/

Author: Бакельман И.Я.
Tags: математика геометрия естественные науки серия популярные лекции по математике
Year: 1966




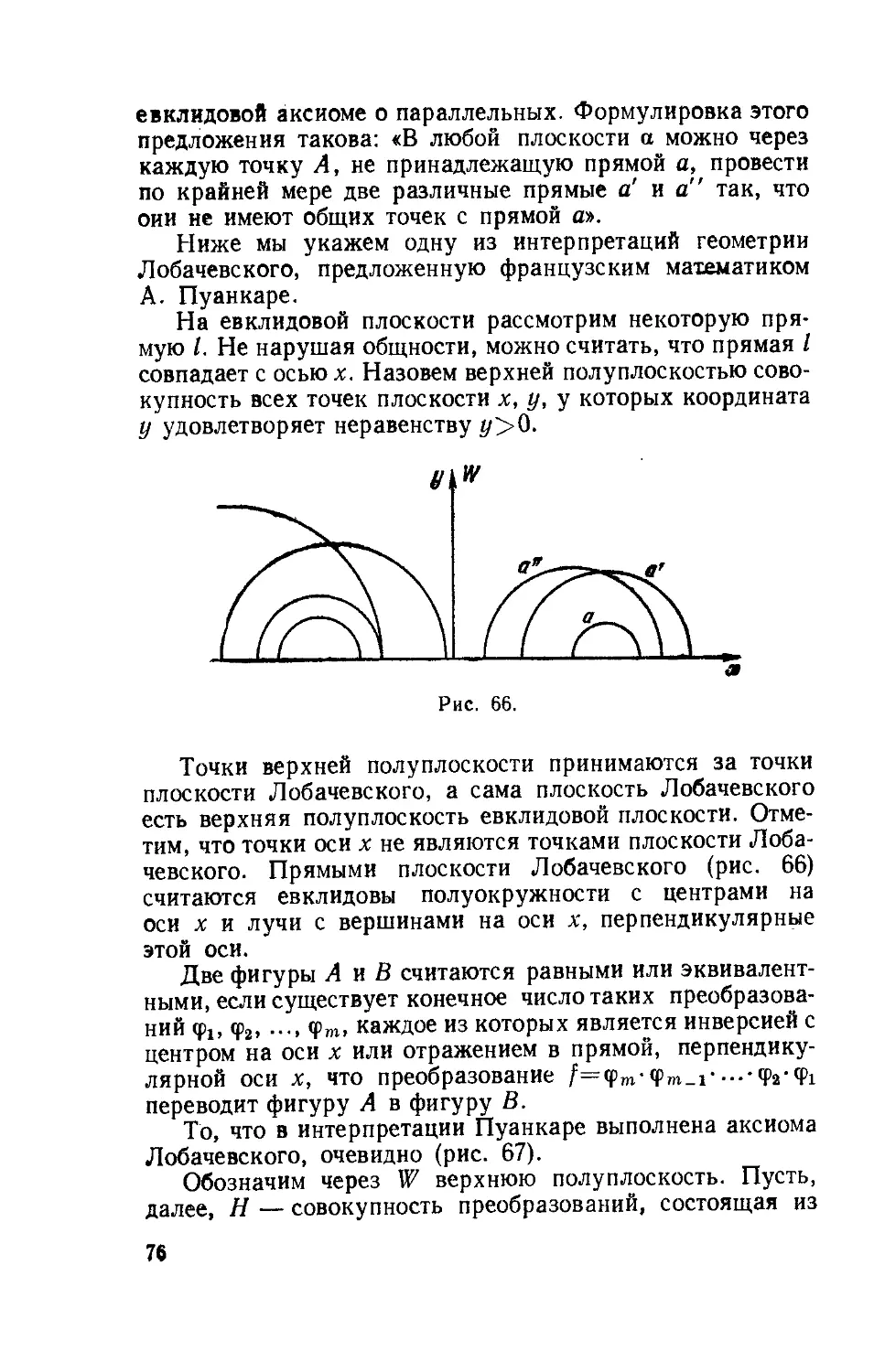
Text
<JOP>
И.Я.БАКЕЛБМАН
ИНВЕРСИЯ
ПОПУЛЯРНЫЕ ЛЕКЦИИ ПО МАТЕМАТИКЕ
ВЫПУСК 44
И. я. БАКЕЛЬМАН
ИНВЕРСИЯ
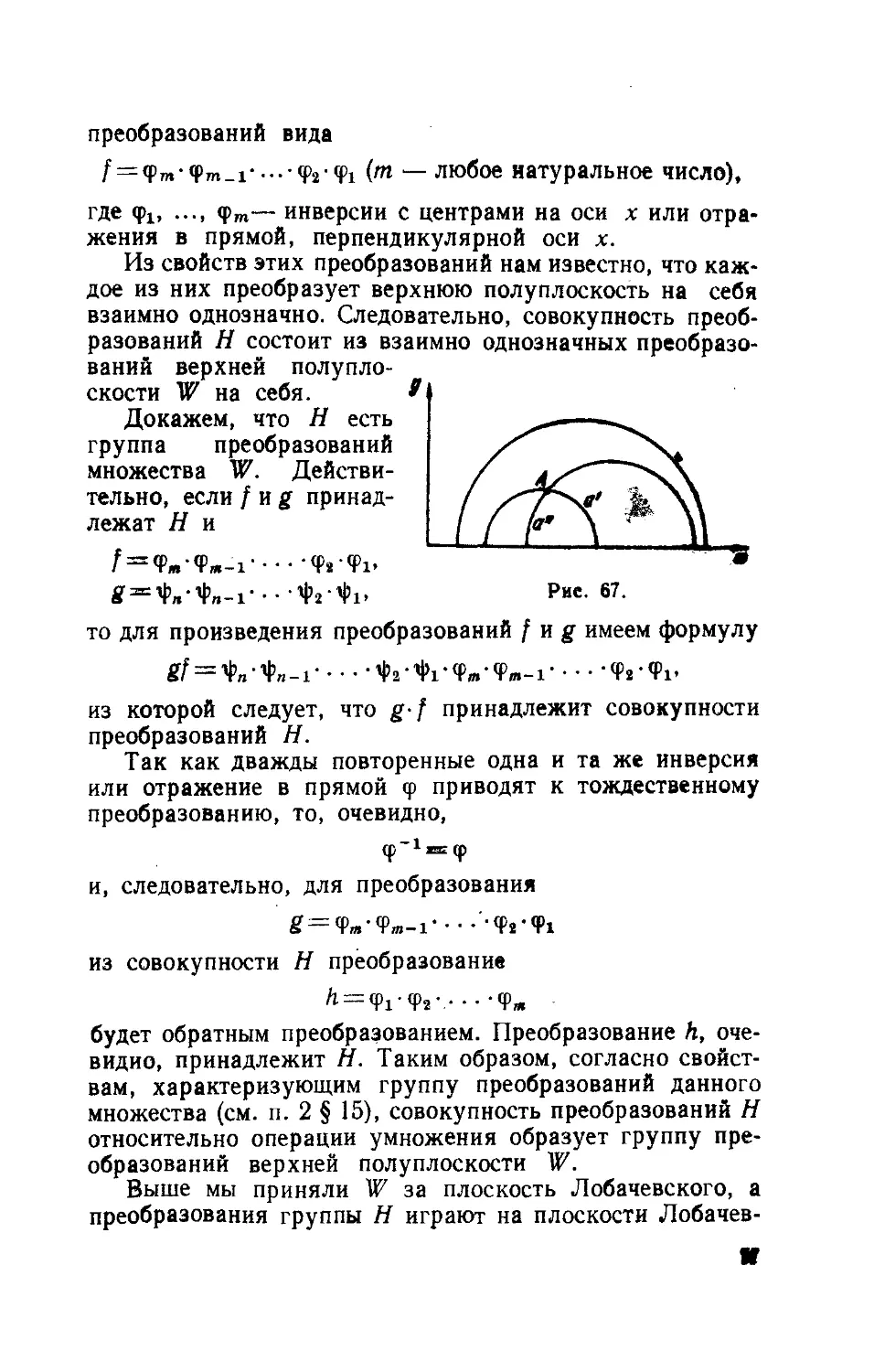
6
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1966
&id
Б 1»
УДК 513.011.1
t-t-s
iia-ee
ПРЕДИСЛОВИЕ
В геометрии основную роль играют различные преоб-
разования фигур. В школе подробно изучаются движения и
гомотетии, а также их приложения. Важной особенностью
этих преобразований является сохранение ими природы
простейших геометрических образов: прямые переводятся
в прямые, а окружности в окружности. Инверсия пред-
ставляет собой более сложное преобразование геометри-
ческих фигур, при котором прямые уже могут переходить
в окружности, и наоборот. Такой подход позволяет дать
в применении к задачам элементарной геометрии едино-
образную методику изучения. Это прежде всего относится
к задачам на построение и к теории пучков окружностей.
Следует отметить, что рассмотрение указанных разделов
элементарной геометрии без применения инверсии связа-
но с привлечением разнообразных, большей частью до-
вольно искусственных построений, носящих частный ха-
рактер. Кроме указанных приложений, инверсия приме-
няется также в пограничных вопросах элементарной и так
называемой высшей геометрии. Речь идет об интерпретации
геометрии Лобачевского на евклидовой плоскости. Инте-
ресны связи инверсии с комплексными числами, точнее,
с простейшими функциями, аргументом и значениями ко-
торых являются комплексные числа.
Настоящая книга посвящена преобразованию инверсии
и ряду ее приложений. Для удобства изложения материал
разбит на три главы.
t* а
В первой главе подробно изучается преобразование ин-
версии и даются ее приложения к вопросам элементарной
геометрии. Во второй главе показано, что преобразования,
рассмотренные в главе I, могут быть заданы линейными и
дробно-линейными функциями комплексного аргумента.
Устанавливается также, что и обратно, такиефункции опи-
сывают преобразования плоскости, сводящиеся к последо-
вательному выполнению движений, гомотетии и, может
быть, инверсий. В третьей главе излагается теоретико-
групповая точка зрения обоснования геометрии, с помо-
щью которой, опираясь на материал глав I и II, строятся
кратко планиметрия Евклида и планиметрия Лобачев-
ского.
Более подробное изложение вопросов, затронутых в
главе III, читатель может найти в книге Н. В. Ефимова
«Высшая геометрия».
В основу настоящей книги легли лекции, прочитанные
автором в разное время школьникам г. Ленинграда.
И. Я- Бакельман
ГЛАВА I
ИНВЕРСИЯ И ПУЧКИ ОКРУЖНОСТЕЙ
§ 1. Простейшие преобразования плоскости
Идея преобразования одних геометрических фигур в
другие будет играть основную роль в этой книге. В этом
параграфе речь будет идти о фигурах на плоскости. Прежде
всего уточним, что мы будем понимать под преобразова-
нием геометрических фигур. Рассмотрим некоторую пло-
скость и пусть дан закон, с помощью которого каждой точ-
ке X этой плоскости ставится в соответствие точка X'
той же плоскости. Этот закон сопоставления называется
преобразованием плоскости, а точка X', соответствующая
точке X, называется ее образом. Ниже преобразования
плоскости будем обозначать греческими буквами. Если
Ф — преобразование плоскости, X — некоторая точка пло-
скости и X' — ее образ относительно преобразований ф,
то мы часто будем пользоваться обозначением Х' = ф(Х)
или просто ф(Х).
Пусть на плоскости задано преобразование ф и пусть
F — некоторая фигура на плоскости. Преобразование ф
переводит каждую точку X фигуры F в некоторую точку
X'—ее образ. Фигура F', состоящая из совокупности
всех образов точек фигуры F, называется образом фигуры F
относительно преобразования ф. Фигуру F' мы часто бу-
дем обозначать также <p(F). Таким образом, преобразова-
ние ф переводит каждую фигуру F на плоскости в ее об-
раз— фигуру F' — q>(F) (рис. 1).
Как правило, точка и ее образ не совпадают. В том слу-
чае, когда точка X и ее образ — точка ф(Х) — совпадают,
точка X называется неподвижной точкой преобразования ф.
5
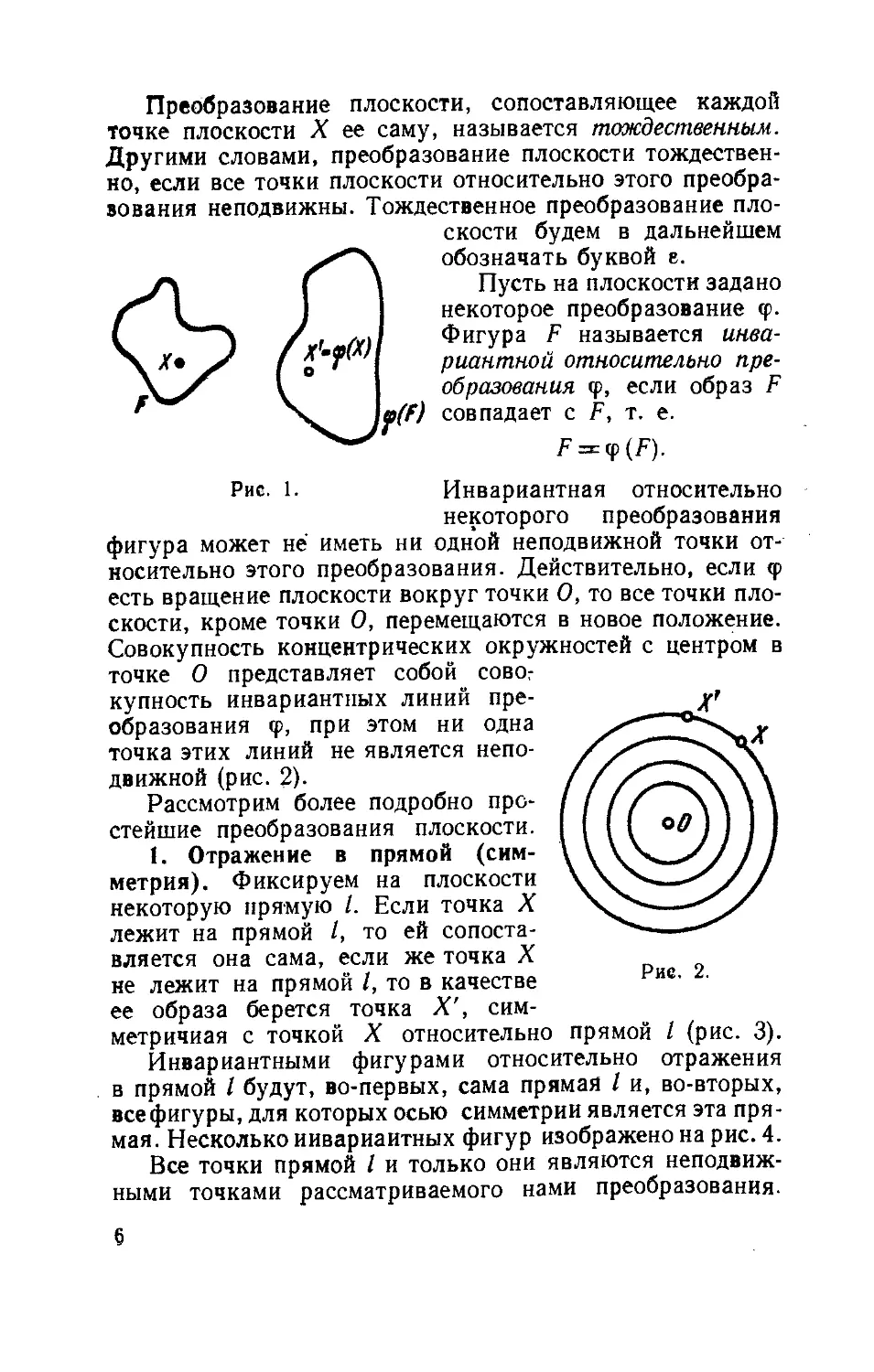
Рис. 1.
Рис. 2.
Преобразование плоскости, сопоставляющее каждой
точке плоскости X ее саму, называется тождественным.
Другими словами, преобразование плоскости тождествен-
но, если все точки плоскости относительно этого преобра-
зования неподвижны. Тождественное преобразование пло-
скости будем в дальнейшем
обозначать буквой е.
Пусть на плоскости задано
некоторое преобразование <р.
Фигура F называется инва-
риантной относительно пре-
образования (р, если образ F
совпадает с F, т. е.
F =^(p(F).
Инвариантная относительно
некоторого преобразования
фигура может не иметь ни одной неподвижной точки от-
носительно этого преобразования. Действительно, если ф
есть вращение плоскости вокруг точки О, то все точки пло-
скости, кроме точки О, перемещаются в новое положение.
Совокупность концентрических окружностей с центром в
точке О представляет собой совог
купность инвариантных линий пре-
образования ф, при этом ни одна
точка этих линий не является непо-
движной (рис. 2).
Рассмотрим более подробно про-
стейшие преобразования плоскости.
I. Отражение в прямой (сим-
метрия). Фиксируем на плоскости
некоторую прямую I. Если точка X
лежит на прямой I, то ей сопоста-
вляется она сама, если же точка X
не лежит на прямой /, то в качестве
ее образа берется точка X’, сим-
метричная с точкой X относительно прямой I (рис. 3).
Инвариантными фигурами относительно отражения
в прямой I будут, во-первых, сама прямая I и, во-вторых,
все фигуры, для которых осью симметрии является эта пря-
мая. Несколько инвариантных фигур изображено на рис. 4.
Все точки прямой I и только они являются неподвиж-
ными точками рассматриваемого нами преобразования.
§
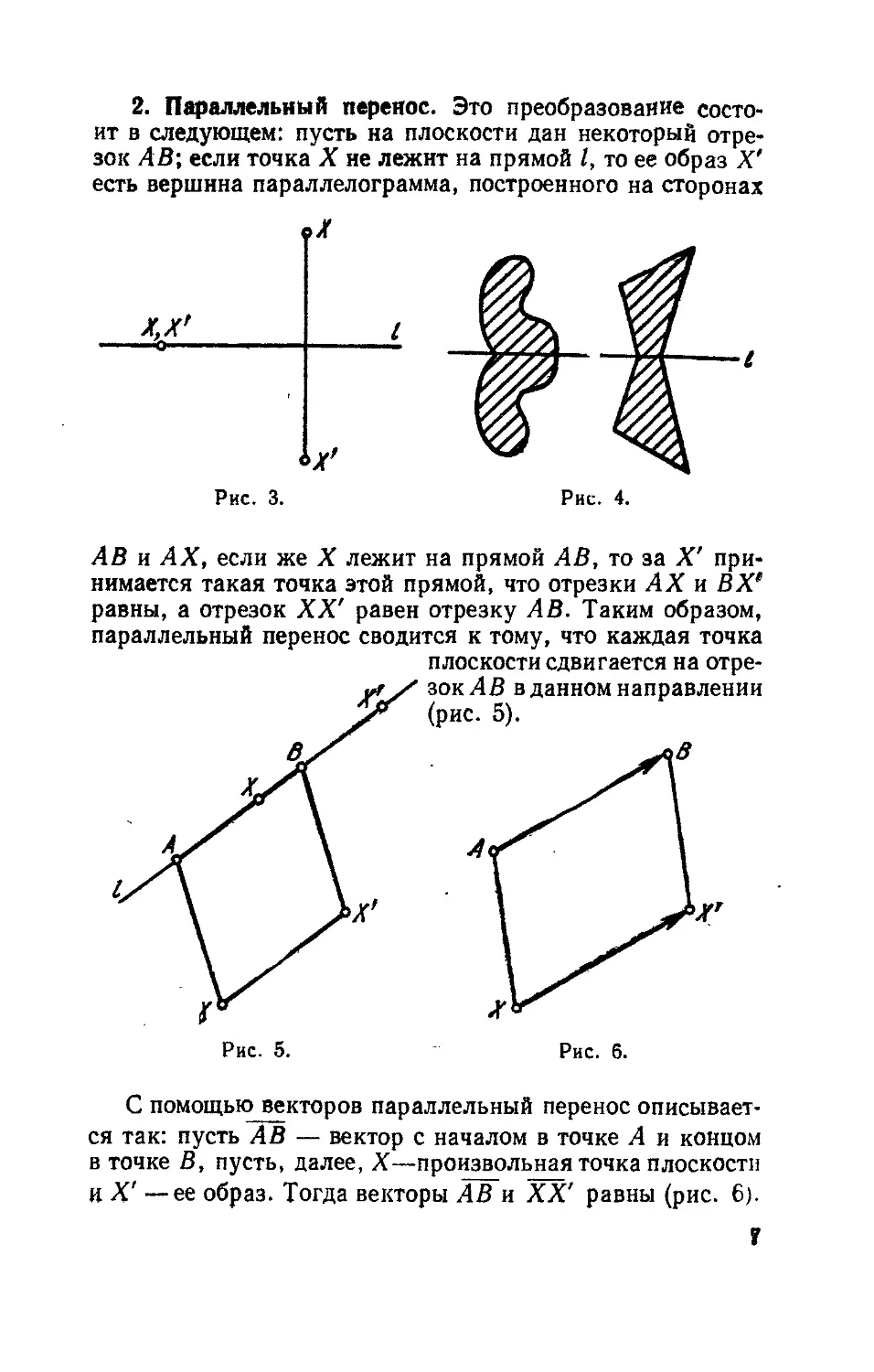
2. Параллельный перенос. Это преобразование состо-
ит в следующем: пусть на плоскости дан некоторый отре-
зок АВ\ если точка X не лежит на прямой I, то ее образ X'
есть вершина параллелограмма, построенного на сторонах
Рис. з.
Рис. 4.
АВ и АХ, если же X лежит на прямой АВ, то за X' при-
нимается такая точка этой прямой, что отрезки АХ и ВХ*
равны, а отрезок XX' равен отрезку АВ. Таким образом,
параллельный перенос сводится к тому, что каждая точка
плоскости сдвигается на отре-
С помощькмзекторов параллельный перенос описывает-
ся так: пусть АВ — вектор с началом в точке А и концом
в точке В, пусть, далее, X—произвольная точка плоскости
и X' —ее образ. Тогда векторы АВ и XX' равны (рис. 6).
1
Поэтому параллельный перенос можно рассматривать
как сдвиг каждой точки X на вектор, равный вектору АВ.
Если вектор АВ нулевой (точка А совпадаете точкой В),
то параллельный перенос на вектор АВ сводится к тож-
дественному преобразованию.
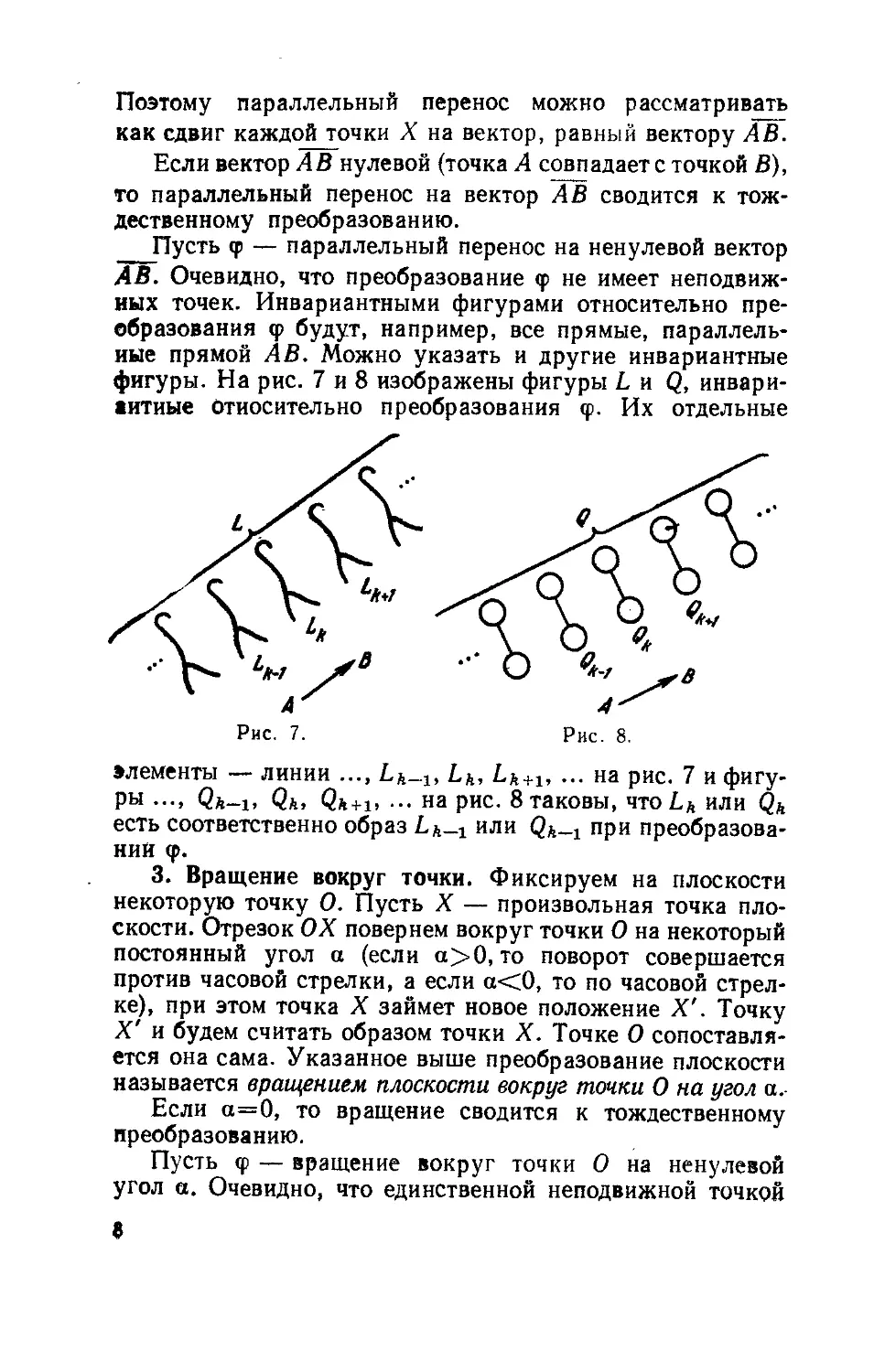
Пусть <р — параллельный перенос на ненулевой вектор
АВ. Очевидно, что преобразование ф не имеет неподвиж-
ных точек. Инвариантными фигурами относительно пре-
образования ф будут, например, все прямые, параллель-
ные прямой АВ. Можно указать и другие инвариантные
фигуры. На рис. 7 и 8 изображены фигуры L и Q, инвари-
антные Относительно преобразования ф. Их отдельные
элементы — линии ..., L^-i, Lk, Lk+i, ... на рис. 7 и фигу-
ры ..., Qa-j, Qa, Qa+i, ••• на рис. 8 таковы, что Lh или Qft
есть соответственно образ La-i или Qa-i при преобразова-
нии ф.
3. Вращение вокруг точки. Фиксируем на плоскости
некоторую точку О. Пусть X — произвольная точка пло-
скости. Отрезок ОХ повернем вокруг точки О на некоторый
постоянный угол а (если а>0, то поворот совершается
против часовой стрелки, а если а<0, то по часовой стрел-
ке), при этом точка X займет новое положение X'. Точку
X' и будем считать образом точки X. Точке О сопоставля-
ется она сама. Указанное выше преобразование плоскости
называется вращением плоскости вокруг точки О на угол а.
Если а=0, то вращение сводится к тождественному
преобразованию.
Пусть ф — вращение вокруг точки О на ненулевой
угол а. Очевидно, что единственной неподвижной точкой
8
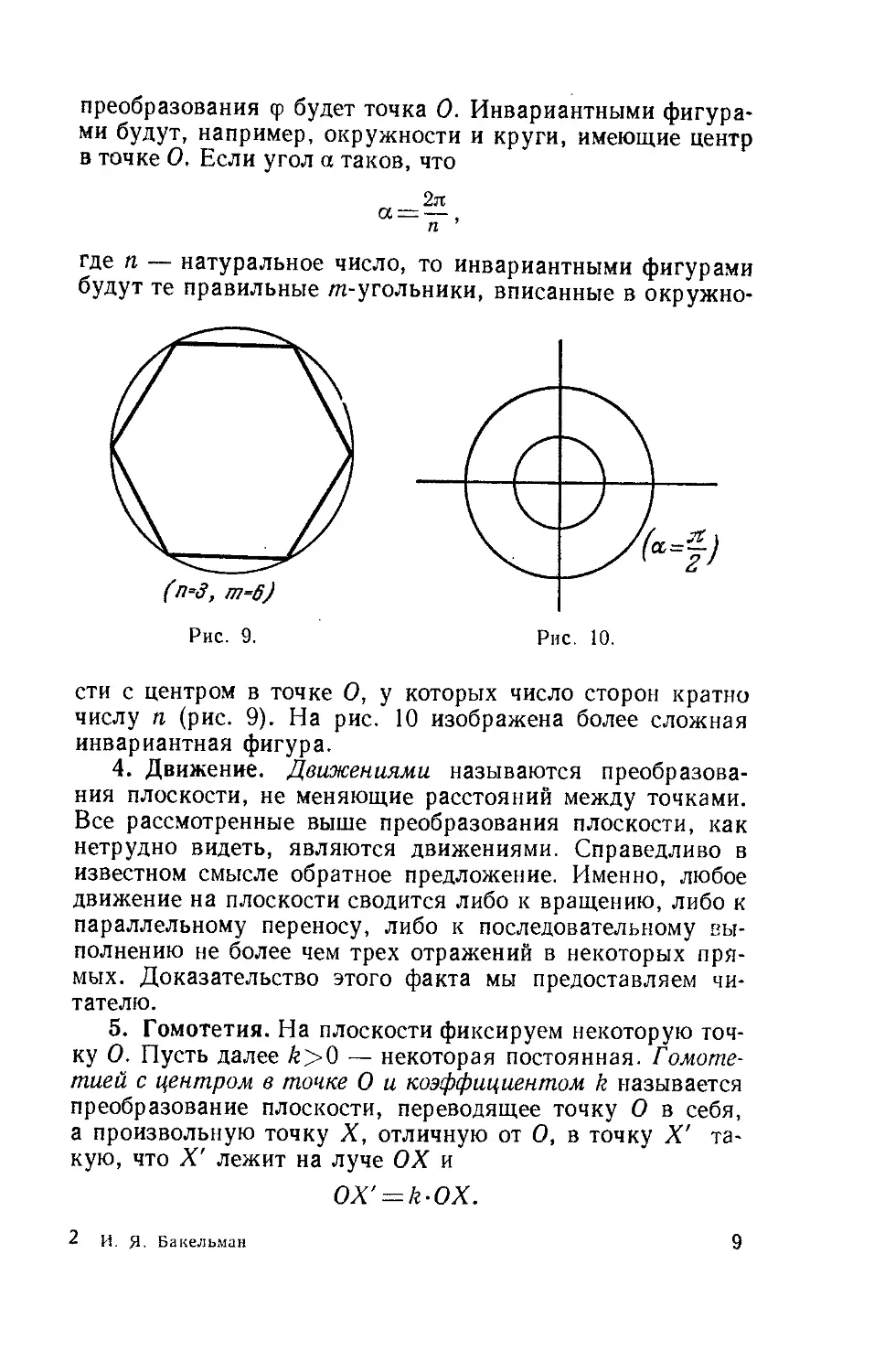
преобразования ср будет точка О. Инвариантными фигура-
ми будут, например, окружности и круги, имеющие центр
в точке О, Если угол а таков, что
где п — натуральное число, то инвариантными фигурами
будут те правильные /n-угольники, вписанные в окружно-
Рис. 9.
Рис. 10.
сти с центром в точке О, у которых число сторон кратно
числу п (рис. 9). На рис. 10 изображена более сложная
инвариантная фигура.
4. Движение. Движениями называются преобразова-
ния плоскости, не меняющие расстояний между точками.
Все рассмотренные выше преобразования плоскости, как
нетрудно видеть, являются движениями. Справедливо в
известном смысле обратное предложение. Именно, любое
движение на плоскости сводится либо к вращению, либо к
параллельному переносу, либо к последовательному вы-
полнению не более чем трех отражений в некоторых пря-
мых. Доказательство этого факта мы предоставляем чи-
тателю.
5. Гомотетия. На плоскости фиксируем некоторую точ-
ку О. Пусть далее /г>0 — некоторая постоянная. Гомоте-
тией с центром в точке О и коэффициентом k называется
преобразование плоскости, переводящее точку О в себя,
а произвольную точку X, отличную от О, в точку X' та-
кую, что X' лежит на луче ОХ и
OX’ = k-OX.
2 И. Я. Бакельман
9
Если k=\, то гомотетия сводится к тождественному
преобразованию. Если /г=/=1, то единственной неподвижной
точкой этого преобразования будет центр гомотетии —
точка О. Инвариантными фигурами гомотетии будут, оче-
видно, лучи, имеющие своей вершиной центр подобия.
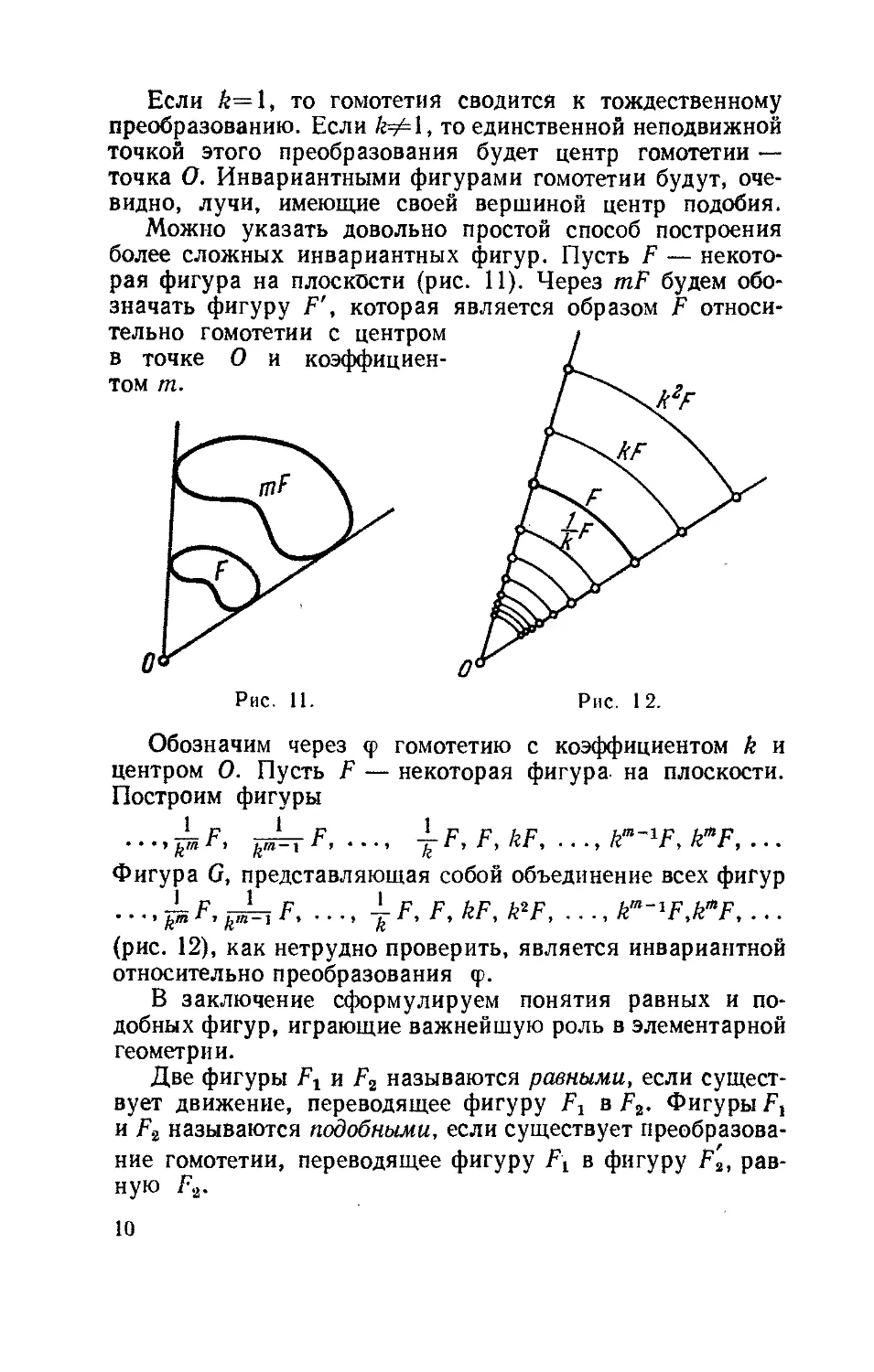
Можно указать довольно простой способ построения
более сложных инвариантных фигур. Пусть F — некото-
рая фигура на плоскости (рис. 11). Через mF будем обо-
значать фигуру F', которая является образом F относи-
тельно гомотетии с центром
в точке О и коэффициен-
том т.
Рис. 11. Рис. 12.
Обозначим через <р гомотетию с коэффициентом k и
центром О. Пусть F — некоторая фигура на плоскости.
Построим фигуры
ртЛ .... ^F,F,kF.........km~lF, kmF, ...
Фигура G, представляющая собой объединение всех фигур
,pnF,^F..........±F,F, kF, k2F, ..., km~1F,kmF, ...
(рис. 12), как нетрудно проверить, является инвариантной
относительно преобразования <р.
В заключение сформулируем понятия равных и по-
добных фигур, играющие важнейшую роль в элементарной
геометрии.
