/



























































































Similar




Text
Г. П. ПЛЕТЙЕВ
АВТОМ АТИЧ ЕСКОЕ РЕГУЛИРОВАНИЕ И ЗАЩИТА ТЕПЛОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК ЭЛЕКТРИЧЕСКИХ СТАНЦИЙ
6П2.22
П 38
УДК 621.311.22.002.5—53(07)
Плетнев Г. П.
П 38 Автоматическое регулирование и защита теплоэнергетических установок. Учебник для энергетических и энергостроительных техникумов. Изд. 2-е, перераб. и доп. М., «Энергия», 1976.
424 с. с ил.
В книге приводятся начальные сведения по теории автоматического регулирования, описываются автоматические регуляторы тепловых процессов и рассматриваются автоматические системы регулирования и защиты теплоэнергетических установок, а. также автоматизированные системы управления тепловых электростанций в целом.
Книга предназначена для учащихся энергетических техникумов и может быть полезна инженерно-техническим работникам электростанций, специализирующимся в области автоматизации тепловых процессов.
„ 30302-496
П 051(01]-76 7‘76 6П2.22
(6) Издательство «Энергия», 1976
ПРЕДИСЛОВИЕ
Во втором переработанном и дополненном издании излагается материал, связанный в основном с работой автоматических систем регулирования и защиты теплоэнергетических установок электрических станций и приводятся некоторые сведения по автоматизированным системам управления тепловыми электрическими станциями в целом. Для успешного усвоения материала книги •in I а гель должен быть знаком с основами электротехники, теплотехники и теплотехнических измерений, владеть начальными сведениями по дифференциальному и инте-гральному исчислению и выполнять простые действия над комплексными числами, т. е. иметь необходимую общегехпическую и математическую подготовку, предусмотренную учебным планом энергетического техникума.
Автор весьма признателен цикловой учебно-методической комиссии Всесоюзного заочного энергетического техникума и отдельным читателям за пожелания и замечания, высказанные в связи со вторым изданием, и благодарит канд. техн, наук М. Я- Хесина за большой труд, проделанный им при редактировании рукописи.
Все замечания по книге следует направлять по адресу: 113114, Москва, Шлюзовая набережная, 10, изд-во «Энергия».
Автор
УСЛОВНЫЕ ОБОЗНАЧЕНИЙ
1. Обозначения теории автоматического регулирования
х — входной сигнал звена, объекта, системы;
(/ — выходной сигнал звена, объекта, системы;
и — задающий сигнал;
у* — сигнал ошибки (рассогласования);
Хр — регулирующий сигнал;
Т — постоянная времени звена, объекта, системы; период колебаний сигнала;
т — время запаздывания, с (мин);
ы — частота колебаний сигнала, с~* (рад/с);
К, k — коэффициент усиления, пропорциональности; p=d]dt — оператор дифференцирования;
\fp—- J'dt— оператор интегрирования;
оо
L {у (/)} = р J у (t) e~Dt dt — оператор преобразования сигнала о
Лапласа—Карсона;
1К(р)—передаточная функция (оператор) звена, объекта, системы;
М(ш)—амплитудно-частотная характеристика (АЧХ);
ф(<о)—фазо-частотная характеристика (ФЧХ);
W(i<o)—амплитудно-фазовая характеристика (АФХ);
Pi = a,i±iPt — корень характеристического уравнения звена, системы;
т) •— степень устойчивости;
m — степень колебательности;
М — показатель колебательности;
ф •— степень затухания;
с — запас устойчивости по модулю, у — запас устойчивости по фазе;
б — степень обратной связи.
II. Обозначения в электрических схемах
w — обмотка, число витков в катушке;
Z — электрическая нагрузка (комплексная);
Д—диод, стабилитрон, двигатель электрический;
Т, ПТ— триод; полупроводниковый транзистор;
МУ — магнитный усилитель;
ТУ — тиристорный усилитель;
Л, НЛ — сигнальная лампа, неоновая лампа;
У — обмотка управления двигателя;
В — выключатель, обмотка возбуждения двигателя;
ПУ — переключатель управления;
КУ — ключ управления;
КВМ, КВБ — концевой выключатель «меньше», «больше»;
ПВМ, ПВБ— путевой выключатель «меньше», «больше».
III. Обозначения в схемах регулирования тепловых объектов
Рп.п — давление перегретого пара за парогенератором;
— давление перегретого пара в общей магистрали.
Температура:
tu.u — перегретого пара (первичного);
п — перегретого пара (вторичного);
<пр — в промежуточной точке тракта;
1с.в — сетевой воды.
Расход:
Du.u — перегретого пара;
/Тв.и — вторичного пара;
/Л-.п — греющего пара;
Dt — пара на турбину;
Do — из барабана;
/>п.в — питательной воды;
DK — конденсата;
Dap — продувочной воды;
Овир — воды на впрыск;
Ос.в — сетевой воды;
/7 — уровень;
V — вакуум;
Qr — расход газа;
Вт — расход топлива;
QB — расход воздуха;
РП — регулирующий прибор;
ЗРУ —задатчик ручного управления;
Д — дифференциатор;
ДП — динамический преобразователь;
ИМ — исполнительный механизм;
ЖОС — жесткая обратная связь;
РО — регулирующий орган.
ВВЕДЕНИЕ
Научно-техническая революция в современном промышленном производстве в значительной мере связана с автоматизацией. Особое значение приобретает автоматизация производственных процессов в решении общенародной задачи —-создании материально-технической базы коммунизма в СССР. Автоматизация способствует росту производительности труда и коренным образом меняет роль человека в процессе производства. При автоматизации повышается культурно-технический уровень работников и создаются условия для ликвидации различий между умственным и физическим трудом.
«Основные направления развития народного хозяйст ва на 1976—1980 годы», принятые XXV съездом КПСС, ставят задачу «.существенно сократить удельный вес ручного труда», «ускорить темпы комплексной механизации и автоматизации производственных процессов во всех отраслях народного хозяйства», повысить производительность труда в электроэнергетике на 27—29 процентов».
Большое развитие получила автоматизация в современной энергетике, основу которой составляют крупные тепловые электрические станции (ТЭС).
На ТЭС осуществляется преобразование первичной химической энергии, заключенной в топливе в электрическую энергию. За счет тепла, выделяющегося при сгорании топлива, в парогенераторе вырабатывается перегретый водяной пар. Он поступает в паровую турбину, в которой происходит преобразование тепловой энергии перегретого пара (теплоносителя) в механическую энергию вращения ротора турбогенератора. В последнем вырабатывается электрическая энергия переменного тока.
Процессы производства и распределения электрической и тепловой энергии на современных тепловых электрических станциях почти полностью механизированы и в значительной степени автоматизированы.
Механизацией в промышленном производстве обычно на пинают применение машин и специальных устройств нлп приспособлений, заменяющих физический труд человека. На тепловых электрических станциях в этих
целях используются передвижные подъемные краны и экскаваторы (разгрузка и пе-
регрузка твердого топлива), механические и гидравлические транспортеры сыпучих материалов (угля и золы), электроприводы запорных и регулирующих органов (клапанов, задвижек), электроприводы вспомогательных механизмов (тяго-дутьевых машин, насосов, утлеразмольных мельниц и др.). Человек в механизированном производстве призван непрерывно управлять машинами, механизмами и установками (включать или отключать их в требуемом порядке) и на
Рис. В-1. Регулятор уровня И. И. Ползунова.
блюдать за их действием.
Автоматизацией механизи-
рованного производства на
зывают управление машинами, механизмами и установками и контроль за их действием с помощью специальных устройств (от простейших автоматов до современных управляющих вычислительных машин) без участия
человека или при ограниченном его участии.
Примером простейшего устройства, осуществляющего автоматическое управление, может служить первый автоматический регулятор промышленного назначения, внедренный на паровых котлах известным русским теплотехником И. И. Ползуновым еще в XVIII в. (1765 г.). Этот регулятор действует следующим образом (рис. В-1). При появлении небаланса между притоком воды в котел и уходящим из него паром Dn уровень воды в барабане (регулируемая величина) Не начнет отклоняться от своего первоначального среднего значения (например, повышаться). Тогда поплавок (чувствительный элемент) /, поднимаясь вдоль направляющей, начнет закрывать заслонку 2 (регулирующий орган) и тем самым уменьшать приток питательной воды в барабан. Этот процесс будет продолжаться до тех пор, пока уровень не достигнет более высокого нового установившегося значения.
Другим примером автоматического регулятора аналогичного принципа действия служит устройство для поддержания вблизи постоянного значения частоты вращения ротора паровой турбины,
предложенное английским механиком Джеймсом Уаттом в 1784 г. Чувствительным элементом регулятора Уатта служит центробежный конический маятник, грузы которого, поднимаясь с ростом частоты вращения, тянут за собой заслонку, регулирующую доступ пара в проточную часть паровой турбины. В обоих случаях реализуется способ регулирования по отклонению, получивший название «принципа Ползунова — Уатта». Сущность его состоит в следующем: чем больше отклонение регулируемой величины, тем больше перемещение регулирующего органа в направлении, препятствующем этому отклонению. Уравнение движения регуляторов Ползунова — Уатта можно записать следующим образом:
хр (О —
где Хр — перемещение регулирующего органа; у — отклонение регулируемой величины; Кр — коэффициент усиления регулятора.
В настоящее время наряду с регуляторами этого типа более широко применяются автоматические регуляторы непрямого действия, в которых регулирующий орган перемещается от внешнего источника энергии (электрического, гидравлического или пневматического). Регулирование по отклонению является основным принци пом действия большинства современных автоматических регуляторов.
К настоящему времени автоматика выделилась в самостоятельную отрасль науки и техники, которая занимается теорией автоматического управления и разрабатывает автоматические системы регулирования и соответствующие технические средства.
В автоматизированном производстве человек призван лишь периодически воздействовать на главные машины, механизмы и установки, определяющие нормальный ход технологического процесса, и наблюдать за наиболее важными его параметрами по показаниям приборов. Автоматизация тепловой части электрических станций осуществляется с помощью системы управления, выполняющей следующие функции:
I) дистанционное управление, или управление машинами и механизмами на расстоянии;
2) теплотехнический контроль (измерение) текущих значений параметров технологического процесса;
3) технологическую сигнализацию о состоянии основного и вспомогательного оборудования;
4) автоматическую защиту основного и вспомогательного оборудования от возможных повреждений в процессе эксплуатации;
5) автоматическое непрерывное регулирование технологических процессов и управление основными и вспомогательными установками;
(>) автоматическое дискретное (прерывистое) управление, обеспечивающее включение или отключение регуляторов, машин, механизмов и установок в заданной последовательности.
Перечисленные функции выполняются подсистемами управления. Человек-оператор и подчиненные ему подсистемы должны управлять процессами выработки тепловой и электрической энергии и поддерживать значения технологических параметров, так чтобы обеспечить максимально возможное значение технико-экономических показателей установок, например коэффициента полезного действия (к. п. д.) парогенератора, турбины и электростанции в целом. Учитывая, что на экономичность установок оказывает влияние большое количество взаимодействующих факторов, для ее оценки можно использовать электронную цифровую вычислительную машину ЭЦВМ, обеспечивающую расчет технико-экономических показателей (ТПЭ) и частично выполняющую функции автоматического контроля, сигнализации, регулирования и управления. Подсистемы контроля, управления и устройства расчета ТЭП, подчиненные оператору, образуют автоматизированную систему управления технологическими процессами (АСУ ТП) объектов (например, энергоблоков) тепловой электростанции.
Применение автоматизированных систем управления позволяет повысить надежность и экономичность энер-I стическнх установок при малом числе обслуживающего персонала, способствует .повышению его квалификации. Автоматизация ТЭС и создание автоматизированных систем управления (АСУ ТЭС) соответствуют общему направлению и перспективам развития энергетики в СССР.
ЧАСТЬ ПЕРВАЯ
ТЕОРИЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ. НАЧАЛЬНЫЕ СВЕДЕНИЯ
ГЛАВА ПЕРВАЯ
АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ И ЕЕ ЭЛЕМЕНТЫ
1-1. Объект регулирования и автоматический регулятор
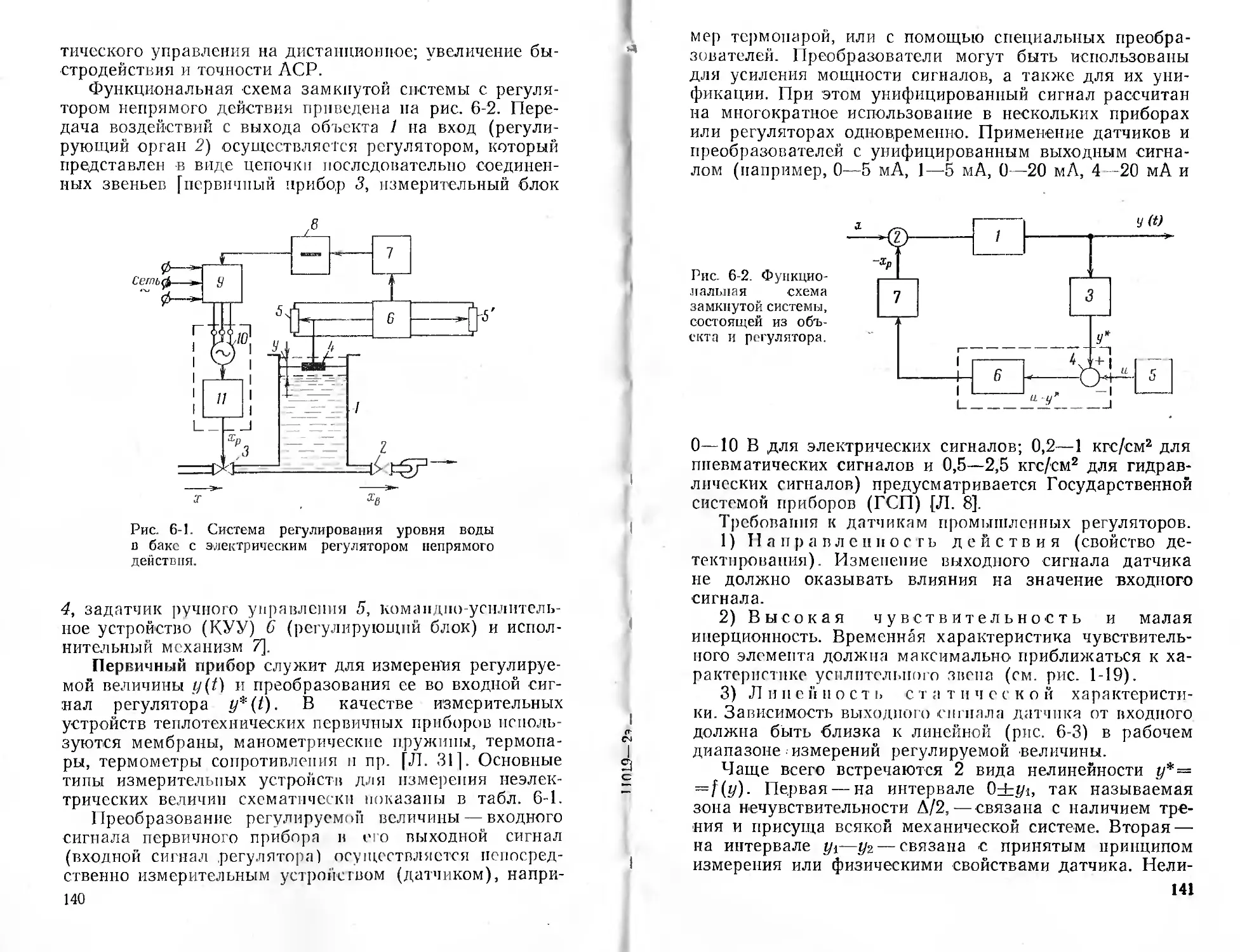
Рассмотрим работу простого устройства (рис. 1-1), с помощью которого можно поддерживать постоянным давление воды в трубопроводе при изменении ее расхода. Оно состоит из коробки с мембраной 1, верхняя полость которой сообщается соединительной трубкой 2
Рис. 1-1. Регулятор давления прямого действия.
с участком трубопровода, где необходимо поддерживать постоянным давление рт, груза 3 массой G, закрепленного на поворотном рычаге 4, и игольчатого клапана 5. Его шток 6 через уплотнение 7 выведен из корпуса клапана и посредством пальца 8 соединен с вилкой пово-10
ротного рычага 4, а верхним концом упирается в жест-кнн шск 10, являющийся активной частью X мембраны 1 При постоянном расходе воды через клапан Qnp и некотором постоянном давлении рт, величина которого может контролироваться с помощью манометра 12, усилие, приложенное к диску 10, уравновешивается грузом 3. При этом диск мембраны и шток клапана неподвижны. С изменением расхода воды со стороны потребителя Qct (допустим, при его увеличении) ее давление начнет уменьшаться, следовательно, уменьшится и усилие, развиваемое диском 10. Тогда под действием груза <3 рычаг будет поворачиваться относительно своей опоры 9 против часовой стрелки и перемещать вверх шток 6, а вместе с ним и иглу 5, увеличивая при этом проходное сечение клапана. Если давление до регулирующего клапана превышает рт, а источник водоснабжения по своим запасам значительно превосходит максимально возможный расход потребителя, то подъем штока клапана и регулирующей иглы приведет к увеличению расхода воды через клапан и восстановлению нарушенного равновесия между ее притоком Qnp и стоком .QCT. Очевидно также, что перемещение диска мембраны и подъем штока будут происходить до выравнивания моментов сил М, и М2, развиваемых грузом 3 и диском 10 мембраны относительно опоры 9: Mi=M2 или Gl\=pTSl2. Эго равенство наступит лишь при достижении давления воды за клапаном, равного своему первоначальному шачеппю ре.
Таким же образом устройство будет восстанавливать давление и при уменьшении расхода со стороны потребителя, действуя в направлении закрытия клапана.
Условимся называть в дальнейшем: участок трубопровода от клапана до точки измерения давления — объектом пли участком регулирования; давление воды /?т — регулируемой величиной; клапан 5, регулирующий расход воды, — регулирующим органом; мембрану 1, воспринимающую давление воды, — измерительным устройством; активную часть мембраны или диск, развивающий усилие, необходимое для перемещения регулирующего органа, — усилительным устройством; груз 3, перемещаемый вдоль рычага 4 и уравновешивающий усилие мембраны, — задающим устройством или задатчиком. Измерительное и усилительное устройства вместе с задатчиком образуют регулятор.
В данном случае регулирующий клапан 5 перемещается под действием усилия, развиваемого измерительной мембраной 1, точнее, активной ее частью S. Это означает, что в ней совмещаются функции измерительного и усилительного устройства. Устройства подобного рода носят название регуляторов прямого действия. В регуляторах непрямого действия для перемещения регулирующих органов используется усилие, развиваемое внешним источником энергии. Объект регулирования, регулятор и регулирующий орган образуют систему регулирования. Поскольку восстановление рт при его отклонении происходит в рассматриваемом примере без участия человека, регулятор называется автоматическим, а система регулирования — автоматической системой регулирования или сокращенно АСР.
Введем общие для различных АСР понятия: входное воздействие — воздействие, приложенное ко входу АСР, в данном случае изменение расхода воды на притоке AQnp! внешнее возмущающее воздействие, в данном случае изменение расхода на стоке AQCt! выходное воздействие — воздействие, выдаваемое на выходе АСР, в данном случае изменение давления воды Д^т; регулирующее воздействие — воздействие регулятора на управляемый объект, в данном случае перемещение регулирующего клапана; задающее (заранее заданное) воздействие, в данном случае перемещение груза, уравновешивающего усилие мембраны, вдоль рычага, на котором он закреплен.
Величины, характеризующие воздействия, будем именовать сигналами. Для вышеназванных понятий введем следующие условные обозначения, являющиеся общими для всех автоматических систем:
у^кр^р^ — выходной сигнал объекта, системы регулирования; x=AQnp/Q°np —входной сигнал объекта, системы регулирования со стороны регулирующего органа; Xb=AQct/Q°ct — сигнал внешнего возмущающего воздействия; хр=Дй//г°—сигнал на выходе регулятора или регулирующий сигнал; «=ДЛЬ/Л/°1 — сигнал на выходе задатчика или задающий сигнал.
В принятых обозначениях Д означает приращение величин относительно их номинальных или заданных значений, обозначенных индексом 0. Таким образом у, х, хр и и являются безразмерными величинами, исчисляемыми в долях единицы, что существенно упрощает
математические операции над ними. В дальнейшем наряду с понятием сигнала по отношению к у и х будут использоваться также •общепринятые в технической литературе понятия выходная величина (у) и входная величина (х) 1.
Работу рассмотренного устройства отражает схема, приведенная на рис. 1-2. Появление небаланса между притоком и стоком или появление внешнего возмущающего воздействия хв вызывает падение давления р-? или
Рис. 1-2. Структурные схемы АСР.
а — замкнутой; б — разомкнутой; /—объект регулирования; 2 — регулятор; 3 — регулирующий орган; 4 — точка разветвления; 5 — элемент сравнения сигналов у и и.
эквивалентной ему выходной величины у. Тогда из-за разницы в усилиях, развиваемых грузом G и давлением рт п действующих па диск 10 (см рис. 1-1), т. е. из-за разности сигналов у*=у- и, игольчатый клапан будет перемещаться до тех пор, пока не исчезнет небаланс между притоком и стоком.
Перемещение клапана обозначается на схеме через х,, со знаком минус. Физически это означает, что движение клапана происходит в направлении, противоположном первоначальному небалансу между притоком и стоком, т. е. в сторону «открыть» при Qnp—Qct<0 и в сторону «закрыть» при Qnp—QCt>0- Стрелки на схеме указывают направление потока вещества или энергии в объекте регулирования и воздействия регулятора на регулирующий орган.
Приведенная на рис. 1-2,а схема с условным изображением элементов системы регулирования отражает ра-
1 Условные обозначения и единицы физических величии даются в приложении 2 (табл. П-1), численные значения некоторых вне-системных единиц, выпаженных в единицах СИ в табл. П-2.
боту рассмотренного автоматического устройства, однако на ней отсутствуют изображения конкретных узлов и деталей (корпус клапана, мембрана, груз, соединительная линия и т. д.). Используемые на схеме условные обозначения сигналов у, х, и являются безразмерными величинами, что позволяет применить методы математического анализа действия рассмотренной АСР ко всем устройствам аналогичной структуры независимо от конструктивного или технического исполнения. Поэтому указанная схема носит название структурной.
Рассмотрим некоторые особенности АСР, структурная схема которой представлена на рис. 1-2,а. Выходная величина объекта регулирования у может изменять ся под действием двух факторов: внешнего возмущаю щего воздействия хЕ (возмущение на стоке) и регулир} ющего воздействия х (изменение расхода на притоке) При этом увеличение или уменьшение у вызывает перемещение регулирующего органа хр, что приводит к восстановлению первоначального значения у посредством изменения регулирующего воздействия х. Таким образом, выход объекта регулирования через регулятор связан с его входом. Такого рода системы относятся к устройствам с замкнутой цепью воздействия и носят название замкнутых автоматических систем регулирования. Поскольку воздействие с выхода объекта на его вход осуществляется в рассматриваемом примере лишь по единственному каналу, система называется одноконтурной, что вполне соответствует ее изображению на рис. 1-2,а. Передача воздействия с выхода объекта или. системы регулирования на вход носит название обратной связи. Канал, по которому передается это воздействие, называется каналом обратной связи.
Подавляющее большинство промышленных АСР, в том числе применяемых на ТЭС, являются замкнутыми системами.
В отличие от замкнутых АСР существуют разомкнутые системы, которые могут быть получены при размыкании одной из связей замкнутого контура. В рассматриваемом на рис. 1 1 примере можно разомкнуть систему, перекрыв соединительную трубку 2. Структурная схема разомкнутой системы представлена на рис. 1-2,6. Здесь изменение у под действием внешнего возмущения хв не приведет к перемещению регулирующего органа хр и изменению х, поскольку нарушена связь измери-14
телыюго устройства регулятора с регулируемой величй-нон Иными словами, отсутствует передача воздействия с выхода объекта на его вход, т. е. система, изображенная па рис. 1-2,а, разомкнута в точке 4. Регулирование давления рт в этом случае можно осуществить лишь ручным способом, воздействуя на поворотный рычаг с грузом.
Рассмотрим отдельные элементы, из которых составлены схемы на рис. 1-2. Элемент 1 (или 2) называется звеном. На структурных схемах звено изображается прямоугольником с указанием стрелками направления входного и выходного сигналов. В реальных системах звеном может быть объект регулирования, регулятор или отдельные их части, в которых происходит преобразование входной величины в выходную. Математическим описанием звена является уравнение, связывающее входную и выходную величины в установившемся состоянии, т. е. в статике y=f(x), или в состоянии движения, т. е. в динамике y(t) =f [^(01-
Элементы или устройства, выполняющие функции сравнения нескольких величин, носят название сумматоров. В АСР сумматором может быть, например, измерительное устройство (устройство сравнения сигналов) или регулирующий орган. Математическим описанием суммирующего элемента является операция алгебраического сложения двух или нескольких величин. В данном случае сумматор описывается следующими уравнениями:
для точки 3
хс=х~ хр;
для точки 5
у*~у—и.
Точка 4 схемы называется точкой разветвления. Ее функции может выполнять тройник 11, с помощью которого, как показано на рис. 1-1, происходит раздвоение трубки на измерительный прибор 12 и регулятор. В тройнике не происходит разделения сигнала у по мощности, т. е. мощность сигнала до точки разветвления на схеме и после нее остается неизменной.
Используя понятия звена, сумматора, точки разветвления и вышепринятые условные обозначения, можно
составить упрощенные структурные схемы любой промышленной АСР. Составление структурной схемы является первым этапом исследования АСР.
1-2. Классификация автоматических систем регулирования
АСР, действующие по отклонению регулируемой величины
Рассмотренная в § 1-1 система регулирования относится к так называемым стабилизирующим автоматическим системам, поскольку в пой осуществляется поддержание регулируемой величины близ постоянного значения независимо от величины QCT или нагрузки объекта.
Рис. 1-3. Графики величин y(t), хв(0. «(О-
Большинство промышленных систем регулирования относится к стабилизирующим автоматическим системам. Работу такой системы отображают зависимости изменения величин у, и и хв во времени, приведенные 16
на рис. 1-3,а. Отличительной чертой таких систем явля-ется постоянство в течение длительного промежутка времени заданного значения регулируемой величины и.
В других системах, например в установках для термической обработки металлоизделий, заданное значение регулируемой величины и должно изменяться с течением времени по заранее заданной программе в соответствии с требуемым режимом. Такого рода системы относятся к программным автоматическим системам. Графики, отображающие их действие, представлены на рис. 1-3,6.
Существуют также системы, в которых задающее воздействие и является произвольной функцией времени, т. е. заранее не определенной. В таких системах выходная величина y(t) должна «следить» за возможными изменениями u(t) и воспроизводить их с требуемой точностью. Системы такого рода относятся к особому классу так называемых следящих автоматических систем управления. Графики y(t) и u(t) для следящих систем представлены на рис. 1-3,в. Примером автоматической следящей системы может служить система непрерывного
регулирования температуры воды на выходе теплофикационных подогревателей. В автоматизированных отопительных системах темпера гура воды «следит» за изменениями сигнала, пропорционального температуре наружного воздуха, которая имеет характер произвольного процесса и является для системы задающим воз-дейстнисм.
АСР, действующие по возмущению. Рассмотренные
Рис. 1-4. Структурные схемы АСР.
АСР, действующая по отклоне-нню — лнння о; АСР. действующая по возмущению — линии б, в; АСР. комбинированная — линии а. б. в.
выше системы могут быть отнесены к классу автоматических систем, действующих по отклонению. Однако задача поддержания регулируемой величины вблизи заданного значения (например, давление воды на выходе системы, изображенной на рис. 1-2) может быть решена принципиально иным способом. Для этого необходи-
мо на вход регулятора вместо сигнала по отклонению регулируемой величины от заданного значения подавать сигнал по расходу воды на стоке Qct (рис. 1-4, линия б)
или по разности расходов на притоке и стоке (Qct—Qnp) (рис. 1-4, линии бив) и воздействовать на перемещение регулирующего клапана в сторону ликвидации небаланса между притоком и стоком. Очевидно, что давление воды за регулирующим клапаном будет постоянным при Qnp— QСТ--0. Рассмотренный способ поддержания
постоянного значения регулируемой величины называется регулированием по нагрузке или по возмущению. Автоматические системы, действующие по возмущению (по нагрузке), включаются в работу, «не дожидаясь» отклонения регулируемой величины, а сразу же за появлением небаланса между притоком и стоком. Это существенно повышает быстродействие АСР. Однако в системах, действующих по возмущению, отсутствует непосредственный контроль отклонения регулируемой величины, что может привести к недопустимому снижению точности АСР вследствие погрешностей изменения расхода. Поэтому в промышленных условиях находят применение комбинированные системы, совмещающие принципы действия по отклонению (для обеспечения точности) и по возмущению (для достижения быстродействия) (рис. 1-4, линии а, б и в). Примером промышленной комбинированной системы служит АСР питания барабанных парогенераторов водой, приведенная на рис. 12-21.
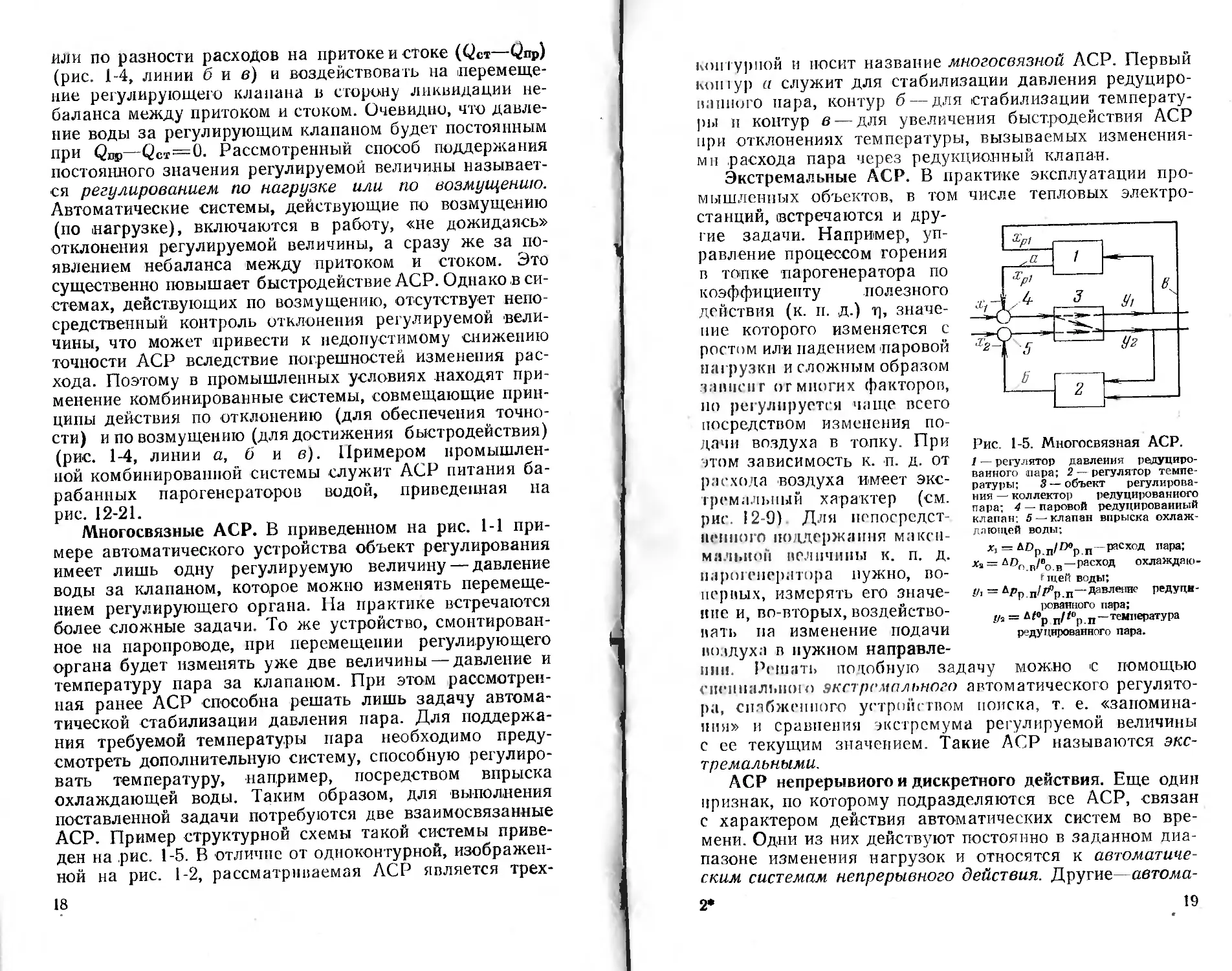
Многосвязные АСР. В приведенном на рис. 1-1 примере автоматического устройства объект регулирования имеет лишь одну регулируемую величину — давление воды за клапаном, которое можно изменять перемещением регулирующего органа. На практике встречаются более сложные задачи. То же устройство, смонтированное на паропроводе, при перемещении регулирующего органа будет изменять уже две величины — давление и температуру пара за клапаном. При этом рассмотренная ранее АСР способна решать лишь задачу автоматической стабилизации давления пара. Для поддержания требуемой температуры пара необходимо предусмотреть дополнительную систему, способную регулировать температуру, например, посредством впрыска охлаждающей воды. Таким образом, для выполнения поставленной задачи потребуются две взаимосвязанные АСР. Пример структурной схемы такой системы приведен на рис. 1-5. В отличие от одноконтурной, изображенной на рис. 1-2, рассматриваемая АСР является трех-
числе тепловых электро-
Рис. 1-5. Многосвязная АСР.
1 — регулятор давления редуцированного пара; 2— регулятор температуры; 3 — объект регулирования — коллектор редуцированного пара; 4 — паровой редуцированный клапан; 5 —клапан впрыска охлаждающей воды;
X, = ДОр п/ о°р п—Расход пара;
ха = Д Do B/eQ в—расход охлаждаю -?щей воды;
X/! = . п/-Р°р. п“*давление редуг ш -
,/^р п—температура пара.
контурной н носит название многосвязной АСР. Первый коп гур а служит для стабилизации давления редуцированного пара, контур б — для стабилизации температуры и контур в — для увеличения быстродействия АСР при отклонениях температуры, вызываемых изменениями расхода пара через редукционный клапан.
Экстремальные АСР. В практике эксплуатации промышленных объектов, в том станций, встречаются и другие задачи. Например, управление процессом горения в топке парогенератора по коэффициенту полезного действия (к. п. д.) ц, значение которого изменяется с ростом или падением паровой нагрузки и сложным образом записи г огмногих факторов, ио регулируется чаще всего посредством изменения подачи воздуха в топку При этом зависимость к. п. д. от р 1 схода воздуха имеет экстремальный характер (см. рис. 12 9) Для пепосредст-пепного поддержания максимальной величины к. п. д. парогенератора нужно, во-первых, измерять его значение и, во-вторых, воздействовать па изменение подачи воздуха в нужном направле
нии. Решать подобную задачу можно с специально!о экстремального автоматического ра, снабженного устройством поиска, т. е. «запомина пия» и сравнения экстремума регулируемой величины с се текущим значением. Такие АСР называются экстремальными.
АСР непрерывного и дискретного действия. Еще один признак, по которому подразделяются все АСР, связан с характером действия автоматических систем во времени. Одни из них действуют постоянно в заданном диапазоне изменения нагрузок и относятся к автоматиче ским системам непрерывного действия. Другие— автома-2* 19
рованного пара;
№ = А*°рпГ"
редуцированного
помощью регулято-
тические системы дискретного (прерывистого) действия, находясь в постоянной готовности, вступают в работу лишь в определенные моменты времени в связи с переходом на другой уровень нагрузки или же в связи с переводом оборудования на иной режим работы. Примером автоматических систем дискретного (прерывистого) действия служат автоматические устройства для производства определенных операций при пусках или остановках энергетических блоков и их вспомогательного оборудования.
1-3. Переходные процессы в системах регулирования
Допустим, что внешнее возмущающее воздействие хв—0, т. е. приток воды в трубопровод равен ее стоку, регулируемая величина у, эквивалентная давлению воды в трубопроводе /?т, в точности соответствует заданному значению и вследствие этого ошибка регулирования у*—у—и равна нулю и регулирующий орган находится в состоянии покоя (см. рис. l-2,ct). Состояние системы при отсутствии возмущающих воздействий и постоянстве регулируемой величины назовем установившимся состоянием.
Теперь представим, что нагрузка потребителя воды в момент времени ti изменилась, т. е. хв¥=0. Следствием этого будут изменение у и появление разности усилий на элементе сравнения, которое приведет к перемещению регулирующего органа в сторону ликвидации небаланса между притоком и стоком. Система и характеризующие ее величины придут в движение во времени. Это движение или изменение во времени величин у, хв, и и будет происходить до полной ликвидации небаланса между притоком и стоком, т. е. до тех пор, пока не наступит новое установившееся состояние равновесия между притоком и стоком при одновременном равенстве регулируемой величины заданному значению. График описанного процесса приведен на рис. 1-6,п.
Нарушение установившегося состояния системы может иметь место и при изменениях управляющего воздействия или задания регулятору и. В этом случае, несмотря на отсутствие внешнего возмущения, появление разности у—и на входе в регулятор также приведет к перемещению регулирующего органа п изменению регулирующего воздействия хр. Регулируемая величина у 20
в результате этого воздействия будет изменяться до своего нового заданного значения. График такого процесса приведен на рис. 1-6,6.
В обоих рассмотренных случаях наблюдается переход во времени из одного установившегося состояния системы в другое, соответствующее новому значению xs
Рис. 1-6. Переходные процессы в замкнутой системе.
а — при внешнем возмущающем воздействии; б — при изменении задания регулятору.
(нагрузки) или и (задания). Такой процесс носит название переходного процесса. Переходный процесс в замкнутой системе называется процессом автоматического регулирования.
Выше рассматривались примеры переходных процессов в АСР, которые после снятия возмущающего воздействия оканчивались новым установившимся состоянием системы. Такие процессы называются устойчивыми. Однако возможны случаи, когда после приложения и снятия возмущающего воздействия новое состояние равновесия в АСР не наступает. Это можно наблюдать при неправильном включении в работу автоматического устройства, рассмотренного на рис. 1-1. Например, если 21
импульсную трубку 2 подсоединить к нижней полости мембраны, соответственно' изменив направление действия груза 3 (рис. 1-7,а), то при увеличении QCT и падении давления рт мембрана, шток и регулирующая игла клапана под действием груза G устремятся вниз в сторону уменьшения притока, что приведет к дальнейшему падению давления р.г и в конечном итоге к полному закрытию регулирующего клапана 5. Аналогичная карти-
Рис. 1-7. Система с положи тельной обратной связью (а) и график переходного процесса в неустойчивой системе (б).
на будет наблюдаться и при изменениях задания регулятору и. График процесса регулирования в этом случае приведен на рис. 1-7,6. Переходный процесс такого вида называется неустойчивым (расходящимся). Структурная схема такой системы останется такой же, как на рис. 1-2, изменится лишь знак регулирующего воздействия хр, т. е. передача воздействия с выхода объекта на его вход будет направлена в сторону увеличения первоначального небаланса между притоком и стоком. Положительная направленность хр превращает АСР в систему с положительной обратной связью в отличие от системы с отрицательной обратной связью, рассмотренной выше и приведенной на рис. 1-1 и 1-2,а
Для проектирования и расчета устойчивых систем, удовлетворяющих также ряду дополнительных требований, предъявляемых к виду переходных процессов в АСР, необходимо располагать характеристиками отдельных звеньев, составляющих систему.
1 4. Способы математического описания звеньев и систем
(ла1ические и динамические характеристики
Зависимость y=f(x) звена или системы в установившемся состоянии называется статической характеристи
кой. Для линейного звена она имеет вид y=kx. В дейст-
вительности большинство войной характеристикой
Рис 18 Характеристика
iiieiia с насыщением
мпа
Рис. 1-9. Линейный участок чкеперимепталыюй статической характеристики парогенератора АрВ11—/(АЛт) при ZJn.n=const.
реальных систем обладает ли-у с «насыщением» (рис. 1-8). Но при малых возмущающих воздействиях —х (до 10—15% максимально возможных) и малых отклонениях у звенья и системы, обладающие такими характеристиками, могут считаться линейными в области изменений х от —Xi до +Хь Примером экспериментальной линейной статической характеристики объекта регулирования является график зависимо
Рис. 1-10. Характеристика нелинейного звена.
сти отклонения давления пара Дрп.п на выходе парогенератора при постоянстве его паровой нагрузки от прироста расхода топлива АВТ (рис. 1-9).
Примером нелинейного звена служит электромеханическое реле со статической характеристикой, изображенной па рис. 1-10, выходной величиной которого является напряжение U, снимаемое с его контактов, а входной — ток / в индукционной катушке. Математическая зависимость, связывающая выходной сигнал звена с входным,
!/(i) =[ [я(0] D переходном режиме, возникающем при изменении входного сигнала, называется динамической характеристикой звена.
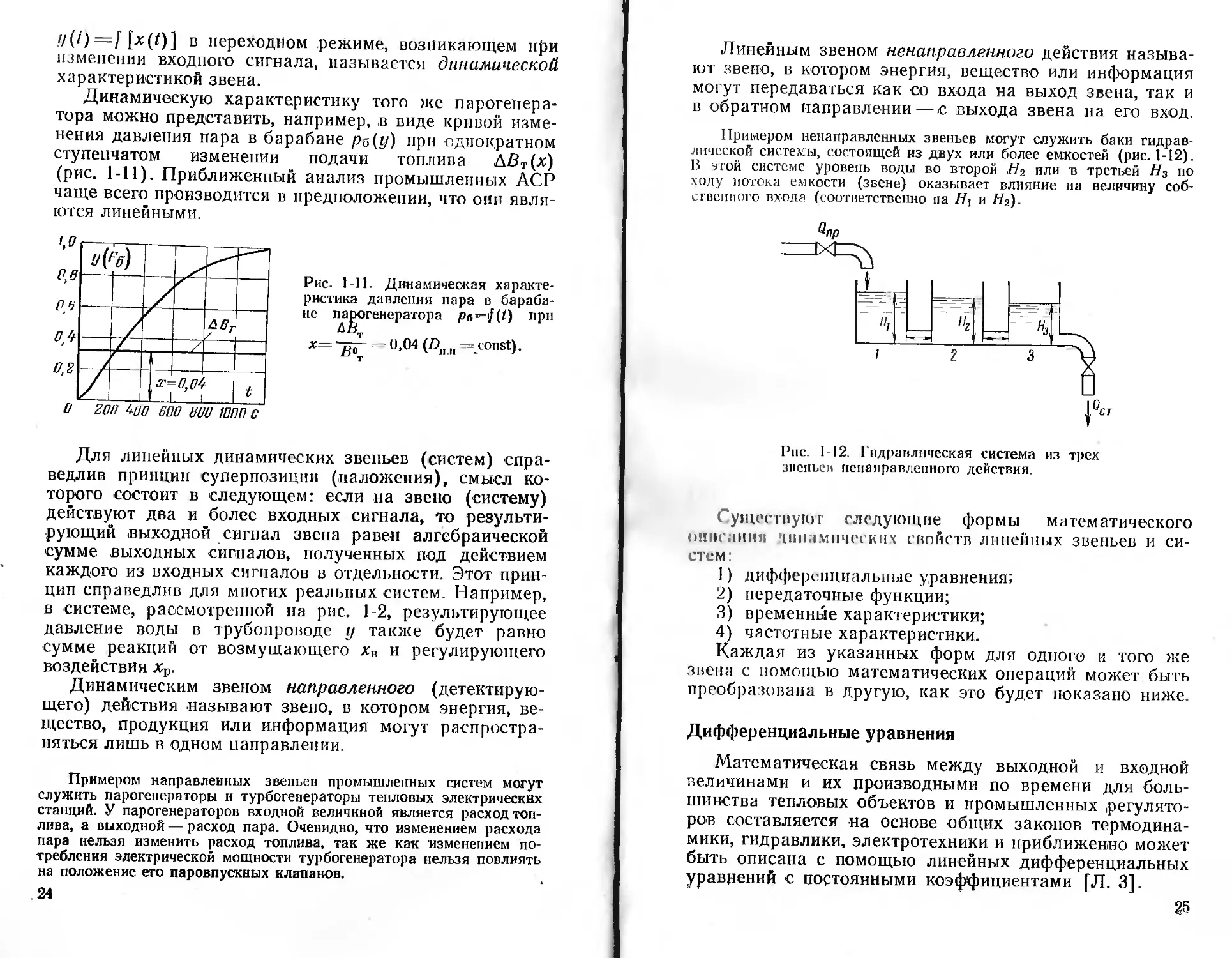
Динамическую характеристику того же парогенератора можно представить, например, ,в виде кривой изменения давления пара в барабане рб(у) при однократном ступенчатом изменении подачи топлива ДВт(х) (рис. 1-11). Приближенный анализ промышленных АСР чаще всего производится в предположении, что они являются линейными.
