




























































































Author: Топильский В.Б.
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика схемотехника измерительные устройства
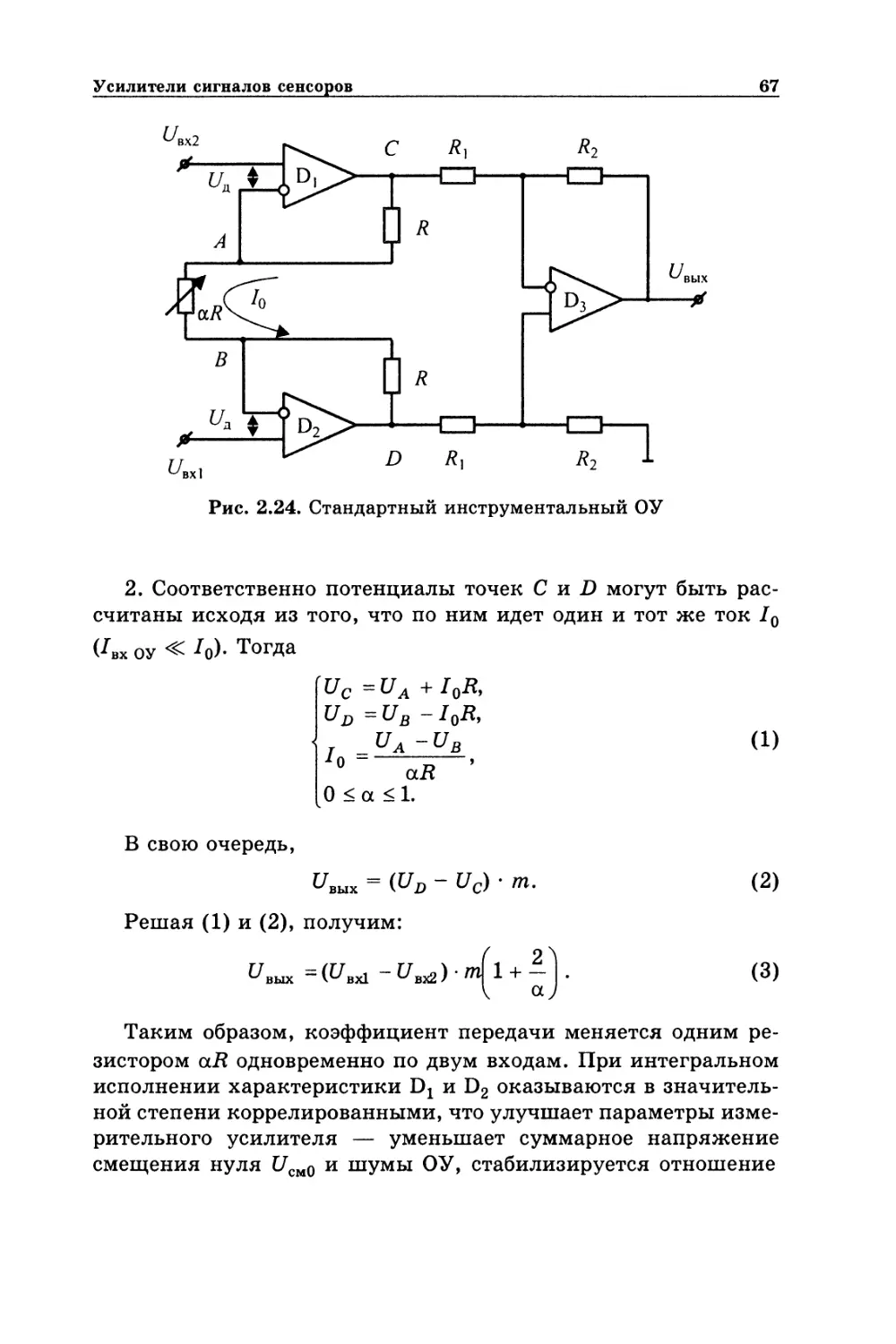
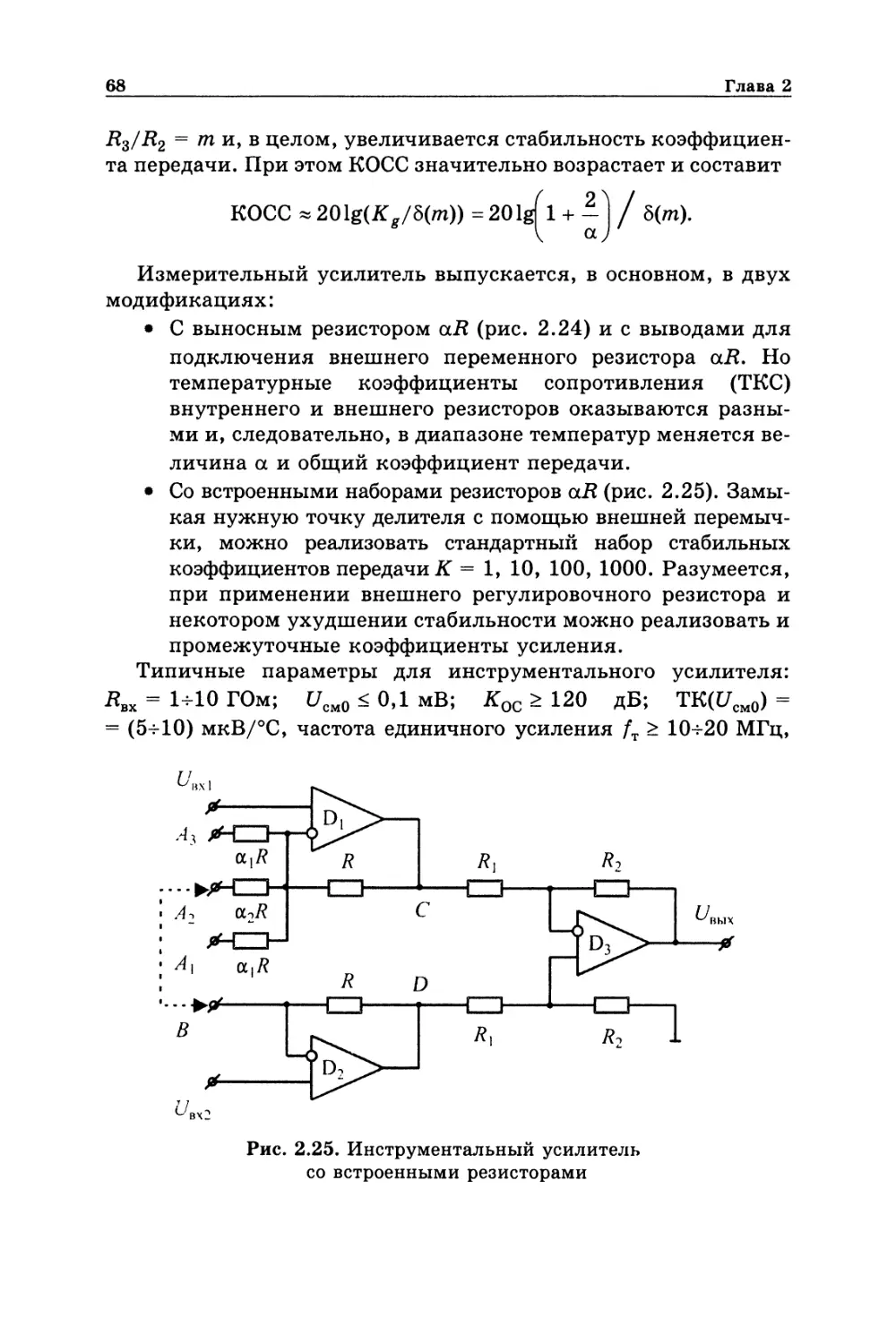
ISBN: 978-5-94774-331-9
Year: 2010




В. Б. Топильский
Схемотехника
измерительных
устройств
Москва
БИНОМ. Лаборатория знаний
2010
УДК 681.518
ББК 32.965
Т58
Топильский В. Б.
Т58 Схемотехника измерительных устройств / В. Б.
Топильский. — М.: БИНОМ. Лаборатория знаний, 2010. — 232 с:
ил.
ISBN 978-5-94774-331-9
В пособии рассматривается комплекс вопросов, связанных с
проектированием информационно-измерительных и управляющих систем.
Подробно описаны компоненты таких систем (датчики физических
величин, усилители сигналов и устройства отображения информации).
Приводятся схемы включения элементов ИИС и анализ их
погрешностей.
Студентам, специализирующимся по направлению «Информатика
и вычислительная техника», преподавателям соответствующих
дисциплин, специалистам-практикам, занимающимся разработкой ИИС
различного назначения.
УДК 681.518
ББК 32.965
Учебное издание
Топильский Виктор Борисович
Схемотехника измерительных устройств
Ведущий редактор Б. Копылов
Художественный редактор О. Лапко
Художник Н. Зотова
Компьютерная верстка В. Носенко
Подписано в печать 16.11.09. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Школьная. Печать офсетная.
Усл. печ. л. 14,5. Тираж 2000 экз. Заказ № 2851
Издательство «БИНОМ. Лаборатория знаний»
Телефон: (499)157-1902, e-mail: binom@Lbz.ru
http://www.Lbz.ru
Отпечатано с готовых диапозитивов
в производственной фирме «Полиграфист».
160001, г. Вологда, ул. Челюскинцев, 3
ISBN 978-5-94774-331-9
© БИНОМ. Лаборатория знаний, 2009
Оглавление
Предисловие 5
Список основных сокращений 7
Введение 9
Глава 1. Общие сведения о датчиках физических величин
и измерительных схемах 12
1.1. Классификация датчиков 12
1.2. Генераторные датчики сигналов 13
1.2.1. Датчики напряжения 14
1.2.2. Датчики тока 18
1.2.3. Датчики заряда 20
1.3. Параметрические датчики сигналов 22
1.3.1. Последовательные цепи и делители
напряжения 23
1.3.2. Мостовые измерительные схемы 26
1.3.3. Мосты переменного тока 31
1.3.4. Подключение датчиков к мостовым схемам ... 34
Глава 2. Усилители сигналов сенсоров 37
2.1. Параметры интегральных операционных
усилителей 37
2.2. Классификация интегральных операционных
усилителей (ОУ) 48
2.3. Анализ погрешностей усилителей 53
2.3.1. Методы анализа усилителей 53
2.3.2. Структура погрешностей усилите лей 59
2.4. Разновидности специализированных ОУ 63
2.4.1. Измерительные усилители 63
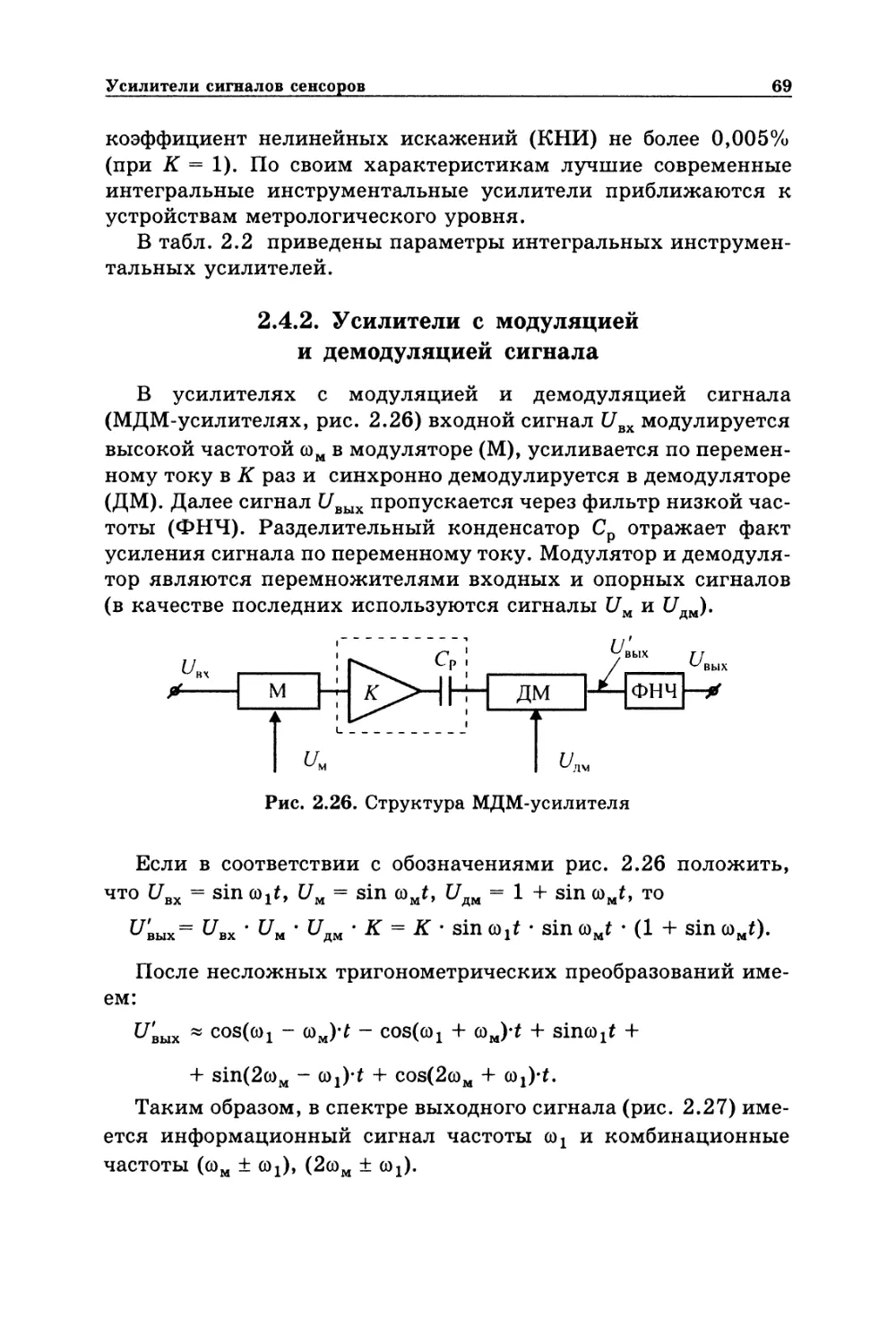
2.4.2. Усилители с модуляцией и демодуляцией
сигнала 69
2.4.3. Двухканальные ОУ 74
Оглавление
2.4.4. Усилители с периодической компенсацией
дрейфа нуля (ПКД-усилители) 78
2.4.5. Программируемые ОУ 86
2.4.6. Токоразностные ОУ (усилители Нортона) 88
2.4.7. Изолирующие ОУ 97
2.5. Однополярное питание ОУ 102
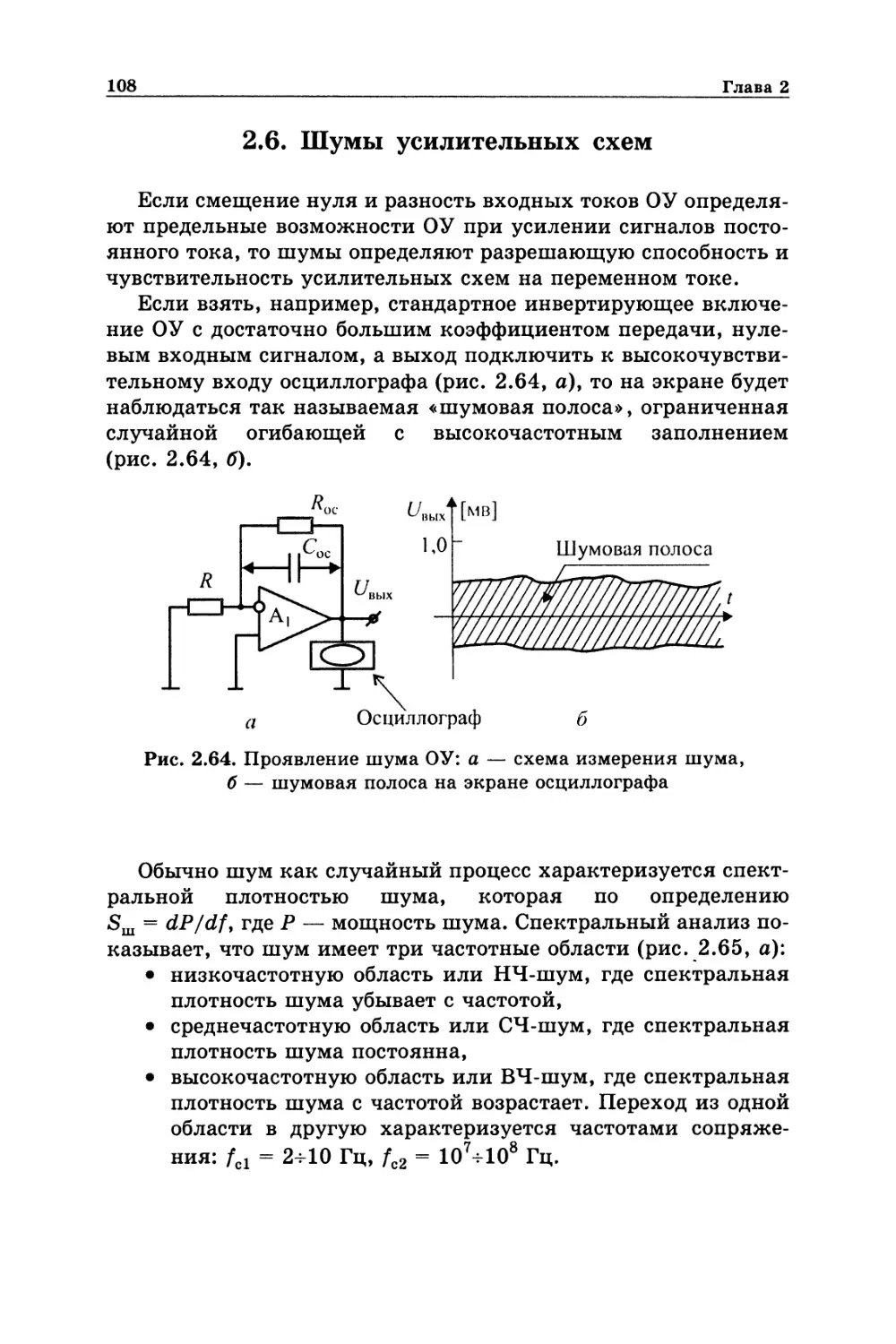
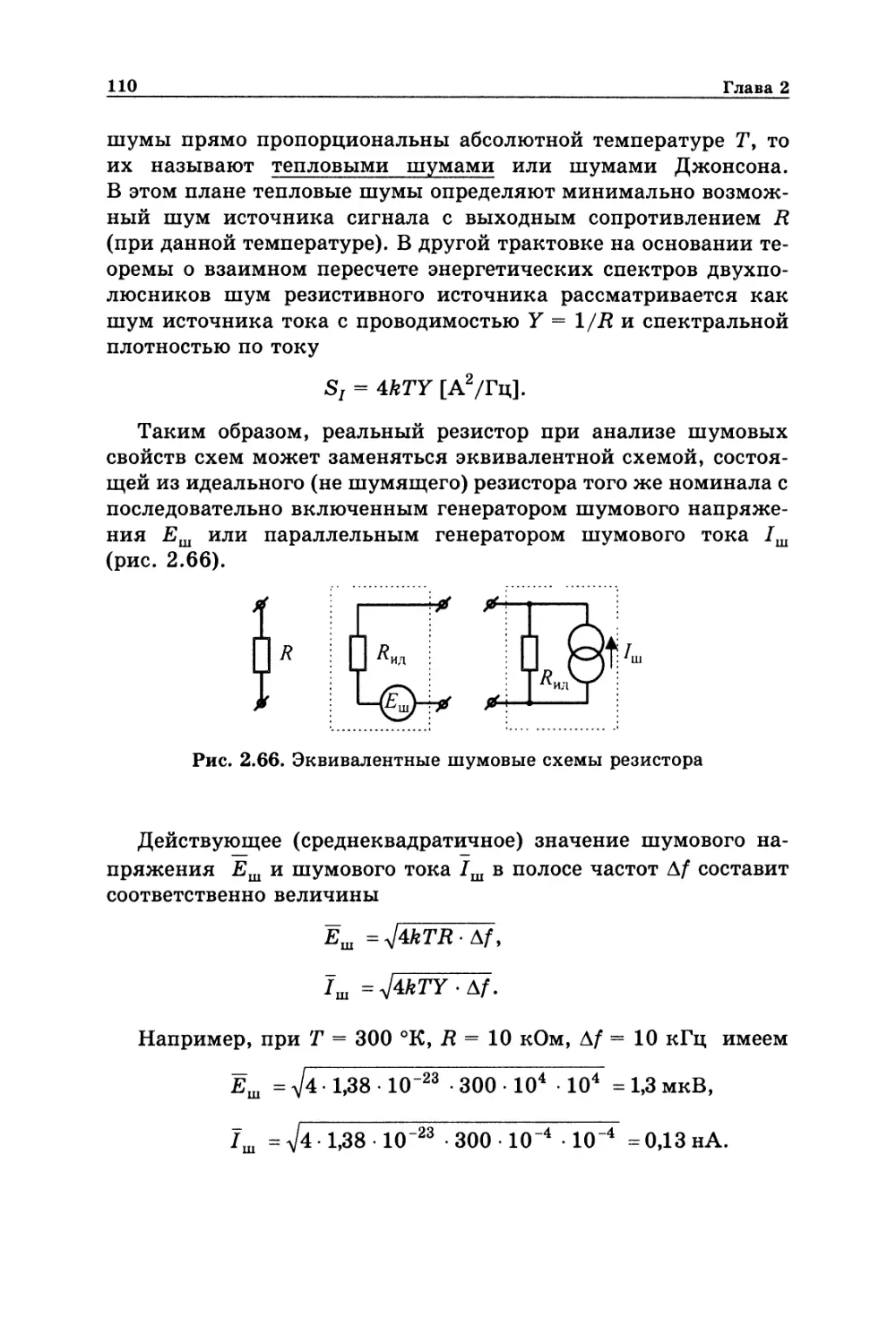
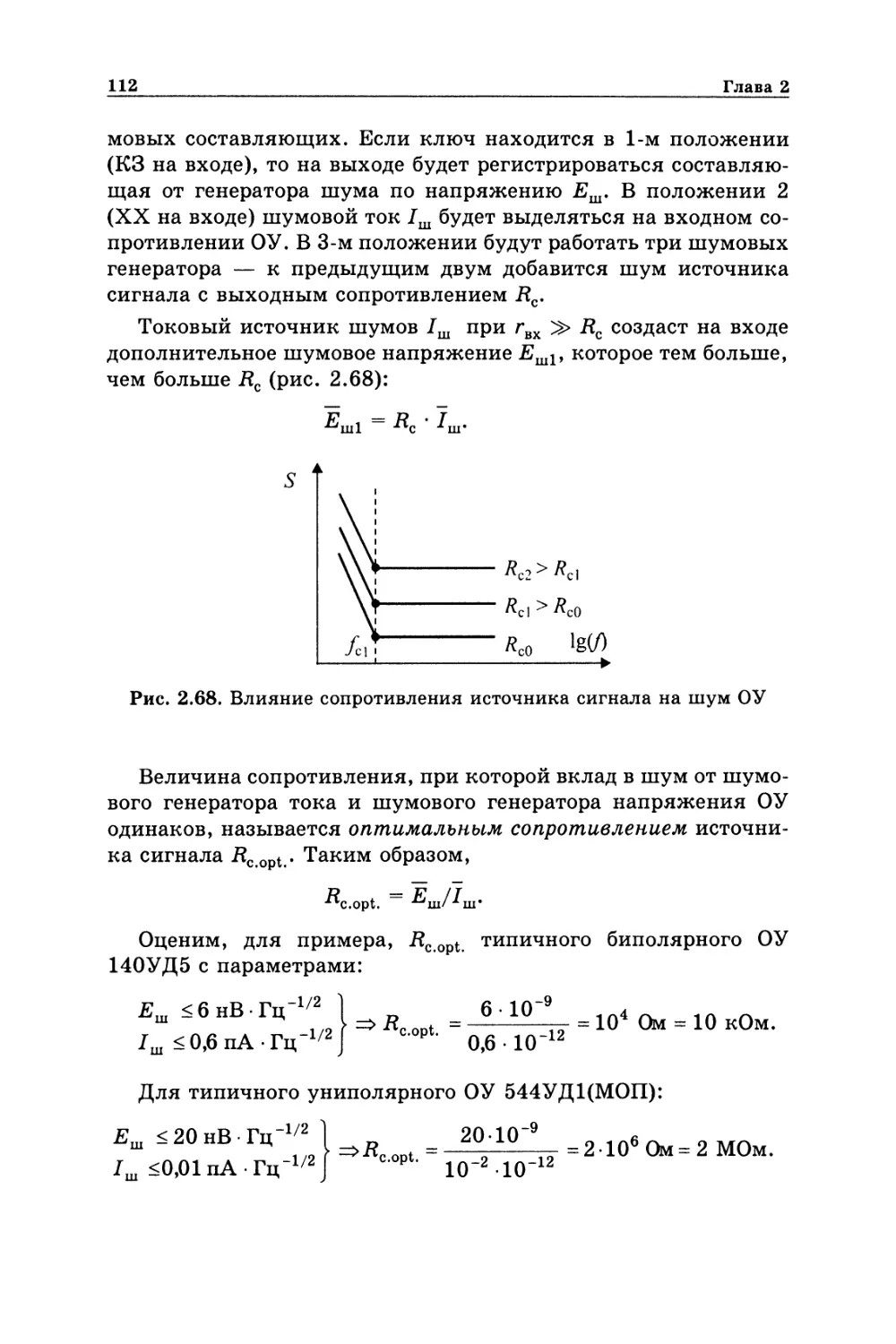
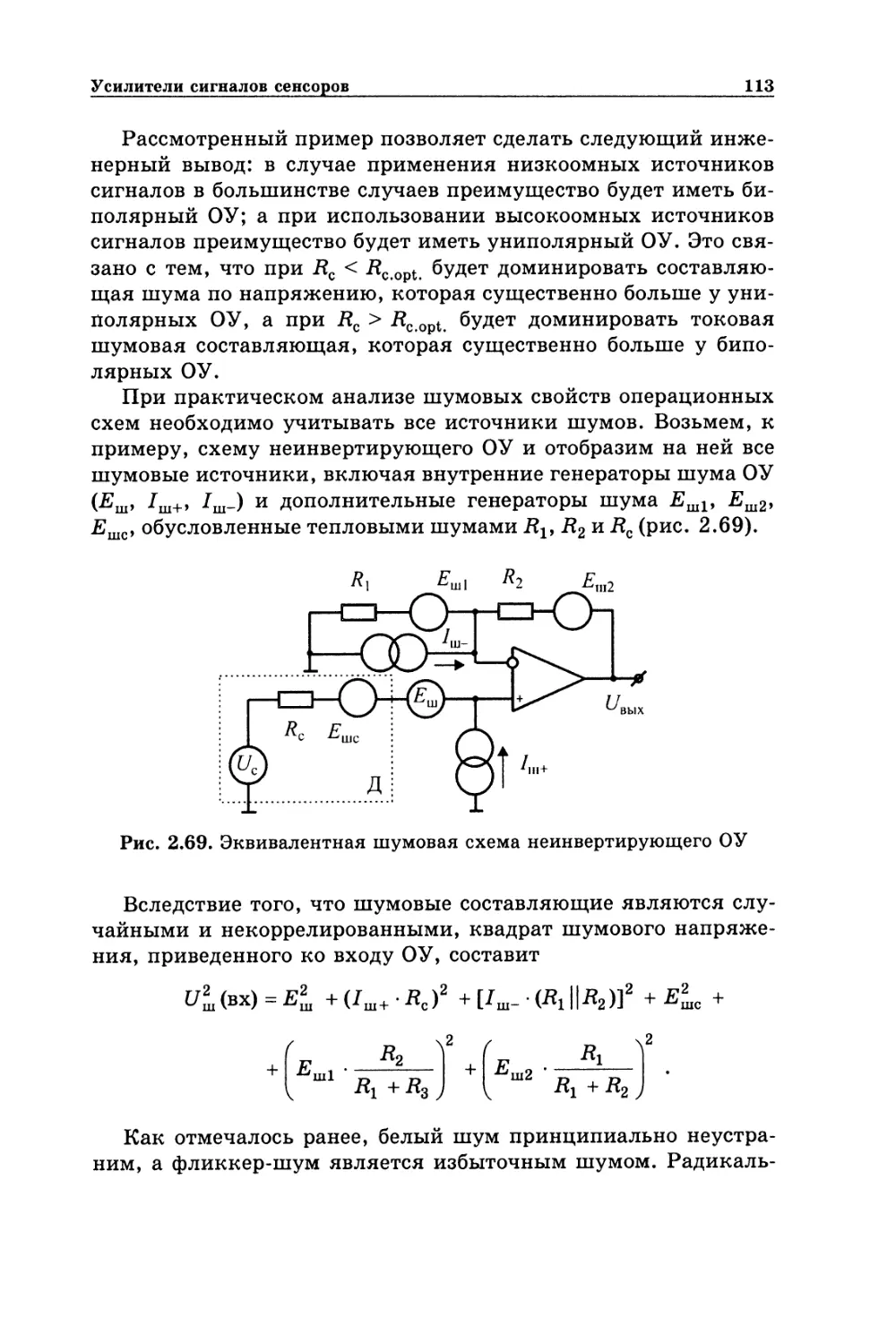
2.6. Шумы усилительных схем 108
Глава 3. Датчики физических величин 116
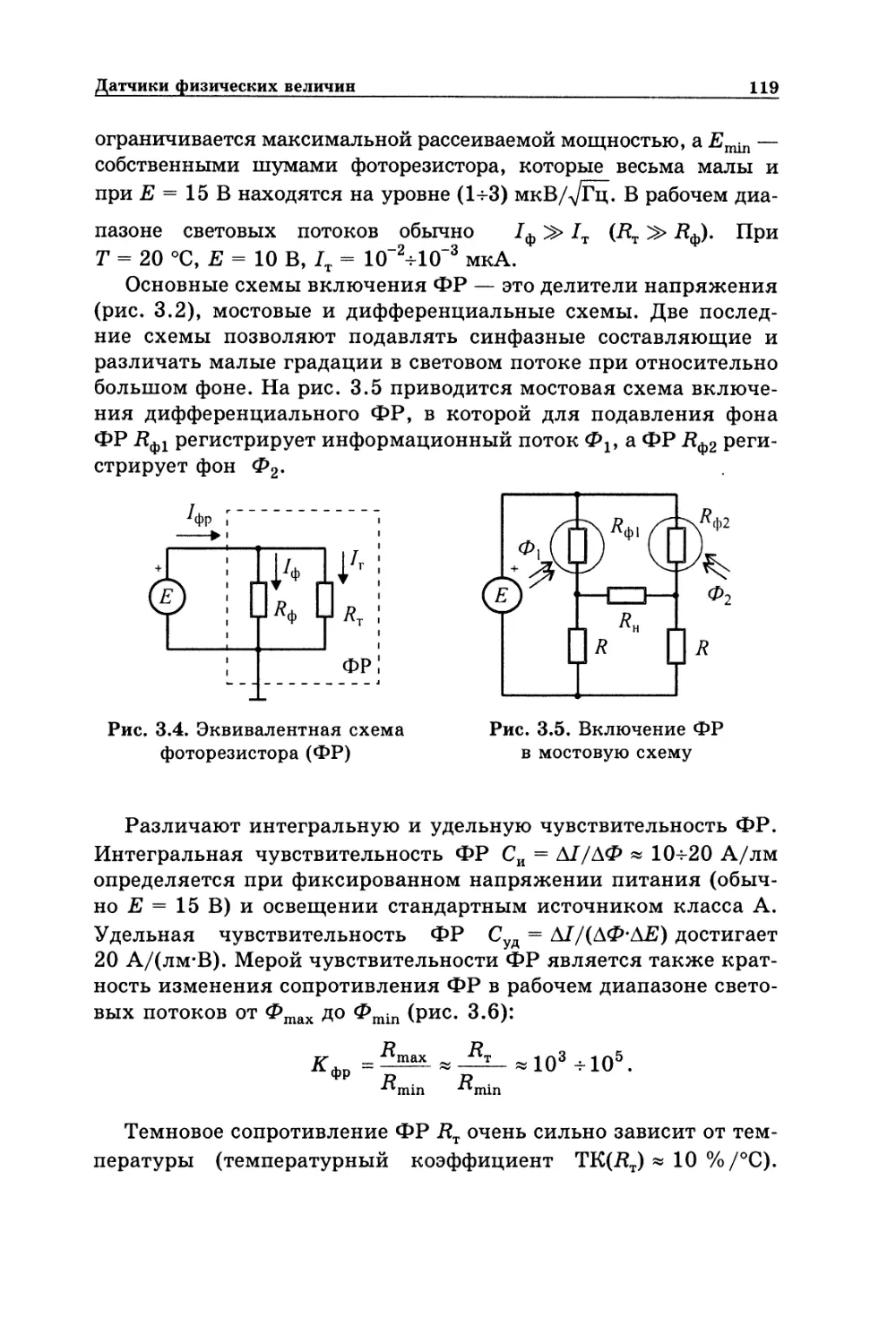
3.1. Фотодатчики 117
3.1.1. Фоторезисторы 118
3.1.2. Фотодиоды 121
3.1.3. Фоточувствительные приборы
с зарядовой связью 133
3.2. Датчики температуры 146
3.2.1. Металлические термометры
сопротивления 147
3.2.2. Терморезисторы 150
3.2.3. Термопары 154
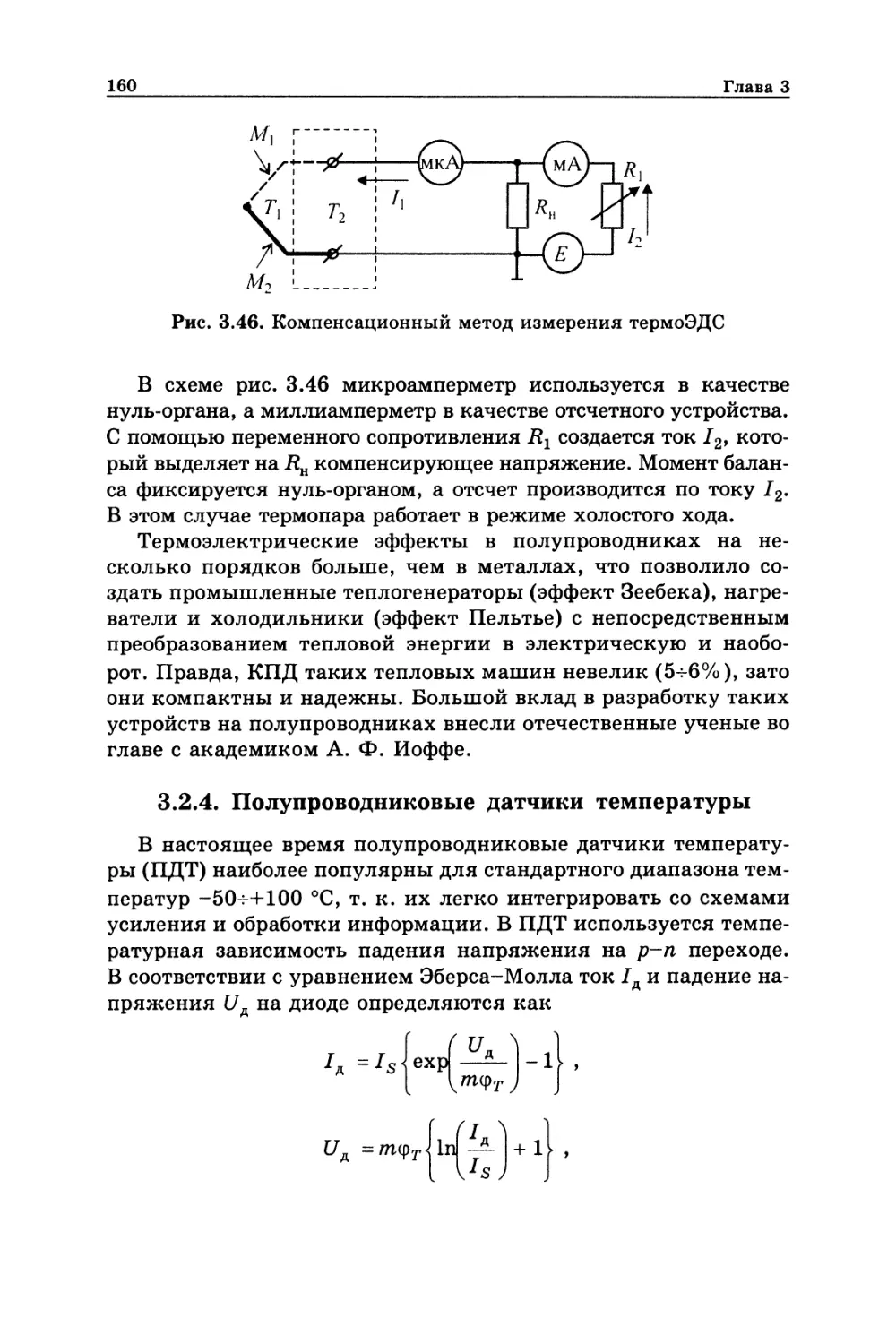
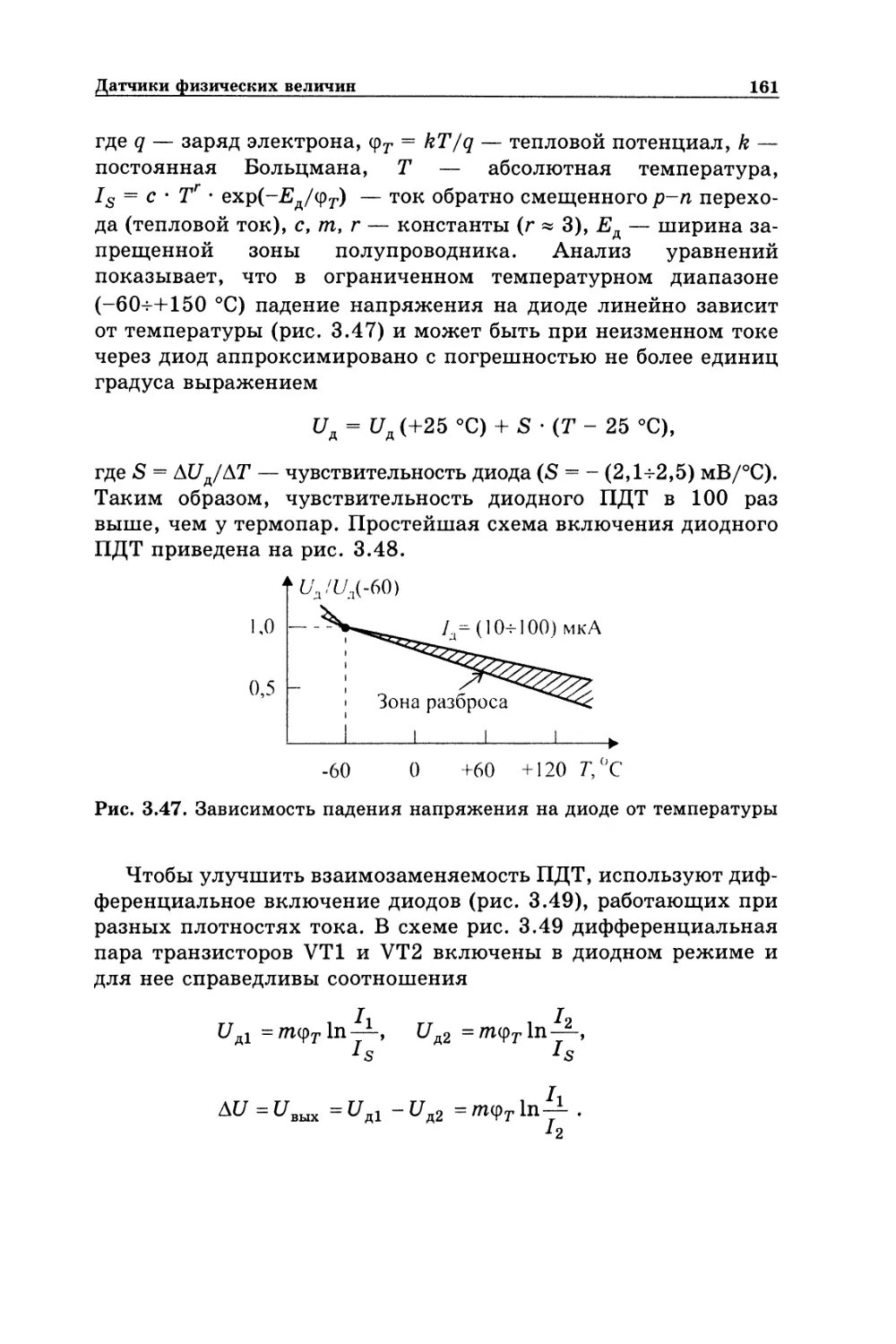
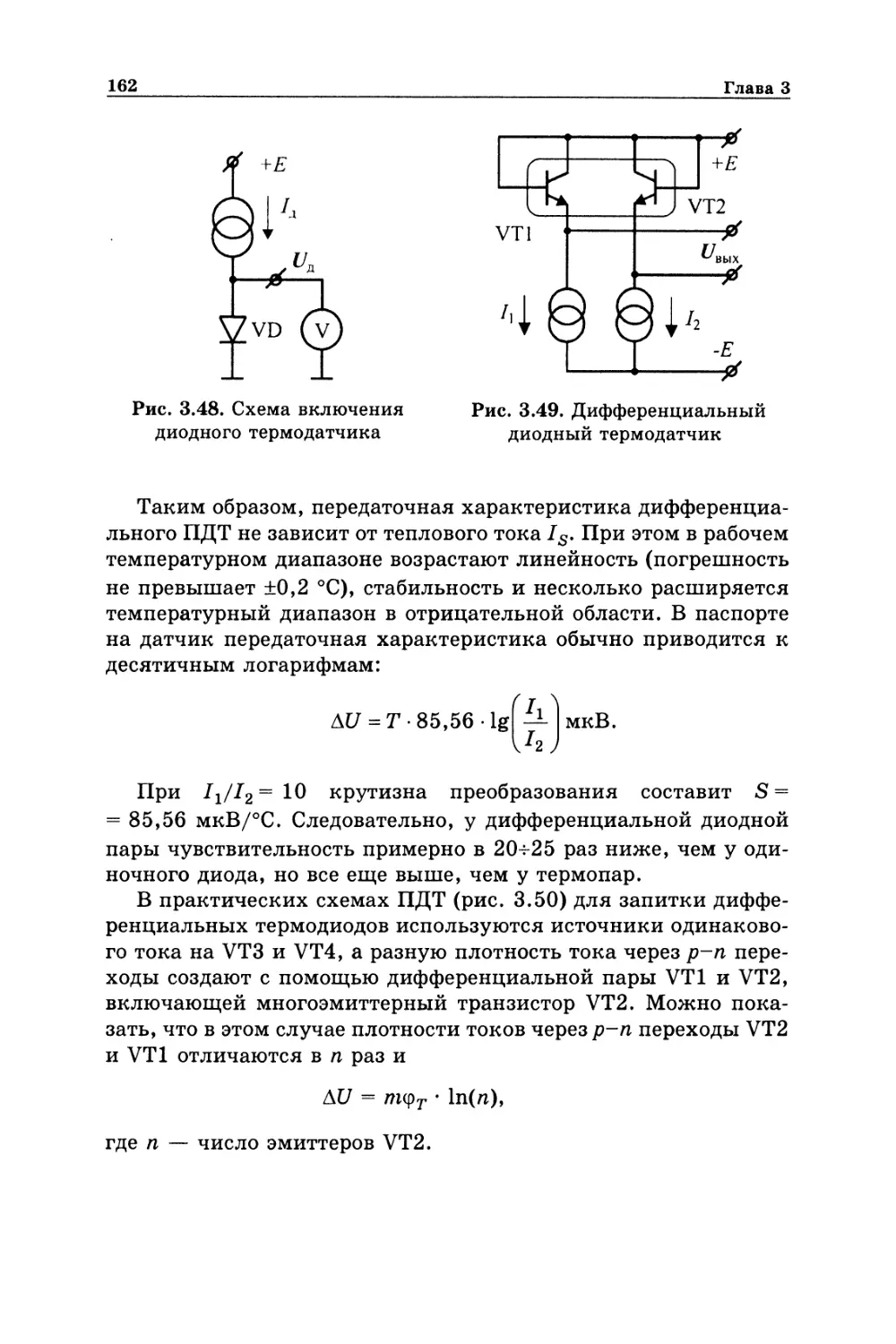
3.2.4. Полупроводниковые датчики
температуры 160
3.3. Датчики деформации и смещения 167
3.3.1. Металлические тензодатчики 168
3.3.2. Полупроводниковые тензодатчики 172
3.3.3. Пьезоэлектрические датчики 178
3.4. Датчики магнитного поля 188
3.4.1. Датчики на эффекте Холла 188
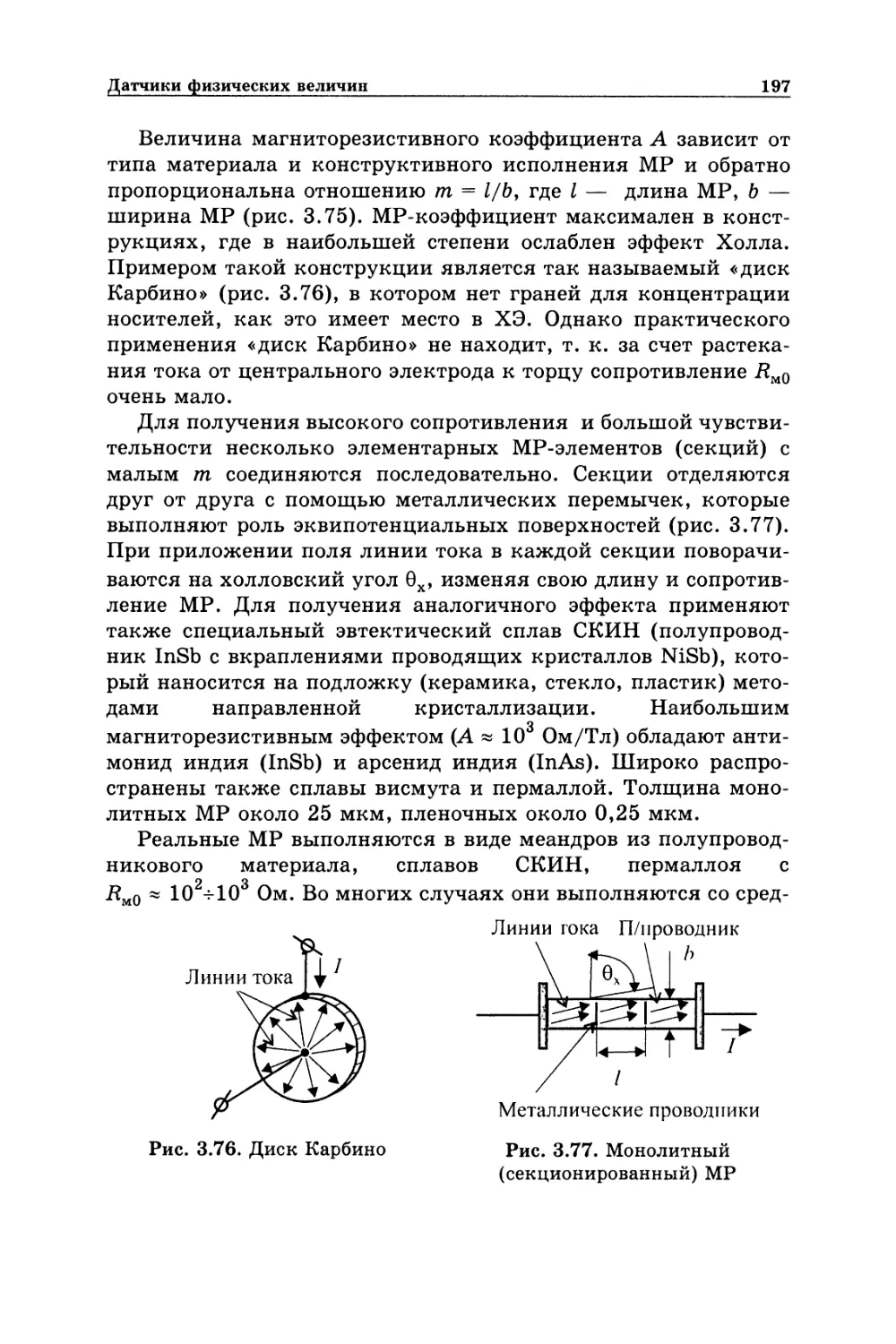
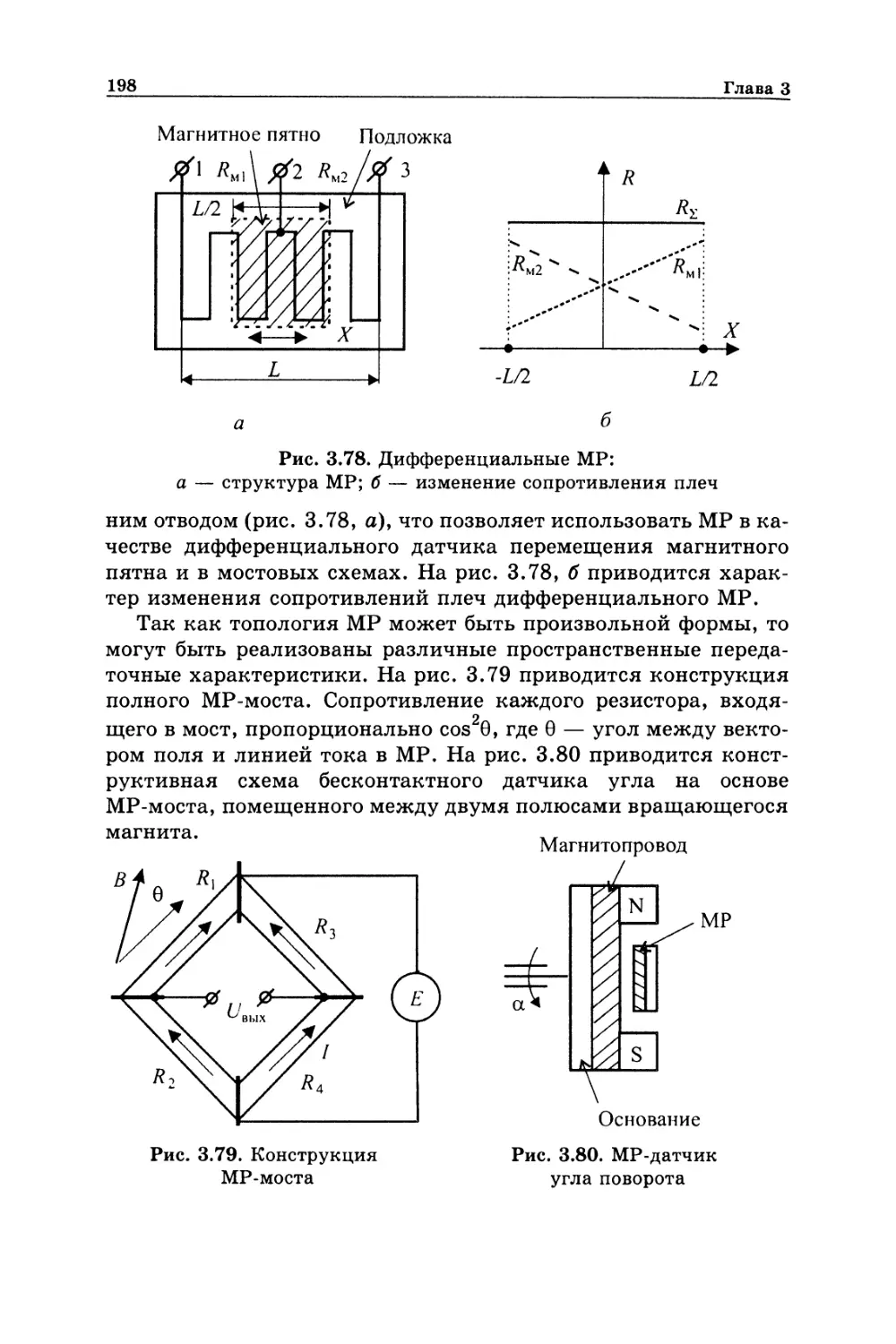
3.4.2. Магниторезисторы 196
Глава 4. Устройства отображения информации (УОИ). . . . 202
4.1. Классификация и характеристики УОИ 202
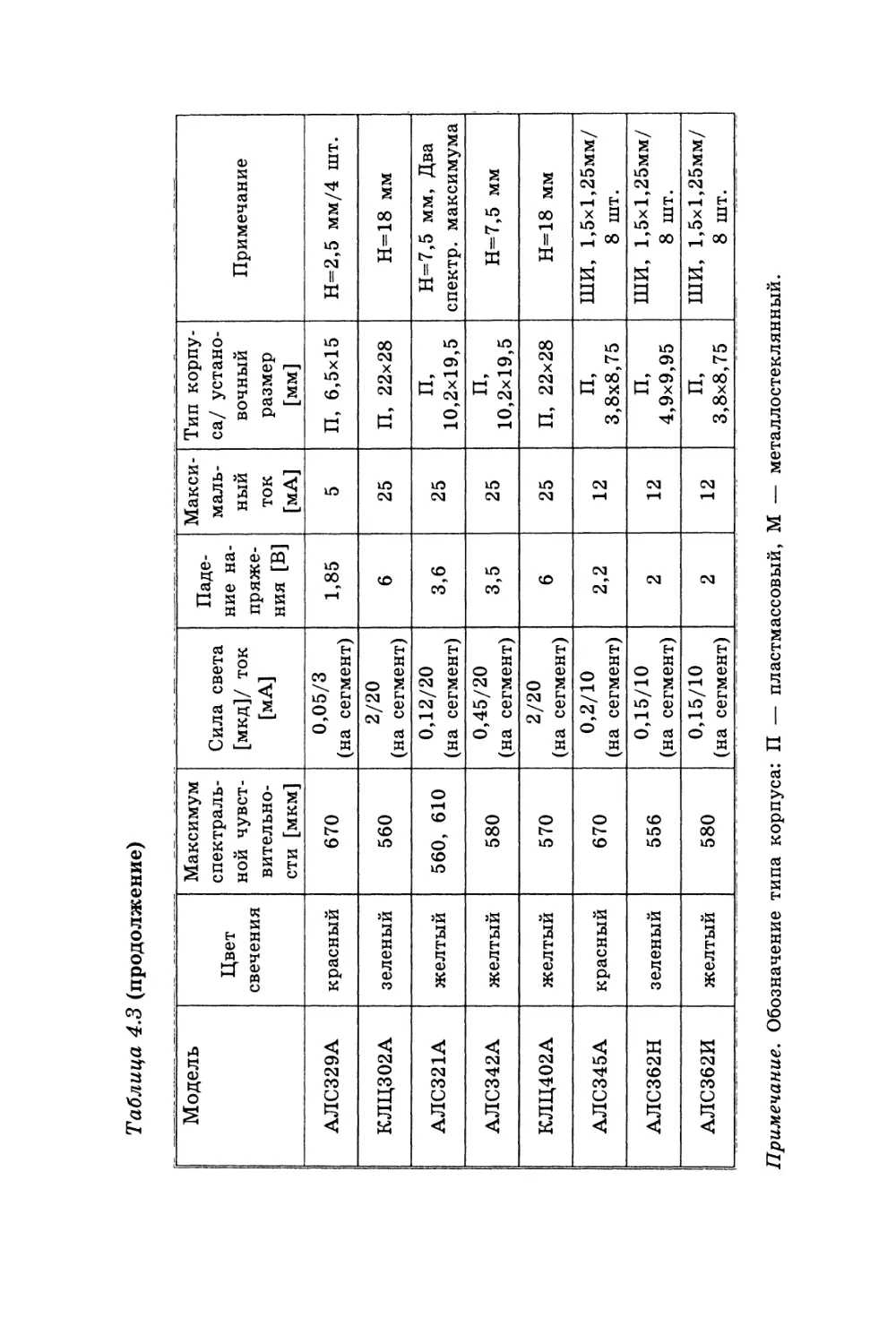
4.2. Светоиндикаторные диоды (СИД) 206
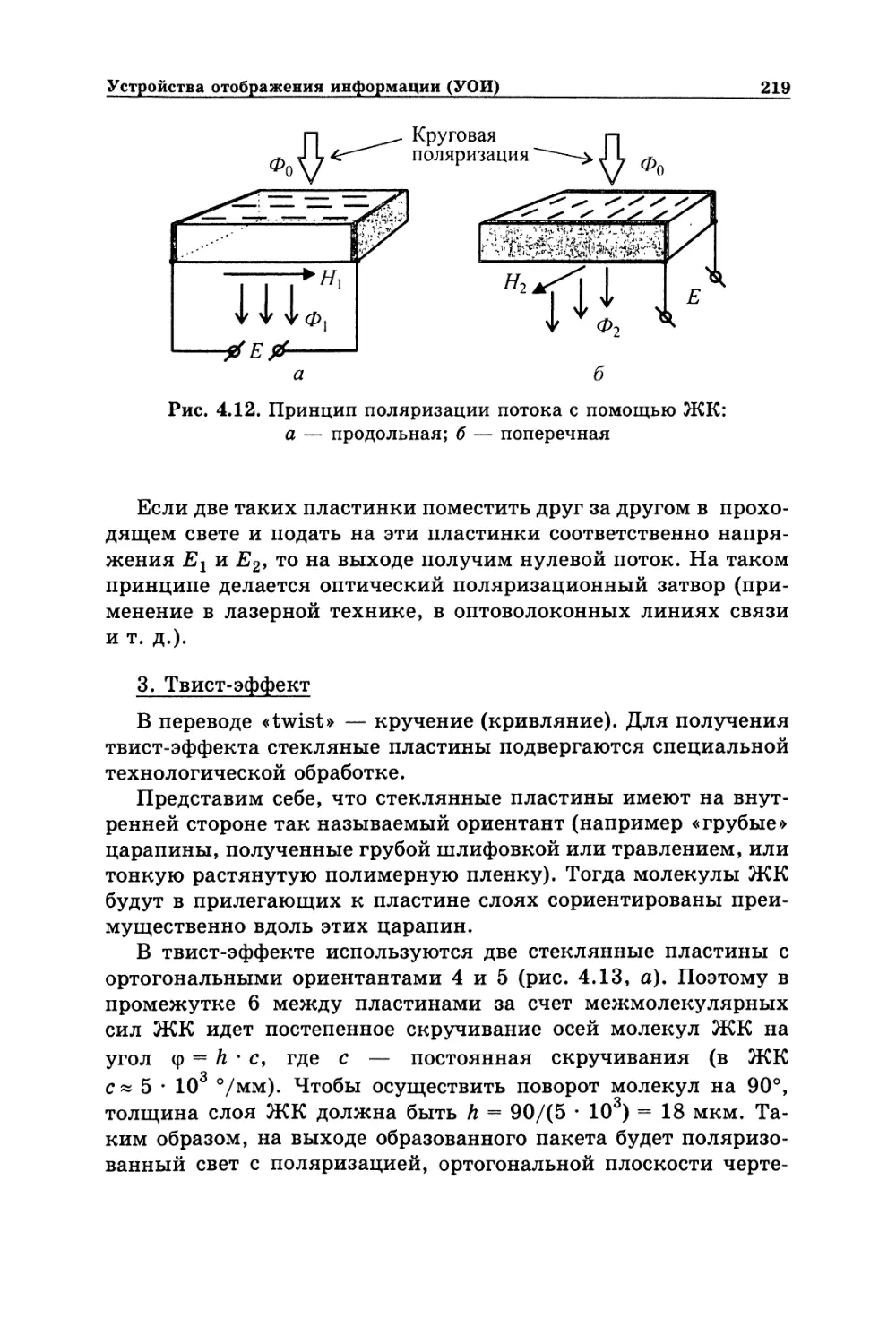
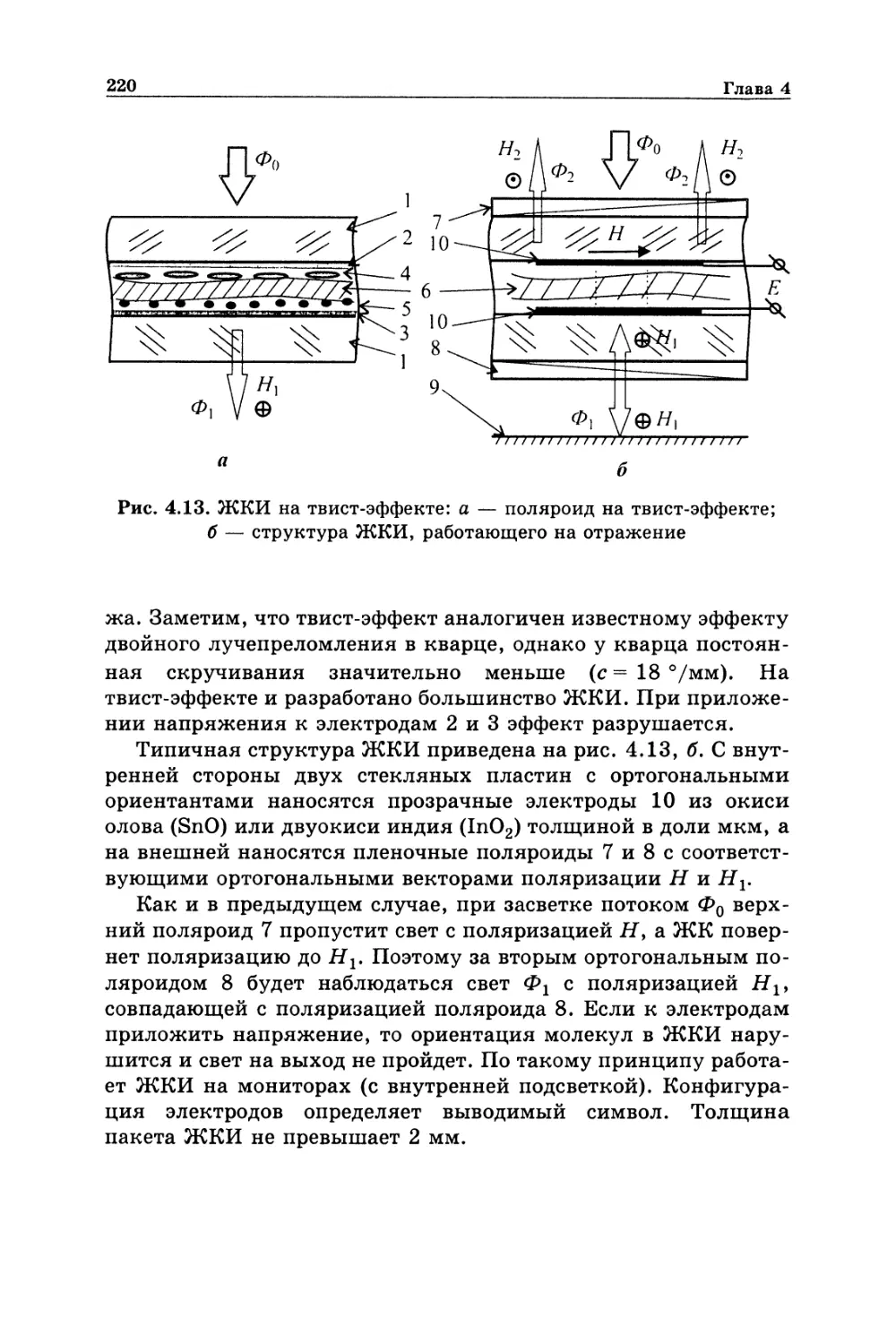
4.3. Жидкокристаллические индикаторы (ЖКИ) 217
4.4. Газоразрядные индикаторы 224
4.5. Электролюминесцентные индикаторы (ЭЛИ) 229
Литература 232
Предисловие
Общепризнано, что технические измерения являются
основой построения современных информационно-измерительных и
управляющих систем. В силу этого измерениям отводится
определяющая роль в научно-техническом прогрессе и именно
изучение измерительных устройств представляет благодатное поле
для привития будущим специалистам комплексных
инженерных навыков в области анализа и проектирования законченных
электронных функциональных устройств, включая сенсоры,
устройства усиления и нормализации электрических сигналов
датчиков и устройства отображения информации.
