между направлением действия ветровой нагрузки и осью крана,°.
Момент сопротивления вращению от составляющей опрокиды-
вающего момента при наклоне площадки (Н-м)
/14укЛ == Мон sin а sin Ф,
где а — угол наклона, °; ф — угол между осью наклона площадки и осью
крана, °.
Динамический момент в период разгона (Н-м)
^Д (*^гр “Г 7К[)) ® гр ’ 1“ JКр) ^Лр = (*^гр “Ь кр) ЛП/30£р,
где /гр mrpZ/— момент инерции груза, кг-м2; 7кр — У (пг^) — момент
инерции элементов пц с радиусом инерции гг- поворотной части крана, кг-мэ;
е — углорое ускорение, 1/с2; ш — угловая скорость, 1/с; п - - частота вращения,
об/мин; — время разгона, с.
Моменты сопротивления А4В и Мукл — переменные величины
и оии зависят от угла поворота крана ф. Средние квадратичные
значения этих моментов за один оборот крана Мв. ск -- 0,7/Ив;
Мунл, ск = 0,7МУ1(Л. Рекомендации по выбору двигателя см. § 26,
тормоза см. § 31.
§,50. СТРЕЛОВЫЕ КРАНЫ С МЕХАНИЧЕСКИМ
ПРИВОДОМ
С механическим приводом механизмов выпускают ав-
томобильные краны (рис. НО) грузоподъемностью 4; 6,3; 10 и 16 т
с гибким подвесом стрелового оборудования (табл. 31). В качестве
ходового устройства применяют шасси серийно выпускаемых гру-
зовых автомобилей 8, в которые внесены некоторые конструктив-
ные изменения: установлены коробка отбора мощности 9 и опор-
ная стойка 7 для стрелы в транспортном положении, смонтированы
стабилизатор 11 или выключатель упругих подвесок (рессор),
которые приводят в действие при работе крана без выносных
опор.
182
Рис. ПО. Автомобильный кран с механическим приводом
Таблица 31. Основные технические данные стреловых кранов
Кран Грузоподъемность, т Вылет L, м Шасси
на вынос- ных опорах без вынос- ных опор при пере- движении
Автомобильные краны с механическим приводом
КС-2561Д 6,3 . .. 1,9 1 ... 0,1 1,6 3,3 ... 7 ЗИЛ-130
КС-2561Е 6,3 . .. 1,9 1,1 ... 0,16 1,6 3,3 ... 7 ЗИЛ-130
КС-3561 А 10 .. 1,6 2,5 .. 0,4 2,5 4 ... 10 МАЗ-5334
МКА-10 16 .. . 4,4 5 .. 0,8 5.0 4,1 ... 10 КрАЗ-257
Автомобильные краны гидравлические
КС-2571 А 6.3 . .. 0,8 2,0 . . 0,2 1,6 1,9 . . 7.4 ЗИЛ-130
КС-3571 10 .. . 1,0 2,5 . . 0,5 2,5 2,8 . . 7,0 МАЗ-5334
М К АС-10 10 .. . 1.2 2,6 . . 0,5 2,5 2,7 . . 7,0 MA3-5334
КС-4571 16 .. . 0,3 5,0 . . 0,5 6,0 3,5 . . 8,5
Краны на специальном автомобильном шасси
КС-5473 25 . . 0,6 5 ... 1,0 — 10 ... 24 ПС-253
КС-6471 40 . . 0,5 10 .. 1,4 — — ПС-403
КС-7471 63 . . 2.0 15,5 ... 2 — — ПС-632
Пневмоколесные краны
КС-4362 16 .. 3.5 8,5 . .. 5 8,5 3,8 .. . 10
КС-5363А 25 .. 3,5 14 .. . 2 14 4,5'. . 13,8
КС-8362 100 .. 10 27 .. . 5 100 5,2 . . 15
Гусеничные краны
МКГ-25Бр — 25 . . 3,8 25 4,9 .. 13
МКГ-40 —' 40 . . 8 40 5 ... 14
ДЭК-50 — 50 .. . 14,8 50 6 ... 14
С КГ 40/63 — 40 .. 7,2 40 4,5 .. 14
СКГ 63/100 — 63 .. . 11,5 63 4,8 .. 14
КС-8165 — 75 .. . 15 70 7 ... 20
183
Ходовая рама крана 10, представляющая собой пространствен-
ную рамную конструкцию, закреплена на раме шасси автомобиля
и снабжена поворотными выносными опорами 12, на которые
должен опираться кран при работе. Выносные опоры определяют
опорный контур крана (линии, проходящие по осям опор), позво-
ляют выравнивать кран на неровной площадке и способствуют уве-
личению устойчивости крана. Выносные опоры снабжены винтами
нли гидроцилиндрами, которые инжней пятой упираются в гнезда
опорных плит. В транспортном и рабочем положениях выносные
опоры поднимают и фиксируют с помощью штырей.
На поворотной раме 13 шарнирно установлены стрела 5 и дву-
ногая стойка 14 с блоками 15 стрелового полиспаста 2. Другая
обойма блоков 3 этого полиспаста подвешена на траверсе, которая
соединена с головкой стрелы с помощью оттяжек 6. Один конец
каната стрелового полиспаста закреплен на барабане стреловой
лебедки 1. Сменным оборудованием являются удлиненная стрела,
выполненная из основной и дополнительной секций, и удлиненная
стрела с гуськом. При минимальном вылете стрела предохраняется
от запрокидывания в случае обрыва грузовых канатов специаль-
ными канатными оттяжками 4. Наличие двуногой стойки 14 позво-
ляет опустить стрелу в нижнее положение, так как при этом сохра-
няется угол между канатами стрелового полиспаста и горизон-
тальной плоскостью.
Опорно-поворотное устройство выполнено в виде трех колец
с дорожками катания, которые заполнены шариками 3 или роли-
ками 7 серийно выпускаемых подшипников (рис. 111). Наружные
Рис. 111. Опорно-пово-
ротные устройства:
а — шариковое; 6 — роли-
ковое
184
Рве. 112, Кинематическая схема механизмов крана КС-2561Д
кольца 2 и 4 соединены между собой и закреплены на поворотной
раме 1. а внутреннее кольцо 5 — на ходовой раме 6. Это же кольцо
выполнено с зубчатым венцом, находящимся в зацеплении с ше-
стерней механизма поворота.
Рабочие механизмы крана расположены на поворотной раме
и привод их осуществляется реверсивно-распределительным меха-
низмом, обеспечивающим независимый привод каждого механизма.
Реверсивно-распределительный механизм крана КС-2561Д
(рис. 112) состоит из реверсивного механизма V и распределитель-
ной коробки VI. Реверсивный механизм приводится от коробки
отбора мощности /, шестерня 23 которой находится в постоянном
зацеплении с шестерней 22 блока заднего хода коробки передач
автомобиля. Включением полумуфты 21 в правое крайнее поло-
жение движение через шестерни 22, 23 и 20 передается кардан-
ному валу 19, от него через вертикальный конический редуктор II
с шестернями 18 и 24 вертикальному валу 25 реверсивного меха-
низма V. На валу 25 установлены шестерни 11 и 9 и на шлицах -
кулачковая муфта 10. При введении муфты в зацепление с шестер-
ней 11 движение в одном направлении, а с шестерней 9 —-в про-
тивоположном направлении передается шестерне 8 входного вала
30 распределительной коробки. При включении полумуфты.7 через
шестерни 31 и 6 передается движение валу 5, червячному редук-
тору 3—2 и барабану 4 грузовой лебедки VII. Если включена
полумуфта 28, то через шестерни 31 и 27 движение передается ва-
185
лами 29 и 32 червячному редуктору 33, 34 и барабану 36 стрело-
вой лебедки VIII.
Механизм поворота IV получает вращение при включении полу-
муфты 26 через шестерни 31 и 27, червячный редуктор 12, /5, фрик-
ционную муфту предельного момента 13 и шестерню 16, которая
находится в зацеплении с зубчатым венцом 17 опорно-поворотного
устройства. На валах червяков лебедок установлены автоматиче-
ские нормально закрытые простые ленточные тормоза 1 и 35, а на
валу червяка механизма поворота — постоянно закрытый ленточ-
ный тормоз 14.
Фрикционная муфта предельного момента 13 предназначена
для предохранения механизма поворота от перегрузок в случаях
упора стрелы о внешние препятствия. Муфту регулируют на рас-
четный момент путем поджатия пружин гайкой.
Кран оснащен механическим ограничителем грузоподъемности,
который отключает зажигание двигателя автомобиля при превы-
шении грузоподъемности на 10 % согласно грузовой характе-
ристики.
Управление краном осуществляют из кабины управления с по-
мощью двух педалей и трех рычагов. .Одна педаль предназначена
для управления сцеплением автомобиля, другая — связана с дрос-
сельной заслонкой карбюратора и позволяет регулировать ча-
стоту вращения двигателя и соответственно скорости механизмов
крана. Работа крана обычно происходит на второй скорости ко-
робки передач. Один рычаг управляет реверсивным механизмом,
второй включает грузовую лебедку и третий включает стреловую
лебедку или механизм поворота. Система управления отрегули-
рована так. что тормоза замыкаются перед отключением механиз-
мов лебедок.
Автомобильный кран может работать без выносных опор и
передвигаться вместе с грузом. В первом случае ограничена зона
обслуживания по углу поворота, во втором стрела должна быть
расположена над поперечной балкой задних выносных опор вдоль
продольной оси симметрии крана. Допускаемую массу груза
в этих случаях устанавливают по грузовой характеристике, ско-
рость передвижения не более 5 км/ч.
§ 51. СТРЕЛОВЫЕ КРАНЫ С ГИДРАВЛИЧЕСКИМ
И ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ
Краны с гидравлическим приводом
Автомобильные краны грузоподъемностью 6,3; 10 и
16 т (табл. 31, рис. ИЗ) снабжены двухсекционными телескопиче-
скими стрелами с жестким подвесом на гидроцилиндрах 2. Враще-
ние от коробки отбора мощности 9 передается аксиально-поршне-
вым гидронасосам 8. Рабочая жидкость от гидронасосов подается
к исполнительным механизмам с помощью шлангов через враща-
186
Рис. 113. Автомобильный кран с гидравлическим приводом
тельное гидравлическое соединение, смонтированное по оси вра-
щения крана. Гидропривод выполнен по открытой схеме, при ко-
торой одна из линий является напорной и соединена с баком ра-
бочей жидкости, компенсирующей разность объемов поршневой
и штоковой полостей гидроцилиндров и наружные утечки.
Опорно-поворотное устройство 7 выполнено роликовым.
Грузовая лебедка 5 и механизм поворота крана 4 выполнены с при-
водом от гидромоторов 6 н 3 и снабжены автоматическими коло-
дочными нормально закрытыми тормозами. Выдвижение-втягива-
ние секций стрелы осуществляется гидроцилиндром 1. Механизмы
и выносные опоры управляются посредством гидрораспределите-
лей с рукоятками. Скорости механизмов регулируются изменением
длины хода рукоятки (изменяется расход жидкости, проходящей
через гидрораспределитель) или частоты вращения двигателя
автомобиля (изменяется подача насоса). На кранах установлены
ограничители грузового момента.
Краны на специальных шасси автомобильного типа (рнс. 114)
составляют группу мобильных кранов повышенной грузоподъем-
ности (25, 40, 63 и 100 и более т). Их применяют при монтажных
и погрузочно-разгрузочных работах на рассредоточенных объек-
Рис. 114. Кран на специальном автомобильном шасси в транспортном положении
187
тах, а также при единичном монтаже тяжелых конструкций (см.
табл. 31). Поворотную часть кранов монтируют на шасси 2, спе-
циально приспособленном к условиям работы крана. Привод ги-
дронасосов может осуществляться от двигателя шасси или отдель-
ной силовой установки, расположенной на поворотной платформе.
Шасси состоит из рамы, на которой смонтированы ходовые мосты
с колесами, двигатели, раздаточная коробка и механическая транс-
миссия. На раме установлено роликовое опорно-поворотное уст-
ройство 3 и поворотная рама 5. Подвеска мостов рессорная, балан-
сирная с жесткими рычагами или гидропневматическая. Шасси
оборудовано системой блокировки осей и выдвижными вынос-
ными опорами с гидроприводом. На поворотной раме располо-
жены кабина управления 4, механизмы и закреплена стрела 1.
Лебедки выполнены в виде мотор-редукторов с дисковыми нор-
мально закрытыми автоматическими тормозами. Стрелы имеют
от трех до четырех секций. Выдвижение-втягивание трех секций
стрелы осуществляют с помощью гидроцилиндра и полиспаста,
а трех-четырех секций у других кранов гидроцилиндрами—меха-
низмом телескопирования, который выполнен с синхронизатором,
регулирующим подачу жидкости в гидроцилиндры в объемах,
обеспечивающих равномерное выдвижение секций стрелы.
Краны снабжают сменным оборудованием: управляемым и не-
управляемыми гуськом, которые позволяют увеличить вылет и
высоту подъема при соответствующем снижении грузоподъем-
ности. На кранах установлены ограничители подъема крюковых
подвесок, стрелы и гуська, опускания гуська, сматывания каната
с барабана, указатели грузоподъемности и креиа крана, углов по-
ворота стрелы при работе без выносных опор.
Краны с электрическим приводом
Пневмоколесные краны (рис. 115, а) применяют для
монтажных и погрузочно-разгрузочных работ на объектах, нахо-
дящихся на небольшом расстоянии (см. табл. 31). Ходовое уст-
ройство имеет плоскую раму, установленную на мосты, число ко-
торых от двух до пяти в зависимости от грузоподъемности крана,
в том числе два ведущих. Подвеска колес жесткая, что ограничи-
вает транспортную скорость передвижения до 18 км/ч. Рама обо-
рудована выносными опорами с гидравлическим приводом и бук-
сирным приспособлением для перевозки крана тягачом на не-
большие расстояния. Опорно-поворотное устройство выполнено
роликовым с венцом, расположенным на наружном кольце, что
позволяет смонтировать по оси крана токосъемник для пере-
дачи электропитания с поворотной платформы на ходовое
устройство.
На поворотной платформе установлены силовая установка
(дизель с генератором), одновременно служащая противовесом,
две грузовые и стреловая лебедки, механизм поворота, двуногая
188
н
L । L
--------------------------------------------
a.)
Рис. (15. Стреловые краны с электрическим приводом:
а — пвевмоколеснын; б — гусеничный
стойка с блоками полиспаста и шарнирно закрепленная решет-
чатая стрела.
Механизмы на поворотной платформе и механизм передвиже-
ния крана приводятся в действие от электродвигателей. Преду-
смотрена возможность питания двигателей от внешней сети, а ге-
нератор может быть использован для питания посторонних по-
требителей.
Органы управления расположены в кабине машиниста. На
кране имеются ограничитель высоты подъема крюка и стрелы,
креномер и ограничитель грузового момента. Кроме основной
стрелы предусмотрены удлиненные стрелы, управляемые и не-
управляемые гуськи и башеино-стреловое оборудование. Допу-
скается передвижение крана с грузом в.соответствии с грузовой
характеристикой без выносных опор. Скорость передвижения
кранов без груза до 3 км/ч.
В транспортном положении габариты кранов превышают нор-
мативные по Правилам дорожного движения, поэтому маршрут
перемещения кранов должен быть выбран заранее.
Гусеничные краны (рис. 115, б) применяют для монтажных и
строительных работ (см. табл. 31). Эти краны обладают наиболее
высокой проходимостью и маневренностью. Малое удельное давле-
ние на грунт (0,6 ... 2„4 МПа), значительный опорный контур
обеспечивают возможность движения крана с грузом на крюке но
грунтовым уплотненным площадкам. На короткие расстояния
краны передвигаются собственным ходом со скоростью 0,75 ...
3 км/ч; на дальние — их перевозят на платформах с частичным
демонтажом. Поворотная часть крана по конструктивному испол-
нению аналогична поворотной части пневмоколесных кранов.
189
Предусмотрены основная и удлиненные стрелы, гуськи и башенно-
стреловое оборудование. Основная стрела выполнена с Г-образ-
ным наголовником для увеличения подстрелового пространства.
Ходовое устройство крана представляет собой ходовую раму,
соединенную с двумя продольными балками. На ходовой раме
установлено опорно-поворотное устройство и кабельный барабан.
На продольных балках расположены бортовые редукторы, приво-
дящие в движение приводные колеса. На балках смонтированы
поддерживающие ролики, опорные катки и неприводные колеса,
огибаемые гусеничной цепью. Бортовые редукторы приводятся
в движение от электродвигателей через карданные валы. Ходовая
рама ие имеет выносных опор, поэтому устойчивость крана обеспе-
чншщ'-'ся опиранием на гусеницы.
§ 52. ОСНОВНЫЕ ПРАВИЛА ЭКСПЛУАТАЦИИ
И ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ ОБСЛУЖИВАНИИ
СТРЕЛОВЫХ КРАНОВ
Эксплуатация стреловых кранов и надзор за ними должны
производиться согласно указаниям Правил по кранам 122 | (см. гл. 17) и руко-
водствам по эксплуатации, прилагаемыми к стреловым кранам. Среди основных
правил эксплуатации можно отметить следующие требования. Перед работой
машинист должен правильно установить кран на площадке в привести его в ра-
бочее положение. При установке крана на выносные опоры необходимо следит!,
за правильным нч положением и надежным опиранием на площадку; работа
крана при опирании на две илн три опоры не допускается.
Масса поднимаемого груза не должна превышать грузоподъемность со-
гласно грузовой характеристике крана. Кран можно устанавливать или пере-
двигать по краю откоса котлована или канавы только при соблюдении допу-
скаемого расстояния от бровки до опорных плит выносных опор ИЛИ ХОДОВЫХ
устройств крана. Кран может работать в зоне, расположенной на расстоянии
не менее 30 м от крайнего провода ЛЭП. Если необходимо работать при меньших
расстояниях, то должно быть получено разрешение организации, эксплуатиру-
ющей ЛЭП, и работа должна выполняться под наблюдением ответственного лица.
Краны с электроприводом, за исключением гусеничных, должны быть обо-
рудованы переносным заземлением. Механизмы кранов должны своевременно
переводиться на зимнюю эксплуатацию при температуре окружающего воздуха
ниже 5 °C. В таких условиях гидронасосы сначала работают на минимальной
частоте вращения, которую затем постепенно увеличивают до номинального
значения.
При работе без выносных опор грузоподъемность автомобильных кранов
должна составлять не более 80 % номинальной. Если допускается движение
крана с грузом, то стрела должна быть расположена над поперечной балкой
задних выносных опор вдоль продольной оси симметрии, а груз поднят на вы-
соту не более 0,5 м. При работе на выносных опорах и без них углы поворота
крана должны быть в границах установленных секторов. Телескопирование сек-
ций стрелы кранов на специальном автомобильном шасси может производиться
с грузом на крюке в соответствии с грузовой характеристикой. При передвиже-
нии кранов не должны превышаться рабочие и транспортные скорости.
Вопросы для повторения I. Какие краны называют стреловыми? По ка-
ким признакам их классифицируют? 2. В каких случаях стреловые краны рассчи-
тывают на устойчивость? Как определяют коэффициент грузовой и собственной
устойчивости? 3. Как устроены механизмы подъема стрелы? 4. Какие сопро-
тивления преодолевают механизмом поворота при вращении крана? 5. Как
устроены автомобильные краны с механическим приводом механизмов? 6. На-
зовите особенности конструкции гидравлических автомобильных кранов?
190
ГЛ AB A 14. КОНСОЛЬНЫЕ КРАНЫ
§ 53. ОБЩИЕ СВЕДЕНИЯ
Консольными называют краны, у которых грузоза-
хватный орган подвешен на консоли или тележке, перемещающейся
по консрли, закрепленной на колонне пли ферме. Краны могут
быть стационарными и передвижными, с ручным или машинным
приводом механизмов. Положение тележки на консоли определяет
максимальный и минимальный Ln1hl вылеты. Управление
стационарными кранами с пола, а передвижными — с пола или
из кабины.
§ 54. СТАЦИОНАРНЫЕ КОНСОЛЬНЫЕ КРАНЫ
Консольные краны применяют для обслуживания
отдельных станков, технологических агрегатов, сборочных и склад-
ских площадок. Разновидность кранов: настенные, на колонне
с верхней и нижней опорами, на колонне свободно стоящие н на
колонне двуплечевые с ручным поворотом плечей. Параметры
кранов с ручными талями регламентирует ГОСТ 19494—74, а с
электроталями — ГОСТ 19811—82; грузоподъемность 0,5; 1; 2;
3,2 т. При большей грузоподъемности краиы могут быть выполнены
с тележками.
Настенный консольный кран (рис. 116, а) состоит из плоской
фермы 2. верхней 1 и нижней 5 опор и тали 3. Опоры с помощью’
кронштейнов прикреплены к стене здания; нижняя опора может
опираться на выступ стены. Угол поворота ограничен подходами
к стене и не превышает ±90°. Вращение крана осуществляют вруч-
ную на канат 4 или механизмом поворота. Подкос фермы выпол-
нен из двутавра в соответствии с грузоподъемностью тали. Макси-
мальный вылет Ьщах — 2,5 ... 6,3 м, высота подъема до 6 м, рас-
стояние между осями опор h = (0,2 ... 0,25) LIIiax.
На нижнюю опору действует вертикальная нагрузка (Н)
Rv — G + GT + 6ир. (134)
Опрокидывающий момент определяет горизонтальные нагрузки
на опоры (Н)
Ун. II Л40п/А = [(G -У Gt) Ьтах GKpa]/h, (135)
где а — расстояние от центра масс стальной конструкции до оси вращения
крана, м; ft— расстояние между осями опор, м.
Подшипники качения опор выбирают по статической грузо-
подъемности с учетом нагрузок Rv и Rh по формулам (134) и (135),
Вращению крана препятствует момент сопротивления от сил
трения в подшипниках опор (Н м):
Мтр — Mv Л4Н. в ---АУн = Rvfdyl2 -ф- /?н. B/dB/2 ф-
где / — коэффициент трения в подшипниках; dy, dB, da — диаметры цапф соот-
ветствующих подшипников опор, м.
191
6) e;
Рис. 116. Стационарные консольные краны:
а — настенный; б — на колонне с верхней и ннжней опорами; в — на свободно стоящей
колонне; г — двуплечевой на свободно стоящей колонне
Необходимое усилие для поворота крана вручную (Н)
F раб = -M-rp/Zp,
где /р — расстояние от оси вращения крана до места крепления тягового ка-
ната, м.
Кронштейн верхней опоры колонны прикрепляют к стене бол-
тами. которые должны быть затянуты так, чтобы под нагрузкой не
было раскрытия стыка. Поэтому расчетное усилие болтов с учетом
предварительной затяжки F6 = 2RH. в. Кронштейн нижней опоры
удерживается силой трения, поэтому его проверяют на сдвиг от-
носительно стены вниз при положении груза на вылете Lmln.
192
Расчетное усилие болтов с учетом предварительной затяжки (Н)
F6 = 2 (/?v — fRa. „)// (здесь f = 0,35 ... 0,5 — коэффициент
трения между опорной плитой кронштейна и стеной).
Консольный кран на колонне с верхней и нижней опорами 1 и 5
показан на рис. 116, б. Нижнюю опору 5 крепят к фундаменту,
а верхнюю 1 — к потолочному перекрытию или стене с помощью
кронштейна. В последнем варианте кран становится неполно-
поворотным. Максимальный вылет Lll]ax = 2,5 ... 5,0 м, высота
подъема до 4 м, расстояние между осями опор h = (0,8 ...
... 1,25) Llfiax.
Обе опоры колонны проверяют на сдвиг при максимальном
значении силы /?|Т. „ 1см. формулу (135) 1. Расчетное усилие болтов
с учетом предварительной затяжки (Н) для верхней опоры F6 =
= 2/?„. В/Д нижней = 2 (RH, и — fRv)/f.
Между плитой и фундаментом проверяют среднее давление
(МПа)
Р = Pv 1" Ра +рм- F^A + /?ц. < [р] >
где Ру, рс, — давления соответственно от нагрузки Rv, усилия затяжки
болтов Fq и момента силы /?н. н относительно опоры, Па; А — площадь опоры, ма;
ft — плечо действия силы /?н, м; W—момент сопротивления площади опоры
относительно оси, проходящей через ее центр перпендикулярно консоли крана, м3;
|р] — 2,5 МПа для бетонного фундамента.
Остальные расчеты аналогичны расчетам настенного крана.
Консольный кран на свободно стоящей колонне (рис. 116, в)
состоит из закрепленной на фундаменте колонны 6, на которой
в подшипниковых опорах вращается выполненная из двутавра
консоль 7. Вертикальная нагрузка воспринимается верхним под-
шипником опоры колонны. Максимальный вылет Lmax — 2,5 ...
5.0 м, высота подъема до 4 м, расстояние между осями опор на
колонне h — (0,25 ... 0,3) LmaK.
Колонну рассчитывают на сжатие силой (134) и изгиб опро-
кидывающим моментом (Н-м)
^Моп ~~ “1“ ^т) ^-niax “I-
Колонна неподвижно соединена с плитой, которая прикреп-
лена болтами к фундаменту (рис. 117). Нагрузка на болты от мо-
мента Моп пропорциональна расстояниям от осей болтов до пло-
скости, проходящей через ось вращения крана и перпендикуляр-
ной консоли (fj/Fg = /А), поэтому в рассматриваемом случае
Мо„ --- F]/i2] F2Z2Z2 ~ Fil\Z} -4- F1/2Z2/6,
откуда наибольшее усилие растяжения одного болта (Н)
Fi = Mon/i/(ZiZi -ф- /^2),
где zlt г2 — число болтов.
7 Балашов В. П.
193
Рис. 117. Схема фундамента крана на
свободно стоящей колонне
Одновременно вертикальная
сила Fv и вес колонны Окол раз-
гружают болты, поэтому нагрузка
на один болт
FР (^Г 4“ G,:0 л)/(21 4- Z3).
Наибольшая нагрузка на один
болт с учетом предварительной
затяжки
2(Гг-^),
Фундамент (см. рис. 117) урав-
новешивает своим весом G$ опро-
кидывающий момент крана с гру-
зом и обеспечивает благодаря
этому устойчивость против опро-
кидывания. Вертикальная на-
грузка Лф = G + GT г GHP +
-г Скол -г дф создает на подошве
фундамента равномерное давление
(Па) pv = F$IA$ (здесь Аф -
площадь подошвы, м2).
Опрокидывающий момент со-
здает положительное давление
на одной стороне подошвы и от-
рицательное — на противополож-
ной. Наибольшее значение этих давлений (Па) рмтах =
= ±Моп/и7ф (здесь Й7ф — момент сопротивления площади фун-
дамента, м:!); при этом принимается такое положение консоли
относительно фундамента, при котором й/ф имеет меньшее зна-
чение. Для обеспечения передачи нагрузок на всю площадь по-
дошвы фундамента должны выполняться условия:
для крана с грузом р1Пах = pv + рм шах < [р];
для крана с грузом и без груза р1|1)п = ру -рмшах>0,
где [р]— допускаемое давление на грунт; для гранита это давление 3 МПа.
песчаника 1,5 МПа, влажного песка 0,2 МПа.
Если ртт < 0, то увеличивают массу фундамента. Глубина
залегания фундамента составляет не более 2 м, причем она больше
глубины промерзания грунта на 0,2 м.
консольный двуплечевой кран, свободно стоящий на колонне
(см. рис. 116, г), состоит из закрепленной на фундаменте колонны
6, на которой установлена поворотная консоль, выполненная
в виде двух шарнирно соединенных плечей 8 и 10. Механизм подъ-
194
ема 9 смонтирован на внешнем плече. Этот кран предназначен для
обслуживания станков, технологических агрегатов в стесненных
условиях, так как благодаря складыванию плеч уменьшается
габарит крана при повороте. Грузоподъемность 0,125; 0,25 и 0,5 т.
Наибольший вылет 2,5 ... 4,0 м, высота подъема 2,0 ... 3,2 м.
Вылет изменяют поворотом вручную внешнего и внутреннего пле-
чей.
§ 55. ПЕРЕДВИЖНЫЕ КОНСОЛЬНЫЕ КРАНЫ
Эти краны применяют для обслуживания участков, на-
ходящихся около стены цеха. Они передвигаются по рельсовым
путям, уложенным на крановые балки колонн одной стороны
цеха на некотором расстоянии от земли, поэтому эти краны назы-
вают также настенными передвижными. Различают краны с не-
подвижной и с поворотной консолями. Грузоподъемность 1 ... Ют,
вылет 4 ... 10 м, высота подъема 6 ... 18 м. При скоростях пере-
движения более 30 м/мин краны управляются из кабины.
Кран с неподвижной консолью (рис. 118, а). Стальная конструк-
ция этого крана выполнена в виде опорной вертикальной рамы 3
с консолью /, по которой перемещается тележка 2 по конструктив-
ному исполнению, аналогичная конструктивному исполнению те-
лежки мостового крана. Вертикальная рама опирается на ходовые
колеса 5, воспринимающие вертикальную нагрузку от веса крана
и тележки с грузом [см. формулу (134)]. Горизонтальную на-
грузку по формуле (135) от опрокидывающего момента восприни-
мают закрепленные на раме верхние нижние 6 опорные катки,
которые опираются на направляющие рельсы. Механизм пере-
движения крана с раздельным приводом колес. Общее сопро-
тивление передвижению крана от трения в ходовых колесах и
опорных катках Ж1[( + 2№н [здесь М/в, №н — сопротив-
ления передвижению ходовых колес и опорных катков, кото-
рые определяют по формуле (125) при соответствующих значе-
ниях нагрузок Rv и в и
Кран с поворотной консолью (рис. 118, б). Стальная конструкция
этого крана состоит из опорной вертикальной рамы 7, на которой
шарнирно закреплена колонна 8 с поворотной консолью 9, как
у настенного поворотного крана. Механизм подъема 11 установ-
лен на основании консоли, а направляющий блок каната 10 —
на конце консоли. Конструкция опорной рамы и ходовой части
такая же, как у крана с неподвижной консолью. Вследствие по-
ворота консоли изменяются нагрузки на ходовые колеса, поэтому
необходимо обеспечить сцепление колес с рельсом при наиболь-
шем угле поворота консоли. Расчет механизма поворота аналоги-
чен расчету механизма поворота настенного консольного краиа.
Вопросы для повторения. 1. Какие краны называют консольными и в
каких случаях их применяют? 2. Как определяют вертикальную и горизонтальную
нагрузки на опоры настенного крана? 3. Какому требованию должен удовлетво-
у *
195
Рис. 118. Передвижные консольные краны:
а, б — соответственно с неподвижной и поворотной консолями
рять фундамент свободно стоящего крана? 4. Как устроен механизм передви-
жения консольного крана и как определяют сопротивления передвижению
крана?
ГЛАВА 15. КРАНЫ-ШТАБЕЛЕРЫ
§ 56. ОБЩИЕ СВЕДЕНИЯ
Тарно-штучные грузы можно складировать в штабе-
лях, стеллажах и подвижных складах. Штабельное хранение гру-
зов экономически выгодно по сравнению со стеллажным при усло-
вии большего количества одинаковых грузов, которые можно
укладывать в таре или на различных поддонах.
196
Стеллажное хранение удобно использовать при различных
видах грузов. При этом более полно используется объем склада
вследствие увеличения высоты складирования; имеется возмож-
ность захватить груз из любой ячейки; строго фиксируется груз
в зоне хранения; облегчается учет грузов и имеется возможность
автоматизации их складирования; обеспечивается сохранность
грузов, а также безопасность складских работ. Основной недо-
статок — это высокая стоимость стеллажей. Нормальное функцио-
нирование стеллажных складов обеспечивается подбором склад-
ской тары, стеллажного оборудования и штабелирующих машин.
Складская тара выполняет важную роль, так как она увязывает
между собой перерабатываемые грузы различной номенклатуры,
внешние грузопотоки и элементы склада. Наибольшее распростра-
нение для пакетирования тарно-штучных грузов получили плоские
деревянные поддоны (см. § 13). Для повышения прочности и устой-
чивости пакетов на поддонах обязательна увязка их лентой или
покрытие термоусадочной пленкой.
Стеллажи представляют собой пространственные металличе-
ские, железобетонные или деревянные конструкции, образованные
вертикальными стойками, соединенными между собой в продоль-
ном направлении горизонтальными связями, а в поперечном —
полками и раскосами.
По способу опирания груза и конструкции опорных поверх-
ностей различают стеллажи полочные, каркасные (рис. 119, а),
бесполочные (рис. 119, б) и консольные. По числу грузовых единиц
в ячейке стеллажи могут быть одно-, двух- и многоместные. Стел-
лажи могут быть одновременно каркасом здания, его частично за-
менять или независимыми от него.
Штабелирующее оборудование может быть двух видов: крано-
вое, к которому относят мостовые (рис. 120, б, в) и стеллажные
(рис. 120, а) краны-штабелеры, и напольное, к которому относятся
погрузчики (рис. 120, а) и электроштабелеры.
За последние годы стали применять высотные склады, благо-
даря которым полнее используется объем помещения. Кроме того,
эти склады имеют большую вместимость и возможность автомати-
зации всех процессов. Такие склады состоят из экспедиции приема
(прибытие груза, разгрузка транспортных средств, распаковка
грузов и перекладка их в складскую тару); отделения хранения,
Рис. 119. Стеллажи:
а — каркасный полочный; б — бесполочный
197
Рис. 120. Схемы стеллажных складов тарно-штучных грузов:
а — с напольным погрузчиком; б, в — соответственно с подвесным и опорным мостовыми
кранами-штабелерами; а — со стеллажными кранами-штабелерами
оборудованного стеллажами; экспедиции отправки (упаковка в по-
требительскую тару, перекладка в транспортную тару, комплекто-
вание заказов, погрузка на транспортные средства),
'Системы автоматического управления применяют в следую-
щих случаях: 1) при управлении несколькими кранами-штабеле-
рами на небольших складах для повышения производительности
склада; при этом установка и снятие грузов с приемного стола
экспедиции выполняется напольным погрузчиком; пульт управ-
ления расположен вблизи стеллажей так, что оператор может
наблюдать за работой крана-штабелера; команды задаются с по-
мощью перфокарт или десятичных пультов управления; 2) при
управлении кранами-штабелерами и транспортными линиями за-
грузки и разгрузки; для контроля груза при его движении; для
осуществления обратной связи исполнительных механизмов с цен-
тральным пультом управления, фиксирующей выполнение задан-
ных команд; 3) при управлении кранами-штабелерами и транспорт-
ными линиями в общей системе АСУ склада.
Широкое применение нашлн небольшие склады, расположен-
ные непосредственно в цехах, для хранения мелких изделий, кото-
рые необходимы для обеспечения эксплуатации технологического
оборудования. Эти грузы обычно хранят в металлической таре.
Стеллажи обслуживаются мостовыми кранами-штабелерами с руч-
ным управлением.
198
§ 57. МОСТОВЫЕ КРАНЫ-ШТАБЕЛЕРЫ
Эти краны предназначены для транспортирования и
укладки тарно-штучных и длинномерных грузов в стеллажи или
штабели, а также для погрузки и разгрузки железнодорожных
платформ, автомобильного транспорта. Кран (рис. 121) состоит из
моста 2 с механизмом передвижения 1 и грузовой тележки 3 с по-
воротной колонной 4, по которой перемешается грузоподъемник 5
с кабиной. Колонны могут быть сплошными и телескопическими.
Колонна с грузоподъемником обеспечивает фиксированное поло-
жение груза относительно ячейки стеллажа, что является необхо-
димым условием установки груза в ячейку и взятие его из нее.
ГОСТ 16553—82 регламентирует следующие исполнения опор-
ных кранов-штабелеров: ОП — опорный, управляемый с пола
(Q =. 0,125 ... 1 т, высота подъема до 5,2 м, LK = 5,1 ... 11,1 м);
ОК — опорный, управляемый из кабины (Q — 1 ... 12,5 т, высота
подъема до 10,5 м, LK = 16 ... 28,5 м); ОКД—опорный для длин-
номерных грузов, управляемый из кабины (Q — 5 т, высота подъ-
ема до 9 м, = 16 ... 28,5 м). Скорость механизмов (м/с): подъ-
Рис. 121. Мостовой опорный кран-штабелер
199
ема 0,3 ...0,12; передвижения крана 1,6 ...0,25; передвижения
тележки 0,3 ... 0,12. Частота вращения колонны 1,6 ... 0,8 об/мин.
Мосты кранов-штабелеров двухбалочные, по конструктивному
исполнению аналогичные мостам мостовых кранов (см. § 44). Меха-
низмы передвижения выполнены по схеме с раздельным приводом.
С целью обеспечения малого пути торможения (60 ... 100 мм) для
точной остановки грузоподъемника перед ячейкой стеллажа при-
меняют асинхронные двухскоростиые двигатели с короткозамкну-
тым ротором и для кранов большой грузоподъемности — двигатели
с фазным ротором.
Тележка представляет собой сварную раму, опирающуюся на
четыре колеса, два из которых приводные. На нижней стороне
рамы установлены четыре ловителя, опорные кронштейны кото-
рых расположены под нижними поясами пролетных балок моста.
При наезде колонны на препятствие ловители удерживают тележку
от опрокидывания. К раме тележки с помощью шарикового или
роликового опорно-поворотного устройства прикреплена опорная
платформа, на которой расположены механизм подъема и поворота.
К фланцу платформы прикреплена колонна коробчатого сече-
ния с направляющими, по которым на катках перемещается грузо-
подъемник, подвешенный на обойме блока полиспаста. Если ко-
лонна телескопическая, то ее верхняя часть является направляю-
щей, по которой на катках перемещается рама с кабиной управ-
ления а по направляющим рамы — грузоподъемник.
Уравнительный блок полиспаста используют в качестве дат-
чика усилия ограничителя массы груза (торсионного или пружин-
ного), предназначенного для отключения механизма подъема
в случае его перегрузки (на 25 %), которая чаще всего возникает
при упирании вил грузоподъемника в стеллаж (кран поднимает
стеллаж). Этот ограничитель контролирует слабину каната. При
срабатывании ограничителя массы груза отключаются все меха-
низмы крана.
Для предохранения от падения телескопической колонны с ка-.
биной при обрыве грузового каната и скорости опускания более
0,5 м/с предусмотрены клиновые ловители, срабатывающие от
ограничителя скорости. Этн ловители по конструктивному испол-
нению аналогичны ловителям кабин лифтов. Коробка с ловите-
лями закреплена на раме телескопической колонны, а клиновые
ловители зажимают направляющие колонны.
Механизм поворота (рис. 122) состоит из двигателя 3, редук-
тора 1 и тормоза 2, которые с помощью шарнира 5 закреплены на
поворотной платформе. При этом зазор между зубьями шестерни
7 и венцом 6 регулируют подпружиненной тягой 8. В случае упи-
рания вил в препятствие при вращении колонны происходит
сжатие пружины и шестерня выходит из зацепления с венцом —
этим предохраняют поломку механизма поворота.
В кабине расположены пульт управления, сиденье для опе-
ратора. Дверь снабжена замком и фиксатором с блокировкой.
200
Рис. 122. Кинематическая схема механизма поворота мостового опорного крана
штабелера
Для эвакуации оператора в аварийных случаях предусматривается
веревочная лестница.
Все механизмы крана снабжены автоматически нормально за-
крытыми тормозами. Кроме рассмотренных устройств безопас-
ности, механизмы подъема и передвижения снабжены конечными
выключателями и упорами. Для остановки вил грузоподъемника
строго перпендикулярно или параллельно относительно стелла-
жей предусмотрены специальные выключатели. Для перегрузки
тарно-штучных грузов грузоподъемник оснащен двумя вилами,
для длинномерных грузов длиной не более 6 м —четырьмя ви-
лами, для рулонных грузов — штырем. Грузы большой ширины
захватываются с помощью сменных насадок на вилы.
Стальные конструкции моста и тележки рассчитывают в слу-
чаях упирания вил в стеллажи.
Для уменьшения отклонения колонны с грузом прогиб про-
летных балок не должен превышать 1/1000 пролета.
В случае управления из кабины для полиспаста принимают
грузолюдские канаты с коэффициентом запаса прочности, рав-
ным 6 и более.
§ 58. СТЕЛЛАЖНЫЕ КРАНЫ-ШТАБЕЛЕРЫ
Эти краны-штабелеры предназначены для механи-
зации и автоматизации процесса укладки в стеллажи и выдачи из
стеллажей грузов, уложенных в стандартную ящичную тару или
на поддонах.
Стеллажный кран-штабелер (рис. 123) состоит из опорной те-
лежки 8 с двумя ходовыми безребордными колесами и боковыми
роликами. На тележке закреплена стойка 6, продолжением кото-
рой является колонна 2 с направляющими. В верхней части ко-
лонны закреплен оголовок 1 с отклоняющими блоками полиспаста
н двумя боковыми роликами, которые взаимодействуют с верхним
рельсом и удерживают кран-штабелер в вертикальном положении.
201
Рис. 123. Стеллажный автоматический кран-штабелер
По направляющим стойки и колонны перемещается грузоподъем-
ник 4 с помощью полиспаста механизма подъема 7, расположенного
в нижней части стойки. На грузоподъемнике установлены кабина 3
и телескопические захваты 5. Стеллажный краи-штабелер переме-
щается между стеллажами по рельсу, уложенному по центру меж-
стеллажного прохода. Для предохранения к рана-штабелера от
опрокидывания вдоль рельсов опорная тележка снабжена под-
хватами. В складах с малым грузооборотом может быть использо-
ван одни кран-штабелер для обслуживания стеллажей в несколь-
ких проходах. Для этого предусматривают возможность переста-
новки крана-штабелера в соответствующий межстеллажный про-
ходе помощью передаточной тележки, перемещающейся в попереч-
ном направлении относительно стеллажей, или с помощью попе-
речного рельса, с которым соединены криволинейными участками
202
со стрелками рельсы, уложенные в межстеллажных прохо-
дах.
ГОСТ 16553—82 регламентирует следующие исполнения стел-
лажных кранов-штабелеров: СА — стеллажный автоматический
(Q = 0,5 ... 2 т, Н = 3,8 ... 16 м); СК — стеллажный комплекто-
вочный (Q = 0,16 ... 2 т, Н = 2,2 ... 14,8 м); САД — стеллажный
автоматический для длинномерных грузов (Q = 5 ... 12,5 т,
Н = 7,7 ... 15 м).' Скорости механизмов (м/с): подъема 0,2 ... 0,5;
передвижения крана 1,0 ... 2,5; выдвижения захватов 0,125 ...
0,25. Максимальное число адресов по вертикали составляет 31,
по горизонтали 255.
Стеллажные комплектовочные краны-штабелеры применяют
на складах для различных мелких изделий (материалов), которые
выдают поштучно или мелкими партиями. В таких случаях целе-
сообразно брать из тары необходимое количество изделий, не вы-
возя тару с изделиями в экспедицию. На грузоподъемнике имеются
кабина оператора и приемный стол для установки тары. Стол
может быть с гладким настилом, роликовыми или шариковыми
опорами для облегчения перемещения тары с грузом из стеллажа
на стол вручную. При грузоподъемности более 250 кг грузоподъ-
емники оборудуются двумя выдвижными телескопическими за-
хватами, один из которых используется для захвата и установки
в стеллажи тары с грузом, второй—для установки свободной
тары, предназначенной для комплектования заказа. Управление
комплектовочным краном-штабелером в ручном режиме осущест-
вляется из кабины. Возможно также полуавтоматическое управ-
ление, которое ускоряет поиск необходимой ячейки стеллажа.
Управление телескопическим захватом производится вручную.
Автоматические краны-штабелеры предназначены для пере-
работки пакетированных грузов, выдаваемых потребителю це-
лыми пакетами.
Механизм подъема стеллажного крана-штабелера состоит из
барабана, вал которого установлен на подшипниках, закреплен-
ных на стойке. На один конец вала насажен навесной редуктор
с фланцевым двигателем. Реактивный момент барабана восприни-
мается упором. Свободный конец каната является датчиком уси-
лия и прикреплен к проушине ограничителя массы груза пружин-
ного типа. Ограничитель массы груза срабатывает при превыше-
нии грузоподъемности иа 25 %, которая может возникнуть прн
подъеме нли при упираиии захвата с грузом в стеллаж. Грузо-
подъемник снабжен клиновыми ловителями, которые срабатывают
от ограничителя скорости аналогично кабинам лифтов.
Телескопический захват (рис. 124) предназначен для уста-
новки и выемки затаренного груза из ячейки стеллажа. Он со-
стоит нз закрепленного на грузоподъемнике корпуса /, по кото-
рому перемещается рама 2, а по ней — платформа 3 для груза.
Рама 2 и платформа 3 перемещаются в направляющих на роликах
с помощью реечной илн цепной передач. На одном из захватов
203
Рис. 124. Схема телеско-
пического захвата
установлено устройство для контроля занятости ячеек. Захват
выдвигается в обе стороны, поэтому груз с загрузочной площадки
может быть установлен в ячейку любого стеллажа. В сложенном
положении захват с грузом находится в пределах габаритов гру-
зоподъемника.
Управление штабелером может быть автоматическим с пульта
управления или от ЭВМ, полуавтоматическим и ручным с пульта
кабины, а также с отдельного наладочцого пульта. Все ячейки
стеллажей кодируются с помощью металлических шунтов, кото-
рые устанавливают на специальных панелях снизу у каждого
вертикального ряда ячеек и колонне крана штабелера на уровне
горизонтальных рядов ячеек. Считывание адреса производится
индуктивными бесконтактными датчиками на опорной тележке
(считывают адреса вертикальных рядов) и грузоподъемника (счи-
тывают адреса горизонтальных рядов). Код ячейки определяется
количеством шунтов и местом их установки в гнездах панелей.
При задании команды набирают два адреса; первый — откуда
взять груз, второй — куда положить его. При движении краиа
и грузоподъемника их датчики последовательно считывают запи-
санные при помощи шунтов коды ячеек и посылают соответствую-
щие сигналы в схему сравнения, где полученная информация
постоянно сравнивается с хранящимся в памяти системы кодом
искомой ячейки. При их совпадении подается команда для оста-
новки приводов крана и грузоподъемника и выдвижения телеско-
пического захвата. Для приводов применяют двигатели постоян-
ного тока с широким диапазоном регулирования скоростей. Эти
двигатели обеспечивают остановку грузоподъемника относительно
ячеек с погрешностью ±5 мм. Подвод электропитания к краиам-
штабелерам осуществляют при помощи гибких кабелей, подве-
шенных на специальных тележках, перемещающихся по
рельсу.
Прочность и устойчивость колонн, грузоподъемника и захвата
проверяют в двух случаях: 1) при нагружении выдвинутого за-
хвата грузами, масса которых составляет 1,25 грузоподъемности,
и массой рассчитываемых конструкций; 2) при наезде крана-штабе-
лера на конечные упоры (замедление 4 м/с2), при этом грузоподъ-
емник с номинальным грузом находится в крайнем верхнем
положении. В краиах-штабелерах используют грузолюдские ка-
наты; коэффициент запаса прочности ие менее 8; при определении
максимального натяжения каната учитывают также сопротивле-
ние передвижению грузоподъемника по направляющим.
204
Повышенные требования предъявляются к жесткости элемен-
тов стальной конструкции — упругое смещение конца выдвину-
того телескопического захвата в крайнем верхнем положении
грузоподъемника при нагружении грузами, масса которых состав-
ляет 1,25 грузоподъемности, не должно превышать 20 мм.
§ 59. ОСНОВНЫЕ ПРАВИЛА ЭКСПЛУАТАЦИИ
И ТЕХНИКИ БА30ПАСН0СТИ ПРИ ОБСЛУЖИВАНИИ
КРАНОВ-ШТАБЕЛЕРОВ
Эксплуатация кранов-штабелеров и надзор за ними должны
производиться согласно требованиям Правил по кранам [22 ] (см. гл. 17) в той
части, которая является общей для них и мостовых кранов, и руководствами по
эксплуатации. Среди основных правил эксплуатации можно отметить следу-
ющие. Высота, укладки грузов в таре не должна превышать высоту бортов &о
избежание падения грузов. При укладке динномерных грузов на пол необхо-
димы прокладки. Тара или пакеты не должны выступать из стеллажа или шта-
беля. Ширина опор стеллажа должна обеспечивать опирание груза в случае его
смещения на полный зазор. Стеллажи должны иметь упоры, которые исключали
бы сдвижение груза в глубину стеллажа. Поднятый груз должен быть равно-
мерно расположен по ширине вилочного захвата, а центр тяжести его отстоять
от стенки вил не более чем на 0,6 м при длине вил 1,2 м. Подводка захвата
под груз, установка груза в штабель или ячейку стеллажа должны выполняться
на малых скоростях механизмов при фиксированном положении грузоподъем-
ника по-высоте. Вывод захвата из-под груза производится только после посадки
груза на штабель или в ячейку стеллажа, при этом грузоподъемник опускают
на 30 ... 50 мм. На малых скоростях должна выполняться также погрузка и
разгрузка транспортных средств, установка груза на приемную площадку.
Зона работы автоматического крана-штабелера должна быть ограждена,
а вход в зону оборудован запирающейся дверью с блокировкой.
Во избежание создания помех автоматическому управлению запрещено про-
изводить электросварочные работы в помещении склада при работе крана-шта-
белера. Особое внимание должно быть обращено на то, чтобы захваты не заде-
вали за стеллажи при работе механизмов.
После окончания работы кабина и грузоподъемник должны быть опущены
в нижнее положение. Тележка с колонной мостового крана-штабелера должна
быть выведена из прохода стеллажа.
Вопросы для повторения 1. Какие преимущества стеллажного хранения
грузов по сравнению со штабельным? 2. Как устроены стеллажи и какое шта-
белирующее оборудование применяют для их обслуживания? 3. В каких слу-
чаях применяют системы автоматического управления складами? 4. Назовите
особенности устройства мостового крана-штабелера по сравнению с мостовым
краном общего назначения? 5. Как обеспечивают точную остановку грузо-
подъемника перед ячейкой стеллажей? 6. Как устроен стеллажный кран-шта-
белер?
ГЛАВА 16. ПОДЪЕМНИКИ
§ 60. ОБЩИЕ СВЕДЕНИЯ
Подъемниками называют грузоподъемные машины,
в которых транспортирование грузов с одного уровня на другой
осуществляется в клетях (кабинах), на платформах или в бадьях,
205
перемещающихся в жестких направляющих по определенной
траектории. К подъемникам относятся лифты, строительные и
скиповые подъемники.
В зависимости от назначения лифты (ГОСТ 23748—79) разде-
ляют на пассажирские, больничные, грузовые и грузовые малые.
Лифты н строительные подъемники должны удовлетворять требо-
ваниям Правил по лифтам 123).
§61. ГРУЗОВЫЕ ЛИФТЫ
Онн предназначены для подъема и опускания штуч-
ных и тарио-штучных грузов с одного уровня иа другой в много-
этажных промышленных зданиях и складах. Лифт (рнс. 125)
состоит из шахты 5 с машинным отделением 2 и приямком 7,
дверьми на посадочных (загрузочных) площадках и жестких на-
правляющих 9 и 10, по которым перемещаются кабина 3 и проти-
вовес 6 с помощью лебедки 1 с канатом 4. В приямке шахты установ-
Рис. 125. Схема лифта
лены буферные устройства 8. В машинном
отделении расположены шкафы управле-
ния. Падение кабины в аварийных слу-
чаях предотвращается ловителями, при-
водимыми в действие ограничителями
скорости.