Две фигуры Fi и F2 называются равными, если сущест-
вует движение, переводящее фигуру Fy в F2. Фигуры Fx
и Рг называются подобньвми, если существует преобразова-
ние гомотетии, переводящее фигуру F\ в фигуру F2, рав-
ную Fa.
10
§ 2. Стереографическая проекция.
Бесконечно удаленная точка плоскости
Понятие преобразования, рассмотренное в § 1 для
случая плоскости, очевидным образом переносится на слу-
чай любых геометрических фигур. Действительно, сопо-
ставляя по определенному закону каждой точке X фигуры
М некоторую точку X' другой фигуры Л\ получаем пре-
образование <р фигуры М в фигуру N. Если при этом образ
фигуры М покрывает всю фигуру AZ, то говорят, что ф
есть преобразование М на N.
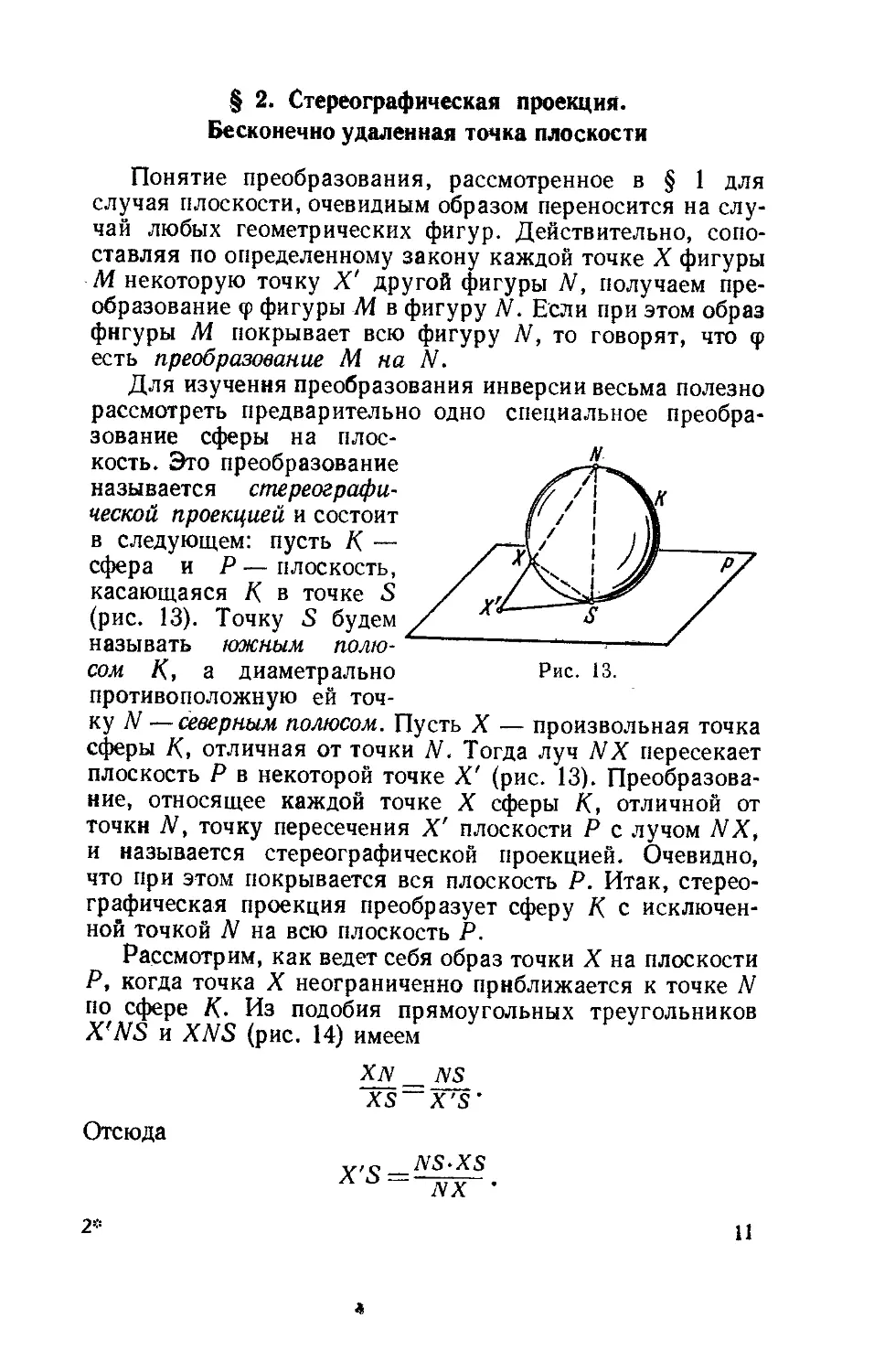
Для изучения преобразования инверсии весьма полезно
рассмотреть предварительно одно
зование сферы на плос-
кость. Это преобразование
называется стереографи-
ческой проекцией и состоит
в следующем: пусть К —
сфера и Р—плоскость,
касающаяся К в точке X
(рис. 13). Точку X будем
называть южным полю-
специальное преобра-
N
сом К, а диаметрально Рис. 13.
противоположную ей точ-
ку N — северным полюсом. Пусть X — произвольная точка
сферы К, отличная от точки Af. Тогда луч NX пересекает
плоскость Р в некоторой точке X' (рис. 13). Преобразова-
ние, относящее каждой точке X сферы К, отличной от
точки N, точку пересечения X' плоскости Р с лучом NX,
и называется стереографической проекцией. Очевидно,
что при этом покрывается вся плоскость Р. Итак, стерео-
графическая проекция преобразует сферу К с исключен-
ной точкой N на всю плоскость Р.
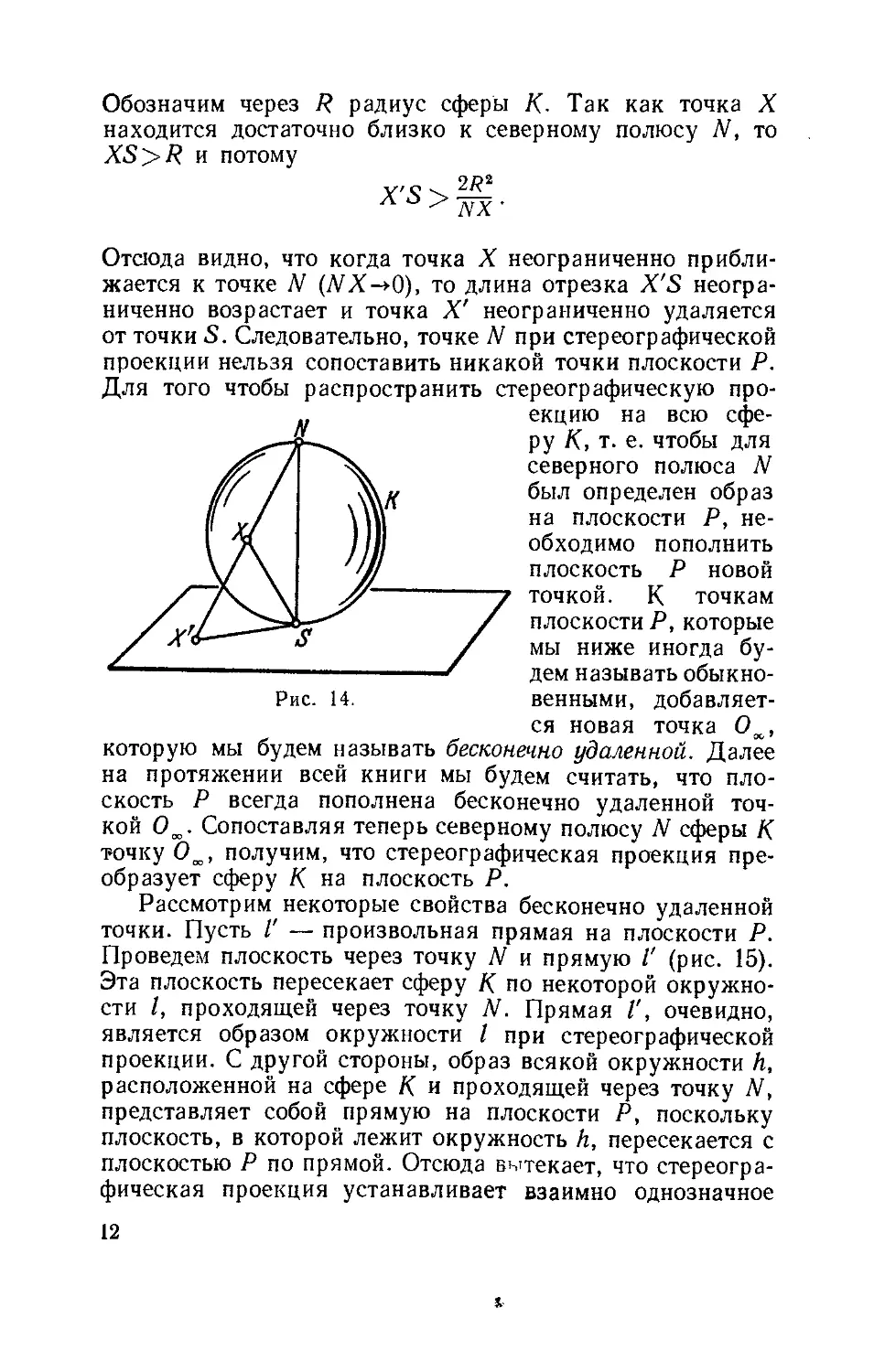
Рассмотрим, как ведет себя образ точки X на плоскости
Р, когда точка X неограниченно приближается к точке N
по сфере К- Из подобия прямоугольных треугольников
X'NS и XNS (рис. 14) имеем
ХА' _ NS
XS~X’S'
Отсюда
v,„_ns-xs
А NX
11
«
Обозначим через R радиус сферы К. Так как точка X
находится достаточно близко к северному полюсу Л\ то
XS>R
и потому
у, о . 2Д2
Отсюда видно, что когда точка X неограниченно прибли-
жается к точке N (NX-*0), то длина отрезка X'S неогра-
ниченно возрастает и точка X' неограниченно удаляется
от точки S. Следовательно, точке W при стереографической
проекции нельзя сопоставить никакой точки плоскости Р.
Для того чтобы распространить стереографическую про-
екцию на всю сфе-
ру К, т. е. чтобы для
северного полюса N
был определен образ
на плоскости Р, не-
обходимо пополнить
плоскость Р новой
точкой. К точкам
плоскости Р, которые
мы ниже иногда бу-
дем называть обыкно-
Рис. 14. венными, добавляет-
ся новая точка 0^,
которую мы будем называть бесконечно удаленной. Далее
на протяжении всей книги мы будем считать, что пло-
скость Р всегда пополнена бесконечно удаленной точ-
кой 0„. Сопоставляя теперь северному полюсу N сферы К
точку 0^, получим, что стереографическая проекция пре-
образует сферу К на плоскость Р.
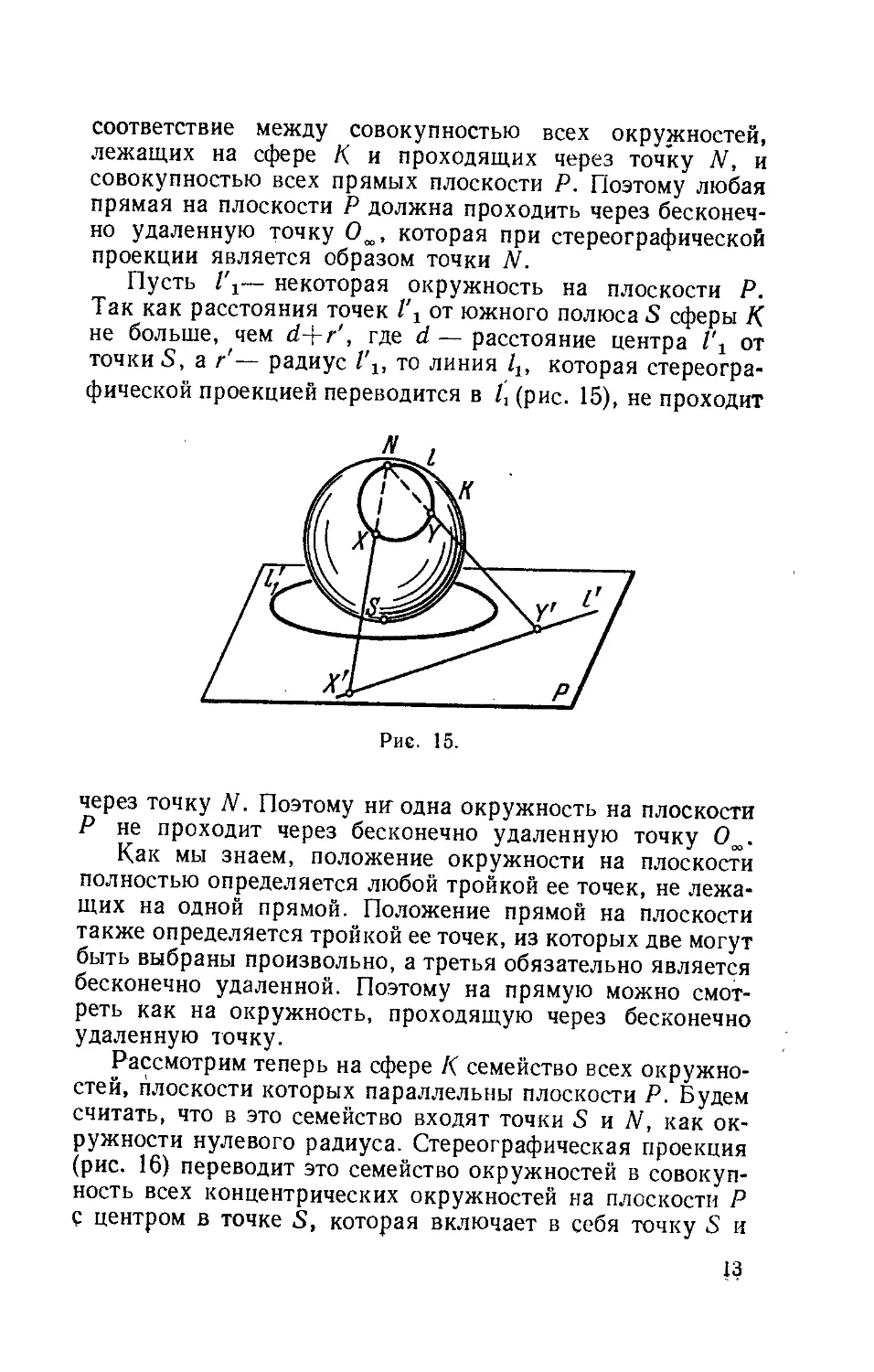
Рассмотрим некоторые свойства бесконечно удаленной
точки. Пусть /' — произвольная прямая на плоскости Р.
Проведем плоскость через точку N и прямую /' (рис. 15).
Эта плоскость пересекает сферу К по некоторой окружно-
сти I, проходящей через точку N. Прямая очевидно,
является образом окружности I при стереографической
проекции. С другой стороны, образ всякой окружности h,
расположенной на сфере К и проходящей через точку W,
представляет собой прямую на плоскости Р, поскольку
плоскость, в которой лежит окружность h, пересекается с
плоскостью Р по прямой. Отсюда вытекает, что стереогра-
фическая проекция устанавливает взаимно однозначное
12
соответствие между совокупностью всех окружностей,
лежащих на сфере К и проходящих через точку N, и
совокупностью всех прямых плоскости Р. Поэтому любая
прямая на плоскости Р должна проходить через бесконеч-
но удаленную точку От, которая при стереографической
проекции является образом точки N.
Пусть 1\— некоторая окружность на плоскости Р.
Так как расстояния точек Гг от южного полюса S сферы К
не больше, чем d+r', где d — расстояние центра 1\ от
точки S, а г'— радиус 1\, то линия /ъ которая стереогра-
фической проекцией переводится в (рис. 15), не проходит
через точку N. Поэтому ни одна окружность на плоскости
Р не проходит через бесконечно удаленную точку 0^.
Как мы знаем, положение окружности на плоскости
полностью определяется любой тройкой ее точек, не лежа-
щих на одной прямой. Положение прямой на плоскости
также определяется тройкой ее точек, из которых две могут
быть выбраны произвольно, а третья обязательно является
бесконечно удаленной. Поэтому на прямую можно смот-
реть как на окружность, проходящую через бесконечно
удаленную точку.
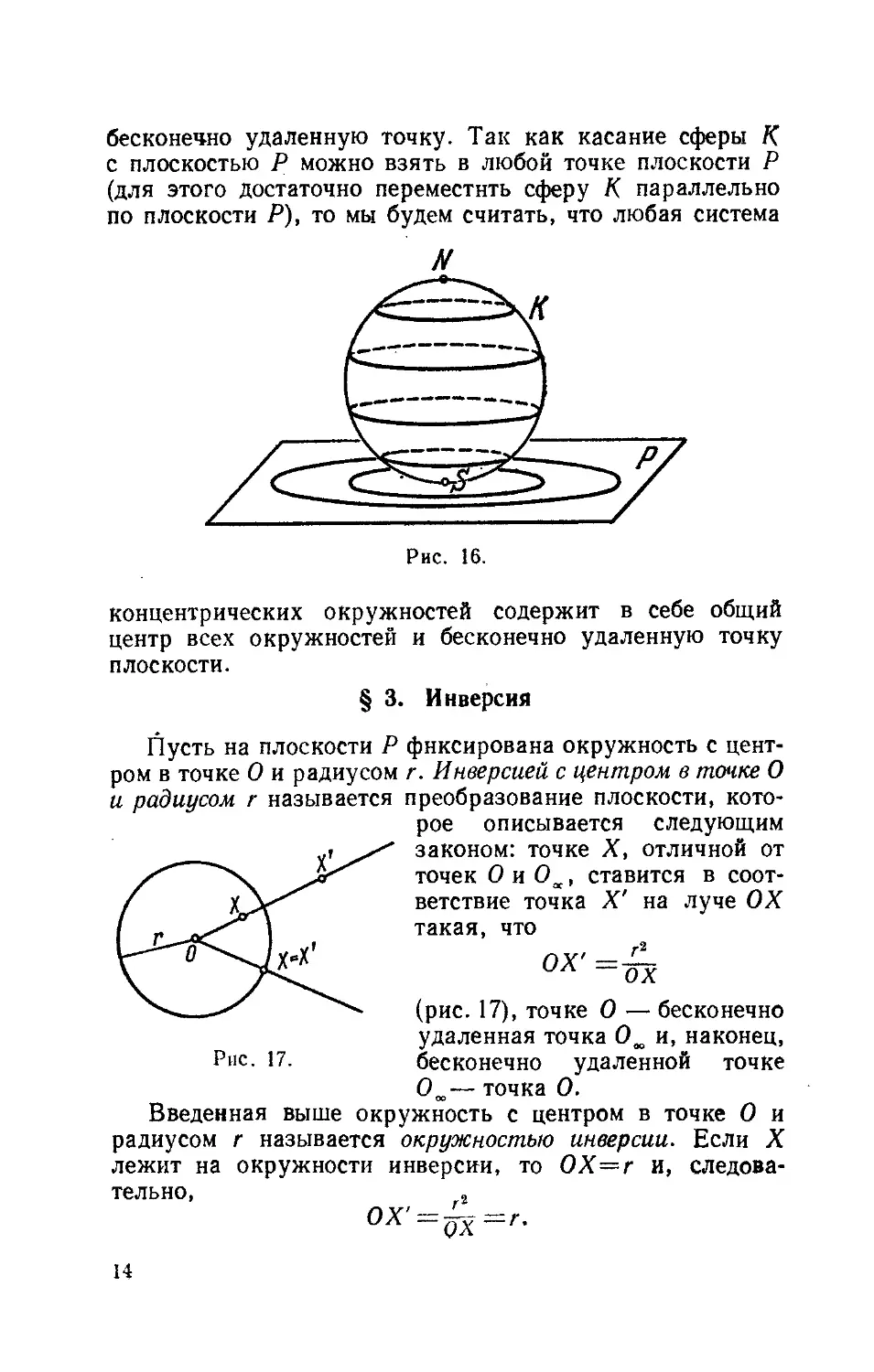
Рассмотрим теперь на сфере К семейство всех окружно-
стей, плоскости которых параллельны плоскости Р. Будем
считать, что в это семейство входят точки S и N, как ок-
ружности нулевого радиуса. Стереографическая проекция
(рис. 16) переводит это семейство окружностей в совокуп-
ность всех концентрических окружностей на плоскости Р
С центром в точке S, которая включает в себя точку S и
13
бесконечно удаленную точку. Так как касание сферы X
с плоскостью Р можно взять в любой точке плоскости Р
(для этого Достаточно переместить сферу К. параллельно
по плоскости Р), то мы будем считать, что любая система
концентрических окружностей содержит в себе общий
центр всех окружностей и бесконечно удаленную точку
плоскости.
§ 3. Инверсия
Пусть на плоскости Р фиксирована окружность с цент-
ром в точке О и радиусом г. Инверсией с центром в точке О
и радиусом г называется преобразование плоскости, кото-
рое описывается следующим
законом: точке X, отличной от
X точек О и 0^, ставится в соот-
[ ветствие точка X' на луче ОХ
I г такая, что
ох’
\ I и Л
------' (рис. 17), точке О — бесконечно
удаленная точка Отс и, наконец,
Р11С- 17. бесконечно удаленной точке
Ото— точка О.
Введенная выше окружность с центром в точке О и
радиусом г называется окружностью инверсии. Если X
лежит на окружности инверсии, то ОХ—г и, следова-
тельно, ,
ох-^.
14
Так как точки X и X' лежат на одном луче ОХ, то точки
X я X' совпадают. Отсюда следует, что все точки окружно-
сти инверсии являются неподвижными точками, а сама
окружность инверсии является инвариантной фигурой.
Точки X, лежащие внутри окружности инверсии и
отличные отточки О, переводятся инверсией в точки, лежа-
щие вне окружности инверсии, и наоборот, точки, лежащие
вне окружности инверсии, переводятся во внутренние точ-
ки по отношению к этой окружности.
Действительно, в первом случае имеем ОХ<г, и по-
тому
0Х'=&
что и показывает, что X' лежит вне окружности инверсии.
Аналогично рассматривается второй случай.
Итак, любая точка X и ее образ—точка X'— лежат на
одном луче ОХ по разные стороны от окружности инвер-
сии, если точка X не лежит на этой окружности (рис. 17).
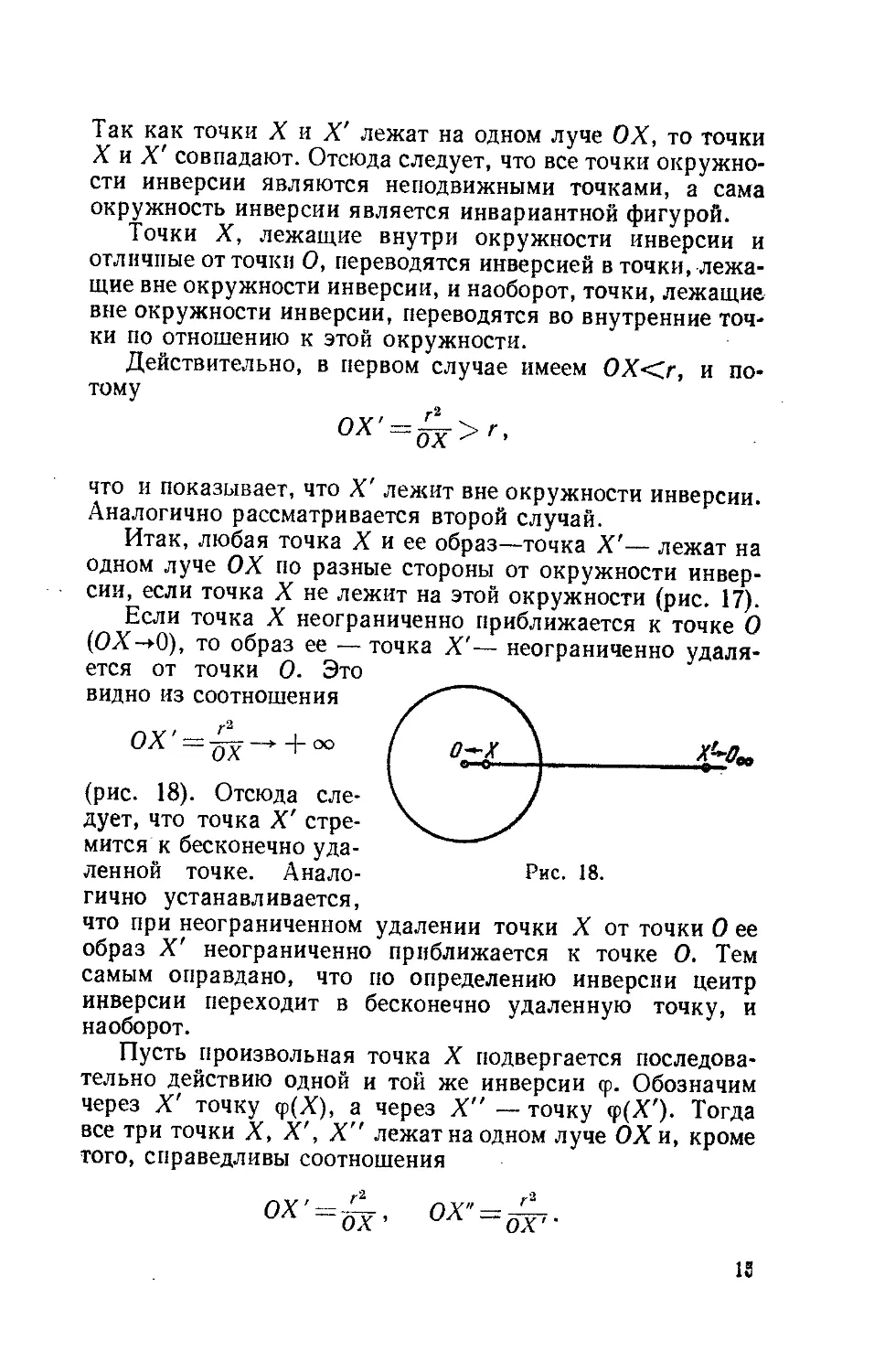
Если точка X неограниченно приближается к точке О
(ОХ—*0), то образ ее — точка X'— неограниченно удаля-
ется от точки О. Это
видно из соотношения
ОХ' = ^-^ + оо
(рис. 18). Отсюда сле-
дует, что точка X' стре-
мится к бесконечно уда-
ленной точке. Анало-
гично устанавливается,
что при неограниченном удалении точки X от точки 0 ее
образ X' неограниченно приближается к точке О. Тем
самым оправдано, что по определению инверсии центр
инверсии переходит в бесконечно удаленную точку, и
наоборот.
Пусть произвольная точка X подвергается последова-
тельно действию одной и той же инверсии ср. Обозначим
через X' точку <р(Х), а через X" — точку <р(Х'). Тогда
все три точки X, X', X" лежат на одном луче ОХ и, кроме
того, справедливы соотношения
ОХ'=^, ох'-^
13
Отсюда получаем
и, следовательно,
ОХ" = ОХ.
Итак, если X — произвольная точка плоскости, отличная
от центра инверсии и бесконечно удаленной точки, то
дважды выполненная инверсия ср переводит точку X снова
в эту же точку X. Если точка X совпадает с точкой О или с
бесконечно удаленной точкой, то тот же результат сохра-
няет силу, т. е. точка X применением последовательно
дважды одной и той же инверсии ср переводится снова в точ-
ку X. Это вытекает непосредственно из определения ин-
версии.
Итак, справедлива следующая теорема.
Теорема 1. Преобразование плоскости, представ-
ляющее собой последовательно выполненную дважды одну и
ту же инверсию, есть тождественное преобразование.
Наконец, отметим, что если при инверсии ср точка X
переходит в точку X', то X' при этой же инверсии <р пере-
ходит в X, т. е. X и X' «меняются местами». Подобным же
свойством обладает отражение в прямой. Поэтому иногда
инверсию называют «отражением в окружности».
§ 4. Свойства инверсии
На протяжении этого параграфа через <р обозначается
инверсия на плоскости, имеющая центр в точке О, радиус
которой равен г.
Прежде всего установим одну простую лемму, которая
играет существенную роль при изучении свойств инверсии.
Лемма 1. Пусть инверсия <р переводит точки А
и В соответственно в точки А' и В' (предполагается, что
точки А и В отличны от точки О и бесконечно удаленной
точки и, кроме того, точки О, А, В не лежат на одном
луче с началом в точке О). Тогда треугольники ОАВ и
О А'В' подобны и
£ОАВ = £ОВ'А’, /_ОВА—/_ОА’В'..
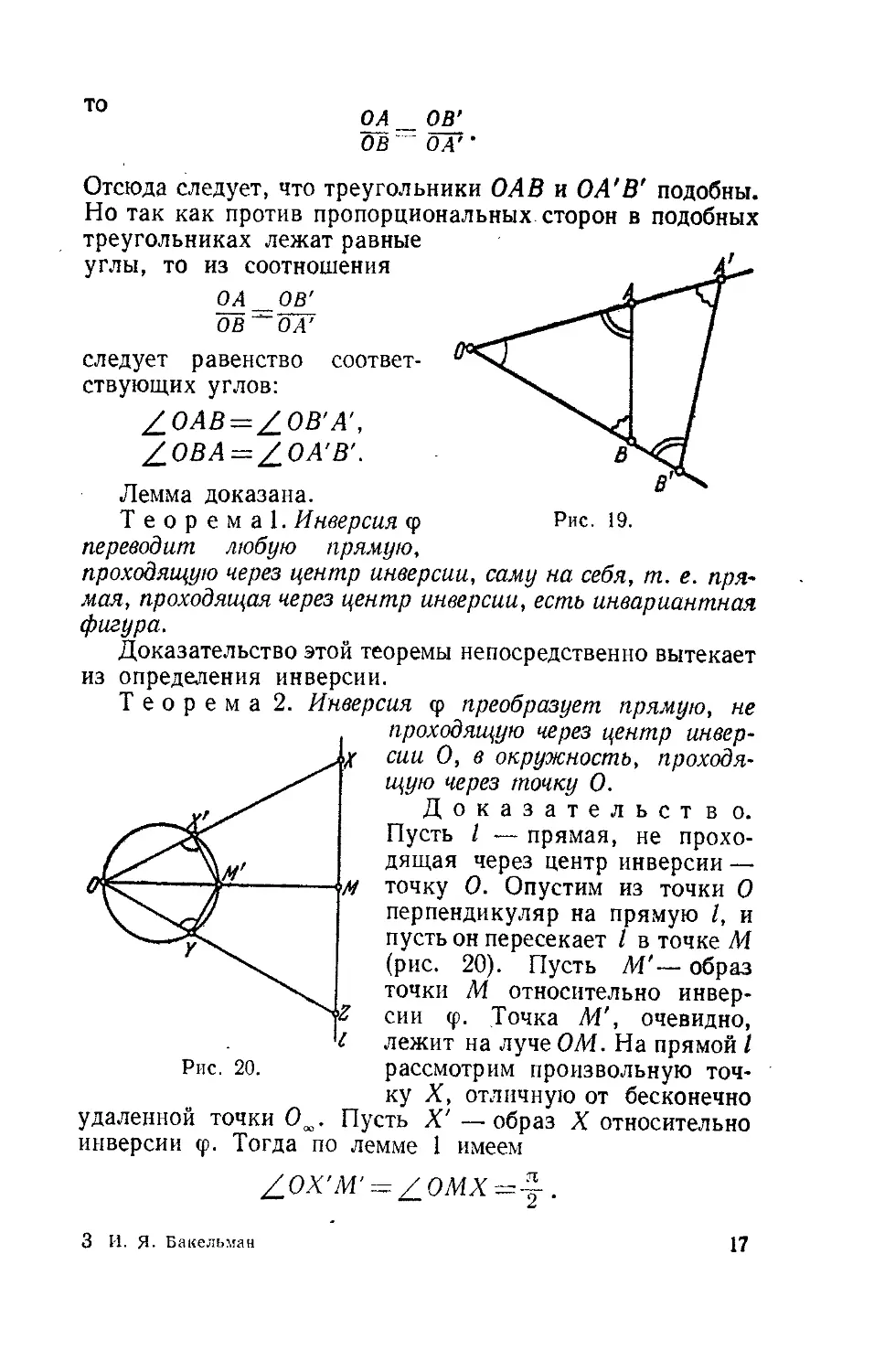
Доказательство. У треугольников ОАВ и
ОА'В' (рис. 19) имеется общий угол, а стороны, заключаю-
щие этот угол, пропорциональны. Действительно, так как
ОА-ОА' = ОВ-ОВ = г2,
16
то
О А _ OB'
ОВ О А' •
Отсюда следует, что треугольники ОАВ и ОА'В' подобны.
Но так как против пропорциональных сторон в подобных
треугольниках лежат равные
углы, то из соотношения
ол _ ов'
ОВ~ОА'
Рис. 19.
следует равенство соответ-
ствующих углов:
2/0АВ = 2/0В’А’,
/_ОВА^/_ОА’В'.
Лемма доказана.
Теорема!. Инверсия <р
переводит любую прямую,
проходящую через центр инверсии, саму на себя, т. е. пря-
мая, проходящая через центр инверсии, есть инвариантная
фигура.
Доказательство этой теоремы непосредственно вытекает
из определения инверсии.
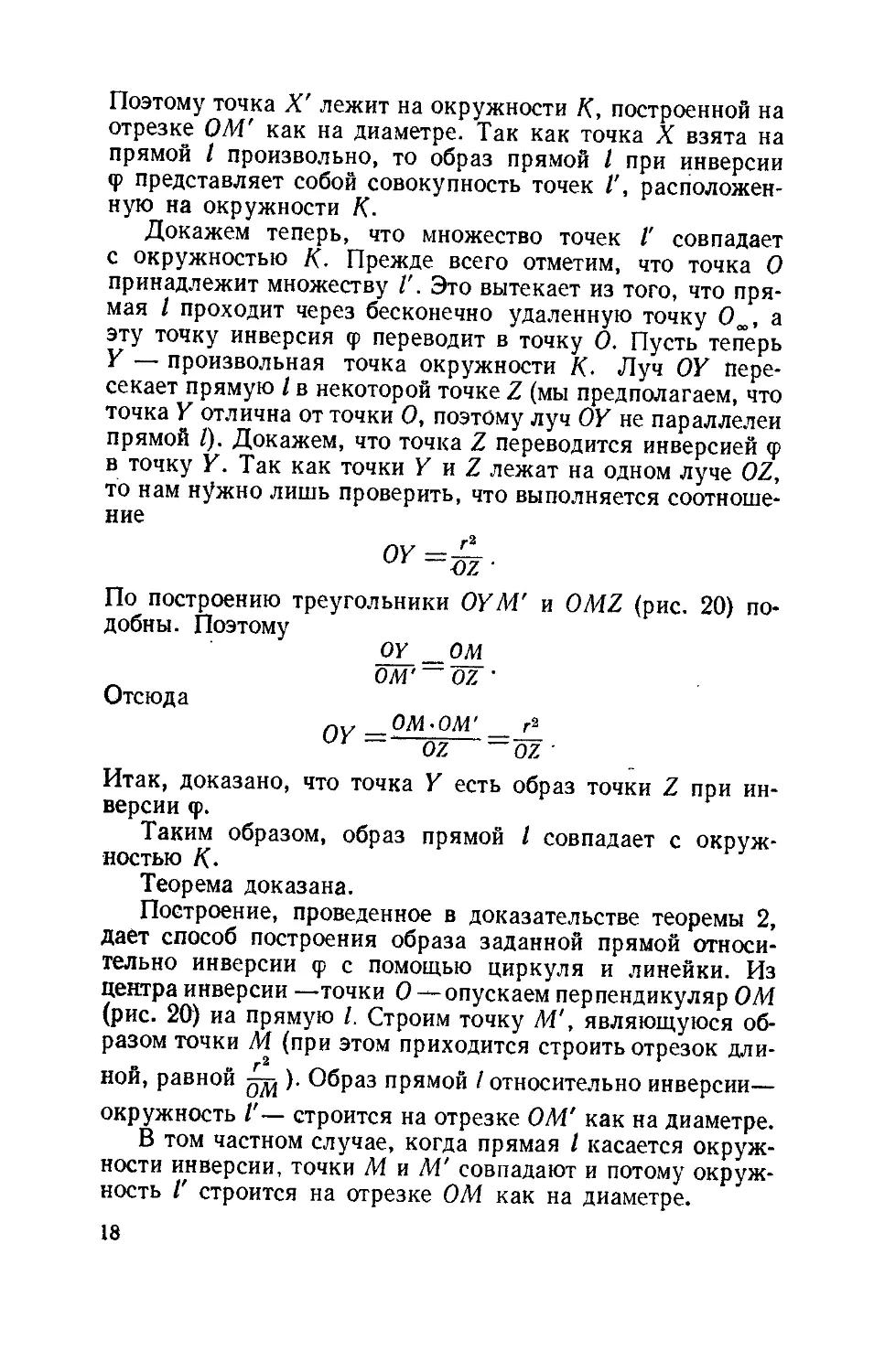
Теорема 2. Инверсия <р преобразует прямую, не
проходящую через центр инвер-
сии О, в окружность, проходя-
щую через точку О.
Доказательство.