Несмотря на развитие формальных методов и систем
автоматизированного проектирования схем (программы PSpice, Auto-
Cad и др.), получение достоверных результатов невозможно без
овладения знаниями из классической системотехники
аналоговых измерительных устройств, что подтверждает
отечественный и зарубежный опыт. Эти знания, адаптированные к
современному уровню развития техники, как представляется, будут
востребованы в течение обозримого интервала времени и
именно на них будет базироваться проектирование технических
устройств в таких революционных технологиях, как
робототехника, нанотехнология и технология микромеханических
систем. Осознание этого факта предопределяет возродившийся
интерес специалистов к получению углубленных знаний в области
аналоговой системотехники и послужило толчком к написанию
данного пособия.
Учебное пособие «Схемотехника измерительных устройств»,
являющееся обобщением аналогичного курса, поставленного и
читаемого автором на старших курсах факультета
«Микроприборов и технической кибернетики» МИЭТ, призвано восполнить
дефицит современной учебной технической литературы в
области информационно-измерительных устройств и систем. Этот
6 Предисловие
курс является завершающим в ряду специальных инженерных
дисциплин. Предполагается, что читатели изучили
институтские курсы по электротехнике, физике, микроэлектронике,
радиоэлектронике, преобразователям информации,
конструированию радиоэлектронной аппаратуры.
По глубокому убеждению автора, подготовка инженеров
напрямую связана с умением проводить адекватный
качественный анализ электронных схем. Поэтому особое внимание в
пособии уделено инженерным подходам, лежащим в основе
анализа измерительных устройств. По этой же причине пособие
снабжено большим количеством числовых примеров с
инженерным уровнем детализации расчетов.
Хотя пособие в первую очередь ориентировано на подготовку
специалистов по специализации 220100 «Вычислительные
машины, комплексы, системы и сети» направления 654600
«Информатика и вычислительная техника», специализирующихся
на разработке различных информационно-измерительных и
управляющих систем, оно может быть рекомендовано и при
изучении смежных дисциплин в области промышленной
автоматики, робототехники, приборостроения, электротехники и
радиоэлектроники.
Список
основных сокращений
DC/AC — интегральный преобразователь (конвертор) постоянного тока
в переменный.
АЦП (ADC) — аналого-цифровой преобразователь.
АЧХ — амплитудно-частотная характеристика.
Би-МОП — комбинированная биполярная/МОП технология
или прибор.
БПЭ — биморфный пьезоэлемент.
ВАХ — вольтамперная характеристика.
ГИП — газоиндикаторная панель.
ГРИ — газоразрядный индикатор.
Д — первичный датчик (сенсор).
ЖКИ — жидкокристаллический индикатор.
ИИС — информационно-измерительная система.
ИМС — интегральная микросхема.
ИУС — информационно-управляющая система.
КВИП — коэффициент влияния источника питания на
смещение нуля ОУ.
КДТ — кремниевый датчик температуры.
КЗ — режим короткого замыкания.
КОСС — коэффициент ослабления синфазного сигнала.
КПД — коэффициент полезного действия.
ЛАЧХ — логарифмическая амплитудно-частотная
характеристика.
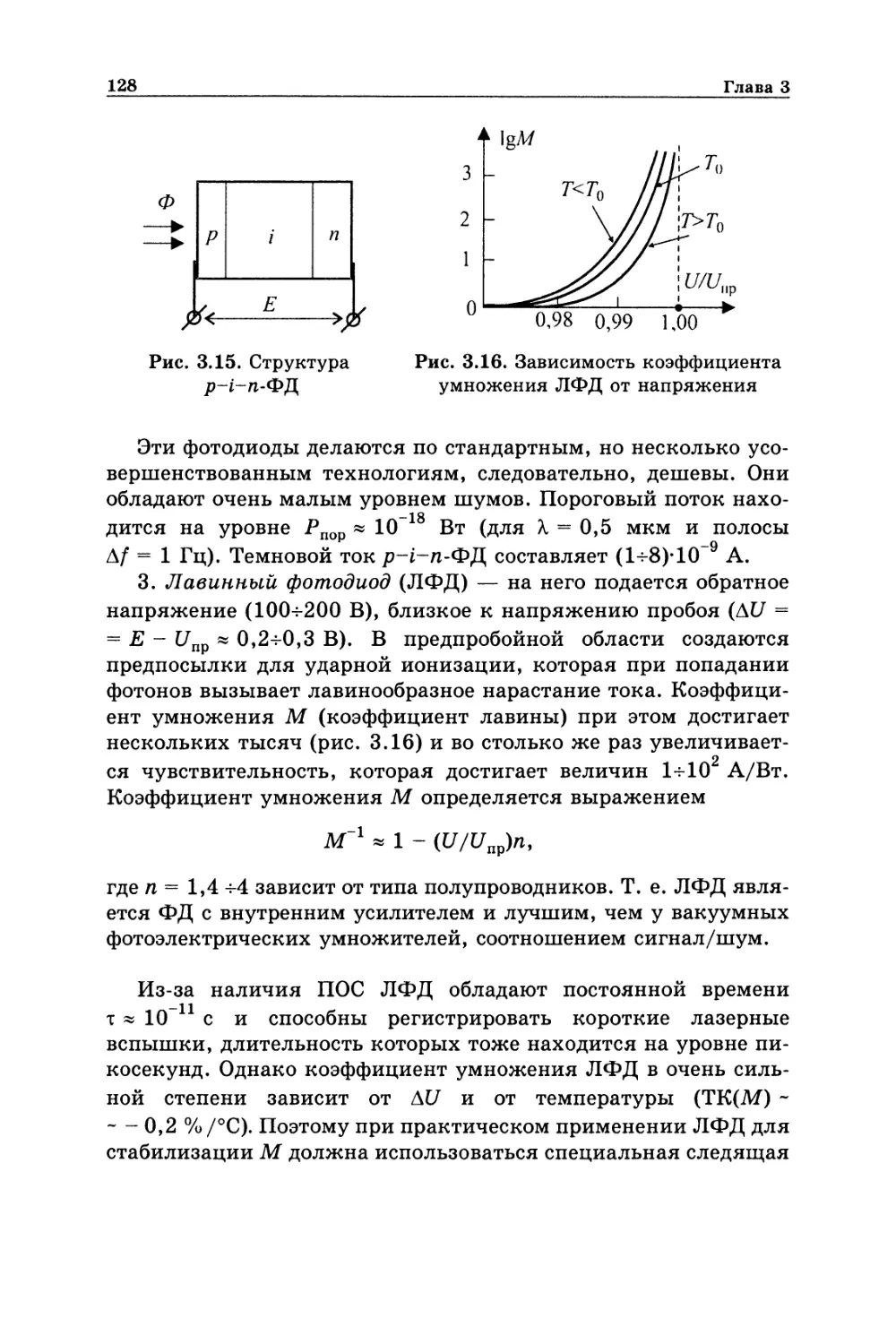
ЛФД — лавинный фотодиод.
МДМ — усилитель с модуляцией и демодуляцией.
МОП (МДП) — прибор, технология «металл-окисел (диэлект-
рик)-полупроводник».
MP — магниторезистор.
ООС — отрицательная ОС.
ОпС — операционная схема.
ОС — обратная связь.
8 Список основных сокращений
ОУ — операционный усилитель.
ПДТ — полупроводниковый датчик температуры.
ПЗС — прибор с зарядовой связью.
ПКД — усилитель с периодической компенсацией дрейфа нуля.
ПОС — положительная ОС.
ПОУ — программируемый операционный усилитель.
ПР — пьезорезистор.
ПФ — полосовой фильтр.
ПЭ — пьезоэлемент.
ПЭВМ — персональная электронная вычислительная машина.
СВХ — схема выборки и хранения.
СИД — светоиндикаторный диод.
ТК — температурный коэффициент, например ТКС —
температурный коэффициент сопротивления.
ТОУ — токоразностный ОУ (усилитель Нортона).
ТП — термопара.
ТПТ — тонкопленочный транзистор.
ТР — тензорезистор.
ТТЛ — транзисторно-транзисторная логика.
УВХ — устройство выборки и хранения сигнала.
УОИ — устройство отображения информации.
ФВЧ — фильтр высоких частот.
ФД — фотодиод.
ФНЧ — фильтр низких частот.
ФПЗС — фоточувствительный прибор с зарядовой связью.
ФР — фоторезистор.
ФТ — фототранзистор.
ФЧХ — фазо-частотная характеристика.
XX — режим холостого хода.
ХЭ — холловский элемент.
ЦАП (DAC) — цифроаналоговый преобразователь.
ЧЭ — чувствительный элемент.
ЭВМ — электронная вычислительная машина.
ЭЛИ — электролюминесцентный индикатор.
ЭЛТ — электронно-лучевая трубка.
Введение
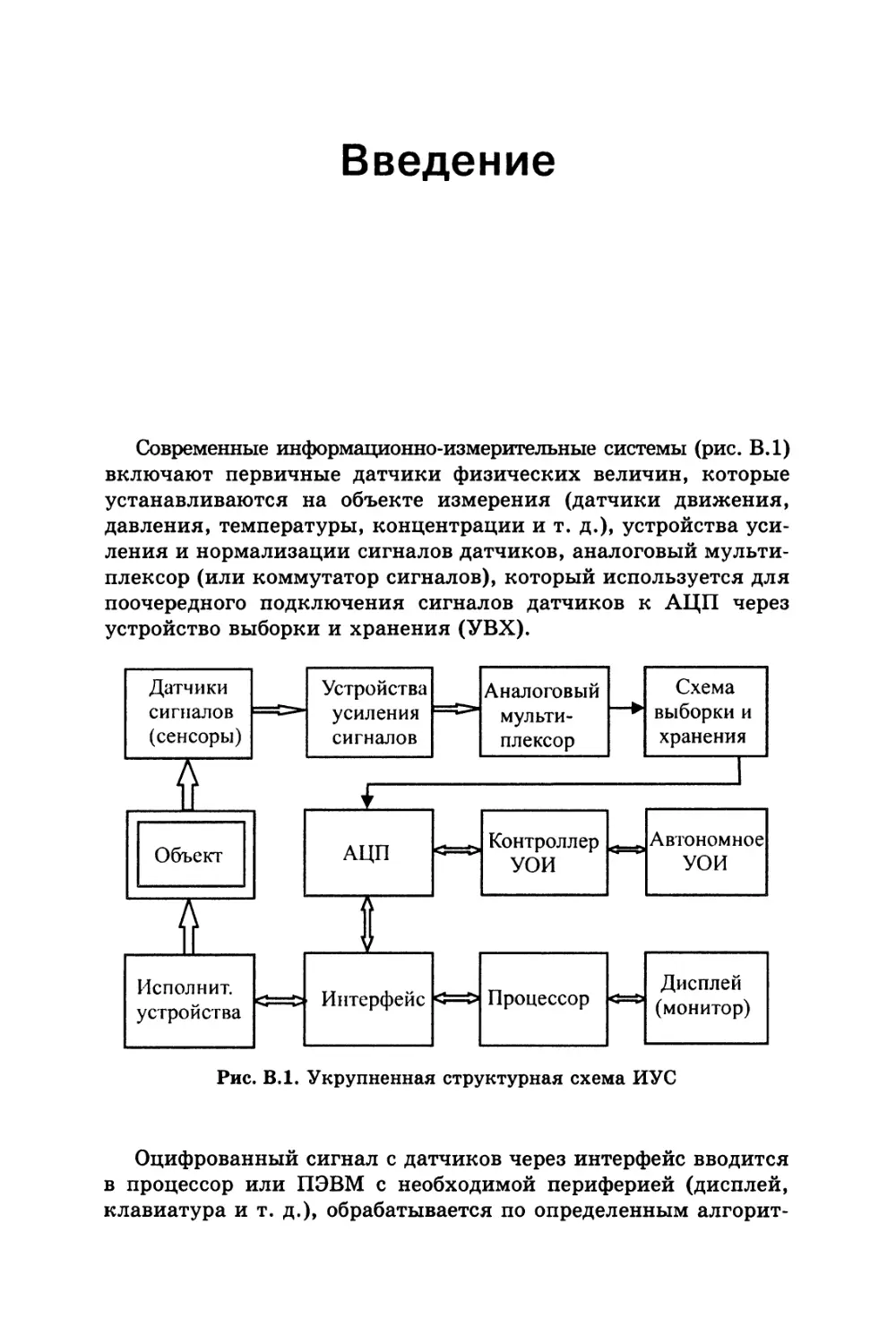
Современные информационно-измерительные системы (рис. В.1)
включают первичные датчики физических величин, которые
устанавливаются на объекте измерения (датчики движения,
давления, температуры, концентрации и т. д.), устройства
усиления и нормализации сигналов датчиков, аналоговый
мультиплексор (или коммутатор сигналов), который используется для
поочередного подключения сигналов датчиков к АЦП через
устройство выборки и хранения (УВХ).
Датчики
сигналов
(сенсоры)
I
Устройства
усиления
сигналов
Аналоговый
мультиплексор
Схема
выборки и
хранения
Объект
I
£
АЦП
Контроллер
УОИ
Автономное!
УОИ
Исполнит,
устройства
Интерфейс
Процессор
Дисплей
(монитор)
Рис. В.1. Укрупненная структурная схема ИУС
Оцифрованный сигнал с датчиков через интерфейс вводится
в процессор или ПЭВМ с необходимой периферией (дисплей,
клавиатура и т. д.), обрабатывается по определенным алгорит-
10
Введение
мам, документируется и выдается в удобном виде пользователю
(оператору) с помощью устройств отображения информации
(УОИ). В автономных или специализированных измерительных
приборах вместо ПЭВМ могут использоваться более дешевые
контроллеры с автономными устройствами отображения
информации (ЖКИ-индикаторы, газоразрядные панели и т. д.).
Если эту структуру дополнить цифроаналоговыми
преобразователями (ЦАП) и исполнительными устройствами, то она
становится информационно-управляющей системой (ИУС), которая
управляет объектом по цепи обратной связи (ОС) по заданному
алгоритму. Такая структура характерна для большинства
автоматизированных систем управления технологическими
процессами микроэлектроники.
В сложных технических ИУС для обеспечения высокой
надежности необходимо применять большое количество датчиков
для контроля физических величин. Например, в отечественной
космической системе «Буран» использовалось около 3000
датчиков (25% — датчики давления, 40% — датчики
температуры), в других изделиях авиационной и космической техники
количество датчиков колеблется от 250 до 2000. Комплексное
автоматизированное оборудование для производства
интегральных микросхем по КМОП-технологии с проектными нормами
в 0,5 мкм, поставленное в Россию фирмой Applied Materials
в 2002 г., содержит около 1000 датчиков непосредственно в
технологическом процессе и около 600 в инженерном
оборудовании, обеспечивающем техпроцесс (очистка газов, воздуха, водо-
подготовка, терморегулирование, бесперебойное питание
и т. п.).
Датчики как измерительные преобразователи,
преобразующие неэлектрические физические величины в электрические
сигналы, стали важнейшими элементами ИИС и ИУС. Во
многих случаях это сложные устройства, созданные с применением
сигнальных процессоров. Именно они и УОИ в значительной
степени определяют качество и стоимость ИИС и систем
управления. Особенно перспективны по метрологическим и
эксплуатационным характеристикам датчики, созданные по
технологии микроэлектроники и микроэлектромеханических систем.
Не менее важна в измерительной технике и роль УОИ,
которые обеспечивают эффективное взаимодействие оператора и
вычислительных средств в ИУС и которые в определяющей степе-
Введение
11
ни влияют на процесс принятия решений. В этой области
наблюдается невиданный прогресс на основе новых дисплейных
технологий.
Для современного этапа развития техники характерны
следующие ориентировочные стоимостные оценки ИИС:
• Датчики — 40% общей стоимости ИИС.
• Устройства обработки данных — 20% стоимости ИИС.
• Устройства регистрации и отображения информации —
40%.
Из приведенной обобщенной структурной схемы ИУС
(рис. В.1) становится ясным, что для ее проектирования или
грамотной эксплуатации необходимо, помимо прочего, иметь
современные представления о первичных датчиках физических
величин (сенсорах), способах их подключения к устройствам
усиления и нормализации сигналов и устройствах отображения
информации (УОИ). Изучению именно этих вопросов
посвящено пособие «Схемотехника измерительных устройств» (СИУ).
Глава 1
Общие сведения о датчиках
физических величин
и измерительных схемах
1.1. Классификация датчиков
Основой любой ИИС и ИУС являются первичные датчики
(сенсоры). Обычно они преобразуют входные физические
величины (температуру, давление, влажность, освещенность,
магнитный поток, ускорение и т. д.) в пропорциональный
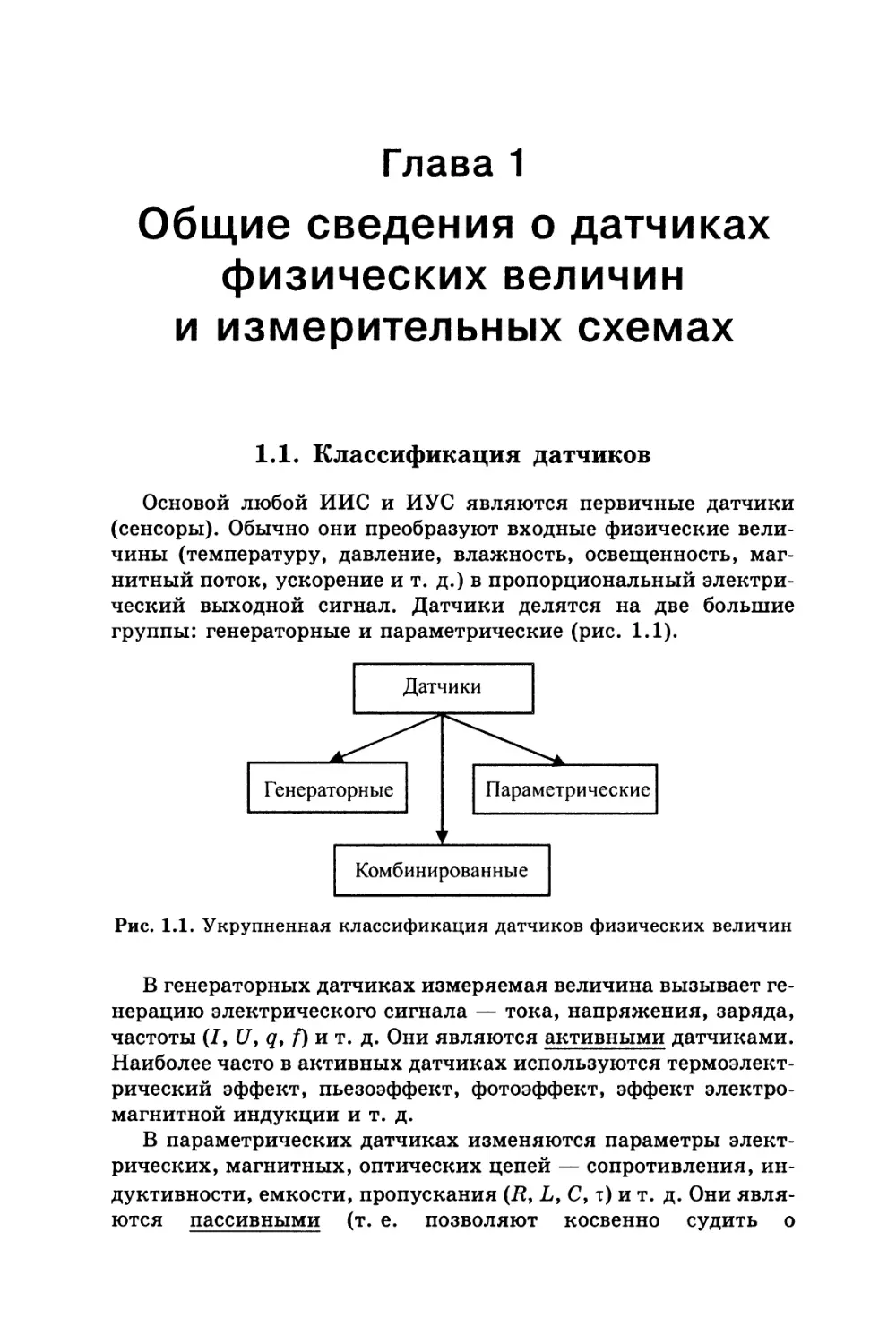
электрический выходной сигнал. Датчики делятся на две большие
группы: генераторные и параметрические (рис. 1.1).
Рис. 1.1. Укрупненная классификация датчиков физических величин
В генераторных датчиках измеряемая величина вызывает
генерацию электрического сигнала — тока, напряжения, заряда,
частоты (/, U, q, f) и т. д. Они являются активными датчиками.
Наиболее часто в активных датчиках используются
термоэлектрический эффект, пьезоэффект, фотоэффект, эффект
электромагнитной индукции и т. д.
В параметрических датчиках изменяются параметры
электрических, магнитных, оптических цепей — сопротивления,
индуктивности, емкости, пропускания (R> L> С, т) и т. д. Они
являются пассивными (т. е. позволяют косвенно судить о
Общие сведения о датчиках физических величин и измерительных схемах 13
физической величине путем включения такого датчика в
электрическую цепь). Такие датчики нуждаются в подведении
питания. В пассивных датчиках наиболее часто используются
эффект изменения активного сопротивления (терморезистивный,
фоторезистивный, магниторезистивный эффекты), изменение
диэлектрической проницаемости, изменение пропускания света
в волокне и т. д.
Промежуточное положение занимают комбинированные
датчики. В комбинированных датчиках для получения результата
используется целая цепь последовательных преобразований.
Например, датчики давления могут работать по схеме:
давление —> деформация мембраны -> изменение сопротивления тен-
зодатчика, закрепленного на мембране —> изменение выходного
электрического сигнала мостовой схемы.
В последнее время в обиход введено понятие
интеллектуальные и интегрированные датчики. Такие датчики оснащаются
встроенными микропроцессорами (сигнальными
процессорами), которые работают по достаточно сложным алгоритмам и
позволяют придать измерительным приборам многие
дополнительные функциональные возможности, такие как фильтрация
сигналов, коррекция, обнаружение отказов, линеаризация
передаточной характеристики, реконфигурация измерительной
схемы и т. п. Тем не менее основой и этих приборов являются
первичные датчики (сенсоры), знание основ функционирования
которых является необходимым условием грамотного
применения датчиков в инженерной практике.
1.2. Генераторные датчики сигналов
Первичные датчики сами по себе маломощные устройства и
генерируют сигналы в следующих диапазонах напряжений (U),
токов (JT) и зарядов (q):
U: 10~в*1(Г10 В;
/: 10"6-г1(Г15 А;
q: 10~6^1(Г12 Кл.
При подключении датчиков к измерительным цепям
приходится решать множество проблем:
• Выбор схемы подключения.
• Усиление сигналов.
14
Глава 1
• Согласование датчиков с нагрузкой для обеспечения
оптимальной чувствительности и линейности.
• Подавление синфазных сигналов и помех.
• Коррекция нелинейности передаточной характеристики.
• Учет или парирование дестабилизирующих факторов
(температуры, давления, паразитных
термоэлектрических эффектов и т. п.).
При анализе схем подключения датчик удобно заменять
своей эквивалентной схемой. По виду эквивалентной схемы
различают три классических случая подключения различных
типов генераторных датчиков:
1. Датчик напряжения.
2. Датчик тока.
3. Датчик заряда.
1.2.1. Датчики напряжения
Датчик напряжения (Д) представляется эквивалентной
схемой в виде последовательного соединения ЭДС Uc с выходным
сопротивлением Rc (рис. 1.2). Заметим, что в общем случае
выходное сопротивление датчика и сопротивление нагрузки носят
комплексный характер. Однако, если это не оговаривается особо,
будем считать, что в рассматриваемой частотной области они
носят омический характер. В такой схеме С/вых = UCRH/(RU + i?c) и, в
принципе, связь между Uc и С/вых является нелинейной и
чувствительность датчика зависит от изменения нагрузки. При
Ru :» Rc достигается линеаризация передаточной
характеристики, т. е. ивых = Uc.
Рис. 1.2. Эквивалентная схема датчика напряжения
Д;ш обеспечения условия линеаризации передаточной
характеристики (RH » Rc) и низкого выходного сопротивления схе-
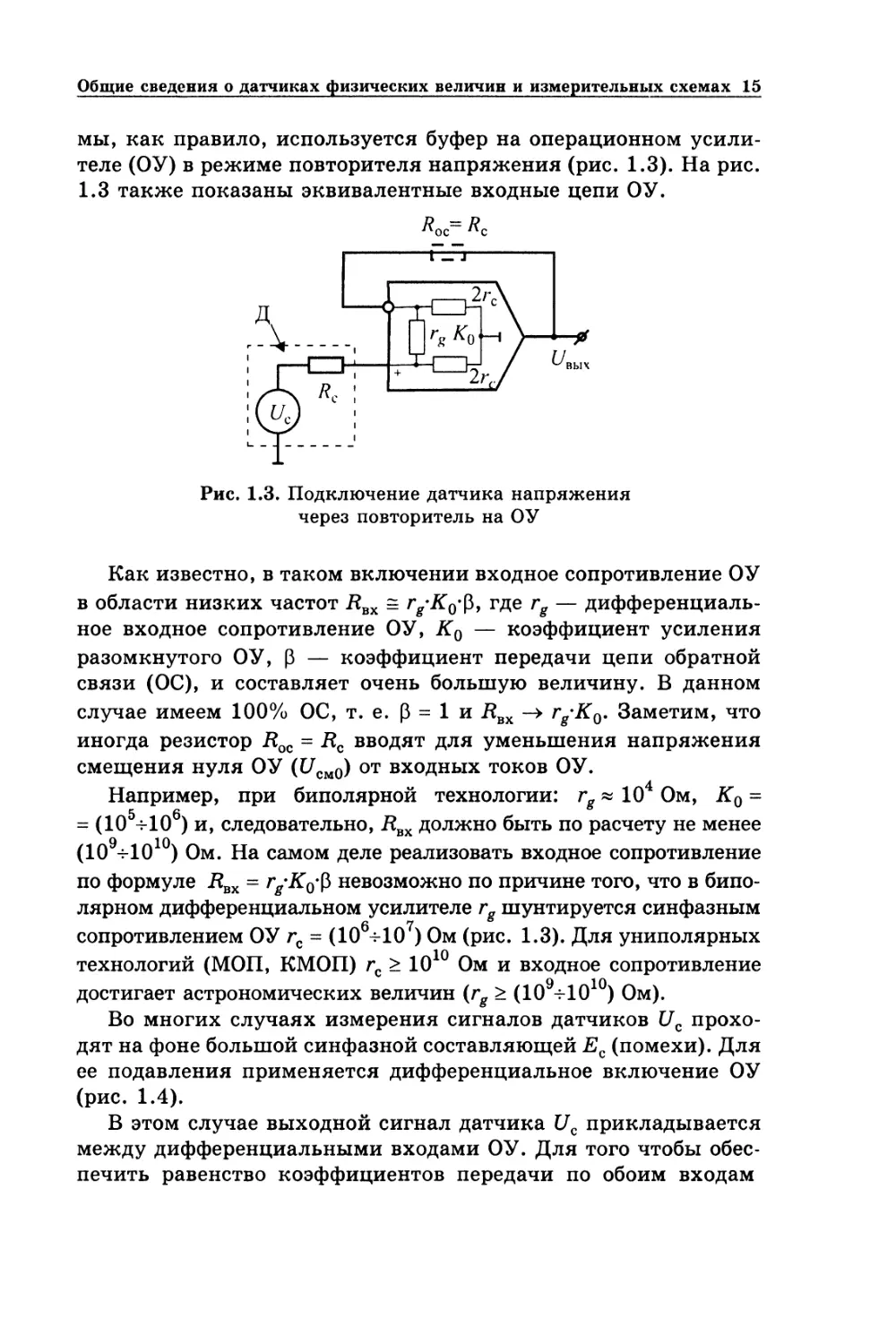
Общие сведения о датчиках физических величин и измерительных схемах 15
мы, как правило, используется буфер на операционном
усилителе (ОУ) в режиме повторителя напряжения (рис. 1.3). На рис.
1.3 также показаны эквивалентные входные цепи ОУ.
Рис. 1.3. Подключение датчика напряжения
через повторитель на ОУ
Как известно, в таком включении входное сопротивление ОУ
в области низких частот RBX = rg-KQ'$, где rg —
дифференциальное входное сопротивление ОУ, К0 — коэффициент усиления
разомкнутого ОУ, Р — коэффициент передачи цепи обратной
связи (ОС), и составляет очень большую величину. В данном
случае имеем 100% ОС, т. е. Р = 1 и RBX -> rgK0. Заметим, что
иногда резистор ROQ - Rc вводят для уменьшения напряжения
смещения нуля ОУ (Ucm0) от входных токов ОУ.
Например, при биполярной технологии:
= (10 -J-10 )и, следовательно, RBX должно быть по расчету не менее
(10 -г 10 ) Ом. На самом деле реализовать входное сопротивление
по формуле RBX = rgK0-fi невозможно по причине того, что в
биполярном дифференциальном усилителе гд шунтируется синфазным
6 7
сопротивлением ОУ гс = (10 тЮ ) Ом (рис. 1.3). Для униполярных
технологий (МОП, КМОП) гс > 10 Ом и входное сопротивление
достигает астрономических величин (rg > (109-i-1010) Ом).
Во многих случаях измерения сигналов датчиков Uc
проходят на фоне большой синфазной составляющей Ес (помехи). Для
ее подавления применяется дифференциальное включение ОУ
(рис. 1.4).
В этом случае выходной сигнал датчика Uc прикладывается
между дифференциальными входами ОУ. Для того чтобы
обеспечить равенство коэффициентов передачи по обоим входам
16
Глава 1
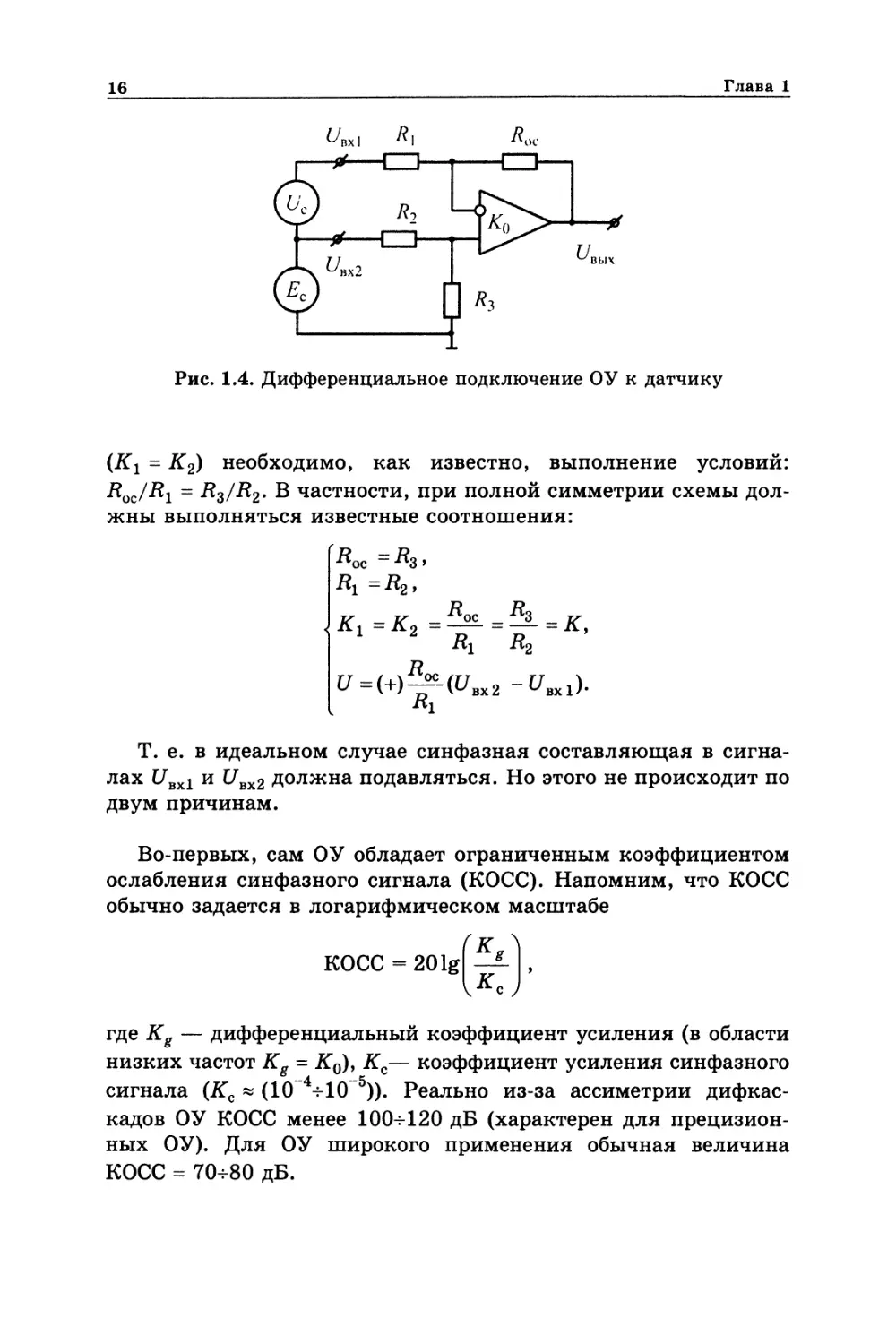
Рис. 1.4. Дифференциальное подключение ОУ к датчику
(Кх = К2) необходимо, как известно, выполнение условий:
Roc/Rx = R3/R2. В частности, при полной симметрии схемы
должны выполняться известные соотношения:
Т. е. в идеальном случае синфазная составляющая в
сигналах UBxl и UBx2 должна подавляться. Но этого не происходит по
двум причинам.
Во-первых, сам ОУ обладает ограниченным коэффициентом
ослабления синфазного сигнала (КОСС). Напомним, что КОСС
обычно задается в логарифмическом масштабе
где Kg — дифференциальный коэффициент усиления (в области
низких частот Kg = К0), Кс— коэффициент усиления синфазного
сигнала (Кс « (10"4-г1СГ5)). Реально из-за ассиметрии дифкас-
кадов ОУ КОСС менее 100-г120 дБ (характерен для
прецизионных ОУ). Для ОУ широкого применения обычная величина
КОСС = 70+80 дБ.
Общие сведения о датчиках физических величин и измерительных схемах 17
Во-вторых, из-за ограниченной точности резисторов
коэффициенты передачи по входам не равны между собой (Кг ф К2)
и, следовательно, синфазный сигнал «просачивается» на
выход с большим значением, чем обеспечивает сам ОУ. Реально
Кс дифференциальной схемы пропорционален относительной
погрешности коэффициентов передачи по входам 8К = К1 - К2,
поэтому
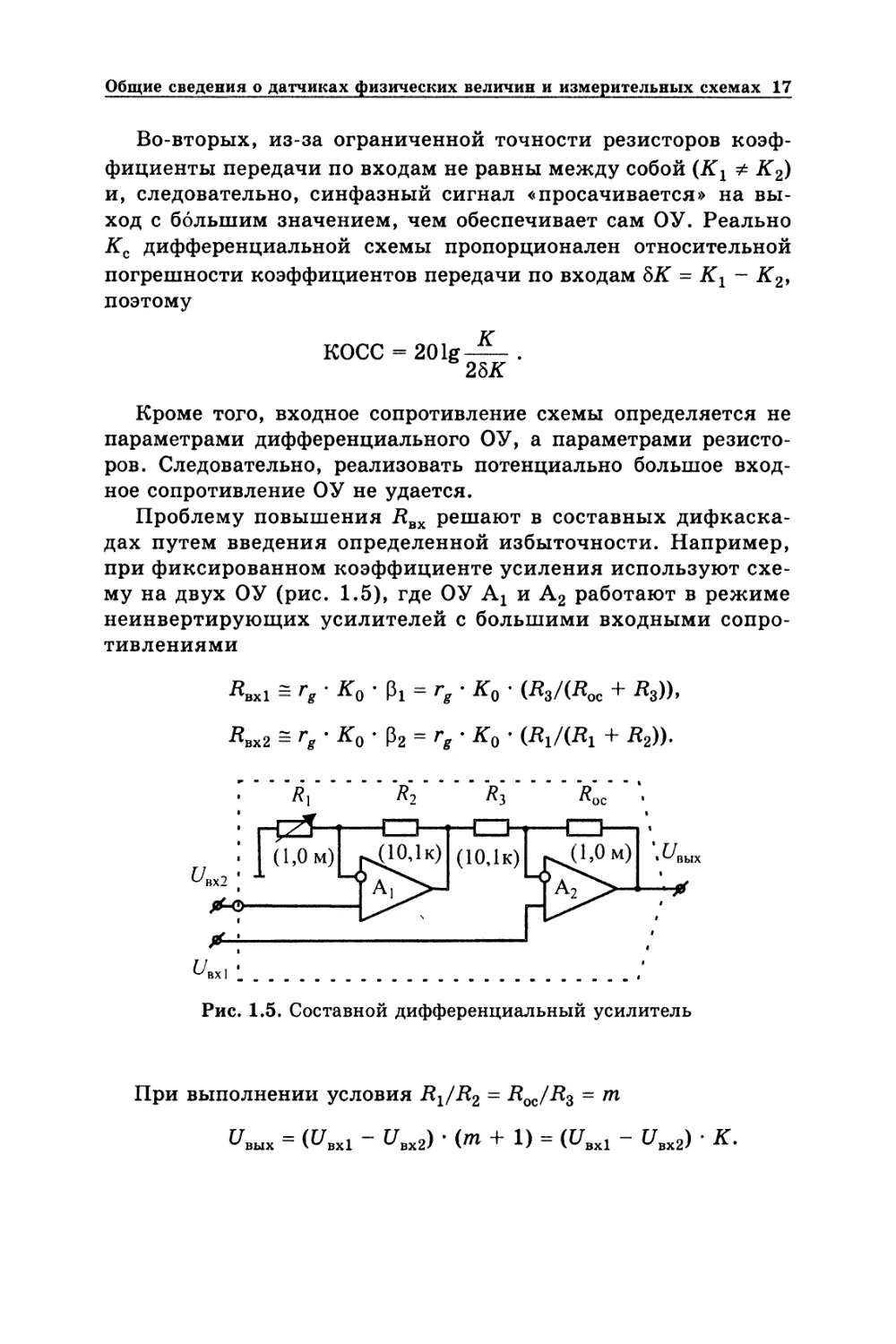
Рис. 1.5. Составной дифференциальный усилитель
При выполнении условия Ri/R2 = Яос/#3 = тп
ивых = (ивх1 - ивх2) • (ш + 1) = (с/вх1 - ивх2) ■ к.
Кроме того, входное сопротивление схемы определяется не
параметрами дифференциального ОУ, а параметрами
резисторов. Следовательно, реализовать потенциально большое
входное сопротивление ОУ не удается.
Проблему повышения RBX решают в составных дифкаска-
дах путем введения определенной избыточности. Например,
при фиксированном коэффициенте усиления используют
схему на двух ОУ (рис. 1.5), где ОУ Аг и А2 работают в режиме
неинвертирующих усилителей с большими входными
сопротивлениями
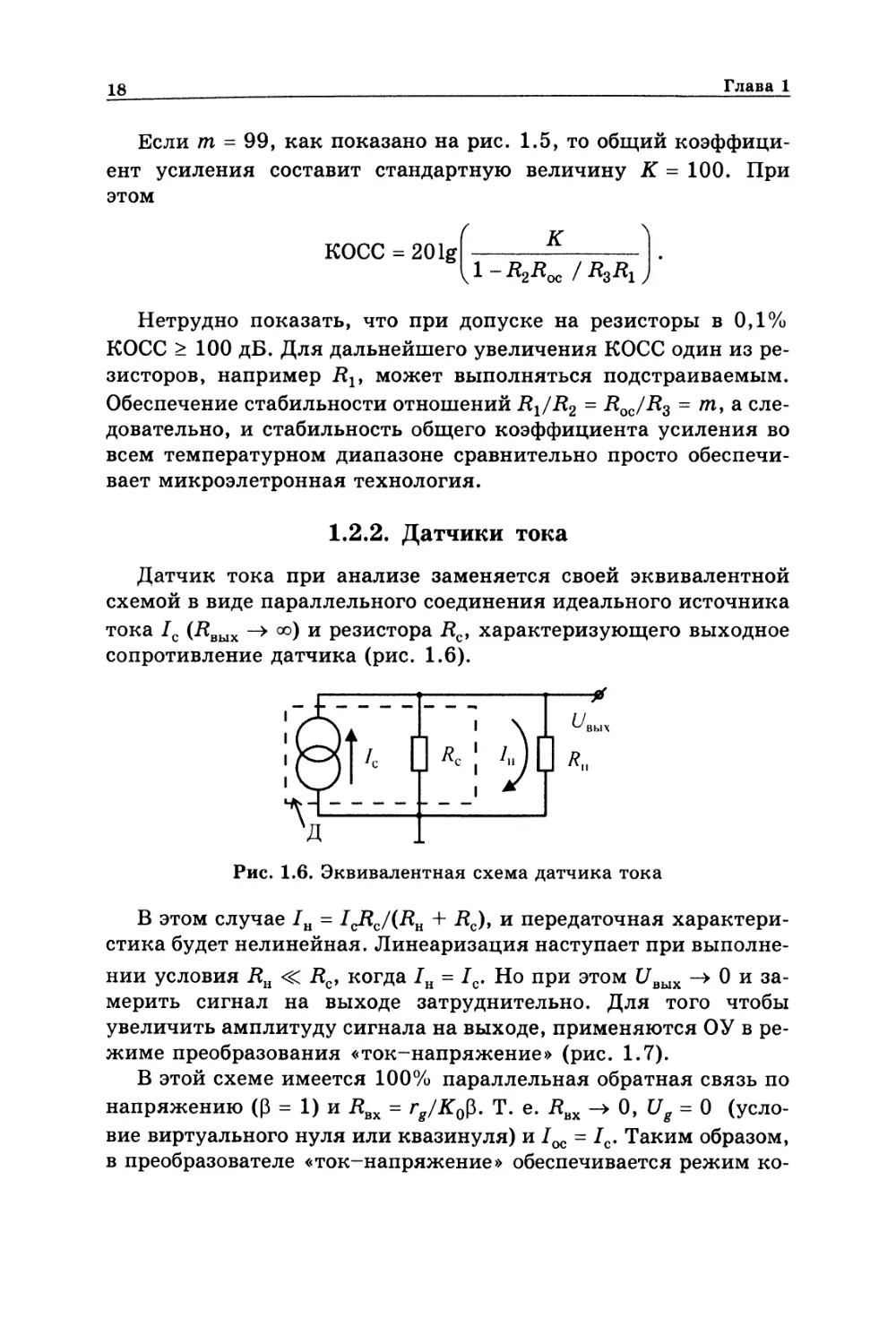
Рис. 1.6. Эквивалентная схема датчика тока
В этом случае In = ICRC/(RH + Rc)> и передаточная
характеристика будет нелинейная. Линеаризация наступает при
выполнении условия RH < Rcy когда /н = /с. Но при этом £/вых -> 0 и
замерить сигнал на выходе затруднительно. Для того чтобы
увеличить амплитуду сигнала на выходе, применяются ОУ в
режиме преобразования «ток-напряжение» (рис. 1.7).
В этой схеме имеется 100% параллельная обратная связь по
напряжению ф = 1) и RBX = rg/K0$. Т. е. RBX -> 0, Ug = 0
(условие виртуального нуля или квазинуля) и 1^ = /с. Таким образом,
в преобразователе «ток-напряжение» обеспечивается режим ко-
Если т = 99, как показано на рис. 1.5, то общий
коэффициент усиления составит стандартную величину К = 100. При
этом
Нетрудно показать, что при допуске на резисторы в 0,1%
КОСС > 100 дБ. Для дальнейшего увеличения КОСС один из
резисторов, например Rlf может выполняться подстраиваемым.
Обеспечение стабильности отношений i?i/i?2 — -^ос/^з — ^> а
следовательно, и стабильность общего коэффициента усиления во
всем температурном диапазоне сравнительно просто
обеспечивает микроэлетронная технология.
Датчик тока при анализе заменяется своей эквивалентной
схемой в виде параллельного соединения идеального источника
тока 1С (#вых -> оо) и резистора Rc, характеризующего выходное
сопротивление датчика (рис. 1.6).
Общие сведения о датчиках физических величин и измерительных схемах 19
Рис. 1.7. Подключение датчика тока к ОУ
роткозамкнутой нагрузки. Следовательно, £/вых = /ос • R^ и
коэффициент передачи К = UBblx/Ic = Roc (Ом). Обратите внимание,
что коэффициент передачи в этой схеме размерен. Допустим
/с = 1 мкА, Roc = 1 МОм, тогда С/вых = 1 В.
Во многих случаях, для того чтобы увеличить коэффициент
передачи без чрезмерного увеличения Д^, в ОС ОУ включается
Т-мост (рис. 1.8).
Рис. 1.8. Увеличение коэффициента передачи с помощью Т-моста
Можно показать, что при использовании Т-моста
коэффициент передачи
Допустим Rx = R2 = 10 кОм, Д3 = 0,1 кОм, тогда К « 10 Ом.
Следовательно, включение Т-моста с указанными номиналами
равносильно тому, что мы ставим в ОС ОУ мегаомный (!) резистор.
Однако у последней схемы более высокое напряжение смещения
нуля, поэтому для нее требуется и более качественный ОУ.
20
Глава 1
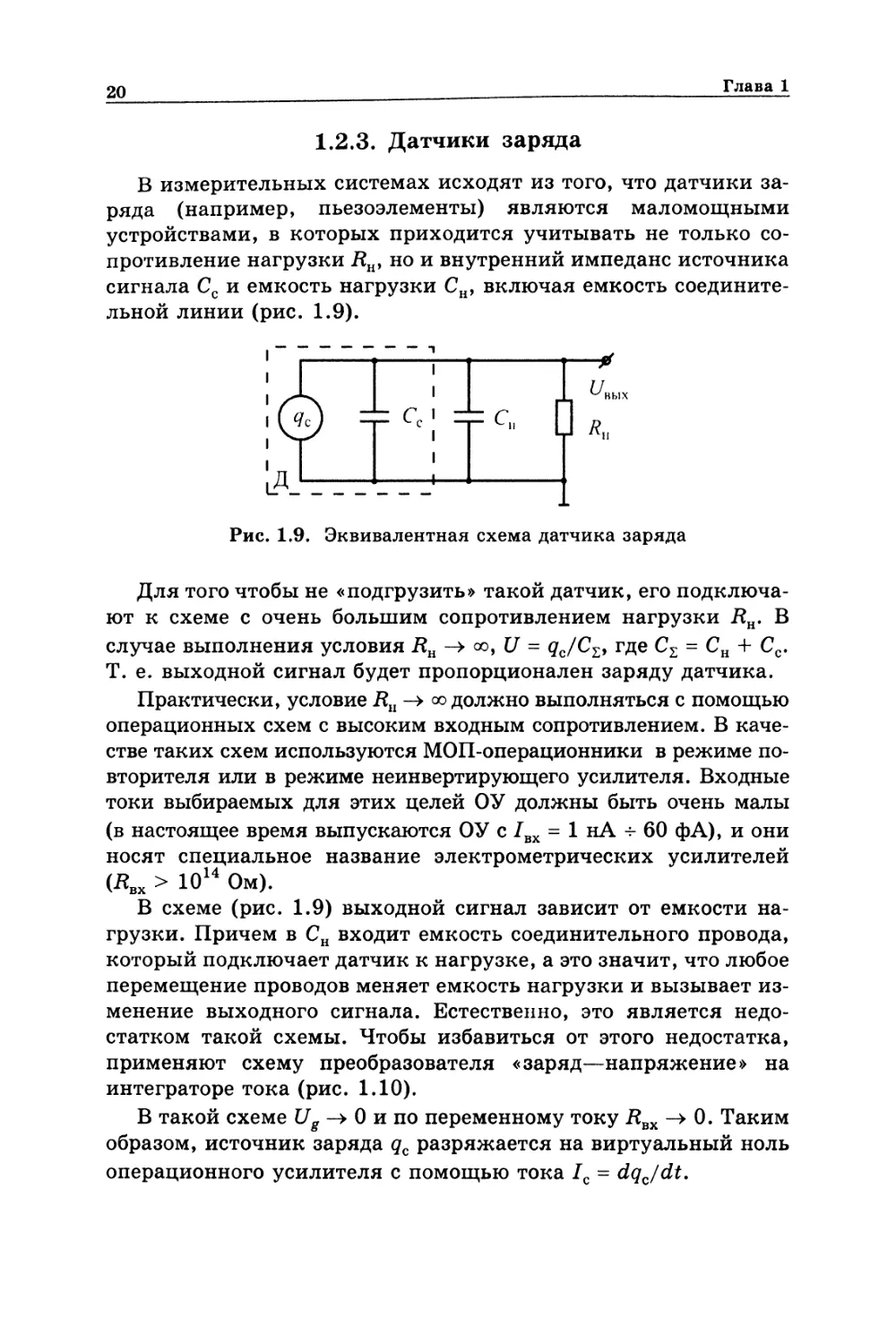
1.2.3. Датчики заряда
В измерительных системах исходят из того, что датчики
заряда (например, пьезоэлементы) являются маломощными
устройствами, в которых приходится учитывать не только
сопротивление нагрузки RH, но и внутренний импеданс источника
сигнала Сс и емкость нагрузки Сн, включая емкость
соединительной линии (рис. 1.9).
Рис. 1.9. Эквивалентная схема датчика заряда
Для того чтобы не «подгрузить» такой датчик, его
подключают к схеме с очень большим сопротивлением нагрузки RH. В
случае выполнения условия RH -> оо, U = qJCz, где Съ = Сп + Сс.
Т. е. выходной сигнал будет пропорционален заряду датчика.
Практически, условие Ru -» оо должно выполняться с помощью
операционных схем с высоким входным сопротивлением. В
качестве таких схем используются МОП-операционники в режиме
повторителя или в режиме неинвертирующего усилителя. Входные
токи выбираемых для этих целей ОУ должны быть очень малы
(в настоящее время выпускаются ОУ с /вх = 1 нА -*- 60 фА), и они
носят специальное название электрометрических усилителей
(RBX > 1014 Ом).
В схеме (рис. 1.9) выходной сигнал зависит от емкости
нагрузки. Причем в Сн входит емкость соединительного провода,
который подключает датчик к нагрузке, а это значит, что любое
перемещение проводов меняет емкость нагрузки и вызывает
изменение выходного сигнала. Естественно, это является
недостатком такой схемы. Чтобы избавиться от этого недостатка,
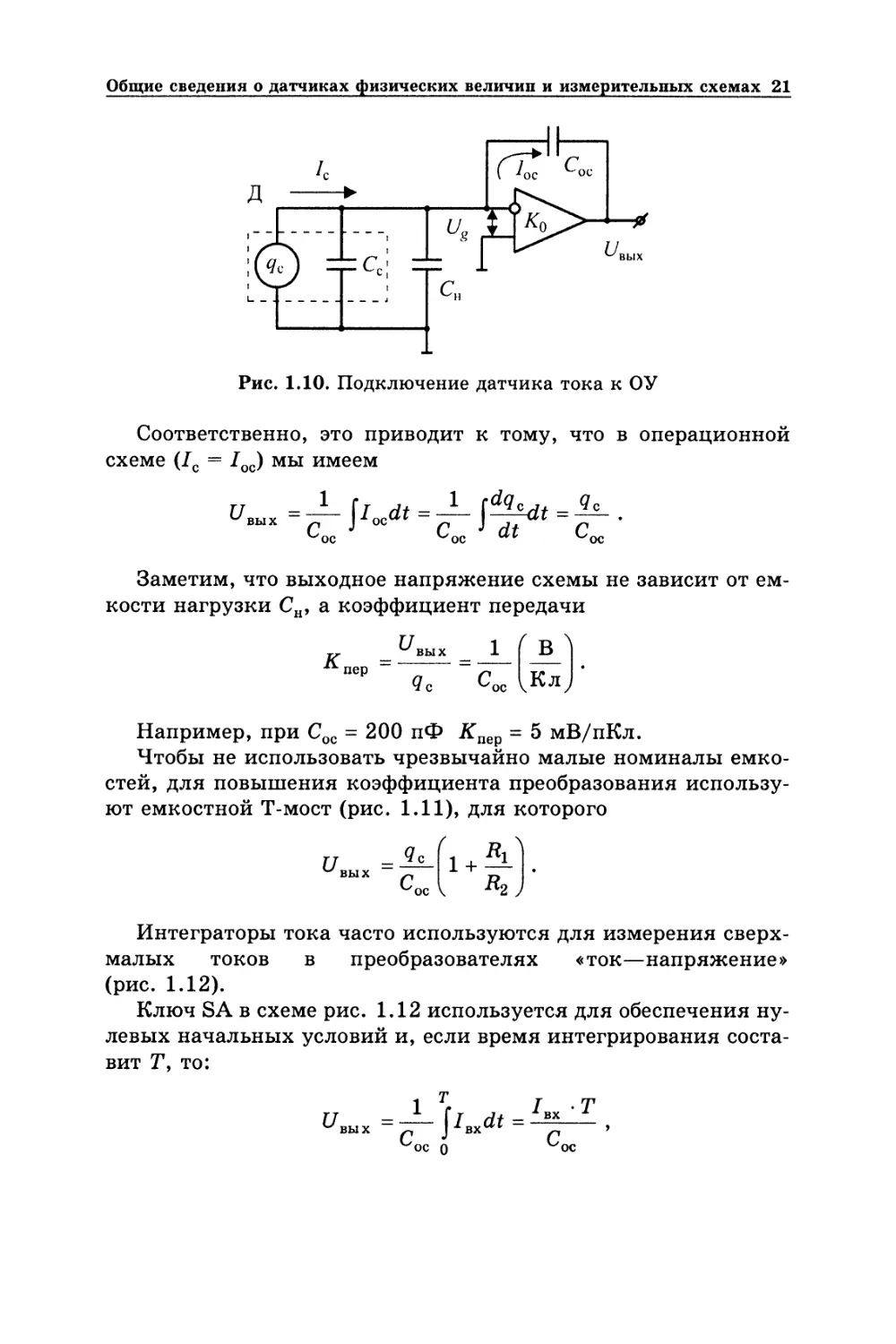
применяют схему преобразователя «заряд—напряжение» на
интеграторе тока (рис. 1.10).
