/

































































































































































































































































Author: Новиков В.С.
Tags: воздушный транспорт перевозки по воздуху электротехника радиотехника
Year: 1987
Similar




Text
Издательство « Тр^спе^т^
В.С. Новиков
ТЕХНИЧЕСКАЯ ЗКСПЛУАТАЦИН авиационного радиоэлектронного ойорудования
Допущено
Управлением учебных заведений МГА в качестве учебника для высших учебных заведений гражданской авиации
МОСКВА"ТРАНСПОРТ"1987
УДК 656.7 : 621.396(075.8)
Новиков В. С. Техническая эксплуатация авиационного радиоэлектронного оборудования: Учебник для вузов. М.: Транспорт, 1987.—261 с.
Комплексно рассмотрены вопросы управления качеством эксплуатации радиоэлектронного оборудования аэродромов и трасс. Изложены основы теории, контроля технического состояния, организация и планирование процесса эксплуатации, особенности эксплуатации в условиях помех, технические средства эксплуатации.
Для студентов вузов гражданской авиации, может быть полезен инженерно-техническим работникам.
Ил. 72, табл. 24, библиогр. 27 назв.
Рецензенты: кафедра АРО и ТЭ МИИГА; каид. техн, наук Ю. М. Демидов
Заведующий редакцией Л. В. Васильева
Редактор И. В. Иванова
Н3606040000—246 049(01)—87 245~87
© Издательство «Транспорт», 1987
Глава 1
РАДИОЭЛЕКТРОННОЕ ОБОРУДОВАНИЕ АЭРОПОРТОВ И ВОЗДУШНЫХ ТРАСС ГА КАК ОБЪЕКТ ЭКСПЛУАТАЦИИ
1.1. ИСПОЛЬЗОВАНИЕ РЭО ДЛЯ ОБЕСПЕЧЕНИЯ ПРОИЗВОДСТВЕННОЙ ДЕЯТЕЛЬНОСТИ АВИАПРЕДПРИЯТИЙ
Радиотехническое оборудование аэропортов и воздушных трасс представляет собой наземные средства радиотехнического обеспечения полетов и связи. Оно используется совместно с бортовым РЭО. Указанное взаимодействие РЭО с целью обеспечения полетов воздушных судов ГА называется технологическим процессом радиотехнического обеспечения производственной деятельности авиапредприятия.
Порядок использования РЭО при выполнении каждого полета определяется руководящими документами МГА и уточняется при предполетной подготовке экипажа перед каждым полетом. При этом в процессе штурманской подготовки полета определяется схема ведения радиосвязи по КВ и УКВ каналам, готовятся данные об использовании имеющихся по маршруту радиотехнических систем, а также сведения о режимах работы радиотехнических средств УВД, навигации и посадки аэропорта вылета, аэропорта назначения и запасных аэропортов. На основе плана полетов оповещаются обеспечивающие полеты службы и ведомства, в том числе службы, использующие РЭО для УВД, навигации и посадки.
Непосредственно использование РЭО для обеспечения полетов начинается с сообщения экипажа по УКВ радиостанции об исправности систем воздушного судна (ВС). По этому радиоканалу диспетчер руления разрешает запуск двигателей и последующее руление к исполнительному старту. Процесс руления в ряде аэропортов может контролироваться с помощью радиолокационной станции (РЛС) обзора летного поля.
Разрешение на взлет экипаж также получает по УКВ радиостанции от диспетчера по соответствующему каналу. После сообщения о взлете по УКВ радиостанции экипаж совершает набор высоты и выход из зоны диспетчерского пункта в соответствии с указаниями диспетчера. В процессе набора высоты и выхода из зоны диспетчерского пункта экипаж использует радиокомпасы, работающие совместно с приводными радиостанциями. Контроль за взлетом и набором высоты ВС осуществляется с помощью диспетчерского радиолокатора или автоматизированной системы управления воздушным движением (АС УВД). Поскольку воздушное пространство разделено на зоны УВД, при достижении очередной зоны экипаж переходит на связь по УКВ каналу
3
с диспетчером этой зоны. Пролет зон УВД фиксируется экипажем с помощью радиокомпаса. Для контроля местоположения ВС используется информация от бортового оборудования радиотехнической системы ближней навигации (РСБН), которое работает совместно с радиомаяками этой системы. Диспетчерский контроль местоположения ВС на трассе осуществляется с помощью аэроузловых и трассовых РЛС и РЛС с активным ответом. Радиосвязь в процессе полета осуществляется с помощью УКВ и, если требуется, КВ радиостанций. Следует отметить, что в обычных условиях связь на КВ радиостанциях используется как резервная. Однако на трассах большой протяженности (например, трансконтинентальные полеты) связь на КВ является основной, а УКВ каналы используются при пролете аэропортов.
При приближении к аэропорту посадки экипаж устанавливает связь по УКВ каналу с диспетчером УВД сектора входа аэроузла. В процессе снижения экипаж использует информацию от автоматических радиокомпасов, радиооборудования РСБН и получает указания по УКВ радиостанции от диспетчера подхода, а затем диспетчера круга. Маневр на посадку осуществляется по одной из стандартных траекторий, при этом используется информация от приводных радиостанций и радиомаяков системы посадки, работающих в комплексе с бортовым оборудованием этой системы. Положение относительно линии курса (ЛК) и линии глиссады (ЛГ) диспетчер посадки контролирует с помощью посадочной РЛС, выдавая служебную информацию о положении ВС, метеоусловиях и состоянии взлетно-посадочной полосы (ВПП) по УКВ радиостанции. Совершив посадку, экипаж устанавливает связь с диспетчером руления и завершает полет по его указаниям, передаваемым по соответствующему каналу УКВ радиостанции.
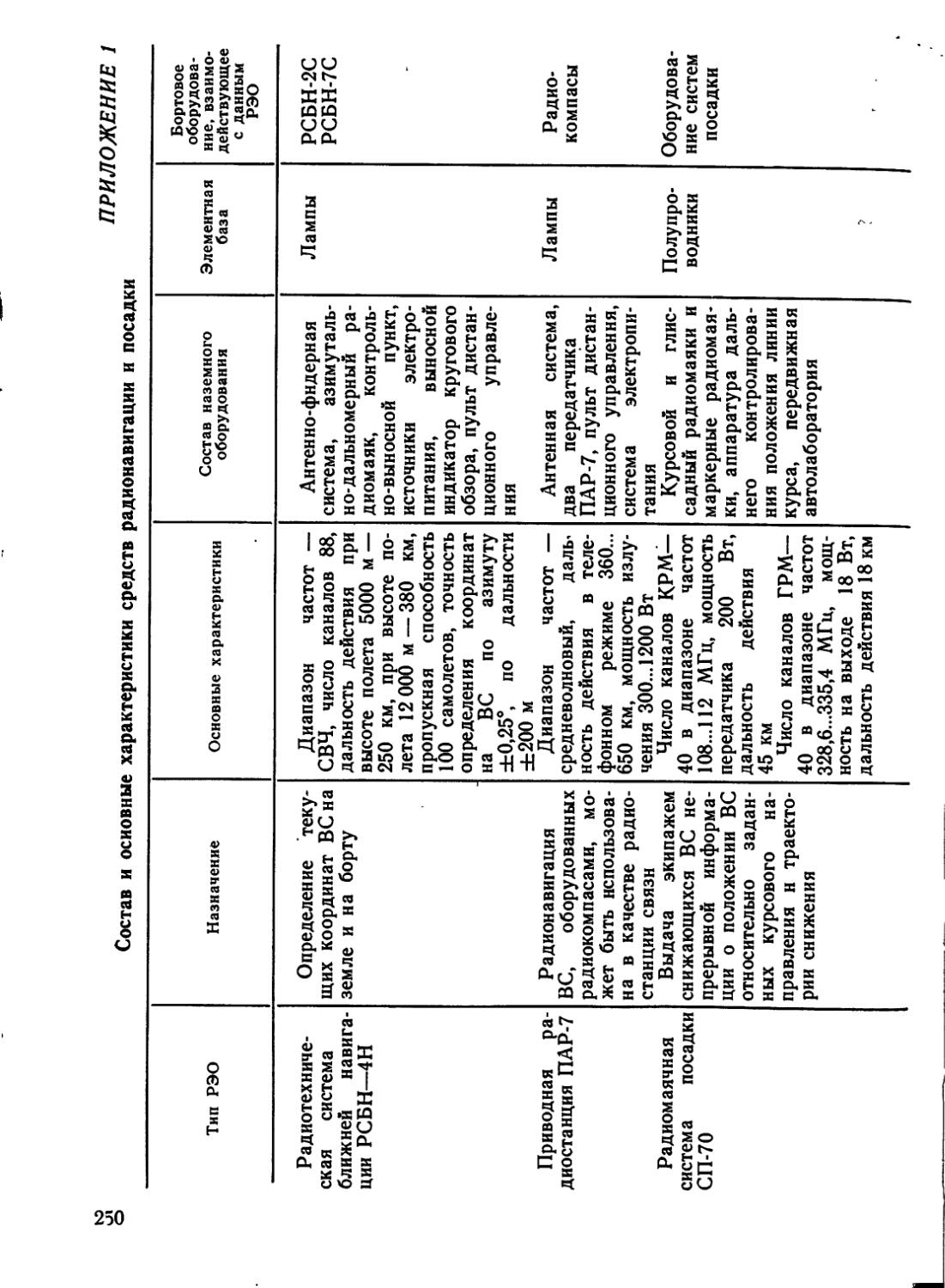
Рассмотренная технология использования РЭО для обеспечения полетов ВС является обобщенной. Она может существенно изменяться в зависимости от целей и условий полета, типа ВС, оснащения аэропортов вылета и прилета радиотехническими системами, особенностями воздушной трассы, метеоусловиями в процессе полета и т. д. Для более наглядного представления о комплексном' взаимодействии бортового и наземного РЭО в технологическом процессе радиотехнического обеспечения полетов в приложении 1...3 приведены состав, назначение и характеристики основных типов РЭО ВС и аэропортов ГА. Анализ информации, приведенной в таблицах, а также рассмотрение технологии использования РЭО, на различных этапах полета для решения задач УВД, навигации и посадки, позволяют определить место и роль каждого из типов РЭО при обеспечении производственной деятельности авиапредприятий.
Рассмотрение технологического процесса обеспечения летной деятельности, состава и назначения РЭО аэропортов и воздушных трасс позволяет произвести его классификацию по различным признакам. Наиболее важными из них следует считать назначение, принцип дей-4
ЯНШИН 4*1
ствия, диапазон частот. Проведем классификацию РЭО по указанным признакам.
По назначению все РЭО можно разделить на радионавигационные системы, системы УВД, посадки и связи. К радионавигационным системам, эксплуатируемым в настоящее время, относятся РСБН и отдельные приводные радиостанции (ОПР).
Системы УВД состоят из радиолокационных средств УВД, включающих в себя трассовые обзорные РЛС, обзорные аэроузловые, обзорные аэродромные РЛС, обзорные вторичные РЛС, посадочных РЛС, РЛС обзора летного поля, автоматических радиопеленгаторов (АРП-6, АРП-7, АРП-75); автоматизированных систем УВД, которые разделяются на трассовые, аэроузловые, аэродромные.
Радиотехнические системы посадки представлены радиомаяками типа СП (СП-50, СП-68, СП-70, СП-75), микроволновыми системами посадки (МСП) и отдельными системами посадки (ОСП).
Радиотехнические средства связи разделяются на средства командной связи, осуществляемой обычно с помощью УКВ радиостанций, и средства дальней связи, осуществляемой с помощью КВ радиостанций.
Классификация РЭО по назначению имеет определенную условность, заключающуюся в том, что некоторые типы РЭО могут применяться для решения, например, задач навигации и УВД. Действительно, оборудование РСБН, основным назначением которой является решение задач навигации, может быть использовано также для решения ряда задач УВД. Другим примером применения одного и того же типа РЭО для решения задач посадки и УВД является возможность использования для этих целей разрабатываемой в настоящее время микроволновой системы посадки. Более того, несмотря на выделение по этому признаку классификации систем связи в отдельный вид оборудования, очевидно, что они являются неотъемлемой частью любого процесса УВД, так как служат для передачи служебной информации в процессе УВД.
Другим признаком классификации РЭО может быть принцип, положенный в основу определения местоположения, траекторий или других навигационных элементов полетов ВС. Поскольку все возможные измерения навигационных параметров в радиотехнических системах в конечном счете сводятся к измерению амплитуды, частоты, фазы или времени распространения сигналов, то все радиоэлектронные системы можно разделить на амплитудные, фазовые, частотные и временные.Такой признак классификации общепринят в теории и практике радионавигации.
