/

































































































































































































































































































































































Text
А.И. Кострикин
ВВЕДЕНИЕ В АЛГЕБРУ
Часть II
ЛИНЕЙНАЯ АЛГЕБРА
Рекомендовано Министерством общего и специального образования
Российской Федерации в качестве учебника
для студентов университетов, обучающихся по специальностям
"Математика" и "Прикладная математика"
МОСКВА
ФИЗИКО-МАТЕМАТИЧЕСКАЯ
ЛИТЕРАТУРА
2000
УДК 512 @75.8) ГГ Издание осуществлено при поддержке
ББК 22.143 F»ctpi^i Российского фонда фундаментальных
К71 •• исследований по проекту 99-01-14089
Кострикин А. И. Введение в алгебру. Часть II. Линейная
алгебра: Учебник для вузов. — М.: Физико-математическая литература,
2000. — 368 с. — ISBN 5-9221-0018-1.
Наиболее важные разделы линейной алгебры изложены в максимально
доступной форме. На первый план выдвигаются простые геометрические
понятия, на базе которых идёт всестороннее развитие алгебраического
аппарата, введённого в части I. Указаны приложения к разным вопросам
анализа, теории линейных групп, алгебр Ли, математической экономики,
дифференциальных уравнений, геометрии Лобачевского.
Каждый параграф заканчивается упражнениями. Ответы и наброски
решений собраны в отдельном разделе. Сформулированы некоторые не-
нерешённые задачи.
Ил. 31.
ТП-2000-1-74
ISBN 5-9221-0018-1 (Т. II) © ФИзматлит, 2ооо
5-9221-0016-5 © А.И. Кострикин, 2000
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 8
ГЛАВА 1
ПРОСТРАНСТВА И ФОРМЫ
§ 1. Абстрактные векторные пространства 11
1. Мотивировка и аксиоматизация A1). 2. Линейные обо-
оболочки. Подпространства A3). 3. Замечания о геометрической
интерпретации A6). Упражнения A8).
§ 2. Размерность и базис 18
1. Линейная зависимость A8). 2. Размерность векторного
пространства и его базис B0). 3. Координаты. Изомор-
Изоморфизм пространств B2). 4. Пересечение и сумма подпрост-
подпространств B6). 5. Прямые суммы B8). 6. Факторпространст-
ва C0). Упражнения C2).
§ 3. Двойственное пространство 33
1. Линейные функции C3). 2. Двойственное пространство и
двойственный базис C4). 3. Рефлексивность C6). 4. Крите-
Критерий линейной независимости C7). 5. Геометрическая интерп-
интерпретация решений ЛОС C8). Упражнения C9).
§ 4. Билинейные и квадратичные формы 40
1. Полилинейные отображения D0). 2. Билинейные
формы D1) 3. Закон изменения матрицы билинейной
формы D2). 4. Симметричные и кососимметричные
формы D3). 5. Квадратичные формы D5). 6. Канони-
Канонический вид квадратичной формы D6). 7. Вещественные
квадратичные формы D9). 8. Положительно определённые
формы и матрицы E0). 9. Канонический вид кососиммет-
ричной формы E4). 10. Пфаффиан E7). Упражнения E8).
ГЛАВА 2
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
§ 1. Линейные отображения векторных пространств 60
1. Язык линейных отображений F0). 2. Задание линей-
линейных отображений матрицами F1). 3. Размерность ядра и
образа F3). Упражнения F4).
§ 2. Алгебра линейных операторов 64
1. Определения и примеры F4). 2. Алгебра операторов F6).
3. Матрицы линейного оператора в различных базисах F9).
Оглавление
4. Определитель и след линейного оператора G1). Упражне-
Упражнения G3).
3. Инвариантные подпространства и собственные векторы . . 74
1. Проекторы G4). 2. Инвариантные подпространства G5).
3. Собственные векторы. Характеристический многочлен G7).
4. Критерий диагонализируемости G9). 5. Существование ин-
инвариантных подпространств (82). 6. Сопряжённый линейный
оператор (82). 7. Фактороператор (84). Упражнения (85).
4. Жорданова нормальная форма 86
1. Теорема Гамильтона—Кэли (86). 2. ЖНФ: формулировка
и следствие (89). 3. Корневые подпространства (90). 4. Слу-
Случай нильпотентного оператора (92). 5. Единственность (94).
6. Другие подходы к ЖНФ (96). 7. Другие нормальные
формы (99). Упражнения A00).
ГЛАВА 3
ВЕКТОРНЫЕ ПРОСТРАНСТВА
СО СКАЛЯРНЫМ ПРОИЗВЕДЕНИЕМ
1. Евклидовы векторные пространства 103
1. Эвристические соображения и определения A03). 2. Основ-
Основные метрические понятия A05). 3. Процесс ортогонализа-
ции A07). 4. Изоморфизмы евклидовых векторных прост-
пространств A10). 5. Ортонормированные базисы и ортогональ-
ортогональные матрицы A12). 6. Симплектические пространства A13).
Упражнения A16).
2. Эрмитовы векторные пространства 117
1. Эрмитовы формы A17). 2. Метрические соотноше-
соотношения A19). 3. Ортогональность A20). 4. Унитарные матри-
матрицы A22). 5. Нормированные векторные пространства A23).
Упражнения A25).
3. Линейные операторы на пространствах со скалярным произве-
произведением 126
1. Связь между линейными операторами и 0-линейными фор-
формами A26). 2. Типы линейных операторов A28). 3. Канони-
Канонический вид эрмитовых операторов A31). 4. Приведение квад-
квадратичной формы к главным осям A33). 5. Приведение пары
квадратичных форм к каноническому виду A35). 6. Канони-
Канонический вид изометрий A36). 7. Нормальные операторы A39).
8. Положительно определённые операторы A43). 9. Полярное
разложение A44). Упражнения A46).
4. Комплексификация и овеществление 147
1. Комплексная структура A47). 2. Овеществление A49).
3. Комплексификация A51). 4. Комплексификация — овеще-
овеществление — комплексификация A53). Упражнения A55).
Оглавление
5. Ортогональные многочлены 156
1. Проблема аппроксимации A56). 2. Метод наименьших квад-
квадратов A57). 3. Линейные системы и метод наименьших
квадратов A59). 4. Тригонометрические многочлены A61).
5. Замечание о самосопряжённых операторах A62). 6. Мно-
Многочлены Лежандра (сферические многочлены) A64). 7. Ор-
тогонализация с весом A68). 8. Многочлены Чебышева (пер-
(первого рода) A69). 9. Многочлены Эрмита A70). Упражне-
Упражнения A71).
ГЛАВА 4
АФФИННЫЕ И ЕВКЛИДОВЫ
ТОЧЕЧНЫЕ ПРОСТРАНСТВА
1. Аффинные пространства 173
1. Определение аффинного пространства A73). 2. Изомор-
Изоморфизм A75). 3. Координаты A76). 4. Аффинные подпрост-
подпространства A77). 5. Барицентрические координаты A80).
6. Аффинно-линейные функции и системы линейных урав-
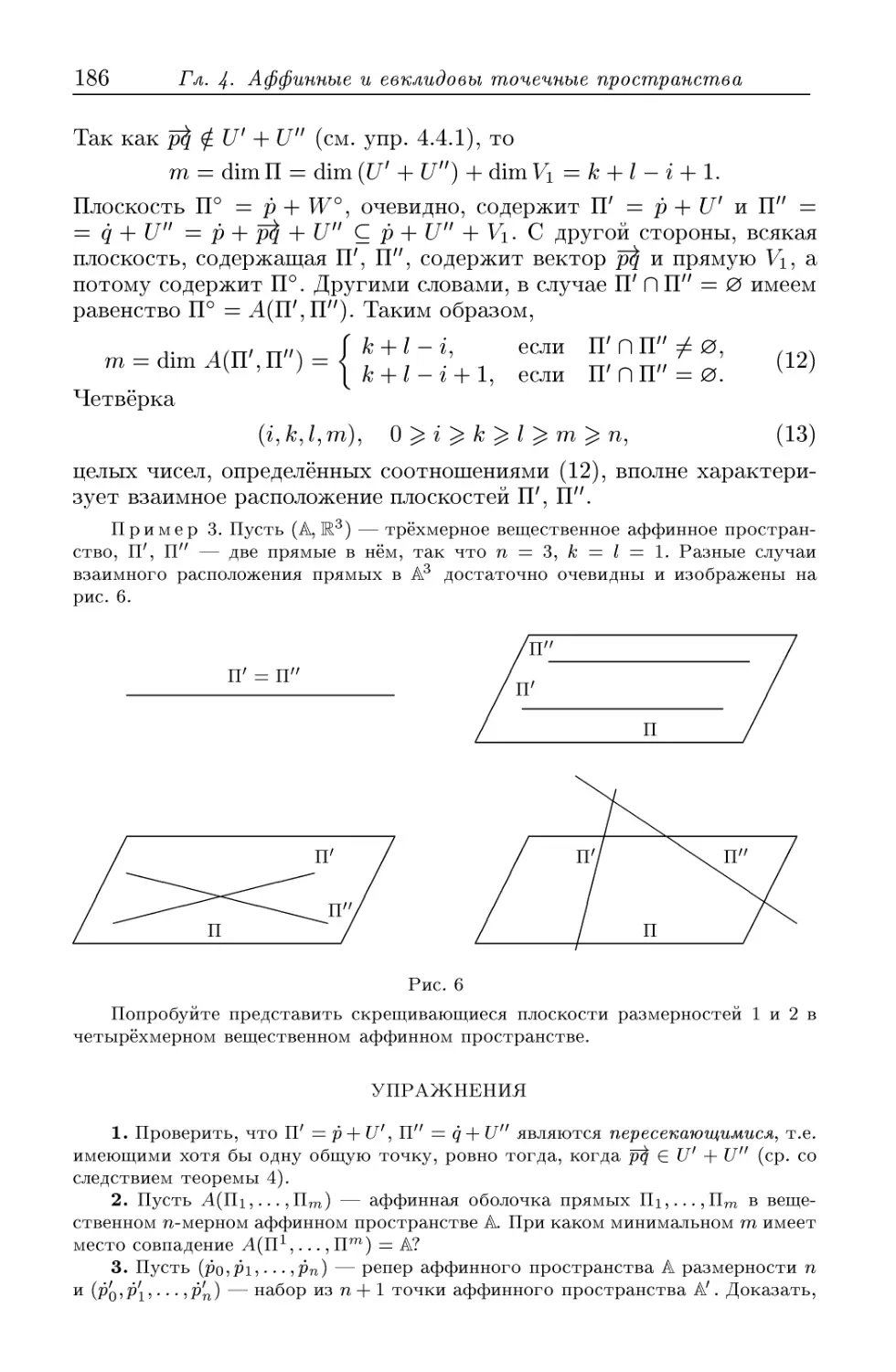
уравнений A83). 7. Взаимное расположение плоскостей A85).
Упражнения A86).
2. Евклидовы (точечные) пространства 187
1. Евклидова метрика A87). 2. Расстояние от точки до
плоскости A88). 3. Расстояние между плоскостями A90).
4. Определитель Грама и объём параллелепипеда A91).
Упражнения A92).
3. Группы и геометрии 193
1. Аффинная группа A93). 2. Движения евклидова простран-
пространства A96). 3. Группа изометрий A98). 4. Линейная геомет-
геометрия, отвечающая группе B01). 5. Аффинные преобразования
евклидова пространства B04). 6. Выпуклые множества B06).
Упражнения B08).
4. Пространства с индефинитной метрикой 208
1. Индефинитная метрика B08). 2. Псевдоевклидовы движе-
движения B09). 3. Группа Лоренца B10). 4. Собственная группа
Лоренца B12). Упражнения B16).
ГЛАВА 5
КВАДРИКИ
1. Квадратичные функции 217
1. Квадратичные функции на аффинном пространстве B17).
2. Центральные точки для квадратичной функции B18).
3. Приведение квадратичной функции к каноническому
виду B20). 4. Квадратичные функции на евклидовом прост-
пространстве B22). Упражнения B24).
Оглавление
2. Квадрики в аффинном и евклидовом пространствах 224
1. Общее понятие квадрики B24). 2. Центр квадрики B27).
3. Канонические типы квадрик в аффинном пространст-
пространстве B28). 4. Общие замечания о типах квадрик B30). 5. Квад-
Квадрики в евклидовом пространстве B32). Упражнения B35).
3. Проективные пространства 236
1. Модели проективной плоскости B36). 2. Проективное
пространство произвольной размерности B39). 3. Однород-
Однородные координаты B40). 4. Аффинные карты B41). 5. По-
Понятие алгебраического многообразия B43). 6. Проективная
группа B44). 7. Проективная геометрия B47). 8. Двойное
отношение B49). 9. Выражения двойного отношения в коор-
координатах B51). Упражнения B53).
4. Квадрики в проективном пространстве 254
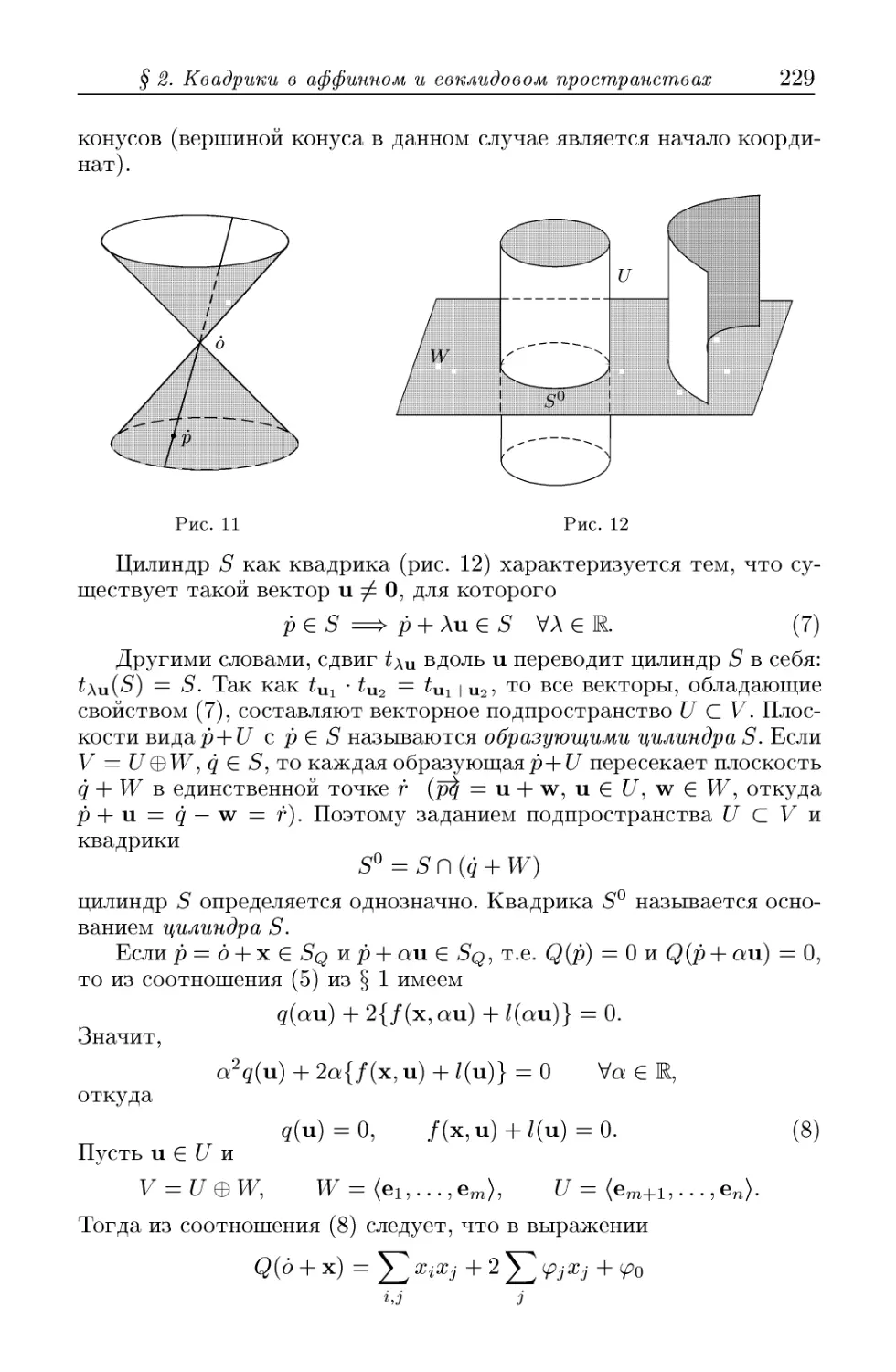
1. Классификация B54). 2. Примеры и изображения проек-
проективных квадрик B55). 3. Пересечение прямой с проективной
квадрикой B57). 4. Общие замечания о проективных квадри-
квадриках B58). Упражнения B59).
ГЛАВА 6
ТЕНЗОРЫ
1. Начала тензорного исчисления 260
1. Понятие о тензорах B60). 2. Произведение тензоров B61).
3. Координаты тензора B63). 4. Тензоры в разных систе-
системах координат B66). 5. Тензорное произведение прост-
пространств B68). Упражнения B71).
2. Свёртка, симметризация и альтернирование тензоров ... . 272
1. Свёртка тензора B72). 2. Структурный тензор алгеб-
алгебры B74). 3. Симметричные тензоры B77). 4. Кососиммет-
ричные тензоры B81). 5. Тензорные пространства B83).
Упражнения B84).
3. Внешняя алгебра 285
1. Внешнее умножение B85). 2. Внешняя алгебра векторного
пространства B86). 3. Связь с определителями B90). 4. Век-
Векторные подпространства и р-векторы B92). 5. Условия разло-
разложимости р-векторов B93). Упражнения B96).
ГЛАВА 7
ПРИЛОЖЕНИЯ
1. Норма и функции линейного оператора 298
1. Норма линейного оператора B98). 2. Функции линейных
операторов (матриц) C01). 3. Экспонента C02). 4. Однопа-
раметрические подгруппы линейной группы C05). 5. Спект-
Спектральный радиус C09). Упражнения C11).
Оглавление 7
§ 2. Линейные дифференциальные уравнения 312
1. Производная экспоненты C12). 2. Дифференциальные
уравнения C13). 3. Линейное дифференциальное уравнение
порядка п C14).
§ 3. Выпуклые многогранники и линейное программирование . . 315
1. Формулировка задачи C15). 2. Мотивировка C15). 3. Основ-
Основные геометрические понятия C18). Упражнения C20).
§ 4. Неотрицательные матрицы 321
1. Производственная мотивировка C21). 2. Свойства неотри-
неотрицательных матриц C22). 3. Стохастические матрицы C23).
§ 5. Геометрия Лобачевского 327
1. Пространство Лобачевского C27). 2. Движения пространст-
пространства Лобачевского C29). 3. Метрика Лобачевского C31).
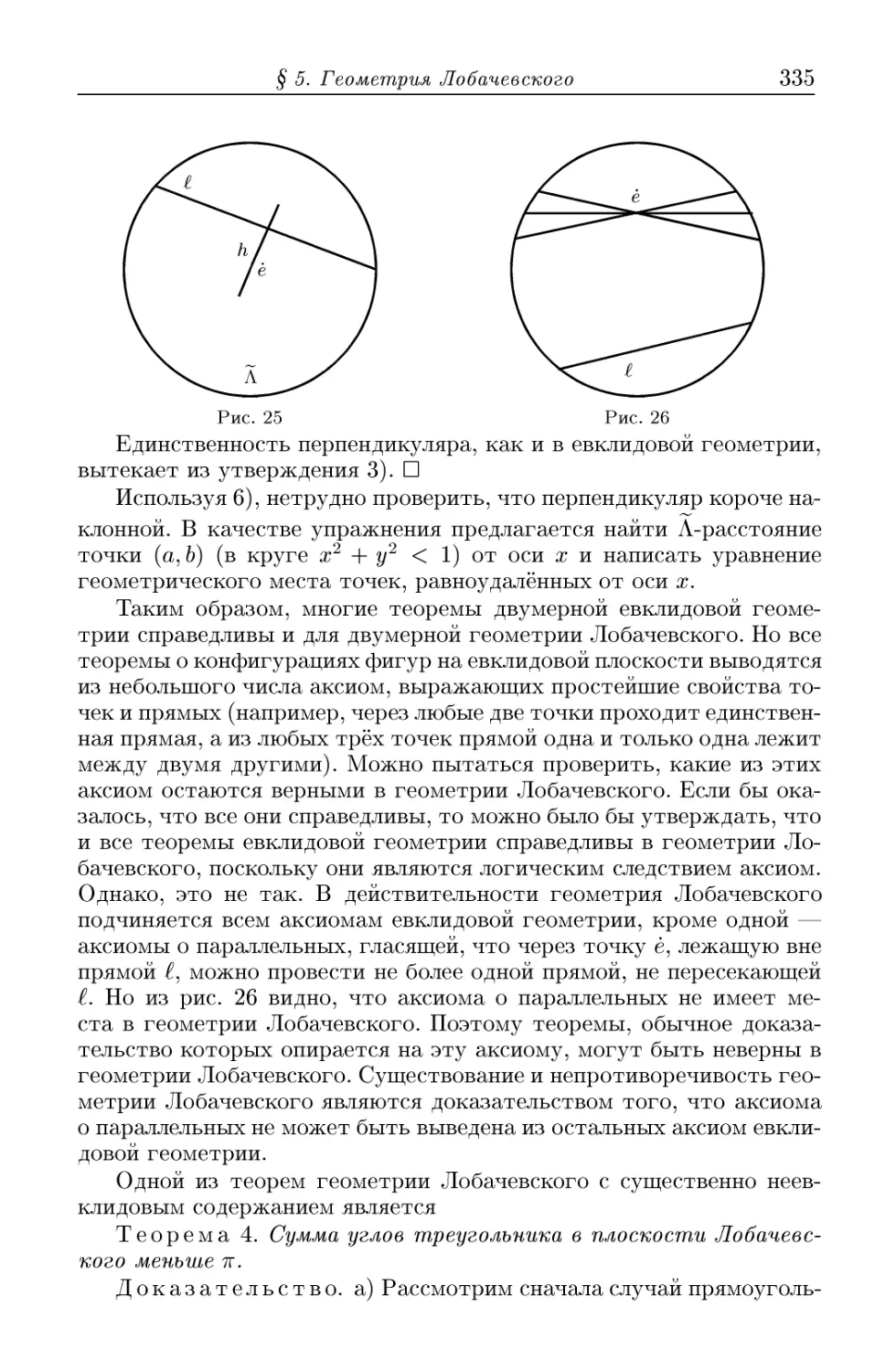
4. Плоскость Лобачевского C34).
§ 6. Нерешённые задачи 339
1. Проблема Штрассена C39). 2. Ортогональные разложе-
разложения C40). 3. Конечные проективные плоскости C41). 4. Ба-
Базисы пространств и латинские квадраты C42).
ОТВЕТЫ И УКАЗАНИЯ К УПРАЖНЕНИЯМ 344
МЕТОДИЧЕСКИЕ ЗАМЕЧАНИЯ 359
ПРЕДМЕТНБ1Й УКАЗАТЕЛВ 362
Линейная алгебра является одновременно
одной из древнейших и одной из самых
новых ветвей математики.
Н. Бур баки
ПРЕДИСЛОВИЕ
Цель этой книги, являющейся частью II единого курса "Введе-
"Введение в алгебру", заключается в систематическом изложении основ
линейной алгебры — важного раздела математики, лишь отчасти
затронутого нами в первой части курса. Одинаково интересны ал-
алгебраический и геометрический аспекты теории, поэтому класси-
классические "сёстры-близнецы", каковыми являются линейная алгебра и
геометрия, будут выступать на равных правах. Из курса аналитиче-
аналитической геометрии на плоскости и в трёхмерном пространстве известно
много примеров геометрической интерпретации алгебраических со-
соотношений для двух и трёх переменных. Существенно, однако, то,
что терминология и идеи линейной алгебры, опирающиеся на гео-
геометрическую интуицию, относятся к пространству произвольного
числа п измерений.
Словосочетания "линейная алгебра и анализ" и "линейная ал-
алгебра и дифференциальные уравнения", равно как и многие другие,
употребляемые в университетских курсах, служат отражением того
факта, что идея линейности — одна из самых распространенных в
математике и, более общо, одна из самых фундаментальных в цикле
естественных наук. Традиционное деление задач на линейные и нели-
нелинейные не прихоть математиков, а вполне осознанная необходимость
подчиняться сравнительной слабости нашей интуиции там, где кон-
кончаются владения линейной алгебры, понимаемой в широком смысле
этого слова.
Аппарат линейной алгебры, вполне сложившийся к началу на-
нашего века, продолжал совершенствоваться и развиваться в разных
направлениях. При этом его бесконечномерная часть, опирающаяся
на понятие предельного перехода, отошла по существу к функцио-
функциональному анализу, а вычислительные аспекты, особенно актуальные
в связи с возможностью применения ЭВМ, стали предметом изу-
изучения самостоятельной науки. Предлагаемая книга не может слу-
служить исчерпывающим руководством по линейной алгебре не только
потому, что она не охватывает указанные два направления, но пре-
прежде всего ввиду недостаточного освещения приложений (хотя
последняя глава как раз названа приложением). В этом отношении
учебное пособие [2] в списке дополнительной литературы содержит
Предисловие
гораздо больше фантазии, поводов к раздумью и, сверх того, кван-
тово-механических интерпретаций понятий линейной алгебры. Оно
рекомендуется всем, кто хотел бы заглянуть за рамки стандартного
курса. А в данный учебник вошли лишь небольшие фрагменты из [2].
Наши намерения и надежды сводятся к тому, что читатель (прежде
всего студент первого курса), досконально проработавший основной
материал учебника (в течение одного семестра по четыре часа лек-
лекций и по четыре часа упражнений в неделю) и затем использовавший
дополнительные разделы обеих книг для домашнего чтения, сумеет
выработать современное математическое мышление в области ли-
линейной алгебры.
Само собой разумеется, что для полного понимания текста учеб-
учебника требуется лишь хорошее владение материалом части I (при
ссылках — [ВА I]), т.е. материалом первого семестра. Терминоло-
Терминология и обозначения обеих частей полностью согласованы, а все ново-
нововведения специально оговорены. Кстати, упражнение г из § q гл. р
иногда в тексте обозначается кратко упр. p.q.r. В этом месте сле-
следует заметить, что в отличие от [ВА I, BA III] ответы и указания
к упражнениям выделены в специальный раздел, обращаться к кото-
которому нужно в крайнем случае.
Автор отдаёт себе отчёт в том, что "приземлять" учебное посо-
пособие [2] и тем самым "наступать на горло собственной песне" — в
высшей степени неблагодарная задача. Единственным оправданием
может служить интерпретация данной части II как отклика на за-
запросы студентов — отклика, давно подготовленного, но реализован-
реализованного с большой задержкой лишь по внешним причинам.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
1. Кострикин А.И. Введение в алгебру. Ч. I. Основы алгебры. — 2-е изд.
— М.: Наука, 1994. — 318 с.
2. Кострикин А.И., Манин Ю.И. Линейная алгебра и геометрия. — М.:
Наука, 1986. — 304 с.
3. Сборник задач по алгебре/ Под ред. А.И.Кострикина. — М.: Факто-
Факториал, 1995. — 456 с.
4. Гелъфанд И.М. Лекции по линейной алгебре. — 5-е изд. — М.: Наука,
1998. — 272 с.
5. Мальцев А.И. Основы линейной алгебры. — М.: Наука, 1956. — 340 с.
6. Халмош П.Р. Конечномерные векторные пространства. — М.: Мир,
1970. — 264 с.
7. Артин Э. Геометрическая алгебра. — М.: Мир, 1970. — 284 с.
8. Шилов Т.Е. Введение в теорию линейных пространств. — М.: Наука,
1956. — 304 с.
10 Предисловие
9. Фаддеев Д.К., Фаддеева В.П. Вычислительные методы линейной ал-
алгебры. — М.: Наука, 1963.
10. Стренг Г. Линейная алгебра и её применения. — М.: Мир, 1980. —
454 с.
11. Прасолов В.В. Задачи и теоремы линейной алгебры. — М.: Наука, 1991.
12. Беллман Р. Введение в теорию матриц. — М.: Наука, 1976. — 368 с.
13. Гантмахер Ф.Р. Теория матриц. — М.: Наука, 1967.
14. Ланкастер П. Теория матриц. — М.: Наука, 1978.
15. Huppert В. Angewandte Lineare Algebra. — Berlin-New York: Walter de
Gruyter, 1990. — 646 p.
ГЛАВА 1
ПРОСТРАНСТВА И ФОРМЫ
Вряд ли стоит объяснять, чем дикий лес отличается от ухожен-
ухоженного парка или от упорядоченного леса, посаженного человеком. При
всём различии, однако, в них столько общего, что инопланетянину,
не познавшему вкуса грибов и не оценившему прелести подстрижен-
подстриженных газонов, леса будут казаться сплошными зелёными массивами,
населёнными различной высоты и формы предметами, которые мы
именуем деревьями. Нечто подобное произойдёт, если сравнить со-
содержание настоящей главы и главы 2 из [ВА I], посвященной ко-
координатным векторным пространствам. Абстрактное линейное про-
пространство, элементы которого именуются векторами и которое по
этой причине мы будем чаще называть векторным пространством,
вводится аксиоматически. Соответствующая система аксиом, по
существу разработанная еще Дж. Пеано A888 г.), хорошо приспо-
приспособлена к теории линейных отображений (в частности, линейных
операторов), занимающей центральное место в линейной алгебре.
Понятие матрицы при этом как бы отходит на второй план. Пер-
Первостепенное значение приобретают инвариантные, не зависящие от
выбора базиса свойства изучаемых объектов.
Однако прежде чем углубляться в абстрактный лес, рекоменду-
рекомендуется ещё раз пройтись по ухоженному парку — конкретному про-
пространству векторов строк длины п. Мы сознательно пошли на
частичное повторение известного материала, чтобы сгладить
абстрактные шероховатости.
§ 1. Абстрактные векторные пространства
1. Мотивировка и аксиоматизация. В [ВА I, гл. 2] мы изу-
изучали n-мерное векторное пространство W1 = {(xi,... ,хп) | х\ Е Щ
строк длины п вместе с линейными отображениями W1 —у Жт, нахо-
находящимися во взаимно однозначном соответствии с т х п-матрицами.
При т = п биективное линейное отображение if a : Мп —>¦ Мп ха-
характеризуется свойством определителя det А ф 0, которое позволяет
применить правило Крамера для решения системы линейных урав-
уравнений, ассоциированной с if а и фиксированным вектором из W1. В
случае det A = 0 решения однородной линейной системы образуют
подпространство в Жп, но, как отмечалось в свое время, это подпро-
подпространство (а точнее, линейная оболочка) — объект иной природы:
если W1 допускает базис A, 0,..., 0),..., @,..., 0,1), то линейная обо-
оболочка U С W1 базисом такого вида, как правило, не обладает. Это
неудобство проистекает из слишком конкретной природы W1.
12 Гл. 1. Пространства и формы
В самом деле, свойства ВЩ-ВЩ, которыми мы фактически поль-
пользовались и которые будут воспроизведены ниже, присущи не только
пространству W1. Рассмотрим, например, дифференциальное урав-
уравнение dPx/dt2 + х = 0, изучаемое в школе. Известно, что его общее
решение записывается в виде x(t) = as'mt + /3cost. Если «о, А) та-
таковы, что «osint + /^ocost = 0 при всех ?, то, полагая поочередно
tx — тг/2, ^2 = 0, получим «о = 0 = (Зо. Это обстоятельство даёт осно-
основание говорить о линейной независимости частных решений sint,
cost и о двумерном линейном пространстве общих решений урав-
уравнения dPx/dt2 + х = 0 в духе следующего определения.
Определение 1. Пусть Я — произвольное поле. Векторным
(или линейным) пространством над Я называется множество V эле-
элементов (именуемых векторами), удовлетворяющее следующим ак-
аксиомам.
а) На V задана бинарная операция V х V —> У, обычно записывае-
записываемая аддитивно: (х, у) н-» х + у, и наделяющая V строением абелевой
группы (аддитивная группа пространства V). Стало быть:
BIIi: х + у = у + х (коммутативность);
ВП2 : (х + у) + z = х + (у + z) (ассоциативность);
ВПз : в V существует выделенный элемент 0, называемый нуле-
нулевым вектором, такой, что х + 0 = х для любого х G V;
ВЩ: для каждого х G V существует обратный (или противопо-
противоположный) вектор —х такой, что х + (—х) = 0.
б) На множестве Я х V задана операция (Л, х) н-» Лх, называемая
умножением векторов из V на скаляры из Я и обладающая свой-
свойствами:
ВП5 : 1 • х = х (унитарность);
ВПе: (а/3)х = а(Cх) для всех а,C G Я, х G V (ассоциативность).
Сложение и умножение связаны двумя законами дистрибутив-
дистрибутивности:
ВП7 : (а + /?)х = ах + /?х;
ВП8 : А(х + у) = Лх + Лу.
Обратим внимание на то обстоятельство, что в левой части ра-
равенства ВП7 знак + относится к элементам поля Я (скалярам), а в
правой — к векторам. Строго говоря, следовало бы обозначить раз-
различными символами операции сложения в аддитивной группе У и в
поле Я (скажем, 0 и +), равно как и операции умножения в Я х V
и в Я (скажем, 0 и • ). Этого обычно избегают, поскольку всегда
бывает ясно, о чём идет речь. Всё же, чтобы сделать это замечание
содержательным и предостеречь от возможных ошибок, рассмотрим
множество V = Ж+ положительных вещественных чисел. Полагая
х(Ву = ху (обычное умножение в!) и Л 0 х = хх (возведение х G Ж+
в степень A G 1), мы без труда убеждаемся в справедливости аксиом
ВЩ-ВЩ, так что V — векторное пространство над Ж. Нулевым
§ 1. Абстрактные векторные пространства 13
вектором служит 1 Е Ж+. Ясно, что в данном случае обычная запись
х + у = ху, Хх = хх могла бы вызвать недоумение.
Вот ещё один пример, когда предпочтительнее другие обозна-
обозначения. Пусть V — векторное пространство над полем комплексных
чисел С. Определим новое векторное пространство V с той же ад-
аддитивной группой_\/, но с^цругим законом умножения на скаляры:
(Л, х) I—у А 0 х = Лх, где Л — комплексно сопряженное число к Л.
Так как А н А — автоморфизм поля С, то легко проверяется, что
V — векторное пространство. Одновременное рассмотрение V и V
без значка 0 (или какого-то другого символа) было бы затрудни-
затруднительно.
Соглашение. Читатель, вероятно, заметил, что векторы про-
пространства V у нас обозначаются то полужирными, то светлыми
строчными латинскими буквами, а иногда и буквами греческого
алфавита. Тем не менее в абстрактных векторных пространствах
предпочтение будет отдаваться полужирному шрифту; в конкретных
примерах следовать этому правилу было бы непрактично, а изобра-
изображать вектор буквой со стрелкой наверху — слишком громоздко. При
небольшом навыке принятый нами компромисс не должен приводить
к недоразумениям.
Непосредственно из определения векторного пространства V вы-
вытекают следствия, которыми мы будем пользоваться в дальнейшем
без всяких ссылок:
а) Ох = АО = 0 для всех Л Е Я, х Е V. Действительно, ввиду ВП7
Ох = @ + 0)х = Ох + Ох, откуда Ох = 0. Аналогично, АО = А@ + 0) =
= АО + АО, т.е. АО = 0;
б) Ах = 0 => А = 0 или х = 0. Если, например, А / 0, то
х = 1 • х = (А-1А)х = А (Ах) = Х-10 = 0;
в) (п • 1)х = х + х + ... + х (п слагаемых) для любого целого
положительного п и любого х Е V (доказательство — индукция по
п). Естественно писать просто пх вместо (п - 1)х, где 1 — единица
поля Я. Если Я — поле конечной характеристики р, то рх = 0;
г) (—1)х = —х. В самом деле, х + (—1)х = 1х + (—1)х = A+
+ (-1))х = Ох = 0.
2. Линейные оболочки. Подпространства. Заметим, что,
располагая любым конечным набором скаляров Ai,..., An G Я и век-
векторов xi,...,xn G У, мы можем составить выражение
п
Aixi + ... + Anxn = ^^ ^Xi,
г=1
называемое линейной комбинацией векторов х^ с коэффициентами
Xi. Более общо: если / — какое-то семейство индексов, возможно,
бесконечное, и М = {х^ G V | г G /} — подмножество векторов
в У, то правомерно рассматривать линейные комбинации ^2ieI А^х^
14 Гл. 1. Пространства и формы
с произвольными коэффициентами Л^ Е Я, среди которых, однако,
лишь конечное число отличны от нуля. Очевидно,
Л
— линейная комбинация с коэффициентами ЛЛ^, г Е /, для всякого
скаляра Л Е Я. Аналогично, сумма
iei iei iei
двух линейных комбинаций с коэффициентами Л^, \±i будет линейной
комбинацией тех же векторов х^ Е М с коэффициентами Л^ + /i«,
среди которых снова лишь конечное число отличны от нуля. Таким
образом, множество (М)д всевозможных линейных комбинаций век-
векторов Xf E M замкнуто относительно операций сложения векторов
и умножения их на скаляры:
ЛЕЯ, х, у Е (М) =^x + yG (М), Лх Е (М).
Принято говорить, что (М) — линейная оболочка множества М С V.
Определение 2. Пусть V — векторное пространство над по-
полем Я, U С V — его подмножество, являющееся аддитивной подгруп-
подгруппой в У и переходящее в себя при умножении на скаляры. Тогда огра-
ограничение на U операций, определённых в У, наделяет U строением
векторного пространства. Оно называется векторным (или
линейным) подпространством в V.
Пересечение любого числа векторных подпространств также
является векторным подпространством (см. начало п. 4 из §2; это
лёгкое упражнение, которое для случая групп рассмотрено в [ВА I]).
Мы видим, что линейная оболочка (М) системы векторов М С V
является векторным подпространством в У, причём, очевидно,
(М) — наименьшее подпространство в V, содержащее М. Говорят
ещё, что (М) — подпространство, натянутое на векторы х Е М
или порождённое векторами х Е М. Если с самого начала М было
подпространством, то (М) = М.
Приведём несколько примеров векторных пространств, которые
будут встречаться в дальнейшем.
Пример 1 {нульмерное пространство). Над любым полем Я существует
нульмерное (одноэлементное) векторное пространство V = {0} с законом умно-
умножения на скаляры Л0 = 0.
Пример 2 {основное поле Я как одномерное координатное пространство).
По определению V = Я, основные операции в V совпадают с операциями в Я.
Если 1 — единица поля Я, то можно считать, что Я = A) — линейная оболочка,
натянутая на 1.
Более общо: если поле Я — расширение своего подполя ф, то Я можно рассма-
рассматривать как векторное пространство над ф. Например, поле комплексных чисел
С — векторное пространство над полем вещественных чисел М, а Ж — векторное
пространство над полем рациональных чисел Q.
§ 1. Абстрактные векторные пространства 15
Пример 3 (п-мерное координатное пространство Яп\ см. [ВА I, гл. 2], где
поле Ж можно заменить на произвольное поле Я). При п = 1 получается преды-
предыдущий пример. Мы увидим вскоре (см. § 3), что всякое подпространство U С Яп
является пространством решений некоторой линейной однородной системы.
Пример 4 (пространство функции). В [ВА I, гл. 1, § 4, п. 1] было вве-
введено кольцо функций Кх, которое на самом деле является ещё векторным про-
пространством над К (кольцо К нужно заменить на поле). Итак, X — произвольное
множество, Я — поле, Ях — множество отображений (функций) / : X —>¦ Я,
наделённое поточечными операциями сложения и умножения на скаляры:
(f + g)(x) = f(x) + д(х) для всех х Е X;
(Л/)(ж) = Л(/(ж)) для всех А е F, х е X.
Каждому элементу х Е X можно поставить в соответствие так называемую
дельта-функцию 6Х, сосредоточенную на {х}:
6х(х) = 1, 5х(х') = 0, хфх'.
Если X = {1, 2,... , п}, то вместо Si(j) обычно пишут Sij — стандартное обозна-
обозначение для символа Кронекера. В этом случае Ях отождествляется с Яп. Именно,
функции / ставится в соответствие вектор-строка всех её значений (/A), /B),...
..., f(n)), а сама функция однозначно представляется в виде линейной комбина-
комбинации дельта-функций
В случае бесконечного множества X аналогичное заключение лишено смысла,
поскольку суммы бесконечного числа векторов не определены (если специально
не позаботиться о топологии).
В анализе чаще всего рассматриваются вещественнозначные функции, опре-
определённые на всей прямой или на интервале (а, Ь) С Ш. Легко проверяется, что ли-
линейное пространство IR(a'&) содержит в качестве подпространств пространство
l^cont всех непрерывных функций, пространство И\^ всех непрерывно диффе-
дифференцируемых функций и т.д., поскольку все отмеченные свойства сохраняются
при сложении функций и умножении их на скаляры.
Пример 5. Многочлены / Е Я[г] степени <С п — 1 с обычными операциями
сложения многочленов и умножения их на скаляры образуют векторное простран-
пространство Рп. Следует отметить, что многочлены степени, равной фиксированному
числу /с, линейного пространства не составляют. Однако формы степени к от
т переменных, рассматриваемые вместе с нулём, образуют векторное простран-
пространство.
Пример 6. Пусть g(t) — фиксированная непрерывная на отрезке [0,1] ве-
вещественная функция, отличная от нуля на некотором интервале J С [0,1], а
Vn{g) — множество функций вида f(t)g(t), где f(t) — многочлен степени <С п — 1.
Тогда Рп — векторное пространство, содержащееся в M^ont.
Пример 7 (пространство матриц). По правилам матричного исчисления
(см. [ВА I, гл. 2]) любую прямоугольную матрицу размера т х п можно умно-
умножить на элемент поля Я и любые две сложить, в результате получится матрица
того же вида. Все аксиомы здесь выполняются, так что т х n-матрицы обра-
образуют векторное пространство. При т = п кольцо квадратных матриц Мп(Я),
являющееся одновременно векторным пространством над Я, называется алгеб-
алгеброй, в соответствии с общим определением, которое мы дадим в § 2 гл. 2 и под
действие которого попадают также объекты из примеров 2 и 4.
16 Гл. 1. Пространства и формы
Пример 8 [Amer. Math. Monthly. — 1990. — V. 94. — P. 60-62]. Матрица
A G Mn(Q) называется полумагической (или полумагическим квадратом), если
суммы коэффициентов в каждой строке и в каждом столбце матрицы совпадают:
Если к тому же tr А = <т(А) := Х)Г=1 аг,п+1-г? т0 матрица А называется маги-
магической (или магическим квадратом).
Магические квадраты издревле привлекали к себе внимание. Нам они инте-
интересны по той достаточно очевидной причине, что множество SMagn(Q) полума-
полумагических квадратов, равно как и множество Magn(Q) всех магических квадратов
порядка п, суть векторные пространства над Q, причём
Magn(Q) С SMagJQ) С Mn{Q).
Стоит оговориться, что чисто комбинаторное множество магических п х п-квад-
ратов с натуральными коэффициентами 1, 2,..., п2 мы не рассматриваем. См. по
этому поводу: Постников М.М. Магические квадраты. — М.: Наука, 1964.
3. Замечания о геометрической интерпретации. Принято
называть векторное пространство V вещественным (соответственно
комплексным), если Я = Ш. (соответственно Я = С); скаляры тогда
будут просто числами. Именно эти случаи наиболее интересны с при-
прикладной точки зрения, хотя значительная часть теории не зависит
от природы поля Я.
Самой естественной моделью векторного пространства служит,
несомненно, совокупность направленных отрезков, выходящих из
фиксированной точки трёхмерного пространства, в котором мы жи-
живем. Умножению отрезка на число A G 1 отвечает его растяжение
в Л > 1 раз (или сжатие в Л раз, А ^ 1) и изменение направле-
направления отрезка при А отрицательном. Сложение направленных отрез-
отрезков осуществляется по правилу параллелограмма. Это вещественное
векторное пространство совпадает также с множеством свободных
геометрических векторов, если условиться считать равными два на-
направленных отрезка, которые можно совместить параллельным пе-
переносом.
Объекты физического трёхмерного пространства Мф принято
изображать посредством чертежей. В случае многомерных прост-
пространств (о размерности мы поговорим в § 2) наша интуиция подверга-
подвергается серьёзному испытанию, тем не менее систематическое апеллиро-
апеллирование к геометрическим образам не только полезно, но и необходимо:
вырабатываются устойчивые ассоциации, оживляющие теорию.
Непривычность геометрии векторного пространства может быть
связана также с особенностями поля Я. Если, например, Я = С, то
прямая над С — это одномерное координатное пространство С1. Её
наглядным геометрическим изображением служит плоскость комп-
комплексных чисел М2, которую не нужно путать с С2. Числу z = х + гу G
G С1 отвечает точка (ж, у) G М; умножение на а / 0 соответствует
§ 1. Абстрактные векторные пространства
17
растяжению в а\ раз и повороту на угол arga против часовой
стрелки. В частности, при а = — 1 ограничение на Ж1 поворота
С1 на 180° даёт "переворачивание" прямой Ж1. В гл. 3, § 4 будут
изложены операции комплексификации и овеществления, позволяю-
позволяющие использовать преимущества алгебраической замкнутости поля
С (для работы с вещественными векторными пространствами), а
n-мерное комплексное пространство Сп представить как 2п-мерное
вещественное пространство М2п.
Отметим ещё, что физическое пространство Мф гораздо богаче,
чем координатное пространство той же размерности, поскольку в M|
определены длины векторов и углы между ними, площади и объёмы
фигур. Вся эта дополнительная информация невольно переносится
на чертежи, призванные отразить свойства абстрактных векторных
пространств, аксиоматика которых пока бедна. Её обогащение
метрическими понятиями в полной мере реализуется лишь в после-
последующих главах.
В какой степени векторное пространство V несёт отпечаток
свойств поля скаляров, видно также из того, что если Я — конечное
поле, то геометрические образы, привнесённые из М3, являются "ды-
"дырявыми" (следствие дискретности Я). Но этот недостаток Я можно
иногда обыграть (рис. 1), ассоциируя с линейной геометрией над Я
дискретные картинки иного рода. Например, n-мерное координатное
пространство Щ над полем из двух элементов F2 = {0,1} = Ъ2 допус-
допускает естественное отождествление с множеством вершин {(?i,?2j • • •
..., ?n); Si — 0 или si = 1} n-мерного куба в W1.
@,1,1)
A,1,1)
0 1
п = 1
П1 = {0}
@
@
П2 =
1)
0)
п
{@,
0
= 2
0), (]
L,l)
L,0)
L,l)}
@ 0
(о
П3
i
/
,0,0)
п -
= {(о,о,
A
,0,1) /
Д,о_)
7
A,С
= 3
0), A,
0,1
), (
,(i,i.o;
,0)
1,0),
0,1,1)}
Рис. 1
Подпростанство Пп, состоящее из точек (?i,?2? • • • ??n) c ?i +
zn = 0 (напомним, что 1 + 0 = 0 + 1 = 1; 0 + 0 = 0 = 1 + 1),
задаёт простейший код, исправляющий одну ошибку (см. [ВА I, гл. 4,
§ 4, п. 7]). Именно, условившись, что закодированным сигналам со-
соответствуют только точки (?i,?2? • • • ??п) ? Пп, и приняв сигнал
(е[, е'2,..., е'п) с е[ + е2 + ... + е'п = 1, мы с полным основанием мо-
можем считать, что при передаче сообщения произошло его искажение
внешними помехами. Наш код с проверкой на чётность не обнару-
обнаружит, конечно, двух искажений, поскольку тогда (?^,?2? • • • ,?гп) ? Пп.
2 А.И.Кострикин
18 Гл. 1. Пространства и формы
УПРАЖНЕНИЯ
1. Образуют ли следующие множества векторные пространства над полем Ж:
а) матрицы из Мп(Ш) фиксированного ранга г;
б) симметричные матрицы (ЬА = А) из Мп(М);
в) кососимметричные матрицы (tA = —А) из Мп(Ш);
г) матрицы из Мп(Ш) с нулевым определителем;
д) матрицы из Мп(Ш) с нулевым следом tr А = 0 (след матрицы А = (а^)
определяется соотношением tr А = оц + <222 + • • • + апп)]
е) матрицы из Мп(М) с положительным следом;
ж) многочлены вида f(t) = (а\-\-...-\-ап) — CL\t —... — antn при фиксированном
п (<ц G М)?
2. Сколько элементов существует в координатном пространстве FJJ векторов-
строк (ж1,... ,жте) длины п над конечным полем Fp из р элементов? Сколько ре-
решений в FJJ имеет уравнение а\х\ + а2Х2 + ... + а,пхп = 0 (не все oli G Fp равны
нулю)?
§ 2. Размерность и базис
1. Линейная зависимость. Действуя по аналогии с [ВА I, гл. 2],
введём следующее
Определение 1. Векторы vi,..., vn пространства V называ-
называются линейно зависимыми, если некоторая их нетривиальная ли-
линейная комбинация равна нулю; другими словами, найдутся такие
скаляры ai,..., ап, не все равные нулю, что
aivi + a2v2 + ... + anvn = 0.
В противном случае система векторов vi,..., vn называется линейно
независимой.
Когда среди векторов vi,...,vn имеется нулевой, эти векторы
не могут быть линейно независимыми: если, например, vi = 0, то,
положив а\ = 1, «2 = ... = OLn = 05 мы получим нетривиальную
линейную комбинацию, равную нулю.
Теорема 1. Векторы vi,...,vn, n ^ 2, линейно зависимы
тогда и только тогда, когда один из них является линейной комби-
комбинацией остальных. Система векторов vi,..., vn линейно зависима,
коль скоро некоторая её подсистема линейно зависима. Другими
словами, если система векторов линейно независима, то и всякая
её подсистема также линейно независима.
Мы сознательно опустили доказательство, поскольку оно доста-
достаточно очевидно и является повторением доказательства соответст-
соответствующей теоремы из [ВА I, гл. 2, § 1]. Фактически там же доказана
Теорема 2. Если в пространстве V каждый из векторов ли-
линейно независимой системы ei,...,es является линейной комбина-
комбинацией векторов системы f\,..., f^, то s ^ t.
§ 2. Размерность и базис 19
Доказательство. Вспомним, как мы рассуждали ранее (чуть
в иных обозначениях). По условию имеем
es =
где dij — какие-то скаляры. Предположим, что s > t. Составим ли-
линейную комбинацию векторов ei,..., es с коэффициентами Xj :
+ ... + xses =
и рассмотрим систему из t линейных уравнений с s неизвестными
+ «12X2 + ... + alsxs = 0,
= 0.
Так как по предположению s > t, то наша однородная система
обладает ненулевым решением (Д,... ,/3s) (см. в этой связи [ВА I,
гл. 1, § 3, следствие 2], а также [ВА I, гл. 4, § 3], где сделано важ-
важное для нас замечание о линейных системах с коэффициентами из
произвольного поля скаляров). Это значит, что /3iei + ... + Cses =
= 0 — нетривиальная линейная зависимость, наличие которой,
однако, противоречит условию теоремы. Стало быть, s ^ t. ?
Следствие. Любые две эквивалентные линейно независимые
системы векторов в V содержат одинаковое число (возможно, бес-
бесконечное) векторов.
При этом две системы векторов мы считаем эквивалентными,
когда каждый вектор одной системы является линейной комбина-
комбинацией векторов другой системы. Разумеется эквивалентные линейно
зависимые системы могут состоять из разного числа векторов так
же, как одна из эквивалентных систем может быть линейно независи-
независимой, а другая линейно зависимой. Но если в данной системе векторов
из V мы возьмём какие-то две максимальные линейно независимые
подсистемы (максимальные — значит не допускающие расширения
до линейно независимых подсистем из большего числа векторов), то
в этих подсистемах будет одинаковое число векторов. Для доказа-
доказательства достаточно применить теоремы 1 и 2.
Определение 2. Число векторов, содержащихся в любой
максимальной линейно независимой подсистеме данной системы
векторов, называется рангом этой системы.
В применении к пространству V установленные нами факты
допускают несколько иную интерпретацию, которая будет играть
основополагающую роль во всём дальнейшем изложении.
20 Гл. 1. Пространства и формы
2. Размерность векторного пространства и его базис.
Могут представиться два случая: либо в пространстве V можно най-
найти произвольное число линейно независимых векторов (системы
векторов произвольного ранга), и тогда оно называется беско-
бесконечномерным, либо все достаточно большие системы векторов в
V линейно зависимы. Бесконечномерные линейные пространства,
содержательная теория которых предполагает наличие в них
дополнительной, обычно топологической структуры, будут рассмат-
рассматриваться лишь эпизодически.
Определение 3. Линейное пространство У, в котором су-
существует п линейно независимых векторов, но нет линейно незави-
независимых систем с большим числом векторов (большего ранга), называ-
называется п-мерным (в записи: dim^V = п или просто dimV = п). Нулевое
пространство считается нульмерным.
Это определение хорошо согласуется с понятием размерности пря-
прямой (одномерное пространство), плоскости (п = 2), пространства M|
(п = 3). В новой терминологии ранг семейства векторов {vi, V2,... }
есть не что иное как размерность линейной оболочки (vi, V2,...).
Примеры. 1) Координатное пространство Яп имеет размерность п (ср.
[ВА I, гл. 2]). Если бы это было не так, то наше определение размерности следо-
следовало признать неполноценным.
2) Пространство матриц размера т х п имеет размерность тп, в чём легко
убедиться, расположив элементы матрицы в одну строку длины тп и отож-
отождествив пространство т х n-матриц с координатным пространством Яшп.
3) Пространство функций в примере 4 из § 1, очевидно, бесконечномерно.
4) Пространство Рп многочленов степени <С п — 1 от одной переменной, оче-
очевидно, n-мерно. Линейно независимыми будут, например, векторы 1,?,... ,tn~1.
5) Пространство однородных форм степени к от т переменных имеет раз-
размерность п = ( +?^~ ) (проверьте это).
В двух последних примерах без труда указываются системы из
п линейно независимых векторов. Для определения размерности не-
необходимо, однако, убедиться в том, что в этих пространствах нет
систем большего ранга. Перебора всевозможных систем можно избе-
избежать, как нетрудно сообразить, если использовать теорему 2 или её
следствия.
Определение 4. Пусть V — n-мерное векторное пространство
над полем Я. Любая система из п линейно независимых векторов
ei,... , en G V называется (конечным линейным) базисом прост-
пространства V.
Удобно считать, что базис нульмерного пространства образует
пустое множество векторов. Существование базиса в V вытекает из
определения n-мерного пространства. Следующая теорема показы-
показывает, в частности, каким образом можно фактически строить новый
базис, исходя из заданного.
Теорема 3. Пусть V— векторное пространство над Я с ба-
базисом (ei,... ,en). Тогда имеют место следующие утверждения:
§ 2. Размерность и базис 21
i) каждый вектор v Е V можно представить, и притом един-
единственным образом, в виде линейной комбинации векторов ei,..., еп;
п) всякую систему из s ^ п линейно независимых векторов fi,...
..., fs пространства V можно дополнить до базиса. В частности,
любой вектор v ф 0 можно включить в базис.
Доказательство, i) Присоединив к данному базису произ-
произвольный вектор v Е V, мы получим согласно определению п-мерного
пространства линейно зависимую систему, причём в нетривиальном
соотношении
aw + aiei + ... + апеп = О
коэффициент а должен быть отличен от нуля. Следовательно,
v = (-а~1а1)е1 + ... + (-a~1an)en
— линейная комбинация базисных векторов.
Из существования двух разложений
/?iei + ... + /Зпеп = v = 7iei + ... + 7nen
мы получили бы после вычитания соотношение
(/?i - 7i)ei + ... + (Рп ~ 7п)еп = О,
но ввиду линейной независимости ei,..., еп отсюда вытекало бы ра-
равенство нулю всех коэффициентов:
А - 7i = • • • = Рп ~ In = О,
т.е. Pi = 7i? • • • 5 Рп — In- Тем самым установлена единственность
разложения.
п) Рассмотрим систему векторов
fi,... ,fs; ei,... ,en. A)
Выбросим теперь из системы A) все те векторы, которые выража-
выражаются линейно через предыдущие. По условию f\,..., fs линейно неза-
независимы, поэтому ни один из них выброшен не будет, и оставшаяся
система примет вид
fb...,fs; ei:L,...,eit. B)
Любое нетривиальное соотношение
aifi + ... + asfs + P±eh + ... + pteit = О
содержало бы коэффициент Д. ф 0 с максимальным номером к, и
мы выразили бы вектор e^fe через предыдущие векторы системы B),
что исключено по построению. С другой стороны, согласно i) все
векторы из V выражаются линейно через базис (ei,..., еп), тем более
через систему A), а стало быть, и через систему B). Таким образом,
линейно независимая система B) максимальна. Она будет базисом
пространства V', а е^,..., е^ — искомым дополнением. ?
22 Гл. 1. Пространства и формы
Рассуждение, использованное при доказательстве утвержде-
утверждения И), называют по традиции принципом Стейница о замене.
Тривиальным следствием утверждения И) является импликация
V\ С V2 => п < г2,
где Vi, V2 — подпространства в V размерностей соответственно ri, г2.
Замечание 1. Число элементов базиса конечномерного прост-
пространства V не зависит от базиса, и иногда базис считается просто
подмножеством в У, но вопрос о нумерации базисных элементов (или
о порядке элементов базиса) приобретает значение при использова-
использовании матричного формализма, как это будет ясно из дальнейшего.
Структура на множестве индексов базиса чаще всего определяется
существом дела. Не всегда в качестве индексов берутся натуральные
числа. Так, базис EХ \ х Е X) из дельта-функций (см. пример 4 из
§ 1) пространства Ях (Я — поле, \Х\ < оо) естественно нумеруется
элементами х Е X. Если вдобавок X — конечная группа, то линейное
пространство Ях функций на X со значениями в поле Я можно прев-
превратить в алгебру размерности \Х\ над Я (см. определение в конце
п. 2 из § 1), положив
Sx *SX> = Sxx> \/х,х' е X
и распространив умножение на все функции / = ^2 f(x)Sx, g —
^2('Kх' по линейности:
f*g= E f(*)9(x')8x* {
х,х'ех Уех хех
Эта операция носит название свёртки функций. Если X = {xi, Ж2,...
... ,жп} и мы возьмём в V базис (Ai,..., Дп), Д« = 8Xi, пронумеро-
пронумерованный натуральными числами, то сразу же возникнет затруднение
с определением номера к в формуле Д^ * Д^ = Д&.
3. Координаты. Изоморфизм пространств. В силу теоре-
теоремы 3 имеет смысл следующее
Определение 5. Пусть (ei,..., еп) — базис векторного прост-
пространства V над Я. Скаляры Ai,..., Лп G Я, входящие в разложение
v = Aiei + ... +Anen,
называются координатами вектора v G V в данном базисе.
Если х = aie1 + ... + апеп, у = р1е1 + ... + /Зпеп, то х + у =
= (oli + /?i)ei + ... + [ап + Pn)enj т.е. при сложении векторов х, у их
координаты складываются. Так как, далее, Ах = Ac^iei + ... + Aanen,
то при умножении х на скаляр А координаты вектора х умножаются
на тот же скаляр. Вектор, все координаты которого равны нулю,
совпадает с нулевым вектором.
Если Рп — пространство, векторами которого являются много-
многочлены из Щг] степени ^ п — 1, то, как уже отмечалось, один из базисов
§ 2. Размерность и базис
23
составляют векторы ео = 1, ei = ?, ..., en_i = tn 1. В этом базисе
координатами многочлена /(?) = «о + ot\t + ... + an-itn~1 будут его
коэффициенты ao,ai,..., an_i. Но тот же многочлен /(?), записан-
записанный в виде
/(*) = /(a) + /'("К* - a) + ... +
it - a
"
будет иметь в базисе е'о = 1, е[ = t — а, ..., e^_: = (t — а)п~1
координаты
()
В
/(a), /'(a), -..,
координатами вектора х =
относительно ба-
базиса ei = A, 0,..., 0), е2 = @,1,..., 0), ..., еп = @, 0,..., 1) (раньше
мы писали E(i}, Е^) •> • • •, ^(п)) являются числа а±, «2,..., ап (поэтому
это пространство и называется координатным), но в 1П имеется бес-
бесчисленное множество других базисов, в которых координатами того
же вектора х будут новые системы чисел.
Рассмотрим теперь эту ситуацию в общем случае. Пусть V —
n-мерное векторное пространство над полем Я и (ei,..., еп), (е^,...
..., е^) — какие-то два его базиса. Векторы одного базиса выража-
выражаются через векторы другого:
е[ =
(з)
аппеп.
Коэффициенты aij G Я определяют матрицу
А = (ац) =
^21 ^22
называемую матрицей перехода от базиса (еь ..., еп) к (е'1?..., е^).
Следует подчеркнуть тот факт, что координатами вектора е'- от-
относительно базиса (ei,...,en) служат элементы j-ro столбца мат-
матрицы А.
Пусть координатами вектора v G V будут Ai,..., Лп в базисе
(ei,..., еп) и Х[,..., Л^ — в каком-то новом базисе (е^,..., е^), т.е.
Aiei + ... + Anen = v = Х[е[ + ... + А^е^.
После подстановки вместо e'j их выражений C) через е^ мы получим
v =
Anen =
a2ie2
anlen)
24 Гл. 1. Пространства и формы
откуда
Ai = ац\[ + ai2A!) + ... + ain\'n,
¦¦_... / / / D)
An = aniA1 + аП2^2 + ... + annAn,
или, как мы писали в [ВА I, гл. 2],
X = АХ', D')
где X = [Ai,..., Ап], X' = [A'l5..., Х'п] — столбцы старых и новых
координат.
Формулы D), D') выражают старые координаты Ai,..., Ап век-
вектора v через его новые координаты А^,..., А^ при помощи линейного
преобразования переменных с матрицей А. Мы могли бы с самого
начала выразить ei,..., еп через е[,... ,е'п (оба базиса в V равно-
равноправны), и тогда получились бы формулы
А^ = a^Ai + a'i2\2 + ... + a'in\nj 1 ^ г ^ п. E)
Их существование означает, что линейное преобразование с матри-
матрицей А обратимо, т.е. det А ф 0, и E) принимает вид
X' = А-'Х, А-1 = (^)-
Итак, справедлива
Теорема 4. При переходе от базиса (ei,...,en) пространства
V к базису (в]_,..., е'п), определяемом матрицей А, координаты век-
вектора в новом базисе выражаются через старые координаты при
помощи обратимого линейного преобразования с матрицей А~х.
Важно отметить, что при явном выражении нового (штрихован-
(штрихованного) базиса через исходный по формуле C) естественным обра-
образом старые координаты выражаются через новые (штрихованные)
по формуле D) (обратить внимание на порядок суммирования), в
то время как выражение новых координат через старые требует
трудоёмкой операции обращения матрицы перехода. Использование
координат позволяет свести операции над векторами к действиям
над скалярами (скажем, над числами из М), а выбор разумной
системы координат (базиса) зачастую существенно упрощает вычис-
вычисления. Понятие базиса или координатной системы мы используем
теперь для того, чтобы алгебраически отождествить векторные
пространства одинаковой размерности.
Определение 6. Векторные пространства V и W над полем Я
называются изоморфными, если существует биективное отображение
f:V->W, для которого
/(au + /3v)=a/(u)+/3/(v) F)
при всех а, C G Я, u, v G V.
Другими словами, / — изоморфизм аддитивных групп прост-
пространств V и W, обладающий дополнительным свойством f(au) =
§ 2. Размерность и базис 25
= af (и). Говорят также, что отображение / линейно над Я, или
Я-линейно. Из определения изоморфизма групп вытекает, что отоб-
отображение /-1 будет также изоморфизмом W и V. Кроме того, ком-
композиция изоморфизмов
и Av -4 w
будет изоморфизмом fog: U —> W. Непосредственно видно, что раз-
размерность является инвариантом изоморфизма: если (ei,...
..., еп) — базис в V, то (/(ei),..., /(еп)) — базис в W, и обратно.
Других инвариантов изоморфизма нет, как показывает
Теорема 5. Все векторные пространства одинаковой размер-
размерности п над Я изоморфны. Более точно: все они изоморфны коор-
координатному пространству Яп.
Доказательство. Пусть (ei,...,en) — какой-нибудь базис
n-мерного пространства V. Координаты ai,...,an произвольного
вектора х = a±ei + ... + otnen однозначно определены, поэтому соот-
соответствие
/: х н> (ai,..
между векторами из V и Яп биективно. Если у = /3iei + ... + /3nen,
то
ax + (Зу = (aai + /?/?i)ei + ... + (аап + /3/Зп)еп.
Стало быть,
/(ах + (Зу) = (аа± + /%,..., аап + /?/?п) =
= a(ai,..., ап) + /3(Д,..., (Зп) = а/(х)
что и является выражением свойств изоморфизма. П
Доказанная теорема в сущности утверждает, что, выбрав базис
в У, мы придём к Яп. Однако было бы крайне неудобно ограничи-
ограничиваться изучением линейных задач только в Яп, поскольку подлинной
целью является получение результатов, совсем не зависящих от спе-
специальных свойств базиса. Кроме того, при переходе к Яп утрачива-
утрачивается наглядный характер многих векторных пространств таких, как
обычное трехмерное пространство, пространство многочленов и др.
Предупреждение. Изоморфизм между двумя векторными
пространствами У, W, если он существует, определён однозначно
только в двух частных случаях: а) V = W = {0}; б) dim V = 1 =
= dim W, Я — поле из двух элементов (попробуйте доказать это).
Во всех остальных случаях изоморфизмов много.
Иногда бывает, что между двумя векторными пространствами
определён некоторый изоморфизм, не зависящий от какого-либо про-
произвола, например от выбора базисов в V и W. Такие изоморфизмы
мы будем называть каноническими или естественными, в отличие
от всех остальных — "случайных". Характерный пример естествен-
естественного изоморфизма нам встретится в следующем параграфе.
26 Гл. 1. Пространства и формы
4. Пересечение и сумма подпространств. Хорошо извест-
известные теоретико-множественные операции пересечения и объединения
мы применим к подпространствам. Пересечение U\ П U^ двух под-
подпространств U\,U2 С V, очевидно, является подпространством. То
же относится и к пересечению С/ = Пге/ ^ любого семейства {Ui\ i G
G /} подпространств (возможно, что С/ — нулевое подпространство).
Действительно, нулевой вектор, входящий во все С/f, входит в С/, так
что U непусто. Если, далее, х, у Е С/, то любая их линейная комбина-
комбинация ах + (Зу входит во все Щ и, следовательно, ах + /Зу Е С/.
Заметим, что объединение U\ U С/2 ДВУХ подпространств не обя-
обязательно является подпространством. Если, например, ei,e2 — ли-
линейно независимые векторы в V и U\ = (ei), С/2 = (ег), то U\ U С/2 не
содержит ei + е2.
Наименьшим подпространством в У, содержащим U\ и С/2, явля-
является, очевидно,
С/ = {ui + u2 I ui e C/i, u2 G C/2}.
Это подпространство называется суммой U\, С/2 и обозначается
C/i + С/2. Ясно, что U\ + С/2 = С/2 + U\, причём C/i + С/2 = С/2 тогда и
только тогда, когда C/i С С/2. Аналогично определяется сумма любого
конечного числа векторных подпространств C/i,..., Um. Именно, под
[/]_ + ... + С/т понимается наименьшее векторное подпространство,
содержащее все векторы из С/^, 1 ^ г ^ ттг, а также их всевозможные
линейные комбинации. При этом не делается никакой расстановки
скобок, поскольку Ui + (Uj + Uk) = {Ui + C/j) + Uk-
Если A, 5 — какие-то фигуры в трёхмерном физическом
пространстве, возможно, с непустым пересечением А П В и vol(A),
vol E) — их объёмы, то справедливо соотношение
vol (A U В) = vol (A) + vol (Б) - vol (An В).
Его аналог в случае пространств выражает
Теорема 6. Пусть U uW — конечномерные подпространства
векторного пространства V. Тогда1}
dim (U + W)= dim С/ + dim W - dim (С/ П W). G)
Доказательство. Положим
dim С/ = fe, dim VF = /, dim (С/ П W) = m.
Так как (U П W) С [/Д, то m ^ к,т ^ /. Выберем в U nW
какой-нибудь базис (ei,..., em) и, опираясь на теорему 3, дополним
его, с одной стороны, до базиса (ei,..., em; ai,..., a^_m) подпрост-
подпространства С/, а с другой — до базиса (еь ... ,em;bb ... ,Ь/_т) под-
подпространства W. Каждый вектор суммы С/ + W имеет вид u + w,
*)Формула G) связывается с именем Г. Грассмана A809-1877).
§ 2. Размерность и базис 27
где u Е U, w Е W, а это значит, что
U + W = (еь...,ет; аь...,ал_т; Ьь ... ,Ь/_т).
Если мы покажем, что система
еь ... ,em; ai,.. .а^_т; Ьь ... ,Ь/_т
линейно независима и, стало быть, имеет место соотношение
dim (U + У) = m + (к - т) + (/ - т) = fe + / - m,
совпадающее с G), то доказательство будет завершено. Предполо-
Предположим, что это не так, и пусть
т к — т 1 — т
8=1 г=1 j=l
нетривиальное линейное соотношение. Тогда мы имеем
т к — т 1 — т
s=l
где в левой части равенства стоит элемент из U, а в правой — элемент
из W. Значит, перед нами вектор из U П W, и мы можем записать
т 1 — т
^25ses + ^Pjbj = 0.
8=1 j = l
Но линейная зависимость базисной системы {ei,... ,em; bi,... ,b/_m}
подпространства W должна быть тривиальной. В частности,
E\ = ... = fli-m = 0, и соотношение (*), превратившееся теперь в
линейную зависимость базисной системы {ei,..., em; ai,..., a^_m}
подпространства С/, также должно быть тривиальным: 71 = • • •
... = >ут = а\ = ... = ak-m = 0- Мы пришли к желаемому противо-
противоречию. ?
Так как размерность суммы U + W не превосходит размерности
объемлющего пространства У, то на основании теоремы б часто
можно делать заключение о нетривиальности пересечения подпрост-
подпространств. Например, две плоскости трёхмерного пространства или два
трёхмерных подпространства пятимерного векторного пространст-
пространства обязательно содержат общую прямую, поскольку в обоих случаях
dim U + dim W > dim V.
По поводу используемой терминологии сделаем следующее
Замечание 2. В n-мерном пространстве V существуют под-
подпространства всех меньших размерностей, в чём легко убедиться,
включив V в цепочку подпространств
ОС Ух С V2 С ... С Уп-х С Vn = V = (еь...,еп),
28 Гл. 1. Пространства и формы
где Vi = (ei,...,ef). Одномерные векторные пространства назы-
называют прямыми, двумерные — плоскостями, ^-мерные при к ^ 3 —
к-мерными плоскостями. Пусть U — подпространство векторного
пространства V. Разность
codim U = dim V — dim U
называется коразмерностью подпространства U. Любое подпрост-
подпространство коразмерности 1 называется гиперплоскостью. Понятие
гиперплоскости относительно: прямая является гиперплоскостью
двумерного векторного пространства W, но перестаёт быть таковой,
если W рассматривается как плоскость векторного пространства V
большей размерности.
5. Прямые суммы. В сумме ненулевых линейных подпрост-
подпространств
U = Ul + U2 + ... + Um (8)
любой вектор и Е U записывается в виде
u = ui + u2 + ... + um, Ui e Ui, (9)
вообще говоря, неоднозначно.
Определение 7. Если каждый вектор u Е U может быть пред-
представлен одним и только одним способом в виде (9), то сумма (8)
называется прямой и обозначается
U = Ux ®U2 <?>... ®Um.
Сумма (8) будет прямой и в том случае, когда однозначность
записи (9) имеет место лишь для нулевого вектора, т.е.
О = ui + u2 + ... + um => ui = 0, u2 = 0, ..., um = 0.
В самом деле, если это более слабое условие выполнено, то из двух
разложений
ui + u2 + ... + um = u = ui + u2 + ... + u^
следовало бы 0 = (ui - u^) + (u2 - u2) + ... + (um - u^J, где
щ — u[ G Ui. По предположению щ — u[ = 0,1 ^ i ^ m, или
ui = u;l5 u2 = u2, ..., um = u^, т.е. выполнено свойство разложения
в прямую сумму.
Условимся в обозначении:
C/l + . . . + Ui + . . . + Um = t/l + • • • + Ui-! + Ui+1 + . . . + Um.
Теорема 7. Сумма U = U\ + t/2 + ... + Um является прямой
тогда и только тогда, когда
uin(u1 + ... + ui + ... + um)=o (ю)
для i = 1, 2,... ,?тг.
Доказательство. Предположим, что наша сумма прямая. Рас-
Рассмотрим произвольный вектор х G Щ П {U\ + ... + [/« + ... + Um), где
§ 2. Размерность и базис 29
индекс % фиксирован. Тогда х = ui +... + й^ +... + um, и для нулевого
вектора мы получим два разложения
0 + ...+ 0 + 0 + 0 + ... + 0 = 0 =
= ui + ... + Щ-1 + (-х) + ui+i + ... + um.
Так как сумма прямая, то эти разложения должны совпадать. В част-
частности, —х = 0, и, следовательно, равенство A0) выполнено.
Обратно, предполагая справедливым A0), докажем единствен-
единственность разложения нулевого вектора (этого, как мы знаем, доста-
достаточно, чтобы сумма была прямой). В самом деле, будем исходить
из какого-нибудь разложения
0 = ai + ... + а* + ... + ат.
Тогда при любом г = 1, 2,..., т имеем
е и{ n (f/i +... + Ui +... + иш) = о.
Стало быть, щ = 0. ?
В случае т = 2 теорема 7 принимает особенно простую форму:
сумма U = U\ + U2 прямая <^=> U\ П XJ^ = 0. В частности, привлекая
соотношение G), получаем, что dimt/ = dimt/i -\-dimU2. Обобщение
этого свойства выражает
Теорема 8. Сумма U = U\ + С/2 + • • • + С/ш является прямой
тогда и только тогда, когда
dim C/ = ^dim С/;. A1)
г=1
Доказательство. Проводим его индукцией по ттг. При т = 2
справедливость утверждения отмечена выше, а в случае произволь-
произвольного т воспользуемся теоремами б и 7. Именно, если сумма прямая,
то прямой будет и сумма U\ + ... + Ui + ... + C/m, а тогда
dim U = dim С/; + dim(C/i + ... + C/i + ... + C/m) -
- dim С/» П (C/i + ... + Ui + ... + Um) =
m
= dim Ui + (dim C/i + ... + clinTc/; + ... + dim Um) - 0 = ^ dim С/г-.
г=1
Обратно, если формула A1) верна, то объединение базисов подпрост-
подпространств Ui будет базисом в С/, и, значит, сумма прямая. ?
Вариацией на ту же тему служит
Теорема 9. Для любого т-мерного подпространства U век-
векторного пространства V размерности п найдётся такое (п — т)-
мерное подпространство W', что V = U (BW (U и W называются
дополнительными подпространствами).
30 Гл. 1. Пространства и формы
Доказательство. Результат получается немедленно, если про-
произвольный базис (ai,..., am) в U дополнить до базиса (ai,..., am;
bi,... ,bn_m) в V (воспользовавшись теоремой 3) и положить W =
= (Ьь... ,bn_m). ?
Рассматривая прямые суммы, мы действовали пока в фиксиро-
фиксированном векторном пространстве V; такие прямые суммы часто назы-
называют внутренними. Но иногда возникает необходимость в рассмот-
рассмотрении внешней прямой суммы U 0 W двух векторных пространств
над одним и тем же полем Я, заранее никуда не вложенных в качестве
подпространств. Под U © W в этом случае понимается совокупность
У = U х W всевозможных упорядоченных пар (u, w) с и Е U, w Е W.
Операции сложения векторов из У и умножения их на скаляры опре-
определены формулой
а(и, w) + /?(u', w') = (аи + Cvl , aw + /?w').
Это похоже на построение плоскости по двум её координатным осям.
Векторы (и, 0) порождают в V подпространство U, изоморфное
U, а векторы @, w) порождают подпространство W, изоморфное W.
Изоморфизмы (и, 0) ь->- и, @,w) i-» w здесь очевидны; вместе с тем
можно записать _ ^
U®W =V = U ©VF ,
внешняя внутренняя
поскольку на U(BW мы уже смотрим как на прямую сумму подпрост-
подпространств данного нам векторного пространства V. В дальнейшем речь
будет идти преимущественно о внутренних прямых суммах, поэтому
всякие спецификации опускаются.
6. Факторпространства. К заданному подпространству L С
С V существует, вообще говоря, много дополнительных подпрост-
подпространств М С V, для которых V = L 0 М. Но все такие дополнения
изоморфны одному векторному пространству, которое строится по
V и L абсолютно инвариантным способом, не связанным с каким-
либо произволом.
Будем смотреть на V и L как на аддитивные абелевы группы.
Множество
x + L = {x + y| у eL}
называется смежным классом V по L, вектор х — представите-
представителем этого смежного класса. Если 0 ф z G (х + L) П (х; + L), то
x + y = x/ + y/ = ZHX + L = x/ + L = z + Z/. Поэтому два смежных
класса либо не пересекаются, либо совпадают. При фиксированном
L положим х := х + L. Каждый вектор v G V попадает в какой-то
смежный класс, и если V = V/L — множество всех смежных клас-
классов V по L, то на V устанавливается структура абелевой группы по
правилу х + х; = х + х;. Операции коммутативности и ассоциатив-
z
§ 2. Размерность и базис 31
ности проверяются непосредственно. Понятно, что 0 = L — нулевой
элемент этой абелевой группы: х + 0 = х + 0 = х. Далее, —х = —х.
Положив Ах = Ах, т.е. А(х + L) = Ах + L VA Е Я, мы легко убеж-
убеждаемся в том, что выполнены все аксиомы ВЩ-ВЩ из § 1. Например,
а(/?(х + L)) = а(/?х + L) = а/Зх + L = (а/?)(х + L).
Таким образом, V = V/L наделено естественным образом струк-
структурой векторного пространства, которое и называется фактор-
пространством пространства V по подпространству L (или по
модулю L). Вместо смежных классов мы могли бы рассматривать
классы по отношению эквивалентности, определенному сравнением
x = x'(modL) <^> x-x'eL,
но это была бы перефразировка сказанного.
Пример 7. Пусть V = Ш2 — координатная плоскость, a L — ось х. Допол-
Дополнительным подпространством М слу- iy
жит любая прямая, проходящая через v '
О и отличная от горизонтальной оси
(рис. 2).
Дополнение М пересекает каждую
прямую, параллельную оси ж, точно в
одной точке, так что М параметризует
множество всех таких прямых. Это мно-
множество как раз и есть V/L. .тис. 2
Теорема 10. Пусть V = L 0 М — прямая сумма подпрост-
ранств, L,M С V. Тогда отображение /:u i->-u + L(uG M)
является изоморфизмом между М и V/L.
Доказательство. В самом деле, / — линейное отображение,
поскольку
f(au + /?v) = аи + /?v + L = а (и + L) + /?(v + L) = a/(u) + /?/(v).
Пусть v + L — произвольный элемент из V/L. По условию v =
= х + у, xGL, у G М, так что v + L = x + y + L= (x + L) + (y + L) =
= L + (y + L) =y + L = /(у). Это доказывает сюръективность /.
Если, далее, u G Кег/, то и + L = L, откуда и G L. Но и G М, а
L Г\ М = 0. Поэтому и = 0, так что Кег/ = 0. Стало быть, / —
биективное отображение. ?
Следствие. Пусть L — произвольное подпространство в V.
Тогда
dim V/L = dim V — dim L.
Другими словами, dim V/L = codimy L.
Доказательство. По теореме 9 найдётся такое подпрост-
подпространство М С V, что V = L 0 М, причём dim М = dim V — dim L.
По только что доказанной теореме 10 это подпространство М изо-
изоморфно факторпространству V/L. ?
32
Гл. 1. Пространства и формы
УПРАЖНЕНИЯ
1. Сколько /с-мерных подпространств, 1 <С к <С п, у n-мерного векторного
пространства V над полем ?q из q элементов?
2. Выяснить, какова размерность пространства вещественных квадратных
матриц порядка п: а) симметричных; б) кососимметричных; в) с нулевым следом.
3. Какова размерность пространства всех многочленов fit) степени <С п от
одной переменной с условием /A) = 0? Найти базис этого пространства.
4. Доказать, что сумма U = U\ + С/2 + • • • + C/m является прямой в точности
тогда, когда
5. Найти матрицу перехода от базиса A,?,... ,tn~1) пространства Рп к ба-
базису A, (t — а),..., (t — а)п~1) того же пространства.
6. Пусть в — комплексный корень неприводимого над Q многочлена / G Q[t].
Найти размерность над Q пространства Q[a] = A, 9,..., 9к,... )q.
7. Доказать, что для прямых сумм не выполняется закон сокращения, т.е. из
равенства сумм С/0 W\ = U0 W^ с одинаковым слагаемым С/, вообще говоря, не
следует, что W\ = W^-
8. Выяснить, конечномерно ли факторпространство &[t]/L, где:
а) L — подпространство Рп многочленов от t степени <С п — 1;
б) L — подпространство многочленов, делящихся на tn\
в) L — подпространство многочленов от ?2?
9. Доказать следующий аналог формулы Грассмана:
codim (С/ + W) + codim (U П W) = codim U + codim W
(U и W — подпространства конечной коразмерности не обязательно конечно-
конечномерного векторного пространства V).
10. Следуя терминологии примера 8 из § 1, выделим тривиальные полумаги-
полумагические матрицы
Е =
1
1
D =
1
5 =
1 1 ... 1
1 1 ... 1
1 1 ... 1
Возникает вопрос: каковы размерности dim SMagn(Q) и dim Magn(Q)? Оче-
Очевидно, SMag2(Q) = {E,D)q. В этом случае S = Е + D — единственная с точ-
точностью до рационального множителя магическая матрица. При п = 3 можно
указать менее очевидную магическую матрицу
А =
1 2 О
О 1 2
2 0 1
Вычислить указанные выше размерности при п = 3 и п = 4.
11. Доказать разложение в прямую сумму
SMagn(Q) = MagJQ) 0 QE 0 QD.
12. Пусть V\,..., Vk — подпространства n-мерного векторного пространства
V. Доказать, что если dim V\ + ... + dim Уд, > п(к — 1), то Пг=1 ^г Ф ^ (прямое
обобщение утверждений, вытекающих из формулы G)).
§ 3. Двойственное пространство 33
§ 3. Двойственное пространство
1. Линейные функции. Любому векторному пространству V
конечной размерности над полем Я можно сопоставить другое век-
векторное пространство, находящееся с У в специальном отношении
двойственности. С этой целью введём
Определение 1. Отображение /: V —У Я, обладающее свойст-
свойством
/(ах + 0у) = а/(х) + /J/(y) Va,/?GF; x,y e V,
называется линейной функцией на V {линейной формой или линей-
линейным функционалом] последний термин чаще используется в теории
бесконечномерных пространств).
Выберем в V какой-нибудь базис (ei,...,en). Тогда результат
применения линейной функции / к вектору х = Aiei + ... + Anen
запишется в виде
/(x) = Ai/?i + ... + An/Jn, A)
где /Зг = /(е^) — скаляры, зависящие только от выбора базиса.
Обратно: непосредственно видно, что при заданном базисе (ei,...
...,еп) произвольным скалярам fa Е Я, г = 1,...,п, отвечает, и
притом только одна, линейная функция. Важно, однако, помнить,
что как в определении линейной функции, так и в эквивалентных
ему соотношениях
/(х + у) = /(х) + /(у), /(Ах) = А/(х)
нет упоминания о каком-либо выборе базиса, т.е. определение линей-
линейной функции инвариантно (не связано с выбором базиса). Предста-
Представляя значения линейной функции / в виде A), мы должны знать пра-
правила, по которым меняются коэффициенты fa = /(ег-) при переходе
от одного базиса к другому. Пусть
(еь... ,еп) = V = (е'ь... , е^),
efj = aijei + a2je2 + ... + anj-en, j = 1, 2,..., n,
— формулы перехода от базиса (еь ..., еп) к базису (е'1?..., е^). Если
теперь
Aift + ... + Klin = /(v) = Х'Ж + ... + \'п/3'п,
где Ai,..., Ап и Х[,... ,Х'п — координаты вектора v G V в базисе
(ei,..., еп) и (е^,..., е^) соответственно, то, как легко видеть,
2 + ... + anjen) =
a2jf(e2) + ... + anjf(en) =
= aij/?i + a2jf32 + ... + anjf3n. B)
3 А.И.Кострикин
34 Гл. 1. Пространства и формы
Стало быть, базисные векторы и коэффициенты линейной формы
при замене базиса меняются по одним и тем же формулам, т.е.
согласованно или, как еще говорят, когредиентно.
2. Двойственное пространство и двойственный базис.
Имея линейные функции /, g на У, мы можем рассмотреть их линей-
линейную комбинацию af + /3g с а, /3 Е Я, полагал
Непосредственно проверяется, что af + Cg является линейной функ-
функцией и, следовательно, имеет смысл
Определение 2. Относительно введённых операций сложения
и умножения на скаляры линейные функции составляют векторное
пространство У* = ?(У, F), двойственное (сопряжённое или дуаль-
дуальное) к У.
Замечание. При одновременном рассмотрении пространств У
и У* элементы из У* называются ко вариантными векторами (или
ко векторами), а элементы из У — контр авариантными векторами.
В рамках общей теории тензоров, которой мы уделим особое внима-
внимание в гл. 6, ковекторы относятся к тензорам типа A,0) (ковариант-
ные тензоры ранга 1), а векторы — к тензорам типа @,1) (контра-
вариантные тензоры ранга 1). Переходя к новой терминологии, мы
назовём тензором типа A,0) соответствие, относящее каждому
базису пространства У систему из п скаляров E\,..., /Зп таким обра-
образом, что нештрихованные и штрихованные системы, отвечающие ба-
базисам (еь...,еп) и (ei,...,e^), где
г=1
связаны между собой соотношениями B). Для тензоров типа @,1),
определяемых системами скаляров (Ai,..., Лп), (A'l5..., Х'п) в соот-
соответствующих базисах, то же самое выражается соотношениями D)
из § 2. Приставки ко и контра часто встречаются в математике (ко-
вариантные и контравариантные функторы в самом общем понима-
понимании), но их смысл всегда примерно одинаков и в какой-то степени
иллюстрируется рассмотренными простейшими примерами. Обще-
Общепринятые обозначения тензоров будут введены позднее.
Мы видели, что при заданном базисе (ei,...,en) пространства
У имеется взаимно однозначное соответствие Ф : / н-» (Д,...,/Зп)
между линейными функциями и системами из п скаляров. Эти сис-
системы мы отождествляем с векторами координатного пространства
Яп и замечаем, что если / н-» (Д,..., /Зп), g \-> G1, • • •, 7п)? то
Таким образом, Ф — изоморфизм векторных пространств У*
в частности dim У* = dim^n = п.
§ 3. Двойственное пространство 35
Задав скаляры /3j = 0 для j ф г, fa = 1, и положив
ег(е^) = Sij, j = l,...,n,
мы определим линейную функцию ег Е У*:
ЦА,еЧе,) = 5>& = Л,.
Функции е1,... , еп, очевидно, линейно независимы, поскольку неза-
независимы соответствующие им векторы-строки @, ..., 1, ..., 0) в Яп.
Тем самым доказана
Теорема 1. Пусть V — векторное пространство размерно-
размерности п над полем Я. Тогда двойственное пространство У* также
имеет размерность п. Если (ei,..., еп) — базис в V, а е1,..., еп —
линейные функции, для которых
if ч r j I при i=j,
e\ej) = Sij = <
[ 0 при г ф j,
то (е1,..., еп) — базис в V*.
Определение 3. Базис (е1,...,еп) пространства V*, указан-
указанный в формулировке теоремы 1, называется двойственным (дуаль-
(дуальным или взаимным) для данного базиса (ei,..., еп) пространства V.
Само название пространства У*, двойственного к У, и двойствен-
двойственных базисов (е1,..., en), (ei,..., еп) связано "двусторонней симме-
симметрией" между V и У*, свойства которой будут раскрываться нами
постепенно, по мере введения новых понятий. Условимся временно
вместо /(х) писать (/, х) — намёк на скалярное произведение век-
векторов, взятых, однако, из разных пространств. Тем самым опреде-
определяется отображение У* х V —> Я, линейное по каждому аргументу:
(а/+^,х) = а(/,х)+/3(я,х), (/,ах+/3у) = а(/,х)+^(/,у). C)
Отображения V х W —> Я с таким свойством принято называть
билинейными, а также спариваниями между пространствами V и W.
Рассматриваемое нами спаривание между У* и У называется кано-
каноническим.
Пользуясь двойственными базисами и представляя через них эле-
элементы
х =
легко вычислить значение
/(х) = (/, X) =
С другой стороны, получаются удобные формулы для вычисления
координат otk вектора х в базисе (ei,... ,еп) и координат fa ковек-
тора (линейной функции) / в базисе (е1,..., еп):
ак = (ек,к), Pk = (f,ek). D)
з*
36 Гл. 1. Пространства и формы
В самом деле,
* к а2е2 + ... + апеп) =
Пример. Пусть V = Рп = A, t,..., tn~1) — n-мерное вещественное век-
векторное пространство многочленов степени <С п — 1. Отображение f\'-tp^t у (А),
ставящее в соответствие каждому многочлену ip(t) = у?о + <Pit + • • • + ^n-i^
его значение в точке А ? I, очевидно, линейно. Меняя А, мы можем получить
некоторый базис двойственного пространства У*. Удобно ввести ещё функции
/ : V I—>¦ Ж вида f((f) = fi(p^(X), где (p(fc) — к-я производная многочлена (р, а
/1, А — некоторые фиксированные числа. Так как f(a(pJrf3^) = fji(aip-\-C^)^ (A) =
= fi{a(p^ (A) +/?^(fc)(A)) = af((p) + flf(if;), to f e V*. В частности, линейные
функции
ек\ю^г- — = (рк, к = 0,1,... ,п - 1,
к\
составляют базис в У*, двойственный к 1,?,...,tn~1. Базисом, двойственным к
1,0- А),...,(?- А)™, будет набор функций <р \-+ ^к\\)/к\, к = 0,1,... ,п - 1.
В этой связи стоит вспомнить о коэффициентах разложения функции в ряд
Тейлора.
3. Рефлексивность. Простое сопоставление теоремы 1 и тео-
теоремы 5 из § 2 приводит нас к заключению, что по крайней мере в
случае dim V < оо существует изоморфизм V* = V. По тем же при-
причинам будут изоморфны пространства V* и У** = (У*)*. По опреде-
определению V** — пространство, двойственное к V*, т.е. пространство ли-
линейных функций на У*. На первый взгляд, кажется затруднительно
разумным образом интерпретировать его элементы в терминах ис-
исходного пространства V. Между тем, У** находится в естественном
соответствии с У, как показывает
Теорема 2. Существует канонический изоморфизм е : У —>¦
—у у**5 определённый формулами
**
Здесь хе У, / G У*, ?х G У*
Доказательство. Линейность г проверяется непосредственно.
Действительно, eax+py(f) = /(ах + /Зу) = «/(*) + /?/(у) = aex(f) +
+ /??у(/) = (а?х + P?y)(f) Для всякой линейной функции /: У —у F.
Отсюда еаъ+Cу = otsx + /feyj т. е. г(ах + /Зу) = ае(х) + /?е(у).
Чтобы убедиться в биективности г, выберем в У и У* двойствен-
двойственные базисы У = (ei,... ,еп), У* = (е1,... ,еп). Тогда
Апеллируя к доказательству теоремы 1, мы видим, что справедливо
равенство У** = (eGl,eG2,... ,?ета)> т.е. (eei) — базис в У**, двой-
двойственный к (ег). Сюръективность и инъективность е теперь оче-
очевидны.
§ 3. Двойственное пространство 37
Каноничность изоморфизма е заключена в его определении. ?
Определение 4. Свойство векторных пространств, выражен-
выраженное в наличии естественного изоморфизма между V и у**5 называ-
называется рефлексивностью.
Рефлексивность делает пространства V и У** совершенно равно-
равноправными. Отождествив У** с V посредством естественного изомор-
изоморфизма е из теоремы 2, мы можем считать V пространством линей-
линейных функций на V* и придать новый смысл формулам спаривания
C): х(/) = (/,х) = /(х). В частности, для всякого базиса в V* су-
существует однозначно определённый двойственный ему базис в V.
4. Критерии линейной независимости. Используя понятие
двойственного пространства У*, удобно формулировать различные
критерии линейной независимости векторов пространства V. Вна-
Вначале доказывается
Лемма 1. Если ai,..., am — линейно зависимые векторы из V,
& /ъ • • • •> fm — произвольные линейные функции на V, то
det(/i(aj)) =0, l^ij^m
[г — номер строки, j — номер столбца).
Доказательство. В силу линейной зависимости векторов
ai,..., am один из них, скажем, ат, является линейной комбинацией
остальных (теорема 1 из § 2). Пусть am = aiai + ... + am_iam_i.
В определителе det (/г(а^)) вычтем из последнего столбца первый,
умноженный на ai, второй, умноженный на а2, и, наконец, (т — 1)-й,
умноженный на аш-\. Мы знаем, что при этих преобразованиях ве-
величина определителя не изменится. Вместе с тем на г-м месте послед-
последнего столбца будет стоять /;(ат) - «i/;(ai) - ... - am_i/i(am_i) =
= Л(ат - aiai - ... - am_iam_i) = /;@) = 0, г = 1,2,...,т.
Поэтому определитель равен нулю. ?
Лемма 2. Если (/i,...,/n) — базис пространства V*, двой-
двойственного к V, то векторы ai,..., an G V будут независимы тогда
и только тогда, когда
det(/i(aj-)) y^O, l^ij^n.
Доказательство. По лемме 1 линейная зависимость векто-
векторов ai,...,an влечёт равенство определителя нулю. Пусть теперь
они линейно независимы, так что V = (ai,..., ап). Обозначим через
(еь ..., еп) базис в У, двойственный к (Д,..., /п), а через aij,..., anj
— координаты вектора а^- в этом базисе. Тогда
an a12 ... а1п
«21 «22 -.. OL2n
OLn2 ... апп
будет матрицей перехода от базиса (ei,..., еп) к (ai,..., ап). По
38 Гл. 1. Пространства и формы
теореме 4 из § 2 она обратима и, следовательно, det(a^) ф 0. Но
otij = fi(jaij) (см. D)), откуда и следует, что det(fi(a.j)) ф 0. П
Теорема 3. Пусть (Д,..., /п) — базис пространства V*, двой-
двойственного к V. Тогда ранг системы векторов ai,..., a/, Е У равен
наибольшему порядку отличного от нуля определителя вида
det(/i(aj-)), E)
1 ^ г = ii, ..., im ^щ 1 ^ j = ji, ..., jm ^ fc.
Доказательство. Обозначим через г ранг системы векторов
ai,..., а&. Любые т > г векторов aJX,..., aJm линейно зависимы и,
значит, по лемме 1 любой определитель вида E) порядка т > г равен
нулю.
Остаётся доказать, что существует определитель E) порядка г,
отличный от нуля. С этой целью обозначим через Д,..., /п ограни-
ограничения линейных функций Д,..., /п на подпространство U = (ai,...
..., а/,). Докажем сначала, что
(h,...,u) = u*, F)
где U* — подпространство, двойственное к U.
В самом деле, включение ( Д,..., /п ) С U* очевидно. Пусть, да-
далее, / — любой вектор из U*, (ei,... ,ег) — базис в U, a (ei,... ,ег;
er_|_i,..., еп) — его дополнение до базиса в V. Рассмотрим линейную
функцию / G У*, для которой /(ei) = /(е;), г = l,...,r; /(ei) =
= 0, г = г + 1,... ,п (существует функция / G V* с любыми, а сле-
следовательно, и с этими значениями). Так как V* = (Д,...,/п), то
/ = f3ifi +... + {3nfn. Ограничим в этом равенстве все функции на U.
Очевидно, / = f\v = /, поскольку / и / принимают одинаковые зна-
значения на базисных векторах ei,..., ег пространства U. Таким обра-
образом, /= / =_/?i/i^... + Pnfn, откуда следует, что / G (Д,...,/п),
т. е. U* С (Д,..., /п ). Тем самым равенство F) доказано.
Выберем, наконец, г линейно независимых векторов как среди
ai,..., а/, (пусть ими_будут aj4 ,..., ajV), так и среди Д,..., /п (пусть
ими будут Дх,..., fir). Они составляют базисы в соответствующих
подпространствах U, U* и по лемме 2
det (/;(aj)) 7^ 0, г = гь...,гг; j = jb...,jr.
Остаётся заметить, что /г(а^) = fi(a.j)- ?
Мы снова подошли вплотную к понятию ранга матрицы (см. [В А I,
гл. 2, § 2]), но останавливаться ещё раз на его свойствах не имеет
смысла.
5. Геометрическая интерпретация решении Л ОС. Напом-
Напомним, что линейная однородная система (ЛОС) с п неизвестными
совместна, а если интерпретировать её решения как векторы про-
пространства Яп строк (или столбцов) над основным полем Я (что мы
§ 3. Двойственное пространство 39
и делали), то в Яп выделяется подпространство U решений нашей
системы. Встанем на несколько более абстрактную точку зрения. По
своему определению ЛОС размера тхп записывается коротко в виде
/i(x)=0, ..., /m(x)=0, G)
где х — вектор n-мерного пространства V, а Д,..., /m E V*. Чтобы
вернуться к обычной записи, достаточно выбрать в V какой-нибудь
базис.
Теорема 4. i) Если ранг системы Д,..., /m E V* равен г, то
размерность пространства U С V решений ЛОС G) равна п — г
(п = dim^V).
И) Любое подпространство U С V является пространством ре-
решений некоторой системы F).
Доказательство. Утверждение i) было доказано в [В А I, гл. 2,
§ 3], но теперь соответствующие рассуждения будут восприниматься
более естественно. Итак, без ограничения общности считаем линейно
независимыми векторы Д,..., Д. Тогда остальные Д будут их ли-
линейными комбинациями, а система G) на самом деле равносильна
системе
/i(x)=0, ..., /r(x)=0. G')
Дополним Д,..., Д до базиса (е1,..., еп) пространства У*(ег = Д
при г ^ г). Пусть (ei,..., еп) — базис в V, двойственный к (е1,..., еп).
Тогда при любом х = х\Ъ\ + ... + хпеп система G') принимает
вид х\ — ... = хг = 0. Следовательно, пространство решений U
системы G;) состоит из векторов х = xr+ier+i + ... + xnenj т.е.
U = (er_|_i,..., еп). Заметим, что xr+i,..., хп играют роль свободных
неизвестных. Так как er+i,..., еп линейно независимы, то dim U =
— п — т.
И) Пусть (ei,...,es) — базис подпространства U С V, являю-
являющийся частью базиса (ei,..., еп) всего пространства V. Вектор х =
= xiei + .. .+хпеп в точности тогда принадлежит U, когда xs+\ = ...
... = хп = 0. Выберем в V* базис (Д,..., /п), двойственный к (еь ...
...,еп). Тогда Xi = Д(ж), и условие х Е U записывается в виде
/e+i(x) =0, ..., /п(х) =0. ?
УПРАЖНЕНИЯ
1. Как легко вытекает из определения (см. упр. 1 из § 1), функция следа
tr : X ь-»¦ trX линейна на пространстве V = Мп(Я) всех квадратных матриц
порядка п над полем Я. Доказать, что каждая линейная функция / на V имеет
вид f(X) = tr АХ, причём матрица А = Af однозначно определена.
2. Пусть a(t) — фиксированный многочлен из ШЭД, Рп — подпространство
вещественных многочленов степени <С п — 1. Рассмотрим следующие функции
на Рп'.
а) /(ад) = [ a{t) u(t) dt, u(t) e Pn;
40 Гл. 1. Пространства и формы
б) f(u) = Г a(t)u(t2)dt-
в) /(it) = / ait) \u{t)\ at;
Jo
Какие из этих функций линейны на Рп?
3. Пусть V — векторное пространство, и пусть функции f,g ? У* таковы,
что Ker/ = Kerg. Доказать, что тогда д = Л/ для некоторого скаляра Л.
4. Пусть х — ненулевой вектор пространства V. Однозначно ли определяется
функция / G V* условием /(х) = 1?
5. Доказать, что для всякой ненулевой линейной функции / на п-мерном
векторном пространстве V над Я найдётся базис (ei,...,en) пространства V
такой, что
... + апеп) = щ Vaj G Я.
§ 4. Билинейные и квадратичные формы
1. Полилинейные отображения. При первом чтении этот
пункт можно опустить. Понятие ковектора (линейной функции на
У), уже проявившее свою работоспособность, допускает далеко иду-
идущее обобщение.