Различают грузовые лифты с проводни-
ком для подъема и опускания грузов и
сопровождающих их лиц, без проводни-
ка — только для груза и .малые лифты
грузоподъемностью до 160 кг без провод-
ника. В лифтах с проводником применяют
кнопочную внутреннюю систему управле-
ния с сигнальным вызовом кабины с лю-
бого этажа, в лифтах без проводника -
наружную кнопочную с основного этажа
с сигнальным вызовом с любого этажа.
Во всех случаях при открытой двери шах-
ты или кабины вызов и любой пуск каби-
ны невозможен. Чаще всего грузы вкаты-
вают в кабину лифта на рельсовых и
безрельсовых тележках напольного транс-
порта, поэтому погрешность остановки
уровня поверхности пола кабины отно-
сительно посадочной площадки должна
быть в пределах -±15 мм. Для механиза-
ции загрузки и разгрузки на потолке
кабины закрепляют монорельс для въезда
монорельсовых тележек или электроталей
с грузом. Монорельс кабины стыкуется с
соответствующими монорельсовыми путя-
206
Рис. 126, Схема проточек канатове-
дущего шкива
ми на этажах здания. Для
таких лифтов погрешность
остановки ±5 мм. Загрузка
кабины возможна и с по-
мощью вилочного погрузчи-
ка, не въезжающего в кабину.
Грузоподъемностью лифта называют наибольшую массу груза
и людей, на перемещение которых в кабине рассчитан лифт. Масса
кабины и постоянно находящихся в ней устройств (монорельс и др.)
в грузоподъемность не включается.
ГОСТ 8823—85 регламентирует грузовые лифты грузоподъем-
ностью 0,5. 1, 2, 3,2; 5 т с высотой подъема 45 ... 75 м. Скорость
лифтов 0,25 ... 0,5 м/с. Максимальное число остановок 14 ... 20.
Лифты с монорельсом имеют грузоподъемность 1, 2 и 3,2 т.
Для уменьшения крутящего момента на шкиве лебедки и мощ-
ности привода применяют противовесы, которые уравновешивают
массу кабины и 0,4 массы груза. Кабина и противовес могут быть
подвешены без полиспаста или с полиспастом на четырех, шести
или восьми канатах. Канаты выбирают по разрывному усилию
по формуле (20) с учетом расчетного натяжения ветви каната ка-
бины (Н):
— (6 4- Сиан И" Си. у)/С
где G — номинальный вес груза, Н; бнаб — вес кабины, Н; GKaH — вес канатов
от точки сбегания их с канатоведущего шкива до точки крепления кабины при
ее ннжне.м положении, Н; G,,. у — вес натяжного устройства и уравновешивающих
канатов; г — число ветвей канатов, на которых подвешена кабина.
При скорости движения до 1 м/с коэффициент запаса прочности
каната для лифтов с проводником не менее 12, а без проводника
не менее 10. В лифтах применяют канаты нераскручивающиеся
(ГОСТ 3077—80). для лифтов с проводником — грузолюдские.
В грузовых лифтах используют редукторные лебедки. В состав
лебедки входят электродвигатель переменного тока специального
исполнения, упругая муфта с тормозным шкивом, червячный гло-
боидный редуктор, канатоведущий шкив и тормоз, смонтирован-
ные на раме. Канатоведущий шкив посажен на выходной вал ре-
дуктора и охватывается канатами, иа которых подвешены кабина
и противовес. Для обеспечения надежного сцепления канатов со
шкивом на нем выполнены параллельные канавки (ручьи) опре-
деленного профиля. В грузовых лифтах применяют клиновые ка-
навки с подрезом (рис. 126). Диаметр шкива по дну ручья опреде-
ляют по формуле (22). При этом для лифтов с проводником коэф-
фициент е 41, а без проводника е 31. Тормоз — колодочный
нормально закрытый автоматического действия.
207
При ремонте предусмотрена возможность привода лебедки
вручную от штурвала. Для закрепления канатов на шкиве при их
замене, смазывании и других операциях применяют прижимную
струбцину.
Кабина состоит из каркаса, выполненного из верхней и нижней
балок, соединенных стояками. Пол кабины из металлических
листов, закрепленных на каркасе. Двери кабины двухстворчатые
раздвижные решетчатые, открываемые вручную. Замки автома-
тически закрывают двери, когда кабина поднимается над данным
этажом на 150 мм и более. С наружной стороны этот замок не от-
крывается. Направляющие башмаки скользящего типа установ-
лены по два с каждой стороны (верхней и нижней) вертикальной
рамы каркаса. Они предназначены для фиксирования кабины от-
носительно направляющих шахты.
Противовес представляет собой жесткую металлическую раму,
загруженную железобетонными или чугунными чушками массой
не более 60 кг. На раме закреплены канаты, а при наличии поли-
спаста — подвижные блоки.
Направляющие, выполненные из стального профиля таврового
сечения или уголкового проката, установлены в вертикальной
плоскости параллельно друг другу по высоте шахты и прикреп-
лены к стенкам через определенные промежутки. Направляющие
предназначены для направления движения кабины и противовеса
с помощью башмаков и удержания их в случае посадки иа лови-
тели. Отрезки профилей (5 м) стыкуются так, что шип одного вхо-
дит в паз другого. Направляющие рассчитывают на нагрузку, воз-
никающую при посадке кабины на ловители.
Ловители предназначены для удержания кабины (и противо-
веса) на направляющих при превышении скорости ее движения
вниз на 15 ... 40 %. В грузовых лифтах применяют клиновые ло-
вители резкого торможения. Ловитель состоит из двух клиньев,
охватывающих направляющую, и расположенных в наклонных
пазах направляющих колодок прикрепленных к швеллерам ниж-
ней балки каркаса. Посредством рычажного механизма клинья
соединены с зажимом каната ограничителя скорости. При номи-
нальной скорости лифта между поверхностями клиньев и направ-
ляющими имеются зазоры.
§ 62. СКИПОВЫЕ ПОДЪЕМНИКИ
Скиповыми называют подъемники для перемещения
кусковых и сыпучих грузов в саморазгружающихся ковшах-ски-
пах (рис. 127) в вертикальной плоскости или под некоторым углом
относительно горизонтальной плоскости. Различают три типа подъ-
емников: 1) уравновешенный с противовесом; 2) с двумя скипами,
из которых один поднимается, а другой опускается и выполняет
роль противовеса; 3) неуравновешенный (получил наибольшее
распространение).
208
Рис. 127. Скиповые подъемники:
а — схемы подъемников; б — устройство для разгрузки
Подъемник (рис. 127. а) состоит из опорной стальной конструк-
ции 5, скипа 1 и приводной лебедки с канатом 3. Загрузка скипа
производится внизу из бункера 2. а разгрузка вверху, в приемной
бункера 4.
На опорной конструкции расположены направляющие для
скипа, которые состоят из трех участков: нижнего загрузочного,
среднего и верхнего разгрузочных. Направляющие могут быть
вертикальными, наклонными (угол наклона 50 ... 60°) или со-
стоящими из вертикальных и наклонных участков.
Скип 7 имеет форму прямоугольного открытого сверху метал-
лического ящика без торцовой стенки (рис. 127, б). Он установлен
на двух осях с катками. Задние катки 8 передвигаются по наруж-
ным направляющим, передние катки 9 — по внутренним. Скип
охватывается П-образной скобой 6, захватывающей его за нижнюю
ось катков. Скоба соединена с канатом 3 лебедки, установленной
в машинном отделении. На среднем участке обе лары направляю-
щих параллельны друг относительно друга. На разгрузочном
участке внутренние направляющие 10 изогнуты в сторону прием-
ного бункера 4 и заканчиваются упором. При проходе разгрузоч-
ного участка задние катки скипа продолжают двигаться по пря-
молинейным направляющим 5 и приподнимаются, а передние
катки доходят до упора, и скип автоматически опрокидыва-
ется .
Загрузку скипа из бункера производят путем открывания за-
твора, контролирующего заполнение скипа до требуемой массы
груза. С помощью конечных выключателей происходит автомати-
ческая остановка и пуск лебедки при крайнем верхнем положении
скипа. Вместимость ковшей 0,5 ... 2,5 м3 при грузоподъемности
209
500... 1500 кг. скорость передвижения 0.3...0.5 м/с. высота
подъема до 50 м.
Тяговый канат выбирают по разрывному усилию (Н) |см.
формулу (20)] при подъеме скипа с грузом. Максимальное натяже-
ние каната (Н)
SKr.ix = (G Gi-K)sin fJ ф (G G(.,;) cos ,
где (i. 6(.к — нес груза и скипа, Н; р — угол наклона направляющих, u; w—
удельные сопротивления движению катков скипа по направляющим |см. фор-
мулу (126) ].
Усилие в канате противовеса (Н)
5 п [, ~ Gnp sin Gn j, с os pre1,
где 6’цр — нес противовеса. Н,
Мощность электродвигателя лебедки (кВт)
Р = (SIIiax — Sn[1) t’r,,/] 100011),
где ц- общий КПД лебедки; —средняя скорость, м/с.
В неуравновешенных подъемниках SIip 0; а при двух ски-
пах следует принять Gnp GPK.
Вопросы для повторения. 1. Поясните устройство грузового лифта. 2.
Поясните работу скипового подъемника.
ГЛАВА 17. ЭКСПЛУАТАЦИЯ ГРУЗОПОДЪЕМНЫХ
МАШИН
§ 63. ОБЩИЕ СВЕДЕНИЯ
Основными документами, определяющими безопасную и надеж-
ную работу грузоподъемных машин, являются Правила по кранам [22] и Пра-
вила по лифтам 123].
В соответствии с этими Правилами руководители предприятий (организаций)
обязаны содержать принадлежащие им грузоподъемные машины, съемные гру-
зозахватные приспособления и тару в исправном состоянии, создавать безопас-
ные условия при их работе, организовать правильное и своевременное освиде-
тельствование, ремонт и обслуживание. Для этого на предприятиях назначаются
инженерно-технические работники: 1) осуществляющие надзор за содержанием
и безопасной эксплуатацией грузоподъемных машин, съемных грузозахватных
приспособлений, тары и крановых рельсовых путей; 2) ответственные за исправ-
ное состояние грузоподъемных машин; 3) ответственные за безопасное производ-
ство работ по перемещению грузов кранами. По этим вопросам на предприятии
издается специальный приказ, форма которого рекомендована Госгортехнадзо-
ром СССР. Им же утверждены «Типовое положение для инженерно-технических
работников, осуществляющих надзор на предприятиях и в организациях за содер-
жанием и безопасной эксплуатацией подъемных сооружений», «Типовая инструк-
ция для лиц, ответственных за исправное состояние гр узо подъемных кранов»
и «Типовая инструкция для лиц, ответственных за безопасное производство ра-
бот по перемещению грузов кранами» [26].
На основании указанных документов министерства разрабатывают и утверж-
дают свои положения и инструкции, которые должны содержать основные ука-
210
Вверх
Вперед
Назад
Рис. 128, Основные сигналы стропальщика крановщику с помощью руки
зания типовых инструкций, дополнительные требования, вытекающие из местных
условий эксплуатации кранов и лифтов на предприятиях и в строительных орга-
низациях; кроме того, инструкции должны содержать указания о взаимоподчи-
ненности должностных лиц, связанных с эксплуатацией кранов.
Находящиеся в эксплуатации грузоподъемные машины должны быть снаб-
жены таблицами с ясными обозначениями регистрационного номера, грузо-
подъемности и даты следующего испытания в виде крупных надписей. Грузо-
подъемные машины, съемные грузозахватные приспособления и тара, не про-
шедшие технического освидетельствования, установленного Правилами [22, 231,
к работе не допускаются.
Для обеспечения безопасности при производстве работ с грузами установлен
порядок обмена условными сигналами посредством движения руками или флаж-
ками (рис. 128) между стропальщиком и крановщиком (машинистом). Допу-
скается сигнализация голосом при работе стреловых самоходных кранов со
стрелой не более 10 м, а также применение двусторонней телефонной и радио-
телефонной связи.
§ 64. ОРГАНИЗАЦИЯ И СОДЕРЖАНИЕ
ТЕХНИЧЕСКОГО НАДЗОРА
Организация надзора. Лицо, ответственное по надзору, подчинено
главному инженеру предприятия или его заместителю по технике безопасности.
На него не могут быть возложены обязанности лиц, ответственных за исправное
состояние кранов, за безопасное производство работ по перемещению грузов
кранами или за их ремонт. В своей работе ответственное лицо обязано руко-
водствоваться Правилами по кранам, инструкциями, методическими указаниями
и информационными письмами Госгортехнадзора, а также «Правилами устройства
электроустановок», «Правилами технической эксплуатации электроустановок»
и «Правилами техники безопасности при эксплуатации электроустановок» и
другими руководящими материалами, регламентирующими безопасность работ.
До пуска в работу подлежат регистрации в органах технадзора все грузо-
подъемные машины, кроме кранов с ручным приводом, управляемых с пола
электрических кранов мостового типа и консольных кранов грузоподъемностью
до 10 т и стреловых кранов грузоподъемностью до 1 т.
Регистрация производится по письменному заявлению предприятия-владельца
211
и паспорту грузоподъемной машины. Перерегистрация кранов производится после
их реконструкции, в случае составления нового паспорта после ремонта, пере-
дачи новому владельцу, перестановки на новое место (только краны мостового
типа). Перерегистрацию лифтов производят при реконструкции, повышении
грузоподъемности, переносе лебедки, изменении конструкции или размеров
шахты, машинного помещения и при принципиальном изменении электрической
схемы.
Снятие с регистрации производится в случаях списания грузоподъемных
машин, пришедших в негодное состояние, при передаче грузоподъемной машины
другому владельцу. Гр узо подъемные машины, не подлежащие регистрации в орга-
нах технадзора, а также съемные грузозахватные приспособления снабжают
индивидуальными номерами и регистрируют в журналах учета предприятия пли
цеха.
Разрешение на пуск в работу грузоподъемных машин, подлежащих реги-
страции s органах технадзора, должно быть получено в этих органах для вновь
зарегистрированных грузоподъемных машин, после установки на новом месте,
реконструкции, ремонта стальных конструкций с применением сварки. Разре-
шение отмечается в паспорте грузоподъемной машины. Разрешение на пуск
в работу грузоподъемных машин, не подлежащих регистрации, выдается лицом,
ответственным за технический надзор на предприятии, и записывается в журнал
их учета и осмотра.
Техническое освидетельствование (ТОСВ) производится для установления
исправного состояния грузоподъемных машин и правильной установки их на
рабочем месте в соответствии с требованиями Правил по кранам и лифтам. Про-
ведение ТОСВ возлагается на лицо, ответственное по надзору, при участии лица,
ответственного за исправное состояние грузоподъемных машин. Различают пол-
ное ТОСВ, при котором грузоподъемная машина подвергается осмотру, стати-
ческому и динамическому испытаниям, и частичное ТОСВ — только с одним
осмотром.
Грузоподъемные краны подлежат полному ТОСВ до пуска в работу после
установки и регистрации. Находящиеся в эксплуатации краны должны подвер-
гаться периодическому ТОСВ: 1) полному— не реже одного раза в три года,
а в случае редкого использования — через пять лет; 2) частичному — не реже
одного раза в 12 месяцев.
Внеочередное полное ТОСВ должно производиться после монтажа, вызван-
ного установкой крана на новом месте, реконструкции крана, ремонта стальных
конструкций, установки вновь полученного сменного оборудования, капиталь-
ного ремонта или замене механизма подъема, смены крюка или крюковой под-
вески.
После смены канатов и во всех случаях перепасовки канатов должна произ-
водиться проверка правильности запасовки и надежности крепления концов
каната, а также обтяжка канатов рабочим грузом.
Осмотр. При осмотре должны быть проверены: 1) состояние стальных кон-
струкций, крюка, деталей крюковой подвески, канатов и их креплений, блоков
с осями и деталей их крепления, а также элементов подвески стрелы; 2) состоя-
ние заземления электрического крана с определением сопротивления расте-
канию тока; 3) соответствие массы противовеса и балласта у стреловых кранов
значениям массы, указанным в паспорте; 4) состояние рельсовых крановых пу-
тей и соответствие их требованиям правил. При осмотре особое внимание должно
быть уделено исправности и регулировке тормозов. Осмотр сопровождается
проверкой работы механизмов.
Статические испытания проводятся после осмотра и имеют целью проверку
прочности стальной конструкции и элементов крановых механизмов, а у стре-
ловых- кранов — дополнительно устойчивости. Испытания выполняются путем
подъема груза, масса которого на 25 % превышает номинальную грузоподъем-
ность.
Мостовые и передвижные консольные краны устанавливают над опорами
подкрановых балок, а тележки их посередине пролета, или на консоли, отве-
чающие наибольшему прогибу стальных конструкций. Груз поднимают на вы-
соту 200 ... 300 мм, выдерживают в течение 10 мин и опускают. Испытания
212
козловых кранов производят так же, но при этом тележку располагают посе-
редине пролета и на консолях. Стреловые краны устанавливают на выносные
опоры, стрелу располагают относительно опорной части в положение наимень-
шей устойчивости крана при минимальном вылете, соответствующем номинальной
грузоподъемности. Груз поднимают на высоту 100 ... 200 мм, выдерживают в те-
чение 10 мин и опускают. После опускания груза осматривают стальные кон-
струкции. Считается, что кран выдержал испытания, если не будут обнаружены
трещины, остаточные деформации стальной конструкции и другие поврежде-
ния. Остаточную точную деформацию можно определить с помощью линейки,
установленной на площадке около груза, и грузика, подвешенного к стальной
конструкции в месте определения деформации. По перемещению грузика отно-
сительно линейки судят об упругой и остаточной деформациях стальной кон-
струкции. При наличии остаточной деформации кран не должен эксплуати-
роваться до выяснения причин образования деформации.
Динамические испытания предназначены для проверки работоспособности
крановых механизмов и тормозов, ^ги испытания проходят путем движения
на полной скорости всех механизмов на пути их работы (до срабатывания кон-
цевых выключателей) с грузом, масса которого превышает грузоподъемность
на 10%. Допускается проводить испытания с грузом, масса которого соответ-
ствует номинальной грузоподъемности.
Результаты ТОСВ записывают в паспорт крана, и при полном соответствии
требованиям Правил по кранам дается разрешение на работу крана.
Съемные грузозахватные приспособления (стропы, цепи, клещи, захваты,
траверсы и пр.) после изготовления подлежат техническому освидетельствованию
на заводе-изготовителе, а после ремонта — на заводе, где они ремонтировались.
Они подвергаются осмотру и испытанию грузом, масса которого составляет
1,25 грузоподъемности. Тара подвергается только осмотру. В процессе эксплуа-
тации приспособления и тара должны осматриваться владельцем в установленные
сроки: траверсы не реже чем каждые шесть месяцев, клещи (другие приспособ-
ления) не реже чем каждый месяц и стропы не реже чем каждые 10 дней. Редко
используемые приспособления и стропы осматривают перед их выдачей.
Лифты подлежат полному ТОСВ после установки и регистрации, после
реконструкции периодически не реже одного раза в 12 месяцев. Частичное ТОСВ
производится: 1) при замене канатов кабины или противовеса (со статическим
испытанием); 2) замене электродвигателя с другими параметрами (с динамиче-
скими испытаниями); 3) после капитального ремонта лебедки, тормоза или их
замене (динамические испытания без проверки ловителей и буферов); 4) замене
ловителей, ограничителей скорости (испытание соответствующего узла).
Осмотр лифта должен сопровождаться проверкой работы его механизмов,
электрооборудования, системы управления и сигнализации, концевых выключа-
телей, предохранительных устройств и освещения. Должно быть проверено также
состояние кабины, противовеса, направляющих, канатов, ограждения, зазоры
и размеры, регламентированные Правилами по лифтам.
Статические испытания предназначены для проверки прочности механизмов
лифта, его кабины, канатов кабины и их крепления, а также действия тормоза,
отсутствия проскальзывания канатов в ручьях канатоведущего шкива. Испыта-
ния проводятся в нижнем положении кабины в течение 10 мин массой груза ,
превышающей на 100 % грузоподъемность.
Динамические испытания имеют целью проверку действия механизмов, тор-
моза, ловителей, буферов. При этих испытаниях кабина с массой груза, превы-
шающей грузоподъемность на 10%, должна передвигаться па полной высоте
подъема с номинальной скоростью. Ловители испытываются от действия огра-
ничителя скорости.
Результаты ТОСВ записывают в паспорт лифта и при полном соответствии
требованиям Правил по лифтам дается разрешение на эксплуатацию и указы-
вается срок очередного ТОСВ.
В случаях выявления неисправностей, а также нарушений требований
Правил при работе грузоподъемных машин и их обслуживании, ответственное
по надзору лицо должно принять меры по устранению неисправностей, а в слу-
чае необходимости остановить грузоподъемную машину.
213
§ 65. СОДЕРЖАНИЕ ГРУЗОПОДЪЕМНЫХ МАШИН
В ИСПРАВНОМ СОСТОЯНИИ
Лицом, ответственным за исправное состояние грузоподъемных
крапов, может быть назначен инженерно-технический работник, кслорому под-
чинен персонал, обсл ужинают ий краны, после пронерки комиссией его знаний
соответствующих Правил |22. 23 | п вручения ему удостоверения и соответству-
ющей инструкции. Номер и дата приказа о назначении, а также должность,
фамилия, имя, отчество н роспись его должны содержаться в паспорте крана.
Лицо, ответственное за исправное состояние кранов, должно знать устройство
кранон. «Инструкцию для лиц, ответственных за исправное состояние грузо-
подъемных кранов» |26|, инструкции завода-изготовителя по монтажу и экс-
плуатации кранов, производственные инструкции для обслуживающего персо-
нала и руководствоваться при работе содержащимися в них указаниями.
Лицо, ответственное за исправное состояние кранов, должно присутствовать
при технических освидетельствованиях, проводимых лицом, осуществляющим
надзор за грузоподъемными кранами.
В процессе эксплуатации машин происходит потеря нх работоспособности
вследствие изнашивания и разрушения отдельных деталей, а также нарушения
регулировок. Восстановление работоспособности осуществляется путем ремонта,
при котором заменяют или ремонтируют изношенные детали и регулируют ме-
ханизмы. Ремонт можно проводи]!,, например, при остановке грузоподъемной
машины, вызванной предельным износом или поломкой деталей. В этих случаях
ресурс элемента будет исчерпан полностью. Внезапная поломка одного элемента
|уюжет повлечь за собой поломку или повреждения других элементов.
В связи с этим почти повсеместно для грузоподъемных машин применяют
систему планово-предупредительного ремонта (ППР), при которой после от-
работки машиной определенного количества часов или при перегрузке опреде-
ленного количества груза производятся осмотры и различные виды плановых
ремонтов. Составными частями ППР являются техническое обслуживание н
ремонт.
§ 66. БЕЗОПАСНОЕ ПРОИЗВОДСТВО РАБОТ
ПО ПЕРЕМЕЩЕНИЮ ГРУЗОВ КРАНАМИ
В каждом цехе, на строительной площадке или другом участке,
обслуживаемых гр'узоподъемнымв кранами, приказом администрации предприя-
тия в каждую смену из числа инженерно-технических работников (начальников
смен, сменных мастеров, прорабов, начальников производственных участков),
в распоряжении которых находятся краны, назначается Лицо, ответственное
за безопасное производство работ по перемещению грузов кранами (после про-
верки его знаний соответствующих разделов Правил по кранам и инструкций
крановщика и стропальщика). Фамилии этих лиц должны быть указаны на
таблице, вывешенной на видном месте участка работ. Приказ об их назначении
должен иметься на участке производства работ.
Лицо, ответственное за безопасное производство работ, должно иметь понятие
об устройстве и устойчивости кранов и знать: соответствующую инструкцию;
порядок производства работ кранами, инструкции по безопасному ведению работ
для машинистов н стропальщиков; правильные способы обвязки и зацепки гру-
зов; знаковую сигнализацию; требования, предъявляемые к съемным грузо-
захватным приспособлениям и таре; назначение приборов безопасности на кра-
нах; правила установки кранов вблизи линий электропередачи и вблизи отко-
сов котлованов, и траншей; габариты приближения кранов к строениям, штабе-
лям грузов и т. п.; грузовые характеристики кранов, находящихся в его веде-
нии; назначение дополнительных опор у стреловых кранов.
При авариях и несчастных случаях лицо, ответственное за безопасное про-
изводство работ по перемещению грузов кранами, должно немедленно принять
меры по оказанию пострадавшим медицинской помощи и поставить в известность
214
администрацию предприятия, а также обеспечить до прибытия инспектора со-
хранность обстановки аварии, если это не представляет опасности для жизни
и здоровья людей и не нарушает порядка работы предприятия.
§ 67. ТРЕБОВАНИЯ К ОБСЛУЖИВАЮЩЕМУ ПЕРСОНАЛУ
К работе в качестве крановщика (машиниста), его помощника,
оператора, слесаря, электромонтера, стропальщика и сигнальщика допускаются
лица мужского н женского пола не моложе 18 лет, прошедшие медицинский
осмотр, признанные годными для этой работы и прошедшие обучение по специаль-
ности, а крановщики — дополнительно курс практической работы на кране
сроком не менее одного месяца под руководством опытного крановщика. Управ-
ление автомобильным краном может быть поручено шоферу после его обуче-
ния по программе крановщиков. К управлению кранами, управляемыми с пола
(кроме управляемых по радио), могут допускаться рабочие после соответству-
ющего инструктажа и проверки навыков пользования. Лицам, выдержавшим
экзамены, выдается удостоверение, которое они должны иметь при себе. Повтор-
ная проверка знаний лиц обслуживающего персонала и инструктаж рабочих,
управляющих кранами, должны проводиться периодически, но не реже одного
раза в 12 месяцев. Допуск к работе должен оформляться приказом по цеху или
предприятию.
Для подвешивания груза на кран должны назначаться стропальщики.
Если затруднена связь между крановщиком и стропальщиком, то назначается
сигнальщик из числа стропальщиков. Подвешивание груза на крюк крана,
управляемого с пола, допускается производить рабочим, прошедшим инструк-
таж.
Госгортехнадзором СССР утверждены «Инструкция по безопасному веде-
нию работ для машинистов (крановщиков) стреловых самоходных кранов (же-
лезнодорожных, автомобильных, гусеничных, пневмоколесных)» и «Инструкция
по безопасному ведению работ для стропальщиков (зацепщнков), обслуживающих
грузоподъемные краны» 126].
Машинист несет ответственность за нарушение указаний, изложенных
в инструкциях.
Стропальщик должен выполнять установленные инструкцией обязанности
перед началом работы, при обвязке и зацепке грузов, при подъеме и перемеще-
нии груза, при опускании груза. Стропальщик подчиняется лицу, ответствен-
ному за безопасное производство, работ по перемещению грузов, и несет ответ-
ственность за нарушение указаний, изложенных в инструкции.
Вопросы для повторения ]. Какие инженерно-технические работники
обеспечивают безопасную работу кранов? 2. Для чего проводят статические
и динамические испытания кранов? 3. Кто допускается к управлению крана-
ми? 4. Какие установлены сигналы стропальщика с помощью руки?
РАЗДЕЛ ВТОРОЙ
ТРАНСПОРТИРУЮЩИЕ МАШИНЫ
ГЛАВА 18. ОБЩИЕ СВЕДЕНИЯ
§ 68. КЛАССИФИКАЦИЯ, основные определения
И ПАРАМЕТРЫ
Транспортирующие машины предназначены для
перемещения насыпных и штучных грузов непрерывным потоком
по заданной трассе без остановок для загрузки и разгрузки.
Одновременно грузы могут распределяться по заданным пунктам
трассы, складироваться и перемещаться но технологическим опе-
рациям. Транспортирующие машины являются одним из наи-
более прогрессивные видов транспорта, которые обеспечивают
высокую производительность при больших грузопотоках. В про- -
мышленности строительных материалов транспортирующие ма-
шины являются неотъемлемой частью технологического про-
цесса, они обеспечивают бесперебойную подачу сырья и полу-
фабрикатов к технологическому оборудованию, регулируют темп
производства, способствуют повышению производительности труда
и увеличению выпуска продукции, позволяют решать вопросы
комплексной механизации транспортно-технологических процес-
сов. В ряде случаев элементы транспортирующих машин входят
в состав технологических машин. Непосредственная связь
этих машин с общим технологическим процессом производства
обусловливает к ним повышенные требования в отношении
прочности и способности работать в автоматических режи-
мах, надежности, экономичности и удобства в эксплуата-
ции.
К транспортирующим машинам относятся:
1) конвейеры (транспортеры), предназначенные для переме-
щения сыпучих, кусковых и штучных грузов; конвейеры разде-
ляют на две группы: с тяговым элементом — ленточные, пла-
стинчатые, скребковые, ковшовые, люлечные, подвесные и др.
(рис. 129, а ... ж) и без тягового элемента — винтовые, инерци-
онные, роликовые (рис. 130);
2) устройства пневматического транспорта, предназначенные
для перемещения сыпучих или штучных грузов по трубопроводам
или желобам при помощи сжатого или разреженного воздуха (см.
рис. 189);
3) устройства гидравлического транспорта, применяющиеся
для перемещения сыпучих и кусковых грузов в смеси с водой по
трубам и желобам (см. рис. 208);
216
Рис. 129. Конвейеры с тяговым элементом
а — ленточный; 6 — пластинчатый; в — скребковый; г— ковшовый; д— подвесной;
е — люлечный; ;ж — злевнтор
4) вспомогательные устройства для хранения и выдачи груза
(бункера, затворы, питатели), гравитационные (лотки, трубы,
спуски, скаты), а также для взвешивания, дозирования и счета
грузов (автоматические весы, дозаторы, счетчики).
По направлению и трассе перемещения грузов машины непре-
рывного транспорта могут быть вертикально или горизонтально
замкнутыми и пространственными.
Транспортирующие машины могут быть стационарными, под-
вижными, переставными, переносными и передвижными на
колесах или гусеницах (два последних вида машин относятся к по-
грузочным машинам).
Основные направления развития современных транспорти-
рующих машин следующие: 1) создание системы машин для
бесперегрузочного транспортирования грузов от начального до
конечного пунктов по сложным трассам большой протяженности;
2) повышение производительности конвейера благодаря выбору
наиболее рациональной формы грузонесущего органа, а также
путем увеличения его скорости движения; 3) повышение надеж-
217
Рис. 130. Конвейеры без тягового элемента:
а — винтовой; б — вибрационный; в — роликовый
ности машин, упрощение их обслуживания, уменьшение обслужи-
вающего персонала — эти требования являются основными пред-
посылками для перехода к полной автоматизации управления ма-
шинами и комплексами машин; 4) автоматизация управления с ис-
пользованием ЭВМ; 5) снижение массы и уменьшение размеров
путем создания принципиально новых, облегченных конструкций
с применением пластмасс и легких сплавов, гнутых профилей
и т. п.; 6) создание транспортных роботов-манипуляторов для
выполнения автоматической загрузки и разгрузки конвейеров
в процессе их движения; 7) улучшение условий труда обслужива-
ющего персонала и производственных рабочих, защита окружаю-
щей среды путем полной герметизации или изоляции пылевидных,
горячих, газирующих н химически агрессивных грузов; снижение
шума при работе машин; 8) унификация и нормализация оборудо-
вания.
К основным параметрам транспортирующих машин относя-
тся: производительность, скорость перемещения груза, длина
218
и конфигурация трассы, режим работы, характеристика переме-
щаемого груза, климатическое исполнение и категория размеще-
ния (ГОСТ 15150—69), а также особые производственные условия.
§ 69. ТРАНСПОРТИРУЕМЫЕ ГРУЗЫ
Физико-механические свойства грузов имеют реша-
ющее значение при выборе конвейеров или проектировании новых.
Грузы разделяют на насыпные и тарно-штучные.
Насыпными (навалочными) считаются массовые кусковые,
зернистые, порошкообразные и пылевидные грузы, хранимые и
перемещаемые навалом (например, уголь, щебень, песок, цемент
и др.). Насыпные грузы характеризуются следующими показа-
телями.
Кусковатость (гранулометрический состав) характеризует
распределение частиц груза по крупности. Характер однород-
ности частиц груза в заданном объеме (пробе) определяется коэф-
фициентом Л'о ama.x/amjI1 [здесь агаах и amiri — наибольшие и наи-
меньшие размеры однородных кусков (рис. 131, а)|. При /Со > 2,5
груз считается рядовым, при < 2,5 — сортированным. Рядо-
вые грузы характеризуются кусками наибольших- размеров
— а сортированные — средним размером кусков аср —
— (Яшах -г amLn)/2. Кусковатость принимается во внимание при
выборе типа транспортирующих машин, определении размеров
грузонесущих органов, а также отверстий бункеров, воронок и
лотков.
Насыпная (объемная) плотность р (т/м3) представляет собой
отношение массы груза в насыпанном состоянии к его объему; она
различна для свободно насыпанного, влажного и уплотненного
грузов вследствие наличия воздушных промежутков между ча-
стицами. Насыпная плотность зависит от крупности частнц. По
насыпной плотности грузы разделяются на легкие (р до 0,6), сред-
ние (р св. 0,6 до 1,6), тяжелые (р св. 1,6 до 2,0) и особо тяжелые
Рис. 131. Схемы к определению:
а — наибольшего размера куска груза; б — углов естественного откоса
219
(более 2,0). Насыпная плотность учитывается при определении
производительности транспортирующих машин, выборе их типа,
нахождении расчетных нагрузок и давлений на стенки и затво-
ры выпускных отверстий бункеров.
Влажность характеризуется наличием воды (%); ее опреде-
ляют высушиванием влажной массы твп пробы груза до постоян-
ной массы тс при температуре 105 °C:
w = (^вл - тс) Ю0/тс.
Угол естественного откоса <р характеризуется углом между
образующей конуса из свободно насыпанного груза и горизон-
тальной плоскостью (рис. 131, б). Этот угол обусловлен взаимной
подвижностью частиц груза (для воды = 0), иа которую влияют
влажность, температура, кусковатость и др. Различают угол д
в состоянии покоя (опорная плоскость неподвижна) и движения
Табл и ц а 32. Основные характеристики насыпных грузов
Груз Группа абразив- ности Насыпная плотность р, т/м3 Угол есте- ственного откоса в покое <р, а Коэффициент трения покоя f
ПО стали по ре- зине
Алебастр обожженный В 1,25 ... 1,5 40 0,6 0,6
кусковой Гипс дробленый куско- В 1,3 ... 1,6 40 0,6 0,7
вой Глина сухая в кусках в 1,0 ... 1,5 40 0,75 —
Гравий Известь: в 1,5 ... 1,9 45 0,8 0,7
гашеная в порошке в 0,5 ... 0,9 50 — —
негашеная в 0.8 ... 0,93 50 —' —
Камень известковый в 1,6 ... 2,0 45 0,56 0,5
Клинкер цементный Песок: д 1.28 ... 1,52 — — —
крупный влажный с 1.4 ... 1,9 45 0,7 0,56
мелкий влажный Q 1,9 ... 2,0 45 0,8 0,56
мелкий сухой Q 1,4 ... 1,65 30 0,8 0,56
Торф сухой кусковой Уголь: А 0,33 ... 0,44 45 0,75 —
бурый сухой В 0,65 ... 0,78 50 0,8 0,7
каменный мелкий Цемент: В 0,8 ... 0,85 45 0,8 0,64
портландскнй С 0,96 ... 1,6 40 0,3 ... 0,64
шлаковый с 0,9 ... 1,2 0,65
Шла к каменноугольный Щебень: д 0,6 ... 1,0 50 1 0,66
булыжный д 1,5 ... 1,8 45 0,63 0,6
бутовый д 1,4 ... 1,6 45 0,5 —
кирпичный д 1,2 ... 1,35 45 0,5 —
220
Рис. 132. Схемы-к определению производительности конвейеров;
а —в — соответственно при непрерывном потоке груза, штучных и порционных грузах
(плоскость колеблется или движется с толчками). В последнем
случае угол уменьшается и составляет в среднем <рд as 0,7<р.
Угол естественного откоса в покое может быть определен с по-
мощью полого цилиндра 1 (см. рис. 131, б), в который насыпают
груз 2, а затем цилиндр осторожно поднимают. Высыпавшийся
при этом груз-располагается в виде конуса, образующие которого
наклонены к горизонтальной плоскости под углом ф. Угол естест-
венного откоса учитывается при определении площади сечения гру-
за, расположенного иа грузонесущем органе.
Коэффициент трения груза на грузонесущем органе учитывают
при определении продольных углов наклона конвейеров, воронок
и пересыпных лотков.
Абразивность — свойство частиц груза истирать (изнашивать)
соприкасающиеся с ним рабочие поверхности элементов машин
непрерывного транспорта, желобов и пр. Грузы разделяют на
четыре группы: А — неабразивные; В — малоабразивные; С —
средней и Д — высокой абразивности. Абразивность учитывается
при выборе материала рабочих поверхностей элементов, а также
защитных устройств опорных узлов машин непрерывного тран-
спорта.
Насыпные грузы характеризуются также слеживаемостью,
смерзаемостью, липкостью, а также особыми свойствами (химиче-
ской активностью, взрывоопасностью, самовозгораемостью, гиг-
роскопичностью и др.). В табл. 32 приведены основные характе-
ристики грузов, транспортируемых в промышленности строитель-
ных материалов.
Штучные и тарно-штучиые грузы характеризуются формой и
размерами, массой одной штуки, коэффициентом трения о поверх-
ность ленты, настила или лотка и особыми свойствами — хруп-
костью (изделия из стекла), склонностью к качению вследствие
округлости формы или к пылению (мешки с цементом), взрывоопас-
ностью, наличием острых выступов, повреждающих элементы кон-
вейера, и т. п. Основные виды тары для тарных штучных грузов
установлены стандартами: ящики для грузов до 200 кг
221
(ГОСТ 5959—80); пакеты бумажные (ГОСТ 13502—68); мешки
бумажные (ГОСТ 2226—75) и .др. Тарно-штучные грузы массой
до 15 кг называют легкими, от 15 до 50 кг средними, от 50
до 200 кг — тяжелыми, от 200 кг — весьма тяжелыми. При тран-
спортировании грузы располагаются на некотором расстоянии,
называемом шагом (см. рис, 132, в).
§ 70. ОСНОВЫ РАСЧЕТА КОНВЕЙЕРОВ
Исходными данными для расчета конвейеров явля-
ются: максимальная производительность, характеристики тран-
спортируемого груза, схема трассы со всеми размерами, режим
работы и особые треббвания к конвейеру. В расчетах различных
конвейеров применяют несколько одинаковых понятий и методов,
которые изложены ниже.
Производительность. Основными показателями, определяю-
щими производительность, являются среднее количество груза,
находящееся на единице длины грузонесущего органа конвейера,
и рабочая скорость перемещения груза. В зависимости от поло-
жения груза на грузонесущем органе различают следующие виды
перемещения груза.
1. Перемещение груза непрерывным потоком, равномерно рас-
положенным подлине конвейера (рис. 132,- а). Если масса распо-
ложенного на единице длины конвейера груза q (кг/м) движется
со скоростью v (м/с), то секундная производительность равна
qv (кг/с), а часовая массовая производительность (т/ч)
Qm = 3600^/1000 - 3,6<ус\ (136)
откуда
q - Qm/(3,6u), (137)
Если известна площадь сечения груза А (м2), то объем на
единице длины конвейера равен А 1 (м3) и соответственно объем-
ная производительность (м3/ч)
Qv - 3600A v = 3600^/р. (138)
Соотношение между массовой по формуле (136) и объемной по
выражению (138) производительностями Qm = pQy/1000.
2. Перемещение груза отдельными порциями, расположенными
с шагом /гр (рис. 132, б). При вместимости ковша t() (м3), коэффи-
циенте заполнения его грузом ф < 1 масса груза на единице длины
конвейера q = £орф//гр, поэтому массовая производительность
(т/ч)
Qm = 3,6(?и З,6^рфи/Ггр; (139)
объемная (м3/ч)
Qv - З,6/Офи/4Р. (140)
Соотношение между ними Qm = pQy.
222
Ряс. 133. Схема расчета сопротивлений
передвижению на прямолинейном уча-
стке
3. Перемещение штучных
грузов массой т^. расположен-
ных с шагом /гр (рис, 132, в).
Масса груза на единице длины
конвейера q mrv7гр и мас-
совая производительность (т/ч):
Qm -•- 3,6ГПгр^/^гр' (141)
При интервале времени между единичными грузами t = /гр/Ф
(с) штучная производительность (шт/ч)
Qz 3,6ШррЦ//рр.
(142)
Соотношение между производительностями по формулам (141)
и (142): = mrpQz/1000.
Тяговый расчет. Этот расчет выполняют для определения
натяжений тягового органа на всей длине трассы конвейера, при
этом трассу разбивают на характерные по виду сопротивлений
участки: прямолинейные, криволинейные, огибания барабанов
(звездочек), места загрузки и разгрузки, очистные устройства.
При расчете находят сопротивления на указанных участках, на-
тяжения в граничных точках участков. В результате тягового
расчета строят диаграмму натяжений тягового органа и определяют
тяговое усилие на приводном барабане (звездочке) и усилие на-
тяжного устройства.
Сопротивления передвижению грузонесущего органа. Опре-
деляются на характерных участках трассы. Исходными данными
являются нагрузки на 1 м длины от массы груза q и грузонесу-
щего органа 7().
На наклонном прямолинейном груженом участке длиной L
(рис. 133) основными сопротивлениями являются составляющая
(Н) от весов груза и грузонесущего органа:
~ (q Ь qt1) gL sin р = (q + gH‘ (143)
сопротивление (H) от трения в опорных элементах грузонесу-
щего органа
№тр = (q [ q{i) gH cos p — (q + t/J gLr, (144)
где P — угол наклона, °; q6 — масса f м длины грузонесущего органа, кг; g -=
= 9,81 м/с2; И — высота подъема груза, м; Lr — проекция пути перемещения
на горизонталь, м; tty, — обобщенный коэффициент сопротивления, зависящий
от типа конвейера л его параметров.
К дополнительным относятся сопротивления на криволинейных
участках, в местах загрузки и разгрузки, от очистительных уст-
ройств. Эти сопротивления существенно зависят от конструктивных
особенностей конвейера и обычно учитываются как добавочные
223
к основному сопротивлению по формуле (144) с помощью соответ-
ствующих коэффициентов.
Обобщенный коэффициент 0,1 ... 4,2 определяют экспе-
риментально: меньшие значения относятся к конвейерам, несущим
груз (ленточные, пластинчатые и т. п.), а большие — к конвейе-
рам, волочащим груз (скребковые, винтовые и т. в.).
Выбор расположения привода и натяжного устройства. Опти-
мальное место расположения привода определяется двумя усло-
виями: I) расчетное натяжение грузонесущего органа должно быть
наименьшим из возможных вариантов расположения привода;
2) суммарные потери тягового усилия иа перегибах грузонесущего
органа должны быть минимальными из всех возможных вариантов
расположения привода. У конвейеров с горизонтальными и полого-
наклониыми участками оба условия выполняются при располо-
жении привода в конце груженого участка грузонесущего органа.
При других трассах место расположения привода определяют по
диаграмме натяжения грузонесущего органа.
Натяжное устройство предпочтительно располагать в точке
минимального натяжения грузонесущего органа.
Мощность привода. При транспортировании груза энергия
привода расходуется иа преодоление основных сопротивлений по
формулам (143) и (144) и дополнительных. В предварительных
расчетах учитываются основные сопротивления от массы транс-
портируемого груза при = Qm/(3,6V). При этом мощность на
рабочем органе — барабане, звездочке (кВт)
Р -= (№тр ± WVp) ООО = </g(w0Lr ± Н) и/1000 =
= Зт£ИЛг± Я) у/( 1000’3,би) = ± /7)/367, (145)
где знак «плюс» перед 1Ггр и Н ставится при подъеме груза, а знак «минус» —
при опускании груза.
Двигатель выбирается по установочной мощности (кВт)
гуот =- Х,Р/Т1, . (146)
где К3 ~ 1,1 ... 1,3—коэффициент запаса, учитывающий возможные пере-
грузки конвейера; Т| — общий КПД привода.
Если известно тяговое усилие (Н) на рабочем органе, то
установочная мощность двигателя (кВт)
Рус. = К37>/(1000т|). (147)
Режимы работы. Конвейеры эксплуатируются в разнообраз-
ных условиях во времени, при различных производительности,
загрузке и натяжении грузонесущего органа, что учитывается па-
раметром, который называется режимом работы конвейера. За
основу классификации конвейеров по режимам работы приняты
два основных показателя: класс использования конвейера во
времени и класс использования конвейера по производительности.
224
Таблица 33. Режимы работы конвейеров
Класс испольэо- Коэффициент относи- Класс использования по производительности
П1 П2 | пз
вання во времени тельного времени работы за сутки Кв с Коэффициент общей загрузки Кп
До 0,25 Св. 0,25 до 0,63 Ся. 0,63 До 1,0
В1 В2 ВЗ В4 В5 До 0,20 Св. 0,20 до 0,32 » 0,32 » 0,63 » 0,63 » 1,0 1,0 ВЛ л с т т ВЛ л с т ВТ Л С Т ВТ ВТ
Класс использования конвейера во времени характеризуется
коэффициентом относительного времени плановой работы конвей-
ера за сутки (или год)
Кв. с = пл/^с, (148)
гДе % пл — плановое время работы за сутки, ч; tc — фактическое (календар-
ное) время работы, ч.
Класс использования конвейера по производительности ха-
рактеризуется коэффициентом общей загрузки
А"и “ Qm ср/Qm max — Qz cp/Q z max! (149)
Табл и ц a 34. Основные характеристики условий работы конвейеров
Условия работы Характеристика условий работы Характерцые примеры
Легкие Чистое, сухое, отапливае- мое, беспыльное, хорошо осве- щенное помещение; удобный доступ для обслуживания Цехи приборостроения, по из- готовлению одежды и т. п.
Средние Отапливаемое помещение, но пыльное или сырое, средняя освещенность и удобный до- ступ для обслуживания Топливоподача ТЭЦ, формо- вочные отделения литейных це- хов, пищевая промышленность и T. [I.
Тяжелые Работа в неотапливаемом помещении и на открытом воз- духе; плохая освещенность и удобный доступ для обслужи- вания Карьеры открытых разрабо- ток полезных ископаемых в рай- онах умеренного климата; транс- портные средства в галереях; обогатительные фабрики и др.
Весьма Наличие указанных выше Карьеры открытых разрабо-
тяжелые факторов, вредно влияющих на работу конвейера ток полезных ископаемых в рай- онах холодного климата; лесо- разработки на открытых пло- щадках
8 Балашов В. П.
225
где Qm ср> Qm max — средняя и максимальная массовая производительность
по формулам (136), (139), (141); Q2Cp, Qz max — средняя и максимальная
штучная производительность по формуле (142), шт/ч.
В зависимости от комбинаций коэффициентов по формулам
(148) и (149) конвейеры относятся к режимам работы весьма лег-
кому (ВЛ), легкому (Л), среднему (С), тяжелому (Т) и весьма
тяжелому (ВТ) (табл. 33). Коэффициенты по формулам (148) и (149)
применяют при расчете элементов конвейеров на прочность
и сопротивление усталости, кроме того, оии являются характери-
стикой фактического эксплуатационного использования конвей-
ера. Конвейеры характеризуются также внешними условиями
работы (табл. 34).
Вопросы для повторения- 1. Какие виды машин относятся к транспор-
тирующим машинам непрерывного транспорта? 2. Назовите главные физико-
механические свойства грузов, транспортируемых в промышленности строитель-
ных материалов. 3. Каким образом определяют угол естественного откоса
груза? 4. Какие различают виды производительности транспортирующих ма-
шин? 5. Как определяют сопротивление грузонесущего органа на прямолинейных
груженых участках? 6. Как определяют мощность привода конвейера?
ГЛАВА 19. ЛЕНТОЧНЫЕ КОНВЕЙЕРЫ
§ 71. ОБЩИЕ СВЕДЕНИЯ
Ленточными называют конвейеры, грузонесущим и
тяговым органом которых является гибкая лента. Движение ленты
происходит благодаря силам трения, возникающим между поверх-
ностью лепты и поверхностью приводного барабана. Необходимое
прижатие ленты к барабану обеспечивается предварительным на-
тяжением ленты. Ленточные конвейеры применяют в карьерах
и на производственных предприятиях промышленности строитель-
ных материалов для- перемещения сыпучих порошкообразных,
мелко- и среднекусковых грузов, а также штучных грузов
непрерывным потоком в горизонтальном и пологонаклонном
направлениях. Эти конвейеры могут использоваться также
в качестве элементов технологических машин, в погрузочных
и перегрузочных устройствах. По расположению на рабочем месте
различают конвейеры стационарные и передвижные, а по приме-
нению — общего назначения и специальные.
Стационарный конвейер общего назначения (рис. 134) состоит
из закрепленной на фундаменте или на несущих частях здания
опорной стальной конструкции 6 в виде пространственной фермы.
В передней части конвейера расположен привод 11 с приводным
барабаном 7, а в задней части — барабан с натяжным устройст-
вом 1. Замкнутая (бесконечная) гибкая лента 5 охватывает бара-
баны и опирается на верхние 4 и ннжиие 10 роликоопоры. В за-
226
висимости от типа роликоопор верхняя ветвь леиты может быть
по форме плоской или желобчатой; при желобчатой ленте можно
увеличить массу перемещаемого насыпного груза и соответственно
производительность примерно в 2 раза при той же скорости и ши-
рине ленты, В коротких конвейерах лента вместо роликов может
опираться на деревянный или металлический иастил. Груз по-
ступает на ленту через загрузочное устройство 2, которое может
быть стационарным или передвижным, а разгружается через
воронку 8 приводного барабана или в любом месте трассы с по-
мощью плужковых сбрасывателей 3 или передвижной разгрузоч-
ной тележки. Конвейеры снабжены дополнительными устройст-
вами безопасности, контроля и автоматизации, а также устройст-
вами очистки ленты 9. Параметры конвейеров регламентирует
ГОСТ 22644—77.
Конвейеры могут быть выполнены с различными трассами
длиной 30 ... 350 м с углом наклона до 30° (рис. 135). В каждом
Рис. 135. Схемы трасс ленточных конвейеров:
а — прямолинейная; б — наклонная; в — наклонно-горизонтальная; г ~ горизонтально-
наклонная; д — сложная
8*
227
Рис. 136. Передвижной ленточный конвейер
конкретном случае конвейеры проектируются индивидуально
согласно заданию, но при этом составные части конвейера
выбираются из типоразмерных рядов имеющегося оборудова-
ния.
Передвижные ленточные конвейеры по ГОСТ 2103—78 (рис. 136)
применяют для перемещения небольшого количества груза на
расстоянии от 5 до 15 м. Они состоят из тех же основных элементов,
что и стационарные, но дополнительно снабжены колесным хо-
дом 2 и механизмом 1 изменения угла наклона конвейера для обе-
спечения подачи груза на высоту разгрузки 1,5 6,0 м при глад-
кой ленте н до 9,6 м при рифленой. В переносных конвейерах от-
сутствует колесный ход и механизм изменения угла наклона;
длина этих конвейеров до 5 м, масса ие более 100 кг. При расчете
ленточных конвейеров учитывают производственные условия ок-
ружающей среды (см. табл. 34).
