/


Similar




Text
Г. П. ПЛЕТЙЕВ
АВТОМ АТИЧ ЕСКОЕ РЕГУЛИРОВАНИЕ И ЗАЩИТА ТЕПЛОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК ЭЛЕКТРИЧЕСКИХ СТАНЦИЙ
1. Каково назначение исполнительных механизмов?
2. Для чего служат концевые и путевые выключатели, устанавливаемые в КДУ-П/П?
3. Поясните 'принцип действия контактного магнитного пускателя типа МКР-0.
4. Пользуясь схемой, изображенной на рис. 9-4, поясните как осуществляется реверсирование хода исполнительного механизма.
5. Поясните принцип действия бесконтактного пускового устройства— магнитного усилителя типа МУ-2Э (рис. 9-7).
6. Как осуществляется управление работой электродвигателя исполнительного механизма па рис. 9-9?
ЧАСТЬ ТРЕТЬЯ
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ
ТЕПЛОЭНЕРГЕТИЧЕСКИМИ УСТАНОВКАМИ
ГЛАВА ДЕСЯТАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ТЕПЛОВЫХ ПРОЦЕССОВ НА ЭЛЕКТРИЧЕСКИХ СТАНЦИЯХ
10-1. Задачи автоматического регулирования тепловых процессов
Современные тепловые электрические станции (ТЭС), работающие на природном (органическом) топливе, используют для выработки электроэнергии промежуточный теплоноситель — перегретый водяной пар. Выработка электроэнергии на ТЭС осуществляется в три этапа и может быть представлена с помощью схемы, изображенной па рис. 10-1. Парогенератор за счет тепла, выделяющегося при сжигании топлива, вырабатывает перегретый водяной пар, паровая турбина преобразует тепловую энергию пара в механическую энергию вращения ротора, а генератор завершает технологический
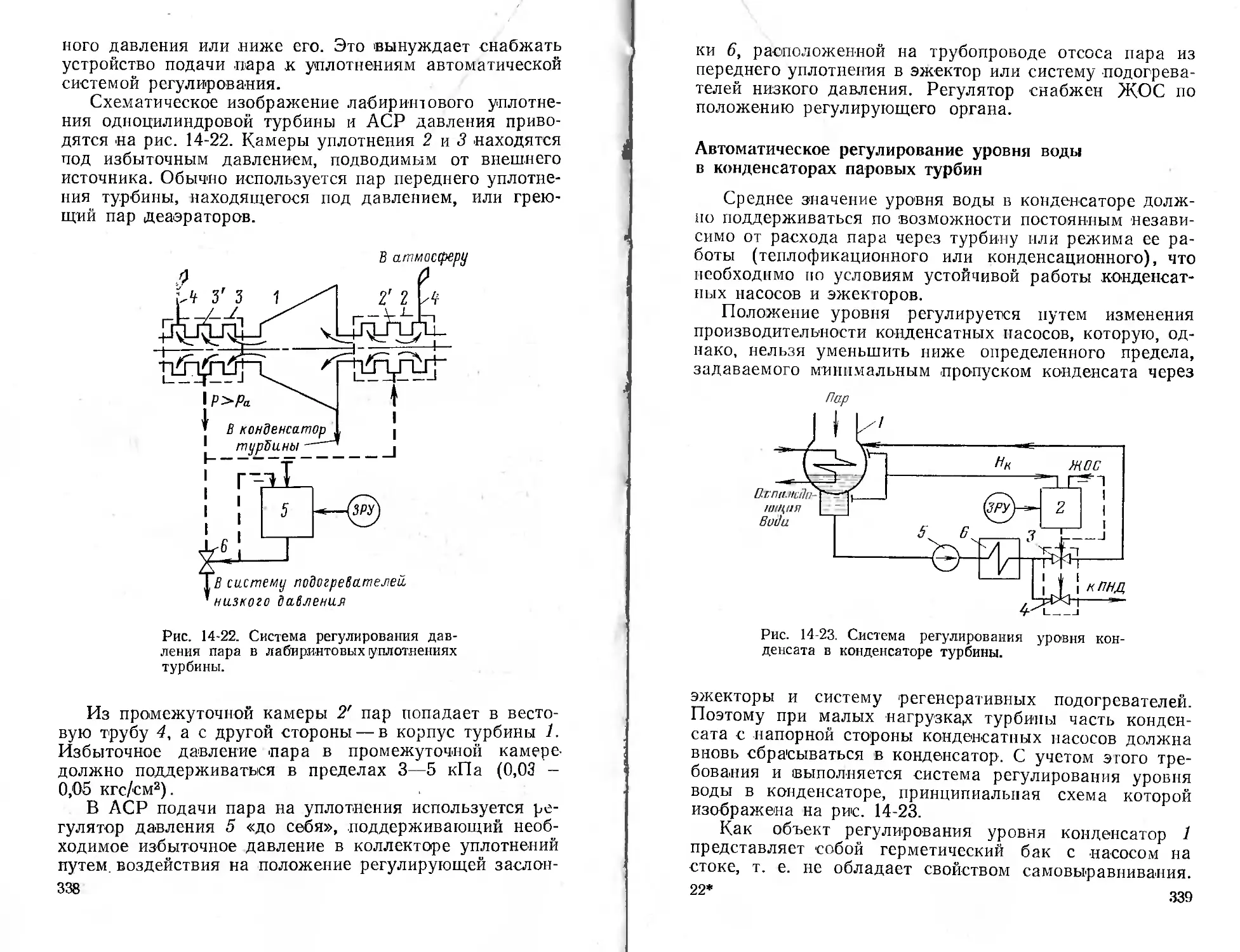
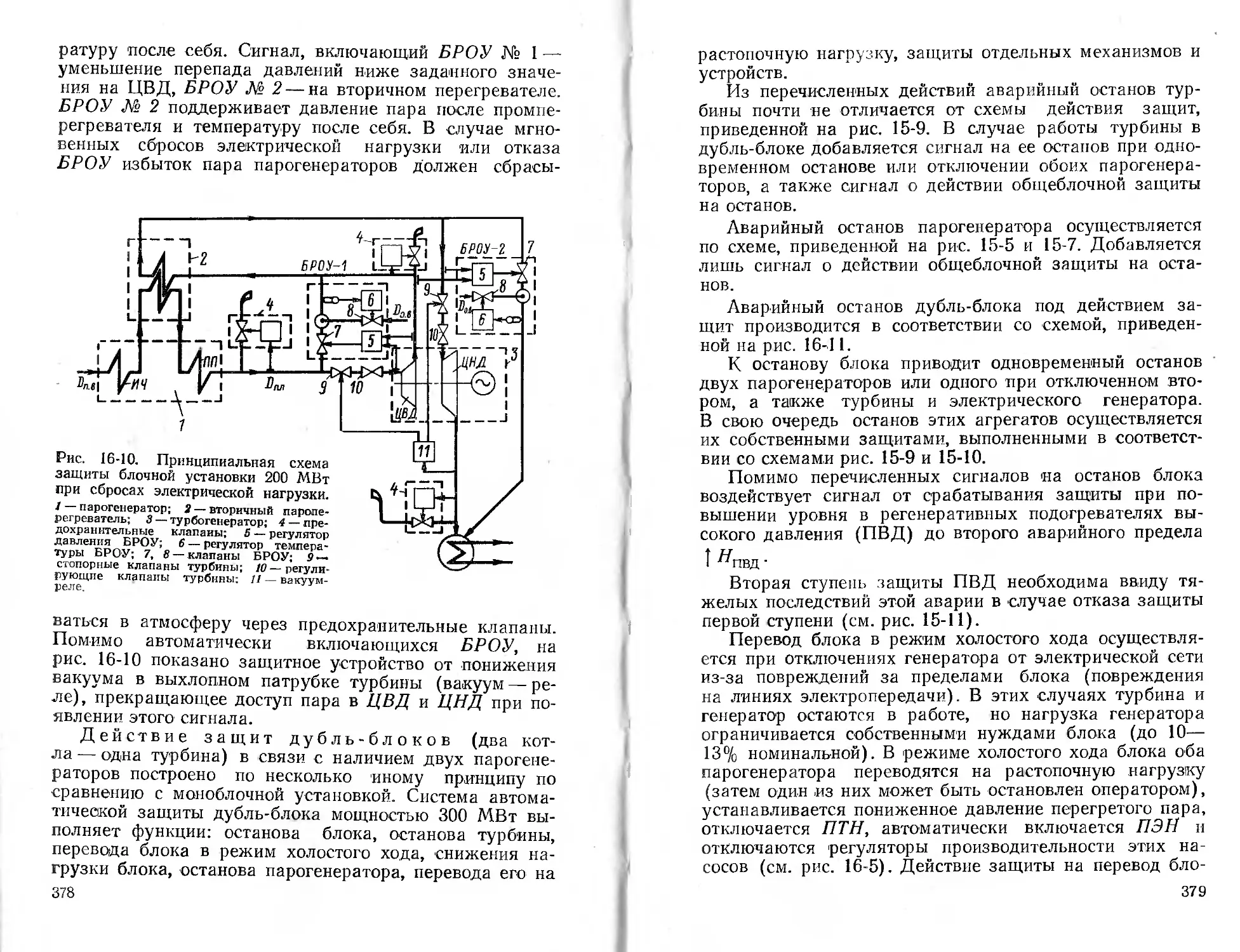
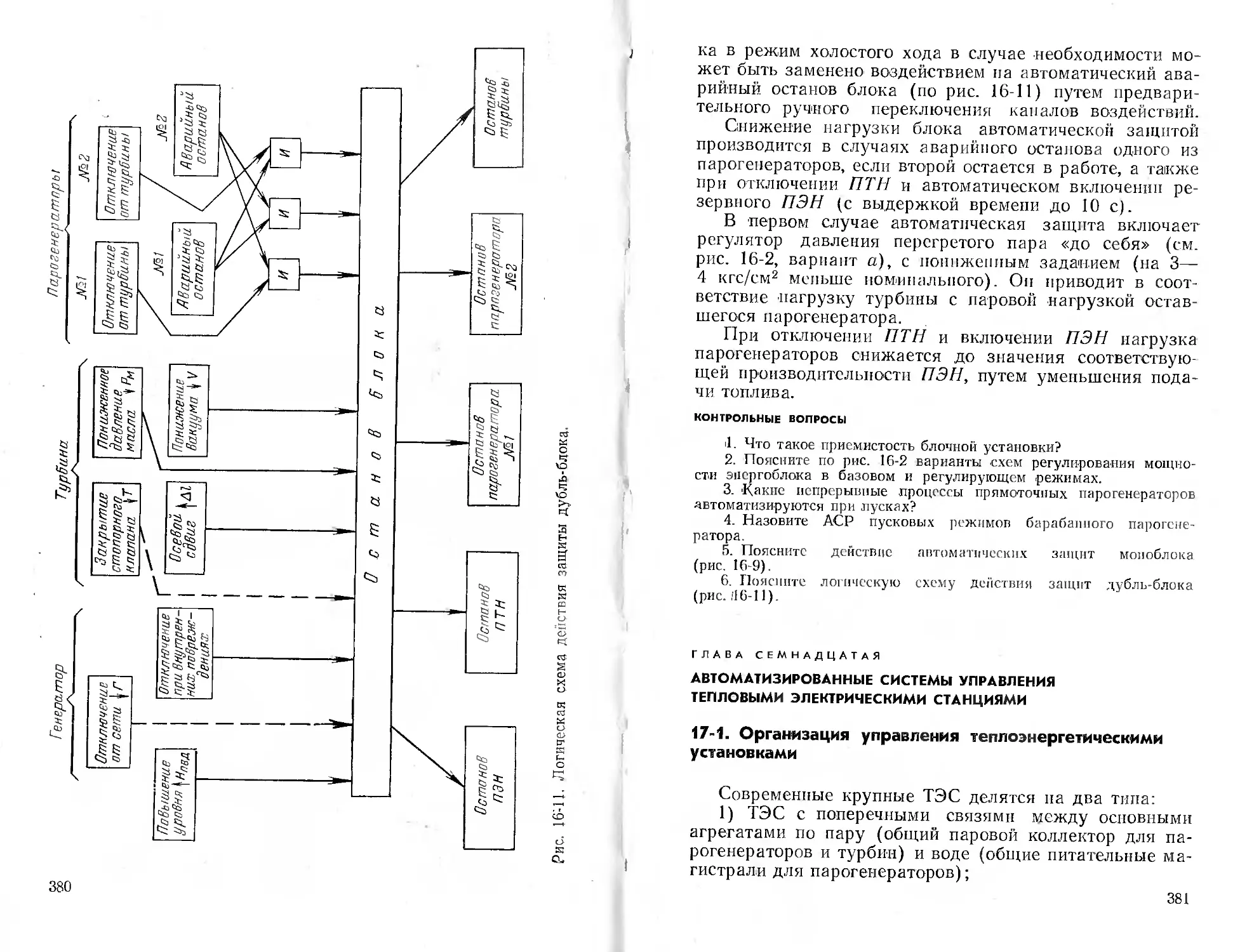
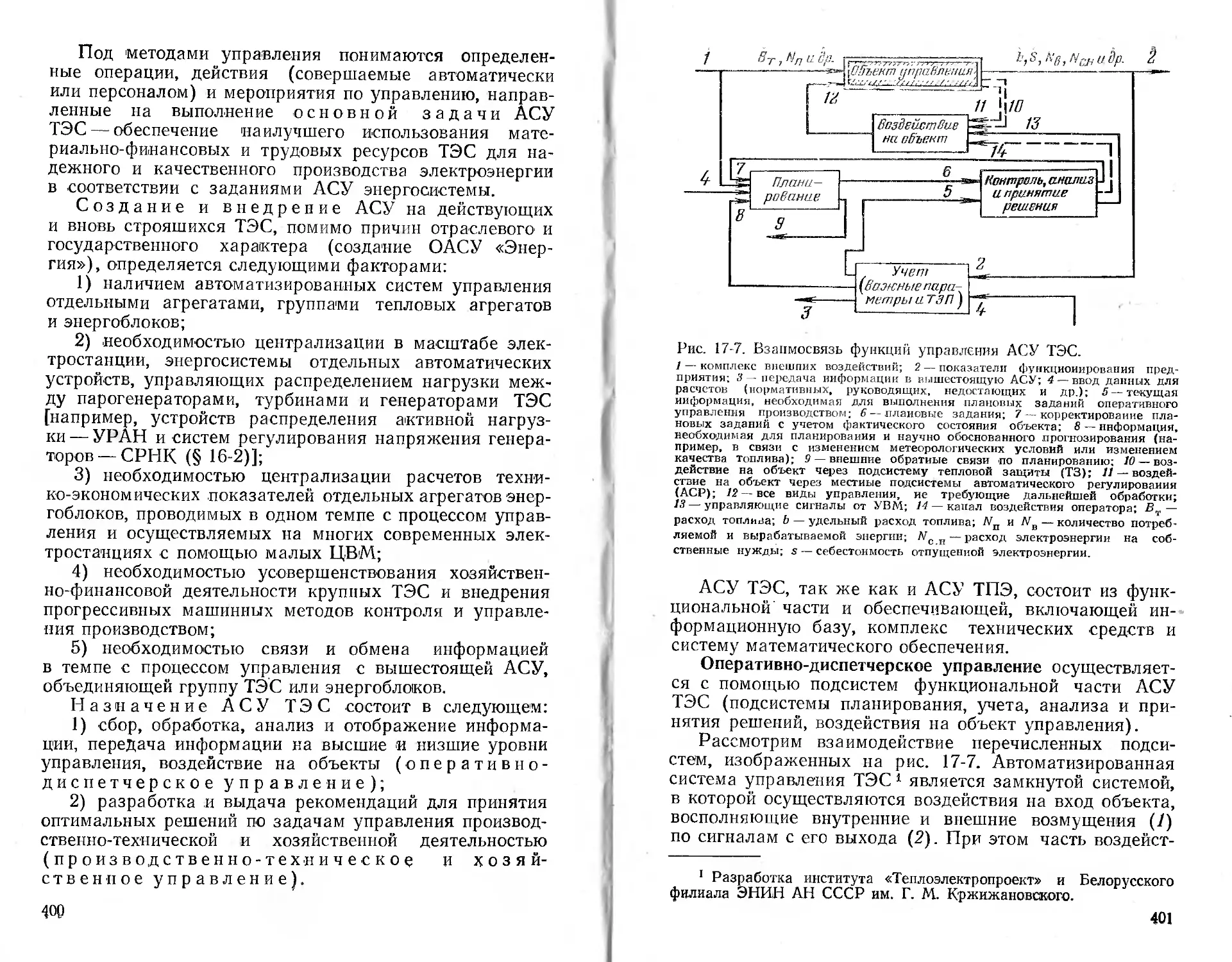
Рис. 10-1. Системы регулирования мощности ТЭС.
1 — парогенератор; 2 — турбина; 3 — электрический генератор; р — давление пара иа выходе парогенератора; п — частота вращения ротора; U — напряжение; f — частота переменного тока электрической сети; Nv — электрическая мощность генератора.
цикл ТЭС, преобразуя механическую энергию в электрическую [Л. 12}.
Особенность технологического и производственного процессов на ТЭС состоит в невозможности складирования готовой продукции, т. е. электроэнергии. Это означает, что количество тепла, а следовательно', и пара, вырабатываемого парогенераторами в каждый момент времени, должно соответствовать количеству потребляемой электроэнергии.
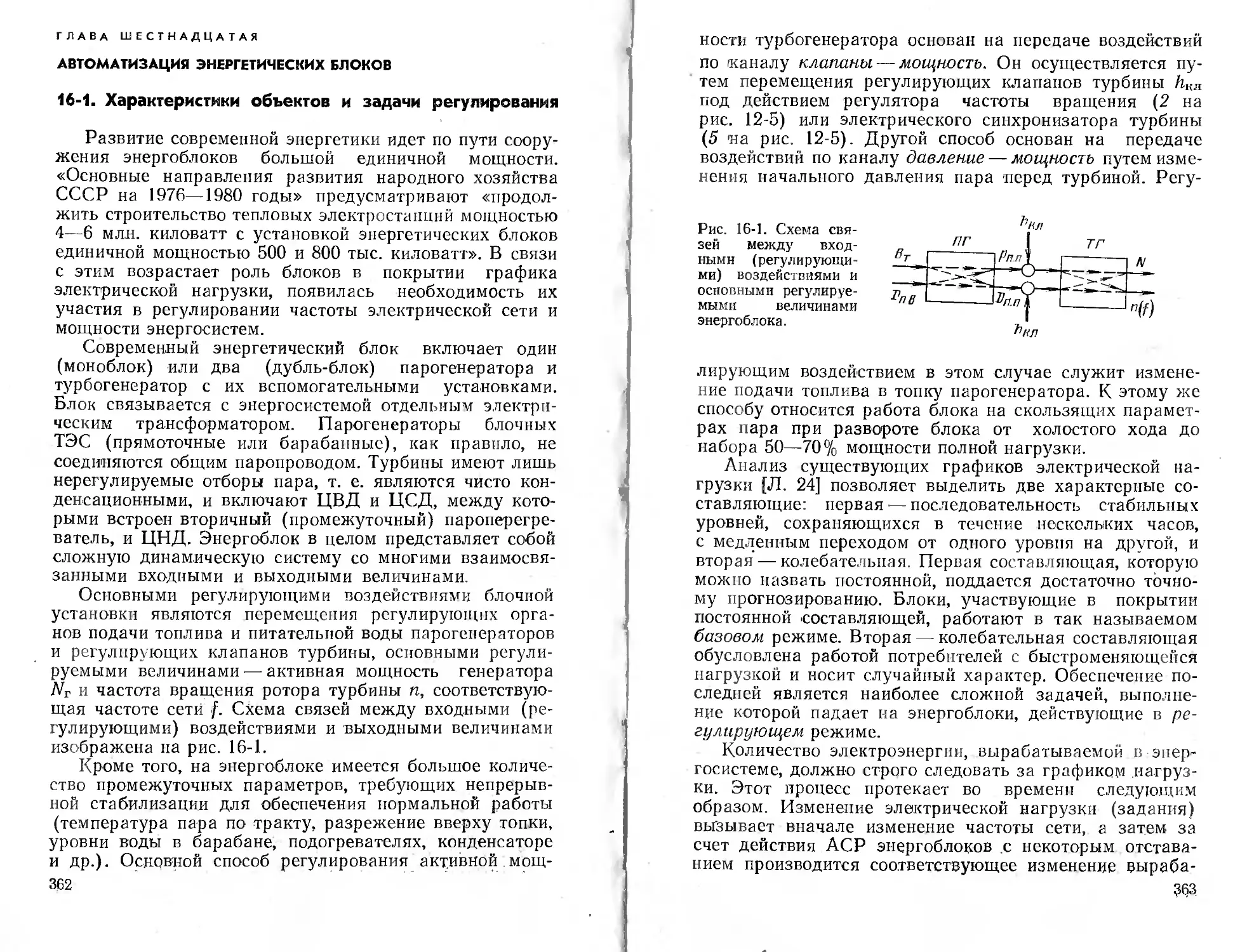
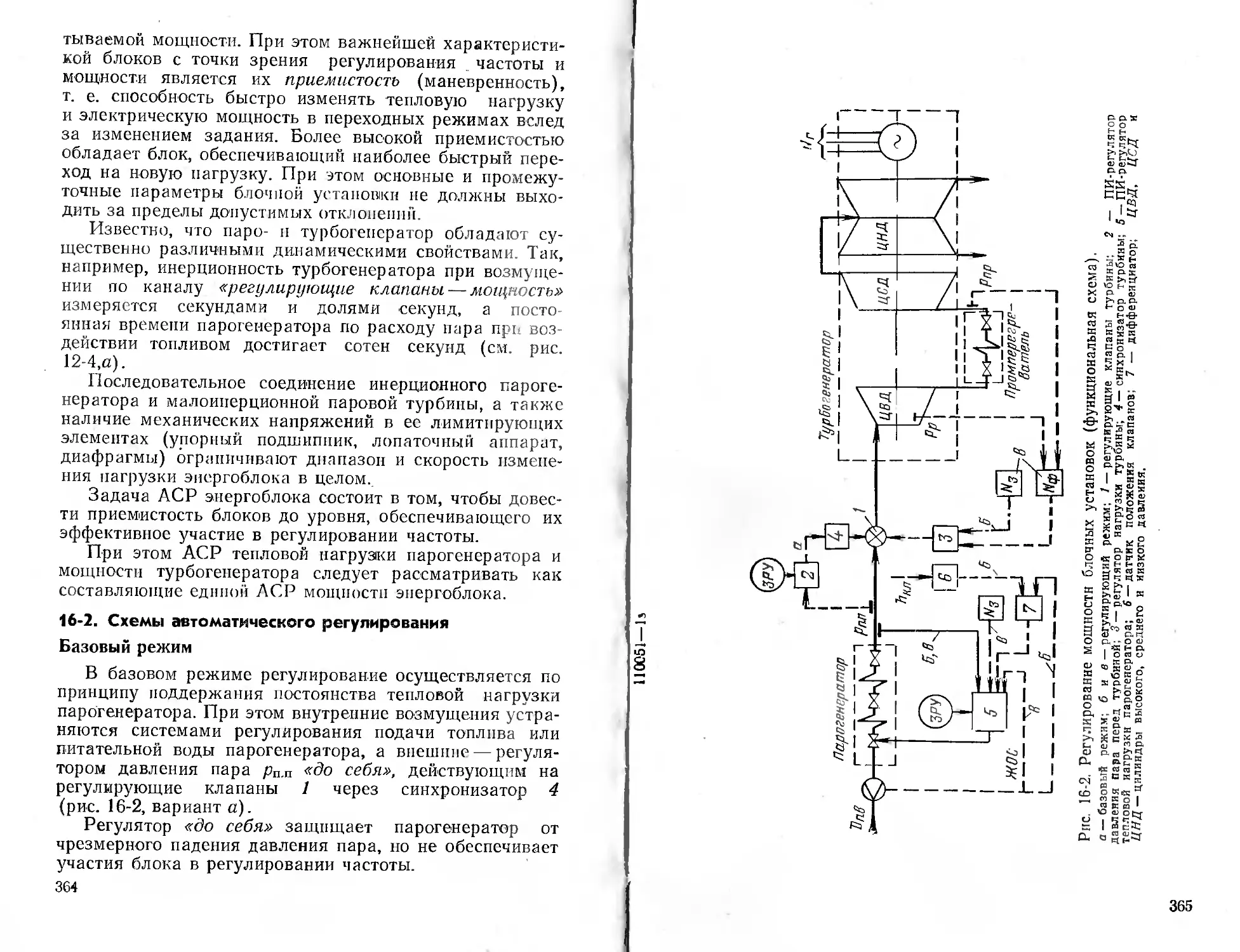
Исходя из необходимости поддержания баланса между расходами пара, вырабатываемым парогенератором и потребляемым турбиной, регулирование производительности парогенераторов ведется по косвенному показателю этого баланса — давлению перегретого пара перед турбиной р — с помощью автоматической системы регулирования парогенератора (АСРП). Исходя из условия баланса тепла и электроэнергии регулирование мощности турбины производится по косвенному показателю этого баланса — частоте-вращения ротора п — с помощью автоматической системы регулирования турбины (АСРТ).
К качеству вырабатываемой электроэнергии предъявляются высокие требования. Допустимые отклонения колебаний промышленной частоты составляют ±0,2 Гц. В процессе стабилизации частоты важную роль играет электрический генератор и его автоматическая система регулирования (АСРГ), действующая по изменению напряжения на шинах генератора и.
Помимо основных агрегатов — парогенераторов, турбин и электрогенераторов — на ТЭС имеется значительное количество вспомогательных установок, также оснащенных автоматическими устройствами
10-2. Объекты автоматического управления и основные регулируемые величины ТЭС
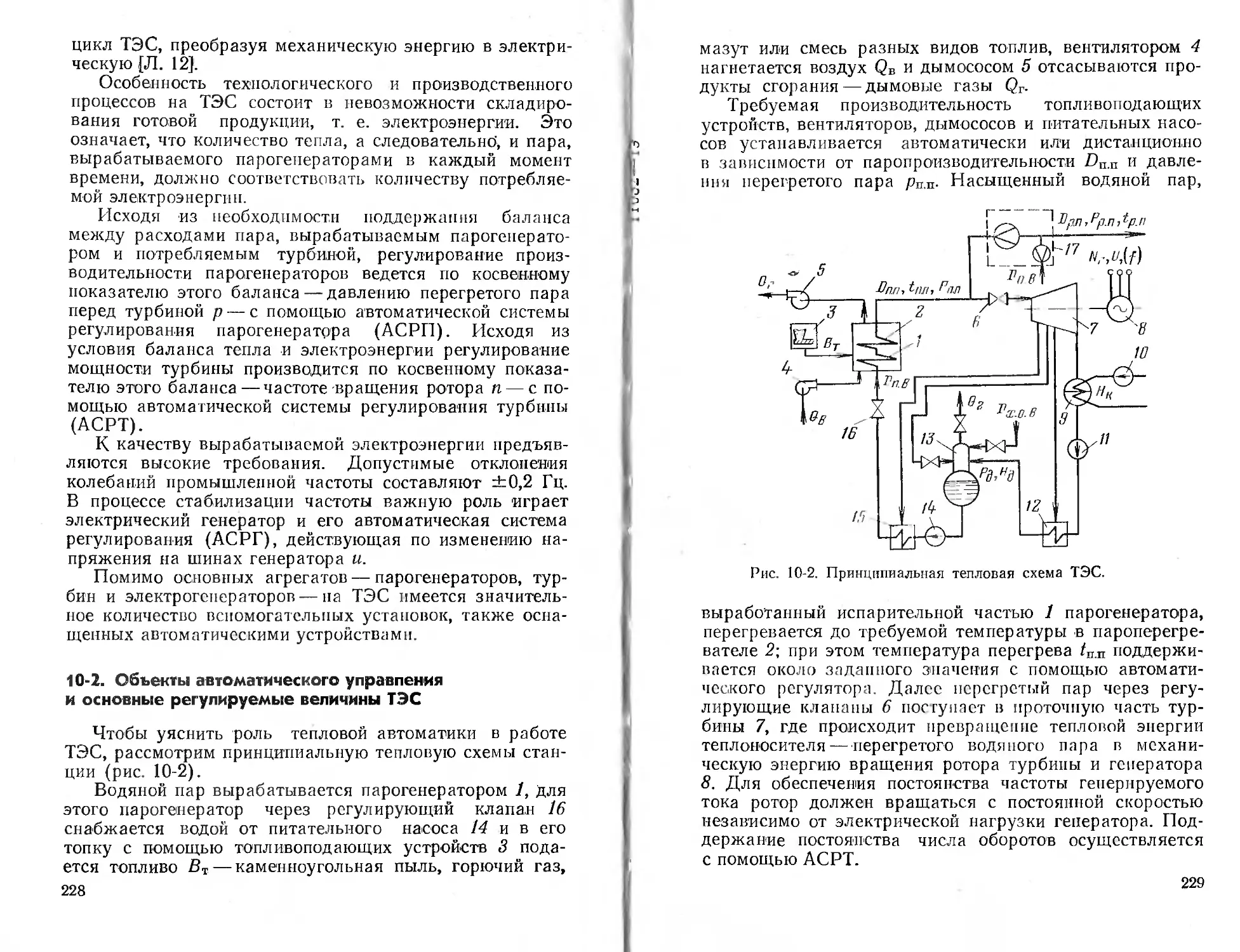
Чтобы уяснить роль тепловой автоматики в работе ТЭС, рассмотрим принципиальную тепловую схемы станции (рис. 10-2).
Водяной пар вырабатывается парогенератором 1, Для этого парогенератор через регулирующий клапан 16 снабжается водой от питательного насоса 14 и в его топку с помощью топливоподающих устройств 3 подается топливо Вт — каменноугольная пыль, горючий газ, 228
мазут или смесь разных видов топлив, вентилятором 4 нагнетается воздух QB и дымососом 5 отсасываются продукты сгорания — дымовые газы Qr.
Требуемая производительность топливоподающих устройств, вентиляторов, дымососов и питательных насосов устанавливается автоматически или дистанционно в зависимости от паропроизводительност,и £>п.п и давления перегретого пара рп.п- Насыщенный водяной пар,
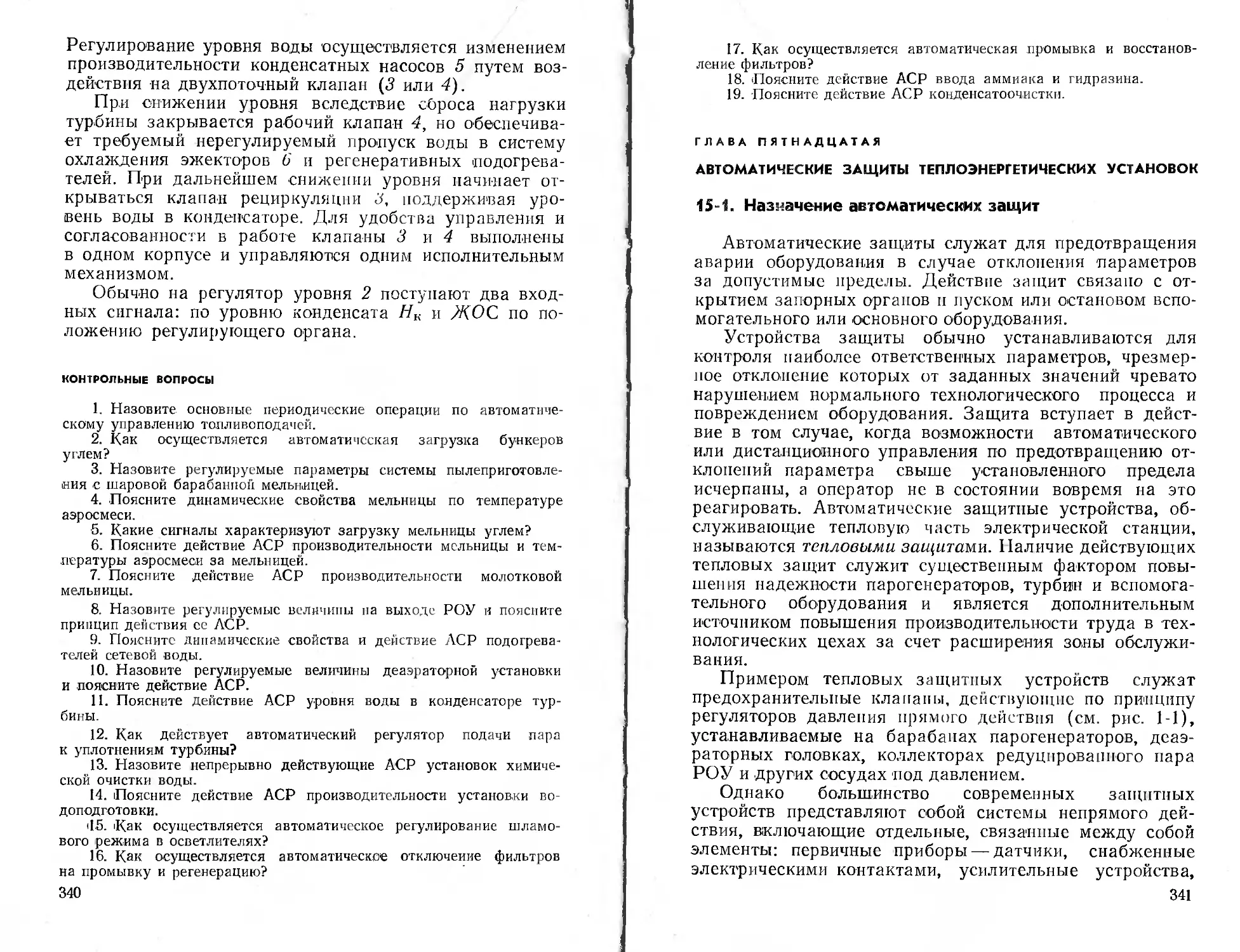
Рис. 10-2. Принципиальная тепловая схема ТЭС.
выработанный испарительной частью / парогенератора, перегревается до требуемой температуры в пароперегревателе 2; при этом температура перегрева /п.п поддерживается около заданного значения с помощью автоматического регулятора. Далее перегретый пар через регулирующие клапаны 6 поступает в проточную часть турбины 7, где происходит превращение тепловой энергии теплоносителя—перегретого водяного пара в механическую энергию вращения ротора турбины и генератора 8. Для обеспечения постоянства частоты генерируемого тока ротор должен вращаться с постоянной скоростью независимо от электрической нагрузки генератора. Поддержание постоянства числа оборотов осуществляется с помощью АСРТ.
Отработанный пар из турбины поступает в конденсатор 9, где охлаждается и конденсируется на поверхности трубной системы, в которой циркулирует охлаждающая вода, поступающая от насоса 10. Уровень конденсата в конденсаторе Як должен поддерживаться постоянным независимо от количества конденсируемого в нем пара. Эту задачу выполняет автоматический регулятор уровня в конденсаторе, воздействующий на производительность конденсатные насосов. Далее конденсат турбины прокачивается конденсатными насосами 11 через систему подогревателей низкого давления (ПНД) 12 и поступает в смешивающий подогреватель-—деаэратор 13. В деаэраторе конденсат смешивается с химически очищенной водой Лх.о.в, подаваемой для восполнения потерь конденсата, и доводится до температуры насыщения (кипения), при которой происходит удаление растворенного в воде кислорода.
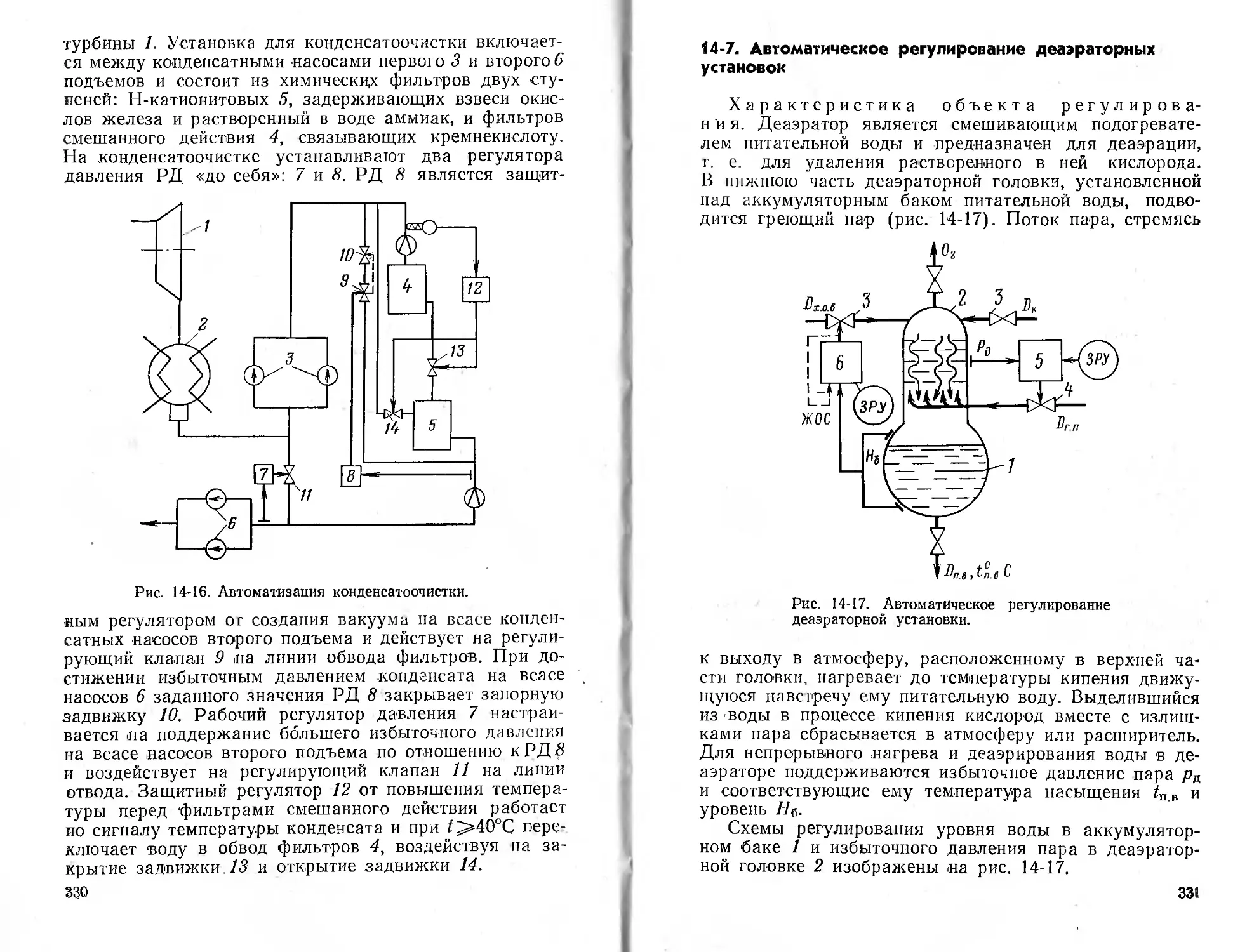
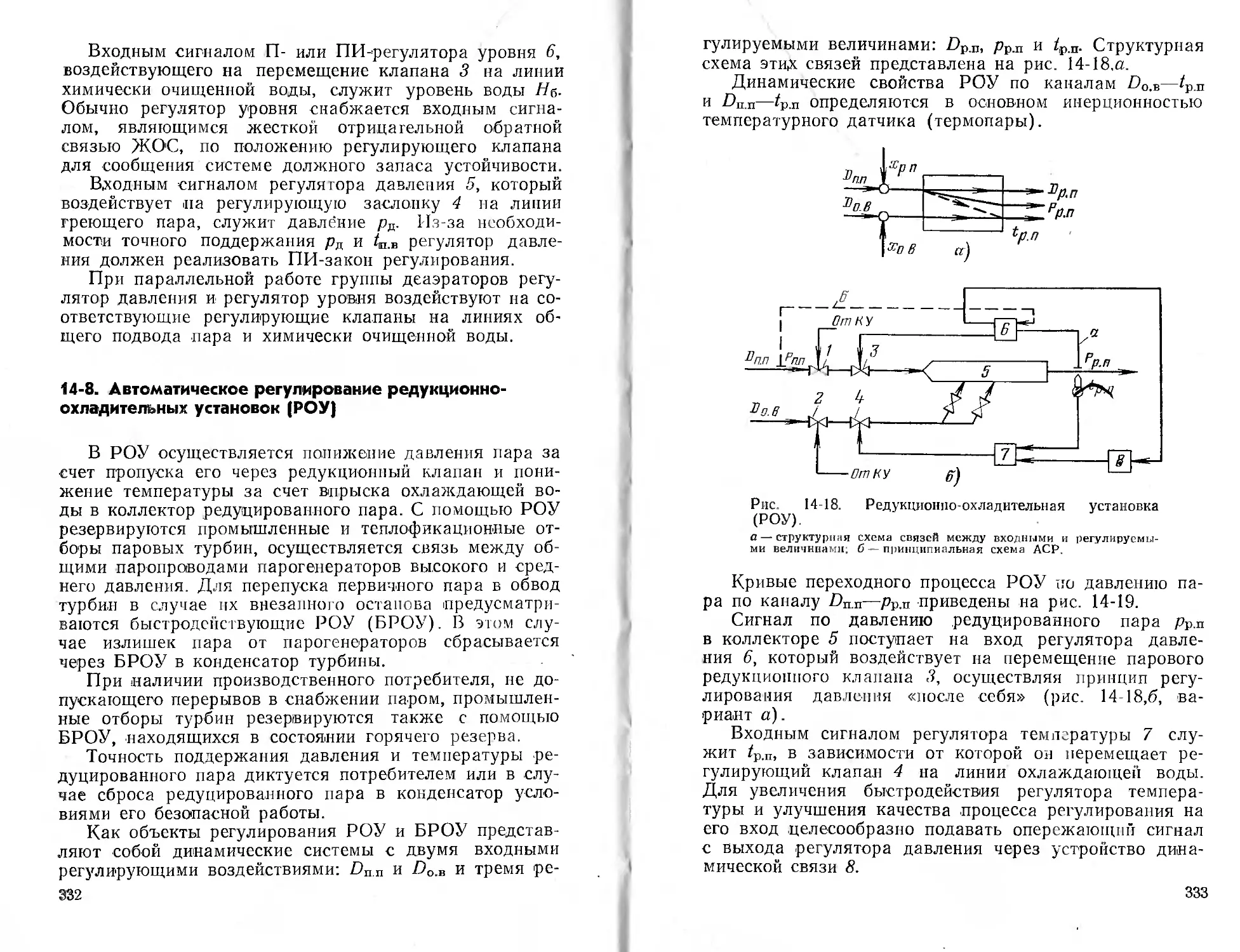
Нормальный режим работы деаэратора и установленного за ним питательного насоса // возможен лишь при постоянстве давления пара в деаэраторной головке и уровня воды Нд в аккумуляторном баке. Это обеспечивается с помощью автоматических регуляторов давления и уровня в деаэраторе, воздействующих соответственно на расход греющего пара и химически очищенной воды, поступающих в деаэратор. Вода из деаэратора перекачивается питательными насосами 14 через систему подогревателей высокого давления (ПВД) 15 и поступает в экономайзерную и испарительную часть парогенератора; при этом ее расход регулируется с помощью автоматического регулятора питания. 11а этом технологический цикл превращения тепловой энергии в электрическую замыкается и описанный выше процесс повторяется.
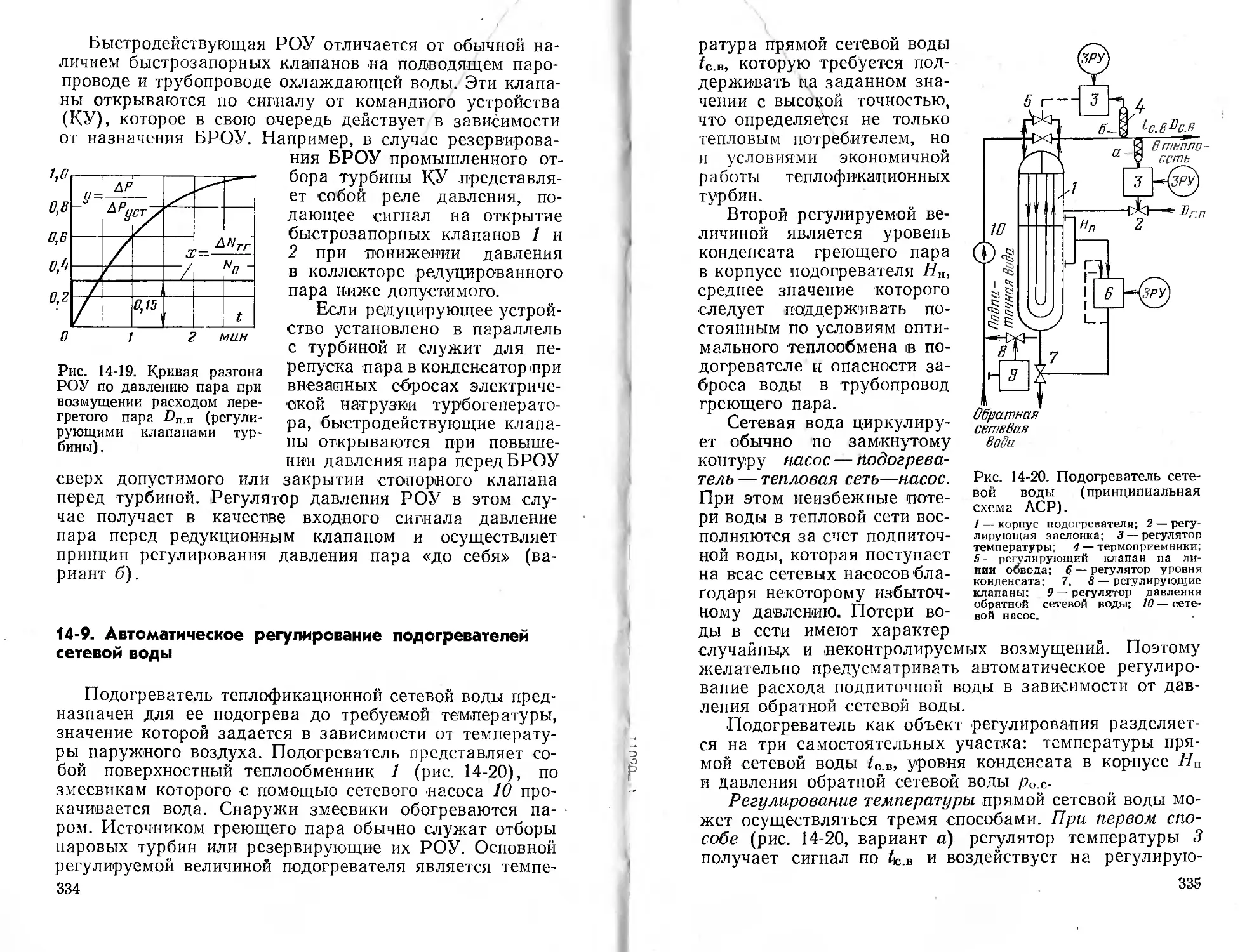
Тепловые электростанции, вырабатывающие помимо электрической энергии и тепловую (ТЭЦ), оборудуются редукционно-охладительными установками (РОУ) 17, предназначенными для резервирования теплофикационных и промышленных отборов пара турбин. Поддержание постоянства давления ррп и температуры /р11 редуцированного пара обеспечивается с помощью автоматических регуляторов давления и температуры, воздействующих соответственно на изменение расхода редуцированного пара охлаждающей воды /)о.в-
1. Поясните схему выработки электроэнергии на ТЭС и назначение АСР парогенератора, турбины и генератора.
2. Назовите основные регулируемые величины тепловой части ТЭС.
ГЛАВА ОДИННАДЦАТАЯ
РЕГУЛИРУЮЩИЕ ОРГАНЫ ТЕПЛОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
11-1. Назначение регулирующих органов
Регулирующим органом называется устройство', позволяющее изменять расход или направление потока энергии или вещества в соответствии с требованиями технологического процесса.
Регулирующие органы теплоэнергетических установок можно разделить па три группы.
Регулирующие органы дроссельного типа, изменяющие расход среды за счет изменения скорости и площади сечения потока при прохождении его через дросселирующее устройство, гидравлическое сопротивление которого является переменной величиной (клапаны, заслонки и шиберы). Массовый расход вещества через дроссельный регулирующий орган определяется по формуле, кг/с:
6 = ИиГ|<2Д^. (11-1а)
Объемный расход, м‘/с:
« = <11-10
где Цкл — коэффициент расхода, под которым понимают отношение действительного измеренного расхода среды к расчетному; F— площадь открытия регулирующего органа, м2; Ар — гидравлическое сопротивление дроссельного устройства, Па (П/м2); р — плотность вещества, кг/м3.
Регулирующие органы объемного типа, изменяющие расход среды за счет изменения ее объема (например, ленточные питатели сырого угля). Уравнение расхода в этом случае имеет вид, м3/с:
Q=Fv, (11-1в)
где F — регулируемая площадь потока, м2; v — скорость потока, м/с.
Регулирующие органы скоростного1 ти-п а, изменяющие производительность транспортирующего устройства за счет скорости его вращения. К регулирующим органам этого типа относятся устройства регулирования частоты вращения первичных двигателей (паровых или электрических насосов, вентиляторов, дымососов и др.). Требуемое изменение расхода в этом случае определяется уравнением
Действие регулирующего органа определяется статическими характеристиками: диапазоном регулирования и рабочей расходной характеристикой.
Диапазон регулирования R — отношение максимального расхода среды к минимальному, соответствующее перемещению регулирующего органа из одного крайнего положения хракр в другое х'р™ для регулирующих органов дроссельного и объемного типов или изменению числа оборотов от максимума до минимума для регулирующих органов скоростио о типа
г, Оиакс п ^макс
*\ " 74 " f -*V —“ •
'‘мни мин
Рабочая расходная характеристика — зависимость расхода среды Q от положения регулирующего органа Яр.О
Q=f(xP.o); G—f (хр.о).
При разработке, выборе и отладке регулирующих органов стремятся получить достаточный диапазон регулирования для обеспечения возможности управления процессом при всех режимах и нагрузках агрегата и линейную рабочую характеристику в пределах этого диапазона.
11-2. Дроссельные регулирующие клапаны
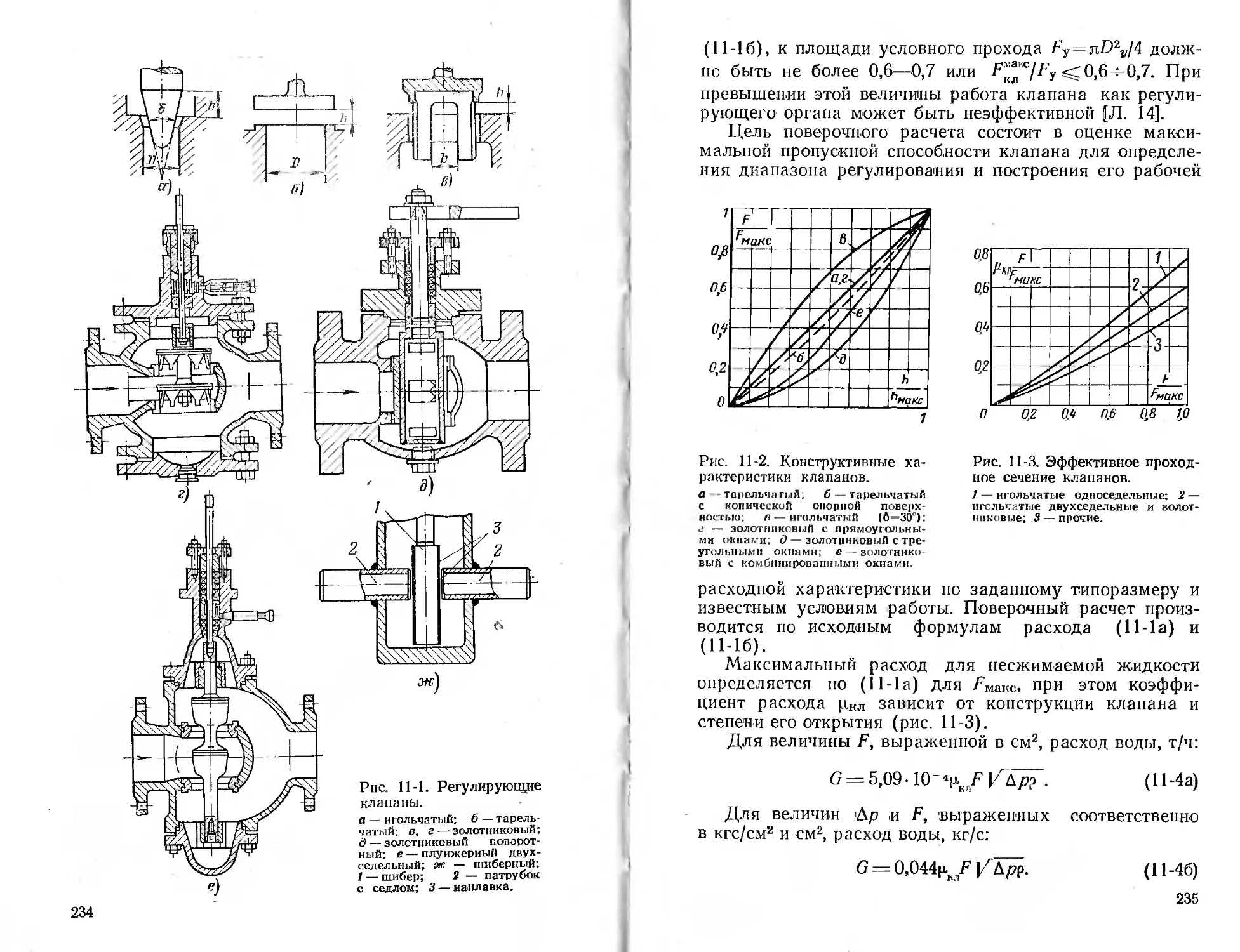
Конструкция клапанов. Регулирующие клапаны служат для изменения расхода жидкости, пара или газа, транспортируемых по трубопроводам.
Существует несколько конструктивных разновидностей клапанов, различающихся формами плунжера и седла (рис. 11-1).
Каждая конструкция имеет особую, так называемую конструктивную характеристику — зависимость площади проходного сечения клапана от положения плунжера h.
Конструктивные характеристики клапанов, изображенных на рис. 11-1 \ имеют следующий вид:
Игольчатый:
F = uh sin8/2 (D — h sin cos (ll-3a)
\ 1 2 2 J
При 6 = 15°
F=0,4lh(D-0,13/i) (/iMa«c=3,78D).
Тарельчатый:
F = itDh (h":№C = 0.25D). (11-36)
Золотниковый с прямоугольным сечением окон:
F—nbh, (11-Зв)
где п — число окон; b — ширина окна.
То же с треугольным сечением окон:
смаке
F = п ----/г’, (11-Зг)
где Ьмакс — ширина основания треугольника.
Примеры конструктивных характеристик различных типов клапанов приведены на рис. 11-2.
Расчет регулирующих органов может быть конструктивный и поверочный. При конструктивном расчете по заданной пропускной способности и условиям работы (параметрам среды) выбирается клапан из имеющихся типоразмеров серийной регулирующей арматуры. Приближенный конструктивный расчет производится с учетом следующего правила: отношение площади прохода клапана ГмаКс, определенного из формул (11-1а) и
1 Поверхность, по которой соприкасаются плунжер (золотник) и седло, называется опорной поверхностью, площадь щели между ними — проходным сечением F, внутренний диаметр поперечного се-
чения в месте присоединения клапана к трубопроводу (по фланцу) — условным диаметром прохода клапана Dy. Величина £>у устанавливается ГОСТ.
(11-1'6), к площади условного прохода Fy = nD21//4 должно быть не более 0,6—0,7 или F^™/Fy ^0,6-^0,7. При превышении этой величины работа клапана как регулирующего органа может быть неэффективной (Л. 14].
Цель поверочного расчета состоит в оценке максимальной пропускной способности клапана для определения диапазона регулирования и построения его рабочей
Рис. 11-2. Конструктивные характеристики клапанов.
а тарельчатый; б— тарельчатый с конической опорной поверхностью; о — игольчатый (6—30°): с — золотниковый с прямоугольными окнами; д — золотниковый с треугольными окнами; е — золотники вый с комбинированными окнами.
Рис. 11-3. Эффективное проходное сечение клапанов.
1 — игольчатые односедельные; 2 — игольчатые двухседельные и золотниковые; 3 — прочие.
расходной характеристики по заданному типоразмеру и известным условиям работы. Поверочный расчет производится по исходным формулам расхода (11-1а) и (11-16).
Максимальный расход для несжимаемой жидкости определяется ио (11-1 а) для FMaKC, при этом коэффициент расхода р1(Л зависит от конструкции клапана и степени его открытия (рис. 11-3).
Для величины F, выраженной в см2, расход воды, т/ч:
G = 5,09-10 4p-kiF • (11-4а)
Для величин Др и F, выраженных соответственно в кгс/см2 и см2, расход воды, кг/с:
G = 0,044р.кР |/ Ьрр.