В такой схеме Ug -> 0 и по переменному току RBX -> 0. Таким
образом, источник заряда qc разряжается на виртуальный ноль
операционного усилителя с помощью тока Ic = dqjdt.
Общие сведения о датчиках физических величин и измерительных схемах 21
Рис. 1.10. Подключение датчика тока к ОУ
Соответственно, это приводит к тому, что в операционной
схеме (1С = 10С) мы имеем
Заметим, что выходное напряжение схемы не зависит от
емкости нагрузки Сн, а коэффициент передачи
Например, при Сос = 200 пФ Кпер = 5 мВ/пКл.
Чтобы не использовать чрезвычайно малые номиналы
емкостей, для повышения коэффициента преобразования
используют емкостной Т-мост (рис. 1.11), для которого
Интеграторы тока часто используются для измерения
сверхмалых токов в преобразователях «ток—напряжение»
(рис. 1.12).
Ключ SA в схеме рис. 1.12 используется для обеспечения
нулевых начальных условий и, если время интегрирования
составит Ту то:
22
Глава 1
Рис. 1.11. Интегратор тока с емкостным мостом
Рис. 1.12. Схема измерения сверхмалых токов
т. е. напряжение на выходе меняется по интегральному закону
и коэффициент передачи
К = ивых/1вх = Т/Сос Ом.
Пример: время интегрирования Т = 10 с, Сос = 100 пФ, тогда
К = 100 ГОм. Таким образом, интегратор тока с указанными
параметрами эквивалентен преобразователю «ток—напряжение»
с резистором Roc = 100 ГОм.
1.3. Параметрические датчики сигналов
В качестве параметрических датчиков наиболее часто
используются резистивные датчики (фоторезисторы, терморезисторы,
магниторезисторы и т. д.), т. е. датчики, у которых в качестве
измеряемого параметра используется сопротивление резистора.
При подключении резистивных датчиков используются
3 вида цепей:
Общие сведения о датчиках физических величин и измерительных схемах 23
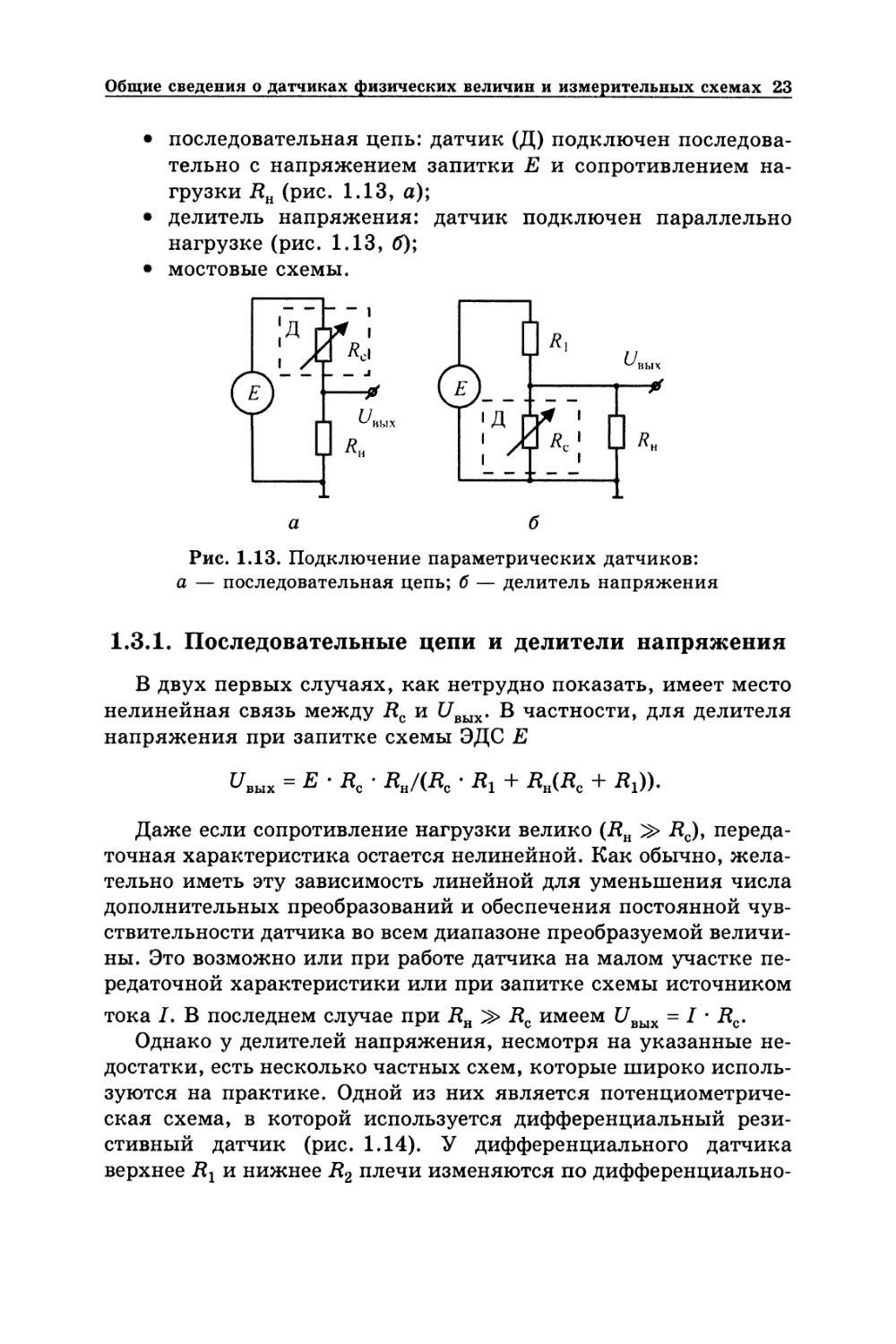
• последовательная цепь: датчик (Д) подключен
последовательно с напряжением запитки Е и сопротивлением
нагрузки Лн (рис. 1.13, а);
• делитель напряжения: датчик подключен параллельно
нагрузке (рис. 1.13, б);
• мостовые схемы.
Рис. 1.13. Подключение параметрических датчиков:
а — последовательная цепь; б — делитель напряжения
1.3.1. Последовательные цепи и делители напряжения
В двух первых случаях, как нетрудно показать, имеет место
нелинейная связь между Rc и UBMX. В частности, для делителя
напряжения при запитке схемы ЭДС Е
ивых = E-RC- RJ(RC • Нг + Rn(Rc + Rx)).
Даже если сопротивление нагрузки велико (Rn ^> Rc)>
передаточная характеристика остается нелинейной. Как обычно,
желательно иметь эту зависимость линейной для уменьшения числа
дополнительных преобразований и обеспечения постоянной
чувствительности датчика во всем диапазоне преобразуемой
величины. Это возможно или при работе датчика на малом участке
передаточной характеристики или при запитке схемы источником
тока J. В последнем случае при RH > Rc имеем £/вых = / • Rc.
Однако у делителей напряжения, несмотря на указанные
недостатки, есть несколько частных схем, которые широко
используются на практике. Одной из них является потенциометриче-
ская схема, в которой используется дифференциальный рези-
стивный датчик (рис. 1.14). У дифференциального датчика
верхнее Rx и нижнее R2 плечи изменяются по дифференциально-
24
Глава 1
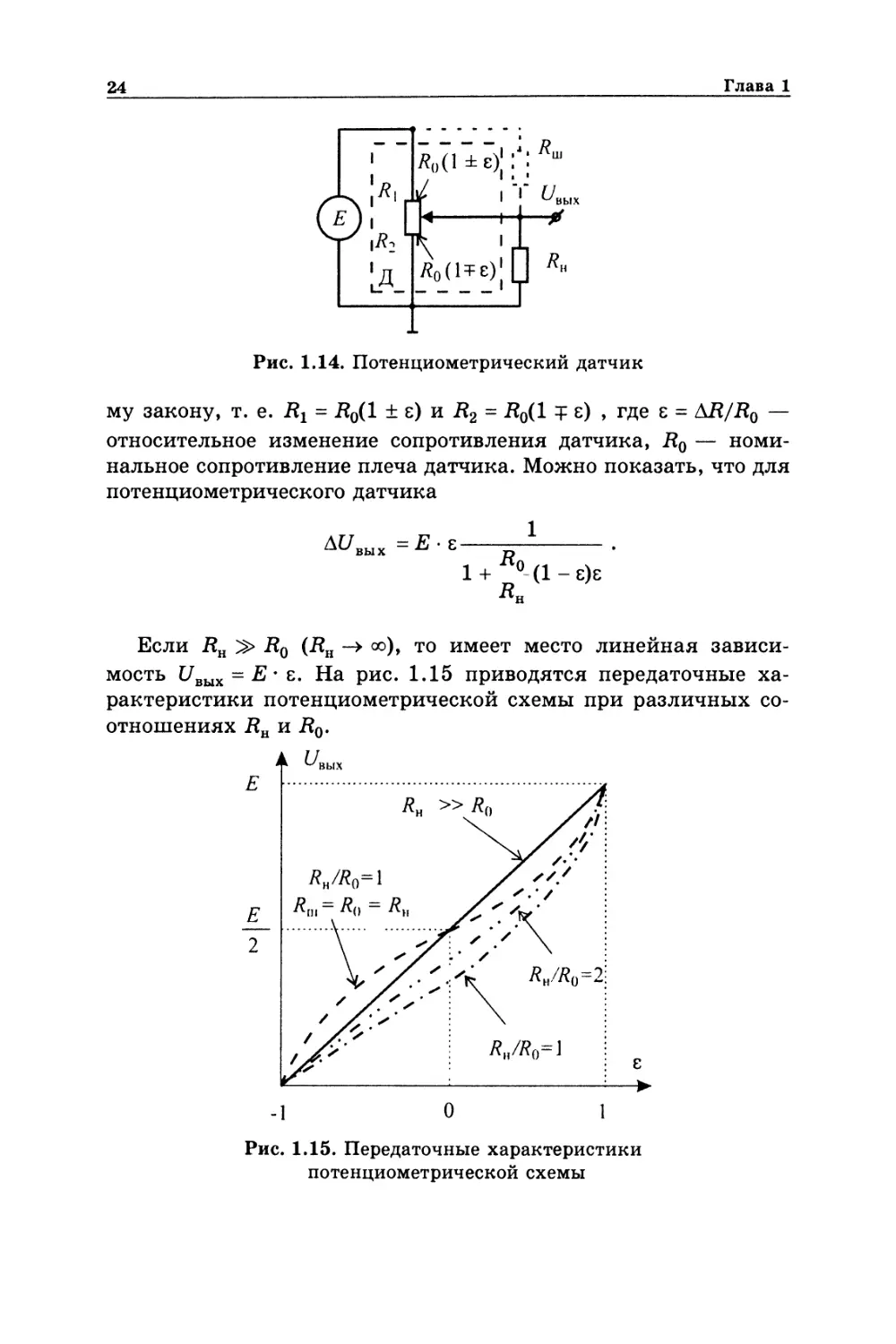
Рис. 1.14. Потенциометрический датчик
му закону, т. е. Rx = R0(l ± е) и R2 = R0(l Т е) , где 8 = AR/R0 —
относительное изменение сопротивления датчика, R0 —
номинальное сопротивление плеча датчика. Можно показать, что для
потенциометрического датчика
Если RH > R0 (Ru -> оо), то имеет место линейная
зависимость UBblx = E- с. На рис. 1.15 приводятся передаточные
характеристики потенциометрической схемы при различных
соотношениях jRh и R0,
Рис. 1.15. Передаточные характеристики
потенциометрической схемы
Общие сведения о датчиках физических величин и измерительных схемах 25
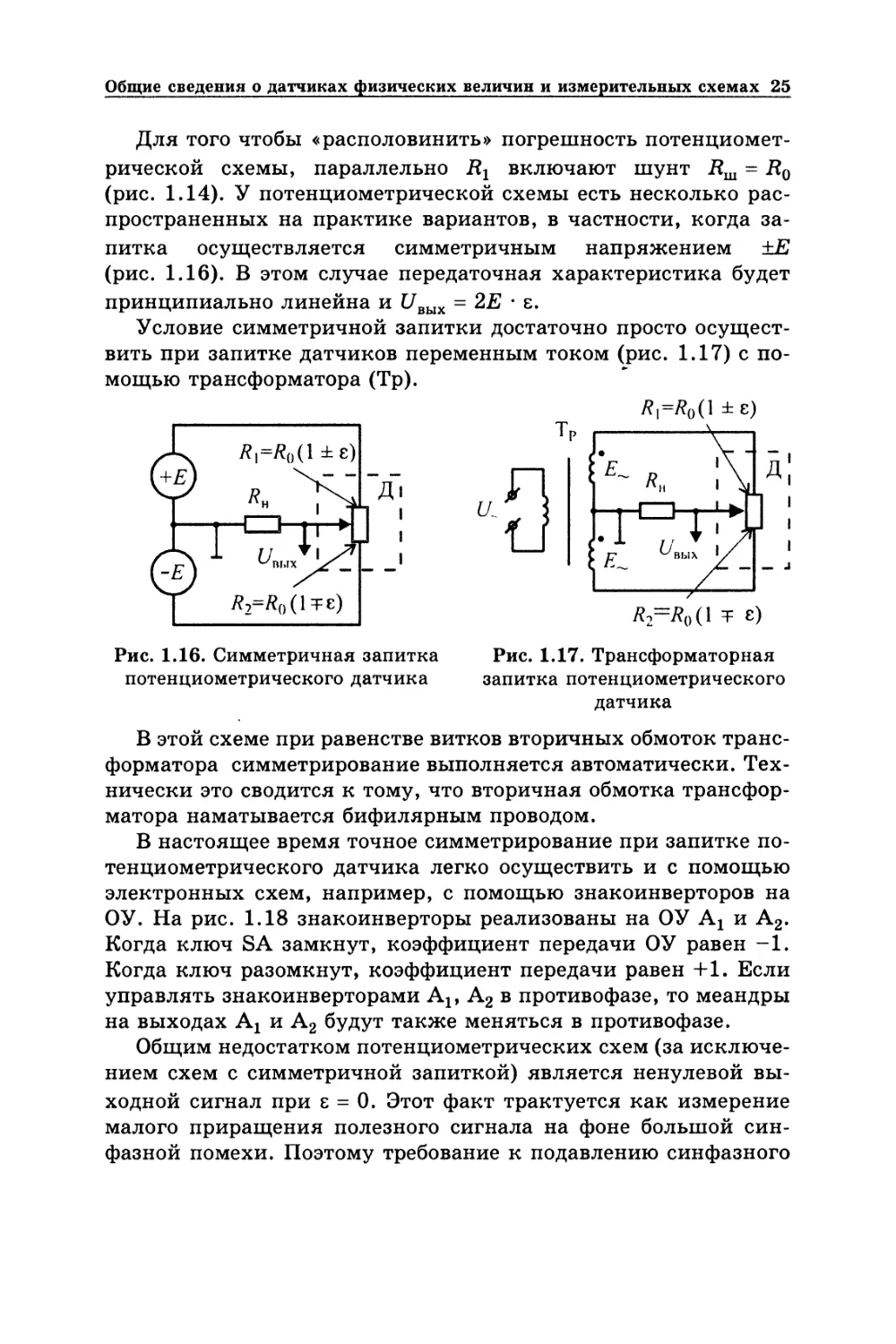
Для того чтобы «располовинить» погрешность потенциомет-
рической схемы, параллельно i?j включают шунт Rm = R0
(рис. 1.14). У потенциометрической схемы есть несколько
распространенных на практике вариантов, в частности, когда за-
питка осуществляется симметричным напряжением ±Е
(рис. 1.16). В этом случае передаточная характеристика будет
принципиально линейна и С/вых = 2Е • с.
Условие симметричной запитки достаточно просто
осуществить при запитке датчиков переменным током (рис. 1.17) с
помощью трансформатора (Тр).
Рис. 1.16. Симметричная запитка
потенциометрического датчика
Рис. 1.17. Трансформаторная
запитка потенциометрического
датчика
В этой схеме при равенстве витков вторичных обмоток
трансформатора симметрирование выполняется автоматически.
Технически это сводится к тому, что вторичная обмотка
трансформатора наматывается бифилярным проводом.
В настоящее время точное симметрирование при запитке
потенциометрического датчика легко осуществить и с помощью
электронных схем, например, с помощью знакоинверторов на
ОУ. На рис. 1.18 знакоинверторы реализованы на ОУ Аг и А2.
Когда ключ SA замкнут, коэффициент передачи ОУ равен -1.
Когда ключ разомкнут, коэффициент передачи равен +1. Если
управлять знакоинверторами Ах, А2 в противофазе, то меандры
на выходах Ах и А2 будут также меняться в противофазе.
Общим недостатком потенциометрических схем (за
исключением схем с симметричной запиткой) является ненулевой
выходной сигнал при 8 = 0. Этот факт трактуется как измерение
малого приращения полезного сигнала на фоне большой
синфазной помехи. Поэтому требование к подавлению синфазного
26
Глава 1
Рис. 1.18. Формирование импульсного напряжения запитки
на знакоинверторах
сигнала в потенциометрических схемах повышено. Чтобы
исключить этот недостаток, применяют мостовые измерительные
схемы.
1.3.2. Мостовые измерительные схемы
В мостовых измерительных схемах устраняется главный
недостаток большинства измерительных цепей с делителями
напряжения — наличие ненулевого выходного сигнала UBbJx0 при 8 = 0.
Например, в простой потенциометрической схеме ивых0 = 0,5Е. Хотя
схемы с симметричным питанием и тем более схемы, работающие
на переменном токе, лишены этого недостатка, они значительно
сложнее схем на постоянном токе. Более того, многие датчики не
работают на переменном токе и не могут включаться в
измерительные схемы переменного тока.
Мостовая измерительная схема (рис. 1.19) содержит два
плеча — измерительное, в которое включен параметрический
датчик Rl9 и опорное с резисторами R3, i?4. Одна диагональ моста
запитывается напряжением Еу а с другой на сопротивлении
нагрузки Rn снимается выходной сигнал.
В случае, если мост сбалансирован, то С/вых = UAB = 0. Любая
разбалансировка моста вызывает А£/вых = ДС/дв, что
эквивалентно маленькому приращению выходного сигнала на фоне
нулевого синфазного сигнала. Если к такой схеме применить методы
Общие сведения о датчиках физических величин и измерительных схемах 27
Рис. 1.19. Простой мост
Рис. 1.20. Полумостовая схема
анализа электрических цепей (например, метод узловых
потенциалов, метод эквивалентного генератора и т. д.), то можно
показать, что:
. (1)
Во многих случаях Ru > #у, тогда выражение (1) упрощается:
(2)
Выражение (2) является основным при расчете мостовых
схем, при этом по умолчанию полагают, что условие i?H > Rj
выполняется. Существуют разные виды мостов. В мосте Уитстона
или «простом мосте» датчик Д включен только в одно плечо
(рис. 1.19). В полумосте (рис. 1.20) в смежные плечи моста
включается дифференциальный датчик, а в полном мосте
(рис. 1.21, а) два дифференциальных датчика (например, два
круговых потенциометра) включаются в оба плеча моста.
Условное представление полного моста приводится на
рис. 1.21, б.
Заметим, что если сигнал в диагонали моста равен нулю, то
такой мост называется сбалансированным. Условие
балансировки моста может быть получено из выражения (2):
Д1Д4 = -^2^3 •
(3)
Это условие на практике может выполняться в двух случаях.
Во-первых, когда
Rx = R2 = R$ = R± = Rq,
(За)
28
Глава 1
а б
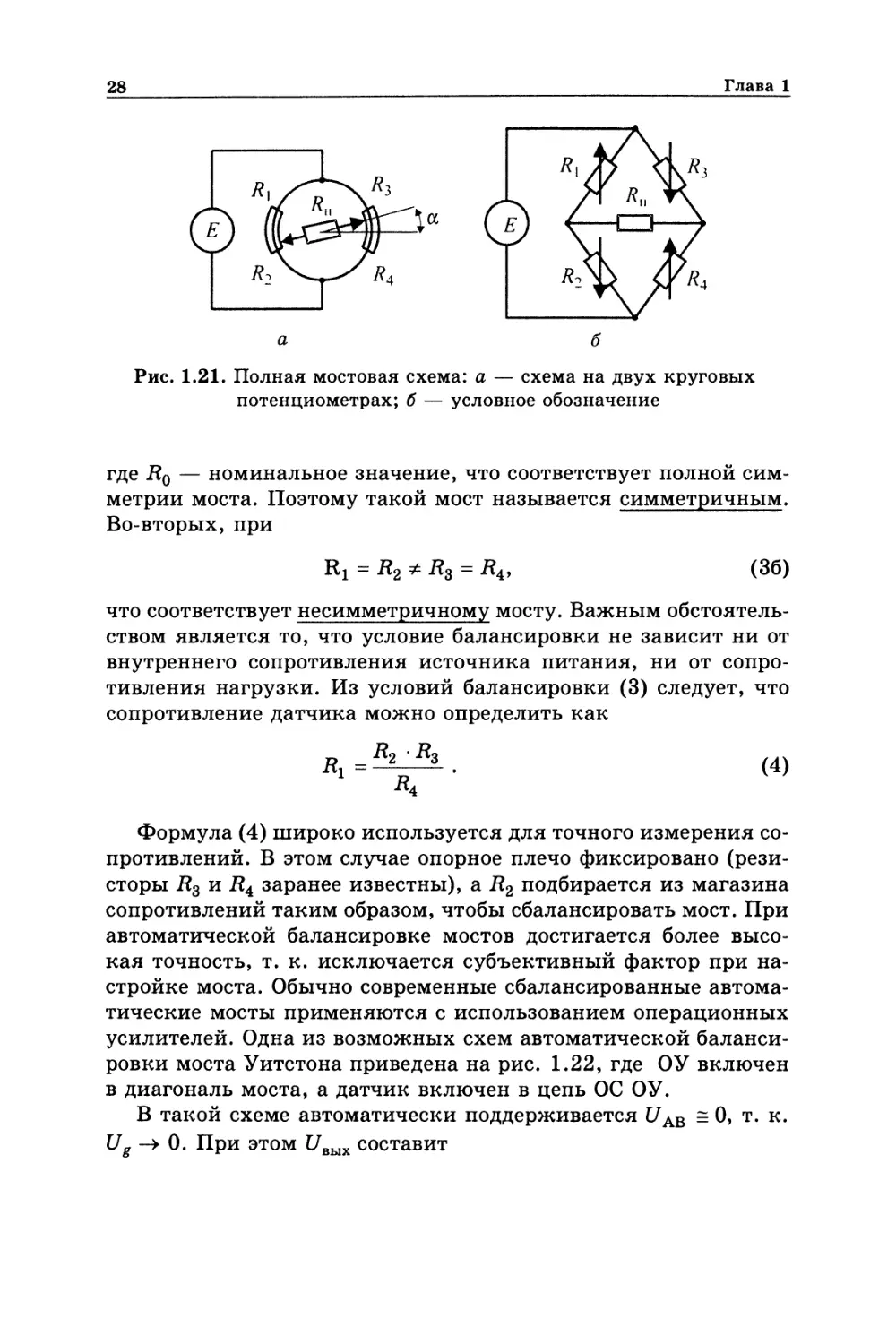
Рис. 1.21. Полная мостовая схема: а — схема на двух круговых
потенциометрах; б — условное обозначение
где R0 — номинальное значение, что соответствует полной
симметрии моста. Поэтому такой мост называется симметричным.
Во-вторых, при
Щ = R2 ф Rs = Я4, (36)
что соответствует несимметричному мосту. Важным
обстоятельством является то, что условие балансировки не зависит ни от
внутреннего сопротивления источника питания, ни от
сопротивления нагрузки. Из условий балансировки (3) следует, что
сопротивление датчика можно определить как
Я1=^-^. (4)
it4
Формула (4) широко используется для точного измерения
сопротивлений. В этом случае опорное плечо фиксировано
(резисторы R3 и #4 заранее известны), a R2 подбирается из магазина
сопротивлений таким образом, чтобы сбалансировать мост. При
автоматической балансировке мостов достигается более
высокая точность, т. к. исключается субъективный фактор при
настройке моста. Обычно современные сбалансированные
автоматические мосты применяются с использованием операционных
усилителей. Одна из возможных схем автоматической
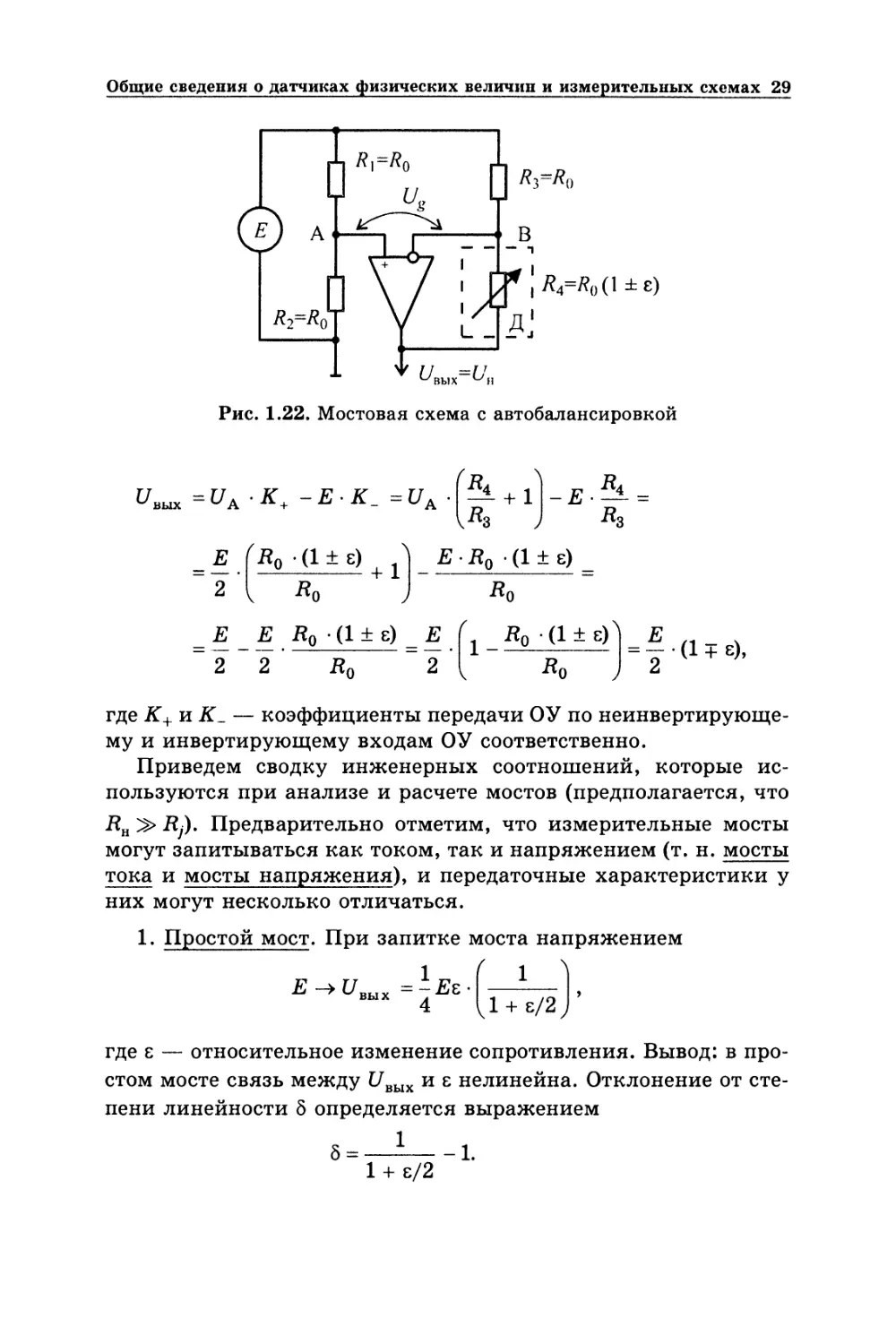
балансировки моста Уитстона приведена на рис. 1.22, где ОУ включен
в диагональ моста, а датчик включен в цепь ОС ОУ.
В такой схеме автоматически поддерживается С/АВ = 0, т. к.
Ug -» 0. При этом ивых составит
Общие сведения о датчиках физических величин и измерительных схемах 29
Рис. 1.22. Мостовая схема с автобалансировкой
где К+иК_ — коэффициенты передачи ОУ по неинвертирующе-
му и инвертирующему входам ОУ соответственно.
Приведем сводку инженерных соотношений, которые
используются при анализе и расчете мостов (предполагается, что
Ra » Rj). Предварительно отметим, что измерительные мосты
могут запитываться как током, так и напряжением (т. н. мосты
тока и мосты напряжения), и передаточные характеристики у
них могут несколько отличаться.
1. Простой мост. При запитке моста напряжением
где б — относительное изменение сопротивления. Вывод: в
простом мосте связь между £/вых и б нелинейна. Отклонение от
степени линейности 8 определяется выражением
30
Глава 1
2. В полумосте, аналогично, при запитке напряжением и
током, соответственно
Таким образом, и в полумосте и в полном мосте
между UBhLX и с имеется линейная связь. Кроме того,
чувствительность схем возрастает. Например, полный мост в 4 раза
чувствительнее простого моста и в 2 раза чувствительнее полумоста.
В случае, если условие Лн » Rj не выполняется, приведенные
соотношения должны корректироваться. Фактическое
выходное напряжение и'вых на нагрузке может быть найдено из
соотношения
где Дэкв = R2 || Д8 + Ri II Д4-
Например, в полумосте при запитке напряжением
Как видно из последнего выражения, отклонение от
линейности является величиной второго порядка малости от б.
Например, при е < 0,1 |8| < 0,05. Если мост запитывается
источником тока, то нелинейность уменьшается:
3. В полном мосте аналогично
Общие сведения о датчиках физических величин и измерительных схемах 31
В случае, если мост несимметричный (неравноплечий), т. е.
Rx = R3 = MR0 и R2 = R± = #о> нелинейность моста может быть
уменьшена. В частности для простого моста при RH > Rj
Хотя, как видно, нелинейность при М > 1 и будет
уменьшаться, одновременно будет уменьшаться и чувствительность.
1.3.3. Мосты переменного тока
Помимо мостов постоянного тока, для измерений
применяются и мосты переменного тока. Простейшей разновидностью
моста переменного тока является рассмотренная ранее потен-
циометрическая схема с симметричным питанием.
Мосты переменного тока могут работать с датчиками,
которые имеют реактивное выходное сопротивление (импеданс),
например с индуктивными датчиками. Точностные
характеристики мостов переменного тока выше, чем в мостах постоянного
тока, поскольку в них отсутствуют напряжение смещения нуля
и паразитные термоЭДС. Однако мосты переменного тока
намного сложнее, т. к. требуют детектирования и фильтрации
выходного сигнала.
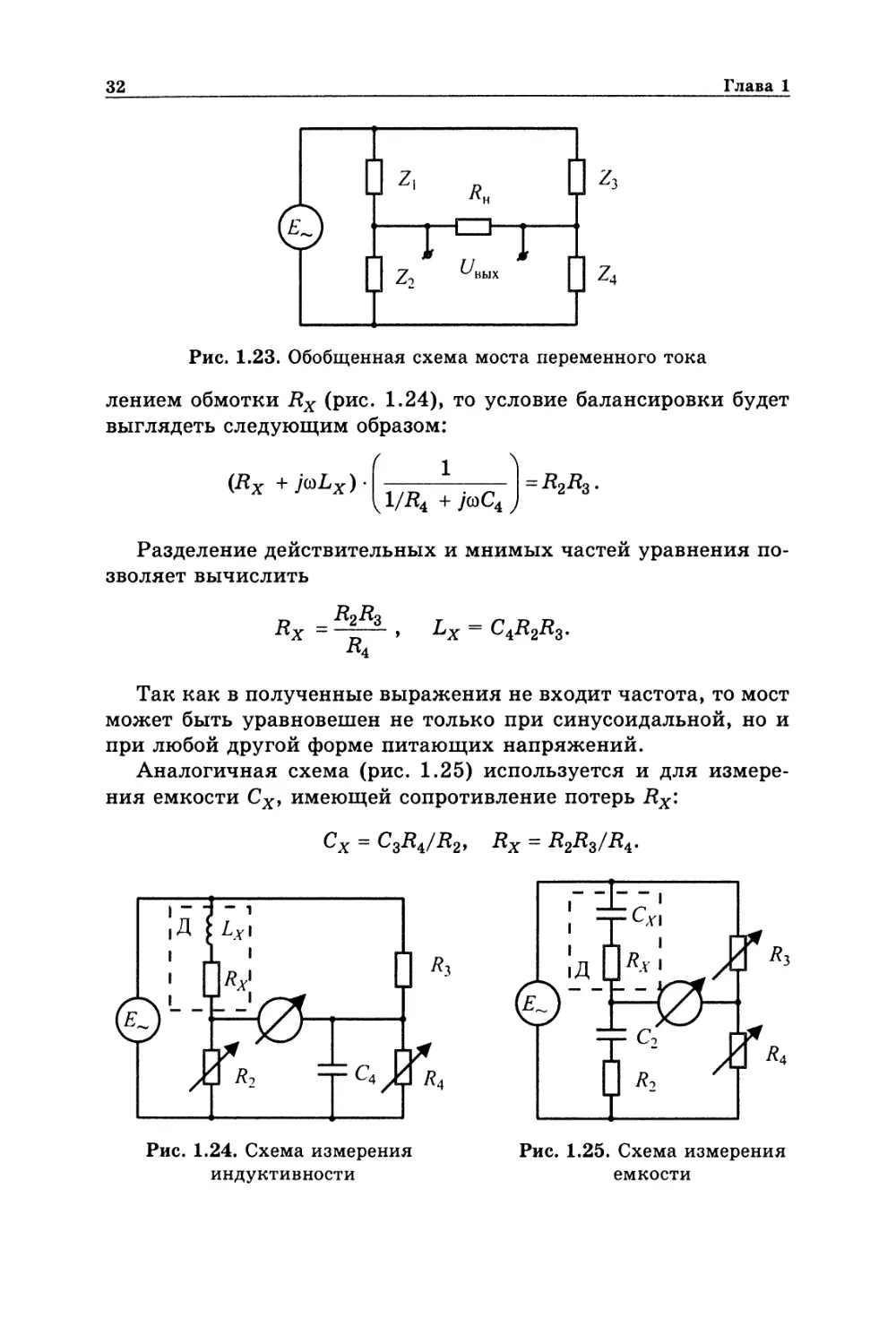
В общем случае в мосте переменного тока (рис. 1.23) все
плечи являются комплексными величинами. Условие
балансировки моста может быть представлено в виде
— уф-
где Zj =Zje J. Условие балансировки моста (1) должно
одновременно выполняться как для модулей Zy, так и для фаз ф;:
Это означает, что в схеме балансировки моста должно быть
как минимум два регулировочных элемента. Если мост
используется для измерения индуктивности Lx с активным сопротив-
32
Глава 1
Рис. 1.23. Обобщенная схема моста переменного тока
лением обмотки Rx (рис. 1.24), то условие балансировки будет
выглядеть следующим образом:
Разделение действительных и мнимых частей уравнения
позволяет вычислить
Так как в полученные выражения не входит частота, то мост
может быть уравновешен не только при синусоидальной, но и
при любой другой форме питающих напряжений.
Аналогичная схема (рис. 1.25) используется и для
измерения емкости Сх, имеющей сопротивление потерь Rx:
Рис. 1.24. Схема измерения
индуктивности
Рис. 1.25. Схема измерения
емкости
Общие сведения о датчиках физических величин и измерительных схемах 33
Очевидно, что помимо ручной балансировки возможна и
автоматическая балансировка. В любом случае при этом
необходимо учитывать вопросы сходимости процесса балансировки.
Наиболее часто измерения проводятся на частотах 100 Гц и
1 кГц, т. к. на более высоких частотах возрастают потери. Часто
мосты для измерения Rx, Lx, Cx совмещают в одном
универсальном Ш,С-измерительном мосте, оснащают
микропроцессорами для осуществления автоматической балансировки и
цифровыми индикаторами. Точность автоматического измерения
универсальных портативных ALC-мостов составляет около
0,5%, а лабораторных приборов на порядок выше.
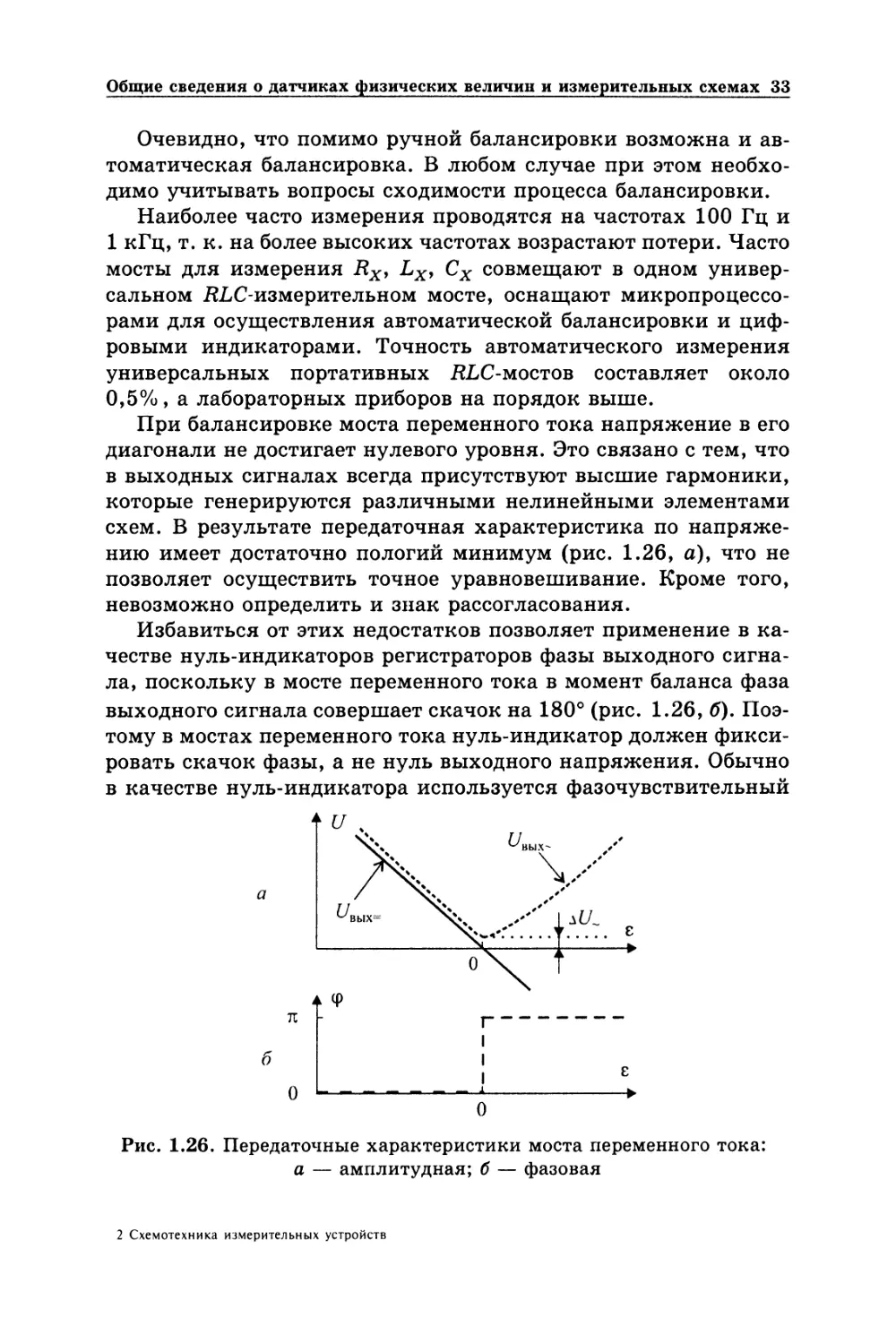
При балансировке моста переменного тока напряжение в его
диагонали не достигает нулевого уровня. Это связано с тем, что
в выходных сигналах всегда присутствуют высшие гармоники,
которые генерируются различными нелинейными элементами
схем. В результате передаточная характеристика по
напряжению имеет достаточно пологий минимум (рис. 1.26, а), что не
позволяет осуществить точное уравновешивание. Кроме того,
невозможно определить и знак рассогласования.
Избавиться от этих недостатков позволяет применение в
качестве нуль-индикаторов регистраторов фазы выходного
сигнала, поскольку в мосте переменного тока в момент баланса фаза
выходного сигнала совершает скачок на 180° (рис. 1.26, б).
Поэтому в мостах переменного тока нуль-индикатор должен
фиксировать скачок фазы, а не нуль выходного напряжения. Обычно
в качестве нуль-индикатора используется фазочувствительный
Рис. 1.26. Передаточные характеристики моста переменного тока:
а — амплитудная; б — фазовая
2 Схемотехника измерительных устройств
34
Глава 1
выпрямитель (ФЧВ), который содержит (рис. 1.27) схему
умножения и фильтр низких частот (ФНЧ).
Рис. 1.27. Структура ФЧВ
Схема умножения перемножает входной сигнал
UBX = U1z - since t и опорный сигнал Uon = U0 • since t одной и той
же частоты. В результате несложных тригонометрических
преобразований можно показать, что выходной сигнал схемы
умножения ивых1 = к г • (1 - cos2co t), где к — коэффициент
пропорциональности.
Таким образом, в выходном сигнале имеется постоянная
составляющая, пропорциональная кг, и переменная
составляющая kzcos2(ot на частоте 2со. Последняя отфильтровывается
ФНЧ, т. е. на выходе имеем сигнал постоянного тока С/вых = кг,
пропорциональный относительному изменению сопротивления
плеча моста г, и точка достижения баланса моста переменного
тока может в данном случае фиксироваться обычным
нуль-индикатором на постоянном токе с высокой точностью.
1.3.4. Подключение датчиков к мостовым схемам
Во многих случаях датчики территориально удалены от
измерительной схемы, а сигналы этих датчиков очень малы,
поэтому изменение сопротивления проводов приводит к изменению
выходного сигнала и уменьшает точность измерения.
Следовательно, при подключении датчиков необходимо принимать
меры по компенсации изменения сопротивления
соединительных проводов.
Наиболее распространенные схемы подключения:
1) Трехпроводная (более экономичная).
2) Четырехпроводная (более помехоустойчивая).
Общие сведения о датчиках физических величин и измерительных схемах 35
В основе работы таких схем лежит уравнение, которое
связывает Л(7Н с ARj (справедливо только для малых приращений ARj с
точностью до второго порядка малости):
(1)
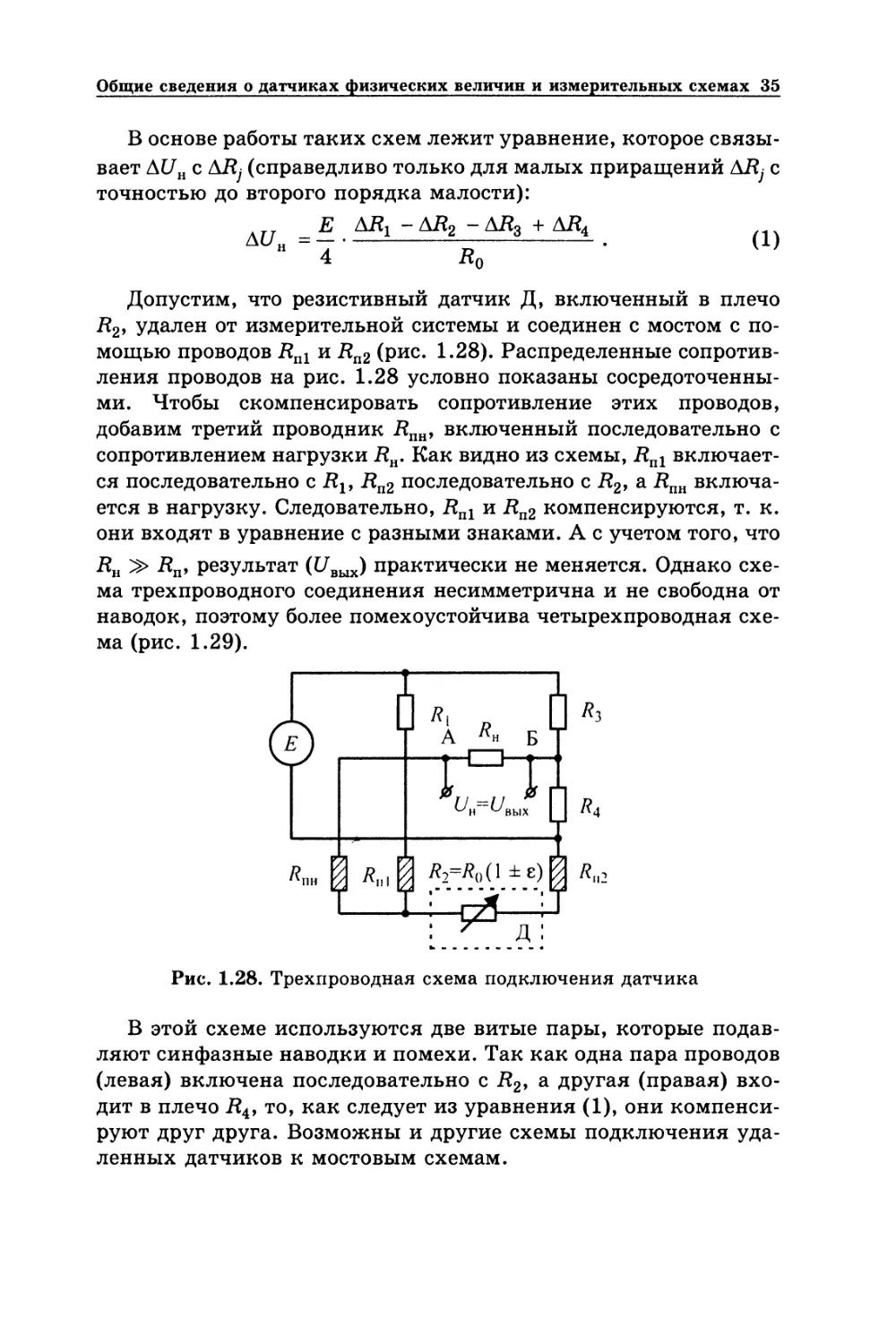
Допустим, что резистивный датчик Д, включенный в плечо
R2, удален от измерительной системы и соединен с мостом с
помощью проводов Еп1 и Rn2 (рис. 1.28). Распределенные
сопротивления проводов на рис. 1.28 условно показаны
сосредоточенными. Чтобы скомпенсировать сопротивление этих проводов,
добавим третий проводник i?nH, включенный последовательно с
сопротивлением нагрузки Rn. Как видно из схемы, Rnl
включается последовательно с Rv Rn2 последовательно с R2, а Лпн
включается в нагрузку. Следовательно, Rnl и Rn2 компенсируются, т. к.
они входят в уравнение с разными знаками. А с учетом того, что
RH > Rn, результат (UBMX) практически не меняется. Однако
схема трехпроводного соединения несимметрична и не свободна от
наводок, поэтому более помехоустойчива четырехпроводная
схема (рис. 1.29).
Рис. 1.28. Трехпроводная схема подключения датчика
В этой схеме используются две витые пары, которые
подавляют синфазные наводки и помехи. Так как одна пара проводов
(левая) включена последовательно с R2, а другая (правая)
входит в плечо Л4, то, как следует из уравнения (1), они
компенсируют друг друга. Возможны и другие схемы подключения
удаленных датчиков к мостовым схемам.
36
Глава 1
Рис. 1.29. Четырехпроводная схема подключения датчика
Глава 2
Усилители сигналов сенсоров
Глава посвящена рассмотрению специализированных
усилителей, в качестве которых используются интегральные
операционные усилители (ОУ). Однако в разделах 2.1-2.3 приводятся
общие инженерные сведения по ОУ. Подготовленный читатель
может эти разделы пропустить.
2.1. Параметры интегральных операционных
усилителей
Усилители предназначены для усиления сигналов датчиков
по амплитуде, мощности и согласования с нагрузкой. В
настоящее время повсеместно в качестве усилителей используются
интегральные дифференциальные операционные усилители (ОУ).
Под ОУ понимают усилитель постоянного тока, выполненный
по интегральной технологии и предназначенный для
выполнения масштабирования (усиления) и других математических и
логических функций (дифференцирования, интегрирования,
сравнения и т. д.). ОУ является основой множества других
схем — компараторов, выпрямителей, фильтров, источников
питания, функциональных преобразователей, ЦАП-АЦП и т. д.
Иными словами, ОУ является базовым элементом
измерительной и аналоговой схемотехники. ОУ имеет два
дифференциальных входа (и — инвертирующий и н — неинвертирующий) и
один-два выхода (второй выход — инверсный). Варианты
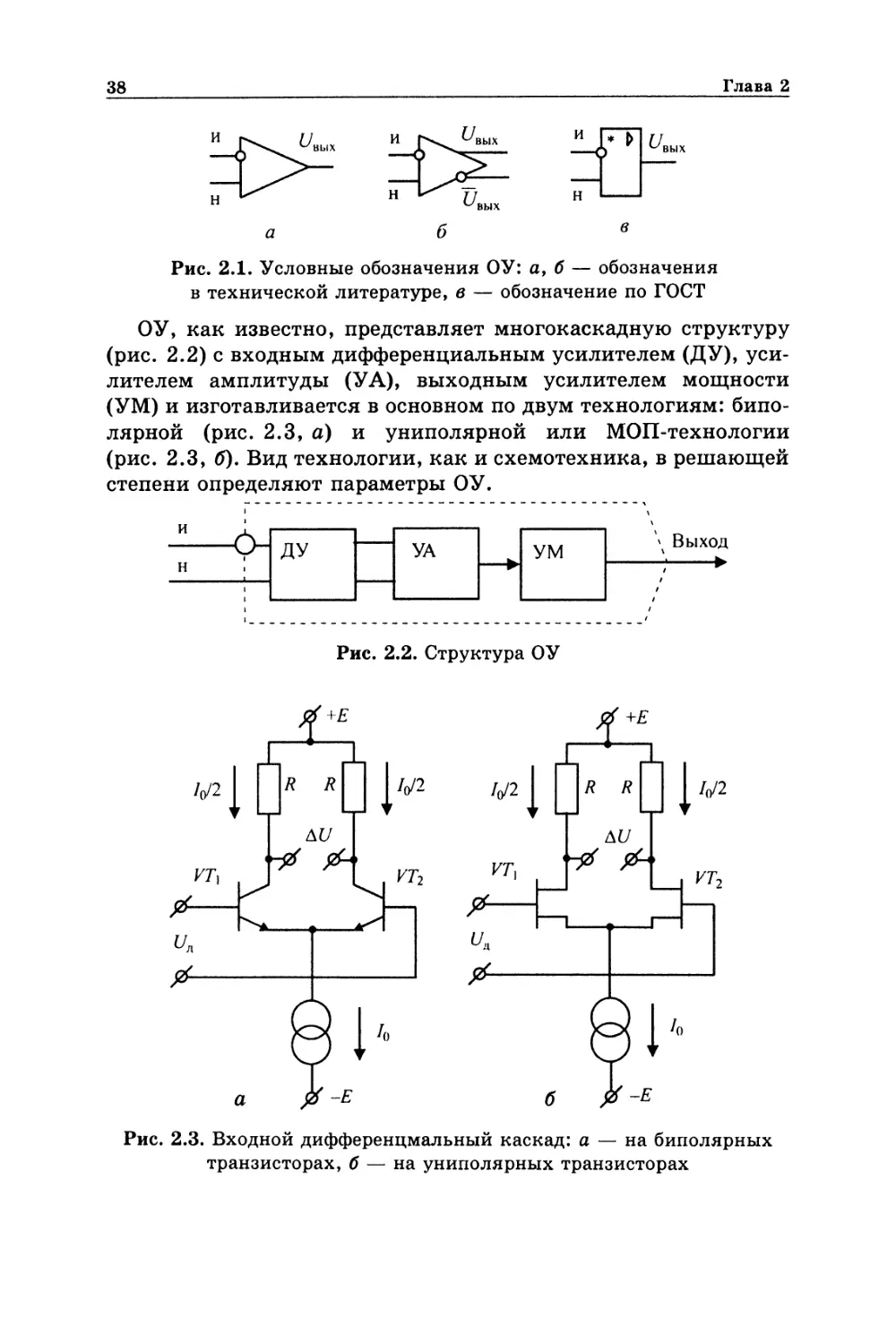
условного обозначения ОУ приведены на рис. 2.1. Варианты
рис. 2.1, а и рис. 2.1 у б соответствуют общепринятым
обозначениям в технической литературе и среди инженеров, а вариант
рис. 2.1, в соответствует ГОСТ.
38
Глава 2
Рис. 2.1. Условные обозначения ОУ: а, б — обозначения
в технической литературе, в — обозначение по ГОСТ
ОУ, как известно, представляет многокаскадную структуру
(рис. 2.2) с входным дифференциальным усилителем (ДУ),
усилителем амплитуды (УА), выходным усилителем мощности
(УМ) и изготавливается в основном по двум технологиям:
биполярной (рис. 2.3, а) и униполярной или МОП-технологии
(рис. 2.3, б). Вид технологии, как и схемотехника, в решающей
степени определяют параметры ОУ.
Рис. 2.2. Структура ОУ
Рис. 2.3. Входной дифференцмальный каскад: а — на биполярных
транзисторах, б — на униполярных транзисторах
Усилители сигналов сенсоров
39
Дифференциальный каскад, по существу, представляет
собой интегральную полумостовую схему с токовой запиткой,
рассмотренную в главе 1, что обуславливает его принципиальную
устойчивость и нечувствительность к различным синфазным
дестабилизирующим факторам (температуре, питанию,
технологии). Коэффициент передачи дифференциального каскада
K^AU/U^R-S,
где R — сопротивление в нагрузке, S — крутизна транзисторов.
Для биполярного транзистора S = ——, фг = —, где k — посто-
4Фг q
янная Больцмана, Т — температура, q — заряд электрона. При
Т = 300 К, /0 = 10 мкА имеем фг « 26 мВ, S * 0,2 мА/В. У
униполярных транзисторов крутизна определяется стоко-затворной
характеристикой (типичные величины S = 0,1^10 мА/В).
Электрические свойства ОУ характеризуют порядка 30
параметров. Важнейшие из них приводятся в технических условиях
(ТУ) и справочных листах на микросхемы. В большинстве
повседневных инженерных расчетов используются порядка 10-15
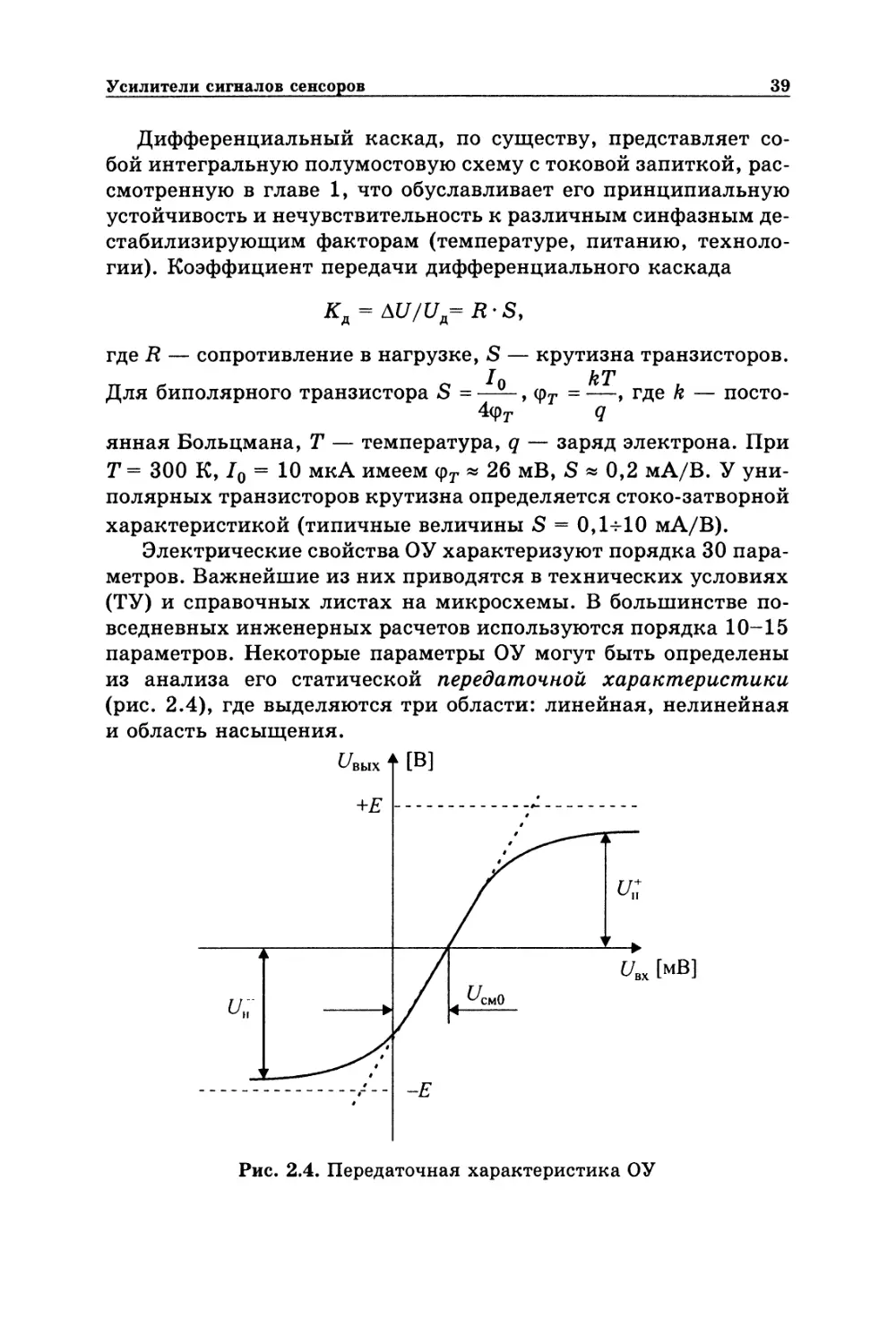
параметров. Некоторые параметры ОУ могут быть определены
из анализа его статической передаточной характеристики
(рис. 2.4), где выделяются три области: линейная, нелинейная
и область насыщения.
