/


















































































Author: Мосолов П.П. Мясников В.П.
Tags: общая механика механика твердых и жидких тел механика физика
Year: 1981

Text
М L п. П. МОСОЛОВ, в. п. мясников
< 7:7
МЕХАНИКА
ЖЕСТКОПЛАСТИЧЕСКИХ
СРЕД
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
198 1
22.25
М 82
УДК 531
Мосолов П. П., Мясников В. П. Механика жесткоплас-
тических сред.— М.: Наука. Главная редакция физико-математи-
ческой литературы, 1981.—208 с.
Книга содержит последовательное изложение механики жестко-
пластических тел и конструкций на основе неклассического вариа-
ционного исчисления и не имеет аналогов в мировой литературе.
В ней содержатся предложенные авторами эффективные общие ме-
тоды исследования негладких функционалов, связанных со стати-
ческими и динамическими задачами теории пластичности.
Прямые вариационные методы в теории жесткопластических сред
являются особенно эффективными в связи со сложностью форму-
лировки задач в традиционных терминах дифференциальных урав-
нений, а в ряде случаев вариационный подход остается пока един-
ственно возможным. При этом обнаруживается тесная связь теории
жесткопластических сред с функциональным анализом, интеграль-
ной геометрией, выпуклым анализом и т. д.
Книга предназначена для научных работников, специализирую-
щихся в области механики деформируемого твердого тела и реоло-
гии, математиков, интересующихся приложениями современных
методов неклассического вариационного исчисления к задачам ме-
ханики и оптимизации, специалистов по вычислительным методам,
а также для преподавателей университетов и технических вузов,
аспирантов и студентов старших курсов.
Табл. 2, илл. 23, библ. 206,
20304-030
М 053(02)-81 ^-81.1703040000
Э Издательство «Наука».
Главная редакция
физико-математической
литературы, 19S1
ОГЛАВЛЕНИЕ
Введение .................................................... 5
Г лава I. Общие понятия и соотношения....................... 11
§ 1. Принцип виртуальных мощностей......................... 11
Принцип виртуальных мощностей. Вязкие сплошные среды.
Монотонные многозначные операторы. Преобразование Юнга.
Вязко- и жесткопластические среды. Условие текучести и ас-
социированный закон. Теоремы единственности и постулат
Друкера
§ 2. Эквивалентность принципа виртуальных мощностей
задаче о минимуме функционала............................... 26
Принцип виртуальных мощностей для медленных движений.
Геометрическая интерпретация проблемы минимума функцио-
нала. Уравнение Эйлера для недифференцируемого функцио-
нала. Эквивалентность принципа виртуальных мощностей зада-
че о минимуме функционала
§ 3. Теоремы существования................................. 38
Интегральные представления для вектор-функции. Неравенство
Корна. Локальная структура пространств Dp (со). Теоремы
о существовании минимума функционала
§ 4. Предельная нагрузка................................... 52
Статический коэффициент. Предельная нагрузка. Теорема о
единственности предельной нагрузки. Кинематический коэф-
фициент. Основная теорема о предельной нагрузке. Теорема о
существовании девиатора напряжений для предельной нагрузки
Глава II. Стационарные течения.............................. 61
§ 5. Антишюские движения................................... 61
Антиплоские движения вязкопластической среды. Предельная
нагрузка. Качественные особенности течений
§ 6. Близость реологических моделей........................ 79
Сильно выпуклые функционалы. Обобщение неравенств Кларк-
сона. Близость реологических моделей
§ 7. Метод двусторонних оценок............................. 86
Двойственность в вариационных задачах. Двусторонние оценки
точной нижней грани функционала. Двойственность по Кас-
тильяно. Метод размораживания дифференциальных связей.
Оценки снизу коэффициента предельной нагрузки
§ 8. Пластическое кручение.................................. 1( 2
Кручение жесткопластического стержня. Вычисление предель-
ного момента. Формулы для скорости депланации поперечного
сечения стержня. Кручение стержня с многосвязным попереч-
ным сечением
1*
4
ОГЛАВЛЕНИЕ
§ 9. Плоские течения....................................... ИЗ
Плоские течения. Плоское напряженное состояние» Осесиммет-
ричные задачи. Понятие полного решения. Двойственная фор-
мулировка и полное решение. Задача о сжатии — растяжении
полосы с отверстием. Задача Прандтля о сжатии слоя
Глава III. Асимптотические задачи.......................... 130
§ 10. Проблема выбора единственного стационарного реше-
ния ....................................................... 130
Неединственность решений стационарных задач в случае жест-
копластической среды. Регуляризация с помощью малой вяз-
кости. Новая задача вариационного исчисления. Метод получе-
ния оценок снизу минимума функционала с помощью перест-
ройки криволинейных координат. Пограничный слой в вязко-
пластической среде
§ 11. Теория оболочек...................................... 143
Асимптотическая теория предельной нагрузки для жесткопласти-
ческих оболочек. Безмоментное приближение и границы его
применимости. Роль краевых условий. Асимптотическая точ-
ность безмоментного приближения и гипотеза Кирхгофа —
Лява. Алгебраизуемые и неалгебраизуемые задачи
12. Жесткопластическая панель........................... 161
Коэффициент предельной нагрузки для жестнопластической
панели. Оценка сверху на полях Кирхгофа — Лява. Осредне-
ние выпуклой функции. Оценка снизу. Пластинки. Переход от
трехмерных задач к задачам меныией размерности
Глава IV. Нестационарные движения.......................... 176
§ 13. Вариационный подход ’ ............................... 176
Нестационарные движения вязких сред. Вариационный подход.
Примеры. Инерционный принцип выбора стационарного реше-
ния для жесткопластических сред.
§ 14. Динамика панели...................................... 186
Динамика жесткопластических панелей. Пластические шарниры.
Примеры
Заключение................................................. 192
Литература................................................. 198
ВВЕДЕНИЕ
Пластические свойства различных материалов были
известны очень давно и изучались, например, еще Куло-
ном (1776 г.). Первые систематические исследования пла-
стических течений металлов были проведены Треска
(1869 г.). В частности, он отметил основное свойство ме-
таллов в состоянии текучести — постоянство напряжений
в них при любой величине происшедшей деформации.
Теоретические основы описания этого явления были
заложены в 1871 г. В. Сен-Венаном [1] и М. Леви [2].
В этих работах, по существу в их современном виде, были
сформулированы определяющие соотношения для жестко-
пластической среды в случае плоских [1] и простран-
ственных [2] течений с условием пластичности Треска.
В этих же работах была дана полная формулировка
определяющих соотношений и для вязкопластической
среды. Так, Б. Сен-Венан указывает [1], что если к ком-
понентам напряжений для жесткопластической среды
прибавить слагаемые, пропорциональные компонентам
тензора скоростей деформации и соответствующие трению
в вязких жидкостях, то уравнения движения будут при-
годны для изучения движений жидкости, в которой суще-
ствуют касательные напряжения двух типов: одни —за-
висящие от скорости (вязкие) и другие — не зависящие
от скорости (жесткопластические).
Таким образом, еще в начальный период создания__тео-
рии пластичности была дана математическая формулиров-
ка определяющих соотношений не только для жестко-
пластических, по и для вязкопластических сред. Однако
в описании материалов, поведение которых требовало бы
комбинирования моделей жесткопластического тела и
вязкой жидкости, не было, видимо, практической потреб-
6
ВВЕДЕНИЕ
ности и поэтому модель вязкопластической среды не при-
влекла широкого внимания и была забыта. Интерес к этой
модели вновь возник на рубеже XIX—XX веков, после
того как в работах Шведова [3], Бингама и Грина [4]
и других было экспериментально показано, что ряд реаль-
ных материалов обнаруживает этот тип реологического
поведения. Кроме того, и технологические задачи обработ-
ки металлов давлением при достаточно высоких темпера-
турах обусловили возрождение интереса к модели вязко-
пластической среды [5—8].
Модель жесткопластической среды была переоткрыта
Р. Мизесом в 1913 г. [9]. Основные соотношения были
сформулированы с использованием условия текучести,
предполагающего постоянным в области пластического
течения интенсивность девиатора напряжений. Несколь-
ко раньше это же условие текучести было предложено
М. Губером (1904 г. см. [10]). Позднее Р. Мизес [И] сфор-
мулировал основные соотношения модели жесткопласти-
ческой среды для произвольного гладкого условия теку-
чести и вывел ассоциированный закон течения. Аналогич-
ное построение для сингулярного условия текучести было
дано Рейссом [12, 13].
G середины 20-х годов модель жесткопластической сре-
ды становится источником многочисленных модификаций
основных соотношений, используемых для описания пла-
стического деформирования различных материалов. По-
лучившая широкое распространение модель упругопла-
стической среды была предложена Л. Прандтлем [14]
в 1924 г. и в более общей форме сформулирована Рейссом
[15] в 1930 г. Модель жесткопластического тела с изо-
тропным упрочнением была впервые рассмотрена в [16].
Другим вариантом модели упрочняющейся жесткопласти-
ческой среды являются модели с трансляционным упроч-
нением [17—20]. Подробное изложение теории жестко-
пластическиХ тел с упрочнением дано, например, в [21, 22].
Приложение модели жесткопластического тела к агре-
гатам из монокристаллов с последующим усреднением мик-
родеформаций для описания пластического деформирова-
ния поликристаллов впервые дано в [23]. Несколько иные
варианты того же направления исследований б тли пред-
ложены в [21, 24, 25]. Подробный обзор этого круга вопро-
сов содержится в [26].
ВВЕДЕНИЕ
7
В пятидесятые годы большое внимание уделялось тер-
модинамическим основаниям теории. Для широкого клас-
са неупругих сред основные определяющие соотношения
были получены на основе общих термодинамических соот-
ношений [10, 27—31] и феноменологических постулатов
типа гипотез о максимальности пластической работы, по-
стулата Друкера, принципа наименьшей необратимой си-
лы и т. п. Все они укладываются в общую схему построе-
ния определяющих соотношений в механике сплошных
сред, данную в [32]. Тем самым модель жесткопластичес-
кой среды и ее многогранные обобщения с физической точ-
ки зрения можно считать хорошо обоснованными.
Приведенный далеко не полный перечень исследований
по обобщению классической модели жесткопластического
тела указывает па ее особую роль в подходе к описанию
пластических свойств реальных материалов.
В монографии основное внимание уделено математичес-
ким аспектам исследования модели жесткопластического
материала и тесно примыкающей к ней модели вязкопла-
стической среды.
Основным математическим аппаратом в механике
сплошных сред являются дифференциальные уравнения
в частных производных. В свою очередь, на развитие тео-
рии дифференциальных уравнений существенное влияние
оказали такие разделы механики сплошных сред, как тео-
рия упругости, гидродинамика, газовая динамика. Они
стимулировали исследования в теории эллиптических, па-
раболических и гиперболических уравнений.
Теория пластичности находится в несколько особом
положении. Это связано с тем, что постановка даже про-
стейших задач, например, для вязкопластической среды,
приводит к краевым задачам для нелинейных уравнений
в областях с неизвестными границами. Общие математи-
ческие методы исследования таких задач возникли лишь
в последние 15 лет. Здесь весьма плодотворными оказа-
лись метод вариационных неравенств [33, 34] и вариацион-
ный подход [35]. Вариационные неравенства охватывают
несколько более широкий класс задач по сравнению с за-
дачами, описываемыми в рамках вариационного подхода.
Однако в задачах, допускающих вариационную фор-
мулировку, теория вариационных неравенств, по сущест-
ву, не дает дополнительной информации.
8
ВВЕДЕНИЕ
Основная трудность применения этих методов к тео-
рии движения жестко- и вязкопластических сред состояла
в установлении эквивалентности традиционной поста-
новки задачи в терминах дифференциальных соотношений
некоторой задачи о минимуме функционала.
Возможность связи между уравнениями движения вяз-
копластической среды с задачей об экстремуме функцио-
нала отмечалась и ранее [8, 36, 37]. Однако в этих работах
не рассматривался основной для вязкопластической среды
случай, когда в области, заполненной средой, существуют
области жесткого состояния. Наличие вариационной фор-
мулировки задачи, по существу, не было использовано.
Единственно была отмечена возможность применения ме-
тода Ритца к построению приближенного решения [8].
В [35] вариационный принцип был постулирован для
движений общего вида, причем подчеркивалось, что из-
за существования областей жесткого состояния среды функ-
ционал является недифференцируемым и переход от ва-
риационного принципа к соответствующим уравнениям
Эйлера требует дополнительного исследования. В полном
объеме обоснование эквивалентности дифференциальной
и вариационной постановок задач было дано в [38]. Суще-
ственную роль в доказательстве играли понятия выпук-
лого анализа.
'Для жесткопластических сред принцип виртуальных
мощностей позволяет получать верхние и нижние оценки
коэффициента предельной нагрузки, формулировать экс-
тремальные принципы для действительного поля скоро-
стей и действительного поля напряжений. Изучение
этих вопросов составляет содержание теории предельного
равновесия жесткопластической среды. Основы этой
теории и применение ее к практическим расчетам зало-
жены"А. А. Гвоздевым [39, 40]. Ее' изложение содержит-
ся во многих учебных руководствах и монографиях по
теории пластичности [41 —46]. С точки зрения вариаци-
онного’подхода отправным физическим” понятием здесь
является скорость диссипации энергии или диссипатив-
ный потенциал. На важное значение функции диссипа-
ции в теории жесткопластических сред впервые указал
Д. Д. Ивлев [47].
^Вариационный подход с использованием диссипатив-
ного потенциала позволяет сформулировать задачу о дви-
ВВЕДЕНИЕ
9
жении жестко- и вязкопластических сред только в кине-
матических терминах. Компоненты тензора напряжений
при этом будут двойственными переменными к соответ-
ствующим компонентам тензора скоростей деформаций.
Такой подход позволяет в полной мере использовать ре-
зультаты теории двойственности выпуклого анализа.
В частности, уравнения равновесия для напряжений
представляют собой условия ортогональности между ис-
ходными и двойственными переменными, а условие теку-
чести является следствием преобразования Юнга дисси-
пативного потенциала. Методы выпуклого анализа позво-
лили, например, доказать важную теорему о совпадении
оценок предельной нагрузки сверху и снизу по кинемати-
ческим и статическим коэффициентам. Другим следствием
последовательного использования вариационной форму-
лировки задачи является возможность построения эффек-
тивных двусторонних оценок предельной нагрузки в ки-
нематических терминах (метод размораживания диффе-
ренциальных связей). Эти методы представляют интерес
в связи с трудностью построения достаточно широкого
класса статически допустимых полей напряжений во всем
объеме, занятом жестко- или вязкопластической средой,
хотя, например, в задачах о плоских течениях жестко-
пластической среды теория линий скольжения в различ-
ных конкретных задачах позволяет эффективно находить
в области течения достаточно широкий класс допустимых
полей напряжений и согласованных с ними полей скоро-
стей.
В нестационарных задачах для жестко- и вязкоплас-
тических сред конкретных результатов получено суще-
ственно меньше по сравнению со случаем стационарных
движений. Определенный прогресс имеется в задачах
о динамике балок, панелей, круглых пластин и оболочек
вращения под действием осесимметричных нагрузок. Ус-
пех в их решении связан с предположением о шарнирном
механизме развития пластических деформаций. Впервые
эта схема была предложена А. А. Гвоздевым [48] и лишь
почти через десять лет была переоткрыта и получила ши-
рокое распространение [49—51].
Вариационная формулировка оказалась полезной
и в исследовании динамических задач. Выяснилось, что
пластические шарниры и их движение являются непосред-
10
ВВЕДЕНИЕ
ственным следствием динамического вариационного прин-
ципа. При этом, если в случае нагрузок общего вида весь-
ма сложно предвидеть число пластических шарниров и
пластических зон, что является существенным при тра-
диционном подходе, то вариационный подход дает общую
схему построения решения, допускающую эффективную
алгоритмизацию и использование ЭВМ.
Все сказанное поясняет определенное своеобразие ма-
тематического аппарата, адекватного задачам теории пла-
стичности. Вариационная постановка задачи имеет опре-
деленные преимущества по сравнению с дифференциаль-
ной постановкой задчи. Примеры показывают, что не-
которые задачи теории пластичности, кажущиеся труд-
ными с точки зрения дифференциальных уравнений, ока-
зываются весьма простыми при геометрической интер-
претации функционала.
Вариационная формулировка дает подходы к решению
ряда асимптотических задач таких, как обоснование ги-
потезы Кирхгофа — Лява для пластин и оболочек, по-
строение принципа выбора решения стационарной задачи
для жесткопластической среды при наличии малой вяз-
кости и др.
В рамках вариационной формулировки задач обнару-
живается тесная связь теории жесткопластических сред
с рядом современных разделов математики: функциональ-
ным анализом, интегральной геометрией, выпуклым
анализом и т. п. Поэтому в заключение авторам представ-
лялось целесообразным сформулировать ряд вопросов,
ответы на которые могут оказать влияние на дальнейшее
развитие теории движения жестко- и вязкопластических
сред и, с другой стороны, стать источником новых задач
в соответствующих разделах математики.
Авторы благодарны Д. Д. Ивлеву, В. Д. Клюшнико-
ву, Ю. Н. Работнову и Г. С. Шапиро за многочисленные
и плодотворные обсуждения проблем теории пластичности,
способствовавшие работе авторов над книгой.
Авторы благодарны В. Л. Бердичевскому, который
прочитал рукопись и сделал ряд важных замечаний.
ГЛАВА I
О
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
§ 1. Принцип виртуальных мощностей
Принцип виртуальных мощностей. Вязкие сплошные среды. Моно-
тонные многозначные операторы. Преобразование Юнга. Вязко- и же-
сткопластические среды. Условие текучести и ассоциированный
закон. Теоремы единственности и постулат Друкера.
Одним из фундаментальных динамических соотноше-
ний механики сплошных сред является принцип виртуаль-
ных мощностей [52], аналитическая формулировка кото-
рого имеет вид
5 Р ~ДГ 'г du) = F• hda Р -hdS, (1.1)
®г со;
где (щ — область, занятая сплошной средой в момент вре-
мени t, dmt —ее граница, и (ас if) = (щ (ас, i), и2 (х, t),
из С-’; 0) — поле скоростей движения в эйлеровой систе-
ме координат х — (zj, z2, zs), р —плотность среды, пред-
полагаемая в дальнейшем постоянной, так что поле
(г, 0 — солепоидально, Оу — тензор напряжений, F,
Р — плотности массовых и поверхностных сил,
du
~dt
«U , , „
-gp-.- (»-V)«,
/} = —
"о 2
11 h (x, t) — вариация кинематически допустимых полей
скоростей, принадлежащая при каждом t некоторому ли-
нейному пространству вектор-функций Ht.
Понятие вариации кинематически допустимых полей
скоростей требует разъяснений. Конкретная постановка
механической задачи выделяет в каждый момент времени
12
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
ГГЛ, I
t класс кинематически допустимых полей скоростей Ut,
т. е. класс возможных движений, совместимых со связя-
ми, наложенными на систему, причем на границе dat
нормальная составляющая скорости и (sc, £) должна сов-
падать с нормальной скоростью движения границы *).
В дальнейшем предполагается, что Ut при каждом t
является линейным многообразием. Это означает, что по-
ля скоростей вида h (х, Г) — иг(х, £) — и2(х, t) при и1,
иг из Ui образуют при каждом t линейное пространст-
во Ht.
Предположение о том, что Ut является линейным мно-
гообразием, приводит к наиболее простому понятию ва-
риации кинематически допустимых полей скоростей, и,
в то же время, этого предположения достаточно для рас-
смотрения весьма широкого класса конкретных задач.
Итак, принцип виртуальных мощностей состоит в том,
что вариационное тождество (1.1) выполняется для всех
h (зс, £) из Ht.
В дальнейшем принцип виртуальных мощностей будет
рассматриваться в качестве основного исходного дина-
мического принципа для описания движений сплошной
среды.
Подчеркнем еще раз, что постановка задачи о движении
сплошной среды включает в себя вариационное тождество
(1.1) и задание множества Ut, т. е. описание связей,"на-
ложенных на систему. 177/1
г Конечно, по-видимому, более естественно при поста-
новке задач механики сплошных сред исходить из локаль-
ных соотношений. Само понятие тензора напряжений яв-
ляется следствием принципа локализации Коши [53].
Далее, от этих локальных соотношений интегрированием
можно перейти к вариационному тождеству (1.1), учиты-
вающему уже конкретную постановку краевой задачи.
Локальные соотношения, определяющие движение
сплошной среды, содержат уравнения движения, имею-
щие универсальный характер, и краевые условия, связан-
ные с конкретной постановкой задачи. При этом, если часть
краевых условий, соответствующая кинематическим огра-
*) Здесь имеются в виду замкнутые системы, состоящие во все
моменты времени из одних и тех же частиц. В случае открытых
систем на участках границы, через которые возможен обмен части-
цами, должно быть задано во все моменты времени поле скоростей. 1
s J] ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ 13
пилениям, определяемым геометрическими факторами,
обычно весьма прозрачна, то формулировка краевых усло-
вий, связанных с напряжениями, иногда бывает затруд-
нительна.
Это затруднение можно обойти, рассматривая принцип
виртуальных мощностей в качестве основного исходного
фундаментального соотношения. Тогда краевые условия,
связанные с напряжениями, являются следствием вариа-
ционного тождества (1.1) и кинематических краевых ус-
ловий, определяющих Ut. В этом, собственно, и состоит
техническое преимущество формулировки задач с исполь-
зованием принципа виртуальных мощностей.
Трудности, связанные с формулировкой краевых ус-
ловий в напряжениях, возникают, например, в задачах
с частичной фиксацией поля скоростей на 5со#, т. е. когда
на границе области задается не полностью поле скоростей,
а только его проекции на одно или два независимых нап-
равления в каждой точке.
Конкретным примером может служить классическая
задача^Сен-Венана о кручении призматических стержней.
Кинематические краевые условия в этой задаче состоят
в том, что проекция поля скоростей в торцах на попереч-
ное сечение стержня является полем вращения твердого
тела, а на боковой поверхности поле скоростей может быть
произвольным. При локальной постановке задачи указан-
ных краевых условий на торцах совместно с условием от-
сутствия нагрузок на боковой поверхности стержня недо-
статочно для выделения единственного решения уравне-
ний движения. К ним должно быть еще добавлено крае-
вое условие на напряжения в торцах стержня. При фор-
мулировке этой же задачи с использованием принципа
виртуальных мощностей не возникает необходимости
в нахождении соответствующего условия на напряжения.
Казалось бы, что вопрос об отыскании условия на на-
пряжения в торцах стержня не возникает п при тради-
ционном подходе. Это объясняется тем, что используе-
мый при ее решении полуобратный метод навязывает ма-
териалу определенный характер деформирования во всем
объеме стержня. Именно, априорно задаются всюду в объе-
ме две компоненты скорости (смещения) и только для треть-
ей компоненты получается дифференциальное уравнение.
Возникает вопрос, как можно экспериментально реали-
14
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ.
зовать решение Сен-Венана, поскольку мы не можем пред-
писать материалу нужного нам поведения во всем объе-
ме. Таким образом, возникает необходимость в полной
формулировке краевой задачи, решение которой совпа-
дало бы с решением Сен-Венана.
В заключение обсуждения принципа виртуальных мощ-
ностей заметим, что в дифференциальной постановке мож-
но описать более широкий круг задач механики сплош-
ных сред по сравнению с классом задач, описываемых
в рамках вариационного тождества вида (1.1). Более об-
щие формы фундаментального вариационного тождества,
необходимые для описания более широкого класса меха-
нических процессов, рассматривались в работах Л. И. Се-
дова и его учеников [32, 54].
Перейдем теперь к описанию класса моделей сплош-
ных сред, включающего в себя классическую модель вяз-
кой жидкости, различные модели нелинейно-вязких жид-
костей, жесткопластические и вязкопластические среды.
Выбор конкретной модели сплошной среды осущест-
вляется заданием связи между динамическими и кинема-
тическими характеристиками движения.
Будем называть сплошную среду вязкой однородной
средой, если она несжимаема и девиатор s = (s^) тензора
напряжений cr = (crf ,•) является функцией, вообще говоря,
многозначной, тензора скоростей деформаций
1 /ди. ди . \
5 = Л(е), е = (ео-), ). (1.2)
\ j i J
В принципе виртуальных мощностей (1.1) в силу ус-
ловия несжимаемости тензор напряжений сгг; можно за-
менить на его девиатор 8у.
Рассмотрим множество девиаторов s (х, t) --- А (е (х, £)).
Сечением в этом множестве будем называть такой девиа-
тор s (х, t), что s (х, t) входит в А (е (х, £)) для всех х, t.
Таким образом, движение вязкой однородной среды
описывается таким полем скоростей и (х, £), что в множе-
стве значений А (е (х, 0) есть сечение s (х, t), для которого
выполняется (1.1) при всех h (х, t) из Hf.
Многозначность функции А представляется, на пер-
вый взгляд, с физической точки зрения, несколько не-
естественным свойством. Однако отметим, что понятие
няпп'пкрния в механике сплошной среды тесно связано
ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ
15
J и
I с принципом локализации Коши [53]: если из объема, за-
нятого сплошной средой, выделить какую-то ее часть, то
можно так распределить поверхностные силы по границе
’ этой части, что движение выделенной части с учетом вве-
денных поверхностных сил будет тождественно ее движе-
нию в полном объеме. Из формулировки принципа лока-
лизации, таким образом, не вытекает однозначность рас-
пределения поверхностных сил на границе выделяемого
объема. Например, для абсолютно твердого, недефор-
мируемого тела (этот случай имеет непосредственное от-
ношение к жестко- и вязкопластическим средам) очевидна
| возможная многозначность распределения поверхност-
ных сил. Поэтому представляется естественным допустить
возможность рассмотрения соотношений вида (1.2) с мно-
гозначными функциями А, если только при этом будет
иметь место единственность решения динамической задачи.
Условие единственности решения динамической зада-
। чи будет выполнено, если предположить, что А является
монотонной функцией (оператором).
Дадим сначала определение монотонно возрастающего
отображения для случая функций одного переменного.
Именно, / (х) является монотонно возрастающей функцией,
, если для любых л2 имеет место неравенство
j I/ (zi) — f (^гЖ^г — «г) > 0. (1.3)
Определение (1.3) монотонно возрастающей функции
непосредственно переносится на случай, когда f (зс) яв-
ляется отображением из Rn в Rn. В этом случае отображе-
ние /' (эс) называется монотонно возрастающим, если для
любых xt и х2 из Rn скалярное произведение удовлетво-
ряет неравенству
(f (Xj) — / (ж2)) • («х — х2) > 0. (1.4)
Рассмотренные примеры приводят к естественному
определению монотонно возрастающего отображения А
пространства девиаторов в себя:
) (И (е1) - А (^)) (б1 - е°) = (4- - 4) (4 - 4) > 0. (1-5)
Эти определения монотонности были введены для одно-
<t значных отображений. Понятие монотонности естествен-
; ным образом переносится и на случай многозначных ото-
I бражений.
16
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ. I
Именно, многозначное отображение (1.2) называется ||
монотонно возрастающим, если выполняется неравенство 1
S',y) (ву Су) 0, (1'6) |
для любых s1, s2 из А (е1), А (е2) соответственно. Нера-
венство (1.6), разумеется, должно иметь место для любых ’
е1, е^‘ 1
Неравенство (1.6) в теории пластичности известно под 1
названием постулата Друкера [55, 56]. Этот постулат 1
является одним из наиболее существенных общих предпо- ]
ложений теории пластичности и широко обсуждался в ли- ]
тературе [41, 42, 57—59]. Как будет показано ниже, соот-
ношение (1.6) является достаточным для обеспечения един-
ственности решений динамических задач в случае вязких |
сред, и, в частности, для жестко- и вязкопластических ма-
териалов.
Однако неизвестно, является ли постулат Друкера 1
и необходимым условием единственности.
С физической точки зрения естественным требованием,
предъявляемым к моделям сплошных сред, представляет-
ся требование единственности решения динамической за-
дачи. Конкретная форма соответствующих ограничений,
конечно, будет изменяться при переходе от одного класса
моделей к другому поможет быть истолкована как аналог
постулата Друкера.
Например, для классической максвелловской вязко-
упругой среды условие (1.6) не выполняется, так как из-
меняется и форма определяющих соотношений (1.2). Тем
не менее и в этом случае можно указать некоторое условие
на связь между напряжениями и скоростями деформаций,
обеспечивающее единственность решения динамичес- I
кой задачи.
Перейдем теперь к анализу конкретных примеров мно- ,
гозначных монотонных операторов, играющих важную i
роль в теории пластичности.
Пусть / (х) — выпуклая функция, действующая из Rn
в Я1. Таким образом, z = / (ас) — «-мерная выпуклая по-
верхность в 7Г+1 с координатами (^р. . хп, z), являю-
щаяся графиком / (зс). Рассмотрим точку х0 и рассмотрим
в этой точке опорную гиперплоскость
z — / (щ0) + (Xi — z")
§ 1]
ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ
17
к поверхности z = / (ас), т. е.
/ (х) > / (Хо) + Ai (яЧ — 4) (1 -7)
для всех х из 2?'*. Следовательно, график / (х) расположен
всюду не ниже опорной гиперплоскости, а в точке эс0 они
совпадают.
Нетрудно видеть, что если f (ас) — гладкая функция
в точке х0, то опорная гиперплоскость определена одно-
значно и является касательной плоско-
стью. При этом
А = ^.. (1.8)
1 'vA /
Однако, если/(х) не является гладкой \ [
в точке хй, например, подобна конусу \ J
или двугранному углу в окрестности
этой точки, то опорная гиперплоскость
определяется неоднозначно (рис. 1).
Итак, выпуклая функция / (ас) опре-
деляет следующую многозначную функ- с
цию Л/ (х), действующую из Rn в Rn-.
вектору т0 из Я" она сопоставляет множество векторов
А = (йп . . ., Лп), каждый из которых определяет опор-
ную гиперплоскость к / (х) в точке х0.
Теорема 1.1. Многозначная функция А(ас) является
монотонной.
Доказательство. Из (1.7) следует
/ (Х1) — / (х0) > Af (Хо) • (Х1 — х0),
/ (х0) — / (aCi) > Af (Xi) • (х0 — Xi).
Складывая эти неравенства, получим (1.4).
Многозначное отображение Af, устанавливающее со-
ответствие между точками Rn и опорными гиперплоско-
стями к графику функции / (х), удобно описывать с по-
мощью преобразования Юнга [60].
Преобразованием Юнга функции / (х) называется
функция /* (у), определяемая формулой
/*(?,) = sup [х-у — /(х)]. (1.9)
X
В случае гладкой выпуклой функции / (х) преобразо-
вание Юнга совпадает с хорошо известным преобразова-
нием Лежандра.
18
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ. 1
Рассмотрим в качестве примера коническую поверх-^
ность (
/ (ж) = | X I -Ь . . . + ХпУ' -. ’
Преобразованием Юнга / (х) будет функция i
Этот пример показывает, что при использовании пре- ]
образования Юнга приходится рассматривать функции- ]
принимающие бесконечные значения.
Выпуклую функцию / (х), принимающую бесконечные;
значения, будем называть собственной [60], если для всех)
х значения / (х*) — оо и хотя бы в одной точке / (х) < оо.;
Преобразование Юнга в классе собственных выпуклых;
функций обладает свойством инволютивности I
f (х) = sup [х-у — f* (у)] ={** (х). (1.10) 1
V 1
Нетрудно непосредственными вычислениями проверить, 1
что для конической поверхности преобразование Юнга'а
инволютивно. 1
Равенство (1.10) и определяет многозначное отображе-
ние Af (х). Именно, хизТ?" соответствует множество Af (х) 1
векторовт/, на которых достигается верхняя грань в (1.10). I
Таким образом, для у из ЛДх) выполняется равенство !
/ (х) +/*(?/) = X.у. (1.11) |
Заметим, что пах, у, удовлетворяющих (1.11), дости- ?
гается верхняя грань в (1.9) и (1.10), и, следовательно, |
если/(х) —гладкая функция, то у из Af (х) определяется ,
формулой
У = W,
что совпадает с формулой (1.8). )
Приведем важный для дальнейшего пример. Пусть .
/ (х)—выпуклая функция, удовлетворяющая условиям
/ (х) > у | х |, у > 0, / (о) = 0,
и / (х) — гладкая функция вне начала координат. Функ-
ция / (х) имеет в начале координат коническую точку «
(см. рис. 1). Отображение Af (х) в этом случае олисвает- ;
I i
§ 11
ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ
19
ся следующим образом:
d f (х) = V/ (ж), | х I > О,
(о) = у, f* (у) = 0.
Наложенные на /(эс) условия приводят к тому, что мно-
жество /* (у) = 0 является выпуклым замкнутым множе-
ством в Rn, содержащим начало координат вместе с не-
которой окрестностью.
Теперь можно в явном виде сформулировать соотно-
шения (1.2) для жестко- и вязкопластических сред.
Будем называть функцию со (с), определенную на про-
странстве девиаторов е = (еЕ;), диссипативным потенциа-
лом однородной вязкопластической среды, если ф (е) —вы-
пуклая функция переменных еЕ;, ср (0) = 0, ср (е) >
> v | с | = у (ei fetj)1'’, у > 0.
Рассмотрим поверхность z = ср (с) и опорную гипер-
плоскость к ней в точке eQ:
z = <p(c0) Ч- sw(eij —еу).
Очевидно, что каждая опорная гиперплоскость однознач-
но определяется девиатором $. Таким образом определен
многозначный оператор
з = (е), (1.12)
который ставит в соответствие девиатору е множество де-
виаторов s, задающих совокупность опорных гиперплос-
костей к поверхности z = ср (е) в точке е.
V Вязкопластической однородной средой называется од-
нородная вязкая среда, в которой связь (1.2) имеет вид
Очевидно, что многозначный оператор Л,, является
монотонным.
Для эффективного описания оператора используем
преобразование Юнга.
^Преобразованием Юнга функции ср (е) является функ-
ция
ср* (s) = sup [еЕЕ.<ц; — ср (е)1- (1-13)
Для собственных функций ср (е) преобразование Юнга
ипволтотивно:
ср (е) = sup ; — ср* (s)J (1.14)
20 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [ГЛ.
Формула (1.13) аналогична (1.10) и определяет опера-
тор 4Ф: девиатору тензора скоростей деформаций е соот-
ветствует совокупность девиаторов тензоров напряжений
s, для которых в (1.13) реализуется равенство.
Множество s, удовлетворяющих условию <р* ($) = 0,
является выпуклым замкнутым множеством S в простран-
стве девиаторов напряжений, содержащим начало коор-
динат вместе с некоторой своей окрестностью. Уравнение
границы этого множества f(s) - 0 обычно называется ус-
ловием текучести, а сама граница называется поверхно-
стью текучести.
Важным частным случаем вязкопластической среды
является жесткопластическая среда, для которой ср (е)
представляет собой функцию первой степени однородности:
ср (Хе) = Х<р (е), X 0. В этом случае ср* (s) имеет вид
Г 0,
’’•'Н <9=2. (,Л5)
Из соотношений (1.14) и (1.15) следует, что для жестко-
пластической среды в область значений А<Р (е) входят
только s из S и, следовательно, (1.14) имеет вид
ср (е) = sup s0-e{;-. (1.16)
Заметим, что если s —произвольный девиатор из S, то
ф (е) > (1.17)
Из соотношения (1.16) вытекает, что s удовлетворяет
условию текучести, а из (1.17) следует, что при этом s ско-
рость диссипации энергии достигает своего максимума.
Это п есть принцип Мизеса максимума скорости дисси-
пации энергии, эквивалентный ассоциированному зако-
ну [41]:
df 1 „ дГ
Верно и обратное утверждение. Из ассоциированного
закона вытекает принцип максимума скорости диссипа-
ции энергии. По заданной выпуклой поверхности текучес-
ти строится ф* (s) (1.15), по которой вычисляется функ-
ция ф (е), а из принципа максимальности скорости дис-
сипации энергии вытекают соотношения (1.16) и (1.17).
§ 1]
ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ
21
Эти соотношения показывают, что действительное поле
напряжений, соответствующее девиатору е, определяется
формулой (1.12).
Таким образом, установлена полная эквивалентность
приведенной выше формулировки определяющих соотно-
шений теории пластичности, использующей преобразова-
ние Юнга диссипативного потенциала и традиционного
изложения, основанного на ассоциированном законе те-
чения и условии текучести.
Отметим, что принцип максимума скорости диссипа-
ции энергии для жесткопластических сред эквивалентен
постулату Друкера (1.6). Действительно, пусть е1, е2 —
девиаторы тензора скоростей деформаций и s1, з2 — неко-
торые соответствующие им девиаторы тензора напряже-
ний. Из принципа максимума скорости диссипации энер-
гии следует, что
(з1 — №)-ег 0, (з2 — аД-е2 0.
Эти соотношения справедливы и в случае, когда е1 или
е2 равны нулю. Складывая их, получаем постулат Друке-
ра (6.1). Обратное утверждение очевидно.
Сделаем еще следующее замечание. Для жесткопласти-
ческой среды зависимость девиатора тензора напряжений
от тензора скоростей деформаций определяется соотноше-
нием (1.14), откуда следует, что при | е | = 0 девиатор s,
соответствующий с, произволен в пределах множества
Ф* (з) = 0. Если же 1 е ( )> 0, то соответствующее ему
з находится, как было показано выше, на границе мно-
жества ср* (з) — 0. В тех случаях, когда граница множе-
ства <р* (s) — 0 строго выпуклая, т. е. не содержит прямо-
линейных отрезков, девиатор s определяется однозначно.
Алгебраический факт однозначного определения де-
виатора напряжений по девиатору тензора скоростей де-
формаций в поле течения при условии строгой выпуклости
поверхности текучести является основным 'содержанием
теорем единственности для жесткопластического тела.
Этого вопроса мы еще коснемся в § 2.
Наиболее часто используются условия текучести Ми-
зеса и Треска [41]. Условие текучести Мизеса имеет вид
susu = 2к2,
где к — предел текучести.
22
ОБЩИЕ 7 ПОНЯТИЯ И СООТНОШЕНИЯ
ti Ji.
ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ 23
Вычислим для условия текучести Мизеса диссипатив-11
ный потенциал. Введем функцию ф* (з) в соответствии
с (1.15)
f 0, Siisij 2А:2,
^)=L //.>27?
Тогда в силу инволютивности преобразования Юнга •]
ср (е) = sup [s^ey — ср* («)] == к 1
S . 1
г? J
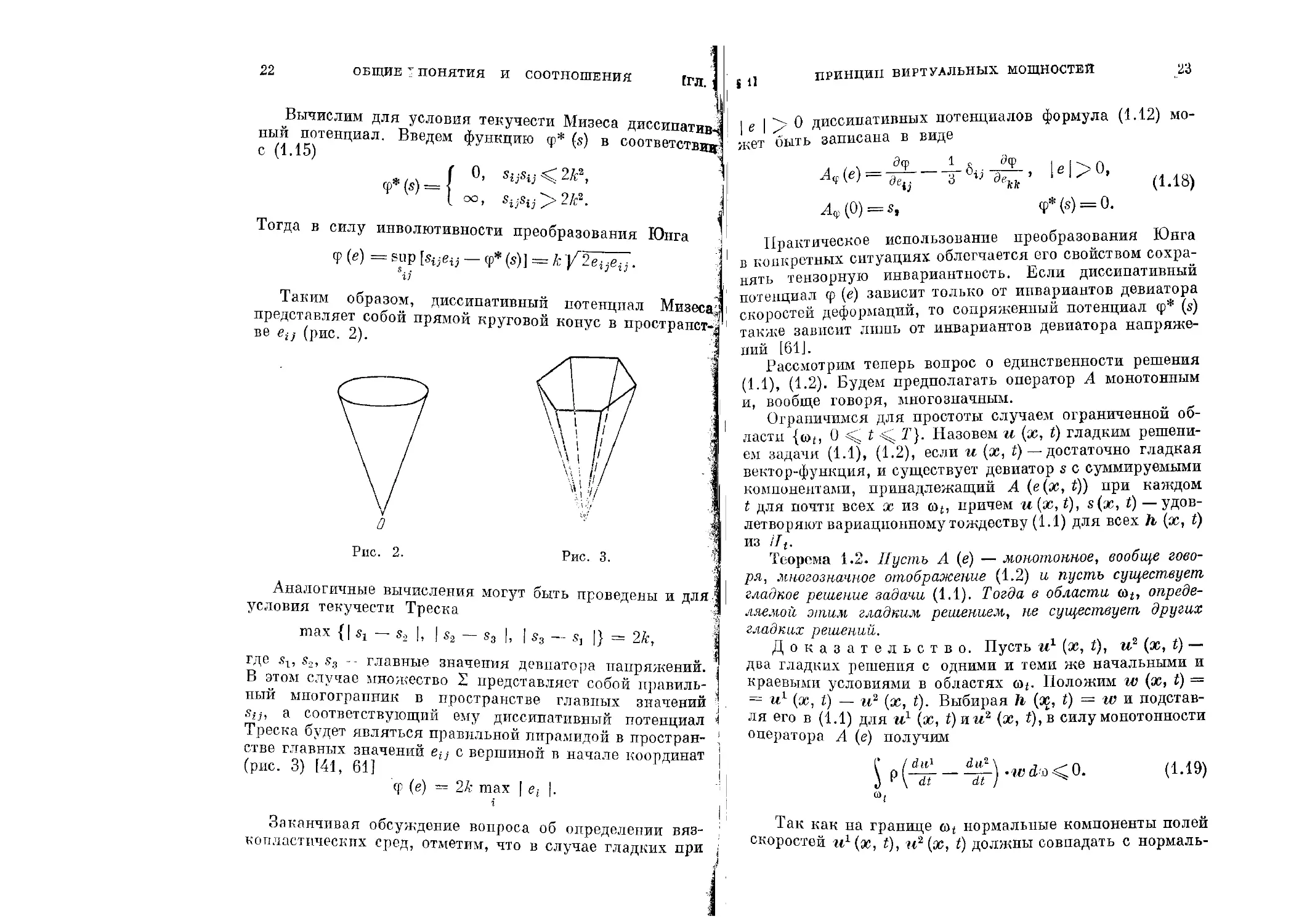
Таким образом, диссипативный потенциал МизесаЗ
представляет собой прямой круговой конус в пространст-Т
ве ei} (рис. 2).
i
I
Рис. 2.
Рис. 3.
Аналогичные вычисления могут быть проведены и для| |
условия текучести Треска 1
max {| Si — s2 I s2 — s3 I, | s3 — s, |} = 2k, 1
где st, s2, s3 -- главные значения девиатора напряжений. 1
В этом случае множество 2 представляет собой правиль- ]
ный многогранник в пространстве главных значений ’
stj, а соответствующий ему диссипативный потенциал 4
Треска будет являться правильной пирамидой в простран- !
стве главных значений ег-7- с вершиной в начале координат I
(рис. 3) [41, 61] ||
Ф (е) = 2к max | е, |.
' i'
Заканчивая обсуждение вопроса об определении вяз- ;
копластическпх сред, отметим, что в случае гладких при j
| е | > 0 диссипативных потенциалов формула (1.12) мо-
жет быть записана в виде
= 1«1>о, (ма)
А (0)—ф* (Д = о.
Практическое использование преобразования Юнга
в конкретных ситуациях облегчается его свойством сохра-
нять тензорную инвариантность. Если диссипативный
потенциал ср (с) зависит только от инвариантов девиатора
скоростей деформаций, то сопряженный потенциал ф* (з)
также зависит лишь от инвариантов девиатора напряже-
ний [61].
Рассмотрим теперь вопрос о единственности решения
(1.1), (1.2). Будем предполагать оператор А монотонным
и, вообще говоря, многозначным.
Ограничимся для простоты случаем ограниченной об-
ласти {о/, 0 > 7 > Т}. Назовем и (эс, t) гладким решени-
ем задачи (1.1), (1.2), если и (х, 7) — достаточно гладкая
вектор-функция, и существует девиатор з с суммируемыми
компонентами, принадлежащий А (е(зс, 7)) при каждом
7 для почти всех х из att, причем и (х, t), s(x, 7) —удов-
летворяют вариационному тождеству (1.1) для всех h (х, 7)
из ift.
Теорема 1.2. Пусть А (е) — монотонное, вообще гово-
ря, многозначное отображение (1.2) и пусть существует
гладкое решение задачи (1.1). Тогда в области (nt, опреде-
ляемой этим гладким решением, не существует других
гладких решений.
Доказательство. Пусть и1 (х, 7), и2 (х, 7) —
два гладких решения с одними и теми же начальными и
краевыми условиями в областях сц. Положим w (х, 7) =
= и1 (х, 7) — гс2 (х, 7). Выбирая h (х, 7) = w и подстав-
ля его в (1.1) дЛя ц} (х, фгг? (х, 7), в силу монотонности
оператора А (е) получим
( / d d \ 7 г\ /ла (\\
) (1Л9)
Так как на границе вц нормальные компоненты полей
скоростей itL(x, 7), и2 (х, f) должны совпадать с нормаль-
24
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[гл.
ной скоростью движения границы, из (1.19) следует, что
т т
С d (' I w I- , „ , (* (’ 1 , i , л , ,
\ \ Р ~2 с'"( + j j ~ Pwtwi ; e'w dt "C 0,
0 0
откуда вытекает неравенство
t
J (i) — j \w (x, t) |2 dco «С c § J | w (x, tr) |2 d'j)dt',
(Oj 0
или
t
о < J (t) < c JJ (t'} dt', J (0) = 0,
0
откуда следует, что J (Z) = 0.
Приведенная схема доказательства теоремы единствен-
ности при более слабых предположениях относительно ре-
шений в случае вязкой жидкости содержится, например,
в работах [62, 63].
Доказанная выше теорема единственности опиралась
на определение класса кинематически допустимых полей
скоростей, естественного для системы, состоящей из од-
них и тех же частиц среды. В практике иногда возникает
потребность рассматривать части полной замкнутой си-
стемы. В этом случае объем в разные моменты времени
будет состоять из различных частиц рассматриваемой пол-
ной системы. Можно показать, буквально повторяя рас-
суждения теоремы 1.2, что теорема единственности также
имеет место, если на участках границы через которые
происходит обмен частицами между оц и внешними час-
тями полной системы, задано после скоростей.
Конкретным примером могут служить течения в тру-
бе конечной длины.
Несколько более сильную теорему единственности
можно доказать для вязкопластических моделей, когда
одно из решений является нулевым. Эта теорема представ-
ляет интерес в связи с понятием предельной нагрузки
для вязкопластической среды (см. § 4).
В доказательстве теоремы 1.2 используется сущест-
венное предположение о том, что в каждый момент време-
ни положения частиц, определяемые полями скоростей
ПРИНЦИП ВИРТУАЛЬНЫХ МОЩНОСТЕЙ 25
§ *1
и1 (х, t) и и2 (яс, 0, образуют одну и ту же область ®г.
Возникает естественный вопрос — почему траектории дви-
жения частиц не могут разветвиться, так что в некоторый
момент времени t их положения будут образовывать две
различные области, оф и и?. Для случая вязкопластической
среды в § 4 будет показано, что при достаточно малых
внешних нагрузках ветвление области невозможно.
Вопрос о возможности конфигурационного ветвления
динамического процесса в общем случае является трудной
и нерешенной задачей и имеет тесную связь с проблемой
динамической устойчивости в механике сплошной среды.
В заключение вернемся еще раз к обсуждению прин-
ципа Друкера. Теорема 1.2 для вязких сред основана на
требовании монотонности оператора А (е), что и совпада-
ет с постулатом Друкера.
Требование единственности решения динамической за-
дачи, возможно, является одним из фундаментальных
принципов механики сплошных сред наряду с требова-
нием непротиворечивости моделей сплошных сред зако-
нам термодинамики. Этот принцип, по-видимому, не свя-
зан с термодинамическими постулатами и должен незави-
симо проверяться при построении моделей сплошных сред
и постановке конкретных задач.
Суть возникающих при этом вопросов можно кратно
пояснить следующим примером. Принятая в теории плас-
тичности форма постулата Друкера является лишь дос-
таточным условием, обеспечивающим единственность ре-
шения динамической задачи. С математической точки зре-
ния это условие может быть ослаблено
(4; — Sy) (еу — ву) > — const | п1 — и212,
И при этом все еще будет иметь место единственность ре-
шения динамической задачи. Возможно, что это условие
является не очень естественным с физической точки зре-
ния. Но тогда возникает вопрос о других естественных ус-
ловиях, обеспечивающих единственность решения дина-
мической задачи. Может" быть, с позиций физической
естественности постулат Друкера является не только
достаточным, но и необходимым условием?
Возможность построения ограничений типа постула-
та Друкера можно проиллюстрировать на примере клас-
26 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [гл I
сической модели вязкоупругого тела 1
. ту I
В этом случае, для обеспечения единственности penied
ния динамической задачи достаточно, чтобы 1
CODPt
Конечно, поставленный вопрос о единственности ре-
шения динамической задачи как фундаментального прин-
ципа механики сплошных сред, является трудной физичек
ской и математической задачей, которая еще далека отч
полного решения. |
Например, одной из старых, до сих пор нерешеннйг
математических задач, является задача о единственност]
обобщенного решения задачи Коши для квазилинейное
гиперболического уравнения второго порядка в диве™
гентной форме. Под обобщенным решением понимаете!