Рис. 1-11. Динамическая характеристика давления пара в барабане парогенератора рв=ДО при х= 0,04 (Д, „ == const).
Для линейных динамических звеньев (систем) справедлив принцип суперпозиции (наложения), смысл которого состоит в следующем: если на звено (систему) действуют два и более входных сигнала, то результирующий выходной сигнал звена равен алгебраической сумме выходных сигналов, полученных под действием каждого из входных сигналов в отдельности. Этот принцип справедлив для многих реальных систем. Например, в системе, рассмотренной па рис. 1-2, результирующее давление воды в трубопроводе у также будет равно сумме реакций от возмущающего хв и регулирующего воздействия хр.
Динамическим звеном направленного (детектирую щего) действия называют звено, в котором энергия, вещество, продукция или информация могут распространяться лишь в одном направлении.
Примером направленных звеньев промышленных систем могут служить парогенераторы и турбогенераторы тепловых электрических станций. У парогенераторов входной величиной является расход топлива, а выходной—расход пара. Очевидно, что изменением расхода пара нельзя изменить расход топлива, так же как изменением потребления электрической мощности турбогенератора нельзя повлиять на положение его паровпускных клапанов.
Линейным звеном ненаправленного действия называют звено, в котором энергия, вещество или информация могут передаваться как со входа на выход звена, так и в обратном направлении — с выхода звена на его вход.
Примером ненаправленных звеньев могут служить баки гидравлической системы, состоящей из двух или более емкостей (рис. 1-12). В этой системе уровень воды во второй ,Н2 или в третьей Н3 по ходу потока емкости (звене) оказывает влияние на величину собственного входа (соответственно на Я, и Я2).
I’uc. I 12. Гидравлическая система из трех звеньев ненаправленного действия.
уществуюг следующие формы математического описания чииампческнх свойств линейных звеньев и систем:
I) дифференциальные уравнения;
2) передаточные функции;
3) временные характеристики;
4) частотные характеристики.
Каждая из указанных форм для одного и того же звена с помощью математических операций может быть преобразована в другую, как это будет показано ниже
Дифференциальные уравнения
Математическая связь между выходной и входной величинами и их производными по времени для большинства тепловых объектов и промышленных регуляторов составляется на основе общих законов термодинамики, гидравлики, электротехники и приближенно может быть описана с помощью линейных дифференциальных уравнений с постоянными коэффициентами [Л. 3].
Постоянные коэффициенты дифференциальных уравнений, например, для тепловых объектов вычисляются по данным теплового расчета агрегата, его конструктивным характеристикам или же определяются экспериментальным путем на действующих установках
Рис. 1-13. Объект регулирования уровня воды в баке.
1 — бак с водой: 2 — откачивающий насос; 3 и 4 — краны стока и притока.
Напомним, что линейное дифференциальное уравнение 1-го порядка имеет вид:
°- = (1-1)
плп в упрощенной записи
[-at)y(l)=box(t).
В качестве примера составим дифференциальное уравнение для системы, изображенной на рис. 1-13. Запишем для нее уравнение материального баланса в приращениях переменных величин:
JW=SbH6, (1-2)
где AV— прирост объема воды в баке за счет дополнительного открытия крана 4; S — площадь бака; А//г> прирост уровня воды в баке. За время Д/
Обычно мерой расхода Q служит А V/А/ (единиц объем a/единиц времени). Тогда (1-3) запишется следующим
образом:
Перейдя к относительным величинам, получим:
(1„
Используя обозначения, введенные в (1-1), получаем:
О-6)
где Аи=<20пр//70бХ — постоянный коэффициент.
При А/—>0 получим дифференциальное уравнение обьекта по уровню воды
(1-Л
Физически по означает, чго скорость изменения уровня воды в баке прямо пропорциональна приросту расхода воды па притоке и обратно пропорциональна площади поперечного сечения бака. Решение (1-7) при ступенчатом изменении х(х=1) имеет вид: у(t) =kut (см. рис. 1-30,о).
Передаточные функции
Дифференциальное уравнение (1-1) можно записать в следующем виде:
«1 РУ (0 + Яоу (0 = Ь„х (/)» (1-8)
где p—d/dt является символом дифференцирования.
Умножение переменной y(t) на р будет означать ее дифференцирование, а деление — операцию, обратную дифференцированию, т. е. интегрирование. Итак,
о
Уравнение (1-8) может быть переписано в следующем виде:
<'Ю(^/>+>)=^»- (1-9)
Аналогично могут быть записаны дифференциальные
уравнения более высокого порядка, имеющие производные в гюавой части:
D(p)y(t)=B(p)x(t), (1-10)
где D(p) и В (р) — многочлены от р.
Такая форма записи уравнений носит название операторной и обычно используется при составлении уравнений систем или звеньев.
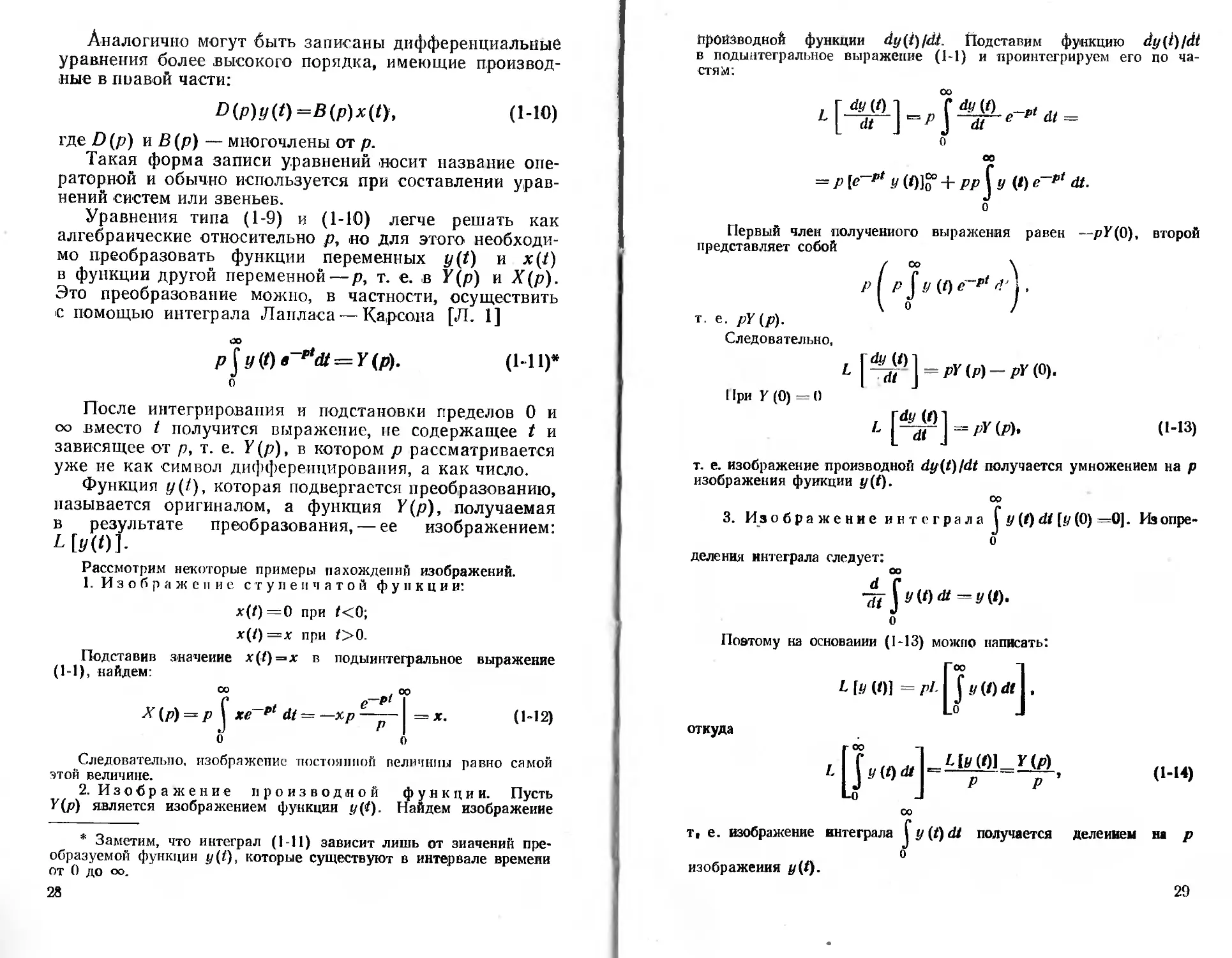
Уравнения типа (1-9) и (1-10) легче решать как алгебраические относительно р, но для этого необходимо преобразовать функции переменных y(t) и х(/) в функции другой переменной — р, т. е. в У(р) и Х(р). Это преобразование можно, в частности, осуществить с помощью интеграла Лапласа — Карсона [Л. 1]
Р^у(1)в-р,(и = У(Р). (1-11)*
о
После интегрирования и подстановки пределов 0 и со вместо t получится выражение, пе содержащее t и зависящее от р, т. е. У(р), в котором р рассматривается уже не как символ дифференцирования, а как число.
Функция у it), которая подвергается преобразованию, называется оригиналом, а функция У(р), получаемая в результате преобразования, — ее изображением: ИИО]-
Рассмотрим некоторые примеры нахождений изображений.
1. Изображение ступенчатой функции:
х(0=0 при /<0;
x(t)=x при f>0.
Подставив значение x(t)=x в подыинтегральное выражение (1-1), найдем:
со р/ 00
X (р) = Р J xe~pt dt = — хр 1 = X. (М2)
о о
Следовательно, изображение постоянной величины равно самой этой величине.
2. Изображение производной функции. Пусть У(р) является изображением функции y(t). Найдем изображение
* Заметим, что интеграл (1-11) зависит лишь от значений преобразуемой функции y(t), которые существуют в интервале времени от 0 до со.
Производной функции dy(i)ldi. Подставим функцию dy(i)/dt в подынтегральное выражение (1-1) и проинтегрируем его по частям:
о
оо
= Р [e~pt У (0]“ + РР J У (С e~pt dt-о
Первый член полученного выражения равен —рУ(0), второй представляет собой
/ 00 PI Р J У (t)e~pt d' j , \ о /
т. е. pY (р).
Следовательно,
11ри У (0) = О
т. е. изображение производной dy(t)!dt получается умножением на р изображения функции y(t).
со
3. Из о б р а ж е н и е интеграла J у (/) dt [у (0) =0]. Из опре-о
деления интеграла следует:
Оо ~-$y(t)dt- y(f).
о
Поэтому на основании (1-13) можно написать:
L [У (01 = Pl
'00
j У (/) л
_0
откуда
tG’wd=y^a=!^’ °’'” 00
Ti е. изображение интеграла J у (t) di получается делением на р изображения y(t).
Вернемся к (1-1), записанному в операторной фор-мер. При x(t) —х
tti РУ (О 4" а»У (0 — ЬоХ-
Далее запишем его изображение с учетом условий (1-12) и (1-13)
а,ру{р} 4-апу(р) — Ь»х.
(1-15)
Нетрудно заметить, что (1-15) можно получить из (1-8) путем простой подстановки р вместо t их вместо x(t). Аналогично можно получить изображение уравнения (1-10)
£>(р)У(р)=В(р)Х(р), (1-16)
где р — символ дифференцирования; D(p) и В(р) — многочлены от р (операторные многочлены); У(р) и Х(р)—изображения регулируемой (выходной) величины и возмущающего воздействия (входной).
Найдем отношение
У (р) _ # (р) Л (р) D (р)'
(М7)
Отношение изображения выходной величины к изображению входной величины называется передаточной функцией (оператором) звена (группы звеньев, системы).
Для системы, описываемой уравнением (1-16) при пулевых начальных условиях [при г/(0)—0, х(0) =0 н равенстве нулю производных ог у(1) и х(1) при / = 0], передаточная функция
w (р) = _L[(dzll______— g.^L. И-18)
W (Р) L [х (01 “X (р) D (р) I1 1О1
Оператор звена, описываемого уравнением (1-9),
Х(р)~~ ап
(1-19)
На основе (1-18) и (1 19) можно заключить, что оператор звена или системы равен отношению операторных многочленов правой и левой частей их уравнений. При этом изображение дифференциальных уравнений типа 30
(1-8), (1-9) и (1-Ю) имеет такой же вид, как сами уравнения, полученные путем простой подстановки в них р вместо t.
Временные характеристики
В зависимости от формы возмущающего воздействия существуют различные виды временньтх характеристик, из которых наиболее распространены переходные и импульсные. Переходной характеристикой (кривой разгона) звена (системы) называют зависимость изменения выходной величины от времени y(t) при приложении ко входу звена однократного ступенчатого возмущающего воздействия x(t)=x. Ступенчатое возмущение может быть приложено со стороны возмущающего, регулирующего или управляющего воздействия. Переходная характеристика звена (системы) по интересующему нас каналу воздействий может бып получена экспериментально па действующей установке (ее модели) или аналитически путем решения дифференциального уравнения звена, т. е. определения y(l)=f [%(#)] при x(t)=x. Пример кривой разгона промышленного объекта- приведен па рис. 1-11.
Составление дифференциальных уравнений сложных систем — процесс трудоемкий, требующий высокой квалификации специалиста, в то время как опыты по определению переходных характеристик сравнительно просты. Кроме того, существуют математические и графоаналитические методы определения дифференциального уравнения звена и его передаточной функции по экспериментальной кривой разгона.
Убедимся в этом на следующем примере. Переходную характеристику можно определить аналитически, решив дифференциальное уравнение звена. Решением уравнения (1-9) для х(/)=х будет экспонента вида:
у(0=^-л(1-е'”'), (1-20)
где pi — корень характеристического уравнения (1-9) £la’_]_1 = 0, До
т. е.
(1-21)
С учетом (1-21)
y® = -h.x(j-e (1-22)
<7о
График y(t) изображен на рис. 1-14. При t—>оо, т. е. в установившемся режиме,
i/yCT = i/(oo)=Ax. (40
Отношение k=y(ca)lx=bolao назовем коэффициентом усиления звена.
Коэффициент усиления (звена системы) k равен отношению установившегося значения выходной величины к значению ступенчатого возмущения.
Уравнение экспоненты при единичном возмущении имеет вид:
—L y{f).= \ - e г. (1-23)
Величина а.\1а.и = Т называется постоянной времени экспоненты. На рис. 1-14 она соответствует отрезку на линии установившегося значения выходной величины, отсекаемому касательной 00'. Постоянная времени звена Т численно равна времени достижения регулируемой величиной установившегося значения при
условии ее изменения с постоянной скоростью, равной скорости изменения в момент нанесения единичного ступенчатого возмущения. Численное значение Т можно определить из (1-23), проинтегрировав обе его части:
ОО 00 _t 00
f 1-М — §y(t)dt = — Те т |, (1-24)
0 0 о
откуда величина Т равна разности площадей, заключенных под прямой у(оо)=&х=1 и экспонентой y(t), т. е. заштрихованной площади на рис. 1-14.
С учетом введенных обозначений (1-22) примет вид:
j/(f) = fcx\l — в т), (1-25)
а передаточная функция (1-19) перепишется в виде:
= О'26)
Таким образом, располагая опытной кривой разгона п определяя по ней k п Т, можно получить выражение
передаточной функции для звена, описываемого дифференциальным уравнением 1-го порядка.
Импульсной характеристикой звена (системы) называют зависимость изменения выходной величины от времени при приложении ко входу звена возмущающего воздействия импульсной формы. График и м пул ьс поп характеристик и y(tK) для звена, описываемого
Рис. 1-15. Импульсная характеристика у(tn).
уравнением (1-25), приведен на рис. 1-15. Необходимость определения импульсной ха-
рактеристики возникает в том
случае, когда ожидаемое установившееся значение у(со)
превышает се максимально допустимый размер по
условиям эксплуатации.
Частотные характеристики
Частотные характеристики определяют путем приложения ко входу звена возмущающего воздействия синуг соидальной (гармонической) формы, например, перемещением регулирующего органа исследуемого объекта по закону
x(t) = |х| sin at,
(1-27)
где |х|—амплитуда колебаний входного сигнала;
= 2п/Т— его угловая частота, имеющая размерность рад/с или рад/мил; Т—период колебаний, с или мин.
При установившихся колебаниях х, если звено или исследуемый объект является линейным, сигнал на его выходе также изменяется по гармоническому закону с той же частотой со, но его амплитуда и сдвиг по фазе 3-6§6 33
могут изменяться в зависимости от динамических свойств звена (рис. 1-16):
(0 = I .VIsin И — ?)- (1-28)
где |у| —амплитуда выходных колебании; q> сдвиг по фазе.
На рис. 1-16 выходные колебания отстают ио фазе от входных на время А/ или угол q = 2зт./7'Л/=о>.Л/. Если выходные колебания опережают входные, то
?/(/) = |z/| sin (соГ + ср).
(1-29)
Динамические частотные свойства линейных звеньев определяются отношением выходного и входного сигналов по амплитудам и фазе.
Зависимость отношения амплитуды выходного сигнала к амплитуде входного (измеренных при одной и той же частоте) от частоты колебаний входного гармониче-
ского сигнала называется теристикой (ЛЧХ)
Рис. I-I6. Реакция звена иа гармоническое входное воздействие.
амплитудно-частотном харак-
^ (<•>)-=-i;' и. (1-зо)
I л I
Зависимость сдвига фаз между выходным и входным сигналами (измеренного при одной и той же частоте) от частоты колебаний входного гармонического сигнала па-сывастся фа и> частотной характеристикой (ФЧХ)
ф((о)=(оА/. (1-31)
Примеры графиков М(со) и ср (со) для промышленного объекта изображены на рис. 1-17. Важную роль при изучении процессов регулирования играют характеристики, являющиеся комбинацией частотных характеристик 7И(со) и ср(со), — так называемые' амплигудпо-фазо-вые характеристики (АФХ).
Амплитудно-фазовые характеристики строятся в полярных координатах Д, ср или па комплексной плоскости U+iV и представляют собой годограф вектора (кривая, описываемая концом вектора), построенного в начале
knop uiii.it для различных значении частот — от о=0 до со=
•х. Модуль этого вектора равен А1 (а), а аргумент или угол поворота <р(<о). Значения М(ы) и <| (ы) берутся для одной и гоп же частоты из графиков ча-t готпых характеристик, изо-бражепных на рис. 1-17. Порядок построения АФХ на комплексной плоскости при изменении © от 0 до оо иллюстрируется па рис. 1-18.
Значение АФХ при <в=0 откладывают по оси абсцисс; при отставании выходных колеба нпй о г входных угол поворота
Рис. 1-17. АмплиТудно-ча-стоТная и фазо-частотная характеристики парогенератора типа ТП-87 по давлению перегретого пара по каналу регулирующего воздействия (расход топлива).
вектора откладывают в направлении по часовой стрелке, при опережении прогни часовой стрелки.
Запись АФХ в полярных координатах имеет вид (первая форма записи):
(1-32)
Г (йо) = (ш>,
Рис. 1-18. Амплитудно-фазовая характеристика парогенератора по давлению перегретого пара на комплексной плоскости.
3
35
где
Ц=^М(ш)= (ш); <р(о>)_ «>AL
Запись АФХ в прямоугольных координатах на комплексной плоскости имеет вид (вторая форма записи):
t/(<•>) +iV(<»), (1-33)
где 17(со) = М (co) coscp(w) — вещественная часть вектора АФХ; V(co) =М(м) sin <( (со)—его мнимая часть.
Длина вектора, или его модуль,
Л4 (<») = I U2 (to) -| V2 (ос), а его аргумент, или угол поворота вокруг начала координат,
z \ , V (о>)
«?(<») = arctg^.
Третья форма записи АФХ имеет вид:
, V (ш) _____________i а, । tg г, )--
W(im) = / U2 (<о) Д- V2 (о>) е и ('0). (1-34)
Аналитически АФХ может быть определена из выражения передаточной функции звена Uy(p). Для этого установим связь между ними на примере звена с оператором (1-26):
^(₽) = Т+Д.--
Векторная форма записи гармонических колебаний для входного сигнала:
х=|л:|е'ю/; (1-35)
для выходного сигнала
у = | у | е‘ 1т,~ч(ш” = | у ] eiale!lt ,ш) . (1-3G)
Подставляя (1-35) и (1-36) в (1-1) и учитывая, что ai!a0=T и bolao=k, получим:
[1 Д- (Ь) 7’] | у | = k | х | е’ш‘, (1-37)
откуда
1Г(»)=-Д(») е |1+Д)Тг. (1-38)
Из сравнения W'(p) (1-26) и W'(ico) (1-38) следует, чю последняя зависимость может быть получена из передаточной функции путем замены оператора р на ia>. Преобразование передаточной функции в АФХ с помощью формальной математической операции — подстановки tio вместо р — имеет определенный физический смысл, поскольку АФХ отражает реакцию звена па входное гармоническое воздействие, т. е. может быть по лучепа экспериментально.
1-5. Типовые динамические звенья
Сложные промышленные системы регулирования (объекты и регуляторы) удобнее и проще изучать, если их условно разбить на более простые элементы или звенья. Динамические свойства простых элементов целесообразно описывать с помощью типовых динамических звеньев. Тип звена однозначно определяется видом переходною процесса при одном и том же входном воздействии и ио зависит от его физической природы. Звенья, характеризуемые простой математической зависимостью между входной и выходной величинами, называются элементарными. Обычно динамические свойства элементарных звеньев описываются линейными дифференциальными уравнениями нс выше второго порядка.
Рассмотрим типовые элементарные звенья, с помощью которых представляются сложные системы регу дарования.
Усилительное звено
Рассмотрим простую электрическую цепь (рис. 1-19) Для нее
С7пх = /(/?1+7?2); ДПых = 7/?2. (1-39)
О геюда
(М°)
в
UBMX—kUBX или y—kx, (1-41)
где k — коэффициент усиления.
Если входной сигнал изменить скачком, как это показано па рис. 1-20, то и (Дых изменится мгновенно. По-
37
этому звено, изображенное па рис. 1 19, называют безынерционным или усилительным. Математическим описанием усилительного звена является уравнение (1-41). На рис. 1-20 изображена кривая разгона усилительного звена.
Передаточная функция усилительного звена W(p) = = k, его ЛФХ также равна k п изображается точкой па вещественной осп.
Рис. 1-19. Электрическая цепь — усилительное звено с Лу<1.
ил ,1’_х
t
О
Рис. 1-20. Временная разгонная характеристика усилительного звена.
У|силптелы1ые звенья часто встречаются в электрических цепях п механических передачах, примером такого звена является рычаг для преобразования усилий (рис. 1-21) с /г - /1//2.
Инерционное звено I порядка
Рассмотрим электрическую цепь (рис. 1 22).
Приложение па входе цепи напряжения вызывает в пен переходный процесс. Ток lJt = lc, причем
Ц(.т)
Рис. 1-21. Механический аналог усилительного звена — поворотный рычаг.
JU,,,,,.
О’43)
Приравняв (1-42) п (1-43), получим:
. и = U . (1-44) dl пых их X ’
Произведение RC=T, следовательно,
•лгу
=и .
dt 1 вых вх
(1-45)
'-)ю уравнение тождественно (1-1). Решение его относительно ПБых при скачкообразном изменении Пвх уже рассматривалось [формула (1-25), рис. 1-14]. Другим примером инерционного „
звена может служить одно-ем'костиый бак с постоянным подпором воды па стоке (рис. 1-23).
Действительно, .при возмущении расходом воды на притоке (например, при увеличении притока па AQnp) уровень воды в баке не будет возрастать безгранично, так как с ростом увелпч па крапе стока, расход пере; раженном Q(.T=a [Д/Д—//<, хода. При некотором зпачепи
Рис. 1 -22. /?С-цепочка — инерционное звено.
пвэется перепад давлений i который описывается вы-где а — коэффициент рас-1 Я'б возросший сток срав-
Рпе. 1 23. Гидравлическая модель инерционного звена.
пяется с СЛр + Дфпр. Наступит новое состояние равновесия системы при новом установившемся значении уровня.
Кривая разгона этого элементарного звена, называемого инерционным или апериодическим, представляет собой экспоненту, изображенную на рис. 1-14. Реакция кого шепа па импульсное возмущение (импульсная ха-39
рактеристика) приведена на рис. 1-15. Передаточная функция и АФХ инерционного звена соответствуют выражениям (1-26) и (1-38).
Построим график АФХ инерционного звена. Для этого представим (1-38) в виде алгебраической суммы вещественной и мнимой частей:
W(Ч = т,* т = й.Лт, - i, (1-46)
' ' 1 + 1Ч>Т 1 ^+1<о2Г2 1 + ш2?2 ' '
При изменении и от 0 до оо годограф вектора 1^(1со) можно получить из (1-46), в котором
'А») Г(»)=-г+^. (1-47)
Отношение П(й)/Д(<о) = аТ, тогда
1 -4- . '
* + 1/2 (ш)
kU2 (w) t/2 (w) 4- 1/2 (w) ’
откуда tA((o) + V2(co)—ЛгС7(со) =0. Прибавив к обеим частям последнего равенства /г'2/4, получим:
^(<»)-;4]2+У2и=4- о-48)
Выражение (1-48) является уравнением полуокружности с радиусом k/2, касающейся мнимой оси в начале координат, с центром О', расположенным на вещественной оси (рис. 1-24).
Рис. 1-24. IT(ico) инерционного звена.
Рис. 1-25. Af(to) и <р(<й) инерционного зврцд.
i ЛЧХ и ФЧХ йнерЦионйого звена ойределяйэФся йД
выражений (1-34) и (1-47):
м (о>) = r^(«>)+V4«o) = <Ь49>
Т (со) = arctg | = — arctg mT. (1-50)
г Функции Al (и) и <р(ю) изображены на рис. 1-25.
Из (1-50) и графиков на рис. 1-16 и 1-25 видно, что при прохождении сигнала через инерционное звено вы-( ходной сигнал отстает по фазе от входного. Такого вида звенья называются фазосдвигающими.
Инерционное звено II порядка
Инерционное звено II порядка образуется при наличии двух соединенных емкостей, способных запасать энергию и обмениваться ею.
Примерами инерционных звеньев II порядка могут служить механическая система (рис. 1-26), представляющая собой массу, под-, вешенную на пружине и имеющую демпфи-
„ , рующее устройство, и электрическая цепь,
। содержащая емкость, индуктивность и оми-
I ческое Сопротивление (рис. 1-27). Дляэлек-
трической цепи, изображенной на рис. 1-27, можно записать:
р* <4х ^вых — lR-\~ L ,
I---- где
ГГ~|_4 i = cduuux/dt.
Рис. 1-26. Гидромеханн- Рис. 1-27. РС£-цепочка —
ческий аналог колеба- колебательное звено,
тельного звена.
Подставив 1 6 Исходное уравнение, получим:
d(71)bIX
<4х = <ДЫХ + CR-~- + LC
Обозначив CR=T} и LC—T22, получим уравнение связи между Выходным и входным сигналами:
C^AlMX ,^вых
=t4x-
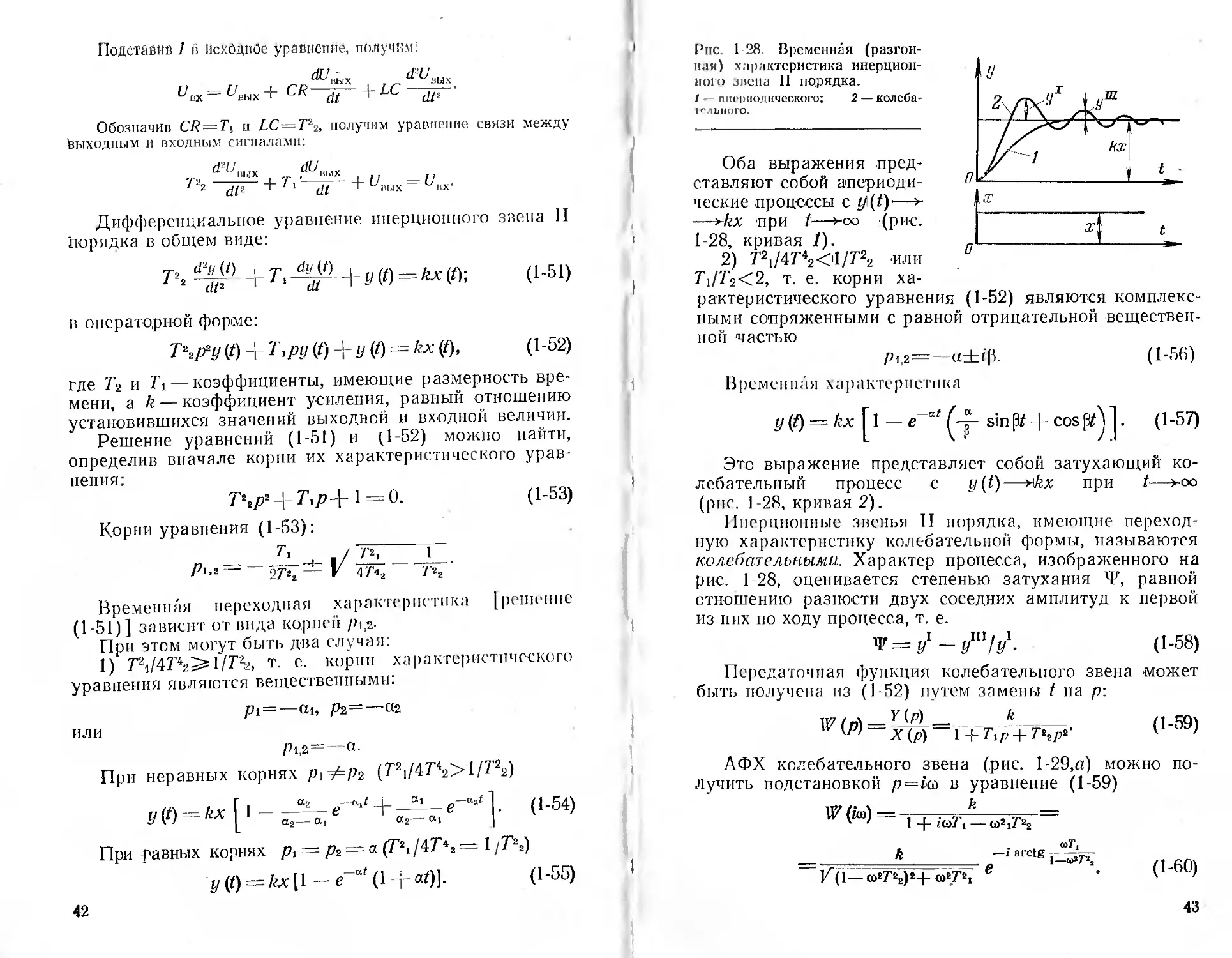
Дифференциальное уравнение инерционного звена II Порядка в общем виде:
р2 W) + Л + у (/) = kx (/); (1-51)
в операторной форме:
Т\ргу (/) + 1\ру (/) -|- у (/) = kx (/), (1 -52)
где Т2 и Л —коэффициенты, имеющие размерность времени, a k — коэффициент усиления, равный отношению установившихся значений выходной и входной величин.
Решение уравнений (1-51) и (1-52) можно найти, определив вначале корни их характеристического уравнения:
1\р2-\-1\р-{- 1 — 0. (1-53)
Корни уравнения (1-53):
Л ,/7^ Г”
Ръ2 - ^ — J/ 4Пг 7гг ’
Временная переходная характеристика | решение (1-51)] зависит от вида корней р\,->.
При этом могут быть два случая:
1) 7’2j/47'42^ ЧТЧ, т. е. корпи характеристического уравнения являются вещественными:
Pl = —О1, Р2 = —02
или
Pl, 2 = ~ Cl-
При неравных корнях pi=/=Pz (T2i/4T'l2>llT22)
y(t) = kx [1--^-^“*' + -— <Т“Ч (1-54)
J ' 7 I а2— ai а2— ai |
При равных корнях = рг = a (T\l4Tis. — 1 /Г%)
у (/) = /гл[1 —- e~at (1 -га01- (1-55)
Рис. 1 28. Временная (разгон-ii.ni) характеристика инерционного знена II порядка.
/- лнсриоднчсского; 2— колеба-1<"ЛЫ|<1ГО.
Оба выражения представляют собой апериодические .процессы с —> —>-kx при t—>оо (рис. 1-28, кривая 1).
2) T^/AT^IJT^ или 7’|/7’2<2, т. е. корни характеристического уравнения
(1-52) являются комплекс-
ными сопряженными с равной отрицательной веществен-
ной частью
Pt,2= (i±ip.
(1-56)
Временная характеристика
у (/) — kx 1
— е а‘
(1-57)
Это выражение представляет собой затухающий колебательный процесс с y(t)—^kx при t—>оо (рис. 1 28, кривая 2).
Инерционные звенья II порядка, имеющие переходную характеристику колебательной формы, называются колебательными. Характер процесса, изображенного на рис. 1-28, оценивается степенью затухания Т, равной отношению разности двух соседних амплитуд к первой из них по ходу процесса, т. е.
(1-58)
Передаточная функция колебательного звена может быть получена из (1-52) путем замены t на р-.
117« = Ж = 1 + г,/+г^'
АФХ колебательного звена (рис. 1-29,о) можно получить подстановкой р=1а> в уравнение (1-59)
W(fo) =
1 -j- к&Гi — со217^2
соГ.
= k р arctE 1=3^
K(I- a>27\)»-|- шг/г, в
(1-60)
АЧХ и ФЧХ колебательного звена изображены на рис. 1-29,6.
Интегрирующее звено
Рассмотрим поведение уровня воды в баке, на выходе которого установлен откачивающий насос (см. рис. 1-13). Математическое описание этого объекта при
Рис. 1 29. Частотные характеристики колебательного звена.
С—ИГ(/й>); 6 -AI(tfl), <р(ы).
возмущении расходом воды па притоке дано уравнением (1-7).
Проинтегрировав его обе части, получим:
у (/) — kK J х (/) dt. (1-61)
«
В операторной форме
Y (Р) А,
= (1-62)
X (р) 'г/р \ >
Звенья с интегральной математической зависимостью между выходной и входной величинами называются интегрирующими.
Интегрирующие звенья часто встречаются в промышленных системах автоматического регулирования. К ним относятся объекты, связанные с регулированием уровней жидкости в открытых баках и сосудах под давлением, исполнительные механизмы автоматических регуляторов и др. Интегрирующее звено, так же как и инерционное, является фазосдвигающим.
Переходная характеристика интегрирующего звена или его реакция па скачкообразное возмущение величи-44-
ной v, как следует из (1-61), есть прямая, выходящая hi начала координат (рис. 1-30,а) под углом а:
y(t)=k„t, (1-63)
1де ku=tga/x — коэффициент пропорциональности интегрирующего звена, характеризующий скорость нарастания сигнала на выходе после ступенчатого возмущения.
Рис. 1-30. Временные характеристики интегрирующего звена.
а — разгонная; б — импульсная.
Импульсная характеристика звена представлена на рис. 1-30,6. Сигнал y(t) остается неизменным после t— =ta, так как х=0 при t>ta. Подстановкой p—ia в уравнение (1-62) можно определить АФХ звена:
^(Н = ^- (1-64)
Освободившись от мнимости в знаменателе, получим:
k
(1-65)
Как следует из (1-65), АФХ интегрирующего звена не имеет вещественной части и располагается на комплексной плоскости вдоль мнимой отрицательной полуоси (рис. 1-31,а).
Рис. 1-31. Частотные характеристики интегрирующего звена.
а И7 (гео); б-М(ьу) п <р((о).
Характеристики ЛЧХ и ФЧХ (рис. 1-31,6) определяются из следующих выражений:
Л1 (Ю) = ]ЛО+Г2 («>)==-^1 (1-66)
7 (ш) = arctg -- (“} — — arcig(oo) = —(1-67)
Звено запаздывания
На рис. 1-32 изображен ленточный транспортер для переброски сыпучего материала пз одного бункера в другой. Особенность его работы как отдельного звена заключается в том, что входной сигнал, проходя через него, не претерпевает изменений по амплитуде, по сдвигается во времени. Иными словами, если изменить количество поступающего па лепту материала, то точно такое же изменение произойдет на выходе ленты через время т—ljv, где I — длина транспортерной ленты, а и — скорость ее движения. Время т называется временем транспортного или чистого запаздывания.
Технические устройства, обладающие свойством «задержки» во времени поступающего на вход сигнала без изменения его значения, относятся к звеньям транспортного или чистого запаздывания. Примером звена транспортного запаздывания па тепловых электрических станциях служат также сравнительно длинные участки tdv-46
бопроводов. Математическое описание звена запаздывания в функции времени имеет вид;
г/(/) = О при 1
у (/) = х (0 при / т. J
(1-68)
Временная характеристика звена запаздывания имеет вид скачка, сдвинутого во времени относительно момента возмущения на отрезок т (рис. 1-33).
Рис. 1-32. Ленточный транспортер-дозатор— звено запаздывания.
/, 2 — бункера; 3 - лента; 4 шибер-доза гпр.
И*)
Рис. 1-33. Временная (разгонная) характеристика запаздывающего звена.
Если подан, па вход звена транспортного запаздывания синусоидальный сигнал, то на выходе получим синусоиду топ же амплитуды, сдвинутую во времени на постоянную величину т независимо от частоты. Фазовый сдвиг, выраженный в градуса^ или радианах;
'?(“) =-------
т. е. будет линейно зависеть от частоты:
ср (со) =—сот.
(1-69)
График ФЧХ звена транспортного запаздывания ср (со) согласно (1-69) является прямой, исходящей из начала координат (рис. 1-34,я). Поскольку величина входного сигнала при прохождении через звено запаздывания не изменяется, его АЧХ равна единице независимо от частоты. График А1(со) представлен на
рис. 1 34,а. (График АФХ звена запаздывания в показательной форме записывается в следующем виде:
W (i<o) == 1 е~1ю\ (1-70)
По формуле Эйлера годограф вектора
1шт __ cos ют — i sin ют. (1-71)
Это означает, что при изменении со от 0 до оо вектор W (ia) описывает на комплексной плоскости окруж
Рис. 1-34. Частотные характеристики звена запаздывания. а — ЛЦсо) и <р(е>); б —1Г(йо).
ность с центром в начале координат (рис. 1-34,6). Из выражения (1-70) подстановкой p = ia можно получить и передаточную функцию звена запаздывания:
W(p) = e~l’\ (1-72)
Реальное дифференцирующее звено
Инерционные, интегрирующие и запаздывающие звенья относятся к фазосдвигающим элементам АСР, в которых выходные колебания отстают по фазе от входных. Ио часто возникает необходимость, например в промышленных автоматических регуляторах, включать в контур автоматического регулирования звенья, у которые при установившихся колебаниях y(t) опережает x(t) на время А/, как показано на рис. 1-35. В качестве примера такого звена рассмотрим цепь, изображенную на рис. 1-36, и составим для нее дифференциальное уравнение, __
При подаче на вход цепи скачкообразного сигнала (/„ и пей возникает переходный процесс, характеризуемый ГОКОМ
Рис. 1 -36. 7?С-цепочка — реальное дифференцирующее звено.
Рис. 1-35. Графики х(1) и y(t) фазоопережающих звеньев.
Тогда
„ \dU d£7 '(011
kmxj,- / [ dt dt 1
пли
Unux(() +RCU вых(0 =RCU вх(0- (1*75)
Обозначим: RC=T; ивых=у, UBX=x, тогда получим:
Ty'(t)+y(t)=Tx'(l). (1-76)
Поскольку изменение y(t) зависит от производной входного сигнала, указанное звено носит название дифференцирующего. Решение уравнения (1-76) при скачко-
образном изменении х(0 имеет вид y(t) — е График функции y(t) (рис. 1-37) представляет собой экспоненту, характеризуемую постоянной времени Т, численно равной подкасательной к кривой y{t) в точке г/(0).
Для определения передаточной функции звена запишем (1-76) в операторной форме и получим соотношение
— W / гЛ---ТР.___
— \-\-Tp ’
4—626
49
Таблица
В общем виде
^« = -^.((77)
где k=y(0)/x.
Наличие члена (\+Тр) в знаменателе передаточной функции по аналогии с передаточной функцией инерционного звена свидетельствует об определенной инерции в изменении y(t) по сравнению с выходным сигналом. Поэтому звено называется реальным дифференцирующим в отличие or идеальна
Рис. 1-37. Временная (разгонная) характеристика дифференцирующего звена.
ной функции которого равен 1.
го, нт мена гель передаточ-
АФХ реального дифференцирующего гвспа
W =
kiuT
1 + ййТ
(1-78)
Рассмотренное звено является фазоопережающим, так как вектор АФХ расположен в I квадранте ком-
Рис. 1-38. Частотные характеристики дифференцирующего звена. а—U^(Zco); б — 2И(со) и <р((о).
плексной плоскости и имеет положительный угол пово-рота (направлен против часовой стрелки) (рис. 1-38,а). Графики АЧХ и ФЧХ (рис. 1-38,6) строятся по выраже-4* 51
ниям М (со) и <р(и):
М (со) = (**>) 4- о2 н = (1-79)
<р (со) = arctg (ш) = arc lg (1 -80)
Сводные данные по динамическим характеристикам рассмотренных типовых звеньев приведены в табл. 1-1.
1-6. Соединения звеньев
Выше указывалось, что промышленные АСР могут быть представлены в виде различных комбинаций соединений элементарных динамических звеньев. Но все эти сложные комбинации в конечном итоге могут быть сведены к трем типам соединений: параллельному, последовательному и встречно-параллельному. При определении суммарных или результирующих характеристик сложных динамических систем, представляемых в виде комбинаций элементарны^ или типовых звеньев, используется принцип суперпозиции, или наложения, сущность которого состоит в том, что для лнпенпого звена результирующая реакция на возмущения равна сумме реакций на отдельные возмущающие воздействия.
Операторная и векторная (частотная) формы представления динамических свойств звеньев наиболее удобны для отыскания результирующей характеристики сложной динамической системы. При этом действия по определению результирующей характеристики сводятся к алгебраическим действиям или операциям сложения, вычитания и умножения векторов па комплексной плоскости.
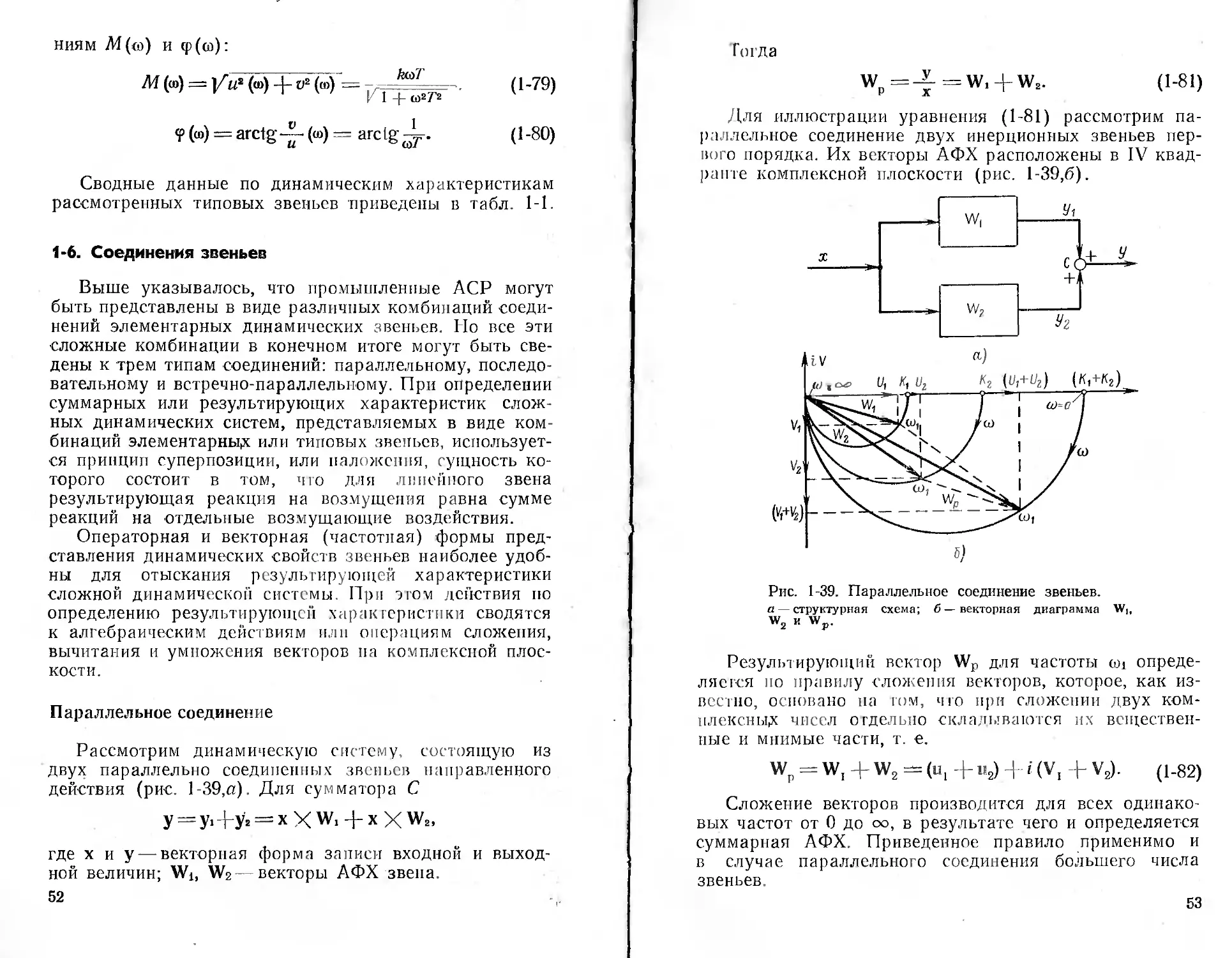
Параллельное соединение
Рассмотрим динамическую систему, состоящую из двух параллельно соединенных звеньев направленного действия (рис. 1-39,о). Для сумматора С
У = У>4-У» = Х X W, Д-x X W2, где х и у — векторная форма записи входной и выходной величин; Wj, W2 — векторы АФХ звена.