Анализируя приложения 1...3, можно отметить, что РЭО аэропортов и воздушных трасс ГА работает в широком диапазоне частот. Например, приводные радиостанции работают в диапазоне средних волн, командные радиостанции в УКВ диапазоне, система ближней навигации в дециметровом, а посадочные РЛС в сантиметровом диапазонах. Следовательно, РЭО можно классифицировать по диапазону частот в со-
5
ответствии с принятым делением диапазонов на длинноволновые, средневолновые, УКВ и СВЧ радиоэлектронные системы. Отметим также, что наличие преобразований сигналов по частоте также приводит к определенной условности классификации. Например, оборудованием РСБН излучаются и принимаются сигналы дециметрового диапазона, однако в процессе обработки сигналов для выделения измеряемой информации (углового положения и дальности полета ВС) используются сигналы различных частот.
Как объекты эксплуатации радиоэлектронные системы ГА характеризуются использованием в них сигналов разнообразных частот, от инфранизких до частот СВЧ диапазона. Эта особенность является существенной и должна учитываться в качестве одной из важнейших эксплуатационных особенностей РЭО ГА. Аналогичное свойство РЭО может быть отмечено также и относительно уровней их сигналов. Действительно, если обратиться к характеристикам сигналов в РЭО ГА по уровню мощности, напряжений, токов и т.д., то можно отметить, что эти параметры также имеют чрезвычайно широкий диапазон. Например, в том же оборудовании РСБН имеются сигналы мощностью в десятки киловатт (мощность передающего устройства) и сигналы мощностью в несколько микроватт (мощность сигнала гетеродина в приемном устройстве), напряжением в несколько киловольт (выходной каскад передатчика) и несколько вольт (напряжение опорных сигналов). Как и широкий диапазон частот, это обстоятельство также является характерной эксплуатационной особенностью РЭО аэропортов ГА и должно учитываться при обосновании системы их эксплуатации, например, при выборе парка измерительной аппаратуры.
Эксплуатируемое в ГА РЭО выполнено на разнообразной элементной базе. В качестве активных элементов используют электронные лампы, полупроводниковые приборы, микросхемы с различной степенью интеграции, лампы бегущей и обратной волны, клистроны, магнетроны и т. д. РЭО ГА можно классифицировать на системы, выполненные в основном на электровакуумных приборах, на полупроводниках и микросхемах. Методы эксплуатации оборудования, выполненного на разной элементной базе, имеют свои существенные особенности. Состав элементной базы может оказать решающее влияние на саму суть и организационную структуру системы эксплуатации, состав технических средств эксплуатации, квалификацию эксплуатирующего персонала, возможность автоматизации производственных процессов эксплуатации и т.д. Следовательно, элементная база является также одной из важнейших характеристик РЭО, она должна быть изучена и ее свойства учтены при разработке и обосновании системы эксплуатации.
Состав элементной базы характеризует исторический процесс развития и совершенствования РЭО, который неразрывно связан с эволюцией элементной базы. В первом поколении ВЭО основной элементной базы являлись электровакуумные приборы. Значительный прогресс электровакуумной техники позволил создать достаточно совер-6
Таблица 1
Техническая характеристика Поколение РЭО
I п ш IV
Диапазон частот, мГц 10 20 100 500
Погрешность измерений Разрешающая способ- 10-6 10~7 ю-8 10“9+1010
ность, мкВ Точность 10 100 10 1—0,1
0,2 0,1—0,5 .0,002 0,001
Входное сопротивление, МОм 1 10 1000 Более 1000
Переключение диапазонов Ручное Ручное Автоматическое Автоматическое
Индикация Лампа накаливания Газоразрядные индикаторы Светодиоды Жидкие кристаллы
Минимальная масса Десятки килограммов Единицы килограммов Около килограмма Сотни граммов
шенные радиолокационные, радионавигационные и связные системы. Однако повышение требований к качеству работы РЭО и прогресс полупроводниковой техники привели к созданию второго поколения РЭО, в которых основой элементной базы служили полупроводниковые приборы. Это позволило улучшить характеристики РЭО, снизить потребляемую мощность, увеличить надежность.
Внедрение интегральных схем позволило создать РЭО III поколения, при этом улучшились процессы обработки информации в системах радиосвязи, радиолокации и радионавигации. Однако стремление в полной мере использовать открывшиеся преимущества привело к созданию РЭО IV поколения, бурное развитие которого происходит в настоящее время. Наглядным примером влияния состава элементной базы на характеристики современной радиоэлектронной аппаратуры служит табл. 1, где приведены характеристики цифровых измерительных приборов, широко используемых при техническом обслуживании авиационного РЭО.
1.2. ВЫБОР И ОБОСНОВАНИЕ СОСТАВА РЭО.
РАЗМЕЩЕНИЕ РЭО АЭРОПОРТОВ И ВОЗДУШНЫХ ТРАСС
Выбор состава РЭО производится в соответствии с его основным назначением — радиотехническое обеспечение производственной деятельности авиапредприятия. При этом тот или иной тип РЭО выбирают с учетом его целевого назначения и качества, под которым понимается совокупность свойств продукции, обусловливающих ее пригодность
, 7
удовлетворять определенные потребности в соответствии с ее назначением. РЭО как один из видов продукции обладает многими свойствами. Качество же РЭО как продукции определяется только теми свойствами, которые определяют возможности применения его для целей радиотехнического обеспечения производственной деятельности авиапредприятия, т. е. тех потребностей, которые непосредственно следуют из назначения конкретного типа РЭО. Именно эти потребности определяют свойства РЭО, которые необходимо учитывать при оценке его качества. Указанные свойства РЭО проявляются в процессе эксплуатации инженерно-техническим составом авиапредприятий ГА. При выборе состава и типов РЭО для оснащения авиапредприятий ГА на основе оценки его качества следует определить совокупность свойств, характеризующих качество работы РЭО. При этом в числе основных свойств следует рассмотреть целевые свойства РЭО, т. е. те свойства, которые характеризуют возможность использования его для решения конкретных задач радиотехнического обеспечения производственной деятельности. Далее следует учитывать также свойства РЭО, называемые ограничительными, которые характеризуют возможности сохраняемости и безопасности при эксплуатации в условиях авиапредприятий ГА. Свойства, которые характеризуют РЭО с точки зрения удовлетворения потребностей авиапредприятия с учетом экономических затрат, составляют группу технико-экономических свойств.
Основными технико-экономическими свойствами РЭО являются его пропускная способность, надежность, приспособленность к непрерывной работе, ресурсопотребность (включает также частные показатели как трудоемкость, энергоемкость, фондоемкость и т. д.), эстетичность, трудоемкость и материалоемкость ремонтов, свойства, характеризующие качество работоспособности (дальность, точность, достоверность и т. д.).
Естественно, что эти разнообразные свойства, которыми характеризуется РЭО, должны учитываться при выборе состава и типов РЭО. Однако именно это разнообразие затрудняет количественную оценку качества различных типов РЭО. Указанную трудность можно преодолеть, если оценивать качество таким, интегральным показателем как эффективность, под которым понимают приспособленность радиооборудования для решения поставленной задачи в определенных условиях применения в течение заданного времени. На эффективность РЭО влияет множество разнообразных факторов, но для каждого типа оборудования их можно разбить на две большие группы: факторы, действующие в процессе подготовки радиооборудования к выполнению задания, и факторы, действующие в процессе решения поставленной задачи.
Учитывая, что событие, заключающееся в успешном выполнении поставленной задачи, является произведением (в вероятностном смысле) нескольких событий, то эффективность РЭО
Э — Рподг Рнад Рвып,
8
где Рподг — вероятность исправного состояния аппаратуры к началу работы; РНад — вероятность безотказной работы радиоаппаратуры при выполнении задания; РВып — вероятность выполнения задания при исправно работающей аппаратуре (зависит от точности радиоаппаратуры, квалификации операторов, помехоустойчивости, метеорологических условий и т. д.).
В общем случае Рподг, ^над и ^вып не являются независимыми величинами. Поэтому при вычислении эффективности по приведенной формуле будет допущена некоторая погрешность. Однако часто эта погрешность мала и в необходимых случаях ее можно исключить, учтя взаимозависимость между величинами РПодг и ^выи- Значения Рподг, ^над и Рзыи могут быть определены только для конкретных случаев применения конкретных типов РЭО. При этом должны быть известны назначение системы и условия ее рабочего использования.
Таким образом, эффективность РЭО — наиболее полная характеристика его качества. При помощи данного критерия можно произвести выбор РЭО аэропортов и воздушных трасс.
Оценка радиооборудования по эффективности удобна тем, что позволяет сравнивать между собой как однотипные виды аппаратуры (например, две радиолокационные станции), так и типы аппаратуры, различные по принципу действия, но предназначенные для решения общей задачи (например, радиолокационную систему посадки самолетов и систему посадки при помощи радиомаяков).
Показатели качества РЭО подразделяют на единичные и комплексные. Единичный показатель качества характеризует только одно из свойств изделия. Комплексный показатель характеризует несколько свойств, описывающих качество изделия. Единичные показатели могут быть получены расчетным или экспериментальным путем. Комплексные показатели качества определяются через единичные. Например, единичными показателями служат среднее время безотказной работы То, и среднее время восстановления Тв. Связанный с ними функциональной зависимостью коэффициент готовности Кг = Т0/(Т0 + + Тв) является комплексным показателем качества, так как характеризует как безотказность, так и восстанавливаемость РЭО.
Выбор состава и типов РЭО может производиться также на основе интегральных показателей качества, которые являются разновидностью комплексных показателей. Интегральный показатель качества показывает соотношение суммарного полезного эффекта П% от эксплуатации РЭО и суммарных затрат на его создание Кс и эксплуатацию Кэ, т. е. I = П^1(КС + Кэ). Следовательно, если количественно выразить полезный эффект, приносимый радиотехническим обеспечением производственной деятельности авиапредприятия, и оценить при этом суммарные затраты, тогда и интегральный показатель определит положительный эффект, приходящийся на 1 руб. затрат авиапредприятия на радиотехническое обеспечение его работы.
Проведем классификацию и рассмотрим требования к размещению РЭО. Одно из основных требований к размещению РЭО — обеспечение
9
тактических характеристик, например, требуемой точности и максимальной дальности действия с целью перекрытия воздушного пространства по всей трассе или внутри определенной зоны. Поскольку РЭО устанавливается на территории аэропорта, то оно должно быть размещено так, чтобы высота любого из элементов РЭО или сооружения, в котором оно размещается, не являлись летными препятствиями в соответствии с требованиями руководящих документов ГА.
Размещение РЭО должно обеспечивать получение наилучших характеристик работы, например получение возможно более высокой (но не хуж.е заданной по техническим условиям) точности определения координат, стабильности задаваемой линии курса и т. д. Данное требование также очень существенно, так как возможно влияние местных предметов, линий электропередачи, больших перепадов рельефа местности на точность и помехоустойчивость работы РЭО.
Мерой борьбы с указанным фактором является отнесение РЭО на определенное расстояние от мешающих объектов. В табл. 2 приведены минимально допустимые расстояния автоматических радиопеленгаторов от различных сооружений и местных предметов.
Многие типы РЭО работают на близких частотах, возможно влияние гармоник сигналов одного или нескольких типов РЭО на работу других объектов. Поэтому размещение РЭО должно быть таким, чтобы обеспечивалось требование минимальных взаимных помех при работе. Из-за наличия на ограниченной территории аэропорта большого числа разнообразных типов РЭО решение этой задачи часто затруднительно. Естественный способ уменьшения взаимных помех — разнесение
Таблица 2
Сооружения и местные предметы Расстояние, м
Антенны УКВ-радиостанций Фургоны автомобилей Антенное зеркало, поднятое над землей, шириной 6 м Кустарник Рвы глубиной 1—1,5 м, валы высотой 1—1,5 м Каменные или деревянные строения высотой 3—5 м Проволочные ограждения Отдельные деревья высотой до 10 м То же, высотой 10—20 м Лес Овраги, реки Отдельно стоящие здания высотой 15 м, длиной 25 м Участки КВ-радиостанций до 0,5 кВт Места стоянки самолетов Ряд домов высотой 10 м Железные дороги и металлические мосты Воздушные высоковольтные линии электропередачи 30 50 60 50 90 70 150 70 180 500 350 500 500 800 800 800 • 1000
10
Таблица 3
Объект Расстояние, м Объект Расстояние, м | Объект Расстояние, м
РСБН-ОРЛ-Т 500 МРЛ-ОЛП 1000 ОРЛ-А-АРП 60
РСБН-ПРЛ 300 ОРЛ-Т-АРП 60 ОРЛ-А-ПРЛ 50
РСБН-ОРЛ-А 650 ОРЛ-Т-ПРЛ 400 ОПРЛ-РСБН 500
РСБН-МРЛ 500 МРЛ-АРП • 300 ОПРЛ-МРЛ 800
МРЛ-ПРЛ 600 ОРЛ-Т-ПРЦ 400 ОЦРЛ-АРП 60
МРЛ-ОРЛ-Т 500 МРЛ-ПРУ 400 АРП-АРП 50
МРЛ-ОРЛ-А 500 ОРЛ-А-ОРЛ-Т 500
объектов РЭО. В табл. 3 приведены минимально допустимые расстояния между различными объектами РЭО.