непрерывная функция, удовлетворяющая соответствуй!
щему интегральному тождеству (производные этой фуищ
ции могут иметь разрывы). Тем самым в настоящее времЛ
является открытым вопрос о единственности решения ди»
намической задачи теории упругости даже в случае ма:
лых деформаций, если связь между напряжениями и дф
формациями нелинейна.
§ 2. Эквивалентность принципа виртуальных мо дностей
задаче о минимуме функционала
Принцип виртуальных мощностей для медленных движений. Геомет-
рическая интерпретация проблемы минимума функционала. Урае*
некие Эйлера для недифференцируемого функционала. Эквивалент-
ность принципа виртуальных мощностей задаче о минимум!
функционала. J
В этом и следующих параграфах будут рассматривать-)
ся медленные стационарные движения вязких сред. К об-!
суждению нестационарных движений мы вернемся в'
гл. IV. I
Принцип виртуальных мощностей (1.1) при условии
пренебрежимой малости ускорений для вязких сред (1.2/,
ЭКВИВАЛЕНТНОСТЬ ПРИНЦИПА МОЩНОСТЕЙ 27
§ 21
будет иметь вид
i 3 3 i 4 G-i)
.9 £ A (e).
Обычный путь использования принципа виртуальных
мощностей (2.1) состоит в переходе к краевой задаче для
системы дифференциальных уравнений. Если этот пере-
ход достаточно очевиден для дифференцируемых А (е),
то в других случаях ситуация здесь существенно ослож-
няется. В частности, для вязкопластической среды ото-
бражение Л (е) (см. (1.12)) не только недифференцируемо,
но и вообще многозначно. Пусть даже, как в случае дис-
сипативного потенциала Мизеса, ср (е) — гладкая при
| е | 0 н вся область ее недифференцируемости сводит-
ся к точке е = 0. Однако в области а, занятой средой,
точке е б может соответствовать множество сложной
структуры. Если предположить, что это множество явля-
ется областью с гладкой границей, то принцип виртуаль-
ных мощностей приводит к краевой задаче для системы
дифференциальных уравнений в области с неизвестной
границей. Именно, в областях, где | е | 0, должна ре-
шаться одна краевая задача, а в областях, где е — 0,—
другая, причем само е заранее неизвестно и должно опре-
деляться из исходной постановки задачи.
Указанная особенность задач для вязко- и жесткоплас-
тических сред хороню известна. В такой локальной по-
становке имеется лишь небольшой набор точных решений
(см., например, [64—68]), однако отсутствуют сколько-
нибудь общие математические методы исследования этих
задач.
С другой стороны, в ряде случаев вариационное тож-
дество (2.1) оказывается эквивалентным условию экстре-
мальности некоторого функционала. Для вязких сред,
У которых связь между девиаторами напряжений и ско-
ростей деформаций дается формулой (1.12), как будет
показано ниже, этот функционал им^ст вид
J (и) = tp (е) d.o — j F -и dp — j -Р • иdS = Ф (и) —L (w).
ш о йо
(2.2)
28
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ. I
Функционал (2.2) является выпуклым, т. е.
J + %2W2) XiJ (ад1) + Х2/ (м2),
+ х2 = 1, > О, Х2 > 0 (2.3)
и, вообще говоря, недифференцируемым, в связи с не-
гладкостью ср (е). Тем не менее, вопрос об экстремуме (ми-
нимуме) выпуклого функционала может быть исследован
методами функционального анализа без предположения
о его гладкости и для нахождения минимизирующего (2.2)
поля скоростей, в частности, может быть использован ме-
тод Ритца.
Эквивалентность вариационного принципа и принци-
па виртуальных мощностей для медленных движений вяз-
кой жидкости была установлена еще в XIX веке Гельм-
гольцем (1882) и Кортевегом (1883).
Формальное получение в случае медленных движений
вязкой среды функционала (2.2) из уравнений представля-
ет собой известную процедуру вариационного исчисле-
ния. В указанной форме для жесткопластических тел
функционал (2.2) был построен в работах [69, 70], а для
вязкопластических сред введен в работах [8, 36, 37]. Од-
нако в них не была установлена эквивалентность прин-
ципа виртуальных мощностей и вариационного принци-
па. Возникающая здесь трудность связана с важной осо-
бенностью функционалов для вязкопластических сред —
их недифференцируемостью. Впервые это обстоятельство
было отмечено в работе [35]. Полное обоснование эквива-
лентности вариационного принципа и принципа вирту-
альных мощностей для вязкопластических сред дано в ра-
боте [38].
Вариационная постановка задачи о медленных дви-
жениях позволяет дать весьма наглядную геометрическую
интерпретацию ряда свойств решений нелинейных задач
в теории пластичности. Линейная часть функционала
(2.2), определяемая внешними нагрузками, может быть
интерпретирована, как гиперплоскость в функциональ-
ном пространстве. Внешние силы задают нормаль к этой
гиперплоскости. Задача о минимуме функционала (2.2)
эквивалентна нахождению такой точки в функциональ-
ном пространстве, в которой эта гиперплоскость является
опорной к выпуклой поверхности, определяемой нели-
нейной частью функционала (2.2).
21
ЭКВИВАЛЕНТНОСТЬ ПРИНЦИПА МОЩНОСТЕЙ
29
Действительно, если м.0 — поле скоростей, минимизи-
рующее функционал (2.2), то
( <р (е) da ф (е0) da F • (и — и°) da -J-
СО СО
-г J P-[u—u^dS,
да)
а это и означает, что гиперплоскость, определяемая внеш-
ними силами, является опорной (см. (1.7)). Интуитивно
эти выпуклые поверхности и гиперплоскости можно пред
ставлять себе расположенными в конечномерном прост-
ранстве.
Опишем различные возможности соприкосновения вы-
пуклой поверхности и гиперплоскости.
Если поверхность является строго выпуклой, т. е.
в (2.3) имеет место строгое неравенство при %£- Д 0, то
точка соприкосновения может быть только одна. В этом
и состоит теорема единственности решения задачи о мед-
ленных движениях вязкопластической среды под дейст-
вием заданных внешних сил (рис. 4). Например, в случае
потенциала Мизеса
ф (^) === ~2~ Т & (^"4)
нелинейная часть функционала (2.2) является строго вы-
пуклой и поэтому задача о медленных движениях такой
среды всегда имеет единственное решение.
30 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
1
Если же выпуклый функционал J(и) не является стрш
го выпуклым, то может существовать несколько трэда
в функциональном пространстве и1, . . .,uN, в котором
опорная гиперплоскость одна и та же. Это означает,
задача о медленных движениях будет иметь неокольца]
решений. В силу выпуклости J (и), наряду с решениям!
и1, . . ., uN, решением будут также все выпуклые комби
нации этих полей (рис. 5): “Я
n N g
i I i =1 J
> 0 (г = 1,2, . . ., N). J
Так наглядно объясняется причина того, что суперпозм
ция решений в нелинейных задачах снова является решй
нием. Объяснение этого факта на языке дифференциале]
ных уравнений не столь наглядно. Такая ситуация харай
терна для жесткопластического материала. Например
в случае условия текучести Мизеса диссипативный потея
циал имеет вид
<р(е)=Л (2.Я
j
В этом случае поверхность Ф (и) является конусом
следовательно, любая опорная гиперплоскость соприкй
сается с этим конусом, по меньшей мере, по образующей
Это обстоятельство иллюстрирует хорошо известное в тер
рии движения жесткопластических сред свойство действ
вительных полей скоростей допускать умножение на npoi
извольное неотрицательное число. :
Более того, в случае жесткопластического тела опор
пая гиперплоскость может иметь несколько линейно нН
зависимых точек контакта с конусом Ф (и) и в общей?
случае теорема единственности для действительного полй|
скоростей не имеет места. |
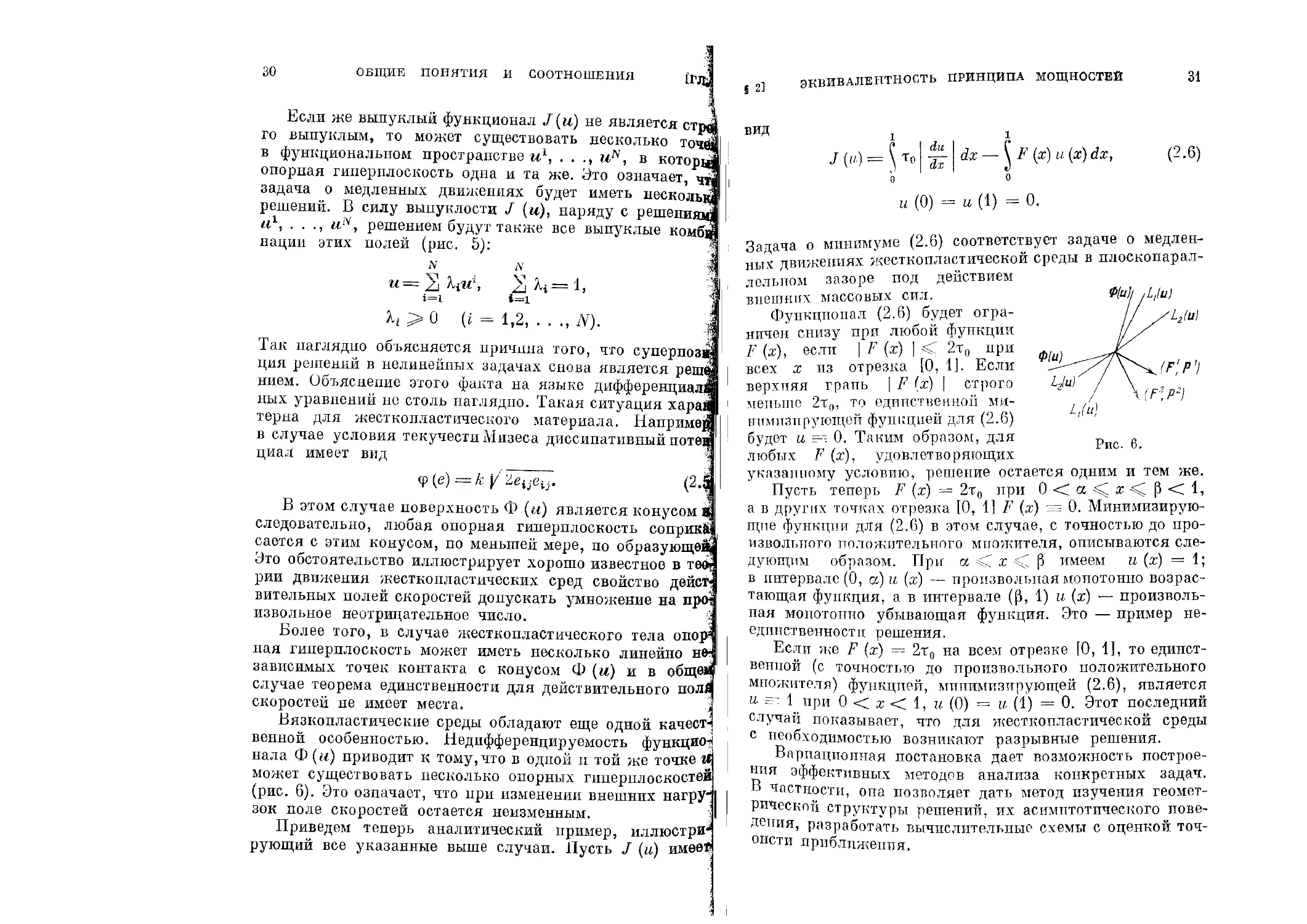
Вязкопластические среды обладают еще одной качеств
венной особенностью. Недифференцируемость функций^
нала Ф (и) приводит к тому,что в одной и той же точке й
может существовать несколько опорных гиперплоскостей
(рис. 6). Это означает, что при изменении внешних пагрУ'
зок поле скоростей остается неизменным.
Приведем теперь аналитический пример, иллюстрй^
рующий все указанные выше случаи. Пусть J (и) имев®
5 2]
ЭКВИВАЛЕНТНОСТЬ ПРИНЦИПА МОЩНОСТЕЙ
31
ВИД ! 1
j ((/.) = т01 ~ | dx — jj F (х) и (х) dx, (2.6)
о О
и (0) = и (1) = 0.
Задача о минимуме (2.6) соответствует задаче о медлен-
ных движениях жесткопластической среды в плоскопарал-
лельном зазоре под действием
внешних массовых сил.
Функционал (2.6) будет огра-
ничен снизу при любой функции
F (ж), если \F (z) | С 2т0 при
всех х из отрезка [0, 1]. Если
верхняя грань | F (х) [ строго
меньше 2т0, то единственной ми-
нимизирующей функцией для (2.6)
будет и = 0. Таким образом, для
любых F (х), удовлетворяющих
Рис. 6.
указанному условию, решение остается одним и тем же.
Пусть теперь F (z) = 2т0 при 0<a^z<^p<l,
а в других точках отрезка [0, 1] F (х) 0. Минимизирую-
щие функции для (2.6) в этом случае, с точностью до про-
извольного положительного множителя, описываются сле-
дующим образом. При а .г Р имеем и (z) = 1;
в интервале (0, а) и (ж) — произвольная монотонно возрас-
тающая функция, а в интервале (|3, 1) и (z) — произволь-
ная монотонно убывающая функция. Это — пример не-
единственности решения.
Если же F (z) = 2т0 на всем отрезке [0, 1], то единст-
венной (с точностью до произвольного положительного
множителя) функцией, минимизирующей (2.6), является
и 1 при 0 < х < 1, и (0) = и (1) = 0. Этот последний
случай показывает, что для жесткопластической среды
с необходимостью возникают разрывные решения.
Вариационная постановка дает возможность построе-
ния эффективных методов анализа конкретных задач,
о частности, опа позволяет дать метод изучения геомет-
рической структуры решений, их асимптотического пове-
дения, разработать вычислительные схемы с оценкой точ-
онсти приближения.
32
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [ГЛ. I
j 2] ЭКВИВАЛЕНТНОСТЬ ПРИНЦИПА МОЩНОСТЕЙ
33
Наметим основные моменты доказательства эквива-
лентности вариационного принципа и принципа виртуаль-
ных мощностей, следуя работе [38].
Остановимся сначала на некоторых важных понятиях
выпуклого анализа. Пусть В — банахово пространство
и В* — его сопряженное, т. е. пространство линейных
непрерывных функционалов на В. Обозначим е) зна-!
чение функционала L из В* на элементе е из В.
Пусть J (е) — выпуклый непрерывный функционал на
банаховом пространстве В и Е — замкнутое линейное
многообразие в В, т. е. Е = е0 -ф Н, где е0 — какой-ни-
будь элемент из Е, а Н — замкнутое подпространство в В.
Линейный, непрерывный функционал L (е) из В* назы-
вается опорным к J (е) на Е в элементе е, если
J (е + h) > J (е) + <L (е), hy (2.7)
для любого h из П.
Известно [71], что выпуклый непрерывный функцио-
нал J (е) имеет опорный функционал на В в любом эле-
менте е. Нетрудно видеть, что понятие опорного функцио-
нала аналогично понятию опорной гиперплоскости в конеч-
номерном пространстве (см. (1.7)).
Совокупность всех опорных функционалов к J (е) на
Е в элементе е называется субдифференциалом и обозна-
чается дЕ J (е) [72].
Таким образом, на Е определен'многозначный оператор
А (е):
А (е): е е Е С В dEJ (е) С В*.
По аналогии с конечномерным случаем, вводится понятие’
монотонного многозначного оператора.
"Оператор А, действующий из В в В*, называется мо-
нотонным, если
<Л, —L2, ег — е2> > 0 (2.8)!
для любых е2 из В. В (2.8) L1T L2 — произвольные ли-
нейные функционалы из множеств A (еД, А (е2) соответ-*
ственно.
Понятие монотонного оператора в абстрактной’форме
(2.8), по-видимому, впервые было введено в [73] и затем
широко использовалось в связи с теорией нелинейных
эллиптических и параболических уравнений [74—76].
Теорема 2.1. Оператор А (е) = dEJ (е), где J (е) —
выпуклый непрерывный функционал на В, является моно-
тонным.
Доказательство теоремы 2.1 аналогично доказательст-
ву теоремы 1.1.
Отметим еще одно свойство субдифференциала (тео-
рема Моро — Рокафеллара [72]).
Пусть J (е) = J\ (е) + /2 (е), где (с), Л (е) — вы-
пуклые, непрерывные в В функционалы. Тогда
dEJ (е) = dEJr (с) + дЕJ2 (е)-
В частности, если J (е) = Ф (е) — <7/, е'}, то
dEJ (₽) = 5еФ (е) — L. (2.9)
Рассмотрим задачу о нахождении е0 из Е такого, что
нулевой функционал входит в dEJ (е), т. е. ищется е0,
для которого существует функционал s (е0) из dEJ (е),
причем
<s (с0), Е> = 0 (2.10)
для любого h из Н. Подчеркнем, что s (е0) на всем прост-
ранстве В, вообще говоря, не является нулевым функцио-
налом.
Задача об отыскании такого е0 эквивалентна задаче о
минимуме функционала J (е) на Е (см. [72]). Доказатель-
ство этого факта элементарно. Действительно, если нуле-
вой функционал входит в dEJ (с), то в силу (2.7) для всех
h аз И имеем
J(e0+ ^) ^/(с0), (2.11)
т. е. J (е) достигает минимума на Е в элементе е0. Наобо-
рот, если J (е) достигает своего минимума на элементе
Со, то выполняется (2.11), а это и означает, что нулевой
функционал входит в dEJ (е0).
Уравнение (2.10) является уравнением Эйлера в аб-
страктной форме для функционала J (е). Иначе говоря,
Уравнение (2.10) имеет вид
0 е dEJ (е). (2.12)
Обычно в случае дифференцируемых функционалов
Уравнения Эйлера (2.10) или (2.12) записывают в виде
6.7 - 0.
2 Н П. Мосолов, В. П. Мясников
34
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [ГЛ,
ЭКВИВАЛЕНТНОСТЬ ПРИНЦИПА МОЩНОСТЕЙ 35
Рассмотрим теперь функционалы J (е) интегрально!
типа. Пусть ср (е) — диссипативный потенциал (см. § 1
удовлетворяющий условию ср (е) с | е |р при | е | J
1, 1 р < оо, с Д 0.
Пусть Dp (<в) — банахово пространство девиаторо
е (ас), х со с нормой
1И| = {У|е(Ж)|рсЦ1/Р. (2.13
(1)
Тогда на пространстве Dp определен функционал
Ф (е (sc)) = У ср (е (ас)) dco. (2.14
Из теоремы об общем виде линейного непрерывной
функционала в Lp (со) [77] следует, что линейный непре-
рывный функционал L на Dp (со) задается формулой
<L, е} = § Sijdjda, ;|
(I)
где $ — девиатор из Dq (со) и (1/р) + (1/#) = 1.
Девиатор s (ас) по функционалу L определяется в а
почти всюду однозначно.
Таким образом, условие (2.7) применительно к функ-|
ционалу (2.14) можно записать в виде 1
У [ф (е (х) + h (ас)) — ср (е (ас)) — sb- (ас) (ас)] dto > 0 (2.151
для любых h (ас) из Dp (со). J
Следующая лемма позволяет эффективно описать суб]
дифференциалы к функционалу (2.14) с помощью опорные
гиперплоскостей к функции конечного числа переменных]
Таким образом, происходит алгебраизация соотношения
(2-15). ]
Идея алгебраизации интегральных соотношений ис
пользуется и при рассмотрении конкретных задач, позво
ляя находить их эффективное решение (см. § 9).
Лемма 2.1. Если s(ac) удовлетворяет (2.15), то для поЧ ।
ти всех ас из w и всех h с компонентами h^, не зависящим*
от х, выполнено' неравенство
ср (е (ас) + h) — ср (е (ас)) Д вц (х)Ьц. (2.16
Доказательство. Если утверждение леммы
неверно, то для некоторого h0 с постоянными компонен-
тами существует в со подмножество <в0 положительной ме-
ры на котором выполнено неравенство, противоположное
(2.16). Полагая h (ас) равным h0 на соо и равным нулю на
to \ w0, приходим к противоречию с (2.15).
Таким образом, для описания субдифференциала функ-
ционала (2.14) па пространстве Dp (ю) достаточно знать
выражения для опорных гиперплоскостей к графику
функции ср (е). Этот вопрос подробно рассмотрен в § 1.
Именно 8 (ас), удовлетворяющие (2.16), при каждом
фиксированном ас определяются как девиаторы, для кото-
рых имеет место равенство (см. (1.11), (1-14))
ср (<? (ас)) + ср* (s (ас)) = etJ (xjsu (ас). (2.17)
В частности, если ср (е) — дифференцируемая функция при
| е | Д 0, то
|eW|>o,
ср* (s (ас)) = О, | е (ас) | = 0. (2.18)
Пусть теперь L — линейный непрерывный функцио-
нал на Dp (ю) и пусть Ер — замкнутое линейное многооб-
разие в Dp (со). Рассмотрим на Ер функционал
J (е) = Ф (е) - <£, е>. (2.19)
Сформулируем основную теорему об уравнениях Эй-
лера для функционалов интегрального типа.
Теорема 2.2. Задача о минимуме функционала (2.19)
на Ер эквивалентна нахождению s (ас) из Dq (со) и е (ас) из
Ер таких, что
j Sij (х) (х) da> — {L, й> = 0
(О
(2.20)
для любого h из Нр (Ер — е (ас) + ЯД, причем s(ac) и
(ас) связаны соотношением (2.17) для почти всех х из w.
Доказательство. Пусть в (ас) минимизирует
Функционал (2.19) на Ер. Рассмотрим субдифференциал
dEpJ (е). По теореме Моро — Рокафеллара эта совокуп-
ность функционалов допускает представление (2.9). Каж-
дый из функционалов множества dEpJ (?) допускает, в со-
2*
36 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ 1гл.
ответствии с теоремой Хана — Банаха [77], продолже)
ние до опорного функционала к Ф (е) на Dp (со) в элемец]
те е (х). Этот опорный функционал, как было показа™
в лемме 2.1, задается девиатором $ (ас) из Dq (со), удовлет]
воряющим почти всюду (2.17). Таким образом, используй
эквивалентность задачи о минимуме функционала J (е]
соотношениям(2.10) или (2.12), находим, что если е (х) да?
ет минимум функционалу (2.19) на Ер, то в множестве
dEpJ (е) существует нулевой на Нр функционал, т. е. вы4
полнены условия теоремы.
Наоборот, выполнение условий теоремы 2.2 означает)
что в dEpJ (в) содержится нулевой на Нр функционал и]
следовательно, е (х) минимизирует на Ер функционал
J (в). ’ ]
Уравнение (2.20) при условии выполнения почти веки
ду равенства (2.17) называется уравнением Эйлера для]
функционала (2.19). Очевидно, что в случае гладкой функ|
ции ср (е) соотношения (2.20) и (2.17) эквивалентны обыч4
ному уравнению Эйлера. Однако, соотношения (2.20) и
(2.17) имеют смысл также для негладких ф (е) и, таким
образом, мы получаем аналог уравнения Эйлера в случав]
недифференцируемых функционалов.
Применим теперь теорему 2.2 к рассмотрению медлен^!
ных движений вязкопластических сред. В этом случае^
ищется поле скоростей и (х) и девиатор тензора напряже-1
ний s (ас) такие, что выполняется принцип виртуальны^
мощностей (2.1), причем е(х) и s(x) связаны соотношением
(2.17).
Пусть диссипативный потенциал ф (е) удовлетворяет
условию Су I е \р < ф (е) < с2 | е |р при | е | > 1, сг
0, с2 )> 0, р 1. Пусть, кроме того, U — множеств^
кинематически допустимых полей скоростей, как и ра?
нее, является линейным многообразием. Предположим
далее, что выражение (2.13) при е (х), являющимся девиа-j
тором тензора скоростей деформаций, порождает нормЯ
на множестве и, т. е. из равенства || е || ~ 0 следует, чтЗ
и (х) почти всюду в © равно нулю. |
Обозначим через Up замыкание множества кинемати!
чески допустимых полей скоростей в норме (2.13). По век-f1
торным полям и (х) из U можно найти соответствующий
им девиаторы тензоров скоростей деформаций е(х). Замы-]
кание этого множества девиаторов тензоров скоростей]
§ 2] ЭКВИВАЛЕНТНОСТЬ ПРИНЦИПА МОЩНОСТЕЙ 37
деформаций обозначим через Ер. Множество Ер — замк-
нутое линейное многообразие в пространстве DP (со).
Пусть линейный функционал
(L, и) = jF-udin j PudS, (2.21)
co da
порождает непрерывный функционал на Ер, а следова-
тельно, по теореме Хана — Банаха и на Dp (со). Тогда из
теоремы 2.2 следует, что задача о медленных движениях
вязкопластической среды эквивалентна задаче о миниму-
ме функционала (2.2) на множестве LP.
Возвратимся теперь еще раз к вопросу о единственнос-
ти определения поля напряжений в жесткопластических
телах. Эта теорема единственности в руководствах по тео-
рии пластичности (см., например [41, 43, 78] и др.) дока-
зывается с использованием принципа виртуальных мощ-
ностей и определяющих соотношений для жесткопласти-
ческих сред. При строгой выпуклости условия текучести
диссипативный потенциал является гладкой функцией
всюду вне начала координат в пространстве девиаторов е.
Как было показано в теореме 2.2, принцип виртуаль-
ных мощностей эквивалентен вариационному принципу.
Если предположить, что действительное поле скоростей
имеет девиатор, всюду отличный от нуля, то этот функцио-
нал является дифференцируемым, т. е. из него могут быть
получены уравнения Эйлера, из которых и определяются
напряжения с точностью до шарового тензора.
Впервые на таком пути эта теорема единственности
была доказана в [69].
Одпако, как было показано в § 1, вопрос о единствен-
ности определения поля напряжений в области течения
для жесткопластических сред не связан с принципом вир-
туальных мощностей, а является следствием строгой вы-
пуклости поверхности текучести и локального принципа
максимума скорости дисссипации энергии.
В заключение параграфа остановимся кратко на вопро-
се об определении диссипативного потенциала ф (е) по
зависимости s = А (е), которая может быть, например,
известна из эксперимента. В этом случае вводится функ-
ция скорости диссипации энергии
D (е) = <Л (е), е>,
38
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ. I
§ 31
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
39
и в том случае, если из выражения
1
<р(е) = J <4(Хе),е>с& (2.22)3
о
следует, что
<5ф (е) = А (е),
то ф (е) и является искомым потенциалом. i i
Формула (2.22) для однозначных зависимостей А (е) I
приведена в [71], а для многозначных А (е) она полученаН
в [61]. Отметим, кстати, что формула (2.22) позволяет в кон--
кретных задачах решать вопрос о потенциальности опе-
ратора Л.
Для жесткопластических тел функция скорости дисси- j
пации энергии совпадает с диссипативным потенциалом |
D = ф. Свойства этой функции и ее связь с условием те- |
кучести и ассоциированным законом рассматривалась,!
; I
у
[§ 3. Теоремы существования
Интегральные представления для вектор-функций. Неравенство
Корна. Локальная структура пространств Dp (со). Теоремы о
существовании минимума функционала. '
В предыдущем параграфе было показано, что задача ,
описания медленных движений вязких сред сводится к за- <
даче отыскания минимума функционала 1
J(-и) = J ф(е)da> — § F•'ltd® — J JP-udS (3.1)j
со GJ do 1
на множестве UP, которое представляет собой замыкание j
множества кинематически допустимых полей скоростей i
в норме (2.13). '
В связи с этим возникают следующие вопросы. ]
1. Как описать структуру множеств Up и их связь !
с пространством Dp (со)? |
2. Когда линейная часть функционала (3.1) является
непрерывным функционалом на Ер? Иначе говоря, какие у
силовые поля приводят к движениям с конечной скоростью I
диссипации энергии? л
3. При каких условиях существует поле скоростей из
U минимизирующее (3.1) и когда это поле единственно?
1 Настоящий параграф и посвящен рассмотрению этих
вопросов.
Для ответа на поставленные вопросы полезно иметь
представление для полей скоростей через соответствующие
им тензоры скоростей деформаций. Эти представления
играют важную роль в связи с разрешимостью задачи о мед-
ленных движениях, при получении известного неравенства
Корна, при построении теории двойственности — анало-
гов принципа Кастельяно в теории упругости и в ряде дру-
гих вопросов. Такого типа интегральные представления
являются одним из существенных моментов при доказа-
тельстве теорем вложения [79].
Интегральным представлениям функций посвящена
обширная литература. Наиболее полно эта проблематика
освещена в [80]. Ниже будем следовать в изложении этих
вопросов работам [81, 82]. Интегральные представления,
аналогичные найденным в [81, 82]. ранее были получены
в [83].
Простейшим примером интегрального представления
функции через ее производную является формула Ньюто-
на — Лейбница для случая одного переменного:
1
и (х) = и (0) + \ R (х, 0 и' (0 dt,
о
где R (х, 0 = 1 при 0 t х-, R (х, t) ~ 0 при t х.
Интегральное представление Соболева для функций мно-
гих переменных, определенных в области и в Rn, п ~^> 1,
имеет вид
/ \ । С & ди (у) , ,о
" w = c + ) (3-)
<0
где Bt (х, у) — некоторые функции, с — постоянная, зави-
сящая от и(х). Видфункции5г (ас, у), характер зависимо-
сти с от и (ж) и условия на со, при которых имеет место (3.2),
будут получены ниже как частный случай из аналогичных
формул для векторных полей.
Перейдем теперь к выводу интегральных представле-
ний для полей скоростей и (ас) через их тензоры скоростей
Деформаций е (х). Как известно, в механике сплошной
40
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ.
среды векторное поле можно представить в виде
нейного интеграла по формулам Чезаро
Щ (#) = 11 г (хо) + <»ij (xj — —
°" д д
(3.
.к-
X
Здесь x = (zlt . . ., xn), x° = (zj, . . Zn) — прол
вольные точки из односвязной области со; интеграл в (3.:
является криволинейным интегралом по кривой в со, исх^
дящей из точки х и заканчивающейся в точке х°, и
ди- ди-
2соъ- = -^--^-.
дх- ох.
J 1
Пусть со является звездной областью по отношени
к некоторому шару со0, расположенному внутри со, т.
любую точку из со0 можно соединить отрезком, расшив
женным целиком внутри со, с произвольной точкой обл;
сти со. Будем считать, что ас0 находится в со0 и в качест]
кривой соединяющей хи х° возьмем прямолинейный отр
зок. Тогда (3.3) можно представить в виде
Щ (х) = Щ (х°) 4- (0{ j (х°) (Xj — х°) —
С I „ , , ( деы & +
0
\ дх.
деИз + 2а) )
(3.
где R = | х — эе° |, Ra = х° — х.
Рассмотрим бесконечно дифференцируемую в со
цию р (х) с носителем, сосредоточенным в со0, т. е. o6j
щуюся в нуль вне со0, причем такую, что
Р = j р (х) d® 0.
СО
Умножая (3.4) на p(je°) и интегрируя по со0, получим
венство
Pvi (ас) — (х, х°) Uj (х°) da — Ai
©•
(3.
§ 31
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
41
;> <• । / о?.. (а? 4- la)
р (х°) dco J ^Cjjc (х + Z«) — la} (--------------------------
Ы" о }
3eitj (ai + Zoe) M
~i J J
ccfe dl
p (ac°) Oj (x, a) do?.
функции Kij (x, x°) — бесконечно дифференцируемы по
переменному х° и линейны по х.
Пусть йх — конус, вершина которого находится в точ-
ке х, а лучи, его составляющие, проходят через точки
шара со0. В частности, этот конус может совпадать со всем
Rn, если х — внутренняя точка со0. Обозначим через Кх
пересечение и со. В силу финитности р(х), интегралы
Л; в (3.5) можно записать в виде
Ai— § р (х°) ai(x, a) dio.
кх
Введем в Кх сферические координаты с полюсом в точке
х, т. е. х° = х + На. Тогда имеем
Щас, а)
Ai (х) = § j р(х°) щ (х, a) Нп~х dR dS. (3.6)
Здесь D (х, а) — расстояние от точки х до границы обла-
сти со в направлении a, Sx — телесный угол, под которым
видна область со0 из точки х, т. е. часть поверхности еди-
ничной сферы, содержащейся в Q*, dS — элемент площади
поверхности единичной сферы.
Изменим в (3.6) порядок интегрирования по I и R.
В результате будем иметь
D(x, d° I I п
Ai (х) = dS J [ (х 4- Ra) — Raj ( —'* —-------
8х ° '
Я / I D X D<'X’ a)
----—kj p(x A-ta)tn~1dt. (3.7)
1 R
Обозначим через В (x, a, R) функцию
D(x, a) “
B(x,a,R)= § p(x ta)tn~1dt = ^ p(x ф ta)tn~1dt,
R R .
42
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ,
Последнее равенство показывает, что В (эс, a, R) не зави-
сит от D (ас, а) в силу финитности р (ас). Кроме того;
В (ас, а, В) — бесконечно дифференцируемая функцш
своих аргументов, определенная при каждом ас из со дл;
всех а и R, причем для у = х + а/?, лежащего вне Кх
она обращается в нуль. Следовательно, В (х, a, R) — (
для у, принадлежащих границе области со. Более того!
все ее производные также обращаются в нуль при у ия
да). Таким образом, (3.7) можно переписать в виде I
, . . С Г , . п /^(У)
Ai(x) = \[ei1t(y)-Ra^-W-------------х
со 3 ]
. . Л /О Ов
Xafc- (3.8|
В формуле (3.8) проинтегрируем по частям, перебрасывав
дифференцирование с ePq (у) на другие сомножители. Учи-,
тывая свойства функции В (ас, a, R), найдем -
, С Вь -1 (sc, а, 7?) ,
А («’) = — ) - дп-i-----(у) do,
СО
где В^н (х, а, R) — бесконечно дифференцируемые функ-
ции своих аргументов, обращающиеся в нуль при у, при-
надлежащих границе да) области со.
Итак, представление (3.5) можно записать в виде
1 Г (®, «, 7?)
Щ (х) = Т J ------------ekj (у) da) +
(О
1 с
+ 'р- Kij (х, у) щ (у) do). (3.9)
(00
Из вывода (3.9) ясно, что функции Вкр, Кц могут быть
эффективно найдены, хотя, конечно, далеко не однознач-
но.
Отметим важный частный случай формулы (3.9).
Пусть кинематические ограничения на поля скоростей
таковы, что и (х) обращается в нуль в со0. Тогда формула
(3.9) имеет вид
1 С" Въ .. (х, a, R)
“i ---— ------ekj (у) do. (3.10)
* d Л
* й)
§ 31
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
43
формула (3.10), например, справедлива, если и (х) обра-
щается в нуль всюду на дсо.
Представление вида (3.10) можно получать и при дру-
гих краевых условиях для незвездных областей, исполь-
зуя разбиение исходной области на звездные составляю-
щие.
Представление компонент векторного поля через более
общие системы дифференциальных операторов от них по-
лучены в [86].
Приступим теперь к исследованию локальной струк-
туры пространств Dp (со). Для этого рассмотрим неравенст-
во Корна [81—86].
Пусть Нр (со) — банахово пространство вектор-функ-
цпй с нормой
1) и \\нр(№) = ) и |Я/.(со) + ]] и
где
II и II Lp(ffl) = j
(О
| w|pd o|1 Р
I f С Г ^“i
|к|нр(И)=^
ГЛ
ди{ 1Р/2
дх-
11/Р
ЙСО [
Локальная структура пространств Нр (со) ясна. Имен-
но, это те и только те вектор-функции, компоненты кото-
рых принадлежат скалярным пространствам Соболева
И7,1, (со). Таким образом, используя теоремы вложения,
можно получать свойства следов вектор-функций из Нр (со)
на многообразиях меньших размерностей, доказывать
непрерывность различных линейных функционалов на
Нр (а>) и т. д.
В дальнейшем часто будет использоваться понятие
слабой сходимости последовательности элементов банахо-
ва пространства. Введем определение этого понятия.
Последовательность элементов еп банахова простран-
ства В слабо сходится к элементу е из В, если
<L, щ> <К, с>
Для любого L из В*.
44 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [ГЛ, ]
Пусть Ф (е) — функционал на В. Он называется слаб)
полунепрерывным снизу на В, если 11
(*п) > Ф (е) |
| j
для любой слабо сходящейся к е последовательности еп !
Отметим, что из теорем вложения следует слабая полу ,
непрерывность снизу функционалов вида
Ф (и) = | и | йп>, Ф (ад) = । и | dS, j
и' да>' \
в пространствах Нр ( о). Здесь « — ограниченная облает!
и со' — произвольная ее подобласть с достаточно регуляр-
ной границей да'. '
Пусть /х, . . fi; — функционалы на Нр (со) такие, что
| fi | — слабо полунепрерывные снизу функционалы па
Нр (со) первой степени положительной однородности. Че^
рез | и |р„(Ш) обозначим следующую преднорму: i
!м|лр<со) = К |еИ|рйсо|1Р= I
со I
Гр Г 1 /ди- du-\fdu; dll; \"]Р/2 1 lip f
= \ -гт^ + т1 Н^+й1 <Ы I
It) L 4 \дх- дх. /\дх- ' dx. /J •<
« 1 1 1 J I
Очевидно, что преднорма | и |ор(<о) определена на прост-!!
ранстве Нр (со). |
Относительно системы функционалов Д, . . ., Д пред-]
положим, что если для и из Нр (со) выполняются условия |
I и |пр(го) = О, /1(и) = ...=/^(и) = 0, |
ТО и = 0.
Теорема 3.1 (неравенство Корна [81, 82]). Если со —
ограничена и звездна относительно открытой подобласти1
соо и р 1, то j
I! U ||нр(Ю) < const [| ад |л (а) + J, I fi (ад) |] (3.11)/
г=1 «
Доказательство (3.11) основано на интегральном пред*
ставлении (3.9). <
Теорему 3.1 можно усилить, распространив ее на об-,-
ласти, представляющие собой объединение конечного илИЛ
$ 3] ТЕОРЕМЫ СУЩЕСТВОВАНИЯ 45
счетного числа областей, звездных относительно некото-
рых своих подобластей, если все эти подобласти содержат
шары фиксированного радиуса.
Из неравенства (3.11) следует, что если векторное поле
и, (х) в окрестности со' некоторой точки эс принадлежит
Ij (&') и для него конечна преднорма | и Ь ((В’), то
компоненты этого векторного поля имеют обобщенные
производные первого порядка, принадлежащие LP (со').
Условие [ и |ор(<в) = 0 для и (х) из Нр (со) означает,
что ад (ж) почти всюду совпадает с распределением скоро-
стей движения области со как твердого тела.
Пусть у — часть границы 5со. В качестве системы
функционалов Д, . . ., Д- можно, например, взять один
функционал вида
/ (и) = ^ | ад | dS.
т
Такой выбор системы функционалов (состоящей из одного
функционала) обеспечивает справедливость неравенства
Корна. В частности, если ад на у обращается в нуль, то
неравенство Корна принимает вид
I! ад (ас) ||нр(ш) < const | ад (ас) |Dp(w). (3.12)
Неравенство (3.12) показывает, что в этом случае преднор-
ма | ад |г> (о») является нормой. В результате, из рассмот-
рения исключаются движения <в как твердого тела.
При выполнении (3.12) легко ответить на вопрос о том,
когда линейный функционал (2.21), порождаемый внеш-
ними нагрузками (F, F), является непрерывным на Dp (<о).
Именно, в силу (3.12) этот вопрос решается на основании
скалярных теорем вложения. В частности, этот функцио-
нал всегда непрерывен при условии ограниченности функ-
ций F и Р.
Неравенство Корна имеет место лишь для р )> 1.
При р = 1, т. е. в случае, соответствующем жесткоплас-
тической среде, имеются примеры, показывающие, что не-
равенство Корна не выполняется. Тем не менее интеграль-
ные представления (3.9) и (3.10) позволяют изучить во-
прос о непрерывности функционала (2.21) в пространстве
(го). Ограничимся представлением (3.10), так как к нему
может быть сведено представление (3.9) для широкого
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
47
46
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ. § з]
класса постановок задач. Покажем сначала, что если имя
ет место представление (3.10), то
(3.13
Это неравенство означает, что вектор-функции и (ж), вха
дящие в иг, суммируемы в области со и линейный функ
ционал, связанный с объемными силами, непрерывен в npq
странстве D1 (со) при ограниченной F (ж). 1
Неравенство (3.13) вытекает из следующей оценки: |
J I « (ас) I dax < do->x | ^|2 е (у) | йсоу.
6) со со
Так как В (ас, у} ограничено, то
) | и (ас) | с/я < с е (у) | day [а.„у|2 < ci J) I е (v) I I
(О (О со со
что и совпадает с (3.13).
На самом деле имеет место неравенство, более сильное!
по сравнению с (3.13), |
|1МмШ) <сыА(ю),
Это неравенство вытекает из свойств интегрального one-j
ратора (3.10) с ядром типа потенциала [87]. 1
Вектор-функции и (ас), входящие в Ur, имеют сумми-л
руемые следы на гладких поверхностях, расположенных]
в со, т. е. имеет место неравенство
J|«(x)|c7S<c J|e(?/)|cfo. (3.!4)
S со 1
Для доказательства неравенства (3.14) рассмотрим J
в области со подобласть соо, относительно которой область]
со звездна и 5 не пересекает со0. Тогда I
J I w (ас) | dS < J | е (у) | dvy JJ dS.
S aS
Так как S не пересекает coo, а функция В (ж, у) равна |
нулю, если отрезок, соединяющий ж и у не лежит внутри j
Конуса т0
8 "
откуда и вытекает неравенство (3.14).
Неравенство (3.14) показывает, что линейный функцио-
нал, соответствующий поверхностной нагрузке, непреры-
вен в пространстве Z)T (со), если JP (ас) — ограниченная
функция.
Неравенство (3.14) является, по-видимому, точным,
т. е. оно не имеет места в пространствах Lv (S) при р ]> 1
[88].
Таким образом, поставленные в начале параграфа во-
просы 1 и 2 получают свое решение как при р )> 1 (вязко-
пластические среды), так и в случае р = 1 (жесткопласти-
ческие среды).
Перейдем теперь к обсуждению вопроса о существова-
нии поля скоростей, минимизирующего функционал (3.1).
Основная цель здесь — получение аналога известной тео-
ремы анализа о том, что всякая непрерывная функция,
определенная на ограниченном замкнутом множестве, до-
стигает на нем своей точной нижней грани.
Этой же теореме анализа можно придать следующую эк-
вивалентную формулировку.
Всякая непрерывная, возрастающая на бесконечности
функция, определенная на замкнутом множестве X в Rn,
достигает на X своей точной нижней грани.
Функция /, определенная на множестве X, А’с Дп,
называется возрастающей на бесконечности, если / (ж) ->
оо при I ас J ОО, X X.
К сожалению, обе эти теоремы, вообще говоря, не пе-
реносятся непосредственно на случай функций, определен-
ных на бесконечномерных пространствах. Дело в том, что
при доказательстве указанных теорем анализа существен-
ным моментом является компактность в Rn ограниченных
замкнутых множеств, что не имеет места в случае бесконеч-
номерных пространств. Конечно, теорема о достижении
нижней грани непрерывного функционала справедлива,
если его рассматривать на компакте в банаховом прост-
ранстве. Однако в такой формулировке теорема не при-
способлена н исследованию разрешимости задач механики
сплошных сРеД> так как множества Up кинематически до-
48
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ.
пустимых попей скоростей обычно представляют собой зам<
кнутые множества в бесконечномерных банаховых про-
странствах, причем эти множества не являются локальщ
компактными.
В связи с этим важное значение приобретают понятия
различных слабых компактностей (компактность в раз-
личных топологиях). |
Одно из таких понятий — слабая* секвенциальная
компактность — и будет сейчас рассмотрено. i
Пусть банахово пространство В является сопряженньп
к некоторому сепарабельному банахову пространств^
Вг (В = В*! разумеется, само В — не обязательно сепара-
бельное пространство). Будем говорить, что последова-
тельность элементов еп из В слабо* сходится к е из В:,
если i
lim <en, а> = а) ;
>
для любого а из Bt. Я
Рассмотрим некоторый элемент а из Вг и произвольной
действительное число са. Пара (а, са) определяет в Л
полупространство В (а, са): |
В (а, еа) = {е: <<?, а> > са}. ’
Пусть М — некоторое непустое множество, образовапное-
пересечением полупространств
М = Q В (а, са), аеГсВр (3.15);
Очевидно, М — замкнутое выпуклое множество в В. Это
множество является слабо* секвенциально замкнутым,
т. е. если последовательность еп из М слабо* сходится
к е, то са для любого а из Г, и, следовательно, е
входит в М.
Известно [77], что множество My-
М. = М П {е: || е || < к}
является слабо* секвенциально компактным, т. е. из любой
последовательности элементов из М. можно выделить
подпоследовательность, слабо* сходящуюся к некоторому
элементу из М..
Выше было введено понятие слабой сходимости после-
довательности элементов банахова пространства. Когда
s ••’I
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
же понятия слабой и слабой* сходимостей совпадают?
Это имеет место в случае рефлексивных банаховых про-
странств, которые определяются следующим образом.
Пусть В — банахово пространство и В*— его сопряжен-
ное. Каждый элемент из В определяет функционал на В*
по формуле
<?(£) = </,, с>, (3.16)
для любого L из В*. Если функционалы вида (3.16) исчер-
пывают все пространство В**, то пространство В назы-
вается рефлексивным. В случае рефлексивных пространств
В и В** можно отождествить, хотя в общем случае про-
странство В является частью пространства В**.
Заметим, что в случае рефлексивных пространств зам-
кнутое выпуклое множество представимо в виде (3.15),
т. е. как пересечение множества полупространств (теоре-
ма Мазура [89]). Одним из эффективных признаков опреде-
ления рефлексивности пространства является свойство
равномерной выпуклости нормы.
Норма в банаховом пространстве называется равномер-
но выпуклой, если для каждого 8 0 существует 6 (е) ^>
> 0 такое, что при || е1 || — |[ еа || = 1 и || ег — е2|| > е име-
ет место неравенство || + е21| «С 2 (1 - 6 (Е)).
Если норма банахова пространства равномерно выпук-
ла, то пространство рефлексивно.
Свойство равномерной выпуклости нормы в простран-
ствах Lp (со), Wp (со), Dp (со) при р > 1, как в случае
ограниченных, так и в случае неограниченных областей
со, является следствием неравенства Кларксона [61, 79].
Пусть теперь полуограниченный снизу функционал
J (е) задан на слабо* замкнутом множестве М пространст-
ва В = В* и является возрастающим на М, т. е. J(a)-> оо
при || е|| _> оо, е j)/. Предположим еще, что J (а) яв-
ляется слабо* полунепрерывным снизу на М, т. е. для
любой последовательности элементов еп из М, слабо*
сходящейся к е, выполняется соотношение
lim J (е„) > J (е).
Легко видеть, что в этом случае существует элемент е0
из М, на котором J (е) достигает своей точной нижней
грани на М.
50
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ. I
При указанных условиях проблема существования
минимума функционала имеет решение.
Примером слабо* полунепрерывного снизу функцио-
нала J (е) может служить J (е) = [| е ||. В случае, когда
В — рефлексивное банахово пространство, слабо* полу-
непрерывным снизу функционалом будет любой непре-
рывный выпуклый функционал.
Таким образом, для основного функционала (3.1) при
р )> 1, т. е. для вязкопластических сред, полностью ре-
шается задача о существовании минимизирующего поля
скоростей. Как отмечалось выше, в случае строгой вы-
пуклости функционала (3.1) это поле скоростей единст-
венно. Тем самым при р)> 1 дан ответ на вопрос 3, постав-
ленный в начале параграфа.
Вернемся теперь к рассмотрению задачи для жестко-
пластических сред (р = 1). В этом случае минимизирую-
щие последовательности полей скоростей для физически
естественных постановок задач, вообще говоря, приводят
к предельным полям скоростей, не входящим в множество
Ъ\. В связи с этим возникает проблема расширения исход-
ного пространства так, чтобы в этом расширенном
пространстве уже имела бы место теорема о существова-
нии минимума. При этом, естественно, что исходные мини-
мизирующие последовательности должны оставаться мини-
мизирующими и в расширенном пространстве, а исходный
функционал должен допускать естественное продол-
жение на элементы, добавляемые при расширении. В ра-
боте [90] дана абстрактная схема построения таких рас-
ширений, допускающая применение и при исследовании
задач о движении жесткопластической среды. Сущность
этой схемы такова. Пусть В — банахово пространство и
пусть В° — сепарабельное, тотальное множество в В*.
Свойство тотальности означает, что если <£, = 0 для
всех L из 2?°, то е = 0. Далее рассматривается пространст-
во (2?°)*. Этой есть искомое расширение, так как Вс(В0)*
и в пространстве (I?0)* имеет место слабая* компактность.
Ясно, что множество 5° в 5* выбирается неоднозначно.