(11-46)
Для газа или пара расчет ведется с учетом поправки на расширение потока е по формуле, кг/с:
G — 2ЛРР • (11-5а)
Для Ар, кгс/см2, и F, см2, расход газа или пара, кг/с: G = 0,044p.KFe )/Дрр. (11-56)
Величина е подсчитывается по следующим формулам:
для Др/рв«^0,5
6=1 -Нг-; <н-6)
для Др/р„>0,5
8=0,95—(р—0,1) Др/рн, (П-7)
где р}, — абсолютное значение давления перед клапаном. Условные значения коэффициентов р следующие:
Регулируемая среда
Насыщенный водяной тр.........................0,5
Перегретый пар и трехач’омпыс газы...........0,47
Воздух и двухатомные газы....................0,45
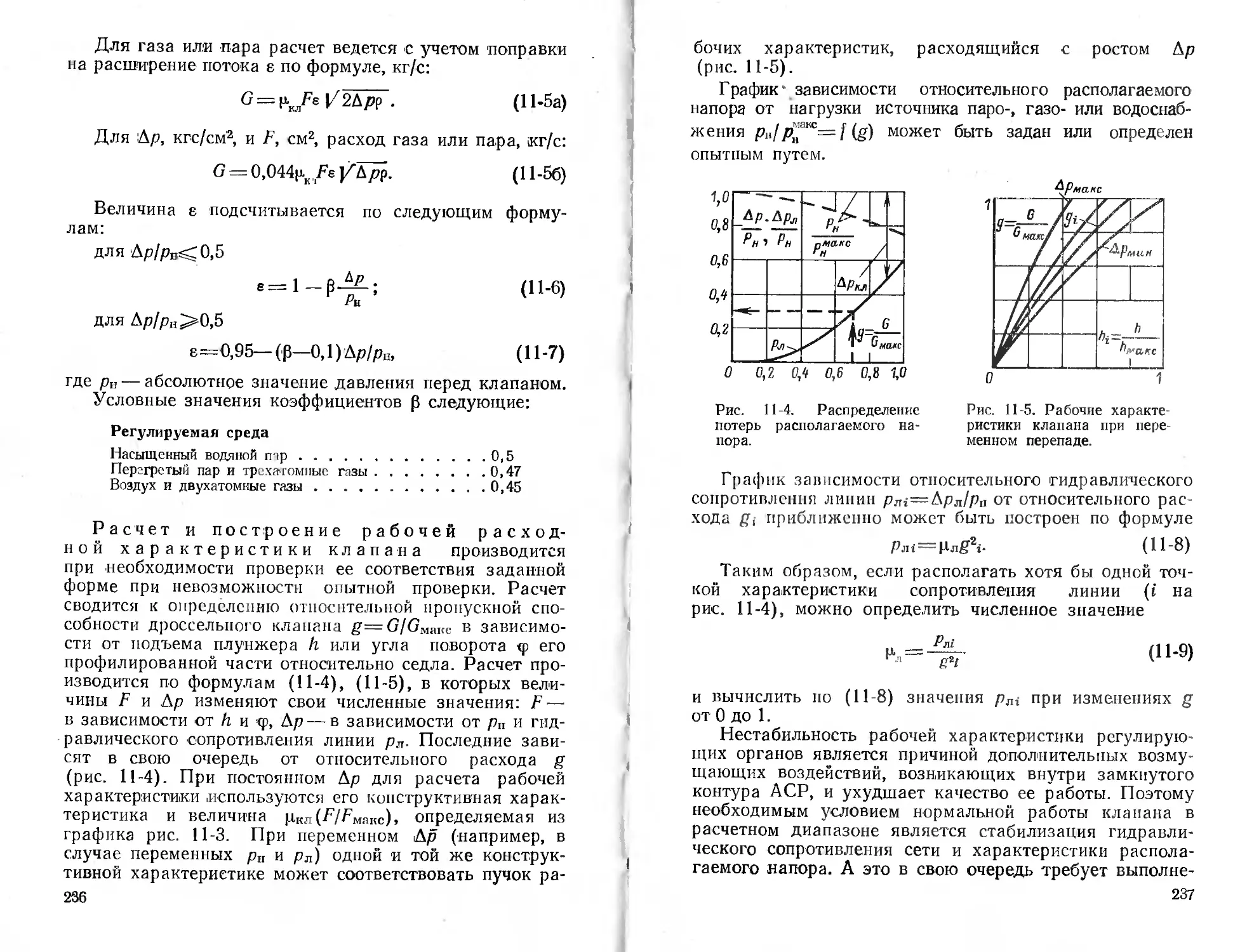
Расчет и построение рабочей расходной характеристики клапана производится при необходимости проверки ее соответствия заданной форме при невозможности опытной проверки. Расчет сводится к определению относительной пропускной способности дроссельного клапана g=G/GMaitc в зависимости от подъема плунжера h или угла поворота <р его профилированной части относительно седла. Расчет производится по формулам (11-4), (11-5), в которых величины F и Ар изменяют свои численные значения: F — в зависимости от h и <р, Ар — в зависимости от ра и гидравлического сопротивления линии рл. Последние зависят в свою очередь от относительного расхода g (рис. 11-4). При постоянном Ар для расчета рабочей характеристики используются его конструктивная характеристика и величина р,кл(7'//7МЯкс), определяемая из графика рис. 11-3. При переменном Ар (например, в случае переменных ри и рл) одной и той же конструктивной характеристике может соответствовать пучок ра-236
бочих характеристик, расходящийся с ростом Ар (рис. 11-5).
График* зависимости относительного располагаемого напора от нагрузки источника паро-, газо- или водоснабжения Р1|//£,жс== f (g) может быть задан или определен опытным путем.
Рис. 11-4. Распределение потерь располагаемого напора.
Рис. 11-5. Рабочие характеристики клапана при переменном перепаде.
График зависимости относительного гидравлического сопротивления линии рл<—Арл/Рп от относительного расхода gi приближенно может быть построен по формуле
Рл<=Цл£г». (11-8)
Таким образом, если располагать хотя бы одной точкой характеристики сопротивления линии (i на рис. 11-4), можно определить численное значение
1*,=-^ (11-9)
и вычислить по (11 8) значения рл; при изменениях g от 0 до 1.
Нестабильность рабочей характеристики регулирую щих органов является причиной дополнительных возмущающих воздействий, возникающих внутри замкнутого контура АСР, и ухудшает качество ее работы. Поэтому необходимым условием нормальной работы клапана в расчетном диапазоне является стабилизация гидравлического сопротивления сети и характеристики располагаемого напора. А это в свою очередь требует выполне-237
ния ряда мероприятий: проверки степени открытия запорных органов, упорядочения работы и надежного резервирования источников питания, стабилизации расходов воды, пара или газа и др.
В качестве примера определим максимальную пропускную способность односедельного игольчатого клапана с заданной конструктивной характеристикой и .построим его рабочую расходную характеристику.
Дано:
диаметр седла £> = 2 см; угол иглы 6=15°; располагаемый напор рн = 5 кгс/см2; перепад па клапане ДрНИи=2 кгс/см2; регулируемая среда — вода при /=150'С (р=917 кг/м3).
Расчет:
1. Определение /макс
этС2 ^макс ~ 4 = 3,14 см2.
2. Определение GMukc
°макс = °-044Вк./макс ГД^минР-
Значение коэффициента расхода определяется по графику РИС. 11-3 ДЛЯ P/Fmakc ~ 1, |Лнл=0,75;
GMaKC = 0,044.0.75.3.14 /2-917^4 4 кг/с.
3. Определение сопротивления линии при максимальном расходе (при £=4) по (11-9)
Д/’л.макс = Р» — Д/’мин = 5 — 2 = 3 кгс/см2; Ддл .макс
Рл = -^- = 0.6.
4. Определение сопротивления линии А/Ъы при расходе G< = = 0,1 = 1 по (11-8) и перепада на клапан при тех же расходах
G2,. 0.G-5G2,.
Д/’л/ = Р..Л = fsT4" = °' |5ВД2<- КП7СМ*; макс 1
Pv.— АдЛ(-= 5 —0,156G2; кгс/см2.
5. Построение рабочей характеристики клапана ё';=/(й<).
По точкам для заданных значений Gt, равным 1; 2; 3; 4;
4,4 кг/с, определяется:
Лл/±.=_________=
^макс 0,044?’макс
G,- 0.29G;.
~ 0,044-3,14 j/SH/Ap'. ~ j/A/T
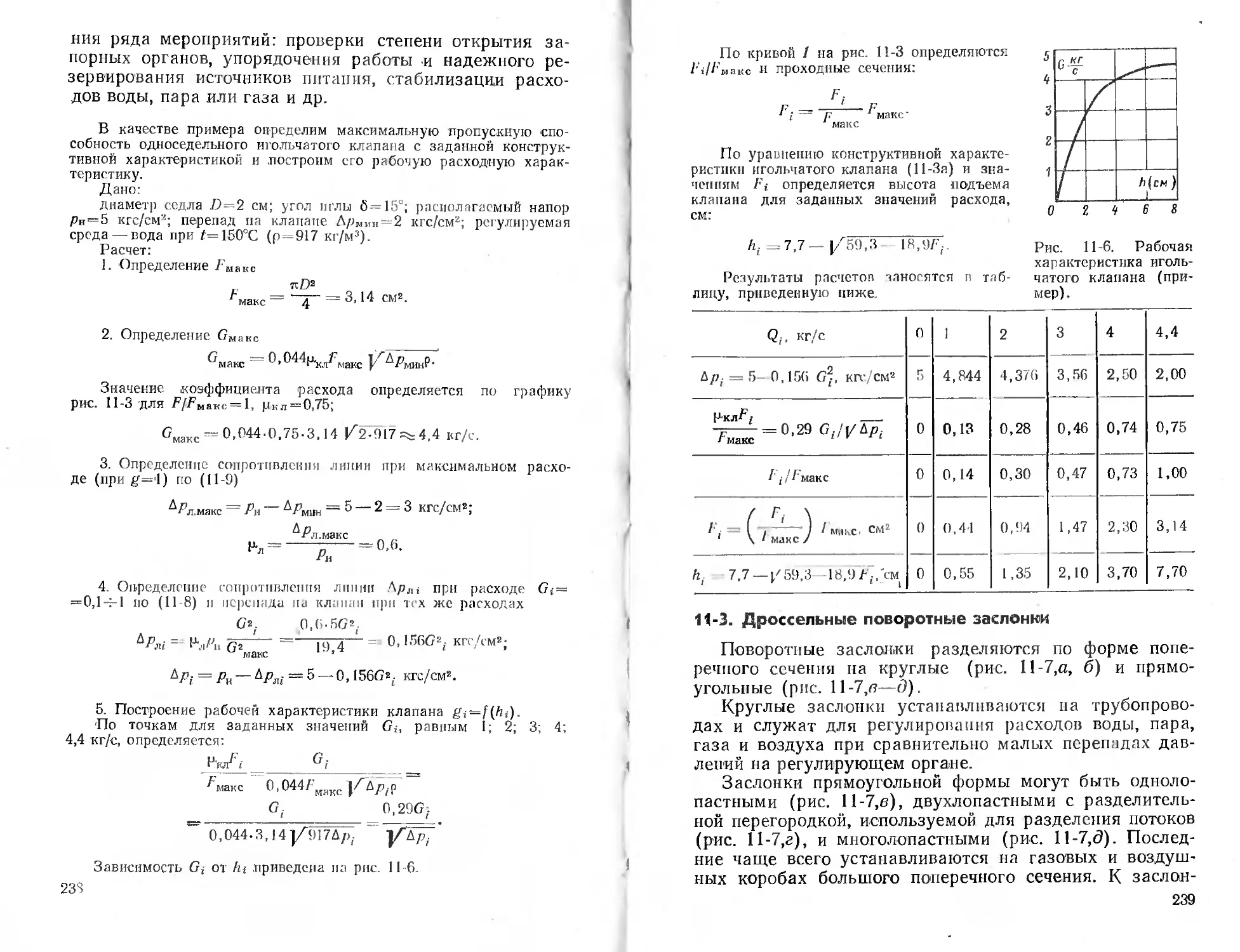
Зависимость G, от hi приведена па рис. 116.
По кривой 1 на рис. 11-3 определяются /'///'макс и проходные сечения:
Ft.
макс
макс'
По уравнению конструктивной характеристики игольчатого клапана (11-За) и значениям определяется высота подъема клапана для заданных значений расхода, см:
Рис. 11-6. Рабочая характеристика игольчатого клапана (пример).
/г; =7,7—j/59,3 - 18.9F,-.
Результаты расчетов заносятся в таблицу, приведенную ниже.
Q, . кг/с 0 1 2 3 4 4,4
Др,- = 5- 0,156 G?, кгс/см2 5 4,844 4,376 3,56 2,50 2,00
Ркл7;- -Р = 0,29 G../1/Да. гмакс ч Г i 0 0,13 0,28 0,46 0,74 0,75
I' J Гмакс 0 0,14 0,30 0,47 0,73 1,00
( r< ъ *'i = 1 / / ‘ MiiKCi СМ2 1 \ 1 макс ✓ 0 0,4-1 0,94 1,47 2,30 3,14
h, 7,7 — /59,3—18,9?;, см / * i L 0 0,55 1,35 2,10 3,70 7,70
11-3. Дроссельные поворотные заслонки
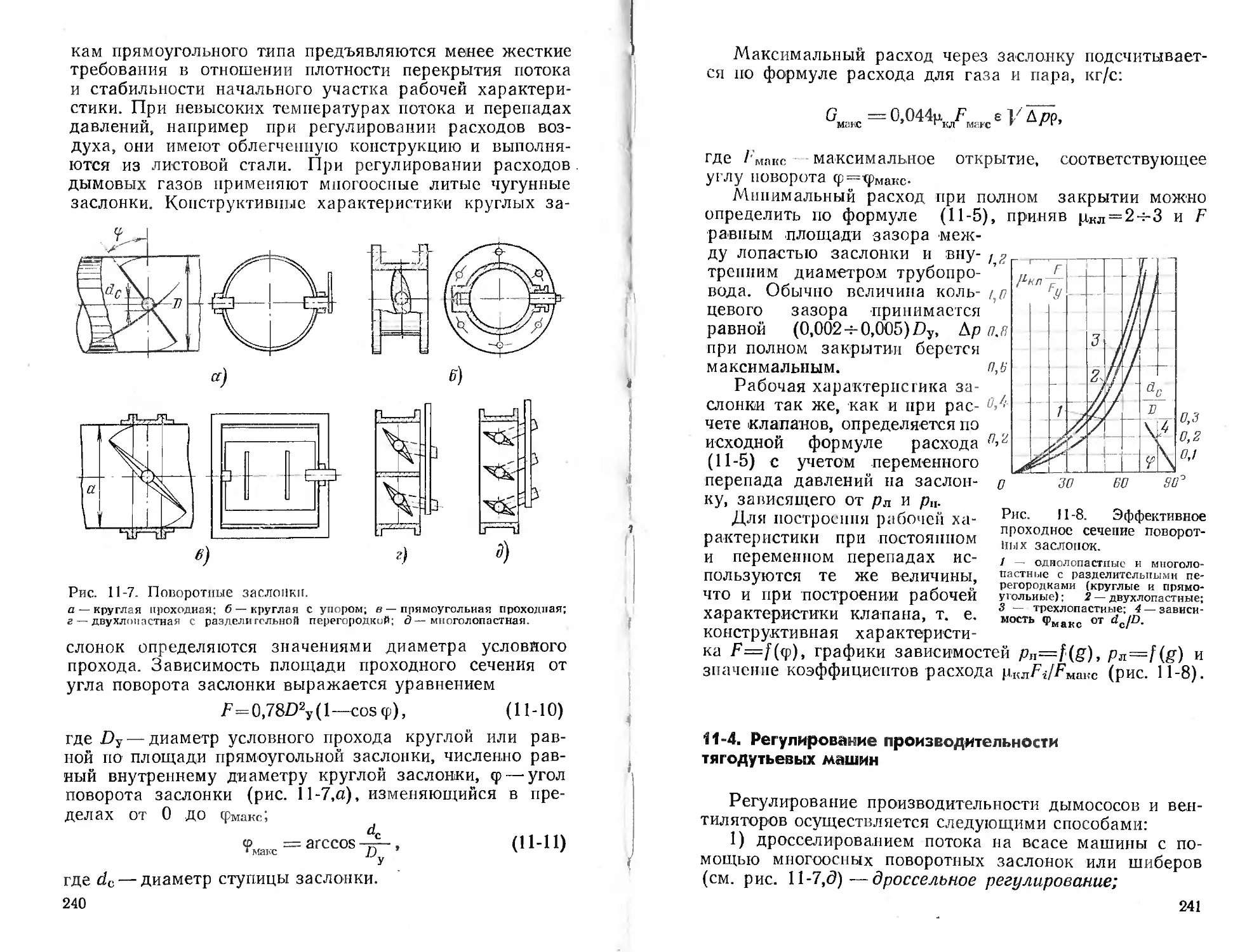
Поворотные заслонки разделяются по форме поперечного сечения на круглые (рис. 11-7,а, б) и прямоугольные (рис. 11-7,в—д).
Круглые заслонки устанавливаются па трубопроводах и служат для регулирования расходов воды, пара, газа и воздуха при сравнительно малых перепадах давлений на регулирующем органе.
Заслонки прямоугольной формы могут быть однолопастными (рис. 11-7,в), двухлопастными с разделительной перегородкой, используемой для разделения потоков (рис. 11-7,а), и многолопастными (рис. 11-7,6). Последние чаще всего устанавливаются на газовых и воздушных коробах большого поперечного сечения. К заслон-239
кам прямоугольного типа предъявляются менее жесткие требования в отношении плотности перекрытия потока и стабильности начального участка рабочей характеристики. При невысоких температурах потока и перепадах давлений, например при регулировании расходов воздуха, они имеют облегченную конструкцию и выполняются из листовой стали. При регулировании расходов дымовых газов применяют многоосные литые чугунные заслонки. Конструктивные характеристики круглых за
Рис. 11-7. Поворотные заслонки.
а — круглая проходная; б — круглая с упором; « — прямоугольная проходная; г — двухлопастная с разделительной перегородкой; д—многолопастная.
слонок определяются значениями диаметра условного прохода. Зависимость площади проходного сечения от угла поворота заслонки выражается уравнением
/7=0,78О2у(1—costp), (11-10)
где Dy — диаметр условного прохода круглой или равной по площади прямоугольной заслонки, численно равный внутреннему диаметру круглой заслонки, ф— угол поворота заслонки (рис. 11 -7,а), изменяющийся в пределах ОТ 0 ДО фмакс;
ф — arccos-fr—, (11-П)
* макс D ' '
У
где dc — диаметр ступицы заслонки.
Максимальный расход через заслонку подсчитывается по формуле расхода для газа и пара, кг/с:
G = 0,044р. F е ]/ Д рр, макс ’ гкл макс f ! г
где /'макс максимальное открытие, соответствующее углу поворота <р=<рМакс-
Минимальный расход при полном закрытии можно определить по формуле (11-5), приняв р.кл=2->3 и F
11-8. Эффективное
равным площади зазора между лопастью заслонки и внутренним диаметром трубопровода. Обычно величина кольцевого зазора принимается равной (0,002-т-0,005) Ру, Др при полном закрытии берется максимальным.
Рабочая характеристика заслонки так же, как и при расчете клапанов, определяется по исходной формуле расхода (11-5) с учетом переменного перепада давлений на заслонку, зависящего от рл и рп.
Для построения рабочей характеристики при постоянном и переменном перепадах используются те же величины, что и при построении рабочей характеристики клапана, т. е. конструктивная характеристи
ка F=/(<p), графики зависимостей pn=f(g), Pn=f(g) и значение коэффициентов расхода ркл^т/^макс (рис. 11-8).
Рис.
проходное сечение поворотных заслонок.
1 — однолопастпые и многолопастные с разделительными перегородками (круглые и прямоугольные) ; 2 — двухлопастные;
3 — трехлопастиые; 4 — зависи-мость Фыакс от dJD.
11-4. Регулирование производительности тягодутьевых машин
Регулирование производительности дымососов и вентиляторов осуществляется следующими способами:
1) дросселированием потока на всасе машины с помощью многоосных поворотных заслонок или шиберов (см. рис. 11-7,с?)—дроссельное регулирование;
2) дросселированием и одновременным изменением направления потока с помощью направляющих аппаратов — смешанное регулирование;
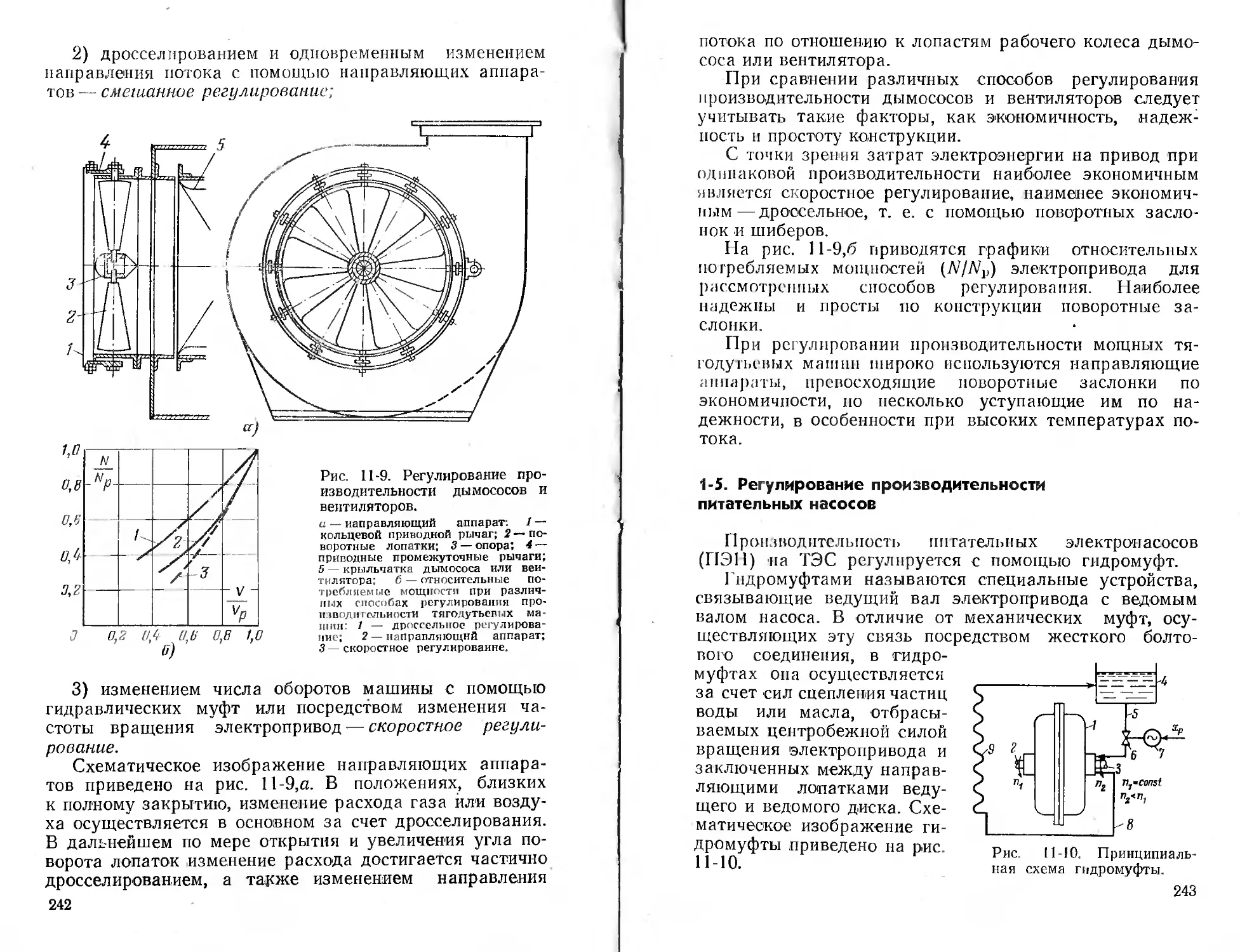
Рис. 11-9. Регулирование про-изводительности дымососов и вентиляторов.
а — направляющий аппарат: 1 — кольцевой приводной рычаг; 2 — поворотные лопатки; 3 — опора; 4 — приводные промежуточные рычаги; 5 — крыльчатка дымососа или вентилятора; б — относительные потребляемые мощности при различных способах регулирования производительности тягодутьевых машин: / — дроссельное регулирование; 2 — направляющий аппарат;
3 — скоростное регулирование.
3) изменением числа оборотов машины с помощью гидравлических муфт или посредством изменения частоты вращения электропривод — скоростное регулирование.
Схематическое изображение направляющих аппаратов приведено на рис. 11-9,а. В положениях, близких к полному закрытию, изменение расхода газа или воздуха осуществляется в основном за счет дросселирования. В дальнейшем по мере открытия и увеличения угла поворота лопаток изменение расхода достигается частично дросселированием, а также изменением направления 242
потока по отношению к лопастям рабочего колеса дымососа или вентилятора.
При сравнении различных способов регулирования производительности дымососов и вентиляторов следует учитывать такие факторы, как экономичность, надежность и простоту конструкции.
С точки зрения затрат электроэнергии на привод при одинаковой производительности наиболее экономичным является скоростное регулирование, наименее экономичным— дроссельное, т. е. с помощью поворотных заслонок и шиберов.
На рис. 11-9,6 приводятся графики относительных потребляемых мощностей (N/Nv) электропривода для рассмотренных способов регулирования. Наиболее надежны и просты по конструкции поворотные заслонки.
При регулировании производительности мощных тя-годутьевых машин широко используются направляющие аппараты, превосходящие поворотные заслонки по экономичности, по несколько уступающие им по надежности, в особенности при высоких температурах потока.
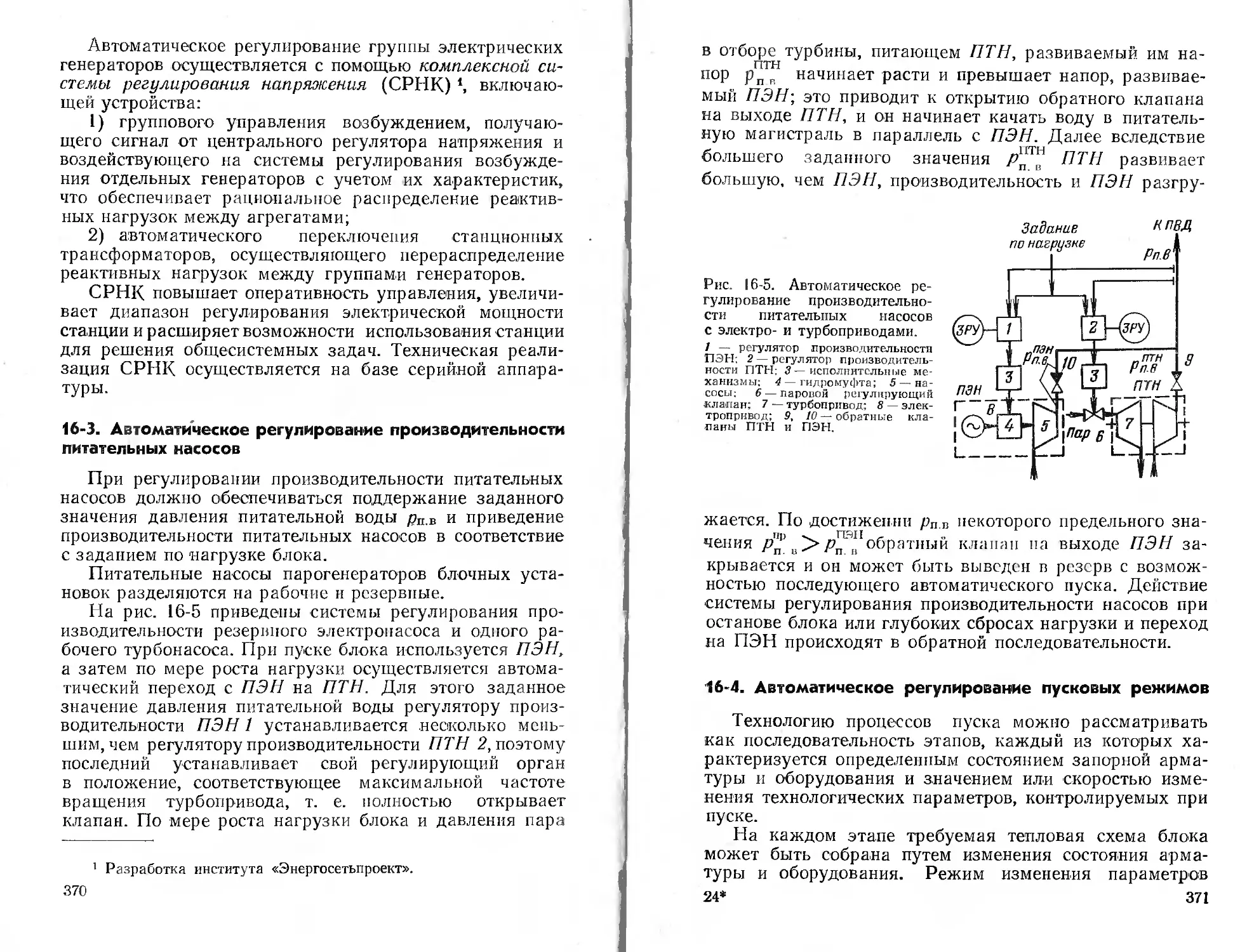
1-5. Регулирование производительности питательных насосов
Производительность питательных электронасосов (ПЭН) на ТЭС регулируется с помощью гидромуфт.
Гидромуфтами называются специальные устройства, связывающие ведущий вал электропривода с ведомым валом насоса. В отличие от механических муфт, осуществляющих эту связь посредством жесткого болто-
вого соединения, в гидромуфтах опа осуществляется за счет сил сцепления частиц воды или масла, отбрасываемых центробежной силой вращения электропривода и заключенных между направляющими лопатками ведущего и ведомого диска. Схематическое изображение гидромуфты приведено на рис. 11-10.
Рис. 11-10. Принципиальная схема гидромуфты.
Муфта передает вращение с ведущего вала 2 на ведомый 3 следующим образом. Масло или вода поступает в муфту из напорного бака 4 через подводящую трубку 5. При вращении ведущего диска 2, жестко укрепленного на валу электропривода, жидкость отбрасывается на периферию, где расположены кольцевые лопатки, в свою очередь направляющие этот поток на кольцевые лопатки ведомого диска. При большой частоте вращения поток жидкости, заключенный между лопатками дисков, увлекает за собой ведомый диск, вал и жестко укрепленное на нем рабочее колесо насоса.
Регулирующим органом в рассматриваемом устройстве является клапан 6, который перемещается под действием сервопривода 7 и изменяет расход жидкости в гидромуфту.
При возрастании нагрузки насоса ведомый диск может «проскальзывать» относительно ведущего. Скольжение, выражаемое величиной S = /ii—П2М1, возрастает или уменьшается с изменением количества жидкости, поступающей в корпус муфты через регулирующий клапан 6. Из корпуса муфты жидкость удаляется через отводящую трубку 8. Скоростной напор потока, создаваемый муфтой, используется для перекачки жидкости через систему ее охлаждения 9 в бак 4.
Изменение производительности насоса определяется выражением
Qi tn Qz
Гидромуфта вместе с насосом призвана в конечном итоге изменять производительность насоса в зависимости от величины командного сигнала регулирующего прибора хр. В некоторых типах гидромуфт регулирование частоты вращения рабочего колеса насоса осуществляется изменением расхода жидкости через отводящую трубку 8 за счет изменения ее положения (высоты) внутри корпуса муфты 1.
11-6. Сочленения регулирующих органов с исполнительными механизмами регуляторов
Помимо прямой связи силового элемента исполнительного механизма с регулирующим органом (сервоприводы мембранного типа, см. рис. 6-9) существуют следующие виды сочленений; рычажное, кулачковое, редукторное, тросовое.
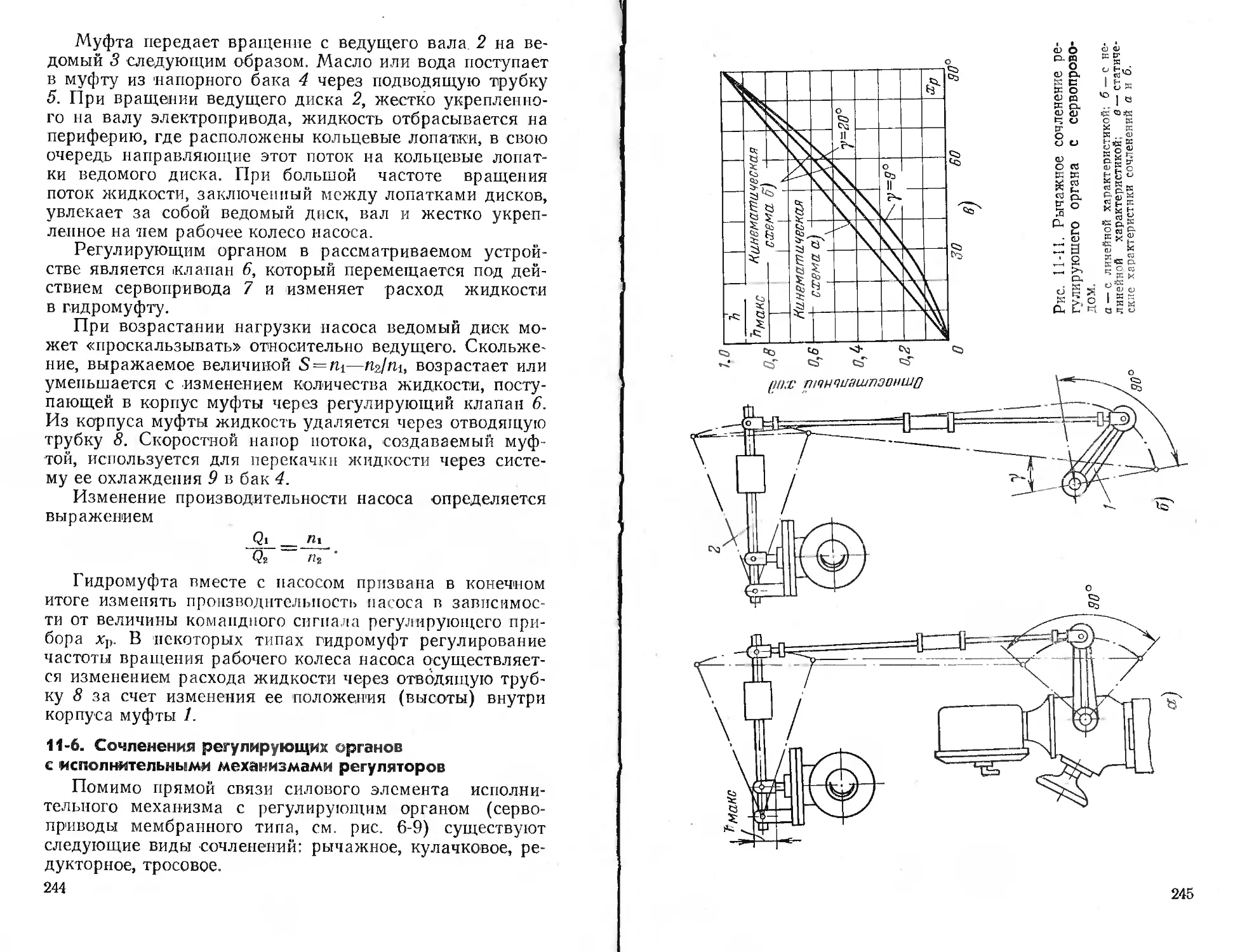
а —с линейной характеристикой: б —с нелинейной характеристикой: в — статические характеристики сочленений а и б.
ма рычажного сочленения с
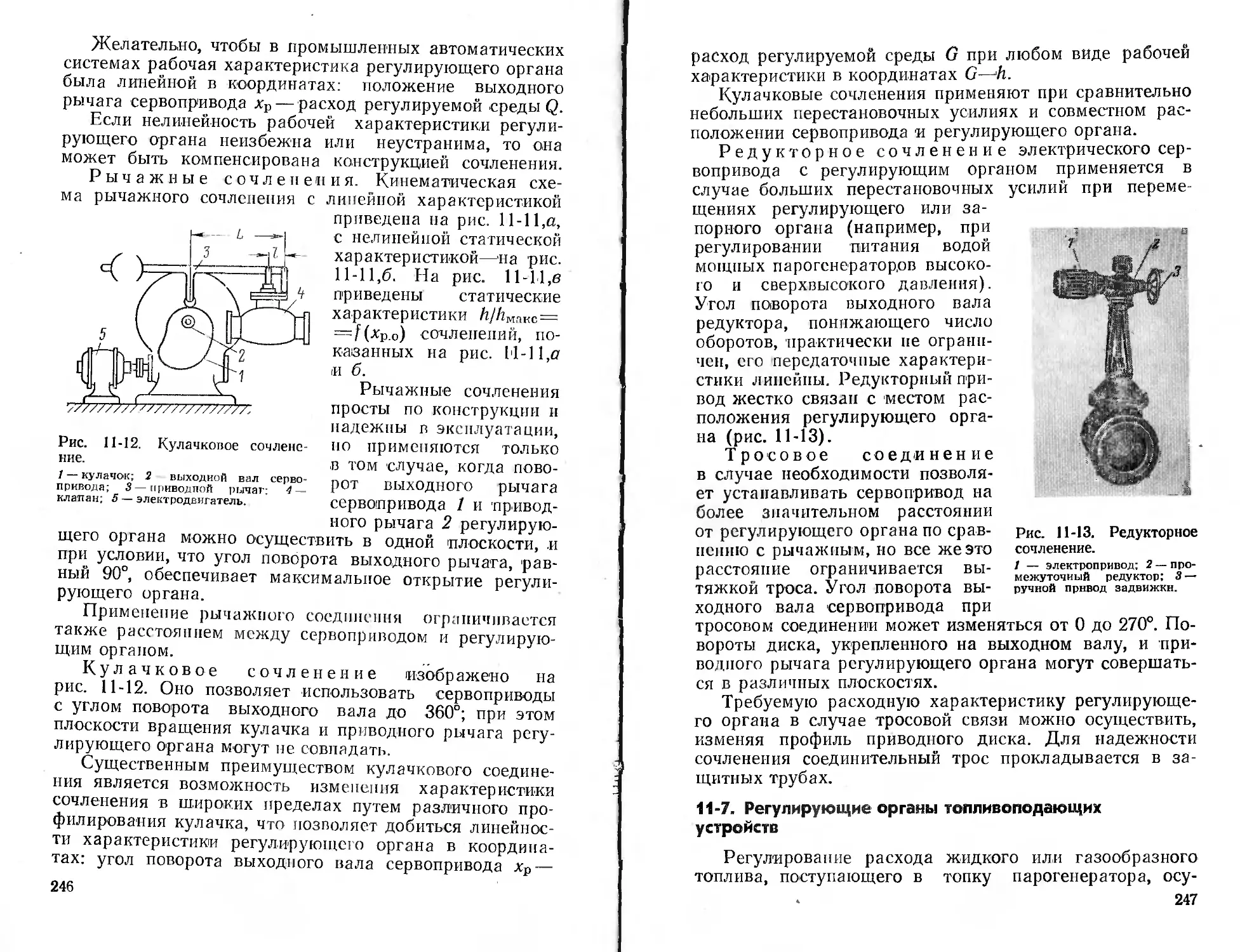
Рис. 11-12. Кулачковое сочленение.
/ — кулачок; 2 выходной вал сервопривода; 3—приводной рычаг; 4 — клапан; 5 — электродвигатель.
Желательно, чтобы в промышленных автоматических системах рабочая характеристика регулирующего органа была линейной в координатах: положение выходного рычага сервопривода хр— расход регулируемой среды Q.
Если нелинейность рабочей характеристики регулирующего органа неизбежна или неустранима, то она может быть компенсирована конструкцией сочленения.
Рычажные сочленения. Кинематическая схе-линейной характеристиной приведена на рис. 11-11,а, с нелинейной статической характеристикой—на рис. 11-11,6. На рис. 11-11,6 приведены статические характеристики /г//гмакс= —f(xP.o) сочленений, показанных на рис. Ь1-11,о п б.
Рычажные сочленения просты по конструкции и надежны в эксплуатации, по применяются только ,в том случае, когда поворот выходного рычага сервопривода / и приводного рычага 2 регулирую
щего органа можно осуществить в одной плоскости, .и при условии, что угол поворота выходного рычага, равный 90°, обеспечивает максимальное открытие регулирующего органа.
Применение рычажного соединения ограничивается также расстоянием между сервоприводом и регулирующим органом.
Кулачковое сочленение изображено на рис. 11-12. Оно позволяет использовать сервоприводы с углом поворота выходного вала до 360°; при этом плоскости вращения кулачка и приводного рычага регулирующего органа могут не совпадать.
Существенным преимуществом кулачкового соединения является возможность изменения характеристики сочленения в широких пределах путем различного профилирования кулачка, что позволяет добиться линейности характеристики регулирующего органа в координатах: угол поворота выходного вала сервопривода хр—
расход регулируемой среды G при любом виде рабочей характеристики в координатах G—h.
Кулачковые сочленения применяют при сравнительно небольших перестановочных усилиях и совместном расположении сервопривода и регулирующего органа.
Редукторное сочленение электрического сер
вопривода с регулирующим органом применяется в случае больших перестановочных усилий при переме
щениях регулирующего или запорного органа (например, при регулировании питания водой мощных парогенераторов высокого и сверхвысокого давления). Угол поворота выходного вала редуктора, понижающего число оборотов, практически не ограничен, его передаточные характеристики линейны. Редукторный привод жестко связан с местом расположения регулирующего органа (рис. 11-13).
Тросовое соединение в случае необходимости позволяет устанавливать сервопривод на более значительном расстоянии
Рис. 11-13. Редукторное сочленение.
/ — электропривод; 2 — промежуточный редуктор; 3 — ручной привод задвижки.
от регулирующего органа по сравнению с рычажным, ио все же это расстояние ограничивается вытяжкой троса. Угол поворота вы
ходного вала сервопривода при
тросовом соединении может изменяться от 0 до 270°. По-
вороты диска, укрепленного на выходном валу, и приводного рычага регулирующего органа могут совершаться в различных плоскостях.
Требуемую расходную характеристику регулирующего органа в случае тросовой связи можно осуществить, изменяя профиль приводного диска. Для надежности сочленения соединительный трос прокладывается в защитных трубах.
11-7. Регулирующие органы топливоподающих устройств
Регулирование расхода жидкого или газообразного топлива, поступающего в топку парогенератора, осу-
• 247
ществляется с помощью клапанов или поворотных заслонок, устройство которых рассматривалось в § 11-2 и 11-3.
Если же используется твердое топливо (каменный уголь, торф или сланец), то для регулирования его подачи и изменения расхода применяются специальные питатели топлива.
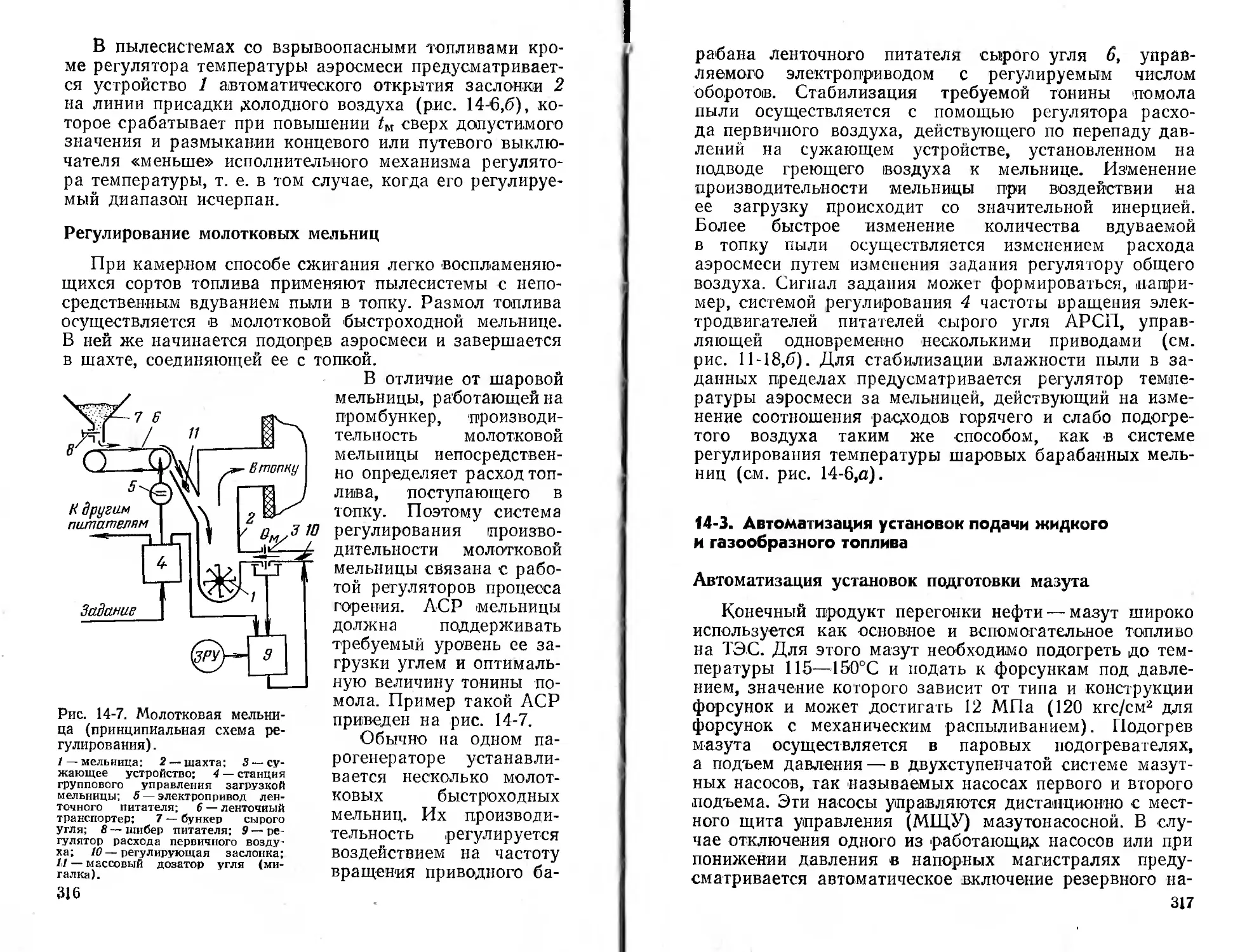
Питатели твердого топлива. Эти питатели используются в качестве топливоподающих устройств барабанных или молотковых мельниц.
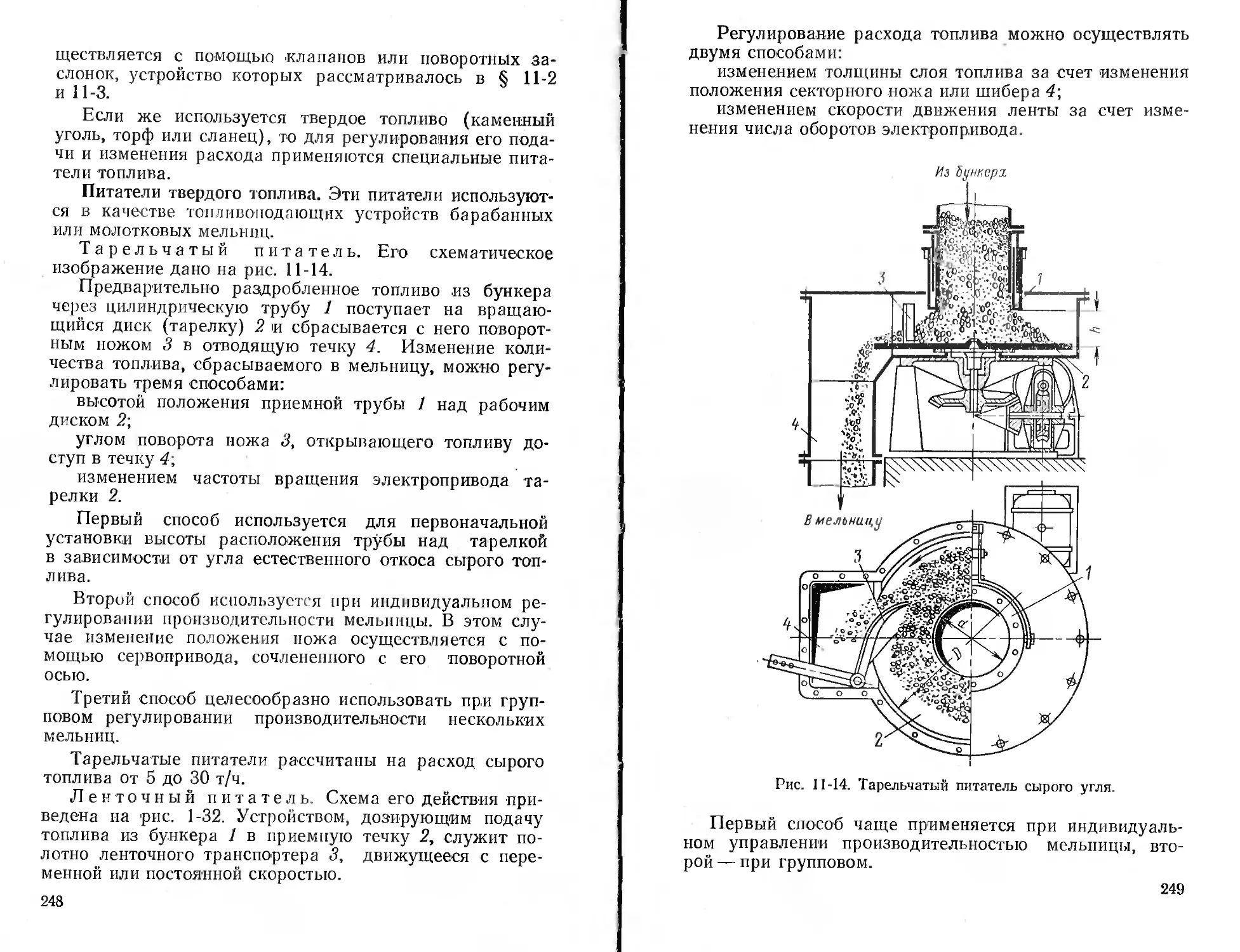
Тарельчатый питатель. Его схематическое изображение дано на рис. 11-14.
Предварительно раздробленное топливо из бункера через цилиндрическую трубу 1 поступает на вращающийся диск (тарелку) 2 и сбрасывается с него поворотным ножом 3 в отводящую течку 4. Изменение количества топлива, сбрасываемого в мельницу, можно регулировать тремя способами:
высотой положения приемной трубы 1 над рабочим диском 2;
углом поворота ножа 3, открывающего топливу доступ в течку 4;
изменением частоты вращения электропривода тарелки 2.
Первый способ используется для первоначальной установки высоты расположения трубы над тарелкой в зависимости от угла естественного откоса сырого топлива.
Второй способ используется при индивидуальном регулировании производительности мельницы. В этом случае изменение положения ножа осуществляется с помощью сервопривода, сочлененного с его поворотной осью.
Третий способ целесообразно использовать при групповом регулировании производительности нескольких мельниц.
Тарельчатые питатели рассчитаны на расход сырого топлива от 5 до 30 т/ч.
Ленточный питатель. Схема его действия приведена на рис. 1-32. Устройством, дозирующим подачу топлива из бункера 1 в приемную течку 2, служит полотно ленточного транспортера 3, движущееся с переменной или постоянной скоростью.
Регулирование расхода топлива можно осуществлять двумя способами:
изменением толщины слоя топлива за счет изменения положения секторного ножа или шибера 4\
изменением скорости движения ленты за счет изменения числа оборотов электропривода.
Рис. 11-14. Тарельчатый питатель сырого угля.
Первый способ чаще применяется при индивидуальном управлении производительностью мсльпицы, второй — при групповом.
Производительность ленточного питателя сырого угля, т/ч:
Qn.n—5040п/ш, где v — скорость ленты, м/с (обычно о=0,1 -н0,3 м/с), а — ширина течки бункера сырого угля (а=0,30->0,50м), Ъ — толщина слоя топлива (ЬМакс = О,1О-ьО,15 м, ЬМИн= =0,03-н 0,04 м).
При сравнительной оценке рассмотренных конструкций питателей сырого угля следует учитывать сорт топлива, качество его предварительной обработки (дробление и очистка) и назначение питателя в системе регулирования.
Тарельчатые питатели имеют малые габариты и наименьшие присосы воздуха в систему пылеприготовления. Но их производительность при неизменных положениях ножа и частоты вращения диска зависит от влажности топлива и качества его предварительной обработки. При попадании в бункер порции сильно увлажненного топлива возможно проскальзывание слоя топлива относительно вращающегося диска. Попадание инородных тел и предметов (щепа, ветошь, камни и т. п ) между нижней кромкой ножа и диском может привести к чрезмерной перегрузке электропривода («заеданию») и его остановку. В связи с этим тарельчатые питатели обычно устанавливаются в системах приготовления пылевидного топлива с промежуточным бункером, где нестабильность топливоподачи в мельницы не приводит к глубоким нарушениям топочного режима парогенератора.
Ленточный питатель лишен недостатков тарельчатого, но в той же мере и его преимуществ. Питатели этого типа устанавливаются для непрерывного взвешивания поступающего в мельницу топлива, поскольку единственным освоенным способом измерения расхода твердого топлива является его взвешивание на ленте. Область применения ленточных питателей — индивидуальное регулирование производительности шаровых барабанных и групповое — молотковых мельниц.
Питатели пылевидного топлива. Для регулирования подачи пыли в топку парогенератора применяются пы-лепитатели.
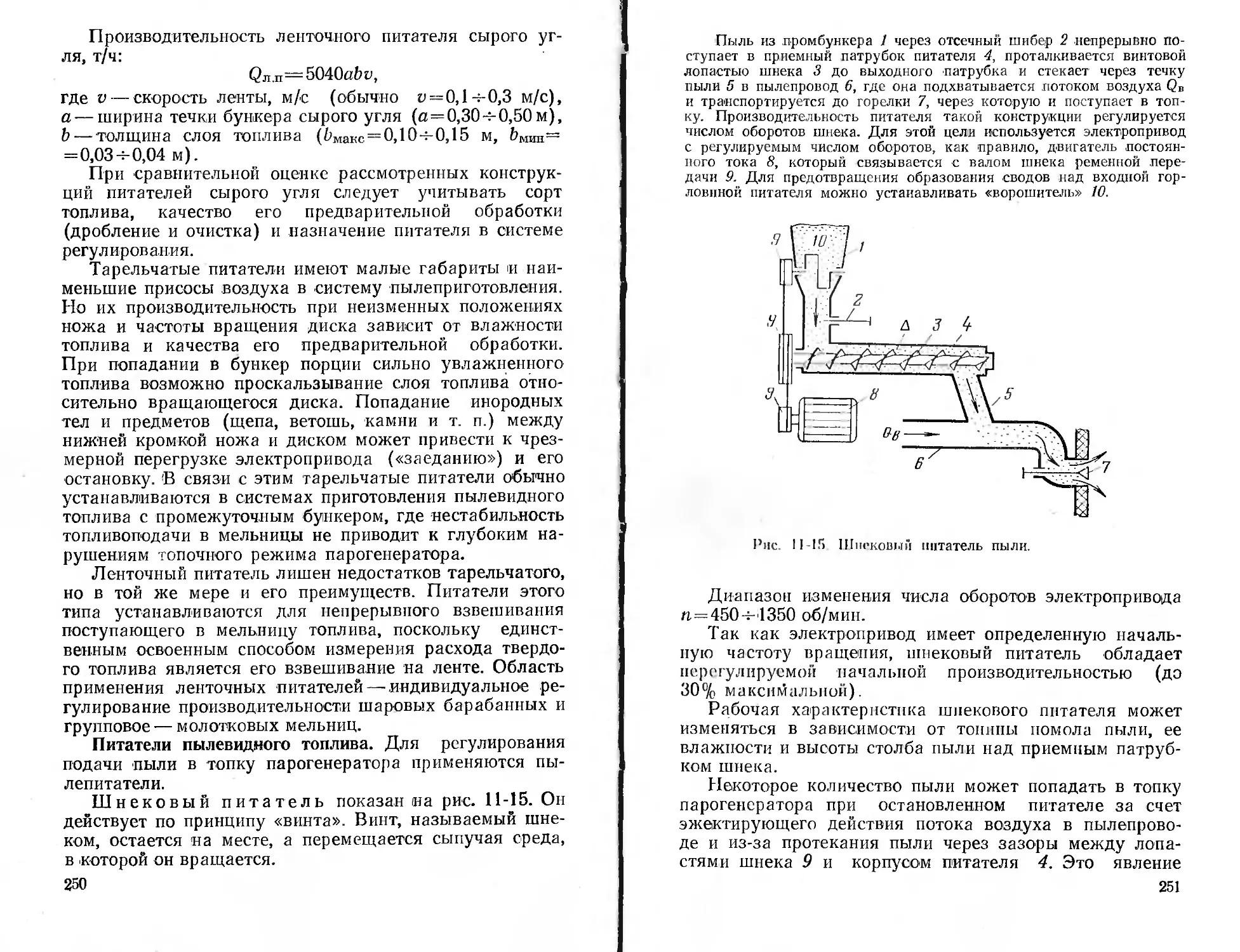
Шнековый питатель показан на рис. 11-15. Он действует по принципу «винта». Винт, называемый шнеком, остается на месте, а перемещается сыпучая среда, в которой он вращается.
Пыль из промбункера 1 через отсечный шибер 2 непрерывно поступает в приемный патрубок питателя 4, проталкивается винтовой лопастью шнека 3 до выходного патрубка и стекает через течку пыли 5 в пылепровод 6, где она подхватывается потоком воздуха QB и транспортируется до горелки 7, через которую и поступает в топку. Производительность питателя такой конструкции регулируется числом оборотов шнека. Для этой цели используется электропривод с регулируемым числом оборотов, как правило, двигатель постоянного тока 8, который связывается с валом шнека ременной передачи 9. Для предотвращения образования сводов над входной горловиной питателя можно устанавливать «ворошитель» 10.