Рассмотрим векторные пространства V\,..., Vp; U над Я. Отобра-
Отображение
называется полилинейным (в данном случае р-линейным, если для
каждого индекса г = 1,... ,р и для любых фиксированных векторов
slj G Vj, I ^ j ^ р, j Ф г, отображение
/г: v ^ /(ах,..., a;_i, v, ai+i ,...,ap)
является линейной формой (линейной функцией), т.е.
Л(ах + /Зу)=а.Л(х)+/З.Л(у) Vx.yGVJ, а,/? ей. A)
Изучение линейных отображений вида A) мы продолжим в гл. 2,
сейчас же сделаем только одно общее замечание. Как и в случае
линейных функций, нетрудно убедиться в том, что линейная ком-
комбинация af + (Зд двух р-линейных отображений снова является р-
линейным отображением. Это обстоятельство позволяет рассматри-
рассматривать множество ?(Vi,..., Vp; U) всех р-линейных отображений
Vi х ... х Vp —У U как векторное пространство над Я.
Мы получим простейший пример, взяв Vx —V2 — ...— Vv— U —
— Я (одномерные векторные пространства) и положив
f(vU...,Vp) =V!...Vp.
Более общо: любое полилинейное отображение V\ х ... х Vp в Я
называется полилинейной формой на V\ х ... х Vp. Если, скажем,
§ 4- Билинейные и квадратичные формы 41
1г : Vi н->- r(vi), г = 1,...,р, — какие-то линейные функции на Vi,
то функция /, определённая соотношением
будет полилинейной формой на V\ х ... х Vp. Она называется тен-
тензорным произведением линейных функций (форм) Z1,..., 1Р и обозна-
обозначается / = I1 ®12 (g) ... (8) /р или просто I1!2 .. Лр (порядок существен).
Можно доказать, что произвольная полилинейная форма на
Vi х ... х Vp является суммой тензорных произведений линейных
форм, но пока этот факт нам не понадобится. При Vi = ... = Vp = V
полагаем Vp = V х ... х V (декартово произведение р экземпляров
множества V). В этом случае удобным является обозначение
?P(V,R) = ?(V,...,V;R).
Полилинейная форма / на Vp x V*g будет впоследствии названа нами
тензором типа (р, q) и валентности р-\- q. To, что тензоры типа @,1)
можно считать векторами из V, есть следствие отмеченного в § 3,
п. 3 свойства рефлексивности.
Полилинейная форма / на Vp (тензор типа (р, 0)) называется сим-
симметричной, если
/ (vttA) j vttB) j - - - Э vtt(p) ) = /(vi,V2,...,Vp)
для любых Vi,..., vp G V и для любой перестановки тг Е Sp. Если же
/ CMi) , V7rB), • • • , V^p)) = ^/(Vi, V2, . . . , Vp),
где s^ — чётность перестановки, то / называется ко со симметрич-
симметричной (или знакопеременной) формой. В случае dim У = р мы знаем
хороший пример кососимметричной формы — это определитель ма-
матрицы А, рассматриваемый как функция её строк или столбцов.
Цель данных здесь общих определений заключается лишь в том,
чтобы уложить в общую схему все частные понятия, с которыми мы
уже встречались и которые нам еще предстоит изучить. Тензорными
обозначениями в общем виде мы воспользуемся лишь в гл. 6.
2. Билинейные формы. Мы ограничимся пока случаем Vi =
= у2 = V и будем говорить о билинейной (р = 2) форме / на V (а
не на У2, что было бы более правильным). В соответствии с общим
определением, билинейная форма f на векторном пространстве V над
Я характеризуется свойствами
/(mi + /?v,w)=a/(u,w)+/3/(v,w),
/(w, аи + /3v) = a/(w, и) + /3/(w, v)
для всех и, v, w е V, а, /3 е Я. Заметим, что, вообще говоря, /(u, v) ф
^/(v,u).
Выбрав в V некоторый базис (ei,..., еп) и выразив х, у G V через
их координаты
х = xiei + ... + жпеп, у = угег + ... + упеп,
42 Гл. 1. Пространства и формы
мы используем определяющие свойства B) для записи значения /(u, v)
формы / через п2 скаляров /(e^ej). Именно,
* 3 hj
где fij = f(ei,ej).
Матрица F = (fij) называется матрицей билинейной формы f
на У в базисе (ei,...,en). Введя в рассмотрение координатную
п х 1-матрицу (столбец) X = [х\,х2,... ,жп] и транспонированную с
ней координатную 1 х n-матрицу (строку) 1Х — (х\,х2,...,жп), мы
перепишем выражение C) в виде
/(х,у)= *X-F-Y. D)
Для этого нужно лишь воспользоваться известными правилами умно-
умножения матриц размеров lxn,nxn,nxl.
Обратно, имея квадратную матрицу F = (fij), мы при помощи
соотношения D) (или C)) определим на V билинейную форму /, по-
полагая /(е^, ej) = fij. Таким образом, при заданном базисе (ei,..., еп)
векторного пространства над Я имеется взаимно однозначное соот-
соответствие между квадратными п х n-матрицами над Я и билинейными
формами на V (п = dim^V). Это соответствие является на самом
деле изоморфизмом векторного пространства С2(У,Я) всех билиней-
билинейных форм V х V -> Я (если f,g e С2(У,Я), то и af + j3g G С2(У,Я)]
проверка очевидна) на векторное пространство Мп(Я) всех квадрат-
квадратных матриц порядка п над Я. Действительно, если
*(„ v\ — fXFY а(тс v) — 1ХПУ
то
а/(х, у) + /Зд(х, у) = 1Х ¦ (aF + /3G) ¦ Y.
3. Закон изменения матрицы билинейной формы. Акси-
Аксиоматическое определение билинейной формы / свойствами B) сво-
свободно от выбора какого бы то ни было базиса в V. Чтобы матрич-
матричная запись / имела реальную ценность, нужно соответствие / н-»
ь->- F дополнить правилом изменения матрицы F при переходе к но-
новому базису. Пусть наряду с (ei,... ,еп) в V задан еще один базис
(e'i,..., е;п) вместе с матрицей перехода А = (а^):
п
е. ^— \ (~1 . . С\ . rt ^— 1 IJJ
1 • ^^Ъ1 2 *i I -L,***,/t/*
г=1
Если xiei + ... + xnen = x = x[e'i + ... + x'ne'n, то координатные
столбцы X и X' связаны соотношением X = А • X'. Пусть теперь
§ 4- Билинейные и квадратичные формы 43
F = (fij) — матрица билинейной формы / в базисе (е^), aF' = (f[j)
— матрица той же формы / в базисе (е^), т.е. fij = /(e^ej) и f[j =
= f(e'i,e'j). Так как 1(АХ') = 1Х' • 1А и так как значение /(х,у)
вообще не зависит от выбора базиса, то
= \АХ') - F - (AY1) = lX' - lA - F • A • Y'.
Сравнивая левую и правую части этого равенства, мы приходим
к заключению, что имеет место
Теорема 1. Матрицы F и F' билинейной формы f на V в ба-
базисах (е^) и (e'i) связаны соотношением
F' = fA-F -A, E)
где А — матрица перехода от (е^) к (e'i).
Определение 1. Матрицы F и F' = lAFA с detA ф 0 называ-
называются конгруэнтными. Рангом билинейной формы / называется ранг
соответствующей ей в каком-нибудь базисе (е^) матрицы F.
Следствие. Ранг rank/ билинейной формы / является её ин-
инвариантом, не зависящим от выбора базиса.
Доказательство. Применить следствие 1 теоремы 5 из [ВА I,
гл. 3, § 3] к конгруэнтным матрицам E). ?
Утверждение о ранге билинейной формы можно доказать ещё
и так. Обозначим через Lf множество тех х G V, для которых
/(х, у) = 0 при всех у G V. Короче: /(х, V) = 0. Очевидная проверка
показывает, что Lf — подпространство в V. Его называют левым
радикалом или ядром формы /. Ясно, что dimL/ — величина, зави-
зависящая только от /. Пусть (ei,..., еп) — базис в V. Условие xGl/
равносильно тому, что
/(x,ei) = 0, ..., /(x,en) = 0.
Эта система уравнений определяется линейными функциями х н-»
•->/;(х) = /(х,е,-)=0, j = l,...,n.
Координатами функций fj являются скаляры /^(е^), т.е. коэф-
коэффициенты /(ef,ej) = fij г-й строки матрицы F. Стало быть, ранг
системы линейных форм Д,..., /n G V* совпадает с рангом матрицы
F = (fij), и если он равен г, то по теореме 7 из [ВА I, гл. 2, § 3] имеет
место равенство dimL/ = п — г. Другими словами,
г = dim V — dim Lf
— величина, не зависящая от какого бы то ни было базиса.
4. Симметричные и кососимметричные формы. В соот-
соответствии с п. 1 билинейная форма / : V х V —> Я называется сим-
симметричной, когда /(х,у) = /(у,х) для всех х,у G V, и кососимме-
тричной, когда /(х,у) = —/(у,х). Эта терминология хорошо согла-
согласуется с понятиями симметричных и кососимметричных многочле-
многочленов (см. [ВА I]), а также симметричной матрицы А = (а^), когда
44 Гл. 1. Пространства и формы
1А — А, и ко со симметричной, когда 1А — —А. Так как /(у,х) =
= */(у,х) (транспонирование 1 х 1-матрицы, т.е. скаляра), то из
/(х,у) = г/(у,х), г = =Ы, в соответствии с соотношением D)
следует
*Х • F • У = /(х, у) = г/(у, х) = г • */(У, х) =
= е- \1У F -X) =?• lX- fF-Y,
откуда lF — sF. Обратно: если lF — sF, s = =Ы, то билинейная
форма /, отвечающая матрице F, будет удовлетворять соотношению
Остаётся еще добавить, что согласно E)
F' = 1А - F - А =^ lFl = lA - lF • А = г • 1А • F • А = eF',
поэтому свойство симметричности или кососимметричности мат-
матрицы F для / не зависит от выбора базиса. Таким образом, билиней-
билинейная форма / симметрична или кососимметрична в точности тогда,
когда её матрица F относительно любого базиса в V симметрична
или соответственно кососимметрична.
Теорема 2. Если char Я ф 2, то пространство С2(У,Я) всех
билинейных форм является прямой суммой
подпространств C^(V,Я), ?^"(У,Л) симметричных и кососиммет-
ричных билинейных форм.
Доказательство. Если / G С^(У,Я) П С^(V,Я), то
/(х,у) = /(у,х) = -/(х,у) => 2/(х,у) = 0 => /(х,у) = О
(поскольку по условию char Я ф 2), откуда / = 0. Следовательно,
сумма С^ + С^ прямая.
С другой стороны, соотношение
/(х,у) {/(х,у)
или соответствующее матричное соотношение
F=hF+ tF)+hF_ *F)
показывает, что всякая билинейная форма / представляется в виде
суммы симметричной и кососимметричной форм. ?
Над Я = Z<z каждая кососимметричная матрица симметрична, и
поэтому утверждение теоремы перестаёт быть верным, поскольку,
например, матрица @1) не является симметричной. Имеется ещё
понятие знакопеременной билинейной формы /: /(и, и) = 0 Vu G V,
которое, однако, при char Я ф 2 совпадает с понятием кососимме-
кососимметричной формы (проверьте это). В дальнейшем предполагается, что
char Я ф 2.
§ 4- Билинейные и квадратичные формы 45
5. Квадратичные формы. Рассмотрение симметричных би-
билинейных форм приводит к следующему важному понятию, которое
естественным образом возникает в разных разделах математики.
Определение 2. Квадратичной формой на конечномерном век-
векторном пространстве V над Я называется функция q: V —> Я, обла-
обладающая двумя свойствами:
i) q(-v) = q(v) Vv G V;
ii) отображение /: V x V —У Я, определённое формулой
/(x,y) = l{g(x + y)-g(x)-g(y)}, F)
является билинейной формой на V (очевидно, симметричной). Её
ранг называется также рангом q: rankg = rank/.
Говорят ещё, что симметричная билинейная форма /, определён-
определённая формулой A), получается из q поляризацией или что / — би-
билинейная форма, полярная к квадратичной форме q.
Пусть теперь / — произвольная симметричная билинейная форма
на V. Положив
<7/(х) = /(х,х), G)
мы получим функцию qf : V —У Я, удовлетворяющую условиям i), ii)
в определении квадратичной формы, поскольку /(—х, —х) = /(х,х)
и
/(х,у) = ^{/(х + у,х + у)-/(х,х)-/(у,у)}. (8)
Можно подумать, что qf — какая-то особая квадратичная форма.
На самом деле это не так, поскольку справедлива следующая теорема
(её несложное доказательство можно опустить без ущерба для пони-
понимания дальнейшего).
Теорема 3. Каждая квадратичная форма q однозначно восста-
восстанавливается по своей полярной форме /; другими словами, q — qf-
Доказательство. Положим в F) у = —х:
отсюда
(?(х) /(х,х) +
Так как / — билинейная форма, то /@,0) = 0. Поэтому при х = 0
имеем q@) =|g@), т.е. q@) = 0. Значит, q(x) = /(x,x). ?
Определение 3. Матрицей квадратичной формы q — qf отно-
относительно базиса (ei,... ,еп) пространства V называется матрица F
билинейной формы /, полярной к q.
Стало быть, F = (Д?), где
fij = 2^ei + e^ ~^(e*) -9(ei)}> hj = 1,2,...,п.
46 Гл. 1. Пространства и формы
Любой симметричной матрице F = (fij) в свою очередь отвечает
квадратичная форма q, заданная соотношением
jxixj. (9)
Таким образом, в соответствии с названием квадратичная форма
суть однородная квадратичная функция координат х\,...,хп век-
вектора х = х±е± + ... + хпеп. Заслуживает быть особо отмеченным
случай диагональной матрицы F.
Определение 4. Говорят, что квадратичная форма q имеет в
базисе (ei,...,en) пространства V канонический или диагональный
вид, если для каждого вектора х = ^2 х\Ъ\ Е V значение д(х) вы-
вычисляется по формуле
Базис (е^) при этом называется каноническим базисом для q.
Та же терминология относится и к соответствующей полярной
билинейной форме /:
Не требуется, чтобы канонический вид квадратичной формы или её
канонический базис определялись однозначно. Скажем, при произ-
произвольной перестановке векторов канонического базиса вновь получа-
получается канонический базис.
Заметим, что в каноническом виде rankg/ = rank/ есть просто
число отличных от нуля коэффициентов fa. Вместе с тем согласно
замечанию в конце п. 3 rankg = dim У — dimLg, где Lq = Lf —
ядро (радикал) формы / (левое или правое — безразлично ввиду
симметричности /). Подпространство Lq С У, называемое также
изотропным (или нулевым) подпространством квадратичной формы
q, в терминах q определяется так:
Lq = {u e V | q(u + v) = q(u) + q(v) Vv G V}.
Ранг формы q — величина инвариантная.
6. Канонический вид квадратичной формы. Вопрос о воз-
возможности выбора базиса, в котором данная форма принимала бы
наиболее простой вид (а таковым является канонический вид), имеет
важное теоретическое и прикладное значение.
Теорема 4. Для всякой симметричной билинейной формы f на
V существует канонический базис.
Доказательство. При п = 1 утверждение очевидно, поэтому
можно использовать индукцию по п. Если /(х, у) = 0 для всех х, у G
G V (т.е. / = 0), то теорема очевидна: любой базис годится. Если же
§ 4- Билинейные и квадратичные формы 47
f ф 0, то отлична от нуля и соответствующая квадратичная форма
(равенства F), (8) или теорема 3). Пусть ei — такой вектор, что
/(ei,ei) = q(ei) ф 0. Тогда линейная функция Д: х \-л /(x,ei) от-
отлична от нуля (/i(ei) ф 0). По теореме 4 из § 3 линейное подпро-
подпространство
L = Ker/1 = {xeV| Д(х)=0}
имеет размерность п — 1, т.е. является гиперплоскостью. По пред-
предположению индукции L обладает базисом (в2,..., еп), в котором ма-
матрица формы /, ограниченной на L, диагональна, т.е.
/(ei,eJ)=0 при гфз, i,j = 2,...,n.
Так как по построению /(е^, ei) = 0, г = 2, 3,..., п, то мы получаем
свойства f(ei,ej) = 0, i ф j, характеризующие канонический базис
(е/,), если только система векторов ei, в2,..., еп линейно независима.
Предположив противное, мы в любом соотношении
aiei + a2e2 + ... + апеп = 0
имели бы коэффициент а± ф 0, поскольку (в2,... ,еп) — базис в L.
Но в таком случае ei = J^i>i Ae* и
0 #
— противоречие, доказывающее теорему. ?
Следствие 1. Пусть на векторном пространстве V размерно-
размерности п над полем Я задана квадратичная форма q ранга г ^ п. Тогда
в V существует базис (е^), в котором q принимает канонический
вид
... + Хгх2г. A0)
Следствие 2. Для любой симметричной матрицы F сущест-
существует невырожденная матрица А такая, что l AFA — диагональная
матрица того же ранга, что и F. Другими словами, всякая симмет-
симметричная матрица конгруэнтна диагональной.
Рассмотренный выше индуктивный способ приведения билиней-
билинейной (а следовательно, и квадратичной) формы к каноническому виду
принадлежит Лагранжу A736-1813). Естественно, что на практике
его применяют в координатной записи, действуя несколько в ином
порядке. Исходя из выражения (9) квадратичной формы д(х), интер-
интерпретируемой как однородный многочлен степени 2 от п независимых
переменных
п
будем избавляться от смешанных членов XiXj, i ф j, древневавилон-
древневавилонским методом дополнения до полного квадрата. Выделим все члены,
48 Гл. 1. Пространства и формы
содержащие координату х\:
= /и х\
(визуально мы имеем суммы типа fij x±Xj + fjiXjXi, но /ji = /ij,
поэтому возникают удвоенные произведения). Предположим сначала,
что /ц ф О, и за счёт коэффициентов при членах, не содержащих xi,
выделим полный квадрат:
(/ +/ + ... + flnxnf + V] fijXiXj.
Полагая теперь
мы приведём форму q к виду
1,2ft ,
/и
где q'(x'2,... ,х'п) = Yl7j=2 fijx'ix'j — квадратичная форма от мень-
меньшего числа переменных. Считая /22 ф 0, перепишем её в виде
пЧг' тМ — f rf2 -U Р v1 Л 1 _L f г* Л 1 V^ P г* Л —
Ч \dj2i • • • 1 ^n) — J22dj 2 ~ J23 ^2*^3 "¦" • • • "¦" J2ndj2djn "¦" / ^ «/ij ^i^j —
— ——({' 7.' -L f 7.' -L _l f -/ A2 1 V^ f" Л r1
— м \J22 X2 "r «/23 X3 "r • • • ~r «/2n xn/ "•" / ^ «/ij xixj
(переход от f[ ¦ к /г''- обусловлен выделением нового полного ква-
квадрата). Очередная замена переменных
Xj — X1? X2 — ,/22x2 "r «/23X3 "Г • • • "Г J2nxrn xi ~ xi-> L ^ L->
даст нам выражение
111 J22
где q"(x'^,..., x'n) = ^Г?=з Л^ ЖГЖУ — форма от ещё меньшего числа
переменных.
Этот процесс, очевидно, продолжаем до канонической записи д(х)
в виде линейной комбинации г = rankg квадратов. Производимые по
ходу дела замены переменных невырожденны и отвечают переходам
к новым базисам. Следует сделать только одно замечание. Ограни-
Ограничительные, на первый взгляд, предположения /ц ф 0, /22 ф 0,...
таковыми не являются. Если /ц = 0, но fkk Ф 0 для некоторого
&, то достаточно поменять нумерацию переменных xi,Xk (или, что
§ 4- Билинейные и квадратичные формы 49
то же самое, иначе занумеровать базисные векторы). Если, однако,
д(х) ф 0 не содержит ни одного квадрата, т.е. fkk — О для всех &,
то без ограничения общности можно считать, что 2f\2X\X2 ф 0, а в
таком случае следует воспользоваться заменой
х\ = х[ + ж2, х2 = х[ - ж2, ж^ = ж^, к > 2.
Возникнет несократимое слагаемое 2/i2(x'1 — ж'2)? дающее возмож-
возможность начать наш процесс.
7. Вещественные квадратичные формы. Действуя над про-
произвольным полем Я (с ограничением char Я ф 2), мы не можем, во-
вообще говоря, приводить диагональные квадратичные формы к ещё
более простому виду. Если, однако, Я = Ж, то все коэффициенты в
A0) мы можем сделать равными =Ы. Действительно, при соответ-
соответствующей перестановке базисных векторов мы имеем право считать
первые s коэффициентов Ai,...,As формы A0) положительными, а
остальные отрицательными. При замене координат
Xi, 1 ^ г ^ s] x\ = \/-\i • Xi, s + 1 ^ i ^ r;
х\ — Xi,
получим 9(х) = Y.UM? - E[=i(^J-
Определение 5. Говорят, что квадратичная форма д, значения
которой вычисляются по формуле
<?(х) =х\ + ... + х28- x2s+1 - ... - xl, A1)
имеет нормальный вид.
Только что проведенное рассуждение показывает, что в случае
Я = Ж справедлив более сильный вариант следствия 1 теоремы 4.
Следствие V. Всякая квадратичная форма q на вещественном
векторном пространстве V приводится к нормальному виду.
Кроме ранга г у квадратичной формы q на векторном простран-
пространстве V над Ж появилась еще одна числовая характеристика — коли-
количество s коэффициентов 1 в её нормальном виде. Оказывается, что
число s также не зависит от способа приведения q к нормальному
виду.
Теорема 5 (закон инерции). Пусть q — квадратичная форма
на п-мерном векторном пространстве V над Ж. Тогда целые числа
г и s, s ^ г ^ п, входящие в нормальный вид A1), зависят только
от q.
Доказательство. Инвариантность г нам известна, так что
нужно лишь убедиться в инвариантности (независимости от выбора
канонического базиса) числа s. Предположим, что в каком-то другом
базисе (e'i,..., е;п) форма q имеет нормальный вид
д(х) = КJ + ... + (x'tJ - (x't+1J - ... - (x'rJ A1')
4 А.И. Кострикин
50 Гл. 1. Пространства и формы
с t положительными членами (х = Yl7=i Xiei = SlLi x'ie'i)- При t ф s
без ограничения общности считаем t < s.
Рассмотрим в V подпространства
L = (ei,...,ee)Rj L' = (е'ж,...,е'п)к.
Так как dim (L + V) ^ dim V ^ п, то по теореме б из § 2 имеем
dim (L П I/7) = dim L + dim Z/ - dim (L + L') ^
^s + (n-t)-n = s-t>0.
Стало быть, существует ненулевой вектор a G (L П Z/):
0/а = aiei + ... + ases = aj+1e'*+i + ... + a^e;n.
Согласно A1)
q(a) = а\ + ... + a2s > 0.
В то же время согласно (II7)
(возможно, что г < п, a't+1 = ... = а'г = 0). Полученное противоречие
устраняется только в случае s = t. П
Ввиду теоремы 5 для числовых инвариантов формы использу-
используются специальные термины.
Определение 6. Ранг вещественной квадратичной формы на-
называется также её индексом инерции, число s — положительным
индексом инерции, число г — s — отрицательным индексом инерции.
Под сигнатурой формы понимают либо пару (s, r — s), либо разность
2s — г между числом положительных и числом отрицательных ква-
квадратов.
Закон инерции квадратичной формы, приписываемый Дж. Силь-
Сильвестру A814—1897), ведет свое происхождение из механики. Оче-
Очевидно, что для комплексной квадратичной формы q: V —У С понятие
положительного или отрицательного индекса инерции теряет смысл,
поскольку ненулевые коэффициенты Л^ в её диагональном виде A0)
можно тогда сделать все равными 1 или все равными — 1.
8. Положительно определённые формы и матрицы. Пусть
снова V — вещественное векторное пространство. Квадратичная
форма q на V называется невырожденной, если rankg = dim^V;
другими словами, её индекс инерции совпадает с размерностью про-
пространства.
Определение 7. Невырожденная квадратичная форма q: V —У
—У Ж называется положительно (соответственно отрицательно)
определённой или просто положительной {отрицательной), когда
q(x) > 0 (д(х) < 0) для любого вектора х ф 0. Форма q называет-
называется положительно полуопределённой (или неотрицательной), если
q(x) ^ 0 для всех х G V. Наконец, форма q неопределённая, если
она принимает как положительные, так и отрицательные значения.
§ 4- Билинейные и квадратичные формы 51
Важно заметить, что эти понятия не связаны с выбором базиса.
Соответствующими нормальными формами от п = dim^V являются:
х\ + х\ + ... + х2п в случае положительной определённости;
—х\ — х\ — ... — х2п в случае отрицательной определённости;
х\ + х\ + ... + х\, г ^ п, в случае положительной полуопределён-
полуопределённости;
г > s > 0 (см. A1)) в случае неопределённости.
Записанная в каноническом базисе (е^) вещественная квадратич-
квадратичная форма g(x) = Xixl + А2Ж2 + ... + Апж^, очевидно, положительно
определена тогда и только тогда, когда все коэффициенты Л^ больше
нуля: достаточно заметить, что Л^ = д(е^).
Билинейная форма, полярная к положительно определённой ква-
квадратичной форме, также называется положительно определённой.
Аналогичная терминология переносится на матрицы. Например, ве-
вещественная симметричная матрица F называется положительно
определённой, если F соответствует положительно определённой ква-
квадратичной форме. Но положительно определённой форме в ее нор-
нормальном виде отвечает единичная матрица, поэтому, согласно след-
следствию 2 теоремы 4 имеет место
Теорема 6. Любая положительно определённая матрица F
имеет вид
F= гА-А, A2)
где А — вещественная невырожденная матрица. Верно и обрат-
обратное: всякая вещественная матрица вида A2) положительно опре-
определена.
Часто возникает необходимость непосредственно по матрице ква-
квадратичной формы судить о том, является ли она положительно опре-
определенной.
Пример. Пусть (р(х,у) — дифференцируемая функция двух вещественных
переменных, допускающая разложение в сходящийся ряд Тейлора в окрестности
начала координат. Символами (р'х, (р'у обозначаются частные производные по х
и у соответственно. Точка @, 0) предполагается критической (или, как еще го-
говорят, стационарной), т.е. (//ж@,0) = 0 = ^@,0), так что разложение в ряд
Тейлора начинается с членов нулевой и второй степени:
<р(х, у) = <р@, 0) + -{ах2 + 2Ъху + су2} + ...
Здесь а = (^^@,0), Ь = (//^@,0), с = (^^@,0), а точками обозначены члены
более высокой степени. В достаточно малой окрестности нуля этими членами
можно пренебречь, так что значение функции tp приближённо равно константе
<р@, 0) плюс 2^(v)' v = же1 + 2/е25 гДе
q(y) = ах2 + 2Ьху + су2
— квадратичная форма на V = (ei, ег). В общем случае rank q = 2, и если это так,
то критическая точка @,0) называется невырожденной. Если q положительно
определена, то, очевидно, tp имеет в @, 0) относительный минимум. Максимум
4*
52
Гл. 1. Пространства и формы
отвечает отрицательно определённой форме q. Если же сигнатура формы q равна
A,1), то в @,0) нет ни минимума, ни максимума, и критическая точка @,0)
называется седловой.
Записав q{v) в виде
а
а ф 0,
или используя аналогичное выражение при а = 0, с ф 0, мы видим, что выполне-
выполнение неравенств
а Ь
b с
а > 0,
>0
является достаточно простым необходимым и достаточным условием положи-
положительной определённости формы q и, следовательно, условием существования ми-
минимума функции ср в окрестности начала координат.
В рассмотренные выше неравенства входят определители, анало-
аналогом которых в n-мерном случае являются так называемые главные
миноры
=/ц, А2 =
/11
/21
/12
/22
Л, —
, . . . , L±k —
/и
/21
/12
/22
/life
/fcl fki
fkk
A3)
матрицы F — (fij). Таким образом, Ап = detF. Для удобства по-
положим еще Aq = 1. Роль главных миноров хорошо иллюстрируется
одним специальным способом приведения квадратичной формы q к
каноническому виду.
Теорема 7 (метод Якоби). Пусть q — квадратичная форма
на V с матрицей F, все главные миноры A3) которой отличны от
нуля.
Тогда существует базис (e'i,..., е'п) пространства V, в кото-
котором #(х) принимает канонический вид
V/ V / д V. 1 / д V. 2 / i • • • i * \ п / ' V /
Доказательство. Пусть (ei,...,en) — первоначальный ба-
базис пространства V. Рассмотрим (п — 1)-мерное подпространство
L = (ei,..., en_i). Пусть q = q\L — ограничение q на L. Матрица
F формы q получается из F вычёркиванием последной строки и по-
последнего столбца, поэтому её главными минорами будут Ai = Ai,
А2 = А2, ..., An_i = An_i. Все они по условию отличны от нуля.
Рассуждая по индукции относительно п, выберем в L базис, в кото-
котором д(х), х G I/, принимает вид
¦ ...+
§ 4- Билинейные и квадратичные формы 53
Отразим этот факт в терминах полярной билинейной формы /:
Система
из п — 1 линейных уравнений с п неизвестными х[,..., х'п обязательно
имеет ненулевое решение в Vг; этому решению соответствует х = е^.
Легко видеть, что система (e'l5 е2,..., е'п) составляет базис простран-
пространства V. Так как вектор е^ определён с точностью до скалярного мно-
множителя, то мы нормируем его условием, чтобы матрица А перехода
от базиса (е^) к (е[) имела определитель
detA = (An) = (
Пусть F' — матрица формы / в базисе (е^). Тогда /(е^,е^) = О
при г ф j и
Л ~~ Л Л * * * Л J v п' п) ~
Дп_1 А1 Д2 An_i i=i
= det F' = det (lA • F • A) = (det AJ det F = ^-,
откуда
Форма g, записанная в базисе (ej), принимает искомый вид A4). ?
Легко убедиться в том, что матрица А будет треугольной:
ei = ацеь
ef2 =
но нам этот факт не понадобится.
Следствие. Отрицательный индекс инерции квадратичной
формы #(х) = /(х,х) с матрицей F, все главные миноры которой
Ai, 1 ^ г ^ п, отличны от нуля, совпадает с числом перемен зна-
знаков в последовательности
1 = До, Аь ..., Ап.
Если, в частности,
А! >0, ..., Ап>0,
то квадратичная форма q положительно определена.
Сейчас мы увидим, что утверждение следствия обратимо.
54 Гл. 1. Пространства и формы
Теорема 8 (критерий Сильвестра). Квадратичная форма q
на п-мерном вещественном векторном пространстве V в том и
только том случае является положительно определённой, когда
все главные миноры Ai, ..., Ап её матрицы F = (fij) положи-
положительны.
Доказательство. Согласно следствию теоремы 7 неравенства
Д^ > 0, г = 1,2,..., п, обеспечивают положительную определённость
формы q. Для доказательства обратного утверждения, как и в тео-
теореме 7, используем индукцию по п, рассматривая ограничение q = q\v
формы q на (п —1)-мерное подпространство U = (ei,... ,en_i) С V =
= (ei,..., en) ((ei) — базис, в котором q имеет матрицу F).
Понятно, что главными минорами матрицы F формы q будут
Ai = Ai, ..., An_i = An_i. Так как мы считаем q положительно
определённой, то таковой будет и форма q. Стало быть, по предпо-
предположению индукции Ai > 0, ..., An-i > 0. Остаётся показать, что
Ап > 0. Но из теоремы б мы знаем, что F = гА-А, где А — не-
невырожденная матрица. Поэтому
An = det F = det lA • det A = (det AJ > 0. ?
9. Канонический вид кососимметричной формы. Уделив
основное внимание квадратичным (и заодно билинейным симметрич-
симметричным) формам, мы обратимся теперь, руководствуясь теоремой 2, к
пространству >С^"(У, Л), т.е. к билинейным кососимметричным фор-
формам. Итак, пусть
Как и в случае симметричных форм, радикалом (или ядром) формы
/ назовём подпространство
Vo=Keif = {veV\ /(v,x) =0 VxeV}.
Если Vi — любое дополнительное к Vb подпространство в У, то
V = Vo®Vu
причём ограничение /\уг будет невырожденной кососимметричной
формой. Действительно, если a G Vi, а ф 0 и /(a,xi) = 0 для всех
xi G Vi, то для любого вектора х = xq + xi G V (xq G Vo) имеем
/(a, x) = /(a, x0 + xi) = /(a, x0) + /(a, xx) = -/(xOj a) = 0
(здесь мы воспользовались кососимметричностью формы), что про-
противоречит определению Vb-
Тем самым изучение / сведено к случаю невырожденной формы.
Будем с самого начала считать, что /: V х V —> Я — невырожденная
кососимметричная билинейная форма. Пусть
V = (еье2,...,еп), х = ^Ж;е;, У =
§ 4- Билинейные и квадратичные формы 55
Тогда
где F = (/ij) — кососимметричнал матрица: fF-\-F = 0. Стало быть,
fij (xiVj ~ х
Из [ВА I, гл. 3, § 2] известно, что для определителя кососимме-
тричной матрицы F порядка п справедливо соотношение {1 +
+ (-l)n~1}detF = 0, так что неравенство detF ф 0 (условие невы-
невырожденности формы /) возможно лишь при чётных п. Мы получим
этот результат другим способом, причём заодно приведём форму /
к каноническому виду.
С этой целью введём понятие гиперболической (или симплекти-
ческой) плоскости W в V, понимая под W любое двумерное подпро-
подпространство с условием f\w ф 0. Такое подпространство найдётся хотя
бы потому, что для всякого вектора е^ ф 0 существует вектор ef2 с
/(еь е2) Ф 0- Умножая ef2 на подходящий скаляр, мы можем считать,
что f(e[,ef2) = 1; разумеется, f(e[,e[) = 0 = /(ef>,e!>).
Теорема 9. Пусть V — векторное пространство с заданной
на нём невырожденной ко со симметричной формой /. Тогда dim У =
= 2т uV — прямая сумма т гиперболических плоскостей, попарно
ко со ортогональных друг другу относительно /.
Доказательство. Применяем индукцию по п = dimV. В силу
сделанного выше замечания найдётся гиперболическая плоскость
W = (e'i,e'2) С V. Если п > 2, то рассматриваем ко со ортогональное
дополнение
W± = (xeV\f(e'i,x)=0, i = 1,2).
Дополним е^, е2 до (штрихованного) базиса пространства V. Пусть
V = (ei,ef>,...,e^), х = х'^ + ... + х'пе'п.
Тогда
/(el, х) = f[2x'2 + Лз4 + • • • + f'mx'n = 0,
/К, х) = Г21х[ + Лз4 + • • • + fLx'n = о
— линейная система ранга 2, поскольку строки матрицы F линейно
независимы. Значит, пространство решений (el1,el2I~ этой системы
имеет размерность п — 2. Так как
то мы получаем разложение
56
Гл. 1. Пространства и формы
причём ограничение / на (e^e^)^ является невырожденной косо-
симметричной формой. В таком случае по предположению индукции
(еье2)± — чётномерное пространство, являющееся прямой суммой
попарно косоортогональных гиперболических плоскостей. Значит,
п = dim V = 2т для некоторого целого числа т и V обладает бази-
базисом (е") с е" = е'ь е2' = е2, таким, что
V = \е1 •> е2/ ® \еЗ •> е4/
0
1
0
0
-1
0
0
0
0
0
0
1
0
0
-1
0
• • • © \е2га-1' e2
йе^-) =0, г
Следствие. Любая, невырожденная ко со симметричная матри-
матрица F размера 2т х 2т конгруэнтна матрице
J =
т.е. найдётся невырожденная матрица А такая, что lAFA = J.
Доказательство немедленно вытекает из теоремы 9, если вспо-
вспомнить закон изменения матрицы билинейной формы при переходе к
новому базису.
Замечание. Теорема и её следствие справедливы над любым
полем характеристики ф 2. Часто за стандартную кососимметрич-
ную матрицу выбирают
О -Еш
Ет О
Переход от J к Jo достигается переупорядочением базисных векто-
векторов.
Если говорить о практическом приведении кососимметричной
формы A5) к каноническому виду, то опять следует воспользоваться
методом Лагранжа. Именно, считая / ф 0 (в противном случае
делать нечего) и в случае необходимости переупорядочивая базис-
базисные векторы, мы придём к ситуации /12 Ф 0. Выделим в A5) все
слагаемые с переменными х\ или у\\
#l(/l22/2 + • • • + flnVn) — (fl2%2 + • • • + flnXn)yi-
С новыми переменными
%2 — /l2^2 + . . . + flnXn, У2 = Л22/2 + • • • + h-пУп
(#1,2/ъ#з,2/з? - - - ->хгпУп остаются прежними) начинается процесс вы-
§ 4- Билинейные и квадратичные формы
57
деления слагаемых, содержащих ж2, у'2:
/п22/п) + •
-х2у[
где
Х[ = X! + /з2^3 + . . . + /п2Жп, 2/1=2/1+
а точками обозначены слагаемые, содержащие лишь жз,2/з?-«-
... ,хп,уп. С ними, если они отличны от нуля, поступаем аналогич-
аналогичным образом. В конечном счёте форма / окажется приведённой к
каноническому виду:
/(Х,У) = (х[у'2 - Х'2у[) + ¦¦¦ + {Am-Wzm ~ Amv'im-x)- A6)
10. Пфаффиан. Согласно следствию теоремы 9 для любой
невырожденной кососимметричной матрицы F найдётся матрица А
такая, что
bAFA =
0 -J
О
= Jo-
Отсюда (det AJdet F = 1, т.е. detF — квадрат в основном поле Я.
Это обстоятельство наводит на мысль рассмотреть поле отношений
(поле частных)
кольца многочленов
от п(п —1)/2 независимых переменных и кососимметричную матрицу
Т = (tij) с tji = —Uj при i < j. Мы знаем, что det T — квадрат в поле
Q(t). С другой стороны, det Т — многочлен из Z[t]. Значит (здесь мы
неявно пользуемся однозначностью разложения на множители в Ъ [t];
см. [ВА I] и [ВA III]), det T — квадрат некоторого многочлена из ZJVJ:
что легко получить, вычисляя определители матриц
О —ti2 — ?13 —?
О -t
Нормируем Pn(i) = Pn(h2, hs,...) так, чтобы Рп(??2, t%,...) = 1 для
тех значений ?9. = О, =Ы переменных ?^-, для которых То = (Uj) = Jo-
При такой нормировке получается однозначно определённый много-
многочлен Pfn(t), называемый общим пфаффианом размера п. Например,
tl2
?14
0
^23
^24
~^23
0
^34
— ^24
— ^34
0
58
Гл. 1. Пространства и формы
Под Pf(F) будем понимать результат подстановки в Pfn(/^) ко-
коэффициентов fij кососимметричной матрицы F вместо tij (заменив
всюду Q на простое поле Zpj мы распространим наши рассуждения
на поля произвольной характеристики). Имеет место
Теорема 10. Если F — ко со симметричная матрица размера
п х п, то
detF = Pf(FJ.
Далее,
Pfi^AFA) = detA-Pf(F)
для любой п х п-матрицы А.
Доказательство. Соотношение det F = Pf (FJ выражает из-
известные нам свойства кососимметричной матрицы и пфаффиана.
Пусть, далее, U = (uij) — произвольная п х n-матрица с алгебраиче-
алгебраически независимыми коэффициентами щ^ Т — рассмотренная выше
кососимметричная матрица. Тогда
Pf CUTUJ = det CUTU) = (detUJ detT= (det UJ Pf (ГJ,
откуда
Pf CUTU) = ±(detU)Pf(T).
Если подставить теперь вместо щ$ vitij такие значения, что U станет
единичной матрицей, а Т — стандартной кососимметричной матри-
матрицей, то слева будет стоять Pf (Jo) = 1, а справа ±1 • Pf (Jo), т.е.
следует взять знак + . Это значит, что и для специальных матриц
U = А, Т = F справедливо доказываемое равенство. ?
Остаётся заметить, что пфаффиан Pf (Т) для Т = (tij)lm, lT =
= —Т — универсальный многочлен, являющийся однородной фор-
формой степени т, коэффициенты которой целочисленны или лежат в
простом поле.
УПРАЖНЕНИЯ
1. Пусть Ai, ..., Ап = F — главные миноры вещественной квадратичной
формы q с матрицей F. Доказать, что q и F отрицательно определены в точности
тогда, когда ( — 1)к Д& > 0 для к = 1, 2,..., п.
2. Привести пример:
а) положительно определённой матрицы А = (а^) с aij < 0 для некоторых
пар (г, j);
б) матрицы А = (aij) с aij > 0 для всех индексов г, j, которая не была бы
положительно определённой.
3. Указать Л, \i E М, для которых матрицы
1
Л
Л
Л
1
Л
Л
Л
1
,
1
1
а
1
1
11
1
1
являются положительно определенными.
§ 4- Билинейные и квадратичные формы 59
4. Пусть х = [жх, Ж2,жз] G С, Q(x) = ж^ + ж| + ж| — ЗЖ1Ж2Ж3, ? — примитив-
примитивный корень степени 3 из 1. Используя выражение
Q(x) =
убедиться в том, что Q(x)Q(y) = Q(z), где z = [21,22,23], 2j = 2j(x,y) =
= ^ • fc a-fcXjyk — билинейные симметричные формы. Найти их явный вид.
5. Пусть А — произвольная вещественная симметричная матрица, е = е(А) —
достаточно малое вещественное число. Доказать, что матрица В = Е + sA поло-
положительно определена.
ГЛАВА 2
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
Как правило, изучают не векторные пространства сами по себе,
а линейные отображения векторных пространств. Примерами могут
служить вращения, отражения, гомотетии в M|, операции дифферен-
дифференцирования и интегрирования в анализе. Для начала сосредоточимся
на наиболее общих свойствах линейных отображений.
§ 1. Линейные отображения
векторных пространств
1. Язык линейных отображении. Как мы знаем (см. [ВА I,
гл. 2, § 3]), каждой т х n-матрице А отвечает линейное отображение
срА '• ~^п —> I^m • Аксиоматизируя его свойства, мы вводим следующее
общее
Определение 1. Пусть V, W — векторные пространства раз-
размерностей п, т над одним и тем же полем Я. Отображение /: V —>¦ W
называется линейным, если
/(х + у)=/(х)+/(у), ДАх) = АДх).
Другими словами, /(ах + /Зу) = а/(х) + /3f(y). Частным типом ли-
линейного отображения служит понятие линейной функции /: V —> Я,
подробно рассмотренное нами в гл. 1.
Совокупность всех линейных отображений V —> W, обозначае-
обозначаемая символом C(V,W) (или Нот(У, W)), — векторное пространство
с естественными операциями сложения отображений и их умножения
на скаляры: если /, д G ?(V, W) и г/, \i G F, то по определению
Непосредственно проверяется, что все аксиомы векторного простран-
пространства (см. гл. 1, § 1) применительно к C(V,W) выполняются.
С любым линейным отображением /: V —>¦ W ассоциируются два
подпространства — его ядро
и образ
Im/ = {w G W\ w = /(v) для некоторого v G V}.
Ядро и образ как понятия для нас не новы, но теперь важно под-
подчеркнуть, что они являются векторными подпространствами в У и
W соответственно (лёгкая проверка, очевидная для Кег/, а для Im/
приводимая ниже). Для любого подпространства U С V условимся
писать коротко f(U) = {/(и) | и G U}. Если ui, 112 G U; v\,V2 G F, то
i/2/(u2) = /(^iui + z/2u2) G /(С/),
§ 1. Линейные отображения векторных пространств
61
поскольку i/iui + z/2u2 ? ^- Поэтому /(С/) — векторное подпростран-
подпространство в W. В частности, это относится к /(V) = Im/.
Заметим, что инъективность / равносильна равенству Кег/ =
= {0}. Действительно, в случае /(х) = /(у), х ф у, имеем 0/x-y G
Е Кег/. Обратно: если О/xG Кег/, то /(х) = 0 = /@).
Теорема 1. Пусть /: V —>¦ VF — линейное отображение. Если
U = <еь...,ев> С У, то /([/) = (/Ы,..., /(ев)> С Ж. 5 част-
К0С7ТШ,
dim/(E/) ^ dim E/.
Доказательство. По условию любой вектор u Е U записы-
записывается в виде u = aiei + ... + ases, поэтому /(u) = ai/(ei) + ...
... + asf(es), а это и означает, что f(U) = (/(ei),..., f(e8)). В том
случае, когда система (ei,...,es) была базисной для Е/, система
(/(ei),..., /(es)), вообще говоря, не обязана быть базисной для f(U),
поэтому dim/(E/) ^ s = dimE/. Вполне может случиться, что
Е/CKer/ и /(Е/) = {0}. ?
2. Задание линейных отображении матрицами. Пусть нам
заданы базисы (vb ..., vn), (wb ..., wm) векторных пространств V
и W соответственно. Любой вектор из образа Im/ С W является
линейной комбинацией векторов
a2iw2
amiwra,
/(vn) =
A)
a2nw2
Обратно, задание набора векторов w^ = /(vi), ..., w^ = /(vn) про-
пространства W полностью определяет линейное отображение /; произ-
произвольному вектору v = aiVi + .. . + anvn достаточно поставить в соот-
соответствие вектор w = aiw[ + ... + anw'n. Если v; = a[vi + ... + «^vn,
то
/(i/v
a[)w[
(i/an
Матрица
an
a22
a2n
B)
называется матрицей линейного отображения f : V ^ W относи-
относительно базисов (vi,... , vn), (wi,... , wm) ( или в базисах (vj), (w^))
пространств V и W. Различным матрицам отвечают различные ли-
линейные отображения.
62 Гл. 2. Линейные операторы
Заметим, что координаты вектора /(vj) составляют j-й столбец
матрицы Mf. Поэтому rank{/(vi),... ,/(vn)} = rankM/, а так как
всегда rank {/(vi),...,/(vn)} = dim (/(vi),..., /(vn))# = dimlm/,
то dim Im / = rank Mf.
Определение 2. Размерность подпространства Im/ называ-
называется также рангом (rank/) линейного отображения /.
Понятно, что от выбора базиса величина rank/ не зависит. Нами
доказана
Теорема 2. i) Пусть V = (vi,...,vn), W = (wi,...,wm) —
два пространства с фиксированными базисами. Тогда существует
взаимно однозначное соответствие между линейными отображе-
отображениями из V в W и т х п-матрицами с коэффициентами в основном
поле Я.
И) Произвольной системе векторов wj_,...,w^ Е W отвечает
единственное линейное отображение / : V —>¦ VF, d/иг которого
iii) Ранги линейного отображения f: V —)¦ W и отвечающей ему
матрицы Mf (при любом выборе базисов в V и W) совпадают.
Как мы знаем, все т х n-матрицы с коэффициентами в поле Я
образуют векторное пространство над Я размерности тп с базис-
базисными векторами Ец — матрицами, в которых на пересечении г-й
строки и j-ro столбца стоит 1, а на остальных местах — нули. Стало
быть, имеет место равенство
dimC(V,W) = (dim У) (dim W).
Соответствие между матрицами и линейными отображениями
можно использовать для нового доказательства известного утверж-
утверждения (см. [ВА I, гл. 2 § 3]) о ранге произведения матриц. На языке
отображений ему соответствует
Теорема 3. Пусть fog — композиция линейных отображений
и Av Aw.
Тогда:
i) dim Im (fog) ^ dim Im /;
ii) dim Im (fog) ^ dim Im g.
Доказательство. Неравенство i) очевидно, поскольку
Im (/ о g) С Im/. Для доказательства И) заметим, что Im (/ о g) =
= f(lmg). Так как dimlm/i ^ dimU для любого линейного отобра-
отображения h: U —> W, то становится очевидным и неравенство ii). ?
Пусть х = Ylj=i xjYj — вектор из У, у = /(х) = Y^Li Viwi — ег0
образ относительно линейного отображения / : V —> W с матрицей
Mf вида B) в указанных базисах (vj), (w^). Тогда в соответствии с
правилом A) имеем
§ 1. Линейные отображения векторных пространств 63
Отсюда yi = ^?=1 o>ijXj, 1 ^ г ^ m, или, коротко,
Y = Mf-X, C)
где X = [xi,...,жп], У = [з/i,...,Ут] — столбцы координат векто-
векторов х Е V и у = /(х) Е W. На C) мы смотрим как на линейное
преобразование координат (в привычном нам смысле), отвечающее
отображению /.
Пусть /, д — линейные отображения из V в W. Фиксируя в этих
пространствах базисы (vj), (w^), мы фактически переходим к рас-
рассмотрению линейных отображений / : X \—У MfX, д : X \—У МдХ
из Яп в Я171. В соответствии с нашими прежними представлениями
[ВА I, гл. 2, § 3] видим, что линейному отображению i/f + \ig (см.
п. 1) отвечает матрица
MVf + jJLg = l/Mf + flMg.
Аналогично, композиции fog линейных отображений U —У V —У W
при фиксированных базисах в С/, V и W отвечает матрица
MfOg = MfMg.
Мы лишь напомнили известные факты, ещё раз подчеркивая полную
согласованность в соответствии между линейными отображениями
и матрицами.
3. Размерность ядра и образа. Справедлива следующая
Теорема 4. Пусть V — конечномерное векторное прост-
пространство над полем Я, /: V —У W — линейное отображение. Тогда
Кег / и Im / конечномерны и
dim Кег / + dim Im / = dim V.
Доказательство (ср. с доказательством аналогичной теоре-
теоремы в [В А I, гл. 2, § 3]). Так как Кег/ С V, то dim Кег/ ^ dim У < оо.
Выберем базис (ei,..., е&) в Кег / и дополним его в соответствии с
теоремой 3 из § 2 гл. 1 до базиса (ei,..., е&, e^+i,..., еп) простран-
пространства V. Любой вектор из Im/ имеет вид
i=k+l
т.е. векторы /(e^+i), ..., /(еп) порождают Im/. Остаётся лишь по-
показать, что эти векторы линейно независимы.
Предположим, что Yn=k+i Л*/(е0 = °- ТогДа /(ЕЩ+i Л*е0 = °-
Это значит, что ElLfe+i Л^е^ е Кег/' т-е- ЕЩ+i Л^е^ = Ej=i Хзез-
Но всякая линейная зависимость между базисными элементами
ei,..., еп должна быть тривиальной. Приходим к заключению, что
Л^+1 = ... = Лп = 0. Следовательно, векторы /(e^+i),..., /(еп) ли-
линейно независимы и dimlm/ = п — к. ?
64 Гл. 2. Линейные операторы
Следствие. В случае dim/ < оо следующие свойства линей-
линейного отображения /: V —>¦ W равносильны:
i) / инъективно;
ii) dim V = dim Im /.
Доказательство. Согласно теореме dim V = dimlm/ тогда
и только тогда, когда dimKer/ = 0, т.е. Кег/ = {0}, а мы видели,
что ядро нулевое только в случае инъективности /. ?
Замечание. Если dim V = dim W и /: V —У W — линейное отоб-
отображение, то, как утверждает следствие, из инъективности (когда
Кег/ = {0}) или из сюръективности (Im/ = W) вытекает биектив-
ность /, т.е. в этом случае / является изоморфизмом.
УПРАЖНЕНИЯ
1. Записав столбец координат X = [ж1,Ж2,жз? %а\ в виде матрицы ( ^ ^2 J Е
Е М2(Д), а затем взяв фиксированную матрицу А = у1 а2 ) Е М2(Д), мы опре-
определим два линейных преобразования:
о Та
которым отвечают матрицы MfL и MfR.
Предлагается проверить, что
0
аз
0
0
а\
0
аз
а2
0
а4
0
0
а2
0
а4
CL2
0
0
аз
CL4
0
0
0
0
ai
а2
0
0
аз
2. Проверить линейность следующих отображений:
а) У — векторное пространство, W = V/L — факторпространство, / отоб-
отображает каждый вектор х Е V на смежный класс х = х + L;
б) f : Рп —> Рп — отображение, определённое по правилу f(u(t)) = tu'(t) —
-u(t). ^
Найти Кег/ и вычислить rank/.
3. Показать, что отображение fc '• X ь-»¦ С-1ХС, определённое невырожден-
невырожденной матрицей С Е Мте(Л), линейно на Мте(Л) и обладает свойством fc(XY) =
§ 2. Алгебра линейных операторов
1. Определения и примеры. Основное поле Я пока предполага-
предполагается произвольным. В случае W = V элементы векторного простран-
пространства C(V, W), которое теперь естественно обозначать символом C(V)
(используется также обозначение End V), обычно называют линей-
линейными операторами или линейными преобразованиями. Ввиду много-
многозначности термина "линейное преобразование" (связанного скорее с
§ 2. Алгебра линейных операторов 65
координатами векторов, чем с самим векторным пространством) мы
предпочтём первый из них. В дальнейшем линейные операторы будем
обозначать заглавными рукописными латинскими буквами Л, Б, С,
Т>, ..., а соответствующие им в каком-нибудь базисе (е^) пространст-
пространства V матрицы — заглавными печатными буквами А, В, С, D, ...
В другом (штрихованном) базисе (е[) тем же операторам Л, В, ...
будут отвечать матрицы А', В', ... Линейный оператор Е = Id с
матрицей Е = (Sij) всегда обозначает тождественное {единичное)
отображение х н-» х. Как правило, результат применения оператора
Л к вектору х обозначается простым приписыванием букв: Ах (реже
Л(х)).
Линейный оператор В называется обратным к Л, если Л В =
= ВЛ = ?. В соответствии с известными общими результатами (см.
[ВА I, гл. 1, § 5]) обратный к Л оператор, если он существует, од-
однозначно определён; его обозначают символом Л. Согласно след-
следствию теоремы 4 из § 1 существование Л эквивалентно условию
Кег Л = 0 или dim V = dim Im Л. В общем случае размерность ядра
dim КегЛ называется дефектом оператора Л. Стало быть, операторы
дефекта нуль и только они обратимы. Например, если уравнение
Лх = b имеет решение при всех Ь, то существует обратный опе-
оператор Л. Напомним ещё, что rank Л = dim Im Л = dim V — dim Ker Л
это ранг оператора Л. Все эти понятия и условия, переведённые на
язык матриц, нам хорошо известны, но важно признать, что поня-
понятие линейного оператора является более фундаментальным: оно не
связано с выбором какого-либо базиса.
Приведём несколько примеров линейных операторов.
Пример 1. Нулевой оператор О переводит любой вектор v ? V в нулевой:
rank О = 0.
Пример 2. Оператор подобия Л: Лх = Ах (Л — фиксированный скаляр).
Пример 3. Оператор Л поворота плоскости Ш2 на угол а проще всего
реализовать, интерпретируя Ш2 как плоскость комплексных чисел с базисом {1, г}.
Тогда, очевидно, Л : z = х + гу ь-»¦ егаz — оператор умножения на число ега =
= cos а + г sin а и Л • г = —sin a + г cos а. Поэтому в базисе A,г) матрицей опе-
оператора Л будет
( cos а
л —
\ sin a cos a
Пример 4. Пусть V = U 0 W — прямая сумма подпространств. Если
х = xjj + х^у — разложение вектора с компонентами xjj ? U, x^y G W и
"Рх = Х?/, то V называется оператором проектирования или проектором на
подпространство U параллельно W (или вдоль W) Заметим, что V2 = V.
Пример 5. Рп = A, t,..., tn~1) — пространство многочленов степени
<С п — 1 над Я, T>t = d/dt — оператор дифференцирования по t: T>t • f(t) = ff(t).
Следует предостеречь от возможной ошибки в истолковании фор-
формулы
dim Ker Л + dim Im Л = dim V A)
(см. формулировку теоремы 4 из § 1). Отсюда вовсе не следует, что
5 А.И.Кострикин
66 Гл. 2. Линейные операторы
V = Кег Д + Im Д, как показывает хотя бы оператор V из примера 5:
Кег?>= A) = Я-1 С A, ?,..., Г~2) =lmV.
2. Алгебра операторов. Мы уже знаем, что множество C(V)
всех линейных операторов на векторном пространстве V само явля-
является векторным пространством размерности
dim?(V) = (dim VJ. B)
Линейный оператор Л на У полностью определяется своим действием
на элементы х Е V. Вспоминая принципы композиции отображений,
изложенные в [ВА I, гл. 1, 2], мы полагаем, что
(А + В)х = Дх + Вх, (АЛ)х = А(Дх), (ЛВ)х = Д(Вх)
(таким образом, композиция А о В обозначается просто "приписы-
"приписыванием" А к В). Из этого определения непосредственно вытекают
соотношения
а(А + В) = аА + аВ,
(а + /3) А = аА + /ЗА,
1 • А = Л;
А(ВС) = (АВ)С (ассоциативность),
(Л + В)С = ЛС + ВС (дистрибутивность);
Х(АВ) = (ХА)В =
Мы видим, что множество линейных операторов C(V) является
одновременно векторным пространством над полем Я (первые че-
четыре соотношения C;)) и ассоциативным кольцом (следующие три
соотношения C")); последнее соотношение (Зш) смешанного типа
устанавливает дополнительную закономерность между умножением
на скаляры и композицией операторов.
Определение 1. Кольцо К, являющееся одновременно вектор-
векторным пространством над полем Я таким, что Х(аЬ) = (Ха)Ь = а(ХЬ)
для всех A G Я, а, Ъ G К, называется алгеброй над Я. Размерность К
как векторного пространства называется размерностью алгебры К
над Я. Всякое векторное подпространство L С К, замкнутое относи-
относительно операции умножения в К (L • L С L), называется подалгеброй
алгебры К.
Говоря об алгебрах, имеют в виду преимущественно ассоциатив-
ассоциативные алгебры (ab)c = а(Ъс) с единицей 1: 1 • х = х, х ? К. Именно
такой является алгебра C(V) линейных операторов на V. Матрич-
Матричный вариант Мп(Я) алгебры C(V) встречался в [ВА I, гл. 2, § 3],
§ 2. Алгебра линейных операторов 67
где приводились аналоги соотношений C/)-C///) для матриц. Хотя о
соответствии между линейными отображениями и матрицами гово-
говорилось неоднократно, в том числе в § 1, ещё раз запечатлеем в памяти
простой, но важный факт: если
п п
А: ек \-> Аек = ^ а^е;, В : е^ н> Bej = ^ bkjek
г=1 jfe=l
— линейные операторы с матрицами А = (а^), В = (bkj) в базисе
(ei) пространства V, то матрицей оператора ЛВ в том же базисе
будет С = АВ.
Действительно,
,-е< = (AB)ej = A(Bej) =
Т.е. Cij = J2kaikbkJ И (Си) = AB'
Наиболее интересные для приложений кольца являются алгебра-
алгебрами. Алгебра многочленов Я [t] — простейший пример бесконечномер-
бесконечномерной ассоциативной алгебры. В ассоциативной алгебре C{V)
размерности п2 (см. B); п = dim У) особого упоминания заслужи-
заслуживают подалгебры, порождённые одним оператором. Именно, если
А — линейный оператор, то порождённая им подалгебра Я [А] есть
наименьшая подалгебра, содержащая А. В этом частном случае удоб-
удобно считать единичный оператор Е принадлежащим Я [А]. Элемен-
Элементами подалгебры Я[А] являются всевозможные степени оператора А:
к
и их линейные комбинации. Другими словами, если
то
/(Л) = аоА™-1 + ... + am_iA + ат? D)
— наиболее общий вид линейного оператора из Я [А]. Встав на функ-
функциональную точку зрения, мы сказали бы, что f(A) — значение мно-
многочлена / G ЯЩ при t = А. Линейный оператор /(Л) вида D) дей-
действует на векторы х G V естественным образом:
/(Л)х = а0Лтх + ахА171'1* + ... + am_iЛх + атх.
Алгебра Я [А] коммутативна, поскольку
f(A)-g(A)=g(A)-f(A)
5*
68 Гл. 2. Линейные операторы
(следствие перестановочности степеней: Ак • Л1 = Ak+l = Л1 • Лк).
Какова ее размерность? Мы увидим в дальнейшем, что всегда
dim Я [Л] ^ dim V. E)
Но это сравнительно тонкий результат, а пока мы сделаем предва-
предварительные полезные замечания.
Определение 2. Говорят, что многочлен f(t) аннулирует ли-
линейный оператор Л, если /(Л) = О. Нормализованный (т.е. со стар-
старшим коэффициентом 1) многочлен минимальной степени, аннули-
аннулирующий Л, называется минимальным многочленом оператора Л.
Пусть
RAW = ^ + ^Ш~Х + • • • + »m-lt + 1Лгп F)
— минимальный многочлен линейного оператора Л. Тогда опера-
операторы ?, Л, Л2, ..., Лш~1 линейно независимы, так как соотношение
S^zo ^гЛг — О означало бы, что многочлен J^I^o ^г аннулирует
Л, хотя его степень меньше т. Обратно, если ?, Л, Л2, ..., Лт~1 —
линейно независимые операторы (как векторы пространства ?(V)),
а оператор Лт уже выражается линейно через них, то это значит,
что т — степень минимального многочлена для Л. Существова-
Существование т — тривиальное следствие включения Я [Л] С C{V). Так как
drmCiy) = n2, то т ^ п2. Тем самым доказана часть следующего
утверждения.
Теорема 1. Для всякого линейного оператора Л существует
минимальный многочлен /i^(t). Его степень совпадает с размерно-
размерностью алгебры Я [Л]. Оператор Л обратим тогда и только тогда,
когда свободный член \±ш многочлена F) отличен от нуля.
Доказательство заключительной части теоремы столь же
просто, как и проведённое выше доказательство первой части. Имен-
Именно, если \1Ш — 0, то
О = »Л(А) = AiA™-1 + /xi Am~2 + ... + nm-rf).
Значит, у Л есть делитель нуля Лт~1 + \1\Лт~2 + ... + \1ш-\? ф
Ф О (минимальность /i^(t)), а делитель нуля в кольце не может быть
обратимым. Если, напротив, /лт ф 0, то соотношение
А {-^1Ат~1 - /vWm - ... - A*-Vm-i?) = ^
вытекающее из \ij± (Л) = О, в явном виде задаёт оператор, обратный
к Л. ?
Теорема 2. Любой аннулирующий многочлен /(?) оператора Л
делится без остатка на минимальный многочлен /i^(t).
Доказательство. По предположению линейный оператор / (Л)
(см. D)) равен нулевому оператору О. Если /(?) = q(t)/jLA(t) +r(t) —
результат деления /(?) на /i^(t) с остатком г(?), то
§ 2. Алгебра линейных операторов 69
откуда г (Л) = О. Но degr(t) < deg/i^(t), так что в соответствии с
определением минимального многочлена имеем r(t) = 0. ?
Определение 3. Линейный оператор А называется нилыпо-
тентным, если Аш = О для некоторого т > 0; наименьшее такое
натуральное число т называется индексом нильпотентности.
Понятно, что fiA(t) — tm для оператора с индексом нильпотент-
нильпотентности т и ца(Ъ) = t2 — t для нетривиального оператора А с А2 = А.
Далее, fio(t) = t и /i^(t) = ? — 1. Типичным примером нильпотент-
ного линейного оператора индекса п служит оператор дифференци-
дифференцирования Ut, действующий на пространстве Рп многочленов степени
^ п — 1. Оператор проектирования V (пример 4 из п. 1) обладает
свойством V2 — V. Эти примеры будут активно использоваться в
дальнейшем.
3. Матрицы линейного оператора в различных базисах.
Пусть V — n-мерное векторное пространство над полем Я, А: V —У
—у V — линейный оператор. Выбрав в V базис (ei,..., еп), мы можем
задать А его матрицей А = (а/^), так что
Ае{ = ^2аыек. G)
к
Но тот же самый оператор А в ином базисе (е^,..., е^) пространства
V будет иметь какую-то другую матрицу А' = {а'к-)\
Ae'j = Y,a'kje'k. (Г)
к
Если В = (bij) — матрица перехода от базиса (е^) к базису (е^), то
формулы efj = ^2ibijei, I ^ i ^ n, наводят на мысль ввести линей-
линейный оператор В:
Bej = е'р (8)
с матрицей В в базисе (ei,..., еп). Так как det В ф 0 (теорема 4 из
§ 2 гл. 1), то оператор В обратим.
Наконец, определим вспомогательный оператор А!, имеющий в
базисе (ei,...,en) ту же матрицу А!, что и оператор А в базисе
(е'ь ..., е^). Другими словами, положим
'ijei. (9)
Мы имеем право это сделать, поскольку при фиксированном базисе
между линейными операторами и матрицами имеется биективное со-
соответствие. Используя G) и (8), перепишем соотношение G;) в виде
ABej = Ae'j = J2 "'irt = E a'iJB^ = B (E 4
70 Гл. 2. Линейные операторы
откуда ввиду обратимости В и ввиду выражения (9) для А' получаем
B^ABej = A'ej, l^j^n. A0)
Рассматривая все операторы Д, В и Л' в одном и том же базисе
(ei,..., еп), мы переходим от A0) к матричному соотношению
AI = B~1AB. A1)
К соотношению A1) можно прийти более прямым, координатным
путем. Пусть, как обычно, J2i х^щ — х = J2i х[е[ — запись произ-
произвольного вектора х Е V в исходном и новом (штрихованном) базисе;
X = [xi,...,хп], X' = [х[,...,х'п] — соответствующие столбцы ко-
координат. Далее, пусть Y = АХ, Y' = АX'', где А, А' — матрицы,
определённые соотношениями G) и G'). Так как X = ВХ', Y = BY'
(см. D') из § 2 гл. 1), то
АВХ' = AX = Y = BY' = ВА'Х'.
Ввиду произвола в выборе столбца X' (вектора х G V) имеем АВ =
= В А', откуда А' = В~ХАВ.
Итак, мы дважды убедились в том, что справедлива
Теорема 3. Матрица А' линейного оператора А в базисе
(е[,... ,е^) получается из матрицы А того же оператора А в ба-
базисе (еь ... ,еп) по формуле A1), где В — матрица перехода от (е^)
*(е;).
Определение 4. Говорят, что матрица А' подобна матрице А и
пишут А' ~ А, если существует невырожденная матрица В, связыва-
связывающая А и А' соотношением A1). Предполагается, что все матрицы
квадратные одинакового порядка, с коэффициентами из одного и
того же поля Я.
Ясно, что всегда А ~ А (взять В = Е). Далее, соотношение A1),
переписанное в виде А = В^1 А'В\ с В\ — В~х, показывает, что отно-
отношение подобия симметрично: А' ~ А =^ А ~ А'. Оно также транзи-
тивно: если А' = В~ХАВ, А" = С'1 А1 С, то А" = (ВС)-1А(ВС), т.е.
А" ~ А', А' ~ А =^ А" ~ А. Таким образом, отношение подобия
является отношением эквивалентности, и все квадратные матрицы
порядка п разбиваются на непересекающиеся классы подобных ма-
матриц (сравнить с классами эквивалентности матриц из [ВА I, гл. 2,
§ 3, п. 6]). Согласно теореме 3 каждому линейному оператору соот-
соответствует ровно один класс подобных матриц, а подобные матрицы
служат матрицами одного и того же линейного оператора в различ-
различных базисах.
Язык линейных операторов удобен в теоретических исследова-
исследованиях, однако конкретные вычисления чаще всего реализуются в ма-
матричной форме. Поэтому классификация матриц с точностью до по-
подобия является весьма важной с практической точки зрения. Если,
скажем, нам требуется вычислить степень Ак матрицы А порядка
§ 2. Алгебра линейных операторов 71
п > 1 (или даже п > 100) для большого показателя к ^ 1000 (а та-
такие задачи встречаются на практике), то естественно попытаться
найти матрицу А' ~ А с легко вычислимой степенью (А')к. Проще
всего это сделать с А' = diag(Ai,..., Лп), коль скоро такая матрица в
классе подобия с представителем А существует. Тогда А = ВА'В~1
и Ак = В diag (Af,..., A*) B~l. В этом отношении достаточно ти-
л ( ° М
пична матрица Л = I 1, имеющая прямое отношение к числам
Фибоначчи и являющаяся главным "героем" в [ВА I, гл. 2, § 3, п. 5,
пример 3]. Добавим ещё, что умение вычислять степени Ак даёт воз-
возможность находить значения
f(A) = а0Ат + ахА771'1 + ... + аш^А + атЕ
для произвольного многочлена /(?) = a^t771 + ... + ат.
4. Определитель и след линейного оператора. Пусть Л —
линейный оператор на V. Его определителем называется определи-
определитель det А матрицы А, соответствующей Л в каком-нибудь базисе
пространства V. Так как det (В~1АВ) = det А, то det Л — инвари-
инвариант оператора Л. Обратимым матрицам отвечают обратимые опе-
операторы, поэтому det Л / 0 — необходимое и достаточное условие
обратимости оператора Л. В случае det Л = 0 мы имеем дело с вы-
вырожденным линейным оператором Л.
Назовём теперь следом линейного оператора Л выражение
п
tr Л = tr A = y^ajj,
г=1
где А = (а^-) — матрица, отвечающая Л (tr — сокращение от ан-
английского trace). Как известно и как легко проверяется,
tiAB = tTBA A2)
для любых матриц А, В одинакового порядка. Применяя это соотно-
соотношение к матрицам В~^ А и В, где В невырождена, получим
1 trE-5-1A) =trA
Значит, определение следа оператора корректно, т.е. не зависит от
выбора базиса в V. Аналогом A2) является соотношение
Обе введённые функции det и tr: C(V) —> Я играют важную роль.
Функция det мультипликативна (det ЛВ = (det A)(det Б)), и с её по-
помощью выделяется группа Aut V автоморфизмов пространства У,
или, что эквивалентно, группа всех невырожденных линейных опе-
операторов на V. Нетрудно сообразить, что при любом выборе базиса в
V группа Aut V превращается в известную из [ВА I] полную линей-
линейную группу GLn(&) матриц порядка п = dim# V. Более точно: имеет
место изоморфизм групп Aut V = GLn(&).
72 Гл. 2. Линейные операторы
Функция tr линейна:
tr (
(легко проверить), и этот факт широко используется в математике;
так, содержательная теория характеров групп (см. [ВА III]) цели-
целиком основывается на понятии следа. Рассмотрим более "скромные"
применения.
Пример 6 (алгебры Ли). Алгебры, как и кольца, не обязательно должны
быть ассоциативными. Очень важным примером неассоциативной алгебры явля-
является так называемая алгебра Ли L (или лиева алгебра — в честь Софуса Ли
A842-1899)), в которой операция умножения (х, у) i—>¦ х * у удовлетворяет двум
аксиомам:
i) (х * х) = О; тогда (х + у) * (х + у) = 0 => х * у = —у * х (свойство
антикоммутативности);
п) (х * у) * z + (у * z) * х + (z * х) * у = О (тождество Якбби).
Операцию х*у чаще обозначают символом [х,у] и называют операцией ком-
коммутирования. Векторное пространство L = М3 = (е^) есть трёхмерная алгебра
Ли с операцией умножения — векторным (или внешним) произведением векто-
векторов: если
+ + у = + +
[х,у] = (Ж22/3 - жз2/2)е1
Легко проверить, далее (а такую проверку каждый математик должен про-
провести хотя бы раз в жизни), что, задав на множестве L = C(V) новую операцию
умножения по правилу
[А,В]=АВ-ВА, A3)
мы удовлетворим обеим аксиомам i), ii) и можем смотреть на C(V) как на ал-
алгебру Ли. Её принято обозначать символом $1п(Я). Имеется глубокая теорема,
согласно которой всякая конечномерная алгебра Ли над Я является подалгеброй
алгебры Ли (?(V); [, ]), где V — некоторое векторное пространство конечной
размерности над Я (напомним, что подалгебра — подпространство в C(V), за-
замкнутое относительно операции [, ]).
Алгебры Ли, конечномерные и бесконечномерные, играют весьма существен-
существенную роль в квантовой механике (см. учебное пособие [2] в списке дополнитель-
дополнительной литературы). Дело в том, что так называемые динамические переменные в
квантовой теории подчиняются законам некоммутативной алгебры, и степень
их неперестановочности измеряется как раз "коммутаторами" A3). Мы полу-
получим нетривиальный и в некотором смысле близкий к квантовой теории пример
коммутационного соотношения, если возьмём в качестве V бесконечномерное
пространство всех многочленов над Я. Пусть T>t = d/dt — оператор дифферен-
дифференцирования по t, a Tt — оператор умножения на t: T>t(f) = f, Pt(f) =t-f. Легко
проверить, что
\РиЪ\ = VtTt - TtVt = 8 A4)
— единичный оператор на V = Я[г].
Возникает вопрос: может ли выполняться соотношение [А, Б] = ? типа A4)
в конечномерной алгебре ?(V)? Ответ на него оказывается зависящим от харак-
характеристики основного поля. Если Я = С или Я = Ж (наиболее интересные случаи),
то сразу же приходим к противоречию:
О = trAB-trBA = tr[A,B] = tr? = n = dimV.
§ 2. Алгебра линейных операторов
73
Однако при р\п, где р = char Я, это противоречие устраняется, как показывают
операторы с матрицами порядка р над Я:
A5)
0
0
0
0
0
1
0
0
0
0
0 ..
1 ..
0 ..
0 ..
0 ..
. 0
. 0
1
. 0
. 0
0
0
0
1
0
0
1
0
0 ...
0 ...
2
0
0
0
0
0
0
о о
>- 1 О
Прежний критерий с функцией tr здесь не срабатывает, и на самом деле [Jp, Np] =
УПРАЖНЕНИЯ
1. Проверить, что обе матрицы вида A5) нильпотентны: Jp = Np = 0.
2. Показать, что если А, В, С — матрицы размеров пхр, pxq, qxn соот-
соответственно, то tr (ABC) = tr (ВСА) = tr (CAB).
3. Интерпретируя GLn(?p) как группу автоморфизмов Aut V векторного
пространства V размерности п над полем ?р из р элементов, найти порядок
4. Показать, что множество 51п(Я) линейных операторов со следом нуль явля-
является подалгеброй коразмерности 1 в алгебре Ли $1п(Я) = C(V).
5. Доказать, что для любых линейных операторов А, В на V имеет место
равенство
rank A = rank В + dim (Im А П Кег В).
6. Используя упр. 5, доказать, что для любых линейных операторов Л, В, С
на V справедливо неравенство Фробениуса
rank В А + rank AC ^ rank A + rank ВАС.
7. Доказать, что для любого линейного оператора А: V —>¦ V и для любого
г ^> 1 имеет место формула
dim (Im Аг~1 П Ker A) = dim Ker Аг — dim Ker Аг~1
(для г = 1 формула очевидна; следует иметь в виду, что по определению всегда
8. Доказать, что две матрицы А, В Е МП(Ш), подобные над полем комплекс-
комплексных чисел, будут подобны и над полем вещественных чисел.
9. По аналогии с определением 2 назовём f(t) аннулирующим многочленом
оператора А относительно вектора v Е V, если f(A)v = О. Аннулирующий нор-
нормализованный многочлен минимальной степени называется минимальным мно-
многочленом оператора А относительно v. Обозначим его /хд^(?). Будем считать
поле Я бесконечным. Доказать, что:
а) AM.,v(?) делит /х,д(?);
б) существует a G У с /J-A,a(t) — АМ.(?)«
10. Пусть У — векторное пространство, С/, W — два его подпространства,
причём
— прямые разложения, где W{ С V{, г = 1,2. Пусть, далее, V% — проекция V на
V~i параллельно Vj, j ф г.
Доказать:
74 Гл. 2. Линейные операторы
а) если
V1=W1 + UnV1, V2=W2+V2(U), (*)
то V = W + U-
б) если V = W + U и V2(U) П W^ = О, то справедливы разложения (*) для Vi,
V2, причём И^ П С/ = Wi П С/.
11. Доказать, что любая матрица А ? Мп(Я) с коэффициентами в поле Я
характеристики нуль и с нулевым следом подобна матрице А' с нулями по главной
диагонали (А' = (а^-), а'п = а'22 = • • • = апп = °)-
12. Существенно ли в упр. 11 ограничение char Я = О?
§ 3. Инвариантные подпространства
и собственные векторы
1. Проекторы. Пример 4 из § 2, п. 1 устанавливает связь между
разложением V в прямую сумму двух подпространств и оператором
проектирования V, обладающим, как мы знаем, свойством V2 = V.
Обратно: всякий оператор с этим свойством является оператором
проектирования. Мы докажем это утверждение в следующем более
общем контексте.
Пусть V = W\ © W2 © ... © Wm — разложение в прямую сумму
т подпространств (см. п. 5 § 2 гл. 1). Тогда каждый вектор х G V
однозначно записывается в виде
х = xi + х2 + ... + xm, Xi е Wi,
а отображение Vi : х \—у х^ является линейным оператором на V.
Кроме того,
причём ViVj = О при г ф j и Vf = Vi. Наконец,
Wi = ViV = {х е V\ Vi* = х},
Ki = KerVi = Wx + ... + Wi + ... + Wm
и Vi суть оператор проектирования V на Wi вдоль Ki.
Теорема 1. Пусть V\,... ,Vm: V -У V — конечное множество
линейных операторов, удовлетворяющих условиям
т
Y,Vi = ?; V?=Vh l^i^m; ViVj = О, i^j. A)
г=1
Доказательство. По условию для любого х G V имеем
х = ?х = 2^7^х = xi + ... + xm, Xi e Wi.
§ 3. Инвариантные подпространства и собственные векторы 75
Поэтому V = W\ + ... + Wm. Эта сумма является прямой, в чём мы
убедимся, применив критерий из гл. 1, § 2, п. 5 (теорема 7). Именно,
предположим, что х Е Wj П (X^j Wi). Так как W\ = imVi, то най-
найдутся такие векторы xi,...,xm, что
Применяя к этому равенству оператор Vj и используя определяющие
свойства Vj = Vj, VjVi = О при г ф j, получим
х = Vj
Таким образом, сумма V = J^ Wi прямая и Vi — оператор проекти-
проектирования V на Wi вдоль Ki = KeiVi = ^ •/f Wj. D
Добавим, что если Р2=РиУ = [/01У — связанное с этим про-
проектором прямое разложение с U = 1т V = (eb ..., er), W = КегР =
= (er+i,..., еп), то в выбранном базисе оператору V отвечает
матрица
Р= f
f I , r = rankP. B)
В частности, мы видим, что любая п х n-матрица А ранга г, обла-
обладающая свойством А2 = А, подобна матрице Р: В~хАВ = Р и
rank A = tr A.
Замечание. Часто говорят, что операторы V\, ..., Vm, удовле-
удовлетворяющие соотношениям
ViVj = SijVh l^ij^m,
составляют ортогональную систему {Vi\ 1 ^ г ^ т} идемпотент-
ных операторов, а отвечающие им матрицы — ортогональную си-
систему {Pi\ 1 ^ г ^ т} идемпотентных матриц. Если выполнены все
условия A), то говорят о полной ортогональной системе.
2. Инвариантные подпространства. Всякий линейный опе-
оператор Л'. V —У V действует не только на отдельные векторы х G V,
но и на подпространства U С V: AU = {Лх| х G U}. В связи с этим
исключительно важное значение приобретает понятие инвариантно-
инвариантности.
Определение 1. Подпространство U С V инвариантно отно-
относительно линейного оператора А: V —> V, если AU С U.
Например, Кег*4 и Im*4 — инвариантные подпространства, хотя, возможно,
и тривиальные, т.е. совпадающие с {0} или с V. Для оператора дифференциро-
дифференцирования T>t на пространстве Рп многочленов степени <С п — 1 сразу же выделяется
цепочка
{0} С Vi С V2 С ... С Vn = V C)
инвариантных подпространств V{ многочленов степени ^г — 1;г = 1,2,...,п.
Рассмотренное выше (п. 1) семейство операторов проектирования Vi,... ,Vm
76 Гл. 2. Линейные операторы
замечательно в том отношении, что с ним ассоциировано большое число подпро-
подпространств
Wjj 0 Wi2 0 ... 0 Wik , {ii,... ,г&} С {1, 2,..., га},
инвариантных сразу относительно каждого оператора V\,..., Vm (мы здесь ис-
использовали то очевидное обстоятельство, что сумма и пересечение в V подпро-
подпространств, инвариантных относительно линейного оператора Л, всегда инвари-
инвариантны).
Пример противоположного свойства доставляют матрицы Jp, Np, указанные
в конце § 2. Отвечающие им операторы действуют на р-мерном пространстве
V = Яр (над полем Я характеристики р > 0) таким образом, что у них нет
общего нетривиального инвариантного подпространства. Можно указать одну
существенную причину такого различия: [Vi,Vj] = О, в то время как [Jp, Np] ф 0.
Над полем Ж также может проявляться подобный феномен. Оператор Л по-
поворота плоскости М? на угол а @ < а < тг; см. пример 3 из п. 1) не имеет
нетривиальных инвариантных подпространств — прямых, которые переходили
бы в себя при действии Л.
Наличие собственного инвариантного подпространства {0} С
С U С V даёт возможность упростить матрицу А оператора А
путём выбора надлежащего базиса в V. Именно, если дополнить ба-
базис (еь...,ет) в U до базиса (еь ..., ет, ет+ь ..., еп) в У, то из
условия Aei Е U, 1 ^ г ^ т, следует, что в этом базисе матрицей
оператора А будет
Ах Ао
0
А=
D)
где А\ — т х m-матрица, А<± — (п — т) х (п — т)-матрица и io —
т х (п — т)-матрица. На А\ можно смотреть как на матрицу ли-
линейного оператора Аи — оператора Л, ограниченного на U (удобно
положить А\ — Ац).
Представим на минуту, что Aq — нулевая матрица. Тогда, оче-
очевидно, W = (em_|_i,... ,еп) тоже будет инвариантным подпростран-
подпространством в V, а Аъ — матрицей оператора Aw- В этом случае говорят
о прямой сумме операторов
соответствующей разложению V = U © W в прямую сумму инвари-
инвариантных подпространств. Матрица прямой суммы операторов имеет
клеточно-диагональный вид:
Аи 0
0 Aw
Нами фактически доказана
Теорема 2. Пространство V является прямой суммой двух
подпространств U, W, инвариантных относительно линейного опе-
оператора А : V —> V, тогда и только тогда, когда матрица этого
оператора в каком-либо базисе принимает клеточно-диагональный
вид E').
А =
§ 3. Инвариантные подпространства и собственные векторы 77
Это утверждение очевидным образом переносится на любое
число т инвариантных подпространств, прямая сумма которых сов-
совпадает с V. При т = п = dim У мы приходим к условиям, когда
матрица линейного оператора в подходящем базисе становится диа-
диагональной.
Вернёмся к тому случаю, когда в равенстве D) матрицу Aq нельзя
сделать нулевой, как бы мы ни выбирали векторы em+i,..., еп, до-
дополняющие базис (ei,... ,em) инвариантного подпространства U С
С V. Это значит, что хотя по теореме 9 из § 2 гл. 1 пространство V
разлагается в прямую сумму V = С/0 W многими способами, ни одно
из дополнительных подпространств W не инвариантно относительно
Л. Такую ситуацию лучше всего иллюстрирует оператор дифферен-
дифференцирования Vt: если Vi — одно из инвариантных подпространств Vi
в цепочке C) и V = Vi © Wi, то заведомо (Dt(Wi)) П Vi ф 0.
Заметим в заключение, что если A(U) С С/ и B{U) С С/, т.е. U —
общее для Ли В инвариантное подпространство, то U инвариантно
относительно линейных комбинаций а Л + (ЗВ и произведений АВ,
ВА. В частности,
AU С U => f(A)U С U
для любого многочлена / G
3. Собственные векторы. Характеристический много-
многочлен. Одномерные инвариантные подпространства заслуживают
специального рассмотрения.
Определение 2. Любой ненулевой вектор из одномерного под-
подпространства, инвариантного относительно Л, называется собствен-
собственным вектором оператора А. Если х — собственный вектор:
Лх = Ах,
то скаляр A G Я называется собственным значением оператора Л,
отвечающим собственному вектору х. Иногда говорят также: харак-
характеристический вектор, характеристическое значение.
Заметим, что
Лх = Ах => Л^х = А^х,
откуда
/(Л)х = /(А)х, F)
каков бы ни был многочлен / G Я[г]. В частности,
f(A) = О => /(А) = 0 G)
для всякого собственного значения А оператора Л.
Пусть
Vх = {v е V\ Av = Av}
— подпространство, состоящее из 0 и всех собственных векторов,
ассоциированных с собственным значением А.
78 Гл. 2. Линейные операторы
Определение 3. Очевидная импликация
Лх = Ах, Лу = Ау =^ А(ах + (Зу) = Х(ах + (Зу)
даёт основание называть Vх собственным подпространством опе-
оператора Л, ассоциированным с А. Его размерность dim Vх называется
геометрической кратностью собственного значения А.
Условие существования собственного вектора записывается, оче-
очевидно, в виде
т.е.
Кег (А - Х?) ф 0.
Это значит, что оператор А — ХЕ вырожден:
det (А - Х?) = 0. (9)
Если в каком-нибудь базисе (е^) пространства V матрицей оператора
А является А = (а^), то матрицей оператора А — ХЕ будет А — ХЕ,
так что условие (9) переписывается в виде
det (А - ХЕ) =
^22 ~ X
= 0. (90
ап2 • • • апп — X
Пусть х = x\G\ + ... + хпеп — собственный вектор оператора
А с собственным значением А. В матричной записи равенство (8)
принимает вид
а12х2 + ... + alnxn = 0,
- А)Ж2 + . . . + CL2nXn = 0,
... + (апп - Х)хп = 0.
Полученная система линейных однородных уравнений с определите-
определителем (9;), равным нулю, имеет нетривиальные решения. Как мы знаем
из [ВА I], линейное пространство всех решений этой системы совпа-
совпадает с собственным подпространством Vх оператора А. Размерность
dim Vх (или геометрическая кратность А) равна п — г, где г — ранг
матрицы А — ХЕ.
Развернув определитель det {tE — А) = (—l)ndet (A — tE) по фор-
формуле C) из [ВА I, гл. 3, § 1]:
det (tE -A)=
мы получим нормализованный многочлен
XA(t) = det (tE -A)=tn + xit71'1 + • • • + Xn-it + Xn
§ 3. Инвариантные подпространства и собственные векторы 79
степени п относительно независимой переменной t с коэффициен-
коэффициентами Хг ? Я.
Определение 4. Многочлен A0) называется характеристи-
характеристическим многочленом матрицы А. Уравнение Ха(Ъ) = 0 называется
также характеристическим (иногда говорят о вековом уравнении
матрицы А).
На самом деле можно говорить о характеристическом многочлене
(или уравнении) линейного оператора Л, а не какой-то ассоциирован-
ассоциированной с ним матрицы А, поскольку наряду с теоремой 3 из § 2 имеет
место несложная
Теорема 3. Характеристические многочлены подобных
матриц совпадают.
Доказательство. Пусть А' = С~1АС. Тогда det (tE - А') =
= det (tC'1 EC - С'1 AC) = (C~x(tE - A)C) = det C'1 det (tE-
-A)detC = det (tE-A). ?
Итак, полагаем
XA(t):=XA(t).
Определяющее равенство A0) показывает, что скаляр Л Е Я явля-
является собственным значением оператора Л тогда и только тогда, ко-
когда хл(А) = 0, т.е. Л — корень характеристического многочлена.
Если многочлен хл(^) не имеет корней в ^, то у оператора Л нет
собственных векторов. Всякий линейный оператор, действующий
на комплексном векторном пространстве, обладает собственными
векторами.
Определение 5. Кратность Л как корня характеристического
многочлена хл(^) называется алгебраической кратностью собствен-
собственного значения Л оператора Л.
Теорема 4. Геометрическая кратность собственного значе-
значения Л не превосходит его алгебраической кратности.
Доказательство. По определению геометрическая кратность
есть размерность т пространства Vх решений уравнения Лх = Лх.
Очевидно, что Vх инвариантно относительно Л, и если Л1 — ограни-
ограничение Л на Vх, то det (tE'-A1) = (?-A)m, причём хд(*) = (t-A)m^(t),
где q(t) — некоторый многочлен из Я [t]. Пусть А — корень кратности
к ^ 0 многочлена q(t). В таком случае алгебраической кратностью А
будет т + к. ?
4. Критерии диагонализируемости. Корни характеристиче-
характеристического многочлена Хл{^) (говорят также: характеристические корни)
составляют множество, несущее важную информацию о линейном
операторе Л. По понятным причинам, однако, не все характеристи-
характеристические корни равноправны.
Определение 6. Множество всех собственных значений линей-
линейного оператора Л называют спектром этого оператора и обозначают
символом Spec Л (собственные значения считаются с их геометри-
80 Гл. 2. Линейные операторы
ческими кратностями). Аналогично говорят о спектре Spec А мат-
матрицы А. Точка спектра называется простой, если ей отвечает геомет-
геометрическая кратность 1. Если все точки спектра простые, то и спектр
называется простым.
В случае алгебраически замкнутого поля, например, Я = С, ха-
характеристические корни совпадают с точками спектра, но в общем
случае спектр может быть пуст, как, например, для оператора пово-
поворота на вещественной плоскости.
Лемма 1. Собственные векторы, принадлежащие к различным
собственным значениям, линейно независимы. Сумма ^2\е$ресдУх
прямая (вообще говоря, J^A Vх не совпадает с V).
Доказательство. Пусть Ai,..., Хт — какие-то различные соб-
собственные значения, VXl,..., VXm — соответствующие собственные
подпространства. Выберем в каждом VXi по одному собственному
вектору е^. Нужно доказать их линейную независимость. Для т = 1
утверждение верно. Рассуждая по индукции относительно т и пред-
предполагая существование нетривиальной линейной зависимости
aiei + а2е2 + ... + атет = О,
где, скажем, а± ф 0, мы применим к обеим частям этого равенства
оператор А. Так как Ле^ = А^, то
aiAiei + a2A2e2 + ... + атХтет = 0.
Умножая первое соотношение на Хт и вычитая из него второе, при-
приходим к линейной зависимости первых т — 1 векторов:
OLi(\m - Ai)ei + ... + am_i(Am - Am_i)em_i = 0.
По предположению индукции ai(Xm — А^) = 0, i = l,...,m — 1. Но
oti фО, ХтфХг, i <т => ai(Am - Ах) Ф 0.
Полученное противоречие доказывает наше утверждение.
По определению любой отличный от нуля вектор е^ G VXi явля-
является собственным. Поэтому по доказанному VXi П^ -^ VXj = 0. Это
и значит, что сумма ^2i VXi прямая. ?
Определение 7. Линейный оператор А на n-мерном простран-
пространстве V называется диагонализируемым, если существует базис (е^),
относительно которого матрица оператора принимает диагональ-
диагональный вид
Ai 0 ... 0
А= 0 А2 ... 0
0 0 ... Ап
Теорема 5. Линейный оператор А с простым спектром диаго-
нализируем.
§ 3. Инвариантные подпространства и собственные векторы 81
Доказательство. Формулировка теоремы предполагает, что
многочлен ха(Ъ) имеет в основном поле Я п = dim У различных
корней Ai,...,An, которым отвечают собственные векторы е^, г =
= 1,...,п. По лемме 1 эти векторы линейно независимы. Значит,
V = (еь... ,еп), и так как Ащ = K^i, то Л = diag(Ab..., Ап). ?
Простота спектра оператора является всего лишь достаточным
условием его диагонализируемости. Например, идемпотентный опе-
оператор диагонализируем (см. B)), хотя его спектр при п > 2 не будет
простым. Внутреннюю причину этого факта отчасти объясняет
Теорема 6. Пусть А — линейный оператор на конечномерном
векторном пространстве V над полем Я. Для диагонализируемости
Л необходимо и достаточно выполнения следующих двух условий:
i) все корни характеристического многочлена Хл{^) лежат в Я;
И) геометрическая кратность каждого собственного значения
А совпадает с его алгебраической кратностью.
Доказательство. Пусть выполнены условия i), ii). Если
Ai,..., Am — различные корни многочлена XA(t), a fci,..., fcm — их
кратности, то
dim VXi = ki, ki + k2 + ... + km = n. A1)
По лемме 1 любая совокупность не равных одновременно нулю век-
векторов Vi G VXi, i = 1,..., m, линейно независима, так что
v\i n (y\i + т т т + ух, + т т т + vxm^ = д. A2)
Значит (см. теорему 7 из § 2 гл. 1), сумма VXl + ... + VXm прямая, а
с учётом равенств A1) получаем
V = VXl +... + VA™. A3)
Взяв за базис в V объединение базисов в VXi, мы придём к собствен-
собственному базису, т.е. к базису, состоящему из п линейно независимых соб-
собственных векторов оператора Л. Его существование эквивалентно
диагонализируемости Л.
Обратно: пусть оператор Л диагонализируем. Снова обозначим
через Ai,..., Am его различные собственные значения и положим ^ =
= dim VXi, 1 ^ г ^ т. Условие A2) по-прежнему выполнено, а так как
V имеет собственный базис, состоящий из элементов подпространств
Vx\ то УЛ1,...,УЛт порождают V. Из этого мы заключаем, что
имеет место равенство A3). Относительно базиса, получающегося
объединением базисов в VXi, матрицей оператора Л будет
А = diag(Ab...,Ai; ...; Am,...,AmJ).
h lm
Из равенства
XA(t) = хаЦ) = det (tE -A) = (t- ХгУ1 ... (t - \mI™
6 А.И. Кострикин
82 Гл. 2. Линейные операторы
вытекает, что все корни многочлена Хл(^) принадлежат Я, т.е. вы-
выполнено условие i), и что целое число U совпадает с алгебраической
кратностью ki корня Л^ (см. A1)) для г = 1,... , т. ?
5. Существование инвариантных подпространств. Все
рассуждения, связанные с инвариантными подпространствами, соб-
собственными значениями и собственными векторами оператора, про-
проходят, в принципе, над произвольным полем. Однако существова-
существование рассматриваемых объектов находится в прямой зависимости от
основного поля, в чём мы убеждаемся на примере наиболее важных
полей ЕиС.
Теорема 7. Всякий комплексный {соответственно веществен-
вещественный) линейный оператор А имеет одномерное {соответственно од-
одномерное или двумерное) инвариантное подпространство.
Доказательство. Так как характеристический многочлен
ХаA) имеет в С хотя бы один корень, то известный метод нахожде-
нахождения собственных векторов заведомо даст одномерное инвариантное
подпространство исходного пространства V.
В случае вещественного поля Ш. рассмотрим минимальный много-
многочлен fiA(t) оператора А (см. определение 2 из § 2). Его коэффициенты
лежат в Ж. Если /i^(^) имеет вещественный корень а, то
/iA(t) = (t-a)g(t), g(t)eR[t].
Так как д(Л) ф О в силу минимальности /i^(t), то д(Л)и ф 0 для
некоторого вектора u Е V. Но
(Л - а?) = (Л- а?)д(А)и = цл(А)и = О,
откуда Av = av, т.е. v — собственный вектор.
Предположим теперь, что А не имеет собственных векторов.
Тогда по доказанному у /i^(t) нет вещественных корней. Но по тео-
теореме о многочленах с вещественными коэффициентами [ВА I, гл. 6,
§ 4, теорема 1] мы имеем право записать
liA(t) = (?2 - at - /3)h(t), а,/Зе Ж, h(t) eR[t].
Снова v = h(A)u ф 0 для некоторого u G V и
A2y - olAv - Pv = 11а{Л)м = 0.
Получается, что A2v = aAv + /3v, а так как Av ф Av (одномерного
инвариантного подпространства нет), то L = (v,Av) — двумерное
инвариантное подпространство. ?
6. Сопряжённый линейный оператор. Посмотрим, в какой
связи находятся понятия оператора и сопряжённого пространства.
Пусть V — векторное пространство над полем Л, У* — сопряжённое
к нему пространство и А — линейный оператор на V. При любом
фиксированном элементе / G V* отображение х н-» (/, Ах) := f(Ax)
(в обозначениях п. 2 § 3 гл. 1) снова является элементом из У*, т.е.
§ 3. Инвариантные подпространства и собственные векторы 83
линейной функцией:
(/, Л(ах + /Зу)) = (/, аЛк + (ЗАу) = а(/, Лх) + /?(/, Лу).
Раз это так, то мы можем положить
(Л7,х):=(/,Лх), A4)
считая символ Л*/ некоторой линейной функцией на У. Соответ-
Соответствие Л* : / н-» Л*/ при переменном / определяет линейное отобра-
отображение У* —> У*:
=а(/,Лх)
= а(Д7, х) + /3(Д*я, х) = (aA*f + /Ы*<?, х),
так что Л* G ?(У*).
Определение 8. Линейный оператор Л* на У*, заданный со-
соотношением A4), называют оператором, сопряжённым к Л G C(V).
Итак, мы имеем отображение C(V) —> ?(V*), а именно *: Л 4
|—>- Л*. Непосредственно из определения мы выводим следующие его
свойства:
O*v = CV*, ?*, = 5у, (аЛ)* = olA\
(Л + Б)* = Л* + Б\ (АВУ = Б* Л*. A5)
Например, последнее соотношение в A5) доказывается так:
((AB)*f,x) = (f,(AB)x) = (f,A(Bx)) = (A*f,Bx) = (BM*/,x).
Чтобы задать оператор Л* в матричном виде, естественно вы-
выбрать в У и У* дуальные базисы (е^), (ег). Если Aej = ^^=
то
п п
Положив, далее,
п
А'е* = *?<*&",
k = l
будем иметь (Л*ег,е^) = YJl=i ali(ek> ei) = aji- Так как^ с ДРУГОИ
стороны, в соответствии с A4) (Л*ег,е:/) = (ег, Ле^) = а^-, то a*f =
= a^j. Следовательно, верна
Теорема 8. Если в базисе (е^) пространства V линейный опе-
оператор А имеет матрицу А = (ciij), то в дуальном базисе ег про-
пространства У* сопряжённый к А оператор А* имеет транспониро-
транспонированную матрицу lA\ A* = (a*j) = lA. ?
Заметим, что рефлексивность конечномерных векторных прост-
пространств, дающая возможность отождествить У** и У посредством
6*
84 Гл. 2. Линейные операторы
естественного изоморфизма (теорема 2 из § 3 гл. 1), на уровне опе-
операторов выражается в виде
Л** = Л. A6)
Действительно, в силу рефлексивности любую линейную функцию на
V* можно мыслить себе как / н-» (/, х) при некотором фиксирован-
фиксированном х Е V. В частности, (Л*/, х) = (/, у). По определению у = Л**х.
Стало быть,
(/, Ах) = (A*f, x) = (/, А**х),
откуда и вытекает соотношение A6). Оно показывает, что отобра-
отображение Л !->¦ Л**, обладающее свойствами A5), взаимно однозначно.
Его называют антиизоморфизмом алгебр C(V) и C(V*).
Одновременное рассмотрение пар (V, Л), (У*, Л*) часто приво-
приводит к практическим результатам. Одним из содержательных приме-
примеров этого является доказательство следующего утверждения.
Теорема 9. Всякий комплексный линейный оператор А на V
обладает инвариантной гиперплоскостью.
Доказательство. Пусть dim V = п. Как мы знаем, dim Ker/ =
= п — 1 для любой линейной функции / ф 0 на V. Возьмём теперь
в качестве / собственный вектор линейного оператора Л* на V*.
Он существует по теореме 7, и если Л — отвечающее ему собствен-
собственное значение, то, как следует из определяющего равенства A4), х Е
е Кег/ => 0 = Л(/,х) = (Л/,х) = (Л*/,х) = (/, Лх) => Лх е Кег/.
Это и означает, что Кег/ — искомая гиперплоскость. ?
7. Фактороператор. Пусть L — подпространство, инвари-
инвариантное относительно линейного оператора Л, действующего на век-
векторном пространстве V. Считая V и L фиксированными, будем
обозначать факторпространство V/L, определённое в п. 6 § 2 гл. 1,
символом У, а любой его элемент х + L через х.
Определение 9. Соотношением Л • х = Лх на V вводится
фактороператор. Другими словами, Л(х + L) = Лх + L.
Это определение не зависит от выбора представителя х: если х +
+ L = х; + L, то х - х; = у G L и Лх - Лх; = Л(х - х;) = Лу G L (в
силу инвариантности L относительно Л). Отсюда Лх + L = Лх; + L.
Если бы L не было инвариантным относительно Л, то определение
фактороператора Л теряло бы всякий смысл.
Предположим, что V = L(BM — прямая сумма инвариантных от-
относительно Л подпространств. Тогда, как мы знаем, Л = Аь 4- Ам —
прямая сумма операторов ограничений_Л на L и М. Если / : и н-»
ь->- и + L — изоморфизм между М и V = V/L (теорема 10 из § 2
гл. 1), то
(/ • АМ)У = ДДму) = Аму + L = A(y + L) = A(fy),
откуда
f-AM = A-f. A7)
§ 3. Инвариантные подпространства и собственные векторы 85
Итак, действие Л на У совпадает с действием Лм на М. Говорят,
что равенство A7) устанавливает эквивалентность (подобие) между
Л и Лм-
Пример. Как известно, всякому линейному оператору ?>, действующему в
двумерном векторном пространстве V = (ei,e2) с собственным вектором ei,
Л а
отвечает треугольная матрица
О /х
. При V = V/(ei) =
Если теперь V = (е1,е2,ез) — трёхмерное векторное пространство над С
и Л : V —> V — линейный оператор с собственным вектором ei (Ав\ = aei,
a G С), то на двумерном пространстве V = V/(ei) = (ё2~,ёз~) действует факторо-
ператор Л, которому по предыдущему отвечает треугольная матрица ^
в подходящем базисе. Пусть для простоты им будет базис (ё2~,ёз~). Тогда
= 7ез
Таким образом,
a v \i
А= 0f3 6
О 0 7
Аналогичные соображения используются и в общем случае.