Рис. 2.4. Передаточная характеристика ОУ
40
Глава 2
Параметры, определяемые из передаточной характеристики.
1. Динамический диапазон по выходу, соответствующий
максимальному размаху выходного сигнала С/выхм = U* -U~
при напряжении питания ±Е. Типичное отношение UBblXM /Е =
= 0,7ч-0,8 при Е = ±(5-г15) В. Здесь и далее будут приводиться
типичные параметры наиболее распространенных ОУ широкого
применения.
2. Дифференциальный коэффициент усиления КДУ
характеризующий наклон на линейном участке, КД = AUBblx /AUBX.
Типичный КД » 105-104.
3. Напряжение смещения нуля 1/см0 характеризует асимметрию
входного дифференциального каскада. Типичное £/см0 « 10" тЮ" В.
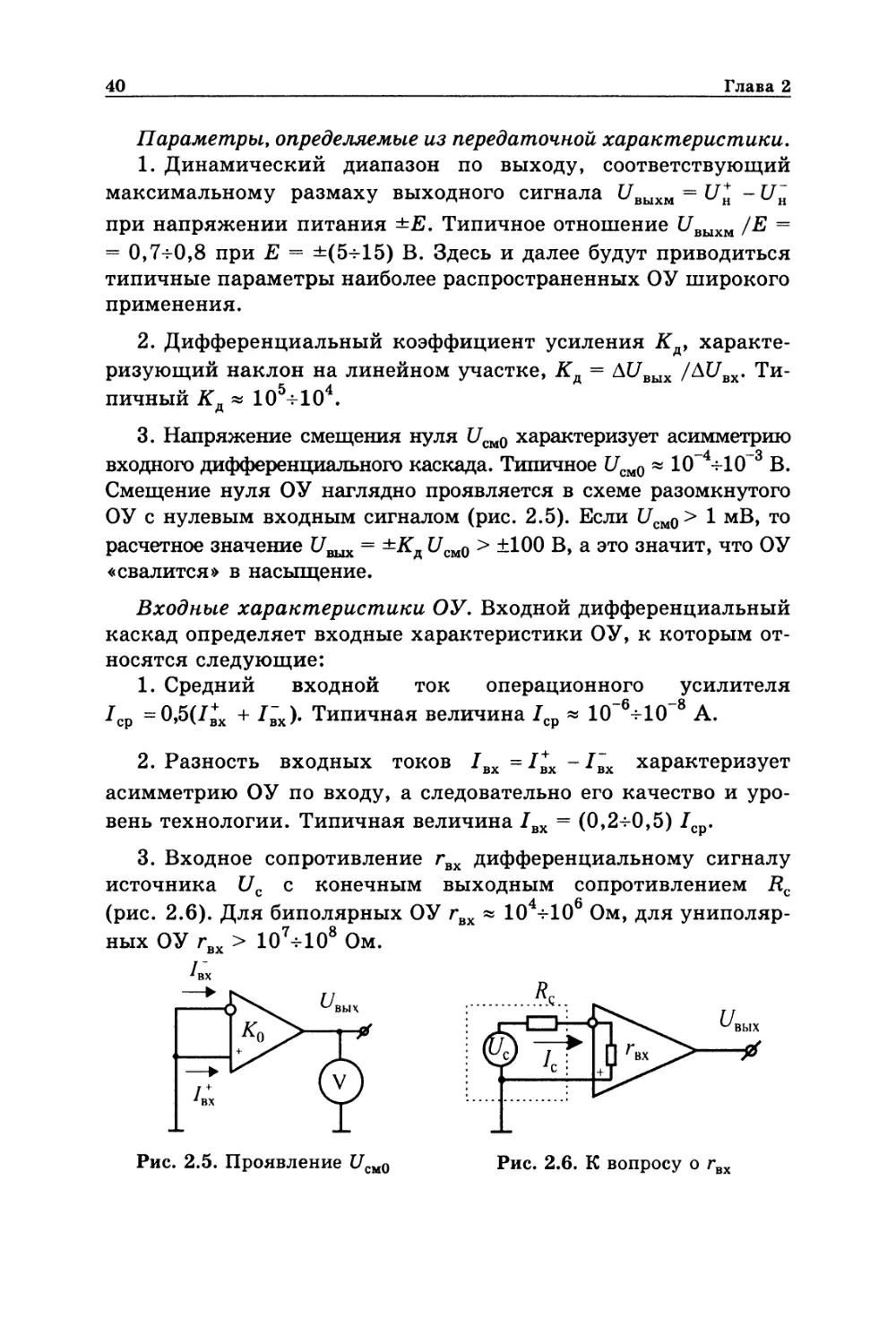
Смещение нуля ОУ наглядно проявляется в схеме разомкнутого
ОУ с нулевым входным сигналом (рис. 2.5). Если Ucm0> 1 мВ, то
расчетное значение UBUX = ±КД (7см0 > ±100 В, а это значит, что ОУ
«свалится» в насыщение.
Входные характеристики ОУ. Входной дифференциальный
каскад определяет входные характеристики ОУ, к которым
относятся следующие:
1. Средний входной ток операционного усилителя
/ср = 0,5(/*х + /~х). Типичная величина /ср « 10~6^10~8 А.
2. Разность входных токов JBX =IBX - I^x характеризует
асимметрию ОУ по входу, а следовательно его качество и
уровень технологии. Типичная величина /вх = (0,2^0,5) /ср.
3. Входное сопротивление гвх дифференциальному сигналу
источника Uc с конечным выходным сопротивлением Rc
(рис. 2.6). Для биполярных ОУ гвх « 10 -г10 Ом, для
униполярных ОУ гнх > 10%108 Ом.
Рис. 2.5. Проявление (Усм0 Рис. 2.6. К вопросу о г,
Усилители сигналов сенсоров
41
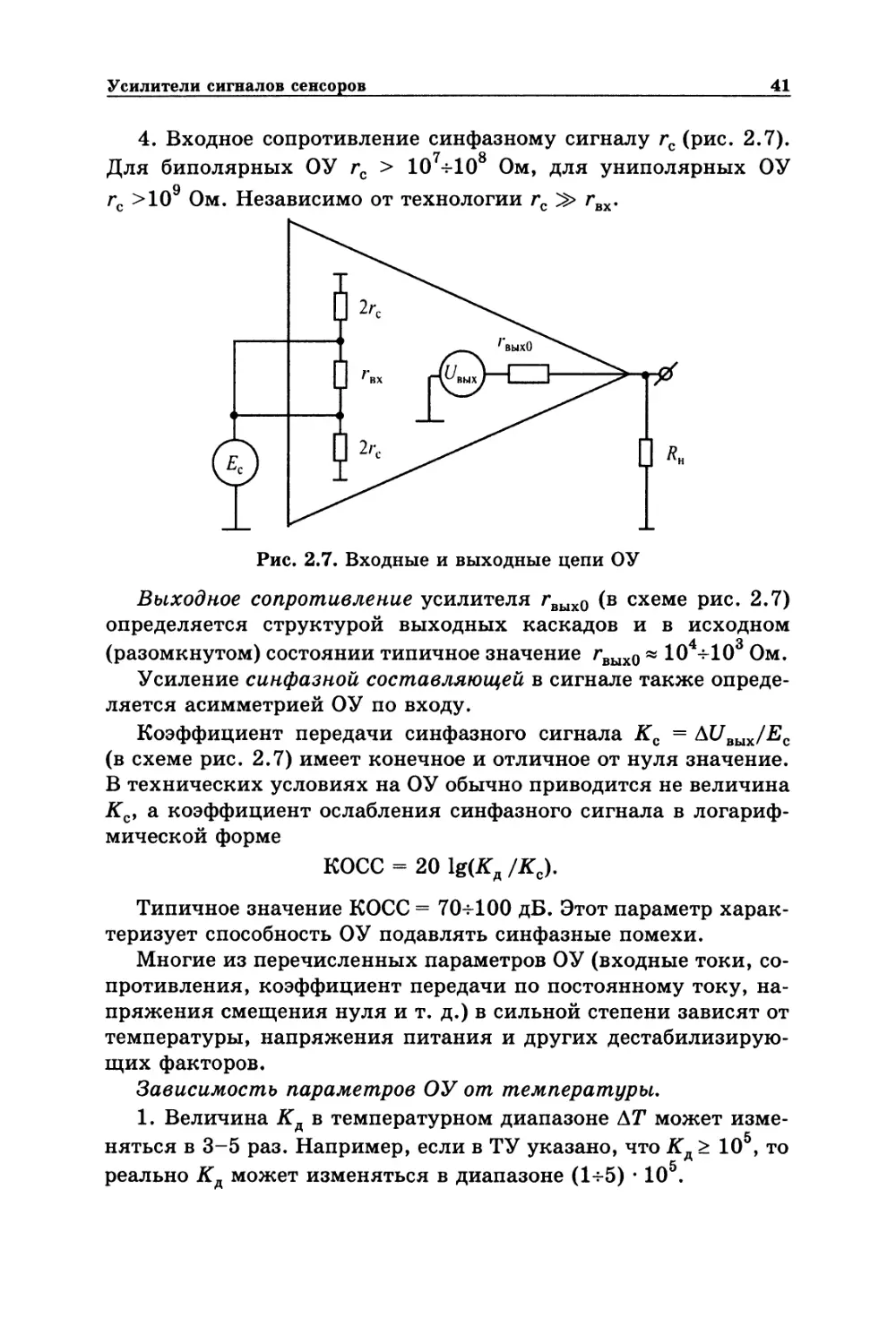
4. Входное сопротивление синфазному сигналу гс (рис. 2.7).
7 8
Для биполярных ОУ гс > 10-^10 Ом, для униполярных ОУ
гс >109 Ом. Независимо от технологии гс > гвх.
Рис. 2.7. Входные и выходные цепи ОУ
Выходное сопротивление усилителя гвых0 (в схеме рис. 2.7)
определяется структурой выходных каскадов и в исходном
(разомкнутом) состоянии типичное значение гвых0 « lO^lO3 Ом.
Усиление синфазной составляющей в сигнале также
определяется асимметрией ОУ по входу.
Коэффициент передачи синфазного сигнала Кс = AUBblx/Ec
(в схеме рис. 2.7) имеет конечное и отличное от нуля значение.
В технических условиях на ОУ обычно приводится не величина
Кс, а коэффициент ослабления синфазного сигнала в
логарифмической форме
KOCC = 20lg(KJKc).
Типичное значение КОСС = 70-ьЮО дБ. Этот параметр
характеризует способность ОУ подавлять синфазные помехи.
Многие из перечисленных параметров ОУ (входные токи,
сопротивления, коэффициент передачи по постоянному току,
напряжения смещения нуля и т. д.) в сильной степени зависят от
температуры, напряжения питания и других
дестабилизирующих факторов.
Зависимость параметров ОУ от температуры.
1. Величина КД в температурном диапазоне AT может
изменяться в 3-5 раз. Например, если в ТУ указано, что К„ > 10 , то
реально Кд может изменяться в диапазоне (1-^5) • 10 .
42
Глава 2
2. Изменение величины £/см0 в температурном диапазоне
аппроксимируется линейной зависимостью
^смо(^) = ^смо + ТК(1/см0) • ДГ,
где ТК(17см0) = AUcm0/AT — температурный коэффициент
напряжения Ucm0. Типичная величина ТК(С/см0) = (0,5^-20) мкВ/°С.
Например, если AT = 50 °С, то при ТК(£/см0) = 20 мкВ/°С
дополнительное изменение AUcm0 = 1 мВ.
3. Аналогичную температурную зависимость имеет А1ВХ.
Типичное значение ТК(Л1ВХ) = (10^-100) нА/°С.
Зависимость параметров ОУ от напряжения питания.
Изменение напряжения питания Е наиболее значительно влияет
на Ucm0. Это влияние в инженерных расчетах аппроксимируется
линейной зависимостью
J7CM0(£) = J7CM0 + KBHn-A£,
где КВИП = AUcm0/AE — коэффициент влияния источников
питания на Ucm0. Типичные величины КВИП « (50-fl50) мкВ/В.
Например, если Е = ±(15 В ± 10%) и КВИП = 100 мкВ/В, то
AUcm0(E) = 1,5 • 100 • 10"6 = ±0,15 мВ. Величина КВИП в
сильной степени уменьшается с частотой, что вызывает
необходимость дополнительной фильтрации импульсных помех по
цепям питания. Обычно это достигается установкой
керамических конденсаторов на шины питания в
непосредственной близости от микросхем ОУ.
Средний временной дрейф Ucm0. Этот параметр характеризует
долговременную стабильность, нормируется только для
прецизионных ОУ и составляет единицы мкВ/месяц.
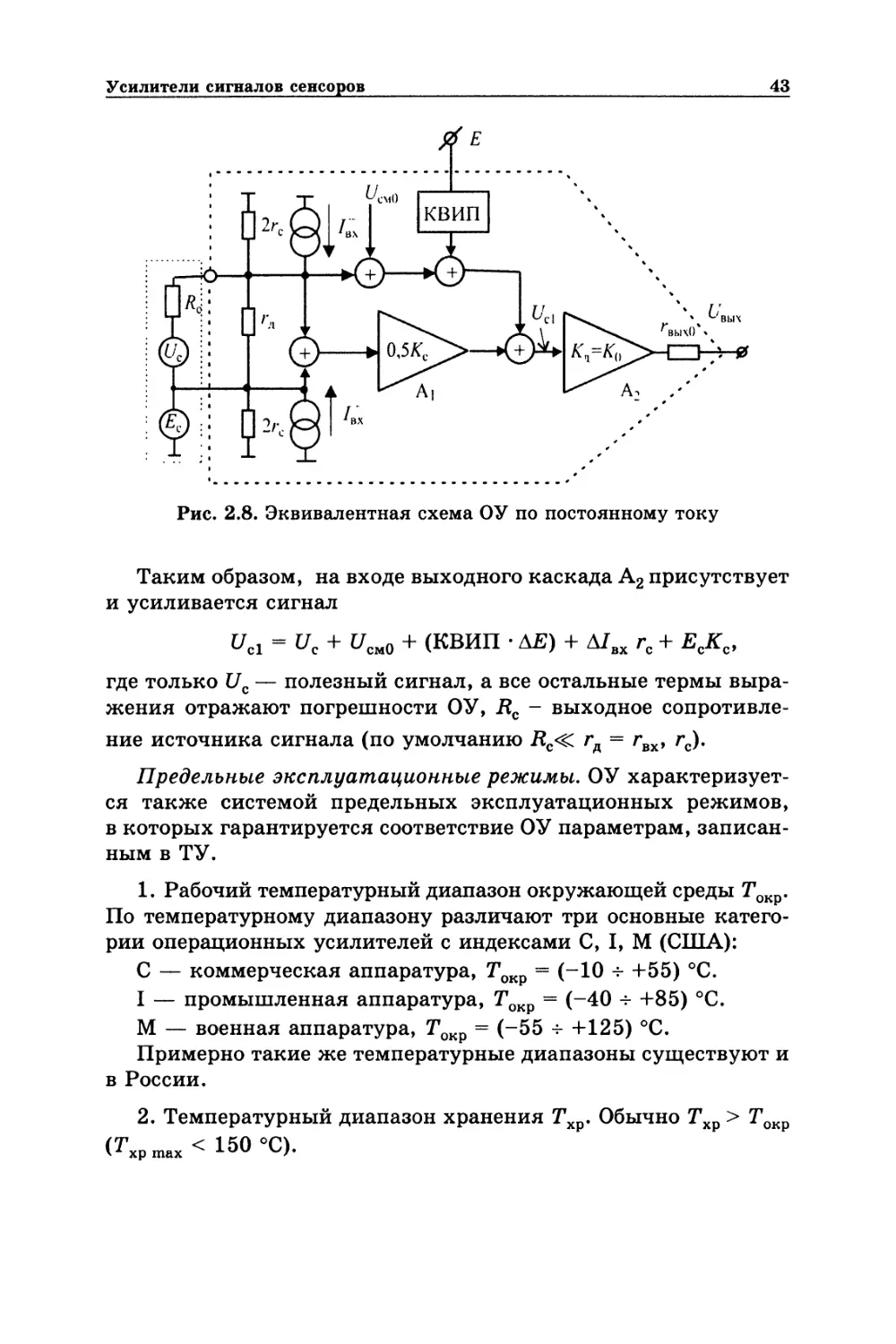
Из обобщения рассмотренных параметров ОУ может быть
составлена его эквивалентная схема, которая отражает основные
статические параметры ОУ и систему его ошибок (рис. 2.8).
Эквивалентная схема включает выходной идеальный усилитель
А2 с усилением на постоянном токе КД = К0 и выходным
сопротивлением гвых0, входные цепи с сопротивлениями гд = гвх, гс и
источниками входных токов /вх, цепи формирования ошибок с
Ucm0, источником КВИП и цепь передачи синфазного сигнала на
идеальном усилителе Ах.
Усилители сигналов сенсоров
43
Рис. 2.8. Эквивалентная схема ОУ по постоянному току
Таким образом, на входе выходного каскада А2 присутствует
и усиливается сигнал
tfci = Uc + UCM0 + (КВИП • АЕ) + Д/вх гс + Яс#с,
где только С/с — полезный сигнал, а все остальные термы
выражения отражают погрешности ОУ, Rc - выходное
сопротивление источника сигнала (по умолчанию #с< гд = гвх, гс).
Предельные эксплуатационные режимы. ОУ
характеризуется также системой предельных эксплуатационных режимов,
в которых гарантируется соответствие ОУ параметрам,
записанным в ТУ.
1. Рабочий температурный диапазон окружающей среды Токр.
По температурному диапазону различают три основные
категории операционных усилителей с индексами С, I, M (США):
С — коммерческая аппаратура, Токр = (-10 -г +55) °С.
I — промышленная аппаратура, Токр = (-40 -f +85) °С.
М — военная аппаратура, Токр = (-55 ч- +125) °С.
Примерно такие же температурные диапазоны существуют и
в России.
2. Температурный диапазон хранения Тхр. Обычно Тхр> Гокр
(Гхргаах<150°С).
44
Глава 2
3. Предельно допустимые входные напряжения:
дифференциальное £/дтах и синфазное 22стах. Обычно эти величины не
превышают напряжения питания ОУ.
4. Максимальной ток нагрузки /нтах. Типичные величины
h шах = 10+20 МА.
5. Максимально допустимая температура кристалла
(^кр max ^ 150 °С для кремния).
6. Тепловое сопротивление «кристалл — корпус» Д01,
позволяющее оценить температуру кристалла при потребляемой
мощности Р
где Rq2 — тепловое сопротивление «корпус — среда».
7. Допустимые механические нагрузки (вибрация, удары,
ускорения, акустический шум и др.).
Динамические свойства ОУ. Все параметры ОУ в той или
иной степени зависят от частоты входного сигнала. Различают
два режима работы ОУ:
1. Режим малого сигнала, когда все каскады операционного
усилителя работают в линейной области.
2. Режим большого сигнала, когда некоторые каскады
уходят в насыщение и работают на пределе своих возможностей.
Этому режиму соответствует, например, работа ОУ в режиме
компаратора, когда весь ток источника 10 переключается в одно
из плеч дифкаскада и заряжает емкость нагрузки Сн. При этом
скорость нарастания напряжения на емкости будет
ограничиваться величиной |dt//df| < 10 /Сн.
В простейшем случае ОУ в линейной области моделируется в
виде звена первого порядка (рис. 2.9), т. е. представляется в
виде последовательности: идеальный (безынерционный) ОУ и
Ж?-цепочка, где R характеризует выходное сопротивление ОУ, а
С — паразитные емкости внутри операционного усилителя.
Рис. 2.9. Динамическая модель ОУ в области малого сигнала
Усилители сигналов сенсоров
45
Эта схема соответствует фильтру низких частот (ФНЧ) с
передаточной функцией
(1)
где со ср = 1/т — частота среза, на которой модуль коэффициента
передачи уменьшается в V2 раз (на 3 дБ), а фаза достигает -45°
(рис. 2.10). За частотой среза АЧХ убывает с наклоном
-20 дБ/дек, а фаза достигает -90°. На этой же диаграмме
отмечена /т — частота единичного усиления. Она характеризует
предельные частотные возможности по усилению ОУ. Типичная
величина fT = 1^-100 МГц.
Несмотря на простоту полученных выражений, их
использование при большем числе звеньев становится неудобным.
Поэтому на практике широкое распространение получили
аппроксимации модуля и фазы в выражении (1) в виде
асимптотических диаграмм Боде. В этом случае АЧХ в
логарифмическом масштабе аппроксимируется двумя асимптотами:
При этом на частоте среза погрешность достигает величины
3 дБ. Одна из возможных аппроксимаций ФЧХ тремя
участками описывается выражением
где т = RC, р = yw. Представляя передаточную функцию в
комплексном виде и разделяя действительную ах и мнимую а2 части,
можно найти амплитудно-частотную (АЧХ) и фазо-частотную
(ФЧХ) характеристики звена:
46
Глава 2
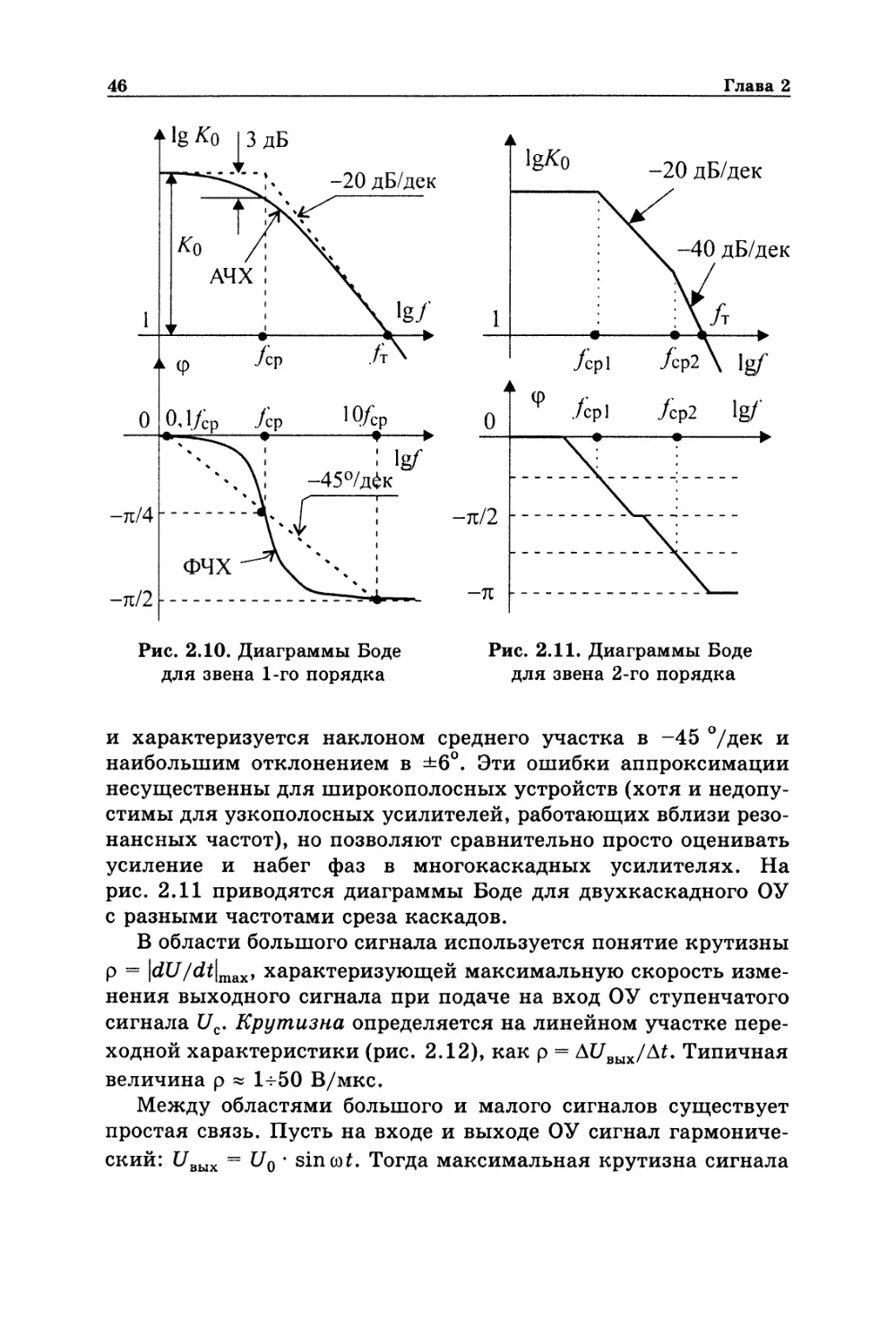
Рис. 2.10. Диаграммы Боде
для звена 1-го порядка
Рис. 2.11. Диаграммы Боде
для звена 2-го порядка
и характеризуется наклоном среднего участка в -45 °/дек и
наибольшим отклонением в ±6°. Эти ошибки аппроксимации
несущественны для широкополосных устройств (хотя и
недопустимы для узкополосных усилителей, работающих вблизи
резонансных частот), но позволяют сравнительно просто оценивать
усиление и набег фаз в многокаскадных усилителях. На
рис. 2.11 приводятся диаграммы Боде для двухкаскадного ОУ
с разными частотами среза каскадов.
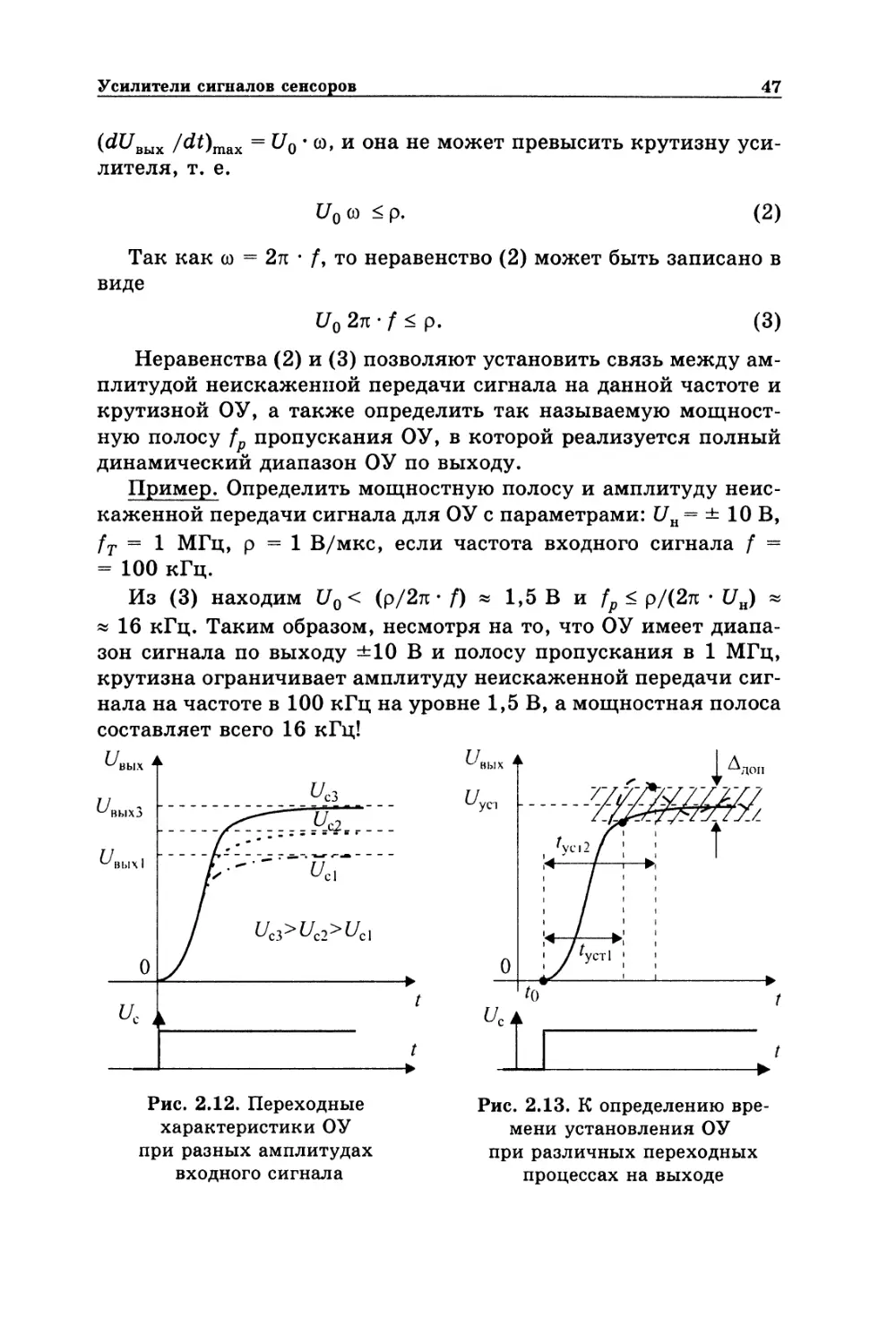
В области большого сигнала используется понятие крутизны
р = \dU/dt\m&x, характеризующей максимальную скорость
изменения выходного сигнала при подаче на вход ОУ ступенчатого
сигнала Uc. Крутизна определяется на линейном участке
переходной характеристики (рис. 2.12), как р = AUBblx/At. Типичная
величина р « 1^-50 В/мкс.
Между областями большого и малого сигналов существует
простая связь. Пусть на входе и выходе ОУ сигнал
гармонический: ивых = UQ • sin cot. Тогда максимальная крутизна сигнала
Усилители сигналов сенсоров
47
(^вых /^Отах = ^о * ш» и она не может превысить крутизну
усилителя, т. е.
(2)
Так как о = 2л • /, то неравенство (2) может быть записано в
виде
(3)
Неравенства (2) и (3) позволяют установить связь между
амплитудой неискаженной передачи сигнала на данной частоте и
крутизной ОУ, а также определить так называемую мощност-
ную полосу fp пропускания ОУ, в которой реализуется полный
динамический диапазон ОУ по выходу.
Пример, Определить мощностную полосу и амплитуду
неискаженной передачи сигнала для ОУ с параметрами: Uu = ± 10 В,
fT = 1 МГц, р = 1 В/мкс, если частота входного сигнала / =
= 100 кГц.
Из (3) находим U0 < (р/2тс • f) « 1,5 В и fp < р/(2я • UJ *
« 16 кГц. Таким образом, несмотря на то, что ОУ имеет
диапазон сигнала по выходу ±10 В и полосу пропускания в 1 МГц,
крутизна ограничивает амплитуду неискаженной передачи
сигнала на частоте в 100 кГц на уровне 1,5 В, а мощностная полоса
составляет всего 16 кГц!
Рис. 2.12. Переходные
характеристики ОУ
при разных амплитудах
входного сигнала
Рис. 2.13. К определению
времени установления ОУ
при различных переходных
процессах на выходе
48
Глава 2
Вторым параметром, характеризующим быстродействие ОУ
в режиме большого сигнала, является время установления
выходного сигнала.
Время установления (tyCT) выходного сигнала —
максимальное время, за которое выходной сигнал входит в так
называемую «трубку» допустимых отклонений Адоп от установившегося
значения UyCT (рис. 2.13). Время установления зависит от Адоп и
характера переходного процесса. Для экспоненциального
переходного процесса
U = U • П - e~t/T)
ивых иуст I1 с /»
*уст = т • 1п(1/5),
где т — постоянная времени, 8 — относительная погрешность
установления выходного сигнала. Для 5 = 0,1% типичное
значение tyCT * 0,1-г5 мкс. Этот параметр особенно важен для техники
ЦАП/АЦП.
Время установления (крутизна ОУ) в общем случае обратно
пропорционально частоте единичного усиления /т. В инженерной
практике полезно также пользоваться приближенным
соотношением для оценки времени установления по уровню 0,9 • UBUxyCT:
*уст < 0,3//т .
2.2. Классификация интегральных операционных
усилителей (ОУ)
В любой измерительной системе необходимо проводить
усиление, нормализацию (приведение к необходимому диапазону
измерения) и преобразование сигналов сенсоров. Эти функции
в настоящее время реализуются на базе интегральных
операционных усилителей (ОУ). Иными словами, ОУ являются основой
любой измерительной системы и от технических характеристик
ОУ во многом зависит достижение конечных результатов. В
настоящее время выпускаются сотни различных ОУ, грамотное
применение которых в измерительной технике основывается
как на знании их характеристик, так и разработанной
классификации.
Усилители сигналов сенсоров 49
Любая классификация основывается на системе выбранных
критериев и является в этом плане субъективной. Тем не менее,
есть ряд более или менее общепринятых устоявшихся
критериев для классификации ОУ.
1. По технологии изготовления (технологический критерий)
ОУ делятся на следующие группы:
• Биполярные ОУ;
• МОП (униполярные) ОУ;
• Би-МОП (комбинированные) ОУ.
Знание технологии позволяет в значительной мере
прогнозировать ожидаемые технические характеристики ОУ. Например,
биполярные ОУ в настоящее время обладают лучшими
характеристиками по постоянному току (меньше напряжение
смещения нуля), более высоким быстродействием, менее подвержены
влиянию статического электричества и более предсказуемы.
В то же время МОП-ОУ обладают большим входным
сопротивлением и минимальными входными токами в области нулевых
частот и при нормальных температурах, а также меньшими
шумами. В Би-МОП ОУ пытаются объединить достоинства тех и
других. В то же время многие отличия не носят
фундаментального характера. Например, использование супер-бета
транзисторов во входных каскадах биполярных ОУ позволило на
несколько порядков уменьшить входные токи и увеличить
входные сопротивления.
2. Второй важный критерий — область применения ОУ.
По этому критерию различают:
• ОУ широкого применения;
• быстродействующие ОУ;
• прецизионные ОУ;
• специализированные ОУ.
ОУ широкого применения, составляющие большую часть
выпускаемой номенклатуры, обладают средними техническими
характеристиками, защитой от короткого замыкания по выходу
и, как правило, встроенной коррекцией частотной
характеристики, что обеспечивает устойчивость во всех условиях
эксплуатации. Типичные параметры ОУ широкого применения:
С/см0 = U5 мВ; ТК(С/см0) = 5^20 мкВ/°С; /вх = ОДч-2 мкА; А/вх =
= 0,5/вх; fT< 1-rlO МГц (частота единичного усиления);
р < 10 В/мкс (крутизна). Характеристики типичных ОУ
широкого применения приведены в табл. 2.1.
Таблица 2.1. Основные параметры ОУ общего применения
140УД6 (МС1456)
140УД7 (цА741)
140УД8 (TLQ81)
140УД23 (LF155)
140УД20 (цА747)
153УД6 (LM101)
1418УД4 (LF147)
LF441
AD642
AD820
Усилители сигналов сенсоров 51.
Быстродействующие ОУ оптимизированы по частотным
характеристикам (обычно за счет ухудшения характеристик по
постоянному току). Типичные параметры быстродействующих
ОУ: р > 30 В/мкс (достигает 200ч-500 В/мкс), /т > 10 МГц
(достигает 300±600 МГц), Туст < 1 мкс (время установления с
точностью до 0,1%).
Прецизионные ОУ — оптимизированы по постоянному току.
Типичные параметры прецизионных ОУ: С/см0 < 0,25 мВ,
ТК(£/см0) < 1 мкВ/°С, /т < 1 МГц, /вх < 10 нА.
Специализированные ОУ составляют самую многочисленную
группу в номенклатуре ОУ. В измерительной технике наиболее
распространены следующие:
1. Усилители с модуляцией и демодуляцией сигналов (так
называемые МДМ-усилители) — обладают непревзойденными
характеристиками по постоянному току (Ucm0 не более десяти
микровольт) при небольшой полосе пропускания (менее 1 кГц).
2. Двухканальные ОУ — более широкополосные, чем
МДМ-усилители, с хорошими характеристиками по
постоянному току.
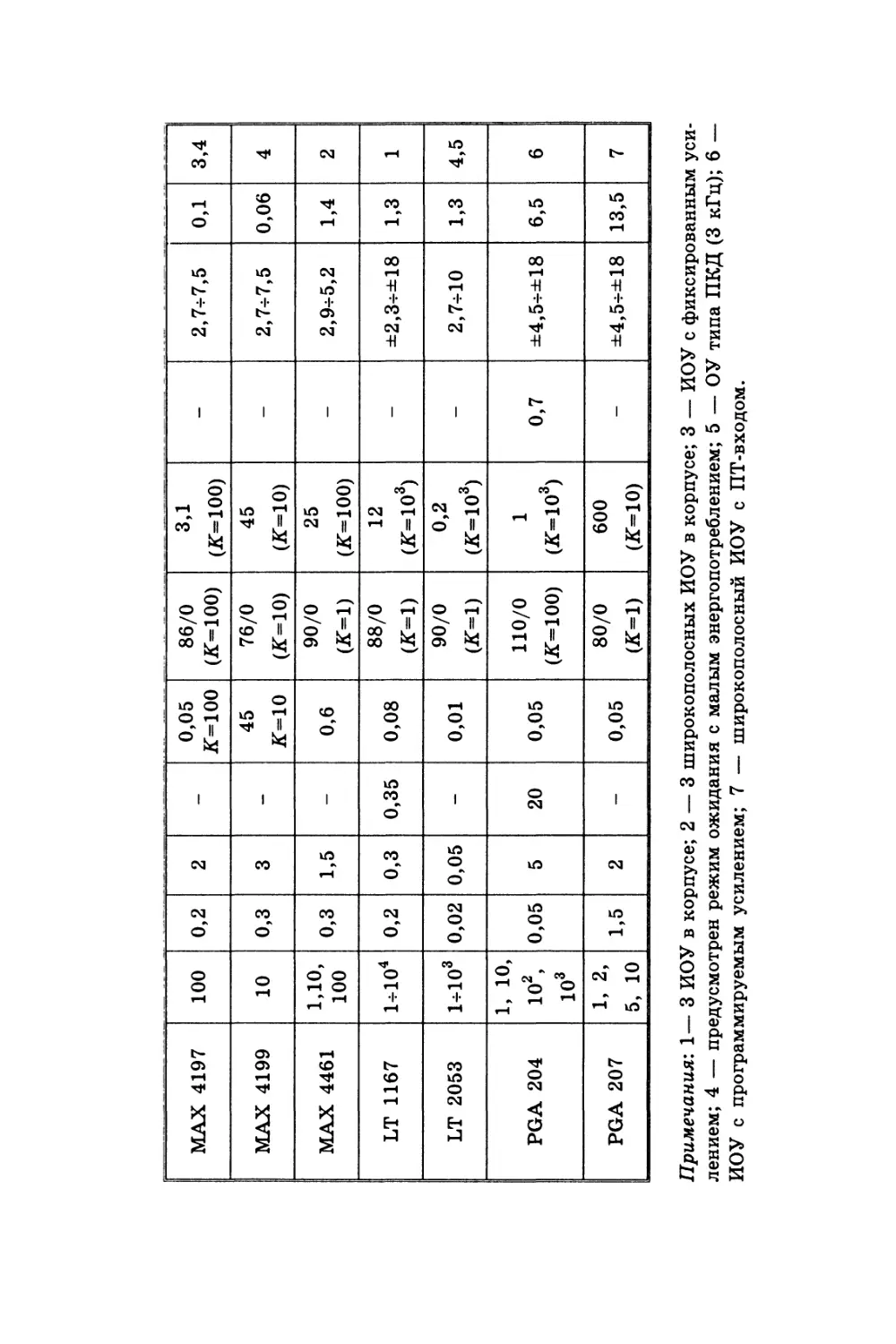
3. Усилители с периодической компенсацией дрейфа нуля
(так называемые ПКД-усилители) — обладают средним
быстродействием и отличными характеристиками по постоянному
току. В настоящее время наиболее перспективный и бурно
развивающийся тип сверхпрецизионных ОУ.
4. Измерительные или инструментальные усилители.
Характеризуются большим входным сопротивлением и большим
коэффициентом ослабления синфазного сигнала (RBX >
> 100-1000 МОм, КОСС > 100 дБ).
5. Программируемые ОУ — характеристики ОУ могут
перестраиваться в диапазоне от быстродействующих до
прецизионных с помощью внешней цепи.
6. Токоразностные ОУ или усилители Нортона —
усиливается токовый сигнал, а не сигнал напряжения. Эти усилители с
однополярным питанием существенно проще классических ОУ,
допускают большую степень интеграции и, как правило, на них
реализуются активные ЛС-фильтры (ARC-фильтры).
7. Малошумящие ОУ — нормируется напряжение и ток
шума (ишУ 1Ш), например, на частоте 1 кГц Um < 10 нВД/Гц-
52
Глава 2
В зарядо-чувствительных усилителях шум нормируется в
электрон-вольтах, например в ОУ 1432УП1 Um < 275 эВ.
8. Изолирующие ОУ — ОУ с гальванической развязкой
между входом и выходом, с сопротивлением изоляции вход/выход
не менее 1 МОм и пробивным напряжением не менее 1 кВ.
9. Усилители с однополярным и батарейным питанием для
переносной аппаратуры. В них исключается так называемый
триггерный эффект (защелкивание ОУ), характерный для
ранних биполярных ОУ.
10. Усилители с расширенным выходным диапазоном,
приближающимся к напряжению питания (так называемые
усилители «real to real»).
11. Микромощные ОУ, в которых нормируется ток
потребления (1п < 1 мА), а в ряде случаев предусмотрен режим
работы с пониженным потреблением (так называемый режим
«SLEEP»). В настоящее время появились ОУ с потреблением
на уровне микроампер, которые годами могут работать от
обычной батарейки. Остальные параметры таких ОУ обычно
невелики.
12. Усилители с мощным выходом — ток нагрузки
1Н > 50 мА. Такие усилители могут непосредственно управлять
исполнительными устройствами.
13. Усилители с высоковольтным выходом (£/вых > 30 В).
Среди других типов специализированных ОУ отметим
также:
• усилители с автоматической регулировкой усиления
(АРУ);
• усилители с переменным во времени коэффициентом
усиления;
• логарифмические усилители;
• сверхскоростные усилители радиочастотного диапазона;
• усилители для работы в области криогенных температур;
• радиационно-стойкие ОУ и т. п.
Применение специализированных ОУ позволяет
осуществлять наиболее эффективное проектирование измерительной
аппаратуры. По этой причине основное внимание при
дальнейшем рассмотрении будет уделено именно специализированным
ОУ.
Усилители сигналов сенсоров
53
2.3. Анализ погрешностей усилителей
В настоящее время усиление сигналов сенсоров
осуществляется преимущественно на интегральных ОУ, дополненных
входными цепями и цепями обратной связи (ОС). В
усилительных каскадах, как правило, используется отрицательная
ОС (ООС), а в генераторах и компараторах — положительная
ОС (ПОС). Введение ОС трансформирует многие
характеристики ОУ (статические и динамические). В общем случае
элементы этих цепей являются частотно-зависимыми, но в
усилительных каскадах датчиков, в основном, используются
резисторы.
2.3.1. Методы анализа усилителей
В зависимости от выводов, на которые подается входной
сигнал, различают три классические операционные схемы:
инвертирующую (рис. 2.14), неинвертирующую (рис. 2.15) и
дифференциальную (рис. 2.16).
При анализе усилительных каскадов схем могут
использоваться различные подходы:
1. Инженерный подход — основан на концепции идеального
операционного усилителя (RBX —> <х>, Лвых -» 0, 1£ -» оо, /т —> оо,
/вх -> 0). В частности, при таком подходе, с учетом того, что
максимальное значение на выходе Un < Еу имеем
Рис. 2.14.
Инвертирующий ОУ
Рис. 2.15.
Неинвертирующий ОУ
54
Глава 2
Рис. 2.16.
Дифференциальный ОУ
Рис. 2.17. Структура ОУ
с цепями ОС
Последнее условие часто трактуется как виртуальный нуль
или «квазинуль» инвертирующего входа ОУ в схеме рис. 2.14.
Если учесть, что в инвертирующей схеме
то коэффициент передачи Wu составит
Wu^Uablx/Um'-Roe/R1. (1)
Для неинвертирующей схемы с учетом С/д —> 0 имеем
^вх/Д1 = (^вых ~ U*x)/Roc у
W»=l+Roc/R1. (2)
Наконец, для дифференциальной схемы, с учетом делителя
И2~Щ на неинвертирующем входе
В частности, если Roc /Rx = R^/R2 ^ ^д> имеем
ивых = (UBX2 - UBxl) • WA = (tfBx2 - 1/вх1)Дос /Rv (4)
2. Кибернетический подход — основан на теории
автоматического управления, когда операционная схема
рассматривается как система с ООС (рис. 2.17), где приняты следующие
обозначения: а — коэффициент передачи входной цепи; Р —
коэффициент передачи обратной цепи; К — собственный
коэффициент передачи ОУ, Woc — коэффициент передачи участка
Усилители сигналов сенсоров 55
цепи, охваченной ОС. С учетом обозначений на схеме рис. 2.17
можно записать систему уравнений
UBxl =a-U„,
UBuyi=K-AU,
&и = ивх1-ивых.р.
Проведя несложные преобразования, получим известную
формулу, определяющую коэффициент передачи такой
структуры:
W = а - . (5)
1 + JT-P
В реальных условиях петлевое усиление К - р > 1, и,
следовательно,
W = а/р. (6)
Из формулы (6) следует фундаментальный вывод, что
коэффициент передачи операционной схемы при большом петлевом
усилении Kfi практически не зависит от стабильности
собственного коэффициента передачи ОУ, а определяется цепями
прямой и обратной связи. Иными словами, операционная схема
при большом петлевом усилении становится инвариантной к
изменению коэффициента передачи собственно ОУ. Это позволяет
строить операционные схемы со стабильными коэффициентами
передачи на чрезвычайно нестабильных ОУ. Применяя
кибернетический подход, получим:
Для инвертирующего включения ОУ: оси = Е0С/(Ег + Roc);
Ри = Ri/(Ri + Дос);
Параметры неинвертирующего включения ОУ: ссн = 1 (весь
сигнал сразу прикладывается ко входу); рн = R1/(R1 + Roc) и,
следовательно,
56
Глава 2
Для дифференциального включения ОУ при симметричных
плечах (Пг = R2, a Roc = Rs), на основания принципа
суперпозиции, справедливого для линейных схем:
Подчеркнем, что результаты, полученные на основании
кибернетического подхода, полностью совпадают с результатами,
полученными ранее на основании концепции идеального ОУ.
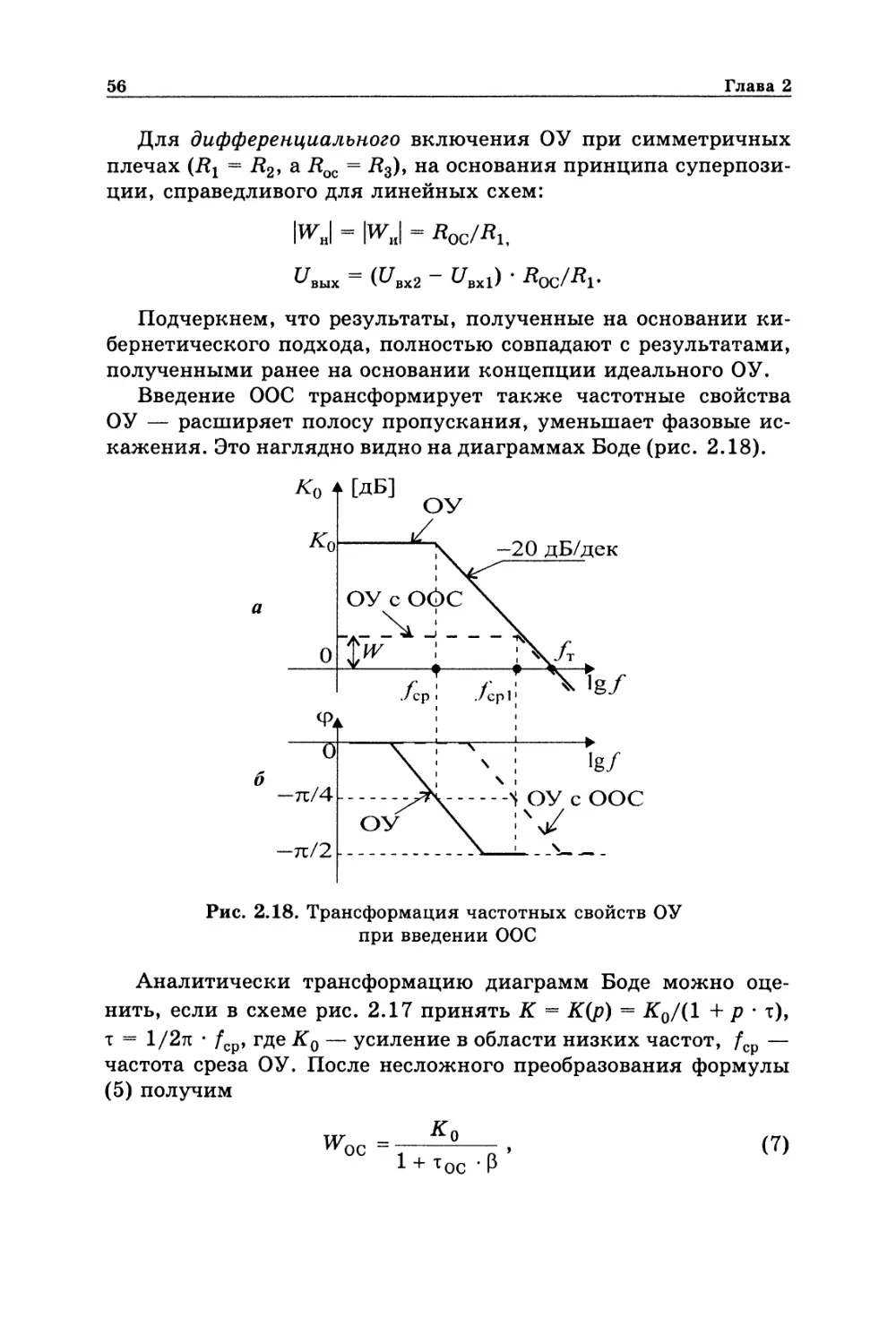
Введение ООС трансформирует также частотные свойства
ОУ — расширяет полосу пропускания, уменьшает фазовые
искажения. Это наглядно видно на диаграммах Воде (рис. 2.18).
Рис. 2.18. Трансформация частотных свойств ОУ
при введении ООС
Аналитически трансформацию диаграмм Воде можно
оценить, если в схеме рис. 2.17 принять К = К(р) = К0/(1 + р • т),
т = 1/2я • /ср, где К0 — усиление в области низких частот, /ср —
частота среза ОУ. После несложного преобразования формулы
(5) получим
(7)
Усилители сигналов сенсоров 57
где тос = т/(1 4- iT0 • р) — постоянная времени усилителя.
Таким образом, рабочая полоса частот усилителя расширилась,
так как соср1 = 1/тос » К0 • р • соср > соср.
Аналогично можно показать, что в области со < юср2 фазовые
искажения также уменьшаются в К0$ раз в соответствии с
уравнением
3. Системотехнический подход — свойства схем, в
основном их входных и выходных цепей, определяются по виду ОС.
Виды ОС по входу (способы подачи сигнала ОС во входную
цепь):
а) последовательная связь (рис. 2.15) приводит к
увеличению входного дифференциального сопротивления ОУ примерно
вК$ раз, но с ограничениями, вызванными наличием во
входных цепях ОУ шунтирующего синфазного сопротивления гс,
т. е.
Важный частный случай — повторитель напряжения (Р -» 1,
Rx -> оо) с очень большим RBX = гс;
б) параллельная связь (рис. 2.14) вызывает уменьшение
входного сопротивления ОУ примерно в Кр> раз. Поэтому
входное сопротивление инвертирующего усилителя практически
Виды ОС по выходу (способы формирования сигнала ОС):
а) ОС по току — вызывает увеличение выходного
сопротивления в К$ раз. Этот случай соответствует включению нагрузки
в ОС, так как /вх = Ix = const.
б) ОС по напряжению (рис. 2.14, 2.15, 2.16) вызывает
уменьшение выходного сопротивления в Кр> раз, т. е.
Выходное сопротивление RBUX усилителя может быть
получено из рассмотрения эквивалентной схемы инвертирующего ОУ
(рис. 2.19).
58
Глава 2
Рис. 2.19. Эквивалентная выходная цепь инвертирующего ОУ
где С/хх, /хх и UK3,1КЗ — напряжения и токи холостого хода и
короткого замыкания на выходе соответственно, Д/н — изменение
тока в нагрузке. С учетом того, что при КЗ ОС размыкается и С/д
определяется как £/д = Uc • Rqq/(Ri + Лос), имеем
В дифференциальном усилителе (рис. 2.16), кстати, имеют
место различные виды ОС по входам и разные входные
сопротивления. Анализируя виды ОС, можно быстро сделать
качественное заключение о характеристиках входных и выходных
цепей, не прибегая к громоздким расчетам.
4. Системы автоматизированного проектирования (САПР)
основаны на теории цепей и используются при разработке
интегральных схем для точной оценки электрических
характеристик. В качестве примера можно сослаться на широко
распространенные программные продукты Pspice, DesignLab и др. При
Окончательно имеем:
Действительно, по определению
Усилители сигналов сенсоров 59
всей привлекательности такого формального подхода получение
достоверных результатов, что подтверждается мировой
практикой, невозможно без овладения классическими инженерными
методами анализа аналоговых схем.
2.3.2. Структура погрешностей усилителей
Погрешности усилительных каскадов являются сложными
функциями от всех входящих в схему элементов (внутренних
элементов ОУ и внешних по отношению к ОУ резисторов,
конденсаторов, диодов и т. д.). В инженерной практике для
простоты анализа все погрешности сводятся к 3-м типам:
мультипликативной, аддитивной и функциональной. Это связано с тем,
что исходные погрешности элементов усилителей зависят от
разных причин и по-разному трансформируют передаточные
характеристики (рис. 2.20).
Номинальные передаточные характеристики
Рис. 2.20. Виды погрешностей; а — мультипликативная;
б — аддитивная; в — функциональная
Мультипликативная погрешность изменяет в
определенных пределах коэффициент передачи (наклон) номинальной
передаточной характеристики (рис. 2.20, а).
Аддитивная погрешность сдвигает номинальную
передаточную характеристику параллельно самой себе (рис. 2.20, б).
Например, такой сдвиг вызывает напряжение смещения нуля
(t/CMo) ОУ.