Рис. 11-15 Шнековый питатель пыли.
Диапазон изменения числа оборотов электропривода п=450-ь1350 об/мин.
Так как электропривод имеет определенную начальную частоту вращения, шнековый питатель обладает нерегулируемой начальной производительностью (до 30% максимальной).
Рабочая характеристика шнекового питателя может изменяться в зависимости от тонппы помола пыли, ее влажности и высоты столба пыли над приемным патрубком шнека.
Некоторое количество пыли может попадать в топку парогенератора при остановленном питателе за счет эжектирующего действия потока воздуха в пылепрово-де и из-за протекания пыли через зазоры между лопастями шнека 9 и корпусом питателя 4. Это явление
Рис. 11-16. Дисковый питатель пыли.
имеет место при сухой и тонкой пыли, обладающей высокой текучестью.
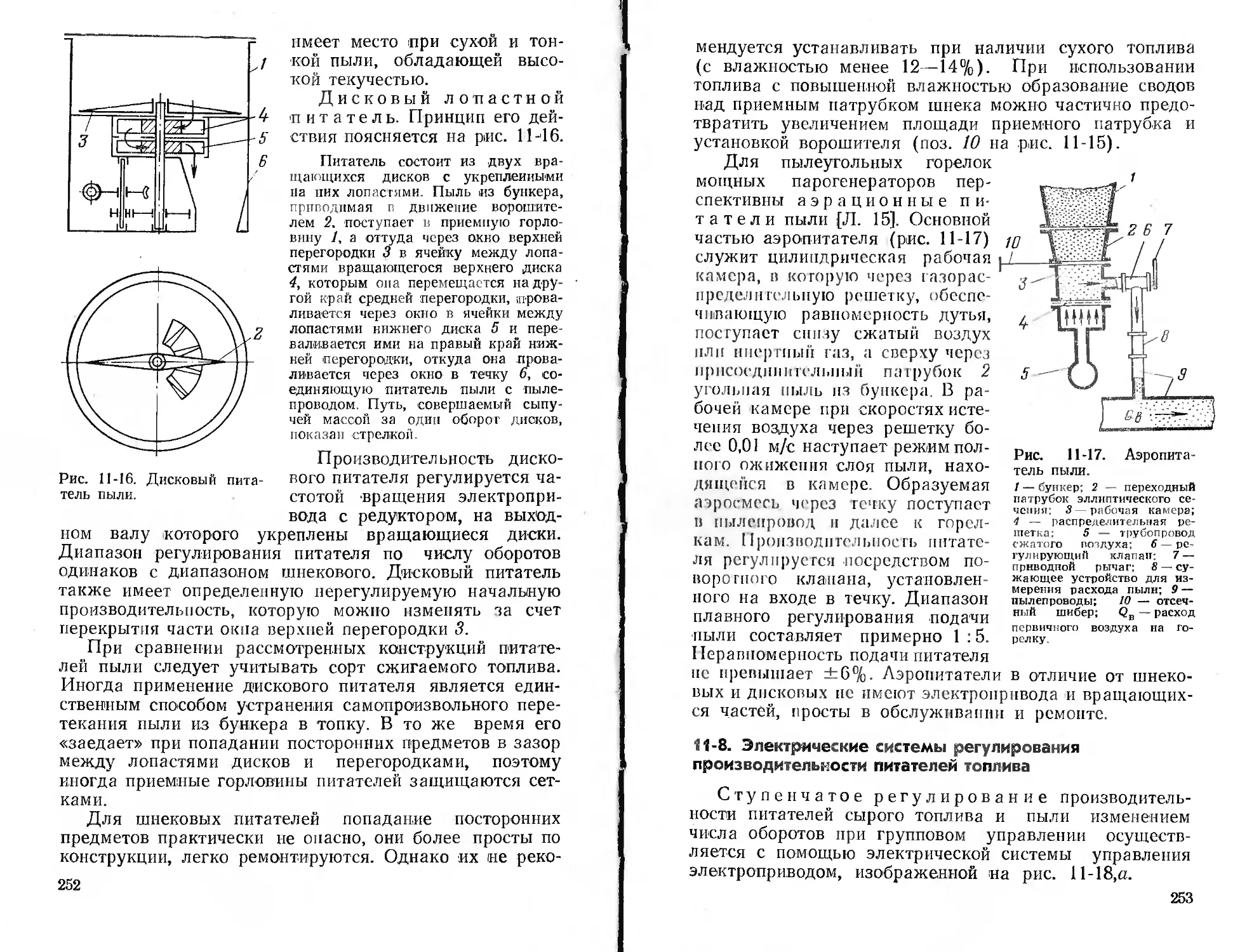
Дисковый лопастной питатель. Принцип его действия поясняется на рпс. 11-16.
Питатель состоит из двух вращающихся дисков с укрепленными па них лопастями. Пыль из бункера, приводимая в движение ворошителем 2, поступает в приемную горловину 1, а оттуда через окно верхней перегородки 3 в ячейку между лопастями вращающегося верхнего диска 4, которым опа перемещается на другой край средней перегородки, проваливается через окно в ячейки между лопастями нижнего диска 5 и переваливается ими на правый край нижней перегородки, откуда она проваливается через окно в течку 6, соединяющую питатель пыли с пыле-проводом. Путь, совершаемый сыпучей массой за один оборот дисков, показан стрелкой.
Производительность дискового питателя регулируется частотой вращения электропривода с редуктором, на выход
ном валу которого укреплены вращающиеся диски. Диапазон регулирования питателя по числу оборотов одинаков с диапазоном шнекового. Дисковый питатель
также имеет определенную нерегулируемую начальную производительность, которую можно изменять за счет перекрытия части окна верхней перегородки 3.
При сравнении рассмотренных конструкций питателей пыли следует учитывать сорт сжигаемого топлива. Иногда применение дискового питателя является единственным способом устранения самопроизвольного перетекания пыли из бункера в топку. В то же время его «заедает» при попадании посторонних предметов в зазор между лопастями дисков и перегородками, поэтому иногда приемные горловины питателей защищаются сетками.
Для шнековых питателей попадание посторонних предметов практически не опасно, они более просты по конструкции, легко ремонтируются. Однако их не реко-
мендуется устанавливать при наличии сухого топлива (с влажностью менее 12—14%). При использовании топлива с повышенной влажностью образование сводов
над приемным патрубком шнека можно частично предотвратить увеличением площади приемного патрубка и
установкой ворошителя (поз. 10 на рис. 11-15).
Для пылеугольных горелок мощных парогенераторов перспективны аэрационные питатели пыли [Л. 15]. Основной частью аэропитателя (рис. 11-17) служит цилиндрическая рабочая камера, в которую через газораспределительную решетку, обеспечивающую равномерность дутья, поступает снизу сжатый воздух пли инертный газ, а сверху через присоедини тельный патрубок 2 угольная пыль из бункера. В рабочей камере при скоростях истечения воздуха через решетку более 0,01 м/с наступает режим полного ожижения слоя пыли, нахо-
Рис. 11-17. Аэропита-
тель пыли.
/ — бункер; 2 — переходный патрубок эллиптического сечения; 3 — рабочая камера; 4 — распределительная решетка; 5 — трубопровод сжатого воздуха; 6 — регулирующий клапан; 7 — приводной рычаг; 8— сужающее устройство для измерения расхода пыли; 9 — пылепроводы; 10 — отсечный шибер; QB — расход первичного воздуха на горелку.
дящейся в камере. Образуемая аэросмесь через точку поступает в пылепровод и далее к горелкам. Производительность питателя регулируется посредством поворотного клапана, установленного на входе в течку. Диапазон плавного регулирования подачи пыли составляет примерно 1 :5. Неравномерность подачи питателя
не превышает ±6%. Аэроиитатели в отличие от шнеко-
вых и дисковых не имеют электропривода и вращающихся частей, просты в обслуживании и ремонте.
11-8. Электрические системы регулирования производительности питателей топлива
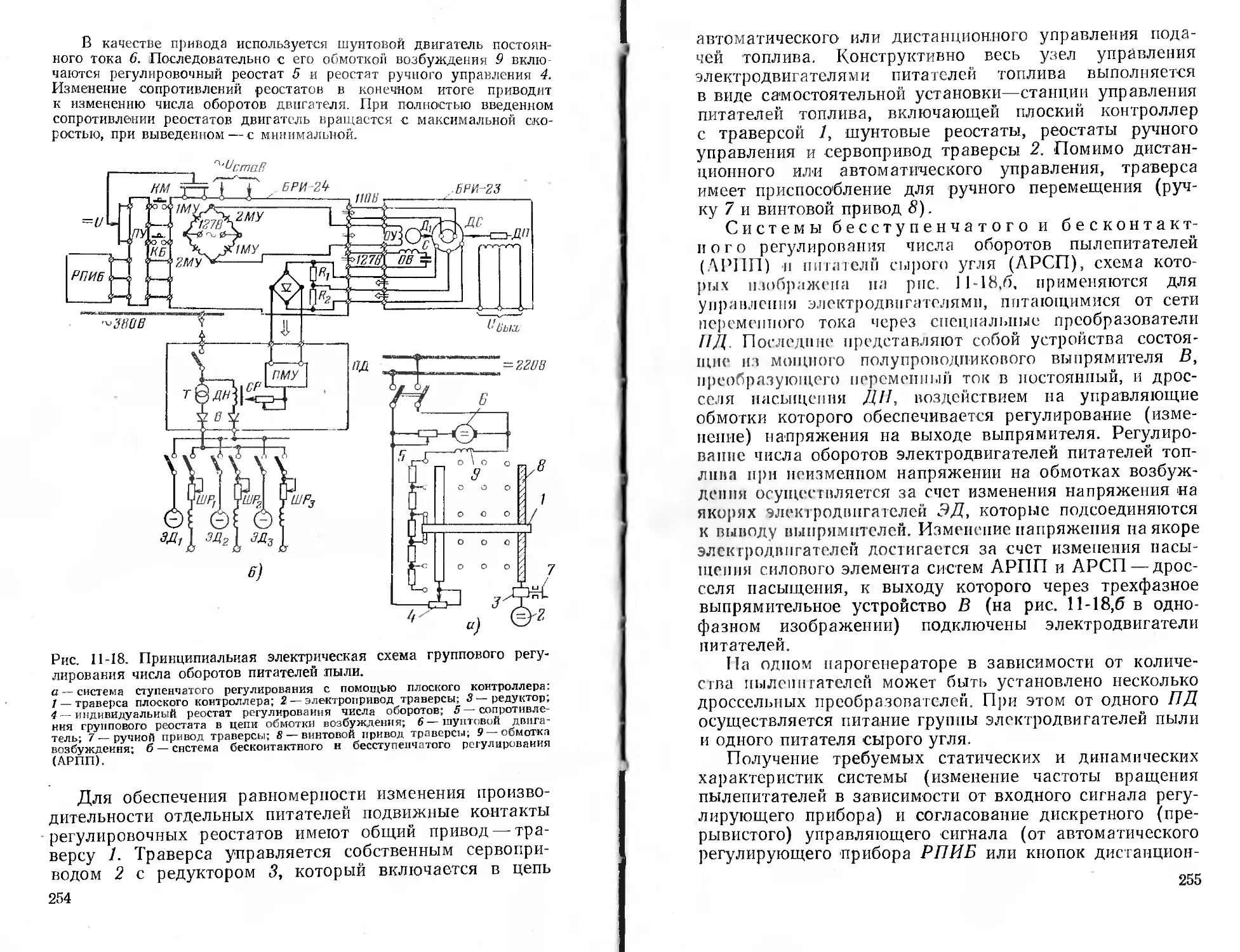
Ступенчатое регулирование производительности питателей сырого топлива и пыли изменением числа оборотов при групповом управлении осуществляется с помощью электрической системы управления электроприводом, изображенной на рис. 11-18,а.
В качестве привода используется шунтовой двигатель постоянного тока 6. Последовательно с его обмоткой возбуждения 9 включаются регулировочный реостат 5 и реостат ручного управления 4. Изменение сопротивлений реостатов в конечном итоге приводит к изменению числа оборотов двигателя. При полностью введенном сопротивлении реостатов двигатель вращается с максимальной скоростью, при выведенном — с минимальной.
Рис. 11-18. Принципиальная электрическая схема группового регулирования числа оборотов питателей пыли.
а — система ступенчатого регулирования с помощью плоского контроллера: I — траверса плоского контроллера; 2 — электропривод траверсы; 3 — редуктор; 4 _ индивидуальный реостат регулирования числа оборотов; 5 — сопротивления группового реостата в цепи обмотки возбуждения; 6—шунтовой двигатель; 7 —ручной привод траверсы; 8 — винтовой привод траверсы; 9 —обмотка возбуждения; б — система бесконтактного и бесступенчатого регулирования (АРПП).
Для обеспечения равномерности изменения производительности отдельных питателей подвижные контакты регулировочных реостатов имеют общий привод — траверсу 1. Траверса управляется собственным сервопри водом 2 с редуктором 3, который включается в цепь 254
автоматического или дистанционного управления подачей топлива. Конструктивно весь узел управления электродвигателями питателей топлива выполняется в виде самостоятельной установки—станции управления питателе?! топлива, включающей плоский контроллер с траверсой 1, шунтовые реостаты, реостаты ручного управления и сервопривод траверсы 2. Помимо дистанционного или автоматического управления, траверса имеет приспособление для ручного перемещения (ручку 7 и винтовой привод 8).
Системы бесступенчатого и бесконтактного регулирования числа оборотов пылепитателей (АРПП) и шпатели сырого угля (АРСП), схема которых изображена па рис. 11-18,6, применяются для управления электродвигателями, питающимися от сети переменного тока через специальные преобразователи IIД. Последние представляют собой устройства состоящие из мощного полупроводникового выпрямителя В, преобразующего переменный ток в постоянный, и дросселя насыщения Д//, воздействием на управляющие обмотки которого обеспечивается регулирование (изменение) напряжения на выходе выпрямителя. Регулирование числа оборотов электродвигателей питателей топлива при неизменном напряжении на обмотках возбуждения осуществляется за счет изменения напряжения «а якорях электродвигателей ЭД, которые подсоединяются к выводу выпрямителей. Изменение напряжения на якоре электродвигателей достигается за счет изменения насыщения силового элемента систем АРПП и АРСП — дросселя насыщения, к выходу которого через трехфазное выпрямительное устройство В (на рис. 11-18,6 в однофазном изображении) подключены электродвигатели питателей.
Па одном парогенераторе в зависимости от количества пылепитателей может быть установлено несколько дроссельных преобразователей. При этом от одного ПД осуществляется питание группы электродвигателей пыли и одного питателя сырого угля.
Получение требуемых статических и динамических характеристик системы (изменение частоты вращения пылепитателей в зависимости от входного сигнала регулирующего прибора) и согласование дискретного (прерывистого) управляющего сигнала (от автоматического регулирующего прибора РПИБ или кнопок дистанцион-
кого управления КМ и /(Д) с параметрами электрического сигнала, поступающего ,на обмотку управления дросселя насыщения, достигается применением промежуточных магнитных усилителей ПМУ и электродвигателя Д1, используемого в качестве интегрирующего звена на выходе регулирующего прибора.
Система автоматического бесконтактного и бесступенчатого регулирования числа оборотов пылепитателей (АРПП) и питателей сырого угля (АРСП) действует следующим образом.
Дискретный управляющий сигнал «больше» или «меньше» с выхода регулирующего прибора или непосредственно от ключа дистанционного управления (КБ и КМ) поступает в управляющие обмотки (на рис. 11-18,6 не показаны) магнитных усилителей 1МУ или 2МУ, расположенных в БРИ-24 (блок регулирования интегрирующий). Выходные обмотки 1МУ и 2МУ соединены по мостовой схеме. Переменное питающее напряжение 127 В подводится к одной из диагоналей этого моста, а ко второй диагонали (выход) подключена обмотка управления ОУ электродвигателя Д1, расположенного в блоке БРИ-23. Обмотка возбуждения ОБ двигателя питается через фазосдвигающий конденсатор С от общего с 1МУ и 2МУ источника питания ~127 В.
При подаче в обмотки управления 1МУ и 2МУ управляющих сигналов нарушается равновесие моста, образованного их выходными обмотками, и на ОУ двигателя Д| поступает напряжение, фаза которого, а тем самым направление вращения Д1 зависят от того, в какой из магнитных усилителен, 1МУ или 2МУ, подан управляющий сигнал. Вал двигателя Д1 через редуктор связан с ротором сельсинного датчика ДС, также расположенного в БРИ-23. Сельсии ДС действует в режиме поворотного трансформатора. Угол поворота сельсина ограничен с помощью выключателей величиной 45°. Положению 0° соответствует минимальная частота вращения двигателей питателей топлива (300 об/мин), положению 45° — максимальная (1500 об/мин). В БРИ-23 размещается также индукционный датчик перемещения ДИ, плунжер которого связан с ротором сельсина. Сигнал [/Пых с выхода ДП используется как индикатор положения системы регулирования подачи топлива.
Время полного хода выходного вала сельсина может регулироваться вручную в пределах 15—60 с с помощью переменного сопротивления, расположенного в БРИ-24 (на схеме не показано). К статору сельсина подводится переменное напряжение 110 В, а ра-тор нагружен резисторами Рл и Р.2, выпрямленное напряжение с выхода которых поступает на обмотку управления промежуточного магнитного усилителя ПМУ, ои суммирует и усиливает поступающие в него сигналы и через потенциометр СР дает ток в управляющие обмотки дросселя насыщения ДИ. Дроссель насыщения ДИ является силовым регулирующим элементом. Питание дросселя производится от трехфазной сети через трансформатор Т. Выпрямленное напряжение от выпрямителей В подается на зажимы якорей электродвигателей питателей топлива ЭД, подключенных к преобразователю ПД. Изменение .напряжения на выходе ПД достигается изменением реактивного сопротивления нагрузочных обмоток дросселя ДИ и регулированием тока в его управляющих обмотках. Ручная групповая регулировка числа оборотов двигателей, подсоеди-256
ценных к одному ПД, осуществляется с помощью потенциометра СР, индивидуальная — с помощью шунтовых реостатов ШР.
В заключение следует отметить, что хорошо отлаженные и надежные регулирующие органы со стабильными рабочими характеристиками являются важнейшей предпосылкой падежной и эффективной работы всех автоматических систем управления ТЭС.
КОНТРОЛЬНЫЕ ВОПРОСЫ
I. Назовите регулирующие органы дроссельного типа, применяемые на ТЭС, перечислите типы дроссельных клапанов и заслонок.
2. Что называется рабочей и конструктивной характеристиками дроссельного органа?
3 Как регулируется производительность тягодутьевых машин на 1ЭС?
4. Как регулируется производительность питательных насосов?
5. Как регулируется подача твердого топлива на ТЭС?
6. Какие устройства используются для регулирования подачи пылевидного топлива?
7 Какие сочленения исполнительных механизмов с регулирующими органами используются па ТЭС?
ГЛАВА ДВЕНАДЦАТАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ БАРАБАННЫХ
ПАРОГЕНЕРАТОРОВ
12-1. Участки регулирования барабанного парогенератора
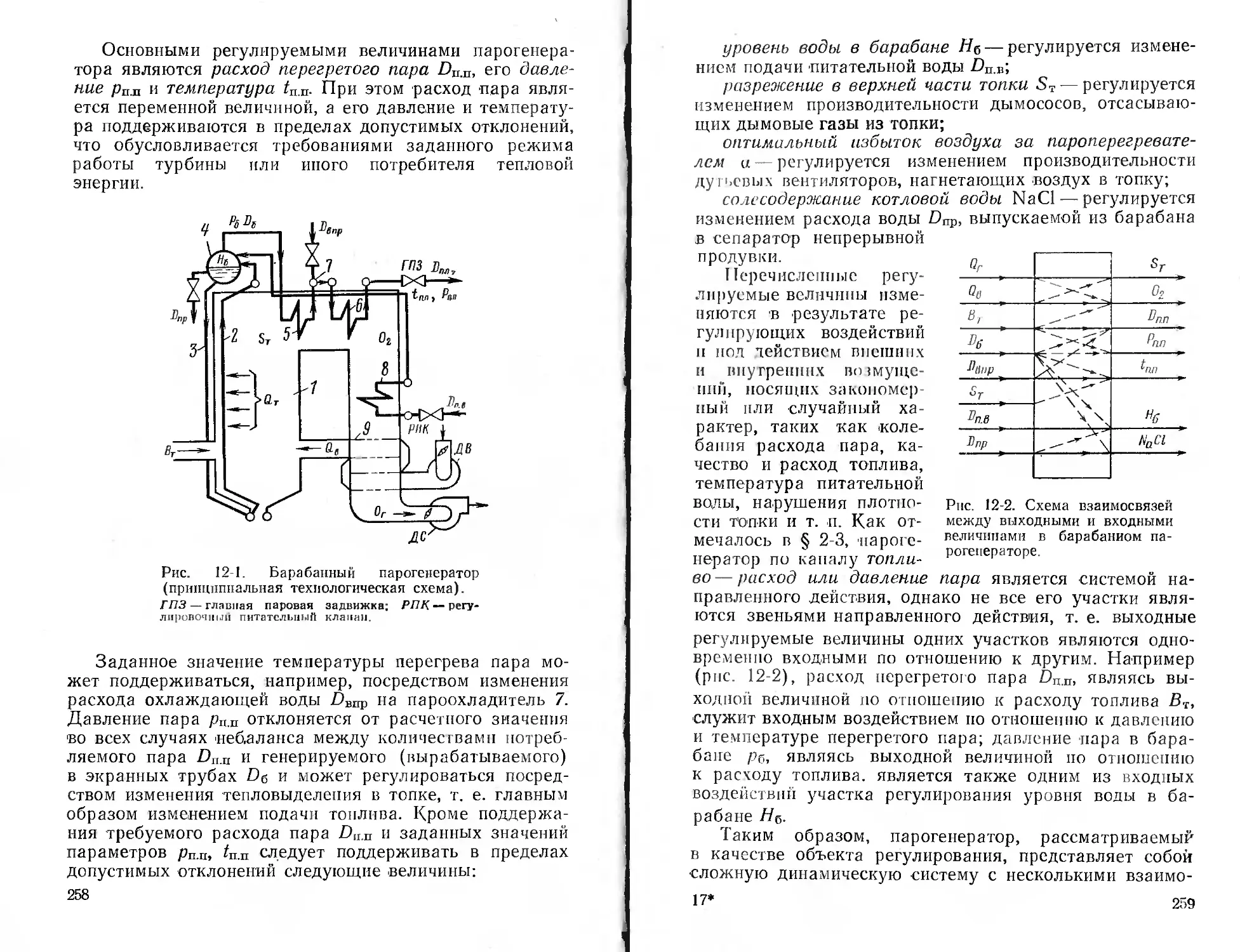
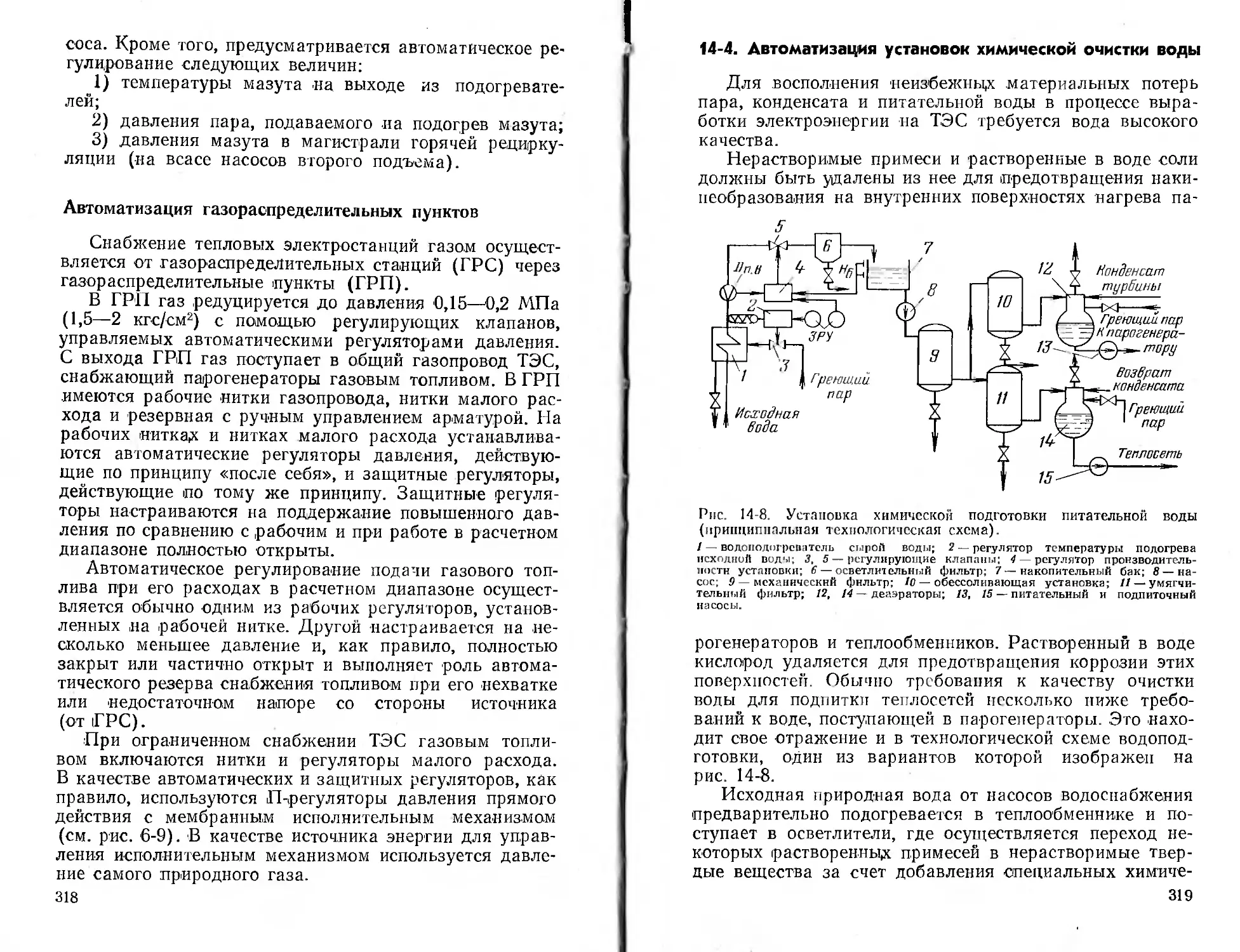
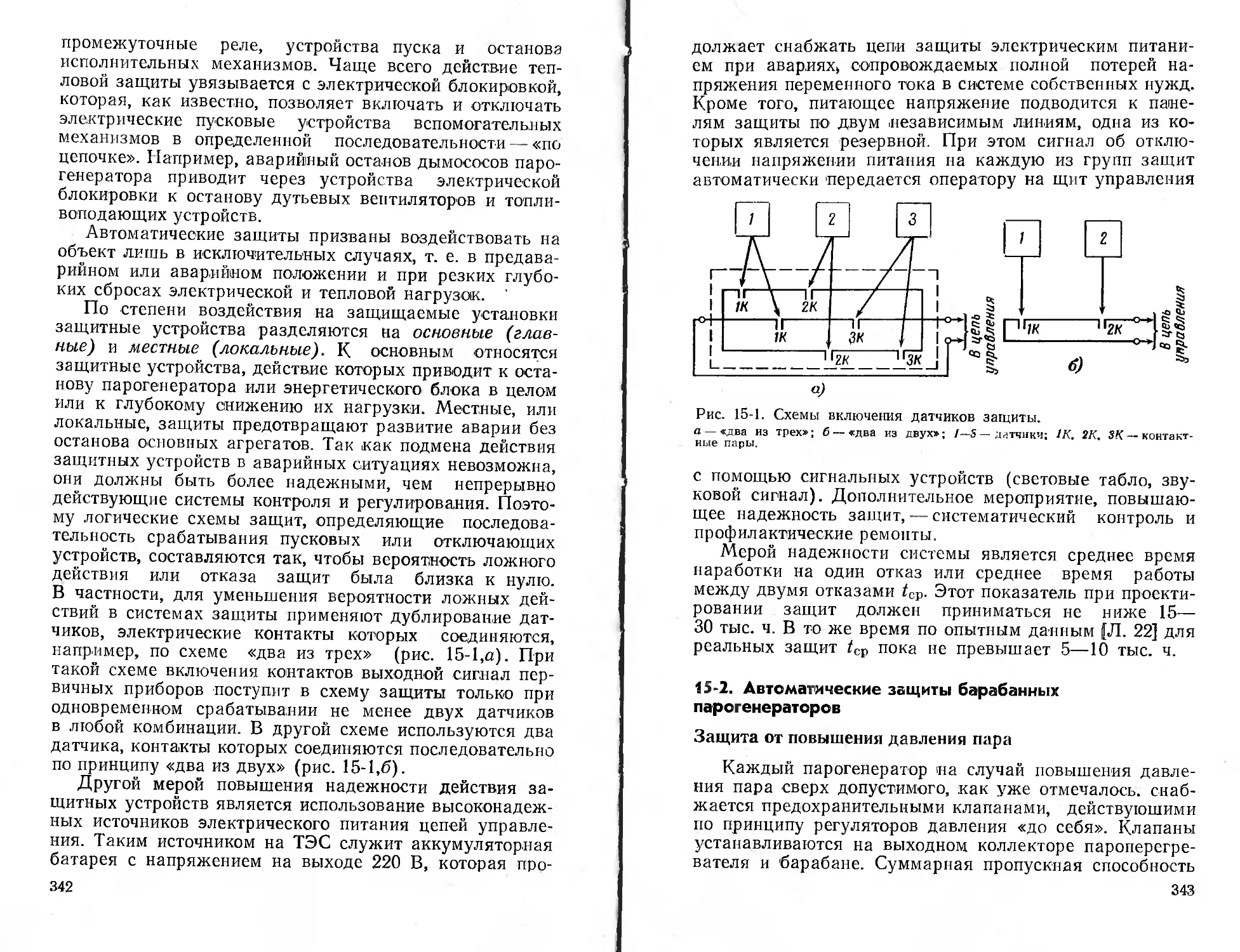
Принципиальная технологическая схема барабанного парогенератора показана на рис. 12-1.
Процесс парообразования происходит в подъемных трубах циркуляционного контура 2, снабжающихся водой из опускных труб 3 и экранирующих камерную топку /, в которой сжигается топливо Вт. Для поддержания процесса горения с определенным коэффициентом избытка а в топку подается с помощью вентилятора ДВ воздух QR, предварительно нагретый в воздухоподогревателе 9.
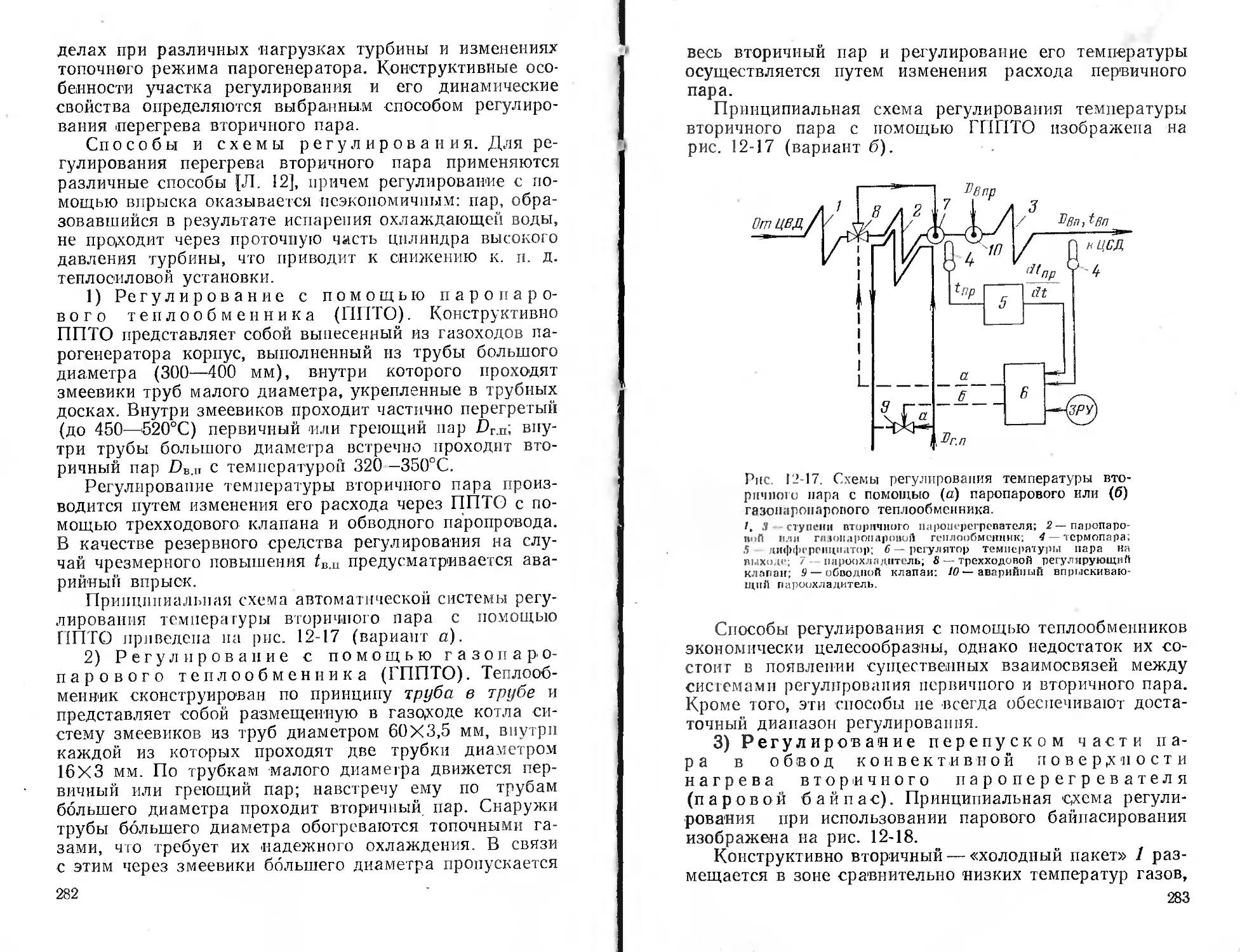
Образовавшиеся в результате процесса горения продукты сгорания (дымовые газы) Qr отсасываются из гонки дымососом ДС, проходят через поверхности нагрева водяного экономайзера 8 и воздухонагревателя 9 и удаляются в атмосферу через дымовую трубу. Насыщенный пар из барабана 4 перегревается до требуемой температуры в пароперегревателе 5, 6 за счет радиации факела и конвективного обогрева топочными газами.
Основными регулируемыми величинами парогенератора являются расход перегретого пара Dn_v, его давление рп.п и температура tn.v. При этом расход пара является переменной величиной, а его давление и температура поддерживаются в пределах допустимых отклонений, что обусловливается требованиями заданного режима работы турбины пли иного потребителя тепловой энергии.
Рис. 12-1. Барабанный парогенератор (принципиальная технологическая схема).
ГПЗ — главная паровая задвижка; РПК — регулировочной питательный клапан.
Заданное значение температуры перегрева пара может поддерживаться, например, посредством изменения расхода охлаждающей воды Овпр на пароохладитель 7. Давление пара рп.п отклоняется от расчетного значения во всех случаях небаланса между количествами потребляемого пара Оп.п и генерируемого (вырабатываемого) в экранных трубах Об и может регулироваться посредством изменения тепловыделения в топке, т. е. главным образом изменением подачи топлива. Кроме поддержания требуемого расхода пара Olt.n и заданных значений параметров рп.п, бт.п следует поддерживать в пределах допустимых отклонений следующие величины: 258
уровень воды в барабане Hq — регулируется изменением подачи 'питательной воды -Оп.в;
разрежение в верхней части топки ST — регулируется изменением производительности дымососов, отсасывающих дымовые газы из топки;
оптимальный избыток воздуха за пароперегревате
лем а — регулируется изменением производительности
дутьевых вентиляторов, нагнетающих воздух в топку;
солесодержание котловой воды NaCl — регулируется изменением расхода воды £)пр, выпускаемой из барабана в сепаратор непрерывной
продувки.
Перечисленные регулируемые величины изменяются 'в результате регулирующих воздействий и пол тействиом внешних и пну грепппх вошуще-iinii, носящих закономерный пли случайный характер, таких как колебания расхода пара, качество и расход топлива, температура питательной
0Г
Оо 0г
0, Впп
tylii? \ / 1 ,\Vt t, xv /'Ы ?пп ^пл
sr \ 7 \ /у х\ \ "б
Пп.В
Впр NaCl
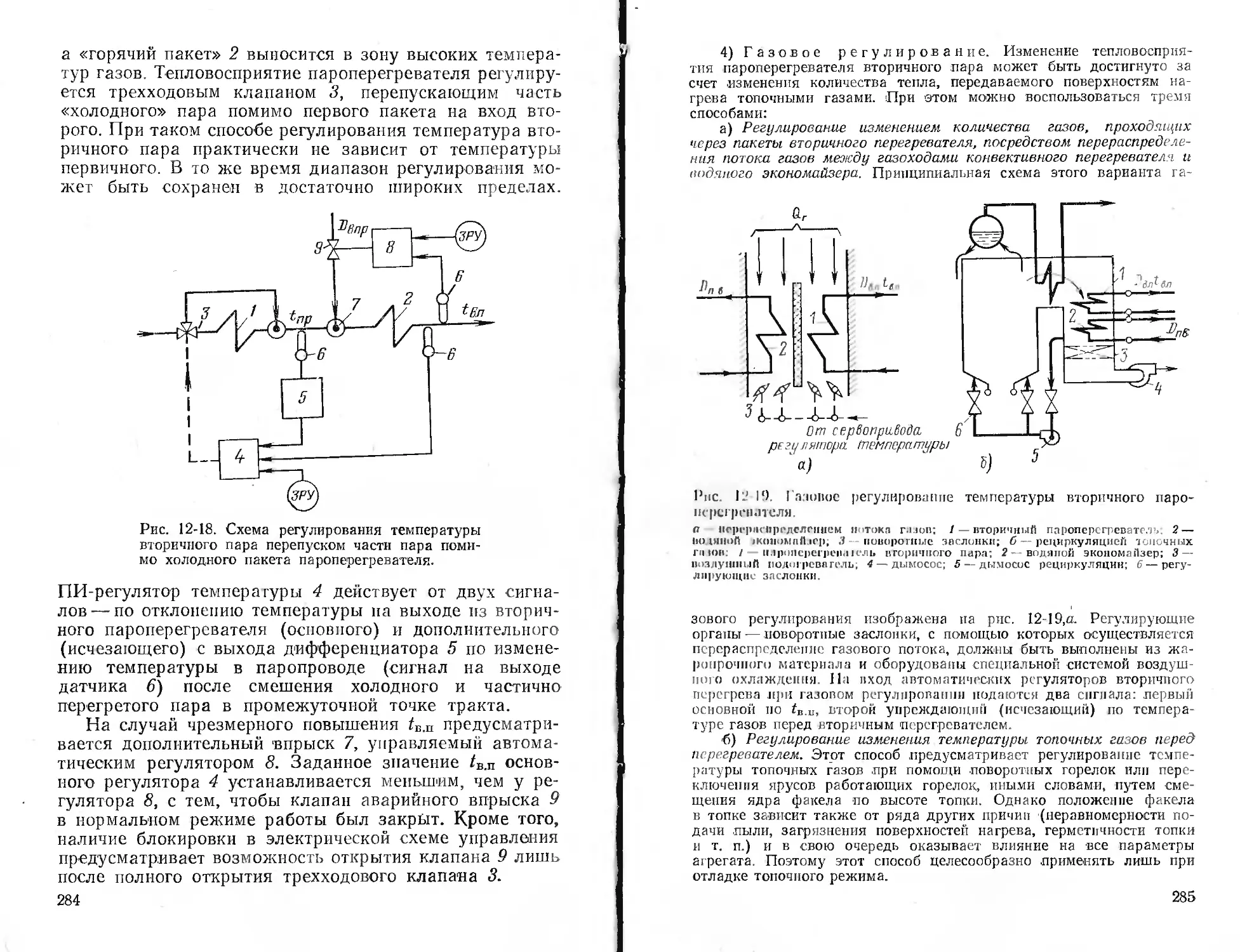
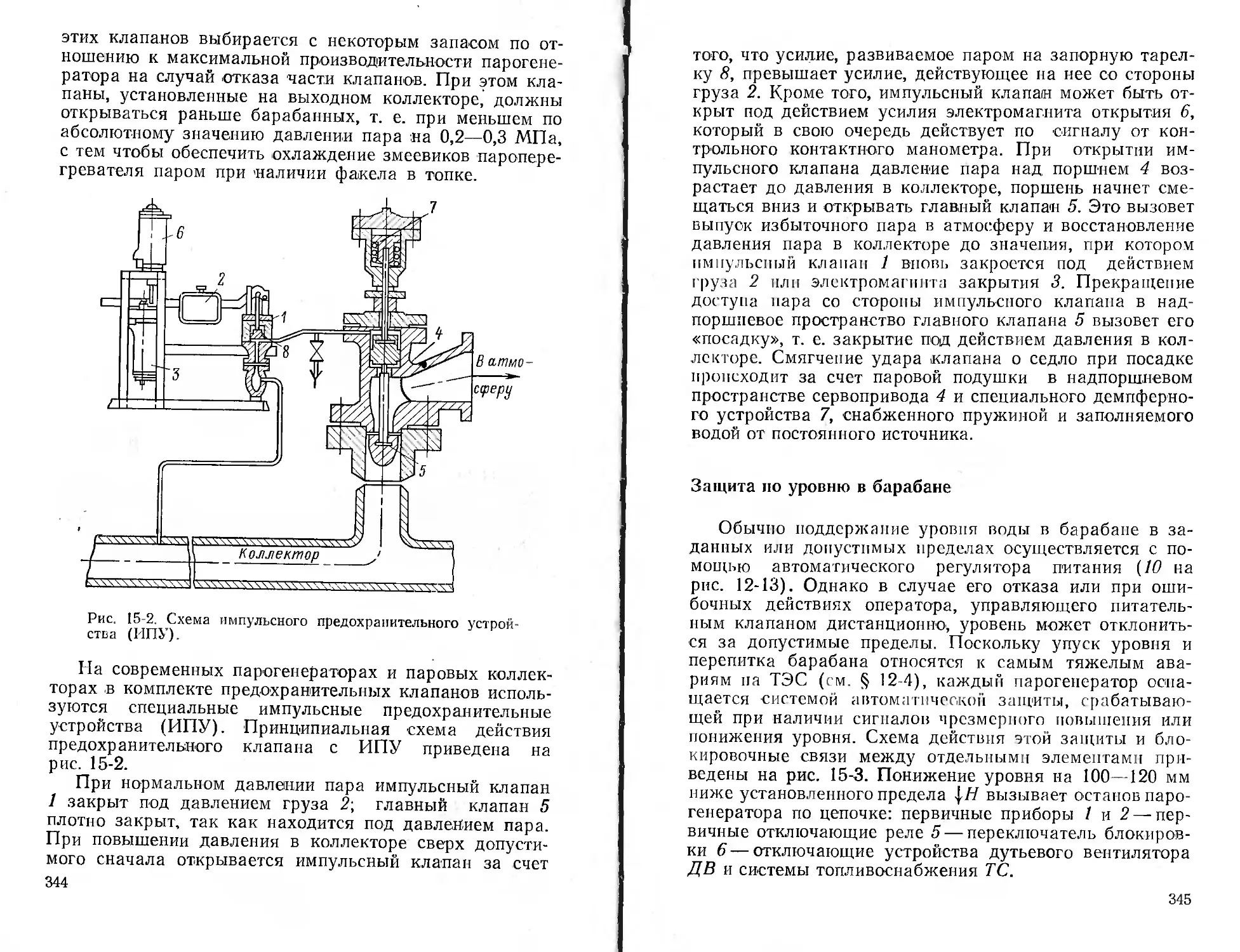
Рис. 12-2. Схема взаимосвязей между выходными и входными величинами в барабанном парогенераторе.
пара является системой на
воды, нарушения плотности топки и т. п. Как отмечалось в § 2-3, парогенератор по каналу топливо — расход или давление
правленного действия, однако не все его участки являются звеньями направленного действия, т. е. выходные
регулируемые величины одних участков являются одновременно входными по отношению к другим. Например (рис. 12-2), расход перегретого пара Ьп.п, являясь выходной величиной по отношению к расходу топлива Вт, служит входным воздействием по отношению к давлению и температуре перегретого пара; давление пара в барабане /?б, являясь выходной величиной по отношению к расходу топлива, является также одним из входных воздействий участка регулирования уровня воды в барабане /7б-
Таким образом, парогенератор, рассматриваемый в качестве объекта регулирования, представляет собой сложную динамическую систему с несколькими взаимо-17* 259
связанными входными и выходными величинами. Однако явно выраженная направленность участков регулирования парогенератора по основным каналам регулирующих воздействий, таким как расход питательной воды Dn.B — уровень Нб, расход воды на впрыск DBirp — перегрев /пп, расход топлива Вт — давление рп.п и другим, позволяет осуществлять стабилизацию регулируемых величин с помощью независимых одноконтурных систем, связанных лишь через объект регулирования. При этом регулирующее воздействие того или иного участка (сплошные линии на рис. 12-2) служит основным способом стабилизации его регулируемой величины, а другие воздействия (пунктирные линии) являются по отношению к этому участку внутренними или внешними возмущениями.
Система автоматического регулирования барабанного парогенератора включает следующие самостоятельные системы регулирования: процесса горения и парообразования, температуры перегрева пара, питания, водного режима.
12-2. Регулирование процесса горения и парообразования
Процессы горения и парообразования тесно связаны. Количество сжигаемого топлива, а точнее, тепловыделение в топке в установившемся режиме должно соответствовать количеству вырабатываемого пара.
Показателем тепловыделения QT является тепловая нагрузка Dq, которая характеризует количество тепла, воспринятого поверхностями нагрева в единицу времени. С другой стороны, количество вырабатываемого пара должно соответствовать количеству пара, потребляемому турбиной. Косвенным показателем этого соответствия является давление пара перед турбиной, которое по условиям экономичности и безопасности должно поддерживаться с высокой точностью.
Процесс сжигания топлива должен осуществляться с максимальной экономичностью. Топливо, поступающее в топку, должно сгорать по возможности полностью, а потери выделившегося тепла при его передаче поверхностям нагрева должны быть минимальными.
В современных энергетических парогенераторах осуществляется факельный способ сжигания топлива. Косвенным показателем устойчивости факела в топочной 260
камере является постоянство разрежения в ее верхней части. В целом регулирование процессов горения и парообразования сводится к поддержанию близ заданных значений следующих величин:
1) давления перегретого пара рп.п и тепловой нагрузки Dq;
2) экономичности процесса горения, т. е. избытка воздуха в топке, определяемого содержанием О2 за пароперегревателем;
3) разрежения в верхней части топки ST.
Регулирование давления перегретого пара и
I силовой нагрузки
Характеристика участка регулирования. Парогенератор как объект регулирования давления н тепловой нагрузки может быть представлен в виде последовательного соединения более простых участков, разграниченных конструктивно (см. рис. 12-1): топочной камеры; испарительной или парообразующей части, состоящей из поверхностей нагрева, расположенных в топочной камере; барабана и пароперегревателя. Динамические свойства каждого из этих участков и парогенератора в целом по каналу расход топлива В? — давление перегретого пара приводятся в § 2-3.
Рассмотрим динамику испарительного участка, в котором вода нагревается до температуры кипения и происходит процесс парообразования. Изменение тепловыделения QT приводит к изменению паропроизводитель-пости До и давления пара в барабане р§ (см. рис. 2-4). Если прирост расхода топлива и тепловыделения идет целиком на нагрев пароводяной смеси и металла парообразующей части, то скорость изменения давления р& будет прямо пропорциональна теплу, затраченному'на нагрев пароводяной смеси, или разности между воспринятым и ушедшим с паром количествами тепла:
—^ = (2' — DJi - i ), (12-1)
где A — размерный коэффициент, характеризующий тепловую аккумулирующую способность пароводяной смеси и металла испарительной части; iH — энтальпия насыщенного пара на выходе из барабана; 1п.в — энтальпия питательной воды.
Разделив правую и левую части уравнения (12-1) на (i"h—1’п.в), получим его вторую форму записи, более удобную для сопоставления экспериментальных и расчетных данных:
A dp6 Q'T
('н-'п.в) dt J
r dP6
Gn dt
Dq~D6,
(12-2)
(12-3)
где Cn — постоянная, характеризующая массовую аккумулирующую способность пароводяной смеси и металла испарительной части парогенератора, кг/(кгс/см2); Dq—Q't/Ih—in.B, кг/с — его тепловая нагрузка, характеризующая тепловосприятне испарительных поверхностей в единицу времени, выраженная в единицах расхода пара.
Величины Сп и Dq могут быть определены экспериментально. Численное значение Сп может определяться, например, по экспериментальной кривой переходного процесса по давлению рс при напесснии возмущения расходом пара Д£>б (перемещением регулирующих клапанов турбины):
С — 6
“ dp6/dt
(12-4)
Значение АОб определяется как разность паровых нагрузок парогенератора до и после нанесения возмущения по показаниям прибора, измеряющего расход перегретого пара (/)п,п~6б). Значение dpddl— по тангенсу угла наклона касательной к кривой переходного процесса Рб(0 в точке перегиба.
Что касается тепловой нагрузки Dq, то в динамическом отношении представляет интерес не ее численное значение в определенный момент времени, а ее изменение или приращение ADq после нанесения внутреннего или внешнего возмущающего воздействия. Непрерывный способ косвенного измерения прироста Dq или его отклонения от заданного значения A£>q основан на использовании зависимости (12-3), из которой следует, что
(12-5)
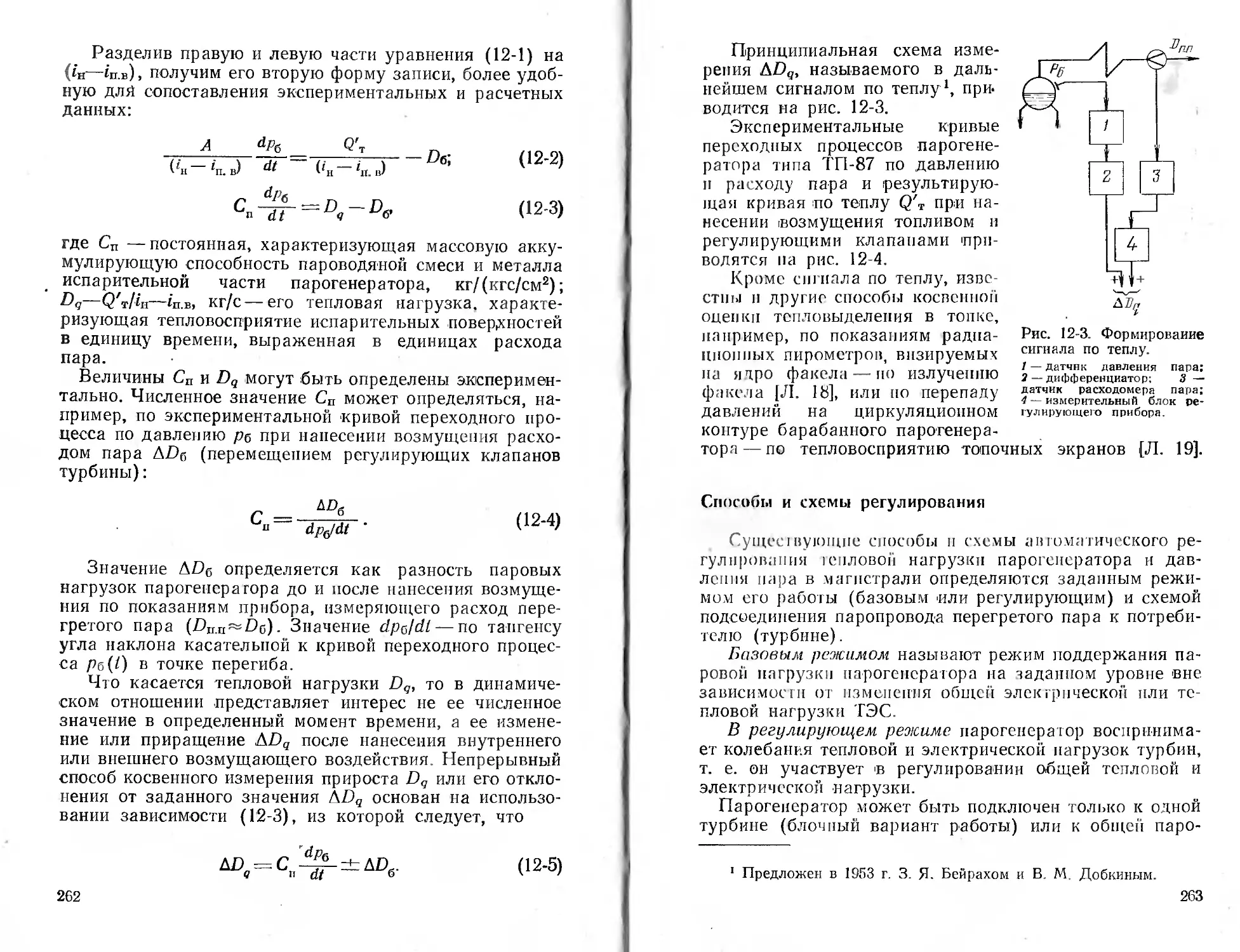
Принципиальная схема измерения А£>д, называемого в дальнейшем сигналом по теплу1, приводится на рис. 12-3.
Экспериментальные кривые переходных процессов парогенератора типа ТП-87 по давлению н расходу пара и результирующая кривая по теплу Q'T при нанесении возмущения топливом и регулирующими клапанами при водятся па рис. 12-4.
Кроме сигнала по теплу, извс стпы п другие способы косвенной оценки тепловыделения в топке,
Рис. 12-3. Формирование сигнала по теплу.
/ — датчик давления пара;
2 — дифференциатор; 3 — датчик расходомера пара;
4 — измерительный блок регулирующего прибора.
например, по показаниям радиационных пирометров, визируемых па ядро факела — по излучению факела [Л. 18], или по перепаду давлений на циркуляционном
контуре барабанного парогенера-
тора— по тепловосприятию топочных экранов [Л. 19].
Способы и схемы регулирования
Сущее тующпе способы п схемы ап соматического регулирования ।силовой нагрузки парогенератора и давления пара в магистрали определяются заданным режимом его работы (базовым или регулирующим) и схемой подсоединения паропровода перегретого пара к потребителю (турбине).
Базовым режимом называют режим поддержания паровой нагрузки парогенератора па заданном уровне вне зависимости от изменения общей электрической пли тепловой нагрузки ТЭС.
В регулирующем режиме парогенератор воспринимает колебания тепловой и электрической нагрузок турбин, т. е. он участвует в регулировании общей тепловой и электрической нагрузки.
Парогенератор может быть подключен только к одной турбине (блочный вариант работы) или к общей паро-
1 Предложен в 1953 г. 3. Я. Бейрахом и В. М. Добкиным.
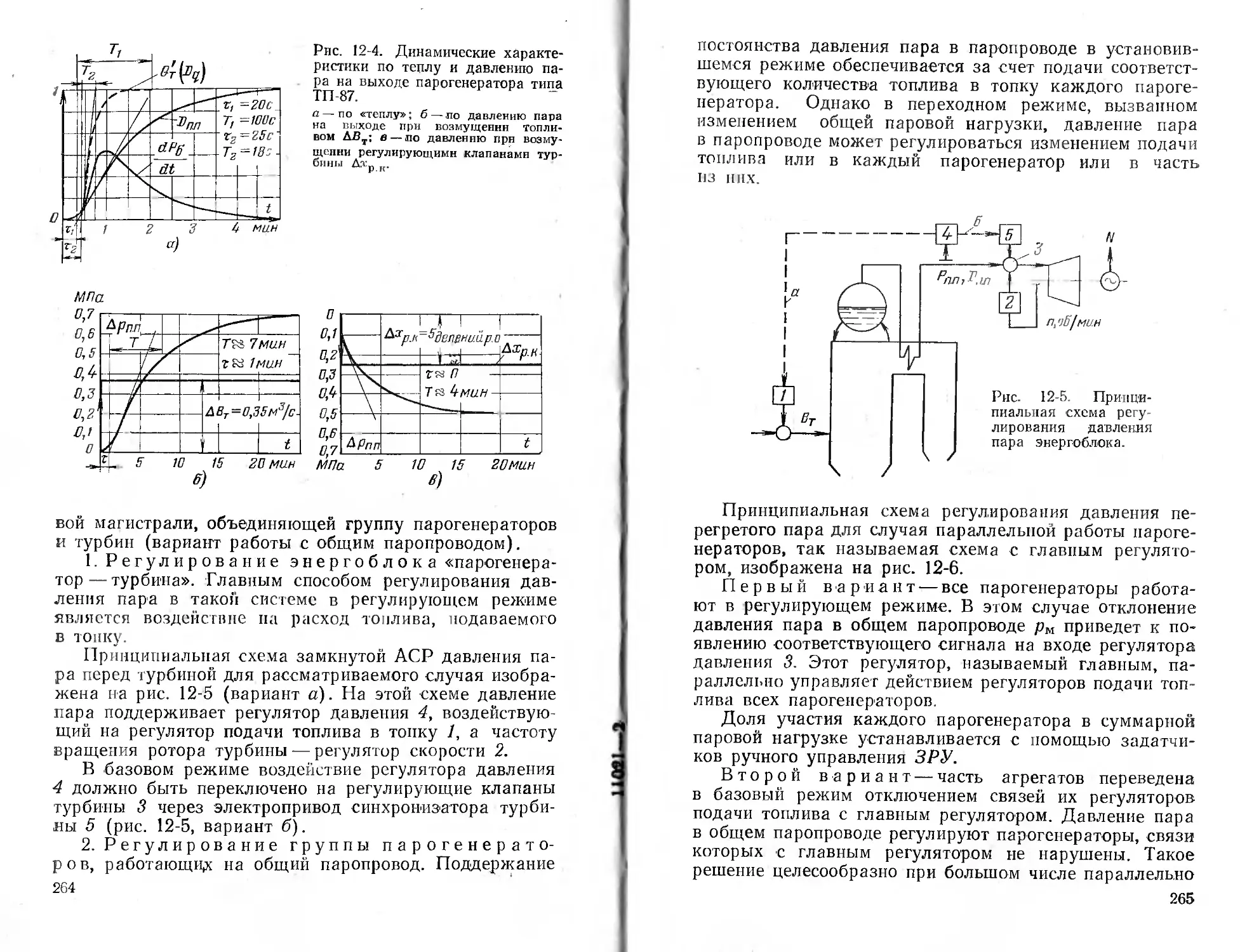
Рис. 12-4. Динамические характеристики по теплу и давлению пара на выходе парогенератора типа ТП-87.