Применение РЭО для решения практических задач не должно оказывать вредного влияния на окружающую среду. Требование соблюдения экологической чистоты в настоящее время является одним из обят зательных в процессе эксплуатации и соблюдение его должно быть обеспечено в процессе размещения. Один из наиболее вредных факторов на окружающую среду при работе РЭО — излучение высокочастотной энергии. Особенно опасно излучение энергии в сверхвысокочастотном диапазоне. Для уменьшения уровня СВЧ излучения объекты РЭО должны быть удалены на достаточное расстояние от мест нахождения людей, в том числе и обслуживающего персонала авиапредприятий. В настоящее время существуют нормы допустимых уровней излучения в различных диапазонах. Например, в соответствии с отраслевым стандартом ОСТ 30013-83 допустимый уровень СВЧ облучения устанавливается разным для лиц, профессионально связанных с работой на СВЧ установках и оборудовании, и профессионально не связанных с работой на них. При установлении норм стандарт предусматривает разделение СВЧ излучения на непрерывное и прерывистое.
Нормируемые параметры СВЧ облучения — интенсивность, длительность воздействия и энергетическая нагрузка на организм человека. Интенсивность облучения оценивается плотностью потока энергии в мкВт/см2. Энергетическая нагрузка W равна произведению плотности потока энергии F на длительность воздействия Т: W — = FT, Для лиц, связанных с работой на СВЧ оборудовании, уровень плотности потока энергии в непрерывном и прерывистом режимах работы не должен превышать 1000 мкВт/см2. При этом предельно допустимое значение энергетической нагрузки на организм в течение рабочего дня равно 200 мкВт-ч/см2 при непрерывном облучении и 2000 мкВт-ч/см2 при прерывистом облучении.
Уровень плотности потока энергии на рабочих местах и местах возможного нахождения людей, не связанных с работой на СВЧ оборудовании, не должен превышать 500 мкВт-ч/см2 при прерывистом облучении. Предельно допустимое значение энергетической нагрузки на ор-
11
ганизм в течение дня составляет 1000 мкВт-ч/см2. Зная значения предельно допустимого потока энергии и энергетической нагрузки на организм, определяют допустимое время пребывания людей в зоне действия СВЧ облучения: Т = W/F.
Например, при непрерывном облучении с плотностью потока энергии, равном 50 мкВт/см2, время пребывания человека, профессионально связанного с работой на СВЧ оборудовании, не должно превышать 4 ч. При одновременном воздействии непрерывного и прерывистого СВЧ облучения, например, при работе нескольких источников облучения, энергетическая нагрузка
п, п2
№'сум= 2 W'iH-l- 5 kt Winp, i=l .= 1
где nlt n2 — число непрерывных и прерывистых источников облучения; kt — коэффициент, учитывающий ослабление биологического эффекта при работе (-го прерывистого источника.
Уровень СВЧ излучения должен контролироваться путем измерения плотности потока энергии на территории авиапредприятия. По результатам измерений составляют схему распределения уровня СВЧ облучения, которую используют при организации производственного процесса на авиапредприятиях (рис. 1).
На рисунке показаны объекты РЭО, являющиеся источниками СВЧ излучения (обзорный радиолокатор ОРЛ и диспетчерский радиолокатор
Рис. 1. Схема размещения источников излучения 12
Таблица 4
Конструкция и материал Толщина, см Ослабление, дБ, для X, см
0,8 3 10
Капитальная стена здания 70 21 16
Оштукатуренная стена здания 15 — 12 8
Межэтажное перекрытие 80 — 22 20
Окна с двойными рамами — — 18 7
Кирпич 12 20 15 15
Штукатурка 1,8 12 8 —
Стекло 0,28 2 2 ——-•
Фанера 0,4 2 1 —
ДР Л), расстояния между ними и другими объектами аэропорта: аэровокзалом, ВПП, стоянкой самолетов, службой ГСМ, энергосветообес-печения полетов (ЭСТОП), командно-диспетчерским пунктом (КДП), ангаром авиационно-технической базы (АТБ), гостиницей. Уровень СВЧ излучения в месте установки ОРЛ, равный в данном случае 500 мкВт/см2, получается при высоте антенны 13,5 м и угле ее наклона +5°. Зоны ограничения вокруг радиолокатора с высоким уровнем излучения показаны пунктирными линиями. Если излучение при работе РЭО превышает допустимый уровень, должны быть приняты меры для его уменьшения. Это достигается выбором и регулировкой углов направленности антенных систем, применением защитных экранов, средств индивидуальной защиты, подъемом антенн и другими мерами. Уменьшение плотности потока СВЧ излучения достигается использованием средств ослабления. В табл. 4 приведены данные об ослаблении плотности потока различными материалами.
Направленные свойства антенных систем РЭО приводят к наличию в некоторых случаях закрытых зон, откуда не выдается информация. Поэтому одно из требований к установке РЭО — обеспечение наименьших размеров таких зон, что обычно достигается подъемом на требуемую высоту объекта и его антенной системы.
Конструктивное исполнение большинства типов РЭО требует выноса устройств индикаторных и управления, например, на командно-диспетчерский пункт аэропорта. Поэтому размещение РЭО должно быть таким, чтобы обеспечивалась возможность выноса индикаторных устройств и устройств управления.
Ряд объектов РЭО по своему функциональному назначению должен быть вынесен на значительное расстояние от основных объектов аэропорта. Например, дальняя приводная радиостанция устанавливается на расстоянии около 4 км от ВПП. Поэтому при размещении РЭО должен быть предусмотрен удобный подъезд к нему в любое время года для проведения технического обслуживания и ремонта.
13
При размещении многих типов РЭО предъявляются высокие требования к качеству территории в определенной зоне. Например, на расстоянии более 1 км в направлении излучения курсового маяка системы посадки не должно быть кустарников, леса, оврагов глубиной более 10 м, любых местных предметов высотой более 1 м. Поэтому место установки РЭО должно выбираться с учетом минимальных затрат на инженерную подготовку территории.
Большинство типов РЭО требует подачи большой мощности от источников питания. Поэтому при выборе места установки РЭО необходимо учитывать возможность обеспечения энергоснабжения при возможно малых капитальных затратах.
Перечисленные требования относились к выбору и размещению РЭО на территории аэропорта. Определенные требования должны соблюдаться также при размещении объектов на выбранной территории. При этом должны быть соблюдены как специфические требования к размещению и монтажу конкретных видов РЭО, так и требования общие для всех типов, т. е. обеспечение условий нормального функционирования, удобства оперативного использования и ТО и ремонта.
Удобство ТО и ремонта характеризуется эксплуатационной технологичностью, под которой понимают совокупность свойств РЭО, определяющих приспособленность РЭО к выполнению операций по техническому обслуживанию и ремонту, и позволяют обеспечить при этом минимально возможный уровень эксплуатационных затрат.
Эксплуатационная технологичность РЭО определяется конструктивно-производственными и эксплуатационными факторами. К конструктивно-производственным факторам относятся доступность, контролепригодность, легкосъемность, взаимозаменяемость элементов РЭО, к эксплуатационным — методы и виды технического обслуживания, состав и качество средств ТО, квалификация обслуживающего персонала. При размещении РЭО должны быть проанализированы и использованы все методы обеспечения требуемого уровня эксплуатационной технологичности.
Приведенная классификация требований к размещению РЭО на территории аэропортов и объектов является общей и применимой ко всем типам РЭО. Анализ показывает, что удовлетворение всех требований к размещению РЭО не всегда возможно,так как некоторые из требований противоречивы. Например, обеспечение максимальной дальности действия достигается увеличением высоты подъема антенных систем, однако это может привести к образованию летных препятствий. Следовательно, вопросы размещения РЭО должны решаться на основе инженерного компромисса, но при этом должны удовлетворяться основные требования.
14
1.з\ УСЛОВИЯ ЭКСПЛУАТАЦИИ РЭО
Основными факторами, определяющими условия работы РЭО, являются климатические и механические воздействия, а также действия солнечных, электромагнитных и радиационныхи излучений. Климатические условия определяются давлением, температурой и влажностью воздуха. Их принято считать нормальными, если температура воздуха находится в пределах 15...25 °C, относительная влажность — 45...75 % и давление воздуха — 650...800 ммрт. ст. При оценке влияния климатических условий на работу радиоаппаратуры принято различать следующие типы климатов: умеренный, холодный, жаркий сухой и жаркий влажный.
Наиболее неблагоприятно на работоспособности РЭО сказываются резкие перепады температуры. Например, суточный перепад температуры может достигать 40° в районах пустынь и 25° в средних широтах. Сильные механические напряжения, возникающие при этом в деталях с различным коэффициентом линейного расширения, могут привести к появлению разрушений, трещин, замыканиям электрических проводников, отслоениям проводящих дорожек на печатных платах, изменению частоты настройки в резонансных цепях и т. д.
Опыт эксплуатации показывает, что в основном авиационное РЭО работает при температуре — 60... + 60° С. Однако прямое воздействие солнечных лучей на блоки аппаратуры может существенно изменить температуру внутри них по сравнению с температурой окружающего воздуха. Так, при длительном воздействии солнечных лучей температура может отличаться от температуры окружающего воздуха на 12...35° С в зависимости от окраски блоков. Кроме того, температура воздуха сильно изменяется с высотой. Определение температуры воздуха на-высоте осложняется тем, что изменение температуры зависит также от климатических особенностей данной зоны.
Температурный режим работы РЭО существенным образом зависит также от тепла, выделяемого в результате преобразования электрической энергии в тепловую некоторыми элементами радиоаппаратуры: электронными лампами, трансформаторами, резисторами и др. Тепло, выделяемое ими, приводит к повышению температуры в блоках, что отрицательно сказывается на работе всех элементов. Таким образом, тепловой режим работы радиоаппаратуры обусловливается поступлением тепла извне и выделением его внутри самой аппаратуры.
Низкая температура приводит к потере эластичности пластмассовых и резиновых деталей, ухудшению смазки в механических узлах. Повышенная температура ускоряет старение органических материалов.
Тяжелые/гемпературные условия работы осложняются трудностями охлаждения, что обусловлено требованиями малой массы и габаритных размеров радиоаппаратуры. Условия охлаждения аппаратуры на больших высотах ухудшаются из-за уменьшения теплоемкости воздуха. Для облегчения теплового режима применяют различные системы ох-15
лаждения, усложняющие техническую эксплуатацию радиооборудования, а также термостатирование, термокомпенсацию и термоизоляцию. Для охлаждения радиоаппаратуры применяются системы охлаждения компрессорного типа с использованием жидкого хладагента.
Другими факторами, определяющими климатические условия, являются давление и влажность воздуха. В условиях пониженного атмосферного давления работает радиоаппаратура, эксплуатируемая в горной местности. Пониженное атмосферное давление не только ухудшает условия охлаждения, но и приводит к увеличению проводимости воздуха, что в определенных условиях может вызвать электрические пробои. Изменение давления вызывает изменение диэлектрической постоянной воздуха и, как следствие, изменение настройки резонансных контуров. Изменение давления может привести к таким нежелательным явлениям, как уход частоты клистронных генераторов и другим вредным последствиям.
Влага, проникающая в радиоаппаратуру, вызывает коррозию металлических деталей, понижает сопротивление изоляции диэлектриков, способствует появлению грибковых образований. Влага — одна из основных причин отказов трансформаторов и дросселей, так как приводит к ухудшению сопротивления изоляции, увеличению диэлектрических потерь, уменьшению пробивного напряжения между витками и выводами. Наличие влаги вызывает увеличение емкости конденсаторов и уменьшение сопротивления потерь в конденсаторах. В резисторах под действием влаги уменьшается сопротивление изоляции и разрушается токопроводящий слой. Пониженная влажность также ухудшает условия работы РЭО, так как ускоряет процессы старения элементов и материалов.
Естественные меры предохранения радиоаппаратуры от изменения давления и влажности воздуха — герметизация блоков или отдельных элементов, однако это приводит к увеличению массы и габаритных размеров радиоаппаратуры. Для предохранения аппаратуры от влаги применяют также защитные покрытия элементов влагонепроницаемыми лаками, заливку компаундами, специальные влагопоглотители и влагоотстойники.
Одно из опасных воздействий на радиоэлектронную аппаратуру — механические нагрузки, возникающие при транспортировке и работе. Удары и вибрации приводят к повреждениям элементов радиоаппаратуры, обрывам проводов и крепежных соединений, нарушают регулировку. Ускорения и вибрации имеют различные значения при перевозках различными средствами транспорта. Для работы РЭО особенно опасны вибрации в диапазоне частот 15...150 Гц и 175...500 Гц. В первом случае возможны резонансные явления в элементах конструкций РЭО, а во втором — резонансные колебания в элементах РЭО: радиолампах, кварцах. При этом разрушаются нити накала, места выводов металлических стержней из баллонов ламп, слюдяные конденсаторы. Появление микротрещин при этом ускоряет процесс старения материалов и 16
увеличивает коррозию. Мерами борьбы с механическими перегрузками являются применение различного рода амортизирующих устройств и рациональное размещение блоков аппаратуры в местах с наименьшими перегрузками.
На работу РЭО существенное влияние могут оказывать солнечная радиация, электромагнитные и радиационные излучения. Длинноволновая часть спектра солнечного излучения приводит в основном к нагреванию блоков, в то время как коротковолновая часть спектра оказывает фотохимическое воздействие, что способствует старению органических материалов: потере упругости, прозрачности и цвета.
Мощное электромагнитное излучение может привести к нарушению электромагнитной совместимости РЭО, а в отдельных случаях к перегрузкам входных каскадов приемных устройств и даже пробою и выгоранию кристаллических смесителей.