УПРАЖНЕНИЯ
1. Пусть {А{\ 1 <С г ^ m — 1} — ортогональная система идемпотентных
матриц (см. замечание в конце п. 1). Показать, что А2 = А, АА{ = А{А = А^,
1 ^ г ^ m — 1 для А = Ai + А2 + ... + Am_i, и если положить Ат = Е — А, то
{А^| 1 ^ г ^ т} будет полной ортогональной системой.
2. Пусть Т> : Мте(Л) —>¦ Мте(Л) — не тождественно равный О линейный опе-
оператор на пространстве квадратных матриц, обладающий свойством мультипли-
мультипликативности:
V(AB) = V(A)V(B)
для всех А, В ? Мп(Я). Доказать, что тогда Т> = fc для некоторой невырожден-
невырожденной п х n-матрицы С (см. упр. 3 из § 1).
3. Пусть А: V —> V — линейный оператор такой, что lmAp = lmAp+1 для
некоторого натурального числа р. Доказать, что в этом случае V = Кег АР 0
01тЛр — прямая сумма двух Л-инвариантных подпространств.
4. Доказать, что если линейные операторы 8, А, А2,... ,Ап~1, действующие
на векторном пространстве V размерности п, линейно независимы, то суще-
существует такой вектор v ? У, что
V = (v^v^v,---,^"^)
(в этом случае говорят, что V циклично).
5. Пусть А — вещественная п х n-матрица без вещественных собственных
значений, так что, в частности, п четно и А обратима. Показать, что существует
вещественная матрица В такая, что АВ = В А и В2 = —Е — единичная матрица
(Д. Джокович).
6. Доказать, что для любых А, В ? МП(М) характеристические многочлены
матриц АВ и В А совпадают.
86
Гл. 2. Линейные операторы
7. Найти характеристические корни "циклической" матрицы
А =
0-2 0-0
используя легко проверяемое соотношение
А =
а2В2,
В =
0
0
1
1
0
0
0
1
0
8. Доказать, что пространство SMagn(Q) полумагических квадратов (см.
пример 8 из § 1 гл. 1) является ^подалгеброй в Mn(Q).
9 [Amer. Math. Monthly. — Febr. 1991. — P. 131-133]. Пусть А, В е МП{Я),
char Я ф 2. Будем писать В ~ А, если В = DA, где D = diag@i,... ,9n), 0i = ±1.
Очевидно, что ~ — отношение эквивалентности. Если S(A) — класс эквивалент-
эквивалентности с представителем А, то CardS'(A) ^ 2П.
Доказать, что по крайней мере одна из матриц в S(A) не имеет собственного
значения 1.
10. Пусть А — линейный оператор на n-мерном векторном пространстве V.
Показать, что
А2 = А <^=> rank A + rank (? — А) = п.
§ 4. Жорданова нормальная форма
Пытаясь разобраться с действием заданного линейного опера-
оператора Л : V —У V', естественно поставить перед собой цель найти
базис в У, наилучшим образом согласованный с Л. Другими словами,
в классе подобных матриц С~1АС, отвечающих оператору Л, требу-
требуется найти матрицу, имеющую как можно более простой вид. По по-
понятным причинам эта задача существенно связана с основным полем
Я, над которым определено векторное пространство V. В дальней-
дальнейшем считаем, что Я = С — поле комплексных чисел, хотя в принципе
С можно заменить на любое алгебраически замкнутое поле.
1. Теорема Гамильтона—Кэли. Весьма полезно следующее
несложное утверждение.
Теорема 1. Матрицу линейного оператора Л всегда можно
привести (в смысле подобия) к треугольному виду.
Доказательство. Проще всего в этом убедиться рассужде-
рассуждением по индукции. По теореме 9 из § 3 пространство V содержит
инвариантную относительно Л гиперплоскость U: AU С U. По пред-
предположению индукции в U можно выбрать такой базис (ei,..., en_i),
что Де; = Л^е^ + v*, v; е (еь... ,ei_i). Имеем V = (?/,еп), где
еп — произвольный, не содержащийся в U вектор. Пусть Леп =
= Anen + u, u G U. Таким образом, в базисе (ei,..., en_i, en) дейст-
§ 4- Жорданова нормальная форма
87
вие оператора А выражается матрицей требуемого вида
А =
О
?
A)
Теперь довольно просто доказывается содержательная
Теорема 2 (теорема Гамильтона—Кэли). Линейный оператор
А и соответствующая ему матрица А (в любом базисе) аннулиру-
аннулируются своим характеристическим многочленом Хл(^)? т-е
ха(Л) = О.
Доказательство. Так как это утверждение не зависит от вы-
выбора базиса (см. п. 3 § 2), то естественно воспользоваться теоремой 1,
с самого начала считая матрицу А в базисе (ei,...,en) имеющей
треугольный вид A). Рассмотрим цепочку Л-инвариантных подпро-
подпространств
V = Vo Э У\ Э • • • Э Уп-1 DVn = 0,
где Vk = (ebe2,...,en_fe_ben_fe). Так как (A- \n-k?)en-k G Vk+i,
то
(A-\n-k?)Vk c%
и, стало быть,
= (Л- MS)... (А - \n?)V0 С (A- Ai?)... (Л - An_i5)^i С
С (А - Aif)... (Л - An_2f)V2 С ... С (Л - Aif)Vn_i = 0.
Но Xa{A)V = 0 ^^ Хл(Л) = О- п
Следствие. Минимальный многочлен /лд линейного оператора
является делителем характеристического многочлена ХаA), деля-
делящимся на все линейные множители t — Л, Л G Spec(^).
Доказательство. По определению \ij±(Л) = О, а по теореме 2
Ха(А) = О. Делимость ха(^) на 1*>аA) вытекает теперь из теоремы 2
из § 2.
Если, далее, Л — собственное значение оператора Л, то
Ay = Av => 0 = да(Д)у = /хл(А)у => /хЛ(А) = 0 => (t - А) | /jA(t)
(мы повторили вывод импликации G) из § 3). ?
Замечание. Казалось бы, det (tE — A)\t=A = det (AE — A) =
= det 0 = 0, и теорема Гамильтона—Кэли доказана. Но это совер-
совершенно неверное рассуждение. Подумайте, почему.
Гл. 2. Линейные операторы
Теорема Гамильтона—Кэли имеет многочисленные приложения,
но нами пока она будет использоваться в самой непосредственной
форме.
Пример 1. Пусть А: V —>¦ V — нильпотентный линейный оператор индекса
нильпотентности т (см. определение 3 из § 2), так что fi^(t) = tm.
Пусть Arn~1v ф О. Тогда векторы v, Av, ..., Arn~1v линейно независимы.
Действительно, всякая нетривиальная линейная зависимость имеет вид
+ ... + OLn-i-kA™-1* = О, 0^/c^m-l.
Применение оператора Ат~1~к к обеим частям этого равенства привело бы нас
к соотношению Arn~1v = О, противоречащему выбору v.
Итак, индекс нильпотентности т оператора А не превосходит п = dim У,
что, разумеется, вытекает и из теоремы Гамильтона—Кэли. Предположим те-
теперь, что т = п и Ап~1е ф О. Введём следующие обозначения для базисных
векторов:
е1=Лпе, е2=Лп-2е, ..., en_i = Ле, еп = е.
Тогда Aei = О, A&k — efc-i? A; > 1, и матрицей оператора А в базисе (ei,..., ете)
будет жорданова клетка Jn(A) с А = 0, определение которой дано чуть ниже.
Если, скажем, V = A, t,..., tn~1) — пространство многочленов степени
< п над С и Т> = — — оператор дифференцирования по ?, то матрицей этого
dt
оператора в базисе (е^), е^ = — ?г, будет как раз клетка Jn@).
ъ.
Определение 1. а) Назовём1) (верхней) клеткой Жордана
размера тхт (или порядка т), соответствующей собственному зна-
значению Л, матрицу
Л
0
0
0
1
Л
0
0
0 ..
1 ..
0 ..
0 ..
. 0
. 0
. Л
. 0
0
0
1
Л
Л. (А) =
б) Жордановой матрицей называется матрица, состоящая из
диагональных блоков Jmi(Aj) и нулей вне этих блоков:
J =
О
О
B)
в) Жордановым базисом для линейного оператора Л : V —> V
называется такой базис пространства У, в котором матрица опера-
оператора Л является жордановой, или, как говорят, имеет жорданову
нормальную форму (ЖНФ) J(A).
честь французского математика К. Жордана A838-1922).
§ 4- Жорданова нормальная форма 89
г) Приведением квадратной матрицы А к жордановой нормаль-
нормальной форме называется решение уравнения в матрицах вида Х~х АХ =
= J(A), где X — (неизвестная) невырожденная матрица, a J(A) —
(неизвестная) жорданова матрица.
Заметим, что Jm(A) — ХЕ = Jm@) — нильпотентная матрица. В
частности, (t — Х)т — минимальный многочлен клетки Жор дана B)
и А — её единственное собственное значение: Spec Jm(A) = {A}.
Пример 2. Пусть Dn(X) — векторное пространство комплексных функций
вида е^*/(?), где А Е С, f(t) пробегает многочлены степени <С п — 1. Так как
dV
d
то дифференцирование T> = — является линейным оператором на Dn(X). Поло-
жим e^+i = —е , г = 0,... , п — 1. Очевидно,
Vei+1 = eAt + A-eA? = е» + Aei+i
(О! = 1; первое слагаемое отсутствует при г = 0). Следовательно, функции ( —eAi)
образуют жорданов базис для оператора Т> в нашем пространстве и J(T>) = Jn(X).
Этот пример показывает особую роль жордановых матриц в
теории линейных дифференциальных уравнений. Мы к нему ещё вер-
вернёмся.
Пример 3. Если f(t) — произвольный многочлен, то
/(А)
/(Jm(A)) =
0 /(А) /'(А)/1! ... /(—2)(А)/(т-2)!
0 0 ... /(А)
так что с Jmjx гораздо легче оперировать, чем с произвольными матрицами.
2. ЖНФ: формулировка и следствие. Сформулируем основ-
основное утверждение и его следствие.
Основная теорема. Каждая квадратная матрица
А порядка п над алгебраически замкнутым полем Я (в частности,
над С) приводится к жордановой нормальной форме. Именно, суще-
существует невырожденная матрица С, для которой С~хАС — J(A) =
— J — матрица вида B). С точностью до перестановки клеток
жорданова нормальная форма матрицы единственна.
Так как минимальные многочлены подобных матриц совпадают,
то из основной теоремы и из замечаний, сделанных по поводу жор-
жордановой клетки Jm(A), следует, что
HA(t) = (t-\il)m<i...(t-\ip)mi*, C)
где {Ai15..., Afp} — все попарно различные собственные значения
90 Гл. 2. Линейные операторы
матрицы А и rrijk — максимальный порядок жордановой клетки, от-
отвечающей собственному значению Xjk.
Ясно, что необходимым и достаточным условием диагонализиру-
емости матрицы А (т.е. подобия её матрице diag (Ai,..., Ап)) явля-
является отсутствие в J(A) клеток порядка > 1. Поэтому с учётом C)
получается следующий полезный критерий.
Следствие. Квадратная матрица А над С диагонализируема
тогда и только тогда, когда её минимальный многочлен ца{1) не
имеет кратных корней.
Этот критерий эффективен, поскольку для вычисления iaa($)
нет необходимости приводить матрицу А к жордановой нормальной
форме.
Доказательство основной теоремы разбивается на три части, со-
соответствующие пп. 3-5. Попутно будут сформулированы некоторые
практические рекомендации для получения ЖНФ (жордановой нор-
нормальной формы), а затем мы укажем на другие доказательства.
3. Корневые подпространства. Приведём следующее
Определение 2. Множество векторов
У (А) = {v G V\ {A — XE)kv = 0 для некоторого к}
называется корневым подпространством, соответствующим собст-
собственному значению A Е Spec A.
В том, что V(A) — подпространство, нас убеждает лёгкая про-
проверка. Если, например, u G V(X), v Е V(X), причём (А - \?)su = 0,
(A - XE)fv = 0, и m = max {s, ?}, то
(A - X?)m(au + /3v) = a(A - XS)mu + /3(A - X?)mv = 0,
откуда аи + /3v G V(A) при любых а,/3 G С Так как в V(A) со-
содержится собственный вектор, отвечающий А, то V(A) ф 0. Далее,
Vх С V(А), но равенства может и не быть, как показывает пример
нильпотентного оператора А индекса нильпотентности п > 1. В этом
случае А = 0 — единственное собственное значение, dim V° = 1, но
V@) = V.
Так как dim V(A) ^ п и ограничение А — ХЕ на V(A) является
нильпотентным оператором, то
V(X) = {veV\ (А-ХЕ)п = О}.
Теорема 3. Пусть A:V^V — линейный оператор с харак-
характеристическим многочленом
р
г=1
Тогда V = V(Ai) © ... (BV(XP) — прямая сумма корневых подпро-
подпространств V(Xi), каждое из которых инвариантно относительно А
§ 4- Жорданова нормальная форма 91
и имеет размерность dim V(Xi) = п^. Оператор Л — А^?, нилъпо-
тентный на V(A«), действует невырожденным образом на подпро-
подпространстве
Vi = y(Ai) e... е v(Ai_i) e v(Ai+i) е... е v(\p).
Наконец, А« — единственное собственное значение оператора
A\v(\i)-
Доказательство. Ни один из простых множителей t — А/, не
может быть делителем одновременно всех многочленов
и поэтому НОД(%1(^),... ,Xp(t)) — 1- Найдутся, стало быть, много-
многочлены /i (t),..., fp (t) G C[t], для которых
l. D)
Подпространства
^ = x№) fi(A) V = {xi{A)fi(A)v |vey}, 1 ^ i ^ p,
инвариантны относительно Л:
AWi = Xi{A) h{A)AV с Xi{A) fi(A) V = Wt.
Кроме того,
(A - \i?)niWi = xa(A) MA) V = 0
(поскольку по теореме 2 ха(Л) = О), так что
Wi С V(Xi). E)
Соотношение D), переписанное в виде
г=1
даёт нам разложение
и тем более (ввиду включения E))
г=1
Предположим, что v G V(\i)P\Vi, где, как и в формулировке теоремы,
Vi = ^2j^iV(\j). Тогда (Л - Aif)nv = 0, а так как v = Y^j^iYj и
(Л - \j?)nYj = 0, то и {Ц^гМ ~ ^i^)n}v = 0- Но из взаимной
92 Гл. 2. Линейные операторы
простоты многочленов (t — А^)п, c(t) = Ylj^it — Xj)n следует сущест-
существование a(t), b(t), для которых
a(t)(t- \{)п + b(t)c(t) = 1.
Получаем
v = а(А)(А - \i?)nv + Ь(Л){Д(Л - A^)n}v = 0,
т.е. пространства V(A^) и Vi не пересекаются. Значит, мы имеем
разложение
у = у(А1)е...еУ(лр) (б)
в прямую сумму Д-инвариантных подпространств.
Из включения E) и из разложения F) непосредственно вытекает,
что Wi = V(Xi). Таким образом, для V(Xi) получено эффективное
выражение
V(\i)=Xi(A)fi(A)V,
где Xi(t)? fi(t) — многочлены из тождества D). В частности,
(A-\i?)nV(\i) = 0.
Минимальным многочленом для А на V(Xi) будет некоторый дели-
делитель многочлена (t — Xi)ni. Отсюда следует, во-первых, что А^ —
единственное собственное значение оператора Л|у(Лг)- Далее, в ба-
базисе, являющемся объединением базисов пространств V(A«), опера-
оператор А имеет матрицу
Аг ... О
А =
О ... Ар
где Ai — матрица порядка п[ = dim V(Xi) с единственным собствен-
собственным значением А« и характеристическим многочленом
XAi(t) = (t - х^<, n'i^m.
Так как XA(t) = ПГ=1 *Ai (*)' т0 п = ni + • • • + п'р и п'г = п*-
Осталось доказать невырожденность ограничения (Л — А^?)|у..
Но это понятно: в противном случае {Кег(Л — А«?)} П Vi / 0 и
Лу — AfV = 0 для некоторого 0 ф v G V^. Однако на Vi характе-
характеристическим многочленом для *4 является Хг(^) = П'^г(^ ~ Aj)nj, и
Af собственным значением быть не может. ?
4. Случаи нильпотентного оператора. Теоремой 3 задача
о выборе простейшей матрицы для линейного оператора А: V —> V
свелась к тому случаю, когда А имеет единственное собственное зна-
значение А и (А — ХЕ)Ш = О, т ^ dim V. Положив В — А — А?, мы по-
получим нильпотентный оператор индекса нильпотентности т с ниль-
потентной матрицей В. В рассматриваемой ситуации естественным
является
§ 4- Жорданова нормальная форма 93
Определение 3. Линейная оболочка
называется циклическим подпространством, ассоциированным с
оператором В индекса нильпотентности т и вектором v. Предпола-
Предполагается, что т! ^ т — наименьшее натуральное число, для которого
Вш\ = 0.
Теорема 4. Жорданова нормальная форма J{B) нилъпотент-
ной матрицы В существует (основное поле Я произвольное).
Доказательство. Из примера 1 и из определения 1 видно, что
всякому циклическому подпространству отвечает клетка Жордана.
Нам нужно показать, что векторное пространство V, на котором
действует нильпотентный оператор В с матрицей В, разлагается в
прямую сумму надлежащим образом выбранных циклических под-
подпространств.
По теореме 1 матрица В приводится к верхнему треугольному
виду с нулями по диагонали. Это значит, что линейная оболочка U
первых п — 1 базисных векторов инвариантна относительно В. По
определению BV С G, а по предположению индукции в U можно
выбрать жор данов базис для 23, или, что то же самое,
Е/ = Я[В]е10...0Я[В]ев, G)
Я [В] е, = (е,, Вщ, ..., Вш^хщ) , Вго'е< = 0.
Без ограничения общности считаем
TTli ^ ?^2 ^ • • • ^ Wls- (8)
Далее, V = (v, С/), By Е U для любого вектора v, не содержащегося
в U, так что By = J^ a^i + Ви, и G U. Заменяя v на v' = v - и,
будем иметь
г=1
Если di = О, 1 ^ i ^ s , то к клеткам Жордана Jmi @),..., Jms @)
добавится Л@), отвечающая циклическому подпространству (v7),
B~J(B)=diag(jmi@),...,Jm.@),Ji@))
(~ — знак подобия).
Остаётся рассмотреть случай, когда
s
Oil = . . . = OLr-\ = 0, jBv' = у OLi^i-, OLr Ф 0
г=г
для некоторого индекса г ^ 1. Удобно положить
1 Qi^
94 Гл. 2. Линейные операторы
Тогда
S
Befr = er + ^ faei := fr.
г=г+1
В соответствии с упорядочением (8) Bmrfr = 0, а так как сумма G)
прямая, то Bnir~1fr ф 0, какие бы ни были коэффициенты Д. Кроме
того, лёгкое рассуждение показывает, что сумма
также является прямой и совпадает с U.
Но теперь циклическое подпространство Я [В] fr расширяется за
счёт вектора e'r (fc U: Я [В] fr С Я [В] efr, и мы имеем прямую сумму
1=1
отвечающую набору индексов т[,..., m's, где т[ = т^ г ф г¦, т'г =
= тг + 1. В свою очередь
5~diag(jmi@),...,Jm-@))
(число клеток Жор дана сохранилось прежним, но размер одной
клетки увеличился на 1). Последовательность (т[,... ,m's), вообще
говоря, не упорядочена, но этого всегда можно добиться путём пере-
переобозначения векторов е^. Таким образом, существование жорданова
базиса для нильпотентного оператора В доказано. ?
5. Единственность. Приступая к доказательству единствен-
единственности, укажем заодно практическое правило для приведения произ-
произвольной матрицы А порядка п к жордановой нормальной форме.
Для этого нужно уметь находить число JV(m, А) жордановых кле-
клеток Jm(A) порядка т, отвечающих собственному значению А ма-
матрицы А. Сопоставим обычным образом матрице А оператор Л, дей-
действующий на n-мерном векторном пространстве У, и разложим V в
прямую сумму
V = V(X) Ф V, (9)
где
= 0 (ej, (Л - XS)ej, ...,(Л-
Будем подсчитывать ранг Tt — rank (A — \ЕI матрицы (А — \ЕI,
или, что то же самое, размерность пространства {Л — ХЕI V. Эта
§ 4- Жорданова нормальная форма 95
размерность, конечно, не зависит от выбора базиса в V. Каждое из
пространств в разложении (9) инвариантно относительно (А — Х?I,
поэтому
dim (А - X?fV = Y^ dim (Л ~ А?)* С[Д] е, + dim (А - X?f V.
з
Считаем для определённости т\ ^ т^ ^ ... ^ ms. Если rrij ^ t, то
(Л - Х?)г С[Л] ej = 0. При rrij > t имеем
(А-Х?)*С[А]е, =
= ((А - Х?)*е,, (А - X?)t+1ej, ..., (А -
так что
dim (А - Х?I ?[А] ej = rrij - t.
На V оператор А — Х? невырожден (теорема 1), поэтому
dim (Л - Х?)* V = di
Получаем
rt = ^2 {rrij -t) + dim V',
откуда
rt — rt+i = /_^ ijuj — t) — 2_, (mj — ^ — l) =
rrij>t rrij>t-\-l
mj>t
Стало быть,
Гт-i -rm- (rm - rm+i) = {7V(m, A) + 7V(m + 1, A) + ...}-
- {N(m + 1, A) + N(m + 2, A) + ...} = N(m, A),
и мы получаем окончательную формулу
N(m, A) = rm_i - 2rm + rm+i, A0)
ттг ^ 1, Tt — rank (Л — Af )*, ro = n.
Заметим, что Tt — инвариант матрицы А (т.е. число, определяе-
определяемое классом подобия матрицы А). Значит, формулой A0) устанавли-
устанавливается также единственность жордановой формы J(A). ?
До сих пор о матрице С, осуществляющей подобие
J(A) = С'1 АС,
96
Гл. 2. Линейные операторы
почти ничего не говорилось. Но так как теперь А и J(A) — известные
нам матрицы, то С = (qj) можно найти из матричного уравнения
XJ(A) - АХ = О,
о котором упоминается в определении 1 из п. в) и которое эквива-
эквивалентно линейной однородной системе порядка п2. Пусть С\,..., Сг —
её фундаментальная система решений. Вообще говоря, не все Сг —
невырожденные матрицы, но так как жорданова нормальная форма
J(A) существует, то
(с неопределёнными коэффициентами ti,... ,tr), и можно подобрать
комплексные числа ai,..., arj для которых
det (aiCi + ... + arCr) ф 0.
Тогда С = ct\C\ + ... + arCr — искомая матрица. Разумеется, С
определяется далеко не единственным образом, даже при нормировке
det G = 1. Нахождение таким способом матрицы С, осуществляющей
переход к жорданову базису, не очень практично, хотя и не пред-
представляет принципиальных трудностей.
Пример 4. Минимальным многочленом п х п-матрицы
1 ... 1
удовлетворяющей соотношению S2 = nS, будет, очевидно, //<?(?) = t2 — nt, т.е.
Ai = n, Л2 = 0 — собственные значения матрицы S кратности 1 и п — 1 соответ-
соответственно. Так как, далее, rank S = 1 и S не может быть нильпотентной матрицей
(не тот минимальный многочлен), то для её жордановой формы остаётся един-
единственная возможность: J(S) = diag(n, 0,..., 0). Это и понятно, поскольку Р = —S
— матрица проектора. Решением матричного уравнения
Хп\ . . . Хп
является, в частности,
0
1
in
Xln
С =
1/п -1
1/п п — 1
-1
-1
1/п -1
п- 1
6. Другие подходы к ЖНФ. Для нахождения жордановой
нормальной формы матрицы и соответствующего жорданова базиса
достаточно эффективной оказывается общая теория модулей над
кольцами главных идеалов, одной из разновидностей которой явля-
является хорошо разработанный метод А-матриц. Хотя эта теория уни-
универсальна и приводит к другим важным следствиям, её изложение
§ 4- Жорданова нормальная форма 97
довольно утомительно и вряд ли уместно в данном контексте. На-
Напротив, прямой геометрический метод, которому мы следовали, до-
достаточно нагляден и заслуживает того, чтобы привести ещё один
его вариант, объединяющий теоремы 3 и 4 (см., например, пособия
[2, 9]).
Итак, пусть Л : V —У V — комплексный линейный оператор,
Л — одно из его собственных значений. Так как жор данов базис
для Л — XS будет также жордановым базисом для Л, то без огра-
ограничения общности считаем Л = 0. Тогда оператор Л вырожден,
включение 1тЛ С V строгое, и мы можем использовать индукцию
по п = dim V. С этой целью рассмотрим последовательность
Ьп Л° Э Ьп Л1 Э Ьп Л2 Э ... Э Ьп Ар~х Э Ьп Лр = Ьп Лр+1 = ...,
стабилизирующуюся на каком-то р-м члене, так что
Ьп Лр П Кег Л = 0, Ьп Ар~х П КегА ф 0.
Согласно упр. 3 из § 3 имеет место разложение V в прямую сумму
V =
Д-инвариантных подпространств. Если dim Im ЛР > 0, то по предпо-
предположению индукции каждое из слагаемых допускает жор данов базис.
Их объединение будет жордановым базисом в V.
Мы пришли к ситуации, когда
V = КетАр,
т.е. Лр = 0, Ар~х ф 0.
Таким образом, в обход теоремы 3, имеющей самостоятельное
значение, получена редукция к случаю нильпотентного оператора.
Не апеллируя к теореме 4, поступим следующим образом. Положим
для удобства
Vi = 1тЛ*ПКегЛ.
Тогда
Кег Л = V! Э V2 э ... Э Vp ф 0, Vp+1 = 0.
Выберем в подпространстве Vp базис (aj; I ^ i ^ пр). Так как
а^ G 1тЛр~1, то а^ = Ар~1ар для некоторого вектора а.р. Рассмо-
Рассмотрим векторы а^ = Ар~кз.р, 1 ^ к ^ р. Векторы а^ дополним до
базиса подпространства Vp-\ векторами bj в количестве пр-\ штук;
найдём вектор Ыр1, для которого Ь] = ЛР~2ЪР~1, и рассмотрим век-
векторы Ъ1- = ЛР~1~1ЪР~1, 1 ^ / ^ р — 1. Затем дополним векторы а.],
Ъ1- до базиса подпространства Vp-2 векторами с^ в количестве пр-2
7 А.И.Кострикин
98 Гл. 2. Линейные операторы
штук и т.д. Иллюстрируем
4-' 3
1
af~:
1
4-
а?
4-
а,1
4-
0
1
4-
4-
Ц
4-
Ц
4-
0
этот процесс
-2 р-2
Cfc
4-
4-
4
4.
4 ¦¦¦
4.
0 0
диаграммой
d?
1
dl 4
I I
0 0
Предположим, что векторы из диаграммы линейно зависимы:
г г j t
(п)
Применение к A1) оператора Ар даст в результате
откуда имеем
а|р) =0, 1 < г ^ пр.
Применив теперь к A1) оператор Ар~2, получим
что в соответствии с выбором векторов даст а\р = 0 = тр .
Продолжение этого процесса приведёт к тривиальности соотноше-
соотношения A1). С другой стороны, общее число векторов в диаграмме равно
= рпр + (р - 1)пр-1 + ... + 2п2 +п\ =
= (щ + ... + пр) + (п2 + ... + Пр) + ... + (rip-i + Пр) +пр =
= dim V\ + dim V2 + ... + dim Vp_i + dim Vp =
= 5^(Im А1'1 П Ker Л) = ^(dim Ker A1 - dim Ker A1'1) =
г=1 г
= dim Ker Ap = dim V
§ 4- Жорданова нормальная форма
99
(по поводу этого равенства см. упр. 7 из § 2)
Таким образом, векторы в диаграмме составляют базис прост-
пространства V, и этот базис жор данов по построению.
Что касается утверждения о единственности ЖНФ, то в обозна-
обозначениях п. 5 имеем
N(m, 0) = dim Vm — dim Vm+i =
= (dim Ker Am - dim Ker A™'1) - (dim Ker Am+1 - dim Ker Am) =
= 2 dim Ker Am - dim Кет A™'1 - dim Ker Am+1 =
= rank Д™ - 2 rank Am + rank Am+1 = rm_i - 2rm + rm+1,
а это, как мы знаем, есть инвариантная величина.
7. Другие нормальные формы. В этом пункте мы вкратце
опишем другие нормальные формы матриц, пригодные, в частности,
для алгебраически незамкнутых полей.
а) Циклические пространства и циклические клетки. Разовьём
определение 3. Векторное пространство V размерности п над Я назы-
называется циклическим относительно линейного оператора А: V —> V,
если в V существует такой вектор v, также называемый цикличе-
циклическим^ что
V = (еь е2, ..., еп),
где
Так как (е7-
е. — Лп глг i — 19 1
базис пространства V, то
п-1
г=0
с однозначно определёнными коэффициентами cti G Я, поэтому опе-
оператору А в этом базисе отвечает так называемая циклическая клетка
— матрица вида
А =
«п-1
«п-2
аг
1
0
0
0
0 ..
1 ..
0 ..
0 ..
. 0
. 0
. 0
. 0
0
0
1
0
A2)
Обратно: если матрица оператора А в базисе (ei,..., еп) является ци-
циклической клеткой, то вектор v = еп цикличен, причём е^ = Ап~геп
(индукция вниз по г).
Покажем, что вид циклической клетки, отвечающей Л, не зависит
от выбора исходного циклического вектора. Для этого достаточно
7*
100 Гл. 2. Линейные операторы
проверить, что первый столбец клетки A2) состоит из коэффициен-
коэффициентов минимального многочлена оператора Д, т.е.
г=0
В самом деле, /(Л) = О, поскольку
' ' = О,
а векторы Alv порождают V. С другой стороны, д(А) ф О для лю-
любого многочлена g{t) степени < п, потому что иначе, применив опера-
оператор д(А) = О к циклическому вектору v, мы получим нетривиальное
линейное соотношение между базисными векторами Alv.
б) Критерий цикличности пространства. Согласно предыдущим
рассмотрениям, если пространство V циклично относительно Л, то
его размерность п равна степени минимального многочлена опера-
оператора А и, стало быть, минимальный многочлен совпадает с характе-
характеристическим. Обратное тоже верно (см. упр. 4 из § 3).
в) Матрица любого оператора в подходящем базисе может быть
приведена к прямой сумме циклических клеток. Доказательство мож-
можно провести аналогично доказательству теоремы о ЖНФ. Вместо
множителей (t — Xi)ni характеристического многочлена следует рас-
рассматривать множителиPi(t)ri, гдеPi{t) — неприводимые над полем Я
делители характеристического многочлена. Теорема единственности
также имеет место, если ограничиться случаем, когда минимальные
многочлены всех циклических клеток неприводимы. Без этого огра-
ограничения она неверна: циклическое пространство может быть пря-
прямой суммой двух циклических подпространств, минимальные мно-
многочлены которых взаимно просты.
УПРАЖНЕНИЯ
1. Используя матрицу S из примера 4 и выражение для J(S), вычислить
определитель матрицы
А =
т -1 ... -1
-1 т ... -1
-1 -1 ... т
представив его в виде det A = xs(m + !)•
2. С точностью до подобия ненулевые нильпотентные 4 х 4-матрицы исчер-
исчерпываются следующими:
Ах = J2@) + Л@) + Л@), А2 = J2@) + J2@),
), A4 = J4@).
§ 4- Жорданова нормальная форма
101
Матрицы
0 0 0 0
10 0 1
0 0 0 0
0 0 0 0
0 0 10
0 0 11
0 0 0 0
0 0 0 0
0 0 0 0
10 0 0
1-10 0
1110
0 0 0 1
0 0 0 0
1-10 0
0 0 0 0
очевидно, нильпотентны. Каким матрицам А{ они подобны?
3. а) Найти J(A), зная, что XA(i) = (t - 3L(t + 2) и rank (Л - 38) = 2.
б) Однозначно ли восстанавливается J(A) в случае rank (Л — 3?) = 1, 3, 4?
4. а) Показать, что матрицы
А =
6 2-2
-2 2 2
2 2 2
Б =
6 2 2
-2 2 0
0 0 2
имеют одинаковые характеристические многочлены.
б) Найти /х^(?) и
в) Найти J(A) и
5. Пусть Я — поле характеристики 0, А — пх n-матрица с коэффициентами
из Я. Доказать, что А нильпотентна в точности тогда, когда tr(Ak) = 0, 1 <С
<С к <С п.
6. Доказать, что матрицы А ? МП(С) и tA всегда сопряжены.
7. Соотношение AN = Е для матрицы А ? МП(С) справедливо тогда и только
тогда, когда А диагонализируема и её собственные значения являются корнями
степени N из 1.
8. Непосредственно проверяется, что А2 ? Mag3(Q) для матрицы
А =
1 2 0
0 1 2
2 0 1
е Mag3(Q),
т.е. магические квадраты, в отличие от полумагических (см. упр. 9 из § 2), кольца
не образуют. Тем более неожиданным является утверждение:
если A G Mag3(Q), то Аш Е Mag3(Q) для любого нечётного т ^ 1.
Доказать это, опираясь на теорему Гамильтона—Кэли.
9. Проверить, что при любом т ^> 2 матрица Ат, где
А =
2 0 0 0
0 0 11
0 10 1
0 110
Е Mag4
не является магической. Используя матрицу А, показать, что для всякого п ^> 4
существует магическая n x n-матрица, т-е степени которой не будут магиче-
магическими (га ^ 2).
10. Запишем матрицу А = Ji(A) + -^(/-О, А ^ р, в виде А = 5 + 7V, где
5 = diag(A, /x,/x). Более подробно:
А
0
0
0
/х
0
0
1
и
S =
А
0
0
0
/х
0
0
0
и
, N =
0
0
0
0
0
0
0
1
0
Выразить S и N в виде многочленов s(A), n(A) от А (по теореме Гамиль-
Гамильтона—Кэли можно считать, что deg s(t) ^ 2, deg n(t) ^ 2; как обычно, А0 = Е).
102 Гл. 2. Линейные операторы
11. Пусть V — n-мерное комплексное пространство, Л — линейный оператор
на V. Доказать, что Л допускает однозначную запись в виде
где S — диагонализируемый, a J\f — нильпотентный линейный оператор, причём
S и J\f выражаются в виде многочленов от Л (S называется полупростой, а
J\f — нилъпотентной компонентой оператора А).
12. Вычислить (jn(A)) для любого натурального к.
13. Доказать, что [[X, Y]2, Z] = 0 для любых трёх матриц X,Y,Z E Мг(Л).
Здесь [X, Y] = XY — YX — коммутатор матриц X, Y.
ГЛАВА 3
ВЕКТОРНЫЕ ПРОСТРАНСТВА
СО СКАЛЯРНЫМ ПРОИЗВЕДЕНИЕМ
Теория билинейных форм была развита нами в гл. 1 отчасти для
того, чтобы иметь возможность перейти от общих векторных про-
пространств к более содержательным и, пожалуй, даже более привыч-
привычным структурам — метрическим пространствам. Вспомним, что бо-
богатство фактов нашей трёхмерной геометрии в значительной мере
обусловлено двумя дополнительными понятиями векторной алгеб-
алгебры — длиной вектора и углом между двумя векторами. Переход от
чисто качественного свойства линейности, безразличного к природе
основного поля, к количественным соотношениям между объектами
векторных пространств заставляет нас сосредоточиться по существу
на двух полях скаляров — ЕиС. Геометрия комплексных векторных
пространств заслуживает особого обсуждения как ввиду её важно-
важности, так и ввиду необходимости рассмотрения нового типа форм.
§ 1. Евклидовы векторные пространства
1. Эвристические соображения и определения. В аналити-
аналитической геометрии пространств М2 и М3 важную роль играет скаляр-
скалярное произведение двух векторов, которое вводится как произведение
длин этих векторов и косинуса угла между ними. Длина ||х|| вектора
х = xiei + Ж2в2 + ^зез, заданного в прямоугольной системе коорди-
координат, определяется по формуле
так что ||х|| > 0 для любого х ф 0. Квадрат длины ||х||2 = х\+х\ + х\
можно интерпретировать как значение положительно определённой
квадратичной формы. Полярная к ней симмет-
симметричная билинейная форма (* | *) сопоставляет
любым двум векторам х, у Е М3 число (или
скаляр) (х|у) = ххух + х2у2 + %зУз- Пусть
7 ~\ х
ер = (х, у) — угол между векторами х и у,
z = у — х — их разность (рис. 3). Обычная
формула косинусов из элементарной геометрии, применённая к треу-
треугольнику со сторонами х, у, z, утверждает, что
N|2 = ||x||2 + ||y||2-2||x||||y||cos^.
104 Гл. 3. Векторные пространства со скалярным произведением
С другой стороны, используя билинейность и симметричность фор-
формы (* | *), получаем ||z||2 = ||у — х||2 = (у — х | у — х) = ||х||2 +
— 2(х | у). Сравнение двух выражений для ||z||2 даёт
(х|у) = ||х
т.е. скаляр (х | у) совпадает с обычным скалярным произведением
векторов х и у. Это обстоятельство подсказывает разумный путь
введения скалярного произведения векторов в W1:
Ш. A)
г=1
В этом определении, однако, ощущается некий произвол, связан-
связанный с выбором специальной системы координат. Чтобы его устра-
устранить, введём следующее общее
Определение 1. Евклидовым векторным пространством на-
называется вещественное векторное пространство V с выделенной на
нём симметричной билинейной формой (х, у) \—у (х | у) такой, что со-
соответствующая квадратичная форма х \-> (х | х) (или просто (х | х))
положительно определена.
В общем случае значение (х | у) симметричной билинейной формы
(* | *) на векторах х, у Е V будет называться их скалярным произ-
произведением. Использованное нами обозначение (х | у) вместо обычного
/(х,у) призвано подчёркивать тот факт, что из бесчисленного мно-
множества форм мы выделили одну, которую и положили в основу опре-
определения евклидова пространства. Так как мы собираемся при помощи
(х | у) ввести понятия длины и угла, то получающуюся при этом не-
неоднозначность можно сравнить с произволом в выборе масштаба при
измерении длин отрезков на прямой. Часто скалярное произведение
обозначают (х,у) или (х,у), но у нас (х,у) есть просто пара векто-
векторов (элемент декартова произведения V х У), а (х, у) — подпростран-
подпространство, натянутое на х и у. В дальнейшем мы отождествляем билиней-
билинейную форму (* | *) как элемент пространства Иъ^У-, Щ с её значениями
(х | у) на произвольных векторах х и у.
Итак, в соответствии с определением 1 евклидово векторное про-
пространство — это пара (V, (* | *)), где V — векторное пространство
над М, а (* | *) — фиксированная симметричная билинейная форма
на V. Отметим ещё раз основные свойства скалярного произведения:
i) (х|у) = (у|х) Vx,y e V;
И) (ах + Ру | z) = а(х | z) + Р(у | z) Va, /3 G M;
iii) (x|x) >0 Vx^0(@|x) =0).
Скалярное произведение, заданное соотношением A) (оно назы-
называется стандартным скалярным произведением), удовлетворяет, ко-
конечно, этим свойствам и подходит под общее определение, иначе по-
последнее было бы лишено смысла.
§ 1. Евклидовы векторные пространства 105
Пример 1. Пусть V = Рп — вещественное векторное пространство мно-
многочленов степени <С п — 1. Сопоставление любым двум векторам (многочленам)
/,3G V числа
dt B)
(f\g)= f f(t)g(t)
J a
([a,b] — фиксированный отрезок на Ж) также задаёт скалярное произведение
на V, как это легко усмотреть из свойств определённого интеграла. Было бы не-
неудобно выражать то же самое скалярное произведение B) в терминах "естествен-
"естественного" базиса 1, ?,..., tn~1. Следует заметить, что соотношением B) задаётся ска-
скалярное произведение и на бесконечномерном пространстве С(а, Ь) непрерывных
функций (на отрезке [а, 6]). Соответствующее бесконечномерное евклидово век-
векторное пространство обозначается символом Сг(а, Ь).
2. Основные метрические понятия. Пусть V — евклидово
векторное пространство со скалярным произведением (х | у).
Определение 2. Длиной или нормой 11 v 11 любого вектора v Е V
называется неотрицательное вещественное число
И = V(v|v). C)
Так как (v | v) ^ 0, то длина любого вектора вполне определена,
причём v / 0 => ||v|| > 0. Если A G 1, то ||Av|| = y(Av|Av) =
= |A|-||v||-
В этом месте заметим, что любое подпространство U евклидова
векторного пространства V само является евклидовым векторным
пространством, поскольку скалярное произведение (х|у), будучи
ограниченным на С/, определяет билинейную форму U x U —> М,
которая, очевидно, остаётся симметричной и положительно опре-
определённой. В частности, само поле Ш. можно рассматривать как одно-
одномерное векторное пространство, длина вектора в котором совпадает
с обычным абсолютным значением вещественного числа. В общем
случае мы будем различать символы | * | и || * ||.
Вектор длины 1 называется нормированным. Любой вектор х ф 0
можно нормировать, умножив его на подходящий скаляр, а именно
1
для вектора х = -—- х имеем
х
х =
1
х
X
1
х
11x11 = 1.
Прежде чем вводить угол между двумя векторами, мы ещё раз
обратимся к свойству iii) скалярного произведения.
Теорема 4 (неравенство Коши—Буняковского). Каковы бы ни
были векторы х, у евклидова векторного пространства У, справед-
справедливо неравенство
D)
106 Гл. 3. Векторные пространства со скалярным произведением
Доказательство. Из положительной определённости скаляр-
скалярного произведения (свойство lil)) следует, что
А2 (х | х) - 2А(х | у) + (у | у) = (Ах - у | Ах - у) ^ 0, E)
где Л — произвольное вещественное число. При фиксированных век-
векторах х, у Е V мы смотрим на левую часть E) как на квадратный
трёхчлен /. Так как /(А) ^ 0 для всех A G 1, то для его дискрими-
дискриминанта D(f) = B(х | у)) — 4(х | х) • (у | у) должно выполняться нера-
неравенство D(f) ^ 0, откуда
(х|уJ^(х|х)-(у|у). F)
Взяв положительный квадратный корень из обеих частей неравен-
неравенства F) и воспользовавшись определением C) длины вектора, мы
придём к неравенству D), в левой части которого стоит абсолютная
величина скаляра (х | у). ?
Замечание. Если |(х | у)| = ||х|| ||у||, то D(f) = 0, т.е. трёхчлен
/ имеет один вещественный корень Ло- Согласно E) имеем (Лох —
у | Лох — у) = 0, откуда у = Лох. Следовательно, лишь для колли-
неарных (пропорциональных) векторов скалярное произведение по
абсолютной величине равно произведению их длин.
Пример 2. В применении к стандартному скалярному произведению A) и
скалярному произведению B) на Сг(а, Ь) неравенство D) принимает вид
G)
п
= 1
<
\
п
Z^ г
г = 1
и соответственно
f{t) git) dt
неравенство (8) играет важную роль в анализе.
Неравенство Коши—Буняковского означает, что
(8)
к (х
IWI
Стало быть, отношение (х | у)/(||х|| • ||у||) является косинусом вполне
определённого угла ip:
Сх I v)
(К^т- (9)
Именно этот угол ip и считается, по определению, углом между век-
векторами х и у.
Определение 3. Векторы х и у называются ортогональными
(обозначение х _L у), когда угол между ними равен тг/2, т.е.
(х | у) = 0.
§ 1. Евклидовы векторные пространства 107
Нулевой вектор ортогонален любому вектору х Е V. Заметим
ещё, что
х±у => ||х + у||2 = ||х||2 + ||у||2
(теорема Пифагора), причём у нас это элементарно-геометрическое
утверждение является следствием формальных свойств скалярного
произведения. Чуть более общим является утверждение о попарно
ортогональных векторах х, у, z, и,...:
||х + у + z + u+ ...||2 = ||х||2 + ||у ||2 + ||z||2 + ||u||2 + ...
В качестве упражнения проверьте, что всегда
||х|| = ||у|| => (x + y)_L(x-y)
(диагонали ромба пересекаются под прямым углом).
Из теоремы 1 вытекает
Следствие (неравенство треугольника). Длины векторов х,
у и х + у связаны неравенством
||х±у|К||х|| + ||у||. A0)
Доказательство. Действительно, используя неравенство D),
получаем
||х ± У||2 = ||х||2 + ||у||2 ± 2(х | у) «С ||х||2 + ||у||2 + 2 | (х | у) | <
Пример 3. В пространстве функций Сг(а, Ь) неравенство A0) принимает
вид
(f(t) ± g(t)) 2dt<:J [ f{ty dt + J [ g{ty dt
(неравенство Минковского).
3. Процесс ортогонализации. В стандартном пространстве
Жп со скалярным произведением A) векторы е^ = @,..., 1..., 0),
г = 1,...,п, попарно ортогональны и образуют базис. Естественно
ожидать, что в любом евклидовом векторном пространстве V можно
выбрать базис с аналогичными свойствами. Сформулируем точно то,
что нам хотелось бы иметь.
Определение 4. Базис (ei,..., еп) евклидова векторного про-
пространства V называется ортогональным, если (е^ | е^) =0 при i ф j;
г, j = 1, 2,..., п. Если, кроме того, (е^ | е^) = 1 при г = 1, 2,..., п, то
базис называется ортонормир о ванным (или ортонормалъным).
Другими словами, в ортонормированном базисе все векторы е^
имеют единичную длину. Из любого ортогонального базиса можно
получить ортонормированный, нормировав каждый из векторов е^.
Отметим следующий почти очевидный факт.
Теорема 4. Любые ненулевые взаимно ортогональные векторы
ei,...,em G V линейно независимы. Если при этом dim У — пи
т = п, то векторы е^ образуют ортогональный базис в V.
108 Гл. 3. Векторные пространства со скалярным произведением
Доказательство. Второе утверждение вытекает (по опреде-
определению размерности) из первого, которое мы сейчас и докажем. Пред-
Предположим, что
+ а2е2 + ... + атет = О
— нетривиальное соотношение между векторами ei,... ,em. Пусть,
скажем, ак ф 0. Умножив скалярно на ек обе части нашего линейного
соотношения, получим
0 = @ | ek) = (aiei + ... + атет \ ек) =
| ек) + ... + ак(ек \ ек) + ... + ат(ет \ ек) = ак(ек \ ек),
поскольку по условию (е^ | е&) = 0 при г ф к. С другой стороны,
(ек | ек) ф 0, и мы приходим к заключению, что ак = 0. Полученное
противоречие доказывает теорему. ?
Утверждение теоремы 4 будет использовано при фактическом по-
построении ортогонального базиса, но его существование устанавлива-
устанавливается немедленно.
Теорема 5. Во всяком п-мерном евклидовом пространстве V
существуют ортонормир о ванные базисы.
Доказательство. Квадратичная форма q:
на V положительно определена. Поэтому для неё, как для всякой дру-
другой положительно определённой формы (см. гл. 1, § 4, п. 8) суще-
существует базис (ei,... ,еп) пространства У, в котором она записыва-
записывается в нормальном виде
(х = x\G\ + ... + хпеп). Скалярным произведением векторов х и у
будет A). Но это и значит, что (е^ | е^) = Sij, т.е. (ei,..., еп) — орто-
нормированный (а в данном случае даже лучше — ортонормальный)
базис. ?
Заметим, что в ортонормированном базисе координаты вектора
х равны скалярным произведениям х на соответствующие базис-
базисные векторы:
(х|е,)=^. A0)
Определение 5. Скалярное произведение (х|е), где е — век-
вектор длины 1, называется проекцией вектора х на прямую (е)^.
Таким образом, мы можем сказать, что координаты вектора х
в ортонормированном базисе (ei,..., еп) совпадают с проекциями х
на "оси координат" (е^. Фактическое построение ортонормирован-
ного базиса осуществляется при помощи так называемого процесса
ортогонализации Грама—Шмидта, встречающегося в самых разных
§ 1. Евклидовы векторные пространства 109
вопросах анализа и геометрии. Предварительно заметим, что множе-
множество всех векторов, ортогональных данному вектору v, есть подпро-
подпространство, называемое ортогональным дополнением к v. Действи-
Действительно, если х _L v, у _L v, т.е. (х | v) = (у | v) = 0, то и
(ах + /Зу | v) = а(х | v) + /?(у | v) = 0 Va, /3 Е М.
Говорят также, что вектор v ортогонален подпространству U С У,
если v _L u Vu G С/. Очевидно, что v _L U *<=>* v _L e^, i = 1,..., m,
где ei,..., em — базисные векторы в U.
Наконец введём
Определение 6. Множество всех векторов х Е V, ортогональ-
ортогональных подпространству U С V, есть подпространство U^~ (ввиду ли-
линейности условия х 1 [/), которое называется ортогональным до-
дополнением к U.
Теорема б (процесс ортогонализации). Пусть е±,..., ет — си-
система из т линейно независимых векторов евклидова векторного
пространства V.
Тогда существует ортонормир о ванная система векторов
е[,..., е'т такал, что линейные оболочки Li = (ei,..., е^) и L\ —
— (е^,..., е^) совпадают при i = 1, 2,... ,m; т ^ п.
Доказательство. Возьмём в качестве е^ вектор Aei, где А =
= Heill. Так как L\ = (ei) = (е^) = L[, то это даёт утверждение
теоремы при г = 1. Пусть уже построена нужная система е^,..., е'к;
1 ^ к < т (Li = L\\ i = 1,..., к). Покажем, как найти вектор е^+1.
Вектор e/,+i не может содержаться в L'k = L^ (иначе e^+i вы-
выражался бы линейно через ei,... ,е^), поэтому L^+i = (ei,..., е&, v),
где
v = efe+i -
г=1
с произвольными скалярами Ai,..., А&. Постараемся подобрать А^
так, чтобы вектор v был ортогонален к L'k. Для этого, как мы знаем,
необходимо и достаточно выполнения условий
г=1
Таким образом, при Xj = (e^+i | е^) получаем вектор v ф 0, ортого-
ортогональный к L'k. Полагая е^+1 = /iv с \i — ||v||—1, мы придём к орто-
нормированной системе е^,..., е^+1, причём L^+i = L'k+l. В конце
концов получим искомую систему е^,..., е'т. ?
110 Гл. 3. Векторные пространства со скалярным произведением
Следствие. Всякая ортонормир о ванная система векторов ев-
евклидова векторного пространства V дополняема до ортонормиро-
ванного базиса в V.
Доказательство. Согласно теореме 3 из §2 гл. 1, имеющуюся
по условию ортонормированную систему ei,..., em можно дополнить
до базиса ei,..., em, em+i,..., еп. К этому базису применим процесс
ортогонализации, описанный в теореме б, не затрагивая при этом
первые т векторов. ?
Воспользуемся приёмом, близким к процессу ортогонализации в
предыдущей теореме, для доказательства следующего утверждения.
Теорема 7. Пусть L — подпространство конечномерного ев-
евклидова векторного пространства V, ZA — его ортогональное до-
дополнение. Тогда
V = L®L±, L±J-=L. A1)
Доказательство. Возьмём в L какой-нибудь ортонормиро-
ванный базис (ei,..., em). Пусть w G V. Рассмотрим вектор
т
V = W — 2_^(w I ei)ei-
г=1
Так как (v | е,) = (w | е,) - Е™ i(w I ei)O; | е,) = (w | е,) - (w | е,)-
— (w | ej) -I = 0; j = 1,2,..., m, то вектор v ортогонален подпрост-
подпространству L. Это значит, что w = u + v, где и = El!li(w | ef)ef Е L и
v elA Итак, V ^L + L^.
Пусть х е ЬПЬ^-. Так как х G L, то (х | ZA) = 0. Но, в частности,
lA э х, так что (х | х) = 0, откуда получаем х = 0. Следовательно,
V = L 0 ZA — прямая сумма.
Из разложения w = u + v(uGL, vG ZA) имеем (w | u) = (u +
-f v | u) = (u | u) + (v | u) = ||u||2 и, аналогично, (w | v) = ||v||2 . Если
теперь w G ZA^, то (w | v) = 0 и ||v||2 = 0, откуда w = u G L. Стало
быть ZA^ С L Так как далее Ь±А- = (ZA)^ — подпространство
р , ( | ) |||| , уд
быть, ZA^ С L. Так как, далее, Ь±А- = (ZA)^ — подпространство,
ортогональное к ZA, a (L | L^) = 0, то L С Ь±А~. Следовательно,
L-L-1- =L.D
4. Изоморфизмы евклидовых векторных пространств.
Мы видели, что выбор ортонормированного базиса в евклидовом
векторном пространстве V даёт возможность записать скалярное
произведение (х | у) в стандартном виде A). Этот факт означает по
существу, что по своим метрическим свойствам пространства V и
W1 неразличимы. Более точное утверждение выражает
Теорема 8. Любые евклидовы векторные пространства V, V
одинаковой конечной размерности изоморфны. Это значит, что
существует изоморфное отображение / : V —> V векторных про-
пространств {см. определение в п. 3 из § 2 гл. 1), сохраняющее ска-
§ 1. Евклидовы векторные пространства 111
лярное произведение, т.е.
(х|у) = (/(х)|/(у))' A2)
((* | *)' — скалярное произведение на V).
Доказательство. Рассмотрим ортонормированный базис
(ei,..., еп) в У и какой-то ортонормированный базис (е^),..., е^ в
V. Соответствие
/: х = ariei + ... + хпеп н> х; = xiei + ... + xnefn,
очевидно, биективно. Как и в случае теоремы 5 из п. 3 § 2 гл. 1,
непосредственно проверяется, что / — изоморфизм векторных про-
пространств. Так как в У и в У скалярные произведения (х | у), (х' | у')'
вычисляются по одной и той же формуле A) (в силу выбора базисов),
то условие A2) изоморфизма евклидовых векторных пространств
также выполнено. ?
Доказанная теорема позволяет перевести на язык элементарной
геометрии любое утверждение, сформулированное в терминах дей-
действий с векторами из У и скалярного произведения на У. Обратно:
метрическая теорема, относящаяся к объектам пространства М3 или
М2, должна оставаться справедливой в любом евклидовом векторном
пространстве У размерности ^ 3.
Раз уж речь зашла об изоморфизмах, рассмотрим пространство
У*, сопряжённое (двойственное) к евклидову векторному простран-
пространству У в смысле § 3 из гл. 1.
Очевидно, что отображение х н-» (v | х) при любом фиксирован-
фиксированном векторе v Е У определяет линейную форму
ф,, = (v | *): V -+ М,
т.е. (v | *) е У*.
Теорема 9. Отображение Ф: v н->- (v | *) = <J>V есть естествен-
естественный изоморфизм векторных пространств V и У*. При этом изо-
изоморфизме ортонормированный базис ei,...,en евклидова вектор-
векторного пространства V отождествляется с дуальным к нему базисом
Л5 • • • •> fn пространства У*.
Доказательство. Так как скалярное произведение (v | х) ли-
линейно по v, то отображение Ф линейно:
= («и + /?v | *) = а(и | *) + /?(v | *) = аФи + /?Ф^
Далее, КегФ = 0, поскольку v G Ker Ф => (v | х) = 0 Vx G V и,
в частности, (v | v) = 0 н->- v = 0.
Как всякий элемент пространства У*, линейная форма (v | *) ли-
линейно выражается через двойственные к (е^) базисные векторы
е1,..., еп G У *. В частности,
г =
112 Гл. 3. Векторные пространства со скалярным произведением
Так как (ei,..., еп) — ортонормированный базис, то
k=l k=l
откуда
(е;|*) = е\ A3)
Это даёт нам сюръективность, а следовательно, и биективность Ф.
Вместе с тем соотношением A3) устанавливается справедливость за-
заключительного утверждения теоремы. ?
Итак, в евклидовом векторном пространстве V каждый вектор
v Е V можно рассматривать также как линейную форму v: V —> Ж.
При таком отождествлении ортонормированный базис в V является
своим собственным дуальным (взаимным) базисом. Естественным
изоморфизмом (сравнить его с изоморфизмом V ~ У** для обыч-
обычного векторного пространства) мы воспользуемся при изучении ли-
линейных операторов. Изоморфизм Ф можно считать метрическим в
смысле теоремы (8), если определить на У* скалярное произведение
по правилу
((u|*)|(v|*))*:=(u|v).
Все аксиомы скалярного произведения выполняются (проверьте).
5. Ортонормированные базисы и ортогональные матри-
матрицы. В евклидовом векторном пространстве V ортонормированные
базисы играют особую роль, поэтому естественно посмотреть на
формулы перехода от одного ортонормированного базиса (ei,..., еп)
к другому ортонормированному базису (е^,... ,е^). Как всегда, за-
записав
a2je2 + ... + anj-en, 1 ^ j ^ n, A4)
мы получаем матрицу перехода А = (ctij), в k-м столбце которой
стоят координаты вектора е^ относительно базиса (ei,..., еп). Пока
мы лишь переписали формулы C) из § 2 гл. 1 и на А имеем един-
единственное ограничение det А ф 0. Воспользуемся теперь ортонорми-
рованностью базисов:
k I k,l k
Итак,
Г 0 при i ф j, . ч
auaij + a2iCL2j + ... + anianj = < 1 ^ _ A5)
Взяв транспонированную матрицу tA, соотношения A4) (или A5))
перепишем в кратком виде:
*А-А = Е, A6)
§ 1. Евклидовы векторные пространства 113
откуда А~х — 1А. Так как А~х А — Е => А • А~х — Е, то и
А-*А = Е, A6')
что приводит к соотношениям
ai2aj2 + ... + ainajn = I jj^ ]^Jj A5')
^ -L При L — J.
Определение 7. Квадратная матрица А = (aij), удовлетво-
удовлетворяющая одному из эквивалентных условий A5), A5'), A6), A6'), на-
называется ортогональной. Множество всех ортогональных матриц
порядка п обозначается символом О(п).
Непосредственно проверяется (и мы к этому ещё вернёмся), что
О(п) — группа. Она называется ортогональной группой. Если те-
теперь А — произвольная ортогональная матрица, то система векторов
(е[,..., е'п), полученная из ортонормированного базиса (ei,..., еп) по
формулам A4), будет также ортонормированным базисом.
Мы приходим к следующему выводу.
Теорема 10. Матрица перехода от одного ортонормирован-
ортонормированного базиса к другому ортогональная, и всякая ортогональная
матрица может быть матрицей такого перехода.
Заметим, что из формул A4) и условия ортонормированности
векторов получается геометрическая интерпретация элементов ац
ортогональной матрицы А. Именно,
ciij = (ef | e'j) = cos ipij, A7)
где ifij — угол между старым базисным вектором е^ и новым базис-
базисным вектором е^-. Переходя в равенстве A6) к определителям, полу-
получаем ещё, что (det АJ = 1, т.е. определитель всякой ортогональной
матрицы равен 1 или — 1.
Мы знаем из § 2 гл. 1 правило преобразования координат вектора
х G V при замене базиса. Если х = ^2i х\Ъ\ = ^2i х[е[, то
Xi = ^ctijXj, i = 1,2,.. . ,n.
з
Но теперь известно дополнительно, что А~х — 1 А, поэтому
jiXj, I = 1, Z, . . . , 77/.
6. Симплектические пространства. Понятие скалярного про-
произведения "многолико". Так, любая невырожденная билинейная косо-
симметричная форма на V = М2т задаёт симплектическую линейную
структуру. Сама форма, часто обозначаемая [х|у], называется ещё
кососкалярным произведением на V. Пара (V, [* | *]) называется симп-
лектическим пространством. Согласно теореме 9 из § 4 гл. 1 симп-
симплектическую структуру без ограничения общности можно считать
8 А.И.Кострикин
114 Гл. 3. Векторные пространства со скалярным произведением
стандартной (отвечающей матрице J или Jo). Соответствующий ба-
базис называют симплектическим. Переформулировка следствия упо-
упомянутой теоремы 9: все симплектические пространства одинаковой
размерности изоморфны.
Так же, как и в случае евклидовых пространств, естественно рас-
рассмотреть группу линейных операторов на V, сохраняющих симплек-
тическую структуру.
Определение 8. Линейный оператор Л : V —> V называется
симплектическим, если
[Лх|Лу] = [х|у] \/x,yeV = R2m.
Множество всех симплектических линейных операторов на про-
пространстве V называется симплектической группой и обозначается
символом SpBm) := Sp(V).
В матричной форме условие принадлежности Л к SpBm) запи-
записывается в виде
Jo • А = Jo =
О -Ет
Ет О
При этом А называется симплектической матрицей. Отсюда сле-
следует, что det A = =Ы. На самом деле det A = 1, как это прямо выте-
вытекает из теоремы 10 (п. 10 § 4 гл. 1):
1 = Pf(J0) =Pf(*A- Jo- A) = (det A)Pf(Jo) =det A.
В том, что множество SpBm) действительно является группой,
т.е. замкнуто относительно обычных операций (А, В) \—у АВ, А \-у
ь->- А~х, легко убедиться непосредственной проверкой.
При ттг = 1 имеем изоморфизм SpB) = SLB,M). Действительно,
для а, /3,7, S G Ж из условий
а E
7 S
0 -1
1 0
а
7
Р
S
а5
0
-Pi
-(аб-р-у)
0
0 -1
1 0
следует, что аб — {3j = 1. ?
Мы видели в п. 5, что элементы ортогональной группы находятся
во взаимно однозначном соответствии с ортонормированными бази-
базисами евклидова пространства. Аналогично, линейный оператор Л :
М2т —у М2т симплектичен тогда и только тогда, когда он переводит
симплектический базис в симплектический (причём для любой пары
симплектических базисов найдётся оператор, переводящий один ба-
базис в другой).
Спектр симплектического оператора (симплектической матрицы)
обладает рядом интересных особенностей, как показывает
§ 1. Евклидовы векторные пространства
115
Теорема 11. Справедлива импликация
Л Е SpBm) => XA(t) = t2mXA\ ~
\t
Корни характеристического многочлена Ха(^) разбиваются на
четвёрки (и на пары), расположенные симметрично относительно
вещественной оси и относительно единичной окружности.
Другими словами, ха{^) — ^2i=i а^г — возвратный многочлен:
CLi = Cl2m — ii I = 1? ^i • • •
Доказательство. Пусть А — матрица оператора Л. Из опре-
определяющего соотношения 1AJqA = Jq имеем 1 А~х = JqAJ^1 =
= — Jo A Jq . Стало быть,
XA(t) = det (IE - А) = det (Jo (IE - A) J) = det(tE - JoAJ^1) =
= det (IE - 1А~Х) = det( \tE - A'1)) = det (IE - A'1) =
= det(tE - A'1) det A = det(tA - E) = det(E - tA) =
Мы видим, что вместе с А характеристическим числом симплек-
тического линейного оператора Л
будет также и А. Кроме того,
XA(t) E М[?], так что вместе с ком-
комплексным корнем А корнем мно-
многочлена XA(t) будет и А. Каждый
корень А с | А | ^ 1 и Im A ^ О
определяет четвёрку корней А,
А, 1/А, 1/А (рис. 4). При наруше-
нарушении одного из условий получается
пара корней. ?
Иногда на симплектическом пространстве V со стандартной
структурой Jq:
т
[х|у] =
X
Рис- 4
вводится согласованная (хотя и связанная с Jo не канонически, т.е.
способом, зависящим от выбора системы координат) евклидова струк-
структура
(х1у) =
k=i
Для [х|у], как и для любой билинейной формы (см.
такой линейный оператор J, что
[x|y] = (x|Jy).
3), найдётся
116 Гл. 3. Векторные пространства со скалярным произведением
Кососимметричность [х | у] влечёт кососимметричность операто-
оператора J. На самом деле его матрицей в выбранном базисе служит Jq.
Ясно, что J Е Sp(V) и J2 = —Е. Наглядно оператор J можно пред-
представлять в виде вращений на угол тг/2 в каждой из симплектических
(гиперболических) плоскостей.
Назовём плоскость П Е V нулевой, если [П | П] = 0, т.е. [х | у] =0
Vx,y Е П (косая ортогональность). Из определения оператора J сле-
следует, что плоскость П нулевая в точности тогда, когда плоскости
П и J(Ji) ортогональны в евклидовом смысле. Так как J — невы-
невырожденный оператор, то dim П = dim ^(П), а поэтому размерность
нулевой плоскости П в V = М2т не превосходит т.
Оператор J, удовлетворяющий условию J2 = — ?, даёт возмож-
возможность ввести в симплектическое пространство V ещё и комплексную
структуру. Что под этим следует понимать, разъясняется в § 4.
УПРАЖНЕНИЯ
1. В пространстве Рз вещественных многочленов fit) степени < 3 векторы
1, t ортогональны относительно скалярного произведения, заданного формулой
(f \g) = f\ f(t)g(t) dt (частный случай формулы B)). Найти:
а) подпространство A,?)^;
б) ортонормированный базис в Рз.
2. Пусть (V, (* | *)) — евклидово трёхмерное векторное пространство такое,
что ||х||2 = (х | х) = Зж2 + 2х\ + ж| — 4ж]_Ж2 — 2ж]_жз + 2x2X2, (проверить, что эта
форма положительно определена). Найти:
а) угол а между векторами х = [1,1,1], у = [2, 2,1];
б) все векторы, ортогональные х.
3. Используя процесс ортогонализации Грама—Шмидта, доказать, что лю-
любая невырожденная матрица А = (aij) Е Мп(М) может быть записана в виде про-
произведения А = ВС ортогональной матрицы В и верхней треугольной матрицы
С с det В = ±det A.
4. Множество Мп(Ж), рассматриваемое как п2-мерное евклидово простран-
пространство со стандартным скалярным произведением, содержит группу О(п) ортого-
ортогональных матриц, определяемых п(п + 1)/2 соотношениями A5) или A57) (О(п)
суть ортогональная группа). Таким образом, О(п) можно рассматривать как "ал-
"алгебраическое многообразие" размерности п2 —п(п + 1)/2 = п(п —1)/2 = dim o(n),
где о(п) — векторое пространство кососимметричных матриц порядка п. Есте-
Естественно ожидать какого-то хорошего соответствия между множествами О(п) и
о(п). Примером такого соответствия служит преобразование Кэли
К = (Е - А)~1(Е + А), А=(Е- К)~1{Е + К). A8)
Требуется доказать, что если А Е О(п), det(i? — А) ф 0, то К Е о(п). Верно
и обратное: каждой матрице К Е о(п) отвечает А Е О(п) с 1 ^ Spec(A). При
указанном соответствии из "алгебраического многообразия" О(п) требуется вы-
выбросить "гиперповерхность", определяемую уравнением det(i? — А) = 0.
Можно предложить другое преобразование Кэли
К = (Е + А)~1{Е -А), А= (Е + К)~1{Е - К), A9)
где из О(п) нужно удалить "гиперповерхность" с уравнением det (А + Е) = 0,
или, что эквивалентно, ортогональные матрицы с — 1 ^ Spec(A).
§ 2. Эрмитовы векторные пространства 117
Требуется убедиться в справедливости соответствия A9).
5. Проверить, что ортогональные матрицы, полученные преобразованием
Кэли из кососимметричных (в соотношениях A8) и A9)), имеют определитель 1
(множество всех таких матриц обозначается символом SO(n)).
6. Доказать, что характеристический многочлен ха{Р) ортогональной
п х n-матрицы А обладает свойством
7. Пусть А = [^4(i), • • •, ^.(п)] — произвольная матрица с попарно ортогональ-
ортогональными строками. Доказать, что
|det A\ =||АA)|Н|ЛB)||...||Л(П)||
(стандартная норма векторов в Шп).
8. Пусть X = [-X"(i), • • • ,^(п)] — произвольная матрица из Мп(Ж). Доказать,
что
|detXK||XA)|H|XB)||...||X(n)||
(неравенство Адамара).
§ 2. Эрмитовы векторные пространства
1. Эрмитовы формы. Многие задачи сводятся к тем или иным
вопросам о линейных операторах, действующих на комплексных век-
векторных пространствах, и по этой причине последние заслуживают
особого внимания. Многообразие метрических соотношений в ев-
евклидовых пространствах над Ж служит естественным стимулом для
введения скалярного произведения и в комплексном случае. Однако,
как было отмечено в конце п. 7 из § 4 гл. 1, стандартная билинейная
форма s(x, у) = xiyi + ... + хпуп с Xj,yj G С не может быть отправ-
отправным пунктом для этой цели, поскольку длина (норма) ||х|| = д/з(х, х)
вектора х G Сп обладает "неприятным" свойством:
||гх||2 = s(ix,ix) = i2s(x,x) = —||х||2.
Если х/Ои ||х|| > 0, то гх G Сп, но ||гх|| < 0. Это определение явно
неприемлемо, если мы хотим пользоваться интуитивно воспринима-
воспринимаемым понятием длины вектора.
Замечательным аналогом евклидова векторного пространства
служит эрмитово (или унитарное) пространство. Введём следующее
Определение 1. Говорят, что /: V х V —> С есть полуторали-
нейнал форма на комплексном векторном пространстве У, если:
i)u/(ax + /3y,z) =a/(x,z)+/3/(y,z) Va,/3eC, x,y,z G У, т.е. /
линейна по первому аргументу при фиксированном втором;
И) /(х, ау +/3z) = a/(x, у) +/3/(х, z), где черта над а, C означает
обычную комплексную сопряжённость (полулинейность по второму
аргументу при фиксированном первом).
Полуторалинейная форма / называется эрмитовой, если
/(у,х)=/(х,у). A)
118 Гл. 3. Векторные пространства со скалярным произведением
Пусть (ei,... ,еп) — базис пространства V. Если х = ^ж^, у =
— выражение значений формы / в базисе (ei,..., еп). Эрмитовость
формы / означает, что коэффициенты её матрицы F = (fij) удов-
удовлетворяют условию fij = fji. Другими словами,
F* = F, (V)
где F* := lF. Матрица F, удовлетворяющая условию A'), также
называется эрмитовой.
Если F' — матрица эрмитовой формы / в базисе (e'l5..., е^),
получающемся из (ei,..., еп) при помощи матрицы перехода А, то
F1 = fA-F-A B)
(А = (<%); ср. с выражением E) из § 4 гл. 1). Непосредственно про-
проверяется, с использованием A'), что
(F1)* =\гА'Т'А)=гА'гТ'А= fA-F*A= lA'F^A = F\
т.е., как и следовало ожидать, при замене матрицы F на 1А • F • А
свойство эрмитовости сохраняется.
Эрмитовой форме /(х,у) отвечает, естественно, эрмитова ква-
квадратичная форма /(х,х). Так как
то квадратичная эрмитова форма принимает только вещественные
значения. Если при этом /(х,х) ^ 0 и /(х,х) = 0 =^ х = 0, то
форма / называется положительно определённой. Записав / в виде
/(х,у) =#(х,у) +i/i(x,y)
с вещественнозначными функциями g,h, мы, используя A), легко
убеждаемся в том, что g и h — билинейные формы на У, причём g —
симметричная, a h — кососимметричная форма. Наконец, положи-
положительная определённость / эквивалентна положительной определён-
определённости д.
Определение 2. Конечномерное векторное пространство V
над полем С, снабжённое положительно определённой эрмитовой фор-
формой (х | у) := /(х,у), называется эрмитовым (унитарным) прост-
пространством. Комплексное число (х | у) называется скалярным произве-
произведением (говорят ещё: внутренним произведением) векторов х,у G V.
Итак, в новых обозначениях имеем
(х|у) = (У |х),
(ах + /Зу | z) = а(~х | z) +
(х | х) ^ 0; (х | х) = 0 лишь при х = 0.
§ 2. Эрмитовы векторные пространства 119
Пример 1. Положив
(X | у) = Ж1?/Г+ Х2У2 + ••• + ХпУ^, C)
мы получим, несомненно, положительно определённую эрмитову форму с единич-
единичной матрицей F = Е, т.е. координатное комплексное пространство Сп, снабжён-
снабжённое этой формой, становится эрмитовым. Если перейти от стандартного базиса
в Сп к любому другому при помощи матрицы перехода А, то согласно B) мы
сопоставим нашей стандартной эрмитовой форме эрмитову матрицу F' = tА- А.
В вещественном случае комплексную сопряжённость можно игно-
игнорировать, так что эрмитово пространство — истинный аналог евкли-
евклидова. Как и в евклидовом пространстве, длина ||v|| вектора v Е V
определяется равенством
2. Метрические соотношения. Легко проверяемое соотноше-
соотношение
показывает, что скалярное произведение выражается непосредствен-
непосредственно в терминах длин (процесс поляризации). Из очевидных равенств
||Ах|| = л/(Ах | Ах) =
следует известное в евклидовом случае свойство нормы
||Ах|| = |А|||х||. C)
Эта параллель распространяется на большинство других ут-
утверждений. В частности, неравенство Коши—Буняковского (его на-
называют ещё неравенством Шварца) приобретает следующий вид:
D)
(равенство достигается в точности тогда, когда векторы х, у про-
пропорциональны) .
Доказательство. Действительно, записывая комплексное чи-
число (х | у) в тригонометрической форме (х | у) = |(х|у)|ег(/?, ср Е М,
мы видим, что при любом t G Ж выполнено неравенство
|2?2
?2 + ((х | у)?-^ + (х | y)ei(fi)t + ||у||2 = (х? + уе* \ х? + yei(f>) > 0.
Так как (х | у)е щ — |(х|у)| = (х|у)ег(/?, то оно переписывается в
виде
22
Получающееся условие на дискриминант приводит к нужному нера-
неравенству. Оно превращается в строгое равенство тогда, когда х?о +
-\-уег(р = 0 при подходящем to G М, т.е. при пропорциональных х, у. ?
Из неравенства D) непосредственно вытекает неравенство тре-
треугольника
||х±у||^||х|| + ||у|| E)
120 Гл. 3. Векторные пространства со скалярным произведением
и его очевидное обобщение
Пример 2. Пространства С2(а,Ь) и Рп над С, снабжённые скалярным про-
произведением
являются, очевидно, эрмитовыми. Неравенство E) в этих случаях принимает вид
dt <= J? |/(«)Р dt + J? \g(t)\* dt
(сравнить с неравенством Минковского в примере 3 из § 1). В эрмитовом
пространстве Сп со стандартным скалярным произведением C) выполнено не-
неравенство
Неравенство D) позволяет утверждать, что существует единствен-
единственный угол ср, 0 ^ if ^ тг/2, для которого
|(
cos tp= '
1|х||-||у11
Квантовомеханическое истолкование величины cos2 ip можно найти в
учебном пособии [2].
3. Ортогональность. Как и в вещественном случае, набор век-
векторов ei,...,em эрмитова пространства (V, (* | *)) называется ор-
тонормир о ванным (или ортонормалъным), если (е^ | е^-) = Sij. Этот
набор векторов линейно независим и дополняем до ортонормиро-
ванного базиса пространства V. Чтобы убедиться в этом, следует
снова воспользоваться процессом ортогонализации Грама—Шмидта
(см. п. 3 из § 1), сопоставляя каждому вектору и вектор v = и —
— ^Г(и1е*)е* И замечая, что v G (ei,... ,em)-L. Вектор v можно
нормировать и продолжить процесс дальше. Кстати,
V = W®W±, W±± = W, F)
для любого подпространства W С V.
В качестве небольшого упражнения предлагается доказать сле-
следующее утверждение.
Теорема 1. Пусть (ei,... ,еп) —ортонормир о ванный базис эр-
эрмитова {или евклидова) векторного пространства (V, (*|*)).
Тогда:
i) х = J^i(x I ei)ei для всякого х G V;
И) (х | у) = J^i(x I ei)(ei I У) для любых х,у G V (равенство Пар-
севаля);
2 2
§ 2. Эрмитовы векторные пространства 121
Пусть (ei,...,en) — ортонормированный базис эрмитова про-
пространства V. В теореме 1 использовано следующее соображение. Для
любого вектора х = ^2i х\Ъ\ ввиду линейности скалярного произве-
произведения по первому аргументу имеем
Таким образом, мы пришли к линейной форме fj = (* | е^): V —>
—> С, сопоставляющей каждому вектору х = ^2i x^i его j-ю коор-
координату Xj относительно (е^). Если теперь у = YljUjCj — ещё один
вектор пространства V, то
(Х I У) =
т.е. вычисление скалярного произведения векторов эрмитова про-
пространства V при выборе в нём ортонормированного базиса происхо-
происходит по формуле C) для стандартного скалярного произведения в Сп.
Тем самым определён изоморфизм Сп = V эрмитовых пространств:
(ж1,...,жп) ь->- ^2i x^i — биективное отображение, сохраняющее
скалярное произведение. В отличие от евклидова векторного прост-
пространства эрмитово пространство не отождествляется со своим двой-
двойственным пространством. Вместе с линейными функциями нужно
рассматривать и полулинейные функции в смысле следующего опре-
определения.
Определение 3. Пусть / — обычная линейная форма (функ-
(функция) на комплексном векторном пространстве V. Сопряжённой к
f линейной формой (или полулинейной функцией) на V называется
функция /: V —> С, удовлетворяющая условиям
7(х + у)=7(х)+7(у),
Если (У, (* | *)) — эрмитово пространство, то / представляется
в виде /(х) = (х | а) для некоторого однозначно определённого век-
вектора а (ср. с теоремой 9 из § 1), но соответствие между / и а не
является линейным. Если теперь / — полулинейная функция, то,
выбрав какой-то ортонормированный базис (е^) в V и положив
а = ^2i /(ef)ef, будем иметь для любого вектора х = ^jxJeJ co~
отношение
01х) =
Единственность вектора а вытекает, очевидно, из положительной
определённости формы (* | *). Свойство эрмитовости (* | *) позволяет
записать
122 Гл. 3. Векторные пространства со скалярным произведением
4. Унитарные матрицы. В евклидовом векторном простран-
пространстве переход от одного ортонормированного базиса к другому реали-
реализуется при помощи ортогональной матрицы (теорема 10 из § 1). Ана-
Аналогичное утверждение имеет место в случае эрмитовых пространств.
Пусть (е^), (е'-) — ортонормированные базисы эрмитова векторного
пространства (V, (*|*)), связанные матрицей перехода А = (а^) :
e'j = ^2iaijei- Тогда
Sjk = (e'j | e'k) = ^ aijurtiPi I e*) = J^ ctijCHk-
Другими словами,
A ¦ A* = E = A* ¦ A, G)
где A* := l A — матрица, эрмитово сопряжённая с А (напомним, что
А = (Щ)).
Определение 4. Матрица А, удовлетворяющая условию G),
называется унитарной.
Понятно, что в вещественном случае унитарная матрица явля-
ется ортогональной. Далее, det A = det А, поэтому det A* = det А и,
принимая во внимание G), получаем, что | det А\ = 1, т.е. det A = егср
для любой унитарной матрицы А. В частности, унитарные матрицы
невырожденны.
Из определения А* непосредственно вытекает, что
(А-ВУ =В* -А*. (8)
Поэтому в случае унитарных матриц А, В мы приходим к заключе-
заключению об унитарности их произведения: (АВ)(АВ)* = А(ВВ*)А* =
= АЕА* = АА* = Е. Далее, А'1 А = Е = А • А'1 =^ А*(А'1)* =
= Е = (А^УА* =^ А~1(А~1У = Е = (А^уА'1, т.е. вместе с А
унитарной является и матрица А~х. Разумеется, те же соображения
относятся и к ортогональным матрицам.
Принимая во внимание общее определение группы, мы видим, что
имеет место
Теорема 2. Справедливы следующие утверждения:
i) все унитарные матрицы порядка п являются элементами (уни-
(унитарной) группы U(n);
п) унитарная группа U(n) содержит в качестве подгруппы (ор-
(ортогональную) группу О(п), состоящую из вещественных ортого-
ортогональных матриц порядка щ
iii) ортогональные (соответственно унитарные) матрицы с
определителем 1 составляют специальную ортогональную группу
SO(n) (соответственно специальную унитарную группу SU(n)).
Таким образом,
SO(n) = О(п) П SL(n) С SU(n) = U(n) П SL(C).
§ 2. Эрмитовы векторные пространства 123
Вообще говоря, можно было бы без особого труда определить
ортогональную группу О(п,Я) над произвольным полем Я, равно
как и унитарную группу 17(п,Я) над полем Я, допускающем аналог
комплексного сопряжения аиа.
5. Нормированные векторные пространства. Неравенство
A0) из § 1 (длина стороны треугольника не превышает суммы длин
двух других его сторон) и его унитарный аналог E) позволяют счи-
считать векторные пространства со скалярным произведением метри-
метрическими пространствами в смысле следующего общего определения.
Определение 5. Пусть Е — множество точек и d: Е х Е —>-
—у Ж — отображение, сопоставляющее любым двум точкам u,v Е Е
неотрицательное вещественное число d(u, v) (расстояние между и и
v) и обладающее следующими свойствами:
i) d{u,v) = d{v,u) (симметрия);
ii) d(u,v) = 0 <^=> и = i?;
iii) d(u,w) ^ d(u,v) + d(v,w) (неравенство треугольника).
Функция d с такими свойствами называется метрикой, а пара
(E,d) — метрическим пространством.
Пример 3. В векторном пространстве V со скалярным произведением и
тем самым с определённой нормой ||х|| за расстояние между векторами х,у при-
принимается d(x, у) := ||х — у||. Так, например, для V = Сг(а, Ь) метрикой служит
d(f,g) =
Но условиям i)-iii) определения 5 удовлетворяют также функции
d'(f,g)= max\№-g(t)\, d"(f,g)= f \f(t)-g(t)\dt,
a^t^b Ja
в чём нетрудно убедиться непосредственной проверкой.
Наличие метрики сразу же приводит к простейшим понятиям из
топологии и анализа, включая понятие предельного перехода. Под-
Подмножества
d(ao,x) < г},
d(ao,x) ^ г},
B(ao,r) = {x G E
В(ао,г) = {х G E
S(ao,r) = {х е Е | d(aOjX) = г}
метрического пространства (Е, d) называются соответственно
открытым шаром, замкнутым шаром, сферой с центром в точке
по и радиусом г.
Подмножество F С Е ограниченное, если оно содержится в неко-
некотором шаре радиуса г < оо.
Последовательность точек е\, в2,..., еп ... в (Е, d) сходится к
точке е G Е, если \imn^ood(en, e) = 0. Последовательность назы-
называется фундаментальной или последовательностью Коши, если для
124 Гл. 3. Векторные пространства со скалярным произведением
всякого е > 0 существует N = N(e) такое, что d(en,em) < е при
т, п > N. Метрическое пространство Е называется полным, если
любая последовательность Коши в нём сходится. Из полноты ЕиС,
доказываемой в анализе, следует, что пространства Жп и Сп с любой
из метрик
П ч1/2
п
di(x,y) =max(|xi -yi\), d2(x,y) = ^ |ж* ~ Уг\
г=1
полны (проверить, что 4 и^ — метрики; для d это следует из при-
примера 2).
Итак, пусть V — вещественное или комплексное векторное
пространство с метрикой d. Особо важным является случай, когда d
удовлетворяет двум дополнительным условиям:
а) d(x, у) = d(x + z, у + z) для любых х, у, z Е V (инвариантность
относительно сдвига);
б) d(Ax, Ay) = | А| d(x, у) (умножение на скаляр А увеличивает рас-
расстояние в |А| раз).
Определение 6. Назовём нормой вектора х Е V относительно
метрики d с условиями а), б) и будем обозначать через ||х|| число
d(x,0).
В пространстве со скалярным произведением (* | *) метрика d
вводилась нами специальным образом (пример 3), так что старое
и новое определения нормы вектора х согласованы. Поэтому исполь-
используется прежнее обозначение ||х||. Возвращаясь к общему случаю, мы
должны убедиться, что выполнены следующие свойства нормы:
||0|| = 0; ||х|| > 0, если х ф 0;
||Ах|| = |А| ||х|| для всех A G С, х е V;
||х + у|| ^ ||х|| + ||у|| для всех х, у G V.
Первые два свойства непосредственно вытекают из аксиом ме-
метрики и условий а), б); третье проверяется так: ||х+у|| = d(x+y, 0) =
= d(x, -у) ^ d(x, 0) + d@, -у) = ||х|| + ||у||.
Определение 7. Векторное пространство V', снабжённое функ-
функцией нормы || * || : V —У М, удовлетворяющей перечисленным трём
условиям, называется нормированным. Полное нормированное век-
векторное пространство называется банаховым.
Пространства Жп и Сп с любыми нормами, отвечающими рас-
рассмотренным выше метрикам, банаховы. Заметим ещё, что по норме
восстанавливается метрика: положив d(x, у) := ||х —у||, легко прове-
проверить аксиомы метрики. Для неё d(x, 0) = ||х||.
§ 2. Эрмитовы векторные пространства 125
Понятие сходимости последовательности в метрическом прост-
пространстве, данное нами выше, специализируется на случай нормиро-
нормированных векторных пространств и называется сходимостью по норме.
Справедлива несложная
Теорема 3. Пусть V — векторное пространство размерности
п над Ж или С со скалярным произведением.
Тогда эквивалентны следующие два понятия сходимости после-
последовательности векторов х/, Е V, к = 1, 2,..., к вектору х Е V:
i) ||xfc — х|| —У 0 при к —У оо;
ii) (xfc — х | у) —У 0 при к —У оо для каждого фиксированного
yev.
Доказательство. i)^=>ii), поскольку в силу неравенства D)
имеем
ii)^=>i). Чтобы увидеть это, возьмём в V ортонормированный
базис (еь...еп). Если верно И), то (х/, — х | е«) ->• 0 для каждого
i = 1, 2,..., п. Поэтому, используя равенство
||Xfc - X|f =
i=l
(теорема 1, iii)), приходим к выводу, что и ||х& — х|| —У 0. П
Линейная структура позволяет определить понятие сходимости
ряда, более сильное, чем сходимость по норме его частичных сумм.
Именно, ряд X^i х« называется абсолютно сходящимся, если схо-
сходится ряд Y^Li IIх*II-
УПРАЖНЕНИЯ
1. ?О(п) = {А ? Мп(?) | ьА • А = Е} — определение комплексной ортого-
ортогональной группы. Понятно, что О(п) С СО(п) и SO(n) С 5*СО(п) (подгруппы в
О(п) и СО(п) элементов с определителем 1). Можно ли по аналогии с теоремой 2
говорить о включениях ?О(п) С U(n) и S?O(n) С U(n)?
2. Показать, что метрики di и с?2 из п. 5 не индуцируются каким-либо ска-
скалярным произведением на М,п (аналогично на Сп).
3. Используя функциональные средства, проверить, что формулой
1|х||„ =
4=i
для любого р ^> 1 на пространстве Мп задаётся норма (так называемая 1р-норма).
Проверить, что
1/р
lim (y^)
р—^оо
Тогда формально можно считать di(x,y) = ||х — у||оо (очевидно, что б?2(х,у) =
= ||х-у||ь d(x,y) = ||х-у||2).
126 Гл. 3. Векторные пространства со скалярным произведением
На векторном пространстве С@,1) непрерывных функций / : [0,1] —>¦ Ж су-
существуют аналоги указанных норм:
||/||oo=omaxi|/(t)|) ll/lli
Более общо: ||/||р = (/0 \f{t)\pdt) (это упражнение носит необязательный ха-
характер).
§ 3. Линейные операторы на пространствах
со скалярным произведением
1. Связь между линейными операторами и 0-линеиными
формами. Под 0-линейной формой на векторном пространстве У
понимается билинейная форма @ = 2), когда У — вещественное век-
векторное пространство, и полуторалинейная форма @ = 3/2), когда
У — комплексное векторное пространство. Будем считать теперь
У евклидовым (соответственно эрмитовым) пространством над Ж
(соответственно над С) со скалярным произведением (* | *). Пусть,
далее, Л — произвольный линейный оператор на У. В п. 6 из § 3
гл. 2 было введено понятие линейного оператора Л*, сопряжённого
к Л и действующего на У*. В случае пространства со скалярным
произведением имеется далёкая аналогия между линейными опера-
операторами и 0-линейными формами, что отражает наличие (по крайней
мере в вещественном случае) естественного изоморфизма между У
и У* и что найдёт отражение в действии Л* непосредственно на У.
Остановимся на этом более подробно. Рассмотрим отображение
jA\V х У -> Я (Я = Ж или Я = С),
определённое по правилу
/д(х,у):=(Лх|у). A)
Из свойств скалярного произведения непосредственно вытекает, что
/д — 0-линейная форма на У, т.е. билинейная форма в вещественном
случае и полуторалинейная — в комплексном. Аналогичную проверку
мы не раз проводили.
Соответствие Л н->- /л, задающее отображение C(V) —> Св(У,Я),
инъективно. Действительно, если (Лх | у) = /л(х5у) — (Sx|y), то
((Л-В)х|у) = (Лх-Вх|у) = (Лх|у) -(Вх|у) =0 Vy G У,
откуда (Л - В)х = 0 Vx G У, или Л = В. Отсюда, а также из
равенства dim?(y) = (Ит?о(У,Я) вытекает биективность нашего
отображения.
Это, впрочем, можно усмотреть и из явной конструкции по задан-
заданной 0-линейной форме /(х, у) линейного оператора Л/, для которого
/(х,у) = (Л/х|у). B)
§ 3. Операторы на пространствах со скалярным произведением 127
Вот как это нужно делать. Пусть (ei,...,en) — ортонормирован-
ный базис в V, a F — матрица 0-линейной формы /(х,у) в этом
базисе. Как всегда, обозначим через X = [xi,... ,хп] столбец коор-
координат вектора х = J^ ?iei- Ввиду ортонормированности базиса ска-
скалярное произведение вектора х и вектора у = ^2- y^j записывается
в виде произведения строки 1Х и столбца Y: (х | у) = 1Х • Y.
Возьмём в качестве Af линейный оператор с матрицей lF. Ему
соответствует линейное преобразование X \-t lFX столбцов коор-
координат в базисе (е^). Определяющее соотношение B) теперь является
просто интерпретацией введённых обозначений:
Дх,у)= lXFY= *^
Но мы могли бы взять некий линейный оператор AZ с матрицей F.
Тогда
Если положить A— fF, A* = l A — F, то А будет матрицей нашего
оператора Д/, а А* = 1А — матрицей оператора Af.
Всё сказанное позволяет утверждать, что справедлива
Теорема 1. Пусть V — векторное пространство со скаляр-
скалярным произведением (* | *). Тогда любая из формул
/д(х,у) = (Лх|у), /д(х,у) = (х|Л*у) C)
устанавливает биективное соответствие между 6-линейными
формами и линейными операторами на V. Взятые вместе форму-
формулы C) однозначно определяют линейный оператор Л* : V —> У,
сопряжённый к А.
В ортонор мир о ванном базисе матрица оператора Л* получа-
получается из матрицы оператора А путём транспонирования и комп-
комплексного сопряжения (в случае Я = С).
Определение
(Лх | у) = (х | Л*у) D)
при Я = Ж полностью согласуется с определением сопряжённого опе-
оператора в п. 6 из § 3 гл. 2, поскольку каждая линейная функция на
V имеет вид у н-» (х | у) при некотором фиксированном х. Вспомним
в этой связи выражение ег = (е^ | *) для векторов дуального базиса
(см. A3) из § 1).
Стоит отметить, что в векторном пространстве, не снабжённом
евклидовой или эрмитовой структурой, сопоставление 0-линейной
форме / с матрицей F в некотором базисе линейного оператора с
матрицей А = lF носило бы случайный характер. Действительно,
при переходе к новому базису при помощи матрицы перехода В ма-
матрицей 0-линейной формы становится F' = lBFB, так что А' =
= lF' = В* lFB. Но в то же время по теореме 3 из § 2 гл. 2 мы
128 Гл. 3. Векторные пространства со скалярным произведением
должны иметь А' = В~хАВ = B~llFB. Между двумя выражениями
для А' нет ничего общего. Однако в случае эрмитова (евклидова)
пространства матрица В должна сохранять ортонормированность
базисов, что влечёт её унитарность (соответственно ортогональ-
ортогональность). Для унитарной матрицы 5* = 5, так что имеется полная
согласованность.
Перепишем ещё раз известные свойства отображения Л н Л*:
Д + Б*=Д*+Б*, (аЛУ=аЛ\ (АВ)*=В*А*, Л** = Л. E)
Небольшое отличие от формул A5) из § 3 гл. 2 — наличие знака
комплексного сопряжения над а, обусловленное полуторалиней-
ностью формы (* | *) и типом соответствия <J>V : / •—>- (v | *) (см.
п. 4 из § 1).
2. Типы линейных операторов. Все линейные операторы,
действующие на векторном пространстве V со скалярным произве-
произведением (* | *), разбиваются на классы в зависимости от их поведения
по отношению к операции *, введённой в п. 1. Выделим наиболее
важные классы.
Определение 1. Линейный оператор Л называется эрмитовым
(или самосопряжённым), если Л* = Л. В случае евклидова простран-
пространства (Я = Ж) оператор Л = Л* называют ещё симметричным.
Самосопряжённость оператора Л эквивалентна условию эрмито-
вости 0-линейной формы (Лх|у), как это вытекает из теоремы 1.
Действительно, условие самосопряжённости записывается в виде
а условие эрмитовости формы /д — в виде
(Лх | у) = /л(х,у) = /л(у,х) = (Лу | х).
Так как (* | *) — эрмитова форма, то (Лу | х) = (х | Лу). Это и уста-
устанавливает эквивалентность упомянутых условий.
В матричной форме, если использовать ортонормированный ба-
базис пространства У, условие самосопряжённости (эрмитовости) опе-
оператора Л выражается равенством 1А — А = 0. Раньше именно такие
матрицы мы называли эрмитовыми, а в вещественном случае — сим-
симметричными.
Каждая вещественная матрица А является суммой симметричной
и кососимметричной (см. гл. 1, § 4, п. 4). Чтобы иметь аналог этого
свойства в комплексном случае, введём
Определение 2. Линейный оператор Л называется косоэрми-
товым (или ко со симметричным при Я = М), если Л* = —Л.
Так как Л** = Л для любого Л G C(V), то оператор Л + Л* эрми-
эрмитов, а Л—Л* косоэрмитов. Аналогично, эрмитовость Л эквивалентна
косоэрмитовости оператора г Л. Поэтому справедлива
§ 3. Операторы на пространствах со скалярным произведением 129
Теорема 2. Каждый линейный оператор Z на эрмитовом
пространстве записывается в виде
Z = A + B,
где А — эрмитов, а В — косоэрмитов оператор. Кроме того,
z = x + iy, (б)
где X и У — эрмитовы линейные операторы.
Доказательство. Положить А = (Z + Z*)/2, В = (Z — Z*)/2,
X — Л, У = —iB. Далее — непосредственная проверка при помощи
формул E). ?
Запись F), очевидно, является прямым обобщением записи ком-
комплексного числа z в виде z = х + гу, т.е. эрмитовы операторы —
далёкие аналоги вещественных чисел. В свою очередь косоэрмитов
оператор — прямой "потомок" чисто мнимого числа z = iy, для
которого ~z — —z. Но если произведение двух вещественных чисел
всегда есть вещественное число, то произведение двух эрмитовых
операторов не обязательно эрмитово.
Имеет место
Теорема 3. Произведение ЛВ эрмитовых операторов является
эрмитовым тогда и только тогда, когда ЛВ = В А.
Доказательство. Используя снова формулы E), получаем
?
Многочисленные приложения в физике и математике вызывают
потребность в рассмотрении множества всех эрмитовых или косоэр-
митовых операторов как алгебр в смысле определения 1 из § 2 гл. 2.
Пример 1. Как видно из теоремы 6, эрмитовы матрицы или операторы,
вообще говоря, не замкнуты относительно ассоциативного произведения. В по-
попытке найти алгебраические рамки для квантовой механики физик П. Йордан
ввёл в 1930-х годах алгебры над М, носящие теперь его имя. В основу положено
йорданово произведение
ЛоБ= -(АВ + ВА),
удовлетворяющее закону коммутативности (очевидно) и тождеству Йордана
(А2 о В) о А = А2 о (В о Л) (проверить!). К настоящему времени развита
содержательная теория йордановых алгебр, не обязательно конечномерных.
Пример 2. Косоэрмитовы операторы образуют над Ж алгебру Ли (см. при-
пример 6 из § 2 гл. 2) относительно обычной операции коммутирования. Именно,
если А и В — косоэрмитовы операторы, то косоэрмитовым будет также их ком-
коммутатор [А, В] = АВ — В А.
Предположим, что (Лх | у) = 0 Vx,y G V. Тогда, в частности,
(Ах. | Ах) = 0, а это может быть только при Ах = 0 Vx G V, т.е. А =
= О. Этот критерий тривиальности А можно существенно усилить.
Теорема 4. Пусть (Ах | х) =0 Vx G V, и пусть выполнено
одно из двух условий:
I) V — эрмитово пространство;
9 А.И.Кострикин
130 Гл. 3. Векторные пространства со скалярным произведением
2) V — евклидово пространство и А — симметричный опера-
оператор.
Тогда Л = О.
Доказательство. 1) Из двух легко проверяемых поляризаци-
поляризационных тождеств
(Лх|у) + (Лу|х)= (Л(х + у)|х + у)-(Лх|х)-(Лу|у), G)
(Ах | у) - {Ау | х) = -г (А(гх + у) | гх + у) + i{A{ix) | гх) + г(Лу | у),
(8)
правые части которых по предположению равны нулю, мы приходим
к системе двух линейных однородных уравнений
(Ах | у) + (Ау | х) = 0, (Ах | у) - (Ay | х) = 0.
Отсюда следует, что (Дх | у) = 0 Vx, у G V, а это, как мы уже знаем,
эквивалентно равенству А — О.
2) Поляризационное тождество G), выполняющееся в любом слу-
случае, и условие симметричности
(Ау | х) = (у \А*х) = (у |Лх) = (Ах | у)
дают в итоге то же самое тождество (Ах | у) = 0 Vx,y Е V, из
которого следует, что А = О. ?
Замечание 1. Симметричность оператора А в условии 2) тео-
теоремы 4 существенна. Например, для кососимметричного оператора
на евклидовом пространстве V выполняется тождество (Ах | х) = 0
Vx G У, но А не обязательно нулевой оператор.
Определение 3. Линейный оператор А на векторном прост-
пространстве со скалярным произведением называется унитарным (в евк-
евклидовом случае — ортогональным), если Л* • А = ? = А • Л*.
При п = 1 имеем z • ~z = 1, т.е. унитарные операторы анало-
аналогичны комплексным числам, по модулю равным единице. В матрич-
матричной форме (по отношению к ортонормированному базису) условие
унитарности выражается равенством G) из § 2. Именно такие ма-
матрицы мы и называли унитарными (в вещественном случае — ор-
ортогональными). Они возникли естественным образом как матрицы
перехода от одного ортонормированного базиса к другому. Этому
факту отвечает более содержательная геометрическая интерпрета-
интерпретация унитарных операторов.
Определение 4. Линейный оператор Л: V —> У, сохраняющий
расстояние (метрику), т.е. такой, что
называется изометрией.
Так как Лх — Лу = Л(х — у), то, очевидно, Л — изометрия на V
§ 3. Операторы на пространствах со скалярным произведением 131
в точности тогда, когда ||Лх|| = ||х|| для всех х Е V. Далее,
||Лх|| = ||х|| «=> (Лх|Лх) = (х|х) «=>
«=> (Л* Лх | х) = (х | х) «=> ((Л* Л - ?)х | х) = О (9)
для любого вектора х G V. Оператор А*А-? самосопряжён, поэтому
согласно теореме 4 как в эрмитовом, так и в евклидовом случае из
(9) вытекает тождество А*А — ? = О, т.е. изометричный оператор
Л должен быть унитарным.
С другой стороны, всякий унитарный оператор изометричен:
(Лх | Лх) = (х | Л"Ак) = (х | ?х) = (х | х).
Следовательно, верна
Теорема 5. Унитарные линейные операторы на векторном
пространстве V с метрикой, и только они, являются изометриями
наУ.
Унитарные, а стало быть, и изометричные операторы на V обра-
образуют группу — унитарную U{n) при Я = С и ортогональную 0{п)
при Я = Ж. На языке матриц мы с этим фактом уже знакомы (тео-
(теорема 2 из § 2). Положение здесь такое же, как с группой GL(n,&):
можно говорить о группе матриц, а можно говорить о группе Aut(V)
автоморфизмов пространства V. Изометрии — это автоморфизмы,
сохраняющие метрику.
3. Канонический вид эрмитовых операторов. Существова-
Существование собственного базиса для любого эрмитова оператора, на первый
взгляд, не очевидное свойство. В самом деле, матрицы А, А' данного
симметричного оператора Л: V ->• V (при Я = Ж) в разных ортонор-
мированных базисах (е^), (ej) связаны соотношением А' = В~1АВ,
где В — ортогональная матрица. Мы знаем, что симметричную ве-
вещественную матрицу можно привести к диагональному виду, но за
счёт произвольного выбора невырожденной матрицы В. Как оказы-
оказывается, свойством самосопряжённости Л можно распорядиться более
"экономно".
Лемма 1. Собственные значения эрмитова оператора веще-
вещественны.
Доказательство. В самом деле, пусть Л: V —> V — эрмитов
оператор, Л — его собственное значение, отвечающее собственному
вектору е G V. По определению
А(е | е) = (Ле | е) = (Ле | е) = (е | Л*е) = (е | Ле) = (е | Ае) = А(е | е).
Так как (е | е) ф 0, то А = А. ?
В случае симметричного (т.е. вещественного самосопряжённого)
оператора утверждение леммы 1 пусто, ибо всякое его собствен-
собственное значение по определению принадлежит Ж. Напротив, следующая
лемма очевидна в комплексном случае.
9*
132 Гл. 3. Векторные пространства со скалярным произведением
Лемма 2. У каждого симметричного линейного оператора А
существует собственный вектор.