Из транспортирующих машин в промышленности строи-
тельных материалов ленточные конвейеры наиболее распростра-
нены благодаря высокой надежности, долговечности, простоте
конструкции, способности транспортировать насыпные и штучные
грузы, сравнительно невысоким капитальным затратам на их
изготовление, возможности автоматизации и простоте обслужива-
ния. Недостатками являются малые углы наклона (16 ... 24°)
и невозможность создания криволинейных (в плане) трасс. В кон-
вейерах с увеличенным углом наклона применяют специальные
рифленые или с поперечными перегородками ленты.
228
§ 72. КОНВЕЙЕРНЫЕ ЛЕНТЫ
Конвейерная лента является основным, наиболее
дорогим (примерно 50 % стоимости конвейера) и наименее дол-
говечным элементом конвейера. Лента должна обладать прочно-
стью, гибкостью, ограниченным удлинением, износостойкостью
рабочей поверхности. Наибольшее применение получили прорези-
ненные конвейерные ленты, состоящие из каркаса (набора прокла-
док), заключенного между резиновыми обкладками (рис. 137, а).
Каркас предназначен для поддержания груза и передачи тяговых
усилий. Резиновые обкладки защищают каркас от механических
повреждений и воздействия окружающей среды. По типу каркаса
ленты делят на резинотканевые (каркас из тканевых прокладок)
и резинотросовые (каркас из стальных тросов) общего назначения
и специальные. Прочность ленты характеризуют усилием разрыва
полоски прокладки шириной 1 см, называемым прочностью ленты
(Гр, значения которого (Н/мм) указываются цифрами в обозначении
ленты.
Для прокладок резинотканевых леит наиболее употребительны
ткани из лавсановых (типа ТЛ) и анидных (типа ТА) волокон,
комбинированные лавсано-хлопчатобумажные (типа БКНЛ), с
брекером из капроновой основы (типа ТК), из лавсана по основе
и нитей капрона по утку (типа ТЛК).
Рнс. 137. Конвейерные ленты:
а — резинотканевая; б — резинотросовая; в — с поперечными перегородками; г — с риф-
леными выступами; I — тканевая прокладка; 2 — резиновая обкладка; 3 — брекер-
ная ткань; 4 — стальной трос; 5 — перегородки
229
Таблица 35. Основные характеристики резинотканевых лент
Тип ткани каркаса ленты Число прокладок при ширине ленты (мм)
650 800 1000 [200 (400 1600 [800
БКНЛ-65 3—6 3—8 4—8
БКНЛ-100. ТА-100 3-4 3—5 3- -6 4—6 4- -8
БКНЛ-150, ТА-150 3—4 3-5 3- -6 4—6 4- -8
ТЛ-200 — 3—6 4-6
Пр имечание. Цифры в обозначении ткани каркаса, например цифры
«65» (БКНЛ-65) означают прочность (Н/мм) прокладки шириной I см.
Ширина ленты и число прокладок регламентированы
ГОСТ 20—76 (табл. 35). Толщины тканевых прокладок 6П = 1,2 ...
2,0 мм, резиновых обкладок рабочей 6j = 3 ... 6 м, нерабочей
62 = 1 ... 3 мм.
Ленты типа БКНЛ применяют для транспортирования абра-
зивных грузов; типа ТА, ТЛ, ТЛК для транспортирования средне-
кусковых абразивных грузов; типа ТА — для транспортирования
среднекусковых и типа ТК — для транспортирования крупно-
кусковых скальных грузов. Достоинствами резинотканевых лент
являются возможность их выбора в широком диапазоне прочност-
ных параметров, относительная простота выполнения стыков,
высокая амортизирующая способность при динамических нагруз-
ках. Недостатки этих лент: значительное удлинение (до 4 %)
при рабочих нагрузках, увеличенные размеры барабанов при
большом числе прокладок.
Резииотросовые ленты (типа РТЛ) состоят из силового каркаса
(одного ряда стальных проволочных тросов диаметром 3 ... 12 мм,
расположенных с шагом 9 ... 18 мм) и наружных резиновых об-
кладок (рис. 137, б). В обкладке могут быть несколько тканевых
прокладок для связи силового каркаса. Резинотросовые ленты
имеют высокую прочность (500 ... 6000 Н/мм), небольшое удлине-
ние при рабочих нагрузках (до 0,25 %) и повышенную долговеч-
ность fill. Недостатками являются большая масса, сложность
изготовления стыкового соединения, увеличенные радиусы пере-
гибов и др. Ленты применяют для транспортирования крупно-
кусковых абразивных грузов.
Для увеличения угла наклона конвейера применяют специаль-
лые леиты с поперечными перегородками (рис. 137, в), рифлеными
выступами (рис. 137, г) и др., которые препятствуют сдвигу ча-
стиц груза.
Ширину ленты определяют с учетом заданной производитель-
ности, причем для насыпных грузов учитывается крупность кус-
230
Рис, 138. Схема расположения насыпного груза на ленте, установленной на
роликоопорах:
а — прямой; б — двухроликовой желобчатой; в — трехроликовой желобчатой
ков, а для штучных — размеры грузов. На ленте, поддерживае-
мой прямыми роликоопорами, сечение насыпного груза представ-
ляет собой примерно равнобедренный треугольник (рис. 138, а),
площадь которого (м2):
А = bh/2 = 0,25Ь2 tg ср,, (150)
где b = (0,9В — 0,05) — рабочая ширина ленты, на которой расположен груз, м
(свободные поля позволяют избежать просыпания груза с ленты); h = 0,5b tg
высота слоя груза, м; q^ = 0,35ф—угол при основании груза на движущей
ленте [здесь ср—угол естественного откоса (см. табл. 32)].
Выразим массовую производительность по формуле (136)
через параметры площади сечения груза по выражению (150):
Qm - 3v6<p = ЗбООЛрпЛр -- 3600 (0,25Ь2 tg tpj pvK$ =
= (3600- 0,25-tg (Pi) py/(p£>2 = Л'дс'А'.ф2, (151)
где v — в м/с; q — в кг/м; р — в т/м3; — коэффициент, учитывающий умень-
шение сечения груза на наклонном участке конвейера, вследствие частичного
ссыпания груза в сторону, противоположную движению (табл. 36); К и =
= 3600Д/Ьа — коэффициент площади поперечного сечения груза на ленте
(табл. 37).
Из формулы (151) находим необходимую ширину ленты (м)
в 5г 1,1 (> <?ro/(K„vpK8) + 0,05). (152)
На ленте, поддерживаемой желобчатыми опорами, общая пло-
щадь сечения насыпного груза равна сумме площадей треуголь-
ника и трапеции, стороны которой обусловлены размерами роли-
ков и углом их наклона аж (рис. 138, в). Ширину ленты определяют
по формуле (152) при соответствующем значении коэффициента
Кц (см. табл. 37).
231
Таблица 36. Значения коэффициента /Ср для ленты
с резиновой гладкой рабочей поверхностью
Подвижность частиц груза Угол наклона конвейера р, °
1 ... 5 6 ... 10 11 ... 15 16 ... 21 21 ... 24
Легкая, <рх — Ю' 0,95 0,90 0,85 0,80 —
Средняя, ф] — 15* 1 0,97 0,95 0,90 0,85
Малая, фг -- 20е 1 0,98 0,97 0,95 0,90
Чтобы исключить выступание кусков за пределы ленты, ши-
рину ленты, найденную по формуле (152), проверяют на кускова-
тость по условию
В ха + 200 м-м,
(153)
где а — размер наибольших кусков, мм (см, с. 219); х = 3,3 — для сортирован-
ного груза; х = 2 — для рядового.
По большему значению В из формул (152) и (153) окончательно
принимаем ширину ленты из нормального ряда (см. табл. 35).
При штучных грузах ширину ленты определяют в зависимости
от размеров груза и способа его загрузки на ленту так, чтобы
по обе стороны от грузов оставались свободные поля ленты шири-
ной не менее 50 ... 100 мм.
Необходимое число прокладок резинотканевой ленты
/ *$тах I^V(Op5),
(154)
где Sma,—максимальное натяжение ленты, Н; In] — допускаемый коэффи-
циент запаса прочности; [«] — 8 — для горизонтальных; [л ] — 10 — для
наклонных конвейеров; Ор — прочность ленты, Н/мм, ширины; В — в мм.
Число прокладок принимаем с учетом ширины ленты (см.
табл. 35).
Толщина леиты (мм)
6Л - i + Mi + 62,
(155)
Таблица 37. Значения коэффициента /Сп
Ролнкоопора Подвижность частиц груза
легкая( = 10° средняя. = 15° малая, — 20°
Прямая (см. Желобчатая рис. 138, а) двух роликовая (см. 250 375 330 450 420 535
рис. 138, б) Желобчатая рис. 138, в) 20 30 трехроликовая при угле наклона (см. «ж- *' 470 550 550 625 640 700
232
где бп— толщина прокладки, мм; 6г; б2 — толщины рабочей и нерабочей об-
кладок, мм.
Масса одного метра длины ленты (кг/м)
?л - О,ОО1Я6Л. (156)
Необходимую ширину резиногросовых лент определяют по
формулам (152) и (153). Принятую ленту проверяют на прочность,
Н/мм, ширины прокладки
*^iriax
где Smax — в Н; [я] = 8 ... 10 — коэффициент запаса прочности; В — в мм.
§ 73. РОЛИКОВЫЕ ОПОРЫ
По назначению роликовые опоры разделяют на рядо-
вые (линейные), предназначенные для поддержания ленты и при-
дания ей необходимой желобчатой формы, и специальные — цент-
рирующие, амортизирующие, дисковые и др.
Рядовые опоры могут быть прямыми и желобчатыми. Первые
состоят из ролика, установленного иа стойках, которые прикреп-
лены к опорной конструкции (рис. 139, а, д\, вторые имеют по-
перечину, на стойках которой смонтированы два, три или пять
роликов (рис. 139, б, ж). Угол наклона боковых роликов 20 и
30°, что позволяет повысить производительность при той же ши-
рине ленты и улучшить ее центрирование.
Основным исполнением рабочей поверхности роликов являются
гладкие ролики. Ролик состоит из цилиндрического корпуса <?,
в) ж)
Рис. 139. Роликоопоры:
а—г — для верхней ветви конвейера соответственно прямая, рядовая желобчатая, амор-
тизирующая, центрирующая; д—ж — для нижней ветви соответственно прямая, дисковая
очистная, желобчатая
233
Рис. 140. Ролики;
а —- среднего типа; б — тяжелого типа; в — без вкладыша
выполненного из отрезков труб, штампованных вкладышей 2
и установленных на оси 1 шарико- или роликоподшипников 4,
которые защищены надежными уплотнениями 5 (рис. 140, а, б).
Ролики выполнены с жестким креплением осей, причем оси с лыс-
ками закладываются в прорези стоек. Диаметры роликов £>р
выбирают в зависимости от ширины ленты, насыпной плотности
груза и скорости движений лецты (табл. 38), а длину — в зависи-
мости от ширины ленты.
Разработан и внедряется унифицированный ряд роликов без
вкладышей, у которых конец трубы закатай в полуоси, вращаю-
Таблица 38. Диаметр ролика Х)р (мм) прямой и желобчатой
роликоопор
Ширина ленты В, мм Насыпная плотность груза р, т/м*
до 1,6 | 2,0 3.5
Максимальная скорость ленты и, м/с
1.6 2,0 2,5 2,5 3,2
400 ... 650 63; 89 — 102; 108
800 63; 89 — 102 108 . 127 133 152 159
1000 - —
1200 — -
1400 ... 2000 — — -' —
234
Таблица 39. Предельные расстояния между рядовыми роликоопорами
груженой ветви резинотканевой ленты (мм)
Насыпная плотность Ширина ленты В, мм
400: Б 00 650: 800 1000; 1200 1400; 1600 2000
груза р. т/м’
До 1,0 1500 1400 1300 1200 1100
Св: 1,0 до 2,0 1400 1300 1200 1 100 1000
» 2,0 » 3.5 1300 1200 1 100 1000 900
щиеся в выносных подшипниках (рис. 140, в). На наружном
кольце подшипника имеется прорезь для установки в стойки ро-
ликоопоры. Стоимость роликов составляет 25 ... 30 % общей
стоимости конвейера. На ролики приходится до 80 % затрат по
обслуживанию и ремонту механического оборудования. От их
работы во многом зависит долговечность ленты и потребление энер-
гии приводом конвейера. Срок службы роликов до первого ре-
монта не менее 18 000 ч.
Основные детали роликоопор унифицированы для лент различ-
ной ширины. Расстояние между роликоопорами на рабочей ветви
принимают в зависимости от ширины ленты и насыпной плотности
транспортируемого груза (табл. 39). На обратной ветви ленты ро-
ликоопоры устанавливают на расстоянии (2 ... 3) /р, но ие более
2,5 ... 3,5 м. При транспортировании мелких штучных грузов
массой до 20 кг принимают /р -- 1,0 ... 1,4 м. Для тяжелых
штучных грузов массой более 20 кг расстояние /р принимают рав-
ным половине наибольшего размера груза в направлении движе-
ния конвейера.
Центрирующие роликоопоры регулируют положение ленты
относительно продольной оси конвейера, ибо лента постоянно
смещается в поперечном направлении вследствие неточной сты-
ковки концов ленты, неравномерной вытяжки ее по ширине и не-
симметричного расположения груза (смещение ленты может при-
вести к аварии). Эта опора выполнена аналогично рядовой опоре,
но ее поперечина может поворачиваться относительно вертикаль-
ной оси на центральной опоре. Опору иногда снабжают дефлектор-
ными роликами (см. рис. 139, г).
При отклонении в сторону лента кромкой нажимает на дефлек-
торный ролик, что приводит к повороту роликоопоры. Возникаю-
щее при этом усилие между опорными роликами и лентой воз-
вращает последнюю в центральное положение (рис. 141). После
того как лента возвратиться в центральное положение, ролико-
опора движением ленты автоматически устанавливается в нормаль-
ное положение.
Амортизирующие опоры служат для смягчения ударов груза
в зоне загрузки, поэтому их ролики футеруют резиной (см. рис.
139, в). Опоры могут быть также пружинными или с резиновыми
235
f Направление
3 8 .имен и я ленты
Рис. 141. Схема действия сил
на дефлекторный и опорный ро-
лики при смещении ленты влево:
1.2 — соответственно дефлектор-
ный н опорный ролики
роликами. При транспор-
тировании пылевидных,
порошкообразных, зернис-
тых и мелкокусковых гру-
зов устанавливают не ме-
нее трех рядовых опор с
шагом 0,5/р.
В зоне перехода ленты
из прямого положения в
желобчатое иа рабочей вет-
ви у головного и хвостового барабанов устанавливают две-три пе-
реходные роликоопоры с уменьшенным углом наклона боковых
роликов аж на расстоянии /р.
Для очистки ленты от липких грузов применяются дисковые
опоры (см. рис. 139, е).
Типы и основные размеры роликоопор установлены
ГОСТ 22645—77.
§ 74. ПРИВОДНЫЕ И НАТЯЖНЫЕ УСТРОЙСТВА
Приводное устройство (рис. 142, а) предназначено
для сообщения ленте движения и необходимого тягового усилия.
Оно состоит из опорной рамы 2, на которой смонтированы привод-
ной барабан 3, отклоняющий ролик редуктор 4, двигатель 5.
Обязательным условием работоспособности фрикционного
привода является создание в ленте предварительного натяжения
для прижатия ее к барабану. Зависимость между натяжениями
набегающей на барабай ленты SH6 (Н) и сбегающей с барабана Sc6
(Н) определяется формулой Эйлера (рис. 142, б):
S„6 = е,а$сб. (157)
где е = 2,72 — основание натуральных логарифмов; / — коэффициент трения
между лентой и барабаном; а — угол обхвата барабана лентой, рад.
Наибольшее тяговое усилие, которое может быть передано
барабаном (Н);
^Itlax-S[(G-Se6-- Sc6(e^-1). (158)
Для исключения пробуксовывания ленты во всех возможных
режимах работы конвейера рабочее тяговое усилие должно быть
F„ = ЮООР/у < F,„„/X3, (159)
где Р в кВт; и в м/с; JKS = 1,3 ... 1,4 — коэффициент запаса.
236
Рис. 142. Схемы приводных уст-
ройств конвейера:
а — общий вид; б — однобарабанный
привод: в однобарабанный привод
с отклоняющим роликом; г — двух-
барабанный привод
Величину &а, характери-
зующую тяговую способность
барабана, называют тяговым
коэффициентом. Чем больше
значение этого коэффициента,
тем меньше натяжение ленты
для обеспечения тягового
усилия по формуле (158)-
Тяговый коэффициент можно
увеличить повышением коэф-
фициента трения /'благодаря
применению футерованного
барабана с фрикционными
материалами, например, с
резиной и увеличением угла
обхвата а барабана лентой,
для чего используют откло-
няющие ролики (рис. 142, в)
или два приводных барабана
(рис. 142, г).
В конвейерах большой
протяженности для уменьше-
ния максимального натяже-
ния ленты применяют мно-
годвигательный привод,
расположенный на соответ-
ствующих участках трассы.
Барабаны могут быть при-
водными (рис. 143, а) и на-
тяжными (рис. 143, б). Ба-
бараиы выполняют сварными с обечайкой из листовой стали.
Диаметр барабана выбирают по условию обеспечения достаточной
долговечности ленты в зависимости от числа прокладок.
Для резинотканевой ленты диаметр барабана (мм)
Пг, > KiKJ,
(160)
где Кг — коэффициент, учитывающий прочность тканевых прокладок ленты,
его значения следующие в зависимости от прочности ор тканевых прокладок, Н/мм,
ширины; Ор — 50, 100, 150 и 200 и соответственно К( — 1,25; 1,4, 1,6 и 1,8;
К.2. — коэффициент, учитывающий усилие в ленте и угол обхвата барабана
(табл. 40); i — число прокладок в ленте.
В предварительных расчетах при диаметре приводного бара-
бана D5 можно принимать диаметры концевых и натяжных
237
Рис. 143. Барабаны:
а — приводкой; б — натяжной и обводной
барабанов примерно равными 0,8Об; диаметр обводного бараба-
на примерно равным 0,657Эб.
Для резннотрособых лент диаметр барабанов определяют
в зависимости от прочности ленты на разрыв [11]. Полученный
диаметр округляют до ближнего большего размера из нормаль-
ного ряда: 160, 200, 250, 315, 400, 500, 630, 800, 1000, 1250,
1600, 2000 и 2500 мм. Длина барабана (мм)
L = В + (150 ... 200). (161)
Барабан проверяют на среднее давление ленты (Па)
рср = 360 (Знб - Зсб)/(ОбВал) « [р], (162)
где а — угол обхвата барабана лентой, °; D$, В — в м; для лент резинотка-
невых [р ] = 0,2 ... 0,3 МПа, резинотросовых [р] — 0,35 ... 0,55 МПа (меньшие
значения для лент меньшей прочности).
Во избежание сбегания ленты приводные барабаны выполняют
бочкообразными со стрелой выпуклости, равной L/200, но не
менее 4 мм.
Расчетный крутящий момент на валу приводного барабана
(Н м), по которому выбирают редуктор (см. § 27):
Мк1, = Х3ГА/2, (163)
где Кд — 1,1 ... 1,2 — коэффициент, учитывающий сопротивления; D$ — в м.
Таблица 40. Значении коэффициента Кг
Угол обхвата барабана лентой а, 0 Усилие ленты в месте установки барабана, % от 5тах Угол обхвата барабана лентой а, 0 Усилие ленты в месте установки барабана. % от Srnax
100 75 50 25 100 75 50 25
180 ... 240 100 80 63- 50 15 ... 30 63 50 40 32
90 ... 110 —‘ 63 50 40 Менее 15 50 40 32 25
238
В качестве привода применяют электродвигатели асинхрон-
ные общепромышленной серии 4А. Двигатель выбирают после тя-
гового расчета конвейера.
В наклонных конвейерах для предотвращения самопроизволь-
ного хода груженой ленты вниз под действием силы тяжести груза
в приводе предусматривают храповые или роликовые остановы
(см. § 30) или колодочные нормально закрытые тормоза (см. § 31)
при ПВ = 100 %.
Для привода питателей, передвижных н переносных конвейе-
ров применяют мотор-барабаны (рис. 144), в которых ротор и ста-
тор двигателя 3 н передаточный механизм 2 смонтированы внутри
обечайки 1 барабана. Имеются мотор-барабаиы диаметром 200 ...
800 мм н мощностью 1 ... 30 кВт.
Натяжные устройства создают начальное натяжение ленты,
достаточное для передачи тяговой силы трением при разгоне и
установившемся движении ленты конвейера; ограничивают про-
висание ленты между роликоопорами; компенсируют удлинение
ленты и сохраняют некоторую запасную длину ленты, необходи-
мую для ремонта ее при. повреждениях. Натяжные устройства
могут быть винтовыми и грузовыми, а по расположению на кон-
вейере — хвостовыми и промежуточными; натяжение ленты осу-
ществляют перемещением натяжного барабана.
Винтовые натяжные устройства применяют в передвижных и
стационарных конвейерах длиной до 60 м и небольших усилиях
в ленте (рнс. 145, а). Этн устройства компактны, но обладают ма-
лым ходом, приводятся вручную и требуют периодического регу-
лирования. Винты работают на сжатие и их расчет аналогичен
расчету вннта домкрата (см. § 39), но при этом учитывают нерав-
номерность нагрузки на винты 1см. формулу (164)1.
На конвейерах длиной 60 ... 500 м распространены грузовые
натяжные устройства, которые автоматически компенсируют удли-
нения ленты и поддерживают ее постоянное натяжение в процессе
эксплуатации. Недостаток этих устройств - громоздкость. Наи-
большее распространение получили устройства тележечного
(рнс. 145, 6) и рамного (рис. 145, е) типа, у которого необходимое
натяжение создается силой тяжести подвешенного груза. Теле-
жечное устройство выполнено с концевым барабаном, а рамное —
установлено на обратной ветви конвейера непосредственно
после приводного барабана.
Усилие натяжного устройства (Н)
Рн.у - (Sj + S2 + Г), (164)
где S2 — натяжения ветвей ленты, набегающей и сбегающей с натяжного
барабана, Н; № — сопротивление перемещению ползунов .винта или колес на-
тяжной тележки, Н.
Масса натяжного груза (кг)
mH.r = P».7/g. (165)
239
Рнс. 144. Мотор-барабан
240
V В)
Рис. 145, Натяжные устройства:
а — винтовое, б грузовое тележечное; в — грузовое рамное; I — ползун; 2 — направ-
ляющие; Я — винт
Для уменьшения массы натяжного груза применяют поли-
спасты.
Рабочий ход натяжного устройства (м)
хв Ks&L, (166)
где Ks ~ (0,63 ... 0,8) — коэффициент использования ленты по натяжению;
принимают в зависимости от класса использования конвейера [11]; в—отно-
сительное удлинение ленты при максимальном натяжении (для резинотканевых
лент 8 = 0,015, резинотросовых е — 0,0025); L — полная длина трассы кон-
вейера, м.
Ход натяжного устройства для резинотканевых лент примерно
составляет 1 % длины трассы конвейера, для резинотросовых
лент — не менее 500 мм.
Общий ход натяжного устройства (м)
*Об = *Н ’ I ' (167)
где хм = (0*3 ... 2,0) В — монтажный ход для компенсации изменения длины
ленты при ремонте и перестыковке, м.
§ 75. ЗАГРУЗОЧНЫЕ И РАЗГРУЗОЧНЫЕ УСТРОЙСТВА
Загрузка н разгрузка ленточного конвейера может
производиться в любом пункте по длине трассы. Насыпные грузы
загружаются на ленту конвейера из бункера и с технологических
транспортных и погрузочных машин. В большинстве случаев за-
грузка происходит у заднего концевого барабана. Загрузочное
устройство должно обеспечивать центрирование и равномерное
расположение груза по длине ленты; скорость подачи груза на
ленту, близкую скорости движения ленты; формирование грузо-
241
потока в загрузочном устройстве, а не на ленте; исключение по
возможности воздействия на ленту и роликоопоры массы посту-
пающего груза; отсутствие завалов и рассыпание груза по сторо-
нам; возможность регулирования скорости подачи груза.
Загрузочные устройства для насыпных грузов могут быть
с самотечным или принудительным движением груза. К первым
относятся воронки с затворами и без затворов, направляющие лот-
ки с прямолинейным днищем (рис. 146, а) или криволинейного
профиля (рис. 146, в). Прн использовании последних обеспечива-
ется скорость груза при выходе, близкая к скорости ленты (не
более 3 м/с). При транспортировании крупнокускового груза це-
лесообразно применять решетчатый желоб (рис. 146, б) (сначала
на ленту попадают мелкие кускн, а затем — более крупные)
или желоб с амортизирующими лентами (рис. 146, в).
Ширина выходного сечения загрузочного устройства должна
составлять 0,6 ... 0,7 ширины ленты, тогда груз распределится
на расчетную ширину, равную 0,8 В. На концах боковых и зад-
них стенок лотка устанавливаются сменные уплотнительные по-
лосы из мягкой износостойкой резины (рис. 147). В зоне загрузки
роликовые опоры располагают так, чтобы исключалось просыпа-
ние материала в щели между стенками воронки и лентой при
провисании последней.
В загрузочных устройствах с принудительным движением груз
перемещается под воздействием приводных устройств, к которым
относятся различные виды питателей. Скорость подачи груза
на ленту не более 1 м/с. С питателей груз свободно падает на ленту,
поэтому для формирования грузопотока необходима установка
направлящих бортов и т. п.
Штучные грузы подают при помощи различных направляющих
спусков или укладывают на конвейер вручную, а также с по-
Рис. 146. Схем],! загрузочных устройств:
а — со сплошным jjoikom; б с решет чатным жело-
бом; в — с амортизирующими резиновыми лентами
мощью транспортных
роботов.
При разгрузке кон-
вейера с переднего кон-
цевого барабана или
перегрузке груза с од-
ного конвейера на дру-
гой оп редел яют место
Рис. 147. Поперечные сече-
ния загрузочного лотка
242
Вид А
а. в — передвижные плужковые сбрасывающие устройства соответственно двусторонние
и односторонние; б — барабанная разгрузочная тележка
установки экрана в приемных лотках, воспринимающего удары
частиц падающего груза; для этого строят траекторию свободного
полета частиц насыпного груза [11, 271.
Воронки и желоба проектируют так, чтобы не происходило
ударов разгружаемого груза о стенки, при этом предусматриваются
средства защиты от быстрого изнашивания стенок (резиновые на-
кладки , слой груза, размещенный в специальных карманах-отсеках).
Разгрузку в промежуточных пунктах вдоль трассы произво-
дят с помощью плужковых сбрасывателей (рис. 148, а, в) или
барабанных разгрузочных тележек (рис. 148, в). Насыпной или
штучный груз, дойдя до щита сбрасывателя, перемещается вдоль
него. Обычно щит установлен под углом 30 ... 40° относительно
продольной оси конвейера, но при условии, что этот угол будет
меньше или равен (90° — /) (здесь f — угол трення груза о щит).
В разгрузочной тележке (рис. 148, в) установлены два направля-
ющих барабана, на которых лента изменяет направление движе-
ния, а насыпной груз под действием сил инерции сбрасывается
с ленты и попадает в отводящие трубы. Длина тележкн составляет
примерно 5 м.
243
Рис, 149. Устройства для очистки ленты конвейера:
а — скребок; б — щетка
§ 76. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ
Частицы груза, прилипающие к ленте, напрессовыва-
ются на поверхность роликов обратной ветви ленты и вызывают
ее сбегание в сторону. Поэтому предусматриваются устройства
для очистки обеих поверхностей ленты, а также поверхностей
переднего и заднего барабанов. Для очистки рабочей поверхности
ленты от сухих и влажных, но не липких грузов применяют
резиновые скребки (рис. 149, а), а липких и намерзающих грузов—
вращающиеся цилиндрические щетки (рис. 149, 6). Эти устрой-
ства, установленные после разгрузочного барабана, прижимают
к поверхности ленты с линейным усилием 200 ... 300 Н/м, созда-
ваемым пружинами или рычагом с грузом. Могут быть установлены
также роликовые очистители, выполненные в виде прямой ролико-
опоры с металлическими или резиновыми дисками (см. рнс. 139, е).
Для очистки внутренней поверхности ленты применяют ск реб-
кн плужкового типа, а поверхностей барабанов — стальные скреб-
ки. Очищаемый груз падает в воронки. В качестве профилактиче-
ских мёр против загрязнения ленты используют гидрофобные по-
крытия, растворы, обогрев и др.
При транспортировании пылевидных материалов ленту поме-
щают в закрытый кожух.
Для автоматизации работы конвейера, защиты его от повре-
ждения и обеспечения безопасности работы используют датчики
скорости, наличия груза на ленте, датчики, фиксирующие запол-
нение воронок. Магнитные шки-
вы, магнитные сепараторы и
металлоискатели позволяют
удалять из транспортируемого
груза металлические включе-
ния. Конвейеры оборудуются
Рис. 150. Выключающее тросовое
устройство
244
тросовыми выключающими устройствами, смонтированными вдоль
трассы и позволяющими остановить конвейер из любого пункта
трассы (рис. 150, б).
§ 77. ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ
ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
Расчет и проектирование рассмотрим на примере лен-
точного конвейера для транспортирования щебня со следующими
исходными данными (рис. 151, а): производительность средняя
Qm -= 200 т/ч; максимальная Qniax - 280 т/ч; р - 1,6 т/м3; атах =
70 мм (куски таких размеров составляют 10 % общей массы);
Ф —- 45°; подвижность частиц средняя. Конвейер расположен
в неотапливаемой галерее (условия работы тяжелые). Загрузка
через воронку, разгрузка через концевой барабан. Барабан фу-
терован резиной. Расстояние транспортирования L = 200 м,
высота подъема Н 24 м.
1. Выбор проектной схемы. Схема конвейера должна быть без
лишних перегибов ленты, привод по возможности однобарабанный.
Если проектируется конвейерная линия, то рекомендуется при-
менять отдельные конвейеры максимальной длины с минималь-
ным числом перегрузочных пунктов.
Пример. Принята трасса конвейера с наклонным и горизонтальными уча-
стками (см. рис. 135, в), привод однобарабанный с углом обхвата барабана
лентой а —- 200° (см. рис. 142, в).
Рнс. 151. Схема к расчету ленточного конвейера:
а — общий вид; б, в - соответственно выпуклый и вогнутый участки
245
2. Определение параметров трассы. Угол наклона должен
удовлетворять условию Ртах < КзФ (здесь ф — угол естествен-
ного откоса груза в состоянии покоя (см. табл. 32); /\э — коэффи-
циент запаса; для грузов легкой подвижности = 0,35; средней —
/<:> = 0,40; малой — - 0,55 I. Предельные углы наклона при
резинотканевых лентах с гладкой поверхностью: (3 24 для
кусковой влажной глины; [3 = 18е для известняка и рядового
каменного угля; = 20° для цемента; (5=15 ... 17° для деревян-
ных и 0 = 12 ... 15° для металлических ящиков; 0 = 15е для
картонных коробок; 0 = 18 ... 20е для льняных и джутовых
мешков; р = 15 ... 17° для бумажных мешков.
Пример. Угол наклона Ьш.ч\ Д /С3ф = 0,4-45° = 18°, где Кз = 0,4 — коэф-
фициент запаса, учитывающий среднюю подвижность частиц щебня. Принято
Р= 18°.
Длина наклонного участка конвейера
= Д/sin р = 24/0,309 = 77,6 м.
Длина горизонтальной проекции наклонного участка
Llr - Я/tg р = 24/0,324 = 74,07 м - 74 м.
Длина горизонтального участка конвейера
/,2Г = — Lir = 200 — 74 - 126 м.
Полная длина трассы конвейера
СТ = ц + t8r = 77,6 4- 126 = 203,6 м.
3. Определение расчетной производительности. Расчетная мас-
совая производительность (т/ч)
<2тР = (168)
где Ки — (1,1 ... 1,5) — коэффициент неравномерности загрузки, зависящий
от способа загрузки; = 0,8 ... 0,95 — коэффициент использования конвейера
по времени; Кг = KriKv>, — коэффициент готовности отдельных конвейеров;
для одного конвейера Кг = 0,96.
Расчетную производительность при транспортировании штуч-
ных грузов н объемную производительность определяют по фор-
мулам (142) и (138).
Пример. Расчетная массовая производительность QT р = QmKd(KtKr) ~
= 200-1,15/(0,9-0,96) = 266 т/ч, где Кв = 1,15; Kt = 0,9; Кс = 0,96.
4. Выбор скорости ленты. Скорость при насыпных грузах
выбирают с учетом условий работы конвейера, характеристик тран-
спортируемого груза, способов загрузки и разгрузки (табл. 41).
Для наклонных конвейеров скорости должны быть снижены при-
мерно на 20 %, если конвейер имеет максимальный угол наклона.
Рекомендуемые скорости для штучных грузов: о = 0,5 ...
1,6 м/с — бумажные мешки с цементом, мелом; v = 0,3 ...
0,6 м/с — ящики массой более 50 кг.
В случаях выполнения на ленте технологических операций
скорость принимают в зависимости от условии выполнения этих
операций.
246
Т а б л и ц а 41. Рекомендуемые значения скоростей ленты (м/с)
при разгрузке через головной барабан
Груз Ширина ленты В. мм
400 — 500 650- 800 1000- 1200 1400- 1600 1800 — 2000
Порошкообразные и зернистые, кро- шение которых не понижает качества 1,25 ... 1,6 2 ... 2,5 2,5 ... 4 3,15 ... 4 3,15 ... 5
Мелко- и средпе- кусковые 1,25 ... 1,6 1,6 ... 2 2 ... 2,5 2,5 ... 3,15 —
Крупнокусковые — — 1.6 ... 2 2 ... 2,5 2,5 ... 3,15
Пылевидные и по- рошкообразные, сухие, пылящие 0,8 0,8 1.0 1,0 1,0
Хрупкие, куско- вые, крошение ко- торых снижает их качество 1,25 1,6 1,6 2,0 2,0
Пример. Предполагаемая ширина ленты 600 ... 800 мм, поэтому из табл. 41
принята скорость 1,6 м/с. Так как угол наклона максимальный, то скорость
ленты уменьшена на 20%; d= 0,8-1,6 — 1,28 м/с. Принята скорость v =
~ 1,3 м/с.
5. Выбор ленты и определение ее ширины. Тип ленты прини-
мают в зависимости от вида транспортируемого груза и условий
работы конвейера (см. § 72).
Пример. Профиль сечения рабочей ветви ленты желобчатый с углом aJK=
= 30° (см. рис, 138, б). Необходимая ширина ленты по формуле (152):
1,1 КО7(?7С^рХз)+О,О5 = 1,1 ]f 266/(625-1,3-1,6 0,9) +0,05 = 0,57 м,
где Кв -- 625 из табл. 37; = 0,9 из табл. 36 при средней подвижности груза.
Ширина ленты по условию кусковатости (153):
В > хсша< | 200 — 2-70 + 200 = 340 мм.
С учетом группы абразивности Д (ГОСТ 20—76) принята резинотканевая
лента ТА-150 шириной В = 650 мм (см. табл. 35).
6. Выбор роликоопор. Размеры роликов, виды роликоопор и
расстояние- между роликоопорами выбирают в зависимости от
скорости и ширины ленты с учетом насыпной массы груза (см.
§ 73).
Пример. По табл. 38 при и = 1,3 м/с, В ; 650 мм и р = 1,6 т/м3 приняты
рядовые роликоопоры с роликами диаметром 89 мм. Расстояния на прямолиней-
ных участках между верхними желобчатыми роликоопорами в — 1,3 м;
нижними прямыми /р Ц — 2,6 м (см. табл. 39). Линейные массы роликоопор
желобчатой qp. }К — ;1(//р, в — 10,9/1,3 - 8,38 кг/м; прямой <7р. и—
= тр. ц//р. и “ ’ 9,2/2.6 — 3,54 кг/м [здесь тр. ж — 10,9 кг, тр. п = 9,2 кг —
массы вращающихся частей роликоопор (табл. 42)].
247
Таблица 42. Значение масс вращающихся частей роликоопор
Ширина ленты В, мм Роликоопора
желобчатая прямая
Dp, мм тр. Ж’ кг Dp, мм тр п, кг
500 102 10,0 102 6,0
650 89 10,9 89 9,2
650 102 12,5 102 10,5
800 89 8,5 89 7,7
800 127 22,0 127 19,0
1000 127 25,0 127 21,5
1200 127 29 0 127 26,5
1400 159 49.8 159 41,9
1600 159 54,9 159 46,7
1800 159 62,0 159 50,0
2000 194 98,1 159 50,0
В зоне перехода ленты из плоского положения в желобчатое, и наоборот,
у барабанов предусмотрены по три переходные опоры на расстоянии /р = 1,3 м.
Центрирующие роликоопоры установлены через каждые 10 рядовых ролико-
олор. В месте загрузки и на криволинейном участке груженой ленты расстояние
между роликоопорами /р. 3 = 0,5 /р = 0,65 м.
Примерное число роликоопор: желобчатых пж = L//Pi в = 200/1,3 = 154;
прямых — L/lp. и — 200/2,6 = 77.
7. Предварительное определение мощности и натяжений ленты
на приводном барабане.
Пример. Мощность на приводном барабане по формуле (145):
Р Qmp + W)/367 = 266 (0,09-200 + 24)/367 = 30,4 кВт,
где =-- 0,09 согласно табл. 43.
Тяговое усилие на барабане по формуле (159)
До - 1000 P/v = Ю00-30,4/1,3 = 23 400 Н.
Натяжения набегающей ветви ленты
5нб = 5тах = foef°7(efa — 1 > = 23 400 2,82/(2,82 — 1) = 36.300 Н.
Табл и ц а 43. Обобщенный коэффициент сопротивления w0
для ленточных конвейеров
Производительность QTp, т/ч
Длина ip. м 1 0 20 30 100 200 4 00
10 2,0 1,4 0,92 0,67 0,50 0,37
50 0.51 . 0.39 0,28 0,21 0,17 0,14
125 0,29 0.23 0,18 0,14 0,12 0,10
250 0.12 0,11 0,09 0,07 0.06 0,04
248
Таблица 44. Значения коэффициента трения /
для прорезиненных лент
Поверхность барабана Состояние поверхности барабана
сухое влажное очень влажное
Стальная, чугунная 0,30 0,20 0,10
Футерованная:
рез нной 0,40 0,30 0,15
деревом 0.35 0,25 0,15
Натяжение сбегающей ветви ленты
5сб = SHg/e^ = 36300/2,82 = 12900 Н,
где = 2,82 — тяговый коэффициент при а — 200° = 3,48 рад; / = 0,3 —
коэффициент трения при влажной поверхности барабана, футерованного рези-
ной (табл. 44).
8. Предварительное определение числа прокладок ленты и
ее характеристик. Число прокладок должно соответствовать ши-
рине ленты (см. табл. 34). Если полученное расчетом число про-
кладок больше имеющихся у принятой ширины ленты, то прини-
мают леиту с более высокой прочностью. При меиьшем числе про-
кладок принимают ближайшее большее число их или выбирают
ленту меньшей прочности.
Пример. Необходимое число прокладок по формуле (154) при коэффициенте
запаса прочности [п] = 10 (наклонный конвейер) i Sm3x (n]/(oRB) =
= 36 300- 10/(150. 650)’ - 3,72.
Принято i = 4, что соответствует В = 650 мм (см. табл. 35). Толщина ленты
по формуле (155): 6 — -ф 6а = 4-1,2 -ф 4 -ф 1 — 9,8 мм. Линейная
масса ленты по выражению (156): = 0,001 В& = 0,001.650-9,8 = 6,37 кг/м
^6,4 кг/м.
9. Определение размеров барабанов. Диаметры барабанов оп-
ределяют с учетом принятого числа прокладок и они должны со-
ответствовать нормальному ряду диаметров.
Пример. Диаметр приводного барабана по формуле (160):
Об > - 1,6-100.4 640 мм,
где Kj = 1,6 (см. с. 237); Кг ~ 100 (см. табл. 40).
Из нормального ряда принят Df> = 800 мм (см. с. 238).
Среднее давление лепты на барабане по формуле (162):
рСр = 360 (SH6 — 5сб)/(ОбВал) = 360 (36 300 — 12 900)/(0,8 0,65-200л) =
= 25 700 Па = 0,025 МПа < [р] =0,3 МПа.
Диаметр натяжного барабана
Дб.н > 0,8-640 = 512 мм.
Из нормального ряда принят Dg. н 600 мм.
Длина барабанов по формуле (161) Lg = В -ф 150 = 650 -ф 150 = 800 мм.
Стрела выпуклости барабанов
/ - Lg/200 = 800/200 - 4 мм.
249
10. Тяговый расчет конвейера. Этот расчет выполняют для
определения натяжений ленты на всех участках трассы конвей-
ера, проверки принятых натяжений ShG и Sc6 и определения
места установки натяжного устройства. Для тягового расчета не-
обходимо определить сопротивления движению ленты на отдель-
ных участках конвейера. С этой целью принятую трассу разби-
вают на участки — прямолинейные, горизонтальные и наклон-
ные, криволинейные, загрузки, разгрузки и т. п.
Точки сопряженных соседних участков нумеруют последова-
тельно в направлении движения ленты, начиная с точки сбегаиня
ленты с приводного барабана. Натяжение в начальной точке при-
нимают равным натяжению Sc6, увеличенному на 20%.
Пример. Из табл, 45 для тяжелых условий работы ш — 0,03; ^аР = 1,05
(натяжной барабан); Кбар = 1,03 (отклоняющие барабаны); Кбат = 1,05 (Р0'
ликовая батарея).
Линейная масса груза по формуле (137):
= QTp/(3,6.y) = 266/(3,6.1,3) ~= 56,8 кг/м.
Натяжение ленты в точках трассы конвейера (см. рис. 151, а)
- 1,25нб--1.2.12 900 15 480 Н; .82 .8\ -154 800 И;
53 = = L03.15 480 = 15 900 Н;
S4 = S3 + (<?Л + Яр. п) £^21^ —
= 15900 +(6,44-3,54)9,81.126 0,03=^16 270 Н;
S5 = Кбар54 = 1,03.16 270 = 16 760 Н;
Se ~ S5 4- (яп + яр. п) — я.^11 =
= 16 760 -4- (6,4 + 3,54) 9,81-74-0,03 — 6,4-9,81-24 15 470 Н;
S7 = 7(6apSe = 1,03. 15 470 - 15 930 Н; SH ~ S7 -= 15 930 Н;
5Э = A^OapSs = 1,05-15 930 = 16 730 Н.
Сопротивление в месте загрузки
1ГЭ = + 1Гзб + Н%п = 227 + 450 + 36 = 713 Н,
где И7зу = q (Ду)3 = 56,8.22 ~ 227 Н — сопротивление при сообщении грузу
необходимого ускорения (здесь Ди2 = у- — У3р 2); Ц7зб = —
= 0,7-0,24а-1600-9,81-1,2.0,6 - 450 Н — сопротивление частиц груза о не-
подвижные борта лотка (здесь = 0,7 — коэффициент трения; До “ 0,ЗЬл —
Таблица 45. Значения коэффициентов w, /(бар, Кбат
Условия работы (см. табл. 34) W ^бар ^бат
Угол обхвата барабана а, ° Угол отклоне- ния на батарее,
30 ... 90 91 ... 140 141 ... 180 5 ... 15 16 ... 25
Легкие 0,02 1,02 1,02 1,03 1,02 1,03
Средние 0,022 1,02 1,03 1,04 1,03 ' 1,04
Тяжелые 0,03 ... 0,04 1,03 1,04 1,05 1.05 1,05
Весьма тяжелые 0,04 ... 0,06 1,04 1,05 1,06 1.05 1,06
250
~ 0,8.0,3 = 0,24 м — высота груза в лотке; /л = 1,2 м — длина лотка); F3n —
= 7СПП/П — 30-1,2 36 Н —-сопротивление от трения уплотнительных полос
загрузочного лотка о ленту конвейера.
Сопротивления в точках трассы конвейера
Sio = S9 + - 16 730 + 713 =-= 17 440 Н;
5ц — + (Я + 7л 4“ 7р. ж) + (7 + 7л) g77 ~
= I 7 440 + (56,8 + 6,4 + 8,38) 9,81 74-0,03 4- (56,8 4- 6,4) 9,81-24 = 33 880 Н;
512 = Лбат^п = 1,05-33 880 = 35 570 Н;
SI3 = S12 4- (7 + 7л + 7р. ж) ё^гг3® =
= 35 570 4-(56,8 4-6,4 4- 8,39) 9,81-126-0,03 = 38 220 Н.
11. Проверка тягового усилия барабана.
Пример. Тяговое усилие достаточно при соблюдении условия из формулы (157):
Sis/Sj = 38 220/15 480 = 2,47 < = 2,82.
Условие выполнено.
12. Проверка прочности ленты.
Пример. Фактический коэффициент запаса прочности
п = 150-650-4/38 220 = 10,2 > fa] - 10.
13, Определение параметров грузового тележечного натяж-
ного устройства (см. рис. 145, б).
Пример. Необходимое усилие натяжного устройства
7’н. y .s9 : U7 - 15 930 + 16 730 + 300 = 32 960 Н,
где 117 = 300 Н — сопротивление передвижению тележки.
Необходимая масса груза
тн. у = Fh. y/g = 32 960/9,81 = 3360 кг.
Рабочий ход натяжного устройства по формуле (166):
хн = KseLT = 0,63-0,015-203 = 1,92 м,
где Ks — 0,63 — коэффициент использования ленты по натяжению; 6 = 0,Со-
относительное удлинение ленты; LT — 203 м — полная длина трассы кон-
вейера.
Ход натяжного устройства при монтаже
хм = 1,2В = 1,2-0,65 = 0,78 м.
Общий ход натяжного устройства по формуле (167):
х ~ хн 4- хм = 1,92 + 0,78 =•- 2,7 м,
14. Проверка провисания ленты. Проверка производится на
участке груженой ветви с наименьшим натяжением ленты и на-
ибольшим расстоянием между опорами. Работа без скольжения
груза по ленте и без просыпания его с ленты обеспечивается при
условии, если стрела провеса ленты составляет [fl < (0,0125 ...
0,025) Zp.fi.
251
Пример. Провес ленты на участке 10—// с наименьшим натяжением
(см. рис. 151,а)
Лпах = (я + «Л е'р. ./(8Sio) = <S6'8 +6'4)9.81 ‘.37(8-17 МО) =
0,007 м < |Д (0,0125...0,025) /р. а = (0,0125.. .0,025) 1,3 = 0,016. . .0,032 м.
15. Определение радиусов криволинейных участков. Радиус
дуги выпуклого участка (рис. 151, б) с роликовыми батареями (м)
/?вп (169)
гае В — ширина ленты, м; — коэффициент, учитывающий тип ленты и ее
натяжение (А\ ~ 10 ... 45 — для резинотканевых, = 90 ... 320 — для рези-
нотросовых лент).
На вогнутых участках считают, что лента провисает по па-
раболе (рис. 151, в). Радиус вогнутого участка (м)
SAK2/(MCOs2 0), (170)
где SA — натяжение ленты в наивысшей точке перегиба /1 при полностью за-
груженном горизонтальном участке и незагруженных криволинейном и наклон-
ном участках, Н; — 1,4 ... 1,8 — коэффициент запаса и типа натяжного
устройства; 0 — угол наклона, °; <?л — в кг/м; g — 9,81 м/с2.
Пример. Радиус выпуклого участка (см. рис. 151,6)
А?вп К, В = 20-0,65 13 м.
16. Выбор элементов привода конвейера. Для привода при-
нимают двигатели серии 4А с короткозамкнутым ротором, а при
мощностях более 75 кВт с фазным ротором. Отметим, что двига-
тели работают с ПВ 100 %. Установочная мощность двигателя
(кВт) по формуле (147)
Руст = К:Д>/(Ю00п). (171)
где Кз = 52 ... 1,3 — коэффициент; — окружное усилие па барабане из
тягового расчета; v — скорость ленты, м/с; q — 0,9 — КПД привода.
В конвейерах с наклонными участками трассы необходимость
установки тормозов определяется условием
t/maxgH cos 0,= У Wt,
где qmaxSB — сила тяжести груза на наклонных участках конвейера при макси-
мальной производительности; £! 11/; — полное сопротивление передвижению на
всех участках трассы.
Необходимый тормозной момент, приведенный к валу двига-
теля (Н-м):
[gIIiaxgtf cos 0 - К (Fo - qgH)] £?бт]/(2«р), (172)
где К — 0,5 — коэффициент возможного уменьшения сопротивлений на трассе
конвейера; Fo — окружное усилие на барабане, Н; ир — передаточное число
редуктора; q — КПД привода.
Пример. Кинематическая схема привода принята по рис. 142„ а.
Выбор двигателя. Окружное усилие на барабане
ро = S13 _ S1 = 38 220 - 15 480 = 22 740 Н.
Установочная мощность двигателя
Руст = Ka7’oy/(100Oq) = 1,2-22 740-) ,3/(1000-0,9) ----- 39,4 кВт.
252
Принят асинхронный электродвигатель с короткозамкнутым ротором типа
4А250 56УЗ (Рн = 45 кВт; пн = 985 об/мин; Кп=1,2; = 2,0; Jn
= 1,16 кг-м3; Л4Н = 436 Н-м).
Выбор редуктора. Частота вращения барабана
пб = £)60/(лОб) = 1,3-60/(ji-0,8) = 31 об/мин.
Необходимое передаточное число редуктора
и = пн/пб = 985/31 = 31,7.
Крутящий момент на тихоходном валу редуктора
Л4Т = K3F0D6/2 - 1,1.22 740-0,8/2 = 10010 Н-м,
где Кз~ 1,1 — коэффициент запаса.
При непрерывной работе Л4Э = 7ИТ = 9880 Н-м, поэтому с учетом и =
— 31,7 по табл. 13 принят редуктор типа Ц2-650 (Л4Н = 16 000 Н-м; 32,42).
Выбор тормоза. Тормозной момент, приведенный к валу двигателя:
А1Т [q^gH cos 0 - Ктр (Fo - qgH)] D6tj/(2up) =
-- [89,7-9,81-24 -0,5(22 740 - 56,8-9,81-24)] 0,8-0,9/(2-32,42) =
L 170 Н-м.
где (/щах = Qzn maxKn/P,6o) = 280.1,57(3,6-1,3) = 89,7 кг/м — линейная масса
груза при максимальной'производительности и возможной перегрузке конвейера
(Кп _ 1,5).
По данным табл. 22 принят тормоз типа ТКГ-200 с номинальным тормоз-
ным моментом 250 Н-м.
Выбор муфт. Расчетный момент муфты, соединяющий вал двигателя с ва-
лом редуктора:
. Мр = К1МН -- 1,2-436 = 523 Н-м.