Пусть / — прямая, не прохо-
дящая через центр инверсии —
точку О. Опустим из точки О
перпендикуляр на прямую I, и
пусть он пересекает I в точке М
(рис. 20). Пусть М'— образ
точки М относительно инвер-
сии <р. Точка М’, очевидно,
лежит на луче ОМ. На прямой I
рассмотрим произвольную точ-
ку X, отличную от бесконечно
удаленной точки О„. Пусть X' —образ X относительно
инверсии <р. Тогда по лемме 1 имеем
ХХ)Х'М' = ^0МХ=~ .
3 И. Я. Бакельман
17
Поэтому точка X' лежит на окружности К, построенной на
отрезке ОМ' как на диаметре. Так как точка X взята на
прямой I произвольно, то образ прямой I при инверсии
<р представляет собой совокупность точек расположен-
ную на окружности /С
Докажем теперь, что множество точек Г совпадает
с окружностью К. Прежде всего отметим, что точка О
принадлежит множеству Г. Это вытекает из того, что пря-
мая / проходит через бесконечно удаленную точку 0°°, а
эту точку инверсия <р переводит в точку О. Пусть теперь
Y — произвольная точка окружности К- Луч ОУ пере-
секает прямую / в некоторой точке Z (мы предполагаем, что
точка У отлична от точки О, поэтому луч ОУ не параллелей
прямой /). Докажем, что точка Z переводится инверсией <р
в точку У. Так как точки У и Z лежат на одном луче OZ,
то нам нужно лишь проверить, что выполняется соотноше-
ние
По построению треугольники OYМ' и OMZ (рис. 20) по-
добны. Поэтому
OY _ОМ
ОМ' ~ OZ •
Отсюда
ПУ _ ОМ-ОМ' __ г*
UY — OZ ~~OZ-
Итак, доказано, что точка У есть образ точки Z при ин-
версии <р.
Таким образом, образ прямой I совпадает с окруж-
ностью К-
Теорема доказана.
Построение, проведенное в доказательстве теоремы 2,
дает способ построения образа заданной прямой относи-
тельно инверсии q> с помощью циркуля и линейки. Из
центра инверсии —точки О — опускаем перпендикуляр ОМ
(рис. 20) иа прямую I. Строим точку М', являющуюся об-
разом точки М (при этом приходится строить отрезок дли-
^•2
ной, равной ). Образ прямой I относительно инверсии—
окружность I'— строится на отрезке ОМ' как на диаметре.
В том частном случае, когда прямая I касается окруж-
ности инверсии, точки М и М' совпадают и потому окруж-
ность Г строится на отрезке ОМ как на диаметре.
18
Теорема 3. Инверсия ср преобразует окружность,
проходящую через центр инверсии О, в прямую, не проходя-
щую через точку О.
Доказательство этой теоремы мы предлагаем провести
читателю самостоятельно.
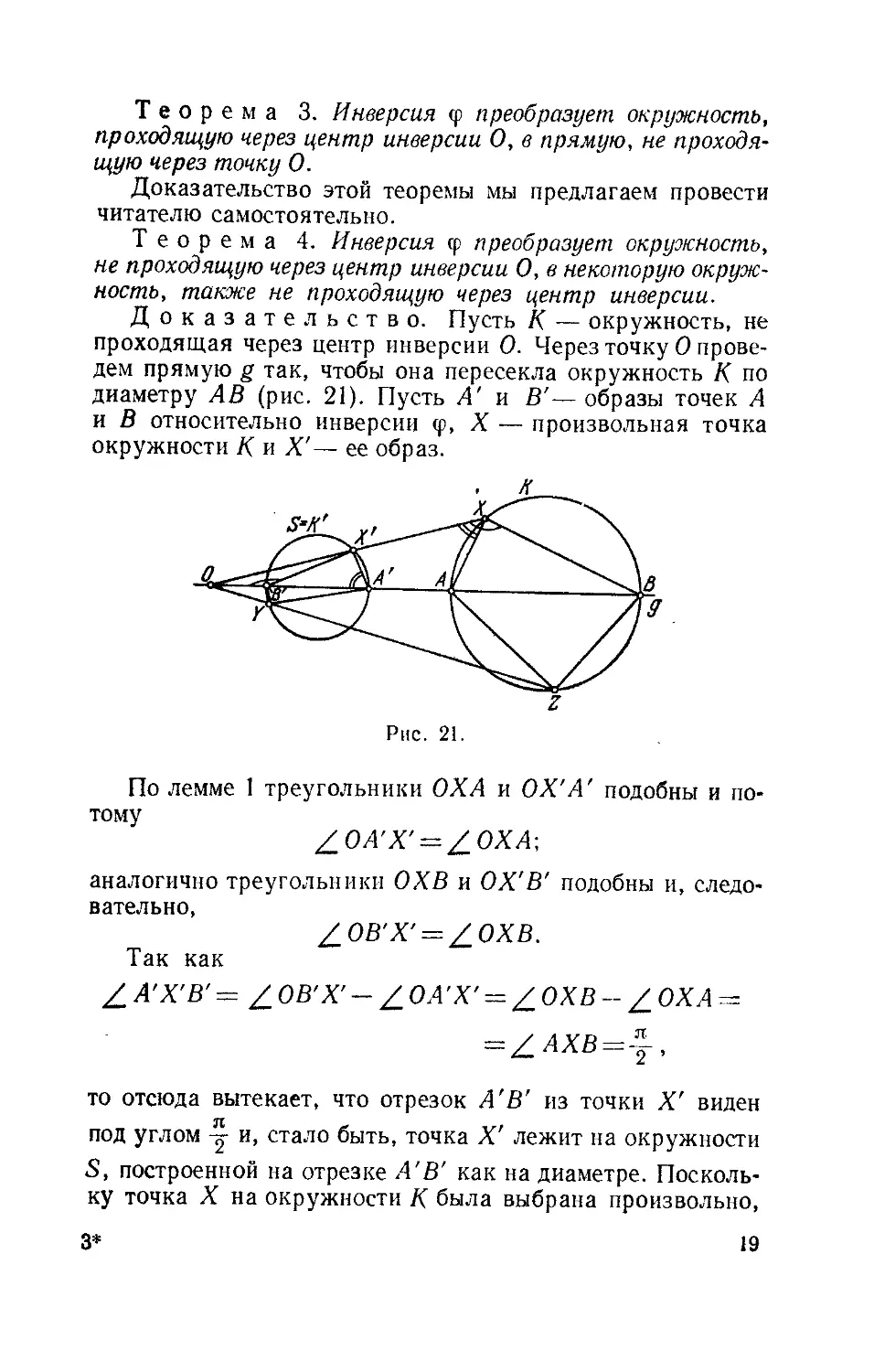
Теорема 4. Инверсия ср преобразует окружность,
не проходящую через центр инверсии О, в некоторую окруж-
ность, также не проходящую через центр инверсии.
Доказательство. Пусть К — окружность, не
проходящая через центр инверсии О. Через точку О прове-
дем прямую g так, чтобы она пересекла окружность К по
диаметру АВ (рис. 21). Пусть А' и В'—образы точек А
и В относительно инверсии ср, X — произвольная точка
окружности К и X'— ее образ.
По лемме I треугольники ОХА и ОХ'А' подобны и по-
тому
£OA'X'=z/_OXA-,
аналогично треугольники ОХВ и ОХ'В' подобны и, следо-
вательно,
/_ОВ'Х' = /.ОХВ.
Так как
/ А'Х'В' = / ОВ'Х' — /_0 А'X'—ОХВ - Z ОХА =
= £АХВ = ~,
то отсюда вытекает, что отрезок А'В' из точки X' виден
под углом и, стало быть, точка X' лежит на окружности
S, построенной на отрезке А'В' как на диаметре. Посколь-
ку точка X на окружности X была выбрана произвольно,
3*
19
то Д'— образ окружности К при инверсии <р — располо-
жен на окружности S. Докажем, что К' совпадает с окруж-
ностью S. Пусть Y — произвольная точка окружности S и
Z — точка на луче OY такая, что
г2
OZ ——
U OY ‘
Очевидно, что точка Z переводится инверсией <р в точку Y.
Далее, из соотношений
ОА-ОА' — г\
ОВ-ОВ' = г\
OZOY = r2
и леммы 1 вытекает, что
/_AZB = ^OZB-^OZA=^OB'Y-^OA'Y =
= ^A'YB' = ~.
Следовательно, точка Z лежит на окружности К- От-
сюда вытекает, что фигуры S и К' совпадают. Так как по
построению концы диаметра окружности К — точки А, В—
отличны от О и расположены на луче ОА по одну сторону
от точки О, то окружность К' не проходит через точку
О. (Впрочем, последнее утверждение вытекает также и из
того факта, что никакая окружность не проходит через
бесконечно удаленную точку СД.)
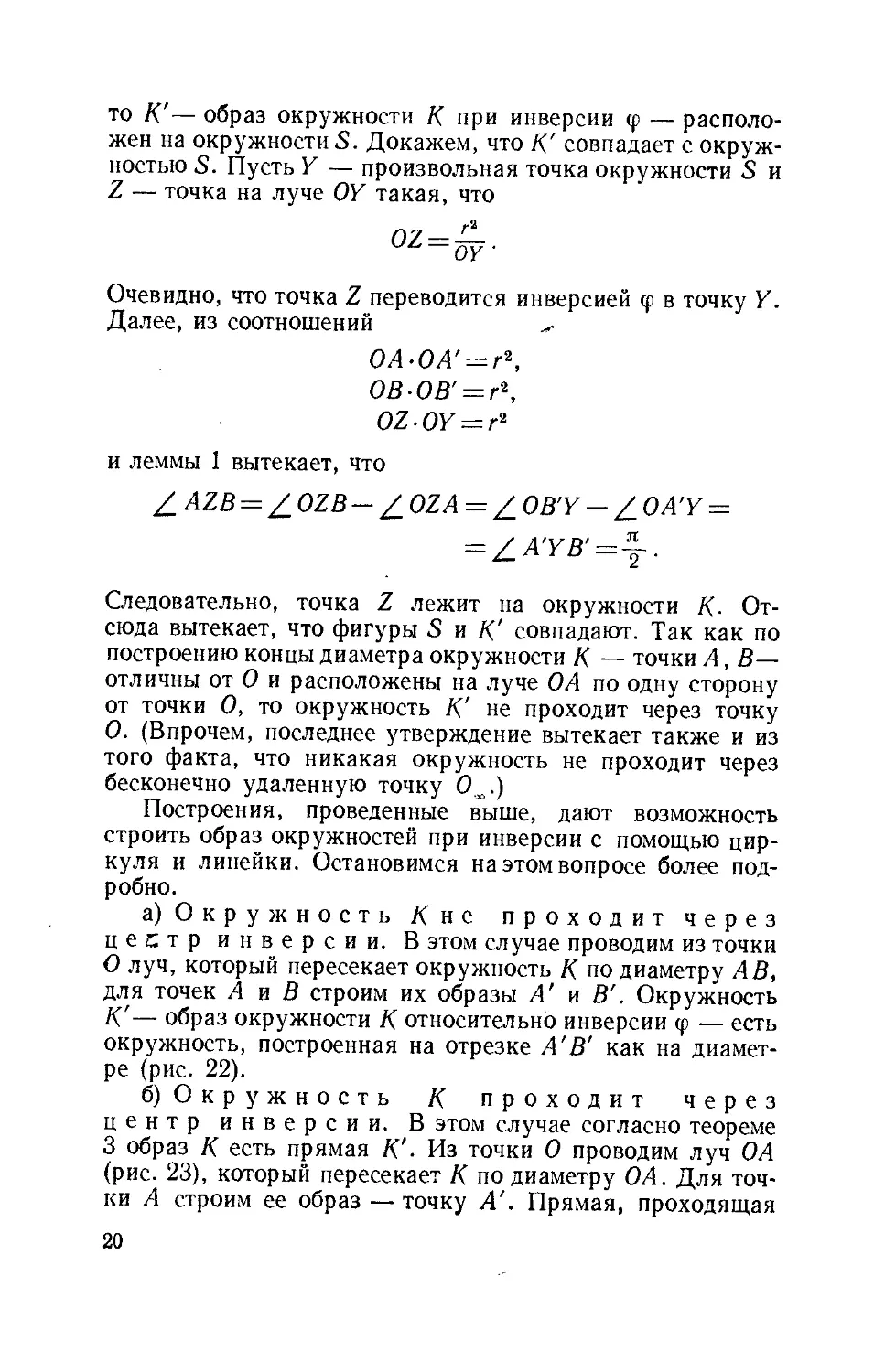
Построения, проведенные выше, дают возможность
строить образ окружностей при инверсии с помощью цир-
куля и линейки. Остановимся на этом вопросе более под-
робно.
а) Окружность /(не проходит через
ц е с т р инверсии. В этом случае проводим из точки
О луч, который пересекает окружность К по диаметру АВ,
для точек А и В строим их образы А’ и В'. Окружность
К'— образ окружности К относительно инверсии <р — есть
окружность, построенная на отрезке А'В' как на диамет-
ре (рис. 22).
б) Окружность К проходит через
центр инверсии. В этом случае согласно теореме
3 образ К есть прямая К'- Из точки О проводим луч О А
(рис. 23), который пересекает К по диаметру ОА. Для точ-
ки А строим ее образ — точку А'. Прямая, проходящая
20
через точку А' перпендикулярно лучу О А, и есть искомая
прямая К'
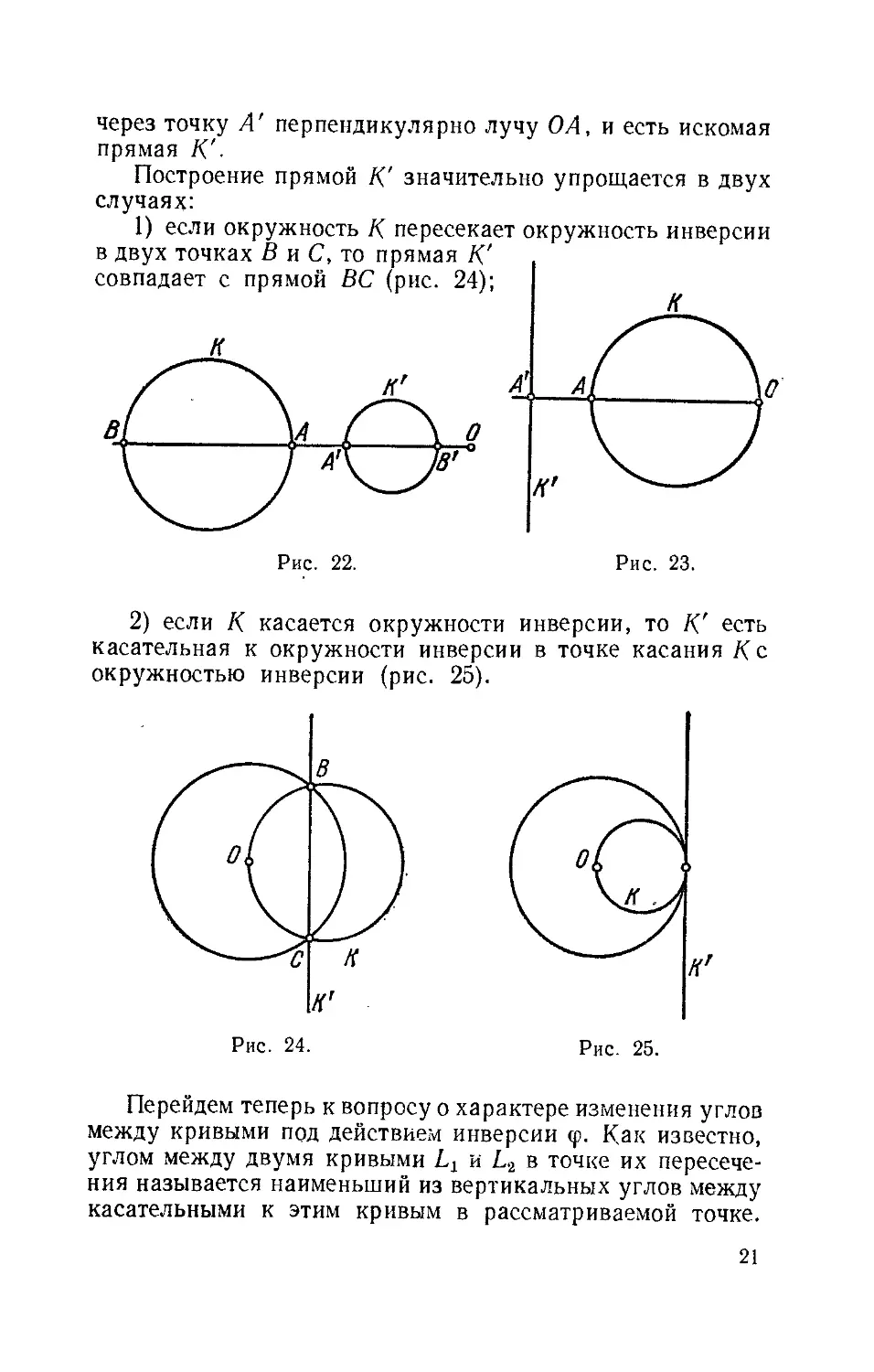
Построение прямой К' значительно упрощается в двух
случаях:
1) если окружность К пересекает окружность инверсии
в двух точках В и С, то прямая К'
совпадает с прямой ВС (рис. 24);
Рис. 23.
Рис. 22.
2) если К касается окружности инверсии, то К' есть
касательная к окружности инверсии в точке касания К с
окружностью инверсии (рис. 25).
Перейдем теперь к вопросу о характере изменения углов
между кривыми под действием инверсии <р. Как известно,
углом между двумя кривыми и Ь2 в точке их пересече-
ния называется наименьший из вертикальных углов между
касательными к этим кривым в рассматриваемой точке.
21
Можно доказать, что при инверсии углы между кривыми
сохраняются. Ниже это предложение доказывается для
окружностей и прямых.
Теорема 5. При инверсии ф угол между прямыми
равен углу между их образами.
Доказательство. Здесь могут представиться
три случая:
1) прямые lv и /3 проходят через центр инверсии ф;
2) одна из прямых /х и /2 проходит через центр ин-
версии;
3) ни /1( ни 1.2 не проходят через центр инверсии.
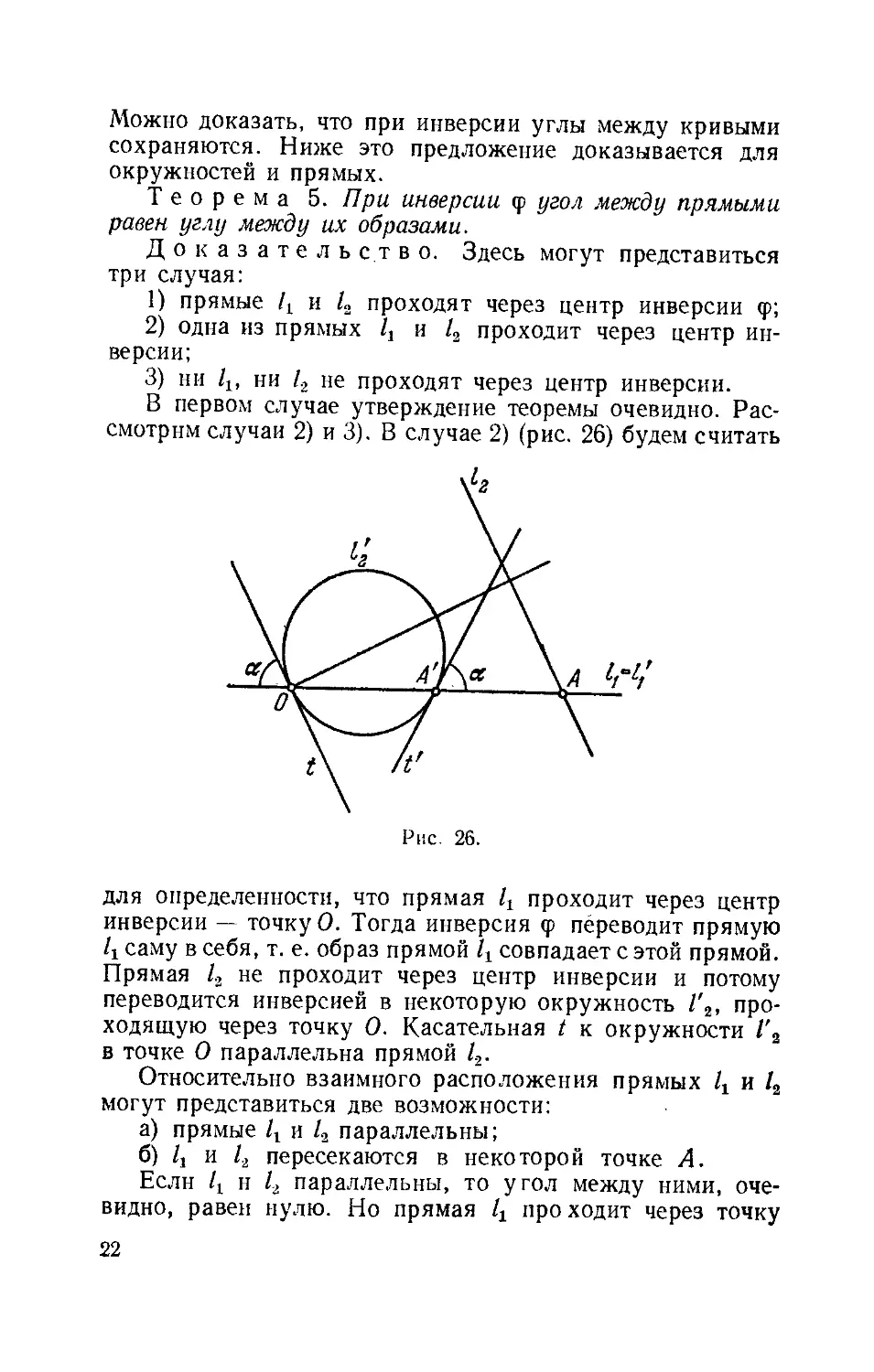
В первом случае утверждение теоремы очевидно. Рас-
смотрим случаи 2) и 3). В случае 2) (рис. 26) будем считать
Рис. 26.
для определенности, что прямая проходит через центр
инверсии — точку О. Тогда инверсия ф переводит прямую
/х саму в себя, т. е. образ прямой Ц совпадает с этой прямой.
Прямая 1.г не проходит через центр инверсии и потому
переводится инверсией в некоторую окружность Г2, про-
ходящую через точку О. Касательная t к окружности Г2
в точке О параллельна прямой /2.
Относительно взаимного расположения прямых /х и /2
могут представиться две возможности:
а) прямые /, и /2 параллельны;
б) /х и /2 пересекаются в некоторой точке А.
Если н 12 параллельны, то угол между ними, оче-
видно, равен нулю. Но прямая /х проходит через точку
22
О и параллельна /2. Поэтому она необходимо будет совпа-
дать с касательной t к окружности /'2 в точке О. Отсюда
следует, что угол между 1\ и /'2 равен нулю и, следова-
тельно, утверждение теоремы в случае а) доказано.
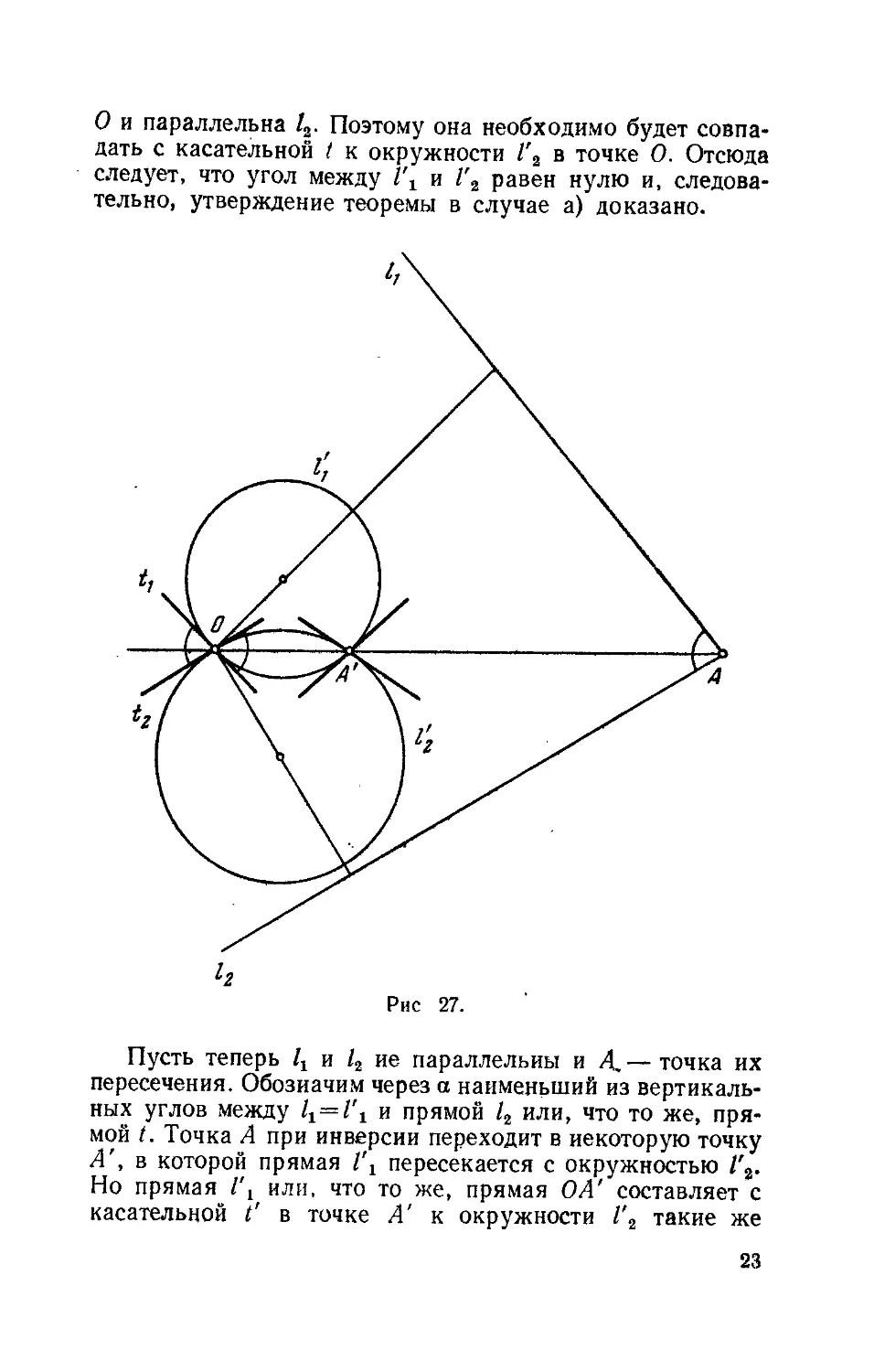
Пусть теперь и /2 ие параллельны и А. — точка их
пересечения. Обозначим через а наименьший из вертикаль-
ных углов между Z1=Z'1 и прямой /2 или, что то же, пря-
мой t. Точка А при инверсии переходит в некоторую точку
Л', в которой прямая 1\ пересекается с окружностью /'2.
Но прямая 1\ или, что то же, прямая О А' составляет с
касательной t' в точке А' к окружности /'2 такие же
23
вертикальные углы, что и с касательной t. Отсюда не-
медленно следует, что угол между и в точке А'
равен а. Случай 2) полностью доказан.
Третий случай (рис. 27) доказывается аналогичными
рассуждениями. Заметим только, что если прямые 4
и /г параллельны, то соответствующие окружности Ц
и 1г имеют в точке О общую касательную и, стало быть,
составляют между собой нулевой угол, Отсюда угол между
1\ и Г2 равен углу между 4 и 4- Если же прямые 4 и 4
пересекаются, то, как видно из рис. 27, угол между
окружностями и /'2 в точке О равен углу между прямыми
4 и 4. ибо касательные и /2 к этим окружностям в точке
О параллельны прямым 4 и 4- Отсюда и вытекает утверж-
дение теоремы.
Имеют место следующие теоремы, доказательство ко-
торых мы предоставляем читателю в виде полезных упраж-
нений.
Теорема 6. Угол между окружностями равен углу
между образами этих окружностей относительно инверсии.
Теорема 7. Угол между окружностью и прямой
равен углу между образами этих фигур относительно ин-
версии.
§ 5. Степень точки относительно окружности.
Радикальная ось двух окружностей
Ниже существенную роль будет играть понятие степе-
ни точки относительно окружности, которое является ана-
логом понятия расстояния от точки до прямой.
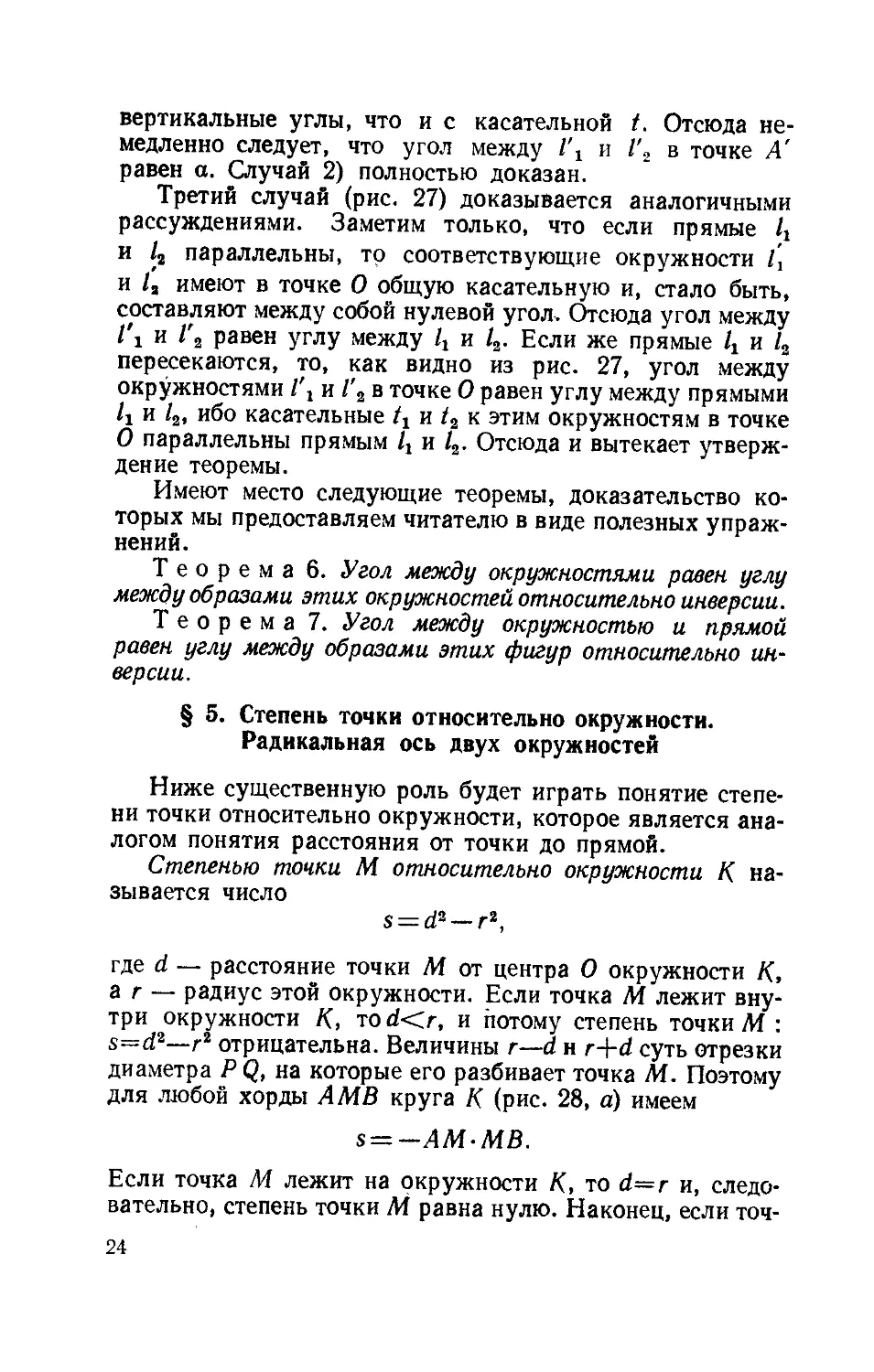
Степенью точки М относительно окружности К на-
зывается число
s~d2 — г2,
где d — расстояние точки М от центра О окружности К,
ar — радиус этой окружности. Если точка М лежит вну-
три окружности К, то d<Zr, и потому степень точки М :
s=d2—г2 отрицательна. Величины г—d н r+d суть отрезки
диаметра PQ, на которые его разбивает точка М. Поэтому
для любой хорды А МВ круга К (рис. 28, а) имеем
s=-AM-MB.
Если точка М лежит на окружности К, то d=r и, следо-
вательно, степень точки М равна нулю. Наконец, если точ-
24
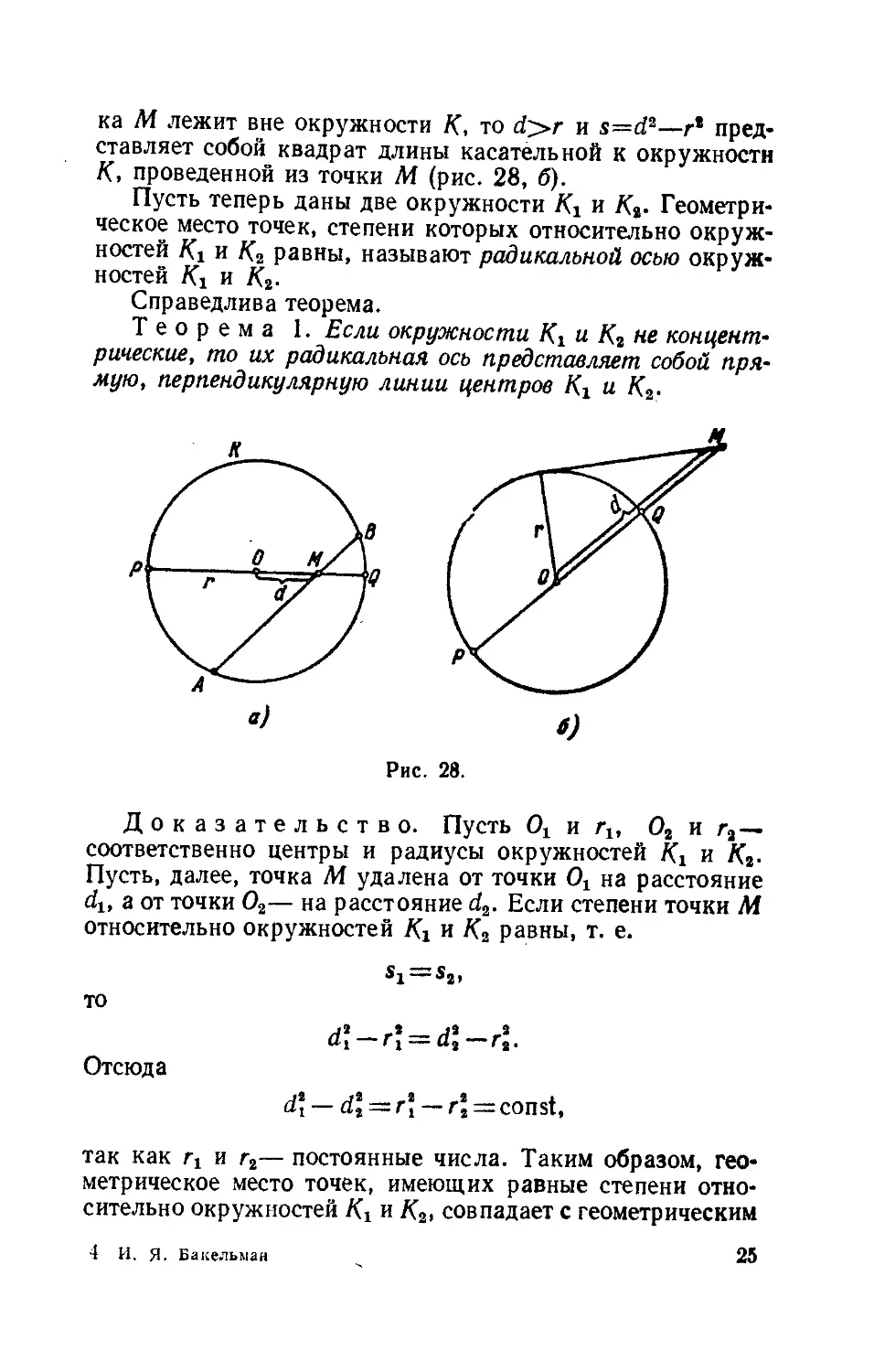
ка М лежит вне окружности К, то d>r и s=d2—г* пред-
ставляет собой квадрат длины касательной к окружности
К, проведенной из точки М (рис. 28, б).
Пусть теперь даны две окружности и К2. Геометри-
ческое место точек, степени которых относительно окруж-
ностей Ki и К2 равны, называют радикальной осью окруж-
ностей Ki и К2.
Справедлива теорема.
Теорема 1. Если окружности Ki и К2 не концент-
рические, то их радикальная ось представляет собой пря-
мую, перпендикулярную линии центров и К2.
Рис. 28.
Доказательство. Пусть Ох и rlt О2 и га —
соответственно центры и радиусы окружностей Ki и К2.
Пусть, далее, точка М удалена от точки на расстояние
dlt а от точки О2— на расстояние d2. Если степени точки М
относительно окружностей и К2 равны, т. е.