Функциональная погрешность вызывается какими-либо
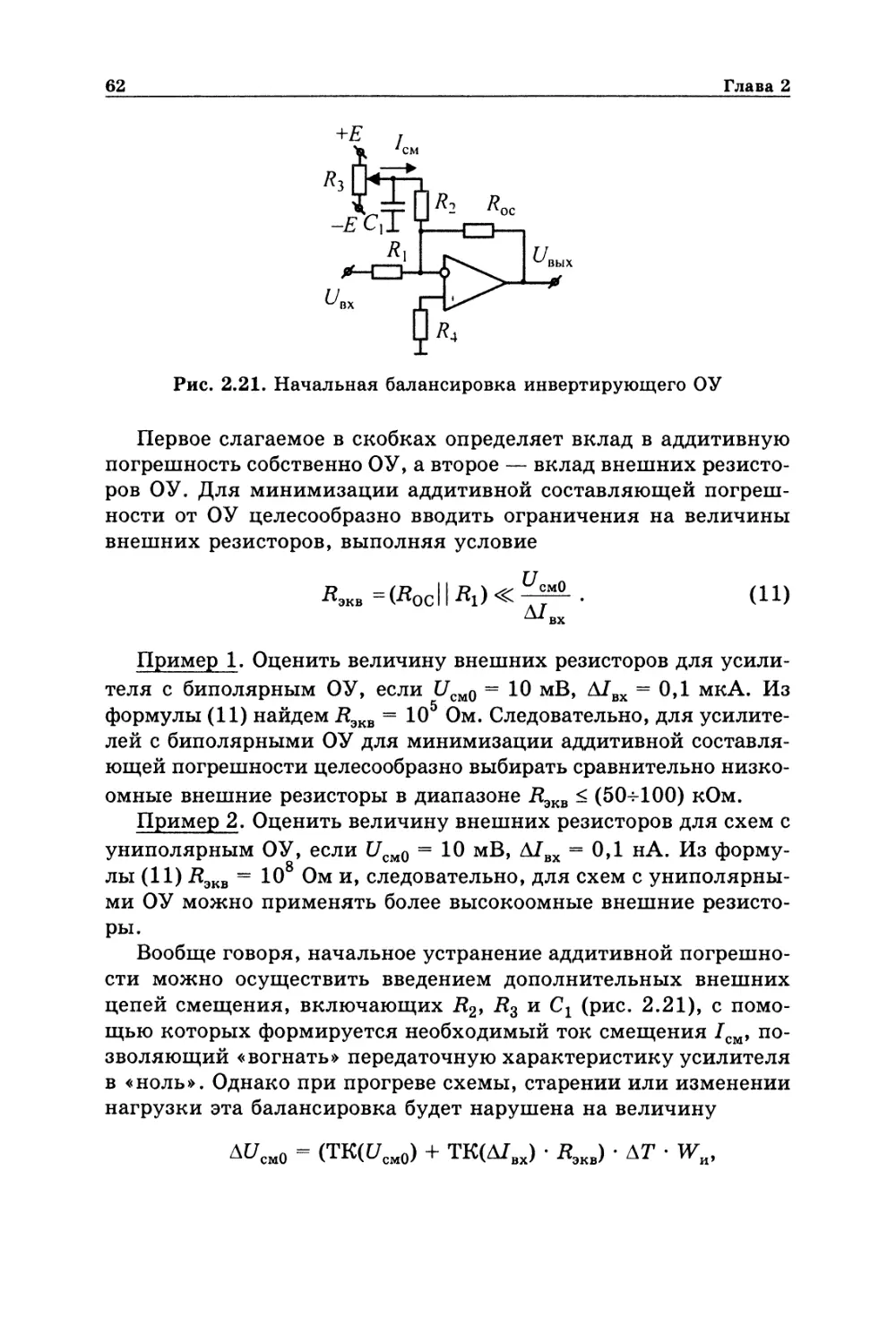
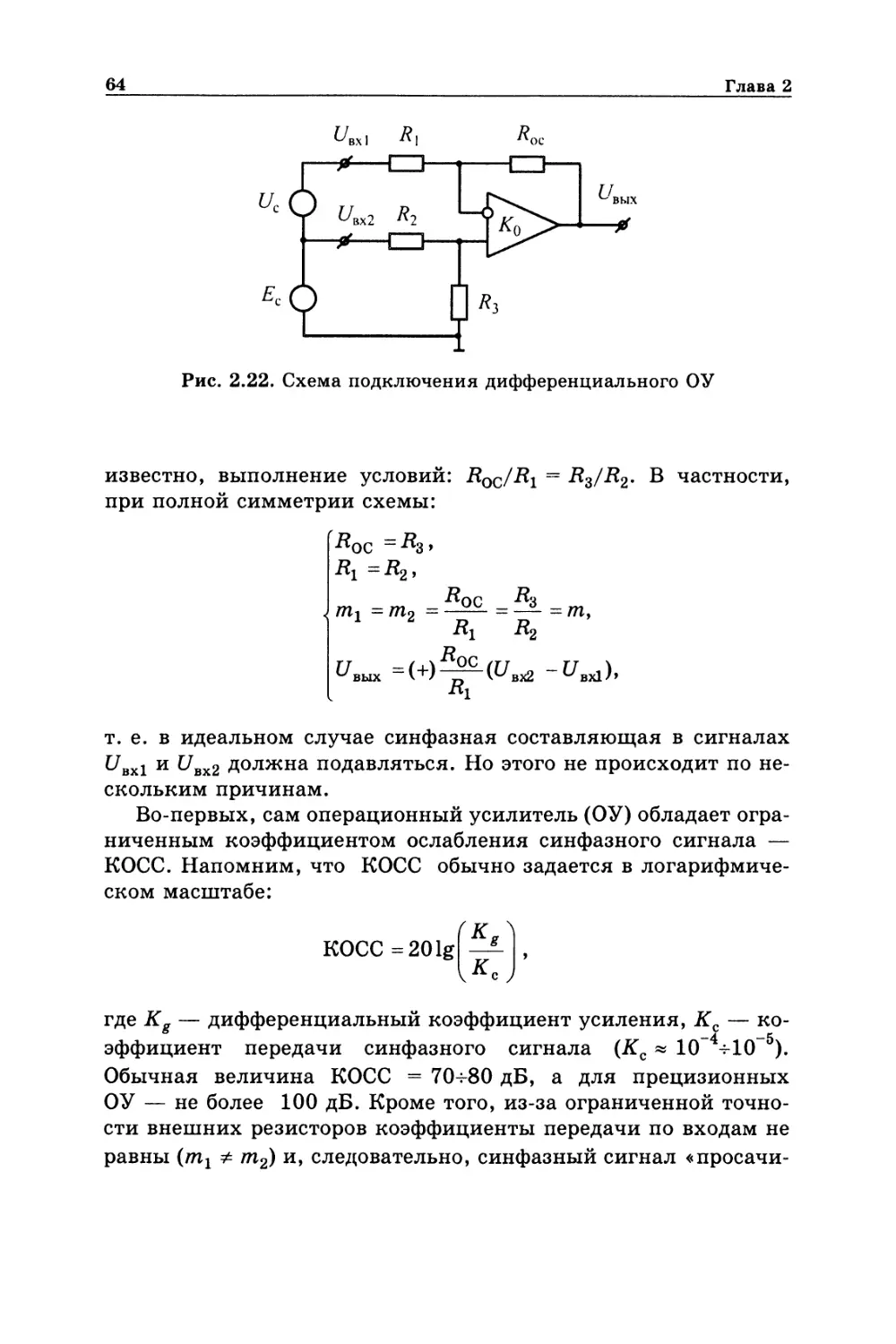
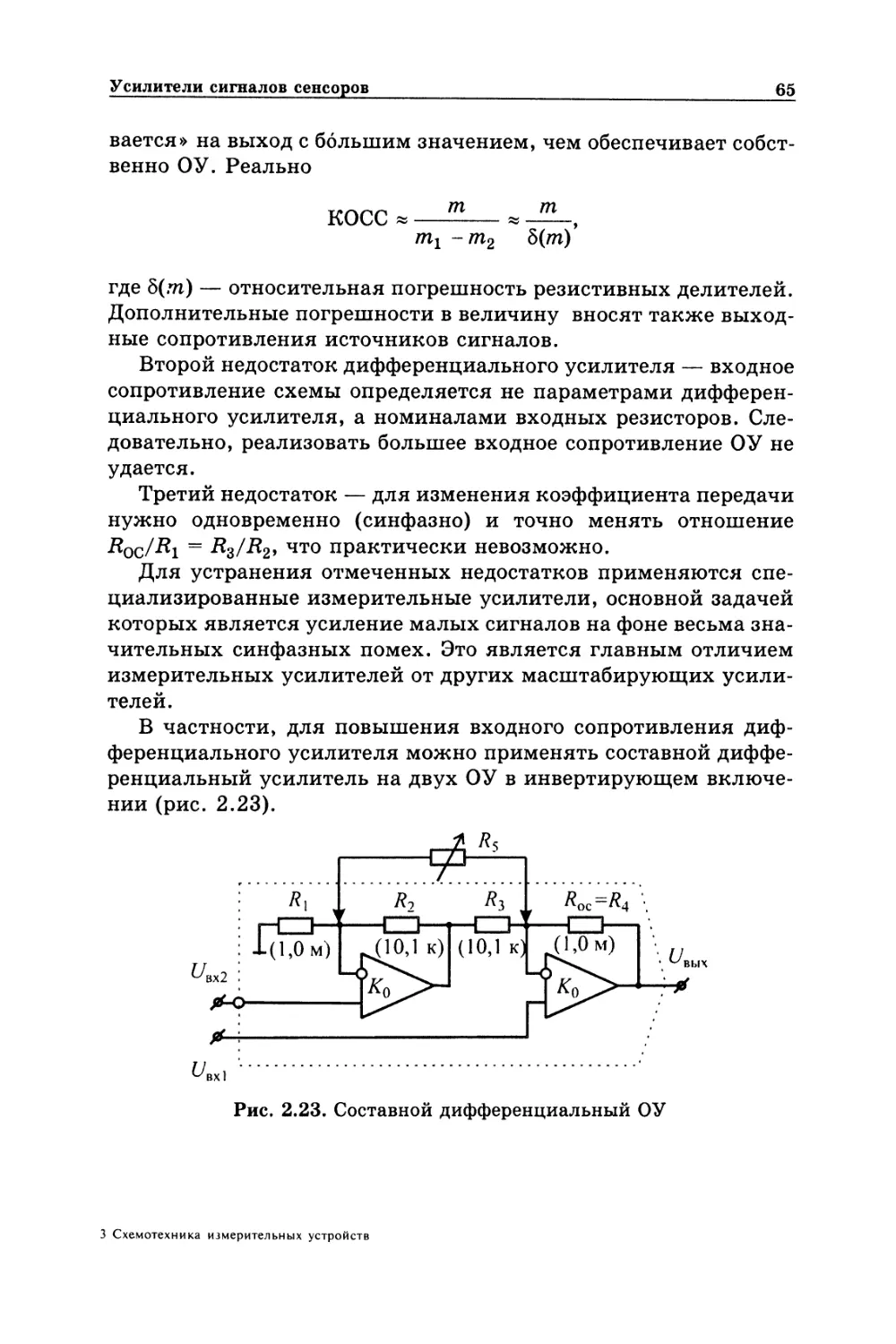
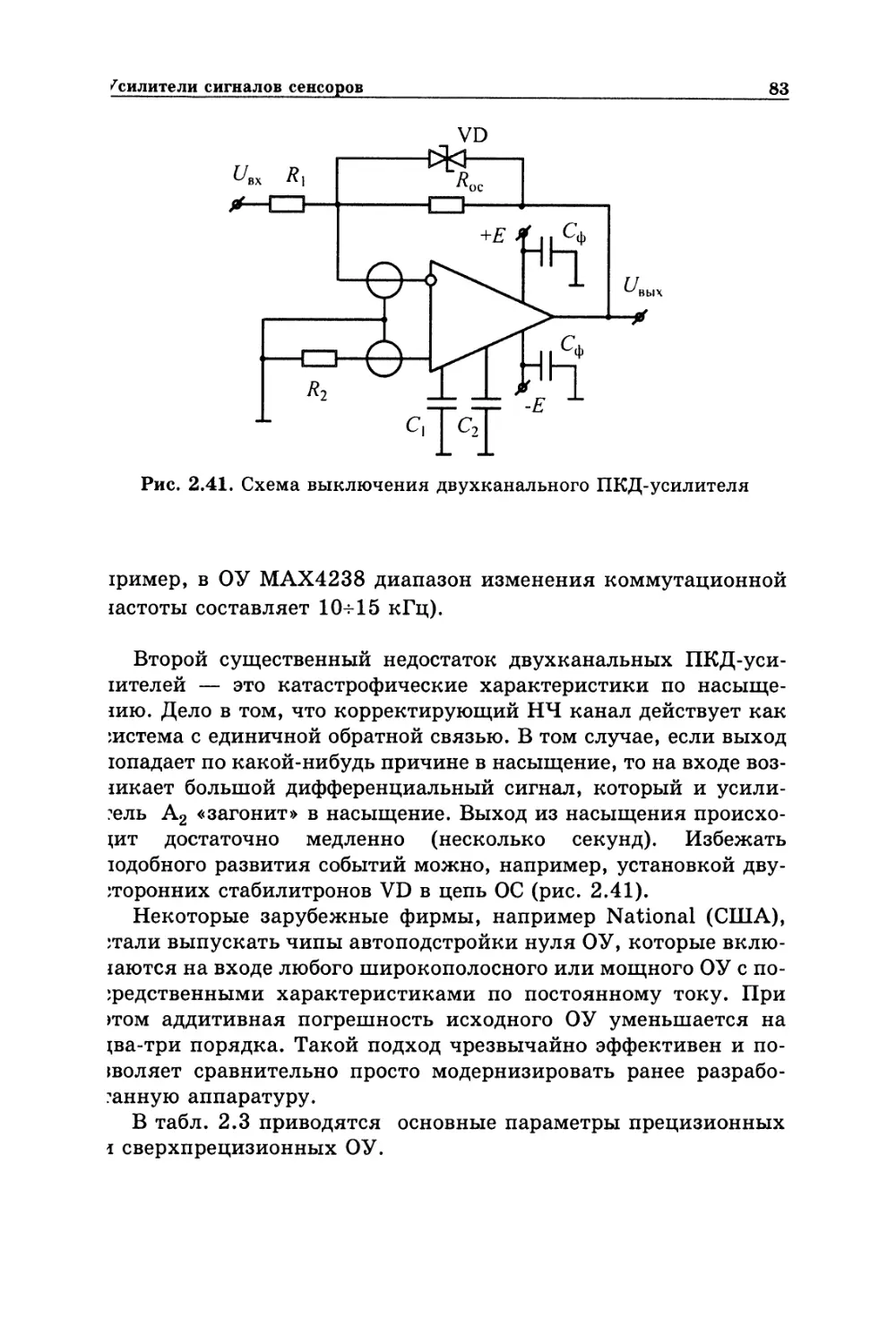
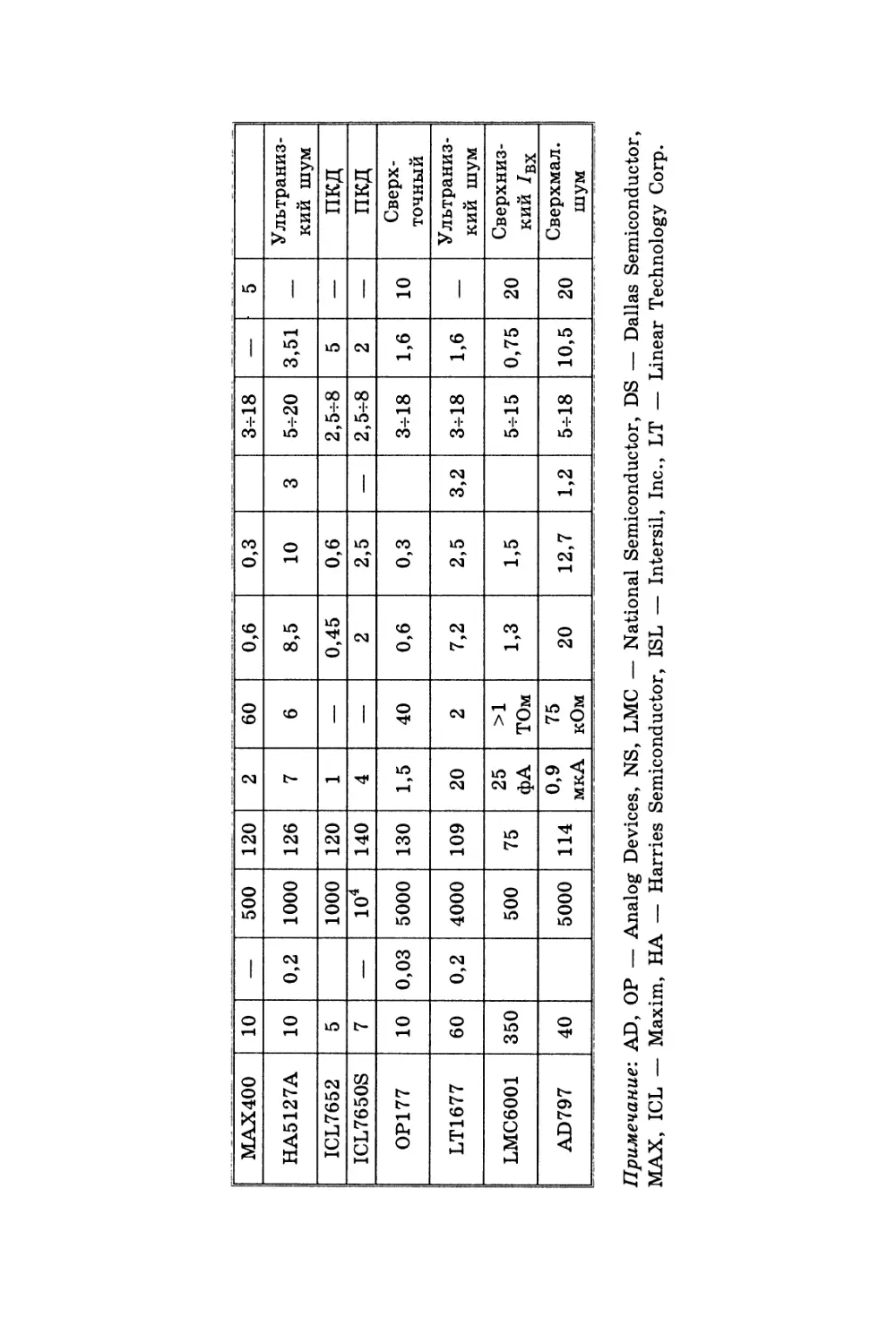
внутренними или внешними нелинейными элементами
каскадов ОУ и может быть аппроксимирована функциональными
зависимостями (рис. 2.20, в).
60
Глава 2
Как правило, мультипликативная и функциональная
погрешности определяются внешними элементами каскадов или
«обвязкой» ОУ. Они в значительной степени зависят от
разработчика усилительных каскадов. В то же время аддитивная
погрешность почти целиком определяется внутренними
свойствами ОУ.
Рассмотрим мультипликативные погрешности. Из теории
погрешностей известно, что, если поведение схемы
(передаточная характеристика) определяется функцией нескольких
переменных
то удобно пользоваться выражением для относительных
погрешностей:
где a,j — параметры схемы, то абсолютная погрешность Ау
определяется рядом Тейлора. С точностью до величин 2-го порядка
малости
где df/ddj — весовые функции или функции чувствительности
к параметру а;, Лау — абсолютная погрешность параметра ау.
В частности, если df/daj = О, то изменение у-го параметра не
вносит погрешности. В теории измерений формула (8) носит
название основной формулы теории чувствительности.
Существует важный частный случай. Если функция у
логарифмируемая, т. е.
Таким образом, вид функции у диктует выбор формулы (8)
или (9) для проведения анализа. В общем случае коэффициент
передачи системы с ООС, как известно, равен
Усилители сигналов сенсоров 61
После разложения в ряд Тейлора для инвертирующей схемы
получим
Таким образом, относительная погрешность определяется
алгебраической суммой погрешностей входной и выходной цепей и
практически не зависит от стабильности коэффициента усиления
ОУ, т. к. последняя уменьшилась в Kfi раз. Например, если
К = 105; р = 0,5; 5(К) = 50 %, то b(W) = 50/(1050,5) = 10~3 %.
С учетом этого обстоятельства (при К$ > 1) можно записать
Например, если Roc изменится на 1%, то Wu тоже изменится
на 1%. Но если погрешности резисторов коррелированы
(например, резисторы выполнены в едином технологическом цикле),
то погрешность коэффициента передачи будет равна нулю. Для
неинвертирующей схемы справедливо аналогичное выражение:
Рассмотрим аддитивную погрешность усилителя, которая
почти целиком определяется внутренними свойствами ОУ.
Аддитивная погрешность инвертирующего ОУ (рис. 2.14),
определяется выражением
Эту погрешность можно несколько уменьшить введением
балансировочного резистора i?4 (рис. 2.21). Если R4 = Roc || Rly то
Так как А/вх < /вх , то аддитивная погрешность будет
несколько уменьшена.
Преобразуем последнюю формулу к виду
62
Глава 2
Рис. 2.21. Начальная балансировка инвертирующего ОУ
Первое слагаемое в скобках определяет вклад в аддитивную
погрешность собственно ОУ, а второе — вклад внешних
резисторов ОУ. Для минимизации аддитивной составляющей
погрешности от ОУ целесообразно вводить ограничения на величины
внешних резисторов, выполняя условие
(И)
Пример 1. Оценить величину внешних резисторов для
усилителя с биполярным ОУ, если Ucm0 = 10 мВ, Д/вх = 0,1 мкА. Из
формулы (11) найдем jR3KB = 10 Ом. Следовательно, для
усилителей с биполярными ОУ для минимизации аддитивной
составляющей погрешности целесообразно выбирать сравнительно низко-
омные внешние резисторы в диапазоне #экв < (50-гЮО) кОм.
Пример 2. Оценить величину внешних резисторов для схем с
униполярным ОУ, если Ucm0 = 10 мВ, Д/вх = 0,1 нА. Из
формулы (11) Яэкв = 108 Ом и, следовательно, для схем с
униполярными ОУ можно применять более высокоомные внешние
резисторы.
Вообще говоря, начальное устранение аддитивной
погрешности можно осуществить введением дополнительных внешних
цепей смещения, включающих R2, Щ и Сг (рис. 2.21), с
помощью которых формируется необходимый ток смещения /см,
позволяющий «вогнать» передаточную характеристику усилителя
в «ноль». Однако при прогреве схемы, старении или изменении
нагрузки эта балансировка будет нарушена на величину
Усилители сигналов сенсоров 63
где ТК(£/см0) и ТК(А/ВХ) — температурные коэффициенты
Ucm0 и А/вх. Например, дополнительное смещение на выходе
усилителя при ТК((7см0) = 20 мкВ/°С; ТК(А/ВХ) = 0,01 мкА/°С;
Дэкв = 20 кОм; AT = 50 °С; WH = 10 составит £/см0 = (20 • 10"6 +
+ 10~8 • 20 • 103) • 50 • 10 * 0,1 В.
Проведенный анализ показывает, что аддитивная
погрешность может составлять большую величину. Это наиболее
трудно устранимая погрешность, которая зачастую и определяет
точность работы усилителей сигналов первичных датчиков на
постоянном токе. В связи с этим устранению именно
аддитивной погрешности уделяется наибольшее внимание при
проектировании усилительных каскадов датчиков.
Как известно, для уменьшения погрешностей могут
использоваться два пути:
1. Технологический, связанный с совершенствованием
технологий, ужесточением допусков на элементы схем и т. д. Этот
путь требует больших одномоментных затрат и рассматривается
в соответствующих технологических курсах по
микроэлектронике и проектированию интегральных микросхем.
2. Структурный — уменьшение погрешности достигается
введением некоторой избыточности в схему усилителя.
Структурный подход к уменьшению аддитивной погрешности
реализован, в частности, в инструментальных усилителях,
МДМ-усилителях, двухка.:альных усилителях, ПКД-усилителях и др.,
которые находят повсеместное распространение. Грамотное
применение подобного рода усилителей в
информационно-измерительной технике требует их более детального рассмотрения.
2.4. Разновидности специализированных ОУ
2.4.1. Измерительные усилители
Во многих случаях измерение сигнала £/вх1 проходит на фоне
большой синфазной составляющей Ес. Для ее подавления, как
известно, применяется дифференциальное включение
усилителя (рис. 2.22).
В этом случае измеряемый сигнал прикладывается между
двумя входами. Для того чтобы обеспечить равенство
коэффициентов передачи по обоим входам (т1 = /п2), необходимо, как
64
Глава 2
Рис. 2.22. Схема подключения дифференциального ОУ
известно, выполнение условий: Еос/Кх = R3/R2» В частности,
при полной симметрии схемы:
т. е. в идеальном случае синфазная составляющая в сигналах
UBxl и UBx2 должна подавляться. Но этого не происходит по
нескольким причинам.
Во-первых, сам операционный усилитель (ОУ) обладает
ограниченным коэффициентом ослабления синфазного сигнала —
КОСС. Напомним, что КОСС обычно задается в
логарифмическом масштабе:
где Кв — дифференциальный коэффициент усиления, Кс — ко-
—4 — Ч
эффициент передачи синфазного сигнала (Кс «10 -г 10 ).
Обычная величина КОСС = 70-г80 дБ, а для прецизионных
ОУ — не более 100 дБ. Кроме того, из-за ограниченной
точности внешних резисторов коэффициенты передачи по входам не
равны (т1 Ф т2) и, следовательно, синфазный сигнал «просачи-
Усилители сигналов сенсоров
65
вается» на выход с большим значением, чем обеспечивает
собственно ОУ. Реально
где Ь(гп) — относительная погрешность резистивных делителей.
Дополнительные погрешности в величину вносят также
выходные сопротивления источников сигналов.
Второй недостаток дифференциального усилителя — входное
сопротивление схемы определяется не параметрами
дифференциального усилителя, а номиналами входных резисторов.
Следовательно, реализовать большее входное сопротивление ОУ не
удается.
Третий недостаток — для изменения коэффициента передачи
нужно одновременно (синфазно) и точно менять отношение
Roc/R1 = R3/R2y что практически невозможно.
Для устранения отмеченных недостатков применяются
специализированные измерительные усилители, основной задачей
которых является усиление малых сигналов на фоне весьма
значительных синфазных помех. Это является главным отличием
измерительных усилителей от других масштабирующих
усилителей.
В частности, для повышения входного сопротивления
дифференциального усилителя можно применять составной
дифференциальный усилитель на двух ОУ в инвертирующем
включении (рис. 2.23).
Рис. 2.23. Составной дифференциальный ОУ
3 Схемотехника измерительных устройств
66
Глава 2
В случае выполнения условия
Например, при 5(/п) < 0,1% и т = 99, что соответствует
номиналам, указанным на рис. 2.23, имеем т = 100,
КОСС > 80 дБ. Для еще большего повышения КОСС в схеме
рис. 2.23 один из резисторов (например, Rx) делается
подстраиваемым. Однако составной дифференциальный усилитель имеет
фиксированный коэффициент усиления, настраиваемый в
процессе производства микросхемы. Чтобы избавиться от этого
недостатка, в ряде случаев применяется схема
усовершенствованного составного усилителя (рис. 2.23), в котором вводится
дополнительный регулируемый резистор Rb. Тогда
и возможна регулировка усиления с помощью только одного
резистора jR5. Однако и в составном ОУ КОСС будет определяться
все теми же четырьмя резисторами.
Более высокий КОСС обеспечивает схема измерительного
(инструментального) усилителя на 3-х ОУ (рис. 2.24): на входе
включены повторители Dx и D2, а на выходе дифференциальный
каскад D3 с коэффициентом передачи т = R2/Rv В
измерительном усилителе:
1. Входное сопротивление определяется повторителями Dx и
D2 и поэтому очень велико по обоим входам (RBX « гс). Тем
самым исключается влияние выходных сопротивлений
источников сигналов.
2. Коэффициент подавления синфазного сигнала будет
определяться только выходным дифференциальным каскадом и не
будет зависеть от входных каскадов.
Проанализируем коэффициент передачи в
инструментальном усилителе:
1. Учитывая, что £/д -> 0, имеем
67
2. Соответственно потенциалы точек С и D могут быть
рассчитаны исходя из того, что по ним идет один и тот же ток 10
Свх оу < 'о)- Tor«a
(1)
В свою очередь,
(2)
(3)
Таким образом, коэффициент передачи меняется одним
резистором оси одновременно по двум входам. При интегральном
исполнении характеристики Dx и D2 оказываются в
значительной степени коррелированными, что улучшает параметры
измерительного усилителя — уменьшает суммарное напряжение
смещения нуля Ucm0 и шумы ОУ, стабилизируется отношение
Решая (1) и (2), получим:
68
Глава 2
Щ/Щ = т и> в Целом, увеличивается стабильность
коэффициента передачи. При этом КОСС значительно возрастает и составит
КОСС *20lg(Kg/S(m)) = 201gfl + -1 / 5(m).
Измерительный усилитель выпускается, в основном, в двух
модификациях:
• С выносным резистором aR (рис. 2.24) и с выводами для
подключения внешнего переменного резистора aR. Но
температурные коэффициенты сопротивления (ТКС)
внутреннего и внешнего резисторов оказываются
разными и, следовательно, в диапазоне температур меняется
величина а и общий коэффициент передачи.
• Со встроенными наборами резисторов aR (рис. 2.25).
Замыкая нужную точку делителя с помощью внешней
перемычки, можно реализовать стандартный набор стабильных
коэффициентов передачи К = 1, 10, 100, 1000. Разумеется,
при применении внешнего регулировочного резистора и
некотором ухудшении стабильности можно реализовать и
промежуточные коэффициенты усиления.
Типичные параметры для инструментального усилителя:
Двх = U10 ГОм; <Усм0<0,1мВ; Кос > 120 дБ; ТК(£/см0) =
= (5-^-10) мкВ/°С, частота единичного усиления /т > 10ч-20 МГц,
Рис. 2.25. Инструментальный усилитель
со встроенными резисторами
Усилители сигналов сенсоров
69
коэффициент нелинейных искажений (КНИ) не более 0,005%
(при К = 1). По своим характеристикам лучшие современные
интегральные инструментальные усилители приближаются к
устройствам метрологического уровня.
В табл. 2.2 приведены параметры интегральных
инструментальных усилителей.
2.4.2. Усилители с модуляцией
и демодуляцией сигнала
В усилителях с модуляцией и демодуляцией сигнала
(МДМ-усилителях, рис. 2.26) входной сигнал UBX модулируется
высокой частотой шм в модуляторе (М), усиливается по
переменному току в К раз и синхронно демодулируется в демодуляторе
(ДМ). Далее сигнал С/вых пропускается через фильтр низкой
частоты (ФНЧ). Разделительный конденсатор Ср отражает факт
усиления сигнала по переменному току. Модулятор и
демодулятор являются перемножителями входных и опорных сигналов
(в качестве последних используются сигналы UM и Um).
Рис. 2.26. Структура МДМ-усилителя
Если в соответствии с обозначениями рис. 2.26 положить,
После несложных тригонометрических преобразований
имеем:
и'вых « cos(co1 - сом)*£ - 008(0)! + (0M)'t + sinco^ +
+ sin(2coM - (oxyt + cos(2coM + (oxyt.
Таким образом, в спектре выходного сигнала (рис. 2.27)
имеется информационный сигнал частоты сог и комбинационные
частоты (шм ± о)!), (2сом ± coj).
Таблица 2.2. Параметры интегральных инструментальных усилителей
AD 623/
Analog Device
AD 625
AD 8255
INA 116
INA 118
INA 217
Примечания: 1— 3 ИОУ в корпусе; 2 — 3 широкополосных ИОУ в корпусе; 3 — ИОУ с фиксированным
усилением; 4 — предусмотрен режим ожидания с малым энергопотреблением; 5 — ОУ типа ПКД (3 кГц); 6 —
ИОУ с программируемым усилением; 7 — широкополосный ИОУ с ПТ-входом.
MAX 4197
MAX 4199
MAX 4461
LT 1167
LT 2053
PGA 204
PGA 207
72
Глава 2
Рис. 2.27. Трансформация спектра сигнала МДМ-усилителем
Обычно ом ^> со1тах и, если сигнал с выхода демодулятора
пропустить через ФНЧ с подходящей частотой среза и при
условии, что сом > соср > со1тах, то ивых = ифт * ^sinco^ (т. е.
входной сигнал будет перенесен на несущую частоту сом, усилен и
восстановлен). Поскольку усиление шло на переменном токе,
аддитивная составляющая погрешности ОУ будет подавлена.
Таким образом, МДМ-усилитель принципиально не имеет
аддитивной погрешности.
В первом отечественном интегральном МДМ-усилителе
140УД13 (рис. 2.28) в качестве модулятора используются
двухполюсные двухпозиционные ключи на полевых транзисторах
(SA^, а в качестве демодулятора однополюсный ключ SA2.
В схеме имеется встроенный импульсный генератор, частота
которого устанавливается внешней задающей емкостью С3. К
выходу МДМ на рис. 2.28 подключен простейший ФНЧ —
ЕС-фильтр с соср = 1/т, где т = ДфСф.
Рис. 2.28. Структура МДМ-усилителя 140УД13
Усилители сигналов сенсоров 73
Хотя спектр выходного сигнала при применении
импульсных (в виде меандров) функций модуляции и демодуляции
значительно сложнее (в спектре модулятора и демодулятора
имеются высшие нечетные гармоники), все комбинационные
частоты будут находиться в высокочастотной области спектра и
при о)м > wlmax будут подавляться ФНЧ. То есть схема работает
так же, как и схема с гармоническими функциями модуляции.
В то же время применение импульсных модуляторов и
демодуляторов значительно повышает стабильность МДМ.
Для расширения полосы пропускания МДМ-усилителя
необходимо увеличивать несущую частоту юм. Однако при каждом
такте коммутации МОП-ключей через паразитные емкости
«затвор-канал» в информационный канал переносится
паразитный заряд. Чем выше частота модуляции, тем больше
паразитный заряд. Поэтому компромиссное решение, соответствующее
современному уровню технологии, определяет частоту
коммутации на уровне 1 кГц. Таким образом, полоса пропускания
МДМ-усилителя реально не превосходит 50ч-100 Гц.
Вследствие переноса заряда из цепей управления реальные
параметры МДМ-усилителей отличаются от идеальных.
Например, для 140УД13 Ucm0 < 20 мкВ, ТК(С/см0) < 0,5 мкВ/°С, что,
впрочем, на несколько порядков лучше, чем у ОУ широкого
применения. Этот усилитель — единственный в мире
монолитный МДМ-усилитель.
Некоторый недостаток 140УД13 — небольшой коэффициент
усиления в разомкнутом состоянии (К < 20). Для устранения
этого недостатка применяют составные ОУ, в которых в
качестве первого каскада применяются МДМ-усилители с
коэффициентом усиления Кif а в качестве второго каскада —
широкополосный усилитель с коэффициентом усиления К2, причем
К2 « Кг (рис. 2.29).
В составном ОУ суммарный коэффициент усиления Kz = КХК2>
тогда
и, следовательно, вклад второго ОУ в аддитивную погрешность
уменьшится в Кх раз. Составной МДМ-усилитель в разомкнутом
варианте может использоваться и в качестве сверхпрецизионно-
74
Глава 2
го компаратора. На рис. 2.30 приводится вариант
сверхпрецизионного составного усилителя, у которого каскад МДМ имеет
коэффициент усиления равный произведению КгК2, а в
качестве ФНЧ используется интегратор.
Я.
ип
Рис. 2.30. Сверхпрецизионный ОУ с входным МДМ-усилителем
и активным ФНЧ
Иными словами, наличие МДМ-усилителя позволяет строить
схемы сверхпрецизионного уровня. Тем не менее, основной
недостаток МДМ-усилителя, связанный с низкой полосой
пропускания, остается. Чтобы устранить этот недостаток, применяют
двухканальные ОУ.
2.4.3. Двухканальные ОУ
Двухканальные усилители (рис. 2.31) содержат 2 канала
усиления — высокочастотный (УВЧ) и низкочастотный (УНЧ)
каналы с коэффициентами усиления Кх и К2 соответственно,
схему суммирования и широкополосный усилитель с
коэффициентом усиления К3.
Рис. 2.29. Составной прецизионный ОУ
Усилители сигналов сенсоров
75
Рис. 2.31. Структура двухканального ОУ
Есть две основные модификации двухканального ОУ:
1. Схема Гольдберга, в которой Кх « 1 и К1 <С К2* Тогда в
НЧ-области
Таким образом, такой двухканальный усилитель имеет
пониженное Ucm0, которое будет приближаться к Ucm02. И если в
качестве УНЧ взять МДМ-усилитель, то получим
прецизионный усилитель с расширенной полосой пропускания. Однако
схема Гольдберга обладает неравномерной АЧХ, поскольку
в низкочастотной области усиление будет пропорционально
К% » К2 *К3, а в высокочастотной — Къ « Кг *К3.
2. Схема Баккерфильда, в которой Кг « К2 = К, Аналогично
предыдущему
В этой схеме выигрыш может быть только в том случае, если
усилитель Кг сделать усилителем переменного тока и тем
самым устранить Ucm0. Однако точно сопрячь частоты среза
низкочастотного и высокочастотного канала не удается, поэтому и
в схеме Баккерфильда АЧХ неравномерна.
Практическая реализация двухканального ОУ требует
определенного схемотехнического искусства. Схема двухканального
ОУ, в котором удается расширить полосу пропускания за счет
введения второго канала, приведена на рис. 2.32.
76
Глава 2
Рис. 2.32. Схема двухканального усилителя на двух ОУ
В схеме в качестве 1-го каскада (Ах) используется
МДМ-усилитель в режиме интегратора тока. 2-ой каскад (А2) —
широкополосный усилитель, который усиливает сигнал как по неин-
вертирующему входу с выхода Аг (по постоянному току), так и
по переменному току через конденсатор С2.
В области низкой частоты эта схема может быть
преобразована (учитывается, что мы имеем разрыв в цепи по постоянному
току) в соответствии с рис. 2.33. Следовательно, на постоянном
токе напряжение смещения нуля составит
Напротив, в области высоких частот интегратор не усиливает
сигнал (из цепи Аг сигнал не поступает), С2 представляет собой
Рис. 2.33. Эквивалентная схема ОУ в области НЧ
Усилители сигналов сенсоров
77
КЗ по переменному току (рис. 2.34), а полоса пропускания
будет определяться полосой пропускания А2.
Рис. 2.34. Эквивалентная схема ОУ в области ВЧ
Сложность применения двухканальных ОУ заключается в том,
что на практике не удается точно сопрягать частоты среза
низкочастотных и высокочастотных каналов, что вызывает
неравномерность АЧХ (рис. 2.35). В схеме рис. 2.35, например, сонч =
= 1/тнч = 1/(RCX • Кг), совч = 1/ДС2. При Кх = 10, R = 100 кОм,
ci = с2 = ОД мкф имеем тнч = 100 • 103 • 0,1 • 10"6 • 10 = 0,1 с.
Итак, общий недостаток двухканальных ОУ состоит в
неравномерности АЧХ. Более усовершенствованными являются
схемы с периодической компенсацией дрейфа нуля (ПКД-усилите-
ли).
Рис. 2.35. Диаграммы Боде двухканального ОУ
78
Глава 2
2.4.4. Усилители с периодической компенсацией
дрейфа нуля (ПКД-усилители)
В работе ПКД-усилителей можно выделить 2 такта:
• Служебный такт, в течение которого схема выделяет и
запоминает напряжение смещения нуля ОУ.
• Рабочий такт, в течение которого усиливается входной
сигнал и одновременно осуществляется коррекция
напряжения смещения нуля ОУ.
Для осуществления этих операций в простейшем случае в
схему инвертирующего ОУ вводится дополнительная емкость С0
и два синхронных ключа, SA^ и SA1_2. Ключи коммутируются
импульсами тактовой частоты /к (рис. 2.36).
Рис. 2.36. Структура простейшего ПКД-усилителя
Когда ключи замкнуты, то на емкости С0 выделяется
напряжение смещения нуля, а сигнал UBX не усиливается. При
размыкании ключей выделенное на емкости С0 напряжение смещения
нуля (Ucm0) оказывается включенным встречно с входным
сигналом и вычитается из него, тем самым осуществляется
периодическая оперативная коррекция Ucm0. Период этой коррекции
определяется периодом коммутационной частоты /к (рис. 2.37).
Простейшая схема ПКД-усилителя хорошо подходит для
работы измерительных систем в многоканальном режиме, когда
существуют моменты времени, в которых сигнал не передается
на вход АЦП. Постоянная заряда С0 определяется как
т3 = 2гкл • С0, где гкл — сопротивление ключей SA. Если 83 —
погрешность заряда емкости (установки Ucyi0), то при
экспоненциальном заряде С0 длительность импульса Ги составит
Усилители сигналов сенсоров
79
Рис. 2.37. Временные диаграммы работы ПКД-усилителя
Пример: Для гкл = 100 Ом, С0 = 100 пФ, 53 = 0,1 получим
Ти < 46 не.
В режиме хранения (7см0 сигнал усиливается, емкость С0
медленно разряжается за счет паразитных токов. Разряд емкости
определяется соотношением
Задаваясь допустимой относительной величиной разряда
емкости 5D (AU = 5D • Ucm0)> получим:
где 1Ъ — все, что разряжает конденсатор. Тогда:
80
Глава 2
Пример: Для 1Ъ = 0,01 мкА, 5р = 0,1, £/см0 = 2 мВ получим
Тк < 2 мкс и скважность импульсов коммутации в
рассмотренном примере составит не менее 40.
Таким образом, реально Гк > Ги и в выходном сигнале будут
наблюдаться лишь короткие просечки (рис. 2.37, б). Для того
чтобы убрать просечки в выходном сигнале, его необходимо
фильтровать (например, с помощью ФНЧ). Во многих случаях в
качестве ФНЧ можно использовать схему выборки и хранения
(СВХ). Тогда схема будет состоять из последовательно
включенных ПКД-усилителя и СВХ (рис. 2.38).
Рис. 2.38. Фильтрация просечек с помощью СВХ
Классическая СВХ (рис. 2.38) содержит ключ SA,
запоминающую емкость С0 и повторитель на А2. В работе такой схемы
есть 2 этапа:
• Выборка, когда ключ SA замыкается и выходное
напряжение ПКД-усилителя С/вых запоминается на С0.
• Хранение, когда ключ SA размыкается и напряжение
[/вых продолжает транслироваться на выход повторителя.
При этом С0 медленно разряжается за счет паразитных
токов утечки. Вид выходного сигнала показан на
рис. 2.37, е. В этом случае справедливы все соотношения
для заряда и разряда емкости, которые выводились ранее.
Из-за своих свойств фильтровать синхронные
импульсные помехи СВХ часто называют «идеальным» ФНЧ.
Функциональная схема сверхпрецизионного ПКД-усилителя
ОРА-404 приводится на рис. 2.39. Усилитель Ах включен по
схеме инвертора с фиксированным коэффициентом передачи,
равным 10, а А2 как интегратор. Когда ключи SAX и SA2
находятся в положении 2, напряжение £/см0 выделяется на емкости
С0 и за счет ООС Ах корректируется в «ноль». В
противоположном положении ключей А2 переводится в режим СВХ, а входной
сигнал усиливается с коэффициентом W = RQC/RX = 10.
Усилители сигналов сенсоров
81
Рис. 2.39. Функциональная схема ПКД-усилителя ОРА-404
Параметры ОРА-404: Ucm0 < 1 мкВ, ТК(С/см0) < 0,05 мкВ/°С,
временной дрейф £/см0 < 1 мкВ/сутки, постоянная времени
интегратора 0,1 с, но время выхода на режим после подачи
питания составляет несколько секунд.
Существуют еще более продвинутые схемы ПКД-усилителей,
в которых просечки устраняются принципиально (рис. 2.40).
При построении таких схем вновь используется идея двухка-
нальности (см. п. 2.4.3). В основном канале находится
широкополосный усилитель Ах, который никогда не отключается от
входа, а на усилителе А2 реализуется канал коррекции. В
работе схемы можно выделить 2 этапа:
• Когда ключи SA находятся в 1-й позиции, на С2
выделяется напряжение смещения нуля усилителя А2 и он
корректируется в ноль.
Рис. 2.40. Структура двухканального ПКД-усилителя
82
Глава 2
• Когда ключи перебрасываются во вторую позицию, то
к входу усилителя А2 оказывается приложенным
напряжение смещения нуля первого ОУ и корректирующее
напряжение смещения нуля А2. В результате на Сг
выделяется напряжение смещения нуля первого ОУ,
которое скорректирует основной усилительный канал на Ах.
Достоинство данного ПКД-усилителя: входной сигнал
усиливается непрерывно без просечек. По этой схеме разработаны
сверхпрецизионные широкополосные ОУ, например, отечественный ОУ
140УД24 с параметрами: (7см0 < 5 мкВ, ТК(С7см0) < 0,05 мкВ/°С;
/вх < 10 пА; Кж * 120 дБ; р > 2 В/мкс; fT > 0,8 МГц. По иронии
судьбы двухканальные ПКД-усилители выпускаются по МОП-
технологии, которая на настоящем этапе развития техники
обеспечивает худшие характеристики по постоянному току, чем
биполярная технология.
Таким образом, параметры по постоянному току данного
класса ОУ соответствуют сверхпрецизионным усилителям, а
параметры по переменному току — усилителям широкого
применения. При применении такого класса ОУ для реализации их
характеристик приходится применять некоторые конструктивные
меры, в частности, так называемые токоулавливающие кольца,
хорошую фильтрацию по цепям питания и т. п. (рис. 2.41).
Токоулавливающие кольца соединяются с низкоимпедансной
точкой (землей) схемы и уменьшают (или отводят) токи утечки на
входе операционного усилителя по причине того, что на входах
ОУ существует виртуальный нуль и разность потенциалов между
входами и землей минимальна (так называемая
эквипотенциальная защита).
Тем не менее, при применении ПКД-усилителей следует
учитывать их общий недостаток — повышенный уровень помех,
связанный с работой коммутационных схем, и возможность
появления сигналов паразитных гармоник и субгармоник
коммутационной частоты в выходном сигнале. Впрочем, это не
вызывает особых проблем и приводит лишь к необходимости лучшей
фильтрации выходного сигнала и помех по цепям питания.
В настоящее время выпускаются ПКД-усилители с
пониженным уровнем коммутационного шума и встроенными
конденсаторами Cv C2 (ISL7652, МАХ430, AD8571 и др.). Для
уменьшения уровня коммутационного шума в некоторых моделях
частоту коммутации меняют по псевдослучайному закону (на-
Усилители сигналов сенсоров
83
Рис. 2.41. Схема выключения двухканального ПКД-усилителя
фимер, в ОУ МАХ4238 диапазон изменения коммутационной
тстоты составляет 10^15 кГц).
Второй существенный недостаток двухканальных ПКД-уси-
1ителей — это катастрофические характеристики по насыще-
шю. Дело в том, что корректирующий НЧ канал действует как
система с единичной обратной связью. В том случае, если выход
юпадает по какой-нибудь причине в насыщение, то на входе воз-
шкает большой дифференциальный сигнал, который и усили-
?ель А2 «загонит» в насыщение. Выход из насыщения
происходит достаточно медленно (несколько секунд). Избежать
юдобного развития событий можно, например, установкой
двусторонних стабилитронов VD в цепь ОС (рис. 2.41).
Некоторые зарубежные фирмы, например National (США),
стали выпускать чипы автоподстройки нуля ОУ, которые вклю-
тются на входе любого широкополосного или мощного ОУ с
посредственными характеристиками по постоянному току. При
>том аддитивная погрешность исходного ОУ уменьшается на
^ва-три порядка. Такой подход чрезвычайно эффективен и
позволяет сравнительно просто модернизировать ранее
разработанную аппаратуру.
В табл. 2.3 приводятся основные параметры прецизионных
i сверхпрецизионных ОУ.
Таблица 2.3. Основные параметры прецизионных и сверхпрецизионных ОУ
140УД17
К544УД12
ОРА77
140УД13
1417УД13
140УД21/
НА2900
140УД24
ISL76500
140УД25
140УД26
ОР27/37
Примечание: AD, OP — Analog Devices, NS, LMC — National Semiconductor, DS — Dallas Semiconductor,
MAX, ICL — Maxim, HA — Harries Semiconductor, ISL — Intersil, Inc., LT — Linear Technology Corp.
MAX400~j
HA5127A
ICL7652 "1
ICL7650S "I
OP177
LT1677
LMC6001
AD797
86
Глава 2
2.4.5. Программируемые ОУ
Вульгарное понимание программируемых ОУ (ПОУ)
включает:
Дискретное изменение коэффициента передачи за счет
коммутации Яос по десятичному или двоичному закону.
Включение или выключение высокоимпедансного
состояния на выходе ОУ для снижения энергопотребления.
Переключение коммутатора на входе/выходе ОУ в
многоканальных усилителях, АЦП/ЦАП и т. п.
Напротив, идея ПОУ состоит в том, чтобы дать разработчику
возможность перестроить характеристики ОУ под конкретное
применение (т. е. чтобы оптимизировать характеристики для
конкретных условий).
Обычно ОУ широкого применения представляют собой
компромисс характеристик по постоянному и переменному току.
Улучшение одних характеристик, как правило, ухудшает
другие. Рассмотрим простейший дифференциальный каскад
(рис. 2.42) на согласованной дифпаре VT14-VT2. Как известно,
режим работы дифкаскада зависит от тока /0. В частности,
показано, что
Рис. 2.42. Биполярный дифкаскад
Усилители сигналов сенсоров 87
Таким образом, если управлять током /0, то можно в
достаточно широких пределах перестраивать характеристики ОУ.
Подобная идея и была реализована в первом отечественном
ПОУ 140УД12. Для этого в ОУ выводится наружу точка А, а 10
задается различными способами, в простейшем случае с
помощью диода VD и резистора Rx (рис. 2.43). Подбирая резистор Rv
перестраиваем ток /01 и характеристики ОУ. Диод VD
используется в качестве защиты от переполюсовки питания. Более
качественные источники управляющего тока 10 можно
сформировать на эмиттерном (VTX) и истоковом (VT2) повторителях
(рис. 2.43).
Рис. 2.43. Способы задания 10
В табл. 2.4 приводятся характеристики ПОУ 140УД12 в двух
режимах, отличающихся током /0 и напряжением питания Е.
Таблица 2.4
88
Глава 2
Применение ПОУ позволяет:
1) Существенно уменьшить номенклатуру применяемых ОУ
при построении аппаратуры.
2) Минимизировать шумовые составляющие в выходном
сигнале путем согласования RBX ОУ с RBMX датчика.
3) С помощью ПОУ можно создавать схемы с уникальными
характеристиками. Для примера рассмотрим СВХ на ПОУ
(рис. 2.44).
Рис. 2.44. Структура СВХ на ПОУ
На Ах реализуется входной буфер, который развязывает
вход/выход и обеспечивает быстрый заряд С0 в режиме выборки
(ключ SA — замкнут). Во время выборки также включен
транзистор VT, при этом за счет 102 возрастает /0, и в А2 реализуется
максимальное быстродействие. Т. е. £/вых на А2 устанавливается
с максимально возможной скоростью, и, следовательно, режим
выборки осуществляется за минимально возможное время.
В режиме хранения ключ SA и VT размыкаются, /0 = /01.
При этом резко возрастает RBX ОУ, уменьшается /вх ОУ и
осуществляется качественное хранение выбранного напряжения.
Таким образом:
1) В режиме выборки: 10 = /01 + 102 « 102 (^02 ^ ^oi) •
2) В режиме хранения: 10 = /01 = /oimin-
Серии микросхем, в составе которых есть ПОУ: 1032, 1401,
1407, 5005, 153.
2.4.6. Токоразностные ОУ (усилители Нортона)
Токоразностные усилители (ТОУ) спроектированы
специально для однополярного питания и используются в основном для
усиления сигналов переменного тока. В отличие от классиче-
Усилители сигналов сенсоров 89
ских ОУ они усиливают не дифференциальную разность
напряжений, а разность входных токов.
ТОУ (рис. 2.45) имеет два токовых входа: (1_, /+) с
дифференциальной парой транзисторов VTX, VT2, включенных по
схеме токового зеркала.
Рис. 2.45. Входные и выходные каскады ТОУ
Следовательно, транзисторы находятся в одинаковом
режиме и 1к2 = /+. Тогда в обозначениях рис. 2.45:
hs ==I-- 1к2 = 1--1+ = А/вх,
auk3 = мвх • р • як,
иъых = т • AUk3 = т • А/вх • (3 • Дк,
где /п — коэффициент передачи промежуточных каскадов ОУ,
Р — коэффициент передачи тока базы транзистора. Таким
образом, усиливается разность входных токов А/вх. Часто /+
называют зеркальным током: 1+ = 13. Условное обозначения ТОУ
приведено на рис. 2.46. Этот усилитель схемотехнически проще,
чем классические, следовательно, степень интеграции выше, а
стоимость ниже. Серийные ТОУ содержат 4 ОУ в одном корпусе.
Но эти ОУ, повторим, имеют усеченные технические
возможности и применяются, в основном, в цепях переменного тока.
При построении схемы на ТОУ необходимо учитывать его
особенности:
1) Зависимость коэффициента отражения токового зеркала
Котр от режима и температуры (рис. 2.47). Для простого токово-
90
Глава 2
Рис. 2.46. Условное
обозначение ТОУ
Рабочий диапазон /3
Рис. 2.47. Зависимость коэффициента
отражения от режима
го зеркала Яотр = 1к2/13 = р • /б/(р + 2) • /б * 1 - 2/р и
транзисторы следует выбирать с тонкой базой (у так называемых су-
пер-р транзисторов величина Р достигает нескольких тысяч).
В случае применения сложных токовых зеркал
Котр « 1 - 2/р2 и требования к транзисторам могут быть
снижены.
2) Необходимость обеспечивать режим работы входных
каскадов по постоянному току.
3) Наличие на входе ТОУ напряжения £/бэ. Это равносильно
тому, что входные каскады всегда работают под небольшим
синфазным сигналом (-0,7 В) и, следовательно, имеют меньшую
точность.
Вследствие рассмотренных причин электрические
параметры ТОУ по постоянному току несколько хуже, чем у
классических ОУ. Типичные параметры серийных ТОУ:
К0 > 3 • 104, /8 * 10+100 мкА, /т * 2,5+3,5 МГц,
Ucm0 * 5+10 мВ, Е = 3+30 В.
Основная схема включения ТОУ — инвертирующий
усилитель по переменному току (рис. 2.48). В инвертирующем
включении ТОУ любое приращение входного тока во входной цепи
может компенсироваться только по цепи ОС, т. е.
Усилители сигналов сенсоров
91
Рис. 2.48. Инвертирующее включение ТОУ
Следовательно, коэффициент передачи такой схемы в полосе
пропускания совпадает с классическим выражением:
Режим работы входных каскадов ТОУ задается зеркальным
током 13 = (Е - ибэ)/Щ. Для того чтобы рассчитать ток /ос,
необходимо задать рабочую точку выходного каскада. В
большинстве случаев рабочая точка выходного каскада для обеспечения
максимального динамического диапазона по выходу (±Е/2)
задается в середине диапазона питания 17вых0 = Е/2. Тогда
Учитывая приведенные соотношения, получим: Дос « 0,5#3.
Пример: Необходимо рассчитать все компоненты
инвертирующей схемы ТОУ при Е = +5 В, Дн = 10 кОм, \W\ = 20,
/н > 100 Гц. Рекомендуемый по паспорту ТОУ зеркальный ток
13 = 5-гЮО мкА.
Рассмотрим методику расчета.
1) С учетом рис. 2.48 и нагрузочной способности
предыдущего каскада задаемся зеркальным током, например, выбираем
L = 10 мкА.
2) Рассчитываем Щ =
92
Глава 2
3) При (Увых0 = Е/2 рассчитываем Дос: Дос =
5) Расчет разделительных емкостей для входной цепи:
хх = C1Rl = 1/(2л/н), где /н — нижняя частота в спектре
сигнала. Тогда Cj >
6) Аналогично для выходной цепи т2 = CURU > l/(2nfu). Так
как Дн « Дх, получаем Сн « 0,15 мкФ.
Помимо инвертирующей схемы ТОУ может использоваться и
как неинвертирующий усилитель (рис. 2.49).
Рис. 2.49. Неинвертирующее включение ТОУ
Как и в предыдущей схеме, если рабочая точка по выходу
£/вых0 = Е/2, а рабочая точка по входу — 13 = (Е - С/бэ)/Д3, то
в схеме рис. 2.49 13 = /ос, Дос = 0,5 Д3, Л£/вх = Л/вх • Д1#
Приращение Д/вх компенсируется по цепи ОС, следовательно,
А17вых = А10С • Дос; А/вх = AUBX/RX. Учитывая вышеприведенные
соотношения, получаем:
w = лос/лх.
Таким образом, коэффициент усиления в неинвертирующей
схеме ТОУ принципиально отличается от классического варианта.
Упражнение. Нарисовать и рассчитать схему
дифференциального включения ТОУ.
Усилители сигналов сенсоров 93
Как известно, фильтрация является одной из базовых
операций при обработке сигналов, где ТОУ с успехом используются
при построении звеньев ARC-фильтров. Как известно, методы
построения ARC-фильтров чрезвычайно многообразны. Любые
из них имеют плюсы и минусы. Например, популярные
ARC-фильтры 2-го порядка с многопетлевой ОС (а также и
другие фильтры на одном ОУ) не позволяют реализовать
добротность больше 10, а коэффициенты чувствительности к
изменению параметров элементов оказываются достаточно большими.
С этой точки зрения, предпочитают ARC-фильтры на основе
метода переменных состояния. В этом фильтре (рис. 2.50)
решается дифференциальное уравнение второго порядка на
интеграторах, методом понижения порядка производных.
Рис. 2.50. Универсальный ARC-фильтр 2-го порядка
на основе метода переменных состояния
Минимальная конфигурация ARC-фильтра 2-го порядка
содержит уже три ОУ (А1-А3), два из них в режиме интеграторов.
Такой фильтр является универсальным звеном 2-го порядка и
имеет соответственно выходы ФВЧ, ПФ (полосовой фильтр) и
ФНЧ. При добавлении А4 может быть реализован режекторный
фильтр (РФ) или фильтр-пробка на частоте со0. Резонансная
частота со0 и добротность Q фильтра рассчитываются по формулам
94
Глава 2
где тх = Rx • Cl9 т2 = R2 ' С2. Обычно в схеме Сх = С2 = С,
Лх = i?2 = ^> ^5 = -^6» т1 = т2 = т и тогда справедливы
достаточно простые соотношения:
Таким образом, в данном фильтре может осуществляться
независимая настройка со0 и Q. Фильтры на основе метода
переменных состояния широко применяются благодаря
устойчивости, легкости регулировки и низкой чувствительности к
изменению параметров резисторов и конденсаторов
(коэффициент чувствительности для любого элемента схемы не превышает
0,5). Наравне с так называемыми биквадратными фильтрами,
реализуемыми также на 3-х ОУ, это наиболее удачные схемы
для реализации ARC-фильтров с добротностью Q « 50-г100. Они
выпускаются в виде ИМС со всеми встроенными элементами и
связями за исключением Rx = R2, -R3 и i?4.
ТОУ также можно использовать для построения
компараторов прямого усиления и схем согласования (рис. 2.51). Момент
переброса компаратора (£/пор на рис. 2.51, б) определяется,
когда знак Д/вх (sign А/вх = sign(/_ - /+)) меняется на
противоположный, т. е. моменту переброса соответствует равенство
Рис. 2.51. Компаратор прямого усиления на ТОУ:
а — схема, б — передаточная характеристика
Усилители сигналов сенсоров 95
Выражая 13 и /вх через параметры схемы, имеем
а б
Рис. 2.52. Триггер Шмитта на ТОУ:
а — функциональная схема, б — передаточная характеристика
Компаратор как и любая схема с положительной ОС, как
известно, может находиться в двух устойчивых состояниях,
соответствующих логическому «О» или логической «1» (£/вых = О-Н-22).
Момент переброса компаратора определяется моментом смены
Величина переходной области на передаточной
характеристике зависит от коэффициента усиления ТОУ К0 и очень мала.
При К0 = 2 • 104 имеем AU = Е/К0 = 0,25 мВ.
В рассмотренной схеме входной сигнал должен быть
положительным. Если необходимо работать с разнополярными
входными сигналами, например, гармоническими, то вводят
дополнительные цепи смещения (рис. 2.51, а), которые обеспечат
возможность работы с входными сигналами отрицательной
полярности с некоторыми ограничениями: напряжение на
инвертирующем входе не должно падать менее 0,7 В, чтобы входные
транзисторы ТОУ работали в активной области.
Кроме компараторов прямого усиления на ТОУ также может
быть реализован и компаратор с петлей гистерезиса (триггер
Шмитта). Для этого вводится положительная обратная связь
(рис. 2.52, а).
96
Глава 2
знака разности входных токов ТОУ sign А/вх = sign(/_ - /+). Из
условия баланса входных токов, пренебрегая падением
напряжения на база-эмиттерных переходах входных транзисторов
ТОУ, имеем
Таким образом, схема имеет два порога срабатывания Unl и
Un2, соответствующих различному состоянию на выходе
(рис. 2.52, б). Подставляя в уравнение баланса
соответствующее значение £/вых, получаем
Триггер Шмитта используется для повышения
помехозащищенности и устранения так называемого «дребезга» в
выходных сигналах, когда во входных сигналах присутствует сигнал
помехи (рис. 2.53).
Сигнал
Un]
Сигнал + Помеха
Рис. 2.53. Подавление помех триггером Шмитта:
а — входные сигналы, б — выход компаратора прямого усиления,
в — выход триггера Шмитта
Часто ТОУ используются в схемах согласования уровней
между различными сериями логических элементов, например
между ТТЛ- и МОП-сериями элементов (рис. 2.54).
Усилители сигналов сенсоров
97
Рис. 2.54. Применение ТОУ для согласования
различных серий цифровых ИМС
При расчете схемы согласования необходимо задаться
«зеркальным» током ТОУ, напряжением питания Ег и порогом
срабатывания компаратора (или порогами срабатывания при
использовании триггера Шмитта). Очевидно, что в данном случае
Ег = Е2, & порог срабатывания схемы согласования должен
соответствовать порогу срабатывания ТТЛ (около 1,5 В).
Упражнение. Рассчитать схему согласования МОП-ТТЛ для
Ех = 9 В при амплитуде помехи в 100 мВ.
В заключение отметим, что при использовании ТОУ в
качестве схем согласования уровней цифровых серий ИМС
необходимо учитывать их сравнительно невысокое быстродействие
(задержка распространения находится на уровне 0,1^-0,5 мкс).
2.4.7. Изолирующие ОУ
Изолирующие ОУ применяются для гальванической
развязки между схемами, имеющими различные уровни заземления,
например, между датчиком и схемой обработки информации
(рис. 2.55), где напряжение Ес может достигать нескольких
сотен и тысяч вольт, будучи приложено к изолирующему барьеру.