а — по «теплу»; б — по давлению пара на выходе при возмущении топливом АВТ; в — по давлению при возмущении регулирующими клапанами тур-бины top K.
вой магистрали, объединяющей группу парогенераторов и турбин (вариант работы с общим паропроводом).
1. Регулирование энергоблока «парогенератор— турбина». Главным способом регулирования давления пара в такой системе в регулирующем режиме является воздействие па расход топлива, подаваемого в топку.
Принципиальная схема замкнутой АСР давления пара перед турбиной для рассматриваемого случая изображена на рис. 12-5 (вариант а). На этой схеме давление пара поддерживает регулятор давления 4, воздействующий на регулятор подачи топлива в топку 1, а частоту вращения ротора турбины — регулятор скорости 2.
В базовом режиме воздействие регулятора давления 4 должно быть переключено на регулирующие клапаны турбины 3 через электропривод синхронизатора турбины 5 (рис. 12-5, вариант б).
2. Регулирование группы парогенераторов, работающих на общий паропровод. Поддержание 264
постоянства давления пара в паропроводе в установившемся режиме обеспечивается за счет подачи соответствующего количества топлива в топку каждого парогенератора. Однако в переходном режиме, вызванном изменением общей паровой нагрузки, давление пара в паропроводе может регулироваться изменением подачи топлива или в каждый парогенератор или в часть из них.
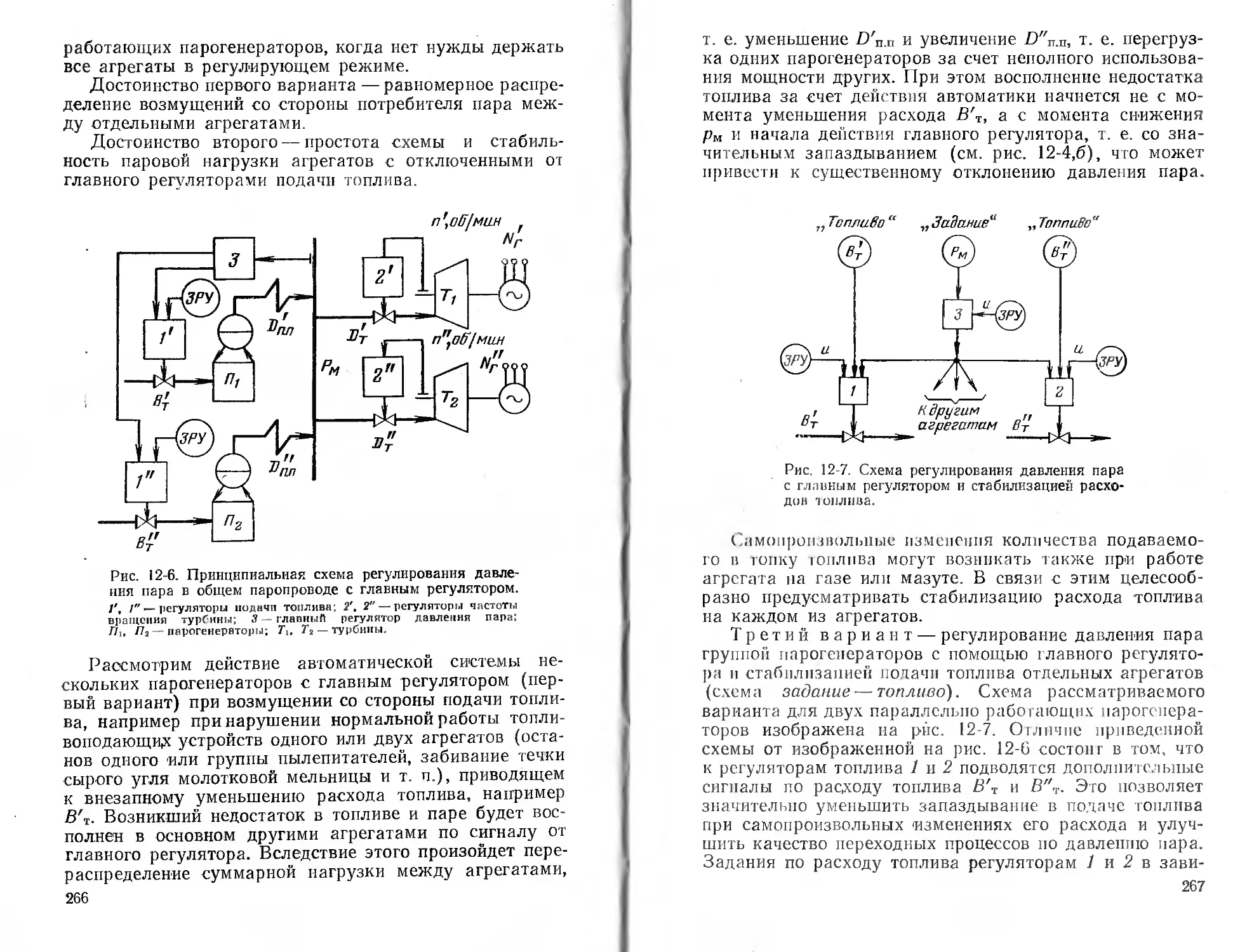
Принципиальная схема регулирования давления перегретого пара для случая параллельной работы парогенераторов, так называемая схема с главным регулятором, изображена на рис. 12-6.
П е р в ы й вар и ант — все парогенераторы работают в регулирующем режиме. В этом случае отклонение давления пара в общем паропроводе рм приведет к появлению соответствующего сигнала на входе регулятора давления 3. Этот регулятор, называемый главным, параллельно управляет действием регуляторов подачи топлива всех парогенераторов.
Доля участия каждого парогенератора в суммарной паровой нагрузке устанавливается с помощью задатчиков ручного управления ЗРУ.
Второй вариант — часть агрегатов переведена в базовый режим отключением связей их регуляторов подачи топлива с главным регулятором. Давление пара в общем паропроводе регулируют парогенераторы, связи которых с главным регулятором не нарушены. Такое решение целесообразно при большом числе параллельно
работающих парогенераторов, когда нет нужды держать все агрегаты в регулирующем режиме.
Достоинство первого варианта — равномерное распределение возмущений со стороны потребителя пара между отдельными агрегатами.
Достоинство второго—простота схемы и стабильность паровой нагрузки агрегатов с отключенными от главного регуляторами подачи топлива.
Рис. 12-6. Принципиальная схема регулирования давления пара в общем паропроводе с главным регулятором.
/" — регуляторы подачи топлива; 2', 2"— регуляторы частоты вращения турбины; 3 — главный регулятор давления пара; /7], — парогенераторы; Л, Гг — турбины.
Рассмотрим действие автоматической системы нескольких парогенераторов с главным регулятором (первый вариант) при возмущении со стороны подачи топлива, например при нарушении нормальной работы топли-воподающи,х устройств одного или двух агрегатов (останов одного или группы пылепитателей, забивание течки сырого угля молотковой мельницы и т. п.), приводящем к внезапному уменьшению расхода топлива, например В'т. Возникший недостаток в топливе и паре будет восполнен в основном другими агрегатами по сигналу от главного регулятора. Вследствие этого произойдет перераспределение суммарной нагрузки между агрегатами, 266
т. е. уменьшение £>'п.п и увеличение £>"п.п, т. е. перегрузка одних парогенераторов за счет неполного использования мощности других. При этом восполнение недостатка топлива за счет действия автоматики начнется не с момента уменьшения расхода В'т, а с момента снижения рм и начала действия главного регулятора, т. е. со значительны VI запаздыванием (см. рис. 12-4,6), что может привести к существенному отклонению давления пара.
Рис. 12 7. Схема регулирования давления пара с главным регулятором и стабилизацией расходов топлива.
Самопроизвольные изменения количества подаваемого в топку юплпва могут возникать также при работе агрегата па газе или мазуте. В связи с этим целесообразно предусматривать стабилизацию расхода топлива на каждом из агрегатов.
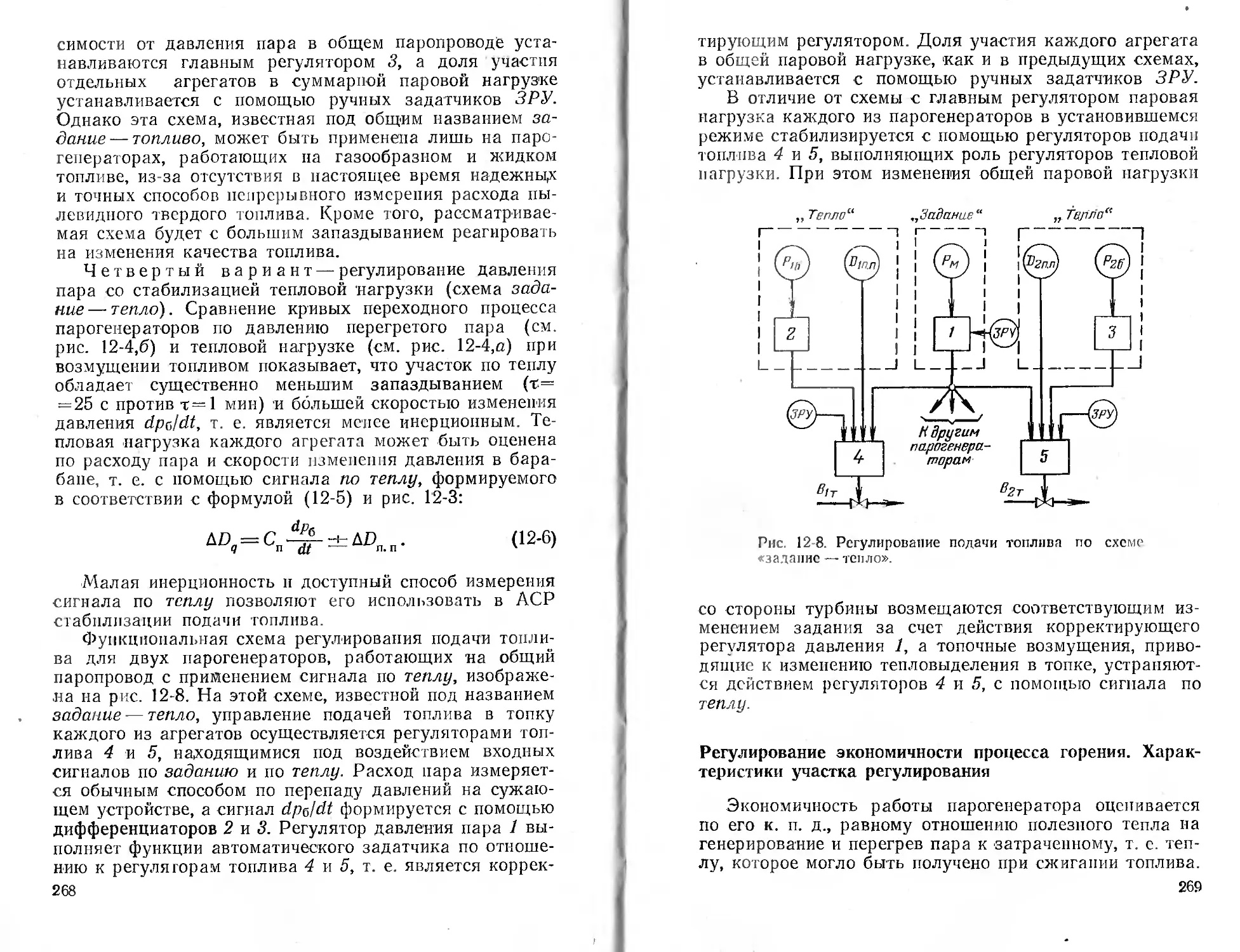
Третий вариант — регулирование давления пара группой парогенераторов с помощью главного регулятора и стабилизацией подачи топлива отдельных агрегатов (схема задание — топливо). Схема рассматриваемого варианта для двух параллельно работающих парогенераторов изображена на рис. 12-7. Отличие приведенной схемы от изображенной на рис. 12-6 состоит в том, что к регуляторам топлива 1 и 2 подводятся дополнительные сигналы по расходу топлива В'т и B".t. Это позволяет значительно уменьшить запаздывание в подаче топлива при самопроизвольных изменениях его расхода и улучшить качество переходных процессов но давлению пара. Задания по расходу топлива регуляторам 1 и 2 в зави
симости от давления пара в общем паропроводе устанавливаются главным регулятором 3, а доля участия отдельных агрегатов в суммарной паровой нагрузке устанавливается с помощью ручных задатчиков ЗРУ. Однако эта схема, известная под общим названием задание— топливо, может быть применена лишь на парогенераторах, работающих на газообразном и жидком топливе, из-за отсутствия в настоящее время надежных и точных способов непрерывного измерения расхода пылевидного твердого топлива. Кроме того, рассматриваемая схема будет с большим запаздыванием реагировать на изменения качества топлива.
Четвертый в а р и а н т — регулирование давления пара со стабилизацией тепловой нагрузки (схема задание—тепло). Сравнение кривых переходного процесса парогенераторов по давлению перегретого пара (см. рис. 12-4,6) и тепловой нагрузке (см. рис. 12-4,а) при возмущении топливом показывает, что участок по теплу обладает существенно меньшим запаздыванием (т= — 25 с против т=1 мин) и большей скоростью изменения давления dpddt, т. е. является менее инерционным. Тепловая нагрузка каждого агрегата может быть оценена по расходу пара и скорости изменения давления в барабане, т. е. с помощью сигнала по теплу, формируемого в соответствии с формулой (12-5) и рис. 12-3:
Малая инерционность и доступный способ измерения сигнала по теплу позволяют его использовать в АСР стабилизации подачи топлива.
Функциональная схема регулирования подачи топлива для двух парогенераторов, работающих на общий паропровод с применением сигнала по теплу, изображена на рис. 12-8. На этой схеме, известной под названием задание — тепло, управление подачей топлива в топку каждого из агрегатов осуществляется регуляторами топлива 4 и 5, находящимися под воздействием входных сигналов по заданию и по теплу. Расход пара измеряется обычным способом по перепаду давлений на сужающем устройстве, а сигнал dp^dt формируется с помощью дифференциаторов 2 и 3. Регулятор давления пара 1 выполняет функции автоматического задатчика по отношению к регуляторам топлива 4 и 5, т. е. является коррек-268
тирующим регулятором. Доля участия каждого агрегата в общей паровой нагрузке, как и в предыдущих схемах, устанавливается с помощью ручных задатчиков ЗРУ.
В отличие от схемы с главным регулятором паровая нагрузка каждого из парогенераторов в установившемся режиме стабилизируется с помощью регуляторов подачи топлива 4 и 5, выполняющих роль регуляторов тепловой нагрузки. При этом изменения общей паровой нагрузки
Рис. 12 8 Регулирование подачи топлива по схеме «задание — тепло».
со стороны турбины возмещаются соответствующим изменением задания за счет действия корректирующего регулятора давления 1, а топочные возмущения, приводящие к изменению тепловыделения в топке, устраняются действием регуляторов 4 и 5, с помощью сигнала по теплу.
Регулирование экономичности процесса горения. Характеристики участка регулирования
Экономичность работы парогенератора оценивается по его к. п. д., равному отношению полезного тепла на генерирование и перегрев пара к затраченному, т. с. теплу, которое могло быть получено при сжигании топлива.
269
Без учета тепла, вносимого в топку воздухом, и потерь на продувку
О» — гп. в)
______________ ^пг BTQap
где ip, in.B — соответственно энтальпии перегретого пара и питательной воды; Q"p— низшая рабочая теплотворная способность топлива.
Задача регулирования экономичности состоит в поддержании максимального значения к. и. д. парогенератора или сведении к минимуму тепловых потерь, сопровождающих процесс сжигания топлива и передачи выделившегося тепла воде и пару.
Регулирование экономичности работы парогенератора непосредственно по к. п. д. или суммарной оценке потерь не получило пока широкого распространения из-за отсутствия надежных и точные способов и средств их непрерывного измерения.
Одним из наиболее представительных косвенных способов оценки экономичности процесса горения является анализ состава топочных газов, покидающих топку. На основе зависимости к. п. д. и суммарных потерь от избытка воздуха, определяемой индивидуально для каждого агрегата, стремятся поддерживать коэффициент избытка воздуха а, при котором к. п. д. парогенератора Ппг-*-т]макспг и суммарные потери >2“ин [Л. 12].
Значение избытка воздуха можно оценить по содержанию свободного кислорода в газах, покидающих топочную камеру, по формуле:
(12-7)
(12-8)
“ 21 — 0-% ‘
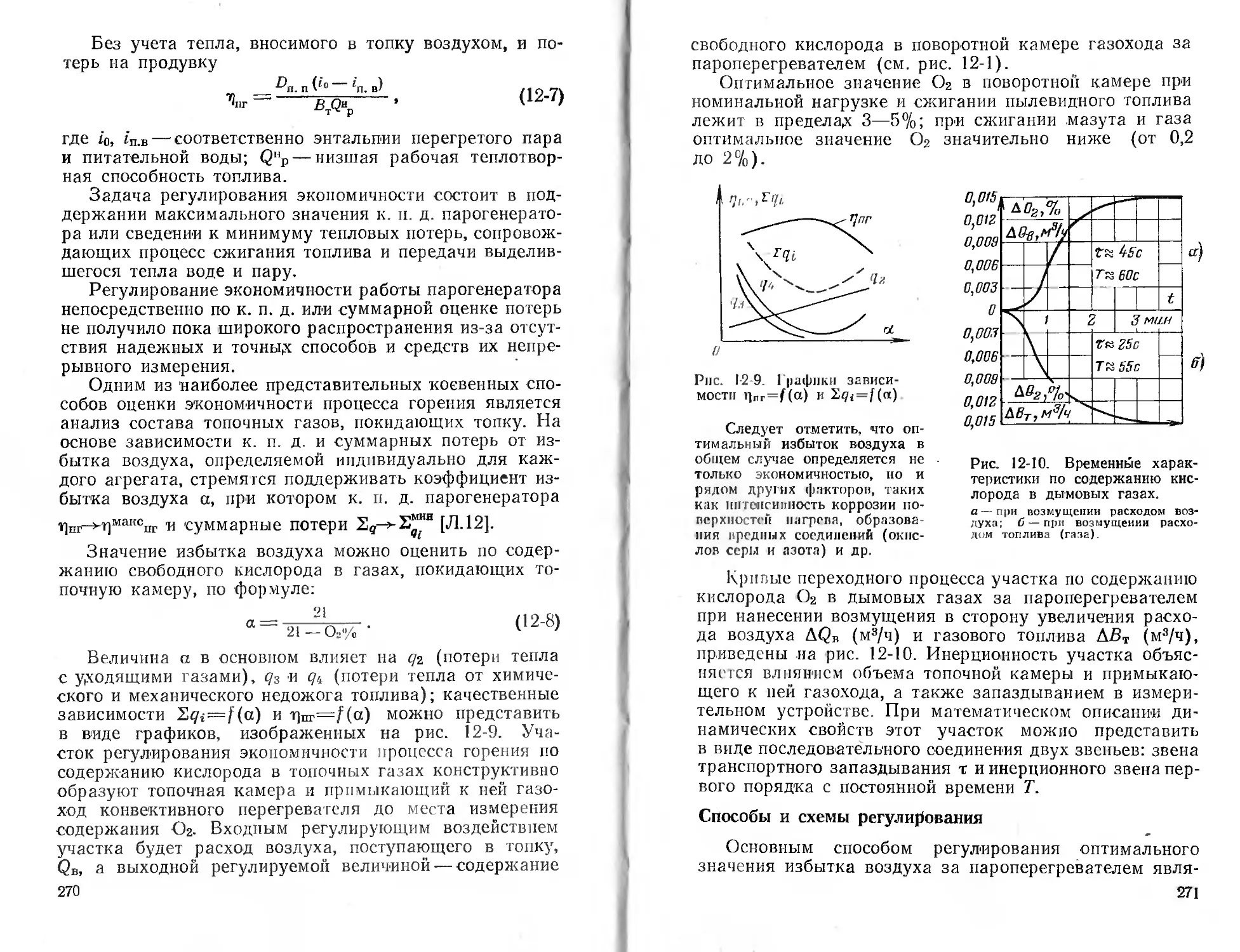
Величина а в основном влияет на <72 (потери тепла с уходящими газами), <73 и <74 (потери тепла от химического и механического недожога топлива); качественные зависимости и можно представить
в виде графиков, изображенных на рис. 12-9. Участок регулирования экономичности процесса горения по содержанию кислорода в топочных газах конструктивно образуют топочная камера и примыкающий к ней газоход конвективного перегревателя до места измерения содержания Ог. Входным регулирующим воздействием участка будет расход воздуха, поступающего в топку, QB, а выходной регулируемой величиной — содержание 270
свободного кислорода в поворотной камере газохода за пароперегревателем (см. рис. 12-1).
Оптимальное значение О2 в поворотной камере при номинальной нагрузке и сжигании пылевидного топлива лежит в пределах 3—5%; при сжигании мазута и газа оптимальное значение О2 значительно ниже (от 0,2 до 2%).
Рис. 1-2-9. Графики зависимости т]пг=((а) и
Следует отметить, что оптимальный избыток воздуха в общем случае определяется не только экономичностью, но и рядом других факторов, таких как пптопсиппость коррозии поверхностей нагрева, образования вредных соединений (окис-лов серы и азота) и др.
Рис. 12-10. Временные характеристики по содержанию кислорода в дымовых газах. а — при возмущении расходом воздуха; 6 — при возмущении расходом топлива (газа).
Кривые переходного процесса участка по содержанию кислорода О2 в дымовых газах за пароперегревателем при нанесении возмущения в сторону увеличения расхода воздуха Дфв (м3/ч) и газового топлива АВТ (м3/ч), приведены на рис. 12-10. Инерционность участка объясняется влиянием объема топочной камеры и примыкающего к пей газохода, а также запаздыванием в измерительном устройстве. При математическом описании динамических свойств этот участок можно представить в виде последовательного соединения двух звеньев: звена транспортного запаздывания т и инерционного звена первого порядка с постоянной времени Т.
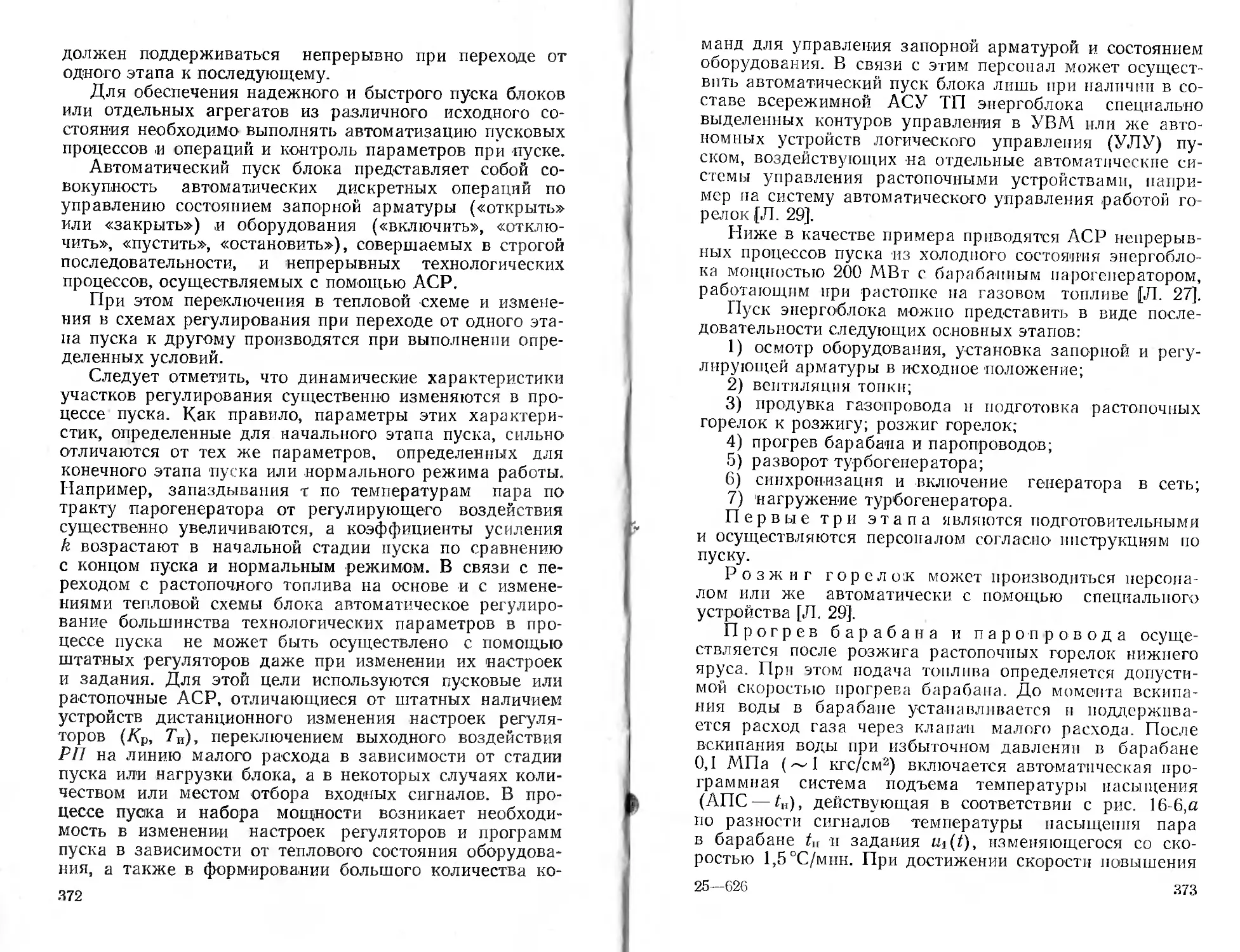
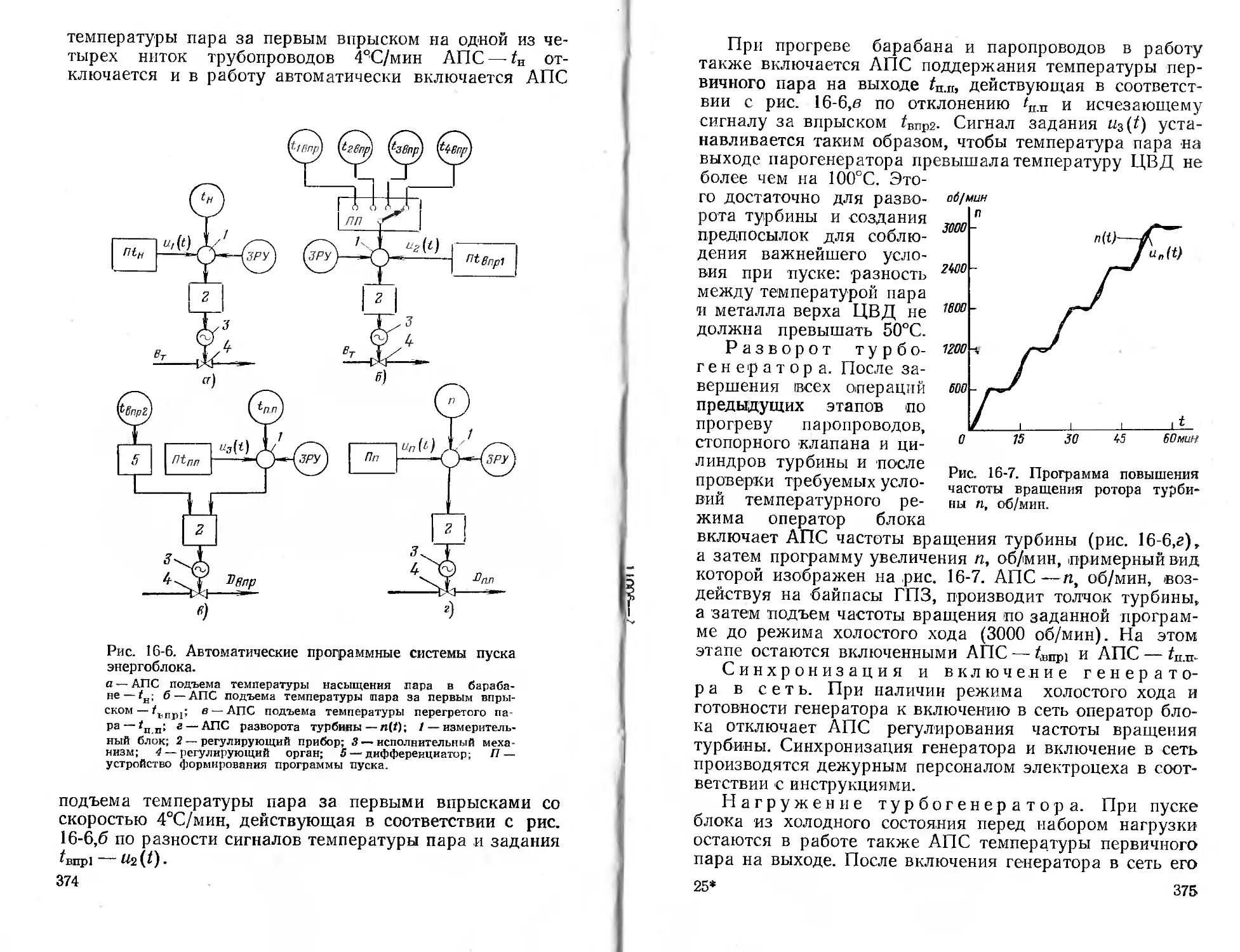
Способы и схемы регулирования
Основным способом регулирования оптимального значения избытка воздуха за пароперегревателем явля-
ется способ изменения количества воздуха, подаваемого в топку с помощью дутьевые вентиляторов. Существует несколько вариантов схем автоматического управления подачей воздуха в зависимости от способов косвенной оценки экономичности процесса горения по соотношению различных сигналов.
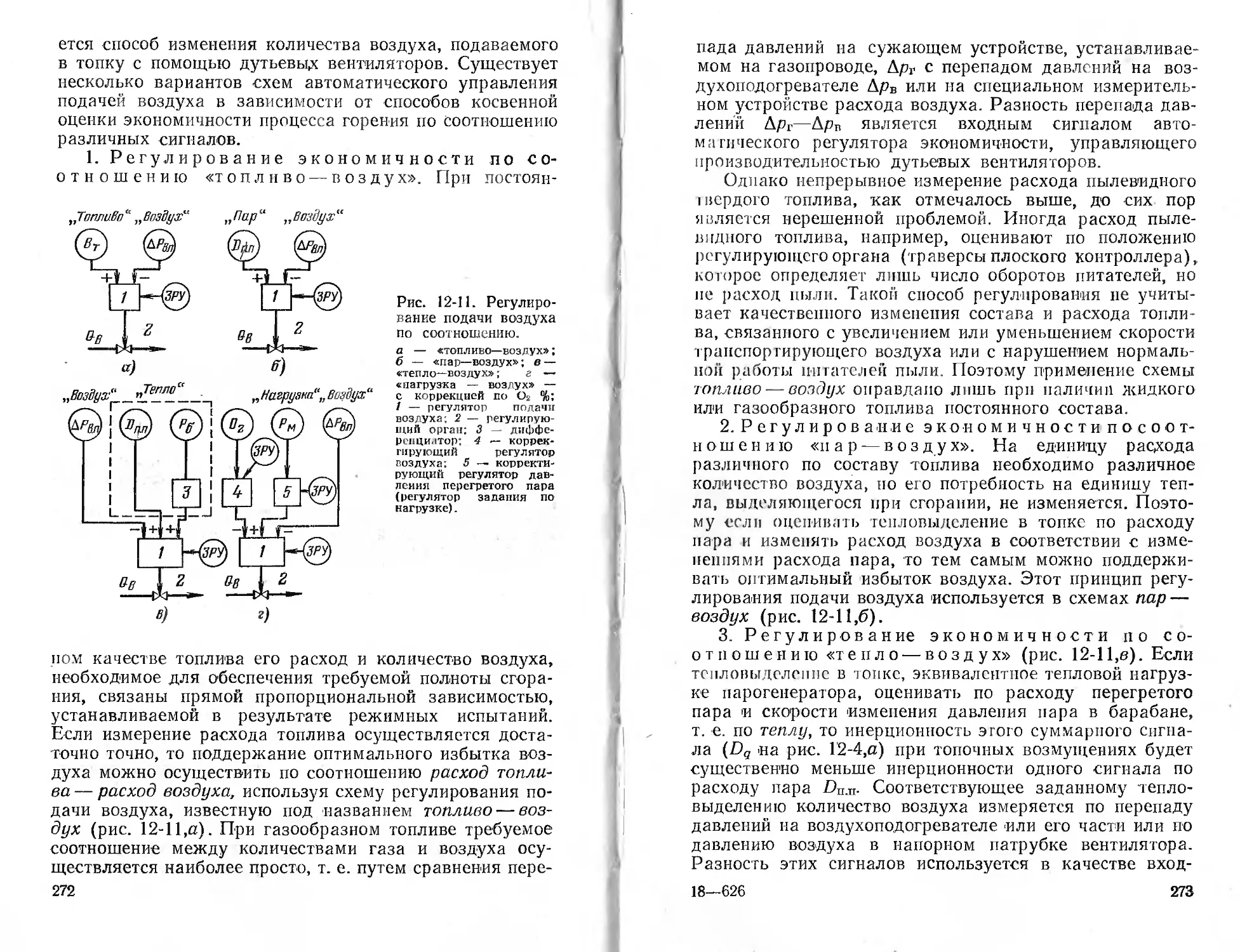
1. Регулирование экономичности по соотношению «топливо — воздух». При постоян-
Рис. 12-11. Регулирование подачи воздуха по соотношению.
а — «топливо—воздух»; б — «пар—воздух»; в — «тепло—воздух»; г — «нагрузка — воздух» — с коррекцией по О2 %: / — регулятор подачи воздуха; 2 — регулирующий орган; 3 — дифференциатор; 4 — корректирующий регулятор воздуха; 5 — корректирующий регулятор давления перегретого пара (регулятор задания по нагрузке).
пом качестве топлива его расход и количество воздуха, необходимое для обеспечения требуемой полноты сгорания, связаны прямой пропорциональной зависимостью, устанавливаемой в результате режимных испытаний. Если измерение расхода топлива осуществляется достаточно точно, то поддержание оптимального избытка воздуха можно осуществить по соотношению расход топлива — расход воздуха, используя схему регулирования подачи воздуха, известную под названием топливо — воздух (рис. 12-11,а). При газообразном топливе требуемое соотношение между количествами газа и воздуха осуществляется наиболее просто, т. е. путем сравнения пере-272
пада давлений на сужающем устройстве, устанавливаемом на газопроводе, Дрг с перепадом давлений на воздухоподогревателе Д/?в или на специальном измерительном устройстве расхода воздуха. Разность перепада давлений Дрг—Дрв является входным сигналом автоматического регулятора экономичности, управляющего производительностью дутьевых вентиляторов.
Однако непрерывное измерение расхода пылевидного вердого топлива, как отмечалось выше, до сих пор является нерешенной проблемой. Иногда расход пылевидного топлива, например, оценивают по положению регулирующего органа (траверсы плоского контроллера), которое определяет лишь число оборотов питателей, но не расход пыли. Такой способ регулирования не учитывает качественного изменения состава и расхода топлива, связанного с увеличением или уменьшением скорости транспортирующего воздуха или с нарушением нормальной работы шпателей пыли. Поэтому применение схемы топливо — воздух оправдано лишь при наличии жидкого или газообразного топлива постоянного состава.
2. Регулирование экономичности по соот-ношенню «пар — воздух». На единицу расхода различного по составу топлива необходимо различное количество воздуха, но его потребность на единицу тепла, выделяющегося при сгорании, не изменяется. Поэтому если оценивать тепловыделение в топке по расходу пара и изменять расход воздуха в соответствии с изменениями расхода пара, то тем самым можно поддерживать оптимальный избыток воздуха. Этот принцип регулирования подачи воздуха используется в схемах пар — воздух (рис. 12-11,6).
3. Регулирование экономичности по соотношению «тепло — воздух» (рис. 12-11,в). Если тепловыделение в топке, эквивалентное тепловой нагрузке парогенератора, оценивать по расходу перегретого пара и скорости изменения давления пара в барабане, т. е. по теплу, то инерционность этого суммарного сигнала (Dq на рис. Г2-4,а) при топочных возмущениях будет существенно меньше инерционности одного сигнала по расходу пара £>п.п- Соответствующее заданному тепловыделению количество воздуха измеряется по перепаду давлений на воздухоподогревателе или его части или по давлению воздуха в напорном патрубке вентилятора. Разность этих сигналов используется в качестве вход
ного сигнала регулятора экономичности в схемах регулирования тепло—воздух.
4. Регулирование экономичности по соотношению «задание — воздух» с дополнительным сигналом по содержанию Ог в дымовых газах (рис. 12-11,г). Процентное содержание О2 в продуктах сгорания топлива характеризует избыток воздуха и слабо зависит от состава топлива. Поэтому использование О2 в качестве входного сигнала автоматического регулятора, воздействующего па расход воздуха, представляется вполне целесообразным *. Однако реализация этой схемы затруднена из-за отсутствия надежных и быстродействующих газоанализаторов на кислород. Поэтому в промышленных условиях получили распространение схемы регулирования подачи воздуха не с прямым, а с корректирующим воздействием по О2.
Поддержание избытка воздуха по соотношению тепло — воздух и в особенности пар — воздух отличается простотой и надежностью, но не является точным. Этот недостаток устраняется в системе регулирования эконо мичности, действующей, например, по схеме задание — воздух с дополнительной коррекцией по О2, в которой регулятор подачи воздуха изменяет его расход по сигналу от главного или корректирующего регулятора давления 5. Сигнал, пропорциональный расходу воздуха Лрв.п, как и в других схемах, во-первых, устраняет возмущения по расходу воздуха, не связанные с регулированием экономичности (включение или отключение систем пылеприготовлепия и т. п.), во-вторых, способствует стабилизации самого процесса регулирования подачи воздуха, так как служит одновременно сигналом жесткой отрицательной обратной связи. Введение дополнительного корректирующего сигнала по содержанию О2 повышает точность поддержания оптимального избытка воздуха в любой системе регулирования экономичности. Добавочный корректирующий регулятор 4 по О2 в схеме регулирования задание — воздух непосредственно управляет подачей воздуха при топочных возмущениях и обеспечивает поддержание заданного избытка воздуха в зависимости от нагрузки агрегата.
1 Предложен В. Д. Мироновым в 1956 г.
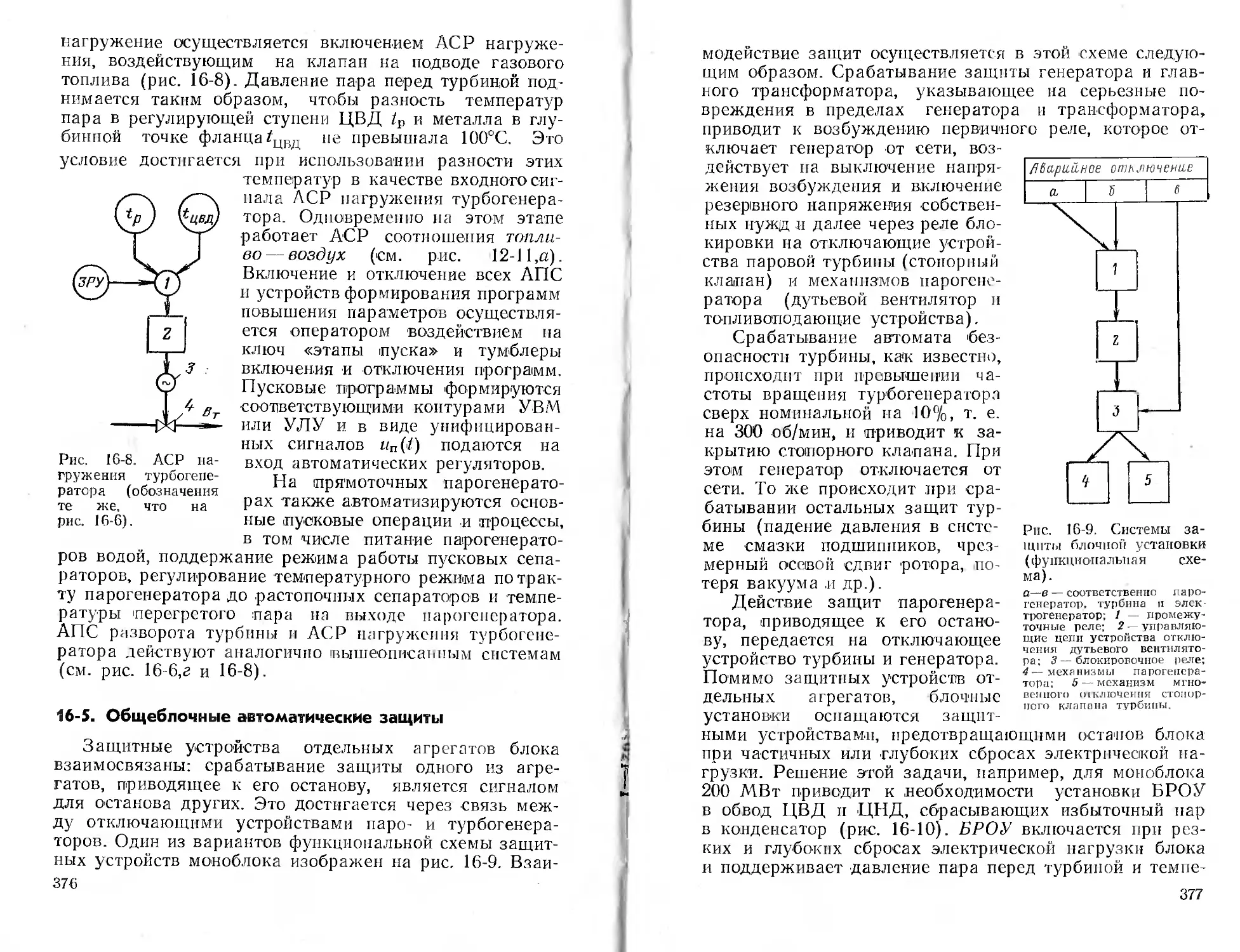
Регулирование разрежения в топке
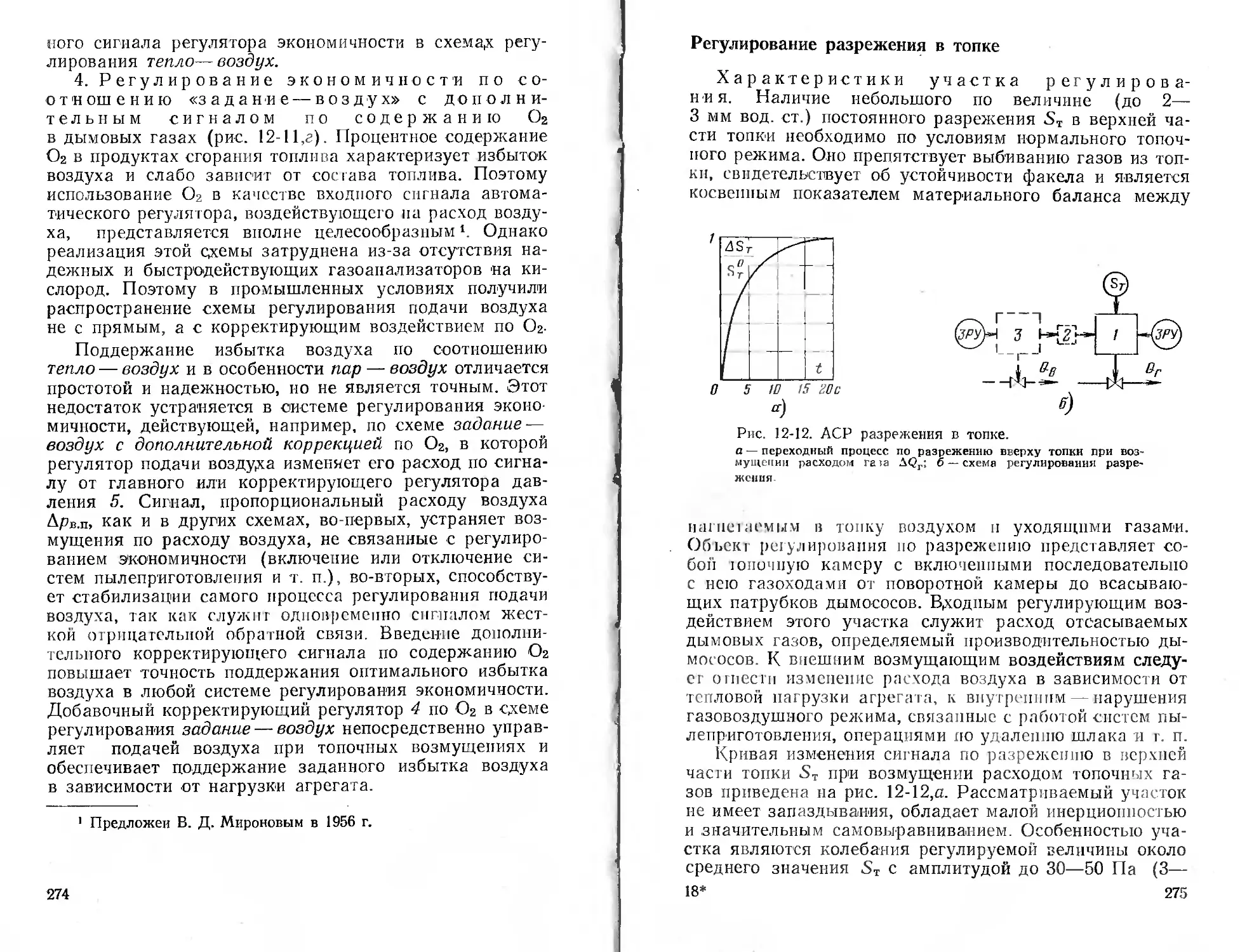
Характеристики участка регулирования. Наличие небольшого по величине (до 2— 3 мм вод. ст ) постоянного разрежения ST в верхней части топки необходимо по условиям нормального топочного режима. Оно препятствует выбиванию газов из топки, свидетельствует об устойчивости факела и является косвенным показателем материального баланса между
Рис. 12-12. АСР разрежения в топке.
а — переходный процесс по разрежению вверху топки при возмущении расходом га?а AQr; б — схема регулирования разрежения
lull пешемым в топку воздухом п уходящими газами. Объект регулирования по разрежению представляет собой юпочную камеру с включенными последовательно с нею газоходами от поворотной камеры до всасывающих патрубков дымососов. Вводным регулирующим воздействием этого участка служит расход отсасываемых дымовых газов, определяемый производительностью дымососов. К внешним возмущающим воздействиям следует отнести изменение расхода воздуха в зависимости от тепловой нагрузки агрегата, к внутренним — нарушения газовоздушного режима, связанные с работой систем пы-леприготовления, операциями по удалению шлака и г. п.
Кривая изменения сигнала по разрежению в верхней части топки ST при возмущении расходом топочных газов приведена на рис. 12-12,а. Рассматриваемый участок не имеет запаздывания, обладает малой инерционностью и значительным самовыравниванием. Особенностью участка являются колебания регулируемой величины около среднего значения ST с амплитудой до 30—50 Па (3— 18* 275
5 мм вод. ст.) и частотой до нескольких герц. Такие колебания (пульсации), зависящие от большого числа факторов, в частности от пульсаций расходов топлива и воздуха, затрудняют работу регулирующих приборов, в особенности снабженных релейными усилительными элементами, вызывая слишком их частые срабатывания. .Для сглаживания пульсаций перед первичными измерительными приборами устанавливаются специальные демпфирующие устройства: дроссельные шайбы, импульсные трубы повышенного диаметра или баллоны (емкости). Для этого может быть использован также электрический демпфер, имеющийся в электрических схемах измерительных блоков регулирующих приборов.
Способы и схемы регул и р о в а н и я. Регулирование разрежения обычно осуществляется посредством изменения количества уходящих газов, отсасываемых дымососами. При этом их производительность можно регулировать:
поворотными многоосными дроссельными заслонками (см. рис. 11-7,6);
направляющими аппаратами (см. рис. 11-9,а);
изменением числа оборотов рабочего колеса дымососа с помощью гидромуфт (см. рис. 11-10) или с помощью изменения скорости вращения первичного двигателя.
Сравнительная оценка различных способов регулирования иллюстрируется графиками удельных расходов электрической энергии на тягу (см. рис. 11-9,6).
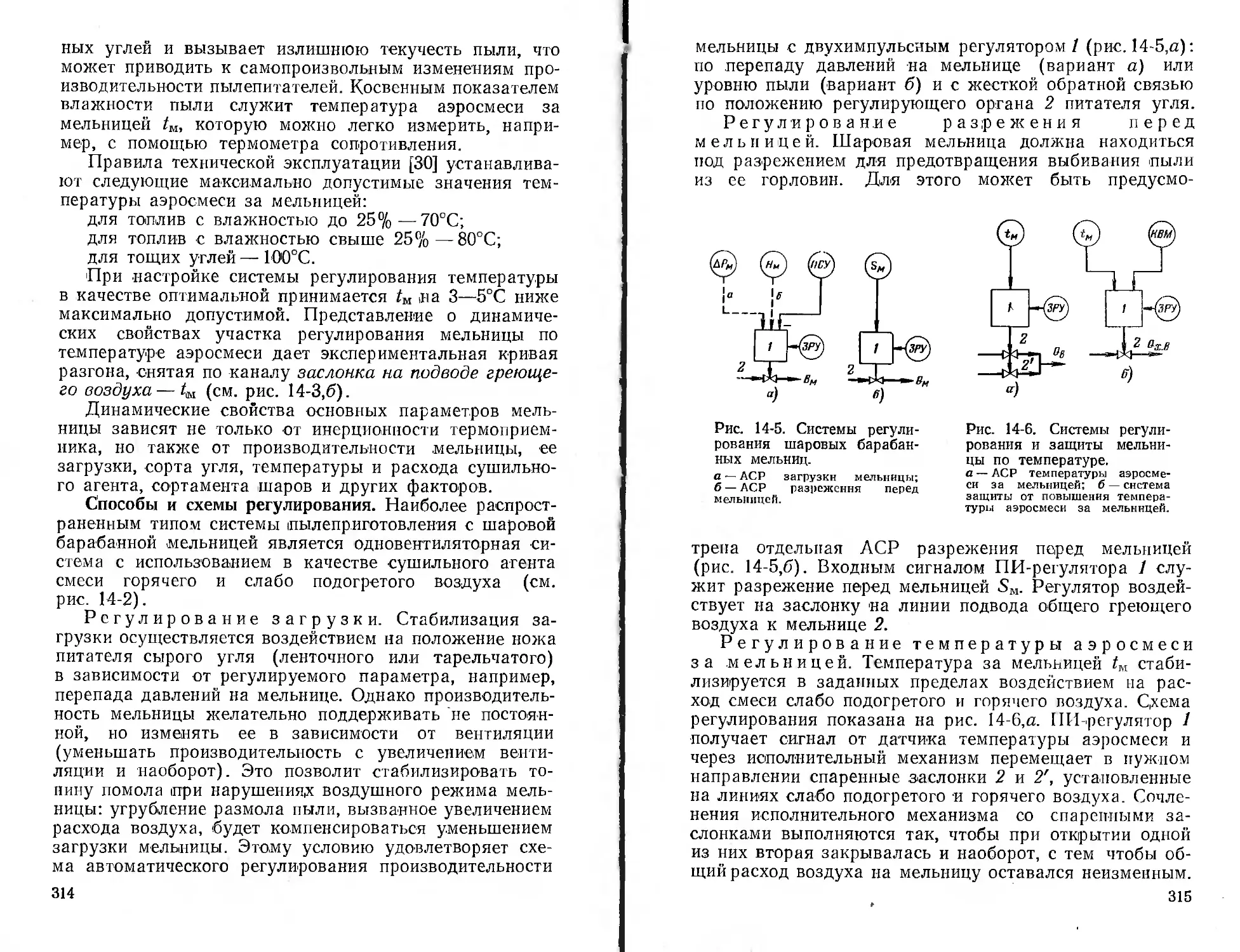
Наибольшее распространение получила схема регулирования разрежения с одноимпульсным ПИ-регулятором (рис. 12-12,6).
Требуемое значение регулируемой величины устанавливается с помощью ручного задатчика ЗРУ регулятора разрежения 1.
Включения регулятора воздуха 3 приводит к временному нарушению материального баланса между поступающим воздухом и уходящими газами. При работе парогенератора в регулирующем режиме могут происходить частые изменения тепловой нагрузки и, следовательно, изменения расхода воздуха. Для предупреждения частого возникновения такого небаланса и увеличения быстродействия регулятора разрежения рекомендуется ввести в ПИ-регулятор разрежения дополнительное исчезающее воздействие от регулятора воздуха через устройство динамической связи 2.
В качестве устройства динамической связи, в частности, может быть использована /?С-цепочка, показанная на рис. 7-18, входной сигнал которой поступает на вход регулятора разрежения лишь в момент включения регулятора воздуха. Устройство динамической связи обладает направленностью действия, т. е. ведомым регулятором может быть только регулятор разрежения.
Регулирование давления первичного воздуха
Скорости аэросмеси в пылепроводах к горелкам парогенераторов с промбупкером должны быть постоянными независимо о г паровой нагрузки и суммарного расхода воздуха. Эго условие необходимо соблюдать из-за опасности забивания пылепроводов.
Регулирование подачи первичного воздуха в пыле-проводы осуществляется с помощью регулятора давления, получающего сигнал по давлению воздуха в коробе первичного воздуха и воздействующего на производительность вентилятора первичного воздуха или на дроссельные заслонки, установленные на отводах общего воздуха в короб первичного воздуха.
12-3. Регулирование перегрева пара
Темпера гура перегрева пара па выходе парогенератора от носи гея к важнейшим параметрам, определяющим экономичность работы паровой турбины и энергоблока в целом. В соответствии с требованиями ПТЭ [Л. 30] допустимые длительные отклонения температуры перегрева пара от номинального значения, например, для параметров пара рп.п=9,8 МПа (100 кгс/см2) и /п.п= = .г)40гС, составляют в сторону увеличения +5°С, а в сторону уменьшения НУС. Температура перегрева пара для барабанных парогенераторов зависит от тепловос-приятия пароперегревателя и паровой нагрузки. При постоянстве паровой нагрузки тепловоспрпягие перегревателей определяется топочным режимом и можег изменяться в зависимости от загрязнения поверхностей нагрева, избытка воздуха, изменений состава топлива и т. и. Изменения паровой нагрузки приводят к перераспределению тепловосприятия между конвективной и радиационной частями перегревателя и изменениям температуры пара на выходе.
Регулирование температуры первичного пара
Характеристика участка регулирования. Для барабанных парогенераторов наиболее распространен способ регулирования температуры пара на выходе (первичного пара) при помощи пароохладителей. Конструктивно участок регулирования перегрева образует часть поверхности нагрева пароперегревателя, включая обогреваемые и необогреваемые трубы, от места ввода охлаждающего агента до выходного коллектора, в котором необходимо поддержать заданную температуру Схема участка представлена на рис. 12-13. К возмущающим воздействи-
Рис. 12-13. Принципиальная схема регулирования температуры перегрева первичного пара.
/ — барабан; 2, 3 —ступени пароперегревателя; 4 — пароохладитель; 5 — регулирующий клапан впрыска;
6 — охладитель пара; 7—сборник конденсата; 3 — гидрозатвор; 9 — дифференциатор; 10 — регулятор.
ям относятся энтальпия на входе в участок /вх, расход потребляемого пара £>п.п и количество тепла, воспринимаемое от топочных газов, Q"T. Выходной величиной участка является энтальпия на выходе из пароперегревателя io. Регулирующим воздействием является расход охлаждающего агента £>Впр-
Динамические характеристики пароперегревателя неодинаковы по каналам возмущающих и регулирующего воздействий, но обладают общим свойством — значитель-278
ной инерционностью, которая присуща также термоэлектрическим термометрам (термопарам), установленным по ходу пароперегревателя и являющимися датчиками измерительных и регулирующих приборов. Инерционность термопар учитывается обычно при определении экспериментальных динамических характеристик пароперегревателей, так как tu.n определяется в этом случае по э. д. с., развиваемой термопарой. Инерционность самих пароперегревателей в большой мере зависит от конструкции пароохладителя. Известны два типа пароохладителей: поверхностные и впрыскивающие.