Sx = S2,
то
4* Л* -2
di ~” г। •— Uj g.
Отсюда
d’ — dl = r\ — r2 = const,
так как Гх и г2— постоянные числа. Таким образом, гео-
метрическое место точек, имеющих равные степени отно-
сительно окружностей /(х и К2, совпадает с геометрическим
4 И. Я. Бакельман
25
местом точек, разность квадратов расстояний которых соот-
ветственно от точек 01 и 02 равна некоторому данному
Не нарушая общности, можно считать, что k^sO, в против-
ном случае, поменяв ролями окружности и К2, придем
к случаю k'^0. Пусть S — точка линии центров ОгОг та-
кая, что
O^-O^^k.
Так как
OjS > 02S
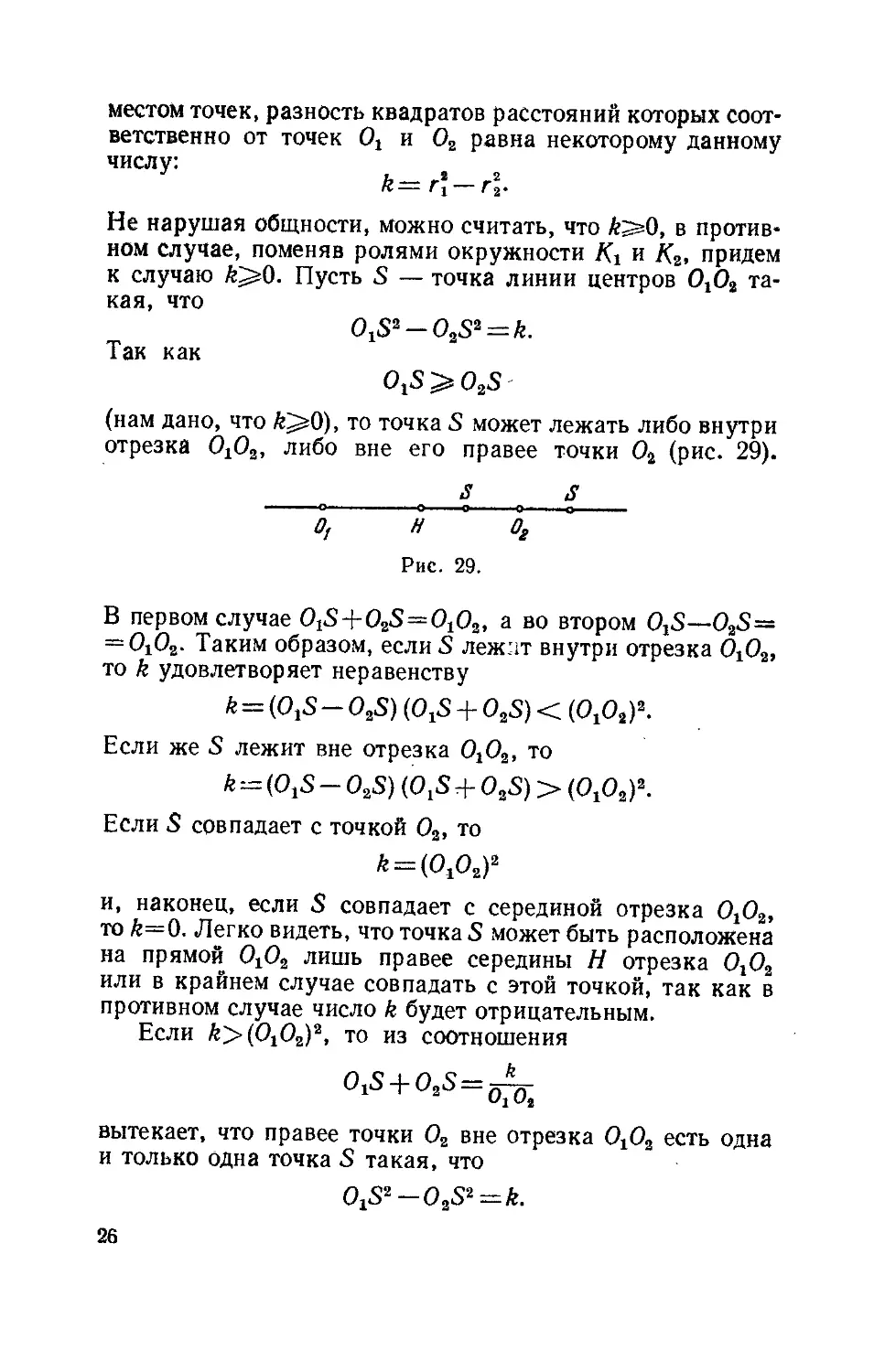
(нам дано, что &>0), то точка S может лежать либо внутри
отрезка OiO2, либо вне его правее точки 02 (рис. 29).
_______ 3 _ з
0f Н ° 0g °
Рис. 29.
В первом случае O1S+O2S = O1O2, а во втором OiS—02S=
— О^. Таким образом, если S лежит внутри отрезка 0t02,
то k удовлетворяет неравенству
fe = (OiS-O2S)(O1S + O2S)<(OA)2-
Если же S лежит вне отрезка ОХО2, то
k = (OjS - 02S) (OtS + 02S) > (ОА)2.
Если S совпадает с точкой 02, то
А=(0А)2
и, наконец, если S совпадает с серединой отрезка ОгО2,
то k—О. Легко видеть, что точка S может быть расположена
на прямой ОА лишь правее середины Н отрезка ОгО2
или в крайнем случае совпадать с этой точкой, так как в
противном случае число k будет отрицательным.
Если А>(0А)2, т0 из соотношения
O1S + O2S = JL-
вытекает, что правее точки 02 вне отрезка ОГО2 есть одна
и только одна точка S такая, что
O^-OtS^k.
26
Аналогичное заключение имеет место и в случае, когда
O^k^OiO^)2. В этом случае точка S расположена на от-
резке Н02. Итак, на линии центров ОХО2 есть единственная
точка S такая, что
где k=r*—rl^O.
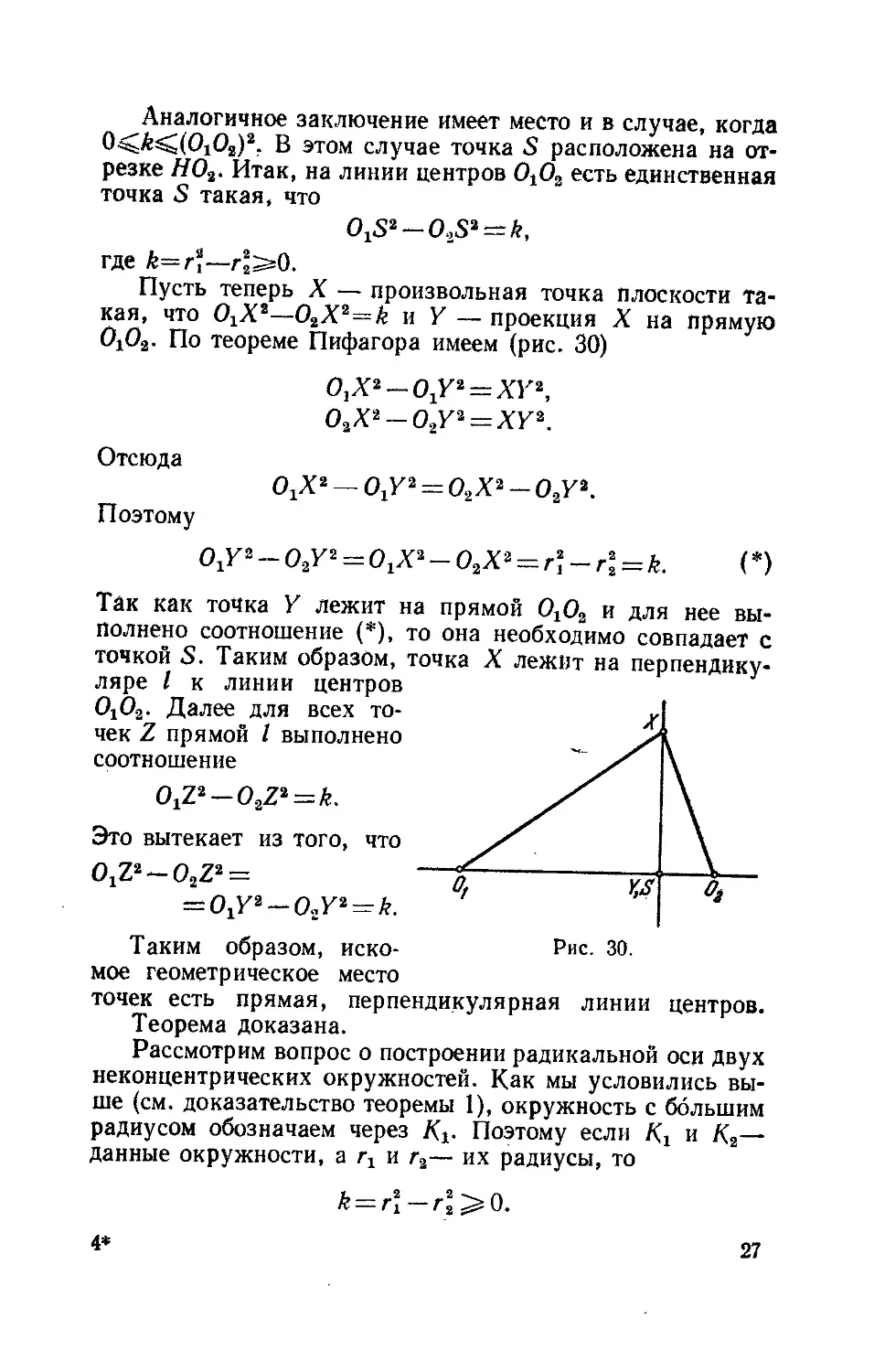
Пусть теперь X — произвольная точка плоскости та-
кая, что ОхХ3—O2X2=k и Y — проекция X на прямую
OiOg. По теореме Пифагора имеем (рис. 30)
OjX^—O^ — XY2,
О2Х3-О2У3 = ХУ3.
Отсюда
ОхХ2 — OyY2 = О2Х3 - O2Y2.
Поэтому
OrY3 - О2У3 = OjX3 - О2Х3 = г} - r\ = k. (*)
Так как точка У лежит на прямой ОгОа и для нее вы-
полнено соотношение (*), то она необходимо совпадает с
точкой S. Таким образом, точка X лежит на перпендику-
ляре I к линии центров
О1О2- Далее для всех то-
чек 2 прямой I выполнено
соотношение
O1Z3-O2Z3=Jfe.
Это вытекает из того, что
OlZt^-OiZt =
-О^-С^У3^.
Таким образом, иско- Рис. 30.
мое геометрическое место
точек есть прямая, перпендикулярная линии центров.
Теорема доказана.
Рассмотрим вопрос о построении радикальной оси Двух
неконцентрических окружностей. Как мы условились вы-
ше (см. доказательство теоремы 1), окружность с большим
радиусом обозначаем через Kv Поэтому если и К2—
данные окружности, а и г2— их радиусы, то
4*
27
Если Oj и 02— центры и К2, а Н — середина Ofi2,
то радикальная ось окружностей и К2 пересекает пря-
мую 0г02 в точке S, которая расположена поту же сторону
от Н, что и точка 02. Построение радикальной оси сводит-
ся, таким образом, к построению точки S на прямой 0х02
и затем к восстановлению перпендикуляра I к этой пря-
мой в точке S.
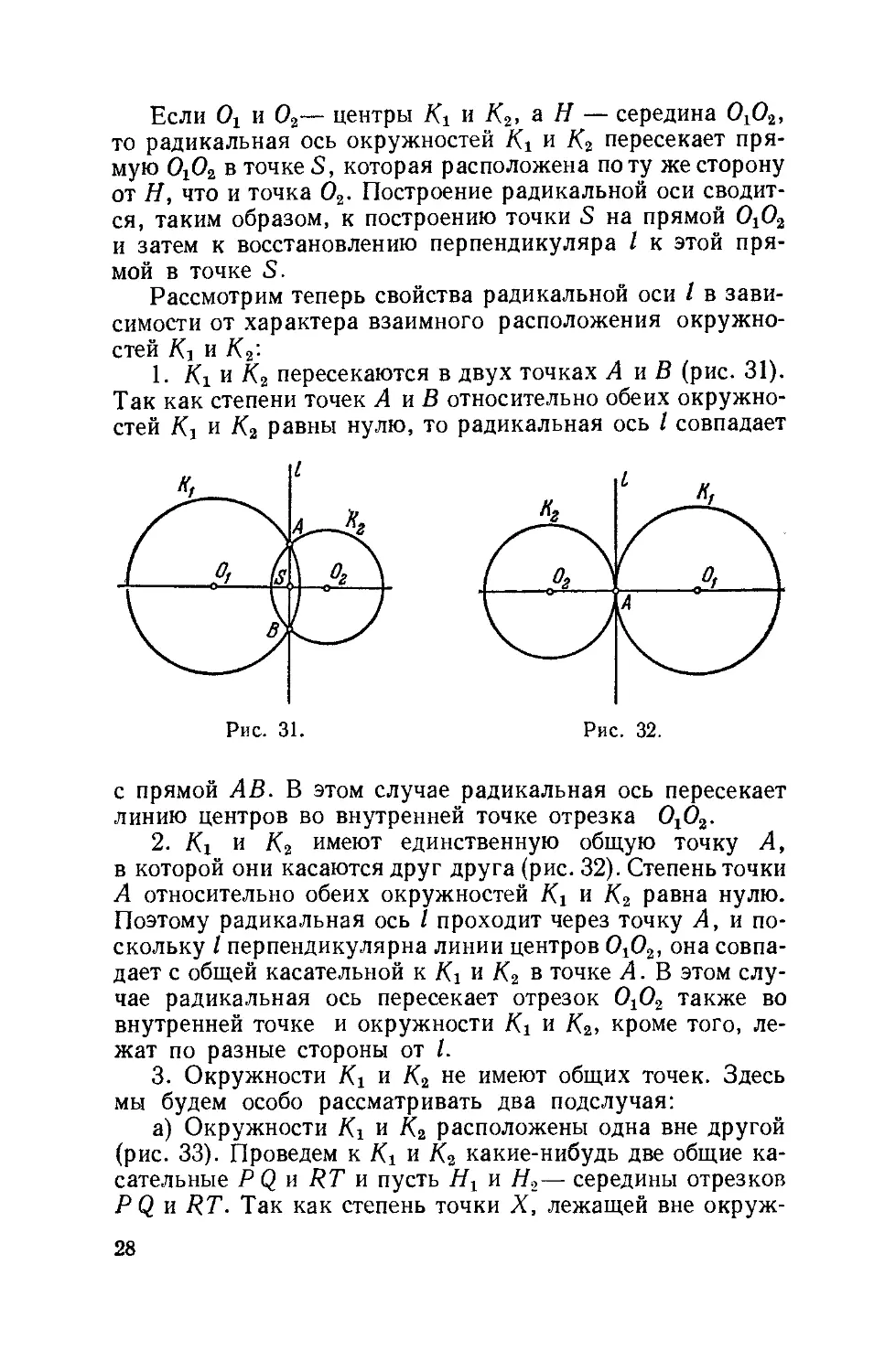
Рассмотрим теперь свойства радикальной оси I в зави-
симости от характера взаимного расположения окружно-
стей К] и К2:
1. Ki и К2 пересекаются в двух точках А и В (рис. 31).
Так как степени точек А и В относительно обеих окружно-
стей К, и К2 равны нулю, то радикальная ось I совпадает
с прямой АВ. В этом случае радикальная ось пересекает
линию центров во внутренней точке отрезка 0^.
2. Ki и К2 имеют единственную общую точку А,
в которой они касаются друг друга (рис. 32). Степень точки
А относительно обеих окружностей Kj и К2 равна нулю.
Поэтому радикальная ось I проходит через точку А, и по-
скольку I перпендикулярна линии центров 0^02, она совпа-
дает с общей касательной к Ki и К2 в точке А. В этом слу-
чае радикальная ось пересекает отрезок 0г02 также во
внутренней точке и окружности Kj и К2, кроме того, ле-
жат по разные стороны от I.
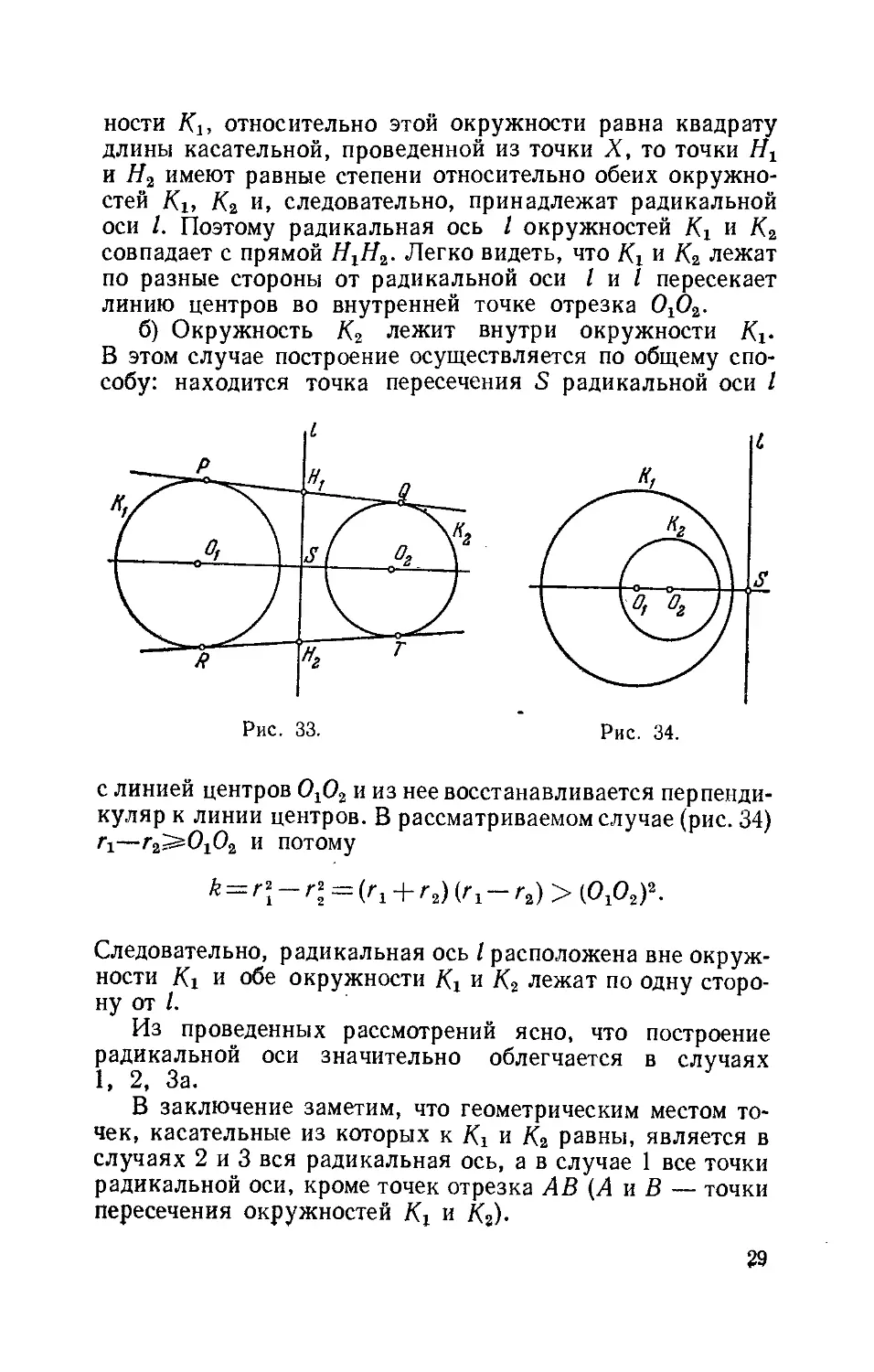
3. Окружности Ki и К2 не имеют общих точек. Здесь
мы будем особо рассматривать два подслучая:
а) Окружности Ki и К2 расположены одна вне другой
(рис. 33). Проведем кК, иК8 какие-нибудь две общие ка-
сательные PQ и RT и пусть Нг и Н2— середины отрезков
PQ и RT. Так как степень точки X, лежащей вне окруж-
28
ности Kj, относительно этой окружности равна квадрату
длины касательной, проведенной из точки X, то точки
и Н2 имеют равные степени относительно обеих окружно-
стей К1; и, следовательно, принадлежат радикальной
оси I. Поэтому радикальная ось I окружностей и
совпадает с прямой НгН2. Легко видеть, что Ki и К2 лежат
по разные стороны от радикальной оси I и I пересекает
линию центров во внутренней точке отрезка 0г02.
б) Окружность К2 лежит внутри окружности Кг.
В этом случае построение осуществляется по общему спо-
собу: находится точка пересечения S радикальной оси I
с линией центров ОХО2 и из нее восстанавливается перпенди-
куляр к линии центров. В рассматриваемом случае (рис. 34)
—г2^0г02 и потому
k = Г2 _ Г2 = (Г1 + (Г1 _ >
Следовательно, радикальная ось I расположена вне окруж-
ности Ki и обе окружности и К2 лежат по одну сторо-
ну от I.
Из проведенных рассмотрений ясно, что построение
радикальной оси значительно облегчается в случаях
1, 2, За.
В заключение заметим, что геометрическим местом то-
чек, касательные из которых к и равны, является в
случаях 2 и 3 вся радикальная ось, а в случае 1 все точки
радикальной оси, кроме точек отрезка АВ (А и В — точки
пересечения окружностей Кг и К2).
29
§ в. Приложение инверсии к решению задач на построение
С помощью преобразования инверсии можно дать весь-
ма простые и изящные решения ряда задач на построение.
Ниже мы рассматриваем задачи, в которых требуется по-
строить окружность, касающуюся или ортогональную со-
ответственно одной или нескольким окружностям.
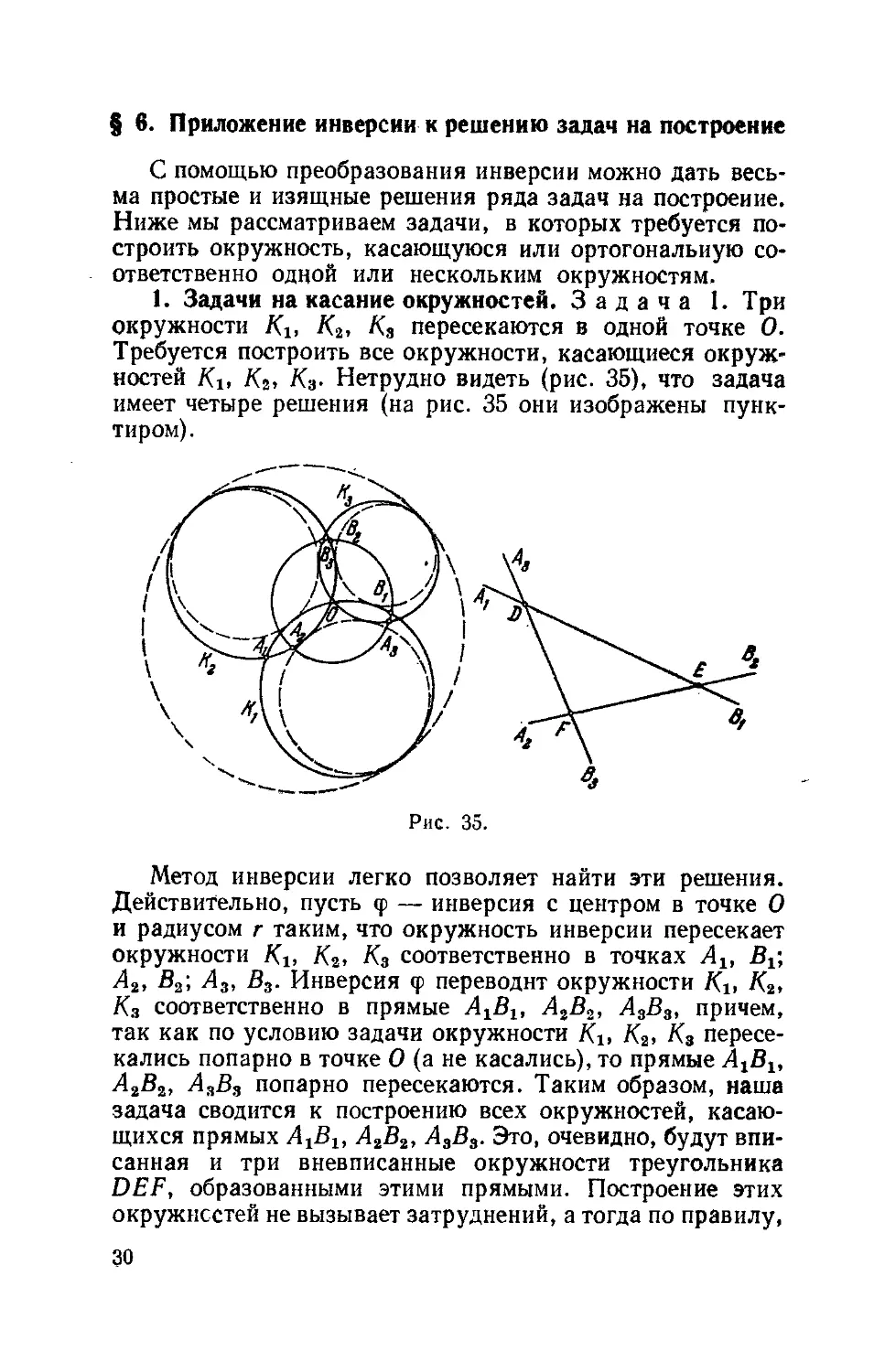
1. Задачи на касание окружностей. Задача 1. Три
окружности К.1, К2, К3 пересекаются в одной точке О.
Требуется построить все окружности, касающиеся окруж-
ностей Ki, Ki, Кя- Нетрудно видеть (рис. 35), что задача
имеет четыре решения (на рис. 35 они изображены пунк-
тиром).
Метод инверсии легко позволяет найти эти решения.
Действительно, пусть <р — инверсия с центром в точке О
и радиусом г таким, что окружность инверсии пересекает
окружности Ki, Ki, K9 соответственно в точках Л1( Bi,
Л2, В2; А3, В3. Инверсия <р переводит окружности Ki, К2,
К3 соответственно в прямые А2В2, А3В3, причем,
так как по условию задачи окружности Ки К2, К3 пересе-
кались попарно в точке О (а не касались), то прямые AiBlt
А2В2, А3В3 попарно пересекаются. Таким образом, наша
задача сводится к построению всех окружностей, касаю-
щихся прямых AiBi, А2В2, А3В3. Это, очевидно, будут впи-
санная и три вневписанные окружности треугольника
DEF, образованными этими прямыми. Построение этих
окружностей не вызывает затруднений, а тогда по правилу,
30
изложенному в § 4, строим образы четырех окружностей,
касающихся сторон треугольника DEF или их продолже-
ний, относительно инверсии <р. Полученные окружности и
есть искомые.
Заметим, что все проведенные построения можно выпол-
нить с помощью циркуля и линейки.
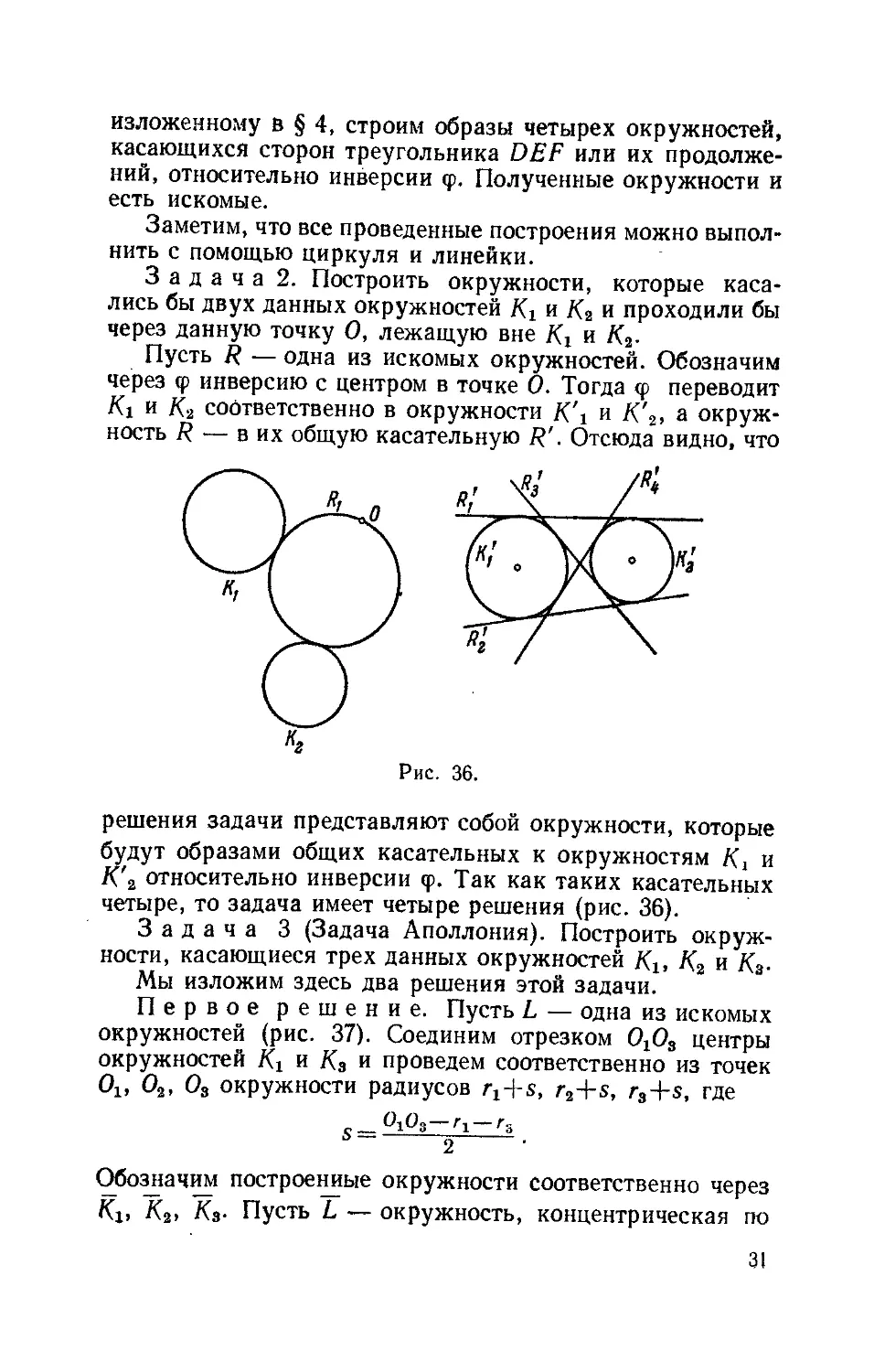
Задача 2. Построить окружности, которые каса-
лись бы двух данных окружностей и К2 и проходили бы
через данную точку О, лежащую вне и К2.
Пусть R — одна из искомых окружностей. Обозначим
через <р инверсию с центром в точке О. Тогда <р переводит
и К2 соответственно в окружности и К',, а окруж-
ность R — в их общую касательную R’. Отсюда видно, что
решения задачи представляют собой окружности, которые
будут образами общих касательных к окружностям и
К’2 относительно инверсии <р. Так как таких касательных
четыре, то задача имеет четыре решения (рис. 36).
Задача 3 (Задача Аполлония). Построить окруж-
ности, касающиеся трех данных окружностей Klt К2 и К3.
Мы изложим здесь два решения этой задачи.
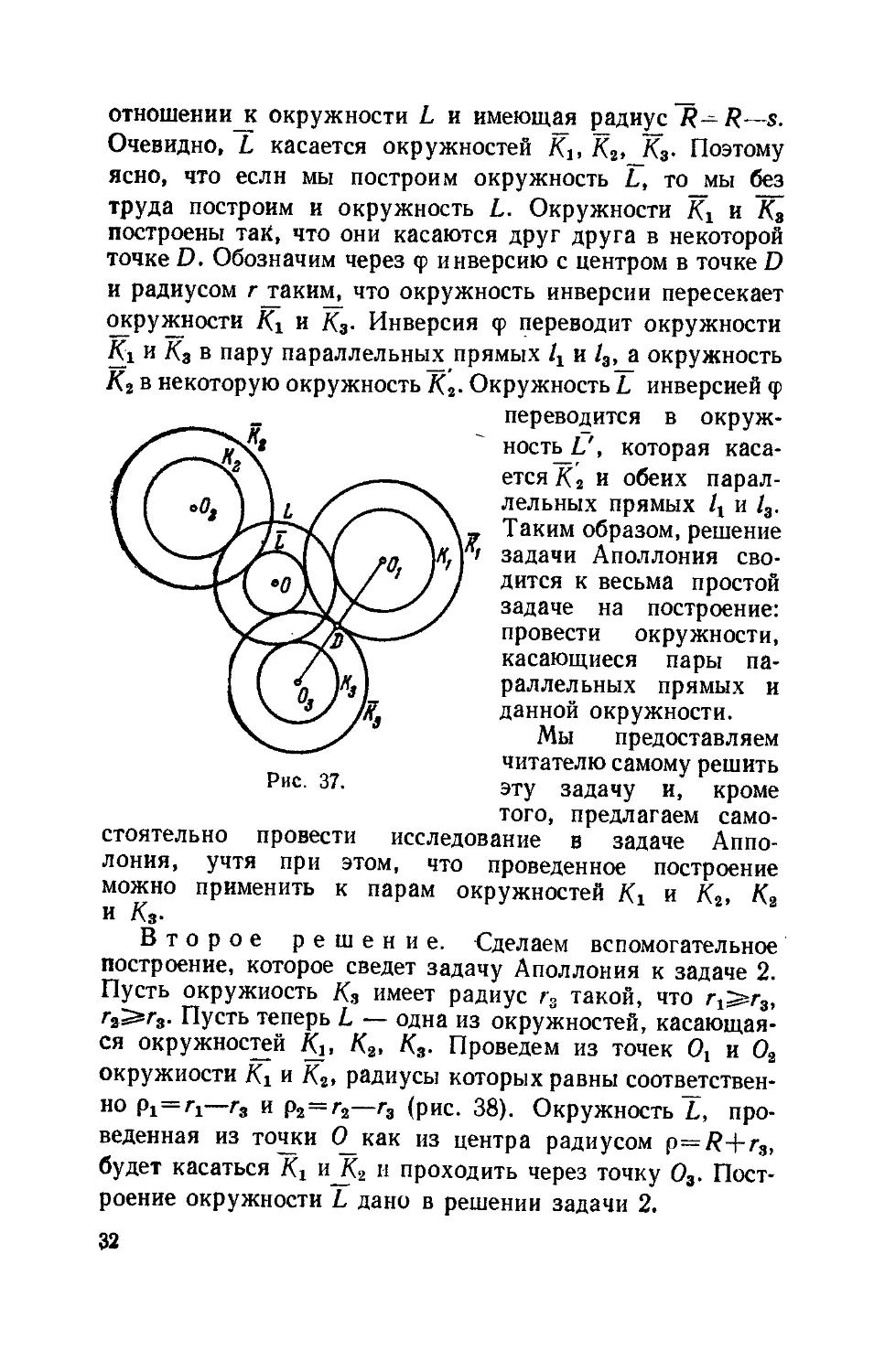
Первое решение. Пусть L — одна из искомых
окружностей (рис. 37). Соединим отрезком О1Оа центры
окружностей Кг и Ка и проведем соответственно из точек
01, 02, Оа окружности радиусов fj+s, r2+s, r3+s, где
„__O1O3—/"1—ra
s- g
Обозначим построенные окружности соответственно через
Кх» ^2> Кз- Пусть L — окружность, концентрическая по
31
отношении к окружности L и имеющая радиус R—R—s.
Очевидно, L касается окружностей К2, К2,_К3- Поэтому
ясно, что если мы построим окружность L, то мы без
труда построим и окружность L. Окружности и К3
построены так, что они касаются друг друга в некоторой
точке D. Обозначим через ф инверсию с центром в точке D
и радиусом г таким, что окружность инверсии пересекает
окружности Кх и К3- Инверсия ф переводит окружности
Ki и К3 в пару параллельных прямых /х и /3,_а окружность
К2 в некоторую окружность К2. Окружность L инверсией ф
переводится в окруж-
ность L', которая каса-
ется К2 и обеих парал-
лельных прямых /х и /3.
_ Таким образом, решение
"i задачи Аполлония сво-
дится к весьма простой
задаче на построение:
провести окружности,
касающиеся пары па-
раллельных прямых и
данной окружности.
Мы предоставляем
читателю самому решить
Рис- 37. эту задачу и, кроме
того, предлагаем само-
стоятельно провести исследование в задаче Аппо-
лония, учтя при этом, что проведенное построение
можно применить к парам окружностей Кх и К2, К2
и К3.