52
Тогда
W = — =Wi4-W,. p x 1
(1-81)
/Тля иллюстрации уравнения (1-81) рассмотрим параллельное соединение двух инерционных звеньев первого порядка. Их векторы АФХ расположены в IV квадранте комплексной плоскости (рис. 1-39,6).
Рис. 1-39. Параллельное соединение звеньев.
а — структурная схема; б — векторная диаграмма Wlt W2 и Wp.
Результирующий вектор Wp для частоты определяется по правилу сложения векторов, которое, как известно, основано па том, что при сложении двух ком-нлексныл чисел отдельно складываются их вещественные и мнимые части, т. е.
Wp = WI+W2=(u1+u2) + i(VI+V2). (1-82)
Сложение векторов производится для всех одинаковых частот от 0 до оо, в результате чего и определяется суммарная АФХ. Приведенное правило применимо и в случае параллельного соединения большего числа звеньев.
Итак, при параллельном соединении звеньев результирующая передаточная функция п результирующая АФХ системы образуются путем сложения передаточных функций и АФХ отдельных звеньев.
Последовательное соединение
Рассмотрим динамическую систему, состоящую из двух последовательно соединенных детектирующих звеньев с характеристиками Wt и W2 (рис. 1-40,я). Для этой структурной схемы
y.-W.Xx, (1-83)
и
y2 = W2Xyi- (1-84)
Заменив у в (1-84) на (1-83), получим:
y! = x,XW1XW! (1-85)
или
W=^- = W1XW2, (1-86)
т. е. результирующая АФХ двух последовательно соединенных звеньев равна произведению и,х характеристик. При этом следует помнить, что при умножении ком-
Рис. 1-40. Последовательное соединение звеньев.
а — структурная схема; б — векторная диаграмма Wp w2 и Wp.
(лексных чисел их Модули перемножаются, а фазы скла-щнпются. Это правило иллюстрируется рис. 1-40,6 для случая последовательного соединения двух инерционных шеиьев первого порядка. При этом годограф вектора результирующей характеристики определяется путем перемножения векторов при одинаковых частотах. Правило умножения при определении результирующей ха рактеристики распространяется и па цепочку, состоящую из п последовательно включенных звеньев.
Итак, результирующая АФХ динамической системы, состоящей из п последовательно включенных звеньев, равняется произведению ,характеристик отдельных звеньев.
Встречно-параллельное соединение
Такой тип соединения рассматривался выше (см. рис I 2) п соответствует замкнутой АСР, состоящей из объекта / и регулятора 2.
Даны:
Wo и Wp, х, хс, у, и, хр.
Требуется найти АФХ или оператор замкнутой системы Wp:t.c = y/x относительно регулирующего воздействия и W“:i.c = y/u относительно задающего воздействия.
(ля системы при и 0 справедливы следующие соотношения:
для объекта /
y==W0Xxc, (1-87)
для сумматора 2
хс = х —хр, (1-88)
где
xP = WpXy- (1-89)
Заменим хр в (1-88) на (1-89):
xc = x-WpXy- (1-90)
Подставим (1-90) в (1-87) и разделим переменные у
y + W0XWpXy = xXW0, п-91)
55
откуда получим АФХ замкнутой системы относительно регулирующего воздействия
WP __- У == Wo
з.с X i + w0XWp-
(1-92)
Для определения у/u, т. е. АФХ замкнутой системы относительно задающего воздействия и, составим уравнение сумматора 5:
у* = у —и. (1-93) .
В рассматриваемом случае (х=0 и хс=хр)
x₽ = yXWp; (1-94)
У = Wo Ххр. (1-95)
Заменив в (1-95) хр его значением из (1-94) и затем исключив у* в уравнении (1-93), получим:
У — Wo X Wp (у — и), (1-96)
откуда
где WoXWp — вектор АФХ разомкнутой системы.
Передаточная функция замкнутой системы относительно ошибки регулирования у* = и—у
(1-98)
Подставив (1-97) в (1-98), получим: Wp* —-------------------1—----.
3 с 1 + Wo X Wp
(1-99)
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите основные элементы одноконтурной АСР.
2. Укажите на схеме места приложений регулирующего, внешнего возмущающего и управляющего воздействии.
3. Что называется обратной связью в АСР?
4. Охарактеризуйте действие следующих автоматических систем регулирования:
а) автоматической системы стабилизации; б) следящих систем;
в) программной системы регулирования; г) экстремальных систем.
5. Поясните работу автоматических систем, действующих по возмущению и нагрузке.
6. Что называется установившимся состоянием системы или объекта регулирования?
7 Что называется переходным процессом?
8. Что называется процессом автоматического регулирования?
9 Поясните понятия устойчивой и неустойчивой АСР.
10. Что называется статической и динамической характеристикой звена, системы?
1]. Назовите формы описания динамических свойств линейных ШСНЬСВ.
12. Что такое направленность (детектирование) динамических тепьев системы? Приведите примеры звеньев направленного и ненаправленного действия.
13. Что называется кривой разгона?
14. Что называется импульсной характеристикой? Нарисуйте импульсную характеристику усилительного звена.
15. Как получить частотные характеристики звена или системы?
16. Назовите виды частотных характеристик.
17. Дайте понятие оператора звена или системы.
18. Перечислите основные типовые звенья.
19. Приведите пример инерционного звена первого порядка.
20. Приведите пример звена запаздывания.
21. Какие звенья относятся к фазосдвигающим? Приведите пример.
22. Приведите пример фа юоисрс жающего звена.
23. В к’м состоит принцип суперпозиции линейных звеньев?
24. Выведите формулу результирующего оператора:
а) двух параллельно соединенных звеньев; б) двух последовательно включенных звеньев.
ГЛАВА ВТОРАЯ
ТЕПЛОВЫЕ ОБЪЕКТЫ РЕГУЛИРОВАНИЯ И ИХ ХАРАКТЕРИСТИКИ
2-1. Общие положения
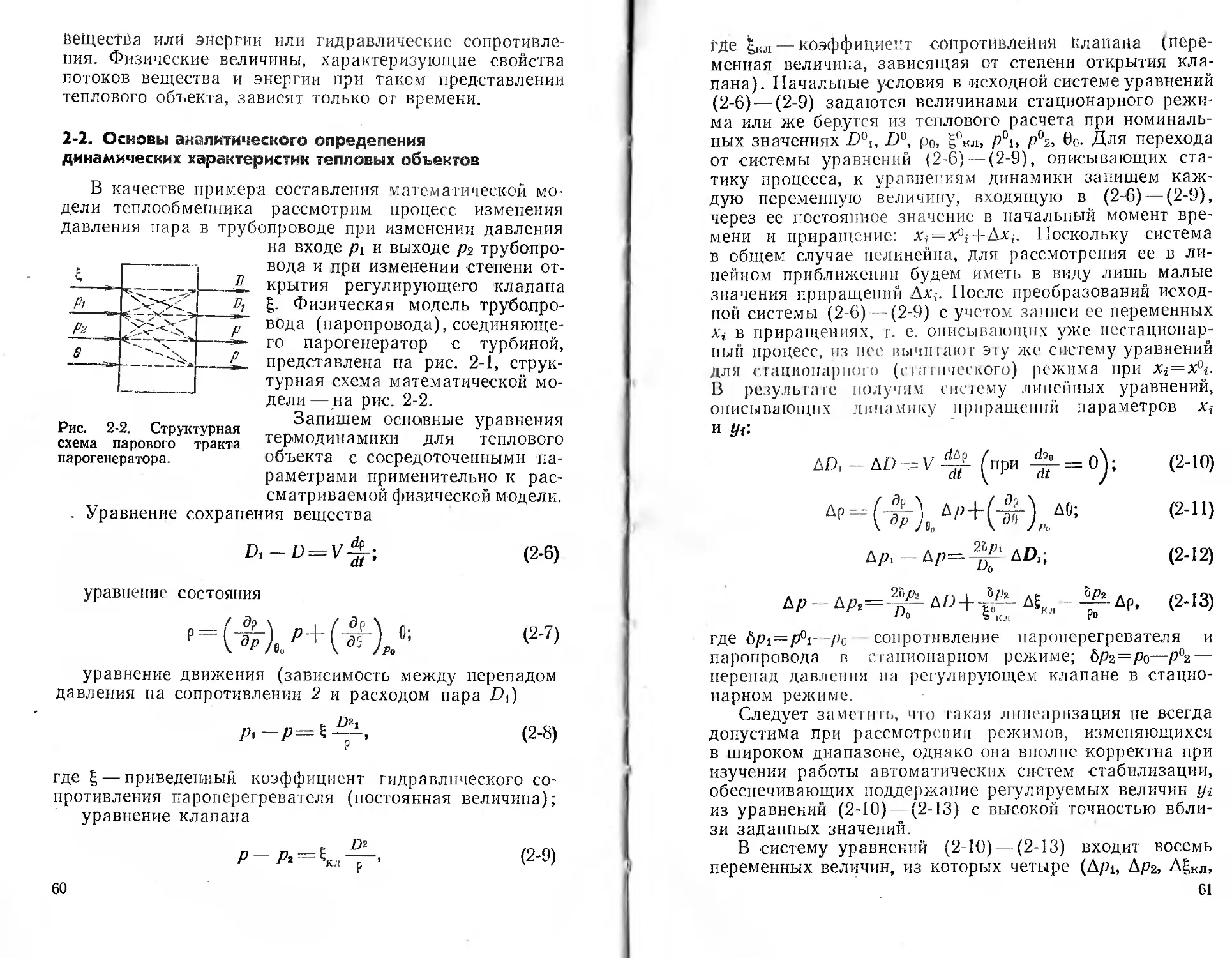
Процессы получения и распределения тепловой энергии на электростанциях происходят в результате взаимодействия потоков вещества и энергии в специальных устройствах-—теплообменниках, которые образуют поверхности нагрева парогенераторов, испарителей, подогревателей н т. н. К основным уравнениям, отражающим законы термодинамики, н описывающим процессы тепло- и массообмена в теплообменниках [Л. 3], относятся следующие:
уравнение сплошности (сохранения вещества)
(2-1)
уравнение сохранения энергии
«-jr+f (?4г)'-=’Л<6с..-°Т ₽-2>
57
уравнение, теплового баланса
<7,— q с —^-=.a.F (0 —0); (2-3)
“Н “м М dt В В'СТ /’ ' /
уравнение состояния
р= р(р, 6), 1 = 1 {р, 0), (2-4)
уравнение движения
(2-5)
В уравнениях (2-2), (2-3) индекс «и» относится к наружной стенке, «в» — к внутренней, «м»— к металлу теплообменника; Ост — температура стенки трубы; 0 — температура потока рабочего тела
Отдельные теплообменники, их группы п парогенераторы в целом представляют собой тепловые объекты регулирования и управления. Тепловые объекты обладают рядом свойств, которые позволяют выделить и,х в особый класс объектов, объединяемых типовыми динамическими хар актер истинами.
Движение потоков вещества и энергии в тепловых объектах может быть установившимся (стационарным) или нестационарным. В первом случае величины, характеризующие теплофизические свойства потоков на входе x-i и выходе pi тепловых объектов (давление, температура, расход и др.), остаются постоянными, во втором изменяются во времени.
В реальных условиям всегда имеют место колебания потоков энергии и вещества, однако, если эти колебания малы, режим объекта может считаться стационарным. Стационарные режимы описываются статическими характеристиками вида yi=kXi (см. рис. 1-9), нестационарные— динамическими вида г/Д/) =Яхг(/)] (см. рис. 1-11).
Тепловые объекты представляют собой термодинамические системы, которые можно представить в виде устройства с несколькими входными п выходными величинами, являющегося упрощенной физической моделью реального объекта. Так, например, упрощенная физическая модель парогенератора представляет собой теплообменник типа «труба в трубе» (рис. 2-1), в кольцевом канале которого движутся продукты сгорания, а во внутреннем — рабочее тело — теплоноситель (вода пли пар) 58
Совокупность математических зависимостей в виде алге браических или дифференциальных уравнений, описывающих взаимосвязи между входными хг и выходными величинами у± физической модели, образует ее математическую модель. При составлении математических моделей тепловых объектов используют модели с сосредоточенными и распределенными теплофизическими параметрами. В моделях с распределенными параметрами свойства греющих газов и рабочего тела, а также геометрические размеры каналов изменяются вдоль пути
Вода
Рис. 2-1. Физическая модель парогенератора и парового тракта ТЭС.
/ парообразующая поверхность нагрева парогенератора; 2 сопротивление пароперегревателя; 3 — емкость народно тракта; 4 — сопротивление турбины с клапанами; 5 к<*н юнсагор турбины.
движения потоков. Математическое описание такой модели является довольно сложным. Для его упрощения в целях определения приближенных динамических характеристик тепловые объектов прибегают к составлению моделей с сосредоточенными параметрами. Масса и энергия таких систем сосредоточены в одной или нескольких материальных точках, а физические величины, характеризующие систему в каждой точке, не зависят от пространственных координат и являются лишь функциями времени, т. е. считается, что параметры в системе постоянны по длине теплообменника па конечном участке.
При таком подходе корректная (сравнительно точная) модель сложной системы или парогенератора в целом может быть представлена в виде последовательного или параллельного соединения участков с сосредоточенными параметрами, представляющих собой источники 59
вещества или энергии или гидравлические сопротивления. Физические величины, характеризующие свойства потоков вещества и энергии при таком представлении теплового объекта, зависят только от времени.
2-2. Основы аналитического определения динамических характеристик тепловых объектов
В качестве примера составления математической модели теплообменника рассмотрим процесс изменения давления пара в трубопроводе при изменении давления на входе pi и выходе р2 трубопро-
вода и при изменении степени открытия регулирующего клапана g. Физическая модель трубопровода (паропровода), соединяющего парогенератор с турбиной, представлена на рис. 2-1, структурная схема математической модели — на рис. 2-2.
Запишем основные уравнения термодинамики для теплового объекта с сосредоточенными па-
Рис. 2-2. Структурная схема парового тракта парогенератора.
раметрами применительно к рассматриваемой физической модели. . Уравнение сохранения вещества
D,-D = V-^-; (2-6)
уравнение состояния
р=Ш. (2-7)
уравнение движения (зависимость между перепадом давления на сопротивлении 2 и расходом пара А)
Рг-р=^^-, (2-8)
Г
где g— приведенный коэффициент гидравлического сопротивления пароперегревателя (постоянная величина); уравнение клапана
F-
(2-9)
где |1!Л — коэффициент сопротивления Клапана (переменная величина, зависящая от степени открытия клапана). Начальные условия в «сходной системе уравнений (2-6) — (2-9) задаются величинами стационарного режима или же берутся из теплового расчета при номинальных значениях £>°|, D°, р0, ь°кл, p°i, р°2, 0о. Для перехода от системы уравнений (2-6) — (2-9), описывающих статику процесса, к уравнениям динамики запишем каждую переменную величину, входящую в (2-6) — (2-9), через ее постоянное значение в начальный момент времени и приращение: хг = л'01 + Дхг. Поскольку система в общем случае нелинейна, для рассмотрения ее в линейном приближении будем иметь в виду лишь малые значения приращений Лх;. После преобразований исходной системы (2-6) (2-9) с учетом записи ее переменных
Лг в приращениях, г. е. описывающих уже нестационарный процесс, из нее вычитают эту же систему уравнений для стационарного (( тагпческого) режима при Х{=х°г. В результате получим систему линейных уравнений, описывающих дина.нику приращений параметров х,-и у{:
Ы), - Д£) — V (при == (А; (2-10)
LIL \ CvL ]
Др“Ш/"+(>)лЛО: <2-,1)
д/л - Д/2=-- ДД; (2-12)
М)
Др др,=-^до+^а.дЕ„...^.др, (2-13) где 6/л=р°г /)0 сопротивление пароперегревателя и паропровода в стационарном режиме; Ьр2=ро—Р°2 — перепад давления па регулирующем клапане в стационарном режиме.
Следует замети и., что такая линеаризация не всегда допустима при рассмотрении режимов, изменяющихся в широком диапазоне, однако опа вполне корректна при изучении работы автоматических систем стабилизации, обеспечивающих поддержание регулируемых величин tp из уравнений (2-10)— (2-13) с высокой точностью вблизи заданных значений.
В систему уравнений (2-10) — (2-13) входит восемь переменных величин, из которых четыре (Д/ц, Дрг, Д£кл,
АО) Являются независимыми, т. е. могут рассматриваться как возмущения на входе рассматриваемой системы, а остальные четыре (Др, ADU &D, Др) являются их функциями и подлежат определению.
Для упрощения математических выкладок и уяснения сути аналитического расчета предположим, что в поставленной задаче искомой величиной является лишь динамика канала воздействия р4—>р.
Таким образом, будем считать в (2-11) -(2-13) 0, ра и ||(л постоянными величинами, а их приращения Д; равными нулю.
Перепишем систему уравнений (2-10) — (2-13) для этого случая:
ДО.-ДО = У^; (2-14)
(2-'5)
Др1=_^£ЕдО1; (2-16)
Ьр^-‘Рг ДО ^ДР. (2-17)
j А) ро
Сведем уравнения (2-14) — (2-17) в одно, подставив в уравнение (2-14) значения других зависимых переменных ДО, ДО] и Др, выраженные из уравнений (2-15) — (2-17) через искомую переменную Др и независимую величину Дрц
А А Д) , Dt) [ t)p \
Др, -- Др .°-----Др (-Г-) =
1 2ор. 2Лрг ‘ 2р0 др
(2-18)
Далее сгруппируем члены с Др в левой части уравнения (2-18), а члены с независимой переменной Api — в правой и поделим обе части на коэффициент, стоящий перед искомой переменной Др.
В результате получим:
л I________1__ W ф
Р ’ / 1 . 1 <1? \ /Др» др dt 6р2 ро др J
=4^- v~i---------------Да (2-19)
\ йРг + Ро др J 0
Введем обозначения:
1 . и — k
1___1__dp ’
0/2 ’’’ Po dp
T_%b_k_d? (2-20)
Do po dp
где 5/21, 5рг, po и Do равны их номинальным значениям, взятым для стационарного режима; (др/др)^ определяются по табличным зависимостям для водяного пара [Л. 3]; Vp0= Go —масса пара в трубе.
Перепишем дифференциальное уравнение (2-19) с учетом принятых обозначений (2-20):
Ар Ю +7’-Чг- = V/91 (2‘21)
Его решение во временной области \р =-/(/) имеет вид переходной характеристики для уравнений вида (1-1) или (1-8), т. е. является экспонентой
t
= kpbp, (1-е т У (2-22)
Для определения динамических характеристик рассматриваемого участка в виде передаточной функции пли амплитудно-фазовой .характеристики применим к (2-21) (при пулевых начальных условиях и возмущающем воздействии Д/д в виде ступенчатой функции) преобразование Лапласа— Карсона. Предварительно обозначим выходную величину участка Др через у=Ар!ро, входную через Xi=Api/po, а их изображения через У(р) н Х(р), тогда
У(р)(1+7р) = РрЛ(р), (2-23)
где p=dldt — оператор Лапласа.
Из уравнения связи между изображениями выходной и входной величин можно получить передаточную функцию участка по каналу воздействия рг—>p(xi—>у)
k
W(p)=-V^'rr (2-24)
и его амплитудно-фазовую характеристику k
(2'25)
63
2-3. Составление математических моделей тепловых объектов
Большинство тепловых объектов на электрических станциях — сложные динамические системы с распределенными параметрами. Аналитическое определение статических и динамических характеристик таких систем, т. е. составление дифференциальных уравнений, связано с большим объемом расчетных и исследовательских ра-
Рис. 2-3. Принципиальная технологическая схема парогенератора.
1—топка; 2—барабан; 3 — газоход; 4— дымосос; 5 — вентилятор; 6 ~ воздухоподогреватель; 7—водяной экономайзер; 8 — циркуляционный контур; 9— пароперегреватель; 10 — горелки; 11— бункер пыли; 12— питатели пыли; 13 — короб первичного воздуха; 14 — пылепр оводы.
бот. Один из методов упрощения расчетов состоит в представлении сложного объекта с распределенными параметрами в виде последовательного или параллельного соединения участков с сосредоточенными параметрами, отличающихся единством конструкции или протекающими в них физическими и технологическими процессами и сравнительной простотой математического описания. Рассмотрим, например, процесс изменения давления перегретого пара в трубопроводе па выходе парогенератора, принципиальная технологическая схема которого изображена па рис. 2-3. Проследим прохождение сигнала по каналу топливо В; — давление перегретого пара рПЛ1.
Как сложная динамическая система парогенератор может быть разбит на ряд более простых участков (рис. 2-4).
Первый участок Wt — транспортировка пылевидного топлива питателями пыли из бункеров пыли по пыле-нроводам к горелкам (см. рис. 2-3).
Динамические свойства этого участка позволяют приближенно считать его звеном транспортного запаздывания с передаточной функцией е~р\ в которой величина т зависит от скорости движения пылевоздушной смеси и длины пылепровода (на современных парогенераторах т=0,5-?-2,5 с).
Рис. 2-4. Структурная схема парогенератора по каналу воздействия Рп.п.
Следующий участок IF2— топочная камера. Здесь происходит подача топлива в топку, его воспламенение п сгорание (полное или частичное).
Процесс тепловыделения приближенно может быть описай уравнением инерционного звена первого порядка с передаточной функцией 1Г2=Л2/(1 + Т2р), где величина Т2 колеблется от нескольких секунд до нескольких десятков секунд в зависимости от типа парогенератора, вида топлива и других факторов. Тепловая энергия, выделившаяся в результате сгорания топлива, воспринимается радиационными и конвективными поверхностями нагрева парогенератора. Следующий участок W3—процесс теплопередачи. Fro динамика приближенно может быть описана уравнением инерционного звена первого (или более высокого) порядка с передаточной функцией Ws='ksf(l + T3p).
Следующий участок №4 образуют барабан, опускные трубы Dоп циркуляционного контурз, экрэнные поверх-пости (подъемные трубы — Dn0H), где происходит процесс парообразования. Здесь происходит передача тепла через стенки труб воде, нагревание ее до кипения, образование пара и перенос его из экранных труб в барабан.
5—626 65
Физическая сущность процесса, происходящего в этом участке, поясняется структурной схемой на рис. 2-4 и заключается в том, что изменение подводимого к воде тепла Q\ приводит к изменению двух регулируемы^ величин — паропронзводительности Сб и давления пара в барабане ре, которые одновременно оказывают воздействие на паропроизводительность подъемных труб Dnon, т. е. являются и входными величинами. Таким образом, рассматриваемый участок не является звеном направленного действия, но, поскольку он включен последовательно с предшествующими направленными звеньями — пылепроводами и топкой, направленность парогенератора как системы в целом со храняется. Это означает, что изменения Dp и Рб не окажут обратного воздействия на количество топлива Вт, подводимого в топку, и на QT и Q'T.
Если предположить, что Q'T изменится скачком, а расход пара />б будет поддерживаться постоянным, например, с помощью регулирующих клапанов турбины или другого потребителя пара, то интересующая нас кривая переходного процесса по давлению пара в барабане Рб будет иметь форму, близкую к экспоненте. Передаточная функция по каналу 1Г4 приближенно может быть представлена в виде инерционного звена первого порядка IF4=^4/1+Т’4р.
Следующий участок W5 составляют пароперегреватель и присоединенный к нему трубопровод перегретого пара, в котором происходит изменение интересующего нас давления. Рассматриваемый участок имеет три вы хода со стороны парогенератора; Dp, рр и Q"? Динамика этого участка по каналу ре,—*~Рп.и (pi—*~р) определена аналитически [формулы (2-21) и (2-24)]. Результирующую расчетную передаточную функцию парогенератора по каналу В,с——рр—рп-а можно определить перемножением передаточных функций последовательно включенных звеньев IFi, №г, №4, Рассмотренный
выше способ составления передаточной функции сложного объекта посредством соединения простых звеньев, передаточные функции которы,х известны или легко определяются, называется структурным моделированием. Составление дифференциальных уравнений и структурное моделирование предусматривают применение расчетных методов определения динамических свойств сложных объектов. Однако эти методы не всегда могут 66
обеспечить достаточно точное воспроизведение фактической динамики объекта. Поэтому последняя часто определяется опытным путем1. При этом возникает обратная задача: по известной экспериментальной временной характеристике требуется составить математическую модель объекта.
При описании динамических свойств тепловых объектов с помощью упрощенных математических моделей широкое распространение получили следующие соединения простых звеньев:
а) инерционного звена первого порядка, последовательно соединенного с запаздывающим звеном,
(2-26)
б) интегрирующего звена, последовательно соединенного с запаздывающим звеном,
ь е~{п
(2-27)
При замене сложных объектов соединениями просты^ звеньев их динамические свойства могут быть описаны небольшим числом параметров. Рассмотрим способы такой замены на примере экспериментальной переходной кривой по давлению пара при возмущении топливом для барабанного парогенератора, приведенной на рис. 2-5,а. Простейший способ состоит в том, что к кривой переходного процесса в точке ее перегиба (точка а на рис. 2-5,а) проводится касательная до пересечения с установившимся значением регулируемой величины и отрицательной полуосью ординат, как показано на рис. 2-5,а. Далее через точку О' пересечения касательной с осью абсцисс проводится прямая, параллельная оси ординат О'С.
Указанные построения позволяют определить длины отрезков Ь, х и Т. При этом линия О'а одновременно является касательной к экспоненте, сдвинутой вправо на отрезок х от начала координат Это означает, что исследуемый объект может быть представлен в виде последовательного соединения двух звеньев: запаздывающего звена со временем запаздывания х и передаточной
1 Методика проведения опытов по определению временных характеристик приведена в приложении 1.
5*
функцией Wi (/?) — e и инерционного звена первого порядка с коэффициентом усиления k, постоянной вре мени Т и передаточной функцией
k
1 + Гр
Рис. 2-5. Экспериментальные кривые разгона парогенератора ТП-87.
а — по давлению перегретого пара при возмущении расходом топлива (газа); б — по уровню воды в барабане при возмущении расходом питательной воды.
Реальная кривая переходного процесса //(/) (сплошная линия) заменяется участком запаздывания т и экспонентой y(t)=kx(l—е-'1г) (прерывистая линия). Динамические свойства объекта при такой замене характеризуют три величины:
1) Коэффициент усиления или передачи k=y>'v/elx. Обратная ей величина—степень самовыравппваиия р= — 1//а; в данном случае
__ Ддуст ____„. КГС/СМ2
ДД. м3/с
Р = 0,042
м3/с
кгс/см2
Коэффициент р характеризует присущее многим 4ёП-лочпергетпчсским объектам свойство самовыравнпвания или саморегулирования, т. е. способность объекта самостоятельно восстанавливать нарушенное равновесие между притоком и стоком энергии или вещества. При этом регулируемая величина после нанесения возмущения переходит к новому установившемуся значению. Однако в большинстве случаев это новое установившееся значение велико и установка автоматических регуляторов диктуется необходимостью снижения ууст.
2) Время запаздывания г — определяется отрезком, отсекаемым касательной О'а на оси времени; является условным запаздыванием, поскольку отклонение регулируемой величины начинается в реальные объектах гораздо раньше момента т. В данном случае т=120 с.
3) Постоянная времени Т, равная по величине подкасательной к экспоненте (1—e~tlT),— определяется временем, за коюрое сигнал y(t), нарастая с постоянной скоростью после приложения ступенчатого возмущения, достигнет нового установившегося состояния (за вычетом времени запаздывания). С другой стороны, 7' численно равна площади S, заключенной между кривой разгона и уровнем ее установившегося значения г/уст= = kx [см. формулу (1-24)], поделенной на это значение (за вычетом времени запаздывания т).
В данном случае
S 2570 с-кгс/смг
(уУсг 4,75 кгс/см2
120 с = 400 с.]
Построение математической модели для объекта, не обладающего свойством самовыравнивания, выполняется в соответствии с рис. 2-5,6. В этом случае до пересечения с осью времени продолжается прямолинейный участок экспериментальной кривой у(1). Передаточная функция объекта имеет вид:
«?</>)= -у г-”.
г. е. представляет собой последовательное соединение шепа запаздывания и интегрирующего звена.
Динамические свойства указанных объектов характеризуются двумя величинами: запаздыванием т и коэффициентом пропорциональности интегрирующего звена feH=tga/x=b/XT.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите и поясните законы термодинамики, на которых базируется вывод уравнений динамики теплообменников.
2. Как осуществляется линеаризация исходных уравнений.
3. Поясните вывод уравнений (2-19), (2-21) и (2-23).
4. Поясните структурную схему математической модели парогенератора, изображенной на рис. 2-4.
5. Начертите типовые кривые переходных процессов для объекта, обладающего и не обладающего самовыравниванием.
6. Какие величины характеризуют динамические свойства типовых тепловых объектов? Как их определить по экспериментальной кривой разгона?
ГЛАВА ТРЕТЬЯ
ЗАКОНЫ РЕГУЛИРОВАНИЯ И СПОСОБЫ ИХ ФОРМИРОВАНИЯ
В АВТОМАТИЧЕСКИХ РЕГУЛЯТОРАХ
3-1. Основные законы регулирования
Понятие о законах регулирования. Рп-закон
Предположим, что оператору требуется поддержать заданное значение регулируемой величины (например, уровня воды в барабане) при помощи измерительного прибора, показывающего отклонения регулируемой величины от заданного значения, и сервопривода, скачком перемещающего регулирующий орган из одного крайнего положения («закрыто») в другое («открыто»).
Схема управления объектом для указанного случая изображена на рис. 3-1,а. При этом оператор может перемещать регулирующий орган 2 из одного положения в другое либо при некотором определенном (небольшом) отклонении уровня воды/7g в водомерном стекле 4 от заданного, либо лишь по достижении уровнем воды в баке верхнего или нижнего допустимого предела.
Условимся называть в дальнейшем математическую зависимость между положением регулирующего органа хр и отклонением регулируемой величины у законом регулирования:
xv=f(y) ИЛИ Xp(t) =f[y(t)l (3-1)
В первом случае закон регулирования описывается двумя уравнениями:
хр при оо > У> Уо', Х™КС При -00<1/<1/о.
(3-2)
I рафнческим изображением уравнении (3-2) ян-ihci ся рис. 3-1,6.
Во втором случае (рис. 3-1,в) закон регулирования
имеет вид:
хрмин при оо >y>t/Ma*c; х™кс при у"и“^у>-оо.
I (3-3)
Па участке т/макс>у >1/мин величина хр имеет два значения хмаКт или хМН11 в зависимости от предшествующих р 4 р
Рис. 3-1. Система регулирования уровня воды в баке двухпозиционным регулирующим органом.
а — принципиальная схема системы регулирования; / — бак; 2—регулирующий орган; 5 — сервопривод; 4 — стекло; 5 прибор; 6 — оператор или автоматический регулятор; б и в — графики зависимости xp^=f(y*); г и д — процессы регулирования в системе с двухпозиционным регулятором; /ь /2. /я и /<—точки переключения.
значений у. Условия скачка при переходе с верхней ветви у па нижнюю записываются следующим образом:
у = умакс,’хр = х;’ин и dyfdt<0,
с нижней на верхнюю:
У=₽*ян. 5 = и dyldi>Q.
Такой способ регулирования называется двухпозиционным (по числу позиций, которые может занимать регулирующий орган). В обоих случаях форма процессов регулирования будет иметь колебательный характер. Функции оператора может выполнять измерительный прибор, снабженный электромагнитным контактным устройством, управляющим перемещением сервопривода в нужном направлении. Графики движения хр(0 = =Я//(0] Для этих случаев приведены на рис. 3-1,г и д.
Закон регулирования, осуществляемый указанным регулятором, описывается нелинейной статической характеристикой, которая связывает хр с установленным значением у, поэтому такой регулятор является нелинейным динамическим звеном с релейной характеристикой 1 и носит название релейного позиционного Рп-регу-лятора.
Промышленные двухпозиционные регуляторы чаще всего выполняются на базе измерительных приборов (стрелочных или самопишущих), снабженных контактным устройством или регулирующей приставкой, управляющей сервоприводом регулирующего органа.
П- и И-законы
Проанализируем теперь действия оператора при дистанционном регулировании температуры перегретого пара барабанного парогенератора (рис. 3-2). В распоряжении оператора имеются автоматический показывающий и самопишущий потенциометр и регулирующий клапан на подводе охлаждающей воды к пароохладителю, управляемый дистанционно с помощью сервопривода. В случае отклонения /п.п пара от заданного значения оператор увеличивает или уменьшает расход охлаждающей воды DOB через пароохладитель посредством перемещения регулирующего клапана. При этом изменять положение клапана можно различным образом Например, перемещение клапана можно осуществлять пропорционально отклонению регулируемой величины. В этом
1 Характеристики, изображенные па рис. 3-1,6 и в, совпадают с характеристиками C/Bbix=J(/Bx) электромагнитного реле.
случае спя и. между Лр и у, т. е. закон регулирований, можно выразить уравнением
Xp<t)=Kvy(t), (3-4)
где Л'р — коэффициент пропорциональности.
Вели в распоряжении оператора имеется сервопривод с регулируемой скоростью перемещения, то он может перемещать клапан со скоростью, пропорциональной скорости отклонения регулируемой величины y(t),
Рис. 3-2. Система регулирования /п.п с регулирую щим клапаном, управляемым сервоприводом с переменной скоростью движения.
/ — бнрнбпн; 2—пароперегреватель; 3— коллектор впрыска охлажлнкмцей воды; 4 — прибор, записывающий /ж п; 5 датчик; 6 сервопривод с регулируемой частотой вращения выходного вала; 1 — клапан, регулирующий расход охлаждающей воды; 8 — оператор или автоматический регулятор.
о которой он может судить по наклону кривой записи /п.п- При этом закон регулирования выразится уравне* н нем
dXt' — IZ dl'ity (О С.
dt Лр dt ‘
Выражения (3-4) н (3-5) соответствуют пропорциональному закону регулирования или сокращенно П-за-кону. В этом случае каждому установившемуся значению регулируемой величины соответствует определенное положение регулирующего органа. Пример промышленного автоматического регулятора (поплавковый регулятор уровня), реализующего принцип регулирования по отклонению или П-закон регулирования, приведен на рис. В-1.
Для замкнутой АСР, состоящей из объекта и П-ре-гулятора, характерно наличие остаточного отклонения регулируемой величины по окончании процесса регулирования.
Регулирование можно осуществлять и так, чтобы скорость перемещения клапана была пропорциональна величине отклонения y(t), т. е.
(3-6)
где Ли—коэффициент пропорциональности или передачи.
Проинтегрировав обе части (3-6), получим:
*Р(0=*ир(0<&- (3-7)
о
Последнее аналогично уравнению интегрирующего звена (1-61). Его решение имеет вид:
хр(/) = Л'И/,
где характеризует скорость нарастания сиг-
нала на выходе регулятора хр после нанесения ступенчатого возмущения на входе y(t) (см. рис. 1-30,а).
Уравнение (3-7) или указанный способ перестановки клапана характеризует интегральный закон регулирования или И-закон.
Другая форма записи интегрального закона имеет вид:
оо
*₽(*)==(3-8)
о где — условный коэффициент передачи интегрального регулятора, а ТИ — условная постоянная времени интегрирования.
Пример автоматического регулятора давления, реализующего И-закон регулирования, приведен на рис. 1-1.
Для замкнутой одноконтурной АСР, состоящей из объекта и И-регулятора, характерно отсутствие остаточного отклонения регулируемой величины но окончании процесса регулирования (рис. 1 6,а, б).
74
ПИ- и ПД-законы
Вернемся к системе регулирования перегрева пара, изображенной на рис. 3-2. Если перемещать клапан, руководствуясь только скоростью отклонения регулируемой величины, можно нарушить соответствие между требуемым количеством охлаждающей воды и отклонением, а если учитывать только отклонение /п.п, можно запоздать с подачей требуемого количества воды. Поэтому, исходя из требований соответствия t и D0B при перестановке клапана в каждый момент времени, целесообразно руководствоваться не только отклонением или скоростью отклонения регулируемой величины, а учитывать оба эти фактора одновременно. При этом возможны два способа:
I) перемещать регулирующий орган со скоростью, пропорциональной отклонению и скорости отклонения
2) переставлять регулирующий орган в положение, пропорциональное отклонению и скорости отклонения y(t).
В обоих случаях оператор руководствуется не только отклонением температуры, но и направлением ее изменения по кривой записи на приборе.
Первый способ перестановки клапана описывается
I уравнением
(М)
Проинтегрировав правую и левую части уравнения (3-9), получим:
оо
Хр (0=^(0 4--^- р (3-10)
о
Такой закон регулирования в соответствии с наименованием составляющих правой части (3-10) носит название пропорционально-интегрального или ПИ-закона.
В замкнутой одноконтурной АСР, состоящей из объекта и ПИ-регулятора, отсутствует остаточное отклонение регулируемой величины. В то же время при устано вившемся значении регулируемой величины регулирую
11С31
щий орган может занимать различные положения. Решение уравнений (3-9) и (3-10) имеет вид:
И
Из графика решения хр(/), изображенного на рис. 3-3, становится ясной правомерность замены коэффициента пропорциональности интегрирующего звена в уравнениях (3-6) и (3-7) Ди на численно равное ему отношение Кр/Та.
Действительно
tg а К„у .. К.
При втором способе перемещения регулирующего ор гана связь между хр и у запишется следующим образом:
+ (3-11)
где Кп и Т’д -коэффициент пропорциональности диффе-
ренцирующей составляющей и постоянная времени со-
Рис. 3-3. График Хр(/) для ПИ-закона.
место остаточное отклонение
ответственно. Они имеют тот же геометрический и физический смысл, что и и Тд для реального дифференцирующего звена (формула (1-77), рис. 1-37]. Закон регулирования в соответствии с паи-мспо1ваппем составляющих правой части (3-11) носит название пропорционально - дифференциального или ПД-закона.
В замкнутой АСР с ПД-регулятором имеет регулируемой величины.
IIU0I
ПИД -закон
Более точного поддержания регулируемой величины можно добиться, если скорость перемещения клапана (см. рис. 3-2) будет зависеть не только oi регулируемой 76
величины ((уклонения) и ее производной, но также и от в горой производной (Py ^l'dt2, учитывающей ускорение (.замедление) роста температуры. Перемещение регулирующего органа в этом случае будет описываться более сложным уравнением:
dxp ___is dy (О । ,, I iz 71 d?y{t) .п «ох
dt ~'Р dt + Ти Н0+лд/д dP
или
оо
*р (О=кру (0+Т7 р (0 dt+Т- <3’12а) о
Перемещение регулирующего органа в соответствии с (3-12) и (3-12а) называется иропорционально-иптс-грально-дифферепциальпым законом регулирования или ПИД-законом.
В замкнутой АСР с ПИД-регулятором отсутствует остаточное отклонение у и обеспечивается большее быстродействие при перемещении регулирующего органа по сравнению с ПИ-законом.
Автоматические регуляторы различной конструкции имеют единую классификацию по виду реализуемых ими законов регулирования. В соответствии с уравнениями (3-2)- (3-12а) существуют следующие типы регуляторов *:
релейный позиционный — Рп-регулятор (3-2) и (3-3); пропорциональный —П-регулятор (3-4) и (3-5);
интегральный — И-регулятор (3-6) и (3-7);
пропорционально-интегральный—ПИ-регулятор (3-9) и (3-10);
пропорционально-дифференциальный — ПД-регуля-гор (3-11);
пропорциопально-иптегра льно-дифференциальный — ПИД-регулятор (3-12), (3-12а).
Динамические характеристики П- и И-регуляторов могут быть выражены с помощью динамически^ характеристик (временных и частотных) соответствующих типовых звеньев.
1 В принципе возможно построение регуляторов, обеспечивающих более высокое качество регулирования и основанных на других более сложных математических законах, но их реализация пока связана с техническими трудностями [Л. 4].
Таблица
Г ------------------
Ma i ем этические модели или структурные схемы ПД-, ПИ и ПИД-регуляторов могут быть изображены в виде параллельных соединений пропорционального, интегрального и дифференцирующего звеньев в зависимости от вида закона регулирования. Динамические характеристики регуляторов сведены в табл. 3-1.
3-2. Формирование законов регулирования в автоматических регуляторах
Требования к автоматическим регуляторам
Автоматические регуляторы, действующие на ТЭС, помимо высокой надежности, должны обладать высокой чувствительностью к изменениям входного сигнала, необходимой для точного поддержания регулируемых величии вблизи заданного значения Для этого в составе
регулятора предусматривается специальное измерительное устройство Кроме того, автоматический регулятор должен развивать на выходе усилие, достаточное для перемещения регулирующих органов (клапанов,задвижек, шиберов), т. е. содержать в своей структуре достаточно мощный исполнительный механизм (сервопривод).
Для реализации выбранного закона регули-
Рис. 3-4 Функциональная схема автоматического регулятора непрямого действия.
/ — измерительное устройство; 2— командно-усилительное устройство; 3-~ сервопривод; 4 — регулирующий орган;
5 — собственно регулятор; Э — источник внешней энергии; ЗУ — задатчик управления.
рования и изменения параметров настройки регулятора в необходимых пределах в его состав должны входить
устройства формирования закона регулирования и изменения (коррекции) параметров настройки. Необходимо
также иметь возможность изменения в широких пределах заданного значения регулируемой величины u(t), с которым сравнивается ее текущее значение y(t). Это требование предусматривает наличие задатчика ручного или автоматического управления (ЗУ) в составе регулятора.
Выполнение перечисленных требований возможно лишь при использовании автоматических регуляторов непрямого действия с функциональной схемой, изображенной на рис. 3-4.
Формирование законов регулирования с помощью корректирующих устройств и сервопривода
Наиболее распространенные сервоприводы, вводящие в состав автоматических peiуляторов, обладают характе-
ристиками интегрального или пропорционального звена. Если сервопривод имеет линейную статическую характе-
ристику, т. е. является пропорциональным звеном, на его
Рис. 3-5. Структурная схема ПИ-регулятора с последовательной коррекцией параметров настройки.
базе может быть осуществлен любой линейный закон регулирования путем последовательного подключения к нему командно - усилительного устройства (КУУ), корректирующего настройку выбранного типа регулятора (метод последовательной коррекции). Например, ПИ-регулятор может быть реализован
в соответствии со структурной схемой, изображенной на рис. 3-5.
На базе сервопривода, обладающего характеристиками интегрального звена, методом последовательной коррекции реализуется лишь интегральный закон регулирования в соответствии с функциональной схемой, изображенной на рис. 3-4. В отличие от регулятора с пропорциональным сервоприводом интегральный сервопривод участвует в формировании закона регулирования:
г;(/,)=-Ж=^wV’ (3'13)
Для формирования законов, отличных от интегрального в регуляторах, имеющих в своем составе интегральный сервопривод, требуются иные методы коррекции входного сигнала. Придать необходимые динамические свойства цепи, состоящей из КУУ и сервопривода, можно при помощи обратных связен методом параллельной коррекции, являющейся разновидностью встречно-параллельных соединений звеньев, рассмотренных выше (см. § 1-'6)_ В качестве примера рассмотрим регулятор, состоящий из усилителя с коэффициентом усиления /<у, сервопривода и звена отрицательной обратной связи 80
(корректирующего устройства) с Характеристикой
(/?) (рис. 3-G). В соответствии с правилом определения передаточной функции встречно параллельных звеньев
(п) — Ц7 (р) =_______^yWc.n (Р)_____
1+лугос(р)1Г/сп(р)
(3-14)
где W'c.n(p)—передаточная характеристика сервопривода.
При что обычно имеет место в автоматиче-
ских регуляторах, в уравнении (3-14) можно пренебречь единицей в знаменателе; тогда
Wp(p)
SltZc.n(P)
Ку^о.с(Л^с.п(Р)
1
с И '
(3-15)
Рис. 3-6. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связи.
Итак, при использовании обратной связи и достаточно большом коэффициенте усиления в прямом канале (Лу»1) характеристики регулятора целиком определяются устройством обратной связи. Это важнейшее свойство систем с обратной связью широко попользуется при конструировании автоматических регуляторов, которые должны, во-первых, значительно усиливать
входной сигнал по мощности и, во-вторых, по возможности точно воспроизводить выбранный закон регулирова-
ния при изменении в широких пределах параметров настройки (коэффициентов 1\р, Тк, Кя и Тд в уравнении 11-, ПИ- и 1111Д-законов).
Первое условие осуществляется в прямом канале усилительное устройство — сервопривод, второе — в маломощных корректирующих цепях обратной связи, выполненных, например, на пассивных 7?С-элеменгах в электрических системах или же на ид аналогах в гидравлических и пневматических системах. При этом характеристика регулятора в целом будет определяться характеристиками корректирующего устройства (цепи обратной связи).
6—626
81
Рассмотрим структурные схемы автоматических регуляторов с типовыми сервоприводами, воспроизводящие основные законы регулирования методом параллельной и последовательной коррекции.
П-регулятор
и
о
Рис. 3-7. Кривая переходного процесса П-ре-
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 3-6.