Рис. 12-14. Поверхностный пароохладитель.
/ корпус; 2 —змеевики охлаждающей воды; S — регулирующий клапан.
Схематическое изображение поверхностного пароохладителя приведено на рис. 12-14. Конструктивно он представляет собой коллектор, внутри которого расположены змеевики охлаждающей воды. Пар, проходя через этот коллектор, охлаждается при соприкосновении с поверхностью змеевиков. Температура пара на выходе из коллектора регулируется изменением расхода воды через змеевик.
Преимущество поверхностных пароохладителей со-cioht в том, что в качестве охлаждающего агента может использоваться сильно минерализованная питательная вода. Недостаток — большая инерционность по температуре пара при изменениях расхода охлаждающей воды.
Современные энергетические барабанные парогенераторы оснащаются впрыскивающими пароохладителями. Принцип их действия основан на изменении энтальпии частично перегретого пара за счет тепла, отбираемого на испарение охлаждающей воды, впрыскиваемой в паропровод. Конструкции впрыскивающих пароохладителей весьма разнообразны. Одна из них изображена на
рис. 12-15. Кривые изменения /п.п по каналу Овпр—tn.a приведены на рис. 12-16.
Преимущество впрыскивающего пароохладителя перед поверхностным состоит в меньшей инерционности изменения температуры перегретого пара при изменени
ях расхода воды на впрыск, недостаток — загрязнение пара охлаждающей водой. Преодоление этого недостатка воз-
Рис. 12-15. Впрыскивающий пароохладитель.
Рис. 12-16. Временные характеристики по температуре первичного пара.
можно путем использования в качестве охлаждающего агента собственного конденсата парогенератора. Для этого насыщенный пар барабана £>б (см. рис. 12-13) поступает в охладитель пара — конденсатор 6 и из сборника конденсата 7 подается на впрыск в пароохладитель 4.
Схемы автоматического регулирования перегрева первичного пара
На парогенераторах малой и средней мощности один пароохладитель, установленный перед последней ступенью конвективного пароперегревателя при оптимальном соотношении между радиационной и конвективной поверхностями нагрева обеспечивает поддержание температуры перегрева в заданных пределах. Общепринятой в этом случае является схема регулирования температуры перегрева с исчезающим сигналом из промежуточной точки (см. рис. 12-13).
Регулятор перегрева 10 получает основной сигнал по отклонению температуры пара на выходе пароперегревателя £п.п и дополнительный — пропорциональный производной от температуры пара в промежуточной точке непосредственно за пароохладителем dtnpldt1, упреждающий изменения температуры на выходе при изменениях эп голыши частично перегретого пара йгр и исчезающий при dluyjdt—0.
Приближение места впрыска к выходу пароперегревателя уменьшает инерционность участка и, следовательно, улучшает качество процессов регулирования. В то же время это приводит к ухудшению температурного режима металла поверхностей нагрева, расположенных до пароохладителя. Поэтому на мощных энергетических парогенераторах с развитым пароперегревателем применяется многоступенчатое регулирование, т. е. по ходу пара устанавливаются два и более впрыскивающих устройств, управляемых автоматическими регуляторами температуры Это позволяет более точно регулировать температуру пара на выходе и одновременно защитить металл предвключенных ступеней перегревателя. Автоматический регулятор каждого впрыска также действует по двухимпульспой схеме: с основным сигналом по отклонению температуры па выходе «своей» ступени и дополнительным исчезающим сигналом по температуре пара после пароохладителя. При наличии независимых потоков пара регулирование температуры перегрева осущес -влястся раздельно, т. е. установка автоматических регуляторов предусматривается на каждом из паропроводов.
Регулирование температуры вторичного пара
Характеристика участка регул и ров а-п и я. Па современных мощных паротурбинных установках предусматривается повторный перегрев пара после его расширения в цилиндре высокого давления (ЦВД) турбины. Для этого пар, прошедший через ЦВД, возвращается в парогенератор, где он нагревается до требуемой температуры и в качестве вторичного пара поступает на вход цилиндра среднего давления (ЦСД) турбины. Температура вторичного пара также должна поддерживаться с высокой точностью в допустимых пре
1 В действительности используется реальное дифференцирование (см. § 1-5).
делах при различных нагрузках турбины и изменениях топочного режима парогенератора. Конструктивные особенности участка регулирования и его динамические свойства определяются выбранным способом регулирования перегрева вторичного пара.
Способы и схемы регулирования. Для регулирования перегрева вторичного пара применяются различные способы [Л. 12], причем регулирование с помощью впрыска оказывается неэкономичным: пар, образовавшийся в результате испарения охлаждающей воды, не проходит через проточную часть цилиндра высокого давления турбины, что приводит к снижению к. и. д. теплосиловой установки.
1) Регулирование с помощью п а р о и а р о-вого теплообменника (ППТО). Конструктивно ППТО представляет собой вынесенный из газоходов парогенератора корпус, выполненный из трубы большого диаметра (300—400 мм), внутри которого проходят змеевики труб малого диаметра, укрепленные в трубных досках. Внутри змеевиков проходит частично перегретый (до 450—520°С) первичный или греющий пар Dr.a; внутри трубы большого диаметра встречно проходит вторичный пар £>в.п с температурой 320 —350°С.
Регулирование температуры вторичного пара производится путем изменения его расхода через ППТО с помощью трехходового клапана и обводного паропровода. В качестве резервного средства регулирования на случай чрезмерного повышения £в.п предусматривается аварийный впрыск.
Принципиальная схема автоматической системы регулирования температуры вторичного пара с помощью ППТО приведена па рис. 12-17 (вариант а).
2) Регулирование с помощью газопаропарового теплообменника (ГППТО). Теплообменник сконструирован по принципу труба в трубе и представляет собой размещенную в газоходе котла систему змеевиков из труб диаметром 60X3,5 мм, внутри каждой из которых проходят две трубки диаметром 16X3 мм. По трубкам малого диаметра движется первичный или греющий пар; навстречу ему по трубам большего диаметра проходит вторичный пар. Снаружи трубы большего диаметра обогреваются топочными газами, что требует их надежного охлаждения В связи с этим через змеевики большего диаметра пропускается
весь вторичный пар и регулирование его температуры осуществляется путем изменения расхода первичного пара.
Принципиальная схема регулирования температуры вторичного пара с помощью ГППТО изображена на рис. 12-17 (вариант б).
Рис. 12-17. Схемы регулирования температуры вторичного пара с помощью (а) паропарового или (б) газонаронарового теплообменника
I, Ч ступени вторичного пароперегревателя; 2 — паропаро-пой или пион а рои яровой теплообменник; 4 термопара; 5 дифференциатор; 6—регулятор температуры пара на выходе; 7 пароохладитель; 8— трехходовой регулирующий клапан; 9— обводной клапан; 10—аварийный впрыскивающий пароохладитель.
Способы регулирования с помощью теплообменников экономически целесообразны, однако недостаток их состоит в появлении существенных взаимосвязей между системами регулирования первичного и вторичного пара. Кроме того, эти способы не всегда обеспечивают достаточный диапазон регулирования.
3) Ре гулирование перепуском части пара в обвод конвективной поверхности нагрева вторичного пароперегревателя (паровой байпас). Принципиальная схема регулирования при использовании парового байпасирования изображена на рис. 12-18.
Конструктивно вторичный — «холодный пакет» 1 размещается в зоне сравнительно низких температур газов, 283
а «горячий пакет» 2 выносится в зону высоких температур газов. Тепловосприятие пароперегревателя регулируется трехходовым клапаном 3, перепускающим часть «холодного» пара помимо первого пакета на вход второго. При таком способе регулирования температура вторичного пара практически не зависит от температуры первичного. В то же время диапазон регулирования может быть сохранен в достаточно широких пределах.
Рис. 12-18. Схема регулирования температуры вторичного пара перепуском части пара помимо холодного пакета пароперегревателя.
ПИ-регулятор температуры 4 действует от двух сигналов— по отклонению температуры на выходе из вторичного пароперегревателя (основного) и дополнительного (исчезающего) с выхода дифференциатора 5 по изменению температуры в паропроводе (сигнал на выходе датчика 6) после смешения холодного и частично перегретого пара в промежуточной точке тракта.
На случай чрезмерного повышения 6;.п предусматривается дополнительный впрыск 7, управляемый автоматическим регулятором 8. Заданное значение /в.п основного регулятора 4 устанавливается меньшим, чем у регулятора 8, с тем, чтобы клапан аварийного впрыска 9 в нормальном режиме работы был закрыт. Кроме того, наличие блокировки в электрической схеме управления предусматривает возможность открытия клапана 9 лишь после полного открытия трехходового клапана 3.
4) Газовое регулирование. Изменение тепловосприя-тия пароперегревателя вторичного пара может быть достигнуто за счет изменения количества тепла, передаваемого поверхностям нагрева топочными газами. При этом можно воспользоваться тремя способами:
а) Регулирование изменением количества газов, проходящих через пакеты вторичного перегревателя, посредством перераспределения потока газов между газоходами конвективного перегревателя и водяного экономайзера. Принципиальная схема этого варианта га-
Рпс. 12 19. Газовое регулирование температуры вторичного паро-щрегрсп.иеля.
а псргрнсир('делением потока газов; / — вторичный пароперегреватель, 2 — подиной jkou )мпйлер; 3 попоротые заслонки; б — рециркуляцией топочных гп юн: / — плропсрегрсваюль вторичного пара; 2 — водяной экономайзер; 3 — воздушный подогрева гель; 4— дымосос; 5 — дымосос рециркуляции; 6—регулирующие заслонки.
зового регулирования изображена па рис. 12-19,а. Регулирующие органы — поворотные заслонки, с помощью которых осуществляется перераспределение газового потока, должны быть выполнены из жаропрочного материала и оборудованы специальной системой воздушного охлаждения. Па вход автоматических регуляторов вторичного перегрева при газовом регулировании подаются два сигнала: первый основной но £в.и, второй упреждающий (исчезающий) по температуре газов перед вторичным перегревателем.
б) Регулирование изменения температуры топочных газов перед перегревателем. Этот способ предусматривает регулирование температуры топочных газов .при помощи .поворотных горелок или переключения ярусов работающих горелок, иными словами, путем смещения ядра факела по высоте топки. Однако положение факела в топке зависит также от ряда других причин (неравномерности подачи .пыли, загрязнения поверхностей нагрева, герметичности топки и т. п.) и в свою очередь оказывает влияние на все параметры агрегата. Поэтому этот способ целесообразно применять лишь при отладке топочного режима.
в) Регулирование одновременным изменением количества и температуры топочных газов перед перегревателем посредством рециркуляции уходящих газов в нижнюю часть топки. Принципиальная схема этого способа регулирования изображена на рис. 12-19,6. В этом случае часть потока уходящих газов специальным вентилятором рециркуляции 5 направляется в нижнюю часть топки. В результате снижается температура факела, уменьшается тепловосприя-тие радиационных поверхностей нагрева, затягивается процесс сгорания топлива, что приводит к увеличению температуры и скорости газов на выходе из топки и в конечном итоге к увеличению тепло-восприятия конвективных поверхностей нагрева первичного и вторичного пароперегревателей.
Применение рециркуляции приводит к некоторому увеличению потерь с уходящими газами и расхода электроэнергии на тягу. Однако этот способ, помимо возможности регулирования температуры вторичного пара, воздействием на производительность вентилятора рециркуляции, позволяет снизить поверхность вторичного перегревателя по сравнению с другими способами регулирования.
В заключение заметим, что наличие промежуточного перегревателя и нежелательность поддержания температуры вторичного пара с помощью впрысков существенно усложняют задачу регулирования перегрева пара в целом. Различные способы газового регулирования /,,.п позволяют увеличить диапазон, но нарушают стабильность топочного режима, оказывают влияние на условия теплообмена первичных перегревателей. Поэтому и,х используют лишь ъ комбинациях с другими способами регулирования при отладке топочного режима и получении требуемых характеристик перегревателей. Для .непрерывного регулирования температуры вторичного пара с помощью автоматических регуляторов чаще всего используют теплообменники и паровое байпасирование.
12-4. Регулирование питания парогенераторов водой
Характеристика участка регулирования. В установившемся режиме работы парогенератора количество поступающей в барабан воды должно соответствовать количеству вырабатываемого пара. Показателем этого соответствия служит уровень воды в барабане //ц. Среднее значение уровня должно быть неизменным при постоянной нагрузке; пределы его изменений в переходных режимах строго ограничены условиями безаварийной работы парогенератора и турбины. Снижение уровня ниже места присоединения опускных труб циркуляционного контура может привести к нарушению питания и охлаждения водой подъемных труб 286
. (см. рис. 12-1), нарушению ил прочности в местах стыковки с корпусом барабана, а в наиболее тяжелом случае— пережогу. Чрезмерное повышение уровня может привести к ухудшению действия внутрибарабапных сепарационных устройств, преждевременному заносу солями пароперегревателя, а также к забросу частиц воды в турбину, что может явиться причиной тяжелых механических повреждений ее ротора и лопаток.
Принято, что максимально допустимые отклонения уровня воды в барабане составляют ±100 мм среднего значения *, установленного заводом-изготовителем. Снижение уровня ниже видимой части водомерного стекла, устанавливаемого па барабане парогенератора, считается «упуском» воды, а превышение сто верхней видимой части — «перепиской». Расстояние между этими критическими отметками ~400 мм. Упуск уровня и перепптка приводят к авариям.
Снабжение барабана водой осуществляется по одной и, реже, двум ниткам трубопроводов питательной воды, одна из которых служит резервной. На каждой нитке устанавливается одинаковое количество запорной и регулирующей арматуры.
Отклонение уровня воды в барабане от среднего значения характеризует наличие небаланса между притоком ниппельной воды и расходом пара, оно происходит также вследствие изменения содержания пара в пароводяной смеси подьемпыл iруб за счет колебаний давления пара в барабане или изменений тепловосприятия испари тельных поверхностей нагрева. Изменение уровня под действием небаланса между расходом пара и воды описывается уравнением
F(p ^L^_ = d —D , (12-9)
V» п. в п. п ’ ' 9
где F — площадь зеркала испарения, м2, рв, рп — плотность воды и насыщенного пара, кг/м3; Е>ил и Йп.в— расходы пара и воды, кг/с.
Приняв F(pB—рп) 1/П°п.в= 1/^и И (£>п.в—£>п.п)/£)0П.в = Х и перейдя к безразмерным величинам, после интегриро-
1 Среднее значение уровня может не совпадать с геометриче-
ской осью барабана. Величины максимально допустимых отклонений уточняются в процессе эксплуатации.
вания (12-9) получим:
t
У Ю = kn J Х ® dt’ О
т. е. по динамическим свойствам канал небаланс расхода воды и пара — уровень в барабане является интегрирующим звеном.
Из уравнения (12-9) можно определить время прохождения А/ уровня от минимального Н™а“ до макси-
Рис. 12 20. Динамические характеристики парогенератора типа ТП-87 по уровню в барабане при возмущениях.
а — расходом питательной воды; б — расходом пара.
мального //”акс допустимого значения при ступенчатом возмущении небалансом:
г; \ / г/МЗКС Г/МИНч
д. ' (% — РП) ("б — Иб )
(12-10)
Кривая переходного процесса по уровню в барабане при возмущении расходом питательной воды для парогенератора типа ТП-87 (£>0п.п=420 т/ч) приведена на рис 12-20,а. Динамика этого же участка при возмуще нии расходом пара — на рис. 12-20,6.
Горбообразная форма последней кривой, типичная для барабанные парогенераторов, объясняется тем, что в первый момент после нанесения возмущения увеличением расхода пара уровень воды в барабане возрастает в результате резкого уменьшения давления пара, что в свою очередь приводит к увеличению паросодержания в подъемных трубах циркуляционного контура и росту
уровня. После того как давление пара примет новое установившееся значение, соответствующее новому значению расхода пара, изменение уровня будет протекать в соответствии с уравнением материального баланса (12-9). Описанное явление носит название набухания или вспучивания уровня.
Схема автоматического регулирования. Исходя из требований к регулированию уровня воды в барабане, автоматический регулятор должен обеспе-
Рис. 12-21. Трехимпульс-пая ЛСР питания водой барабанного парогенератора.
1 •— барабан; 2 — водяной экономайзер; 3— регулятор питания; 4 —- регулирующий клапан питательной воды.
чить постоянство среднего уровня независимо от нагрузки парогенератора и других возмущающих воздей-ствий. В переходных режимах изменение уровня может происходить довольно быстро, поэтому регулятор питания для обеспечения малых отклонений уровня должен поддерживать постоянство соотношения расходов питательной воды и пара, т. е. быть также регулятором соотношения. Эту задачу выполняет трехимпульсный регулятор питания, принципиальная схема которого изображена на рис. 12-21. Регулятор 3 перемещает клапан 4 при появлении сигнала небаланса между расходами питательной воды Оп.в и пара £)пп- Помимо того, он воздействует па положение питательного клапана при отклонениях уровня от заданного значения, которое может изменяться при помощи задатчика ручного управления ЗРУ. Эта схема получила наибольшее распространение на крупных энергетических барабанных парогенераторах.
12-5. Регулирование водного режима в парогенераторах
Характеристика участка регул и рова-н и я. Химический состав воды, циркулирующей в барабанных парогенераторах, оказывает существенное влияние на длительность их безостановочной или безремонт-10—626 289
ной кампании. К основным показателям качества котловой воды относятся общее солесодержание (концентрация NaCl, мг/кг) и избыток концентрации фосфатов (содержание ионов РО3-4, мг/кг).
Повышение общего солесодержания может привести к уносу солей котловой воды в пароперегреватель и турбину. Недостаток концентрации фосфатов вызывает интенсивный процесс накипеобразования на внутренних поверхностях экранных груб, что приводит к ухудшению их охлаждения пароводяной смесью, а следовательно, к перегреву в местах образования накипи и в конечном итоге к пережогу.
Поддержание общего солесодержания котловой воды в предела,х нормы осуществляется с помощью непрерывной и периодической продувок из барабана в специальные расширители. Потери котловой воды с продувкой восполняются питательной водой в количестве, определяемом уровнем воды в барабане.
Периодическая продувка служит для удаления скоплений шлама в нижних коллекторах, производится 1 — 2 раза в смену и, как правило, не автоматизируется
Непрерывная продувка служит для удаления избытка солей NaCl и S1O2, скапливающихся в котловой воде в процессе парообразования. Величина непрерывной продувки колеблется в пределах 0,5—2% максимальной производительности парогенератора. При ступенчатом испарении количество удаляемой из барабана воды регулируется в зависимости от солесодержания воды 'в отсеках барабана. Поскольку потери тепла с продувкой лишь частично возвращаются в тепловую схему станции с конденсатом пара из расширителей непрерывной продувки, поддержание солесодержания котловой воды с большим запасом по отношению к допустимому за счет увеличения расхода воды на продувку не экономично.
По своим динамическим свойствам этот участок регулирования типичен для тепловых объектов. Кривая переходного процесса по солесодержанию при нанесении возмущения расходом пара или количеством продуваемой воды близка к кривым типовых тепловых инерционных объектов, изображенным на рис. 2-5. Время запаздывания т определяется в основном инерционностью измерительных устройств и составляет 1—3 мин, постоянная времени Т— Г0-г40 мин в зависимости от типа парогенератора.
Помимо соотношения между паровой нагрузкой парогенератора и величиной непрерывной продувки существенное влияние на величину солесодержания в переходных режимах оказывает изменение количества пара под зеркалом испарения.
Схема автоматического регулирования. Па парогенераторах электростанций предусматривается автоматическое регулирование непрерывной продувки путем воздействия регулятора на регулирующий
Рис. 12 22. Регулирование водного режима барабанного пароперегревателя.
а — схема регулировании продувки с трехнмпулъсным регулятором; б-'-принципиальные схемы регулирования продувки и ввода фосфатов; / — барабан; 2—регулятор продувки; 3— импульсатор расхода пара; 4 — пусковое устройство; 5 — мерный бак; 6 — плунжерный иасос; 7 — корректирующий прибор.
клапан на линии непрерывной продувки. Обычно применяется двух- или тредимпульсная схема регулирования (рис. 12-22).
В первой схеме (рис. 12-22,а), помимо корректирующего сигнала по солесодержапию, на вход ПИ-регулято-ра 2 поступает сигнал по расходу продувочной воды ДПР и сигнал по расходу пара Оп.п- В некоторых случаях значения непрерывной продувки определяется нс общим солесодержанием котловой воды, а концентрацией кремниевой кислоты. При этом поддержание концентрации кремниевой 'кислоты в допустимых пределах гарантирует поддержание в пределам нормы и общего солесодержания котловой воды.
Однако прямое и непрерывное измерение концентрации кремниевой кислоты затруднено и предпочтительнее 19* 291
регулировать ее содержание в котловой воде по косвенным показателям: паровой нагрузке и количеству продуваемой воды. При этом зависимость между содержанием кремниевой кислоты, паровой нагрузкой и значением непрерывной продувки устанавливается по результатам специальных теплохимических испытаний парогенератора. Автоматическое регулирование продувки в этом случае осуществляется по двухимпульсной схеме без корректирующего регулятора (рис. 12-22,6).
Помимо продувки для выполнения условий безнакип-ной работы поверхностей нагрева и поддержания требуемой щелочности котловой воды барабанный парогенератор оснащается аппаратурой, регулирующей ввод фосфатов. Концентрация фосфатов РО3~4 должна поддерживаться в пределах 10—20 мг/кг с точностью до ±3-^5 мг/кг при бесступенчатом испарении, а при ступенчатом испарении в пределах 5—10 мг/кг в чистом отсеке и до 75 мг/кг в соленом [Л. 30].
Непрерывное измерение избытка фосфатов в воде, а также и содержания кремниевой кислоты в настоящее время затруднено из-за отсутствия соответствующих датчиков. Требуемая концентрация РО^~ устанавливается в зависимости от паровой нагрузки £)п.п путем ввода фосфатов в чистый отсек барабана в соответствии с принципиальной схемой, изображенной на рис. 12-22,6.
Мерный бак 5 заполняется раствором фосфата натрия крепостью 5 г/кг. Сигнал по расходу пара поступает на расходомер 8, электромеханический интегратор которого используется в качестве импульсатора, воздействующего через пусковое устройство 4 на включение и отключение плунжерного фосфатного насоса 6. При увеличении паровой нагрузки увеличивается продолжительность цикла включения фосфатного насоса и наоборот. Обычно такая система ввода фосфатов применяется совместно с двухимпульсной системой непрерывной продувки, изображенной на этой же схеме. Поэтому вводимые в барабан фосфаты находятся в постоянной зависимости от нагрузки парогенератора, а их содержание в котловой воде определяется непрерывной продувкой и концентрацией подаваемого раствора фосфата натрия, которая должна быть неизменной. Требуемые соотношения между количеством фосфатов, паровой нагрузкой и величиной непрерывной продувки устанавливаются по результатам теплохимических испытаний.
Автоматизация водного режима облегчает труд обходчиков оборудования и позволяет сократить трудоемкий лабораторный анализ качества котловой воды.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите участки регулирования барабанного парогенератора.
2. Какие участки регулирования входят в систему регулирования процесса горения?
3. Охарактеризуйте динамические свойства парогенератора по каналу «топливо — давление пара на выходе».
4. Как формируется сигнал по теплу в барабанных парогенераторах?
5. Сравните схемы регулирования подачи топлива «задание — тепло» и «задание — топливо».
6. Сравните схемы регулирования экономичности «тепло — воздух» и «задание — воздух» с коррекцией по Ог.
7. Сравните схемы регулирования экономичности «топливо — воздух» и «тепло — воздух».
8. Поясните значение регулятора разрежения.
9. Для чего служит устройство динамической связи между регулятором воздуха и регулятором разрежения?
10. Поясните динамические свойства уровня в барабане.
11. Поясните принцип действия трехимлульсиой схемы регулирования питания.
12. Назовите способы регулирования температуры первичного пара.
13. Охарактеризуйте динамические свойства участка регулирования температуры.
14. Поясните типовую схему регулирования температуры первичного лара с помощью впрыска охлаждающей воды или собственного конденсата.
15. Назовите способы регулирования температуры перегрева вторичного пара.
16. Поясните двух импульсную схему автоматического регулирования общего солесодержаиия котловой воды парогенератора.
17. Как осуществляется автоматический ввод фосфатов в барабан парогенератора?
ГЛАВА ТРИНАДЦАТАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПРЯМОТОЧНЫХ ПАРОГЕНЕРАТОРОВ
13-1. Участки регулирования
Принципиальная гехнологическая схема прямоточного парогенератора изображена на рис. 13-1, принципиальные схемы циркуляционных контуров прямоточного и барабанного парогенераторов — на рис. 13-2,а и б.
Последовательно соединенные поверхности нагрева прямоточного парогенератора можно представить в виде змеевика, в один конец которого поступает питательная вода, а из другого выходит перегретый пар. Этот змеевик укрупненно может быть разделен на три части: водяную, пароводяную и паровую. Положение точки начала пере-
грева, определяющей границу между испарительной и перегревательной частями, может изменяться в зависимости от паропроизводительности, количества подводимого тепла и расхода питательной воды.
В барабанном парогенераторе границей между пароводяной смесью и насыщенным паром служит барабан и расход питательной воды практически не оказывает влияния на расход, перегрев и давление пара на выходе из пароперегревателя.
Рис. 13-1. Прямоточный парогенератор (принципиальная технологическая схема).
/ — дутьевой вентилятор; 2 — дымосос; 3 — воздухоподогреватель; 4 — водяной экономайзер; 5 — нижняя радиационная (испарительная) часть; 6 — переходная зона; 7, 8— радиационный и конвективный пароперегреватель;
9 — пароохладители.
В прямоточном парогенераторе в отличие от барабанного расход питательной воды оказывает непосредственное воздействие на расход, температуру и давление пара на выходе, т. е. задачи регулирования теплового и материального балансов здесь тесно связаны. Это оказывает существенное влияние на выбор способов и схем регулирования парогенератора. АСР питания в прямоточном парогенераторе в противоположность барабанному нельзя считать автономной. Она связана с АСР давления и температуры пара по тракту (до первого регу-294
Рис. 13-2. Принципиальные схемы пароводяного тракта парогенераторов.
а — прямоточного; б — барабанного; I — водяной экономайзер; 2—испарительная часть; 3 — переходная зона; 3'— барабан; 4 — средняя радиационная часть; 5, 6— ступени пароперегревателя; / — пароохладитель.
лируемого впрыска). Существенно усложняется и регулирование температуры перегрева первичного пара из-за влияния на псе расхода питательной воды и более существенного, чс.м у барабанных, влияния подачи топлива. Эго приводит к необходимости увеличения числа впрысков и расхода воды на впрыск. По сравнению с барабанными парогене
раторами, у которых величина впрысков в нормальном режиме составляет около 5% поминальной производительности, впрыски у прямоточных доходят до 10% общего количества выработанного пара и оказывают заметное влияние на расход и параметры перегретого пара.
Упрощенная схема связей между входными и выходными величинами прямоточного парогенератора пред-
Рис. 13-3. Схема взаимосвязи между выходными и входными величинами в прямоточном парогенераторе.
ставлена на рис. 13-3. Для прямоточных, как и для барабанных парогенераторов, регулирование процесса горения, тепловой нагрузки и перегрева пара сохраняет свое значение, но добавляется участок регулирования температурного режима водопарового (первичного) тракта от его начала до первого регулируемого впрыска с каналами регулирующих воздействий: Вт—или Дп.В--tup-
13-2. Регулирование температурного режима первичного тракта и тепловой нагрузки
Способы и схемы регулирования
Температурный режим первичного тракта, характеризуемый температурой пара в промежуточной точке тракта до первого впрыска /Пр, зависит от соотношения расходов воды и топлива, и влиять на него можно посредством любого из этих регулирующих воздействий.
Регулирование же тепловой нагрузки, характеризуемой давлением и расходом пара, требует совместного и согласованного изменения В? и Dn.B. Поэтому АСР подачи топлива и питательной воды для прямоточных парогенераторов следует анализировать, проектировать и налаживать совместно. Схемы автоматического регулирования подачи топлива и питательной воды разделяются по виду основных сигналов, используемых для контроля температурного режима первичного тракта и тепловой нагрузки парогенератора.
В качестве основного сигнала для контура температурного режима первичного тракта используются соотношение вода (Рил) —тепло (Dg) или же температура рабочей среды непосредственно в промежуточной точке водопарового тракта Ар- В качестве основного сигнала, характеризующего фактическую тепловую нагрузку парогенератора применяются: расход питательной воды /)п.в, сигнал по теплу Do и расход топлива Вт (на газомазутных установках). О нагрузке парогенератора, работающего в моноблоке с турбиной, можно судить также по следующим косвенным сигналам: мощности турбогенератора N, давлению в камере регулирующей ступени турбины рр, положению регулирующих клапанов турбины йкл, если давление пара перед турбиной поддерживается постоянным и др.
296
В зависимости От функций, выполняемых регуляторами питания и топлива, существует два вида схем. В одном случае регулятор питания является регулятором тепловой нагрузки, а регулятор топлива поддерживает температурный режим первичного тракта, в другом — регуляторы меняются ролями.
Регулирование температурного режима по соотношению «вода — тепло»
Сигнал по теплу, образованный суммированием расхода пара на выходе и скорости изменения давления пара в промежуточной точке тракта,
(13-1) используемый для косвенной оценки тепловосприятия топочных экранов (тепловыделения в топке) в прямоточном парогенераторе, является значительно менее представительным .по сравнению с аналогичным сигналом по теплу для барабанного парогенератора [см. формулы (12-5)]. Это объясняется тем, что сигнал Dq, сформированный в соответствии с (13-1), не учитывает количества тепла, аккумулированного в перегревательном тракте. Большое расхождение в динамике между фактическим тепловыделением и сигналом по теплу подтверждает немонотонная форма его кривой разгона при возмущении топливом (рис. 13-4,а) и его зависимость от расхода питательной воды (рис. 13-4,6). Отмеченные особенности сигнала по теплу на выходе прямоточного парогенератора при использовании его в АСР топлива или питания могут привести к появлению слабозатухаю-
Рис. 13-4. Кривые разгона прямоточного парогенератора ПК-41 по расходу пара £)п.п и теплу на выходе Dg.
а — при возмущении топливом Вт (при постоянном расходе питательной воды и включенном регуляторе первого впрыска); б — при возмущении питательной водой
в (при постоянной нагрузке и включенном регуляторе первого впрыска).
щих низкочастотных колебаний в процессе регулирования. Поэтому сигнал по теплу на выходе парогенератора «в чистом виде» в схемах автоматического регулирования питания и топлива в настоящее время не применяется. Для компенсации влияния расхода питательной воды на сигнал по теплу можно использовать сигнал по температуре среды в ранней точке водопарового тракта (до переходной зоны) который приближен-
но учитывает изменение количества аккумулированного тепла и тем самым повышает точность измерения фактической тепловой нагрузки парогенератора в динамике. Однако применение скорректированного сигнала по теплу усложняет схему регулирования и ее наладку. Недостатков вышеназванных способов формирования сигнала по теплу лишен сигнал по теплу, сформированный в промежуточной точке водопарового тракта. Так называемое промежуточное тепло Рдр образуют при суммировании три сигнала.
1) „Видимый" расход пара £>®"д в промежуточном сечении тракта до первого впрыска (рис. 13-3,а). Отличие «видимого» расхода от действительного £)дПр связано с отклонениями плотности пара р в месте установки сужающего устройства от принятого расчетного значения, т. е.
(|3‘2)
где рПр—действительная плотность пара в промежуточной точке; р°Пр — плотность, при которой выполнен расчет сужающего устройства.
2) Скорость изменения давления в том же месте (см. рис. 13-3,а) (для компенсации отклонения расхода пара, связанного с изменением аккумулированного тепла при внешние возмущениях нагрузкой).
3. Давление пара рПр в месте установки сужающего устройства (для компенсации влияния отклонения этого давления от расчетного значения на «видимый» расход).
Различие между сигналами по теплу на выходе Dq и в точке тракта заключается в том, что основной составляющей первого (13-1) служит действительный расход пара (при поддержании рп.п и #пл вбли-298
зи постоянных значений) Рдп.п, а второго — видимый ^прЯ- Последний зависит не только от действительного расхода, но и от параметров пара (13-2), вследствие чего соотношение расхода воды Da.B и «промежуточного г>пр
тепла» U можно использовать в схемах регулирования температурного режима первичного тракта. Временные характеристики прямоточного парогенератора по промежуточному теплу Dqp имеют монотонный харак-
Рис. 13 5. Схемы регулирования тепловой нагрузки и температурного режима по соотношению вода— тепло.
о —первый вариант (I); б —второй вариант (11); Д — дифференциатор; ДП — динамический преобразователь: РТ •— регулятор топлива; РП — регулятор литания; РО — регулирующий орган.
тер при возмущении топливом и слабо реагируют на изменения расхода питательной воды, т. е. являются более благоприятными для регулирования, чем по теплу на выходе. Это объясняется тем, что Z^p формируется в начале водопарового тракта, на него не влияет аккумуляция тепла в последующей части тракта и, следовательно, отпадает необходимость в добавлении исчезающего сигнала по температуре среды в ранней точке
Рис. 13-6. Переходные процессы в АСР температурного режима.
а — при возмущении топливом; б — при- возмущении нагрузкой.
водопарового тракта. На рис. 13 5 представлены два основных варианта схем регулирования питания и топлива с контролем температурного режима первичного тракта по соотношению расход воды — промежуточное тепло [Л. 20]. В первом варианте (I) регулятор питания, действующий по сигналам задание — вода, поддерживает нагрузку агрегата в соответствии с заданием, а регулятор топлива, действующий по соотношению вода — промежуточное тепло, — температурный режим первичного тракта. Во втором варианте (II) регуляторы меняются местами: тепловую нагрузку поддерживает регулятор топлива, а температурный режим — регулятор питания.
Сопоставим приведенные варианты схем регулирования .питания и топлива.
1) В первом варианте контур регулирования топлива не оказывает влияния на контур регулирования питания. Во втором — между 300
ними существует некоторая связь, так как промежуточное тепло реагирует не только на топливо Вт„ но (в значительно меньшей степени по сравнению с теплом на выходе) и на питательную воду.
2) Для поддержания необходимого температурного режима первичного тракта требуется, чтобы существовал достаточный диапазон регулирования топлива в первом варианте и питания — во втором
3) Сопоставляемые варианты по-разиому реагируют на возмущения топливом и нагрузкой.
В первом варианте в ликвидации топочных возмущений (Вт) принимает участие только регулятор топлива (рис. 13-6,с). При возмущениях нагрузкой £)s (рис. 13-6,6) вода и топливо изменяются одновременно.
Во втором варианте топочные возмущения приводят в действие по сигналу тепло оба регулятора. При этом изменение расхода воды носит временный характер, так как регулятор топлива возвращает сигнал по теплу в исходное состояние. При возмущении нагрузкой изменяется подача топлива, а затем с некоторым отставанием, определяемым инерцией сигнала по теплу. — расход воды.
4) Динамическая точность поддержания температуры в промежуточной точке (fnp) тракта при возмущениях нагрузкой в первом варианте выше, чем во втором; при топочных возмущениях — наоборот.
5) В отношении аппаратуры второй вариант несколько сложнее первого, так как требует дополнительных приборов для формирования сигнала по теплу для двух регуляторов. Сложнее он и в настройке.
Преимущества первого варианта перед вторым сводятся лишь в пп. 1 и 5 (отсутствие связи между РТ и РП и некоторый выигрыш в аппаратуре и ее настройке). Поэтому определяющим фактором при выборе одного из вариантов служат длительные испытания в условиях эксплуатации и сравнительный анализ переходных процессов с привлечением интегральных показателей качества (см. § 4 6. 4-7).
Общим и основным недостатком схем регулирования температурного режима первичного тракта по соотношению тепло—вода является необходимость их тщательной статической настройки (совмещения статических характеристик сигналов по теплу и воде) и ограниченная статическая точность из-за погрешностей датчиков и приборов расхода.
Регулирование температурного режима с непосредственным контролем температуры рабочей среды
В схемах с непосредственным контролем температуры рабочей среды статическая погрешность (остаточное отклонение) в поддержании заданного значения регулируемой величины существенно меньше (в 1,5—3 раза), чем в схемах, действующих по соотношению вода — тепло, что объясняется значительно меньшей допустимой погрешностью датчиков температуры по сравнению с датчиками расхода [Л. 31]. К тому же здесь отпадает необходимость в периодическом и тщательном совмеще
нии статических характеристик двух или нескольких первичных приборов расхода и давления.
В большинстве случаев в схемах регулирования с непосредственным контролем температуры поддержание нагрузки парогенератора возлагается на регулятор питания, действующий по схеме задание — вода (рис. 13-5,а), а поддержание температурного режима — на регулятор топлива. Температура пара на выходе первичного тракта (перед первым впрыском) обладает существенной инерцией по отношению к возмущениям топливом и водой. Поэтому для поддержания ее отклонений в допустимы^ пределах на вход регулятора топлива вводятся опережающие сигналы, по виду которых
в основном и различаются варианты схем регулирования. Рассмотрим некоторые варианты схем.
Вариант I (рис. 13-7, вариант /). Основным сигналом служит температура пара в промежуточной точке
Рис. 13-7. Схема регулирования температурного режима с непосредственным контролем температуры пара в промежуточной точке тракта.
тракта /Пр. В качестве опережающих сигналов, поступающих на вход регулятора топлива через дифференциатор Д, используются сигналы по температуре дымовых газов (внутренний опережающий сигнал) 6г и по расходу питательной воды (внешний опережающий сигнал). Для более точной и независимой настройки внешнего сигнала в схеме пре-
страя реакция на топочные возмущения
/усматривается дипамиче-ский преобразователь ДП с изменяемыми коэффициентами настройки.
Достоинства 'рассматриваемого варианта АСР: бы-(т=8-е-10 с),
независимость настройки внешнего опережающего сиг-
нала, относительная простота настройки самого регулятора топлива и дифференциатора с использованием ме
тодики расчета настроек, разработанных для двухкон-
тур пых схем регулирования температуры перегрева пара с исчезающим сигналом из промежуточной точки (см. § 5-5). Его недостаток — быстрый износ (до полугода
непрерывной работы [Л. 20]) газовых термоприемников, контактирующих с агрессивной средой, и пульсация сигнала по 0г. В настоящее время взамен сигнала по 0г успешно применяется менее инерционный сигнал по излучению факела Оф, формируемый с помощью нескольких параллельно включенных радиационных пирометров, устанавливаемых в верхней части топки и визируемых на факел [Л. 18]. Вариант I опробован и внедрен на пылеугольных парогенераторах различной мощности.
Вариант II. Отличается от первого только тем, что вместо сигнала по 0г используется расход топлива (рис. 13-7, вариант II). Схема опробована и внедрена на парогенераторах, работающих па газомазутны,х топливах, расход которых можно измерить непосредственно.
Вариант III (рис. 13-7, вариант III). Отличается от первого и второго применением опережающего сигнала по температуре воды перед зоной максимальной теплоемкости (ЗМТ) ®3!Лт- Этот сигнал, являясь более инерционным по сравнению с 0г и 6ф, все-таки сравнительно быстро реагирует на возмущения топливом (т~ 15 с) и водой (т.~40 с), а температуру воды можно проще и надежнее измерить, чем температуру топочных газов или излучение факела.
К недостаткам схемы следует отнести зависимость динамики участка по каналу Вт — 0змт от режимных фак
торов, влияющих на положение ЗМТ, и как следствие
этого—ухудшение качества процессов регулирования при резкопеременных режимах, вызываемых возмущениями нагрузкой и температурой питательной воды. Схема опробована и внедрена на ряде мощных парогенераторов.
Для всех трех вариантов схем отсутствует взаимосвязь между контурами питания и топлива, характер переходных процессов, вызванных топоч
Рис. 13-8. Схема регулирования температурного режима для парогенераторов, работающих на газомазутном топливе (обозначения иа рис. 13-5).
ными возмущениями, остается таким же, как и в варианте I схемы «вода — тепло» (см. рис. 13-6,а, вариант /), При возмущениях нагрузкой во всех трех случаях можно обеспечить динамическое соответствие расходов воды £>п.в и топлива Вт, необходимое для обеспечения допустимых отклонений температуры fDp-
Выбор того или иного варианта схемы регулирования подачи топлива с непосредственным контролем температуры пара определяется типом прямоточного парогенератора, его параметрами и видом сжигаемого топлива. Исключение составляет лишь вариант II для газомазутных парогенераторов, в котором регуляторы топлива и питания можно поменять местами (рис. 13-8). Это не приведет к усложнению схемы в целом. Выбор более целесообразной из них должен основываться на сравнении переходных процессов и результатов испытаний при включенной АСР подачи воздуха.
13-3. Регулирование экономичности процесса горения
Схемы регулирования экономичности процесса горения прямоточных парогенераторов строятся в зависимости от выбранных вариантов схем регулирования тепловой нагрузки. В частности, могут использоваться схемы:
Рис. 13-9. Регулирование подачи воздуха прямоточного парогенератора по схеме вода — воздух с коррекцией по О2.
1 — регулятор экономичности процесса горения; 2 — регулирующий орган подачи воздуха; 3 —корректирующий регулятор по содержанию О2 в газоходе за конвективным пароперегревателем.
нагрузка — воздух (см. рис. 12-11,г) три регулировании подачи топлива по схеме нагрузка — тепло; вода — воздух (рис. 13-9) при регулировании подачи топлива по схеме вода — тепло, тепло — воздух и топливо — воздух (см. рис. 12-11,а, в).
Введение корректирующего сигнала по содержанию свободного кислорода О2 во всех схемах обеспечивает более точное поддержание коэффициента избытка воздуха.
Разрежение вверху топки регулируется так же, как и в барабанных парогенераторах (см. рис. 12-12,6).
13-4. Регулирование температуры перегрева пара
Характеристика участков регулирования
Регулирование температуры перегрева пара в прямоточных парогенераторах представляет собой более сложную задачу по сравнению с барабанным, так как по условиям температурного режима металла поверхностей нагрева ее следует стабилизировать по всей длине перегревательного тракта. При этом необходимо поддерживать местоположение точки начала перегрева или границы между испарительным и перегревательным участками.
Перегревательная часть прямоточных парогенерато ров состоит из отдельных последовательно включенных участков, разграниченных конструктивно и размещенные в различных температурных зонах газового тракта. Поверхности нагрева отдельных участков, соединительные трубопроводы и паросборные коллекторы, а также устройства впрыска охлаждающей воды образуют объект регулирования, представляющий собой сложную динамическую систему, подверженную действию многих возмущающих воздействий. Температура на выходе каждого участка стабилизируется с помощью отдельных автоматических регуляторов, действующих на впрыскивающие устройства, устанавливаемые между поверхностями нагрева. Динамические характеристики отдельных пароперегревательных участков могут быть получены экспериментально или по данным теплового расчета. Экспериментальные кривые пароперегревателей прямоточных парогенераторов по каналу впрыск — температура на выходе участка по своей форме аналогичны кривым, приведенным на рис. 12-16.
Способы и схемы регулирования
Регулирование температуры пара первичного тракта (до первого впрыска) состоит в стабилизации положения границы между испарительной и перегревательной частями пароводяного тракта. Эта задача решается с помощью регулятора топлива или питания путем точного поддержания соотношения расходов топлива и питательной воды.
Регулирование температуры пара последовательно включенных перегревательных участков осуществляется 20—626 305
так же, как и регулирование температуры первичного пара на барабанных парогенераторах: с помощью впрысков по двухимпульсной схеме.
На рис. 13-10 изображена принципиальная схема автоматической системы регулирования температуры первичного пара одного из контуров прямоточного парогенератора с двумя впрысками. Введение дополнительного входного сигнала по заданию (расходу пара — ва-
Рис. 13-10. Регулирование температуры первичного пара. 1—3 — ступени пароперегревателя; 4 — сужающее устройство; 5, 6 — пароохладитель; 7 — дифференциатор; 8 — регулятор температуры перегрева первичного папа на выходе парогенератора; 9— предвключенный регулятор температуры перегрева пара; 10— вспомогательный корректирующий регулятор; 11 — регулирующий клапан.
риант а) для регулятора 9, первого по ходу пара впрыска, позволяет поддерживать температуру пара на выходе промежуточной ступени пароперегревателя в соответствии с тепловой нагрузкой агрегата. Переменный сигнал по заданию может быть сформирован и по положению регулирующего органа регулятора, второго по ходу пара впрыска (вариант б). В этом случае сигнал от датчика положения исполнительного механизма поступает на вход вспомогательного корректирующего регулятора, а с его выхода — на вход регулятора первого впрыска 9. Регулирование температуры перегрева вторичного пара осуществляется по схемам, приведенным на рис. 12-17 и 12-18.
контрольные вопросы
1. Назовите основные участки регулирования прямоточного парогенератора.
2. В чем основное отличие прямоточного парогенератора от барабанного как объекта регулирования?
3. Как формируются сигналы по «теплу» «а выходе и в промежуточной точке прямоточных парогенераторов, сопоставьте их между собой?
4 Поясните принцип действия схемы регулирования подачи топ-лнпа с сигналом по температуре .пара в промежуточной точке парового тракта с дополнительными исчезающими сигналами.
5. Как регулируется экономичность процесса горения прямоточных парогенераторов?
6. Поясните способы и схемы регулирования температуры первичного пара.
ГЛАВА ЧЕТЫРНАДЦАТАЯ
АВТОМАТИЗАЦИЯ ВСПОМОГАТЕЛЬНЫХ ПРОЦЕССОВ И УСТАНОВОК
14-1. Автоматизированное управление трактом топливоподачи
Подача твердого топлива к парогенераторам осуществляется с помощью щелевых приемных бункеров, установленных в разгрузочных помещениях, расположенных пол 'Ними лопастных питателей, промежуточных транспортеров первой очереди, дробильных устройств, транспортеров второй очереди и бункеров сырого угля, снабжающих системы пылеприготовления парогенераторов. В системе топливоподачи автоматизируются следующие периодические операции:
1) пуск механизмов и ленточные транспортеров;
2) процесс загрузки бункеров сырого угля и отключения механизмов и транспортеров по окончании загрузки;
3) включение вибраторов при застревании угля в узлах пересыпки;
4) останов всех предыдущих по ходу топлива транспортеров при пробуксовке, обрыве и сходе лепты или забивании течек на последующих транспортерах.
Автоматический пуск механизмов и транспортеров. Сигнал на включение ленточных транспортеров поступает от датчиков нижних уровней, т. е. при понижении уровня угля в каком-либо бункере ниже заданной отметки НУ (рис. 14-1). Датчики уровня представляют 20* 307
собой токопроводные стержни, имеющие релейную статическую характеристику (см. рис. 3-1,в) в зависимости от электрического сопротивления слоя топлива. На каждом бункере 1 или 2 устанавливают один датчик нижнего уровня 5 и один или несколько (по числу загрузочных люков) датчиков верхнего уровня 6, которые располагаются в непосредственной близости от загрузочных люков 4. Разгрузка бункеров в последующую за ними систему пылеприготовления производится через шиберы — дозаторы 3.
Рис. 14-1. Схема регулирования загрузки бункеров углем.
Нормально замкнутые контакты датчика нижнего уровня размыкаются при понижении уровня угля ниже электрода и включают реле автоматического пуска тракта (РАП), которое в свою очередь включает реле времени и промежуточные реле в схеме пуска механизмов и предупреждающей сигнализации, оповещающей дежурный персонал топливоподачи о предстоящем включении транспортеров и механизмов.
Автоматическое регулирование загрузки бункеров углем. Бункера сырого угля (БСУ) являются конечным звеном технологической цепи топливоподачи. Они располагаются вдоль последнего транспортера И и загружаются с помощью неподвижного загрузочного устройства— плужковых сбрасывателей 10. Их рабочим органом служит остроугольный отвал (плужок), устанавливаемый навстречу движению угля. Плужок может нахо-308
диться в двух положения^: верхнем, когда он не касается транспортерной ленты, и нижнем, когда он прижат к ней. При верхнем положении плужка слой угля на ленте проходит под ним к другим бункерам, при нижнем уголь скользит вдоль боковых отвалов плужка и ссыпается в БСУ. Перемещение плужка осуществляется электрическим исполнительным механизмом 8 (ИМ.) посредством тросовой или рычажной передачи 9.
При установке переключателя управления плужко-выми сбрасывателями в положение «автоматика» их ИМ подготовлены к автоматическому пуску. «Разрешение» на автоматический пуск поступает после включения промежуточного реле, действующего по сигналу реле автоматического пуска транспортеров (РАП). Загрузка производится только в бункера, где уголь еще не достиг верхнего уровня ВУ. Питание цепей опускания плужков осуществляется через нормально открытые контакты, чем обеспечивается принятая последовательность загрузки БСУ. Питание цепей подъема каждого плужко-вого сбрасывателя осуществляется независимым. После окончания засыпки первых бункеров до верхнего уровня 6, а последнего до среднего 7 осуществляется автоматический останов системы топливоподачи через реле времени и промежуточное реле останова. Тракт топливоподачи останавливается последовательно, начиная с лопастных питателей. Рассыпка угля, оставшегося на лептах, производится в последний по рсоду топлива (второй на рис. 14-1) бункер. Плужок этого бункера всегда находится в опущенном положении, а его засыпка в нормальном режиме происходит лишь до среднего уровня СУ с тем расчетом, чтобы оставшийся на транспортерах уголь заполнил его свободный объем после непредвиденного останова лопастного питателя.
Включение вибраторов при застревании угля в узлах пересыпки. Для устранения застревания угля в пересыпных течках на них устанавливают вибраторы, включающиеся 'автоматически. При забивании течки уголь касается электрода датчика, что служит сигналом для включения реле, управляющего пусковым устройством вибратора. Вибратор включается лишь на заданный промежуток времени. Если в течение этого времени забивание течки устраняется, вибратор останавливается. В противном случае автоматическое отключение вибратора по истечении заданного времени приводит к одно-
временному останову предыдущих по ходу угля транспортеров и механизмов.
Останов предыдущих по ходу топлива транспортеров и механизмов при пробуксовке, обрыве и сходе ленты. При сходе ленты она через ролики 12, расположенные по обеим ее сторонам, нажимает на концевой выключатель, который разрывает цепь питания электропривода соответствующего транспортера и (через блокировку) цепи питания всех предыдущих.
При пробуксовке и обрыве ленты останов транспортера осуществляется с помощью реле скорости, первичным датчиком которого является вращающийся ролик 13, устанавливаемый на нижней не нагруженной части ленты. Датчик работает по принципу центробежного регулятора скорости, вращающиеся грузы которого воздействуют на микровыключатель при пробуксовке ленты и снижении числа оборотов ролика. Контакты микровыключателя заведены в цепь управления электропривода ленты.
14-2. Автоматизация установок пылеприготовления
Приготовление пылевидного топлива для сжигания в камерных топках прямоточных и барабанных парогенераторов осуществляют в системах двух типов: с пром-бункером и без него. Размол и подсушку топлива в пы-лесистемах с промбункером производят в шаровых барабанных тихоходных мельницах, при отсутствии промбункера в системах с непосредственной подачей пыли в топку — в молотковые быстроходных мельницах.
Регулирование пылесистем с шаровыми барабанными мельницами
Характеристика объекта регулирования. В системах пылеприготовления с промбункером (рис. 14-2) производительность шаровой мельницы не определяет расход топлива, поступающего в топку. Поэтому мельница должна работать в наиболее экономичном режиме независимо от нагрузки парогенератора. Экономичность работы мельницы оценивается по удельному расходу электроэнергии на помол пыли. Наиболее экономичным является режим максимальной производительности мельницы, так как на привод ее барабана, ЗЮ
загруженного одними стальными шарами, расходуется до 90—95% мощности, требуемой при максимальной загрузке барабана углем. Производительность мельницы и ее загрузка однозначно связаны лишь до опреде-
Рис. 14-2. Принципиальная схема регулирования пылеспстемы с шаровой барабанной мельницей.
1 — шаровая мельница; 2 — сепаратор; 3 — циклон; 4 — мельничный вентиля-тор; 5 — мигалки (массовые дозаторы пыли); 6— спаренные заслонки; 7 — ленточный питатель топлива; в—шибер ленточного питателя; 9 — бункер сырого угля; 10 — распределительный шнек; // — промежуточный бункер пыли: /2 — шнековый питатель пыли; 13, /4 —заслонки; /5 — регулятор загрузки мельницы; 16 — регулятор разрежения во входной горловине мельницы; 17 — регулятор температуры аэросмесн за мельницей; 18 — регулятор аварийной присадки холодного воздуха.
ленных пределов. Дело в том, что чрезмерная загрузка мельницы может привести к ее «завалу». Это явление сопровождается резким уменьшением производительности, вследствие того что чрезмерная толщина слоя топлива внутри мельницы препятствует захвату стальных шаров вращающимся барабаном и масса шаров «проскальзывает» относительно него. Показателем «завала»
служит резкое уменьшение тока электропривода мельницы.
Величина загрузки мельницы оценивается косвенным путем по перепаду давлений на мельнице (воздух до мельницы и аэросмесь после мельницы) Дрм. При постоянстве расхода воздуха Дрм растет пропорционально ее загрузке (до определенного предела). Характер ди-
Рис. 14-3. Временные характеристики шаровой барабанной мельницы при возмущении расходом сырого угля.
а—по относительному изменению сопротивления мелышцы ДРМ/ДР°М ;
б — по относительной температуре д/м/д^°м-
намики этого участка можно установить по кривой разгона, снятой по каналу положение ножа питателя сыро-го угля % УП,— Лрм и приведенной на рис. 14-3,а. Этому участку свойственны значительные инерция и самовыравнивание.
Другим показателем загрузки .мельницы может служить условный уровень пыли внутри барабана мельницы. Его можно измерить косвенным путем по перепаду давлений воздуха в сдвоенной пневматической трубке 4, один конец которой заводится в мельницу через ее горловину, а другой сообщается с постоянным источником сжатого воздуха, непрерывно .прокачиваемым через слой пыли в барабане (рис. 14-4).
Условный уровень пыли определяется по сопротивлению трубки, которое возрастает с ростом загрузки мельницы, однако использование этого способа измерения наталкивается на трудности, связанные с необходимостью защиты трубки 4 от износа шарами.
Известен также ряд других показателей загрузки мельниц (уровень «шума» .мельницы, вибрации подшипников, мощность электропривода и др.).
Помимо экономичности, мельница должна обеспечивать заданное качество пыли, определяемое тониной помола и влажностью. Чем тоньше пыль, тем меньше тепловые потери от механического недожога в топке гд. Однако требования тонины помола и экономичности работы мельницы противоречивы. Поэтому оптимальная тонина помола определяется по минимуму суммы удельного расхода электроэнергии и потерь qt, приведенных
Рис. 14-4. Измерение уровня пыли в барабаие мельницы.
/ — барабан; 2 — дифманометр; 3 —защитная труба; 4 — импульсные трубки; 5—'Уровень шароугольиой массы.
к единому энергетическому эквиваленту. Тонина помола пыли, поступающей в промбункер, определяется в основном положением створок сепаратора, сбрасывающего крупные фракции пыли в мельницы для повторного размалывания. Их положение, соответствующее оптимальной тонине помола, устанавливается в результате испытаний при наладке пылесистемы и остается неизменным в процессе нормальной эксплуатации для определенного сорта угля.
Влажность пыли на выходе из мельницы или степень ее подсушки устанавливается по условиям процесса сжигания и нормальной работы пылепитателей, а также по условиям взрывобезопаспости аэросмеси, заполняющей систему пылеприготовления. Чрезмерная влажность пыли ухудшает ее воспламенение, приводит к ее зависанию в бункерах и нарушению нормальной работы топливоподающих устройств («замазывание» пылепитателей, забивание пылепроводов и т. и.). Чрезмерная подсушка пыли чревата взрывом аэросмеси взрывоопас
ных углей и вызывает излишнюю текучесть пыли, что может приводить к самопроизвольным изменениям производительности пылепитателей. Косвенным показателем влажности пыли служит температура аэросмеси за мельницей tM, которую можно легко измерить, например, с помощью термометра сопротивления.
Правила технической эксплуатации [30] устанавливают следующие максимально допустимые значения температуры аэросмеси за мельницей:
для топлив с влажностью до 25%—70°С;
для топлив с влажностью свыше 25%—80°С;
для тощих углей—10'0°С.
При настройке системы регулирования температуры в качестве оптимальной принимается tM на 3—5°С ниже максимально допустимой. Представление о динамических свойствах участка регулирования мельницы по температуре аэросмеси дает экспериментальная кривая разгона, снятая по каналу заслонка на подводе греющего воздуха—4i (см. рис. 14-3,6).
Динамические свойства основных параметров мельницы зависят не только от инерционности термоприем-иика, но также от производительности мельницы, ее загрузки, сорта угля, температуры и расхода сушильного агента, сортамента шаров и других факторов.
Способы и схемы регулирования. Наиболее распространенным типом системы пылеприготовленпя с шаровой барабанной мельницей является одновентиляторная система с использованием в качестве сушильного агента смеси горячего и слабо подогретого воздуха (см. рис. 14-2).