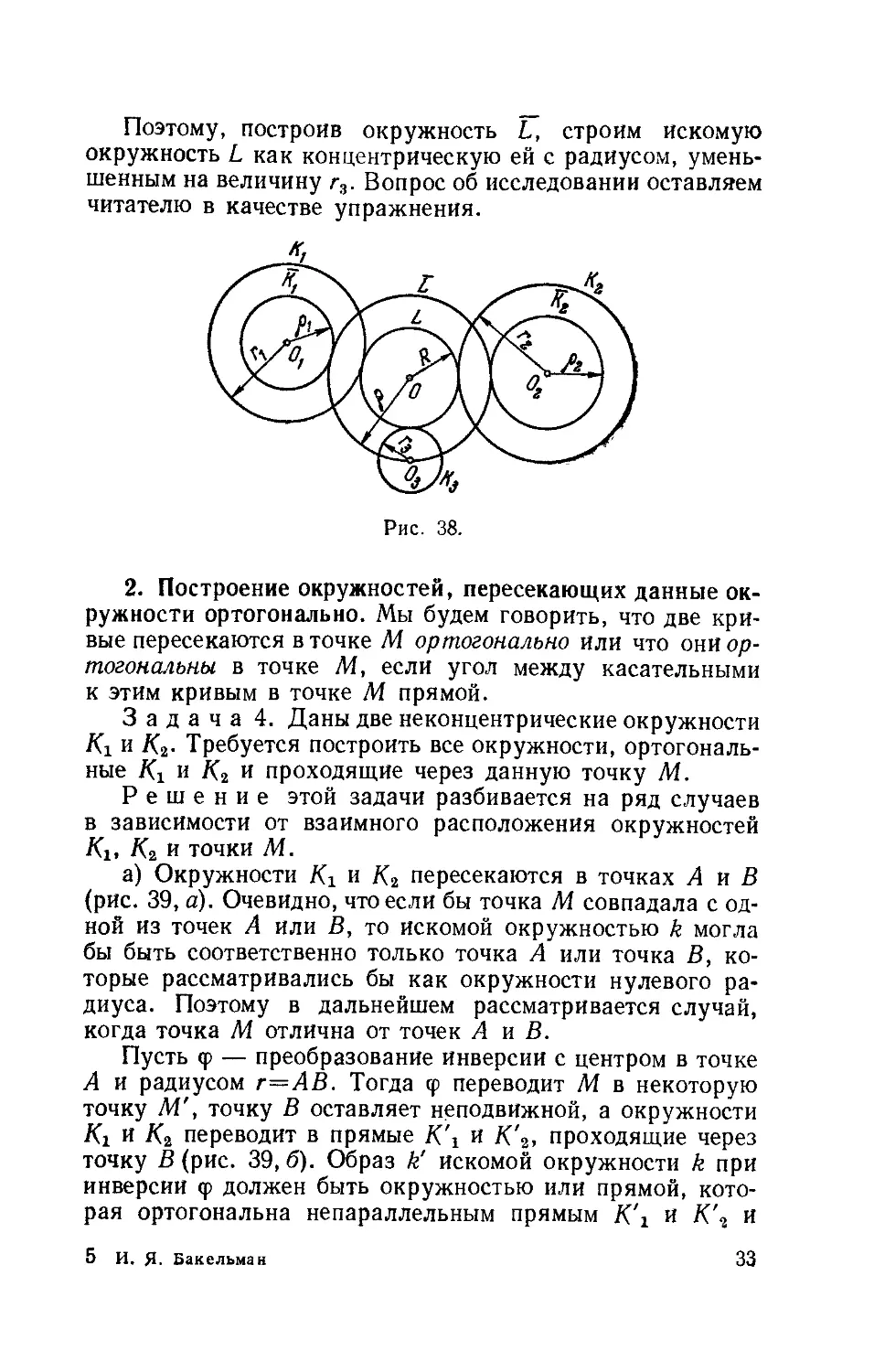
Второе решение. Сделаем вспомогательное
построение, которое сведет задачу Аполлония к задаче 2.
Пусть окружность Кя имеет радиус г3 такой, что Г1>г3,
г2^г3. Пусть теперь L — одна из окружностей, касающая-
ся окружностей Kj, К2, К3. Проведем из точек Ох и О2
окружности Кх и К2, радиусы которых равны соответствен-
но Р1=Г1—г3 и р2=г2—г3 (рис. 38). Окружность L, про-
веденная из точки О как из центра радиусом р=/?+г3,
будет касаться Кх и_К2 и проходить через точку О3. Пост-
роение окружности L дано в решении задачи 2.
32
Поэтому, построив окружность L, строим искомую
окружность L как концентрическую ей с радиусом, умень-
шенным на величину г3. Вопрос об исследовании оставляем
читателю в качестве упражнения.
2. Построение окружностей, пересекающих данные ок-
ружности ортогонально. Мы будем говорить, что две кри-
вые пересекаются в точке М ортогонально или что они ор-
тогональны в точке М, если угол между касательными
к этим кривым в точке М прямой.
Задача 4. Даны две неконцентрические окружности
К.1 и /С2. Требуется построить все окружности, ортогональ-
ные Ki и Кг и проходящие через данную точку М.
Решение этой задачи разбивается на ряд случаев
в зависимости от взаимного расположения окружностей
К1, Кг у ТОЧКИ М.
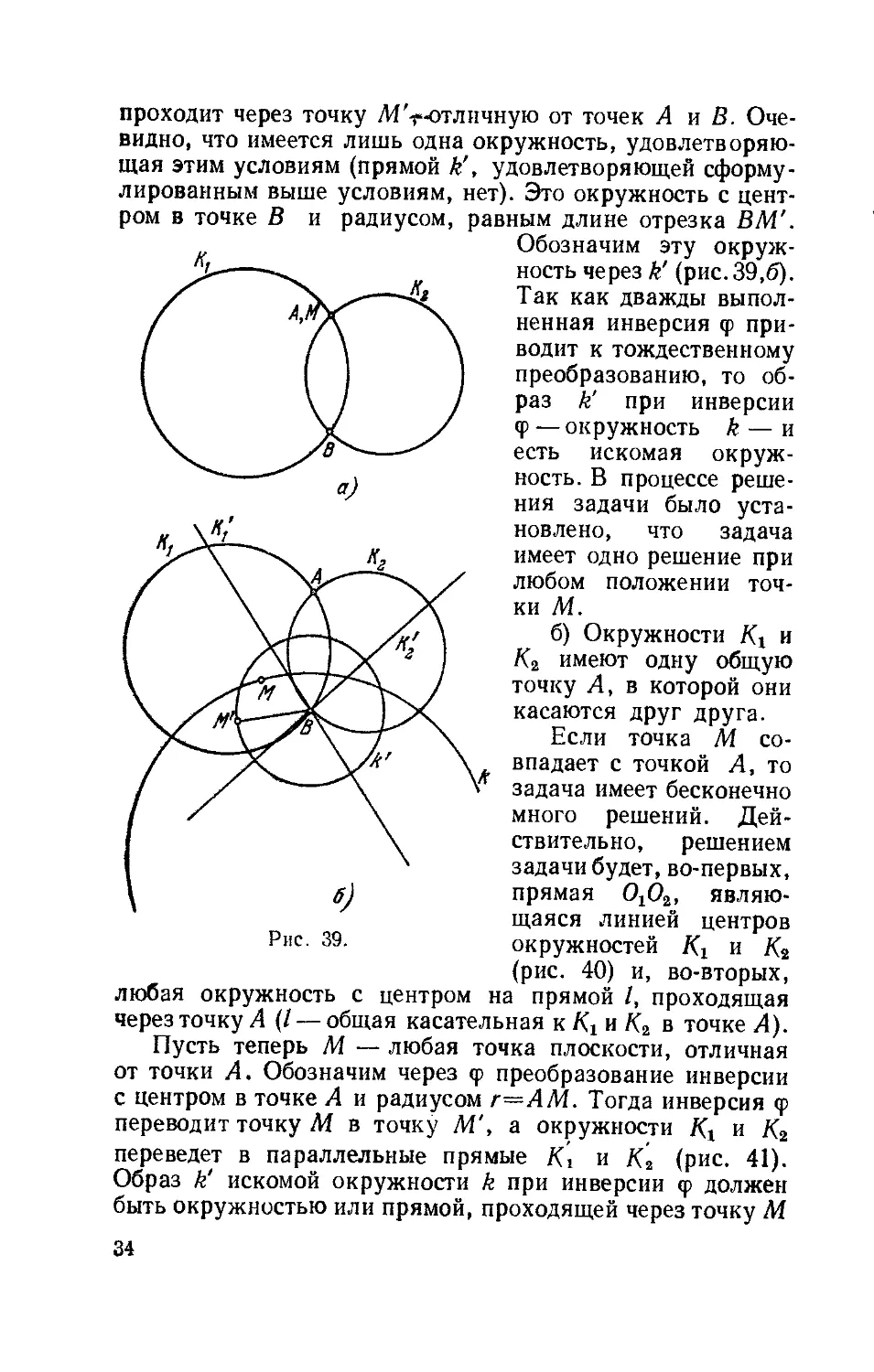
а) Окружности Ki и Кг пересекаются в точках А и В
(рис. 39, а). Очевидно, что если бы точка М совпадала с од-
ной из точек А или В, то искомой окружностью k могла
бы быть соответственно только точка А или точка В, ко-
торые рассматривались бы как окружности нулевого ра-
диуса. Поэтому в дальнейшем рассматривается случай,
когда точка М отлична от точек А и В.
Пусть <р — преобразование инверсии с центром в точке
А и радиусом г=АВ. Тогда ф переводит М в некоторую
точку М', точку В оставляет неподвижной, а окружности
Кг и Кг переводит в прямые К\ и К'г, проходящие через
точку В (рис. 39, б). Образ k' искомой окружности k при
инверсии ф должен быть окружностью или прямой, кото-
рая ортогональна непараллельным прямым К\ и К\ и
5 И. Я. Бакельма
33
Рис. 39.
проходит через точку ЛГ-г-отлпчную от точек А и В. Оче-
видно, что имеется лишь одна окружность, удовлетворяю-
щая этим условиям (прямой k', удовлетворяющей сформу-
лированным выше условиям, нет). Это окружность с цент-
ром в точке В и радиусом, равным длине отрезка ВМ'.
Обозначим эту окруж-
ность через k' (рис.39,6).
Так как дважды выпол-
ненная инверсия <р при-
водит к тождественному
преобразованию, то об-
раз k’ при инверсии
Ф — окружность k — и
есть искомая окруж-
ность. В процессе реше-
ния задачи было уста-
новлено, что задача
имеет одно решение при
любом положении точ-
ки М.
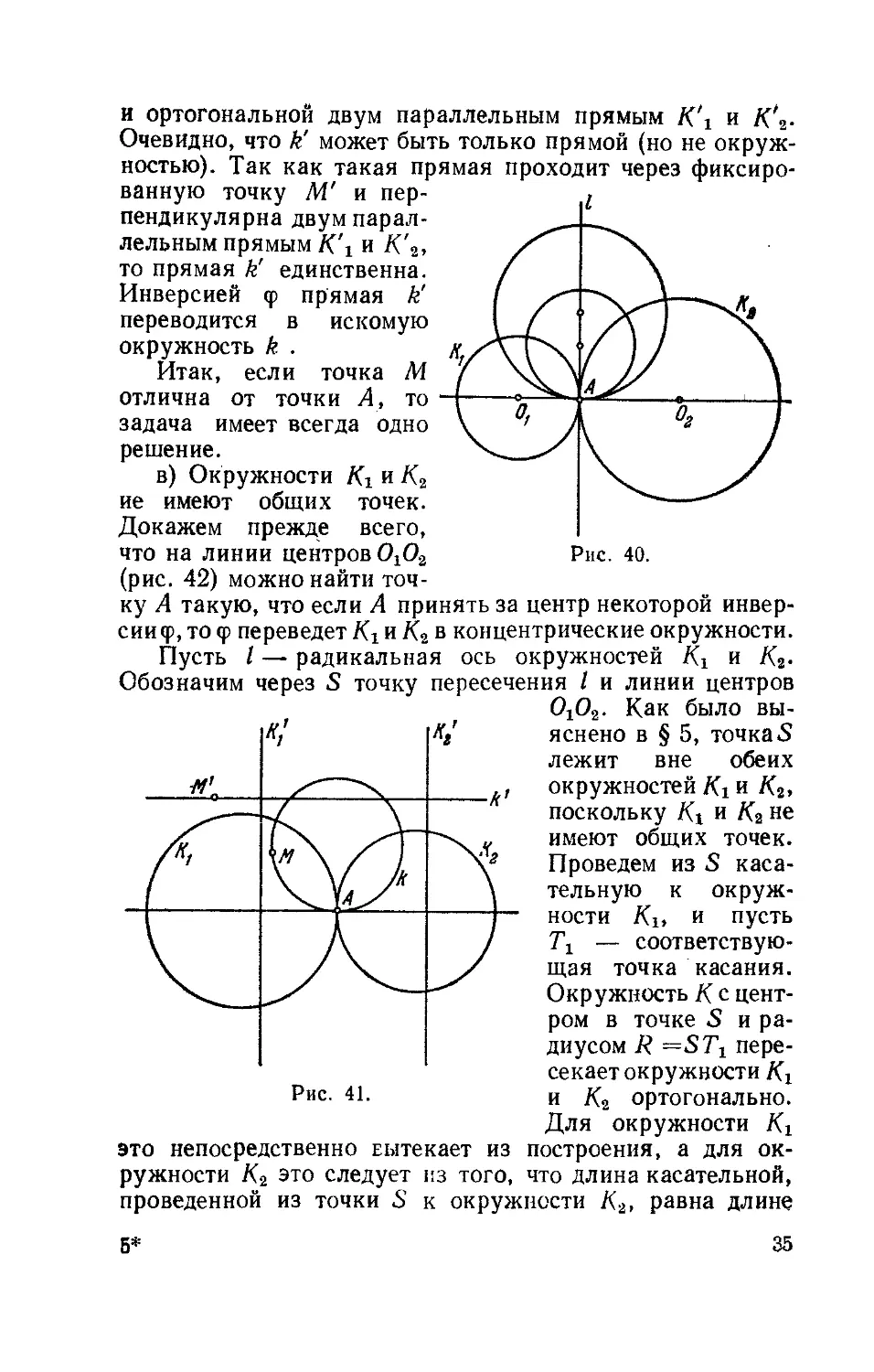
б) Окружности Kj и
имеют одну общую
точку А, в которой они
касаются друг друга.
Если точка М со-
впадает с точкой А, то
задача имеет бесконечно
много решений. Дей-
ствительно, решением
задачи будет, во-первых,
прямая OjOa, являю-
щаяся линией центров
окружностей /Q и
(рис. 40) и, во-вторых,
любая окружность с центром на прямой I, проходящая
через точку А (I — общая касательная к Ki и в точке Л).
Пусть теперь М — любая точка плоскости, отличная
от точки А. Обозначим через ф преобразование инверсии
с центром в точке А и радиусом г—AM. Тогда инверсия ф
переводит точку М в точку М', а окружности и
переведет в параллельные прямые Ki и К2 (рис. 41).
Образ k’ искомой окружности k при инверсии ф должен
быть окружностью или прямой, проходящей через точку М
34
и ортогональной двум параллельным прямым и К*2.
Очевидно, что k' может быть только прямой (но не окруж-
ностью). Так как такая прямая проходит через фиксиро-
ванную точку М' и пер-
пендикулярна двум парал-
лельным прямым и К'2,
то прямая k' единственна.
Инверсией ф прямая k’
переводится в искомую
окружность k .
Итак, если точка М
отлична от точки А, то
задача имеет всегда одно
решение.
в) Окружности Ki и К2
ие имеют общих точек.
Докажем прежде всего,
что на линии центров ОгО2 Рис. 40.
(рис. 42) можно найти точ-
ку А такую, что если А принять за центр некоторой инвер-
сии <р, то ф переведет и К2 в концентрические окружности.
Пусть / — радикальная ось окружностей и К2-
Обозначим через S точку пересечения I и линии центров
ОгО2. Как было вы-
яснено в § 5, точкаS
лежит вне обеих
окружностей Кг и К2,
поскольку Ki и К2 не
имеют общих точек.
Проведем из S каса-
тельную к окруж-
ности Ki, и пусть
Тг — соответствую-
щая точка касания.
Окружность К с цент-
ром в точке S и ра-
диусом R =S7\ пере-
секает окружности Kj
и К2 ортогонально.
Для окружности Kj
это непосредственно вытекает из построения, а для ок-
ружности К2 это следует из того, что длина касательной,
проведенной из точки S к окружности К2, равна длине
5*
35
отрезка S7\ или, что то же, радиусу окружности К. Обо-
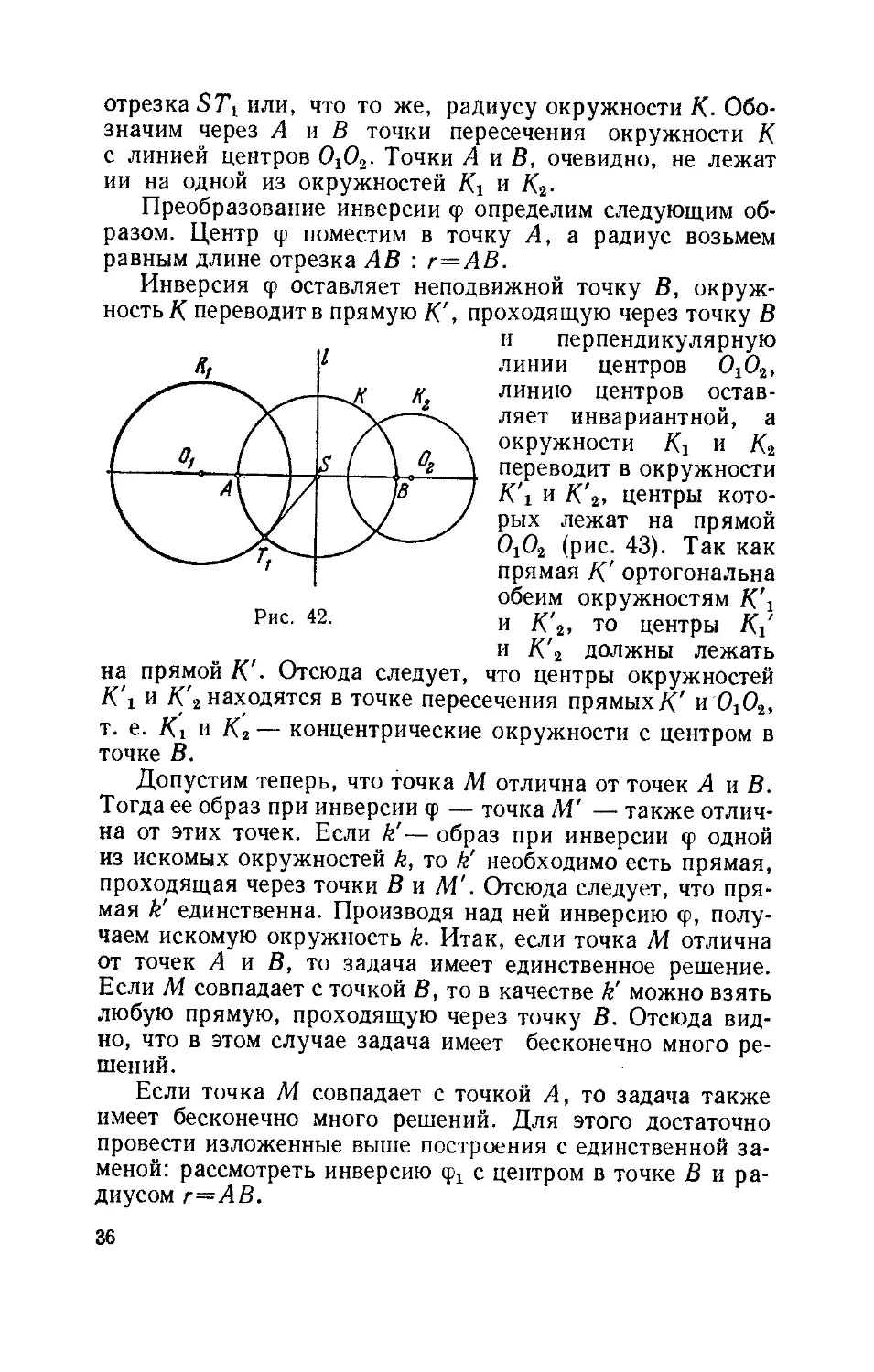
значим через А и В точки пересечения окружности К
с линией центров 0г02. Точки А и В, очевидно, не лежат
ии на одной из окружностей Ki и К2.
Преобразование инверсии <р определим следующим об-
разом. Центр <р поместим в точку А, а радиус возьмем
равным длине отрезка АВ ; г=АВ.
Инверсия ф оставляет неподвижной точку В, окруж-
ность К переводите прямую К', проходящую через точку В
и перпендикулярную
линии центров 0г02,
линию центров остав-
ляет инвариантной, а
окружности Ki и
переводит в окружности
К\ и К'2, центры кото-
рых лежат на прямой
0г02 (рис. 43). Так как
прямая К' ортогональна
обеим окружностям К\
и Х'2, то центры К/
и К'2 должны лежать
на прямой К'- Отсюда следует, что центры окружностей
и К'2 находятся в точке пересечения прямых К' и 0г02,
т. е. Ki и К2— концентрические окружности с центром в
точке В.
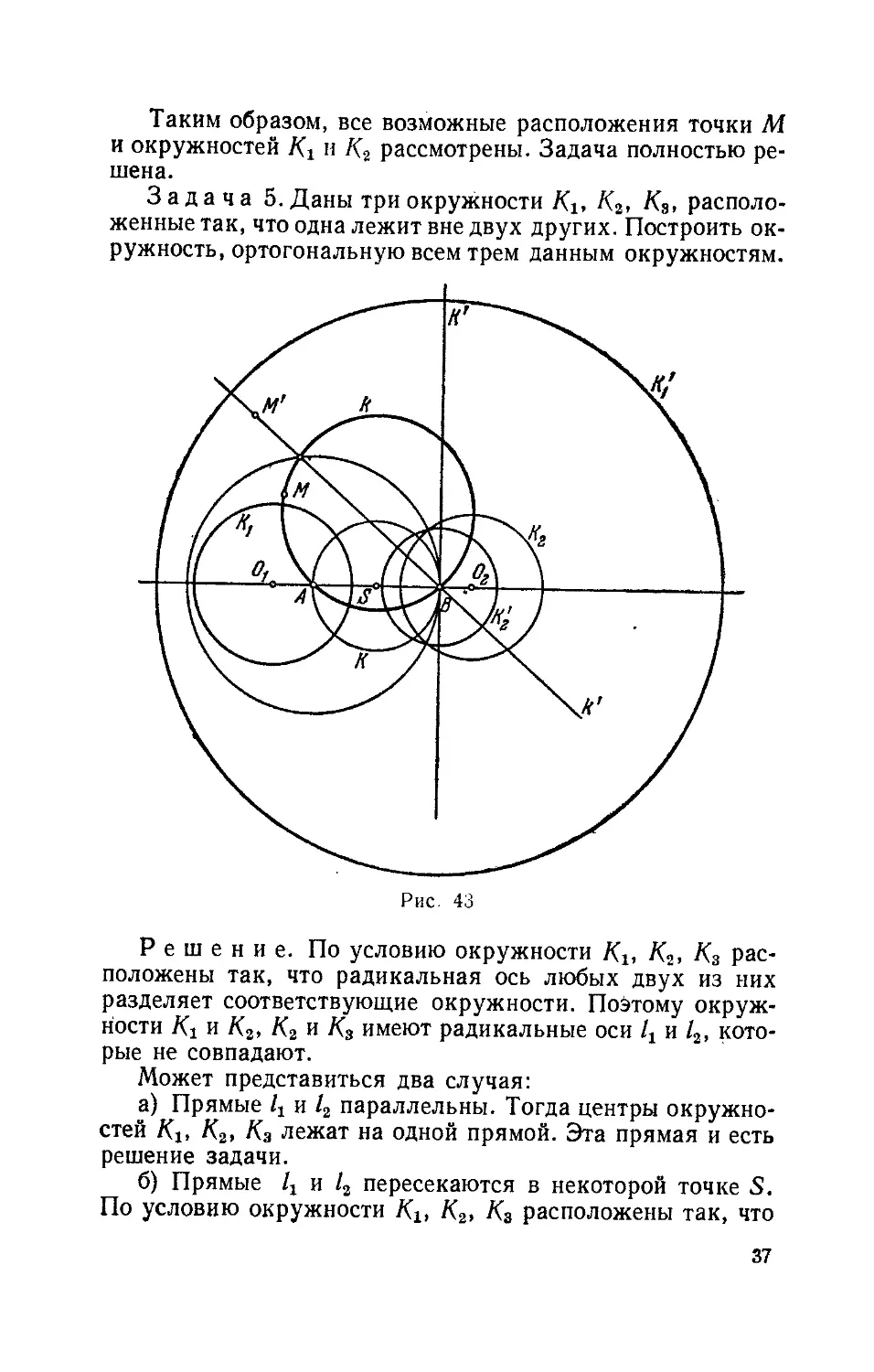
Допустим теперь, что точка М отлична от точек А и В.
Тогда ее образ при инверсии ф — точка М' — также отлич-
на от этих точек. Если k'— образ при инверсии ф одной
из искомых окружностей k, то k' необходимо есть прямая,
проходящая через точки В и М'. Отсюда следует, что пря-
мая k' единственна. Производя над ней инверсию ф, полу-
чаем искомую окружность k. Итак, если точка М отлична
от точек Л и В, то задача имеет единственное решение.
Если М совпадает с точкой В, то в качестве k' можно взять
любую прямую, проходящую через точку В. Отсюда вид-
но, что в этом случае задача имеет бесконечно много ре-
шений.
Если точка М совпадает с точкой А, то задача также
имеет бесконечно много решений. Для этого достаточно
провести изложенные выше построения с единственной за-
меной: рассмотреть инверсию фг с центром в точке В и ра-
диусом г—АВ.
36
Таким образом, все возможные расположения точки М.
и окружностей Кх н К2 рассмотрены. Задача полностью ре-
шена.
Задача 5. Даны три окружности 7Q, ^г> Кз> располо-
женные так, что одна лежит вне двух других. Построить ок-
ружность, ортогональную всем трем данным окружностям.
Решение. По условию окружности К.,, К3 рас-
положены так, что радикальная ось любых двух из них
разделяет соответствующие окружности. Поэтому окруж-
ности Кх и К2, К2 и К3 имеют радикальные оси и 12, кото-
рые не совпадают.
Может представиться два случая:
а) Прямые /j и /2 параллельны. Тогда центры окружно-
стей Кх> ^2, Кз лежат на одной прямой. Эта прямая и есть
решение задачи.
б) Прямые 1г и /2 пересекаются в некоторой точке S.
По условию окружности Кх> К2, К3 расположены так, что
37
их радикальные оси лежат вне соответствующих пар ок-
ружностей. Поэтому из точки S можно провести касатель-
ные ко всем окружностям Ki, Kz, К3- Все касательные име-
ют равные длины. Пусть S7\— касательная к окружности
Ki (Ti— точка касания с окружностью Ki) иг — длина
этой касательной. Окружность с центром в точке S и ра-
диусом г, очевидно, и будет искомой.
Из рассмотрений, проведенных выше, вытекает, что
задача всегда имеет одно решение.
§ 7. Пучки окружностей
Фиксируем на плоскости две окружности Ki и К3
Совокупность всех окружностей, ортогональных Ki и Ка,
будем называть пучком окружностей. Мы будем также го-
ворить, что этот пучок порождается окружностями Ki и
Кг, и обозначать его P(Ki, Ki)', часто, если порождающие
пучок окружности Ki и К2 не будут играть специальной
роли, мы будем обозначать пучок кратко буквами Р или Q.
Так как выше мы условились считать прямую частным
случаем окружности, то в состав пучков наряду с окруж-
ностями могут входить и прямые.
Рассмотрим сначала три пучка, устроенных наиболее
просто. Эти пучки возникают при специальном выборе ок-
ружностей Ki и К2.
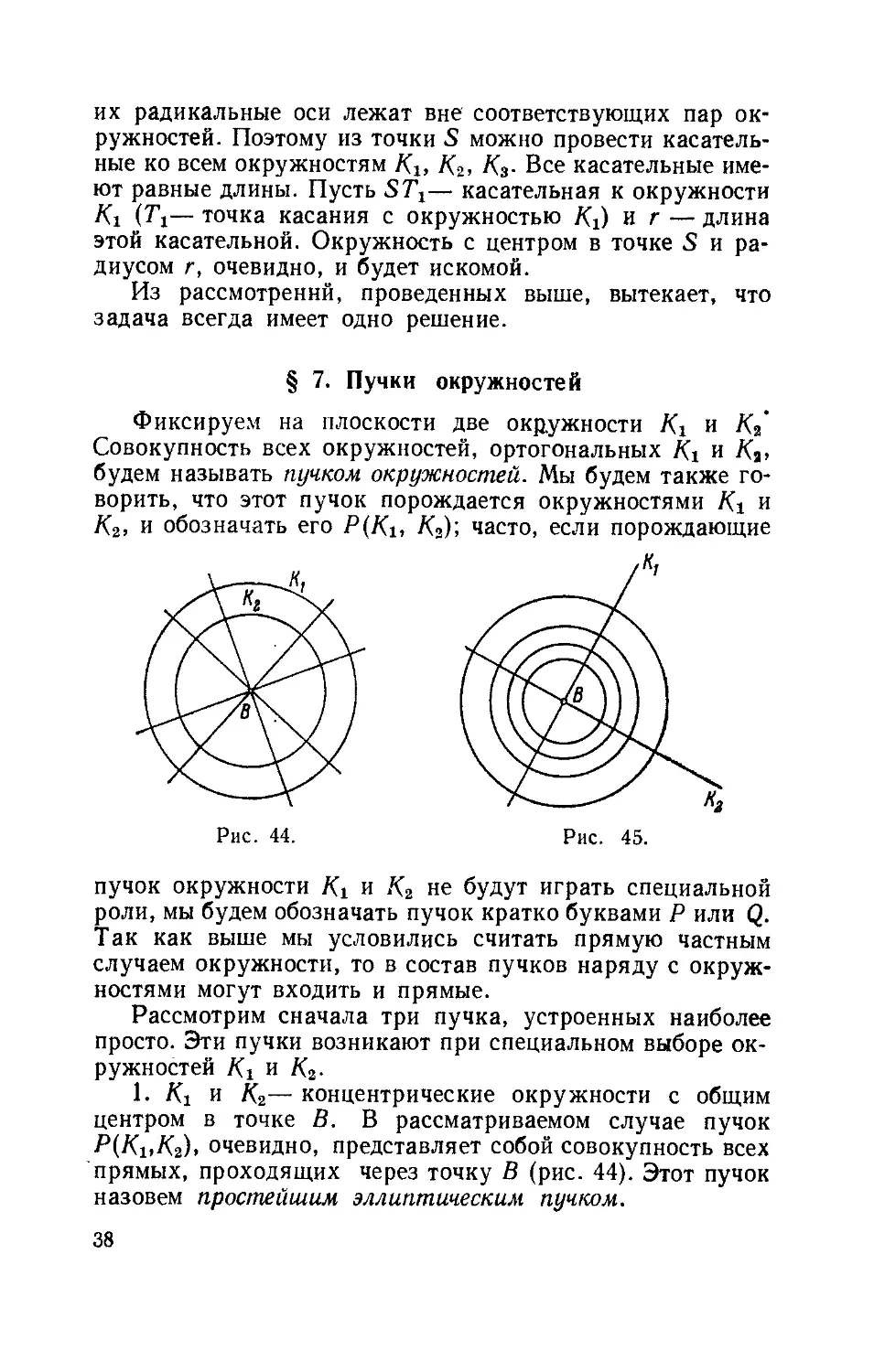
1. Ki и К2— концентрические окружности с общим
центром в точке В. В рассматриваемом случае пучок
очевидно, представляет собой совокупность всех
прямых, проходящих через точку В (рис. 44). Этот пучок
назовем простейшим эллиптическим пучком.
38
2. Ki и /С2— прямые, пересекающиеся в точке В.
Пучок P(Ki, К2), очевидно, представляет собой совокуп-
ность всех концентрических окружностей с общим центром
в точке В (рис. 45). Пучок
гиперболическим пучком.
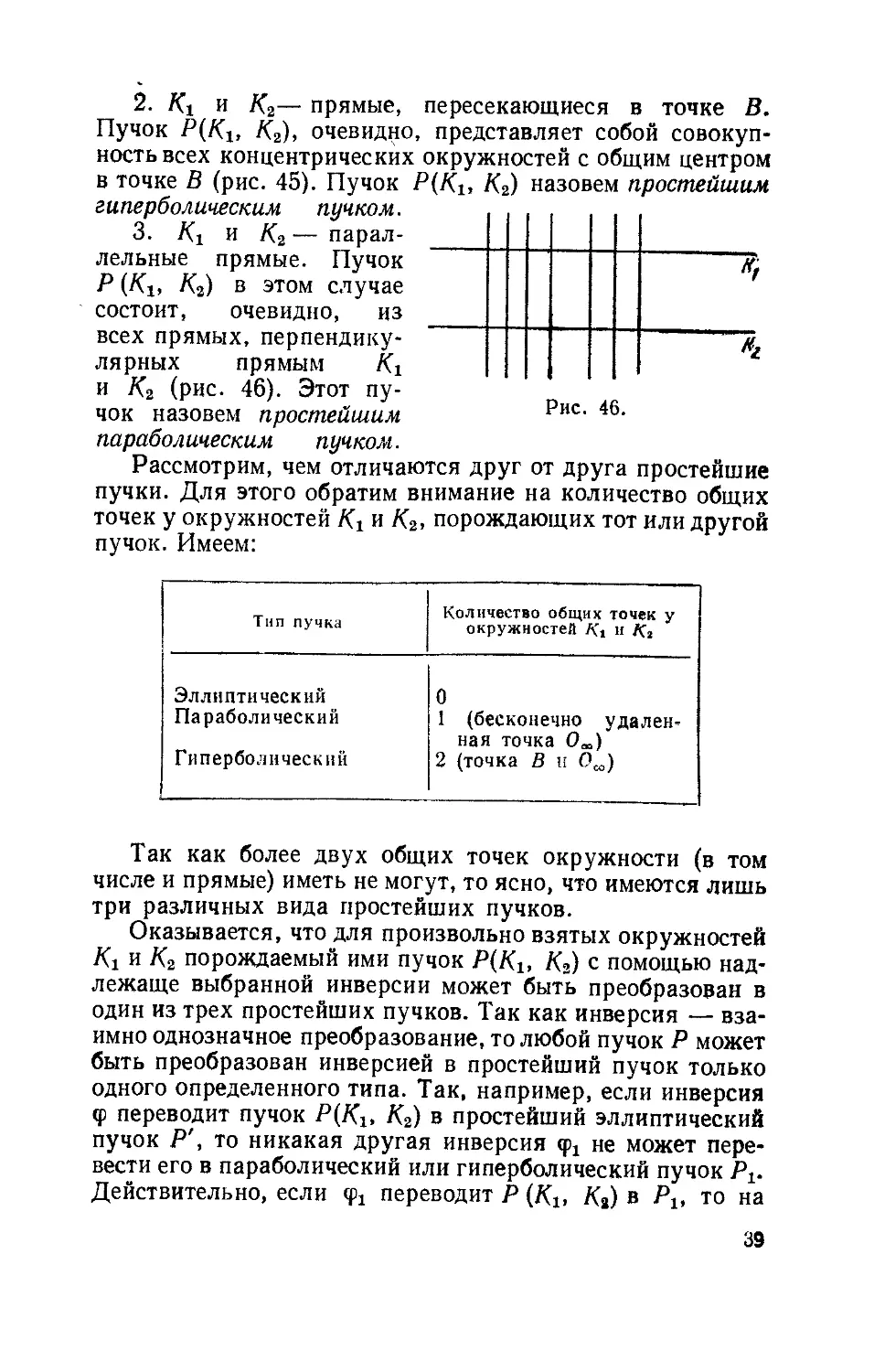
3. Ki и К2 — парал-
лельные прямые. Пучок
Р (^1, ^г) в этом случае
состоит, очевидно, из
всех прямых, перпендику-
лярных прямым Ki
и /С2 (рис. 46). Этот пу-
чок назовем простейшим
параболическим пучком.
Рассмотрим, чем отличаются друг от друга простейшие
пучки. Для этого обратим внимание на количество общих
точек у окружностей Ki и К2, порождающих тот или другой
пучок. Имеем:
Тип пучка Количество общих точек у окружностей и
Эллиптический Параболический Гиперболический 0 1 (бесконечно удален- ная точка О„) 2 (точка В и О«,)
Так как более двух общих точек окружности (в том
числе и прямые) иметь не могут, то ясно, что имеются лишь
три различных вида простейших пучков.
Оказывается, что для произвольно взятых окружностей
Ki и К2 порождаемый ими пучок P(Ki, К2) с помощью над-
лежаще выбранной инверсии может быть преобразован в
один из трех простейших пучков. Так как инверсия — вза-
имно однозначное преобразование, то любой пучок Р может
быть преобразован инверсией в простейший пучок только
одного определенного типа. Так, например, если инверсия
<р переводит пучок P(Ki, К2) в простейший эллиптический
пучок Р', то никакая другая инверсия <pj не может пере-
вести его в параболический или гиперболический пучок 1\.
Действительно, если переводит Р (Ки К2) в Ри то на
39
основании теоремы 1 § 3 та же инверсия фг переводит Р,
в Р(К1; /Q). Положим
Kt = 4>(Kt), ^1 = Ф1(/<1),
/<2 = Ф(/<2), Кг = <Рг(Кг)-
Тогда
А'1 = Ф1(/<1), К2 = Ф1(К2)-
Очевидно, К\ и К'г— концентрические окружности, а Kt
и К2— пересекающиеся или параллельные прямые. Обо-
значим через f преобразование плоскости, которое состоит
в последовательном выполнении двух инверсий <рх и <р.