Радиационное излучение является неблагоприятным фактором для работы РЭО. Особенно опасен этот фактор для качества полимерных материалов, так как воздействие радиации приводит к нарушению молекулярных связей в полимерах. Это может привести к изменению их физических и электрических свойств. Сильные дозы радиационного излучения особо опасны для РЭО, выполненного на полупроводниковых приборах и интегральных схемах, так как могут привести к существенному изменению их характеристик^
Кроме того, нежелательные изменения параметров радиоаппаратуры могут быть вызваны наличием вредных примесей в воздухе: пыли, паров кислот, морской соли и т. п. При эксплуатации радиоаппаратуры приходится также учитывать действие различных биологических факторов. Например, на деревянных деталях может образоваться грибок. Особенно интенсивно он размножается при повышенной влажности и неподвижности окружающего воздуха. Пыль органического происхождения также способствует его быстрому размножению.
1.4. ОЦЕНКА СООТВЕТСТВИЯ РЭО
НОРМАМ ГОДНОСТИ К ЭКСПЛУАТАЦИИ
Все типы РЭО должны удовлетворять требованиям норм годности к эксплуатации, которые определены руководящими документами МГА, в том числе методикой оценки соответствия нормам годности к эксплуатации в СССР гражданских аэродромов. В методике приводится перечень технологических операций, которые должны быть выполнены при оценке соответствия параметров РЭО требованиям норм летной годности. Оценка состоит в сопоставлении характеристик, полученных в результате наземных и летных испытаний РЭО, требованиям норм летной годности. Для наземных и летных проверок РЭО разрабатывают соответствующие методики, для реализации которых используется кон-17
трольно-измерительная аппаратура, прошедшая соответствующую проверку.
Результаты проверок технического состояния РЭО должны быть оформлены таблицами соответствия, в которых представлены фактические характеристики РЭО. При этом должны быть проверены наличие действующих удостоверений годности РЭО к эксплуатации, состав и качество эксплуатируемой документации, электромагнитная совместимость РЭО, соответствие комплектации РЭО требованиям автоматизации заходов на посадку, наличие и соответствие требованиям средств пожарной сигнализации и пожаротушения, состояние подъездных дорог к РЭО, соответствие зданий и сооружений предъявляемым требованиям, а также дана оценка размещения РЭО в соответствии с эксплуатационно-технической документацией.
Для всех типов РЭО имеются специфические требования соответствия нормам годности, однако существуют следующие общие требования, которые должны удовлетворяться для всего комплекса РЭО аэропорта.
1. Наземное оборудование должно пройти необходимый объем испытаний и проверок и быть допущено к эксплуатации в установленном порядке.
2. Состав, содержание и качество эксплуатируемой документации должны обеспечивать эксплуатацию, обслуживание, ремонт и хранение оборудования.
3. Условия эксплуатации наземного РЭО и его размещение на аэродроме должны удовлетворять требованиям обеспечения электромагнитной совместимости.
4. Объекты УВД и радиосветотехнического оборудования аэродромов должны быть оборудованы инженерно-техническими средствами охраны в установленном порядке.
5. Объекты УВД и радиосветотехнического оборудования аэродромов должны быть оборудованы средствами пожарной сигнализации и пожаротушения в соответствии с нормативной документацией министерств и ведомств.
6. Подъездные пути к объектам УВД, радионавигации и посадки должны примыкать к дорогам общего пользования или аэропорта. <
7. Здания, сооружения объектов УВД, радионавигации и посадки должны удовлетворять требованиям, изложенным в санитарных нор- ; мах и правилах при работе с источниками электромагнитных полей высоких, ультравысоких и сверхвысоких частот, санитарных нормах и правилах размещения радио-, телевизионных и радиолокационных станций и других нормативных документах министерств и ведомств.
8. Техническая эксплуатация оборудования должна осуществляться в соответствии с Правилами технической эксплуатации электроустановок и потребителей и Правилами техники безопасности при эксплуатации электроустановок.
18
9. Мощность источников питания на участках размещения и в зоне действия радиотехнических средств навигации, посадки и УВД должна соответствовать требованиям эксплуатационной документации на конкретный тип оборудования.
10. Категория радиомаячной системы посадки (РМС) должна быть не ниже категории минимума данного аэропорта.
11. В состав РМС должны входить КРМ с контрольным устройством, ГРМ с контрольным устройством, ближний, дальний, внешний МРМ или внешний, средний, внутренний МРМ (в зависимости от принципа работы системы) с контрольными устройствами, устройство дистанционного управления радиомаяками и сигнализации их технического состояния на контрольных пунктах.
12. Передающие устройства аппаратуры КРМ, ГРМ и МРМ должны иметь 100% -ный резерв, переключение резервируемой аппаратуры должно быть автоматическое.
13. Включение, выключение радиомаяка и выбор рабочего комплекта аппаратуры должны производиться дистанционно с командно-диспетчерского пункта аэродрома.
14. КРМ, ГРМ и МРМ должны обеспечивать автоматическое переключение аппаратуры на резервный фидер электропитания при пропадании напряжения сети в основном фидере.
15. Рабочие частоты КРМ и ГРМ должны выбираться с учетом обеспечения отсутствия взаимного влияния радиомаяков, размещенных на одном или ближайших аэродромах. В тех случаях, когда противоположные направления посадки одной ВПП оборудованы РМС, работающими на одном частотном канале, либо если на аэродроме, имеющем две и более ВПП, установлены две или несколько РМС, работающих на общем частотном канале, должна быть обеспечена блокировка с сигнализацией на КДП, исключающая возможность одновременной работы этих систем.
Глава 2
ОСНОВЫ ТЕОРИИ ЭКСПЛУАТАЦИИ РЭО
2.1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА
ЭКСПЛУАТАЦИИ
Эксплуатация — комплекс мероприятий, проводимых для обеспечения требуемого качества использования авиационного РЭО для решения производственных задач авиапредприятий ГА.
Понятие эксплуатация включает в себя как непосредственно использование РЭО для решения производственных задач авиапредприятия, так и комплекс работ, проводимых с целью обеспечения требуемого качества функционирования РЭО. Обширный комплекс работ, не связанных непосредственно с оперативным использованием РЭО, называют технической эксплуатацией. Следовательно, техническая эксплуатация есть совокупность взаимосвязанных по месту, времени и объему мероприятий, которые служат для обеспечения требуемого качества РЭО в процессе его хранения, транспортировки, установки и подготовки к оперативному использованию.
Совокупность мероприятий, проводимых в определенной последовательности и протекающих во времени, образует технологический процесс эксплуатации РЭО. Простейшим примером технологического процесса являются последовательно выполняемые операции контроля технического состояния РЭО и технологические операции восстановления и регулирования РЭО по результатам контроля.
Из приведенного определения следует, что для процесса эксплуатации характерно наличие объекта эксплуатации, средств эксплуатации и людей, осуществляющих этот процесс. В качестве объектов эксплуатации будем рассматривать РЭО аэропортов и воздушных трасс ГА. Технические средства эксплуатации представляют собой комплекс средств контроля технического состояния РЭО, средства механизации и автоматизации и средства питания РЭО и т. д. Управление объектом эксплуатации и техническими средствами эксплуатации осуществляется инженерно-техническим составом авиапредприятий ГА.
Рассмотрим основные виды работ, выполняемых в процессе эксплуатации РЭО ГА (рис. 2). Прежде всего необходимо выделить использование РЭО по назначению для решения задач радиотехнического обеспечения производственной деятельности авиапредприятия (см. гл. 1). Далее следует выделить виды работ, которые выполняют при вводе РЭО в эксплуатацию. Это работы по монтажу, установке, наладке, опробированию, испытанию, т. е. тот обширный комплекс работ, который 20
сопутствует всякому процессу ввода в строй РЭО. В процессе эксплуатации возможны ситуации, когда новое или уже эксплуатируемое РЭО ставится на хранение в течение определенного времени. Работы по хранению РЭО также являются составной частью эксплуатации. Определенный объем работ приходится выполнять также при транспортировке РЭО.
В процессе эксплуатации РЭО большой объем работ проводится для поддержания его работоспособности, а также по восстановлению работоспособного состояния в случае возникновения отказов, т. е. при ремонте РЭО. Для улучшения качества работы РЭО в процессе эксплуатации возможно проведение модернизации и доработок, что является еще одним из видов работ. Необходимость поддержания требуемого качества средств измерений, используемых при эксплуатации РЭО, приводит к работам по метрологическому обеспечению процесса эксплуатации.
Из приведенного перечня работ, который может быть продолжен, следует, что в процессе эксплуатации выполняется большой комплекс разнообразных мероприятий, основная цель которых — обеспечение требуемого качества работы РЭО в процессе использования его для решения основных производственных задач авиапредприятий ГА.
Обобщение многолетнего опыта использования РЭО показывает, что требуемое качество работы авиационной техники не может быть достигнуто без выполнения широкого комплекса эксплуатационных мероприятий. В этой связи уместно отметить следующее. На определенном этапе развития техники было принято считать, что качество закладывается при проектировании изделия, обеспечивается в процессе его изготовления и поддерживается в процессе эксплуатации. Отдавая должное роли первых двух этапов жизненного цикла техники (конструирование — производство), следует все же считать, что этап эксплуатации, где именно проявляется их качество, часто является определяющим при обеспечении требуемого качества работы.
Анализ показывает, что условия эксплуатации (например, внешние и внутренние воздействия на РЭО, такие как температура, влаж-
Зксплуатация авиационного радиооборудования
I
Использование
Обеспечение работоспособности
Восстановление работоспособности
Ремонт
Техническое
Подготовка к работе
Модернизация и доработка
Дополнительные работы (хранение, транспортировка ит.д.)
Рис. 2. Основные виды работ в процессе эксплуатации РЭО
21
ность, вибрация, уровень нагрузок и т. д.) могут приводить как к ухудшению, так и улучшению условий работы РЭО по сравнению с условиями, определенными в процессе его конструирования и изготовления. Большинство эксплуатационных факторов может быть познано и сознательно изменено в процессе эксплуатации. Данное обстоятельство может быть использовано для обеспечения требуемого качества работы на этапе эксплуатации, эффективность которого при правильно построенной системе эксплуатации может оказаться не хуже эффективности методов обеспечения качества работы при проектировании и производстве.
Данное положение будет убедительно доказано в гл. 5 при анализе работы РЭО в экстремальных условиях, например в условиях сложной электромагнитной обстановки. Следовательно, необходимость в проведении рационального комплекса эксплуатационных мероприятий существует и будет существовать, поскольку существует и будет существовать проблема обеспечения требуемого качества работы создаваемых человеком технических систем.
Как и во всякой науке, в теории эксплуатации существует ряд основных понятий и определений. Наиболее важные из них стандартизированы (например, ГОСТ 18322 — 78 и 24212—80). В частности, ГОСТ 18322 — 78 определяет понятие о многих видах работ, выполняемых в процессе эксплуатации. Например, ТО в соответствии с указанным ГОСТ определяется как комплекс операций или операция по поддержанию работоспособности изделия при использовании по казначей нию, ожиданию, хранению и транспортировке. Система ТО и ремонта техники — совокупность взаимосвязанных средств, документации тех? нического обслуживания и ремонта и исполнителей, необходимых для поддержания и восстановления качества изделия, входящих в эту систему. Данное определение предполагает, что в необходимых случаях в систему ТО и ремонта могут входить материалы, запасные части и т.д.
ТО может осуществляться различными методами, при этом под методом ТО следует понимать совокупность технологических и организационных правил выполнения операций ТО. Известны следующие методы: поточный, централизованный, децентрализованный, метод ТО эксплуатационным персоналом, специализированным персоналом, метод ТО эксплуатирующей организацией, специализированной организацией и метод ТО предприятием-изготовителем.
Признаком классификации видов технического обслуживания может быть также этап эксплуатации, в течение которого это обслуживание производится. По этому признаку различают ТО в процессе использования РЭО, при хранении, в режиме ожидания, а также при транспортировании. Для изделий авиационной техники (ГОСТ 24212— 80) в зависимости от периодичности выполнения различают оперативное, периодическое и сезонное ТО, а в зависимости от условий — ТО в стационарных и полевых условиях. Метод ТО, при котором комплекс операций расчленяется на отдельные этапы и распределяется по видам 22
меньшей трудоемкости с сохранением установленной периодичности называют поэтапным.
Если организация ТО и специализация исполнителей осуществляются по функциональным системам, то такой метод называют посистемным. В отличие от него при зонном методе организация ТО и специализация исполнителей осуществляется по зонам конструкции эксплуатируемого устройства, например по зонам механических узлов, электросиловых устройств, радиоэлектронных устройств и т. д.
Как следует из приведенной классификации, существует большое разнообразие видов и методов ТО. Обоснованный выбор каждого из них отдельно или в совокупности зависит от многих факторов, основными из которых являются конструктивные особенности эксплуатируемого РЭО, состав его элементной базы, объем, трудоемкость ТО, квалификация инженерно-технического состава, оснащенность авиапредприятия средствами ТО и т. д.
Однако при выборе и обосновании видов и методов ТО в качестве основного требования к ним выдвигается необходимость обеспечения безопасности и регулярности полетов при возможно малых эксплуатационных затратах.