Регулирование загрузки. Стабилизация загрузки осуществляется воздействием на положение ножа питателя сырого угля (ленточного или тарельчатого) в зависимости от регулируемого параметра, например, перепада давлений на мельнице. Однако производительность мельницы желательно поддерживать не постоянной, но изменять ее в зависимости от вентиляции (уменьшать производительность с увеличением вентиляции и наоборот). Это позволит стабилизировать тонину помола при нарушения^ воздушного режима мельницы: угрубление размола пыли, вызванное увеличением расхода воздуха, будет компенсироваться уменьшением загрузки мельницы. Этому условию удовлетворяет схема автоматического регулирования производительности
мельницы с двухимпульсным регулятором / (рис. 14-5,а): по перепаду давлений на мельнице (вариант а) или уровню пыли (вариант б) и с жесткой обратной связью по положению регулирующего органа 2 питателя угля.
Регулирование разрежения перед мельницей. Шаровая мельница должна находиться под разрежением для предотвращения выбивания пыли из ее горловин. Для этого может быть предусмо-
Рис. 14-5. Системы регулирования шаровых барабанных мельниц.
а — АСР загрузки мельницы; б — АСР разрежения перед мельницей.
Рис. 14-6. Системы регулирования и защиты мельницы по температуре.
а — АСР температуры аэросме-еи за мельницей; б — система защиты от повышения температуры аэросмеси за мельницей.
трепа отдельная АСР разрежения перед мельницей (рис. 14-5,6). Входным сигналом ПИ-регулятора 1 служит разрежение перед мельницей SM. Регулятор воздействует на заслонку на линии подвода общего греющего воздуха к мельнице 2.
Регулирование температуры аэросмеси за .мельницей. Температура за мельницей /м стабилизируется в заданных пределах воздействием на расход смеси слабо подогретого и горячего воздуха. Схема регулирования показана на рис. 14 6,a. IllI регулятор 1 получает сигнал от датчика температуры аэросмеси и через исполнительный механизм перемещает в нужном направлении спаренные .заслонки 2 и 2', установленные на линиях слабо подогретого и горячего воздуха. Сочленения исполнительного механизма со спаренными заслонками выполняются так, чтобы при открытии одной из них вторая закрывалась и наоборот, с тем чтобы общий расход воздуха на мельницу оставался неизменным.
В пылесисгемах со взрывоопасными топливами кроме регулятора температуры аэросмеси предусматривается устройство 1 автоматического открытия заслонки 2 на линии присадки холодного воздуха (рис. 14-6,6), которое срабатывает при повышении tM сверх допустимого значения и размыкании концевого или путевого выключателя «меньше» исполнительного механизма регулятора температуры, т. е. в том случае, когда его регулируемый диапазон исчерпан.
Регулирование молотковых мельниц
При камерном способе сжигания легко воспламеняю-
щихся сортов топлива применяют пылесистемы с непосредственным вдуванием пыли в топку. Размол топлива осуществляется в молотковой быстроходной мельнице.
В ней же начинается подогрев аэросмеси и завершается в шахте, соединяющей ее с топкой.
Рис. 14-7. Молотковая мельница (принципиальная схема регулирования) .
/ — мельница: 2 —шахта; 3 — сужающее устройство; 4 — станция группового управления загрузкой мельницы; 5 — электропривод ленточного питателя; 6 — ленточный транспортер; 7 — бункер сырого угля; 8 — шибер питателя; 9 — регулятор расхода первичного воздуха; 10 — регулирующая заслонка; U — массовый дозатор угля (мигалка).
В отличие от шаровой мельницы, работающей на промбункер, производительность молотковой мелышцы непосредственно определяет расход топлива, поступающего в топку. Поэтому система регулирования производительности молотковой мельницы связана с работой регуляторов процесса горения. АСР мельницы должна поддерживать требуемый уровень ее загрузки углем и оптимальную величину тонины помола. Пример такой АСР приведен на рис. 14-7.
Обычно на одном парогенераторе устанавливается несколько молотковых быстроходных мельниц. Их производительность регулируется воздействием на частоту вращения приводного ба-
рабана ленточного питателя сырого угля 6, управляемого электроприводом с регулируемым числом оборотов. Стабилизация требуемой тонины помола пыли осуществляется с помощью регулятора расхода первичного воздуха, действующего по перепаду давлений на сужающем устройстве, установленном на подводе греющего воздуха к мельнице. Изменение производительности мельницы при воздействии на ее загрузку происходит со значительной инерцией. Более быстрое изменение количества вдуваемой в топку пыли осуществляется изменением расхода аэросмеси путем изменения задания регулятору общего воздуха. Сигнал задания может формироваться, например, системой регулирования 4 частоты вращения электродвигателей питателей сырого угля АРСП, управляющей одновременно несколькими приводами (см. рис. 11-18,6). Для стабилизации влажности пыли в заданных пределах предусматривается регулятор температуры аэросмеси за мельницей, действующий на изменение соотношения расходов горячего и слабо подогретого воздуха таким же способом, как в системе регулирования температуры шаровых барабанных мельниц (см. рис. 14-6,а).
14-3. Автоматизация установок подачи жидкого и газообразного топлива
Автоматизация установок подготовки мазута
Конечный продукт перегонки нефти — мазут широко используется как основное и вспомогательное топливо на ТЭС. Для этого мазут необходимо подогреть до температуры 115—150°С и подать к форсункам под давлением, значение которого зависит от типа и конструкции форсунок и может достигать 12 МПа (120 кгс/см2 для форсунок с механическим распиливанием). Подогрев мазута осуществляется в паровых подогревателях, а подъем давления — в двухступенчатой системе мазутных насосов, так называемых насосах первого и второго подъема. Эти насосы управляются дистанционно с местного щита управления (МЩУ) мазутонасосной. В случае отключения одного из работающие насосов или при понижении давления в напорных магистралях предусматривается автоматическое включение резервного на-317
coca. Кроме того, предусматривается автоматическое регулирование следующих величин:
1) температуры мазута на выходе из подогревателей;
2) давления пара, подаваемого на подогрев мазута;
3) давления мазута в магистрали горячей рециркуляции (на всасе насосов второго подъема).
Автоматизация газораспределительных пунктов
Снабжение тепловых электростанций газом осуществляется от газораспределительных станций (ГРС) через газораспределительные пункты (ГРП).
В ГРП газ редуцируется до давления 0,15—0,2 МПа (1,5—2 кгс/см2) с помощью регулирующих клапанов, управляемых автоматическими регуляторами давления. С выхода ГРП газ поступает в общий газопровод ТЭС, снабжающий парогенераторы газовым топливом. В ГРП имеются рабочие нитки газопровода, нитки малого расхода и резервная с ручным управлением арматурой. На рабочих ниткам и нитках малого расхода устанавливаются автоматические регуляторы давления, действующие по принципу «после себя», и защитные регуляторы, действующие по тому же принципу. Защитные регуляторы настраиваются на поддержание повышенного давления по сравнению с рабочим и при работе в расчетном диапазоне полностью открыты.
Автоматическое регулирование подачи газового топлива при его расходах в расчетном диапазоне осуществляется обычно одним из рабочих регуляторов, установленных на рабочей нитке. Другой настраивается на несколько меньшее давление и, как правило, полностью закрыт или частично открыт и выполняет роль автоматического резерва снабжения топливом при его нехватке или недостаточном напоре со стороны источника (от ГРС).
При ограниченном снабжении ТЭС газовым топливом включаются нитки и регуляторы малого расхода. В качестве автоматических и защитных регуляторов, как правило, используются П-регуляторы давления прямого действия с мембранным исполнительным механизмом (см. рис. 6-9). В качестве источника энергии для управления исполнительным механизмом используется давление самого природного газа.
14-4. Автоматизация установок химической очистки воды
Для восполнения неизбежные материальных потерь пара, конденсата и питательной воды в процессе выработки электроэнергии на ТЭС требуется вода высокого качества.
Нерастворимые примеси и растворенные в воде соли должны быть удалены из нее для предотвращения наки-пеобразования на внутренних поверхностях нагрева па-
7
Конденсат турбины
Лп.Н
8
ЗРУ
8
вода
Теплосеть
Гоеюшии пар
Рис. 14 8. Установка химической подготовки питательной воды (принципиальная технологическая схема).
/ — волоподогрсватсль сырой воды; 2 — регулятор температуры подогрева исходной воды; 3, 5 — регулирующие клапаны; 4 — регулятор производительности установки; 6 — осветлительный фильтр; 7—накопительный бак; 8—насос; 9 — механический фильтр; 10 — обессоливающая установка; 11— умягчи-тельиый фильтр; 12, 14 — деаэраторы; 13, 15 — питательный и подпиточный насосы.
Греющий пар К парогенера-^ь^тору
Возврат конденсата
Греющий пар
регенераторов и теплообменников. Растворенный в воде кислород удаляется для предотвращения коррозии этих поверхностей. Обычно требования к качеству очистки волы для подпитки теплосетей несколько ниже требований к воде, поступающей в парогенераторы. Это находит свое отражение и в технологической схеме водоподготовки, один из вариантов которой изображен на рис. 14-8.
Исходная природная вода от насосов водоснабжения предварительно подогревается в теплообменнике и поступает в осветлители, где осуществляется переход некоторых растворенные примесей в нерастворимые твердые вещества за счет добавления специальных химиче-
ских реагентов в виде растворов определенной дозировки. Осветленная вода поступает в накопительные баки, а оттуда с помощью насосов прокачивается через группу механических фильтров, в которых задерживаются выделенные в осветлителях нерастворимые твердые вещества (шлам). Затем поток воды раздваивается: часть воды, необходимая для подпитки теплосети, пропускается через фильтры химического умягчения, другая часть, требующаяся для восполнения потерь питательной воды парогенераторов, проходит через обессоливающую установку. Удаление кислорода из обоих потоков воды осуществляется раздельно в деаэраторных установках. Технологические операции по химической очистке воды по условиям автоматизации можно разделить на операции, требующие непрерывного регулирования, и операции, осуществляемые периодически, т е. один или несколько раз в сутки. К непрерывным процессам химической очистки воды относятся регулирование подогрева исходной воды, производительности водоподготовительной установки, дозировки реагентов и уровня шлама в осветлителях.
Периодические операции включают приготовление растворов реагентов, отключение на промывку механических и регенерацию (восстановление фильтрующих способностей) химических фильтров.
Автоматическое регулирование непрерывных процессов
Регулирование температуры исходной воды. Поддержание заданного значения температуры исходной воды необходимо по условиям нормального протекания химических реакций в осветлителях и химических фильтрах. Подогрев воды осуществляется в поверхностном пароводяном теплообменнике, который по своим динамическим свойствам является типичным тепловым объектом.
Принципиальная схема одноконтурной автоматической системы подогрева исходной воды изображена на рис. 14-8.
В качестве регулятора температуры используется ПИ-регулятор.
Регулирование производительности. Потребность в добавке химически очищенной воды в теплосеть и к парогенераторам может изменяться в зависимости от режимов работы и нагрузки ТЭС, 320
Косвенным показателем соответствия производительности установки химочистки количеству требуемых добавок в тепловую схему ТЭС является уровень воды в промежуточных баках.
На рис. 14-8 изображена принципиальная схема одного из вариантов АСР производительности установки очистки воды. Схема является двухконтурной. Заданием регулятору производительности, воздействующему на расход исходной воды, служит уровень воды в баке. В качестве сигнала, стабилизирующего работу системы, используется перепад на измерительной диафрагме, установленной па линии исходной воды. Регулятор 4 в этом случае будет работать с остаточным отклонением ио уровню в баке, что вполне допустимо для подобных объектов. Помимо того, измерительный блок регулятора 4 должен обладать зоной нечувствительности по уровню (до 20—30% всего диапазона изменений уровня), для того чтобы не изменять задание регулятору по нагрузке при колебаниях уровня воды в накопительных баках в этих пределах.
Автоматическое дозирование реагентов, поступающих в осветлитель. В осветлитель одновременно могут подаваться два или три реагента. В качестве реагентов обычно используются раствор извести в виде известкового молока, порошковый магнезит, транспортируемый в осветлитель с помощью смывной воды, и раствор коагулянта, добавляемый в осветлитель для укрупнения (коагуляции) мелкодисперсных коллоидных частиц. Наиболее целесообразно регулировать подачу реагентов по результатам химического анализа осветленной воды. Однако до сих пор отсутствуют надежные и быстродействующие датчики непрерывного анализа.
На рис. 14-9 изображена принципиальная схема прерывистого или импульсного автоматического дозирования указанных реагентов, подаваемых в осветлитель /, с использованием индивидуальных автоматических регуляторов— импульсаторов, управляющих работой электродвигателей плунжерных насосов-дозаторов, действующих в режиме «пуск—останов». В качестве пмпуль-саторов можно, например, использовать релейные регулирующие приборы типа РПИБ-Ш, входным сигналом для которых служит расход исходной воды. Регулирующий прибор Р-1 управляет (включает или отключает) 21—626 321
электродвигателем шнекового дозатора 4 каустического магнезита. Магнезит из бункера 2 с помощью шнекового дозатора 3 поступает в смывное устройство За, а оттуда в виде суспензии перекачивается в осветлитель насосом-дозатором 4.
Второй регулирующий прибор Р-2 управляет одновременно включением или отключение электродвигателей насосов-дозаторов на линиях известкового молока 6 и раствора коагулянта 5.
Рис. 14-9. Схема регулирования дозирования реагентов в осветлитель (принципиальная схема).
Возможные незначительные отклонения химического состава осветленной воды от нормы при автоматической дозировке реагентов по расходу исходной воды могут устраняться с помощью изменения интервала включения электродвигателей насосов-дозаторов, в приведенном примере — путем воздействия на орган настройки регулирующих приборов «Длительность импульса» (см. рис. 7-4).
Регулирование шламового режима в осветлителя^. Регулирование шламового режима состоит в поддержании постоянства среднего значения уровня взвешенного осадка (шлама) в корпусе осветлителя и шламоотделителя и осуществляется с помощью непрерывной и периодической продувок осветлителя.
Принципиальная схема регулирования шламового режима изображена на рис. 14-10.
Количество воды, непрерывно сбрасываемой из осветлителя 1 в дренаж через вентили 3, как правило, не регулируется и устанавливается вручную при включениях осветлителя в схему очистки.
Периодическая продувка осуществляется с помощью системы двухпозиционного регулирования, состоящей из
Рис. 14-10. Схема регулирования шламового режима осветлителей.
сигнализаторов верхнего 5 и нижнего 6 уровней шлама в осветлителе / и шламоотделителе 2. Сигнализатор уровня шлама устроен ио принципу фотореле, непрерывно контролирующего прозрачность потока воды, проходящего через датчик. Фотореле управляет через устройство пуска 7 исполнительным механизмом 8, который открывает вентиль периодической продувки 4 при достижении шламом верхнего уровня и закрывает при достижении нижнего уровня.
Автоматическое регулирование периодических процессов химводоочистки
Система автоматического управления приготовлением регенерационных растворов для ионитных фильтров. Промывка и восстановление ионитных фильтров, используемы^ в технологических схемах химической очистки воды на ТЭС, осуществляются осветленной водой с введенным в нее регенерационным раствором. Требуемая концен-21* 323
трация этого раствора .может обеспечиваться с помощью специального регулятора, использующего в качестве датчика концентратомер и воздействующего на расход заранее приготовленного раствора, вводимого в осветленную воду, или же с помощью автоматической системы регулирования соотношения расходов регенерацион-оного раствора и осветленной воды. Второй способ в настоящее время более приемлем, так как он не требует использования датчика-копцснтратомера.
Рис. 14-11. Схема регулирования приготовления регенерационных растворов для ионитных фильтров
Схема автоматического управления процессом приготовления растворов по соотношению расходов концентрированного раствора и осветленной воды изображена на рис. 14-11. Исходный концентрированный раствор содержится в баке 2.
Система состоит из трех регуляторов. Регулятор давления 5 эжектпрующей осветленной воды работает по принципу регулирования давления «после себя» и обеспечивает постоянство ее расхода через гидроэлеватор 6. Регулятор уровня 4 в бачке концентрированного раствора 3' обеспечивает требуемый расход на притоке. Автомат регенерации 1 управляет закрытием и открыти-324
ем запорных задвижек на линиях осветленной воды и концентрированного раствора на линиях подвода и раствора реагентов к промежуточному баку 3 и к фильтрам.
В качестве автомата регенерации используется командный электрический прибор (КЭП) (рис. 14-12), который замыкает и размыкает контакты электрогидрав-лпческих реле (ЭГР) посредством распределительного вала (РВ).
Рис. 14-12. Контактный электрический прибор (КЭП) (схе ма действия).
К — ключ управления (включения); РВ — распределительный вал; Р — редуктор; Д — конденсаторный двигатель; Л — сигнальная лампа; A'i -контактная пара самоблокировки двигателя при включении; К2—Л'12-контактные пары автоматического управления.
Электрогидравлическое реле представляет собой двусторонний электромагнитный клапап, открывающий доступ воды под давлением 0,15- 0,2 МПа (1,5—2 кге/см2) в верхнюю полость мембранного исполнительного механизма (МИМ) или соединяющий эту полость с дренажем.
Таким образом КЭП по заданной программе осуществляет управление несколькими МИМ, которые могут принимать два положения «открыто» и «закрыто».
Последовательность включения и отключения контактов КЭП устанавливается путем установки кулачков, закрепленных на РВ, вращающемся с постоянной скоростью, против соответствующих .контактов.
Электродвигатель КЭП, приводящий в движение РВ, отключается по достижении верхнего уровня в мерном баке 3 и включается по достижении его нижней отметки.
Автоматическое отключение фильтров па промывку и регенерацию (рис. 14-13) осуществляется автоматическим устройством 2, действую-325
Исходная бода
Рис. 14-13. Схема автоматического отключения на промывку.
в схему управления ср и. ль трон
слоя сжатым воздухом. По
щим по соотношению гидравлического сопротивления фильтра 1 и водомерной шайбы, установленной на трубопроводе воды после фильтра. Сопротивление фильтра возрастает с ростом загрязненности фильтрующего слоя и увеличением общего расхода воды через фильтр, поэтому увеличение перепада давлений на фильтре служит вполне надежным косвенным показателем его загрязненности лишь при неизменном расходе воды.
Автоматизация процесса промывки и восстановления фильтров. Процессы промывки и восстановления (регенерации) фильтров осуществляются 'в следующей последовательности (рис. 14-14,а). Вначале закрывается клапан 2, управляемый МИМ, на линии обрабатываемой воды. Далее закрывается клапан 1 на линии исходной воды. Затем открываются клапаны 4 и 5 и происходит взрыхление фильтрующего окончании операции взрых
ления клапаны 4 и 5 закрываются. Процесс промывки фильтра осветленной воды снизу вверх осуществляется открытием клапапа 3 и клапана 5 на липни дренажа. Регулятор расхода 8 устанавливает с помощью регулирующего клапана 7 количество воды, требуемое для промывки. Следующая операция — отмывка (восстановление) осуществляется пропуском воды через фильтр сверху вниз в дренаж путем открытия клапанов 1 и 6. После этого фильтр может быть включен в работу открытием клапана 2 и закрытием клапана 6. Описанные процессы могут быть автоматизированы с помощью КЭП 11, управляющего открытием и закрытием клапанов 1—6 с помощью ЭГР (электрогидравлического реле). Разрешение на выполнение операций, следующих после закрытия клапана 2, формируется сигнализатором нулевого расхода воды 9, разрешение на завершающую операцию — отмывку дается сигнализатором расхода 326
промывочной воды 10. Автомат промывки может включаться вручную с помощью ключа 13 или по сигналу от группового КЭП 14 через переключатель управления 12.
В качестве командного прибора 11 может быть применен также электрогпдравлический прибор типа КП-ЭГП12/8 (12 — электрических, 8 — гидравлических ячеек), благодаря чему командный прибор
Рис. 14-14. Схемы управления процессом промывки ления.
и восстанов-
а — с использованием КЭП; б —с использованием ЛАРИФ; РУ — регенерационный узел (дозаторы растворов, запорные клапаны н др); Ф] н Ф2— фильтры; КП12 — командные приборы; БФ — логические блоки управления фильтром; ДФ— датчики, установленные на фильтрах; ДРУ—датчики регенерационного узла; БО — блок операций по управлению.
непосредственно управляет запорными органами типа МИК (мембранный исполнительный клапан). В рассматриваемой индивидуальной системе управления регенерацией фильтра также предусматривается контроль исполнения команд по расходу от сигнализирующего расходомера.
Для управления регенерацией группы фильтров попользуется также логический автомат регенерации фильтров ЛАРИФ, который является надстройкой над индивидуальными КП. Структурная схема ЛАРИФ ,[Л. 16] изображена на рис. 14-14,б. Блок управления фильтров БФ получает сигналы от датчиков фильтров ДФ и осуществляет управление ими по жесткой программе (выключение из работы, переключение операций промывки, контроль, аварийная сигнализация .и др.).
В заключение следует отметить, что автоматизация установок химводоочистки помимо облегчения труда и сокращения количества операторов позволяет повысить надежность подготовки химочищенной воды за счет исключения возможных ошибок эксплуатационного персонала при проведении трудоемких операций непрерывных и периодических процессов очистки, в особенности в установках с большим количеством фильтров и осветлителей, и, кроме того, позволяет добиться более полного использования оборудования и сокращения расхода реагентов.
14-5. Автоматизация ввода аммиака и гидразина
Введение раствора аммиака в питательную воду парогенераторов повышает ее щелочность и замедляет процессы коррозии поверхностей нагрева. Схема автоматического регулирования ввода аммиака показана на рис. 14-15 (вариант а). Регулятор производительности 2 насоса-дозатора 4 получает сигнал по расходу питательной воды и действует по 'принципу импульсатора, увеличивая или уменьшая частоту включения электропривода плунжерного насоса-дозатора, а тем самым его производительность в .зависимости от изменения расхода питательной воды. Действие регулятора может корректироваться по сигналу электропроводности питательной воды (вариант б). По тому же принципу осуществляется автоматическое регулирование ввода раствора гидразина, поглощающего остаточный кислород, не удаленный термическим деаэрированием (вариант в). В обеих системах предусматривается установка двух насосов-дозаторов: рабочего и резервного и возможность дистанционного регулирования с помощью задатчиков ручного управления (ЗРУ). 328
Рис. 14-15. Автоматизация ввода в питательную воду аммиака и гидразина.
а, в — количественное регулирование; б — качественное регулирование; 1— регулятор ввода гндразнна; 2— регулятор ввода аммиака; 3 — электромагнитные муфты скольжения; 4 — плунжерные насосы-дозаторы; 5 — бак раствора аммиака; б—бак раствора гидразина; 7— деаэратор; 8 — конденсатор; 9, 10 — конденсатный н питательный насосы; И — группа ПВД; 12— группа ПНД; 13 — размножитель сигнала; 14— отборное устройство аммнакомера; 15 — кондуктометрический датчик.
14-6. Автоматизация установки для очистки конденсата
Современные блочные установки, как правило, оборудуются конденсатоочисткой (рис, 14-16) для предотвращения останова блока из-за ухудшения качества питательной воды вследствие присосов в нес охлаждающей воды в местах повреждения трубок в конденсаторе 2
турбины 1. Установка для конденсатоочнстки включается между конденсатными насосами первого 3 и второго6 подъемов и состоит из химических фильтров двух ступеней: Н-катионитовых 5, задерживающих взвеси окис-лов железа и растворенный в воде аммиак, и фильтров смешанного действия 4, связывающих кремнекислоту. На конденсатоочистке устанавливают два регулятора давления РД «до себя». 7 и 3. РД 8 является защит-
Рис. 14-16. Автоматизация конденсатоочнстки.
ным регулятором ог создания вакуума па всасе конденсатных насосов второго подъема и действует на регулирующий клапан 9 па линии обвода фильтров. При достижении избыточным давлением конденсата на всасе насосов 6 заданного значения РД 8 закрывает запорную задвижку 10. Рабочий регулятор давления 7 настраивается на поддержание большего избыточного давления на всасе насосов второго подъема по отношению кРДЙ и воздействует на регулирующий клапан И на линии отвода. Защитный регулятор 12 от повышения температуры перед фильтрами смешанного действия работает по сигналу температуры конденсата и при />40oC пере, ключает воду в обвод фильтров 4, воздействуя на закрытие задвижки 13 и открытие задвижки 14.
14-7. Автоматическое регулирование деаэраторных установок
Характеристика объекта регулирова-н и я. Деаэратор является смешивающим подогревателем питательной воды и предназначен для деаэрации, г. с. для удаления растворенного в ней кислорода. В ппжшою часть деаэраторной головки, установленной пад аккумуляторным баком питательной воды, подводится греющий пар (рис. 14-17). Поток пара, стремясь
Рис. 14-17. Автоматическое регулирование деаэраторной установки.
к выходу в атмосферу, расположенному в верхней части головки, нагревает до температуры кипения движущуюся навстречу ему питательную воду. Выделившийся из воды в процессе кипения кислород вместе с излишками пара сбрасывается в атмосферу или расширитель. Для непрерывного нагрева и деаэрирования воды в деаэраторе поддерживаются избыточное давление пара рд и соответствующие ему температура насыщения /п.в и уровень Нъ.
Схемы регулирования уровня воды в аккумуляторном баке 1 и избыточного давления пара в деаэраторной головке 2 изображены на рис. 14-17.
Входным сигналом П- или ПИ-регулятора уровня 6, воздействующего на перемещение клапана 3 на линии химически очищенной воды, служит уровень воды Обычно регулятор уровня снабжается входным сигналом, являющимся жесткой отрицательной обратной связью ЖО'С, по положению регулирующего клапана для сообщения системе должного запаса устойчивости.
Входным сигналом регулятора давления 5, который воздействует па регулирующую заслонку 4 на липин греющего пара, служит давление рк. Из-за необходимости точного поддержания ря и /п.в регулятор давления должен реализовать ПИ-закон регулирования.
При параллельной работе группы деаэраторов регулятор давления и регулятор уровня воздействуют на соответствующие регулирующие клапаны на линиях общего подвода пара и химически очищенной воды.
14-8. Автоматическое регулирование редукционноохладительных установок (РОУ)
В РОУ осуществляется понижение давления пара за счет пропуска его через редукционный клапан и понижение температуры за счет впрыска охлаждающей воды в коллектор редуцированного пара. С помощью РОУ резервируются промышленные и теплофикационные отборы паровых турбин, осуществляется связь между общими паропроводами парогенераторов высокого и среднего давления. Для перепуска первичного пара в обвод турбин в случае их внезапного останова предусматриваются быстродействующие РОУ (БРОУ). В этом случае излишек пара от парогенераторов сбрасывается через БРОУ в конденсатор турбины.
При наличии производственного потребителя, не допускающего перерывов в снабжении паром, промышленные отборы турбин резервируются также с помощью БРОУ, находящихся в состоянии горячего резерва.
Точность поддержания давления и температуры редуцированного пара диктуется потребителем или в случае сброса редуцированного пара в конденсатор условиями его безопасной работы.
Как объекты регулирования РОУ и БРОУ представляют собой динамические системы с двумя входными регулирующими воздействиями: Оп.п и DO.B и тремя ре-332
гулируемыми величинами: £>р.п, рР.п и /р.п. Структурная схема этих связей представлена на рис. 14-18,0.
Динамические свойства РОУ по каналам £>0.в—Д.п и Дп.п—^Р.п определяются в основном инерционностью температурного датчика (термопары).
Рис. 14-18. Редукционно-охладительная установка (РОУ).
а — структурная схема связей между входными и регулируемыми величинами; б — принципиальная схема АСР.
Кривые переходного процесса РОУ по давлению пара по каналу £>пп—РР.п приведены на рис. 14-19.
Сигнал по давлению редуцированного пара рР.п в коллекторе 5 поступает на вход регулятора давления 6, который воздействует на перемещение парового редукционного клапана <?, осуществляя принцип регулирования давления «после себя» (рис. 14 18,6, вариант а).
Входным сигналом регулятора температуры 7 служит /р.п, в зависимости от которой он перемещает регулирующий клапан 4 на линии охлаждающей воды. Для увеличения быстродействия регулятора температуры и улучшения качества процесса регулирования на его вход целесообразно подавать опережающий сигнал с выхода регулятора давления через устройство динамической связи 8.
Быстродействующая РОУ отличается от обычной наличием быстрозапорных клапанов на подводящем паропроводе и трубопроводе охлаждающей воды. Эти клапаны открываются по сигналу от командного устройства (КУ), которое в свою очередь действует в зависимости от назначения БРОУ. Например, в случае резервирова
Рис. 14-19. Кривая разгона РОУ по давлению пара при возмущении расходом перегретого пара Г>п.п (регули рующими клапанами турбины) .
ния БРОУ промышленного отбора турбины КУ представляет собой реле давления, подающее сигнал на открытие быстрозапорных клапанов 1 и 2 при понижении давления в коллекторе редуцированного пара ниже допустимого.
Если редуцирующее устройство установлено в параллель с турбиной и служит для пе-
репуска пара в конденсатор при внезапных сбросах электрической нагрузки турбогенератора, быстродействующие клапаны открываются при повышении давления пара перед БРОУ
сверх допустимого или закрытии стопорного клапана перед турбиной. Регулятор давления РОУ в этом слу
чае получает в качестве входного сигнала давление
пара перед редукционным клапаном и осуществляет принцип регулирования давления пара «до себя» (вариант б).
14-9. Автоматическое регулирование подогревателей сетевой воды
Подогреватель теплофикационной сетевой воды предназначен для ее подогрева до требуемой температуры, значение которой задается в зависимости от температуры наружного воздуха. Подогреватель представляет собой поверхностный теплообменник 1 (рис. 14-20), по змеевикам которого с помощью сетевого насоса 10 прокачивается вода. Снаружи змеевики обогреваются паром. Источником греющего пара обычно служат отборы паровых турбин или резервирующие их РОУ. Основной регулируемой величиной подогревателя является темпе-334
ратура прямой сетевой воды ?с.в, которую требуется поддерживать на заданном значении с высокой точностью, что определяется не только тепловым потребителем, но и условиями экономичной р а боты теплофикационных турбин.
Второй регулируемой величиной является уровень конденсата греющего пара в корпусе подогревателя Нп, среднее значение которого следует поддерживать постоянным по условиям оптимального теплообмена в подогревателе и опасности заброса воды в трубопровод греющего пара.
Сетевая вода циркулирует обычно по замкнутому контуру насос — подогреватель — тепловая сеть—насос. При этом неизбежные потери воды в тепловой сети восполняются за счет подпиточной воды, которая поступает на всас сетевых насосов благодаря некоторому избыточному давлению. Потери воды в сети имеют характер
случайных и неконтролируемых возмущений. Поэтому желательно предусматривать автоматическое регулирование расхода подпиточной воды в зависимости от давления обратной сетевой воды.
Подогреватель как объект регулирования разделяется на три самостоятельных участка: температуры прямой сетевой воды /с.в, уровня конденсата в корпусе НП и давления обратной сетевой воды р0.с-
Регулирование температуры прямой сетевой воды может осуществляться тремя способами. При первом способе (рис. 14-20, вариант а) регулятор температуры 3 получает сигнал по 4:.в и воздействует на регулирую
Soffa
Рис. 14-20. Подогреватель сетевой воды (принципиальная схема АСР).
1 — корпус подогревателя; 2 — регулирующая заслонка; 3—регулятор температуры; 4 — термоприемники; 5 — регулирующий клапан на линии обвода; 6 — регулятор уровня конденсата; 7, 8 — регулирующие
клапаны; 9— регулятор давления обратной сетевой воды; 10 — сетевой насос.
щую заслонку 2 на трубопроводе греющего пара. Судя по графику /c.B=f(O (рис. 14-21), этому участку свойственна значительная инерция. Для обеспечения требуемой точности поддержания регулируемой величины при этом варианте могут потребоваться относительно большие перемещения регулирующей заслонки, что может привести к существенным колебаниям давления пара источника. Чтобы избежать этого, температуру прямой
Рис. 14-21. Кривая разгона подогревателя по температуре сетевой воды по каналу регулирующего воздействия.
ны. Однако этот метод
сетевой воды можно регулировать перепуском части обратной сетевой воды через клапан 5 в обвод подогревателя в трубопровод прямой сетевой воды, т. е. смешением подогретого и холодного потоков сетевой воды (рис. 14-20, вариант б).
Помимо уменьшения инерционности регулируемого участка, второй способ регулирования позволяет сохранить неизменный расход греющего пара и тем самым способствует стабилизации давления в теплофикационных отборах турбине экономичен и эффективен
лишь при значительных перепадах температур обратной и прямой сетевой воды (не менее 20—30°С). Для регулирования /с.в обычно используются ПИ-регуляторы с авто-
матическим или ручным изменением задания в зависимости от температуры наружного воздуха.
Третий, наиболее экономичный способ предусматривает поддержание /с.п при полностью открытой ршули-рующей заслонке 2 путем регулирования давления пара в теплофикационном отборе с помощью системы регулирования паровой турбины и специального автоматического задатчика температуры, действующих в зависимости от электрической нагрузки турбогенератора и температуры наружного воздуха.
Регулирование уровня осуществляется регулятором 6, который получает сигналы по уровню конденсата в корпусе и по положению регулирующего органа и воздействует на открытие или закрытие клапана 7 на линии
слива конденсата.
Регулятором расхода подпиточной воды служит регулятор 9, работающий по принципу регулирования давления «после себя» и воздействующий на клапан 8, установленный на трубопроводе подпитки.
14-10. Автоматическое регулирование пиковых водогрейных котлов
Подогрев сетевой воды свыше / = 104°С, соответствующей температуре насыщения при максимальном давлении в теплофикационном отборе, осуществляется по двухступенчатой схеме: вначале сетевыми подогревателями, а в диапазоне 104 — 150°С пиковыми котлами, которые работают па газе пли мазуте при естественной тяге. Пуск котлов производится с помощью растопочных горелок по сигналу наличия 30% расхода сетевой воды через котел. Регулирование температуры сетевой воды на выходе водогрейных котлов осуществляется либо дистанционно по графику тепловой нагрузки, либо автоматически в зависимости от температуры наружного воздуха. В обоих случаям регулирующим воздействием является включение и отключение части рабочих горелок.
Для стабилизации работы горелочных устройств на котле устанавливается регулятор давления газа или мазута «до себя», воздействующий на соответствующую заслонку или клапан па общей линии подвода топлива. Регулирование разрежения ла выходе из топки осуществляется с помощью автоматического регулятора разрежения, воздействующего на положение газового шибера перед дымовой трубой (см. рис. 12-12).
14-11. Автоматизация вспомогательных установок паровых турбин
Автоматическое регулирование подачи пара на лабиринтовые уплотнения турбин
Лабиринтовые уплотнения устанавливаются в местах выхода вала турбины, т. е. между ее корпусом и опорными подшипниками. Они препятствуют выходу пара в атмосферу и проникновению воздуха в корпус турбины. В многоцилиндровых турбинах давление пара в местах уплотнений является переменной величиной, т. е. зависит от нагрузки и может оказаться выше атмосфер-22—626 337
ного давления или ниже его. Это вынуждает снабжать устройство подачи пара к уплотнениям автоматической системой регулирования.
Схематическое изображение лабиринтового уплотнения одноцилиндровой турбины и АСР давления приводятся на рис. 14-22. Камеры уплотнения 2 и 3 находятся под избыточным давлением, подводимым от внешнего источника. Обычно используется пар переднего уплотнения турбины, находящегося под давлением, или греющий пар деаэраторов.
Рис. 14-22. Система регулирования давления пара в лабиринтовых уплотнениях турбины.
Из промежуточной камеры 2' пар попадает в вестовую трубу 4, а с другой стороны — в корпус турбины 1. Избыточное давление пара в промежуточной камере-должно поддерживаться в пределах 3—5 кПа (0,03 -0,05 кгс/см2).
В АСР подачи пара на уплотнения используется регулятор давления 5 «до себя», поддерживающий необходимое избыточное давление в коллекторе уплотнений путем, воздействия на положение регулирующей заслон-338
ки 6, расположенной на трубопроводе отсоса пара из переднего уплотнения в эжектор или систему подогревателей низкого давления. Регулятор снабжен ЖОС по положению регулирующего органа.
Автоматическое регулирование уровня воды в конденсаторах паровых турбин
Среднее значение уровня воды в конденсаторе должно поддерживаться по возможности постоянным независимо от расхода пара через турбину пли режима ее работы (теплофикационного или конденсационного), что необходимо по условиям устойчивой работы конденсатных насосов и эжекторов.
Положение уровня регулируется путем изменения производительности конденсатных насосов, которую, однако, нельзя уменьшить ниже определенного предела, задаваемого минимальным пропуском конденсата через
Пар
Рис. 14-23. Система регулирования уровня конденсата в конденсаторе турбины.
эжекторы и систему регенеративных подогревателей. Поэтому при малых нагрузка^ турбины часть конденсата с напорной стороны конденсатных насосов должна вновь сбрасываться в конденсатор. С учетом этого требования и выполняется система регулирования уровня воды в конденсаторе, принципиальная схема которой изображена на рис. 14-23.
Как объект регулирования уровня конденсатор 1 представляет собой герметический бак с насосом на стоке, т. е. не обладает свойством самовыравнивания. 22* 339
Регулирование уровня воды осуществляется изменением производительности конденсатных насосов 5 путем воз- । действия на двухпоточный клапан (3 или 4).
При снижении уровня вследствие сброса нагрузки турбины закрывается рабочий клапан 4, но обеспечивает требуемый нерегулируемый пропуск воды в систему охлаждения эжекторов 6 и регенеративных подогревателей. При дальнейшем снижении уровня начинает открываться клапан рециркуляции 3, поддерживая уровень воды в конденсаторе. Для удобства управления и согласованности в работе клапаны 3 и 4 выполнены в одном корпусе и управляются одним исполнительным механизмом.
Обычно на регулятор уровня 2 поступают два входных сигнала: по уровню конденсата Нк и ЖОС по положению регулирующего органа.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите основные периодические операции по автоматическому управлению топливоподачсй.
2. Как осуществляется автоматическая загрузка бункеров углем?
3. Назовите регулируемые параметры системы пылеприготовления с шаровой барабанной мельницей.
4. Поясните динамические свойства мельницы по температуре аэросмеси.
5. Какие сигналы характеризуют загрузку мельницы углем?
6. Поясните действие АСР производительности мельницы и температуры аэросмеси за мельницей.
7. Поясните действие АСР производительности молотковой мельницы.
8. Назовите регулируемые величины па выходе РОУ и поясните принцип действия се АСР.
9. Поясните динамические свойства и действие АСР подогревателей сетевой воды.
10. Назовите регулируемые величины деаэраторной установки и поясните действие АСР.
11. Поясните действие АСР уровня воды в конденсаторе турбины.
12. Как действует автоматический регулятор подачи пара к уплотнениям турбины?
13. Назовите непрерывно действующие АСР установок химической очистки воды.
14. Поясните действие АСР производительности установки водоподготовки.
45. Как осуществляется автоматическое регулирование шламового режима в осветлителях?
16. Как осуществляется автоматическое отключение фильтров на промывку и регенерацию?
17. Как осуществляется автоматическая промывка и восстановление фильтров?
18. Поясните действие АСР ввода аммиака и гидразина.
19. Поясните действие АСР конденсатоочисткп.
ГЛАВА ПЯТНАДЦАТАЯ
АВТОМАТИЧЕСКИЕ ЗАЩИТЫ ТЕПЛОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
15-1. Назначение автоматических защит
Автоматические защиты служат для предотвращения аварии оборудования в случае отклонения параметров за допустимые пределы. Действие защит связано с открытием запорных органов п пуском или остановом вспомогательного или основного оборудования.
Устройства защиты обычно устанавливаются для контроля наиболее ответственных параметров, чрезмерное отклонение которых от заданных значений чревато нарушением нормального технологического процесса и повреждением оборудования. Защита вступает в действие в том случае, когда возможности автоматического или дистанционного управления по предотвращению отклонений параметра свыше установленного предела исчерпаны, а оператор не в состоянии вовремя на это реагировать. Автоматические защитные устройства, обслуживающие тепловую часть электрической станции, называются тепловыми защитами. Наличие действующих тепловых защит служит существенным фактором повышения надежности парогенераторов, турбин и вспомогательного оборудования и является дополнительным источником повышения производительности труда в технологических цехах за счет расширения зоны обслуживания.
Примером тепловых защитных устройств служат предохранительные клапаны, действующие по принципу регуляторов давления прямого действия (см. рис. 1-1), устанавливаемые на барабанах парогенераторов, деаэраторных головках, коллекторах редуцированного пара РОУ и других сосудах под давлением.
Однако большинство современных защитных устройств представляют собой системы непрямого действия, включающие отдельные, связанные между собой элементы: первичные приборы — датчики, снабженные электрическими контактами, усилительные устройства, 341
промежуточные реле, устройства пуска и останова исполнительных механизмов. Чаще всего действие тепловой защиты увязывается с электрической блокировкой, которая, как известно, позволяет включать и отключать электрические пусковые устройства вспомогательных механизмов в определенной последовательности — «по цепочке». Например, аварийный останов дымососов парогенератора приводит через устройства электрической блокировки к останову дутьевых вентиляторов и топливоподающих устройств.
Автоматические защиты призваны воздействовать на объект лишь в исключительных случаях, т. е. в предава-рийном или аварийном положении и при резких глубоких сбросах электрической и тепловой нагрузок. '
По степени воздействия на защищаемые установки защитные устройства разделяются на основные (главные) и местные (локальные). К основным относятся защитные устройства, действие которых приводит к останову парогенератора или энергетического блока в целом или к глубокому снижению их нагрузки. Местные, или локальные, защиты предотвращают развитие аварии без останова основных агрегатов. Так как подмена действия защитных устройств в аварийных ситуациях невозможна, они должны быть более надежными, чем непрерывно действующие системы контроля и регулирования. Поэтому логические схемы защит, определяющие последовательность срабатывания пусковых или отключающих устройств, составляются так, чтобы вероятность ложного действия или отказа защит была близка к нулю. В частности, для уменьшения вероятности ложных действий в системах защиты применяют дублирование датчиков, электрические контакты которых соединяются, например, по схеме «два из трех» (рис. 15-1,а). При такой схеме включения контактов выходной сигнал первичных приборов поступит в схему защиты только при одновременном срабатывании не менее двух датчиков в любой комбинации. В другой схеме используются два датчика, контакты которых соединяются последовательно по принципу «два из двух» (рис. 15-1,6).
Другой мерой повышения надежности действия защитных устройств является использование высоконадежных источников электрического питания цепей управления. Таким источником на ТЭС служит аккумуляторная батарея с напряжением на выходе 220 В, которая про
должает снабжать цепи защиты электрическим питанием при авариях* сопровождаемых полной потерей напряжения переменного тока в системе собственных нужд. Кроме того, питающее напряжение подводится к панелям защиты по двум независимым линиям, одна из которых является резервной. При этом сигнал об отключении напряжении питания на каждую из групп защит автоматически передается оператору на щит управления
Рис. 15-1. Схемы включения датчиков защиты.
а —«два из трех»; б — «два из двух»; /—3 — датчики; IK. 2К. ЗК — контактные пары.
с помощью сигнальных устройств (световые табло, звуковой сигнал). Дополнительное мероприятие, повышающее надежность защит, — систематический контроль и профилактические ремонты.
Мерой надежности системы является среднее время наработки на один отказ или среднее время работы между двумя отказами tcp. Этот показатель при проектировании защит должен приниматься не ниже 15— 30 тыс. ч В то же время по опытным данным (Л. 22] для реальных защит /Ср пока не превышает 5—10 тыс. ч.
15-2. Автоматические защиты барабанных парогенераторов
Защита от повышения давления пара
Каждый парогенератор на случай повышения давления пара сверх допустимого, как уже отмечалось, снабжается предохранительными клапанами, действующими по принципу регуляторов давления «до себя». Клапаны устанавливаются на выходном коллекторе пароперегревателя и барабане. Суммарная пропускная способность
этих клапанов выбирается с некоторым запасом по отношению к максимальной производительности парогенератора на случай отказа части клапанов. При этом клапаны, установленные на выходном коллекторе, должны открываться раньше барабанных, т. е. при меньшем по абсолютному значению давлении пара на 0,2—0,3 МПа, с тем чтобы обеспечить охлаждение змеевиков пароперегревателя паром при ’наличии факела в топке.
Рис. 15-2. Схема импульсного предохранительного устройства (ИПУ).
На современных парогенераторах и паровых коллекторах в комплекте предохранительных клапанов используются специальные импульсные предохранительные устройства (ИПУ). Принципиальная схема действия предохранительного клапана с ИПУ приведена на рис. 15-2.
При нормальном давлении пара импульсный клапан 1 закрыт под давлением груза 2; главный клапан 5 плотно закрыт, так как находится под давлением пара. При повышении давления в коллекторе сверх допустимого сначала открывается импульсный клапан за счет 344
того, что усилие, развиваемое паром на запорную тарелку 8, превышает усилие, действующее на нее со стороны груза 2. Кроме того, импульсный клапан может быть открыт под действием усилия электромагнита открытия 6, который в свою очередь действует по сигналу от контрольного контактного манометра. При открытии импульсного клапана давление пара над поршнем 4 возрастает до давления в коллекторе, поршень начнет смещаться вниз и открывать главный клапан 5. Это вызовет выпуск избыточного пара в атмосферу и восстановление давления пара в коллекторе до значения, при котором импульсный клапан 1 вновь закроется под действием груза 2 или электромагнита закрытия 3. Прекращение доступа пара со стороны импульсного клапана в над-поршпевое пространство главного клапана 5 вызовет его «посадку», т. е. закрытие под действием давления в коллекторе. Смягчение удара клапана о седло при посадке происходит за счет паровой подушки в надпоршневом пространстве сервопривода 4 и специального демпферного устройства 7, снабженного пружиной и заполняемого водой от постоянного источника.
Защита по уровню в барабане
Обычно поддержание уровня воды в барабане в заданных иля допустимых пределах осуществляется с помощью автоматического регулятора питания (10 на рис. 12-13). Однако в случае его отказа или при ошибочных действиях оператора, управляющего питательным клапаном дистанционно, уровень может отклониться за допустимые пределы. Поскольку упуск уровня и перепитка барабана относятся к самым тяжелым авариям па ТЭС (см. § 12-4), каждый парогенератор оснащается системой автоматической защиты, срабатывающей при наличии сигналов чрезмерного повышения или понижения уровня. Схема действия этой защиты и блокировочные связи между отдельными элементами приведены на рис. 15-3. Понижение уровня на 100—120 мм ниже установленного предела \Н вызывает останов парогенератора по цепочке: первичные приборы 1 и 2 —первичные отключающие реле 5 — переключатель блокировки 6 — отключающие устройства дутьевого вентилятора ДВ и системы топливоснабжения ТС.
Защита от понижения уровня выполняет одновременно функции защиты от разрыва экранных труб парогенератора (опорожнение барабана приводит к нарушению питания экранных труб и их пережогу при наличии факела в топке).
Защита от превышения уровня сверх уставки сигнализации \Н0, действующей от датчика 3, обычно имеет
Рис. 15-3. Система защиты и сигнализации от повышения и понижения уровня воды в барабане.
ГПЗ— главная паровая задвижка; ЗПК— запорный питательный клапан; ТС — топливоподающие системы; ДВ— дутьевой вентилятор; ПП — пароперегреватель; СК — собственный конденсат (впрыск).
два предела срабатывания. Достижение уровнем первого из них f/Д (до 100 мм) вызывает открытие запорных задвижек на линии аварийного слива воды из барабана по цепочке: первичный прибор 4 — первичное реле 5 — контактор «открыть» электропривода задвижек аварийного слива 7. Эта защита является типичным примером локальной защиты.
По достижении уровнем второй предельной отметки (до 120—150 мм) действие защитных устройств должно привести к останову парогенератора в той же последовательности, что и при упуске уровня. В обоих случаях сигнал на останов парогенератора от одного из датчиков-уровнемеров вызовет действие защиты лишь при наличии «подтверждающего» сигнала от второго датчика. С этой целью их контакты в электрических цепях первичных отключающих реле соединяются по схеме «два из двух» (см. рис. 15-1,6). Останов дутьевого вентилятора и отключение системы подачи топлива в топку по линиям блокировочных связей должны вызвать закрытие главной паровой задвижки (ГПЗ) для предотвращения доступа пара в парогенератор из общей магистрали с одновременным открытием продувки пароперегревателя и закрытием запорного клапана на линии впрыска собственного конденсата СК и ЗПК для предотвращения доступа воды в пароохладитель и в парогенератор.
Переключатели 6 на линиях выходных сигналов и линиях электроблокировочных связей между пусковыми устройствами отдельных агрегатов позволяют оператору управлять вспомогательными механизмами и запорными органами, входящими в систему защиты, дистанционно с помощью ключей управления или кнопок пуска и останова во время пусковых операций и ремонтных работ.
Защита от потускнения и погасания факела
Тепловая защита этого вида предусматривается на парогенераторах на случай погасания факела в топке при неустойчивом горении. Подача топлива при этом должна быть прекращена, так как его скопление в топке может привести к образованию взрывоопасной смеси. Останов парогенератора в системе защиты от погасания факела осуществляется в следующей последовательности: первичный прибор (датчик) — первичные реле, отключающие устройства дутьевых вентиляторов, и далее по линии связей электроблокировки, изображенной на рис. 15-3. В качестве датчика используются фоторезисторы, визируемые на факел и включенные последовательно с обмоткой фотореле, срабатывающего при заданном уровне излучения факела. В качестве подтверждающего
сигнала может использоваться сигнал по разрежению вверху топки, которое резко увеличивается при обрывах факела. С этой целью контакты сигнализатора падения
давления в топке тактами фотореле, левпдном топливе,
Рис. 15-4. Принципиальная электрическая схема защитного устройства от потускнения факела.
ФС — фотосопротивление; Р — катушка отключающего реле: МА — миллиамперметр; РВ— катушка реле времени; ЛС— сигнальная лампа; R\—Rt — подгоночные резисторы; СМ и СП — катушка соленоидных приводов мазутного и парового клапанов; П — кнопки ручного воздействия на соленоидные приводы СМ и СП.
ТЭС с центральными щт
тор лишен возможности прямого наблюдения за состоянием факела в топках парогенераторов.
В последнее время разработан и выпускается специальный комплект высоконадежных устройств защиты типа «Факел» |[Л. 23], в которых потускнение факела
определяется по уровню светимости, а погасание — по пульсациям факела в видимой и инфракрасной частях
спектра свечения.
включаются последовательно с кон-Парогенераторы, работающие на пы снабжаются защитой от потускнения факела, воздействующей на
подачу резервного топлива (включение газовых горелок или мазутных форсунок) при снижении уровня светимости факела. Принципиальная электрическая схема управления системой защиты от потускнения факела и подхвата его тазомазутными горелками изображена на рис. 15-4. 'Схема содержит реле времени РВ, которое задерживает команды на открытие клапана с электромагнитным приводом на линии подвода резервного топлива на 5—10 с, что необходимо для предотвращения ложных срабатываний в случае кратковременных потускнений (миганий) фа
кела.
Защита от погасания и потускнения факела н связанная с нею система звуковой и световой сигнализации приобретают особенно большое значение на крупных 1и управления, когда опера-
Защита от понижения температуры перегрева первичного пара
Автоматические защитные устройства этого вида практически выполняют роль защиты от заброса частиц воды в паропровод и проточную часть турбины. При понижении температуры пара до предельного значения сигнал от температурного датчика (термопары), пройдя через электронный усилитель, поступает на вход релейной схемы, воздействующий на останов дутьевого вентилятора и далее по линии электроблокировочной связи на останов парогенератора (см. рис. 15-3).
На блочных установках с одним парогенератором (моноблоках) защита от понижения температуры пара относится к турбине и воздействует на закрытие стопорного клапана.
Аналогично устроена и действует система защиты от повышения температуры первичного пара сверх установленного максимального значения.
Логическая схема защит барабанного парогенератора, работающего на пылеугольном топливе
Па парогенераторе устанавливается несколько систем защит, действующих независимо. Один из вариантов логической схемы защит барабанного парогенератора в целом изображен па рис. 15-5. Часть защит действует па останов парогенератора, часть — на снижение нагрузки или перевод агрегата па растопочную нагрузку (основные), часть па открытие запорных органов, предотвращающих развитие аварии (локальные).
Символ И в логической схеме означает условие одновременности действия сигналов, символ ИЛИ — выбор воздействия системы защиты. Например, для действия защиты от повышения уровня в барабане до второго установленного значения на защитное устройство должны поступать сигналы от датчиков уровня № 1 и № 2, при этом если сигнал поступит на промежуточное реле одновременно от двух датчиков, система защиты отключит дутьевой вентилятор и топливо, закроет ГПЗ и ЗПК и откроет продувку пароперегревателя.
Символ Ат на схеме означает, что действие защиты осуществляется с выдержкой времени, необходимой для предотвращения ложного срабатывания.
Помимо рассмотренных выше защит, к останову парогенератора или к снижению нагрузки приводит не-349
Рис. 15-5. Логическая схема действия защит барабанного парогенератора.
Обозначения те же, что и на рис. 15-3.
предвиденное или ошибочное отключение дутьевых вентиляторов ДВ, дымососов ДС и вентиляторов первичного воздуха ВПВ.
15-3. Автоматические защиты прямоточных парогенераторов
Прямоточные парогенераторы оснащаются всеми видами защит, предусматриваемых на барабанных агрегатах, за исключением защиты от повышения и понижения уровня воды в барабане. Однако конструктивные особенности прямоточного парогенератора, связанные с наличием принудительной циркуляции, требуют установки па нем ряда дополнительных защит, воздействующих на останов парогенератора при возникновении аварийных ситуаций.
Защита от прекращения подачи воды в парогенератор
Для каждого контура прямоточных парогенераторов предусматривается автоматическая защита, воздействующая на останов агрегата при снижении расхода воды (\D) на контур до 30% расчетной производительности. Сигналом, подтверждающим необходимость действия защиты, может служить снижение давления за регулирующим питательным клапаном РПД до 15% по сравнению с давлением при полном расходе. Одновременное появление этих сигналов вызывает включение резервных питательных насосов, а в случае их отказа через 20 с защита производит останов парогенератора воздействием на отключение дутьевых вентиляторов.
Защита от разрыва труб водяного экономайзера
Утечка воды в экономайзере из-за появления свища в трубах, помимо значительных потерь питательной воды, может привести к нарушению нормального режима работы испарительного контура и повышению температуры пара по тракту. Поэтому появление небаланса А/Д до 25—30% между расходами воды до и после водяного экономайзера (ВЭ) на каждом из его потоков служит сигналом для срабатывания защиты, воздействующей на останов парогенератора с выдержкой времени 20 с, необходимой для предотвращения ложного останова из-за небаланса расходов по режимным условиям. Иногда
Рис. 15-6. Схема защиты прямоточного парогенератора от разрыва труб пароводяного трактд.
/ — сигнализатор небаланса расхода; 2—датчик подтверждающего сигнала; 3— первичное реле; 4 — переключатель блокировки; РВ — реле времени; ДВ — отключающее устройство дутьевого вентилятора; ПН — поверхность нагрева.
в качестве подтверждающего сигнала этой защиты используется резкое повышение температуры пара по тракту (например, за ВРЧ). Функциональная схема защиты приведена на рис. 15-6. Так же могут быть устроены защиты от повреждения других поверхностей нагрева.
Защита от повышения (понижения) давления пара перед встроенной задвижкой
Защитами этого вида необходимо оснащать парогенераторы со сверхкритическим давлением пара. При повышении (|р) или понижении (|р) давления пара перед встроенной задвижкой против номинального значения, устанавливаемого заводом, замыкаются контакты контрольных манометров, включенных в цепь защиты по схеме «два из двух» (рис. 15-1,6), что приводит к срабатыванию промежуточного реле и далее по цепочке электроблокировки к отключению дутьевых вентиляторов и топливоподающих устройств.
Логическая схема защит прямоточного парогенератора
На рис. 15-7 изображена логическая схема действия автоматических защит прямоточного парогенератора, работающего на газовом или жидком (мазуте) топливе. Использование газомазутного топлива требует применения защит, действующих на останов парогенератора в случае понижения давления топлива (газа или мазута) перед горелками.
Рис. 15-7. Логическая схема действия защит прямоточного парогенератора (обозначения те же, что на рнс. 15-3).
Символ «И», так же как и на схеме на рис. 15-5 означает одновременность действия, «ИЛИ» в рассматриваемой схеме — независимость действия, а Ат— задержку действия защиты во времени. Отключение дутьевых вентиляторов или дымососов прямоточного парогенератора также приводит к его останову (по каналам электроблокировки), а превышение давления пара в выходном коллекторе — к срабатыванию импульсного предохранительного устройства (ИПУ)—сбросу излишнего пара в атмосферу (см. рис. 15-2). Кроме того, прямоточный парогенератор, так же как и барабанный, снабжается системами защит от повышения и понижения температуры первичного пара (на схеме не показаны), действующими на останов дутьевых вентиляторов ДВ и прекращение подачи топлива. При повышении температуры вторичного пара до первой уставки (|Zj) открывается запорная задвижка на линии аварийного впрыска и включается в работу регулятор аварийного впрыска (регулятор /Еп), а превышение температурой вторичного пара второй уставки (f/ц), так же как и понижение ее до первой уставки |4, должно приводить к останову парогенератора.
Парогенераторы, имеющие регенеративные воздухоподогреватели (РВП), оснащаются дополнительной защитой, воздействующей на останов парогенератора при отключении всех РВП.