Доказательство. Как и всякий вещественный оператор, А
обладает одномерным или двумерным собственным подпространст-
подпространством (теорема 7 из § 3 гл. 2). Существование одномерного инвари-
инвариантного подпространства совпадает с утверждением леммы. Рассмо-
Рассмотрим случай, когда L — двумерное инвариантное подпространство.
Оператор А индуцирует на L симметричный линейный оператор
Ль •> поскольку условие симметричности (Ах | у) = (х | Ау), будучи
ограниченным на х, у Е L, продолжает оставаться справедливым:
Ах G L, Ay Е L.
Выберем в L ортонормированный базис (ei,e2). Матрицей опе-
оператора Аь в этом базисе будет симметричная 2 х 2-матрица
а Ъ
Ь d
s±L =
с характеристическим многочленом
*(*) =
t — a —b
= t2 -(a + d)t + (ad-b2).
-b t-d
Дискриминант этого многочлена
Dx = (а + dJ - 4(ad - Ъ2) = (а - dJ + 4b2 ^ 0,
так что x(t) имеет вещественный корень Л, а оператор А — соб-
собственный вектор с собственным значением Л. ?
Дальнейшие рассуждения ведутся одновременно для Я = С и
Я = Ж.
Лемма 3. Пусть А — самосопряжённый линейный оператор
на векторном пространстве V со скалярным произведением (* | *),
L — подпространство, инвариантное относительно А. Тогда ор-
ортогональное дополнение ZA к L также инвариантно относи-
относительно А.
Доказательство. В самом деле, если х G L, у G ZA, то Ах G L
и (Ах | у) =0. Условие самосопряжённости А даёт также соотноше-
соотношение (х | Ау) = 0. Стало быть, вектор Ау ортогонален любому вектору
х G L, т.е. Д1А С ZA ?
Теперь мы готовы доказать основную теорему.
Теорема 6. Существует ортонормированный базис прост-
пространства V со скалярным произведением, в котором матрица
самосопряжённого оператора А диагоналъна, причём Spec (А) ве-
вещественный.
Доказательство. По леммам 1 и 2 у линейного оператора А
имеется собственный вектор ei с собственным значением Ai G ffiL
Без ограничения общности считаем ||ei|| = 1. Ортогональное допол-
дополнение V к одномерному подпространству (ei) имеет размерность
§ 3. Операторы на пространствах со скалярным произведением 133
dim V — 1 и по лемме 3 инвариантно относительно А. Рассматривая
ограничение Л на У и повторяя все рассуждения, находим собствен-
собственный вектор в2: Лв2 = А2^2,||^21| = 1, А2 E М. Линейная оболочка
(ei,e2) инвариантна относительно Д, поэтому инвариантно ортого-
ортогональное к нему дополнение размерности dim У — 2 и т.д. Рассуждая
по индукции относительно dim V или просто повторяя нужное число
раз описанную процедуру, мы найдём требуемые п = dim V взаимно
ортогональных нормированных векторов ei,..., еп. ?
Замечание 2. Характеристическое уравнение произвольной
симметричной матрицы A Е Мп(Ж) имеет по доказанному только
вещественные корни. К изучению их взаимного расположения приме-
применимы, следовательно, теоремы Декарта, Бюдана—Фурье, Штурма из
[ВА I]. Геометрическая и алгебраическая кратности каждого корня А
уравнения Ха(Ъ) = 0 совпадают, как это прямо вытекает из теоремы
б и теоремы б из § 3 гл. 2.
Замечание 3. Согласно теореме б для каждого самосопряжён-
самосопряжённого оператора А: V —> V имеется п = dim V попарно ортогональ-
ортогональных собственных направлений. Действие оператора А сводится к
растяжению пространства по k-му направлению в |А^| раз, где А/. —
соответствующее собственное значение, и, возможно, при А/. < 0 к
отражению относительно плоскости, ортогональной к /с-му напра-
направлению.
4. Приведение квадратичной формы к главным осям. Мы
знаем (см. п. 1), что всякой эрмитовой форме /(х,у) на векторном
пространстве V со скалярным произведением (* | *) соответствует
линейный самосопряжённый оператор Л = Л/, определяемый усло-
условием
/(х,у) = (Лх|у).
По теореме б существует ортонормированный базис (ei,...,en)
пространства У, состоящий из собственных векторов оператора Л:
Aei = А^е^. Если записать векторы х, у в этой координатной системе:
х = х1е1 + ... + жпеп, у = у1е1 + ... + упеп,
то получим
п
/(х> У) =
поскольку /(e^, e^) = (Aei | e^) = (A« | e^) = (A^ | e^) = XiSij. Полагая
x = у, мы приходим к следующему утверждению.
Теорема 7 (приведение к главным осям). Для всякой квадра-
квадратичной эрмитовой формы q(x) на п-мерном векторном прост-
пространстве со скалярным произведением существует такой ортонор-
134 Гл. 3. Векторные пространства со скалярным произведением
жированный базис, в котором q(x) принимает вид
^|2. (9)
г=1
Пример 3. При Я = 1и п=2 квадратичная форма q определяет централь-
центральное коническое сечение, состоящее из тех векторов х, для которых #(х) = 1.
Используя ортонормированный базис (ei,e2), в котором #(х) принимает вид (9),
имеем Х\х^ + А2Ж2 = 1. Векторы ei, e2 определяют направления главных осей
эллипса (А1А2 > 0) или гиперболы (А1А2 < 0), а через Ai, A2 выражаются длины
полуосей.
Теоремы б и 7 на матричном языке звучат одинаково.
Для любой эрмитовой (или вещественной симметричной) мат-
матрицы А существует унитарная (соответственно ортогональная)
матрица В такая, что матрица В~х АВ диагоналъна. По диагонали
стоят собственные значения матрицы А, каждое со своей крат-
кратностью.
Практические рекомендации. Матричная интерпрета-
интерпретация геометрических фактов подсказывает возможный порядок дейст-
действий для приведения квадратичной формы
п
q(x) = ^2 aij хгхз
(ограничимся вещественным случаем) к каноническому виду. Имен-
Именно, примем х\,...,хп за координаты вектора х в евклидовом прост-
пространстве V со скалярным произведением
п
(х1у) = ^2xiVi>
так что ei = A, 0,..., 0), ..., еп = @,..., 0,1) — ортонормирован-
ортонормированный базис в V. Вычислим характеристический многочлен XA(t) =
= det(tE — А) с А = (а^) и найдём его корни (наиболее трудная
часть процесса). Для каждого корня Л^ решим линейную однород-
однородную систему уравнений
(аи - Xi)xi + а12х2 + ... + alnxn = 0,
- (а22 — Xi)x2 + ... + а2пхп = 0,
ап2х2 + ... + (апп - \i)xn = 0.
Пространство решений этой системы имеет размерность, рав-
равную алгебраической кратности корня Xi (следствие симметричности
матрицы А). Применяя к фундаментальной системе решений про-
процесс ортогонализации Грама—Шмидта, а затем объединяя системы,
§ 3. Операторы на пространствах со скалярным произведением 135
соответствующие различным А^, получим ортонормированный базис
пространства V
e'j = b^-ei + b2je2 + ... + bnjen, 1 ^ j ^ n.
В этом месте мы опираемся по существу на известное свойство сим-
симметричного (более общо: самосопряженного) оператора Л с матри-
матрицей А = (ciij) в ортонормированном базисе (ei,...,en): собствен-
собственные векторы u, v, отвечающие различным собственным значениям
Л, /i, ортогональны друг другу. В самом деле, (Ли | v) = (и | Av) =>
=> (Ли | v) = (и |/iv) => (A —/i)(u|v) => (и | v) = 0 (веществен-
(вещественность A, \i существенна).
Матрица {bij)-> связывающая две ортонормированные системы,
будет ортогональной (у нас Я = М), поэтому новые координаты
х[,..., х'п вектора х, для которых
г=1
выражаются через старые координаты по формулам, выписанным в
конце § 1.
5. Приведение пары квадратичных форм к каноническо-
каноническому виду. Пример форм g(x) = |xi|2 - |ж2|2, г(х) = \х\\ • \х2\ по-
показывает, что не всегда можно в векторном пространстве выбрать
такой базис, чтобы две квадратичные формы одновременно приняли
канонический вид. Тем не менее в одном практически важном случае
существование указанного базиса гарантировано.
Теорема 8. Пусть на векторном пространстве V размернос-
размерности п над Я = Ж или Я = С заданы две эрмитовы квадратичные
формы (т.е. квадратичные формы с вещественными значениями)
q(x) и г(х), причём форма г(х) положительно определена.
Тогда в V существует базис, в котором обе формы записыва-
записываются в каноническом виде.
Доказательство. Пусть д(х,у) — эрмитова 0-линейная фор-
форма, отвечающая квадратичной форме г(х). Определим на V скаляр-
скалярное произведение, полагая
(х|у) :=#(х,у).
Положительная определённость формы г(х) позволяет это сделать.
Согласно теореме 7 в У с указанной эрмитовой метрикой найдётся
ортонормированный базис (ei,...,en), в котором д(х) принимает
канонический вид (9). В свою очередь в том же базисе скалярный
квадрат вычисляется по формуле
п
(х|х) =#(х,х) = г(х) = ^2\xi\2.
136 Гл. 3. Векторные пространства со скалярным произведением
Итак, в базисе (е^) обе квадратичные формы приняли канонический
вид. ?
6. Канонический вид изометрии. Согласно теореме 5 изо-
метрии на У — это в точности унитарные операторы (ортогональ-
(ортогональные операторы в случае Я = Ж). Мы рассмотрим по отдельности
комплексный и вещественный случаи, но вначале докажем некото-
некоторые общие факты.
Лемма 4. Собственные значения унитарного (ортогонального)
оператора по модулю равны 1 (соответственно равны =Ы).
Доказательство. Пусть Л : V —> V — унитарный (в част-
частности, ортогональный) оператор и е Е V — собственный вектор с
собственным значением Л. Тогда
(Ле | Ле) = (Ле | Ле) = АЛ.
С другой стороны,
(Ле | Ле) = (Л* • Ле | е) = (Ее | е) = (е | е).
Поэтому АЛ = 1, т.е. |А| = 1. Понятно, что в вещественном случае (ор-
(ортогональных операторов) имеются лишь две возможности А = =Ы. ?
Лемма 5. Пусть U С V — инвариантное подпространство
унитарного (ортогонального) оператора Л : V —> V. Тогда орто-
ортогональное дополнение U1- к U в V также инвариантно относи-
относительно Л.
Доказательство. По определению
и1- = {v e v | (и| v) = о Vu e и}.
Ограничение Ли оператора Л на U является, очевидно, унитарным
оператором (изометрией на U). Так как det Ли ^ 0? т0 вектор и
можно записать в виде и = Ли' с и' G [/. Имеем
(и | Av) = (Ли1 | Av) = (u; | v) = 0.
Другими словами, Av G U1- вместе с v G U±. ?
А) Унитарные операторы. В терминах матриц мы хотим
доказать следующее: для каждой унитарной матрицы А сущест-
существует такая унитарная матрица В, что
— диагональная матрица с |А^| = 1.
На самом деле удобнее действовать, опираясь на геометрический
смысл унитарных операторов.
Теорема 9. Каждый унитарный оператор (Я = С) диагонали-
зируем. Другими словами, для каждого унитарного оператора Л :
V —У V, dim У = п, найдётся ортонормир о ванный базис, в котором
матрицей оператора будет
A = diag{Ai,...,An}, |Ai| = l. A0)
§ 3. Операторы на пространствах со скалярным произведением 137
Доказательство. Возьмём любой нормированный собствен-
собственный вектор ei оператора А. Он существует, поскольку основное
поле Я = С алгебраически замкнуто. По лемме 5 подпространство
(eiI- = U размерности п — 1 инвариантно относительно А. Индук-
Индукция по размерности V даёт требуемый результат. Утверждение о Л^
доказано в лемме 4. ?
Заметим, что оператор с матрицей А вида A0), конечно, является
унитарным, поскольку
*А-А = diag{Ab...,An} • diag{Ab ..., An} = Е.
Обычно диагональную унитарную матрицу А записывают в виде
А =
используя формулу Эйлера ег(/? = costp + г sin у?.
Б) Ортогональные операторы. Как отмечалось, леммы 4
и 5 справедливы для ортогонального оператора А : V —> V с тем
уточнением, что собственные значения в данном случае равны =Ы.
Однако дальнейшие рассуждения нуждаются в небольшом измене-
изменении. Дело в том, что ортогональный оператор может и не обладать
собственными векторами. Разумеется, как и всякий вещественный
линейный оператор, А имеет одномерное или двумерное инвариант-
инвариантное подпространство. Поэтому при помощи леммы 5 мы можем раз-
разложить V в прямую сумму одномерных и двумерных инвариантных
попарно ортогональных подпространств:
v =
(п)
на каждом из которых А индуцирует ортогональный линейный опе-
оператор. Объединение ортонормированных базисов в Vi, г = 1,...,т,
даст нам ортонормированный базис в V. Мы получим так называе-
называемый канонический базис для ортогонального линейного оператора А,
предположив, что в разложении A1) ни одно из двумерных подпро-
подпространств не разложимо в прямую сумму одномерных инвариантных
подпространств. Этого всегда можно добиться, и мы будем предпо-
предполагать, что разложение A1) является таковым.
Посмотрим теперь, какова матрица оператора А в каноническом
базисе. Если А\ := Ayi — матрица ограничения оператора А на Vi,
то
= Ai+...+Am =
138 Гл. 3. Векторные пространства со скалярным произведением
Достаточно поэтому ограничиться случаем, когда V не имеет инва-
инвариантных подпространств и dim V = 1 или dim V = 2. Если dim V = 1
и У = (е), ||е|| = 1, то Ле = Ле, Л = =Ы (лемма 4). Если dim У = 2 и
V = (ei,e2), (е^ | е^-) = Sij, то в этом ортонормированном базисе
Ъ
А =
Предположим, что det A = ad — be = —1. Тогда характеристи-
характеристический многочлен XA(t) = t2 — (а + d)t — 1 имеет два веществен-
вещественных корня и, стало быть, у оператора Л существует собственный
вектор. Это, однако, противоречит условию, наложенному на V. Мы
приходим к выводу, что det A = 1. Вычисляя по известным правилам
обратную матрицу А, находим
d -b
—с а
С другой стороны, в силу ортогональности
Л-1_ t л _
а с
b d
А =
с2 = 1.
. _
Сравнивая два выражения для А г, получаем
а —с
с а
Таким образом, при а = cos(p, с = simp будет
cos if — sin if
sin if cos if
т.е. линейный оператор Л осуществляет вращение в плоскости V.
Проведённый анализ показывает, что если в разложении A1) пер-
первые г слагаемых V\,..., Vr отвечают двумерным неразложимым ин-
инвариантным подпространствам, а остальные — одномерным (чего
всегда можно добиться подходящей перенумерацией базисных век-
векторов), и если ipi,...,ipr — соответствующие углы поворотов, то
матрица А примет вид, указанный в следующей теореме.
Теорема 10. Для всякого ортогонального линейного оператора
Л на V существует ортонор мир о ванный базис пространства V, в
котором матрицей оператора будет
cos if\ — sin if i
sin ifi cos ifi
COS ifr — Sin
sin ifr cos
-Ek
k + I + 2r = n.
§ 3. Операторы на пространствах со скалярным произведением 139
7. Нормальные операторы. В доказательствах спектральных
теорем б и 9 много общего, и это не случайно, поскольку эрмитовы и
унитарные операторы входят в естественный, более широкий класс
диагонализируемых операторов.
Определение 5. Пусть V — эрмитово пространство. Линей-
Линейный оператор А: V —> V, обладающий свойством
Л • Л* = Л* • Л, A2)
называется нормальным. Его матрица в любом базисе также назы-
называется нормальной.
Напомним, что в силу E) имеют место соотношения
(А?)* = Х?, (Л - \?)* = Л* - Х?,
поэтому оператор Л нормален вместе с Л — Х?. Из нормальности Л
вытекает, что
||Лх||2 = (Лх|Лх) = (х|Л*Лх) = (х| ЛЛ*х) = (Л*х| Л*х) = ||Л*х||2.
Заменяя Л на Л — А?, получаем
||Лх-Ах|| = ||Л*х-Ах||,
а отсюда следует, что
Лх = Ах <^> Л*х = Ах. A3)
Понятно, что любое из условий А* = А или Л* = Л влечёт
A2). Совсем нетрудно, однако, привести примеры нормальных опе-
операторов, не являющихся ни эрмитовыми (или косоэрмитовыми), ни
унитарными (скажем, с матрицей А = diagBi, 2,1,..., 1)). Вместе с
тем определение нормального оператора переносится на бесконечно-
бесконечномерные гильбертовы пространства и находит там многочисленные
применения. Нашей непосредственной целью является точное описа-
описание класса диагонализируемых линейных операторов на эрмитовом
пространстве.
Теорема 11. Эквивалентны следующие условия:
а) Л: V —У V — оператор, диагонализируемый в ортонормиро-
ванном базисе пространства V;
б) Л — нормальный оператор.
Доказательство, а) =^ б). Если (ei,..., еп) — ортонормиро-
ванный базис с Ле^ = А^е^, то в силу A3) Л*е^ = А^е^, так что
[Л, Л*] = О, и из а) следует б).
Для доказательства обратной импликации б) ^=> а) выберем соб-
собственное значение А оператора Л и, как обычно, положим
Vх = {хе У|Лх = Ах}.
Снова из A3) следует, что
Л*(УЛ) С Vх,
140 Гл. 3. Векторные пространства со скалярным произведением
а в таком случае
Л(УЛ)± С (Ул)±.
Действительно,
у е(УЛ)х ^=> (у|х) Vxe ул.
Стало быть, (Лу | х) = (у | Л*х) = (у | х') = 0, поскольку х' Е Vх.
Так как (Л*)* = Л, то по симметрии подпространство (VхI-
также Д*-инвариантно. Ограничения операторов А и Л* на (УЛ)±,
очевидно, коммутируют, т.е. являются нормальными. Применяя ин-
индукцию по размерности п = dim У, мы можем считать, что на (VхI-
оператор А диагонализируется. Для Vх это верно по определению, а
поскольку V = Vх © (Ул)±, доказательство завершено. ?
Так как эрмитовы и унитарные операторы нормальны, то, диа-
гонализировав их по теореме 11, мы легко получим спектральные
свойства, о которых говорится в теоремах б и 9. Вспомним теперь
о полной ортогональной системе идемпотентных операторов (проек-
(проекторов) из теоремы 1 из § 3 гл. 2. Общая спектральная теорема для
нормальных операторов может быть сформулирована в следующем
виде.
Теорема 12. Каждому нормальному оператору А на конечно-
конечномерном пространстве V отвечают попарно различные числа Ai,...
...,Am, 1 ^ т ^ п = dim V, и взаимно ортогональные проекторы
V\,... ,Vm, отличные от О и такие, что:
б) ^2j XjVj = Л — спектральное разложение оператора Л, так
что Xj G Spec(^);
в) разложение из п. б) единственно]
г) существуют комплексные многочлены /i(t),...,/m(t), обла-
обладающие свойствами
Л(А,-) = Л«, fi(A)=Vi
(в случае самосопряжённого оператора все числа Xi и многочлены
fi(t) вещественные).
Доказательство. Пусть Ai,..., Хт — все попарно различные
собственные значения оператора Л и V% — проектор на VXi (г =
= 1,..., т) параллельно ^2j^i Vхj. По теореме 11 (см. также её дока-
доказательство) все Vj взаимно ортогональны (т.е. V{Pj = VjVi = &ijVi)
и отличны от О. Далее, V = (BiVx, так что ^2i V% — ? — свидетельст-
свидетельство полноты системы Vi,... ,Vm (утверждение а)).
Для любого вектора v G V имеем Avj = AjVj, где Vj = VjV.
Таким образом, Av = A(?v) = A^jVjv) = J2j^vj = J2j^jvj =
= Z)j ^j(^jY) — (Z)j ^j^Pj)Y^ a эт0 и есть основное утверждение б).
Что касается утверждения в) о единственности спектрального
разложения оператора Л, то рассуждаем так. Из V\ ф О следует
§ 3. Операторы на пространствах со скалярным произведением 141
существование вектора х / 0, х G imVi. По определению Vi~x. — х,
VjX = 0 при j ф г. Поэтому
Лх = 2^ AjPjX = AiPfX = AfX,
j
т.е. Xi G Spec(^).
Обратно, если Л G Spec(^) и Av = Av для некоторого v ф О, то
Ду = Av = A ^ Vj, Vj = Pj v,
j
а с другой стороны,
Ay = Л
j j j
Поэтому J^j(A — Aj)vj = 0. Но векторы vi,...,vm взаимно орто-
ортогональны (следствие взаимной ортогональности проекторов V\,...
... ,Pm) и, значит, те из них, которые отличны от 0, линейно неза-
независимы. Стало быть, (А — Aj)vj = 0 для каждого j, и если v^ ф 0
(а такое г найдётся, поскольку v ф 0), то А = А^ G {Ai,...,Am}.
Единственность установлена.
Многочлены /i(t),..., fm(t) G C[t] из утверждения г) строятся
конструктивно:
Понятно, что fi(t) G M[t], если Л — самосопряжённый оператор.
Используя определение семейства взаимно ортогональных проек-
проекторов Vj и разложение б), будем иметь
«) (Е w) = Е A«A^^i = Е Л!^>
* i j j
А* = (
(при к = 0 использовать а): Л° = ^2j X®Vj = ^jVj = ?). Таким
образом,
для любого многочлена /(?). В частности,
= Е Л(А,0 ^i = Л(А<) Vi = Vi. и
142 Гл. 3. Векторные пространства со скалярным произведением
Как всякий линейный оператор, нормальный оператор Л записы-
записывается в виде Л = В + гС и, аналогично, Л* = В — г С, где 23, С —
эрмитовы операторы (см. F)), в свою очередь выражающиеся через
Ли Л*:
Б=1(Л + Л*), С = ±.{А-А*).
Из АА* = А*А следует, что БС = СВ. Обратно, из перестановочно-
перестановочности В и С вытекает перестановочность Л и Л*:
ЛЛ* =Б2+С2 = Л*Л,
т.е. нормальность Л.
Отвлекаясь от нормальных операторов, остановимся на роли пе-
перестановочных или, как ещё говорят, коммутирующих операторов.
Лемма 6. Пусть А, В — перестановочные операторы на ком-
комплексном пространстве V. Тогда А и В имеют общий собственный
вектор.
Доказательство. Пусть Л Е 8рес(Л). Рассмотрим подпро-
подпространство Vх = {х е V | Лх = Ах}. Тогда BVX С Vх. Действительно,
используя условие АВ = 23Л, приходим к импликации
А = В(Лх) = В(Ах) = А(Вх),
т.е. Бх G Ул.
Линейный оператор Б, ограниченный на Vх, имеет собственный
вектор у G Vх : By — /iy, /i G Spec(S). Таким образом, Лу = Ay,
By = /iy, т.е. у — общий собственный вектор. ?
Теорема 13. Два эрмитовых оператора Л, В или две изоме-
трии Л, В на п-мерном эрмитовом пространстве V одновременно
приводятся к диагональному виду в некотором ортонормир о ванном
базисе тогда и только тогда, когда они перестановочны.
Доказательство. Предположив, что AvlB диагонализируемы
в общем ортонормированном базисе, мы приходим к выводу о пере-
перестановочности их матриц А, В в этом базисе. Но так как в любом
другом базисе матрицами операторов будут С~1АС, С~1ВС, а
С'1 АС • С'1 ВС = С'1 ABC = С'1 ВАС = С'1 ВС • С'1 АС,
то перестановочны сами операторы.
Обратно, пусть АВ = ВА. Тогда по лемме б операторы Л, В
имеют общий собственный вектор ei. Без ограничения общности
можно считать, что ||ei|| = 1. Подпространство W = (eiI- размер-
размерности п — 1 инвариантно относительно Л и относительно В в силу
их эрмитовости (лемма 3) или в силу унитарности (лемма 5). Огра-
Ограничения Л и В на W будут перестановочными эрмитовыми (соот-
ветствтенно унитарными) операторами. Индукция по размерности
приводит к явной конструкции ортонормированного базиса, в кото-
котором Ли В запишутся в диагональной форме. ?
§ 3. Операторы на пространствах со скалярным произведением 143
Замечание 4. Напомним, что по теореме 3 перестановочность
эрмитовых операторов Л, В эквивалентна эрмитовости операто-
оператора АВ.
8. Положительно определённые операторы. Так как лю-
любому эрмитову оператору Л на эрмитовом пространстве V (симмет-
(симметричному оператору на евклидовом векторном пространстве)
отвечает квадратичная форма q(x) = (Лх | х), а к последней приме-
применимы такие понятия, как положительная определённость, полуопре-
полуопределённость и т.п. (см. гл. 1, § 4, п. 8), то их можно переносить и
на Л.
Определение 6. Эрмитов (или линейный симметричный ) опе-
оператор Л называется положительно определённым, если (Лх | х) > О
для любого вектора х ф 0 из V.
Теорема б и последующие замечания показывают, что для вся-
всякого положительно определённого оператора Л существует ортонор-
мированный базис пространства У, в котором матрица А принимает
диагональный вид:
А= •¦ A4)
А„
с положительными собственными значениями Ai,..., An Е Ж. Обрат-
Обратно, интерпретируя любую матрицу А вида A4) как матрицу эрми-
эрмитова (симметричного) оператора Л относительно какого-то орто-
нормированного базиса пространства У, мы приходим к выводу,
что условие Ai > 0, ..., Ап > 0 обеспечивает положительную опре-
определённость Л. Это обстоятельство закрепляется символом Л > 0.
Имеет смысл также говорить о положительно полуопределённом
операторе Л (обозначение: Л ^ 0), когда Ai ^ 0, ..., Ап ^ 0 и А^ =
= 0 для некоторых индексов г. Для двух эрмитовых (симметричных)
операторов Л, В будем писать Л ^ В, если А — В ^ 0.
По смыслу положительно определённый оператор невырожден
(обратим). Это видно и из неравенства Коши—Буняковского
Обратно, условия невырожденности и Л ^ 0 гарантируют положи-
положительную определённость Л.
Предложение 1. Всякий положительно определённый опера-
оператор А записывается в виде квадрата некоторого другого положи-
положительно определённого оператора: А = В2, причём выражение корня
квадратного В := л/Л единственно.
Доказательство. Достаточно привести матрицу оператора
Л к диагональному виду A4) и положить В = diag(v/Ab • • •, л/^пM
считая у/\1 > 0. Оператор В с матрицей В в данном ортонормирован-
ном базисе будет положительно определённым. Соотношение А = В2
144 Гл. 3. Векторные пространства со скалярным произведением
при переходе к другому базису сохраняется: С~1АС = (С~1ВСJ.
Таким образом, А = В2.
Утверждение о единственности В удобно доказывать при помощи
теоремы 12 о спектральном разложении. Именно, если В' > 0 и {В'J =
= Л, то, рассматривая спектральное разложение В' = J^/ij'Pj, по-
получаем соотношение
Все числа fij > 0 попарно различны, как и их квадраты fi2. Един-
Единственность спектрального разложения оператора А приводит нас к
заключению, что множества {/л2} и {А^} совпадают, т.е. при надлежа-
надлежащей перенумерации должны выполняться равенства /i2 = А^, Т[ — Vi,
откуда fii = y/Xi и В' = В = у/А. ?
Предложение 2. Пусть С — произвольный невырожденный
линейный оператор на пространстве со скалярным произведением.
Тогда произведение А = СС* (или С*С) является невырожденным
положительно определённым оператором.
Доказательство. Эрмитовость (или симметричность) опера-
оператора СС* уже проверялась: (СС*)* = С**С* = СС". Невырожденность
А = СС* очевидна: det СС* = detCtC = detC detC = detCdet С =
= | detC|2 ф 0. Далее, х ф О => C*x ф О, поэтому по определению
сопряжённого оператора имеем
(СС*х|х) = (С*х | С*х) > 0 Vx ф 0.
Это и значит, что А = СС* — положительно определённый оператор.
То же относится и к произведению А* А. ?
Из предложений 1, 2, обобщённых на случай вырожденных опе-
операторов, немедленно вытекает
Теорема 14. Пусть V — пространство со скалярным произве-
произведением (* | *). Следующие свойства линейных операторов на V экви-
эквивалентны:
2) д _ се*-
3) (Лх|х) ^0.
В одномерном комплексном пространстве каждое из свойств 1),
2) характеризует неотрицательные вещественные числа: z ^ 0 озна-
означает возможность как записи z = A2, A G Ж (аналог 1)), так и z = zf z'
(аналог 2)).
9. Полярное разложение. Упомянутый параллелизм между
комплексными числами и линейными операторами на пространстве
со скалярным произведением простирается дальше, вплоть до за-
записи комплексного числа в тригонометрической форме: z =
= у/~^ещ'. Об этом свидетельствует
§ 3. Операторы на пространствах со скалярным произведением 145
Теорема 15. Всякий невырожденный линейный оператор А на
эрмитовом (или евклидовом) векторном пространстве V может
быть представлен в виде
A5)
где Р — положительно определённый оператор, a Q — изометрия
(унитарный или ортогональный оператор). Разложение A5) един-
единственно. (Оно называется полярным разложением оператора А.)
Доказательство. Согласно предложениям 1 и 2 AJC — Р2,
где Р — положительно определённый оператор, являющийся един-
единственным квадратным корнем: V — л/АА*. Разумеется, V — обрати-
обратимый оператор. Положив Q = V~1 А, получим выражение A5). Нужно
только убедиться, что Q — изометрия.
Действительно, так как ?*=?и РР~Х =? = ?* = (р^ур* =>
=^ (р-1)* = (V*)-1 = Р~\ то
Q = Р^ААЦР'1)* = Р-^Р-1 = ?.
Если теперь PQ = А = PiQi — два представления в виде A5),
то имеем Q*P = Q*Pb Поэтому PQ • Q*P = ViQi • Q*Vi, откуда
P = P\ ^=> P = P\ (единственность квадратного корня) и, стало
быть, Q = Qi, т.е. единственность полярного разложения также
установлена. ?
Замечание 5. Очевидно,
A = VQ = QQ~1VQ,
и мы видим, что
A=QPlt
где Q — изометрия, а Р\ = Q*PQ — положительно определённый
линейный оператор.
Полярное разложение A5) (но не единственность Q) справедливо
и в случае вырожденного оператора. Однако мы обратимся к дру-
другому свойству разложения. Для комплексного числа z безразличен по-
порядок множителей в его тригонометрической записи: \z\et(f = et(f\z .
Если теперь А = PQ = QV, то
ДД* = PQ . Q*p* = р2 = PQ*QP = (QPfQP = A"A,
что означает нормальность оператора А.
Обратно,
А4* = Л*Л => Р2 = PQQ*P = Q*P*PQ = ОГХР2О,.
Но из перестановочности Q с Р2 следует перестановочность Q с Р,
поскольку Р = л/Р2" — многочлен от Р2 (как это вытекает из тео-
теоремы о спектральном разложении). Таким образом,
А = PQ — нормальный оператор <^=> PQ =
10 А.И. Кострикин
146 Гл. 3. Векторные пространства со скалярным произведением
УПРАЖНЕНИЯ
1. Когда унитарная п х n-матрица А записывается в виде (мультипликатив-
(мультипликативного) коммутатора А = XYX~1Y~1 с унитарными матрицами X, Y? Условие
det A = 1, очевидно, необходимо. Доказать, что оно и достаточно. Другими сло-
словами, в группе SU(n) каждый элемент является коммутатором.
2. Под матрицей Якдби понимается вещественная матрица вида
J =
а\
-с\
0
0
—Ь\
а2
-С2
0
0
-Ь2 ••
аз
0
0
0
0
an_i
-сп-1
0
0
0
ап
Ci > О, 1 ^ г ^ п — 1.
Доказать, что Spec(J) всегда вещественный и простой.
3. Справедлив ли аналог теоремы 13, когда один из операторов А, В эрмитов,
а второй является изометрией?
4. Пусть Л, В — произвольные коммутирующие линейные операторы на век-
векторном пространстве V над полем Я. Доказать, что если каждый из операторов
Л, В диагонализируем, то они одновременно диагонализируемы, т.е. существует
базис в У, состоящий из собственных векторов как для Л, так и для В.
5. Доказать, что если Л, В — положительно определённые линейные опера-
операторы и ЛВ = ВЛ, то ЛВ — тоже положительно определённый оператор.
6. Доказать, что если tА = —А, то А2 — симметричная неположительно
определённая матрица. В частности, отличные от нуля собственные значения
кососимметричной матрицы являются чисто мнимыми.
7. Пусть Л и В — эрмитовы (симметричные) операторы, из которых один,
скажем, Л, положительно определённый. Доказать, что тогда Spec(AB) веще-
вещественный.
8. Пусть о(х) — квадратичная форма в евклидовом пространстве Е со ска-
скалярным произведением (* | *). В каких точках единичной сферы (х | х) = 1 форма
q достигает максимума или минимума? Более общо: в каких точках единичной
сферы форма q принимает стационарное значение, т.е. все её производные в
этих точках по любому направлению равны нулю? Доказать, что справедливо
следующее утверждение.
Квадратичная форма о(х) принимает стационарные значения ровно в тех
точках единичной сферы, которые отвечают собственным векторам симме-
симметричного оператора J7, определяемого формой о(х) = (JTx|x).
В частности, максимум формы о(х) на единичной сфере равен наибольшему
из её канонических коэффициентов, а минимум — наименьшему (экстремаль-
(экстремальные значения квадратичной формы).
9. Доказать следующее обобщение леммы 6.
Теорема 16. Любое семейство коммутирующих линейных операторов на
конечномерном комплексном векторном пространстве обладает общим соб-
собственным вектором.
10. Доказать, что если
е = {А{ е мп(?) | AiAj = AjAi- ij e J}
— любое множество коммутирующих (попарно перестановочных) матриц по-
порядка п, то найдётся такая невырожденная матрица С, что сопряжённое мно-
множество
с~1ес = {c~1Ajc | j e J}
§ 4- Комплексификация и овеществление
147
будет состоять из коммутирующих верхнетреугольных матриц.
11. Пусть, как обычно, Е — единичная матрица порядка щ E
— матричные единицы. Проверить, что семейство
<с i <с [п2/2], [п2/2] + 1 ^ j ^ п} и {Е}
i,j
е =
имеет мощность [п2/4] + 1 и состоит из линейно независимых коммутирующих
верхнетреугольных матриц. Под [p/q] понимается целая часть дроби p/q.
12. Теорема [И. Шур, 1905]. Максимальная размерность коммутативной
подалгебры в Мп(?) равна [п2/4] + 1.
Другими словами, нужно доказать, что максимальное число попарно комму-
коммутирующих линейно независимых матриц порядка п над С есть [п2/4] + 1.
На самом деле С можно заменить на любое поле Я.
13. Доказать следующее утверждение. Пусть (V, (* | *)) — евклидово век-
векторное пространство чётной размерности п = 2т, и пусть /(х,у) — невы-
невырожденная ко со симметричная форма на V. Тогда найдутся разложение V в
прямую сумму V = V\ 0 V2 двух т-мерных подпространств и невырожденный
симметричный {относительно
что
/(х,у)
Здесь х = xi +х2, у = yi + У2,
*)) линейный оператор Л : V —>¦ V такие,
- (х2|Лу1).
, г = 1,2.
§ 4. Комплексификация и овеществление
Как мы не раз имели возможность убедиться, вопрос о приведе-
приведении к каноническому виду матрицы линейного оператора Л: V —> V
решается по-разному в зависимости от того, является основное поле
Я алгебраически замкнутым (Я = С) или нет (Я = Ж). Это относится,
в частности, к изометриям — унитарным и ортогональным операто-
операторам. Так как в комплексном случае алгебраическая картина (при не-
некоторой потере геометрической интуиции) становится проще, то ча-
часто применяют операцию (или, как ещё говорят, функтор) комплек-
сификации к вещественным пространствам и операторам, а при по-
помощи обратной операции (функтора овеществления) возвращаются
к первоначальным объектам. Остановимся на этом подробнее.
1. Комплексная структура. Пусть V — векторное простран-
пространство над Ж конечной размерности п.
Определение 1. Говорят, что на V определена комплексная
структура, если задан линейный оператор J: V —> V с квадратом
J2 = -?.
Пример 1. Пусть п = 2m, J — оператор с матрицей
J =
0
1
-1
0
0
1
-1
0
0
1
-1
0
A)
10*
148 Гл. 3. Векторные пространства со скалярным произведением
(см. следствие теоремы 9 из § 4 гл. 1). Очевидно, что J будет определять на V
комплексную структуру, поскольку J2 = —Е.
Словосочетание "комплексная структура" оправдано тем обстоя-
обстоятельством, что пару (V, J) можно превратить в векторное простран-
пространство V над С, полагая
(а + г/3)v = av + f3Jv, a,/3ei, v G V.
Аксиомы дистрибутивности
a(u + v) = аи + av, (a + b)v = av + 6v, a, 6 G C, u, v G V,
будут выполнены, поскольку J — линейный оператор. Далее, из
J2 = —Е следует, что
+ aSJv + /37Jv - fiSv = («7 - /?<J)v + (aS + Pj)Jv =
= [«7 - /Зй + г(ш5 + /?7)]v = [(a + г/3)G + iE)]v.
Все остальные аксиомы векторного пространства выполнены, по-
поскольку V и V совпадают как множества.
Определение 2. Говорят, что V — комплексное векторное про-
пространство, связанное с вещественным пространством V.
Докажем, что пример 1 не случаен.
Предложение 1. Пространство V с комплексной структурой
J всегда чётномерно над М, а матрица оператора J в некотором
базисе имеет вид A). Далее,
~ 1
dime V = - dim^ V. B)
Доказательство. Пусть мы уже нашли векторы ei,..., е/, G
G V такие, что 2fc векторов ei, jTei, ..., е&, J^k оказались линейно
независимы. Либо линейная оболочка
Vk = (еь Je1, ..., ек, Jek)
совпадает с У, и тогда всё доказано, либо найдётся вектор e^+i ^ Vk.
Допустив на минуту, что
Jek+1 = аек+1 + vk, aGl, vk e Vk,
мы применим к обеим частям этого равенства оператор J:
-ек+1 = ajek+1 + Jvk.
Заметим, что подпространство Vk инвариантно относительно J, по-
поэтому Jvk G Vk- Умножив первое из имеющихся у нас соотношений
на а и сложив со вторым, получим
[а2 + 1)ел+1 = -avk - Jvk G Vk.
§ 4- Комплексификация и овеществление 149
Это, однако, противоречит выбору e^+i, поскольку всегда а2 + 1 ф 0.
Продолжая процесс присоединения к Vk линейно независимых век-
векторов, мы, наконец, получим при некотором т всё пространство
V = Vm = (еь Je1, ..., em, Jem) .
Таким образом, dimK V = 2m, причём в базисе (еь Jei,..., em, Jem)
матрица оператора J имеет как раз вид A). Равенство B) отражает
просто тот факт, что векторы ек и Jek пропорциональны над С :
Jek = ге*. П
Проведённое рассуждение по существу повторяет процедуру приведения ко-
сосимметричной формы к каноническому виду (см. гл. 1, § 4).
2. Овеществление. Пусть теперь U — произвольное векторное
пространство над С размерности п.
Определение 3. Овеществлением U называется вещественное
векторное пространство C/r, которое совпадает с U как множество
и как аддитивная группа, но в котором об умножении на комплекс-
комплексные числа "забыто", а умножение векторов на вещественные числа
производится так же, как и в U.
Овеществляя U, мы обедняем U и из n-мерного пространства
U = (еь ..., еп)с
получаем 2п-мерное пространство
Ur = (еь геь ..., en, ien)R .
Определённое с самого начала умножение на г = д/~Т в U превра-
превращается в комплексную структуру J на Uu — линейный оператор,
задаваемый соотношениями
Jek=iek, J(iek) = -ek, l^k^n. C)
Применяя к паре (C/r, J) соображения п. 1, получаем в качестве ком-
комплексного пространства, связанного с C/r, исходное пространство,
т.е. _
uR = u.
Введём теперь следующее
Определение 4. Овеществлением оператора A'.U^U назы-
называется линейный оператор Ar : C/r —> C/r, действие которого пото-
поточечно совпадает с действием А. Различие между А и Ar заключается
в интерпретации результата действия:
Ur = (еь...,еп)м + (геь...,геп)м.
В соответствии с этим разложением С-линейный оператор А :
U —>- U мы запишем в виде А = А\ + iA^-, где А\ и А<± — М-линейные
операторы на (ei,..., en)R с вещественными п х n-матрицами А\ и
Аъ соответственно. Так как
A(iek) = iAek = i(Aiek + iA2ek) = -A2ek + iA±ek,
150 Гл. 3. Векторные пространства со скалярным произведением
матрицей овеществленного
D)
то в базисе (ei,..., en; ie±,..., ien) для i
оператора Аи будет
Ах -А2
А2 А1
Мы видим, что далеко не каждый линейный оператор на Uu может
рассматриваться как овеществление некоторого оператора на U.
Пусть C(U)u — совокупность всех овеществлённых операторов, а
?(Uu) — пространство всех М-линейных операторов на Uu- Из опре-
определения или из матричной интерпретации D) овеществлённых опе-
операторов видно, что
(А + В)и = Аи + BR, (AB)u = AwBu, (аА)и = аАи, аеЖ.
Другими словами, C(U)u — подалгебра в C(Ur). Очевидно,
dimM C(U)u = 2n2 = -BnJ = - dim C(Ur).
Zj Zj
Матрицей линейного оператора J (комплексной структуры) в нашем
базисе служит
О -Е
Е О
По смыслу Аи ' J — J ' Аи, что соответствует легко проверяемому
матричному соотношению Аи • Jo — Jo ' Аи- Более того, из условия
Аз
0
Е
-Е
0
0
Е
-Е
0
Аз
переписанного (после перемножения блочных матриц) в виде
—А2 —А±
Ах Аз
43 -Ах
44 -А2
мы видим, что Аз = —А2, А± = А\, т.е. всякая 2п х 2п-матрица над
Ж, перестановочная с Jo, имеет вид D).
Итак, справедливо
Предложение 2. Подалгебра C(U)u С C(Uu) овеществлённых
операторов (относительно структуры J) состоит в точности из
операторов, перестановочных с J.
Более интересен следующий вопрос. Пусть V — чётномерное ве-
вещественное пространство (скажем, dim^ V = 2п) и Л: У -У У —
линейный оператор. Когда на V существует комплексная структура
J, согласованная с Л, т.е. такая, что А = Br, где В : U —>¦ U —
оператор на комплексном n-мерном пространстве U1 Мы разберём
содержательный частный случай.
Теорема 1. Пусть V = Ж? и А: V —>¦ V — Ж-линейный опера-
оператор, не имеющий собственных векторов. Тогда на V можно опре-
определить согласованную с А комплексную структуру (подробности
сообщаются в ходе доказательства).
§ 4- Комплексификация и овеществление
151
Доказательство. Согласно условию А имеет два комплексно
сопряжённых характеристических корня Л, Л. Положим Л = Ai + iX2j
Ai,A2 G М, где А2 ф 0. По теореме Гамильтона—Кэли А2 — trA +
+ (detA)? = О, т.е.
А2 - 2AiА + (А? + Х2)? = О. F)
Определим оператор J, полагая
или, что эквивалентно,
Подставляя выражение для А в равенство F), находим
(Х2? + 2AiA2J + X2J2) - 2Х1{Х1? + X2J) + (X2 + A|
откуда следует
J2 = -?.
Согласно общим рассуждениям из п. 2 на У определена структура
комплексной прямой С1. Так как оператор А перестановочен с J,
то А — Br, где В : С1 ->• С1 — оператор умножения на некоторое
комплексное число. Этим числом, очевидно, является А. ?
Докажем теперь
Предложение 3. detАи = |detA\2.
Доказательство. Проведём прямые выкладки, основанные на
элементарных преобразованиях над полем С и не слишком входящие
в детали овеществления. Так как det A = det А, где черта означает
комплексное сопряжение, и так как имеет место соотношение D),
использующее запись А = А\ + iA2, то
det Аи =
= det
det
M
Аи
L +
= det
A2
iA2 -A2 + iA
= det
Аг
1
г
=
= det
L
0
A2
= det A
M м
•det A
0
iA2
det
3. Комплексификация. Пусть V — произвольное векторное
пространство над Ж размерности п. Непосредственно проверяется,
что на внешней прямой сумме У 0 У — векторном пространстве пар
(u, v) с операциями
а(и, v) + а'(и1, v') = (аи + а1 и1, av + aV), a, a' G М,
— соответствием
J: (u,v) h^ (-v,u)
определяется линейный оператор, задающий комплексную структуру
на У © У. Эта комплексная структура называется канонической.
152 Гл. 3. Векторные пространства со скалярным произведением
Определение 4. Комплексное векторное пространство V © V,
связанное с V© V, называется комплексификацией (или комплексной
оболочкой) пространства V. Для него вводится специальное обозна-
обозначение ^-^^
Vе := VreVr.
Если смотреть на С как на векторное пространство размерности
2 над М, то
Vе = V ®R С
— частный случай тензорного произведения пространств — кон-
конструкции, широко используемой в математике (мы упоминали о ней
в § 4 из гл. 1, а более подробно она будет рассматриваться в главе б,
§ 4). Так как dim^(V © V) = 2п, то в соответствии с равенством B)
dime Vе = dimK V.
По определению i(u, v) = ^7(и, v) = (—v,u), так что (и, v) =
= (u, 0)+i(v, 0). Поэтому пару (u, v) естественно обозначать u + iv.
При этом
(u + iv) + (u' + iv') = (u + u') + i(v + v7).
Далее,
(a + iC)(u + iv) = (аи - /?v) + (av + /?u),
поскольку
(a? + PJ)(u, v) = a(u, v) + /?(-v, u) = (cm - /?v, av + /3u).
Запомнить эти правила нетрудно, поскольку они в точности со-
соответствуют правилам действий с комплексными числами. Векторы
и+г 0 обозначаются просто через и, так что вещественное простран-
пространство V считается подпространством в Vе.
Определение 5. Комплексификацией М-линейного оператора
Л: V —> V назовём С-линейный оператор Лс : Vе —> Vе, для кото-
которого
Лс(и + iv) = Ли + iAv.
Имеем импликацию
V = (ei,..., еп)м => V = (ei,..., еп)с .
Стало быть, матрица А оператора Л в базисе (ei,..., еп) будет слу-
служить одновременно и матрицей Ас оператора Лс в том же базисе,
т.е.
АС = А.
В частности, det Лс = det Л и tr Лс = tr Л. Так как
(Л + Bf(u + iv) = (Л + В)и + i(A + В)\ =
= {Аи + Ви) + i{Av + Bv) = (Аи + iAv) + (Bu + iBv) =
= Ас(и + iv) + Bc(u + iv) = (Ac + Bc)(u + iv),
§ 4- Комплексификация и овеществление 153
то (А + В)с = Ас + Вс. Аналогично проверяется, что (АВ)С = АСВС.
По аналогии с Ас определяются продолженные с У линейные и,
более общо, полилинейные формы на Vе. Если, например, / — били-
билинейная форма на вещественном пространстве У, то полагаем
/с(х + гу, u + iv) = /(х, и) - /(у, v) + г (/(х, v) + /(у, и)).
В качестве упражнения проверьте, что из кососимметричности / следует
кососимметричность /с.
Пусть теперь У — вещественное векторное пространство со ска-
скалярным произведением (* | *). Тогда и на Vе определяется скалярное
произведение
(x + iy|u + iv)c := (х | и) + (у | v) -i((x|v) - (и|у)).
Если при этом пара (У, (* | *)) — евклидово пространство, то
(Ус, (* | *)с) будет эрмитовым векторным пространством. В част-
частности, норма || * ||с на Vе задаётся равенством
Возвращаясь к общему случаю, предположим, что А — линейный
оператор на У, а а + гЬ — собственный вектор с собственным зна-
значением а + i/З линейного оператора Ас на Vе (a, b G У, а,/3 е Ж).
Тогда, в соответствии с определением, Да + гАЬ = Лс(а + гЬ) =
= (а + г/3)(а + гЬ) = (аз. - (ЗЪ) + г(/3а + ab), т.е.
Да = аз — /ЗЪ, Ah = /3a. + ah.
Таким образом, (a, b)R — двумерное инвариантное относительно А
подпространство. Так как Ас всегда имеет хотя бы один собствен-
собственный вектор, то мы ещё раз доказали теорему 7 из § 3 гл. 2.
Заметим, далее, что каждое векторное пространство U над С раз-
размерности п изоморфно комплексной оболочке Ус подходящим обра-
образом выбранного векторного пространства У над Ж. Достаточно за-
зафиксировать некоторый базис (ei,..., еп) в[/и взять в качестве У
совокупность всех векторов вида J^ . olj^j с aj G M:
U = (еь...,еп)с = ((еь...,еп)м) .
4. Комплексификация — овеществление — комплексифи-
комплексификация. Введём обозначение
W = (V€h
для вещественного пространства размерности 2п, полученного из
n-мерного вещественного пространства У комплексификацией, а за-
затем овеществлением. Легко понять, что
W = У 0 г У, G)
154 Гл. 3. Векторные пространства со скалярным произведением
причём говорят о вещественной плоскости У и о мнимой плоскости
г У. Согласно C) на W определён оператор J = (i?)u — овеществле-
овеществление оператора i? умножения на г в Vе. Его матрицей служит Jq (cm.
E)). Оператор J меняет местами вещественную и мнимую плоско-
плоскости.
Простейший случай представится, когда У = Mi, Ус = С1 и
W = (С1 )^ = М2. На комплексной прямой определена операция ком-
комплексного сопряжения
а + i/З \-У а + i/З = а — i/3.
В общем случае на пространстве G) действует аналогичный линей-
линейный оператор
S : u + iv ь->- u + iv = u — iv
с матрицей
Еп О
О -Еп
Расширяя эту ситуацию, рассмотрим произвольный С-линейный опе-
оператор А : Vе —У Vе (а при желании даже линейное отображение
Vf' —У У2С, где V\ ф У2). Комплексно сопряжённым к А назовём опе-
оператор А: Vе -У Ус, для которого
Л • и + iv = Л(и + iv).
При этом
(Ah = S ¦ Лк ¦ S.
Линейность над С оператора Л является простым следствием линей-
линейности Л и оператора комплексного сопряжения. Записанный в базисе
(еь ..., еп) пространства V оператор А имеет матрицу А — А\ +iA2,
а оператор А — матрицу А = А\ — %А2 с вещественными матрицами
А\ и А<± (ср. с рассуждениями из п. 2). Отсюда следует, что условие
А = А необходимо и достаточно для возможности записи А = 23е
(комплексификация некоторого вещественного оператора V —> V).
Используя понятие комплексно сопряжённого оператора, мы можем
записать для любого овеществлённого оператора Аи с матрицей D)
trAu = 2trAi = tr(A + Л) = tr^ + tr ~A.
Пусть U — произвольное комплексное пространство. В п. 1 гл. 1
мы рассматривали пример пространства С/, которое назовём ком-
комплексно сопряжённым с U ш которое отличается от U только умно-
умножением на скаляры: Л 0 х = Лх.
Аналогично, если (У, J) — вещественное пространство с ком-
комплексной структурой, то линейный оператор — J также определяет
комплексную структуру, называемую сопряжённой с исходной. Если,
далее, V — комплексное пространство, отвечающее (У, J), то У —
комплексное пространство, отвечающее (У, —J).
§ 4- Комплексификация и овеществление 155
Применяя теперь к комплексному векторному пространству У
сначала функтор овеществления, а затем функтор комплексифика-
ции, мы построим канонический С-линейный изоморфизм
С этой целью заметим, что на (Vyc имеются два М-линейных опе-
оператора: оператор канонической комплексной структуры J7"(x, у) =
= (—у,х) и оператор умножения на г = л/--1, отвечающий исходной
комплексной структуре на У : г(х,у) = (гх, гу). Так как J комму-
коммутирует с г, то он С-линеен в этой структуре. Поскольку J2 = —?,
его собственные значения равны ±г. Введём стандартные обозначе-
обозначения для двух подпространств, отвечающих этим собственным значе-
значениям:
V1'0 = {(х, у) е (VRf | J(x, у) = г(х, у)},
V0'1 = {(х,у) G (Vk)c|J(x,y) = -г(х,у)}.
Оба множества У1'0, У0'1 являются комплексными подпространства-
подпространствами в (Vk)c: ясно, что они замкнуты относительно сложения и умно-
умножения на вещественные числа, а замкнутость относительно умноже-
умножения на J следует из того, что J и г коммутируют. Покажем, что
V = У1'0 0 У0'1, а также, что V1 ^естественно изоморфно У, тогда
как У0'1 естественно изоморфно У.
Из определений сразу же следует, что У1'0 состоит из векторов
(х,-гх), а У0'1 — из векторов вида (у,гу). Для данных u, v G У
уравнение (u, v) = (х, —гх) + (у, гу) имеет единственное решение
х = (u + iv)/2,y = (и - iv)/2. Следовательно, У = У1'0 0 У0'1.
Отображения х н-» (х, —гх), х н-» (х,гх) являются М-линейными изо-
изоморфизмами У на У1'0 и соответственно У на У0'1. Кроме того, они
перестановочны с действием г на У, У и действием J на У1'0, У0'1
в силу определений. Это завершает нашу конструкцию.
УПРАЖНЕНИЯ
1. Предлагается убедиться в том, что ортогональный оператор Л на евкли-
евклидовом векторном пространстве У, не имеющий собственных векторов (это воз-
возможно лишь в случае dim V = 2га), является овеществлением унитарного опе-
оператора Б : U —> U на комплексном векторном пространстве U размерности т,
связанном с V. Заметим в этой связи, что овеществление унитарного простран-
пространства приводит к евклидову пространству в два раза большей размерности.
2. Доказать формулу из предложения 3, выбрав базис (ei,..., ете) комплекс-
комплексного пространства U, в котором матрица А оператора Л: U —>¦ U имеет верхне-
верхнетреугольную форму с Ai,..., Хп по диагонали.
3. Пусть U — векторное пространство над С. Чему изоморфна комплекси-
комплексификация ?/с?
4. Пусть (У, (*|*)) — евклидово пространство, Vе — его комплексификация,
Л — линейный оператор на Vе, определяемый правилом: Л(и + iv) = u — zv для
156 Гл. 3. Векторные пространства со скалярным произведением
всех u, v G V. Будет ли Л линейным оператором на овеществлении Ryc5 и если
да, то будет ли Л симмметричным, ортогональным, идемпотентным?
§ 5. Ортогональные многочлены
1. Проблема аппроксимации. В самых различных вопросах
математики и физики встречается задача о разложении произвольно
взятой из некоторого класса функции по заданной системе функ-
функций. Не вдаваясь в аналитические тонкости, которые обычно рас-
рассматриваются в курсе анализа, мы ограничимся обсуждением чисто
алгебраического аспекта этой задачи. Попутно будут затронуты не-
некоторые новые вопросы линейной алгебры и геометрии.
Запас функций вещественной переменной t у нас будет исчерпы-
исчерпываться пространством С2(а, Ь) непрерывных на отрезке а ^ t ^ Ъ
(или на интервале с бесконечными концами) функций со скалярным
произведением
(f\g)= [ f(t)W)dt.
Черта означает комплексное сопряжение, если встретится необходи-
необходимость рассматривать комплекснозначные функции. В С2(сц Ь) будут
выделяться подмножества гладких функций, например дважды не-
непрерывно дифференцируемых.
Обычным образом вводится норма функции /: ||/|| = y/(f | /).
Пространство С2(а,Ь) превращается в метрическое с расстоянием
d(f,g) = \\f-g\\.
Сформулированная выше общая задача основана на рассмотрении
ортонормированной системы функций ipi(t), ^(t), ...
и линейных комбинаций J^i^^W c коэффициентами с^, завися-
зависящими от "приближаемой" функции / Е С2(а, Ь). Задача приближе-
приближения имеет смысл лишь в том случае, если функции (fi(t) достаточно
хорошие — бесконечно дифференцируемые или даже аналитические.
Если функция f(t) описывает какой-то периодический процесс в
физике или механике, то естественно строить систему {(fn(t)} ПРИ
помощи элементарных периодических функций sinnt, cosnt, n = О,
1,... В общем случае хорошим источником ортонормированных сис-
систем служит обычное пространство многочленов ЖЩ. Построение сис-
системы {(pn(t)} заключается просто в последовательном применении
уже известного нам процесса ортогонализации Грама—Шмидта. Мы
рассмотрим вскоре эти два важных примера (sin, cos и М[?]), а сей-
сейчас остановимся на уточнении проблемы приближения (или, как ещё
говорят, аппроксимации) функции /(?).
§ 5. Ортогональные многочлены 157
2. Метод наименьших квадратов. Пусть дана ортонорми-
рованная система функций {(pn(t)}. Если / — любая функция из
G2 (а, 6), то числа
сп = (f\Vn), n = 1,2,...
,2,...,
называются коэффициентами Фурье функции / относительно
{(pn(t)}. Так как
0 ^ |/ ~ Е cwi I = (/ - Е cJfj i / - ECs<
3=1 3 = 1 e=l
3 « 3,s
- II f ||2 _ ^ „.7ГТ _ \--, +J2cjCj= Il/H2 - E
3
то всегда
В правой части стоит не зависящее от п число, поэтому на самом
деле выполнено неравенство
или, что то же самое,
Неравенство A), справедливое для произвольной ортонормиро-
ванной системы {ipj(t)}, называется неравенством Бесселя. Оно до-
доказывает сходимость ряда ^^>i lc^|2 c неотрицательными членами.
Аппроксимировать в смысле метода наименьших квадратов
данную функцию f(t) линейной комбинацией J^/eLi d>k <Pk(t) с постоян-
постоянными коэффициентами dk и фиксированным числом слагаемых
т — значит подобрать коэффициенты dk так, чтобы мини-
минимизировать среднее квадратичное уклонение (по другой термино-
терминологии — сделать наименьшей "среднюю квадратичную ошибку"
\\f ~^Ук=1 dk (Pk(t)\\2- Геометрический смысл этой задачи достаточно
ясен. Для вектора / из (бесконечномерного) векторного прост-
пространства V = G2 (а, Ь) мы ищем вектор ср из линейной оболочки U =
158 Гл. 3. Векторные пространства со скалярным произведением
= (<?ъ ^2? • • • ? Рт), расстояние которого ||/ — ip|| до / было бы мини-
минимальным. Это так называемая задача о кратчайшем расстоянии от
точки до подпространства, или ещё — задача о перпендикуляре, к
которой мы вернёмся позднее, находясь уже по настоящему в точеч-
точечных, а не в векторных пространствах. Мы всегда имеем разложение
в прямую сумму
v = u®u±,
так что / = /о + /i, где /о — проекция / на U, а Д — перпендикуляр
"из конца вектора /" (довольно бессмысленное выражение) на U, или,
что то же самое, проекция / на U^. Если теперь U Э (р ф /о, то
11/-И1>11/-/о||- B)
В самом деле, /о — ip G U и, следовательно, fo — tp ортогонален вектору
/i = / — /о- Согласно теореме Пифагора
II/ - И12 = II/ - /о + /о - И12 = II/ - /oil2 + Н/о - И12.
откуда и следует неравенство B).
Фактически задача о перпендикуляре сводится к задаче о нахо-
нахождении проекции /о вектора / на U. Записав /о в виде
/о = xi<pi + ... + хтсрт,
мы из условий
выраженных в виде системы из т линейных уравнений
SlOPl I ^j) + (^2 !<?/) + •••+ Жт(^т | ^j) = (/ | ^)j I ^ j ^ Ш, C)
находим неизвестные коэффициенты Х{.
Условия C) годны и в том общем случае, когда система {(^i,...
..., (рт} не ортонормирована. Если же система ортонормирована, то
Cj = (/ \cpj) — коэффициент Фурье, и система C) сразу даёт
Возвращаясь к нашей задаче аппроксимации, мы заключаем, что
среднее квадратичное уклонение ||/ — ^2dj(pj\\2 будет минимальным
при dj = Cj. Это, между прочим, можно видеть и непосредственно:
||||
3 = 1 3 = 1 3 = 1
Если при увеличении т для любой функции / G С2(а,Ь) норму
разности | / — Y^jLiiflv^Vj I можно сделать сколь угодно малой, то
систему {<Pj(t)} называют полной ортогональной системой функций.
Необходимое условие полноты {<Pj(t)}, как видно из предыдущих рас-
рассуждений, заключается в том, чтобы для любой функции / выпол-
§ 5. Ортогональные многочлены 159
нялось соотношение (равенство Парсеваля)
Вопрос о полноте ортонормированных систем {<Pj(t)} относитель-
относительно данного класса функций /(?) впервые был исследован крупным
русским математиком В.А. Стекловым A864-1926).
Условие полноты D) выражается в интегральной форме
[
((/(*) -
= 0 V/eC2(a,6). E)
/
При выполнении условия E) говорят ещё, что последовательность
функций Yl'JLi cj Pjit) сходится в среднем к функции /(?). Из сходи-
сходимости в среднем, вообще говоря, не следует, что /(?) разлагается в
ряд по функциям ^j(t), т.е. /(?) = YlJLi cj Pjit)- Лишь в случае рав-
равномерной сходимости ряда ^2jLicj Pjit) можно в условии полноты
E) сделать переход к предельной функции под знаком интеграла, и
разложимость /(?) в ряд становится фактом.
Понятие сходимости в среднем, а вместе с ним и понятие полноты
системы функций сохраняет смысл для системы, не обязательно явля-
являющейся ортогональной и нормированной.
3. Линейные системы и метод наименьших квадратов.
В связи с последним замечанием, а также ради получения дополни-
дополнительной информации, относящейся к методу наименьших квадратов,
вернёмся к задаче о вычислении расстояния от точки до подпро-
подпространства.
Пусть по-прежнему V — векторное пространство произвольной
размерности со скалярным произведением (* | *), / — фиксирован-
фиксированный вектор и U = (ei,..., em) — подпространство в V. Мы видели,
что расстояние от "точки" / до U измеряется нормой вектора / — /о,
где /о — вектор из U с координатами xi,...,хт, определяемыми из
линейной системы
х1(е1 | е^) + ж2(е2 | е^) + ... + хт(ет | е^) = (/|еД 1 ^ j ^ m F)
(см. C), где следует заменить cpj на ej). Если ei,...,em — орто-
нормированная система, то х3- — (/|ej), I ^ j ^ m, — искомое
решение. Но существование решения, т.е. возможность опустить од-
однозначным образом перпендикуляр из / на U, неестественно связы-
связывать с каким-то базисом. Нам известно, что любой базис допускает
ортогонализацию. Поэтому решение системы F) существует всегда,
и оно единственно. Это значит, что определитель
det |(e^ | ej)|
160 Гл. 3. Векторные пространства со скалярным произведением
называемый определителем Грама системы векторов ei,..., em, от-
отличен от нуля. Определитель Грама, очевидно, равен нулю, если один
из векторов ек является линейной комбинацией остальных. Факти-
Фактически нами доказана
Теорема 1. Система векторов {ei,...,em} линейно незави-
независима тогда и только тогда, когда её определитель Грама отличен
от нуля.
Это утверждение не ново (ср. с теоремой 4 из § 1). Возникший у
нас в связи с проблемой аппроксимации метод наименьших квадра-
квадратов позволяет выработать свежую точку зрения на, казалось бы, до
конца исчерпанную задачу о решениях системы линейных уравнений.
Пусть дана линейная система
+ B22^2 + • • • + ап2Хп = 62, /,-Л
CLmlXl + CLm2X2 + . . . + CLmnXn = Ът
с большим числом т > п уравнений. Без ограничения общности
можно считать, что гапк(а^) = п. Такие переопределённые системы
возникают на практике, например при обработке большого массива
вычислений. В общем случае система G) несовместна и не имеет ре-
решений. Однако можно попробовать найти такие значения неизвест-
неизвестных х\, ^2, ..., ж^, чтобы средняя квадратичная ошибка
т
^2(aklx® + ак2х% + ... + акпХп - Ьк)
к=1
принимала наименьшее значение. Будем интерпретировать столбцы
ei = [an,... ,ami], ..., en = [ain,... ,amn], f = [61,..., bm]
как векторы m-мерного евклидова пространства со стандартным
скалярным произведением
г=1
В таком случае
т п 2
^{aklx\ + ... + акпх°п -ЪкJ = |^ж°е; - f |
k=l г=1
есть квадрат расстояния от J^ILi ж?е* R0 ^- Если U = (ei,..., еп) —
линейная оболочка линейно независимых по условию векторов ei,...
...,еп, то задача о минимуме квадратичного уклонения свелась к
известной задаче о перпендикуляре, т.е. к отысканию проекции век-
вектора f на U. Интересующие нас компоненты ж?,..., х^ "приближён-
"приближённого решения" исходной линейной системы находятся из совместной
§ 5. Ортогональные многочлены 161
определённой "нормальной" системы
V 1 1 / 1 I V 2 1 / *? I • • • | I ^77.
(ех | е2)ж? + (е2 | е2)х2 + ... + (еп
(ех | еп)ж? + (е2 | еп)ж2 + ... + (еп | еп)х°п = (f | еп)
с определителем Грама det| (е^|е^)| ф 0.
4. Тригонометрические многочлены. Из легко проверяемых
соотношений
cos kt • cosltdt = 0, кф1, / cos2 ktdt = тг,
— 7Г J —7Г
7Г /»7T
^t = 2тг,
/*7Г /*7Г
J —ТГ J —7Г
/ sin kt • sin I tdt = 0, кф1, / sin2 &t dt = тг
J—ТГ </— 7Г
следует, что функции
, —^cost, —=sint, ..., —= cosnt, —= sinnt
V2tt v71" v71" V71" v71"
составляют ортонормированный базис Bп+1)-мерного пространства
V2n+i так называемых тригонометрических многочленов
sn(t) = — + а\ cost + bi sint + ... + ап cos nt + Ьп sin nt (8)
порядка п.
Общие рассуждения об аппроксимации функций показывают, что
тригонометрический многочлен sn(t) с (чуть изменёнными) коэффи-
коэффициентами Фурье
1 Г
ао = - f(t)dt,
К J-7T
1 Г I Г
аи = — / /(t) cosltdt, bk = — f(t) sinltdt, 1 ^ fc ^ n,
Я" ^-тг ТГ У_7Г
даёт наилучшее приближение в среднем (порядка п) к произвольной
функции / е С2(-7г,тг).
Глубоко развитая теория рядов Фурье решает для различных
классов функций, являются ли многочлены Фурье, дающие наилуч-
наилучшее приближение в среднем, также равномерно аппроксимирующими,
т.е. сходится ли бесконечный ряд \imn^oq sn(t) равномерно и пред-
представляет ли он функцию /(t). Ответ оказывается утвердительным, в
частности, для любой непрерывной на отрезке [—тг,тг] функции /(t)
11 А.И. Кострикин
162 Гл. 3. Векторные пространства со скалярным произведением
с естественным условием /(—тг) = /(тг). Этот результат можно вы-
вывести из теоремы Вейерштрасса, формулируемой в п. 6. Доказатель-
Доказательство не входит в наши планы.
Сделаем важное замечание технического порядка. При помощи
уже встречавшейся нам формулы Эйлера cos kt + i sin kt = егЫ три-
тригонометрический многочлен (8), отвечающий комплексной функции
/(?), можно представить в более удобной форме
sn(t) = J2 akeik\ (9)
k=-n
(обратите внимание на необычное суммирование от — п до п), где
2а0 = а0; 2ак = ак - гЪк, к > 0; 2ак = а_к + гЬ-к, к<0.
Показательные функции
дают на отрезке [—тг, тг] пример комплексной ортонормированной си-
системы, как это непосредственно вытекает из соотношений ортого-
ортогональности
2^
5. Замечание о самосопряжённых операторах. Полнота
ортонормированной системы тригонометрических (показательных)
функций даёт повод взглянуть на неё с несколько необычной сто-
стороны. Дело в том, что очень многие полные ортонормированные сис-
системы функций являются наборами собственных функций (собствен-
(собственных векторов) соответствующих самосопряжённых операторов, дей-
действующих на С^а, Ь) или на некоторых подмножествах п С С^а, Ь).
Вообще говоря, теорема о диагонализируемости самосопряжён-
самосопряжённого оператора Л: V —У V, dim У < оо, не переносится на бесконеч-
бесконечномерные пространства, как показывает хотя бы пример линейного
оператора Tt умножения на t. Оператор Tt симметричен:
(?t№\g(t)) = [ tf(t)g(t)dt= f f(t)tg{t)dt={f{t)\Ttg(t)).
J a J a
Ho Tte(t) = Xe(t) —у e(t) = 0, поэтому оператор Tt совсем не имеет
собственных векторов. Можно было бы упомянуть и другие трудно-
трудности работы с линейными операторами на бесконечномерных (хотя
бы и гильбертовых) пространствах, но это только увело бы нас в
сторону.
§ 5. Ортогональные многочлены 163
Гораздо важнее отметить, что многие операторы на бесконечно-
бесконечномерных метрических пространствах, имеющие первостепенное зна-
значение в математике и физике, при выполнении ряда условий явля-
являются самосопряжёнными, причём для них справедлив естественный
аналог спектральной теоремы в конечномерном случае. Именно, если
Л : V —> V — самосопряжённый оператор, то ортонормированная
система 5д его собственных векторов (функций) зачастую оказыва-
оказывается полной в У в смысле п. 2. Этот замечательный факт мы проил-
проиллюстрируем простейшим доступным примером.
В дальнейшем пусть С^а, Ь) — пространство дважды непрерыв-
непрерывно дифференцируемых функций с обычным скалярным произведе-
произведением
(/Ы= Г f(t)W)dt.
J — 7Г
Рассматривается совокупность вещественнозначных функций
и линейный оператор
Л=-^2: С2(-7Г,7Г) ->> С2(-7Г,7Г)
с областью определения П. Правило интегрирования по частям даёт
(Af(t)\g(t))= Г f"(t)g(t)dt =
J — 7Г
= /'(*) $(С,г- Г f(t)g'(t)dt=- Г f(t)g'(t)dt =
J —7Г J —7Г
= №9'Щ\- Г f(t)g'(t)dt= Г f(t)g"(t)dt=(f(t)\Ag(t)).
J— 7Г J— 7Г
Это означает, что при сделанных предположениях оператор Л явля-
является самосопряжённым (симметричным). Что можно сказать о его
собственных функциях и собственных значениях? Пусть
dt2
Решениями этого уравнения с учётом ограничений, сформулирован-
сформулированных в определении П, будут функции
Мк cos kt + Nk sin kt, (9)
отвечающие собственному значению Л = —к2 (к = 0,1,...). Если
бы существовали какие-то ещё собственные значения, то нашлась
бы функция, ортогональная ко всем тригонометрическим функциям
(свойство ортогональности собственных векторов самосопряжённого
оператора, отвечающих различным собственным значениям), а это
11*
164 Гл. 3. Векторные пространства со скалярным произведением
невозможно в силу полноты тригонометрической системы. По тем
же соображениям при Л = — к2 все решения исчерпываются функ-
функциями B).
Таким образом, справедлива
Теорема 2. Дифференциальное уравнение
в классе дважды непрерывно дифференцируемых функций, определён-
определённых на отрезке [—тг,тг] и удовлетворяющих условиям
/(-тг) = Ятг), /'(-т) = /Ч*)>
имеет решения только при А = — п2 (п = 0,1,...). Каждому п отве-
отвечает двумерное пространство решений (cosnt, sinnt). Все решения
1, cost, sint, cos2t, sin2t, ... образуют в Сг(—тг,тг) полную ортого-
ортогональную систему функций.
Термин "дифференциальное уравнение" нужно воспринимать
пока лишь как синоним "уравнение на собственные значения и собст-
собственные функции"
?>/(*)= А/(*),
где
лга лга-1 л
V {t) + dt) + + (t) ()
V = am{t) + am_dt) + ... + ai(t) (*)
— линейный дифференциальный оператор, действующий на прост-
пространстве достаточно гладких вещественных функций на отрезке [а, Ь];
предполагается, что если /(?) — функция из этого класса, то f^ (a) =
= f(k)(b) для /c = 0,l,...,m — 1. Используя формулу интегрирования
по частям несколько раз, получаем
где запись — о al(t) для оператора означает, что, применяя его к
Ол/
функции /(?), мы сначала умножаем её на a,i(i) и затем дифференци-
дифференцируем г раз по t. Формула (**) определяет операцию (формального)
сопряжения дифференциальных операторов: D 4 D*. Оператор V
называется {формально) самосопряжённым, если V* = V. Слово
"формальный" здесь напоминает о том, что в определении не ука-
указано явно пространство, на котором V реализуется как линейный
оператор.
6. Многочлены Лежандра (сферические многочлены).
Упомянутая в п. 4 теорема Вейерштрасса гласит: любую функцию
/(t), непрерывную на отрезке а ^ t ^ b, можно равномерно аппрок-
аппроксимировать на этом отрезке многочленами от t. Другими словами,
§ 5. Ортогональные многочлены 165
для любого положительного е найдётся многочлен а® -\-a\t-\-.. . + antn
достаточно высокой степени п такой, что
\а0 + ait + ... + antn - f(t) | < е, a^t ^b
(функция /(?) задана). Из этой теоремы, доказываемой в курсе ана-
анализа, вытекает как полнота в смысле п. 2 бесконечной системы од-
одночленов {?г}о°, так и сходимость в среднем (или по норме) к /(?)
ряда Фурье, построенного по /(?) и по соответствующей ортонор-
мированной системе. Чтобы получить такую систему, нужно при-
применить к одночленам tk процесс ортогонализации Грама—Шмидта.
Этот процесс даст последовательность ортогональных нормирован-
нормированных многочленов — однозначно определённых, если зафиксировать
отрезок, скажем, — 1 ^ t ^ 1, и условиться выбирать старший коэф-
коэффициент в каждом многочлене положительным.
Чаще, однако, систему ортогональных многочленов {(fn(t)} нор-
нормируют не интегральным условием ||(^п(?)|| = 1, а каким-нибудь ло-
локальным соглашением одного из следующих типов:
1) tpn(t) — нормализованный многочлен степени п, т.е. ipn = п\;
В любом случае получаются системы пропорциональных векто-
векторов (функций), поскольку условие ортогональности записывается
одинаково:
/ tkcpn(t)dt = O, & = 0,1,...,п-1.
J—1
Последовательно полагая п — 1,2,3,... и выбирая нормировку типа
1), получаем систему ортогональных многочленов
1 3
uo(t) = 1, Ul(t)=t, u2(t) =t2 - -, ix3(t)=t3--t, ... A0)
о 5
рассмотренных более двухсот лет назад A785 г.) французским мате-
математиком Лежандром в связи с задачами теории потенциала. Общая
формула для них была получена позднее, и теперь многочленами Ле-
жандра называют систему ортогональных многочленов
1 dn(t2 - л\п
Ро(*) = 1, Р"(*) = 2^[ ей" ' п = 1,2,..., A1)
с нормировкой типа 2): РпA) = 1. Вот несколько первых многочле-
многочленов:
2 2
Проверим, что действительно многочлены A1) обладают нужными свой-
свойствами. По формуле бинома Ньютона имеем
(t2 - 1)п = ^(-l)fc (П\гЧп-к) = f2n _ nt2
к=о к
166 Гл. 3. Векторные пространства со скалярным произведением
Поэтому
Pn(t) = —— [2пBп - 1) ... (п + l)tn + члены степени ^ п - 2] =
Z ТЬ.
[2п)\
= * tn + члены более низкой степени A2)
2п(п\J
Это показывает, что deg Pn{t) = п, причём мы получили одновременно выраже-
выражение для старшего коэффициента многочлена Pn(t).
Далее, применяя к многочлену (t2 — 1)п = (t — l)n(t + l)n формулу Лейбница
n-кратного дифференцирования произведения, получим
Ип .П - / п \ rfk fin —k
— [it - l)n(t + 1)п] = V ( ) ^-r(t - 1)п • r(t + 1)п.
dk
Так как при к < п многочлен —-(t — 1)п делится на t — 1 и, следовательно,
dtk
обращается в нуль при t = 1, то
Заметим, кстати, что при т < п формула Лейбница m-кратного дифференциро-
дифференцирования произведения (t — l)n(t + l)n даст нам многочлен, делящийся на t — 1 и на
t+ 1, т.е.
(t2 - 1)п = (t2 - 1) • vm(t), т <п.
п * dtm
Стало быть,
fim
— (t2-l)n, m<n,
dtm
— многочлен, обращающийся в нуль при t = ±1. Используя теперь правило ин-
интегрирования по частям, проведём проверку условий ортогональности Pn(t) к
функциям 1, ?, ..., tn~1. Имеем
2пп\ (tk | Pn(t)) = Г tk — (t2 - l)n dt =
+_k
-l 7_
+ fc(fc-l)/ tk-2—^-_
Постепенно понижая показатель при t, придём к окончательному равенству
2пп\ (tk | Pn(t)) = (-l
-l
= 0.
Косвенным образом мы не только доказали попарную ортогональность много-
многочленов Лежандра
(Pk(t)\P,(t))=O, кф1,
но и получили выражение для членов последовательности A0):
un{t) = V ' Pn(t), n = l,2,...
[zn).
§ 5. Ортогональные многочлены 167
Действительно, из общих соображений мы знаем, что un(t) и Pn(t) могут отли-
отличаться лишь постоянным множителем, и сравнение старших коэффициентов (см.
формулу A2)) даёт нужное соотношение.
Предлагается проверить, что
\\Pn(t)\\2= f Pl(t)dt=-^—. A3)
J-i 2n + 1
Положим временно wn = {t2 — l)n. При помощи формулы Лейб-
Лейбница (п + 1)-кратного дифференцирования произведений, стоящих в
обеих частях тождества
(f - l)-j-wn = 2ntwn,
at
получим
2 1 dn
{ + 1)
2{n + !) dt^ dt^
dn+1 dn
+ 2( + 1)
Умножив все члены этого равенства на 1/Bпп!) и воспользовавшись
тем, что
1 dn
2^.d?Wn = Pn{t)>
мы придём к дифференциальному соотношению
(t2 - 1)^Рп(*) + 2t lj-Pn(t) - n(n + l)Pn(t) = 0. A4)
dtz at
Рассмотрим на пространстве С^—1,1) линейный дифференциаль-
дифференциальный оператор
с областью определения С^—1,1), где, как и ранее (см. п. 4), берётся
пространство дважды непрерывно дифференцируемых функций с
обычным скалярным произведением. Оператор S самосопряжён, как
это вытекает непосредственно из общих формул (*), (**) в конце п. 4.
Равенство A4), переписанное в виде
SPn(t)=n(n + l)Pn(t), A5)
показывает, что многочлен Pn(i) является собственной функцией са-
самосопряжённого линейного оператора 5, отвечающей собственному
значению Л = п{п + 1). Итак, уравнение Sx(t) = п{п + 1) x(t) допус-
допускает ненулевое решение х = Pn(t). Если бы размерность собствен-
собственного подпространства Vх была больше единицы, то в Vх существовал
бы вектор y(t) ф 0, ортогональный к Pn(t). Так как собственные под-
подпространства самосопряжённого оператора взаимно ортогональны:
(Vх | У) = 0, Л ф ц,
168 Гл. 3. Векторные пространства со скалярным произведением
то вектор y(t) ортогонален ко всем Pj(t), j = 0,1,... Это, однако,
противоречит полноте системы A1), вытекающей из теоремы Вей-
ерштрасса. По той же причине оператор S не имеет собственных
значений, отличных от п(п + 1), п = 0,1,...
Нами доказано (по модулю теоремы Вейерштрасса) следующее
утверждение.
Теорема 3. Дифференциальное уравнение
в классе дважды непрерывно дифференцируемых функций на отрезке
— 1 ^ t ^ 1 имеет решения только при А = п(п + 1), п = 0,1, 2,...
Каждому п отвечает единственное с точностью до умножения на
константу решение x(t) = Pn{t). Все указанные решения образуют
в C^i—1,1) полную ортогональную систему функций.
Рассмотренные нами (весьма бегло) дифференциальные опера-
d2 d г 2 di
торы —— и — \{t — 1)— принадлежат к более широкому классу так
UjL UjL L UjL -I
называемых операторов Штурма—Лиувилля, играющих заметную
роль в математической физике.
Замечание. Многочлены
2п(п!J
un(t)-anrn(t), an- Bn)! ,
из системы A0) обладают следующим интересным свойством мини-
минимальности. Среди всех нормализованных вещественных многочленов
степени п многочлен un(t) наименее удалён в среднем от нуля на от-
отрезке — 1 ^ t ^ 1.
В самом деле, речь идёт о минимуме интеграла
f(tJ dt для fit) = tn + ... G M[t].
-l
Используя разложение
fit) =anPn(t)+7n_iPn_i(t) + ... + 7iPi(t)+7o, 7; el,
попарную ортогональность многочленов Pk(t) и формулу A3) для
||Pn(t)||, получим выражение
~ о п—1 о
7г
г=0
которое, очевидно, достигает минимума при 7г = 0, О^г^п — 1.
7. Ортогонализация с весом. Непосредственным обобщением
многочленов Лежандра служат многочисленные семейства функций,
получающиеся следующим образом. Пусть на отрезке а ^ t ^ Ъ за-
§ 5. Ортогональные многочлены 169
дана неотрицательная функция p(t), которую мы будем называть ве-
весовой функцией. Рассматривается векторное пространство
V{y/W)) = (VW)tk\ k = 0,1,2,...
или его конечномерное подпространство
Встаёт вопрос о выборе в V(\/рЩ) (или в Vn(^fp(f))) орто-
нормированного базиса. Обычный процесс ортогонализации Грама—
Шмидта приводит к системе функций
{л/pW Qn(t)}, Qn{t) е M[t], degQn = п, п = о, 1,...,
удовлетворяющих условию
= / P(t) Qm(t) Qn(t) dt = Smn.
Ja
Говорят, что {Qn(t)} — ортогональные многочлены, соответ-
соответствующие весу p(t). В этом смысле многочлены Лежандра соответ-
соответствуют весу 1.
Мы могли бы с самого начала ввести новое скалярное произведе-
произведение
(f\g)P(t)= f p(t)f(t)g(t)dt,
J a
и тогда речь шла бы об ортогонализации многочленов в прежнем
смысле, но, как правило, предпочитают иметь дело с фиксированным
скалярным произведением.
8. Многочлены Небышева (первого рода). Русский матема-
математик и механик П.Л. Чебышев A821-1894), обладавший разносторон-
разносторонними интересами, заложил основы теории аппроксимации функций.
Ему принадлежат основные идеи общей теории ортогональных мно-
многочленов. Замечательная серия ортогональных многочленов Tn(t),
п ^ 0, (а, Ъ) = (—1,1), соответствующих весу p(t) = 1/л/1 — ?2, носит
его имя. Вот их явное выражение:
Tn{t) = Тг^Г^^^^1 " *2)"~1/2 = cos(n
В частности,
T3(t) = 4t3 - 3t, T4(?) = 8t4 - 8t2
Нормировка:
lTm(t)Tn(t)dt_i"_^ ^ m = n#0>
при m = n = 0.
170 Гл. 3. Векторные пространства со скалярным произведением
В связи с замечанием в конце п. 6 отметим, что многочлены Чебы-
шева, наименее уклоняющиеся от нуля в том смысле, что максимум
абсолютного значения |-^brTn(t)\ на отрезке — 1 ^ t ^ 1 принимает
наименьшее значение в классе всех нормализованных вещественных
многочленов степени п.
Упражнение. Проверьте, что выражение A6) правильно, и докажите, что
многочлен Чебышева Tn(t) является собственным вектором с собственным зна-
значением п2 дифференциального оператора
9. Многочлены Эрмита. Рассмотрим вкратце многочлены Эр-
мита Hn(t) (правильнее — многочлены Лапласа—Чебышева—Эрми-
Лапласа—Чебышева—Эрмита), отвечающие выбору а = — оо, Ъ = оо, p(t) = e~l и получаю-
получающиеся в результате ортогонализации базисной последовательности
одночленов 1, ?, ?2, ... Явные формулы:
/о
1 [Т) = Z6, ?12\1) = 4б — Z, ?13[Т) = Об — 1Z6,
нормировка:
ro° r n при ш/п,
при m = п.
Это — небольшое упражнение для читателя, овладевшего материа-
материалом п. 5. Надо только воспользоваться значением несобственного
интеграла
Г e~edt = л/^F
•/—оо
и тем обстоятельством, что на концах интервала (—оо, оо) все про-
производные функции е~1 обращаются в нуль.
Далее, прямая индукция по п устанавливает справедливость сле-
следующего утверждения.
Многочлен Эрмита Hn(t) есть собственный вектор с собствен-
собственным значением —2п дифференциального оператора
~ ~d^~ ~dt
В математической физике полезны также функции Эрмита
Докажем, что функция ij)n(t) является собственным вектором
оператора
§ 5. Ортогональные многочлены 171
с собственным значением — Bп + 1).
С этой целью рассмотрим вспомогательный оператор
dt
Легко проверить, что
[Я, М] = ЧМ - МП = -2(-^ - t) = -2М.
Отсюда следует, что если / — собственная функция оператора Я с
собственным значением Л, то М/ есть собственная функция опера-
оператора Я с собственным значением Л — 2:
ЯМ/ = [Я, М\/ + МЯ/ = -2М/ + ХМ/ = (Л - 2)М/.
Индукция по п приводит к соотношению
ЯМп/ = (А - 2п)Мп/.
Так как Яе~1 /2 = —е~1 /2, то, заменяя / на е~1 '2 и А на -1, мы
приходим к выводу, что Мпе~1 I2 есть собственная функция для Я
с собственным значением — Bп + 1) при всех п ^ 0.
С другой стороны, индукция по п и непосредственные вычисле-
вычисления показывают, что
Тем самым всё доказано.
УПРАЖНЕНИЯ
1. Тригонометрический ряд XlfcLi —1=~ сходится на Ж. Используя нера-
у/к
венство Бесселя, показать, что он не является рядом Фурье никакой функции
/ес2(-тг,7г).
2. Получить рекуррентные формулы:
а) для многочленов Лежандра Pn+i(t) = tPn(t) Pn—i(t)',
п + 1 п + 1
б) для многочленов Чебышева Tn+\(t) = 2tTn(t) — Tn-\(t)\
в) для многочленов Эрмита Hn+\(t) = 2tHn(t) — 2nHn—\(t).
3. Доказать самосопряжённость дифференциального оператора S из п. 6 не-
непосредственно, не опираясь на общую формулу (**) из п. 5.
4. Доказать, что/(ж,?) = —^^^=^^^= — производящая функция для мно-
VI - 2tx + х2
гочленов Лежандра (в разложении f(x,t) по степеням х коэффициентом при хп
служит Pn(t)).
1
5. Доказать, что
2п~1
172 Гл. 3. Векторные пространства со скалярным произведением
6. Доказать, что многочлены Чебышева второго рода
[п/2]
тт (+\ - г dln+l\t) _ ^ / п + 1
п + 1 dt *-^n V 2га +
m=U
ортогональны на отрезке [—1,1] с весом у/\ — t2 :
7. Доказать, что все нули многочленов Tn(t), Un(t) — вещественные, попарно
различны и лежат внутри отрезка [—1,1]. Указать эти нули в явном виде.
ГЛАВА 4
АФФИННЫЕ И ЕВКЛИДОВЫ
ТОЧЕЧНЫЕ ПРОСТРАНСТВА
Нам, живущим в трёхмерном физическом мире (обозначаемом
), приходится иметь дело с точками, прямыми, плоскостями, рас-
расположенными причудливым образом относительно друг друга и не
привязанными к какой-то выделенной точке — началу координат.
Понятно, что и в общем случае было бы желательно рассматривать
геометрические объекты, которые получаются из прямых и плоско-
плоскостей, проходящих через начало координат, сдвигами. Другими сло-
словами, отвлекаясь пока от метрики, мы хотели бы сделать вектор-
векторное пространство однородным, расширив его группу автоморфизмов
при помощи сдвигов так, чтобы все векторы (теперь уже "точки"
нового "аффинного пространства") становились эквивалентными. В
этой главе будут введены все необходимые определения и доказаны
простейшие свойства аффинных пространств.
§ 1. Аффинные пространства
1. Определение аффинного пространства. Как было от-
отмечено выше, в любом векторном пространстве начало координат,
ассоциирующееся с нулевым вектором, играет особую роль: при всех
автоморфизмах пространства нулевой вектор остаётся на месте. Все
векторы станут равноправными (или эквивалентными) только после
расширения общей линейной группы за счёт сдвигов (параллельных
переносов) пространства. Чтобы эти соображения приобрели точ-
точный смысл, введём несколько определений.
Определение 1. Пусть А — некоторое непустое множество,
элементы которого мы будем называть точками и обозначать1) р,
Q,r,...
Пусть, далее, V — векторное пространство над полем Я. Мно-
Множество А (а точнее, пара (А, У)) называется аффинным простран-
пространством, ассоциированным (или связанным) с У, если задано отобра-
отображение (р, v) н->- р + v декартова произведения А х V в А, обладающее
следующими свойствами:
i) р + 0 = р, (ft + u) + v = р + (и + v) для любой точки р Е А и
любых векторов u, v Е V @ — нулевой вектор пространства V);
*) Часто, особенно в механике и в теории дифференциальных уравнений, сим-
символом р обозначают производную dp/dt дифференцируемой функции р = p(t). У
нас эта ситуация не встретится.
174 Гл. 4- Аффинные и евклидовы точечные пространства
ii) каковы бы ни были точки p,g G А, найдётся, и притом един-
единственный вектор v Е V, для которого р + v = q (этот "вектор из р в
qn обозначается обычно р$ или q — р).
Размерность п = dim# V векторного пространства V считается
одновременно размерностью ассоциированного с V аффинного про-
пространства А. Иногда пишут Ап, чтобы подчеркнуть роль размерно-
размерности. В тех наиболее интересных случаях, когда Я = Ж или Я = С,
говорят о вещественном или соответственно комплексном аффин-
аффинном пространстве.
По своему смыслу аксиома И) утверждает, что каждой точке р Е
Е А отвечает биекция v —> p+v множеств: V = А. С другой стороны,
мы имеем биективное отображение
U : Р -> Р + v = U(p), ре А,
на множестве А, называемое сдвигом (или параллельным переносом)
в А на вектор v. Из аксиом i), ii) следует, что
(е := to — тождественное отображение), т.е. ?_v — сдвиг, обратный
к tv. Стало быть, сдвиги образуют группу, изоморфную аддитивной
группе пространства V. Если положить
то множество всех сдвигов становится векторным пространством,
однозначно определённым пространством А и изоморфным прост-
пространству V. Обозначим его символом А#.
Замечание. Обратим внимание на то обстоятельство, что один
и тот же знак + используется в выражениях u + v, p + v, имеющих
совершенно разный смысл, но это не приводит к недоразумениям.
Если, далее, р, g, r, s — такие точки из А, что p + v = ^, r + v = ,s,
то р^, г% — ничто иное как разные представители класса, обозна-
обозначаемого вектором v. Запись р + р$ = q удобно использовать в силу
её мнемоничности, не более того. Непосредственно из определения
получаются простые правила действий с векторами р§\
р$ + qfi = pfi, P<i = ~q$, pf> = 0
(p, q, r — произвольные точки из А). С таким же правом можно
писать
(Q-p) + (r-q)=r-p, (q-p) = ~(p -q), p-p = 0.
Пример 1. Если V — произвольное векторное пространство над полем Я
и А = vo + U — смежный класс по векторному подпространству U С V (vo —
фиксированный вектор из У), то А является аффинным пространством над Я с
пространством параллельных переносов А# = U. Каждому вектору и' ? U от-
отвечает биекция vo + u —>¦ vo + u + и', удовлетворяющая аксиомам i), ii) просто
потому, что векторы пространства V образуют группу по сложению. Говорят,
§ 1. Аффинные пространства 175
что А — аффинное линейное многообразие (или, коротко, линейное многообра-
многообразие) пространства У, а подпространство U — направление линейного многообра-
многообразия А.
В частности, когда U = V и А как множество совпадает с У, будем писать
Уа := А, понимая под точкой р Е Va просто некоторый вектор u E V. Таким
образом, для любого вектора v E V имеем p + v = u + vGV^,n отображение
Va х V —>¦ Уа обладает свойствами i), ii). В этом случае (V^)# — V. Фактически
на одном множестве V определены две различные алгебраические структуры.
2. Изоморфизм. Аффинные пространства А, А', ассоциирован-
ассоциированные с одним и тем же векторным пространством V, естественно
называть изоморфными, если существует биективное отображение
/: А —У А', для которого f(p + v) = f(p) + v при всех v E V, р Е А
(ради простоты мы обозначаем результат применения сдвига tv в А
и А' одним и тем же символом).
Дадим более общее
Определение 2. Пусть А, А' — аффинные пространства, ассо-
ассоциированные с векторными пространствами V, V над одним и тем
же полем Я. Отображение / : А —у А' называется аффинным (или
аф финн о-линейным), если для всех р Е A, v E V выполнено соотно-
соотношение
/(p + v)=/(p)+I>/-v, A)
где D/: У —>¦ У; — линейное отображение векторных пространств.
Отображение Df называют иногда линейной частью (или дифферен-
дифференциалом) отображения /. Для биективного аффинно-линейного ото-
отображения / линейная часть Df также биективна. В этом случае го-
говорят об изоморфизме между АиА',а при А; = А — об (аффинном)
автоморфизме пространства А, реализованном посредством невыро-
невырожденного аффинного преобразования /.
Заметим, что в принятых ранее обозначениях p+v = q уравнение
A) переписывается в виде
(V)
Теорема 1. Аффинные пространства (А, У), (Л!,V) одинако-
одинаковой размерности изоморфны.
Доказательство. Так как dim У = dim A = dirnA7 = dirnl/7,
то существует биективное линейное отображение Т: V —У V (тео-
(теорема 5 из § 2 гл. 1). Зафиксируем точки о Е А и 6' G А'. Построим
отображение / : А —у А;, полагая /(о) = с/, Df = Т. Любую точку
р Е А можно записать в виде р = о + v. Согласно нашему определе-
определению
/(p)=d'+.F(v). B)
Когда р пробегает все точки в A, v пробегает все векторы в V (по
определению аффинного пространства), а тогда о1+F(y) в силу биек-
тивности Т пробегает все точки в А;. По тем же причинам разным
точкам из А соответствуют разные точки в А;. Стало быть, / —
176
Гл. 4- Аффинные и евклидовы точечные пространства
биективное отображение. Осталось проверить, что оно аффинно-ли-
нейно. В самом деле, используя B), получаем
u) =/(F + v)+u) =/F+(v + u)) =
= 6'
и) = 6'
?
3. Координаты. Введём естественное
Определение 3. Системой координат (или репером) в п-мер-
ном аффинном пространстве (А, У) называется совокупность {о;
ei,...,en} точки о Е А и базиса (ei,...,en) в У. Координатами
xi,..., хп точки р в системе {о; ei,..., еп} считаются координаты
вектора сф в базисе (ei,..., еп): сф = xiei + ... + хпеп.
Из равенства р$ = о$ — сф следует, что если xi,..., хп — коорди-
координаты точки р, a 2/i,..., уп — координаты точки д, то координатами
вектора р$ в базисе (ei,..., еп) будут у\ — х\,..., уп — хп. Обратно,
если q = р + а, то координаты у\,..., уп точки q получаются сло-
сложением координат а\,..., ап вектора а и координат х\,..., хп точки
р: yi = ai + Xi,i = l,...,n.
Замечание. Систему координат можно задавать также п + 1
точками {ро; pi,... ,рп} такими, что векторы popl, ..., popl обра-
образуют базис пространства V.
Сказанное выше об основных операциях, выраженных в коорди-
координатах, резюмирует
Теорема 2. Пусть {ро; Pi,... ,рп} — система координат в про-
пространстве (А, У), е^ := рор\, i = 1,...,п. Если координатами то-
точек р, q в этой системе являются соответственно х\,...,хп и
2/i,...,2М> то вектор р$ имеет координаты у\ — х\, ..., уп — хп в
базисе (ei,..., еп). Для любого вектора а = aiei + ... + апеп точка
р + а имеет координаты х\ + ai, ..., хп + an.
Пусть мы хотим перейти от системы координат {о; ei,..., еп} к
системе {с/; е^, ..., е^}. Тогда нужно задать координаты bi, ..., bn
Рис. 5
§ 1. Аффинные пространства 177
точки о' в старой системе (т.е. координаты вектора од*') и матрицу
перехода А = (а^) от базиса (ei,..., еп) к базису (e'l5..., е^) в прост-
пространстве V (рис. 5). Пусть xi,..., хп и х[,..., х'п — старые и новые
координаты точки р Е А. Из равенства
следует, что
Xi — j CLijXj -\- Oij I — 1,...,77/. yo)
Короче,
X = AX' + B,
где
: , X' = | : | , В =
ХП )
Так как det А ф 0, то
W _ Л—1 ЛГ | p/ D/ _ I • I _ /J-l TD
i
4. Аффинные подпространства. Для дальнейшего введём
Определение 4. Пусть р — фиксированная точка п-мерного
аффинного пространства (А, У) и [/ — векторное подпространство
в V. Тогда множество
называется плоскостью (или аффинным подпространством) в А раз-
размерности т = dim U. Считается, что П проходит через точку р в
направлении векторного подпространства U. При т = 0 плоскость
П называется, естественно, точкой, при т = 1 — прямой, при т =
= п — 1 — гиперплоскостью (в полном соответствии с терминоло-
терминологией, принятой для векторных пространств). Говорят ещё, что U —
направляющее подпространство плоскости П.
Заметим, что если q = р + и, г = р + v, u,vG G, то
Отсюда qt* = v — и, а так как v — и G С/, то qt* G С/. Стало быть,
^ г G П => ф* G С/. D)
12 А.И. Кострикин
178 Гл. 4- Аффинные и евклидовы точечные пространства
Далее,
S,g,fGlI^S + ^GlI, E)
поскольку s=p + w,wGGh^GG, так что s + qft( )
где w + qft e U.
Обратно, подмножество П С А, обладающее свойствами D), E),
очевидно, является плоскостью в смысле данного нами определения.
Итак, направляющее подпространство U С V однозначно опре-
определяется плоскостью П как совокупность всех векторов qft с q, r Е П.
Точку р, входящую в определение П, можно заменить любой другой
точкой q Е П. Действительно, q = р + и, и Е U, поэтому
Из отмеченных свойств П непосредственно вытекает
Теорема 3. Всякая плоскость П = р + U в аффинном прост-
пространстве сама является аффинным пространством, ассоциирован-
ассоциированным с векторным пространством U.
Доказательство. В самом деле, аксиомы i), ii) аффинного
пространства с заменой У на G, выполняющиеся в А, выполняются
и в П. Далее, как мы знаем, для любых двух точек q, r Е П вектор
w = qft принадлежит U и г = q + w, причём вектор w определён
однозначно в У, а значит, и в U. ?
Получим ещё несколько полезных фактов о подпространствах аф-
аффинного пространства (А, У). В дальнейшем предполагается, что
основное поле Я, которое пока находилось в тени, имеет характе-
характеристику ф 2. В соответствии с общим определением на плоскости П
размерности г > 0 лежат по крайней мере две различные точки р, q.
При г = 1 (П — прямая) имеем
П = {р + \р$\ ХеЯ}. F)
Теорема 4. Подмножество П С А тогда и только тогда явля-
является подпространством (плоскостью), когда оно целиком содер-
содержит прямую, проходящую через любые две его различные точки
Доказательство. Пусть сначала П — плоскость. Тогда П =
= р + U, p G A, U С V. Если q\,q2 ? П, то согласно F) точки прямой,
проходящей через q±, q^, имеют вид
Если qx — p + ui, q2 = p + u2, то Ui, u2 G U, q±q^ = u2 - Ui, pqt = Ui
и,значит,
4i + Xq^ = p + ui + A(u2 - ui) e p + U = U.
Обратно, пусть p G П, U = {p$ | q G П}. Надо доказать, что
U — векторное подпространство в V. По условию, если ^i,^2 G П,
Mi = иъ РЯ2 = u2, то точка р + ui + A(u2 — ui), лежащая на прямой
§ 1. Аффинные пространства 179
{qi + \Щ\Ф1 | 1л G Я} в А, содержится в П при любом А Е Я. Другими
словами,
ui,u2 G С/ => ui + Л(и2 - ui) G С/.
Кроме того, О G С/, поскольку р Е П. При ui = 0 получаем импли-
импликацию u2 G U => Ли2 G С/. При Л = 1/2 из ui,u2 G С/ следует
|ui + |u2 G [/, а тогда и ui + u2 = 2(|ui + |u2) G С/.Стало быть,
U — векторное подпространство в V. ?
Следствие. .Еслг/ П7 и П" — плоскости аффинного простран-
пространства А, то их пересечение П = П' П П" либо пусто, либо является
плоскостью. Если U'', U" и U — векторные подпространства в V,
соответствующие плоскостям П', П" и П, то U = U' П U".
Доказательство. Если П содержит лишь одну точку, то ут-
утверждение верно {U — нулевое подпространство). Пусть в П имеются
хотя бы две различные точки qi, g2. Тогда по теореме 4 прямая, про-
проходящая через gi, g2, целиком содержится как в П;, так и в П". Сле-
Следовательно, эта прямая целиком содержится и в П = П' П П". Опять
согласно теореме 4 приходим к заключению, что П — плоскость.
Впрочем, это видно и непосредственно: если р G П' П П", то П; =
= p+U', U" = p+U". В таком случае q G П'ПП" ->> q = р+и' = р+и",
где u; = u" G U' П U". Мы видим, что П состоит из точек вида
р + u, u G U' П U" и, стало быть, является плоскостью, ассоцииро-
ассоциированной с U = U' П U". U
Определение 5. Любые две плоскости в направлении одного и
того же подпространства U называются параллельными.