Поэтому существует много различных расширений исход-
ного пространства. Исследованию этих расширений, в част-
ности, вопросам отделимости в них и вопросам продолжи-
мости функционалов, первоначально заданных на В,
и посвящена работа [90].
ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
51
§ 3]
Поскольку в задачах, связанных с движением жестко-
пластической среды, возникает пространство типа
то в качестве тотального множества В0 в В* может быть
взято пространство типа С (пространство непрерывных
вектор-функций). Следовательно, искомое расширение
представляет собой пространство вида С*, т. е. простран-
ство мер в со. Именно в этом классе получена теорема о су-
ществовании минимума функционала для жесткопласти-
ческой среды в работе [91]. Однако такое расширение
нельзя считать эффективным и окончательным, поскольку
расширение исходного пространства нужно найти в тер-
минах вектор-функций, а не мер.
В случае одного переменного известно [77], что меры
могут быть отождествлены с функциями ограниченной
вариации. Поэтому в случае одного переменного простран-
ство функций ограниченной вариации и является иско-
мым расширением пространства ТУ1, в котором существует
минимум функционала, описывающего движение жестко-
пластической среды.
По существу, с разрывными функциями ограниченной
вариации мы уже фактически столкнулись в примере
(2.6), когда показали, что единственная ненулевая мини-
мизирующая функция разрывна. Расширением функцио-
нала (2.6) служит функционал
1
J (?/.) = Tovar и (х) — \ F (ж) и (х) dx.
По-видимому, функции ограниченной вариации и бу-
дут представлять собой искомое расширение для общей по-
становки задач в случае жесткопластической среды. Тео-
рия скалярных функций ограниченной вариации для мно-
гих переменных изложена в работах [92, 93]. Для полного
решения задачи о движении жесткопластической среды
нужна теория вектор-функций ограниченной вариации.
Топким вопросом здесь является построение такого опре-
деления вариации вектор-функции, которое в случае ее
гладкости совпадало бы с | и |п,(т)- Эта задача в настоя-
щее время еще не решена.
52
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
[ГЛ,
§ 4. Предельная нагрузка
Статический коэффициент. Предельная нагрузка. Теорема об един-
ственности предельной нагрузки. Кинематический коэффициент,
Основная теорема о предельной нагрузке. Теорема о существование
девиатора напряжений для предельной нагрузки.
Модели вязкопластических сред обладают рядом ха-
рактерных свойств, отличающих их от моделей вязкиз
жидкостей. Одним из таких свойств является необходи-
мость приложения конечных нагрузок для возникновения
течения среды. К более детальному рассмотрению этогс
свойства мы сейчас и перейдем.
Предположим, что нулевое поле скоростей входт
в класс кинематически возможных. Пусть
действуют внешние нагрузки (F (х, t), Р (х, £))
вует девиатор s (х, t) из (0) такой, что
на сред}
и сущест-
dtp — F-hdio-r § P-hdS, (4.
со. Wo 3wo
для любого h из Uo. Здесь Uo — класс кинематически до-
пустимых полей скоростей в начальный момент времени.
Из (4.1) следует, что и (х, t) = о является решениеь
задачи о движении вязкопластической среды, еслт
и (х, 0) = о.
Пусть теперь (F, Р) — произвольные внешние нагруз-
ки. Рассмотрим числа ms 0, такие, что каждому ms соот-
ветствует девиатор sm, зависящий, Конечно, от ms. для ко-
торого выполняется соотношение
s™hijd<o = ms F-hdti) P-TidSj ? (4.2;
СОо СОо 5 СОо
ДЛЯ любого h из ио и при ЭТОМ Sm ВХОДИТ В Лф(0) для ПОЧТЕ
всех х из <в0, т. е. девиатор sm находится внутри поверхно-
сти текучести.
Таким образом, для нагрузки вида (msF, msP) нулевое
поле скоростей является решением полной динамической
задачи (1.1), (1.12).
Числа т., называются статическими коэффициентами.
Обозначим через т* верхнюю грань всех чисел ms
т* — зпр тз-
ПРЕДЕЛЬНАЯ НАГРУЗКА
53
Внешняя нагрузка (m*F, т*Р) называется предельной
нагрузкой, а число т* называется коэффициентом пре-
дельной нагрузки.
Как было только что показано, нагрузка (msF, msP)
допускает нулевое поле скоростей в качестве решения ди-
намической задачи. Возникает естественный вопрос —
не может ли под действием тех же сил существовать еще и
ненулевое решение динамической задачи?
Из теоремы 1.2 следует, что другого гладкого решения
задачи, при котором сохраняется область <в0, существо-
вать не может. Но. может быть, существует другое реше-
ние задачи и* (x,t), меняющее форму области, занимаемой
средой в начальный момент? В этом случае не очень ясно,
что значит, что решение и*(х, t) возникает под действием
«тех же самых сил», так как область меняет свою конфигу-
рацию. Таким образом, необходимо более точно поста-
вить задачу.
Пусть для внешних нагрузок (F (ас), Р (х)) существует
5 (х) такой, что выполнено (4.1), причем Xs (х) принадле-
жит (0) при 0 О X 1 +6. Пусть, далее, и* (х, t) —
достаточно гладкое поле скоростей, определяющее движе-
ние среды. При этом предполагается, что отображение
х (i, £) области соо в со( определяет траектории частиц
-^b^-=w*(xj); х(0Л) = 1,
и якобиан отображения х (£, |) равен единице:
я (5) аец^. у — 1'
Отображение х (t, |) является диффеоморфизмом со0 на
Пусть, далее, движение происходит под действием
внешних нагрузок (F (х, t), Р (х, £)) таких, что
шах [Р (х (t, |), t) — Р(|)|—>0 при £—>0.
ёеОи° (i 3}
max | F (х (t, |), t) — F (|) | -> 0 при t—>0.
Be®»
Ниже будет показано, что в этих предположениях, при
Достаточно малых t, поле скоростей и* (х, t) будет нуле-
вым. Тем самым будет обоснована корректность понятия
предельной нагрузки.
ПРЕДЕЛЬНАЯ НАГРУЗКА
55
54 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [ГЛ.]'
||
Покажем, что имеет место следующее утверждение!
Теорема 4.1. Пусть для (F (х, 0, Р (ас, i)) и для ecej
t, 0 < t < 7, существует s° (х, t) из Av (0) такой, чтл\
§ F (ас, 0 и* (ас, t) d& + J Р (ас, 0• и* (х, t)dS=^ soife^da>.|
(4-4)’
Тогда и* (х, t) = о при 0 t Т. И
Доказательство. Для решения и* (ас, 0 су-1
шествует $* (х, 0 из (е* (ас, 0) такой, что 1
§ р ~dt ' ‘и*+ § sVeV йс0 = F-u*dm + Р-и* dS. 1
И; at dtnf Г
(4-5)Г
Соотношение (4.5) следует из принципа виртуальных $
мощностей (1.1), если положить h = и*. При этом сущест-у
венным является совпадение Ut и Ht, что следует из при-1
надлежности нулевого поля скоростей множеству Ut.)
Из условий (4.4) и (4.5) находим ” j
р——• и* dr,o + (s*-—Sy) e*j d<.o = 0. (4.6)
<0 f at
В силу монотонности оператора Лф (е) выполнено нера- j
венство |
<8* — s°, С*) 0.
Следовательно, из (4.6) находим
р fill*
J p^.M*da)<0. (4.7)
Переходя в (4.7) к переменным |, получим
$ 4г^[ад*(^О,0№<°. !
Отсюда, используя нулевое начальное условие, находим |
и* ' о. Теорема, таким образом, доказана. ,
Итак, для доказательства теоремы единственности ре-
шения динамической задачи достаточно найти девиатор
s° из Лгг (0), удовлетворяющий (4.4). Построение такого
девиатора будем проводить в предположении, что для мно-
жества кинематически допустимых полей скоростей вы-
полнено неравенство (3.13) и, кроме того, поле
h*(l) = 4f' -u*(x(t,l), 0 (4.8)
удовлетворяет кинематическим ограничениям, определяю-
щим Uo (за исключением условия соленоидальности). По-
следнее условие, например, всегда выполнено, если на ча-
сти границы 5о>0 кинематически допустимые поля скоро-
стей обращаются в нуль, а на оставшейся части — произ-
вольны.
Из неравенств (3.13) и (3.14) следует, что
J /ед d& > const (J | Л* | do) + j | h*\ dS) , (4.9)
co. Oo
где постоянная в (4.9) зависит лишь от величины площади
поверхности о0, расположенной внутри <оо.
Из формулы (4.8) следует, что
j |w*|du) + J | w* | d5 сх (0 (^ |/i-* | do + J|^*|d5) ,
. Of Wo
(4.10)
где c0 является образом сг0 при отображении х = ас (£, £),
а щ (0 стремится к единице при t -> 0.
Аналогичной процедурой можно получить следующее
неравенство;
j |e*|d(O>c2(0 J /K55dco-c3(0 j |ft*|d(O, (4.11)
(0^ too O>0
где c2 (0 1 при t -> 0, a c3 (0 0 при £ —> 0.
Из неравенств (4.9)—(4.11) получаем
j | e* | dco > A (j | u* | d& + j | u* | dS j , (4.12)
lu ( Щ
где постоянная А от t не зависит.
Предположим, что внешние нагрузки (F (х), Р (ж)) та-
ковы, что существует s (ас), удовлетворяющий указанным
выше условиям и, кроме того, s(ac), является гладким вне
некоторой кусочно-гладкой поверхности О0, т. е. вне а0
компоненты Sij (х) имеют равномерно ограниченные по
ас частные производные.
56
ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ
1ГЛ.|
Теорема 4.2. (теорема единственности предельной на|
грузки). При выполнении указанных выше предположение
относительно внешних нагрузок, девиатора напряжения
s (х) и поля и* (х, t) при достаточно малых t и*(х, I) =
Доказательство. Теорема будет доказана!
если показать, что из ее условий вытекает существование
при достаточно малом t девиатора s° (х, t) из Aq> (0), удов-1
летворяющего условию (4.4).
Предположим сначала, что при некотором t выполняет^
ся неравенство
| j F (х, t) • и* dco + j Р (х, t) • и* dS j ад k § | е* | dco,
<0( б(й( Шг
где постоянная к достаточно мала. Возьмем в качестве
искомого девиатора 5° следующий девиатор:
Непосредственной проверкой убеждаемся в том, что з°
удовлетворяет условию (4.4), а при достаточно малом к он
принадлежит (0). Тем самым искомый девиатор № при
рассматриваемом t построен.
Поэтому в дальнейшем будем предполагать, что выпол-
нено неравенство
j Р (х, t) -и* dS -г F (х, t)-u*d!J) | Дз к j |e*|dco. (4.13)
9lO; Иг О;
Сопоставим полю u* (x, i) в coj поле h° (|) в (oo:
7 0 * = иг D (ад, ад) D<&, C * Д (а'з, Ж1) 2 Д(^,а:2) 1 s 2>(52Лз) ’
1,0 * D (ад, ад) * , * D (x,, Xg) - 1
/? 2 — Uj Я(5зЛ1) " г 2
7 0 * h3 = ад Z) (jTq, х3) D (&, 1 * D^xj) 2 D{^, ?2) * ^(^1,^2) 3 •
Поле h° удовлетворяет краевым условиям и является со-
леноидальным.
Используя девиатор «(эс), соответствующий нагрузкам
(Р (х), Р (х)), имеем
$ su(^)4 d® = J P(£)-fc°d®+ J P(&h°dS. (4.11)
(Оф C0q 5(0»
§ 43
ПРЕДЕЛЬНАЯ НАГРУЗКА
57
Перейдем в (4.14) к переменным х. Тогда
j Sij (i) da —
= § sij (I 0) еУ da + f • u* da 4- pu* dS,
f F$)-h° da f P(|)-WS =
<e0 '4os
= \ F*-u*da -r j P*-u*dS.
'a dt»t
(4.15)
В равенствах (4.15) max | f | —>- 0, max \ p | -> 0,
max | F* (x,t) — F (x, t) | —> 0,
max | P* (x, t) — P (x, t) | 0
при t -ч- 0. Здесь at — образ кусочно-гладкой поверхности
CTd, на которой девиатор $ (|) терпит разрыв.
Таким образом, имеем
j si; (ъ (х, ()) e*fda =
°>t
— J F (x, i) -u*d a h P (x, <)• a* dS ]- B,
at a“t
где
(f -r F* — F) • и* da В
“г
i- J {P*-P)-u*dS '-J p-u*dS.
du>t
Девиатор s° будем теперь искать в виде s° — p.s1 (^ (х, Д).
Тогда
F (х. /) ,ч* d в д- ) И‘ (ж. I) и * dS
Из (4.16), (4.5 2) и (4.13) вытекает следующая оценка:
| (X | 'ч. 1 -|- а (/), ос (/) —> 0 при t -> 0.
14]
ПРЕДЕЛЬНАЯ НАГРУЗКА
59
58 ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ [ГЛ.2
Следовательно, в силу предположения относительм|
девиатора s (|), при достаточно малом t девиатор s° входи®
в (0). Теорема, тем самым, доказана.
Смысл чисел ms состоит в том, что, как было показано!
нагрузки вида (msF, msP) не вызывают движения вязкЛ
пластической среды. Под действием этих сил среда остается
абсолютно жестким телом и и (х, i) == о. Ясно, что при
т т* не существует девиатора s, удовлетворяющего'
(4.1) и входящего в Atf (0), т. е. нулевое решение и (х, t) ==|
= о не является решением задачи о движении вязкопла-i
стической среды под действием внешних нагрузок (mF, mP'w
при т'Д т*. Это свойство вязкопластической среды и де-1
лает возможным ее применение к изучению поведения!
твердых тел, упругие деформации которых весьма малы.)
В § 2 была показана эквивалентность принципа вир-j
туальных мощностей задаче об определении минимума)
функционала. Для жесткопластической среды его можно
представить при внешней нагрузке (mF, тР) в виде
J (и, т) — ср (е) da — т\^ F -uda Д Р -udS j ,
СОо 0)э
(4.17)
где и (х) принадлежит С70.
Обозначим через ти такое число, для которого суще-,
ствует поле (х) из Uo и J (ит, ти) < 0. Покажем, что
т* ’С ти- Действительно, для любых s из (0) и для
любых е имеем ср (е) так как ср* (s) = 0. Тогда
справедливо неравенство
Sij-ey da—ти F-umdaJr Р • ит dS"] |
(Оо (Оо Эсоо I
< J(um, т^)<0.
Последнее показывает, что (4.1) с s из Av (0) выполняться!
не может. Таким образом, типе входит в класс чисел ms Щ
следовательно, т.,:.
Числа ти называются кинематическими коэффициента- :
ми для нагрузки (F, F)-
Обозначим т* величину
т* = inf ти. '
Только что было показано, что
™* > т*.
Укажем способ нахождения чисел ти для внешней на-
грузки (F, F). Пусть щ некоторое поле из Uo такое, что
J F • ио da> J Р Uo dS 0.
(Do д (Do
Подберем такое число т, что J (щ, т) < 0. Это число т
и входит в класс чисел ти.
Теорема 4.3 (основная теорема о предельной нагрузке),
inf ти — т* — т* = sup ms.
Доказательство. Предположим, что т* ^>
Д т*. Рассмотрим число т, заключенное в интервале меж-
ду т* и т*. Из определения™* следует, что J (и, т) 0
для любого и из Uo, т. е. и == о дает минимум функциона-
лу .> (и, т). Из теоремы 2.2 следует, что существует де-
виатор s, удовлетворяющий (4.1), и s принадлежит А(;, (0).
Это означает, что число т входит в класс ms, что противо-
речит предположению.
Теорема 4. » (существование девиатора напряжений для
предельной нагрузки). Для, предельной нагрузки (m*F,
т*Р) существует девиатор хДх), удовлетворяющий (4.1)
и принадлежащий А? (0).
Доказательство. Как только что было по-
казано, J (и, т#) > 0 для всех и из UQ. Следовательно,
и ~ о минимизирует функционал J (и, тД. Из теоремы
2.2 следует, что существует девиатор s* (х), удовлетво-
ряющий (4.1) и принадлежащий Av (0).
Теорема, аналогичная теореме 4.4, была получена в ра-
боте [94] в предположении достаточной гладкости гра-
ницы Эсо0. Теорема 4.4 справедлива при условии, что ли-
нейная часть функционала J (и, ™) непрерывна в прост-
ранстве девиаторов тензоров скоростей деформации с нор-
мой пространства Dv (со) (см. § 3). Это выполнено,
например, когда Эсо0 удовлетворяет условию Липпйща.
В заключение укажем возможность большей детали-
зации понятия коэффициента предельной нагрузки. Имен-
но, можно ввести вектор коэффициентов предельной на-
гРузки (m*,t*), определяемый из анализа функционала
T(u,m,f) = j ср (е)da—шДщДа— § tiPp^dS.
(At) ID о <Э <D')
60J ОБЩИЕ ПОНЯТИЯ И СООТНОШЕНИЯ 1ГЛ. i [
Геометрические свойства множества векторов
подробно рассматриваются в [61]. |
При расчетах предельных нагрузок в конкретных за-|!
дачах широкое применение нашел метод линейного про-1
граммирования. Впервые на возможность применения] I
этого метода для жесткопластических сред было указано!
в [95]. Сущность этого вычислительного метода состоит!
в том, что уравнения равновесия для напряжений с по-
мощью конечных разностей заменяются линейной систе-
мой алгебраических уравнений, а нелинейное условие те-
кучести аппроксимируется системой линейных неравенств.
Таким образом, возникает стандартная задача линейного
программирования — ищется максимум линейной формы
(в данном случае ти5) при наличии серии ограничений в ви-
де линейных равенств и неравенств. Аналогичный пере-
ход к конечномерной задаче линейного программирова-
ния можно осуществить и для кинематической постановки.
При этом дискретизация в этих двух задачах может быть I
выбрана так, что соответствующие задачи линейного про-
граммирования двойственны.
В последнее время этот метод расчета получил широ-!
кое распространение [96—105]. Однако следует иметь!
в виду, что получаемые с его помощью значения коэффи^!
циента предельной нагрузки, вообще говоря, могут за-?
метно отличаться от истинного коэффициента предельно!
нагрузки в исходной задаче, хотя оценка сверху и снизу
экстремального значения линейной формы в двойствен-
ных задачах линейного программирования могут быть
очень близкими. Это связано с тем, что не установлена
оценка отличия истинного коэффициента предельноЕ
нагрузки от рассчитываемого при переходе к дискретно! |
постановке задачи. В частности, поля скоростей и напря-
жений в исходной задаче часто бывают разрывными и ап-
проксимация их конечными разностями может оказаться
недостаточно точной.
ГЛАВА II
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
§ 5. Антиилоские движения
А нтиплоские движения вязкопластической среды. Предельная
нагрузка. Качественные особенности течений.
В предыдущих параграфах исследовались общие воп-
росы существования и единственности решений задач для
вязких и, в частности, вязкопластических сред. Выше
уже отмечалось, что при изучении общих вопросов наряду
с вариационным подходом можно было бы использовать
и другие методы, например, теорию вариационных нера-
венств. Однако вариационные методы являются эффектив-
ным средством исследования не только общих вопросов тео-
рии, но и изучения качественной структуры конкретных
движений.
Анализ качественной структуры течений, наглядно
демонстрирующий возможности вариационного подхода,
может быть проведен в случае антиплоских движений вяз-
копластической среды. К этому классу движений отно-
сятся течения в трубах и открытых каналах, течения,
вызванные продольным движением цилиндров.
Рассмотрим сначала задачи о движении вязкопласти-
ческой среды в цилиндрической трубе под действием по-
стоянного градиента давлений вдоль оси трубы. Пусть (о
является цилиндром длины 2L с поперечным сечением/):
О) •= {[(xv ж2) е £>] X [-L < х3 < А]}.
Функционал, соответствующий рассматриваемой задаче,
62
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ,
J 51
АНТИПЛОСКИЕ ДВИЖЕНИЯ
63
имеет вид
L
—L L>
^2 — Р (Р) Us (^1, Т2, Р) dxr dx2 -J
О 1
— j P (— L) u3 (xlf x2, — L) dx-i dz2|
где P (L), P (—L) — давления на концевых сечения»
трубы. I
В качестве множества кинематически допустимых по-1
лей скоростей U рассматривается совокупность вектор-1
функций, обращающихся в нуль на боковой поверхности
цилиндра и удовлетворяющих условию несжимаемости!
Из физических соображений представляется довольней
естественным при больших L искать минимизирующее по4
ле скоростей в виде
и(х) -= (ur и2, и3) = (0, 0, и (xlt ж2)),
Тогда выражение для J (и) примет вид J (u) = 2LJ (и)|
J (и) = \ ф (Уи) dxidx2 — с \ и dxrdx2, I
н|эг> = 0. (5.11
(5.2]
P(L) + P(-L)
2L
Здесь с — перепад давлений между концевыми сечениямЛ
трубы, отнесенный к ее длине, т. е. с —постоянный гра|
диент давлений вдоль оси трубы. 1
Конечно, приведенный вывод функционала (5.2) трет,
бует обоснования. В случае трубы конечной длины дей|
ствительное поле скоростей не будет иметь вида (5.1)1
К функционалу (5.2) можно прийти, изучая асимптотиче^
ское поведение экстремалей исходного трехмерного функ,
ционала при L —> сю, с = const. Вариационные методь
анализа аналогичных асимптотических задач будут рас;
смотрены в § 12.
Переход от трехмерной задачи к функционалу (5.2
требует также определенных предположений относительна
диссипативного потенциала ср (е). В частности, он, вообнц
говоря, не имеет места для произвольной однородно!
и даже изотропной вязкопластической среды. К обсуяч
дению этого вопроса мы еще вернемся в конце параграфа
Остановимся на анализе функционала (5.2) для клас-
сической модели вязкопластической среды с диссипатив-
ным потенциалом вида (2.4). Тогда
ф(7п) = Via |2 4- т0| Vu|, /с = т0, (5.3)
и функционал (5.2) перепишется в виде
J (и, с) = 0^- | Vaa |2 т01 Via | — cuj dxr dx2,
I n (5.4)
и I an = 0.
Впервые задача о движении вязкопластической среды
в круглой трубе с потенциалом (5.3) рассмотрена в [64].
В случае поперечных сечений D общего вида эта задача
была исследована в [35].
Исследование функционала (5.4) начнем с определения
величины предельной нагрузки с*, т. е. такого градиента
давлений, что при с =4 с*, J (и, с) > 0 для всех и из U,
а при с 4 с* существует ис из U, для которого J (ис, с) < 0.
Кстати, отметим, что из результатов § 3 следует суще-
ствование минимизирующей (5.4) функции из простран-
о
ства Wl (D) и ее единственность.
Из результатов § 4 о предельной нагрузке вытекает,
что предельный градиент давлений с* может быть опре-
делен также из следующих условий. При с с*
§ (т01 Vu| — си) dx^dx2 0
о
для любого и из U, а при с"у> с* существует гладкая функ-
ция ис х2) из U, для которой
(То | Vaac | — сис) dxi dx« 0.
b
При вычислении с*, а также в других качественных иссле-
дованиях вида экстремалей (5.4) важную роль будет играть
Формула
А
| Vw | dxr dx» = § I (s) ds, (5.5)
Ь о
где 0 и (xx, x2) A, I (s) — длина линии уровня и (ац, х2) ~s.
АНТИПЛОСКИЕ ДВИЖЕНИЯ
65
64
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ.
Формула (5.5) будет использована в случае гладкщ
функций и (zx, ж2). В работе [109] показано, что (5.5) имв
ет место для существенно более широкого класса функций
Из конструкции интеграла Лебега вытекает, что (
(5.6]
j U> С1Х2 — J
D 0
где S (s) — плоская мера множества точек (я^, ж2), в кот
рых и (рц, х2) > s.
Из определения с* следует
( I V и I d q dr2
0, п|9с = 0. (5.7)
и
с* = ro inf —(—;—г~
* и \ и сид ах2
D
Подставляя в (5.7) формулы (5.5) и (5.6), приходим к сле-1|
дующей теореме.
Теорема 5.1 [35]. Для предельного градиента давле-ц
формула
. „ mes dD'
С* = ro 1111 -----,
п'г-п ines D
ний имеет место
где D' —произвольная подобласть D с границей dD',
mes D' — плоская мера D', mes dD' — длина ее границы.
Нетрудно показать, используя, например, теорему
Гильберта о компактности семейства спрямляемых кри-
вых с равномерно ограниченными длинами [110], что суще-]
ствует подобласть Dt, с границей dDlf такая, что
mes dD> _ inf тезЭД' /г 8J
mesZ»! —mesD' ' ( f
Теорема 5.2 [35]. Если (zj, x%) — точка dDlt лежащая
внутри D, то связанная часть dDr, лежащая внутри D,^
является дугой окружности, касающейся границы обласД
mu D. ?
Теорема 5.2 позволяет эффективно вычислять вели-
чины с* для широкого класса областей. В частности,,,,
в случае областей с полигональными границами теорема
5.2 сводит задачу вычисления с* к нахождению экстремума
функции конечного числа переменных. Примеры вычис-
ления для конкретных областей содержатся в [35].
Если Z?1 и £)2 — две произвольные области, причем
Р, с D2 и с» — предельные градиенты, соответст-
вующие областям Dr, D2, то можно показать, что с* с^.
Эта оценка позволяет эффективно находить приближенные
значения с* для областей произвольного вида, используя,
например, области с полигональными границами.
Итак, вопрос о вычислении предельного градиента дав-
лений с* связан с исследованием функционала
J (и,с)~ (То I Vn| — cu)dx1dx2, и |9В = 0. (5.9)
D
Очевидно, что этот же функционал возникает при рас-
смотрении антиплоских движений жесткопластической
среды (ц = 0) с условием текучести Мизеса или Треска,
которые в этом случае совпадают. Функционал (5.9) ана-
логичен функционалу (2.6), соответствующему движению
жесткопластической среды в плоском зазоре.
При с < с* функционал (5.9) минимизирует лишь ну-
левая функция, а при сД> с* значения (5.9) неограничены
снизу. В § 13 будет показано, что в этом случае имеющееся
единственное нестационарное решение не выходит на
стационарный режим.
В случае, когда с = с*, нижняя грань (5.9) равна ну-
лю и, как следует из формул (5.5), (5.6), можно указать
минимизирующую последовательность гладких функций,
сходящуюся к функции
f а, при (хг, гг2) из £Д,
и* (х,, Х«} = i п „
' 7 [ 0, при (Ж1, а-2) из £>\£>i,
где а — произвольное неотрицательное число, D1 — экс-
тремальная область, определенная в (5.8).
Таким образом, эта задача показывает, что для опи-
сания движения жесткопластической среды в цилиндри-
ческой трубе недостаточно пространства (£)) (и* (а^,
хз) не входит в W* (D)). Исходное пространство Wi (D), как
Указывалось в § 3, нуждается в расширении, а функцио-
нал (5.9) —в естественном продолжении на это расшире-
ние.
Приступим теперь к изучению структуры течения вяз-
копластической среды в трубе при условии с с*. Для
отого необходимы некоторые геометрические построения.
3 П. П. Мосолов, В. П. Мясников
66
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[гл.
I 5J
ЛНТЙПЛОСЫ1Е ДВИЖЕНИЯ
67
Введем понятие экстремальной перестройки функции
Пусть и (zjl, х2) — достаточно гладкая функция в облает^
D. Два значения s2 (sx < s2) этой функции будут назь$
ваться эквивалентными, если для почти всех s (sx < s ' Г yJ
выполнено неравенство |
Отметим, что в случае гладких функций и (х15 z2) величиной
входящие в (5.10), имеют смысл для почти всех s, так кам
по теореме Сарда значения функции и (хг, х2), при который
| Vu | — 0, имеют меру нуль [111, 112]. J
Эквивалентные значения функции образуют совокум
ность ненулевых непересекающихся отрезков. Очевидной
что такая совокупность отрезков не более, чем счетнад
Пронумеруем это множество отрезков ({AJ, 7 1,2, ...и
От функции и (xv х2) перейдем к функции н1 (х15 ж2), вй4
резая из графика и (хг, х2) слой, соответствующий значЯ
ниям Дх, Ах = {.<?! О з О s2}. Функция uY (ay х2) опредеЗ
ляется формулой 1
и (Ж1, ж2) при
U (^1> Ж2)---- (s2
W1 (^1,М =
При U (Ж1, х2) ^s2, I
SX U (,Т1, Ж2) So. j
Далее, вырезая из графика ux (zx, ж2) слой, соответствую*
щий отрезку Д2, получаем функцию и2 (хх, х2) и т. д. j
В результате получаем монотонно убывающую после!
довательность функций иг, и2, . . . Предел этой последовав
тельности обозначим через v (xL, х2) и назовем экстре-,
мальной перестройкой функции и (xv xz). 1
Первый шаг в построении перехода к функции и (яу, ж2!
изображен на рис. 7.
Лемма 5.1. Если и (яу, г2) —достаточно гладка#
функция, то v (хг, х2) удовлетворяет условию Липшицт
и для почти всех s из области значений v (ay, х2) выполнено^
неравенство |
То
(5.11/
Доказательство. Выполнение условия Лип-
шица следует из того, что каждая следующая функция
(ац х2) имеет постоянную Липшица не большую, челе
предыдущая. (
Приступим к доказательству неравенства (5.11). Заме-
тим, что при экстремальной перестройке различные зна-
чения функции и (жх, х2) могут переходить в одно значение
функции v (xv z2). Пусть sx, s2 (sx < s2) — два значения
и (xv х2), переходящие в одно значение функции v (хи х2).
Тогда значения $х 11 s2 эквивалентны.
Действительно, если между sx и з2 найдется положитель-
ная мера значений s таких, что т0/ (s) < cS (s), то суще-
ствует хотя бы одно s0, sx < s0 < з2, такое, что на линии
Рис. 7.
уровня и (яу, х2) -- s0 будет | У и | Д 0 и т0 I (s0) < cS (s0).
По тогда и в малой окрестности значения з0 будет выпол-
нено неравенство xol (s) < cS (s). Отсюда следует, что эти
значения sr и з2 функции и (рц, я:2) не могут переходить в од-
но значение функции v (xlt z2).
Значения функции v (хъ х2) разбиваются па два класса.
В первый класс входят особые точки, соответствующие
значениям s функции и (хг, яг2), для которых на линии уров-
ня и = s найдется хотя бы одна точка, где | Vu | = 0.
В этот же класс входят точки, соответствующие отрезкам
эквивалентных значений функции и (яу, я:2). Второй класс
состоит из регулярных точек. Это — значения функции
v (xt х2), соответствующие всем остальным значениям
Функции и (яу, х2).
Первый класс особых точек имеет меру нуль, так как
Точки, соответствующие отрезкам эквивалентности, обра-
зуют не более, чем счетное множество, а точки, соответ-
ствующие значениям функции и (хг яу) с вырожденным
градиентом, по теореме Сарда имеют меру нуль. При этом
следует учесть, что отображение множества значений
3*
08
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[гл. j
и (хг, ж2) на множество значений v (zx, z2), определяемое
экстремальной перестройкой, является сжимающим. •'
В регулярных значениях s линии уровня v = § совпав
дают с линиями уровня и = s, где s определено по 5 с по-
мощью экстремальной перестройки функции. Нетрудно'
видеть, что в регулярных значениях функции v (£1} а:2)
выполнено неравенство (5.11).
Лемма 5.2. Если и (хх, a?2) — достаточно гладкая
функция в области D, и — () и v (xlt х2) —ее экстре-
мальная перестройка, то v (zlt х2) принадлежит простран-
0
ству W2 (Р) и J (г) -С J (ы)» где J (и) — функционал (5.4).
Доказательство. При определении экстре-
мальной перестройки функции и (хг, ж2) была введена пос-
ледовательность ип (^j, z2). Покажем сначала, что ип
о
входит в W2 (D) и J (un)^J (и). Последнее неравенство
докажем при п = 1. При остальных п доказательство
аналогично.
Рассмотрим две монотонные последовательности чи-
сел s2, где sx > s15 s2 % s2, sx, s2 -> s2 при n co
и I Vu | ^> 0 при и = s" или и = Существование таких
последовательностей следует из теоремы Сарда.
Введем далее последовательность функций
Hi (хъ ж2) —
и (Х1, х2)
UfXi,^—S2 + Si
при
при
при
Нетрудно видеть, что функции н” принадлежат W2 (D) и
У | Vui I Vu ^dxidxz. (5.12)
о Ъ
Из (5.12) следует, что
J (и) — J(n")^>T0 j (| Viz | — си) dxi dx<i ~
n n
n
s2
= To J [I (s) — (cS (s))/Tp] ds. (5.13)
АНТИПЛОСКИЕ ДВИЖЕНИЯ
(i9
Так как для и (z1, z2) при s[ С и О а2 выполнено почти
всюду неравенство (5.10), то последний интеграл в (5.13)
положителен, и, следовательно, J (u) > J (и").
Последовательность щ (з^, ж2) поточечно (монотонно)
сходится к функции щ. Следовательно, она слабо схо-
0 .
дится к их в W2 (D). Отсюда следует, что принадлежит
о
]\С (D) и так как выпуклый функционал (5.4) является
слабо полунепрерывным снизу, то J (и) J (щ).
Повторяя последнее рассуждение применительно к по-
следовательности ип, получим утверждение леммы.
Из леммы 5.1 и 5.2 непосредственно вытекает сле-
дующее утверждение.
Теорема 5.3 [107]. Существует последовательность
функций ип (ху, х2), минимизирующая функционал (5.4),
такая, что для почти всех линий уровня функции ип (xi, х2)
выполняется неравенство (5.11).
Заметим, что на самом деле неравенство (5.11) выпол-
няется для каждой связной компоненты линии уровня
ип fa, х2).
В работе [113] доказано, в частности, что если D —
плоская область с внутренним радиусом R (т. е. круг
радиуса R можно разместить вО, а круг большего радиу-
са разместить нельзя), то
mes D R mes dD — nR2.
Из этого неравенства и соотношения (5.11) следует,
что внутри почти всех связных компонент линий уровня
ип (хг, х2), указанных в теореме 5.3, можно разместить
круг радиуса
Д>^1+1------------—« с>с (5.14)
с L 1 \ с2 mes D / J с \ /
В работе [35] показано, что минимизирующая функцио-
нал (5.4) последовательность ип Сщ, х2), удовлетворяющая
условию (5.11), сходится к функции и* (xlf х2), миними-
0
зирующей (5.4) в норме пространства Wi (D) f] С (/)).
Отсюда непосредственно следует утверждение.
Теорема 5.4 [107]. Каждый локальный максимум функ-
ции и* (.гх, х%) достигается па множестве, каждая связ-
ная компонента которого содержит круг радиуса xjc.
70
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. |
Локальные максимумы функции и* (^ls #2) называются
ядрами течения. 1
Нетрудно показать, что ядро течения не может содей
жать круга радиуса, большего 2т0/с. Далее, в [107] пока
зано, что ядра течения обладают следующим свойством
Если А —ядро течения с границей дА, то 1
т0 mes дА = с mes А, т0 mes дА’ с mes А', (5.13
где А' —произвольная подобласть А с границей дА 1|
Из соотношений (5.15) следует
---------------что если граница ядра течения в ой
А рестности некоторой точки имеет не
/1 Я ) прерывную кривизну, то в этой точк
у--------------J радиус кривизны ее не меньше, чет
У х^с-
к Подобласть D* области D, гд
и* (zx, z2) Д> 0, будем называть об J
ластыо течения. В работе [35] дока
Рис' 8' зано, что граница dD* во внутрен
них точках D выпукла.
Дополнение к области D* в области D будем называт!
застойной зоной.
Из свойства (5.11) линий уровня функции и* (zx, х%
вытекает признак существования застойной зоны. Имен .
но, если
~ mes dD ~
С* < С < Т0 ---п- , (5.16;
* u meg d \
то в области D существует застойная зона. I
Соотношение (5.16), хотя и устанавливает факт сущеА
ствования застойной зоны, но не позволяет определите
место ее расположения и размер. Эти характеристики за*
стойных зон ниже будут получены из принципа мажо|
рации. |
По аналогии со свойством (5.15) ядра можно получит»
следующее свойство застойных зон. Пусть В' — подоб-
ласть застойной зоны В, граница которой дВ' представш
ма в виде дВ' — Г [J у, где у — часть границы застойно!
зоны с областью течения, Г — расположена в застойной
зоне (рис. 8). Тогда имеет место неравенство
т0 mes Г [> с mes В' -]- т0 mes у. (5.17)
, г,1 АНТИПЛОСКИЕ ДВИЖЕНИЯ 71
5 IJ
Из соотношения (5.17), по аналогии с (5.15), можно
доказать, что при условии непрерывности во внутренних
точках кривизны границы области течения радиус кри-
визны не превосходит т0/с.
Неравенства (5.15) и (5.17) имеют прозрачный механи-
ческий смысл. Они означают, что среда в ядре А и застой-
ной зоне В находится в жестком состоянии.
Отметим еще одно свойство застойных зон. При опре-
делении предельного градиента давлений с* была введена
экстремальная область Dr (см. (5.8)).
Теорема 5.5 [106]. Если в области D существует лишь
одна экстремальная область Dr, то застойная зона мо-
жет быть расположена только вне области D
Условия (5.15) и (5.17) оказываются характеристиче-
скими для экстремальности функции и* (х±, х2) по отно-
шению к функционалу (5.4). Пусть и* (ац, х2) имеет неп-
рерывные первые производные в области D. Далее, пусть
в области, где | Vu* | )> 0, функция и* имеет непрерыв-
ные производные второго порядка.
Теорема 5.6 [106]. Для того чтобы и* (xlt х2) была
минимизирующей функцией для функционала (5.4), не-
обходимо и достаточно, чтобы в области, где |Vu*| )> 0,
выполнялось уравнение
р, Ви* + т0 div I р “j + с = 0. (5.18)
В ядре должно выполняться условие (5.15), а в застойной
зоне-—условие (5.17).
Отметим, что в § 2 были даны уравнения Эйлера для
недифференцируемого функционала общего вида. Однако
там условие экстремальности было связано с отысканием
поля напряжений, обладающего определенными свойства-
ми. В области | е | Д 0 эти условия па напряжения в рас-
сматриваемом частном случае совпадают с уравнением
(5.18), а в ядре и в застойной зоне выполняются условия
жесткости среды ср* (s) = 0. В теореме 5.6 экстремаль-
ность функции и* устанавливается непосредственно че-
рез геометрические характеристики жестких областей.
Можно показать, что условия (5.15) и (5.17) эквивалентны
Условию ср* (s) = 0.
Проверка условий (5.15) и (5.17) не всегда элементарна
в связи с произвольностью областей А' и В'. В [106] по-
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ.
АНТИПЛОСКИЕ ДВИЖЕНИЙ
73
.11 Ра3’
11 ну-’
казано^’ что при проверке этих условий можно огран! Г
читься Узким классом областей А', В', границами кот!
рых яв*ляются ДУГИ окружностей радиуса х0/с, специам
ным об'Разом расположенные в областях А и В. ’
ПрИ£ исследовании качественной структуры течей
важнукД роль игРает принцип мажорации.
Teoi^eMa (принцип мажорации) [106]. Пусть DJI
р2 __д^зе плоские области и Dx с. Ь2, Рассмотрим фунЛ,
ции и* и и*’ которые минимизируют функционалы (5.4ж1
в обласг^ях Di и D2- Пусть, далее, и* |9Dj = Фг 0 = 1, 2)1ц
где ~ кусочно-гладкие функции. Если min <р2
~> шах *Р1’ то и2 и* в области Dv ||
В ра-^оте 168] было найдено явное решение уравнения!
(5.18) в области D, являющейся внутренностью тупого|
угла, т^Рнчем Уравнение удовлетворяется в некотором
подобла,сти тУПО1,о угла, а на определенной линии, соеди*1
няющей стороны угла, решение вместе с первыми про<11
изводны1,111 обращается в нуль. Естественно, что за этэд I
линию ^ешение продолжается нулем. |
Выд®ляя из У™а круговой сектор и применяя к пемут
теорему можно показать, что найденное в работе [68Я ра1Цается в
решение минимизирует функционал (5.4). 1 ----
Испо^ьзУя это конкретное решение и теорему 5.71
о мажор ацин» можно обнаруживать и оценивать размеры!
застойнь!х 30н в * -
нее этот мет°Д изложен в [106].
Сделйем некоторые замечания в связи с рассмотрен-О
ной задЕ*46^ 0 Движении вязкопластической среды в ЦИ*|1
линдрич^ской трубе. Выше на границе трубы предпола-| i
гались ц1,1 полпенными условия прилипания. В работе!
[114] да!1а постановка задачи при условии проскальзы-j
вапия ср’еДы на стенках трубы. Функционал, аналогии^ |1
пый (4.5)’ имеет Для этого случая вид
j(H.) ^wl2 + To|Vu| — cu\dxidxz + viPds.
D 8 D |'
Естествен110’ что Для этого функционала сохраняются
основные, указанные выше качественные свойства эк-?
стремалей- |
На рйе- у показаны основные качественные особенно-!
сти поля скоростей движения вязкопластической среды!
в цилиндрической трубе. Заштрихованные области яв-
ляются областями жесткого состояния. Подчеркнем еще
, что заштрихованные области имеют отличную от
нуля площадь и являются следствием недифференцируе-
мой структуры функционала.
В рассмотренную схему входят и задачи о движении
вязкопластических сред в открытых каналах [115]. В этом
случае задача состоит в нахождении функции, минимизи-
рующей функционал (5.4), при условии, что скорость об-
; — —-— з нуль только на стенках канала, а на свободной
поверхности произвольна.
Для простоты ограничимся случаем, когда свободная
поверхность горизонтальна. Обозначим через D область,
гххжхи vcjxxcxp у /лххх±лм.л о *i Ulivuiib-ui^ f VKV'X’*'- r UVD t’ U AHU VIX» X - _ лтттлРПТОТГГ-
областях произвольной формы. Подроб-h симметричную поперечному сечению на кчнале
иожен в 11081. I ”» raoUnoa поверхности. Задета о
горые замечания в связи с рассмотрев-1 j сводится к задаче о движении в трубе, ес
вижении вязкопластической среды в ци- це пересекаются. Именно, решая л д
В
А
задачу о течении в трубе £ попе-
речным сечением D (J D при
условии прилипания па границе
ЭТОЙ области, получим, в част-
ности, решение задачи о движе-
нии в канале.
Пример расположения за-
стойных зон и ядра течения
в канале приведен на рис. 10.
I К рассмотренному классу задач
Дичи об осевом движении системы цилиндров в вязкопла-
। стической среде [108].
, Пусть имеется цилиндрическая труба с поперечным
сечением Do, ось которой параллельна оси х3, и система
В
В
В
Рис. 10.
примыкают также за-
ЧЬ СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ, |
||
цилиндров с поперечными сечениями В,, . . Dn, нахЦ
дящихся внутри трубы. Вязкопластическая среда запо»
няет цилиндрическую область D между цилиндрами 1
стенками трубы. Движение вязкопластической среды ввда
зывается продольными силами . . ., Рп, приложенным)!
к цилиндрам. 1g
Задача о движении вязкопластической среды в этом!
случае приводит к нахождению минимума функционал^
J (и, /Д,..., Рп) -= I
= (-§4 Vu|2 То I — Piu\dDi, (5.19g
где и |od, = 0, и |api = ut. Постоянные щ должны на-;
ходиться в процессе решения задачи. 1
Заметим, что если Do совпадает с R2 и т0 = 0, то функ-е
ционал (5.19) неограничен снизу. Таким образом, постав-''
ленная задача о продольном движении системы цилиндром
в пространстве, заполненном вязкой жидкостью, некорИ
ректна. В случае же вязкопластической среды эта же за&
дача, как будет показано ниже, является корректной Ш
более того, функция, минимизирующая (5.19), будеи
обращаться в нуль вне цилиндра достаточно большого
радиуса. Это означает, что рассматриваемая задача для!
вязкопластической среды не зависит от вида области De3
если поперечное сечение Do достаточно велико. я
Для простоты ограничимся в функционале (5.19) слу«
чаем, когда все В, неотрицательны. Предельнаянагрузкй|
Р*, . . ., Р* в задаче о продольном движении цилиндров
определяется следующим образом. Пусть L,,..., —кон-
тур наименьшей длины, расположенный в Do и охваты-
вающий области Р/,, . . ., Dis. Тогда, если для любых
наборов индексов ilt.. ,,is (s^ п) выполняется соотношение
I
s |
т0 mes > 2 Р*, (5.20);
причем для хотя бы одного набора индексов в (5.20) имеет]
место равенство, то нагрузки Р*, . . .,Р* — предельные.!
Сформулированное правило определения предельной
нагрузки является непосредственным следствием формул»
$ 5] АНТИПЛОСКИЕ ДВИЖЕНИЯ 75
Точно так же, как и в задаче о вычислении предельного
градиента давлений, определяющего начало течения в тру-
бе, задача о предельной нагрузке для системы цилиндров
связана с исследованием аналогичной задачи для жестко-
пластической среды. Соответствующий функционал в этом
случае имеет вид
J (и, Pi...Ря) = У t0| Vu| dxrdxz — Piu|9D.. (5.21)
Ъ
Когда нагрузки Р{ являются предельными, можно ука-
зать минимизирующую последовательность для (5.21),
которая сходится к функции
( а внутри области, ограниченной л ,
//*= - г' (5.22)
0 вне области, ограниченной М,.,.is,
где а — произвольное неотрицательное число, (?\, . . .
. . is) — один из наборов индексов, при котором в
(5.20) имеет место равенство. Здесь мы считаем, что функ-
ции и (.q, х^} определены во всей области Z)o и постоян-
ны внутри областей Рг, . . .,РП.
Если имеется несколько наборов индексов, на которых
реализуется равенство в (5.20), то предельных функций
вида (5.22) будет несколько. Кроме того, в этом случае
предельными будут являться также функции, представ-
ляющие собой линейные комбинации с положительными
коэффициентами функций вида (5.22).
Итак, в рассматриваемой задаче, как и в задаче о
движении жесткопластической среды в трубе, экстремаль-
ными функциями для функционала (5.21) являются раз-
рывные функции, не входящие в W} (D). Отметим еще,
что если в случае вязкопластической среды экстремальная
функция всегда единственна (функционал (5.19) строго
выпуклый), то в случае жесткопластической среды един-
ственность решения, вообще говоря, отсутствует. Струк-
тура решений (5.22) показывает, что если Do содержит
выпуклую оболочку областей Z)1, . . .,Dn, то вид области
D о не влияет на решение жесткопластической зада-
чи, так как оно всегда равно нулю вне этой выпуклой обо-
лочки.
Рассмотрим некоторые примеры.
76 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ. Я|
Пример 5.1. Пусть Do — выпуклая область
п = 1. Обозначим через Т)г выпуклую оболочку Dv Пре.-
дельная нагрузка Р*, как следует из (5.20), имеет вид i
Р* = т0 mes dD-f. 1
При этом минимизирующая функция и* (zJt т2) такова;
Гав Di, &
и* =.= . 1
[ 0 вне Di, |
где а — произвольное неотрицательное число.
Следовательно, в случае
жесткопластической среды
вместе с цилиндром вытяги-
вается его выпуклая оболочка
(рис. И). Заштрихованная
область движется вместе с
цилиндром.
а)
d l<d d
d L=d d
Рис. 12.
Пример 5.2. Пусть Z>0 — выпуклая область и
п = 2. Предположим, что Dr и Z>2 — выпуклые области.
Обозначим через D выпуклую оболочку областей Dr и Z?2.
Пусть внешняя нагрузка Pj, Р2 удовлетворяет условиям
Р1 < т0 mes dDr, Р2 т0 mes dD2,
Pi + Р2 < То mes dD. (5.23)
Нагрузка Рх, Р2 будет предельной, если хотя бы в од-j
ном из соотношений (5.23) достигается равенство. I
Возможные варианты решений проиллюстрированы!
на рис. 12 для случая, когдаDltD2—квадраты со сторо-|
J rj ЛНТИПЛОСКИЕ ДВИЖЕНИЯ 77
ной d, расположенные на расстоянии I друг от друга, а
внешние нагрузки Рг и Р2 одинаковы. Здесь могут пред-
ставиться следующие случаи: а) цилиндры движутся не-
зависимо друг от друга, а среда неподвижна (рис. 12, а);
б) цилиндры движутся одновременно и вместе со средой,
заключенной между ними (рис. 12, б); в) цилиндры и
среда, заключенная между ними, движутся независимо,
но скорость среды не может быть больше меньшей из ско-
ростей цилиндров.
Вернемся к рассмотрению задачи о движении систе-
мы цилиндров в вязкопластической среде. Ограничимся
для простоты одним цилиндром с поперечным сечением
Р1. Пусть Do — выпуклая область и Рх > т0 mes 9Dr.
Обозначим через и* (хг, х2) функцию, минимизирую-
щую функционал (5.19). Функция и* (a?t, х2) принадле-
жит пространству Wl (D) f) С (Z)) и для почти всех своих
значений имеет спрямляемые линии уровня, причем
I (s) «С Р1^й- Из этого неравенства следует, что если гра-
ница области Do достаточно удалена от границы Z>x, то
и* (.г-!, х2) должна обращаться в нуль в окрестности
границы Ьо. В этом случае вид £)0 не влияет на решение
и* (zx, х2) и можно считать, что Do совпадает с Z?2.