Отрицательная обратная связь осуществляется по положению регулирующего органа, т. е. на вход устройства обратной связи поступает сигнал с вывода серво привода. Конструктивно это осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и КУУ. Характеристики П-регуляторов (операторная и частотная) имеют вид:
(3-16)
Для того чтобы (3-16) было тождественно уравнению пропорционального регулятора Хр—КрУ*, необходимо выполнить условие
В соответствии с (3-17) обратная связь должна быть выполнена на базе безынерционного усилительного звена. Коэффициент усиления звена обратной связи Ао.с=б= = 1/Кр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
Для математического описания пропорционального регулятора с жесткой обратной связью по положению регулирующего органа используют выражение
(3-18>
П-регуляторы имеют орган настройки для изменения величины б, которая является параметром его настройки. Переходная характеристика реального П-регу-
•z'pft)
"рУ*
t
t
лятора (рис. 3-7) несколько отличается от характеристики идеального в начальной своей части из-за ограниченной скорости сервопривода.
ПД-регулятор
Функциональная схема ПД-регулятора представлена на рис. 3-8,я. Дифференцирующая составляющая формируется с помощью специального прибора — дифференциатора, обладающего характеристикой реального дифференцирующего звена и служащего для оценки
Рис. 3-8. ПД-регулятор. а — структурная схема б кривая переходного процесса.
скорости изменения регулируемой величины. Скоростной сигнал регулируемой величины суммируется с сигналом по ее отклонению. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются отрицательной жесткой обратной связью. В замкнутом контуре усилитель — привод — обратная связь формируется П-закон регулирования с коэффициентом усиления Др. Характеристика реального ПД-регулятора имеет вид:
(3-19)
или
У» > ’ + У )
ь*
wP{Pf-у*(р) г
(•> - С)
83
Переходная характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3-8,6 и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора является степень обратной связи 6; параметрами настройки дифференциатора служат коэффициент усиления /Сд и постоянная дифференцирования Тд, произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
П И-регулятор
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 3-9). В первом варианте (рис. 3-9,а) сервопривод охватывается отрицательной обратной связью [ООС] и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи.
Рис. 3-9. Структурные схемы ПИ-регуляторов.
а — сервопривод охвачен ООС; б — сервопривод не охвачен ООС.
Во втором варианте (рис. 3-9,6) сервопривод не охватывается обратной связью и ПИ-закон регулирования формируется путем охвата обратной связью только усилителя /(у. При этом характеристики регулятора в целом определяются свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ду— W'o.c) и сервопривода.
Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
В первом варианте устройство обратной связи должно иметь характеристику реального дифференцирующего 84
mciia (1-77):
tfZ Ip) — КдГд/> • Wo.cW l+Tap
В этом случае регулятор независимо от типа сервопривода будет иметь характеристику ПИ-регулятора
1 1 + Т„р । 1
V’=-w = (3-21)
Если принять Тц = Тп и ЙГР=1/^, получим:
+ I3'22»
т. е. передаточную функцию ПИ-регулятора, описываемого дифференциальным уравнением (3-9) или (3-10). В промышленных ПИ-регуляторах в качестве обратные связей используют различные устройства: электрические, пневматические и гидравлические. Но все они являются аналогами реального дифференцирующего звена (см. рис 1-36), т. с. имеют соответствующие ему динамические характеристики и называются устройствами гибкой или упругой (т. е. изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис 3-9,6) возможны два случая:
1) сервопривод имеет характеристику интегрального тепа (например, электрический или гидравлический сервопривод с переменной скоростью);
2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной).
В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
VV"p(p) = U7Kyy(p)117cn(p), (3-23)
где
В случае использования сервопривода с передаточной функцией интегрального звена WCB(p) = 1/Тр характеристика регулятора будет иметь вид:
(3-24)
При этом для формирования в идеальном регуляторе ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
= (3-25)
что соответствует k Л
(3-26>
Последнее уравнение является оператором инерционного звена первого порядка. При охвате Ку такой обратной связью оператор регулятора в целом будет иметь вид (3-22):
«Мр)=к,(1+т5г)-
Параметрами настройки ПИ регулятора будут величины Кр и Т„.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью
Рис. 3-10. Переходный процесс в устройстве обратной связи.
Рис. 3-11. Переходный процесс ПИ-регулятора.
(рис. 3-9,6), то звено Woc(p) для того, чтобы выполнялось условие (3-22), должно иметь характеристику реального дифференцирующего звена (1-77)
Постоянная времени ПИ регулятора Ти численно равна подкасательной Тд к переходной кривой (рис. 3-10) реального дифференцирующего звена.
Промышленные регуляторы имеют специальные приспособления или органы настройки для изменения Кр и 8G
Тп в достаточно широких, но ограниченных предела^. Так как подача на вход регулятора ступенчатого возмущения не составляет труда, установленные значения /Ср и Тп можно определить из его экспериментальной переходной кривой (рис. 3-11). Наклонный участок О А на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
а Тю численно равно времени, небрсодимому для перемещения выходного вала сервопривода из положения xpi до его удвоенного значения 2хр). Отсюда второе название Тп — время удвоения выходного сигнала ПИ-регу лятора хр при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что К?ГТп определяет степень ввода интегральной составляющей в ПИ-закон регулирования:
t
о
Действительно, при безграничном увеличении Ти вто-К /.
рой член в последнем уравнении -Л I у* (/) dt будет ' и J
О стремиться к нулю и регулятор из пропорционально-интегрального превратится в П-регулятор. При этом экспонента вида Т") на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал 6 (см. рис. 3-10).
П ИД-регулятор
Его закон регулирования
+ П р
Р'?/ р I | 'д дА*
Рис. 3-12. ПоследоЁателЬ-пая (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена.
следователи! ой (рис. 3-12, а) коррекции ПИ рейдирующего
в реальных регуляторах формируется путем ' по-и параллельной (рис. 3-12,6) -регулятора с помощью реального диффе-(РД) звена. В обоих случаях ПИД-за-
кон воспроизводится лишь приближенно. При последовательной коррекции
^*пид(Р) —
_s. ТнР
1
“ 1 + V
где
(3-27)
При параллельной коррекции
^*пид(Р)
Кр(' + 7» Кр Т«Р 1 + 1 + 7дД ( +
KpII+ZhP^I ^-^+ГиГдР!]
АиД | + КдАр /'7Я(1 4~ АдАр) |
1 Г / Т \ К* 1
=-r+w г*<+’ (з-28) где
rz-x- ________А>________• у-х __-г * ~Ь АрАд
р [ 7\ \ Гп
1+а,лд1#-
ПИД-регулятор имеет четыре параметра настройки: Ар, Т„, Ад и Гд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры 88
настройки реального ПИД-регулятора 7(*р и Т*л можно определить по формулам (3-27) и (3-28).
На рис. 3-13 приведена кривая разгона реального ПИД:,:-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» х*р, связанный с дифференцированием ступенчатого сигнала с помощью РД звена.
Рис 3 13. Переходные характеристики ПИД регуляторов
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что называется законом регулирования? Приведите пример.
2. Напишите дифференциальное уравнение ПИ-регулятора. Какие величины являются параметрами его настройки?
3. Начертите структурную схему идеального ПИ-регулятора.
4. Начертите переходные характеристики П-, И- и ПИ-регулятора.
5 Как реализуются линейные законы регулирования в регуляторах прямого действия методом последовательной коррекции?
6. В чем сущность реализации линейных законов регулирования с помощью обратных связей.
7. Нарисуйте структурную схему 11И-рсгулятора с сервоприводом, охваченным обратной связью. Какой вид имеет передаточная функция устройства обратной связи для этого случая?
8. Нарисуйте структурную схему ПИ-регулятора с сервоприводом, обладающим характеристиками интегрального звена, последовательно включенным с командно-усилительным устройством. Какой вид имеет передаточная функция устройства обратной связи, охватывающего линейный усилитель для этого случая?
9. I laniniiHie дифференциальное уравнение ПИД-регулятора и назоните параметры его настройки.
ГЛАВА ЧЕТВЕРТАЯ
УСТОЙЧИВОСТЬ И КАЧЕСТВО ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
4-1. Процессы автоматического регулирования в замкнутой системе
Процессом регулирования (см. § 1-3) называется переходный процесс в замкнутой АСР, т. е. процесс перехода во времени из одного установившегося состояния 89
системы в другое под действием возмущений, приложенных в различных местах системы одновременно или порознь. С целью упрощения первоначального анализа условимся считать:
1) АСР является одноконтурной (структурная схема рис. 1-2);
2) динамические свойства объекта регулирования описываются типовыми характеристиками (2-26) и (2-27);
3) регулятор является идеальным и осуществляет основные законы регулирования — Рп, П, И, ПД, ПИ и ПИД;
4) возмущающее воздействие является однократным, ступенчатым по форме и прилагается в одной из точек замкнутой системы.
При этих условиях форма процесса регулирования определяется динамическими свойствами объекта, законом регулирования и настройкой регулятора, местом приложения и значением возмущающего воздействия.
Будем считать, что возмущения в систему могут поступать по трем каналам: со стороны нагрузки хв, со стороны регулирующего органа х и со стороны задатчика регулятора и. Представление о многообразии устойчивых переходных процессов, которые могут иметь место в одноконтурной автоматической системе с принятыми вначале ограничениями, дает диаграмма, изображенная на рис. 4-1.
Переходные процессы могут быть определены расчетным путем по известным динамическим характеристикам, опытным путем при помощи моделей объекта и регулятора, а также на действующих объектах с промышленными регуляторами. Опытный путь является наиболее достоверным, но не всегда выполним в условиях промышленной эксплуатации. Расчетный путь возможен почти всегда, но, помимо знания динамических свойств объекта и регулятора, он требует значительных затрат времени, всегда является приближенным.
Применение аналоговых или цифровых моделей является важным средством исследования переходных процессов, однако для этого требуется предварительно определить динамические характеристики объекта и автоматического регулятора, 90
Существуют различные расчетные методы построения переходных процессов. Рассмотрим метод, основанный на решении дифференциального уравнения замкнутой системы. Пусть система состоит из объекта, не обладающего свойством самовыравнивания, и ПИ-регулятора. К ней приложено ступенчатое возмущение со стороны регулирующего органа.
Рис. 4-1. Диаграмма возможных форм переходных процессов в АСР.
Исходные данные для расчета: уравнение объекта без самовыравнивания
/(0=Мх(0—-МОГ. (4-1)
уравнение 11И-рсгулятора
Кр
Х'р (/) = КрУ' (/) + у (0 - (4 -2)
Порядок расчета.
1. Объединим уравнения (4-1) и (4-2): продифференцируем (4-1) и подставим в него х'р из (4-2):
Г КР
У" (t) = k„ х' (f) -К^’ (О
(4-3)
или
1 КР
у У" (О + V' (О + / у (0 = х' (/). (4-4)
и ‘ и
При ступенчатом возмущении на входе системы после его нанесения, т. е. при
(>0/(()=0. (4-5)
2. Запишем уравнения (4-4) с учетом (4-5) в операторной форме:
Т
J^p4(t)+T„py(t) + y(t)=O. (4-6)
3. Запишем характеристическое уравнение для (4-6):
Т^/Я+Гир-Н =0, (4 7)
где
4. Представим решение (4-6) в виде суммы экспонент:
у (/) = СщЛ' + Сгср‘‘, (4-8)
где pi и р2— корни характеристического уравнения (4-7): Тк ,
Pi, s — 27’21 ± 27"а1 ‘ t4*9)
Если корни pt и р2 вещественные и отрицательные, т. е. р\ — а( и р2=—а2, то
У (п = - Сге-а'* + (4-10)
Если р|=—а~Нр и р2=—«—ф, т. е. если они комплексные и сопряженные, то
у (/) = е-а/ (Cl sin ₽/ + Cs cos PQ. (4-11)
Ci и C2 в (4-10) и (4-11) определяются из начальных условий:
р(0)=0 и р'(0)=Лих. (4-12)
Пример. Построить переходный процесс y(t) для заданных значений коэффициента пропорциональности объекта регулирования 1
Ли=17,2Па/с; параметров настройки ПП-регулятора Лр=0.00042
7’и = 30 с; величина возмущения х=0,25.
92
Запишем характеристическое уравнение системы (4-7), подставив в него заданные значения ku, kp и Т1::
4200р2+30р+1=0. (4-13)
Определим его корни:
р1=_0,00375+1’0,015;
р2=—0,00375—i0,015.
Найдем решение исходного уравнения (4-6) с учетом численных значений корней pt и р2:
у (<) =fi-o-oo375f (Ci sin 0,015/ + Сг cos о,О151). (4-14)
С учетом начальных условий (4-12) из (4-14) следует, что С2=0.
Тогда
у' (Л = — Ci sin 0,0151-0,00375с-°100375' + с-0,0037'^.-0,15 cos 0,015/.
(4-15)
Значение С, определяется установкой //'(0) Аилг = 4,3 Па/с и (1 15), откуда
С, =293 Па/с.
С учетом численных значений С| и С2=0 решение исходного уравнения системы (4-4) при нанесении ступенчатого иолмущепия х=0,25 будет:
1/(1)-с о,ооз78«29.Ч sin 0.015/ На.
(4 16)
Значения у(1) из (4-16) на
Рис. 4-2. Переходные процессы по уровню в баке при х=0,25.
отрезке времени 0—600 с:
с 0 50 >00 150 200 250 300 350 400 ио 600
'X 0 0,18 0,2 0,13 0,19 -0,00 —0,09 —0 ,06 —0,02 0,04 0,013
График переходного процесса приведен на рис. 4-2, кривая а.
Аналогично построен процесс регулирования с П-регулятором ^Ар = 0,00042 pj^ Для того же объекта и того же значения возмущения (рис. 4-2, кривая б), в — кривая разгона объекта.
4-2. Методы анализа устойчивости
Задача анализа систем регулирования в наиболее общей постановке формулируется так: дана система, каковы ее возможности?
Исследование устойчивости систем является одним
из центральных вопросов анализа, решаемых с помощью теории автоматического управления. При решении технических задач под устойчивостью линейны^ систем понимают способность системы, выведенной из установившегося состояния, снова к нему возвращаться после снятия возмущающих воздействий.
Следовательно, об устойчивости систем или звеньев
можно судить по виду их импульсной характеристики,
Рис. 4-3. Переходные процессы. а — затухающие; б — расходящиеся; в — незатухающие колебательные; г — в нейтральной системе.
колебаний, соответствует 4-3,в). Переходный п
т. е. реакции системы или звена на импульсное возмущение.
Все физические системы с точки зрения устойчивости могут быть устойчивыми, неустойчивыми и нейтральными.
В технических задачах обычно исследуется устойчивость замкнутых систем и составляющих их динамических звеньев. Устойчивый переходный процесс в результате нанесения импульсного возмущения затухает со временем (рис. 4-3,а), неустойчивый— с расходящимися колебаниями (рис. 4-3,6). Переходный процесс, имеющий вид незатухающих границе устойчивости (рис. оцесс, изображенный на
рис. 4-3,а, считается нейтральным.
Системы регулирования теплоэнергетических установок чаще всего включают устойчивые или нейтральные звенья. Так, например, устойчивым является типовой теплотехнический объект с операторной характеристи-
кой W(p)=ke ^/(l+pT) или временной характеристикой, изображенной па рис. 2-5,а.
К нейтральным относятся объекты с типовой характеристикой W (р) = /гие‘-р’/ р, например уровень воды в ба-
рабане парогенератора при возмущении расходом питательной воды, а также И- или ПИ-регуляторы с харак-
теристиками, изображенными в табл. 3-1. Однако замкнутые системы, включающие нейтральные или устойчивые звенья, при определенных условиях могут быть неустойчивыми или недостаточно устойчивыми, т. е. могут находиться вблизи границы устойчивости или иметь малое значение так называемого запаса устойчивости.
Динамические свойства объекта, находящегося в эксплуатации, как правило, можно считать постоян иыми вблизи номинальных или расчетных нагрузок. В связи с этим задача анализа устойчивости состоит в том, чтобы выяснить, при каких значениях изменяемых параметров настройки регулятора замкнутая система устойчива при различных возмущениях, действующих на систему порознь и одновременно. Для иссле доваиия устойчивости можно воспользоваться двумя методами: прямым и косвенным.
Прямой метод предусматривает получение переходного процесса экспериментальным путем на действующей установке, ее модели или с помощью расчета на основе известных динамических характеристик звеньев, составляющих замкнутую систему. При этом для суждения об устойчивости системы необходимо располагать множеством картинок отдельных переходных процессов, что требует больших затрат времени на проведение экспериментов и расчетов. Поэтому важно установить общие первоначальные требования к системе — критерии устойчивости, при помощи которых можно было бы судить об устойчивости системы без построения или экспериментального определения переходных процессов. Оценка систем при помощи таких критериев составляет сущность косвенных методов исследования устойчивости. При этом динамические характеристики объекта и регулятора лолжны быть представлены в одинаковой форме.
4-3. Понятие о корневом и алгебраическом критериях устойчивости
Предположим вначале, что требуемые характеристики объекта и регулятора даны в виде дифференциальных уравнений. На их основе составляется дифференциальное уравнение системы с регулируемой величиной 95
y(t) в качестве переменной:
апУ (О + ^п—\УП ' (О Ь • • + а'У' (О Н-
-\-a,>y(t) = kx, (4-17)
где п — порядок старшей производной; ап, an-t, ..., «о— постоянные коэффициенты.
Известно, что решение уравнения (4-17) относительно y(t) можно представить в виде двух составляющих, описывающих свободные и вынужденные колебания системы:
У(1) =Усв(0 +Увын(0,
где уВып(0 определяется неснимающимся возмущением, приложенным к системе. Поскольку об устойчивости системы можно судить по ее реакции на однократное импульсное возмущение, для изучения устойчивости можно ограничиться исследованием свободных колебаний регулируемой величины:
Усв (0 - Ctep'f + +... + сп еРп‘ , (4-18)
где Ci, Cz, ..., Сп — постоянные интегрирования, а
р2, .... рп — корпи характеристического уравнения (4-17), записанного в операторной форме:
апрп+ап-\Рп-' + ... +а1р + ао='О. (4-19)
Корни этого уравнения зависят от коэффициентов ап, an-i, ..., Со и среди них могут быть:
вещественные положительные /7»к =-|-ак;
а
вещественные отрицательные рк — — ак;
комплексные сопряженные с отрицательной вещественной частью
P*i,2—~—пк±^Рк;
комплексные сопряженные с положительной вещественной частью
Р?,2 = ак±Фк;
мнимые
P*i,2=±i'Pk;
нулевые
/Л(=0.
На рис. 4-4 показаны возможные случаи расположения корней характеристического уравнения АСР па комплексной плоскости а, ф.
Составляющая уСв(0 устойчивой системы должна стремиться к нулю по окончании переходного процесса, т. е.
Усв(О—*0; t—>оо.
Для удовлетворения этого условия необходимо, чтобы все корни характеристического уравнения (4-19) были отрицательными, если они вещественные, или имели отрицательную вещественную часть, если они комплексные. Денстви телык», уравнение (4 18) в случае вещее гневных отрицательных корней можно переписать в следующем виде:
Рис. 4-4. Расположение корней характеристического уравнения ЛСР на комплексной плоскости.
А - устойчивой системы — апериодический процесс; >< — устойчивой системы — колебательный процесс; * — системы на границе устойчивости;
О. П — неустойчивых систем; 0 — нейтральной системы.
усп(1) = С^ + Сге
। ..._LC e^nt
При комплексных корнях с отрицательной венион частью
(4-20)
вещест-
.. । Г' -—а2^±/р2/ ।
(4-21)
В последнем уравнении при t—ню, т. е. по окончании переходного процесса, так же как и в (4-20):
y<n(t)—>0-
На этой основе формулируется корневой критерий устойчивости: АСР устойчива, если корни ее характеристического уравнения являются вещественными отрицательными или комплексными с отрицательной вещественной частью, т. е. расположены в левой полуплоскости корней (заштрихованной на рис. 4-4).
Если хотя бы один корень уравнения (4-19) будет вещественным, положительным или комплексным с по-7—626 97
ложительной вещественной частью, то при i—>00 член, содержащий экспоненту с положительным а в уравнениях (4-20) и (4-21), будет неограниченно возрастать. Следовательно, неограниченно возрастать будет и y(t).
Наличие двух сопряженных чисто мнимых корней приведет к появлению незатухающей колебательной составляющей yk(t) в выражении для т/Св(О:
yk (t) = Cke±l?t = Ck (cos р/ ± i sin p/). (4-22)
Система в этом случае будет находиться на границе устойчиво'сти. Система, характеристическое уравнение которой имеет хотя бы один нулевой корень, т. е. размещенный в начале координат на плоскости корней при всех остальных корнях, располагающихся слева от оси ординат, является нейтральной.
В этом случае yCB(t) = y™(t) z/2n(Z), где у\ (/) соот-
ветствует сумме экспонент с устойчивыми корнями, a t/gB(/) —экспоненте с нулевым корнем /?к в (4-18), т. е.
//“(/) = Ск при / —оо
при снятии возмущающего воздействия, что соответствует определению нейтральной системы. При использовании для исследования устойчивости корневого критерия нужно определить лишь знак корней характеристического уравнения системы, что для характеристических уравнений системы, записанных в операторной форме, является чисто алгебраической операцией. Эта задача решается с помощью обобщенных соотношений, связывающих коэффициенты ап, an-t, .... «о в уравнении (4-19), или так называемых алгебраических критериев устойчивости, при выполнении условий которых можно судить об устойчивости системы, не вычисляя корней ее характеристического уравнения.
В качестве примеров рассмотрим системы, описываемые дифференциальными уравнениями первого и второго порядка. Характеристическое уравнение инерционного звена первого порядка
Я1Д-|-Яо=О. (4-23)
Условимся, что коэффициент ао всегда положительный. В случае ао<О обе части уравнения (4-17) умножаются на —-J.
Корень уравнения (4-23) /н=—т. е. вещественный отрицательный. Отсюда следует, что система первого порядка будет устойчива, если коэффициенты ее характеристического уравнения ai и Со положительны. Для системы второго порядка, образованной объектом без самовыравнивания (интегральное звено) и ПИ-регуля-тором (4-6), характеристическое уравнение
a2p2+aip+ao==O. (4 24)
Корни его
«I 1/"в21—4а2а0 пп
= - 2^7 -------2^----
Для устойчивой системы необходимо, как известно, чтобы корпи Р1.2 лежали слева от мнимой оси в плоскости корней (см. рис. 4-4), т. е. рассматриваемая система устойчива в случае вещественных корней (ai>0 и a2i> >4azao) и в случае комплексных корней (ai>0, a2i< <4a>av).
Как следует из (4-25), положительность коэффициента Ci является необходимым, но недостаточным условием устойчивости системы второго порядка. Для этого необходима также положительность коэффициентов az и «п. Итак, необходимым и достаточным условием устойчивое in систем первого и второго порядка является положи ими ность постоянных коэффициентов их характерце гичсскп.х уравнений. Эго условие п будет алгебраическим критерием устойчивости для рассмотренных простых систем. Его математическая запись:
а2, ci, cz0>O. ' (4-26)
По виду характеристического уравнения простых систем, т. е. описываемых уравнением не выше второго порядка, сравнительно просто можно произвести анализ их устойчивое!п путем прямого определения корней. Следует заметить, что условие положительности всех коэффициентов характеристического уравнения, выявленное при анализе уравнения второго порядка, является необходимым условием устойчивости и для более сложных линейных систем. Но в этих случаях требование положительности всех коэффициентов характеристического уравнения не является достаточным.
Так, например, для системы третьего порядка с характеристическим уравнением
а3р3+а2р2+а1р+а0={). (4-27)
7* 99
Для выполнения условия корневого критерия устойчивости, кроме положительности коэффициентов а3, а2. «1 и ао, необходимо соблюдение дополнительного требования:
а!а2>а3а0,
т. е. произведение средних коэффициентов в уравнении (4-27) должно быть больше произведения крайних.
Для исследования па устойчивость систем более высокого порядка дополнительные требования и соответствующие расчеты усложняются *.
4-4. Понятие о частотных критериях устойчивости
Частотный критерий Михайлова
iu
о о . 9 9
1‘агШз гаг(эг
Ла.}и>2
Рис. 4-5. Годограф вектора U/ftco) характеристического уравнения 2-То порядка устойчивой АСР.
ш=0 U
(tl СЦ 0-0
W(iw,)
Сложные системы целесообразнее исследовать на устойчивость с помощью частотных характеристик, которые могут быть получены экспериментально или аналитически по передаточным характеристикам системы и представлены в виде графиков.
Предположим, что требования корневого критерия устойчивости, примененного к характеристическому уравнению замкнутой системы типа (1-53) и (4-7), выполняются. Выясним, какой вид будет иметь годограф вектора этого уравнения при увеличении ы от 0 до оо. Для этого перепишем уравнение (4-7), заменив
в нем р на /со и изобразим W (/со) на комплексной плоскости в виде суммы векторов (напомним, что умножение вектора на i соответствует его повороту па 90п против часовой стрелки (рис. 4-5):
W(iw2)
1 По известным коэффициентам характеристического уравнения можно проверить на устойчивость линейную систему любой сложности с помощью алгебраических критериев Рауса—Гурвица, изложение которых можно найти во всех руководствах но теории автоматического регулирования, например в |Л 2, ч. 1].
При со —О
iF(0) = ao, при ш = ц>1
W (ши) = а0 \-i (aia>i) i1 2 (a2w\);
при СО = ша
IF (tco3) — a0 4~ i (йсШз) H is (а2ш2,у,
При щ->оо вектор IF(ico) повернется вокруг начала координат на угол 180° и пройдет через два квадранта комплексной плоскости. При увеличении порядка характеристического уравнения замкнутой системы до п со блюдение требований корневого или алгебраического критерия устойчивости будет соответствовать прохождению вектора последовательно через п квадрантов в положительном направлении '. Это положение составляет сущность частотного критерия устойчивости, предложенного А. В. Михайловым в 1938 г.
Замкнутая система устойчива, если годограф вектора ее характеристического уравнения п-й степени W(ia) с ростом ш от 0 до еа проходит последовательно через п квадрантов комплексной плоскости, поворачиваясь в положи тельном направлении.
Примеры устойчивой системы, системы, находящейся па границе усюйчивостп, п неустойчивой системы с ха рактерисшческпм уравнением 4-й степени приведены на рис. 4-6.
Амплитудно-фазовый критерий Найквиста
Об устойчивости замкнутой системы с АФХ
можно судить также по расположению па комплексной плоскости годографа вектора АФХ разомкнутой системы lFp.cG<o) относительно так называемой критической точки е координатами U=—1; tV=0 (рис. 4-7). Амплитудно-фазовый критерий Найквиста, используемый для исследования устойчивости в этом случае, формулируется
1 Направление движения по часовой стрелке считается отрица-
тельным в комплексной плоскости.
Следующим образом: замкнутая система устойчива, если годограф вектора ее ЛФХ в разомкнутом состоянии I^p.c(ico) не охватывает точку с координатами £7=—1; t y=oi.
Рис. 4-6. Годографы векторов 1Г('ы) характеристического уравнения 4-го порядка.
Рис. 4-7. Годографы векторов IFp’o) разомкнутых систем.
а — устойчивой; б — неустойчивой; в — предельной.
Охватываемая область остается справа при движении вдоль годографа W'p.cfn») в направлении увеличения от. На рис 4-7 изображены годографы АФХ разомкнутых систем, которые в замкнутом состоянии устойчивы, неустойчивы или находятся на границе устойчивости.
Амплитудно-фазовый критерий примечателен тем, что исходная динамическая характеристика ра Юмкпугой системы W'p.c(ю) = Wo(щ>) WJt(/ы) можег быть получена экспериментально, например, с помощью методов, изло-
1 Формулировка распространяется па системы устойчивые или нейтральные в разомкнутом состоянии. Доказательства частотных критериев устойчивости приводятся в [Л 2, ч. 1].
жспных в § 1-4 и приложении 1. Кроме того, с его помощью можно исследовать устойчивость систем, содержащих звенья запаздывания.
Сравнительная оценка критериев устойчивости
Рапос (§ 4-2) отмечалось, что методы исследования устойчивости АСР можно разделить на прямые и косвенные.
Первый из прямых методов — экспериментальный — требует определения переходного процесса исследуемой регулируемой величины на объекте или на модели опытным путем. Об устойчивости в этом случае судят по форме переходного процесса.
Второй прямой метод — расчетный-—заключается п том, чго переходный процесс определяется в виде уравнения пли графика //(/) как одного из решений уравнения динамики замкнутой системы. В частности, широкое распространение получил метол решения дифференциальных уравнений по корням характеристического уравнения системы и построения переходного процесса в виде суммы экспонент (4-18).
При использовании косвенных методов исследования устойчивость системы определяется:
ш> шику вещественной части корней характеристического уравнения системы — он должен быть отрицательным для выполнения условия у(;в(0 ►<», /~>оо (корневой критерий);
по коэффициентам характеристического уравнения системы апрп + ап-1рп~1+ ... +ai + ao=0 (алгебраический критерий);
но виду годографа вектора характеристического уравнения замкнутой системы IF3.C (йо) = 1 + W'p.c (Йо) (частотный критерий Михайлова);
по виду годографа вектора АФХ разомкнутой системы Wp.c (<т) = U^o(«<>) IP'p(ia) (амплитудно-фазовый критерий Найквиста).
Опытный прямой метод наиболее достоверен, по пе всегда возможен или целесообразен в промышленных условиях. Во многих случаях целесообразно опытное исследование на математических моделях, построенных па базе аналоговых или цифровых вычислительных машин. При этом требуется знание исходных дифференциальных уравнений составных элементов системы.
Расчетный прямой метод определения устойчивости по известным дифференциальным уравнениям звеньев, образующих систему, можно применять всегда, но он трудоемок и требует последующей проверки. Этот метод позволяет изучать систему до се реализации в промышленных условиях.
Косвенный метод — по корням характеристического уравнения или коэффициентам исходного дифференциального уравнения системы с помощью корневого или алгебраического критерия - менее трудоемок по сравнению с расчетным прямым методом, но требует определенного навыка в расчете сложных систем. Он не применим при исследовании систем, содержащих звенья запаздывания.
Частотный критерий Михайлова предусматривает построение годографа lP:i.c(tw) характеристического уравнения замкнутой системы, при этом требуются исходные уравнения динамики системы и определенные навыки в действиях над комплексными числами в плоскости комплексного переменного. Полученный результат в фоп-ме годографа (ico), в особенности тля сложных не-однокоитурных систем доста точно нагляден.
Амплитудно-фазовый критерий Найквиста также требует построения годографа IFftoi), но уже для разомкнутой системы, и его преимущество перед предыдущим критерием состоит в возможности опытного определения с = IKn(Ko) IFp(io)). Удобен при анализе систем с запаздыванием.
4-5 Понятие о запасе устойчивости
Рассмотренные способы проверки систем па устойчивость позволяют также определить, насколько исследуемая система близка к границе или пределу устойчивости.
Мерой удаления характеристик АСР от границы пли предела устойчивости служит запас устойчивости. Для одной и той же системы запас устойчивости будет измеряться различными величинами в зависимости от при пятого метода исследования. При прямых методах о запасе устойчивости судят по степени затухания Т=1— —У111///1 переходных процессов, изображенных на рис. 1-28 и 4-3. При этом предельным значением степени затухания, при котором система оказывается на границе устойчивости, будет хГ = 0 (рис. 4-8, кривая а). 104
flpn использовании косвенных методов, в чаСтНОстй корченого критерия, о запасе устойчивости судят по расположению ближайшего к мнимой оси корня рк или пары корней р\ и р2 характеристического уравнения системы (см. рис. 4-4). В этом случае мерой запаса служит степень устойчивости т]. При использовании частотного критерия Найквиста о запасе устойчивости можно судить по минимальному расстоянию от годогра-
Рис. 4-8. Переходные процессы. а — колебательный: б — апериодический.
фа вектора АФХ разомкнутой системы 1ГР.С (Ао) (рис. 4-9) до точки с координатами С/=—1; /V=0. Расстояние между точкой пересечения годографом вещественной оси и точкой с координатами U ——1; тР=О на-
Рис 4-9. Годографы векторов IFp.c(ito), обладающих запасом устойчивости.
а — с заданными значениями с н у; б — с большим с и малым у;. в — с малым с н большим у.
ЗЫйаёТсй запасом устойчивости по модулю с. Угол между отрицательной вещественной полуосью Щы) и лучом ОА, проведенным из начала координат через точку пересечения I^p.c(iw) с окружностью единичного радиуса с центром в начале координат, называется запасом устойчивости по фазе -у0.
О необходимости использования в качестве меры запаса устойчивости двух величии видно из рис. 4-9,6, где АФХ пересекает вещественную ось при значении с, близком к единице, но имеет весьма малый угол у°. А на рис. 4-9,в, угол у° (близок к 90°), но с мало.
В обоих случаях АФХ разомкнутой системы близка к критической точке, а замкнутая система — к границе устойчивости.
Промышленные автоматические системы всегда должны обладать определенным запасом устойчивости, но чрезмерный запас в большинстве случаев противоречит требованиям качества процессов регулирования, о которых пойдет речь ниже. Наглядным примером этого может служить сравнение двух переходных процессов в замкнутой системе при одинаковых возмущениях х, изображенных на рис. 4-8, если в качестве меры запаса устойчивости использовать степень затухания V.
Система а находится на границе устойчивости (XF= = 0). Система б имеет максимальный запас устойчивости (гР=1), но значительно уступает системе а по наличию в ней существенного отклонения регулируемой величины i/MaKC.
4-6. Качество процессов регулирования
Понятие качества процессов регулирования
Запас устойчивости является необходимым, во недостаточным условием оптимальности автоматической системы. От правильно спроектированной и хорошо отлаженной замкнутой системы объект — регулятор ожидают по крайней мере тех же результатов, что и в случае управления технологическим процессом опытным и квалифицированным оператором. С этой точки зрения процессы автоматического регулирования должны удовлетворять ряду дополнительных требований, по степени выполнения которых судят о качестве АСР. В реальных системах под качеством понимают совокупность показателей или критериев, позволяющих оценить характер отклонения регулируемой величины под действием изменяющих-106
ся во iMyiueiinii и судить о том, насколько система удовлетворяет поставленным требованиям при заданных конкретных ограничениях.
Теплоэнергетические установки как объекты регулирования характеризуются следующими особенностями:
1) значительные по величине и длительные отклонения регулируемой величины от заданного значения не только ухудшают экономические показатели основного оборудования, но также повышают вероятность его повреждения. Например, повышение температуры перегрева пара выше заданного значения может привести к повреждению труб пароперегревателя. В этом случае действие АСР связано с долговечностью работы (сроком службы) основного оборудования;
2) кратковременные, но значительные отклонения так называемые «выбросы» регулируемой величины также могут привести к повреждению основного оборудования.
Например перепитка барабанного парогенератора может явиться причиной заброса воды в паропроводы и повреждения турбины. Здесь действие АСР связано с надежностью работы основного оборудования;
3) незначительные, но длительные и систематические отклонения регулируемой величины от заданного значения могут привести к ухудшению экономичности того или иного участка технологического процесса или установки в целом.
Например, отклонение содержания кислорода в уходящих газах от оптимального значения приводит, даже при незначительном понижении к. п. д. парогенераторов, к весьма ощутимому перерасходу топлива в масштабе крупной электростанции или энергосистемы. Действие АСР па этом участке связано с экономичностью работы основного оборудования.
О том, насколько автоматические системы учитывают указанные особенности и выполняют свое основное назначение— поддержание параметров вблизи заданных значений, можно судить либо по форме процесса регулирования при наиболее характерном или опасном однократном возмущении по одному из каналов воздействия, так называемому единичному процессу, либо по данным статистики, т. е. по среднесменным, суточным и месячным отклонениям регулируемых величин или числу выбросов за сутки, месяц или год.
Оценка качества по кривым переходных процессов
Вернемся к рассмотрению переходных процессов в замкнутой одноконтурной споеме при нанесении ступенчатого возмущения со стороны задатчика регулятора (рис. 4-10, а) и со стороны регулирующего органа
Рис. 4-10. Оценки качества по виду переходного процесса.
а — при возмущении задатчиком регулятора: б, в — при возмущении нагрузкой или при возмущении со стороны регулирующего органа (расходом регулирующей среды).
(рис. 4-10,6 п в). Для оценки качества этих процессов используют следующие показатели.
1) Максимальное отклонение регулируемой величины от ее установившегося значения //'(/).
2) Время регулирования lv, определяемое промежутком времени от начала переходного процесса до момента, когда регулируемая величина будет отличаться от установившегося значения менее чем па некоторую заранее заданную величину А.
3) Cieueiib затухания регулируемой величины
ip — у1~ уШ — 1 _
Р “ yl
I) Перерегулирование
(4-28)
За количественную меру перерегулирования принимается величина g, равная отношению максимального абсолютного отклонения отрицательного знака уп к максимальному отклонению положительного знака г/1.
Система регулирования считается настроенной оптимально, если она удовлетворяет одновременно по крайней мере двум пли трем показателям качества. Например, кроме максимального отклонения, которое должно быть нс выше максимально допустимого по условиям эксплуаIацпп, пепспь затухания Чг и время регулирования /р должны быть нс ниже заданных значений.
Косвенные методы оценки качества
Рассмотренные выше методы оценки качества отно' сягея к прямым методам исследования АСР. С их помощью трудно определить общие закономерности влияния изменяемых параметров системы (например, параметров настройки промышленных регуляторов) на характер переходного процесса. Для определения влияния изменяемых параметров АСР на ее качество используют косвенные методы оценки — интегральный, корневой и частотный, которые позволяют установить характер переходного процесса без построения его графика.
Интегральные критерии. Обобщающим показа гелем качества переходных процессов является линейный интегральный критерий 7, численно равный алгебраической сумме площадей (заштрихованных на рис. 4-10,6 и в), заключенных между кривой регулируемой величины y(t) и осью времени i или линией установившегося значения г/уст(7) для процесса, изображенного на рис. 4-10,а:
(4-29а)
oj
Практически / = J у (I) dt, где /р — время регулиро-о
вапия.
Численное значение линейного интегрального критерия может быть получено через передаточную функцию замкнутой системы и изображение возмущающего воздействия. Используя преобразование Лапласа — Карсона и определение передаточной функции [§ 4, формула (1-11)], можно написать для единичного ступенчатого возмущения:
У(р)=№3.с(р). (4-296)
Подставляя (1 II) в (4-296), получаем:
г , W'sctp)
I у (/) е~Р dt =--------• (4-29В)
о
Левая часть этой формулы превращается в выражение линейного интегрального критерия, сели р устремить в ней к нулю.
Следовательно,
р W's.HP)
I = I У (/) dt = I 1 m —— . (4-29г)
J p-M) г
О
Оптимальный по значению линейный интегральный критерий равен минимальной (по возможности) площади между кривой переходного процесса //(/) и осью времени t. Но использование линейного интегрального критерия в случаях значительной колебательности процесса может привести к ошибочной оценке качества АСР, как это следует из графика у(1), приведенного на рис. 4-8. Здесь алгебраическая сумма площадей под кривой щ заштрихованных над и под осью времени I, равна пулю. Следовательно, линейный интегральный критерий / для незатухающих колебательных процессов, т. е. наихудших с точки зрения качества, равен нулю, т. е. своему предельному оптимальному значению. Поэтому для опенки качества колебательных процессов, в том числе слабо затухающих, используют интеграл от модуля регулируемой величины
|7|= f |y(/)|d/. (4-30) I]
(I
В этом случае значения функции |z/(/)|, показанной на рис. 4-8 пунктирной линией, ц интеграла |/| не за-110
Пися г 01- знака пёремейной. ОДнако ий-За трудностей вычисления интеграла типа |/| для оценки качества слабо за Iухающих процессов удобнее использовать квадратичный интегральный критерий
Р = J (4-31)
о
Рпс. 4-11. Расположение корней характеристического уравнения системы с заданным показателем качества.
Геометрическое представление этого интеграла показано на рис. 4-8.
Корневой критерий качества является развитием корневого критерия устойчивости. Он предъявляет более жесткие требования к расположению корней характеристического уравнения системы на комплексной плоскости корней p=a±i'p. При этом показателем качества служит число т= =а/р = (|Г(|) (рис. 4-11), называемое степенью колебательности системы и равное о гпошспию действительной части а к мнимой р для ближайшей к мнимой оси пары корней pi и р-2.
Расположение корней характеристического уравнения системы в секторе А'ОА
обеспечивает степень затухания переходного процес-са ЧГ — 1 — е
Частотный критерий качества связан с наличием у системы некоторого запаса устойчивости, о котором можно судить по расположению годографа АФХ разомкну той системы относительно точки с координатами — 1,т() на комплексной плоскости (рис. 4-12,а).
Представив АФХ замкнуто системы в виде отноше-
пня векторов, можно записать па основании (1-97):
ум“ __ У _ Wp-c ОА ОА
зс— и “ i + wpc — i + oa_=’ba’
(4-32)
откуда следует, что при неизменном значении входного сигнала амплитуда на выходе замкнутой системы объект — регулятор будет возрастать с уменьшением ВА.
Максимальное отношение ОА/ВА= (W’'3.c)Maitc имеет место при так называемой резонансной частоте колебаний сор, которой соответствует максимальная амплитуда y(i) на выходе АСР или объекта.
Заметим, что положение ыр па годографе W-p,c(iv>) соответствует точке касания его с окружностью радиусом г, т. е. точке А на рис. 4-12,а.
Отношение
|W“ (<о )|
I З.С-Л рЛ |w3\(0)|
(4-33)
где |W“3.c((Op)| и |W“3.c(0| — модули векторов АФХ замкнутой системы при частотах соответственно со = О и СО = ТОр.
Рис. 4-12. Определенно границы областей 'ттопчпвостн п запаса устойчивости по расположению 1Р'(й») относительно критической точки —I, /0.
Число 7И называется показателем колебательности и служит одним из критериев оценки качества переходных процессов.
Если полагать, что в (4-33) W’',ll(0) = l (это допущение справедливо для систем, имеющих интегральную составляющую в своей структуре, например, для системы с ПИ-регулятором АФХ, которая представлена на рис. 4-12,а), то из формул (4-32) п (4-33) следует:
<-)=<“-> = KJ
I рафики Л4(ю) для различных значений отношения ОЛ ВЛ систем, имеющих интегральную составляющую, приведены на рис. 4-12,6.
Из геометрических соотношений на рис. 4-12,6 нетрудно установить функциональную связь между г и М. Для этого модули векторов ОА и ВА в (4-32) следует выразить через их мнимую и вещественную составляющие:
ОА = j/U2-Ц V2; BA = /(T-U)24-V2.
Тогда получим:
__l4L+ _____—Al2
(I—Up-f-U2
(4-34)
11осле преобразований (4-34) получим уравнение
W V2-2-^, U =0, (4-35)
кигирос является уравнением окружности радиуса __ м
г~~ "/Иг— 1 '
Центр этой окружности расположен на отрицательной вещественной полуоси на расстоянии Uo от начала координат:
= <4"37)
Из рис. 4 12,и видно, что указанная окружность касается также луча ОО', проведенного из начала коорди-иа г под углом 0 к отрицательной полуоси:
/ТЗ — arcsin —arcsin (4-38)
(. помощью соотношений (4-36) и (4-37) и графика АФХ разомкнутой системы можно сформулировать условия, при соблюдении которых шмкпутая система будет обладать заданным показателем колеба тслыюст*! 714.
Для того чтобы показатель колебательности замкнутой системы соответствовал заданному значению М, необходимо, чтобы АФХ разомкнутой системы касалась окружности радиусом г=М/(М2—1) с центром на отрицательной вещественной полуоси
и __ м*
/И2 — 1 •
Итак, для того чтобы замкнутая система быЛй устойчивой, годограф вектора ее АФХ в разомкнутом состоянии не должен охватывать точку с координатами —l,iO (см. рис. 4-9), а для выполнения условий заданного качества этот годограф не должен заходить внутрь «запретной» области, ограниченной окружностью с параметрами г (4-36) и б/0 (4-37), зависящими от заданной величины Л4.
Обычно при настройке промышленных АСР добиваются значений М в пределах 1,3 -2,4. Если полагать, что форма колебательных переходных процессов па выходе объекта в основном определяется расположением ближайших к мнимой оси пары корней характеристического уравнения замкнутой системы (см. рис. 4-11), то выбор М в диапазоне чисел 1,3—2,4 обеспечит степень затухания в пределах 0,75—0,95.
4-7. Статистические показатели качества случайных процессов
Основные понятия теории случайных процессов и математической статистики
До сих пор при описании динамических характеристик объектов и систем считалось, что возмущающие воздействия х, х,, носят вполне определенный (детерминированный) характер и имеют форму ступенчатого, прямоугольного или гармонического сигнала. Однако в промышленных условиях АСР непрерывно находится под воздействием разнообразных возмущений. В таких случаях для анализа линейных систем используются аппарат и терминология теории случайных процессов одного из разделов теории вероятностен [Л. 2, ч. II, Л. 5].
Ниже приводятся некоторые понятия теории случайных процессов и математической статистики, используемые в практике исследования АСР.
Случайным процессом называют процесс изменения случайной величины во времени. Случайной в этом определении считается величина, которая может принимать различные значения в зависимости от случая.