Совпадение двух параллельных плоскостей p + U, q + U, очевидно,
имеет место в точности тогда, когда р$ G U. В любом случае
q + U = tp$(p + U),
т.е. параллельные плоскости получаются друг из друга сдвигом.
Уточним теперь замечание перед теоремой 2.
Определение 6. Говорят, что точки po,pi,... ,рт аффин-
аффинного пространства А находятся в общем положении (или являются
аффинно независимыми), если они не лежат в какой-нибудь
(т — 1)-мерной плоскости.
Свойство точек po,pi,... ,рш находиться в общем положении, вы-
выполнимое лишь при m ^ п = dim А, равносильно условию линейной
независимости векторов popl, Рор\, ..., РоРт или системы векторов
. . , PiPi-i, PiPi+i, • • • , PiPm
для любого другого индекса г, поскольку pip) = р$р) —рор\. Взяв за U
линейную оболочку (popt, ..., PoPm), мы придём к выводу, что через
точки po,pi,... ,Ргт находящиеся в общем положении, проходит, и
притом единственная, т-мерная плоскость ро + U.
12*
180 Гл. 4- Аффинные и евклидовы точечные пространства
В случае произвольного множества Л4 точек из А линейная обо-
оболочка U векторов pof) с фиксированным началом ро Е М. и концами
р, также лежащими в Л4, имеет размерность, равную рангу мно-
множества (pof) | р Е A4), и не зависит от выбора точки ро. Плоскость
П := A(Ai) := ро + U можно рассматривать как пересечение всех
плоскостей, содержащих Л4.
Определение 7. Плоскость П = А(Л4) называется аффинной
оболочкой множества Л4.
В частности, при М. = {П',П"} можно говорить об аффинной
оболочке А(П',П") любых двух плоскостей П', П" С А. Легко ви-
видеть, что аффинная оболочка А(М) определена множеством А4 од-
однозначно: А(Л4) — минимальная плоскость, содержащая П' и П".
Пример 2. Я' = {р} — нульмерная плоскость, содержащая одну точку р
двумерной плоскости (А, М2), Я" = {q + Л^ | Л G Щ — прямая в (А, М2). Если
реЯ", то, разумеется, А(П',П") = Я". Если же р ? Я", то А{Я',Я") = (А, М2).
5. Барицентрические координаты. Замечание в п. 3 наво-
наводит на мысль заменить в определении 3 векторы ei,..., еп точками
Po,pi,... ,рп, находящимися в общем положении. Координаты произ-
произвольной точки р G А определяются из записи р = р0 -\- ^2™=1 Xi{pi —
— ро). Формально это выражение можно переписать в виде
р= [1-
г=1 г=1
где, очевидно, отдельные слагаемые не имеют смысла. Более точно,
для любых точек q, r Е А и скаляра А Е Я, вообще говоря, бессмыс-
бессмысленно как-то геометрически интерпретировать сумму q + г или вы-
выражение Ад, за исключением того случая, когда А = V. Тем не менее
имеет смысл
Определение 8. Пусть ро?Ръ • • • ->Рт — произвольные точки
аффинного пространства А. Любым скалярам ao,ai,...,am Е Я с
условием Х^о аг — 1 сопоставим формальную сумму ^Шо а«Р«? п0"
лагая
т т
где р — любая точка из А. Говорят, что J^ otiPi является барицентри-
барицентрической комбинацией точек ро, р\,..., рш с коэффициентами ао, а\,...
. . . , О^ттг-
Данное определение корректно, поскольку справедливо
Предложение 1. Выражение
iipi -Р),
i=0 i=0 i=0
не зависит от выбора точки р.
§ 1. Аффинные пространства 181
Доказательство. Действительно, заменив р на точку q = р +
+ v, v Е V, мы получим
т
Р + V + ^^ аг(Рг - Р - V) =
г~ m mm
= p + v + ^2ai(pi -p) - (^2<Xi)v =p + ^2ai(pi -p),
i=0 i=0 i=0
поскольку A - YnLo ai)Y = 0. ?
Например, можно говорить о "полусумме точек" \q + \т = q-\-
+ \(г — q), но никак не об "одной трети" ^q + |г.
Определение 8. Если любая точка р G А однозначно пред ста-
ставима в виде барицентрической комбинации
i=0 г=0
то система точек {ро?Ръ • • • ?Рп} называется барицентрической
системой координат в А, а числа жо,... ,хп — барицентрическими
координатами точки р.
Переписав выражение для р в виде р = ро + J^ILix*fe ~~ ^о)?
мы видим, что однозначность барицентрической комбинации равно-
равносильна тому, что система {fto',Pi — Ро, • • • ->Рп — Ро} является аффин-
аффинной системой координат в А, т.е. точки ро?Ръ • • • ->Рп находятся в
общем положении, а набор векторов (р\ — ро,... ,рп — Ро) является
базисом в V. По координатам xi,...,xn вектора х барицентриче-
барицентрические координаты точки ро + х восстанавливаются однозначно в виде
1 — 2^i=l xi — ж0? ^1-) - - - •> хп-
Рассуждая несколько иначе, предположим, что {о; ei,..., еп} —
какой-то репер n-мерного аффинного пространства А, Пт — един-
единственная m-мерная плоскость, проходящая через точки po,pi,... ,pm,
находящиеся в общем положении, и х\,... ,хгп, 0 ^ г ^ ттг, — их ко-
координаты. Тогда координаты х\,..., хп любой точки р G Пт одно-
однозначным образом выражаются в виде:
Xj = x°j + Ai(rrJ - x°j) + ... + Xm(xf - x°), j = 1, 2,... ,n. G)
Эти уравнения — способ так называемого параметрического зада-
задания плоскости Пт. Мы достигнем большей симметричности в за-
записи, если введём параметр Ло, связанный с Ai,..., Am соотношением
Ао + Ai + ... + Хт = 1, и перепишем G) в виде
xj = Аож° + Xix) + ... + Amxf, j = 1,2,..., п. G')
Барицентрические комбинации хорошо согласованы с аффинными
отображениями, как это видно из следующего утверждения.
182 Гл. 4- Аффинные и евклидовы точечные пространства
Предложение 2. i) Пусть /: А —у А' — аффинное отображе-
отображение и ро,... ,рт G А. Тогда
г=0 г=0 г=0
И) Пусть точки Po.Pi,... ,рп задают барицентрическую систе-
систему координат в А. Тогда для любых точек qo, qi, ..., qn G А' су-
существует единственное аффинное отображение /, для которого
f(Pi) =Qu г = 0,1,..., п.
Доказательство. Выбрав точку р G А, в соответствии с пред-
предложением 1 получим
i=0
j )
i=0 i=0
г=0 г=0
что доказывает утверждение i).
Так как всякая точка из А представляется единственной барицен-
барицентрической комбинацией, то теоретико-множественное отображение
/: А —У Л! можно определить формулой
Это — единственно возможное определение в силу i), и нужно лишь
проверить, что / — аффинное отображение. Действительно,
г=0 г
i{qi - q0) - (q0
i=0 г=0
где Df : V —> V — линейное отображение, переводящее pi — ро в
q\i — qo для всех г = 1,..., п. Оно существует, ибо по предположению
(Pi - Ро, • • • ,Рп - Ро) — базис векторного пространства V. П
Пример 3. В вещественной аффинной плоскости А в качестве репера можно
взять вершины любого невырожденного треугольника. Если, скажем, A,0,0),
@,1,0), @,0,1) — барицентрические координаты вершин треугольника, то
A/3,1/3,1/3) — барицентрические координаты его центра тяжести.
§ 1. Аффинные пространства 183
6. Аффинно-линеиные функции и системы линейных урав-
уравнении. Пусть (А, У) — аффинное пространство над полем Я. В
соответствии с определением 2 отображение / : А —у Я называется
аффинно-линейной функцией, если
f(p + v) = f(p) +Df v Mp e A, v e V,
где Df G V* — линейная функция на V, называемая, как и ранее,
линейной частью (или дифференциалом) функции /. Константы, т.е.
скаляры, относятся к аффинно-линейным функциям с равными нулю
линейными частями.
Выбрав систему координат {о; ei,..., еп} и обозначив через х\,...
..., хп координаты точки р Е А в этой системе, мы выразим значение
функции / в виде
п
f(p) = f(o+o$) = ^2 aiXi + а0, (8)
г=1
где а0 = /(о), a.i = Df - еь о^ = xiei + ... + жпеп.
Обратно: если значения функции /: А —у Я вычисляются по фор-
формуле (8) и v = i7]_ei + ... + vnen, то согласно теореме 2
п
f(P + v) = ^2 ai(xi + vi) + «О =
г=1
0)
а0) + ^2 aiVi =
т.е. / — аффинно-линейная функция.
Замечание. Положив (Л/ + /^д)(р) = А/(р) + /J<g(p), D(\f+
-\-fig) = AD/ + [iDg, мы обнаруживаем, что множество 5 всех аф-
финно-линейных функций А —у Я наделено структурой векторного
пространства: если /, д G 5, то
(А/ + ng)(p + v) = А/(р + v) + w(p + v) =
= А{/(р) + Df • v} + /i{#(p) + ^ • v} =
= (А/ + W)(p) + (XDf + ^^) • v =
т.е. \f + [ig G 5. Теперь D можно интерпретировать как линейное
отображение 5 —у У*. Ядром KerD является прямая 5° в 5, состоя-
состоящая из постоянных функций.
Обратимся ещё раз к системе линейных уравнений
(9)
... + атпхп = Ьп,
которую можно записать в виде
Л(р)=0, ..., /га(р)=0, (9')
184 Гл. 4- Аффинные и евклидовы точечные пространства
где fi — аффинно-линейнал функция:
п
Предположим, что система (9) совместна и х\,... , ж^ — одно из
её решений. Принимая х\,... , ж^ за координаты точки ро в некото-
некотором репере {о; ei,...,en} (так что fi(o) = —bj) и условившись для
краткости называть саму точку ро решением, мы на основе извест-
известных фактов приходим к выводу, что любое другое решение системы
(9) или (9') имеет вид р = ро + х, где х Е V удовлетворяет системе
линейных уравнений
D/i • х = 0, ..., Dfm • х = 0. A0)
Здесь Dfi — линейная часть функции fi : Dfi • х = У^ • cljjXj.
Решения системы A0) образуют, как мы знаем (см. гл. 1, § 3, п. 5),
подпространство U С V размерности п — г, где г — ранг системы
D/i,... ,Dfm. Таким образом, совокупностью решений системы C)
будет плоскость П = ро + U размерности п — г.
Обратно: любую плоскость П = ро + U С А можно задать сис-
системой линейных уравнений. Действительно, согласно теореме 4 из
§ 3 гл. 1, векторное подпространство U С V размерности п — г явля-
является пространством решений системы уравнений вида A0), имею-
имеющей ранг г. Далее, по определению точка р принадлежит П тог-
тогда и только тогда, когда р^) G U. Если х\,...,хп — координаты
точки р в выбранном репере, а х\,... ,ж^ — координаты точки ро,
то pof) = ^2j(xj — x®)ej, и система A0) принимает вид
п
ИЛИ
п
' ' X ' '=- Ь' i ^ 1 777/
где hi = ^2j x®. Ранг этой системы по-прежнему равен г.
Итак, доказана
Теорема 6. Пусть А — аффинное пространство размернос-
размерности п. Множество точек из А, координаты которых удовлетво-
удовлетворяют совместной системе линейных уравнений ранга г, образуют
(п —г)-мерную плоскость П С А. Любая плоскость в А может быть
так получена.
В частности, гиперплоскость задаётся одним линейным уравне-
уравнением
а\Х\ + B2^2 + • • • + апхп = Ь.
§ 1. Аффинные пространства 185
Оставив в системе (9) лишь г ^ т линейно независимых уравнений
(линейно-аффинных функций /^), мы на любую плоскость П размер-
размерности п — г можем смотреть как на пересечение г гиперплоскостей. В
случае несовместной системы линейных уравнений пересечение ги-
гиперплоскостей пусто.
7. Взаимное расположение плоскостей. Пусть (А, У) — аф-
аффинное пространство размерности п. Обобщая понятие параллельно-
параллельности плоскостей одинаковой размерности (см. определение 5), введём
следующее
Определение 9. Пусть П' = р + [/', П" = q + U" (U1', U" —
векторные подпространства в V размерностей к, I) и к ^ I. Говорят,
что плоскость П' параллельна И", если U" С U'.
В случае к = I мы возвращаемся к прежнему понятию параллель-
параллельности. Если П" С П', то условие параллельности автоматически вы-
выполняется. Учитывая установленное нами соответствие между плос-
плоскостями и системами линейных уравнений, мы можем утверждать,
что справедлива
Теорема 7. Для любой плоскости П С А и любой точки q G
G А найдётся, и притом единственная, плоскость П; размерности
dimn7 = сШпП, проходящая через точку q параллельно П. Если
q G П, то П' = П. Если q fi П, то И и И' не пересекаются.
В частности, параллельность двух гиперплоскостей ПиП', за-
заданных в одной и той же системе координат уравнениями
... + апхп = Ъ, а[х[ + ... + а'пх'п = У\
означает попросту пропорциональность коэффициентов при пере-
переменных: а[ = Xcti, г = 1,...,п; а совпадение П = П; налагает, ес-
естественно, ещё одно ограничение Ь' = \Ъ с тем же Л G Я.
Определение 10. Непараллельные и непересекающиеся плос-
плоскости П, П' С А называются скрещивающимися.
Качественную картину взаимного расположения плоскостей под-
подкрепим некоторыми количественными оценками. Во-первых, если
плоскости П; = р + U', П" = q + U" пересекающиеся и о — их общая
точка, то, как мы знаем, аффинная оболочка имеет вид
П := А(П', П") = о + W, W = U' + U".
Но в таком случае по теореме б из § 2 гл. 1 имеем
т := dim П = dim W = к + I — г,
где
Jb = dimC7'J / = dimU"\ k^l, i = dim (U( П U"). A1)
Если пересечение П; П П" пусто, то рассмотрим векторную пря-
прямую V\ = {Ap^| ЛЕЯ} и подпространство
W° = U' + U" + Vi С V.
186
Гл. 4- Аффинные и евклидовы точечные пространства
Так как р$ ? U' + U" (см. упр. 4.4.1), то
т = dim П = dim ([/' + U") + dim Vi = k + / - г + 1.
Плоскость П° = р + VF°, очевидно, содержит П' = ^ + U' и П" =
= q + U" = р + р$ + U" С р + ?7" + Vi. С другой стороны, всякая
плоскость, содержащая П', И77, содержит вектор р$ и прямую Vi, a
потому содержит П°. Другими словами, в случае П7 П П" = 0 имеем
равенство П° = A(U',U"). Таким образом,
, „ (k + 1-i, если П' П П" / 0, , Л
m = dMi(n,n) = Jfc + ;_j + 1) если Шпп„;0_ A2)
Четвёрка
(г, /с, /, ттг), O^i^k^l^m^n, A3)
целых чисел, определённых соотношениями A2), вполне характери-
характеризует взаимное расположение плоскостей П7, И".
Пример 3. Пусть (А, М3) — трёхмерное вещественное аффинное простран-
пространство, П7, И" — две прямые в нём, так что п = 3, к = I = 1. Разные случаи
взаимного расположения прямых в А3 достаточно очевидны и изображены на
рис. 6.
Я' = Я"
П
П
Рис. 6
Попробуйте представить скрещивающиеся плоскости размерностей 1 и 2 в
четырёхмерном вещественном аффинном пространстве.
УПРАЖНЕНИЯ
1. Проверить, что П' = p-\-U', IV" = q-\- U" являются пересекающимися, т.е.
имеющими хотя бы одну общую точку, ровно тогда, когда p(j E U' + U" (ср. со
следствием теоремы 4).
2. Пусть А(П1,..., Пт) — аффинная оболочка прямых III,..., Пт в веще-
вещественном n-мерном аффинном пространстве А. При каком минимальном т имеет
место совпадение ^(П1,..., Пт) = А?
3. Пусть (pojPi? • • • iPn) — репер аффинного пространства А размерности п
и (pfQ,Pi, • • • iP'n) — набор из п + 1 точки аффинного пространства К . Доказать,
§ 2. Евклидовы {точечные) пространства 187
что существует в точности одно аффинное отображение /: А —>¦ М , для которого
f(pi)=p'i,i = 0,1,...,п.
4. Убедиться в том, что барицентрическая комбинация конечного числа ба-
барицентрических комбинаций точек po,pi,... ,рп является барицентрической ком-
комбинацией этих точек.
5. Пусть А — n-мерное аффинное пространство. Доказать, что отображение
/: А —>¦ А, сохраняющее любые барицентрические комбинации точек из А, явля-
является аффинным преобразованием (обращение утверждения i) из предложения 2).
6. Используя свойства аффинных преобразований, доказать известную тео-
теорему о том, что медианы любого треугольника пересекаются в одной точке.
§ 2. Евклидовы (точечные) пространства
1. Евклидова метрика. Чтобы полностью приблизиться к реа-
реалиям трёхмерного физического пространства, мы введём следующее
Определение 1. Аффинное пространство (Е, V) называется
евклидовым {точечным) пространством, если V — евклидово век-
векторное пространство.
Слово "точечное" мы будем обычно опускать, поскольку ранее
рассматривались только евклидовы векторные пространства, и по-
поэтому никакой путаницы не произойдёт. Итак, евклидово простран-
пространство есть тройка (Е, V, р), где р(*,*) — функция расстояния между
точками из Е. Именно,
- A)
Здесь (и | v) — положительно определённая форма, задающая скаляр-
скалярное произведение на V.
Известные нам свойства функции расстояния в метрических про-
пространствах (см. гл. 3, § 3, п. 5) гласят:
i) p(p,q) =p(q,p);
iii, p(p,q) + p(q,f) ^ p(p,f) (неравенство треугольника).
В дальнейшем символом Пр5д будем обозначать прямую, проходя-
проходящую через две различные точки р, q G Е.
Определение 2. Углом между прямыми Пр5д и П^^ назовём
угол ср между векторами р|иг1:
Й11-1И1Г
Определение 3. Система координат {о; ei,..., еп} в евклидо-
евклидовом пространстве (Е, V) называется прямоугольной (или декарто-
декартовой), если (ei,...,en) — ортонормированный базис евклидова век-
векторного пространства V: (е^ | ej) = Sij] г, j = 1, 2,... , п.
Пусть p,q — точки в Е с координатами х\, х<±,..., хп и у\, у<±,...
..., уп в прямоугольной системе координат. Тогда координатами век-
188 Гл. 4- Аффинные и евклидовы точечные пространства
тора р$ будут у\ — х\, ..., уп — хп. Поэтому в соответствии с опре-
определяющим равенством A)
р(р, й) = \/Ы-Х1J + ... + {Уп-хпJ B)
— обычная формула, по которой измеряется расстояние между точ-
точками.
Теорема 1. Любые евклидовы {точечные) пространства Е, Е'
одинаковой конечной размерности изоморфны. Это значит, что су-
существует изоморфное отображение / : Е —у Е' аффинных прост-
пространств, сохраняющее расстояние между точками:
P(p,q)=p'(f(p),f(q)) C)
(р' — функция расстояния на Е').
Доказательство. Выберем прямоугольную систему коорди-
координат {о; ei,..., еп} в Е и прямоугольную систему координат {с/; е^,...
..., е^} в Е'. Построим отображение /: Е -у Е', полагая
/(о) = о1', ^(xiei + ... + хпеп) = х^ + ... + хпе'п. D)
Так как линейное отображение Т \ V —У V, очевидно, биективно, то
проверка, проведённая при доказательстве теоремы 1 из § 1, пока-
показывает, что / — изоморфизм между аффинными пространствами Е
кЕ' с Df = Р.
Кроме того, точка р' = f(p) имеет те же координаты х\,... ,хп
в {6';е'1?... ,е^}, что и точка р в {о;еь ... ,еп}. А так как в Е и в В
расстояния р(р, q), p'(p'', q') вычисляются по одной и той же формуле
B) (в силу выбора базиса), то условие C) изоморфизма евклидовых
пространств также выполнено. ?
Введём некоторые новые понятия.
Определение 4. Отрезком, соединяющим точки р и q аффин-
аффинного пространства, называется множество
М = {Р + ^Й\ (К А О}.
По смыслу pq = qp. Точка г, удовлетворяющая условию pft =
= f^, обычно называется серединой отрезка pq. В случае евклидова
пространства под длиной отрезка pq будем понимать величину
\pq\ := ||р^|| = p(p,q).
2. Расстояние от точки до плоскости. Пусть П — т-мерная
плоскость в евклидовом пространстве Е размерности n, p — точка в
Е, лежащая вне плоскости П. Пусть q — точка в П.
Определение 5. Если (р$ | ft) = 0 для любых точек г, s G П, то
говорят, что прямая Пр5д перпендикулярна к плоскости П и пишут
Пр5д _1_ П; величина р(р, q) в этом случае называется расстоянием от
точки р до плоскости П (оно равно нулю, если р G П), а отрезок pq
между точками р и q — перпендикуляром из точки р на П. Пишут
также pq _L П.
§ 2. Евклидовы {точечные) пространства
189
Длина перпендикуляра — кратчайшее расстояние от точки р до
П, т.е. р(р, г) > р(р, q) для любой точки г Е П, отличной от q. В самом
Рис. 7
деле, как видно из рис. 7, pft =
векторов. Поэтому
+ qft — сумма двух ортогональных
если f ф q (свойство И) функции р).
Пусть П = о + U. Точку q = о + х на П ищем из условия pq _L П.
Так как V = U + U1- (теорема 7 из § 1 гл. 3), а о$ = х + д^, где
х G С/, то компонента g^ G С/" вектора с^ существует и определяется
однозначно.
Чтобы фактически найти перпендикуляр из р на П, выберем в Е
прямоугольную систему координат
{о; еь ..., ет, ..., еп}, E)
в которой векторы ei,..., em составляют базис векторного подпро-
подпространства U. Вектор v = сф мы считаем заданным. Мы найдём
h = ||р^||, вычислив координаты вектора
Заметим, что
х =
хте
Следовательно,
(х- v|e;) = 0, г =
F)
откуда Xi = (v | ei), i = 1,..., m.
Если бы система координат E) не была прямоугольной, то усло-
условия F) выразились бы в виде системы из т линейных уравнений
(е2 |
(е
= (v
г = 1,..., т, G)
которая по доказанному имеет единственное решение. Система из т
линейных уравнений с т неизвестными имеет единственное решение
только тогда, когда её определитель отличен от нуля. Определителем
190
Гл. 4- Аффинные и евклидовы точечные пространства
системы G) является
G(eb...,em) =
(8)
Таким образом, G(ei,..., em), называемый определителем Грама
векторов ei,..., em, не равен нулю. Мы ещё раз получили теорему 1
из § 5 гл. 3, фактически повторив все рассуждения.
Резюмируем наши сведения о перпендикуляре.
Теорема 2. Из каждой точки р, лежащей вне плоскости П =
= о + U евклидова пространства Е, можно опустить перпенди-
перпендикуляр pq. Его длина \pq\ есть кратчайшее расстояние от р до П.
Если о — любая выбранная нами точка на П, то р$ = х — с^,
где х = xiei + ... + хтет — вектор в U, координаты которого
в любой системе координат {о; ei,..., em,..., еп} пространства Е
вычисляются как решение системы G) по формулам Крамера
Xi =
G(eb...,em)
(|) (|)
(е2 |ех) ... (е2 | v) ...
(ex | ero)
(е2 | ет)
(ет |ех) ... (ет | v) ... (ет | е
v =
Если (ei,..., е) — ортонор мир о ванный базис, то xi = (е^
3. Расстояние мелсду плоскостями. Пусть ПиП' — плос-
плоскости в евклидовом пространстве (Е, V, р): П = р + U, И' = р' + U'.
Так как р' можно заменять на любую точку в плоскости И', то без
ограничения общности можно считать, что рр' _L IT, т.е. Пр,р> _L H'.
Если одновременно lip^ _L П, то отрезок рр' — общий перпендику-
перпендикуляр кПиП'.
Лемма 1. Если отрезок рр' — общий перпендикуляр к И и IT,
то
p(p,p')^p(q,q'), (9)
каковы бы ни были точки q G П, q' G П7.
Доказательство. Пусть q = р + u, q' = р' + и'. Так как р' =
= р + pf)', то q' = р + pf)' + и; и
qq1 =
и - и.
По условию (pf)' | и) = 0 и (pf)' | и;) = 0, т.е. (pf)' \ и' - и) = 0, а в
таком случае по теореме Пифагора имеем
откуда и следует неравенство (9). ?
§ 2. Евклидовы {точечные) пространства 191
Лемма 2. Любые две плоскости П; П' в (K,V,p) имеют общий
Доказательство. Пусть П = q + U, П' = q' + U'. Подберём
точки р = q — u, р' = q' — и' так, чтобы вектор pf>' был ортогонален к
U и U'. Очевидно, р$' = u-u' + Й'- Так как V = (?/ + ?/')©(?/ + ?/')±,
то д^' = b + с, где b G [/ + [/', с G (G + U')^, причём компоненты b
и с определены однозначно. Кроме того, b = v + v', vG G, v' G G'.
Получаем
р$' = -и' + v' + v + и + с.
Вектор pf>' будет искомым, если мы возьмём u' = v', u = — v. Дейст-
Действительно, тогда pf>' = с Е (U + Uf)±. D
Из лемм 1 и 2 почти непосредственно вытекает
Теорема 3. Для любых двух плоскостей П, П; G (Е, У,р) най-
найдутся такие точки р G П, р' G П'; что будет выполнено нера-
неравенство A). Отрезок рр' является общим перпендикуляром к П и
Л'. Он определён однозначно в точности тогда, когда U P\U' = 0
(U, U' — направляющие подпространства для П и П').
Доказательство. Действительно, если рр' и qq' — два об-
общих перпендикуляра, то p(p,pf) = p(q,qf) и согласно доказательству
леммы 2 и = и', т.е. q' = р' + и, q = р + и, и G U C\U'. Таким обра-
образом, множество общих перпендикуляров взаимно однозначно соот-
соответствует векторам из UP\U'. Единственность имеет место только в
случае U П U' = 0. Так обстоит дело, в частности, когда П; — точка,
и, значит, U' = 0. ?
4. Определитель Грама и объём параллелепипеда. Решение
задачи о перпендикуляре в п. 2 привело нас попутно к заключению,
что определитель Грама G(ei,..., em), вычисляемый по формуле (8),
отличен от нуля, коль скоро векторы ei,..., em линейно независимы.
На G(ei,... ,em) можно смотреть и как на последний главный ми-
минор Ат матрицы положительно определённой квадратичной формы
g(v) = (v | v) на направляющем векторном подпространстве U плос-
плоскости П. Согласно критерию Сильвестра (теорема 8 из § 4 гл. 1)
G(eb...,em) = Am > 0.
Если же ei, ..., em линейно зависимы и, например, ет =
= а±е± + ... + am-iem-i (мы уже отвлекаемся от базиса подпрост-
подпространства U), то
га — 1
(ет | ef) = ^ ai (em I ei), г = 1,..., т,
так что последняя строка в G(e±,..., em) оказывается линейной ком-
комбинацией остальных строк. Таким образом, G(ei,..., em) = 0 и спра-
справедлива
Теорема 4. Определитель Грама системы векторов ei,..., em
отличен от нуля в точности тогда, когда векторы системы ли-
192
Гл. 4- Аффинные и евклидовы точечные пространства
нейно независимы. Всегда выполнено неравенство G(ei,...,em) ^
^ 0, частным случаем которого при т = 2 является неравенство
Коши—Буняковского.
Определитель Грама G(ei,..., ет) можно истолковать как
квадрат vm объёма параллелепипеда P(opi,..., дрт) со сторонами
дръ...,дрш (pi = о + е;; г = l,...,m):
Р(рри...,дрт) = {hdp! + ... + tm6pm | 0 ^ U ^ 1}. A0)
Пусть (fi,..., fm) — ортонормированный базис векторного прост-
пространства С/, в котором лежат векторы ei,..., em (возможно, линейно
зависимые), и пусть
По определению считаем
^га =vm(P(dp1,...,dpm)) =
что полностью соответствует замечаниям из [ВА I, гл. 3, § 1, п. 1].
Поэтому
аи ... alT
0*11
aml
&11 • • • dim
• • • dmm
= det(aij),
ач = 2^ аы акэ =
к=1
ввиду ортонормированности базиса (fi,..., fm). Следовательно,
... (ei | em)
= G(eb...,em).
i) ... (em | em)
Итак, определитель Грама G(ei,... ,em) равен квадрату объёма
m-мерного параллелепипеда со сторонами opi, ..., дрш.
По поводу объёмов фигур в евклидовом пространстве более под-
подробные разъяснения даны в учебном пособии [2].
УПРАЖНЕНИЯ
1. Найти расстояние от точки р = B,1, —3,4) до плоскости
П: 2ж1 - 4ж2 - 8ж3 + 13ж4 + 19 = 0, х\ + ж2 - ж3 + 2ж4 -1 = 0.
2. Найти расстояние между плоскостями
П1: х\ + жз + Х4 — 2жб — 2 = 0, ж2 + жз — Ж4 — х$ — 3 = 0,
xi - х2 + 2ж3 - х5 - 3 = 0;
П2: A,-2,5,8,2) + (@,1,2,1,2), B,1,2,-1,1)).
§ 3. Группы и геометрии 193
3. Показать, что объём уш параллелепипеда A1) вычисляется по формуле
где Ik — длина перпендикуляра, опущенного из точки Pk+i на аффинную обо-
оболочку A(d,pi,... ,рт).
§ 3. Группы и геометрии
1. Аффинная группа. Вначале рассмотрим простейший при-
пример.
Пример 1. Вещественная аффинная прямая А по определению совпадает с
множеством Ж вещественных чисел. Другими словами, точка i?l отождествля-
отождествляется (и мы этим отождествлением будем пользоваться) с вещественным числом
ж Gl. Геометрия прямой описывается аффинными автоморфизмами в смысле
п. 2 из § 1. В данном случае это будут отображения Фаф : А —>¦ А, определённые
правилом
фа,/3: х ^ аж + /3, «GM*jGl. A)
Если угодно, х — координата точки х в некотором репере {о,е}, т.е. х = о +
+ ж, Фа^(х) = (о + C) + ах = о + (ах + C). Обозначим символом А\ — Aff (Ж)
множество всех аффинных преобразований вида A). Так как композиция
Фа,/3 • Ф^,т = <$>а*,ат+C B)
любых двух преобразований Фа;/д? Ф<т,т ? ^.1 снова принадлежит А\, и так как
S = Ф1,о G Ai, а Фа-1 _Qj-i^g — преобразование, обратное к Фа;/д? т0 множество
Ai вместе с естественной операцией умножения B) является группой (см. [ВА I,
гл. 4, § 2]), называемой одномерной вещественной аффинной группой. Из B)
следует, что А\ — неабелева группа, а отображение
тг: Фа,/3 •->¦ «
является эпиморфизмом А —>¦ М* на мультипликативную группу М* вещественных
чисел, отличных от 0. Ясно, что Кегтг = {Ф].,/з | Р ? Щ — подгруппа сдвигов в
Ai, изоморфная аддитивной группе М+ = {М,+} вещественных чисел. Мы имеем
то, что принято называть короткой точной последовательностью морфизмов
групп:
0 ^М+ -)> Ai -^R* -)> 1.
Пусть теперь (А, У) — n-мерное аффинное пространство над по-
полем Я, /: А —у А — биективное аффинное преобразование (аффин-
(аффинный автоморфизм). Согласно общему определению (см. § 1)
/(p + v)=/(p)+.Fv,
где Т — невырожденный линейный оператор на У, обозначаемый
в общем случае Df. По условию det^F ф 0 и линейный оператор J-
имеет обратный J-~1, являющийся линейной частью аффинного пре-
преобразования f~1:
/-1(P + v)=r1(p)+^-1v.
Обозначив через е единичное (или тождественное) аффинное пре-
преобразование с линейной частью J:v4v, мы видим, что / • j~x —
= f~1-f = e.
13 А.И. Кострикин
194 Гл. 4- Аффинные и евклидовы точечные пространства
Пусть / и g — два аффинных преобразования пространства А.
Их композиция
h = / -g: p^ f(g(p))
снова является аффинным преобразованием с линейной частью % =
= TQ (Т и Q — линейные части преобразований / и д). Дейст-
Действительно,
= (/' 9)(р) + TGw = h(p) + П.
Ассоциативность операции умножения на множестве Aff(A) =
= Ап(Я) всех аффинных автоморфизмов следует из ассоциативности
закона композиции на множестве произвольных отображений А —у А
(см. [ВА I]). Таким образом, Aff(A) есть группа, называемая п-мерной
аффинной группой (аффинного) пространства А. Мы получили часть
следующего утверждения.
Теорема 1. Совокупность Ап(Я) всех аффинных автоморфиз-
автоморфизмов п-мерного пространства (А, У) над полем Я образует группу.
Все аффинные автоморфизмы, оставляющие на месте фиксирован-
фиксированную точку о Е А, образуют подгруппу Ап(Я)д С Ап(Я), изоморфную
полной линейной группе GL(V) = GLn(&). Подгруппа Т = {tv | v G
G V} сдвигов пространства А нормальна в Ап(Я) и служит ядром
эпиморфизма D в точной последовательности
е -+ Т 4 Ап(Я) 4 ОЬп(Я) -+ ё.
(Точность означает, что limp = KerD.)
Доказательство. Рассмотрим аффинные автоморфизмы
/,g е Ап(Я)д. Так как /(о + х) = о + Ту. и д(р + х) = о + ??х, то
(/о^)F + х) = f(gF + bfx)) = /F + ^х) = o + TG, т.е. fog e Ап(Я)д.
Аналогично показывается, что j~x G Ап(Я)д- Единичное отобра-
отображение также содержится в Ап(Я)д- Таким образом, Ап(Я)д — под-
подгруппа в Ап(Я). Соответствие D : / \-> Df = Т для / G Ап(Я)д,
очевидно, является изоморфизмом Ап(Я)о на группу всех невырож-
невырожденных линейных операторов, т.е. на GL(V).
Мы ещё раньше отмечали, что сдвиги образуют подгруппу
Т С Ап(Я), изоморфную аддитивной группе пространства V. Пусть
tw — сдвиг и / — произвольный аффинный автоморфизм с линейной
частью Т. Тогда
= {Г%)№ = Г'(/(р) + v) =
= /(/(p))+^"lv=P + ^"lv =
Так как р — произвольная точка, то отсюда следует, что
C)
§ 3. Группы и геометрии 195
Равенство C) показывает, что Т — нормальная подгруппа в Ап(Я),
т.е. ядро некоторого гомоморфизма. Найдём этот гомоморфизм.
Хорошо известное отображение D : / \—у D f = J- имеет в качестве
ядра подгруппу Кет D = {/ G Ап(Я) | Т — ?}. Значит,
/ g KeiD =^ /(p + v) =
В этом случае вектор и = (р + v)/(p + v) = (р + v)(/(p) + v) = р/(р)
не зависит от точки р и /(р + v) = (р + u) + v = (р + v) + и, так что
/ = tu — сдвиг на вектор и. Итак, KerD = Т. С другой стороны,
выбрав какую-то начальную точку о и построив для любого Т G
G GL(V) отображение o + v4 p + JFv, мы видим, что ImD = GL(V),
так что D — эпиморфизм. ?
Докажем ещё следующее утверждение.
Теорема 2. Каждое аффинное преобразование f : Е —у Е с ли-
линейной частью Т можно представить в виде / = tag, где ta —
сдвиг на вектор а = of (о), g — аффинное преобразование, остав-
оставляющее на месте заданную точку д. Это разложение зависит от
точки д. Если заменить 6 на д'', то вместо вектора а нужно взять
а! = &+(?-?) од1.
Доказательство. Положим а = of (о) и g = t~x f. Мы уже зна-
знаем, что g — аффинное преобразование. При этом g(o) = t~x • /(о) =
= t-a • f(o) = /(о) - of (о) = о. Стало быть, д оставляет о на месте.
Взяв вместо о другую точку с/, мы получили бы вектор а; =
= о'f{o'). Если с/ = о + Ь, то /(с/) = /F) +^Ь, или, что то же самое,
с/ + о' f{p') = 6 + о /(о) + J^b, откуда
а; = ТЬ - b + а = а + [Т - Е) oh'. ?
При фиксированной начальной точке о G А группу Aff(A) можно
представлять себе как множество (GL(V), V) пар (J-, v) с действием
v D)
и с законом композиции
(.Fi,vi) • №,v2) = (^1^2, vi +^iv2). E)
Действительно, если fi = (jT^Vf), г = 1,2, то
(Л-/2)F + х)=Л(/2F + х)) =
= /lF + ^2Х + V2) = О + fl(f2X + V2) + Vi.
Отсюда следует D) и E).
Выберем теперь в А какую-нибудь систему координат {о; ei,...
..., еп}. Тогда координатами точки р = о + х будут по определению
13*
196 Гл. 4- Аффинные и евклидовы точечные пространства
координаты х\,..., хп вектора сф = х = ^2 xiei- Если / — аффинное
преобразование с линейной частью Df = Т', то
f(p) = /(о) + Ту, = 6 + of (о) + Ту,.
Обозначим координаты точки f(p) через yi,... ,уп; пусть также
о /(о) = Х]^еь а F — (fij) — матрица линейного оператора Т, так
что
Собирая все данные, мы получим
ijXj +bi, i = l,...,n. F)
Y = FX + B,
Короче, J~
где У, X, В — столбцы соответствующих координат (ср. с C) из § 1,
а ещё лучше — с C) из § 1 гл. 2).
2. Движения евклидова пространства. Пусть (Е, V, р) —
евклидово (точечное) пространство размерности п. По умолчанию
предполагается, что Я = Ж.
Определение 1. Движением (или изометриеи) пространства Е
называется любое отображение /: Е —> Е, сохраняющее расстояние,
т.е.
p{f(p), f(o)) = pipA) G)
для всех р, q G E.
В определении движения / не предполагается, что / — аффинное
преобразование, но на самом деле / им является, как показывает
Теорема 3. Отображение /: Е —у Е является движением тог-
тогда и только тогда, когда f — аффинное преобразование с линейной
частью Т — ортогональным линейным оператором на V.
Доказательство. В одну сторону утверждение почти оче-
очевидно. Действительно, любое аффинное преобразование с ортого-
ортогональной линейной частью Т обладает свойством G):
= p(/(p)./(P + v))=||/(p)/(p-
= р(р,о)-
Заметим, в частности, что любой сдвиг есть движение.
Центр тяжести лежит в доказательстве обратного утверждения.
Мы разобьём это доказательство на несколько этапов.
1. Очевидная проверка показывает, что произведение двух дви-
движений будет движением. Пусть / — движение, о — фиксированная
§ 3. Группы и геометрии 197
точка, р' = /(о), а = ой' и ta — сдвиг на вектор а. Тогда д = t~x • /
также есть движение. Так как
gF) = t-1(fF))=t-1F') = d,
то / = ?ад, где д{6) = о, т.е. любое движение является произведе-
произведением сдвига (параллельного переноса) и движения д, оставляющего
неподвижной точку о. Нам достаточно показать, что д — аффинное
преобразование с ортогональной линейной частью.
2. Итак, д — движение и дF) = о. Определим отображение Q :
V ->• У, полагая ?х = о#(о + х), т.е.
#(о + х)=о + ?х. (8)
Отображение Q обладает свойствами
?0 = 0, ||?х-?у|| = ||х-у||. (9)
Действительно, д(о) = о =^ ^0 = 0. Положим теперь р = о + х,
^ = о + у. Тогда /о(р,^) = ||у-х||, поскольку^ =р + у-хи р^ = у-х.
Так как д — движение, то p(g(p),g(q)) = p{t>A) — ||у ~ Х11- Но из (8)
следует, что д(р) = о + ^х, р(^) = о + ?у, и поэтому p(g(p),g(q)) =
= ||^у — ^х||. Вместе это и даёт (9).
Полагая у = 0, получаем, в частности, с учётом C)
||<?х|| = ||х||. A0)
3. Отображение Q сохраняет скалярное произведение, т.е.
@х|0у) = (х|у). A1)
Действительно, согласно (9)
||х||2 - 2(х | у) + ||у||2 = (х - у | х - у) = ||х - у||2 = Ц^х - ?у||2 =
= (ах - ау | ах - ау) = ||хц2 - 2^\дУ) + \\ду\\2.
Это соотношение с учётом A0) даёт A1).
4. Отображение Q линейно. В самом деле, положим z = х + у,
так что ||z — х — у||2 =0. Расписав это равенство более подробно,
получим
IWI2 + ||х||2 + ||у||2 - 2(z | х) - 2(z | у) + 2(х | у) = 0.
Отсюда с учётом A0) и A1) находим
ll^zii2 + цахц2 + цау||2 - Щъ \ ах) - 2(gz \ у) + 2(д* \ аУ) = о,
что эквивалентно равенству \\Qz — Qx — Qy\\ = 0, т.е. Qz — Qx — Qy =
= 0. Стало быть,
Равенство ^(Лх) = XQx доказывается аналогично.
198 Гл. 4- Аффинные и евклидовы точечные пространства
5. Конец доказательства. Из (8) и из пп. 3,4 следует, что g —
аффинное преобразование с линейной частью — ортогональным ли-
линейным оператором Q. ?
Уточнением рассуждений, проведенных в п. 1 доказательства
теоремы 2, служит
Теорема 4. Пусть / — движение евклидова пространства
(Е, V, р) с линейной частью — ортогональным линейным операто-
оператором Т. Существует разложение V в прямую сумму ортогональных
подпространств, инвариантных относительно Т\
V = L®L±, A2)
и такал точка о Е Е, что JFx = х для всех х Е L, причём f = ta- g,
a Е L и д(о) = 6.
Доказательство. Обозначим через L совокупность всех век-
векторов из У, остающихся неподвижными при действии J-. Очевидно,
это будет векторное подпространство, инвариантное относительно
Т. Как мы знаем (теорема 7 из § 1 гл. 3), ZA также JF-инвариантно
и имеет место разложение A2).
Возьмём любую точку о' Е Е и представим / в виде / = ?а/ • д',
д'(р') = о1. При замене точки 6' на точку 6 = с/ + х вектор а; перейдёт
ва = а' + (^- ?)х (теорема 2), а д' в д с д(о) = о.
Пусть а; = b + с, х = у + z, где Ь, у G L, с, z G ZA. Подберём над-
надлежащим образом вектор х. Линейный оператор Т—?, ограниченный
на lA, не имеет ядра, поскольку L П ZA = 0 . Поэтому (Т — S)\l±
невырожден. Это значит, в частности, что существует такой вектор
z G ZA, для которого [Т — ?)ъ = —с. Но тогда
a = b + c-c = beL. ?
3. Группа изометрии. Так как аффинные преобразования
образуют группу (теорема 1) и ортогональные линейные операторы
образуют группу (теорема 2 из § 2 гл. 3), то согласно теореме 1
совокупность всех движений евклидова пространства Е будет также
группой. Назовём её группой изометрии пространства Е и обозначим
символом Iso (E). Поскольку два евклидовых пространства одина-
одинаковой размерности изоморфны (теорема 1 из § 2), имеется с точ-
точностью до изоморфизма лишь одна группа изометрии для каждой
размерности. Ясно, что Iso (E) — подгруппа аффинной группы Aff(E).
В Iso (Е) содержится подгруппа Т сдвигов, изоморфная аддитивной
группе векторного пространства V. Подгруппа движений, оставляю-
оставляющих на месте фиксированную точку о G Е, изоморфна ортогональ-
ортогональной группе О(п), п = dimE. Если {о; ei,..., еп} — прямоугольная
система координат в Е, то движение / запишется в виде
Y = FX + А, A3)
где X = [xi,...,хп], Y = [з/i,...,уп] — столбцы координат точек р
§ 3. Группы и геометрии 199
и f(p) соответственно, А = [а\ ..., ап] — столбец координат вектора
а Е V, отвечающего сдвигу ?а, F — ортогональная матрица.
Если F Е SO(n), т.е. det F = 1, то / называется собственным
движением. Группу всех собственных движений пространства Iso(E)
обозначим Iso+(E) (это, впрочем, нами использоваться не будет).
Элементы группы изометрий, т.е. движения постоянно встре-
встречаются в геометрии и механике, поэтому имеет смысл остановиться
на их интерпретации в случае небольших п.
Случай п = 1. Согласно общей формуле A3)
у = ех + а, A4)
где е = ±1 (ортогональность одномерного линейного оператора) и
а — некоторая постоянная, соответствующая сдвигу. Если г = 1, то
получаем сдвиг прямой. Если г = — 1, то формула A4), переписанная
в виде
у - а/2 = -(х- а/2),
наводит на мысль выбрать новое начало координат: х = х' + а/2,
у = у' + а/2. Теперь формула ^/ = —ж; показывает, что мы имеем
дело с отражением (симметрией) прямой относительно некоторой
точки 6'.
Случай п = 2. Выбрав прямоугольную систему координат
{o;ei,e2J, в которой линейная часть Т движения / приводится к
каноническому виду (теорема 10 из § 3 гл. 3), мы видим, что коор-
координатная запись / сводится к одной из следующих:
1) х' = х + а, 2) х' = х + а, 3) х' = xcos(^ — у shop + а,
у' = у + Ь; у' = -у + Ь; yf = xsincp + ycoscp + Ь.
В случае 1) мы имеем сдвиг на вектор а е,\-\-Ъ в2. В случае 2) нужно
перенести начало координат в точку 6' = (о, —6/2), т.е. ввести новые
координаты ^,77:
х = ?(х'= Г), У = V (У' = П' + Ь/2).
После этого формулы 2) примут вид
f' = f + а, ^ = -*7.
В случае 3) при у? ^ 0 перенесём начало координат в точку о' =
= (жо,2/о)? гДе ж°' ^° опРеДеляются из системы
хо cos у? - у о sin у? + а = х0,
ж0 sin ср + у0 cos cp + b = y0.
Геометрически это означает, что f(o') = о'. Существование точки с/
вытекает и из теоремы 3, в обозначениях которой L = 0 (отсутствие
неподвижных векторов при действии F) и ta = е, так что f = g —
200 Гл. 4- Аффинные и евклидовы точечные пространства
чистое вращение. Если рассуждать формально, то нужно ввести но-
новые координаты ?,77:
х = ? + хо (xf = ?' + хо),
У = V + Уо (у' = г}1 + 2/о),
после чего формулы 3) примут вид
?' = ? cos (р — г) sin (p,
т/ = ? sin ip + г) cos (p.
Таким образом, доказана
Теорема 5. Любое собственное движение плоскости есть либо
сдвиг, либо вращение вокруг некоторой точки. Стало быть, собст-
собственное движение, оставляющее неподвижной какую-то точку, есть
вращение вокруг этой точки. Несобственное движение плоскости
сводится к отражению относительно некоторой прямой {у нас —
оси абсцисс ?) и сдвига плоскости вдоль этой прямой. Из суще-
существования хотя бы одной неподвижной точки относительно несоб-
несобственного движения вытекает существование целой прямой, со-
состоящей из неподвижных точек.
Случай п = 3. Снова опираясь на теорему 10 из § 3 гл. 3,
мы постараемся выбрать в трёхмерном евклидовом пространстве Е
такую прямоугольную систему координат {о; ei, в2, ез}, чтобы ли-
линейная часть Т движения / приняла канонический вид. Тогда в ко-
координатной записи для / получается всего несколько возможностей:
1) х' = х + а, 2) х' = xcostp — у simp + a,
у' = х sin ip + у cos ip + b,
z' = z + c;
3) x' = x + a, 4) x' = xcosip — у shop + a,
у' = у + b, y' = x sin ip + у cos ip + b,
z' = —z + c; z' = —z + c.
В случае 1) имеем сдвиг на вектор ае± + Ье.2 + сез.
В случае 2) при ip ф 0, проводя аналогию с плоскостью, мы
придём (после перенесения начала координат в точку 6' = (жо,2/о?0))
к формулам
?' = ? cos ip — rj sin (p,
= ж -
= 2/4
= 2 4
Ь а
-c;
+ rjcostp,
\jl — \i + с
Стало быть, / есть сдвиг на вектор @,0, с) вдоль прямой о1 \i,
соединённый с вращением вокруг этой же прямой на угол ср. Полу-
Получается то, что в механике называют винтовым движением (навёр-
(навёртывание гайки на болт).
§ 3. Группы и геометрии 201
В случае 3), перейдя к новым координатам ?,,г],/и:
мы придём
У = V,
к формулам
f = f + а,
¦с/2
V'
= 77
У =
Z1 =
+ ъ,
ц' + с/2,
«' = -
показывающим, что / сводится к отражению относительно плос-
плоскости П = о(т/ и к сдвигу на вектор (а, 6,0), компланарный этой
плоскости.
В случае 4), являющемся комбинацией 2) и 3), формулы приво-
приводятся к виду
- 77 sin <p,
77' = ? sin (f + г) cos (p,
// = -/i,
откуда следует, что / есть отражение относительно плоскости д^т],
соединённое с вращением вокруг оси д/л на угол ср.
Теорема 6. Собственное движение f трёхмерного евклидо-
евклидова пространства Е является всегда винтовым, т.е. f сводится к
сдвигу вдоль некоторой прямой и вращению вокруг этой же пря-
прямой (винтовое движение включает как чистый сдвиг, так и чистое
вращение).
Несобственное движение есть отражение относительно неко-
некоторой плоскости П, соединённое либо со сдвигом на вектор, ком-
компланарный той dice плоскости П, либо с вращением на угол ср вокруг
прямой, перпендикулярной плоскости П (при ср = тг получается сим-
симметрия относительно точки).
Из теоремы б в качестве частных случаев вытекают теорема
Эйлера A776 г.), согласно которой всякое перемещение твёрдого тела
с одной закреплённой точкой о представляет собой вращение вокруг
некоторой оси (проходящей через точку о), и теоремы Шаля A830 г.)
о том, что любое перемещение тела может быть осуществлено путём
поступательного перемещения тела вдоль некоторого направления и
вращения вокруг оси с этим направлением.
4. Линейная геометрия, отвечающая группе. В соответс-
соответствии с точкой зрения, ставшей общепринятой более 125 лет назад и
впервые чётко изложенной в "Эрлангенской программе" Ф. Клейна
A872 г.), под геометрией следует понимать совокупность инвариан-
инвариантов данной группы G. Пусть Г — некоторое множество, или, как мы
ещё будем говорить, пространство точек, G — какая-то подгруппа в
группе всех биективных отображений Г —у Г. Предметом геометрии,
202 Гл. 4- Аффинные и евклидовы точечные пространства
отвечающей G, является изучение тех свойств пространственных фи-
фигур (или пространственных конфигураций точек) в Г, которые оста-
остаются неизменными при действии преобразований из G.
Все фигуры разбиваются на классы G-конгруэнтных фигур.
Именно, фигура Ф1 объявляется конгруэнтной (или равной) фигуре
ф2 (ф1 ^ ф2M если <I>2 = g($i) хотя бы для одного элемента g Е G.
Из аксиом группы непосредственно вытекает, что конгруэнтность
является отношением эквивалентности, т.е. справедливы свойства:
с*
1) рефлексивность (поскольку <I>i ~ Ф1 <^=> Ф1 = е(Ф].), е —
единичный элемент группы G;
2) симметричность (поскольку Ф2 = #($i) ==^> ^i = 9~1(^2),
g~x Е G и, стало быть, Ф: ~ Ф2 <^=> Ф2 ~ Ф]_);
3) транзитивность (так как Ф1 = ^(Фг), Ф2 =
@
Таким образом, классы конгруэнтных фигур не пересекаются.
Рассматриваемые в линейных геометриях пространства Г являются
либо линейными (векторными) пространствами, либо пространст-
пространствами, производными от линейных. Ближайшими к нам примерами
служат: евклидова геометрия (Г = Е, G = Iso(E)) и аффинная гео-
геометрия (Г = A, G = Aff(A)). Уже эти две геометрии различаются
множествами изучаемых фигур. Элементарная евклидова геометрия
на плоскости имеет дело с прямыми, углами, треугольниками, окруж-
окружностями и т.д. и с соотношениями между линейными и угловыми
элементами различных фигур. В аффинной геометрии приходится
отказаться от всего, что обусловлено расстоянием между точками.
Остановимся на некоторых простейших свойствах фигур в аффин-
аффинной и евклидовой геометриях.
Теорема 7. Пусть (K,V,p) — евклидово пространство. Лю-
Любые две плоскости П, П' G Е тогда и только тогда G-конгруэнтны
(G = Iso(E)), когда dim П = dim П;. В частности, все точки кон-
конгруэнтны. То же самое верно в случае аффинного пространства
(А, У) и группы G = Aff(A).
Доказательство. Действительно, если П = р + U, И' = р' + U'
и /(П) = П;, / G G, то Df(U) = U', а так как det / := det Df ф 0, то
dim U = dim U'', откуда по определению dim П = dim П; .
Обратно: пусть dimn = dirnn7 = т. Выберем в U (соответ-
(соответственно в U') ортонормированный базис (ei,..., em) (соответственно
(e'l5..., е'т)) и дополним его до ортонормированного базиса е^ (со-
(соответственно е^) всего векторного пространства V. Существует ор-
ортогональный линейный оператор Т\ V —> У, для которого T^i — е[.
Движение / с f(p)=pfn Df = Т будет переводить ПвП'.
В случае аффинного пространства (А, V) рассуждения совершен-
совершенно аналогичны. Не нужно лишь заботиться об ортонормированности
и ортогональности. ?
§ 3. Группы и геометрии 203
Отмеченную в формулировке теоремы 7 конгруэнтность точек
выражают ещё словами: группа G действует транзитивно на точках
пространства Е (соответственно А). Транзитивность — важнейшее
свойство группы G и отвечающей ей геометрии, без которого мы ли-
лишились бы возможности "сравнивать" различные фигуры. В случае
аффинной геометрии группа Aff(A) обладает гораздо более сильным
свойством.
Теорема 8. В аффинной геометрии любые две системы {ро,...
• • • ,Рт} и {р'о,... ,р'т} в (А, V) из т + 1 точек, 0 ^ т ^ п, находя-
находящихся в общем положении, конгруэнтны.
Доказательство. Дополним данные системы до систем точек
{ро,- • • ,Рп) и {fib,- • • ,Pn}i n — dim А, также находящихся в
общем положении. По определению это значит, что векторы
(в! = popt,..., en = popl) составляют один базис пространства V,
а (е^ = p'qPi, ... ,е'п = Рор'п) — другой базис. Найдётся невырожден-
невырожденный линейный оператор Т \ V —У V с Тъ{ — е[ . Положив f(po + x) =
= р'о + JTx, мы получим искомое аффинное преобразование /: А —у А,
переводящее щ в р[, г = 0,1,..., п. П
Ясно, что теорема 8 перестаёт быть верной в евклидовой гео-
геометрии уже при т = 1, ибо для 18о(Е)-конгруэнтности пар точек
p,q и р',q' необходимо, чтобы выполнялось условие р(р, q) = p(p' ,q').
Впрочем, это условие и достаточно, что можно усмотреть из дока-
доказательства теоремы 7.
Геометрический смысл аффинных автоморфизмов виден также
из следующих рассуждений. Рассмотрим произвольное биективное
отображение /: А —у А, для которого
=> f(r)f(s) = Xf(P)f(q) VA e R A5)
(поле Ш. здесь можно заменить любым другим полем). Геометрически
это значит, что / переводит коллинеарные точки в коллинеарные
или, что то же самое, аффинную прямую отображает на некоторую
другую аффинную прямую.
Положив Т(р§) = f(p) f(q), мы видим (при А = 1), что отобра-
отображение Т \ V —У V не зависит от выбора точек г, s G А, для которых
?$ = р^, а целиком определяется самим вектором р$. Докажем, что
определённое так отображение Т линейно. Условие ^(Av) = \T(y)
вытекает из определения Т и из условия A5). Любые два вектора
u, v G V можно представить в виде v = p^, v = qft для некоторых
точек p,q,r G А, поэтому u + v = p$ + qft = pftm
?(п + v) = /(р) /(г) = /(р) f(q) + f(q) f(r) = Tvl + Fv.
Стало быть, Т — линейный оператор на V. Для любой точки q = р+х
имеем
/(«) = /(р) + /(р)/(«), f(p) /(?) = ПЙ) =
204 Гл. 4- Аффинные и евклидовы точечные пространства
откуда f(p + х) = f(p) + JFx, т.е. биективное отображение /, обла-
обладающее свойством A5), обязательно является аффинным преобразо-
преобразованием.
Обратное также верно: если / — аффинный автоморфизм с ли-
линейной частью Т и если ?$ = Ар^, то F(Ti) = ХТ(р$). Но f(s) =
+ r^) = f(r) + JT(f^), так что Р(г?) = /(г) f(s). Аналогично,
= f(p) f(q). Нами доказана
Теорема 9. Свойство A5) биективного отображения /: А —>-
—У А является характеристическим для аффинных преобразований.
Рассмотрим теперь специальный случай, когда р, д, г — три точки
на одной прямой (как говорят, коллинеарные точки) и р ф q. Тогда
найдётся такое число Л, что
рт* = АИ- A5')
Определение 2. Число А в формуле A5;) называется простым
отношением коллинеарных точек p,q,r и обозначается [р, q, r].
Понятно, что из теоремы 9 вытекает
Следствие. Аффинное преобразование f пространства А
сохраняет коллинеарность точек и простое отношение тройки
коллинеарных точек.
Формула A5;), переписанная в "аддитивной" форме г — р =
= X(q — р), означает попросту, что любая точка г на прямой Hp,q
записывается в виде г = A — Х)р-\- Xq. В частности, в аффинной гео-
геометрии имеет смысл отношение между: образ внутренней точки г,
0 < А < 1, остаётся внутренней точкой отрезка pq. Мы уже отме-
отмечали раньше, что длина отрезка — понятие евклидовой геометрии,
но середина отрезка — аффинное понятие.
5. Аффинные преобразования евклидова пространства.
Эффект воздействия аффинных преобразований в окружающем нас
мире наблюдается повсеместно. Простейший пример — растяжение
резиновой ленты. Отметим более аккуратно ещё несколько фактов.
В § 2, п. 4 мы условились понимать под объёмом vn паралеллограмма
P(opi,..., дрп) со сторонами opi,..., дрп величину vn = | det (a^)!??
где (ctij) — матрица перехода от ортонормированного базиса (fi,...
..., fn) евклидова векторного пространства V к базису (ei,..., еп),
е^ = ор^, г = 1,... ,п. С другой стороны, если g — аффинный авто-
автоморфизм с линейной частью Q, то объёмом параллелепипеда, постро-
построенного на векторах Qei,..., Qen (точнее, на отрезках, отождествля-
отождествляемых с этими векторами), будет v'n = |detFj^)|, где матрица
вычисляется по следующему правилу. Пусть
§ 3. Группы и геометрии 205
Тогда
т.е. Ь^-jfe = Y,i9jiO>ik, откуда
В = GA.
Следовательно,
v'n = \det(bjk)\ = |detG| • vn = \detg\ • vn.
Мы пришли к следующему выводу.
Теорема 10. При аффинном преобразовании п-мерного евк-
евклидова пространства объём параллелепипеда, построенного на п
векторах, умножается на абсолютную величину определителя пре-
преобразования. Другими словами, при аффинном преобразовании от-
отношение объёмов параллелепипедов сохраняется.
То же самое относится и к объёмам любых других фигур в ев-
евклидовом пространстве.
Следующее утверждение имеет наглядный геометрический смысл.
Теорема 11. Всякое невырожденное аффинное преобразование /
п-мерного евклидова пространства (Е, V) есть произведение:
1) сдвига на некоторый вектор]
2) движения, оставляющего неподвижной некоторую точку о;
3) аффинного преобразования h, являющегося композицией п
сжатий (растяжений) вдоль взаимно перпендикулярных осей, пере-
пересекающихся в точке д.
Доказательство. Действительно, согласно теореме 2 / =
= ta • g, где g(o) = о для некоторой точки д. Если Q — линейная
часть преобразования д, то согласно теореме 15 из § 3 гл. 3 Q — VH,
где D — ортогональный линейный оператор на V, а Ц — положи-
положительно определённый симметричный оператор. В соответствии с тео-
теоремой б из § 3 гл. 3 выберем в Е прямоугольную систему координат
{о; ei,..., еп}, в которой оператор % принимает канонический вид:
7-Lei = \iei, А; > 0, г = 1,...,п.
Тогда
f = ta-d-h, dF + х) = 6 + ?>х, hF + х) = о + Ш, A6)
так что d — движение пространства Е, a ft- — аффинное преобразо-
преобразование, которое можно ещё записать в виде произведения
h = ftift2 .. .hn. A7)
Здесь ft/, — аффинное преобразование с линейной частью %k '•
1-Lkei = ei при г ф к; Чк^к = ^к^к-
Формулы A6) и A7) дают искомое разложение аффинного преобра-
преобразования /. ?
206 Гл. 4- Аффинные и евклидовы точечные пространства
6. Выпуклые множества. Вспоминал определение барицентри-
барицентрической комбинации точек (из § 1, п. 5)
р = ЛоРо + Aipi + ... + XrnPrn, Ao + Ai + ... + Am = 1, A8)
и барицентрических координат, мы замечаем теперь, что при т = 1
точки р = ХоРо + Aipi, Ло + Ai = 1, пробегают
всю прямую Пр0 5рх. Если же дополнительно 0 ^
^Ai^l,i = 0,l, то получится отрезок poPi-
При т = 2 точки р = Хоро + Aipi + Х2Р2, Ао +
+Ai + А2 = 1, Ai > 1, г = 0,1,2, пробегают от-
Рис. 8 крытый треугольник с вершинами ро, Ръ p2.
Действительно, внутренняя точка р треугольника будет внутрен-
внутренней точкой отрезка poq, где q — внутренняя точка отрезка p
Имеем
р = АоРо + Ад, Ао + А = 1, Ао > 0, А > 0,
q = Q/1pi + «2P2, «1 + «2 = 1, «1 > 0, «2 > 0.
Стало быть,
р = АоРо + Х{а1р1 + а2р2) = АоРо + Aipi + А2р2,
где Ai = A«i > 0, А2 = А«2 > 0 и Ao + Ai +A2 = 1 (прямые вычисления
или упр. 4 из § 1).
Обратно: если р = АоРо + Aipi + А2Р2 и Ао + Ai + А2 = 1, А^ > 0,
i = 0,1,2, то р = АоРо + Xq, где А = Ai + А2 > 0, Ао + А = 1 и
q = ot\p\ + OL2P2, OL\ = Ai/(Ai + A2), ot2 — A2/(Ai + A2), так что ot\ > 0,
ot2 > 0, a\ + ot2 — 1. Итак, g — внутренняя точка отрезка Р1Р2, a
p — внутренняя точка треугольника с вершинами po,Pi,P2 (рис. 8).
Рассуждая аналогичным образом, мы при т = 3 придём к тетра-
тетраэдру, а при любом т ^ п — к симплексу. Именно, дадим следующее
Определение 3. Открытым т-мерным симплексом с верши-
вершинами в точках общего положения Po^Pij • • • ,Рт называется мно-
множество всех точек вида A8) с положительными барицентрическими
координатами Ао, Ai,..., Am. Неотрицательные барицентрические
координаты относительно системы Po,pi,... ,рт соответствуют
точкам замкнутого симплекса с вершинами Po,pi,... ,pm.
Теорема 12. Образом любого т-мерного симплекса при аффин-
аффинном автоморфизме является симплекс. Все т-мерные симплексы в
аффинной геометрии конгруэнтны.
Доказательство. Это почти очевидно. Пусть / : А —> А —
аффинное преобразование с линейной частью — линейным операто-
оператором Т \ V —У V. Применяя / к обеим частям равенства A8) с А^ ^ 0
и используя предложение 2, i) из § 1, мы придём к равенству
f(P) = Ао/Ы + Ai/(pi) + . . . + X
§ 3. Группы и геометрии 207
означающему, что f(p) — точка симплекса с вершинами f(po),Pi,...
•••jf(Pm)- Последнее утверждение теоремы есть перефразировка
утверждения теоремы 8. ?
Определение 4. Пусть (А, V) — аффинное пространство. Под-
Подмножество М С А называется выпуклым, если вместе с любыми точ-
точками р, q оно целиком содержит отрезок pq.
Симплекс — важный пример выпуклого множества. Понятно, что
пересечение любого числа выпуклых множеств выпукло.
Определение 5. Пересечение всех выпуклых множеств, содер-
содержащих данное множество М, называется выпуклой оболочкой мно-
множества М и обозначается С(М).
Очевидно, что С(М) = М в точности тогда, когда М выпукло.
Собственно говоря, m-мерный симплекс с вершинами ро,... ,рш явля-
является выпуклой оболочкой указанной системы точек.
Предложение 1. Пусть М — выпуклое множество, р Е А.
Тогда
C(MUp) = Upq, qeM.
Доказательство. По определению отрезок pq, q G М, при-
принадлежит любому выпуклому множеству, содержащему Мир. Стало
быть, UqeMpq С С(М Up).
Обратное включение будет следовать из выпуклости множества
Upq, q G М, проверкой которого мы и займёмся.
Пусть qi,q2 Е М. Тогда произвольным точкам Т\ G pq\\, г2 Е PQ2
отвечает точка г G Г]Т2- Покажем, что
г G pq, где q — какая-то точка из
М. Предположим сначала, что точки
р, q\\, c[2 не лежат на одной прямой.
Тогда они принадлежат своей аффин-
аффинной оболочке — двумерной плоскости
П = А(р, q\\, q2), к которой мы вправе Рис.9
применять обычную элементарную геометрию. В частности, мы за-
замечаем, что прямая Пр^г пересекает отрезок qxq^ в некоторой точке
q. Ввиду выпуклости М имеем включение q G М (рис. 9). В таком
случае г G pq, т.е. в этом случае всё доказано. Если же точки р, q\\,
q2 лежат на одной прямой, то в качестве q можно взять просто одну
из точек qi,c[2- ?
Теорема 13. Аффинно-линейная функция f на выпуклой обо-
оболочке S = C(po,pi,... ,Pm) конечной системы точек pi, i = 0,1,...
..., т {т.е. на симплексе), достигает своего максимума в одной из
вершин:
max/(p) =
pES
208 Гл. 4- Аффинные и евклидовы точечные пространства
Доказательство. При т = 0 утверждение теоремы триви-
тривиально. Используем, далее, индукцию по т > 0. Считаем по предполо-
предположению индукции, что максимум функции / на выпуклом множестве
М = C(jpo,... ,pm-i) равен тах^<т f(fti). Ввиду предложения 1 вся-
всякая точка s G S содержится в некотором отрезке pmq, q G М, и,
значит,
s = Рт + Ар^, 0 ^ Л ^ 1.
Если Т — линейная часть функции /, то
/(в) = /(Рт) + А^-(р^), Т(&$1) = f(q) ~ f(Pm),
а поэтому
/(в) = A - А)/(рт) + А/(?) ^ max{/(pra),/(g)} ^ max/(Pi). D
Несложная теорема 13 относится к аппарату линейного програм-
программирования, имеющего прикладное значение.
УПРАЖНЕНИЯ
1. Убедиться, что группа Ai(?p) автоморфизмов аффинной прямой над полем
из р элементов (р простое) имеет порядок р(р — 1). Какой группе изоморфна
Ai(F3)?
2. Дать геометрическое описание собственного движения / евклидовой плос-
плоскости, если
3. Провести классификацию собственных движений четырёхмерного евкли-
евклидова точечного пространства.
§ 4. Пространства с индефинитной метрикой
1. Индефинитная метрика. Под пространством со скалярным
произведением мы условились понимать векторное пространство V,
рассматриваемое вместе с фиксированной невырожденной квадра-
квадратичной формой
<?(Х) = /(Х,Х) = ^CLijXiXj.
Евклидовы и эрмитовы (унитарные) пространства, соответствую-
соответствующие положительно-определённой форме q (обычной или эрмитовой),
нами рассмотрены достаточно подробно. Важную роль играют также
пространства с так называемой индефинитной метрикой, отвечаю-
отвечающей неопределённой форме q. Как известно из § 4 гл. 1, при надле-
надлежащем выборе базиса (е^) пространства V невырожденная форма q
§ 4- Пространства с индефинитной метрикой 209
принимает нормальный вид
<?(х) = х\ + ... + х\ - x2s+1 - ... - х2п A)
(основным полем теперь считается Ж). Скалярным произведением на
V будет
(х | у) := ЯШ + ... + xsys - xs+1ys+1 - ... - хпуп.
Чтобы оставаться в вещественной области, будем говорить только
0 квадрате нормы (длины) ||х||2 = (х | х) вектора х, которая может
принимать как положительные, так и отрицательные значения при
1 ^ s ^ п — 1. Вектор х будем называть изотропным, если ||х||2 = 0.
На аффинном пространстве Е, связанном с векторным простран-
пространством V, определён квадрат "расстояния"
Р2(Р, 4) = ^2
i=l i=s+l
между точками р(хг,..., хп), q(yi,..., уп) G Е.
Квадратичная форма (х | х) называется ещё метрической фор-
формой векторного пространства У, a p2{p,q) — метрической формой
аффинного пространства Е. При 1 ^ s ^ п — 1 пространство Е назы-
называется псев до евклидовым, а при s = 1 говорят ещё о пространстве
Минковского (иногда к нему относят случай s = п — 1, но это не-
несущественно: замена формы q на — q). В случае п = 4 пространство
Минковского отвечает физическому пространственно-временному
континууму и играет важную роль во всех вопросах, связанных со
специальной теорией относительности.
2. Псевдоевклидовы движения. Согласно общей концепции,
изложенной в § 3, п. 4, геометрия псевдоевклидова пространства
определяется группой G псевдоевклидовых движений, которая по-
порождается подгруппой Т параллельных переносов (сдвигов) и ста-
стационарной подгруппой 0{s,n — s) некоторой фиксированной точки
о G Е (подгруппой, оставляющей о на месте). При s = n мы имеем
ортогональную группу О(п) = О(п,0). В общем же случае "псев-
"псевдоортогональная" группа O(s,n — s) состоит из линейных опера-
операторов Т \ V —> V, сохраняющих форму A). Говорят также, что
O(s,n — s) — группа автоморфизмов формы q.
В выбранном каноническом базисе (ei,...,en) пространства V
форма A) имеет матрицу
Es 0
0 -Еп-8
а оператор Т G 0{s,n — s) — матрицу F такую, что
Чтобы это понять, надо вспомнить закон изменения матрицы квад-
квадратичной формы при переходе к другому базису, в данном случае —
14 А.И. Кострикин
210
Гл. 4- Аффинные и евклидовы точечные пространства
к базису (jTei,..., JTen). Очевидно, как и в случае ортогональной
группы, detJ7 = det F = =Ы. Если detJ7 = 1, то говорят, что Т —
собственный автоморфизм формы q, а аффинное преобразование
/ : Е —у Е с Df — Т — собственное "псевдоевклидово" движение.
Заметим ещё, что автоморфизм J- формы q переводит изотропные
векторы в изотропные, поскольку ^(^х, JFx) = g(x, x) = 0.
3. Группа Лоренца. Как уже отмечалось, четырёхмерное ве-
вещественное пространство с невырожденной симметричной метрикой
сигнатуры A,3) занимает особое место.
Определение 1. Группа 0A,3) называется группой Лоренца и
обозначается L.
В этом случае стандартными являются обозначения
V = (eo,ei,e2,e3),
х = te0 + xie1 + ж2е2 + ж3е3,
||Y||2_ / \_,2 2 2 2
||л.|| — L[yJLj — I — Х-\ — Хо — "^3*
Достаточно интересным является частный случай "одномерной
группы Лоренца" Li автоморфизмов двумерного пространства, со-
сохраняющих метрику
(и и)
= t2-x2.
Группа Li описывает физическое движение по прямой (у нас теперь
х — не вектор, а координата вектора u = teo + xei). Ясно, что все
изотропные векторы пропорциональны векторам ео + ei и ео — ei.
Поэтому для оператора Т в силу его невырожденности имеются две
возможности:
= а(е0 + ei), Т(е0 - ех) = C(е0 - ei),
= а(е0 - ei), ^(е0 - ех) = C(е0 + ei).
Рассмотрим одну из этих возможностей, например, первую. Имеем
а + /3 а-/3
е0 Н —еь
2
а- C
ео Н
2
a + f3
Матрица
F =
2 и 2
а + /3 а- /3
2 2
а-C а + C
оператора Т имеет определитель det F — аC. Ограничимся собствен-
собственным преобразованием Лоренца, т.е. будем считать аC = 1. Для пре-
§ 4- Пространства с индефинитной метрикой
211
образования координат получим
откуда
(Я-
а + а а — а
t'=
2 2
а~ — а а~ + а
2 2
а + а / а - а
х =
а ± - а \
, х),
( оГ1 —а \
a i + а (а г — а
Введём обозначение
v-l
Ещё один повод к недоразумению: у нас v — скаляр, а не вектор,
как было раньше. Рассматриваемая величина соответствует физи-
физической скорости, а скорость принято обозначать буквой г?. Заметим,
что всегда \v\ < 1, и поэтому имеют смысл выражения, вытекающие
из соотношения B):
1-v
а + а
а =
-1
Наконец, получаем
t' =
t — vx
X =
х — vt
C)
Эта элегантная формула записана в масштабе, когда скорость
света принята за единицу. В обычном масштабе преобразования при-
приняли бы вид
t-vx/c2 ,_ x-vt
t' =
y/l-V2/c2'
X =
Они соответствуют квадратичной форме c2t2 — х2. Будем для
простоты пользоваться формулой C). Замечательно, что уравнения
электродинамики Максвелла не меняются в результате применения
преобразования Лоренца и Эйнштейн, следуя мысли, впервые выска-
высказанной математиком А. Пуанкаре, предположил, что все физические
законы не должны меняться от преобразований Лоренца (при п = 4).
Этим было положено начало специальной теории относительности.
Мы не останавливаемся на физической интерпретации и на следст-
следствиях формулы C). Заметим лишь, что при скорости г?, близкой к
14*
212
Гл. 4- Аффинные и евклидовы точечные пространства
нулю (малой по сравнению со скоростью света), преобразования C)
принимают вид преобразований Галилея:
t' = ?, х1 — х — vt.
Однако в общем случае положение точки характеризуется двумя ко-
координатами (?, х) — временной и пространственной. Положениям
(xi,ti), (^2,ti) с одним и тем же t = ti, в первой (неподвижной) сис-
системе координат соответствуют различные t[, t'2 во второй системе.
Отсюда получается, например, закон изменения длин
Xi — Vti Х2 — Vti Xi — Х2
С2 ~
/1 — v2 у/1 — v2 л/1 — v2
Наоборот, при х\ — Ж2, t\ ф t2 получаем закон изменения времени.
Если fv — преобразование Лоренца C), определённое параме-
параметром V, ТО
9V! ' 9v2 = 9v
Найдём параметр (скорость) v. Положив
t - ViX
X -
получим
Значит,
t-
¦v2)x/(l + '
V =
V2
что является просто законом сложения скоростей.
4. Собственная группа Лоренца. Что такое собственная
группа Лоренца, отвечающая квадратичной форме
<?(х) = t2 -x\ -х\ -х\, D)
мы уточним чуть позже. В одномерном случае для преобразования
Лоренца мы получили явную формулу C). Формула общего преобра-
преобразования, сохраняющего д(х), выглядела бы довольно громоздко. По-
Поэтому мы изберём несколько иной путь описания группы L. Именно,
рассмотрим пространство всех эрмитовых матриц порядка 2
t — Ж3
Х2 + IXi
Х2 — ixi
t + Ж3
Здесь х = (?,ж
пространства
Ж2,жз) — вектор из четырёхмерного вещественного
4. Соответствие между векторами и эрмитовыми
§ 4- Пространства с индефинитной метрикой 213
матрицами взаимно однозначно и линейно:
А =
aS - /З7 = 1,
Каждой комплексной матрице
а C
7 S
т.е. каждому элементу группы SZ/2(C), поставим в соответствие
преобразование Г^ в пространстве эрмитовых матриц, полагая
Легко видеть, что
{ГА(РХ)У = А**Р*А* = ГА(РХ),
где А* = lA — обычное эрмитово сопряжение. Так как
Гл(Гв(Рх)) = АВРХВ*А* = АВРХ(АВ)* = ТАВ(РХ),
ТО
причём оператор Г^ линеен:
ТА(аРх + /ЗРУ) = аТА(Рх)
Обратим внимание на то, что
det A • det Px • det A* = det Px,
поскольку det A = det A* = 1 по условию. Но
det Рх = t2 - х\ - х\ - х\.
Значит, линейный оператор Г^ не меняет квадратичной формы D).
В частности, detF^ = =Ы. На самом деле из простых топологичес-
топологических соображений (непрерывность функции det и связность группы
SZ/2(C)) следует, что det Г^ = +1. Мы примем это на веру, хотя при
небольшом усилии этот факт можно установить.
Уравнение
t2 - х\ - х\ - х\ = 0 F)
определяет в М4 конус — специальную поверхность второго порядка
(или, как мы будем говорить в следующей главе, квадрику), на ко-
которой лежит целиком прямая, проходящая через начало координат
и через любую точку на поверхности. Условие t > 0 выделяет так
называемую верхнюю полость конуса F).
Далее, неравенства
t > 0, t2 - х\ - х\ - х\ > О
дают необходимые и достаточные условия положительной определён-
определённости матрицы Рх или, что то же самое, положительной определён-
определённости соответствующей квадратичной формы (см. гл. 1, § 4, п. 8).
214 Гл. 4- Аффинные и евклидовы точечные пространства
Ясно, что эти условия положительной определённости сохраняются
и для матрицы
ГА(РХ) = А-РХ-А*.
Значит, линейный оператор Г^ сохраняет не только конус F), но и
его верхнюю полость.
Резюмируем свойства Г^:
1) Г^4 является автоморфизмом квадратичной формы D);
2) detrA = l;
3) Г^ сохраняет верхнюю полость конуса F).
Определение 2. Всякий линейный оператор М4 —у М4, удовлет-
удовлетворяющий условиям 1)-3), называется собственным преобразованием
Лоренца, а группа L+ всех таких преобразований — собственной
группой Лоренца.
На самом деле гомоморфизм Г является эпиморфизмом (см.
упр. 3). Найдём ядро КегГ. Пусть
Рх = А ¦ Рх ¦ А*
для любой эрмитовой матрицы Рх (условие Г^ = ?). В частности,
при е = A,0,0,0) имеем Ре = Е и АА* = Е, откуда А* = А~х.
Таким образом,
АРХ = РХА.
Выбирая различные независимые матрицы Рх, получим А = аЕ, а
так как det А = 1, то а = ±1. Стало быть, КегГ = {±Е}.
Мы получили следующее утверждение.
Теорема 1. Соответствие Г : А \—у Та между комплексными
матрицами второго порядка с определителем 1 и собственными
преобразованиями Лоренца является гомоморфным отображением
группы SZ/2(C) на группу L+ всех собственных преобразований
Лоренца. Каждому собственному преобразованию Лоренца отве-
отвечают ровно две комплексные матрицы А и —А, различающиеся лишь
знаком.
Имея в виду теорему 1, часто группой Лоренца называют SZ/2(C),
хотя правильнее было бы говорить о факторгруппе SХ2(С)/{±Е}.
Так как по определению форма д(х) инвариантна относительно
преобразований Лоренца, то эти преобразования переводят в себя
поверхности Sc, заданные уравнениями
t2 - х\ - х\ - х\ = с, с еЖ.
Если с > 0, то Sc — двуполостный гиперболоид; если с < 0, то Sc —
однополостный гиперболоид; наконец, So — конус (терминология,
заимствованная из аналитической геометрии трёхмерного прост-
пространства, будет активно использоваться нами в следующей главе). На
каждой из этих поверхностей (в отдельности на каждой полости ги-
гиперболоида или конуса) Г^ является движением в том же смысле, в
§ 4- Пространства с индефинитной метрикой 215
каком ортогональный оператор на W1 определяет движение на сфере
Sn~1 (движение — преобразование, сохраняющее расстояние между
точками).
Верхняя полость двуполостного гиперболоида
V Xл ^9 Xо — -L, V ^ U,
с определённой на ней группой движений L+ (или SL/2(C)) представ-
представляет собой одну из моделей пространства Лобачевского Л3. Мы не бу-
будем пока останавливаться подробно на самом понятии пространства
Лобачевского, но обратим внимание на одно обстоятельство. Группа
движений G какого-либо пространства S лишь тогда представляет
интерес, когда любую точку р Е S можно перевести в любую другую
точку q Е S некоторым движением g Е G: g(p) = g, или, что экви-
эквивалентно, любая точка q Е S является образом относительно g Е G
некоторой фиксированной точки ро G S. Мы уже отмечали в § 3, что
группа Aff(A) действует транзитивно на аффинном пространстве А,
a Iso(E) — на евклидовом пространстве Е. Группа О(п) действует,
очевидно, транзитивно на сфере 5n-1 С W1 (как это проще всего
обосновать?).
Покажем теперь, что собственная группа Лоренца L+ транзи-
тивна на Л3. Для этого точке х = (t,xi,X2,xs) E Л3 сопоставим, как
и ранее, эрмитову матрицу Рх (см. E)). Она будет положительно
определённой и иметь определителем 1. Как нам известно, любую
такую матрицу можно представить в виде
л ( а C \ , ^
где А = I ~ 1 — комплексная матрица с определителем 1. Это
/ 1 0 \
и означает, что Р^ получается из фиксированной матрицы I 1
при помощи движения Г^.
Стационарной подгруппой L+o точки xq = A,0,0,0) служит со-
совокупность всех Г^4 с
10
Другими словами, А • А* = Е. Так как ещё det A = 1, то мы за-
заключаем, что
L+ - SUB)/{±E} - 50C)
(последний изоморфизм будет установлен в [ВА III]; нам он пока не
понадобится). Движения пространства Л3 называют ещё гиперболи-
гиперболическими вращениями.
216 Гл. 4- Аффинные и евклидовы точечные пространства
УПРАЖНЕНИЯ
1. Рассмотреть подробно вторую возможность для действия оператора
:FELi.
2. Доказать, что det Г^ = 1 для линейного оператора Г^, определённого
в п. 4.
3. Доказать, что гомоморфизм
Г: 5L2(C) -^L+
является на самом деле эпиморфизмом, т.е. отображением на всю группу L+.
4. Прочитать § 12 в части 2 учебного пособия [2], чтобы усилить для себя
физический аспект, присущий пространству Минковского и группе Лоренца.
ГЛАВА 5
КВАДРИКИ
Геометрические фигуры аффинной и евклидовой геометрий, ко-
которые будут изучаться в этой главе, знакомы читателю из курса
аналитической геометрии. Используемая терминология — кривые,
поверхности и т.д. — та же самая. Но мы уже видели в конце преды-
предыдущей главы, что возникает настоятельная необходимость выйти за
пределы трёхмерного пространства. Чисто алгебраическая класси-
классификация поверхностей 2-го порядка в многомерных пространствах
не очень сложна: надлежащий аппарат имеется в нашем распоряже-
распоряжении, хотя наглядное геометрическое воображение, вероятно, отойдёт
на второй план. Важное место займёт изучение геометрических объ-
объектов с проективной точки зрения.
§ 1. Квадратичные функции
1. Квадратичные функции на аффинном пространстве.
Пусть А — аффинное пространство, ассоциированное с векторным
пространством V размерности п над полем Я. Будем смотреть на
Я как на одномерное аффинное пространство Яа. Например, множе-
множество Ж вещественных чисел есть в то же время вещественная аф-
аффинная прямая Ша = М, на которой действует одномерная аффинная
группа (см. § 1, 3 гл. 3).
По аналогии с билинейными формами /: V х V —> Я определяются
биаффинные функции.
Определение 1. Функция Ф: А х А —У Я называется биаффин-
нощ если Ф(р, q) при фиксированной точке р Е А или при фиксиро-
фиксированной точке q является аффинным отображением q н-» a Е Яа (или
р н-» a Е Яа). Биаффинная функция называется симметричной, когда
Мы не будем доказывать тот факт, что если выбрать какую-то
точку о G А в качестве "начала" и положить р = о + х, q = о + у, то
любая биаффинная функция Ф выражается в виде
Ф(о + х, о + у) = /(х, у) + /(х) + Г (у) + <р0, A)
где / — билинейная форма на У, a ipo = Ф(о, 6) — скаляр. Зафикси-
Зафиксировав вектор у = а и положив
Цд) = /'(а) + щ, Dh{*) = /(х, а) + /(х),
мы без труда убеждаемся в том, что действительно отображение
p = o + x4/i(o + x) = hF) + Dh(x)
218 Гл. 5. Квадрики
аффинно-линейно, с линейной частью — линейной функцией Dh :
V -+Я.
Для простоты мы возьмём A) за определение биаффинной функ-
функции, мотивируя его обоснованность предыдущими замечаниями. Те-
Теперь легко проверяется, что симметричная биаффинная функция Ф
имеет запись
Ф(о + х, о + у) = /(х, у) + /(х) + /(у) + <Л) B)
с симметричной билинейной формой /: V х V —> Я, линейной функ-
функцией I: V -У ЯA' = I) и скаляром <?0 = Ф(о, 6) G Я.
Определение 2. Положим Q(p) = Ф(р,р), где Ф имеет вид B),
и назовём Q: А —у Я квадратичной функцией на А.
Пусть q — квадратичная форма на V: g(x) = /(x,x). В соответ-
соответствии с B) имеем
Q{6 + х) = ^(х) + 2/(х) + <р0 C)
Взяв систему координат {о; ei,..., еп} в А с началом в точке о, мы
получим координатную запись значения квадратичной функции Q:
п п
QF + X) = ^ Ч>4 XiXj + 2 ^ ?iXi + <А) D)
hj=l i=l
в точке р = о + х, х = х\Ъ\ + ... + жпеп. Здесь коэффициенты крц со-
составляют симметричную матрицу F = (^j)- Сравнивая C) и D), мы
замечаем, что в любой другой координатной системе Q(p) запишется
аналогичным образом, т.е. в виде многочлена степени ^ 2, хотя и с
какими-то другими коэффициентами.
Пусть х[,..., х'п — координаты точки р = 6' + х; в системе ко-
координат {с/; е[,..., е^}. Как мы знаем (см. C) из § 1 гл. 4), старые
координаты х\,..., хп выражаются через новые по формулам
п
Xi = ^2 aijx'j + h, i = 1,..., n,
i=l
с невырожденной матрицей А = {аф. В новых координатах матри-
матрицей квадратичной формы q будет * A- F • А (см. E) из § 4 гл. 1). В
частности, её ранг г является инвариантом относительно аффинных
преобразований и имеет смысл положить
rankQ := rankg = г.
2. Центральные точки для квадратичной функции. Введём
ещё одно полезное понятие, для чего рассмотрим значение Q в точке
^ = p + y = o + x + yGA. Непосредственно из C) получаем
Q(q) = Q(P + У) = Q(o + x + у) = gf(x + у) + 2/(х + у) + <р0,
т.е.
Q(q) = Q(i>) + ?(у) + 2{/(х, у) + z(y)} E)
§ 1. Квадратичные функции 219
(напомним, что / — симметричная билинейная форма, полярная к q).
Определение 3. Точку р Е А назовём центром (или централь-
центральной точкой) для квадратичной функции Q, если
Qip + у) = Qip) + #(у) ^у ? У- F)
Множество всех центров квадратичной функции Q обозначается сим-
символом C{Q). Про квадратичную функцию Q с C{Q) ф 0 говорят, что
она центральная.
Сравнение E) и F) показывает, что условие р = 6 + х G C(Q)
записывается в виде
Дх,у)+/(у)=0 VyeF. G)
В частности, точка о центральная, когда в формуле C) линейная
функция I нулевая. Другими словами, если начало координат о —
центральная точка, то выражение Q(p + x) не содержит членов пер-
первой степени относительно xi,... ,хп. Для о G C(Q) условие G) цен-
центральности точки 6' = о + b принимает вид /(Ь,у) = 0. Значит,
q(h) = /(b,b) = 0. Вспоминая, что сро = QF), мы получаем из C)
равенство Q(o') = Q(o). Таким образом,
Как узнать, является ли квадратичная функция Q, заданная фор-
формулой C) или D), центральной? А если она центральна, то как найти
множество C(Q)?
Для решения этих вопросов нужно исходить из условия G), экви-
эквивалентного, как легко понять, системе уравнений
Для координат вектора х = x\ei + ... + хпеп, определяющего цен-
центральную точку р = о + х, получается, таким образом, система ли-
линейных уравнений
п
совместность которой проверяется при помощи теоремы Кронеке-
ра—Капелли. В случае совместности системы (9) множество C(Q)
будет либо точкой (случай det F ф 0), либо, как это следует из упо-
упомянутой теоремы, аффинным подпространством размерности п — г.
Направляющая плоскость U этого подпространства совпадает с
пространством решений линейной системы
^ijXj =0, j = l,.
так что
U = Ker q = Ker /
220 Гл. 5. Квадрики
(напомним, что Kerq = {x Е V\ /(х,у) = 0 Vy Е V}).
Нами доказана
Теорема 1. Множество центров C{Q) квадратичной функ-
функции Q, заданной в системе координат {о; ei,..., еп} соотно-
соотношением D), состоит из точек р = о + х; определяемых линейной
системой (9). Если 6' = 6 + х' — центральная точка, то
C(Q) = 6f +U
— аффинное пространство с направляющей плоскостью U = Kerq.
Далее, C(Q) = 0 => г < щ C(Q) — аффинно инвариантное образо-
образование, зависящее только от функции Q.
3. Приведение квадратичной функции к каноническому
виду. Две квадратичные функции Q и Q' на А аффинно эквива-
эквивалентны, когда существует аффинный автоморфизм g Е Aff(A) такой,
что Q' = Q • д.
Естественное желание иметь для Q(p) наиболее простое выраже-
выражение реализует
Теорема 2. Пусть Q — квадратичная функция ранга г на
п-мерном аффинном пространстве А над Я. Если множество C(Q)
пусто и, значит, г < п, то путём надлежащего выбора системы
координат {о; ei,..., еп} функция Q приводится к виду
Q(p + х) = olxx\ + ... + агх\ + 2xr+i A0)
с ненулевыми скалярами а±,..., аг; в этом случае Keiq есть подпро-
подпространство решений системы х\ = ... = хг = 0 (q — квадратичная
форма, связанная с Q).
Если Q центральна, то выбором надлежащей системы коорди-
координат с началом в центральной точке о её можно привести к виду
Q(o + х) = ot\x\ + ... + arx2r + (?0; A1)
в этом случае Q{6') = (ро для любой точки 6' G C{Q). Функции вида
A0) и A1) аффинно неэквивалентны.
Доказательство теоремы проще, чем её формулировка. Вы-
Выберем сначала в V канонический базис для квадратичной формы q
(см. § 4 гл. 1). В соответствующей системе координат {д';е'1,... ,е'п}
функция Q примет вид
QFf + х) = alX[2 + ... + arx'r2 + 2{3[х[ + ... + 2/3'пх'п + У
с а\ ф 0, ..., аг ф 0. Перенос начальной точки в о", сводящийся к
замене координат
х'{ = х[ + 1%/аи i = l,...,г,
х'1 = х\, i = г + 1,... ,п,
сделает равными нулю коэффициенты при х",..., ж" в линейной
части, так что
Q(o") = alXf + ... + arxf + 2[3';+kx';+k + ... + « + У-
§ 1. Квадратичные функции 221
Если не все C'J равны нулю (/?"+& Ф 0)? т0 ешё одна аффинная
замена координат
Xi = х", г = 1,...,г,
xr+1 = #'+*<'+* + ... + « + 772,
xr+k+i = #V+&+i, * ^ 1,
приведёт Q к виду A0). В противном случае Q с точностью до обоз-
обозначений будет иметь вид A1).
Итак, мы можем считать Q приведённой к виду A0) или A1). Так
как q(x) = ot\x\ + ... + arx2r, то Kerg есть (n - г)-мерное подпрост-
подпространство в V, заданное уравнениями х\ — ... = хг — 0. Предположим,
что р = о + х — центральная точка, р + у — любая точка. Тогда
Р + У) = Q(O + X + у) = ^ аг(Хг + Уг? + 2(Жг+1 + 2/r+l) =
для вида A0) и
Q(P + У) = QiP) + «(У) + 2
г=1
для Q вида A1). Условие F) центральности точки р, которое должно
выполняться для произвольного у G V, в последнем случае сводится
к xi,...,xr = 0, т.е. к х G Kerg, а в первом случае из-за наличия
свободного члена 2^/r+i оно вообще не может удовлетвориться, т.е.
C{Q) = 0. ?
Следствие. Над полем Ж вещественных чисел всякая квадра-
квадратичная функция Q путём надлежащего выбора системы координат
{о; ei,..., еп} в А может быть приведена, причём единственным
образом, к одному из канонических видов
Q{p + х) = х\ + ... + х\ - x2s+1 -...-x2r + 2хг+1, A2)
Q(p + х) = х\ + ... + х\ - x2s+l - ... - х2г + (р0. A3)
Доказательство. Так как положительный индекс инерции s
квадратичной формы q, связанной с Q, и её ранг г инвариантны
относительно невырожденных линейных преобразований (теорема 5
из § 4 гл. 1), то теорема 2 даёт всё, что нужно. ?
Следствию можно придать несколько иную формулировку:
Две квадратичные функции Q, Q' на А аффинно эквивалентны
тогда и только тогда, когда они имеют одинаковые ранги и одина-
одинаковые сигнатуры и когда они обе либо нецентральны, либо
222 Гл. 5. Квадрики
центральны с одинаковыми значениями на соответствующих
центральных точках.
4. Квадратичные функции на евклидовом пространстве.
В случае евклидова (точечного) пространства (Е, V) естественно изу-
изучать эквивалентность квадратичных функций относительно действия
группы изометрий Iso(E).
Определение 4. Две квадратичные функции Qi, Q2 на Е
называются Iso(E)-эквивалентными, если существует движение g Е
е Iso(E), для которого Q2 = Qi • g, т.е. Q2(p) = Qi(g(p))-
Теорема 3. Любая квадратичная функция Q на п-мерном ев-
евклидовом пространстве Е может быть приведена путём надлежа-
надлежащего выбора прямоугольной системы координат {о; ei,..., еп} в Е
к одному из следующих видов:
QF + х) = \хх\ + ... + \гх2г + (ро, бе C(Q), A4)
Q(p + х) = Xxxl + ... + \rx\ + 2/ixr+b fi > 0. A5)
Все вещественные числа Xi отличны от нуля. Указанные виды
определены однозначно с точностью до нумерации переменных Х{.
Доказательство. Пусть Q(o' + х) = q(x) + 21'(х) + Q(o').
Начнём с выбора в евклидовом векторном пространстве V ортонор-
мированного базиса (е^,..., е^), в котором q имеет канонический
вид:
г=1 г=1
Этот выбор обеспечивается теоремой 7 из § 3 гл. 3. Если Q — цен-
центральная функция, то, заменив в случае необходимости 6' на центр о
(который отыскивается так же, как в аффинном случае), мы придём
к выражению A4). В случае же нецентральной функции имеем
г п
Q(o') + у = Y, XiVi +2Y, 4>'iVi + Ж-
i=l i=l
Совершив преобразование координат (перенос начала)
Zi = yi + ip'i/\u i = 1,2,..., г,
Zi = Uij i = r + 1,.. .,n,
получим
i=l i=r+l
где из-за нецентральности Q не все /if, i > г, равны нулю. Введём
"норму"
J+i + • • • + /4 > о
§ 1. Квадратичные функции
223
линейной формы Yl7=r+i ^iZi и сДелаем преобразование координат
гр. ~. j 1 О Г
П
k=r+l
п
i = г + 2,... ,n,
3=r+l
используя матрицу А размера (п — г) х (п — г):
А =
Так как мы хотим использовать только прямоугольные реперы,
то матрицу А нужно брать ортогональной. Сумма квадратов эле-
элементов её первой строки равна 1, как и положено, а элементы о.ц
находятся в нашем распоряжении, поэтому ортогональная матрица
А может быть построена (см. по этому поводу п. 5 из § 1 гл. 3). После
подстановки будем иметь
\гх1 + 2/ixr+b x =
г=1
как и требуется в формуле A5).
Однозначность типов A4) и A5) докажем, исходя из следующих
соображений. Согласно теореме о приведении к главным осям ква-
квадратичной формы q ранг г и числа А^ определены единственным
образом. Число сро = QF) не зависит от выбора центра о (см. (8)).
Нам осталось установить отсутствие произвола в выборе кон-
константы \i > 0 в формуле A5). Предположим, что в какой-то прямо-
прямоугольной системе координат {с/; е^,..., е^} будет
г=1
QF' + х) =
0.
Пусть Т — симметричный линейный оператор на V, соответст-
соответствующий билинейной форме /, полярной к q (см. п. 1 из § 3 гл. 3):
/(x,y) = (.Fx|y).
Его матрица
F = diag(Ab...,Ar,0,...,0)
имеет один и тот же вид в базисе (е^) и в базисе (е^). Значит,
= (еь...,ег) = (е'ь ... ,ej.>,
224 Гл. 5. Квадрики
а поэтому матрица перехода от (е^) к (е^) имеет вид
В =
В1 О
О Во
с ортогональными матрицами В\ размера г х г и В^ размера
(п — г) х (п — г). С учётом переноса начала координат и отсутствия
в выражениях для Q координат с номерами > г + 1 получаем
Отсюда
г=1 г=1
= 2fjLrx'r+1 -
ii ii
В силу ортогональности В в выражении xr+\ = ^oljx'j + щ должно
выполняться равенство ^oi2- = 1, которое в нашем случае сводится
к соотношению
(// l\iJ — 1.
Отсюда вытекает нужное нам равенство // = /i, поскольку // и \i
положительны. ?
УПРАЖНЕНИЯ
1. Считая 2s ^> г > 0, найти число классов эквивалентных нецентральных
квадратичных функций на n-мерном вещественном аффинном пространстве.
2. Найти C(Q) для квадратичной функции Q над М вида
ж2+2 Х^ ЖгЖ- +2^Жг + 1.
§ 2. Квадрики в аффинном и евклидовом
пространствах
1. Общее понятие квадрики. Каждой квадратичной функ-
функции Q на А ставится в соответствие пространственная конфигура-
конфигурация точек Sq, называемая квадрикой (или поверхностью (гиперпо-
(гиперповерхностью) второго порядка) и определяемая как "геометрическое
место" (множество) всех точек р G А, удовлетворяющих уравнению
Q(p) = 0. При п = 2 квадрики называются ещё коническими сечения-
сечениями (кривыми 2-го порядка). Квадрики можно рассматривать (и они
действительно встречаются в различных задачах) над произвольным
§ 2. Квадрики в аффинном и евклидовом пространствах
полем Я, причём наиболее естественно брать в качестве Я алгебра-
алгебраически замкнутое поле, например Я = С. Однако из соображений
наглядности (тоже, впрочем, несколько условной) мы ограничимся
случаем поля Я = Ж. Здесь с самого начала удобно временно
исключить из рассмотрения так называемые "нулевые" квадрики,
на которых нет ни одной точки. Скажем, квадратичная функция
х\ + х\ + 1 определяет нулевую кривую. Более точно: в дальнейшем
предполагается, что квадрика Sq, заданная уравнением Q{p) = О, —
непустое множество и что
rankSg := г = rankQ = rankg > 0.
Считаем также п ^ 2.
Определение 1. Квадрика называется двойным подпрост-
подпространством, если она совпадает с аффинной плоскостью в А.
Например, уравнение х\ +... + х\ = 0 в n-мерном пространстве А
равносильно системе х\ — 0, ..., хг = 0 и, стало быть, определяет
(п — г)-мерное подпространство. Определение двойного подпрост-
подпространства не зависит от системы координат, поэтому квадратичную
функцию Q, определяющую Sq, можно брать в каноническом виде.
Как показывает следствие теоремы 2, любое двойное подпространст-
подпространство задаётся уравнением рассмотренного выше типа х\ + ... + х2г = 0.
Заметим, что двойные (линейные) подпространства х\ + х\ — 0 и
2х\ + Ъх\ — 0 изображают в трёхмерном пространстве одну и ту же
прямую Х\ = 0, Х2 = 0. Ситуация совершенно меняется и становится
гораздо более удовлетворительной в случае квадрик, отличных от
двойных подпространств.
Теорема 1 (теоремаединственности). Если квадрика S не явля-
является двойным подпространством, то любые два её уравнения (в
одной и той же системе координат) пропорциональны, т.е.
SQl=S = SQ2 =*- Q2 = AQb AGE*.
Доказательство. По условию наша квадрика S задаётся дву-
двумя уравнениями: Qi(p) = 0 и Q2(p) = 0. Беглого взгляда на формулы
A2) и A3) из § 1 достаточно, чтобы убедиться в существовании на
квадрике S не менее двух различных точек. Более того, существуют
хотя бы две различные точки p,q G S такие, что проходящая через
них прямая Пр5д не содержится целиком в S. В самом деле, иначе
в соответствии с теоремой 4 из § 1 гл. 4 квадрика S сводилась бы
к аффинному подпространству (плоскости), т.е. была бы двойным
подпространством. Легко видеть, что Пр5д П S = {р, q} — множество
из двух точек.
Зафиксируем две точки р, q G S с указанным свойством и выбе-
выберем р за начало координат в А, а вектор р$ ф 0 — за последний
вектор базиса (ei,...,en) пространства V. Тогда Пр5д будет состо-
состоять из точек с координатами @,..., 0, C). Точка р имеет координаты
@,..., 0, 0), a q — координаты @,..., 0,1).