Кроме того, отметим, что если область невыцуклая,
а значение Рх достаточно близко к т0 mes dDr, то при дви-
жении цилиндр увлекает некоторую часть вязкопласти-
ческой среды, которая движется с ним как твердое
тело.
Проведенный выше качественный анализ антиплоских
движений, основанный на вариационном подходе, оче-
видно, связан с возможностью построения геометрически
наглядной процедуры изменения пробных функций, при-
водящей к уменьшению значения функционала. Это и
является одной из сильных сторон вариационного метода,
поскольку аналог подобной процедуры на языке диффе-
ренциальных уравнений отсутствует.
В заключение параграфа вернемся к обсуждению воп-
роса о форме принципа виртуальных мощностей для дви-
жений вязких сред в трубах.
Покажем, что функционал (5.2) является прямым след-
ствием трехмерной постановки задачи, если предположить,
что кинематически допустимые поля скоростей удовлетво-
78 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ* П
ряют краевым условиям: И
иг (хг, х2, L) = пг (х15 х2, —£); S
w2 (хь х2, L) = иъ (х15 х2, —А),
Vi |ап = w-г [ан = «з |ал =0, j
а диссипативный потенциал <р (е) обладает следующий4
свойством на девиаторах тензора скоростей деформаций;
специального вида 1
/О <’ е13\ •
М =- 0 0 • (5.24) 5
\ els е2) 0 J •
Именно, предполагается, что
ср ([е]) -= slip [2 (s13e13 + s23e23) — <р* (<?)]
I'l
— sup [2 (s13e13 -!- s.,3^3) ~ Ф* (h])J- (5.25)
Последнее условие выполняется, например, в случае,
когда ф (е) ----- ср (Д, | 13 |), где I,,. 13 — второй и третий
инварианты девиатора тспзора скоростей деформаций.
В этих предположениях принцип виртуальных мощ-
ностей для поля скоростей и (ас, f) = (0, 0, и (хп х2, t))
примет вид
^р-^-ЬзЙю-, \ —n,S23^_pw = \(Ch3d(o.
<0 to (0
Последнее равенство эквивалентно соотношению
С ди , , 7 , С Г dh . dh \ 7 7
\ р п dx-L п.г-7 - - \ $13 — - «2з -5— dxi ах« =
J r dt «) \ ЭТ] дг2 )
V D
~ ch (h i dx?, j
i)
h = h (хл. z2, t), h |op = 0,
причем
ф (M) Ф* (M) = 2 4* s23e13).
Полагая 2^3 2^23 — £23 — ^23 — s*3, ф ([<?)) = j
= ф (e1? e2), окончательно получим полную постановку I
БЛИЗОСТЬ ГЕОЛОГИЧЕСКИХ МОДЕЛЕЙ
•щ панической задачи о движении вязкой среды в трубе;
\ о-^-Л dot\dtr<>. s2^-} d.i'id.ro = \ chduhd-r*,,
) 1 dt J \ CTi <лг3 / J
/) О " о
ф (elt е2) 4- ф* (sn s2) = е^! + e2s2, (5.26)
h ~ h (я^, х2, t), h j9J; — 0.
В случае стационарной задачи в силу теоремы 2.2 задача
(5.26) эквивалентна (5.2).
Таким образом, антиплоские движения реализуются,
вообще говоря, не для всех вязких сред. Условие (5.25),
которому должен удовлетворять диссипативный потен-
циал, является существенным ограничением класса потен-
циалов, позволяющих осуществить, например, одномерные
течения в трубах. Это условие в общем случае не выпол-
няется даже для однородных изотропных вязких сред,
когда ф (е) = ф (72, /3).
§ 6. Близость реологических моделе’й
Сильно выпуклые функционалы,. Обобщение неравенств Кларксона.
Близость реологических моделей.
При обработке результатов экспериментов важное
значение имеет выбор модели сплошной среды. Используя
различные соотношения между девиатором тензора нап-
ряжений и девиатором тензора скоростей деформаций,
получим разные уравнения, описывающие движение.
С механической точки зрения все модели, удовлетворяю-
щие основным термодинамическим ограничениям, допус-
тимы для описания течений и поэтому естественно вы-
делить те из них, которые, по возможности, наиболее
просты и отражают основные характерные свойства ма-
териала. Возникает естественный вопрос, как оценить
различие между решениями задач, соответствующих раз-
ным математическим моделям, если они получены, как
аппроксимации одного и того же экспериментального ма-
териала?
В этом параграфе будет показано, что две модели вяз-
кой среды с близкими диссипативными потенциалами в
идентичных условиях приводят к близким решениям.
80 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ. Ц| Е
Подчеркнем, что близость потенциалов, вообще гово-|
ря, не означает близости уравнений. Так, например,!
негладкие потенциалы, как было показано в § 2, приводят
к задачам в области с неизвестной границей. В то же вре- ,
мя близкий гладкий потенциал порождает обычную крае-
вую задачу. Таким образом, появляется возможность ап-;
проксимировать задачу в области с неизвестной границей
традиционными краевыми задачами для дифференциаль-
ных уравнений, что может иметь значение с вычислитель-11
ной точки зрения. |
Изложение в настоящем параграфе следует работе [61]. 1
Пусть J (е) — непрерывный выпуклый функционал, |
определенный на банаховом пространстве В. Назовем |
J (е) сильно выпуклым, если существует непрерывная, ||
положительная при р > 0 функция Ф (ц, с) такая, что ||
J (ЧР)+ф di ii>с) < 4- (J +J (6Л>
где ег — произвольные элементы из В и || е, || с, |
IR2IK*. '
В [61] доказана следующая теорема. I
Теорема 6.1. Если сильно выпуклый функционал J (е) 1
достигает на е0 своего минимума и е — произвольный эле- ]
мент из В, || е0 || с, |[ е || е, то 1
Ф(Це-М, <0<7 (е)-7(е0). (6.2)
Например, пусть функционал J (е) имеет вид 1
7 («) = 7о (е) + А (е, е), (6.3)
где 70 (е) — выпуклый непрерывный функционал, а би- 1
линейная симметричная форма A (elf е2) является положи- I
тельно определенной, т. е. А (е, е) > к |) е ||2. В этом слу- 1
чае Ф (р, с) — к р2/4 и, следовательно, для функционала I
(6.3) неравенство (6.2) имеет вид 1
4-/с||е- ео||2<7(е)- 7(е0). (6.4)
1
Отметим, что примерами функционалов вида (6.3) |
являются функционалы типа (5.4), использованные при |
описании антиплоских движений. i
Неравенства типа (6.4) можно получать и для функ-
ционалов более общего вида по сравнению с (6.3). При этом ]
§ 61
БЛИЗОСТЬ РЕОЛОГИЧЕСКИХ МОДЕЛЕЙ
81
часто оказывается полезным неравенство Кларксона [79].
Остановимся на этом подробнее. При р > 2 неравенство
Кларксона имеет вид
ы | ?/2 |'J)rfco. (6.5)
а СО W
Это неравенство означает сильную выпуклость функ-
ционала
J (и) = j | и |рdco. (6.6)
€0
При этом Ф (ц, с) = ц'72р. При 1 <р 2 неравенство
Кларксона таково
1 1
Ф со
<(4-^iMiip+iM2iP)do,r1’ (6-7)
(0
откуда, как показано в [61], следует
33-2
$ । !1+л-1’ +(± $ а И1 г+1 иг и а,у~1 (КК]+«у1 х
со (0
1
х (6.8)
I л I / V
(0 (0
где [а] — целая часть числа а.
Таким образом, функционал (6.6) является сильно
выпуклым и при 1 < р < 2. В этом случае функция
Ф (ц, с) имеет вид
РД2/Г ! 7 \-i —
Ф(р, с) = с»-Ц[^771] -fl) Н2”1 •
Неравенства Кларксона (6.5), (6.7) и следствие из него
(6.8) установлены для скалярных функций их, и2, что
существенно используются при их доказательстве.
Исследование экстремальных задач, связанных с трех-
мерными движениями вязких сред, требует нахождения
82 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ. j
векторных (тензорных) аналогов этих неравенств, откув
будет вытекать сильная выпуклость функционала (2.2
Укажем сначала аналог неравенства Кларксона (6.£’
Для положительной симметричной билинейной форм
Я (е15 е2) имеет место следующее равенство
р
Г д [ <Т + '’a Ci + рг\ , д / ei — е2 ei — <"2 \ 1 2
L V~2~’ 2 Г‘ \ Г"’ 2~JJ ~
— [~2~^ (ei’ 2
Пусть р > 2. Тогда имеют место неравенства
Р
1 if 1 Я Я t
Ci) 4" И(б2, 62)]j- I <42 (еъ ei) Jr A* (c2> 62)],
p
ei — e2 ci — c2 \ 1 2 >
Ь е2 ег
P
A 2
Из трех последних соотношений следует
61 (я?) + е2 (ж)
2
С1 (а?) 4- е2 (ж)
2
С] (ж) — е2 (ж
2
р
f / ei (ж) — е2 (а?)
2
1 Я .
С -у- [А2 (ех (ас), ei (ас)) + А2 (е2 (ас), е2 (ас))]. |
Интегрируя это неравенство по области со, приходим
к векторному (тензорному) аналогу неравенства (6.5) I
W (О
(61, ед) ска 4
СО
(е2, е2) Ло j . (6.9)j
СО
Неравенство (6.5) является простым частным случаем
(6.9).
Перейдем теперь к рассмотрению более общего случая.
Пусть <р (е) — однородная функция степени р > 1. Пред-
§ 6]
БЛИЗОСТЬ РЕОЛОГИЧЕСКИХ МОДЕЛЕЙ
83
положим, что поверхность <р (е) = 1 является гладкой
замкнутой поверхностью со строго положительными глав-
ными кривизнами > а > 0. Отсюда следует, что для
любого п > 2, п р существует число у (н, а) такое, что
т (а*а), т(„,„)-at-<4*м+Ф(ъИ. (ело.
Положим в (6.10) п = р2/(р — 1) и проинтегрируем полу-
ченное неравенство по области (о:
l^lP’/(W) do
(Ы + Ы)Р/(М)
(6.11)
Далее, из неравенства Гёльдера находим
р. _ r, IPW-1)
—----2-!--—^-d(o
(г)
С1---- <’2 |р dto,
откуда следует, что
уг
С
j _р_
“ (|«i|-|-|e2|)p-1
Из последнего неравенства и (6.11) находим
8'1
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. i
. БЛИЗОСТЬ РЕОЛОГИЧЕСКИХ МОДЕЛЕЙ
) 6J
Неравенство (6.12) аналогично неравенству (6.8). В отл«|||
чие от неравенства (6.9), в неравенстве (6.12) фигурируЖ
постоянная у, вычисление которой является самостоятелд
ной задачей. 1|
Рассмотрим теперь два диссипативных потенциал»,
срх (<?), Ч>2 (₽) и числа а, Р такие, что Ц
I Ф1 — <р2 I < а + Р max {срх, <р2}. (6.1ж'
Пусть диссипативным потенциалам <рх (е), ср2 (е) C0°lS
ветствуют функционалы 7Х, Л и функционал J\ — сильн®
выпуклый, так что для него выполнено неравенство (6.1|
с функцией Фх (ц. с).
Теорема 6.2 [61]. Если (х), w2 (х) — поля скоростей,
минимизирующие J\ (и), (и), и ||wx|| с, || w2|| «С с, то
Ф1(||«1— 'й||, с) < 2а mesю | |3 Н max^ex), q?2(ei)] tZco +‘.||
to I
тах[ф1(е2), qp2 (e2)]cZcol. (6.14) f
Доказательство. Из теоремы 6.1 следует, что |
Фх (И ut — иг ||, с) /х (м2) — /х (мх). ,|
Далее, |
Ji (w2) 1 (мх) (^2) J2(^2) J2(н2) — Jх (мх)
/х (По) — J2 (мг) + Л (м1) —
Из этих неравенств и предположений теоремы вытекаеп|
(6.14). |
Заметим, что теорема 6.2 имеет смысл и в случае неог-1|[
раниченной области с бесконечной мерой, если толькоИ
число а в (6.13) можно положить равным нулю.
Пусть диссипативный потенциал ср (е) является глад-1
кой функцией при | е | > 0. Сопоставим ему гладкий!
диссипативный потенциал <рЕ (е) = (ср2 + е2)1''2 — е. Для*
диссипативных потенциалов ср, <ре имеет место неравенство»
типа (6.13); | ср — <р6 | 8. ?
Неравенство (6.14) дает оценку различия минимизи- ,
рующих полей в энергетической норме. Однако если пред- ;
положить, что со — ограниченная область и что | ег (х) | 1
и | е2 (х) | суммируемы в со с достаточно большой сте-
пенью, то из (6.14) следует оценка различия между и^х)
и u<i(x) в равномерной метрике. Эта оценка является
непосредственным следствием теорем вложения.
Действительно, в силу теорем вложения при р > 3
имеем
max | и | = || и ||С(Ш) < *1 II Мн„(Ю)-
В силу неравенства Корна при соответствующих кинема-
тических ограничениях из последнего неравенства сле-
дует
1
II W ||ща)< А’зК
(6.15)
Пусть энергетическая норма соответствует показателю
р0. Если р0> 3, то, полагая в (6.15) р — р0, и — и^— щ,
е -- — е2, получаем из (6.14) оценку различия между
экстремальными полями мх и м.2 в равномерной метрике.
Если же р0 3, то будем предполагать, что
I е,- (х) |?йю < 00, i = l,2, <?= . (6.16)
Ро 1
В этом случае из неравенства Гёльдера следует
1
| е (х) |pd® <| | е (х) |р»[ е (х) \qd(o
В силу предположения (6.1
оценку различия долей в j
оценку разности этих же
полей в энергетической мет-
рике.
Полученные оценки допу-
скают следующую наглядную
механическую интерпрета-
цию. Пусть <рх и ф2 — дис-
сипативные потенциалы, за-
из (6.17) и (6.15) получим
шомерной метрике через
Рис. 13.
между компонентами
висящие только от второго
инварианта девиатора тен-
зора скоростей деформаций.
На рис. 13 указаны зависимости
812 и е12 — единственными отличными от нуля в чисто
сдвиговом течении, соответствующие этим потенциалам.
86
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. И
Область разброса экспериментальных точек на рис. 13
заштрихована.
Приведенные выше оценки показывают, что и в слу-
чае произвольных течений, если значения | е | попадают
в заштрихованную область, поля скоростей, определяемые
этими потенциалами, также будут различаться в пределах
разброса экспериментальных данных.
В заключение этого параграфа отметим, что здесь
было рассмотрено влияние изменения диссипативного
потенциала на минимизирующее поле скоростей. К этому
кругу вопросов примыкает задача об оценке изменения
поля скоростей течения при изменении внешних силовых
полей, действующих па среду. Устойчивость минимизи-
рующих полей при вариации внешних нагрузок рассмот-
рена в работе [82].
§ 7. Метод двусторонних оценок
Двойственность в вариационных задачах. Двусторонние оценки точ-
ной нижней грани функционала. Двойственность но Кастильяно.
Метод размораживания дифференциальных связей. Оценки снизу
коэффициента предельной нагрузки.
При решении конкретных задач одним из важнейших
вопросов является определение точности приближенного
решения. Обсуждению этого вопроса и посвящен настоя-
щий параграф.
Часто используемым методом построения приближен-
ного решения вариационной задачи является метод Рит-
ца. Обобщением этого метода для невариационных задач
является метод Бубнова — Галеркина — Петрова [116].
Практическая реализация этих методов связана с выбо-
ром некоторых координатных систем функций и с опре-
делением коэффициентов разложения приближенного ре-
шения по этим системам. Какова же точность так построен-
ного приближенного решения?
Обычно для оправдания приближенного решения
добавляют к первоначально использованной конечной
системе координатных функций еще некоторое количество
их и показывают, что это не приводит к существенному
изменению результата.
s"1
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
87
Возможно, что в некоторых случаях итог интуитив-
ный прием и оправдан. Тем не менее, вопрос о математи-
ческой оценке точности приближенного решения пред-
ставляется существенным.
Один из возможных путей решения этого вопроса та-
кой. Предположим, что имеется оценка отличия точной
нижней грани функционала от значения функционала на
приближенном решении. Тогда, в случае сильной выпук-
лости функционала из формулы (6.2), следует энергети-
ческая оценка различия между минимизирующим полем
п приближенным решением. Далее, из соотношений типа
(6.15), (6.17) можно получить оценку различия между
ними и в других метриках.
В случае задач невариационного типа оценку отличия
точного решения от приближенного можно получить
путем подстановки приближенного решения в исходные
уравнения и затем использования априорных оценок.
Этот путь возможен для гладких задач, в которых извест-
ны априорные оценки.
В задачах, соответствующих вязкопластическим сре-
дам, приводящих к краевым задачам с неизвестными гра-
ницами, таких априорных оценок в настоящее время нет.
Тем не менее, оценку точности приближенного решения
в этом случае можно получить, исходя из вариационной
постановки задачи.
Для решения этого вопроса существенным является
получение оценок снизу значения точной нижней грани
рассматриваемого функционала. Такие оценки можно
получать, используя теорию двойственности в экстремаль-
ных задачах.
Теория двойственности в настоящее время является
одним из основных разделов выпуклого анализа [60, 72].
В этом параграфе будет приведен один общий результат из
теории двойственности в форме, удобной для приложений
(теорема 7.2).
В механике сплошных сред одним из первых приме-
ров двойственной формулировки задачи является прин-
цип Кастильяно [117]. Для жесткопластической среды
теория двойственности, по существу, сводится к установ-
лению двусторонних оценок для коэффициента предельной
нагрузки через статический и кинематический коэффи-
циенты. Эти вопросы были рассмотрены в § 4. Получение
88 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ. Ц
таких двусторонних оценок для коэффициента предель-
ной нагрузки впервые было предложено А. А. Гвоздевым
в 1936 г. (см. [39]).
Другой, предлагаемый авторами, подход к получению
оценок снизу точной нижней грани функционала состоит
в следующем. Строится последовательность вспомогатель-
ных вариационных задач, для которых известно, что их
точные нижние грани образуют возрастающую числовую
последовательность. Каждый член этой последовательности
не превосходит точнохг нижней грани исходного функцио-
нала. При этом структура вспомогательных функционалов
существенно более проста по сравнению со структурой
исходного функционала.
Именно, каждый из вспомогательных функционалов
не зависит от производных искомых функций и, следова-
тельно, определение его нижней грани является задачей
об экстремуме функции конечного числа переменных.
Построение такой системы функционалов связано с
«размораживанием дифференциальных связей». Под этим
имеется в виду следующая процедура. Компоненты ец
девиатора тензора скоростей деформаций не являются
независимыми функциями, а связаны условиями совмест-
ности. Эти условия могут быть переписаны в виде условий
ортогональности тензора ег7- (ж) к некоторому классу
гладких тензорных полей. Выбирая в этом классе счетное
плотное множество, приходим к задаче об экстремуме
функционала при наличии счетной системы условий ор-
тогональности. Отбрасывая все условия ортогональности,
оставляя одно, два или большее конечное число этих ус-
ловий, получаем искомую последовательность вариацион-
ных задач. Конечное число условий ортогональности мож-
но учесть в функционале с помощью множителей Лаг-
ранжа.
Таким образом, определение точной нижней грани
вспомогательного функционала сводится к алгебраичес-
кой задаче об исследовании экстремума функции конеч-
ного числа переменных.
Подчеркнем,что для получения оценок снизу точной
нижней грани исходного функционала по общей теории
двойственности требуется нахождение достаточно боль-
шого запаса полей напряжений, удовлетворяющих урав-
нениям равновесия (аннуляторы кинематически допусти-
5 ”
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
89
}1Ых полей скоростей). При использовании предлагаемого
авторами метода в построении таких полей напряжений
лет необходимости.
В задачах о нахождении коэффициента предельной
нагрузки для плоских течений жесткопластической среды
метод двойственности, связанный с размораживанием диф-
ференциальных связей, близок к методу Сен-Вепана по-
лучения оценок снизу коэффициента предельной нагруз-
ки. Этот метод будет изложен в § 9.
Подчеркнем еще раз, что получение оценки различия
точного и приближенного решений непосредственно свя-
зано с понятием сильно выпуклого функционала и по-
этому важное значение имеют рассмотренные в предыду-
щем параграфе обобщения неравенств типа Кларксона и
задача определения значений числовых коэффициентов
в них.
Перейдем теперь к рассмотрению общей теории двой-
ственности.
Пусть множество кинематически допустимых полей U
порождает в Dp (со) замкнутое линейное многообразие
Ер = е0 + Нр, где е0 — некоторый девиатор из Dp (со),
а Нр — замкнутое подпространство в Dp (со).
Относительно диссипативного потенциала ср (е) пред-
положим, что с2 | е Р > ср (е) щ | е |р при | е | > 1.
Теорема 7.1 (принцип двойственности для гладкого
потенциала). Пусть р > 1, ср (в) — гладкая функция е,
s0 (ж) принадлежит Dq (со). Тогда имеет место равенство
i»f [ср (е) — sn-e]dm~ sup \ [(s — So)-eo — cp*(s)]dco, (7.1)
е;=!Л> « seS« Ы
где S„ — линейное многообразие девиаторов в Dq (со),
I 1
— I-----= 1, таких, что
i> 1 <1
— (7.2)
<0
для всех h из НР.
Доказательство. Из определения преобразо-
вания Юнга имеем ср (е) > s-e ср* (s) для любых е и s.
Следовательно, при s из Sq
§ [<Р (*?) — -So • <?] d<0 > Ц<? — So) еп — ср* (s)] dm,
(Л 0)
90
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. Ц
откуда вытекает неравенство
inf \ [<р (е) — $0 е] da sup \ [(s — $0) • е0 — ф* (s)] dot. (7.3)
<0 sl=S<7 (О
Далее, пусть ё—элемент из Ер, на котором функционал
(е) = У [<р (е) — ,v0 е] с?со (7.4)
СО
достигает своей точной нижней грани на Ер. Существо-
вание ё следует из результатов § 3. Тогда для ё выполня-
ется соотношение
Up—= o
\ ^{у J
(О
для всех h из НР. Следовательно, девиатор s
__ Эф (в) 1 Эф
— де - 3 де
входит в множество Sq. Кроме того, для s выполнено ра-
венство (см. теорему 2.2)
Ф (ё) + ф* (s) = з-ё. (7.5)
Из (7.5) находим
inf \ [ф (е) — s0-e]d(j)= И(з— з0)-е0 —ф*($)]йю. (7.6)
<0 О)
Из соотношений (7.3), (7.6) и вытекает утверждение тео-
ремы 7.1.
Таким образом, для получения оценки снизу точной
нижней грани функционала (7.4) можно взять s, удовлет-
воряющее (7.2), и подставить в функционал J* (s):
J* (s) = J l(s — So) • е0 — Ф* (S)l dio. (7.7)
О
Функционал (7.7) называют двойственным к функционалу
(7.4). В теории упругости этот функционал называют
функционалом Кастильяно.
Условие (7.2) означает, что напряжения удовлетворя-
ют уравнениям равновесия.
Для представления функционала (2.2) в виде (7.4),
вообще говоря, можно воспользоваться формулами (3.10).
t 7 I
МЕТОД двусторонних ОЦЕНОК
'Л
Однако в конкретных задачах иногда бывает проще вос-
пользоваться каким-либо частным приемом.
Теорема 7.2 (принцип двойственности для потенциа-
лов общего вида). Пусть выполнены условия теоремы 7.1
без предположения о гладкости ср (е) и пусть <в — огра-
ниченная область. Тогда имеет место равенство
inf f [ср (е) — So е] d'o = sup \ [(s — s0) • e0 — <p* (s)]dm.
co w
Доказательство. Пусть <pe — гладкий дисси-
пативный потенциал, удовлетворяющий условиям тео-
ремы 7.1 и такой, что | ср (е) — <ре (е) | < е. Тогда | <р* (s) —
— ф* ($)1 "'С е- Из этих неравенств и из теоремы 7.1 выте-
кает утверждение теоремы 7.2.
Заметим, что если ср — гладкий потенциал при | е | >
> 0, то фе (е) = [ср2 (<?) + в2]1/г — е.
Одним из моментов, затрудняющих применение тео-
рем 7.1 и 7.2, является условие равновесия (7.2). Однако
в некоторых задачах можно эффективно описать все поля
s (х). удовлетворяющие этому соотношению.
В связи с обсуждением условия (7.2), вернемся к рас-
смотрению задачи о движении вязкопластической среды в
цилиндре под действием градиента давлений. Эта задача
сводится к нахождению функции, минимизирующей функ-
ционал (5.2):
J (и) = \ [ф (Vu) — си] dxidxz, u|aD = 0,
где сх| е|р < ф (е) < с2| е|р при | е\ > 1.
Интегрируя по частям, получим
J (u) = [ф (Viz) — Р1 (жъ ж2)-^- —
Г)
— Рг^ь Жг)-^-] dxidxt, и |0D = а, (7.8)
где а — произвольная постоянная. Функции р2, ко-
нечно, определены неоднозначно.
Положим
92
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
1ГЛ, 11
Вектор-функции е (ж) = (ех, е2) образуют подпространство
Ер в пространстве Dp (со) (см. § 5). Подпространство Ер
состоит из вектор-функций е (ж), по которым в соответ-
ствии с (7.9) можно восстановить функцию и, причем
и = а (а — некоторая постоянная, одна и та же для
всех компонент связности dD). Можно показать, что если
\{e^~e^}dxidXi = ^' <7Л0)
D
для всех X из Wq (D) и е (рс) принадлежит Lp (Z>), то по
е (ж) восстанавливается функция и (х1, ж2), принимающая
постоянное значение на SD, однако на разных компонен-
тах связности dD эти значения могут быть различны.
Пусть D — односвязная область. Тогда Ер является
множеством вектор-функций из Lp (D), удовлетворяющих
условию (7.10). Кроме того, если а (ж) = (^ (aj, ж2), s2 Си»
х2)) из Lq (D) и для всех е из Ер выполнено равенство
У (eisi + e2s2) dxidx2 = 0, (7.11)
D
то существует функция % из Wq (D) такая, что =
= дХ/дх2, s2 = —д’к!дх1.
Таким образом, задача о минимуме функционала (7.8)
эквивалентна задаче о минимуме на Ер функционала
J (еь ег) = У [ф(е1( е2) — р^ —p2e2]dx1dx2. (7.12)
D
В силу теоремы 7.2 имеет место равенство
inf J (ei, е2)= sup — i|)*(si, s2)dxlt dx2 | ,
е&Ер s€=S^ р J
е0 = 0,
где Sq определяется условием (7.2), которое в данном слу-
чае имеет вид
У 1(81 — Pl) С1 + («2 рз) е2] dxAdx2 = 0.
D
Отсюда, используя (7.11), получаем
хе1Ч,(О).
§ 71
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
93
Итак, окончательно будем иметь
inf j [ф (Vw) — си\dxidx2 =
и|щ)=0р
= sup Г С ,
KeW^(D) L J \ ^2
(7.13)
Равенство (7.13) показывает, что если подставить
произвольную функцию X из Wq (D) в интеграл
J* (X) = — ф* (pi + , рг —-~^dxxdx<i, (7.14)
D
то получим оценку снизу для точной нижней грани ис-
ходного функционала (5.2).
Функционал J* (X) является двойственным функцио-
налом по отношению к функционалу (5.2) и является точ-
ным аналогом функционала Кастильяно.
Аналогичное построение можно провести и в случае
многосвязных областей D. Однако в этом случае возни-
кают затруднения в описании вектор-функций s (х), удов-
летворяющих (7.11).
Ниже этот вопрос будет подробно рассмотрен для двух-
связных областей в связи со вторым методом оценок сни-
зу точной нижней грани исходного функционала.
Второй подход к получению оценок снизу сначала из-
ложим в общей форме, а затем дадим его приложения
к задачам о движениях вязких сред и, в частности, к
функционалу (5.2) в двухсвязной области.
Пусть В — рефлексивное банахово пространство и
пусть 7\, . — счетное множество линейных не-
прерывных на В функционалов. Рассмотрим непрерывный
и выпуклый на В функционал J (е), причем J (е) -> оо при
II е || —>- ОО.
Обозначим через К подпространство в В такое, что
Для всех е из К выполняются равенства 7\ (е) = О,
i = 1, 2, ... Через обозначим подпространство в В,
гДе Tt (е) = 0, i ~ 1, . . ., N. Обозначим
A=inf / (е); Ду = inf J (е).
94
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[гл. д
Теорема 7-3 (второй принцип двойственности). Имеют»,
место следующие соотношения
Aw)>Aw-i, А = lim An~
N-rx>
Доказательство. Первое утверждение теоре-
мы очевидно, так как Kn S Kn-i. Пусть ем — элемент из
KN и Aw — J (eN). Так как J (eN) J (0), то последова-
тельность ew ограничена и, следовательно, имеет слабо
предельную точку ё. Нетрудно видеть, что ё входит в К.
Из выпуклости функционала J (е) имеем
J (ё) lim Aw.
Так как А lim An, то из последнего соотношения выте-
N—(х
кает второе утверждение теоремы 7.3.
Из теоремы 7.3 следует, что An оценивают снизу точ-
ную нижнюю грань на К функционала J (е). Как извест-
но [118], числа Aw вычисляются с помощью множителей
Лагранжа по формуле
n
An— sup inf I/(е) — 3 (е) • (7.15)
kJ; L i-i I
Для функционалов J (e), T{ (e) интегрального типа
вычисления Aw по формуле (7.15) приводят к задаче об
экстремуме функции конечного числа переменных.
Дадим теперь геометрическую интерпретацию изло-
женных выше двух подходов к получению оценки снизу
точной нижней грани исходного функционала.
В первом подходе строится функционал, при подста-
новке в который произвольного из некоторого класса де-
виатора напряжений получается интересующая нас оцен-
ка. Эти функционалы J и J*, как показано на рис. 14,
определены на разных пространствах, но графики их
имеют экстремальные значения при одной и той же ор-
динате.
Второй подход состоит в расширении области опреде-
ления исходного функционала Ер за счет разморажива-
ния дифференциальных связей до пространства Dp или
до его подпространств конечной коразмерности. Таким
образом, график исходного функционала является не-
которым сечением графика расширенного функционала.
i 71
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
95
Естественно, что при этом минимальное значение расши-
ренного функционала оценивает снизу минимальное зна-
чение исходного функционала (рис. 15).
Трудность использования первого подхода состоит
в необходимости эффективного описания области опреде-
ления функционала J* (определение достаточно широкого
запаса полей напряжений, удовлетворяющих уравнениям
равновесия и краевым условиям).
Трудность использования второго подхода состоит
в необходимости нахождения точного значения минимума
расширенного функционала. Как было показано выше-
эта задача сводится к отысканию минимума функции ко-
нечного числа переменных.
Заметим, что при решении конкретных задач, рассмо-
тренных выше, второй подход позволяет в ряде случаев
построить и функционал J*, введенный в первом подходе.
Проиллюстрируем это на примере задачи о движении
вязкой среды в трубе с двухсвязным поперечным сече-
нием.
Пусть (г, <р) — полярные координаты на плоскости
и пусть поперечное сечение трубы D в полярных коорди-
натах определяется соотношением {О <Z а < 1\ (ф) <7 г
г2 (ф), О ф 2л}. Обозначим через Ev множество
вектор-функций е (х) = (ег (х), е2 («?)) из Lv (Z>), таких,
что по е (х) можно в соответствии с (7.9) восстановить
Функцию и (х), причем и 0. Нетрудно видеть, что
множество Е? можно описать следующим образом: в (аг)
96
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. t
входит в Ер, если е (ас) из Lp (Р), причем
Г / эх эх\ , _
Не1'^_е2'^ГГа:1&2==0
D
для всех X (ас) из Wg (D) и
С / cos (р . S1H Ф \ 7 7 л
\ (ci + е2 —) г ar dtp == 0.
D
Итак, исходная постановка задачи эквивалентна за-
даче о разыскании минимума функционала (7.12) на Ер.
Заметим, что для любого числа а и произвольной
функции X (ас) из Wg (D) выполняется неравенство
А~ inf J (е) > inf |Ч(е1> е2)—
е(ас)еЕр е(к)еЬр(О) J L
/ ЭХ a cos <гЛ ( , ЭХ a sin <p\ "I , ,
~ и1 - -----01 “V2 + ------г) ^1^2=
= inf J(e, а, К). (7.16)
Из (7.16) следует, что
А sup sup inf J (е, а, K) =
ае& Х(<г)£^(р) e(®)Gbp(D)
„ „ I f .1 * / ЭХ a cos <p . ЭХ
= sup sup -------I, P. + -JJ--
аея1 X(ac) 6ТУ *(D) d
ashijp> dxidxi] = sup sup .J*(%, a). (7.17)
aeR> teW*
Неравенство (7.17) дает оценку снизу для искомой
величины А. Используя второй подход, покажем, что
на самом деле в (7.17) имеет место равенство. Рассмотрим
систему гладких функций Х; (ас), i — 1, 2, . . ., плотную
в Wg (D), и обозначим через Т* (е), к = 0, 1, 2, . . .,
следующие функционалы:
. Г [ COS ф , Sin ф\ , ,
Го (е) = \ (^1 -у— -н е2 dxidx-i,
D
р / ЭХ. эх. \
Л (₽) = J — ez-^jdxxdx«, i = i, 2,...
р
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
97
Лз теоремы 7.3 и формулы (7.15) следует, что
/ N \
4 = lim Лдг = lim sup sup J* \ У, 7’7; (ас), а/. (7.18)
;v->x JV-»oc а k>,...,KN i=I
Обозначим через An пространство линейных комби-
наций функций (ас), . . Kn (х). Тогда (7.18) можно
переписать в виде
А = lim sup sup J* (X (ас), a). (7.19)
jV-»-*? a ?Дх)еЛ]у
Так как An входит в Wq (D), to из (7.19) следует
A C sup sup J* (7 (ас), a). (7.20)
a X(x)eW^D)
Из неравенств (7.17) и (7.20) находим
inf J(e) = sup sup J* (X (ас), a).
eeEp a X(»)eWj(D)
I Функционал J* и определяет соответствующую двой-
| ственную задачу в случае двухсвязной области.
Приведем конкретный пример двойственного потен-
I циала к потенциалу Мизеса (5.3)
ф* (si, s2) =
0
(I а 1 — тп)2
2ц
при | 8 | < То
При |8 | >Т0.
Рассмотренные задачи о движении вязкопластической
среды в трубах с различными поперечными сечениями
численно анализировались в работах [115, 119], причем
в [1191 использовалась рассмотренная выше процедура
оценки точности приближенного решения с помощью
двойственного функционала.
В работе [119] приведены расчетные данные для круг-
лой и квадратной трубы. Для круглой трубы результаты
расчета сравниваются с точным решением.
Расчеты для квадратной трубы с единичной площадью
поперечного сечения и сравнение их с результатами [115]
приведены в таблице 1.
Таблица 1 показывает, что при больших градиентах
Давлений результаты расчетов достаточно близки. Однако
4 П. П. Мосолов, В. П. Мясников
98
СТАДИОН A PJIЫЕ ТЕЧЕ НИ Я
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
С То
5 6 7 10 20
Егл. ц |
I
Оцени а сверху j* Оценка снизу Расход по fl 19] « v л it ц а ' । Расход по [115]
—0,00845 —0,04072 -0,10268 —0,48724 - -4,02201 —0,00882 —0,04121 -0,10339 —0,48778 —4,02283 0,019 0,047 0,078 0,179 0,528 0,0198 0,0602 0,159 0,518
Вернемся теперь к применению второго двойственного
подхода к общему трехмерному функционалу
J (Р) = [<р (е) — s0-c]d<>>. (7.21)
Выделим сначала в Dp (со) подпространство девиато-
ров, которые порождаются векторными полями и (ас):
I
при малых градиентах давлений они заметно различаются, |
так как существенную роль начинает играть недифферен- ||
цируемость функционала J (и) и наличие оценок снизу 1
является определенной гарантией надежности численных
результатов.
Приведем еще численные результаты из [119] для круг- I
лой трубы с поперечным сечением радиуса 0,5. В этом
случае известно точное решение задачи и можно провести
сравнение оценок сверху и снизу с точным значением
функционала. Из таблицы 2 видно, что оценки снизу
ближе к истинным значениям функционала по сравнению
с верхними оценками. По-видимому, это связано с тем, '
что двойственной задаче соответствуют естественные крае-
вые' условия. Поэтому при минимизации функционала У#
нет -необходимости^следить за удовлетворением*краевых |
условий.
: Таблица 2 I
«0 а» Точное значение J
6 7 8 10 20 30 128
—0,0197614 —0,0561258 —0,1141548 —0,3003341 -2,6805900 —7,5082981 —1,84687.1с2 о со cq оо 1- ST ^5 ОО t— Nf ю с© . £• S 77 М С ~ itr "2 СО од о v. С-. хп Q Q Сй ф Т1 L'-. со с ч- О СО СО QQ о О О О (М ч-Г ь ! 1 1 1 1 еч с г. у-с; Q § СО ч_, СО 1"- -sr ю • Ю СО «4» хг о £ 77 со cq •5^^001*' LO т-ч о О0 О *4< О СО О 00 с о © с n sV I : i 1 1 1 1
Впервые, по-видимому, численные расчеты, исполь-
зующие двойственные оценки, были проведены примени-
тельно к задачам кручения упругих стержней в работах
1120-1221.
1
i)u
~chC
(7.22)
Исходная постановка задачи состоит в отыскании ми-
нимума функционала (7.21) на подпространстве (7.22).
Компоненты девиатора е (х) удовлетворяют в этом
случае условиям совместности
д2е. гт d\l д2г., 'ji д*е -
dz.dx. dxjdxm . дх‘дх г т дх-дх, г 1
(7.23)
Верно, как известно, и обратное,
удовлетворяет (7.23) в односвязной
вует векторное поле и (ас), связанное
(7.22).
Запишем условия (7.23) в виде
Если девиатор е (ас)
области, то сущест-
с ним соотношением
е = 0, i = J, .. . , б.
Из соотношений (7.23) следует, что если ец {х) при-
надлежит Lp (<в) и со — односвязная область, то из усло-
вия
е-X (ac)dco = 0, i = l..................................б, (7.24)
(J)
Для всех X (ас) из Со (со) следует, что е (ас) порождается
векторным полем и (х) в соответствии с (7.22).
Далее, кинематически допустимые поля скоростей
Удовлетворяют некоторым краевым условиям. Предполо-
жим, что и |? — о, где у — часть границы бсо, причем
имеет место представление (3.10). С учетом (*8.10), условие
4*
100
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[гл. и
и |? — о перепишем в виде
v (х) dS
у ш
( (• (jo, a, R)
= J («/) cfo J v (as)—~-------------dS^-O, (7.25)
io 7
для всех гладких на у функций v (as).
Выбирая полные системы функций Л (ас) и v (as) и ис-
пользуя соотношения (7.24), (7.25), находим, что множе-
ство Ёр можно задать как подпространство нулей счетной
системы линейных функционалов Тt (е), и следовательно,
далее можно воспользоваться теоремой 7.3 для получе-
ния оценок точной нижней грани функционала (7.21).
Остановимся в заключение на применении принципов
двойственности к оценке снизу коэффициента предельной
нагрузки для жесткопластических тел.
Изложенный выше первый метод двойственности при-
водит к статическим коэффициентам ms. Этот вопрос был
подробно рассмотрен в § 4.
Изложим теперь второй метод, основанный на размо-
раживании дифференциальных связей применительно
к этой задаче.
Пусть Ф (е) — выпуклый положительный функционал
первой степени однородности, определенный на банаховом
пространстве В, причем сх || е 1| С Ф (е) с2 II е ||, сх )> О,
с2 > 0.
Пусть F (е) — непрерывный линейный функционал
в В. Положим
1 F (О 1 F (е) ,п оду
т* еек ф Iе! mN e<=KN
Нетрудно видеть, что т* > ту тц-i, так как
Ку С Ку-1.
В предположении рефлексивности пространства В по
аналогии с теоремой 7.3, можно доказать, что lim ту = т*-
Однако для нерефлексивных пространств, а именно эти
пространства возникают в теории жесткопластических
сред, такое равенство, вообще говоря, несправедливо.
Тем не менее, числа ту дают нижнюю оценку для ко-
эффициента предельной нагрузки т*.
§71
МЕТОД ДВУСТОРОННИХ ОЦЕНОК
101
Числа т^, используя теорему Никольского [123],
jtO/i’HO вычислять по формуле
1 . » F (е) — к*Т, (?) /7 971
— = inf sup_________—______1
mN М,...дЛГееи Ф(?)
Пусть теперь Ф (е), F (е) определяются формулами
ф (е) = ф (е) d(o, F (е)= sft-edw.
(I) ф
Используя соотношения (7.24) и (7.25), пространство
можно представить как совокупность элементов из
Dt (со), удовлетворяющих счетной системе условий орто-
гональности
7\ (е) — (х) • е (эс) (ко = 0.
СО
Здесь предполагается односвязность области со и воз-
можность представления (3.10).
В итоге, (7.27) можно переписать в виде
(s0 — Vs.) edtii
-L = inf sup S—;--------------------. (7.28)
™N v......хкдам J<p(e)d®
Сй
Заметим, что
У г (ж) • е (х) da
sup -----------------= sup sup , (7.29)
e^jeaie) j(p(e)d© !веш e '
Cl)
где e в правой части равенства (7.29) рассматривается
независящим от х.
Из равенств (7.28), (7.29) следует, что
1 с («О (ж) — (ж)) • е
~ = inf sup sup - (7.30)
N Х1,...,*Л яе® е <р(?) 7
Формула (7.30) показывает, что вычисление тк яв-
ляется задачей об экстремуме функции конечного числа
переменных. Из этой же формулы следует, что экстре-
мальный девиатор е (эс) в (7.28) имеет, вообще говоря,
‘-'-образный характер.
102
стационарные течения
[ГЛ. Ij
По экстремальному девиатору е (х) попытаться
восстановить в соответствии с формулой (/.^2) поле ско-
ростей и (эс), удовлетворяющее краевым условиям. Если
ЭТО ВОЗМОЖНО, ТО Шдг --
Конкретные примеры применения этого подхода будут
даны в § 9.
Следует заметить, что возможны и другие подходы
к построению двойственных функционалов. В частности,
в § 11 будет рассмотрен еще один подход к построению
оценок снизу точной ни?кней грани функционала.
§ 8. Пластическое кручение
Кручение жесткопластического стержня. Вычисление предельного
момента. Формулы для скорости депланации поперечного сечения
стержня. Кручение стержня с многосвязным поперечным сечением.
Задача о кручении жесткопластического стержня яв-
ляется одной из простейших задач теории пластичности.
В этом параграфе будет изложено решение задачи о кру-
чении на основе метода получения двусторонних оценок
точной нижней грани соответствующего ей функционала.
Изложение следует работе [124].
Сформулируем постановку задачи. Пусть ю — цилиндр
а = {fo, х2) е D, 0 < х3 < Н}- Кинематически допу-
стимые поля скоростей и (») удовлетворяют условию не-
сжимаемости и краевым условиям
и (xlt х2, 0) — (0, 0, u3 (xv х2, 0)), Q ,
и (xt, х2, Н) = (-<№, сий, и3 (zj, х2, Н)), ' >
где функции и3 (xv х2, 0)» из 0е!, ж2, Н) произвольны,
а — действительное число.
Условия (8.1) допускают следующую физическую ин-
терпретацию. Торцы цилиВДРа жестко соединены с тон- Ji
кими жесткими пластинами, которые изгибаемы в пер-
пендикулярном к их плоскости направлении (оси х3) и
недеформируемы (пренебрежимо мало деформируемы)
в плоскости хг, х2. НижнЯя пластина изгибается в на-
правлении х3, а верхняя пластина вращается как твердое .
тело вокруг оси х3 с углоБ°й скоростью а, изгибаясь <
в направлении х3.
5 81
ПЛАСТИЧЕСКОЕ КРУЧЕНИЕ
103
Пусть к верхней пластине приложен закручивающий
момент. В силу условия (8.1) соответствующую этому
моменту плотность распределения сил на торце х3 ~ Н
можно задать в виде
(—Мх2, Mxlf 0),
где М — величина закручивающего момента.
Таким образом, если задан диссипативный потенциал
Ф (е) для жесткопластической среды, то задача полностью
поставлена.
Отметим, что приведенная здесь постановка задачи
несколько отличается от обычной, в которой с самого на-
чала делается предположение о структуре внутри закру-
чиваемого стержня (см. например, [45]). В приведенной
постановке материалу в стержне не предписывается ни-
какой определенной структуры движения.
Из определения жесткопластической среды диссипа-
тивному потенциалу ср (е) соответствует условие текуче-
сти ср* (s) = Ов соответствии с (1.15). В рассматриваемой
задаче это условие удобно записать в несколько иной фор-
ме. Для этого введем понятие поляры к функции ср (е).
Полярой <р° (s) для функции <р (с) называется положи-
тельная, первой степени однородности, выпуклая функ-
ция такая, что
Ф° (s)cp (е) s-e, (8-2)
причем для любого е, отличного от нуля, существует
отличное от нуля s (е), для которого в (8.2) имеет место
равенство.
Связь между полярами и преобразованием Юнга
подробно изложена в [60]. Условие текучести ср* (s) 0
эквивалентно условию ср0 (s) С 1. По условию текучести
поляра находится элементарно. Необходимо построить
конус с вершиной в начале координат в пространстве ком-
понент девиаторов напряжения .< такой, чтобы на поверх-
ности текучести его значения были равны единице.
Оценим снизу предельное значение момента М* с по-
мощью статического коэффициента Ms, определяемого из
соотношения
(,г)-с (.г) — Л/.а (а® .'(2) (Ixph’-i, (8.3)
(о D
С (.) 1.
104
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. п
§81
ПЛАСТИЧЕСКОЕ КРУЧЕНИЕ
105
Обозначим через [5]
[s] (X) матрицу вида
Н(Х) = О
\ эх ________
\ дх2 дх-2
ЭХ
о
о
о
= A(«X, т2).
матрицу вида (5.24), а через
эх
Эх2
ЭХ
Эхх
0 /
Будем искать статически допустимое поле напряже-
ний s в виде Ы (X), причем A |3D = const. Тогда условие
(8.3), с учетом (8.1), примет вид
— § (Ж1 dx2=(xi dxi dx2r
D 1 D
rt ,Г Ч ....
Из (8.4) непосредственно вытекает оценка снизу для
предельного момента
Г С I d'f- эх \ и
3 \ 1 Эг2 ;dxiJ;r2 |
Af#>supi-----5-------------------, (8.5)
j .Н-4 + ^2) da;idr2
Ln J
где A —множество функций X (Zj, Т2) таких, что
X |ад = const и ср0 (Ы (X)) 1 •
В случае однородной изотропной среды условие
ф° (Ы (X)) < 1 можно переписать в виде
I
I
ii
I va | const. (8.6)
Постоянная в (8.6) в случаях диссипативных потенциалов
Мизеса или Треска равна тоуг2.
Получим теперь оценку сверху предельного момента
М*, используя кинематический коэффициент Ми.
Рассмотрим кинематически допустимые поля скоростей
следующего вида:
и (эс) = (—а^з, ^3> и (эф, ж2)). (8.7)
В этом случае девиатор тензора скоростей деформации
имеет вид [<?] и
1 f ди
~ Т \ Э^
1
623 = -7
Кинематический коэффициент Ми определяется из ра-
венства
( ф (Iе!) — НМи ( (ж? ф- D dxidxz = 0,
io У)
откуда
J <Р ([«]) dxr dx-2,
inf .
«(Х11Ж2) (z2 + x2)dlldz2
В
(8-8)
Предположим, что диссипативный потенциал <р (е) удо-
влетворяет условиям, при которых возможны антиплоские
движения (см. (5.25)).
Обозначим ех — 2е13, е2 = 2е2з, s13 = sx, s23 = s2,
<p (И) = ф (е). Тогда ср0 ([з]) = ф° (s).
В этих предположениях о диссипативном потенциале
в [124] доказано, что
inf \ ф(?ц — to) dxtdxz = sup —\ to-GcKdxidx^ , (8.9)
и(Х1,х2)д ХеА L Д I
где t0 = (х2, —хх), G = (д/дх2, —д/дх-?).
Сравнивая (8.5), (8.8) и (8.9), получаем формулу для
вычисления предельного момента
inf \ ф (Vu — to)dxidxz — М* \ (я? ф- х%) dxjdxt —
Чч,х2)й й
= sup i—Л t0-G'kdxidx3 . (8.10)
ХеА L а |
Подчеркнем, что формула (8.10) дает не только выра-
жение но и доказывает, что экстремальные поля
в указанной постановке задачи о кручении имеют спе-
циальный вид (8.7). В обычном изложении с самого начала
предполагается, что поля скоростей в стержне имеют вид
Пусть граница области/) состоит из N компонент связ-
ности, так что dD — [J yi, — ограничивают области
7)г (Dt э D). Положим X |71 = 0. Тогда
С с w ।
|"~ \ to-CrKdxidx^ — 2 A Kdxrdx2 + mesl)/). (8.11)
О 'р 2 1 '
106
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
*ГЛ. IT
Если D —односвязная область, то (8.11) принимает
вид
— t<i’G'Kdxxdx2 = 2 С (8.12)
D D
Из формул (8.10)—(8.12) получаем метод вычисления
предельного момента. Именно, нужно взять непрерывную
почти всюду дифференцируемую функцию %в (яу, х2), при-
надлежащую почти всюду множеству функций Л, причем
Хо Ivi — 0, и ее график должен ограничивать вместе
с плоскостью (яр х2) наибольший возможный объем.