По табл. 15 принята упругая втулочно-пальцевая муфта с тормозным шки-
вом диаметром 200 мм и номинальным крутящим моментом 500 Н-м.
Расчетный момент муфты, соединяющей вал барабана с валом редуктора:
Мр = KiMHUpT] = 1,2-436-32,42-0,9 = 15 270 Н-м.
По ГОСТ 5006—83 принята зубчатая муфта типа 1 с номинальным крутя-
щим моментом 1600 Н-м.
17. Выбирают или проектируют загрузочные и разгрузочные
устройства (см. § 75). При этом особое внимание уделяют разме-
рам разгрузочных воронок с учетом траектории движения груза.
§ 78. ОСНОВНЫЕ ПРАВИЛА ЭКСПЛУАТАЦИИ
И ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ ОБСЛУЖИВАНИИ
ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
Перед пуском в работу конвейер осматривают, при этом особое
внимание уделяют состоянию ленты. О начале работы конвейера находящиеся
вблизи люди должны быть предупреждены. Пуск конвейера производится вхоло-
стую (в течение 2 ... 3 мин лента не загружается), что способствует процессу симме-
тричного расположения ее на роликоопорах и барабанах. Лента должна пере-
мещаться равномерно и не сдвигаться в стороны от центральной оси. Загрузка
ленты должна быть равномерной на середину и без динамических нагрузок, ибо
односторонняя нагрузка по ширине ленты вызывает ее сползание. При работе
следует обратить особое внимание на положение ленты на роликоопорах, так как
смещение (боковой сдвиг) приводит к ее повреждению и, следовательно, к рас-
сыпанию груза. Качество очистки ленты контролируется очистными устрой-
253
ствами. Система конвейеров включается в определенной последовательности, во
избежание завалов грузом.
Длительную остановку следует производить только после полного освобож-
дения ленты от груза, а затем рекомендуется несколько ослабить натяжение
ленты, так как это способствует увеличению срока ее службы.
В случае возникновения опасности, нарушения работы механизмов, появле-
ния значительного бокового сдвига ленты и в других случаях, предусмотренных
инструкцией по эксплуатации, конвейер должен быть немедленно остановлен
без освобождения его от груза.
В процессе эксплуатации наблюдается вытягивание ленты, что приводит
к уменьшению силы трения между барабаном и лентой и, как следствие этого,
возникает пробуксовка барабана. Такое явление недопустимо, так как вызывает
ускоренное изнашивание ленты. К аналогичному результату приводит и увели-
ченное натяжение лепты. Поэтому необходимо поддерживать оптимальное на-
тяжение ленты. Если лента сдвинута в сторону более чем на 50 мм, то необхо-
димо произвести ее центрирование изменением положения роликоопор.
На длительность срока службы лепты влияет также состояние роликоопор.
При исправной работе ролики должны проворачиваться свободно, без заеданий,
поэтому роликоопоры необходимо периодически разбирать, чистить и смазывать
ноной смазкой. При остановке ролика на его поверхности образуется лыска, что
способствует интенсивному изнашиванию ленты.
В процессе эксплуатации ленты наблюдаются местные продольные и попереч-
ные разрывы, повреждения резиновых обкладок, расслоение тканевых прокладок
у кромок лент и др. Эти повреждения устраняют непосредственно на конвейере
при помощи переносного вулканизационного пресса. Чаще всего нарушаются
стыковые соединения, поэтому их периодически восстанавливают, используя
запасную длину ленты в натяжном устройстве или устанавливая новые отрезки
ленты. Концы ленты соединяют также при монтаже конвейера для того, чтобы
отдельные отрезки представляли собой замкнутую бесконечную ленту. Стыковое
соединение концов лент должно обеспечивать прочность, близкую или равную
прочности ленты, гибкость, плотность стыка, чтобы предотвратить просыпание
материала, износостойкость; кроме того, стыковое соединение должно быть про-
стым и возможно менее трудоемким в изготовлении.
Стыковка лент механическим способом с помощью заклепок, скоб, металли-
ческих шарниров, соединяемых Стальными стержнями или отрезками стального
троса (рис. 116, б, д), получила широкое распространение вследствие простоты,
но эта стыковка обладает недостаточной прочностью и гибкостью.
Лучшим способом соединения лент является горячая вулканизация, которую
производят электрическими вулканизационными аппаратами, состоящими из
двух обогреваемых дюралевых плит с зажимами. Схема разделки концов лент
показана на рис. 152, а. Поверхность ступеней тщательно очищают щеткой от
резины, при этом не должна быть повреждена ткань прокладок ленты. Очищен-
ные поверхности промывают бензином и этиленацетоном, смазывают резиновым
клеем, а между стыкуемыми поверхностями прокладывают сырую резину тол-
щиной 0,5 ... 0,8 мм. Ленты складывают и зажимают в вулканизационном аппа-
рате, в котором их нагревают 30 ... 40 мин до температуры 140 ... 145 °C, а затем
выдерживают в течение 15 ... 50 мин в зависимости от числа прокладок. Прочность
стыка получается практически равной прочности ленты, причем стык достаточно
износостойкий и не дает заметного утолщения.
При соединении лент холодной вулканизацией операции те же, что и при
горячей вулканизации, но при этом применяют клеи, не требующие высокой
температуры и давления.
Резинотросовые ленты стыкуют только методом горячей вулканизации,
при этом концы тросов освобождают от резины и собирают, как показано на
рис. 152, г:
Эластичность ленты резко снижается при работе на открытом воздухе при
низкой температуре. Процесс изнашивания ленты ускоряется при воздействии
на нее прямых солнечных лучей и атмосферных осадков, поэтому ленту необ-
ходимо защищать. На предприятиях промышленности строительных материалов
срок службы ленты составляет от девяти месяцев до двух лет.
254
г;
Рис. 152. Способы стыковки проре-
зиненных конвейерных лент:
а — разделки стыка резинотканевой
ленты перед вулканизацией; 6. в -
механические стыки; с — стык резнно-
тросовой ленты
Вопросы для повторения. 1. Из каких элементов состоит стационарный
ленточный конвейер? 2. Чем ограничивается максимальный угол наклона кон-
вейера? 3. Как устроены резинотканевая и резинотросовая ленты? 4. Для чего
необходимы натяжные устройства конвейеров? 5. Какими способами загружают
конвейер? 6. Какие требования предъявляют к загрузочным устройствам? 7. Ка-
ков порядок проектирования ленточного конвейера?
ГЛАВА 20. ПЛАСТИНЧАТЫЕ КОНВЕЙЕРЫ
§ 79. ОБЩИЕ СВЕДЕНИЯ
Пластинчатыми называют конвейеры, у которых тя-
говым органом являются цепи, а грузонесущим органом — настил
из пластин, которые закреплены на цепях. Эти конвейеры при-
255
меняют для транспортирования насыпных, крупиокусковых, аб-
разивных и тяжелых штучных грузов. При транспортировании
грузы-изделия могут подвергаться закалке, отпуску, охлаждению,
мойке, сушке, окраске и т. п. В промышленности строительных
материалов пластинчатые конвейеры используют для перемещения
горячего клинкера от вращающихся печей, обожженной извести,
известкового камня и др. Короткие пластинчатые конвейеры особо
прочной конструкции применяют в качестве питателей для по-
дачи грузов из приемных бункеров в дробилки и т, п.
Пластинчатый конвейер (рис. 153) состоит из станины 4 с на-
правляющими путями 5, приводной 1 и натяжной 7 звездочек,
охватываемых замкнутыми тяговыми цепями 5, на которых за-
креплены пластины 2. Загрузка осуществляется через лоток 6
в любом месте трассы, разгрузка — через головной барабан.
Конвейеры классифицируют по конструкции настила, виду трассы
и назначению.
Настилы состоят из стальных пластин (рнс. 154), которые вы-
полняют разомкнутыми (для штучных грузов), сомкнутыми и вол-
нистыми (для насыпных грузов). Настилы могут быть плоскими,
с бортами в виде коробки ковшеобразной формы. Волнистая форма
способствует надежному перекрытию соседних пластин, увеличи-
вает жесткость настила и повышает сцепление грузов с полотном,
что обеспечивает их перемещение под большими углами наклона.
Конвейеры, у которых пластины имеют форму лотка, называют
лотковыми.
Схемы трасс пластинчатых конвейеров приведены на рис. 155.
В качестве тяговых элементов применяют пластинчатые цепи
(ГОСТ 588—81) следующих типов: ПВ — пластинчатые втулоч-
ные; ПВР — пластинчатые втулочно-роликовые; ПВК — пластин-
чатые втулочно-катковые с гладкими катками; ПВКГ — пластин-
чатые втулочно-катковые с гребнями (ребордами) на катках
(рис. 156) и ПВКП — аналогичные типу ПВК, нос подшипниками
качения у катков. Могут быть применены и сварные круглозвен-
ные цепи (ГОСТ 2319—70) (см. рис. 27, а). Конвейеры легкого
типа шириной 400 мм выполняют с одной тяговой цепью, осталь-
ные - с двумя цепями. Две цепи соединяют жесткими пластинами
настила или сквозными осями через 1 ... 3 шага цепи.
Привод со звездочками устанавливают в головной части кон-
вейера. Взаимное расположение зубьев звездочек на валу строго
одинаково для обеспечения равномерной загрузки. Привод имеет
тормоза нлн храповые остановы.
Натяжное устройство обычно винтовое, как у ленточных кон-
вейеров, или пружинно-винтовое (у конвейеров тяжелого типа).
Одна натяжная звездочка посажена на ось с помощью шпонки, а
другая — свободная с возможностью самоустановки по положе-
нию шарниров цепи.. Ход натяжного устройства 320 ... 1000 мм
в зависимости от трассы конвейера и шага цепи. Для стандартных
конвейеров звездочки (ГОСТ 592—81) имеют число зубьев 6 ... 13.
256
Загрузка
Рис. 153. Пластинчатый ло‘
9 Балашов В, П.
257
Рис. 154. Схемы сопряжений
пластин пластинчатого конвейера
у Основные параметры ста-
Ж.—Z Мд/ ционарных пластинчатых
у W1 конвейеров регламентирует
---* ГОСТ 22281- 76. Произво-
дительность конвейеров
16 ... 2000 м3/ч; ширина настила 400 ... 1600 мм; высота борта
80 ... 500 мм; скорость полотна 0.01 ... 1.0 м/с.
К достоинствам пластинчатых конвейеров по сравнению с лен-
точными относятся увеличенные углы наклона (до 70"). большая
производительность, возможность непосредственной загрузки из
бункеров без питателей, а также транспортирование горячих
грузов (температура до 400 ;С). Недостатком является большая
металлоемкость и стоимость.
Конвейерам с цепным тяговым органом свойственна некоторая
неравномерность хода цепи при установившемся движении при-
вода, что обусловлено кинематикой зацепления цепи со звездоч-
кой (рис. 157, а). Цель движется неравномерно, так как ее звенья
ложатся на стороны многоугольника (звездочки), грани которого
Рис. 155. Схемы трасс пластинчатых конвейеров;
а — горизонтальный; б — наклонный; в — горизонтально-наклонный; г — наклонно-
горнзонтальвый; д, е — сложного профиля
Рис. 156. Тяговые цепи пластинчатых конвейеров;
д втулочная; 6 — втулочно-роликовая; в -• втулочно-катковая с гладкими катками
г — втулочно-катковая с гребнями
258
Рис. 157. Схема к определению ускорения цепи конвейера:
а — скема расположения цепи на звездочке; б — диаграммы ускорения и скорости цепи
имеют разные радиусы, а поэтому ведущими последовательно
являются один зуб или грань. Периодом изменения скорости
является время поворота звездочки на центральный угол а0,
соответствующий одной грани. Если окружная скорость зуба
звездочки узв = ш/? постоянна, то скорость цепи vn tc.B cos ср
(здесь <р — угол между вертикальной осью и осью зуба) изменя-
ется по косинусоиде, а ускорение — по синусоиде (рис. 157, б).
§ 80. ОСНОВЫ РАСЧЕТА ПЛАСТИНЧАТЫХ КОНВЕЙЕРОВ
Исходными данными являются: производительность,
схема трассы, характеристики груза, режим и условия работы.
Конвейеры рассчитывают в два этапа: 1) предварительно опре-
деляют основные параметры конвейера и его ходовой части по
исходным данным; 2) проводят проверочный расчет конвейера
с параметрами, определенными на первом этапе расчета. Последо-
вательность расчета такая же, как при расчете ленточных кон-
вейеров.
Наибольший угол наклона конвейера с гладкими пластинами
Р с 0,7ф — (7 ... 10°).
Скорость движения полотна зависит от назначения конвейера
и ширины настила н принимается в среднем до 0,3 м/с. Скорость
конвейера, связанного с технологическими операциями, выбира-
ется с учетом требования производства.
По расчетной производительности [см. формулы (168), (138)
или (141)] определяют необходимую ширину настила с учетом
высоты бортов, при этом принимается коэффициент использования
борта (ф = 0,65 ... 0,8).
В зависимости от насыпной плотности груза принимают тип
настила: легкий — при р <7 1 т/м3, средний — при р = 1 ...
2 т/м3 нли тяжелый — при р 2 т/м3. Пригодность плоского
настила по кусковатости проверяют по формуле (153). Для штучных
грузов ширина настила на 50 ... 150 мм больше опорной по-
верхности груза.
9*
259
При тяговом расчете принимают минимальное натяжение
Sniht = 1 ... 2 кН. В конвейерах с наклонным участком Snii;i на-
ходится в точке набегания цепей на криволинейный участок после
опускания с наклонного участка, поэтому обход по контуру на-
чинают с этой точки. Коэффициент, учитывающий сопротивление
передвижению роликов цепи, to = 0,08 .. 0,11 при подшипниках
скольжения и w = 0,025 . . . 0,040 — при подшипниках качения.
Масса одного метра настила с цепями qh = цл принимается по
данным завода-изготовителя (11 |.
Расчетное натяжение цепи (Н)
S - 0,75Smaif ф- 8ДЙН. (173)
где 0,75 — коэффициент, учитывающий неравномерность натяжения двух цепей.
Динамические усилия 8ДИН не учитывают при скорости менее
0,16 и равной 0,16 м/с и звездочках с числом зубьев более шести.
Цепь выбирают по разрывному усилию 1см. формулу (20)1
с коэффициентом запаса прочности [ц] — 6 ... 8 — для горизон-
тальных конвейеров, (ц I = 8 ... 10 — для наклонных.
Окружное тяговое усилие на звездочке определяют по формуле
(159), а установочную мощность двигателя -- по выражению
(147). Тормозной момент рассчитывают по уравнению (172),
при этом коэффициент запаса торможения. 1КТ1 = 1,5 ... 1,75.
Вопросы для повторения. 1. Перечислите области применения пластин-
чатых конвейеров, их достоинства и недостатки. 2. Поясните устройство пластин-
чатых конвейеров. 3. Какие разновидности пластинчатых цепей применяют в кон-
вейерах? Как выбирают цепи? 4. Назовите особенности пластинчатых конвейеров.
ГЛАВА 21. СКРЕБКОВЫЕ КОНВЕЙЕРЫ
§ 81. ОБЩИЕ СВЕДЕНИЯ
Сжребковыми называют конвейеры, тяговым органом
которых являются цепи, а перемещение груза осуществляется
волочением по желобу или настилу при помощи скребков, прикре-
пленных к цепям. Конвейеры применяют тогда, когда необходимо
распределить груз между несколькими технологическими агрега-
тами, либо для перемещения грузов под большим углом наклона,
если не могут быть использованы конвейеры других типов. Кон-
вейеры различают по виду скребков, которые могут быть высокими
или низкими, а ио конструкции сплошными и контурными.
Скребковый конвейер прерывного волочения (рис. 159, а} состоит
из станины 7 с направляющими путями 8 и желоба 6. На станине
смонтированы приводная 4 и натяжная 1 звездочки, охватывае-
мые цепью 2 со скребками 3. Загрузку производят сверху в любом
месте трассы, а разгрузку — через отверстия в дне желоба,
перекрываемые шиберными задвижками 5. Высота скребков равна
260
261
я... = мп
Рис, 159. Тяговые вильчатые цепи со скребками
или превышает стенку желоба, груз перемещается отдельными пор-
циями перед каждым скребком, при этом происходит его трение
о днище и боковые стенки желоба, перемешивание и измельчение.
Скребки изготовляют из стальных листов толщиной 3 ... 8 мм пря-
моугольной, трапецеидальной или полукруглой формы, соответ-
ствующей форме желоба. Конвейеры с высокими скребками при-
меняют для перемещения насыпных грузов, не подверженных кро-
шению, или таких грузов, крошение которых не снижает их ка-
чества (клинкер, каменный уголь, зола, песок и др.). Транспорти-
рование может осуществляться по нижней, верхней или одновре-
менно по нижней и верхней ветвям в разные стороны.
В качестве тягового органа используют пластинчатые цепи
типа ПВК (ГОСТ 588—81) с шагом 160 ... 400 мм, разборные тя-
говые цепи (ГОСТ 289—74) (рис. 159) и сварные.
Производительность конвейеров 300 ... 600 т/ч, ширина скреб-
ков 200 ... 120 мм, скорость 0,1 ... 1,0 м/с.
Скребковый конвейер с низкими сплошными скребками показан
на рис. 158, б. Низкие скребки погружены в массу груза. Сопро-
тивление насыпного груза перерезанию скребками возрастает, и
он движется сплошным потоком, при этом груз меньше подвержен
перемешиванию и крошению. Конвейеры с такими скребками
называют конвейерами сплошного волочения или с погруженными
скребками. Эти конвейеры применяют для транспортирования су-
хой глины, мелкого гравия, извести, мела, цемента, песка, моло-
того камня и др. Тяговая цепь со скребками проходит внутри же-
лоба и огибает концевые звездочки; нижняя ветвь цепи перемещает
груз, а верхняя располагается в верхней части желоба и движется
по направляющим путям или роликами, ?4\елоб выполнен в виде еди-
ного сварного каркаса из листовой стали, подкрепленного про-
фильным прокатом. Наиболее изнашиваемые части желоба выпол-
няют из сменных пластин легированной стали и футерованными.
262
&) *
Рис. 160. Схемы трасс скребковых конвейеров;
а — горизонтальной; б - наклонной; в — наклонно-горизонтальной: г — горизонтально-
наклонной; д — сложного профиля
Производительность скребковых конвейеров с погруженными
скребками до 700 т/ч, длина до 100 м, угол наклона менее 60°,
ширина желоба 125... 1000 мм, скорость цепи 0,1 ...0,4 м/с.
Возможно транспортирование грузов, нагретых до температуры
700 °C.
К конвейерам сплошного волочения относятся также конвей-
еры с контурными скребками, внешние контуры которых повторя-
ют с небольшими зазорами рабочий контур желоба, поэтому груз
транспортируется более эффективно, чем с низкими сплошными
скребками. Такие конвейеры могут перемещать груз по крутому
наклону и вертикально.
Разновидностью скребковых конвейеров являются трубчатые
конвейеры, в которых бесконечная цепь с прикрепленными к ней
плоскими или контурными скребками движется внутри герметич-
ной трубы и обеспечивает перемещение груза непрерывным пото-
ком. Трубчатые конвейеры могут иметь различные пространствен-
ные трассы, их применяют для транспортирования разнообразных
пылевидных, порошкообразных, зернистых и мелкокусковых гру-
зов. Эти конвейеры не предназначены для транспортирования
быстрослеживающихся грузов и грузов с мелкими кусками боль-
шой прочности, так как последние, попадая между скребками и
и трубой, могут застопорить конвейер.
В приводных механизмах предусматривают муфты предельного
момента, предохранительные пальцы или штифты, исключающие
поломку конвейера в случае его перегрузки и заклинивания цепи.
Винтовые или пружинно-винтовые натяжные устройства
обеспечивают устойчивое положение скребков для предотвращения
их опрокидывания при консольном приложении нагрузки.
Ход натяжного устройства не менее 1,5 шага цепи.
К достоинствам конвейеров следует отнести простоту конструк-
ции, возможность создания герметичности трассы, осуществление
промежуточной разгрузки, саморегулирование загрузки без при-
менения питателей, простоту загрузки и разгрузки во многих
точках трассы, а также выполнение трасс разнообразных конфи-
263
гураций (рис. 160). Недостатки — измельчение груза, быстрое из-
нашивание скребков, желоба и цепей, повышенный расход
энергии, а также возможность «всплывания» скребков над грузом.
§ 82, ОСНОВЫ РАСЧЕТА СКРЕБКОВЫХ КОНВЕЙЕРОВ
Расчет конвейеров выполняют аналогично расчету
ленточных и пластинчатых конвейеров. Скорость движения скреб-
ков для кокса 0.5 м/с; для породы и клинкера 0,65 м/с; для золы,
известняка, цемента 0,75 м/с; для песка и гравия 0,90 м/с.
Производительность определяют по формуле (138), но при этом
учитывают ее уменьшение вследствие наличия зазоров между
скребками и желобом коэффициентом ф (для конвейеров прерыв-
ного волочения ф ~ 0-5 ... 0,6, сплошного волочения — ф —
— 0,7 ... 0,9). По расчетной производительности 1см. формулы
(168), (138) или (141)] определяют необходимую ширину желоба
[11], которую проверяют на кусковатость.
Мощность на валу приводных звездочек предварительно опре-
деляют но выражению (145), при этом обобщенный коэффициент
сопротивления да() принимают по данным табл. 46.
Тяговый расчет начинают с точки минимального натяжения
цепи, которое принимают Sintll — 1 ...5 кН. У горизонтальных
конвейеров Smin находится в точке 1 (см. рис. 160) сбегания цепи
с приводной звездочки. У наклонных и комбинированных конвей-
еров может быть в точках 1 или 2 в зависимости от соотно-
шения Lr, да и Н (здесь w — коэффициент сопротивления движе-
нию опорных элементов тяговой цепи; для цепей с ходовыми кат-
ками w = 0,10 ... 0,13; без катков w = 0,25). Если Lrw > Н, то
S[llln находится в точке 1, если Lvw </ Н, то Smln — в точке 2
(см. рис. 160, г).
Сопротивление передвижению груза в желобе учитывается ко-
эффициентом да (да = 0,93 для цемента; да = 0,6 ... 0,7 для глины;
да = 0,63 для гашеной извести; да = 0,68 для песка; да = 0,6
для каменного угля). Расчетное натяжение цепи определяют по
формуле (173), цепь выбирают по разрывному усилию [см. урав-
нение (20)1 с коэффициентом запаса прочности [rz] 10.
Вопросы для повторения. 1. В каких случаях применяют скребковые
конвейеры? 2. Какие имеются виды скребковых конвейеров? 3. Назовите осо-
бенность перемещения ими груза.
Таблица 46. Значения коэффициента сопротивления w,,
для скребковых конвейеров
Тип цепи Производительность конвейера, т/ч
4.5 9 18 27 36 45
Роликовая Безроликовая втулочная 2,3 4,2 1.7 3,0 1,3 2,3 1,1 1,9 1,0 1,7 0.7 1,6
264
Г Л А В A 22. КОВШОВЫЕ И ЛЮЛЕЧНЫЕ КОНВЕЙЕРЫ
§ 83. ОБЩИЕ СВЕДЕНИЯ
Ковшовыми называют конвейеры, у которых к пла-
стинчатым тяговым цепям шарнирно прикреплены ковши и пере-
мещение груза происходит по сложной трассе с горизонтальными
и вертикальными участками, расположенными в вертикальной
плоскости. Эти конвейеры применяют для транспортирования пы-
левидных, зернистых и кусковых грузов (в том числе цемента)
в вертикальном и горизонтальном направлениях без перегрузки.
Ковшовый конвейер (рис. 161, а) состоит из металлической
опорной конструкции 6 с горизонтальными и вертикальными участ-
ками, на которой закреплены направляющие пути и звездочки —
приводные 3, натяжные 7 и поворотные 8. Две вертикально замкну-
тые пластинчатые втулочно-катковые цепибтипа ПВКГ с шарнирно
подвешенными ковшами 4 огибают звездочки и движутся
опорными катками по направляющим путям. Ковши сварные,
корытообразные с загругленными днищами. На их боковых стен-
ках имеются ролики или упоры 1, воздействием на которые обеспе-
чивается их опрокидывание и разгрузка. Загрузка ковшей про-
изводится в любом месте нижнего горизонтального участка. Бла-
годаря шарнирной подвеске перемещение ковшей по трассе пло-
скопараллельное.
Ковши могут разгружаться в любом месте верхней ветви кон-
вейера при помощи подвижного разгрузочного устройства 2.
Ось шарниров ковша расположена выше его центра тяжести, бла-
годаря чему достигается устойчивое положение ковшей при дви-
жении и возврат их в исходное положение после опрокидывания.
Ковши (рис. 161, б) обычно расположены почти вплотную друг
к другу, при этом зазор между ними перекрывается боковыми план-
ками-козырьками. Такая конструкция ковшей позволяет загру-
жать их при непрерывной подаче груза. Расставленные ковши
применяют тогда, когда по гранулометрическому составу груза
требуются большие ковши, а по производительности нет необ-
ходимости уменьшения их шага /к.
Если трасса конвейера имеет повороты ходовой части (цепи
с ковшами) в разные стороны по ходу конвейера, то необходимо
переориентирование козырьков ковшей. В этом случае ковши снаб-
жают дополнительными консольно расположенными роликами 9
(см. рис. 161, б), которые при набегании на направляющие шины
создают наклоны ковшей, в результате чего первые козырьки
(по ходу движения) переходят из верхнего положения в иижнее.
Производительность конвейеров до 400 т/ч, скорость 0,3 м/с,
вместимость ковшей менее 300 л, ширина ковша 250 ... 1000 мм,
длина 200 ... 920 мм, высота обычно равна половине длины.
В люлечных конвейерах ковши заменены шарнирно подвешен-
ными люльками. Эти конвейеры применяют для транспортирования
265
Рис. 161. Ковшовый кон-
вейер:
а — схема конвейера; б —
ходовая часть с сомкнутыми
ковшами; 1 — упоры; 2 —
разгрузочное устройство; 3,
7, 8 — звездочки соответ-
ственно приводные, натяж-
ные н поворотные; 4 — ков-
ши; 5 — втулочно-катковые
цепи; 6 — опорная конструк-
ция; 9 — ролики
штучных грузов, в большинстве случаев как специальное обору-
дование, связанное с технологическим процессом. Скорости пере-
мещения люлек 0,1 ... 0,3 м/с, длина менее 150 м, высота подъема
не более 30 м. Загружаются и разгружаются люльки на верти-
кальных участках вручную или автоматически при помощи
специальных устройств, например, гребенчатых столов-лот-
ков.
266
В приводе имеется нормально закрытый автоматический тор-
моз. Натяжное устройство может быть винтовым, пружинно-вин-
товым или грузовым с ходом, равным одному-двум шагам цепи.
Достоинства конвейеров — возможность бесперегрузочного
транспортирования грузов по горизонтальным, вертикальным и
наклонным участкам, что позволяет этим конвейерам заменить
три отдельных конвейера, например, пластинчатые и элеватор;
удобство загрузки и выгрузки;более высокий уровень сохранности
груза при транспортировании. Недостатками являются сложность
конструкции и эксплуатации вследствие большого числа шарни-
ров.
§ 84. основы расчета ковшовых
И ЛЮЛЕЧНЫХ КОНВЕЙЕРОВ
Расчет выполняется аналогично расчету пластинча-
тых конвейеров. Производительность определяют по формуле (140),
при этом принимают коэффициент заполнения ковшей ф — 0,7 ...
0,9 при сомкнутых ковшах и ф = 0,75 для расставленных. При
выборе ковша его размеры проверяют по наибольшим размерам
кусков транспортируемого груза.
Тяговый расчет начинают с точки, в которой ожидается наш '
меньшее натяжение. Начальное натяжение 2...3 кН 111].
Вопросы для повторения. I. Как устроены ковшовые конвейеры? Как
происходит разгрузка ковшей? 2. Чем отличаются люлечпые конвейеры от ков-
шовых?
Г Л А В А 23. ПОДВЕСНЫЕ КОНВЕЙЕРЫ
§ 85. ОБЩИЕ СВЕДЕНИЯ
Подвесными называют конвейеры, у которых тран-
спортируемые грузы находятся на подвесках и движутся вместе
с ходовой частью (цепью с роликами) по подвесному направляю-
щему пути сложного замкнутого контура. Конвейеры применяют
для непрерывного внутрицехового и межцехового перемещения
разнообразных штучных грузов по транспортному или техноло-
гическому процессу. С применением подвесных конвейеров все
производство объединяется в единую транспортную систему,
вплоть до склада готовых изделий.
По профилю трасс различают конвейеры одноплоскостные го-
ризонтальные замкнутые и пространственные.
По способу соединения тягового элемента с транспортируемым
грузом конвейеры разделяют на грузонесущие, грузотолкающие
(толкающие) и грузоведущие (рис. 162, а—в).
В промышленности строительных материалов подвесные гру-
зонесущие конвейеры получили широкое применение на заводах,
267
Рис. 162. Виды подвесных конвейеров:
а — гр уз «несущий; б — толкающий; в — грузоведущий; 1 — каретка; 2 — подвесной
путь; ,7 — тяговая цепь; 4 — подвеска; 5 — тележка; 6 — толкатель; 7 — захват;
8 — вертикальная штанга; 9 — тележка
изготовляющих крупные санитарно-техиические фарфоровые из-
делия; их используют для подачи полуфабриката от кареточных
сушилок к глазуровочным конвейерам и далее к туннельным пе-
чам для установки на печные вагонетки для обжига и т. д. Кон-
вейеры распространены также на кирпичных и стекольных за-
водах.
§ 86. ПОДВЕСНЫЕ ГРУЗОНЕСУЩИЕ КОНВЕЙЕРЫ
Подвесной грузонесущий конвейер (рис. 163) состоит
из замкнутого, пути 8 (обычно двутавра), по которому перемеща-
ются каретки 7, соединенные тяговой цепью 3, приводимой в дви-
жение приводом 5. Предварительное натяжение создается натяж-
ным устройством /. Поворот трассы в горизонтальной плоскости
осуществляется с помощью поворотного устройства 4, а в вертикаль-
ной — за счет криволинейных участков 2 пути. На вертикальных
поворотах трассы установлены ловители, удерживающие грузы
от падения при обрыве цепи. К кареткам 7 шарнирно подвешены
подвески 6 для грузов 9.
Для конвейеров, расположенных в одной плоскости, тяговым
элементом могут быть любая цепь или канат. Для конвейеров
с пространственными трассами применяют разборные цепи, зве-
нья которых имеют возможность поворачиваться в вертикальных
и горизонтальных плоскостях. ГОСТ 589—85 регламентирует
разборные цепи типа Р1 с вращающимися валиками 2 и холодно-
штампованными звеньями 1 и 3 (рис. 164, а) и типа Р2 с фиксиро-
ванными валиками 6 и горячештампованными звеньями 4 и 5
(рис. 164, в). Оба типа цепей являются взаимозаменяемыми. Угол
поворота цепей в плоскости продольных шарниров 3 ... 12°. Наи-
более распространены цепи с шагом 80, 100 и 160 мм. Цепи типа
Р1 применяют на конвейерах с простой трассой, работающих в лег-
ком режиме. Достоинства разборных цепей: простые монтаж, де-
монтаж, ремонт и возможность изменения длины цепи; легкость
присоединения цепи к каретке, простота обслуживания.
268
Рис, 163. Подвесной грузонесущий конвейер:
/ — натяжное устройство; 2 — вертикальный перегиб; 3 — тяговая цепь; -/ — поворотное устройство; 5 — привод конвейера; 6 — подвес-
ка: 7 - каретка; 8 — ходовой путь; 9 — транспортируемый груз
269
I
Рис. 164. Тяговые цепи:
а — разборная с холодноштампованныыи звеньями; б — разборная с горячештампован-
ными звеньями; а—двухшарнирная с сомкнутыми шарнирами
В подвесных конвейерах легкого типа для транспортирова-
ния грузов с массой до 50 кг применяют двухшарнирные цепи
с катками (рис. 164, б). Эти цепи имеют малые радиусы поворота
(0,6... 1,0 м), причем повороты в обеих плоскостях осуществ-
ляются по направляющим ходовым путям без каких-либо допол-
нительных устройств типа звездочек, блоков и др. В конвейерах
легкого типа используют также круглозвенные сварные цепи
(ГОСТ 2319—70) из круглой стали диаметром 6 ... 18 мм.
В конвейерах с разборными цепями имеются каретки трех ти-
пов: грузовые одинарные (рис. 165. а) и грузовые сдвоенные и
опорные (поддерживающие). Крепление кареток к цепям жест-
кое или шарнирное. Опорные каретки, установленные между гру-
зовыми, предназначены и служат для поддержания цепи и умень-
шения ее провисания. Каретки могут быть одно- двух- и четырех-
катковыми (для наиболее тяжелых грузов). В качестве катков при-
меняют подшипники качения, наружное кольцо которых выпол-
нено со сфероконическим ободом для качения по полке двутавра
(рис. 165, б). Такие каретки пригодны для работы при темпера-
туре от —20 до +150 °C. Подвески прикрепляют непосредственно
к звеньям двухшариирных цепей или оси шарнирного узла.
270
271
Рис. 166. Угловой редукторный привод конвейера:
а — общий вид; б — кинематическая схема; 1 — звездочка; 2 — предохранительное
устройство; 3 — редуктор; 4 — муфта; 5 — электродвигатель
Приводные устройства выполняют двух типов: угловые
(рис. 166) и гусеничные (рис. 167). Первые устанавливают в местах
горизонтальных поворотов трассы; цепь приводится в движение
посредством звездочек, получающих вращение от коническо-
цилиндрического редуктора. Вторые монтируют на прямых участ-
ках трассы; тяговая цепь приводится в движение с помощью гу-
сеничной цепи, по которой закреплены кулачки. Гусеничная цепь
находится в зацеплении со звездочкой редукторного привода,
Для предупреждения от поломок предусмотрены предохрани-
тельные штифты, которые срезаются в случае превышения рас-
четного момента в 1,5 ... 2 раза, и концевые выключатели для ос-
тановки конвейера.
Предварительное натяжение цепи создается с помощью пру-
жинно-винтовых (рис. 168) или грузовых (см. рис. 163) натяжных
устройств со звездочкой.
Повороты трассы в горизонтальной плоскости осуществляются
с помощью поворотных устройств, имеющих закругленный уча-
сток, а также звездочку (блок) или роликовую батарею, на кото-
рые опирается ходовая часть (см. рис. 163).
На конвейере имеется пульт управления с пусковым устройст-
вом, лампами сигнализации, телефоном, пневмонической схемой
трассы с указанием пунктов загрузки и разгрузки конвейера,
а также телевизионные установки, если трасса большой протя-
женности ,
Производительность конвейеров 100 ... 6000 шт/ч; скорость
транспортирования 0,01 ... 0,70 м/с; длина трассы 5 ... 500 м;
масса перемещаемого груза 1 ... 8000 кг.
272
Вид А (поёернуто)
Рис. 167. Гусеничный редукторный привод конвейера:
1 — роликовая батарея; 2 — направляющая гусеничной цепи; 3 — ведущий кулачок;
4 — гусеничная цепь; 5 — натяжное устройство; 6 — приводная звездочка; 7 — привод
Груз укладывают или подвешивают на подвеску. Загрузку
и разгрузку производят вручную (при массе до 8 кг), полуавтома-
тически или автоматически при помощи различных механизмов
и устройств (в том числе и роботов). При полуавтоматической
работе основные трудоемкие операции загрузки и разгрузки вы-
полняются конвейером в процессе его движения с использованием
опускания или подъема трассы; обслуживающий персонал при
этом может лишь направлять груз, контролировать его захват
и т. п.
Автоматическая загрузка состоит из следующих операций:
грузы в заданном порядке подаются к месту загрузки конвейера;
273
1
4 5 /од натяжения
Рис. 168. Пружинно-винтовое натяжное устройство грузонесущего конвейера:
1 — подвесной путь кареток; 2 — стык-, 3 — натяжной винт; 4 - тележка; 5 — непо-
движная рама; 6 — поворотная звездочка; 7 — концевой выключатель
Рис. 169, Схема автома-
тической загрузки под-
весного грузонесущего
конвейера
проходящие подвески устройством автоматического адресования
включают погрузочные приспособления (исполнительные ме-
ханизмы), которые автоматически подготовляют груз к захвату
его подвеской или непосредственно навешивают его на проходящие
подвески конвейера. При автоматической разгрузке подвесок
операции выполняются в следующей последовательности: при за-
грузке подвески системой автоматического адресования задается
любой пункт — адрес разгрузки; перед прибытием к месту раз-
грузки подвеска на ходу конвейера включает необходимые испол-
нительные механизмы, при помощи которых подвеска освобожда-
ется от груза или же груз передается на какое-либо устройство
вне конвейера. Пример автоматической загрузки конвейера по-
казан иа рис. 169.
§ 87. ПОДВЕСНЫЕ ТОЛКАЮЩИЕ КОНВЕЙЕРЫ
Толкающие конвейеры (см. рис. 162, б) отличаются
от грузоиесущих тем, что у них каретки 2 с тяговой цепью 3 дви-
жутся по отдельному тяговому пути 8, а грузовые тележки 6
с подвесками 5 — по другому грузовому пути 10, расположенному
под тяговым путем (рис. 170). Оба пути соединены между собой
хомутами 9. Тележка к тяговой цепи не прикреплена, но на ее
корпусе установлены передний 7 и задний 4 упоры, с помощью
которых тележка входит в зацепление с толкателем 7, закреплен-
ным на каретке цепи. Один нз упоров взаимодействует с толка-
телем 1 при движении по горизонтальному пути и на подъемах,
а второй упор — на спусках. В остановочных пунктах тяговый
путь поднимается над грузовым путем, толкатель выходит из за-
цепления с упором, и тележка останавливается.
Грузоподъемность тележек 50 ... 1250 кг (при двухтележечном
сцепе 70 ... 2000 кг); максимальный угол наклона путей менее
60°; максимальная скорость передвижения 0,65 ... 0,3 м/с. Обо-
рудование толкающих конвейеров унифицировано с оборудованием
грузонесущих конвейеров.
Отсутствие крепления тяговой цепи к тележкам и наличие
двух раздельных путей позволяет свободно включать и отключать
тележки от тяговой цепи, переводить их на ответвления путей
при помощи автоматически управляемых передаточных устройств
и устанавливать на ходу конвейера при помощи специальных ос-
тановов или автостопов.
С помощью толкающего конвейера можно без перегрузок осу-
ществлять следующие операции: 1) переводить тележки с одного
конвейера на другой при помощи автоматических или дистан-
ционно управляемых стрелок, а также выводить тележки к рабо-
чим местам; 2) автоматически распределять грузы по складским
путям; 3) выдавать грузы с подвесных складов в заданном ритме
и последовательности с подачей их к рабочему месту; 4) орга-
низовать сборку непосредственно на подвесках конвейера; 5) из-
менять на конвейере расстояние между грузами, если это необхо-
димо по технологическим соображениям (например, в камере
окраски расстояние должно быть увеличено, а в сушилках для
экономии площади — уменьшено).-
§ 88. ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ
ПОДВЕСНЫХ КОНВЕЙЕРОВ
Исходными данными являются: программа выпуска
изделий; масса, размер и характерные особенности транспортируе-
мых грузов; трасса конвейера с расположением пунктов за-
грузки и разгрузки; условия и режим работы конвейера. Рас-
чет и проектирование выполняют в следующей последователь-
ности.
1. Устанавливают порядок размещения н количество транс-
портируемого груза г на одной подвеске,
2. Предварительно выбирают типоразмеры цепи, кареток и
тележек для подвесок с грузами и устанавливают их характери-
стики: цц — масса 1 м цепи; и тп — соответственно массы
каретки и подвески, кг.
3. Определяют наименьший шаг подвесок /и, обеспечивающий
свободную проходимость грузов наибольшей длины Ьтах: на гори-
276
Рис. 171. Схемы к расчету конвейера:
а—в — положение подвесок соответственно из горизонтально-поворотном, наклонном
и вертикальном участкак
зонтальных поворотах наименьшего радиуса /?min и на наклонных
участках с наибольшим углом наклона 0тах- (рис. 171, а, б):
(^так A)/COS ртах.
где Л -- 0,15 ... 0.2 м —минимальный зазор между подвесками с грузом.
Шаг подвесок ta должен быть кратным удвоенному шагу звена
цепи.
4. Выбирают скорость движения ходовой части; в зависимости
от вида и массы транспортируемого груза, способа загрузки и
разгрузки и = 0,05 ... 0,4 м/с.
5, Определяют расчетную производительность конвейера
(шт/ч)
QzP - ПКР. ЖвКД
где // — программа выпуска груза-изделнй, шт/ч; Кр. 3 1.1 ... 1,2 — коэф-
фициент неравномерности загрузки конвейера; Кв - 0,85 0,90 — коэффи-
циент использования конвейера во времени; /СР — коэффициент готовности кон-
вейера.
6. По расчетной производительности устанавливают шаг под-
весок и скорость их движения:
tu = 3600zu/Qzp; и - QzPU(3600z),
где z — число грузов на одной подвеске.
2?7
7. Производят расстановку кареток, тележек и подвесок на
трассе. Определяют необходимые для тягового расчета линейные
массы (кг/м) движущихся частей: иа холостой (обратной) ветви
без учета пропуска незагруженных подвесок
- /и.п//п 4- mh.//K 7Ц;
на холостой обратной ветви с учетом пропуска на обратную
ветвь незагруженных вагонеток
4“
на груженой (рабочей) ветви
= 7* 4- Я = Я.< 4- тгр/(П!
где ти, щгр — соответственно массы подвески, каретки и груза, кг; tn,
tK - - соответственно шаги подвески и каретки, м; qn — масса 1 м цепи, кг/м;
Кн - 0.08 ... 0.12 — коэффициент пропуска незагруженных подвесок на об-
ратную ветвь.
8. Приближенно определяют максимальное натяжение тяго-
вой цепи (Н):
, S|iiax ~~ (*7р^г 1 ^х7-х)(1 “I- /СкХм)<7 4- QpgH,
где So = Smin = 500 ... 1000 Н — первоначальное натяжение цепи (большие
значения для более тяжелых типоразмеров конвейеров); Км = —-сум-
марный коэффициент местных сопротивлений (здесь ср, £, X — соответственно
коэффициенты сопротивления движению кареток на вертикальном повороте
Ф= 1,01 ... 1,07, горизонтальном повороте на звездочке или блока £ = 1,03 ...
1,08 и на роликовой батарее X - 1.02 ... 1,18; во всех случаях большие значения
этих коэффициентов устанавливают для больших углов поворота трассы и более
тяжелых условий работы; х. у, 0 — соответственно количество указанных по-
воротов); Лг, —соответственно горизонтальные проекции длин груженой
и холостой ветвей, м; ур, q^ — линейные массы груженой и холостой ветви, кг/м;
g -- 9,81 м/с2; Кк == 0,3 ... 0,5 — коэффициент концентрации местных сопротив-
лений (меньшее значение принимается для конвейеров, имеющих более пяти
поворотов, т. е. х 4- у -ф 0 > 5); Н — общая высота подъема груза на трассе
конвейера, м; и> ~ 0,02 ... 0,05 —-коэффициент сопротивления движению на
прямолинейном участке (меньшие значения принимаются для хороших условий
работы).
9. Проверяют правильность выбора типоразмера цепи-по до-
пускаемой нагрузке. При необходимости корректируются размеры
цепи и кареток.
10. Определяют положение точки минимального натяжения
тяговой цепи на трассе конвейера и устанавливают значение
этого натяжения путем вычитания соответствующих сопротивле-
ний из максимального натяжения (см. п. 8).
11. Трассу разбивают на отдельные расчетные участки (пря-
молинейные, поворота, подъема, опускания и другие пункты со-
противлений) и нумеруют их, начиная с точки минимального на-
тяжения.
12. Выполняют тяговый расчет конвейера с определением
натяжений по всему контуру трассы, начиная с точки минималь-
ного натяжения при нормальном и наиболее неблагоприятном ва-
278
риаите загрузки трассы конвейера при прерывистой загрузке с за-
груженными спусками и подъемами. На всем контуре трассы
цепь должна быть натянута (т. е. нагружена усилием растяжения,
так как цепь на сжатие работать не может) и минимальное натяже-
ние должно быть для грузонесущего конвейера SmiI] 500 ...
1000 Н, для толкающего — Smln 2? 1500 ... 3000 Н.
13. Окончательно проверяют правильность выбора типораз-
мера цепи и кареток по полученным натяжениям и нагрузкам.
Допускаемая нагрузка на каретку (Н)
G = Gv + 6Ф,
где Gy — 1500 ... 5500 Н — условная расчетная нагрузка на горизонтальных
участках трассы, принимаемая в зависимости от типа конвейера; G(; — StK/jR —
составляющая от натяжения цепи на вертикальном повороте трассы [здесь S —
максимальное натяжение цепи, Н; — шаг между каретками, м; R — радиус
вертикального поворота, м (рис. 171, <?)].
14. Устанавливают н айвы годнейшее расположение привода
на трассе. Как правило, привод должен располагаться после участ-
ков с большим сопротивлением движению, например, после подъ-
ема трассы.
15. Выбирают место расположения натяжного устройства и
определяют необходимое усилие натяжения — вес натяжного
груза (Н):
^Н. у — 6н. у — + *$1+1 -|- W тел,
где Sj и Sj+1 — натяжения в ветвях цепи, соответственно в набегающей на
натяжное устройство и сбегающей, Н; И7тел = 250 ... 600 Н — усилие, необ-
ходимое для перемещения натяжных тележек,
16. Рассчитывают установочную мощность приводного двига-
теля (кВт)
Руст = РоиКз/(1000п),
где Ao = SHg — Scg — окружное усилие на звездочке, Н; v — скорость
цепи, м/с; /<3 — 1,15 ... 1,25 — коэффициент запаса; г) = 0,8 — КПД редуктора.
По окружному усилию и скорости движения ходовой части
выбирают исполнение привода, а затем уточняют скорость кон-
вейера и проверяют его производительность. После этого произ-
водят выбор остальных узлов (поворотных и натяжных устройств
и т. п.).
17. Для- конвейеров со сложной трассой при уточнении на-
грузки на отдельных участках трассы должен учитываться части-
чный пропуск грузов на холостую ветвь. Для таких конвейеров
расчет обычно проводится для двух вариантов; для нормальной
нагрузки конвейера и неблагоприятной загрузки, когда на подъе-
мах имеется нормальная загрузка, а на спусках полностью или
частично она отсутствует.
Второй вариант может возникнуть при перебоях в загрузке
и в этом случае обычно возникают наибольшие натяжения в цепи.
Чем больше на трассе спусков и подъемов, тем меньше вероятность
279
того, что все подъемы будут загружены, а спуски — разгружены.
Поэтому при наличии на трассе одного-двух спусков нагрузку на
них при расчете по неблагоприятной нагрузке принимают равной
нулю; если на трассе три спуска, то нагрузку принимают равной
20 %, четыре спуска — 30 %; пять спусков — 40 % и шесть и
более спусков — 50 % номинальной загрузки. В вариантах для
неблагоприятной загрузки проверяется на перегрузку электро-
двигатель. Нагрузка на цепь в этом случае не должна превышать
допускаемого усилия в цепи более чем на 25 %.
13. В длинных конвейерах рекомендуется устанавливать не-
сколько приводных устройств. Оборудование таких конвейеров и
методика расчета такие же, как у одноприводного конвейера.
Приводы желательно разместить так, чтобы окружные усилия
у них были примерно одинаковыми.
19. После выбора механического оборудования проектируют
опорные металлические конструкции, ограждения, предохраня-
ющие людей и оборудование от случайного падения грузов с под-
вески и другие элементы подвесного пути.
Вопросы для повторения. 1. Облг1сти применения подвесных конвейеров
на заводах строительных материалов. 2. Какие имеются типы подвесных кон-
вейеров? 3. Из каких основных элементов состоит грузонесущий конвейер?
4. Почему разборные цепи получили наибольшее распространение? 5. Назовите
основное отличие толкающего конвейера от грузонесущего.
ГЛАВА 24. ЭЛЕВАТОРЫ
§ 89. ОБЩИЕ СВЕДЕНИЯ
Элеваторами называют конвейеры, транспортиру-
ющие грузы по вертикальной и крутонаклонной (угол наклона
от 60 до 75°) трассам от начального до конечного пункта без про-
Таблица 47. Характеристика элеваторов
Транспортируемый груз Тил ковша Скорость, м/с ’1’ Тип разгрузки
ленты цепи
Пылевидный (уголь- ная пыль) г — 0,63- 0,8 0,85 Самотечная свободная
Легкосыпучий (це- мент) г ) ,25— 1,6 -- 0.80 Цен1робеж- I [Ы й
Пылевидный и зер- нистый, нлохосыпу- чий (влажные земля,, песок, мел в порошке) м 1 .... 2,0 0,8 ... 2.0 0.60 То же
Малоабразивный (су- хая глина, каменный уголь, торф) г 1,25 ... 2,0 1,0 .. 1,6 0,80
Сильно абразивный (гравий, шлак, руда, щебень) О, с 0,4 ... 0,8 0,4 ... 0,6,3 0,8 Самотечная направлен- ная
280
межуточной загрузки и разгрузки. По виду грузонесущего органа
элеваторы бывают ковшовые, люлечные и полочные (табл. 47).
Элеваторы занимают малую площадь, что позволяет компактно
располагать технологические агрегаты и другие сооружения.
Поэтому Элеваторы наряду с ленточными конвейерами широко
распространены на заводах промышленности строительных мате-
риалов.
§ 90. КОВШОВЫЕ ЭЛЕВАТОРЫ
Эти конвейеры предназначены для транспортире
вания пылевидных, зернистых и мелкокусковых грузов (цемента,
песка, химикатов, угля, торфа, известняка и т. п.). Элева* ры
могут быть стационарными и передвижными (на погрузочных
машинах), транспортными и технологическими, вертикальными
и наклонными. Элеватор (рис. 172) имеет закрытый металлический
кожух, включающий верхнюю часть (головку) 2, средние секции 3
и нижнюю часть (башмак) 6. В верхней части расположен при-
водной 1, а в нижней — натяжной 5 барабаны (или звездочки),
которые охватываются замкнутым тяговым элементом с жестко
прикрепленными к нему ковшами 4. Последний приводится в дви-
жение от привода, а начальное натяжение создается натяжным
устройством.
По виду тягового элемента элеваторы бывают ленточные и
цепные с расставленными (рис. 172, а, б) или сомкнутыми ковшами
(рис. 172, в—д). По скорости движения различают элеваторы
тихоходные и быстроходные.
Загрузка ковшей осуществляется либо зачерпыванием груза
из закругленной иижней части кожуха (см. рис. 172, а, б), либо
а) 5/ S) г) д)
Рис. 172. Схемы ковшовых элеваторов:
а -- ленточный с расставленными ковшами (типа ЛГ и ЛМ); б — ленточный цепной
(типа ЦГ и ЦМ); в — с сомкнутыми ковшами (типа ЛО и ЦО}; а, д - наклонные с сомк-
нутыми ковшами
281
Рис. 173. Схемы к определению показателей, характеризующих способ раз-
грузки ковшей:
а — полюсного расстояния; б — г —- сил, Действующих соответственно при центробеж-
.ной, самотечной и смешанной разгрузке
засыпанием груза в ковши (см. рис. 172, в, г, д). Разгрузка ковшей
может быть центробежной (Ц) при скорости движения ковшей
1 ... 5 м/с (см. рис. 172, а), самотечной свободной (СВ) (см.