15 А.И. Кострикин
226 Гл. 5. Квадрики
Распишем Q\ по степеням координаты хп:
Qi(p + x) = 5х2п +g(x1,...,xn-1)xn + h(x1,...,xn-1).
Здесь д — многочлен первой степени, a h — многочлен второй сте-
степени относительно xi,..., хп-\ (д и h не обязательно линейные мно-
многочлены). Тот факт, что Пр5д пересекается с S в двух разных точках,
означает, что трёхчлен
6x2n+g@)xn + h@)
имеет два различных вещественных корня, т.е. д@J — 4Sh@) > О
(на самом деле S ф О, д@) ф 0, /i@) = 0). Поделив на S, мы можем
считать с самого начала S = 1. То же верно и для Q^- Итак,
Qi(p + x.) = х\ +^(жь...,жп_1)жп + /ii(xi,...,xn_i), i = 1,2,
причём Ai@) > 0, А2@) > 0, где
Ai(xb...,xn_i) =#iOi,...,xn_iJ -4/ii(xi,...,xn_i), г = 1,2,
— дискриминант многочлена Qi от переменной хп с коэффициентами
в M(xi,...,xn_i).
При осуществлённой нами нормировке нужно показать, что
Q2 = Qi- Выберем произвольные, но фиксированные скаляры Ai,...
..., An_i G Ш. и рассмотрим в А плоскость
xi=t\i, ..., xn-i =t\n-i, teR. A)
Тогда для
х = Uiei + ... + ?An_ien_i + хпеп
будем иметь
Qi(p + х) = х2 + gi(t)xn + hi(t), B)
где
9i(t) = gi(t\u...,t\n-1), Jii(t) = /ii(Ui,...,Un_i). C)
Положим также
Ai(t)=gi(tJ-4hi(t), г = 1,2.
По условию Ai@) > 0, А2@) > 0. Найдётся, следовательно, такое
г > 0, что при \t\ < г будут выполнены неравенства
Ai(t) >0, A2(t) >0.
Иначе говоря, многочлены B) имеют при любом |?| < ? два различ-
различных вещественных корня. Но по условию множества корней этих мно-
многочленов при фиксированном t совпадают — это есть просто пересе-
пересечение S с подпространством A). Раз нормализованные многочлены
степени 2 имеют одинаковые корни, то их коэффициенты совпадают:
9i(t)=h(t), Ai(t) = Л2(*), |*| <е. D)
§ 2. Квадрики в аффинном и евклидовом пространствах
227
Но значений t Е М, \t\ < s, бесконечно много, следовательно, равен-
равенства D) справедливы при всех t. В частности, они выполнены при
t = 1. Положив t = 1 в C), перепишем D) в виде равенства полино-
полиномиальных функций:
Pi (Ai,..., An_i) = 02 (Ai,..., An_i),
/ii(Ai ..., An_i) = /i2(Ai,..., An_i).
Из [ВА I] мы знаем, что две полиномиальные функции /^: А и
н->- /г(А) степени т, совпадающие при k ^ т + 1 различных значениях
А, совпадают как многочлены: fi(X) = f2(X). Обобщением на слу-
случай многочленов многих переменных служит следующее утвержде-
утверждение (см. [ВА I, упр. 2 в § 1 гл. 6]). Если многочлены /i(Xl, ... ,Xn_i)
и /2(Xl, ... ,Xn_i) определяют одинаковые полиномиальные функ-
функции Жп~1 —> М, то они совпадают, т.е. их коэффициенты равны. Для
доказательства нужно расписать многочлены по степеням одной пе-
переменной и воспользоваться индукцией по п.
Опираясь на это утверждение, мы переходим от E) к равенствам
которые показывают, что Q\ — Q^- П
2. Центр квадрики. Непосредственно видно, что изображён-
изображённая на рис. 10 квадрика симметрична относительно начала коорди-
координат. Более общую геометрическую
картину отражает
Определение 2. Точка о аф-
аффинного пространства А называется
центром (или центром симметрии)
квадрики Sq, если вместе с любой
точкой о + х к Sq принадлежит и
точка о — х. Квадрика S называется
центральной, если у неё есть хотя бы
один центр, и нецентральной, если
центр отсутствует. Рис. 10
Предположим, что центральная квадрика S с центром в точке о
не является двойным подпространством. Пусть
Q{6 + х) = д(х) + 2/(х) + г0 = 0
— её уравнение. В силу центральности S квадратичная функция
Qi(o + х) := Q(o — x) определяет ту же квадрику S:
Qi(o + х) = д(х) - 2/(х) + г0 = 0.
По теореме 1 имеет место пропорциональность
Qi =XQ, A G M,
15*
228 Гл. 5. Квадрики
а так как q ф О, то это возможно лишь при Л = 1 и I = 0. Но
мы уже знаем из п. 2, что 1 = 0 — условие центральности точки о
для Q. Мы приходим к выводу, что центр квадрики {не являющейся
двойным подпространством) и центр для квадратичной функции
Q, задающей эту квадрику, совпадают. Множество C(Sq) центров
симметрии квадрики Sq совпадает с множеством C(Q) централь-
центральных точек для квадратичной функции Q и является (в случае не-
непустоты) аффинным подпространством (теорема 1 из § 1). Способ
его описания в какой-либо координатной системе был нами разобран,
поэтому вопрос о центральности любой квадрики S может быть
решён эффективно.
3. Канонические типы квадрик в аффинном пространст-
пространстве. Основной является
Теорема 2. Уравнение квадрики в п-мерном вещественном аф-
аффинном пространстве приводится аффинным автоморфизмом к од-
одному и только одному из следующих канонических типов.
Случай центральной квадрики с центром симметрии в начале
координат исчерпывается типами
/s,r : х\ + ... + х\ - x2s+1 - ... - х\ = 1, 0 < s ^ г;
/;г : х\ + ... + х\ - х28+1 - ... - х\ = 0, r/2^s^r.
Случай нецентральной квадрики исчерпывается типами
IIs^r : xl + ... + x28- x2s+l - ... - х\ = -2жг+ь г/2 ^ s ^ г.
Доказательство почти очевидно: достаточно применить след-
следствие теоремы 2 из § 1 и заметить, что S\q = Sq для А / 0. Это
даёт возможность заменить в выражении A3) из § 1 постоянную (ро
на —1 (если она отлична от нуля). Условие s > 0 в Is^r исключает
нулевую квадрику. Равенство s = г в I'sr соответствует двойному
подпространству. ?
Определение 3. Квадрика типа /п?п называется эллипсоидом,
типа Is^n, s < n, — гиперболоидом, типа //n_i5n_i — эллиптическим
параболоидом, типа IIs^n-i — гиперболическим параболоидом. Все
эти квадрики невырожденные.
Квадрики типа Is^r, I'sr при г < п и типа IIs,r ПРИ г < п — 1
называются цилиндрами, а квадрики типа I's n — конусами. Конусы
и цилиндры вместе называются вырожденными квадриками.
Конус (рис. 11) можно характеризовать инвариантным образом
как квадрику S, на которой имеется точка о, обладающая тем свойст-
свойством, что
о + х G S => о + Лх G S VA G Ж. F)
Точка о в этом случае называется вершиной конуса (она авто-
автоматически является центром симметрии), а прямые о + Лх — обра-
образующими конуса. Лишь квадрики типа I'sr обладают свойством F)
§ 2. Квадрики в аффинном и евклидовом пространствах 229
конусов (вершиной конуса в данном случае является начало коорди-
координат).
Рис. 11
Рис. 12
Цилиндр S как квадрика (рис. 12) характеризуется тем, что су-
существует такой вектор и ф 0, для которого
Другими словами, сдвиг t\u вдоль и переводит цилиндр S в себя:
t\u(S) = S. Так как tUl • tU2 = tUl+U25 T0 все векторы, обладающие
свойством G), составляют векторное подпространство U С V. Плос-
Плоскости вида p + U с р Е S называются образующими цилиндра S. Если
V = U®W, q ? S, то каждая образующая p + U пересекает плоскость
q + W в единственной точке г (р$ = u + w, u G 17, w G 1У, откуда
р + и = q — w = r). Поэтому заданием подпространства U С V и
квадрики
цилиндр 5 определяется однозначно. Квадрика 5° называется осно-
основанием цилиндра S.
Если р = д + хе Sq ир + аие Sq, т.е. Q(p) = 0 и Q(p + аи) = О,
то из соотношения E) из § 1 имеем
q(au) + 2{/(х, аи) + 1(аи)} = 0.
Значит,
a2q(u) + 2а{/(х, и) + 1(и)} = 0 Va G М,
откуда
Пусть uGt/и
У = [/е W, VF = (еь...,ет), [7 = (ет+ь...,<
Тогда из соотношения (8) следует, что в выражении
QF + x)=Txixj+2'
(8)
230
Гл. 5. Квадрики
коэффициенты ipij и ipj с j > m равны нулю. Стало быть, и в кано-
каноническом уравнении квадрики Sq не будет координат, соответствую-
соответствующих базисным векторам подпространства U. Получается следующий
вывод.
Если г = rankQ, то Sq — цилиндр ^==> г < п в случае цент-
центральной квадрики и г < п — 1 в случае нецентральной квадрики.
Далее, dimU — п — г или соответственно п — г — 1, а основанием
Sq цилиндра Sq служит невырожденная квадрика или конус в аф-
аффинном пространстве размерности г (центральная квадрика) или
г + 1 (нецентральная квадрика).
Определение 4. В зависимости от типа основания 5° цилиндр
называется эллиптическим, гиперболическим или коническим. Гово-
Говорят также о цилиндре над квадрикой S0.
Следует заметить, что конусы и цилиндры различаются по тому,
является их вершина конечной или бесконечно удалённой точкой.
4. Общие замечания о типах квадрик. Мы назвали рангом
квадратичной функции Q и соответствующей ей квадрики Sq число
г = rankg, где q — квадратичная форма, связанная с Q. Часто это
число называют малым рангом квадрики Sq и вводят наряду с г ещё
большой ранг г. Для его определения по общему уравнению квадрики
Sq в какой-либо системе координат {о; ei,..., еп}:
Q{6 + X) =
составляют две матрицы —
q и расширенную матрицу
F =
= 0
(9)
г=1
матрицу F = ((fij) квадратичной формы
фпп
Тогда по определению г = rankF и г = rankF. Для удобства поло-
положим
^г,п+1 = <?п+1,г := фи i = 1, 2, . . . , Щ <^гг+1,гг+1 := Ц>0,
так что F = (^jOi" и ^ есть ранг квадратичной формы q:
n+l
Можно считать, что хп+\ = 1, придерживаясь этого соглашения и
в формулах перехода от {о; ei,..., еп} к новому реперу {с/; е^,..., е^},
§ 2. Квадрики в аффинном и евклидовом пространствах 231
т.е. мы полагаем
[ + ... + а1пх'п
Хп — 0>nlx\ Н~ • • • Н~ &пп%п ' ^n,n
хп+1 = Хп+1
(жп+1 = х'п+1 = 1). Матрица перехода А = (а^)™+1, разумеется,
невырожденная. В новых координатах матрицей формы q станет,
очевидно, матрица
F' = 1А • F • А.
Так как det А ф 0, то F — инвариант относительно аффинных пре-
преобразований, и, в частности, F легко вычисляется по уравнению квад-
квадрики Sq в её каноническом виде. Мы видим, что квадрика Sq
вырождена, т.е. является конусом или цилиндром, если г < п + 1
или, что то же самое, если det F = 0.
На аффинную инвариантность малого ранга г мы обращали вни-
внимание ранее. Число квадратов с коэффициентом =Ы в каноническом
уравнении определяется числом положительных и отрицательных
корней характеристического многочлена XF(t), а единственность
центра квадрики выражается условием det F ф 0. Если det F = 0,
то либо центров нет (rankF < rankF), либо их бесконечно много
(rankF = rankF), что соответствует случаю цилиндрической квад-
квадрики. Итак, канонический тип квадрики Sq целиком описывается без
фактического приведения её уравнения Q{p) = 0 к каноническому
виду.
Введём ещё некоторые понятия, возникающие естественным обра-
образом при исследовании квадрики. Предположим, что мы хотим найти
пересечение квадрики (9) с прямой, проходящей через точку ро =
— [Х±, . . . ,Хп).
xi = x°i+ait, г = 1,2,...,п. A0)
Подставляя A0) в (9), получаем квадратное уравнение для t
Q(°)t2 + 2QAH + QW=0 A1)
с коэффициентами
Q@)=q(a),
2^
г=1 г }=1
Qi2) = Q(po).
Здесь а = (ai,..., ап) — направляющий вектор прямой A0),
..., хп — координаты текущей точки р.
232 Гл. 5. Квадрики
Определение 5. Вектор а = (а\,..., ап) называется асимпто-
асимптотическим для квадрики Sq, если q(a) = 0. Уравнение
q(a) = 0
задаёт так называемый конус асимптотических направлений квад-
квадрики Sq.
Если прямая A0) неасимптотического направления, т.е. q(a) ф 0,
то уравнение A1) имеет два (возможно, комплексно сопряжённых)
корня, отвечающих паре точек (возможно, мнимых) пересечения пря-
прямой с квадрикой. Прямая асимптотического направления либо не пе-
пересекается с квадрикой, либо пересекается в одной точке, либо, на-
наконец, целиком содержится в Sq (в последнем случае прямая C) есть
прямолинейная образующая квадрики Sq).
Предположим, что ро = (xj,..., ж^) — точка квадрики, т.е. Q^ =
= Qipo) = 0- Точка ро называется особой точкой квадрики Sq, если
Qi(fto) = 0 для г = 1,...,п. Координаты ж?,...,ж^ особой точки
находятся из системы линейных уравнений
п
+ ^г = 0, г = 1, 2, . . . , П, ^ ifjXj + <?о = 0.
Ясно, что особые точки могут быть лишь у вырожденных ква-
квадрик, причём при г = п существует не более одной особой точки.
В общем случае особые точки лежат на (п — г)-мерной плоскости.
Уравнение
п
г=1
задаёт касательную плоскость к квадрике Sq в её неособой точке ро.
5. Квадрики в евклидовом пространстве. Пусть Е —
n-мерное евклидово пространство, V — связанное с ним векторное
пространство над Ж Как и в общем аффинном пространстве, квад-
квадрика Sq С Е задаётся уравнением Q(p) = 0.
Очевидной перефразировкой теоремы 3 из § 1 о Iso(E)-эквива-
Iso(E)-эквивалентности квадратичных функций на Е является
Теорема 3. Уравнение квадрики в п-мерном евклидовом про-
пространстве Е приводится подходящим выбором прямоугольной
системы координат {о; ei,..., еп} к одному и только одному ка-
каноническому типу. Именно, центральные квадрики с центром сим-
симметрии в начале координат 6 исчерпываются типами
•^1 , , *ьs s+1 г -| С\ ^ <^ (Л О\
а? а2о aLi al ^
§ 2. Квадрики в аффинном и евклидовом пространствах 233
нецентральные квадрики исчерпываются типами
о о О о
г
+ Жг+i - , 2 ^ s ^ Т
(нулевые квадрики и двойные подпространства исключены).
Формулировку теоремы 3 следует дополнить описанием величин
а;. В случае A2)
г = 1,...,г, A20
где 0 ф (ро = Q(o), a Ai,...,Ar — характеристические корни (соб-
(собственные значения) симметричной матрицы F = (ipij). Всегда можно
выбрать такую нумерацию переменных х^ чтобы в выражении
Q(p + х) = Х\х\ + ... + Хгх2г + сро
для величин А^, сро выполнялись неравенства
\iipo < 0, ..., Xs(po < 0; Xi^po > 0, i > s.
В случае A3) нужно положить
7 — 19 г (Л ЧМ
г — 1, z,... ,г, [16 )
причем, очевидно, всегда можно удовлетворить условию s ^ ?/2,
умножая в случае необходимости обе части уравнения на —1.
В случае A4) считаем
Ai/i > 0, ..., Xsfi > 0; Хф < 0, г > s,
так что
i = l,...,г. A4')
Аффинные названия невырожденных квадрик: эллипсоид (A2),
s = п, рис. 13), гиперболоид (A2), 0 < s < г = п, рис. 14, 15),
эллиптический параболоид (A4), s = n — 1, рис. 16), гиперболиче-
гиперболический параболоид (A4), 0^s<r = n — 1, рис. 17), переносятся на
евклидовы квадрики, у которых, однако, появляются непрерывные
инварианты (параметры) — так называемые полуоси ai. Их Iso(E)-
инвариантность есть следствие 18о(Е)-инвариантности величин А^,
сро, [г, установленной в теореме 3 из § 1. С аффинной точки зрения,
например, все эллипсоиды эквивалентны при данном п "единичной
сфере". С евклидовой же точки зрения даже у сферы имеется свой
инвариант — её радиус R = а± = ... = ап (эллипсоид с равными по-
полуосями). Эллипсоид с полуосями а\ ^ а^ ^ ... ^ ап > 0, очевидно,
можно считать вписанным в сферу радиуса а\, поскольку расстояние
от центра до точки (xi,..., хп) эллипсоида равно \/х\ + ... + х\ и
О О -,
234
Гл. 5. Квадрики
т.е. х\ + .. .-\-х2п ^ а\, причём равенство достигается в точке (ai,0,...
..., 0). Аналогично, ап — радиус сферы, вписанной в эллипсоид.
В случае гиперболоида полуоси as+i,..., ап называются мнимыми
полуосями. Эта терминология отражает тот факт, что в сечении ги-
гиперболоида плоскостью х\ = ... = xs = 0 нет вещественных точек.
Вообще, исследование квадрик при помощи сечений — обычный гео-
геометрический приём, вносящий элемент наглядности в многомерную
картину.
Рис. 17
Рис. 16
§ 2. Квадрики в аффинном и евклидовом пространствах 235
Сечения эллипсоида гиперплоскостями xi = const < ai дадут
снова эллипсоиды в пространстве размерности п — 1. Сечения
гиперболоидов отличаются большим разнообразием. Гиперболу
х\/а\ — x\jo^ — 1 при п = 2, двуполостный и однополостный ги-
гиперболоиды
9 9 9 9 9 9
9~ 9~ 9~ 5 9~ ~*~ 9~ 9~
af a^ ag af a^ a\
при n = 3 мы можем изобразить на чертеже (рис. 14, 15).
Гиперболоиды трёх различных типов при п = 4 сводятся к ним
и к эллипсоидам при помощи сечений. Так, например, двуполостный
гиперболоид
2 2 2 2
1 2 Жо «^4
9~ 9~ 9~ 9~ '
af a^ ад a|
встречающийся в теории относительности, состоит из двух связных
компонент, расположенных в полупространствах х\ ^ а± и х\ ^ а±.
Его сечения гиперплоскостями ж« = const, г > 1, являются обычными
двуполостными гиперболоидами, а сечение гиперплоскостью х\ —
= const, \x\\ > ai, даёт эллипсоид. Столь же многообразно семейство
параболоидов. Мы не останавливаемся подробно ни на их анализе, ни
на анализе конусов и цилиндров (эллиптических, гиперболических,
параболических).
УПРАЖНЕНИЯ
1. Убедиться, что в аффинном пространстве А размерности 3 над Ж любая
квадрика может быть задана в надлежащей системе координат одним из сле-
следующих уравнений:
1) х\ + х\ + х\ = 1; 2) х\ + х\ - х\ = 1; 3) х\ + х\ - х\ = -1;
4) х\ - х\ = 2ж3; 5) х\ + х\ = 2ж3; 6) х\ + х\ + х\ = -1;
7) х\ + х\ - х\ = 0; 8) а;2 + х\ + ж§ = 0; 9) х\ + ж^ = -1;
10) ж?+ж| = 1; 11)ж2=2ж2; 12) ж? - х\ = 1;
13) х\-х\= 0; 14) ж? - 1 = 0; 15) х\ + ж| = 0 = 0;
16) х\ + 1 = 0 17) xf = 0.
2. Пусть 5 — квадрика в евклидовом точечном пространстве Е . Если её
уравнением в ортонормированном репере {o;ei,... ,еп} будет
п п
^2 Xixl + 2 ^2 ^iXi + МО = 0,
г = 1 г = 1
то говорят о репере главных направлений квадрики S (вспомним о "главных
осях" квадратичной формы). Найти главные направления квадрик:
а) 2ж2 + у2 - 3z2 + 12ху + ^xz + 8yz + 18 = 0;
б) 6ж2 + Ъу2 + 7^2 + 4ж?/ - 4ж^ - 8ж - 10?/ + 14г - 6 = 0.
236 Гл. 5. Квадрики
3. Упражнению 3.3.8 на экстремальные значения вещественной квадратичной
формы q{x) можно придать больший геометрический смысл. Напомним, что речь
идёт о значениях q(y) при ||v|| = 1, или, что то же самое, о значениях g(v)/||v||2.
Убедиться в том, что
max q(v) = min llvll2
l|v|| = l V У g(v)M "
(аналогично — при перемене местами max и min). Пусть, скажем, п = 2 и
q{y) = ах2 + 2f3xy + jy2 = 1 — уравнение эллипса. Если Л^, г = 1,2, — корни
характеристического многочлена Л2 — (а + 7) А + (cry — /З2) = 0 и (ж^, ?/г) — соот-
соответствующие точки экстремума, то х2 -\-у2 = 1/Aj, т.е. один из корней отвечает
квадрату минимального (а второй — максимального) расстояния от начала ко-
координат до эллипса. Заодно получаются условие перпендикулярности главных
осей (направлений) эллипса и формула тг/у^сгу — (З2 для площади эллипса (обос-
(обосновать!).
4. При каких значениях параметра t квадрика
х\ + Х2 + хз + 2?ж1Ж2 + 2/;ж1Жз + 2tx2X$ — 4t = О
является эллипсоидом?
5. Найти аффинный тип кривой, являющейся пересечением квадрики
х\ + Ъх\ + х\ + 2Ж1Ж2 + 2Ж2^з + 6Ж1ЖЗ — 2Ж1 + 6Ж2 + 2жз = О
И ПЛОСКОСТИ 2Ж1 — Х2 + Жз = 0.
6. Когда два гиперболоида имеют общий асимптотический конус?
7. Какую квадрику напоминает башня Шухова в Москве?
§ 3. Проективные пространства
Развитие проективной геометрии, особенно в первой половине
XIX века, оказало существенное влияние на всю математику. Мы
коснёмся лишь немногих фактов, относящихся к ней, отсылая за по-
подробностями к учебному пособию [2] и к специальной литературе.
1. Модели проективной плоскости. В аффинной плоскости
над полем Я любые две точки лежат на единственной прямой, а любые
две непараллельные прямые пересекаются в единственной точке.
Напомним из курса аналитической геометрии построение проек-
проективной плоскости Р2 = ЯР2, в которой:
i) любые две различные точки лежат на единственной прямой;
И) любые две различные прямые пересекаются в единственной
точке.
Для построения Р2 начнём с произвольного трёхмерного вектор-
векторного пространства V над Я и определим Р2 = P(V), считая точ-
точкой р G P(V) одномерное векторное подпространство (прямую) в
У, а прямой L С P(V) — двумерное векторное подпространство в
V. Точка р лежит на проективной прямой L (или инцидентна с L),
когда аффинное подпространство р содержится в L. Свойство инци-
инцидентности i), очевидно, выполнено: если р ф q — точки, то они же
являются различными прямыми в V, так что их суммой будет дву-
двумерное подпространство L, т.е. прямая в P(V), причём единственная
§ 3. Проективные пространства 237
прямая, содержащая р и q. Далее, две различные проективные пря-
прямые L и М суть различные двумерные подпространства в У, так что
их суммой L + М в V должно быть всё пространство V. Поэтому по
формуле G) из § 2 гл. 1 имеем
dim(L П М) = dim L + dim M - dim(L + M) = 2 + 2-3 = 1.
Это означает, что ЬГ\М — одномерное аффинное подпространство,
т.е. единственная точка р Е IP(V), в которой пересекаются проек-
проективные прямые L и М. Свойство инцидентности И), таким образом,
тоже выполнено.
Выше была приведена одна из реализаций проективной плоскости,
близкая к тому, что принято называть связкой в аффинном прост-
пространстве. Мы добьёмся известной наглядности в изображении проек-
проективной плоскости, используя также следующую модель.
Рис. 18 Рис. 19
Пусть Я = Ж — поле вещественных чисел. В евклидовом про-
пространстве Е = R3 берётся двумерная сфера
S2: x2+y2 + z2 = l.
Каждая прямая, проходящая через начало ов!3, пересекает единич-
единичную сферу в двух диаметрально противоположных точках, а каждая
плоскость, содержащая о, пересекает сферу по большой окружности.
В проективном пространстве МР за точку можно брать пару
(t, t') диаметрально противоположных точек (рис. 18), а за прямую —
большую окружность на 52, считая, что точка р = (?,?') лежит на
прямой L, когда большая окружность L проходит через t и ?''. Совер-
Совершенно очевидно, что две различные большие окружности пересекают
S2 точно в одной паре (?,?') диаметрально противоположных точек.
Свойства инцидентности i), ii) выполнены.
Можно ограничиться рассмотрением нижней полусферы S2,, со-
состоящей из всех точек (ж, у, z) в Ж3 с х2 + у2 + z2 = 1, z ^ 0 (рис. 19).
Её границей является экватор S1 С S2 с уравнением х2 + у2 = 1
и z = 0. Одна из диаметрально противоположных точек сферы S2
238 Гл. 5. Квадрики
должна лежать на S2,, а обе — только в том случае, когда они будут
диаметрально противоположными точками экватора S1. Итак, точка
р Е МР есть точка полусферы S2, при условии, что диаметрально
противоположные точки её экватора отождествляются. Прямой L в
ЖР2 считается пересечение с S2, любой большой окружности на S2. В
частности, сам экватор S1 с отождествлёнными противоположными
точками является прямой в МР .
Рассмотрим аффинную плоскость П, касательную к полусфере
S2, в её южном полюсе @,0,-1), и спроектируем полусферу из на-
начальной точки о на П. Это значит, что точке t Е S2, \ S1 ставится в
соответствие точка t* Е П, лежащая на прямой, соединяющей о и t.
Очевидно, что проекция
a: S2_ XS1 ->П
является взаимно однозначным отображением. Каждой прямой на
МР2, т.е. дуге большой окружности на 52, отображение тг ставит
в соответствие прямую на П. Отображение о~х переводит точки в
точки, сохраняя инцидентность. Образом о~х будет множество всех
точек в МР2, за исключением точек прямой Lq, представленной эква-
экватором S1 полусферы S2,. Таким образом, проективная плоскость мо-
может быть получена из аффинной плоскости добавлением всех точек
некоторой новой проективной прямой Lq, называемой бесконечно
удалённой прямой. Любое множество параллельных прямых на аф-
аффинной плоскости отображается при о~х на множество дуг больших
окружностей на S2,, проходящих через концы некоторого диаметра
экватора S1. При этом определяется пара (?, t') диаметрально проти-
противоположных точек экватора, т.е., по соглашению, одна точка на Lq.
Стало быть, добавление бесконечно удалённой прямой к аффинной
плоскости есть добавление точек пересечения всех тех пар парал-
параллельных прямых, которые не пересекаются в П. Следует заметить,
что бесконечно удалённая прямая Lq не
является аффинной прямой.
В отличие от проективной плос-
плоскости, проективная прямая МР1
изображается точками окружности
(одномерной сферы) без отождествления
диаметрально противоположных точек.
В самом деле, МР1 есть пучок прямых,
проходящих через фиксированную точку
о обычной плоскости (рис. 20). На
Рис. 20 фиксированной окружности 51, проходя-
проходящей через точку о, каждой прямой пучка соответствует ровно одна
точка (её пересечение с S1). Точке о соответствует касательная к S1
в д. Итак, окружность — модель проективной прямой.
§ 3. Проективные пространства 239
2. Проективное пространство произвольной размер-
размерности. Создав себе наглядное представление о проективной прямой
и проективной плоскости, нетрудно ввести понятие проективного
пространства более высокой размерности и над любым полем. Его
можно мыслить как множество точек вместе с некоторыми выделен-
выделенными подмножествами, называемыми проективными подпростран-
подпространствами и подчиняющимися естественным аксиомам или отношениям
инцидентности. Аксиоматический путь (его называют ещё синтети-
синтетическим) имеет свои преимущества, но является чересчур окольным и
более приспособленным для изложения в отдельном курсе. Поэтому
мы изберём непосредственный подход, по-существу эквивалентный
рассмотрению связки в аффинном пространстве.
Определение 1. Проективным пространством ?п = Я?п =
= Р(У) размерности п над полем Я называется совокупность (одно-
(однородных или векторных) прямых (п + 1)-мерного векторного прост-
пространства У над Я. Прямые пространства У называются точками
пространства Я?п. Если U С У — (т + 1)-мерное векторное под-
подпространство в У, то подмножество ?(U) С Р(У), состоящее из всех
прямых пространства У, содержащихся в U, называется проектив-
проективным подпространством (а также проективным линейным много-
многообразием или плоскостью) размерности т пространства Рп. В случае
т = п — 1 говорят о проективной гиперплоскости. Считается, что
Р({о}) = 0 — пустое множество.
Можно несколько иначе выразить то же самое определение, ска-
сказав, что проективным пространством, порождённым векторным
пространством У над Я, называется фактормножество Р(У) допол-
дополнения У* к {х} в У по отношению эквивалентности между х и у
в У*:
х - у <^> ЗА е Я", х = Лу.
Класс эквивалентности х, определённый элементом х G V* (не-
(ненулевым вектором х G У), и есть точка проективного пространства
?(V). Итак, по определению
Лх = х VAgjT. A)
Отображение П:хих называется каноническим отображением
У* на фактормножество P(V). Следует подчеркнуть, что на P(V)
не определены линейные операции, и мы не можем, например, поло-
положить х 0 у = х + у. Двумерное векторное подпространство U С V
определяет проективную прямую Р(С/), а трёхмерное векторное под-
подпространство — проективную плоскость. Если U С W, т.е. если U
— векторное подпространство другого подпространства W С У, то
Р(С/) С P(W), поскольку каждая прямая из У, содержащаяся в U,
содержится и в W. Если ?(U) С P(W), то говорят, что проективное
подпространство ?(U) лежит на или инцидентно с ?(W). Имеет
240 Гл. 5. Квадрики
смысл положить
Р(?/)ПР(?/') =F(UnU').
Для каждого множества S С P(V) существует наименьшее содер-
содержащее его проективное подпространство ?(U): если S = {хь х2,... },
то U = (xi,X2,.. .)&. Говорят, что S есть система образующих для
?(U). Наименьшим проективным подпространством, содержащим
?(U) и ?(U'), очевидно, следует считать ?(U-\-U'). Каждое подпрост-
подпространство P(W) можно рассматривать как самостоятельное проектив-
проективное пространство с выделенными подмножествами ?{U) для U С W.
3. Однородные координаты. Пусть (eg, ei,..., еп) — базис
векторного пространства V. Если
то ^о5 ?ъ • • • 1 ?,п принято называть однородными координатами точки
х относительно базиса (е^) пространства V. Каждая система (^) из
п + 1 элементов поля Я, одновременно не равных нулю, есть одно-
однородная (или проективная) система координат некоторой точки из
?(V) относительно (е^). Две такие системы (^), (/if) будут систе-
системами однородных координат одной и той же точки из ?(V) отно-
относительно одного и того же базиса (е^) тогда и только тогда, когда
Hi — A?i, г = 0,1,... ,п, для некоторого Л ф 0 из Я. Этот факт мы
будем выражать записью
означающей, что имеется взаимно однозначное соответствие между
точкой х G P(V) и классом пропорциональных друг другу систем её
однородных координат в данном базисе.
Если (вр, е^,..., е^) — какой-то другой базис пространства У,
причём
п
e'j = ^a^-ei, 0 ^ j ^ n,
г=0
то (^0, ?i,..., ^) будет системой однородных координат точки х от-
относительно базиса (е[) тогда и только тогда, когда найдётся Л G Я*,
для которого
Действительно,
a^'v O^i^n. B)
i=0
и достаточно вспомнить из гл. 1 правило перехода от новых коорди-
координат к старым.
Отметим ещё, что, как следует из теоремы 4 (§ 3 гл. 1), всякое
подпространство ?(U) С ?(V) задаётся в данном базисе (е^) систе-
§ 3. Проективные пространства 241
мой линейных однородных уравнений
?n = 0,
C)
aro?o + Gri?i + • • • + а>гп?,п = 0.
4. Аффинные карты. Выделим в векторном пространстве V
с базисом (е^) векторное подпространство
Vb = (еье2,...,еп),
а в аффинном пространстве (Е = У, V) — гиперплоскость
Ео = е0 + Vb = {е0 + х | х Е Vo}.
Как мы уже знаем, пара (Ео, Vo) есть аффинное пространство, если
для a := а = ео + а', Ь = ео + Ь' положить
Прямая (х) С V, не содержащаяся в Vo, пересекается с Ео в един-
единственной точке. Действительно,
... + ?пеп, ^о Ф 0.
Значит, Лх = А?оео + ... + А?пеп = е0 + у с у G Vo тогда и только
тогда, когда А?о = 1-
Поставим в соответствие прямой (х) эту точку пересечения
(х) П Ео. Мы получим биективное соответствие
Ф: (х) ^(х)ПЕо
между прямыми (х) ^ Vo и точками аффинного пространства Eq.
Другими словами, Ф индуцирует биективное отображение
Фо:Р(У)\Р(Уо)^Ео. D)
Под P(V)\P(Vo) понимается проективное пространство Р(У) с уда-
удалённой (выброшенной) гиперплоскостью P(Vb).
Определение 2. Аффинное пространство Eq вместе с отобра-
отображением Фо (а иногда и просто P(V)\P(Vo)), отождествляемое с Ео,
называется аффинной картой проективного пространства P(V). При
этом P(Vo) называется бесконечно удалённой гиперплоскостью отно-
относительно карты Ео. Бесконечно удалёнными считаются также точки
и плоскости, содержащиеся в P(Vo).
Выразим то же самое в координатах. По своему смыслу
P(V)\P(Vb) состоит из точек х = (?0 : 6 : ... : €п) с & Ф 0.
Выберем в Ео аффинную систему координат {ёо; ei,..., еп}, пони-
понимая под ёо = ео точку в Eq , а под ei,..., еп — базисные векторы
пространства Vo, с которым ассоциировано Eq. Чтобы найти аф-
аффинные координаты точки х, надо найти точку пересечения прямой
(х) = (?оео + ^iei + • • • + ?пеп) с Ео. Мы видели, что эта точка имеет
16 А.И. Кострикин
242 Гл. 5. Квадрики
вид
Значит, в системе координат {eg; ei,..., еп} карты Eg аффинными
координатами точки х будут ?i/?o? • • • ? ?п/?о-
Итак, приписывая точке х Е P(V)\P(Vo) координаты точки
Фо (х) Е Ео, мы получаем аффинную (или неоднородную) систему ко-
координат в P(V), определённую, правда, лишь на множестве
P(V)\P(Vo). Между точками этого множества и их неоднородными
координатами (в фиксированном базисе) имеется биективное соот-
соответствие.
Если U — векторное подпространство в V размерности т + 1,
то m-мерная проективная плоскость Р(С/) либо будет бесконечно уда-
удалённой относительно Eg (в случае U С Vb), либо её образом
Ф0(Р(Е/)) =ипЕо =eo + Uo
будет ттг-мерная аффинная плоскость на карте Eg. С другой стороны,
любой m-мерной аффинной плоскости eg + Uq С Eg соответствует
ттг-мерная проективная плоскость Р(С/), где U = (eg,t/g). Проведен-
Проведенное рассуждение показывает, что Фд есть не только биективное
точечное соответствие между P(V)\P(Vo) и Eg, но и соответствие
между плоскостями одинаковых размерностей. В этом смысле P(V)
получается из Eg добавлением бесконечно удалённой гиперплоскости.
Взяв вместо eg вектор е^, а вместо Vg гиперплоскость
Vi = (е0,... ,ei_i,ei+b... ,en),
мы получим другую аффинную карту (Е$, Ф^). Она состоит из точек
(?0 : ^ : ... : ?п) с & ^ 0. В Ei с системой координат {ё;; е0,..., е;_ь
e^_|_i,..., еп} аффинными координатами точки (^g : ^i : ... : ?п) будут
Беря за исходные векторы последовательно eg,ei,..., мы полу-
получаем п + 1 карт
(Е*,Ф<), г = 0,1,...,п.
Их объединение "совпадает" с P(V). Действительно, для любой точки
х = (^g,^i,..., ?n) G Р(У) хотя бы одна координата ^ отлична от
нуля, а это значит, что Ф«(х) G Е^. С принятым нами соглашением
об отождествлении Р(У)\Р(Т/^) и Е^ имеем
Легко видеть, что меньшим числом карт пространство Рп не покры-
покрывается.
§ 3. Проективные пространства 243
5. Понятие алгебраического многообразия. Будем гово-
говорить, что многочлен
/(to, ti, . . . , tn) G Л[?о,?ъ • • • ?^n]
обращается в нуль в точке х = (?0, ?ъ • • •, ?n) ? №(V), если /(?о> ?i, • • •
... ? ?п) = 0. Это значит, что /(А?о? A?i,..., A?n) = 0 для всех А ф
Ф 0, A Е Я. Положив
/ = /0+/l + ... + /m,
где /^ — сумма всех одночленов степени i в /, мы видим, что из
условия
в случае бесконечного поля Я следуют равенства /г(?о? • • • ? ?п) — 0 Для
г = 0,1,... ,т. Стало быть, если / обращается в нуль в некоторой
точке х Е P(V), то в той же точке обращаются в нуль и все его
однородные составляющие. Естественно поэтому ввести следующее
Определение 3. Подмножество S С Рп точек (ао : сц : ...
... : ап), удовлетворяющих системе алгебраических уравнений
gi(ao,...,an) = 0,
0,...,an) =0,
где ^i,..., дь — однородные многочлены, называется (проективным)
алгебраическим многообразием.
Точнее, следовало бы говорить о замкнутом алгебраическом мно-
множестве в Рп, поскольку многообразия уместно вводить на языке од-
однородных простых идеалов и топологии Зарисского. Мы, однако, в
детали входить не будем. Алгебраические многообразия (в особен-
особенности комплексные алгебраические многообразия, когда Я = С) —
предмет изучения большой самостоятельной математической дисци-
дисциплины — алгебраической геометрии.
Ограничимся для простоты случаем одного уравнения
д(а^,аъ...,ап) = 0.
Найдём уравнение пересечения So = S П Eq . Если х G Eq , х = (ао :
: а\ : ... : ап), то «о Ф 0- Поэтому условие д(ао,..., ап) = 0 равно-
равносильно условию
Так как а±/ао,..., ап/ао — аффинные координаты точки ж, то это
и есть уравнение "аффинного" многообразия So, т.е. уравнение мно-
многообразия S в Ео • Аналогично, делением на щ находятся уравнения
16*
244 Гл. 5. Квадрики
Обратно: если координаты точек в Ео обозначены xi,...,xn и
множество So задано уравнением
/(жь...,жп) = О,
где / — произвольный, не обязательно однородный многочлен сте-
степени т, то
д{ао,а1,...,ап) = (а0) Я—,•••, —
\а0 а0
— однородный многочлен. Действительно, из одночлена
(х!)к1...(хп)кп, h + ... + кп^т,
в / получается одночлен (ao)m~kl~'"~kn {a\)kl ... (ап)кп степени т в
д. При этом
Следовательно, если S задано уравнением д = 0 в Рп, то SnEo = So-
Пример 1 (конические сечения). Считаем ниже Я = Ж.
1) Окружность S, имеющая в карте Ео уравнение х\ +ж^ = 1, в проективных
однородных координатах задаётся уравнением а\ + а\ = а^. Её пересечение
STiP(Vo) с бесконечно удалённой прямой P(Vo) относительно карты Ео находится
из условия ао = 0 (это уравнение Vq и P(Vo)). Из ol\ + a\ =0 следует, что и
а\ = OL2 = 0. Таких точек (ао — а1 — а2 = 0) вообще нет, и, значит, STiP(Vb) = &•
2) Гипербола S с уравнением х\—х\ = \ъ карте Ео в однородных координа-
координатах имеет уравнение ol\—ol^ = a^. Её пересечение с бесконечно удалённой прямой
P(Vo) получается из условия ао = 0, т.е. OL2 = ±аь При этом а\ ф 0, иначе все
три координаты были бы равны нулю. Поделив на ai, две точки пересечения
STlP(Vb) можно записать в виде @ : 1 : 1), @ : 1 : — 1). С другой стороны, в карте
Ei будет ol\ ф 0, и уравнение гиперболы в карте S приобретает вид х\ + х\ = 1
(хо = ao/cKi, Ж2 = скг/скх), т.е. 5 П Ei является окружностью и S'nP(Vi) = 0.
3) Парабола sci = х\ (уравнение в Ео) при х\ = ai/ao,^2 = «2/^0 задаётся
уравнением а§а\ = ag. Пересечение с P(Vo) (ao = 0) содержит одну (двойную)
точку @:1:0). Совершив переход к другой системе координат ао = j3q — C\,
ol\ = (Зо + C\, а2 =02, мы получим уравнение Cf -\- C% = /^о' которое в новой
карте Ео даст окружность. Таким образом, окружность (или эллипс), гипербола
и парабола — это одна кривая на проективной плоскости, рассматриваемая лишь
в разных аффинных картах. Собственно, этот результат, известный из аналити-
аналитической геометрии, приведён лишь для иллюстрации рассматриваемых понятий.
6. Проективная группа. Пусть P(V) — проективное прост-
пространство, порождённое векторным пространством V над полем Я,
так что точка х G P(V) есть векторная прямая (х) С V. Пусть
Л : V —> V — невырожденный линейный оператор на V. Он пере-
переводит прямую в прямую и не может перевести её в 0. Стало быть,
имеет смысл
Определение 4. Каждый невырожденный линейный оператор
Л на У индуцирует некоторое преобразование Л : P(V) —> P(V),
называемое проективным преобразованием:
А'Х = Ах. E)
§ 3. Проективные пространства 245
Равенство E) полностью согласуется с принятым нами определе-
определением точки х, поскольку
Л • Ах = А • Лх = Лх = Л • х. F)
Из F) следует также, что АЛ = Л. На самом деле верна
Теорема 1. Равенство В = Л имеет место тогда и только
тогда, когда В = АЛ.
Доказательство. Нам нужно только показать, что В — А =>
=> В = АЛ. Так как Бх = Бх = Лх = Лх, то 23х = Ах • Лх для
любого вектора х ф 0 из V и какого-то скаляра Ах ф 0, зависящего
от х. Если у = ах, то
Ау • Лу = By = аВх = аАхЛх = АхЛу,
откуда Ау = Ах. Если же х и у — линейно независимые векторы, то
линейно независимыми будут векторы Лх, Лу, а из соотношения
Ах • Лх + Ау • Лу = Вх + By =
= #(х + у) = Ах+У • Л(х + у) = Ах+уЛх + Ах+уЛу
вытекает, что Ах = Ах+У = Ау. Это значит, что Ах = А — скаляр, не
зависящий от х, и, следовательно, В = А • Л. П
Чтобы получить запись проективного преобразования Л в коор-
координатах, выберем базис (ео, ei,..., еп) пространства V и обозначим
через А = (а^) матрицу линейного оператора Л в этом базисе:
Aej =
г=0
Если х = (ао : сц ....'. ап) и Лх = (/3q -Pi : ... : (Зп), то
п
/3j = A ^ CLjj aj, г = 0,1,...,п, G)
где А ф 0 — некоторый скаляр. Это видно непосредственно из ра-
равенства
п п п п
i=0 j=0 j=0 г=0
и согласуется с законом преобразования координат вектора при
действии линейного оператора (см. гл. 2).
Пусть теперь Eq — аффинная карта в P(V). Она состоит из точек
х = (ао '.ol\ : ... : ап) с ао ф 0. Если окажется, что (Зо ф 0 в G), то
Лх G Eq. Аффинными координатами точки х являются Xj = otj/ao,
1 ^ j ^ nj а Для точки Лх — координаты yj = Pj/fio, I ^ j ^ n.
246 Гл. 5. Квадрики
Если разделить равенства G) с номерами г = 1, 2,... , п на /Зо, а за-
затем разделить числители и знаменатели в правых частях на «о, то
получится запись проективного преобразования А в аффинных ко-
координатах карты Ео:
ацх\ + ... + ainxn + aw .
2/г = ; ; ; , 1 ^ г ^ п. (8)
Характерно то, что что во всех этих формулах — общий знамена-
знаменатель. Неопределённый множитель Л исчез.
Замечание. Следует, конечно, иметь в виду, что проективное
преобразование А вполне может переводить точку из Eg (точнее, из
множества Ф^(Ео)) в точку, не принадлежащую карте, т.е. в беско-
бесконечно удалённую (иначе: принадлежащую P(Vo)). Формулы (8) в этом
случае теряют смысл. Этого заведомо не произойдёт, если a^j = О,
1 ^ j' ^ п; аоо — 1- Тогда мы получаем известные формулы аффин-
аффинного преобразования карты Eg. Стало быть, аффинное преобразова-
преобразование — частный случай проективного.
Для любого вектора у ф 0 из V найдётся в силу невырожденно-
невырожденности А такой вектор х, что Ах = у. Значит, любая точка у Е Р(У)
является образом некоторой точки х при проективном преобразова-
преобразовании Л: у = Ах = Ах. Аналогично, любые две различные точки х, z
переходят в различные: Ах = Az => Ах = Az => Az = ЛЛх =>
=^ A(z — Лх) = 0 =^ z = Лх =^ z = х.
Итак, всякое проективное преобразование биективно.
Определение 5. В группе всех биективных отображений
P(V) —У Р(У) проективные преобразования образуют подгруппу,
обозначаемую символом PGL(V) и называемую проективной
группой.
Обозначение PGL(V) связано с тем, что эта группа является го-
гомоморфным образом полной линейной группы GL(V) = GLn+i($).
В самом деле, отображение тг: А н-у А удовлетворяет условию гомо-
гомоморфизма 7Г(АВ) = 7Г(Л) 7Г(В), ПОСКОЛЬКУ
АВх = АВх = АВх = А(Вх) = (АВ)х.
Из теоремы 1 следует, что ядро Кегтг состоит из операторов подобия
ХЕ: А = ? =^ А = Х?. Так как отображение Ф : Л \-^ Х? является,
очевидно, изоморфизмом групп Я* и Кегтг = {А?| Л G Я*}, то на
основании всего вышесказанного получается
Теорема 2. Все проективные преобразования пространства
P(V) образуют проективную группу PGL(V), являющуюся гомо-
гомоморфным образом полной линейной группы GL(V). Ядро гомомор-
гомоморфизма тг изоморфно мультипликативной группе Я* поля Я и имеет
место "короткая точная последовательность"
1 -> Я* Л GL(V) Л PGL(V) -> 1. (9)
§ 3. Проективные пространства 247
В данном случае мы могли бы обойтись без точной последова-
последовательности (9), означающей просто, что Ф — изоморфное вложение,
1тФ = Кегтг, а тг — эпиморфизм. Но мы воспользовались случаем,
чтобы ещё раз ввести в обиход само понятие точной последователь-
последовательности, широко применяемой в современной математике.
7. Проективная геометрия. Мы знаем, что проективная груп-
группа PGL(V) действует транзитивно на P(V), т.е. переводит любую
точку в любую другую точку. В соответствии с общей концепцией
(см. гл. 4, § 2, п. 4), группе PGL(V) отвечает некоторая геомет-
геометрия. Эта геометрия называется проективной. Предметом проектив-
проективной геометрии является изучение тех свойств пространственных фи-
фигур в P(V), которые не меняются при действии преобразований из
PGLiV). Такие свойства называют также проективными. Свойство
параллельности прямых или плоскостей, очевидно, не относится к
числу проективных. Теорема Пифагора тоже не является проектив-
проективной, поскольку она содержит понятия длины и угла. Требованием
проективности исключается много теорем не только евклидовой, но
и аффинной геометрии. Тем не менее проективная геометрия отно-
относится к числу весьма содержательных и крайне необходимых гео-
геометрий. Чуть позднее мы остановимся на одном важном проектив-
проективном свойстве четырёх коллинеарных точек, а пока отметим ряд
свойств проективной группы PGL(V).
1) Согласно замечанию, сделанному после формул (8), группа
PGL(V) содержит в качестве подгруппы аффинную группу Aff(Eo),
действующую на аффинной карте Eq (а также группы Aff(Ej),
г = 1,2,...,п).
2) Будем говорить, что точки xq,xi, ... ,xn+i n-мерного проек-
проективного пространства P(V) находятся в общем положении, если
никакие п + 1 из них не лежат в одной гиперплоскости. Другими
словами, любые п + 1 векторов
линейно независимы.
Теорема 3. Пусть х0, хь ..., xn+i и у0, Уь ..., Уп+i — две
системы точек в P(V), находящихся в общем положении. Тогда
существует, и притом единственное, проективное преобразование
Л Е PGL(V), для которого Aki — у^, г = 0,1,... ,п + 1.
Доказательство. Согласно определению
(xi,x2,...,xn+i) =V = (yi,y2,...,yn+i),
поэтому существует невырожденный линейный оператор Л'', для ко-
которого
Д'х;=у;, 1^г^П+1. A0)
На первый взгляд, не остаётся никакого произвола для отыскания
248 Гл. 5. Квадрики
А. Но условие Axi = Уг в терминах векторов х^у^ Е V приобретает
вид
Дх; = АгУг, А; Ф О, 0 ^ i ^ П + 1.
Так как А^Д = Л, то нормируем А условием Ао = 1.
Определим теперь линейный оператор В:
Byi = Xiyi, 1^г^п + 1, A1)
и, пользуясь тем, что скаляры А^ находятся в нашем распоряжении,
подберём их так, чтобы выполнялось условие
ВЛ'хо=уо. A2)
Из определения системы точек в общем положении следует, что
П+1 П+1
Х0 = ^ ЩХи Уо = ^ АУг, A3)
г=1 г=1
причём все коэффициенты щ, fa отличны от нуля. В соответствии с
A0) имеем
п+1 п+1 п+1 п+1
г=1 г=1 г=1 г=1
Ввиду A3) нам остаётся положить с^А^ = А, 1 ^ г ^ п + 1, чтобы
удовлетворить условию A2). Скаляры Xi = a^1 Ci, а вместе с ними и
преобразования A1) полностью определены. Положив теперь
А = ВА',
мы получим однозначно определённый линейный оператор, которому
соответствует проективное преобразование А с требуемыми свой-
свойствами. ?
Ясно, что теорема 3 — аналог теоремы 8 из § 3 гл. 4, относящейся
к аффинным преобразованиям.
Следствие. Любые две тройки х0, хь х2 ^ Уо? Уъ У2 попарно
различных точек на проективной прямой Р1 однозначно определяют
проективное преобразование Р1 —у Р1, переводящее соответственно
^ в yi, г = 0,1,2.
Это утверждение означает между прочим, что свойство точки
лежать между двумя другими точками не является проективным.
Из теоремы следует также (утверждение о единственности А), что
не всякую четвёрку точек на прямой можно перевести в заданную.
3) Пусть Р(?/), P(W) — две т-мерные плоскости в P(V). Тогда
они PGL(V)-конгруэнтны, т.е. их можно перевести друг в друга
проективным преобразованием.
В самом деле, пусть
U = (uo,ub...,um), W = (wo,wb...,wm).
§ 3. Проективные пространства 249
Дополним {и0,..., um} до базиса (и0,..., um,..., un), {w0,...
..., wm} — до базиса (wq, ..., wm,..., wn) пространства V и рас-
рассмотрим линейный оператор А : V —> V, для которого Ащ = w^,
I = 0,1,..., П. Тогда Ащ = W;, Д]Г\ «;11; = Л(^2{Щщ) = YliaiWii
так что A(F(U)) =F(W).
4) Всякое проективное преобразование D плоскости f{U) С Р(У)
может быть продолжено до проективного преобразования всего
пространства Р(У).
В самом деле, вместе с uq, ui, ..., um векторы Puq, ^ui, ...
..., Vum также образуют базис подпространства U С V. Пусть
(и0,..., um, um+b ..., un), (Pu0,..., ?>um, wm+b ..., wn)
— базисы в У, получающиеся дополнением указанных базисов в U.
Полагая
Ащ = U\ii, 0 ^ i ^ ттг,
Лщ = Wi, ш + 1 ^ г ^ п,
мы получим линейный оператор А: V —> У, которому соответствует
проективное преобразование A: P(V) —>¦ P(V), совпадающее с ?> на
A4)
8. Двойное отношение. Пусть Pn = P(V) — проективное про-
пространство и Si, S2, S3, S4 — четыре точки из P(V), лежащие на
прямой Р1 = Р(С/), причём
Это значит, что
(аьа3) = (аьа4) = U = (а2,а3) = (а2,а4).
Обозначим через
,Ъ_\_а/3
,c,d/ 7 &
определитель матрицы перехода от базиса (с, d) двумерного вектор-
векторного пространства к другому его базису (а, Ь):
а = ас + /3d, b = jc + Sd.
В силу условий, наложенных на точки щ, можно образовать выраже-
выражение
г~ ~ ~ ~ -, /ai,a3\ /a2,a3\
[аьа2,а3,а4] = I II 1 . A5)
Определение 6. Выражение A5) называется двойным отно-
отношением четырёх точек Si, S2, S3, S4.
Следует, конечно, убедиться, что [Si,S2,S3,S4] зависит только от
точек Sf, а не от выбора векторов а^ (вспомним, что Ла^ = щ), т.е.
оно не меняется при замене а^ на A^af.
250
Гл. 5. Квадрики
Действительно, заменим ;
yai + йа4, то bi = bi, аз =
/аьа3\ _ 1 О
Vai,aJ " 7 &
на bi = Aai. Если ai =
V-1bi + ?а4, и поэтому
1 О
уА-1 S
аз =
\
L,a4/
Множитель
/а2,а3\
V а2, а4 /
-1
при этом, очевидно, тоже не меняется. Так же обстоит дело при за-
замене а2 на Аа2.
Заменим теперь а4 на Ь4 = Аа4. Если
то
и поэтому
а3 =
а3 =
а2 = а2,
а2 = а2,
а3 =7'*
ьа4
/а2,а3
V а2, а4
)=
1
7
1
i
0
s
0
5'
= А
= А
0
= А
ai,b3
аьа4
Отношение в правой части A5) при этом не меняется. Так же обстоит
дело при замене аз на Лаз. Одновременная замена а^ на Ла^ сводится к
последовательной замене одного из них, поэтому двойное отношение
четырёх точек корректно определено формулой A5).
Теорема 4. Двойное отношение не меняется при проективном
преобразовании, т.е.
, Ла4] = [ах, а2, а3, а4]
A6)
для любого Л G PGL(V).
Доказательство. Пусть Л G GL(V), U — двумерное вектор-
векторное подпространство в У, [/' = A(U). В силу невырожденности Л
любые два линейно независимых вектора перейдут под действием Л
в линейно независимые. Если теперь
ТО
(Ла,ЛЬ) =U' = (Ac,Ad),
а соотношениям, связывающим базисы (а, Ь) и (c,d):
а = ас + /3d, Ь = 7с + ?d,
соответствуют ровно такие же соотношения в плоскости U':
Да = аЛс + /3Ad, Ah = jAc + 5 Ad.
§ 3. Проективные пространства
251
_ /Да, ДЬ\
" \Ac,Ad)'
Это значит, что
/a,b\ a 0
Vc,d/ 7 S
Стало быть, в применении к нашей ситуации имеем
[Asli, Ла2, Ла3, Ла4] = [Asli, Ла2, Ла3, Ла4] =
'Азц, Ла3\ /Ла2, Ла3\-!
_ /ЛаьЛа3\ /
V Ла1, Да4 / V
3\-1 _ /аьа3\ /а2,а3\-1 _
4 / V ai, а4 / V а2, а4 /
= [аьа2,а3,а4]. П
9. Выралсения двойного отношения в координатах. Вве-
Введём на прямой ?(U) с точками Si,a2 a3,a4, для которых можно за-
задать двойное отношение, некоторую однородную систему координат.
Именно, пусть U = (е, f) и а^ = с^е + /%f, г = 1, 2, 3,4. Тогда
а; =
г = 1,2,3,4.
A7)
Смысл A7) ясен из общего определения однородных координат в про-
проективном пространстве. Если ai = ai, a3 = 7^1 + йа4, то
/аьа3
\аьа4>
Кроме того, из соотношения
а3е + 03f = '
получаем а3 = 7ai + 5a4l 0з = J0i + S04- Поэтому
Аз
A8)
что в сочетании с A8) даёт
Аналогично
\аьа4
а2,а3
а2, а4
«3
«3
«2
04
-1
-1
Таким образом, по определению F) двойного отношения имеем
[аьа2,а3,а4] =
«1
«з
«1
ft
03
01
04
«2
«4
«2
«3
02
04
02
03
A9)
252
Гл. 5. Квадрики
Если
О, 1 ^ г ^ 4, и Xi = /Зг/щ, то из A9) следует
т.е.
[aba2,a3,a4j =
[ai,a2,a3,a4j =
1 х1
1 хз
1 Ж1
-I
-L X 4
1 х2
1 ж4
1 х2
1 хз
-х2)
-xi)(x3 -ж2)'
Выражение B0) или эквивалентное ему выражение
[Si,S2,S3,S4] = :
B0)
можно брать в качестве определения двойного отношения, но это не
очень удобно, потому что формально оно зависит от выбора аффин-
аффинной карты (условие oti ф 0, 1 ^ г ^ 4), в то время как выраже-
выражение, стоящее в правой части равенства A9), имеет смысл и в том
случае, когда одна из точек а^ является несобственной (бесконечно
удалённой).
Если за бесконечно удалённую точку по отношению к карте Eq
выбрана точка а4 = @ : 1), то из A9) получаем
г~ ~ ~ ~ 1 хх
ai,a2,a3,a4 =
- х2
Если, сверх того, выбрать аз за начало координат A : 0), а а2 — за
единичную точку A : 1), то Хз = 0, х2 = 1 и
[аьа2,аз,а4] =жь B1)
Это не что иное как координата точки Si в системе координат, в
которой а4 — бесконечно удалённая, аз — нулевая и а2 — единичная
точки.
Полезно и такое рассуждение. Будем выбирать не точки, а од-
однородную систему координат на Р1 = Р(С/). Пусть Si,a2,a3 — три
фиксированные точки прямой Р1, Si ф S2. Положим е = z/ai, f = /ia2,
где скаляры г/, \i таковы, что S3 = e+f. Тогда Si = A : 0), S2 = @ : 1),
S3 = A : 1). Если теперь S4 = (а : C) — произвольная точка на Р1,
то по формуле A9), где следует положить
ai = 1, А = 0; а2 =0, /32 = 1;
а3 = 1, Аз = 1; а4 = а, /?4 = /3,
находим
[SbS2,S3,S4] = а//3.
Мы видим, что отношение однородных координат а, C, задаю-
задающее точку S4, само однозначно определяется двойным отношением
[Si,S2,S3,S4]. Таким образом, справедлива
§ 3. Проективные пространства
253
Теорема 5. При трёх попарно различных фиксированных точ-
точках Si; &2; S3 проективной прямой Р1 всякая четвёртая точка
S4 G Р1 однозначно задаётся двойным отношением [Si,S2,S3,S4].
Мы готовы теперь доказать утверждение, существенно уточ-
уточняющее следствие теоремы 3.
Теорема 6. Две четвёрки Si, S2, S3, S4 и t>i, t>2, Ьз, b4 кол-
линеарных точек в п-мерном проективном пространстве PGL(V)-
конгруэнтны (эквивалентны в смысле проективной геометрии) то-
тогда и только тогда, когда
B2)
[ai,a2,a3,a4] = [bi,b2,b3,b4].
Доказательство. Необходимость условия B2) следует из A6),
коль скоро hi = Ав-i.
Пусть теперь выполнено условие B2). Согласно свойству 3) про-
проективной группы, найдётся проективное преобразование В: ?(V) —>¦
—> P(V), переводящее прямую Р(С/), на которой лежат точки Sf, в
прямую P(W), на которой лежат точки Ь^. Согласно следствию тео-
теоремы 3 существует проективное преобразование V прямой P(W),
переводящее Вщ в bf, i = 1,2,3. Используя свойство 4) проектив-
проективной группы, продолжим V до проективного преобразования А\ всего
пространства Р(У). Преобразование А — А\В переводит точки щ в
точки hi, г = 1, 2, 3, соответственно, а точку S4 — в некоторую точку
С4 на прямой P(W). По теореме 4 имеем
[Si,S2,S3,S4] = [bi,b2,b3,c4],
что с учётом B2) даёт
[bi,b2,b3,b4] = [bi,b2,b3,c4].
Из теоремы 5 следует, что ?4 = b4. ?
УПРАЖНЕНИЯ
1. В основе знаменитого кода Хэмминга Н длины 7 лежит конфигурация из
семи точек и семи прямых проективной плоскости F2P2 G = 22 + 2 + 1). Эта
конфигурация схематично изображена на рис. 21.
В каждой строке матрицы инцидентности J стоят по три единицы: они от-
отвечают трём точкам на одной прямой. Каждая строка служит^ также кодовым
словом в Н веса 3. Кодовые слова веса 4 составляют матрицу J;
J =
0
0
0
1
0
1
1
1
0
0
0
1
0
1
1
1
0
0
0
1
0
0
1
1
0
0
0
1
1
0
1
1
0
0
0
0
1
0
1
1
0
0
0
0
1
0
1
1
0
J =
1
1
1
0
1
0
0
0
1
1
1
0
1
0
0
0
1
1
1
0
1
1
0
0
1
1
1
0
0
1
0
0
1
1
1
1
0
1
0
0
1
1
1
1
0
1
0
0
1
254
Гл. 5. Квадрики
Рис. 22
Матрица J получается из J заменой 0 на 1 и 1 на 0. Всего в Н имеется 16
кодовых слов. Мы выписали 14. Вот оставшиеся два: @000000), A111111).
а) Проверить, что код Н — суть четырёхмерное векторное подпространство
в Fg, определённое линейной системой
XI + Жз + Х4 + Ж5 = 0, Х\ + Х2 + Жз + Xq = 0, Ж2 + Ж3 + Ж4 + Ж7 = 0
(в каждом уравнении задействованы переменные, лежащие в одном из трёх кру-
кругов на рис. 22).
б) Доказать, что PGL^P2) — неабелева группа порядка 168, которую можно
реализовать перестановками степени 7, действующими на множестве точек про-
проективной плоскости.
в) Доказать, что
PGL{?2F2) = Aut(tf) := {а е S7 \ (т{Н) = Н}.
2. Пусть П = F2P2 — проективная плоскость, состоящая из семи точек, а
q — две различные точки плоскости П. Сколько существует автоморфизмов,
р
q?
переводящих р в q
3. Доказать, что над полем С любое проективное преобразование имеет по
крайней мере одну неподвижную точку.
§ 4. Квадрики в проективном пространстве
1. Классификация. Пусть V — вещественное векторное про-
пространство размерности п + 1 ^ 2, q — квадратичная форма на У, / —
симметричная билинейная форма, полярная к q. Множество С, состо-
состоящее из векторов х G У, удовлетворяющих уравнению д(х) = 0, на-
называется {изотропным) конусом с вершиной 0. Если это множество
состоит не только из 0, то образ С множества С\{0} при отображе-
отображении тг множества У\{0} в проективное пространство P(V) (см. § 3)
называется проективной квадрикой {проективным коническим сече-
сечением при п = 2). Это определение полностью согласуется с общим
определением проективного алгебраического многообразия, данного
ранее. Стоит только выразить q(x) в какой-нибудь однородной си-
системе координат. Если форма q невырождена, то и квадрика С на-
называется невырожденной. Когда С как геометрическое место точек
§ 4- Квадрики в проективном пространстве 255
есть проективная плоскость размерности п — г, г < п (с уравнением
х\ +... -\-х2г — 0), то С называют, как и в аффинном случае, двойным
подпространством.
Выберем в V любой базис (ео, ei,..., еп). В соответствующей си-
системе координат с началом в 0 конус С задаётся уравнением вида
г, 3=0
Уравнение A) является также уравнением квадрики С в однород-
однородных координатах. Как известно, базис (е^) можно выбрать таким
образом, чтобы форма q приняла нормальный вид. Переход от од-
одного базиса к другому совершается при помощи линейного опера-
оператора Л Е GL(V), которому соответствует проективное преобразо-
преобразование Л Е PGL(V) (см. § 3). Используя ещё возможность умножения
обеих частей уравнения A) на —1, мы правомерны считать, что в
нормальном виде форма q имеет не менее половины положительных
квадратов. Надо вспомнить ещё о законе инерции для веществен-
вещественных квадратичных форм. В результате мы приходим к следующему
утверждению.
Теорема 1. Всякая, не являющаяся двойным подпространст-
подпространством квадрика С в п-мерном проективном пространстве Р(У)
(проективно) эквивалентна квадрике с каноническим уравнением
xl + ... + x2s- x2s+1 -...-4=0, [г/2] <; a < г. B)
Для проективной эквивалентности двух квадрик в P(V) необхо-
необходимо и достаточно, чтобы левые части их уравнений имели оди-
одинаковые ранги и сигнатуры (считается выполненной нормировка
s 2 [г/2]).
2. Примеры и изображения проективных квадрик. Мы
видим, что классификация проективных квадрик проще, чем в аф-
аффинной и тем более в евклидовой геометрии. Хорошей иллюстрацией
служит пример 1 из § 3: аффинно различные эллипс, гипербола и па-
парабола соответствуют одной и той же проективной кривой в раз-
различных аффинных картах. Аналогичная ситуация наблюдается и в
многомерном случае. Например, в Р3 имеются две различные невы-
невырожденные квадрики, определённые соответственно уравнениями
а1 + а\ + а22 - а\ = 0, о% + а\ - а\ - а\ = 0. C)
Квадрика С: а$ + а\ + а% — ol\ =0 включает эллипсоид, двупо-
лостный гиперболоид и эллиптический параболоид: первый соответ-
соответствует карте Ез = ез + Vs, второй — карте Ео, Еа или Е^, а третий
— карте, которую удобно выделить в новой системе координат
/?0 = «О, Pi = Oil, @2 = «2 - «3, Рз = «2 + «3-
256 Гл. 5. Квадрики
Тогда уравнение квадрики С запишется в виде
01 + f% + hlh = 0,
что в карте Е' = ез + V% соответствует эллиптическому параболоиду.
Эти три случая различаются пересечением аффинной квадрики Са с
бесконечно удалённой проективной плоскостью P(Vi):
Са П Р(Уз) = 0, если Са — эллипсоид;
С а П P(V2) — окружность, если С а — двуполостный гиперболоид;
С а П IP(V^) — двойная точка @:0:1:0), если Са — эллиптичес-
эллиптический параболоид.
Аналогично показывается, что квадрика, отвечающая второму
уравнению в C), включает однополостный гиперболоид и гипербо-
гиперболический параболоид. Нетрудно получить и в общем случае изобра-
изображение проективной квадрики A) (ненулевой и не являющейся двой-
двойным подпространством) на аффинной карте (Е, Ф). Всегда можно
выбрать такой базис (ео, ei,..., еп) пространства У, что гиперплос-
гиперплоскость Е совпадает с Ео = е0 + Vo- Тогда Ф = Фо, и в системе ко-
координат {ео; ei,..., еп} квадрика S = С П Е = Фо(С) определяется
уравнением
<Э(ео + У) = ^2 Щэ УгУз + 2 ^ Wo У г + <Лю. D)
i,j=l г=1
Условия ((fij) ф @) достаточно для того, чтобы аффинная ква-
квадрика S с уравнением D) не была нулевой или двойным подпростран-
подпространством. Действительно, в противном случае квадратичная функция Q
в некоторой системе координат {fo; fi,..., fn} приняла бы вид
(
г=1
где г = 0 или г = 1. Тогда уравнением проективной квадрики в одно-
однородных координатах, отвечающих базису (f^), было бы ^[=1 z\ — 0
или YH=o zi = 0, что не так.
Обратно: всякая аффинная квадрика S (ненулевая и не двойное
подпространство, скажем, с уравнением D)) является изображением
в точности одной проективной квадрики из P(V). Действительно,
уравнению D) квадрики S в системе координат {ео; ei,..., еп} со-
соответствуют квадратичная форма q вида A) и конус С. Так как
(Vij)i Ф °> т0 и (<Pij)o Ф 0. Если, далее, q(z) = ±Y^=ozo B какой-
нибудь системе координат, то С — плоскость, что не так, поскольку
пересечение S = С П Е — квадрика. Итак, q(x) =0 — уравне-
уравнение проективной квадрики С и S — изображение С в аффинной
карте Е. Если одновременно S — изображение проективной ква-
квадрики С' С P(V) с уравнением #i(x) = 0, то по теореме 1 из § 2
§ 4- Квадрики в проективном пространстве 257
соответствующие квадратичные функции Q и Q\ пропорциональны.
В таком случае будут пропорциональными ди gi, так что С = С1.
Обратим внимание на тот факт, что в проективном простран-
пространстве стирается всякое различие между цилиндрами и конусами. Дело
в том, что прямолинейные образующие любого цилиндра, параллель-
параллельные с аффинной точки зрения, пересекаются в бесконечно удалённой
точке. Скажем, конус х\+х\—х\ — 0, эллиптический цилиндр, пара-
параболический цилиндр и гиперболический цилиндр в трёхмерном аф-
аффинном пространстве являются изображениями в различных аффин-
аффинных картах всего лишь одного цилиндра а2+C2 —72 = 0 в трёхмерном
проективном пространстве.
3. Пересечение прямой с проективной квадрикой. Как и
следует ожидать, любая проективная квадрика имеет непустое пере-
пересечение с любой прямой (в отличие от аффинного случая).
Именно, пусть квадрика С задана уравнением A), а прямая —
уравнением
Xi = /Jdi + vbi, г = 0,1,..., п. E)
Имеется в виду, что а = (ао : сц : ... : ап), b = (bo : Ъ\ : ... : Ьп) —
две лежащие на прямой точки. После подстановки E) в A) получим
уравнение
4(a)/i2 + 2/(a, b)/iz/ + q(h)v2 = 0. F)
Нас интересуют решения (/i, v) ф @, 0), поскольку координаты жо, • • •
..., хп не должны обращаться в нуль одновременно.
Если
то получаем два решения (/i, г/), соответствующие двум разным (воз-
(возможно, комплексно-сопряжённым) точкам пересечения прямой с квад-
квадрикой С.
Если же D = 0, но не все g(a), g(b), /(a, b) равны нулю, то прямая
и квадрика имеют одну двойную общую точку. Если эта точка р не
dq
является особой, т.е. ——
0 хотя бы для одного г, то в этой точке
р
дх
прямая E) касается квадрики.
Наконец, при
g(a)=g(b) = /(a,b)=0
уравнение F) обращается в тождество и прямая E) целиком лежит
на квадрике G, являясь её прямолинейной образующей.
Мы видим, что понятие асимптотического направления для про-
проективной квадрики не имеет смысла.
17 А.И. Кострикин
258 Гл. 5. Квадрики
4. Общие замечания о проективных квадриках. 1) Рас-
Рассмотрим точку a Е Р(У) и уравнение
п
^а^-=0, G)
где / — билинейная форма, полярная к q. Если обращаются в нуль
коэффициенты при всех Xj, то
+ ^10^1 + • • • + ^nO^n = 0,
(8)
и так как не все однородные координаты ai равны нулю, то (8) равно-
равносильно условию det((^ij)o = 0. Таким образом, G) будет тождеством
только в случае вырожденной квадрики C(q(x) = 0) с точкой а на
ней. Точка а при этом особая.
Исключив из рассмотрения указанную ситуацию, мы видим, что
уравнение G) определяет в Р(У) гиперплоскость П, которая называ-
называется полярой точки а относительно квадрики С. Точка а называется
полюсом своей поляры П. Ясно, что поляра П точки а проходит через
а в точности тогда, когда a G С.
Любая гиперплоскость П:
+ ... + рпхп = 0
имеет единственный полюс относительно любой невырожденной ква-
квадрики С С Р(У). Действительно, в случае det(^j)o Ф ^ система
. . . + (PnjCLn = Pj, 0 ^ j ^ П,
имеет одно и только одно решение.
2) Квадрики, равно как и общие алгебраические многообразия,
естественно изучать с комплексной точки зрения. Именно, комплекс-
комплексные проективные многообразия, вложенные в СРП, дают возмож-
возможность разобраться во многих тонкостях, не разрешимых в веще-
вещественном случае. Ситуация напоминает проблему о корнях много-
многочлена с вещественными коэффициентами. Из [ВА I] мы знаем, что
только привлечение поля С позволяет дать исчерпывающее решение
этого вопроса. В части 3 учебного пособия [2] проводится предмет-
предметное сравнение МРП и СРП; важную роль при этом играет комплек-
сификация Р(УС) проективного пространства P(V) над Ж в духе § 4
из гл. 3. Каноническое вложение V С Vе позволяет сопоставить ка-
каждой М-прямой в У её комплексификацию — С-прямую в Vе, что
определяет вложение P(V) С Р(УС). Точки в Р(УС) суть "комплекс-
"комплексные точки" вещественного проективного пространства P(V).
§ 4- Квадрики в проективном пространстве 259
УПРАЖНЕНИЯ
1. Убедиться, что в пространстве ШР3 имеется ровно 8 классов проективно
эквивалентных квадрик (включая нулевые и вырожденные квадрики, а также
двойные подпространства). В подходящей однородной системе координат пред-
представители этих классов задаются уравнениями:
1: е0+??+е2+а = о; г- ео+ег+е2-а = о;
3: ^+Й-Й-Й = О; 4: $ + С? + Й = 0;
5: Й+Й-{| = 0; 6: f02 + tf = 0;
7 : f02 " f? = 0; 8 : f02 = 0.
2. Используя упр. 1 и упр. 5.2.1, указать аффинные изображения квадрик
типов 1-3.
17*
ГЛАВА 6
ТЕНЗОРЫ
На протяжении всего курса нам приходилось иметь дело с такими
общими математическими понятиями, как векторное пространство
У над Я, сопряжённое (или двойственное, дуальное) к У простран-
пространство У* линейных форм, пространство ?2(V,&) билинейных форм
на У, пространство C(V) := C(V,V) (часто обозначаемое End У или
Нот(У, У)) линейных операторов на У и т.п. Было введено даже (см.
гл. 1, § 4, п. 1) пространство полилинейных отображений. Как пра-
правило, вычисления с элементами из У, У*, ?(У,Я) и пр. становились
эффективными после выбора базиса и описания закона изменения ко-
координат (вектора, линейной или билинейной формы) при переходе к
новому базису. Мы собираемся теперь посмотреть на все указанные
понятия с единой точки зрения и навести в вычислениях некоторый
формализм (или порядок), уже давно с успехом используемый в ме-
механике, физике, геометрии.
§ 1. Начала тензорного исчисления
1. Понятие о тензорах. Разумной общности можно достичь,
ограничившись лишь полилинейными отображениями некоторого спе-
специального вида.
Определение 1. Пусть Я — поле, У — векторное пространство
над Я, У* — сопряжённое к У пространство, р и q — целые числа
Vp х (V*)q = V х ...хУ хУ* х У*
— декартово произведение р экземпляров пространства У и q экзем-
экземпляров пространства У*. Всякое (р + д)-линейное отображение
f:Vp х (V*)q -+ Я
называется тензором на V типа (p,q) и валентности (или ранга)
р + q. Говорят также, что / — смешанный тензор, р раз ковариант-
ный и q раз контравариантный. При р = 0 тензор / будет просто
контравариантным, а при q = 0 — ковариантным.
В частности, тензорами типа A,0) являются обычные линейные
функции на У, т.е. элементы из У*, а тензорами типа @,1) — линей-
линейные функции на У*, т.е. элементы из у**. Но в силу рефлексивно-
рефлексивности конечномерных векторных пространств (теорема 2 из § 3 гл. 1)
между У и У** существует естественный изоморфизм, позволяющий
отождествить ср G У** с некоторым вектором х^ G У (или вектор
§ 1. Начала тензорного исчисления 261
х — с линейной функцией гх Е V**). Это отождествление реали-
реализуется в записи линейной формы
/(х) = (/,х), A)
которую мы уже применяли ранее. При фиксированном / это есть
линейная функция на У, а при фиксированном х — линейная функ-
функция на V*. Итак, тензоры типа @,1) можно считать векторами —
элементами из V.
Далее, ковариантный тензор типа B,0) есть, очевидно, билиней-
билинейная форма на У, а контравариантный тензор типа @, 2) — билиней-
билинейная форма на V*.
Интересна интерпретация простейшего смешанного тензора,
именно тензора / типа A,1). По определению /(х, г&) — функция,
линейная по х Е V и по и Е V*. При любом фиксированном х функ-
функция / линейна по и, поэтому найдётся вектор JFx Е У, для которого
/(x,u) = (u,.Fx) B)
(мы использовали запись A)). Так как /(ах + /Зу,и) = af(x.,u) +
+ /?/(у,гО, то
(и, Т(аъ + /?у)) = а(и, Тх.) + C(и, Ту) = (и, аТх + (ЗТу),
откуда
т.е. Т — линейный оператор на V. Обратно, для каждого Т G C(V)
строится функция /: V х V* —У Я по формуле B), линейная по х G V
и и G У*. Ясно, что соответствие / н-» Т биективно. Таким обра-
образом, каждому тензору типа A,1) отвечает, и притом единственный,
линейный оператор на V.
Условившись ещё понимать под тензором типа @,0) обычный
скаляр (элемент поля Я), мы приходим к выводу, что все тензоры
ранга ^ 2 нам хорошо известны.
Совокупность TP]q = T?(V) всех тензоров на V типа (p,q) обра-
образует векторное пространство. Действительно, если /, д G T^(V) и
а,/3 G Я, то под af +/Зд естественно понимать тензор, определённый
формулой
(af + /Зд)(vi,..., vp; щ,..., uq) =
= a/(vi,..., vp; щ,..., uq) + /?/(vi,..., vp; щ,..., uq). C)
2. Произведение тензоров. Вначале пусть
/: Vi x ... х Vr -+ Я, д: Wx x ... x Ws -+ Я
— произвольные полилинейные формы. Это значит, что Vi, Wj —
никак не связанные друг с другом векторные пространства.
262 Гл. 6. Тензоры
Определение 2. Под тензорным произведением / и g пони-
понимают отображение
/ ® g: Vi x ... х Vr x W\ x ... х PFS -»> Я,
определённое формулой
(/ ® яО (vi,..., vr; гУ1,..., w8) = /(vx ,...,vr) p(wi,..., we).
Существенно подчеркнуть, что переменные v^ независимы от пере-
переменных Wj.
Очевидно, что / (g) g — полилинейное отображение, поскольку,
например, при фиксированных vi,..., vr; W2,...,ws мы имеем функ-
функцию, пропорциональную g(wi,...), которая линейна по wi.
Если, скажем, / и g — линейные формы на У, то
— билинейная форма специального вида на У, причём даже этот про-
простенький пример показывает, что нет никаких оснований ожидать
равенства / (g) g = g (8) /. В самом деле,
{9® /)(х,у) = /(y)fl(x) ф /(хK(у) = (/® (?)(х,у).
В то же время выполняется закон ассоциативности
(f®g)®h = f®(g®h) D)
для любых трёх полилинейных форм (скажем, h: U\ x ... х Щ —> Я),
поскольку левая и правая части совпадают как функции с
/(vi,..., vr) #(wi,..., we) /i(ub . ..,uf).
Пусть теперь / — тензор типа (p,q) и g — тензор типа (г, s).
Тогда f ®g будет полилинейной функцией на декартовом произведе-
произведении
Vp х (V*)q x Vr x (V*)s.
Отождествив это произведение с
мы можем рассматривать f ® д как тензор на V типа (р + г, q + s),
определённый формулой
p+r; iai,..., uq+s) =
.., vp; iai,..., uq) ^(vp+i,..., vp+r; uq+1,..., ixg+s) E)
для всех Vj G У и Wj G V*. В дальнейшем точка с запятой, разде-
разделяющая аргументы разных типов, как правило, будет опускаться.
Определение 3. Тензор / 0 д, заданный формулой E), назы-
называется (тензорным) произведением тензоров f и д.
Пример 1. Пусть /, д, h — три линейные функции на V и a, b — два
вектора из V. Как мы заметили ранее, при известных отождествлениях можно
§ 1. Начала тензорного исчисления 263
говорить о трёх тензорах /, д, h типа A,0) и о двух тензорах a, b типа @,1), а
в таком случае — и о тензоре
t = f<g>g<g)h<g)a.<g)h
типа C,2). Если х,у, z E У, u,v E V*, то
?(х, у, z, w, v) = /(х) д{у) h(z) a(w) b(v),
где под а(«), Ь(г>) следует понимать выражения, определённые формулой A):
а(«) = (a, it) = («, а) = «(а).
Из формулы E) и из определения C) линейной комбинации
otf + (Зд тензоров видно, что имеет место дистрибутивность тен-
тензорного умножения:
— j — , ,„ а — --J (a\
h ® (af + Cg) = ah ® f + Ch ® g.
Резюмируем сказанное:
1) операция умножения (g) определена для тензоров произвольных
типов;
2) валентность произведения равна сумме валентностей сомножи-
сомножителей;
3) тензорное произведение ассоциативно и дистрибутивно, но не
коммутативно.
3. Координаты тензора. Мы уже почувствовали необходи-
необходимость в чётком разделении элементов из У и У*. Тензорный анализ
в классическом понимании начинается тогда, когда в пространстве
Т^(У) выбирается базис и тензор описывается своими координатами.
Обычно в У и У* выбираются дуальные (взаимные) базисы
VT I \ Т Г* / 1 П\
= (Pi Р ) V = (Р Р )
с указанным расположением индексов у базисных векторов. Для
наглядности векторы с верхними индексами у нас изображаются
обычным (бледным) шрифтом. Расположение индексов у соответст-
соответствующих координат противоположное, т.е. мы полагаем ^2i аге^ для
х G У, / = ^2i /Згв1 для / G У*. Напомним, что
(е- ej) = (е> е) = Sj = { °' 6СЛИ^ ^ ^ G)
v г' ) v ' 1) г 1 1, еслиг = j,
Верхние индексы не следует смешивать с показателями степеней;
впрочем, последние у нас встречаться не будут.
В тензорном анализе суммирование обычно ведётся по так назы-
называемым немым индексам, встречающимся один раз сверху и один раз
снизу. Поэтому для тех, кто часто соприкасается с тензорами, "двух-
"двухэтажное" расположение индексов постепенно привело к молчаливому
264 Гл. 6. Тензоры
соглашению опускать знак суммирования, отождествляя, например,
х = ^2i azei с х = azei. Мы этого соглашения не придерживаемся.
Условимся, однако, суммирование по различным индексам заменять
знаком кратной суммы:
??...?= ? '
г з к tj,...,/!
не указывая пределов суммирования, поскольку из контекста ясно,
какие значения пробегают индексы (обычно от 1 до п = dim V).
Пусть дан произвольный тензор Т типа (р, q), значения которого
обозначаются в виде
jijivJg ._ j"(eiij ф ф ф ? Gi 5 eJ1,..., eJg). (8)
Определение 4. ЧислаТ/1''"'/9 называются координатами (ко-
(коэффициентами или компонентами) тензора Т в базисе (ei,..., еп).
Мы придадим этому определению привычный смысл, выбрав над-
надлежащий базис в самом пространстве TP]q тензоров типа (р, q). Имен-
Именно, рассмотрим так называемый разложимый тензор типа (р, q)
егг 0 ... 0 elp (g) е-;, (g) ... (g) e-i , (9)
отождествляя, как и ранее, е^,..., eJg с линейными функциями на
V*: ej(f) = f(ej) = (/,е,). Так как (e\ev) = 6j,, (ek,ek') = 6kk', то
(e ® ...®ep 0 e^ (g) ... (g) e^ ) (e^/ ,..., е^/ , eJl,..., eJq) =
Построим тензор
являющийся линейной комбинацией тензоров (9) с коэффициентами
(8). Используя формулы C) и A0), получим
Ti(V Р- Pjl p3q\—rph-3q
11 \^г1 5 • • • 5 егр 5 е 5 • • • •> ^ ) — ± ix...iv ->
т.е. как раз координаты тензора Т (см. (8)). Но своими координатами
тензор Т определяется полностью, поскольку в силу его полилиней-
полилинейности для произвольных векторов
и линейных форм
Л Jq
§ 1. Начала тензорного исчисления 265
имеем
Г(хь ...,Хр,и\...,и9) = Y,Ttt^ ¦ ¦¦Pip(Jn • --ти- (И)
Вспомним в этой связи, что билинейную форму / : V2 —У Я мы
записывали в виде /(х,у) = ^2 fij xiVj- Единственное различие за-
заключается в расположении индексов. Теперь мы писали бы /(х,у) =
Раз координаты тензоров Т\ и Т совпадают, должны совпадать
сами тензоры, т.е.
Т = Е Ttt е* ® ... ® е<* ® еЛ ® ... ® ejq. A2)
В частности, всякая билинейная форма / имеет вид
Осталось показать, что разложимые тензоры вида (9), отвечаю-
отвечающие различным наборам индексов i\,..., ip, j\,..., jq, линейно незави-
независимы, но это прямо следует из правила A0) вычисления их значений.
Действительно, предположив существование линейной зависимости
V A^-^V1 <g) ... <g) eip <g) eh (g) ... (g) eja = 0
с какими-то коэффициентами ХЦ'Я G Я и обращаясь с левой частью
этого равенства, как с тензором Т\ выше, мы немедленно приходим
к выводу, что ХЦ]]'?* = 0.
Размерность пространства Тр;д равна числу различных базисных
векторов (9). Она совпадает, следовательно, с числом npJrq всевоз-
всевозможных наборов индексов ii,... ,гр, ji,..., jq, каждый из которых
независимо от других пробегает значения от 1 до п. Из сообра-
соображений наглядности координаты (8) тензора Т следовало бы разме-
размещать в виде пространственной кубической таблицы. Размерность
куба равна валентности тензора Т. Привычные нам строки, столбцы,
квадратные матрицы будут частными случаями таких (р + q)-мер-
q)-мерных таблиц.
Резюмируем сказанное в виде следующего утверждения.
Теорема 1. Тензоры на V типа (p,q) составляют векторное
пространство T^(V) размерности np+q с базисными векторами
eh (g) ... <g) eip (g) e^ <g) ... <g) ejq,
где (ei,..., en) — базис пространства V, a (e1,..., en) — дуальный
базис пространства V*.
Существует, и притом только один, тензор с наперёд задан-
заданными координатами T^'"^q.
266 Гл. 6. Тензоры
4. Тензоры в разных системах координат. Нам нужно по-
получить правило изменения координат тензора при переходе к новому
базису. Пусть (е'ь ..., е'п) — какой-то другой базис пространства V,
(е! ,..., е'п) — дуальный к нему базис пространства У* и А = (а*-) —
матрица перехода от (е^) к (е^). Элементы а*- матрицы А обозначены
так, что верхний индекс указывает номер строки, а нижний — номер
столбца. В этих обозначениях
=1,...,п. A3)
Обозначив через В = (Ь*-) матрицу, транспонированную к матрице
перехода от (ег) к (е/г), мы должны писать
* A4)
в точном соответствии с правилом суммирования по "разноэтаж-
"разноэтажным" одинаково обозначаемым индексам. Введём вспомогательную
матрицу В~х — С — (с*-):
г
Используя свойство G) дуальных базисов, находим
Стало быть, С = А и
Далее, 5 = А, и мы видим, что матрицей перехода от (ег) к (е/г)
является 1В = t{A~1) = 1 А~х — матрица, которую называют
контраградиентной к А.
Найдём теперь координаты Т' 3^"\q нашего тензора Т в базисе
e'h <g) ... <g) e/ip (g) e'- (g) ... (g) e'- .
Jl Jq
По определению (см. (8))
Г = ГГ?1"^*1 (8) ... (8) е, =
Итак, справедлива
§ 1. Начала тензорного исчисления 267
Теорема 2. При переходе от дуальных базисов (е^), (ег) прост-
пространств V и V* к новым дуальным базисам тех же пространств по
формулам A3) и A4) координаты тензора Т типа (p,q) преобразу-
преобразуются по формулам
г',3'
Говорят, что в формуле A5) матрица А = (а*-) действует на
верхние индексы координат тензора, а матрица В = (Ь*-) = А~х —
на нижние индексы.
Определение тензора, данное в самом начале, можно теперь вы-
высказать иначе, назвав тензором на V типа (р, q) соответствие Т, от-
относящее каждому базису пространства V систему из np+q скаляров
T3^'q (внизу стоят р ковариантных индексов, вверху — q контрава-
риантных индексов) таким образом, что системы, отвечающие раз-
различным базисам, связаны между собой соотношениями A5).
Действия над тензорами, сформулированные на языке полилиней-
полилинейных форм, легко описать и на координатном уровне. Скажем, если S
и Т — два тензора одинакового типа, то их линейной комбинацией
aS + /ЗТ называется тензор с координатами
Произведением тензоров (Q^.'.'.tp) и (^iV'^J Л1°бых типов будет
тензор с координатами
Это определение на самом деле от выбора базиса не зависит, по-
поскольку применение к левой части A6) преобразования A5) сводится
к перераспределению величин а3- , Ъ3-, между множителями Q и R в
правой части.
Пример 2. Рассмотрим линейный оператор Т на V. Мы видели (см. при-
пример 1), что Т можно интерпретировать как тензор типа A,1). Это согласуется
и с матричными обозначениями. Если V = (ei,...,en) и Тъ}~ = Si/^еЬ т0 в
случае перехода к новому базису по формулам
e'fc = J2 <4еь е* = ? б|е'„ ? b{a\ = 5[
г г г
будем иметь
Отсюда
268 Гл. 6. Тензоры
как это и должно быть для тензора F = (/Л, один раз ковариантного и один раз
контравариантного. Формула A7) в иных обозначениях нам уже встречалась при
выражении матрицы линейного оператора в различных базисах.
Тензоры в физике и математике рассматриваются большей ча-
частью как геометрические объекты (наборы величин) произвольной
природы, подчиняющиеся правилу преобразования A5). Для физики,
кроме того, важны не сами тензоры, а тензорные поля (тензор кри-
кривизны, тензор гравитационного поля и пр.). Коротко говоря, под
тензорным полем понимается отображение пространства V в мно-
множество всех тензоров данного типа на V. Подробности см. в [2,
ч. 4, § 8].
5. Тензорное произведение пространств. Операция тензор-
тензорного произведения тензоров допускает естественное обобщение, на-
находящее многочисленные применения в дифференциальной геомет-
геометрии, теории представлений групп, и в математической физике. Не
стремясь к максимальной общности, необходимость в которой у нас
вряд ли возникнет (а если так, то зачем вводить её заблаговремен-
заблаговременно?), ограничимся достаточно интересной конструкцией тензорного
произведения векторных пространств. Эта конструкция найдёт при-
применение в [В А III].
Теорема 3. Пусть V, W — векторные пространства над по-
полем Я. Тогда существуют векторное пространство Т над Я и би-
билинейное отображение т: V х W —У Т, удовлетворяющее условиям:
(Т1) если vi,..., v/, G V линейно независимы и wi,..., w/, G W,
mo E;=i r(vi,Wi) = 0 => wi = 0, ..., wk = 0;
(T2) t если wi,..., w/, G W линейно независимы и vi,..., v/, G V,
1710 Ei r(vb w*) = 0 ^ vi = 0, ..., vk = 0;
(ТЗ) г — сюръективное отображение, т.е.
T = (r(v,w)| v G У, we W)si.
Кроме того, пара (г, Т) универсальна в том смысле, что какова
бы ни была пара (т',Тг), состоящая из векторного пространства
Т' и билинейного отображения г': V х W —>¦ Т'', найдётся единст-
единственное линейное отображение а : Т —>¦ Т;, для которого r/(v,w) =
= cr(r(v,w)), v G V, w G W.
Доказательство. Ниже даётся лишь набросок необходимых
рассуждений.
а) Если V = (еь...,еп)л, W = (fb...,fm)*, то (П)-(ГЗ) экви-
эквивалентны в совокупности единственному условию: векторы r(ef,fj),
l^i^n, l^j^m, составляют базис пространства Т.
б) Для любого nm-мерного пространства Т над Я отображение т
с v = ^2i a^i, w = ^2j /3jfj можно определить соотношением
§ 1. Начала тензорного исчисления 269
где (tij | 1 ^ г ^ n, I ^ j ^ т) — базис в Т. Согласно а) пара
(т,Т) удовлетворяет условиям (Т1)-(ТЗ), и все пары получаются
таким способом.
в) Для всякой пары (rf,Tf) с билинейным отображением г': Ух
х W —У Т' определим линейное отображение а : Т —у Z", полагая
^(ETijtij) = E7ij^(ei,fj)> Ъз € &- Согласно а) и б) r'(v,w) =
= ^2aiCjTr(ei,fj) = a{J2aiCjtij) = ct(t(v,w)). Обратно: если
cr(r(v,w)) = r/(v,w), то a(tij) = сг(т(е;, f,)) =r/(ei,fJ-).
г) Предположив существование двух универсальных пар (т,Т),
(rf,Tf), мы легко обнаруживаем, что линейные отображения
а: Т —У Т1, а1: Т1 —У Т являются на самом деле взаимно обратными
изоморфизмами: а' о а — ет, о о а1 — ет>. Таким образом, Т = Т',
причём изоморфизм сг : Т —у Т' обладает свойством, указанным в
формулировке теоремы. ?
Определение 5. Пару (т,Т), однозначно определённую с точ-
точностью до изоморфизма по заданным векторным пространствам У,
W, называют тензорным произведением этих пространств.
Нетрудно показать, что в системе (Т1)-(ТЗ) можно опустить усло-
условие (Т1) или (Т2), а при априорном предположении dimT = nm для
определения тензорного произведения достаточно оставить одно из
трёх условий.
Записывая Т = V 0л W или просто V 0 W, мы должны ещё по-
помнить, что векторное пространство Т снабжено билинейным ото-
отображением (v, w) I-)- v 0 w декартова произведения V х W на Т,
удовлетворяющим условиям (Т1)-(ТЗ). Итак, элементами тензорного
произведения V 0 W служат формальные линейные комбинации с ко-
коэффициентами из Я упорядоченных пар v ® w с v G У, wEVF. При
этом предполагаются выполненными следующие условия:
(vi + V2) ®w-vi®w-V2®w = 0,
v 0 (wi + W2) — v 0 wi — v 0 W2 = 0,
A8)
Av (g) w - v ® Aw = 0, \ e Я,
A(v (8) w) = Av 0 w = v 0 Aw.
Непосредственно из теоремы 3 видно, что биективные отображе-
отображения v®w4w0v, (u0vHw4u®(v0w), v(8)Ai->A(8)vi->Av
устанавливают изоморфизмы, называемые каноническими, вектор-
векторных пространств
V 0 W ^ W 0 У,
(U ®V) ®W ** U ® (V ®W),
V ®Я = &®V = V
(эти изоморфизмы нельзя заменить равенствами). Выполнены также
270
Гл. 6. Тензоры
законы дистрибутивности
(и е V) <g> w s* (и <g> w) e (v <g> w),
и <g> (v e w) s* (с/ 0 У) е (с/ <g> vf).
Следующим шагом в рассматриваемой конструкции должен быть
синтез пространств и линейных операторов на них.
Определение 6. Пусть А: V ^ V, В : W ^ W — линейные
операторы. Их тензорным произведением называется линейный опе-
оператор
A®B:V®W ^V ®W,
действующий по правилу
(Л <g) B)(v <g) w) = Ay <g) Sw A9)
(далее по линейности (Л 0 В) (XXvi ® w^)) = J^ Лу^ 0 Bwi).
Ясно, что это определение согласовано с соотношениями A8). На-
Например,
А(у\ + v2) 0 Bw - Avi 0 Bw - Av2 0 Bw =
= (Avi + Av2) 0 Kw - Avi 0 Kw - Лу2 0 Kw = 0.
Поэтому действие А®В на У ®VF задано корректно. Отметим также
непосредственно вытекающие из A9) соотношения
А® \В = \А® В = \(А® В).
Проверку их оставляем читателю.
Пусть, как прежде, V = (еь ... ,en), W = (fb ... ,fm). Матрицу
А 0 В размера пт х пт оператора А® В в базисе
(ех (8)fi,...,ei (8)fm,...,en(8)fi,...,en(8)fm)
мы получим, заметив, что
Aei = у o>i>iei>, Blj = > 0j'j4',
(Л (8) B)(ei (8) f,-) = Y^ ai>iPj>
i'J'
Стало быть, с А = (а^г)? В = (/3j'j) имеем
ап2В ... annl
B0)
§ 1. Начала тензорного исчисления 271
В частности, имеем формулу для следа
tr A ® В = antr В + ... + annti В = tr A • tr В. B1)
Отметим попутно, что
det А ® Б = det ((А 0 Ет)(Еп ® Б)) =
= det (А 0 Ят) • det(?n (8) Б) = (det A)m(det B)n, B2)
так что невырожденность операторов А и Б влечёт невырожден-
невырожденность их тензорного произведения А® В.
Формулы B1) и B2) используются в теории представлений групп.
УПРАЖНЕНИЯ
1. Символ Кронекера. Проверить, что 6? является элементом из Tj(V), пред-
представляющим тождественное отображение пространства V в себя.
2. Метрический тензор. Пусть V = (ei,... ,ете)к — евклидово векторное
пространство со скалярным произведением, заданным положительно определён-
определённой билинейной формой
01 У) = 0(х,у) = ^2gijXlxJ, gij = g(ei,ej)
(следуя традиции, принятой геометрами, мы используем здесь букву д и сим-
символы gij). Принято Go = {gij) называть метрическим тензором (типа B,0))
пространства V. Таким образом, компоненты метрического тензора — это эле-
элементы матрицы Грама исходного базиса в V относительно соответствующего
скалярного произведения.
Теперь мы вспоминаем, что евклидово пространство канонически изоморфно
своему двойственному пространству У*, а базис (е^) отождествляется с дуаль-
дуальным к нему базисом (ег) пространства V* : (е^ | *) = ег (см. A3) из § 1 гл. 3). Если
дгэ = д(ег,е-?), то G0 = (дг^) также называется метрическим тензором (теперь
уже типа @,2)) пространства V. При этом gij и glJ являются ковариантными и
контравариантными координатами метрического тензора G.
Проверить, что G°Go = Е, т.е.
3. Подъём поля скаляров. Пусть V — вещественное векторное пространство
с базисом (ei,..., ете), Vе — его комплексификация (см. п. 3 § 4 гл. 3). Поскольку
поле С суть векторное пространство над Ж с базисом A,г), мы можем построить
векторное пространство
С (8) V = A (8) ei,..., 1 (8) еп, г (g) ei,..., г (g) ете>.
Проверить, что М-линейное отображение
сеь г (g) ek \-> iek
определяет изоморфизм С (8> V с Vе.
Более общо: пусть Я — подполе поля ?, V — векторное пространство над Я.
Рассмотрев сначала ? как векторное пространство над Я, построим тензорное
272 Гл. 6. Тензоры
произведение ?(&&У. После этого введём на нём структуру векторного простран-
пространства над ?, определив умножение на скаляры йЕ? формулой
a(b ® х) = (аЬ) ® х, а,6<Е?, x G V.
Убедиться в корректности этого определения.
4. Пусть dim У > 1, dimW" > 1. Показать, что в тензорном произведении
V ® W существуют элементы, не представимые в виде v (8> w.
5. Пусть А, В — обратимые квадратные матрицы. Указать матрицу, обрат-
обратную к А ® В.
6. Сравнить
РиА р12А ... р1тА
с клеточной матрицей B0).
7. Доказать формулу B2) для квадратных матриц А, В порядков пит со-
соответственно с комплексными коэффициентами, используя возможность их при-
приведения к треугольному виду.
§ 2. Свёртка, симметризация и альтернирование
тензоров
1. Свёртка тензора. Для линейного оператора Т : V —> V с
матрицей F = (/j) в некотором базисе (ei,...,en) инвариантным
образом определено понятие следа (см. гл. 2, § 2):
Инвариантность следа, т.е. его независимость от выбора базиса,
легко усматривается и из формулы A7) из § 1 при интерпретации
(fj) как тензора типа A,1), поскольку в базисе (е^) имеем
Операции взятия следа в тензорном анализе соответствует бо-
более общая операция свёртывания. Чтобы её определить, проще всего
временно отождествить смешанный тензор Т типа (р, q) с его значе-
значением как (р + д)-линейной формы на произвольных векторах xi,...
..., хр G V, щ,..., uq G V*. Зафиксировав все переменные, кроме хг
и us, мы получим билинейную форму:
Определение 1. Сумма
Т=?/(еье*) A)
§ 2. Свёртка, симметризация и альтернирование 273
называется свёрткой тензора Т по r-му ковариантному индексу и
по s-mj контравариантному индексу.
В сумме A) каждое слагаемое /(e^,efe), являющееся полилиней-
полилинейной формой от xi,..., хг,..., us ..., uq, зависит от выбора базиса в
V, но Т от выбора базиса не зависит (как всегда, а означает про-
пропуск символа а). Действительно, если е'к = ^га!еЬ ^ = (а!)> т0
е'к = ?. Ь\е\ где В = (Щ) = А'1 (см. § 1, п. 4). Поэтому
i,j,k
что и доказывает инвариантность Т. Как мы знаем, билинейную
форму / можно представить в виде
/(хг,глв) = (^s,^xr),
где Т — линейный оператор, зависящий от xi,...,хг,...,us ...,uq.