15-4. Автоматические защиты паровых турбин
Защита от повышения частоты вращения ротора
Известно, что частота вращения вала турбогенератора, включенного в электрическую систему, должна поддерживаться постоянной с высокой точностью для поддержания частоты сети. Эту задачу выполняет специальная система регулирования. Увеличение частоты вращения на 10% сверх допустимого из-за отказа системы регулирования или по другим причинам вызывает срабатывание автомата безопасности, воздействующего на закрытие стопорного клапана перед турбиной.
Защита при сдвиге ротора
Вращающийся ротор имеет некоторую свободу продольного перемещения относительно статора. Размер -354
этого перемещения весьма мал (до ±1,2 мм для различных типов турбин) и ограничивается упорным подшипником турбогенератора. Однако из-за износа рабочих поверхностей или превышения расчетного усилия может произойти продольное смещение ротора, превышающее допустимую величину. Если при этом не принять соответствующих мер (частичный или полный сброс нагрузки либо останов турбины), то чрезмерный сдвиг ротора вызовет повреждение концевых уплотнений или лопаточного аппарата турбины. Современные турбогенераторы оснащаются специальным защитным устройством, воздействующим на останов турбины при чрезмерном осевом сдвиге ротора. Действие этого устройства, в котором первичным прибором, фиксирующим изменения положения ротора относительно статора, является индукционный датчик, поясняется на рис. 15-8
Кольцевой выступ 1 на валу ротора располагается в магнитном поле Ш-образного трансфор матора 2. На укороченном среднем стержне трансформатора расположена обмотка питания, подключенная к источнику переменного тока <3, наводящая магнитные потоки М\ и М2 в крайних стержнях, на которых имеются обмотки с одинаковым числом витков. При равенстве воздушных зазоров а и б потоки Aft и М2 равны, а следовательно, равны и наводимые в их обмотках э. д. с. В этом положении фиксируется
нулевой сдвиг ротора. При продольном сдвиге ротора изменяются зазоры а и б, а следовательно, потоки Mi и М2 и наводимые ими э. д. с. Результирующее напряжение вторичной обмотки выпрямляется па выпрямителе 4, питающем цепь, состоящую из обмотки сигнального реле 2РОС и обмотки первичного реле осевого сдвига
Рис. 15-8. Реле осевого сдвига ротора турбины (принципиальная схема действия).
23*
355
1Р0С, действие которого через промежуточное реле приводит к включению электромагнитного привода, управляющего механизмом закрытия стопорного клапана турбины.
Применение датчика с одинаковыми вторичными обмотками позволяет измерять величину смещения ротора в обе стороны, которое фиксируется указательным стрелочным прибором мА, включаемым в диагональ моста, образованного резисторами Ri. Мост питается переменным напряжением 24 В непосредственно от понижающего трансформатора.
Защита от ухудшения вакуума в конденсаторе
Известно, что ухудшение вакуума (|И) в конденсаторе приводит к росту температуры пара в хвостовой части турбины, термическим деформациям громоздких частей корпуса и требует снижения нагрузки. Однако при резком ухудшении вакуума оператор может не успеть своевременно принять предупредительные меры. В этом случае необходимо вмешательство автоматической защиты, воздействующей на останов турбины во избежание серьезного ее повреждения. Сигнал для защиты при срыве вакуума формируется с помощью специального вакуум-реле, которое через промежуточное реле воздействует на электромагнитный привод, управляющий механизмом закрытия стопорного клапана.
Защита от понижения давления масла в системе смазки и охлаждения подшипников
В нормальном режиме работы масло в систему смазки подшипников поступает под заданным избыточным давлением около 20 кПа (0,2 кгс/см2) от системы гидравлического регулирования турбины. На случай ее отказа предусматривается установка двух резервных маслона-сосов. Они могут включаться автоматически по сигналу специального реле давления при непредвиденном уменьшении давления в системе смазки ниже первого (|Рх) или второго (|рп) установленного значения.
При снижении давления масла в системе смазки ниже третьей установленной точки (|рш) сигнал от реле давления через промежуточное реле воздействует на закрытие стопорного клапана перед турбиной и систему включения ее валоповоротного устройства.
Логические схемы действия защит турбогенератора
На рис. 15-9 изображена схема действия защит турбины без промежуточного перегрева пара.
Помимо рассмотренных выше систем защит, на схеме изображена защита от повышения (V) и понижения температуры (|/) пара перед стопорным клапаном.
Рис. 15-9. Логическая схема действия защит турбины.
Действие различных защит на останов турбины во всех случаях сводится к закрытию стопорных клапанов воздействием па электромагнитные приводы их защелок.
Кроме того, в любом случае отключение электрического генератора должно приводить к останову турбины. Генератор оснащается собственной системой защит,
Рис. 15-10. Схема действия тепловых защит электрического генератора.
воздействующей на его отключение при останове всех маслонасосов уплотнения вала ,и при прекращении потока охлаждающей воды через статор.
Действие тепловых защит электрического генератора поясняется на рис. 15-10, Оно связано с остановом турбины, отключением генератора от сети и включением автомата гашения электрического поля (АГП) по сигналам, указанным в схеме, в аварийных случаях.
15-5. Автоматическая защита вспомогательных установок
Защитные устройства вспомогательных установок ТЭС относятся к так называемым локальным или местным системам автоматических защит. Их действие не связано с остановом основного оборудования и его механизмов, так как вспомогательные установки обычно резервируются или же сравнительно быстро ремонтируются, кроме того, чрезмерное отклонение их регулируемых параметров не оказывает прямого влияния на производительность парогенераторов и выработку электроэнергии.
Защита регенеративных подогревателей высокого давления (ПВД)
Переполнение корпуса ПВД водой до уровня врезки трубопровода греющего пара недопустимо из-за опасности заброса воды в паропровод. Такая опасность возникает при отказе автоматических регуляторов уровня конденсата в ПВД или разрыве змеевиков питательной воды. На этот случай предусматриваются обратный клапан на трубопроводе греющего пара, соединяющем корпус ПВД с камерой нерегулируемого отбора, и специальное защитное устройство, воздействующее на систему подачи питательной воды в обвод всей группы ПВД.
Приципиальная схема автоматического отключения системы ПВД. приведена на .рис 15-1 l,fz. Повышение уровня в любом подогревателе вызовет замыкание 'контактов первичных прпборов-урЬв-немеров, мто явится сигналом для действия соленоида, управляющего клапаном 4. Он откроется, и конденсат от насосов .поступает в верхнюю полость гидравлического сервопривода, поршень которого, перемещаясь вниз, соединит импульсную трубку со сливом в бак низких точек. Давление под поршнем клапана 9 упадет, он опустится, закроет своей тарелкой доступ воды в ПВД со стороны питательных насосов и откроет ей проход к парогенераторам через обводную линию. При этом обратный клапан 2 перекроет доступ воды.в ПВД со стороны парогенераторов.
Рис. 15-11. Защитное устройство ПВД.
а — принципиальная схема: 1 — впуск-ной клапан; 2 — обратный клапан: 3 — поршневой автоматический клапан; 4 — электромагнитный клапан; Б — вентиль ручного управления; 6, 1—запорные вентили; Б — штурвал ручного управления 9— поршень гидросервопривода впускного клапана; /0 обводная линия; 6 электрическая схема: Уз. У2. Уз — контакты уровнемеров; Р/< — реле контроля напряжения; PC — реле сигнализации; 1РП — реле промежуточное (самоудсрживающее-ся); 1КП — контактор промежуточный; 30 — обмотка электромагнитного клапана; /<У — ключ управления.
6)
Электрическая схема защиты приведена на рис. 15-11,6. Выходные контакты уровнемеров У1, У2 и У3 всех ПВД соединяются параллельно и при повышении уровня воды сверх установленной величины в любом из них отключается вся группа В схеме имеются реле 1КП с самоподхватом, контакты которого обеспечивают питание катушек ЭО1, ЭО2 электромагнитного клапана 4 после срабатывания защиты и установления нормального уровня, в ПВД, что не допускает их самовключения.
Защиты питательно-деаэрационной установки
Питательные насосы являются «сердцем» тепловой части электростанции. Поэтому в случае аварийного отключения работающего насоса или непредвиденного снижения давления воды в питательной магистрали предусматривается автоматическое включение резервного насоса. При наличии питательных турбонасосов их приводные турбины обеспечиваются защитами от повышения частоты вращения вала, сдвига ротора и понижения давления масла в системах регулирования и смазки подшипников. На деаэраторах питательной воды предусматриваются защиты от повышения давления в деаэраторной головке (предохранительные клапаны или гидрозатворы), понижения давления в трубопроводе отбора пара на деаэратор (включение линии резервного подвода пара) и повышения уровня воды в аккумуляторных баках. При превышении максимально допустимого уровня автоматически открывается задвижка на аварийном сливе воды из бака, а при достижении минимального включается резервный насос подачи химически очищенной воды.
Защиты редукционно-охладительных установок
В качестве защитных устройств на обычных редукционных установках (РОУ) предусматриваются предохранительные клапаны на коллекторах редуцированного пара. На быстродействующих РОУ, которые сами выполняют функции защитных устройств, предусматриваются два вида собственной защиты: от повышения давления редуцированного пара и прекращения подачи охлаждающей воды. Раздельное включение или отключение быстродействующих запорных клапанов (БЗК) одинаково недопустимо. Поэтому на случай исчезновения напряжения питания предусмотрено питание электроприводов БЗК через общие предохранители. С по-360
мощью устройств электроблокнровкп открытие БЗК на трубопроводе охлаждающей воды становится возможным лишь после начала открытия парового БЗК. Сигнал на его закрытие одновременно служит сигналом для перекрытия БЗК па линии воды. На РОУ с клапанами, управляемыми гидравлическими сервоприводами, при исчезповейии давления ребочей жидкости паровой и водяной клапаны закрываются под действием пружины (см. рис. 14 18,6).
Защитные устройства мельничных систем парогенераторов
Помимо защит от повышения температуры tM аэро-смеси за шаровой или молотковой мельницей, воздействующей на открытие заслонки на липни присадки холодного воздухг! (см. рис. 14-6,6), па мельничных системах предусматривается защитное устройство, действующее па останов мельниц при понижении давления масла в системе смазки подшипников. Этот сигнал формируется с помощью элсктроконтактпого манометра. При падении давления масла до первого установленного значения включается резервный маслонасос. При падении давления масла до второго установленного значения срабатывает отключающее устройство электропривода мелыпщы н далее по цепи электроблокировки останавливается питатель сырого угля. На обоих типах мельниц может быть предусмотрено включение вибраторов на течках сырого угля при обрыве подачи топлива. Отключение впбрагоров производится после восстановления подачи топлива пли но истечении установленной выдержки времени. В системах пылепрнготовлення с шаровой барабанной мельницей при забивании циклона предусматривается ее отключение.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. В чем состоит назначение устройств тепловой защиты?
2. Перечислите основные виды защит барабанного парогенератора.
3. Поясните принцип действия импульсного предохранительного устройства (рис. .15-2).
4. Перечислите основные виды защит прямоточного парогенератора.
5. Назовите основные виды защит паровых турбин.
6. Поясните принцип действия автоматической защиты от переполнения корпусов ПВД водой (рис. 15-11,а).
7. Назовите защиты питательно-деаэраторной установки
8. Охарактеризуйте защитные устройства РОУ
9. Назовите виды защит системы пыленриготовления.
ГЛАВА ШЕСТНАДЦАТАЯ
АВТОМАТИЗАЦИЯ ЭНЕРГЕТИЧЕСКИХ БЛОКОВ
16-1. Характеристики объектов и задачи регулирования
Развитие современной энергетики идет по пути сооружения энергоблоков большой единичной мощности. «Основные направления развития народного хозяйства СССР на 1976—1980 годы» предусматривают «продолжить строительство тепловых электростанций мощностью 4—6 млн. киловатт с установкой энергетических блоков единичной мощностью 500 и 800 тыс. киловатт». В связи с этим возрастает роль блоков в покрытии графика электрической нагрузки, появилась необходимость их участия в регулировании частоты электрической сети и мощности энергосистем.
Современный энергетический блок включает один (моноблок) или два (дубль-блок) парогенератора и турбогенератор с их вспомогательными установками. Блок связывается с энергосистемой отдельным электрическим трансформатором. Парогенераторы блочных ТЭС (прямоточные или барабанные), как правило, не соединяются общим паропроводом. Турбины имеют лишь нерегулируемые отборы пара, т. е. являются чисто конденсационными, и включают ЦВД и ЦСД, между которыми встроен вторичный (промежуточный) пароперегреватель, и ЦНД. Энергоблок в целом представляет собой сложную динамическую систему со многими взаимосвязанными входными и выходными величинами.
Основными регулирующими воздействиями блочной установки являются перемещения регулирующих органов подачи топлива и питательной воды парогенераторов и регулирующих клапанов турбины, основными регулируемыми величинами — активная мощность генератора Nr и частота вращения ротора турбины п, соответствующая частоте сети f. Схема связей между входными (регулирующими) воздействиями и выходными величинами изображена на рис. 16-1.
Кроме того, на энергоблоке имеется большое количество промежуточных параметров, требующих непрерывной стабилизации для обеспечения нормальной работы (температура пара по тракту, разрежение вверху топки, уровни воды в барабане, подогревателях, конденсаторе и др.). Основной способ регулирования активной мощ-362
ности турбогенератора основан на передаче воздействий по каналу клапаны — мощность. Он осуществляется путем перемещения регулирующих клапанов турбины ЛКл под действием регулятора частоты вращения (2 на рис. 12-5) или электрического синхронизатора турбины (5 на рис. 12-5). Другой способ основан на передаче воздействий по каналу давление — мощность путем изменения начального давления пара перед турбиной. Регу-
Рис. 16-1. Схема связей между входными (регулирующими) воздействиями и основными регулируемыми величинами энергоблока.
лирующим воздействием в этом случае служит изменение подачи топлива в топку парогенератора. К этому же способу относится работа блока на скользящих параметрах пара при развороте блока от холостого хода до набора 50—70% мощности полной нагрузки.
Анализ существующих графиков электрической нагрузки [Л. 24] позволяет выделить две характерные составляющие: первая — последовательность стабильных уровней, сохраняющихся в течение нескольких часов, с медленным переходом от одного уровня на другой, и вторая — колебательная. Первая составляющая, которую можно назвать постоянной, поддается достаточно точному прогнозированию. Блоки, участвующие в покрытии постоянной составляющей, работают в так называемом базовом режиме. Вторая — колебательная составляющая обусловлена работой потребителей с быстроменяющенся нагрузкой и носит случайный характер. Обеспечение последней является наиболее сложной задачей, выполнение которой падает на энергоблоки, действующие в регулирующем режиме.
Количество электроэнергии, вырабатываемой в энергосистеме, должно строго следовать за графиком .нагрузки. Этот процесс протекает во времени следующим образом. Изменение электрической нагрузки (задания) вызывает вначале изменение частоты сети, а затем за счет действия АСР энергоблоков с некоторым отставанием производится соответствующее изменение выраба
тываемой мощности. При этом важнейшей характеристикой блоков с точки зрения регулирования частоты и мощности является их приемистость (маневренность), т. е. способность быстро изменять тепловую нагрузку и электрическую мощность в переходных режимах вслед за изменением задания. Более высокой приемистостью обладает блок, обеспечивающий наиболее быстрый переход на новую нагрузку. При этом основные и промежуточные параметры блочной установки не должны выходить за пределы допустимых отклонений.
Известно, что паро- п турбогенератор обладают существенно различными динамическими свойствами. Так, например, инерционность турбогенератора при возмущении по каналу «регулирующие клапаны — мощность» измеряется секундами и долями секунд, а посто янная времени парогенератора по расходу пара при воздействии топливом достигает сотен секунд (см. рис. 12-4,а).
Последовательное соединение инерционного парогенератора и малоиперционной паровой турбины, а также наличие механических напряжений в ее лимитирующих элементах (упорный подшипник, лопаточный аппарат, диафрагмы) ограничивают диапазон и скорость изменения нагрузки энергоблока в целом.
Задача АСР энергоблока состоит в том, чтобы довести приемистость блоков до уровня, обеспечивающего их эффективное участие в регулировании частоты.
При этом АСР тепловой нагрузки парогенератора и мощности турбогенератора следует рассматривать как составляющие единой АСР мощности энергоблока.
16-2. Схемы автоматического регулирования
Базовый режим
В базовом режиме регулирование осуществляется по принципу поддержания постоянства тепловой нагрузки парогенератора. При этом внутренние возмущения устраняются системами регулирования подачи топлива или питательной воды парогенератора, а внешние — регулятором давления пара рп.п «до себя», действующим на регулирующие клапаны 1 через синхронизатор 4 (рис. 16-2, вариант а).
Регулятор «до себя» защищает парогенератор от чрезмерного падения давления пара, но не обеспечивает участия блока в регулировании частоты.
110051—Is
Рис. 16-2. Регулирование мощности блочных установок (функциональная схема).
а — базовый режим; б и в — регулирующий режим; 1 — регулирующие клапаны турбины; 2 — ПИ-регулятор давления пара перед турбиной; 3— регулятор нагрузки турбины; 4 — синхронизатор турбины; 5 — ПИ-регулятор тепловой нагрузки парогенератора; 6 —датчик положения клапанов; 7 — дифференциатор; ЦВД, ЦСД и
НМД — цилиндры высокого, среднего и низкого давления.
Регулирующий режим
При резком увеличении электрической нагрузки из-за большой инерционности парогенератора в первый момент времени возникает нехватка пара. В системе регулирования турбины в этом случае целесообразно предусмотреть временное дополнительное открытие регулирующих клапанов ЦВД, так называемое динамическое переот-крытие (прочность элементов турбины: упорного подшипника, диафрагм, лопаточного аппарата — должна обеспечивать возможность кратковременной перегрузки). Парогенератор вырабатывает дополнительное количество пара в связи с глубоким падением давления в результате переоткрытия клапанов. При этом в системе регулирования парогенератора следует увеличить быстродействие АСР подачи топлива путем введения дополнительных форсирующих сигналов. Кроме того, в технологической схеме блочной установки в качестве дополнительных источников пароснабжения турбины можно предусмотреть использование греющего пара регенеративных подогревателей низкого давления, подача которого в систему ПИД будет прекращаться по сигналу набора нагрузки.
При сбросах электрической мощности, наоборот, появляется опасность чрезмерного повышения давления первичного пара. При значительных по величине сбросах нагрузки лишний пар может быть сброшен в конденсатор турбины через автоматически включающиеся БРОУ.
Таким образом, приемистость блока можно повысить за счет усовершенствования технологических схем выработки пара и увеличения быстродействия 'автоматических систем регулирования парогенераторов, турбогенераторов и вспомогательных установок.
Система регулирования блока в целом должна быть выполнена так, чтобы изменение задающего сигнала по мощности блока приводило к немедленной перестановке регулирующих клапанов турбины с одновременным воздействием на регулирующие органы парогенератора. В этом случае изменение нагрузки блока сопровождается временным отклонением давления пара на выходе парогенератора. Ниже в качестве примеров рассматриваются два варианта существующих схем АСР мощности блочных установок, участвующих в регулировании частоты энергосистемы (Л. 20].
1) Основным сигналом регулятора мощности турби
ны (рис. 16-2, вариант б), воздействующим на положение паровпускных клапанов, служит сигнал по заданной мощности N3. На вход автоматического регулятора тепловой нагрузки парогенератора, воздействующего на расход питательной воды Ьпв, поступает статический сигнал по давлению пара перед турбиной рп.п и два исчезающих сигнала с выхода дифференциаторов по положению клапанов турбины /гкл (для увеличения быстродействия АСР при изменениях нагрузки турбины) и по расходу питательной воды £)„.в (гибкая обратная связь по расходу воды, обеспечивающая необходимое качество АСР).
2) На регулятор мощности турбины действует сигнал, пропорциональный разности между заданной (N3) и фактической (.Уф) мощностью турбины (рис. 16-2, вариант с). Сигнал, пропорциональный может быть сформирован ио разности давлений пара в камере регулирующей ступени перед ЦВД (рр) и перед ЦСД (рПр)-В случае паброса электрической нагрузки при наличии дополнительного сигнала по разности N3—N$ регулятор мощности турбины будет стремиться к немедленному приведению фактической мощности в соответствие с заданной за счет динамического переоткрытия регулирующих клапанов перед ЦВД. ПИ-регулятор тепловой нагрузки парогенератора, воздействующий на расход питательной воды, воспринимает три сигнала: давление пара перед турбиной рпи, расход питательной воды £>пв (жесткая отрицательная обратная связь, обеспечивающая необходимый запас устойчивости АСР) и заданное значение мощности блока N3 (компенсация неравномерности, вызываемой применением ЖОС, и опережающее воздействие при изменениях нагрузки блока). Динамическое перерегулирование парогенератора осуществляется благодаря временному изменению давления пара при переходе блока с одной нагрузки па другую.
Техническая реализация описанных схем может осуществляться с помощью электрогидравлических приставок (ЭГП), позволяющих вводить электрические сигналы (по частоте и мощности) в гидравлическую систему регулирования турбины [Л. 25].
Регулирование частоты и мощности группы энергоблоков
Колебания электрической нагрузки вызывают изменение частоты электрической сети, которое воспринима-367
ется регуляторами скорости турбин, действующими в регулирующем режиме на положение паровпускных клапанов. Распределение нагрузки между турбогенераторами зависит от статических характеристик регуляторов (рис. 16-3).
Значение статизма
* ямакс лмии
О - ----------------
пмакс
1ОО7о
обычно находится в пределах 1,5—3%. Турбины с более пологой статической характеристикой регуляторов будут
воспринимать большие колебания нагрузки при одном и том же изменении частоты An(AAA<iAAr2).
Однако такой способ регулирования суммарной мощ-
ности ТЭС, допускающий
Рис. 16-3. Статическая характеристика регулятора частоты вращения (мощности) турбогенератора.
самопроизвольное изменение нагрузки отдельных турбоагрегатов при колебаниях частоты сети, нельзя признать удовлетворительным. В особенности это относится к крупным станциям с большим числом агрегатов, участвующим в регулировании перетоков мощности по линиям электропередач энергосистемы. Распределение нагрузок между отдельными агрегатами в этом -случае тесно связано с их экономическими показателями, а человек-оператор (дежурный инженер
станции) не в состоянии быстро составить график оптимального распределения нагрузок с учетом потребностей энергосистемы. В связи с этим возникает необхо-
димость в создании общестанционных автоматических
систем регулирования частоты и активной мощности (АСРЧМ), являющихся надстройкой над АСР мощности отдельных энергоблоков или турбоагрегатов и в свою очередь действующих по сигналу задания от соответствующих автоматических устройств энергосистемы, объединяющей группу станций.
Пример управления АСР мощности энергоблока с помощью общестанционного автоматического устройства
1
распределения активных нагрузок (УРАН) 1 показан на рис. 16-4.
Сигнал по отклонению частоты (мощности) с выхода измерительного устройства 1 поступает в УРАН 2, а с его выхода в индивидуальные устройства распределения нагрузки парогенератора 4 и турбины 3. Последнее
в свою очередь получает дополнительный сигнал по N-tr от датчика мощности 5 турбоагрегата, а устройство распределения нагрузок парогенератора 4 — по давлению перегретого пара. Устройство 3 через синхронизатор 7 управляет впуском пара в турбину через клапаны 8, а устройство 4 формирует сигнал задания регулятору тепловой нагрузки парогенератора 6, воздействующему на РПК 9. Действие устройств 3 и 4 прекращается после достижения заданных значений мощности и давления пара рп.п- В УРАН в качестве сигнала задания (уставок) вводятся характеристики относительных приростов
Рис. 16-4. Функциональная схема системы УРАН блочной тепловой электростанции.
(зависимость требуемого увеличения расхода топлива от роста нагрузки) отдельных энергоблоков и сигналы
на ограничение нагрузки. Оптимальный режим параллельной работы блоков будет достигнут при равенстве их относительных приростов. При этом осуществляется регулирование частоты и мощности станции в целом при одновременном экономически целесообразном распределении нагрузок между отдельными энергоблоками.
Техническая реализация УРАН осуществляется на базе серийных средств вычислительной техники.
1 Разработка Всесоюзного научно-исследовательского института электроэнергетики (ВНИИЭ).
Автоматическое регулирование группы электрических генераторов осуществляется с помощью комплексной системы регулирования напряжения (СРНК) *, включающей устройства:
1) группового управления возбуждением, получающего сигнал от центрального регулятора напряжения и воздействующего на системы регулирования возбуждения отдельных генераторов с учетом их характеристик, что обеспечивает рациональное распределение реактивных нагрузок между агрегатами;
2) автоматического переключения станционных трансформаторов, осуществляющего перераспределение реактивных нагрузок между группами генераторов.
СРНК. повышает оперативность управления, увеличивает диапазон регулирования электрической мощности станции и расширяет возможности использования станции для решения общесистемных задач. Техническая реализация СРНК осуществляется на базе серийной аппаратуры.
16-3. Автоматическое регулирование производительности питательных насосов
При регулировании производительности питательных насосов должно обеспечиваться поддержание заданного значения давления питательной воды рп.ъ и приведение производительности питательных насосов в соответствие с заданием по нагрузке блока.
Питательные насосы парогенераторов блочных установок разделяются на рабочие и резервные.
На рис. 16-5 приведены системы регулирования производительности резервного электронасоса и одного рабочего турбонасоса. При пуске блока используется ПЭН, а затем по мере роста нагрузки осуществляется автоматический переход с ПЭН на ПТН. Для этого заданное значение давления питательной воды регулятору производительности ПЭН 1 устанавливается несколько меньшим, чем регулятору производительности ПТН 2, поэтому последний устанавливает свой регулирующий орган в положение, соответствующее максимальной частоте вращения турбопривода, т. е. полностью открывает клапан. По мере роста нагрузки блока и давления пара
1 Разработка института «Энергосетьпроект».
в отборе турбины, питающем ПТН, развиваемый им напор рп р начинает расти и превышает напор, развиваемый ПЭН-, это приводит к открытию обратного клапана на выходе ПТН, и он начинает качать воду в питательную магистраль в параллель с ПЭН. Далее вследствие большего заданного значения д”™ ПТН развивает большую, чем ПЭН, производительность и ПЭН разгру-
Рис. 16-5. Автоматическое регулирование производительности питательных насосов с электро- и турбоприводами.
1 — регулятор производительности ПЭН; 2 — регулятор производительности ПТН; 3—исполнительные механизмы: 4 — гидромуфта; 5 — насосы; 6— паровой регулирующий «лапан; 7 — турбопривод: 8 — электропривод; 9, 10 — обратные клапаны ПТН и ПЭН.
жается. По достижении рп ,в некоторого предельного значения д^₽ u > д™1 обратный клапан па выходе ПЭН закрывается и он может быть выведен в резерв с возможностью последующего автоматического пуска. Действие системы регулирования производительности насосов при останове блока или глубоких сбросах нагрузки и переход на ПЭН происходят в обратной последовательности.
16-4. Автоматическое регулирование пусковых режимов
Технологию процессов пуска можно рассматривать как последовательность этапов, каждый из которых характеризуется определенным состоянием запорной арматуры п оборудования и значением или скоростью изменения технологических параметров, контролируемых при пуске.
На каждом этапе требуемая тепловая схема блока может быть собрана путем изменения состояния арматуры и оборудования. Режим изменения параметров 24* 371
должен поддерживаться непрерывно при переходе от одного этапа к последующему.
Для обеспечения надежного и быстрого пуска блоков или отдельных агрегатов из различного исходного состояния необходимо выполнять автоматизацию пусковых процессов .и операций и контроль параметров при пуске.
Автоматический пуск блока представляет собой совокупность автоматических дискретных операций по управлению состоянием запорной арматуры («открыть» или «закрыть») и оборудования («включить», «отключить», «пустить», «остановить»), совершаемых в строгой последовательности, и непрерывных технологических процессов, осуществляемых с помощью АСР.
При этом переключения в тепловой схеме и изменения в схемах регулирования при переходе от одного этана пуска к другому производятся при выполнении определенных условий.
Следует отметить, что динамические характеристики участков регулирования существенно изменяются в процессе пуска. Как правило, параметры этих характеристик, определенные для начального этапа пуска, сильно отличаются от тех же параметров, определенных для конечного этапа пуска или нормального режима работы. Например, запаздывания т по температурам пара по тракту парогенератора от регулирующего воздействия существенно увеличиваются, а коэффициенты усиления k возрастают в начальной стадии пуска по сравнению с концом пуска и нормальным режимом. В связи с переходом с растопочного топлива на основе и с изменениями тепловой схемы блока автоматическое регулирование большинства технологических параметров в процессе пуска не может быть осуществлено с помощью штатных регуляторов даже при изменении их настроек и задания. Для этой цели используются пусковые или растопочные АСР, отличающиеся от штатных наличием устройств дистанционного изменения настроек регуляторов (Лр, Тц), переключением выходного воздействия РП на линию малого расхода в зависимости от стадии пуска или нагрузки блока, а в некоторых случаях количеством или местом отбора входных сигналов. В процессе пуска и набора мощности возникает необходимость в изменении настроек регуляторов и программ пуска в зависимости от теплового состояния оборудования, а также в формировании большого количества ко
манд для управления запорной арматурой и состоянием оборудования. В связи с этим персонал может осуществить автоматический пуск блока лишь при наличии в составе всережимной АСУ ТП энергоблока специально выделенных контуров управления в УВМ или же автономных устройств логического управления (УЛУ) пуском, воздействующих на отдельные автоматические системы управления растопочными устройствами, например па систему автоматического управления работой горелок [Л. 29].
Ниже в качестве примера приводятся АСР непрерывных процессов пуска из холодного состояния энергоблока мощностью 200 МВт с барабанным парогенератором, работающим при растопке па газовом топливе [Л. 27].
Пуск энергоблока можно представить в виде последовательности следующих основных этапов:
1) осмотр оборудования, установка запорной и регулирующей арматуры в исходное положение;
2) вентиляция топки;
3) продувка газопровода и подготовка растопочных горелок к розжигу; розжиг горелок;
4) прогрев барабана и паропроводов;
5) разворот турбогенератора;
6) синхронизация и включение генератора в сеть;
7) нагружение турбогенератора.
Первые три этапа являются подготовительными и осуществляются персоналом согласно инструкциям по пуску.
Розжиг горелок может производиться персоналом или же автоматически с помощью специального устройства [Л. 29].
Прогрев барабана и паропровода осуществляется после розжига растопочных горелок нижнего яруса. При этом подача топлива определяется допустимой скоростью прогрева барабана. До момента вскипания воды в барабане устанавливается и поддерживается расход газа через клапан малого расхода. После вскипания воды при избыточном давлении в барабане 0,1 МПа (~1 кгс/см2) включается автоматическая программная система подъема температуры насыщения (АПС — 7Н), действующая в соответствии с рис. 16-6,а по разности сигналов температуры насыщения пара в барабане tu и задания иД/), изменяющегося со скоростью 1,5°С/мпн. При достижении скорости повышения
температуры пара за первым впрыском на одной из четырех ниток трубопроводов 4°С/мин ЛПС — tH отключается и в работу автоматически включается АПС
Рис. 16-6. Автоматические программные системы пуска энергоблока.
а — АПС подъема температуры насыщения пара в барабане— /н; б — АПС подъема температуры пара за первым впрыском— в — АПС подъема температуры перегретого па-
ра — /п п; г — АПС разворота турбины — л(/); 1 — измерительный блок; 2 — регулирующий прибор; 3 — исполнительный механизм; 4— регулирующий орган; 5—дифференциатор; П — устройство формирования программы пуска.
подъема температуры пара за первыми впрысками со скоростью 4°С/мин, действующая в соответствии с рис. 16-6,6 по разности сигналов температуры пара и задания Ainpl — ^2 (/) .
Рис. 16-7. Программа повышения частоты вращения ротора турбины п, об/мин.
При прогреве барабана и паропроводов в работу также включается ЛПС поддержания температуры первичного пара на выходе /п.п, действующая в соответствии с рис. 16-6,в по отклонению tn.n и исчезающему сигналу за впрыском /ВпР2. Сигнал задания u3(t) устанавливается таким образом, чтобы температура пара на выходе парогенератора превышала температуру ЦВД не более чем на 100°С. Этого достаточно для разворота турбины и создания предпосылок для соблюдения важнейшего условия при пуске: разность между температурой пара и металла верха ЦВД не должна превышать 50°С.
Разворот турбогенератора. После завершения всех операций предыдущих этапов по прогреву паропроводов, стопорного клапана и цилиндров турбины и после проверки требуемых условий температурного режима оператор блока
включает АПС частоты вращения турбины (рис. 16 6,а), а затем программу увеличения п, об/мин, примерный вид которой изображен на рис. 16-7. АПС—п, об/мин, воздействуя на байпасы ГПЗ, производит толчок турбины, а затем подъем частоты вращения по заданной программе до режима холостого хода (3000 об/мин). На этом этапе остаются включенными АПС — /Bnpi и АПС — /п.п-
Синхронизация и включение генератора в сеть. При наличии режима холостого хода и готовности генератора к включению в сеть оператор блока отключает АПС регулирования частоты вращения турбины. Синхронизация генератора и включение в сеть производятся дежурным персоналом электроцеха в соответствии с инструкциями.
Нагружение турбогенератора. При пуске блока из холодного состояния перед набором нагрузки остаются в работе также АПС температуры первичного пара на выходе. После включения генератора в сеть его 25* 375
нагружение осуществляется включением АСР нагружения, воздействующим на клапан на подводе газового топлива (рис. 16-8). Давление пара перед турбиной поднимается таким образом, чтобы разность температур пара в регулирующей ступени ЦВД /р и металла в глубинной точке фланца £цВД не превышала 100°С. Это
условие достигается при использовании разности этих
Рис. 16-8. АСР нагружения турбогенератора (обозначения те же, что на рис. 16-6).
температур в качестве входного сигнала АСР нагружения турбогенератора. Одновременно на этом этапе работает АСР соотношения топливо— воздух (см. рис. 12-11,а). Включение и отключение всех АПС и устройств формирования программ повышения параметров осуществляется оператором воздействием па ключ «этапы пуска» и тумблеры включения и отключения программ. Пусковые программы формируются соответствующими контурами УВМ или УЛУ и в виде унифицированных сигналов иП(1) подаются на вход автоматических регуляторов.
На прямоточных парогенераторах также автоматизируются основные пусковые операции и процессы.
в том числе питание парогенераторов водой, поддержание режима работы пусковых сепа-
раторов, регулирование температурного режима по тракту парогенератора до растопочных сепараторов и температуры перегретого пара па выходе парогенератора. АПС разворота турбины и АСР нагружения турбогенератора действуют аналогично вышеописанным системам (см. рис. 16-6,г и 16-8).
16-5. Общеблочные автоматические защиты
Защитные устройства отдельных агрегатов блока взаимосвязаны: срабатывание защиты одного из агрегатов, приводящее к его останову, является сигналом для останова других. Это достигается через связь между отключающими устройствами паро- и турбогенераторов. Один из вариантов функциональной схемы защитных устройств моноблока изображен на рис. 16-9. Взаи-376
модействие защит осуществляется в этой схеме следующим образом. Срабатывание защиты генератора и главного трансформатора, указывающее на серьезные повреждения в пределах генератора и трансформатора, приводит к возбуждению первичного реле, которое от
ключает генератор от сети, воздействует па выключение напряжения возбуждения и включение резервного напряжения собственных нужд и далее через реле блокировки на отключающие устройства паровой турбины (стопорный клапан) и механизмов парогенератора (дутьевой вентилятор и топливоподающие устройства).
Срабатывание автомата безопасности турбины, как известно, происходит при провышеп'ии частоты вращения турбогенератора сверх номинальной на 10%, т. е. на 300 об/мин, и приводит к закрытию стопорного клапана. При этом генератор отключается от сети. То же происходит при срабатывании остальных защит турбины (падение давления в систс-
Рис. 16-9. Системы за
ме смазки подшипников, чрезмерный осевой сдвиг ротора, потеря вакуума и др.).
Действие защит парогенератора, приводящее к его останову, передается на отключающее устройство турбины и генератора. Помимо защитных устройств отдельных агрегатов, блочные установки оснащаются защит
щиты блочной установки (функциональная схема).
а—в — соответственно парогенератор, турбина п электрогенератор; / — промежуточные реле; 2 - управляющие цепи устройства отключения дутьевого вентилятора; 3 — блокировочное реле; 4—механизмы парогенератора; 5 — механизм мгновенного отключения стопорного клапана турбины.
ными устройствами, предотвращающими останов блока при частичных или глубоких сбросах электрической нагрузки. Решение этой задачи, например, для моноблока 200 МВт приводит к необходимости установки БРОУ в обвод ЦВД п ЦНД, сбрасывающих избыточный пар в конденсатор (рис. 16-10). БРОУ включается при резких и глубоких сбросах электрической нагрузки блока и поддерживает давление пара перед турбиной и темпе-
ратуру после себя. Сигнал, включающий БРОУ № I — уменьшение перепада давлений ниже заданного значения на ЦВД, БРОУ №2 — на вторичном перегревателе. БРОУ № 2 поддерживает давление пара после промпе-регревателя и температуру после себя. В случае мгновенных сбросов электрической нагрузки или отказа БРОУ избыток пара парогенераторов должен сбрасы-
7
БРОУ-2
БРОУ-1
г
Рис. 16-10. Принципиальная схема защиты блочной установки 200 МВт при сбросах электрической нагрузки. 1 — парогенератор: 2 — вторичный пароперегреватель; 3 — турбогенератор; 4 — предохранительные клапаны; 5 — регулятор давления БРОУ; б — регулятор температуры БРОУ; 7, S—-клапаны БРОУ; Р — стопорные клапаны турбины; 10— регулирующие клапаны турбины-. 11 — вакуум-реле.
ваться в атмосферу через предохранительные клапаны. Помимо автоматически включающихся БРОУ, на рис. 16-10 показано защитное устройство от понижения вакуума в выхлопном патрубке турбины (вакуум — реле), прекращающее доступ пара в ЦВД и ЦНД при появлении этого сигнала.
Действие защит дубль-блоков (два котла — одна турбина) в связи с наличием двух парогенераторов построено по несколько иному принципу по сравнению с моноблочной установкой. Система автоматической защиты дубль-блока мощностью 300 МВт выполняет функции: останова блока, останова турбины, перевода блока в режим холостого хода, снижения нагрузки блока, останова парогенератора, перевода его на 378
растопочную нагрузку, защиты отдельных механизмов и устройств.
Из перечисленных действий аварийный останов турбины почти не отличается от схемы действия защит, приведенной на рис. 15-9. В случае работы турбины в дубль-блоке добавляется сигнал на ее останов при одновременном останове или отключении обоих парогенераторов, а также сигнал о действии общеблочной защиты на останов.
Аварийный останов парогенератора осуществляется по схеме, приведенной на рис. 15-5 и 15-7. Добавляется лишь сигнал о действии общеблочной защиты на останов.
Аварийный останов дубль-блока под действием защит производится в соответствии со схемой, приведенной на рис. 16-11.
К останову блока приводит одновременный останов двух парогенераторов или одного при отключенном втором, а также турбины и электрического генератора. В свою очередь останов этих агрегатов осуществляется их собственными защитами, выполненными в соответствии со схемами рис. 15-9 и 15-10.
Помимо перечисленных сигналов на останов блока воздействует сигнал от срабатывания защиты при повышении уровня в регенеративных подогревателях высокого давления (ПВД) до второго аварийного предела 1 ^ПВД •
Вторая ступень защиты ПВД необходима ввиду тяжелых последствий этой аварии в случае отказа защиты первой ступени (см. рис. 15-11).
Перевод блока в режим холостого хода осуществляется при отключениях генератора от электрической сети из-за повреждений за пределами блока (повреждения на линиях электропередачи). В этих случаях турбина и генератор остаются в работе, но нагрузка генератора ограничивается собственными нуждами блока (до 10— 13% номинальной). В режиме холостого хода блока оба парогенератора переводятся на растопочную нагрузку (затем один из них может быть остановлен оператором), устанавливается пониженное давление перегретого пара, отключается ПТН, автоматически включается ПЭН и отключаются регуляторы производительности этих насосов (см. рис. 16-5). Действие защиты на перевод бло-
Рис. 16-11. Логическая схема действия защиты дубль-блока.
ка в режим холостого хода в случае необходимости может быть заменено воздействием на автоматический аварийный останов блока (по рис. 16-11) путем предвари тельного ручного переключения каналов воздействий.
Снижение нагрузки блока автоматической защитой производится в случаях аварийного останова одного из парогенераторов, если второй остается в работе, а также при отключении ПТН и автоматическом включении ре зервного ПЭН (с выдержкой времени до 10 с).
В первом случае автоматическая защита включает регулятор давления перегретого пара «до себя» (см рис. 16-2, вариант а), с пониженным заданием (на 3— 4 кгс/см2 меньше номинального). Он приводит в соответствие нагрузку турбины с паровой нагрузкой оставшегося парогенератора.
При отключении ПТН и включении ПЭН нагрузка парогенераторов снижается до значения соответствующей производительности ПЭН, путем уменьшения подачи топлива.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что такое приемистость блочной установки?
2. Поясните по рис. 16-2 варианты схем регулирования мощности энергоблока в базовом и регулирующем режимах.
3. Какие непрерывные процессы прямоточных парогенераторов автоматизируются при пусках?
4. Назовите АСР пусковых режимов барабанного парогенератора.
5. Поясните действие автоматических защит моноблока (рис. 16-9).
6. Поясните логическую схему действия защит дубль-блока (рис. (16-11).
глава семнадцатая
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ТЕПЛОВЫМИ ЭЛЕКТРИЧЕСКИМИ СТАНЦИЯМИ
17-1. Организация управления теплоэнергетическими установками
Современные крупные ТЭС делятся па два типа:
1) ТЭС с поперечными связями между основными агрегатами по пару (общий паровой коллектор для парогенераторов и турбин) и воде (общие питательные магистрали для парогенераторов);
2) ТЭС с блочной компоновкой основного оборудования и с независимым технологическим процессом на каждом энергоблоке.
Дальнейшее развитие и наращивание единичной мощности блочных установок (сооружение турбогенераторов мощностью до 800—1200 МВт и парогенераторов производительностью до 2500—4000 т/ч) требует в свою очередь разделять энергоблок и его вспомогательные установки па группы по функциональному признаку1.
Функциональная группа (ФГ) представляет собой часть основного оборудования, выполняющую вполне определенную функцию. Например, по парогенератору могут быть выделены ФГ подачи и сжигания топлива, перегрева пара, подачи и подогрева воздуха, питания парогенератора водой и др;
по турбине—ФГ маслоснабжения турбины, конденсатных насосов и регенеративных ПНД, регенеративных ПВД и др.;
по генератору — ФГ охлаждения генератора, возбуждения генератора и др.
ФГ в свою очередь может быть разделена на несколько подгрупп. В подгруппу, как правило, входит один из однотипных агрегатов, входящих в ФГ. Управление в подгруппе осуществляется по определенной программе путем выполнения последовательности отдельных операций.
Управление может осуществляться по «шаговому» принципу с контролем выполнения каждого шага. Например, для подгруппы пуска ПЭН последовательность шагов следующая: I) пуск маслосистемы смазки подшипников, 2) открытие задвижки на всасе, 3) включение электропривода насоса, 4) открытие запорной задвижки с напорной стороны, 5) включение автоматического регулятора производительности ПЭН.
Реализация управления энергоблоком на основе функционально-группового принципа требует оптимального формирования групп оборудования и отдельных систем блока.
Управление технологическим процессом ТЭС во всех случаях осуществляется оператором с единого группово
1 Разработка и внедрение Всесоюзного теплотехнического инсти- |
тута им. Ф. Э. Дзержинского, института «Теплоэлектропроект» и ОРГРЭС.
го или блочного щита управления. Задачи, выполняемые человеком-оператором, существенно усложняются в связи с увеличением объема информации о состоянии оборудования и количества операций по управлению. Автоматические устройства контроля, регулирования и управления позволяют разгрузить оператора от выполнения многочисленных однообразных действий по наблюдению за состоянием оборудования и управлению им и сосредоточить его внимание на главных параметрах и операциях. В число таких автоматических устройств входят подсистемы дистанционного и дискретного автоматического управления механизмами и арматурой, автоматического регулирования и защиты, теплового контроля и сигнализации, расчета ТЭП. Структура организации управления технологическими процессами с помощью перечисленных подсистем изображена на рис. 17-1.
Назначение устройств дистанционного управления, помимо замены мускульного труда человека, состоит в передаче воздействий оператора на регулирующие и запорные органы, пусковые и отключающие устройства механизмов, удаленных от поста управления.
На современных ТЭС наибольшее развитие получили системы индивидуального (прямого) дистанционного управления, действующие по цепочке оператор (команда)—ключ — система передачи сигнала — пусковое устройство — исполнительный механизм (/ на рис. 17-1). При значительном количестве электроприводов и исполнительных механизмов — избирательные устройства управления (по вызову 2), осуществляемого в две стадии: выбор объекта управления с помощью клавишного аппарата и подача командного сигнала на исполнительный механизм ключом, общим для группы (см. рис. 9-9).
Автоматическое дискретное управление 4 предусматривает одновременное управление несколькими исполнительными механизмами от одной команды (сигнала) пли же воздействие на группу функционально связанных механизмов с дальнейшим автоматическим развитием команды по определенной программе. Например, управление пуском конденсатного электронасоса (КЭН) предусматривает проведение элементарных операций в следующей последовательности: открытие запорной задвижки на всасе — пуск электропривода — от-
КУ — ключ управления; ЛС - индикатор состояния («включено—отключено»), («открыто—закрыто»); ИМ — исполнительный
механизм; ЦП — цифровой прибор; ПМ — печатающая машинка,
крытие запорной задвижки на напорной линии. Перечисленные операции могут быть сведены к одной (нажатию кнопки пуска КЭН) с последующим автоматическим развитием команды по требуемой программе.
Устройства автоматического регулирования 3 должны поддерживать заданную производительность (мощность) установок, стабилизировать технологические параметры на заданном уровне и обеспечивать надежную и экономичную работу установки в целом.
Действие устройств автоматического регулирования осуществляется без участия пли при ограниченном уча стип человека-оператора (воздействие па задатчики управления).
Устройства тепловой защиты 5 призваны предотвращать возникновение и развитие аварий и защищать теплоэнергетические установки от повреждений и разрушений в случае отказов или ложных действий систем регулирования, а также при ошибочных действиях оператора. Системы защиты, как правило, выполняются независимо от других систем, т. е. имеют собственные первичные устройства для измерения и датчики контролируемых технологических параметров, независимые каналы управляющих воздействий, а также собственные автоматические резервируемые источники питания.
Назначение устройств сигнализации 6 состоит в том, чтобы в момент превышения параметром допустимого отклонения от заданного значения четко информировать оператора о случившемся. Как правило, это осуществляется путем зажигания постоянного или мигающего светового табло с соответствующей надписью и сопровождается звуковым сигналом.
Приборы непрерывного измерения 7 контролируют наиболее важные технологические параметры. В качестве непрерывно действующих измерительных устройств используются стрелочные приборы. Некоторые из них снабжаются устройствами регистрации (например, расходов пара и воды в парогенераторе и др.) для наблюдения за изменением (уменьшением или увеличением) контролируемой величины в каждый момент времени и качеством работы систем управления отдельными участками. Кроме того, с помощью записывающих приборов можно анализировать причины возникновения
и ход развития аварий и оценивать экономичность установки в течение длительных периодов времени.
Измерения по вызову 8 необходимы для периодического контроля менее ответственных параметров (например, температуры и разрежения по газовому тракту парогенераторов, температуры и уровни пыли в промбункерах и др.). Контроль по вызову осуществляется путем подключения к одному показывающему прибору через переключатель измерительных цепей от группы первичных приборов. Простейшими измерительными устройствами, осуществляющими принцип контроля по вызову, являются стрелочные приборы с многоточечными переключателями.
Массовый контроль 9 применяется при необходимости измерения большого количества однотипных вспомогательных параметров при малой вероятности отклонения их от заданного значения (например, температуры подшипников вращающихся механизмов, металла турбины и др.). Для массовых измерений применяются автоматические измерительные системы, снабженные обегающими устройствами и связанные с системой сигнализации.
Расчет технико-экономических показателей 10 (ТЭП) на крупных установках целесообразно производить с помощью электронных цифровых вычислительных машин (ЭЦВМ), снабженных выходными печатающими устройствами непрерывного и периодического действия [Л. 26]. Такая система расчета ТЭП может быть использована в качестве «советчика» оператора в ходе процесса управления.
Показывающие и регистрирующие измерительные приборы, ключи и переключатели управления, указатели положения регулирующих органов всех перечисленных выше систем размещаются на блочных или групповых щитах управления (БЩУ и ГрЩУ), которые устанавливаются в специально отведенных для них помещениях и обслуживаются оператором. Щит управления представляет собой сооружение из пультов и панелей, на которых размещается вся контрольно-измерительная и пускорегулирующая аппаратура теплоэнергетической установки или группы установок. Однако часть второстепенных технологических параметров контролируется с помощью приборов, установленных на так называемых местных щитах управления, расположенных вблизи действующих
агрегатов (например, щиты питательно-деаэраторных и
редукционно-охладительных установок, щиты манометров турбогенераторов или щиты U-образных манометров давления первичного и вторичного воздуха перед горелками парогенератора и др.). Наблюдение за состоянием действующего оборудования и показаниями приборов на местных щитах управления, а также необходимые ручные воздействия на регулирующие или запорные органы осуществляются дежурными обходчиками. Связь между обходчиками, обслуживающими местные щиты
управления, операторами центральных щитов и дежурным инженером станции осуществляется по радио и телефону.
Использование централизованных систем контроля и управления по вызову, систем массовых измерений и применение первичных приборов с унифицированным выходным сигналом (электрическим или пневматическим), пригодным для многократного использования
в системах контроля и регулирования, позволяет сократить общее количество измерительных приборов, суще-
ственно уменьшить размер щитов управления и разгрузить оператора от выполнения большого количества необходимых, но второстепенных операций.
При организации БЩУ большое внимание уделяется созданию благоприятных условий для работы оператора, облегчению процессов восприя
тия и осмысливания получаемой им информации, выполнения управляющих воздействий.
В связи с этим непосредственно в поле зрения оператора располагают только те приборы и аппаратуру, которые необходимы ему для управления блоком в нормальном режиме или в опасных (предаварпп-ных или аварийных) ситуациях. Эти приборы и аппараты образуют так называемые оперативный контур БЩУ, который выполняется в виде вертикальных приборных панелей и противостоящих им пультов управления. На панелях неопе-
Рис. 17-2. Компоновка блочного щита управления (на два блока).
1 — оперативные панели щитов;
2 — оперативные панели пультов; 3—неоперативные панели щитов: 4 — оператор блока; 5 — старший оператор (начальник смены).
ративного контура БЩУ устанавливаются измерительные приборы вспомогательного назначения (обычно приборы массового контроля пли контроля по вызову), регулирующие приборы автоматических систем управления, коммутационная и вспомогательная аппаратура остальных подсистем управления.
Пример компоновки БЩУ в плане для двух энергоблоков приведен на рис. 17-2 |[Л. 17].
17-2. Управление технологическими процессами с применением информационных и управляющих вычислительных машин
Общее число контролируемых технологических параметров и механизмов управления регулирующими или запорными органами достигает на современных ТЭС нескольких сотен. В этих условиях возрастают ответственность и напряженность труда персонала и вместе с тем повышается актуальность более широкого использования автоматических измерительных и управляющих систем, позволяющих сосредоточить внимание оператора на главной задаче — выработке требуемого количества электроэнергии заданного качества (частоты).
Применение средств контроля по вызову и массового контроля явилось предпосылкой для создания и использования в целях контроля и управления машин централизованного контроля (МЦК) [Л. 13], реализующих принципы многократного обегающего контроля и кодирования информации.
Еще более высокой ступенью в централизации п автоматизации процесса управления энергоблоком является применение информационных вычислительных машин (ИВМ), выполняющих функции непрерывного и периодического контроля технологических параметров, регистрации и сигнализации их отклонений, вычисления технико-экономических показателей, а также выдачи обобщенной информации в вычислительную машину системы управления ТЭС или энергосистемы. Измерение небольшого количества важных параметров (электрическая мощность генератора, частота сети, давление, расход и температура перегретого пара и др.) производится приборами, не зависящими от ИВМ. Независимой выполняется также система аварийно-предупредительной -388
сигнализации. Такой принцип контроля позволяет скомпоновать удобный, легко обозримый щит управления с минимальным числом измерительных приборов.
В настоящее время ИВМ типа ИВ-500 установлены на ряде мощных энергоблоков [Л. 13]. Для выполнения сложных задач управления, таких как оптимизация тех-
Рис. 17-3. Управление объектом с помощью УВМ (принципиальная схема).
1 — устройство ввода программ управления ГЛ и П2; 3 — печатающие устрой-ства отклонения параметров; 3—устройство периодической печати техникоэкономических показателей; 4 — независимые и местные (локальные) АСР; 5 — исполнительные механизмы, действующие по сигналам от УВМ; 6— регулирующие органы местных (независимых) систем; 7 — регулирующие органы центральной системы; 8— датчики систем тепловой защиты; 9—устройства защиты; 10 — исполнительные органы систем защиты и дистанционного управления; // — измерительные приборы ответственных параметров; /2 —система аварийио-предупредительной сигнализации; /3 —система управления по вызову; 14— система прямого дистанционного управления.
нологических процессов и самих процессов управления, автоматизация пусковых операций (непрерывных и дискретных) по заданной программе целесообразно применение управляющих вычислительных машин (УВМ).
Использование УВМ в единой системе контроля и управления блочной энергетической установки поясняется схемой, приведенной на рис. 17-3.
Регулируемые параметры yi—yt поддерживаются вблизи заданных значений с помощью регуляторов местных (локальных) систем управления и управляющих сигналов Ui от УВМ, осуществляющей оптимизацию технологических процессов.
Программы управления ГЦ, П2 (например, автоматического пуска, подсчета ТЭП, критериев оптимизации процессов управления и др.) вводятся в УВМ через уст-
Инсрормационная часть
вычислительная часть
Рис. 17-4. Функциональная схема УВМ.
390
ройства ввода. Помимо действия регулирующих органов 6 и 7 по сигналам от УВМ, предусматривается возможность управления по вызову и прямого дистанционного управления.
УВМ, функциональная схема которой приведена на рис. 17-4, состоит из информационной (измерительной) и вычислительной (управляющей) частей. Информационная часть работает следующим образом. Сигналы датчиков первичных приборов (Д) поступают па нормирующие преобразователи (НП) с унифицированным токовым выходом и далее на входные ключи коммутатора (обегающего устройства), который обеспечивает передачу сигналов от объекта к УВМ и от УВМ к объекту через выходные ключи. Действие входных и выходных ключей синхронизовано, т. е. согласовано во времени. Это означает, что сигнал на выходе УВМ появляется в момент поступления сигнала в заданную цепь управления или контроля на ее входе. От входного коммутатора сигналы в дискретной пли аналоговой форме поступают в цифровой преобразователь, который преобразует их в цифровой код (число), соответствующий текущему значению параметра. В накопителе отклонений производятся умножение кода на постоянный коэффициент и передача результатов в систему регистрации —• информационную часть, а также сравнение кода с уставкой— заданным значением и передача результата сравнений в магнитное оперативное запоминающее устройство (МОЗУ).
Сигнализация отклонений параметров осуществляется па мнемосхеме объекта. Отклонения параметров выводятся на печатающие устройства через систему управления печатью. При этом на машинке печати отклонений отбиваются абсолютное значение параметров и время. Текущее значение параметра в цифровой форме оператор может проконтролировать с помощью устройства вызова параметров на цифровом индикаторе отклонений.
Основное назначение УВМ — отпимизация процессов управления осуществляется вычислительной частью, действующей по сигналам от накопителя отклонений. Вычислительная часть состоит из МОЗУ (магнитное оперативное запоминающее устройство), которое служит для хранения исходной информации, поступающей от накопителя отклонений, и запоминания результатов расче
тов, произведенных в арифметическом устройстве. Последнее формирует также законы управления регулирующими органами.
Программы управления (автоматический пуск, подсчет ТЭП и др.) поступают в УВМ через устройство ввода данных. Ввод программ управления может осуществляться оператором вручную с помощью нажатия соответствующих клавишей или автоматически с перфолент. Управление действия УВМ в целом и отдельных ее устройств осуществляется от блока управления.
Рис. 17-5. Центральный щит управления энергоблоком с вычислительной машиной «Комплекс» (внешний вид).
Следящая система исполнительных механизмов УВМ в зависимости от знака отклонения регулируемого параметра воздействует на пусковое устройство исполнительного механизма до тех пор, пока значение регулируемого параметра не сравняется с заданным.
Условные обозначения основных и вспомогательных теплоэнергетических установок и линий технологической связи между ними выполняются на отдельной панели — мнемонической схеме блока. В качестве примера на рис. 17-5 приведен внешний вид щита управления бло-392
ком с мнемосхемой для УВМ типа «Комплекс» [Л. 28] 4.
На мнемосхеме условно показано все технологическое оборудование блочной установки, обозначены точки контроля параметров и органы управления с номерами, соответствующими избирательным системам контроля и управления.
В центральной части мнемосхемы расположены панели паро- и турбогенератора, по бокам — панели вспомогательных установок. Система аварийно-предупредительной технологической сигнализации, как отмечалось выше, выполнена независимой от УВМ. Сигнализация о действиях защиты выведена на световые табло, расположенные в соответствующих технологических участках мнемосхемы.