рис. 172, в).
В первом случае на разгрузку существенно влияет центро-
бежная сила инерции, поэтому груз из ковшей вылетает по кривой
и попадает в лоток, расположенный на некотором расстоянии
от ковшей. Ковши расставляют на необходимом расстоянии, чтобы
они не задевали друг друга при разгрузке. Самотечную разгрузку
применяют у тихоходных элеваторов при скорости движения
ковшей 0,4 ... 0.8 м/с; груз из ковшей падает почти вертикально,
так как центробежные силы малы. Поэтому для улавливания
груза в лоток устанавливают специальные приспособления, на-
пример отклоняющие звездочки (см. рис. 172, б), или ковши
располагают вплотную друг к другу так, чтобы дно предыдущего
ковша являлось направляющим лотком для последующего.
Рассмотрим критерии, определяющие характер разгрузки
груза из ковша. На восходящей ветви вертикального элеватора
до подхода к барабану ковш движется прямолинейно и равномерно,
и имеющийся на нем груз находится под действием силы тяжести
G — mg (рис. 173, а). При повороте ковша на барабане начинает
действовать центробежная сила (Н)
- ти^/г, .
282
где т — масса груза в ковше, кг; v0 — скорость движения центра масс, м/с;
г — радиус вращения (расстояние от центра масс А груза в ковше до центра
барабана О), м.
Равнодействующая R сил G и Fr[ при вращении ковша изме-
няется по значению и направлению. Однако, если продлить век-
тор А? до пересечения с вертикалью, проходящей через центр
барабана, то при любом положении ковша вектор R будет пере-
секать вертикаль в одной и той же точке В, называемой полюсом.
Расстояние hn от точки В до центра барабана О называется полюс-
ным расстоянием. Из подобия треугольников А ВО и ADC следует,
что
hjr =- G/Fu =- fng/(mvl/r),
откуда
t 2/2
hn = gf Wo-
Подставив значение лгпб/30, получим полюсное рассто-
яние
, ^гт = gr2/v2 = £г2302/(л2г24) = 895/п'б, (174)
где п — частота вращения барабана, об/мин.
Из формулы (174) следует, что полюсное расстояние зависит
только от частоты вращения барабана (звездочки). С ее увеличе-
нием полюсное расстояние уменьшается, и центробежная сила
возрастает по сравнению с силой тяжести.
; Характер разгрузки ковшей зависит от соотношения сил G
* н Fu и соответственно полюсного расстояния ha и радиуса бара-
’ баиа гб. При /in < rG полюс находится внутри окружности бара-
j баиа, сила FI( значительно больше силы G, все частицы движутся
I в ковше к его наружной стенке, и происходит центробежная раз-
грузка (рис. 173, б). Если ha > га (рис. 173, в), то сила G больше
V силы Fg, и происходит самотечная (гравитационная) разгрузка
ковшей через заднюю (ближнюю к барабану) стенку. При гб <
< hn < га имеет место смешанный (центробежный и самотечный)
; способ разгрузки (рис. 173, г).
। Следовательно, характер разгрузки ковшей определяется со-
отношением
; Б = hn/re = gr2l(u2,r5} = gr6/u2, (175)
где и — окружная скорость барабана, м/с.
Рекомендуются следующие значения Б и диаметра барабана
(или начальной окружности звездочки) D,-t (м) для различных
способов разгрузки: для высокоскоростного элеватора с центро-
бежной разгрузкой
Б с 1; Об = 2Bv2/g < 0,204F2; (176)
для быстроходного элеватора со смешанной разгрузкой
Б = 1 ... 1,4; D5 - (0,205 ... 0,286) v2; (177)
283
1
Рис. 174. Ковши элеваторов:
а — полукруглые мелкие (типа М); б —
полукруглые глубокие (типа Г}; в, г —
остроугольные (типа О); д — скругленные
трапецеидальные (типа С)
д)
для среднескоростного элеватора со смешанной разгрузкой
с внутренней стенки ковша
Б = 1,5 ... 3; Dq - (0,306 ... 0,612) у2; (178)
для тихоходного элеватора с самотечной разгрузкой
Б > 3; D6 .< 0,6v2. (179)
В качестве тягового органа применяют прорезиненные ленты
(ГОСТ 20—76) и цепи. Число прокладок в ленте по условию креп-
ления ковшей не менее четырех. Ковши к лейте крепят болтами,
имеющими плоские головки с шипами, которые вдавливаются
в ленту (см. рис. 174, а). При небольших ковшах используют
приводные плоские резинотканевые ремни (ГОСТ 23832—-79).
Применяют цепи сварные круглозвенные и пластинчатые ролико-
вые (ГОСТ 588—81) с шагом цепи 100 ... 630 мм. Для крепления
ковшей на пластинах цепи предусмотрены лапки. При ширине
ковшей не более 250 мм применяют одну цепь, при ширине ковшей
более 250 мм — две (см. рис. 174, в—д). Ковши к цепям при-
креплены с помощью болтов или заклепок.
Имеются четыре типа ковшей (ГОСТ 2036 77): полукруглые
глубокие ковши (типа Г) (рис. 174, б) для перемещения хорошо
284
сыпучих грузов (песок, цемент и т. п.); полукруглые мелкие
(типа М) (рис, 174, а) — для влажных и плохо сыпучих грузов
(мел в порошке и др.); остроугольные (типа О) (рис. 174, в, г) —
для тяжелых абразивных и трапецеидальные скругленные (типа С)
(рис. 174, д) — для тяжелых абразивных г-рузов. Ковши типов Г
и М расставлены, и их применяют при центробежной разгрузке;
типов О и С сомкнуты, и разгрузка их гравитационная. Ковши
типа Г, Ми О применяют с лентой или цепью, а типа С — только
с двумя цепями.
Привод элеваторов аналогичен приводу ленточных конвей-
еров. Приводные барабаны (£>б = 250 ... 1250 мм) и звездочки
(z = 6 ... 20) расположены в верхней секции кожуха. Обязательно
наличие в приводе храпового останова с бесшумной собачкой
(см. рис. 53, а).
Натяжные устройства — винтовые, пружинно-винтовые, ры-
чажно-грузовые, последние обеспечивают автоматическое на-
тяжение ленты. Натяжное устройство размещено на оси нижнего
барабана, диаметр которого обычно равен диаметру приводного
барабана. Для устранения налипания груза натяжной барабан
выполнен решетчатым.
Загрузочные патрубки нижней секции выполнены с наклон-
ным днищем (угол наклона 45 или 60°) для обеспечения самотеч-
ного движения груза к ковшам. Разгрузочные патрубки снабжены
боковыми люками для осмотра и очистки барабана н звездочек.
В кожухе закреплены направляющие шины для ограничения
поперечного раскачивания ленты или цепей с ковшами. Для
предохранения ходовой части элеватора от падения при случай-
ном обрыве цепи или ленты предусматриваются на цепных элева-
торах — ловители цепи, на ленточных — соединение ковшей по
боковым стенкам стальными канатами, которые без натяжения
свободно располагаются вдоль ленты, а при обрыве ее исключают
падение ходовой части. На натяжных барабанах (или звездочках)
элеватора устанавливают реле скорости, которые при обрыве
тягового элемента выключают электродвигатель привода.
Основные параметры вертикальных элеваторов регламенти-
рует ГОСТ 2036—77, а наклонных — ГОСТ 12864—69. Производи-
тельность элеваторов 3,2 ... 320 м3/ч; скорость движения ковшей
0,4 ... 2,5 м/с; расчетная высота 12 ... 35 м.
§ 91. ЭЛЕВАТОРЫ ДЛЯ ШТУЧНЫХ ГРУЗОВ
Полочные и люлечные элеваторы (рис. 175, а, б)
предназначены для транспортирования штучных грузов (ящиков,
кип. люков, бочек и т. п,).
Люлечные элеваторы (рис. 175, а) состоят из вертикально
замкнутых цепей 2, огибающих верхние 1 и нижние 4 звездочки.
К цепям с определенным шагом шарнирно прикреплены люльки 3.
Такая конструкция позволяет производить автоматическую за-
285
Рис. 175. Элеваторы для штучных грузов;
а — люлечный; б — полочный
грузку люлек на восходящей ветви и разгрузку в любом месте
нисходящей ветви. Привод этих элеваторов выполнен редукторным
е автоматическим тормозом или остановом, препятствующими
движению ходовой части в обратную сторону. Скорость движения
люлек 0,2 ... 0,3 м/с.
Полочные элеваторы (рис. 175, б) состоят из цепей 8, огиба-
ющих звездочки 5 и 9. К. цепям на определенном расстоянии друг
от друга жестко прикреплены полки 6 (захваты). Кронштейны
полок опираются на подкосы 7, что позволяет цепям беспрепят-
ственно огибать звездочки. Загрузка н разгрузка полок произ-
водится вручную или автоматически. Полки выполнены гребенча-
тыми, а столы — с колосниковыми решетками. Разгрузка может
выполняться также при помощи отклоняющих звездочек.
§ 92. ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ
ЭЛЕВАТОРОВ
Расчет и проектирование рассмотрены на примере
ковшового элеватора (рис. 176) для сухой глины с исходными
данными; производительность Qm = 60 т/ч; высота подъема И =
— 20 м; плотность глины р = 1,5 т/м3; дшах = 40 мм; условия
работы средние (см. табл. 34).
286
Таблица 48. Параметры ковшей вертикальных элеваторов
Ширина ковша Вк. мм Шаг ковшей /к, мм Глубокие (тип Г) Мелкие (тип М)
Вмести- мость 10, л Линейная вместимость л/м Вмест и- МОСТЬ £о, л Линейная вмести- мость л/м
160 320 1,0 3.2 0,65 2,0
200 400 2,0 5,0 1,35 3,3
250 400 3.2 8,0 2.50 6.3
320 500 6,4 12,8 4,50 9,0
400 400 9,8 20,0 7,90 15.8
500 630 18,6 30,0 — —
Остроугольные Трапецеидальные
(тип О) (тип С)
ковша ковшей Линейная Линейная
Вк. мм 1к, мм Вмести- вмести- вмести-
мость мость MUC1 ь МОСТЬ,
io, л »п, л/м io, л 1п. л/м
160 160 1,2 7,5
200 200 2,4 12Д — —
250 200 3,4 16,8 — —
320 250 6.8 27,0 7,6 30
400 320 13,1 41,0 16,6 52
500 400 27,0 68,0 33,0 84
1. Выбор типа ковша, скорости ленты и способы разгрузки.
Пример. По табл. 48 приняты глубокие ковши типа Г по ГОСТ 2036—77
с коэффициентом заполнения ф — 0,8. Скорость ленты v — 1,6 м/с, разгрузка —
центробежная.
2. Определение диаметров ба-
рабанов. Для диаметров должно
соблюдаться условиеD6 (125...
... 150) i (здесь i — число про-
кладок; i 4).
Пример. Диаметр барабана, необ-
ходимый для центробежной разгрузки
по формуле (176):
Dq < 0,204V3 = 0,204-1,6а = 0,522 м.
Из нормального ряда (см. с. 238) принят
Dq = 500 мм. При 4 отношение
Об// = 500/4 = 125, что соответствует
условию. Диаметр натяжного барабана
принят таким же.
3. Проверка обеспеченности
центробежной разгрузки ковшей.
Рис. 176. Схема к расчету элеватора
287
Пример, Частота вращения приводного барабана == бИу/лСД — 60 X
X 1,6/(тс - 0,5) = 61,1 об/мин.
Полюсное расстояние
/гп = 895/= 895/61, Iй = 0,24.
Отношение Б = hnjrQ = 0,24/0,25 — 0,96 < 1,0, поэтому центробежный
способ разгрузки обеспечен.
4. Определение линейной вместимости ковшей. Из формулы
(139) при принятом значении ф находят отношение
= Qm/(3,6opi|>), (180)
по которому устанавливают вместимость ковшей t и их шаг /к.
Ковши проверяют на кусковатость по условию Лк хатах
[здесь £к — вылет ковша (см. рис. 174); х = 2 — для рядовых
грузов; х = 4 — для сортированных].
Пример. По отношению (180):
ljtK = Qm/(3,бпрф) ~ 60/(3,6.1,6.1,5-0,8) 8,68 л/м;
по табл. 48 приняты ковши типа Г шириной Вк = 250 мм и вылетом LK = 140 мм
с шагом установки /к = 400 мм, i = 3,2 л. Условие пригодности ковша по ку-
сковатости LK — 140 мм 7> хатах — 2-40 = 80 мм выполнено.
Необходимая ширина ленты В = Ви 50 = 250 —f- 50 300 мм. Принятэ
лента типа БКНЛ-100 шириной 300 мм. Толщина ленты
— /бд -|- 61 -|- бг — 4-1,25 -J- 3 1 — 9 мм,
5. Проверка фактического значения, коэффициента фд. Значе-
ние фд определяют по формуле (139). При необходимости коррек-
тируют скорость, которую принимают из стандартного ряда ско-
ростей: 0,32; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 20 м/с.
Пример. Фактическое значение коэффициента
фд = ZKQm/(3,6 оры) = 0,4-60/(3,6 1,6-1,5-3,2) = 0,86
близко к принятому ф=0,8.
6. Определение линейных масс. Линейную массу груза q опре-
деляют по формуле (137). Линейная масса ходовой части qG =
— XQm (здесь К — коэффициент, приведенный в табл. 49).
Табл пца. 49. Значения коэффициента К
Производи- тельность т/ч Тип элеватора
ленточный одноцепной ’ | двухцепной
Тип ковшей
Г; М о Г; М О Г; М О; С
•До 10 10 ... 25 25 ... 50 50 ... 100 Св. 100 0,60 0,50 0,45 0.40 0,35 0,60 0,55 0,50 1,1 0,8 0,6 0,5 1,10 0,85 0,70 1,2 1,0 0,8 0,6 -° “ 1 I 1 U5 — 1 1 1
288
Пример. Линейная масса: груза q = Qm/(3,6o) = 60/(3,6-1,6) ~ 10,4 кг/м;
ходовой части = KQm — 0,4-60 — 24 кг/м (здесь К -- 0,4, см, табл. 49).
7. Тяговый расчет элеватора. Расчет начинают с точки трассы 1
наименьшего натяжения ленты (цепи). Предварительно принимают
— Smin -= 500 ... 2000 Н. Для нормального зачерпывания
груза необходимо, чтобы Smin 5s bqg. Сопротивления на натяжном
барабане учитывают коэффициентом Кбар (см. табл. 45), при
зачерпывании груза ковшами — коэффициентом /(зап (для порош-
кообразных и мелкокусковых Кзач — 1,25 ... 2,5; для средне-
кусковых /<зач — 2 ... 4).
Пример. Натяжения ленты в точках трассы (см. рис, 176):
54 -= 5m|n = 600/7 > $qg = 5.10,4-9,81 = 510 Н\
S2 = КбагА + K^qg'- 1,04-600 -у 1,25-10,4-9,81 - 752 Н\
53 = S2 - (q -I ?с) gH - 752 (10,4 + 24) 9,81-25 - 918977;
S4 - 5j I - qagH 600 + 24-9,81-25 -= 6486/7.
8. Проверка тягового усилия барабана.
Пример. Тяговое усилие достаточно при соблюдении условия (157): S3/S4 =
= 9189/6486 = 1,42 < е^а = 2,720,^п = 2,56 (здесь / — 0,3 — коэффициент
трения ленты с барабаном; а = ISO" = л рад. — угол обхвата барабана лентой).
Условие выполнено.
9. Проверка запаса прочности ленты.
Пример. Фактический коэффициент запаса прочности по формуле (154).'
п = opBi/S3 = 100-300-4/9189 = 13 > [nJ = 10.
10. Проверка среднего давления ленты на барабан по фор-
муле (162).
Пример.
рср = 360 (53 — 34)/(ГбВал) — 360 (9189 — 6486)/(0,5-0.3-180. л) --
- 11 470 Па - 0,114 МПа < [р] - 0,2 МПа.
11. Определение параметров натяжного устройства.
Пример. Необходимое усилие натяжного устройства
Рн. у 5, - S2 600 ' 752 - 1352 Н.
Рабочий ход натяжного устройства
х = 0,0377 = 0,03-25 0,75 м.
12. Выбор элементов привода.
Пример. Выбор двигателя. Окружное усилие на барабане
Fo - S3 — S4 = (9189 - 6486) = 2703 Н.
Установочная мощность двигателя
Руст = К3ад{Ю00ц) = 1,25-2703-1,6/(1000-0,85) = 6,36 кВт.
Принят асинхронный двигатель с короткозамкнутым ротором типа 4A132S 6УЗ
(Рн = 7,5 кВт, пн = 870 об/мин).
10 Балашов В. П.
289
Выбор редуктора. Необходимое передаточное число редуктора
и — Пн/пп= 870/61,1 14,23.
Крутящий момент на тихоходном валу редуктора
Л7Т = Knf0D6/2 = 1,1.2703-0,5/2 — 743 Н-м.
При непрерывной работе Л4Э = М.г = 743 Н м, поэтому с учетом и =
— 14,23 по табл. 13 принят редуктор типа Ц2-250 (Л4Н 750 Н-м, Up = 12,4).
Привод снабжен храповым остановом для предохранения от обратного
движения ходовой части в случае остановки элеватора.
Вопросы, для повторения. 1. В каких случаях применяют элеваторы?
Как они устроены? 2. Какие способы разгрузки могут быть в элеваторах?
Г J1 Л В А 25. КОНВЕЙЕРЫ БЕЗ ТЯГОВОГО ЭЛЕМЕНТА
§ 93. ВИНТОВЫЕ КОНВЕЙЕРЫ
Винтовыми называют конвейеры, у которых транс-
портирование груза осуществляется вращающимся винтом. При-
меняют для транспортирования сыпучих пылевидных, зернистых
и мелкокусковых грузов (цемента, извести, молотой глины, мела,
гравия, песка, шлака, угольной пыли и т. д'.), а иногда для влаж-
ных. липких и слеживающихся грузов. По принципу действия
различают следующие конвейеры: 1) горизонтальные и полого-
наклонные; 2) крутонаклонные и вертикальные и 3) винтовые
транспортирующие трубы.
Горизонтальный конвейер (рис. 177) состоит из неподвижного
желоба 7, нижняя часть которого имеет форму полуцилиндра,
закрытого сверху крышкой 3. В желобе на концевых 2, 6 и про-
межуточных 4 опорах размещен продольный вал 8 с закреплен-
ными на нем витками. Вал получает вращение от привода 1. Груз
подается в желоб через одно или несколько отверстий 5 в его
крышке и скользит вдоль желоба при вращении винта. Совме-
стному вращению груза с винтом препятствуют сила тяжести груза
и трение его о желоб подобно тому, как движется по винту гайка,
удерживаемая от совместного с ним вращения. Разгрузка произ-
водится через одно или несколько отверстий в днище Р, снабжен-
ных затворами.
Винт конвейера выполняют с правым или левым направлением
спирали, одно-, двух- или трех за ходи ым. Поверхность винта может
быть сплошной для транспортирования исслеживающихся порош-
ковых и мелкозернистых грузов (цемента, мела, гипса, золы, су-
хого песка); ленточной (рис. 178. а) — для мелкокусковых грузов
(гравия, песчаника, известняка); фасонной — для тестообразных
грузов (глииы, бетона, цементного раствора) и с лопастями
(рис. 178, б) — для тестообразных грузов с одновременным ин-
тенсивным их перемешиванием. Вал винта для удобства сборки
выполнен из отдельных секций. Концевые подшипники закреп-
290
Рис. 177. Винтовой конвейер
10*
291
Рис. L78. Винт:
<7^- лентичin.tfi: б - лонлсгний; в - распределительный; г — собирательный
лены в торцовых стенках желоба. Подшипник со стороны, в кото-
рую перемещается груз, выполнен упорным. Этот подшипник
воспринимает действующую вдоль вала осевую растягивающую
силу. В местах установки промежуточных опор витки винта
прерываются. По направлению подачи груза конвейер может
быть распределительным (рис. 178, в) или собирательным
(рис. 178, г).
ГОСТ 2037-75 регламентирует следующие ряды диаметров
винтов. D/ 100, 125, 160, 200, 250, 320, 400, 500, 630 и 800 мм.
Шаг винта t ~ D^, а для наклонных и трудно перемещаемых грузов
его уменьшают до t ~ 0,8DH или применяют двух- и трехзаходные
винты. Частоту вращения винта выбирают в зависимости от вида
перемещаемого груза и диаметра винта для обеспечения пере-
движения груза без пересыпания через вал. Наибольшая допуска-
емая частота вращения (об/мин)
— /1/V (181)
где А — коэффициент (табл. 50); £)в -- в м.
Чтобы не было заторов груза в зоне подвесных опор и нару-
шения нормальной работы конвейера, диаметр виита проверяют
на пропускную способность по условию (м)
О„^а,„„Хк. (182)
где атлх- -- наибольший размер кусков груза, м; 4 — для рядовых гру-
зов; /Ск —“ 12 — для сортированных.
Таблица 50. Значения коэффициентов А, ф, к>0
Транспортируемые грузы А Ф
Легкие и малоабразивные (мел. асбест, угольная пыль, сода, торф) 50 0,32 1,6
Тяжелые и малоабразивные (глина су- хая, кусковой уголь) 45 0,25 2,5
Тяжелые и абразивные (цемент, зола, песок, шлак, сырая глина, известь, гипс, гравий) 30 0,125 4,0
292
Производительность винтового конвейера (т/ч)
Qm — 60nDs/rti|)p/\fj/4, (183)
где DB — в м; I — шаг винта, м; р — - в т/м3; ф — коэффициент заполнения же-
лоба (табл. 50); Kg — коэффициент, учитывающий угол наклона конвейера:
р. .......................... 0 5 10 15 20
Кр........................... 1 0,9 0,8 0.7 0,6.
Скорость транспортируемого груза (м/с)
v ----- tn/60. (184)
Общее сопротивление движению груза складывается от сил
трения груза о желоб и поверхность винта, сопротивления в про-
межуточных и концевых подшипниках, а также сопротивления
подъему при перемещении вверх по наклону. Значение первых
сопротивлений учитывается полученным опытным путем общен-
ным коэффициентом сопротивления (см. табл. 50).
Установочная мощность двигателя (кВт)
^ует = ШМо± W)/(367ii). (185)
где Kg = 1,15 ... 1,25 — коэффициент запаса; Qm — в т/ч; £г — в м; ш’о —
общенный коэффициент сопротивления; Н—высота подъема, м: т]—0,8 ... 0,85 —
КПД пр ивода.
Горизонтальные конвейеры
применяют для транспортиро-
вания груза на расстояние не
более 40 м. Преимуществами
этих конвейеров являются про-
стота устройства и обслужива-
ния, небольшие размеры;
наличие промежуточной раз-
грузки, герметичность. Про-
изводительность горизонталь-
ных конвейеров составляет не
более 50 т/ч. К. недостаткам
относятся значительное исти-
рание и измельчение груза,
повышенное изнашивание вин-
та и желоба, возможность об-
разования внутри желоба скоп-
ления (затора) груза при пере-
грузке и повышенный удельный
расход энергии.
Вертикальный (или круто-
наклонный) конвейер (рис. 179)
Рис. 179. Вертикальный винтовой кон-
вейер
293
мооп
Рис. 180, Винтовая транспортирующая труба
состоит из подвешенного на упорном подшипнике вала со сплошны-
ми винтовыми витками 2, вращающегося в цилиндрическом кожу-
хе 3 (трубе), короткого горизонтального винта-питателя 4 и приво-
дов 1,5для винтов. Подаваемый груз приводится винтом во враще-
ние и под действием центробежной силы прижимается к поверхно-
сти цилиндрического кожуха; а под действием силы трения и силы
тяжести несколько отстает в движении от винтовой поверхности.
Таким образом, груз вращается с угловой скоростью, меньшей
угловой скорости винта (подобно гайке, которая несколько при-
тормаживается на вращающемся винте), и одновременно пере-
мещается вдоль оси винта. Для создания необходимой центро-
бежной силы винт должен иметь достаточно большую частоту
вращения.
Вертикальные конвейеры применяют для подъема груза на
высоту до 30 м. По сравнению с ковшовыми элеваторами они
имеют меньшие размеры и удобную разгрузку в любую сторону.
Винтовая транспортирующая труба (рис. 180) представляет
собой полый цилиндр 4, внутри которого на стенках закреплены
винтовые витки 3. С наружной стороны труба охватывается со
стальными кольцами 1 (бандажами), опирающимися на парные
294
ролики 5, закрепленные на станине 7. К станине прикреплены
по два упорных ролика 6. расположенных по обе стороны от колец
и удерживающих трубу от осевого смещения.
Вращение трубе передается от привода 2 с зубчатыми коле-
сами, причем колесо последней зубчатой пары надето подобно
кольцу на корпус трубы. При вращении трубы груз, поданный
к ней с одного конца, постепенно пересыпаясь под действием силы
тяжести по образуемому витками винтовому желобу, продвигается
вдоль оси трубы и высыпается с другого конца. Трубы устанавли-
вают горизонтально или с небольшим наклоном. Транспортирова-
ние грузов часто применяют в сочетании с технологическим про-
цессом, например, промывкой, обжигом, гашением извести и др.
Частоту вращения винтовой трубы принимают такой, чтобы
центробежная сила была меньше силы тяжести. Обычно п ~
— (20 ... 30)/|/Drp (здесь D.rp — диаметр трубы, м). Шаг винта
t— 0,5£>тр, высота гребня h ~ (0,1 ... 0,15) DTp. Производи-
тельность определяют по формуле (183) при ф = 0,2 ... 0,3; ско-
рость транспортирования груза рассчитывают по выражению
(184).
Пример. Определить основные параметры горизонтального винтового кон-
вейера для цемента; Qm = 40 т/ч; Lv — 20 м; р— 1,5 т/м3,
1. Для цемента из табл, 50 ф“ 0,125; А 30; що=^4,О.
2. Предварительно принимаем п — 40 об/мин и шаг l=0,8OF..
3. Диаметр винта по формуле (183):
DH >3/4Q7„/(60n0,8m|ip) ~ у'4 4О/(бОлО,8-40-0,125-1,5) =0,32 м.
В соответствии с нормальным рядом принимаем DE — 0,4 м и I— 0,4-0,8 =
- 0,32 м.
4. Проверка частоты вращения винта по формуле (181):
nn,;tx ==. АD-a — 30/К0,5 — 47,6 об/мин > п = 40 об/мин.
5. Установочная мощность двигателя по уравнению (185):
Руст«= K3Qmi.pUy0/(367Ti) 1,2-40-20-4,0/(367-0,85) == 12,3 кВт,
§ 94. КАЧАЮЩИЕСЯ КОНВЕЙЕРЫ
Качающимися называют конвейеры, в которых
вследствие возвратно-поступательного (колебательного) движе-
ния желоба находящийся в нем груз совершает по днищу следу-
емые друг за другом короткие перемещения вперед с определен-
ной скоростью. Колебательное движение желобу сообщается виб-
ратором. Конвейеры применяют для транспортирования насыпных
и реже штучных грузов в горизонтальном, пологонаклонном и
вертикальном направлениях. Наиболее оптимальная область
применения — герметичное транспортирование пылящих, горя-
чих (температура не более 500 °C), ядовитых и химически агрес-
сивных насыпных грузов. Пылевидные грузы транспортируют
в трубах прямоугольного сечеиия, зернистые и кусковые —
в желобах (ширина 125 ... 1600 мм, высота 80 ... 400 мм) и трубах
295
диаметром 160 ... 800 мм. По режиму движения желоба конвей-
еры разделяют на инерционные и вибрационные.
Инерционные конвейеры. Желоба конвейеров имеют большие
амплитуды (А 100 ... 150 мм) и малую частоту (v = 40 ...
400 кол/мин = 0,66 ... 6,6 Гц). Имеются конвейеры с постоянным
и переменным давлением груза на желоб.
Конвейер с постоянным давлением груза на желоб состоит
(рис. 181. а) из желоба 1 на опорных катках 3, перемещающихся
по станине с помощью специального привода (рис. 181, б), который
включает шатун 2, коленчатый вал 8, соединительную планку 7,
кривошип 6, клиноременную передачу 5, электродвигатель 4
и маховик 9.
Желоб совершает прямолинейное возвратно-поступательное
движение в горизонтальной плоскости с различными скоростью
и ускорением при прямом и обратном ходе. При движении вперед
груз движется вместе с желобом, при обратном ходе желоба
груз по инерции продолжает движение вперед, скользя по желобу
(желоб как бы выскальзывает из-под груза), и только небольшую
часть хода груз движется с желобом назад. Груз всегда лежит на
дне желоба, не отрываясь от него. Давление на желоб постоянно
и равно силе тяжести груза.
Конвейер с переменным давлением груза (рис. 182, а) состоит
из желоба 1, который с помощью упругих стоек 4, расположенных
под углом 20 ... 30° к вертикали, закреплен на опорной раме 3.
Колебательное движение желоба производится приводом
(рис. 182, б), включающим шатун 2, коленчатый вал 7, маховик 8,
клиноремеииую передачу 6 и двигатель 5. Кривошип 2 вращается
с постоянной угловой скоростью и сообщает желобу возвратно-
поступательное движение одинакового характера для прямого
и обратного ходов в направлении, перпендикулярном опорным
296
стойкам. При движении вперед желоб немного приподнимается,
а при движении назад — соответственно опускается, поэтому
давление иа дно желоба равно алгебраической сумме сил тяжести
груза и вертикальной составляющей силы инерции. Таким обра-
зом, давление груза на дно желоба при прямом ходе больше и груз
движется вместе с желобом; при обратном ходе меньше и груз
скользит по желобу с переменной скоростью.
Инерционные конвейеры применяют в основном в технологи-
ческих машинах, например, в грохотах.
Производительность этих конвейеров до 400 т/ч, длина не
более 60 м, средняя скорость движения груза 0,2 м/с, угол на-
клона желоба до 15°, коэффициент заполнения открытого желоба
ф = 0,5 ... 0,6, прямоугольных труб ф ~ 0,6 ... 0,8, круглых
труб ф = 0,5 ... 0,6.
Вибрационные конвейеры. Желоба конвейеров совершают коле-
бания с малой амплитудой (А ~ 0,5 ... 15 мм) и большой часто-
той (v = 7,5 ... 50 Гц). При этих колебаниях желобом обеспечи-
вается вертикальная составляющая ускорения груза, которая
больше ускорения свободного падения. Частицы отрываются от
желоба и их движение происходит в виде непрерывно следующих
один за другим микрополетов. Вследствие большого числа коле-
баний при движении слоя материала визуально нельзя заметить
отдельные фазы движения, и создается впечатление, что материал
течет, как жидкость. При этом характер движения частиц при
сплошном слое значительно отличается от движения единичной
частицы. Это объясняется тем, что в слое помимо силы тяжести
частиц, сил трения о желоб и сил инерции действуют силы взаим-
ного трения и соударения частиц, а также переменное давление
воздуха, которое взвешивает частицы и придает материалу теку-
честь. Имеются две разновидности конвейеров — подвесные й
опорные.
Подвесной конвейер (рис. 183. а) состоит из грузонесущего
элемента (трубы или желоба) 4, свободно подвешенного иа упругих
297
Рис. 183. Вибрационный конвейер:
а — подвесной; б — опорный уравновешенный двух желобчатый
связях-амортизаторах 1 к неподвижным опорным конструкциям
и получающего направленные колебания от электромагнитного
нли центробежного привода 3 направленного действия. На случай
обрыва упругих подвесок предусмотрены предохранительные по-
яса 5. Загрузочные и разгрузочные патрубки конвейера соединены
с неподвижными конструкциями бункеров или пересыпных во-
ронок при помощи гибких гофрированных патрубков 2 из прочной
тканн, резины или пластмассы, которые, обеспечивая герметич-
ность соединения, не препятствуют колебательному движению
трубы.
Для перемещения груза в заданном направлении привод
устанавливают так, что линия действия его вынуждающей силы
составляет с продольной осью конвейера угол 0 — 20 ... 30°,
называемый углом направления колебаний.
Для обеспечения строго направленных прямолинейных коле-
баний грузонесущего элемента привод конвейера должен рас-
298
полагаться так, чтобы линия действия вынуждающей силы про-
ходила через центр инерции (ЦИ), всей колебательной системы.
В рассматриваемых конвейерах при полной симметричности кон-
струкции в поперечной плоскости центр инерции совпадает с ее
центром тяжести, координаты которого в пространственной си-
стеме конвейера определяют по формулам механики. Если ука-
занное условие не соблюдено и линия действия вынуждающей
силы не проходит 4ерез ее центр инерции, то образуется момент,
и система получает не только прямолинейные, но и дополнительные
крутнльиые колебания, неблагоприятно воздействующие на про-
цесс перемещения груза.
В опорном неуравновешенном вибрационном конвейере грузо-
несущий орган установлен на упругих стойках, наклоненных
под углом направления колебаний 0 к вертикальной осн и за-
крепленных на опорной раме, которая может быть установлена
непосредственно на фундамент или амортизаторы. Колебания
создаются вибровозбудителем. Конвейеры с одним желобом не-
уравновешены, поэтому вибрационные нагрузки передаются на
фундамент. Для уменьшения этих нагрузок опорную раму кон-
вейера выполняют достаточно большой массы и устанавливают
на амортизаторах.
Уравновешенный двухжелобчатый (двухтрубный) конвейер
(рис. 183, б) состоит из параллельно расположенных грузонесущих
труб 6, соединенных между собой упругими связями — рессо-
рами 9 и шарнирными коромыслами 8, которые крепятся к стой-
кам 10 опорной рамы 11. Привод 7 закреплен непосредственно
на трубах. Верхняя н нижняя трубы совершают возвратно-посту-
пательное перемещение относительно друг друга со сдвигом фаз
на 180л, т. е. когда одна труба движется вперед, другая на ту же
величину отклоняется назад. Такая конструкция обеспечивает
уравновешивание движущихся масс конвейера. Груз перемещается
по верхней и нижней трубам в одном направлении в сторону на-
клона коромысел. Упругая система конвейера выполняется с ре-
зонансной настройкой, т. е. частота вынуждающей силы равна
или близка частоте собственных колебаний упругой системы.
Благодаря этому при установившемся режиме требуется мало
энергии, но необходимо наличие специальных устройств для
разгона конвейера. Имеется ряд конвейеров с трубами диаметром
160, 220, 320 и 400 мм, производительностью 10 ... 70 м3/ч, дли-
ной до 60 м, углом наклона до 20° (для пылевидных грузов до 5°).
Достоинства вибрационных конвейеров: возможность транс-
портирования груза в условиях полной изоляции в герметически
закрытых трубах; совмещение транспортных операций с техноло-
гическими (сушка, охлаждение, смешивание и т. п.); промежуточ-
ная загрузка и разгрузка, простота конструкции, малый расход
энергии и износ несущего элемента. К недостаткам относится
снижение производительности транспортирования на подъеме
и увеличение на спуске (на 3 ... 5 % на Г подъема или спуска).
299
4
Рис. 184. Схемы приводов (вибраторов):
а — центробежный одинарный; б — центробежный сдвоенный; в — эксцентриковый
с жестким щатуном; с — эксцентриковый с полужестким шатуном; д — электромагнит-
ный однотактный; е — электромагнитный двухтактный
В конвейерах применяют несколько видов приводов-вибрато-
ров: центробежные, электромагнитные, эксцентриковые. Цен-
тробежные приводы могут быть дебалансными одинарными или
сдвоенными, а также в виде двух дебалансных мотор-вибраторов
с самосинхронизацией. Дебалансный центробежный одинарный
привод (рис. 184, а) представляет собой электродвигатель 2,
на валу 4 которого иа некотором расстоянии закреплен груз-
дебаланс 3. При вращении последнего возникает центробежная
сила Fy = т0Г[)(о (где т0 — масса дебаланса, кг; г0 — эксцентри-
ситет массы, м; © — угловая скорость вала, 1/с).
Чтобы сообщить трубе конвейера прямолинейные направлен-
ные колебания, привод закрепляют на опорной плите 1 с упругим
шарниром 5, благодаря этому на конвейер передается только
продольная состввляющая центробежной силы Fy = Fu sin ср;
поперечная составляющая Fx — Fn cos ф воспринимается упругим
шарниром и на конвейер не передается (здесь ф — угол поворота
груза).
В сдвоенном центробежном приводе (рис. 184, б) на двух со-
единенных друг с другом зубчатых колесах (или на двух валах)
закреплены одинаковые дебалансы 6. Прн вращении колес воз-
никают центробежные силы Fn, продольные составляющие кото-
рых Fy складываются (оии направлены в одну сторону), а попереч-
300
ные составляющие Fx уравновешиваются, так как они направлены
в разные стороны. Центробежные вибровозбудители могут соз-
давать значительные вынуждающие силы. Они имеют частоту
14 ... 25 Гц.
Преимуществами центробежного привода являются простота
конструкции, малый уровень шума при работе, возможность
надежной герметизации и получение большого диапазона частот
и вынуждающих сил (до 100 кН). К недостаткам относится неболь-
шой срок службы опорных подшипников (до одного года).
Эксцентриковые приводы с жестким (рис. 184, в) и полуже-
стким (рис. 184, г) упругими шатунами применяют иа однотрубных
н главным образом на двухтрубных конвейерах с резонансной
настройкой упругой системы. Их преимуществами являются
возможность получения амплитуд большого диапазона (до 15 мм)
и частоты колебаний в пределах 6 ... 12 Гц. Ускоренный износ
опорных подшипников присущ и этим приводам.
Электромагнитные приводы бывают однотактные и двухтакт-
ные. Однотактный вибровозбудитель (рис. 184, д) состоит нз
статора-электромагнита 12 с обмотками 11, присоединенными
через выпрямитель 10 к сети переменного тока, якоря 9, попере-
чины 8, упругих связей-пружин 7. Поперечина и пружины соеди-
няют между собой статор и якорь электромагнита. Колебательное
движение якоря возникает под действием пульсирующей силы
притяжения статора электромагнита, причем якорь притяги-
вается электромагнитом в одну сторону, а в другую он движется
благодаря усилиям пружин. При питании обмотки 11 переменным
током с частотой 50 Гц частота притяжения якоря в статоре будет
равна 100 Гц. Такую большую частоту использовать нельзя,
поэтому питание обмотки осуществляют через однополупериодный
выпрямитель, что позволяет использовать только одну из полу-
волн синусоидального тока н получить частоту колебаний вибро-
возбудителя (а следовательно, и конвейера) 50 Гц. Основное
преимущество этих вибровозбудителей — малые размеры и масса;
недостаток их — небольшая мощность (обычно до 1 кВт), поэтому
их применяют для конвейеров и питателей с малой производи-
тельностью (до 20 м3/ч).
Двухтактный вибровозбудитель (рис. 184, е) состоит нз двух
статоров 12, якоря 8, обмоток переменного 14 и постоянного 13
тока и упругих связей 7. Под действием магнитных потоков якорь 8
совершает возвратно-поступательные движения, причем якорь
притягивается к одному статору и отталкивается от другого
(частота 50 Гц). Двухтактные вибровозбудители используют
для конвейеров тяжелого типа подвесной конструкции.
Электромагнитные вибровозбудители снабжены аппаратурой
управления, которая позволяет плавно изменять силу тока в об-
мотках электромагнитов и амплитуду колебаний, а следова-
тельно, и производительность конвейера. Преимуществами этих
внбровозбудителей являются отсутствие трущихся частей, воз-
301
Рис. 185. Номограмма для выбора оптимальных режимов транспортирования
при прямолинейных гармонических колебаниях грузонесущего органа
можность плавного регулирования производительности, простота
конструкции. К их недостаткам относятся значительное снижение
производительности при уменьшении напряжения в сети.
Расчет виброконвейеров включает: 1) расчет колебательной
системы — определение амплитуды и частоты колебаний; 2) опре-
деление средней скорости перемещения груза и .производитель-
ности конвейера; 3) определение мощности привода.
На основе расчетов составляют номограмму (рис. 185), с по-
мощью которой можно выполнить выбор оптимальных режимов
работы конвейеров при заданной амплитуде вибрации и скорости
транспортирования. Оптимальным является такой режим, прн
котором достигается максимальная скорость транспортирования
при минимальной нагруженности конвейера. Расчет производят
в следующем порядке:
1) определяют необходимую скорость транспортирования
груза (м/с) по формуле (138):
v = Ст/(3600Дтфр); (186)
2) по номограмме (см. рнс. 185) по оси абсцисс находят точку а,
соответствующую скорости и; нз точки а восстанавливают перпен-
дикуляр, пересечение которого в точках bud одной амплитуды А
определяет угол направления колебаний (вибрации) 0 и частоту
колебаний v, кол/мин.
Задаются амплитудой, которая составляет для центробежных
вибраторов А = 3 ... 6, эксцентриковых А = 3 ... 10 и электро-
магнитных А = 1 ... 2 мм, а затем находят частоту колебаний v.
Мощность двигателя (кВт)
Р = QmL (&y0 cos 0 ± sin 0)/(367т]), (187)
гДе — в м/ч; L — в м; 0,05 ... 0,08 — обобщенный коэффициент сопро-
тивления груза по желобу; г| — 0,9 — общий КПД.
302
Пример. Определить основные параметры горизонтального вибрационного
однотрубного конвейера для транспортирования молотого доломита; Qm — 40 т/ч;
L ~ 15 м; р = 1,5 т/м3; А = 3 мм.
1. Принята труба DT — 250 мм, коэффициент заполнения ф — 0,6.
2. Скорость перемещения груза по формуле (186) при А — v =
= 4(?т/(Зб00л1)2фр) = 4.40/(3600.л0,252-0,6.1,5)’- 0,25 м/с.
3. По номограмме (см. рис. 185) при v = 0,25 м/с (точка а) и А — 3 мм
(точки bud) принимаем ₽ = 25° (точка с) и v — 1100 1/мин — 18,3 Гц (точка е).
4. Мощность двигателя привода по формуле (187) при j3 -^= 0;
Р = QmLtw0/(367r|) - 40.15-0,06/(367.0,9) = 0,12 кВт.
§ 95. РОЛИКОВЫЕ КОНВЕЙЕРЫ
Роликовыми называют конвейеры, в которых
груз перемещается по роликам, установленным на раме со стой-
ками. Конвейеры применяют для транспортирования по горизон-
тали или с небольшим углом наклона различных штучных и
тарно-штучных грузов, которые могут перемещаться по роликам.
Эти грузы имеют плоскую опорную поверхность или прямые
продольные опорные ребра, цилиндрическую форму и пр. Кон-
вейеры могут быть стационарными, переставными и передвижными
с цилиндрическими или дисковыми роликами, а также с шари-
ками. Цилиндрические ролики могут быть приводными и не-
приводными. Расстояние между осями роликов должно быть
таким, чтобы груз всегда лежал не менее чем на двух роликах,
поэтому на практике принимают шаг роликов не более 1/3 дли-
ны груза, а прн длинномерных грузах, которые могут изгиба-
ться в пролетах между роликами, шаг роликов будет еще меньше.
Стационарные неприводные роликовые конвейеры (рис. 186)
(рольганги) общего назначения (ГОСТ 8324—71) состоят из сек-
ций с роликами длиной 160 ... 1200 мм, диаметром 40 ... 155 мм
и шагом роликов 50 ... 630 мм. Радиусы поворотных (криволиней-
ных) секций от 400 до 4000 мм (рис. 186, а). Типоразмер конвейера
принимается в зависимости от нагрузки на ролик и габаритов
перемещаемого груза. Расчетную нагрузку на ролнк F (Н) от веса
груза G (Н) принимают в зависимости от соотношения между дли-
ной груза tp и шагом роликов L: F = 0,5G при 2/р< /гр < 3/р;
F = 0,33G при 3/р< /гр< 4/р; F = 0,25G при 4/р < /гр< 5/р.
Роликовые конвейеры могут иметь узлы пересечения и развет-
вления, в которых переходные секции выполнены как стрелки
рельсовых путей (рис. 186, б). На этих секциях используют также
дисковые ролики на поворотных головках и шаровые опоры,
допускающие движение грузов в любую сторону (рис. 186, в).
На криволинейных участках для уменьшения скольжения уста-
навливают два ряда роликов. Для прохода людей и напольного
транспорта секции выполняют откидными или подъемными. Пере-
мещение грузов осуществляют вручную, с помощью различных
толкателей или под действием составляющей силы тяжести. В пос-
леднем случае конвейер устанавливают наклонно в горизон-
303
Рис. 186. Неприводные роликовые конвейеры:
а — конвейеры с криволинейными секциями; б — стрелка; е — узел пересечения на
поворотном круге и шарах
тальной плоскости. Этот конвейер называют гравитационным
(см. § 96).
Общее сопротивление передвижного груза W7 (Н) по иепривод-
ному конвейеру слагается из сопротивления треиия в цапфах
ролика сопротивления качению груза по роликам и со-
противления, возникающего вследствие разгона роликов под
действием веса груза (сообщение им кинетической энергии) №3:
Г - F Г2 + Г3 = fd (G cos (3 + Gpzrp)/Dp 4- 2pG cos p/Dp +
+ KGpz&igL = G cos p (2p, + fd)(Dp + GpzTpfd/Dp + KGpzv2/gL =
= Gcosf3(2p + fd)/Dp + GpZrp^H + KGpzz^/gL, (188)
где G, Gp — веса соответственно груза и вращающейся части ролика, Н; ггр,
г — число роликов, на которые опирается груз, и на длине конвейера; / ==
= 0,03 ... 0,06 — коэффициент трения подшипников качения роликов; g — коэф-
фициент трения качения груза по роликам, м (для строительных деталей р =
= 0,001 м; металлических деталей ~0,005 м); v — скорость передвижения груза,
м/с; L — длина конвейера, м; К - 0,« ... 0,9 — коэффициент, учитывающий
неравномерность распределения масс ролика по диаметру; р —угол наклона, °;
w = (2р. + fd)jDp, fdjDp.
304
На гравитационных конвейерах груз должен перемещаться без
остановок и с постоянной скоростью под действием составляющей
веса груза G sin 0, поэтому угол наклона конвейера определяется
нз условия G sin 0 W7 или с учетом формулы (188):
Gsin 0 д..- G cos 0lc -|- GpZrp^j,, -р KGpZ&lgL.
Приняв cos 0 = 1 вследствие малости угла 0 и разделив на G,
получим выражение для определения угла наклона:
sin 0^^ -Р (щи2гр -f- Kzo*/g£)(Gp/G). (189)
Угол наклона зависит от вида и массы перемещаемого груза
и составляет 2 ... 7°; при транспортировании неровных кип мяг-
кого материала этот угол примерно равен 12 ... 14°.
У передвижных роликовых конвейеров секции монтируют на
колесах, а для регулирования угла наклона стойки выполняют
выдвижными.
Дисковые конвейеры применяют для транспортирования легких
грузов с небольшой опорной поверхностью. Они оснащены диско-
выми роликами, установленными на специальных шарикопод-
шипниках на осях.
Переносные дисковые конвейеры имеют ширину 160, 250, 400
и 650 мм. Шаг дисков в продольном направлении конвейера 40,
80 и 160 мм, шаг дисков в поперечном направлении составляет
(0,5 ... 1,0) шага дисков в продольном направлении.
Приводные роликовые конвейеры (рис. 187). Эти конвейеры
применяют в заготовительных цехах, на складах и в линиях с дру-
Рис. 187. Приводные роликовые конвейеры:
а — с продольным валом и коническими зубчатыми передачами; б — с приводными
цепями
305
гимн конвейерами или с технологическим оборудованием (окрасоч-
ным, сушильным, охладительным и т. д.). С помощью этих кон-
вейеров возможно транспортирование грузов на подъем от 5 до 6°.
Передвижение груза осуществляется силами сцепления роликов
с грузом (аналогично сцеплению колес с рельсом). Наибольшее
ускорение груза ограничивается коэффициентом сцепления: аП)ЯХ =
= — 0,15.9,81 — 1,46 м/с2 (здесь /сц = 0,15 - среднее зна-
чение коэффициента сцепления при буксовании ролика).
Ролики установлены на внешних опорных подшипниках и вра-
щаются от привода, который может быть индивидуальным на каж-
дый ролик (в тяжелых условиях работы) или один на группу
роликов. В последнем случае предусматривают устройства для
передачи вращения каждому ролику (цепь, канат, ряд зубчатых
колес, трансмиссионный вал с коническими колесами и т. п.).
Конвейеры могут быть н реверсивными. Ролики выбирают по до-
пускаемой нагрузке.
Если необходимо обеспечить накопление грузов иа конвейере
(накопительные конвейеры), то крутящий Момент передаете^
роликам через муфту предельного момента. Накапливаемые грузы
и ролики, расположенные под ними, останавливаются, а привод
конвейера продолжает работать.
Производительность роликового конвейера (т/ч) определяют
как для штучных грузов по формуле (142).
В процессе передвижения груза преодолеваются сопротивле-
ния и W2 1см. формулу (188)], поэтому для наклонного кон-
вейера мощность привода (кВт)
Р = (W\ + Га) п/(1000т]) + Qm///(367n),
где Qm — в т/ч; — в Н; у — в м/с; Н — в 0,8 ... 0,85 — общий
КПД привода конвейера.
§ 96. ГРАВИТАЦИОННЫЕ УСТРОЙСТВА
Гравитационными называют устройства, в которых
грузы перемещаются под действием их силы тяжести. К ним
относятся гладкие и роликовые спуски. Гладкие спуски выпол-
няют в виде наклонной плоскости, желоба, трубы. Для тарно-
штучных грузов в основном используют открытые спуски прямо-
угольной формы с бортами (рис. 188, а). Для перегрузки насып-
ных грузов применяют открытые и закрытые гладкие желоба.
Первые могут быть овальной, прямоугольной и треугольной
формы. Закрытые желоба для сильно пылящих грузов имеют
форму круглых и прямоугольных труб. Рабочие поверхности
обычно выполняют из стального листа или проката; применяются
также текстолит и дерево и др. Спуски могут быть использованы
как перегрузочные устройства в различных транспортно-склад-
ских системах, осуществляя при этом передачу груза с одного
рабочего органа иа другой, расположенный на более низкой
306
Рис.
188. Гравитационные устройства;
г;
а — гладкий спуск (желоб); б — торможение груза створками с пружинами; в — роли-
ковый спуск; г — торможение роликами, охваченными лентой
отметке. Одновременно спуски могут выполнять операции по
накоплению грузов, а затем их выдаче в соответствии с заданной
программой.
Угол наклона плоскости (желоба) определяют в зависимости
от коэффициента трения между его опорной поверхностью и гру-
зом и углом естественного откоса груза (см. табл. 32). Для начала
движения груза необходимо, чтобы угол наклона был больше угла
трения на 5 ... 10".