Укажем способ нахождения функции Хо (хи х2) в слу-
чае однородной изотропной жесткопластической среды и
односвязной области D. В этом случае ф (е) = т0 ]Л2 | е|,
ф° (s) — | s| /(т01/"2). Рассмотрим в каждой точке гра-
ницы dD конус с вершиной в этой точке, образующие |
которого наклонены к плоскости (х1( х%) прд углом
arctg (т0 ^2) и расположенный выше плоскости (xlt х^).
Объем, ограниченный снизу областью D, а сверху сово-
купностью конусов, и будет ограничен искомой поверх-
ностью, являющейся графиком функции Хо (zv х2), кото-
рый представляет собой огибающую указанного семейства
конусов. Свойства функции Ло (Яр х2) подробно изучаются |
в работе [125].
Процедура построения функции Хо (а:1, х2) в многосвяз- !
ных областях, включая и случай неоднородных жестко-
пластических материалов, рассматривается в [124].
Перейдем теперь к определению поля скоростей тече-
ния, т. е. функции и0 (ггр х2) — скорости депланации
поперечного сечения стержня — минимизирующей левую .
часть в (8.10). Нетрудно видеть, что
г
inf \ф(7п— t^dxidx^^
11(35) й
> inf § [ф (р— i0) — р {x)-G-'K(x)]dxrdx2, (8.13) ,
М®) D
где к (xv х2) — произвольная непрерывная, почти всюду ,
дифференцируемая функция с ограниченными производ-
ными, а р (х) = (рх (жр х2), р2 (zn ж2)) — произвольная /
вектор-функция с суммируемыми компонентами.
( в]
ПЛАСТИЧЕСКОЕ КРУЧЕНИЕ
107
Значение вектора р, при котором подынтегральное
выражение в правой части (8.13) достигает наименьшего
значения, определяется из системы уравнений
— *о) = 6^-
Таким образом, если удастся найти функцию и0 (х±, ж2),
удовлетворяющую переопределенной системе
VPy(yu0 — t0) = GK (8.14)
то к0 (^п жг) минимизирует левую часть в (8.13).
В дальнейшем для простоты будем предполагать, что
ф И и 4'° (&) — гладкие функции своих аргументов при
| е I > 0, | s | > 0.
В работе [124] показано, что система (8.14) эквивалент-
на переопределенной системе уравнений
Vw(l — t(t ф (Vu0 — to) Vgip0 (q) |g==er (8.15)
Заметим, что в частном случаз ф (е) — | е |, системы
(8.14) и (8.15) совпадают.
Рассмотрим двухсвязные области D, ограниченные ку-
сочно-гладкими контурами Pj иГ2 (Г2 лежит внутри Tj).
Частным случаем этих двусвязных областей являются
произвольные односвязные) области (Г2 стягивается
в точку).
Возьмем теперь в (8.14), (8.15) специальную функцию
X (х^ х2), которую будем обозначать через Хо (я^, х2).
Относительно Хо (жх, х2) будем предполагать, что она
является неотрицательной гладкой функцией всюду,
кроме, быть может, конечного числа гладких кривых и
Хо|п = О, |Гг= const, ф° (Gfk0) — 1. (8.16)
Последнее условие выполняется в точках гладкости
Хо (ж1? хг).
Объединение совокупности кривых, на которых
/-о (zj, z2) не является гладкой, и контура Г2 будем назы-
вать множеством особенностей и обозначать через Г.
В области D/Г определим поле направлений
(Gk0)
I (GXC) | ’
(8.17)
Заметим, что знаменатель в (8.17) в D/Г положителен.
Это следует из того, что ф° (я) —функция первой степени
однородности и ф° (G-k0) = 1 в D/Г.
108
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
(гл. п
Сформулируем теперь условие, выделяющее класс
специальных двусвязных областей и одновременно по-
казывающее, что рассматриваемая функция к0 (гс1, х2)
определяет поверхность максимального объема над D.
Требуется, чтобы любую точку Г можно было соеди-
нить с 1\ интегральной кривой поля (8.17), причем эта
интегральная кривая, кроме концевых точек, целиком
лежит в Д/Г.
Приведем примеры рассматриваемого класса двусвяз-
ных областей. Пусть, например, ф (е) = | е |. Рассмотрим
произвольный контур Гх, ограничивающий односвязную ||
область Д1. Построим «крышу» максимального объема
над £\, причем с тангенсом угла наклона ската, равным J
единице. Эта крыша и задает функцию Хо. В качестве Г2
можно теперь взять любую линию уровня функции il
А,о (z1; z2) (рис. 16). Область D2, ограниченная контуром
Г2, на рис. 16 заштрихована.
Требование возможности соединения точек Гх с точ- |
ками Г интегральными кривыми поля (8.17), не пересе-
кающими нигде, кроме концевых точек, множество осо-
бенностей, эквивалентно требованию максимальности
объема, ограниченного крышей. Поясним это простым
примером. Пусть Dr — круг и пусть X (жх, z2) —• прямой I
круговой конус, опирающийся на окружность Гг Опро-
кинем вниз некоторую окрестность у вершины конуса
(рис. 17). Полученную поверхность нельзя использовать i
в качестве Хо, если Г2 расположено внутри проекции во- I
ронки, так как любой радиус окружности Гх обязательно
пересекает Г. В случае круга единственной поверхностью,
5 g] ПЛАСТИЧЕСКОЕ КРУЧЕНИЕ 109
удовлетворяющей всем указанным выше условиям, будет
поверхность прямого кругового конуса.
Покажем теперь, что и в общем случае условия, нало-
женные на функцию %0 (zp z2), выделяют «крышу», огра-
ничивающую максимальный объем.'" Из условий (8.16)
следует, что
inf J [ф (р — to) — р <А0] dx-i dx2 = — to CrXo dxi dx2.
p b b
(8.18)
Так как ниже будет показано, что в (8.13) на самом деле
имеет место равенство, то из (8.18), (8.9) и (8.11) вытека-
ет максимальность объема, ограниченного «крышей»
(яр х2).
Линии уровня Хо (zp z2) и интегральные кривые поля v
образуют в D/Г регулярную сеть линий. Пусть I — еди-
ничный касательный вектор к линии уровня Хо = с,
задающий обход области Хо > с против часовой стрелки
и пусть — длина дуги на Гх, отсчитываемая от некоторой
точки на Гг в направлении I. Длина контура Г2 равна L.
Фиксируем точку з на Гг и введем на интегральной кривой
поля v, выходящей из этой точки, параметр п. Именно,
точке (zp ж2) на этой интегральной кривой соответствует
значение п, равное Хо (xlf х2). Так как (VX0, v) 0 в D/Г,
то разным точкам интегральной кривой соответствуют
разные значения п. В результате имеем отображение
Zi = xv (.$, п), х2 ~ х2 (s, и), (8.19)
которое при каждом фиксированном а определяет инте-
гральную кривую поля V, а при фиксированном п, когда s
из области определения (8.19), задает линию уровня Хо,
параметризованную s.
Нетрудно показать, что система (8.15) эквивалентна
соотношениям
^=«.v. (8.20)
Действительно, (8.20) получается из (8.15) скалярным
умножением уравнений (8.15) на векторы I и г соответ-
ственно.
Пусть в переменных (s, п) множество особенностей Г
задано в виде {х = х (s, п),п — п (s)}. Введем касатель-
110
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
ГГЯ. $
8 81
ПЛАСТИЧЕСКОЕ КРУЧЕНИЕ
Ill
ный вектор на Г:
дх , дх ,
os дп
п' (
Ж = . 5-----х—
I ох , дх
I ds дп
Пусть^ (х, п) — произвольная точка в D/Г. Ввели»,
ТТПГГТЧТТЛ __ /ГХ ,/Ххч _ |^'ЗМ
-----------------------------хмАии rv/i. о вед ем |
кривую С, соединяющую точки (х, п) и (0, п (0)). Пред-
ставим С в виде С — Cv IJ С2, где Сх — интегральная 1
кривая поля г от точки (s, п) до точки (s, п (х)), а С2 — |
часть Г от точки (0, п (0)) до точки (х, п (х)).
Обозначим через т единичный касательный вектор
на Ср. т —V. В [124] показано, что общее решение
системы (8.20) имеет вид
где т — длина дуги вдоль С, р (s) — произвольная, вообще
говоря, разрывная, неубывающая функция и
/’ (L) — Р (0)
/о (т) ж (т) dr = 2 nics D<t. (8.22) |
г I
Из формул (8.21) и (8.22) следует, что в случае одно- |
связной области D имеем mes Z)2 — 0, р (х) = const и ।
и0 (х, п) — непрерывная, кусочно-гладкая функция. I
В работе [124] показано, что в случае односвязного
поперечного сечения стержня задача о кручении имеет I
единственное решение и это решение определяется фор- i
мулой (8.21). I
Задача о кручении жесткопластического стержня свя-
зана с нахождением функции Z,o {хг, х2), определяющей
множество особенностей в области D. Построение функции
Гп Си, ^2) весьма эффективно может быть проведено с по-
мощью так называемой «песчаной аналогии». Многочис-
ленные примеры таких функций для различных областей
приведены в [126].
В случае, когда ф (е) = | е |, интегральными кривыми
поля v являются прямые линии. Например, в случае
стержня с треугольным поперечным сечением графиком
функции Ао (Яр x2) является боковая поверхность пира-
миды, а множеством особенностей (zJt х?) служат про-
18 показан пунктиром,
скорости депланации
случае многосвязных
s = 0
Рис. 18.
екции ребер на плоскость (ад, хг) (рис. 18). Путь инте-
грирования в (8.21) на рис. ~ ---
‘ Перейдем теперь к определению
поперечного сечения стержня и0 в
поперечных сечений.
В случае двусвязной (области
специального вида, скорость де-
плаиации и0 определяется форму-
лой (8.21). Однако в этом случае
м0 (х, п), вообще говоря, не един-
ственна и разрывна. Все возмож-
ные решения в этом случае опреде-
ляются монотонно возрастающими
функциями р (х), удовлетворяющими неравенству (8.22).
Пусть теперь D — произвольная двусвязная область,
ограниченная контурами 1\ и Г2 (Г2 расположен внутри
1\). Рассмотрим функцию Хо, образующую «крышу» мак-
симального объема над областью D. Пусть — замкну-
тая кривая, на которой значения функции ).о совпадают
со значениями Ао на Г2. Кривые Г2 и Tj имеют общие точки.
Случай, когда Г2 и совпадают, соответствует двусвяз-
ным областям специального вида. Предположим далее,
для простоты, что Г2 и Г2 имеют только одну общую точку.
Обозначим через D' область, заключенную между кри-
выми Г2 и Г15 а через D" — область, заключенную между
1\ и 1\- Тогда в односвязной области D' решение строится
по формуле (8.21), причем р (х) = 0. В области/)" решение
также строится по формуле (8.21), но здесь уже функция
р (х) однозначно выбирается из условия непрерывности
функции и0 при переходе через Гр Отметим, что построен-
ное таким образом решение в области D будет разрывным,
причем разрыв функции и0 идет по интегральной кривой
поля v, соединяющей Г2 с общей точкой Г2 и Г1.
Покажем, что действительно можно определить возра-
стающую функцию р (х), склеивающую решения в обла-
стях D’ и D". Обозначим через Г' множество особенно-
стей в D' и через Г" —множество особенностей в D".
Линии Г' и Г" имеют общую точку, являющуюся общей
точкой линий Г2 и Г(. Эту точку и примем за начальную
на Г' и Г". Пусть и6 — функция, определенная по форму-
112
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. ц
ле (8.21) в D' с р -О, u'i — функция, определенная п0
той же формуле в D". Пусть, далее А — точка на Г’
Тогда Р
ио (А)= (8.23)
С"
Аналогично
u"(A)== j to-tndx + p(s). (8.24)
С"
Летке видеть, что кривые С и С" ограничивают об-
ласть Ds, причем из (8.23) и (8.24) следует, что
р (s) = 2 mes Ds. (8.25)
Из формулы (8.25) непосредственно вытекает, что р (s) —
неубывающая функция, удовлетворяющая неравенству
(8.22). Из этой же формулы следует, что скачок функции
и0 в области D равен 2 mes Dl, где DL — область, заклю-
ченная между Г' и Гг
Аналогичная конструкция позволяет находить ско-
рость депланации поперечного сечения в случае, когда
области D имеют более общий вид по сравнению с рассмо-
тренными выше. Изложенные методы непосредственно пе-
реносятся на случай неоднородных материалов, когда
ф = ф Cq, х2, е).
Задача кручения подробно рассматривается во мно-
гих монографиях и учебниках по теории пластичности
(см., например, [45, 126—129]).
Отметим, тем не менее, что при определении депла-
нации поперечного сечения исходят не из переопределен-
ной системы (8.15), а из уравнения, получающегося от
деления этих уравнений друг на друга. Например, для
ф (а^, х2, е) = к (хг, х2) | е | (такого типа потенциалы
только и рассматриваются) как следствие переопределен-
ной системы (8.15) получают уравнение
+ + — = (8-26)
дх^ дх-^ &Х2 OiCg
Это уравнение не эквивалентно переопределенной системе
(8.15). Так, если D — круговое кольцо с внутренним и
внешним радиусами 7?х и В2 соответственно, то общее ре-
шение уравнения (8.26) при к (хх, х2) = 1 имеет вид
j 9]
ПЛОСКИЕ ТЕЧЕНИЯ
113
Uo с (0), где 0 — полярный угол и с (9) — произволь-
ная функция.
В то же время решение переопределенной системы
(8.15) в этом случае приводит к формуле
Мо =-. -R& + р (0), Р' (0) > 0, р (2л) - р (0) < 2nR{,
и функция р (9) в остальном произвольна.
Кручение жесткопластических призматических стер-
жней представляет один из немногих примеров задач
теории пластичности, в которых достигается исчерпываю-
щее решение. Имеются различные обобщения постановки
этой задачи (кручение части тора, валы переменного се-
чения и т. д.). Изложение этих вопросов можно найти
в работах [41, 43, 130—132].
§ 9. Плоские течения
Плоские течения. Плоское напряженное состояние. Осесимметрич-
ные задачи. Понятие полного решения. Двойственная формулировка
и полное решение. Задача о сжатии — растяжении полосы с отвер-
стием. Задача Прандтля о сжатии слоя.
Один из часто возникающих в теории пластичности
вопросов связан с проверкой экстремальности явно предъ-
являемого кинематически допустимого поля скоростей.
В традиционных задачах вариационного исчисления для
гладких выпуклых функционалов такая проверка легко
осуществима. В этом случае достаточно проверить, что
на предъявляемом поле вариация рассматриваемого функ-
ционала равна нулю. Такая же проверка может быть про-
ведена и в случае жесткопластической среды с гладким
вне нуля диссипативным потенциалом, если кинематиче-
ски допустимое поле скоростей является гладким и де-
виатор соответствующего ему тензора скоростей дефор-
маций всюду в области, занятой средой, отличен от нуля.
Однако в большинстве задач о движении жесткопласти-
ческих сред такие решения найти, как правило, не уда-
ется. Обычно «кандидаты» в решения жесткопластиче-
ских задач являются разрывными и содержат области
жесткого состояния. В этом случае проверка их экстре-
мальности существенно усложняется.
114
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. и
Из результатов § 4 вытекает возможная общая проце-
дура проверки экстремальности поля скоростей. Пусть
ий —некоторое, вообще говоря, разрывное поле скоро-
стей, удовлетворяющее краевым условиям и условию не-
сжимаемости — «кандидат» в решение. Естественно пред-
положить, что мощность работы внешних сил на поле и0
положительна.
Поле и0 можно всегда рассматривать как предел после-
довательности гладких кинематически допустимых полей
ип при п -> оо, причем соответствующие им мощности ра-
боты внешних сил сходятся к значению мощности работы
внешних сил на поле и0.
Пусть теперь для некоторого т0 существует статически
допустимое поле напряжений (см. § 4) с девиатором s?;>
для которого
lim ?Icp(e„) — sO.e£.]d« = O.
Тогда нетрудно показать, что т0 совпадает с коэффициен-
том предельной нагрузки т* и, следовательно, поле яв-
ляется экстремальным. Поле скоростей и0, для которого
можно указать соответствующий девиатор Sy статически
допустимого поля напряжений, определенный всюду в об-
ласти, занятой средой, включая области жесткого состоя-
ния, и называют обычно полным решением.
Таким образом, при проверке экстремальности явно
предъявляемого поля скоростей м0 приходится решать
задачу об отыскании подходящего девиатора напряже-
ний Sij.
Казалось бы, если «кандидат» в решение явно задан,
то из связи между напряжениями и скоростями деформа-
ций (1.12) и (1.18) можно по полю и0 найти искомый де-
виатор Sij. Однако формулы (1.12) и (1.18) не определя-
ют sy в области жесткого состояния среды.
Возможен и другой подход к решению указанной за-
дачи. Именно, сначала нужно решить задачу об отыска-
нии статически допустимого поля напряжений, а затем,
используя ассоциированный закон, найти искомое поле
скоростей и0. Естественно, что в этом случае желательно
иметь замкнутую постановку задачи для напряжений.
$ »] ПЛОСКИЕ ТЕЧЕНИЯ 115
Замкнутую постановку задачи для напряжений мож-
но получить, например, в задачах кручения. Есть надеж-
да получить ее для плоских течений и в задачах с плос-
ким напряженным состоянием. Это объясняется тем, что
в этих последних случаях искомый тензор напряжений
имеет три независимые компоненты и два уравнения рав-
новесия, совместно с условием текучести, образуют замк-
нутую систему уравнений.
В случае плоских течений эта система соотношений
подробно исследовалась многими авторами и мы ограни-
чимся лишь кратким изложением основных общих ре-
зультатов, полученных в этом направлении.
Нелинейной заменой искомых функций, используя
алгебраичность условия текучести, можно систему урав-
нений для напряжений, описывающую плоскую задачу,
свести к квазилинейной гиперболической системе уравне-
ний первого порядка для двух неизвестных функций.
При интегрировании этой системы удобно перейти к спе-
циальным криволинейным координатам, так называемой
сетке линий скольжения, являющимися характеристика-
ми этой системы.
Линии скольжения для поля напряжений были впер-
вые введены Г. Генки в 4923 г. [133].
В итоге, задача о нахождении поля напряжений сво-
дится в случае плоских задач к исследованию квазили-
нейной системы гиперболического типа. Для выбора един-
ственного решения этой системы к ней необходимо доба-
вить граничные условия.
Если на границе заданы кинематические условия, то
значения напряжений на границе неизвестны и в этом
случае задача о нахождении поля напряжений не отщеп-
ляется от задачи построения поля скоростей. Такие за-
дачи являются существенно более сложными: имеющиеся
в этой области результаты связаны с решением некоторых
конкретных задач [134—135].
В случае, когда на границе заданы напряжения, ги-
перболическую систему можно решать методом характе-
ристик. Однако оказывается, что во многих задачах ха-
рактеристики не покрывают всю область, занятую сре-
дой, а имеют некоторую огибающую, за пределы которой
они не продолжаются. Поведение характеристик в ок-
рестности огибающей было исследовано в [136].
11G
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
[ГЛ. и
Теория и методы построения сетки линий скольжения
и определения поля напряжений детально разработаны
и подробно излагаются практически во всех руководст-
вах по теории пластичности с приложениями к конкрет-
ным задачам [10, 41, 43, 45, 78, 126, 137]. Развитая техни-
ка интегрирования соответствующих гиперболических си-
стем дает возможность построения «кандидатов» в решения
во многих конкретных задачах. Однако лишь в весьма
ограниченном числе случаев удалось установить, что по-
строенные решения являются полными. Основным препят-
ствием к превращению «кандидатов» в полные решения
является отсутствие доказательства возможности продол-
жения найденного в областях течения поля напряжений
в области жесткого состояния среды.
Линии скольжения позволяют существенно упростить
и систему уравнений для отыскания поля скоростей, так
как в координатах, связанных с сеткой линий скольже-
ния, уравнения для поля скоростей имеют наиболее прос-
той вид и сводятся к телеграфному уравнению. Исследо-
вания полей скоростей в координатах, определяемых
сеткой линий скольжения, впервые были проведены в ра-
боте X. Гейрингер [138].
Конструкцию, аналогичную изложенной выше, мож-
но реализовать и в случае плоского напряженного состоя-
ния. Линии скольжения для условий текучести Мизеса —
Треска — Сен-Венана были введены в работе [139]. Урав-
нения для поля скоростей, аналогичные соотношениям
X. Гейрингер, в случае плоского напряженного состоя-
ния в сетке линий скольжения рассмотрены в [43].
Несколько иное положение имеет место в случае осе-
симметрических задач. Тензор напряжений здесь имеет
четыре независимые компоненты. Поэтому система урав-
нений и условие текучести не образуют замкнутой си-
стемы. Г. Генки [133] предложил для замыкания системы
определяющих соотношений использовать так называе-
мое условие полной пластичности. Это условие предпола-
гает равенство двух из трех главных напряжений. Обсуж-
дение этого условия и возникающих при его использова-
нии трудностей можно найти в [41, 45, 137]. Применение
условия полной пластичности в теории проб Бринелля
было дано в работе [140]. Дальнейшие исследования этой
же задачи содержатся в [141].
5 91
ПЛОСКИЕ ТЕЧЕНИЯ
417
Совместное изучение поля напряжений и поля скорос-
тей для осесимметрических задач было проведено в [142],
где показано, что система уравнений в этом случае, вооб-
ще говоря, не является гиперболической. В [41] указана
возможность применения условия полной пластичности
для общих трехмерных задач.
Тем не менее, несмотря на весьма глубокие исследова-
ния поля напряжений в области течения, полные решения
были найдены лишь для очень небольшого числа конк-
ретных задач. Поэтому представляется полезным иметь
в виду и другие возможные подходы и их комбинации с из-
ложенным выше подходом при решении конкретных задач.
В частности, остановимся на подходе, предложенном
еще Сен-Венаном [126, 143]. Вводя функцию напряжений
F (х, у), позволяющую тождественно удовлетворить урав-
нениям равновесия, из условия текучести Мизеса или
Треска — Сен-Венана получаем дифференциальное нера-
венство
^_^Г + 4(^Г<4АЛ (9.1)
\дх2 ду2) \дх ду) ' '
Возьмем произвольную функцию Fo (х, у), удовлетво-
ряющую краевым условиям исходной задачи. Тогда функ-
ция mF0 (х, у) удовлетворяет краевым условиям с теми
же поверхностными силами, умноженными на т. Теперь
из (9.1) легко находится величина статического коэффи-
циента исходной задачи
Выбирая различные 7% (ж, у) в (9.2), будем получать
различные оценки снизу коэффициента предельной нагруз-
ки т*.
Видимо, весьма перспективно объединение подхода
Сен-Венана с предыдущим подходом. Именно, подходя-
щую функцию Fo (х, у) в области течения можно искать
из решения соответствующей гиперболической системы.
При проверке экстремальности поля и0 могут оказать-
ся полезными следующие простые соображения. Пусть
в рассматриваемой задаче известен коэффициент предель-
ной нагрузки т*. Тогда, вообще говоря, разрывное поле
Jig СТАЦИОНАРНЫЕ ТЕЧЕНИЯ (Гд J
w0 является полным решением, если существует последов
вательность гладких полей ип, (п -> оо), сходящаяся к «3
и J (ип, т.^ -> 0 при п оо, где J (и, т) — функционал
(4.17).
Рассмотрим теперь применение к плоским задана*
метода двойственности, основанного на размораживание
дифференциальных связей и изложенного в § 7. Проил-
люстрируем его применение на примере задачи о растя-
жении конечной жесткопластической полосы. Математи-
ческая постановка задачи такова. Рассматривается функ-
ционал
TZ \ С Г1 /дя2\2 . 1 /дщ 9u2\27l,27 J
J (и, m) = J To -Г У (gy 4- J dxr dx* -
D
h
— m \ [ui(L, x2) — Mi (—L,x2)]dx«. (9.3)
-л
Здесь D = {—L < x, < L, —h < z2 < h, L h}. Поле
скоростей (uj, u2), как обычно, соленоидально.
Коэффициент предельной нагрузки определяется по
следующей формуле:
\ «и d^i
1 Г)
— «= Sup --------Р------------------. (9.4)
m* ’ J-r0/2(e21 + 42)’Adlldr2
D
В последнем соотношении числитель после интегри-
рования по хг совпадает с линейной частью функционала
(9.3), а в знаменателе использовано условие eu -j- ем =0.
Подчеркнем, что в (9.4) функции еи, е12 должны быть
связаны условием совместности. v
В рассматриваемой задаче метод размораживания диф-
ференциальных связей будет использован в простейшем
варианте. Именно, предположим, что функции еи и е12
независимы друг от друга. Тогда имеет место неравенство
I dx2
— < — = sup---------. (9,5)
т» е Т0У2 ^(e211 + e212yl2dxldx2
D
ПЛОСКИЕ ТЕЧЕНИЯ
119
I 81
В силу произвольности еп и е13 правая часть в (9.5) легко
вычисляется и получается следующая оценка снизу для т*:
ш*>т0/2. (9.6)
Получим теперь оценку сверху для т*. Рассмотрим поле
и0 = (ui> w°) следующего вида:
К? Ui, «2) = / (Ж1 — ul Un ж2) = / Ui — х2). (9.7)
В случае непрерывной, кусочно-гладкой функции / (£),
/' (£) > 0, получаем из (9.4)
^<т0|/2. (9.8)
Из (9.6) и (9.8) находим коэффициент предельной нагрузки
т* = т0У 2.
Формулы (9.7) определяют некоторые возможные ви-
ды течения полосы. Они показывают неединственность
возможной структуры течения, так как функция / может
выбираться произвольной в рамках указанных выше ог-
раничений. Можно рассмотреть еще поля скоростей сле-
дующего вида:
Ui = g Ui + я:2)> u2 = — g («1 + ж2), (9.9)
где g' (/) 0. Возможно также рассматривать и сумму
полей вида (9.7) и (9.9):
*4 = / Ui — ^) + g Ui + ж2),
U°2 = f Ui — Х>) — g Ux + X2). '
Поля вида (9.10) исчерпывают все возможные экстре-
мальные поля скоростей для функционала (9.3), у кото-
рых суммируемы в D производные от компонент. Это сле-
дует из того, что в случае экстремальности поля скоростей
должны выполняться соотношения
ди^ диг___р. диг , ди2 л.
дх^ ' дх., ’ дх2 "Т" дх±
Среди полей вида (9.10) содержится поле
= ах1ч и2 = —ах2. (9.11)
Векторное поле (9.11) определяет течение полосы,
причем деформируется вся полоса, включая стороны =
= ±L. Однако, в классе полей (9.10) можно указать по-
120
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
ля скоростей, соответствующих течениям полосы, при ко-,
торых стороны полосы = +L не деформируются.
В этом случае функции / и g должны удовлетворять сле-
дующим условиям
/ (t) = Ci при t^L — h, f (t) — с2
при t > — L 4 h
g(t) = c3 при t<L — h,
при t > — L 4- h.
Подчеркнем еще раз, что в задаче о течении полосы,
при условиях Uj (±L, х2) = ±const, u2 (± L, x2) — 0, или
при отсутствии каких-либо ограничений, предельная
нагрузка одинакова.
Рис. 19.
В классе функций (9.10) содержатся и разрывные ре-
шения, если в качестве функций fag взять кусочно-глад-
кие монотонные функции.
Решение изложенной выше простой задачи хорошо
известно [45] и дословно может быть повторено для слу-
чая плоского напряженного состояния. В частности, сре-
ди возможных решений содержатся решения, называе-
мые полосами Людерса.
Класс указанных точных решений для конечной поло-
сы можно легко использовать и в ряде других задач.
Рассмотрим, например, задачу о растяжении полосы с от-
верстием (рис. 19). Постановка этой задачи аналогична
(9.3), а относительно поля скоростей предполагается, что
ui (±L, х2) = +const, и2 (±L, х2) = 0.
Найдем сначала кинематический коэффициент тг1 на
поле, изображенном на рис. 19. Легко видеть, что
ти'-='^Г
§ И
ПЛОСКИЕ ТЕЧЕНИЯ
121
Для получения статического коэффициента ms полезно
линейную часть функционала (9.3) записать в виде
[7/.х. (£, х2) — ui (—L, х2)] dx2 =
= т \ f (rr2) [uj (L, хъ) — Ui(—L,Xi)]dx2,
-Xh.
где
f Ы =
2h
Ai + h-2
0
( h — hi^Xi^h
при j —h % л2 — h hi,
при —h yhi^Xi^h — hlt
что возможно в силу того, что торцевые сечения полосы
не деформируются.
Легко показать [41], что предельная нагрузка не мо-
жет увеличиться, если удалить часть материала, свобод-
ного от внешних нагрузок.
Таким образом, если из области D удалить весь мате-
риал, перерезаемый отверстием, то задача сведется к оп-
ределению предельной нагрузки для полосы ширины h^ + hi
(см. рис. 19). Отсюда получаем статический коэффициент
ms = 7пи.
В итоге найдено полное решение задачи о растяжении
полосы с отверстием произвольной формы.
Аналогичным образом мояшо рассмотреть задачу о
сжатии плоского слоя гладкими недеформируемыми пли-
тами. Эта задача приводит к отысканию минимума сле-
дующего функционала:
г/ ч С \3 (ди.-Л2 1 [ди, , ди., \31'2 1 з
= j } dXidXi-
1)
L
— m [ы2 (.<i, h) — iii (x’!, —h)] du'i. (9.12)
По-прежнему предполагается выполненным условие не-
сжимаемости и, кроме того, выполняются следующие крас-
имо условия: и., (хп +h) — ^yconst. Отсутствие ограниче-
нии на их (.гу, ±4) означает гладкость сжимающих плит.
Для функционала (9.12) можно получить формулу для
коэффициента предельной нагрузки вида (9.4). Далее,
122
СТАЦИОНАРНЫЕ ТЕЧЕНИЯ
1ГЛ.
буквально повторяя изложенную выше процедуру раз.
мораживания дифференциальных связей, придем к сле-
дующей оценке снизу для коэффициента предельной на-
грузки т0]Л2.
С другой стороны, рассматривая поля скоростей вида
(9.10), найдем, что кинематический коэффициент для них
также равен т0|/ 2. Таким образом, в задаче о сжатии
слоя гладкими плитами найдено значение предельной на-
грузки.
Заметим, что краевые условия на поля скоростей вы-
полняются, например, для поля ur = xjh, и2 = —x2/h.
Рис. 21.
Возможны также и другие поля скоростей вида (9.10),
удовлетворяющие поставленным краевым условиям. При-
мер такого поля в случае целого отношения L/h приведен
на рис. 20. Стрелки указывают направления движения
областей жесткого состояния среды.
Из полученных выше результатов вытекает решение
задачи о сжатии гладкими плитами слоя с отверстием.
Полное решение этой задачи изображено на рис. 21. Для
простоты предполагается, что соотношение между длиной
и толщиной слоя таково, что полная длина слоя, за выче-
том горизонтального диаметра отверстия, кратна его тол-
щине. Величина коэффициента предел!,пой нагрузки в об-
щем случае равна //г* — т0|/ 2(Л — «)/..
В только что рассмотренных задачах был использован
простейший вариант двойственного метода, связанного
с размораживанием дифференциальных связей. Именно
функции ец (эс) предполагались удовлетворяющими лишь
условию несжимаемости + е22 = 0, т. е. в этом случае
не учитывались соответствующие условия ортогонально-
сти (7.24), (7.25).
Рассмотрим теперь этот же метод двойственности в при-
менении к общим плоским задачам.
§
ПЛОСКИЕ ТЕЧЕНИЯ
123
Пусть, для простоты, D — плоская односвязная об-
ласть с кусочно-гладкой границей, удовлетворяющей ус-
ловию Липшица. Известно, что функции еп, е12, е22 по-
рождаются в области D некоторым полем скоростей, если
они удовлетворяют условию совместности
Д-tji . 2 ^ei-
' дх*
<£ 1
(9.13)
Остановимся сначала на случае, когда на границе об-
ласти D пет кинематических ограничений на поле ско-
ростей. Задача о плоском течении сводится к исследова-
нию следующего функционала:
J (w, т) — ) (тл | e | •— ins^.eij) da,
i)
где еи удовлетворяют условию (9.13), eu + e22 -- О и
s®- — тензор, определяющий мощность работы внешних сил.
Коэффициент предельной нагрузки т* определяется
из соотношения
1
— = sup
b
To | e. | da
b
(9.14)
Пусть 0 (zi( z2) — произвольная достаточно гладкая
функция такая, что
в1,»=4Х = °- (9-<5)
Нетрудно видеть, что имеет место неравенство
— <suPP(e), (9.16)
е(я?)
+ ~ ' И) \ 2 щ2] da,
причем в (9.16) eij — произвольные, не связанные друг
с другом функции, ц — произвольное число.
124 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ. Ц
ПЛОСКИЕ ТЕЧЕНИЯ
125
Формула (9.16) получается из (9.14), если с помощью
множителей Лагранжа 9 (х1г х2) для (9.13) и и для условия
несжимаемости учесть указанные условия ортогональ-
ности. Заметим, что если бы был доказан аналог теоремы
Никольского (см. (7.27)) о норме функционала на под-
пространстве с бесконечной коразмерностью, то соотно-
шение (9.16) являлось бы точным равенством при подхо-
дящем выборе ц и 0. Однако, неравенство (9.16) имеет са-
мостоятельное значение, так как оно позволяет получать
оценки снизу для т*.
Легко видеть, что имеет место следующее равенство:
sup Р (е) = sup -А-1 («о — + и)2
е(аг) х то L\ /
+ fso ! „Г > 2^о М) Vf2
Соответствующие e (ас), при которых в (9.17)
ется равенство, имеют вид
«n='-(s!1-S+
e2s = x(S.
' о <?20
с 0 ______
12 дхг дх.
где ж* — точка, в которой достигается точная
грань в (9.17).
Если окажется, что по функциям ец из (9.18) можно
восстановить кинематически допустимое поле скоростей, 1
то это поле скоростей представляет полное решение за-
дачи о плоском течении.
Именно так были решены задачи о сжатии полосы и 1
слоя, рассмотренные выше, причем 0 (гр х^ для них
было положено равным нулю.
Итак, из (9.16), используя равенство (9.17) и вычис-
ляя точную нижнюю грань по ц в (9.17), находим ।
[2 (Sll S22 ^2 I dxiJ + 2 \ 12 “ dxY dx^ ] •
(9.19)
(9.17)
достига-
(9.18)
612
верхняя«:
sup
Подстановка в (9.19) любой функции 9 (жп х2), удов-
летворяющей краевым условия (9.15), дает оценку снизу
для значения т*.
Подчеркнем, что полученная оценка (9.19), по суще-
ству, совпадает с оценкой снизу (9.2) по методу Сен-
Вепана. В оценке (9.2) предполагалось, что уравнения
равновесия однородны, а функция напряжений F (zp z2)
удовлетворяет неоднородным краевым условиям. В оцен-
ке (9.19) функция 0 (xx, х2) удовлетворяет однородным
краевым условиям (9.15), а неоднородность краевых ус-
ловий для F (xt, х2) учитывается тензором Sij.
Оценка (9.19) для т* была получена в случае, когда
в исходной постановке задачи кинематически допусти-
мые поля скоростей па границе произвольны. Это соответ-
ствует условиям (9.15) па функцию 0 (хц х£. Если же,
например, в исходной постановке задачи на границе поле
скоростей обращается в нуль, то формула (9.19) также дает
оценку снизу для т* и при этом функция 9 (2^, х2) сво-
бодна от каких-либо краевых условий. Формула (9.19)
для оценки снизу значений т* кажется весьма простой.
Однако нахождение достаточно хороших нижних оценок,
т. е. подбор соответствующих функций 9 (х1? ж2), не всегда
является простой задачей. Остановимся на этом подроб-
нее в случае классической задачи о сжатии жесткопласти-
ческого слоя шероховатыми плитами (задача Прандтля).
Постановка этой задачи сводится к исследованию функ-
ционала (9.12) при краевых условиях
Ui ±h) = 0, U2 (яг, ±h) = Т1.
Для т* из (9.14) находим
622
— = sup - ------. (9.20)
т* ) То | е | <йо
D
Сначала дадим оценку сверху для т*, т. е. вычислим ки-
нематический коэффициент тг! на некоторых конкретных
полях скоростей. Заметим, что из формулы (9.20) следует,
что при определении величины т* можно ограничиться
полями скоростей ц.(х1; х2), у которых х2) — четная
Функция по х2 и нечетная по хг, а и2 fo, х2) — четная по
и нечетная по х2. Рассмотрим кинематически допусти-
126
СТА 11.IIOHAPI 1ЫЕ ТЕ ЧЕНИЯ
[гл. и
мне поля споростей следующего вида:
ni(zi,^) = -rg МтЪ
гы (.Г], ,г2) ~ — g (~/Г) 5
(9.21)
где g (+ I) — + 1, g — нечетная функция ,г2> q \~f-j—
четная функция ;/2.
Функция ul (xv х2) должна обращаться в нуль при
х2 — ±h. Однако мы не будем налагать этого условия и тем
самым будем допускать разрыв поля скоростей при х2 —
-- ±h. Естественно, что этот скачок следует учитывать при
вычислении скорости диссипации энергии. По существу,
можно было бы рассмотреть поля tiE (zt, х2), для ко-
торых и® (zt + К) _ 0 и которые при е -> 0 сходятся
к функции uL (xL, х2), терпящей при х2 -- ±h скачок.
Скорость диссипации энергии для поля и в этом случае
вычисляется как предел скоростей диссипации энергии
для полей ме при в —0.
Поле (9.21) удовлетворяет условию несжимаемости
и краевым условиям. Подчиним его условию согласования
расхода
h h
2L = Uj (E, ,г2) </.г-2 = 2Л \-2 q(~j~^dxit
-h Л
т. e.
i
[q^d^Q. (9.22)
-1
Вычислим скорость диссипации энергии на поле (9.21)
0 —h
4^(-r)|2rdM 2т" 2р(1)|^.
(9.23)
Второе слагаемое в (9.23) соответствует скорости дис-
сипации энергии, связанной со скачком при х2 ---
I я
ПЛОСКИЕ ТЕЧЕНИЯ
127
Из формулы (9.23) следует, что А = (ЯД) + о (1/fe).
Подберем теперь g (g) так, чтобы уменьшить величину К.
Из (9.23) находим
л=т0^/2-[4- $ ют++о(4) •
-1
Так как g (±1) — ±1 и g (g) —нечетна, то для всех та-
ких функций имеем
4- $ +(g'(i)i >i-
—1
Следовательно, наименьшее значение К будет достигаться
на функции g (g) = g. Таким образом, формула (9.23) при
g (%) = g имеет вид
1
А = 4т0Л V2 {jj <% + i + <7 (1)} + 0(h).
(9.24)
Итак, для получения по возможности меньшей вели-
чины А функция q (Q должна выбираться из условия ми-
нимальности последнего выражения, причем должно вы-
полняться условие (9.22). Условие (9.22) можно исклю-
чить, положив
= — J г (h)dh,
О
где г (X) — произвольная функция. Таким образом, из
(9.24) следует, что надо найти минимум функционала
1 1
Л' = J fl O(r'(ij)*dX ;-r(1) —J r(k)rtX. (9.25)
О 6
Задача о разыскании минимума функционала А' является
классической изопериметрической задачей и экстремалью
его является дуга окружности г (g) = fl — t2- Таким
образом, <?(g) = fl —g2 —л/4- Окончательно имеем
X.J = - -А + 2 ft - - А, (Г1, = _ .
(9.26)
128 СТАЦИОНАРНЫЕ ТЕЧЕНИЯ [ГЛ. II
j
Подчеркнем, что поле (9.26) нельзя рассматривать при]
х± 0, так как в этом случае при соответствующем его i
продолжении на область хх 0 получится разрывное при .
= 0 поле. Поэтому поле (9.26) можно рассматривать, I
например, при хх > лЛ/2. В этом случае поле (9.26) легко
продолжить нужным образом в область 0 xt лА/2, I
причем вклад в полную величину скорости диссипации *
энергии от этого продолжения имеет порядок h.
Для т* непосредственным вычислением на поле (9.26)
получаем оценку сверху ।
^<т0/2 . (9.27) j
Задача о сжатии жесткопластического слоя шерохо- .
ватыми плитами впервые изучалась Л. Прандтлем [144]
для бесконечной полосы с помощью линий скольжения. I
Им было найдено поле напряжений в бесконечной полосе. |
Надаи [126] построил поле скоростей, соответствующее I
этому полю напряжений, совпадающее с (9.26). Можно |
рассмотреть класс полей скоростей существенно более |
общего вида по сравнению с (9.26). Однако экстремаль- I
ным среди этих полей, с асимптотической точностью I
в коэффициенте предельной нагрузки порядка О (ti), по- J
прежнему будет являться поле скоростей (9.26). !
Перейдем теперь к получению оценок снизу для т* в за- i
даче Прандтля. В этом случае имеет место оценка (9.19) !
при
4 = s?3 = 0, 4 = —1, 6(+L, ж2) = 4^-(±Д х2) = О J
и 9 (^р ж2) при -- ±h — произвольно. Таким образом,
оценку (9.19) для задачи Прандтля можно записать в виде
Т„ . fl f 1 /, , <Э20\2 / 920 ysy;,
-Л- Jill 8lip I — / 1--------' 2 5------j- .
‘o J ( 2 dr[ dx\ } Wj drs/ j I
(9.28) ’
Из вида правой части (9.28) следует, что при разыскании 1
оптимальных функций 9 (гг, х2) можно ограничиться I
функциями 9 (хр х2), четными по х1г х2. Поэтому (9.28) мож- 1
но рассматривать лишь при 0 Д L для четных по <
х2 функций 9, удовлетворяющих краевым условиям
S 91 ПЛОСКИЕ ТЕЧЕНИЯ 129
Выберем функцию 9 (ж15 х2) в виде
0 (Л7|, .М>) --= f 9“ S (^1) £'2 Ф (И 9' ^г) Ф (^1
Тогда, полагая
g (^1) = (^i) —1 ь
найдем, что
1 — с ^1 = 0 (h2).
' дх2 [ ’
Функцию / (xj положим равной пулю в окрестности хх - 0
порядка h и
в окрестности xr — L, также порядка h.
Функция ф (£) в области 0 '</ L — h определяется
из соотношения
Проведя вычисления, из (9.28) получим оценку снизу
для
[^--4 + (?(fe)] . (9.29)
Сравнивая формулы (9.27) и (9.29), находим, что ре-
шение Прандтля дает асимптотически точное в главном
члене решение задачи о сжатии жесткопластического слоя
шероховатыми плитами. Однако остается неясным, яв-
ляется ли оно точным и во втором члене асимптотики.
Для конечных отношений L/h численное решение этой
задачи было проведено в работах [145, 146]. Обобщение
задачи Прандтля на случай сжатия прямоугольного па-
раллелепипеда по боковой поверхности рассмотрено в [147].
Теория плоских течений жесткопластической среды,
которой мы кратко коснулись в этом параграфе, еще
очень далека от своего завершения. Например, представ-
ляет большой интерес эффективное решение вопроса о про-
должении полей напряжений в зоны жесткого состояния
среды. Такие продолжения известны в небольшом числе
конкретных задач. Например, они построены для реше-
ний Прандтля и Хилла задачи о внедрении плоского
[нтампа в полупространство [148]. Вопросам продолже-
ния напряжений в жесткие зоны посвящена работа [149].
5 И. И. Мисолои, В. И. Мне и и ион
ПРОБЛЕМА ВЫБОРА РЕШЕНИЯ
131
Г Л А В А III
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
§ 10. Проблема выбора единственного
стационарного решения
Неединственность решений стационарных задач в случае жестко-1
пластической среды. Регуляризация с помощью малой вязкости. Но-
вая задача вариационного исчисления. Метод получения оценок снизу,
минимума функционала с помощью перестройки криволинейных.
координат. Пограничный слой в вязкопластической среде.
В ряде рассмотренных выше стационарных задач
для жесткопластической среды весьма часто имеет место
неединственность решения. Так, например, неединствен-|!
ность решения возникает в задаче о растяжении или сжа-|
тии полосы (§ 8), в задаче о совместном движении в осевой
направлении системы цилиндров (§ 5) и др. ||i
В рамках стационарных постановок задач для жестко-1
пластической среды нет критерия выбора какого-либяЦ
одного из имеющегося запаса решений. 1
Ниже будет показано, что различные решения из всего!
набора решений можно реализовать, учитывая, например,!
динамику процесса или наличие малой вязкости мате-
риала. )
В этом параграфе внимание будет обращено на регу-
ляризацию модели жесткопластической среды с помощью’
малой вязкости.
Один из основных результатов этого параграфа будет ।
связан со следующей общей конструкцией. Пусть функ-
ционал Jn (и, Щ) = Фо (u) —mL (и) — определен на ба-
наховом пространстве 7?п. Здесь L —линейный непре-
рывный на Во функционал, Фо — выпуклый, положитель->
но однородный первой степени функционал на Во. Пред-
§ Щ-1
положим еще, что Jo (и, т) — полуограничен снизу,
п следовательно Jo (и, т) 0. Пусть, далее, при т т*
существуют ненулевые элементы из Вй, на которых
J0 (и, — 0. Очевидно, что множество таких элементов
образует конус. В силу однородности Jo (и, т) ограни-
чимся рассмотрением множества V элементов этого ко-
нуса, для которых L (У) — 1.
Добавим теперь к функционалу ./0 (и, т) строго вы-
пуклый функционал Фх (и) с малым параметром
/у. (и, т) = ц®! (и) + Фо (и) — mL (и).
Теперь /у. (и, т) является строго выпуклым функциона-
лом, который может иметь не более одного экстремаль-
ного элемента.
Возникает вопрос — к какому элементу из V стремят-
ся эти экстремальные элементы, когда ц-> 0?
Дадим точную постановку сформулированной задачи.
Эта постановка задачи и ее решение содержится в [61].
Пусть Фх (п) — строго выпуклый функционал, опреде-
ленный на рефлексивном банаховом пространстве
Вх CZ Во. При этом предполагается, что [Ф, (к ) +
Д Фо (и)] -> сю при || и ||в, сю и Фг (и) > XJ L (и) |р,
Р 1 при \ L (и) I Z2, %! Д' 0, ^2 Д 0.
Из результатов § 3 следует, что для каждого т суще-
ствует единственный экстремальный элемент из В±.
В [61] показано, что L (и^1т) при фиксированном ц яв-
ляется непрерывной функцией т, неограниченно возра-
стающей при т —>- оо. Возьмем такое т (ц), что L (ugim) —
--- 1 и положим Ту, (п) = /у (и, т (ц)). Элемент, мини-
мизирующий Jy. (и), обозначим через и^.
Предположим, что в множестве V есть хотя бы один
элемент v GE У, для которого Фх (у) < оо. Рассмотрим в
множестве У такой элемент и0, на котором Ф, (к) дости-
гает своего минимума на Г. Из строгой выпуклости
Фг (и) следует, что элемент и0 определяется единственным
образом.
Именно к элементу и0 и сходятся элементы «у при
Ц -> 0. Это и есть ответ на поставленный выше вопрос.
Подчеркнем, что столь простой ответ в задаче о выде-
лении единственного решения получен в силу предполо-
'Кепия о существовании в У элемента и0, для которого
Ф1 (п0) < оо.
5*
АСИМПТОТИЧЕСКИЕ ЗАДАЧ!!
[гл. щ
Рассмотрим в качестве простого примера задачу о дви-
жении жесткопластической среды в плоскопараллельном
зазоре (см. (2.6)), F (х) 2т0 при Р (а)>0
Р < 1) и F (,г) = 0 в остальных точках отрезка [0,1].
Как было указано в § 2, все движения жесткопластической
среды в этом случае описываются следующим образом.
В промежутке а < х Р и (х) = в интервале (0, а)
и (х) — произвольная монотонно возрастающая функ-
ция, а в промежутке (Р, 1) и (х) — произвольная монотонно
убывающая функция.
Пусть Фг (и) в этом случае имеет вид
1
-i- | и' (х) |2 dx.
о
Тогда из сформулированного выше общего результата
следует, что при и —>- 0 получается следующее решение
жесткопластической задачи: и (х) — линейная функция
в промежутках (0, а), (Р, 1) и и (х) — 1 в промежутке
(a, Р).
Сформулированная выше общая конструкция выде-
ления единственного решения далеко не всегда элемен-
тарна при ее приложении к исследованию конкретных
задач. В этом можно убедиться на примере задачи о ра-
стяжении конечной полосы, в которой возникает новый
тип задач вариационного исчисления.