Прямые Кг и /Q, которые имеют по крайней мере одну об-
щую точку О преобразованием f переводятся в окруж-
ности К'1, К'2, которые не имеют общих точек, что невоз-
можно, так как фигуры f(Kt) и /(К2) должны иметь хотя
бы одну общую точку.
Имеет место следующая основная теорема.
Теорема 1. 1. Если Kt и Кг не имеют общих точек,
то существует инверсия <р1( переводящая Р(КЛ, К2) в про-
стейший эллиптический пучок.
2. Если Kt и К2 имеют единственную общую точку, то
существует инверсия <р2, переводящая Р(К^ Кг) в простей-
ший параболический пучок.
3. Если Kt и Кг имеют две общие точки, то существует
инверсия <р3, переводящая P(Kt, Кг) в простейший гипербо-
лический пучок.
Доказательство теоремы 1 тесно связано с построения-
ми, проведенными в § 6 при решении задачи 4. Дальнейшие
построения будут опираться также на следующую лемму.
Лемма 1. Пусть произвольная инверсия <р переводит
любые две окружности Кг и Кг в'окружности К\ и К'г-
Тогда образ пучка P(Kt, Кг) относительно <р есть пучок
P{Kt', К'г).
Доказательство леммы. Так как ортого-
нальность окружностей при любой инверсии сохраняется,
то образ P(Kt, Кг) относительно ф есть совокупность ок-
ружностей, входящих в пучок Р (К\, К'г)- Для того чтобы
доказать совпадение образа P(Kt, Кг) с пучком Р(К\, Д'2),
достаточно установить, что для любой окружности
/г' пучка Р(К\> К'г) найдется окружность k пучка Р(Д1,/(2)
такая, что ф(#)=Л'.
40
Положим
k = (f(k').
Тогда k ортогональна Ki и К2 и, стало быть, принадлежит
пучку P(Ki, К2). Так как дважды последовательно выпол-
ненная инверсия есть тождественное преобразование, то
<р(Л) = <р(<р (k'))=k'.
Лемма доказана.
а) Доказательство утверждения 1.
Пусть Kj и К2 — Две произвольные окружности, не имею-
щие общих точек. Интерес представляет случай, когда
и /С2— не концентрические окружности. Одна из окружно-
стей Ki и Ki может быть прямой (но не обе, ибо тогда
и К2 имеют по крайней мере одну общую точку — именно,
бесконечно удаленную точку 0^).
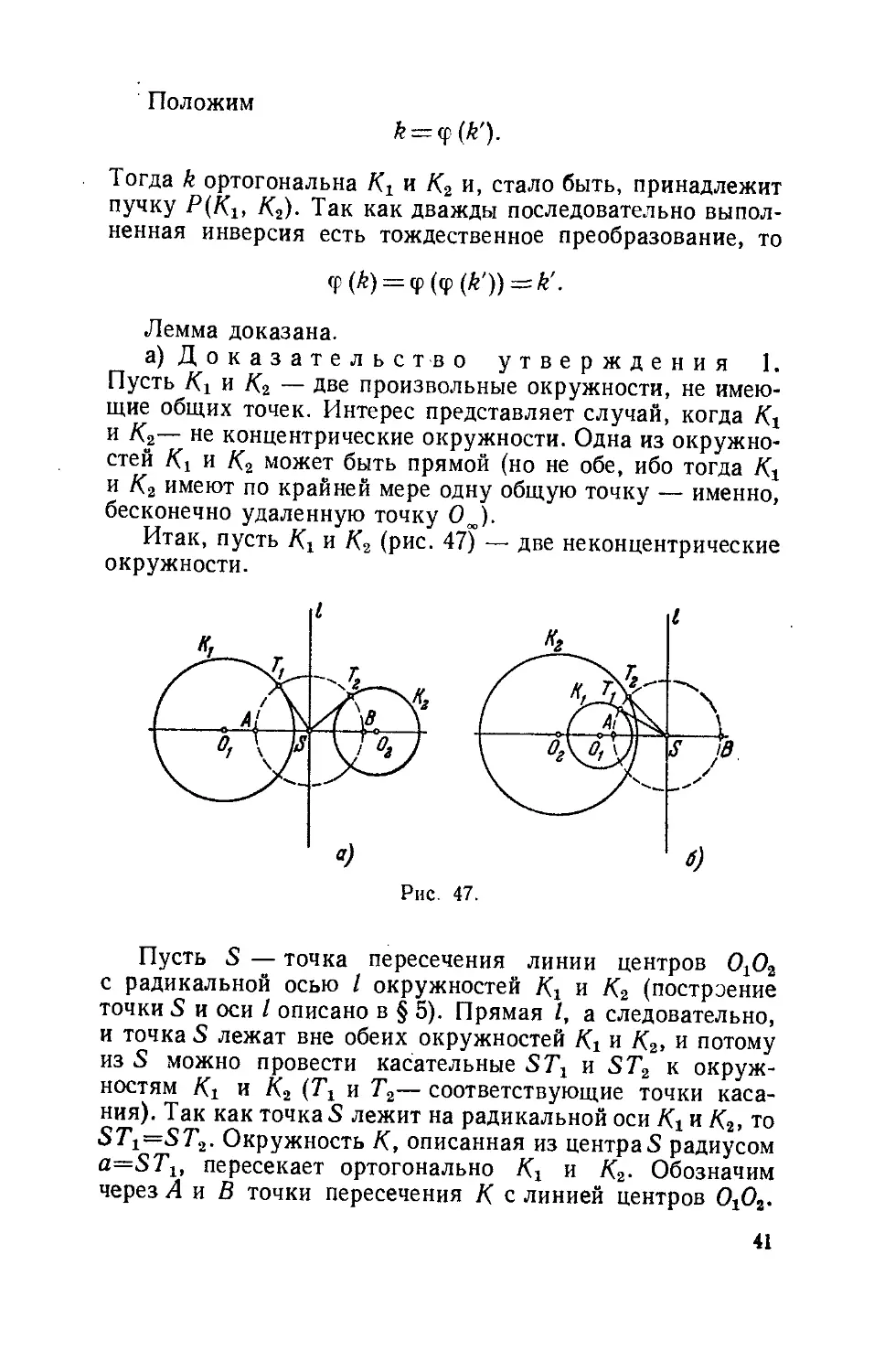
Итак, пусть Ki и К2 (рис. 47) — две неконцентрические
окружности.
Пусть S — точка пересечения линии центров 0г02
с радикальной осью / окружностей Ki и К2 (построение
точки S и оси I описано в § 5). Прямая /, а следовательно,
и точка S лежат вне обеих окружностей Ki и К2, и потому
из S можно провести касательные S7\ и ST2 к окруж-
ностям Ki и К2 (Тг и Т2— соответствующие точки каса-
ния). Так как точка S лежит на радикальной оси Ki и К2, то
STi—S^. Окружность К, описанная из центраЗ радиусом
a—STlt пересекает ортогонально Кг и К2- Обозначим
через А и В точки пересечения К с линией центров ОХО2.
41
Инверсию фг определим следующим образом: центр ее
находится в точке А, а радиус равен длине отрезка АВ.
В задаче 4 § 6 доказано, что инверсия фг переводит окруж-
ности Ki и К2 в концентрические окружности Kt и К2
с общим центром в точке В. Пучок окружностей Р(Кг, К2)
инверсия-ф! переводит в пучок P(Ki, К2). который состоит
из всех прямых, проходящих через точку В.
Таким образом, инверсия фг переводит пучок Р(Ку, К2)
в простейший эллиптический пучок.
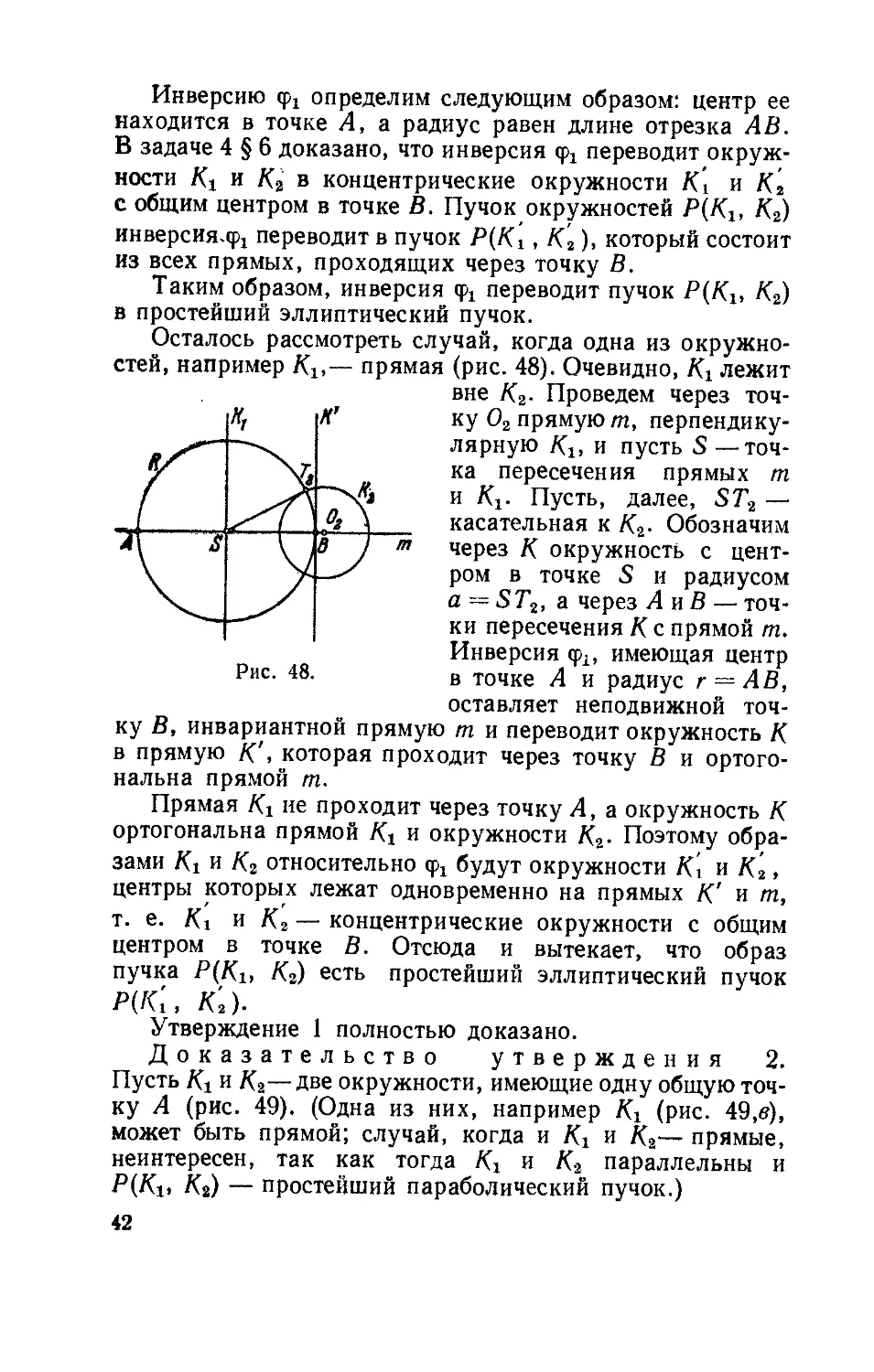
Осталось рассмотреть случай, когда одна из окружно-
стей, например Kj,— прямая (рис. 48). Очевидно, лежит
вне Кг. Проведем через точ-
ку О2 прямую т, перпендику-
лярную Ki, и пусть S —точ-
ка пересечения прямых т
и Кг. Пусть, далее, ST2 —
касательная к К2. Обозначим
через К окружность с цент-
ром в точке S и радиусом
a — ST2, а через А иВ — точ-
ки пересечения К с прямой т.
Инверсия ф2, имеющая центр
в точке А и радиус г = АВ,
оставляет неподвижной точ-
Рис. 48.
ку В, инвариантной прямую т и переводит окружность К
в прямую К.', которая проходит через точку В и ортого-
нальна прямой т.
Прямая Ki не проходит через точку А, а окружность /(
ортогональна прямой Ki и окружности К2. Поэтому обра-
зами Ki и К2 относительно ф! будут окружности и К2,
центры которых лежат одновременно на прямых /(' и т,
т. е. Ki и К2 — концентрические окружности с общим
центром в точке В. Отсюда и вытекает, что образ
пучка P(Ki, К2) есть простейший эллиптический пучок
P(jC, К’2).
Утверждение 1 полностью доказано.
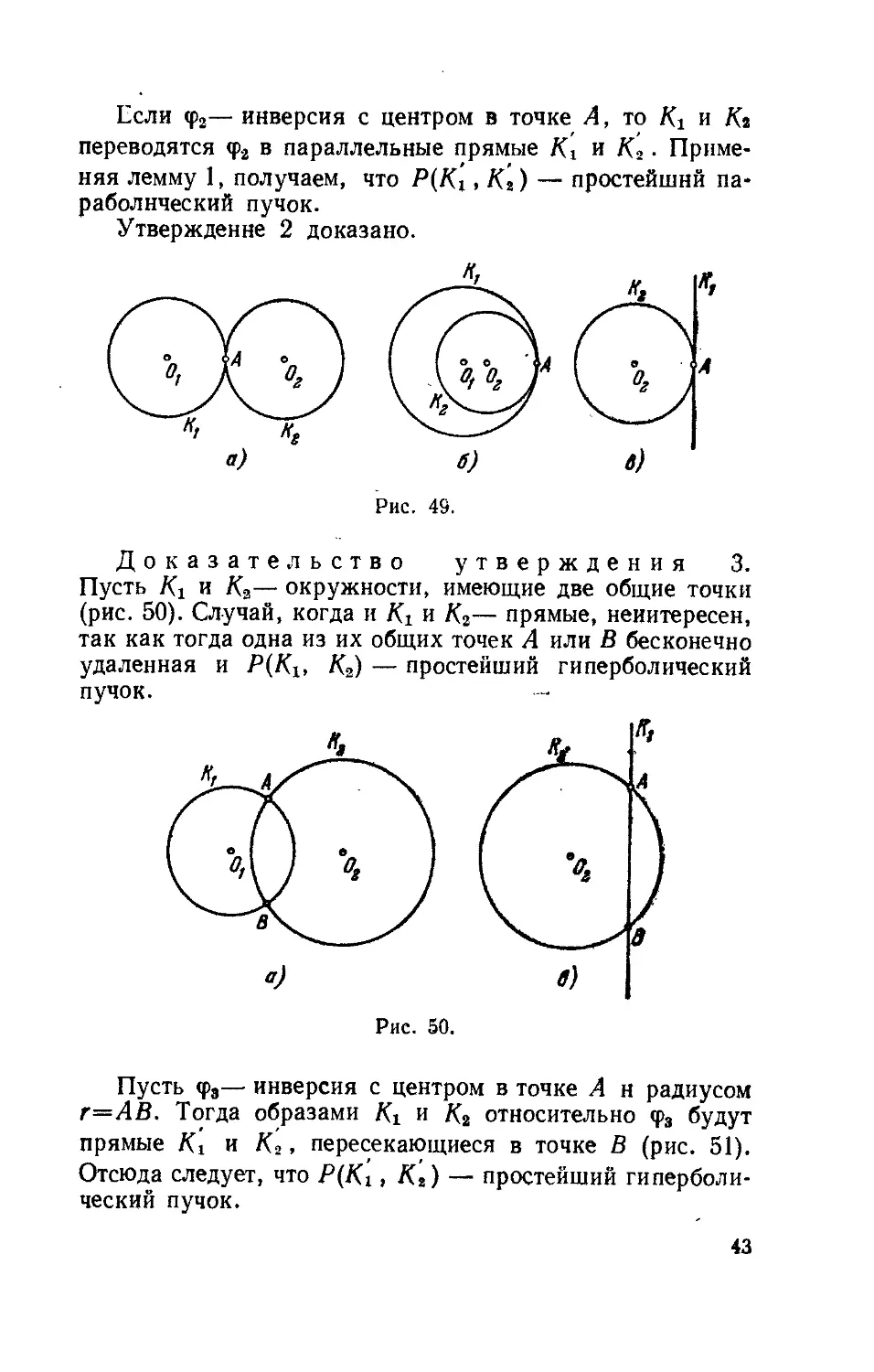
Доказательство утверждения 2.
Пусть Ki и К2—две окружности, имеющие одну общую точ-
ку А (рис. 49). (Одна из них, например (рис. 49,в),
может быть прямой; случай, когда и и К2— прямые,
неинтересен, так как тогда Ki и К2 параллельны и
P(Ki, К2) — простейший параболический пучок.)
42
Если <p2— инверсия с центром в точке А, то Ki и Кг
переводятся ф2 в параллельные прямые Ki и К2 Приме-
няя лемму 1, получаем, что P(Ki, Kt) — простейший па-
раболический пучок.
Утверждение 2 доказано.
Рис. 49.
Доказательство утверждения 3.
Пусть Ki и К2— окружности, имеющие две общие точки
(рис. 50). Случай, когда и Ki и К2— прямые, неинтересен,
так как тогда одна из их общих точек А или В бесконечно
удаленная и Р(К1, К2) — простейший гиперболический
пучок.
Рис. 50.
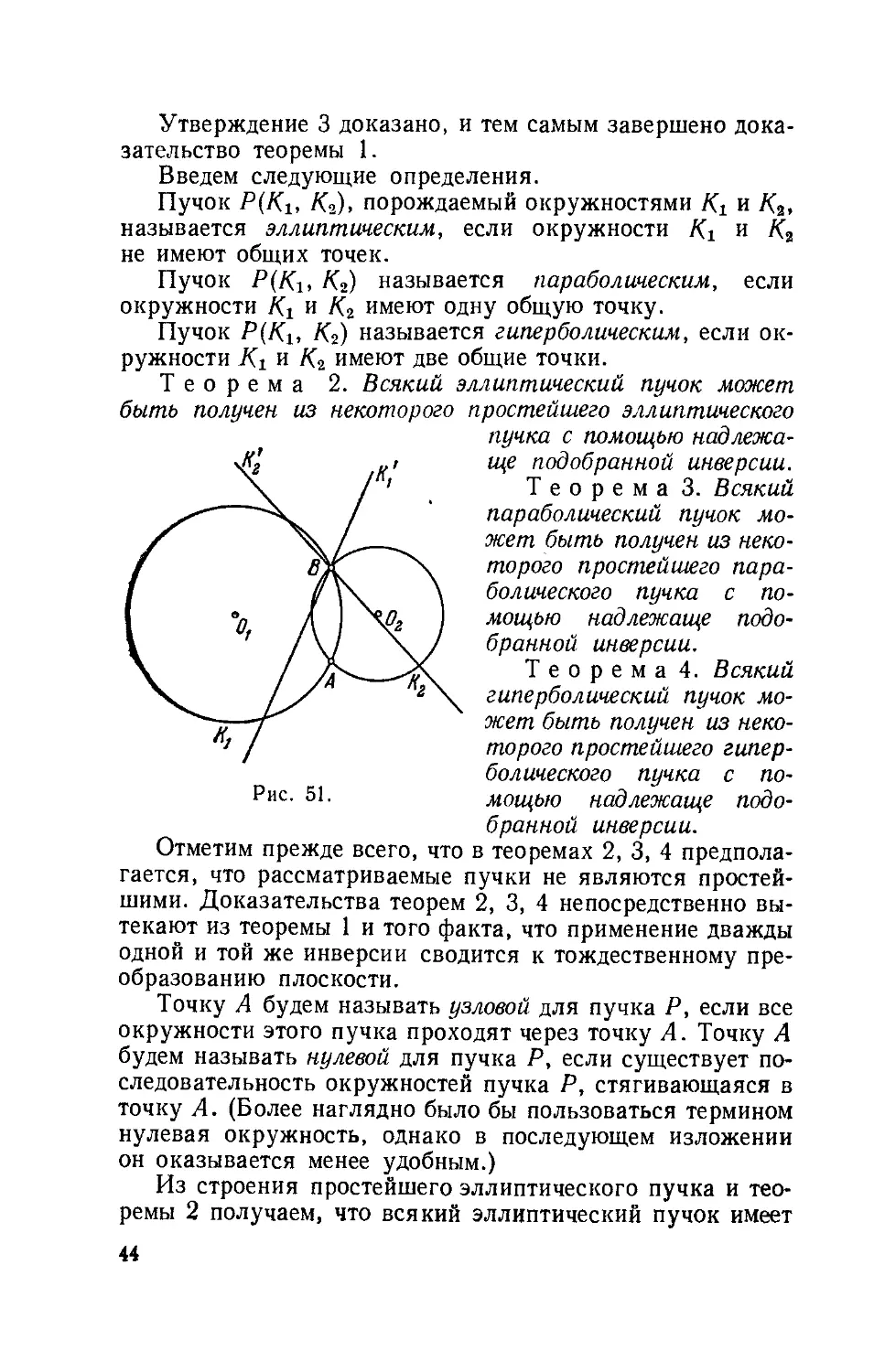
Пусть ф3— инверсия с центром в точке А и радиусом
г=АВ. Тогда образами Ki и относительно ф3 будут
прямые Ki и , пересекающиеся в точке В (рис. 51).
Отсюда следует, что Р(Кх > Кг) — простейший гиперболи-
ческий пучок.
43
Утверждение 3 доказано, и тем самым завершено дока-
зательство теоремы 1.
Введем следующие определения.
Пучок P(Ki, Кз), порождаемый окружностями Ki и К,2,
называется эллиптическим, если окружности Ki и К2
не имеют общих точек.
Пучок P(Ki, К2) называется параболическим, если
окружности Ki и К2 имеют одну общую точку.
Пучок P(Ki, Кг) называется гиперболическим, если ок-
ружности Ki и К2 имеют две общие точки.
Теорема 2. Всякий эллиптический пучок может
быть получен из некоторого
Рис. 51.
простейшего эллиптического
пучка с помощью надлежа-
ще подобранной инверсии.
Теорема 3. Всякий
параболический пучок мо-
жет быть получен из неко-
торого простейшего пара-
болического пучка с по-
мощью надлежаще подо-
бранной инверсии.
Теорема 4. Всякий
гиперболический пучок мо-
жет быть получен из неко-
торого простейшего гипер-
болического пучка с по-
мощью надлежаще подо-
бранной инверсии.
Отметим прежде всего, что в теоремах 2, 3, 4 предпола-
гается, что рассматриваемые пучки не являются простей-
шими. Доказательства теорем 2, 3, 4 непосредственно вы-
текают из теоремы 1 и того факта, что применение дважды
одной и той же инверсии сводится к тождественному пре-
образованию плоскости.
Точку А будем называть узловой для пучка Р, если все
окружности этого пучка проходят через точку А. Точку А
будем называть нулевой для пучка Р, если существует по-
следовательность окружностей пучка Р, стягивающаяся в
точку А. (Более наглядно было бы пользоваться термином
нулевая окружность, однако в последующем изложении
он оказывается менее удобным.)
Из строения простейшего эллиптического пучка и тео-
ремы 2 получаем, что всякий эллиптический пучок имеет
44
две узловые Точки и ни одной нулевой. С другой стороны,
всякий гиперболический пучок имеет две нулевые точки и
не имеет ни одной узловой точки.
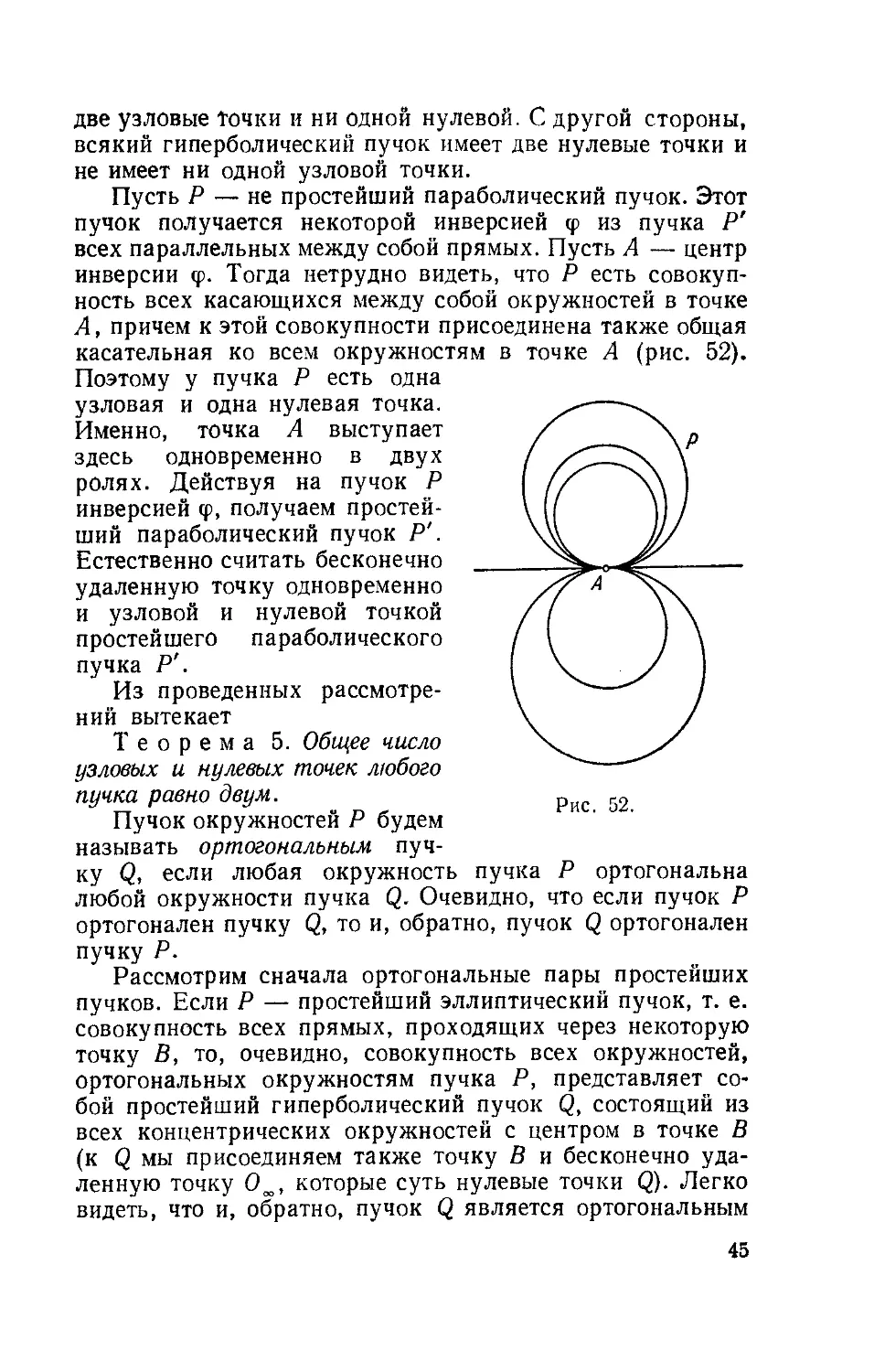
Пусть Р — не простейший параболический пучок. Этот
пучок получается некоторой инверсией <р из пучка Р'
всех параллельных между собой прямых. Пусть А — центр
инверсии <р. Тогда нетрудно видеть, что Р есть совокуп-
ность всех касающихся между собой окружностей в точке
А, причем к этой совокупности присоединена также общая
касательная ко всем окружностям в точке А (рис. 52).
Поэтому у пучка Р есть одна
узловая и одна нулевая точка.
Именно, точка А выступает
здесь одновременно в двух / \
ролях. Действуя на пучок Р I f/' ]
инверсией <р, получаем простей- \ /
ший параболический пучок Р'. jJJ
Естественно считать бесконечно ____ ° ______
удаленную точку одновременно /7^А
и узловой и нулевой точкой /V \\
простейшего параболического / I у \
пучка Р'. I 'ч J
Из проведенных рассмотре- \ х----------- /
ний вытекает \ /
Теорема 5. Общее число ,/
узловых и нулевых точек любого
пучка равно двум. рис 52
Пучок окружностей Р будем
называть ортогональным пуч-
ку Q, если любая окружность пучка Р ортогональна
любой окружности пучка Q. Очевидно, что если пучок Р
ортогонален пучку Q, то и, обратно, пучок Q ортогонален
пучку Р.
Рассмотрим сначала ортогональные пары простейших
пучков. Если Р — простейший эллиптический пучок, т. е.
совокупность всех прямых, проходящих через некоторую
точку В, то, очевидно, совокупность всех окружностей,
ортогональных окружностям пучка Р, представляет со-
бой простейший гиперболический пучок Q, состоящий из
всех концентрических окружностей с центром в точке В
(к Q мы присоединяем также точку В и бесконечно уда-
ленную точку О„, которые суть нулевые точки Q). Легко
видеть, что и, обратно, пучок Q является ортогональным
45
пучку Р\ при этом узловые точки Р являются нулевыми
точками пучка Q.
Если Р — простейший параболический пучок, т. е.
совокупность параллельных прямых вместе с бесконечно
удаленной точкой 0т, то ортогональным ему будет пучок
Q, полученный из Р поворотом на прямой угол, и наоборот.
При этом узловые и нулевые точки пучков Р и Q совпа-
дают.
Из проведенных выше рассмотрений и теорем 2, 3, 4
получаем следующую теорему.
Теорема 6. Для всякого пучка Р есть только один
ортогональный пучок Q. Если Р — эллиптический пучок,
то Q — гиперболический, и наоборот; при этом узловые
точки Р есть нулевые точки Q, и наоборот. Если же Р —
параболический пучок, то Q — также параболический
пучок. Узловые и нулевые точки пучков Р и Q в этом случае
совпадают и находятся в одной и той же точке А. Пучок Q
получается из пучка Р поворотом пучка Р вокруг точки А
на прямой угол.
§ 8. Строение эллиптического пучка
Теорема 1. Всякий эллиптический пучок Р, не
являющийся простейшим, представляет собой совокупность
всех окружностей, проходящих через некоторые две фикси-
рованные точки.
Доказательство. Так как Р—эллиптиче-
ский пучок, то существуют простейший эллиптический
пучок Р' и инверсия <р (см. теорему 2 § 7), переводящая пу-
чок Р' в пучок Р.
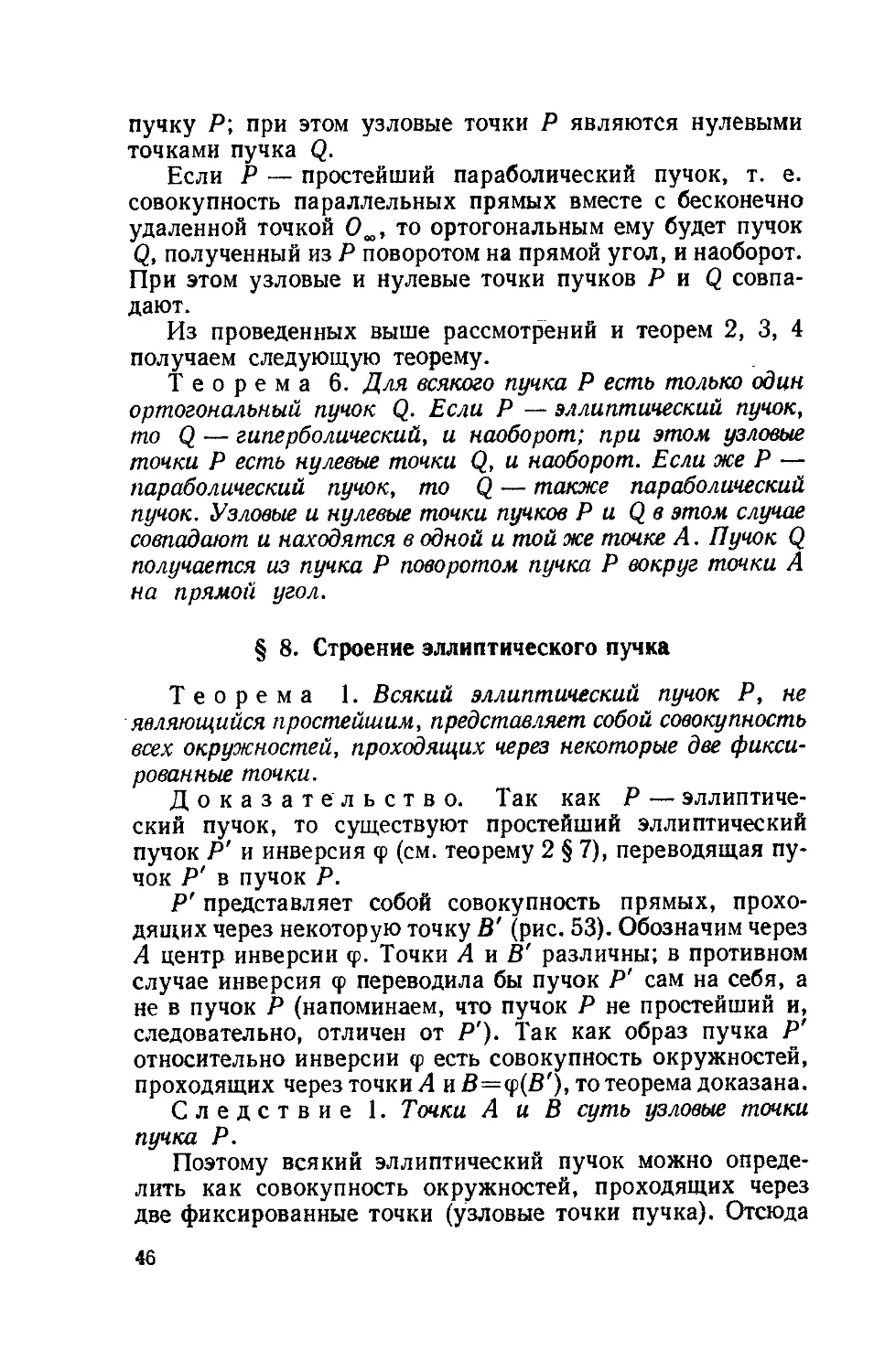
Р' представляет собой совокупность прямых, прохо-
дящих через некоторую точку В' (рис. 53). Обозначим через
А центр инверсии <р. Точки А и В' различны; в противном
случае инверсия <р переводила бы пучок Р' сам на себя, а
не в пучок Р (напоминаем, что пучок Р не простейший и,
следовательно, отличен от Р’). Так как образ пучка Р'
относительно инверсии <р есть совокупность окружностей,
проходящих через точки А и B=<p(S'), то теорема доказана.
Следствие 1. Точки А и В суть узловые точки
пучка Р.
Поэтому всякий эллиптический пучок можно опреде-
лить как совокупность окружностей, проходящих через
две фиксированные точки (узловые точки пучка). Отсюда
46
следует, что узловые точки однозначно определяют эллип-
тический пучок.
Если одна из узловых точек пучка бесконечно удален-
ная, то эллиптический пучок превращается в простейший.
Следствие 2. Пусть А и В — узловые точки пуч-
ка Р. Тогда прямая АВ является элементом пучка Р.
Если А и В — обыкновенные точки, то прямая АВ
является единственной прямой в пучке Р (все его другие
элементы суть окружности). Легко видеть, что прямая АВ
является радикальной осью для любой пары окружностей
пучка Р. Поэтому прямую АВ называют радикальной осью
пучка Р.
Таким образом, непростейший эллиптический пучок
представляет собой совокупность всех «настоящих» окруж-
ностей, проходящих через две фиксированные точки, и
общей радикальной оси всех пар окружностей, взятых из
этой совокупности. Как мы отмечали, эта радикальная
ось проходит через узловые точки эллиптического пучка.
Если же одна из точек А и В, например А, бесконечно
удаленная, то пучок Р состоит из всех прямых, проходя-
щих через точку В. В этом случае особое положение прямой
АВ исчезает и, следовательно, для простейшего эллиптиче-
ского пучка понятие радикальной оси теряет смысл. Та-
ким образом, наличие в эллиптическом пучке единственной
прямой является необходимым и достаточным условием
отличия этого пучка от простейшего.