Скорость движения груза по спуску зависит от угла наклона,
коэффициента трения, длины пути и характера груза. Конечная
скорость на выходе с гравитационного устройства, как правило,
ограничивается рядом факторов: прочностью груза и тары, усло-
виями перегрузки. В связи с этим угол наклона прямолинейных
спусков не превышает |3 = 20 ... 30". При таком угле и значитель-
ной высоте перегрузки спуски будут иметь большую длину и
занимать много площади. Для уменьшения площади применяют
спиральные спуски, которые наиболее эффективны- для пере-
грузки мелких штучных грузов и грузов в мягкой таре (мешки,
картонные коробки и т. п.).
Движущей силой является составляющая силы тяжести F =
— G sin р (см. рис. 188, а). Сопротивление движению 11/ =
= G/sin р. Для движения груза необходимо выполнение условия
F = G sin р > W — G/ cos р или sin р f cos 0, откуда tg £ f
307
(здесь под коэффициентом трения понимается приведенный коэф-
фициент, учитывающий сопротивление трению по дну и боковым
стенкам желоба).
Если груз массой т скользит с коэффициентом трения f по
наклонной плоскости под углом 0 на длине I, разность уровней
в начальной и конечной точках h = I sin 0 и скорости в этих
точках и vK, то работа силы тяжести груза затрачивается на
работу трення и приращение кинетической энергии:
mgh = rngfl cos 0 -с tn — Vb)/2.
В случае, когда заданы ин, ик, h, то угол, под которым должна
быть расположена наклонная плоскость, находят из равенства
tg 0 %ghf!(2gh + —1£).
Если известна ин и задан угол 0, то конечная скорость груза
»к = - f ctg 0) 4-t£.
При vK = ин, т. е. при движении с постоянной скоростью,
tg 0о — f- Для ускоренного движения (ик > ин) необходимо 0>
0от Для замедленного движения (ук ун) должно быть 0< 0О.
Для снижения скорости штучных грузов при сходе их со спуска
применяют различные виды торможения: торможение тормозными
створками с пружинами (рис. 188, б) (при перегрузке грузов почти
одинаковых размеров); кратковременная остановка (до 2 с) с по-
мощью выдвижных упоров; уменьшение угла наклона желоба.
Если требуется при перегрузках направить поток насыпного груза
под каким-либо углом, то желобу придается изогнутая форма.
При этом весьма важно, чтобы форма желоба обеспечивала наи-
меньшее сопротивление перемещению груза и поток груза был
сплошным. Иногда требуется два грузопотока соединить в один
и направить его в необходимую сторону илн, наоборот", один
грузопоток разделить на два. В таких случаях желоба собирают
из нескольких фасонных частей. Для подачи груза по окружности
и кольцевой площади желоба и трубы выполняют поворотными.
Рабочая поверхность роликовых спусков образована роликами
(рис. 188, в), конструкция которых аналогична неприводным
роликовым конвейерам; их собирают из отдельных секций длиной
2—3 м (см. § 94). Роликовые спуски применяют для перемещения
различных штучных грузов, а также грузов в различной таре, на
поддонах, в контейнерах. Для устойчивого движения груза шаг
роликов принимают равным г/3 ... г/4 длины перемещаемого груза.
Грузы могут следовать с определенным шагом или непосредственно
друг за другом. В первом случае частота вращения ролика пере-
менная. В последнем случае ролики вращаются с постоянной
угловой скоростью. Условия движения груза на наклонном роли-
ковом конвейере рассмотрены в § 95.
Снижение скорости груза осуществляется путем его кратко-
временной остановки с помощью выдвижного упора и торможе-
нием опорных роликов. Простой способ торможения основан на
308
объединении нескольких роликов с помощью конвейерной ленты
или цепи (рис. 188, г). Время разгона объединенного участка
больше времени разгона единичных роликов, что и создает тормоз-
ной эффект.
Для опускания грузов с большой высоты применяют спираль-
ные спуски, аналогичные спиральным желобам.
Вопросы для повторения. 1. Какие виды конвейеров относятся к конвейе-
рам без тягового органа? За счет чего осуществляется перемещение груза в этих
конвейерах? 2. По какому принципу действуют качающиеся конвейеры? 3. Ка-
кие виды приводов применяют в вибрационных конвейерах? 4. В каких случаях
применяют роликовые конвейеры? 5. Назовите условие для перемещения груза
по спуску с постоянной скоростью.
ГЛАВА 26. ПНЕВМАТИЧЕСКИЙ ТРАНСПОРТ
§ 97. ОБЩИЕ СВЕДЕНИЯ
Пневматическим называют транспорт, в котором
перемещение грузов осуществляется по трубам или желобам
сжатым или разреженным воздухом. Пневматические транспорт-
ные устройства (пневмотранспорт) применяют для перемещения
насыпных грузов (пылевидных, порошкообразных, зернистых,
мелкокусковых) и единичных грузов, упакованных в патроны,
капсулы и др. В промышленности строительных материалов
пневмотранспорт широко используют для транспортирования
цемента, извести, гипса, соды, мела, глинозема и других подобных
грузов благодаря следующим основным достоинствам: высокой
производительности (до 400 т/ч) за счет механизации загрузки
н разгрузки; герметичности трассы перемещения груза, что умень-
шает загрязнение среды и др.
Среди недостатков пневмотранспорта можно отметить быстрое
изнашивание элементов установки, соприкасающихся с транс-
портируемым грузом; необходимость тщательной очистки воздуха,
выбрасываемого в атмосферу.
Насыпной груз транспортируют в виде смеси его частиц с воз-
духом, которую называют аэросмесью. Перемещение аэросмеси
обеспечивается разностью давлений в трубопроводе только при
определенной скорости воздуха, называемой критической. На
процесс транспортирования оказывают влияние свойства грузов,
главные из которых сыпучесть, размер частиц, плотность, коэффи-
циенты внутреннего трения и трения о твердые поверхности,
влажность, слеживаемость, абразивность, угол естественного от-
коса. Груз с повышенной влажностью легко прилипает к стенкам
трубопровода и других элементов, закупоривает их, нарушая
процесс транспортирования. Влажность цемента и гипса иедолжна
превышать 1 %, так как при увеличении влажности эти грузы
могут слеживаться.
309
Аэросмесь характеризуется коэффициентом массовой концен-
трации (кг/с груза на кг/с воздуха)
Н = (190)
где Qm — массовая производительность, кг/с; QB — массовый расход воз-
духа, кг/с.
Пневмотранспортиые устройства, перемещающие насыпной
груз, по принципу действия разделяют на три вида: 1 — уста-
новки, в которых аэрированные частицы груза перемещаются по
трубопроводу в потоке воздуха во взвешенном состоянии (п <
< 100); 2 — установки, в которых аэрированный груз переме-
щается по трубопроводу с высокой концентрацией (в плотном
слое) (р =- 200 ... 600); 3 — аэрожелоба, в которых аэрированный
груз движется по наклонному желобу под действием силы тяжести
груза (р = 60 ... 150).
Пневмотранспортиые устройства состоят из следующих основ-
ных элементов: системы воздухоподготовки (воздуходувные ма-
шины, воздухопроводы, влагомаслоотделители, контрольно-
измерительная аппаратура); питателя или сопла, подающих груз
в трубопровод; транспортного трубопровода с арматурой; разгру-
зочного устройства для отделения груза от воздуха (отделитель);
фильтра для очистки воздуха и системы управления. Элементы,
находящиеся под давлением, должны удовлетворять требованиям
«(Правил устройства и безопасной эксплуатации сосудов, работа-
ющих под давлением» (Правила по сосудам), утвержденных Гос-
гортехнадзором СССР |25|.
§ 98. УСТАНОВКИ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТА,
ПЕРЕМЕЩАЮЩИЕ ГРУЗ ВО ВЗВЕШЕННОМ СОСТОЯНИИ
Установки разделяют на всасывающие, нагнетатель-
ные и всасывающе-нагнетательные (смешанные).
Во всасывающей установке (рис. 189, а) вакуум-насос 6 соз-
дает разрежение в пневматической системе. Под действием атмо-
сферного давления воздух через сопло / вместе с грузом засасы-
вается из штабеля в трубопровод 2 и поступает в осадительную
камеру (отделитель) 5, где создается завихрение потока, вслед-
ствие чего частицы груза, двигаясь по инерции, ударяются о его
стенки, в результате чего их скорость уменьшается и они падают
вниз. Воздух, содержащий мелкую пыль, по трубопроводу по-
ступает в фильтр 4, где очищается, и, пройдя вакуум-насос 6,
выбрасывается в атмосферу. Груз из отделителя и фильтра вы-
гружается через затворы 5, которые пропускают груз и препят-
ствуют проникновению воздуха из атмосферы. Всасывающие
установки целесообразны в тех случаях, когда требуется забирать
груз из нескольких пунктов и транспортировать его в один прием-
ный пункт.
Всасывающая установка с вентиляторами в конце транспорт-
ного трубопровода имеет давление не более 0,01 МПа; с воздухо-
310
*
Рис. 189. Схемы установок пневматического транспорта для транспортирования
груза во взвешенном состоянии:
а — всасывающей, б — нагнетательной; в — всдсывающе-нагнетательной
дувками не более 0,03 МПа; с водокольцевым вакуум-насосом
не более 0,09 МПа. Всасывающие установки применяют для легких
сыпучих грузов, при разгрузке вагонов, судов на небольшие
расстояния, так как перепад давлений в трубопроводе невысокий
(0,04 ... 0,05 МПа)..
В нагнетательной установке (рис. 189, б) сжатый воздух от
компрессора 7, пройдя через масловлагоотделитель и воздухо-
сборник, через воздухопровод поступает в смесительную камеру,
в которую принудительно питателем подается груз. В камере
груз интенсивно перемешивается с воздухом и через транспортный
трубопровод 2 поступает в отделители 3 на местах разгрузки.
Для переключения потока с одного отделителя на другой в транс-
портном трубопроводе устанавливают переключатели 8. Отрабо-
танный воздух, пройдя фильтр, выбрасывается в атмосферу.
Отделители п фильтры также снабжены затворами. Эта установка
целесообразна в тех случаях, когда груз, забираемый с одного
пункта, необходимо распределить по нескольким приемным точ-
кам. Установки с компрессорами имеют давление 0,6 МПа. Нагне-
тательные установки применяют для транспортирования грузов
на большие расстояния.
Всасывающе-нагнетательная установка (рис. 189, в) состоит
из двух частей: всасывающей, забирающей груз, и нагнетательной,
транспортирующей его к месту разгрузки. Засасываемый соплом 1
311
груз поступает по трубопроводу 2 в отделитель 3, который через
затвор 5 соединен с питателем. Воздух из отделителя 3, прошед-
ший через фильтр 4, подается всасывающе-нагиетательной возду-
ходувной машиной 6 в смесительную камеру питателя, смеши-
вается с грузом и направляется к месту разгрузки в отделитель 9.
Груз может забираться из нескольких загрузочных мест и по-
даваться в ряд пунктов. Такие установки применяют при обеспы-
ливании мельниц и других технологических аппаратов, а также
в качестве перегружающих устройств, когда необходимо совме-
щать две операции — забирание груза из штабеля и подачу его
по вертикали.
Основные правила эксплуатации и безопасной работы. Нормальная эксплуата-
ция установок заключается в наблюдении за состоянием и своевременном ре-
монте. При плохо смонтированной и отрегулированной установке повышается
мощность силовых агрегатов, быстро изнашиваются ее отдельные узлы и детали
и в конечном счете выход из строя всей системы. Перед началом эксплуатации
рекомендуется многократная обработка чистым кварцевым песком для «шли-
фовки» внутренней поверхности трубопроводов. Фланцевые соединения должны
быть герметичны, так как утечки нарушают режим работы. Пуск и остановку
следует проводить строго по инструкции (кроме аварийных случаев).
Для нормальной работы большое значение имеет подготовка, и сушка воз-
духа для рабочей трассы и систем управления, поэтому фильтры должны быть
исправны и своевременна очищаться. Поступающий в загрузочное устройство
груз должен быть однородным, чистым, без посторонних примесей и с влаж-
ностью, не превышающей допустимую для данной установки. Несоблюдение
этих требований может привести к закупорке трубопровода.
С большой ответственностью необходимо относиться к обслуживанию ре-
зервуаров и узлов, находящихся под давлением. Манометры и мановакуумметры
должны быть хорошо освещены, а их показания хорошо видны.
Основные трудности при эксплуатации возникают вследствие быстрого
изнашивания конечных участков трубопроводов и колен нагнетательных уста-
новок. Нижняя часть горизонтальных труб изнашивается в несколько раз бы-
стрее, чем верхняя, поэтому рекомендуется поворачивать трубы относительно
горизонтальной оси на 180° через 1 ... 1,5 года эксплуатации. Вертикальные
трубы служат в 2 ... 3 раза дольше, а колена с углом 90° — в 3 ... 10 раз меньше.
Тщательный монтаж, а также использование труб из высокоуглеродистых
и легированных сталей значнтё'льно увеличивают срок службы. Для этого колена
футеруют керамикой, резиной и др., а также наплавляют на них твердые сплавы.
При транспортировании абразивных и кусковых грузов срок службы труб и
колен резко Снижается.
Для нормальной работы установки должны своевременно проводиться все
виды предусмотренных инструкцией регулировок, чистки, смазывания в пол-
ном объеме. Периодически должны проверяться соединения элементов на трассе,
причем эти работы запрещается проводить на установке, находящейся под дав-
лением. Предохранительные клапаны не должны допускать превышения давле-
ния более чем на 0,05 МПа для элементов с давлением до 0,3 МПа и на 15 %
с давлением 0,3 МПа и более.
$ 99. УСТАНОВКИ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТА,
ПЕРЕМЕЩАЮЩИЕ ГРУЗ С ВЫСОКОЙ КОНЦЕНТРАЦИЕЙ
СМЕСИ
Находящийся в сосуде груз с помощью сжатого
воздуха насыщается (аэрируется) до состояния текучести и под
давлением вытекает из разгрузочного патрубка. В плотном слое
312
груз перемещается по горизонтали и вертикали в пневматических
подъемниках, пневматически разгружающихся автоцементовозах,
цистернах для перевозки цемента, технологических установках
и др. Транспортирование в плотном слое широко распространено
в стекольной промышленности.
Пневмоустановка для перемещения мелкодисперсного легко-
сыпучего груза (рис. 190, а) состоит из сосуда (монжуса) 13,
который периодически заполняется грузом при открытых конус-
ном затворе 3, задвижке 4 и клапане 5. После заполнения сосуда
грузом компрессором 1 через масловлагоотделитель 2 подается
а)
Рнс. 190. Схемы устано-
вок пневматического
транспорта для транспор-
тирования груза:
а — легкосыпучего; б — не-
достаточно сыпучего
313
сжатый воздух, аэрирующий груз. При скорости воздуха 1,2 ...
1,5 м/с в трубопровод 7 поступает аэросмесь с наибольшей возмож-
ной концентрацией (в плотном слое), при этом пробковый кран /2,
фильтр-кран 11 открыты, а кран 6 для продувки трубопровода
закрыт. Груз собирается в приемнике 10, а воздух направляется
в фильтр 8, снабженный затвором 9. Диск 14 исключает поступле-
ние воздуха в трубопровод по пути наименьшего сопротивления
вдоль трубы без захвата аэросмеси. Датчики 15 и 16 контролируют
уровень груза в сосуде.
Для транспортирования недостаточно сыпучих грузов (клин-
керного порошка, соды, стекольной шихты и т. п.) применяют
дополнительные устройства для аэрирования (рис. 190, б). Воздух
поступает в сосуд 13 не сверху, а через установленные внутри
монжуса секторы-кольца 21 и распределитель 20, состоящий из
статора и ротора. На статоре имеются патрубки, соединенные
с секторами-кольцами. Ротор 14, приводимый во вращение дви-
гателем 18 через редуктор 19 (п == 20 ... 30 об/мин), имеет одно
отверстие, которое поочередно совпадает с отверстием одного из
патрубков статора, куда и поступает в этот момент сжатый воздух.
Этим обеспечивается аэрирование груза и подача его в плотном
слое в трубопровод 7.
После заполнения сосуда 13 грузом приводится во вращение
распределитель 20, открывается вентиль 17, и сжатый воздух
подается в сосуд. После поднятия давления до расчетного слегка
открывается продувочный вентиль 6, пробковый кран 11, и аэро-
смесь начинает поступать по трубопроводу 7 в приемник 10. Через
15 ... 20 с закрывается продувочный вентиль 6. Окончание транс-
портирования определяется иижним уровнемером 15, после сиг-
нала которого открывается продувочный вентиль 5 и закрывается
пробковый кран 12, выключается электродвигатель 18. После
выпуска воздуха сосуд заполняется грузом и цикл повторяется.
Давление воздуха 0,2 ... 0,35 МПа в зависимости от длины транс-
портирования. Производительность обусловливает вместимость
сосуда и составляет 10 ... 25 т/ч.
Правила эксплуатации и безопасной работы аналогичны уста-
новкам, рассмотренным в § 98.
§ 100. ОСНОВНЫЕ ЭЛЕМЕНТЫ ПНЕВМОТРАНСПОРТНЫХ
УСТАНОВОК
Арматура транспортного трубопровода. Включает
трубопровод, соединения н уплотнения его участков, компенса-
торы, колена (отводы), переключатели потока. Элементы трубо-
провода должны обеспечивать герметичность соединений, мини-
мальное сопротивление движению аэросмеси, быть надежными
и долговечными.
В качестве трубопроводов применяют стальные бесшовные
трубы (ГОСТ 8734—75) диаметром (внутренним) dr = 50 ... 300 мм
314
I
Рис. 191. Арматура трубопровода:
а -- колено; толщина стенки которого увеличена; б — переключатель пробкового типа;
в переключатель с поворотным клапаном; г - сопло
с толщиной стенки 4 ... 5 мм, а для транспортирования абразив-
ных грузов (цемента) с толщиной 8 ... 12 мм. Стальные трубо-
проводы соединяют сваркой, при помощи фланцев с прокладками
из резины, клингерита, паронита и т. п., а для горячих грузов —
с асбестовой прокладкой. У каждого колена или переключателя
фланцевые соединения разъемные для обеспечения разборки
трубопровода в случае образования в нем пробки и для провора-
чивания прямолинейных участков труб вокруг продольной оси.
Для трубопроводов используют также гибкие шланги. Разгрузоч-
ные патрубки у силосов выполняют из чугунного литья, причем
стенка, о которую ударяется струя при повороте, утолщена.
Наиболее интенсивному абразивному износу подвержены ко-
лена и разветвления трубопровода вследствие неизбежных ударов
аэросмеси о стенки. Углы перегиба колен не должны быть менее
90е; закругления должны быть плавными с радиусом /?Т> 5dT.
Наибольшее распространение получили колена с увеличенной
толщиной стенки (рис. 191, а) и наплавкой истирающейся поверх-
ности абразивостойкими металлами.
В установках с несколькими пунктами разгрузки применяют
переключатели потока аэросмеси. Перемещением пробки 1
(рис. 191, б) или перестановкой диска 2 (рис. 191, в) перекрывают
одно из отверстий и поток направляют в соответствующий трубо-
провод.
Трубопровод должен быть установлен в закрытом помещении
или надежно теплоизолирован, чтобы в нем не происходила кон-
315
денсация влаги; перед коленами, переключателями, затворами
и др. должны быть предусмотрены патрубки для продува слежав-
шихся частиц груза.
Сопла предназначены для образования аэросмеси и подачи
ее в трубопровод всасывающих установок. Сопло (рис. 191, г)
состоит из внутренней 3 и внешней 4 труб, соединенных регулиро-
вочными винтами с гайками, посредством которых можно изменять
ширину кольцевой щели для впуска воздуха. Сопло устанавли-
вают иа поверхность штабеля сыпучего груза нижним раструбом.
Под действием силы тяжести оно погружается на некоторую
глубину. Входящий с большой скоростью через кольцевую щель
атмосферный воздух разрыхляет поверхностные частицы груза
в раструбе, образуя аэросмесь и увлекая ее в трубопровод.
Питатели (загрузочные устройства). Они предназначены для
подачи груза в трубопровод нагнетательных установок. Питатели
могут быть винтовыми или камерными.
Рабочим органом винтового питателя (рис. 192) является
консольный виит (шнек), установленный в цилиндрическом кор-
пусе со сменной износостойкой гильзой. Зазор между винтом
и стенкой составляет 1 ... 2 мм. Винт имеет переменный шаг
(в заборной части t — 0,80; у последнего витка t 0,60), частота
вращения винта около 1000 об/мин. Груз из бункера поступает
в загрузочное отверстие, захватывается винтом и подается в смеси-
тельную камеру. В нижней части камеры находятся два ряда
форсунок, через которые подается сжатый воздух так, что его
потоки пересекаются в смесительной камере в одной точке —
фокусе.
Подаваемый винтом груз смешивается с воздухом, образуя
аэросмесь, которая перемещается по трубопроводу к месту вы-
грузки. Благодаря переменному шагу винта материал у входного
отверстия уплотняется так, что между последним витком н клапа-
ном образуется пылевая пробка, препятствующая прохождению
сжатого воздуха из смесительной камеры в загрузочный бункер.
Длину пробки и, соответственно, степень герметизации регули-
руют выдвижением цилиндрической части корпуса. Параметры
пневматических винтовых насосов (питателей) для цемента регла-
ментирует ГОСТ 12018—66.
Производительность питателя 36 ... 100 т/ч, приведенная
дальность подачи 200 ... 400 м, в том числе по вертикали до 30 м,
давление подводимого воздуха 0,4 МПа, расход воздуха
15 ... 40 м3/мин.
Для исключения поломки насоса перед питающим бункером
устанавливают просеивающее устройство, а иногда и дополни-
тельный магнитный сепаратор, например, при производстве шла-
копортландцемента.
В камерных питателях используют аэрацию груза. По числу
камер питатели делят на одно- и двухкамерные, по типу выдачи
аэросмеси в трубопровод — с верхней и нижней выдачей в один
316
I электродвигатель; 2 — муфта: J — ограждение; 4 — корпус подшипников: 5 — уплотнение вала; О -
винт; Л загрузочный корпус; У броневая втулка; 10 -- смесительная камера: 11 — клапан; 12 - форсунка
317
или два независимых трубопровода. Одна камера периодически
загружается и разгружается, поэтому подача груза циклическая.
В двухкамерном питателе (рис. 193) во время загрузки одной ка-
меры происходит разгрузка другой, благодаря чему обеспечи-
вается непрерывная подача груза в трубопровод. Время раз-
грузки, как правило, всегда меньше временя загрузки. Управляет
работой камер система автоматики, состоящая из гядродатчиков,
соединенных с воздухораспределителем.
При определенной массе материала в питателе гидродатчик
загружаемой камеры срабатывает, переключая одновременно воз-
духораспределитель на прекращение загрузки. Закрывается за-
грузочный клапан с помощью пневмоцилиндра н клапана впуска
воздуха. В это время через запорный вентиль начинается подача
свежего воздуха в камеру, аэрациоиные устройства и форсунки.
Нижние слои лежащего в камере груза аэрируются, под давлением
воздуха поступают в выводную трубу и направляются в транспорт-
ный трубопровод. Разгрузка заканчивается при падении давления
в камере. С помощью специального устройства воздухораспредели-
тель переключается на загрузку. Сжатый воздух подается на от-
крывание загрузочного клапана и клапана выпуска воздуха из
камеры. Одновременно прекращается подача воздуха в камеру.
По сравнению с винтовыми камерные питатели имеют ряд
преимуществ: отсутствие быстродвижущихся и изиашивающихся
частей; возможность создания больших давлений и транспорти-
рования на большие расстояния (до 1500 м). Недостатки камерных
питателей :— большие размеры и увеличенный расход энергии.
Производительность питателей зависит от дальности транспорти-
рования груза, например, у питателя TA-28 Qm — 100 т/ч при
£ = 1000 м; Qm = 125 т/ч при L — 500 м; = 220 т/ч при
L = 250 м.
Разгрузочные устройства (отделители) предназначены для от-
деления транспортируемого груза от воздуха.
Отделитель с внутренними направляющими поверхностями
(рис. 194, а) состоит из корпуса, внутри которого закреплены
направляющие из листовой стали, замедляющие движение аэро-
смеси. При этом наиболее крупные фракции груза отделяются
быстрее, чем мелкие, их выгружают через нижний патрубок с по-
мощью затворов. Воздух, содержащий более мелкие фракции,
поднимается вверх в конический бункер, в котором отделяются
мелкие фракции. Воздух с пылевидными фракциями направляется
в фильтр для окончательной очистки.
В циклонный отделитель (рис. 194, б) аэросмесь поступает
через патрубок по касательной к внутренней поверхности корпуса
и приобретает вращательное движение. Частицы груза отбрасы-
ваются центробежными силами к стенкам корпуса, тормозятся
силами трения, падают вниз и выгружаются через затвор вы-
пускного отверстия. Воздух через верхний патрубок выходит
в фильтр.
318
й — с внутренними направляющими поверхностями; б - циклонного типа
Затворы предназначены для выпуска груза из емкостей.
Ротационный (шлюзовой) затвор (рис. 195) состоит из много-
камерного барабана У, плотно притертого к корпусу 3, враща-
ющегося с валом и опирающегося на фланцы 2. Груз самотеком
поступает сверху в шлюзовые камеры барабана, перемещается
ими вниз и непрерывно высыпается в приемный трубопровод.
Вместимость барабана 2 ... 20 л.
Фильтры. На всасывающем трубопроводе компрессора уста-
навливают фильтр для очистки наружного воздуха от пыли. Перед
устройством, расходующим сжатый воздух для траиспортнрова-
Рис, 195. Ротационный затвор
320
ння груза, помещают масловлагоотделитель, в котором сначала
производится грубая очистка воздуха от масла и влаги, а затем
его обезвоживание. Отработавший воздух перед выбрасыванием
его в атмосферу очищают от пылевидных частиц груза.
На цементных заводах применяют сухие тканевые рукавные
фильтры (напорные и всасывающие). В среднем необходим 1 ма
фильтрующей поверхности на 1 м3/мин очищаемого воздуха.
Напорные фильтры (рис. 196, а) устанавливают на крышках
силосов. В верхней части рукава закрыты деревянными пробками
с крючками для подвешивания к металлической раме. Нижние
части рукавов присоединены к патрубкам, через которые поступает
воздух из силоса под давлением выше атмосферного. Он проходит
через пористый материал фильтра, а пылинки задерживаются
на шероховатой внутренней поверхности рукава. Возникающие
неизбежные колебания давления воздуха вызывают небольшие
сотрясения рукавов, в результате осевшая на них пыль падает
вниз и рукава самоочищаются.
Металлическая камера всасывающего фильтра (рис. 196, б)
разделена перегородками на секции, соединенные с трубопрово-
дами. внутри которых помещены рукава так, что сверху они
надеты на диски, подвешенные к раме, а внизу — неподвижно
прикреплены к решетке с отверстиями. Таким образом, сверху
рукава закрыты, а внизу — открыты.
Загрязненный воздух поступает в рукава снизу, а очищенный,
пройдя через ткань, поступает в верхнюю коробку и- выбрасы-
вается в атмосферу. В течеиие 5 ... 10 мин работы фильтра рукава
покрываются изнутри слоем пыли и становятся почти непроница-
емыми для воздуха. В процессе работы рукава периодически
очищают встряхиванием, одновременно пропуская воздух в обрат-
ном направлении.
Для отвода зарядов статического электричества ткань рукавов
и металлические части кожухов заземляют.
Воздуходувные машины осуществляют подачу воздуха в пнев-
мотранспортную установку.
В ротационном компрессоре (рис. 197, а) воздух через фильтры
и патрубок 3 поступает во всасывающую полость. По мере поворота
ротора 2 объем ячейки, образованный подвижными лопатками,
увеличивается и происходит всасывание. При дальнейшем по-
вороте ротора вследствие его эксцентричного расположения отно-
сительно оси корпуса объем ячейки уменьшается, происходит
сжатие и воздух через нагнетательный патрубок 1 поступает
в трубопровод.
Водокольцевой насос (рис. 197, б) через патрубок 11 заполняют
до определенного уровня водой. При вращении эксцентрично
установленного ротора с радиальными лопастями вода под 'дей-
ствием центробежной силы отбрасывается к внутренней стенке
корпуса 9. При этом образуется жидкостное кольцо 7 н серпо-
видное пространство 6, являющееся рабочей полостью, которое
11 Балашов В. П. 321
322
разделено лопастями на, отдельные ячейки 8, 13. За время первой
половины оборота эти ячейки увеличиваются и происходит за-
сасывание воздуха. При второй половине оборота объем ячеек
уменьшается, воздух сжимается и через нагнетательное окно
подается в патрубок 10. Преимущества насоса — простота кон-
струкции, возможность работы при сильно запыленном воздухе,
самоохлаждение и самоочищение притоком свежей воды. КПД
насоса до 0,4.
Центробежный насос (рис. 197, в) состоит из заключенных
в кожух 16 быстровращающихся рабочих колес 14 с лопастями,
под воздействием которых воздух отбрасывается в кольцевой
диффузор 15, при этом кинематическая энергия воздуха, полу-
ченная в рабочем колесе, превращается в потенциальную энергию
(давление). Насосы применяют при малом разрежении и большом
расходе воздуха, оии обладают устойчивым режимом работы.
Многоступенчатые насосы называют турбокомпрессорами.
Н*
323
Воздухосборник (ресивер) представляет собой сосуд с мано-
метром. Его устанавливают после насоса для выравнивания давле-
ния воздуха в трубопроводе.
Средства контроля. Они предназначены для сигнализации
о заполнении емкости. Указатель уровня типа УМК (рис, 198, а)
состоит из корпуса 1 с установленным в нем электродвигателем
с червячным редуктором, опорной трубы 2 и вала с крыльчат-
кой 3. При неполной емкости крыльчатка свободно вращается.
Когда уровень груза достигнет крыльчатки, она застопорится
вместе с валом и червячным колесом, при этом червяк смещается
в осевом направлении, поворачивает рычаг н переключает ртут-
ные контакты.
Указатель уровня поплавкового типа (рис, 198, б) имеет дат-
чик, представляющий сосуд грушевидной формы 7, шарнирно
324
закрепленный на скобе 6, подвешенной с помощью цепей 5
к крышке 4 емкости. При заполнении емкости грузом датчик от-
клоняется, замыкается ртутный контакт и сигнал подается на
пульт. В случае освобождения емкости датчик возвращается в на-
чальное положение, при этом замыкается другой контакт и по-
дается соответствующий сигнал.
Указатель уровня С-607 (рис. 198, в) состоит из закрепленного
в гнезде датчика 9 с гибким проволочным щупом. Контакты, рас-
положенные в датчике, при изгибе щупа замыкаются.
К средствам контроля относятся также манометры и мано-
вакуумметры.
§ 101. ОСНОВЫ РАСЧЕТА УСТАНОВОК
ПНЕВМАТИЧЕСКОГО ТРАНСПОРТА
Расчет рассмотрим на примере нагнетательной уста-
новки с двухкамерным питанием для подачи портландцемента
в силосные склады (рис. 199) со следующими исходными данными:
производительность Qm = 180 т/ч; плотность цемента ргр =
= 3,2 т/м3; воздуха рв — 1,2 кг/м3. Общая длина горизонтальных
участков трубопровода £ Lr = 226 м, вертикальных У ‘
= 55 м. Радиус закругления колен А! 2 а.
1. Определение приведенной длины трубопровода. На криво-
линейных участках трассы (колена, отводы, переключения и др.)
создаются дополнительные сопротивления прохождению аэро.
Рис. 199. Схема для расчета пневмотранспортной установки
325
Таблица 51. Значения длины трубопроводов (м) и коэффициента у
Груз (наибольшая крупность частиц, мм) Лэк при отношении R/dT V
4 6 1 0 20
[ 1ылевидный (0,001 ... 1) 4 ... 8 ‘ 5 ... 10 6... 10 8 ... 10 10 .. 16
Сортированный зернистый (1 ... Ю) — 8 ... 10 12 ... 16 16... 20 17 .. 20
Мелкокусковой рядовой (10 ... 20) — — 28 ... 35 38 ... 4 о 17 .. 22
Среднекусковой рядовой (40 - - - 80) — — 60 ... 80 70 ... 90 22 .. 25
смеси. Колена, имеющие угол 90°, условно заменяют эквивалент-
ными прямолинейными участками £эк с соответствующими по-
терями давления (табл. 51). При транспортировании цемента для
колеи с R/d-т. 3 принимают L3K -5 м, если колено расположено
в горизонтальной плоскости, £Эк - 8 м, если колено расположено
в вертикальной. Для двухходовых переключателей Lm = 8 м.
Пример. Предварительно принят диаметр трубопровода dr — 0,2 ... 0,3 и;
R/dy — - 2/(0,2 ... 0,3) = (10 ... 6,7) > 3. В трассу включены три горизонтальных
и три вертикальных колена; аэросмесь проходит через два переключателя. При-
веденная длина трубопровода 1,ир = £ ”1' £ Н- L ^чп = 226 +
+ 55 -J- | (3 X 5) v (3 X 8) ] + (2 X 8) - 336 м.
2. Определение скорости воздуха. Устойчивое транспортиро-
вание аэросмеси возможно лишь при достаточной скорости воз-
духа, при которой частицы материала находятся во взвешенном
состоянии и колеблются относительно какого-то среднего поло-
жения. Такое явление называют витанием частиц, а скорость
воздушного потока при этом — скоростью витания us. Для надеж-
ного транспортирования необходимо, чтобы скорость воздуха
ив (1,3 ... 1,5) vs. Уменьшение скорости может привести к проб-
кам (завалам) груза в трубопроводе при изменении режима транс-
портирования. Большая скорость нежелательна во избежание
излишнего расхода энергии.
Скорость воздуха в трубопроводе изменяется обратно пропор-
ционально его давлению (плотности). В установках давление
уменьшается от начального участка трубопровода к конечному
по направлению движения аэросмеси, и скорость соответственно
возрастает. Переносная способность струи воздуха пропорци-
ональна его плотности и квадрату скорости. На начальном уча-
стке трубопровода, где воздуху сообщается начальная скорость,
переносная способность, струи меньше, чем на последующих
участках. В связи с этим скорость воздуха должна определяться
на выходе из трубопровода нагнетательной установки и у сопла
всасывающей установки. Для установок, давление которых в ука-
326
Рис. 200. Зависимость коэффициента yz
массовой концентрации р от расстоя-
ния транспортирования Lnp 80
заиных местах близко к атмос- 50
ферному, необходимая скорость ьо
воздуха (м/с) ZQ
Vн = V V' Ргр -f~P^np> (191) о
где у — коэффициент, учитывающий $00 500 700 1~пр,м
крупность частиц груза (см. табл. 51);
ргр — в т/м3; Lnp — н м; Р - (2 ... 5). КН — коэффициент, учитывающий свой-
ство грузов (меньшее значение для пылевидных).
Пример. Скорость воздуха на выходе из трубопровода по формуле (191):
ов = у Ргр + ₽£цр "= Vх 5,2 + (3- Ю“5) 336,J = 24,9 м/с 25 м/с [здесь у =
— 12 для цемента (см. табл. 51); Р— ЗЛО'5 —коэффициент, учитывающий
пылевидное состояние цемента].
3. Определение массовой концентрации смеси. Во всасывающих
установках принимают р — 1 ... 5. Для нагнетательных р, опре-
деляют в зависимости от £пр и вида питателя (рис. 200). Большие
значения и принимают для сухих, легко сыпучих грузов большой
плотности (ргр = 2,5 ... 3,5 т/м3), а меньшие —для грузов мень-
шей плотности, а также для влажных и абразивных.
Пример. Принята ц — 33 при Лпр ~ 336 м (см. рис. 200).
4, Определение расхода воздуха (м3/с) и диаметра трубопро-
вода (м). Эти параметры связаны зависимостью
V, = <?„/<3,6рв(*> ndX/4- (192)
Пример. Требуемый расход воздуха
^B = Qm/(3,6pBfx) = 180/(3,6-1,2-33) = 1,26 ма/с 75,6 м:1/мин.
Внутренний диаметр трубопровода
dT > /4Ув/(лцв) У 4 1,26/(л:-25) = 0,253 м.
По ГОСТ 8732—70 с учетом абразивности цемента принята труба с толстыми
стенками (dT = 273 X 10; dT — 273 — (2 X 10) ~ 253 мм).
5. Определение давления воздуха в трубопроводе. Давление
для нагнетательных установок в начале трубопровода (МПа)
= 0,1 /1 Ч- pfi^np^T ± Phi (193)
разрежение во всасывающих установках в конце трубопро-
вода (МПа) ____________
= 0,1 /Т^- pjuiLnp^/^T ± Ph, (194)
где Р= 1,5.10-7 —опытный коэффициент для всасывающих установок; для
нагнетательных р принимают в зависимости от величины s = (Р”с. 201);
рл — LBpBp, 1СГЙ МПа — потеря давления на подъем массы столба аэросмеси
(здесь рв = 1,6 ... 2 кг/м3 — средняя плотность воздуха на длине вертикального £в
участка трубопровода нагнетательной установки; для всасывающей установки
р; = 1 кг/м3).
327
Рис. 201. Зависимость коэффи-
циента Р от величины s для вы-
соконапорных установок
Знак перед ph в
формуле (193) относится
к движению аэросмеси
вверх, а знак «—» — к
движению вниз; в форму-
ле (194) знак «+» относится к движению аэросмеси вниз,а«—» —
к движению вверх.
Необходимое давление компрессора (МПа)
Рм = арн 4 АРв,
(195)
где сс — 1,15 ... ! ,25 — коэффициент, учитывающий уменьшение давления в пи-
тателе; Дрв 0.02 ... 0,03 МПа — уменьшение давления в воздухопроводе от
компрессора до питателя.
Пример. Давление в начале трубопровода по формуле (193):
Рн = О'1 / 1 PllLIipuM + Е ЧРнН10 й =
= 0.1/1 ) 16-Ю’7-33-336-253/0,233 + 55 1,9-33-IO’5 =0,69 МПа,
где р — 16-10“7 — коэффициент, принятый но рис. 201 при s — Ц^приа/^т
= 33-336-25-/0,253 - 27,2.10й; рв = 1,9 кг/м3.
Необходимое абсолютное давление в воздухопроводе у компрессора по
формуле (195)
рм =- I АрР -= 0,69-1,15 + 0,03 — 0,82 МПа.
6. Выбор воздуходувной машины. Тип машины выбирают с уче-
том необходимого давления 1см. формулу (193)] или разрежения
1см. формулу (194)1 и требуемой производительности с учетом
утечек воздуха.
Пример. Необходимая подача компрессора = 1,1 VE "= 1,1-75,6 =
= 83,2 м3/мин ~ 5000 м3/ч.
Компрессор выбирают с учетом рм — 0,82 МПа и VBM = 82,3 м3/мин.
7. Выбор двигателя воздуходувной машины. Необходимая мощ-
ность двигателя (кВт)
Р - л„VB„/<1000.60ц), (196)
где д — 0,55 ... 0,75 — общий КПД машины; для компрессоров, работающих
в изотермическом процессе сжатия (постоянная температура воздуха), Лм —
= 230 300р0 1g (рм/Ро) (здесь р0 — 0,1 МПа — атмосферное давление); для ва-
куум-насосов значение Дм принимают в зависимости от давления в воздухо-
проводе [см. формулу (194)]:
рм, МПа......................... 0.06 0.07 0.08 0,09
Дм, Джем3 .......................... 47 000 41000 35 000 27 000
328
Пример. Мощность двигателя компрессора по формуле (196):
Р -4MVBM/(60. 1000ц) -- 2! 050.83,2/(60- 1000.0,6) = 48,6 кВт
(здесь р0 — 0,1 МПа, Ам = 230 ЗООр0 1g (pM/At) — 230 300-0,1 X
х Jg (0,82/0,1) — 21 050 Дж/м3; т) = 0,6).
Принят электродвигатель серии 4А (Рн 55 кВт, пн — 1500 об/мин).
8. Выбор питателя.
Пример, Для обеспечения Q,„ 180 т/ч принят двухкамерный' питатель
типа ТА’28.
Расчет пневмотранспортной установки даже с учетом экспери-
ментальных коэффициентов является приближенным, поэтому
после монтажа и пуска установки необходим регулировочный
период, в течение которого должны быть установлены опытным
путем наивыгоднейшее давление и количество поступающего
воздуха.
§ 102. АЭРОЖЕЛОБА
Аэрожелоб (рис. 202) состоит из секций 6. изготов-
ленных из листовой стали и соединенных фланцами с помощью
болтов. Аэрожелоб, установленный под углом 4—5°, по высоте
разделен пористой перегородкой 7. Груз с толщиной слоя 50 ...
100.мм поступает из бункера 4 через патрубок 5 в верхнюю часть
желоба на пористую перегородку. Подаваемый вентилятором 1
через воздухопровод 3 с дросселем 2 в нижнюю часть желоба воз-
дух проникает сквозь пористую перегородку в верхнюю часть
и аэрирует груз, который движется по наклонному желобу под
действием составляющей силы тяжести. Вентилятор вращается от
электродвигателя 10. воздух засасывается через фильтр 9. Про-
шедший через аэросмесь воздух очищается при помощи плоских
матерчатых фильтров 8 и поступает в атмосферу. Для аэрации
необходимо, чтобы воздух вводился в порошковый груз в виде
мельчайших струек, поэтому в качестве перегородки применяют
керамические плитки или многослойную техническую ткань
(например, приводной хлопчатобумажный цельнотканый ремень
по ГОСТ 6982—75). Груз можно выгружать в любом месте желоба
при помощи выпускных лотков, течек и др., для чего предусматри-
вают разгрузочные устройства с заслонками на отводах. Скорость
движения груза (м/с) и = 10 /Stgp (здесь В — ширина желоба,
м; р — угол наклона, °).
Ширина выпускаемых аэрожелобов 100, 150, 200, 250, 300
и 400 мм, длина 10 ... 40 м, производительность не более 220 т/ч.
Расход воздуха 400 ... 300 м3/ч на 1 м2 пористой перегородки
при давлении (2 ... 3) 103 Па. При одинаковых условиях мощность,
необходимая для транспортирования груза аэрожелобом, в 5 ...
8 раз меньше, чем при транспортировании конвейерами.
329
Рис. 202. Аэрожелоб
330
§ 103. ПНЕВМАТИЧЕСКИЕ РАЗГРУЗЧИКИ
Эти разгрузчики предназначены для выгрузки
цемента, соды и других порошковых материалов из крытых же-
лезнодорожных вагонов в приемные устройства складов. Пневмо-
разгрузчик всасывающе-нагиетательиого действия представляет
собой стационарную установку, в состав которой входят устрой-
А-А
Рис. 203. Самоходное заборное устройство
331
5
Рнс. 204. Схема работы пневморазгрузчика
ства для забора груза (сопло или самоходное заборное устройство)
и комплект пневматического оборудования.
Самоходное заборное устройство (рис. 203) представляет собой
тележку на двух ребристых колесах 4 и одном опорном ролике 6.
Оно состоит из питателя, выполненного в виде двух вращающихся
навстречу друг другу перфорированных дисков 1 и расположен-
ного между ними всасывающего сопла 5 с поворотным патрубком 3,
на котором закреплен резинотканевый рукав. Вращение дисков
питателей н ходовых колес осуществляется от электродвигателей.
Для обрушения материала на подгребающие диски в передней
части заборного устройства расположен штыревой рушитель 2.
Позади дисков закреплено очистное устройство 7.
Заборное устройство 1 пневморазгрузчика (рис. 204) вводится
в железнодорожный вагон, рушитель разрыхляет цемент, который
поступает на подгребающие диски и далее к всасывающему соплу.
Вследствие разрежения, создаваемого вакуум-насосом 7, груз
засасывается в рабочий трубопровод 2 и поступает в осадитель-
ную камеру 4 с рукавными фильтрами, затем винтовым питателем
подается в смесительную камеру нагнетательной части с аэрацион-
ным устройством, из которой аэросмесь сжатым воздухом транс-
портируется к месту выгрузки. Воздух, попавший вместе с це-
ментом в осадительную камеру, очищается в фильтрах и вакуум-
насосом выбрасывается в атмосферу. В процессе работы установки
производится автоматическая продувка фильтров поочередным
соединением отдельных секций 5 камеры с атмосферой. В конус-
ной части установлены отбойиик и указатель уровня 3 типа УКМ,
который при нарушении синхронной работы всасывающей и
нагнетательной линий (повышение уровня в осадительной камере
выше установленного) подает сигнал для включения продувки
фильтров или уменьшения подачи груза.
В разгрузчиках всасывающего действия отсутствует смеси-
тельная камера и груз подается винтовым питателем непосред-
332
ственно в приемное устройство (бункер). Такие разгрузчики обычно
применяют совместно с пневматическим подъемником в основ-
ном на складах с большим грузооборотом. Основные характе-
ристики разгрузчиков для цемента установлены ГОСТ 12590—79.
§ 104. ПНЕВМАТИЧЕСКИЕ ПОДЪЕМНИКИ
Эти подъемники предназначены для вертикального
транспортирования порошкообразных грузов при помощи сжа-
того воздуха. При необходимости подачи груза в горизонтальном
направлении, например, для раздачи по силосам, несколько уве-
личивают высоту подачи, щ затем транспортируют груз другими
средствами — аэрожелобами, винтовыми конвейерами и т. п.
Благодаря компактности винтовые пневмоподъемники размещают
в приямках под железнодорожной колеей на местах выгрузки
бестарного цемента из вагонов или в других стесненных местах
транспортных линий. Применяют пневмоподъемники также сов-
местно с разгрузчиками всасывающего действия при перегрузке
цемента из крытых и саморазгружающихся вагонов с гравитацион-
ной разгрузкой.
Пневмовинтовой подъемник по конструктивному исполнению
аналогичен пневмовинтовым питателям. Различаются они между
собой способами подвода сжатого воздуха под аэроднище, Благо-
даря принудительной подаче материала в смесительную камеру
обеспечивается высокая концентрация аэросмеси и соответст-
венно малый расход воздуха и скорость транспортирования, что
упрощает отделение груза из аэросмеси и обеспыливание воз-
духа. Основные характеристики винтовых пиевмоподъемников
для цемента регламентирует ГОСТ 12589—67.
§ 105. СПЕЦИАЛИЗИРОВАННЫЕ ТРАНСПОРТНЫЕ
СРЕДСТВА С ПНЕВМОРАЗГРУЗКОЙ
Для бестарной перевозки цемента с заводов потреби-
телям, а также для доставки на стекольные заводы соды приме-
няют автомобильные цементовозы (содовозы) и железнодорожные
цистерны, разгрузку которых осуществляют пневматическим спо-
собом .
Автоцементовоз (рис. 205) состоит из автотягача 1 и цистерны-
полуприцепа 4, установленного с уклоном 6 .. 8° в сторону
выгрузки. Внутри цистерны под углом 45... 50° с двух сторон
приварены откосы 5. образующие в ее нижней части желоб, в ко-
торый помещается короб аэролотка 7, покрытого сверху пористой
тканью. Сверху цистерны имеется загрузочный люк 5. гермети-
чески закрываемый крышкой. В нижней задней части цистерны
устроен разгрузочный патрубок 6 с краном, продувочной форсун-
кой и грибовидной головкой для подсоединения наконечника
разгрузочного рукава посредством быстроразъемного замка.
333
Рис. 205. Автоцементовоз
Кран предназначен для регулирования производительности и
экстренного прекращения разгрузки. Пневмооборудование со-
стоит из ротационного компрессора 2, приводимого во вращение
от двигателя тягача через коробку отбора мощности, масловлаго-
отделителя, коллектора с предохранительным клапаном и мано-
метром и системы воздухопроводов с кранами. На воздуховоде,
подающем воздух к продувочной форсунке, имеется обратный
клапан. Органы управления компрессором расположены в ка-
бине водителя.
Загружают цистерну через загрузочный люк из складов си-
лосного типа. Разгрузка осуществляется подачей сжатого воздуха
от компрессора к аэролотку. Проходя через пористую перего-
родку, сжатый воздух аэрирует слон груза. Аэросмесь стекает
по аэролотку к разгрузочному патрубку, подхватывается струей
Рис. 206. Схема пневматической самозагрузки автоцементовоза
334
воздуха, идущей от продувочной форсунки, и транспортируется
за счет избыточного давления в цистерне по трубопроводу к месту
разгрузки. При падении избыточного давления в цистерне до
нуля разгрузка заканчивается.
Цементовоз может быть самозагружающимся (рис. 206). За-
грузку производят по принципу действия всасывающих пневмо-
установок (см. § 92) за счет вакуума, создаваемого в цистерне ро-
тационным компрессором 6, работающим в режиме вакуум-на-
соса. Оборудование для самозагрузки состоит яз заборного сопла 1,
фильтров 4, 5, 7, загрузочно-распределительной трубы 2, сигна-
лизатора уровня наполнения цистерны 3 и др. Параметры цементо-
возов регламентирует ГОСТ 13669—78.
В агон-цементовоз с пневморазгрузкой (рис. 207) оборудован
двойным днищем с четырьмя аэролотками, двумя рассекате-
лями 27 и боковыми откосами 26 для лучшего стекания цемента
на аэролотки. В средней части цистерны снизу имеется разгрузоч-
ный патрубок с продувочной форсункой к которому подсоеди-
нен гибкий транспортный трубопровод с помощью быстроразъем-
ного замка.
335
Загрузка цемента производится через патрубки 7, при этом
воздух из цистерны выходит через горловину 4, на которую уста-
навливается крышка 3 с фильтром и указатель уровня наполне-
ния. Возможна загрузка и через центральный люк 2 с помощью
пневматических загружателей. После загрузки все горловины
герметически закрывают крышками 5
При выгрузке цемента воздух под давлением до 0,2 МПа
поступает от стационарного компрессора по гибкому шлангу 19,
присоединенному к патрубку 20, в коллектор 14. откуда переме-
щается через краны 17 и 20 в аэролотки 25 и аэроплитки 23 и
проходит через их пористые перегородки 24 Полученная аэро-
смесь разгружается через патрубок 6 с крышкой 8, дроссельный
кран 10 и гибкий шланг 11. Между патрубком 8 и гибким шлан-
гом И имеется продувочная форсунка 13 со шлангом 7, в котором
установлены обратный клапан и край 12. Работа системы контро-
лируется манометром 16 с трехходовым краном 15, предохрани-
тельным клапаном 14 н опускным клапаном 18. Окончание вы-
грузки определяется по манометру.
Основные характеристики вагона-цементовоза: грузоподъем-
ность 50 т; полезная вместимость цистерны 49 м3; производитель-
ность разгрузки 1 ... 2 т/мин; дальность подачи 50 м, в
том числе по вертикали 25 м; диаметр разгрузочного шлан-
га 150 мм; требуемый расход воздуха 15 м3/мин; рабочее дав-
ление в цистерне не более 0,2 МПа; размеры: длина 12 020,
ширина 3000. высота 4627 мм; масса нетто (без груза)
25,6 т,
Основные правила эксплуатации и безопасной работы. Для обслуживания,
ремонта и замены узлов имеются внутренняя и наружная лестницы с площадкой
сверху цистерны. Перед подачей под погрузку цистерна должна быть тщательно
подготовлена для приема груза: проверено техническое состояние внутреннего
и наружного оборудования; удалены, если имеются, остатки цемента;
проверено действие разгрузочного устройства, воздушных коммуникаций
и т. п.