В таком случае Т = tr J-, а это ещё раз устанавливает независимость
Т от выбора базиса и делает очевидной связь между операциями
свёртывания и взятия следа.
Если обозначить операцию свёртывания по паре индексов г, s
символом tr*, то tr* будет линейным отображением
относящим каждому разложимому смешанному тензору
Д = Д (8) ... (8)/р (8) vi (g)...(g)vg, Vi G У, /j-еГ,
тензор
tr*(i?) = (/r,vs)/i (g)...(g)/r(g)...(g)vs(g)...(g)vg.
Так как (ег, es) = й^, то операцию tr* удобно выразить в координат-
координатной форме. Пусть
Т = JlTt:iqeil ^•••^^0ejl0...0 ejq
(ср. с формулой A2) из § 1). Тогда
18 А.И. Кострикин
274 Гл. 6. Тензоры
где
к
Мы знаем, что разложимые тензоры
составляют базис пространства Tqp_1(V), поэтому Т^г''л^_^^''л^ —
координаты тензора Т. Нами доказана
Теорема 1. Свёртка по т-му ко вариантному индексу и по
s-му контравариантному индексу смешанного тензора Т типа (р, q)
является тензором Т типа (р — 1,д — 1) с координатами, опреде-
определёнными по формуле B).
К тензору Т = tr?(T) можно в свою очередь применить операцию
свёртывания. В результате m-кратного свёртывания, где
m = min(j9, q), получится либо скаляр, либо чисто ковариантный (или
чисто контравариантный) тензор, к которому операция свёртывания
уже не применима. В этом случае говорят о полном свёртывании
тензора. Взятие следа линейного оператора — пример полного свёр-
свёртывания. Примером неполного свёртывания может служить произве-
произведение двух линейных операторов Л и Б. В самом деле, если А = (а*),
В = (bf) — матрицы этих операторов в каком-то базисе, то тензор
rp _ rpik rpik _ i-Lk
1 — 1ji ' 1ji — aj°i '
свёрнутый по ковариантному индексу тензора А и по контравари-
антному индексу тензора В, будет равен тензору С = (cj), где
Легко догадаться, что с\ — элемент произведения матриц АВ.
Рассмотренный пример иллюстрирует часто применяемую опера-
операцию, которая состоит в образовании произведения двух тензоров (не
являющихся одновременно контравариантными или ковариантными)
и последующего свёртывания полученного смешанного тензора по
одной или нескольким парам индексов.
2. Структурный тензор алгебры. Пусть V — конечномер-
конечномерная алгебра над полем Я (см. определение 1 из § 2 гл. 2) с опера-
операцией умножения (а, Ь) н-» а * 6, не обязательно ассоциативной. Если
(ei,..., еп) — базис пространства У, то
Определение 2. Скаляры jfj G Я называются структурными
константами алгебры V в данном базисе.
§ 2. Свёртка, симметризация и альтернирование 275
В силу билинейности операции умножения * алгебра V полно-
полностью определяется заданием базиса и структурных констант в нём.
В другом базисе (e'l5..., е'п) структурные константы, однако, будут
совсем иными
и мы хотим найти связь между структурными константами в раз-
различных базисах. Пусть
t
= (fi) = А~хА
так что В = (Щ) — А 1, А — (af). Имеем
t
к s j
s,t s,t,r s,t,r,k
откуда
s,t,r
Сравнив эту формулу с формулой A5) из § 1, мы видим, что струк-
структурные константы меняются так же, как координаты тензора типа
B,1). Следовательно, мы имеем право рассматривать так называе-
называемый структурный тензор Г = G^) алгебры V. Заданием Г алгебра
V полностью определяется.
Для фиксированного а G V рассмотрим отображение La : х \—>
\—> а*х, являющееся, очевидно, линейным оператором на V. Важным
инструментом для исследования строения алгебры V служит форма
следа — билинейная симметричная форма
jV(a,b)=trLaLb. C)
Билинейность формы fy вытекает из билинейности операции *, её
симметричность — из общего свойства tr ЛВ = tr В А (соотношение
A2;) из § 2 гл. 2).
Для явного вычисления fy запишем
i
LaLhek = a * (b * ek) = ^ а^'е* * (e,- * ek) = ^ a1
18*
276 Гл. 6. Тензоры
Чтобы вычислить fv (a, b), нужно взять диагональные коэффици-
коэффициенты матрицы
и просуммировать их:
/у (a, b) = ^ c^/3J7J?;7is- D)
Как и следовало ожидать, мы записали /у (а, Ь) в виде полной свёртки
тензора.
Пример 1. С точки зрения механики и физики интересно рассмотреть
трёхмерную алгебру Ли V = (ei,e2,e3) (см. пример 6 из § 2 гл. 2), операция
умножения в которой (а, Ь) ь-»¦ а * b = [a, b] задаётся правилом векторного умно-
умножения векторов в трёхмерном евклидовом пространстве
[ei,e2] = e3, [e3,ei] = e2, [e2,e3]=ei.
Здесь 7г- Ф 0 лишь для трёх попарно различных индексов i,j,k, причём 7^ =
= — 7^ • Для любых векторов
а = c^ei + а2е2 + а3е3, b = /^ei + C2е2 + /53е3
скалярное произведение вычисляется по обычной формуле
а произведение в алгебре — по формуле
[а,Ь] = (а2C3 - a3f32)e! + (а3(З1 - а1 C3)е2 + (а1 (З2 - а2C1)е3. F)
Вспомним в этой связи выражение для координат момента силы.
Опираясь на формулу F), можно непосредственно проверить, что скалярное
произведение E) обладает свойством "ассоциативности"
Это красивое соотношение является на самом деле следствием свойства ассоциа-
ассоциативности формы следа в произвольной конечномерной алгебре Ли V
/к([а)Ь])с)=/к(а)[Ь,с]). (8)
Для доказательства (8) заметим, что тождество Якбби в V
переписанное в виде
даёт нам для всех х, у ? V
^[х,у] — LxLy — LyLx.
Так как tr ЛБ = trBA, то, полагая поочерёдно Л = ЬъЬа, Б = Lc или Л =
Б = La, получим
/y([a,b],c) = trL[a b]Lc = tr(LaLbLc - LbLaLc) =
= tr LaLbLc — tr LcLbLa = tr LaL\>Lc — tr ЬаЬсЬъ =
= trLa(LbLc - LcLb) = trLaL[b5C] = /y(a, [
§ 2. Свёртка, симметризация и альтернирование 277
что и даёт соотношение (8).
Эквивалентность G) и (8) в случае нашей трёхмерной алгебры прямо выте-
вытекает из подсчёта /у(а, Ь) по тензорной формуле D):
/у (a, b) = -2(а1/^1 + а2р2 + а3р3) = -2(а | Ь).
Обратим ещё внимание на следующее обстоятельство. Соотношение G), пе-
переписанное в виде
(Lax | у) + (х | Lay) = О
и означающее попросту кососимметричность матрицы, отвечающей оператору
La в каком-нибудь базисе, чем-то напоминает условие ортогональности опера-
оператора Ле О3(М) = Aut((x|y)):
(Лх|Лу) = (х|у).
Оказывается, связь здесь самая непосредственная, и корни её уходят в общую
теорию групп и алгебр Ли.
3. Симметричные тензоры. В теории билинейных форм мы
акцентировали внимание на двух классах: симметричных и кососим-
метричных. В случае тензоров можно говорить о симметричности
или кососимметричности по выделенной совокупности индексов, од-
одновременно ковариантных или контравариантных. Например, симме-
симметричность тензора по первым двум ковариантным индексам и по по-
последним двум контравариантным индексам означает попросту, что
имеют место равенства
rpr...st rpr...ts rpr...st rpr...ts
1ij...k -1ij...k -1ji...k -1ji...k-
Перестановка ковариантного индекса с контравариантным, вообще
говоря, не несёт смысловой нагрузки и не приводит к тензору.
Обсуждая вопросы симметричности и кососимметричности, мы
нисколько не потеряем в общности, если ограничимся тензорами
типа (р, 0) или @,д), причём перестановки будем применять ко всем
р (или q) индексам, а не к какой-то их части. Кроме того, поле Я,
которое до сей поры считалось произвольным, мы будем считать
имеющим нулевую характеристику. В приложениях наиболее важны
поля ЕиС.
Итак, пусть для определённости Т Е Т^(У), т.е.
Т= Y, Til...ipeil®...®ei*, (9)
ii...ip
Sp — симметрическая группа степени р, действующая на множестве
индексов {1, 2,..., р). Для любой перестановки тг Е Sp положим
/ЛГ)(хь . • •, хр) = Г(х,ь ..., Х7ГР) A0)
(здесь Xf — вектор с номером г; его k-ik координатой будет х\).
Так как Т — полилинейная форма на Vp, то и fn(T) — поли-
полилинейная форма, причём того же типа (р, 0). Действительно, если,
278 Гл. 6. Тензоры
скажем, пк = 1, то
/7r(T)(axi +/?уьх2,...,хр) = Г(х7гЬ... ,
= аТ(х7гЬ...,хь...,х7гр) +/ЗГ(х7гЬ...,уь...,х7гр) =
= a/^TXxi,х2,...,хр) + РМТ)(уих2,...,хр).
Полагал ещё по определению
/Л«Т' + /ЗТ") = аД(Г') + 0fn(T"),
мы видим, что тг индуцирует невырожденный линейный оператор
fn : jp;0 -+ Т^;0. Полезно заметить ещё, что fa о fT = faT (см. [ВА I,
гл. 1, § 8, п. 4]).
В соответствии с выражением (9) тензора Т через базисные
элементы еп (8)...®егр его координатами являются Х^...^ = Т(е^,...
..., е^р). Координатами тензора /^Т в том же базисе будут
и(Т)гг..Лр = A(T)(eil,... ,eip) = T(eiwl,... ,eiwp) = Tiwl...iwp,
т.е.
или, что равносильно,
U{T)= Y,Tn..Ape^-^®...®e^-^. A1)
ii...ip
Отсюда, между прочим, следует, что
/п-1(е^ (g) ... 0eip) = einl 0 ... (g) eijvp.
Конечно, если бы мы рассматривали действие Sp на контравариант-
ных тензорах, то получили бы формулу
Определение 3. Тензор Т типа (р, 0) (или @,^)) называется
симметричным, если fn{T) = Т для всех тг G 5Р (соответственно для
всех тг G 5g). Симметризацией (или симметрированием) тензоров из
Тр (V) называется отображение
:Гр°(У)^Гр°(У). A2)
Подпростанства симметричных тензоров в Т^(У) и Tq(V) обо-
обозначим соответственно через Т+(У) и Т^(У).
Например,
^(е1 (g) e2 (g) е2) = -(е1 (8) е2 (8) е2 + е2 (8) е1 (8) е2 + е2 (8) е2 (8) е1).
§ 2. Свёртка, симметризация и альтернирование
279
Очевидно, результат симметризации всякого тензора из Т^ сим-
симметричен:
1 ~~ = А У илт) = -,У /г(г) = s(T).
Мы воспользовались здесь тем фактом, что при фиксированной пе-
перестановке a Е Sp элементы атг пробегают вместе с тг все элементы
группы Sp, причём ровно по одному разу. Итак, ImS С Т+(У).
Напротив, на симметричных тензорах симметризация является
тождественной операцией, как это следует непосредственно из A2),
так что Т е Т+(У) => Г = S(T). Стало быть, имеет место
Теорема 2. Действие отображения симметризации S на Т^
обладает свойствами S2 = S и ImS =
Пример 2. Одним из классических примеров тензора является тензор инер-
инерции — симметричная матрица J = (Jij) порядка 3, где Зц — осевой момент
инерции твёрдого тела относительно оси е^, a Jij, i ф j, — центробежные мо-
моменты инерции, взятые с обратными знаками. Итак, пусть дано вращающееся
твёрдое тело с одной закреплённой точкой о. Предполагается, что тело состоит
из некоторого числа п частиц с массами т&; положение частиц задано векторами-
столбцами [xk,yk, Zk], I <C k <С п. Тензор J, описывающий распределение массы и
используемый при вычислении углового момента и кинетической энергии тела,
задаётся матричным соотношением
(здесь, как обычно, Е — единичная матрица порядка 3, (xk,yk,zk) =
=t [xk,yk,zk] — вектор-строка; суммирование заменяется интегрированием в
случае непрерывно распределённой массы тела). Переходя от первоначального
прямоугольного репера (о;е1,е2,ез) к штрихованному при помощи ортогональ-
ортогональной матрицы А по обычному правилу [xk,yk,zk] ->¦ A[xk,yk,zk] = [х'к,у'к, z'k]
(понятно, что А не действует на массы тк), мы получим матрицу
J' = AJ ЬА = AJA'1,
т.е. J/ • = E]r a a>\a>s-Jrs, как и положено для тензора валентности 2. Если выписать
компоненты Jij в явном виде, то из (*) будем иметь
J =
Координаты Jij не могут рассматриваться как физические величины, име-
имеющие независимый от выбора репера смысл, но как мы видели, в целом J такой
смысл приобретает, причём с J ассоциируются три тензорных инварианта:
Л =
т _ Ju
J21
J3 = det J.
-4l
к
Jl2
J22
J11
J31
J13
J33
J22
J32
J22,
J33
280 Гл. 6. Тензоры
Инвариантность Ji, J2,«/3 относительно поворотов — следствие инвариант-
инвариантности характеристического многочлена матрицы J.
Приведение J к главным осям, а симметричность J это позволяет сделать,
даст нам матрицу diag (Ai, Л2, A3) с собственными значениями А^ > 0, г = 1,2,3,
называемыми главными моментами инерции. В частности, тензор инерции по-
положительно определён. Если ш — угловая скорость вращающегося тела, a j —
угловой момент, то j = Juo. Параллельность j и ш имеет место тогда и только
тогда, когда тело вращается вокруг одной из своих главных осей.
В своё время теоремой 3 из § 4 гл. 1 мы установили биективное
соответствие между квадратичными формами и симметричными би-
билинейными формами. Это соответствие в более слабой форме про-
продолжает иметь место и в случае полилинейных форм.
Определение 4. Функцию Q: х н-» Я на V назовём однородной
степени р, если
Q(x) = F(x,...,x),
где F: Vp —> Я — какая-нибудь р-линейная форма на V.
Отображение симметризации, применённое к форме F, даёт нам
по теореме 2 симметричную р-линейную форму S(F):
,...,xp) = -
Р' nesp
где F: Vp —> Я — какая-нибудь р-линейная форма на V.
Ясно, что
Q(x) = E(F))(x,...,x). A3)
Форма S(F) называется р-линейной формой, полярной к Q.
Мы получили часть следующего утверждения.
Теорема 3. Каждая однородная функция Q степени р выра-
выражается через свою полярную р-линейную форму в виде A3). Форма,
полярная к Q, единственна.
Доказательство. Единственность полярной формы следует
из её координатного выражения. Пусть
i ^
Тогда
5] ...ijyi...s4 A4)
Однородный многочлен /[Xl, ..., Хп] степени р от п независимых пе-
переменных, значение которого при Xi = хг есть Q(x), единственным
образом записывается в виде
f(Xu...,Xn)= J2 fh...ipXh...Xip. A5)
Сравнивая A4) и A5), получаем
§ 2. Свёртка, симметризация и альтернирование 281
где с = c(ii,...,ip) Е Ъ — множитель, равный числу различных
размещений, которые возникают при всевозможных перестановках
индексов в строке ii,..., ip. Например, при р = 4 имеем с (г, г, &, I) =
12, c(i,i,i,j) = 4 и т.д. Вместе с fix...iv однозначно определёнными
оказываются и коэффициенты (S(F))ilt_ip. ?
По существу мы получили биективное соответствие между
пространством симметричных тензоров Т+(У) и пространством
Я [Xi,..., Хп]р однородных многочленов (форм) степени р от п неза-
независимых переменных. То же самое относится к пространству T^_(V).
Заметим в этой связи, что
<ИшЯ[Х1,...,Хп]р=(П+Р~1).
4. Кососимметричные тензоры. Как и ранее, ограничимся
тензорами типа (р, 0) или @, q) и зададим действие симметрической
группы Sp на Г е T°p(V) формулой A0) или A1).
Определение 5. Назовём тензор Т ко со симметричным или
антисимметричным, если
U(T)=enT W?SP, A6)
где ?п — знак (или чётность) перестановки тг.
Напомним, что s: тг \-^> еп — гомоморфизм группы Sp в {±1} со
значениями ет = — 1 на всех транспозициях т.
Условие A6) можно заменить эквивалентным ему требованием
/Г(Т) = -Т, A6')
где т пробегает множество транспозиций (это ясно из определения
и из равенства fa(f7T{T)) = fa7T(T), что в свою очередь выражается
в виде
Г(...,х,...,у,...) = -Г(...,у,...,х,...), х,уеУ A7)
(на месте точек стоят произвольные векторы — одни и те же в обеих
частях равенства A7)). У нас char Я = 0, поэтому при х = у = z из
A7) следует
T(...,z,...,z,...) = 0. A7')
Положив z = х + у в A7;) и воспользовавшись полилинейностью Т,
мы получим
а это значит, что из A7;) следует A7). Поэтому условия A7) и A7;)
равносильны.
282 Гл. 6. Тензоры
Свойство кососимметричности тензора Т очевидным образом вы-
выражается на языке координат Х^...^. Например, при р = 2 кососим-
кососимметричность означает Тц = —Tji (кососимметричность линейного
оператора или квадратной матрицы порядка п), причём это свой-
свойство, как и следовало ожидать, с выбором базиса не связано. В общем
случае
Стало быть, любая координата кососимметричного тензора одно-
однозначно определяется координатой с теми же индексами, расположен-
расположенными, скажем, в порядке возрастания:
Tili2...ipi 1 ^ Ч < г2 < ... < гР ^ п. A8)
Всякая координата с двумя одинаковыми индексами равна нулю.
Напротив, координаты вида A8) с различными наборами индексов
никак не связаны между собой, так что всего получается (^) неза-
независимых координат. Эти предварительные соображения мы сейчас
уточним и разовьём.
Определение 6. Отображение
А = ~1
Р' iresp
называется альтернированием.
Естественно также ввести множество ЛР(У*) кососимметричных
тензоров, содержащихся в Т°(У) (соответственно Aq(V) С Тр). На
самом деле эти множества являются подпространствами, как это
видно, например, из следующей импликации:
UP = епР, UR = ?nR => f*(aP + 0R) = afnP + /3fnR =
= asnP + CsnR = en(aP + CR) Va,C G Я
Теорема 4. Отображение альтернирования A9) является ли-
линейным оператором
А(аТ + CR) = аА(Т) + CA(R),
обладающим следующими свойствами:
1) А2 = А;
2) ImA = \p(V*);
3) A(U(T))=eaA(T).
Доказательство. 1) Согласно A9) имеем
Л2 — ^ \^ f f — ^ \^ f — ^ \^ f — А
Здесь учтено, что любой элемент р G Sp ровно р! способами представ-
представляется в виде произведения а тг: а выбирается любым, тг находится
§ 2. Свёртка, симметризация и альтернирование 283
из равенства тг = а~хр. Использована также мультипликативность
?а И fa ПО (Т.
2) Для всякого TG Tj имеем
U{A(T)) = i J2 e*f4f*(F))=ea± ? eCTJr/CTJr(r) = e
так что ImAC AP(V*). С другой стороны,
Это и даёт нужное утверждение.
3) В 2) было проверено, что faA = гаА. По тем же причинам
Afa = гаА. П
5. Тензорные пространства. В дальнейшем мы будем придер-
придерживаться терминологии, ставшей общепринятой в разных областях
математики.
Определение 7. Ковариантный кососимметричный тензор, т.е.
элемент пространства ЛР(У*), принято называть внешней р-формой
или, более подробно, внешней формой степени р на V. Контравари-
антные кососимметричные векторы (элементы пространства AP(V)
называются р-векторами.
Считается, что Л1 (У*) = V* и Л1 (У) = V. Введём, далее, внеш-
внешнюю прямую сумму (см. § 2 гл. 1)
T(v*) = я е т?(у) е r°2(v) е... E)
бесконечного числа тензорных пространств Т^(У), р = 0,1,... Эле-
Элементами этой суммы считаются последовательности
члены которой почти все (т.е. исключая конечное их число) равны
нулю. На T(V*) можно смотреть как на бесконечномерную ассоциа-
ассоциативную алгебру с умножением, определённым для тензоров:
8 t S + t S + t
(Е fi) ® (Е^i) = Е Л ® &• = !>*• F)
i=0 j=Q i+j=0 k=0
При этом, разумеется, выполнено условие
А(/ 0 д) = А/ 0 д = / 0 Хд, X е Я.
Мы назовём T(V*) алгеброй ковариантных тензоров.
Правило F) весьма напоминает правило умножения многочленов
и отличается от него разве лишь некоммутативностью. В T^(V) вы-
выделяется подпространство Т+(У) симметричных тензоров, отожде-
отождествляемое, как мы видели в конце п. 3, с пространством однородных
284 Гл. 6. Тензоры
многочленов степени р от п переменных. Их внешняя прямая сумма
является обычной алгеброй многочленов, а правило F), надлежащим
образом доопределённое, совпадает с правилом умножения многочле-
многочленов.
Совершенно аналогичным образом вводится алгебра контрава-
риантных тензоров
т(у) = #ет?ет2 + ..., G)
а в ней выделяется подпространство
q=0
симметричных тензоров, снова изоморфное алгебре обычных много-
многочленов от п = dim V переменных. В явном виде структура комму-
коммутативной ассоциативной алгебры на пространстве S(V) вводится по
формуле
ТгТ2 = 5(Ti ® Г2), Тг е T*_(V), Т2 е l
Алгебра S(V) над полем Я называется симметрической алгеброй
пространства V.
Теперь мы обращаем своё внимание на подпространства
= леЛ1(у)еЛ2(У)е... ст(у). ^
В отличие от симметричных тензоров (ковариантных или контрава-
риантных), подпространства, определённые соотношениями (8), не
являются подалгебрами в T(V*) и соответственно в T(V). Оказы-
Оказывается, однако, что на Л(У*) и Л(У) можно ввести естественным
образом операцию, превращающую их в ассоциативные алгебры.
Замечание. Рассмотренные нами операции симметризации и
альтернирования возможны лишь над полем Я характеристики нуль.
Как избавиться от этого ограничения, показано в [2].
УПРАЖНЕНИЯ
1. Поднятие и опускание индексов. Пусть по-прежнему (У, д) — евклидово
векторное пространство, Т — тензор типа (p,q) с координатами Т^1^2'"^4. По-
Построим тензор с координатами J^fc gtkTkj 2'V q и у координат полученного тен-
тензора индекс г обозначим через ii, а затем положим
rphJlJ2---Jq _ ST^ iikrpjl32---jq
г2...гр ~~ 2-^У ki2---ip '
к
Говорят, что тензор в левой части этого равенства суть результат примене-
применения к Т операции поднятия индекса ъ\. Операция опускания индекса при помощи
§ 3. Внешняя алгебра 285
метрического тензора G определяется аналогично. Например,
rr3l32,---3q _ V~^ rr3lkJ3---jq
1i1...ipj2 - Z^gJ2k1i1...ip
к
— координаты тензора, полученного в результате опускания у тензора Т индекса
j2 на последнее место в ряду нижних индексов.
В общем, подъём s-ro индекса и опускание t-ro индекса — это линейные
отображения
в результате применения которых получаются тензоры с компонентами
Г? is 31 ¦¦¦Jq rp 3l---3t-l 3t + l---3q
i\...is_1 is + 1...ip ' ii...ip jt
Мы здесь воспользовались "блочным расположением" сложных индексов у коор-
координат тензора. Например, тензор Т ? V ® V* можно задавать компонентами,
которые обозначаются T?,a,TEV®V*®V®V — компонентами Т^ Jl^3 •
Операции подъёма и опускания индексов можно применять несколько раз,
причём и к самому метрическому тензору.
Показать, что
9ik9jl9kl = 9ij, 9ik9jl9U = 9ij •
Убедиться в справедливости равенства дгкх^ = жг, означающего, что контра-
вариантные координаты хг вектора х получаются применением операции подня-
поднятия индекса у ковариантных координат Х{ того же вектора.
2. Пусть dim У > 1. Показать, что Т(У) — некоммутативное кольцо без дели-
делителей нуля. Единственными обратимыми элементами в T(V) являются ненулевые
скаляры.
3. Вычислить в явном виде тензорные инварианты J2, «/з в примере 2.
§ 3. Внешняя алгебра
1. Внешнее умножение. Безразлично, как вести дальнейшее
изложение — на языке внешних форм или р-векторов. Для разнообра-
разнообразия возьмём пространство Л(У).
Определение 1. Зададим операцию внешнего умножения
Л:Л(У) xA(V) -
полагая
R) A)
для любого g-вектора Q и любого r-вектора R (считается, что
\AR = RA\ = XR VA е Я). Под A(Q (g) R) здесь понимается ре-
результат применения отображения альтернирования к тензору Q&R.
Так как Q 0 R e To+r(V), а тензор A(Q 0 R) согласно теореме 4 из
§ 2 кососимметричен, то формулой A) задано отображение
Л: Aq(V) х Ar(V) -+ Aq+r(V).
Чтобы задать внешнее произведение Q' Л R' любых двух элементов
пространства Л (У), запишем
286 Гл. 6. Тензоры
и положим
QfAR'=
Заметим ещё, что если в A) заменить R на aR + /ЗТ Е ЛГ(У), то
Q Л (aR + /ЗГ) = A(Q <g) (аД + (ЗТ)) = A(aQ 0 Д + CQ ® Г) =
Д) + CA(Q (8) Г) = a(Q Л Д) + /3(Q Л Г).
Аналогично, (aQ + /35) Л Д = a(Q Л Д) + P(S Л Д).
2. Вне1пняя алгебра векторного пространства. Мы устано-
установили, что операция внешнего умножения билинейна (или дистрибу-
дистрибутивна), т.е. она наделяет Л(У) строением алгебры.
Определение 2. Алгебра Л(У) над полем Я называется внеш-
внешней алгеброй пространства V (или алгеброй Грассмана).
Алгебра Л (У) обладает единичным элементом, отождествляемым
с 1 G Я. Более важное свойство внешней алгебры заключено в тео-
теореме 2 ниже.
Лемма. Для любых тензоров Q G Tq(V), Д Е Tq(V) справедливы
соотношения
A(A(Q) ® Д) = A(Q 0 A(R)) = A(Q 0 Д).
Доказательство. Заметим, что по определению
A(Q) = ^j
в то время как
Опираясь на линейность отображения альтернирования, получаем
± TQ)®R). B)
Рассмотрим вложение ср: Sq —> 5g+r, понимая под тг = <р(тг), тг Е
перестановку из 5g+r, действующую по правилу
если г < р,
ттг = <; . . ^^'
если г > р.
Тогда fn(Q) О Д = /tt(Q ® Д) (см. формулу A1) из § 2) и согласно
теореме 4, 3) из § 2
Q) ® Л) = А/г (Q «. Д) = егA(Q ® Д).
§ 3. Внешняя алгебра 287
Заметив ещё, что е^ = еп, мы приведём соотношение B) к требуе-
требуемому виду
A(A(Q) ® R) = i
поскольку e^. = 1. Соотношение A(Q ® A(R)) = A(Q ® R) доказыва-
доказывается аналогично. П
Теорема 2. Внешняя алгебра Л(У) ассоциативна.
Доказательство. Нам нужно убедиться в справедливости
тождества
(PAQ)AR = PA(QAR) C)
для любых P,Q,R Е Л(У). В силу билинейности операции Л доста-
достаточно рассмотреть случай
Pe\p(V), Qe\q(V), Re\r(V).
Согласно A)
(PAQ)AR = A(A(P ®Q)®R),
а по лемме
A(A(P®Q)®R) =A((P®Q)®R).
Опираясь, далее, на ассоциативность тензорного произведения и сно-
снова используя лемму, получим
А((Р ®Q)®R)= A(P ® (Q ® R)) =
= А(Р ® A(Q ® R)) = Р A (Q A R).
Всё вместе взятое даёт нам тождество C). ?
В ассоциативной алгебре, как и в группе, безразлична расста-
расстановка скобок, поэтому произведение Р^г APi2 Л... APim имеет смысл.
Стоит ещё отметить, что в соответствии с A)
х Л у = - (х ® у - у ® х) = А(х ® у) D)
для любых х, у G V (р = г = 1), так что
хЛу = -уЛх, хЛх = 0. E)
Следствие. Пусть xi,X2,...,xp — произвольные векторы из
V. Тогда
Xi Л Х2 Л . . . Л Хр = A(xi 0 Х2 0 ... 0 Хр). F)
Доказательство. При р = 2 соотношение F) совпадает с D).
При р > 2, используя индукцию по р, на основе леммы и теоремы 2
получаем
Лх2 Л .. .Лхр = (xi Л ... AXp_i) Лхр = A((xi Л ... Axp_i) ®xp) =
= A(A(jc1 0 ... (g) xp_i) (g) xp) = A(xi ® ... (g) xp_i (g) xp). П
288 Гл. 6. Тензоры
Теорема 3. Пусть (ei,... еп) — базис векторного пространст-
пространства V. Тогда р-векторы
eh Л ei2 Л ... Л eip, 1 ^ ii < г2 < ... < гр ^ п, G)
образуют базис пространства AP(V).
Доказательство. В любом произведении е^ Л ej2 Л ... Л eJp
можно переставлять множители, меняя при этом знак всего произве-
произведения или получая 0, когда jr = js для каких-нибудь двух индексов
(см. E)). Поэтому множество всех таких произведений содержится
в множестве тензоров вида G).
Пусть, далее, Р Е AP(V). Как всякий тензор из Tq(V), P выра-
выражается через базис:
Р = ^2 pJ1'"JPeji ® •••®ejP-
h---3v
Ввиду линейности отображения альтернирования, теоремы 4 из § 2
и соотношения F) имеем
Р = А(Р)= J2 P^-^A(eh®...®ejp)= J2 P^eh Л .. .Aejp,
jl---jp jl---jp
а это значит, что любой р-вектор выражается через р-векторы G).
Нам осталось доказать их линейную независимость. Предположим,
что
^2 А*1-*^ A...Aeip =0.
l^ii<...<ip^n
Тогда ввиду F)
или, в более подробной записи,
_ ^2 Xh'"ip Yl e*f^n ® ... (8> eip) = 0.
С учётом формулы (II7) из § 2 получаем
^е^ ® ... ® е<„) = 0. (8)
Если тг т^ в, то последовательность индексов i^i,..., inp уже не будет
упорядоченной по возрастанию. Стало быть, соотношение (8) пере-
переписывается в виде
0...0eip + ... = O, (9)
где точками обозначена линейная комбинация тензоров е^ 0... 0 eJp
хотя бы с одной инверсией в последовательности индексов ji,..., jp.
§ 3. Внешняя алгебра 289
Так как тензоры е^ (g).. . ®е^р линейно независимы, то из (9) следует,
что Л*1-** =0. П
Напомним (см. (8) из § 2), что Л(У) — внешняя прямая сумма
подпространств ЛР(У), так что, в частности,
и имеет место
Следствие. Внешняя алгебра Л(У) пространства V имеет раз-
размерность 2п. При этом
Базис пространства An(V) состоит из одного п-вектора
ei Л в2 Л ... Л еп.
Доказательство достаточно очевидно, поскольку число
р-векторов е^ Л ... Л е^р с i\ < ... < гр равно числу сочетаний из
п по р. Далее, (™) = 1, (™) = 0 при р > п и
= 2n. ?
К И J
р=0
Отметим ещё одно полезное свойство операции внешнего умно-
умножения. Именно,
Q e Aq(V), R е Ar(V) => Q Л R = (-l)qrR Л Q. A0)
Имея в виду соотношение A0), говорят, что внешняя алгебра про-
пространства V (обобщённо) антикоммутативна.
В силу билинейности операции Л для доказательства A0) доста-
достаточно рассмотреть случай
Q = eh Л ... Л eiq, R = ej± Л ... Л ejr.
Используя q раз соотношение E), получаем
(eix Л ... Л eiq) Л ejk = (-l)qejk Л (eh Л ... Л eiq),
т.е. Q Aejk = (—l)geJfc AQ независимо от того, совпадает jk с каким-
нибудь индексом г8 или нет. Таким образом,
Q AR = Q Л (ej4 Л ... Л ejV) = (-l)gej4 Л (Q Л еь Л ... Л ejV) =
= (-lJqeh Л ei2 Л (Q Л ei3 Л ... Л ejV) = ... = (-l)qrR Л Q.
Из соотношения A0) следует, что
РЛР = 0 A1)
19 А.И. Кострикин
290 Гл. 6. Тензоры
для любого р-вектора Р при нечётном р. В случае чётного р соотно-
соотношение A1) не обязано выполняться.
Пример 1. Пусть V = (ei,... ,ете), п ^ 4. Тогда
(ei Л е2 + ез Л е4) Л (ei Л е2 + ез
= ei Л е2 Л (ез Л е4) + ез Л е4 Л (ei Л ег) = 2ei Л е2 Л ез Л е4 т^ 0-
3. Связь с определителями. Используя операцию внешнего
умножения, легко сформулировать критерий линейной независимо-
независимости векторов и получить заново все свойства определителей.
Теорема 4. Пусть V — векторное пространство размерности
п над полем Я. Для линейной независимостир векторов xi,... ,хр Е
Е V необходимо и достаточно, чтобы
xi Л Х2 Л ... Л хр ф 0.
Доказательство. Если векторы xi,...,хр образуют зависи-
зависимую систему, то один из них, скажем, хр, есть линейная комбинация
остальных. При его замене этой комбинацией внешнее произведе-
произведение xi Л Х2 Л ... Л хр разлагается в сумму внешних произведений
c^xi Л ... Л хр_1 Л Xf, г < р, содержащих каждое по два одинаковых
множителя и, следовательно, равных нулю.
Если, напротив, xi,...,хр линейно независимы, то мы можем их
принять за первые р векторов некоторого базиса. Тогда р-вектор
xi Лх2 Л... ЛХр будет элементом соответствующего базиса для AP(V)
и поэтому не равен нулю. ?
Пусть (еь ..., еп) — базис пространства V и хь ..., хп — любые
п векторов из V. Имеем
г=1
Согласно следствию теоремы 3
xi Л ... Л хп = А • ei Л ... Л еп,
где А = А (ж*) — некоторая скалярная функция векторов xi,..., хп,
или, что то же самое, функция столбцов матрицы (хгЛ. Из свойств
внешнего умножения немедленно следует, что эта функция линейна
и кососимметрична, причём А = 1 для Xj = ej, j = 1,..., п. Теорема
единственности определителя [ВА I, гл. 3, § 1, теорема 3] показывает,
что А = det (xlj). Таким образом,
xi Л ... Л xn = det (xlj) ei Л ... Л еп. A2)
Соотношению A2) в любом р-мерном подпространстве U С V с
двумя произвольными базисами (а^), (Ь^) отвечает соотношение
ai Л...Лар = Abi Л ...ЛЬР, Л G Я. A2;)
§ 3. Внешняя алгебра 291
Замечание. Из соотношения A2) без труда выводятся все свой-
свойства определителей. Более того, внешнюю алгебру можно положить
в основу значительной части линейной алгебры, достигнув при этом
наибольшей естественности в доказательствах ряда теорем. Для нас
это несколько запоздалое замечание, о котором, впрочем, жалеть не
стоит (всему своё время).
Обобщением соотношения A2) служит аналогичная формула для
векторов Xj Е V в количестве р штук. Именно,
Л ... Л Хр = 2^ х[г ...xppeh A...Aeip =
>inl Л ...Aeinp) =
= ^2 (Ylx%^ -"xinp(^e^л• • •ле*р)) =
=.<E<
По формуле C) из [ВА I, гл. 3, § 1] полного развёртывания опреде-
определителя имеем
л / \ X ^ i I i
/\ . . (Xi X ) *^ 7 S X X ^
Jb-^ . . . Jbp
- Hpt (rplk \ (Л 4\
- UctlX • J. yA-OJ
t1p
<Lp
Стало быть, справедлива
Теорема 5. Пусть (ei,..., еп) — базис пространства V и
— любые р векторов из V. Тогда
Х1Л...Лхр= ^2 Ai1...ip(xi,...,xp)eil Л ...Aeip, A4)
l^ii<...<ip^n
где Af1...fp(xi,... ,хр) — определитель вида A3).
При р — п формула A4) превращается в A2). Заметим, что на
Т = Д^...^ можно смотреть как на внешнюю р-форму, нормирован-
нормированную условием Af1...fp(ef1,..., е^р) = 1. В частности, det = Ai...n —
единственная относительно базиса (е^) внешняя n-форма на V, для
которой det(ei,..., еп) = 1.
19*
292 Гл. 6. Тензоры
4. Векторные подпространства и р-векторы. По-прежнему
пусть V — n-мерное векторное пространство над Я.
Определение 3. Аннулятором р-вектора Р / 0 из AP(V) на-
называется векторное подпространство
Ann Р = {х G V| P Л х = 0}.
Условимся ещё называть р-вектор Р разложимым, если
Р = ai Л а2 Л ... Л ар
для каких-нибудь векторов а^ Е V, г = 1, 2,..., р.
В том, что множество АппР действительно есть векторное
пространство, мы легко убеждаемся непосредственной проверкой:
xi, Х2 G Ann Р =>
=> Р Л (aixi + «2X2) = aiP Л xi + а2Р Л х2 = 0 =>
+ a2x2 G AnnP Vai,a2 G Л.
Теорема б. Пусть AnnP = (ei,...,er) — подпространство
размерности г. Тогда г ^ р и существует такой (р — г)-вектор Q,
для которого
Р = е1 Л...Лег AQ.
Равенство г = р имеет место тогда и только тогда, когда
р-вектор Р разложим.
Доказательство. Считаем с самого начала, что
V — \G\,..., ег 5 6r_|_i,..., еп/.
Записав
р= J2 Pil-4A...Aeip) A5)
мы в явном виде выражаем условия на аннулятор:
Y^ P^-^ei Л ... Л eip Л е, = 0, j = 1, 2,..., г. A6)
l^ii<...<ip^n
Если j совпадает с одним из г&, то е^ Л ... Л е^р Л е^ = 0, поэтому в
левой части равенства A6) остаются слагаемые cii /j,...,ip/ j.
Так как (р + 1)-векторы е^ Л ... Л е^р Л е^ с различными наборами
ii,... ,гр линейно независимы, то условие A6) приводит к тому, что
ргг..лр _ q для всех наборов индексов, не содержащих целиком от-
отрезка 1, 2,..., г. По условию Р ф 0, поэтому г^ри
Р = ^ P12-rir+1-ip ei Л ... Л ег Л eir+1 Л ... Л eip =
= ei Л ... Лег Л Q, A7)
§ 3. Внешняя алгебра 293
где
— некоторый (р — г)-вектор.
Если теперь г = р, то для Р получается выражение Р =
= Aei Л ... Л ер, означающее, что Р — разложимый р-вектор.
Обратно: если Р ф 0 разложим, т.е.
Р — ai Л а2 Л ... Л ар,
то а^ Е АппР, г = 1,2,... ,р. Стало быть, dim Ann P ^ р, а так как
по уже доказанному всегда dim Ann P ^ р, то dim Ann Р = р. ?
Теорема 7. Пусть U = (ai,...,ap); VF = (bi,...,bp) — два
подпространства в V одинаковой размерности р. Для совпадения
U и W необходимо и достаточно, чтобы были пропорциональными
р-векторы Р = ai Л ... Л ар и Q = hi А ... А Ър.
Доказательство. Как мы видели (теорема 6), U = АппР =
= (ai,..., slp). Если также (bi,..., Ър) = Ann P, то в силу A2;) будем
иметь Р = XQ. Обратно: если Р = AQ, то
U = Ann Р = Ann Q = W. П
Уточнением теорем б и 7 служит
Теорема 8. Пусть U = AnnP, W = AnnQ, где Р — разложи-
разложимый р-вектор и Q — разложимый q-вектор. Тогда:
1) U D W <^=> Р = Q Л R (R — некоторый (р — q)-вектор);
2) UHW = 0<=^ РЛ(^фО.
Если UHW = 0, moU^W = Ann (PAQ).
Доказательство. Утверждение 1) содержится в теореме 6.
Если, далее, Р = ai Л ... Л ар, Q = bi Л ... Л hq и Р Л Q ф 0, то
векторы a^,bj, 1 ^ г ^ р, 1 ^ j ^ g, линейно независимы и состав-
составляют базис пространства С/ © W. Если же Р Л Q = 0, то существует
нетривиальная линейная зависимость
aiai + ... + ap8ip + /3ibi + ... + /3gbg = О,
из которой следует, что U П W ф 0. ?
5. Условия разложимости р-векторов. Теоремы 6-8 указы-
указывают на особую роль разложимых р-векторов. Встречаются они и в
других вопросах. Условия разложимости р-вектора Р G AP(V) могут
быть записаны в виде алгебраических соотношений на его компо-
компоненты рг1-гр (см. A5)). В самом деле, пусть х = J^ жге^ — произ-
произвольный вектор. Произведение Р Л х является (р + 1)-вектором с ко-
координатами — линейными формами от ж1,... ,жп. Число компонент
(р + 1)-вектора равно (г>+ \)- Поэтому условие х G АппР равно-
/ и, \ "
сильно системе из \г> + \) однородных уравнении с п неизвестными.
Пространство решений этой системы, совпадающее с АппР, имеет
по теореме 6 размерность г ^ р, причём г = р тогда и только тогда,
294 Гл. 6. Тензоры
когда Р разложим. Другими словами, Р разложим в точности тогда,
когда ранг матрицы системы не превосходит п — р, т.е. когда все
миноры порядка п — р + 1 равны нулю. Это и есть нужное условие
разложимости.
Теорема 9. Всякий (п — 1)-вектор Р/0 разложим.
Доказательство. Согласно A2)
Р Л х = /(х) • ех Л ... Л en, /(x) G Я,
где / — скалярная функция, а (е^) — некоторый базис в V. Из
свойств операции внешнего умножения следует, что / — линейная
функция. Кроме того, АппР = Кег/ и, следовательно, dim Ann P =
= dim Кег/ ^ п — 1. По теореме б имеем dim Ann P ^ п — 1, так что
/ ф 0. Поэтому dim Кег/ ^ п — 1 и, стало быть, dim Ann P = п — 1.
Снова по теореме б это равенство влечёт разложимость Р. ?
Пример 2. Пусть V — трёхмерное евклидово векторное пространство с
ортонормированным базисом (е1,е2,ез). Если Р = а Л b ф 0, то
а Л b Л х = (с | х) • ei Л е2 Л ез,
где (с | х) = /(х). Можно проверить, что с = [а, Ь] есть векторное произведение
векторов а и Ь.
Понятно, что Р Л Р = 0 для разложимого р-вектора Р. Оказыва-
Оказывается, что в случае бивекторов (р = 2) условия Р Л Р = 0 достаточно
для разложимости.
Теорема 10. Бивектор
Р= J2 PiJeiAej A8)
разложим тогда и только тогда, когда Р Л Р = 0.
Доказательство. Нужно доказать, что если Р Л Р = 0, то Р
разложим. Рассуждаем по индукции относительно п = dim У. При
п = 3 утверждение следует из теоремы 9.
Соберём в A8) все члены, содержащие ei. Они дадут выражение
вида ei Л а. Положим ещё
Q= E ^'е*Ле,, A9)
Будем иметь
Р = ех Ла + Q,
причём можно считать, что а есть линейная комбинация векторов
в2,..., еп и Q ф 0. Из условия Р Л Р = 0 следует что
(ех Л а) Л Q + Q Л (ех Л а) + Q Л Q = 0.
При помощи соотношения A0) получаем отсюда
2ех ЛаЛ<2 + <2Л<2 = 0. B0)
§ 3. Внешняя алгебра 295
Все 4-векторы в левой части B0) представим через базисные век-
векторы е^ Л ej Л е/, Л е/. В ei Л а Л Q входит множитель ei, а в Q,
как видно из A9), входят только члены е^ Л е^ с г, j ^ 2. Поэтому
в Q Л Q множитель ei не встретится. Следовательно, равенство B0)
распадается на два:
eiAaAQ = 0, QAQ = 0. B1)
Но Q G A2 (U), где U = (е2,..., еп). Поэтому для Q выполнено пред-
предположение индукции, и он оказывается разложимым: Q = ЬЛс. Под-
Подставив это выражение в первое равенство B1), получим
eiAaAbAc = 0. B2)
Из четырёх сомножителей этого произведения линейно зависимыми
могут быть только а, Ь, с Е U. Если b = Ла, то Р = ei Л а + Ла Л с =
= (ei — Лс) Л а, и всё доказано. На этом основании считаем ei, a, b
линейно независимыми. По теореме 4 имеем i? = eiAaAb^0, a
по теореме 3 в таком случае dim Ann R = 3. Более точно, AnnR =
(ei,a,b). Но в соответствии с B2) и с Е AnnR. Значит, с = аа. + /ЗЪ.
В таком случае
Q = Ъ Л с = b Л (аа + /ЗЪ) = ah Л а
= eiAa + ah Л а = (ei + ab) Л а. П
Следствие. Бивектор
Р = Р12е1 Л е2 + P13ei Л е3 + Рыег Л е4 +
+ Р23е2 Л е3 + Р24е2 Л е4 + Р34е3 Л е4
разложим тогда и только тогда, когда его координаты Ргз связаны
соотношением
р12р34 _ р13р24 + р14р23 = Q
Пусть теперь Р3 = ?(V) — трёхмерное проективное простран-
пространство, порождённое четырёхмерным вещественным векторным про-
пространством V. Напомним, что прямые в Р3 соответствуют двумер-
двумерным плоскостям в V. По теореме б любая плоскость U С V есть
аннулятор разложимого бивектора Р, определённого с точностью до
скаляра. Другими словами, координаты (Р12 : Р13 : ... : Р34) бивек-
бивектора Р можно рассматривать как однородные координаты прямой
линии в Р3 (плюккеровы координаты прямой). Эти координаты в
количестве шести штук определяют также точку в пятимерном про-
проективном пространстве МР . Мы видим, что прямые в проективном
трёхмерном пространстве взаимно однозначно соответствуют точ-
точкам квадрики, определённой уравнением B3) в пятимерном проек-
проективном пространстве.
296 Гл. 6. Тензоры
УПРАЖНЕНИЯ
1. Пусть V = Шп — вещественное пространство, натянутое на векторы-
столбцы А^1),..., А^п\ и В — произвольный вектор-столбец. Показать, что ком-
компоненты А& решения векторного уравнения
даются соотношением
Л ... Л А^)Хк = А^ Л ... Л А^-1) Л Б Л А^+1) Л ... Л А™.
Вывести отсюда формулы Крамера [ВА I, гл. 3, § 3].
2. Пусть V — n-мерное векторное пространство над полем Я характеристики
нуль,
z = JTzk (zkeAk(v))
к=0
— элемент внешней алгебры Л(У),
Z(A(V)) ={Z\ZAX = XAZ VXG Л(У)}
— центр внешней алгебры.
Показать:
а) для обратимости Z, т.е. для существования Z, необходимо и достаточно,
чтобы Z@) Ф 0;
Лч г, г- ?(\(лг\\ j. v. / ^2г-1 = 0 при г = 1,... ,т, если п = 2т,
б) ZeZ(A(V)) ^ | Za._i =0 при г = 1,...,т-1, если п = 2т - 1.
Как переформулировать указанные условия в случае бесконечномерного про-
пространства У?
3. Пусть Л : V —> V — линейный оператор. Его р-ж внешней степенью
называется линейный оператор
АРЛ: AP(V)
определённый на разложимых р-векторах формулой
(ЛрЛ)(х1 Л . .. Л Хр) = ^(xi) Л ... Л Л(хр).
Это, очевидно, есть знакопеременное полилинейное отображение. При фиксиро-
фиксированном базисе пространства V можно говорить о матрице А оператора Л и о её
р-ж внешней степени ЛРА. Показать, что
det Ар А • det Ап~р А = (det А) ( р ) .
4. Пусть на векторном пространстве У задана невырожденная квадратичная
форма q. Пусть / — билинейная форма, полярная к q. Тогда на AP(V) можно
ввести квадратичную форму qAp формулами
qA0 =
J(xi,xi)
/(xp,xi)
Доказать, что полученное продолжение формы q на алгебру A{V) является
невырожденной квадратичной формой.
5. Ориентацией n-мерного евклидова векторного пространства (V, (
называется элемент d Е ЛП(У), для которого (d\d)An = 1.
§ 3. Внешняя алгебра 297
Пусть, далее, (ei,..., еп), (е^,... ,е'п) — два базиса в V. Говорят, что эти ба-
базисы одинаково ориентированы, если определитель матрицы перехода от одного
из них к другому положителен. Понятно, что порядок базисных векторов при
этом важен. Ясно также, что множество упорядоченных базисов пространства
V разбивается в точности на два класса, состоящих из одинаково ориентиро-
ориентированных базисов, тогда как базисы из разных классов ориентированы по-разному
(или противоположно). Выбор одного из этих классов называется ориентацией
пространства V.
Существует ли какая-либо связь между двумя определениями ориентации?
ГЛАВА 7
ПРИЛОЖЕНИЯ
Материал, собранный в этой главе и рассчитанный на обшир-
обширную категорию читателей, обычно не излагается целиком в основном
курсе линейной алгебры и геометрии по тривиальной причине отсут-
отсутствия аудиторного времени. Вместе с тем полезно ознакомиться хотя
бы с некоторыми приложениями математического аппарата, разви-
развитого в основном тексте. Собственный студенческий опыт автора по-
показывает, что такого рода выходы за пределы обязательного мини-
минимума развивают естественное любопытство. На тот же эффект рас-
рассчитан и последний параграф, где приведены некоторые нерешённые
задачи. На самом деле их гораздо больше: они постоянно возникают
в процессе творческой деятельности любого математика.
§ 1. Норма и функции линейного оператора
1. Норма линейного оператора. Пусть V — нормированное
(в смысле определений из гл. 3, § 2, п. 5), не обязательно конечномер-
конечномерное векторное пространство над Ж или С. Если || * || — норма на У,
то естественно поинтересоваться, будет ли нормированным вектор-
векторное пространство C(V) линейных операторов на V. Существуют по
крайней мере два эквивалентных способа введения нормы на C(V).
Определение 1. Назовём нормой \\А\\8 линейного оператора
А: V —У V точную верхнюю грань значений функции v \-> \\Av\\ на
векторах v Е V единичной длины:
\\A\\S = sup \\Av\\. A)
l|v|| = l
Вообще говоря, существование ||Л||в не гарантировано.
Пример 1. На пространстве V = M[t] всех многочленов с нормой ||/|| =
= у f0 f(tJ dt рассмотрим оператор дифференцирования T>t- Имеем
, / 7±
||V2ra + ltn|| = ч/Bга + 1) / t2n dt = 1.
V Jo
Интересующая нас величина
неограниченно растёт вместе со степенью га многочлена.
Теорема 1. Если V — конечномерное векторное простран-
пространство, то точная верхняя грань \\А\\8 существует.
Доказательство. По определению нормы и по определению
линейного оператора функция v \-> ||-4v||, будучи суперпозицией двух
§ 1. Норма и функции линейного оператора
299
непрерывных функций v н-» Av и Av н-» ||^v||, является непрерыв-
непрерывной функцией координат ai,...,an вектора v, n = dim У. По
известным теоремам Больцано—Вейерштрасса непрерывная функ-
функция v н-» \\Av\\ на ограниченном и замкнутом множестве (у нас на
(п — 1)-мерной сфере ||v|| = 1) является ограниченной функцией и,
стало быть, ||*4||s существует, поскольку ограниченное множество
всегда имеет точную верхнюю грань. Более того, на сфере ||v|| = 1
найдётся точка (вектор vq), в которой \\Av\\ достигает своей верхней
грани. ?
Таким образом, доказано больше: ||Л||в = ||-4vo|| хотя бы для од-
одного единичного вектора vq G У. Вектор с этим свойством иногда
называют максимальным вектором линейного оператора А.
Конечномерное пространство ?(V), наделённое нормой A), ста-
становится нормированным пространством (очевидно, банаховым) в
обычном смысле этого слова. В самом деле,
= 0
= 0
Av = 0 (для v с ||v|| = 1
<^> Av = 0 (для всех v G V
Далее,
||АЛ||в = sup ||АЛу|| = sup |А| • ||Лу|| = |А| sup ||Ду||
А = О.
= |А|
= sup ||(Л + В)у||= sup \\Av + Bv\\^
l|v|| = l ||v|| = l
sup (Pv|| + ||Bv||) = sup ||,Av|| + sup ||Bv|| =
+
Выполнены, следовательно, все свойства, входящие в определение
нормы. Далее, имеет место неравенство
для каждого вектора v Е V. Действительно,
и v
II и
ММ I I I I I I I I I I I I
Неравенство B) можно положить в основу другого определения
нормы.
Определение 2. Линейный оператор А на векторном простран-
пространстве V с нормой || * || называется ограниченным, если существует
неотрицательное вещественное число N такое, что
для каждого вектора v Е V. Нижняя грань inf N множества всех кон-
констант, для которых справедливо неравенство C), называется нормой
оператора А и обозначается символом
300 Гл. 7. Приложения
Приведённый выше пример 1 показывает, что оператор Vt не-
неограниченный. Вместе с тем в конечномерном случае из неравенства
B) вытекает неравенство C) с N ^ ||-4.||s. Таким образом, справед-
справедлива
Теорема 2. Каждый линейный оператор А на конечномерном
нормированном векторном пространстве ограничен.
Мы видели, что ||Л||г ^ Il^lls- С другой стороны,
При ||V|| = 1,
откуда ||Л||в ^ ||-4||г- Таким образом, ||Д||^ = ||Л||в, т.е. обе нормы
совпадают. В дальнейшем норму на У и норму линейного оператора
А: V —У V будем обозначать одним и тем же символом || * ||. Это не
может привести к недоразумению, поскольку для векторов и опера-
операторов у нас используются различные буквы.
Пример 2. Дополним пример 1, рассмотрев на пространстве M[t] оператор
Tt умножения на t. Утверждается, что он ограничен. Действительно,
/о
откуда \\Tt\\ ^ 1.
Заметим, что норма единичного оператора ?: V —> V равна 1, по-
поскольку ||?v|| = ||v|| для любого вектора v G V. Менее тривиальный
пример доставляет диагонализируемый оператор Л, действующий
на n-мерном евклидовом пространстве V с нормой ||v|| = \/(у \ v) и
заданный соотношениями
Aei = Л^е^, 1 ^ г ^ п,
где (ei,... ,еп) — ортонормированный базис в V. Без ограничения
общности считаем
Ai ^ А2 ^ ... ^ Ап.
Тогда для любого вектора v = ^2г- а^е^ имеем
||Лу||2 = (Av\Av) =
откуда ||^v|| ^ |Ai| - ||v|| и, следовательно, ||Л|| ^ |Ai|. Так как
и ei — мак-
мак= ||Aiei|| = |Ai|, то на самом деле ||Л|| = |Ai
симальный вектор для А.
Дополнительное важное свойство нормы оператора связано с её
поведением относительно композиции операторов.
§ 1. Норма и функции линейного оператора 301
Теорема 3. Пусть Л, В — два ограниченных линейных опера-
оператора на нормированном векторном пространстве V. Тогда АВ —
ограниченный оператор и
\\ЛВ\\^\\Л\\-\\В\\. D)
Доказательство. Действительно, в силу неравенства B) для
любого вектора v Е V имеем
\\(AB)v\\ = \\A(Bv)\\ 4:
откуда вытекает ограниченность АВ, причём согласно второму опре-
определению нормы оператора выполнено неравенство D). ?
Следствие. Пусть А: V —У V — ограниченный линейный опе-
оператор. Тогда
\\Лт\\ 4 \\А\\т.
Выпишем ещё раз свойства нормы на C(V):
= sup Pv||=inf{iV| ||.4v||<JV-||v||},
Л = 0' E)
||Л + В||^||Л|| + ||В||,
\\Ат\\ t
Неравенство \\AB\\ ^ ||Д|| • ||B|| может быть строгим. Если, например,
V = Ш , Vx — проекция точки плоскости М на координатную ось
ж, Ту — проекция на координатную ось у, то
VxVy = VyVx = О,
в то время как \\РХ\\ — \\Py\\ — 1-
2. Функции линейных операторов (матриц). Ранее мы
уже встречались с необходимостью рассматривать многочлены /(Л)
от операторов. Наличие нормы на C(V) позволяет непосредственно
перенести на функции со значениями в V (линейные операторы)
теорию функциональных рядов. При этом существенна полнота
пространства C(V). Из сходимости ряда ^2i>0Ai, составленного из
линейных операторов Лг, вытекает, что если Л — сумма ряда, то
каждому выбору базиса (ei,... еп) в V отвечает матрица А = ^2i>0 A\
оператора Л, являющаяся суммой матриц А{ операторов А%. Обратно:
каждому сходящемуся ряду матриц можно сопоставить сходящийся
ряд линейных операторов.
Как и в случае обычных числовых функций, особый интерес пред-
представляют функции операторов, представимые в виде степенных ря-
302 Гл. 7. Приложения
дов. Из определения сходимости по норме и из так называемого кри-
критерия Вейерштрасса вытекает, что ряд J^i>o аг^г сходится абсо-
абсолютно и равномерно на множестве
UC?(V), п = {Л\\\Л\\^а},
если сходится числовой ряд J^i>o а1а% -
Пример 3. Если Л — нильпотентный оператор (Л171 = О), то оператор
8 — Л обратим, причём
(8 -Л)'1 =? + Д+... + Дт~\
в чём легко убедиться непосредственной проверкой. Пусть теперь V — произ-
произвольное банахово пространство и Л : V —>¦ V — линейный оператор с нормой
||Л|| < 1. Тогда снова оператор 8 — Л будет обратимым в C(V) с (? — Л)~1 =
= Si>o А-Ь- Действительно, сходимость ряда X)i>o ^ слеДУет из сходимости гео-
геометрической прогрессии Y^i>o \\А\\г (под Л° понимается единичный оператор ?),
мажорирующей ряд из норм 2^>о Н^гН* Пусть В — сумма ряда 2i>o ^' Тогда
В А = ЛВ — сумма ряда X)i>i ^ • Это означает, что
В(8 -Л) = (8- Л)В = 8,
т.е. В — оператор, обратный к 8 — Л.
4. Экспонента. Безусловно, наиболее важным рядом, сходя-
сходящимся нормально для каждого линейного оператора А : V —У V
(V — конечномерное нормированное пространство или произвольное
банахово пространство, если А — ограниченный оператор), является
\
ряд Х^о ~п^к' "^г0 сходимость обеспечивается тем, что ряд из норм
\
У\>п — IIЛ II мажорируется сходящимся рядом
^ к\
— обычной экспоненциальной функцией вещественной переменной.
Определение 3. Сумму ряда ^2к>0 ~г,^к (соответственно
/с.
^2к>0Ак) обозначают через ехрЛ (соответственно ехр А) и назы-
называют экспонентной линейного оператора Л (экспонентой матрицы
А). Вместо ехр Л часто пишут е . В силу равномерной сходимости
ряда ^2-r;Ak на множестве п = {А\ \\A\\ ^ а} функция X \-л ехрЛ*
/с.
непрерывна и является отображением C(V) в себя.
Вот прямое доказательство в несколько строк существования экс-
экспоненты ехр А для п х n-матрицы А. Обозначим
§ 1. Норма и функции линейного оператора
303
Пусть т — верхняя граница для абсолютных значений коэф-
коэффициентов ац\ \dij\ ^ т, 1 ^ г, j ^ п. Пусть мы уже знаем, что
Тогда
,00
(ш)8,
ik akj
1 ^ г, j ^ п.
(*)
(nm)s m = (пттг)
s+l
т.е. неравенство (*) справедливо для всех s. Это означает, что каж-
о'ьш из п числовых рядов z^s=o ~lalj СХОДИТСЯ равномерно на мно-
S
l
S.
жестве всех матриц с максимумом абсолютных значений коэффици-
коэффициентов, не превосходящих т. Ряд
являющийся объединением п2 равномерно сходящихся числовых ря-
рядов, сам равномерно сходится.
Пример 4. Пусть V — пространство вещественных многочленов степени
<С п — 1 от переменной t, T>t — оператор дифференцирования. Известная формула
Тейлора для многочленов гласит, что если f(t-\-a) — многочлен степени <С п — 1,
получающийся из f(t) подстановкой t + а, а Gl, вместо t, то
f(t + а) =
То же самое можно переписать в виде
f(t + а) =
1!
(п —
)f(t).
Ввиду нильпотентности оператора оператора aT>t на V ряд для exp aT>t об-
обрывается и выражается конечной суммой. Это общее свойство нильпотентных
операторов. В нашем случае exp aVt = 7ia — оператор сдвига на a G R, пере-
переводящий f(t) в f(t + а). В его линейности можно убедиться непосредственной
проверкой.
Как мы знаем, в базисе
оператору T>t отвечает матрица D = Jn — верхняя клетка Жор дана порядка п,
поэтому матрицей оператора 7ia в этом базисе будет
На = exp a Jn =
1 а а?/2\
О 1 а
О 0 1
0 0 0
ап-2/(п- 2)!
ап-3/(п-3)\
304 Гл. 7. Приложения
Заметим, что в определении экспоненты мы считали основное
поле вещественным или комплексным. Как это принято в теории
функций комплексной переменной, полагаем
+ егуi
= ex • ег
Содержащуюся здесь формулу Эйлера
егу = cos у + г sin у
можно получить, воспользовавшись рядом
и разложениями функций cosy, sin у в степенные ряды от веществен-
вещественной переменной у.
Пример 5. Комплексную плоскость С с точки зрения векторных прост-
пространств над полем С лучше называть комплексной прямой С1, изображаемой
вещественной плоскостью Ш2. В базисе (ei = 1,е2 = г) матрица А линейного
оператора Л: v ь-»- (х + iy)w имеет вид
А=\у
Из определения экспоненты комплексного числа следует, что
~exsmy \ _ ( cosy -sin?/
ex smy excosy ) \ smy cos?/
Вывод: ехр Л, где Л — оператор умножения на комплексное число z =
есть композиция поворота на угол у и растяжения в ех раз.
Пользуясь тем, что в произведении абсолютно сходящихся рядов
члены получающегося ряда можно переставлять, докажем следующее
полезное утверждение.
Теорема 4. Если матрицы А и В размера п х п перестано-
перестановочны, то
(ехр А) (ехр В) =ехр(А + В).
Доказательство. Имеем
(ехр А) (ехр В) =
= (у Ia
sв1 = V V
k^O s=0
sk8) ) fcV
s=0 y ' fe>0 s=0
k>0
§ 1. Норма и функции линейного оператора 305
Здесь мы применили формулу бинома Ньютона
)А8Вк~8 =
\лз цк-s
s=0
справедливую в любом коммутативном кольце и, в частности, в коль-
кольце Z[A,B].
Законность почленного умножения наших рядов вытекает из ре-
редукции доказательства к числовому случаю. В самом деле,
к=0 к=0 к=0
v^ As В1
где Rk = 2J ~~j~~i сумма по всем парам (s,t) с max(s,?) > К,
S. Ъ.
(s + t) ^ 2K. Число таких пар равно К(К + 1). Если т — верхняя гра-
граница для модулей коэффициентов матриц А и В, то коэффициенты
As В1
произведения ——- не превосходит
si t\
n(nm)s п(птУ (nrrioJK
где mo — некоторое положительное число. Значит, коэффициенты
матрицы Rk по абсолютной величине не превосходят
К(К + 1)(птоJК
К\ '
т.е. Rk стремится к нулю при неограниченном возрастании К. Это
и даёт нужную формулу. ?
Для нулевой матрицы О имеем по определению ехр О = Е. Так
как матрицы А и —А, очевидно, перестановочны, то согласно тео-
теореме 4
ехр А • ехр(-А) = ехр(А - А) = ехр О = Е,
откуда мы извлекаем
Следствие. Пусть А —произвольная п х п-матрица (вещест-
(вещественная или комплексная). Тогда ехр А — невырожденная матрица и
(ехр А) =ехр(—А).
4. Однопараметрические подгруппы линейной группы.
Функция ехр интересна во многих отношениях, в том числе с теоре-
теоретико-групповой точки зрения, как это видно из следующего простого
утверждения.
Теорема 5. Соответствие
(pA-t\-> exp(L4), tGl,
20 А.И. Кострикин
306 Гл. 7. Приложения
определённое для любой матрицы А Е Мп(Я), Я = Ж или Я = С,
есть непрерывное гомоморфное отображение аддитивной группы
вещественных чисел М+ в GLn(8).
Доказательство. В самом деле, перефразируя следствие тео-
теоремы 4, мы можем утверждать, что ipA(t) Е СЬп(Я), причём
(<рА(*)Г1=<РА(-*)-
Кроме того,
ipA(s) -
= exp(sA) • exp(tA) = exp(sA + tA) = exp((s + t)A) =
т.е. действительно cpA — гомоморфизм Ж.+ —у GLn($). Его непре-
непрерывность заложена в определении экспоненты. ?
Определение 4. Обычно множество {ехр(?Д) | t G 1} назы-
называют однопараметрической группой линейных операторов на V (при
фиксированном базисе — однопараметрической группой матриц).
Пример 6. Если А = а — вещественное число, то {exp(ta) | t Е Щ — группа
вещественных чисел по умножению. Если А = у/—1 = г, то {ехр(?г) | t Е М} —
окружность.
Чтобы иметь более определённое суждение о природе матрицы
ехр А (оператора ехр Л), мы докажем следующее утверждение.
Теорема 6. Пусть Х±, А2,..., Ап — характеристические корни
матрицы А Е МП(С), рассматриваемые со своими кратностлми
(т.е. Xi не обязательно различны).
Тогда характеристическими корнями матрицы ехр А являются
expAi, expA2, ..., ехрАп.
Доказательство. Как мы знаем (теорема 1 из § 4 гл. 2), лю-
любая комплексная матрица подобна треугольной. В частности, для
нашей матрицы А найдётся невырожденная матрица В такая, что
А = В~1ТВ, где Т — (верхняя) треугольная матрица. Мы знаем
также, что матрицы А и Т имеют одни и те же характеристические
корни. Так как характеристическими корнями треугольной матрицы
являются её коэффициенты, стоящие на главной диагонали, то без
ограничения общности считаем А^ упорядоченными таким образом,
что
Т =
Ai * ... *
0 А2 ... *
0 0 ... Ап
§ 1. Норма и функции линейного оператора
307
Имеем
откуда
к _
А?
0
0
expAi
0
0
*
XI ...
0 ...
*
ехрЛ2
0
*
*
\к
*
*
е
хр
ехрГ =
т.е. expAi, ..., ехрЛп — характеристические корни матрицы ехрТ.
Осталось заметить, что ехр А = В~1 • ехрТ • В (см. упр. 7.1.1), а
поэтому exp Xi будут также характеристическими корнями матрицы
ехрА ?
Следствие. Для любой матрицы А справедливо соотношение
det exp A = exp (tr A). F)
Доказательство. В самом деле, определитель матрицы равен
произведению всех её характеристических корней, а след — сумме
характеристических корней, так что всё немедленно вытекает из
теоремы 6. Более наглядно:
det exp A = det В'1 • exp Г • В = det exp Г =
= exp(Ai + ... + An) = exp(tr A). ?
Из соотношения F) вновь вытекает, что exp A — всегда невыро-
невырожденная матрица, причём det exp A — положительное вещественное
число для всех A G Мп(Ж).
Сделаем ещё несколько замечаний по поводу экспоненты матриц
(линейных операторов). Как всегда, обозначаем через 1А матрицу,
транспонированную к А, а через А — матрицу, полученную из А
заменой всех её коэффициентов комплексно-сопряжёнными числами
(если А — вещественная матрица, то А = А). Напомним, что
\Ак) = ( lA )k, Ak = (А)к.
По поводу первого соотношения см. [ВА I, гл. 2,
G)
3, п. 3], а вто-
рое является следствием того простого факта, что коэффициенты
матрицы Ак записываются в виде однородных форм степени к от
коэффициентов матрицы А. Отображение же z н->- ~z суть автомор-
автоморфизм поля С. Далее,
20*
308 Гл. 7. Приложения
Поэтому прямо из определения ехр А и из соотношений G) получаем
*(ехр А) = ехр (гА), ехр А = ехр А. (8)
Ниже используем общепринятые обозначения для некоторых ма-
матричных пространств:
1) д[(п,Я) = д1п(Я) = Мп(Я) — пространство всех матриц по-
порядка п над полем Я = Ж или Я = С;
2) $1(п,Я) = $1п(Я) — пространство п х n-матриц с нулевым сле-
следом;
3) бо(п,Я) = 50п(Я) — пространство кососимметричных
п х п-матриц X (вещественных или комплексных), 1Х + X = 0;
4) и(п) = ип — пространство над Ж (но не над С) косоэрмитовых
матриц X е МП(С), X* + X = 0 (X* := *Х);
5) 5u(n) = 5Un — пространство над Ж косоэрмитовых матриц с
нулевым следом.
В примере б из § 2 гл. 2 было введено понятие алгебры Ли (см.
также пример 2 из § 3 гл. 3). Справедливо следующее утверждение.
Предложение. Каждое из пространств 1)—5) наделено струк-
структурой (классической) алгебры Ли относительно обычной операции
коммутирования матриц [А, В] = АВ — В А.
Доказательство. Элементарная проверка, основанная на свой-
свойствах отображений
14 *Х, ХиГ, X
известных нам из первых глав. В качестве примера рассмотрим слу-
случай 4):
[А, В}" = (АВ-ВАУ =
= (АВ)* - (BAY = Б*А* - А*Б* = (-В)(-А) - (-А)(-В) =
= ВА- АВ = -[А, В].
В случае 5) добавлено условие trX = 0, сохраняющееся при комму-
коммутировании, поскольку всегда
tr[X,F] =tr АВ -tiBA = Q. ?
Ещё раз условимся в обозначениях, на этот раз неоднократно
встречавшихся нам групп (также классических):
]/) GL(n,&) = ОЬп(Я) — полная линейная группа степени п над
Я = Ж или Я = С;
2') SL(n,&) = ЗЬп(Я) — специальная линейная группа матриц из
Мп(Я) с определителем 1;
3;) SO(n) = БО(п,Ж) = 5ОП(М) (или 5О(п,С)) — группа ве-
вещественных или комплексных ортогональных матриц с определите-
определителем 1;
4;) U(n) = Un — группа унитарных матриц порядка п;
§ 1. Норма и функции линейного оператора 309
5') SU(n) = SUn — специальная унитарная группа (группа уни-
унитарных матриц с определителем 1).
Теорема 7. Отображением X \-> ехрХ устанавливается со-
соответствие г) —у г'), 1 ^ г ^ 5, между алгебрами Ли указанных
типов и группами.
Доказательство. 1) См. следствие теоремы 4.
2) Утверждение зафиксировано в 1) и в формуле F).
3) Если 1Х + X = 0, то, применяя следствие теоремы 4 и форму-
формулу F), находим
*(ехрХ) = ехр 1Х = ехр(-Х) = (ехрХ),
т.е.
*(ехрХ) -ехрХ = Е ^ехрХ е SO(n).
4) X* +Х = 0 =^ (ехрХ)* = ехрХ* = ехр(-Х) = (ехрХ) =^
=> expX G U(n).
5) Если X е 5u(n), то detexpX = 1 и expX G SU(n). ?
Можно было бы доказать, что имеется взаимно однозначное со-
соответствие типа
Ае ... <^> ехр А е ... ,
если в левой части брать из алгебры Ли матрицы с нормой ||А|| < е
для какого-то малого г, а в правой части — матрицы вида ехр А =
= Е + В с \\B\\ < S. Но в целом стрелки в утверждении теоремы 7
нельзя обратить, как показывает следующий
Пример 7. Жорданова клетка
является элементом группы 5ХB,С). Предположим, что J2( —1) = ехр А, где
A G sIB,C). Так как J2( —1) не приводится к диагональной форме, то матрица
А также недиагонализируема (см. упр. 7.1.1). Стало быть, характеристические
корни Ai, A2 матрицы А должны совпадать, т.е.
Ai = A2, Ai + А2 = 0 => Xi = 0, г = 1, 2.
Но \i{ := ехр А^ = ехр 0 = 1 — характеристические корни матрицы J2( —1) (те-
(теорема 6), в то время как на самом деле \i{ = — 1. Это означает, что матрица А
не существует. Другими словами, не каждый элемент группы 5ХB,С) лежит в
однопараметрической подгруппе.
5. Спектральный радиус. Попытка решить упр. 9 ниже при-
приводит к выводу, что норма ||Л|| нормального оператора А на конеч-
конечномерном эрмитовом пространстве равна максимальному из модулей
его собственных значений.
Определение 5. Пусть А — произвольный линейный опера-
оператор на n-мерном векторном пространстве V над С, и пусть {Ai,...
..., Ап} — его собственные значения. Тогда величина
г (А) = max |А7-|
jln
310 Гл. 7. Приложения
называется спектральным радиусом оператора Л.
Как мы видели, г (Л) = ||Л|| для диагонализируемого линейного
оператора Д, но, вообще говоря, г (Л) ^ \\A\\. Действительно, если
А = г (Л) и v — собственный вектор (||v|| = 1), отвечающий А, то
= sup ||Лх|| ^ ||Лу|| = ||Av|| = |А|.
Это неравенство может быть строгим.
Пример 8. Рассмотрим линейный оператор Л с матрицей А = Jn(A) в
ортонормированном базисе (е^) пространства V, снабжённого стандартным ска-
скалярным произведением
Ради простоты считаем Я = Ж и А Е М, так что
х2J + ... + {xn-i А + хп
Если ||х|| = ^jx\ + ... + х\ = 1, то
\ г = 1
и простые соображения показывают, что
г(Л)=А< sup \\Ax\\ = \\A\\.
Цх|| = 1
Далее, А = 0 =^ (jn@)) = 0 при /с ^ п, и, следовательно, г (Л) = 0 =
. Ориентируясь на упр. 2.4.12, мы замечаем, что и при А ф 0 (с
||х|| = 1) имеет место равенство
и / Т /л ч \ к и 1/к
\\(Jn(X)) х|| 7 =
x + + ^x) +(Ж + -Я;з + ... + -^гг
ai(x, А)/с + ... + an_i(x,
lim || (jn(A)) x|| =
= A- lim (l + ai(x, X)k + ... + an_i(x, A)/^) = A • 1 = г(*4).
Используя рассмотренный пример и теорему о ЖНФ, можно показать, что
и в случае общего линейного оператора Л имеют место следующие факты:
2) г (Л) ^ ЦД^Ц1^ ^ ||Л|| (см. следствие теоремы 3).
§ 1. Норма и функции линейного оператора
311
Опираясь на теорему 7 из [2, ч. 1, § 10] об эквивалентности норм на конеч-
конечномерном пространстве (которое обязательно является банаховым), мы можем
также прийти к неравенствам:
3) г (Л) ^ max/, Y^j=\ \ajk\, г (Л) ^ maxj Y^k=i \ajk\ Для любой матрицы
АеМп{?).
Замечание. Понятно, что г (Л) = г (А), где А — матрица линейного опера-
оператора Л в любом базисе, и все соображения, связанные со спектральным радиусом,
можно переводить на матричный язык. Более детально свойства нормы опера-
оператора исследованы в [15].
УПРАЖНЕНИЯ
1. Проверить, что
dimsl(n,&) = п2 — 1,
= п(п — 1)/2, dimsu(n) = п2 — 1.
0
г
—г
0
^з =
1 .
9
2. Построить изоморфизм групп U(l) и 5*0B,Ж).
3. Следующие матрицы над С называются матрицами Паули:
01 _°~г' _10
1 0 ' (У2 ~ г 0 ' as ~ 0 -1
Т2 = --гс
(Г1,Г2,Гз>с=5ГB),
(Ti,T2,T3>E=5uB).
[Ti,T2]=T3, [T3,Ti]=T2, [T2,T3]=Ti.
4. Установить изоморфизм алгебр Ли 5оC,М) и suB) с алгеброй Ли векторов
в трёхмерном евклидовом пространстве относительно векторного произведения.
5. Доказать, что если А, В — п х n-матрицы и det В ^ 0, то
(ТО =
1
0
Положим
Очевидно,
0
1
Проверить, что
Ti
(П =
1
6. Найти ехр А для матрицы
1 1
1 1
7. Доказать, что каждый унитарный оператор Л представляется в виде
j\ = егБ, где В — эрмитов оператор.
8. Доказать, что ||АВ|| = ||?>||, если Л — унитарный, а В — произвольный
линейный оператор.
9. Доказать, что ||«4fc|| = ||v4||fc, k = 1,2,3,..., для каждого нормального
оператора Л.
10. Доказать, что lim/^oo Ak = О <^=> г(Л) < 1.
312 Гл. 7. Приложения
§ 2. Линейные дифференциальные уравнения
1. Производная экспоненты. Пусть P(t) = [pij(t)) — мат-
матрица, коэффициенты которой Pij(t) являются дифференцируемыми
функциями от вещественной переменной t. Полагая по определению
dt
и называя P'(t) = dP/dt производной матрицы Р, будем, очевид-
очевидно, иметь обычное правило дифференцирования произведения
матриц
dt dt dt
Вообще говоря,
. Например,
как показывает пример матрицы
0 t
1 О
dt ^ dt'
Однако в интересующем нас частном случае матрица и её производ-
производная перестановочны.
Теорема 1. Пусть А — матрица с постоянными коэффициен-
коэффициентами (вещественными или комплексными), F(t) = exp(tA).
Тогда
F(t)AF(t). A)
Доказательство. По своему определению матрицы F(t) и А
перестановочны, т.е. в правой части доказываемого соотношения A)
можно было бы поставить F(t)A. Обозначим через At малое прира-
приращение переменной t. По теореме 4 из § 1 имеем
поэтому
±-[F(t + At)-F(t)} =
~i=0
1 1 1
= ^[F(A*) - Е] ¦ F(t) = — [J2 ту(А^)* - Е] ¦ F(t) =
§ 2. Линейные дифференциальные уравнения 313
Из соображений непрерывности степенных рядов мы приходим к вы-
выводу, что
Поэтому
Р ± ). D
2. Дифференциальные уравнения. Пусть теперь
[ = auzi + a12z2 + ... + alnznj
Z2 =
z'n = anizi
— однородная система линейных дифференциальных уравнений пер-
первого порядка с постоянными коэффициентами, записываемая корот-
коротко в виде
Здесь z = \z\, z<2,..., zn] — вектор-столбец; его компоненты zi =
= Zi(t), 1 ^ г ^ п, — неизвестные дифференцируемые функции от
?, рассматриваемые на каком-то интервале r\ < t < r2 и удовлетво-
удовлетворяющие начальным условиям ^@) = z®.
Общая теория дифференциальных уравнений1) гарантирует су-
существование и единственность z = z(t). Более того, из B) и B')
видно, что решения, отвечающие различным начальным условиям,
образуют векторное пространство, а так называемые фундаменталь-
фундаментальные решения составляют базис этого пространства.
Обратившись вновь к соотношению A), мы замечаем что оно до-
допускает следующую интерпретацию: каждый столбец Zj = [/ij,...
..., fnj] матрицы F(t) = (fij(t)) суть решение системы B), удов-
удовлетворяющее начальному условию Zj(O) = [0,..., 1,..., 0] с 1 на j-м
месте (поскольку F@) = Е). Так как начальные условия при j =
= 1,..., п линейно независимы, а все другие являются их линейными
комбинациями, то п столбцов матрицы F(t) исчерпывают всё множе-
множество фундаментальных решений системы B). Пространство решений
оказывается п-мерным.
Более общая система линейных дифференциальных уравнений
имеет вид
§ = ^ + Ь, C)
at
*) См., например: Понтрягин Л.С. Обыкновенные дифференциальные уравне-
уравнения. — М.: Физматлит, 1961.
314
Гл. 7. Приложения
где
А=
z =
Ь =
Как и в случае алгебраических уравнений, возможно, что система
C) несовместна. Если это не так и zq — какое-то частное решение,
то общим решением системы C) будет 2 = z + zq, где z — общее
решение однородной системы B), ассоциированной с C).
3. Линейное дифференциальное уравнение порядка п.
Имеется в виду уравнение
z(n) + aiZ(n-i) + ... + On_l2r(i) + anz = О, D)
где по-прежнему z = z(t) — неизвестная функция независимой пере-
переменной ?, а коэффициенты ai,..., ап — вещественные или комплекс-
комплексные числа. Не касаясь общей теоремы о существовании и единствен-
единственности решения z(t), удовлетворяющего начальным условиям
z/q\ _ zo^ ^A)@) = z°, ..., z<yTl~1\0) = z°
заметим, что линейность уравнения D) относительно z и её произ-
производных имеет следствием линейность пространства решений. Сами
же решения можно найти путём сведения D) к специальной системе
B). Именно, положив
*, = * ^о = Л1) *о = Л2) * , = >-2) - - Лп-1)
Zn =
мы придём к системе B') с матрицей специального вида
0 1 0 ... 0
0 0 1 ... 0
А =
0
—ап
0 0
—an-i —ап-з
1
Далее используем тот же приём, что и в п. 2.
Но к уравнению D) можно подойти с другой стороны. Перейдём
к линейным операторам, действующим на пространстве бесконечно
дифференцируемых функций. Пусть Vt — оператор дифференциро-
дифференцирования not и
= Vtn + aiDf-1 + ... + an-iDt + anS
— линейный оператор, позволяющий переписать D) в виде
X(Vt)z = 0. D')
Многочлен x(t) называется характеристическим многочленом диф-
дифференциального уравнения D'). В этой терминологии есть опреде-
определённый смысл. Так, попробовав искать решение в виде z = eAt,
приходим к соотношению
х(А)ел* = X(Pt)ext = 0,
мы
§ 3. Выпуклые многогранники и линейное программирование 315
из которого следует, что
ext — решение уравнения D') ^==> %(А) = 0.
Теорема 2. Пусть Ai,...,Am — совокупность всех попарно
различных корней характеристического многочлена %(?) уравнения
D'), причём корень Xj имеет кратность к^ так что к\ + ... + кш =
= п. Тогда функции
tkeXjt, l^j^m, O^k^kj-1,
составляют фундаментальную систему решений.
Доказательство мы не будем приводить, отсылая читателя к упо-
упомянутому учебнику Л.С. Понтрягина. В частном случае простых
корней (все kj = 1) рассуждения совсем несложные, но наличие крат-
кратных корней вынуждает использовать ЖНФ (см. гл. 2).
Наша задача заключалась лишь в том, чтобы проиллюстрировать
методы линейной алгебры в теории дифференциальных уравнений
простейшего типа.
§ 3. Выпуклые многогранники и линейное
программирование
1. Формулировка задачи. Основная задача линейного про-
программирования ставится следующим образом. Дано конечномерное
аффинное пространство А над полем вещественных чисел Ж и т + 1
аффинно-линейных функций Д,..., /ш; / : А —у Ж. Требуется отыс-
отыскать точку (или точки) a Е А, удовлетворяющие условиям
для которых функция / принимает наибольшее возможное значение
при этих ограничениях.
Вариант, в котором некоторые из неравенств направлены в обрат-
обратную сторону, fi (a) ^ 0 и/или требуется отыскать точки, в которых
/ принимает наименьшее возможное значение, сводится к преды-
предыдущему случаю заменой знака соответствующих функций. Условие
fi(a) = 0 равносильно совокупности условий fi(a) ^ 0 и —fi(a) ^ 0.
Все функции fi можно считать непостоянными.
2. Мотивировка. Рассмотрим следующую математическую мо-
модель производства. Пусть имеется предприятие, использующее т ви-
видов различных ресурсов и производящее п видов различных продук-
продуктов. Ресурсы и продукты измеряются в своих единицах неотрица-
неотрицательными вещественными числами (случай, когда это целые числа,
например, количество штук автомобилей, мы не рассматриваем; при
больших объёмах производства и потребления ресурсов он хорошо
аппроксимируется "непрерывной" моделью).
316 Гл. 7. Приложения
Объём выпуска всех видов продукции данного предприятия есте-
естественно описывать вектором производства (xi,?2,... ,хп) Е W1.
Широкое распространение получила следующая линейная модель пот-
потребления ресурсов. Считается, что расход ресурса с номером г
(г = 1,2,...,п) на производство единицы продукции вида j (j =
= 1, 2,..., т) составляет а^ ^ 0, причём наличие ресурса г ограни-
ограничено величиной Ь{. Другими словами,
п
fi(xi,. ..,xn) = bi- ^ctijXj ^ О, 1 ^ г ^ т,
или, что эквивалентно,
п
^ 7 • 1 О (Л \
При этом, конечно,
х. > q j = 1 2 п B)
т.е. предприятие не добывает производимых им продуктов на сто-
стороне — для продажи или для запчастей. Предполагается, что система
неравенств A), B) совместна. Любой вектор производства, удов-
удовлетворяющий этой системе неравенств, называется допустимым.
Пусть, далее, ttj — прибыль, получаемая предприятием с каждой
единицы j-ro продукта. Положим
п
Функцию C) в линейном программировании принято называть це-
целевой функцией. Допустимый вектор производства, обеспечивающий
максимум целевой функции C), называется оптимальным по при-
прибыли. Интересы предприятия заключаются в том, чтобы извлечь
наибольшую прибыль, т.е. правильно распорядившись имеющимися
ресурсами, получить оптимальный вектор производства. Мы видим,
что эта задача является частным случаем задачи, сформулированной
в п. 1.
Прежде чем переходить к более содержательной геометрической
интерпретации общей задачи линейного программирования, рассмо-
рассмотрим пример из конкретной экономики.
Пример. Предположим, что некая фирма (назовём её MBRB) производит
два вида продукции: моторные лодки и речные трамвайчики (коротко — MB
и RB). Фирма располагает четырьмя типами оборудования, каждое фиксиро-
фиксированной мощности: по сборке MB, по сборке RB, по сборке моторов и по штам-
штамповке листового металла. Задача: сколько моторных лодок и сколько речных
трамвайчиков следует производить фирме? Прибыль от MB или от RB зависит
от рыночной цены за моторную лодку или за речной трамвайчик и от посто-
§ 3. Выпуклые многогранники и линейное программирование 317
янных издержек фирмы. Предположим, что рыночная цена и средние перемен-
переменные издержки производства (хорошо известные понятия экономики) постоянны,
т.е. они не меняются при выпуске продукции в разумных пределах. Более опре-
определённо, допустим, что рыночная цена моторной лодки равна 70 000 руб., а цена
речного трамвайчика — 125 000 руб. Средние переменные издержки производ-
производства MB равны 65 500 руб, а средние переменные издержки производства RB —
120 000 руб.
Таким образом, фирма получает 4 500 руб. за вычетом переменных издержек
за каждую произведенную MB и 5 000 руб. — за каждый RB. Если А^т& (соответ-
(соответственно Nrb) — число MB (соответственно RB), произведённых фирмой за один
день, то доходы фирмы (до вычета постоянных издержек) должны равняться
тг = f(Nmb,Nrb) =
+ 5000Nri
D)
Допустим, что каждая MB (соответственно RB), произведённая за день, исполь-
использует 15 % мощности МВ-оборудования, 12 % мощности моторного оборудова-
оборудования, 9% — оборудования по штамповке металла (соответственно 17% мощности
RB-оборудования, 8 % мощности моторного оборудования и 13 % — оборудова-
оборудования по штамповке металла). Ясно, что ограничения на решения руководителей
фирмы будут следующие:
0 <С 15Nmb <С 100,
0 ^ l7Nrb ^ 100,
12Nmb + 8Nrb <С 100,
<с юо.
Опустив очевидные пояснения, проиллюстрируем это с помощью рис. 23.
к RB
Рис. 23
Чтобы учесть все указаные выше ограничения, сочетание выпуска моторных
лодок и речных трамвайчиков должно лежать внутри области OABCDE, являю-
являющейся "ареной" для действий руководителей фирмы. Каждая прямая линия оди-
одинаковых прибылей (штрихованные прямые на чертеже) показывает различные
комбинации производства MB и RB, которые ведут к одной и той же суммар-
суммарной прибыли. Чертёж показывает, что оптимальное решение лежит в точке С,
где фирма водного транспорта производит 5,95 MB и 3,57 RB в день. С этими
данными по выпуску валовой доход фирмы MBRB составит 44 625 руб. в день.
318 Гл. 7. Приложения
В рассмотренном примере целевая функция D) принимает своё
максимальное значение в вершине С выпуклого многоугольника. Мы
собираемся показать, что это отнюдь не случайно. Разумеется, прак-
практические приложения линейного программирования связаны с раз-
разработкой конкретных алгоритмов отыскания оптимального вектора
производства, которые можно применять вручную или на ЭВМ. Здесь
мы ограничимся изложением геометрических аспектов задачи, лежа-
лежащих, конечно, в основе всех алгоритмов.
3. Основные геометрические понятия. Фиксируем конечно-
конечномерное аффинное пространство А над полем Ж. Буквы / с индексами
будут обозначать аффинно-линейные функции на А.
Полупространством называется множество точек вида
{а€А\ f(dJO},
где / — непостоянная аффинно-линейная функция. Многогранником
называется пересечение конечного числа полупространств.
Напомним (см. гл. 4, § 3, п. 6), что подмножество S С А выпуклое,
если из ai,a2 G S и 0 ^ А ^ 1 следует, что Adi + A — Х)п2 Е S.
Поскольку
/(Aai + A - A)a2) = A/(ai) + A - A)/(a2),
все полупространства выпуклы. Так как пересечение любого семей-
семейства выпуклых множеств является выпуклым, то все многогранники
выпуклые. Как и ранее, будем говорить, что любая точка
Adi + A - A)d2j 0 < А < 1,
является внутренней точкой отрезка did2 с концами di и d2-
Пусть S — выпуклое множество. Выпуклое подмножество Т С S
называется гранью множества 5, если любой отрезок с концами в 5,
некоторая внутренняя точка которого лежит в Т, целиком лежит в
Т. Всё множество S является своею гранью. Грань множества 5, со-
состоящая из одной точки, называется вершиной S. (Читателю следует
представить себе куб, октаэдр и многогранный угол в трёхмерном
пространстве, чтобы иметь наглядную картину основной ситуации,
важной для линейного программирования. Грани этих фигур в смы-
смысле нашего определения — это грани, рёбра и вершины из школьной
геометрии плюс сама фигура. Вершины шара — это все точки его
поверхности. Число всех граней многогранника S не превосходит чи-
числа подмножеств в системе аффинно-линейных функций Д,..., /т,
определяющих S, и, следовательно, конечно.)
Многогранник S С А естественно называть ограниченным, если
для какой-либо системы координат в А найдётся такое число JV, что
координаты любой точки а Е S по абсолютной величине не превос-
превосходят N. От выбора системы координат это определение не зависит.
Важнейший результат, доказываемый ниже, будет состоять в том,
что максимум аффинно-линейной функции на ограниченном много-
§ 3. Выпуклые многогранники и линейное программирование 319
граннике (в приложениях этот случай наиболее распространён) до-
достигается на одной из его вершин; последних конечное число. Но пре-
прежде нам придётся разобраться подробнее в структуре многогранни-
многогранников и их граней.
Лемма 1. Пересечение семейства граней и грань грани выпук-
выпуклого множества S является гранью S.
Доказательство, а) Пусть Г = ПГ^, Ti — грани S. Любой
отрезок с концами в S, внутренняя точка которого принадлежит Т^,
целиком лежит в Ti. Значит, если его внутренняя точка лежит в Т,
то он лежит в Т.
б) Пусть Т\ С Т С S, Т — грань множества S. Любой отрезок с
концами в 5, внутренняя точка которого лежит в Т\, целиком лежит
в Т, ибо Т — грань S. Значит, его концы лежат в Т, и потому он
целиком лежит в Xi, ибо Т\ — грань грани Т. ?
Лемма 2. Пусть S — многогранник, заданный неравенствами
/г ^ О, г = 1,...,т.
Тогда для любого индекса г многогранник
либо пуст, либо является гранью S.
Доказательство. Пусть Si непуст, di, a^ G S и внутренняя
точка Adi + A — A)d2 отрезка лежит в Si. Функция
/i(Aai + (l-A)a2), 0 ^ А ^ 1,
линейна по А, обращается в нуль для некоторого 0 < Ао < 1 и, кроме
того, неотрицательна при А = 0 и А = 1. Поэтому она тождественно
равна нулю, так что весь отрезок лежит в Si. ?
Лемма 3. Непостоянная аффинн о -линейная функция f на мно-
многограннике
S = {d\ fi(a) ^0; 1 ^ г ^ т}
не может принимать максимальное значение в точке a G 5, для
которой все /i(d) > 0.
Доказательство. Так как / непостоянна, то Df ф 0. Выбе-
Выберем в векторном пространстве У, ассоциированном с А, вектор v G
G V, для которого Df(y) ф 0. Можно считать, что Df(y) > 0, из-
изменив в случае необходимости вектор v на противоположный. Если
число г > 0 достаточно мало и d G 5, то fi(a + ev) > 0 для всех
г = 1,...,т: достаточно взять е < mmi(fi(a)/\Dfi(v)\). Поэтому
d + sv G S для таких е. Но /(d + ev) = /(d) + sDf(a), так что /(d)
не является максимальным значением /. ?
Теперь мы можем доказать наш основной результат.
Теорема. Предположим, что аффинно-линейная функция / ог-
ограничена сверху на многограннике S.
320 Гл. 7. Приложения
Тогда она принимает своё максимальное значение во всех точ-
точках некоторой грани S, являющейся также многогранником. Если
S ограничен, то f принимает своё максимальное значение в неко-
некоторой вершине многогранника S.
Доказательство. Проведём индукцию по размерности про-
пространства А. Случай dim A = 0 очевиден. Пусть dim A = п, и пусть
для меньших размерностей теорема доказана. Пусть многогранник
S задан системой неравенств Д ^ 0,..., /m ^ 0. Так как множе-
множество S замкнуто, то ограниченная сверху функция / на нём при-
принимает максимальное значение в некоторой точке а. Если fi(a) >
> 0,..., fm{cb) > 0, то по лемме 3 / может быть только константой;
в частности, своё максимальное значение она принимает на всём S.
Считаем теперь, что fi(d) = 0 для некоторого г. Это значит, что
/ принимает максимальное значение в точке непустого многогран-
многогранника Si, который является гранью S и лежит в аффинном подпро-
подпространстве {а\ fi(a) = 0} размерности п - 1, ибо fi непостоянна. По
индуктивному предположению максимальное значение ограничения
/ на Si принимается во всех точках некоторой грани многогранника
Si. По леммам 1 и 2 она же будет гранью исходного многогранника
5, причём — многогранником, ибо к неравенствам, определяющим
её в Si, с левыми частями, продолженными на всё пространство А,
следует добавить равенство fi = 0.
Теперь индукцией по размерности аффинной оболочки S пока-
покажем, что у любого ограниченного многогранника обязательно есть
вершина. В самом деле, для размерности нуль это очевидно. Пусть
размерность больше нуля. Мы можем считать, что аффинная обо-
оболочка многогранника S есть всё А. Возьмём любую непостоянную
аффинно-линейную функцию на А. Она должна принимать на S мак-
максимальное значение, ибо S ограничен и замкнут. Стало быть, у S
есть непустая грань, во всех точках которой это значение принима-
принимается. Она является ограниченным многогранником, аффинная обо-
оболочка которого имеет строго меньшую размерность. По индуктив-
индуктивному предположению у неё есть вершина, являющаяся по лемме 3
также вершиной многогранника S.
Окончательно, пусть S ограничен и Т — многогранная грань
5, на которой исходная функция / принимает своё максимальное
значение. Тогда любая вершина Т, существование которой доказано,
является искомой вершиной многогранника S. ?
УПРАЖНЕНИЯ
1. Доказать, что всякий ограниченный многогранник является выпуклой
оболочкой множества своих вершин.
2. Используя упр. 1 и теорему 13 из § 3 гл. 4, доказать, что максимум ли-
линейной функции на ограниченном многограннике достигается в одной из его
вершин.
§ 4- Неотрицательные матрицы 321
§ 4. Неотрицательные матрицы
1. Производственная мотивировка. Следуя [12, 15], изложим
задачу планирования производства в достаточно известной эконо-
экономической модели Леонтьева1^. Некий концерн владеет п фабриками
Fj, I ^ j ^ п. На фабрике Fj производится продукт Pj. Для произ-
производства единицы продукта Рк нужно использовать ctjk ^ 0 единиц
продукта Pj, j ф к (естественно полагать ctjj = 0). Для производ-
производства Xk единиц продукта Pk при к = 1, 2,..., п концерну потребуется
в итоге Х]/г=1 ajkXk единиц продукта Pj. Таким образом, для рынка
остаётся
A)
к=1
единиц продукта Pj.
Задача планирования принимает следующий вид: при заданной
рыночной потребности у = (?/i,... ,уп) Е W1 с у3 ^ 0 нужно найти
вектор производства х = (xi,...,xn) с Xj ^ 0, удовлетворяющий
условию A). Полагая А = (а^), мы перепишем A) в матричной
форме:
у = (Е - А)х. (V)
Теперь мы используем обозначение
х ^ 0, у ^ О, А ^ 0 B)
для векторов и матриц с неотрицательными вещественными
компонентами (коэффициентами), называя их коротко неотрица-
неотрицательными. В случае строгих неравенств говорят о положительных
векторах и матрицах (не смешивать с положительно определёнными
матрицами).
Воспользуемся теперь элементарными результатами о спектраль-
спектральном радиусе матрицы (или отождествляемого с нею линейного опе-
оператора в Жп) из п. 6 § 1. Если г (А) < 1, то, как следует из примера 3
из § 1, матрица Е — А обратима, причём (Е - А)~х = ^2к>0 Ак. Так
как матрица А по определению неотрицательна, то неотрицательна
любая её степень Ак, а в таком случае неотрицательна и матрица
(Е — А)-1. Поэтому нужное решение х ^ 0, отвечающее матричному
ссотношению A;), даётся формулой
х=(Е-А)-1у.
Условие г (А) < 1 вряд ли интерпретируется в экономических терми-
терминах, но к этому можно прийти, используя неравенство 3) из § 1, п. 5:
*) Василий Васильевич Леонтьев A905-1999) — выпускник Петербургского
университета, впоследствии профессор Гарвардского университета, крупный
экономист, лауреат Нобелевской премии.
21 А.И. Кострикин
322
Гл. 7. Приложения
г (А) ^ тахк^=1 ajk- Следовательно, Ylj=iajk < 1, к = 1, 2,... ,п,
является достаточным условием для разрешимости нашей задачи.
Это условие уже допускает экономическую интерпретацию. Действи-
Действительно, Y^j=i ajk — издержки, которые несут на фабрике Fk при
изготовлении единицы продукта Р/.. Требование J^jLi ajk < 1 озна-
означает, следовательно, что фабрика Fk работает рентабельно.
Таким образом, имеет место
Теорема 1. Если все фабрики работают рентабельно, то за-
задача планирования разрешима, причём единственным образом.
2. Свойства неотрицательных матриц. Согласно теореме 1
система A) с матрицей А ^ 0, удовлетворяющей условиям B), имеет
единственное решение при любом у ^ 0, т.е. det(E — А) ф 0. Заметим
теперь, что если А^0и1^Л^0, то матрица ХА ^ 0 удовлетворяет
тем же условиям B), так что
det(E - ХА) ф 0, (К Л ^ 1.
Определитель det(.E — Л А) положителен при Л = 0 и непрерывен по
Л, а поэтому он положителен и при Л = 1, т.е. имеет место
Теорема 2. Пусть А = (ajk) ^ 0 и Y^j=i ajk < 1 пРи к =
= 1, 2,..., п. Тогда det(E - А) > 0.
Неотрицательные матрицы — важный и неотъемлемый инстру-
инструмент исследования в теории игр, комбинаторике, задачах оптимиза-
оптимизации, математической экономике (линейное и динамическое програм-
программирование), теории вероятностей, в генетике.
Пусть Р — матрица, отвечающая некоторой перестановке тг G Sn
(см., в частности, упр. 6 в [ВА I, гл. 2, § 3]). Например, при п = 3 и
тг = A 2 3) имеем
0 0 1
Р= 1 0 0
0 1 0
Понятно, что 1Р — Р~1. Преобразование подобия А н-» Р~1 АР осу-
осуществляет перестановку одновременно строк и столбцов матрицы
A G Мп(Щ.
Определение 1. Пусть при п > 1 найдётся матрица переста-
перестановки Р, для которой
Ац А12
0 А22
где Ац, А22 — квадратные матрицы порядка < п. Тогда А называ-
называется приводимой матрицей. Если такой матрицы Р не существует,
то А — неприводимая матрица.
Понятно, что матрица А > 0 всегда неприводима, поскольку при
любой перестановке её строк и столбцов угол нулей возникнуть не
может.
§ 4- Неотрицательные матрицы
323
Основным результатом, относящимся к неприводимым неотрица-
неотрицательным матрицам, является следующая классическая теорема Пер-
Перрона—Фробениуса A907-1912), усовершенствованная впоследствии
Виландом.
Теорема 3. Пусть А = (aij) Е Мп(Ж) — произвольная неотри-
неотрицательная неприводимая матрица с характеристическими корнями
Тогда:
1) А обладает положительным собственным значением г = г(А)
алгебраической кратности 1;
2) собственному значению г отвечает положительный собст-
собственный вектор х : Ах = гх;
3) если г = Ао, Ai,..., Afc_i — множество всех характеристи-
характеристических корней, по модулю равных г, то Xj = Q3r, 0 ^ j ^ k — 1, где
0- = е^гз/к^ Причём п точек в С, отвечающих Xs, 0 ^ s ^ п — 1, инва-
инвариантны относительно вращений около начала координат с углами,
кратными 2тг//с;
4) если к > 1, то найдётся матрица перестановки Р, для кото-
которой
0 А12 0 ... 0
0 0 А23 ... 0
о
0
где A/,j+i — ^j x rij+i-матрица и А^\ — п/. х ni-матрица;
5) еслг/ <2jj > 0 жоттгя #ьг скя одного j, то к = 1;
6) ес/ш найдётся i ф j с a^uji > 0, mo к ^ 2.