47
§ 9. Строение параболического пучка
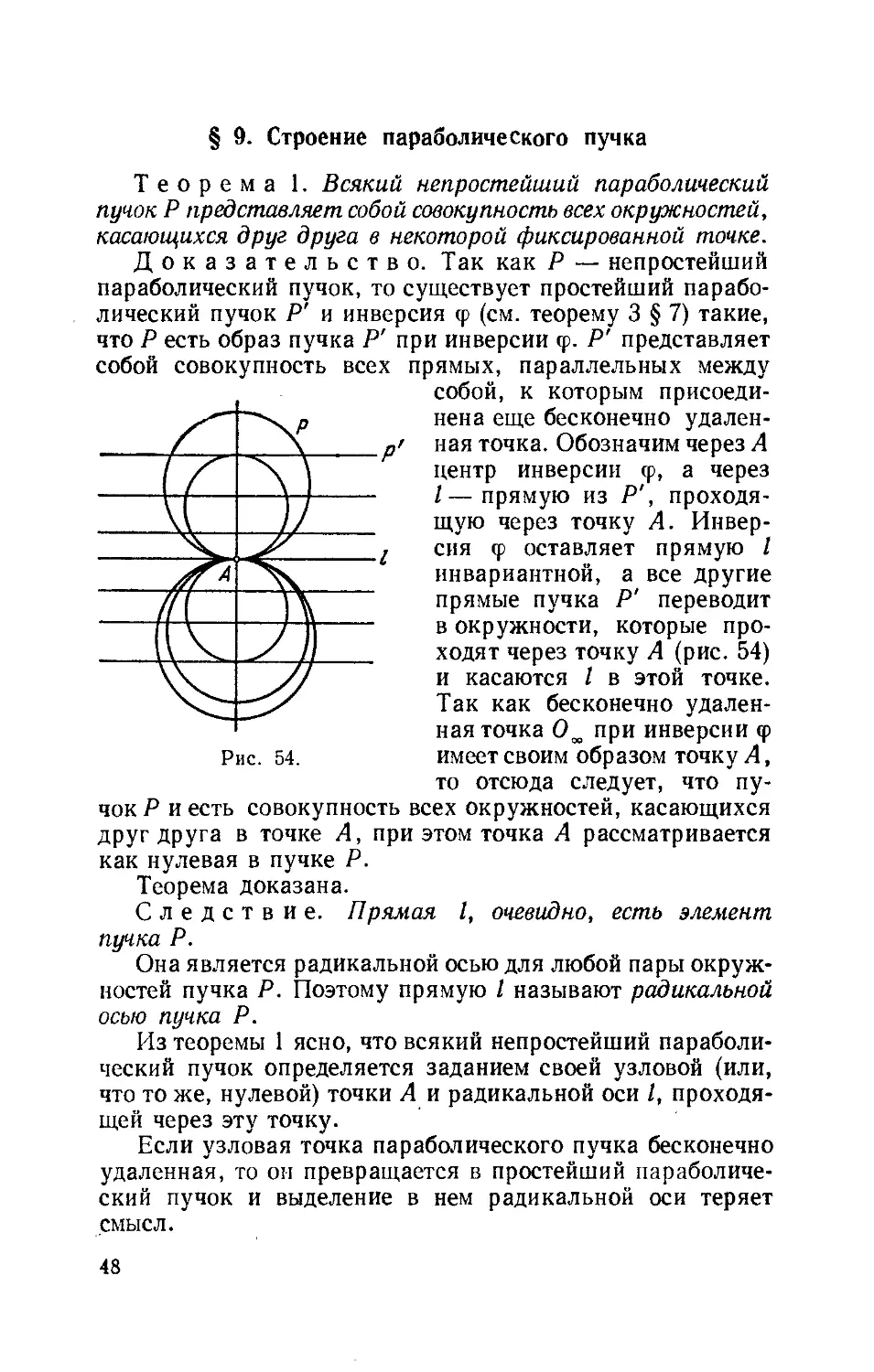
Теорема 1. Всякий непростейший параболический
пучок Р представляет собой совокупность всех окружностей,
касающихся друг друга в некоторой фиксированной точке.
Доказательство. Так как Р — непростейший
параболический пучок, то существует простейший парабо-
лический пучок Р' и инверсия <р (см. теорему 3 § 7) такие,
что Р есть образ пучка Р' при инверсии <р. Р’ представляет
собой совокупность всех прямых, параллельных между
собой, к которым присоеди-
нена еще бесконечно удален-
ная точка. Обозначим через А
центр инверсии <р, а через
I—прямую из Р’, проходя-
щую через точку А. Инвер-
сия <р оставляет прямую I
инвариантной, а все другие
прямые пучка Р’ переводит
в окружности, которые про-
ходят через точку А (рис. 54)
и касаются I в этой точке.
Так как бесконечно удален-
ная точка 0°° при инверсии ф
имеет своим образом точку Л,
то отсюда следует, что пу-
чок Р и есть совокупность всех окружностей, касающихся
друг друга в точке А, при этом точка А рассматривается
как нулевая в пучке Р.
Теорема доказана.
Следствие. Прямая I, очевидно, есть элемент
пучка Р.
Она является радикальной осью для любой пары окруж-
ностей пучка Р. Поэтому прямую I называют радикальной
осью пучка Р.
Из теоремы 1 ясно, что всякий непростейший параболи-
ческий пучок определяется заданием своей узловой (или,
что то же, нулевой) точки А и радикальной оси I, проходя-
щей через эту точку.
Если узловая точка параболического пучка бесконечно
удаленная, то он превращается в простейший параболиче-
ский пучок и выделение в нем радикальной оси теряет
смысл.
48
Так же как и в случае эллиптических пучков, необхо-
димым и достаточным условием отличия параболического
пучка от простейшего является наличие в нем единствен-
ной прямой — радикальной оси пучка.
§ 10. Строение гиперболического пучка
Гиперболический пучок имеет более сложное строение,
чем описанные в §§ 8 и 9 эллиптический и параболический
пучки.
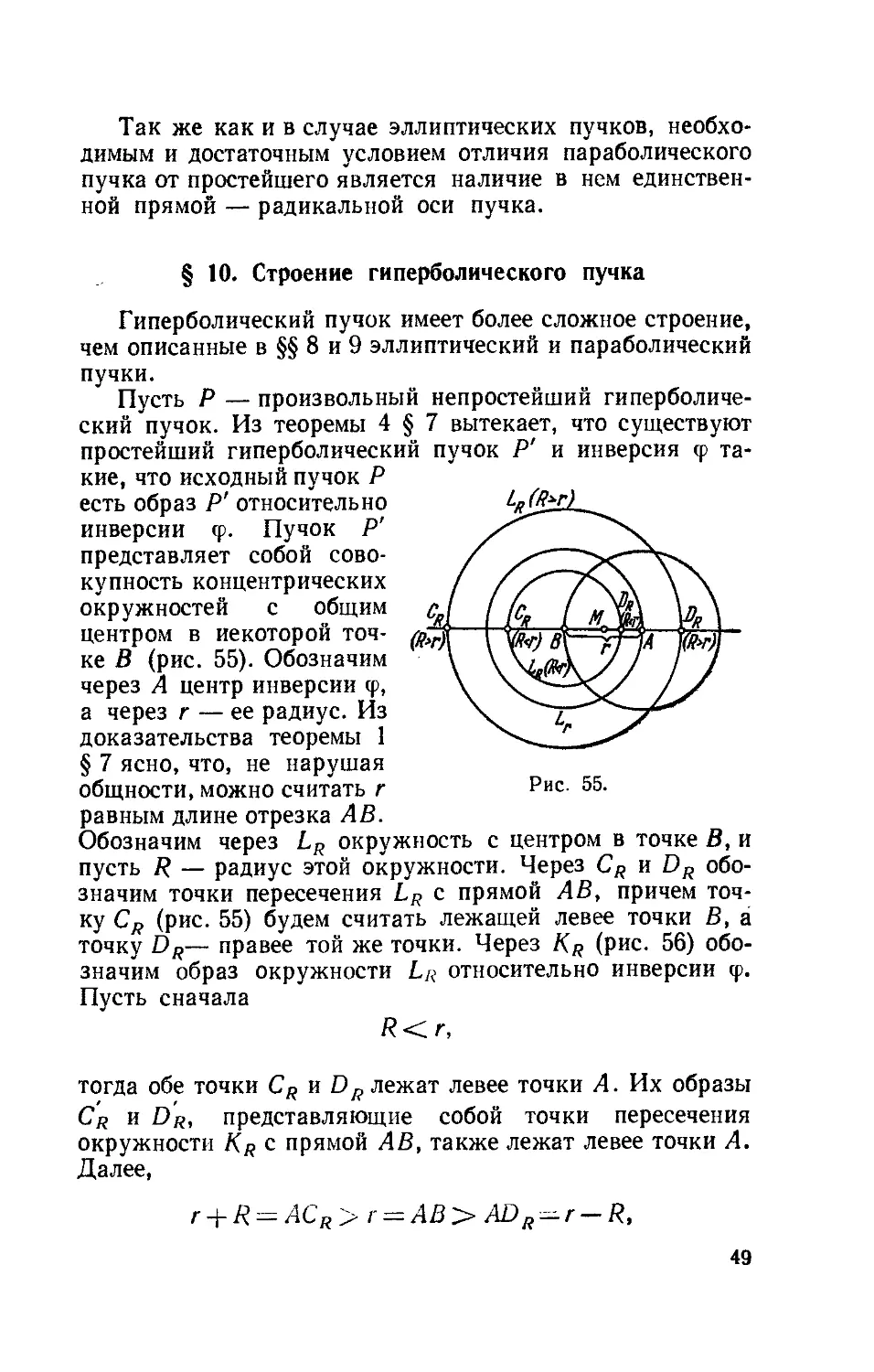
Пусть Р — произвольный непростейший гиперболиче-
ский пучок. Из теоремы 4 § 7 вытекает, что существуют
простейший гиперболический пучок Р' и инверсия <р та-
кие, что исходный пучок Р
есть образ Р’ относительно
инверсии <р. Пучок Р'
представляет собой сово-
купность концентрических
окружностей с общим
центром в некоторой точ-
ке В (рис. 55). Обозначим
через А центр инверсии <р,
а через г — ее радиус. Из
доказательства теоремы 1
§ 7 ясно, что, не нарушая
общности, можно считать г
Рис. 55.
равным длине отрезка АВ.
Обозначим через LR окружность с центром в точке В, и
пусть R — радиус этой окружности. Через CR и DR обо-
значим точки пересечения LR с прямой АВ, причем точ-
ку CR (рис. 55) будем считать лежащей левее точки В, а
точку Dr— правее той же точки. Через KR (рис. 56) обо-
значим образ окружности LR относительно инверсии <р.
Пусть сначала
R<r,
тогда обе точки CR и Облежат левее точки А. Их образы
CR и Dr, представляющие собой точки пересечения
окружности KR с прямой АВ, также лежат левее точки А.
Далее,
r + R = ACr > г = АВ> ADR — r — R,
49
я потому
"2 < 7+R = ^Cr< АБ=Г A®r-
Отсюда следует, что точка CR лежит внутри отрезка ВМ,
где М — середина отрезка ЛВ; точка DR лежит вне отрез-
ка Л В слева от точки В и, наконец, центр окружности KR
находится в точке Qp, лежащей также левее точки В, по-
скольку
лг) _CRA-\-DRA __rt / i । 1 \ _ гз
2 ~ 2\r + R ' r—R)~~ra-—R* > Г'
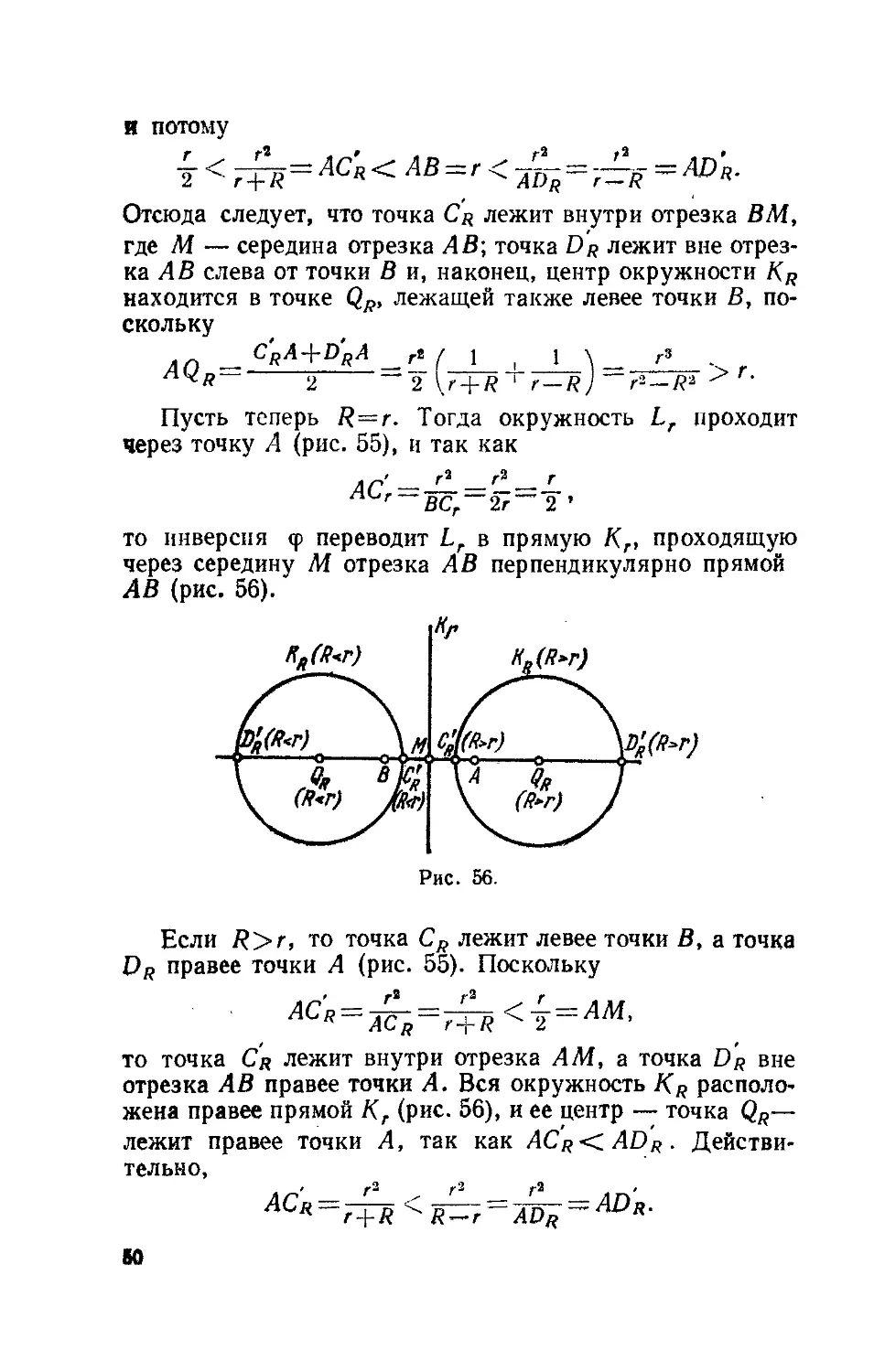
Пусть теперь R=r. Тогда окружность Lr проходит
через точку А (рис. 55), и так как
АС —— — ———
ВСг~2г~" 2 ’
то инверсия q> переводит Lr в прямую К.г, проходящую
через середину М отрезка АВ перпендикулярно прямой
АВ (рис. 56).
Рис. 56.
Если R>r, то точка CR лежит левее точки В, а точка
Dr правее точки А (рис. 55). Поскольку
/ ^8 <*2 г
ACR = ^C-R = 7TR<i = AM’
то точка CR лежит внутри отрезка AM, а точка DR вне
отрезка АВ правее точки А. Вся окружность KR располо-
жена правее прямой Кг (рис. 56), и ее центр — точка QR—
лежит правее точки А, так как ACR<ZADR. Действи-
тельно,
, г2 ,2 г2
ACR~ ТлГо < =
Г-f-A ли#
so
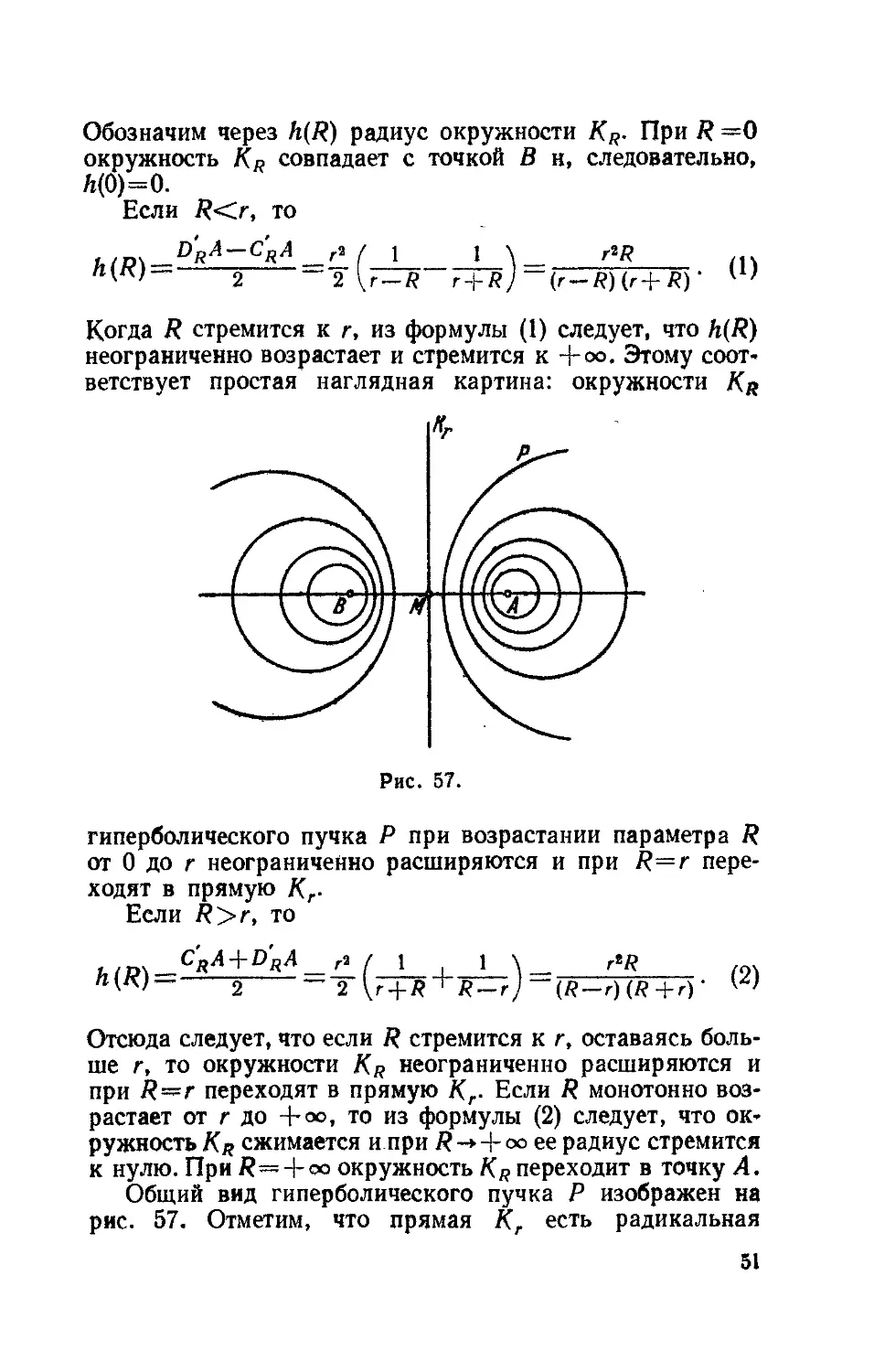
Обозначим через h(R) радиус окружности KR- При7?=0
окружность KR совпадает с точкой В н, следовательно,
А(0)=0.
Если 7?<г, то
h(R)
DrA CrA
2
r2R
rl ( 1_____I \ _ '•* /П
2 \r-/? r-h/?/ (r-R)(r+R)‘
Когда R стремится к г, из формулы (1) следует, что h(R)
неограниченно возрастает и стремится к +оо. Этому соот-
ветствует простая наглядная картина: окружности KR
Рис. 57.
гиперболического пучка Р при возрастании параметра R
от 0 до г неограниченно расширяются и при R=r пере-
ходят в прямую Кг.
Если R>r, то
2
Г2 / 1 , 1 \ г2/?
2 + (/?-г)(/?+г)‘
(2)
Отсюда следует, что если R стремится к г, оставаясь боль-
ше г, то окружности KR неограниченно расширяются и
при R=r переходят в прямую Кг. Если R монотонно воз-
растает от г до +оо, то из формулы (2) следует, что ок-
ружность Кд сжимается и при К-+4-оо ее радиус стремится
к нулю. При R—4-оо окружность KR переходит в точку А.
Общий вид гиперболического пучка Р изображен на
рис. 57. Отметим, что прямая Кг есть радикальная
51
ось любой пары окружностей пучка Р. (Этот факт мы
предлагаем доказать читателю.) Прямая Кг называется
радикальной осью пучка Р.
Из проведенных рассуждений ясно, что гиперболиче-
ский пучок полностью определяется заданием своих нуле-
вых точек или одной нулевой точки и радикальной оси.
Если одна из нулевых точек бесконечно удаленная,
то пучок Р превращается в простейший гиперболический
пучок, состоящий из совокупности концентрических ок-
ружностей. Для такого пучка понятие радикальной оси
лишено смысла.
Так как в простейшем гиперболическом пучке нет ни
одной прямой, то необходимым и достаточным условием
отличия гиперболического пучка от простейшего является
наличие в нем хотя бы одной прямой. Как мы знаем, в
непростейшем гиперболическом пучке такая прямая един-
ственна.
§ 11. Теорема Птоломея
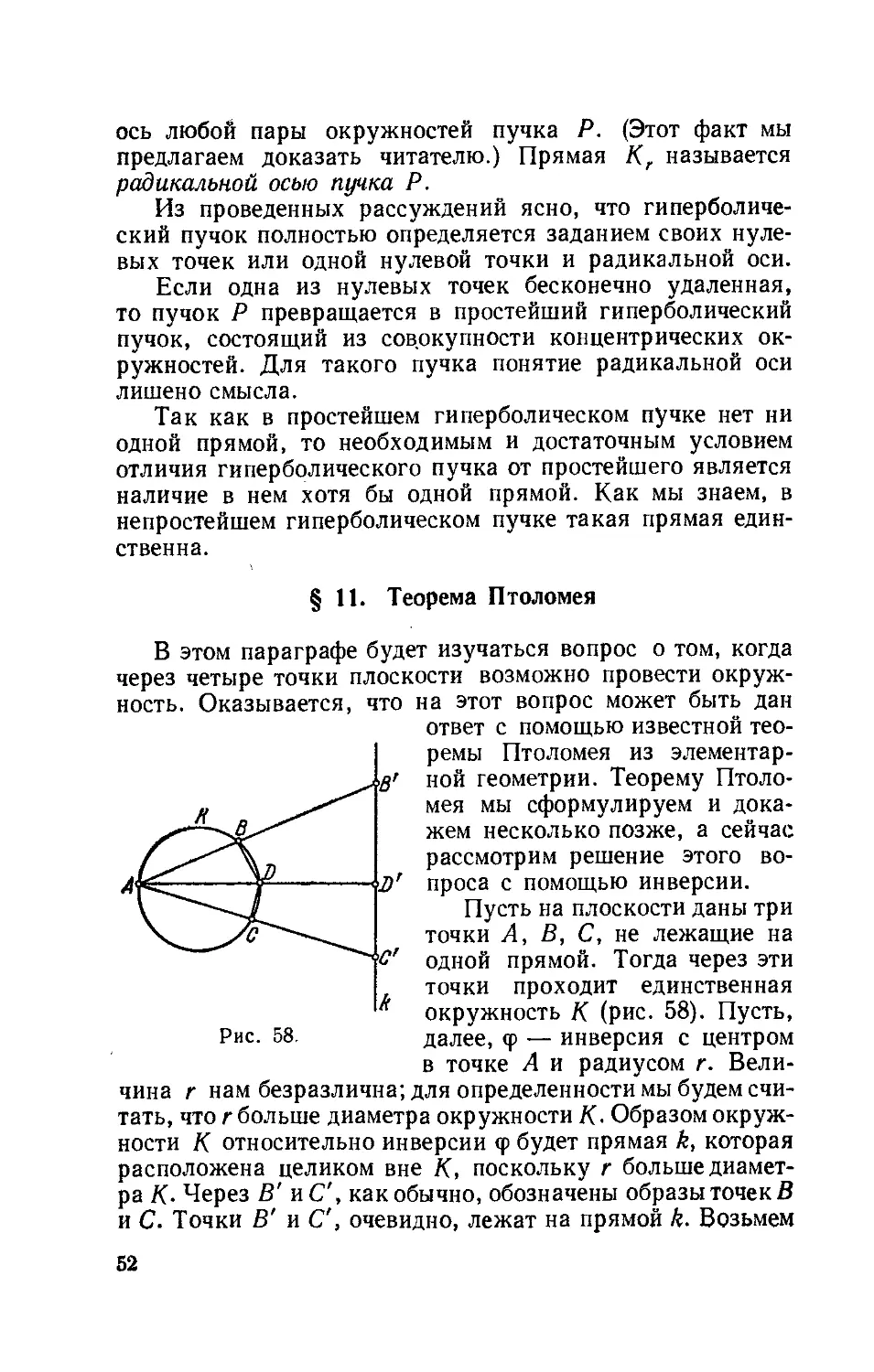
В этом параграфе будет изучаться вопрос о том, когда
через четыре точки плоскости возможно провести окруж-
ность. Оказывается, что на этот вопрос может быть дан
ответ с помощью известной тео-
ремы Птоломея из элементар-
ной геометрии. Теорему Птоло-
мея мы сформулируем и дока-
жем несколько позже, а сейчас
рассмотрим решение этого во-
проса с помощью инверсии.
Пусть на плоскости даны три
точки А, В, С, не лежащие на
одной прямой. Тогда через эти
точки проходит единственная
6 окружность К (рис. 58). Пусть,
Рис. 58. далее, <р — инверсия с центром
в точке А и радиусом г. Вели-
чина г нам безразлична; для определенности мы будем счи-
тать, что г больше диаметра окружности К- Образом окруж-
ности К относительно инверсии <р будет прямая k, которая
расположена целиком вне К, поскольку г больше диамет-
ра К- Через В' и С', как обычно, обозначены образы точек В
и С. Точки В' и С', очевидно, лежат на прямой k. Возьмем
52
теперь на плоскости произвольную точку D *), и пусть
D' — ее образ. Если точка D лежит на окружности К,
то точка D' принадлежит прямой k; если же D не лежит на
К, то D' не принадлежит прямой k. Очевидно, что обратное
также имеет место. Поэтому для того, чтобы четыре
точки А, В, С, D лежали на окружности К, необходимо и
достаточно, чтобы точки В', С', D' лежали на прямой k.
Если три точки В', С', D' лежат на одной прямой, то
для отрезков В’С', CD', B’D’ выполнено одно и только
одно из трех соотношений:
B'D’A-D'C = В'С,
В'С +CD’ = B'D', (*)
CB’ + B'D’ = CD'.
Если же три точки В', С, D' не лежат на одной прямой,
то для тех же отрезков справедливо неравенство
B’D’ Н- CD' > В’С. (**)
Постараемся теперь соотношения (*) и (**) записать
так, чтобы в них не участвовали точки В', С, D'.
Предварительно установим следующую лемму.
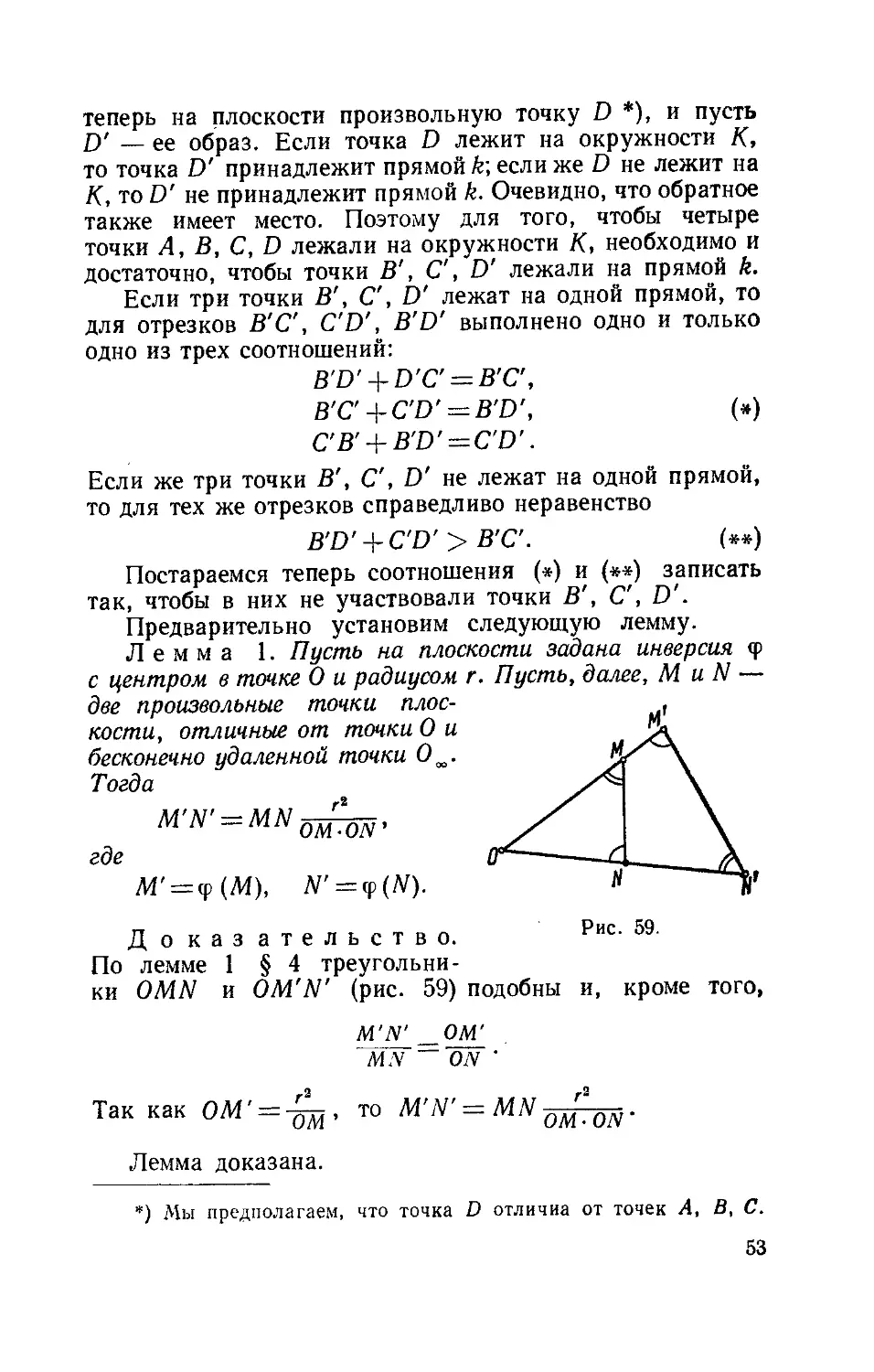
Лемма 1. Пусть на плоскости задана инверсия <р
с центром в точке О и радиусом г. Пусть, далее, М и N —
две произвольные точки плос- ,
кости, отличные от точки О и
бесконечно удаленной точки О„.
Тогда \
M’N’ = MN -____ / \
mnOM-ON’ s \
где _______\
М' = ф(Л1), Л/' = ф(ЛГ). пр
Доказательство. Рис- 5Э-
По лемме 1 § 4 треугольни-
ки OMN и OM'N’ (рис. 59) подобны и, кроме того,
M’N’ —ОМ'
MN — ON ‘
г2
Так как ОМ' = -^, то
Лемма доказана.
:) Мы предполагаем, что точка D отлична от точек А, В, С.
53
Пользуясь только что доказанной леммой 1, имеем
г2 г2
B'D'—BDabad, d'C=dc ad.ac,
. . г2
вс = вс АВ.АС •
Таким образом, если точки Л, В, С, D лежат на окружности
К, то нх образы В', С, D’ лежат на прямой k и справедливо
соотношение
г2 г2 _ г2
BD AB-AD + DC AD AC = BC ABAC '
(мы предполагаем для определенности, что D' лежит между
В' и С'); если же точки А, В, С, D не лежат па окружности
К, то справедливо соотношение
- га г® г2
BD AB-Ad + DC AD-AC > ВС AB-AC -
Отсюда имеем, что
bd-ac+dc-ab=bc-ad,
если точки А, В, С, D лежат иа одной окружности, и
BD • АС + DC АВ > ВС AD,
если точки А, В, С, D не лежат на одной окружности.
Итак справедлива
Теорема 1. Для того чтобы четыре точки А, В, С,
D лежали на одной окружности и при этом точки А и D
лежали на разных дугах с концами В и С, необходимо и до-
статочно выполнение равенства
BD-AC + DC-AB — BC-AD.
Так как четырехугольник ABDC, вписанный в окруж-
ность К, удовлетворяет условиям теоремы 1, то мы полу-
чаем, что произведение диагоналей этого четырехуголь-
ника равно сумме произведений противоположных сторон.
Так как окружность К и четырехугольник ABDC, вписан-
ный в К, выбраны произвольно, то мы приходим к теореме.
Теорема 2 (Теорема Птоломея). Во всяком вписан-
ном четырехугольнике сумма произведений противополож-
ных сторон равна произведению диагоналей.
ГЛАВА II
КОМПЛЕКСНЫЕ ЧИСЛА И ИНВЕРСИЯ
§ 12. Геометрическое изображение комплексных чисел
и действий над ними
Как известно, каждое комплексное число z=x+iy,
где i — так называемая «мнимая» единица (t*=—1), удобно
изображать точкой М плоскости с декартовыми координа-
тами х, у. Мы предполагаем, что на плоскости фиксирова-
на некоторая декартова система координат с началом в точ-
ке О (рис. 60). С каждой точкой
плоскости М взаимно однозначно У
связан вектор г с началом в точ-
ке О и концом в точке Af. Такой
вектор принято называть радиусом-
вектором точки М, а координаты
точки М называются координа-
тами или компонентами радиуса-
вектора. Поэтому комплексное чи-
сло z=x+iy геометрически можно
изображать также с помощью ради-
уса-вектора с координатами х, у.
Если z^x^-iyi и Zz—Xt + iyt— Два комплексных числа,
агхиг2—соответствующие им радиусы-векторы, то форму-
лы для чисел zx4-z2 и zx—z2 согласно определениям таковы:
гх + z2 = (хх 4- х2) 4- i(у± 4- у2); zx--z2 — (хх—х2) 4- i(t^-y^).
С другой стороны, из определения правил действия сложе-
ния н вычитания векторов (имеется в виду правило парал-
лелограмма) вытекает, что векторы гг+гг и гх—г2 имеют
координаты хх4-х2, У1+у2 и хх—х2, i/x—у2 соответственно.
Поэтому сумме и разности комплексных чисел отвечают
55
радиусы-векторы, являющиеся соответственно суммой и
разностью радиусов-векторов, изображающих данные ком-
плексные числа (рис. 61).
Число z=x—iy называется числом, сопряженным
z=x+iy. Пусть М — конец радиуса-вектора г, соответ-
ствующего числу z=x+iy, а Мг— конец радиуса-вектора
гх, соответствующего числу z—x—iy. Так как точки М и
имеют соответственно координаты х, у и х,—у, то Л4Х
получается из М отражением в оси х (рис. 62).
Пусть z — некоторое комплексное число иг — изоб-
ражающий его радиус-вектор. Обозначим через |z| длину
вектора г, а через <р угол, отсчитываемый от положитель-
ной части оси х до вектора г против часовой стрелки. Число
|z| называется модулем комплексного числа z, а угол <р —
66
его аргументом. Часто модуль z мы будем обозначать
через р, а аргумент — через arg z (рис. 63). Очевидно,
что для комплексного числа z=x+it/
X =р COS ф,
у — р sin ф.
Отсюда
z = х+iy — р (cos ф + i sin ф).
Запись числа z=x+iy в виде
z — p (cos фг sinф)
называется тригонометрической формой комплексного
числа.
Наряду с положительными углами, отсчитываемыми от
положительной части оси х до вектора против часовой
стрелки, введем отрицательные углы, которые отсчиты-
ваются от положительной части
оси х до вектора г по напра-
влению часовой стрелки.
Если z — число, сопряжен-
ное числу
z = х + iy = р (cos ф + i sin ф),
то
z = р (cos ф — i sin ф) =
= р (cos (— ф) 4- i sin (— ф)) =
=р (cos (2л —ф) + i sin (2л—ф)).
Рис. 64.
Поэтому в качестве аргумента числа z можно взять любой
из углов — ф или 2л—ф (рис. 64).
Так как синус и косинус — периодические функции
с периодом 2л, то значение аргумента комплексного числа z
определяется с точностью до целого кратного 2л. Поэтому
полезно выделить среди значений аргумента так называе-
мое главное значение, которое заключено в пределах от
нуля до 2л.
В дальнейшем, если не будет специальных оговорок,
под аргументом комплексного числа z понимается любой
угол ф такой, что z=p(cos ф+tsin ф).
Перейдем к рассмотрению умножения комплексных
чисел. Если даны два комплексных числа zl~x1-\-iy1 и
57
z2==x2+j'i/2, то согласно определению произведением этих
чисел zx-z2 называется комплексное число
г = (ххх2 -уху2) + i (хгу2 + х2ух).
Рассмотрим геометрическую интерпретацию действия ум-
ножения с помощью записи комплексных чисел в триго-
нометрической форме. Пусть
zx = рх (cos фх + i sin фх),
г2 = р2(соз ф2 + i sin ф2).
Тогда
z = zx • г2 = рхр2 [(соз фх соз ф2 — sin фх sin ф2) +
+ i (соз фх sin ф2 + cos ф2 sin фх)[ =
= рхр2 [соз (фх + ф2) + i sin (фл + ф2)].