Для предупреждения возможных несчастных случаев пневматическую раз-
грузку следует прекращать в следующих случаях: если давление в цистерне
поднимается выше допускаемого, несмотря на соблюдение всех требований, ука-
занных в инструкции по эксплуатации; при неисправности предохранительного
клапана; если в основных элементах резервуара будут обнаружены трещины,
разрывы прокладок и др.; при возникновении пожара, непосредственно угрожа-
ющего цистерне, находящейся под давлением; при неисправности манометра и
невозможности определить давление по другим приборам. Указанные требования
относятся и к автоцементовозам.
Вопросы для повторения. 1. Укажите область применения пневматичес-
кого транспорта на заводах строительных- материалов, отметьте его достоинства
и недостатки. 2. Какие имеются виды пневмотралспортных установок и по ка-
кому принципу они работают? 3. Что называется аэросмесью и чем она характери-
зуется? 4. Как устроен и работает винтовой питатель? 5. Объясните устройство
и принцип действия двухкамерного питателя. 6. Что называется скоростью
витания? В какой зависимости находятся действительная скорость возду-
ха в трубопроводе и скорость витания? 7. Укажите последовательность рас-
чета пневмотранспортной установки. 8. Как устроены и работают аэроже-
лоба?
336
ГЛАВ A 27. ГИДРАВЛИЧЕСКИЙ ТРАНСПОРТ
§ 106. ОБЩИЕ СВЕДЕНИЯ
Гидравлическим транспортом называют транспорт,
в котором перемещение грузов осуществляется вместе с жидкостью
(водой) по трубам, лоткам и другим искусственным руслам, Ги-
дравлический транспорт применяют для гидромеханизации гор-
ных работ при добыче сырья на карьерах, а также для транспор-
тирования цементного сырья на заводе, а также с установок,
расположенных в непосредственной близости от карьера.
Смесь жидкости с частицами груза называют гидросмесью
или пульпой. Отношение твердой составляющей Т к жидкой Ж
характеризует консистенцию смеси (Т : Ж) - Гидросмеси сТ:Ж —
= 1 : 2 и большим содержанием твердой составляющей назы-
вают шламами.
В расчетах используют концентрации гидросмеси объемную
S = V /V v = V/(V 4- Гл) = (рг - рн)/(р - рв)< 1
или массовую
Р ~ Фт/(ГвРв)|
где V — производительность установки, м3/ч; Рг — расход гидросмеси, м3/ч;
VB — расход воды, м3/ч; р, р8, рР — плотность соответственно транспортируе-
мого груза, воды и гидросмеси; Qm — массовая производительность, т/ч; (Гврв)—
массовый расход воды, т/ч.
Гидравлический транспорт может быть самотечным по жело-
бам или напорным по трубам. Последний по способу ввода груза
в трубопровод разделяют на установки с пульпонасосами и пита-
телями.
Гидротраиспортная установка с пульпонасосом показана на
рис. 208. Транспортируемый груз подается ленточным конвейе-
ром 1 в резервуар 10 с водой, где в результате перемешивания об-
б)
Рис. 208. Схемы гидротраиспорти ых установок:
а — с пульпонасосом; б — с камерным питателем и центробежным насосом
337
разуется пульпа. Далее пульпонасосом 9 пульпа подается по пуль-
попроводу 8 на грохот 3. Здесь груз отделяется от воды и по на-
клонным решеткам поступает в приемный бункер 5. Вода, освобо-
дившаяся от частиц груза, через воронку 4 стекает в резервуар 6,
а оттуда насосом 7 подается по водоводу 2 в резервуар 10, где снова
смешивается с насыпным грузом, образуя пульпу. Достоинством
рассмотренной установки является ее простота устройства, а не-
достатком — ускоренное изнашивание пульпонасоса под абразив-
ным воздействием частиц перемещаемого груза.
В гидротранспортной установке с подачей груза из бункера
(рис. 208, б) насос 12 подает в трубопровод 13 воду из резервуа-
ра 11. Насыпной груз подается в этот же трубопровод из бун-
кера 14, оборудованного питателем. Частицы груза, попадая в по-
ток быстро движущейся воды, увлекаются в направлении транс-
портирования по пульпопроводу 15.
Питатели могут быть периодического действия (камерные)
н непрерывного действия. В камерных питателях (см. рис. 208, б)
груз проходит через шлюзующие камеры, имеющие в верхней
части загрузочное, а в нижней части разгрузочное отверстия.
При работе бункер всегда отделен от трубопровода, поэтому вода
нз трубопровода не попадает в него. При камерных питателях
не обеспечивается непрерывность подачи груза в трубопровод.
Бескамерные питатели могут быть винтовыми и поршневыми.
С помощью нх рабочих элементов груз непрерывно проталкивается
в трубопровод. Уплотнение груза в винтовом питателе и уплотне-
ние поршней препятствуют проникновению воды из трубопровода
в питающий бункер. На заводах промышленности строитель-
ных материалов распространены установки с пульпонасосами.
При турбулентном потоке гидросмеси в горизонтальном трубо-
проводе ее твердые частицы в зависимости От крупности и плот-
ности могут перемещаться во взвешенном состоянии, скачкооб-
разно или скользить по дну. В общем случае это перемещение
можно представить как скачкообразное движение отдельных ча-
стиц. Отрыву единичной частицы от дна предшествует трогание
ее с места; средняя скорость потока, соответствующая этому со-
стоянию, называется скоростью трогания. С увеличением скорости
потока частицы отрываются от дна и совершают скачкообразные
движения. С повышением средней скорости потока длина траек-
тории, описываемой отдельными мелкими частицами, возрастает,
и продолжительность пребывания их в взвешенном состоянии
увеличивается. Взвешиванию мелких частиц способствует подъ-
емная сила, возникающая вследствие большого градиента (раз-
личия) скоростей вблизи дна.
Распределение частиц по поперечному сечению трубопровода
зависит от средней скорости потока, гранулометрического состава,
плотности и формы частиц транспортируемого груза. В зависи-
мости от дисперсного состава горные породы в смеси с жидкостью
образуют различные двухкомпонентные среды, которые принято
338
разделять на тонкодисперсные (частицы 0,05 . 0,75 мм), грубо-
дисперсные суспензии (частицы 0,15 ... 1, 15 мм) и неоднородные
дисперсные системы (частицы более 1,5 мм). Гидросмеси чаще
всего представляют собой полидисперсные системы, состоящие
из частиц различных размеров.
Различают следующие режимы движения потока гидросмеси
в трубопроводе.
1. Движение, близкое к равномерному распределению твердых
частиц по поперечному сечению трубопровода, которое практи-
чески возможно при тонкоднсперсных и других видах смесей,
но при больших скоростях потока. Такой режим связан с боль-
шими затратами энергии на перемещение единицы массы груза.
2. Движение потока с неравномерным распределением твер-
дых частиц по поперечному сечению. Этот режим возникает при
средней скорости потока, равной критической (скорости трога-
ния). Движение частиц происходит при минимальном расходе
энергии. На практике стремятся поддерживать скорость потока
обычно на 6 ... 20 % больше критической, чтобы избежать отло-
жение частиц на нижней стенке трубопровода.
3. Движение потока при частичном отложении частиц и с об-
разованием на дне трубопровода неподвижного слоя. Такой
режим иногда используют при перемещении абразивных мате-
риалов для меньшего изнашивания стенок трубопроводов. При
этом трубопровод периодически промывают чистой водой.
В большинстве случаев гидроустановки работают по второму
режиму.
К преимуществам гидротранспорта относятся высокая произ-
водительность и большая длина транспортирования без перегру-
зок по сложной трассе с подъемами под любым углом и по верти-
кали; отсутствие механического оборудования на трассе и, следо-
вательно, несложное техническое обслуживание; возможность
совмещения транспортирования с некоторыми технологическими
процессами (гашением и гранулированием шлаков, сортирова-
нием по крупности и т. п.), возможность полной автоматизации.
Недостатками гидравлического транспорта являются огра-
ничения по виду и характеристикам перемещаемых грузов, на-
пример, по крупности, что вызывает нередко необходимость пред-
варительного дробления груза; повышенное изнашивание пуль-
попровода; увеличенный расход энергии; потребность в боль-
ших количествах воды; опасность замерзания в зимних условиях
и др.
§ 107. ОСНОВНЫЕ ЭЛЕМЕНТЫ ГИДРОТРАНСПОРТНЫХ
УСТАНОВОК
Основными элементами являются грунтовые насосы,
пульпопроводы и арматура.
Грунтовые насосы (пульпонасосы, шламнасосы) применяют
для транспортирования гидросмеси по трубопроводам. Они пред-
339
ставляют собой специальные центробежные одноступенчатые на-
сосы повышенной износостойкости (рнс. 209). Гидросмесь посту-
пает к центру насосного колеса 6 через всасывающий трубопровод 1
и патрубок 3, присоединенный к передней крышке 2 корпуса 4.
Затем гидросмесь проходит межлопаточное пространство ко-
леса 6 и выходит в отводной канал корпуса, из которого посту-
пает в пульпопровод. Насосы выбирают по рабочей характери-
стике, которая представляет собой зависимости напора, мощ-
ности, КПД и допустимой высоты всасывания от расхода (подачи).
В паспортных рабочих характеристиках насосов приведены
данные для воды и гидросмеси. В зависимости от сопротивления,
преодолеваемого насосом, изменяется его подача, поэтому пас-
портные характеристики пересчитывают.
Для пульпопроводов применяют цельнотянутые и сварные
трубы, которые соединяют с помощью фланцев Для компенсации
температурных деформаций используют сальниковые компенса-
торы. С целью увеличения срока службы трубы внутри армируют
расплавленным базальтом с помощью специальных станков для
центробежной заливки. Перспективными являются двухслойные
трубы, твердость внутреннего закаленного слоя которых в 3 раза
н более превышает твердость наружного слоя.
Быстроизнашиваемыми элементами пульпопровода являются
колена. Для увеличения их долговечности применяют сменные
стальные вкладыши (рис. 210, а). Радиус закругления колен
500 ... 700 мм, толщина вкладышей 30 ... 85 мм. Колена армируют
также брусками гранита или другой крепкой породой, срок
службы которых в 4 5 раз больше срока службы стальных
(рнс. 210, б)
На напорной линии устанавливают обратный клапан для за-
щиты насоса от гидравлического удара, который может возник-
340
Рис. 210. Колено пульпопровода, армированное вкладышами:
а стальными сегментными; б — секционными из гранита
нуть в случае движения потока гидросмеси в обратном направле-
нии при отключении насоса. При большой протяженности пуль-
попроводов на трассе устанавливают воздушные колонны-кол-
пакн для нейтрализации гидравлических ударов. Для перекры-
тия трубопроводов используют задвижки Работу гидротранспорт-
ной установки контролируют манометрами и вакуумметрами.
§ 108. ГИДРАВЛИЧЕСКИЙ ТРАНСПОРТ ШЛАМОВ
При использовании пластичных мягких пород (мела,
глины и отдельных разновидностей мергелей) транспортирование
их с карьера на цементный завод железнодорожным или автомо-
бильным транспортом, особенно в осенний и зимний сезоны, свя-
зано с большими трудностями, так как эти материалы размо-
кают, слипаются и пр. В последнее время получили применение
гидравлические транспортирующие установки. Сначала сырье
перерабатывают в концентрированную гидросмесь (шлам) вблизи
места добычи и в подготовленном виде транспортируют по трубам
на завод. К месту переработки от забоя сырье доставляют авто-
самосвалами с обогревом кузова. Шлам образуют с помощью бол-
тушек или специальных мельниц.
При гидравлическом транспорте шламов повышенной влаж-
ности (Т : /К = 0,5 : 0,6) потери напора на 1 м длины пульпо-
провода составляют 0,02 ... 0,03 м, что позволяет применять на-
сосы с невысоким напором.
За последнее время область применения гидравлического транс-
порта на цементных заводах все более расширяется в связи с раз-
работкой новой технологии приготовления сырья. Известняк
в карьере дробится в конусной дробилке и после вторичного
дробления в молотковых дробилках поступает в стержневые мель-
ницы, куда одновременно по трубопроводу подается в заданном
количестве приготовленный на карьере глинистый шлам. Измель-
341
ценные частицы размером 2 ... 3 мм смешиваются с глинистым
шламом и транспортируются в виде шлама влажностью 36 ,..
38 % по трубам на завод.
Известна система гидравлического транспорта шлама на рас-
стояние около И км, которая состоит нз трех труб диаметром
400 мм н четырех перекачных станций с центробежными насосами.
Пуск системы шламов из твердого сырья (р = 1,7 ... 1,8 т/м3),
как показала практика, более сложен, чем транспортирование
шламов из мягкого сырья, так как значение пускового давления
кратковременно (на 30 . .40 с) резко возрастает и превышает
в 2 2,5 раза рабочее давление, достигая 2 ... 3 МПа. Количество
перекачиваемого шлама по одному шламопроводу составляет
1200... 1400 м3/ч, при этом скорость движения шлама по трубе
диаметром 400 мм составляет 2,6 . . 3,1 м/с Удельный расход иа
транспортирование 1 м3 шлама равен 1,9 .. 2,2 кВт ч. Потерн
давления на 1 км шламопровода 0,4... 0,45 МПа. Уменьшение
скорости до 2 м/с снижает потери давления св. 0,3 до 0,35 МПа,
что позволяет перейти на перекачные станции.
§ 109. ОСНОВЫ РАСЧЕТА УСТАНОВОК
НАПОРНОГО ГИДРАВЛИЧЕСКОГО ТРАНСПОРТА
Исходными данными для расчета являются: подача
установки по массе груза Qm, т/ч; дальность перекачки L, м;
разность отметок подъема Н, м; характеристики транспортируе-
мого груза; плотность р, т/м3; крупность кусков а11ИХ, м, и др.;
плотность гидросмеси рг, т/м3; концентрация р.
Расчет установки выполняют в следующей последователь-
ности.
1. Определяют критическую скорость гидросмеси vKp (м/с)
в зависимости от характеристик груза и предварительно принятого
внутреннего диаметра пульпопровода D.T (табл. 52).
2. Принимают расчетную скорость гидросмеси (м/с)
v = (1,1 ... 1,2) цф.
Т а б л и ц а 52. Значения критической скорости, м/с
Транспортируемый груз Диаметр трубопровода, мм
200 300 400 500 600
Глинистые фракции 1,6 1,8 2,2 2,5 2,7
Мелкозернистые пески 2,1 2,4 2,7 3,0 3,2
Крупнозернистые пески с содержанием гра- вия (%): не более 10 2,6 2,8 3,2 3,4 3,6
не более 45 2.8 3,0 3,4 4,0 4,3
Гравий, щебень 3,4 3,8 4,2 4,6 5,0
342
3. Находят расход гидросмеси (м3/ч)
V'r = Qm/(PrH).
где Qm — подача, т/ч; р, — концентрация гидросмеси.
4. Проверяют предварительно принятый диаметр пульпо-
провода (м) по подаче
£>т > /4Иг/(3600ил).
Если диаметр окажется меньше, то принимают следующий
больший диаметр н заново определяют критическую и расчетную
скорости.
5. Проводят проверку диаметра £>т на кусковатость:
Пт (2,5 ... 3) Стах,
где атах —размер максимального куска, м.
6. Рассчитывают давление насоса (Па)
Р = Рве d- Рг Ртр Рм “1“ Pt),
где рйс - 20 ... 30 Па — потерн при всасывании; рг= \Q00HpTg — потери
вследствие разности Н (м) в геодезических отметках оси насоса и от пульпопро-
вода в месте выпуска гидросмеси, Па (здесь рг — в т/м3); ртр = 1000A.uaLpr/2DT—
потери на трение по длине пульпопровода, Па (здесь L — в м; v — в м/с; g —
— 9,81 м/с2; DT — в м; Л, — коэффициент сопротивления при протекании чистой
воды:
£)т, м ..................... 0,2 0,3 0,4 0,5 0,6
1 ..... ................... 0,018 0,016 0,0155 0,015 0,0145
рм ~ 0,1ртр — местные потери в коленах и др., Па; ро = ЗО...5О Па—оста-
точное давление в конце пульпопровода.
7. По давлению (Па) и расходу гидросмеси Vr (м3/ч) выбирают
соответствующий иасос.
Пример. Определить основные параметры гидротранспортной установки
для подачи глинистого шлама с карьера на цементный завод. Потребность абсо-
лютно сухой глины Q= 180 000 т/год, плотность глины р - 24 т/м3 при есте-
ственной влажности 25 %.
Консистенция шлама Т : Ж 4 : 6. Режим работы установки; 307 дней
в году по 7 ч в сутки. Расстояние транспортирования L = 2000 м Разность
в отметках в начале и конце шламопровода 7/ - 20 м (подъем в сторону завода).
Скорость движения шлама в трубе и = 1,2 м/с.
1. Консистенция шлама Т ; Ж = 4 : 6 соответствует влажности w = 60 %,
поэтому содержание твердых частиц глины в 1 т шлама составит (1 - 0,6)/2,4 =
-= 0,166 м3.
2. Плотность шлама (гидросмеси)
рг = (0,4+ 0,6)/(0,166 + 0,6) = 1,3 т/м8.
3. Часовой расход сухой глины
q = Q/(307.7) = 180 000/(307-7) = 83,8 т;
соответствующие расходы шлама;
массовый
Qm = <?/(! - 0,6) = 83,8/(1 — 0,6) = 209,5 т/ч;
343
объем п ы и
1/г == Q,n /рг = 209,5/1,3 = 161,1 м3/ч.
4. Необходимый диаметр
D.r > |/ 41/г/(3600лу) = I/ 4-161,1/(3600jt- 1,2) = 0,22 м.
Принят = 200 мм.
Вопросы для повторения. 1. Укажите область применения гидротравс-
портной установки на заводах промышленности строительных материалов? Какие
могут быть режимы движения потока гидросмеси? 3, Назовите последователь-
ность расчета гидротранспортпой установки?
ГЛАВА 28. ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА
§ ПО. БУНКЕРА
Бункерами называют емкости, предназначенные для
приема, хранения и подачи на транспортные средства или техно-
логическое оборудование насыпных грузов. Бункера представ-
ляют собой сосуды, снабженные вверху загрузочными, а внизу
разгрузочными отверстиями в днище или боковой стенке, которые
перекрываются затворами. Продвижение груза в бункере н исте-
чение его через разгрузочное отверстие происходит под действием
силы тяжести груза.
Имеются три основных вида бункеров: воронкн, у которых
отсутствует вертикальная часть (сосуд), силосы — с увеличенной
высотой (8—10 м) и собственно бункера. Последние выполнены
прямоугольными, круглыми, корытообразными с различной фор-
мой корпуса и днища (рис, 211). Бункера изготовлены из листовой
стали, железобетона, а иногда и дерева. Внутренняя поверх-
ность бункера может быть футерована стальными листами.
Рис. 211. Бункера:
о — призматический; б — пирамидальный; в — цилиндрический; г — конусный; д
корытообразный
344
Рис. 2Г2. Схемы истечения сыпучих материалов из бункеров:
и — нормальное: 6 — гидравлическое; в — гидравлическое с боковой разгрузкой
Основным требованием к бункерам является обеспечение сво-
бодного истечения груза через разгрузочные отверстия. Возможны
два вида истечения насыпных грузов: нормальное, при котором
груз движется в виде столба, расположенного над отверстием
(рис. 212, а); гидравлическое, когда груз движется подобно жидко-
сти (рис. 212, б). Наиболее распространен первый вид истече-
ния. Второй имеет место при больших углах наклона воронки
(75 ... 80°) и у вибробункеров.
Все виды материалов в той или иной степени склонны к сле-
живанию, зависанию и образованию сводов над разгрузочными
отверстиями. Такое явление возникает, когда выпускное от-
верстие бункера меньше максимального сводообразующего от-
верстия груза, поэтому воронки бункеров следует выполнять
рациональной формы. Например, ширина выходного отверстия
бункера должна превышать максимальный размер куска
в 3 ... 6 раз.
В расчетах площадь истечения груза А (м2) принимают сле-
дующей: для круглого отверстия бункера диаметром D (м) —
А = л (D - а')2/4 (здесь а' — размер типичного куска, м);
для квадратного отверстия Со стороной а (м) — А = (а — а')2;
для прямоугольного отверстия со сторонами а а b (м) — А =
~ (а — а') (Ь — а').
Скорость при нормальном истечении (см. рис. 212) легко-
сыпучих грузов (м/с)
г X / з,з^я0,
где X -- коэффициент истечения (X — 0,55 ... 0,65 для хорошо сыпучих, сухих
и порошкообразных грузов; X — 0,3 ... 0,5 для крупнозернистых и рядовых гру-
зов); Ro — A/L — гидравлический радиус выпускного отверстия, м (здесь А —
площадь выпускного отверстия, м2; L — периметр выпускного отверстия); для
круглых отверстий (D — а')/А, квадратных Ro — (а —
Средняя скорость (см. рис. 212, б) при гидравлическом исте-
чении (м/с)
и =
где h — высота столба груза, м.
345
Скорость истечения (рис. 212, в) при боковой разгрузке (м/с)
v = Xsin сс / 2g 1,6А?а — т/Юр
где а — угол наклона днища в зоне расположения отверстия, °; — гидрав-
лический радиус условного отверстия истечения, являющегося проекцией дей-
ствительного выпускного отверстия, на плоскость, перпендикулярную к направ-
лению движения струи груза, м; т — сопротивление сдвигу (для цемента т =
— 410 Па; для шлака т = 700 Па; для угля т = 400 Па); р — насыпная плот-
ность, кг/м3; / — коэффициент внутреннего трения груза.
Пропускная способность бункера (т/ч)
Q = 3600о4,
где v — скорость истечения, м/с; А — расчетная площадь истечения, м2.
Насыпной груз оказывает на затвор меньшее давление, чем
его столб над затвором (см. рис. 212, а). Это объясняется тем,
что верхний слой груза сползает по нижележащему слою под не-
которым углом обрушения и давит при этом на стенки бункера,
а возникающая сила трения уравновешивает часть силы тяжести
груза. Чем больше высота груза в бункере, тем большая часть
силы тяжести уравновешивается силами трення.
Для невысоких бункеров и воронок силу трения ие учиты-
вают и давление (нагрузку) на горизонтальный затвор (Н)
F = gX/ip,
где А — расчетная площадь истечения, м3; h — высота столба груза, м; р —
насыпная плотность, кг/м3.
Для глубоких (высоких) бункеров давление (нагрузка) на
горизонтальный затвор (Н)
F ~ Ар?,
где рг = 5,6 ggpRo — давление груза, Па (здесь Д' — 1,5 — коэффициент за-
паса).
Давление (нагрузка) на наклонный и вертикальный затворы
при прочих равных условиях меньше, чем на горизонтальный;
F - Лрв,
где рв = рг (cos2 а + т sin2 а) — давление на затвор, Па (здесь а — угол
наклона затвора к горизонту, °; т—0,18//— коэффициент подвижности; / —
коэффициент внутреннего трения частиц груза).
§ 111. ЗАТВОРЫ И ПИТАТЕЛИ
Затворы предназначены для перекрытия выпускных
отверстий бункеров и выпуска из него груза с регулированием
потока. Затворами управляют дистанционно с помощью пневмо-
цилиндров или электрических гидротолкателей (см. § 31) и вруч-
ную посредством рычажных устройств или лебедок. Конструкция
затвора должна обеспечивать возможно меньшее усилие для от-
346
Рнс. 213- Затворы:
а — лотковый: б — ценной: в — плоский вертикальный; г — гусеничный; д — сектор'
ный; р — челюстной
крывания и закрывания, четкость отсечки груза (быстроту от-
крывания и закрывания), равномерность потока груза и возмож-
ность регулирования скорости его высыпания.
Откидной лотковый затвор (рис. 213, а) для ускорения исте-
чения груза устанавливают в наклонное положение. Скорость
истечения регулируют изменением угла наклона лотка. Такие за-
творы применяют в известковых карьерах при погрузке крупио-
кусновых материалов в железнодорожные платформы или авто-
мобили .
Цепной затвор (рис. 213, б) состоит из лотка и ряда парал-
лельных. свободно висящих тяжелых цепей, образующих штору,
препятствующую высыпанию груза. При подъеме цепей лебед-
кой материал начинает ссыпаться, а скорость его регулируется
высотой подъема цепей. Эти затворы применяют для крупно-
кусковых материалов.
Плоский затвор (рис. 213, в) перекрывает выпускное отвер-
стие стальной задвижкой, движущейся по направляющим. По
расположению задвижки различают затворы горизонтальные и
вертикальные.
Гусеничный затвор (рис. 213, г) представляет собой разно-
видность горизонтального затвора. Его рабочим органом яв-
ляется замкнутая прорезиненная или пластинчатая леита, оги-
бающая концевые барабаны, смонтированные иа раме. Рабочая
часть ленты поддерживается роликами. Выпускное отверстие от-
347
крывается с помощью реечной передачи, при этом верхняя часть
ленты до правого концевого барабана остается неподвижной,
а иижияя — движется вправо н выпускное отверстие постепенно
открывается. При закрытии отверстия нижняя лента смещается
влево, переходит наверх и перекрывает отверстие. Достоинство
такого затвора — малое сопротивление открыванию и закрыва-
нию, так как верхняя лента не скользит по грузу.
Секторный затвор (рис. 213, д) используют при работе с мо-
лотыми и мелкокусковыми грузами. Он состоит из патрубка, при-
крепленного к выпускному отверстию бункера, и шарнирной
цилиндрической заслонки (называемой сектором) с боковыми ще-
Рис. 214. Питатели:
а, е — вибрационный; б — скребковый:
в — барабанный; г — пластинчатый; д —
с задвижкой; ж — дисковый
348
ками. Для управления служит рычаг с рукояткой. Направление
струн груза зависит от степени открытия сектора.
Челюстной затвор (рис. 213, е) является разновидностью сек-
торного. Челюсти соединены между собой зубчатыми секторами и
одновременно поворачиваются в противоположных направлениях.
Симметричное раскрытие челюстей обеспечивает положение струн
груза в центре затвора независимо от степени его раскрытия.
Питатели (загрузочные устройства) предназначены для рав-
номерной подачи груза нз бункеров иа конвейеры, транспортные
средства и в технологические установки. Питатели могут созда-
вать также поток груза с направленной скоростью заданного
значения, что требуется, иапример, для конвейеров. Питатели
представляют собой механические устройства, снабженные двига-
телями. Их монтируют у выпускных отверстий бункеров или во-
ронок. Пропускную способность питателя регулируют измене-
нием выпускного отверстия бункера нли рабочих параметров пи-
тателя. Большинство питателей не требует отдельных бункерных
затворов, так как при остановке питателя груз удерживается
от самопроизвольного высыпания через отверстие силой подпора.
Большая часть питателей представляет собой разновидности
конвейеров — ленточных, пластинчатых (рис. 214, г), скребко-
вых (рнс. 214, б), винтовых, качающихся вибрационных
(рис. 214, а, е). От конвейеров питатели отличаются меньшей дли-
ной, относительно повышенной мощностью двигателя и прочно-
стью, так как онн могут испытывать давление груза под отверстием
бункера нли воронки, перемещают груз более толстым слоем и
преодолевают большие сопротивления прн движении. Питатели
этой группы иногда являются одновременно и конвейерами и пере-
мещают груз на некоторое расстояние от отверстия бункера.
Питатели барабанные (рис. 214, в), дисковые (рис. 214, ж),
цепные, лопастные не имеют прототипов среди конвейеров. Они
могут служить только для выдачи груза непосредственно у от-
верстия бункера.
Вопросы для повторения 1. Для какой цели предназначены бункера?
Какие их разновидности? 2. Каким должен быть наклон боковых стенок днища
бункера для обеспечения свободного высыпания груза? 3. Какое назначение и
какие основные типы бункерных затворов? 4. Для чего применяют питатели?
Укажите их основные типы.
Г Л А В А 29. МАНИПУЛЯТОРЫ И ПРОМЫШЛЕННЫЕ
РОБОТЫ
§ 112. ОБЩИЕ СВЕДЕНИЯ
Манипуляторы н промышленные роботы являются
перспективным средством комплексной механизации н автомати-
зации основного и вспомогательного производства, в том числе
349
и погрузочно-разгрузочных транспортных н складских работ.
Манипулятором называют устройство, которое предназначено для
перемещения в пространстве объекта манипулирования, при этом
он имитирует двигательные и (или) рабочие функции рукн чело-
века и может управляться оператором или действовать автомати-
чески. Манипулятор включает следующие основные элементы;
задающий орган, предназначенный для создания управляющих
сигналов и движений; исполнительный орган, выполняющий дей-
ствия по сигналам и движениям, поступающих от задающего
органа; связующий орган, осуществляющий передачу сигналов н
движений от задающего органа к исполнительному. Рабочий ор-
ган, называемый также «рукой», является частью исполнитель-
ного органа и выполняется в виде захватов, инструмента н т. п.
Основные технические показатели манипуляторов.
Грузоподъемность, соответствующая нормальному ряду грузо-
подъемностей кранов. В зависимости от нее манипуляторы от-
носят к следующим типам: сверхлегкий (масса не более 1 кг);
легкий (масса св. 1 до 10,0 кг); средний (масса св. 10 до 100 кг);
тяжелый (масса св. 100 до 1000 кг) и сверхтяжелый (масса более
1000 кг).
Число степеней подвижности, которое определяет кинематику
движения руки и форму рабочей зоны обслуживания, зависит
от принятой системы координатных перемещений (прямоугольной,
полярной, цилиндрической и др.).'Движение захвата в число сте-
пеней подвижности не входит, так как оно присуще всем манипу-
ляторам и не связано с перемещением объекта.
Рабочая зона — пространство, в котором при работе может
находиться рука вследствие движения исполнительного органа,
когда опора манипулятора неподвижна.
Погрешность позиционирования — отклонение фактической по-
зиции исполнительного органа. Погрешность оценивают в ли-
нейных или угловых единицах.
Мобильность — возможность совершать движения. Манипу-
ляторы могут быть стационарными н передвнжиымн.
По виду управления манипуляторы могут быть: 1) с ручным
управлением, которое осуществляется вследствие ручного пере-
мещения рабочего органа или дистанционно; эти манипуляторы
требуют непрерывного участия оператора в процессе управле-
ния; 2) со смешанными управлением (интерактивные), при ко-
тором задающий орган содержит рукоятку, управляющую не-
сколькими степенями подвижности, и малую ЭВМ или специаль-
ный вычислитель, которые преобразуют сигналы с рукоятки
в сигналы, управляющие движениями исполнительных или рабо-
чих органов; 3) автоматические, в которых выполнение рабочих
операций обеспечивается по заданной программе без участия опе-
ратора; к автоматическим манипуляторам относят автоопера-
торы, работающие с постоянной программой, и промышленные
роботы, программа которых может изменяться.
350
Для реализации рабочих движений используют электромеха-
нические, гидравлические и пневматические приводы, которые
могут также применяться в комбинации; например, тип привода
схвата может отличаться от типа манипулирующего устройства
и т. д.
§ ИЗ. УСТРОЙСТВО И ПРИМЕРЫ ПРИМЕНЕНИЯ
МАНИПУЛЯТОРОВ И ПРОМЫШЛЕННЫХ РОБОТОВ
ПРИ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ
И ПЕРЕГРУЗОЧНЫХ работах
Манипуляторы с ручным управлением. Они выпол-
нены с манипулирующим устройством в виде шарннрно-рычаж-
ного механизма, устанавливаемого стационарно на колонне (крон-
штейне) или передвижной тележке; число степеней подвижности
3—4, привод электромеханический или пневматический. В ка-
честве примера рассмотрим манипулятор ШБМ-150 (рис. 215)
грузоподъемностью 150 кг с четырьмя степенями подвижности,
который предназначен для выполнения подъемно-транспортных
операций при загрузке технологического оборудования, конвейе-
ров и иа складах. Манипулятор состоит из приводной головки 3,
установленной на колонне 1 с помощью опорно-поворотного уст-
ройства 2, обеспечивающего поворот головки на 360°. Приводная
головка оснащена шарнирной стрелой, состоящей из плеча 4
и руки 5. На конце руки установлена головка схвата 6, которая
может вращаться относительно вертикальной оси. Рукоятка 7,
закрепленная на головке схвата, служит для управления вруч-
ную приводом вертикального движения головки, а также для пере-
дачи усилий рабочего на груз и стрелу при горизонтальном дви-
жении. На головке схвата имеется зажим 8 для закрепления смен-
ных грузозахватных устройств.
На приводной головке 3 смонтирован привод механизма подъ-
ема, состоящий нз электродвигателя, тормозной муфты, редук-
тора и реечного устройства, обеспечивающего вертикальное пере-
мещение головки схвата с грузом. Скоростью вертикального пере-
мещения управляет рабочий при помощи рукоятки управления:
при повороте конца рукоятки вверх груз также начинает дви-
гаться вверх, причем скорость движения груза зависит от угла
поворота рукоятки; поворот того же конца рукоятки вниз вызы-
вает опускание груза.
Электропривод механизма подъема выполнен с двигателем по-
стоянного тока и тиристорным блоком управления, что обеспе-
чивает плавное регулирование скорости вертикальных переме-
щений.
Рычажная система стрелы сбалансирована с помощью пру-
жинного устройства и сконструирована так, что перемещение го-
ловки схвата в радиальном направлении к опорно-поворотному
устройству и от него происходит по горизонтали с минимальным
351
Рис. 215. Шарнирно-балансир-
ный манипулятор ШБМ-150
усилием, необходимым для преодоления силы инерции груза.
Управление перемещением груза может осуществляться одной
рукой. После опускания рабочим рукоятки управления оиа под
действием пружины устанавливается в нейтральное горизонталь-
ное положение. Груз в этот момент останавливается и удержи-
вается механизмом подъема. Предусмотрены предварительные
регулировки по высоте вертикального перемещения, которые
производят до начала работы вращением ручек потенциометров,
установленных на щитке блока управления. Манипулятор осна-
щен световой и акустической сигнализациями перегрузки,
индикатором подключения к сети, аварийной кнопкой
352
«пуск—стоп», размещенной на руке недалеко от рукоятки управ-
ления.
Преимуществами шарнирно-балансирного манипулятора по
сравнению с электроталями, консольными и мостовыми кранами,
выполняющими аналогичные функции, являются жесткое креп-
ление груза на головке стрелы манипулятора, широкий диапазон
регулирования скорости подъема и опускания груза, удобство
управления и высокая точность установки груза, что позволяет
увеличить производительность в среднем в 2 раза.
Промышленные роботы предназначены для автоматического
выполнения задаваемых операций перемещения грузов и обла-
дают возможностью быстрой перестройки и перехода на новые
операции. Роботы выполняют три вида работ: погрузочно-раз-
грузочные и перегрузочные; загрузку технологического оборудо-
вания и технологические (сварку, окраску, сборку и др.). Робот
состоит из двух основных частей (рис. 216, а)\ 1) исполнительной
Рис. 216. Схемы управления промышленного робота:
а — функциональная; б — структурная
12 Балашов В. П. 353
в виде манипулирующего устройства 1 со схватом 2 и устройства
передвижения 3; 2) управляющей, состоящей из управляющего
устройства (У У) и пульта управления (ПУ).
Манипулирующее устройство робота представляет собой много-
звенный механизм с числом степеней подвижности 3 ... 9 с рабо-
чим органом в виде схвата, который может быть сменным. Каждая
степень подвижности осуществляется своим двигателем (электри-
ческим, гидравлическим или пневматическим). Один двигатель
может реализовать и несколько степеней подвижности. Передви-
жение робота осуществляется любым из известных способов.
В состав управляющего устройства У У (рис. 216, б) входят
пульт управления ПУ, с помощью которого оператор осуществ-
ляет ввод и контроль задания, запоминающее устройство ЗУ
для хранения программ, вычислительное устройство ВУ, реали-
зующее алгоритм управления роботом, блок управления БУП
механизмами робота, а также датчики Д для выявления состояния
механизмов робота и внешней среды ВС. Обычно управляющее
устройство осуществляет также управляющее воздействие на
совместно работающее с ним технологическое оборудование и
другие роботы. Конструктивно управляющее устройство может
быть встроено в корпус робота или расположено отдельно.
По принципу управления различают роботы: 1) с програм-
мным управлением (управляется по заданной, жесткой программе);
2) очувствленные (снабжены элементами очувствления —сенсори-
кой в виде тактильных, локационных, телевизионных и других
устройств); такие роботы также управляются по программе,
но в процессе работы она может корректироваться в соответствии
с изменяющимися условиями; 3) с искусственным интеллектом
(с самообучением). По типу привода манипулирующие устройства
делят на электромеханические (двигатели постоянного тока, ша-
говые и асинхронные), гидравлические (гндроцилиндры и гидро-
моторы) и пневматические (пневмоцилиндры, поворотные и ро-
тационные двигатели).
Конструкции схватов весьма разнообразны и зависят от формы
размеров н фнзико-механических свойств объектов манипулиро-
вания. По способу захватывания и удержания груза схваты
могут быть механическими, электромагнитными, ваккуумными
и пневматическими. Для захвата различных по форме объектов
губки схватов выполняют сменными, причем смена губок (или
всего схвата) может осуществляться автоматически роботом.
Промышленные роботы могут быть целевыми для обслужива-
ния конкретного технологического оборудования и деталей или
универсальными, которые пригодны для типовых погрузочно-
разгрузочных работ и перегрузочных операций. В качестве при-
мера рассмотрим подвижной напольный-робот МАН-100П грузо-
подъемностью 100 кг с пятью степенями подвижности, предназна-
ченный для обслуживания подвесных толкающие и напольных
конвейеров. Он может также подавать детали в загрузочные устрой-
354
Рис, 217, Промышленный
робот МАН-ЮОП;
•а — общий вид; б, в —.схе-
мы компоновки соответст-
венно при разгрузке подвес-
ного толкающего конвейера
и при обслуживании группы
станков с конвейерной по-
дачей заготовки
ства автоматических станков. Робот (рис. 217, а) состоит из пере-
движной тележки 1, поворотного механического схвата 4. Привод
руки 3 и схвата гидравлический. На рис. 217, б показан съем
груза роботом 6 с подвесного толкаКицего конвейера 5 и пере-
дача его на напольные распределительные конвейеры 7 и 8. На
рис. 217, в — последовательная передача груза роботом 11 с кон-
вейера 9 на станки 10, 14, 13 и с последней операции — на кон-
вейер 12.
Согласно прогнозу манипуляторы и промышленные роботы,
найдут широкое применение в цементной промышленности при
упаковке цемента (надевание мешков на штуцера, формирование
пакетов из мешков с затаренным цементом); на футеровочных ра-
ботах (разборка пакетов с огнеупорами, устранение отработав-
шей футеровки); в производстве строительного и технического
стекла (манипуляции с листовым стеклом, строительным камнем,
трубопроводами, набирание стекломассы, укладка в контейнеры,
стопирование стекла); в производстве изделий грубой керамики
(укладка сырых полуфабрикатов, разгрузка сухого полуфабри-
ката и укладка его на печные вагонетки, пакетирование готовой
продукции). Промышленные роботы и манипуляторы находят
применение в технологических процессах (при окраске, эмалиро-
вании и др.).
Вопросы для повторения. 1. Какое устройство называется манипулято-
ром? 2. На какие виды разделяют манипуляторы? 3. Что такое промышленный
робот? 4. Приведите примеры применения подъемно-транспортных роботов.
12*
РАЗДЕЛ ТРЕТИЙ
НАЗЕМНЫЙ И ПОДВЕСНОЙ
ВНУТРИЗАВОДСКОЙ ТРАНСПОРТ
ГЛАВА 30. РЕЛЬСОВЫЙ ТРАНСПОРТ
§ 114. ОБЩИЕ СВЕДЕНИЯ
Рельсовый промышленный транспорт применяют для
перевозок в пределах предприятий, а также для связи с карьером.
Кроме того, на заводах промышленности строительных материа-
лов имеются подъездные железнодорожные пути для вывоза го-
товой продукции и доставки материалов, оборудования и др.
внешним общегосударственным железнодорожным транспортом.
В оборудовании рельсового транспорта можно выделить следую-
щие основные звенья (службы): путь и путевое хозяйство; прицеп-
ной подвижной состав - вагоны, локомотивы, маневровые и
вспомогательные устройства.
Различают рельсовый транспорт нормальной (широкой) и
узкой колеи. Первый обслуживается транспортными цехами,
укомплектованными специалистами-железнодорожниками, вто-
рой — узкоколейный, обычно составляющий часть общего меха-
нического оборудования завода, причем его обслуживание и ре-
монт входит в функции заводской службы механика.
Внутризаводские пути в пределах ограждения территории
предприятия представляют собой в основном погрузочно-выгру-
зочные фронты для приема грузов и отправления готовой про-
дукции. Для массовых насыпных грузов (твердое топливо, мине-
ральное сырье, добавки и пр.) в зависимости от их количества,
поступающего в год, для разгрузки вагонов предусматриваются
разгрузочные фронты, оборудованные вагоноопрокидывателями,
бункерными приемными устройствами с конвейерными системами,
пневмо- и гидротранспортом, крановым оборудованием, наполь-
ным безрельсовым транспортом.
§ 115. РЕЛЬСОВЫЕ ПУТИ
Рельсовый путь состоит из основания (земляного
полотна), балластного слоя, шпал и рельсов со скреплениями.
Земляное полотно вместе с искусственными сооружениями назы-
вается нижним строением пути. Балластный слой шпалы, рельсы
н рельсовые скрепления называют верхним строением пути. Звенья
рельсов, соединенные между собой, образуют «нитку» рельсового
пути. Две нитки составляют рельсовую колею. Расстояние между
356
внутренними головками рельсов — это ширина рельсовой колеи,
которая составляет 1524 мм для широкой колеи и 750 мм для уз-
кой. Расположение пути определяется трассой, планом и профи-
лем. Ось пути, разбитая на местности (или нанесенная на карту),
называется трассой, проекция трассы на горизонтальную плос-
кость — планом пути, а проекция развернутой трассы на верти-
кальную плоскость — профилем пути.
Щебеночный балластный слой способствует равномерному рас-
пределению давления, воспринимаемому шпалами, иа основание
пути. Шпалы соединяют обе нитки рельсового пути, обеспечи-
вая постоянство ширины колеи, передают и распределяют дав-
ления от рельсов на балласт.
Путь в плане состоит из отдельных прямых участков, соеди-
ненных между собой плавными кривыми, а профиль пути — из
горизонтальных и наклонных участков, соединенных между со-
бой сопрягающими дугами. Значение уклона измеряется танген-
сом его угла tg р = Z и обозначается десятичной дробью, напри-
мер, t — 0,004 или тысячной долей (промилле) — i — 4 °/00. Пере-
ход с одного пути на другой осуществляют с помощью стрелочных
переводов. Пересечение путей происходит на крестовинах.
При прокладке путей и проектировании всех сооружений,
примыкающих к железнодорожным путям, учитывают ira6a-
риты подвижного состава и приближения строений согласно
ГОСТ 9238—73. Габаритом подвижного состава называют предель-
ное поперечное сечение, в котором должен помещаться на прямо-
линейном пути исправный и нагруженный подвижной состав.
Габаритом приближения строений называется предельное попе-
речное очертание железнодорожного пути, внутрь которого не
должны заходить никакие части сооружений и устройств, распо-
ложенных по обеим сторонам пути. Габарит приближения строе-
ний должен быть больше габарита подвижного состава, чтобы
между ними оставался промежуток (зазор), соответствующий
нормированным допускам. В местах пересечения путей между
внутренними рельсами на определенном расстоянии от точки
пересечения рельсов устанавливают столбик, который указывает
габарит приближения строений. Останавливать подвижной со-
став ближе этого столбика не разрешается.
§ 116. ВАГОНЫ
Для доставки сырья с карьеров на завод применяют
вагоны-самосвалы (думпкары) по ГОСТ 10915—73 с наклоняю-
щимся и открывающимся в сторону разгрузки продольным бор-
том. Открытый верх кузова вагона позволяет загружать его
экскаваторами или другими погрузочными машинами. Разгрузку
можно производить на обе стороны, так как пневмоцилиндры
опрокидывания расположены с обеих сторон. Рабочей средой
в цилиндрах опрокидывания является сжатый воздух, пода-
357
Рис. 218. Виброрыхлительная уста-
новка:
1 — портал; 2 — электроталь; :i — двига-
тель вибратора; 4 — вибратор; ,5 — упор-
ные лапы; б — плита; 7 - рыхлительные
штыри
ваемый компрессором локомо-
тива или стационарной компрес-
сорной установкой. Открывание
бортов кузова принудительное
и происходит при помощи ме-
ханизма, смонтированного в бо-
ковых стенках кузова и сбло-
кированного с последним таким
образом, что борт со стороны
выгрузки открывается вниз, а с
противоположной стороны оста-
ется закрытым. Открытый борт
образует с днищем наклонную
плоскость, по которой насыпной
груз разгружается на значи-
тельном расстоянии от рельсов.
Топливо, гипс, известняк, песок поступают с внешней сети
железных дорог в полувагонах (гондолах) типа ПС-63, ПС-94
и ПС-125 с числом осей соответственно четыре, шесть и восемь.
Цифра в обозначении полувагона указывает его грузоподъем-
ность (т); требования к ним регламентирует ГОСТ 10936—75.
В полу полувагонов предусмотрены разгрузочные люки, которые
закрываются крышками и удерживаются в закрытом состоянии
крюками. Разгрузка полувагонов в зависимости от объема по-
ступающих грузов может производиться через люки или с по-
мощью роторных и боковых вагоноопрокидывателей. При раз-
грузке через люки для подъема и закрывания люков устанавли-
вают пневматические подъемники.
Насыпные грузы, прибывающие в полувагонах, часто слежи-
ваются, а при низких температурах смерзаются. Для восстанов-
ления их сыпучести, необходимой для разгрузки, грузы оттаи-
вают в тепляках или разрыхляют, используя бурорыхлительные
машины н виброрыхлительные установки (рис. 218). Порошковые
и мелкозернистые грузы перевозят в вагонах-хопперах.
§ 117. ЛОКОМОТИВЫ
На внутризаводском рельсовом транспорте заводов
основным типом локомотива являются тепловозы. По типу пере-
дач различают тепловозы с электрической и гидравлической пере-
дачами (рис. 219, й, б). Серии тепловозов обозначают индексами
из нескольких букв, в которых первая буква Т означает тепловоз;
вторая буква, как правило, характеризует тип передачи (Э —
358
a) ^2
Рис. 219. Принципиальные схемы тепловозов с передачами:
а — электрической; б — гидравлической
электрическая; Г — гидравлическая); третья буква свидетельст-
вует о назначении тепловоза (П — пассажирский, М — маневро-
вый). На заводах промышленных строительных материалов в оо
новном применяют тепловозы серий ТГМ-4 и ТГМ-3 с гидравли-
ческой передачей и незначительно тепловозы серий ТЭМ-1 и ТЭМ-2.
Тепловоз серии ТГМ состоит из экипажной части, дизеля, пере-
дачи и вспомогательного оборудования. Главной частью тепло-
воза является его первичный двигатель—дизель. При электриче-
ской передаче (рис, 219, а) дизель 1 вращает главный генератор 2,
связанный с тяговыми электродвигателями постоянного тока 3.
Эти электродвигатели соединены механической передачей с при-
водными колесными парами 4. Управление двигателями произво-
дят с помощью командоконтроллера. Регулируя частоту враще-
ния электродвигателя, получаем необходимые режимы движения
локомотива.
На тепловозах с гидравлической передачей (рис. 219, б) ди-
зель 1 приводит в действие гидравлический насос 2'. Рабочая
жидкость поступает в гидротрансформатор 3' и вращает его колесо,
а вместе с ним и приводные колесные пары 4 тепловоза. Регулиро-
ванием подачи жидкости в гидротурботрансформатор получают
различные режимы движения локомотива.
Тяговую способность локомотива оценивают сцепным весом Л,.ц
(кН), т. е. нагрузкой, приходящейся на приводные колесные нары
от массы локомотива.
§ 118. ОСНОВЫ ТЯГОВОГО РАСЧЕТА
Тяговым расчетом при известных трассе и профиле
пути решаются две основные задачи: 1) по принятому тину при-
цепного подвижного состава и известной характеристике локомо-
тива определяют максимальный вес (массу) поезда, который спо-
собен тянуть локомотив; 2) при принятом типе подвижного состава
и заданном весе поезда находят необходимую характеристику локо-
мотива.
359
В первой задаче допускаемый вес (масса) поезда рассчитывают
по силе тяги локомотива с учетом руководящего уклона, встре-
чающегося на трассе, и сопротивлений движению на криволиней-
ных участках. Вместо того, чтобы вводить в формулу два коэффи-
циента, характеризующих руководящий уклон % и дополни-
тельное сопротивление передвижению щкр, используют один коэф-
фициент = /р 4' wJ(p.
При равномерном движении (с постоянной скоростью) сила
тяги локомотива Ел уравновешивает сопротивление движению
поезда U7;
= Wcll - (6л -Ь Св) И + /в) = Г,
откуда максимальный вес поезда при равномерном движении
Gnax = G.„ У G„ = АсДсц/(®„~ i,<), (197
где fcn — сцепной вес локомотива. кН; бл — вес локомотива, кН; GB — вес
груженых вагонов, кН; /сц — коэффициент сцепления колес; — коэффициент
удельного сопротивления передвижению.
Полученный вес поезда [см. формулу (197)1 проверяют на
случай трогания с места груженого поезда в наиболее неблаго-
приятных условиях (руководящий уклон, минимальный радиус
кривой, влияние сил инерции). Уравнение движения поезда
при трогании
Fcufcu = (G;1 -4- GB) (&>6 ф 1к) (Сл -4- GB) (1 -4- у) ятр/£,
откуда вес поезда при трогании с места
— (GiTI ф- GB) — Fai/\ii/[(<£’o Ф- iI() 4- (1 —Y)^jp/gJ. (198)
где f'— коэффициент сцепления при трогании; w'Q — коэффициент удельного
сопротивления; атр — 0,15 ... 0,2 м/с2 — ускорение; у — 0,1 ... 0,08 — коэффи-
циент, учитывающий массу вращающихся колес.
За максимально допускаемый вес поезда принимают его наи-
меньшее значение, определяемое по формулам (197) и (198). За-
тем находят общий вес вагонов GB -- Gwax — G.,, и число вагонов
в поезде:
п -бв/(<?г + ?т), (199)
где qr — средний вес груза в вагоне, кН; q.r — средний вес тары (вагона), кН.
При решении второй задачи из формул (197) и (198) опреде-
ляют необходимый сцепной вес локомотива Лец, а по нему выби-
рают локомотив. В этих расчетах весом локомотива задаются.
Если известен вес поезда (GdI + GB), то из формулы (197)
можно определить максимальное значение руководящего уклона.
При движении вниз по уклону торможение поезда может осу-
ществляться либо только локомотивом, либо локомотивом и ваго-
нами. Если уклон большой, то может оказаться, что вес поезда,
выбранный исходя из тяговой силы, нельзя принять по условиям
торможения, поэтому необходима проверка сцепления по усло-
360
виям торможения поезда на руководящем уклоне. При торможе-
нии колеса локомотива и вагонов не должны скользить по рель-
сам, следовательно, сила трения FTp, создаваемая тормозными
колодками, должна быть меньше силы сцепления затормаживае-
мых колес с рельсами:
^тр f нол/кол (Fсц Т GB. т)/сц> (200)
где Ffiojj — суммарная сила нажатия колодок, кН; /кол — коэффициент трения
колодок о бандажи колес; fcl,—сцепной вес локомотива, кН; GB. т —вес
вагонов, снабженных тормозами, кН; /сц — коэффициент сцепления.