Применение изолирующих ОУ обязательно в медицинской
аппаратуре.
Обычно используют 3 типа гальванической развязки:
1) трансформаторную;
2) оптоэлектронную;
3) емкостную.
4 Схемотехника измерительных устройств
98
Глава 2
Изолирующий барьер
Схема
обработки
информации
Изолирующий ОУ
Рис. 2.55. Структура и схема подключения изолирующего ОУ
В наиболее точных изолирующих ОУ используют
трансформаторную развязку и трансформаторный изолирующий ОУ.
Такие усилители содержат два канала: информационный и
энергетический (рис. 2.56). Информационный канал строится по
схеме МДМ-усилителя и содержит входной дифусилитель Ах,
модулятор, изолирующий импульсный трансформатор Трх,
демодулятор и выходной буферный повторитель на А2.
Энергетический канал может быть двухпортовым и трехпортовым.
Рассмотрим трехпортовый энергетический канал, в котором
силовой источник питания Еп изолирован от входных цепей
датчика и схемы обработки информации с помощью
малогабаритных импульсных трансформаторов Тр2 и Тр3.
Импульсный генератор (G) служит для создания несущей
частоты /н. Эта же частота fu с обмоток трансформатора Тр2 и Тр3
используется для синхронной модуляции и демодуляции
информационного сигнала. Блок питания Ег, включающий
выпрямитель, стабилизатор и ФНЧ (на рис. 2.56 не показаны),
служит для запитки усилителя А1э модулятора (Мод) и датчика.
Блок питания Е2 служит для запитки усилителя А2,
демодулятора (ДМ) и схемы обработки информации.
Полоса пропускания МДМ-ОУ обычно много меньше, чем
несущая частота (f^^ «С /н). В свою очередь, несущая частота сверху
ограничивается свойствами импульсных трансформаторов.
Реально fH = 20-ь100 кГц, следовательно, полоса пропускания
определяется несущей частотой и составляет / х = 4-ь20 кГц.
99
Рис. 2.56. Трансформаторный трехпортовый изолирующий ОУ
В силу того, что импульсные трансформаторы являются
моточными изделиями, такие усилители являются гибридными
схемами, имеют достаточно большие размеры (50x15x6 мм) и
дороги. Типичные параметры гибридных изолирующих ОУ
(AD202, AD215): пробивное напряжение £/проб > 1,5-ьЗ кВ,
коэффициент нелинейных искажений Кии < 0,05%, температурный
диапазон AT = -40 ч- 4-85 °С, коэффициент передачи К = 1-J-100,
12
потребляемая мощность Р = 25-^75 мВт, RBX > 10 Ом.
В последнее время разработаны технологии изготовления
недорогих печатных трансформаторов на основе многослойных
печатных плат, в которых концентрические проводники
переходят из слоя в слой и служат обмотками трансформаторов.
В платах имеются сквозные отверстия для установки и
закрепления магнитных сердечников. В отличие от традиционных
моточных изделий такие трансформаторы имеют ряд
преимуществ:
• высокую технологичность и низкую стоимость,
• отсутствие каркаса,
• малые габариты и вес,
• высокое сопротивление изоляции,
• хороший теплоотвод.
Усилители сигналов сенсоров
100
Глава 2
Изолирующие усилители с оптоэлектронной развязкой более
технологичны, чем трансформаторные. Простейшая оптоэлект-
ронная развязка между датчиком и схемой обработки
информации может осуществляться с помощью оптопары «светоди-
од-фотодиод», «светодиод-фоторезистор» и т. п. (рис. 2.57).
Изолирующий барьер
Рис. 2.57. Гальваническая развязка на диодной оптопаре
Однако такая схема в измерительных устройствах
практически никогда не используется в силу того, что коэффициент
передачи оптопары в сильной степени зависит от температуры.
Например, коэффициент передачи оптопары «светодиод-фотодиод»
в промышленном диапазоне температур меняется на десятки
процентов. В лучших схемах с термокомпенсацией (например,
при установке терморезистора RT в ОС ОУ) нестабильность
коэффициента передачи может быть снижена только до нескольких
процентов.
Проблему позволяет решить применение дифференциальной
оптопары (рис. 2.58), состоящей из одного светодиода VD3 и
двух согласованных фотодиодов VDX и VD2, причем фотодиод
VDX включен в ОС усилителя Аг.
Дифференциальное включение оптопары позволяет
компенсировать температурную зависимость коэффициента передачи
оптопары. Действительно:
Усилители сигналов сенсоров
101
ИзОЛИруЮЩИЙ /0с ^ос
Рис. 2.58. Гальваническая развязка на дифференциальной оптопаре
Таким образом, выходной сигнал С7ВЫХ за счет включения
VDX в ОС Аг не зависит от коэффициента передачи оптопары, а
полностью определяется стабильностью отношения R^/R^
В ОУ с оптоэлектронной развязкой не нужна несущая частота,
полоса пропускания достигает 100 кГц и более при
17проб > 1,5 кВ и коэффициенте нелинейных искажений
Кни « 0,5^1,0 %. Недостатком схемы является ограниченный
температурный диапазон (Ттах = +85 °С), лимитируемый опто-
парой.
Изолирующие ОУ с емкостной развязкой. В данных ОУ
элементом гальванической развязки служит конденсатор Сх, через
который в схему обработки информации поступают частотные
сигналы fx от первичного датчика (рис. 2.59). Для
преобразования сигналов постоянного тока датчика Ux в частоту в
первичной цепи находится преобразователь «напряжение-частота»
(ПНЧ). На приемном конце частота fx вновь должна быть
преобразована в сигнал постоянного тока. Для достаточно точного
проведения этой операции применяют схемы фазовой авто-
Рис. 2.59. Структура изолирующего ОУ с емкостной развязкой
102
Глава 2
подстройки частоты (ФАПЧ), которые являются
разновидностью следящей системы.
Степень развязки между входом и выходом в схеме
определяется пробивным напряжением Сх (достигает нескольких
киловольт). Точность (около 0,5 %), динамический диапазон по
входу (около 60 дБ) и полоса пропускания определяются
характеристиками ПНЧ и ФАПЧ.
Из краткого рассмотрения изолирующих ОУ с емкостной
развязкой ясно, что это достаточно сложные и дорогие схемы,
хотя все их компоненты имеются или могут быть выполнены в
интегральном исполнении. Достоинством схемы является
расширенный температурный диапазон и возможность реализации
в виде ИМС.
Характеристики некоторых моделей изолирующих
усилителей приведены в табл. 2.5.
2.5. Однополярное питание ОУ
Существует множество практических приложений, в
которых желательна работа ОУ широкого применения от однополяр-
ного питания. Примером таких схем являются схемы с
батарейным питанием — автомобильная электроника, связная
аппаратура и т. п. В классической аналоговой схемотехнике
использование двух симметричных источников питания ±Е
объясняется тем, что их общая точка является стабильной низкоим-
педансной шиной с нулевым потенциалом.
В случае, если источники питания несимметричны, то это
приводит к разбалансировке входных дифференциальных
каскадов, что вызовет дополнительное напряжение смещения
нуля, которое может быть пересчитано через коэффициент
влияния источников питания (КВИП) по формуле
А^смо = КВИП • АЕ, где КВИП = ±(100^300) мкВ/В. Например,
при Е = ±15 В, ЬЕ = ±10%, КВИП = 200 мкВ/В имеем
дополнительное смещение АС/см0 = ±0,3 мВ.
В случае применения однополярного питания для ОУ
широкого применения необходимо искусственно создавать цепи
смещения. Это не вызывает особых трудностей при усилении сигналов
переменного тока (рис. 2.60, а), когда сигнал поступает в схему
через разделительную емкость Свх. В этом случае цепь смещения
состоит из высокоомных резисторов R2 и Rs, чтобы не подгру-
Таблица 2.5. Основные характеристики изолирующих усилителей
АР 204 [
АР 208
АР 210
АР 215
ISO 100 [
ISO 124
ISO 175 I
104
Глава 2
Рис. 2.60. Цепи смещения ОУ: а — с высокоомным делителем,
б — с параметрическим стабилизатором
жать источник сигнала. Потенциал средней точки В выбирается
обычно в середине диапазона выходного напряжения (UB = Е/2).
В области низких частот Аг работает в режиме повторителя,
коэффициент передачи схемы W = 1 и UBblx0 = Е/2. В полосе
пропускания сигнала, когда Хс «/?!, имеем стандартный
инвертирующий усилитель с коэффициентом передачи W = 1 + Roc/R1.
Такая простейшая схема обладает несколькими
недостатками:
1. Свойство ОУ подавлять изменение напряжения питания
АЕ оказывается бесполезным, т. к. любое изменение АЕ
передается в точку В и, следовательно, на выход ОУ.
2. Если ОУ отдает в нагрузку большой ток, то на шине +Е
возникают дополнительные пульсации, которые вновь
передаются в точку Б и на выход ОУ. В результате схема может
перейти в возбужденное состояние. Т. е. эта схема потенциально
неустойчива и при ее конструировании приходится прибегать к
специальным мерам (звездообразные разводки цепей питания,
улучшенная фильтрация цепей питания и т. п. конструктивные
меры), которые, впрочем, могут оказаться не очень
эффективными.
Более эффективны способы задания напряжения смещения в
точку В с помощью параметрических стабилизаторов на
стабилитроне (рис. 2.60, б). Эта схема значительно более устойчива
за счет низкого сопротивления стабилитрона (типичное
динамическое сопротивление стабилитрона гст < 100 Ом при
Усилители сигналов сенсоров
105
1СТ = 3-гЮ мА). Но в этом случае в цепи смещения потребляется
значительная мощность, т. к. нужно задать ток стабилизации
/ст, который может превышать ток потребления самого ОУ.
Хотя нижняя граница полосы пропускания выбором
постоянных времени входных и выходных цепей может быть снижена
до единиц герц, работать на постоянном токе усилитель не
сможет.
Более радикальным способом при однополярном питании
является создание так называемых «расщепленных» источников
питания, в которых формируется виртуальная земля для
последующей симметричной запитки ОУ или схемы обработки
информации. По существу, это дополнительная схема для
формирования виртуальной земли, которая на рис. 2.61 обозначена
значком треугольника.
Рис. 2.61. Расщепленный источник питания на ОУ
Рабочая точка по входу и по выходу в схеме рис. 2.61
задается высокоомным делителем R1-R2. Поскольку ОУ работает в
режиме повторителя, а его выход заземлен, на выходе схемы
формируется симметричное питание ±Е/2. При этом ток,
отдаваемый в нагрузку, определяется выходным каскадом Ах.
Например, в микросхеме TLF2425 ток нагрузки составляет 25
мА в любом направлении.
Другой схемой расщепления питания является схема с
«плавающим» конденсатором Сх (рис. 2.62)._Ключи схемы
находятся под парафазным управлением UK, UK. Когда левые ключи
(SA1.1 и SA1.2) замыкаются, емкость Сх заряжается до +Е.
Когда замыкаются правые ключи (SA2.1 и SA2.2), часть заряда пе-
106
Глава 2
Рис. 2.62. Источник расщепленного Рис> 2.63. Однополярное вклю-
питания на «плавающем» чение ОУ с фотодиодом
конденсаторе
редается с Сх на С2 и происходит переполюсовка напряжения на
С2. За несколько тактов управляющего напряжения емкость С2
заряжается до напряжения -Е.
Достоинство схемы — простота, связанная с наличием четы-
рехканальных ключей со схемой управления в одном корпусе
(например, серия 590). Недостаток схемы — ее маломощность.
Обычно максимальный ток нагрузки /н < 10^20 мА.
При использовании расщепленных источников питания все
проблемы, связанные с цепями смещения, исключаются и,
самое главное, последующие схемы могут работать на постоянном
токе. По этой причине схемы с расщепленным питанием
находят самое широкое распространение в бортовой аппаратуре.
В заключение заметим, что в некоторых случаях входной
сигнал бывает однополярным. В этом случае можно не вводить
ни цепи смещения, ни схемы расщепления питания, а схемы
усиления чрезвычайно упрощаются. Примером такой схемы
является фотометр для усиления однополярных токовых сигналов
от фотодиода VD (рис. 2.63) с 1/вых = /вх • Roc. Подобный
фотометр, работающий на гальванометр, используется, например, в
фотоэкспонометрах.
В то же время напомним, что существуют ОУ, специально
спроектированные для однополярного питания.
Характеристики некоторых из них приводятся в табл. 2.6. К ним, в
частности, относятся токоразностные усилители или усилители
Нортона, рассмотренные в разделе 2.4.6. Диапазон выходных
напряжений ОУ с однополярным питанием обычно
незначительно отличается от напряжения питания, что обозначается
специальным термином «Real-to-Real».
AD823
AD8032B
AD8571
ОР196/
296/
496
TLC2272
TLV2462
МАХ480
140УД66
108
Глава 2
2.6. Шумы усилительных схем
Если смещение нуля и разность входных токов ОУ
определяют предельные возможности ОУ при усилении сигналов
постоянного тока, то шумы определяют разрешающую способность и
чувствительность усилительных схем на переменном токе.
Если взять, например, стандартное инвертирующее
включение ОУ с достаточно большим коэффициентом передачи,
нулевым входным сигналом, а выход подключить к
высокочувствительному входу осциллографа (рис. 2.64, а), то на экране будет
наблюдаться так называемая «шумовая полоса», ограниченная
случайной огибающей с высокочастотным заполнением
(рис. 2.64, б).
Шумовая полоса
Рис. 2.64. Проявление шума ОУ: а — схема измерения шума,
б — шумовая полоса на экране осциллографа
Обычно шум как случайный процесс характеризуется
спектральной плотностью шума, которая по определению
Sm = dP/df, где Р — мощность шума. Спектральный анализ
показывает, что шум имеет три частотные области (рис. 2.65, а):
• низкочастотную область или НЧ-шум, где спектральная
плотность шума убывает с частотой,
• среднечастотную область или СЧ-шум, где спектральная
плотность шума постоянна,
• высокочастотную область или ВЧ-шум, где спектральная
плотность шума с частотой возрастает. Переход из одной
области в другую характеризуется частотами
сопряжения: /с1 = 2^10 Гц, /с2 = 107-fl08 Гц.
Усилители сигналов сенсоров
109
Рис. 2.65. Спектральная плотность шума ОУ:
- общий случай, б — после фильтрации ВЧ-шума
Обычно ВЧ-шум достаточно просто подавляется с помощью
простейшего ФНЧ, например, с помощью небольшой емкости
обратной связи Сос, устанавливаемой параллельно Roc
(рис. 2.64, а). С учетом этого обстоятельства, в инженерной
практике шумовой спектр характеризуется двумя областями
(рис. 2.65, б).
Соответственно спектральная плотность шумов в данном
случае аппроксимируется как
Шум с постоянной спектральной плотностью S0 и гауссов-
ским распределением амплитуд носит название белого шума.
Шум в низкочастотной области убывает обратно
пропорционально частоте и называется шумом вида 1//, фликкер-шумом
или мерцающим шумом.
Шумы генерируются пассивными резистивными элементами
и активными усилительными элементами схем, в том числе р-п
переходами. Шумы в резистивных элементах физически
объясняются взаимодействием электронов с материалом проводника.
Спектральная плотность шумов резистивного элемента по
напряжению Sv не зависит от частоты вплоть до 10 Гц и
определяется формулой Найквиста
Sv =dEl/df =4kTR [В2/Гц],
где k = 1,38 • 10~23 Дж/К — постоянная Больцмана, Т —
абсолютная температура, R — номинал резистора. Поскольку эти
110
Глава 2
шумы прямо пропорциональны абсолютной температуре Ту то
их называют тепловыми шумами или шумами Джонсона.
В этом плане тепловые шумы определяют минимально
возможный шум источника сигнала с выходным сопротивлением R
(при данной температуре). В другой трактовке на основании
теоремы о взаимном пересчете энергетических спектров
двухполюсников шум резистивного источника рассматривается как
шум источника тока с проводимостью Y = 1/R и спектральной
плотностью по току
Sj = 4kTY [А2/Гц].
Таким образом, реальный резистор при анализе шумовых
свойств схем может заменяться эквивалентной схемой,
состоящей из идеального (не шумящего) резистора того же номинала с
последовательно включенным генератором шумового
напряжения Еш или параллельным генератором шумового тока /ш
(рис. 2.66).
Рис. 2.66. Эквивалентные шумовые схемы резистора
Действующее (среднеквадратичное) значение шумового
напряжения Еш и шумового тока 1Ш в полосе частот А/ составит
соответственно величины
Например, при Т = 300 °К, R = 10 кОм, А/ = 10 кГц имеем
Еш = ^4-1,38 Ю-23 300-104 104 = 1,3 мкВ,
/ш = д/4 • 1,38 ■ Ю-23 • 300 • Ю-4 • Ю-4 = 0,13 нА.
Усилители сигналов сенсоров Щ
В активных элементах с р-п переходами возникает так
называемый дробовой шум, связанный с дискретной природой
электричества, что объясняется тем, что заряд переносится квантами,
а измеряемый ток является статистической характеристикой
этого процесса. Спектральная плотность такого шума неизменна
в полосе до 10 Гц и пропорциональна току:
Sj =dI2m/df=2qI[A2/Tjxl
где q = 1,6 • 10~19 Кл — заряд электрона, I — рабочий ток.
Наиболее существенное влияние на дробовой шум оказывает ток
управляющего электрода, т. к. он усиливается. Действующее
значение дробового шума в полосе частот Д/ составит
7Ш =^2qIAf.
Тепловые и дробовые шумы являются принципиально
неустранимыми шумами. В отличие от них фликкер-шум является
избыточным шумом. Природа его полностью не установлена, но
полагают, что в полупроводниках он достаточно хорошо
коррелирован с дефектами кристаллической структуры. Мощность
фликкер-шума постоянна в пределах декады.
Для оценки шумовых свойств операционных схем наиболее
часто пользуются понятием о генераторах эквивалентных
шумов на входе ОУ. Использование этого понятия состоит в том,
что реальный ОУ заменяется идеальным (не шумящим ОУ), у
которого на входе действуют эквивалентные шумовые
генераторы по току и напряжению (рис. 2.67). Такая замена позволяет
определить параметры шумовых генераторов Еш и /ш ОУ
независимо друг от друга в режиме короткого замыкания (КЗ) и
холостого хода (XX) на входе ОУ.
В эквивалентной шумовой схеме рис. 2.67 трехпозиционный
ключ SA служит для демонстрации измерения отдельных шу-
Рис. 2.67. Эквивалентная шумовая схема ОУ
112
Глава 2
мовых составляющих. Если ключ находится в 1-м положении
(КЗ на входе), то на выходе будет регистрироваться
составляющая от генератора шума по напряжению Еш. В положении 2
(XX на входе) шумовой ток 1Ш будет выделяться на входном
сопротивлении ОУ. В 3-м положении будут работать три шумовых
генератора — к предыдущим двум добавится шум источника
сигнала с выходным сопротивлением Rc.
Токовый источник шумов 1Ш при гвх > Rc создаст на входе
дополнительное шумовое напряжение EmV которое тем больше,
чем больше Rc (рис. 2.68):
Рис. 2.68. Влияние сопротивления источника сигнала на шум ОУ
Величина сопротивления, при которой вклад в шум от
шумового генератора тока и шумового генератора напряжения ОУ
одинаков, называется оптимальным сопротивлением
источника сигнала #Cf0pt.- Таким образом,
Оценим, для примера, #Ct0pt. типичного биполярного ОУ
140УД5 с параметрами:
Для типичного униполярного ОУ 544УД1(МОП):
Усилители сигналов сенсоров
113
Рассмотренный пример позволяет сделать следующий
инженерный вывод: в случае применения низкоомных источников
сигналов в большинстве случаев преимущество будет иметь
биполярный ОУ; а при использовании высокоомных источников
сигналов преимущество будет иметь униполярный ОУ. Это
связано с тем, что при RQ < i?Ct0pt. будет доминировать
составляющая шума по напряжению, которая существенно больше у
униполярных ОУ, а при Rc > -Rcopt. будет доминировать токовая
шумовая составляющая, которая существенно больше у
биполярных ОУ.
При практическом анализе шумовых свойств операционных
схем необходимо учитывать все источники шумов. Возьмем, к
примеру, схему неинвертирующего ОУ и отобразим на ней все
шумовые источники, включая внутренние генераторы шума ОУ
(Еш, /ш+, /ш_) и дополнительные генераторы шума EmV Еш2,
Ешс, обусловленные тепловыми шумами Rv R2 и Rc (рис. 2.69).
Рис. 2.69. Эквивалентная шумовая схема неинвертирующего ОУ
Вследствие того, что шумовые составляющие являются
случайными и некоррелированными, квадрат шумового
напряжения, приведенного ко входу ОУ, составит
Как отмечалось ранее, белый шум принципиально
неустраним, а фликкер-шум является избыточным шумом. Радикаль-
114
Глава 2
ным способом борьбы с фликкер-шумом является применение
на входе ОУ МДМ-усилителя, укрупненная схема которого
приведена на рис. 2.70.
Рис. 2.70. Структура составного ОУ с МДМ-усилителем на входе
Рассмотрим преобразование спектра в таком усилителе.
Допустим, входной сигнал ограничен сверху полосой частот сов
(рис. 2.71, а). Модулятор (Мод) переносит спектр входного
сигнала на частоту модуляции сом в виде полос боковых частот
На этот сигнал накладывается шум усилителя Ах, который
состоит из фликкер-шума и белого шума (рис. 2.71, б). В
демодуляторе (ДМ) осуществляется дальнейший перенос спектра
входного сигнала как в высокочастотную область на 2сом, так и в
область нулевых частот, а шум Ах переносится на частоту сом
(рис. 2.71, в).
Спектр входного сигнала
Рис. 2.71. Преобразование спектра сигнала и шума в МДМ-усилителе
Усилители сигналов сенсоров 115
Таким образом, исходя из полученного на выходе
демодулятора спектра, для подавления фликкер-шума можно пойти
двумя путями:
1) На выходе МДМ-усилителя поставить ФНЧ с необходимой
частотой среза соср. Тогда ФНЧ пропустит только
низкочастотную составляющую спектра и не пропустит фликкер-шум Ах
(рис. 2.71, в),
2) Поставить ФВЧ в виде разделительного конденсатора Ср
на выходе Аг и, следовательно, сразу подавить фликкер-шум от
Ах на входе ДМ.
Что касается фликкер-шума усилителя А2, то в такой
структуре он будет ослаблен в Кх раз, где К1— коэффициент
усиления Аг.
Более того, применение МДМ-усилителя позволяет
эффективно подавлять помехи частотой соп, проникающие на вход Ах
и лежащие в полосе пропускания полезного сигнала, что
особенно актуально для территориально удаленных датчиков. При
таком приложении помех демодулятор переносит их в область
высоких частот, где помехи легко отфильтровываются
(рис. 2.71, 0, б). Подобными особенностями подавлять помехи
обладают, в частности, и мосты переменного тока.
Вывод: МДМ- и ПКД-усилители не только подавляют
аддитивную составляющую погрешности, о чем говорилось ранее, но
и фликкер-шум ОУ и низкочастотные помехи. В настоящее
время шумовой порог чувствительности МДМ-усилителей
характеризуется пороговой чувствительностью по напряжению и току
на уровне (7пор = Ю-8 В, /пор = (1-ь5) • 10"~17 А соответственно.
В то же время не следует забывать о коммутационном шуме
МДМ- и ПКД-усилителей, которым объясняется их в целом
более высокий уровень шума, чем у классических малошумящих
усилителей.
Глава 3
Датчики физических величин
Датчики как первичные измерительные преобразователи
стали важнейшей частью измерительных систем и систем
управления. Датчики или чувствительные элементы (сенсоры)
обычно преобразуют неэлектрические физические величины
(температуру, давление, световой поток и т. п.) в электрические
сигналы. При внешней простоте и небольших массо-габаритных
параметрах датчики представляют из себя сложнейшие
конструктивно-технологические устройства, работающие зачастую в
тяжелых эксплуатационных условиях. Надежность датчиков
должна быть выше, чем надежность изделия, в котором они
устанавливаются.
Многообразие датчиков сигналов поистине безгранично,
как безгранично количество измерительных задач. Например,
утверждается, что номенклатура датчиков ведущей
американской фирмы Honeywell составляет несколько сот тысяч
различных типов для машиностроительной, авиакосмической,
автомобильной, химической промышленности, микроэлектроники
и военной техники. В данном курсе рассматриваются только
некоторые типы датчиков, преимущественно те, которые
получили наиболее широкое распространение или те, которые
могут быть реализованы по микроэлектронной технологии и
технологии микромеханики, что обеспечивает высокую
тиражируемость, повторяемость и низкую стоимость. По этой
причине, а также из-за ограниченного объема курса, не
рассматриваются другие широко распространенные первичные
датчики физических величин (например, индуктивные и фер-
розондовые, являющиеся моточными изделиями). Однако и
рассматриваемых датчиков вполне достаточно, чтобы очертить
круг проблем, с которыми сталкиваются инженеры в
повседневной деятельности при создании или эксплуатации
измерительных устройств.
Датчики физических величин
117
3.1. Фотодатчики
Фотодатчики предназначены для регистрации световых
потоков в оптическом диапазоне длин волн и широко используются в
метрологии, системах управления, робототехнике, системах
технического зрения, различных сенсорах и охранных системах.
Диапазон чувствительности фотодатчиков простирается от
рентгеновского излучения до радиоволн, т. е. эти датчики
перекрывают диапазон длин волн в 6 порядков (10~3-ь103) мкм (рис. 3.1).
Короткие длины волн в оптическом диапазоне спектра
обуславливают высокое разрешение фото датчиков.
Кривая видности глаза Лампа накаливания
Рентген n. A/ %^ ^^ Радиоволны
УФ-область л л \ ИК-область
Рис. 3.1. Оптический диапазон спектра излучения
Как известно, частота излучения связана с длиной волны X
соотношением:
Гц.
Таким образом, свет — это излучение очень высокой
частоты и, следовательно, световой поток характеризуется не только
волновыми, но и энергетическими характеристиками -
мощностью Р [Вт] и световым потоком Ф [лм], которые и
регистрируются фотоприемниками. В настоящее время наиболее
распространенными типами фотодатчиков являются:
1) Фоторезисторы.
где V — скорость распространения излучения в среде с
показателем преломления п, с — скорость распространения света в
вакууме. В воздухе п « 1 и при X = 1 мкм
118
Глава 3
2) Полупроводниковые фотодатчики (фотодиоды,
фототранзисторы).
3) Фотодатчики на приборах с зарядовой связью (ФПЗС).
3.1.1. Фоторезисторы
В фоторезисторах (ФР) используется явление изменения
внутренней фотопроводимости, т. е. изменение сопротивления
резистивного элемента под действием падающего излучения.
ФР является пассивным датчиком и его в простейшем случае
включают в цепь делителя напряжения (рис. 3.2). В схеме под
влиянием светового потока меняется сопротивление ток и
выходной сигнал. Для изготовления фоторезисторов используются
полупроводниковые материалы (в основном, сернистые и
селеновые соединения кадмия (CdS), свинца (PbS), висмута, таллия,
теллура), которые наносятся на изолированную подложку.
Диапазон спектральной чувствительности зависит от материала ФР
и простирается от 0,1 до 10^40 мкм.
В общем случае ВАХ ФР (рис. 3.3) — нелинейная.
Детальный анализ показывает, что ток ФР /фр состоит из двух
составляющих, световой /ф и темновой /т:
Рис. 3.2. Делитель напряжения на ФР Рис. 3.3. ВАХ ФР
где С « 0,1 А/лм-В — коэффициент пропорциональности, у = 0,5^-1
(зависит от материала фоторезистора), RT — темновое
сопротивление (сопротивление фоторезистора при Ф = 0), Е — напряжение
питания. Таким образом, эквивалентная схема фоторезистора на
постоянном токе представляет собой параллельное соединение #ф
и Rr (рис. 3.4). Типичные величины Е = 10-^-100 В. Величина Етах
Датчики физических величин
119
ограничивается максимальной рассеиваемой мощностью, a i*^ —
собственными шумами фоторезистора, которые весьма малы и
при Е = 15 В находятся на уровне (1-ьЗ) мкВД/Гц. В рабочем
диапазоне световых потоков обычно /ф > /т (RT > #ф). При
Т = 20 °С, Е = 10 В, /т = 10~2ч-10"3 мкА.
Основные схемы включения ФР — это делители напряжения
(рис. 3.2), мостовые и дифференциальные схемы. Две
последние схемы позволяют подавлять синфазные составляющие и
различать малые градации в световом потоке при относительно
большом фоне. На рис. 3.5 приводится мостовая схема
включения дифференциального ФР, в которой для подавления фона
ФР #ф1 регистрирует информационный поток Ф19 а ФР #ф2
регистрирует фон Ф2.
Рис. 3.4. Эквивалентная схема
фоторезистора (ФР)
Рис. 3.5. Включение ФР
в мостовую схему
Различают интегральную и удельную чувствительность ФР.
Интегральная чувствительность ФР Си = AI/АФ « 10^20 А/лм
определяется при фиксированном напряжении питания
(обычно Е = 15 В) и освещении стандартным источником класса А.
Удельная чувствительность ФР Суд = А1/(АФАЕ) достигает
20 А/(лм-В). Мерой чувствительности ФР является также
кратность изменения сопротивления ФР в рабочем диапазоне
световых потоков от Фтах до Фт1п (рис. 3.6):
Темновое сопротивление ФР RT очень сильно зависит от
температуры (температурный коэффициент TK(jRt) « 10 %/°С).
120
Глава 3
Если при нормальных условиях Rt0 = 10 ч-Ю8 Ом (рис. 3.7), то
при AT = ±50 °С темновое сопротивление изменится не менее,
чем в 10 раз.
Рис. 3.6. Типичная передаточная Рис. 3.7. Нормированная темпера-
характеристика ФР турная характеристика ФР
Вследствие нелинейной передаточной характеристики и
температурной нестабильности фоторезистор, в основном,
применяется в пороговых схемах, охранных системах,
фотометрических схемах (фотоэкспонометрах), устройствах управления,
тепловизорах. Чувствительность ФР примерно на 3 порядка
выше, чем у фотодиодов. Это позволяет фоторезисторам
работать, в ряде случаев, непосредственно на исполнительное
устройство, например фотореле (рис. 3.8). В случае, если
используются предусилители, с помощью ФР могут фиксироваться
очень малые световые потоки.
Рис. 3.8. Схема фотореле на ФР
Фоторезистор обладает очень низкими шумами, которые
уменьшаются с понижением температуры. В тех случаях, когда
Датчики физических величии 121
надо получить предельную чувствительность, фоторезистор
охлаждается до низких температур (при -40 °С шумы находятся
на уровне Um « 1 мкВ). Это можно сделать, например, с
помощью микрохолодильников на эффекте Пельтье. Сочетание
высокой чувствительности и низких шумов предопределяет
использование ФР в различных теплопеленгаторных устройствах, в
частности, головках самонаведения ракет. Существенные
недостатки фоторезисторов: сравнительно высокая инерционность
(постоянная времени т « 0,1-^100 мс), что ограничивает
максимальную рабочую частоту входного сигнала на уровне 1-г5 кГц.
Достоинства ФР:
1) низкая стоимость,
2) чрезвычайно высокая надежность (наработка на отказ
более 100 тыс. часов),
3) очень высокая чувствительность и/или обнаружительная
способность (тепловизоры с ФР на InSb позволяют по ИК
излучению регистрировать разность температур в 0,01 °С).
Недостатки ФР:
1) высокая инерционность (низкая полоса пропускания),
2) низкая температурная стабильность, которая вызывает
аддитивные погрешности и необходимость работать на
переменном токе,
3) нелинейные световые и вольтамперные характеристики.
Характеристики отечественных фоторезисторов приведены в
табл. 3.1.
3.1.2. Фотодиоды
Работа фотодиода (ФД) основана на явлении внутреннего
фотоэффекта в полупроводниках. Простейший ФД — это
освещенный р-п переход, в котором при засветке световым потоком
генерируются пары носителей электрон-дырка, которые
диффундируют в область р-п перехода и вызывают фото-ЭДС и
фототок в замкнутой цепи. Направление фототока совпадает с
направлением обратного тока через р-п переход (рис. 3.9, а).
Этот режим работы ФД называется фотогальваническим
режимом. При наличии внешнего обратного напряжения при
изменении освещенности меняется обратный ток через р-п переход
(рис. 3.9, б), что соответствует фотодиодному режиму работы.
'<1ф) яос1охэи£Э(1охоф хгсннэяхээьэхо инихэи(1эхнв(1вх эгсняонэо •/-•£ vhnvgvj,
ФР765-1
(ФСК-1)
ФСК-7А
ФР 118
(ФПФ7-2)
ФР764
(ФСД1-2)
СФ 3-1
СФ 3-9А
СФ 3-9Б
ФР 1-3
ФСА 6
СФ 4-ЗД
124
Глава 3
Рис. 3.9. Режимы работы ФД:
а — фотогальванический; б — фотодиодный
Как известно, ВАХ диода определяются по уравнениям Эбер-
са-Молла, в которых в случае ФД появляется
фотоэлектрическая компонента /ф:
/фд = /5(ехр(С/д/Фг) - 1) + /ф,
ФГ = kT/q,
/Ф = S • Ф,
где Is — ток обратно смещенного р-п перехода, ц>т — тепловой
потенциал, £/д — напряжение на диоде, k — постоянная Боль-
цмана, q — заряд электрона, Т — абсолютная температура, S —
коэффициент чувствительности ФД, Ф — световой поток.
Фотоэлектрическая компонента /ф наиболее сильно проявляется в
3-м и 4-м квадрантах ВАХ (рис. 3.10). Как отмечалось,
фотодиод может работать в двух режимах: фотогальваническом или
генераторном режиме (без подачи внешнего напряжения) и
фотодиодном (при подаче внешнего напряжения обратной
полярности).
Фотогальванический режим соответствует работе ФД в 4-м
квадранте, где можно выделить 2 предельных режима работы:
1) режим, близкий к короткому замыканию (режим КЗ),
2) режим, близкий к холостому ходу (режим XX).
В режиме КЗ £/д -► 0, ток /фд оказывается пропорционален
световому потоку. Эта пропорциональность (линейность)
простирается на 6-7 порядков. Режим, близкий к КЗ, достаточно
просто реализовать на ОУ, включенном по схеме
преобразования «ток-напряжение» (рис. 3.11, а), для которого, как изве-
Датчики физических величин
125
Рис. 3.10. Вольтамперная характеристика ФД
стно, RBX —> 0; С/вых = /фд • Roc. Схема рис. 3.11, а носит
название трансимпедансного усилителя, который позволяет за счет
малого входного сопротивления существенно уменьшить
постоянную времени входной цепи ОУ и повысить быстродействие.
Напротив, режим близкий к XX, в фотогальваническом
включении реализовать вообще затруднительно. В режиме XX
передаточные характеристики ФД существенно нелинейны и
напряжение на диоде не может превосходить контактное
напряжение полупроводника vj/K (UK < vj/K). Для кремния v|/K < 1,2 В
(реально С/вых < 0,4 В). Этот режим, в основном, используется
для получения энергии от солнечных батарей (так называемые
Рис. 3.11. Режимы включения ФД с ОУ:
а — фотогальванический (близкий к режиму КЗ);
б — фотодиодный по переменному току
126
Глава 3
солнечные элементы). КПД фотоэлемента находится в пределах
(5^-25) %. В фотогальваническом режиме отсутствуют темновые
токи и, следовательно, малы шумы. Но для обеспечения
большего соотношения сигнал/шум и высокой обнаружительной
способности следует применять малошумные ОУ.
Фотодиодному режиму соответствует работа в 3-м
квадранте, т. е. работа с внешним обратным напряжением, когда под
действием светового потока меняется сопротивление ФД, а,
значит, меняется и ток в цепи нагрузки (рис. 3.9, б). Для
построения нагрузочной прямой фотодиодного режима на
вертикальной оси ВАХ (рис. 3.10) откладывается точка / = /кз = E/RH,
а на горизонтальной оси точка Е. Передаточная характеристика
в данном режиме линейна и простирается на 7-f9 порядков, а
ток /ф = S • Ф, где S — токовая чувствительность ФД.
Особенность фотодиодного режима — наличие темнового
(теплового) тока обратно смещенного р-п перехода. Тепловой
ток в полупроводнике, как известно, удваивается на каждые
10 °С. Стандартный прием улучшения температурной
стабильности — работа на переменном токе (рис. 3.11, б), для которого
в полосе пропускания справедливы следующие соотношения.
Фототок также зависит от угла падения излучения а.
Ширина так называемой апертурной характеристики ФД по уровню
0,5 находится в пределах Да = ±50-г70 угловых градусов
(рис. 3.12).
20 [угл. град]
Рис. 3.12. Апертурная характеристика ФД
Датчики физических величин
127
Динамические характеристики ФД могут быть оценены из
эквивалентной схемы (рис. 3.13), где Сл — собственная емкость
з
плоскостного ФД (10-гЮ пФ), Ид — динамическое
сопротивление обратно смещенного р-п перехода (1-^10 МОм). Если в
фотогальваническом режиме при RH = 100 кОм полоса пропускания
достигает l-f2 МГц, то в фотодиодном за счет обратного
смещения емкость Сд уменьшается и полоса пропускания
простирается до нескольких сотен мегагерц при Е = 15-^150 В.
Спектральные характеристики ФД зависят от вида
полупроводников, которые в них используются. Наиболее часто
используются кремний (максимальная чувствительность на 0,9 мкм) и
германий (рис. 3.14).
Рис. 3.13. Динамическая
модель ФД
Лампа
накаливания
Рис. 3.14. Спектральные
характеристики ФД
Фотодиоды обладают исключительной стабильностью
характеристик во времени, а в фотогальваническом режиме и в
температурном диапазоне. Поэтому они являются метрологической
базой оптоэлектроники и фотометрии.
Существуют три основных разновидности фотодиодов.
1. Обычные классические фотодиоды с постоянной времени
т = 10~6-10"7 с.
2. Так называемые p-i-n-фотодиоды (рис. 3.15), в которых
между р- и n-областями имеется протяженная высокоомная ин-
жекционная область (/-область). Сопротивление /-области в
106-г107 раз больше р- и /i-областей. Она поглощает фотоны, при
этом в /-области концентрируется ускоряющее электрическое
поле, возникает дополнительный дрейф носителей и
быстродействие возрастает (т = 10" -г 10 с).
128
Глава 3
Рис. 3.15. Структура
p-i-n-ФЦ
Рис. 3.16. Зависимость коэффициента
умножения ЛФД от напряжения
Эти фотодиоды делаются по стандартным, но несколько
усовершенствованным технологиям, следовательно, дешевы. Они
обладают очень малым уровнем шумов. Пороговый поток
находится на уровне Рпор « 10~18 Вт (для X = 0,5 мкм и полосы
А/ = 1 Гц). Темновой ток p-i-n-ФД составляет (1+8)-1СГ А.
3. Лавинный фотодиод (ЛФД) — на него подается обратное
напряжение (100-ь200 В), близкое к напряжению пробоя (AU =
= Е - Unp « 0,2-г0,3 В). В предпробойной области создаются
предпосылки для ударной ионизации, которая при попадании
фотонов вызывает лавинообразное нарастание тока.
Коэффициент умножения М (коэффициент лавины) при этом достигает
нескольких тысяч (рис. 3.16) и во столько же раз увеличивает-
о
ся чувствительность, которая достигает величин 1-г10 А/Вт.
Коэффициент умножения М определяется выражением
М"1 * 1 - (U/Uup)n,
где п = 1,4 -г4 зависит от типа полупроводников. Т. е. ЛФД
является ФД с внутренним усилителем и лучшим, чем у вакуумных
фотоэлектрических умножителей, соотношением сигнал/шум.
Из-за наличия ПОС ЛФД обладают постоянной времени
т « 10"11 с и способны регистрировать короткие лазерные
вспышки, длительность которых тоже находится на уровне пи-
косекунд. Однако коэффициент умножения ЛФД в очень
сильной степени зависит от AU и от температуры (ТК(М) -
— 0,2 %/°С). Поэтому при практическом применении ЛФД для
стабилизации М должна использоваться специальная следящая
Датчики физических величин
129
система, которая удерживает Л£/, а следовательно М, в
заданном диапазоне значений, и не допускает необратимого пробоя.
Второе обстоятельство связано с возрастанием в ЛФД
шумового тока /щ « 2q • I • М3 • А/, где q — заряд электрона, / —
полный ток ЛФД, М — коэффициент умножения, А/ — полоса
пропускания. Оно накладывает ограничение на величину М, т. к.
нет смысла увеличивать М выше предела, когда уровень шума
ЛФД превысит уровень шума усилителя.
Наконец, качество полупроводниковых материалов в ЛФД
должно быть много выше, чем у ФД других типов, т. к.
большая напряженность поля в р-п переходе может вызвать пробой
на дефектах структуры полупроводника (микроплазмы).
В последнее время отечественными учеными разработана
разновидность ЛФД со структурой металл-резистивный
слой-полупроводник (ЛФД-МРП) на длины волн 0,2^-1,8 мкм.
В ЛФД-МРП осуществляется локальная отрицательная
обратная связь и достигается М = 10 при более высокой
стабильности, чем у ЛФД.
Еще одной разновидностью фотодиода является
фототранзистор (ФТ). ФТ — это транзистор, у которого освещен
база-коллекторный переход (рис. 3.17, а). При этом через переход
протекает фототок /ф, который усиливается в р раз (1К =
= 1Ь • (Р + 1) « /бР) и в Р раз увеличивается чувствительность по
сравнению с ФД. Но при этом также усиливается и тепловой ток
^ко (^б = ^ко + -*ф)> что предопределяет сравнительно низкую
Рис. 3.17. Фототранзистор:
а — схема включения; б — эквивалентная схема
5 Схемотехника измерительных устройств
130
Глава 3
температурную стабильность одиночного ФТ, так как /к0
удваивается на каждые 10 °С. Таким образом, ФТ является прибором
с достаточно низкой температурной стабильностью и высоким
уровнем тепловых шумов. В то же время чувствительность ФТ
значительно выше чувствительности ФД (достигает 1 А/Вт
против 0,2 А/Вт у ФД). Эквивалентная схема ФТ приведена на
рис. 3.17, б, а В АХ ФТ приводится на рис. 3.18. Частота среза
/ср у ФТ несколько ниже (10 -гЮ Гц), чем у ФД за счет
дополнительной емкости база-коллекторного перехода.
Для того чтобы повысить термостабильность ФТ, применяют
дифференциальную пару из двух ФТ (рис. 3.19). В этой
дифференциальной паре используются 2 транзистора — один освещен
(VT1), другой затемнен (VT2). В результате /к0 в значительной
степени компенсируется.
Рис. 3.18. ВАХ
фототранзистора
Рис. 3.19. Дифференциальное
включение ФТ
ФД выпускаются в корпусном и бескорпусном исполнении,
в виде отдельных элементов и в виде многоэлементных
структур — дифференциальных, четырехплощадочных,
протяженных линеек и матриц.
Основные характеристики отечественных фотодиодов (ФД) и
фототранзисторов (ФТ) приведены в табл. 3.2.
Таблица 3.2. Основные характеристики отечественных фотодиодов (ФД)
и фототранзисторов (ФТ)
КФДМ
ФД-7К
ФД-19КК
ФД-20КП
ФД-20-30КП
ФД-20-32К
ФД-22КП
ФД-252
ФД-256
Таблица 3.2 (продолжение)
ФД-265
ФД-3 (Ge)
ФД-5Г (Ge)
ФД-7Г (Ge)
ФД-10Г (Ge)
ФТ-2К
КТФ-102
КТФ-109
ФТГ-5 (Ge)
Датчики физических величин 133
3.1.3. Фоточувствительные приборы
с зарядовой связью
Фоточувствительные приборы с зарядовой связью (ФПЗС)
относятся к твердотельным датчикам изображения и широко
используются в промышленных телевизионных камерах,
сканерах, датчиках перемещений, системах технического зрения,
компьютерной томографии и флюорографии. ФПЗС является
разновидностью приборов с зарядовой связью (ПЗС).
Рассмотрим принцип работы ПЗС. В основе работы ПЗС лежат 2
процесса:
1) Накопление заряда.
2) Передача заряда.
Накопление заряда происходит на МОП-емкости. Она
содержит подложку из полупроводникового материала, допустим
р-типа, изолятор (Si02), напыленный электрод (рис. 3.20).
Электрод Si02 (изолятор)
Рис. 3.20. Структура МОП-емкости
Если к электроду приложить напряжение положительной
полярности, то основные носители (дырки) уйдут вглубь под
электрод. Образуется потенциальная яма, глубиной 0,5-г2 мкм.
При этом неосновные носители (электроны) скапливаются под
электродом и постепенно заполняют потенциальную яму за
счет, например, процесса термогенерации в полупроводнике.
Таким образом, под электродом создается область
пространственного заряда. Если взять пару таких МОП-емкостей и
расположить их достаточно близко друг к другу, то, манипулируя
потенциалами электродов, можно осуществить перенос или
переливание (гидродинамическая аналогия) заряда из одной
МОП-области в другую.
134
Глава 3
На рис. 3.21, а показаны различные фазы переноса заряда,
на рис. 3.21, б временные диаграммы управления процессом
переноса заряда. Моменту t0 соответствует накопление заряда под
левым электродом, моменту tx — создание потенциальной ямы
под правым электродом и начало переноса заряда вправо, t2 —
уменьшение глубины потенциальной ямы под левым
электродом и принудительное выталкивание заряда вправо, t3 —
окончание переноса (перелива) заряда под правый электрод.
Близость МОП-емкостей — основное условие эффективной (без
потерь) передачи заряда.
Очевидно, что при перемене фазировки управляющих
сигналов направление перетекания заряда изменится в другую
сторону (возможно и вправо, и влево). На этом принципе и удалось
Рис. 3.21. Перенос заряда в МОП-емкостях:
а — фазы переноса, б — временная диаграмма
Датчики физических величин
135
Рис. 3.22. Структура ФПЗС с трехфазным управлением
создать сдвиговый ПЗС-регистр, например с трехфазной
системой управления. На рис. 3.22 приводится его упрощенная
структурная схема, а на рис. 3.23 — временные диаграммы
управления. В начале и конце каждой строки имеется элемент
ввода/вывода заряда (например, диоды VD1 и VD2).
Так как в процессе сдвига нет промежуточных
преобразований, затраты и потери энергии очень малы (порядка
5 • 10~6 Вт/бит). По этой причине на сегодняшний день ПЗС
являются ИМС с самой высокой плотностью упаковки и степенью
интеграции.
Рис. 3.23. Временные диаграммы работы ПЗС
с трехфазным управлением
136
Глава 3
Сдвиг заряда в любую сторону сопровождается потерями за
счет диффузии носителей в соседние области полупроводника.
Поэтому процесс переноса должен осуществляться достаточно
быстро (ПЗС не работоспособны в статике и являются
динамическими приборами), и МОП-емкости должны находиться
близко друг к другу.
Типичные конструктивные и электрические параметры ПЗС:
размер электродов — 15-гЗО мкм, расстояние между ними —
2^-5 мкм, тактовая частота, под которой осуществляется
управление, /такт « 1-г10 мГц, потери е « 10" (0,1%) на единичный акт
переноса заряда. Например, при п = 1000 (количество ячеек),
k = 3 (трехфазная система управления) эффективность переноса
составит М=1-£*Л'Б«0,7. На эффективность переноса
заряда влияет также и форма управляющих напряжений в фазах
(рис. 3.23).
Появление зарядов в МОП-емкостях может происходить
разными способами.
1. Во-первых, за счет процесса термогенерации (процесс
является паразитным).
2. Во-вторых, за счет упомянутой направленной
электрической инжекции заряда. Она может быть создана за счет прямо
смещенного/?-/г-перехода VD1 (рис. 3.22). Таким образом, если
одновременно с первой фазой в течение интервала накопления
подать положительное напряжение 1/вх, то в первую яму
«сольется» заряд Q — /вх • tH. Следовательно, в ПЗС-регистр можно
ввести и сдвинуть последовательную двоичную информацию,
подавая и смещая заряд. Вывод зарядов (информации) может
осуществляться из-под последнего электрода с помощью
преобразователя «заряд — напряжение» на ОУ (рис. 3.22).
3. Наконец, в третьих, световая инжекция. С помощью
оптической системы на поверхности ПЗС создается изображение или
световой рельеф (рис. 3.24). Если энергия фотонов больше
ширины запрещенной зоны полупроводника, то возникают пары
носителей дырки-электроны, которые собираются в потенциальные
ямы. Затем этот потенциальный рельеф с накопленным зарядом
в потенциальных ямах может выталкиваться через устройство
вывода и на выходе получается видеосигнал с огибающей,
соответствующий изображению рис. 3.24. Таким образом,
пространственное распределение освещенности на поверхности ПЗС будет
преобразовано во временной видеосигнал. Это и есть ФПЗС.
Датчики физических величин
137
Рис. 3.24. Световая инжекция в ПЗС (ФПЗС)
Структура серийных линейных ФПЗС значительно сложнее
рассмотренной на рис. 3.24 схемы и представлена на рис. 3.25.
Это объясняется рядом причин.
• В реальных ФПЗС процесс накопления заряда и функции
транспортировки разделены.
• Для уменьшения растекания заряда все ячейки
накопительной секции делятся на четные и нечетные, которые
отделяются друг от друга так называемыми «стоп-каналами»
(таким образом потери по растеканию уменьшаются).
Транспортный
регистр (RG2
Фотозатвор 2
Стоп-канал
Секция
накопления
Фотозатвор 1
Транспортный
регистр (RG1)
Огибающая
видеосигнала
Рис. 3.25. Структура серийных линейных ФПЗС
138
Глава 3
• Накопленные заряды из четных и нечетных ячеек
переносятся в транспортные регистры RG1 и RG2 с помощью
фотозатворов 1 и 2. При такой организации количество
передач уменьшается вдвое, что особенно важно при
числе фотоячеек п >1000.
Неэффективность переноса приводит к размытию
видеоизображения, так как за счет процесса растекания заряда в соседние
ячейки он будет передаваться на выход в других тактах. В
пределе видеоимпульс, например, становится гауссовским
(рис. 3.22). Неэффективность переноса зависит от температуры,
дефектов кристаллической решетки и оптимизируется
подбором формы управляющих импульсов (рис. 3.23) и различными
технологическими ухищрениями.
Линейные ФПЗС представлены отечественными
микросхемами серий 1200ЦЛ, А1200 и др., содержащими несколько
тысяч фотоячеек, с минимальными размерами « 15x30 мкм.
Помимо линейных ФПЗС (где фоточувствительные ячейки
располагаются в линию), существуют и матричные ФПЗС, где
фоточувствительные ячейки располагаются в форме матрицы
(рис. 3.26) — микросхемы серий 1200ЦМ, А1100 и др.
Организация считывания в матричных ФПЗС координатная. На
рис. 3.26 приведена структура матричной ФПЗС со строч-
Матричный ФПЗС
Изображение
Транспортный регистр
столбцов
Схема управления
строк
^вых
^Секция накопления строки
Транспортный регистр строки
Рис. 3.26. Структура матричного ФПЗС
со строчно-кадровой организацией считывания
Датчики физических величин
139
но-кадровои организацией считывания, когда в каждую строку
наряду с фоточувствительными ячейками вводятся
транспортные регистры строки, закрытые непрозрачными экранами.
ПЗС относятся к приборам, особо чувствительным к
температуре. Это связано с тем, что информационные токи и заряды
очень малы, а паразитные температурные токи удваиваются на
каждые 10 °С. Поэтому верхний рабочий температурный
диапазон не превышает Тт&х = + (40^55) °С и при эксплуатации ФПЗС
при больших температурах приходится проводить охлаждение
ФПЗС, например, с помощью микрохолодильников на эффекте
Пельтье. В то же время при низких (криогенных) температурах
чувствительность ФПЗС возрастает настолько, что
регистрируется видеоизображение даже при звездном свете.
Динамический диапазон ФПЗС достигает 70 дБ.
В простейшем случае, для регистрации зарядов,
поступающих на выход, может быть применен преобразователь
«ток-напряжение» на интеграторе тока Ах (AUA = Q/C) (рис. 3.22).
Перед поступлением заряда интегратор должен быть обнулен с
помощью ключа SA1. Однако работа ФПЗС сопровождается
большим уровнем помех, которые вызываются как тактовым
шумом ключей управления, так и шумовой составляющей в
виде синфазного сигнала пропорционально (kT/C) / ,
создающих так называемый плавающий (зависящий от температуры)
потенциал (к — постоянная Больцмана). Чтобы подавить этот
так называемый «геометрический шум», применяется схема
двойной корреляционной выборки (ДКВ), аналоговый вариант
которой приведен на рис. 3.27.
В схеме ДКВ перед поступлением информационного заряда
ключ SA2 замыкается и на С2 выделяется шумовая составляю-
Огибающая
видеосигнала
Рис. 3.27. Схема двойной корреляционной выборки
140
Глава 3
щая сигнала. На А3, С3, SA3 реализуется схема выборки и
хранения (СВХ). При поступлении заряда Qy ключ SA2
размыкается, SA3 замыкается и напряжение £/. со Q оказывается
включенным встречно с плавающим потенциалом.
Соответственно, плавающий потенциал и шум вычитаются из смеси
полезного сигнала с шумом и полезная составляющая в сигнале
Uj запоминается на С3. Таким образом, с помощью ДКВ
осуществляется синхронная фильтрация помех. Непременное
требование к ДКВ, чтобы интервал между запоминанием
плавающего потенциала и поступлением Q; не превышал интервала
корреляции шума.
На рис. 3.28 приведена блок-схема управления линейным
ФПЗС. Для увеличения эффективности переноса временные
диаграммы и уровни управляющих сигналов должны быть
оптимизированы (рис. 3.23). Для этого разработаны специальные
микросхемы (серии 1119, 1124, 1138 и т. п.).
Применение ФПЗС:
• Датчики линейных и угловых перемещений средней
точности. Линейные ФПЗС могут использоваться в качестве
датчиков перемещения с ограниченной разрешающей
способностью, которая определяется размерами
МОП-области (10-г40 мкм). При специальной обработке
видеосигнала (нахождение центра тяжести видеоизображения)
разрешающая способность может составлять единицы
микрон.
Формирователь
управляющих
аналоговых сигналов
(серия 1138)
Огибающая
видеосигнала
Линейный
ФПЗС
Схема
ДКВ
Схема
формирования
сигналов цифрового
управления
(серия 1119, 1124)
Схемы
синхронизации
Тактовый
генератор
Рис. 3.28. Блок-схема управления линейным ФПЗС
Датчики физических величин
141
• Наземная и космическая астрономия.
• Сканеры, цифровые фотоаппараты (т. е. устройства ввода
в ПЭВМ).
• Видеокамеры на ФПЗС заменяют вакуумные передающие
электронно-лучевые трубки, миниатюрны, располагаются
в плоскости изображения.
• Возможна эксплуатация в чрезвычайно жестких
механических условиях. Например, установка ФПЗС в
летательных аппаратах, в том числе в артиллерийских снарядах,
позволяет осуществлять передачу изображения по
радиоканалу.
• Тепловизоры на X = Зч-5,5 мкм для термографии, систем
разведки, энергетики (контроль утечки тепла), анализа
распределения тепла в микросхемах и другой аппаратуре.
При охлаждении до температуры жидкого азота в ФПЗС
реализуется чувствительность AT = 0,1 °С.
• Системы технического зрения (видеодатчики),
применяемые в роботехнических системах. Так, интеллектуальные
измерительные системы помимо ПЗС-камеры содержат
встроенный процессор с интерфейсом и полную
библиотеку программ технического зрения для определения
положения, контроля, измерения и идентификации деталей.
Причем, развитое ПО позволяет не программировать
камеру на измерение конкретной детали, а, например,
только показать ей нормальную деталь. Далее обмер деталей и
последующий контроль пойдет в автоматическом режиме.
• Медицинская электроника и биология, включающие
термографическую диагностику, рентгенографию и флюрог-
рафию (доза облучения пациента уменьшается в 20 раз).
Из сравнительно краткого рассмотрения ФПЗС следует
однозначный вывод, что это одна из наиболее сложных и в то же
время перспективных информационно-измерительных систем.
ФПЗС является одним из самых востребованных изделий
микроэлектроники. Мировой годовой выпуск ФПЗС (2003 год)
достиг 50 млн. штук. Ведущие фирмы: Kodak (США), Dalsa
(Канада), Thomson (Франция), Sony, Toshiba (Япония). Японцы
доминируют в ширпотребе.
Альтернативой матричных ФПЗС в последние годы
становятся КМОП-фотодиодные матрицы (КМОП-ФД) с активными
пикселами, содержащими также схемы управления, аналого-
142 Глава 3
вые усилители, схемы ДКВ, АЦП на выходе каждого столбца и
цифровые блоки (рис. 3.29), которые позволяют повысить
быстродействие.
В КМОП-ФД схемы управления могут реализовать
произвольную координатную выборку, что значительно расширяет
возможность пространственной фильтрации и обработки
изображения. Вывод так называемого «окна интереса», которое, как
правило, занимает только часть кадра, может многократно
увеличить быстродействие.
Активный пиксел (рис. 3.30, а) образован ФД VD1 и
четырьмя ключами на полевых транзисторах VT1-VT4 со следующими
функциями:
VT1 — выполняет функцию считывания заряда,
накопленного на ФД VD1;
VT2 — восстанавливает исходное напряжение в точке А;
VT3 — истоковый повторитель;
VT4 — осуществляет выбор строки.
Рис. 3.29. Структура матричного КМОП-ФД
Пиксел-АЦП
Дешифратор столбцов
+ аналоговые усилители
+ схемы ДКВ
Шина
процессора
Матрица активных
/ элементов
Датчики физических величин
~& Столбец
Рис. 3.30. КМОП-ФД: а — активный пиксел;
б — временная диаграмма
Временная диаграмма работы активного пиксела приведена
на рис. 3.30, б,
1. В режиме накопления все транзисторы закрыты,
потенциал ФД уменьшается, а потенциал UA оказывается
плавающим.
2. В режиме выборки поступает сигнал восстановления
(R = 1), VT2 открывается и потенциал плавающего узла
устанавливается до исходного уровня +Е.
3. Затем на все активные элементы выбранной строки
подается открывающий импульс TG1 = 1 и заряд ФД
передается в плавающий узел.
4. После прихода сигнала RS= 1 (выборка строки)
открывается VT4. VT3 и VT4 образуют истоковый повторитель и на
общем нагрузочном транзисторе столбца VT5 выделяется
усиленный по мощности сигнал ФД.
Таким образом, на шины столбцов передаются считанные
сигналы всех элементов выбранной строки. Дешифратор
столбцов выбирает шины столбцов и подключает их к схемам
аналоговой обработки. После считывания пиксела ключи
закрываются и начинается накопление зарядов следующего кадра
изображения.