На рис. 4-13,я приводится участок диаграммы прибора, регистрирующего расход пара на выходе барабанного парогенератора типа ТП-87. При отключенной автоматике процесса горения и невмешательстве оператора в работу топливоподающих устройств можно считать, что изменения расхода пара носят случайный характер. Выделенная часть записи D(t) в этом примере представляет собой реализацию случайного процесса X(t). Следует заметить, что отдельные наблюдения над случайными процессами одного и того же объекта при неизменных условиях опыта дадут каждый раз различные функции X (/).
114
При анализе линейных систем и их звеньев чаще всего рпссмагривают так называемые стационарные случайные процессы, характеризуемые тем, что их статистические характеристики не зависят от начала отсчета времени. К основным статистическим хар актеристи-кам относятся следующие.
Математическое ожидание случайного процесса mxi(/) — некоторая средняя линия (рис. 4-13,а), относительно которой колеблется реализация случайного процесса X(t)-,
дисперсия случайного процесса DX (!) считается равной математическому ожиданию квадрата отклонения случайной функции Х(1) ог се среднего шачспия
В прицеленной па рис 4 13.я реализации случайного процесса дисперсия
DX (!) = М {X (/)}2.
(4-39)
Рис. 4-13. Участок диаграммы прибора, регистрирующего расход пара парогенератора ТП-87, — реализация случайного процесса X(t) (а) и корреляционная функция по расходу пара J?x(t) (б).
Чпсперс ия характеризует рассеяние случайной величины относи 1сл|лю <’с ма тематического ожидания. Величину DX(t) можно получил* по >кс,псрпмепталы1ым данным по формуле {Л. 5]:
1=п
3 (*, - X)2
^V(0^f=ln_1 ,
(4-40)
где х, — значения случайной величины, полученные по результатам отдельных Н1мерсипй случайного процесса X(t)\ x=Xxln — среднее арифметическое значение случайной величины, полученное по результатам и наблюдений пли измерений.
Среднскпадрагичное отклонение случайной величины
Ojc-=j/D,Y(f).
(4-41)
Hi этого определения следует другая форма записи дисперсии случайной величины:
DX (/) =
(4-42)
Корреляционная функция случайного процесса. Математическое ожидание и дисперсия для рассматриваемых нами случайных процесс ов являются постоянными величинами и не дают представления 8* 115
об изменчивости случайного процесса с течением времени. Для оценки его изменчивости используется специальная статистическая зависимость ДХ(Л, t2)—корреляционная функция, которая связывает отклонения случайной функции от ее математического ожидания при двух значениях аргумента (времени) А и А:
(т) = М {[Л- (А) - тх (А)]} {[X (А) - тх (А)]}. (4-43)
где т=А—t] — интервал корреляции.
В практических расчетах корреляционную функцию случайного процесса (автокорреляционную функцию) определяют как среднее во времени от произведения Х(/)ХД4-т), т. е.
+т
Rx (т) = lim gyr j*X (О X (t + т) dt, (4-44)
—т
где —Т и +'/— конечные интервалы времени, взятые слева и справа от точки начала отсчета на графике реализации случайного процесса.
График для реализации О(Д, приведенной на рис. 4-13,а, представлен на рис. 4-13,6. Он отражает физическую сущность корреляционной функции, характеризующей тесноту связи по времени между отдельными точками случайного процесса. Если промежуток времени т невелик, то величины X(t) и Х(/-)-т) незначительно удалены одна от другой и тесно связаны, а значение /?х(т) близко к значению R,-(0)>0. При достаточно большом т, например, после нескольких пересечений реализацией X(f) своего среднего значения
X(t) и ХД-|-т) становятся неьтни'нмымн, г. е. /?Л (т) стремится к пулю с ростом т.
Для оценки связи двух случайных процессов, например X (£) и У(/), вводится понятие взаимной корреляционной функции
+ т
RXy№ =1im Yf (* + ДЛ, (4-45)
—Г
где X(t) и У(0 — случайные сигналы на входе и выходе исследуемого объекта.
Следует заметить, что вишмпая корреляционная функция двух независимых сигналов равна пулю.
Сравнивая записи диспепсии DY(t) и авгокоппелянпонпой функции /?s (т) при т = 0, г. е. при А="Л, можно установить следующее соотношение между ними-
/?(0)=ПУ(7). (4-46)
Сравнивая (4-42) и (4-46). получаем:
а2 = /?(0), (4-47)
откуда величина одного из важнейших показа гелей случайного процесса — среднеквадратичное отклонение
о = //Г(0). (4-48)
С введением понятий математического ожидания, дисперсии и корреляционной функции можно более конкретно сформулировать условие стационарности случайного процесса н дать его определение: стационарным случайным процессом называется такой про-116
цссс, математическое ожидание mx(f) и дисперсия DX(t) которого постоянны, а корреляционная функция зависит только от разности времени т.
Следует подчеркнуть, что статистические методы анализа позволяют выявить лишь закономерности, присущие множеству реализаций случайного процесса, т. е. с их помощью нельзя, например, заранее предсказать точное значение регулируемой величины в какой-либо момент времени и тем более вид единичного переходного процесса.
Однако на основе статистического анализа отдельных реализаций какого-либо случайного процесса можно определить некоторые его усредненные характеристики, например математическое ожидание дисперсию DX(t) и корреляционную функцию
/?Л(т), которыми будут обладать все реализации рассматриваемого случайного процесса при условии его стационарности.
Статистические показатели качества автоматических систем, находящихся под действием случайных возмущений
Основная задача АСР состоит в поддержании равенства между выходной регулируемой величиной и се заданным значением, т е. pineiicrna у и 0 Однако любая реальная АСР не может выполнить эту задачу совершенно точно. Т’егулирусмая величина на выходе объекта в установившемся н переходном режимах будет отличаться от требуемого значения па величину у*=у—и, называемую ошибкой регулирования.
Если считать, что входное возмущающее воздействие X(f] и регулируемая величина У(/) являются случайными стационарными процессами, то для их описания можно применить статистические пока ытелп В этом случае отклонение случайной величины У(У) от со заданного постоянного значения u(t) равно У*(0-
Полученные рапсе выражения (4 39) и (4-40) для дисперсии применительно к сигналу на выходе системы DY(i), а также величина
а;Л = /7)У*1/Ь (4-49)
называемая среднеквадратичной ошибкой регулирования, являются показателями качества автоматических систем. Выше отмечалось, что если возмущающее воздействие является случайной функцией времени, то регулируемая величина //(/) или сигнал ошибки y*(t) также будут иметь случайный характер. При этом введенные выше критерии качества //’, ф (см. рис. 4-10) теряют физический смысл, а интегральные оценки вида
*р
/= [ r/(0d/ и /== ^ [У/ (01s dt
6 о
нс сходятся, т. е. ле имеют конечного значения при /р—>оо. В таких случаях качество устойчивых процессов регулирования следует оценивать по значению дисперсии DY(t) или среднеквадратичной ошибки, вычисляемых по формулам (4-40), (4-41), (4-48) и (4-49).
Следует отметить, что статистические методы оценки качества АСР используются для оценки технико-экономической. эффективности АСР за счет повышения экономичности, надежности и долговечности работы оборудования [Л. 6].
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Отчего зависит форма переходного процесса в АСР?
2. Сформулируйте понятие устойчивости.
3. Как подразделяются физические свойства системы с точки зрения устойчивости?
4. В чем состоит сущность корневого критерия устойчивости? Укажите расположение корней характеристического уравнения на плоскости корней для устойчивой системы.
5. Приведите определение частотного критерия устойчивости Михайлова.
6. Приведите пример устойчивой и неустойчивой ио Михайлову замкнутой АСР.
7. Приведите определение амплитудно-фазового критерия устой-'чивости и поясните его на комплексной плоскости.
8. Поясните понятие запаса устойчивости системы.
9. Назовите прямые показатели качества переходного процесса.
10. В чем сущность оценки качества переходных процессов по линейному интегральному критерию? Назовите виды интегральных критериев.
11. Как определяется показатель .колебательности замкнутой системы Л4?
12. Что такое степень колебательности т?
'1 3. Дайте определение, стационарного случайного процесса.
14. Что такое математическое ожидание и дисперсия?
15. Что такое корреляционная функция?
16. Какая связь существует между DX(t) и /?.,(т)?
17. Как вычисляется среднеквадратичное отклонение регулируемой величины?
18. Как оценить качество процессов регулирования, имеющих случайных характер?
ГЛАВА ПЯТАЯ
ВЫБОР ТИПА И РАСЧЕТ НАСТРОЕК АВТОМАТИЧЕСКОГО РЕГУЛЯТОРА
5-1. Выбор типа регулятора
В большинстве случаев при проектировании автоматических систем регулирования на тепловых электрических станциях возможность выбора типа регулятора по виду реализуемого в нем закона регулирования ограничена, поскольку большинство систем предназначено для автоматической стабилизации параметров при весьма ограниченном диапазоне допустимых отклонений. Выбор закона регулирования осуществляется в зависимости от сложности и ответственности объекта управления и требований к точности поддержания регулируемой величины. В тех случаях, когда допускаются относительно большие колебания регулируемой величины, целесообразно устанавливать простейшие позиционные регуля-118
горы, работающие rio принципу «открктб— закрыто» и реализующие Рц-закон регулирования. При их наладке важно соблюдать одно требование (рис. 5-1)
Д^макс^Д^доп (5-1)
Для обеспечения этого условия пропускная способ-
ность регулирующего органа превышать максимально возможные возмущения по нагрузке.
При более жестких требованиях к автоматической системе, например при нежелательности автоколебательных режимов, возникающих в системах с позиционными Рц регуляторами, целесообразно проверить возможность установки 11-регуляторов прямого действия — наиболее доступных и простых по конструкции.
Основанием для установки 11 регулятора на объекте с самовыравниванием служит следующее неравенство;
при его открытии должна
Рис. 5-1. График процесса регулирования температуры t в электрической печи двухпозиционным Рп-регулятором.
ост
8 <--------. (5-2)
х 1 ~ (,уСт )
\ J
где бопт — численное значение оптимальной степени обратной связи регулятора, подсчитанное по формулам оптимальной настроили; уост — максимально допустимое по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины; ^ст — установившееся значение регулируемой величины по кривой переходного процесса (см. рис. 4-1, 4 2); х — максимально возможное ступенчатое возмущающее воздействие по нагрузке или эквивалентное возмущение со стороны регулирующего органа.
Для объекта без самовыравнивания возможность установки П-регулятора определяется из условия
8
ОПТ
(5-3)
Если Рп- и Et-законы регулирования не удовлетворяют требованиям (5-1) — (5-3), то следует применить более сложные законы — ПИ или ПИД.
При выборе типа регулятора в основном следует руководствоваться:
динамическими характеристиками объекта по каналам регулирующего и возмущающею воздействий;
требованиями к качеству системы регулирования при всех возможных возмущениях;
номенклатурой заводов — изготовителей средств автоматизации.
5-2. Основы методов расчета
Расчет настроек предусматривает определение численных значений параметров настройки регуляторов, при которых переходные процессы в замкнутых автоматических системах удовлетворяют заданным или приемлемым показателям качества, т. е. являются оптимальными.
Обычно настройки рассчитываются лишь для одного из каналов воздействий, по которому система является наиболее чувствительной и может обеспечить компенсацию возмущений, поступающих на объект по другим каналам. При этом для большинства автоматических систем стабилизации оптимальный процесс регулирования характеризуется интенсивным затуханием, минимальными значениями отклонений регулируемой величины и времени регулирования.
Существующие методы расчета позволяют определить численные значения параметров настройки регуляторов (с помощью формул пли графиков) ио показателям, характеризующим динамические свойства объекта или системы. При этом динамические свойства объекта могут быть представлены в виде временных характеристик, передаточных функций или частотных характеристик. Расчетные формулы или графики по определению оптимальных настроек основываются па оценке временных, частотных или статистических характеристик замкнутой системы с помощью пока затслсй и критериев качества, рассмотренных в предыдущей главе.
После аналитического расчета н установки оптимальных значений параметров настройки па регуляторе следует проверить его работу в условиях эксплуатации. 120
Оценку качества промышленных систем автоматического регулирования следует производить не только по кривым переходных процессов, необходимо учитывать также ограничения, связанные с перемещением регулирующего органа. Нельзя, например, признать удовлетворительным процесс регулирования уровня воды в барабане парогенератора, если основные показатели качества по регулируемой величине (отклонению уровня) выполняются за счет слишком частых и быстрых перемещений регулирующего клапана, что приводит к резким колебаниям расхода питательной воды и повышенному износу пусковых элементов и арматуры. В таких случаях следует уменьшить скорость изменения расхода воды с целью более плавных ее изменений путем некоторой корректировки установленных значений параметров настройки.
Ниже рассматривался ряд методов расчета настроек II 1111 и ПНД-регуля торов, используемых при наладке АСР па ТЭС.
Приводимые формулы и графоаналитические методы расчета настроек [Л. 1, 2, 4] являются приближенными. Вычисленные по ним значения параметров настройки требуют экспериментальной проверки на моделях АСР пли в промышленных условиях. Отличие полученных в реальных условиях показателей качества от ожидаемых или расчетных объясняется идеализацией динамических свойств объектов при их замене типовыми характеристиками и искажениями закона регулирования и динамических характеристик регуляторов в реальной аппаратуре.
5-3. Расчет настроек на заданное М по участку АФХ регулируемого объекта
Основы расчета
Сущность метода заключается в графоаналитическом определении К-p для П-регулятора и /<р и Тп для ПИ-ре-гулятора, при которых АФХ разомкнутой системы касается окружности с заданными параметрами (4-36):
М г,
— 1 и
М*
М*— 1
Численное значение показателя колебательности М выбирается из двух условий:
1) обеспечения должного запаса устойчивости и интенсивности затухания переходного процесса в замкнутой системе;
2) упрощения графоаналитических расчетов.
Первое условие выполняется при Л4, изменяющемся в пределах 1,3—2,4, первое и второе одновременно — при выборе Л-1 из соотношения М/М2—1 = 1 (4 36), т. е. при 714= 1,62 (этому значению Л4 соответствует Чг = 0,9). Убедимся в этом на примере расчета настроек П- и ПИ-рс-гуляторов температуры воды на выходе поверхностного пароводяного теплообменника. Функциональная схема замкнутой системы изображена на рис. 1-2. Регулятор получает сигнал по отклонению температуры воды и воздействует на расход греющего пара Dr.n
Расчет настроек П-регулятора
Исходными данными для расчета служат участок АФХ объекта по температуре AU, мВ, по каналу регулирующего воздействия /)гп, расположенный в III квадранте комплексной плоскости (рпс. 5-2,«), заданное значение М= 1,62 (Ч/ = 0,9) и передаточная функция П-регулятора №р(/э)=/<р.
Порядок операций следующий.
1. Геометрические построения. Из начала координат под углом к отрицательной полуоси, найденным из условия (4-38), т. е. — arcsin -|~62-_ 38°, проводится луч ОО' Затем путем подбора радиуса проводится окружность с центром па отрицательной полуоси, касающаяся луча ОО' и характеристики объекта 1Го(щ>) (окружность радиусом г0 на рис. 5-2).
2. Расчетное определение оптимального значения /Ср. Окружность радиусом г0 касается луча ОО' и АФХ разомкнутой системы для /(,,= = 1 [^p.c(i<o) =/СрИ70(гсо)]. Поэтому г0 будет меньше требуемого по соотношению (4 36) значения г=М/(М2—1) в /Ср раз, т е. гъ=г1К$.
Таким образом, оптимальное значение /Ср, удовлетворяющее условию (4-36), определи гея по формуле
М 1
/Ср — — 1 rt * .
т
Рис. 5 2. Определение oniнмлльпых параметров настройки П- и 1111-регуляторов но участку АФХ объекта.
л — построение 11Тр C(ico) при Кр-1; б — определение оптимальных значений /<р(б) и Ти для ПИ-регулятора.
При выбранном значении М=1,62 /Ср=1/го.
В рассматриваемом примере оптимальное значение А',. 2,3 (кг/с)/мВ.
Расчет настроек ПИ-регулятора
Исходными данными для расчета оптимальных значений /<р и 7’ц служат тог же участок АФХ объекта в III квадранте комплексной плоскости (рис. 5-2,а), заданное шачеппе М 1,62 и передаточная функция ПИ-рсгулягора И"г>(/') А'Р(1-Н/Гцр).
Для системы с ИН регулятором можно построить семейство окружностей, одновременно касающихся луча ОО', проведенного из начала координат под углом 0= = 38°, и АФХ разомкнутой системы, предварительно построенных для Ар = 1 и различных значений Тп. Следовательно, для каждого Ти может быть определено /<р, при котором максимум амплитудно-частотной характеристики не будет превышать заданного значения
Л4=1,62. Итак, можно определить множество значений /Ср и Ги для ПИ-регулятора, удовлетворяющих заданно-
Му показателю качества замкнутой системы М. Функциональная зависимость между Kv и Тк, отвечающая заданному значению М (кривая равного запаса устойчивости), строится в виде графика Kp = f(Tw) в координатах Кр—Тк.
Для определения оптимальных Д, и Та вводится дополнительный линейный интегральный критерий качества I, минимум которого соответствует максимуму отношения /<р/7'ц.
Убедимся в этом па примере ЛСР с объектом IFo (р) -
ke~pz
(1 + тр)
и ПИ-регулят4?ом с (р) =*= /<р
г , ,
+- . па основании
7чР
(4-29г) запи-
шем значение линейного интегрального критерия для у (Г) на выходе замкнутой системы при единичном ступенчатом возмущении по каналу регулирующего воздействия:
Со г
I = ( у (t) dt = lim-;—I \ ~ "iF-- (5-4)
J д->0 P 1 + (P) Wp (p) Kp k '
0
Следовательно, минимум / будет соответствовать максимуму отношения у—.
1 и
Условие минимума I дополняет первоначальные исходные данные для расчета оптимальных параметров настройки ПИ-регулятора.
Порядок операций следующий.
1. Па основе соотношения 1Ур.с(йо) = 1^о(Ло) Wp(ia) строится семейство АФХ разомкну гой системы для различных /<р II 'Гц.
При /<р= 1
lFp c(M = U70 (Н-7-^-,
т. е. является разностью вектора и вектора
/слТ1Ъ повернутого относительно UZo(i<o) на 90° по часовой стрелке. Построение 1Ур.с(йо) всделся в следующем порядке (рис. 5-2,а). Для годографа W0(i(n) проводим несколько векторов OAt, ОА2, ОА;), ОА4 с частотами raj, <о2, со3, И4. К этим векторам в точках А1т /12, Лз, А4 восстанавливаем перпендикуляры AiA'lt АгА'2, A3A'S, Ai^A’
(Определяются концы векторов АФХ разомкнутой ^системы путем откладывания•на каждом из перпендикуляров АЛ' отрезков —i ^°у.г<д--= (напРимеР> 0Ai/wi7H1> и и
ОЛ2/<027’и1 и т. д., всего 4—5 значений). Найденные точки соединяются плавной кривой.
2. Из начала координат проводится луч 00' под углом 38° к отрицательной вещественной полуоси.
3. Путем подбора радиусов rlt г2, Гз, а проводят окружности с центром на отрицательной вещественной полуоси, касающиеся луча 00' и каждой из семейства ЛФХ разомкнутой системы VTp.c(/io).
4. В координатах /\р и 7И строится кривая равных запасов устойчивости системы /\р=/(Ти): по оси ординат откладываются найденные значения /Cpi=1/a'i; К-р2 = = 1/г2 ... APn=l/Gi, а по осп абсцисс — соответствующие нм значения времени 7’(1I, 1\а, ..7’ип. Точки с координатами /<,>!, 7’1П; Д',,2, 7п2; /\11Я, ТДц l\v,„ Тп>, п т. д. соединяю! плавной кривой (рис. 5 2,6).
5. Оптимальные численные значения 7<р и Ти находятся из условия выполнения минимума интегрального показателя 7 пли максимума отношения Кр/Ти. Для этого из начала координат проводят касательную к кривой 7\р / (7’и) па рис. 5-2,6.
Координаты точки касания 7(р и Тц дают оптимальные значения параметров настройки I ПТ-регулягора, удовлетворяющих о щовремеипо двум показателям: заданному запасу устойчивости (Л1 =1,52) и минимуму интеграла
zi>
7 = J ’у (7) dt.
О
t
5-4. Расчет настроек по временным характеристикам объектов регулирования
Исходными данными для расчета настроек служат кривые переходного процесса при ступенчатом возмущении по каналу регулирующего воздействия. При расчетах они аппроксимируются, т. е. заменяются кривыми математической модели объекта, состоящей из нескольких последовательно соединенных типовых звеньев, например запаздывающего и одноемкостного инерционного (с самовыравниванием) или нейтрального (без самовы-
равнивания). Простейшая аппроксимация прбйзйбДитсй по методу, описанному в § 2-4, т. е. проведением касательной в точке перегиба к кривой переходного процесса или продолжением участка ее постоянного наклона к оси времени t. Обработка кривых показана на рис. 2-5 и и П-1.
При обработке вычисляют величины, характеризующие динамические свойства объекта: коэффициент усиления k (единиц отклонения у. единиц измерения х); постоянную времени Т (с или мин); время запаздывания т (с или мин); отношение т/Т и, для объекта без самовы-равнивания, коэффициент пропорциональности интегрирующего звена: kn—k!T или /ги=Ь/хт (единиц отклонения у :единиц измерения х X единиц времени).
Для определения настроек регулятора по вычисленным величинам рекомендуются расчетные формулы, приведенные в табл. 5-1 [Л. 1] для параметров Др или б, 7'и и Уд в П-, ПИ- и ПИД-регуляторах. Приведенные в табл. 5-1 настройки рассчитаны на степень затухания Т=0,75 и минимум квадратичного интегрального кри-
терпя/гмш1 = J уг (?) dt для процессов регулирования в о
линейных АСР.
Пример. Рассчитать оптимальные параметры настройки ПИ-регулятора температуры, обеспечивающие затухающий процесс регулирования с Чг=0,75 по экспериментальной кривой (см. рис. 14-21) температуры [ДЦ мВ —)(£)] па выходе из подогревателя при возмущении расходом греющего пара Ог.п.
1. Определение величии k, т и Т по методике, изложенной в § 5 4
k 1,11 мВ/кг/с; т= 18 с; Г 50 с
2 Подсчет отношения т/Т=0 36.
3. Определение оптимальных значений
Оптимальные величины 8 и Тп определяю гея из табл. 5-1 по фор-
’t
муле для ПИ-регуляторч и для значения 1,5 > —у > 0,2:
8 = 0,84
мВ 1 ( кг/с \ .
кг/с | \^> мВ J ’
Т„ = 0,8Z = 40 с.
Таблица 5-1
1?7
5-5. Расчет настроек двухконтурных АСР
Система регулирования с корректирующим и стабилизирующим регуляторами
Двухконтурная схема автоматического регулирования (рис. 5-3) с одним корректирующим и одним или несколькими стабилизирующими ПИ-регуляторами часто применяется на ТЭС, например, при поддержании давления пара в общем паропроводе.
Рис. 5-3. Структурная схема двухкоитурпоп АСР со стабилизирующим регулятором.
В приведенной схеме основной сигнал у (давление пара в общей магистрали) поступает на вход корректирующего регулятора №р2, а промежуточный сигнал у\ (тепловыделение в топке) — на вход стабилизирующего регулятора УГр). При этом стабилизирующий регулятор воздействует на подачу топлива. Методика определения оптимальных значений параметров настройки регуляторов двухконтурных систем основана па возможности расчета одного контура (стабилизирующего пли внутреннего) с выходным сигналом //, независимо от другого (корректирующего пли внешнего) с выходным сигналом у. Такой подход возможен в тех случаях, когда корректирующий регулятор может быть временно отключен. При этом настройка стабилизирующего регулятора может быть независимо рассчитана по амплитудно-фазовой характеристике IFO6j. После определения настроек стабилизирующего регулятора производится расчет оптимальных значений параметров настройки корректирующего регулятора
Для корректирующего рсгуля гора объектом, называемым заменяющим или эквивалентным №аобг(р), является система, включающая стабилизирующий кон-128
(5-6) виде (5-7)
(5-8)
тур W, (p) и последовательно соединенный с ним объект с характеристикой №Об(Р) (на рис. 5-3 обведен пунктиром) .
Передаточная функция стабилизирующего контура
^(р) ’+^(^1^ (р)
Передаточная функция эквивалентного объекта
П7» / о\ — -- ГР»(Р)^об(Р) .
°® {Р) ~~ *р2 (Р) ~ 1 + ^pl (Р) (Р)
Представим передаточную функцию W^(p) в произведения
^г1(р)=ЯР1Г'и(р),
где ЛСГ>1 — коэффициент усиления Pi. Тогда
И7. ____
~ 1//<рГ I W'ofi! (Р) Г'р| (р) •
В этом выражении годограф вектора амплитудно-фазовой характеристики разомкнутой системы W'p.ct (Йо) = = 1ГОб 1 (йо) IF'pi (Йо) строится при проведении предыдущей операции определения настроек стабилизирующего регулятора IFpt способом, изложенным в '§ 5-3, а годограф вектора АФХ разомкнутой системы №р.г.2(йо) = IFn6(ico) X X W%i(f<i>)—по заданной амплитудной-фазовой характеристике П7(,б(йо) аналогичным способом.
Искомый годограф Т^’обИйо) строится по точкам на комплексной плоскости, определенным как частное от деления векторов IF06 (йо) I7'pi (йо) на векторы, проведенные для тех же частот к характеристике И70б1(йо)Х’ Х^']>|(йо) из точки, расположенной на отрицательной вещественной полуоси на расстоянии 1//Ср, от начала координат.
После построения голографа вектора Т^э(1б2(гсо) производится определение настроен корректирующего регулятора WV2 методом, приведенным в § 5-3 (рис. 5-2).
Система регулирования с введением исчезающего сигнала от промежуточной величины объекта
С целью улучшения качества процессов регулирования для объектов, обладающих значительной инерционностью, например температуры перегретого пара, 9—626 129
используются системы регулирования с введением исчезающего после снятия возмущения промежуточного сигнала yi, существенно менее инерционного по сравне-
нию с основным сигналом у. Структурная схема такой двухконтурной системы изображена на рис. 5-4, где Wo6(p) и И7О61(Р)—передаточные функции регулируе-
Рис. 5-4. Структурная схема двухконтурной АСР с дифференциатором.
относительно основного у и вспомогатель-
ного участка
ного сигналов yit а №д — устройство для формирования исчезающего сигнала, обладающее характеристиками реального дифференцирующего звепа [см. § 1-5, формула (1-77)], т. с.
W7 Z -1 ^Л^П.Р
В двухконтурной системе, показанной на рис. 5-4, и соответствующей ей функциональной на рис. 12-13, на вход ПИ-регулятора поступают два сигнала: основной— по отклонению регулируемой величины у и дополнительный, «исчезающий» в установившемся режиме (производная от постоянной величины равна нулю) с выхода дифференцирующего устройства. Свойство и7д-звспа формировать на своем выходе значительный по величине сигнал в первый момент времени после нанесения возмущения, т. е. при малых отклонениях регулируемой величины yt(t), и иметь пулевой сигнал при ее установившемся значении (см. рис. 1-37) используется для увеличения быстродействия при возмущениях ср стороны объекта, приводящих к изменениям температуры пара на входе в пароперегреватель. Следует заметить, что подача сигнала yi непосредственно на вход регулятора помимо дифференциатора привела бы к тому? 130
что ПЙ-регулятор W'p поддерживал бы разность или сумму сигналов (y±yi) вместо заданного значения у.
Представим схему рис. 5-4 в более удобном для анализа виде (рис. 5-5). При таком замещении передаточная функция системы относительно задающего воздействия Wu(p) =у(р)/и(р) не изменится.
Рис. 5-5. Схема замещения двухкоптурпой АСР с дифференциатором.
Действительно, для системы па рис. 5-4:
, ч ,£дч
«(A) i + ^p(p)IVa)«Wa) об^'‘ 1 '
Для системы на рис. 5-5:
_''(л) __Ц7 /„ч_____Гр‘.!.Й-----w (д) (5-10)
«(/') i’2^' । + ^р1 (/') ^об! (Й а[Р1' [
Положив в последнем уравнении IFp2 = 1 Г№л(р) и подставив №Р№д(р) вместо lFpi(p), получим:
Д(А) 1_________________ГР (Й 117д (А)________w .
«(Р) ~ ИЗД (1+И7р(р)Гд(р)Г£)б1(р)1
(5-11)
Сравнивая полученную формулу (5-11) с исходной (5-9), убеждаемся в том, что они одинаковы.
В конечном итоге в двухконтур ной системе определению подлежат четыре параметра настройки: А’д, 7Д, /Ср и Тп. Если инерционность регулируемого объекта значительно превышает инерционность участка то переходный процесс щ(() заканчивается задолго до окончания переходного процесса y(t). В связи с этим в установившемся режиме на схеме, изображенной на рис. 5-5, величину хр2 можно принять равной yi, т. е.
Хр2=Уь (5-12)
9* 131
Составим для схемы па рис. 5-5 систему у-равнепий:
ydp) =xPi(p)Wo5l(p)-, y(p)=W^(p)xPi{p).
(5-13)
Далее исключением щ(р) и Xpi(p) из (5-13) с помощью (5-12) получим оператор -швпвалентного объекта для регулятора 1Г112:
_ц(р) __
*р2 (Р) «'об. (Р)
Пб2 (Р)
(5-14)
Следовательно, двухконтурпая схема (см. рис. 5-5) может быть заменена упрощенной одноконтурной схемой рис. 5-6, где
^об(Р) М^об! (Р)
^062^)-
— передаточная функция эквивалентного (замещаю-
щего) объекта, находящегося под воздействием лишь одного регулятора №р2 с
передагочпой функцией вида Wp2=l/lV„(p). Параметры настройки регулятора Wp2 или дифференциатора /<д= 1//<р и
Рд,= Ри можно определить Рис. 5-6. Схема преобразования после построения годогра-двухконтурнои АСР. фа вектОра ДфХ разомк-
нутой системы Wp,c(i(i>) = = 1#р2(йв) П^’обгДсо) для нескольких значений Ти мето-
дом, изложенным в § 5-3. Для расчега параметров настройки /\р и /и регулятора И?р(р), находящегося под воздействием двух сигналов у и уд, необходимо определить вначале передаточную функцию эквивалентного (замещающего) объекта Ш'эОб(р), на который он действует в схеме на рис. 5-4:
Пб(^) = + (5-15)
По характеристике (5-15) определяется Др
и 7’и методом, изложенным в § 5-3.
При этом рекомендуется следующий порядок расчетных и графических операций [Л. 1]:
1) По известным АФХ lFoe (iw) и УГобДйа) строится АФХ первого эквивалентного объекта для регулятора №Р2, равная №эоб2(*®) = (tco)/U/O6i(гео).
2) По графику АФХ этого эквивалентного объекта определяются настройки корректирующего ПИ-регуля-гора U7P2 в схеме на рис. 5-5: /СР2 и Та2.
3) По найденным настройкам /<р2 и Т112 определяются настройки дифференциатора:
Кд— 1/Лр и Т„—Уд.
4) Строится АФХ второго эквивалентного объекта для регулятора U^p в схеме па рис. 5-4
(Ч = 1^06, (М (М + ^06 (М.
5) По графику 1Г00б(1со), точнее по его части, находящейся в III квадранте комплексной плоскости, определяются настройки регулятора Wp: /<р и Ги.
Пример. Определить оптимальные значения параметров настройки дифференциатора (Лд, Тп) и ПИ-регулятора (КР, Т„) в двухкоп-гуриоп ан соматической системе регулирования.
Исходные данные для расчета.
1) Регулятор действует по отклонению у (основной участок) и исчезающему сигналу yt(промежуточный участок).
2) Структурная схема рассчитываемой системы приведена на рис. 5-4, функциональная — на рис. 12-13, 12-17 и др.
3) Динамические характеристики основного UA>6 и промежуточного И7„б| участков заданы в виде частотных характеристик Л1(со) и ч (<»):
4) 11ок. 1.з।гели качества переходного процесса в АСР: М =1,62;
*р
/ = | «/(О <» = /»,,„,. т. е. (Хр/Ги)=(Кр/Ги)макс[см. формулу (5-4)]
О
ш, с"1 мВ/ед. возм -Ч>( б (w)’ град со, с"1 мсб1 (<»). мВ/ед. возм —<Р (^)т град
0,006 0,029 84 0,008 0,030 11
0,008 0,019 106 0,010 0,0297 14
0,010 0,018 126 0,012 0,0294 16
0,012 0,015 145 0,016 0,0291 22
0,016 0,012 180 0,020 0,0285 24
0,021 0,010 213 0,08 0,0182 92
0,04 0,005 365 0,1 0,0160 109
0,06 0,003 510 0,14 0,0122 137
0,08 0,0026 666 0,18 0,0098 163
0,1 0,002 800 0,2 0,0082 172
Порядок расчета. 1. Заменим Исходную схему (рис. 5-4) равнозначной (рис. 5-6) с целью определения оптимальных параметров настройки для регулятора
1Гр2(1ы) = 1/№д((ы).
Эквивалентным (замещающим) объектом для 1^р2 будет участок
«"об ('“) ^062 ('“) lV/i61 ((W) •
определяем (/to) по
II
4>эоб2(со) =(ров(со)—фоб! (to).
Результаты сводим в таблицу и по tp%62(to) и Л1э0б2(со) строим W^owG’to) (рис. 5-7,а).
<o, C"1 2 (ш) Э . » —Vo62 (®). град С1>, с * «об 2 (“) —Фоб 2 И* град
0,008 0,65 95 0,016 0,412 158
0,01 0,63 112 0,017 0,392 164
0,012 0,51 128 0,02 0,346 185
2. По годографу вектора АФХ первого замещающего объекта и методике, изложенной в § 5 3 (см. рис. 5-2), определяем оптимальные параметры настройки регулятора Ц7Р2 в схеме на рис. 5-6: /(“‘=0,12; 7’и2=Н2 с (рис. 5-7 Д).
3. По найденным значениям /\р2 и Ти2 определяем настройки дифференциатора:
1/01 ГТ . уоит _ уЧ>1ГГ
Лд 1,'Otn > ' Д - ' ||2 • Лр2
т. с.
Л“т=8,35 и 7™1Т= 112 с.
Составляем таблицу значений /Ид(со) и срд(ы).
со, с'1 Мд(“>) Фд («). град и>, с”1 «д (<о) Фд(Ш). град
0,08 9,92 6 0,18 9,98 2
0,1 9,95 5 0,2 9,99
0,14 9,97 3
4. Определяем АФХ второго эквивалентного (замещающего) объекта для регулятора 117р(/и) в схеме па рис. 5 4 как сумму последовательно и параллельно включенных звеньев:
Кб (<«) = Гоб1 (/и) WA (/«) + И70б (.to).
Составляем таблипу АФХ для объекта, состоящего из произведения двух звеньев: Ги0б1(йо)^д(й>).
W, С’1 Mof>i <“>• ЛГд(ш), мВ/еД. возм —Ч’об, <°О+ +V’ град О), С"1 Моб,<“> Л4д(ш), мВ/ед. возм -фо61(“)+ +ФД». град
0,08 0,182 86 0,18 0,098 161
0,1 0,158 104 0,2 0,082 172
0,14 0,122 134
Рис. 5 7.
а — АФХ эквивалентного объекта
5Po6(f<" E)=W'o6(to)/W'o6l(ta);
б — определение оптимальных настроек дифференциатора.
|35
Сравнивая модули АФХ для объектов 11ГОб1(<») 1₽д(йв) | и |№об(йо)|, заметим, что второй, начиная с частоты ыс=0,08 с-1, становится пренебрежимо малой величиной. Тогда 1Г8ов(г<о)~ ~ 1Гоб1(йв) 1Гд(1й). Строим годограф этого вектора в координатах «(&>), iv(a) по данным вышеприведенной таблицы (рис. 5-8,а).
5. По участку АФХ второго замещающего объекта, расположенному в III квадранте комплексной плоскости, определяем К“п и 7°пт для регулятора 1Гр(/<о) в исходной схеме на рис. 5-4 при М = 1,62 ед Кр/7ц)макс (Рис- 5-8,6).
—3,8 ед возм/мВ; 7'°"т — щ с
i-b. Выбор Оптимальных значений параметров настройки регуляторов для автоматических систем, находящихся под воздействием случайных возмущений
Выбор или расчет оптимальных значений параметров настройки регуляторов всегда связан с оценкой качества работы автоматических систем. Это условие должно соблюдаться и для систем, находящихся под воздействием случайных возмущений. Наличие случайных воздействий %(/) на входе в объект предопределяет случайный характер изменений регулируемой величины Y(t) на выходе. Для оценки последней применяются статистические показатели качества: дисперсия DY(/) (4-40) или значение среднеквадратичного отклонения (ошибки) оу= У DY (t) (4-41). В то же время в реальных условиях эксплуатации возможны детерминированные возмущения, близкие по форме к сту
пенчатым или прямоугольным, действующие со стороны регулирующего органа, задатчика или потребителя (нагрузки). Это означает, что АСР должна обладать определенным запасом устойчивости, оцениваемым, например, по степени затухания Ч' или колебательности т. Следовательно, регулятор с оптимальными настройками должен обеспечить одновременно заданный запас устойчивости и минимум дисперсии регулируемой величины DY(t) или среднеквадратичного отклонения (ошибки) о„.
В связи с этим расчет настроек регулятора осуществляется в два этапа: вначалестро-
Рис. 5-9. Определение оптимальных настроек регулятора при случайных воздействиях.
ится линия равного затухания
(равной степени колебательности т) в кооодинатах Ар/Ги—Ар (для ПИ-регулятора), а затем определяется минимум дисперсии DY(t) или среднеквадратичной ошибки для устойчивой системы. Местонахождение точки оптимальных настроек на линии равного затухания (равного запаса устойчивости) для систем, находящихся под воздействием случайных возмущений, определяется на основании практики расчетов, моделирования и опыта их наладки и эксплуатации [Л. 7]. Эта точка лежит несколько правее максимума отношения Ар/7и на линии Kj>/Tu=f(Kp).
В качестве иллюстрации на рис. 5-9 построена линия равного затухания (запаса устойчивости) Ф=0,9 в координатах Ар/Л,—Ар для примера расчета настройки, приведенного на рис. 5-2. Точка, соответствующая оптимальной настройке ПИ-регулятора в устойчивой системе, находящейся под действием случайных возмущений, находится справа от максимума отношения Ар/Ти в соответствии с условием: /к \
I р 1 I Т / \ в /«пт
/Кр \
= 0,8 — 0,91-уг- 1
\ и / макс
кбйгРОЛьниЕ вопросы
1. Какие параметры Настройки Имеют П-, ЙЙ- и ЙЙД-рёгулй-16ры?
2. Как рассчитать настройки ПИ-регулятора по временной характеристике объекта?
3. В чем заключается графоаналитический метод расчета оптимального значения Л'„ для П-рсгуляторов но ЛФХ объекта?
4. Рассчитайте параметры настройки 1II1 Д-регулятора температуры для 11г = 0,7.г> по кривой разгона объекта, изображенной на рис. 14-21.
5. В чем состоит сущность метода расчета настроек стабилизирующего и корректирующего регулятора в двухконтурной автоматической системе регулирования?
6. Поясните порядок расчета настроек дифференциатора и регулятора в двухконтурной системе с вводом исчезающего воздействия по промежуточному параметру.
7. Как выбираются настройки в системах, находящихся под действием случайных возмущений?
ЧАСТЬ ВТОРАЯ
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ТЕПЛОВЫХ ПРОЦЕССОВ
ГЛАВА ШЕСТАЯ
ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРАХ
6-1. Промышленные регуляторы и их основные элементы
Регуляторы прямого действия (см. рис. В-1 и 1-1) в настоящее время в значительной степени вытеснены регуляторами непрямого действия, в которых для перемещения регулирующего органа используется внешний источник энергии. В зависимости от вида этой энергии промышленные автоматические регуляторы делятся на электрические, пневматические, гидравлические и комбинированные (электропневматические и электрогидрав-лическпс) системы.
Рассмотрим в качестве примера электрический регулятор, действующий в автоматической системе регулирования воды в баке, изображенной па рис. 6-1. В этой системе стабилизация уровня осуществляется путем передачи воздействия с выхода объекта 1 на вход (регулирующий орган 2 или 3) через систему элементов: датчик уровня 4, реостаты 5 и 5' текущего и заданного значений регулируемой величины, измерительный блок 6, командно-усилительное устройство 7, ключ 8 управления электроприводом, магнитный пускатель 9, электропривод переменного тока 10 и редуктор 11, понижающий число оборотов двигателя. Внешний источник электрической энергии подводится в рассматриваемой системе в трех местах: в измерительном блоке Г> для преобразования механического перемещения поплавка в электрический сигнал, в командно-усилительном устройстве 7 для формирования управляющего электрического сигнала, в исполнительном механизме, состоящем из электропривода 10 с магнитным пускателем и редуктором 11.
Системы непрямого регулирования позволяют развивать большие усилия при перемещении регулирующего органа и обеспечивают возможность территориального разделения объекта, автоматического регулятора и исполнительного механизма; централизацию управления технологическим процессом; удобный переход с автома-139
тического управления на дистанционное; увеличение быстродействия и точности АСР.
Функциональная схема замкнутой системы с регулятором непрямого действия приведена па рис. 6-2. Передача воздействий с выхода объекта 1 на вход (регулирующий орган 2) осуществляется регулятором, который представлен в виде цепочки последовательно соединенных звеньев [первичный прибор 3, измерительный блок
Рис. 6-1. Система регулирования уровня воды в бакс с электрическим регулятором непрямого действия.
4, задатчик ручного управления 5, командно-усилительное устройство (КУУ) 6 (регулирующий блок) и исполнительный механизм 7].
Первичный прибор служит для измерения регулируемой величины «/(/) и преобразования ее во входной сигнал регулятора </*(/)• В качестве измерительных устройств теплотехнических первичных приборов используются мембраны, манометрические пружины, термопары, термометры сопротивления и пр. [Л. 31]. Основные типы измерительных устройств для измерения неэлектрических величин схематически показаны в табл. 6-1.
Преобразование регулируемой величины — входного сигнала первичного прибора в его выходной сигнал (входной сигнал регулятора) осуществляется непосредственно измерительным устройством (датчиком), напри-140
unto.
мер термопарой, или с помощью специальных преобразователей. Преобразователи могут быть использованы для усиления мощности сигналов, а также для их унификации. При этом унифицированный сигнал рассчитан на многократное использование в нескольких приборах или регуляторах одновременно. Применение датчиков и преобразователей с унифицированным выходным сигналом (например, 0—5 мА, 1—5 мА, 0—20 мА, 4 —20 мА и
Рис. 6-2. Функциональная схема замкнутой системы, состоящей из объекта и регулятора.
0—10 В для электрических сигналов; 0,2—1 кгс/см2 для пневматических сигналов и 0,5—2,5 кгс/см2 для гидравлических сигналов) предусматривается Государственной системой приборов (ГСП) [Л. 8].
Требования к датчикам промышленных регуляторов.
1) Направленность действия (свойство детектирования). Изменение выходного сигнала датчика не должно оказывать влияния на значение входного сигнала.
2) Высокая чувствительность и малая инерционность. Временная характеристика чувствительного элемента должна максимально' приближаться к характеристике усилительного звена (см. рис. 1-19).
3) Линейность статической характеристики. Зависимость выходного сигнала датчика от входного должна быть близка к линейной (рис. 6-3) в рабочем диапазоне измерений регулируемой величины.
Чаще всего встречаются 2 вида нелинейности у* = — Первая — на интервале 0±i/i, так называемая зона нечувствительности А/2, —связана с наличием трения и присуща всякой механической системе. Вторая — на интервале yi—у2— связана с принятым принципом измерения или физическими свойствами датчика. Нели-
Таблице 6-1
Род измеряемой величины Схематический вид и наименование первичного прибора входное воздействие выходной сигнал
Темпера тура Термоэлектри чес кий термометр (термопара) 1 ( \имв Температура t Напряжение йимВ
Температура Термометр сопротив ле 1 ния t Температура t Напряжение на диагонали моста ивых
Давление Трубчатая пружина f р Давление в трубке Р Угол поворота свободного конца трубки у
Давление, уровень Мембрана ' t Давление или уровень Р.П Прогиб мембраны &L
Разность давлений (расход) Дифманометр для измерения расхо жидкости или газе да. Разность давлений рГрг Прогиб мембраны Д1
* Pl
ценности первого и второго вида могут существенно снизить точность и быстродействие автоматического регулятора. Нелинейность характеристики датчика также оказывает существенное влияние на точность расчетов АСР, в основу которых положены операции с линейными звеньями.
4) Высокая надежность. Отказ в работе первичного прибора может привести к отказу или ложным действиям АСР. Датчики устанавливаются непосредственно на объекте, часто находятся в контакте с измеряемой средой, поэтому они должны обладать высокой 142
Рис. 6-3. Статическая характеристика датчика.
уйюйчйЁос'гыо По отношению к термическим и механическим воздействиям, вибрации, коррозии и т. п. Защита датчиков от этих воздействий иногда усложняет их конструкцию, снижает их быстродействие и чувствительность.
Измерительный блок предназначен для сравнения фактического значения регулируемой величины с заданным. На вход измерительного блока поступают два сигнала (см. рис. 6-2): сигнал с выхода первичного прибора, характеризующий действительное значение регулируемой величины у*, и сигнал с выхода задающего устройства, характеризующий ее заданное значение и. С выхода измерительного блока снимается сигнал (у*— —и).