В расчетах используют коэффициент нажатия колодок
6 ~ FКОЛ/(Ясц 4~ GB т).
Из формулы (200) следует, что = ЙД«ол, поэтому тормоз-
ная сила имеет вид
FTp (Frii 4- GB т) 6fK0J].
При средних условиях работы б = 0,8.
Пример. Определить вес поезда при следующих условиях: тепловоз ТГМ-3;
вагоны-самосвалы типа 6ВС-60; руководящий подъем прямой выездной траншеи
карьера ip = 10%; коэффициент сцепления колес с рельсами при подсыпке
/сц=0,2; коэффициент сопротивления движению тепловоза и вагонов иу —
= 0,0025. Следует предусмотреть возможность трогания груженого поезда на
подъем при аварийной остановке.
1. Принимаем вес тепловоза ТГМ-3 Сл = 680 кН; вес вагона-самосвала
q-i — 290 кН, средний вес груза в вагоне qr~ 600 кН.
2. Для случая трогания принимаем w'(] = 0,0025;
= г'р = 0,010; аТр — 0,15 м/с3; у =0,1; /'ц = 0,2.
3. Максимальный вес поезда
Gnuix — бл + бв = Fсц/сц/Цдао + Хр) + (1 + ?) атр/£^ =
= 680 0,2/1(0,0025 + 0,010) + (1 + 0,1)0,15/9,81] = 4600 кН.
4. Вес прицепной части поезда (вагонов)
бв = бпт — бл = 4600 — 680 = 3920 кН.
5. Число вагонов в поезде по формуле (199):
п = бв/(9т + 9г) = 3920/(290 + 600) = 4,4 шт.
Принимается п — 4 шт.
Если считать, что поезд движется по выездной траншее с установившейся
скоростью, то его допускаемый вес по формуле (197)
б,11ах — АСц/Сц/(®о 4- ф) = (680 0,2)/(0,0025 + 0,010) =. 10 880 кН.
Вес вагонов бв = бП(ах - бл 10 880 — 680 = 10 200 Н и возможное
число вагонов п= бв/(^т + qr) 10 200/(290 + 600) = 11,5, т. е. число ва-
гонов может быть увеличено до 11 шт.
Вопросы для повторения. 1. Назовите основные элементы рельсового
пути. Что такое габарит подвижного состава и габарит приближения строений?
2. Какие виды вагонов применяют для транспортирования насыпных грузов?
Как разгружаются вагоны? 3. Как устроены тепловозы с электрической и гидра-
влической передачами? 4. С какой' целью выполняется тяговый расчет?
361
Г/1 А В A 31. ПОДВЕСНЫЕ КАНАТНЫЕ ДОРОГИ
§ 119. ОБЩИЕ СВЕДЕНИЯ
Подвесными канатными дорогами (ПКД) называют
сооружения, состоящие из опор, погрузочной и разгрузочной
станций, соединенных стальными канатами, по которым движутся
вагонетки, кабины или сиденья. Различают канатные дороги
пассажирские и грузовые. Грузовые подвесные канатные дороги
применяют на предприятиях угольной и химической промышлен-
ности на горнорудных разработках, для доставки на заводы
сырья с карьеров, при строительстве плотин, для перевозок
в горных районах; их производительность составляет 50 ... 60 т/ч.
В горных, пересеченных и труднопроходимых местностях ПКД
являются одним из самых эффективных и экономичных видов
грузового и пассажирского транспорта. Вагонетки, кресла или
кабины перемещаются иа некотором расстоянии от поверхности
земли, что позволяет соединять конечные пункты по кратчай-
шему расстоянию, причем уклон трассы в вертикальной плос-
кости может достигать 45°, что недоступно для транспорта дру-
гих видов. Для ПКД не требуется сооружать мосты, тоннели,
выполнять трудоемкие планировочные работы на местности.
По числу канатов ПКД разделяют на одноканатные, в которых
один и тот же канат является несущим и тяговым, и двухкаиат-
ные, когда один канат является несущим, а другой — тяговым.
По характеру движения вагонеток ПКД могут быть с круговым
и маятниковым движением вагонеток. В маятниковой ПКД по
несущему канату совершает реверсивное движение одна ваго-
нетка, присоединенная к тяговому канату, что позволяет значи-
тельно увеличить скорость ее движения и разность уровней рас-
положения конечных точек трассы дороги. Длина таких дорог
до 700 м, скорость до 10 м/с.
По назначению перевозок грузовые ПКД можно разделить
на транспортные и отвальные. В первых груз перемещается в ваго-
нетках между конечными пунктами без промежуточной разгрузки.
Отвальные дороги предназначены для образования отвалов гру-
зов.
В промышленности строительных материалов наиболее распро-
странены двухканатные дороги с круговым движением вагоне-
ток (рис. 220) для подачи сырья на цементные и кирпичные за-
воды от загрузочной станции (пункт Л) к разгрузочной станции
(пункт Б). Груз накапливается в бункере 2, загружается в ваго-
нетки 10, которые по жесткому рельсовому пути 1 вручную или
принудительной тягой продвигаются на станции к выходу. Пере-
движение вагонеток по станционным путям может осуществляться
вспомогательным тяговым канатом, подвесными цепными толкаю-
щими конвейерами и другими средствами. С помощью включаю-
щего устройства у выхода вагонетка присоединяется к тяговому
362
канату 5 и следует на линию. На
линии рельсовый путь 1 заменяется
несущими канатами 6 и 7, натянуты-
ми между станциями. Несущие ка-
наты поддерживаются на трассе ли-
нейными опорами 4 с башмаками,
закрепляются на якорях 12 на одной
из станций и натягиваются весом
груза 11. Вагонетка, передвигаясь
по несущему канату, поступает на
жесткий рельсовый путь 9 разгрузоч-
ной станции. Вагонетки, обойдя об-
водной шкив 8 тягового каната, по
рельсовому пути выходят с разгру-
зочной станции вновь на линию, где
перемещаются по несущему канату 7
к загрузочной станции. Вагонетки
по несущим канатам передвигаются
тяговым замкнутым канатом. Тяго-
вый канат на линейных опорах под-
держивается роликами, а на станциях
отводится направляющими шкивами
к приводу 3 или грузовому натяж-
ному устройству.
Соединение отдельных кусков не-
сущих канатов между собой произ-
водится при помощи линейных муфт,
а закрепление концов каната — с
помощью конечных муфт. Соединение
отдельных кусков тягового каната
при помощи заплетки прядей на
длине не менее 1000 диаметров ка-
ната.
На трассе дороги расстояние от
низшей точки подвижного состава,
а также любого каната до земли
должно быть не менее 2,5 м над не-
застроенными территориями;4,5 м —
над территориями промышленных
предприятий и автомобильными до-
рогами; 1 м — над зданиями и со-
оружениями. Габариты приближения
вагонеток на линии должны быть
не менее 1 м к сооружениям и не
менее 2 м в местах, где возможен
проход людей.
В .качестве несущих применяют
канаты закрытой конструкции
Рис. 220. Грузовая подвесная канатная дорога
363
Рис. 221. Вагонетка подвесной канатной дороги:
а, б — четырех- и двухколесная вагонетки
(ГОСТ 7675—80; ГОСТ 7576—80) диаметром 18 ... 50 мм. Бла-
годаря гладкой поверхности каната уменьшается трение на
опорных башмаках и сопротивление движению колес тележки.
Обрыв одной наружной Z-образной проволоки не вызывает ее
выпучивание и выход из каната. Срок службы этих канатов
1 ...6 лет. В качестве тяговых используют стальные канаты
двойной свивки линейного касания. Срок службы канатов до 5 лет.
Приводом служат одножелобчатые канатоведущие шкивы
с футеровкой из конвейерной ленты или резины. Работа этих
шкивов аналогична работе канатоведущих шкивов лифтов. Кроме
основного, предусматривается предохранительный тормоз, рас-
положенный на канатоведущем шкиве и срабатывающий от тахо-
генератора при превышении номинальной скорости на 20 %.
Вагонетки (рис. 221) типовых ПКД состоят из ходовой те-
лежки на двух или четырех колесах, подвески с зажимным зам-
ком и кузова. В грузоподъемность тележки входит масса под-
вески, кузова и перемещаемого груза. ГОСТ 10353—75 регламен-
тирует следующие параметры вагонеток: грузоподъемность 800;
1000; 2000 и 3200 кг и вместимость кузова вагонеток от 0,25
до 3,2 мТ
В четырехколесных вагонетках (рис. 221, а) каждая тележка
шарнирно закреплена на раме и может самоустанавливаться,
благодаря чему достигается равномерное распределение нагрузки
на все колеса (аналогично балансирным тележкам у мостовых
кранов). Кузов подвешен на подвеске шарнирно и удерживается
от опрокидывания рычагом 4. Ось вращения кузова смещена от-
носительно его средней оси на 20—25 мм, вследствие чего при
набегании на неподвижный упор, установленный в месте раз-
364
грузки, рычаг откидывается и кузов опрокидывается. В рабочее
положение кузов возвращается вручную или с помощью противо-
веса. Место расположения и масса кузова выбраны так, чтобы при
груженой вагонетке опрокидывающий момент был больше вос-
станавливающего, а при порожней вагонетке — меньше.
Зажимной аппарат (рис. 221,6), служащий для присоедине-
ния вагонетки к тяговому канату, представляет собой шарнирные
клещи с двумя щеками — неподвижной 9 и подвижной 5, имею-
щей рычаг 10. Подвижная щека приварена к раме 2 тележки 5.
Рычаг подвижной щеки связан с тягой /, на верхнем конце ко-
торой закреплена ось 7 с двумя роликами 6, а на нижнем подвешена
рама 3 вагонетки. Когда вагонетка роликами 6 набегает на спе-
циальные направляющие рельсы, клещи раскрываются и канат
освобождается при сбегании роликов с рельсов. Вес рамы и ку-
зова вагонетки передается через тягу на рычаг, и канат зажи-
мается .
Управление канатной дорогой осуществляется централизо-
ванно с пульта управления диспетчера.
Режим работы канатной дороги регламентирован правилами
эксплуатации, а работа обслуживающего персонала—соответ-
ствующими должностными инструкциями. В процессе эксплуа-
тации дороги систематически ведется документация, в которой
отражается работа и основные показатели дороги.
Четкая и безаварийная работа ПКД достигается строгим
соблюдением правил эксплуатации и своевременным проведением
всего комплекса планово-предупредительных ремонтов. Требо-
вания к грузовым ПКД изложены в «Правилах устройства и без-
опасной эксплуатации грузовых подвесных канатных дорог
(ГПКД)», утвержденных Госгортехнадзором СССР [241.
§ 120. ОСНОВЫ РАСЧЕТА ПОДВЕСНЫХ КАНАТНЫХ
ДОРОГ
Трассу дороги следует выбирать прямолинейной.
Профиль дороги может быть ровным, выпуклым или вогнутым.
При вогнутом профиле трасса имеет большой пролет (до 1,5 км).
Часовая производительность дороги (т/ч)
Qm = QrK/(«r«c).
где Qr —необходимая годовая производительность, т/ч; К~ 1,1-К 1,2 — коэф-
фициент неравномерности работы; пг — расчетная или фактическая продолжи-
тельность работы дороги в течение года, дни; — расчетное число часов работы
дороги в сутки, ч.
Скорость движения вагонеток назначают, исходя из расчет-
ной часовой производительности и грузоподъемности вагонеток.
Она составляет 3,3 м/с при отсутствии автоматического обвода
криволинейных участков на станциях и 1,6 ... 2 м/с — при авто-
матическом обводе криволинейных участков.
365
Несущие канаты выбирают по разрывному усилию [см. фор-
мулу (20)1 при коэффициенте запаса прочности [n 1 2? 3,0. Мак-
симальное натяжение каната определяют с учетом нагружения
его ве^ом груза и сопротивлениями от сил треиия канатов на баш-
маках. Следует отметить, что применение свободно висящих
натяжных грузов обеспечивает постоянство натяжения канатов,
ибо при нагрузках от тележек изменяется только стрела про-
веса.
Тяговые канаты выбирают по разрывному усилию [см. фор-
мулу (20)1 при коэффициенте запаса прочности [л1 2-4,5- Мак-
симальное натяжение каната находят в результате тягового
расчета натяжений в характерных точках трассы (аналогично
тяговому расчету цепи подвесного конвейера), при этом учиты-
ваются силы инерции в периоды разгона и торможения дороги.
Вопросы для повторения. I. Укажите области применения подвесных
канатных дорог. Какие имеются разновидности ПКД? 2. Укажите основные эле-
менты грузовых ПДК. 3. Как определяют грузоподъемность тележки грузо-
вых ПДК? 4. Какие типы канатов применяют в качестве несущих и тяговых?
Г Л А В А 32. НАПОЛЬНЫЙ БЕЗРЕЛЬСОВЫЙ ТРАНСПОРТ
§ 121. АВТОМОБИЛИ-САМОСВАЛЫ
Для доставки сырья с карьеров применяют автомо-
били-самосвалы с задней разгрузкой кузова. Имеется несколько
компоновочных схем большегрузных автомобилей-самосвалов:
1) кабина расположена за двигателем (автомобиль-самосвал
МАЗ-525, КрАЗ-256); 2) рядом с двигателем (автомобили-само-
свалы БелАЗ) и 3) над двигателем (автомобили-самосвалы
КамАЗ-5510).
Автомобили-самосвалы БелАЗ имеют колесную формулу 4x2
(первая цифра указывает общее число колес, а вторая — число
ведущих). Автомобили-самосвалы КрАЗ-256 и КамАЗ-5510 имеют
колесную формулу 6x4.
В автосамосвалах в качестве двигателя применяют дизель
и трансмиссии трех видов: механическую с коробкой передач
(автомобили-самосвалы МАЗ-525, КрАЗ-256 и др.), гидромехани-
ческую (автомобиль-самосвал БелАЗ-540) и электромеханическую
(автомобиль-самосвал БелАЗ-549). Механическая трансмиссия,
состоящая из фрикционного сцепления и шестеренчатой коробки
передач, мало отличается от трансмиссий автомобилей общего
назначения. При использовании механической трансмиссии дви-
гатель не всегда работает на экономичных режимах. При движе-
нии в сложных карьерных условиях требуется частое переклю-
чение передач, поэтому в этих случаях целесообразно использо-
вание гидромеханических и электрических трансмиссий.
366
Большегрузные автомобили-самосвалы БелАЗ вследствие боль-
ших размеров и грузоподъемности относят к внедорожным авто-
мобилям, эксплуатация которых разрешена только в карьерах.
На автомобилях применена гидромеханическая передача, которая
включает гидротрансформатор и трехступенчатую фрикционную
коробку передач. Особенностью автосамосвала БелАЗ-540А яв-
ляется наличие гидравлического тормоза-замедлителя, позволяю-
щего тормозить машину на спусках без механических тормозов.
§ 122. УНИВЕРСАЛЬНЫЕ АВТОПОГРУЗЧИКИ
Автопогрузчики представляют собой самоходные
подъемно-транспортные машины на пневмоколесном ходу, ко-
торые применяют для погрузки, выгрузки, укладки в штабели
и перемещения на расстояния до 150 м штучных и насыпных
грузов в основном на открытых площадках. Погрузчик состоит
из ходовой части и рабочего оборудования. В зависимости от рас-
положения рабочего оборудования относительно ходовой части
погрузчики разделяют на фронтальные (перевозят груз на вилах)
и с боковым грузоподъемником (перевозят груз на платформе,
грузоподъемник в этом случае служит для загрузки н выгрузки
груза на платформу). Погрузчики могут быть общего назначения
и специальные. Погрузчики общего назначения изготовляют в со-
ответствии с ГОСТ 16215—80 фронтальными двух типов: универ-
сальные и улучшенной проходимости. Номинальные грузоподъем-
ности погрузчиков 1; 2; 3,2; 5; 10 и 25 т.
Ходовая часть фронтального универсального автопогрузчика
(рис. 222) состоит из рамы, переднего неуправляемого и заднего
управляемого мостов, двигателя внутреннего сгорания, пульта
управления. Для обеспечения устойчивости погрузчика в задней
части рамы предусмотрен противовес. Рабочее оборудование со-
стоит из грузоподъемника с механизмом наклона.
Грузоподъемник состоит из вертикальной неподвижной рамы /,
внутри которой по направляющим с помощью гидроцилиндра 2
перемещается телескопическая рама 3. На последней также по
направляющим перемещается каретка 7 с вилочным захватом 4.
Каретка подвешена на грузовых цепях, которые обходят блоки
(звездочки) 6, установленные на поперечине 5 штока-плунжера
гидроцилиндра, й затем закрепляются на неподвижной раме.
Наклон грузоподъемника осуществляют посредством гидроци-
линдров. Система, состоящая из каретки, цепей, блоков и плун-
жера, образует полиспаст с кратностью, равной двум для выиг-
рыша в скорости. При нагнетании масла в гидроцилиндр подни-
мается плунжер вместе с телескопической рамой и поперечиной
со звездочками. Так как концы цепей закреплены, одновременно
по телескопической раме поднимается каретка. За время подъема
телескопической рамы на высоту h каретка с вилочным захватом
поднимается иа высоту h,. — 2h. При открывании выпускного
367
Рис. 222. Фронтальный универсальный автопогрузчик
крана плунжер с рамой и каретка с вилочным захватом опускаются
вниз под действием силы тяжести. Если изменить кратность поли-
спаста, то можно тем же грузоподъемником поднимать грузы на
большую высоту, но при этом соответственно уменьшается грузо-
подъемность.
При работе с однотипными грузами, например, керамическими
трубами, пакетами кирпича, бочками и др. вилочные автопогруз-
чики оснащают сменным оборудованием (рис. 223), которое упро-
щает операции, производимые с грузами, и повышает производи-
тельность труда. Погрузчики со специальными зачерпывающими
ковшами применяют для погрузки насыпных грузов. Погрузчики
со стрелой можно использовать как кран с крюком или грейфе-
ром.
Гидропривод (рис. 224) сообщает движение грузоподъемнику
и сменным грузозахватным устройствам, а также усилителю
рулевого управления (последний имеется у погрузчиков грузо-
подъемностью более 3 т). Гидроусилитель служит для облегче-
ния управления при передвижении и ускорении поворота управ-
ляемых колес: насос 4 забирает жидкость из бака 3 и нагнетает
в цилиндр 5, шток которого связан с тягами управления колесами.
Гидросистема у всех автопогрузчиков работает по одной прин-
368
Рис. 223. Сменное оборудование автопогрузчиков:
и — поворотный ковш; б — безблочная стрела с переставным крюком; в — одноштыревой
захват; г— каретка с полным боковым прижимом; д — каретка с нижним боковым при-
жимом; е — захват для бочек; ж — многоштыревой захват; з — сталкнватель
ципиальной схеме. Лопастной насос 72 забирает рабочую жидкость
из бака 1 и через фильтр 2 нагнетает ее в золотниковый распреде-
литель 10 с тремя рабочими золотниками. В зависимости от поло-
жения золотников жидкость может поступать в цилиндр 6 подъ-
ема, цилиндры 9 наклона грузоподъемника и цилиндры ^сменных
захватных устройств. Из гидроцилиндров жидкость возвращается
в масляный бак 1 через гидрораспределитель по сливному трубо-
проводу 11. В трубопроводе между цилиндром подъема и гидро-
расиределителем установлен дроссельный клапан 7 односторон-
него действия, который предназначен для уменьшения скорости
опускания груза до безопасного значения.
Для внутрицехового транспорта в основном используют элек-
трические погрузчики. При необходимости работы в помеще-
нии на автопогрузчиках устанавливают нейтрализаторы отработав-
369
।
Рис. 224. Принципиальная схема гидропривода автопогрузчика
ших газов. Корпус нейтрализатора нагревается до 450 °C, по-
этому при работе автопогрузчика должна быть обеспечена пожар-
ная безопасность.
§ 123. ЭЛЕКТРОПОГРУЗЧИКИ И ЭЛЕКТРОШТАБЕЛЕРЫ
Электропогрузчики по конструктивному исполне-
нию аналогичны автопогрузчикам, по источником энергии в иих
служат аккумуляторные батареи. Электропогрузчики применяют
для загрузки и разгрузки железнодорожных крытых вагонов,
грузовых автомобилей, штабелирования тарно-штучных грузов
и перевозки грузов на небольшие расстояния. Для работы по-
грузчиков необходимо твердое и ровное дорожное покрытие.
Кроме вил электропогрузчики могут оборудоваться сменными
грузозахватными устройствами (см. рис. 223).
Имеются две разновидности погрузчиков — трехколесные и
четырехколесные. У первых управляемое колесо поворачивается
вокруг вертикальной оси на угол 90°, благодаря чему обеспечи-
вается хорошая маневренность (малые радиусы поворота). Ос-
воено производство унифицированного ряда трехколесных ма-
шин грузоподъемностью 0,63; 0,8; 1,0 и 1,25 т соответственно мо-
делей ЭП-0601, ЭП-0801, ЭП-1001 и ЭП-1201.
Четырех колесный электропогрузчик (рис. 225) состоит из рамы
шасси 9, которая опирается на задний управляемый мост 8 и
370
передний ведущий мост 7, на котором шарнирно закреплен грузо-
подъемник 2. С рамой грузоподъемник связан гидроцнлиндрами 10
механизма наклона. Управление осуществляется рулевой ко-
лонкой 3 с ручным тормозом 4. Аккумуляторные батареи 6 рас-
положены над задним мостом. Для обеспечения устойчивости
к раме прикреплен груз противовеса 7. Для машиниста преду-
смотрено сиденье 5. Электропогрузчики изготовляют грузоподъем-
ностью 1; 1,5; 2 и 5 т. При высоте подъема 2 и 3 м грузоподъем-
ники имеют двухрамную конструкцию, а при высоте 4,5 м — трех-
рамную. Грузоподъемник наклоняется вперед на угол 3°, а назад —
на угол 10°.
В эксплуатации находятся также электропогрузчики фирмы
«Балканкар» (НРБ) грузоподъемностью 1; 2; 3,2 т.
Для погрузочно-разгрузочных работ в складских помещениях,
а также в стесненных условиях цехов применяют электропогруз-
чики с фронтальным выдвижным вперед грузоподъемником, на-
зываемые электроштабелерами. Скорость их 6 ... 7 км/ч. Перед-
ние колеса, несущие основную нагрузку, имеют массивные шины
диаметром 200—320 мм. Электроштабелер модели ЭШ-186 грузо-
подъемностью 1 т выполняет погрузочно-разгрузочные операции
371
посредством грузоподъемного устройства и каретки, которые
обеспечивают подъем груза на высоту 4,5 м, поворот вил на угол
90° в каждую сторону, поперечное смещение вил на 900 мм н про-
дольное выдвижение вил на 640 мм. Этот штабелер успешно при-
меняется в небольших стеллажных складах взамен стеллажных
кранов-штабелеров.
На электропогрузчиках, изготовляемых в СССР, применяют
батареи щелочных никель-железных аккумуляторов типа ТНЖ
с номинальным напряжением 24, 40 и 48 В с числом элементов 22
до 40. На погрузчиках фирмы «Балканар» и на электроштабеле-
рах ЭШ-186 устанавливают батареи кислотных аккумулято-
ров.
Для нормальной работы погрузчиков должна быть обеспечена
их устойчивость от опрокидывания. Для фронтальных погрузчи-
ков с противовесом проверяют три положения.
1. Продольную устойчивость неподвижного погрузчика при
штабелировании груза на максимальной высоте и наклоне грузо-
подъемника вперед на угол 4°; при этом предполагается, что по-
грузчик плавно управляется и работает на сравнительно малой
скорости при минимальном значении инерционных сил. Чтобы
была обеспечена продольная устойчивость, равнодействующая R
веса груза G и веса погрузчика не должна выходить за точку В
опоры передних колес (рис. 226, а).
2. Продольную устойчивость при неожиданном торможении
движущегося с максимальной скоростью погрузчика с грузом;
при этом грузоподъемник наклонен назад на угол 0 = 18°. Устой-
чивость погрузчика будет обеспечена, если равнодействующая RQ
от веса груза и веса погрузчика R. и инерционной силы ЛИ|| не
выходит за точку В опоры передних колес (рис. 226, б). Угол 0 =
= 18° считается оптимальным, удовлетворяющим современным
требованиям безопасности. При таком условии погрузчик, дви-
жущийся со скоростью 12 км/ч, должен иметь тормозной путь
не менее 3 м.
Рис. 226. Схема для проверки устойчивости электропогрузчика:
а — при штабелировании; б —• при движении (при резком торможении)
372
3. Поперечную устойчивость при действии центробежных сил
при повороте погрузчика. Опрокидывание может произойти от-
носительно одной из сторон (ребра опрокидывания) опорного
контура ходовой части погрузчика.
§ 124. ЭЛЕКТРОТЕЛЕЖКИ И ЭЛЕКТРОТЯГАМИ
Электротележки применяют для внутри- и межцехо-
вого транспорта. Имеются тележки с неподъемной и подъемной
платформами. Первые имеют грузоподъемность 1; 2; 5 и 10 т,
вторые — 0,2; 0,5 т.
Электротележка ЭК-2 .с неподъемной платформой грузоподъ-
емностью 2 т (рис. 227) состоит из платформы с рамой 1, переднего
моста с рулевым управлением 4, заднего ведущего моста 6 с ре-
дуктором и карданным валом, электродвигателя, управляемого
рукояткой 2 кулачкового контроллера 3, и аккумуляторной
батареи 5.
Электротележки с подъемной платформой (рис. 228) или ви-
лами грузоподъемностью 0,2 и 0,5 т предназначены для транспорти-
ровки грузов на поддонах или в контейнерах для подъема их на
высоту 75 ... 125 мм и штабелирования в один ярус. Малые габа-
риты и хорошая маневренность позволяют использовать тележки
в узких проездах на складах и в цехах с подачей грузов непосред-
ственно к рабочим местам. Основными узлами тележек являются
ходовая часть с опорной рамой, подъемная рама с вилами, меха-
низм подъема груза, механизм передвижения с рукояткой управ-
ления, системы гидро- и электрооборудования.
Электротягачи с прицепными тележками применяют при
транспортировании грузов на пути длиной, более 120 м, когда
нерационально применение электропогрузчиков. Основным пара-
метром тягача является тяговое усилие на крюке. Номинальным
называется тяговое усилие, которое имеет тягач при передвиже-
нии с постоянной скоростью прицепных тележек в заданном ре-
Рис. 227. Электрическая тележка типа ЭК-2
373
2300
Рис. 228. Электрическая тележка с подъемной платформой
жиме. Тягач кратковременно (с ограничением по нагреву электро-
двигателя) может развивать тяговое усилие, превышающее номи-
нальное в 5 раз. Серийно выпускаются тягачи с номинальным тяго-
вым усилием на крюке 1,25; 2,5 и 8 кН. Основными узлами тягача
являются корпус, передний и задние мосты, рулевое и тормозное
устройство, электрооборудование и автоматическое сцепное устрой-
ство. Сцепление тягача с тележкой происходит автоматически.
Расцепление производится нажатием на рычаг, который натяги-
вает трос и раздвигает зажим на стяжке.
§ 125. ПОГРУЗЧИКИ ДЛЯ НАСЫПНЫХ ГРУЗОВ
Погрузчики для насыпных грузов разделяют на ма-
шины непрерывного действия (рис. 229, а) и машины прерывного
(цикличного) действия (рис. 229, б, в). По способу захвата груза
различают погрузчики с ковшовым рабочим органом и с ковшо-
вой цепью. Наиболее распространены погрузчики на самоходном
пневмоколеспом шасси с дизельным приводом и гидравлическим
управлением механизмом зачерпывания. На заводах промышлен-
ности строительных материалов широко применяют многоковшо-
вые элеваторные погрузчики (см. рис. 229, а). Кромки ковшей
армированы зубчатой накладкой. Эти погрузчики можно накло-
нять для перевода из транспортного в рабочее положение. Ма-
териал из штабеля зачерпывается ковшами, поднимается вверх
и по наклонному лотку высыпается непосредственно в кузов транс-
портного средства (прямая погрузка) или ковши разгружают груз
на перегрузочный конвейер, а последний перемещает его в транс-
портное средство (ступенчатая погрузка). Наличие перегрузочного
374
d) 5) в)
Рис. 229. Схемы погрузчиков:
а - непрерывного действия; б, л - циклического действия
конвейера позволяет уменьшать высоту машины и регулировать
высоту иогрузки.
Для захватывания насыпного груза ио фронту штабеля и по-
дачи его к ковшам вал нижней звездочки элеватора выполнен
удлиненным и на каждой стороне его имеются винтовые подгре-
бателн, лопасти которых установлены по правой и левой винтовым
линиям и при вращении сдвигают груз к центру машины. При
перемещении погрузчика ковши и подгребатели внедряются в шта-
бель. Чтобы груз не отбрасывался назад, с задней стороны под-
гребателя установлены регулируемый по высоте отвал с ножом.
Для работы с разнородными слежавшимися грузами исполь-
зуют одноковшовые погрузчики цикличного действия, смонтиро-
ванные па тракторе. Ковшовый рабочий орган (см. рис, 229, б)
может быть с механической трансмиссией или гидроприводом,
в последнем случае упрощается кинематическая схема и управле-
ние погрузчиком. Широко применяют также погрузчики на уни-
фицированном шасси ня пневмоколеспом ходу. Стрела погрузчика
поднимается двумя гидроцилнндрами одностороннего действия,
а ковш поворачивается гидравлическими цилиндрами двойного
действия. Погрузчик может также использоваться для перевозки
груза на небольшое расстояние. Аналогичную схему имеет по-
грузчик на колесном тракторе (см. рнс. 229, в), достоинством
которого является большая мобильность и возможность передви-
жения по дорогам с усовершенствованным покрытием.
§ 126. РАЗГРУЗЧИКИ ДЛЯ НАСЫПНЫХ ГРУЗОВ
В зависимости от типа заборных и транспортирую-
щих устройств разгрузчики разделяют иа три группы: механиче-
ские, пневматические и пневмомеханические.
Простым разгрузчиком является механическая лопата, кото-
рая состоит из лебедки е электродвигателем, скребка, соединен-
ного тросом с лебедкой, и направляющих роликов для троса.
Для выгрузки груза (например, цемента) просвет между дверным
проемом вагона и рамой склада перекрывают металлическими щи-
тами, скребок заводят в вагон и погружают в цемент. Затем накло-
няют скребок вперед; при этом ослабляется тяговый трос и ле-
375
бедка автоматически включается и подтягивает скребок до места
разгрузки. Лопата выключается по настройке на заданное рас-
стояние, после чего цикл повторяется.
Разгрузчики типов С-347, С-559, С-362Б и С-578 представляют
собой пневматические установки всасывающего типа, сопла ко-
торых смонтированы на самоходной тележке и снабжены механи-
ческими рыхлителями. Указанные разгрузчики работают по одной
схеме. Отличаются они друг от друга типоразмерами вакуумных
насосов, размерами осадительных камер и другими элементами.
В пневмомеханических разгрузках захват груза производится
механическими устройствами, например винтами, а дальнейшее
транспортирование с помощью пневматической нагнетательной
установки. Процесс работы разгрузчика заключается в следующем:
штыревой рушитель, расположенный в передней части машины,
врезается в массу груза, обрушивает его на подгребающие диски,
которые направляют груз к наклонным заборным виитам, а по-
следние подают его в камеру напорного винта. Далее груз напор-
ным винтом нагнетается в'аэрационную камеру, куда через по-
ристую ткань компрессором подается сжатый воздух, который
интенсивно перемешивается с грузом, образуя аэросмесь; послед-
няя по гибкому трубопроводу перемещается к месту разгрузки.
Напорный винт выполнен с переменным шагом, благодаря чему
у выходного отверстия образуется пылевая пробка, предотвращаю-
щая прорыв сжатого воздуха из аэрационной камеры.
Подача воздуха в камеру регулируется автоматическим кра-
ном с электромагнитным приводом, срабатывающим в зависимости
от нагрузки на электродвигатель напорного винта. Поэтому при
перерывах в поступлении цемента подача воздуха автоматически
прекращается. Управление разгрузчиком дистанционное.
Вопросы для повторения Назовите основные виды напольного без-
рельсового транспорта. 2. Назовите основные виды разгрузчиков и погрузчиков.
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович И. И., Котельников Г. А. Козловые краны общего назначе-
ния. 2-е изд., перераб. и дон. М.: Машиностроение, 1983. 232 с.
2. Александров М. П. Подъемно-транспортные машины: Учебник для
машиностроительных техникумов. 2-е изд., перераб. М.: Машиностроение, 1984,
336 с.
3. Базанов А, Ф., Забегалов Г. В. Самоходные погрузчики. 2-е изд., пе-
рераб. и доп. М.: Машиностроение, 1979. 406 с.
4. Грузоподъемные машины: Учебник для вузов по специальности «Подъ-
емно-транспортные машины и оборудование»/М. П. Александров, Л. Н. Коло-
бов, Н. А. Лобов и др. 2-е изд. перераб. и доп. М.: Машиностроение,
1986.
5. Евневич А. В. Грузоподъемные и транспортирующие машины: Учеб-
ник для техникумов промышленности строительных материалов, 5-е изд., пе-
рераб. М.: Машиностроение, 1977. 304 с.
6. Егоров К- А. Справочник механизатора погрузочно-разгрузочных и
транспортных работ. М.: Машиностроение, 1979. 326 с.
7. Зайцев Л. В., Полосин М. Д. Автомобильные краны: Учебник для сред-
них ПТУ. 3-е изд., перераб. и доп. М.: Высшая школа, 1982. 208 с. (Проф-
техобразование) .
8. Зайцев Л. В,, Улитенко И. П. Строительные стреловые краны. 2-е
изд., перераб. и доп. Л.: Машиностроение, 1984. 256 с. (Справочник для ра-
бочих)',
9. Зерцалов А. И., Певзнер Б. И., Бененсон И. И. Краны-штабелеры.
3-е изд., перераб. и доп. М.: Машиностроение, 1986.
10. Козырев Ю. Г. Промышленные роботы: Справочник. М.: Машинострое-
ние, 1983. 376 с.
II. Конвейеры; Справочник/P. А. Волков, А, И. Гнутов и др.; Под общ.
ред. Ю. А. Пертена. Л,: Машиностроение, 1984. 367 с.
12. Кузьмин А. В., Марон Ф. Л. Справочник по расчетам механизмов
подъемно-транспортных машин. 2-е изд., перераб. и доп. Минск: Высшая школа,
1983. 350 с.
13. Лапкин Ю. П., Малкович А. Р. Перегрузочные устройства; Справоч-
ник. Л.: Машиностроение, 1984. 224 с.
14. Малевич И. П., Серяков В. С., Мишин А. В. Транспортировка и скла-
дирование порошкообразных строительных материалов. М.: Стройиздат, 1984.
184 с.
15. Мархель И. И. Крановые канаты: Пособие механику. 2-е изд,, перераб.
и доп. М.; Машиностроение, 1983. 128 с.
16. Мачульский И. И., Алепин Е. А. Машины напольного безрельсового
транспорта. М.: Машиностроение, 1982. 232 с.
17. Подвесные канатные дороги/М. Б. Беркман, Г. Н. Боевский, Г. Г. Куй-
бида, Ю. С. Леотьев. М.: Машиностроение, 1984. 264 с,
18. Подъемно-транспортное оборудование: Отраслевой каталог: 18-4-82.
М.: ЦНИИТЭИтяжмаш, 1982. Ч. 111. 130 с.
19. Подъемно-транспортное оборудование: Отраслевой каталог: 18-4-82.
М.: ЦНИИТЭИтяжмаш, 1982. Ч. III. 164 с.
20. Пладис Ф. А,, Шкурин В. А., Сурмаев Г. Э. Контейнеры: Справочник/Под
ред. В. А. Шкурина. М.: Машиностроение, 1981. 191 с.
377
21. Погрузчики; Справочник/Под ред. Г. П. Ефимова. М.: Транспорт,
1978. 278 с.
22. Правила устройства и безопасной эксплуатации грузоподъемных кранов.
М.: Металлургия, 1974. 192 с.
23. Правила устройства и безопасной эксплуатации лифтов. М.: Недра,
1972. 96 с.
24. Правила устройства и безопасной эксплуатации грузовых подвесных
канатных дорог (ГПКД). М.: Недра, 1973. 30 с.
25. Правила устройства и безопасной эксплуатации сосудов, работающих
под давлением. М.: Недра, 1973. 40 с.
26. Сборник инструкций по безопасной эксплуатации грузоподъемных
кранов. М.: Недра, 1984. 95 с.
27. Спиваковский А. О., Дьячков В. К. Транспортирующие машины: Учебн.
пособие для машиностроительных вузов. 3-е изд., перераб. М,: Машиностроение,
1983. 487 с.
28. Справочник по крановому электрооборудованию/К). В. Алексеев,
А. П. Богословский, Е. М. Певзнер и др.; Под ред. А. А. Рабиновича, М.: Энер-
гия, 1979. 290 с,
29. Тройнин М. Ф., Ушаков Н. С. Электрические самоходные машины на-
польного транспорта. 4-е изд. перераб. и доп. Л.: Машиностроение, 1984. 261 с.
30. Щербаков В. Д. Автопогрузчики: Учебник для средних ПТУ. М.: Выс-
шая школа, 1983. 127 с.
31. Электрооборудование кранов/А. П. Богословский, Е. М. Певзнер,
Н. Ф. Семерня и др. М.: Машиностроение, 1983. 310 с.
32. Правила устройства электроустановок. М.: Атомиздат, 1977. Разд. I.
55 с. Разд. V. С. 30—37.
33. Правила устройства электроустановок. М.: Атомиздат, 1980. Разд. VII.
С. 19—66.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автоцементовоз 333
Аэросмесь 309
Б
Барабан для канатов 63
--- конвейерной ленты 237
Буфер пружинный 129
— резиновый 129
В
Вагон-цементовоз 335
Вес сцепкой 359
Вибратор центробежный 300
— эксцентриковый 301
— электромагнитный 301
Воздуходувная машина водокольцевая
321
— — ротационная 321
---центробежная 323
Г
Гидросмесь (пульна) 337
Грейфер двухканатный 36
— одноканатный 37
— приводной 38
Грузовой момент 14
Г рузонодъемность 13
Группа режима работы крана 18
— — — механизма 20
Д
Двигатель крановый асинхронный с ко-
роткозамкнутым ротором 81
---- с фазным ротором 78
— постоянного тока 82
---- номинальный момент 78
—— средний пусковой момент 81
И
Испытания кранов динамические 213
--- статические 212
Истечение груза из бункера гидрав-
лическое 345
—---------нормальное 345
К
Канат стальной 46
— — браковка 54
------ выбор и расчет 50
Класс использования крана 18
------ механизма 19
— — нагружения крана 18
Коэффициент запаса прочности каната
50
--- конвейерной ленты 232
---торможения тормоза 102
— полезного действия блока 58
— — -— полиспаста 60
— трения 101
— тяговый 237
— устойчивости 169
Кратность полиспаста 60
Л
Лента конвейерная резинотканевая 229
— — резинотросовая 230
----- стыковка 254
М
Механизм изменения вылета И
— передвижения крана 8
— поворота 11
— подъема груза 7
Мотор^арабан 239
Н
Нагрузка ветровая 21
— динамическая 21
— нормативная 23
- — расчетная 23
— эквивалентная 23
Насос грунтовой 339
О
Ограничитель грузового момента 129
— массы груза 129
Освидетельствование кранов 211
Относительная продолжительность
включения 77
П
Перекосы кранов 161
Привод гидравлический 86
— ручной 75
— электрический 77
Производительность конвейера массо-
вая 222
— — объемная 222
---штучная 223
— крана 15
Плотность насыпная (объемная) 219
Р
Расчет по методу допускаемых напря-
жений 23
—------предельных состояний 24
С
Сопротивление передвижению крана
от ветровой нагрузки 174
-- — от сил трения 173
— — — от уклона рельсовых путей
174
---полное 172
Сцепной вес 359
Т
Тележка грузовая мостового крана 156
Толкатель электрогидравлнческий 108
У
Угол естественного откоса 220
Ф
Фильтры пневмотранспортных устано-
вок 320
Фундамент крана 194
ц
Цепи конвейерные тяговые 256. 262,
268
Ш
Шлам 341
Э
Эйлерова зависимость 68, 236
ОГЛАВЛЕНИЕ
Введение ............................................................ 3
Раздел первый. Грузоподъемные машины................................ 6
Глава 1. Общие сведения..................................... 6
§ 1. Классификация и конструктивные особенности .... 6
§ 2. Основные параметры и определения 13
§ 3. Технический надзор за грузоподъемными машинами 16
§ 4. Режимы работы кранов и крановых механизмов ... 17
5. Особенности расчета элементов грузоподъемных машин 20
Глава. 2. Грузозахватные устройства. Тара, поддоны и контейнеры ... 25
'§ 6. Общие сведения и классификация.................. 25
§ 7. Грузовые крюки и петли .......................... 25
§ 8. Стропы........................................... 28
§ 9. Захваты для штучных грузов....................... 29
§ 10. Грузоподъемные электромагниты.................... 32
§ 11. Вакуумные захваты.............................. 3 4
§ 12. Грейферы......................................... 35
§ 13. Тара, поддоны и контейнеры....................... 38
Глава 3. Гибкие элементы .......................................... 46
§ 14. Общие сведения и классификация................... 46
§ 15. Стальные проволочные канаты...................... 46
§ 16. Канаты из органических и синтетических материалов 51
§ 17. Грузовые цепи.................................... 51
Глава 4. Элементы, с которыми взаимодействуют канаты и цепи ... 56
§ 18. Блоки............................................ 56
§ 19. Звездочки и тяговые колеса....................... 59
§ 20. Полиспасты....................................... 60
§21. Барабаны ........................................ 63
Глава 5, Соединения канатов и цепей с элементами крана и грузоза-
хватными устройствами ..............................................67
§ 22. Соединения концов каната и цепи с элементами крана
и барабаном............................................ 67
§ 23. Крюковые подвески с блоками и звездочками .... 70
Глава 6. Привод механизмов........................................ 75
§ 24. Общие сведения .................................. 75
§ 25. Ручной привод.................................... 75
§ 26. Машинный привод ................................. 77
Г лава 7. Передаточные механизмы .................................. 88
§ 27. Передачи и редукторы............................. 88
§ 28. Муфты ................................. 94
380
Глава 8, Тормозные устройства........................................ 98
§ 29. Общие сведения..................................... 98
§ 30. Остановы.................................... 98
§31. Тормоза........................................ 3 00
§ 32. Автоматические тормоза, замыкаемые силой тяжести
поднятого груза ........................................ 116
Глава 9. Опорные элементы кранов.................................... 118
§ 33. Крановый рельсовый путь........................... 118
§ 34. Колеса и катки.................................... 122
Г лава Ю. Устройства безопасности................................... 126
§ 35. Общие сведения .................t................. 126
§ 36. Ограничители перемещений и буфера............... 126
§37. Ограничители грузоподъемности..................... 129
§ 38. Противоугонные устройства......................... 130
Глава 11. Грузоподъемные устройства ................................ 133
§ 39. Домкраты ,......................................... 133
§ 40. Лебедки............................................ 138
§ 41. Полиспасты......................................... 140
§ 42. Тали............................................... 142
Глава 12. Краны мостового типа.................................... 148
§ 43. Общие сведения ................................. 148
§ 44. Опорные мостовые краны ............................ 149
§ 45. Подвесные мостовые краны........................... 163
§ 46. Козловые краны ................................. 165
§ 47. Основы расчета кранов.............................. 171
§ 48. Основные правила эксплуатации и техники безопас-
ности при обслуживании мостовых и козловых кранов 177
Глава 13. Передвижные стреловые краны............................... 178
§ 49. Общие сведения ................................... 178
§ 50. Стреловые краны с механическим приводом........... 182
§ 51. Стреловые краны с гидравлическим и электрическим
приводом................................................. 186
§ 52. Основные правила эксплуатации и техники безопасно-
сти при обслуживании стреловых кранов................... 190
Глава 14. Консольные краны......................................... 191
§ 53. Общие сведения .................................. 191
§ 54. Стационарные консольные краны.................... 191
§ 55. Передвижные консольные краны..................... 195
Глава 15. Краны-штабелеры .......................................... 196
§ 56, Общие сведения .................................. 196
§ 57. Мостовые краны-штабелеры ........................ 199
§ 58. Стеллажные краны-Штабслеры ...................... 201
§ 59. Основные правила эксплуатации и техники безопас-
ности при обслуживании кранов-штабелеров............... 205
Глава 16. Подъемники .............................................. 205
§ 60. Общие сведения .................................. 205
§61. Грузовые лифты .................................. 206
§ 62. Скиповые подъемники.............................. 208
Глава 17, Эксплуатация грузоподъемных машин........................ 210
§ 63. Общие сведения . ................................ 210
§ 64, Организация и содержание технического надзора ... 211
381
§ 65. Содержание грузоподъемных машин в исправном со-
стоянии .............................................. 214
§ 66. Безопасное производство работ по перемещению гру-
зов кранами ............................... 214
§ 67. Требования к обслуживающему персоналу ..... 215
Раздел второй. Транспортирующие машины....................... 216
Глава 18. Общие сведения ....................................... 216
§ 68. Классификация, основные определения и параметры 216
§ 69. Транспортируемые грузы . ........................ 219
§ 70. Основы расчета конвейеров........................ 222
Глава 19. Ленточные конвейеры ..................................... 226
§ 71. Общие сведения .................................. 226
§ 72. Конвейерные ленты ............................... 229
§ 73. Роликовые опоры.................................. 233
§ 74. Приводные и натяжные устройства.................. 236
§ 75. Загрузочные и разгрузочные устройства............ 241
§ 76. Дополнительное оборудование ..................... 244
§ 77. Основы расчета и проектирования ленточных кон-
вейеров ............................................... 245
§ 78. Основные правила эксплуатации и техники безопас-
ности при обслуживании ленточных конвейеров . . . 253
Глава 20. Пластинчатые конвейеры ................................. 255
§ 79. Общие сведения .................................. 255
§ 80. Основы расчета пластинчатых конвейеров........... 259
Глава 21. Скребковые конвейеры .................................... 260
§ 81. Общие сведения ................................. 260
§ 82. Основы расчета скребковых конвейеров............. 264
Глава 22. Ковшовые и люлечные конвейеры............................ 265
§ 83. Общие сведения................................. 265
§ 84. Основые расчета ковшовых и люлечных конвейеров 267
Глава 23. Подвесные конвейеры ................................ . 267
§ 85. Общие сведения ................................. 267
§ 86. Подвесные грузонесущие конвейеры................ 268
§ 87. Подвесные толкающие конвейеры.................... 275
§ 88. Основы расчета и проектирования подвесных конвейе-
ров ................................................... 276
Глава 24. Элеваторы................................................ 280
§ 89. Общие сведения ................................. 280
§ 90. Ковшовые элеваторы.............................. 281
§ 91. Элеваторы для штучных грузов................... 285
§ 92. Основы расчета н проектирования элеваторов .... 286
Глава 25. Конвейеры без тягового элемента..................... . . 290
§ 93. Винтовые конвейеры.............................. 290
§ 94. Качающиеся -конвейеры .............._........... 295
§ 95. Роликовые конвейеры ........................... 303
§ 96. Гравитационные устройства....................... 306
Глава 26. Пневматический транспорт ................................ 309
§ 97. Общие сведения ................................. 309
382
§ 98. Установки пневматического транспорта, перемещающие
груз во взвешенном состоянии........................... 310
§ 99. Установки пневматического транспорта, перемещаю-
щие груз с высокой концентрацией смеси................. 312
§ 100. Основные элементы пневмотранспортных установок 314
§ 101. Основы расчета установок пневматического транс-
порта ................................................. 325
§ 102. Лэрожелоба....................................... 329
§ 103. Пневматические разгрузчики....................... 331
§ 104. Пневматические подъемники ....................... 333
§ 105. Специализированные транспортные средства с пневмо-
разгпузкой ...................................... 333
Глава 27. Гидравлический транспорт ................................ 337
§ 106. Общие сведения.................................. 337
§ 107. Основные элементы гидротранспортных установок 339
§ 108. Гидравлический транспорт шламов................. 341
§ 109. Основы расчета установок напорного гидравлического
транспорта .................................... 342
Глава 28 Вспомогательные устройства ............................... 344
§ 110. Бункера.......................................... 344
§111. Затворы и питатели .............................. 346
Глава 29. Манипуляторы и промышленные роботы....................... 349
§ 112. Общие сведения................................... 349
§ 113. Устройство и примеры применения манипуляторов
и промышленных роботов при погрузочно-разгрузоч-
ных и перегрузочных работах .......... 351
Раздел третий. Наземный и подвесной внутризаводской
транспорт ......................................................... 356
Глава 30. Рельсовый транспорт...................................... 356
§ 114. Общие сведения................................... 356
§ 115. Рельсовые пути .................................. 356
§ 116. Вагоны .......................................... 357
§117. Локомотивы ...................................... 358
§ 118. Основы тягового расчета ......................... 359
Глава 31. Подвесные канатные дороги ............................... 362
§ 119. Общие сведения.................................. 362
§ 120. Основы расчета подвесных канатных дорог......... 365
Глава 32. Напольный безрельсовый транспорт......................... 366
§ 121. Автомобили-самосвалы ............................ 366
§ 122- Универсальные автопогрузчики..................... 367
§ 123. Электропогрузчики и электроштаберы............... 370
§ 124. Электротележки и электротягачи .................. 373
§ 125. Погрузчики для насыпных грузов................... 374
§ 126. Разгрузчики для насыпных грузов ................. 375
Список литературы................................................. 377
Предметный указатель.....................................• . . . . 378
УЧЕБНИК
Виталий Петрович Балашов
ГРУЗОПОДЪЕМНЫЕ
И . ТРАНСПОРТИРУЮЩИЕ
МАШИНЫ НА ЗАВОДАХ
СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ
Редактор Ю. Н. Макарова
Художественный редактор С. С. Водчиц
Технический редактор И. В. Малыгина
Корректоры; Т. В. Багдасарян,
Л. Л- Шалашова
ИБ № 4816
Сдано в набор l6.Gl.87. Подписано в печать
07.(4.87. Т-О-1625. Формат 60 X 901,'! е. Бумага
офсетная № 2. Гарнитура литературная. Печать
офсетная. Усл. печ. л. 24,0. Усл. кр.-отт. 24,0.
Уч.-изд, л. 26,5. Тираж 13 000 экз. Заказ 17.
Ц ена I р. 10 к.
Ордена Трудового Красного Знамени издатель-
ство «Машиностроение», 107076, Москва, Стро-
мынский пер., 4
Ленинградская типография № 6 ордена Трудо-
вого Красного Знамени Ленинградского объеди-
нения «Техническая книга» им. Евгении Соко-
ловой Союзполнграфпрома при Государственном
комитете СССР по делам издательств, полигра-
фии и книжной торговли. 193144, г. Ленинград,
ул. Моисеенко, 10.