2.2. ПРОЦЕССЫ НАКОПЛЕНИЯ И УСТРАНЕНИЯ ОТКАЗОВ
Накопления отказов. При эксплуатации РЭО состояние эксплуатируемого оборудования изменяется. Смена состояний заключается, например, в том, что исправное оборудование может применяться по-назначению, находиться на различных формах ТО, быть в режиме хранения. Следует отметить, что нахождение РЭО в каждом из состояний может определяться многими факторами. Трудности учета этого многообразия факторов усложняются еще и тем, что влияние большинства из них носит случайный характер. Действие множества факторов, влияющих на время перехода РЭО из исправного в неисправное состояние, приводит к тому, что время наступления отказа является случайной величиной. Неисправным считается такое состояние объекта, при котором он не соответствует хотя бы одному из требований нормативнотехнической документации (ГОСТ 27.002—83). Элементы случайности присущи также характеристикам процесса восстановления работоспособности (время восстановления также случайная величина) и т. д.
В процессе эксплуатации действуют две группы факторов. Первую составляют внутренние и внешние воздействия на РЭО: старение, изнашивание, влияние внешней среда, влага, температурные воздействия и т. д. Действие первой группы факторов в конечном итоге приводит к отказам РЭО. Целенаправленные воздействия со стороны системы ТО и ремонта, представляющие вторую группу факторов, наоборот, направлены на компенсацию влияния факторов первой группы и способ
23
ствуют сохранению и восстановлению работоспособного состояния эксплуатируемого РЭО.
По характеру своего возникновения все отказы авиационного радиооборудования разделяются на внезапные и постепенные. Накопление постепенных отказов в радиоаппаратуре обусловлено относительно медленными изменениями параметров элементов под влиянием различных факторов. Обычно значения медленных изменений параметров возрастают с течением времени, что в конце концов приводит к тому, что один или несколько параметров выходят за пределы эксплуатационных допусков. Во время эксплуатации возможно также такое состояние радиоаппаратуры, когда ее выходные параметры находятся в пределах допусков, а параметры элементов уже вышли за пределы установленных допусков. Такие элементы являются потенциальными источниками отказов и должны быть выявлены при ТО.
Для своевременного предупреждения отказов радиооборудования необходимо знать и количественно описывать закономерности накопления неисправностей во времени. Знание этих закономерностей позволяет особенно определить сроки выполнения профилактических работ. Существуют различные способы количественного описания процесса накопления неисправностей во времени. Один из них основан на знании закономерности изменения параметров элементов во время эксплуатации. Поскольку процесс изменения параметров является случайным, задача описания накопления неисправностей сводится к определению моментов времени tl912, ..., tn пересечения реализаций случайной функции | (/), описывающей изменение параметра, с уровнем допуска |доП на этот параметр (рис. 3).
При решении данной задачи часто считают, что параметр | (/) в каждый момент времени имеет нормальное распределение с математическим ожиданием | (/) и средним квадратическим отклонением (/), которые в свою очередь, являются функциями времени. Если известны | (/) и (t) в любом сечении по оси времени, то вероятность того,
Рис. 3. Изменение случайной функции во времени 24
Рис. 4. Статистическая линеаризация случайной функции
что элемент исправен, равна вероятности того, что значение параметра | (ti) в данный момент времени превышает уровень допуска:
Р(Л) = Р[£('г)>адоп]= f/(5. (2.1)
а
где f (I, 0 — плотность распределения параметра £ в момент времени t.
Для определения этих вероятностей необходимо знать математическое ожидание параметра и среднее квадратическое отклонение в каждый момент времени.
При отсутствии полных статистических данных можно пользоваться методом статистической линеаризации случайной функции изменения параметра во времени. При статической линеаризации случайной функции (рис. 4) каждая реализация (/, 2) этой функции заменяется прямой вида
б(0 = Ы-^.
где — случайное начальное значение параметра; k — случайная скорость его изменения.
Математическое ожидание линейной случайности функции
F(O=lo+^t,
где £0 и &£ — математическое ожидание величин £ и £.
При практическом применении метода статистической линеаризации часто приходится встречаться с веерной и равномерной случайной функцией. Веерная случайная функция (рис. 5, а) характеризуется случайной скоростью изменения параметра и имеет следующие характеристики:
&t(0=£o+(<-fo)*; КОМо+О-ЛОД-
25
Рис. 6. Накопление отказов при постепенном изменении параметров
Для равномерной случайной функции (рис. 5, б) скорость изменения параметра постоянна, а случайным является начальное значение параметра. Равномерная случайная функция характеризуется уравнением | (/) = |0 + математическим ожиданием | (/) =
= So — ty. Таким образом, статистическая линеаризация случайной функции изменения параметров позволяет описать процесс при минимуме статистической информа
ции: в этом случае каждая линеаризация случайной функции может
быть определена по результатам измерения параметров в двух достаточно удаленных друг от друга сечениях по оси времени.
Вероятность того, что элемент исправен в любом сечении по оси времени, определяется выражением (2.1). Однако вероятность исправной работы в данный момент времени еще не определяет надежности, так как надежность есть функция времени. Чтобы определить, насколько
изменяется вероятность отказа при эксплуатации элемента в течение времени Д/ь т. е. чтобы описать процесс накопления неисправностей, можно поступить следующим образом. Определим вероятность отказа в момент времени tt и tt + Д£. По известной случайной функции | (/) это можно сделать, используя формулу (2.1). Приращение вероятности появления отказа элемента за время Д^:
Д<2 (A/) = (Q (^Ч-ДО—Q (Zf))/A^f.
Приращение вероятности отказа равно разности заштрихованных участков площади между кривой распределения и вертикальной осью при ti + Д/ и ti (рис. 6). Определив приращение вероятности отказа в достаточно большом числе сечений по оси времени, можно построить гистограмму, которая будет показывать процесс накопления неисправностей во времени.
Если воспользоваться методом статистической реализации случайной функции изменения параметра во времени, то можно довольно просто получить аналитические выражения для закона распределения времени безотказной работы.
Для веерной случайной функции плотность вероятности времени безотказной работы
где Т — t— /о’> 6 = к^/о— относительная скорость изменения параметра; 0 — = (адоп — 60)/&—характеристическое время изнашивания (время, в течение которого элемент откажет с вероятностью 0,5).
26
Для равномерной случайной функции плотность вероятности времени безотказной работы
, 1 Г (<—л>)21
(2.2)
где Т9 = — математическое ожидание времени безотказной работы эле-
мента; О/ — среднее квадратическое отклонение времени безотказной работы от математического ожидания То.
Таким образом может быть описан процесс накопления неисправностей авиационного РЭО в том случае, если возможно определить процесс постепенного изменения параметров элементов.
Процесс накопления внезапных отказов авиационного РЭО можно описать на основе статистических данных о времени безотказной работы элементов. Как показывают статистические данные, время безотказной работы в случае внезапных отказов элементов распределяется по экспоненциальному закону с плотностью вероятности f (t) = X exp (—М), где X — интенсивность внезапных отказов.
Распределение времени безотказной работы по постепенным отказам можно описать плотностью
а-т0>*
1 2а«
/(0 = ^—е , (2.3)
а у 2л
где То — среднее время безотказной работы; о — среднее квадратическое отклонение; ------—г---------—г — нормирующий множитель.
ф/ То I_____ф / t2 \
\ 6 / \ d /
В выражении для функции Лапласа Ф (0, 0 и t2 соответствуют границам случайной величины /.
Так как РЭО имеются элементы, подверженные внезапным и постепенным отказам, процесс накопления неисправностей в радиоаппаратуре определяется суперпозицией (наложением) законов, описывающих накопление внезапных и постепенных отказов. Так, если постепенные отказы описываются выражением (2.3), суперпозиция этих законов имеет вид
exp - (Z~y2 | + С2Хехр(-М, (2.4) о У 2ч [ 2а J
где C1nCt — нормирующие коэффициенты.
На основе уравнения (2.4) можно получить выражение, характеризующее интенсивность A (t) накопления неисправностей при наличии внезапных и постепенных отказов РЭО (рис. 7):
Ci —ехр — + С2 % exp (—kt)
МО----------"-р------1-------------------------------
Cl —exp I — Л*I dt+С2 exp {—kt)
о У2л J \ 2а2 }
27
При наличии достаточно полных статистических данных принципиально возможно описать процесс накопления внезапных и постепенных отказов. Однако описание только моментов наступления внезапных отказов дает малую информацию о состоянии элементов аппаратуры. В настоящее время все чаще возникает необходимость наблюдения за процессом приближения элементов радиоаппаратуры к отказам. Это особенно важно при обосновании профилактических работ.
Предотвращение отказов. Изучение процессов накопления неисправностей показало, что причинами отказов РЭО
Рис. 7. Зависимость интенсив ности отказов от времени
являются изменения параметров, которые в свою очередь объясняются накоплением физико-химических изменений в элементах, узлах и деталях РЭО. Именно поэтому РЭО в процессе эксплуатации может переходить из одного состояния в другое. Данное положение нашло отражение в ГОСТ 27.022—83 «Надежность в технике», в котором предусмотрена следующая градация состояний эксплуатируемой техники: исправное, работоспособное и предельное. В исправном состоянии объект соответствует всем требованиям нормативно-технической документации. Работоспособное состояние — это состояние объекта, при котором значения всех параметров, характеризующих способность выполнять заданные функции, соответствуют требованиям нормативно-технической документации. Предельное состояние объекта — это такое состояние, при котором его дальнейшее применение недопустимо или нецелесообразно.
Процесс предотвращения отказов в общем виде заключается в том, что при достижении параметром РЭО значения, равного упреждающему допуску (ГОСТ 24212—80), параметр определенным образом убудет возвращен в область, предусмотренную нормативно-технической документацией. Введение упреждающих допусков на параметры РЭО позволяет значения параметров разделить на три области, соответствующие трем состояниям РЭО: исправному, предотказовому (состояние, когда требуется проведение работы по предотвращению отказа) и неработоспособному. Необходимость проведения работ по предотвращению отказов, т. е. по управлению техническим состоянием, определяется в процессе ТО. В связи с этим в любой структуре ТО должна быть выработана система правил управления техническим состоянием изделия. Такая система правил составляет стратегию ТО. В системе технического обслуживания авиационной техники ГОСТ предусмотрены стратегия ТО по наработке и по состоянию.
28
Предотвращение отказов в любой системе ТО основано на определении технического состояния эксплуатируемого объекта. Следовательно, для определения технического состояния должна быть выработана мера, в качестве которой может служить наработка, показатель надежности РЭО или значение параметра, характеризующего его работоспособность. Для стратегии ТО по наработке мерой технического состояния эксплуатируемого изделия является наработка, в стратегии ТО по состоянию мерой является либо показатель надежности эксплуатируемого изделия, либо значение одного или нескольких параметров, характеризующих работоспособность. Важнейшим элементом любой системы ТО является признак, положенный в основу при определении периодичности и объема выполняемых работ. Именно этот признак положен в основу при выборе стратегии ТО.
Обобщая сведения о процессах накоплений неисправностей и приведенную ранее классификацию систем ТО, следует отметить, что систематизация и классификация любой системы технического обслуживания, в которой реализуется процесс предотвращения отказов, основаны на разделении их по видам, стратегиям и методам.
Конечная цель ТО — предотвращение отказов авиационного РЭО. Для этого необходима определенная информация о состоянии РЭО. Однако современный уровень развития средств контроля технического состояния не позволяет достаточно просто определить многие изменения, происходящие в элементах радиооборудования. Кроме того, часто нельзя с достаточной точностью выявить влияние отдельных элементов на выходные характеристики аппаратуры. Поэтому, учитывая возможность предупреждения отказов при проведении профилактических работ, все отказы РЭО можно разделить на предотвращаемые и непредотвращаемые.
Предотвращаемыми называют такие отказы, появление которых можно обнаружить по наблюдаемым изменениям элементов в данных условиях. Типичными примерами отказов такого рода могут служить отказ усилителя вследствие уменьшения крутизны характеристики электронной лампы, отказ электродвигателя из-за уменьшения высоты щеток, пробой электрического кабеля при уменьшении сопротивления изоляции и т. д. В основном к предотвращаемым отказам относятся постепенные отказы аппаратуры. Но не все постепенные отказы можно предотвратить, так как часто весьма трудно определить медленные изменения параметров различных элементов РЭО. С другой стороны, не все внезапные отказы принадлежат к непредотвращаемым, поскольку появление некоторых внезапных отказов может быть предсказано на основе изучения статистических закономерностей их возникновения во времени. Например, известно, что время безотказной работы для некоторых элементов радиоаппаратуры (реле, электровакуумные и полупроводниковые приборы и др.) подчиняется закону распределения Вейбулла.
29
Плотность вероятности при этом
h / \
7(0= — tk~1 exp ( — — |,
*0 \ *0 /
где k и /0 — параметры распределения.
Время безотказной работы ряда других элементов (изоляторы,
электромеханизмы) определяется усеченным нормальным законом распределения с плотностью вероятности (2.3).
Следует отметить, что деление отказов на предотвращаемые и непре-дотвращаемые вводится для оценки эффективности профилактических работ и до некоторой степени условно. Более того, совершенствование методов контроля радиоаппаратуры приводит к тому, что все большая часть изменений в аппаратуре может быть обнаружена и на этой основе предупреждена.
Соотношение между числом предотвращаемых и непредотвращаемых отказов различных типов радиоаппаратуры оценивается коэффициентом характера отказов
"пр (0 +"недр (0
где ппр (/) и Днепр (0 — число предотвращаемых и непредотвращаемых отказов в данном типе радиоаппаратуры.
На значение коэффициента характера отказов любого типа РЭО влияет большое число конструктивных, технологических и эксплуатационных факторов: свойства материалов и технология изготовления элементов, физические и химические воздействия на аппаратуру при эксплуатации, длительность эксплуатации и т. д.