В качестве примера на рис. 6 4 приводи гея схема электрических соединений измерительного блока с реостатным датчиком уровня, примененным в АСР, изображенной на рис. 6-1. Измерительный блок в этом случае действует по принципу электрического равновес
ного моста. При неизменном значении уровня воды в баке с резистора датчика /?д снимается напряжение t/DI, уравновешиваемое напряжением U3, снимаемым с резистора — задатчика ручного управления. Изменение уровня вызовет смещение движка резистора /?д и появление на выходе моста сигнала небаланса Д</Вых- Аналогичное явление произойдет при изменении положения движка резистора /?а, что равнозначно изменению заданного значения регулируемой величины.
Рис. 6-4. Принципиальная электрическая схема реостатного датчика постоянного тока.
Измерительный блок служит суммирующим звеном в цепочке звеньев автоматической системы, показанной на рис. 6-2. В нем осуществляется алгебраическое суммирование заданного и текущего значений регулируемой величины. На вход измерительного блока одновре
менно могут поступать несколько различных сигналов, при этом он имеет несколько входов и один выход.
К измерительным блокам промышленных регуляторов подводится энергия, необходимая для преобразования и усиления входных сш палов.
Требования к измерительным блокам регуляторов.
1) Возможность компенсации сигналов, поступающих от датчиков.
2) Линейность и стабильность статической характеристики, связывающей изменения входного и выходного сигналов.
3) Безынерциониость действия.
4) Возможность суммирования нескольких входных сигналов.
Задатчик ручного управления предназначен для формирования сигнала, соответствующего заданному значению регулируемой величины. Входом задатчика служит положение органа, устанавливающего это значение, выходом— сигнал, соответствующий заданному значению >и той же форме, что и выходной сигнал первичного прибора. Например, если первичный прибор имеет па выходе напряжение постоянного тока, то и с выхода задатчика должно поступать напряжение постоянного тока.
Конструктивно задатчик может быть встроен в измерительный блок регулятора или установлен отдельно на щите управления.
Требования к задатчикам.
1) Высокая стабильность выходного сигнала.
2) Достаточный диапазон изменения сигнала, позволяющий компенсировать постоянную составляющую регулируемой величины.
Командно-усилительное устройство (КУУ) предназначено для преобразования выходного сигнала измерительного блока и усиления его до значений, необходимых для управления исполнительным механизмом. КУУ участвует в формировании закона перемещения регулирующего органа. Входом КУУ служит выходной сигнал измерительного блока, выходом— сигнал, управляющий исполнительным механизмом. В состав КУУ промышленных регуляторов входят сложные многоступенчатые усилители.
Рассмотрим принцип действия и устройство некоторых типов одноступенчатых усилителей.
Рис. 6-5. Принципиальные электрические схемы усилителен.
с — трансформаторный усилитель переменного тока; б — ламповый усилитель: /— анод; 2— катод; 3—сетка; о и а — полупроводниковый усилитель: Б — база (промежуточный слой); Л— коллектор; 3— эмиттер; — источник смещения; Ек — источник питания; б —модулятор: / — схема модулятора; 2 — графики входного и выходного напряжения модулятора и Рвызс(0.
Трансформаторный усилитель (рис. 6-5,а). В нем используется известный принцип повышения (понижения) напряжения, индуцированного во вторичной обмотке трансформатора переменного тока. Коэффициент усиления
U ВЫХ _ 012
Лу= ^Вх
1‘Де и ®2 — ЧИсЛа ёйткой йерйичйои и вторичной обмоток. Трансформаторы относятся к усилителям преобразовательного типа й используются обычно для преобразования входного сигнала по напряжению и кондуктивногО разделения цепей.
Ламповый усилитель (рис. 6-5,6). Усилители этого ти-
па действуют по известному принципу управления напряжением, развиваемым анодным током на нагрузочном резисторе 7?а, с помощью изменения напряжения между сеткой 3 и катодом 2, так называемого сеточного смещения Напряжение сеточного смещения является входным сигналом ламповых усилителей, которые применяются для усиления по напряжению и мощности (току) [Л. 9].
Полупроводниковый усилитель (рис. 6-5,в). Входной сигнал вводится в участок цели между базой Б и эмиттером Э, а нагрузочное сопротивление — между эмиттером и коллектором К. Общим электродом для выходной и входной цепей является эмиттер. Усилитель, собранный пс» такой схеме, Обеспечивает одновременное усиление тока и напряжения [Л. 9].
Полупроводниковый ключ (нелинейный усилитель мощности). Действие ключа соответствует двум его стабильным положениям (закрыто — открыто). Картина токораспределения в цепях ключа изображена на рис. 6-5,г (/ и 2).
Для того чтобы триод (и тем самым ключ) был надежно «заперт» (рис. 6-5,а; 1), его базе должен быть сообщен положительный потенциал (не менее 0,5—1 В) по отношению к эмиттеру.
В этом случае эмиттерный переход не пропускает тока (/»=0, ключ «заперт»), а через коллекторную и базовую цепи проходит тепловой ток 1ы—1ко-
При полностью открытом ключе (рис. 6-5,г; 2) через его коллекторную цепь проходит ток IK~EK/RK. Для того чтобы такой ток мог .пройти через базу, в нее необходимо вводить электронный ток 1б.н=1к/В (минимально необходимое значение), где В — коэффициент передачи тока. В действительности для повышения стабильности открытого положения ключа в его базу вводится ток /в>/б.н. Это приводит триод в режим насыщения (нелинейного усиления) [Л. 9].
Полупроводниковый усилитель преобразовательного типа (модулятор). В качестве преобразователя постоянного тока в переменный применяется полупроводниковый модулятор. Одна из схем модулятора приведена на рис. 6-5,6; 1.
Преобразуемый сигнал (посто-
'вых
Рис. 6-6. Электромагнитный релейный усилитель.
янное входное напряжение Пвх) подведен одним полюсом к общей точке связи коллекторов полупроводниковых триодов и Т2, другим—к средней точке первичной обмотки выходного трансформатора Тр2. Переменное выходное напряжение в виде разнополярных прямоугольных импульсов (рис. 6-5,6; 2) снимается с зажимов обмотки II. Модулирующее напряжение, управляющее частотой преобразования, подведено через трансформатор Тр\ к ба-
зам триодов и от средней точки вторичной обмотки через общий базовый резистор /?с к общей точке связи коллекторов. Под действием ~ UМОД триоды и Г2 открываются поочередно и также поочередно пропускают ток. Частота выходного сигнала переменного тока при этом равна модулирующей [Л. 9].
Электромагнитн ый релейный усилитель представляет собой электромагнитное реле (рис. 6-6). Входным сигналом реле служит постоянный или переменный электрический ток, проходящий по сигнальной обмотке 1, охватывающей магнитопровод 2 и индуцирующей в нем магнитный ноток и соответствующее ему усилие. Под его действием подвижная часть магпитопровода— сердечник 3 втягивается в катушку и замыкает нормально разомкнутые контакты реле К2, к которым подводится электрическое напряжение от внешнего источника постоянного или переменного тока t/ист. При исчезновении входного сигнала К? размыкается под действием пружины 4.
Гидравлический струйный усилитель. Входной величиной струйного усилителя (рис. 6-7) является ной трубки 1, ной опоры 2.
Рис. 6-7. Гидравлический струйный усилитель.
Рис. 6 8. Золотниковый усилитель.
механическое перемещение струй-поворачивающейся относительно полой шарнир-В качестве внешнего источника используется энергия сжатого масла или воды поступающих в нижний конец струйной трубки через трубопровод 3. Выходной величиной является энергия направленной струи жидкости, вытекающей из насадки 4. Обычно струйный усилитель используется совместно с поршневым сервоприводом. Направленное движение поршня 8 обусловливается положением струйной трубки относительно приемных сопл 5. В нейтральном положении трубки, совпадающем с осью 00', давление жидкости в отводящих трубках б и 7 одинаково, а поршень 8 неподвижен. При смещении трубки вправо ее насадка 4 большей своей частью перекроет правое сопло, большая доля струи жидкости устремится в полость а сервопривода 9, давление в ней превысит давление в полости б и поршень под действием перепада давлений начнет смещаться вниз. Отклонение трубки 4 влево по той же причине вызовет перемещение поршня 8 и шгока 10 вверх и открытие (закрытие) регулирующего органа 11.
Гидравлический золотниковый усилитель. Входной величиной золотникового усилители (рис. 6-8) является перемещение штока 2 золотника 1. В зависимости от положения его дисков 4 относительно окон 5 поток сжатого масла из трубопровода 3 может устремляться в полость а и б поршневого сервопривода 6, обусловливая направление движения поршня.
Пневматический усилитель типа «сопло —засл о н к а» (рис. 6-9). Его входной величиной является перемещение заслонки относительно сопла-насадки. Отклонение входной величины усилителя приводит к изменению давления сжатого воздуха в верхней полости мембранного исполнительного механизма. Изменение этого давления будет выходной величиной усилителя.
Р:ШГ
rv3
Рис. 6-9. Пневматический усилитель типа «сопло—заслонка».
1 — заслонка; 2— сопло; 3 подводящая трубка; 4 — соединительная трубка; 5 — эластичная мембрана с жестким центром; 6 — уравновешивающая пружина;
7 — регулирующий орган.
Комбинированные усилители состоят из двух последовательно включенных разнотипных усилителей — приемных (обычно электрического действия) и выходных (гидравлических или пневматических).
Наиболее распространены два типа комбинированных усилителей —электрогидравлические и элсктронневматические.
Основные требования к усилителям всех типов:
1) направленность действия;
2) достаточно' высокий и стабильный коэффициент усиления;
3) малая инерционность;
4) линейность статической характеристики в широком диапазоне изменений входного сигнала (для усилителей, относящихся к классу линейных).
Исполнительные механизмы (сервоприводы). Исполнительные механизмы (сервоприводы) предназначены для перемещения регулирующего органа, с которым они сочленяются посредством рычажных, кулачковых, редукторных или тросовых передач. Исполнительный меха-148
низм развивает усилие, необходимое для перестановки регулирующего органа (клапана, задвижки, поворотной заслонки и т. п.), за счет использования энергии внешнего источника, которая подводится к нему непосредственно или через командно-усилительное устройство.
Сервопривод характеризуется двумя основными показателями: усилием, развиваемым поршнем (или крутящим моментом на выходном валу), и максимальным ходом поршня (или углом поворота выходного вала).
Автоматическое управление исполнительным механизмом от управляющего сигнала с выхода КУУ обычно дублируется посредством ручного или дистанционного управления. Перевод с автоматического управления на дистанционное осуществляется с помощью переключателя управления.
По виду используемого источника энергии исполнительные механизмы (ИМ) или сервоприводы (СП) подразделяются па электрические, гидравлические п пневматические.
Сервоприводы промышленных регуляторов подразделяются также по виду зависимости скорости перемещения выходного вала или поршня от изменения командного или управляющего сигнала па три группы.
Сервопри воды с постоянной скоростью. Выходной вал пли поршень СП перемещается с постоянной скоростью независимо от значения управляющего сигнала. Уравнение движения:
dx
. Тс-^ = ±1, (6-1)
где — перемещение выходного вала или поршня; Тс — время, необходимое для перемещения регулирующего органа из одного крайнего положения в другое. Знак правой части зависит ог направления движения.
Величина, обратная 7\, носит название скорости перемещения S. График уравнения (6-1), плп скоростная характеристика сервопривода с постоянной скоростью, приведен на рис. 6-10,а. Этот сервопривод представляет собой интегрирующее звено с коэффициентом пропорциональности 1/Тс. Его временная характеристика приведена на рис. 6-10,6. К сервоприводам с постоянной скоростью чаще всего относятся электрические исполнительные механизмы. Они состоят из электродвигателя, сочлененного с редуктором. Включение (диетапцпопное
или автоматическое) и отключение двигателя осуществляются с помощью магнитного пускателя. Характеристиками электрического сервопривода являются крутящий момент на выходном валу Л4кр, число оборотов электродвигателя п, об/мин, передаточное число редуктора 1=пЭпМсп и угол поворота выходного вала.
Рис. 6-10. Характеристики сервоприводов с постоянной и переменной скоростью.
а и в — скоростные; биг — временные.
Сервоприводы с переменной скоростью. Выходной вал редуктора или поршень сервопривода перемещается со скоростью, пропорциональной значению управляющего сигнала:
= j
хР=4-[у*(ол, ! (6'2)
7 с J I
П I
fTtc R — размерный коэффициент; Тс — время йбЛнбМ хода сервопривода» обусловленное его конструкцией и значением входного сигнала. Скоростная характеристика dxvldt=x%—f{Ky*) приведена на рис. 6-10,в, временная— на рис. 6-10,г. Как следует из уравнения (6-2), сервоприводы с переменной скоростью имеют характе-
Рис. 6-11. Характеристики сервопривода с пропорциональной скоростью.
а — статическая; б — разгонная.
ристику интегрирующего звена с коэффициентом пропорциональности К1Т<-. К сервоприводам с переменной скоростью относятся, например, гидравлические исполнительные механизмы (рис. 6-7).
Сервоприводы с пропорциональной скоростью. Скорость движения штока или выходного вала сервопривода такого типа пропорциональна скорости изменения управляющего сигнала:
dxv _ Kdy* (t) dt dt
(6-3)
Его скоростная, или статическая, характеристика приведена на рис. 6 11,а, переходная или разгонная — на рис. 6-11,6. Как следует из уравнения (6-3) и соответствующих ему временных характеристик, рассматриваемый сервопривод представляет собой пропорциональное звено. Примером сервопривода с пропорциональной скоростью перемещения может служить мембранный сервопривод с уравновешивающей пружиной (см. рис. 6-8).
Общим недостатком сервоприводов всех типов является разгон и выбег выходного вала или поршня, связанные с наличием вращающихся или движущихся масс.
Разгон характеризуется временем разгона А/р, выбег — временем полувыбега Д/в/2. Обычно А/р невелико. Как следует из графика движения поршня или вала (рис. 6-12), на долю Л/в/2 приходится наиболее сущест
вен величина дополнительного перемещения хр, происходящего после снятия управляющего сигнала. Выбег сервоприводов может существенно искажать динамические характеристики регулятора. Для устранения выбега предусматриваются специальные тормозные устройства (механические, электрические, электромагнитные) .
Требования к сервоприво-
дам промышленных регуля-Рис. 6-12. Характеристика «вы- топов-бега» сервопривода.
1) некоторый запас мощности по отношению к максимальному перестановочному усилию (примерно 25%—чрезмерный запас экономически невыгоден);
2) минимально возможный выбег А/в (рис. 6-12);
3) отсутствие «мертвого хода» или зоны нечувствительности А (см. рис. 6-11);
4) реверсирование хода, т. с. возможность изменения
направления движения в зависимости от знака управ-
ляющего сигнала.
6-2. Формирование линейных законов регулирования в пульсирующем режиме работы автоматических регуляторов
В некоторых типах промышленных электрических регуляторов, имеющих структурную схему, изображенную на рис. 6-13, в качестве второй ступени усиления командно-усилителыюго устройства используется трехпозиционное реле. Такие регуляторы относятся к релейно-импульсным автоматическим регуляторам.
В регуляторе используется сервопривод с постоянной скоростью перемещения регулирующего органа S=l/7’c, в качестве устройства обратной связи—ДС-це-почка или инерционное звено первого порядка с переда-152
k
точной функцией IF0.c (р) =—и кривой переходного процесса в виде экспоненты
(6-4)
где T=RC.
Рассмотрим характер перемещения сервопривода указанного регулятора при подаче на вход измерительного блока 1 ступенчатого сигнала у* (t) (например, пере-
Рис. 6-13. Функциональная схема промышленного регулятора с линейным элементом в прямом канале усиления, охваченном обратной связью.
мещением ручки задатчика). На выходе первой ступени усиления 2 сигнал будет иметь значение Xi—Kyj*. При превышении этим сигналом зопы нечувствительности прямого хода трехпозиционного реле 3 XiZ>iA/2 (рис. 6-14,а), т. е. в момент времени / = 0 (рис. 6-14,6), произойдет включение реле и ступенчатый сигнал хр.э через пусковое устройство включит сервопривод 4, который начнет перемещаться с постоянной скоростью х'р= = S Одновременно сигнал хр.э поступит на вход устройства обратной связи 5.
Сигнал на выходе /?С-ценочки обратной связи хос будет изменяться по экспоненте в соответствии с уравнением (6-4).
Поскольку обратная связь в данной схеме является отрицательной, нарастающий по экспоненте сигнал Хо.с(0 будет вычитаться в блоке сравнения 1 из постоянного сигнала y*(t) и в момент времени t, когда их разность, усиленная в К раз, станет меньше зоны нечувствительности обратного хода (Л/2—Дв) трехпозиционного релейного элемента, последний отключится. Это приве-15?
Дет к разрыву цепи управления сервоприводом и остановке последнего. В то же время скачком исчезнет сигнал на входе устройства обратной связи. Конденсатор С начнет разряжаться через резистор R. Потенциал х0.с начнет уменьшаться по экспоненте, а разность Xi(t) =
—Хо.с(01 возрастать из-за постоянства у*(/) и в момент /2. когда Xi вновь превысит зону нечувстви-
тельности прямого хода Xi>A/2, произойдет повторное включение реле в ту же сторону. Одновременно начнет перемешаться сервопривод регулятора, а ступенчатый сигнал Хр.э вновь поступит на вход RС-цепочки обратной связи.
Описанный цикл будет повторяться до тех пор, пока на входе измерительного блока будет оставаться сигнал y*(f). Сервопривод при этом будет перемещаться до срабатывания концевого вьщлуочзтрля электрического 154
Двигателя. Соединив вершины ступенчатой лйПйи пере-мещепия сервопривода хр прямой, получим идеализированную кривую переходного процесса регулятора с релейным усилителем, являющуюся его реакцией на входной ступенчатый сигнал y*(t) =А.
Полученная кривая идентична кривой переходного процесса линейного регулятора, ее наклон при t>ty определяется постоянной времени цепочки обратной связи Т. Чем больше Т и чем меньше крутизна экспоненты хо.с(0» тем меньше угол наклона кривой переходного процесса регулятора а к оси времени. Иными словами, динамические свойства промышленного релейно-импульсного регулятора также определяются параметрами устройства обратной связи: Ко.с = б и Т=ТИ, которые являются параметрами настройки ПИ-регулятора.
Итак, сервопривод регулятора с релейным элементом, охваченным инерционным устройством обратной связи, движется прерывисто во промоин при подаче на его вход ступенчатого сигнала. Описанный режим работы регулятора носит название пульсирующего. Он может возникнуть в регуляторах с релейным усилителем лишь при наличии устройства обратной связи, охватывающей релейный элемент, потому что в противном случае при подаче па вход измерительного блока ступенчатого сигнала сервопривод будет перемещаться с постоянной скоростью. Отсюда следует, что регулятор с релейным усилителем будет приближенно воспроизводить линейный ПИ-закон регулирования только в пульсирующем режиме работы регулирующего прибора и сервопривода. Соблюдение этого режима необходимо и при реализации других известных нам линейных законов регулирования в регуляторах с релейным усилителем. Математическое условие возникновения пульсирующего режима регулятора при подаче на его вход ступенчатого сигнала определится из соотношения
dxn К __
(6'5)
где dxp!dt=S= \/Тс— постоянная скорость перемещения регулирующего органа; Л'р и Тю — численные значения установленных в регуляторе параметров настройки; у* — величина ступенчатого сигнала на входе измерительного блока регулятора.
Переписав уравнение (6-5) с учетом введенных обозначений и равенства /Ср= 1/6, получим:
или 87' > у*Т (6-6)
7и У* 1с “ J с v '
Итак, для того чтобы ПИ-регулятор действовал в пульсирующем режиме, необходимо, чтобы произведение установленных значений параметров его настройки 67'и было больше произведения времени сервопривода 7'с па значение ступенчатого сигнала у* на выходе измерительного блока (на входе в регулятор). При выполнении этого условия пульсирующий режим будет иметь место и в замкнутой АСР, когда па вход измерительного блока регулятора поступает низкочастотный сигнал У*(1), произвольно изменяющийся во времени.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Нарисуйте функциональную схему регулятора непрямого действия и перечислите его основные элементы.
2. Для чего служит датчик промышленного регулятора? Поясните его действие па одном из примеров.
3. В чем состоит назначение измерительного блока и задатчика регулятора?
4. В чем состоит назначение комапдпо-усплитслыюго устройства?
5. Перечислите основные виды электрических усилителей.
6. Приведите пример гидравлического усилителя.
7. Поясните принцип действия пневматического усилителя типа «сопло — заслонка».
8. В чем состоит назначение исполнительных механизмов промышленных регуляторов?
9. Как разделяются сервоприводы но скорости перемещения регулирующего органа?
10. Нарисуйте функциональную схему электрического регулятора с релейным усилителем, охваченным обратной связью.
11. Пользуясь рис. 6-14, поясните действие ПИ регулятора «в пульсирующем» режиме. Что такое «пульсирующий» режим?
ГЛАВА СЕДЬМАЯ
АППАРАТУРА МОСКОВСКОГО ЗАВОДА ТЕПЛОВОЙ АВТОМАТИКИ (МЗТА)
7-1. Устройство и назначение автоматических регуляторов МЗТД
Автоматизация тепловых процессов на ТЭС в Советском Союзе в основном осуществляется на базе электрических регуляторов, включающих первичный прибор 7, регулирующий прибор 2 и исполнительный механизм 3 156
Рис. 7-1. Комплект устройств электронного регулятора.
(рис. 7-1). Регулйрующий прибор 2 состоит из измерительного а и электронного б блоков, конструктивно объединенных в одном корпусе. Исполнительный механизм 3, конструктивно выполняемый в виде колонки дистанционного управления а и электропривода б с редуктором в, размещается отдельно от регулирующего прибора и может управляться с помощью специального ключа дистанционного управления.
Регулирующая аппаратура МЗТА предназначена для реализации АСР различных технологических процессов. Она обеспечивает суммирование и компенсацию электрических сигналов, поступающих от первичных приборов (преобразователей сигналов), и усиление этих сигналов до значения необходимого для управления пусковым устройством электрического исполнительного механизма. При этом регулирующие приборы в сочетании с исполнительным механизмом с постоянной скоростью позволяют осуществить П- и ПИ-законы регулирования. Более сложный ПИД-закон регулирования формируется лишь при подаче на вход электронного блока дополнительного сигнала по скорости изменения регулируемой величины.
Ниже рассматриваются принцип действия и устройство бесконтактных регулирующих приборов типа РПИБ и корректирующих приборов типа КПП.
Регулирующие приборы РПИБ модифицируются по типу установленных в них измерительных блоков. Например, в РПИБ-П1. установлен измерительный блок типа И-Ш для суммирования и компенсации электрических сигналов, поступающих от трех индукционных или дифференциально-трансформаторных датчиков переменного тока, в РПИБ-IV —- от четырех.
Приборы РПИБ-П1 и РПИБ-IV применяются, как правило, в АСР давления, уровня, расхода или соотношения расходов жидкостей, пара или газа, т. е. в тех случаях, когда используются датчики переменного тока.
В приборах типа РПИБ-Т установлен измерительный блок типа И-Т, получающий сигнал от одной или нескольких термопар.
В приборах РПИБ-С использован измерительный блок типа Й-С для работы с одним, а РПИБ-2С — с двумя термометрами сопротивления. Приборы РПИБ-Т и РПИБ-С используются в АСР температуры и других параметров, измеряемых датчиками постоянного тока, 15§
В приборе РПИБ-2Т установлен измерительный блок типа И-2Т, предназначенный для работы одновременно с датчиками постоянного тока и с одним или двумя датчиками переменного тока. С выхода измерительных блоков различных типов на вход электронных блоков типа РПИБ поступает электрический сигнал постоянного напряжения.
7-2. Электронный блок регулирующего прибора РПИБ
Автоматический регулятор с бесконтактным регулирующим прибором РПИБ имеет структуру, аналогичную структуре релейного контактного регулятора (см. рис. 6-13) и отличается лишь тем, что трехпозиционное электромагнитное реле заменено транзисторным триггером. Это позволило выполнить бесконтактным и выходной каскад, управляющий исполнительным механизмом посредством магнитного усилителя. Функциональная схема электронного прибора РПИБ (рис. 7-2) включает линейный ламповый усилитель, последовательно с ним включенный трехпозиционный релейный усилитель (триггер) в прямом канале усиления и пассивную ^С-цепочку в канале главной обратной связи. Теперь проследим прохождение входного сигнала ступенчатой формы по прямому каналу усиления и каналам обратных связей. С выхода измерительного блока сигнал постоянного тока поступает па левый триод электронной лампы 6Н1П (ламповый каскад), который выполняет функции усилителя напряжения постоянного тока. Правый триод действует в режиме катодного повторителя. Разность напряжений постоянного тока нагрузок триодов (сигнал хс) снимается с конденсатора С6, выполняющего роль сумматора, и направляется на вход транзисторного модулятора Л—Tz. С его выхода модулированный сигнал хм поступает па вход лампового каскада через цепочку местной отрицательной обратной связи /(/?8С1) и по прямому каналу через цепочку C7RnRiS управляет триггером, имеющим два устойчивых состояния.
Выход триггера хт связан через цепочку CuRm (местная положительная обратная связь 1Г) и далее через Rsb со входом лампового каскада. По прямому каналу через трансформатор ТрЗ сигнал поступает на рыходпОй каскад Т7,— Т$, выполняющий роль усилителя
Рис. 7-2. Функциональная схема РПИБ.
Главная обратная связь (нР.Ти\
мощности и нагруженный пусковыми устройствами исполнительного механизма Zt и Z2. Триггер, управляемый модулятором, образует е помощью местных статических обратных связей I и II узел с релейной статической характеристикой с зоной нечувствительности А и зоной возврата Ав (см. рис. 6-14,а). Значение Л устанавливается с помощью переменного резистора а значение Лв — резистора R-я,. В исходном положении при отсутствии сигнала на выходе лампового каскада триггер находится в одном из устойчивых положений, сигнал на его выходе (и на выходе обмоток / и II ТрЗ) отсутствует, транзисторы Т5 и Те заперты н ток в нагрузках Zi и Z2 отсутствует.
При появлении сигнала хс>А/2 и управляющего сигнала на выходе модулятора хм происходит «опрокидывание» триггера, т. е. переход в другое устойчивое состояние. При этом на выходе 7'рЗ возникает напряжение прямоугольной формы, открывается один из транзисторов выходного каскада 7'5 пли Т(„ в нагрузке Zt или Z2 появляется ток и происходит включение исполнительного механизма. Выходной сигнал хв.к через трансформатор связи Тр4 поступает на вход ЛйСэ-цепочки главной (динамической) отрицательной обратной связи. При этом конденсатор С3 заряжается в течение той части периода, когда напряжение па вторичной обмотке Тр4 превышает напряжение свечения неоновой лампы Л3. Выход хо.с подсоединен к управляющей сетке правого триода лампового каскада. Если сигнал обратной связи уравновешивает входной сигнал у*, начинается повторный цикл работы регулирующего прибора, связанный с разрядкой конденсатора обратной связи С3.
Напряжение, до которого успевает зарядиться С3 (рис. 7-3), во много раз меньше напряжения свечения лампы Л3, которая обеспечивает разделение цепей заряда /?п,С3 и разряда R<>CS и тем самым и независимость параметров настройки регулятора Кр(6) и Т„. Многократный повторный разбаланс лампового каскада вызывает «пульсирующий режим» движения исполнительного механизма xp(t), график которого изображен на рис. 6-14,6. При этом длительность однократного включения исполнительного механизма обусловливается зоной возврата релейного элемента Ав (см. рис. 6-14,а), устанавливаемой с помощью Rzs, а направление движения xp(t) определяется знаком выходного сигнала лам-11—626 J61
пового каскада хс. Так же, как и релейно-импульсный контактный регулятор, РПИБ приближенно обеспечивает ПИ-закон регулирования в «пульсирующем» режиме.
Рассмотрим теперь прохождение входного сигнала более детально по принципиальной электрической схеме (рис. 7-4). Сигнал с выхода измерительного блока ±6 В (у*) через клеммы 14 и 15 поступает на сетку левого триода Лг. Ко входу правого триода Л, ПОД; водится сигнал с выхода цепи обратной связи. Выходное напряжение постоянного тока каскада, снимаемое с конденсатора Се, представляет собой разность напряжений на нагрузках триодов, которая может балансироваться с помощью потенциометра /?в, включенного между катодами лампы и являющегося корректором электронного блока регулирующего прибора. С выхода С3 сигнал хс поступает на вход транзисторного модулятора, преобразующего этот сигнал в прямоугольные разнополярные импульсы с частотой 50 Гц, ампли-
туда которых равна напряжению на выходе лампового каскада, а фаза определяется знаком этого напряжения.
Модулятор собран на триодах Т\ и Тг, действующих в ключевом режиме и управляемых опорным напряжением, формируемым с помощью диодов Дг и Дз-
С выхода модулятора правого триода лампы
сигнал хм поступает на вход через конденсатор Ct и потен-
циометр регулирующий нечувствительность или коэффициент усиления лампового каскада (местная статическая отрицательная обратная связь) Напряжение на выходе лампового каскада не может быть больше опорного напряжения модулятора. Таким образом, модулятор, кроме своего основного назначения, выполняет функцию ограничения напряжения и предохраняет следующий за ним по схеме триггер от перегрузок большим сигналом хм Этот сигнал поступает иа вход триггера через дифференцирующую цепочку C7RITRIS.
В течение одного периода от лампового каскада потребляется среднее значение тока, необходимое
Рис. 7-3. Динамическая характеристика цепочки обратной связи.
для полного заряда конденсатора С?. При С?=0,1 мкФ и /=50Гц эквивалентное сопротивление, подключенное к выходу лампового каскада ,/?э, составляет 200 кОм независимо от входного сопротивления триггера 7?Пх = 1 кОм. Таким образом, осуществляется соединение высокоомного выхода лампового каскада с низкоомным входом триггера, построенного на коллекторах 7"з и У*, действующих в ключевом режиме и имеющих общей нагрузкой первичную обмотку трансформатора ТрЗ. Токи коллекторов Т3 и Т4 задаются раздельными источниками питания. Триггер характеризуется двумя устойчивыми состояниями- Xi-t и хат (см. рис. 6-14,а). При отсутствии входного сигнала хм (исходное положение) Т3 заперт, а Т3 открыт. При появлении сигнала х„ триггер опрокидывается, т. е. коллектор Т3 открывается, а закрывается.
Рис. 7-4. Принципиальная электрическая схема электронного блока РПИБ.
Возвращение триггера в исходное положение также осуществляется управляющим сигналом хк. Периодические «опрокидывания» триггера вызывают периодические изменения напряжения в первичной обмотке III трансформатора ТрЗ, благодаря которым во вторичных обмотках I и II индуцируются напряжения, близкие по форме к прямоугольным со знаком «+» или «—», зависящим от полярности выходного сигнала хс лампового каскада. Местная статическая 'положительная обратная связь (СыЯгз), соединяющая через переменный резистор /?2в выход триггера хт со входом лампового каскада, вступает в действие лишь после срабатывания триггера, когда сигнал на его входе хс превышает зону нечувствительности Д/2 (хс>Д/2). В этот момент значение сигнала хс из-за наличия обратной связи увеличится скачком на некоторую постоянную Дхс, зпаче ние которой будет зависеть лишь от коэффициента усиления местной обратной связи II, определяемого положением движка ,/?гв. Поэтому действие триггера в обратном направлении произойдет лишь при
Д
значении хс<~2~—-Дх0- т. е. Дхс определяет в рассматриваемой схеме зону возврата Дп релейной характеристики триггера.
Местная обратная связь II, параллельная главной (динамической) обратной связи, не влияет на параметры настройки Кр и Тя, а изменяет лишь величину зоны возврата триггера Дв. Прямоугольное напряжение, полученное на выходе триггера и выделенное на обмотках I и II трансформатора ТрЗ, подастся на входе двухтакт него фазочувствительного каскада — демодулятора силового напряжения, снимаемого с обмоток III и IV трансформатора Тр2. Действием выходного каскада (хик) управляют два мощных триода То и Те, работающие в ключевом режиме и в свою очередь управляемые выходным сигналом триггера. Нагрузкой выходного каскада служат пусковые устройства исполнительного механизма Z, и Zz-
В исходном положении, т. е. при отсутствии сигнала хс, триоды То и Те заперты начальным опорным напряжением, формируемым на базе триодов с помощью диодов Дю, Ди и Дю, Дп-
Сигналы с обмоток I и II трансформатора ТрЗ, управляющие действием выходного каскада, находятся в противофазе, поэтому при появлении одного из них триод (например, То) открывается а другой (Ге) принудительно запирается. В соответствии с имеющейся в данный полуперпод полярностью через нагрузку Zi будет протекать ток. В следующий полуперпод триод 7’5 запирается, а триод Тв подключает нагрузку Zt к обмотке IV трансформатора Тр2. Так как обмотки III и IV включены протпвофазно, полярность напряжения на обмотке IV окажется к этому моменту такой же, какой она была в предыдущий полуперпод па обмотке III. Через нагрузку Z, потечет ток того же направления, что и в первый но лупериод, т. е. при открытом То и запертом Та. Таким образом через нагрузку Zi будет протекать пульсирующий ток одного па правления.
Если при первом опрокидывании триггера откроется триод Те, то пульсирующий ток будет протекать через другое сопротивление нагрузки Z2. Итак, направленность действия выходного каскада, т. е. протекание пульсирующего тока в нагрузке Zt и Z2, определяется соотношением фаз выходного прямоугольного напряжения триггера и напряжения питания выходного каскада, т. е. в конечном итоге полярностью сигнала па входе лампового каскада у*.
Выходной каскад нагружен -Также Первичной обмоткой трансформатора динамической обратной связи Тр4. При «закрытии» триода выходного каскада 75 ток в первичной обмотке Тр4 изменяется от максимума до нуля, в результате чего- на его вторичной обмотке возникает резко несимметричное напряжение х-г.о.с- При этом в момент, когда «закрыт», амплитуда напряжения во вторичной обмотке Тр4 значительно превышает напряжение зажигания неоновой лампы в результате чего она «вспыхивает» и начинается процесс заряда конденсатора Сз, включенного в /?эСз-цепочку обратной связи, выполняющей те же функции, что и в рассмотренных выше схемах, изображенных на рис. 6-13 и 7-2.
При изменении фазы напряжения трансформатора ТрЗ, а следовательно, при изменении знака амплитудного значения напряжения вторичной обмотки Тр4 неоновая лампа будет пропускать ток в противоположном направлении, в результате чего конденсатор Сз изменит полярность своего заряда. В то же время неоновая лампа разделяет цепь заряда (R^R\l) и разряда (/?оСз), т. е. в период разряда потенциометры JRu и Rls выключаются из цепи, что обеспечивает возможность независимой установки параметров динамической настройки регулятора: времени интегрирования Т„, (называемого также временем изодрома, и степени обратной связи 6(/(р).
Конструктивно регулирующий прибор РПИБ выполнен в виде металлического шасси прямоугольной формы (см. рис. 7-1), на котором укреплены пять монтажных блоков (ламповый каскад, модулятор, триггер, выходной каскад, трансформатор и устройство главной обратной связи). На фасаде шасси расположены органы настройки, электронная лампа, выходные гнезда лампового каскада А и Б и сигнальные лампы «больше» (КЛ|) и «меньше» (КЛ2). На задней стенке расположен клеммник с контактными зажимами 1 -20 (см рис. 7-10).
Органы и а с т р о й к и. Ручки переменных резисторов:
I Rn — «корректор» — относится к блоку «ламповый каскад» и служит для балансировки регулирующего прибора
2 Rh — «нечувствительность» — относится к блоку «ламповый каскад» и предназначена для регулирования зоны «нечувствительности» регулятора.
3. J?2b — «длительность импульса» — относится к устройству местной обратной связи и служит для изменения длительности однократного включения пускового устройства.
4. Rr> служит для установки требуемого значения Та —времени изодрома.
5. — «скорость связи» — служит для установки требуемого
значения степени обратной связи б или Кр=1/6.
6. Сменный резистор Rn предназначен для изменения диапазона действия потенциометра «скорость связи».
О р г а н ы к о н т р о л я. 1. Контрольные гнезда Л и Б служат для включения вольтметра при проверке и баламенровке лампового каскада.
2. Индикаторные лампы «больше» (красный цвет) и «меньше» (зеленый цвет) загораются при срабатывании прибора в соответствующую сторону.
Основные технические характеристики прибора типа РПИБ
Напряжение питания................................. 220 В (50 Гц)
Потребляемая мощность............................... 30 В-А
Зона нечувствительности, приведенная ко входу элек-
тронного блока Д: минимальная........................................ 120 мВ
максимальная................................... 600—1000 мВ
Зона возврата .......................................(0,15-т-0,3) Д
Пределы изменений времени изодрома...................... 5—2000 с
Максимальное значение скорости связи, приведенное ко
входу прибора:
по переменному току (для приборов чипов РПИБ-Ш и РПИБ-IV)..................................... 20 мВ/с
по постоянному току (для приборов типа РПИБ-Т) 0,8 мВ/с
Управляющее напряжение постоянного тока.................. 27 В
Масса прибора с измерительным блоком..................... 15 кг
7-3. Электронный блок корректирующего прибора КПИ
Корректирующий прибор КПИ предназначен для работы в каскадных системах автоматического регулирования, в которых сигнал с выхода этого прибора поступает на вход «подчиненного» регулирующего прибора типа РПИБ. Корректирующий прибор в комплекте с соответствующими измерительными блоками обеспечивает: суммирование и компенсацию электрических сигпа лов от первичных приборов;
усиление входных сигналов до величины, пеобходи мой для управления «подчиненными» электронными регуляторами (количество «подчиненных» регуляторов со ставляет от 1 до 6);
выходной трансформатор
Цепь обратной связи
Рис. 7-5. Функциональная схема корректирующего пропорционально-интегрального прибора (КПИ).
формирование П-, ПИ-, ПИД-законов регулирования.
Рассмотрим вначале работу прибора в режиме ПИ-регулятора. По функциональной схеме прибора (рис. 7-5) нетрудно установить, что она представляет собой одну из разновидностей встречно-параллельного соединения звеньев. При этом в прямом канале усиления расположены последовательно-включенные ламповые усилители и выходной трансформатор, а в канале отрицательной обратной связи — пассивная ДС-цепочка, обладающая характеристиками реального дифференцирующего звена. Схема в целом копирует структуру ПИ-регулятора, изображенную па рис. 3-9,а (при отсутствии сервопривода).
Можно считать, что коэффициент усиления системы в прямом канале значительно больше единицы. Тогда передаточная функция электронного блока в целом будет в соответствии с (3-21) и (3-22) равна:
П7 ( '
Y* (р) ~ Wpc(l>} ’
гже
w (р) = -К-П т,’р-
WO.C\P) \+тлр-
Следовательно,
'л д/ 'л \ ИГ /
т. е. является ио своим динамическим свойствам ПИ-регулятором с /<Г=1/КД и 7’и=7’д, где Лд=/(/?и), а 7’и= = ReCg-
При охвате лампового усилителя КПИ жесткой отрицательной обратной связью формируется П-закон регулирования.
Принципиальная электрическая схема прибора КПИ приведена на рнс. 7-6. Проследим прохождение входного сигнала через элементы схемы. Входной сигнал постоянного тока от измерительного блока поступает на сетку левого (по схеме) триода первого лампового каскада, который выполняет функции усилителя напряжения постоянного тока и собран по схеме баланса напряжений (выходное напряжение равно нулю при отсутствии входных сигналов). Левый триод Jli работает в режиме катодного повторителя. Его нагрузка (резистор Т?4 и часть переменного резистора Rs) включена в катодную цепь. На вход правого триода (правая сетка) поступает сигнал постоянного тока с выхода цепи обратной связи. Напряжение с выходов левого и правого триодов алгебраически суммируется на резисторе Rs, выполняющем функции корректора. Разность напряжений постоянного тока левого и правого триодов лампового каскада снимается с конденсатора Ст и поступает через ограничитель
сигнала на вход (левая сетка) второго каскада, являющегося усилителем мощности переменного тока и собранного по схеме баланса токов (ток нагрузки на выходе каскада равен нулю при отсутствии входного сигнала). Между первым и вторым ламповыми каскадами расположена электрическая цепь ограничителя сигнала, состоящая из выпрямителей В6 и Ве и переменных резисторов Ri и Rs- Назначение этой цепи состоит в ограничении верхнего и нижнего уровней напряжений на выходе первого лампового каскада, т. е. его амплн-
Рис. 7-6. Принципиальная электрическая схема прибора КПП.
тудных значений. Ее питание осуществляется от независимого' стабилизированного источника постоянного тока. Сущность действия ограничителя заключается в том, что при превышении его входным сигналом Хщ определенного максимально допустимого значения он шунтируется малоомным сопротивлением электрической цепи, состоящей из выпрямителей В5 или В6 и долей резисторов Ri или R&.
Ограничитель, имеющий статическую характеристику с насыщением (см. рис. 1-8), действует следующим образом. На диоды В$ и Ве подается стабилизированное запорное напряжение, величина которого определяется положением движков переменных резисторов Ri и Re. До тех пор, пока выходное напряжение каскада меньше запорного, каскад нагружен сравнительно большими обратными сопротивлениями диодов. При превышении запорного напряжения один из диодов (В6 или Ве) отпирается и шунтирует нагрузку кас-168
каДа Малоомиым сопротивлением, равным сумме сопротивления Дйб да в прямом направлении и доли переменного резистора R-; (/?в) между движком и «землей». Выходной сигнал первою каскада раздваивается: часть его поступает на вход второго лампового каскада, а часть идет на «землю» через малоомный резистор Ri (Rs). При этом выходное напряжение первого каскада практически равняется запорному, поступающему на диоды. Уровень ограничения регулируется положением движков Ri и Rs. Крайнее левое (по схеме) положение движков соответствует максимальному ограничению или минимальному напряжению на выходе ограничителя.
Второй ламповый каскад также собран на двойном триоде 6Н1П с общим катодом. Он является усилителем переменного тока, чувствительным к полярности входного сигнала постоянного тока, поступающего на левую сетку. Питание каскада осуществляется от обмотки IV силового трансформатора Тр2. Анодной нагрузкой каскада является первичная обмотка выходного трансформатора ТрЗ. Резистор Rn обеспечивает отрицательное сеточное смещение на сет ках правой и левой половин лампы по отношению к общему катоду. При отсутствии напряжения на выходе каскада анодные токи триодов лампы и и й, протекающие по соответствующим половинам первичной обмотки ТрЗ, равны по величине и противоположны по «вправлению. Результирующий ток нагрузки й—12 равен нулю, следовательно, равны нулю магнитный поток в сердечнике ТрЗ и напряжение на его выходе. При появлении напряжения на входе Лг смещение па одной из сеток уменьшается, а на другой увеличивается, в результате чего анодный ток одного из триодов увеличивается, а другого уменьшается. Возникший результирующий ток й—г'г наводит магнитный поток в сердечнике ТрЗ. На его вторичных обмотках возникает напряжение переменного тока, пропорциональное изменению потока [скорости изменения разности токов &(й—iz)[dt], Резонансный конденсатор С'1а выделяет первую гармонику выходного напряжения вторичных обмоток с частотой 50 Гц, совпадающего по фазе с напряжением .питания. Выходной каскад корректирующего прибора нагружен измерительными блоками «подчиненных» регуляторов и вторичной обмоткой устройства обратной связи, которое, как и в регуляторах РПИБ, предназначено для формирования ПИ-зако-на регулирования. Но в отличие от РПИБ Ли, Ra и С3 в КПИ образуют дифференцирующую ЛС-цепочку. Ее входной сигнал со вторичной обмотки IX ТрЗ н от независимого источника питания ио-сгоянного тока поступает на переменный резистор Лк (степень или скорость связи), а выходное напряжение, поступающее на правую сетку первою лампового каскада, снимается с резистора Rs («время изодрома») Итак, сигнал с выхода электронного блока КПП вновь поступает на его вход, а в замкнутой линейной системе «ламповый усилитель — обратная связь» реализуется ПИ-закоп регулирования в соответствии с (7-1).
К недостаткам КПИ следует отнести нестабильность выходного сигнала из-за интегрирования помех на входе.
Действие корректирующего регулятора, управляющего подчиненным регулятором, происходит следующим образом. При отклонении регулируемой величины от заданного значения и появлении на выходе измерительного блока напряжения рассогласования (сигнала ошиб-
170
ки) корректирующий прибор воздействует па подчиненный регулятор и одновременно за счет действия устройства обрипой связи осуществляет временную компенсацию входного сигнала. В процессе работы подчиненного регулятора в требуемом направлении будет происходить уменьшение напряжения рассогласования на входе КПИ до его полного исчезновения. Если к моменту окончания действия устройства обратной связи регулируемая величина не придет к заданному значению и напряжение рассогласования полностью не исчезнет, действие корректирующего регулятора повторится в том же направлении.
Схема внешних соединений корректирующего регулятора с измерительным блоком U-1II и «подчиненным» регулятором РПИБ-Ш изображена на рис. 7-7.