Доказательство теоремы 3 довольно длинное и здесь не приво-
приводится (см. [14, 15]).
3. Стохастические матрицы. Напомним (см. [ВА I, гл. 2, § 3,
упр. 4]) следующее
Определение 2. Матрица Р = (pij) G Мп(Ж) называется сто-
стохастической, если
Если, кроме того, ^2^=1Pij = 1, J = 1,2,...,п, то матрица Р
называется дважды стохастической.
Матрица перестановки — один из частных видов дважды стоха-
стохастической матрицы.
Теорема 4. Стохастичность неотрицательной матрицы Р
имеет место тогда и только тогда, когда Ре = е для е = [1,1,...
21*
324 Гл. 7. Приложения
...,1]. Кроме того, г(Р) = 1 для каждой стохастической мат-
матрицы Р.
Доказательство. Если матрица Р = (p%j) стохастична, то,
очевидно, Ре = е, так что 1 — собственное значение. Обратно: свой-
свойство Ре = е — лишь иная запись стохастичности Р.
Далее, из Рх = Лх, х = [xi,?2,... ,хп] для стохастической ма-
матрицы Р следует, что ^^=\Ргзхз ~ ^хг- Поэтому, полагая \хт =
= maxi^j^n{xj}, мы приходим к неравенству
п п
\М ' Ы ^ ^Pij\Xj\ ^ \xm\ ^Pij = \хт .
3 = 1 3 = 1
В частности, при г = т имеем
|А| • |жт| ^ |жт| =j. |А| ^ 1 => г(.Р) = 1. ?
Связь стохастических матриц с общими неотрицательными ма-
матрицами устанавливает
Теорема 5. Пусть А — произвольная неотрицательная мат-
матрица с положительным собственным вектором с = [ci,... ,сп], от-
отвечающим вещественному собственному значению г = г (А). Пусть
С = diag(cb...,cn).
Тогда матрица
Р = (Pij) = ^С-1 АС
является стохастической.
Доказательство. По условию Ас = гс, что эквивалентно сис-
системе равенств
п
^ctijCj = rci, i = 1,2,..., п.
Так как р^ = т~1с^1ацс^ то
п п
^Pij = r^C^^CLijCj = Г^СГ1 • rCi = 1. ?
3 = 1 3 = 1
Легко видеть, что стохастичность матриц Р = (pij), Q = fej) ?
G Мп(Ж) влечёт стохастичность их произведения PQ = R = (г^):
j=l j=l k=l k=l 3 = 1 k=l
В частности, любая степень стохастической матрицы является сто-
стохастической.
Мы лишены возможности доказать здесь интересное свойство
§ 4- Неотрицательные матрицы 325
эргодичности — существование предела
Р=
.. .^к
з=о
где Р снова является стохастической матрицей с Р2 = Р = РР =
= PP. Если Р — неприводимая стохастическая матрица, для кото-
которой
AeSpec(P), |А| = 1 => А = 1,
то существует даже предел
Р°° = lim Pk. C)
к—>-оо
Наконец, если Р — дважды стохастическая матрица и dim Ker (P—
-Я) = 1, то
Р = Нт -
к—>-оо /С
3=0
1/n 1/n ... 1/n
1/n 1/n ... 1/n
Всякая стохастическая матрица Р переводит, очевидно, любой
вероятностный вектор х = [xi,... ,жп], xi ^ 0, J^ILi Xi = ¦'¦' снова в
вероятностный, причём в случае Р > 0 любому вероятностному век-
вектору х отвечает положительный вектор Рх. Именно по этой причине
стохастические матрицы играют важную роль в теории вероятно-
вероятностей. Пусть дана некоторая физическая система S, которая может на-
находиться точно в одном из п состояний si,..., sn. Пусть систему воз-
возможно наблюдать в дискретные моменты времени to < t\ < ?2 < • • •,
и пусть р/, = [pi(tk), • • • ,Pn(tk)] — вероятностный вектор, где
Pj(tk) — абсолютная вероятность нахождения системы в состоянии
Sj в момент времени tk для j = 1, 2,..., п; к = 0,1, 2,... Предполо-
Предположим теперь (и это предположение вполне реалистично), что известны
условные вероятности pij перехода в момент времени tk системы S в
состояние Si, коль скоро в момент времени tk-i система находилась
в состоянии Sj. По правилам теории вероятностей
3=1
Полагая Р = (pij), перепишем это в матричном виде: р/. = Pp^_i.
Если, наконец, начальное состояние системы S есть sr, то ро —
вектор-столбец с 1 на r-м месте и нулями на остальных местах. Итак,
Рк = РкРо-
Описанный здесь процесс носит название однородной цепи Map-
326
Гл. 7. Приложения
кова с матрицей перехода Р (в обычной цепи Маркова2) условная
вероятность рц = Pij{tk] tk-i) зависит от момента времени ?/,). Есте-
Естественно поинтересоваться предельным поведением последовательно-
последовательности {р*;}, т.е. фактически — пределом C).
Пример. Матрица перехода
Р =
отвечает элементарному сообщению типа "да", "нет" и искажениям в процессе
передачи "да —>¦ нет" с вероятностью р, "нет —>¦ да" с вероятностью q\ 1 — р :
"да —>¦ да"; 1 — q : "нет —>¦ нет").
-р р
g -q
нас 0 ^ р, q ^ 1, поэтому р + q = О
далее, р -\- q > 0. Тогда
Записав Р = Q + Е, Q =
> +
, мы будем иметь Q2 = — (р + g)Q. У
Р = Е — тривиальный случай. Пусть,
к
+ q p + q
Очевидно, — 1 <С 1—p — q ^ 1. При 1—p — q = 1 мы опять приходим к тривиальному
случаю Р = Е. При 1 — р — q = —1 имеем р = q = 1, так что
0 1
1 0
р2к =
_ р
поэтому предел Р°° не существует.
Теперь рассмотрим общий случай —1 < 1 — р — q < 1. Имеем Птд,_).ооA —р —
q)k = 0, так что
= \im Рк = Е-
1
-Q =
q/{p + q) p/{p + q)
q/(p + q)
В частности, при 0 < р = g < 1 имеем
lim Pk =
1/2 1/2
1/2 1/2
В заключение отметим, что всякая ненулевая неотрицательная
матрица А = (ciij) из пространства SMagn(Qj) полумагических ма-
матриц порядка п (см. пример 8 из § 1 гл. 1) приводит к дважды сто-
стохастической матрице Р = (pij). Действительно, если ^jdij = а =
= ^2i ctij, 1 ^ г, j ^ п, 0 т^ « G Q, то достаточно положить р^- = 1/а.
Это лишь дополнительная иллюстрация к теореме 5.
2) Андрей Андреевич Марков A856-1922) — крупный русский математик, один
из виднейших представителей Петербургской математической школы.
§ 5. Геометрия Лобачевского 327
§ 5. Геометрия Лобачевского
1. Пространство Лобачевского. Пусть V — (п + 1)-мерное
векторное пространство над полем вещественных чисел М, ?(V) —
порождённое V проективное пространство. Пусть q — невырожден-
невырожденная квадратичная форма на V, имеющая положительный индекс инер-
инерции п и отрицательный индекс 1; / — симметричная билинейная
форма, полярная к q. Как мы знаем из гл. 1, существует базис (ei,...
..., еп) пространства V, в котором форма q принимает нормальный
вид
gr(x) = -х% + х\ + х\ + ... + х2п. A)
Пару (V, q) мы могли бы считать "псевдоевклидовым" простран-
пространством (пространством Минковского), но сейчас нам полезнее подойти
к предмету с другой стороны.
На жо, xi,..., хп можно смотреть как на однородные координаты
точки
х G Р(У), х = жоео + ... + жпеп,
в данной системе проективных координат. Уравнением q(x) = О
задаётся проективная квадрика (в V мы её назвали бы конусом).
Определение 1. Множество Л С У, заданное условием q(x) <
< 0, т.е.
х\ + х\ + ... + х2п < xl B)
(световой конус в теории относительности), есть "внутренность"
конуса q(x) = 0. Прямым, проходящим через начало координат и
лежащим внутри конуса, соответствует множество
Л = РГ(Л) С F(V),
которое называется п-мерным пространством Лобачевского.
Фактически Л целиком содержится в аффинной карте (Ед,Фо),
определённой условием хо ф 0: это условие необходимо для выполне-
выполнения неравенства B). В системе аффинных координат
Уг = Xi/xo, г = 1,2,... ,п,
пространство Л задаётся неравенством
у1+у1 + ... + у1<1, B')
т.е. Фо(Л) (рис. 24) изображается в виде открытого (п — 1)-мерного
шара радиуса 1 с центром в точке ёо-
Вспомним теперь, что Eq = ео + Vo, где ео — первый вектор того
базиса, в котором q(x) имеет вид A), и Vo — векторная гиперплос-
гиперплоскость, определённая условием хо = 0. Другими словами, Eg — аффин-
аффинное пространство, ассоциированное с векторным пространством Vo-
На Vo определена квадратичная форма qo = q\v0, имеющая в базисе
328
Гл. 7. Приложения
(ei,..., еп) вид go(x) = х\ + ... + х2п и являющаяся, следовательно,
положительно определённой. При помощи qo на Eq вводится евкли-
евклидова функция расстояния. Таким образом, Eq наделяется структурой
евклидова пространства.
Рис. 24
Мы обобщим теперь наши рассуждения и попытаемся связать с
каждой точкой ё Е Л аффинную карту (Ее,Фе) пространства P(V).
Так как q(e) < 0 и Ле = ё, то вектор е можно считать нормирован-
нормированным условием q(e) = —1. Положим
Уе = {хе^|/(е,х)=0}, C)
где / — билинейная форма, полярная к q. Стало быть, Ve — псевдо-
псевдоортогональное дополнение к е. Пусть, далее,
Ее =е + Уе.
Квадратичная форма qe = q\ye положительно определена. В самом
деле, записав вектор х Е V в виде х = ае + х;, х; G VG, и восполь-
воспользовавшись определением C), мы видим, что д(х) = —а2 + ^(х;) =
= —а2 + де(х/)- Отсюда видно, что отрицательный индекс инерции
формы qG должен быть равен нулю.
Итак, (VG,qG) — евклидово векторное пространство со скаляр-
скалярным произведением (х'|у')е, что позволяет рассматривать Ее как
(точечное) евклидово пространство. Отображение
Фе: F(V) \ Р(Ув) -»¦ Ее
определяется обычным образом: Фе(х) есть точка пересечения пря-
прямой (х) с Ее • В частности,
Фе(Л)=ЛПЕе.
§ 5. Геометрия Лобачевского 329
Вектор х = е + х', х' Е VG, принадлежит множеству Л тогда и только
тогда, когда д(х) = #е(х') — 1 < 0, т.е. д(х') < 1, а это значит, что
на аффинной карте (Ее,Фе) пространство Л изображается в виде
открытого евклидова шара радиуса 1 с центром в точке ё Е Фе (ё).
2. Движения пространства Лобачевского. Псевдоортого-
Псевдоортогональная группа O(q) = О(п, 1) С GL(V), или, что то же самое, группа
автоморфизмов квадратичной формы q, состоит из линейных опера-
операторов Л Е GL(V), для которых
q(Ax) = g(x) Vx G V. D)
Сравнивая определения B) и D), мы видим, что Л(А) = Л. Рассмо-
Рассмотрим образ O(q) группы O(q) при эпиморфизме тг: GL(V) ->• PGL(V)
(см. гл. 5, § 3, п. 6)
Так как Л(Л) = Л и Л • х = Дх, то
х G Л <(=^> х е Л => Лх G Л ^ А • х G Л.
Итак, О(д) — подгруппа проективной группы PGL(V), сохраняю-
сохраняющая Л.
Определение 2. Элементы группы O(q) называются движе-
движениями, а сама группа O(q) — группой движений n-мерного простран-
пространства Лобачевского Л. Группе О(д), действующей на Л, отвечает гео-
геометрия, называемая гиперболической геометрией или геометрией
Лобачевского1^.
В этом определении непривычным является употребление тер-
термина "движение", его принято ассоциировать с таким преобразо-
преобразованием множества, которое сохраняет какую-то метрику на множе-
множестве. Наша основная задача — ввести такую метрику на Л, чтобы
группа O(q) оправдывала своё название. Но пока мы остановимся
на другом свойстве группы О(д), которое столь же необходимо для
содержательного определения геометрии.
Теорема 1. Группа O(q) действует на Л транзитивно, т.е. в
геометрии Лобачевского все точки О(q)-конгруэнтны.
Доказательство. Пусть с, ё — любые две точки простран-
пространства Л. Как мы уже видели, без ограничения общности можно счи-
считать, что q(c) = g(e) = — 1. В векторных гиперплоскостях Ус и Уе
*) В честь Николая Ивановича Лобачевского A792-1856) — великого русского
геометра, открывшего и впервые изложившего (в 1829 г.) основы новой геомет-
геометрии. Его сочинением "О началах геометрии" и последующими моделями плоскос-
плоскости Лобачевского была, в частности, доказана независимость пятого постулата
Евклида.
330 Гл. 7. Приложения
(см. C)) выберем ортонормированные базисы (с[), (е[), 1 ^ г ^ п (ор-
тонормированность относительно скалярных произведений (* | *)с и
(* | *)е). Матрица F билинейной формы, полярной к q, в каждом
из базисов (c,cj), (e,ej) пространства V имеет один и тот же вид
diag (—1,1,1,...,1). Поэтому линейный оператор Л, заданный равен-
равенствами Ас = е, Лс[ = е^, 1 ^ i ^ п, очевидно, является автоморфиз-
автоморфизмом формы q (или /), т.е A Е O(q). При этом А • с = Лс = ё, так
что А — движение пространства Лобачевского, переводящее точку
с в точку ё. ?
Некоторую информацию о группе 0{q) даёт
Теорема 2. Стационарная подгруппа O(q)~ любой точки ё Е
Е Л изоморфна группе SO(n) вращений вокруг точки ё = Фе(ё) на
аффинной карте (Е, Фе).
Доказательство. Наша цель — показать, что движению Л
пространства Лобачевского Л, оставляющему на месте точку ё G Л,
соответствует вращение в Ее вокруг точки ё; верно и обратное.
Итак, пусть Л • ё = ё, т.е. Ле = Ле. По условию q(e) = — 1. Так
как Л е O(q), то
q(Xe) = q(e) => A = ±1.
Без ограничения общности считаем А = 1, заменяя в случае необхо-
необходимости Л на — Л. Из C) следует, что Л(Уе) = VG. Полагая Лё = Л|ке ,
A'G = Ae\ve, будем иметь
ДДе + х7) =е + .<х' E)
для любой точки х := х = ё + х; G Ее, где х' G 14-
Таким образом, AfG — ортогональный линейный оператор на Уе,
а Лё — вращение пространства Ее вокруг точки ё := е. Так как
х G Л => х = /i(e + x;), \i ф 0,
то с учётом E) имеем
Фе( J • х) = Фе(Лх) = Фе (/i(e + Дех')) =
= ё + Лех; = Л(е + х;) = Л(Фех),
т.е. именно вращение Лё и изображает действие А : Л —У Л на аф-
аффинной карте (Ее,Фе).
В свою очередь если Лё — вращение пространства Ее вокруг
точки ё с линейной частью Ле, то линейный оператор А : V —> V,
определённый равенствами Ае = е, Ах' = Дех'•> будет, очевидно, ав-
автоморфизмом формы q, оставляющим инвариантной аффинную ги-
гиперплоскость Ее С У. При этом A G O(q) действует на Л в точном
соответствии с действием Лё на Ее. ?
§ 5. Геометрия Лобачевского 331
3. Метрика Лобачевского. В дальнейшем мы фиксируем точ-
точку ёо — центр открытого шара B') в евклидовом пространстве Ео =
= ео + Vo и возвращаемся к аффинной карте (Ео ,Фо).
Лемма 1. Пусть Si,a2 G A, Si Ф э.2- Проведём через <I>o(ai) и
Фо(а2) прямую L аффинного пространства Eq .
Тогда L пересекает сферу
S11-1: yl+yl + ... + yl = l F)
в двух различных точках.
Доказательство. Точки прямой L задаются в виде р + ?а',
где р — некоторая точка в Ео, 0 ф а' — вектор из Vo и t — про-
произвольное вещественное число (координата точки на прямой). Если
а' = aiei + ... + anem P = С#ъ • • • •>&п)-> то аффинные координаты yi
точки г = р + ?а' имеют вид yi — ^i-\- ton. Точка пересечения прямой
L со сферой F) получается из уравнения
at2 + /3t + 7 = ^(tati + АJ -1 = 0.
Квадратный трёхчлен at2 + Et + 7 с положительным коэффициен-
коэффициентом a = ^2i а2 при ?2 принимает отрицательные значения в точках
<I>o(ai), Фо(а2) прямой L, поскольку для них ^2^2 — 1 < 0. Значит,
at2 + Ct + 7 имеет два различных вещественных корня. ?
Пусть Фо(Ь].), <J>o(t>2) — точки пересечения L со сферой F), взя-
взятые в таком порядке, чтобы координаты tk точек <I>o(bi), <I>o(ai),
Фо(а2), Фо(Ь2) на прямой шли в порядке возрастания (в случае необ-
необходимости меняем местами точки Si и S2). Положим
A(aba2) := S • |dia2| = [Si,S2,b2,bi], G)
где, как обычно, [Si,S2,b2,bi] — двойное отношение четырёх точек
(см. гл. 5, § 3). У нас Si фв.2^ но соотношение G) сохраняется и при
Si = S2, когда S • \a\CL2\ = 1, а L — любая прямая, проходящая через
точку Фо(а].).
Лемма 2. Если Si ф S2, то A(ai,a2) > 1.
Доказательство. Прямая L, проходящая через Фо(а].), Фо^),
может рассматриваться как аффинная карта проективной прямой
Р1. Определим на Р1 другую аффинную карту, взяв за бесконечно
удалённую точку bi. Введём в этой аффинной карте систему ко-
координат, взяв за нулевую точку Ь2, а за единичную — S2 (понять,
что это значит, лучше всего из описания свойств двойного отно-
отношения в гл. 5). Тогда по формуле B1) из § 3 гл. 5 получим, что
[Si,S2,b2,bi] = х — аффинная координата точки Si. Так как Фо(а].)
332 Гл. 7. Приложения
лежит между Фо(Ь].) и
оо х 1 О
о о о о
Ф0(Ь1) Ф0(а1) Ф0E2) Фо(Ь2),
то х > 1. Остаётся добавить, что двойное отношение не зависит от
выбора аффинной карты.
Замечание. Из свойств двойного отношения следует, что
[aba2,bbb2] = [ai,a2,b2,bi]~1 < 1.
Теорема 3. Выражение A(Si,S2), определённое по формуле G),
инвариантно относительно движений пространства Лобачевского,
т.е. _ _ _ ^~^
А(ЛаьЛа2) = Д(аьа2) VAe 0(q).
Доказательство. Пусть A Е 0(q). Если Si = а2, то Ав.\ =
= Ла2 и А(аьа2) = А(Лаь Ла2).
Пусть Si ^3.2- Так как Si,S2,b2,bi лежат на одной прямой Р1
пространства ?(V) D Л, то Asii, Л52, ЛЬ2, ЛЬ1 тоже лежат на од-
одной прямой ^(Р1). Далее, Ф0(Ь1),Ф0(Ь2) G S71'1, где S71'1 — сфера,
определённая уравнением F). По своему смыслу А переводит 5n-1
в себя, так что Фо(ЛЬ].), Фо(ЛЬ2) — это точки пересечения с 5n-1
прямой, проходящей через Фо(Ла].), Фо(Ла2).
Согласно теореме 4 из § 3 гл. 5
[Даь Ла2, ЛЬ2, АЪ±] = [aba2,b2,bi] = А(аьа2). (8)
Осталось показать, что [Asii, Ла2, ЛЬ2, Ahi] = А(Ла1,Ла2), а это
верно, если точки Ф0(ЛЬ1), Ф0(Ла1), Ф0(Ла2), Ф0(ЛЬ2) расположены
на соединяющей их аффинной прямой в порядке возрастания коор-
координат. Предположив, что это не так, мы должны признать, что в по-
порядке возрастания координат идут точки Фо(ЛЬ2), Фо(Ла].), Фо(Ла2),
Фо(ЛЬ].). Но тогда по лемме 2
[Лаь Ла2, ЛЬЬ ЛЬ2] = А(Лаь Ла2) > 1,
откуда
[Лаь Ла2, ЛЬ2, АЪх] = [Лаь Ла2, ЛЬЬ ЛЬ2]-1 < 1.
Полученное неравенство, однако, противоречит соотношению (8) и
лемме 2. ?
Определение 3. Расстоянием Лобачевского между точками
Si, a2 G Л называется величина
/о(аьа2) = log A(SbS2), (9)
§ 5. Геометрия Лобачевского 333
где А — функция, заданная соотношением G).
Основание логарифма, влияющее лишь на масштаб, не указыва-
указывается. Из доказанных нами фактов относительно А вытекают следу-
следующие свойства метрики Лобачевского р:
1) ^(ЛаьЛаз) =/о(аьа2) УЛ G O(q);
2) /о(аьа2) =/o(a2jai);
3) ^(Si,a2) ^ 0, причём ^(ai,a2) = 0 «<=>* Si = а2;
4) ^(Si,a3) = ^(Si,a2) +^(a2,a3), если точки аьа2,а3 коллине-
арны и Фо(а2) лежит между точками <I>o(ai) и Фо(а3).
Для доказательства последнего утверждения нужно проверить
равенство
Д(аьа3) = А(аьа2) • A(S2,S3),
но оно вытекает непосредственно из определения двойного отноше-
отношения.
Стоит обратить внимание на тот факт, что пространство Лоба-
Лобачевского не ограничено, хотя оно и "помещается" в шаре.
Метрика Лобачевского позволяет ввести понятие угла в простран-
пространстве Л. Углы с вершиной в точке ёо (ёо — центр сферы F)) изме-
измеряются так же, как в аффинной карте. Для определения величины
угла У с вершиной в любой другой точке ё рассмотрим движение
A Е O(q), переводящее ё в ёо, и положим величину угла У равной
величине угла Л(У) (для последнего величины в геометрии Лоба-
Лобачевского и в аффинной карте совпадают, поскольку его вершиной
является eg). Это определение не зависит от выбора движения А.
Действительно, если Be = ёо для какого-то другого движения 23, то
С = В А'1 — движение и Сё0 = ё0. Тогда В = С,А и Я(У)=С(Л(У)).
Согласно теореме 2 С реализуется евклидовым движением аффин-
аффинной карты (Ео, Фо)- Поэтому величины углов В(У) и Л(У) в аффинной
карте совпадают.
Пусть снова У — угол с вершиной в точке ё, А — любое движе-
движение Лобачевского иУ' = Л (У). По определению А-величина угла У;
равна Е-величине (евклидовой величине) угла Д'(У'), измеренного в
аффинной карте, где А' — А-движение, переводящее вершину ё угла
У; в ёо. Но тогда движение А1 А переводит ё в ёо, и величина угла У
равна величине угла (Л;Л)(У), измеренного в аффинной карте. Так
как (А'А)(У) = А'(А(У)) = А'(У), то мы доказали, что величины
углов не меняются при движении Лобачевского.
Любое утверждение относительно углов с общей вершиной, спра-
справедливое в евклидовом пространстве, будет справедливо и в про-
пространстве Лобачевского. В частности, развёрнутый угол равен тг:
334 Гл. 7. Приложения
если углы pqr и rqs находятся в одной плоскости и имеют общую
сторону qr, лежащую между qp и qs, то их сумма равна углу pqs.
4. Плоскость Лобачевского. Как нетрудно видеть, одно-
одномерная геометрия Лобачевского совпадает с одномерной евклидовой
геометрией (если Л задано неравенством х2 < 1, то функция
f(x) = log-——
определяет отображение Л на вещественную прямую, причём Л-рас-
стояние переходит в евклидово и Л-движение — в евклидово
движение).
Остановимся несколько более подробно на двумерном простран-
пространстве Лобачевского. Из гл. 4 мы знаем, что всякое движение евкли-
евклидовой плоскости с неподвижной точкой ё является либо поворотом
вокруг ё на некоторый угол, либо отражением относительно прямой,
проходящей через ё. Соответствующая терминология переносится и
на плоскость Лобачевского.
В равной мере справедливы также следующие утверждения.
1) В равнобедренном треугольнике углы при основании равны,
биссектриса угла при вершине перпендикулярна к основанию и де-
делит его пополам.
2) Три признака равенства треугольника: по стороне и двум
прилежащим углам; по двум сторонам и углу между ними; по трём
сторонам.
3) Внешний угол треугольника больше любого внутреннего, с
ним не смежного.
4) Во всяком треугольнике против большей стороны лежит и
больший угол.
5) Во всяком треугольнике любая сторона меньше суммы двух
других сторон.
6) Из точки ё, не лежащей на прямой ?, можно опустить на ?
перпендикуляр, причём единственный.
Приведём обоснование последнего утверждения, для чего рассмо-
рассмотрим изображения ё и ? на аффинной карте (Ее,Фе), опуская для
простоты символ Фе.
Прямая ? представляется на этой карте как хорда круга Л, а
точка ё — как его центр ё. Опустим евклидов перпендикуляр h из
ё на ? и покажем, что он будет перпендикуляром в смысле геоме-
геометрии Лобачевского. Для этого рассмотрим отражение плоскости Л
относительно h. На карте Ее оно представляется как евклидово от-
отражение и поэтому переводит прямую ? в себя. Отсюда следует, что
П!ив геометрии Лобачевского.
§ 5. Геометрия Лобачевского 335
Рис. 25 Рис. 26
Единственность перпендикуляра, как и в евклидовой геометрии,
вытекает из утверждения 3). ?
Используя 6), нетрудно проверить, что перпендикуляр короче на-
наклонной. В качестве упражнения предлагается найти Л-расстояние
точки (а, Ъ) (в круге х2 + у2 < 1) от оси х и написать уравнение
геометрического места точек, равноудалённых от оси х.
Таким образом, многие теоремы двумерной евклидовой геоме-
геометрии справедливы и для двумерной геометрии Лобачевского. Но все
теоремы о конфигурациях фигур на евклидовой плоскости выводятся
из небольшого числа аксиом, выражающих простейшие свойства то-
точек и прямых (например, через любые две точки проходит единствен-
единственная прямая, а из любых трёх точек прямой одна и только одна лежит
между двумя другими). Можно пытаться проверить, какие из этих
аксиом остаются верными в геометрии Лобачевского. Если бы ока-
оказалось, что все они справедливы, то можно было бы утверждать, что
и все теоремы евклидовой геометрии справедливы в геометрии Ло-
Лобачевского, поскольку они являются логическим следствием аксиом.
Однако, это не так. В действительности геометрия Лобачевского
подчиняется всем аксиомам евклидовой геометрии, кроме одной —
аксиомы о параллельных, гласящей, что через точку ё, лежащую вне
прямой ?, можно провести не более одной прямой, не пересекающей
?. Но из рис. 26 видно, что аксиома о параллельных не имеет ме-
места в геометрии Лобачевского. Поэтому теоремы, обычное доказа-
доказательство которых опирается на эту аксиому, могут быть неверны в
геометрии Лобачевского. Существование и непротиворечивость гео-
геометрии Лобачевского являются доказательством того, что аксиома
о параллельных не может быть выведена из остальных аксиом евкли-
евклидовой геометрии.
Одной из теорем геометрии Лобачевского с существенно неев-
неевклидовым содержанием является
Теорема 4. Сумма углов треугольника в плоскости Лобачевс-
Лобачевского меньше тг.
Доказательство, а) Рассмотрим сначала случай прямоуголь-
336
Гл. 7. Приложения
ного треугольника, действуя в аффинной карте (Eg, Фо) и обозначая
для простоты (до конца параграфа) точки в Л и в Л одинаковыми
заглавными латинскими буквами, а Л-движения — греческими бу-
буквами. При помощи Л-движения совместим вершину при прямом угле
с точкой О. Мы получим треугольник АО В. Докажем, что каждый
его угол В АО и ОВА в смысле геометрии Лобачевского (пишем
ВАО\а) меньше, чем измеренный в аффинной карте (пишем ВАО\е)'-
ВАО\а < ВАО\Е, ОВА\а < ОВА\Е.
(9)
Мы знаем, конечно, что АОВ\\ = АОВ\е = тг/2. Из (9) будет следо-
следовать нужное утверждение, поскольку
сумма углов треугольника в евклидовой
геометрии равна тг.
Доказательства неравенств (9) оди-
одинаковы, поэтому ограничимся первым
из них.
Найдём движение, переводящее А в
О, и умножим его на другое движение —
поворот вокруг точки О — так, чтобы
сторона ip(A)ip(O) (tp — результирую-
результирующее движение) лежала на одной прямой
со стороной АО. Рис. 27
Дальнейшие рассуждения опираются на рис. 27 и на утверждения
1)-б), сформулированные в начале этого пункта.
По определению
Ш6\а = ^(в)о^(О)\е,
и нам достаточно доказать, что в аффинной евклидовой карте имеет
место неравенство ср(В)Оср(О) < В АО. В свою очередь это неравен-
неравенство в силу утверждения 4) будет следовать из евклидовых соотно-
соотношений
A0)
A1)
= АО,
<p(O)ip(B) < OB.
Отрезки АО и Оср(О) = (f(A) (f(O) равны в геометрии Лоба-
Лобачевского, поскольку один получается из другого Л-движением ср.
Поэтому поворот на угол тг вокруг О должен совместить А с ip(O).
Но этот поворот является и евклидовым движением, откуда следует
равенство A0).
Для доказательства неравенства A1) воспользуемся свойством
§ 5. Геометрия Лобачевского
337
расстояния Лобачевского
Обозначим в соответствии с рис. 27 евклидовы длины: ОВ = ж,
if {О) if {В) = у, if{O)C2 = т. Заметим ещё, что ODi = 1, г = 1,2.
По определению расстояния Лобачевского
p(O,B)=\og[O,B,D2,D1} =
О?>2
р(<р(О)МВ)) =log[p(O)MB),C2,C1] =
г + у
Стало быть,
г + у
1 + х
1 + 2//г 1 + х
1-у/г 1-х
у = гж,
г -у 1-у
а так как г < 1, то у < х.
б) Для доказательства в общем случае воспользуемся утвержде-
утверждением 3). Из него следует, что треугольник не может иметь двух ту-
тупых углов: если бы у Л ABC (рис. 28) углы при вершинах А, В были
тупые, то внешний угол при вершине А был бы острым и, значит,
вопреки 3) меньше внутреннего угла при вершине В.
Пусть теперь в Л ABC углы при вершинах А и В острые (если
один из них прямой, то теорема доказана (см. а))). Опустим, поль-
пользуясь 6), из С перпендикуляр CD на сторону АВ (рис. 29). Тогда D
лежит между А и В: допустив, что А лежит между D и В, мы при-
приходим к выводу, что в Л CAD внешний угол при вершине А острый,
а внутренний угол при вершине D прямой, что опять противоречит
утверждению 3).
D
D А В А
Рис. 28 Рис. 29
Итак, точка D лежит между А и В, а треугольник ABC разбива-
разбивается на два прямоугольных: ADC и BDC, для каждого из которых
теорема доказана. Имеем
а + E + Л < тг, j + S
<
откуда
а + (/3 + 7) + & + А + \i < 2тг,
22 А.И. Кострикин
338 Гл. 7. Приложения
а так как Л = \i — тг/2, то
а + (C + 7) + 8 < тг,
а это и есть утверждение теоремы. ?
Замечание. Можно доказать, что в плоскости Лобачевского
имеются треугольники со сколь угодно малой суммой углов. Далее, в
евклидовой геометрии сумма углов n-угольника равна тг(п — 2). Так
как всякий многоугольник М с углами «i,a2,...,an может быть
разбит на треугольники, то из теоремы 4 следует, что в геометрии
Лобачевского справедливо неравенство
Uii \ /I yli ZiJ. уЛ-ZiJ
i=l
Теорема 5. Пусть
v(M) := тг(п - 2) -
i=\
Если
M = Mi UM2 U ...UMfe,
причём многоугольники М\, М2,..., М^ ке имеют попарно общих вну-
внутренних точек, то
г=1
Доказательство. Очевидно, v(M) не изменится, если какую-
нибудь внутреннюю точку на стороне многоугольника М объявить
вершиной: число сторон увеличится на 1, а сумма углов увеличится на
тг. Следовательно, можно считать, что если вершина многоугольника
Mi принадлежит Mj, то она является и вершиной Mj. Стало быть, пе-
пересечение любых двух многоугольников Mi, Mj будет являться объ-
объединением их общих сторон. Нетрудно видеть также, что найдётся
такой многоугольник Mj, что Ui^jMi будет многоугольником. Это
позволяет свести доказательство к случаю к = 2.
Пусть многоугольники Mi и М2 имеют соответственно п\ и п2
сторон, причём т сторон у них общие. Эти стороны идут подряд,
иначе множество MiUM2 не было бы многоугольником. Число сторон
многоугольника М равно п\ + п2 — 2т. Сумма углов многоугольни-
многоугольников Mi и М2 равна сумме углов многоугольника М плюс 2тг(т — 1).
Элементарная выкладка показывает, что
v(M)=v(M1)+v(M2). ?
Свойства функции v аналогичны свойствам площади фигур на ев-
евклидовой плоскости. В плоскости Лобачевского значение v(M) можно
по определению считать площадью многоугольника М.
Приведём своеобразный признак равенства треугольников.
§ 6. Нерешённые задачи
339
Теорема 6. Если все углы треугольника АВС на плоскости
Лобачевского равны соответственно углам треугольника А'В'С',
то эти треугольники равны.
Доказательство. Движением плоскости Лобачевского можно
совместить вершину А' треугольника А'В'С с А и сделать так,
чтобы сторона А'В' пошла по АВ, а сторона А'С — по АС (рис. 30).
Тогда стороны ВС и В'С не могут пересечься, поскольку это про-
противоречило бы утверждению 3).
А = А'
В'
= А'
В'
В
Рис. 30 Рис. 31
Следовательно, один из этих треугольников будет лежать цели-
целиком внутри другого (рис. 31). Обозначим через М дополнительный
четырёхугольник. Так как суммы углов в А АВС и А А'В'С равны,
то из теоремы 5 следует, что v(M) = 0, но это противоречит нера-
неравенству A2). Остаётся единственная возможность, что треугольники
АВС и А'В'С совпадут. ?
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ
A. Записки лекций И.Р. Шафаревича 60-х годов.
Б. Винберг Э.Б., Линейная алгебра и геометрия. — М., МГУ, 1966.
B. Никулин В.В., Шафаревич И.В., Геометрии и группы. — М., Наука, 1983.
В части IV книги В можно получить основательное знакомство не только с
плоскостью Лобачевского (в другой её модели), но и с общей точкой зрения на
геометрию.
§ 6. Нерешённые задачи
1. Проблема Штрассена. Как и в случае гауссовой величины
Гп (см. замечание 2 в [ВА I, гл. 1, § 3]), представляет значитель-
значительный интерес оценка числа операций, необходимых для перемножения
двух квадратных матриц большого порядка п. Так как умножение
двух чисел более трудоёмко, чем сложение, то преобладающее значе-
значение при априорных оценках необходимого машинного времени имеет
число операций умножения.
Непосредственно видно, что умножение двух п х n-матриц тре-
требует п3 умножений коэффициентов матриц и п2{п — 1) сложений.
Начнём с п = 2:
аА + ЬВ aB + bD
с A + dC cB + dD
а
с
Ъ
d
А
С
В
D
22*
340 Гл. 7. Приложения
Из тождеств
аА + ЪС = (а - d)(A - D) + (Ъ - d)(C + D) + d(A + С) + (а -
aB + bD = -(а - Ь)?> + а(В + ?>),
сА + dC = (с - d)A + d(A + С),
cB + dD = (a- d){A -D)-(a- c){A + В) + а(В + D) - (с - d)A
видно, что для умножения двух 2 х 2-матриц с любыми коэффициен-
коэффициентами (которые в свою очередь могут быть матрицами) достаточно
7 умножений (вместо 8) за счёт большего числа 18 сложений (вме-
(вместо 4). Применяя этот метод к матрицам порядка п = 2^, разбитым
на четыре 2к~х х 2к~х-блока и используя простую индукцию по к,
нетрудно показать, что их можно перемножить, применив 7к умно-
умножений и 6G^ — 4*) сложений. Пусть теперь п — любое произвольно
большое натуральное число. Дополнив матрицы порядка п до бли-
ближайшего порядка 2к нулями, можно убедиться в том, что для их
умножения достаточно O(nlog27) = О(п2'81) операций (V. Strassen,
1969).
Позднее было доказано (Coppersmith-Winograd, 1982), что доста-
достаточно и О(п2>50) операций. Остаётся открытой следующая
Гипотеза. Существует алгоритм, гарантирующий умноже-
умножение двух п х п-матриц при больших натуральных п за О(п2+?) опе-
операций, где г — любое сколь угодно малое вещественное число.
2. Ортогональные разложения. Пусть ? — комплексное век-
векторное пространство всех матриц порядка п с нулевым следом:
Относительно операции коммутирования
[А, В] = АВ- В А
пространство ? является алгеброй Ли sl(n, С) (или, как принято го-
говорить, алгеброй Ли типа Ап-\). На ? определено невырожденное
скалярное произведение
(А\В) =trAB,
обладающее (см. G) из § 2 гл. 6) свойством ассоциативности:
([А,В]\С) = (А\[В,С]).
Легко проверяется, что ограничение (А|5) на подпростран-
подпространство
Яо = (diag(Ab...,An)
всех диагональных матриц из ? невырождено. То же относится и к
любой сопряжённой подалгебре
§ 6. Нерешённые задачи 341
(в теории алгебр Ли говорят о подалгебре Картана !К). Можно по-
показать, что ? как векторное пространство может быть разложено в
прямую сумму подалгебр Картана:
? = я0 е яг е... е яп, A)
где
!Ki = Xi J-CoXi, Xi
— подходящим образом выбранные невырожденные матрицы. Ста-
Ставится следующий
Вопрос. Можно ли найти такие матрицы сопряжения Xi,
чтобы в разложении A) подпространства Jii были попарно орто-
ортогональны?
Если это так, то говорят об ортогональном разложении (коротко:
ОР) алгебры Ли ?. Существование ОР интересно с точки зрения
приложений к теории конечных групп, целочисленных решёток и т.д.
(см. по этому поводу монографию: Kostrikin A.I., Pham Huu Тгер.
Orthogonal Decompositions and Integral Lattices. — Berlin-New York:
Walter de Gruyter, 1994).
Гипотеза. OP алгебры Ли ? = sl(n,C) существует тогда
и только тогда, когда п = рк — степень некоторого простого
числа р.
В одну сторону гипотеза доказана: для каждого п = рк ОР по-
построено. Осталось доказать, что при п ф рк ОР построить невоз-
невозможно. Очевидно, п = б — наименьшее целое число, для которого
гипотезу надо доказать или опровергнуть. Итак, существуют ли 7
попарно ортогональных 5-мерных подпространств *Ki в 51F, С), удо-
удовлетворяющих условию A)? Ответить на этот, казалось бы, весьма
конкретный вопрос пока не представляется возможным.
3. Конечные проективные плоскости. Развивая тему § 3 из
гл. 5, назовём проективной плоскостью П множество точек с выде-
выделенными подмножествами — прямыми, удовлетворяющими следую-
следующим аксиомам.
Р1. Любые две различные точки принадлежат одной и только
одной прямой.
Р2. Любые две различные прямые содержат одну и только одну
общую точку.
РЗ. Существуют четыре точки, никакие три из которых не
лежат на одной прямой.
Справедлива следующая
Теорема 1. Пусть дано целое число п ^ 2. В проективной
плоскости П следующие свойства эквивалентны:
1) некоторая прямая состоит в точности из п + 1 точек]
2) некоторая точка принадлежит в точности п + 1 различным
прямым;
3) каждая прямая состоит в точности из п + 1 точек]
342 Гл. 7. Приложения
4) каждая точка принадлежит в точности п + 1 различным
прямым]
5) П содержит ровно п2 + п + 1 точек]
6) П содержит ровно п2 + п + 1 прямых]
Доказательство можно извлечь, например, из книги: Холл М.
Теория групп. — М.: ИЛ, 1962.
Определение. В случае |П| = п2+п + 1 говорят о проективной
плоскости порядка п.
В [ВА III] будет установлено, что для любого простого числа р и
любого натурального числа к существует поле ?q = GF(q) из q = рк
элементов (при к = 1 нам это известно). Если V — трёхмерное век-
векторное пространство над Fg, то FgP2 = P(V) — дезаргова (см. [2])
проективная плоскость порядка q. Вообще говоря, при к > 1 су-
существуют и недезарговы проективные плоскости порядка q. Но (и
это самое замечательное) до сих пор не построено ни одной проек-
проективной плоскости порядка п ф рк.
Гипотеза. Порядок любой конечной проективной плоскости
должен быть степенью некоторого простого числа р.
По своей формулировке эта гипотеза напоминает гипотезу из
п. 2, и какая-то скрытая аналогия на самом деле существует, но
задача о проективных плоскостях имеет более почтенный возраст.
Результаты однако довольно скромные.
Приведём интересный результат арифметического характера
(Bruck, Ryser): если П — проективная плоскость порядка п и п =
= 1, 2 (mod 4), то п = а2 + Ъ2 — сумма квадратов двух целых чисел.
Скажем, п = б, не пред ставимое в виде суммы двух квадра-
квадратов, не может быть порядком проективной плоскости. Долгие годы
оставался открытым вопрос о возможности построения проективной
плоскости порядка 10 = З2 + I2. Лишь грубый счёт на ЭВМ "Крейг"
в течение 700 ч чистого процессорного времени привёл к выводу о
несуществовании такой плоскости. Разумеется, идти по такому пути
далее не представляется возможным. При п > 10 гипотеза остаётся
недоказанной.
4. Базисы пространств и латинские квадраты. На уровне
понимания гл. 1 формулируется следующая
Гипотеза 1 (Rota, 1989). Пусть V — п-мерное векторное про-
пространство над любым бесконечным полем. Предположим, что В\,
??2, • • • Вп — какие-то п базисов пространства V.
Тогда каждый из базисов Bi может быть так упорядочен, ска-
скажем , Bi = (bii,bi2,.. -,bin), что наборы Cj = (Ь^,Ь2^,... ,bnj-),
1 ^ j ^ n5 тоже будут базисами в V.
Другими словами, после надлежащего упорядочения каждая стро-
строка и каждый столбец матрицы В = (Ь^) будут состоять из базисных
элементов. Уже при п = 3 возникает маленькое упражнение, а при
при любых п гипотеза, имеющая отношение к теории инвариантов,
§ 6. Нерешённые задачи 343
пока не доказана. Между тем установлено, что при любом чётном
п гипотеза 1 вытекает из гипотезы 2 ниже, относящейся к другому
старинному комбинаторному объекту.
Квадратную п х n-таблицу (или матрицу) L, заполненную п сим-
символами, скажем, целыми числами 0,1,..., п — 1, называют латинским
квадратом, если символы в каждой строке и в каждом столбце ока-
оказываются различными. Знаком строки или столбца латинского ква-
квадрата L называется знак перестановки на множестве {0,1,..., п — 1},
отвечающей данной строке или данному столбцу. Произведение всех
2п знаков строк и столбцов называется знаком г(Ь) квадрата L. По
определению L чётный, если s(L) = +1, и нечётный, если s(L) = — 1.
При нечётном п число чётных и нечётных латинских квадратов по-
порядка п одинаково, но уже при п = 2,4, б это не так.
Гипотеза 2 (Alon-Tarsi, 1986). Пусть п — чётное натуральное
число. Тогда ^2e(L) ф 0, где сумма берётся по всем латинским
квадратам L порядка п.
Совсем недавно было доказано [Drisko A.A. // Advances in Math. —
1997. — № 128. — P. 20-35], что если п = р + 1, где р — нечётное
простое число, то гипотеза 2 верна. Следовательно, верна при любом
п = р + 1 и гипотеза 1. Возможно ли обобщение этого результата на
случай п = рк + 1?
ОТВЕТЫ И УКАЗАНИЯ
К УПРАЖНЕНИЯМ
Номер p.q.r отсылает к упражнению г из § q главы р.
1.2.9. dimMag3(Q) = 3. dimMag4(Q) = 8.
1.2.10. Непосредственно проверяется, что SA = a(A)S = AS для лю-
любой полумагической матрицы А. Кроме того, Sm = пт~1 S для любого
показателя т ^ 1.
Если теперь Mag° (Q) (соответственно SMag°) — множество магичес-
магических (соответственно полумагических) матриц с нулевым следом, то
Magn(Q) = Mag° (Q) 0 QS, SMagn(Q) = SMag° (Q) 0 QS (*)
(достаточно заметить, что tr (A ti(A)S) = 0).
Далее,
dim Mag° (Q) ^ dim SMag° (Q) - 2,
поскольку пространство магических квадратов получается из полумаги-
полумагических квадратов добавлением ровно двух ограничений. Более точно,
SMag° (Q) = Mag° (Q) 0QE0 QL>. (**)
Действительно, предположим, что имеется соотношение А + ХЕ + /iD = О,
где A,/i E Q, A G Mag°(Q). Умножив его на 5, получим (Л + //)Sf = О,
откуда А + /i = 0. Если же в соотношении перейти к следу, то получим
п\ + fitiD = 0. Результатом будет А = /и, = 0.
Остаётся сопоставить равенства (*) и (**).
1.2.11. Указание. Рассмотреть отображение из прямой суммы под-
подпространств Vi в прямую сумму к — 1 экземпляров пространства V, а
именно
(Vi,. . . ,Vfc) !->• (Vi - V2,V2 - V3,. . . ,Vfc-l - Vfc).
Пересечение всех Vi есть ядро этого отображения, имеющее размерность
не менее, чем dim V\ + ... + dim Vk — (к — l)n.
1.4.3. -1/2 < A< 1, //< -2.
1.4.4. z\ = Х1У1+Х2У3 + Х3У2, z2 = Х1У2 + Х2У1+Х3У3, Х1уз-\-х2у2-\-хзУ1.
2.1.3. Очевидно.
2.2.7. Пусть dim Im A1'1 = к + /, причём
где (Лг~1в1,... ,Лг~1ек = Im Лг-1 П Кег Л.). Таким образом,
V = (ei ... , е
,... ,еп) = Кег Лг~\
,... ,en) = Кег Лг,
Ответы и указания к упражнениям 345
и мы имеем
i~1
dimKer Лг = п — /, dimKer Ai~1 = п — к — /,
П Кег Л) = к = (п - I) - (п-к-1).
2.2.8. По условию А = С'1 ВС, где С G Мп(С). Нужно доказать, что
среди решений уравнения ХА = ВХ наряду с X = С найдётся и невы-
невырожденная вещественная матрица D. Решения над С нашего уравнения
составляют комплексное векторное пространство W с базисом Ci,..., Ст.
Представив Cj в виде Cj = Gj + iHj с Gj,Hj G Mn(R), мы убеждаемся в
том, что CjA = ВСj ж HjA = BHj, т.е. пространство W допускает ве-
вещественный базис (Di,..., Dm) (некоторую выборку из Gi,..., Gm; Hi,...
..., ifm). Пусть /(ti,... ,trn) = &et(t\Di + ... + trnDm) — вещественный
многочлен от т переменных. По условию он не равен тождественно нулю
над С, а в таком случае он не равен тождественно нулю и над R. Значит,
наше матричное уравнение имеет невырожденное вещественное решение
t°1D1^...^t°rnDm.
2.2.9. а) Очевидно.
б) В случае п = dim^ V = 1 утверждение справедливо. Действуем по
индукции относительно п. Пусть W — произвольная гиперплоскость в V,
так что V = (W, е)я- По предположению индукции существует вектор
w G VF такой, что //д,лдг(ЛIУ = 0. Положим
/fe(t) =AU,w+fce(t), A; = 0,1,...
Согласно a) /fc(t) делит /х.д(?). Но таких делителей конечное число, по-
поэтому /г(?) = fj(t) := /(t) для некоторой пары индексов г, j, г ф j (поле Я
бесконечно). Итак,
/C4)(w + ге) = 0 = f(A)(ir
Отсюда /(-4)w = 0 = /(Л)е, и вектор а = w + ге или а = w + je будет
искомым.
2.2.10. а) Ясно, что
(*) => W + UD Wi +(U HVi) = Vi.
Далее, V2(W + U) = W2 + V2(U) = V2. Поэтому V = W + U.
б) По условию v G У ^=> v = w + u, w G W, и G U. Значит, v =
= [7>i(w) + ^2(w)] + [Pi(u) + P2(u)] = [7^i (w) + 7>i(u)] + [^2(w) + P2(u)].
Если v G И, то V2(w) +V2(u) = 0. Но по условию V2(U) П Wi = 0, поэтому
7^2(w) = 0 = V2(u) и, следовательно, Fi = W\ + ([/ П Vi). Применяя V2 к
У = W + [/, получаем V2 = VF2 + V2(U), т.е. справедливы разложения (*).
Наконец, w G Tynt/=^P2(w) G Р2(^)П?2(С/) = ТУ2ПР2(?/) = 0 =^>
=^> w G Wi и w G ТУ1 П U, т.е. ТУ П U = Wi П C/.
2.2.11. Матрице А отвечает линейный оператор Д:У—>-V
Пусть при этом V = (ei,..., ете). Задача заключается в построении но-
нового базиса (e'l5..., е^), относительно которого оператору Л отвечала бы
матрица А' с нужными свойствами.
Если Л = А?, то tr^ = пЛ и Л = 0. Если Л / ^?> т0 обязательно
найдутся два линейно независимых вектора вида e'l5 e2 = Ле^. Это даёт
346 Ответы и указания к упражнениям
возможность поставить 0 в левом верхнем углу матрицы оператора А.
Пусть уже построены линейно независимые векторы e'l5..., е^, относи-
относительно которых а'ц = ... = a'kk = 0. Берём теперь такой вектор е^+1 (? Vk,
Vk = (e'l5.. . ,e'fc), чтобы e'fc+2 := Aek+1 не содержался в (Vfc,e'fc+1). Полу-
Получаем ещё один нуль на диагонали. Если это невозможно, то приходим к
ситуации, когда х ф Vk => Ах G Vk. В случае Ах. ? Vk Vx ф Vk любой
базис пространства V, продолжающий e'l5..., е^, будет искомым. Пусть
теперь Ах = Лжх + ..., где точками обозначен вектор из Vk. Если Лж = Л
Vx ф Vk, то снова tr А = (п — к)Х = 0 => Л = 0, и всё доказано. Если же
Ли = Ли, Av = //v, Л ф //, для некоторых векторов и, v ^ 14, то полагаем,
например, е'к+1 = u + v, е]ь+2 = Л(и + v) = Ли + fiw. Это даёт возмож-
возможность поставить дополнительный нуль на диагонали. Очевидная индукция
завершает рассуждение.
2.2.12. Да, существенно. Если, например, п = р и А = Е, то tr A = О,
а все подобные матрицы С АС совпадают с А.
2.3.2. Для матриц Ец, 1 ^ г, j ^ п, положим Р^ = Т>(Ец). Тогда
т.е. Pi,...,Pn — ортогональная система идемпотентных матриц. Отож-
Отождествляя п х n-матрицы с операторами на координатном векторном про-
пространстве V, для единичной матрицы Е будем иметь
V(E)V = PiV ® ...® PnV,
откуда ^2{ rank Pi = rank Т>(Е). Если Pi ф 0 при всех г, то отсюда вытекает,
что rank i^ = 1. Естественно ожидать, что так оно и есть. Действительно,
в противном случае Pi = 0 для некоторого г, а тогда
Р3 = V(EJlEllElJ) = V(EJl)Plf(ElJ) = 0 Vj,
так что V(E) = "?{Pi = 0. Но в этом случае V(X) = V(EX) = V(E)f(X) =
= 0 для произвольной матрицы X — противоречие. Мы приходим к вы-
выводу, что rank?>(?0 = n, а из Т>(ЕJ = Т>(Е) следует, что Т>(Е) = Е.
Далее, dim Pi У = 1 => P{V = (АA)). Пусть А^ — вектор-столбец в
V = Яп вида А^ = V(En)A^\ 2 ^ г ^ п. Так как ^^ы = SjkEih то
)A^ = V(EtJEki) =
В частности, V(Eli)A{i) = АA) и PM(i) = A(i). Стало быть, А^ ф О
и A(i) G Рг^, т.е. PiV = (A(i)), 1 ^ г ^ п; У = (АA),..., А{п)). Пусть
А = (А^\ ..., А^) — п х п-матрица (строка столбцов). По определению
rank А = п. Согласно (*)
и, значит, Т>(Х)А = АХ. Полагая С = А'1, будем иметь Т>(Х) = С~ХХС =
= fc(X).U
2.3.3. По предположению
APV = AP+1V = ... = A2pV = Ар (APV),
Ответы и указания к упражнениям 347
откуда Im АР П Кег АР = 0, что с учётом теоремы 4 из § 1 приводит к пря-
прямой сумме V = Кег АР © Im АР. Инвариантность слагаемых относительно
А очевидна и отмечалась ранее.
2.3.5. Нормализованному многочлену f(t) = t™ + ^™L1CLitrn~l ^ ^М
сопоставим комплексно-сопряжённый f(t) = tm + ^2T-i uitm~l. Из условий
следует, что ха{Ь) = f{t)f{t) — произведение нормализованных взаимно
простых комплексно-сопряжённых многочленов. Следовательно, Хл(^) =
= р2 -\-q2 для некоторых взаимно простых вещественных многочленов p(t),
q(t). Определим r(?), s(t) G M[t] такие, что pr—qs = 1, и положим д = ps+qr,
/i = r2 + s2. Тогда
l+g2 = (pr- qsf + (ps + qrf = (г2 + s2)(p2 + q2) = h(t) Ха(Ь).
Остаётся положить В =
2.3.6. Если одна из матриц А, В невырождена, то всё в порядке. Ска-
Скажем, хав(Х) = det(AB - ХЕ) = det А'1 (АВ - \Е)А = det(BA - ХЕ) =
= Хва(Х). Так как Л-многочлены det(AB — ХЕ) и det(BA-XE) непрерывно
зависят от коэффициентов матриц А, В, то интересующее нас равенство
справедливо и для вырожденных матриц.
2.3.7. Привести матрицу В к диагональному виду.
2.3.8. Убедиться в том, что матрица А Е Mn(Q), интерпретируе-
интерпретируемая как линейный оператор на координатном пространстве Qn, является
полумагической в точности тогда, когда столбец е := [1,1,..., 1] слу-
служит собственным вектором одновременно для А и 1А (с одним и тем
же собственным значением Л = с (А) = а( А)). Коль скоро это так, то
А, В е SMagJQ) =* (АВ)е = А(Ве) = а(В)Ае = а(А)а(В)е; \АВ)е =
= ьВ(ьАе) = а(А)а(В)е => АВ е SMagJQ).
2.3.9. При п = 1 утверждение верно. Далее — индукция по п. Пусть
п — наименьший порядок, для которого утверждение неверно, т.е. для
некоторой п х n-матрицы А = (cnj) все матрицы из S(A) имеют собствен-
собственное значение 1. Другими словами, любой матрице D = diag(#i,..., 9п),
6{ = ±1, отвечает вектор-стобец х/Ос DAx = x, или, что то же самое,
(А — D)x = 0. Приходим к соотношению
<Z@i ..., On) = det(A - diag@i,..., 0n)) = 0
для всех 2п выборов 9i, г = 1,..., п. Разлагая определитель по элементам
первой строки, получим выражение
<Z@i,...,0n) = (an -0i)<f @2,...,0n)+ члены без 0i. (*)
По предположению индукции определитель d*(#2, • • •, 9п) порядка п — 1
отличен от нуля для некоторого набора 0°,..., 0°. В таком случае из
и из (*) следует, что
(an - 1) <Г{&, ...,е°„) = (an + 1) <Г@§,..., е°„),
откуда an — 1 = an + 1 — противоречие, поскольку char Я ф 2.
348 Ответы и указания к упражнениям
2.3.10. В одну сторону импликация вытекает из результатов п. 1
о проекторах. Предположим теперь, что rank Л = г, rank(? — Л) =
= п — г. Тогда V = (ei,..., er; er+i,..., еп), векторы Лег,..., Лег линейно
независимы и Лег+1 = ... = Леп = 0. Так как (? — Л)(ег+1,..., ете) =
= (er+i,..., ете) и rank(? — Л) = п — г, то
..,ег) С (er+i,...,en>.
Если (? — Л)вг = ar+ier+i + ... + anen, то, положив
е^ = вг — ar+ier+i — ... — anen, г ^ г; е^ = е^, г + 1 ^ г ^ п,
мы будем иметь Ле^ = Ле^ и
(?-Л)е-=0, г^г; (?-Л)е-=е-, г + 1 ^ г ^ п.
Значит, Л и ? — Л — проекторы и Л2 = Л.
2.4.1. Матрица А имеет вид А = (т + 1)?7 — 5 и
detA= (m + l)n(m+l-n).
2.4.2. Ai, A2, А4 и Аз соответственно.
2.4.3. a) J(A) = J2C)+JiC)+JiC)+Ji(-2); б) да — в случае ранга 1
или 4, нет — в случае ранга 3.
2.4.4. a) XA(t) = XB(t) = (t- 4J(* - 2);
б) »A(t) = (t- 4)(t - 2), XB(t) = (t- 4J(t - 2);
в) J(A) = diagB,4,4), J(B) = JiB)+J2D).
2.4.5. Удобно рассмотреть расширение Я поля Я, содержащее все ха-
характеристические корни матрицы А (разумеется, Я = С ^=> Я = С).
Аналог теоремы 4 позволяет привести А к треугольному виду, а так как
tr Ak = tr(G~1AG)fc, то с самого начала можно считать А верхней треу-
треугольной матрицей с характеристическими корнями Хо,..., Xn—i по диа-
диагонали. Пусть Ао, Ai,..., Хр — все попарно различные корни кратностей
по ^ 0, ni ^ 1, ..., пр ^ 1, ^2rii = п. Для степени Ак характеристичес-
характеристическими корнями будут Хок,..., Хрк, так что по условию
гцХк + ... + ПрХк =0, к = 1,2,...,р.
При р ^ 1 имеем линейную однородную систему с отличным от нуля опре-
определителем Вандермонда, откуда т = ... = пр = 0 — противоречие. Таким
образом, Ао = 0 — единственный характеристический корень кратности
п и, следовательно, ха(?) = tn, т.е. Ап = 0. Обратное утверждение триви-
тривиально.
2.4.6. Пусть сначала А — жорданова клетка порядка т. Тогда непо-
непосредственно проверяется, что И^АИт = ЬА, где Пт = ||^,m+i-j ||^ —
матрица с 1 на побочной диагонали и с 0 на всех остальных местах. Если
А — прямая сумма клеток Жордана, то берётся прямая сумма матриц
вида Пт.
2.4.7. Без ограничения общности считаем А приведённой к ЖНФ:
А = J(A). Соотношение AN = Е выполняется в точности тогда, когда
Ответы и указания к упражнениям 349
J^(A) = Em для каждой жордановой клетки Jm(A), входящей в J(A). Но
это возможно только при т = 1. Таким образом,
F = J(A), AN =E^A = diag(Ai,..., А„), \? = 1.
2.4.8. Пусть сначала А — магическая 3 х 3-матрица с нулевым следом.
Так как tr А = 0 => сг(А) = 0, то, используя матрицу S из упр. 1.2.9, полу-
получаем AS = a(A)S = 0 => det А = 0 (в противном случае S = A~1(AS) =
= 0 — противоречие). По теореме Гамильтона—Кэли имеем А3 = ХА для
некоторого А Е Q, так что А3 — магическая матрица. В таком случае и
Ат = А(т~1)/2А — магическая матрица, т = 2к + 1 ^ 3.
Если теперь А — произвольная магическая 3 х 3-матрица, то Aq :=
:= А — A/3)(tr A)S — магическая матрица и tr Aq = 0. Стало быть, А™ Е
Е Mag3(Q) для любого нечётного т ^ 1. Но S^4o = AoS* = cr(Ao) = 0,
поэтому
A \ т /1 \ m
Ao + -(tvA)S) =AZ + (-txA) 5™6Mag3(Q).
2.4.10. s(i) = (f - 2jA + A/*)/(A - p), n(t) = (t - \)(t -
2.4.11. Пусть x^(t) = Щ=1(* " Ai)nS A< ф \j при i ^ j, ^ni = n.
По теореме 3 имеем разложение V = 0^=iV(Ai) в прямую сумму корневых
подпространств. Полагаем <Sx = А^х для любого х Е V(Aj) и ЛГ = Л — S.
Если А — матрица оператора Л в жордановом базисе, то соответственно
S = \iEni + ... +\РЕПр, N = А - S = Nni + .
где Nn. — прямая сумма жордановых клеток Л@), к ^ щ. Так как
?;n.7Vn. = 7vn.?;n., то ^tv = ns.
По китайской теореме об остатках (принять на веру или заглянуть в
[ВА III]) эффективно строится комплексный многочлен f(t) такой, что
f(t) -\i = (t- \i)nihi(t), hi(t) e см, i = l,... ,P.
Если теперь w — произвольный вектор из V(Aj), то
ЛК Xl(t) = ]J(t - А,)%
и поэтому (/(Л) — Aj)w = x^^/i(^)^*(^)v = О? т-е- можно положить
S = /(Л), N = А — /(Л). Очевидно, можно считать deg/(?) < п.
2.4.12.
0 0 0 ... А*
2.4.13. По теореме Гамильтона—Кэли (см. также упр. 14 в конце гл. 2
из [ВА I]) 2 х 2-матрица [X, У] = ХУ — УХ удовлетворяет соотношению
[X, У]2 = ХЕ, X = — det[X, У], поскольку, как мы знаем, tr [X, У] = 0. Так
как [Е, Z] = 0, то и [[X, У]2, Z] = 0.
350 Ответы и указания к упражнениям
3.1.1. a) (t2 -1/3).
3.1.2. a) cos а = 3/л/ТО; б) z _L x ==* zi + ?3 = 0, z = [21,22,23].
3.1.3. Пусть (ei,...,en) — какой-нибудь ортонормированный базис
n-мерного евклидова пространства У. Ввиду невырожденности матрицы
А = (ajj) система векторов (ai,...,an) с а/. = Х^Г=1 а^ег тоже будет
базисом в V. Применяя к (ai,...,an) процесс ортогонализации, описан-
описанный в теореме 6, получим ортонормированный базис (е'ь ..., е'п), где е^ =
= Si=i ckjak, c'kj ф 0; матрица перехода С' = (ckj) верхняя треугольная.
Обратная к ней матрица С = (С') = (ckj) тоже верхняя треугольная.
Имеем
Матрица В = (bij) ортогональная как всякая матрица перехода от одного
ортонормированного базиса е; к другому е^. Таким образом, В = АС' =
= АС, А = ВС.
3.1.4. Матрицы (Е ± А)±х, А±х коммутируют. Поэтому
ЬК = \Е - А)'1 • \Е + А) = (Е- ьА)(Е + ЬА) =
= (Е- А-Х){Е + А'1) = (Е- А'^А'1 • А(Е + А'1) =
= (А(Е - А'1))-1^ + А) = (А - Е)-\Е + А) = -К.
ЬА = \E-Ky1 \Е+К) = (Е- tK)~1(E+ ЬК) = {Е+К)~1{Е-К) = А'1.
Следует отметить ещё, что det(E — А) = 0 <^=> (Е — А)х = 0 для
некоторого 0/xG Мп(Ж).
3.1.5. Из A8) следует, что
det A = det(E - К)'1 det(E + К) = (det(E - К))'1 det \E + К) =
= (det(?7 - К))'1 det(?7 + lK) = (det(?7 - К)'1) det(?7 - К) = 1.
Аналогично поступаем в случае A9).
3.1.6. Из определения ортогональной матрицы А следует, что если
Фа(Х) = 0, то и флA/\) = 0, поскольку 1/А = А/(АА) = А, а многочлен
Фа($) вещественный. Стало быть, многочлены f(t) := ?п(/>аA/?) и Фа($)
имеют одни и те же корни, причём с одинаковыми кратностями. Остаётся
добавить, что фл @) = =Ы, так что старшие коэффициенты многочленов
fit) и фл^) могут отличаться лишь знаком.
3.1.7. Перейти к ортонормированному базису
(А{1)/\\А{1)\\,...,А(п)/\\А(п)\\)
пространства Жп.
3.1.8. Получить из (Х(^) ортогональный базис (У(г)) пространствам71.
Сравнить ||Y(i)|| с \\X(i)\\, det[y(i),..., Y(n)] — с [ХA),... ,Х(гг)] и восполь-
воспользоваться предыдущим упражнением.
Ответы и указания к упражнениям
351
3.2.1. Нет, как показывает хотя бы пример матрицы
г -л/2 II
А =
л/2
г
Имеем ЬА • А = Е, det А = 1, т.е. А е 5СО(п), но ЬА • А ф Е, так что
А $ Щп).
3.3.1. Без ограничения общности считаем унитарную матрицу А ?
G SU(ri) имеющей диагональный вид
А = diag(Ao, Ai,..., An_i), Ao = Ai ... An_i, АД; = 1.
При п > 2 одним из решений уравнения XYX~1Y~1 = А является пара
унитарных матриц
0 0 ... О 1
1 0 ... О О
О 1 ... О О
X =
о о
1 О
У =
0
0
0
1
0
0
0
0 ..
0 ..
0 ..
0
0
OLn-1
0
= 1.
Непосредственно проверяется, что а& = А/Д/e+i ... An_i — вполне подхо-
подходящее значение. При п = 2 имеем
А О
О А
0 1
1 О
У =
О а
-а О
3.3.2. Пусть Xn(t) '•= Xj(t) — характеристический многочлен матрицы
Якоби порядка п (xo(t) = 1). Рассматривая главные миноры в J и разлагая
их по элементам последней строки, придём к рекуррентному соотношению
Xk(t) = (ak - t)Xk-i(t) - bk-ick-iXk-2(t), k^2-
Отсюда следует, что Xn(t) зависит от произведений bici,..., bn-icn-i, а не
от чисел bk, Ck в отдельности. В таком случае, заменив в J коэффициенты
bk,Ck на у/bkCk, мы придём к симметрической матрице Якоби J1 с тем же
характеристическим многочленом Xn(t). Но, как мы знаем (см. примеча-
примечание 2), характеристические корни матрицы J1 вещественные, поэтому и
Spec(J') С R.
Обращаясь к вопросу о кратности любого собственного значения А
(при действии J на Rn), заметим, что координаты xi,... ,хп соответст-
соответствующего собственного вектора х связаны линейными соотношениями
-ck-2Xk-2 + (afc-i - \)xk-i - bk-iXk = О,
fc = 2,3,...,n + l (со = 0 = bn).
В соответствии с этими соотношениями Xk = o~kXi, где коэффициент про-
пропорциональности а к имеет вид дроби со знаменателем bib2 .. .bk-i и с
числителем — функцией от bici, ..., bk-iCk-i, (ai — А), ..., (ak-i — А).
Без ограничения общности считаем х\ = 1, а в таком случае х — од-
однозначно определённый собственный вектор. Стало быть, алгебраическая
кратность корня А, совпадающая в данном случае с его геометрической
кратностью, равна 1.
352 Ответы и указания к упражнениям
3.3.3. Да.
3.3.4. Понятно, что одновременно диагонализируемые операторы Л, Б
перестановочны. Обратно, пусть Л, Б — перестановочные диагонализиру-
диагонализируемые линейные операторы. Диагонализируемость Л означает, что V =
= VXl 0 ... 0 VXp, {Л1,..., Ар} = 8рес(Л). По лемме 6, где С можно
заменить на любое поле, содержащее 8рес(Л) и SpecB3), каждое из под-
подпространств VXi инвариантно относительно Б. Но если W — любое ин-
инвариантное подпространство, то диагонализируемость Б влечёт диагона-
диагонализируемость его ограничения на W. В частности, в VXi можно выбрать
базис (е^ ,... ,е^ ), диагонализирующий Б. Так как это верно для г =
= 1,... ,р и так как Ле^ = А;е^ , то (е^ ,..., е?у, е[2\ ..., е^) — базис,
диагонализирующий Л и Б.
3.3.5. Так как ЛБ = Б А, то из эрмитовости (симметричности) Л и Б
следует эрмитовость произведения. Кроме того, из теоремы о спектраль-
спектральном разложении следует, что у/А является многочленом от Л, а у/В —
многочленом от Б. Поэтому
;=л/Бл/Л,
и мы имеем
АБ = (у/Ал/А) (л/Бу/Б) = (л/Лл/БJ,
а так как (у/А)* = у/А > О, (у/В)* = у/В > О, то {у/Ау/В»У = у/Ау/Б и,
следовательно, АБ > 0.
3.3.6. Очевидно, ?(А2) = (ьАJ = (—АJ = А2, поэтому, интерпрети-
интерпретируя А как линейный оператор на пространстве векторов-столбцов со стан-
стандартным скалярным произведением, будем иметь (А2х | х) = (Ах | 1 Ах) =
= -(Ах | Ах) ^ 0. Далее, Ах = Ах ==* А2х = А2х и А2 ^ 0.
3.3.7. Рассмотреть две квадратичные формы
а("V 1 — i /л"V "V 1 т*i "V 1 — i /i"v "V 1
ассоциированные с А ж Б соответственно. По условию форма д(х) поло-
положительно определена, поэтому по теореме 8 из § 2 формы д(х), г(х) могут
быть приведены к каноническому виду одновременно. Если
А = diag(Ai,..., Ап), В = diag(//i,... ,/хте) — матрицы операторов Л, Б
в соответствующем базисе, то
8рес(ЛБ) = Spec(AS) = {Л1//1,..., An//n} G R,
поскольку Ai G R, [ii G R. To же самое можно доказать и другим способом.
3.3.8. Для определения стационарных значений формы (?(х) удобно
воспользоваться известным из анализа методом Лагранжа. В прямоуголь-
прямоугольных координатах евклидова векторного пространства V будем иметь
#(х) = Si j fijxi>xh (x Ix) = 1- В соответствии с методом Лагранжа
строится функция
п п
iX^i • • • 1 Хп) = / Jijxixj ~ А / xi
Ответы и указания к упражнениям 353
и приравниваются нулю её первые частные производные по xi, г = 1,..., п.
Приходим к линейной системе
которая встречалась нам при нахождении собственных значений и соб-
собственных векторов симметричного оператора J7, ассоциированного с q.
Отсюда вытекает требуемое утверждение.
Итак, по доказанному форма д(х) принимает стационарное значение
на каком-то собственном векторе е^ (длины 1) оператора J-. Так как J-Gi =
= А^е^, то
q(ei) = (ej | Fei) = А;(е; | вг) = Лг.
Это значит, что стационарные значения формы д(х) совпадают с коэффи-
коэффициентами её канонической формы.
3.3.9. Указание. Без ограничения общности данное семейство ком-
коммутирующих линейных операторов на пространстве V над С, diml/ < оо,
можно считать конечным, поскольку, в силу конечномерности C(V), в этом
семействе всегда можно выбрать конечное базисное подмножество
Далее — индукция по т и рассуждения, использованные при доказатель-
доказательстве леммы 6.
Если уже найден собственный вектор х для Ai,... ,Am-i- Ai* = А^х,
то рассматривается Am -инвариантное подпространство W = С[Дт]х, а
в нём — собственный вектор у = /(Дт)х: Ату = Ату, где / — неко-
некоторый многочлен. Но в таком случае Aiy = Aif(Am)x = f(Am)Ai'x. =
= /(Лт)АгХ = АгУ, 1 ^ % ^ ГП — 1.
3.3.10. Указание. При п = 1 утверждение очевидно. Далее — рас-
рассуждение по индукции относительно п. Можно считать, что Aj, j G J, —
матрица линейного оператора Aj, действующего на векторном прост-
пространстве V с фиксированным базисом (ei,..., ете), причём AiAj = AjAi
для i,j G J. Согласно упр. 3.3.9 семейство {Aj \j G J} обладает общим
собственным вектором Ajx. = AjX. Без ограничения общности полагаем
х = ei, заменяя в случае необходимости в на сопряжённое множество
& = (С") вС". При таком соглашении имеем
Из условия AiAj = AjAi следует, что BiBj = BjBi, и по предположению
индукции найдётся такая невырожденная матрица D G Mn_i(C), что все
матрицы D~1BiD будут верхнетреугольными. Теперь достаточно поло-
положить
С7 = с7С7, ??=п г» •
3.3.12. Указание. В соответствии с упр. 3.3.11 максимальная раз-
размерность коммутативной подалгебры в МП(С) не может быть меньше
23 А.И. Кострикин
354
Ответы и указания к упражнениям
[п2/4] + 1. Для доказательства максимальности этого числа используем
рассуждения из статьи: Mirzakhani М. // Amer. Math. Monthly.—1998. —
March. — P. 260-262. Преположим, что m ^ [n2/4] + 2. Как и в упр. 3.3.10,
записываем матрицы Aj, I ^ j ^ т, в виде (*) с коммутирующими матри-
матрицами Bj e Mn_i(C): BiBj = BjBi. Пусть
9t = (Bi,..., Вш)с-
По предположению индукции г = dimD^ ^ [(п — 1J/4] + 1. Без ограни-
ограничения общности считаем В\,..., Вг линейно независимыми, так что В{ =
= Sj=i aijBj- При г > г положим С% = Ai — 2j=i aijAj- Очевидно, мат-
матрицы Cj линейно независимы, причём при г = г + 1,..., т каждая из них
имеет вид С% = ^ , где ci — 1 х n-матрица. Кроме того, векторы ci
должны быть линейно независимыми над С.
Заметим теперь, что верхнетреугольные коммутирующие матрицы Aj
мы можем также записать в виде
0 flnj
с коммутирующими матрицами Bj. Снова используя предположение ин-
индукции, мы приходим к множеству линейно независимых п х 1-матриц
II j II
. - 1J/4] + 1. При этом Cj =
с'в+1,..., с'т, где
ДЛЯ j ^ 8 + 1.
Так как С% и Cj принадлежат к одному коммутирующему семейству, то
CiCj = 0 для i = г + 1,... ,т is. j = s + 1,... ,т.
Наконец, рассмотрим (т — г) х n-матрицу С, г-й строкой которой слу-
служит Сг, г = г + 1,..., т. Поскольку С{ линейно независимы, rank А ^ т — г.
С другой стороны, Ccfj = 0 для j = s + 1,..., т. Так как c'j линейно не-
независимы и так как dimKerC + dim ImC = п (теорема 4 из § 1 гл. 2) для
линейного оператора С с матрицей С, то, с учётом неравенства для т, г,
s, получаем
— противоречие, доказывающее нужное нам утверждение.
3.3.13. Указание. Выберем базис в У, относительно которого ма-
матрицей формы / будет
О -Еш II
Рассмотрим симметричную невырожденную форму <^(х, у) с матрицей
Ф =
0
—Ет
0
и согласованное с этой матрицей разложение V = V\ © V2, так что
/(X, У) =
1, у2) - ^(Х2, yi).
Ответы и указания к упражнениям 355
С другой стороны, в силу соответствия между линейными операторами и
билинейными формами имеем
<р(х,у) = (х|Лу),
где А — линейный оператор, обладающий всеми требуемыми свойствами:
невырожденность (р => невырожденность А; симметричность (р => сим-
симметричность А.
3.4.1. Рассмотреть ортонормированный базис, в котором А прини-
принимает канонический вид, и интерпретировать каждый блок
II cos if —sin if ||
sin ip cos 9?
как умножение на еЪ(р в одномерном подпространстве пространства U.
3.4.2. Положить Xj = olj + ij3j (обычная запись комплексного числа).
Тогда в базисе (ei, zei,..., en, ien) матрица Ar оператора Ar принимает
блочно-треугольный вид с блоками
|| <*э ~Рз
|| Рз аз
по диагонали. Согласно правилу вычисления определителя с углом нулей
detAR = П(а| +$) = f[ |А,|2 =
det А
Так как определитель линейного оператора от выбора базиса не зависит,
то утверждение тем самым доказано. Остаётся воспроизвести детали.
3.5.1. Потому что ряд X}fcLi(~/=) расходится.
V к
3.5.7. t = cosBz - 1)—^— для Tn(t) и t = cos —^— для Un(t); i =
п + 1 п + 1
= 1,2,..., п.
3.5.8. Да, имеет: с точностью до линейной замены переменной, fn —
многочлен Чебышева второго рода.
4.1.1. Согласно следствию теоремы 4
П'ПП" =r + ?/, U = Uf ПИ".
Поэтому
геп'п и" <^> р + и' = г = q + и" ^^ р$ = и - и" е и' + и".
4.1.6. Достаточно заметить, что утверждение справедливо для рав-
равностороннего треугольника, что существует аффинное преобразование /,
переводящее равносторонний треугольник в заданный треугольник, и что
/ переводит прямые в прямые, середины отрезков в середины и, следова-
следовательно, медианы в медианы.
4.2.1. 7.
4.2.2. 7.
23*
356
Ответы и указания к упражнениям
4.3.1. Симметрическая группа S3.
4.3.2. Вращение на угол тг/4 вокруг точки (—1/л/2, 1 + 1/л/2).
4.3.3. а) поворот вокруг неподвижной точки в двух ортогональных
плоскостях; б) поворот в одной плоскости плюс сдвиг в ортогональной
плоскости; в) сдвиг.
5.2.3. Как и в упр. 3.3.8, в соответствии с методом Лагранжа составля-
составляется функция ^2ix1 — A ^2i j fijXiXj и записываются условия экстремаль-
экстремальности Х{ — Х^2 fijXj = 0, 1 ^ j ^ п. Приходим к характеристическому
уравнению относительно /и, = 1/Л.
5.2.4. -1/2 <t<l.
5.2.5. Гипербола.
5.2.6. В случае пропорциональности всех соответствующих коэффи-
коэффициентов (возможно, кроме свободных) их уравнений.
6.1.3. Указание: см. [2, ч. 4, § 1].
6.1.4. Взять, например, V = Я2 = W и рассмотреть элемент
A,0)® @,1)+ @,1)® A,0).
Если попытаться представить его в виде (а, 6H(с, с/), то в итоге получатся
противоречивые соотношения ad = 1, be = 1, ас = 0, bd = 0.
6.1.5. (А® Б) = А® Б.
6.1.6. Обе матрицы совпадают с A <g> В.
6.3.2. Указание: воспользоваться соотношением A0).
6.3.3. Указание: воспользоваться формулой Лапласа [ВА I, гл. 3, § 3,
упр. 8].
7.1.4. Из упр. 7.1.3 следует нужный изоморфизм для алгебры suB).
Действительно, если
А =
+ а2Т2 + а3Т3,
В =
[А, В] = АВ-ВА = С
и мы легко проверяем, что вектор
G1 >72,7з) = («i,«2,a3) х
суть векторное (или внешнее) произведение.
ТХ + /32Т2 + /33Т3,
72Т2 + 7зТ3,
То же верно и для soC,R), если заметить, что матрицы
Pi =
0 0 1
0 0-1
0 1 0
0 0 1
0 0 0
-10 0
0
1
0
-1
0
0
0
0
0
составляют базис пространства soC,R) и
[Л, Р2] = Р3, [Р3, Pi] = Р2, [Р2, Рз] = Рь
Ответы и указания к упражнениям 357
7.1.5. Из очевидного соотношения
= В~ХАВ • В'1 АВ ... В'1 АВ = В~хАкВ
следует, что
7.1.6. (е2/2)А
7.1.7. Из гл. 3, § 3 известно, что в подходящем ортонормированном ба-
базисе матрица А унитарного оператора Л записывается в виде А =
= В • diagje^1,..., ег1Рп } • 5, так что А = expz(.Bdiag{(^i,..., (рп}В~1).
7.1.8. Как для всякой изометрии, ||Лх|| = ||х||, поэтому ||(Д23)х|| =
= ||ДB3х)|| = ||23х||. Остальное ясно:
\\ЛВ\\= sup НСДВД = sup ||Вх|| = ||В||.
7.1.9. Выбрать базис, в котором нормальный оператор Л имеет диа-
диагональную матрицу
А = diag{Ai,..., Ап}, |Ai| ^ |А2| ^ ... ^ |АП|.
Тогда
\\A\\ = sup ^/|Aixi|2 + ... + |AnXri|2 = |Ai|.
Отсюда всё следует.
7.1.10. Схема рассуждений достаточно естественна и изложена в [15].
Так как г(Л)к ^ ||*4fc|| (см. 2) в п. 9), то в случае \im.k^oo Лк = О имеем
linifc-^oo г(Л)к = О, а значит, г (Л) < 1. Обратно: при г (Л) = 1 — 2s < 1 и
достаточно большом А; из 1) в п. 6 вытекает, что ЦЛ^Ц1^ ^ г(Л)-\-е = 1-е,
откуда \\Лк\\ ^ A - е)к и, стало быть, lim/^oo Лк = О.
7.3.1. Пусть
S = {а | /г (а) ^ 0, г = 1,..., т}
— наш ограниченный многогранник. Если а Е S и, скажем,
/i(d) = 0, ..., /r(d) = 0, /r+i(d) > 0, ..., /m(d) > 0, (*)
то уравнения /г (ж) = 0, 1 ^ г ^ г, определяют плоскость Щ (Щ = 5 при
г = 0). Множество & = Па П 5 будет гранью в 5, содержащей точку d.
Пусть теперь 5' — выпуклая оболочка множества всех вершин много-
многогранника S. Так как S — выпуклое множество, то Sf С S. Остаётся пока-
показать, что всякая точка d E S содержится в S'. Докажем это индукцией по
dimna. Если dimna = 0, то d — вершина и, стало быть, содержится в S' по
определению. Считаем далее dimna > 0 и полагаем для определённости,
что выполнены соотношения (*). Проведём в плоскости Па через точку d
358 Ответы и указания к упражнениям
любую прямую {d+Лх}, пересечение которой с многогранником S задаётся
неравенствами
/г(а + Лх) = /»(а) + Л^(х) ^ О, г + 1 ^ г ^ т
(Т% — линейная часть функции fi). Многогранник S ограничен, поэтому
данное пересечение представляет собой отрезок pq. Как и на всей плос-
плоскости Щ, функции /i,...,/r обращаются в нуль в каждой из точек р,
q. Но и fi(p) = /г(^) = 0 хотя бы для одного г > г, а это значит, что
dimllp < dimlla и dimllq < dimlla. По предположению индукции можно
считать, что р, q E S'. Так как а Е р^, то и a E S*7. Это рассуждение,
очевидно, почти повторяет доказательство теоремы из § 3 гл. 7.
МЕТОДИЧЕСКИЕ ЗАМЕЧАНИЯ
Наивно думать, что всё содержание книги было когда-то изложено в
реально читаемом курсе. На самом деле, уже начиная с главы 3, прихо-
приходилось жертвовать отдельными фрагментами, а глава 7 затрагивалась
лишь частично (экспонента линейного оператора и геометрия Лобачев-
Лобачевского). Правда, некоторый материал сознательно переносился в упражне-
упражнения. Один из вариантов курса отражён ниже в списке экзаменационных
вопросов на устном экзамене. Экзаменационный билет включал два во-
вопроса из разных разделов и не очень сложную задачу.
ЭКЗАМЕНАЦИОННЫЕ ВОПРОСЫ
1. Теорема о базисе конечномерного векторного пространства над
полем.
2. Закон изменения координат вектора при переходе к новому базису.
3. Изоморфизм пространств одинаковой конечной размерности.
4. Теорема о размерности суммы подпространств.
5. Когда сумма подпространств является прямой?
6. Теорема о размерности двойственного векторного пространства.
Рефлексивность.
7. Геометрическая интерпретация решений линейной однородной
системы.
8. Задание линейных отображений векторных пространств матрицами.
Преобразование координат вектора.
9. Критерий биективности линейного отображения в терминах ядра (в
терминах образа).
10. Алгебра линейных операторов. Минимальный многочлен. Крите-
Критерий невырожденности оператора.
11. Теорема о связи между матрицами линейного оператора в различ-
различных базисах.
12. Инвариантные подпространства: общие факты; теорема об опера-
операторе проектирования.
13. Собственные векторы и собственные значения. Характеристи-
Характеристический многочлен.
14. Теорема о геометрической и алгебраической кратности. Свойства
следа оператора.
15. Теорема о диагонализируемости линейного оператора с простым
спектром.
16. Инвариантные подпространства комплексных и вещественных ли-
линейных операторов.
17. Теорема о приведении комплексного линейного оператора к
треугольному виду.
18. Теорема Гамильтона—Кэли и её следствие.
19. Формулировка теоремы о ЖНФ матрицы и её следствия (критерий
диагонализируемости).
20. Теорема о ЖНФ нильпотентной матрицы.
360 Методические замечания
21. Теорема о разложении пространства в прямую сумму корневых
подпространств.
22. Единственность ЖНФ матрицы.
23. Матрицы билинейной формы в различных базисах.
24. Симметричные и кососимметричные билинейные формы. Квадра-
Квадратичные формы.
25. Теорема о приведении квадратичной формы к каноническому виду.
26. Однозначная определённость сигнатуры вещественной квадратич-
квадратичной формы (закон инерции).
27. Метод Якоби приведения невырожденной симметричной билиней-
билинейной формы.
28. Положительно определённые формы и матрицы. Критерий Силь-
Сильвестра.
29. Канонический вид кососимметричной билинейной формы.
30. Евклидовы векторные пространства. Неравенство Коши—Буня-
ковского и его следствия.
31. Теорема о существовании ортонормированного базиса. Процесс
Грама—Шмидта.
32. Теорема об ортогональном разложении пространства.
33. Естественный изоморфизм евклидова векторного пространства и
двойственного пространства.
34. Ортонормированные базисы и ортогональные матрицы. Группы
О(п) и SO(n).
35. Связь между линейными операторами и билинейными формами на
евклидовом векторном пространстве. Свойство самосопряжённости.
36. Теорема о диагонализируемости самосопряжённого оператора.
37. Приведение квадратичной формы к главным осям. Матричная фор-
формулировка.
38. Теорема о приведении пары квадратичных форм.
39. Теорема о каноническом виде матрицы ортогонального оператора.
40. Теорема о представлении невырожденного оператора в виде ком-
композиции самосопряжённого и ортогонального операторов.
41. Эрмитовы формы и пространства. Существование ортонормиро-
ортонормированного базиса.
42. Эрмитовы и унитарные линейные операторы. Группы U(n) и SU(n).
43. Аффинные пространства: изоморфизм; системы координат.
44. Аффинно-линейные функции и системы линейных уравнений. За-
Задание подпространств.
45. Теорема о расстоянии от точки до плоскости в евклидовом
пространстве.
46. Метод наименьших квадратов. Понятие об аппроксимации функ-
функций. Переопределённые линейные системы.
47. Теорема о расстоянии между плоскостями евклидова пространства.
48. Определитель Грама и объём параллелепипеда. Понятие ориента-
ориентации вещественного пространства.
49. Разложение аффинного преобразования евклидова точечного
пространства в произведение сдвига, движения с неподвижной точкой и
растяжения во взаимно перпендикулярных направлениях.
Методические замечания 361
50. Определитель аффинного преобразования как коэффициент изме-
изменения ориентированного объёма.
51. Классификация движений прямой и плоскости.
52. Классификация движений трёхмерного евклидова пространства.
53. Квадратичные функции на аффинном пространстве. Свойство
центральности.
54. Приведение квадратичной функции к каноническому виду.
55. Соответствие между квадриками и квадратичными функциями.
56. Типы квадрик.
57. Малый и большой ранг квадрики. Свойства конусов и цилиндров.
58. Понятие о тензорах. Тензоры валентности ^ 2.
59. Координаты тензора. Понятие о свёртке.
60. Кососимметричные тензоры. Свойства операции альтернирования.
61. Внешнее умножение и внешняя алгебра.
62. Базис внешней алгебры.
63. Внешнее умножение и определители.
предметный указатель
Автоморфизмы пространства 175
— формы 209
Аксиомы векторного пространства
12
Алгебра внешняя 286
— Грассмана 286
— Йордана 129
— Ли 72, 129
классическая 308
&1(п,Я) 308
sl(n, Я) 308
$о(п,Я) 308
su(n) 308
u(n) 308
— над полем ассоциативная 66
— операторов 66
— полумагических квадратов 86
— симметрическая 284
— тензорная 283
Алгоритм Грама—Шмидта 108
— Штрассена 340
Альтернирование тензора 282
Аннулятор р-вектора 292
Антисимметризация тензора 281
Антиизоморфизм алгебр 84
Аппроксимация 156, 157
Базис канонический квадратичной
формы 46
Базис пространства 20
взаимный 35
двойственный 35
дуальный 35
жорданов 88
ортогональный 107
ортонормированный 107, 120
симплектический 114
собственный 81
Базис тензорный 264
Базисы ориентированные 297
Бивекторы 294
Валентность тензора 260
Вектор асимптотический 232
— вероятностный 325
— корневой 90
— изотропный 209
— ковариантный 34
— контравариантный 34
— максимальный 299
— нормированный 105
— нулевой 12
— производства 316
— оптимальный по прибыли 316
— противоположный 12
— собственный 77
— характеристический 77
— циклический 99
Векторы ортогональные 106
Вершина выпуклого множества 318
— конуса 228
Вид нормальный формы 49
— канонический изометрии 136
Вращения гиперболические 215
Геометрия проективная 247
Гиперплоскость 28
— бесконечно удалённая 241
— инвариантная 84
Гиперболоид 228, 233
Гиперповерхность второго порядка
224
Грань выпуклого множества 318
Группа аддитивная пространства
12
— аффинная 194
Предметный указатель
363
Группа движений 198
— изометрий 198
— линейная полная 71, 308
специальная 308
— Лоренца 210
— однопараметрическая 306
— ортогональная 116, 122, 131
специальная 122, 308
— проективная 246
— симплектическая 114
— унитарная 122, 131
специальная 122, 309
Движение евклидова точечного про-
пространства 196
винтовое 200
собственное 199
Движения псевдоевклидовы 210
— пространства Лобачевского 329
Двойственность пространств 34
Действие симметрической группы
на тензорах 278
Дельта-функция 15
Дифференциал аффинного отобра-
отображения 175
Длина вектора 103
Дополнение ортогональное 109
— прямое 29
Задача о перпендикуляре 158
Зависимость линейная 18
Закон ассоциативности 12
— дистрибутивности 12
— инерции 49
— коммутативности 12
Значение собственное 77
— характеристическое 77
— стационарное квадратичной фор-
формы 146
Изометрия линейных пространств
130
Изоморфизм аффинных пространств
175
— векторных пространств 24, 110
— естественный 25, 111
— канонический 25
— метрический 111
Изоморфизм проективный 244
Индекс инерции формы 50
— нильпотентности оператора 69
Карта аффинная 241
Квадрат латинский 343
— магический 16
— полу магический 16
Квадрика аффинная 224
— вырожденная 228
— проективная 254
— центральная 227
Клетка жорданова 88
— циклическая 99
Код Хемминга 253
Комбинация линейная 13
— точек барицентрическая 180
Коммутатор в Я-алгебре Ли 72
— в группе 146
Комплексификация линейного про-
пространства 152
— оператора 152
Компонента группы Лоренца 214
— нильпотентная оператора 102
— полупростая оператора 102
— тензора 264
Конгруэнтность матриц 43
Константы структурные алгебры
274
Конус асимптотических направле-
направлений 232
Координаты тензора 264
Координаты аффинные 176
— барицентрические 171
— вектора 22
— однородные 240
— Плюккера 295
Коразмерность подпространства 28,
31
Коэффициенты Фурье 157
Кратность собственных значений
алгебраическая 82
геометрическая 81
Критерий диагонализируемости 80,
90
— Сильвестра 54
— цикличности пространства 100
Максимум квадратичной формы 146
364
Предметный указатель
Матрица билинейной формы 42
— дважды стохастическая 323
— жорданова 88
— композиции линейных отобра-
отображений 63
— линейного оператора 67
— магическая 16
отображения 61
— неотрицательная 321
— ортогональная 113
— Паули 311
— положительная 321
— положительно определённая 51
— полу магическая 16
— перехода 23, 326
—, подобная данной 70
— приводимая 322
— стохастическая 322
— унитарная 122
— эрмитова 118
— эрмитово сопряжённая 122
— Якоби 146
Метод Лагранжа 47
— наименьших квадратов 157
— Якоби 52
Метрика 123
— индефинитная 208
— Лобачевского 333
Минор главный матрицы 52
Многогранник 318
Многообразие алгебраическое 243
— аффинное линейное 175
Многочлен, аннулирующий линей-
линейный оператор 68
— возвратный 115
— Лежандра 165
— минимальный 68
— сферический 165
— тригонометрический 161
— Фурье 161
— характеристический 79
— Чебышева 169, 171
— Эрмита 170
Множество выпуклое 207
Модели проективной плоскости 236
Моменты инерции 280
Направление асимптотическое 232
— главное квадрики 235
Направление линейного много-
многообразия 175
Независимость линейная 18
Неравенство Адамара 117
— Коши—Буняковского 105
— Коши—Буняковского—Шварца
119
— Минковского 107
— треугольника 107
Норма вектора 105, 124
— линейного оператора 298, 299
Оболочка аффинная 180
— выпуклая 207
— линейная 14
множества векторов 14
Образ линейного отображения 60
Образующие конуса 228
— цилиндра 229
Объём п-мерный 192
Овеществление линейного прост-
пространства 149
оператора 149
Оператор диагонализируемый 80
— единичный 65
— комплексно сопряжённый 154
— кососимметричный 128
— косоэрмитов 128
— линейный 64
— нильпотентный 69
— нормальный 139
— ограниченный 299
— ортогональный 113, 136
— положительно определённый 143
— проектирования 65
— самосопряжённый 128
— симметричный 128
— симплектический 114
— сопряжённый 83, 127
— унитарный 130
— эрмитов 128
Операция свёртывания 272
Определитель Грама 160, 190
— линейного оператора 71
Опускание индекса тензора 284
Ориентация пространства 296
Основание цилиндра 229
Отношение двойное 249
— простое 204
Предметный указатель
365
Отображение альтернирования 282
— аффинное 175
— аффинно-линейное 175
— билинейное 35
— линейное 25, 60
— полилинейное 40
— полулинейное 121
— полуторалинейное 117
— симметризации 278
— сопряжённое 121
— 0-линейное 126
Отрезок 188
Параболоид 228, 233
Параллелепипед 192
Параллельность плоскостей 179, 185
Перенос параллельный 174
Перпендикуляр к двум подпрост-
подпространствам 189
Плоскость вещественная 154
— гиперболическая 55
— мнимая 154
— проективная 236
— симплектическая 55
Плоскости скрещивающиеся 185
Подалгебра 66
Подгруппа операторов однопара-
метрическая 306
— стационарная 209, 329
Подмногообразие линейное 175
Подмножество выпуклое 207
— ограниченное 123
Поднятие индекса тензора 284
Подпространства аффинные парал-
параллельные 179, 185
Подпространство аффинное 177
— векторное 14
— двойное 225, 255
— изотропное 46
— инвариантное относительно опе-
оператора 75
— корневое 90
— направляющее 177
—, натянутое на векторы 14
—, порождённое векторами 14
— циклическое 93
Подъём индексов тензора 284
— поля скаляров 271
Покрытие проективного прост-
пространства аффинное 242
Положение общее подпространств
185
точек 179
Полость верхняя конуса 213
Полупространство 318
Поляра точки 258
Поляризация квадратичной формы
45
Порядок конечной проективной
плоскости 342
Последовательность Коши 123
— сходящаяся 123
— точная 193
— фундаментальная 123
Преобразование аффинное невы-
невырожденное 175
— Кэли 116
Приведение билинейной формы к
каноническому виду 46, 133
— квадратичной формы к канони-
каноническому виду 46, 134
— матрицы к каноническому виду
89
Принцип Стейница о замене 22
Программа Эрлангенская 201
Программирование линейное 315
Проектор 65, 74
Проекция вектора 108
Произведение векторов внутреннее
118
— скалярное 104
— симплектическое 113
Произведение тензорное 41, 262
— — линейных отображений 41,
262
пространств 269
Производная экспоненты 312
Пространства изометричные 130
— изоморфные 130
Пространство аффинное 173
— банахово 124
— бесконечномерное 20
— векторное 12
—, двойственное к данному 34
— евклидово 104
— комплексное 16
— конечномерное 20
366
Предметный указатель
Пространство координатное п-мер-
ное 15
— линейное 12
— Лобачевского 215, 327
— магических квадратов 16, 86
— матриц 16
— метрическое 123
— метрическое полное 124
— Минковского 209
— нормированное 123, 124
— нормированное полное 124
— нульмерное 14, 20
— полу магических квадратов 16,
86
— проективное 239
— трёхмерное вещественное 16
— симплектическое 113
— сопряжённое 34
— унитарное 118
— функций 15
— циклическое 93, 99
— эрмитово 118
Процесс ортогонализации Грама—
Шмидта 108
Пфаффиан 57
Равенство Парсеваля 159
Радикал формы 43
Радиус спектральный 310
Разложение оператора полярное 145
спектральное 140
— ортогональное алгебры Ли 341
— р-вектора 292, 294
Размерность алгебры 65
— векторного пространства 20
— аффинного пространства 174
— проективного пространства 239
Ранг билинейной формы 43
— квадрики 225
— семейства векторов 19
— тензора 260
Расположение подпространств 185
Расстояние между множествами 190
— Лобачевского 332
точками 188
— от точки до подпространства
188
Репер 176
— главных направлений квадрики
235
Рефлексивность 36
Ряд абсолютно сходящийся 125
— Фурье 161
Свёртка тензора 273
по индексам 274
полная 274
— функций 22
Сдвиг 174
Семейство векторов линейно зави-
зависимое 18
независимое максималь-
максимальное 19
Середина отрезка 188
Сигнатура квадратичной формы 50
Символ Кронекера 271
Симметризация тензора 278
Симплекс 206
Система аффинных координат 176
— координат барицентрическая 181
прямоугольная 187
— функций ортогональная 156
Системы векторов линейно неза-
независимые 18
максимальные 19
эквивалентные 19
Скаляр 12
След линейного оператора 71
— матрицы 16
Сопряжение формальное 164
Спаривание пространств 35
каноническое 35
Спектр оператора 79
простой 80
Степень внешняя оператора 296
Структура комплексная 147
каноническая 151
Сумма линейных операторов пря-
прямая 76
— подпространств 26
— подпространств прямая 28
внешняя 30
Сфера 123
Сходимость в среднем 159
— по норме 125
Предметный указатель
367
Тензор 260
— антисимметричный 281
— инерции 279
— ковариантный 260
— контравариантный 260
— кососимметричный 281
— Кронекера 271
— метрический 271
— симметричный 278
— смешанный 260
— структурный алгебры 274
Теорема Гамильтона—Кэли 87
— об инерции 49
— о продолжении базиса 20
— Перрона—Фробениуса 323
— Шаля 201
— Шура 147
— Эйлера 201
— Якоби 52
Теория относительности специаль-
специальная 211
Тип тензора 34, 260
Точка аффинного пространства 173
— критическая 51
— невырожденная 51
— проективного пространства 239
— седловая 52
— центральная 219
Точки коллинеарные 203
Углы в пространстве Лобачевского
333
Угол между прямой и аффинным
подпространством 187
прямыми 187
Уклонение среднеквадратичное 157
Умножение внешнее 285
— на скаляр 12
— тензорное 262
— тензорное линейных операторов
270
Унитарность 12
Уравнение вековое 79
— дифференциальное 313
— характеристическое 79
Форма билинейная 41
— внешняя 283
— жорданова нормальная 89
— квадратичная 45
— кососимметричная 43
— метрическая 209
положительно определённая
50, 118
— полилинейная 40
— полуторалинейная 117
— полярная 45, 280
— симметричная 41
— эрмитова 117
Формула Грассмана 26
— косинусов 103
Функции аффинно-эквивалентные
220
Функция аффинно-линейная 183
— биаффинная 217
— весовая 169
— квадратичная 218
— линейная 33
— полилинейная 40
— полулинейная 121
—, сопряжённая к данной 121
— целевая 316
Центр 219
— квадрики 227
Цепь Маркова 325
Цилиндр 228
Часть линейная аффинной функ-
функции 175
Шар замкнутый 123
— открытый 123
— п-мерный 123
Эквивалентность систем векторов
19
Экспонента линейного оператора
302
Эллипсоид 228, 233
Фактороператор 84
Факторпространство 31
Фигуры конгруэнтные 202
Ядро линейного отображения 60
— формы 43
Учебное издание
КОСТРИКИН Алексей Иванович
ВВЕДЕНИЕ В АЛГЕБРУ
Часть II
ЛИНЕЙНАЯ АЛГЕБРА
Редактор Е.Ю. Ходан
Оригинал-макет Н.Н. Андреева
ЛР №071930 от 06.07.99. Подписано в печать 08.04.04.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 23. Уч.-изд. л. 25,3. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru
http://www.fml.ru
Отпечатано с готовых диапозитивов в ПФ «Полиграфист»
160001, г. Вологда, ул. Челюскинцев, 3
Тел.: (8172) 72-55-31, 72-61-75, факс: (8172) 72-60-72
E-mail: form.pfp@votel.ru http://www.vologda/~pfpv