Коэффициент характера отказов может быть определен для конкретных типов радиооборудования на основании статистических данных по отказам. Ниже приведены значения коэффициента характера отказов в процентах некоторых элементов радиоаппаратуры:
Электровакуумные приборы и индикаторы .... 60...80
Полупроводниковые приборы.........................40...60
Реле, переключатели...............................50...60
Электромоторы................................. 3 . 40...60
Резисторы, конденсаторы . . . . . . . 20...30
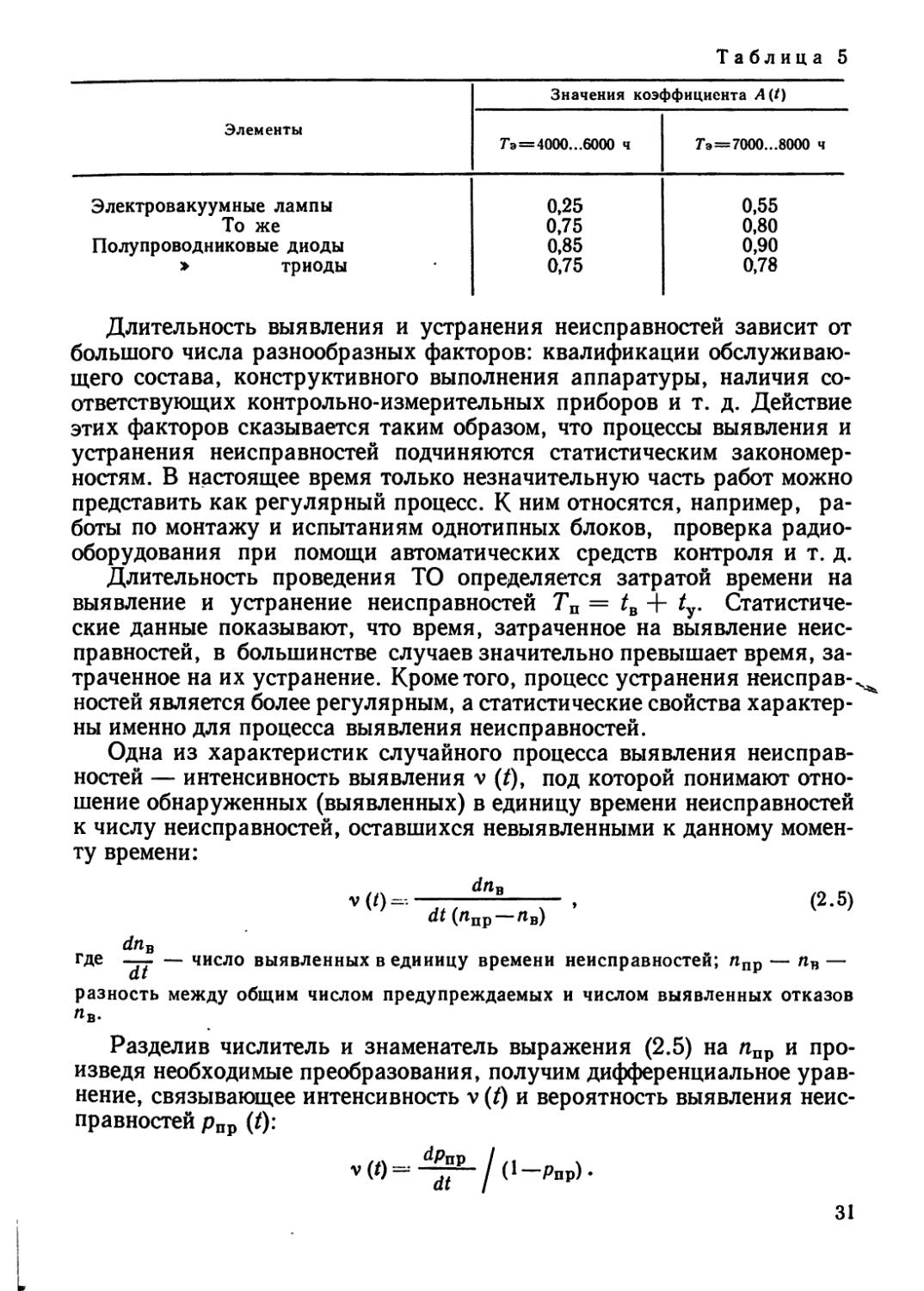
В табл. 5 приведены значения коэффициентов характера отказов при различной наработке элементов. Из таблицы следует, что коэффициент характера отказов существенно зависит от наработки оборудования. Статистические данные показывают, что в процессе эксплуатации возможно предотвратить большое число отказов авиационного радиооборудования. Число предотвращаемых отказов зависит от качества выполнения работ. Процесс предотвращения отказов в аппаратуре состоит из выявления неисправностей и операций (настройка, регулировка и т. д.) по их устранению. 30
Таблица 5
Элементы Значения коэффициента A(t)
Гэ=4000...6000 ч 7000...8000 ч
Электровакуумные лампы 0,25 0,55
То же 0,75 0,80
Полупроводниковые диоды 0,85 0,90
> триоды 0,75 0,78
Длительность выявления и устранения неисправностей зависит от большого числа разнообразных факторов: квалификации обслуживающего состава, конструктивного выполнения аппаратуры, наличия соответствующих контрольно-измерительных приборов и т. д. Действие этих факторов сказывается таким образом, что процессы выявления и устранения неисправностей подчиняются статистическим закономерностям. В настоящее время только незначительную часть работ можно представить как регулярный процесс. К ним относятся, например, работы по монтажу и испытаниям однотипных блоков, проверка радиооборудования при помощи автоматических средств контроля и т. д.
Длительность проведения ТО определяется затратой времени на выявление и устранение неисправностей Тп = tB + /у. Статистические данные показывают, что время, затраченное на выявление неисправностей, в большинстве случаев значительно превышает время, затраченное на их устранение. Кроме того, процесс устранения неисправностей является более регулярным, а статистические свойства характерны именно для процесса выявления неисправностей.
Одна из характеристик случайного процесса выявления неисправностей — интенсивность выявления v (/), под которой понимают отношение обнаруженных (выявленных) в единицу времени неисправностей к числу неисправностей, оставшихся невыявленными к данному моменту времени:
v(0- яи/"в-я;-> <2-5)
UI (Яцр ^в)
dnB гдр — число выявленных в единицу времени неисправностей; ппр — пв — разность между общим числом предупреждаемых и числом выявленных отказов пв.
Разделив числитель и знаменатель выражения (2.5) на ппр и произведя необходимые преобразования, получим дифференциальное уравнение, связывающее интенсивность v (t) и вероятность выявления неисправностей рпр (/):
31
После интегрирования
Рпр (0=1—exp — j v(t)dt 0
(2.6) 1
Таким образом, случайный процесс выявления неисправностей радиооборудования при проведении профилактических работ характеризуется интенсивностью и вероятностью выявления неисправностей.
Выражение (2.6) позволяет определить вероятность выявления неисправных элементов при любой продолжительности профилактических работ, если известна интенсивность выявления.
Если интенсивность выявления в процессе ТО постоянна, т. е. v (t)= = const = v, то выражение для определения вероятности выявления неисправностей упрощается: ;
Рпр(0=1 —ехр(—vTn). (2.7) I
Выявление неисправностей в процессе ТО носит многоэтапный характер, что следует из анализа практической работы инженерно-тех- ч нического состава по выявлению и устранению неисправностей РЭО. Весь процесс предотвращения неисправностей в РЭО можно разделить „ на следующие характерные этапы. V
1. Контроль состояния РЭО в обесточенном режиме. Неисправно- '« сти на этом этапе выявляются путем внешнего осмотра блоков и узлов, 4 проверкой прочности крепления паек и монтажа, качества изоляции, г состояния контактных поверхностей реле и т. д. В некоторых случаях 1 может производиться разборка блоков для доступа к необходимым ‘ элементам. |
2. Контроль и испытания РЭО под током. Отыскание и устранение | неисправностей на этом этапе осуществляются путем контроля режимов работы аппаратуры в нормальных или специальных условиях, замены, настройки и регулировки элементов и блоков. 1
3. Контроль качества выполненных работ по предотвращению отка-зов. Он сводится к проверке работоспособности всего комплекса РЭО и ; необходимой подстройке параметров блоков к характеристикам комп- .j лекса. *;
Поскольку процесс выявления неисправностей носит случайный ха- i рактер, возможно повторение процедур поиска и устранения неисправ- ' ностей. Следовательно, наличие нескольких этапов в процессе предот- I вращения неисправностей требует дополнить построенную "модель пре- j
дотвращения с учетом многоэтапности этого процесса. Если число этапов равно k и каждый из них характеризуется случайной длительно-стью ti и интенсивностью выявления то вероятность предотвраще- ’
ния отказов |
k ;
- S V[ t. !
Рпр(0 = 1-е . (2.8) |
32 ;
Недостаток построенной модели предотвращения отказов заключается в том, что в ней не учитываются ^предотвращаемые отказы. Действительно, в соответствии с этой моделью при достаточно большом времени ТО вероятность предотвращения равна единице, хотя при наличии непредотвращаемых отказов это не соответствует действительности. Поэтому для реальных процессов предотвращения неисправностей результат определения вероятности предотвращения по формулам (2.7) и (2.8) должен быть скорректирован на величину, пропорциональную доле непредотвращенных при данной системе технического обслуживания отказов.
Регулярный процесс выявления неисправностей характерен тем, что заранее известны последовательность и продолжительность каждой операции по выявлению неисправностей. Примером регулярного процесса может служить профилактическая проверка параметров радиооборудования при помощи автоматической проверочной установки. Вероятность того, что неисправные элементы не будут обнаружены в данном случае, обусловлена двумя причинами: недостаточной точностью измерительной аппаратуры, что может привести к пропуску имеющихся отказов, вероятность невыявления неисправности по этой причине обозначим через 0; недостатком времени технического обслуживания. Вероятность выявления неисправностей в последнем случае пропорциональна длительности проведения технического обслуживания, т. е. равна а Тп, где а = ----коэффициент пропорциональности, ха-
рактеризующий производительность работ.
Считая первую и вторую причину невыявления неисправностей независимыми событиями, выражение для вероятности выявления неисправностей в случае регулярного процесса можно представить в виде
Рпр(О = (1-0)аГп, , (2.9)
что подтверждает зависимость этой вероятности от характеристик средств контроля.
2.3. ЭФФЕКТИВНОСТЬ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
Система технического обслуживания РЭО относится к классу сложных систем. Анализ показывает, что для системы ТО характерно наличие всех признаков сложной системы. Действительно, в ней взаимодействует большое'число разнородных элементов (разнообразные типы РЭО, средства ТО, обслуживающий персонал), имеющих единую функциональную цель — радиотехническое обеспечение производственной деятельности авиапредприятий. Между отдельными частями системы ТО существуют сложные функциональные связи. Поэтому как всякая сложная система система ТО характеризуется разнообразными показателями. Часть этих показателей характеризует экономические затраты 2 Зак. 2262 33
на функционирование системы, другие связаны с оценкой качества работы эксплуатируемого—РЭО. Некоторые показатели дают оценку трудозатрат на проведение операций ТО. Приведем показатели системы технического обслуживания, предусмотренные ГОСТ 18322—78.
Средняя продолжительность ТО определяется как математическое ожидание продолжительности Тt одного ТО данного вида при п ТО за п
определенный период эксплуатации, т. е. Тср = ^Ti/n. Аналогично определяют среднюю трудоемкость и среднюю стоимость ТО. Средняя суммарная трудоемкость Тт.о — математическое ожидание Тт.о. суммарной продолжительности nt ТО за определенное время, т. е.
^т.о” 2) ^Т,О.ЛГ
Z=1 1
Аналогично определяются средняя суммарная трудоемкость и стоимость ТО. Удельная суммарная продолжительность ТО — отношение средней суммарной продолжительности ТО к заданной наработке t, т. е. Туд = T^Jt. Так же определяют удельную суммарную трудоемкость и удельную суммарную стоимость ТО. Другие показатели системы ТО определены ГОСТ 27.002—83.
Коэффициент готовности — вероятность того, что объект окажется в работоспособном состоянии в произвольный момент времени, кроме планируемых периодов, в течение которых применение объекта по назначению не предусматривается. Коэффициент технического использования — отношение математического ожидания интервалов времени пребывания объекта в работоспособном состоянии за некоторый период эксплуатации к сумме математических ожиданий интервалов времени пребывания объекта в работоспособном состоянии, простоев, обусловленных ТО, и ремонтов за тот же период эксплуатации.
Коэффициент оперативной готовности — вероятность того, что объект окажется в работоспособном состоянии в произвольный момент времени, кроме планируемых периодов, в течение которых применение объекта по назначению не предусматривается, и, начиная с этого момента, будет работать безотказно в течение заданного интервала времени.
Коэффициент оперативной готовности характеризует надежность объектов, необходимость применения которых возникает в произвольный момент времени, после которого потребуется безотказная работа на определенном интервале времени. До этого момента такие объекты могут находиться как в режиме дежурства (при полных или облегченных нагрузках, но без выполнения заданных рабочих функций), так и в режиме применения — для выполнения других рабочих функций. В обоих режимах возможны возникновение отказов и восстановление работоспособности объекта.