Перевод «подчиненного» регулятора на управление ручным задатчиком (ЗРУ-174) осуществляется переключателем управления. Прежде чем перевести переключатель управления подчиненным прибором в положенно «дистанционно», необходимо создать компенсационное напряжение, совпадающее по фазе и величине с выходным напряжением корректирующего регулятора. Для этого до переключения пакетного переключателя задатчик ручного управления ставится в положение (по его шкале), соответствующее показаниям указателя выходного сигнала КПИ. Тогда при снятии корректирующего воздействия переключателем на .входе измерительного блока «подчиненного» регулирующего прибора происходит подключение напряжения с выхода его задатчика. Одновременно соответствующая вымгцыя обмотка корректирующего регулятора шунтируется балласт пым сопротивлением 200 Ом. В дальнейшем управление «подчиненным» регулятором осуществляется задатчиком.
Для контроля за работой КПП и значением сигнала на выходе предусмотрена возможность подключения к клеммам 12 и 13 (рис. 7 7) указателя выходного сигнала (УВ). Потенциометр Ru предназначен для корректировки УВ. Конструктивно электронный блок КПП выполнен на металлическом шасси, на передней стенке которого размещены органы настройки и контроля (гнезда А—Б), а также электронные лампы и Л2 (см. рис. 7-6).
Пт задней стенке прибора укреплен выходной клеммник (клеммы / —20) (рис. 7-7).
Органы настройки. Ручки переменных резисторов (см. рис 7-6):
1. Rs— «корректор» — служит для балансировки электронного блока.
2. >/?14 — «скорость связи»—служит для установки требуемого значения степени обратной связи.
3. Т?7 и Rs— «ограничитель I» и ограничитель II» — предназначены для ограничения выходного напряжения .первого лампового каскада, контролируемого на гнездах А—Б, раздельно для каждой полярности входного напряжения второй лампы.
4. /?21 (корректор УВ) служит для установки стрелки указателя выходного сигнала УВ на нуль.
5. Сменный резистор /?<> служит для установки расчетного значения времени изодрома Ти.
Основные технические характеристики электронного корректирующего прибора КИИ
Напряжение питания (стабилизированное)................ -<-220 В
Максимальная потребляемая мощность.................... 40 В-А
Коэффициент усиления электронного блока при измене-
нии входного сигнала в пределах 0—100 мВ (при по-
ложении ручек „ограничителя" на делении 0).........ky — Ъ—7
Величина выходного (управляющего) наряжения хр при
входном сигнале у* (приведенном к сетке первой
лампы), равном 2 В постоянного тока:
при минимальном ограничении....................... 050—950 мВ
при максимальном ограничении...................... 220 мВ
Пределы изменений времени изодрома.................... 5—500 с
Масса прибора (с измерительным блоком)................ 15 кг
7-4. Измерительные блоки регулирующих приборов
Общие сведения об измерительных блоках
Измерительная часть бесконтактных автоматических регуляторов состоит из первичных приборов (датчиков) и измерительного блока. Измерительный блок для датчиков переменного тока содержит источники электрического питания датчиков и предназначен для суммирования, компенсации и предварительного усиления поступающих от них сигналов.
Измерительные блоки классифицируются в зависимости от типа первичных приборов, для работы с которыми они предназначены, по все модификации измерительных блоков включают установленный па выходе фазочувствитсльпын одпокаскадпый полупроводниковый усилитель.
Принципиальная электрическая схема усилителя представлена на рис. 7 8
Входом усилителя является первичная обмотка 1 разделительного трансформатора Тр2 (гнезда Д и £), который служит для кондуктивного (гальванического) разделения измерительных цепей и усилителя. Триод 1\ работает в режиме с общим эмиттером (источником свободных электронов). Напряжение, снимаемое с диода В2, используется для смещения рабочей точки вольт-амперной характеристики транзистора Рабочий ток диода В2 в прямом направлении задается резистором Ri2. Для стабилизации рабочей точки вольт-амперной характеристики транзистора при непостоянстве напряжения сети применяется стабилизированный источник питания, состоящий из выпрямительного диода lit, фильтрующего конденсатора С50 и стабилитрона Дз, гок в котором задается резистором 7??з. 172
^ггов
Рис. 7-8. Принципиальная электрическая схема измерительного блока И-1П.
Источником питания коллектора транзистора служит напряжение, снимаемое с обмоткн III Тр1 и стабилизированное опорными диодами Д1 и Дг, включенными встречно Ток через Д1 и Дг задается резистором /?74. Нагрузка усилителя /??.'> включена последовательно с источником напряжения переменного тока (обмотка III ТрЗ). Для выделения постоянной составляющей напряжения нагрузка R76 шунтируется конденсатором Csi.
Мостиковый выпрямитель проводит ток нагрузки в одном направлении через триод Tt в каждый полупернод колебаний сетевого напряжения При отсутствии сигнала па входе в усилитель токи коллектора равны и в каждый полупернод протекают по сопротивлению нагрузки в противоположных направлениях, т. е. среднее значение или постоянная составляющая напряжения нагрузки равны нулю.
Прн подаче входного сигнала ток коллектора, проходящий через Сл, в один полупериод увеличивается, а в другой уменьшается. При этом в нагрузке усилителя выделяется постоянная составляющая напряжения, пропорциональная разности токов коллектора в каждый полупериод. Знак постоянной составляющей зависит от того, в какой из полупериодов ток через С61 будет увеличиваться, что в свою очередь зависит от фазы или направления изменения входного сигнала. Это обстоятельство и определяет фазочувстви-тельность транзисторного усилителя в целом Входной сигнал переменного тока, как известно, может содержать гармоники, сдвинутые относительно напряжения питания на 90° (так называемую реактивную составляющую) и па 180° (четные гармоники). Но средние значения токов коллектора от этих гармоник в каждый полупериод равны и постоянная составляющая напряжения в нагрузке от них равна нулю. Таким образом, усилитель пропускает гармоники, находящиеся только в фазе с питающим напряжением, т. е. он обладает, кроме фазочувствительности, еще и свойством фазоселектив-пости (избирательности).
Коэффициент усиления усилителя k=UrrlUjiE —404-60. Для проверки k необходимо на вход усилителя (гнезда Д и Е) подать напряжение переменного тока ^д^=50 мВ. Для проверки диапазона линейности усилителя снимается характеристика Vnr — f(U^E) Она должна быть линейной в пределах ±6 В по выходу (гнезда В и Г па рис. 7-8) Питание измерительных блоков осуществляется от сети 220 В переменного тока с частотой 50 Гц.
Измерительный блок типа И-1П
Принципиальная электрическая схема блока И-Ш представлена на рис. 7-8, органы контроля и настройки — на рис. 7-9. Блок предназначен для суммирования и компенсации сигналов, поступающих от одного, двух и трех первичных приборов, снабженных дифференциально-трансформаторными, индуктивными или реостатными преобразователями (датчиками) переменного тока.
Каждый датчик питается от отдельной обмотки трансформатора Тр1. При среднем положении плунжера дифференциально-трансформаторного датчика напряжение, индуцируемое во вторичной 174
обмотке, райно нулю. Индуктивный и реостатный датчики образуют совместно со вторичной обмоткой Тр1 мост переменного тока, в диагональ которого включен потенциометр «чувствительность». При отклонении плунжеров дифференциально-трансформаторного и индуктивного датчиков или движка реостатного датчика от среднего положения на потенциометре «чувствительность» возникает пропорциональное значению этого отклонения напряжение переменного тока, фаза которого зависит от направления отклонения. Изменение фазы
Рис. 7-9. Органы контроля и настройки И III.
сигнала при одном и том же направлении действия датчика достигается переключением крайних концов проводников на клеммах измерительного блока, например 31 и 33, или на клеммнике датчика. Сигнальные напряжения, нужные доли которых устанавливаются с помощью «ручек чувствительностей» 7?si, i/?82 и Rsa, суммируются иа резисторе включенном в диагональ вспомогательного моста. В этот же мост включены задатчик, с помощью которого можно вручную изменять заданное значение регулируемой величины, и корректор измерительного блока 7?ао, с помощью которого осуществляется балансировка или компенсация сигналов. Переменный резистор /?в5 одновременно позволяет изменять чувствительность задатчика. Выход измерительной части соединен со входом полупроводникового усилителя измерительного блока через трансформатор Тр2. Для предотвращения частых включений регулятора при наличии пульсации регулируемой величины на выходе усилителя включен демпфер, т. е. Т^тСзг-цепочка с постоянной времени Т'макс = 12 с.
Аналогично устроен блок И-IV, предназначенный для работы с четырьмя датчиками переменного тока. Схема внешних соединений датчиков с измерительным блоком И-Ш и регулирующими приборами РПИ и КПИ представлена на рис. 7-10.
Дифференциально-трансформаторные датчики полуиают питание переменного тока 12 В с клемм .?/—33, 34—36 и 37—$9. Вторичные обмотки дифференциально-трансформаторных датчиков подсоединяются к клеммам 32—23, 35—26 и 38—27. /
5
Рис. 7-10. Схема внешних соединений электронного регулирующего прибора РПИБ-1П.
I — выход к пусковому устройст-ву исполнительного механизма: 2 — клеммник электронного блока РПИ; 3 — задатчик ручного управления (ЗРУ); 4 —клеммник измерительного блока И-Ш; 5 — дифференциально-трансформаторные преобразователи первичных приборов.
Индукционные и реостатные датчики (подключаются к клеммам 31—32—33, 34—35—36 и 37 -38—39. Их средний вывод подключается к клеммам 32, 35 и 38. Между крайними концами реостатного датчика и клеммами измерительного блока необходимо включать добавочные сопротивления одинаковой величины (порядка 200 Ом для реостатного датчика с сопротивлением 120 Ом). Совместно с измерительным блоком И-Ill могут работать и ферро-динамические датчики. При этом их рамки подсоединяются к клеммам 32—23 и 35—27 измерительного блока.
Конструктивно измерительный блок И-Ш представляет собой прямоугольное шасси (см. рис. 7-9). На передней панели блока располагаются органы настройки измерительной схемы и контрольные розетки (гнезда Д—Е и В—Г). На задней панели блока закреплен клеммник с контактными винтами 21—40 (рис. 7-10).
Органы настройки (см. рис. 7-8. 7-9). Ручки переменных резисторов.
1. «Чувствительность» 1, 2 и 3 (/?еь Ria и Rus) с оцифрованной шкалой для подачи оп
ределенной доли входного сигнала от соответствующего датчика на вход регулирующего прибора.
2. «Корректор» Дао для балансировки измерительного блока.
3. «Чувствительность 3d» (задатчика) Rm для изменения диапазона действия и цены деления задатчика.
4. «Демпфер» Д77 для устранения нежелательных пульсаций регулируемой величины на входе регулирующего прибора.
5. Гнезда Д—Е для контроля напряжения переменного тока на выходе измерительной части блока.
6. Гнезда В — Г для контроля напряжения постоянного тока на выходе усилителя измерительного блока (пл входе регулирующего прибора).
Измерительный блок типа И-С
Принципиальная электрическая схема блока И-С изображена на рис. 7-11. Он предназначен для работы с одним термометром сопротивления в качестве первичного прибора, измеряющего температуру.
Основной частью блока служит электрический мост .переменного тока, образованный термометром сопротивления и постоянными резисторами /?7в, >/?78 и А??»- В одну из диагоналей моста включен задатчик с шунтом Rn, в другую — корректор Rsi с шунтом Два-
Рнс. 7-11. Принципиальная электрическая схема измерительного блока 1ГС.
Входные вершины моста через переменный резистор «чувствительность» подсоединены к источнику питания — трансформатору Тр1, выходные вершины — к разделительному трансформатору Тр2, являющемуся входом транзисторного усилителя измерительного блока (гнезда Д— Е). Резисторы моста подобраны таким образом, что при заданном значении регулируемой величины (температуры) напряжение на выходе моста (гнезда Д — Е) равно нулю. При отклонении температуры от заданного значения па выходе блока (гнезда В — Г) появляется пропорциональное этому отклонению напряжение постоянного тока соответствующего знака.
Измерительный блок предназначен для измерения медленно изменяющихся температур, поэтому отсутствует необходимость 12—626 177
в установке демпфера на выходе транзисторного усилителя. Грубая настройка измерительного блока на заданное значение регулируемой температуры осуществляется с помощью смежного резистора /?7в, величина которого должна быть примерно равна сопротивлению термометра при номинальном или заданном значении контролируемой температуры.
При отклонении сопротивления термометра на 1 Ом от его номинального значения (равного 76 Ом) па выходе моста (гнезда Д — Е) должен появляться сигнал нс менее 14 мА, а на выходе блока (гнезда В — Г) — не менее 700 мВ.
Конструктивно измерительный блок представляет собой прямоугольное шасси. На его передней панели располагаются органы настройки и контроля (гнезда Д— Е и В —Г).
На задней стенке блока укреплен клеммник. Термометр сопротивления подключается по трехпроводной схеме к клеммам 37, 38 и 39 (клемма 37 заземляется).
Органы настройки (см. рис. 7-11). 1. Переменный резистор «чувствительность» 7?вг — служит для изменения величины напряжения источника питания н чувствительности измерительного моста.
2. Переменный резистор «корректор» Rei—предназначен для балансировки измерительного блока.
3. Сменный резистор Rn — служит для изменения цены деления н диапазона действия задатчика.
4. Сменный резистор — служит для грубой настройки изме-
рительного моста на заданное значение регулируемой температуры.
Аналогично устроен измерительный блок И-2С. Он предназначен для работы с двумя термометрами сопротивления, измеряющими разность температур в двух точках (например, температуры сетевой воды и температуры наружного воздуха в системах регулирования подогрева сетевой воды).
Измерительный блок типа И-Т
Принципиальная электрическая схема блока И-Т приведена на рис. 7-12. Он предназначен для работы с одной, двумя или несколькими термопарами, термо-э. д. с. которых предварительно суммируются в коробке холодных спаев.
Термоэлектродвижущие силы термопар компенсируются напряжением постоянного тока, развиваемым на диагонали измерительного моста (клеммы 29—37), образованного резисторами Лл, Ra, Rt,s, Rn, Rm и Rte. К двум другим вершинам моста подсоединяется источник компенсирующего напряжения постоянного тока, снимаемого с дополнительного моста, образованного резисторами Res, Rm, Ran и полупроводниковым стабилитроном Дк- Этот мост дополнительно улучшает стабилизацию напряжения питания постоянного тока, поступающего от иторичной обмотки IV трансформатора Тр1 через 178
За датчан
Рис. 7-12. Принципиальная электрическая схема измерительного блока И-Т.
выпрямительный диод В5, ограничительный резистор /?5о и фильтрующий конденсатор С6з. /
Медный резистор Д6з устраняет влияние температурного дрейфа напряжения стабилитрона Дс- Необходимое для измерительного моста напряжение устанавливается с помощью переменного сопротивления Дв1-
Наводкн напряжения переменного тока на линию, соединяющую термопару с измерительным блоком, проходящие через измерительный мост, фильтруются на выходе моста с помощью дросселя (ДР) и конденсатора С55. Резисторы измерительного моста должны быть подобраны так, чтобы при заданном значении регулируемой температуры напряжение на его выходе (клеммы 29—37) равно нулю. При отклонении регулируемой температуры от заданного значения на выходе измерительного моста появляется пропорциональное этому отклонению напряжение постоянного тока соответствующего знака.
Корректором измерительного моста служит переменный резистор /?54, используемый при балансировке блока. Резистор /?57 шунтирует корректор и определяет диапазон его действия. Задатчиком прибора является переменный резистор (задатчик ручного управления), шунтируемый сопротивлением /?5), определяющим диапазон действия задатчика. Напряжение постоянного тока на выходе измерительного моста, снимаемое с конденсатора С55, преобразуется в напряжение переменного тока с частотой 50 Гц и усиливается магнитным усилителем (МУ), собранным на двух кольцевых магнитопроводах, изготовленных из молибденового пермаллоя — магнитопроводного сплава, не обладающего свойством остаточного магнетизма. Первичные обмотки МУ питаются от источника напряжения, состоящего из вторичной обмотки IV трансформатора Тр1 и стабилитронов Да н Д5, включенных последовательно. Ток в стабилитронах задается резистором /?6в- Напряжение на выходе источника содержит постоянную составляющую и переменную приблизительно прямоугольной формы. Первичные обмотки являются обмотками подмагничивания МУ, ток в них устанавливается с помощью переменного резистора /?ет- Резисторы /?6S, R'№ и переменный резистор /?с6 (корректор) служат для балансировки МУ, т. е. для установки нулевого напряжения на выходе МУ при отсутствии напряжения на выходе измерительного моста (на конденсаторе С55).
Вторичная обмотка МУ охватывает оба кольца магпнтопроводов п совмещает функции входной (сигнал постоянного тока) и выходной ( игнал переменного тока) обмоток. Напряжение переменного тока с выхода МУ поступает на вход первичной обмоткн Тр2 (гнезда Д— Е). Полупроводниковый усилитель выполнен по той же схеме, что и в других измерительных блоках.
Коэффициент усиления измерительного блока И-Т составляет 1000—1500. Он проверяется при подаче на вход МУ (клеммы 29—37) сигнала равного 1 мВ. Для проверки диапазона линейности измерительного блока снимается характеристика Дд/-=/(ПВх) Она должна быть линейной в пределах ±54-6 В.
Органы настройки (корректор Т и сменные резисторы Rm, R52 и 7?г>з) и контроля (гнезда Д — Е и В — Г) расположены на передней панели блока.
На задней стенке панели укреплен выходной клеммник 21—40 (рис. 7-13).
Органы настройки. 1 Переменный резистор корректор /?54 — служит для балансировки измерительного блока.
2. Сменный резистор R5i — служит для изменения диапазона действия и цены деления задатчика.
3. ( мепные резисторы /?52 и Rss — предназначены для установки рабочего диапазона регулируемых температур (в зависимости от градунропкн термопар).
Измерительный блок типа И-Т2 предназначен для работы одновременно с датчиками постоянного тока — тер-
мопарами и одним или двумя первичными приборами
переменного тока — дифференциально - трансформа торными, индуктивными или реоста тным и датчи ка м и.
Схема блока И-Т2 отличается от схемы блока И-Т тем, что в диагональ измерительного моста постоянного тока включен предварительно просуммированный и выпрямленный сигнал напряжения датчиков переменного тока.
Суммарный сигнал напряжения постоянного тока усиливается МУ, а затем полупроводниковым усилителем. ( хема измерения сигналов с помощью датчиков переменного тока приведена на рис. 7-10.
Рис. 7 13. Схема внешних соединений регулирующего прибора РП11Б-Т.
1 выход к пусковому устройству исполнительного механизма; 2 — клеммник электронного блока; 3 — задатчик; 4 — клеммник измерительного блока И-Т2; 5 — коробка холодных спаев; 6 — термопара.
7-5. Вспомогательные и функциональные устройства
Электронный дифференциатор
Электронный дифференциатор служит для формирования сигнала по скорости изменения регулируемой величины (первой производной сигнала по времени) Выпускаются дифференциаторы двух типов: ДЛ-П - ламповый дифференциатор для работы с одним датчиком переменного тока и ДЛ-Т— ламповый дифференциатор для работы с датчиком постоянного тока (термопарой).
Принципиальная электрическая схема дифференциатора ДЛ-П изображена на рис. 7-14. Его измерительное устройство по принци-
181
пу действия и параметрам элементов схемы совпадает с измерительным блоком типа И-Ш. Сигнал с выхода полупроводникового усилителя измерительной схемы, регулируемый переменным резистором /?7в, поступает на вход лампового усилителя напряжения постоянного тока. Он собран по балансовой схеме (выходное напряжение равно нулю при отсутствии входного). При этом знак выходного напряжения зависит от знака входного.
Левый (по схеме) триод лампы является катодным повторителем. Напряжение с катодной нагрузки левого триода поступает ма сетку правого триода, работающего в режиме усилителя напряжения. Для сглаживания пульсаций входного сигнала можно использовать демпфирующую цепочку RsCg, включаемую между выходом левого триода и входом правого, постоянная времени которой регулируется с помощью переменного резистора Rs в пределах 0—15 с. Конденсаторы Са и Cs служат для сглаживания пульсаций высокой частоты выпрямленного напряжения питания. Отрицательное по отношению к катоду сеточное смещение 1 порядка нескольких вольт обеспечивается устройством, состоящим из выпрямителя В4, фильтра CjRt и небольшой части обмотки питающего трансформатора, напряжение переменного тока которой добавляется к выпрямленному напряжению. Фаза переменной составляющей смещения такова, что в проводящие полупериоды триодов на их сетки поступает потенциал со знаком плюс. 'Назначение переменной составляющей состоит в том, чтобы устранить появление сеточных токов в нерабочие полупериоды триодов (в эти полупериоды на сетки поступает минус).
Общее напряжение между катодами и сетками складывается из напряжения сеточного смещения, напряжения нагрузки левого триода и соответствующих входных сигналов. Помимо входа со стороны измерительного устройства, ламповый усилитель имеет дополнительные входы: клеммы 8 (или 12) и 17, на которые могут подаваться сигналы переменного и постоянного тока. Это позволяет путем введения отрицательных и положительных обратных связей изменять статические и динамические характеристики усилителя. В нормальном режиме работы коэффициент усиления лампового каскада Ку= =80. На выходе усилителя включена дифференцирующая -цепочка, постоянная времени которой равна:
Т (с) =Св (мкФ) Xi/?e (мОм).
Регулируя величину Rti, можно изменять Т в широких пределах. Резисторы Rn и Rts включены в цепь положительной обратной связи, вводимой в случае необходимости увеличения коэффициента усиления лампового каскада.
Возможные режимы работы дифференциатора
1. Дифференцирование входного сигна-л а. Клеммы //—12—17 и 14—15 закорачиваются. Оператор прибора
1 + 7дД-
1 Аналогичные цепи сеточного смещения имеют ламповые каскады РПИБ и КПИ.
Дифференцированный сигнал снимается с клемм 11— 14. Постоянная времени Тд регулируется в пределах О— 30 с с помощью переменного резистора Ив, коэффициент усиления Л'д—с помощью ручки «чувствительность 2».
2. Дифференцирование выходного сигнала с удвоением коэффициента усиления. Вводится положительная обратная связь с делителя, образованного резисторами Иц и RiS. Клеммы 8—9— 10, 14—15 и 11—17 закорачиваются. Дифференцированный сигнал снимается с клемм 11—14.
3. Дифференцирование сигнала с одновременным демпфированием. Демпфирование пульсаций сигнала достигается охватом лампового усилителя отрицательной инерционной обратной связью (/^Се-цепочка). Клеммы 17—18—19, 11—12 и 14—15 закорачиваются. Дифференцированный и демпфированный сигнал снимается с клемм 11—14.
4. Дифференцирование и демпфирование с одновременным удвоением коэффициента усиления лампового усилителя. Этот режим достигается включением жесткой положительной обратной связи усилителя (закорачивание клемм 8—9—10), введением демпфера (закорачивание клемм 17—18—19) и дифференциатора (закорачивание клемм 14 и 15). Дифференцируемый сигнал снимается с клемм 11—14.
5. Дифференцирование с увеличенной постоянной времени Тд осуществляется включением отрицательной связи с выхода дифференциатора (7?6Св-цепочки) на вход усилителя путем закорачивания клемм 14—15 -17 и 11—12. При этом постоянная времени дифференцирования Тл может регулироваться в пределах 0—500 с. При дополнительном введении положительной обратной связи (закорачивание клемм 8—9—10) можно увеличить /<д вдвое или увеличить постоянную времени дифференцирования Тд до 1000 с. Несколько меньшее увеличение /<д и постоянной Тд достигается включением дополнительной цепи обратной отрицательной связи путем закорачивания клемм 14—17 и 11—12, состоящих из демпфера, образованного переменным резистором /?в и сменным резистором Иц, включенным между клеммами 14—15. Дифференцированный сигнал снимается в этом режиме с клемм 11—14.
6. Д е м п <|> п р о в а н и е входного сигнала. «Чисгос» демпфирование достигается переводом диффе-ренн.п.1 гора в режим работы демпфера, введением отрицательной обратной связи с выхода усилителя на его вход, путем закорачивания клемм 11—12, 14 -15 и 16— !7. Демпфированный сигнал снимается с клемм 15—16.
Конструктивно ламповый дифференциатор типа ДЛ II выполнен на металлическом шасси, заключенном в металлический ящик размером 140X125X345 мм. На его передней стенке размещены органы настройки и контроля (гнезда В—Г).
Органы настройки. Ручки переменных резисторов (см. рис. 7-14).
1. Као— «корректор И» — служит для балансировки измерн тельного блока.
2. /?82 — «чувствительность 1» — служит для изменения доли входного сигнала, поступающего на вход полупроводникового усилителя.
3. Rn — «чувствительность 2» — служит для изменения величины сигнала, поступающего на вход лампового усилителя. Может использоваться для установки расчетного значения коэффициента усиления Кл.
4. Ко— «корректор» — служит для балансировки лампового усилителя.
5. Ke — «время Тд» — служит для установки расчетного значения постоянной времени Гл.
(>. Кв — «демпфер» — служит для сглаживания пульсаций регулируемой величины, поступающих со стороны датчика переменного тока.
Установка расчетных значений Кд и Тд. Для установки Кд и Тп снимается кривая разгона дифференциатора (см. рис. 1-37). Для этого на его вход (клеммы 12—20) от постороннего источника или движка «корректора И» подается сигнал i7BX=l В:
17макс л j
__ ^ВЫХ . 'Г
<Л,ых2
Схема внешних соединений дифференциатора, действующего в режиме дифференцирования, с датчиком л регулирующим прибором, приведена на рис. 7-15.
Ламповый дифференциатор ДЛ-Т для работы с термопарой отличается от ДЛ-П лишь схемой измерительного блока, которая идентична схеме блока И-Т. Ламповый усилитель ДЛ-Т имеет такие же динамические
Рнс. 7-15. Схема внешних соединений ДЛ-П с РПИ.
характеристики, как и ДЛ-П, и может работать в тех же режимах. Конструктивно он оформлен так же, как и ДЛ-П.
Переключатели ламповые контактные
Переключатель контактов электромагнитного реле с ламповым усилителем входного сигнала типа ПЛК-П используется в системах тепловой защиты и сигнализации, а также в электрических схемах управления двумя исполнительными механизмами от одного регулирующего прибора. Прибор предназначен для работы с одним или двумя первичными приборами, снабженными дифференциально-трансформаторными или индукционными датчиками переменного тока.
Принципиальная электрическая схема ПЛК-П без измерительной части ‘изображена на рис. 7-16. Измерительная часть и промежуточный полупроводниковый выпрямитель собраны так же, как и у электронного дифференциатора типа ДЛ-П (см. рис. 7-14), т. е. полупроводниковый выпрямитель Т1 входного сигнала переменного тока является фазочувствительным (полярность напряжения постоянного тока на выходе клемм 10—20 зависит от фазы входного сигнала) и фазоизбирательпым (подавляет г армоники входного сигнала, сдвинутые по фазе относительно питающего напряжения на 90°). В отлнчие от ДЛ-П на выходе полупроводникового усилителя ПЛК-П имеется дополнительная цепь, состоящая из выпрямителя В$, 186
резистор on /?7с и Rn й конденсатора Си. Зто позволяет получить па клеммах 18—8 сигнал постоянного тока, напряжение которого по зависит от фазы входного сигнала.
Таким образом, если требуется, чтобы измерительная схема ПЛК-П реагировала на отклонения контролируемой величины от зад итого значения с учетом ее фазы или направления, выходной сигнал промежуточного усилителя снимается с клемм 10—2(7, если направление отклонения не учитывается, то выходной сигнал снимается с клемм 18—8. С выхода промежуточного усилителя сигнал через перемычки 20—19 и 10—9 (18—19 и 8—9) поступает через демпфер ReCs на левую по схеме сетку лампового усилителя, собранного на двойном триоде 6НГП. Первый триод лампы работает в режиме усилителя напряжения. Его анодной нагрузкой является резистор Rl. С выхода левого триода сигнал поступает на сетку правого, являющегося усилителем мощности (тока). Его анодной нагрузкой служит обмотка электромагнитного реле Общий коэффи цнент лампового каскада по напряжению /гу=90-:-|150. Диапазон линейности выходного сигнала усилителя с клемм 20—10 должен быть в пределах ±6 В
При отсутствии сигнала с выхода измерительной схемы реле должно быть обесточено, якорь реле отпущен, его контактные пары 12—13 и 15 16 замкнуты, 13—14 и 16—17 разомкнуты. Такое положение реле является исходным. Оно достигается с помощью корректора Rs, регулирующего величину анодного тока в нагрузке /?4- В исходном режиме напряжение, снимаемое с Ri, устанавливается достаточным для запирания правого триода. При этом обмотка реле обесточивается. Если на вход лампового усилителя поступает управляющий сигнал, увеличивающий анодный ток левого триода, то правый трнод запирается глубже. Наоборот, управляющий сигнал, уменьшающий анодный ток левого триода, отпирает правый триод, и реле срабатывает. При этом контакты 12—13 и 15 16 размыкаю гея, а 13—14 и 16 17 замыкаются. Такой режим работы 1ы.1ыпаотся режимом одностороннего ограничения. В том
^ггов
Рис. 7-16. Принципиальная электрическая схема лампового переключателя типа ПЛК-П.
случае, когда реле должно срабатывать независимо от направления отклонения управляющего сигнала (клеммы 18—19 и 8—9 замкнуты), на сетку левого триода в любом случае поступает сигнал, вызывающий уменьшение анодного тока левого триода, отпирание правого триода и в конечном итоге отпускание реле. Такой режим работы лампового усилителя называется режимом двустороннего ограничения.
При работе прибора с двумя датчиками он может быть использован, во-первых, в системах сигнализации или защиты, работающих по соотношению сигналов от каких-либо двух контролируемых параметров, во-вторых, в схемах «шагающей» синхронизации двух исполнительных механизмов — колонок типа КДУ-П/П, управляемых одним регулирующим прибором. Выходные контакты реле (клеммы 12—13—14 и 15 16—17) в первом случае включаются в электрические цепи сигнализации пли защиты, во втором — в цепь управления исполнительными механизмами.
Для выполнения тех же функций, но при использовании в качестве датчика термопары применяется переключатель типа ПЛК-Т. Его измерительная часть выиол йена аналогично измерительному блоку типа И-Т (см. рис. 7-12), а усилитель с релейным выходом аналогичен прибору ПЛК-П.
Размножитель сигналов
Размножитель применяется для увеличения числа выходных сигналов датчиков переменного тока или корректирующего прибора КПИ. При работе с одним датчиком или корректирующим прибором он размножает сигнал на его выходе на пять независимых каналов с выходцы ми сигналами переменного тока. При работе с двумя датчиками размножитель предварительно суммирует их выходные сигналы.
Принципиальная электрическая схема полупроводникового размножителя типа РП изображена на рис. 7-17.
Измерение отклонений контролируемых величин осуществляется с помощью мостов переменного тока. Переменные резисторы Rt и /?а служат для регулировки чувствительности, т. е. долей сигнала, поступающего от первичных приборов. Для балансировки входных мостов предусмотрен корректор R3.
Суммарный сигнал усиливается полупроводниковым усилителем. Цепь питания триода состоит из обмотки V силового трансформатора Тр1, выпрямительного диода Д1 н шунтирующего конденсатора С4. Для задания рабочей точки вольт-амперной характеристики триода используется напряжение смещения, развиваемое на дио-188
ре Дг, для ее стабилизации — диод Д3. Триод Ti нагружен обмоткой / выходного трансформатора Тр2, который используется для размножения сигналов на пять независимых каналов. Напряжение, развиваемое на обмотке Н выходного трансформатора, поступает на вход триода. Таким образом, создается режим работы усилителя с отрицательной обратной связью, цепь которой образуют обмотка II и резисторы Ri и Ro- Их величины подобраны таким образом,
К регулирующим приборам
Рис. 7-17. Принципиальная электрическая схема размножителя сигналов 1’11.
что общий коэффициент усиления размножителя сигнала равняется единице и входной сигнал от первичного прибора без искажения распределяется по выходным каналам размножителя.
Прибор выполнен па металлическом шасси, на переднюю панель которого вынесены движки переменных резисторов и контрольные гнезда А — Б.
Комплект динамической связи — КДС
В некоторых .АСР предусматриваются динамические воздействия одного регулирующего прибора на другой, осуществляемые при помощи специального устройства — комплекта динамической связи (КДС). Устройство динамической связи (рис. 7-18) представляет собой инерционную /?С-цепочку, вход которой (клеммы 1 и 2) подсоединяется через переключатель управления ПУ к выходным цепям (клеммам 7—9) ведущего регулятора
PIIH, а выход включается последовательно с выходным сигналом измерительного блока И-Ш (клеммы 15—25 РПИБ) ведомого регулятора. Воздействие динамической
Рис. 7-18. Принципиальная электрическая схема динамиче-скоп связи между двумя приборами.
РПИ — регулирующий прибор; 11У — переключатель; КДС — колонка динамической связи; И-Ш— измерительный блок.
связи на ведомый регулятор проявляется лишь в момен-ты появления сигнала на выходе ведущего. Степень этого воздействия регулируется изменением коэффициента усиления Ri и постоянной времени R3.
Задатчики и указатели положения
Задатчики ручного управления регуляторов МЗТА служат для дистанционного изменения заданного значения регулируемой величины. Задатчик ЗРУ представляет собой проволочный потенциометр с круглой равномерной шкалой — от 0 до 100% угла поворота. Регулируемое сопротивление обоих типов задатчиков составляет 24 Ом. Полные активные сопротивления задатчиков ЗРУ-24 и ЗРУ-174 равны соответственно 24 и 174 Ом.
Указатель положения служит для наблюдения за перемещением выходного вала сервопривода и положением регулирующих органов. Он представляет собой магнитоэлектрический милливольтметр с равномерной шкалой от 0 до 100%.
7-6. Настройка электронных регулирующих приборов типа РПИ
Настройкой называют установку органов настройки регулирующего прибора и измерительного блока в положение, обеспечивающее нормальную работу прибора и расчетные значения параметров его статической и динамической настройки.
1. Проверка нормальной работы прибора
1) Включить напряжение питания.
2) Ручки «нечувств.», «время интегр.», «скор, связи», «длит, импульса» повернуть до упора против часовой стрелки.
3) Поставить перемычку между контрольными гнездами А и Б.
4) Сбалансировать электронный блок с помощью ручки «корректор». Убедиться, что при повороте ручки «корректор» по часовой стрелке загорается одна из сигнальных лампочек, а при повороте против часовой стрелки— другая.
5) Подать ступенчатый сигнал на вход регулирующего прибора; убрать перемычку между гнездами А и Б и сбалансировать регулирующий прибор с помощью ЗРУ и ручки «корректор» измерительного блока.
G) Поставить ручки «ск. связи» и «время интегр.» в среднее положение, разбалансировать прибор корректором измерительного блока. При этом прибор должен отрабатывать последовательность импульсов, т. е. включать одну из сигнальных ламп через равные промежутки времени.
7) Убедиться, что поворот ручки «длит, импульса» по часовой стрелке приводит к увеличению длительности импульсов.
2. Установка параметров статической настройки
К параметрам статической настройки регулятора относятся:
1) заданное значение регулируемой величины;
2) зона нечувствительности релейного элемента;
3) диапазон действия и цена деления задатчика.
а) Настройка измерительного блока на заданное значение регулируемой величины для приборов РПИБ-Т производится сменными резисторами Р52 и $53, значения которых выбираются в зависимости от заданного значе-
пия регулируемой температуры и градуировки термопары по графику рис. 7*19. Точная настройка производится переменным резистором «корректор Т».
Для приборов РПИБ-С грубая настройка производится сменным резистором /?7б, значение которого должно быть равно сопротивлению термометра (датчика) при
заданном значении температуры. Точная настройка осуществляется 'переменным резистором «корректор Т».
Для приборов РПИБ-III и РПИБ-IV настройка на заданное значение регулируемой величины (балансировка) производится переменным резистором Т?8о — «корректором».
При наличии двух и более первичных приборов следует производить совмещение их статических характеристик, если сигналы вычитаются. Со-
Рис. 7-19. Градуировочная харак- вмещению статических теристика и /?м- характеристик обычно
предшествует установление соответствия отклонения каждого измеряемого параметра знаку плюс или минус (полярности) сигналов на выходе измерительного блока и действию регулятора в требуемом направлении (в сторону больше или меньше). Статическая характеристика первичного прибора определяется значением регулируемой величины и крутизной характеристики первичного прибора у, которая определяется с помощью измерительного блока регулятора. Напряжение, развиваемое индукционным или дифференциально-трансформаторным датчиком, измеряется милливольтметром переменного тока па гнездах Д—Е измерительного блока при максимальном положении ручки «чувствительность» (см. рис. 7-9), При этом максимальные напряжения, мВ:
г/маис.1__ макс .
UDE, ~У\ !«’
ггмакс макс
Чод, Уъ Т*’
где z/MaKC — максимальные отклонения регулируемых величин в расчетном диапазоне отклонений.
Для совмещения статических характеристик поворотом ручек переменных сопротивлений «чувствительность 1» на угол at и «чувствительность 2» на угол а2 добиваются равенства он = a2 Если требуется осуществить максимальную чувствительность регулятора по одному из каналов измерений, ручкой «чувствительность» этого канала устанавливается аМакс, при этом положение ручки (деления) «чувствительность 2» определится из соотношения
г /макс
1П UDEt аг= 10------— .
* г /макс
При произвольном значении at величина аз определяется из соотношения
I/макс UDE,
г/макс ’ и!)Е-1
Проверку точности совмещения характеристик можно осуществить с помощью милливольтметра, подключаемого к гнездам Д — Е. При точном совмещении при отклонении обеих измеряемых величин от заданного значения и до максимума z/MaKC в расчетном диапазоне отклонений результирующий сигнал па выходе измерительного блока должен быть равен нулю. Допустимым является расхождение характеристик в пределах зоны нечувствительности Л.
б) Установка зоны нечувствительности. Установка А осуществляется с помощью ручки «нечувствительность».
Для повышения точности регулирования значения А следует выбирать минимальным. Однако наличие случайных флуктуаций параметров в промышленных условиях может приводить при малых А к увеличению частоты срабатывании пускового устройства и ускорению износа пусковой аппаратуры, в особенности контактных устройств. Поэтому Амии ограничивается снизу. Рекомендуется при настройке устанавливать А= = (0,1-т-0,3)г/*макс, где у*Макс— максимальное допустимое отклонение регулируемой величины, приведенное ко входу регулирующего прибора. В процессе эксплуатации величина А может корректироваться.
в) Установка диапазона и цены деления задатчика. Для приборов РПИБ-Ш и РПИБ-IV диапазон действия 13—626 193
задатчика D устанавливается с помощью переменного резистора R85 «чувствительность задатчика». (Максимум Д85 соответствует максимуму D.)
Цена деления задатчика г определяется по формуле, мВ,
z —
п
п ’
где п — число делении шкалы задатчика.
Для приборов РПИБ-Т и РППБ-Т2 диапазон действия задатчика D, мВ, устанавливается с помощью сменного резистора Д51 (шунт задатчика), Ом,
п 13,6Р
h's,-_ (55,5 — 0) •
Для приборов РПИБ-С и РПИБ-2С диапазон действия задатчика D (°C) изменяется с помощью сменного резистора Д77 (шунт задатчика). Для медного терморе-зистора (Гр23) Ом,
п _________В______
11—0,04160 ’
Для платинового термометра (Гр21), Ом, р _______________________________
— 14,45 — 0,04160 ’
3. Установка динамических параметров настройки
К динамическим параметрам настройки относятся:
1) коэффициент усиления регулятора Др (степень обратной связи 6=1/Др);
2) постоянная времени интегрирования Д,;
3) длительность импульса t...
Установка постоянной времени интегрирования
Установка 7И в приборах РПИ осуществляется сменным резистором До, значение которого подсчитывается по формуле
Тргеит
Д8, Мом= ИС1 м’кф (7-2)
Значение Д9, подсчитанное по формуле (7-2) округляется в сторону увеличения до ближайшего стандартного значения До (у регуляторов типа РПИ С3=10 мкФ).
Значение 7'„ для каждого сменного резистора Р9 определяется из опытной кривой переходного процесса регулятора, как показано на рис. 6-14,6.
Значение 7’„ без снятия кривой разгона регулятора определяется следующим образом: 1) сбалансировать прибор; 2) установить ручку «скорость связи» и «время интегрирования» в положении 1: ручки «нечувствительность» и «длительность импульса» — в крайнее левое положение; 3) подать на вход прибора ступенчатый сигнал у' = I В; при этом загорится сигнальная лампа; 4) посредством электросекундомера измерить длительность пропорциональной части кривой переходного процесса (длительность первого включения сигнальной лампы Д/11КЛ = 0—ti на рис. 6-14,6); 5) с помощью механического секундомера измерить сумму длительностей импульсов и пауз 2(/и+7п), с помощью электрического — сумму за 8— 10 включений сигнальной лампы; 6) величину 7’„ определить по формуле [Л. 11], с:
т __AZBK4S(Zn+ Zu) ,7
7 и— Ии •
Примерный вид графика xv(t) изображен на рис. 6-14,6.
Установка коэффициента усиления per у-л я тор а
Установка расчетного значения осуществляется
с помощью ручки переменного резистора «скорость связи» = (7-4)
где 6 = 1/Лр — расчетное значение степени связи; kn — коэффициент усиления измерительного блока; x'v=S— максимальное значение скорости регулирования, S = n/Tc; Т1,.— время перемещения сервопривода; п — диапазон изменения сигнала па выходе регулирующего органа.
У регулятора типа РПИБ расчетное значение скорости связи устанавливается с помощью двух резисторов: сменного Р1з (ступенчатое изменение) и переменного Т?14 (плавное изменение v в пределах каждой ступени). Поэтому для установки требуемого значения скорости связи необходимо располагать градуировочными характеристиками ц=/(7?1з, Т?14), которые определяются опытным путем из кривой переходного процесса регулятора (см. рис. 6-14,6) по следующей формуле: v=UBx/htBKli, где 13* 195
UBT — величина ступенчатого сигнала, поданного на вход электронного блока ((7вх=1000 мВ); Д/вкл— время первоначального включения сигнальной лампы «больше»
или «меньше» (0—h на рис. 6-14,6). При этом Pis изменяется ступенчато (5—6 vcs значений) от 0 до 70 МОм,
500
400
300
200
Rg—ZMUM', R/a= /МОм
100 S
*с*ГТ
О а0пт2 О 6 8 10
Рис. 7-20. Градуировочные характеристики ручки «скорость связи».
a Ru — плавно — от одного до десяти больших делении ио шкале «скорость связи». Для серийно выпускаемых приборов РПИБ величину о, приведенную ко входу в электронный блок, можно изменять от 30 (минимальное значение) до 1500 мВ/с. Примерный вид градуировочной кривой о=/(Д1з) и f(Pu) приведен на рис. 7-20. После
установки требуемых значений о(Лр) и Т„ на регуляторе целесообразно опреде-
лить их фактические величины из опытной кривой переходного процесса ПИ-регулятора (см. рис. 6-14,6) и в случае необходимости произвести корректировку установленных значений.
Установка ручки «длительность импульса»
Положение движка переменного резистора Rzb в РПИ определяет длительность однократного включения сервопривода ta в пульсирующем режиме перемещения сервопривода (см. рис. 6-14,6). Выбор положения ручки /?28 — «длительность импульса» производится после установки параметров настройки Ар и Ти. Максимальное значение /и, с, устанавливается из условия недопустимости появления автоколебаний в замкнутой АСР в режиме однократного включения (переброски управляющего сигнала):
Гакс< Tc/d,
где d — диапазон регулирования, равный изменению регулируемой величины Д//макс при перемещении сервопривода из одного крайнего положения в другое, отне
сенному к значению установленной зоны нечувствительности <1 = А//макс/Д.
С другой стороны, tu не должен быть слишком малым из-за инерции пусковых устройств и наличия времени разгона сервопривода Д/р после поступления управляющего сигнала (см. рис. 6-12), т. е.
с>ч-
Обычно величина tu устанавливается в пределах 0,1—0,5 с и проверяется с помощью электросекундомера в пульсирующем режиме работы регулятора.
Пример. Определите установочные значения 7?о и Тл для регулятора температуры.
Исходные данные
1. Тип регулятора — РПИБ-Т.
2. Оптимальные значения Кр и Ги, определенные по графикам АФХ объекта на рис. 5-2,6:
7-- = 23с; /<°"г=1,35^^ =0,74^-).
3. Скорость регулирования (изменение сигнала в единицу времени на выходе регулирующего органа при его перемещении с постоянной скоростью):
$ = 0,058 с
Порядок расчета
1. Определение Ra по формуле (7-2) /опт 23
Rt = —=='—ГО" = 2,3 МОм.
2. Определение скорости связи по формуле (7-4)
ц^Г = Лн80пг5 = 1500-0,74 мВ/кг/с-0,058 *^- = 65 мВ/с.
3. Определение угла поворота ручки «скорость связи» а .по градуировочной кривой на рис. 7 20:
аопт=1,5.
КОНТРОЛЬНЫЕ ВОПРОСЫ
По регуляторам РПИБ
1. Из каких узлов состоит регулятор в целом?
2. Пользуясь схемой, приведенной па рис. 7-2, поясните назначение отдельных узлов регулирующего прибора.
3. Поясните принцип действия регулирующего прибора, проследив за прохождением входного ступенчатого сигнала по электрической схеме, изображенной на рис. 7-4.
4. Какой закон регулирования реализует регулятор в пульсирующем режиме?
5. Назовите органы настройки статических и динамических параметров регулятора.