Системы управления агрегатами ТЭС, включающие средства вычислительной техники, особенно перспективны для энергоблоков большой мощности. Однако создание сложных централизованных систем управления с большим количеством контролируемых и регулируемых величин имеет смысл лишь при достаточной надежности их составных элементов (первичных и вторичных измерительных и регулирующих приборов, ключей и переключателей управления, пусковых устройств исполнительных механизмов и др.). Поэтому обеспечение максимальной надежности больших систем управления должно' быть главным требованием в процессе их разработки проектирования, монтажа, наладки и эксплуатации.
17-3. Автоматизированные системы управления энергоблоков и ТЭС
«Основные направления развития народного хозяйства СССР па I97G 1980 годы» ставят задачу «продолжить работы по формированию Единой энергетической системы страны».
Автоматизация ТЭС должна осуществляться с учетом перспективы создания отраслевой автоматизированной системы управления производством и распределением электроэнергии в масштабе всей страны — ОАСУ «Энергия» [Л. 13]. В качестве составных частей в эту сложную
1 Разработка и внедрение Центрального научно-исследовательского института комплексной автоматизации (ЦИНИКА).
26— 626 393
К другим ВЦ
информационно-
2 — зональные
Рис. 17-6. Многоступенчатая структура (иерархическое дерево) спетчерского управления гия».
/ — главный управляющий вычислительный центр; .. _ _ __ _
управляющие информационно-вычислительные центры; 3 — автоматизированные системы управления энергосистемами (АСУ ЭС); 4 — автоматизированные системы управления электростанциями (АСУ ТЭС); 5 — автоматизированные системы управления технологическими процессами энергоблоков (АСУ ТПЭ); 6 — функциональные группы теплоэнергетического оборудования (ФГ); 7 — функциональные подгруппы; 8— исполнительные органы.
оперативно-ди-ОАСУ «Энер-
К другие ДСУЭС
К другим ПСУ ТЭС
4
к другицвсутпэ
К другим <РГ
К другим ФПГ
многоступенчатую (иерархическую) систему должны входить подсистемы управления технологическими процессами отдельных энергоблоков (АСУ ТПЭ), тепловыми и атомными электростанциями (АСУ ТЭС и АСУ АЭС) и энергосистемами (АСУ ЭС) (рис. 17-6).
Рассмотрим назначение и основные функции этих подсистем.
АСУ ТПЭ представляет собой совокупность средств измерений и сигнализации, дистанционного управления, автоматического регулирования и защиты, а также расчета ТЭП, позволяющих персоналу осуществлять централизованное и эффективное управление технологическими процессами энергоблока во всех эксплуатационных режимах, включая пуски и остановы, плановые и внеплановые изменения и нагрузки.
Основная цель автоматизированного управления состоит в том, что-управления оптимальной, т. е. наилучшей
бы сделать систему
в определенном смысле. В практике автоматического управления технологическими процессами в качестве показателей (критериев) оптимальности, на основе которых строится система, используются: .производительность автоматизированной установки, качество переходных процессов при изменяющихся входных воздействиях (§ 4-6, 4-7), экономичность, сложность схемного и аппаратурного решений и другие технико-экономические показатели ₽ зависимости от особенностей системы.
В общем случае критерий оптимальности Q представляет собой величину, зависящую от функции управления и(/) и выходной координаты системы ут(О> т- е.
Q =/[«(*). УД/)]- (17-1)
Основной задачей оптимальной системы является обеспечение экстремального значения критерия Q |(максималыюго или минимального). Примером задачи, где Q должен быть максимальным, служит управление процессом горения парогенератора .по к. п. д. Примером, когда Q минимизируется, служит та же задача, но при управлении процессом по сумме тепловых потерь (см. рис. 12-9).
Таким образом, для оптимальной системы необходимо, чтобы
Q[u(/). (/)] = extremum, (17-2)
т. е. в соответствии с (17-2) задача оптимального управления заключается в отыскании допустимого управления и(/), доставляющего экстремум критерию Q при соблюдении ограничений па выходные координаты Уг(О- В большинстве задач ограничения на управления вызываются ограниченностью энергоресурсов системы. Обычно |u|^il. Отклонение выходных координат Yi(t) (например, частота вращения турбин, давление и температура .пара и др.) чаще всего ограничивается по соображениям безопасности и прочности установок.
Наиболее часто критерий Q задается в виде определенного интеграла
Т
Q= Jg[u(/), у(0]Л- (17-3)
о
Например, к системе управления энергоблоком, оптимальной по быстродействию, предъявляются требования наибыстрейшего перехода от одного уровня нагрузки к другой. В частности, при сбросе или наборе электрической мощности энергоблока до нового заданного значения 2VS (и (/)) в качестве критерия оптимальности можно взять время переходного процесса по фактическому значению нагрузки 7V<p(y(Z)), которое должно быть минимальным. В этом случае и(Г)=у(Г) = 1 в (17J3) и требование Q=QMhh обращается в требование 7'=7’мив.
Автоматизированную систему управления ТПЭ следует рассматривать как систему, состоящую из двух частей: 1) функциональной, призванной решать задачи оптимального управления технологическими процессами, и 2) обеспечивающей, необходимой для решения этих задач.
При этом обеспечивающая часть состоит из информационной базы (данные для расчетов, априорные данные об объекте управления и графиках нагрузки, нормативные и руководящие материалы, текущие сведения о возмущающих воздействиях и т. п.), комплекса технических средств (датчики, преобразователи сигналов, информа-26* 395
ЦионнЫе и управляющие машины, традиционные средства контроля и регулирования и др.) и системы математического обеспечения (трансляторы с языков любых уровней: машинных и процедурных, готовые программы и алгоритмы для решения перечисленных задач, запрограммированные методы оптимизации процессов управления и экономико-математические методы расчета ТЭП, статических и динамических характеристик объектов управления и др.).
Основу современной АСУ ТП составляет управляющий вычислительный комплекс (УВК), который строится по двухуровневому принципу. Нижнюю ступень составляет информационная подсистема, работающая по алгоритмам, имеющим несложный и массовый характер: сбор и первичная обработка информации, оперативный контроль, сигнализация, вызывная цифровая печать, графическая регистрация и передача информации вычислительному комплексу. Верхнюю ступень составляет собственно вычислительный комплекс — вычислительная подсистема, выполняющая функции и решающие задачи со сложными алгоритмами.
Функции, выполняемые АСУ ТПЭ1
1. Оперативный контроль
а) Контроль на индивидуальных постоянно включенных приборах. Охватывает минимальное число наиболее важных технологических параметров, позволяющих оценить общее положение на энергоблоке. Для этой цели используются преимущественно регистрирующие приборы.
б) Контроль по вызову на аналоговых приборах. Предназначен для обеспечения повышенной надежности измерений ограниченной группы технологических параметров. Этот вид контроля охватывает в основном оперативные технологические параметры.
в) Контроль по вызову на цифровых приборах. Расширяет возможности контроля, обеспечивает информацию о любом подключенном ко входу УВК или вычисленном параметре.
1 Приводится примерный перечень функций. Состав функций АСУ ТПЭ может уточняться и наращиваться в процессе эксплуатации.
г) Контроль по вызову на электронных лучевых трубках. Обеспечивает наглядность, позволяя представлять оператору для обозрения группу взаимосвязанных параметров.
д) Графическая регистрация на аналоговых приборах. Применяется для важных точек контроля и для ряда параметров множественного контроля в целях представления оператору предыстории и направления изменения параметров.
е) Цифровая регистрация по вызову. Обеспечивает возможность печати на цифропечатающих машинках любого вычисленного параметра пли подключенного ко входу УВК-
ж) Предупредительная световая или звуковая сигнализация технологических параметров, вышедших за пределы установленных значений.
з) Сигнализация состояний оборудования (положений задвижек, шиберов и др., состояний агрегатов и электродвигателей, режимов работы регуляторов и т.п.). Осуществляется на элементах мнемосхемы объекта, которая располагается на оперативном контуре блочного щита управления.
2. Регистрация аварийных положений
Предназначена для регистрации событий и параметров в аварийных режимах работы энергоблоков с по-следущей обработкой и представлением информации персоналу для анализа причин возникновения и характера развития аварий. В памяти УВК хранится информация о событиях и значениях параметров в течение заданного промежутка времени 1\ от момента последнего опроса. В каждом новом цикле обновления данных «стирается» информация, вышедшая за пределы интервала Ti, и вместо нее заносится вновь полученная информация. Система регистрации аварийных положений обеспечивает регистрацию последовательности и времени срабатывания технологических защит, положения всех контролируемых регулирующих и запорных органов на момент аварии, а также значений важнейших технологических параметров.
3. Автоматический расчет технико-экономических показателей.
В состав вычисляемых ТЭП входят: показатели парогенератора и турбины, тепловых и электрических соб-397
ствснпых нужд, анализ топливоиспользоваиия по отдсль ным составляющим и по блоку в целом и другие показатели в объеме существующей технической отчетности. Все расчеты ТЭП производятся одновременно с ходом технологического процесса на основе данных, получаемых за различные интервалы времени непосредственно с объекта или накапливаемых памятью УВД в результате обработки информации. В целях подавления динамических помех значение оперативного интервала расчета устанавливается равным 15 минут. Для анализа качества работы вахтенного персонала предусмотрен сменный (за 8 ч) интервал расчета ТЭП. Для анализа работы всего энергоблока и составления отчетности предусматривается месячный интервал расчета ТЭП. При этом обеспечивается контроль достоверности важнейших каналов измерения, осуществляемый путем сравнения с показаниями дублирующих датчиков, со сходными параметрами или со значениями параметров, полученных на основе косвенных вычислений. УВД на основе данных теплотехнических испытаний, расчетов и другой заранее известной информации вычисляет также нормативные значения ТЭП, которые определяются как функция внешних не зависящих от эксплуатации факторов.
4. Коррекция настроек регуляторов
Предназначена для автоматической подстройки регуляторов при изменениях режимов работы энергоблока (изменения видов топлива, нагрузки, состава работающего оборудования и его характеристик). В систему настройки АСР должны входить следующие устройства: автоматические регуляторы, снабженные приспособлениями для дистанционного управления настройками, автоматические задатчики регулируемых величин и источники пробных воздействий на АСР в форме ступенчатых или гармонических сигналов. УВД должен обеспечивать выполнение трех режимов: определение динамических характеристик объектов, оптимизация АСР (расчет настроек) и автоматическая коррекция настроечных органов регуляторов.
5. Оптимизация процесса горения в топке парогенератора
Предназначена для поддержания максимального значения к. п. д. парогенератора в различных режимах его работы путем воздействия на расход воздуха, подавае-398
мого в топку. Осуществляется с помощью регулятора подачи воздуха и экстремального регулятора к. п. д., реализуемого в УВК. Обеспечивает автоматический поиск экстремума к. п. д. и автоматическую коррекцию оптимального избытка воздуха в толке.
6. Оптимизация вакуума в конденсаторе турбины
Предназначена для выбора оптимального расхода циркуляционной воды на турбоустановку. Применяется для энергоблоков с индивидуальной системой снабжения циркуляционной водой и оснащенных устройствами изменения производительности циркуляционных насосов. В качестве оптимального критерия используется к. п. д. турбоустановки нетто. Управляющими воздействиями являются включения отдельных циркуляционных насосов и изменения положения их направляющих аппаратов.
Низшим звеном по отношению к АСУ ТПЭ являются системы управления функциональными группами.
Управление отдельными ФГ осуществляется на нескольких уровнях (см. рис. 17-6). Низшим уровнем являются исполнительные механизмы 8, которые могут управляться индивидуально и независимо от состояния всей системы управления. Выше уровня исполнительных механизмов расположено управление на уровне подгруппы— ФПГ 7. Над подгруппами расположена система управления ФГ (6), координирующая работу отдельных подгрупп в зависимости от режима энергоблока. Высшим уровнем группового управления является управление блоком 5, т. е. совокупностью ФГ энергоблока.
АСУ ТЭЦ (4) является высшим звеном по отношению к АСУ ТПЭ. Она представляет собой совокупность методов управления и технических средств автоматизации, позволяющих осуществлять наиболее эффективное оперативно-диспетчерское управление эксплуатацией и управление производственно-хозяйственной - деятельностью ТЭС.
Под техническими средствами автоматизации имеются в виду средства вычислительной техники и связи (информационные и управляющие вычислительные машины), а также традиционные средства контроля и регулирования (измерительные и регулирующие приборы, исполнительные механизмы и пр.).
Под методами управления понимаются определенные операции, действия (совершаемые автоматически или персоналом) и мероприятия по управлению, направленные на выполнение основной задачи АСУ ТЭС — обеспечение наилучшего использования материально-финансовых и трудовых ресурсов ТЭС для надежного и качественного производства электроэнергии в соответствии с заданиями АСУ энергосистемы.
Создание и внедрение АСУ на действующих и вновь строящихся ТЭС, помимо причин отраслевого и государственного характера (создание ОАСУ «Энергия»), определяется следующими факторами:
1) наличием автоматизированных систем управления отдельными агрегатами, группами тепловых агрегатов и энергоблоков;
2) необходимостью централизации в масштабе электростанции, энергосистемы отдельных автоматических устройств, управляющих распределением нагрузки между парогенераторами, турбинами и генераторами ТЭС [например, устройств распределения активной нагрузки— УРАН и систем регулирования напряжения генераторов—СРНК (§ 16-2)];’
3) необходимостью централизации расчетов технико-экономических показателей отдельных агрегатов энергоблоков, проводимых в одном темпе с процессом управления и осуществляемых на многих современных электростанциях с помощью малых ЦВМ;
4) необходимостью усовершенствования хозяйственно-финансовой деятельности крупных ТЭС и внедрения прогрессивных машинных методов контроля и управления производством;
5) необходимостью связи и обмена информацией в темпе с процессом управления с вышестоящей АСУ, объединяющей группу ТЭС или энергоблоков.
Назначение АСУ ТЭС состоит в следующем:
1) сбор, обработка, анализ и отображение информации, передача информации на высшие и низшие уровни управления, воздействие на объекты (оперативнодиспетчерское управление);
2) разработка и выдача рекомендаций для принятия оптимальных решений по задачам управления производственно-технической и хозяйственной деятельностью (производственно-техническое И хозяйственное управление).
1
Объект'управления-
b, S, Ng, Nc}. U dp. 2
Воздействие на объект
11
// I/Z7 st-i i3
/4 “1
(онтроль, анализ и принятие решения
Рис. 17-7. Взаимосвязь функций управления АСУ ТЭС.
1 — комплекс внешних воздействий; 2 — показатели функционирования предприятия; 3 — передача информации в вышестоящую АСУ; 4 — ввод данных для расчетов (нормативных, руководящих, недостающих и др.); 5 — текущая информация, необходимая для выполнения плановых заданий оперативного управления производством; 6— плановые задания; 7 — корректирование плановых заданий с учетом фактического состояния объекта: 8 — информация, необходимая для планирования и научно обоснованного прогнозирования (например, в связи с изменением метеорологических условий или изменением качества топлива); 9 — внешние обратные связи по планированию; 10— воздействие на объект через подсистему тепловой защиты (ТЗ); 11— воздействие на объект через местные подсистемы автоматического регулирования (АСР); 12 — все виды управления, ие требующие дальнейшей обработки; 13 — управляющие сигналы от УВМ; 14 — капал воздействия оператора; Bv — расход топлива; Ь — удельный расход топлива; Nn и NB — количество потребляемой и вырабатываемой энергии; 7VC н — расход электроэнергии на собственные нужды; s — себестоимость отпущенной электроэнергии.
АСУ ТЭС, так же как и АСУ ТПЭ, состоит из функциональной части и обеспечивающей, включающей информационную базу, комплекс технических средств и систему математического обеспечения.
Оперативно-диспетчерское управление осуществляется с помощью подсистем функциональной части АСУ ТЭС (подсистемы планирования, учета, анализа и принятия решений, воздействия на объект управления).
Рассмотрим взаимодействие перечисленных подсистем, изображенных на рис. 17-7. Автоматизированная система управления ТЭС1 является замкнутой системой, в которой осуществляются воздействия на вход объекта, восполняющие внутренние и внешние возмущения (/) по сигналам с его выхода (2). При этом часть воздейст
1 Разработка института «Теплоэлектропроект» и Белорусского филиала ЭНИН АН СССР им. Г. М. Кржижановского.
вий осуществляется йепбсреДственйо с выхода объекта на вход (12) по каналам общестанционных автоматических систем регулирования (10) (например АСР частоты и активной мощности, см. рис. 16-4) и общестанционной тепловой и электрической автоматической защиты (11), часть через корректирующий контур управляющей вычислительной машины при наличии таковой (13), а часть по каналу воздействия оператора (14) ио цепочке: объект (2) учет и анализ (5) и (6) —блок воздействия на объект (12). Наименование остальных каналов по функциональным признакам дается в подрисуночной подписи.
Общестанционное автоматизированное оперативно-диспечерское управление предусматривает:
1) автоматический сбор и первичную обработку информации о режиме главной электрической схемы станции и о состоянии общестанционного технологического оборудования;
2) автоматический контроль достоверности информации;
3) регистрацию и предупреждение аварийных состояний;
4) расчет и анализ общестанционных технико-экономических показателей ТЭС, с различными интервалами времени в зависимости от требуемых форм отчетности;
5) определение энергетических характеристик энергоблоков с целью оптимального распределения нагрузок между отдельными энергоблоками, в частности для конденсационных станций, по равенству относительных приростов
_ двк. hB2i _ __ ДВШ-
°г A/v1(. — ДМ,. - Д/У„г ’
где bо» — прирост расхода топлива ABhi энергоблока при увеличении его мощности на величину АМн при i-м режиме энергосистемы (1—1, 2.....п);
6) выбор оптимального количества работающих энергоблоков при снижении нагрузки станции с учетом предполагаемой длительности простоя части оборудования и затрат топлива и электроэнергии на его последующий пуск;
7) учет выработанной, переданной в энергосистему и отпущенной потребителям электроэнергии;
8) обмен оперативно-диспетчерской информацией с АСУ высших уровней;
9) выполнение логических операций по переключениям главной электрической схемы станции;
10) управление общестанционными технологическими процессами и оборудованием.
Практика внедрения автоматизированных систем оперативно-диспетчерского управления показывает, что контроль за ходом технологического процесса стал более действенным благодаря следующим факторам: контроль основывается не только на измерениях параметров процесса, но и на оперативных расчетах ТЭП; контроль хода технологического процесса более тесно увязывается с состоянием основного и вспомогательного оборудования; получили применение методы контроля достоверности получаемой информации.
Эффективное управление процессами обеспечивается не только оптимизацией отдельных технологических режимов, но и более тщательной оперативной увязкой положений на управляемом объекте и смежных с ним участках производства. Кроме того появилась возможность объективно оценивать последствия ошибок, вносимых операторами, а также своевременно обнаруживать отказы и сбои технических средств.
Источники экономического эффекта от внедрения АСУ технологических процессов лежат в первую очередь в улучшении качественных показателей технологического процесса и повышении надежности функционирования технологического оборудования.
Производственно-техническое и хозяйственное управление ТЭС осуществляется с помощью следующих подсистем функциональной части АСУ:
а) обслуживания основного и вспомогательного оборудования;
б) обслуживания автоматизированных систем управления;
в) экономического управления.
а) Подсистема обслуживания основного и вспомогательного теплового оборудования.
Устанавливает сроки планово-предупредительных и капитальных ремонтов. Оптимальные сроки планово-предупредительных ремонтов (очистки теплообменных аппаратов-конденсаторов, различных подогревателей, эко
номайзеров и др.) определяются сопоставлением денежных затрат, например, на очистку SO4, включая затраты, связанные с простоем оборудования, и ущерба в денежно выражении от загрязнения теплообменников Д5^ [Л. 26]. Критерием оптимальности сроков очистки служит минимум выражения
S 4-AS(T) = Q,
где т— время между очистками, определяется из условия Q^QmhII-
Например, ущерб от загрязнения конденсатора определяется по формуле
о
где сд — средняя величина себестоимости энергии ТЭС за время т, a — суммарное снижение мощности (выработки) нетто установки при значении вакуума, взятом с учетом загрязнения конденсатора.
Для определения сроков и целесообразности капитальных ремонтов необходимо сопоставить затраты на ремонт и замену оборудования (например, воздухоподогревателя в связи с коррозией) с возможным улучшением экономичности установки (в данном примере повышением к. п. д. брутто парогенератора). Критерий оптимальности капитальных ремонтов Q может быть представлен в следующем виде [Л. 26]
ДК IAS" 4-Д5>> = 0 ,
где ДЛ'к — затраты на ремонт или замену, включая простои оборудования, ASBK— ухудшение экономичности работы оборудования в связи с износом за время безремонтной эксплуатации, ASHK— ущерб от снижения надежности за то же время т.
б) Подсистема обслуживания автоматизированных систем управления.
Обеспечивает надежность аппаратуры АСУ в эксплуатации. Она осуществляет сбор и обработку информации о надежности элементов самой АСУ и определяет объем и сроки заказа запасных изделий на основе анализа статистических данных потока отказов, что под силу лишь информационным вычислительным машинам. 404
в) Подсистема экономического управления признана оптимизировать хозяйственную деятельность на электростанции, включая развитие основного производства, оборотные средства, трудовое и производственно-финансовое обеспечение ТЭС. С ее помощью осуществляется автоматизированный сбор, обработка необходимой информации и представление ее в удобном для принятия решения виде.
В качестве критерия эффективности для проведения работ по1 реконструкции основного' и вспомогательного оборудования должно быть использовано1 выражение экономии приведенных затрат
А8В — ДК =0 р 'р ^макс ’
где ASBp — ожидаемая экономия топлива в результате реконструкции, ЛКр— суммарные затраты на данную реконструкцию. Оптимизация оборотных средств предусматривает поставки наивыгоднейшего топлива, с точки зрения качества и транспортных затрат, при наличии возможностей выбора источника топливоснабжения и экономию средств на управление запасами ТЭС (пополнение запчастями и материалами).
Неоптимальность существующей практики управления запасами состоит в недостаточной изученности потока отказов, что под силу лишь машинному расчету и анализу. Вследствие этого наряду с убытками, которые несет станция от простоев оборудования из-за отсутствия нужных запчастей и материалов, имеют место потери от длительного хранения дорогостоящих узлов в связи с «замораживанием» средств и затратами на хранение материальных ценностей в надлежащих условиях. Критерием оптимальности запаса материалов и приобретения запасных частей служит выражение
ASB 4-AS*1 -AS ’=Q , ’
к. р 1 к. р з. м ^макс’ ,
где Д5вкр и А8нкр соответственно экономия топлива и снижение ущерба от надежности, которые могут быть получены вследствие проведения капитальных ремонтов оборудования и реконструктивных работ в заданные сроки; А8з.м — затраты на материалы и запасные части.
В заключение следует отметить, что АСУ ТЭС призвана решать сложные задачи технологического и экономического управления станцией с наличием связей
с высшими (энергосистема) и низшими (энергоблоки или группы агрегатов) уровнями. С учетом этих связей и функций выполняемых АСУ наиболее удобным является агрегатный принцип построения технических средств для АСУ, который позволяет широко варьировать количественный состав аппаратуры (наращивать и уменьшать) в зависимости от особенностей тепловой эл ектр оста нции.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите подсистемы управления энергоблоком. В чем состоит назначение каждой из них?
2. Что представляет собой функциональная группа, в чем состоит сущность функционально-группового управления?
3. Пользуясь рис. 17-4, объясните действие информационной и вычислительной частей УВМ.
4. Назовите информационные и управляющие функции АСУ ТПЭ. 1
5. Пользуясь рис. 17-7, поясните взаимодействие подсистем АСУ ТЭС.
ПРИЛОЖЕНИЕ 1
ОПЫТНОЕ ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ СВОЙСТВ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
1. Определение временных характеристик
Для того чтобы опытным путем оценить динамические свойства объекта или участка регулирования по временным характеристикам, необходимо руководствоваться следующими положениями:
il) Проведение эксперимента целесообразно лишь в условиях, типичных для нормальной эксплуатации объекта с хорошо отлаженными технологическими процессами и регулирующими ор!анами при наличии необходимого количества измерительных приборов.
2) Перед нанесением возмущения регулируемая величина должна быть стабилизирована на требуемом значении в течение времени, в несколько раз превышающем ожидаемую постоянную времени объекта.
3) При наличии других входных воздействий следует обеспечить их стабилизацию в течение опыта (например, обеспечить постоянство расхода топлива при снятии зависимости по каналу «впрыск охлаждающей воды — температура перегрева пара») и ие производить операций, вызывающих дополнительные внутренние возмущения (например, нельзя производить обдувку поверхностей нагрева, смывание шлака и пр. при снятии этой же кривой).
4) Измерение регулируемой величины желательно производить на выходе измерительного блока регулятора, в особенности когда характеристики используются для расчета настроек регулятора. Запись экспериментальных кривых следует производить на высокоточных регистраторах с повышенной скоростью движения диаграммной бумаги. Входное воздействие желательно оценивать как по указателю положения регулирующего органа, так и по расходу регулирующей среды.
•5) Для получения представительных результатов при определении коэффициентов k, Т и т следует снимать несколько '(6—10) характеристик в одинаковых условия;;. Результирующая характеристика строится по усредненным ординатам.
6) Для получения более полного представления о динамических свойствах объекта кривые переходного процесса должны быть определены при различных значениях нагрузки '(средней, минимальной и максимальной) агрегата и различных режимах его работы. Коэффициенты ik, Т ит подсчитываются отдельно для каждой нагрузки.
7) Временные характеристики снимаются в предположении, что исследуемые объекты являются линейными, т. е. что их динамические характеристики не зависят от размера возмущения.
Большое значение имеет правильный выбор возмущающего воздействия, которое должно быть достаточно большим для получения четкой кривой на фоне неизбежных случайных воздействий
(помех) на регулируемую величину. Однако чрезмерное возмущение может привести, во-первых, к недопустимым отклонениям регулируемой величины и, следовательно, к срыву эксперимента, во-вторых, к нарушению условия независимости динамических свойств исследуемой системы от значения возмущения.
8) В тех случаях, когда выбранные значения ступенчатых возмущений приводят к превышению допустимых отклонений, снимают импульсную характеристику. При выборе амплитуды и длительности импульсного воздействия следует исходить из того, чтобы регулируемая величина y(t), совпадающая на участке времени ta (см. рис. П-1) с кривой переходного процесса при ступенчатом возмущении, имела на нем точку перегиба или участок постоянного наклона, что позволит определить наиболее важные.коэффициенты: kB и т.
Рис. П-1. Построение кривой разгона по импульсной характеристике.
9) Возмущающие воздействия, как правило, наносятся с помощью регулирующих или запорных органов, снабженных дистанционным управлением сервоприводом с постоянной скоростью перемещения. В этих случаях следует учитывать немгновенный характер скачка возмущения, в особенности когда время перестановки регулирующего органа соизмеримо с постоянной времени объекта [например, при снятии кривой y(f) по каналу «направляющий аппарат дымососа — разрежение вверху топки»]. При обработке кривых разгона и импульсных характеристик таких участков следует смещать вправо момент нанесения возмущения на время /р.о/2 (/ро — время перестановки регулирующего органа в процессе эксперимента, см. рис. 2-5).
10) При снятии импульсных Характеристик в промышленных условиях регулируемая величина может не вернуться к своему первоначальному значению после снятия возмущающего воздействия. При остаточных отклонениях (/Ост>0„2(/макс опыт следует повторить.
На рис. П-1 приведена экспериментальная импульсная характеристика объекта, обладающего самовыравниванием. При обработке импульсной характеристики следует учитывать, что ее начальный участок до момента tK (снятие импульса возмущения) является одновременно начальным участком кривой переходного процесса при ступенчатом возмущении, поэтому время запаздывания т и коэффициент .пропорциональности Аи определяются методами, аналогичными для кривой y(t). Для определения коэффициента усиления объекта Л можно воспользоваться способами достройки импульсной характеристики до кривой разгона у(1).
Достройка возможна, если допустить, что исследуемый объект является линейным. При справедливости такого допущения он, во-первых, обладает одинаковыми динамическими свойствами при нанесении возмущающих воздействий в сторону их увеличения или уменьшения, во-вторых, для него справедлив принцип наложения, т е. рассматриваемая импульсная характеристика является суммой двух кривых y(f): уЦГ) и yll(t), являющихся реакцией объекта на ступенчатое возмущающее воздействие xv\t) и №(<), сдвинутых на время импульса tK одно относительно другого и направленных в противоположные стороны. В таком случае
уп (/и)=? (U=i/P(U;
Ур (2/и) = у11 (У +У1 (2/и) = у1 (О + у1 (2/и);
i/p(3U = '/p(2/II) + f/,(3U-
Это построение может быть сведено в таблицу, в верхней строке которой проставляются значения времени 0» tK, 2/и, 3/и н т. д. и во второй строке — значения ординат экспериментальной импульсной характеристики у1 (У), а в третьей—сумма ординат:
Ур^ + у1 W,
У1 (2у + У1 (3/„);
f/pW + f/1 К« + OU-
где п — порядковый номер ординаты, a y(n.tu) — ордината импульсной характеристики, соответствующая атому номеру.
Указанное построение проделано для экспериментальной импульсной кривой давления газа в газгольдере, изображенной на рис. П-4. Данные для построения сведены в таблицу.
27—626 409
у, мм вод. ст. t
0 'и 2'и З'и 4 'и 5ГН
У1 (1) 0 15,0 13,0 6,5 3,0 0,0
Ур (0 0 15,0 28,0 34,5 37,5 37,5
Полученные в результате обработай экспериментальных характеристик коэффициенты k, Т и т служат исходными данными для последующих расчетов оптимальных настроек автоматических регуляторов.
2. Определение частотных характеристик
Сущность экспериментов по определению частотных характеристик заключается в подаче на вход объекта пли АСР синусоидального возмущающего воздействия и одновременной регистрации входных и выходных колебании. Обработка результатов сводится к вычислению отношений амплитуд выходного сигнала y(t) к амплитудам входного сигнала x(t) и их сдвигу во времени для различных частот входного воздействия, рад/с:
2л
<о = -у?->
причем годными для обработки считаются лишь установившиеся колебания входных и выходных сигналов. Режим установившихся колебаний исследуемой регулируемой величины в условиях промышленной эксплуатации может быть достигнут лишь при стабилизации нагрузки и режима работы объекта. Кроме того, на выходе объекта желательно получить симметричные или близкие к ним по форме колебания. Этого можно достигнуть лишь при симметричных относительно среднего значения входных колебаниях. Для точного определения амплитуды выходных колебаний необходимо получить несколько периодов, повторить опыт при ряде значений частоты входных колебаний и затем повторить их на двух-трех нагрузках. Время, требующееся для определения частотных характеристик, существенно больше времени, необходимого для определения характеристик при ступенчатом возмущении. При этом значительной трудностью является также формирование синусоидального1 входного сигнала. Однако для объектов, обладающих существенной инерцией по отношению к изменениям x(t), это требование ие обязательно. Уже из рассмотрения импульсных характеристик (см. рис. П-1) следует, что при прохождении через объект сигнала, имеющего прямоугольную или трапецеидальную форму, на выходе он приобретает форму плавной кривой. Это свойство объекта носит название сглаживания или фильтрации входного сигнала. Оно проявляется сильнее с увеличением частоты входных колебаний. Другим свойством инерционных объектов, наглядность которого демонстрируют экспериментальные импульсные характеристики, является то, что из-за своей инерции выходные величины далеко не успевают достигнуть значения, соответствующего верхнему уровню ступен-
чатого сигнала на входе, т. е. {/макс(/) (см. рис. П-1) будет каждый раз уменьшаться с сокращением времени импульса /и- Уменьшение амплитуды выходного сигнала будет еще более значительным при подаче на вход объекта ступенчатого волнового импульса при одновременном уменьшении его периода колебаний Т (рис. П-2,б).
Рис. П-2. Определение частотных характеристик изолированного объекта.
а — схема экспериментальной установки: 1 — объект; 2 — преобразователь сигналов; 3 —- исполнительный механизм; 4 — регистрирующий прибор; б — метод прямоугольной волны; в — определение частоты е — смещение средней линии колебаний регулируемой величины.
27* 411
В конечном итоге при значительном возрастании частоты входного сигнала амплитуда колебаний регулируемой величины будет стре миться к нулю. Частота колебаний входного сигнала, при которой отклонения регулируемой величины соизмеримы с зоной нечувствительности А, измеряющих ее приборов, носит название частоты среза объекта <оСр. Значение а>Ср=0Д-Р0,2 рад/с (0,015—0,03 Гц) для большинства тепловых объектов ТЭС.
Чаще всего используются два способа определения частотных характеристик. При первом способе опыты проводятся на изолиро ванном объекте, снабженном устройствами дистанционного управления регулирующими органами. Схема эксперимента приведена на рис. П-2,а. Сущность его заключается в том, что на вход исследуемого объекта 1 дистанционным перемещением регулирующего органа РО подаются сигналы х трапецеидальной формы. Инерционные объекты в большинстве своем являются фазосдвигающими звеньями, т. е. им свойственно отставание по фазе выходных колебаний от входных. Прежде всего целесообразно определить частоту ь>„. при которой это отставание составляет величину —л (180°). Для этого при стабилизированных значениях регулируемой величины, нагрузки объекта и расхода регулирующей среды наносится толчкообразное возмущение на входе в объект по интересующему нас каналу воздействий +Дх |(рис. П-2,в). Затем по достижении заметного по измерительному прибору отклонения регулируемой величины регулирующий орган перемещается в другую сторону на величину —Ах.. В результате этого регулируемая величина начнет откло мяться в направлении, соответствующем новому изменению расхода регулирующей среды.
При прохождении t/(j) своего среднего или номинального значения у° регулирующий орган вновь перемещается в положение, которое он занимал при первоначальном толчке и т. д., >г. е. регулирующий орган должен перемещаться от хмпп до хМакс при каждом прохождении //(/) своего среднего значения. Очевидно, что установившийся фазовый сдвиг между x(t) и как это следует из графика на рис. П-2,в, составит значение близкое к —л, a определится из отношения c2~t!Tr_ Затем следует провести опыты для 5—б значений частот в диапазоне 0—с одновременной регистрацией входных колебаний на регистрирующем приборе. В течение опыта важно поддерживать постоянными средние значения расхода регулирующей среды и нагрузки объекта. При нарушении материального или энергетического баланса между входом и выходом объекта, установленного до опыта, средняя линия колебаний регулируемой величины может смещаться (рис. П-2,г) и при длительном сохранении небаланса отклонения y(t) могут превысить допустимые значения. Особенно велика эта опасность при больших периодах колебаний входного сигнала, когда происходит наиболее быстрое накопление небаланса. Это явление чаще всего наступает из-за нелинейности и нестабильности характеристик регулирующего органа, несоблюдения условия постоянства нагрузки и недостаточной стабилизации входных воздействий.
Второй способ определения частотных характеристик основан на генерировании колебаний в замкнутой АСР Схема экспериментальной установки приведена на рис. П-3,а. Синусоидальный сигнал на входе формируется с помощью специального прибора — генератора синусоидальных колебаний (ГСК) [Л. 1]. Он представляет собой 412
электромеханическое устройство, позволяющее получить синусоидальные колебания электрического напряжения как постоянного, так и переменного (60 Гц) напряжения с периодами колебаний от 1000 до 20 с. Сигнал с выхода ГСК включается в цепь задатчика регулирующего прибора. В замкнутой системе генератор формирует задание регулятору, изменяющееся по синусоидальному закону. При этом выходная величина АСР y(t) с некоторым фазовым сдвигом и измененной амплитудой воспроизводит колебания сигнала задатчика. Автоматический регулятор выполняет в такой системе две функции: поддерживает постоянное среднее значение регулируемой величины y(t) и перемещает регулирующий орган по синусоидальному закону в соответствии с сигналом задатчика. Амплитуда и период колебаний, формируемых ГСК, легко регулируются.
Рис. П-3. Определение частотных характеристик объекта, включенного в АСР.
а —с помощью ГСК; / — объект; 2 — регулятор; 3 —генератор (ГСК): 4 — многоточечный потенциометр; 5 — преобразовательная приставка; 6 — регулирующий орган; 7 — измерительный блок регулятора; б — с помощью включения релейного элемента на выходе объекта; / — объект; 2—регулятор: 3 — одноточечный потенциометр; 4 — многоточечный потенциометр; 5 — преобразовательная приставка; 6 — регулирующий орган; 7 — двухпозициониый релейный элемент.
Формировать периодические сигналы в АСР можно также путем включения последовательно с прибором, регистрирующим отклонения регулируемой величины, двухпозиционного реле, подающего сигналы прямоугольной формы на вход измерительного блока автоматического регулятора1 (рис. П-3,б). Реле переключается в моменты прохождения пером прибора 5 заданного значения у^ в обоих направлениях. При этом автоматический регулятор, имея сервопривод с постоянной скоростью перемещения, формирует па входе в объект сигнал трапецеидальной пли треугольной формы.
Система в целом работает в режиме двухпозиционного регулирования, поддерживая среднее значение регулируемой величины не изменным. Уровень выходного сигнала реле 7 и тем самым ампли туды ^макс(0 регулируется от нуля до максимально допустимого значения с помощью переменного сопротивления, установленного
1 Метод Гольдфарба в теории автоматического регулирования, статья Г. Б. Беляева, Г. П. Плетнева, D. Я. Ротача. М., Госэнерго-издат, 1962, с. 211—244.
на выходе реле. Требуемая частота или период колебаний (<о или Т) устанавливается с помощью настроечных органов регулятора. В обоих случаях, т. е. при использовании ГСК и реле, автоматизируется процесс эксперимента, стабилизируется среднее значение регулируемой величины, но сохраняется требование постоянства нагрузки объекта для обеспечения симметричности колебаний y(t).
Обработка результатов экспериментов при всех рассмотренных способах определения частотных характеристик ведется следующим образом. Для вычисления амплитуды входного сигнала Хмакс (О прямоугольного или трапецеидального вида используются формулы их разложения в гармонический ряд.
Для первой гармоники прямоугольной волны (см. рнс. П-Е,б)
1*1 =
(П-1)
Для первой гармоники трапецеидальной волны
I х~\ "=.—5 sin а, 1 1 па]
где
ДУ
2л.
(см. рис. 'П-2,а)
(П-2)
Амплитуда выходных колебаний в области сравнительно высоких частот, примыкающих к частоте среза, определяется непосредственно по кривой ее записи на потенциометре.
Фазовый сдвиг определяется по формуле 1-31 (см. рис. 1-16).
Д/
у (со) == -у- 2л.
В области низких и средних частот колебания выходной величины могут существенно отличаться от гармонической кривой из-за ощутимого влияния случайных возмущений и ухудшения фильтрующих свойств объекта в этой области частот. Первую гармонику колебании можно выделить в этом случае из кривой записи регулируемой величины одним из графических методов гармонического анализа, сущность которого поясняется на рис. П-4,а. Выделенный для обработки участок установившихся колебаний с периодом Т разбивается на >12 разных частей по оси времени. Затем по этим ординатам строится векторная диаграмма, как показано на рис. П-4,б. При перемене знака ординаты x(t) (хб на рис. П-4,а) она откладывается к предыдущей под углом а+180°. Амплитуда первой гармоники вычисляется по формуле хмг>кс=2Л1/12. Ее сдвиг относительно принятого начала отсчета Дф=0—90°. Фазовый сдвиг ФЧХ объекта для данной частоты определяется общепринятым методом по формуле 1-31.
Располагая пятью или шестью точками амплитудно- и фазо-частотной характеристик, можно построить АФХ объекта, соединив отдельные ее точки плавной кривой. Точка АФХ. расположенная на отрицательной вещественной полуоси, соответствует отношению амплитуд и сдвигу фаз при со—<0^ (рис, П-4,в).
Точка АФХ на положительной вещественной поЛубсй соответствует коэффициенту усиления объекта k, определенному из кривой разгона или импульсной характеристики объекта.
Изображенная на рис. П-4,в АФХ может быть представлена в аналитической форме с помощью типовой характеристики вида ke~ian
W (ico) = , , . у. • 1 ’ • I + «сот
Для этого на базе вектора k строится полуокружность радиусом k/2. Параметры т и Т определяются с помощью несложных гра-
Рис. П-4. Обработка графиков колебаний входных и выходных величин объекта.
а — записи колебаний регулируемой величины и перемещение регулирующего органа; б —векторная диаграмма; в —построение АФХ типового объекта инерционного звена первого порядка с запаздыванием; г — определение
и т по графику АФХ для интегрирующего звена.
фических построений с учетом того, что последовательное включение звена запаздывания с инерционным звеном ме 1из,меняет модуль вектора АФХ, ио дает дополнительный сдвиг по фазе —Ду,- Для вы-выбранной частоты со3Ду, = <о3т, откуда
Ду, Т = ---
«3
Постоянная времени Т определяется по величине оставшегося угла Д<р3, который по формуле ФЧХ инерционного звена первого порядка равен A<p3=arctg <0зГ, откуда
tg Дуз = «а'Г
(П-3)
(П-4)
И
у. __ tg Ду*
(П-5)
«3
Аналогичные построения можно выполнить и Для определения типовой характеристики вида
*и
Они показаны на рис. П-4,г.
При выборе способа экспериментального определения частотных характеристик следует руководствоваться следующими соображениями:
1) Четко представлять, для каких целей требуются частотные характеристики.
2) Если они необходимы для расчета настроек П- или ПИ-регу-лятора, целесообразно проводить опыты в АСР с помощью ГСК-
3) При отсутствии ГСК можно использовать более простую схему с двухпозиционным реле.
4) При необходимости определения частотных характеристик инерционных объектов в широкой полосе частот может возникнуть необходимость использовать метод прямоугольной волны, поскольку при использовании ГСК и двухпознциоиного реле максимальный период генерируемых синусоидальных колебаний ограничен.
5) Если определение частотных характеристик экспериментальным путем по каким-либо причинам затруднено, следует ограничиться снятием временных характеристик. Частотные характеристики могут быть получены затем из временных путем аппроксимации с помощью типовых звеньев (см. § 2-3) или перестроения по методике, изложенной в [Л. 1].
ПРИЛОЖЕНИЕ 2
Таблица П-1
ЕДИНИЦЫ ФИЗИЧЕСКИХ ВЕЛИЧИН
№ п.п. Условные обозначения Величина Единица СИ Сокрап. обозна международное сонное чение русское
Основные
I 1, 2 длина метр tn M
2 tn масса килограмм kg КГ
3 t время секунда s c
4 I, J сила элекрического тока ампер А A
5 t, 6. 0 термодинамическая температура П р о и з в кельвин о д и ы е к к
6 F площадь квадратный метр M2
7 v. Q объем кубический метр m8 M®
8 V скорость метр в секуцду tn/s м/с
9 f частота герц Hz Гц
Ю p плотность килограмм на метр кубический kg/tn’ кг/м»
11 p сила ньютон N H
12 p давление паскаль Pa Па
13 Q, V количество теплоты, энергии джоуль i Дж
14 N, P мощность ватт w Вт
15 U, и электрическое напряжение вольт V В
16 R, r электрическое сопротивление ом 0 Ом
17 c электрическая емкость фарада F ф
18 L электрическая индуктивность генри H г
Таблица П-2
ЧИСЛОВЫЕ ЗНАЧЕНИЯ НЕКОТОРЫХ ВНЕСИСТЕМНЫХ ЕДИНИЦ ИЗМЕРЕНИЯ, ВЫРАЖЕННЫХ В ЕДИНИЦАХ СИ
№ п.п. Величина Единица измерения Сокращенное обозначение Значение в единицах СИ
1 время минута мин 60 с
час ч 3600 с
2 частота вращения оборот в минуту об/ИНН 0,01666 с-1
3 масса тонна т Юз кг
4 сила килограмм-сила кге 9,80665 Н
5 давление техническая атмосфера к ю/см2 9,80665-10* Па
миллиметр водяного столба мм вод. ст. 9,80665 Па
6 расход объем- кубический метр в секунду Ма/С М3/С
массовый килограмм в секунду кг/с кг/с
работа, энер- тонна в час т/ч 0.277778 кг/с
7 киловатт-час кВт-ч 3,6- 10е Вт-с
ГИЯ
8 количество калория кал 4,1868 Дж
теплоты (энтальпия)
9 температура градус Цельсия °C К
10 теплоемкость калория на градус Цельсия кал/°С 4,1868 Дж/К
11 коэффициент килокалория на метр квад-ратныйХ час X градус ккал 1.1630 Вт/(м»<К)
теплопер е- (м2-Ч’*С)
дачи Цельсия
Список литературы
II. Стефани Е. П. Основы расчета настройки регуляторов теплоэнергетических процессов. М., «Энергия», 11'972. 3'76 с.
2. Теория автоматического управления. Под ред. А. В. Нету-шила. М., «Высшая школа», 1976, ч. I, 400 с.; ч. II, 1972, 432 с.
3. Серов Е. П., Корольков Б. П, Динамика парогенераторов. М., «Энергия», 1972. 416 с.
4. Ротач В. Я. Расчет динамики промышленных систем регулирования. М., «Энергия», 1973. 440 с.
5. Смирнов Н. В., Дунин-Барковский И, В. Курс теории вероятностей и математической статистики (для технических приложений). М„ «Наука», '1969. 912 с.
6. Кузьмина Г. И., Ринкус Э. К. Методические основы оценки экономической эффективности систем автоматического управления энергоблоками. — «Теплоэнергетика», >1973, № 4, с. 2'1—24.
7. Волгин В. В., Каримов Р. Н., Корецкий А. С. Учет реальных возмущающих воздействий и выбор критериев качества регулирования при сравнительной оценке качества регулирования тепловых процессов, — «Теплоэнергетика», 1'970, № 3, с. 91—53.
8. Унифицированная система пневматических и электрических датчиков теплоэнергетических параметров, ЦНИИТЭИприборострое-ния. Москва. '1970, 77 с.
9. Каганов И. Л. Промышленная электроника, М., «Высшая школа», 1968. 559 с.
10. Штейнберг Ш. Е., Хвилевицкий Л. О., Ястребенецкий М. А. Промышленные автоматические регуляторы. М., «Энергия», 1973. 568 с.
11, Яковлев Ю. С., Малыгин О. А., Камчаткин А. П. Технические средства локальных САР (Чебоксарский завод электрических исполнительных механизмов). Чувашкпигоиздат, '1973. 335 с.
>12 . Белинский С. Я., Липов Ю. М. Энергетические установки электростанций. М., «Энергия», 11974 . 304 с.
13. Автоматизация крупных тепловых электростанций. Под ред. М. П. Шальмана. М., «Энергия», 1974. 240 с.
44. Благов Э. Е., Ивницкий Б. Я. Дроссельно-регулирующая арматура в энергетике. М., «Энергия», .'1974. 264 с.
>15. Миронов В. Д., Муравкин Б. Н., Новиков А. Ф. Исследование автоматизированного аэропитателя для мощных пылеугольных горелок энергоблоков. — «Теплоэнергетика», Т973, № 12, с. 81—S3.
16. Справочник химика-энергетика. Под общ. ред. С. М. Гуревича, т. :1. М., «Энергия», 1972. 456 с.
117. Емельянов А. И., Капник О. В. Проектирование автоматизированных систем управления технологическими процессами. М., «Энергия», 1974. 500 с.
18. Миронов В. Д., Хесин М. Я. Регулирование процесса горения с использованием сигнала по излучению факела. — «Теплоэнергетика», 1968, Ns 12, с. 17—20.
19. Герасимов С. Г., Плетнев Г. П., Кондрашин А. К. Оценка тепловосприятия экранных поверхностей в барабанных котлах. — «Теплоэнергетика», 1969, № il, с. 70—72.
20. Давыдов Н. И. Схемы автоматического регулирования топлива и питания отечественных прямоточных котлов. «Энергия», 1972. 62 с.
21. Миронов В. Д., Стефани Е. П., Шальман М П. Проблемы и перспективы автоматизации мощных энергоблоков. — «Теплоэнергетика», 1970, № 6, с. 2—5.
22. Ястребенецкий М. А., Соляник Б. Л. Определение надежности аппаратуры промышленной автоматики в условиях эксплуатации. М., «Энергия», 11968. 1128 с.
23. Ринкус Э. К. Комплект сигнализаторов автоматики безопасности процесса горения «Факел ВТМ» для мощных энергетических котлоагрегатов. — «Теплоэнергетика», il967, № 1.1.
24. Плетнев Г. П., Штробель В. А., Мухин В, С. Исследования систем автоматического регулирования мощности парогенератора н турбины в режиме регулирования частоты. — «Теплоэнергетика», 1972, № Г1, с. 55—57.
25. Фрагин М. С., Щетинин А. А. и др. Системы регулирования конденсационных турбин большой мощности ЛМЗ. — «Теплоэнергетика», 1972, № 11, с. .'19—25.
26. Ермаков В. С., Минков В. Л., Миркин М. Л. «Автоматизированные системы экономического управления тепловыми электростанциями», «Энергия», 1970, 248 с.
27. Дуэль М. А. Автоматический пуск блока мощностью 200 МВт с помощью управляющей вычислительной машины, «Энергия», 1971. 40 с.
28. Комплексная автоматизация теплоэлектростанций с помощью управляющих вычислительных машин. Об. статей под ред. В. А. Дементьева. — «ОНТИприбор», 1967. 134 с.
29. Асташкин Е. И., Жирнов Ф. Г., Хесин М, Я. Система автоматического управления растопочными устройствами горелок. — «Теплоэнергетика», 1975, № 5, с. 53—56.
30. Правила технической эксплуатации электрических станций и сетей. М., «Энергия», 11969. 224 с.
31. Мурин Г. А. Теплотехнические измерения. М., «Энергия», 1968. 584 с.
6 Г Л А В Л Ё Н И Ё
Предисловие................................................. 3
Введение ................................................... 6
ЧАСТЬ ПЕРВАЯ
ТЕОРИЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ.
НАЧАЛЬНЫЕ СВЕДЕНИЯ
Глава первая. Автоматическая система регулирования и ее элементы............................................10
1-1. Объект регулирования и автоматический регулятор 10
1-2. Классификация автоматических систем регулирования .............................................16
4-3. Переходные процессы в системах регулирования . 20
1-4. Способы математического описания звеньев и систем 23
'1-5. Типовые динамические звенья......................37
11-6. Соединения звеньев...............................52
Контрольные вопросы....................................56
Глава вторая. Тепловые объекты регулирования и их характеристики ....................................... 57
2-1. Общие положения...................................57
2-2. Основы аналитического определения динамических характеристик тепловых объектов..................60
2-3. Составление математических моделей тепловых объектов.........................................64
Контрольные вопросы....................................70
Глава третья. Законы регулирования и способы их формирования в автоматических регуляторах.................70
3-1. Основные законы регулирования.....................70
3-2. Формирование законов регулирования в автоматических регуляторах...............................79
Контрольные вопросы....................................39
Глава четвертая. Устойчивость и качество процессов регулирования .... 89
4-1. Процессы автоматического регулирования в замкнутой системе . . 89
4-2. Методы анализа устойчивости.......................93
4-3. Понятие о корневом и алгебраическом критериях устойчивости ................................... 95
4-4. Понятие о частотных критериях устойчивости . . 100
4-5. Понятие о запасе устойчивости....................104
4-6. Качество процессов регулирования.................106
4-7. Статистические показатели качества случайных процессов . . 114
Контрольные вопросы ............................... 118
Глава пятая. Выбор типа и расчет настроек автоматического регулятора.....................................118
5-1. Выбор типа регулятора..........................118
5-2. Основы методов расчета.........................120
5-3. Расчет настроек на заданное Л1 по участку АФХ регулируемого объекта ........................ 121
5-4. Расчет настроек по временным характеристикам объектов регулирования.........................125
5-5. Расчет настроек двухконтурных АСР .... 128
5-6. Выбор оптимальных значений параметров настройки регуляторов для автоматических систем, находящихся под воздействием случайных возмущений . . 137
Контрольные вопросы ............................... 138
ЧАСТЬ ВТОРАЯ
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ТЕПЛОВЫХ ПРОЦЕССОВ
Глава шестая. Общие сведения об автоматических регуляторах .............................................139
6-1. Промышленные регуляторы и их основные элементы 139 6-2. Формирование линейных законов регулирования в пульсирующем режиме работы автоматических регуляторов.........................................152
Контрольные вопросы ............................... 156
Глава седьмая. Аппаратура Московского завода тепловой автоматики (МЗТА).............................. 156
7-1. Устройство н назначение автоматических регуляторов МЗТА.......................................156
7-2. Электронный блок регулирующего прибора РПИБ 159
7-3. Электронный блок корректирующего прибора КПП 166
7-4. Измерительные блоки регулирующих приборов . 172
7-5. Вспомогательные и функциональные устройства . 181
7-6. Настройка электронных регулирующих приборов типа РПИ.......................................191
Контрольные вопросы ............................... 197
Глава восьмая Автоматические регуляторы, работающие на унифицированном токовом сигнале связи . . . . 198
8-1. Общие сведения.................................198
8-2. Регулирующие блоки.............................200
8-3. Измерительный блок И-04 ...................... 206
8-4. Функциональный состав новых серий аппаратуры . 209
Глава девятая. Исполнительные механизмы автоматических регуляторов.....................................212
9-1. Исполнительные механизмы МЗТА..................212
9-2. Исполнительные механизмы типа МЭО (механизм электрический однооборотиый) . . . . , . 214
9-3. Пусковые устройства и схемы управления . . 215
9 4 Избирательное управление исполнительными механизмами (управление по вызову)................223
Контрольные вопросы...................................226
ЧАСТЬ ТРЕТЬЯ
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ
ТЕПЛОЭНЕРГЕТИЧЕСКИМИ УСТАНОВКАМИ
Глава десятая. Автоматическое регулирование тепловых процессов на электрических станциях.................227
110-4 Задачи автоматического регулирования тепловых процессов.................................... 227
10-2. Объекты автоматического управления и основные
регулируемые величины ТЭС..........................228
Контрольные вопросы....................................231
Глава одиннадцатая. Регулирующие органы теплоэнергетических установок ...........................231
1'1-1. Назначение регулирующих органов.......231
1'1-2. Дроссельные регулирующие клапаны......232
11-3. Дроссельные поворотные заслонки ..... 239
111-4. Регулирование производительности тягодутьевых .машин.........................................241
11-5. Регулирование производительности питательных насосов .........................................243
11-6. Сочленения регулирующих органов с исполнительными механизмами регуляторов...................244
14-7. Регулирующие органы топливоподающих устройств 247
11-8. Электрические системы регулирования производитель-
ности питателей топлива.....................253
Контрольные вопросы .................................. 257
Глава двенадцатая. Автоматическое регулирование барабанных парогенераторов..........................257
12-1. Участки регулирования барабанного парогенератора 257
12-2. Регулирование процесса горения и парообразования 260 12-3. Реулирование перегрева пара...............277
12-4. Регулирование питания парогенераторов водой . . 286
12-5. Регулирование водного режима в парогенераторах 289
Контрольные вопросы............................293
Глава тринадцатая. Автоматическое регулирование прямоточных парогенераторов.........................293
13-11. Участки регулирования....................293
13J2. Регулирование температурного режима первичного тракта и тепловой нагрузки ................... 296
43-3. Регулирование экономичности процесса горения . 304
43-4. Регулирование температуры перегрева пара . . 305
Контрольные вопросы.............................307
Глава четырнадцатая. Автоматизация вспомогательных процессов и установок...........................307
44-1. Автоматизированное управление трактом топливо-подачн.........................................307
14-2. Автоматизация установок пылеприготовления . . 310
14-3. Автоматизация установок подачи жидкого и газообразного топлива................................317
114-4. Автоматизация установок химической очистки воды 319 114-5. Автоматизация ввода аммиака и гидразина . . . 328
14-6. Автоматизация установки для очистки конденсата 329 '14-7. Автоматическое регулирование деаэраторных установок ................................................331
14-8. Автоматическое регулирование редукционно-охладительных установок (РОУ)..........................332
14-9. Автоматическое регулирование подогревателей сете-
вой воды.........................................334
14-10. Автоматическое регулирование пиковых водогрейных котлов.......................................337
14-11. Автоматизация вспомогательных установок паровых турбин......................................... 337
Контрольные вопросы . 340
Глава пятнадцатая. Автоматические защиты теплоэнергетических установок..............................341
45-1. Назначение автоматических защит.................341
15-2. Автоматические защиты барабанных парогенераторов .............................................343
15-3 Автоматические защиты прямоточных парогенераторов .............................................351
15-4. Автоматические защиты паровых турбин . . . 354
15-5. Автоматическая защита вспомогательных установок 358 Контрольные вопросы...................................361
Глава шестнадцатая. Автоматизация энергетических блоков............................................... 362
16-4. Характеристики объектов и задачи регулирования 362 16-2. Схемы автоматического регулирования .... 364
16-3. Автоматическое регулирование производительности питательных насосов.............................370
16-4. Автоматическое регулирование пусковых режимов 371 116-5. Общеблочные автоматические защиты .... 376
Контрольные вопросы...................................381
Глава семнадцатая. Автоматизированные системы управления тепловыми электрическими станциями . . 381
174. Организация управления теплоэнергетическими установками.....................................381
17-2. Управление технологическими процессами с применением информационных и управляющих вычислительных машин....................................388
17-3. Автоматизированные системы управления энергоблоков и ТЭС ....................................393
Контрольные вопросы...................................406
Приложение 1. Опытное определение динамических свойств объектов регулирования ...................... 407
1. Определение временных характеристик . . . . 407
2. Определение частотных характеристик................410
Приложение 2............................................._ 417
Список литературы..........................................418