34
Таблица 6
Система посадки Диспетчерский радиолокатор
Составляющие затрат Эксплуатационные расходы
тыс. руб. % тыс. руб. %
Амортизационные отчисления 17,6 36,6 8,1 37,4
Отчисления на капиталь- 5,0 10,4 2,3 10,6
ный ремонт
Техническое обслужива- 10,9 22,7 10,6 49,0
ние и текущий ремонт 3,0
Летные проверки 14,6 30,3 0,73
Прямые суммарные за- 48,1 100 21,53 100
траты на эксплуатацию 43,0
Заработная плата 2,76 25,01 4,7
Расходные материалы 0,2 19,1 0,2 2,0
Запасные части и инстру- 4,693 44,1 3,0 27,6
менты в том числе:
электровакуумные при- 4,459 — 1,83 —
боры 0,064 0.97
полупроводниковые при- — —
боры 0,17
другие запасные части и инструменты — 0.2 —
Электроэнергия 2,64 25,0 2,554 23,4
Топливо 0,407 \9 0,438 4,0
Показатели, характеризующие коэффициенты готовности, технического использования и оперативной готовности являются комплексными показателями надежности эксплуатируемого РЭО. Введением их в показатели системы ТО подчеркивается тот факт, что характеристики системы ТО существенным образом влияют на показатели качества эксплуатируемого РЭО, в том числе на надежность его работы. Поскольку надежность РЭО оценивается также единичными показателями надежности, характеризующими такие свойства РЭО, как безотказность, долговечность, ремонтопригодность и сохраняемость, все единичные показатели этих свойств также используются в теории и практике эксплуатации. Определение и методы вычисления этих характеристик изучаются в курсе надежности.
Анализ опыта эксплуатации РЭО показывает, что авиапредприятия несут большие затраты на проведение ТО. В табл. 6 приведена примерная структура затрат на радиотехническое обеспечение полетов по некоторым объектам. Затраты на эксплуатацию в различных аэропортах и географических зонах неодинаковы, однако порядок значений величин показывает, что стоимость радиотехнического обеспечения производст-2* 35
венной деятельности-достаточно высока. Обращает на себя внимание, что среди эксплуатационных расходов большую часть составляет заработная плата обслуживающего персонала, что свидетельствует о больших трудозатратах на ТО. Естественно поэтому поставить вопрос об эффективности использования РЭО в авиапредприятиях ГА, для чего необходимо выработать соответствующий критерий.
Критерий эффективности радиотехнического обеспечения и системы его ТО должен установить связь между характеристиками РЭО, характеристиками системы технического обслуживания и основными показателями работы авиапредприятия. Ввиду многообразия связей между этими характеристиками аналитическое выражение такого критерия получается чрезвычайно громоздким и трудным для анализа. Поэтому влияние системы ТО на характеристики РЭО часто оценивают с помощью частных критериев. Например, качество процессов предотвращения неисправностей можно оценить по критерию, который назовем эффективностью предотвращения. Поскольку одна из основных задач ТО — предотвращение отказов для обеспечения требуемого уровня надежности РЭО, критерием эффективности может служить отношение показателей среднего времени безотказной работы Тооб РЭО,обслуживаемого в заданной системе ТО, к такому же показателю То, РЭО, эксплуатация которого проводилась бы без технического обслуживания, т. е.
^ = 7’ооб/П. (2.Ю)
Ценность критерия увеличится, если в нем удастся соединить показатели системы ТО и характеристики эксплуатируемого РЭО. Для упрощения вывода будем считать, что РЭО работает в период нормальной эксплуатации, т. е. применим экспоненциальный закон надежности. Следовательно, вероятность отказа обслуживаемого и необслуживаемого РЭО Qo6 (0 = 1 — Q (t) = 1 —
При малой наработке 0об(0^^/Тоб; Q Следовательно,
^ = ro6/T0-Q(/)/Qo6 (О-
Вероятность отказа для обслуживаемого и необслуживаемого РЭО зависит от числа отказов п и поб соответственно, поэтому Qo6 (Z) = no6/W; Q (0 = nIN. Отсюда W = n/noQ.
В процессе предотвращения отказов часть из них по ряду причин не будет выявлена при ТО, и они проявятся в процессе работы. Поэтому качество выявления неисправностей можно оценить с помощью вероятности выявления, статистически определяемой как доля выявленных пв в процессе ТО отказов к числу ппр предотвращенных отказов:
Рпр (0 “ Лв (0 /Лпр •
36
Рис. 8. Зависимость эффективности технического обслуживания от вероятности предотвращения отказов
пв п
С учетом сказанного выражение W можно представить как
W ~ п/поб = п/п— пв.
Подставив значение nB (t) в полученный критерий, имеем 1 1_______________________________
1—“"Рпр (О 1 1 (0 Рпр (О
Полученный критерий показывает, что эффективность процесса предотвращения отказов зависит от характеристик объекта эксплуатации и качества выполнения ТО. Об этом
свидетельствует зависимость критерия от коэффициента А (0, который характеризует объект эксплуатации (его элементную базу) и вероятность предотвращения рпр (0, которая зависит от организации процесса ТО и оснащения его необходимыми средствами эксплуатации (рис. 8).
Качество ТО можно оценить также коэффициентом эффективности ТО
Произведя преобразования в выражении для эффективности предотвращения, получим
1 1 1
«7 =---------------- ; U7--------------------------- •
1 A (t) Рпр (0 । ппр пв 1
«пр
Для установления явной зависимости эффективности предотвращения отказов от времени выполнения ТО (рис. 9) в полученный критерий под-
ставим выражения (2.6) и (2.9) для вероятности предотвращения отказов. Тогда в случае статистического характера
w (0=-----------------------
1— Л (0 11 — е где Т — длительность ТО.
Рис. 9. Зависимость эффективности ‘ технического обслуживания от его длительности при 0 = 0,2
37
Для регулярного процесса предотвращения имеем аналогичное выражение
1Г (О =-------!----—- • (2.11)
1—Л (/) (1 —0) —S-
* по
Зависимости, рассчитанные по полученным выражениям, для некоторых характерных случаев показывают, что на эффективность ТО существенно влияет соотношение между предотвращаемыми и непредо-твращаемыми отказами.
2.4. СТРАТЕГИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
ПО НАРАБОТКЕ
Стратегия ТО по наработке определяется как стратегия, согласно которой перечень и периодичность выполнения операций определяются значением наработки изделия с начала эксплуатации или после капитального или среднего ремонта. Использование данной стратегии предусматривает единые для всех однотипных элементов определенных систем перечень и периодичность выполнения работ по ТО. В современном РЭО применение такой стратегии целесообразно для элементов, не имеющих ярко выраженного показателя качества, который удобно было бы измерять в процессе эксплуатации, однако интенсивность их отказов возрастает с течением времени.
Анализ отказов современного РЭО показывает, что в конструкции многих типов РЭО имеется сравнительно небольшое число элементов с повышенной интенсивностью отказов (магнетроны, клистроны, антенные переключатели и т.д.). Хотя число таких элементов обычно невелико по сравнению с числом массовых элементов РЭО (резисторы, конденсаторы, микросхемы, лампы, полупроводниковые приборы и др.), большая интенсивность отказов этих элементов приводит к ухудшению показателей надежности, что в свою очередь отрицательно влияет на безопасность и регулярность полетов. Отказы таких элементов чаще всего носят внезапный характер. Внезапные отказы приводят к увеличению времени ремонта, что ухудшает такие показатели системы как коэффициенты готовности и технического использования эксплуатируемой техники. В современных условиях, пожалуй, единственным приемлемым способом предотвратить отказы этих элементов является их своевременная замена. Правило замены элементов должно быть таким, чтобы обеспечить наименьшие в среднем потери при эксплуатации и повысить надежность РЭО в целом. Однако успешное решение этой задачи возможно, если будет найдено, например, аналитическое выражение, позволяющее отыскать оптимальные значения показателей работы РЭО в зависимости от показателей системы ТО и показателей надежности работы элементов. Большое практическое значение этой задачи 38
привело к ее решению многих советских и зарубежных исследователей, однако наиболее полное и методически стройное решение найдено проф.
Е. Ю. Барзиловичем на основе использования современных математических методов.
Итак, следуя указанному подходу, поставим задачу определить оптимальное значение ресурса элементов, эксплуатирующихся с применением стратегии ТО по наработке. При решении задачи будем считать, что выполняются следующие условия:
отказы элементов возникают только при работе и независимы;
отказы наступают мгновенно и время их появления сразу же фиксируется;
элементы заменяются либо при проведении ТО (плановая замена), либо при отказе.
Среднее время замены элемента в плановом порядке обозначим через Тъ среднее время замены элемента при отказе через Т2.Так как при замене элемента при отказе часто требуется дополнительное время на отыскание отказа, будем считать, что выполняется условие 7\
В качестве показателя системы ТО, на основе которого будем решать задачу определения оптимального значения наработки, по истечении которой элемент должен быть заменен при эксплуатации по данной стратегии, примем коэффициент оперативной готовности, физический смысл которого состоит в вероятности застать элемент в исправном состоянии в момент времени t и проработать после этого момента в течение времени х. Положим, что времена плановых замен элемента случайны и образуют последовательность независимых, одинаково распределенных случайных величин с функцией распределения J (О, т. е. образуют процесс восстановления.
Процесс восстановления описывается функцией восстановления, определяемой как математическое ожидание числа восстановлений, происшедших до момента /, т. е. Н (/) = М (Aff) или интенсивность восстановления [2] h (t) = Известно также, что при достаточно большом времени эксплуатации коэффициент оперативной готовности Р (х, t) стремится к своему стационарному значению, т. е. lim р (x,t)= = р (х) при оо. Определим значение р (х, t) через функции J (О, F (О и Н (t) и найдем его стационарное значение при / 0. Рассмотрим
возможные пути реализации случайного события, состоящего в том, что элемент РЭО будет работать безотказно в промежутке (t,t + х).
1. Исправный элемент не планируется заменять в промежутке (0,0 и он не отказал в интервале (0,/ + х). Вероятность этого события равна
[1-FG+x)][1~J(0L (2.12)
2. В некоторый момент | (0 t) закончилась замена элемента, на дальнейшем интервале (|, 0 замена исправного элемента не планируется и в промежутке времени (|, /+х) элемент не отказал. Посколь
39
ку величина | может принимать любые значения от 0 до t, то, используя формулу полной вероятности, вероятность второго события определяется как
t
f [l-G(/-a)][l-F(/ + x-5)]dW(g). (2.13)
b
Следовательно, событие, заключающееся в исправной работе на интервале (/ + х), является суммой перечисленных двух несовместных событий, поэтому вероятность его равна сумме (2.12) и (2.13), т. е.
t
р(х. O = [l-G(0j[l_F (<+*)] + ]• [l-G (t-g)][l- F(t. I о
Для получения стационарного значения р (х, /) при оо, т. е. значения р (х), воспользуемся узловой теоремой восстановления. Суть этой теоремы состоит в том, что для неотрицательной невозрастающей функции Q (t), определенный при всех t и Q (t) < оо
t оо
lim I Q(t —u)dH(u) =— Г Q(u)du.
/~>оо J P J
0 0
где p — математическое ожидание времени между заменами элемента по причине отказа либо после выбранного ресурса.
В нашем случае Q (/) = П — G (/)] [1 — F(t+x)].
Следовательно,
оо
PW-— f 11-G(0] 11-F(t + x)]dx. (2.14)
И о
Математическое ожидание р времени между заменами элемента определим по формуле полного математического ожидания как сумму математического ожидания времени работы элемента без отказов и замен оо
f [1 — G (/)] [1 — F (/)] dt, доли времени на замены отказавших эле-о
оо
ментов 7\ I F (/) dG (t) и доли времени на предупредительные заме-b
оо
ны исправного элемента Т2 f G(t) dF (t), т. e. b
H = f [1-6(0] U-P (01 dt+7\ J F(t)dG(O+Tj G(t)dF (t). (2.15)
0 0 0
40
G учетом (2.14) выражение для стационарного значения р (х) при нимает вид
J [1—G (01 [1-F(t +x)]dt о
f + F(04G(/) + rJ [1-f (OHG(0
0 0 0
Для дальнейшего исследования полученного выражения обозначим /+* t
j [1-f (01di = f [l-F(Z + x)]df = i|>(/, x). (2.17)
t b
Подставляя (2.17) в (2.16), получим
f i|)(/,x)dG(0
px = —------2-------------------• (2.18)
J IW'Oy+T^+^-TJFWdGit) о
Обозначая далее (t, 0) = A (();i|> (/, 0) + 7'2+(T1 — T2)F (t) = В (t), выражение (2.18) сводим к виду
f 4(0dG(0
P(x) = ^-------- (2.19)
f B(OdG (/) 0
С учетом того что A (t) >0 и В (t) >0, полученное для р (х) выражение является дробно-линейным функционалом относительно G (/).
Для получения интересующего нас решения по отысканию максимума значения р (х) к полученному функционалу применим теорему В. А. Каштанова, суть которой применительно к нашему результату означает, что экстремальные значения функционала типа (2.19) достигаются при функциях распределения вида
( 0 Gi(x) = { j
при Xi <Tf; при Xi > Т/,
(2.20)
i = 1, N,
где Gi (х) — функция распределения времени между моментами окончания предупредительных замен элементов в системе.
Поскольку экстремум функционала достигается при G£ (xf) вида (2.20), это означает, что элементы необходимо заменять через детерминированное время т£. Следовательно, применение теоремы В. А. Каштанова позволяет свести задачу нахождения экстремального значения коэффициента оперативной готовности к исследованию выражения (2.19) как функции одного переменного. При этом максимум этого функционала 41
(максимальное значение коэффициента оперативной готовности) будет обеспечен при замене элементов через детерминированное время т, т. е. в функционале (2.19) необходимо положить
Г 0 при t т;
7(0= , [ 1 при t > т.