Введем следующие обозначения:
L h
L h
-I, -h
1_ (dl<i
2 \ дх2
2,
dxL
ПРОБЛЕМА ВЫБОРА РЕШЕНИЯ
133
§ 10]
В указанной постановке задачи но предполагается,
что торцы полосы + L являются я;есткими (w2(+Z,
2S) — произвольны).
Решение поставленной задачи можно провести следую-
щим образом. Легко видеть, что поле скоростей (9.11) щ =
... xJL, 11%= —x-JL минимизирует функционал Ф^и)
на классе векторных полей, удовлетворяющих краевому
условию Л+Л, гг2) -- +1. Так как это решение входит
в множество V (см. § 9), то именно это решение и выде-
ляется при ц->-0.
Решение указанного вида для вязкопластической
среды было получено в 18].
Перейдем теперь к выделению единственного решения
в задаче о растяжении жесткопластической полосы при
условии, что торцы + L не деформируются, т. е.
u2(+ L, х2) — 0. Эта задача оказывается значительно более
трудной по сравнению с предыдущей.
В § 9 были указаны все поля, дающие решение задачи
о растяжении жесткопластической полосы при условии
недеформируемости торцов (см. (9.10)). Из строгой вы-
пуклости функционала Фх(и) и из симметрии задачи отно-
сительно оси а?! следует, что при минимизации Ф1(и) мож-
но ограничиться полями вида (9.10), у которых f — g и
f(t) =---щ — Z, + h,
! (ЮЛ)
При этом функцию / (0 можно считать нечетной.
Функционал Ф1(и) на указанных полях имеет вид
L h
Ф1(гу) = 2Р(/)= § § [/'(Xi-l-Xz)+f'(x1 — x2)]zdx1dx2 =
-L —h
= 2 J
В результате получаем новую задачу вариационного
исчисления о нахождении минимума функционала
P(f) = j [2h(f О2-~ЛШ(£-2Л)М, (Ю.2)
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
ла классе монотонных функций, удовлетворяющих усло-
виям (10.1).
Уравнением Эйлера для функционала (10.2) является
весьма сложное дифференциально-разностное уравнение,
содержащее как запаздывающий, так и опережающий
аргументы.
Отметим еще один важный момент в этой экстремальной
задаче. Предположим, что удалось найти решение урав-
нения Эйлера для фупкциоанала (10.2), удовлетворяющее )
условиям (10.1). Так как в данном случае нет описания
всего запаса решений этого уравнения (в отличие от слу-
чая дифференциального уравнения), то нельзя утверждать,
что найденное решение доставляет минимум функционалу
(10.2). Поэтому приходится непосредственной проверкой
убеждаться в том, что на построенном решении вариация
выпуклого функционала Р (/) обращается в нуль.
Рассмотрим задачу об отыскании минимума функцио-
нала Р (/) при некоторых соотношениях между L и h.
Пусть сначала L 2h. Функционал P(f) имеет вид
L-h
Р(1) = J
-L+h
Из условий (10.1) в данном случае находим, что
f (| — 2/i) = —~ при (— L + h g < L — /г). Таким
образом, функцией, дающей минимум Р (/), является ли-
нейная функция
/®=7(АпГ>- <10-3)
Подчеркнем, что функция f (g) получилась монотонно
возрастающей.
Пусть теперь L = 31г. Представим P(f) в виде
о
р (/) = J [2^ (Г (g))3 - f' (В) / (£ - 2h)l d£ +
-г/i
2ft
+ J [2h (f (g))2 - f (g) / (g - 27г)] dg. (10.4)
0
Предположим, что функция /(g), минимизирующая
Р (f), известна при — 2h g <1 0. Тогда первое слагав-
§ 10]
ПРОБЛЕМА ВЫБОРА РЕШЕНИЯ
135
мое в (10.4) известно и для функции f (В) при 0 2/г.
из второго слагаемого в (10.4) получим уравнение
4Л/'(£) — / (| —2ti) = const. (10.5)
Учитывая нечетность функции / (g), уравнение (10.5)
перепишем в виде
W (^) + f(2h - £) const. (10.6)
Подчеркнем, что уравнение (10.6) можно рассматривать
на отрезке О О £ 2/г, не привлекая значений / (£) из
других промежутков изменения Н.
Непосредственной проверкой убеждаемся в том, что
решением уравнения (10.6), удовлетворяющим условиям
(10.1) и условию монотонности, является функция
1 1 / 1 1ч
COS —~ — sin —Г~ / г COS-у— е COS -к- \
l 4 * I • £ 2 £. । 2 ।
J &) =----------3----- Sin-77------------COS77 ------------г .
-v~ 1 I 4A 1 4/г 1 1 I
4 sin— \ 1 —sin-g- 1—sin ту/
(10.7)
В силу нечетности находим функцию / (£) и при —2/г
< с Далее, можно непосредственно проверить, что
на f (Ё) вида (10.7) вариация функционала Р (/) равна пулю.
Тем самым доказано, что функция (10.7) дает минимальное
значение функционалу (10.2).
В случае, когде 2h •< L < 37г, минимизирующая Р (/)
функция строится путем склейки функции вида (10.3)
и (10.7). Именно в этом случае при с 1т 0 экстремальная
функция имеет вид
при 0 < 'Р
1
cos ~2~
Г
1 — sin~2
при 3h—— h.
(10.8)
Числа X, А, В находятся из условий непрерывности
/ (Е) при S -= 3h — L, обращения в пуль вариации Р (/)
п краевого условия / (L — h) = 1/2. Отсюда получаются
136
АСИМПТОТ!!ЧЕСКИЕ ЗАДАЧИ
§ i<”
ПРОБЛЕМА ВЫБОРА РЕШЕНИЯ
137
следующие выражения:
il
Ill
। л ci, • L — 2h. ( 1 . 1 \ ,
X < 16/?. sm —r [cos — - sin — j -r
--2(3/г —A) Us ^__£_sin±—A)!'1 |
v ' \ 4/t 4A J J « ,1
1 1
<‘os — sin ——
) [1 — 2л (ЗА - Л)]
Нормальные составляющие поля скоростей ла свобод-
ах от нагрузок сторонах полосы + h изображены
на рис. 22 и рис. 23 для L = 3/?/2 и L — 3h соответственно.
В первом случае максимальная скорость сжатия дости-
гается в середине полосы на отрезке (— h/2 С^С h/2).
Во втором случае максимальная скорость сжатия попереч-
ного сечения достигается в точках xv = + h-
f L — h 3/i — L \
1 x[slD^r~^C()S~
Нетрудно проверить, что функция f (£), определяемая
формулами (10.8), (10.9), является монотонно возрастающей.
Перейдем теперь к анализу экстремальных полей ско-
ростей, определяемых по формулам (9.10), (10.1) с помощью
соответствующей функции / (£).
Рассмотрим сначала случай L О 2/1. Тогда для н2
при х2 — h получаем
— 1 при 0 О Х]_ 2/г—L,
и^{Х1,к) = ‘ ад — А____1_ п, _Т < т <h Т (10Л°)
2 (Л — к) 2 ПРИ
При L-- oh получим
на(ад,/г) =
1
т, . с03 2 .
COSU"!---------rsin
1-sin т
Рис. 23.
1 1
cos — — sm —
i
4 sin T
при 0 Xy
1
cos
------j-COS
l-siny
при Л : н/г. (10.11)
Аналогичным образом можно определить экстремаль-
ную функцию / (£) и соответствующее ей поле скоростей
и при L 3/г, однако соответствующие формулы стано-
вятся очень громоздкими.
Выше отмечалось, что сформулированный принцип
выделения единственного решения с помощью малой
вязкости основан на предположении существования глад-
кого решения в классе всех экстремальных полей для рас-
сматриваемой задачи о течении жесткопластической среды.
Однако в ряде случаев весь запас экстремальных полей
состоит из разрывных функций.
Рассмотрим в качестве примера такого рода задачу о
соосном движении двух цилиндров в жесткопластической
среде. Эта задача была подробно рассмотрена в § 5 (см.
Рис. 12, в).
!
1,38
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. 1Ц
Пусть Dl, D2— выпуклые поперечные сечения цилинд-
ров. Математическая постановка задачи состоит в разы-
скании минимума функционала
Jo (и, m)= j т01 Vи | dxt —т (и |ai)i + и |ао2),
m|q.D1 = c3, u\dD2=c2, u—>0 при |x|—>oo.
Пусть, далее, mes mes dD2 = mes dD, где D —
выпуклая оболочка областей и D2. Тогда m* = т0 mes D.
При этом экстремальные функции для Jo (и, т) имеют вид
щ на dDi (ui > и0 > 0),
п2 на dD2 (м2 > ио > 0),
Uo в и Па),
(10.12)
0 вне D.
Рассмотрим следующий функционал:
|хФ1 (и) = -у- j Vw |2 dxidx?..
я2\(в;ивд
Функционал Ф/u) на функциях вида (10.12) обраща-
ется в бесконечность. Таким образом, в данном случае
в множестве V нет ни одной функции, на которой значе-
ние Ф1(м) было бы конечным. j
Выделение единственного решения с помощью мало®
вязкости в классе разрывных решений связано с исследо-?
ванием пограничного слоя, который возникает в окрест-
ности разрывов полей скоростей в жесткопластической
теле, если учесть малую вязкость материала. Исследова-
ние пограничного слоя в вязкопластической среде прЯ
малой вязкости с помощью вариационного метода проил<
люстрируем на примере задачи о движении цилиндра В
направлении его оси [150]. Как было показано в § 5, этМ
задача сводится к отысканию функции, минимизирую-
щей функционал
J II = \ I |2 + то | VM 11 dxi dx2t u\t)D = Uo,
(10.13)
причем и -> 0 при | ас| -> оо.
ji;
§ 19] ПРОБЛЕМА ВЫБОРА РЕШЕНИЯ
139
Перейдем в задаче (10.13) к безразмерным перемен-
ным, относя х2 к длине L контура dD и полагая w =
(и/и0), е = (р н0/т0Б) <0 1. Тогда
J£{w) = xouoL Vw|2 | ^w\^dxrdx2, w|aQ = 1.
H'\Q
(10.14)
Здесь Q — образ области D при преобразовании подобия,
а для координат сохраняются прежние обозначения.
Пусть we — функция, минимизирующая функционал
(10.14). Будем говорить, что w*—приближение порядка
б (е), б (в) -+ 0 при е -> 0, если
Л И) — Из) = ₽ (с) = о (6 (&)).
(10.15)
Приближение, в котором б (в) — Уе> будем называть
погранслойным приближением. Это название связано с
тем, что, как показано в [150], /е(ш8) = топо L (1 +
+0 (/< причем вклад порядка О У е) дают значения
функции ш£, связанные с разрывами решений жесткопла-
стической задачи. Заметим, что из соотношения (10.15)
и результатов § 6 следует
| Vw.’£— V?/,’* |2diCidz2 (&)• (10.16)
H-'iQ
Из неравенства (10.16) следует, что при б (е) = s w*
в соответствующей метрике приближает решение we.
Остановимся сначала на методе построения прибли-
жений Wg. Перейдем в функционале (10.14) к криволиней-
ным ортогональным координатам (5, ц), так что внешность
Q отображается в полуполосу (0 О | < а, ц > 0), при-
чем (ц 0, 0 О В <1 а) соответствует границе области Q.
Н = T0u0L $ J [-J- [Л2 (Вц) -1- С2 (В, п) (4г)2 j +
ж [л2(е, Т])(-^)2 pWt],
A ___ I
a'l
dxj dj-2 |
rii] I
140
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. ТЦ
Введем функционал
а сю
J* (w) = xouoL jj J Л2 + I A 4^ |} Ac^drl-
0 0
Очевидно, что Je (w) > J*e («?) и, следовательно, имеет
место двусторонняя оценка
Jе (W*) > Je(ws) > inf J* (w) = J* (w*). (10.17)
Эта двусторонняя оценка и определяет порядок при-
ближения we к ше. Заметим, что нахождение ш* — задача
значительно более простая по сравнению с нахождением
we, так как в этой задаче существенной переменной являет-
ся лишь т), а | можно рассматривать как параметр. Такой
переход от функционала JE (w) к функционалу J* (w) фак-
тически означает переход от дифференциальных уравнений
в частных производных к обыкновенным дифференциаль-
ным уравнениям.
Найдя w*, можно построить более точное приближение.
Для этого следует в качестве криволинейных коорди-
нат (£, ц) взять координаты, определяемые линиями уров-
ня wl и ортогональными к ним кривыми. Если в качестве
криволинейных координат взять линии уровня самого
решения и ортогональные к ним кривые, то w* ws.
Таким образом, каждое последующее приближение улуч-
шает предыдущее.
После работы [150] появилась работа [151], в которой
тот же процесс перестройки криволинейных координат
рассматривался для произвольных уравнений эллипти-
ческого типа второго порядка от двух независимых пере-
менных. Именно, последующие приближения определяются
путем перехода в уравнении к криволинейным коор-
динатам, связанным с линиями уровня предыдущего при-
ближения и ортогональными к ним кривыми с последую-
щим отбрасыванием дифференцирований вдоль линий
уровня. Подчеркнем, что процедура построения прибли-
жений, рассмотренная в [150], применима как к дифферен-
цируемым, так и недифференцируемым функционалам.
Случай недифференцируемого функционала, вообще го-
воря, не охватывается схемой работы [151]. Наконец,
отметим, что вариационная постановка задачи дает возмож-
5 io!
ПРОБЛЕМА ВЫБОРА РЕШЕНИЯ
ность получения количественных оценок точности при-
ближения. В работе же [151] показано лишь, что если по-
следовательность приближений сходится и приближения
удовлетворяют определенным условиям, то предел этой
последовательности является решением исходной задачи.
Применим теперь описанную выше процедуру к функ-
ционалу (10.14). Пусть ~ «2(s), 0 s О 1,
задают уравнение границы 9Q области Q и s — длина
дуги вдоль 3Q. Рассмотрим систему криволинейных ко-
ординат:
— xi(s) + ж2 (s) п, (10.18)
ay £2(s) — (4) п> « > 0.
Функции ^(.s), г2(«) предполагаются достаточно глад-
кими и кривизна к (s) границы dQ всюду положительна.
В переменных (10.18) функционалы JR (w) и J* (w)
имеют вид
a<«>=S $ [1 от [(£)’•
о о
+ тот I (от)' г (1 4- М2 (от)' | 2!- (1 Т kn)dsdn,
l~kn[_\ds ) 1 х 1 ’ \ on) ! J к 7
1
J* (и>) = t0Lz/o Jj J (4)г)’ + 1|}(1 ' кп^ds dn'
о о
Функция 4 определяется теперь по формуле
‘-^ОТОТ1*'
о
(10.19)
п > Y («).
где у (s) определяется из уравнения
e = /,’(s) S
о
(10.20)
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[гл. ш
Из формулы (10.20) находим, что у (s) = (2g/& (s))1/» 4.
+ О (e). Отсюда, используя (10.19), строим функцию
Можно показать, что J* (^’е) — J* (fg) — О (е). Далее,
непосредственными вычислениями находим, что Д (vg) —
— J* (t>e) = О (е). Из этих соотношений и неравенства
(10.17) получим
Jг (We) = Л (V*) + О (В) =
= X0Lu0 1 -!
J /^(s)dsj + 0(e).
Для построения более точных приближений нужно
переходить в функционале Je (w) к криволинейным коор-
динатам, связанным с линиями уровня гг*. Следующие
приближения вычислены в [150].
Вернемся теперь к вопросу о выборе единственного
решения в задаче о соосном движении двух цилиндров
в классе функций (10.12). Для решения этого вопроса
оказывается достаточно ограничиться анализом погран-
слойных приближений.
Пусть, для простоты, Dr, Dz—круги одинакового ра-
диуса. Тогда в силу симметрии задачи можно считать,
что иг— и2. Если сходится при р, 0 к решению из
(10.12) так, что п0< иу= и2, то на границах областей Dv
D2 образуются пограничные слои. В случае же u0= иг=
= и2 на части границ Dr и D2 пограничный слой не воз-
никает. Здесь появляется пограничный слой, не примы-
кающий к стенкам цилиндров, а идущий внутри вязко-
пластической среды. Вклад от такого пограничного слоя,
как показано в [150], в скорость диссипации энергии имеет
порядок о (]/~ц). Таким образом, малая вязкость выбирает
в классе (10.12) решение, в котором и^-- и2~ и0.
Заметим, что в случае регуляризации рассматриваемой
задачи с помощью учета инерционных свойств среды вы-
S 111
ТЕОРИЯ ОБОЛОЧЕК
143
деляется решение с и0= 0. Подробнее этот вопрос рас-
смотрен в § 13.
Вопросам исследования пограничного слоя для вяз-
копластической среды при |л—>0 посвящен ряд исследова-
ний. Впервые для плоских течений пограничный слой был
проанализирован в [152] в задачах об обтекании пластины
потоком вязкопластической среды. Полная постановка
задачи обтекания затупленных тел вязкопластической
средой рассмотрена в [153]. Теоретические выводы [153]
подтверждены экспериментальными исследованиями
[154, 155]. Позднее подобные исследования были проведаны
в [156] и их выводы аналогичны результатам [153—155].
В § 9 рассматривалась задача Прандтля о сжатии
жесткопластического слоя шероховатыми плитами. Ре-
шение Прандтля этой задачи (9.26) имеет скачок касатель-
ной к сжимающим плитам составляющей скорости. По-
этому при учете малой вязкости материала вблизи поверх-
ности плит возникает пограничный слой. Исследованию
этого пограничного слоя посвящена работа [157].
Некоторые задачи, связанные с пограничным слоем па
двумерных поверхностях, для вязкопластической среды
рассмотрены в [158].
§ 11. Теория оболочек
Асимптотическая теория предельной нагрузки для гхесткопласти-
ческих оболочек. Бегмоментное приближение и границы его приме-
нимости. Роль краевых условий. Асимптотическая точность безмо-
ментного приближения и гипотеза Кирхгофа — Лява. Алгебраизуе-
мые и неалгебраизуемые задачи.
Важное значение в приложениях имеют такие конструк-
тивные элементы, как пластины, оболочки, стержни, бал-
ки и т. д. Соответствующие им задачи в теории упругости
и пластичности связаны с наличием геометрического ма-
лого параметра в исходной трехмерном постановке задачи,
что дает возможность существенно упростить ее и получить
допускающую эффективное исследование модель пове-
дения соответствующей конструкции под действием внеш-
них нагрузок.
В настоящем параграфе такой переход от трехмерной
постановки задачи к ее упрощенной модификации будет
АСИМПТОТИЧЕСКИЕ .ЗАДАЧИ
[ГЛ. Ill
проведен при вычислении предельных нагрузок для жест-
копластических оболочек.
Исследование несущей способности жесткопластической
оболочки будет проведено на основе вариационного асимп-
тотического метода. Ранее уже подчеркивалось, что ва-
риационный подход оказывается эффективным при ис-’
следовании задач теории пластичности. Центральным
моментом в вариационном подходе является получение
двусторонних оценок минимального значения функцио-
нала. Оценка сверху этого значения получается путем
подстановки в функционал полей скоростей специаль-
ного вида. Для оценок снизу имеется ряд подходов;
некоторые из них уже были изложены ранее в §4,7,9
и 10. Ниже будет рассмотрен еще один вариант полу-
чения оценок снизу минимального значения функцио-
нала. Этот подход связан с анализом структуры зави-
симости диссипативного потенциала от компонент тензора
скоростей деформаций.
В асимптотических вариационных задачах иногда
удается получить оценки сверху и снизу минимального
значения функционала, совпадающие в главном члене.
Это означает, что специальные поля скоростей, на ко-
торых получена оценка сверху, являются асимптотиче-
ски точными. Именно так будет установлена асимптоти-
ческая точность гипотезы Кирхгофа — Лява.
Изложение настоящего параграфа следует работам
(159-161].
Рассмотрим трехмерный объем Тп, определяемый со-
отношениями
*’ = р(ъ, Т]) + 'Qhn, n = (pg х Рп) | Pg X Pnp1,
gl<^2, ? = (Ж1, Ж2, T3), (g, 1])EO.
Здесь p (g, т|) задает поверхность в трехмерном про-
странстве. Предполагается, что координатные линии на
пей g = const и т] = const являются линиями кривизны.
Объем Th заполнен жесткопластической средой с
потенциалом
Ф (?» е^> ечЛ’ е&п)’
где е = (е^, ew е^, е^, тензор скоростей
деформаций, соответствующий полю скоростей и =
= (и, v, w) в криволинейных ортогональных коор-
ТЕОРИЯ ОБОЛОЧЕК
145
динатах £, ц,
1 ди , v "/л=
: ПУ~дГ т 7477^ “ТЩ”
1 dv } и
б>’11г^ тц "йг ТцЦ ~дТ
/f I д
Ю]
д / v \
та
_ 1
^п— Т
1 Г 1 дю д и
dl • h
1 1 дш д 1 v
£4п— -у дт] 1 h 91
(ил)
^=44г- яп=ы1-wi-
Здесь к& — главные кривизны поверхности в на-
правлениях £, 1] соответственно. Напомним, что поля
скоростей предполагаются удовлетворяющими условию
несжимаемости:
4- 4- = °-
Для простоты предполагается, что диссипативный
потенциал ср является гладкой функцией своих аргументов
при | е ] Д> 0; кроме того, будем предполагать, что
ф (М> Ф (L П, £)> (И.2)
где е = (е^, enn, —е^ — ew 0, 0). Условие (11.2),
выполнено, например, в случае неоднородной изотроп-
ной /кесткопластической среды.
В переменных g, ц, с, объем Th имеет вид
Пусть на среду в объеме Т действует система сил
{(/' (L П, С), hft (|, ц); i = 1, 2)}, где f (2, ц, £) — плот-
ность объемных сил, hfi (5, ц)— плотность поверхност-
ных сил, действующих на поверхности £ = £г, i = 1,2.
Обозначим через U класс кинематически допустимых
полей скоростей, удовлетворяющих условию несжимае-
мости и некоторым однородным краевым условиям на
14G
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
1ГЛ. nj
торце оболочки dD х [£1? L]. Предполагается, что эти
краевые условия не зависят от £.
Из общей формулы для коэффициента предельной
нагрузки в данном случае имеем
2
j f • нА dp -Г- У, j
T i=l s;
J tpA dp
T
£ = £ь Д» ~ x J*n I k=L ’ ? = 1,2.
, (И.З)
В работе [159] показано, что при определенных усло-
виях относительно данных задачи выполняется соотно- >
шение '
т* О1) — + а W, а (^) О при h -> 0. (И.4)
Число т£ называется коэффициентом предельной нагрузки
в безмоментном приближении. Формула для вычисления
несущественно более проста по сравнению с (11.3) и
имеет вид
( 1Ри -р Qv Hw) dp
-i-— sup ----------, (11.5)
и’ «есш, rp ф(5, nxHlpJ Ipj^dp
D
где P, Q, R — осредненные внешние нагрузки
/мшЬ- ^=1-2,
P^ifi L fl !- ? k I Ре 1|Ря !>
(1 = (A+ fi} f MS)|P£llPnl>
ь
b-
и e° — тензор 8 при k = 0, вычисленный по полю
tt (В, П) = (« (t n)> v (S, nh (t Ф)-
Через Uo (§, ц) обозначено множество полей и (^, ц),
которые удовлетворяют краевым условиям, но, вообще
говоря, могут и не удовлетворять условию несжимаемости.
§ 111
ТЕОРИЯ ОБОЛОЧЕК
147
Поясним основную идею получения формулы (11.5)
и доказательства соотношения (11.4).
Получим сначала оценку сверху для т* (h) через те®:
т* W < т* + Pi (ty, Pi (A) -> 0 при h -> 0. (11.6)
Для получения такой оценки необходимо для любого
ноля из U0 найти близкое к нему поле uh, удовлетворяю-
щее краевым условиям и условию несжимаемости, и
такое, чтобы имело место соотношение
2
У f • Uh\ d’c, d’l] dt, + У j f
T i=l Si
J Ф (5, Щ eh) & d^dr\d^ (h->0)
T
-I- (4 -г
________D _______________________
(£2 - ы) )' 4, I Pg 11 PnI d,l
D
(11.7)
Из (И.7) в этом случае непосредственно следует (11.6).
Процедура построения поля по полю и0 включает
в себя построение разложения типа Кирхгофа — Лява по
степеням Цг и согласование этого разложения с краевыми
условиями. Построение разложения Кирхгофа—Лява, как
обычно, проводится из требования обращения в нуль с точ-
ностью до порядка h компонент тензора скоростей деформа-
ций е^, и удовлетворения условия несжимаемости. Для
удовлетворения краевым условиям в окрестности границы
(>D х 1С1» Ssl могут быть введены соответствующие по-
правки, которые дают малый вклад в скорость диссипа-
ции энергии. Построение этих краевых функций может
быть проведено по схеме, изложенной в [62]. Подробное
построение поля Uh проведено в [159].
Перейдем теперь к получению оценки снизу для
Ограничимся здесь случаем, когда внешние нагрузки
имеют специальный вид
В [159] показано, как можно нагрузки общего вида свести
к указанному специальному виду.
148
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[гл. и:
Рассмотрим т0 (х), определяемое формулой
( f -и& (х) d£di]
1 D
---7-г- = sup —------------------------, X =
то W Я) У ф (£, Д е) Д (х) d? dr)
D
В силу (11.2) J? inf m0 (х). Таким образом?
для установления справедливости (11.4) достаточно по-
казать, что
т0 (х) -> /п® при h -> 0.
(11.8)
Исследование поведения т0 (х) связано с изучением си-
стемы уравнений бесконечно малых изгибаний поверх-
ностей, порождаемой тензором е:
1 ди. + _JL_
1 ~ х/ч e5s>
1 ди + 11 = (11.9)
3? 1 -
1 Г IC. д Кг Г д
2 dp dt UJj
Соотношение (11.8) можно доказать для ряда краевых
условий в случае поверхностей положительной или ну-
левой гауссовой кривизны. В первом случае при дока-
зательстве (11.8) можно воспользоваться известными
результатами теории краевых задач для эллиптических
систем. Во втором случае можно использовать формулы
для общего решения системы уравнений бесконечно ма-
лых изгибаний развертывающихся поверхностей [162].
Приведем еще класс задач, когда справедливо (11.8).
Пусть для системы (11.9) поставлена однозначно разре-
шимая для любых достаточно гладких 8 = (е^, епл, е^п)
однородная краевая задача. Обозначим через G (х) об-
ратный оператор: и — G (х)е. Система (11.9) зависит
от х как от параметра.
Пусть G* (х) — сопряженный к G (х) оператор, т. е.
s-G* (х) / d%ch] = f G (х) с rfgrfp. (11.10)
/; />
5 ill
ТЕОРИЯ ОБОЛОЧЕК
149
Тогда, как показано в [159], если
max|(G*(x)— G*(O))f|—>0 при h—>0,
L в, и
то выполнено условие (11,8).
Во всех этих случаях тем самым доказана асимптоти-
ческая точность безмоментного приближения для коэф-
фициента предельной нагрузки и, следовательно, обо-
снована асимптотическая точность гипотезы Кирхгофа —
Лява для жесткопластических оболочек.
Рассмотрим теперь вопрос о границах применимости
безмоментного приближения. Оно имеет смысл лишь
при ш#, отличном от нуля и если значение устойчиво
по отношению к малым изменениям внешних нагрузок.
Остановимся более подробно на случае, когда то®, = 0.
Это имеет место, если вектор (Р, Q, R) не ортогонален
хотя бы одному решению системы уравнений е® (г/) = 0.
Эта система получается из (11.9) при х = 0.
Система уравнений е° (и) = 0 (три дифференциальных
уравнения относительно трех неизвестных функций) для
незамкнутой поверхности г = р(|, ц), если для нее
не поставлены краевые условия, имеет бесконечно много
линейно независимых решений, в отличие от переопре-
деленной системы (11.1) е (и) == 0, имеющей в качестве
решений лишь движения Т как твердого тела.
Таким образом, чтобы т°_. не обращалось в нуль,
необходимо предположить, что вектор (Р, Q, R) орто-
гонален ко всем решениям системы 8° (м) = 0. Однако
в этом случае ш®. неустойчиво относительно возмущения
внешних нагрузок. Примерами задач, в которых без-
моментное приближение не является корректным, слу-
жат задачи для незамкнутых оболочек без краевых усло-
вий на поле скоростей гг, т. е. задачи в напряжениях.
Такие задачи рассматривались, например, в [163, 164].
Указанная некорректность постановок задач в напряже-
ниях для безмоментного приближения имеет место и в
случае упругих оболочек, на что было обращено внима-
ние И. Н. Векуа [162].
Укажем условия корректности постановок задач для
безмоментного приближения. Эти условия связаны с
корректными постановками краевых задач для системы
(11.9) при х — 0. Свойства этой системы подробно ис-
150
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. Jij
следованы в [162]. Например, в случае оболочек поло-
жительной гауссовой кривизны система (11.9) является
эллиптической. Если оболочка имеет отрицательную га- i
уссову кривизну, то система (11.9) — гиперболическая. |
Для поверхности нулевой гауссовой кривизны система
(11.9) допускает явное решение [162].
Для всех этих типов систем известны корректные
постановки задач. При соответствующих кинематических
ограничениях безмоментное состояние реализуемо и ус-
тойчиво. Однако эти случаи не исчерпывают область i
корректности безмоментного приближения. Именно, ес- |
ли в корректной краевой задаче для системы (11.9) до-
бавить дополнительные краевые условия, характеризую-
щие условия закрепления оболочки на краю, то безмо- i
ментное приближение по-прежнему будет корректным.
Например, в случае оболочек с несущей поверхностью
р (|, ц), являющейся поверхностью второго порядка с
положительной гауссовой кривизной, система (11.9) при
х = 0, после исключения w, превращается в систему
Коши — Римана [162]. Для системы Коши — Римана
корректной является, например, задача Гильберта, в
которой на границе области D задается одна линейная
комбинация искомых функций и и v. Требования и |0D = 0
и v |эд = 0 приводят к переопределенной краевой за-
даче для системы Коши — Римана. Однако эта задача
корректна при рассмотрении безмоментного приближения.
Итак, пусть для системы (11.9) при х = 0 поставлена
однозначно разрешимая краевая задача. Пусть G (х),
как и ранее, обратный оператор краевой задачи для (11.9).
Положим G (0) — G. Относительно оператора G предпо-
лагается, что сопряженный оператор G* в (11.10) является
непрерывным оператором, действующим из пространства
достаточно гладких векторных полей в пространство
непрерывных векторных полей. Задачи, в которых сущест-
вует такой оператор G, будем называть алгебраизуемыми.
Используя оператор С*, для m2. получим
( е° • G*P di. dr]
1 ___ qiii, ______D_______________________ _
«4 & - ?o (('’ Ti’ e° n)) I p$ il pn I
b
= sup . (Ш1)
J.n.F" (ю I Pg и I
ТЕОРИЯ ОБОЛОЧЕК
154
t 1 VI
Формула (11.11) показывает, что если известен оие-
р лор G*, то задача о вычислении т°,, сводится к задаче
о разыскании экстремума функции конечного числа пе-
ременных. Этим и объясняется термин — алгебраизуемые
задачи.
Пусть g*, е®. — значения переменных, при кото-
рых достигается верхняя грань в (11.11). Тогда экстре-
мальное поле е“. (Ё, ц) имеет вид (£, т|) — е®..б (£ —
I]-—т]*) и поле скоростей и* = Се®,. (Е, ц).
Из соотношения (11.11) следует, что
G*P G*Q _ G*R .,
/ dtp \ / <Эф \ / <?([; \
\5e?s ; \де° / \аетс/
Например, в случае потенциала Мизеса
ф (£°) = % Ке!й2 + (ечл)2 + (£й + ечч)2 + 2 (е1ч)2] 2>
система (11.12) легко решается и для т% получается
формула
-V = max (—Г (G*PY + (G*Qy — G*PG*Q ф
m® g, В I. ТО v 6 L
4. Л- (G*RP]1/2--------, 1. (11.13)
4 J <?2 — &0 IP^II pni J
Отметим, что формула (11.13) имеет место лишь для
алгебраизуемых задач, так как только в этом случае
можно в (11.11) перейти от исследования функционала
к экстремальной задаче для функции нескольких пе-
ременных .
Эффективный аналитический расчет предельной на-
грузки для алгебраизуемых задач может быть проведен,
если известен оператор G*. Его можно явно построить
в случае поверхностей нулевой гауссовой кривизны,
а также для эллипсоидальных и параболических оболочек.
В случае оболочек вращения систему (11.9) при х = О
можно решать методом разделения переменных. Это при-
водит к заданию ядра оператора G* в виде ряда Фурье.
I
Г гл. щ
§ 14
ТЕОРИЯ ОКОЛОЧЕН
152
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
Наиболее просто при этом решаются задачи, в которых
вектор внешних нагрузок (Р, Q, 1{) разлагается в конеч-
ный рад Фурье. ,
Рассмотрим несколько примеров. |
Пример 11.1. Пусть г = р (£, т|) — поверхность
тора
/ £ \
Ж1= f b + о sin cos т],
ж2 =х (b 4- a sin sin ц,
5
ж3 — a cos — .
а
В этом случае однородная система (11.9) при х = О,
кроме решений, соответствующих движению тора
твердого тела, имеет еще решения вида
как
у = 0,
CiSin -А-
а
сг Sin
• а
при
при ла2ла,
.
— Cj Sin -у- при
Е,
— с2 cos при
«Спа,
Яа «С I «С Зла.
Чтобы было отлично от нуля, на внешние нагрузки
(В, Q, Я), кроме очевидного условия самоуравновешен-
ности, нужно наложить дополнительное условие
^Psin—---R cos j dg = 0.
о
Этому условию удовлетворяет, например, нагрузка вида
Р = 0, Q~fi, R — р [b 4- a sin -j-'j ,
соответствующая случаю, когда тороидальная оболочка
находится под равномерным внутренним давлением
Для величины т®. из (11.13) находим
т° — ТО (6 ~ °) (£3 — Ц)
* pa /3Z>2 — ЗаЬ + а2
При этом — ла!2 или Зла/2; г)* — любое.
Пример 11.2. Рассмотрим круговую цилиндри-
ческую оболочку радиуса а. Пусть внешние нагрузки
имеют вид
Р = 0, Q - 0, R = R (|).
Здесь £ — координата вдоль образующей цилиндра.
В этом случае оболочка находится под действием нормаль-
ного давления, меняющегося с высотой. Нижний край
оболочки предполагается закрепленным:
и (0, ц) = v (0, т|) = w (0, ц) = 0.
Из формулы (11.13) в этом случае следует, что предельная
нагрузка определяется из соотношения
шах|Л ©КУб’то^-^)^. (11.14)
Пример 11.3. Рассмотрим задачу о жесткости
перекрытия в форме цилиндрической поверхности, на-
ходящейся под действием собственного веса. Цилиндри-
ческая поверхность задается уравнением р (|, ц) =
= ^(ц), ж2 (т]), Н), где т| — длина дуги вдоль направляющей
цилиндра. Внешние нагрузки в этом случае имеют вид
Р = 0, Q = —(ц), R = —ygx"2 (т])//с (т)), где у —
плотность материала перекрытия, g — ускорение силы
тяжести, к (ц) — кривизна направляющей линии ци-
линдра. По торцу | = 0 перекрытие, как и в предыдущем
примере, закреплено.
Формула (11.13) в данном случае имеет вид
_!__ ____..... х(('--Я' I» _1 ' ,.
1 4 bfU 'll 1
/ у£\2 _ (l - e,)2
' у /,2 у 2 к2 dr]2 у k2
4-3(L-^^^-r2jj J , (11.15)
Р-
где L — длина перекрытия.
Пусть цилиндрическая оболочка является половиной
кругового цилиндра радиуса а. Тогда к ~ —1/а и из
1
—— —-----!—шах
(t>2 — Cl) Т0 Кв Л
2т?
154 АСИМПТОТИЧЕСКИЕ ЗАДАЧИ [ГЛ. П1|
?
(11.15) находим
+ а2 + Lz} sin2 + I
\ а‘ ' ' / а 1
+ 12Lscos2-~p'2. (11.16)!
Если L4 + о4 — 11Z.2«3 0, то наибольшее значение в'
(11.16) достигается при ц = ла/2, £ =0. Если же £44-а4—
— HL2a2 <ф 0, то наибольшее значение достигается при1
р = 0 пли 1] = ла, | = 0.
Заметим, что жесткость перекрытия, вообще говоря,
зависит от L и при увеличении L она уменьшается. Фор-
мула (11.15) показывает, что существует единственная
форма перекрытия, для которой т^, не зависит от L. Для
этого нужно, чтобы
J 2
—2---.Т2 = const.
Это уравнение легко интегрируется и из него получается,
что направляющей линией такого перекрытия является
цепная линия.
Как уже указывалось, алгебраизуемые задачи не ох-
ватывают всей области корректности безмоментного
приближения. Именно, если в алгебраизуемой задаче за-
дать дополнительные кинематические ограничения на поля
скоростей, то такая задача также корректна с точки зрения
безмоментного приближения. Тем не менее, в случае
неалгебраизуемых задач можно предложить алгебраиче-
ский алгоритм нахоткдения системы оценок снизу для
т%. Этот алгоритм повторяет описанную в § 7 процедуру
размораживания дифференциальных связей, согласно ко-
торой дополнительные к алгебраизуемой задаче условия
нужно представить в виде условий ортогональности. Та-
ких условий будет, вообще говоря, счетное множество. Ос-
тавляя конечное число этих условий и учитывая их в
(11.11) с помощью множителей Лагранжа, будем получать
оценки снизу для величины т°. Заметим, что получение
всех этих оценок будет сводиться к алгебраическим зада-
чам на экстремум функции конечного числа переменных.
Пример 11.4. Рассмотрим, как и в примере 11.2,
цилиндрическую оболочку с дополнительным условием
и (L, ц) = v (L, ц) = w {L, ц) -= 0,
§ 111
ТЕОРИЯ ОБОЛОЧЕК
155
Вти дополнительные условия приводят к следующему
ус Товию ортогональности
I.
р.?': (р, р) ор —. 0.
Тогда
-L- = min max —-----------[X2 ф- R2 (g) а2 — 7? (£) аХ]*\
111 К Sj Т0 Р" 6 (.,2 ь1)
Пусть R (£) заключено в пределах R* = min R (|)
R (Н) тах = В*> Предельное давление в этой
задаче определяется следующими условиями
R* </2"т0-^-^!- при Я* > — 2/?*,
(Rl + (Н*)2 + R*R*y- < |/б~т0
прп ——27?*,
ПРП Я*< — ~R*.
Заметим, что закрепление и второго края оболочки приво-
дит к увеличению ее жесткости.
Остановимся кратко на вопросе о поведении жесткопла-
стических оболочек в условиях, когда т® = Ои безмомент-
иое приближение некорректно. В этом случае т* (А) -> 0
при h -> 0. Исследование главного члена асимптотики
in* (К) требует более точного учета краевых условий и бо-
лее детального изучения структуры экстремальных полей.
Несложные подсчеты показывают, что краевой эффект мо-
жет изменить скорость диссипации энергии в оболочке на
величину порядка h. Если же, например, краевые кине-
матические ограничения на поля скоростей отсутствуют,
то можно показать, что т* (А) ~ h.
Из сказанного вытекает следующий возможный подход
к асимптотическому анализу оболочек за пределами без-
моментного приближения. Если оказывается, что т* (А) ~
~ Уh, то экстремальное поле скоростей следует строить
путем склейки безмоментного решения задачи с погранич-
ным слоем в окрестности края оболочки. В случае же, ког-
156
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. Ц
ТЕОРИЯ ОБОЛОЧЕК
157
S II'
да т* (/г) ~ h, необходимо уточнить класс векторных по»,
лей {70 (£, ц) за счет рассмотрения полей, компоненты ко*(
торых линейно или квадратично зависят от tji. Простейшим
примером такой задачи является задача о вычислении пре-
дельной нагрузки для панели, которая будет рассмотре-
на в следующем параграфе. '
Пример 11.5 (обработка экспериментальных дан-
ных по определению условия текучести для изотропного
материала). Для определения условия текучести материа-
ла можно использовать эксперименты на тонкостенных
цилиндрических образцах. Будем исследовать их поведение 1
на основе рассмотренной выше теории жесткопластиче-
ских оболочек. В этом случае i
Р(£, ц) = (a cos (ц/п), a sin (ц/а), g), i
Поведение оболочки, как и раньше, определяется функ-
циями и (£, т|), v (£, 1]), wfe, ц), при этом тензор е° (£, ц)
имеет компоненты
e°g = Uj, е?^ = v\ + (w/a), 8gn = (ii^ + гД/2.
На функции и, v, to наложены кинематические ограниче-
ния и (0, г]) — v (0, ц) = w (0, ц) = w (Z, ц) = 0, и (1,1]) =
= ct, v (I, г|) = с2, сп с2 — постоянные. Предполагается,
что оболочка изготовлена из однородного жесткопла-
стического материала с диссипативным потенциалом <р (е)
и находится под действием растяжения, кручения и внут-
реннего давления. В связи с рассматриваемой задачей вве-
дем функционал
D I
— (w]a), 0,0) dfc, di] — Pu (Z, ц) — Qv (Z, ц) — J
- J (7?/2n«2)wcZ^)i, (11.17)
• D
где P, Q, R — постоянные числа, характеризующие рас-
тяжения, кручение и давление соответственно. Можно до-
казать, что при минимизации функционала (11.17) можно ,
ограничиться функциями и, v, w не зависящими от ц.
Да таких функциях функционал (11.17) примет вид
j VJ (г/, <г/а, г'/2, —и' — (wja), 0,0) —
— Pu' — 2Q (р'/2) - R (w/a)) <%. (11.18)
Задача о минимуме функционала (11.18) является алге-
браической и связана с определением величины
т s”p '4 + и -I 2гМп
-<p(4rew - elg- 8W °’ °))’
где
s&=P’
sm~R, Sfr — Q. (11.19)
Предположим, что материал оболочки изотропен,
ср (е) = ср (/2, /3), тогда Т = ср* (s), где s — девиатор, у
которого = 0. В эксперименте определяется
граница множества ср* (s) = 0. Действительно, при из-
менении по некоторой программе величин Р, Q, И, в экс-
перименте фиксируются такие их значения, при которых
наступает течение. В силу (11.19) они и определяют ?,
находящиеся на поверхности текучести ср* (s) = 0. Ус-
ловие текучести удобно записывать с помощью поляры к
потенциалу ср (е) (см. § 8). Напомним, что поляра <р° (?) —
это функция первой степени однородности, равная 1,
на поверхности текучести. Итак, определению подле-
жит функция <р° (s) по известной из эксперимента функции
Ф° (.?). Из изотропности материала следует, что ср0 ($) =
= 22/гф (23'72У2), где S2 = + (sg£ + s^)2 +
+ 28^ + 2-A + 28^, S3 = det s. Следовательно, дол-
жна быть найдена функция ф (Z). Нетрудно показать,
что I 1 < З-'АЯ-1/'.
Из эксперимента известна функция
/ др + Д) (Q^-РД))'-'»
Т ' \ /2 (Р? да -р РД -р Q2)
Рассмотрим функцию ф (Z) при положительных t. В этом
случае можно положить R = 0 и считать Р, Q положитель-
ными. Нетрудно видеть, что тогда при 0 < Q/Р 2! ’ ар-
гумент у ф (Z) в (11.20) пробегает все значения из проме-
(11.20)
158 АСИМПТОТИЧЕСКИЕ ЗАДАЧИ [ГЛ. П$|
жутка [0,3“‘ 2 2Л °]. При нахождении ф (t) для t 0 мож-|
но было бы опять положить R — 0 и считать Р отрица-1
тельным. Однако в этом случае до перехода оболочки в<i
пластическое состояние может произойти потеря устой- ,
чивости. Поэтому при t < 0 для нахождения ф (7) можно >
ограничиться нагрузками Q = О, Р > О, R 0. Нетрудно
видеть, что при 0 С Р/R 1 аргумент у ф (/) в (11.20)
пробегает все значения из промежутка [—3~‘ ’ 2"1-6, 0].
Таким образом, оказывается, что в классе девиаторов вида
s можно описать всю область определения функции ф (/). ,
Пусть и, v, w дают минимальное значение функционала j
(11.18). Можно показать, что эти решения имеют следую-
щую структуру. Возьмем е^, е*^, на которых
реализуется sup F (е):
F (g) = + + .
ф <-wl. — г-пт), 0, 0)
Пусть / (|) — произвольная неотрицательная функция
f (0) = / (/) =0. Экстремальные функции для функциона-
ла (11.18) имеют вид
и (£) = J / (X) dX, V а) = 2e»n J / (X) dX,
(Ю = (В)-
Таким образом, в классе решений этой задачи имеются
гладкие функции и, v, w, удовлетворяющие всем краевым
условиям. Следовательно, от решения трехмерной зада-
чи, учитывающей толщину h оболочки, можно перейти
к решению оболочечного приближения без введения функ-
ций типа пограничного слоя. Отсюда следует , что усло-
вие текучести, определенное по указанной выше схеме,
имеет точность порядка h/l.
Заметим, что в аналогичной упругой задаче в обо-
лочечном приближении экстремальная функция w (£)
такова, что w (£) = с при 0 < £ < I, где с — постоянная,
и, следовательно, при переходе от трехмерной задачи к
оболочечному приближению возникает пограничный слой
на торцах оболочки g = 0, £ = Z, если с Ф 0.
Итак, жесткопластическая задача, соответствующая
минимизации функционала (11.18), имеет много решений.
S 11]
ТЕОРИЯ ОБОЛОЧЕК
159
Рассматривая регуляризацию задачи с помощью введе-
ния исчезающе малой вязкости в оболочечном приближе-
нии, придем к функции f (g) = const при 0 < | < I.
При определении условия текучести использовалось
нагружение лишь по двум параметрам. Возможность ве-
сти нагружение по трем параметрам Р, Q, R позволяет
дать косвенную проверку выполнения свойств изотропии
материала. В связи с этим возникает вопрос о зависимости
между Р, Q, R, при которой (Р, Q, R) и S3 (Р, Q, R)
остаются постоянными, т. е. вопрос о решении системы
уравнений
Р2 + Q2 + R2 + PR = (Р + R)(Q~ - PR) = с2.
Положив % = У2 (Р + R)I2 и ц = У2 (Р — R)I2, пе-
репишем эту систему в виде
Система (11.21) эквивалентна системе уравнений
-7|-+2V = c1, А. (11.22)
Отметим, что первое уравнение в (11.22) при Р )> О,
Ну.() может иметь два решения. Подставляя во второе
уравнение (11.22) найденное значение X, получим зави-
симость между Q и Р — R.
Обширные практические применения обусловили пре-
вращение теории оболочек в весьма разветвленную самосто-
ятельную область механики твердого тела. Остановим-
ся еще на некоторых принципиальных моментах теории
жесткопл астичлых оболочек.
Одним из важных элементов этой теории является по-
нятие конечных соотношений между обобщенными момента-
ми и силами. С точки зрения развитого ранее формализма
эти соотношения возникают естественным образом, как
следствие перехода от постановки задач в кинематических
терминах к постановке задач в напряжениях с помощью
преобразования Юнга (см. § 1). Именно, диссипативный
потенциал ср для жесткопластической среды рассматрива-
160
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[гл. и:
ется на полях скоростей, удовлетворяющих гипотезе Кирх-s
гофа — Лява. Эти поля являются разложениями произ-*
вольных полей скоростей по параметру th. В приближении;:
теории оболочек в диссипативном потенциале удержи-1
ваются выражения, содержащие tji в степени не выше двух.
Таким образом, диссипативный потенциал ср в приближении
теории оболочек, после интегрирования его по толщине
оболочки, зависит от двух групп параметров: скоростей
удлинений и скоростей изменения кривизн срединной по-
верхности. Этот осреднепный диссипативный потенциал '
по-прежнему является выпуклой положительной функцией
первой степени однородности по отношению к этим пара-
метрам. Двойственные по Юнгу переменные к скоростям
удлинений и скоростям изменения кривизн называют обоб-
щенными силами и моментами, а само преобразование Юн-
га осреднепного потенциала приводит к условию текуче-
сти, которое и называют конечным соотношением между
обобщенными силами и моментами. Эти соотношения для
условия текучести Мизеса были впервые получены в [163],
а для условия Треска — Сен-Венана в [164]. Позднее они
рассматривались также в [165]. Подробная библиография
по этому вопросу дана в [42]. В весьма общем и закон-
ченном виде конечные соотношения изложены в [166,
167].
Обобщенные силы и напряжения в силу принципа двой-
ственности должны быть ортогональны классу кинема-
тически допустимых скоростей удлинения и кривизн.
Эти условия ортогональности тождественны с обычно
рассматриваемыми уравнениями равновесия оболочек.
По аналогии с общей теорией пластичности, для жестко-
пластических оболочек можно ввести понятие коэффициен-
та предельной нагрузки, а также понятия кинематического
и статического коэффициентов. Для них справедлива ос-
новная теорема, доказанная в § 4.
Изложенная в этом параграфе вариационная схема пов-
торяет схему построения теории оболочек в теории упруго-
сти, которая исходит из первоначальной постановки за-
дачи в смещениях.
Теории жесткопластических оболочек и решению кон-
кретных задач посвящена обширная литература. Подроб-
ная библиография, в том числе ссылки на обзоры, содер-
жится в [42, 46, 168—172].
ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ
161
Даже в случае простейших условий текучести Мизеса
и Треска — Сен-Венана, осредпенные диссипативные по-
тенциалы и соответствующие им конечные соотношения
чрезвычайно громоздки и вызывают затруднения при их
использовании в конкретных расчетах. Важную роль в
приложении теории жесткопластических оболочек к прак-
тическим задачам сыграла схема двухслойных оболочек,
предложенная в [173], и получившая в дальнейшем мно-
гочисленные применения [174—178].
В последние годы широкое распространение в конкрет-
ны х расчетах несущей способности оболочек получили ме-
тоды линейного программирования [46].
§ 12. Жесткопластическая панель
К1.>ффициент предельной нагрузки для жесткопластической панели.
Оценка сверху на полях Кирхгофа — Лява. Осреднение выпуклой
дтнкции. Оценка снизу. Пластинки. Переход от трехмерных задач
к задачам меньшей размерности.
В предыдущем параграфе отмечалось, что задача о де-
<; ормировании жесткопластической панели является про-
стейшим примером, в котором нельзя ограничиться безмо-
ш нтным приближением. Математическая постановка этой
задачи [ 179, 180] сводится к отысканию минимума функцио-
нала Je(«, т), который в безразмерных переменных имеет
вид
in) =
1 1
= 5 5 Дг(“(< + —
S (12.1)
где
Ge(«) =
г 1 г г
= 5 f 1’>=1 А • w|у=-1 —
0—1 о о
11
( I । С/-у ^1? 1 [dll . О и. \ "I i -j / л су г) \
= J И51 + Гxdy’
О —1
6 Е. П. Мосолов, В. П. Мясников
162
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. Ш
Здесь /,/15/2— безразмерные плотности внешних мае»
совых и поверхностных сил, определяемые через их размен-
ные значения следующим образом:
L — длина панели, 2h — ее толщина. Безразмерные
координаты и скорости введены соотношениями
«о ’ ,Jo
В соотношении (12.2) переход от одной формы записи
мощности работы внешних сил к другой можно осуществить,
используя интегральные представления § 3, либо непосред-
ственно интегрируя по частям. Различные конкретные при-
меры таких преобразований приведены в [180].
Множество кинематически допустимых полей скоростей
определяется соотношениями
и (0, у) = и (1, у) = v (0, у) = v (1, у) = 0;
Пусть функции дц, q2, q3 удовлетворяют соотношениям
шах | Ух (ж, у, е) — у” (ж, у) | 0 при е -> 0,
шах | у2 (ж, у, е) — (ж, у) | —> 0 при е -» 0, (12.4)
max | уя (ж, у, fe) | —> 0 при е 0.
», V
В предположениях (12.4), характеризующих допусти-
мый класс внешних нагрузок, будет доказана асимптоти-
ческая точность гипотезы Кирхгофа — Лява.
Пусть т* (е) — коэффициент предельной нагрузки в
исходной задаче (12.1). Заметим, что выбранная нормиров-
ка внешних сил (12.4) приводит к т* (е) для (12.1) порядка
единицы. Если же сохранить нормировку внешних сил,
указанную в § 11 при анализе оболочек, то в этом случае
т* (е) для (12.1) имела бы порядок е.
ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ
163
§ 12]
Обозначим через т°. (е) коэффициент предельной нагруз-
ки для функционала JnB (и, т), получающегося из (12.1),
если в выражении для Ge (а) (12.2) функции q±, q2, q2 за-
менить их предельными значениями из (12.4). В работе
[179] показано, что
т* (е) — т* (е) -> 0 при е -> 0.
Получим теперь оценку сверху для (&). В связи с
этим рассмотрим с ециальные векторные поля
и = Р0н0 (г) - (у) их (z),
v = - /Т?о j W1 (К) dk - 82н'о (ж) Ро (у + 1) — (12.5)
о
V
— (.Г) j ₽! (к) (Д,
___ —1
где Ро = ~= , Pi (к) = j/ -|- X —первые два полинома в
ортонормированной на отрезке [—1, 1] системе полиномов
Лежандра. Этот специальный класс полей скоростей обыч-
но называют полями сиростей, удовлетворяющими гипоте-
зе Кирхгофа — Лява или гипотезе плоских сечений.
Краевые условия (12.3) приводят к следующим ограни-
чениям на функции и0 (г) и (х):
и.а (0) = ио (0) (0) = ui (0) = и0 (1) = ио (1) = 0,
U; (1) = (1) = 0,
) (12.6)
J ?'1(Х)^ = 0.
о
Рассматривая функционал (12.1) на полях вида (12.5),
получим оценку сверху для т* (е) [180]:
(е) та + а (в), а (е) -> 0 при в —>- 0, (12.7)
где т-о — коэффициент предельной нагрузки для функцио-
нала
J* (щ, Hi, т) = § § { ^2 | Рй1!0 (х) 4- PjUj (z) | —
— m (у" — у°) (?0Щ И + ?iWi(x))} dxdy, (12.8)
6*
164 АСИМПТОТИЧЕСКИЕ ЗАДАЧИ [ГЛ. цф
Функционал .7* рассматривается на функциях uf, (x),i
Uj (ж), удовлетворяющих только части условий (12.6):
ио (0) = и0 (1) = их (0) = ui (1) = 0,
(12.9)
5 I
Для доказательства гипотезы Кирхгофа — Лява оста-
ется показать, что
т* (е) > т0 + (1 (е), |3 (е) -> 0 при 8 -> 0. (12.10) '
В силу однородности функционала (12.1) его можно рас-
сматривать на вектор-функциях и — (и, и), удовлетворяю-
щих условию
(12.11)
Для дальнейшего важную роль будет играть неравенст-
во, возникающее при коммутировании операции усредне-
ния и выпуклой функции (неравенство Йенсена). Пусть
К (х) 0,
ь
j К (ж) dx ~ 1
а
и ср (X) — произвольная выпуклая функция. Тогда для
любой функции и (ж) имеет место неравенство
ь ь
f К (ж) ср (и (ж)) dx >= <р ( К (ж) и (.т) dxj. (12.12)
а а
Поясним использование (12.12) при получении оценки
снизу для выпуклого функционала на простом примере.
Пусть Рп (ж) — ортонормированная система полиномов
Лежандра на отрезке [—1, 1]. Положим
п
(*, А) = £ (1 - Рк (х) Р, (X). (12.13)
А-=б
§ 12]
ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ
165
Нетрудно видеть, что
1 1
§ Кп (т, X) dx = Кп (,т, X) dX = 1
—1 —1
и А',, (х, X) является 6-образным ядром, т. е. Кп (х, X) -> О
при п -> оо, если I х — X I ф 0.
Ядро Кп (х, X) возникает из рассмотрения вторых чеза-
ровских средних для рядов Фурье по полиномам Лежан-
дра. Из теоремы Фейера [181] вытекает, что Кп (ж, X) 0.
Рассмотрим следующий простой функционал:
1
J (г) = У [ср (?/ (ж)) — q (ж) и (т)] dx.
—1
Получим для функционала J (и) оценку снизу. Используя
И2.12) и вид ядра (12.13), имеем
1 1
J (и) = Кп (ж, X) dx] [ср (и (ж)) — q (х) и (ж)] dx
—1 —1
1 1
О У ср ( j Кп (х, X) и (ж)dx} dX —
—i —г
— У [ У Кп (х, X) q (ж) и (ж) dx} d\ =
= У dX (ср ( j Кп (х, X) и. (ж) dx} —
Я -1
1
— q (X) У Кп (х, X) и (ж) d dX +
-1
i i
+ У \ Кп (.г, X) и (ж) (q (ж) — q (X)) dx dX.
-i -i
(12.14)
Если функция q(x) гладкая, то из 6-образности ядра
Кп (х, X) следует, что последнее слагаемое в (12.14) стре-
мится к нулю при тг-> оо.
Осредняя поля к, у в функционале Д (**, по пе-
ременным х, у в соответствии с указанной процедурой,
166 АСИМПТОТИЧЕСКИЕ ЗАДАЧИ |ГЛ. f|f|j
получаем неравенство 1
1 1 п 1 (
J°s (и, т) > jV 2 I V (у) f Кs (х, X) dX j — |
J I | 7 1 J |
О —1 /£=0 О J
П П ЧП Г 1
— ТП (ft — ft) У , Р* (у) J Ks (х, X) dXj dy dx — уп — ?в, |
ft=0 О [
(12.15)
где уп, ys стремятся к нулю при п, s -> оо и U* определяют- |
ся формулой
i,
(£) = (1 —-J-)' jj Ру. (У) и (х, у) dy. (12,16)
-1
В работе [179] доказано следующее неравенство при
к> 2:
Р С Г / ди \2 1 / dv \2 , 1 / дм , dt> \2 у/2 ।
JJ LvM '^’ЁГЫ/ / '"^'2&Н'¥’ + I dxdy^ (
О PIP I
> \ \ А\ (х, X) dk \dx. (12.17) ,
8 tJ I t' I i
0 0
Последнее неравенство показывает, что в (12.15) суще-
ственными являются слагаемые с индексами 1с = О,
к = 1. Тем самым произвольные поля скоростей и, и
переведены в поля типа (12.5), удовлетворяющие гипотезе
Кирхгофа — Лява: '
1 1
ий(х) = \ Ks (x,k)d-^dk, u1(x) = {)Ks(x,k)l^dk. l|
о “ о
Функция иг (х) удовлетворяет всем условиям в (12.9), (
кроме интегрального, причем, с учетом условия нормиров-
ки (12.11), будем иметь ||
ill I
| i'i (^) dx | с | J J уи (г, у) dx dy I Ci?. il
о о -i II
Поэтому функцию иг (х) можно мало изменить, так, чтобы
5 12]
ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ
167
эта мало измененная функция удовлетворяла бы всем усло-
виям (12.9).
Тем самым неравенство (12.10) доказано и из соотноше-
ний (12.7) и (12.10) вытекает асимптотическая точность ги-
потезы Кирхгофа — Лява.
Итак, задача о вычислении предельной нагрузки для
панели сводится в главном члене к вычислению тп0, для ко-
торого из (12.8) получаем соотношение
j' J — 7.2) I- ^1^] dt dy
SUP JL=h---------------------------• (12-18)
b -1
где u0 (т), иг (ж) удовлетворяют условиям (12.9). Формулу
112.18) перепишем в виде
J [Q± (1) а (х) Q., (x)b (,r)] dt
-^-=s..p , ---------------------, (Илз;
°’ Ъ § ( К2 | а (ж) 4- уЬ (г) | dr dy
о —1
где а (ж), b (х) удовлетворяют условиям ортогональности
ill
J а (х) dx — Ъ (.г) dx — (1 — j ) b (х) dx = 0.
ООО
Учитывая эти условия ортогональности, с помощью мно-
жителей Лагранжа формулу (12.19), следуя [61], можно
преобразовать к виду
1 — inf чип । ~ ; 1 + ~ -а ~~ у ।
"’° J yCfl i
—1
Таким образом, задача вычисления гп0 сводится к вы-
числению экстремума функции пяти переменных. В [611
аналогичные простые формулы получены для изгиба и ра-
стяжения криволинейных панелей.
Описанный метод получения оценки снизу, опирающий-
ся на коммутационное соотношение операции осреднения
и выпуклой функции (12.12), имеет более общее значение
и дает подход к отысканию асимптотических приближений
168 АСИМПТОТИЧЕСКИЕ ЗАДА Ш [ГЛ. £1 i |
Ш
$
в различных задачах. Именно, рассматривая различные )
ядра осреднения, можно получить оценку снизу исход- ?
ного функционала значениями того же функционала па по- |
лях специального, но все же достаточно общего вида типа t
(12.14). Исходя из специфики задачи, нужно получить оцен-
ку, аналогичную (12.17), которая позволяет выделить глав-
ную часть в указанных поля?; специального вида. Вычисле-
пне значения исходного функционала па главной части )
этих специальных полей покажет точность асимптотике- |
ского приближения и пути ее увеличения. ’
В силу тех же обстоятельств указанный метод является ,
эффективным и прп доказательстве асимптотической точ-
ности различных гипотез типа гипотезы Кирхгофа — Лява.
Например, в случае пластин можно прор.о'Ч'п описанную
выше методику, связанную с разложениями полей скоро-
стей типа (12.15) пр толщине пластины.
Теории несущей способности жесткопластических пла-
стин посвящена обширная литература. Традиционный под-
ход к исследованию этих задач связан с введением обобщен-
ных напряжений и обобщенных скоростей деформаций.
При этом исходное условие текучести заменяется соотноше-
ниями между обобщенными напряжениями. Подробный
анализ этих понятий дан в [174, 182, 183]. Результаты ре-
шения конкретных задач и их подробный анализ приво-
дится, например, в [42, 58, 78, 129, 169, 184].
По существу, используемые в этом подходе соотноше-
ния могут быть получены как уравнения Эйлера для соот-
ветствующей асимптотической формы исходного функцио-
нала.
Другим примером применения изложенного выше ме-
тода является исследование перехода от трехмерных за-
дач к задачам меньших размерностей, например, к плос-
ким [185, 186] и одномерным задачам. В этих задачах
оценка сверху минимального значения функционала
получается путем подстановки в него специального
вида полей скоростей, зависящих от меньшего числа прос-
транственных переменных. С другой стороны, внося опе-
рацию осреднения под диссипативный потенциал, автомати-
чески получается выражение для исходного функционала
на полях той же структуры, что и при получении оценок
сверху. Прп этом получается количественная оценка для
отличия минимального значения функционала па всех
S 121 ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ 169
кинематически допустимых трехмерных полях от мини-
мального значения этого же функционала на соответствую-
щих полях, зависящих от меныпего числа пространствен-
ных переменных.
Используя далее свойство сильной выпуклости функ-
ционала, можно получить оценку различия между точным
ж'хмерным решением и идеализированным течением.
В заключение этого параграфа рассмотрим задачу
о предельной нагрузке для жесткопластическогг пластины,
находящейся под действием сосредоточенной нормальной
нагрузки. В случае, когда край пластины защемлен, ре-
г-оние этой задачи известно [42]. Скорость прогибов
]. этом случае равна нулю всюду, кроме точки , в которой
приложена сосредоточенная сила (явление «пробоя»),
Нрп этом пластина имеет конечную, отличную от нуля
предельную нагрузку. Пусть трехмерная область (пла-
стина) имеет вид со = Dx (—h z3 Л), где D — об-
ласть в плоскости ж2. Предположим, что кинематиче-
ски допустимые поля скоростей и (х) обращаются в нуль
на краю пластины dDx(—h х3 A h). Пусть для опре-
деленности пластина находится под действием нормальной
поверхностной нагрузки с плотностью — h2g х2, h),
действующей на плоскость = h. Эту задачу обычно рас-
сматривают в рамках гипотезы Кирхгофа — Лява, т. е.
предполагают, что поле скоростей и = (ut, п2, п3) имеет
вид
Щ (эс) - — xaw'x (ад, х2), м2 (аг) = — Wx ,
,2 ' (12.20)
;(х) =. г, + _А д^, д„, = + wx x ,
причем w (Xj, ж2) и ее производные до второго порядка
включительно обращаются в нуль на dD. Функция w
определяет скорость прогиба срединной плоскости х3 = 0
пластины. Задача о нахождении функции w связана с
исследованием функционала
Jh (w. г,:) = — J <р (—xaw’XiXi, — z3z? Х? —.ц3гс"1х/ ?3Ди\
CD
Atc'x , Дг/yJ d(.o ф- т g (^i, ж2, h) (w ф- Awj (h^ dxz.
D
170
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
1ГЛ. Ill
Пусть для простоты функция g(-Ti, ж2, h) является доста-
точно гладкой функцией ад, ад. Тогда линейную часть функ- ‘
циопала Jh перепишем в виде '
/ № \ (*
\ g (w + — Aiv) dx1 dx2 = \ ? (п. .г-2, h) iv dzi d.r2,
Ь о
а сам функционал Jh (iz>, т) будем записывать в виде
Jh (w, т, g (ад, ад, h)'). С функционалом Jh естественно свя- i
зать пространство Bh с нормой I
Ilw к=П i] । w"x.Xj ।+н м.1+1 Kwx, 0dx^s
I) * J
. dm I ff2w I p
w ho дп |эп дп2 |эп
При h = 0 это пространство Bo имеет норму
2
IML = Jj (£j lwv.|)^i^2,
D i, .;=!
I I л
wan—=0.
ld£l дп |эо
Так как ct ) e [ % <P (e) С c2 | e |, то имеют место нера-
венства
1
сз1| tv И < — \ гр (. . .) do < c41| w || , (12.21)
h /4 d
CO
где многоточием в (12.21) обозначены те же аргументы, что
и у функции <р в функционале Jh (w, т, g). Заметим, что
функционал <6, iv) = w (яг", г?) (функционал — 6-функ-
ция) является непрерывным функционалом в простран-
стве Вь, так как
II tv ||с < с& II w ||вл, (12.22)
причем неравенство (12.22) выполняется и при h = 0.
Таким образом, функционал Jh (w, т, tj с математиче-
ской точки зрения ил[еет смысл и при g (xL, х2, h) : 6 (яд —
— х[, — ггЦ) (сосредоточенная нагрузка). Ниже, без
ограничения общности, будем предполагать, что =
= яд = 0. Рассмотрим задачу о поведении предельной на-
грузки в случае, когда функционалы интегрального
; 13]
ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ
171
липа, определяемые функциями g (хи х2, h), приближают
6-функцию, т. е.
g (zlf х3, h) w x2) dxYdx2 —>w(0, 0) при 7г—>0.
D
Обозначим через wh — коэффициент предельной нагрузки
для функционала A (u>, т, g) и через т* этот же коэф-
фициент для J (w, т, 6 (з?!, ж2)). Из неравенства (12.21)
следуют соотношения
J (m*)-1 — (А)-1 | < с6 || 6 — А Цв^,
где 6Л — функционал на Bh,
<8h. W> = g (ац, x2, h) w (хъ x2) dxr dx2,
b
i| В |?b — норма функционала L на пространстве Bl:.
Нетрудно показать, что
|| 6 — А ||вд -> 0 при h -> 0.
если || Go (жх, х2) — Gh (a?i, х2) ||ьр(ш), Р > 2, достаточно
быстро стремится к нулю при 7г—>0. Здесь Go (тц ж2),
Gh Ai, ж2) — такие функции, что (G0)X1x2 — б Ai, х2),
(G/,)XlJ:, = g (xY, х2, h). Предположим в дальнейшем, что
Ф (е) = ф (12, А) (А> А — второй и третий инварианты
тензора скоростей деформаций). Рассмотрим функционал
J (w, т, g (хъ х2)) =
— \ ф hi" , w , w" , — Л?/', (\ A dr, d:r2 —
в
f , s 7 1 ^’1 <
— \ ?(•’’!• •*‘0 л Р(Г2- = '•
J х ' И'7'’ дп |дО
D
Обозначим через т * коэффициент предельной нагрузки
для функционала J (iv, m, 6 ж2)). Из неравенства (11.12)
следует, что A (w, m, g) > J (ir, in, g). Поэтому имеет
место неравенство mk А т*. Покажем, что
limm-j = m*. (12.23)
h-»0
172
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. III
Возьмем кинематически допустимую достаточно глад-
кую функцию wE (#!, ж2) такую, что J т* + е, б)<0.
Тогда при достаточно малом h выполняется неравенство
Л, (н’е, т* + е, 6) < 0.
Следовательно, при достаточно малом h справедливо не-
равенство /, * т* + е. Соотношение (12.23) доказано.
Рассмотрим теперь задачу о нахождении числа т*.
Число т* зависит от области D. Поэтому будем обозна-
чать его т* (D). Если/?! с Ос О2, то т* (DJ т* (D) >
> т * (D?). Рассмотрим два кругаК} и К.2 с центром в точ-
ке Xj = х2 = 0 и таких, что сд D сс К2. Нетрудно
видеть, что при определении m* в функционале
./ (и», т, б (хх, х2)) можно рассматривать функции ш(жх, ж2),
зависящие в полярных координатах г, 0 лишь от радиуса.
На таких функциях функционал J (гг, т, б) для круга
радиуса Pi имеет вид
н
J (it. б) = J ri. Pi) - 2л ф (rw", w') dr -|- mw(0).
S
(1?,.'.Уи
w (R) = w' (R) — 0.
Сделаем в функционале (12.24) замену независимой пе-
ременной, положив г = Хр, w (г) = q (р). Нетрудно пока
зать, что J (и>, т, R) — J (q, т, RP). Следовательно,
m* (KJ = т* (D) = т* (К2). Это равенство показыва-
ет существование экстремального прогиба, локализован-
ного в сколь угодно малой окрестности точки хг = х2 — 0,
хотя, конечно, наряду с этим решением есть и другие.
Итак, выше было проанализировано понятие сосредо-
точенной нагрузки на основе гипотезы (12.20). При этом
оказалось, что можно гарантировать сходимость коэф-
фициентов mh предельной нагрузки для распределенных
внешних сил к коэффициенту предельной нагрузки т*
для сосредоточенной нагрузки, если плотности g (ад, ж2, h)
внешних сил достаточно быстро в соответствующей
метрике сходятся к 6-функции. Если же сходимость
(ж15 х2, h) к 6-функции медленная, то вопрос о сходи-
мости iTih к fl * остается открытым. Рассмотрим теперь не-
; 12]
ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ
173
сколько более общую гипотезу по сравнению с (12.20)1
и-! (х) = и (xi, а?2) — ж3п’Ж1 (^i, х’о),
Ц2 (х) ~ V (Xj, х2) — :rnwx ,
о
ия (х) = W — г3 (г/ 4 V ) -_е1д?г. (12.25)
Относительно функций u(xt, ж2), v (xlt х2) предполагается,
что они обращаются в нуль вместе с производными
первого порядка на dD. Относительно w (х1? гг2) предполо-
жения остаются прежними. Векторное поле (12.25) яв-
ляется соленоидальным при любых u, v, w. Для вектор-
ных полей (12.25) функционал Jh (tv, т) следует заменить
функционалом
1 С /
(п, v, w, т) = —г \ ср [и —xaw" . v' —xav” ,
' ’ ’ ’ > J > I Xi а XiXi X.- 11 X-iXS
(!)
4-(4 4- v — 2x3w” ),
2 ' Xl Xi а XiXh1
— u' —v' + ягоДгс, -------4- (и" - v" ) -Ё-
.V, X2 1 d ’ 2 ' ж‘ж* x’x-
x2
4 -A Aw' ,-------(u + o" ) 4
*4 я* 2 ' x^x- xxs 1
4 \ .
4- ]d<x> + m \g (ад, x2, h) I w (хх, x-2) —
d '
— h (u 4 v' ) 4- ДиЛ dxi dx2.
Функционал Jh (u, v, w, m) является неограниченным
снизу в случае, когда g {xt, х2, К) = б (ж1; х,) или когда
g (Xi, х2, К) 4 (А-2/2) Ag (^i, х2, h) = б (aii, ж2). Таким об-
разом, функционалу J (w, т, б) должна соответствовать
некоторая распределенная б-образная нагрузка в функцио-
нале’ Jh (u, v, w, т), зависящие от параметра h, причем ока-
зывается существенным характер сходимости распределен-
ной нагрузки к сосредоточенной. Эта сходимость не
должна быть очень быстрой, что в свою очередь при-
водит к трудности перехода от функционала Jh (w, т, g)
к функционалу Jh (w, т, б (^17 х2)).
Остановимся еще на связи между функционалами
Jh (и, v, w, т) и Jh (1Щ т). Естественно ожидать, что при
действии только нормальной нагрузки векторные поля
174
АСИМПТОТИЧЕСКИЕ ЗАДАЧИ
[ГЛ. III
(12.25) должны сводиться к векторным полям (12.20).
Обозначим через mh — коэффициент предельной нагрузки
для функционала Ул (и, v, iff, т) и через тп® — коэффи-
циент предельной нагрузки для функционала
lll) =
= ~ <р (...) сО) — т f (.г.!, h) w (zi, z2) c?zj
<_t> 1J
Здесь многоточием обозначены те же аргументы функ-
ции ф, что и в функционале Jh (w, v, w, т).
Пусть щ | е | > ф (е) > с2 | е | и | g (хг, х2, h) | <
О c3h~2+^, р 0. Кроме того, предположим, что суще-
ствует достаточно гладкая функция iff0 (хг, х2), удовле-
творяющая краевым условиям такая, что при всех доста-
точных малых h выполняется неравенство
g (3’1, х2, h) w0 (х±, ,т2) dxt dx2 > с3 > 0.
в
Тогда можно показать, что гпц — mh^ 0 при h -»• 0.
Итак, при исследовании главного члена асимптотики
тпл вместо функционала A (w, v, w, т) можно рассматри-
вать функционал У® (и, v, w, т). Кстати, отметим, что пе-
реход от функционала У/, (и, v, w, т) к функционалу
У® (и, v, iff, т) осуществляется без предположения о
гладкости g (хг, х2, К). Так как ф (е) = ф (Z2, | 13 |),
то У^ (и, v, w, т) = Уд (—и, —v, w, т) и, следова-
тельно, при минимизации функционала Уд (u, v, w, т),
можно ограничиться векторными полями, у которых
и = v = 0. Заметим, что Уд (0, 0, w, т) = Jh (ш, т, g).
Рассмотрим функцию g = g (z1? z2), не зависящую от
параметра, и обозначим через inh коэффициент предель-
ной нагрузки для функционала Ул (w, т, g (xn z2)).
Предположим, что
тц — 0 при h 0, (12.26)
и предположим, что функционал У (ш, т, g (х^, z2)) огра-
ничен снизу при достаточно малом т. Обозначим через
т* коэффициент предельной нагрузки для функционала
У (w, т, g (хг, т2)). Повторяя рассуждения, проведенные-
§ 12' ЖЕСТКОПЛАСТИЧЕСКАЯ ПАНЕЛЬ 175
яри доказательстве (12.23), приходим к соотношению
Л—О
Итак, переход функционала Jh (и, v, w, т) к функцио-
налу J (w, т, g (х1; х2)) возможен, если выполнено
условие, ограничивающее рост g (rc1? х2, h) по h, и со-
отношение (12.26). Соотношение (12.26) имеет место, на-
пример, в случае, когда g (ж1; х2, ti) сходится к g (ж15 ж2)
при h —> 0 в норме пространства В*. В частности, (12.26)
выполняется, если g (хъ х2, h), g (xr, х2) — интегрируемые
функции и
I g (^i, 3’2, h) — g (zt, ж2) | dxr dx2 -> 0 при h —> 0.
Более того, условие (12.26) также справедливо, если g (хъ
х2) — 6-функция, сосредоточенная на гладкой линии в
области D, a g(xi, х2, К) при весьма общих предположениях,
сводятся к g (зу, х2).
ВАРИАЦИОННЫЙ ПОДХОД
177
ГЛАВА IV
9
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
§ 13. Вариационный подход
Нестационарные движения вязких сред. Вариационный подход.
Примеры. Инерционный принцип выбора стационарного решения
для жесткопластических сред.
П ер ех о; 1,я к изучению не стационарных д виж ений, вернем- 1
ся к анализу исходных соотношений (1.1) и (1.2). Свое- I
образно этой задачи связано с многозначностью оператора А |
в условии (1.2). Одним из подходов к исследованию за-
дачи (1.1), (1.2) состоит впревращении с помощью малого j
возмущения многозначного оператора А в однознач- 'j
ное гладкое отображение Ае: |
s = Ag(e). (13.1) 1
Например, если многозначный оператор А порождается *
диссипативным потенциалом ср (е) для вязкопластической 5
среды, то в качестве отображения Ае можно взять градиент I
диссипативного потенциала [
срЕ (е) = I е I2 + T+V । е 11+6 "Т I е Г + I е । Ф (е)-
Задача (1.1), (13.1) представляет собой обычную зада- !
чу о движении нелинейновязкой жидкости, приводящую
к квазилинейной системе дифференциальных уравнений. *
Разрешимость этой задачи можно исследовать, опираясь
на результаты теории уравнений Навье—Стокса [62].
Затем можно вернуться к исходной постановке задачи (1.1),
(1.2), устремляя s к нулю. Такая схема реализована в
[187]. Однако этот путь пока ничего не дает в случае
жесткопластической среды, когда ц, = 0.
Другим подходом, позволяющим обойти трудности,
связанные с многозначностью оператора А. является ва-
риационный подход. Однако в этом случае мы вынуждены
ограничиться классом движений, в которых конвективная,
квадратично зависящая от скоростей часть полного уско-
рения среды несущественна. В результате принцип вирту-
альных мощностей (1.1) примем в виде
jj р • h d o J do = ^F li dto -’r P h dS.
0) CD CO 0 G)
(13.2)
Такого рода ограничение весьма часто используется
и оказывается приемлемым для достаточно широкого клас-
са задач.
Ограничимся в дальнейшем соотношениями (1.2), в
которых оператор порождается диссипативным потенциа-
лом s = Аф (е) (см. (1.12)).
Задачу (13.2) и (1.12) будем рассматривать так же, как
и в случае стационарных движений, как частный случай
более общей абстрактной задачи в банаховых простран-
ствах. Пусть Н — гильбертово пространство со скалярным
произведением (u, h)u и F (t, и) — непрерывный линейный
по и функционал в И. Пусть, далее, В — банахово прост-
ранство и Ф (и) — выпуклый положительный непрерыв-
ный функционал на В. Обозначим, как и ранее, ЗФ (и) —
субдифференциал функционала Ф (и), отображающий В
в В*.
Рассмотрим следующую задачу: найти и (t) из В f~| Н
такую, что
для любого h из Н, и (0) = и0 ЕЕ Н, L ЕЕ ЗФ (и).
Исследование задачи (13.3) проведено в [38,188]. Имен-
но, в [188] предложена следующая схема построения при-
ближенного решения. Пусть решение задачи (13.3) ищется
в промежутке времени [0, Т]. Рассмотрим разбиение про-
межутка [0, 7’]:
А?” = (I - о = I’1 < < . . . < Сг < tn = Т.
7 IT II. Мосолов, В. И. Jbii'iiiiKon
178
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. г
Обозначим через и" элемент из В Q Н, минимизирующи:
функционал
Л И = Ф (</) + I!1: ~ w*-i Ин + F (13-4Г
I
Функционал (13.4) является выпуклым и строго воз-|
растающим. Как следует из результатов §3, если В Q Н —|
рефлексивное пространство, то существует элемент и",»1
на котором достигает своего минимума. Если же В f] Я|
нерефлексивно, то можно воспользоваться указанной в § 3*
схемой расширения пространства, в котором существует
экстремальный элемент для функционала J™-
Приближенным решением задачи (13.3) будем называть*
непрерывную, кусочно-линейную по t функцию и ({А^"},)
I), которая совпадает с я” при t = В работе [188] пока-
зано, что в предположении выполнения соотношений г
II F fe) - F (t2) || < С1 Их - t2 |, =|
— и0
-<( с2 ДЛЯ любого Af
я
(13.5)
приближенные решения сходятся к некоторой функции^
и (t) из В f] Н, причем ) ।
]«(/) —0 Ип<с>max (1Э.в)|н
‘ '|
Величину с3 можно эффективно оценить через исходные
данные задачи. .
В работе [188] указываются условия, при которых име-’
ет место второе неравенство в (13.5). Например, оно выпол-
нено, если к0 дает минимум Ф(н)наВ. Это ограничение
выполнено и в том случае, когда и0 является достаточно
гладким, т. е. входит в банахово пространство с более'(
сильной нормой.
В работе [38] показано, что предельная функция и (t)
удовлетворяет уравнению (13.3). Там же доказана единст-
венность обобщенного решения задачи (13.3).
В рамках указанной вариационной схемы доказывается,
в частности, существование и единственность обобщенного
решения краевой задачи для некоторого класса квазилц-
§ 13] ВАРИАЦИОННЫЙ подход 179
цепных параболических уравнений высших порядков.
Впервые доказательство разрешимости краевых задач
для параболических уравнений высших порядков общего
вида было получено в [189], где для доказательства ис-
пользовался метод Бубнова—Галеркина—Петрова. По-
видимому, впервые метод Бубнова—Галеркина—Петрова
был использован как средство доказательства теорем су-
ществования в нестационарных задачах в [190]. Однако
в схеме с использованием метода Бубнова—Галеркина—
Петрова не были получены оценки скорости сходимости
приближенных решений. Предложенная в [38. 188] вариа-
ционная схема дает возможность получать такие оценки
(см. (13.6)). Эти оценки получаются в метрике простран-
ства Н. Но если известна априорная гладкость решения
нестационарной задачи и приближенных решений, то,
как следует из результатов § 6, оценка скорости сходимос-
ти может быть получена в пространствах с более сильной
нормой. Кроме того, так как вариационный метод сводит
нестационарную задачу к задаче о нахождении минимума
для серии однотипных функционалов, то при анализе
точности приближенного решения может быть использо-
вана описанная в § 7 процедура построения двойственных
оценок.
Проиллюстрируем конструкцию двойственной задачи
на примере уравнения теплопроводности. Даже в этом
простом случае она может оказаться полезной. Разуме-
ется, эта же конструкция реализуется для весьма об-
щих нелинейных задач. Рассмотрим однородную зада-
чу Дирихле для однородного уравнения теплопроводно-
сти в односвязной области D, D су R2. В этом случае в
соответствии с общей схемой § 13 возникает система одно-
типных функционалов
Jk (и) = )2 4- (wy)2 + A- (;i — 7Л,._] )“ '1 dx dy, и |9П = 0,
и !
где Uk-i (х, у) — известная функция. Пусть р, q из
(Я) и
J (рКу — dxdy — Q, V\(x,y) e (О).
D
Тогда существует функция v (х, у) из Wl (D) такая, что
vx = р, vy = q, v |Ор = с — постоянная. Пусть, кроме
180
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. IV
того, для некоторой функции и (х, у) из /.2 (^) выполня-
ется равенство
J (Я-1 Т i^x)dxdy = i.), Vp(.r,y) (щщ е £>(£)).
Ъ х
Если выполнены два последних интегральных равенства,
о
то функция и из Wi (О) и их = р, иу = q. Следователь-
но, из теоремы 7.3 вытекает, что
inf Jк (и) = sup inf Up2 + + 4т (и — Щ-i)2 + рХ' —
u ?„ц р, g,u jj '
— qk'x + рр + щО) dx dy =
= W [— (px)2 — |i (uk^x — у (ц + Ху)2 —
К. ц J V
— ~ (kx)2\ dx dy = sup J* (X, p,).
, |X
Это равенство показывает, что, подставляя в J* (%, р)
произвольные функции X, ц, получаем оценку снизу для
inf А. Функционал/* позволяет контролировать точность
приближенного решения. Целесообразно вести параллель-
но процессы минимизации функционала Jk и максимиза-
ции функционала Jk, причем численный эксперимент пока-
зывает, что значения sup J* определяются более точно
по сравнению с inf Jk, так как функции X, р не подчине-
ны краевым условиям. Разумеется, для более эффективно-
го счета полезно брать координатные функции Ап, Цп,
удовлетворяющие соответствующим естественным крае-
вым условиям. Заметим, что функционал Jk отличается
от функционала (5.2) тем, что в него функция и входит не-
линейно. Это приводит к необходимости введения двух
множителей Лагранжа, в то время как для функционала
(5.2) можно ограничиться только одним множителем.
Параболические уравнения с многозначными стаци-
онарными операторами рассматривались в [191, 192].
§ 13J
ВАРИАЦИОННЫЙ ПОДХОД
18-1
1) [ 191] для построения обобщенного решения использовано
понятие производящего оператора полугруппы и само по-
нятие обобщенного решения более слабое, чем в (13.3).
Это объясняется тем, что в [191] не было использовано
второе условие в (13.5) на начальный элемент. В работе
[192] многозначность стационарного оператора имеет ал-
гебраическую структуру и, следовательно, исследуется
несколько другой класс уравнений.
Сформулируем теперь указанный выше общий резуль-
тат применительно к случаю движения вязкопластической
и, в частности, жесткопластической среды. В этом случае
функционалы имеют вид
(м —- T/k-i)2 dx 4- ср (е) dx —
(!)
F (tk, х) udto— Р (ZjJ, ж) udS. (13.7)
ш да
Проиллюстрируем предложенный выше метод рядом при-
меров. Рассмотрим сначала задачу о затухании движения
жесткопластической среды в плоскопараллельном за-
зоре 0 х 1, стенки которого неподвижны. Пусть в
начальный момент времени имеется некоторый гладкий
профиль скоростей (ж) Для простоты предположим,
что график п0 (ж) симметричен относительно центра зазо-
ра и функция н0 (ж) монотонно возрастает на отрезке
[О, V2], причем н0 (0) = н0 (1) = 0. Экстремальные функ-
ции и* (ж) в этой задаче последовательно находятся из
системы функционалов
г
fl
(и — w”-i)2 dx
(13.8)
в безразмерных переменных с характерными масштабами
времени t0 = L/u0 и скорости и0 = max | и0 (ж) |,
причем п0 = рно/т0. Из вида функционалов (13.8)
непосредственно следует, что и” (ж) симметричны отно-
сительно середины зазора и являются монотонно воз-
растающими при О'Сж дС V2, причем и* (V2) Wfc-i (1/з).
182
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. IV
Далее, из этих общих свойств ui (ж) и вида (13.8)
следует, что
Ufc (х) =
n / 1 \ п п /1 , \ z
При 1 ~ «Ь иИ ( /г) = Ы<4-),
ь’о (х) при 0 ж а", 1 — а" х 1.
Для чисел а” из (13.8) вытекают соотношения
2Дг"
и0 (а£) - wo (ati) = — —— * - Ч-о(Д^). (13.9)
(1 - 2а”_х) Но
Таким образом, используя теорему о существовании обоб-
щенного решения нестационарной задачи, находим это
решение при каждом значении t:
( ид (о. (I)) при a (£)<Г х 1 — a (О,
С’I. Ио (ж) при (?), 1 — а(£)<;ж<С1,
(13.10)
И° (а ИГ = (1 -2u(«))So ’ а ~ "Т •
Ясно,что если бы для решения этой задачи была исполь-
зована та или иная схема сглаживания потенциала, то
построение решения (13.10) было бы существенно более
сложной задачей.
Рассмотрим еще одну задачу о движении жесткопласти-
ческой среды в плоскопараллельном зазоре —72 х V2.
Пусть в начальный момент времени и0{х) — х. При t Д> 0
стенки зазора свободны от внешних нагрузок. Инерцией
стенок х = +V2 пренебрегаем. Эта задача сводится к
только что рассмотренной путем продолжения и0 (ж) сим-
метрично относительно х = х/2 на отрезок V2 «С ж !•
В силу нечетности начальной функции и0 (ж), решение за-
дачи и (х, t) будет нечетной функцией х при t Д> 0.
Из (13.10) следует, что на отрезке 0 ж 7г решение
задачи имеет вид
“(1’'>=[««)
при 0<^ж<(а(г),
при сД/Хж’чД/г,
2 , 1 2( „
сг — а О—---------------= 0.
4 50
(13.11)
§ 13]
ВАРИАЦИОННЫЙ ПОДХОД
183
Соотношение (13.11) показывает, что движение в зазоре
будет длиться конечное время Т = о0/8 = р;4/8т0.
Решение аналогичной задачи для случая вязкопласти-
ческой среды приведено в [193]. В этом решении зона жест-
кого состояния вязкопластической среды возникает толь-
ко на одной из стенок зазора. Такое течение в случае сво-
бодных стенок зазора невозможно, так как зоны жесткого
состояния среды должны образовываться на обеих стенках.
Эта некорректность построенного в [193] решения связана
с неполнотой постановки задачи. Для реализации решения,
приведенного в [193], необходимо приложить к одной из
стенок зазора соответствующую внешнюю силу, меняю-
щуюся во времени. Аналогичное замечание можно сделать
и по ряду решений других нестационарных задач, приве-
денных в [193].
С механической точки зрения представляют интерес
задача о движении вязких сред в трубах при различных
изменениях градиента давления. В качестве модельной
задачи рассмотрим аналогичную задачу о движении жест-
копластической среды в плоскопараллельном зазоре ши-
рины Z под действием пульсирующего градиента давления.
Эта задача для произвольно изменяющегося градиента
давления с (I) 0 была решена в [194]. Скорость движения
среды в зазоре в этом случае постоянна по сечению и ве-
личина ее определяется формулой
и (Z) = [1с (s) — 2та] ds|+,
о
где знак (+) означает, что берутся только положительные
значения интеграла, а там, где интеграл отрицателен,
и (Z) = 0.
Положим с (£) = (2r0/Z) -|- / (/), где f — периодическая
функция, / (£) = f (t + Т) > —(2t0/Z) и среднее ее значе-
ние за период Т равно нулю. Расход через поперечное
сечение зазора в среднем за период равен
т
(? = —ds-
о
Из последней формулы следует, что максимальный рас-
184
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. IV
ход достигается при
/(0 = ^4 Г* (*)-!], <2max=^, 0</<Т.
Здесь 6 (t) — дельта-функция.
Таким образом, в нелинейно вязких средах можно ожи-
дать увеличения расхода за счет наложения пульсаций
на средний градиент давления, причем оптимальная фор-
ма этих пульсаций имеет импульсный характер.
Важной качественной особенностью решения рассмот-
ренных выше задач для жесткопластической среды, в отли-
чие от вязкой жидкости, является конечность промежутка
времени затухания движения прп отсутствии внешних сил.
Оценим время затухания движения жесткопластической
среды в круглой цилиндрической трубе.
Пусть начальная скорость движения постоянна по
сечению трубы и равна единице. В безразмерных пере-
менных функционалы имеют вид
1
На поверхности трубы выполняются условия прилипания
и (1) = 0. Аналогично решению предыдущих задач,
находим
1----при 0 < г < 1, 0 <3 ,
<5q 2
U' (г’ =\ %
0 при
откуда следует, что время затухания движения
гр J0
К
2т0
(13.12)
Формула (13.12) дает оценку времени затухания дви-
жения вязкопластической среды, начальная скорость ко-
торой не превосходит и0 и предел текучести равен т0 при
произвольной вязкости.
В заключение этого параграфа вернемся к обсуждению
вопроса о неединственности стационарного решения за-
дач для жесткопластической среды. В § 10 был указан
5 l.’ij
ВАРИАЦИОННЫЙ ПОДХОД
185
способ выбора решения стационарной задачи для жестко-
п шстической среды, основанный на введении малой вяз-
кости материала. Правило выбора стационарного решения
может быть получено и с точки зрения учета инерционных
свойств течения среды. Именно, среди всех стационарных
решений динамика выбирает то, у которого кинетическая
анергия движения минимальна при условии равенства
внешних кинематических характеристик.
Проиллюстрируем это правило выбора решения стаци-
онарной задачи на примере соосного движения двух оди-
наковых цилиндров с квадратными поперечными сечени-
ями (см. рис. 12). Все стационарные решения этой задачи
указаны в § 5. Пусть d — сторона квадрата и I — рассто-
яние между квадратами. Рассмотрим нестационарное
движение этих цилиндров при условии, что I d. Ус-
ловие l^> d сводится к случаю I = d.
На каждый из цилиндров действует сила Р, причем при
I = d предельная нагрузка Р* = 4rod, а при I < d Р* —
= т0 (3d + I).
Решение этой задачи дапо в [194] и при
То (3d + /)< Р (0 < ---Т-°-Н±Г^Р2-±2рг].
имеет вид (р0 — плотность материала цилиндров)
V (t) = Р + l} r° ds, Q<t<T,
v ’ J pZd -j- 2pod2 ’ \ »
о
где V (t) — скорость движения цилиндров. При этом, если
I d, то скорость среды, заключенной между цилиндрами,
равна нулю, а если I < d, то скорость среды между цилин-
драми равна V (t).
При условии, что I < d и
Р (£) > 2с*То[(<* Л.Ро + 2РП при t > Т,
скорость движения цилиндров равна
= S P(5)p^4Tod ^ + 1Л(П.
г
186
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. IV
а скорость движения среды определяется формулой
2^-l-±-ds + V(T).
Если I d, то скорость цилиндров определяется той же
формулой, а скорость среды между ними равна нулю.
Таким образом, при I = d, в отличие от выбора ста-
ционарного решения с помощью введения малой вяз-
кости (см. § 10), при регуляризации с помощью неста-
ционарного процесса выбирается решение, в котором среда
между цилиндрами неподвижна.
Подчеркнем, что вязкость и инерция выбирают край-
ние случаи в классе всех возможных решений стацио-
нарной задачи.
Изложенная выше вариационная схема исследования
динамики вязких и, в частности, жесткопластических
сред, конечно, не является единственно возможной.
Другие вариационные конструкции для динамических
задач можно найти, например, в [46, 195].
§ 14. Динамика панели
Динамика жесткопластических панелей. Пластические шарниры*
Примеры.
Задачи о динамике жесткопластических панелей яв-
ляются одними из простейших нестационарных задач
в теории пластичности и исследованию их посвящена об-
ширная литература. Исследования динамики балок и
панелей обычно проводятся в рамках представлений о
пластических «шарнирах», где и происходит диссипация
энергии из-за пластических деформаций.
Такого типа подход впервые рассматривался
А. А. Гвоздевым [48]. Значительно позднее аналогичные
задачи анализировались многими авторами [49—51, 196—
199].
Основная трудность решения задачи при таком под-
ходе, когда заданы внешние изгибающие нагрузки доста-
точно общего вида, связана с неопределеппостью в по-
ложении и числе пластических шарниров. В частности,
пластические шарниры могут быть распределены непре-
§ Ы
ДИНАМИКА ПАНЕЛИ
187
рывно. Это затрудняет, например, создание эффектив-
ных вычислительных алгоритмов для расчетов подобных
задач на ЭВМ. Указанные трудности представляют со-
бой отголосок типичной для теории пластичности ситуа-
ции, когда решение задачи ищется в области с неизвест-
ной границей. Естественно, что эти трудности исчезают
при переходе к вариационной постановке задачи.
Ограничимся здесь анализом нестационарных задач
об изгибе жесткопластической панели. Введем безразмер-
ные переменные
где w — скорость прогиба панели, Р (х, i) — изгибаю-
щая нагрузка, действующая нормально к плоскости па-
нели. Тогда из (13.7), с учетом приближения Кирхгофа —
Лява для панелей (12.8), в условиях чистого изгиба по-
лучим систему функционалов:
1
Jk («) = У2 I и” (х) I dx 'г
о
1 1
1 (* г
-В —— \ (и — iik-ifdx—\ q (х, £") и dx, и0 = 0. (14.1)
A t г, V J
к о О
Постановка задачи о нахождении минимума функцио-
нала (14.1) уже не связана непосредственно с отысканием
мест расположения пластических шарниров и для нее
могут быть предложены достаточно эффективные вычис-
лительные методы. Более того, пластические шарниры,
как будет показано ниже, с необходимостью возникают
при решении соответствующих экстремальных задач.
Рассмотрим в качестве примера задачу о динамике
панели, защемленной на ее концах (и (0) = и' (0) =
= и(1) = и (1) = 0), под действием сосредоточенной си-
лы, приложенной в середине панели:
1
С / 1 \
\q(t, х) а. (,т) dx = f (f) и — .
о
188
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. IV
При |/ (0 | С 8/2 функция и, минимизирующая
(14.1), будет равна нулю.
Предположим, что / (0 — положительная монотонно
возрастающая функция. Рассмотрим два случая
(a) 8/2 </(0 < 24/2,
(б) 24/2 </(0.
Ниже будет показано, что в этих случаях поведение па-
нели различно.
Рассмотрим сначала случай (а). Из геометрических
соображений нетрудно показать, что экстремальные эле-
менты Нр (ж) имеют вид
А’рХ при 0 х -4- ,
т> . . *
Подставляя и” в (14.1), находим
/ - = 3 | / - 8 /2 ] А^. (14.2)
Из (14.2) непосредственно
/г (0 X
w (4
вытекает,
при
х) при
t
к (0 = 3 jj [f(M — 8/2]dL
О
(14.3)
Формулы (14.3) показывают, что в рассматриваемом слу-
чае пластические шарниры образуются в середине пане-
ли (х = 1/2) и в торцевых сечениях (х = 0, х = 1).
Перейдем теперь к рассмотрению нагрузки / (0 =
= а/2, а 24, т. е. к нагрузке постоянной интенсив-
ности. В этом случае, совершенно аналогично предыду-
щему, можно показать, что неподвижные пластические
шарниры образуются в точках (х = /,
1 12 1 12 \
х = -------- ' х ~ ~ —л-) и скорость прогиба имеет
§ i'*]
ДИНАМИКА ПАНЕЛИ
189
виД
v (л 0 —
о
м,_- .-1 12
при 0 ' х % ~2-----— ,
(14.4)
На отрезке от V2 до 1 и (х, t) симметрично относительно
X =
Перейдем теперь к рассмотрению последнего случая,
когда / (£) > 24]Л2 и является монотонно возрастающей
функцией. Здесь на панели образуется подвижней пласти-
ческий шарнир, который движется к центру панели от
1 12И 2
точки х = ----—• Скорость движения панели в момент
времени t определяется из следующих соотношений:
190
НЕСТАЦИОНАРНЫЕ ДВИЖЕНИЯ
[ГЛ. IV
Для V2 х 1 график и (х, t) симметричен относи-
тельно х == V2.