Для подавления так называемого геометрического шума
применяются схемы ДКВ. В цифровом варианте ДКВ плаваю-
Плавающий
узел
144
Глава 3
щий потенциал UA (в который входит и шум восстановления) с
помощью пиксел-АЦП, подключенных к каждому столбцу
матрицы, преобразуется в код, запоминается и в последующем
вычитается из смеси информационного сигнала и помехи.
Процесс накопления и считывания в КМОП-ФД отличается
от ФПЗС, т. к. в последних:
1. Фоточувствительная область занимает 100% от площади
кристалла (у КМОП-ФД фактор заполнения из-за
активных элементов и шин не превышает 30^35%). Отсюда
значительно меньшая фоточувствительность КМОП-ФД,
которая повышается (до 80% при ортогональном падении
света) за счет установки дополнительных микролинз.
2. Глубина залегания объемного канала ФПЗС значительно
больше (у КМОП только 0,25 мкм), что позволяет
оптимизировать процесс накопления.
3. Высокий геометрический шум КМОП-ФД (обусловлен
несколькими КМОП-транзисторами и несколькими
шинами), больший темновой ток, меньшая разрешающая
способность.
Возможность повышения быстродействия до 200-т-ЗОО кадров
в секунду в КМОП-ФД с функциями обработки информации на
одном кристалле требует технологии с проектными нормами не
более 0,3-г0,5 мкм. Общее число транзисторов СБИС КМОП-ФД
фирмы Kodak размером 800x600 пикселов составляет 2,2-10 .
Схема размещается на кристалле 7,6x8,6 мм и содержит 800
пар 8-разрядных параллельных пиксел-АЦП с активными
элементами 8x8 мкм.
В США разработана комплексная программа создания
аппаратуры наблюдения за полем боя в реальном масштабе времени
на базе КМОП-ФД, которая устанавливается на беспилотных
самолетах-разведчиках и передает изображение через
тактический центр управления непосредственно солдату на нашлемный
дисплей.
Характеристики некоторых отечественных ФПЗС приведены
в табл. 3.3.
Таблица 3.3. Основные характеристики отечественных ФПЗС
6 Схемотехника измерительных устройств
1200ЦЛ1
1200ЦЛ2
А 1203
А 1155
А 1202
А 1212
1200ЦМ7
А 1157
А 1186
А 1187
ISD017
0ISD029
ISD048
ISD069
146
Глава 3
3.2, Датчики температуры
Температура (от лат. temperature — смесь) является
важнейшим параметром вещества, характеризующим его внутреннюю
энергию — давление, объем, электрическое сопротивление,
агрегатное состояние, фазовые переходы, жизнедеятельность и т. п.
Температурные измерения доминируют среди всех видов
измерений (до 40 % от общего числа измерительных задач), что
обуславливает их важность и разнообразие методов измерений —
электрические, оптические, магнитные, акустические и т. д.
В основе температурных измерений находится понятие о
температурных шкалах, среди которых различают абсолютную
термодинамическую температурную шкалу — ТТШ, которая
воспроизводится на основе законов термодинамики и так
называемых газовых термометров (создана Кельвином и
определяется внутренним состоянием идеального газа PV = RT, где Р —
давление, V — объем, R — газовая постоянная), и
относительные (производные) температурные шкалы. Газовые термометры
громоздки и на практике не используются.
В практическом диапазоне температур на относительных
температурных шкалах (рис. 3.31) отмечены легко
воспроизводимые реперные точки, соответствующие различным
агрегатным состояниям веществ — тройная точка воды, точка
плавления золота, точка отвердевания сурьмы и т. д.
Положение реперных точек воспроизводится на шкале с точностью до
10"3-г10~4 °С. Промежуточные точки на шкале находятся
методами интерполяции и экстраполяции. Около 50% всех
технических измерений температуры производится в диапазоне
-20^+250 °С.
Тройная точка Точка отверде-
воды вания сурьмы
Рис. 3.31. Практическая температурная шкала
Точка
плавления золота
Датчики физических величин
147
Все методы температурных измерений делятся на
контактные (передача тепла осуществляется контактным путем) и
бесконтактные (используются в оптических пирометрах). В
контактных датчиках используется передача тепла за счет,
теплопроводности.
Среди контактных датчиков температуры, классификация
которых приведена на рис. 3.32, доминируют традиционные
термометры сопротивления (резистивные датчики температуры) и
термопары (датчики термоЭДС). В последнее время бурно
развиваются полупроводниковые датчики температуры в виде ИМС. В
свою очередь, термометры сопротивления подразделяются на
металлические термометры, терморезисторы и кремниевые
датчики температуры. Температурный диапазон контактных датчиков
простирается от 10" К до 3 • 10 К (более распространенный
диапазон 10^-1500 К) и перекрывается термометрами сопротивления
и термопарами. Более высокие температуры измеряются
бесконтактными датчиками (оптическими пирометрами) по спектру
излучения веществ.
3.2.1. Металлические термометры сопротивления
Как известно, сопротивление проводника зависит от
температуры:
Контактные датчики температуры
Термометры
сопротивления
Металлические
термометры
сопротивления
П/п датчики
температуры
Терморезисторы
Термопары
Кремниевые
датчики
температуры
Рис. 3.32. Классификация контактных датчиков температуры
148
Глава 3
где I — длина проводника, S — площадь поперечного сечения,
р(Т) — удельное сопротивление материала проводника,
зависящее от температуры. Зависимость изменения относительного
сопротивления некоторых металлических материалов от
температуры приведена на рис. 3.33.
Рис. 3.33. Относительное изменение сопротивления
некоторых металлов от температуры
В общем случае эти зависимости нелинейны и обычно
аппроксимируются степенными полиномами не выше 3-й
степени:
R(T) = Д0(1 + аАТ + Р(АТ)2 + у(АТ)3),
где AT = Т - Т0у R0 — сопротивление при Т = Т0. Например,
для платины в линейном диапазоне Т « -260ч-+1000 °С ct(Pt) =
= 3,9 • Ю-3 °С~\ P(Pt) = -5,8 • 10"7 °С~2. Коэффициент у
учитывается только при Т < Т0 и составляет
y(Pt) = -(4,0-г6,0) • 10~12 °С~3. В ограниченном температурном
диапазоне, например ±200 °С, эти зависимости с погрешностью
не более ±0,25% аппроксимируются линейной функцией
R(T) = R0(l + аЛГ),
где а — температурный коэффициент сопротивления,
характеризующий наклон температурной характеристики. Таким
образом, при AT = 100 °С относительное изменение сопротивления
платины составляет 6R « 39%.
Другие материалы могут иметь большую чувствительность,
но для них зависимости сопротивления от температуры менее
линейны. Например, для никеля линейный диапазон
Датчики физических величин
149
Т « -135-Н-425 °С, a a(Ni) « 5,4 • 10 * °С \ Отличную линей-
—3 —1
ность имеют медные датчики, a(Cu) = 4,2 -10 °С , однако
после +180 °С в меди начинаются процессы химокисления. Кроме
того, удельное сопротивление меди очень мало, что затрудняет
применение таких материалов в качестве термодатчиков.
Конструктивно термометры сопротивления выполняются в
виде моточных изделий или резистивных пленок. Например,
серийные платиновые датчики температуры изготавливаются в
виде секционированных катушек, намотанных отожженной
платиновой проволокой диаметром 50 мкм со стандартными
номиналами 50, 100, 500 Ом, и помещаются в защитный кожух
для работы в агрессивных жидкостях и газах (рис. 3.34). По
числу выводов термометры сопротивления выпускаются с
двумя, тремя и четырьмя выводами. Термометры сопротивления
платиновые (ТСП) из проволоки имеют наивысшую точность
(5 «0,01%) и стабильность (дрейф серийных ТСП не более
0,025 мК/ч и не превышает 0,1 К/год). Стабильность ТСП при
циклическом изменении температуры характеризуется средне-
квадратической величиной в 6 мК. Проволочные ТСП
используются в качестве эталонных датчиков температуры в диапазонах
« 10-ь1200 К, а при более высоких температурах используются
датчики из тугоплавких материалов (например, вольфрама).
Платиновые пленочные датчики более технологичны, дешевы и
обеспечивают при лазерной подгонке погрешность на уровне
±0,25 %в диапазоне температур « -200-^+500 °С.
Корпус Каркас Катушка
^ ^ L
Рис. 3.34. Конструкция моточного термометра сопротивления
Например, платиновый датчик ТСП-4054 измеряет
температуру в диапазоне AT » 13,8^-1010 К с точностью 0,02 К (при
этом, заметим, степень очистки платины должна составлять
99,9999%). У металлических термометров воспроизводимость
характеристик составляет около 0,1%, что обеспечивает
хорошую взаимозаменяемость при измерениях.
7 Схемотехника измерительных устройств
150
Глава 3
Типичная схема измерения с помощью термометра
сопротивления RT приведена на рис. 3.35, где изменение сигнала на
входе неинвертирующего ОУ составляет
~ Датчик
Рис. 3.35. Схема преобразования термосопротивления в напряжение
При этом перегрев (саморазогрев) датчика АТп составит
где RQ— тепловое сопротивление «датчик-среда». Например,
для платинового зонда при RT0 = 300 Ом в неподвижном
воздухе (Де * 30 °С/Вт), /р = 5 мА, AT = 100 °С, а » 4 • 10~3 °С-1,
получаем АТп « 0,2 °С, a AUBX » 0,6 В. Таким образом, ток через
датчик должен ограничиваться величиной
В пленочных ТСП RQ зависит от конструкции и имеет
большую величину RQ « 120 °С/Вт. Для устранения постоянной
составляющей в выходном сигнале термодатчика широко
используются и мостовые измерительные схемы (см. раздел 1.3.2).
3.2.2. Терморезисторы
Терморезисторы (ТР) — это теплозависимые сопротивления,
изготовленные из полупроводниковых материалов, окислов и
сульфатов металлов. Значительная зависимость сопротивления
полупроводников от температуры была обнаружена Фарадеем
Датчики физических величин
151
еще в 1833 г., но лишь через 100 лет первые ТР с
отрицательным ТКС были применены для пускорегулирующей
аппаратуры для ограничения пусковых токов.
ТР с отрицательным ТКС (термисторы) получаются методом
прессования смеси порошков из окислов полупроводниковых
материалов и спеканием их при высокой температуре.
Конструктивно они выполняются в виде бусинок, таблеток, шайб,
стержней, трубок и пленок. Термисторы существенно меньше
термометров сопротивления по габаритам, обладают меньшей
тепловой постоянной и хорошо герметизируются.
Термисторы имеют существенно нелинейную
характеристику с отрицательным ТКС (рис. 3.36). Наиболее близкая
аппроксимация передаточной характеристики термистора дается
выражениями
(2)
где А, В (Ом) — константы. Если известны сопротивления тер
мистора при Тг и Тг то
(3)
где Т0 — базовая температура, В = (3-^-5) -10 К — константа,
зависящая от материала и конструкции термистора. Из (2)
можно найти ТКС термистора:
Рис. 3.36. Передаточная характеристика терморезистора
линеаризация
152
Глава 3
При Т = 300 К ТКС « (3-6) • Ю"2 °С-1. Т. е.
чувствительность термисторов сильно зависит от температуры и в
нормальных условиях на порядок выше, чем чувствительность
металлических термометров сопротивления. Воспроизводимость
терморезисторов составляет около 10%, температурный
диапазон AT = -80-Н-600 °С, долговременная стабильность
(повторяемость) около 0,03-0,5 °С/год. Простейшая схема включения
термистора в измерительную цепь приведена на рис. 3.37.
Учитывая высокую чувствительность и нелинейный характер
передаточной характеристики, термисторы, помимо своего
основного назначения, используются во многих высокочувствительных
схемах, например в термисторной пневмографии для определения
разности температур между вдыхаемым и выдыхаемым воздухом,
в датчиках уровня жидкости, в измерителях электрической
мощности и т. д. Их достоинством является дешевизна.
При производстве ТР с положительным ТКС используется
стандартная технология микроэлектроники (легирование
полупроводникового материала путем диффузии различных
примесей), что упрощает формирование интегральных датчиков
температуры в едином технологическом цикле со схемами
обработки сигналов. Такие ТР часто называют кремниевыми
датчиками температуры (КДТ).
КДТ имеют положительный ТКС (рис. 3.38) и достаточно
хорошо аппроксимируются полиномами второй степени
Рис. 3.37. Схема
включения
терморезистора
Рис. 3.38. Передаточная
характеристика КДТ (1 — исходная,
2 — линеаризованная)
Датчики физических величин
153
где а = 3,8 • КГ3 °С 1; р = 4,9 • 1(Г6 °СГ2; R0 = (U2) кОм,
АТ= Т-Т0(°С).
Чувствительность КДТ на порядок ниже, чем
чувствительность термисторов, а воспроизводимость на порядок лучше
(примерно 1%).
При использовании любых термометров сопротивления
возникает ряд специфических проблем, включающих:
1. Учет нелинейности (или линеаризация) термодатчика.
2. Самопрогрев.
3. Инерционность.
1. Наиболее простым и распространенным способом
линеаризации характеристик ТР является параллельное или
последовательное включение с термодатчиком дополнительного
резистора RL (рис. 3.39).
а 6
Рис. 3.39. Линеаризация характеристик терморезисторов:
а — параллельный шунт; б — последовательный шунт
Условие линеаризации в окрестности точки !Г; запишется
как d2Rx I dTf = 0, где Rz — суммарное сопротивление цепи.
Приравнивая вторую производную от Rz к нулю, находим
номинал RL. Для КДТ, в частности, последовательный шунт
(рис. 3.39, б)
где 2АТ — симметричный диапазон линеаризации относительно
Tj (рис. 3.38). Для термисторов последовательный шунт не
применяется, а параллельный шунт RL находится по формуле
154
Глава 3
Отметим, что линеаризация уменьшает чувствительность
терморезистора.
2. Самопрогрев.
Все резистивные термодатчики — пассивные приборы. На
них рассеивается мощность и, следовательно, их собственная
температура отличается от измеряемой температуры на
величину перегрева:
АГП = RQ - /д • RT у
где Rq = 30-н70 °С/Вт — тепловое сопротивление между
датчиком и воздушной средой (в воде RQ « 2 °С/Вт), /д — ток запитки
датчика. Следовательно, ток через датчик должен
ограничиваться величиной
/д<(Ж1.
vRQRT_
Например, при допустимом перегреве АТП = 1 °С, Rq = 50 °С/Вт,
RT = 1 кОм имеем 1„ < 4,5 мА.
3. Инерционность. Если датчик переместить из среды с
температурой Т0 в среду с температурой Тх> то переходный процесс
будет соответствовать звену первого порядка с постоянной х,
которая зависит как от теплопроводности среды, так и от размеров
и конструкции датчика. Типичная величина постоянной т тер-
мисторов для воздуха т » 0,1^0,5 с, а для корпусированных в
пластик КДТ т * 10^60 с.
3.2.3. Термопары
Термопарой (ТП) называется устройство, состоящее из двух
разнородных проводников или полупроводников со сварным
контактом или спаем. В основе работы ТП лежит
термоэлектрический эффект (эффект Зеебека), т. е. возникновение термоЭДС
между так называемыми «холодным» и «горячим» спаями,
имеющими разную температуру. Эта термоЭДС может быть
зафиксирована милливольтметром (рис. 3.40).
ТП в отличие от терморезисторов является генераторным
(активным) датчиком и не нуждается в запитке. Следовательно,
Датчики физических величин
155
Рис. 3.40. Схема измерения
термоЭДС
Рис. 3.41. Передаточная
характеристика термопары
в ТП принципиально нет явления самопрогрева и связанной с
ним погрешности. Величина термоЭДС зависит от разности
температур спаев (AT) и материалов термопары (Mv М2), т. е.
U = ЩАТ, М19 М2).
Выходное сопротивление ТП невелико (#вых = 1+10 Ом) и
с помощью ТП перекрывают температурный диапазон
Т = (-100+2300) °С. Передаточная (градуировочная)
характеристика носит нелинейный характер (рис. 3.41) и отклонение от
линейности может составлять десятки градусов. Крутизна
передаточной характеристики невелика и для различных
материалов находится на уровне S = AU/AT = 54-80 мкВ/°С. Например,
если взять термопару из меди и медно-никелевого сплава
(S = 40 мкВ/°С), то при разности температур между
«холодным» и «горячим» спаями в AT =100 °С термоЭДС составит
всего 4 мВ.
Крутизна передаточной характеристики термопары не
остается постоянной и уменьшается в области низких температур.
По этой причине термопары предпочитают использовать в
области положительных температур, хотя большинство из них
может работать и в области криогенных температур.
Долговременная нестабильность показаний ТП (после наработки в 10 ч при
максимально допустимой температуре) не превышает 20+50 °С.
Таким образом, чувствительность термопары значительно
меньше, чем у термометров сопротивления, и разрешение на
уровне 1 °С может быть реализовано только в микровольтном
156
Глава 3
диапазоне регистрируемых сигналов с применением
прецизионных усилителей (например, рассмотренных ранее ПКД- или
МДМ-усилителей). Чтобы провести абсолютные измерения,
температура одного из спаев должна быть известна.
Эффект Зеебека обратим. Следовательно, если по цепи из
разнородных материалов пропустить ток, то один из спаев будет
охлаждаться, а другой нагреваться (эффект Пельтье). Но КПД
прямого и обратного эффекта невелик. Для прямого эффекта,
если AT = 100 °С, то КПД * 5% . У эффекта Пельтье КПД * 5%,
при AT = 5 °С. На эффекте Пельтье основана работа
термоэлектрических холодильников, которые широко используются в
бортовой аппаратуре.
Среди термопар выбираются такие, которые обладают
максимальной крутизной передаточной характеристики,
перекрывают требуемый температурный диапазон и обладают
необходимой стойкостью к окружающей, зачастую чрезвычайно
агрессивной, среде (таблица 3.4).
Таблица ЗА
Материал
термопары
| Платина-родий (10%)-платина
1 Платина-родий (13%)-платина
Платина-родий (30% )-платина-
1 родий (6%)
1 Медь-медно-никелевый сплав
1 Вольфрам-рений (5%)
1 Хромель-константан
1 Хромель-копель
1 Хромель-алюмель
| Железо-константан
Тип
термопары
S
R
В
Т
-
Е
L
К
J
Крутизна
[мкВ/°С]
-10
-10
-4
-40
-20
-80
-80
-40
-65
Рабочий/max
диапазон [°С]
0+1300/1600
0+1500/1700
0+1700/1800
-200+400/-
0+2200/2500
-270+700/870
0+600/1800
-200+900/1200
-200+800/1200)
Конструктивно термопары выполняют в корпусном и
бескорпусном исполнении. Промышленные ТП в большинстве случаев
корпусируются и выполняются с закрытым спаем (рис. 3.42, б).
Однако такие ТП обладают большей инерционностью
(постоянная времени достигает десятков секунд) по сравнению с ТП,
Датчики физических величин
157
имеющими открытый спай (рис. 3.42, а), и тем более по
сравнению с бескорпусными ТП (постоянная времени составляет доли
секунды). Габаритные размеры ТП (рис. 3.42) составляют:
d = 2,5ч-10 мм, L = 40-1000 мм, I = 20-50 мм.
Рис. 3.42. Варианты конструкций термопар:
а — с открытым спаем; б — с закрытым спаем
Усредненные (номинальные) градуировочные
характеристики различных термопар приводятся в соответствующих
справочниках в виде таблиц или в виде степенных многочленов.
Допустимые отклонения серийных термопар от номинальных
градуировочных характеристик не превышают 1-г10 °С. В целом
чувствительность термопар значительно меньше, чем у
термометров сопротивления, и на 2 порядка меньше, чем у
терморезисторов, но они могут работать в более тяжелых условиях.
При измерениях абсолютных температур необходимо знать
или фиксировать температуру холодного спая. В реальных
условиях фиксировать температуру холодного спая трудно,
поэтому ее не фиксируют, а учитывают или компенсируют.
В большинстве случаев термопара (измеряет температуру Тх)
и удаленный измерительный прибор (имеет температуру
окружающей среды Г0) соединяются с помощью присоединительной
колодки (рис. 3.43) и медных соединительных проводов. При
таком соединении колодка нагревается за счет теплопередачи
Присоединительная колодка
Рис. 3.43. Схема подключения термопары
через присоединительную колодку
158
Глава 3
по проводам ТП до температуры Т2 и образуется еще одна
термопара с медью, которая искажает результаты показаний.
Например, при длине ТП в 1 м, Тг = 1000 °С и Гокр = 25 °С
температура присоединительной колодки может составить около
Т2 * 100 °С, а паразитная термоЭДС в паре с медью для
различных материалов составляет ±(1-г10) мкВ/°С.
Методы компенсации температуры холодного спая делятся
на пассивные и активные. При пассивных методах вводят
дополнительные (так называемые удлинительные) провода из
специальной термоэлектродной проволоки (рис. 3.44), которые
термоэлектрически идентичны материалам измерительной
термопары в диапазоне изменений АГ2.
Удлинительные провода
Алюмель
Константан
Рис. 3.44. Схема пассивной компенсации
температуры холодного спая
Для любого типа термопары существуют свои
удлинительные провода. Например, для термопары «хромель-алюмель»
удлинительные провода состоят из пары «медь-константан».
При этом погрешность измерения температуры не превосходит
AT = 2 °С. При пассивной компенсации важно не спутать
удлинительные провода (нельзя менять провода местами), т. к.
погрешность возрастает (в рассмотренном примере до AT « 200 °С).
В последнее время стали широко применяться схемы
активной компенсации температуры холодного спая с помощью
ИМС. В этих схемах последовательно с термопарой на
присоединительной колодке, которая играет роль термовыравнивателя,
устанавливается электронная компенсирующая микросхема,
имеющая в своем составе термодатчик (рис. 3.45, а). Кроме
того, ИМС еще и усиливает сигнал. Например, для термопары
Датчики физических величин
159
«железо-константан» фирмой Analog Device разработана
микросхема AD-594, позволяющая осуществлять измерения в
диапазоне температур Оч-ЗОО °С с погрешностью AT = ±0,6 °С и
крутизной преобразования 10 мВ/°С. Для уменьшения паразитной
термоЭДС пайка медных проводов к проводам ТП должна
осуществляться специальными кадмиевыми припоями (ПОСК-50-18) и
защищаться золотом, серебром, цинком.
В более ранних мостовых измерительных схемах для
компенсации температуры холодного спая часто применяли
компенсационный терморезистор (рис. 3.45, б). В такой схеме
терморезистор находится при такой же температуре, что и
холодный спай, и, следовательно, при изменении Т2 мост
перекашивается и возникает компенсирующее напряжение.
В ряде случаев желательно, чтобы ТП работала в режиме
холостого хода во избежание дополнительного ее нагрева, и тогда
применяют компенсационные методы измерения термоЭДС
(рис. 3.46).
A/j (Железо)
Рис. 3.45. Схемы активной компенсации паразитной термоЭДС:
а — с помощью микросхемы AD-594;
б — с помощью терморезистора в мостовой схеме
Схема
компенсации
(AD-594)
Присоединительная колодка
А/2 (Константан)
160
Глава 3
Рис. 3.46. Компенсационный метод измерения термоЭДС
В схеме рис. 3.46 микроамперметр используется в качестве
нуль-органа, а миллиамперметр в качестве отсчетного устройства.
С помощью переменного сопротивления Нг создается ток /2>
который выделяет на Ru компенсирующее напряжение. Момент
баланса фиксируется нуль-органом, а отсчет производится по току /2-
В этом случае термопара работает в режиме холостого хода.
Термоэлектрические эффекты в полупроводниках на
несколько порядков больше, чем в металлах, что позволило
создать промышленные теплогенераторы (эффект Зеебека),
нагреватели и холодильники (эффект Пельтье) с непосредственным
преобразованием тепловой энергии в электрическую и
наоборот. Правда, КПД таких тепловых машин невелик (5-М>%), зато
они компактны и надежны. Большой вклад в разработку таких
устройств на полупроводниках внесли отечественные ученые во
главе с академиком А. Ф. Иоффе.
3.2.4. Полупроводниковые датчики температуры
В настоящее время полупроводниковые датчики
температуры (ПДТ) наиболее популярны для стандартного диапазона
температур -50-г+ЮО °С, т. к. их легко интегрировать со схемами
усиления и обработки информации. В ПДТ используется
температурная зависимость падения напряжения на р-п переходе.
В соответствии с уравнением Эберса-Молла ток /д и падение
напряжения С/д на диоде определяются как
Датчики физических величин 161
где q — заряд электрона, (рг = kT/q — тепловой потенциал, к —
постоянная Больцмана, Т — абсолютная температура,
Is = с • Тг • ехр(-£д/фг) — ток обратно смещенного р-п
перехода (тепловой ток), с, т, г — константы (г « 3), Ед — ширина
запрещенной зоны полупроводника. Анализ уравнений
показывает, что в ограниченном температурном диапазоне
(-60-Г-Н50 °С) падение напряжения на диоде линейно зависит
от температуры (рис. 3.47) и может быть при неизменном токе
через диод аппроксимировано с погрешностью не более единиц
градуса выражением
(Уд = ил (+25 °С) + S • (Г - 25 °С),
где S = АС/Д/АГ — чувствительность диода (S = - (2,1-^2,5) мВ/°С).
Таким образом, чувствительность диодного ПДТ в 100 раз
выше, чем у термопар. Простейшая схема включения диодного
ПДТ приведена на рис. 3.48.
Рис. 3.47. Зависимость падения напряжения на диоде от температуры
Чтобы улучшить взаимозаменяемость ПДТ, используют
дифференциальное включение диодов (рис. 3.49), работающих при
разных плотностях тока. В схеме рис. 3.49 дифференциальная
пара транзисторов VT1 и VT2 включены в диодном режиме и
для нее справедливы соотношения
162
Глава 3
Рис. 3.48. Схема включения
диодного термодатчика
Рис. 3.49. Дифференциальный
диодный термодатчик
Таким образом, передаточная характеристика
дифференциального ПДТ не зависит от теплового тока Is. При этом в рабочем
температурном диапазоне возрастают линейность (погрешность
не превышает ±0,2 °С), стабильность и несколько расширяется
температурный диапазон в отрицательной области. В паспорте
на датчик передаточная характеристика обычно приводится к
десятичным логарифмам:
При /1//2=Ю крутизна преобразования составит S =
= 85,56 мкВ/°С. Следовательно, у дифференциальной диодной
пары чувствительность примерно в 20-^25 раз ниже, чем у
одиночного диода, но все еще выше, чем у термопар.
В практических схемах ПДТ (рис. 3.50) для запитки
дифференциальных термодиодов используются источники
одинакового тока на VT3 и VT4, а разную плотность тока через р-п
переходы создают с помощью дифференциальной пары VT1 и VT2,
включающей многоэмиттерный транзистор VT2. Можно
показать, что в этом случае плотности токов через р-п переходы VT2
и VT1 отличаются в п раз и
где п — число эмиттеров VT2.
Датчики физических величин
163
Рис. 3.50. Принципиальная Рис. 3.51. Принципиальная
схема диодного термодатчика схема диодного термодатчика тока
напряжения
Рассматриваемые ПДТ выпускаются серийно за рубежом в
виде интегральных схем и являются датчиками напряжения.
Но в ряде случаев, например при дистанционных измерениях
температуры, требуются температурные датчики тока. При
этом уменьшаются наводки и исключается влияние падения
напряжения на соединительных проводах.
В токовом ПДТ, являющемся двухполюсником и
приведенном на рис. 3.51, транзисторы VT3 и VT4 включены по схеме
токового зеркала и делят входной ток 1Т пополам. Плотность
тока через р-п переходы VT1 и VT2 отличается в п раз и
поэтому
(1)
При этом разность падений напряжения на переходах
выделяется на резисторе Дх:
(2)
164
Глава 3
Решая уравнения (1) и (2), окончательно получим
где k — постоянная Больцмана, q — заряд электрона.
Если п = 8, Rx = 358 Ом, то крутизна преобразования
составит «круглую» цифру S = 1 мкА/°С.
Схема дистанционного измерения с помощью токового
датчика приведена на рис. 3.52.
Рис. 3.52. Схема дистанционного измерения температуры
с помощью датчика тока
Датчик запитывается напряжением Е, соединяется со
схемой преобразования сигнала с помощью витой пары и нагружен
на сопротивление нагрузки RH. Цепь R3-R4 предназначена для
смещения рабочей точки усилителя по температурной шкале,
чтобы обеспечить измерения как по шкале Цельсия, так и по
шкале Кельвина. Если Ra = 1 кОм, коэффициент усиления
выходного усилителя kx = 10, то крутизна преобразования
токового ПДТ составит Sx = S • Ra • kx = 10 мВ/°С.
Общий недостаток кремниевых ПДТ — сравнительно узкий
температурный диапазон. Температурный диапазон
расширяется до +300 °С при использовании гетероструктур на основе
карбида кремния (SiC/Si). При этом крутизна составляет около
-7 мВ/°С, а отклонение от линейности не превышает ±(3-ь5) °С.
В области низких температур (вплоть до единиц градусов
Кельвина) используются ПДТ из германия, легированного
различными примесями, и арсенида галлия.
Характеристики интегральных датчиков температуры
приведены в таблице 3.5.
Таблица 3.5. Характеристики интегральных датчиков
температуры
AD592
LM135
LM20
DS18S20
DS18S20
LM124
МАХ6576
Таблица 3.5 (продолжение)
Примечание. Исполнение: 1 — встроенное, 2 — удаленное. Фирмы: AD — Analog Device, NS — National
Semiconductor, DS — Dallas Semiconductor, MX — Maxim.
TMP36
LM234-3
LM37
MAX1619
AD592CN
LM324
TMP35
Датчики физических величин
167
3.3. Датчики деформации и смещения
Датчиками деформации и смещения (ДДС) называются
датчики, фиксирующие упругие микродеформации и смещения в
диапазоне 10~8-ь10~5 м, которые возникают в различных
материалах, конструкциях, деталях машин, чипах при воздействии на
них физических факторов (давления, силы, температуры и
т. д.). Следовательно, регистрируя микродеформации, мы
можем косвенно судить о физических воздействиях на объект. На
этом принципе строятся датчики давления, силы, ускорения,
моментов, сейсмодатчики и т. д. Классификация ДДС
приведена на рис. 3.53.
Микромеханические
датчики
Интерферометрические
датчики
Тензодатчики
Металлические
тензодатчики
Проволочные
тензодатчики
Датчики
смещения
Пьезодатчики
Полупроводниковые
тензодатчики
Фольговые
тензодатчики
Пленочные
тензодатчики
Рис. 3.53. Классификация датчиков
деформации и смещения
Наиболее чувствительными, но и наиболее сложными
являются оптические, в том числе интерферометрические, ДДС.
В последние годы бурно развиваются ДДС на принципах
микромеханики. Но наибольшее распространение, благодаря в
первую очередь малым габаритам и массе, получили тензодатчики
(металлические и полупроводниковые) и пьезодатчики.
168
Глава 3
3.3.1. Металлические тензодатчики
Работа металлических тензодатчиков (тензорезисторов,
тензометров) основана на тензоэффекте, т. е. на изменении
сопротивления материала проводника под действием
прикладываемой силы. В простейшем случае тензорезистор представляет
собой отрезок провода, жестко закрепляемый на
деформируемой детали с помощью клея. Деформация детали вызывает
деформацию проволоки, в результате чего изменяются ее длина,
сечение и удельное электрическое сопротивление, что в
конечном итоге приводит к изменению электрического
сопротивления проволоки. Рассмотрим растяжение/сжатие в пределах
упругой деформации прямоугольного металлического бруска
длиной / и сечением S = Ъ под действием силы Р (рис. 3.54).
Сопротивление такого проводника R составляет
(1)
где р — удельное сопротивление материала. Из (1) следует, что
относительное изменение сопротивления d(R) связано с
относительными изменениями параметров проводника соотношением
(2)
В свою очередь, относительное изменение удельного
сопротивления материала 8(р), в первом приближении,
пропорционально изменению объема b(V) под действием деформации, а
Рис. 3.54. К расчету
тензочувствиительности
Рис. 3.55. Проволочный
тензодатчик
Датчики физических величин 169
поперечная деформация 3(b) пропорциональна продольной
деформации 3(1). Тогда
5(р) = С • 3(V) = С • 3(Ь2 • I) = С • [26(b) + 6(0],
5(6) = - ц • 5(Z), (3)
5(S) = 5(62) = 25(6),
где ц — коэффициент Пуассона (для металлов ц « 0,3), С —
коэффициент пропорциональности (С = 1). Подставляя (3) в (2),
получаем
3(R) = [(1 + 2ц) + С • (1 - 2ц)] 5(0 = Кт • 5(0, (4)
где Jfr — коэффициент тензочувствительности (для большинства
металлических материалов Кт& 2ч-2,5, хотя у сплава
«пермаллой-вольфрам» Кт достигает 4,1). Таким образом, изменение
сопротивления металлических проводников в пределах упругой
о
деформации (у стали до 200-г800 Н/мм ) пропорционально
продольной деформации 3(1). Линейность соотношения (4) сохраняется
при 5(0 < 1ч-10 %.
Конструктивно дискретные металлические тензодатчики
выполняются в двух вариантах:
Проволочный тензодатчик (рис. 3.55) — в нем для большей
продольной чувствительности проволока диаметром 20^-50 мкм
выполняется в виде меандра (10-5-20 звеньев) и наклеивается на
тонкую (толщиной < 0,1 мм) подложку.
Фольговые и пленочные тензодатчики (рис. 3.56) —
выполняются с применением методов фотолитографии и напыления. Для
уменьшения поперечной тензочувствительности в топологии
фольговых тензодатчиков делаются утолщения (рис. 3.56, а). При
этом обычно поперечная тензочувствительность не превышает
0,1 ч-0,2 % от продольной.
Фольговый тензодатчик может быть выполнен с высокой
точностью и оптимизирован под конкретное применение. На
рис. 3.56, б показан тензодатчик с двумя тензорезисторами Rx и
R2 одинакового номинала, но ось Хг максимальной
чувствительности резистора Rx ортогональна оси Х2 максимальной
чувствительности резистора R2. Анализируя соотношения между
тензорезисторами Rx и Л2, можно судить о деформации плоскости
образца в любом направлении.
8 Схемотехника измерительных устройств
170
Глава 3
Утолщение
Подложка
Рис. 3.56. Фольговый тензодатчик:
а — однокоординатный; б — двухкоординатный
Тензодатчики могут использоваться и для динамических
измерений. При этом при выборе размера тензодатчика 10
(рис. 3.56, а) исходят из того, что тензодатчик должен иметь
размер точечного зонда, чтобы регистрировать деформацию в
локальной точке образца. Следовательно, его размеры должны быть
меньше, чем деформационная волна в контролируемом образце:
z0<o,n,
где X = v/f — длина деформационной волны, v — скорость
распространения ультразвука, / — частота колебаний. Для
металла v « 5 • 103 м/с, /тах « 50 кГц и, следовательно, 10 < 10 мм.
При динамических измерениях величины допускаемых
продольных деформаций должны быть уменьшены на порядок по
сравнению со статическими измерениями, исходя из
усталостной прочности материала.
Особая проблема всех тензодатчиков — температурная
чувствительность. Это обусловлено, в основном, тремя причинами:
1. Температурной зависимостью р= р(Т) (на этом эффекте
работают, как известно, металлические термометры
сопротивления).
Датчики физических величин
171
2. Температурной зависимостью 8(1) = 5(/г), что приводит к
изменению Кт.
3. Разностью температурных коэффициентов расширения
датчика и подложки.
Таким образом, даже при отсутствии прикладываемой силы
сопротивление тензодатчика в рабочем диапазоне температуры
изменяется. Эта зависимость в достаточно широком
температурном диапазоне от -100 до +300 °С аппроксимируется
линейной функцией
bR(T) = Р • ЛГ,
где AT = Т - Т09 р « 2,2 • 10~5 °С-1, что соответствует
приклеиванию тензорезистора на стальную деталь. Наличие
температурной зависимости сопротивления тензорезистора приводит к
так называемой «кажущейся деформации»
Пример: Допустим, р = 2,2 • 10"5 °C_1, AT = 100 °С, Кт = 2,2,
10 = 10 мм. Тогда кажущаяся деформация в относительных
единицах составит 5(/)к = 2,2 • 10~5 • 102/2,2 = 10~3 или 0,1 %, а в
абсолютных величинах Л(/)к = 10 • 5(/)к = 10 мкм, что
представляет действительно внушительную величину и иллюстрирует
возникающую проблему. Соответствующим подбором сплавов для
тензодатчика и образца можно минимизировать коэффициент р
(вплоть до р < 1,5 • 10~ °С~ в диапазоне -50-+200 °С) и получить
так называемые термокомпенсированные тензорезисторы.
Для изготовления металлических тензорезисторов
номиналами R = 100-1000 Ом обычно используются сплавы на основе
никеля: константан (Ттах < 250 °С), нихром, карма (Ттах < 400 °С),
никель-молибденовые сплавы (Тт&х < 550 °С). В частности, сплав
Н70МХЮЭ (ЦАГИ, Москва) обеспечивает термостабильность на
уровне < (1,0-1,5) • 10~6 Ом/°С в диапазоне -250-4-500 °С.
Очень важным вопросом является прикрепление дискретных
тензодатчиков к исследуемому образцу. Для этой цели
используются как традиционные клеи типа БФ-2, так и специальные
безусадочные клеи (циакрин, ВН-15Т, В-58Т и др.),
обладающие хорошей адгезией в широком диапазоне температур. В
частности, соединения на полимерном клее ВК-18М (ВИАМ, Мо-
172
Глава 3
сква) способны выдерживать Ттах < 450 °С в течение 2000 ч,
а Гтах < 600 °С в течение 500 ч. Для достижения столь высоких
результатов требуется специальная технология, включающая
высокотемпературную полимеризацию клея в высокочастотном
поле.
3.3.2. Полупроводниковые тензодатчики
Полупроводниковые тензодатчики или пьезодатчики
получаются из легированного кремния р- или /i-типа путем
вырезания полоски монокристалла кремния (так называемые
вырезные полупроводниковые тензодатчики, рис. 3.57) или путем
диффузии примесей в подложку (так называемые
диффузионные полупроводниковые тензодатчики). В силу очень высокой
жесткости полупроводниковых тензодатчиков (кремниевой
подложки) диапазон измеряемых деформаций существенно
меньше, чем у фольговых (6(/)тах < 0,1%), и они практически
не имеют поперечной чувствительности. Если изменение
сопротивления металлического проводника связано как с
изменением удельной проводимости его материала, так и с изменением
его геометрических параметров, то в полупроводниках
изменение удельной проводимости более существенно, чем изменение
их геометрических параметров.
Передаточная характеристика полупроводниковых
тензодатчиков существенно нелинейная (рис. 3.58) и обычно
аппроксимируется полиномом третьей степени
5(Д) = аг • 5(0 4- а2 • S2(Z) + a3 • &*(1).
Монокристалл
Подложка
Рис. 3.57. Конструкция Рис. 3.58. Передаточная
вырезного полупроводникового характеристика полупроводнико
тензодатчика вого тензодатчика
Датчики физических величин 173
При небольших деформациях (|5(/)тах| < 0,01%) допустима
линейная аппроксимация и характеристика квазилинейна:
5(#) = аг • 6(1),
где ах определяет коэффициент тензочувствительности,
который приблизительно в 50-г100 раз выше, чем у металлических
тензодатчиков (а1 « ЮОч-200). Коэффициент
тензочувствительности полупроводниковых тензодатчиков сильно зависит от
степени легирования и от температуры (температурный
коэффициент чувствительности составляет около ±0,05 %/°С).
Минимальная регистрация деформации для
полупроводникового тензорезистора определяется тепловым шумом и при
Т= 300 К находится на уровне 5(0тш ~ Ю~7-^10~8. Таким
образом, динамический диапазон измерений, определяемый
отношением 5(0max/ S(0min составляет 4-ь5 порядков.
Основными факторами, влияющими на выбор
измерительной цепи полупроводниковых тензорезисторов, является
возможность коррекции температурных погрешностей.
Например, при дифференциальном включении тензорезисторов
удается понизить погрешность нуля в 10^-20 раз, а в полной
мостовой схеме удается стабилизировать и коэффициент
преобразования. При использовании тензодатчиков необходимо также
проводить компенсацию изменения сопротивления
соединительных проводов Rn. Для компенсации используется трех- или
четырехпроводное соединение с мостовой схемой (см.
раздел 1.4).
Пример: Допустим сопротивление тензодатчика R0 = 100 Ом.
Если 6(R) = 0,1%, то AR = R0 • d(R) = 0,1 Ом, что действительно
соизмеримо с изменением сопротивления проводов Лп. Для
простого моста, как известно, Д£/вых = (Е/4) • b(R) • [1/(1 + 5(Д)/2].
Если \b(R)\ < 0,1%, то можно принять С/вых » (Е/4) • 5(#).
Например, при Е=5 В и b(R) = 0,1% выходной сигнал составит
ивых = 12,5 мВ. Допустимая величина £мах, а следовательно и
крутизна тензодатчика, ограничивается саморазогревом
терморезисторов.
Хотя вырезные монокристаллические датчики в силу очень
высокой жесткости практически не имеют поперечной
чувствительности, именно диффузионные полупроводниковые тензо-
датчики позволяют в большей степени реализовать преимуще-
174
Глава 3
ства микроэлектроники. Примером является интегральный
мостовой тензодатчик давления и силы (рис. 3.59, а), у
которого все четыре тензорезистора моста выполнены на одной тонкой
кремниевой подложке (мембране). Мембрана (2) выполняет
роль чувствительного элемента, воспринимающего давление
или силу, и закрепляется в штуцере (1) с помощью прокладки
(3) и гайки (4).
Рис. 3.59. Мембранный датчик давления на пьезорезистивном мосте:
а — конструкция; б — схема расположения пьезорезисторов
Два внутренних резистора моста сформированы на малой
окружности мембраны и еще два — на большой окружности
(рис. 3.59, б). При приложении силы или давления к мембране
внутренние тензорезисторы сжимаются, а внешние —
растягиваются или наоборот. В результате образуется полный мост.
Как известно, полный мост малочувствителен ко всем
синфазным дестабилизирующим факторам и, следовательно,
нечувствителен к температурным изменениям тензорезисторов.
Подобные датчики применяют и в весоизмерительной
аппаратуре.
Выходной сигнал полного моста в пределах упругих
деформаций может быть представлен как
АС/ВЫХ = Д-5(Д) = Е • Кт • ОД - Е • (Рг - Р0) .
В серийных интегральных полупроводниковых тензодатчи-
ках для снижения термочувствительности на мембрану напыля-
Датчики физических величин
175
ются и терморезисторы (датчики температуры), которые
используются для термокоррекции, а плечи моста балансируются с
помощью лазерной подгонки.
Полоса пропускания интегральных мембранных тензодатчи-
ков ограничивается собственной частотой мембраны (которая
обратно пропорциональна толщине мембраны и достигает
100 кГц).
Типичные характеристики интегральных
полупроводниковых пьезодатчиков давления:
• Выходной сигнал в диапазоне Р = 100 МПа -50 мВ/В
• Нелинейность передаточной характеристики ~(0,5-г1,5) %
• Динамическая погрешность в полосе 0-40 кГц -(10^-30) %
• Изменение чувствительности в диапазоне
-20-+80 °С 415-20) %
Заметим, что термин «диффузионные тензорезисторы» (от
латинского слова tenso — растягиваю) применяется наравне с
термином «пьезорезисторы» (от латинского слова pieso —
сжимаю), т. к. сопротивление диффузионных резисторов
определяется пьезорезистивным эффектом.
Стандартный температурный диапазон кремниевых
пьезодатчиков равен А71 = -60-Н-125 °С. При использовании
технологии «кремний на кремнии» (КНК), где изоляция происходит по-
ликремнием, температурный диапазон расширяется до
AT = -60-Н-250 °С. Для высокотемпературных измерений
давлений, например в двигателях внутреннего сгорания, в качестве
полупроводникового материала используют карбид кремния
(SiC), позволяющий создавать датчики, работающие вплоть до
600 °С, и обладающий высокой коррозионной стойкостью. К
примеру, подобные датчики используются для исследования
процессов горения в реактивных двигателях и двигателях
внутреннего сгорания.
Характеристики интегральных тензодатчиков давления
приведены в табл. 3.6.
Таблица 3.6. Интегральные датчики давления
MPX10D
Motorola
MPX100D
Motorola
MPX200D
Motorola
SX05
Honeywell
SX30
Honeywell
МРХ2100А
Motorola
MPX2200A
Motorola
MPX7100A
Motorola
SCC30
Honeywell
SCX30AN
Honeywell
SDX30A2
Honeywell
4040PC01564
D
Honeywell
141PC01D
Honeywell
178
Глава 3
3.3.3. Пьезоэлектрические датчики
Работа пьезоэлектрических датчиков основана на
пьезоэлектрическом эффекте (пьезоэффекте), то есть эффекте
возникновения зарядов в некоторых материалах при приложении к ним
механической нагрузки. Это так называемый прямой пьезоэф-
фект (например, в микрофоне звуковое давление преобразуется
в заряд). Существует и обратный пьезоэффект, то есть
возникновение механических перемещений материалов при
приложении к ним внешнего напряжения (например, в телефонах и
динамиках электрический сигнал преобразуется в звуковое
давление).
Пьезоэлектрический эффект был открыт в 1880 г. братьями
Жаком и Пьером Кюри. Заметным пьезоэффектом обладают те
материалы, которые имеют ярко выраженные анизотропные
свойства, то есть различные свойства по различным
направлениям кристаллографических осей. Примером естественных пье-
зоматериалов являются турмалин, кварц, ниобат лития, сегне-
това соль и др.
Искусственные пьезоматериалы (пьезокерамики)
получаются спеканием смеси порошков (оксидов полупроводников) при
температуре выше так называемой точки Кюри (Тк) с
последующим постепенным остыванием и выдержкой при Т = 70-^200 °С
в течение нескольких часов при высокой напряженности
электрического поля (более 106 В/м). В этом случае происходит
поляризация керамики. Выше точки Кюри пьезоэффект исчезает.
Наибольшее распространение получили керамики на основе
цирконата-титаната свинца (ЦТС). Для керамики ЦТС
(PbTi03-PbZr03) ТК « 305-г370 °С, а для кварца Тк < 535 °С.
Преимущества пьезокерамики заключаются в том, что из нее
можно изготавливать образцы пьезоэлементов (ПЭ) сложной
формы с хорошей воспроизводимостью электрофизических
характеристик, она химически стойка и изготавливается по
стандартным керамическим технологиям.
В керамических материалах может наблюдаться частичная
или полная деполяризация с потерей электрофизических
свойств, если:
• материал подвергся воздействию сильного переменного
или постоянного поля противоположной полярности,
• температура возрастает выше точки Кюри,
Датчики физических величин
179
• механические воздействия превышают допустимый
уровень.
Простейший искусственный ПЭ представляет собой
параллелепипед прямоугольной формы из пьезоматериала, на гранях
которого находятся проводящие обкладки (электроды) для
снятия выходного сигнала £/вых, возникающего при приложении
сил (рис. 3.60). В зависимости от направления приложения
силы относительно кристаллографических осей ПЭ различают
продольный (соответствует направлению сил Fx—Fx)9
поперечный (F2—F2)y сдвиговый (F3—F3) пьезоэффект. Каждый из
видов пьезоэффекта подходит для каких-то конкретных
измерений. ПЭ обладают знакочувствительностью, т. е. знак UBblx
зависит от направления приложенной силы.
Рис. 3.60. Проявление пьезоэффекта
Заряд Q, который генерируется ПЭ, в первом приближении
пропорционален прикладываемой силе F, т. е.
(1)
где d — пьезомодуль (коэффициент пропорциональности).
Величина пьезомодуля зависит от материала ПЭ и от направления
кристаллографических осей. Продольный пьезомодуль для
-12
кварца характеризуется величиной d = 2 • 10 [Кл/Н], для ке-
— 12
рамики d = (80-г250) • 10 [Кл/Н]. Таким образом, керамика
намного более чувствительна, чем кварц. Однако кварц
обладает более высокой температурной стабильностью и линейностью
передаточной характеристики (погрешность не превышает
10~VlO"6).
Пьезоэлемент
Обкладки
180
Глава 3
В пределах упругой деформации перемещение X
пропорционально силе F, поэтому выражение (1) можно записать также в
виде
(2)
где К — коэффициент пропорциональности.
В простейшем случае ПЭ можно рассматривать как плоский
конденсатор емкостью Сд = г • S/h (S — площадь пластин, Л —
расстояние между ними) с очень высоким сопротивлением утеч-
11 12
ки Яд (Кл = 10 ч-10 Ом), который в результате приложенной
силы заряжается до напряжения U = Q/CA (рис. 3.61).
Пример:
С • U2
тх лхт Д вых
При этом запасенная энергия составит W = =
= 4 • 10 ~13 [Дж], а мощность холостого хода Рхх = \]\ /Дд =
= 16 • 10~15 [Вт] (нагрузкой пренебрегаем). Таким образом,
пьезоэлектрический датчик является чрезвычайно маломощным
устройством и, следовательно, чтобы снять с него сигнал,
необходимо принимать специальные меры.
Рис. 3.61. Эквивалентная Рис. 3.62. АЧХ ПЭ
схема ПЭ
Датчики физических величин
181
Поскольку при заряде емкости производится работа и заряд
на емкость Сд переносится током
I = — = d —, то
dt dt
• во-первых, эквивалентную схему ПЭ можно представить в
виде параллельного соединения источника тока и
плоского конденсатора (рис. 3.61),
• во-вторых, выходной сигнал будет проявляться на выходе
в виде «пичка» напряжения в момент приложения силы,
т. к. в статике при DF/dt -> О ток также будет стремиться
к нулю. Иными словами, ПЭ является динамическим
датчиком и не может работать на постоянном токе (не может
измерять статические нагрузки или нагрузки в области
нулевых частот).
Все предыдущие рассуждения не учитывают
пьезоэлектрического резонанса, то есть явление перехода одного вида энергии в
другой (механической в электрическую и наоборот), который
наступает вблизи резонансной частоты сор, где АЧХ ПЭ имеет
резонансный пик (рис. 3.62). Наличие резонанса связано с
возникновением в тонкой пластине кварца стоячих волн с длиной
волны X = V/fD, где V — скорость распространения ультразвука
з
в пьезоматериале (V « 10 м/с). Например, в пластинке кварца
толщиной в 1 мм резонансная частота составит 1 МГц. Поэтому
более сложная модель ПЭ, учитывающая явление резонанса,
представляется в виде источника тока, нагруженного на три
параллельные ветви (рис. 3.63), где дополнительная ветвь
(Lp-Cp-iip) и создает последовательный резонанс
на частоте сор = 1 /jLp • Ср. Типичные величины Lp = 1-г10 Гн,
Ср = КГ^КГ2 пФ, Др = 106+107 Ом. Обычно сор > (105-ь106) с'1.
Рис. 3.63. Схема подключения ПЭ к нагрузке
182
Глава 3
Рабочая область пьезодатчика — среднечастотная область,
где его передаточная функция W соответствует ФВЧ с частотой
среза соср:
где Сэ — эквивалентная емкость пьезоэлемента и нагрузки,
тср = 1/о)ср. В связи с тем, что ПЭ является чрезвычайно
маломощным прибором, частоту среза соср определяют с учетом
импеданса соединительной линии (RL-CL) и параметров входных
цепей усилителя (RU-CH) — рис. 3.63.
Пример. Допустим, для схемы рис. 3.63 имеем: R^ = RL =
= 1011 Ом, RBX = RH = 109 Ом, Сд = 500 пФ, CL = 100 пФ,
Сн = 30 пФ. Тогда эквивалентные сопротивления и емкости ПЭ
составят Яэ * 109 Ом, Сэ * 600 пФ, а тср = Rd • Сэ * 0,6 с, /ср =
= 1/2я • тср « 0,25 Гц. Таким образом, хотя пьезодатчик и
является динамическим элементом, рабочая область частот может
начинаться от единиц герц. Во всех случаях измерения заряда
основная сложность связана с высоким выходным импедансом
источника заряда.
Существуют две основные схемы подключения
пьезодатчика:
1. Схема усилителя напряжения.
2. Схема усилителя заряда.
Схема усилителя напряжения с учетом маломощности ПЭ,
должна обеспечивать большое сопротивление нагрузки. Для
этого обычно используют МОП ОУ в неинвертирующем
включении (рис. 3.64).
Рис. 3.64. Усилитель
напряжения ПЭ
Рис. 3.65. Усилитель
заряда ПЭ
Датчики физических величин 183
Заряд пьезодатчика выделяется на эквивалентной нагрузке
Лэ-Сэ, которая создается не только пьезодатчиком с
параметрами #Д-СД, но также присоединительной линией с параметрами
RL-CL. Очевидные соотношения для усилителя с учетом
соединительной линии:
а сомножитель —-— харак-
1 + рх
теризует частотные свойства системы, К —коэффициент
пропорциональности .
Таким образом, в данном случае выходной сигнал зависит
от параметров присоединительной линии. Например, любые
изменения в соединительном кабеле вызовут изменения в
выходном сигнале. Эта измерительная схема может быть
рекомендована, если усилитель находится непосредственно у
пьезодатчика (при этом ограничивается температурный диапазон)
или присоединительный кабель зафиксирован жестко и имеет
малую длину.
Усилитель заряда создается на интеграторе тока (рис. 3.65).
В области средних частот для схемы справедливы соотношения
(3)
Таким образом, UBUX не зависит от параметров
присоединительного кабеля, так как заряд пьезодатчика, разряжаясь на
виртуальный нуль ОУ, полностью переносится на С^. Из формулы
(3) можно сделать неправильный вывод о том, что W не зависит
где типичные погонная емкость и сопротивление изоляции
линии составляют: CL » 100 пФ/м; RL « 10n-rl012 Ом.
Передаточная функция датчика с усилителем
184
Глава 3
от времени, хотя очевидно, что С^ разряжается входными
токами ОУ и другими токами утечки I в соответствии с выражением
Например, при 1ут =0,1 нА, R^ = 1 ГОм имеем UBUx0 =
= 1 • 10~10 • 1 • 109 = 0,1 В. Заметим, что даже при отсутствии
дискретного R^ конденсатор Сос в реальных условиях
шунтируется сопротивлением утечки, которое сильно зависит от
влажности и температуры.
Факторы, ухудшающие характеристики пьезодатчика
1. Величина пьезомодуля d зависит от температуры.
Наиболее стабилен кварц (TK(d) « 2 • 10~4 1/°С). Менее стабильна
керамика (для керамики ЦТС TK(d) * 2 • 10"3 1/°С).
2. Влажность уменьшает сопротивления ПЭ и увеличивает
токи утечки. Керамика накапливает влагу намного сильнее,
чем кварц, поэтому нуждается в защите от влаги.
3. Трение в кабеле порождает шум в кабеле за счет
электризации, что вызывает флуктуации (изменение) выходного сигна-
Пример: 1ут = 1 нА; Сос = 500 пФ. Тогда скорость разряда
С_ составит
Для усилителя заряда нужны ОУ с малыми входными
токами (специальные электрометрические ОУ, например AD546,
AD549, которые имеют /вх = 1 пА-ьбО фА) и конденсаторы с
малыми токами утечки. Чтобы избежать «сползания» ОУ в
насыщение за счет входных токов ОУ и токов утечки, в обратной
связи ОУ устанавливается высокоомное сопротивление Roc
(рис. 3.65). С учетом Roc постоянная цепи ОС тос = Roc • Сос
определит частотные свойства ПЭ, а передаточная функция W и
начальное смещение ОУ £/вых0 составят
Датчики физических величии
185
ла. Это явление устраняется введением графитовой смазки
между кабелем и оплеткой.
4. Температурный гистерезис. Характерен, в основном, для
керамики и отсутствует в кварце.
5. Наличие поперечной чувствительности (в пьезокерамике
около 1% от продольной, в кварце (монокристалл) -
значительно меньше).
Несмотря на указанные недостатки, пьезокерамические
датчики отличает простота, высокая надежность, малые габариты,
возможность создания керамики любой формы.
Конструкции пьезодатчиков
Наиболее распространенной конструкцией пьезодатчика
является так называемое нагрузочное кольцо (рис. 3.66),
состоящее из кольцевого ПЭ, защитных кожухов и разъема.
Защитный
кожух
Втулка
Разъем
Рис. 3.66. Конструкция нагрузочного пьезокольца
Нагрузочные кольца могут использоваться для измерения
веса объектов в динамике, например при взвешивании вагонов
поезда при прохождении их по рельсу, под которым установлено
нагрузочное кольцо, или при взвешивании самолета на
рулежной дорожке. Промышленные кольца рассчитаны на нагрузку
F = ±(25-ь120) кН, имеют чувствительность S = 2 пКл/Н,
температурный диапазон AT == - 4СЫ-150 °C, частоту среза /ср в
единицы герц, полосу пропускания /тах = 10 кГц.
Нагрузочные кольца являются основой пьезоакселеромет-
ров, которые используются для измерения ускорения объектов.
Заметим, что зная ускорение, можно также судить о скорости и
перемещении. Типичный пьезоакселерометр (рис. 3.67) состоит
из основания с нагрузочным кольцом, на котором с
предварительным натягом, создаваемом с помощью гайки,
устанавливается инерционная масса. Осевое усилие, которое вызывается уско-
186
Глава 3
Инерционная масса
Нагрузочное,
кольцо
Фланец
Гайка
Разъем
Л.
Крепежный
болт
Рис. 3.67. Конструкция вибродатчика
рением (F = т • а), будет приводить к сжатию или разгрузке
нагрузочного кольца. При этом генерируется заряд
соответствующей величины и знака, который и характеризует ускорение.
Пьезоакселерометры используются в вибростендах для
фиксации ударов и ускорений и встраиваются в различные
механизмы, что позволяет производить, например, балансировку
вращающихся частей механизмов и машин. Промышленные
акселерометры работают при температурах -250-Н-300 °С и
имеют чувствительность 1-г100 мВ/м/с в полосе 10 -10 Гц.
Для увеличения чувствительности пьезодатчиков можно
использовать их последовательное или параллельное соединение
(рис. 3.68). При последовательном соединении (рис. 3.68, а)
емкость ПЭ уменьшается и С/вых увеличивается. Напротив, при
параллельном соединении (рис. 3.68, б) емкость возрастает и
увеличивается заряд Q (UBUX не меняется).
F
Рис. 3.68. Составные ПЭ: а — последовательное;
б — параллельное включение
Датчики физических величин
187
Для увеличения чувствительности пьезодатчиков также
широко используются биморфные пьезоэлементы (БПЭ). БПЭ в
простейшем случае представляют собой два протяженных
склеенных ПЭ, установленных консольно (рис. 3.69, а). При нагру-
жении консоли один пьезоэлемент будет растягиваться, а
другой — сжиматься и наоборот. Вследствие малой жесткости
консоли механические перемещения оказываются большими
(доли мм) и С/вых имеет большую амплитуду (соответственно
увеличивается чувствительность). БПЭ ведет себя как
дифференциальный датчик, поэтому всякая синфазная дестабилизирующая
величина (например, температура) в значительной степени
компенсируется.