6. Как установить требуемое время Т„ и степень обратной связи 6? '
По измерительным блокам
1. Поясните принцип действия измерительного блока И-1П и назовите его органы настройки.
2. Поясните принцип действия измерительного блока И-С.
3. Поясните принцип действия измерительного блока И-Т.
По корректирующему регулятору КПП
1. Какой закон регулирования реализуется в КПП-регуляторе?
2. Пользуясь функциональной схемой (рис. 7-6), поясните назначение отдельных элементов КПП.
3. Поясните принцип действия регулятора по принципиальной схеме (рис. 7-7).
4. Назовите органы настройки КПП.
5. Как используется КПП в схемах регулирования? Поясните схему внешних соединений КПП с «подчиненным» регулятором (рис. 7-10).
По электронным дифференциаторам и вспомогательной аппаратуре
1. Каково назначение электронных дифференциаторов в схемах регулирования?
2. Поясните принцип действия прибора типа ДЛ-П (рис. 7-25).
3. Назовите режимы работы дифференциаторов.
4. Перечислите органы настройки электронных дифференциаторов.
5. Каковы назначение и принцип действия полупроводникового размножителя сигналов?
ГЛАВА ВОСЬМАЯ
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ, РАБОТАЮЩИЕ НА УНИФИЦИРОВАННОМ ТОКОВОМ СИГНАЛЕ СВЯЗИ
8-1. Общие сведения
Развитием системы автоматических регуляторов РПИБ являются новые серии аппаратуры, выпускаемые МЗТА (аппаратура «Каскад»1 и Чебоксарским заводом электрических исполнительных механизмов [Л. И] (ап-
1 Краткие сведения о новой аппаратуре МЗТА приводятся в журнале «Приборы и системы управления» № 12, 1972 г. и № 5, 1974 г. в статьях 3. Я. Бейраха, В. Н. Фальковича, В. Н. Шмелева и ДР-198
пара гура РП-2)’, отличающиеся использованием унифицированного сигнала связи постоянного тока 0—5 мА, а также блочно-модульным принципом построения приборов.
Сигнал постоянного тока удобно суммировать, преобразовывать, контролировать. Унификация сигнала связи позволяет осуществить дублирование датчиков, что существенно повышает надежность регулятора в целом. Унифицированный сигнал может быть использован многократно, что позволяет уменьшить число, датчиков и кабельных связей. Применение унифицированного сигнала позволяет наиболее просто и надежно скомпоновать сложные взаимосвязанные автоматические системы регулирования в конкретных условиях автоматизации теплоэнергетических установок.
Автоматические регуляторы новых серий, так же как и ныне существующих, обеспечивают суммирование и компенсацию электрических входных сигналов, поступающих от первичных приборов (преобразователей сигналов), в измерительном блоке и усиление этих сигналов до значения необходимого для управления пусковым устройством исполнительного механизма в электронном регулирующем блоке. Регулирующие блоки в сочетании с исполнительным механизмом обеспечивают реализацию II и НИ законов регулирования в пульсирующем режиме. ПИД закон регулирования, так же как н в системе регуляторов РПИБ, реализуется с помощью дифференциатора, присоединяемого ко входу регулирующего блока параллельно измерительному блоку. В состав новых серий аппаратуры автоматических регуляторов входят также различные вспомогательные и функциональные устройства (блок суммирования, вычислительные блоки, дифференциатор, задатчик ручного управления и др.).
Для пояснения принципов построения приборов, входящих в состав новых серий аппаратуры, рассмотрим в качестве примера регулирующие блоки типов Р-21 и Р-12 и измерительный блок типа П-04, входящие в состав аппаратуры «Каскад».
1 В настоящее время взамен РП-2 выпускается новая серия аппаратуры — агрегатированный комплекс электрических средств регулирования (АКЭСР), отличающийся использованием унифицированного токового сигнала связи и агрегатированным принципом построения регулирующих, функциональных и вспомогательных блоков на интегральных микросхемах.
8-2. Регулирующие блоки
Релейный регулирующий блок Р-21 управляет исполнительным механизмом и формирует ПИ-закон регулирования.
Регулирующий блок Р-21 построен по блочно-модульному принципу в соответствии с фукциональной схемой релейно-импульсного регулятора, изображенной на рис. 8-1.
Входные унифицированные токовые сигналы 0—5 мА и 0—20 мА вводятся в блок через демпфирующее устройство (ДС-цепь) непосредственно или с выхода измерительного блока И-04.
В качестве линейного усилителя применяется высокочастотный усилитель постоянного тока типа УВ-41, в качестве трехпозиционного релейного усилителя — магнитно-тиристорный усилитель УР-2, имеющий регулируемые зоны нечувствительности А и возврата Ав. Оба усилителя выполнены в виде отдельных модулей. Значение А так же, как и в РПИБ (рис. 7-2), устанавливается с помощью местной отрицательной обратной связи, охватывающей линейный усилитель, а величина Ав, определяющая длительность импульса tK в пульсирующем режиме,— с помощью местной положительной связи. ПИ-закон регулирования формируется в пульсирующем режиме с помощью исполнительного механизма и главной отрицательной обратной связи, охватывающей оба усилителя и выполненной на базе инерционного звена 1-го порядка (7?С-цепочки). Демпфирующее устройство и настроечные органы цепей обратных связей объединены в модуль статических и динамических настроек блока — модуль динамики. Усилители блока питаются от источника питания, выполненного в виде отдельного модуля.
'Принципиальная электрическая схема Р-21 показана на рис. 8-2. Сигнал постоянного тока 0—5 мА поступает на резистор i/?i через клеммы 15—16, а сигнал 0—20 мА—па R? через клеммы 16—17. Они преобразуются на входных резисторах в сигналы постоянного напряжения я суммируются с сигналом 0 — 2,5 В, поступающим на вход демпфирующего устройства через клеммы 14—15. Сигнал 0—5 мА, поступающий на Rs через клеммы 17—18, не демпфируется и поступает непосредственно на вход усилителя. Демпфер представляет собой инерционную RC-цепочку с переменным сопротивлением Rt, регулирующим постоянную времени демпфирования ГДф. Непосредственно на вход усилителя через клеммы 19—20 может быть подан также сигнал ±24 В. Все неиспользуемые входы блока закорачиваются.
Рис. 8-1. Функциональная схема Р-21.
-X ~гж Рнс. 8-2. Принципиальная электрическая схема Р-21.
дотд дохд дохд дохд цгмпдпзпиггтти! ттснгпз 4uoduinog
Усилитель УВ-41 'выполнен двухступенчатым на базе двух последовательно включенных транзисторов. Его выходной каскад построен на третьем транзисторе, коллекторная цепь которого вместе с диодным мостом выполняет роль низкочастотного демодулятора. Усилитель в целом охвачен через резистор Rs глубокой отрицательной обратной связью, которая способствует повышению стабильности его характеристик. Итак, входом усилителя является сигнал по напряжению постоянного тока 0+10 мВ при высокоомном сопротивлении входа (более 100 МОм); выходом — сигнал постоянного тока — 0 + 0,5 мА при сопротивлении нагрузки 10 кОм. Коэффициент усиления УВ-41 находится в пределах 40—60 мкА/мВ, частота опорного напряжения 50±0,1 Гц. Питание усилителя осуществляется от модуля источника питания сглаженным напряжением 30 В постоянного тока и 12 В напряжением переменного тока.
Сигнал с выхода УВ-41 преобразуется в релейном усилителе УР-2 в напряжение постоянного тока +24 В в зависимости от фазы (знака) входного сигнала у (у*). Релейный усилитель собран на базе магнитного усилителя, управляющая обмотка которого подключена к выходу усилителя постоянного тока. Релейные свойства усилителя достигаются путем включения тиристоров 7\ и Т2 в цепи его нагрузки. Нагрузка модуля УР-2 (не менее 72 Ом) подключается к клеммам 7—8—9. Модуль УР-2 питается от источника питания несглаженным двухнолунериодпым (пульсирующим) напряжением 24 В постоянного тока (питание тиристоров) и напряжением переменного тока 48 В (питание обмоток возбуждения магнитного усилителя). ;
При срабатывании УР-2 одновременно с появлением напряжения +24 В па клеммах 7—8—9 на выходе УР-2 возникает напряжение импульсной формы и„.с. С клеммы 15А—16А это напряжение подастся на вход устройства главной отрицательной образной связи блока Р-21, а с клеммы ИЛ — 11>Л - па цепь дополнительной положительной обратной связи.
В момент, когда напряжение Uo.c превышает пороговое значение напряжения зажигания находящейся в цепи обратной связи неоновой лампы НЛ, начинается заряд конденсатора С2 главной обратной связи и конденсатора Сз дополнительной обратной связи. При срабатывании блока УР-2 в другую сторону напряжение U0.c и ток зарядов конденсаторов С2 и С3 меняют знак Скорость заряда конденсатора обратной связи оСп определяется его емкостью (постоянная величина) и суммой резисторов — постоянного Rs и переменного (ступенчатого) В2 (R>s—R:n), изменением которого можно установить расчетное значение коэффициента усиления регулятора АР в целом. Постоянная времени разряда конденсаторов 7И, происходящего в момент прерывания сигнала t/0.c (постоянная интегрирования ПИ-регулятора Тц=ЛВ1С2, см. (3-22)], определяется переменным (ступенчатым) резистором Bi (положением ручки переключателя Bi}. Длительность включений (длительность импульса) 1И устанавливается движком переменного резистора Atso (ручка «импульс»). Влияние зоны нечувствительности (ручка переменного резистора Re) на зону возврата или длительность импульса устраняется путем спаривания ручек А6а и Аве, а взаимовлияние главной обратной связи и t„— спариванием переменных резисторов Агва и Rist>. Резисторы R>2—Rn и конденсатор С4 дополнительно уменьшают зависимость ts, от обратной связи и зоны нечувствительности.
Конструктивно блок Р-21 выполнен в виде металлического шасси прямоугольной формы и сварного корпуса размером 80X1160 X 508 мм, в котором смонтированы четыре модуля (источник питания, усилитель постоянного тока, релейный усилитель и модуль динамики с панелью органов контроля и настройки). Объединение всех модулей в единой электрической схеме осуществляется с помощью печатной платы с гибкими контактами, соединяемыми пайкой с выводами модулей. На задней стенке корпуса размещена колодка с 20 коммутационными клеммами для внешних электрических соединений блока.
Основные технические данные релейного регулирующего блока Р-21
22
Напряжение питания..................... 220 4; 33 В (50±15 Гц)
Потребляемая мощность....................... 30 В-А
Зона нечувствительности, приведенная ко вхо-
ду блока, А:
минимальная ............................ 120 мкА
максимальная............................ 180 мкА
Зона возврата Дп........................ 0,35—0,45 от зоны
нечувствительности
Продолжительность однократных включений . . 0,12±0,04-т-1±0,4 с Пределы изменения постоянной времени инте-
20—2000 с ±20% (5—510 с ±30%)
грирования
Пределы изменения скорости обратной связи
fee, приведенной ко входу блока.......... 0,1—2,5% УП/с
Допустимое отклонение диапазона изменения Пев ±20% (±30%) Масса блока................................ 8 кг
Органы настройки. Ручки переменных резисторов: 1. «Демпфер» (/?/,)—для изменения постоянной времени демпфирования Гдф.
2. «Зона» (7?са)—для изменения зоны нечувствительности регулятора.
3. «Импульс» (Т?15б)—для регулирования времени однократного включения регулятора (/и).
4. Ручка переключателя Ти (Bi) для изменения постоянного времени интегрирования.
5. Ручка переключателя оев (Вг) для изменения скорости обратной связи (степени обратной связи 6 или коэффициента усиления регулятора /<р).
Органы контроля. 1. Сигнальные лампы «больше» (красная) и «меньше» (зеленая)—для визуального наблюдения за работой регулятора.
2. Гнезда А— Б — для измерения сигнала рассогласования на входе блока.
3. Гнезда В — Б — для контроля напряжения на входе релейного усилителя (вход усилителя постоянного тока).
4. Гнезда Г—Б — выход главной обратной «вязи.
5. Гнезда Д — Б — выход дополнительной обратной связи (измерения длительности импульса At).
Блок регулирующей аналоговый Р-12 входит в состав аппаратуры автоматических регуляторов в качестве регулирующего блока и применяется как самостоятельное регулирующее устройство для управления исполнительными устройствами (позиционерами) или пропорциональными (линейными) усилителями мощности. Другое назначение Р-12 — корректирующий регулятор в каскадных (многоконтурных) схемах регулирования, призванный заменить корректирующие регуляторы типа К'ПИ ,(§ 7-2).
Рис. 8-3, Функциональная схема Р-12.
Входные токовые сигналы 0—5 и 0—20 мА вводятся в регулирующий блок непосредственно (без масштабирования н без гальванической изоляции) или с выхода измерительного блока типа И-04 (с независимым масштабированием и с гальванической изоляцией). Аналоговый блок Р-12 построен по блочно-модульному принципу в соответствии с функциональной схемой, изображенной на рис. 8-3. Он состоит из следующих элементов, включенных последовательно:
а) узла входных цепей 1;
б) усилителя постоянного тока с высокоомным входом и токовых выходом 2 УВ-22;
в) модуля ограничения 3;
г) усилителя постоянного тока 4 с высокоомным раздельным входом и с двумя сигналами на выходе (основным токовым и дополнительным по напряжению гальванически изолированным от основного) УВ-21.
Элементы в пп. «б»—«г» снабжаются от одного источника питания 5 и охвачены устройством отрицательной обратной связи, образующей модуль динамики 6.
Узел входных цепей (/) воспринимает токовые сигналы (ZA) или датчиков напряжения (t/д) и компенсирует их сигналом за
дающего устройства с токовым выходом (7ЗУ). Пру ручном управлении на вход узла поступает сигнал от блока управления (БУ). На выходе узла формируется сигнал рассогласования у* по напряжению.
Усилитель постоянного тока 2 УВ-21 воспринимает разность между сигналом рассогласования у* н сигналом обратной связи х0.с и усиливает его по напряжению с Ку = 1,5-'1О3.
Модуль ограничения 3 воспринимает сигнал с выхода УВ-22 и передает на вход второго усилителя УВ-21 на активном линейном участке (см. рис. 8-3) с коэффициентом усиления Лу=1, а па участках ограничения (насыщения) обеспечивает двустороннее регулирование ограничения.
Второй усилитель постоянного' тока 4 УВ-21 воспринимает сигнал с выхода модуля ограничения и передает его на основной токовый выход с крутизной статической характеристики Sy = l мА/B и на дополнительный выход по напряжению с коэффициентом усиления Ку = 1. Модуль динамики 6 содержит 7?С-цепи функциональной (главной) обратной связи и цепи, обеспечивающие безударное переключение с ручного управления на автоматическое. Цепи главной обратной связи воспринимают сигнал с дополнительного выхода второго усилителя УВ-21 и формируют сигнал обратной связи U„.c (Хо.о), в свою очередь формирующий П -, ПИ- и ПИД-законы регулирования [последний в соответствии с (3-28)]. Цепи, обеспечивающие безударное переключение, получают управляющее воздействие в виде замыкания или размыкания контакта от блока управления.
8-3. Измерительный блок И-04
Измерительный блок И-04 служит для формирования сигнала рассогласования между заданным значением и алгебраической суммой входных токовых сигналов О—5 мА.
В измерительный блок может быть введено до четырех сигналов с независимым масштабированием и взаимной гальванической изоляцией.
Сигнал заданного значения формируется с помощью встроенных в блок корректора и выносного потенциометрического задающего устройства (ЗУ). Выходной сигнал блока формируется в виде напряжения постоянного тока и рассчитан на введение в регулирующие блоки Р-21, Р-12 и другие функциональные блоки системы.
Принципиальная схема электрических соединений блока показана па рис. 8-4.
Блок содержит входные цепи (резисторы «), четыре преобразователя сигнала МП-04, генератор напряжения МГ-2, четыре узла масштабирования сигналов, узел компенсации (корректор-задатчик) и источник .питания. Сигнал напряжения постоянного тока с входных резисторов поступает на вход преобразователя МП-04, который преобразует и усиливает сигнал. Преобразователь МП-04 представляет собой модулятор и демодулятор, выполненные на трио-206
I
I
Задатчик
Рис. 8-4. Схема электрических соединений блока И-04.
goxg
дах и связанные разделительным трансформатором, обеспечивающим гальваническую изоляцию входных целей от выходных. Питание МП-04 осуществляется от генератора напряжения МГ-2, представляющего собой полупроводниковый преобразователь постоянного напряжения в переменное. Он выполнен на транзисторах. Частота выходного напряжения около 10 кГц. Питание генератора осуществляется от стабилизатора тока До Выходные сигналы снимаются с клемм 1—8 и 15—22. Выходные сигналы с преобразователей МП-04 поступают на узлы масштабирования, регулирующие величину коэффициентов усиления Км по каждому из каналов.
Далее сигналы всех преобразователей последовательно суммируются, а еатем алгебраически складываются с сигналом узла компенсации.
Уравнение статической характеристики блока:
в
= 2 ^п/вх К°Р ^3У *
1
где = — коэффициент усиления (пропорциональности)
по каждому каналу; (7Кор — сигнал на выходе корректора; 1/зу — сигнал на выходе задатчика. В блоке принято: /?вхгл,=0-<-0,5 кОм; у;=0-:-1. Тогда Дп<=0+0Д B/мА. Узел компенсации представляет собой компенсационный мост. Потенциометры Ris и 7?ie соответственно служат для «грубой» и «плавной» компенсации. Резисторы T?i7 и Ды для ступенчатого и плавного изменения сигнала задания.
Питание моста осуществляется от стабилитрона Д1, питающегося в свою очередь от источника питания ИП-10. Выходной сигнал И-04 ±2,5 В снимается с клемм 4—5.
Конструктивно блок выполнен в виде металлического шасси и сварного корпуса, являющихся одинаковыми для всех блоков системы. Для контроля и настройки блока его шасси выдвигается из корпуса. При этом электрические связи шасси с клеммной колодкой, расположенной на задней стенке корпуса, не нарушаются и обеспечиваются гибким кабелем.
Для полного извлечения шасси из корпуса необходимо разъединить штепсельный разъем.
Органы настройки и контроля. 1. Кп1—Кп41для установки коэффициентов усиления по каждому из каналов (для совмещения статических характеристик датчиков).
2. Переключатель «диапазон задатчика — дискретно» (ступенчато) для установления диапазона действия выносного ЗУ от 0 до 100% или от 0 до 40%.
3. Ручка потенциометра «диапазон задатчика — плавно» для установки точного значения заданной регулируемой величины.
4. Ручка потенциометра «Корректор» для установки заданного значения регулируемой величины в измерительном блоке (ручка «грубо» для изменения заданного значения от 0 до 100% и «плавно» от 0 до 5%).
5. Гнезда А— Б для контроля напряжения на выходе блока.
8 4. Функциональный состав новых серий аппаратуры
В состав аппаратуры автоматических регуляторов новых серии помимо регулирующих блоков и различных измерительных блоков входит ряд вспомогательных и функциональных устройств.
1. 15 л о к суммирования — предназначен для алгебраического суммирования нескольких входных токовых сигналов.
2. Блок импульсного интегрирования (аппаратура РП-2)—предназначен для интегрирования выходных сигналов релейного регулирующего прибора и позволяет совместно с этим прибором сформировать ПИ-закон регулирования.
3. Блок ограничения Н-02 (аппаратура «Каскад») — предназначен для двустороннего ограничения выходного токового сигнала 0—5 мА.
4. Вычислительные блоки — умножения, деления и извлечения корня.
5. Блок согласующих приставок В-21 (аппаратура «Каскад»)—предназначен для согласования характеристик выходных цепей и нагрузок релейных регулирующих приборов при наличии в нагрузках индуктивной составляющей сопротивления, например, магнитных усилителей.
6. Блоки управления (БУ) регуляторов — предназначены для ручного дистанционного управления регулирующими органами и переключения выходных цепей регулирующего блока с автоматического управления па ручное.
7. Защитные диодные устройства В-01 (аппаратура «Каскад») и блок распределения (аппаратура РП-2) — предназначены для распределения унифицированного сигнала связи нескольким потребителям и защиты от разрыва токовой цепи 0—5 мА при отключении отдельных потребителей путем их шунтирования без искажения нагрузочных характеристик источника сигнала.
8. Блок указателей В-12—-предназначен для визуального контроля тока нагрузки аналогового регулирующего прибора или тока датчика положения исполнительного механизма, а также для контроля сигнала рассогласования на входе регулирующих блоков.
Схема внешних соединений главного (аналогового Р-12) и «подчиненного» (релейного Р-21) регуляторов 14—626 209
и сопутствующей этому случаю (см. рис. 12-7) измерительной, функциональной и вспомогательной аппаратуры «Каскад» приведена на рис. 8-5.
Рис. 8-5. Схема внешних
Перевод Р-21 па автоматическое управление от Р-12 осуществляется с помощью БУ-12 и БУ-21. Перед этим Р-12 балансируется по показаниям блока указателей В-12 с помощью задатчика ручного управления ЗУ-11. После проведения этой операции, тщательно сбалансировав Р-21, можно переводить БУ-21 в положение «автоматика» (А).
Перевод Р-21 на ручное управление осуществляется переключением БУ-12 в положение «Р» («ручное»), В результате «подчинен-210
иый» регулятор отключается от «главного» и подсоединяется к регулируемому источнику тока, находящемуся в БУ-12, воздействуя на который оператор вручную устанавливает нужный ток на входе в Р-21, пользуясь указателем тока.
осдчпспнй аппаратуры «Каскад»
При ручном управлении клеммы 5—6 блока Р-12 замыкаются переключателем БУ-12. При этом одна из контактных групп, находящихся в Р-12, подает па его вход сигнал 0—5 мА от блока управления БУ-12 (с клемм //—12) и переводит Р-12 в режим П-регу-лятора с АР=1, а другая подключает к его выходу (клеммы 7—10) резистор фиктивной нагрузки вместо Р-21. В результате выходной сигнал Р-12 непрерывно следит за током на входе Р-21, задаваемом оператором, чем обеспечивается безударное переключение С ручного управления на автоматическое.
14* 211
ГЛАВА ДЕВЯТАЯ
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
9-1. Исполнительные механизмы МЗТА
Исполнительный механизм предназначен для перемещения регулирующего органа. Он состоит из электрического сервопривода и колонки дистанционного управления КДУ. Внешний вид одного из распространенных исполнительных механизмов показан на рис. 7-1.
Сервопривод. Электрический сервопривод представляет собой трехфазный асинхронный электродвигатель переменного тока, рассчитанный на напряжение 220/380 В и частоту вращения 1400 об/мин, сочлененный с двухступенчатым редуктором. Первая ступень редуктора имеет передаточное отношение й=1:70, вторая 12= 1 : 40(1 : 20). Общее передаточное число редуктора ip=2800(1400). На выходном валу сервопривода крепятся рычаг для сочленения с регулирующим органом (в случае тросового соединения — диск) и профилированный кулачок для сочленения с тягой указателя положения.
Полный ход сервопривода соответствует повороту выходного вала на 90°. Время полного хода называется временем сервопривода (сервомотора) Тс.
При ручном управлении штурвал выдвигается «на себя» и выводит из зацепления с электродвигателем приводную червячную пару. Поворот выходного вала в этом положении осуществляется вращением штурвала вручную.
Электрические сервоприводы выпускаются нескольких моделей с различной мощностью электродвигателя и временем сервомотора. Сервоприводы малой модели серий РМ и РМБ (быстроходный) имеют мощность электродвигателя 0,15—0,25 кВт и развивают на выходном валу крутящий момент до 25 кг-м. Сервоприводы большой модели серии РБ развивают .на выходном валу моменты, равные 100 кг-м (РБ-100), 200 кг-м (РБ-200) и 400 кг-м (РБ-400).
Для моделей РМ и РБ 7с=30ч-60 с, для модели РМБ — 15 с.
Колонка дистанционного управления типа КДУ-I служит для управления сервоприводами серии РМ, РМБ и РБ.
Колонка дистанционного управления КДУ-П/П в отличие от КДУ-I снабжена датчиком перемещения выходного вала и путевыми выключателями и также предназначена для установки на сервоприводах серий РМ и РБ. Общий вид колонки представлен на рис. 9-1.
Рис. 9-1. Внешний вид КДУ-П/П.
1—плунжерный индукционный датчик перемещения; 2— ры-члг обратной связи по положению выходного вала редуктора; 3—6— механизм передачи движения от рычага к плунжеру датчика; 7 — мопгяжная плата; 8, регулировочные винты концевых (путевых) выключателей 10 — реостат указателя положения; 11 — корректор нуля РУП-, 12 — клеммник; К — концевые выключатели.
Внутри корпуса колонки размещены клеммная сборка 12, панель 7, на лицевой стороне которой смонтированы концевые и путевые выключатели, а на тыльной — цепи электрического литания потенциометрического датчика указателя положения УП, потенциометрический датчик УП 10 и индукционный датчик перемещения.
Концевые выключатели К служат для ограничения перемещения выходного вала сервопривода при дистанционном управлении. Путевые выключатели (на рис. 9-1 не показаны) выполняют эту же задачу при управлении КДУ от регулирующего прибора. .Предель-
ные углы поворота выходного вала редуктора при автоматическом и дистанционном управлении могут различаться по значению и регулироваться с помощью двух регулировочных винтов, установленных на верхних и нижних поворотных рычагах выключателей. Движение выходного вала редуктора через тягу передается поворотному рычагу, который, поворачиваясь вокруг своей шарнирной опоры, перемещает движок потенциометрического датчика и одновременно с ним посредством тяги и рычага плунжер индукционного датчика переменного тока, предназначенного для формирования сигнала, пропорционального перемещению выходного вала сервопривода (регулирующего органа).
Исполнительные механизмы типа МЭО К (механизм электрический однооборотный контактный) предназначены для контактного управления сервомотором. В них установлены датчик перемещения с унифицированным токовым выходным сигналом О—5 мА и два концевых выключателя.
Исполнительные механизмы типа М Э О Б (механизм электрический однооборотный бесконтактный) предназначены для бесконтактного управления сервоприводом и снабжены электромагнитным тормозом, подключаемым параллельно обмотками статора электродвигателя.
9-2. Исполнительные механизмы типа МЭО (механизм электрический однооборотный)
Исполнительные механизмы этого типа обеспечивают бесконтактное управление и включают двухфазный асинхронный электродвигатель типа ДАУ, многоступенчатый зубчатый редуктор, электромагнитный тормоз и датчик перемещения. Частота вращения выходного вала редуктора при работе электродвигателя постоянна, но может меняться путем изменения передаточного отношения редуктора. Угол полного перемещения выходного вала может устанавливаться в диапазоне 0—90° и 0—240°. Фрикционная муфта электрического тормоза расположена на валу электродвигателя и прижата к нему пружиной. При появлении управляющего сигнала электромагнит оттягивает муфту и растормаживает электродвигатель. При исчезновении пружина вновь прижимает муфту к валу, при этом разгон п выбег выходного вала лежат в пределах 0,5- I ’.
Исполнительные механизмы типа МЭО допускают длительную работу в стопорном режиме, т. е. механическое ограничение перемещения выходного вала сервопривода (вращение до упора) не требует отключения на-214
>npяжения электродвигател я. Это позволяет исключать контакты концевых выключателей из цепей управления и тем самым повышать надежность схемы управления.
Преобразование положения выходного вала ,в электрический сигнал обеспечивается с помощью двух индуктивных датчиков типа БДИ-6 и реостатных типа БДР. Имеются также кон такты для сигнализации
Рис. 9-2. Сервопривод МЭО (внешний вид)
крайних п промежуточных положений выходного вала. Внешний вид исполнительного механизма МЭО25/250
приведен на рпс. 9-2.
9-3. Пусковые устройства и схемы управления
Контактные пусковые устройства
Магнитный контактор реверсивный (МКР 0) —рпс. 9-3 предназначен для управления трех-фа.шым асинхронным двигателем переменного тока мощностью до 1 кВт при напряжении 220/380 В и объединяет два механически и электрически сблокированных контактора. Каждый контактор имеет три нормально разомкнутых силовых контакта 2, включенных в цепь питания электродвигателя, и вспомогательный нормально замкнутый блок-контактор для электрической блокировки катушек магнитного пускателя.
Пускатель магнитный реверсивный с тормозным устройством ПМРТ-69-1 выполнен на базе магнитного контактора МКР-0, предназначен для контактного реверсивного управления асинхронным трехфазным электродвигателем с короткозамкнутым ротором мощностью до 0,27 кВт. Управление пускателем осуществляется постоянным (двухполупериодным) пульсирующим напряжением со средним значением 24 В при автоматическом управлении или переменным напряжением при дистанционном управлении. ПМРТ-69-2 предназначен для управления более мощным двигателем — от 0,4 до 1 кВт.
Принципиальная электрическая схема управления одним исполнительным механизмом типа КДУ с помощью магнитных реверсивных пускателей (типа МКР или ПМРТ) изображена па рис. 9-4.
Исполнительный механизм и цепи дистанционного управления .получают питание 380/220 В через автоматический выключатель АВ, располагаемый на силовой сборке вместе с магнитным пускателем и конденсаторным электрическим тормозом ТЭК.
Рис. 9-3. Внешний вид магнитного контактора.
1 — неподвижный силовой контакт; 2 — подвижный силовой контакт; 3 — индукционная катушка; 4— блок-контакт; 5—подвижный сердечник магнитопровода .
Регулирующий прибор РП п указатель положений УП питаются от шинок управления ШУ, при этом к регулятору питание подводится от стабилизатора напряжения СП (один СИ на три-четыре регулирующих прибора). Независимое питание УП позволяет сохранить контроль за положением выходного вала исполнительного механизма или связанного с ним регулирующего органа при отключении электрического питания исполнительного механизма. Поскольку от шинок управления ШУ (1АВ) подается питание на группу регуляторов, каждый регулятор и его указатель положения УП могут отсоединяться на время испытания или проверки с помощью специальных испытательных клемм К.И.
Когда переключатель управления ПУ находится в .положении А (автоматика), то .при появлении сигнала на выходе регулятора (например, «больше») напряжение с клемм 8—9 подводится к катушке ПМБ, срабатывает контактор и замыкает контакты ПМБ, при этом иа обмотку статора двигателя поступит трехфазное напряжение источника 380 В в последовательности фаз А—В—С (считая слева). 216
Двигатель и выходной вал сервопривода начнут вращаться в сторону «больше». При срабатывании регулятора в сторону «меньше» под напряжением окажется катушка ПММ, замкнутся контакты ПММ и на обмотки статора двигателя поступит напряжение источника в последовательности фаз А—С—В. Таким образом произойдет чередование двух фаз — В и С и асинхронный двигатель исполнительного механизма начнет вращаться в противоположном направлении — в сторону «меньше». Перемещение выходного вала сервопривода при дистанционном управлении кнопками КБ и КМ огра-
Рис. 9-4. Принципиальная электрическая схема управления исполнительным механизмом с колонкой дистанционного управления.
ничиваются концевыми выключателями КВБ—КВМ, при автоматическом управлении — путевыми выключателями ПВБ—ПВМ.
Магнитный пускатель снабжен тормозным электролитическим конденсатором ТЭК., который, подключаясь к обмоткам статора двигателя через нормально замкнутые вспомогательные контакты ПМБ и ПММ в момент разрыва силовых, «поглощает» остаточный заряд обмоток статора, способствующий дополнительному вращению (выбегу) ротора и вызывает его электрическое торможение. Тормозной эффект (см. рис. 6-12) зависит от соотношения емкости конденсатора и мощности двигателя. Для контроля за действием регулятора к клеммам 7—8 п 9—8 подключаются индикаторные лампы ЛК и
Рис. 9-5. Функциональная схема синхронизации хода двух исполнительных механизмов.
РП — электронный регулирующий прибор; СХ — синхро-низатор хода (ПЛК-П); 1ИМ, 2ИМ— исполнительные механизмы; IPO, 2РО — регулирующие органы; 1ДП, 2ДП — датчики положения.
ЛЗ, расположенные на пульте. Нажимая кнопку контроля включения ламп КВЛ, оператор может проследить за частотой и знаком сигналов, поступающих с выхода регулятора в цепь управления исполнительным механизмом, т. е. проверить наличие так .называемого «пульсирующего» режима, характеризующего режим работы .регулятора. Вся аппаратура управления, на которую может воздействовать оператор: переключатель управления ПК, кнопки КМ - КБ, лампы ЛК — ЛЗ, кнопка КВЛ и задатчик регулятора ЗРК— собрана в один блок управления БК и располагается совместно с указателем положения КП на пульте управления.
Система управления двумя исполнительными механизмами (рис. 9-5) предусматривает автоматическое пли дистанционное управление двумя исполнительными механизмами, а также дистанционное управление одним исполнительным механизмом и автоматическое — другим.
Согласованное перемещение двух механизмов 1ИМ и 2ИМ осуществляется с помощью лампового переключателя типа ПЛК-П (см. § 7-5 и рис. 7-16), действующего в режиме одностороннего ограничения и выполняющего функции синхронизатора хода СХ двух ме-218
хаппзмов Предварительно совмещаются статические характеристики датчиков 1ДП и 2 ДИ с помощью ручек «чувствительность 1» и «чувствительность 2» на ПЛК-П, а 1ИМ и 2ИМ с помощью кнопок дистанционного управления КБ и КМ (рис. 9-6) устанавливаются в примерно равные положения. Далее на ПЛК-П с помощью корректора устанавливается исходное .положение, при котором левые контактные пары выходного реле СХ i(Ki и Ki на рис. 7-116) замкнуты, а правые (Ка и К?,) разомкнуты. >В моменты появления управляющих сигналов с выхода РП вначале включается лишь один ИМ, а далее вследствие появления сигнала небаланса между 1ДП и 2ДП переключается выходное реле СХ (замыкаются его правые контакт-
Рис. 9-6. Принципиальная электрическая схема синхронного автоматического управления двумя исполнительными механизмами.
ные пары) и управляющий сигнал поступает па «отставший» ИМ. В результате перемещения отстающего ИМ вслед за ведущим сигнал рассогласования с выхода датчиков в 1ДП и 2ДП исчезнет и выходное реле СХ снова займет исходное положение. Скорость регулирования при шаговой синхронизации уменьшается в 2 раза, поэтому при расчете АСР время сервопривода ТЕ должно быть увеличено вдвое.
Если один исполнительный механизм переводится на дистанционное управление (например, 2ИМ), а второй (1ИМ) остается под воздействием РП, то к его магнитному пускателю подводится сигнал непосредственно с выхода РП в обход СХ через контакты переключателя управления 2ПУ, находящегося в положении «дистанционно».
Бесконтактные пусковые устройства
Для бесконтактного управления электроприводом используются магнитный или тиристорный усилитель.
Переход на бесконтактные пусковые устройства связан с недостаточной надежностью контактных магнитных пускателей.
В тиристорном и магнитном усилителях сигнал, поступающий от регулирующего прибора, усиливается до уровня, достаточного для управления исполнительным механизмом.
Магнитный усилитель типа МУ-2Э
Принципиальная электрическая схема МУ-2Э совместно с управляемым с его помощью бесконтактным исполнительным механизмом типа МЭО приведена на рис. 9-7. Усилитель собран на четырех магнитопроводах I—IV. Насыщение магпптопроводов осуществляется с помощью обмоток смещения 5—6. Эта обмотка .питается выпрямленным с помощью диодов Д1 и Дг двухполупериодным напряжением, значение которого может изменяться при настройке усилителя путем изменения положения ручки переменного резистора R. Питание выходных обмоток 1—2 и 3—4 осуществляется от первичной обмотки автотрансформатора Тр. Обмотки 7—8—9—10 являются управляющими. Напряжение на них (входной сигнал) поступает с выхода РП, пройдя через внешние цепи управления, аналогичные рис. 9-4 (включающие ПУ, КМ и КБ, ПВМ и ПВБ). При отсутствии входного сигнала, а следовательно, и тока в управляющих обмотках все четыре магиитоировода (/—IV) насыщены одинаково. Поэтому токи в один из полупериодов в обмотках 3—4 в другой полупериод в обмотках 1—2 равны, а через управляющую обмотку двигателя II текут в противоположных направлениях. В результате ток в ней в оба полупериода отсутствует. Появление тока в одной из управляющих обмоток (7—8, 10—9 или 10—9, 7—8) вызовет изменение магнитного потока в сердечниках усилителя. В двух из этих сердечников (III и IV) или (/ и //) магнитный поток складывается с потоком от тока в выходных обмотках, в двух — вычитается. При этом в оба лолупериода встречно-направленные токи, идущие через управляющую обмотку II двигателя, не равны друг другу и на ней появляется переменное напряжение. Рабочая обмотка I двигателя питается переменным напряжением от автотрансформатора Тр, сдвинутым по фазе конденсатором С. При появлении переменного напряжения на обмотке II электродвигатель начнет вращаться в направлении, которое зависит от фазы напряжения на управляющей обмотке II. Фаза в свою очередь определяется тем, на какой из сигнальных обмоток магнитного уси-220
лителя (7—8, 10—9 или 10—9, 7—8) появилось напряжение. Одновременно с появлением напряжения на обмотке двигателя II появляется напряжение на обмотке электромагнита электромеханического тормоза ЭМ, который, оттягивая муфту, растормаживает выходной вал двигателя в моменты его включения и тормозит .при остановках.
При дистанционном управлении напряжение на одну из управляющих обмоток МУ подается через кнопки или ключ дистанционного управления от источника постоянного тока, собранного на диодах Д1 и Д2
Рис. 9-7. Принципиальная схема магнитного усилителя МУ-2Э.
Магнитный усилитель типа МУ-2Б отличается от МУ-2Э только значением входного-сопротивления (160 Ом у МУ-2Э и 5000 Ом у МУ-2Б).
Магнитный усилитель типа УМД используется для управления исполнительными механизмами 221
с двухфазными асинхронными электродвигателями типа ДАУ. Принцип действия усилителей УМД и МУ-2Э одинаков.
Усилитель обеспечивает отработку двигателем сигналов длительностью 0,15—0,2 с.
Выше отмечалось, что исполнительный механизм типа ЛАЭ О с двигателем типа ДАУ может находиться длительное время (до 1000 ч) в стопорном режиме, при котором выходной вал, жестко сочлененный с регулирующим органом, удерживается упорами. Это позволяет исключить концевые выключатели из цепей управления и .повышает надежность управления двигателем. Остальные элементы схемы, приведенной на рис. 9-8, аналогичны по назначению и обозначениям, приведенным на рис. 9-4 и 9-6.
24/?
Рис. 9-8. Принципиальная схема тиристорного усилителя.
Тиристорный усилитель (тип У-101) предназначен для работы с трехфазным асинхронным двигателем с короткозамкнутым ротором (серия АОЛ), и обладая преимуществами бесконтактного пускового устройства, имеет большее быстродействие п меньшие по сравнению с магнитными усилителями габариты.
Его принципиальная электрическая схема приведена на рис. 9-8. Он построен по блочно-модульному принципу и состоит из семи модулей: модуля блокинг-геиератора БГ, четырех левых и правых (Л и П) тиристорных ключей, блока питания и блока защиты (последние два на схеме не показаны).
Каждый полупроводниковый ключ состоит из мостикового выпрямителя на четырех диодах. В одну из диагоналей моста включен 222
тиристор, в другую через фазную обмотку двигателя Д подводится силовое напряжение 380 В. На вход тиристорного усилителя (клеммы 7—8—S) поступает управляющий сигнал с напряжением 24 В с выхода РП (см. рис. 9-4). В зависимости от знака напряжения включаются верхний или нижний блокинг-генератор и правый или левый ключ. Блокинг-генераторы включают тиристоры. Фаза В силового питания непосредственно подводится к двигателю, а фазы А и С — через ключи. Последовательность подключения фаз к двигателю зависит от того, какие ключи открыты — левые или правые. Таким образом устанавливается соответствие сигнала с выхода регулирующего прибора с направлением вращения двигателя. Схема управления асинхронным двигателем исполнительного механизма с помощью трехфазного реверсивного тиристорного усилителя аналогична схеме управления с магнитным пускателем (рис. 9-4), вместо которого используется тиристорный усилитель ТУ, а вместо конденсаторного тормоза ТЭК электромагнитный тормоз.
Для дистанционного управления двигателем используется па пряжение источника 24 В с блока питания (па рис. 9-8 ие по казан). Плюс источника соединен с клеммой 8 минус — с клеммой 10 и с входом цепей управления ТУ. При переводе переключателя управления в положение «дистанционно» нажатием кнопки КБ или КМ клемма 10 сое пишется с клеммами 9 «больше» или 7 «меньше» ТУ и тем самым ими тируется сигнал с выхода РП. В остальном схема управления с тиристорным усилителем ие отличается от схемы и обозначений, приведенных па рис. 9-4.
9-4. Избирательное управление исполнительными механизмами (управление по вызову]
Сущность управления по вызову состоит в том, что вместо отдельных блоков управления (БУ) и указателен положения (УН) исполнительных механизмов устанавливается один БУ и одни УП на группу регулирующих н запорных органов. При этом каждый орган может быть переведен с помощью общего ключа па автоматическое или дистанционное управление. Принципиальная электрическая схема управления по вызову приведена па рис. 9-9, где изображены лишь цепи, относящиеся к избирательному управлению. Цепи и аппараты, обслуживающие группу исполнительных механизмов, выделены на этой схеме жирными линиями.
Управление по вызову осуществляется оператором с пульта с помощью маркированных клавишей, которые образуют наборное) поле. При нажатии одной из клавиш пДл, где п номер клавиши регулирующего или запорного органа в группе, включается его реле выбора РВО, на мнемосхеме зажигается соответствующая лампа ЛВО. Контакты РВО подключают к общим шинкам литания катушек 1ШР—2ШР—ЗШР цепи управления вызванного магнитного пускателя ПМБ—ПММ, к шинкам 11ДУП—2ШУП — цепи реостатного датчика указателя .положения РУП, а к шипкам ША и ШД — катушки двухпозиционного реле РА выбранного исполнительного
механизма. Контакты РА могут находиться в двух положениях: А — автоматически и Д‘—дистанционно в зависимости от нажатия соответствующей кнопки /\А или КД- Далее с помощью ключа ДУ регулирующий орган управляется в сторону «больше» или «меньше» дистанционно и от клемм 7—8—9 РП автоматически. При этом по указателю положения РП можно наблюдать за перемещением регулирующего органа. Контрольные лампы ЛА (красная) и ЛД (зеленая) указывают на характер воздействия регулирующего органа — автоматическое или дистанционное.
Д Пых о8у зленriранного регуляКп'орб.
Существуют схемы парного вызова исполнительных механизмов. В них имеются по две системы шинок ШР и ШИП, по два ключа дистанционного управления и два указателя положения. С помощью системы парного вызова оператор имеет возможность управлять и следить 224
за положением двух регулирующих органов одновременно.
С помощью системы избирательного управления можно управлять также задвижками с установленным на них электроприводом, в состав которого входит трех-фазпып асинхронный- двигатель и редуктор, понижаю-
Рис. 9-10 Принципиальная схема двухступенчатого управления мощным электродви гателсм.
щий число его оборотов. Различие в схемах управления исполнительным механизмом и электроприводом задвижки существует лишь для мощных двигателей. В этом случае возникает необходимость двухступенчатого усиления управляющего сигнала с выхода РП или с ключа дистанционного управления, так как магнитные пускатели исполнительных механизмов рассчитаны на управление двигателем мощностью не свыше 1 кВ (рис. 9-10). В качестве первой ступени усиления используется пускатель типа МКР-0 или ПМРТ-69, выходные контакты которых 1РПМ и 2РПМ коммутируют цепи управления катушек ПМБ и ПММ более мощного реверсивного магнитного пускателя, включающего и отключающего электродвигатель задвижки.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Каково назначение исполнительных механизмов? •
2. Для чего служат концевые и путевые выключатели, устанавливаемые в КДУ-П/П?
3. Поясните принцип действия контактного магнитного пускателя типа МКР-0-
4. Пользуясь схемой, изображенной на рис. 9-4, поясните как осуществляется реверсирование хода исполнительного механизма.
5. Поясните принцип действия бесконтактного пускового устройства— магнитного усилителя типа МУ-2Э (рис. 9-7).
6. Как осуществляется управление работой электродвигателя исполнительного механизма па рис. 9-9?
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ
ТЕПЛОЭНЕРГЕТИЧЕСКИМИ УСТАНОВКАМИ
ГЛАВА ДЕСЯТАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ТЕПЛОВЫХ ПРОЦЕССОВ НА ЭЛЕКТРИЧЕСКИХ СТАНЦИЯХ
10-1. Задачи автоматического регулирования тепловых процессов
Современные тепловые электрические станции (ТЭС), работающие на природном (органическом) топливе, используют для выработки электроэнергии промежуточный теплоноситель — перегретый водяной пар. Выработка электроэнергии на ТЭС осуществляется в три этапа и может быть представлена с помощью схемы, изображенной на рис. 10-1. Парогенератор за счет тепла, выделяющегося при сжигании топлива, вырабатывает перегретый водяной пар, паровая турбина преобразует тепловую энергию пара в механическую энергию вращения ротора, а генератор завершает технологический
Рис. 10-1. Системы регулирования мощности ТЭС.
1 — парогенератор; 2— турбина; 3— электрический генератор; р— давление пара на выходе парогенератора; п — частота вращения ротора; {/ — напряжение; f — частота переменного тока электрической сети; /Уг — электрическая мощность генератора.