Предположим теперь, что начиная с некоторого мо-
мента времени нагрузка f (i), действующая на панель,
обращается в нуль. Рассмотрим вопрос о затухании дви-
жения панели, предполагая, что профиль скоростей в
момент снятия нагрузки имеет вид (14.3) или (14.4). Ана-
логичные построения можно провести и для случая (14.5),
однако получаемые при этом выражения очень громоздки.
Итак, пусть в момент времени t — t0 профиль скорос-
тей имеет вид (14.3) и к0 = к (£0). Тогда поле скоростей
при 0 х 1/2 имеет простой вид:
и (х, Z) = [/с0 — 24У2 (t — £0)] х. (14.6)
Время движения конечно и равно
В случае начального поля скоростей вида (14.4) эво-
люция этого поля во времени при 0 х Д2 описывает-
ся следующий зависимостью:
Г 0 при 0 х s (/),
и (.г, 0 | k(t)[x— s (t)) при «(£)<[ ж Va,
где
16/2 .
s(Z) = s0---------(£ —
с0
1<‘> = 7------------------------V'
I 1 - 2з0 + —----(« - «0)
\ с0 /
с0 = 40(1 — 2$оЛ «о = 4-----------
Указанные формулы справедливы при i—fo<coso/16)^2.
При больших значениях времени действует формула
(14.6) с к0 = с0.
Вопрос о затухании движения с помощью указанного
подхода для начальных полей скоростей более общего вида
рассмотрен в [200, 201].
Динамике балок, панелей, пластин и оболочек посвя-
щена обширная литература. Весьма подробные обзоры
этой проблематики в динамической теории пластичности
J 14] ДИНАМИКА ПАНЕЛИ 191
даны в [42, 46, 202—206]. Как правило, используется
дифференциальная постановка задачи и условие текучес-
ти в форме конечного соотношения между растягиваю-
щими усилиями и изгибающими моментами. Однако та-
кой подход сталкивается с определенными трудностями
при расчете оболочек достаточно сложных конфигураций
и под нагрузками общего вида. Этим объясняется то, что
большинство решенных конкретных задач обладает до-
статочно высокой степенью симметрии.
Весьма общим подходом к расчету достаточно широ-
кого класса задач в динамике пластин и оболочек явля-
ется метод динамического программирования. Тем не ме-
нее, при его практической реализации приходится вклю-
чать в рассмотрение большое число искомых величин.
В связи с этим отметим, что рассмотренный в § 13 и
§ 14 вариационный подход также допускает построение
эффективных численных алгоритмов и может оказаться
существенно более экономичным.
)
I
ЗАКЛЮЧЕНИЕ
За более чем столетнюю историю своего развития,
теория движения жесткопластических и вязкопласти-
ческих сред превратилась в обширный раздел теории
пластичности. Результаты ее оказались весьма полезны-
ми в решении ряда практических задач и, тем не менее,
эта область теории пластичности все еще далека от завер-
шения, как с точки зрения ее приложений к описанию
механических процессов со сложными пространственны-
ми конфигурациями полей деформаций и напряжений,
так и с точки зрения совершенствования математических
методов исследования соответствующих задач.
Поэтому представляется целесообразным кратко ос-
тановиться на обсуждении некоторых задач, представля-
ющих интерес в связи с дальнейшим развитием теории
движения вязко- и жесткопластических сред и соответ-
ствующих математических методов.
1. В § 1 в связи с обсуждением постулата Друкера от-
мечалось, что основное значение этого постулата сводится
к обеспечению теоремы единственности решения неста-
ционарных задач о движении вязких сред. Математичес-
кое содержание этого постулата состоит в предположении
монотонности отображения s ~ А (е). Известно, что тре-
бование монотонности оператора А естественно ассоции-
руется с параболическими уравнениями. Возможно ли
ослабление требования монотонности при сохранении
свойств тензорной инвариантности отображения А?
2. В § 3 при обсуждении вопроса о существовании
минимума функционала отмечалось, что жесткопластичес-
кая среда приводит к исследованию непрерывных выпук-
лых функционалов в пространстве с нормой
|| и || = | е | da 4- j | w | dco,
ди №ди (1)
, е|= ei} = ~ -{- дх^ ) , divw = 0.
ЗАКЛЮЧЕНИЕ
193
Это пространство по своим топологическим свойствам
аналогично пространству Lx (<в) и в нем теорема о сущест-
вовании минимума функционала не имеет места, так как
минимизирующая последовательность гладких полей мо-
жет сходиться к разрывному полю, не принадлежащему
этому пространству. В § 3 указана возможная абстракт-
ная схема расширения исходного пространства, приводя-
щая к разрешимости задачи о существовании минимума
функционала. Было бы очень важно построить конкрет-
ную реализацию такого расширения.
В случае скалярных функций таким расширением яв-
ляется пространство BV. Представляет интерес построе-
ние векторного аналога пространства BV, норма в кото-
ром на гладких вектор-функциях переходила бы в (1).
Конечно, можно обойтись использованием лишь ми-
нимизирующих последовательностей гладких векторных
полей и их пределами в пространствах суммируемых
функций. Однако, ясно, что это существенный недостаток
теории, так как на этих предельных векторных полях
нельзя непосредственно определить значение функцио-
нала.
3. При исследовании конкретных задач теории движе-
ния жесткопластической среды обнаруживается, что эти
задачи, несмотря на кажущуюся сложность постановки
в терминах дифференциальных уравнений (краевые за-
дачи для нелинейных уравнений с особенностями в об-
ластях с неизвестной границей) допускают построение
решений в существенно более эффективной форме, чем
аналогичные им линейные задачи. Это было проиллюст-
рировано на примере антиплоских движений (§ 5) и кру-
чения (§ 8). Приведем еще один пример. Пусть ищется ми-
нимум функционала
J (и) = § | Vu jrffo, и |(?ю — (f. (2)
СО
Аналогичной (2) линейной задачей является задача Ди-
рихле для уравнения Лапласа в области со. Выписать ее
решение в явной форме в случае произвольной области
невозможно. В то же время задача (2) допускает эффек-
тивное решение. Пусть, для простоты, функция <р прини-
мает каждое свое значение не более двух раз. Имеет место
194
ЗАКЛЮЧЕНИЕ
формула (см. § 5)
ъ
| Vu | dto = I (k) dh,
со а
(3)
где а = min и, b = max и, I (h) — длина линии уровня
и = h. Из (3) непосредственно вытекает решение (2).
Именно, экстремальная и (х, у) определяется линейчатой
поверхностью, получаемой соединением отрезками оди-
наковых значений функции ср.
В связи с этим возникает задача об аналогичной (3)
геометрической интерпретации интеграла
J (и) = § | е | d'o, div н = 0.
(I)
Эта геометрическая интерпретация может оказаться
полезной при решении конкретных задач о движении жест-
копластической среды, а также при решении задачи, ука-
занной в предыдущем пункте.
4. В задаче о плоских течениях жесткопластических
сред на основе техники линий скольжения найдено боль-
шое количество «кандидатов» в решения соответствующих
задач. Как уже отмечалось в § 9, отсутствует регулярный
прием проверки полноты соответствующего решения.
С математической точки зрения проблема состоит в
том, чтобы проверить экстремальность конкретного век-
торного поля для недифферепцируемого функционала.
Разумеется, речь идет о построении метода проверки эк-
стремальности, допускающего эффективное применение
в конкретных задачах.
5. Известен метод множителей Лагранжа в задачах
о вычислении нормы функционала на линейном подпрост-
ранстве, выделяемом конечным числом условий ортого-
нальности (теорема Никольского [123]). Задачи теории
пластичности приводят к необходимости перенесения это-
го метода на случай подпространств, выделяемых беско-
нечным числом условий ортогональности.
Именно, требуется доказать, что норма функционала
на подпространстве, выделяемом бесконечным числом
условий ортогональности, является пределом норм функ-
ционала на подпространствах, определяемых конечной
совокупностью таких ограничений, когда их число неог-
ЗАКЛЮЧЕНИЕ
195
раничено увеличивается. Доказательство легко провести
в случае рефлексивных банаховых пространств. В не-
рефлексивных пространствах можно привести примеры,
показывающие, что такого предельного перехода, вообще
говоря, нет. Тем не менее, имеется ряд содержательных
задач, в которых это предельный переход, по-видимому,
имеет место. В частности, это относится к методу размо-
раживания дифференциальных связей в общей теории
пластичности (§ 7) и в неалгебраизуемых задачах тео-
рии оболочек (§ 11). Доказательство теоремы о пре-
дельном переходе в этих случаях означает возможность
использования функциональных множителей Лаг-
ранжа.
6. Вариационная формулировка задач теории пластич-
ности дает возможность строить эффективные оценки точ-
ности приближенного решения. Используя двойствен-
ную формулировку задачи, можно оценить минимальное
значение функционала. Вычисляя затем значение функ-
ционала на приближенном решении для сильно выпуклых
функционалов, получаем с помощью неравенств типа
Кларксона оценку погрешности решения в энергетичес-
кой норме (§ 6).
Существование оценки в энергетической норме и до-
статочная гладкость точного и приближенного решений
позволяют получить оценку погрешности в более сильных
нормах (например, в равномерной метрике).
Поэтому, в связи с оценкой погрешности, важное зна-
чение имеет задача о нахождении точных значений по-
стоянных в неравенствах типа Кларксона и теоремы о
гладкости обобщенного решения.
7. Большой интерес представляют нелинейные
задачи с малым параметром. Такие задачи весьма разнооб-
разны по постановкам, и весьма разнообразны мате-
матические методы их исследования. В частности, имеется
ряд асимптотических методов, основанных на вариацион-
ной формулировке задачи. Некоторые из них изложе-
ны в гл. III. Однако вариационные методы исследования
асимптотических задач в настоящее время еще не полу-
чили широкого распространения, хотя возможность ва-
риационной формулировки задач (такая формулировка
может" быть дана далеко не всегда) открывает дополнитель-
ные направления в их исследовании.
196
ЗАКЛЮЧЕНИЕ
Вариационная формулировка задачи позволяет есте-
ственно определить понятие точности асимптотического
решения. Именно, пусть имеется функционал ./е (и), за-
висящий от параметра е. Элемент vz назовем асимптоти-
ческим решением задачи порядка f (е), если Je (уе) —
— inf (и) = О (J (е)) при е -> 0. Свойство сильной вы-
пуклости функционала позволяет дать оценку разности
между приближенным и точным решениями. При введен-
ном определении точности асимптотического решения
важную роль играют оценки снизу для inf Je(u). Такие
оценки можно получать, используя теорию двойственно-
сти. Этот подход к определению точности приближенного
решения удается реализовать в ряде задач, для которых
неизвестны априорные оценки. Кроме того, для вариацион-
ных задач есть специфические технические конструкции,
например, коммутация выпуклой функции с интеграль-
ным преобразованием (неравенство Йенсена), приводящая
к оценкам снизу точной нижней грани функционала с по-
мощью вектор-фуикций специального вида. Эта кон-
струкция, в частности, позволяет получать в теории пла-
стин и оболочек количественную оценку различия между
точным решением (коэффициентом предельной нагрузки)
для упругих (жесткопластических) пластин и оболочек и
их приближениями в рамках гипотезы Кирхгофа — Лява.
Такие оценки являются обоснованием этой гипотезы и
показывают границы ее применимости. Отметим, что ири
получении оценок снизу минимума функционала важную
роль играют теоремы типа теоремы Фейера [181] о поло-
жительности ядра интегрального оператора (12.13), со-
ответствующего вторым чезаровским средним разложения
функции в ряд Фурье по полиномам Лежандра.
Можно было бы назвать огромное число задач с малым
параметром, решение которых представляет научный ин-
терес. Одной из таких задач является построение погра-
ничного слоя для жесткопластической оболочки положи-
тельной кривизны, склейки его с безмоментным решением,
найденным в § 11, и определение асимптотической точно-
сти полученного решения.
8. Схема исследования нестационарных задач, изло-
женная в § 13, связана с пренебрежением конвективными
составляющими в ускорениях. Важной проблемой в теории
нестационарных задач является нахождение прямой вариа-
ЗАКЛЮЧЕНИЕ
191
ционной схемы, подобной указанной в § 13, учитывающей
конвективные составляющие в ускорениях, использующей
специальную структуру квадратичных выражений в ускоре-
ниях и такой, чтобы в рамках этой схемы допускали ис-
следование, например, уравнения Эйлера для идеальной
несжимаемой жидкости.
Теория жесткопластических сред создавалась и про-
должает развиваться благодаря усилиям большого числа
исследователей. Основным математическим аппаратом в
этой области и до сих пор являются методы теории диф-
ференциальных уравнений, которые позволили заложить
и основы математической теории и получить огромный
фактический материал по решению конкретных задач. Ре-
зультаты этих исследований отражены в многочисленных
монографиях, обзорах и учебных руководствах по теории
жесткопластических тел. Безусловно, авторы в своих ис-
следованиях опирались на этот фундамент. Излагаемое в
книге научное направление в математической теории жест-
ко пластических сред *) является, конечно, лишь одним
из многих возможных. Несомненно, будут открыты и
другие подходы к исследованию проблем теории жестко-
пластических сред.
*) Исследования авторов по применению вариационных ме-
тодов в теории пластичности нашли отклики как в отечественной,
так п в зарубежной научной литературе. В частности, привлекла
внимание работа [35], в которой впервые было указано на недиф-
ференцируемость функционалов теории пластичности и была дана
новая математическая формулировка известной задачи механики.
Именно в этой формулировке задача допускает наиболее деталь-
ное исследование.
В 1979 г. в издательстве «Мир» вышел перевод книги И. Эк-
ланда и Р. Темама «Выпуклый анализ и вариационные проблемы»,
где в и. 3.1 § 3 гл. 4 в связи с теорией двойственности рассматри-
вается поставленная и исследованная в [35] задала. В этом пунк-
те дается ссылка на [35]. Мы считаем необходимым отметить рав-
ный вклад авторов в работу [35] и их одинаковую ответственность
за все научные результаты, опубликованные в совместных рабо-
тах. Название п. 3.1 книги И. Эйланда и Р. Темама мы находим по-
этому некорректным по отношению к авторам работы [35].
ЛИТЕРАТУРА
1. Сен-Венан Б. Об установлении уравнений внутренних движе-
ний, возникающих в твердых телах за пределами упругости.—
В кн.: Теория пластичности.— М.: ИЛ, 1948.
2. Леви М. К вопросу об общих уравнениях внутренних движений,
возникающих в твердых пластических телах за пределами
упругости.— В кп.: Теория пластичности.— М.: ИЛ, 1948.
3. Schwedoff Т. Recherches experimental sur la cohesion des liqui-
des.— J. de Phys, 1890, v. 34, p. 9.
4. Bingham F. C-, Green H. Paint a plastic material and not a vis-
cous liquid.— Proc. Amer, Soc. Testing Materials, 1919, v. 2,
N 19, p. 640.
5. Генки Г. О медленных стационарных течениях в пластических
телах с приложениями к прокатке, штамповке, волочению.—
В кн.: Теория пластичности.— М.: ИЛ, 1948.
6. Финци Б. О пластическом вращении. Рассеяние вихря в плас-
тической среде,— Atti della Reale Accademia Nazionale dei
Lincei, 1936, v. 23, № 10, 733-738.
7. Ильюшин А. А. К вопросу о вязкопластическом течении мате-
риала.— Тр. Всес. конф, по пластичности.— М.: 1936.
8. Ильюшин А. А. Деформация вязкопластичного тела.— Уч.
зап. Моск, ун-та, 19^0, вып 39, с. 3—81.
9. Мизес Р. Механика твердых тел в пластически деформирован-
ном состоянии.— В кн.: Теория пластичности.— М.: ИЛ,
1948.
10. Фрейденталъ А., Гейрингер X. Математические теории неупру-
гой сплошной среды.— М.: Физматгиз, 1962.
11. Mises R. Mechanik der plastischen Formanderung von Kristal-
len.— ZAMM, 1928, Bd. 8, S. 161.
12. Reuss A. Fliezpotential oder Gleitebenen.— ZAMM, 1932,
Bd. 12, S. 15.
13. Reuss A. Vereinfachte Berechnung der plastischen Formander-
ungsgeschwindigkeiten bei Voraussetzung der Sehubspannungs-
flieszbedingung.— ZAMM, 1933, Bd. 13, S. 356.
14, Pfandtl L. Spannumgsverteihing in Plastischen Korpern.— Proc.
1-st Int. Congr. Appl. Meeh., Delft, 1924, p. 43.
15. Рейсс А. Учет упругой деформации в теории пластичности.—
В кн.: Теория пластичности.— М.: ИЛ, 1948.
16. Melan Е. Zur Plastiztat des raumlichen Kontinuums.— Ing.
Arch., 1938, № 9, p. 116.
17. Edelman and Drucker. Some extentions of elementary plasti-
city theory.— Franklin Inst., June, 1951.
ЛИТЕРАТУРА
199
18. Ишлинский А. 10. Общая теория пластичности с линейным
упрочнением.— Укр. матем. ж., 1954, вып. 3, с. 314—325.
19. Новожилов В. В., Кадаш''вич 10. И. Теория пластичности,
учитывающая остаточные микронапряжения.— ПММ, 1958,
т. 22, вып. 1, с. 78—89.
20. Ивлев Д. Д. Об идеально пластическом течении материала
с учетом остаточных мпкронапряжений,— ПММ, 1962, т. 26,
вып. 4, с. 709—714.
21. Клюшников В. Д. О законах пластичности для материалов
с упрочнением (обзор).—ПММ, 1958, т. 22, вып. 1, с. 97—118.
22. Ивлев Д. Д., Быковцев Г. И. Теория упрочняющегося пласти-
ческого тела,— М.: Наука, 1971.
23. Батдорф С., Будянский Б. Математическая теория плас-
тичности, основанная на концепции скольжения.— Сб. пер.
Механика, 1961, № 1, с. 134—155.
24. Малмейстер А. К. Основы теории локальности деформаций
(обзор).— Мех. полимер., 1965, № 4.
25. Lin Т. И. A proposed theory of plasticity based on slip.— Proc.
U. S. Nat. Congr. Appl. Meeh. 2nd, 1954, p. 461—468.
26. Линь T. Г. Физическая теория пластичности.— Сб. Механи-
ка. Новое в зарубежной науке, № 7, Пробл. теор. пласт,—
М.: Мир, 1976, с. 7—68.
27. Prager W. Theory of plastic flow versus theory of plastic defor-
mation.— J. Appl. Phys., 1948, v. 19, № 6, p. 540—543.
28. Вакуленко A. A. О связях между напряжениями и деформа-
циями в неупругих средах.— ДАН СССР, 1958, т. 118, № 4,
с. 655-668.
29. Вакуленко А. А. Термодинамическое исследование связей меж-
ду напряжениями и деформациями в изотропных упруго-
пластических средах.— ДАН СССР, 1959, т. 126, № 4, с. 736—739.
30. Седов Л. И. Введение в механику сплошной среды.— М.:
Физматгиз, 1962.
31. Циглер Г. Экстремальные принципы термодинамики необра-
тимых процессов и механика сплошной среды.— Библ. сб.
Механика.— М.: Мир, 1968.
32. Седов Л. И. Математические методы построения новых
моделей сплошных сред.— УМН, 1965, т. 20, вып. 5, с. 121—
180.
33. Stampacchia G., Formes bilinearies coercitives sur les ensembles
convexes.— Comp. Rend. Acad. Sci. (Paris), 1964, v. 258,
No. 18, p. 4413—4416.
34. Lions J. L., Stampacchia G.— Variational inequalities.— Comm.
Pure Appl. Math., 1967, v. 20, № 3, p. 493-519.
35. Мосолов П. П., Мясников В- И. Вариационные методы в тео-
рии течений вязкопластической среды.— ПММ, 1965, т. 29,
вып. 3, с. 468—492.
36. Oldroyd J. G. A rational formulation of the equation of plastic
flow for a Bingham Solid.— Proc. Cambridge Phyl. Soc. 1947,
v. 43, № 1, p. 100.
37. Prager W- Mises Memorial volume.— New York, 1954, p. 208.
38. Мосолов И. И. О некоторых математических вопросах теории
несжимаемых вязкопластических сред,— ПММ, 1978, т. 42,
вып. 4, 737—746.
200
ЛИТЕРАТУРА
39. Гвоздев А. А. Определение величины разрушающей критичес-
кой нагрузки для статически неон ределимых систем, претер-
певающих пластические деформации. — Тр. конф, по пласти-
ческим деформациям.— At.: изд-во АП СССР, 1938. '
40. Гвоздев А. А. Расчет несущей способности конструкций по ме- !
тоду предельного равновесия.— М.: Стропиздат, 1949.
41. Ивлев Д. Д. Теория идеальной пластичности.-М.: Наука,
1966.
42. Олыиак В., Мруз 3., Нежина II. Современное состояние теории
пластичности.— М.: Мир, 1964.
43. Хилл Р. Математическая теория пластичности.— М.: Гостех-
издат, 1956.
44. Прагер В. Проблемы теории пластичности.— М.: Фпзматгиз,
1958.
45. Качанов Л. М. Основы теории пластичности.— М.: Наука,
1969.
46. Ерхов М. И. Теория идеально пластических тел и конструк-
ций.— М.: Наука, 1978.
47. Ивлев Д. Д. О диссипативной функции упрочняющихся плас-
тических сред,— ДАН СССР, 1957, т. 176, № 5, с. 1037—1039.
48. Гвоздев А. А. К расчету конструкций на действие взрывной
волны.— Строит, пром., 1943, № 1, с. 2.
49. Duwez Р. Е., Clark D. С., Bohnenblust Н. Г. The behaviour of
long beams under impact loading.— J. Appl. Meeh. 1950, v. 17,
№ 1, p. 27-34.
50. Lee E. H., Symonds P. S. Large plastic deformation of beams
under transvese impact.— J. Appl. Meeh. 1952, v. 19, № 2,
p. 308-314.
51. Seiler J. A., Symonds P. S. Plastic deformation in beams under
distributed dynamic loads.— J. Appl. Phys. 1954, v. 25, N 3,
p. 556-563.
52. Жермен П. Механика сплошных сред.— М.: Мир, 1965.
53. Cauchy О. Sur les equations qui experiment les conditions d’equi-
libre on lois de mouvement interieur d’un corps solide.— Exer-
cises mathematique, 1828.
54. Бердичевский В. Л., Седов Л. И. Динамическая теория непре-
рывно распределенных дислокаций. Связь с теорией пластич-
ности.— ПММ, 1967, т. 31, вып. 6, с. 981—1000.
55. Drucker D. С. Some implications of work-hardening and
ideal plasticity — Quart. Appl. Math., 1949, v. 7, № 2, p. 411 —
418.
56. Drucker D. C- A more fundamental approach to plastic strcss-
strain relations.— Proc. 1-st US Nat. Congr. Appl. Meeh. Chi-
cago, 1951 (ed. E. Stranherg. Ann. Arbor. Mich. 1952, p. 487—
491).
57. Bishop J. F. W., Hill H. A theory of plastic distortion of a poly-
crystalline aggregate under combined stress.— Phys. Mag., 1951,
v. 42, № 7, p. 414.
58. Гудьер Дж. II., Ходж Ф. Г. Упругость и пластичность.— М.:
ИЛ, 1960.
59. Койтвр В. Т. Общие теоремы теории упругопластических сред.
М.: ИЛ, 1961.
60. Рокафеллар Р. Выпуклый анализ.— М.: Мир, 1973.
ЛИТЕРАТУРА
201
(Л. Мосолов II. II., Мясников В. П. Вариационные методы в тео-
рии течений жестко-вязкопластических сред.— М.: изд-во
МГУ, 1971.
Ci2. Ладыженская О. А. Математические вопросы динамики вязкой
несжимаемой жидкости.—М.: Физматгиз, 1961.
(>3. Лионе Ю. Л. Некоторые методы решения нелинейных краевых
задач,— М.: Мир, 1972.
64. Buckingham Е. On the plastic flow through capillary tubes.—
Proc. Amer. Test. Math. 1921, № 21, p. 1154.
65. Мирзаджанзаде A. X. Некоторые вопросы движения вязких
и вязкопластических жидкостей в применении к нефтедобы-
че.— Баку.: Изд-во Азнефть, 1959.
66. Мясников В. П. Некоторые точные решения для прямолиней-
ных движений вязкопластической среды.— ПМТФ, 1961,
№ 2, с. 54—60.
67. Мясников В. П. Течение вязкопластической среды при сложном
сдвиге. ПМТФ, 1961, № 5, с. 76-87.
68. Быковцев Г. И., Чернышов А. Д. О вязкопластическом течении
в некруговых цилиндрах при наличии перепада давления.—
ПМТФ, 1961, № 5, с. 76-87.
69. Марков А. А. О вариационных принципах в теории пластич-
ности.— ПММ, 1947, т. II, вып. 3, 339—350.
70. HUI R. A variational principle of maximum plastic work in
classical plasticity.— Quart. J. Meeh. Appl. Math., 1948, v. 1,
№ 1, p. 18-28.
71. Вайнберг M. M. Вариационный метод и метод монотонных опе-
раторов.— М.: Наука, 1972.
72. Иоффе А. Д., Тихомиров В. М. Теория экстремальных задач.—
М.: Наука, 1974.
73. Вайнберг М. М., Качуровский Р. И. К вариационной теории
нелинейных операторов и уравнений.— ДАН СССР, 1959,
т. 129, № 5, с. 1199-1202.
74. Minty G. I. Monotone (nonlinear) operators in Hilbert Space.—
Duke Math. J., 1962, v. 29, № 3, p. 341-346.
75. Browder F. E. Non-linear equations of evolution.— Ann. Math.
1964, ser. 2, v. 80, № 3, p. 485—523.
76. Leray I., Lions J. L. Quelquesresultats de Visiksurles problemes
elliptiques non linear par les methods de Minty.— Bull. Soc.
Math. France, 1965, v. 93, № 1, p. 96—107.
77. Канторович JI. ВАкилов Г Я. Функциональный анализ в нор-
мированных пространствах.— М.: Физматгиз, 1959.
78. Прагер В., Ходж Ф. Г. Теория идеально пластических тел.—
М.: ИЛ, 1956.
79. Соболев С- Л. Некоторые применения функционального анализа
в математической физике.— Л.: Изд-во ЛГУ, 1950.
80. Бесов О. В., Ильин В. П., Никольский С. М. Интеграль-
ные представления функций и теоремы вложения.— М.: Наука,
1975.
81. Мосолов Л. П-, Мясников В. Р. Доказательство неравенства
Корна,- ДАН СССР, 1971, т. 201, № 1, с. 36—40.
82. Мосолов П. П., Мясников В. П. О корректности краевых задач
в механике сплошных сред.— Матеи, сб., 1972, т. 88, вып. 2,
с. 256-267.
202
ЛИТЕРАТУРА
83. Решетняк Ю. Г. Некоторые интегральные представления диф-
ференцируемых функций.— Сиб. матем. ж., 1971, т. 12, выл. 2,
420—432. 5
84. Fridrichs К. О. On the boundary-value problems of the theory;
of elasticity and Korn’s inequality.— Ann, of Math. 1947, v. 48,
№ 2, p. 447—471.
85. Smith К. T. Inequalites for formally positive integrodifferential
forms.— Bull. Amer. Math. Soc., 1961, v. 67, № 4, p. 368—370.
86. Бесов О. В. О коэрцитивности в неизотропных пространствах
С. Л. Соболева.— Матем. сб., 1967, т. 73, вып. 4, с. 585—599. .
87. Красносельский М. А., Забрейко И. Л., Пустыльник Е. И.,
Соболевский П. Е. Интегральные операторы в пространствах
суммируемых функций.— М.: Наука, 1966.
88. Gagliardo Е. Proprieta di alcune classi di Sunzioni in piu varia-
hili.— Ricerche di Mat., 1958, v. 7, № 1, p. 102—137. (сб. nep.
Математика, 1961, т. 5, № 4, с. 67—116).
89. Дей М. М. Нормированные лилейные пространства.— М.:
ИЛ, 1961.
90. Мосолов П. П. О проблеме минимума функционала.— Изв. АН
СССР, сер. матем. 1967, т. 31, вып. 6, с. 1289—1310.
91. Nayroles В. Essai de theorie functionnelle des structures rigides
plastiques parfaites.— J. Mec. 1970, v. 9, № 3, p. 491—506.
92. Кружков С- H. Квазилинейные уравнения первого порядка от
нескольких независимых переменных.— Матем. сб., 1970,
т. 81, вып. 2, с. 228—255.
93. Вольперт А. И. Пространства BV и квазилинейные уравне-
ния.— Матем. со., 1967, т. 75, вып. 2, с. 255—302.
94. Каменярж Я. А. Пластическое тело под действием предель-
ной нагрузки: поле напряжений.— ДАН СССР, 1978, т. 241,
№ 1, с. 56—59.
95. CharnesA., Herbert J., Greenberg H. Plastic collapse and linear
programming.— Bull, of the Math. Soc., 1951, v. 57, № 6.
96. CharnesA., Lemke C., Zienkiewich O. Virtual work, linear pro-
gramming and plastic limit analysis.—Proc, of the Roy. Soc.,
1959, A 251.
97. Dorn W., Herbert J., Greenberg H- Linear programming and
plastic limit analysis of structures.— Tech. Rep. 7, Carnegue
Inst, of Technology.— Pittsburg, Pa., 1955.
98. Мирзабекян Б. Ю., Рейтман M. И. Определение несущей спо-
собности оболочек при помощи линейного программирования.—
МТТ, 1968, № 1, с. 122-124.
99. Ржаницът А.Р. Определение несущей способности цилинд-
рических сводов оболочек с применением параметрического
линейного программирования.— Докл, на конгр. IASS.—
М.: Стропив дат, 1966.
100. Чирас А. А. Некоторые применения методов математического
программирования в задачах строительной механики.— Изв.
АН СССР, техн, киберн., 1965, № 1.
101. Lance R. Construction of velocity fleilds in plastic limit analy-
sis.— J. Genio Civile, 1965; v. 103, № 1—2.
102. Koopman D., Lance R. On linear programming and plastic limit
analysis. J. Meeh, and Phys, of Solids, 1965, v. 13, № 2, p. 77—
87, (сб. пер. Механика, 1966, № 2).
ЛИТЕРАТУРА
203
103. Prager W. Mathematical programming and theory of structu-
res.— J. Soc. Industr. and Appl. Math., 1965, v. 13, № 1,
p. 312—332.
1о4. Чирков В. Д. Определение несущей способности осесимметрич-
ных оболочек методом линейного программирования.— Изв.
вузов, Машиностроение, 1969, № 5.
1о5. Себекина В. И. Кинематический метод определения предель-
ного состояния с применением линейного программирования.—
Тр. VII Всес. конф, по теор. оболоч. и пласт.— М.: Наука,
1970, с. 547—550.
106. Мосолов П. П., Мясников В- П. О застойных зонах течения
вязкопластической среды в трубах.— ПММ, 1966, т. 30, вып. 4,
с. 706—717.
107. Мосолов II. II., Мясников В. II. О качественных особенностях
течения вязкопластической среды в трубах.— ПММ, 1967,
т. 31, вып. 3, с. 581—585.
108. Мосолов II. П., Мясников В. П. О прямолинейных стационар-
ных движениях вязкопластической среды.— ДАН СССР,
1967, т. 174, № 2, с. 312—314.
109. Кронрод А. С. О функциях двух переменных.—УМН, 1950,
т. 5, вып. 1, с. 24—134.
110. Ахиеаер Н. И. Лекции по вариационному исчислению.— М.:
Гостехиздат, 1965.
111. Sard A. The measure of the critical values of differentiable
maps.— Bull. Amer. Math. Soc., 1942, v. 48, № 12, p. 883—
890.
112. Morse A. P. The behavior of a function on its critical set.— Ann.
Math., 1939, v. 40, № 1, p. 62—70.
113. БурагоЮ.Д., Залгаллер В А. Изопериметрическая задача
при ограничении ширины области на поверхности.— Труды
матем. ин-та АН СССР, 1965, т. 76, с. 81—87.
114. Мосолов П. П., Мясников В. П. О взаимодействии дисперсных
систем со стенкой.— Труды Второго Всесоюзного семинара
по гидравлике, ч. II.— М.: ЦНИИТЭ нефтехим, 1969, с. 3—11.
115. Черноусым Ф. Л., Баничук Н. В. Вариационные задачи меха-
ники и управления.— М.: Наука, 1973.
116. Красносельский М. А., Вайникко Г. М., Забрейко II. ПРу-
тицкий Я. Б., Ствценко В. Я. Приближенные решения опе-
раторных уравнений.— М.: Наука, 1969.
117. Synge J. L. The hypersicl in mathematical physics.— Cambrid-
ge Univ. Press, 1957»
118. Пшеничный Б. II. Необходимые условия экстремума,— М.:
Наука, 1969.
119. Корниенко О. Г. Численный расчет течений вязкопластической
среды по цилиндрическим трубам структурным методом.—
ВИНИТИ, № 687—78, Деп.
120. Тополянский Д. Б. Об оценке интеграла Дирихле.—ПММ,
1947, т. II, вып. 5, с. 551—554.
121. Тополянский Д. Б. О применении вариационных методов при
приближенном решении краевых задач для дифференциальных
уравнений эллиптического типа.— ПММ, 1949, т. 13, вып. 3,
с. 317—320.
204 ЛИТЕРАТУРА
122. Тополянский Д. Б. Об оценке обобщенного интеграла Дирих-
ле в плоской задаче теории упругости и в трехмерной краевой
задаче,— ПММ, 1950, т. 14, вып. 4, с. 423—428.
123. Никольский С. М. Приближение функций тригонометрически-
ми полиномами в среднем.— Изв. АН СССР, сер. матом., 1946.
т. 10, вып. 3, с. 207—256.
124. Мосолов П. П. О кручении жесткопластического цилиндра.—
ПММ, 1977, т. 41, вып. 2, с. 344-353.
125. Ting Т. W. The ridge of a Jordan domain and completely plas-
tic torsion.— J. Math, and Meeh., 1966, v. 15, Ml, p. 15—47.
126. HadauA. Пластичность и разрушение твердых тел.— М.:
ИЛ, 1954.'
127. Кузнецов А. И. Кручение неоднородных пластических стерж-
ней.— Изв. АН СССР, ОТН, 1958, № 11, с. 110-113.
128. Кузнецов А. И. The problem of torsion and plane straine of
non-homogeneous body.—Arch. Mec. Stos., 1958, v. 10, №4,
p. 447-462.
129. ОлыиакВ., Ръгхлевский Я., Урбановский В. Теория пластич-
ности неоднородных тел.— М.: Мир, 1964.
130. Sadowsky М. A. An extension of the sand-heap analogj7 in plas-
tic torsion applicable to cross section having one or more ho-
les.— J. Appl. Meeh., 1941, v. 8, №4, p. 166—168.
131. Freiberger W. The uniform torsion of a perfectly plastic circular
ring.— Commonwealth of Australia, Aeronautical Research. La-
boratories, Report ARLSM 28, 1953.
132. Freiberger W., Prager W. Plastic twisting of thick — walled
circular ring sectors.— J. Appl. Meeh., 1956, v. 23, № 3,
p. 461—463.
133. Генки Г. О некоторых статистически определимых случаях
равновесия в пластических телах.— В кн.: Теория пластич-
ности.— М.: ИЛ, 1948.
134. Друянов В. А. Распределение напряжений под штампом
с криволинейной подошвой.— ПМТФ, 1961, № 6, с. 155—
157.
135. Соколовский В. В. Построение полей напряжений и скоростей
в задачах пластического течения.— Инж. журнал, 1961, т. 1,
№ 3,! с. 116—121.
136. Xрисшианович С. А. Плоская задача математической теории
пластичности при внешних силах, заданных па замкнутом
контуре,— Матем. сб., 1936, т. 1, вып. 4, с. 511—543.
137. Соколовский В. В. Теория пластичности.— М.: Высшая шко-
ла, 1969.
138. Pollaczek-Geiringer Н. Beitrag zum vollstiindigen ebenen Plas-
tizitatsproblem.— Proc. 3rd Intern. Congress for Appl. Meeh.,
Stockholm, 1930, p. 185—190.
139. Соколовский В. В. Уравнения пластического равновесия при
плоском напряженном состоянии,— ПММ, 1945, т. 9, вып. 1,
с. 111-128.
140. Ишлинский А. 10. Осесимметричная задача теории пластич-
ности и проба Бринелля.— ПММ. 1944, т. 8. вып. 3, с. 201 —
224.
141. Шилд Р. О пластическом течении металлов в условиях осевой
симметрии.— Сб. пер. Механика, 1957, № 1, с. 102—122.
ЛИТЕРАТУРА
205
142. Symonds Р. S. On the general equations of problems of axial
symmetry in the theory of plasticity.— Quart. Appl. Math.,
1949, v. 6, № 4, p. 448-452.
143. Сен-Венам Б. Дифференциальные уравнения внутренних дви-
жений, возникающих в твердых пластических телах, и гранич-
ные условия для этих тел. Некоторые приложения.— В кн.:
Теория пластичности.— М.: ИЛ, 1948.
144. Прандтлъ Л. Примеры применения теорем Генки к равнове-
сию пластических тел.— В кн.: Теория пластичности. М.:
ИЛ, 1948.
145. Hill В., LeeE.H., Tupper S.J. A method of numerical ana-
lysis of plastic flow in plane strain and its application to the
compression of a ductile material between rough plates.— J.
Appl. Meeh., 1951, v. 8, p. 46—52. (сб. пер. Механика, 1953,
№ 3).
146. Соколовский В. В. Теория пластичности.— М.: Изд-во АН
АН СССР, 1946.
147. Ивлев Д. Д. Об одном классе решений общих уравнений тео-
рии идеальной пластичности.— Изв. АН СССР, ОТН, 1958,
№ И, с. 107—109.
148. Bishop J. F. W. On the Complete Solution to Problem of De-
formation of a Plastic Rigid Material.— J. Meeh. Phys. Solids,
1953, vol. 2, N 1, pp. 43.
149. Друянов Б. А. О полных решениях некоторых задач деформа-
ции полосы.— Инж. журнал. МТТ, 1968, № 2, с. 171 —173.
150. Мосолов П. II., Мясников В. И. Пограничный слой в задаче
о продольном движении цилиндра в вязкопластической сре-
де,-ПММ, 1974, т. 38, вып. 4, с. 682—692.
151. Чернышов А. Д. Об одном эвристическом методе решения нели-
нейных задач эллиптического типа для двусвязных областей.—
ПММ, 1978, т. 42, вып. 2, с. 321—326.
152. Oldroyd J. G. Two-dimensional plastic flow of a Bingham So-
lid. A plastic boundary-layer theory lor slow motion.— Proc.
Cambridge Phil. Soc., 1947, v. 43, № 3, p. 383.
153. Мясников В. 11. О постановке задачи обтекания тел вязкоплас-
тической жидкостью.— ПМТФ, 1962, № 4, с. 52—59.
154. БулинаИ.Г., Савин В. Г. Образование передней застойной
зоны при обтекании затупленных тел вязкопластическими
жидкостями.— ДАН СССР, 1962, т. 145, № 1, с. 56—58.
155. Булима И. Г., Мясников В. П., Савин В. Г. Эксперименталь-
ное исследование обтекания затупленных тел плоским пото-
ком вязкопластической среды.— ПМТФ, 1964, №5, с. 127—131.
156. Robertson J. М., Pazwachff. Forces on bodies in bottom-like
Materials.— Ocean Engng., 1971, v. 2, p. 75—81.
157. Мясников В. П. О сдавливании вязкопластического слоя
жесткими плитами.— Изв. АН СССР, Механ. и машиностр.,
1963, № 4, с. 92—96.
158. Астрахан И. М. Об уравнениях движения вязкопластической
жидкости в пограничном слое на произвольной поверхности.—
Изв. АН СССР, ОТН, Мех. и маш., 1960, № 2, с. 54—59.
159. Мосолов П. И., Мясников В. П. Асимптотическая теория жест-
копластических оболочек.— ПММ, 1977, т. 41, вып. 3,
с. 538-552.
2()f>
ЛИТЕРАТУРА
160. Мосолов II. II., Мясников В. II. Асимптотическая теория не-
сущей способности жесткопластических оболочек.— Тр. IV
Всес. конф, но числ. методам реш. задач теор. упр. и пласт.,
ч. 11,— Новосибирск, 1976, с. 77—86.
161. Мосолов II. II., Мясников В. II. Асимптотическая теория пре-
дельных нагрузок для жесткопластических оболочек.— В кн.:
Пластическая деформация легких и специальных сплавов,
ч. 1,— М/. Металлургия, 1978, с, 69—81.
162. Benya 11. II. Обобщенные аналитические функции.— М.: Физ-
матгиз, 1959.
163. Ильюшин А. А. Пластичность.—М.: Гостехиздат, 1948.
164. Onat Е. Т., Prager W. Limit analysis of shells of revolution
Proc. Konenklije Nederl. Acad. Wet B., 1954, v. 57, № 5, p.
534-548.
165. Рождественский В. В. К вопросу о предельных состояниях
сечений тонких оболочек.— Ькн. Исследования по вопросам
строительной механики и теории пластичности.— М.: Гос-
стройиздст, 1956.
166. Шредер Дж. Шерборн О. Общая теорема теории тонких обо-
лочек в классической теории пластичности.— Сб. пер. Меха-
ника, 1969, № 2, с. 90-103.
167. Шапиро Г. С. О поверхностях текучести для идеально пласти-
ческих оболочек.— В кн.: Проблемы механики сплошной сре-
ды (к 70-летшо Н.П. Мусхелишвилп).— М.: Изд-во АН СССР,
1961.
тб8. Гвоздев А. А., Проценко А. М. Перспективы приложения тео-
рии предельного равновесия для оболочек.— Тр. VII Всес.
конф, по теор. оболоч. и пласт.— М.: Наука, 1970, с. 736—
748.
169. Рыхлевский Я., Шапиро Г. С. Идеально пластические пластин-
ки и оболочки.— Тр. VI Всес. конф, но теор. оболоч. и пласт.—
М.: Наука, 1966.
170. Олыиак В., Савчук А. Неупругое поведение оболочек.— М.:
Мир, 1969.
171. Немировский 10. В. Предельное равновесие многослойных ар-
мированных осесимметричных оболочек.— МТТ, 1969, № 6,
с. 80—89.
172. Ивлев Д. Д. К теории предельного равновесия оболочек вра-
щения при кусочно-линейных условиях пластичности.—
Изв. АН СССР, ОТН, Мех. и машиностр., 1962, № 6, с. 95—
102.
173. Работное 10. И- Приближенная техническая теория упруго-
пластических оболочек.— ПММ, 1951, т. 15, вып. 2, с. 167—
174.
174. SawczukA., Bychlewski J. On the yield surfaces for plastic
checlls.— Arch. Meeh. Stos., 1960, v. 12, № 1, p. 29—53.
175. Hodge P. G. The linearization of plasticity problems bemeans
of non-homogeneous materials.— Proc. IUTAM Symp. Warsa-
wa, 1958, p. 147—156.
176. Hodge P. G. The Mises yield condition for rotationally simmet-
ric shells.— Quart. Appl. Math. 1961, v. 18, № 4, p. 305—311.
177. 71/икелайзе M. HI. О пластическом течении анизотропных обо-
лочек.— Изв. АН СССР, ОТН, 1955, № 8, с. 67—80.
ЛИТЕРАТУРА
207
178. Микеладзе М. Ш. Введение в техническую теорию идеально
пластических оболочек.— Тбилиси: Мецниереба, 1969.
179. Мосолов II. П. Асимптотическая теория тонких прямолиней-
ных панелей.— ДАН СССР, 1972, г. 206, № 2, с. 300-303.
180. Мосолов II. И. Асимптотическая теория тонких прямолиней-
ных панелей.— ВИНИТИ, № 4607—72, деп.
181. Fejer L. fiber die Laplacesche Reihe.— Math. Ann. 1909, v. 67.
182. Pell W. II. Limit design of plates.— Proc. First Amer. Congr.
Appl. Meeh. Chicago, 1951.
183. Prager W- Minimum weight design of plates.— De Ing., 1955,
v. 67, № 1, p. 141-142.
184. Гопкинс Г., Прагер В. Несущая способность круглых пласти-
нок.— Сб. пер. Механика, 1955, № 3, с. 100—111.
185. Мосолов П. П. Связь пространственных и плоских задач
в механике сплошных сред.— ДАН СССР, 1972, т. 206, с. 55—
58.
186. Мосолов П. П. Связь пространственных и плоских задач в ме-
ханике сплошных сред.— ВИНИТИ, № 4606 — 72, деп.
187. Лионе Ю. Л. О неравенствах в частных производных.— УМН,
1971, т. 26, № 2, с. 205-263.
188. Мосолов П. И- Вариационные методы в нестационарных зада-
чах.— Изв. АН СССР, сер. матем., 1970, т. 34, вып. 2, с. 425—
457.
189. Вишик М. А. О разрешимости краевых задач для квазилиней-
ных параболических уравнений высших порядков.— Матем.
сб., 1962, т. 5*9, дополнительный, с. 289—325.
190. Ворович И. И. О методе Бубнова — Галеркина в нелинейной
теории колебаний пологих оболочек.— ДАН СССР, 1956,
т. НО, № 5, с. 723-726.
191. Komura Y. Non linear semi-groups in Hilbert space.— J. Math.
Soc. Japan 1967, v. 19, № 4, p. 493—507.
192. Brezis II., Crandall M., Расу A. Perturbations of non-linear ma-
ximal monotone sets.— Comm. Риге Appl. Math., 1970, v. 23,
№1, p. 123—144.
193. Огибалов П. M., Мирзаджанзаде A. X. Нестационарные дви-
жения вязкопластичных сред.— М.: Изд-во МГУ, 1970, изд.
2-е, 1977.
194. Мосолов П. П., Мясников В. П. О прямолинейных движениях
идеально пластической среды.— ДАН СССР, т. 174, № 3,
с. 541—544.
195. Тамуж В. П. Об одном минимальном принципе в динамике
жосткопластического тела.— ПММ, 1962, т. 26, вып. 4, с. 715—
722.
196. Саймондс П. Характеристики динамической нагрузки при
пластическом изгибе брусьев.— Сб. пер. Механика, 1954, № 5,
с. 158-171.
197. Саймондс II. Большие пластические деформации стержней
под действием нагрузки взрывного типа.— Сб. пер. Механика,
1956, № 4, с. 90—108.
198. Гопкинс Г., Прагер В. Динамика круглой пластической плас-
тинки.— Сб. пер. Механика, 1955, № 3, с. 112—122.
199. Шапиро Г. С. Удар по кольцевой жесткопластической плас-
тинке.— ПММ, 1959, т. 23, вып. 1, с. 172—175.
208
ЛИТЕРАТУРА
200. МосоловП. П. Вариационный метод в нестационарных зада-
чах теории пластичности.— Тр. IV Всес. конф, по числ. ме-
тодам рш. задач теор. упр. и пласт, ч. I.— Новосибирск,
1976, с. 92-103.
201. МосоловП. П. Вариационные методы исследования нестацио-
нарных движений жесткопластических несжимаемых сред.—
В кн.: Пластическая деформация легких и специальных спла-
вов, т. I,— М.: Металлургия, 1978, с. 82—98.
202. Ходж Ф.Г. Расчет конструкций с учетом пластических дефор-
маций.—М.: Махпгиз, 1963.
203. Шапиро?. С. О поведении пластических конструкций при
импульсивном действии нагрузки.— Материалы летной школы
по проблеме «Физически и геометрически нелинейные задачи
теории шастин и оболочек», ч. I,— Тарту, 1966.
204. Зволинскш Н. В., Малышев В. М., Шапиро Г. С. Динамика
пластичсжих сред.— Тр. II Всес. съезда по теорет. и прикл.
механ., \1ТТ.— М., 1966.
205. РейтманМ. И., Шапиро Г. С. Динамическая теория пластич-
ности.— В кн.: Упругость и пластичность, 1966 (Итоги науки,
ВИНИТИ АН СССР, М.; 1966).
206. Мазалов i. Н., Немировский Ю. В. Динамика тонкостенных
пластических конструкций.— Сер. Механика, Новое в зару-
бежной науке, в. 5. Проблемы динамики упругопластических
сред.— М: Мир, 1975, с. 155—247,
Петр Петрович Мосолов, Вениамин Петрович Мясников
МЕХАНИКА ЖЕСТКОПЛАСТИЧЕСКИХ СРЕД
М., 1081 г., 208 стр. с илл.
Редактор А. Г. Мордвипцев
Техн, редактор Л. М. Кривова
Корректоры Е. А. Белицкая, Л. II. Боронина
ИВ Л 11'35
Сдано в набор 05.09.80. Подписано к печати 10.02.81. Т-02991.
Бумага 84хЮ81/з>. Тип. № 1. Обыкновенная гарнитура.
Высокая печать. Усл. печ. л. 10,92. Уч.-изд. л 11,72.
Тираж 2800 экз. Заказ № S606. Цена книги 1 р. 20 к.
Издательство «Наука»
Главная редакция физико-математической литературы
11'071, Москва, В-71, Ленинский проспект, 15
2-я типография издательства «Наука». Москва. Г-99, [Шубинский пер., 10