Рис. 3.69. Биморфные ПЭ: а — пьезодатчик; б — пьезодвигатель
ПЭ может широко использоваться также в качестве
обратного преобразователя «напряжение-перемещение». Обратный пье-
зоэффект используется, в частности, в гидролокации
(ультразвуковые сонары), различного рода пьезодвигате лях и
микроприводах, например нанодвигателях зондовых установок
и туннельных микроскопов. Рис. 3.69, б иллюстрирует
применение БПЭ в качестве оптического модулятора, отклоняющего
падающий на зеркало световой поток в нужном направлении.
При встречном включении ПЭ1 и ПЭ2 перемещение оси
одиночного биморфа у и угол поворота зеркала а вычисляются как
188
Глава 3
где к — коэффициент пропорциональности (зависит от материала
и конструкции), d — пьезомодуль, ly h — длина и толщина
консольных ПЭ, (Уудр — напряжение управления. В типичном случае
(керамика ЦТС) при к = 0,5, d = 3 • 10~10 Кл/Н, I = 50 мм,
h = 1 мм, Е/ =100 В имеем у « 10 мкм, а « 0,4 • 10 рад.
3.4. Датчики магнитного поля
Работа многих современных технических средств основана
на взаимодействии с магнитными полями различной
интенсивности — от 10" Тл (биополя) до 10 Тл (силовая электроника).
Для регистрации магнитных полей применяют различные типы
магнитных датчиков: гальвано-магнитные датчики, магнитоди-
оды, магнитотранзисторы, магнитооптические датчики,
датчики Виганда и т. д. В основе работы наиболее отработанных и
изученных гальвано-магнитных датчиков лежат эффекты,
возникающие в твердых телах, помещенных в магнитное поле.
Наиболее часто используются открытые в 1879 г. эффект Холла
и магниторезистивный эффект (эффект Гаусса). Эти эффекты
взаимодополняющие. Усиление одного эффекта приводит к
уменьшению другого (превалирование того или иного эффекта
достигается конструктивными мерами).
3.4.1. Датчики на эффекте Холла
Это четырехполюсники из тонкого полупроводникового
материала толщиной d, которые имеют пару так называемых
токовых электродов и пару так называемых холловских
электродов (рис. 3.70).
Рис. 3.70. Холловский элемент
Датчики физических величии
189
Если через токовые электроды пропускать ток / и поместить
холловский элемент (ХЭ) в магнитное поле с индукцией В, то на
электрические заряды в полупроводнике будет действовать сила
Лоренца. Траектория зарядов искривится и на одном холлов-
ском электроде возникнет избыток зарядов одного знака, а на
другом — противоположного знака. Таким образом, между хол-
ловскими электродами возникнет так называемое холловское
напряжение Ех, пропорциональное (в определенном диапазоне)
индукции поля В. Холловское напряжение создает поперечное
электрическое поле, уравновешивающее силу Лоренца. В
линейной зоне передаточной характеристики ХЭ (рис. 3.71)
холловское напряжение определяется выражением
(1)
где Сх — холловская постоянная, / — ток, а — отклонение поля
от ортогонального направления к поверхности полупроводника,
d — геометрический параметр ХЭ. Таким образом, ХЭ является
множительным и знакочувствительным элементом.
Рис. 3.71. Чувствительность ХЭ по магнитному потоку
Эта формула справедлива в том случае, если холловские
электроды являются «точечными» (а/1 <^С 1). Эффект Холла
характеризуется холловской постоянной Сх и присущ всем твер-
— 10 3
дым телам. Например, для меди Сх(Си) «10 м /А • с. В то
же время полупроводники (Si, Ge, InSb, GaAs, InAs) имеют
холловскую постоянную на много порядков больше:
Сх = 10~3-г10~5 м3/А • с. Из формулы (1) следует, что в ХЭ из
InAs (Cx «10 м /А • с) толщиной в 100 мкм, помещенном в
190
Глава 3
поле В = 1 Тл, при токе в 1 мА возникает Ех = 10 мВ. Толщина
твердотельных ХЭ колеблется в районе 10ч-200 мкм, а
напыленных и эпитаксиальных ХЭ — в районе 5-г10 мкм. Технология
«кремний на изоляторе» обеспечивает толщину ХЭ в
0,2-И),3 мкм и соответственно более высокую чувствительность.
Типичные размеры ХЭ 0,1x1,0 мм.
Выходной сигнал ХЭ является гармонической функцией
угла поворота а и ориентационная характеристика (диаграмма
направленности) в полярных координатах имеет симметричный
вид (рис. 3.72).
Рис. 3.72. Чувствительность ХЭ по углу
Датчик Холла характеризуется набором параметров,
которые нормируются при а = 0:
1. Чувствительность по току:
2. Чувствительность по магнитному потоку:
3. Гальвано-магнитная или удельная магнитная
чувствительность:
Датчики физических величин
191
4. Сопротивления RBX и Явых определяются материалами
полупроводников и геометрическими размерами кристалла
(типично 104-Ю3 Ом).
5. Холловская постоянная Сх в сильной степени зависит от
температуры и имеет нелинейный характер. Для различных
полупроводников и режимов работы температурный коэффициент
ТК(СХ)« ±(0,1-1) %/°С.
6. Температурный диапазон ХЭ простирается далеко в
низкотемпературную область и для некоторых полупроводников
достигает AT = -270-+250 °С (для кремния AT = -150-+150 °С).
Поэтому ХЭ незаменимы при исследовании свехпроводимости!
7. Быстродействие ХЭ очень велико и характеризуется
полосой /в - 10 ГГц. Однако индуктивное поле электродов и
вихревые токи ограничивают /в до 10 МГц. Таким образом, ХЭ
является высокочастотным датчиком!
8. Нелинейный характер передаточной характеристики.
В слабых полях (\В\ < 0,1 Тл) погрешность достигает 0,1-1%, а в
сильных полях (В < 10 Тл) погрешность достигает 1-10 %.
Таким образом, ХЭ обладает погрешностью на уровне процентов.
Типичная схема подключения ХЭ приведена на рис. 3.73,
где ХЭ включен в ОС усилителя Ах для создания стабильного
тока через токовые электроды, а выходной сигнал ХЭ снимается
с помощью измерительного усилителя А2. Потенциометр Rx
позволяет устанавливать ток /, a R2 — компенсировать остаточное
напряжение на холловских электродах ХЭ.
Рис. 3.73. Схема включени ХЭ
192
Глава 3
Особенности применения датчиков,
основанных на эффекте Холла
1. В местах контактов токовых электродов из-за эффекта
Пельтье возникает нагрев, а следовательно, возникает градиент
температур AT, что приводит к возникновению термоЭДС на
холловских электродах. К примеру, если AT = 0,1 °С, то
АЕ = 10ч-100 мкВ. По этой причине ХЭ устанавливают на
массивное теплопроводящее (медное, бериллиевое или
алюминиевое) основание. Однако даже в этом случае остаточная
термоЭДС составляет АЕ = 1-ь5 мкВ.
2. Погрешности из-за собственного поля ХЭ, которое
создается токовыми электродами. Величина собственного поля
составляет В = 0,1^1 мТл (при токах менее 100 мА). Если при запит-
ке ХЭ применить бифилярное расположение электродов
(рис. 3.70 и рис. 3.73), то возникает компенсация поля,
уменьшающая погрешность на 1-^2 порядка.
3. Необходимость учета остаточного напряжения UQCT на
холловских электродах. Оно измеряется при нулевом поле и
номинальном токе (В = 0; / = ^Ном)- Остаточное напряжение
определяет разрешающую способность ХЭ, т. к. является аддитивной
погрешностью. Она зависит от температуры и доходит до
±(1-г10) мВ. В паспортных данных часто приводится не
величина £/ост, а величина остаточного сопротивления ХЭ — R0CT,
позволяющая оценить U0CT:
-'ном
Например, при /ном =10 мА, Дост =10" Ом, U0CT = Дост • /ном =
= 0,1 мВ. Предложено много схем компенсации погрешности
С/ос,.. Одна из простейших схем компенсации UOCT с включением
потенциометра R2y эффективная для сравнительно узкого
температурного диапазона, приведена на рис. 3.73.
Характеристики отечественных монолитных датчиков
Холла приведены в табл. 3.7, а характеристики монолитных
датчиков Холла фирмы Honeywell в табл. 3.8.
Таблица 3.7, Характеристики отечественных монолитных датчиков Холла
ПХЭ606117
ПХЭ606118
ПХЭ606817
ПХЭ607118
ПХЭ607817
ИМ101
ИМ102
ИМ103
Таблица 3,7 (продолжение)
ПХИ312
ПХИ313
ПХЭ602117
ПХЭ602118
ПХЭ602817
ПХЭ605118
ПХЭ605817
Таблица 3.8. Характеристики монолитных датчиков Холла фирмы Honeywell
SS94A1
SS94A1E
SS94A1F
SS94A2C
SS495A
SS495A1
SS496A1
196
Глава 3
Примечание. Iy — ток управления, /вых — выходной ток, исш —
напряжение смещения нуля, Сх — постоянная Холла, Кв — магнитная
чувствительность, В — индукция магнитного поля, ТК —
температурный коэффициент, Еп — напряжение питания, Тоткл — время отклика.
3.4.2. Магниторезисторы
Магниторезистор (MP) — это двухполюсник из
ферромагнитного или полупроводникового материала, сопротивление
которого зависит от индукции магнитного поля. В основе работы MP
лежит эффект, обусловленный изменением траектории зарядов
в магнитном поле под действием сил Лоренца (эффект Гаусса).
Конструктивно MP могут быть монолитными
(кристаллическими) или тонкопленочными. Типичная нормированная
передаточная характеристика монолитного MP из пермаллоя
приведена на рис. 3.74. Передаточная характеристика четная и
аппроксимируется выражением
Ru = RM0(l+A-\»-B\\
где RM — сопротивление MP, В —индукция поля, Лм0 —
сопротивление MP при В = О, А — магниторезистивный коэффициент
(положителен для монолитных и отрицателен для пленочных
MP), jlx — подвижность носителей, у — показатель степени. В
относительно слабых магнитных полях (В < 1 Тл) принимается
у « 2, а при В > 1 Тл принимается у « 1. Ориентационная
характеристика MP подобна характеристике ХЭ, хотя и не
описывается чисто гармонической функцией.
Рис. 3.74. Типичные
характеристики монолитного MP из пермаллоя
Рис. 3.75. Характеристики MP
в функции от параметра m
Датчики физических величин 197
Величина магниторезистивного коэффициента А зависит от
типа материала и конструктивного исполнения MP и обратно
пропорциональна отношению т = l/b, где I — длина MP, Ь —
ширина MP (рис. 3.75). MP-коэффициент максимален в
конструкциях, где в наибольшей степени ослаблен эффект Холла.
Примером такой конструкции является так называемый «диск
Карбино» (рис. 3.76), в котором нет граней для концентрации
носителей, как это имеет место в ХЭ. Однако практического
применения «диск Карбино» не находит, т. к. за счет
растекания тока от центрального электрода к торцу сопротивление Rm0
очень мало.
Для получения высокого сопротивления и большой
чувствительности несколько элементарных MP-элементов (секций) с
малым т соединяются последовательно. Секции отделяются
друг от друга с помощью металлических перемычек, которые
выполняют роль эквипотенциальных поверхностей (рис. 3.77).
При приложении поля линии тока в каждой секции
поворачиваются на холловский угол 0Х, изменяя свою длину и
сопротивление MP. Для получения аналогичного эффекта применяют
также специальный эвтектический сплав СКИН
(полупроводник InSb с вкраплениями проводящих кристаллов NiSb),
который наносится на подложку (керамика, стекло, пластик)
методами направленной кристаллизации. Наибольшим
магниторезистивным эффектом (А « 10 Ом/Тл) обладают анти-
монид индия (InSb) и арсенид индия (InAs). Широко
распространены также сплавы висмута и пермаллой. Толщина
монолитных MP около 25 мкм, пленочных около 0,25 мкм.
Реальные MP выполняются в виде меандров из
полупроводникового материала, сплавов СКИН, пермаллоя с
2 3
Rm0 « 10 -7-10 Ом. Во многих случаях они выполняются со сред-
Линий гока П/проводник
Рис. 3.76. Диск Карбино Рис. 3.77. Монолитный
(секционированный) MP
Металлические проводники
198
Глава 3
Магнитное пятно Подложка
Рис. 3.78. Дифференциальные MP:
а — структура MP; б — изменение сопротивления плеч
ним отводом (рис. 3.78, а), что позволяет использовать MP в
качестве дифференциального датчика перемещения магнитного
пятна и в мостовых схемах. На рис. 3.78, б приводится
характер изменения сопротивлений плеч дифференциального MP.
Так как топология MP может быть произвольной формы, то
могут быть реализованы различные пространственные
передаточные характеристики. На рис. 3.79 приводится конструкция
полного MP-моста. Сопротивление каждого резистора, входя-
щего в мост, пропорционально cos Э, где 0 — угол между
вектором поля и линией тока в MP. На рис. 3.80 приводится
конструктивная схема бесконтактного датчика угла на основе
MP-моста, помещенного между двумя полюсами вращающегося
магнита. Л,
Магнитопровод
Рис. 3.79. Конструкция Рис. 3.80. МР-датчик
MP-моста угла поворота
Датчики физических величин
199
Температурная стабильность пленочных MP (TKC около
0,3%/°С) примерно вдвое лучше, чем у монолитных MP, но
шумы выше за счет поверхностных дефектов. Полоса
пропускания MP простирается до 10 Гц.
В последние годы начал использоваться гигантский МР-эф-
фект (открыт в 1988 г.), возникающий в многослойных
тонкопленочных структурах с субмикронными размерами (например,
структурах «железо-медь-кобальт»). Чувствительность
мостовых схем с гигантским MP-эффектом в десятки раз больше, чем
у тонкопленочных мостов.
Применение MP
В силу высоких эксплуатационных качеств MP и
возможности работать в запыленной среде, MP наиболее широко
используются в пороговых схемах:
• в охранных системах (датчики приближения) и
турникетах,
• в автомобильной электронике (бесконтактное зажигание,
датчики наклона, датчики износа тормозных колодок),
• в головках считывания с магнитных дисков (например,
пленочные MP имеют размеры 10x100 мкм и позволяют
считывать информацию с линейной плотностью записи
порядка 4 кбит/мм,
• в неразрушающем контроле изделий (контроль полей
рассеяния вблизи дефектов),
• в бесконтактной клавиатуре.
В то же время магниточувствительные схемы широко
применяются и при измерениях:
• в магнитометрах и металлоискателях (чувствительность
современных магнитометров составляет около 10 от
поля Земли), в поиске полезных ископаемых,
• в бесконтактных измерителях тока и напряжения
(токовые клещи),
• в преобразователях линейных перемещений и углов
поворота (в том числе в бесконтактных двигателях
постоянного тока),
• в медицинской технике (магнитотерапия и магнитодиаг-
ностика),
• в магнитной навигации.
Характеристики магниторезистивных датчиков фирм Mura-
ta, Honeywell приведены в табл. 3.9.
Таблица 3.9. Магниторезистивные датчики фирм Murata, Honeywell
BS05C1HFAA
Murata
BS05C1HGCA
Murata
BS05M1HFAL
Murata
BS05N1HFAA
Murata
BS05C1HFAA
Murata
BS05C1HFAA
Murata
9 Схемотехника измерительных устройств
BS05W1KFAA
Murata
FR05CM12AL
Honeywell
FR05CM62AF
Honeywell
FR05CM65AF
Honeywell
Счетчик банкнот
под протокол ATM
Датчик угловой скорости
(квадратурный выходной
сигнал)
Датчик угловой скорости
(квадратурный выходной
сигнал и опорное напряжение)
Датчик угловой скорости
(четырехфазный выходной
и индексный сигнал)
Глава 4
Устройства отображения
информации (УОИ)
Устройства отображения информации (УОИ) предназначены
для предъявления измерительной информации в удобной для
регистрации форме. В состав УОИ наряду со схемой управления
(драйвером) входит и собственно индикатор, через который
выводится визуальная информация для оператора.
4.1. Классификация и характеристики УОИ
Исходя из физических принципов формирования
изображения все типы индикаторов делятся на активные (светоизлучаю-
щие) и пассивные (светомодулирующие). Для каждого типа
индикаторов существует множество технологий, хотя на рынке
реально присутствует сравнительно небольшое количество
индикаторов. Укрупненная классификация индикаторов
приведена на рис. 4.1.
Наиболее универсальным и хорошо отработанным средством
отображения информации являются электронно-лучевые трубки
(ЭЛТ). ЭЛТ являются своеобразным эталоном по
информационным и светотехническим характеристикам, с которым обычно
сравниваются другие типы индикаторов. Однако ЭЛТ не лишены
определенных недостатков (хрупкость, громоздкость, высокие
управляющие напряжения). Поэтому для измерительных
устройств более предпочтительны УОИ на полупроводниковых
светоиндикаторных диодах (СИД), газоразрядных (ГРИ),
электролюминесцентных (ЭЛИ), жидкокристаллических (ЖКИ)
индикаторах, которые изготавливаются по групповым технологиям
оптоэлектроники и обладают несравненно более высокими
эксплуатационными характеристиками.
По типу отображаемой информации УОИ подразделяются на
индикаторы для отображения:
Устройства отображения информации (УОИ)
203
Индикаторы
^
Светоизлучающие
индикаторы
Светомодулирующие
индикаторы
т
Электронно-лучевые
трубки (ЭЛТ)
Электролюминесцентные
индикаторы (ЭЛИ)
Светоизлучающие
диоды (СИД)
Газоразрядные
индикаторы (ГРИ)
Жидкокристаллические
индикаторы (ЖКИ)
Рис. 4.1. Классификация индикаторов
• Дискретных сигналов.
• Цифровых данных.
• Алфавитно-цифровых данных.
• Шкальной и мнемонической информации.
• Универсальной графической информации (матричные
дисплеи).
Для управления индикаторами применяются различные
типы адресации:
• Прямая адресация.
• Циклическая адресация (сканирование).
• Двухкоординатная (матричная).
Технологии изготовления индикаторов, тип отображаемой
информации и типы адресации влияют на сложность систем
управления УОИ. Основное требование к УОИ — надежность
регистрации измерительной информации, которая является
сложной функцией от технических характеристик индикатора
и психо-физиологических характеристик оператора. Система
параметров индикаторов включает:
• светотехнические и эргономические параметры,
характеризующие индикатор как элемент человеко-машинного
интерфейса,
• электрические параметры индикатора,
• эксплуатационные и надежностные параметры индикатора.
204
Глава 4
Основные светотехнические и эргономические
характеристики индикаторов — яркость, контрастность, угол зрения,
спектральная характеристика, светоотдача (ГОСТ 29.05.002-82)
связаны с фотометрическими единицами — силой света, световым
потоком и освещенностью.
Сила света J (измеряется в канделах (кд)) — основная
фотометрическая единица, определяющая внутреннее свойство
источника излучения создавать световой поток Ф в единице
телесного угла а (измеряется в стерадианах (ср)):
J = Ф/а.
Для примера, силу света в 1 кд обеспечивает электрическая
лампочка мощностью около 1 Вт, а глаз нормально
воспринимает источник с яркостью в 1 мкд. Световой поток Ф измеряется в
люменах (лм) или (для монохроматических излучателей) в
ваттах (Вт).
Яркость индикатора ЬИ характеризует среднее излучение
активного источника (световой поток) в данном направлении,
испускаемое с единицы поверхности S, и измеряется наиболее
часто в канделах на метр квадратный (кд/м ) или в люменах на
метр квадратный (лм/м ):
ЬИ = Ф/S.
о
Нормальной считается яркость излучателя не ниже 70 лм/м .
Эта величина примерно соответствует яркости белой бумаги на
письменном столе при дневном освещении. Собственный фон
индикатора характеризуется яркостью фона Ьф.
Контрастность символа характеризуется отношением
Ьп/Ьф. Контрастность напрямую зависит от освещенности и
определяет соотношение сигнал/шум в канале передачи
визуальной информации. При нормальной освещенности в 800^2000
лк контрастность для излучающих индикаторов не должна
быть меньше 100^150.
Спектральная характеристика индикатора характеризует
распределение излучения в видимом диапазоне спектра
(X = 0,38^-0,75 мкм) и определяет цвет свечения. Эта
характеристика должна быть сопряжена с нормированной спектральной
чувствительностью глаза у(Х) (рис. 4.2), которая носит название
кривой видности и определяет чувствительность глаза к раз-
Устройства отображения информации (УОИ)
205
Рис. 4.2. Нормированные спектральные характеристики:
1 — кривая видности глаза; 2 — зеленый СИД (GaP:N);
3 — красный СИД; 4 — люминофор GaP:Zn; 5 — инфракрасный
светодиод (GaAs); 6 — лампа накаливания при Т = 2800 °С
личным линиям частотного спектра излучения. Максимальная
чувствительность для дневного зрения соответствует длине
волны X = 0,555 мкм, а при сумеречном зрении — X = 0,515 мкм.
Кривая видности глаза позволяет установить связь между
объективными энергетическими характеристиками индикатора
и такой субъективной фотометрической единицей, как световой
поток. Установлено, что для нормального дневного зрения при
X = 0,555 мкм световая мощность излучения Рсв в 1 Вт
эквивалентна световому потоку в 683 лм. Следовательно, для
монохроматических излучателей справедливо соотношение
(1)
Скорость и точность восприятия информации оператором
зависит от многих факторов и в первую очередь от яркости,
контрастности и углового размера символа. Т. к. острота
зрения равна приблизительно 1 угл. мин., угловой размер знака
выбирается в пределах не менее amin = 7-^20 угл. мин.
Минимальный угол зрения определяет и минимальную высоту символа
Н при заданном расстоянии /:
206
Глава 4
Угол зрения — это максимальный угол между нормалью к
плоскости индикатора и направлением наблюдения, при
котором обеспечивается безошибочное восприятие отображаемой
информации при заданном контрасте, освещенности и
расстоянии наблюдения. Величины углов зрения нормируются в
вертикальной и горизонтальной плоскостях и для различных типов
индикаторов находятся в пределах ± (30-^80) угл. град.
Как правило, многоэлементное отображение информации на
индикаторах осуществляется в так называемом динамическом
режиме. При этом частота смены кадров не должна утомлять
оператора (не вызывать эффекта мелькания изображения). Это
достигается при частотах смены кадров не менее 30 Гц.
Светоотдача — отношение испускаемого светового потока к
электрической мощности, подводимой к излучателю
(измеряется в лм/Вт):
Л - Ф/Рэл. (2)
Этот параметр характеризует коэффициент полезного действия
(КПД) излучателя. У современных активных излучателей
светоотдача достигает 0,1-г1,0 лм/Вт. При недостаточной
светоотдаче возрастает потребляемая мощность, температура и
снижается ресурс индикаторов. Преобразуя формулы (1) и (2),
можно найти коэффициент преобразования электрической
мощности в световую:
Например, при крайних значениях г\ = 1 лм/Вт, у(^) = 1
получаем &тах « 0,15%.
Таким образом, проблема выбора индикатора или УОИ для
измерительного устройства представляет сложную задачу,
которая может быть решена лишь при комплексной оценке
технических характеристик индикаторов и психофизиологических
особенностей оператора.
4.2. Светоиндикаторные диоды (СИД)
В основе работы светоиндикаторных диодов (СИД) лежит
явление излучательной рекомбинации при прохождении тока
через р-п переход. При этом частота излучения v и длина волны
Устройства отображения информации (УОИ) 207
излучения X определяются шириной запрещенной зоны
полупроводника АЕ в соответствии с выражениями
1 Материал СИД
Si
1 GaAs
GaAsP
SiC
ZnS
InSb
i
АЕ, эВ
* 1,2
«1,3
* 1,9
«2,1
3,7
2,6
X, мкм
* 1,1
«0,9
«0,65
«0,59
0,34
0,61
1
Цвет свечения |
ИК
ИК
Красный |
Оранжевый |
УФ
Красно-оранжевый |
Наиболее известна планарная конструкция СИД, в которой
излучение распространяется во всех направлениях от р-п
перехода, причем наибольший световой поток Ф идет с торцов
кристалла, где нет поглощения излучения полупроводниковым
материалом (рис. 4.3).
Рис. 4.3. Планарный СИД
где h — постоянная Планка, с — скорость света в вакууме, я —
показатель преломления среды. Спектральные характеристики
некоторых полупроводниковых материалов, используемых в
производстве СИД, приведены в табл. 4.1.
Таблица 4Л. Характеристики полупроводниковых
материалов
208
Глава 4
Передаточная характеристика СИД линейна на протяжении
3-^4 декад, но световой поток экспоненциально (!) зависит от
температуры:
Ф(Т) = Ф0 • е~КАТ,
где AT = Т - Т0; К = (1-2) • 10~2 °С-1, Ф0 — световой поток при
Т=Т0.
Для того чтобы сделать излучение направленным,
применяют конструктивные меры, например, кристалл помещают в
миниатюрный отражатель (рис. 4.4, а) или перед кристаллом
помещают полимерную линзу, в частности, из эпоксидной смолы
(рис. 4.4, б).
Кристалл
а б
Рис. 4.4. Конструкции СИД: а — с отражателем; б — с линзой
Для задания тока через СИД его включают последовательно с
токоограничивающим резистором. Для расчета токоограничи-
вающего резистора необходимо знать падение напряжения на
диоде С/д, которое зависит от цвета свечения (табл. 4.2).
Таблица 4.2
Напряжение на диоде (В)
1,4
1 1,6
2,2
[ 2,4
Цвет свечения
ик 1
Красный
Желтый
Зеленый
Устройства отображения информации (УОИ) 209
Обычно приборные светодиоды имеют токи запитки в районе
20 мА, что соизмеримо с токами нагрузки логических
элементов. Логические элементы и используются во многих случаях
для управления дискретными СИД (рис. 4.5, а). При
включении СИД с большими токами потребления используют мощный
оконечный каскад на транзисторе (рис. 4.5, б).
а б
Рис. 4.5. Схемы управления СИД от ТТЛ:
а — маломощный СИД; б — мощный СИД
Спектральные характеристики СИД очень узкие и ширина
их по уровню 0,5 не превышает 50-ь100 нм (для GaAs,
например, ДА, = 20ч-50 нм). Т. е. СИД являются
квазимонохроматическими источниками излучения и для оценки их излучательной
способности используется не световой поток, а мощность
излучения Р. Типичная мощность излучения приборных СИД
составляет единицы-десятки мВт. Монохроматичность
излучения приводит к большой яркости и более высокому
коэффициенту полезного действия СИД, чем у ламп
накаливания (в 5-г25 раз).
Диаграмма направленности излучения СИД зависит от
конструкции. В планарной конструкции диаграмма имеет так
называемый ламбертовский вид (рис. 4.6) и описывается
выражением
Ф = Ф0 cosoc.
При этом эффективным углом излучения считается угол сси,
в котором световой поток уменьшается вдвое относительно Ф0.
Для ламбертовского излучателя сси = 2arccos(0,5) = 120 °.
Перемещая кристалл излучателя вдоль оси X и помещая его в отра-
210
Глава 4
жатель, можно существенно изменять диаграмму
направленности излучения, в частности, сделать ее более направленной
(кривая 2 на рис. 4.6).
Ламбертовская диаграмма
Рис. 4.6. Индикатрисса СИД (1 — без отражателя; 2 — с линзой)
Помимо одиночных, выпускаются многоэлементные СИД
(сегментные, матричные, шкальные, мнемонические).
Наиболее распространены сегментные СИД. В частности, так
называемый семисегментный СИД используется для отображения
цифровой и некоторой буквенной информации. Он состоит из 7
отдельных СИД (сегментов), не считая десятичной точки,
расположенных в определенном порядке (рис. 4.7, а). Включая
определенную комбинацию сегментов, можно отобразить
различные стилизованные цифры от 0 до 9 и некоторые буквы.
Например, комбинации «a-b-g-e-d» будет соответствовать цифра
«2», а комбинации «a-b-c-e-f-g» соответствует буква «А».
Отечественная промышленность выпускает также и 9-сегментные
СИД (рис. 4.7, б).
Западные фирмы выпускают и более сложные индикаторы.
Например, фирма «King bright» выпускает 16-сегментные
индикаторы, которые позволяют отображать не только
десятичные цифры, но и все буквы латинского алфавита. Яркость СИД
превышает 300 кд/м .
Примером 7-сегментных индикаторов являются
отечественные АЛС312, АЛ324 и др., для управления которыми
необходимы специальные дешифраторы (514 ИД2, 555 ИД1 и др.)
двоично-десятичного кода в сегментный код «а-b-c-d...-h» (рис. 4.8).
Устройства отображения информации (УОИ)
211
Рис. 4.7. Алфавитно-цифровые индикаторы:
а — 7-сегментный; б — 9-сегментный; в — 16-сегментный
Ток потребления индикатора при этом составляет десятки
миллиампер. В современных схемах управления (драйверах) в их
состав включается также дополнительный регистр для фиксации
входного кода.
Промышленностью выпускаются также многоместные
сегментные индикаторы, состоящие из нескольких «знакомест»
(рис. 4.9, а). В этом случае возникает проблема уменьшения
количества выводов (например, для 10-местного индикатора
требуется 10x7 = 70 выводов). Решается эта проблема с помощью
так называемого динамического управления, при котором все
одноименные сегменты индикаторов включаются параллельно
Рис. 4.8. Схема включения 7-сегментного индикатора
212
Глава 4
Рис. 4.9. Многоместный знакоиндикатор:
а — конструкция; б — схема включения; в — временная диаграмма
(рис. 4.9, #), а выбор конкретного индикатора осуществляется
подачей напряжения питания на соответствующий анодный
электрод индикатора в режиме мультиплексирования
(рис. 4.9, в). При этом количество выводов составит 7 + N. Для
исключения эффекта мерцания изображения частота
коммутации СИД не должна быть менее 100 Гц.
Недостатком сегментных СИД является то, что выход из
строя (отказ) любого сегмента практически приводит к потере
информации. От этого недостатка свободны матричные
индикаторы, в которых светящиеся СИД располагаются в виде
матрицы пикселов (рис. 4.10). Выборка любого СИД осуществляется
координатным способом в динамическом режиме. Стандартный
размер матричных индикаторов 7x5 (АЛС363), 8x8 (АЛС347),
хотя существуют индикаторы размером 64x64. Яркость
серийных матричных индикаторов находится в диапазоне
200-гЗОО кд/м2 при токе 1 мА.
При координатной выборке управление уже настолько
сложное, что оно осуществляется с помощью или микроконтроллера
Устройства отображения информации (УОИ)
213
HG
Рис. 4.10. Управление матричным индикатором
или специальных микросхем (514 серия). Из таких матричных
СИД может набираться матричное «панно» (для управления
требуется микропроцессор).
Достоинством матричных индикаторов является
отображение любого типа информации (буквенной, цифровой,
графической). Кроме того, отказ любого СИД не приводит к потере
информации, а только ухудшает качество отображения.
Помимо сегментных и матричных индикаторов, существуют
шкальные индикаторы, в которых излучающие элементы
располагаются в линию (до 100 штук). Они позволяют отображать,
например, «бегущую» точку, термометрический код и т. д.
Схемы управления шкальными индикаторами имеются в 155 серии
элементов. Основное применение — аудиоаппаратура,
видеоаппаратура и системы управления (табло для операторов).
Точность представления информации в шкальных индикаторах,
естественно, ограничена, однако наглядность выше и
утомляемость оператора значительно меньше.
Наконец, упомянем менее распространенные мнемонические
СИД (по западной терминологии — кластеры) для отображения
некоторой специальной информации — предупреждение о
возникновении пожара, возникновении аварийной ситуации,
указатели направления движения и т. д.
214
Глава 4
Достоинства СИД:
• большая яркость (в последнее время появились СИД на
органических материалах, которые обладают суперярко-
стью (в 100 раз больше обычных) и могут работать при
прямом солнечном освещении);
• надежность (наработка на отказ свыше 50^-100 тыс. часов;
• стандартный температурный диапазон;
• высокое быстродействие (частота переключения не менее
1 МГц, могут использоваться в оптоэлектронных линиях
связи);
• совместимость с микроэлектронными схемами
управления;
• большая цветовая гамма, включая СИД белого цвета;
• могут заменять лампы накаливания в индикационных
табло (до 80-7-90% экономии электроэнергии).
Недостатки СИД:
• сравнительно большая потребляемая мощность (до 40 мВт
на пиксел);
• деградация световых характеристик — в течение срока
службы (обычно не менее 25000 ч) деградация может
достигать 30^50 %;
• большая температурная нестабильность (1-^-2 %/°С);
• сравнительно высокая стоимость.
В разработке СИД велик вклад отечественных ученых. Еще в
1922 г. свечение кристаллического детектора было обнаружено
советским ученым О. В. Лосевым («эффект Лосева»), что дало
толчок к последующим исследованиям в этой области. В 70-е
годы ушедшего века Ж. Алферов с сотрудниками разработал
СИД на двойных гетероструктурах (Нобелевская премия
2000 г.), в которых квантовый выход повышен с 0,1 % до
15^-30 %.
В целом, по совокупности характеристик СИД являются
непревзойденными средствами отображения информации.
Характеристики полупроводниковых светоиндикаторных диодов
приведены в табл. 4.3.
АЛ310А
ИПД04-1К
КИПМ04Б-1К
АЛ360Б
КИПМ04В-1Л
АЛ307ЖМ
ЗЛ341Е
КИПД02Е-1Ж
КЛД910А
АЛС324А
КЛЦ201А
Таблица 4.3 (продолжение)
Примечание. Обозначение типа корпуса: П — пластмассовый, М — металлостеклянный
АЛС329А
КЛЦ302А
АЛС321А
АЛС342А
КЛЦ402А
АЛС345А
АЛС362Н
АЛС362И
Устройства отображения информации (УОИ)
217
4.3. Жидкокристаллические индикаторы (ЖКИ)
Жидкокристаллические индикаторы (ЖКИ) являются
альтернативой СИД, т. к. потребляют в 1000 раз меньшую
мощность. В основе работы лежат жидкие кристаллы (ЖК), то есть
органические вещества, обладающие как свойствами жидкости
(текучесть), так и свойствами кристаллического вещества
(упорядоченная структура, анизотропия свойств в разных
направлениях, двулучепреломление под действием приложенного
напряжения и т. д.). Эти свойства сохраняются в ограниченном
температурном диапазоне (ЛТ « -40^+70 °С). Ниже Tmin — ЖК
«замерзает», выше Гтах — «тает», т. е. переходит в жидкую
фазу. У ЖК отсутствует кристаллическая решетка, а есть
только однородная однонаправленная ориентация молекул.
Анизотропия свойств ЖК (электрическая, оптическая,
геометрическая) проявляется в ряде электрооптических эффектов
(управляемое поглощение, рассеяние, отражение,
поляризация), которые вызывают модуляцию светового потока.
1. Поглощение и пропускание света ЖК
Наиболее известны так называемые нематические
(нитевидные) ЖК, в которых одинакова послойная ориентация молекул.
Если тонкий слой нематического ЖК (толщиной около 10 мкм)
поместить между двумя стеклянными пластинками
(рис. 4.11, а), то молекулы ЖК выстраиваются
преимущественно вдоль образующих пластинок (поведение молекул является
а б
Рис. 4.11. Принцип поглощения и модуляции света ЖК:
а — в отсутствие поля; б — с внешним полем
218
Глава 4
статистическим процессом). Ориентация молекул задается
граничными условиями, создаваемыми на внутренней поверхности
стеклянных пластинок, например, грубой шлифовкой в
определенном направлении. Пропускание светового потока по
определению составит
Если на внутреннюю поверхность стеклянных пластинок
нанести тонкие прозрачные электроды и приложить к ним
электрическое напряжение амплитудой 10-^20 В (рис. 4.11, б)у то под
электродами произойдет ориентация молекул по
электрическому полю (изменится оптическая ось ЖК), пропускание
увеличится и составит
Таким образом, на просвет может быть отображен символ с
топологией нанесенных электродов. Это и есть простейший
ЖК-индикатор (ЖКИ). При снятии напряжения исходная
ориентация молекул будет медленно восстанавливаться за счет
упругих сил ЖК. Поэтому цикл элсктрооптического
переключения свойств в нематиках (включение/выключение), даже с
применением более сложного двухчастотного управления
(изменяет знак анизотропии) и напряжения в десятки вольт, может
быть уменьшен лишь до миллисекунды. Если на электроды
подавать, например, переменный сигнал, то будет осуществляться
модуляция света (ЖК-модулятор). ЖКИ является индикатором
пассивного типа, то есть нуждается во внешней подсветке.
2. Поляризация
Если к торцам ЖК приложить напряжение Е (рис. 4.12, а),
то молекулы ^КК сориентируются вдоль поля и образуют
своеобразную дифракционную решетку. Поэтому световой поток с
круговой поляризацией на входе будет иметь на выходе
преимущественную поляризацию Нх. Если теперь напряжение Е
прикладывать к другим (ортогональным) торцам ЖК (рис. 4.12, б),
то соответственно поляризация изменится на Н2.
Устройства отображения информации (УОИ) 219
Рис. 4.12. Принцип поляризации потока с помощью ЖК:
а — продольная; б — поперечная
Если две таких пластинки поместить друг за другом в
проходящем свете и подать на эти пластинки соответственно
напряжения Ег и Е2, то на выходе получим нулевой поток. На таком
принципе делается оптический поляризационный затвор
(применение в лазерной технике, в оптоволоконных линиях связи
и т. д.).
3. Твист-эффект
В переводе «twist» — кручение (кривляние). Для получения
твист-эффекта стекляные пластины подвергаются специальной
технологической обработке.
Представим себе, что стеклянные пластины имеют на
внутренней стороне так называемый ориентант (например «грубые»
царапины, полученные грубой шлифовкой или травлением, или
тонкую растянутую полимерную пленку). Тогда молекулы ЖК
будут в прилегающих к пластине слоях сориентированы
преимущественно вдоль этих царапин.
В твист-эффекте используются две стеклянные пластины с
ортогональными ориентантами 4 и 5 (рис. 4.13, а). Поэтому в
промежутке 6 между пластинами за счет межмолекулярных
сил ЖК идет постепенное скручивание осей молекул ЖК на
угол ф = h • с, где с — постоянная скручивания (в ЖК
с « 5 • 10 °/мм). Чтобы осуществить поворот молекул на 90°,
о
толщина слоя ЖК должна быть h = 90/(5 • 10 ) = 18 мкм.
Таким образом, на выходе образованного пакета будет
поляризованный свет с поляризацией, ортогональной плоскости черте-
220
Глава 4
Рис. 4.13. ЖКИ на твист-эффекте: а — поляроид на твист-эффекте;
б — структура ЖКИ, работающего на отражение
жа. Заметим, что твист-эффект аналогичен известному эффекту
двойного лучепреломления в кварце, однако у кварца
постоянная скручивания значительно меньше (с = 18 °/мм). На
твист-эффекте и разработано большинство ЖКИ. При
приложении напряжения к электродам 2 и 3 эффект разрушается.
Типичная структура ЖКИ приведена на рис. 4.13, б. С
внутренней стороны двух стекляных пластин с ортогональными
ориентантами наносятся прозрачные электроды 10 из окиси
олова (SnO) или двуокиси индия (1п02) толщиной в доли мкм, а
на внешней наносятся пленочные поляроиды 7 и 8 с
соответствующими ортогональными векторами поляризации Н и Hv
Как и в предыдущем случае, при засветке потоком Ф0
верхний поляроид 7 пропустит свет с поляризацией Н, а ЖК
повернет поляризацию до Нх. Поэтому за вторым ортогональным
поляроидом 8 будет наблюдаться свет Фх с поляризацией Н19
совпадающей с поляризацией поляроида 8. Если к электродам
приложить напряжение, то ориентация молекул в ЖКИ
нарушится и свет на выход не пройдет. По такому принципу
работает ЖКИ на мониторах (с внутренней подсветкой).
Конфигурация электродов определяет выводимый символ. Толщина
пакета ЖКИ не превышает 2 мм.
Устройства отображения информации (УОИ) 221
Для того чтобы ЖКИ работал без внутренней подсветки, за
вторым поляризатором устанавливается отражающее зеркало 9.
Тогда в отсутствие управляющего напряжения на электродах
поток Фг с поляризацией Нх отразится от зеркала 9, опять
«войдет» в ЖКИ, скрутится в нем еще на 90° и в обратном
направлении выйдет поток Ф2 с поляризацией Н2 (рис. 4.13, б). При
подаче управляющего напряжения эффект скручивания
пропадает и свет на выход не проходит.
В цветных индикаторах используется так называемый эффект
«гость-хозяин», когда в ЖК добавляются окрашенные
молекулы, которые создают какую-то цветовую гамму. При нарушении
(разрушении) твист-эффекта эта цветовая гамма пропадает.
При практической реализации ЖКИ необходимо решить ряд
сложных технологических проблем:
• разработать технологию предварительной ориентации
прилегающих слоев ЖК (напыление, травление, грубая
шлифовка, нанесение полимерных пленок и т. д.);
• осуществить жесткую (с высокой точностью) фиксацию
зазоров между пластинами (осуществляется с помощью
калиброванных стекляных шариков-спейсеров диаметром
10-20 мкм);
• отработать беспузырную технологию заливки ЖК в
микронные зазоры между пластинами (так называемая
вакуумная заливка с последующей герметизацией);
• разработать технологию контактирования ЖКИ со
схемой управления (80 % всех отказов в ЖКИ),
исключающую пайку и отслаивание электродов (осуществляется с
помощью проводящей резины).
Технологический процесс производства ЖКИ должен
исключать появление каких-либо неоднородностей, которые в силу
очень высокой напряженности поля внутри ЖК (доходит до
10 В/м) могут привести к локальному пробою ЖК.
Достоинства традиционных ЖКИ:
о
• малое энергопотребление (не более 2 мкА/см , что без
учета подсветки на три порядка меньше, чем у СИД);
• возможность отображения любого вида информации;
• совместимость с МДП-схемами управления;
• улучшение контраста при высокой освещенности.
222
Глава 4
Недостатки традиционных ЖКИ:
• сравнительно низкий температурный диапазон;
• низкое быстродействие (постоянная
включения/выключения достигает долей секунды);
• ограниченное поле зрения (не превышает ±(30-ь60)
градусов);
• сравнительно низкий контраст (у традиционных ЖКИ не
превышает 40:1, у усовершенствованных ЖКИ доведен до
100:1, а у СИД не менее 200:1);
• более сложные чем у СИД схемы управления (драйверы),
т. к. в управляющих сигналах не должно быть
постоянной составляющей, наличие которой приводит к
«сшиванию» (слипанию) молекул ЖК;
• недостаточная радиационная стойкость.
Качество универсальных матричных ЖКИ существенно
улучшилось после изобретения в 1975 г. тонкопленочных
МДП-транзисторов (ТПТ), которые наносятся на подложку над
каждым пикселом. Выборка ТПТ осуществляется
координатным способом, подачей открывающего напряжения на затвор
ТПТ. При этом заряжается пиксел-конденсатор, являющийся
элементом памяти при последующем закрытии ТПТ. Это
состояние сохраняется до следующего цикла сканирования
изображения (1/60 с). Применение активных ЖКИ, промышленный
выпуск которых начался с конца 90-х годов, позволило
значительно повысить информационную емкость и разрешающую
способность (размер пиксела 30x30 мкм), быстродействие (время
реакции 15-г25 мс), контраст (свыше 100:1) и угол обзора
±(60-7-80) градусов. Таким образом, благодаря новым
технологиям контраст и угол обзора перестали быть слабым местом ЖКИ.
Правда, процент выхода годных у активных ЖКИ не
превышает 50 %.
Некоторые характеристики традиционных цифровых
многоместных ЖК-индикаторов приведены в табл. 4.4.
Таблица 4.4. Многоразрядные жидкокристаллические индикаторы
ИЖКЦЗ-6/17
ИЖКЩ-6/5
ИЖКЩ-4/18
ИЖКЦ2-4/5
ИЖКЦ1-8/5
ЦИЖ-4-1
224
Глава 4
4.4. Газоразрядные индикаторы
В газоразрядных индикаторах (ГРИ) используют излучение,
возникающее при тлеющем разряде вокруг отрицательного
электрода в среде инертного газа. Видимое излучение создается
плазмой (облаком ионов и электронов высокой энергии).
Простейшим ГРИ является неоновая лампочка, в которой колба
заполнена неоном с добавкой небольшого количества паров ртути.
Механизм образования светящейся плазмы состоит из
начальной ионизации атомов ртути, которые, ускоряясь к катоду,
бомбардируют атомы неона, переводя их в возбужденное состояние.
При релаксации электронов на стабильные уровни и возникает
излучение. Цвет свечения зависит от состава инертного газа.
Область применения ГРИ значительно расширилась с
появлением матричных газоиндикаторных панелей (ГИП) или
плазменных панелей, в которых изображение создается из
множества светящихся точек. Основу ГИП составляют две системы
ортогональных металлических электродов, отделенных друг от
друга диэлектрическим сепаратором с отверстиями в зоне
пересечения электродов (рис. 4.14). Сепаратор помещается между
двумя герметизируемыми стеклянными пластинами и
выполняет функции механического каркаса для закрепления
электродов и локализует разряд.
Типичная вольт-амперная характеристика (ВАХ) ГРИ имеет
вид S-образной кривой (рис. 4.15). При низких напряжениях
(участок 1) разряд отсутствует, ток невелик. Но при
достижении напряжения зажигания U3 = 150^-400 В начинается
лавинообразный процесс ионизации, нарастание тока, и возникает
так называемый тлеющий разряд (участок 2). Для ограничения
тока во внешней цепи ГРИ должно устанавливаться токоогра-
ничивающее сопротивление. При отсутствии токоограничиваю-
Рис. 4.14. Конструкция ГИП
Рис. 4.15. ВАХ ГРИ
Устройства отображения информации (УОИ) 225
щего сопротивления и дальнейшем увеличении напряжения
может возникнуть дуговой разряд (участок 3). Тлеющий разряд
поддерживается при напряжениях горения Ur значительно
меньших U3 (типично Ur « 0,5 U3). Для выключения ГРИ
напряжение на нем должно быть уменьшено до величин ниже
напряжения горения.
ГРИ обладают высокой яркостью (свыше 150 кд/м2 ) и
сравнительно низкой экономичностью (ток потребления
2-гЗ мА/пиксел). Если к ГРИ прикладывается знакопеременное
поле, то свечение возникает попеременно около обоих
электродов и они могут модулироваться до частот в 20+25 кГц. При
наличии начальной ионизации время включения может быть
уменьшено до единиц микросекунд. Таким образом, ГРИ могут
принципиально работать как на постоянном, так и на
переменном токе.
В простых устройствах отображения цифровой и знаковой
информации нашли широкое применение индикаторные лампы
тлеющего разряда. Их особенностью является наличие
нескольких фигурных катодов в одном баллоне. Катоды имеют вид
изображаемого знака и расположены пакетом друг за другом,
или вид сегментов, расположенных в плоскости и образующих
требуемый знак. В обоих случаях свечение возникает между
общим анодом и теми катодами, на которые подано рабочее
напряжение. Для управления цифровыми ГРИ выпускаются
специальные высоковольтные дешифраторы, например 155ИДЗ.
Существуют два основных типа ГИП: постоянного тока и
переменного тока.
Среди ГИП постоянного тока наибольшее распространение
получили ГИП с самосканированием, в которых возможен
параллельный ввод информации во все строки, что значительно
упрощает управляющие цепи. Схема и временная диаграмма
ГИП на постоянном токе приведена на рис. 4.16.
Основным элементом является сепаратор 1, под которым
располагается система электродов. Одна группа полупрозрачных
электродов 2 (Е/к1, £/к2, Uk3) располагается под
перфорированными отверстиями, заполнеными инертным газом, и объединена в
трехфазную систему. Ниже располагается анод сканирования 3,
на который подается напряжение £/ас. В левой части каждой
строки находится пара вспомогательных электродов 4, между
которыми под действием напряжения С/д постоянно горит неви-
226
Глава 4
Рис. 4.16. Принцип раболты ГИП на постоянном токе:
а — конструкция; б — временные диаграммы
димый наблюдателю дежурный разряд 5. Там же располагается
стартовый катод б, на который в начале сканирования строки
подается стартовый отрицательный импульс UCK.
С учетом начальной ионизации от дежурного разряда 5
сравнительно быстро поджигается стартовый катод, а при подаче
фазовых напряжений сканирующий разряд 7 перемещается
вдоль строки. Сканирующий разряд горит между катодами и
анодом и практически не виден наблюдателю. Для зажигания
основного разряда 8 на анод индикатора 9 подается
положительный импульс. Каждая ячейка (пиксел) ГИП с
самосканированием не требует токоограничения, т. к. работает в
динамическом режиме. После окончания сканирования строки
начинается сканирование следующей строки и т. д.
Принципиальным преимуществом самосканирования
является высокое быстродействие и малое количество выводов. На
принципе самосканирования реализуются и шкальные ГРИ.
Однако плазменные панели постоянного тока не обладают спо-
Устройства отображения информации (УОШ
227
собностью запоминать информацию и требуют регенерации
изображения.
Этот недостаток устраняется в ГИП переменного тока, в
которых электроды гальванически изолированы от газовой смеси"
диэлектриком и по существу пиксел представляет собой
конденсатор. При подаче на обкладки конденсатора напряжения
зажигания возникает тлеющий разряд в газе и изолированная
плазма создает обратный потенциал, препятствующий горению.
Если в соответствующий момент времени изменить полярность
приложенного напряжения, то его поле совпадает с полем еще
тлеющего разряда и вновь возникает разряд в газе. Таким
образом, если какая-либо ячейка была включена, то ее горение
может поддерживаться подачей внешнего напряжения
переменной полярности и необходимой частоты. Это напряжение также
значительно меньше напряжения первоначального зажигания,
т. к. оно складывается с напряжением на обкладках
конденсатора. Данная ячейка не требует применения токоограничиваю-
щих резисторов, т. к. их роль, как и в предыдущем случае,
выполняет реактивное сопротивление конденсатора.
Конструкция ГИП переменного тока показана на рис. 4.17, а.
На двух стеклянных подложках 1 расположены наборы
параллельных ортогональных проводников 2 и 3, покрытых слоем
прозрачного диэлектрика 4. Между подложками находится
герметизированная газовая смесь 5, которая поджигается выбором
элементов матрицы.
Рис. 4.17. ГИП переменного тока:
а — конструкция; б — временная диаграмма
228
Глава 4
Яркость пикселов, образующих мозаичное изображение,
достаточна велика и не зависит от размерности матрицы. Работа
такой панели осуществляется в соответствии с диаграммой
управления (рис. 4.17, б). Импульса напряжения горения
амплитудой Un недостаточно для возникновения разряда, но
достаточно для поддержания горения. Для селективного перевода
пикселов из одного состояния в другое используются
стабилизированные по амплитуде импульсы записи U3n и стирания £/ст,
синхронизированные с поддерживающим напряжением Uu.
Данный тип ГИП обладает яркостью в 2-гЗ раза большей, чем
ГИП постоянного тока и характеризуется отсутствием
мерцания изображения. Данный принцип работы позволяет
осуществлять покадровую смену изображений без циклической
регенерации.
Современные ГИП имеют ряд важных преимуществ перед
другими типами индикаторов:
• плоскостность экрана (толщина Ю-т-20 мм);
• высокую разрешающую способность (минимальный
размер пиксела около 0,3-г0,5 мм);
• высокую информационную емкость (созданы панели
с матрицей 1024x1024);
о
• высокую яркость (свыше 350+450 кд/м ),
обеспечивающую четкое воспроизведение информации при
освещенности до 75000 люкс, что соответствует прямому
солнечному освещению;
• широкий угол зрения (до 80 угл. град.);
• высокую контрастность (свыше 300:1);
• высокую надежность (более 3-10 ч) в полном
температурном диапазоне (-60-Н-85) °С и при жестких механических
нагрузках;
• безопасность для обслуживающего персонала (отсутствие
электромагнитного излучения);
• возможность наращивания больших информационных
панно из сравнительно небольших (64x64) ГИП.
Недостатком ГИП, как указывалось, является низкий КПД
(0,1-ь0,3 лм/Вт) и большое энергопотребление, которое
оценивается на уровне около 0,35 Вт/см .
Указанные характеристики делают ГИП одними из самых
перспективных индикаторных устройств.
Устройства отображения информации (УОИ)
229
4.5. Электролюминесцентные индикаторы (ЭЛИ)
Электролюминесцентное излучение возникает в результате
приложения электрического поля к люминофорному
материалу. Свечение связано с ударным возбуждением люминофоров
потоком электронов высокой энергии (так называемая предпро-
бойная электролюминесценция), для чего требуется достаточно
большая напряженность поля (порядка (0,1-г1,0)Ю6 В/см).
Интенсивность излучения зависит от напряженности поля, а
также частоты его изменения, если поле переменное.
Наиболее распространенным люминофором является
сульфид цинка (ZnS), легированный медью, марганцем (ZnS:Mn) и
некоторыми другими элементами. От типа люминофора и
количества примесей зависит интенсивность и цвет свечения,
перекрывающий практически всю видимую область спектра.
Наибольшей яркостью обладают люминофоры лимонно-желтого и
зеленого свечения.
В УОИ наибольшее распространение получили два типа
ЭЛИ: на основе порошкообразных люминофоров,
возбуждаемых постоянным полем, и ЭЛИ на основе тонких пленок,
возбуждаемых переменным полем. Рассмотрим тонкопленочные
ЭЛИ, которые работают на переменном токе и в настоящее
время являются наиболее технологичными, надежными и
перспективными приборами.
Конструктивно тонкопленочные ЭЛИ представляют собой
сложную слоистую структуру, которая создается на подложке
методами вакуумного напыления (рис. 4.18).
Ф
Рис. 4.18. Структура тонкопленочного ЭЛИ
230
Глава 4
Тонкий слой люминофора (размеры на рис. 4.18 приводятся
в микрометрах) размещается между слоями диэлектрика, на
которые напылены проводящие электроды. Один из электродов
является прозрачным (тонкие пленки оксида олова (Sn02)
имеют прозрачность около 80%), а другой поглощающим,
повышающим контрастность изображения. Таким образом, элемент
ЭЛИ представляет собой конденсатор. После приложения к
электродам переменного напряжения начинается свечение лю-
минофорной панели. При необходимости форма электродов
может быть сделана фигурной, что дает возможность высветить
определенные знаки, фигуры и транспаранты.
Характерной особенностью тонкопленочных ЭЛИ является
нелинейная зависимость яркости L (кд/м ) и световой отдачи |д
(лм/Вт) от приложенного напряжения (рис. 4.19).
Рис. 4.19. Зависимость яркости L и световой отдачи ц ЭЛИ
на ZnS:Mn от напряжения
Такая характеристика, а также отсутствие свечения ниже
порогового уровня облегчают конструирование
тонкопленочных ЭЛИ и панелей с матричной формой управления, когда
координатные управляющие электроды выполняются в виде
тонких параллельных шин. Переменное питающее напряжение
прикладывается к шинам с помощью высоковольтных ключей
Устройства отображения информации (УОИ)
231
и при этом обеспечивается свечение пиксела, который
расположен на пересечении активной пары электродов. Изменяя
амплитуду и частоту управляющего напряжения, можно менять
яркость ЭЛИ и даже цвет его свечения.
Наиболее благоприятно синусоидальное управляющее
напряжение (крутые фронты могут пробить диэлектрик)
амплитудой 100+250 В и частотой 50+2000 Гц. Для управления ЭЛИ
выпускаются специальные микросхемы (например, в серии 1224),
а получение высоковольтных напряжений осуществляется с
помощью схем интегральных конверторов DC/AC.
Достоинства тонкопленочных ЭЛИ:
• высокая технологичность;
• малая толщина панелей (плоская конструкция) и
возможность изготовления ЭЛИ на гибком основании;
• большой угол обзора (более 160 угл. град.);
• сравнительно высокое быстродействие (время отклика
менее 1 мс);
• высокое разрешение (0,2+0,8 мм/пиксел);
• хорошие эксплуатационные и надежностные
характеристики (температурный диапазон -50++80 °С, ресурс
(0,2+1,0)Ю5 ч).
В то же время серийные ЭЛИ характеризуются:
• средней яркостью (до 150 кд/м );
• средней контрастностью (до 150:1);
• средней светоотдачей (зависит от яркости и достигает
1+1,5 лм/Вт).
Определенные проблемы связаны с применением
высоковольтных напряжений, высоковольтных ключей и деградацией
люминофоров. Широкое распространение ЭЛИ находят также в
качестве подсвечивающих панелей ЖКИ (обладают высокой
равномерностью) и пультов операторов.
Последние достижения в области ЭЛИ связаны с
применением органических люминофоров, в которых значительно
уменьшены рабочие напряжения (не более 5+6 В), увеличена
светоотдача (до 20 лм/Вт) и улучшены другие светотехнические и
эргономические характеристики (пиковая яркость, угол
зрения, контраст). Матричные ЭЛИ с органическими
люминофорами уже нашли применение в дисплеях сотовых телефонов.
Литература
1. Аш Ж. и др. Датчики измерительных систем: в 2-х книгах. Пер. с
франц. — М.: Мир, 1992.
2. Левшина Е. С, Новицкий Н. В. Электрические измерения
неэлектрических величин. (Измерительные преобразователи). Учебное
пособие для вузов. — Л.: Энергоатомиздат, 1983.
3. Гутников В. С. Интегральная электроника в измерительных
устройствах. 2-е изд. — Л.: Энергоатомиздат, 1988.
4. Хоровиц П., Хилл У. Искусство схемотехники. Пер с англ. — Изд.
шестое. — М.: Мир, 2001.
5. Сопряжение датчиков и УВВ с компьютерами IBM PC. Под ред.
У. Томпкинса и Дж. Уэбстера. Пер с англ. — М.: Мир, 1992.
6. Прянишников В. А. Электроника. Курс лекций. — СПб: КОРОНА
принт, 1998.
7. Алексенко А. Г. Основы микросхемотехники. 3-е изд. — М.:
ЮНИМЕДИАСТАЙЛ, 2002.
8. Кайдалов С. А. Фоточувствительные приборы и их применение.
Справочник. — М.: Радио и связь, 1995.
9. Быстрое Ю. А. Оптоэлектронные приборы и устройства. Учеб.
пособие. Изд. третье. — М.: ИП РадиоСофт, 2001.
10. Васерин Н. Н. и др. Применение полупроводниковых
индикаторов. Под ред. Липина Е. С. — М.: Энергоатомиздат, 1991.
11. Пароль Н. В., Кайдалов С. А. Знакосинтезирующие индикаторы и
их применение: Справочник. — М.: Радио и связь, 1988.
12. Тартаковский Д. Ф., Ястребов А. С. Метрология, стандартизация
и технические средства измерений. Уч. для вузов. — М.: Высшая
школа, 2001.