Таким образом, если радиус-вектор г изображает комплекс-
ное число z=zx-z2, а радиусы-векторы гх и г2— комплекс-
ные числа гх и Za, то радиус-вектор г получается из гх и
г2 следующими операциями: радиус-вектор гх поворачи-
вается на угол ф2 против часовой стрелки, если ф2>0,
или по часовой стрелке, если ф2<0, и после этого его длина
увеличивается в р2 раз. Другими словами, если аф2—
вращение плоскости вокруг начала координат на угол
ф2, а ₽р2— преобразование гомотетии с коэффициентом р2
и центром в начале координат, то вектор г получается из
вектора гх последовательным применением преобразований
афа и рРз. Таким образом,
г = К, (П)Ь
Совершенно аналогично, если аФа — вращение вокруг на-
чала координат на угол фх, а рР1 — преобразование гомоте-
тии с коэффициентом рх и центром в начале координат, то
вектор г получается из вектора г2 последовательным при-
менением преобразований аф1 и р?1:
г = РР1 [ОфДГа)].
Обратимся теперь к геометрической интерпретации дей-
ствия деления двух комплексных чисел: zx =-px(cos фх-г
+1 sin фх), г2=р2(сО5ф2-Н’зшф2). Если г — - — частное от
58
деления zt на г2, то
z__zx-za_px (cos <pt + i sin <pt) p2 (cos <p2 — I sin <p2) __
— z2-F2 — Pa (cos <p2+i sin <p2) p2 (cos <p2— i sin <p2) “
_ Pi (cos tpi-H sin tpt) (cos ( —qi2)-H sin (— <p2)) __
p2(cos <p2 + tsin <p2) (cos (— <p2) 4- i sin ( — <p2))
= Ь [cosfcpi-cpa) H-isin^-iPa)].
Таким образом,
2 = |-= Icos (Vi - Ф2) + i sin (<pt - <p2)J.
Обозначим через и а_<р> вращения плоскости вокруг
начала координат соответственно на углы фх и —<ра, а
через 0?1 и 0, — преобразования гомотетии с центром в
р.
начале координат и коэффициентами рх и —. Пусть, далее,
. Р2
г, rt, гг— радиусы-векторы, отвечающие соответственно
комплексным числам z, г1( г2. Тогда вектор г получается
из вектора гх последовательным применением преоб-
разований а_ (р2 и 0, или из вектора г2 последовательно
₽7
выполненными преобразованиями а_<Р1 и 0Pl, т. е.
г=01 [а-Ф, (G)]
р.
или
г==0р,[аф1(г2)].
§ 13. Линейная функция комплексного переменного
и простейшие преобразования плоскости
Пусть каждому комплексному числу z~x-\-iy по не-
которому правилу ставится в соответствие комплексное
число z'=х'-\-iy'. Тогда говорят, что на совокупности
всех комплексных чисел или, что то же самое, на комплекс-
ной плоскости определена функция комплексного перемен-
ного z'=/(z). Комплексная функция, закон соответствия
которой дается формулой
z'ssf(z)=az-H,
где а и b — постоянные комплексные числа, называется
линейной.
59
Поскольку комплексные числа отождествлены с точ-
ками плоскости, то всякая комплексная функция может
одновременно рассматриваться как преобразование точек
плоскости. Задачей настоящего параграфа как раз и яв-
ляется описание такого преобразования с помощью про-
стейших преобразований плоскости, изученных в § 1.
Итак, пусть дана линейная функция
z' = az-\-b.
Если а=0, то функция z'=b является постоянной, пос-
кольку любому комплексному числу z она относит комп-
лексное число Ь. Преобразование плоскости, соответствую-
щее этой функции, переводит всю плоскость в одну и ту же
точку Ь.
В дальнейшем мы исключим из рассмотрения это три-
виальное преобразование и постоянно будем считать, что
Пусть
a | а | (cos ф 4- i sin ф)
— запись комплексного числа а в тригонометрической
форме. Обозначим через г', г, h радиусы-векторы, отвечаю-
щие числам z', z, b. Пусть, далее, 0(о| — преобразование
гомотетии с центром в точке z=0 и коэффициентом |а|,
аф— вращение плоскости на угол ф вокруг точки z=0 и,
наконец, уь— параллельный перенос плоскости на вектор
й. Нетрудно видеть, что точка г'-г-конец вектора г'—
получается из точки г — конца вектора г — с помощью
последовательно выполненных преобразований: вращения
аф, подобия ра и параллельного переноса уь.
Функцию
z' = az-|-b
часто называют линейной функцией первого рода. Таким
образом, линейной функцией первого рода на плоскости
соответствует преобразование, состоящее в последователь-
ном выполнении преобразований вращения вокруг точки
z=0, гомотетии с центром в точке z=0 и параллельного
переноса. При этом вращение и гомотетия определяются
числом а, а параллельный перенос — числом Ь.
Отметим особо некоторые частные случаи.
а) |а| =1, Ь=0—вращение плоскости вокруг точки
г—0 на угол, равный аргументу числа а.
60
б) a — вещественное положительное число, 6=0 — пре-
образование гомотетии с центром в точке z=0 и коэффици-
ентом а.
в) а= 1 — параллельный перенос на вектор Л.
Функция
= + 6
называется линейной функцией второго рода. Рассмотрим
сначала частный случай а=1, Ь=0. Тогда функция
z' =г
относит каждой точке z симметричную ей относительно оси
х точку z. Таким образом, функция
z' =z
описывает преобразование симметрии относительно оси х.
Отсюда легко видеть, что общей линейной функции второ-
го рода соответствует преобразование плоскости, состоя-
щее в последовательном выполнении симметрии в оси х,
вращения вокруг точки z=0, гомотетии с центром в точке
z=0 и параллельного переноса. Так же как и в случае
линейной функции первого рода, угол вращения равен
аргументу числа а, коэффициент подобия равен модулю
числа а и, наконец, вектор параллельного переноса опре-
деляется числом Ь.
§ 14. Дробно-линейная функция комплексного переменного
и связанные с ней точечные преобразования плоскости
Функции комплексного переменного, заданные с помо-
щью формул
,_аН-6
cz+d ’
где a, b, c,d — некоторые постоянные комплексные числа и
ad — bc=^=Q,
называются соответственно дробно-линейными функциями
первого и второго рода.
61
Рассмотрим функции вида
и
*'=-£, (4)
2
где г — некоторая положительная постоянная.
Для функции (4) определяющую ее формулу можно
записать так:
Отсюда вытекает, что преобразование плоскости, соответ-
ствующее функции
Z =— ,
2
относит точке z точку z', лежащую на луче с вершиной
в точке z=0, проходящем через точку z, и такую, что для
модуля числа z' справедлива формула
г2 г2
I 2'1 = 4- = ^-.
И |г|
Отсюда следует, что z' получается из точки z инверсией с
центром в точке z=0 и радиусом г.
Таким образом, функции z' = 4- соответствует преоб-
разование инверсии с центром в точке z=0 и радиусом г.
Для функции (3) определяющую ее формулу записыва-
ем так:
z .
2
С помощью рассмотрений, проведенных выше, легко за-
ключаем, что функции
соответствует преобразование плоскости, состоящее в
последовательном выполнении симметрии относительно
оси х и инверсии с центром в точке z=0 и радиусом г.
Имеет место теорема.
62
Теорема 1. На комплексной плоскости преобразо-
вание инверсии <р радиуса г с центром в точке d задается
функцией
z’^^ + d. (5)
г—а
Аналогично функция
ГЧ.
z=7h+d (6)
задает преобразование инверсии с центром в точке d
ражение в прямой, парал-
лельной оси х и проходя-
щей через точку d.
Доказательство.
Пусть инверсия ф перево-
дит точку х в точку г'
(рис. 65). По определению
инверсии имеем
и от-
г*
• (7)
г2
I2—d|
Далее, числах — d их'—d
имеют равные аргументы.
Поэтому числа z'—d и х—d
имеют аргументы, отлича-
ющиеся лишь знаком. Сле-
довательно, используя правило умножения комп-
лексных чисел в тригонометрической форме, получим
(z' — d) (z— d) = l z' — d\ | z — d|.
Вместе с соотношением (7) это дает
, J г2
z — d = =——.
г—d
Отсюда
г'
г2
Цг + Й.
г—а
Аналогично доказывается вторая часть теоремы.
Теорема 2. Дробно-линейные функции второго рода
, аг+Ь
Z =
cz-j-d
63
при условии с#=0 описывают преобразование комплексной
плоскости, состоящее в последовательном выполнении сле-
дующих преобразований:
1) инверсии с центром в точке —~ и радиусом 1;
С
2) поворота плоскости на угол, равный аргументу числа
Ьс — ad .
с* 2
3) гомотетии с коэффициентом, равным модулю числа
be — ad.
с2 ’
4) параллельного переноса на вектор, равный числу
a d (Ьс — ad).
с с2с
Доказательство. Дробно-линейную функцию
(2) можно записать так:
, / 1 d\ bc — ad , Г а , d(bc — ad)l ,о.
] (8)
Из формулы (8) справедливость теоремы 2 вытекает непо-
средственно.
Для дробно-линейных функций первого рода имеет
место аналогичная теорема. Единственное различие состо-
ит в том, что между преобразованиями инверсии и поворо-
та делается дополнительно отражение в прямой, проходя-
„ d „
щей через точку — —, параллельной оси х.
Если для дробно-линейных функций (1) и (2) коэффи-
циент с равен нулю, то они сводятся к линейным функциям,
рассмотренным в § 13.
ГЛАВА III
ГРУППЫ ПРЕОБРАЗОВАНИЙ.
ГЕОМЕТРИИ ЕВКЛИДА И ЛОБАЧЕВСКОГО
В этой главе будет дано краткое построение геометрий
Евклида и Лобачевского, исходя из теоретико-групповой
точки зрения на геометрию. Этот подход к изучению раз-
личных геометрических теорий был предложен известным
немецким математиком Ф. Клейном в 1872 г.
§ 15. Геометрия группы преобразований
1. Понятие группы. Одним из основных понятий ал-
гебры является понятие группы.
Пусть G — совокупность элементов, природа которых
нам безразлична. Например, элементами G могут быть чис-
ла, векторы, функции, преобразования и т. д. Тот факт,
что нас не интересует конкретная природа Ьлейентов мно-
жества G, позволяет применять различные выводы о свой-
ствах множества G к различным конкретным системам объ-
ектов.
Пусть теперь каждым двум элементам множества G,
взятым в определенном порядке, по некоторому правилу
отнесен элемент из G. Тогда говорят, что в G определена
операция, которую обычно называют умножением и обо-
значают точкой. Если двум элементам а и b из G сопостав-
лен элемент с из G, то это записывают так:
с — а-Ь.
Элемент с обычно называют произведением элементов а и
Ь. Из определения операции не вытекает, что всегда а-b
равно b-а.
65
Итак, пусть в множестве G введена операция умно-
жения.
Говорят, что G образует группу относительно этой опе-
рации, если выполняются следующие требования (аксио-
мы группы):
1. Справедлив закон ассоциативности, т. е. для любых
трех элементов а, Ь, с из G всегда имеет место равенство
(а-b) -с=а-{Ь-с).
2. Существует такой элемент е из G, что для любого
другого элемента а множества G имеет место равенство
а-е—а.
Элемент е называется единицей группы.
3. Для любого элемента а из G найдется такой элемент
х множества G, что
а-х = е.
Элемент х называется обратным элементу а и обозначает-
ся а-1.
Отметим ряд важных простых предложений, непосред-
ственно вытекающих из определения группы.
а) Из аксиомы 1 следует, что произведения (а-Ь)-с и
а-(Ь-с) всегда равны между собой. Поэтому элемент груп-
пы G, равный (а-Ь)-с или а-(Ь-с), можно обозначать просто
а-Ь-с.
б) Если е — единица группы, то для любого элемента
а из G имеет место равенство
е-а—а.
Далее, для всякого элемента а из группы G обратный
элемент а-1, помимо равенства
а-а~1 = е,
удовлетворяет еще и равенству
а-1-а = е.
Докажем предложение б). На основании аксиом 2 и 3 имеем
а~1-а-сГ1 = а~1-е = а~1.
Пусть (а-1)-1—обратный элемент для а-1, т. е.
а-1 -(а- 1)-1 = в.
Тогда
(а-1-а)-(а-1-(а х) 1) = а 1-(а
66
Отсюда
(а_,-а)е = е или а~1-а = е.
Последнее равенство показывает, что (а~*)~1 = а.
Далее,
e-a = a-a~i-a,
но по уже доказанному имеем
а~1-а = е.
Поэтому
е-а=а-в=а.
Итак, утверждение б) доказано- Одновременно мы показали, что
(а-1)-1 = а.
в) В группе G каждое из уравнений
а-х = 6, (I)
и
t/-a = & (2)
относительно х и у имеет решение и притом единственное.
Отсюда, в частности, следует единственность единицы в группе
и единственность обратного элемента, поскольку е является реше-
нием уравнения а-х = а, а а~1—решением уравнения а-х — е.
Нетрудно видеть, что элементы и 6-а-1 являются соот-
ветственно решениями уравнений (1) и (2).
Если х—какое-нибудь решение уравнения (I), то
а-х = Ь.
Отсюда
а~1-(а-х) — а~1-Ь,
и мы имеем х = а~1-Ь. Аналогично устанавливается, что уравне-
ние (2) всегда имеет также единственное решение у~Ьа~К
Подмножество Н группы G, удовлетворяющее условиям
группы относительно операции, рассматривающейся в
группе G, называется подгруппой группы G. Очевидно, что
всякая подгруппа содержит всегда единицу группы и
вместе с каждым элементом обратный ему.
Укажем примеры групп.
1. Совокупность всех целых чисел относительно сло-
жения образует группу. Если т — некоторое целое число,
то совокупность чисел вида km, k—0, ±1, ±2, ..., образует
подгруппу этой группы.
2. Совокупность всех вещественных чисел, из которой
исключен нуль, образует группу относительно умножения.
Совокупность рациональных чисел, отличных от нуля,
образует подгруппу этой группы.
3. Совокупность всех радиусов-векторов плоскости
образует группу относительно сложения. Совокупность
67
радиусов-векторов, лежащих на одной прямой, образует
ее подгруппу.
4. Совокупность всех не равных нулю комплексных
чисел образует группу относительно умножения. Ее под-
группами, например, являются совокупность комплекс-
ных чисел, модули которых равны единице, и совокупность
вещественных чисел, отличных от нуля.
2. Группа преобразований множества. Пусть М. —
произвольное множество. Его элементы будем обозначать
буквами х, у, г, ... илих', у', г', ... Каждому элементу х
множества М поставим в соответствие некоторый элемент
х' множества М. Тем самым определяется преобразование
множества М в себя. Преобразования будем записывать
так:
x' = f{x)
или кратко одной буквой /. Элемент х' называется обра-
зом элемента х. Совокупность всех образов х'=/(х), когда х
пробегает множество М, будем обозначать f(M). Очевид-
но, что f(M) или совпадает с М, или составляет его часть.
Преобразование f множества М в себя называется
взаимно однозначным преобразованием М. на себя, если вы-
полняются следующие требования:
1. Разным элементам х± и х2 множества М соответст-
вуют разные образы f(xr) и /(х2).
2. Множество f(M) совпадает с множеством М.
Ниже мы будем рассматривать только взаимно одно-
значные преобразования множества М. Поэтому под
преобразованиями множества М будут всегда подразуме-
ваться взаимно однозначные преобразования.
Пусть f — преобразование множества М. Так как
то для любого х'еМ можно найти х и притом
только один такой, что
x'-f (х)
(единственность х вытекает из условия 1 взаимной одно-
значности преобразования f). Тем самым по преобразова-
нию f строится взаимно однозначное преобразование
х=ф(х')- Оно называется обратным для f. Очевидно, что
обратное преобразование для данного преобразования
всегда единственно. Оно обозначается f-1.
Пусть даны два преобразования и Д>. Тогда каждый
элемент х множества М преобразованиями и /2 перево-
65
дится последовательно сначала в x' — f^x), а затем в/'=
=/2(х'). Соответствие f:
xf=f(x),
как легко видеть, есть взаимно однозначное преобразова-
ние М. Оно называется произведением двух данных преоб-
разований f± и /2, взятых в определенном порядке, и может
быть записано символически так:
f (x)=f2 (f± (X)).
Произведение преобразований, вообще говоря, зависит от
порядка, в котором они производятся, т. е., вообще гово-
ря, f2(fiW)#=fi(f2W)-
Преобразование е(х)=х, оставляющее все элементы
неподвижными, называется тождественным. Если f —
данное преобразование и — обратное к нему, то, как
легко видеть, при любом х из М. справедливы соотношения
f (f~1(x)) = x = e(x), f~1(f(x))=x=^e(x).
Условимся через f2-f± обозначать произведение преоб-
разований flt f., множества М, если первым производится
преобразование f±, а вторым f2, а через — произве-
дение и f2, когда производится первым.
Имеет место
Теорема I. Совокупность всех взаимно однозначных
преобразований множества М на себя образует группу,
если произведение любых двух преобразований понимать
так, как это было только что определено.
Действительно, в совокупности всех взаимно однознач-
ных преобразований М на себя для каждой пары преоб-
разований Л и /г, взятых в определенном порядке, опреде-
лено их произведение
являющееся также взаимно однозначным преобразованием
М на себя. Проверка аксиом, характеризующих группу,
здесь очень проста.
1. Если fi, f<>, /3—данные преобразования множества
М, то
Действительно, если x’^f^x), x'=f2(x), x'=f3(x)—дан-
ные преобразования, то (f3-A>)7i и /з ’ (f2 • Л) оба сводятся
к преобразованию /3[/2(Л(Х)1-
69
Следовательно, произведение преобразований всегда
подчиняется ассоциативному закону.
2. Тождественное преобразование е(х)=х играет роль
единицы группы. Действительно, для любого преобразо-
вания x'—f(x) и любого х из М имеем
x' = f(e(x)) = f(x).
Отсюда и следует, что f-e=f.
3. Для любого преобразования f существует преобра-
зование g такое, что
fg-e-
Именно, таким преобразованием g служит преобразова-
ние, обратное для f, т. е. g=f~l-
Теорема доказана.
Группу всех взаимно однозначных преобразований
множества М будем обозначать G(Af).
Любую подгруппу И группы G(M) будем называть
группой преобразований множества М. Поскольку тож-
дественное преобразование принадлежит любой подгруппе
Н н закон ассоциативности также выполняется всегда для
любых трех преобразований flt f.2) fa, то подмножество пре-
образований, входящих в Н, будет группой преобразова-
ний М, если 1) для любых преобразований Д и из Н их
произведение также принадлежит Я; 2) вместе с любым
преобразованием f множеству Н принадлежит преобразо-
вание /-1.
3. Геометрия данной группы. Пусть М — некоторое
множество произвольных элементов и Н —- некоторая
группа его преобразований.
В целях наглядности будем называть М пространством,
а его элементы — точками. Совокупность точек будем
называть фигурой.
Фигуру А назовем эквивалентной или равной фигуре В,
если существует преобразование f в группе Н, переводя-
щее А в В.
Отношение эквивалентности фигур обладает следую-
щими важными свойствами:
1. Всякая фигура А эквивалентна самой себе.
Действительно, единица группы Н — тождественное
отображение множества М на себя — переводит А в А.
2. Если фигура А эквивалентна фигуре В, то и, об-
ратно, фигура В эквивалентна фигуре А.
70
Действительно, если фигура А преобразованием f из
группы Н переводится в В, то, так как обратное к f пре-
образование f~* также принадлежит Н, то f-1 переводит
фигуру В в фигуру А.
3. Если фигура А эквивалентна фигуре В, а фигура В
эквивалентна фигуре С, то фигура А эквивалентна фигу-
ре С.
Если преобразование f из Н переводит А в В, а преоб-
разование g переводит В в С, то преобразование g- f пере-
водит А в С, и так как g-f принадлежит Н (Н — группа),
то А эквивалентна С.
Отношение эквивалентности разбивает все фигуры на
классы эквивалентных между собой фигур, причем всякая
фигура принадлежит одному и только одному классу
Теоретико-групповая точка зрения, положенная Ф.
Клейном в определение геометрии, состоит в том, что гео-
метрическими свойствами фигур пространства М и гео-
метрическими величинами этих фигур считаются те, кото-
рые инвариантны относительно любого преобразования
из данной группы Н и которые, следовательно, одинаковы
у всех эквивалентных фигур.
Система предложений о свойствах фигур и величин, ин-
вариантных относительно всех преобразований группы Н,
называется согласно Ф. Клейну геометрией группы Н.
Концепция Клейна рассматривать различные геомет-
рии как теории инвариантов соответствующих групп дала
возможность вскрыть глубокие связи между различными
геометриями: проективной, аффинной, евклидовой и гео-
метрией Лобачевского, которые были построены и изучены
к восьмидесятым годам XIX века. Подробное изложение
этих вопросов читатель может найти в книге Н. В. Ефимо-
ва «Высшая геометрия».
В следующих двух параграфах мы покажем, как с тео-
ретико-групповой точки зрения строятся геометрии Ев-
клида и Лобачевского.
§ 16. Евклидова геометрия
Мы ограничимся рассмотрением евклидовой геомет-
рии на плоскости. В § 1 на евклидовой плоскости изуча-
лись движения, которые представляли собой взаимно од-
нозначные преобразования плоскости, сохраняющие рас-
стояния между точками. В том же § 1 приводилось понятие
71
равных или, как мы говорили выше в п. 3 § 15, эквивалент-
ных фигур в евклидовой геометрии. Именно, за эквива-
лентные фигуры в евклидовой геометрии принимались
такие, которые преобразовывались друг в друга с помощью
движений. Пусть fug — два движения. Тогда преобразо-
вание h=g- f также является движением. Действительно, h
является взаимно однозначным преобразованием; далее,
пусть А' и В'— образы точек А и В относительно преоб-
разования h. Тогда
A'=h(A)=g(f (A)), B'=h(B)=g(f(B)).
Поэтому если г(А, В) — расстояние между точками А и
В на плоскости, то
r(A', B') = r (g[f (A)], g[f(B)]) = r(f(A),f(B)) = r(A,B).
Отсюда и следует, что h=g- f есть движение. Для любого
движения f существует обратное преобразование f-1,
поскольку f — взаимно однозначное преобразование пло-
скости. Пусть А и В —любые точки плоскости и А'~
=f~1(A), B’—f~1(B). Так как движение f является об-
ратным преобразованием для f-1, то
A=f(A'), B=f(B')
и, следовательно,
r(A, B) = r(f(A'),f(B')) = r(A', В').
Отсюда вытекает, что f-1 есть движение.
Таким образом, движения образуют группу преобразо-
ваний плоскости. Геометрия этой группы и называется
евклидовой геометрией плоскости.
Поскольку любое движение (см. § 1) есть произведение
частных видов движений: вращения, параллельного пере-
носа и еще, может быть, симметрии в прямой (при этом
допускаются вращения на нулевой угол и параллельные
переносы на нулевой вектор, сводящиеся к тождественному
преобразованию), то евклидову геометрию можно опреде-
лить как систему предложений о свойствах фигур и вели-
чин, инвариантных относительно всевозможных вращений,
параллельных переносов и симметрий в прямых, а также
произведений этих преобразований.
В § 13, исходя из того, что точки евклидовой плоскости
были отождествлены с комплексными числами, мы пока-
зали, что линейные функции комплексного переменного
72
первого и второго рода
z' = az4 (1)
z' = az4-f> (2)
определяют на плоскости взаимно однозначные преобразо-
вания, являющиеся движениями, если модуль числа а
равен единице. Докажем, что с помощью функций (1) и
(2) можно задать любое движение на плоскости. Действи-
тельно, пусть f — произвольное движение плоскости и
пусть
f = p-g или f=s-p-g,
где g — вращение вокруг точки D (dlt d2) на угол а, р —
параллельный перенос на вектор ОВ с координатами Ьх,
bt и, наконец, s — симметрия в прямой I, проходящей
через точку С (clt с2) и составляющей угол у с положитель-
ным направлением оси Ох.
Вращению g соответствует линейная функция
z' = G (z) — a(z — d) + d,
где
a = cosa-H since, af—af т-f-Zrf а,
параллельному переносу p — линейная функция
z' = P (z) —z + &,
где
b = b1 ib2,
и, наконец, симметрии s в прямой / — линейная функция
z' = S(z) = u(z — c) + c,
где
u = cos2y + t sin2y, c=cr + ict, c=cr — ict.
Мы предоставляем читателю самостоятельно убедиться
в справедливости этих фактов.
Таким образом, функция, соответствующая f в случае,
когда f — p-g, имеет вид
z' = P[G (z)]==G(z) + b==a(z — d) + d + b — az+d + b — ad,
или окончательно
z' = az + (d + b — ad),
причем [a| = У cos2asin2a = 1.
73
Если f = s-p-g, то соответствующая функция имеет вид
z' = S [Р (G (z))] = S [G (г) + Ь] = и([Й (?) + &] -7) + с =
яаи (a-z + (d + &—ad)— с) + с,
или окончательно
z'^(и-а) z + [u(d + b — ad — c) + c],
причем
| иа |s= | соз(2у—а)-Н sin (2у — а)| = 1.
Из всех наших рассмотрений вытекает
Теорема 1. Между движениями евклидовой плоскости
и линейными функциями комплексного переменного пер-
вого и второго рода
z'=az + b
и
z' = az-J-h
при условии, что |а|х=1, а и Ь —постоянные числа,
существует взаимно однозначное соответствие; при этом
если движение f есть произведение движений и f2:
F(г)— функция, соответствующая f, F1(z)—функция,
соответствующая flt и Pa(z) — функция, соответствующая
ft, то
Г(г) = Р2(Рг(г)). (3)
В подобной записи это означает следующее: если
г + (4) (a2z + bt, (6)
1U (5) ,U (Л
то соответственно
a2a1z + (a2&i + &g),
ОАг + СаЛ + М; (8)
а^г + Са^Н-^),
a2aiZ + (a2&i + &2).
I a2FL(z) + b2 =
/Ч (Л (*)) = < ________
[ o3Ft(z) + b2 =
Произведения функций (4), (6) и (5), (7) дают линейную
функцию первого рода, а произведения функций (4), (7)
и (5), (6) — второго рода. Модуль коэффициента при г
или z у всех четырех функций, очевидно, равен единице.
74
Формулы (3) — (8) каждой паре линейных функций
F1(z) и F2(z) ставят в соответствие функцию F(z), которую
мы будем называть произведением функций F^z) и Fs(z).
Относительно так введенного умножения совокупность
линейных функций первого и второго рода образует груп-
пу. Проверка этого факта чрезвычайно проста. Из самого
определения умножения вытекает, что оно подчиняется
закону ассоциативности. Далее, функция F(z)=z, соот-
ветствующая тождественному преобразованию плоскости,
играет роль единицы группы и, наконец, функция
— z — — , если F(z)s»az4-b,
Q(*) = C- ab - (9)
4г z——, если F(z)saaz + &,
'-а а
такова, что
FQ(z)sF(Q(z))«z,
т. е. Q(z) = F"1(z).
Рассмотрим совокупность линейных функций первого
и второго рода, у которых коэффициент при переменной z
имеет модуль, равный единице. Тогда из формул для про-
изведения линейных функций (8) и формулы (9) для об-
ратной функции вытекает, что эта совокупность образует
подгруппу введенной выше группы линейных функций.
Эту подгруппу будем обозначать Е. Очевидно, что Е есть
группапреобразований множества всех комплексных чисел.
Из всех рассмотрений, проведенных выше, получаем
следующую теорему.
Теорема 2. Теория инвариантов группы Е есть
евклидова геометрия плоскости.
§ 17. Геометрия Лобачевского
В первой половине XIX века выдающийся русский
математик Н. И. Лобачевский решил труднейшую много-
вековую проблему геометрии о независимости аксиомы
параллельности от прочих аксиом евклидовой геометрии.
Развитые в работах Н. И. Лобачевского новые идеи
оказали огромное влияние на последующее развитие
математики.
Система аксиом, лежащая в основе геометрии Лобачев-
ского, получается из системы аксиом евклидовой геометрии
заменой аксиомы параллельности новой аксиомой, кото-
рая представляет собой предложение, противоположное
75
евклидовой аксиоме о параллельных. Формулировка этого
предложения такова: «В любой плоскости а можно через
каждую точку А, не принадлежащую прямой а, провести
по крайней мере две различные прямые а' и а" так, что
оии не имеют общих точек с прямой а».
Ниже мы укажем одну из интерпретаций геометрии
Лобачевского, предложенную французским математиком
А. Пуанкаре.
На евклидовой плоскости рассмотрим некоторую пря-
мую I. Не нарушая общности, можно считать, что прямая I
совпадает с осьюх. Назовем верхней полуплоскостью сово-
купность всех точек плоскости х, у, у которых координата
у удовлетворяет неравенству г/>0.
Точки верхней полуплоскости принимаются за точки
плоскости Лобачевского, а сама плоскость Лобачевского
есть верхняя полуплоскость евклидовой плоскости. Отме-
тим, что точки оси х не являются точками плоскости Лоба-
чевского. Прямыми плоскости Лобачевского (рис. 66)
считаются евклидовы полуокружности с центрами на
оси х и лучи с вершинами на оси х, перпендикулярные
этой оси.
Две фигуры А к В считаются равными или эквивалент-
ными, если существует конечное число таких преобразова-
ний ф1, <р2, ..., <рто, каждое из которых является инверсией с
центром на оси х или отражением в прямой, перпендику-
лярной оси х, что преобразование /=<Pni-<iPni_r••••qv’Pi
переводит фигуру А в фигуру В.
То, что в интерпретации Пуанкаре выполнена аксиома
Лобачевского, очевидно (рис. 67).
Обозначим через W верхнюю полуплоскость. Пусть,
далее, Н — совокупность преобразований, состоящая из
76
преобразований вида
f = 4>т • <Fm_1- • • • ф2 <Fi (т — любое натуральное число),
где <рт— инверсии с центрами на оси х или отра-
жения в прямой, перпендикулярной оси х.
Из свойств этих преобразований нам известно, что каж-
дое из них преобразует верхнюю полуплоскость на себя
взаимно однозначно. Следовательно, совокупность преоб-
разований Н состоит из взаимно однозначных преобразо-
ваний верхней полупло-
скости W на себя. 9
Докажем, что Н есть
группа преобразований
множества W. Действи-
тельно, если / и g принад-
лежат Н и
Рие. 67.
то для произведения преобразований fug имеем формулу
= • • • •'Ь ФгФ»-4>т-г • • • -Фг-Фг
из которой следует, что g-f принадлежит совокупности
преобразований Н.
Так как дважды повторенные одна и та же инверсия
или отражение в прямой ср приводят к тождественному
преобразованию, то, очевидно,
и, следовательно, для преобразования
^=фм-фт-1-- • • "Фг'Ф1
из совокупности Н преобразование
/1 = ф1ф2-• • • -ф»,
будет обратным преобразованием. Преобразование h, оче-
видно, принадлежит Н. Таким образом, согласно свойст-
вам, характеризующим группу преобразований данного
множества (см. п. 2 § 15), совокупность преобразований Н
относительно операции умножения образует группу пре-
образований верхней полуплоскости W.
Выше мы приняли W за плоскость Лобачевского, а
преобразования группы Н играют на плоскости Лобачев-
W
ского роль движений — по определению они совмещают
равные (эквивалентные) фигуры.
Поэтому геометрию Лобачевского можно определить
как теорию инвариантов группы преобразований Н верх-
ней полуплоскости W.
В заключение мы предлагаем читателю в качестве весь-
ма полезной задачи сформулировать предмет геометрии
Лобачевского с помощью дробно-линейных функций ком-
плексного переменного так же, как это было сделано в
§ 15 для геометрии Евклида с помощью линейных функций
комплексного переменного.
Подробное изложение вопросов, на которых мы оста-
навливались в главе III, читатель может найти в книге
Н. В. Ефимова «Высшая геометрия». Подробное изложение
геометрии Лобачевского в модели Пуанкаре можно найти в
книге А. С. Смогоржевского «О геометрии Лобачевского»
(серия «Популярные лекции по математике», выпуск 23).
ОГЛАВЛЕНИЕ
Предисловие.......................................... 3
Глава 1. Инверсия и пучки окружностей
§ 1. Простейшие преобразования плоскости ... 3
§ 2. Стереографическая проекция. Бесконечно уда-
ленная точка плоскости И
§ 3. Инверсия...................................... 14
§ 4. Свойства инверсии............................. 16
§ 5. Степень точки относительно окружности. Ради-
кальная ось двух окружностей........................ 24
§ 6. Приложение инверсии к решению задач на построе-
ние ................................................ 30
§ 7. Пучки окружностей............................. 38
§ 8. Строение эллиптического пучка................. 46
§ 9. Строение параболического пучка ............... 48
§ 10. Строение гиперболического пучка............... 49
§ 11. Теорема Птоломея.............................. 52
Г л а в а II. Комплексные числа и инверсия
§ 12. Геометрическое изображение комплексных чисел
и действий иад ними................................. 55
§ 13. Линейная функция комплексного переменного и
простейшие преобразовании плоскости................. 59
§ 14. Дробно-лннейная функция комплексного пере-
менного и связанные с ней точечные преобразования
плоскости........................................... 61
Глава III. Группы преобразований. Геометрии Евклида
и Лобачевского
§ 15. Геометрия группы преобразований............... 65
§ 16. Евклидова геометрия.......................... 71
§ 17. Геометрия Лобачевского........................ 75
Илья Яковлевич Бакельман
Инверсия
М.. 19 66 г. 80 стр. с илл.
Редакторы: А. Л. Вернер, В. В. Донченко.
Техн, редактор Л. А. Пыжова.
Корректор Л. С. Бакулева.
Сдано в набор 25/VII 1966 г. Подписано к печати
3/Х 1966 г. Бумага 84Х1081/за. Фнз. печ.
л. 2,5. Условн. печ. л. 4,2. Уч.-нзд. л. 3,85.
Тираж 75 000 >кз. Т-12748. Цена 12 коп.
Заказ № 614.
Издательство «Наука»
Главная редакция
физико-математической литературы
Москва, В-71, Ленинский проспект, 15
Отпечатано с матриц
Первой Образцовой типографии
в Чеховском полнграфкомбинате
Зак. № 53
Цена 12 коп.
Г
ПОПУЛЯРНЫЕ ЛЕКЦИИ по математике
Вып I. А. И. Маркушевич. Возвратные последовательности.
Вин 2. И. П. Натансон Простейшие задачи на максимум и минимум
Вып 3. И. С. Сомикским. Метод математической индукции.
Вып. 4. А. И. Маркушевич. Замечательные кривые
Вып. 5. П. П. Коровкин. Неравенства.
Вып. 6. Н. Н. Воробьев. Числа Фибоначчи.
Вып. 7. А. Г. Курош. Алгебраические уравнения произвольных
степеней.
Вып. 8. А. О. Гельфонд. Решение уравнений в целых числах.
Вып. 9. А. И. Маркушевич. Площади и логарифмы
Вып. 10. А. С- Смогоржевский. Метод координат.
Вып. И. Я- С. Дубнов. Ошибки в геометрических доказательствах.
Вып. 12. И. П. Натансон. Суммирование бесконечно малых величин.
Вып. 13. А. И. Маркушевмч. Комплексные числа и конформные ото-
бражения.
Вып. 14. А II. Фетисов. О доказательствах в геометрии.
Вып 15. И. Р. Шафаревич. О решении уравнений высших степеней
Вып. 16. В. Г- Шерватов. Гиперболические функции.
Вып. 17. В. Г. Болтянский. Что такое дифференцирование?
Вып. 18. Г. М. Миракьян. Прямой круговой цилиндр.
| Вып. 19. Л. А. Люстерник. Кратчайшие линии.
Вып. 20. А. М. Лопшиц. Вычисление площадей ориентированных фи-
гур .
Вып. 21. Л. И. Головина и И. М. Яглом. Индукция в геометрии.
Вып. 22. В. Г. Болтянский. Равновеликие и равиосоставленные фигуры.
! Вып. 23. А. С. Смогоржевский. О геометрии Лобачевского.
Вып. 24. Б. И. Аргунов и Д. А. Скорняков. Конфигурационные теоремы.
Вып. 25. А. С. Смогоржевский. ЛииеЙка в геометрических построениях.
। Вып. 26. Б. А. Трахтенброт. Алгоритмы и машинное решение задач.
Вып. 27. В. А. Успенский. Некоторые приложения механики к мате-
мат ике
Вып. 28. Н А. Архангельский и Б. И. Зайцев. Автоматические циф-
ровые машины.
Вып. 29. А. Н. Костовский. Геометрические построения одним цирку-
лем.
Выл. 30. Г. Е. Шилов. Как строить графики.
Вып. 31. А. Г. Дорфман. Оптика конических сечеянй.
Вып. 32. Е. С. Вентцель. Элементы теории игр.
Вып. 33. А. С. Барсов. Что такое линейное программирование
Вып. 34. Б. Е. Маргулис. Системы линейных уравнений
Вып. 35. Н. Я- Виленкин. Метод последовательных приближений.
Вып. 36. В. Г. Болтянский. Огибающая.
Вып. 37. Г. Е. Шилов. Простая гамма (устройство музыкальной шкалы).
Вып. 38. Ю. А. Шрейдер. Чю такое расстояние?
Вып. 39. Н. Н. Воробьев. Признаки делимости.
। Вып. 40. С. В- Фомин. Системы счисления.
Вып- 41. Б. Ю« Коган. Приложение механики к геометрии
Вып. 42. Ю= И. Любич и Л. А. Шор. Кинематический метод в геоме!-
рических задачах.
Вып. 43.-В. А. Успенский, [реугольник Паскаля.
Вып. 44. И. Я. Баке.тьман. Инверсии.