С учетом (2.21) функционал (2.19) преобразуется к виду f[l — F (<+*)]dt , ч о
р(х, Т)=—------------------------------
.[ [ 1 -F (/)) dt + Т2+ (Тх-Г2) F (т)
(2.21>
(2.22)
Для отыскания максимального значения коэффициента оперативной готовности (2.22) необходимо продифференцировать по х и полученный результат приравнять нулю. Тогда
f (.Т+х) . -F(t)+X(t) [ (l-F(/)]dz
1 —F(x) J
О
1-^(т)
i-F^+xy
1
Ti —T
1 — F (t) Г Г
7~< [l-F(t + x)]dt- \ [\ — F(t)]dt •
I— F(t-T-x) J J
0 0 J
(2.23)
Полученное уравнение имеет хотя бы одно решение (корень уравнения). Действительно, левая часть корня является положительной величиной, ибо равна отношению двух положительных чисел. Сравним правую часть с левой при крайних значениях т = 0 и т = оо, учитывая, что х' (/) >0. Если т0, тх, т2,..., тп корни уравнения, наибольшее значение р (х, т) достигается при наименьшем положительном корне т0, так как функция max р (х, xf) является монотонно убывающей по
Для проведения практических расчетов уравнение, определяющее максимум коэффициента оперативной готовности, необходимо упростить. В частности, на практике оперативное время работы обычно существенно меньше среднего времени безотказной работы, т. е. выполня-t
ется условие х < f [1 — F(t)]dt. Следовательно, 1 — F (/ + х) 1 — о
— F (t) + [1—F (/)]' х = 1 — F (t) — f (х)х, и уравнение (2.23) преобразуется к виду
f [1 —F (/)] dt-xF(x)
J [ 1 - F (0J dt+Т2-(Л -Т2) F (т) о
42
Дифференцируя по т упрощенное уравнение, приравнивая нулю полученный результат, получим выражение для определения аргумента, соответствующего максимальному значению р (х, т):
т
а -Г (т)+X (т) f [ 1 -F (OJ dt - ~Гг х* (т). (2.24)
Ti — T2 + * J
О
Если режим эксплуатации элементов такой, что выполняется еще одно приближенное условие, а именно Т2 + (т) < 1, то уравнение (2.24) еще более упрощается и сводится к виду
т 1
---—-------1 ----- • (2.25) Ti + x '
l_f (T) + X(T)f[l-f (0J dt о
Уравнения (2.24) и (2.25) можно использовать при практических расчетах оптимального времени предупредительных замен элементов.
Расчеты с использованием уравнений (2.24) и (2.25) целесообразно выполнять с помощью вычислительных машин или путем построения графиков. Для проведения расчетов необходима следующая исходная информация: выражение для функции интенсивности отказов X (/); среднее время 7\ замены отказавшего элемента; среднее время Т2 исправного элемента при его предупредительной замене. Источником получения этих данных является обработка статистических данных по результатам эксплуатации, при этом эмпирическая функция X* (t) должна быть сглажена по одному из известных методов математической статистики. Обычно в качестве аппроксимирующей функции при сглаживании кривой интенсивности отказов выбирают кривую вида
где a, Ь, у — коэффициенты, характеризующие начальное значение и скорость изменения X (/).
На основании интенсивности отказов находят функцию распределе-t
г 1 K^dt я
ния F (t) = 1 — е о . Аргумент х задают условиями использования эксплуатируемого оборудования. Данная исходная информация позволяет построить график, на оси ординат которого откладывают отношение Т2 /(7*! — Т2 + х), если пользуются выражением (2.24), или т
~т х , если пользуются выражением (2.25). В точке пересечения т т
построенной МОНОТОННОЙ функции С прямой -yi-'—y?- х- ИЛИ т ^_х определяется значение корня т0, соответствующее максимальному значению коэффициента оперативной готовности при данной стратегии ТО.
Для ориентировочных расчетов полезными окажутся данные таблиц, в которых приведены результаты расчета т0 при аппроксимирую-43
Таблица 7
а, отказов/ч2 а 6, отказов/ч т0 при значениях отношения Т2/(7\+х)
0,05 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
1,05—1,25 0—0,08 5 7 10 12 15 20 30 40 50 80 10
0,95 0—0,04 6 8 12 20 24 30 37 65 115 200 20
0,004 0,90 0—0,04 6 9 13 21 26 34 46 68 120 250 21
0,85 0—0,02 6 9 15 21 27 36 50 75 128 310 22
1,10—1,25 0—0,03 7 10 16 22 28 37 51 76 130 315 25
0,0015 0,85—1,05 0—0,3 8 13 18 24 30 40 57 80 140 340 37
1,10—1,25 0—0,02 9 14 20 25 32 42 58 82 145 345 40
0,001 0,85—1,05 0—0,02 10 16 25 30 40 52 70 НО 150 400 42
1 ,10—1,25 0—0,012 12 20 27 35 45 57 75 120 160 410 43
0,0006 0,85—1,05 0—0,012 15 23 30 40 50 60 85 140 230 500 60
0,0004 0,85—1,05 0—0,008 20 27 45 55 60 80 100 200 300 600 70
0,00015 0,85—1,05 0—0,003 30 45 60 90 ПО 140 200 250 400 1000 120
0,0001 0,85—1,5 0—0,002 35 50 75 100 140 180 260 360 600 1300 150
0,00006 0,85—1,05 0—0,00012 50 75 120 150 200 250 350 500 700 1700 200
Таблица 8
То при значениях отношения Т2/(Т\-]-х)
а, отказов/ч2 ь, отказов/ч 0,05 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0.9 То, ч
0,01 0—0,2 3 5 8 12 15 20 25 30 100 7,
0,008 0—0^6 4 6 9 13 17 22 27 35 120 8,
0,006 0—0,12 5 7 10 15 19 25 32 45 140 10
0,004 0—0,08 6 8 12 17 22 28 35 50 150 12
0,003 0—0,06 7 9 14 18 25 32 40 60 200 17
0,002 0—0,04 8 11 17 22 28 37 48 70 230 21
0,0016 0—0,032 9 12 19 25 33 44 58 76 260 25
0,0012 0—0,024 Ю 14 21 29 37 49 65 90 280 29
0,0008 0—0,016 12 17 26 35 45 60 72 100 340 37
0,0006 0—0,012 14 20 30 40 52 65 82 115 380 43
0,0004 0—0,008 17 24 37 50 62 80 100 140 450 54
0,0003 0—0,006 19 28 42 57 72 92 120 165 500 63
0,00026 0—0,005 21 31 47 62 80 102 127 175 550 72
0,002 0—0,004 23 34 52 70 88 НО 145 190 600 80
0,00015 0—0,003 28 40 59 77 100 120 160 220 670 93
0,0001 0—0,002 33 46 71 98 125 150 200 270 850 НО
0,00008 0—0,0016 36 53 81 107 138 175 226 310 950 130
0,00006 0—0,0012 44 62 92 125 160 205 260 350 1050 150
0,00004 0—0,0008 53 77 115 152 196 250 320 430 1300 185
0,00003 0—0,0006 60 85 132 117 225 285 370 500 1500 215
0,000025 0—0,0005 66 95 145 193 247 312 400 540 1600 240
0,00002 0—0,0004 74 J08 163 216 275 350 450 600 1800 270
0,000016 0—0,00032 84 119 181 242 307 390 500 760 2000 300
0,000014 0—0,00028 90 128 193 257 330 417 535 720 2150 325
0,000012 0—0,00024 95 139 209 279 355 450 575 755 2450 350
0,00001 44 0—0,0002 105 153 229 305 390 492 635 850 2550 385
щей функции % (/) = at* + b (табл. 7) и 1 (/) = at + b (табл. 8). В последних столбцах таблиц приведены расчеты среднего времени безот-
казной работы TQ = f [1 — F(t)] dt. b
2.5. СТРАТЕГИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
ПО СОСТОЯНИЮ
Стратегия ТО по состоянию—это стратегия, согласно которой перечень и периодичность выполнения операций определяются фактическим состоянием изделия в момент начала ТО.
Данная стратегия ТО — более прогрессивна, и стремление к ее использованию вызвано тем, что планово-предупредительная система ТО не позволяет устранить противоречие между возросшим объемом работ и требованием обеспечения необходимого качества функционирования авиационной техники.
При использовании стратегии ТО по состоянию объем и периодичность работ определяются по результатам непрерывного или периодического контроля технического состояния каждого изделия. Периодичность контроля при этом может назначаться индивидуально для каждого изделия, например, на основе прогнозирования его технического состояния. Признаком, на основании которого выполняется та или иная операция ТО, служит предотказовое состояние РЭО. В зависимости от способов определения предотказового состояния различают два вида стратегии ТО по состоянию: с контролем параметров и уровня надежности. В стратегии по состоянию с контролем параметров признаком предотказового состояния является значение параметра РЭО, при этом предотказовое значение параметра устанавливают расчетным или опытным путем и указывают в нормативной документации. Операции по ТО назначаются при достижении параметром предотказового состояния. Безопасность полетов при такой стратегии обеспечивается за счет раннего обнаружения неисправностей и своевременного их устранения. Стратегия по состоянию с контролем параметров используется в системе ТО таких РЭО, отказы которых влияют на безопасность полетов. Естественно, улучшение качества эксплуатации может быть достигнуто при использовании систем контроля технического состояния. Поскольку в процессе определения технического состояния РЭО могут быть ошибочные решения, эффективность системы ТО по состоянию в существенной мере будет зависеть от характеристик средств контроля. Для установления факторов, влияющих на экономическую эффективность ТО по состоянию с контролем параметров, разработаем техникоэкономический критерий эффективности, воспользовавшись при этом методами теории статистических решений.
. Если при планово-предупредительной системе ТО решение о проведении определенных видов ТО принимается априорно, без установле-
45
ния фактического состояния эксплуатируемого РЭО, то в системе ТО по состоянию проведения операций ТО предшествует процедура определения технического состояния РЭО. Следовательно, при хорошем техническом состоянии РЭО в проведении ряда операций по ТО необходимость отпадает. Именно в этом суть преимущества системы ТО по состоянию с контролем параметров. Однако эта стратегия окажется более выгодной только при определенных условиях, которые и предстоит выявить с помощью устанавливаемого критерия.
При установлении фактического состояния РЭО (исправного или неисправного) с помощью системы контроля и возможных ошибочных решений могут быть следующие заключения о техническом состоянии РЭО:
Исправное
Вероятность состояния
Р
Неисправное . . q
Решение
Исправное
Неисправное
Исправное
Неисправное
Условный риск Сопр
СоПр-^Ст.0 £опр4“£нв ^•опр+^т.о
В качестве условных рисков приняты потери (затраты) СоПь на определение технического состояния РЭО, Ст.о — на операции ТО, выполняемые по результатам определения технического состояния, Спв — потери вследствие невыполнения оперативной задачи, так как к радиотехническому обеспечению производственной деятельности авиапредприятия может быть допущено неисправное РЭО. Составляющие рисков могут быть определены в каждом конкретном случае для любого типа РЭО.
Средний условный риск
R — Р [(1 а) ^опр "4~ а (^опрН- Ст.о)] + <7 IP (Сопр4- Снв)Н-+ 0 — Р) (Сопр + Ст.о).
Поскольку в планово-предупредительной системе ТО при любом обслуживании затраты равны Ст.о, то критерий у = Ст.о//? может служить технико-экономическим критерием эффективности системы технического обслуживания. Следовательно,
Ст.о ______________________________
Р ((1—ос) Сопр-|-а (Сопр + Ст.о)]4- q [Р (СопрН-Снв4-( 1 — Р) (Сопр4- Ст.о)]
(2.26)
В выражение для полученного критерия, кроме чисто экономических затрат Ст.о, СоПр, Снв, входят вероятности ошибочных решений аи0. Эти величины определяются характеристиками объекта эксплуатации и характеристиками средств контроля технического состояния. Следовательно, полученный критерий эффективности устанавливает связь между надежностными характеристиками эксплуатируемого РЭО, показателями системы контроля и экономическими факторами. Наиболее наглядно преимущества системы ТО по состоянию с контролем параметров проявляются, если определение ТО будет производиться 46
безошибочно, т. е. при а = 0 = 0. В этом случае из (2.26) следует, что У^Ст.о^опр + ?СТ.О), ИЛИ у = (Сопр/Ст о) + ? •
Преимущества системы ТО по состоянию еще более возрастут, если затраты на определение технического состояния будут существенно меньше затрат на ТО, т. е. Сопр < С?,о. В этом случае у = q"1.
Из последнего следует также вывод о том, что стратегия ТО по состоянию с контролем параметров особенно эффективна при эксплуатации высоконадежных типов РЭО. В реальном процессе ТО соблюдение условия Сопр < Ст.о- возможно при использовании эффективных средств контроля технического состояния РЭО. В наибольшей степени этим условиям удовлетворяют автоматизированные системы контроля.
Другой разновидностью стратегии ТО по состоянию является стратегия ТО с контролем уровня надежности. Признак технического состояния изделия при такой стратегии — возникновение отказа, т. е. операции по ТО проводятся при отказах. Следовательно, ее использование возможно только для изделий авиационной техники, отказы которых не влияют на безопасность полетов. Использование стратегии по уровню надежности предполагает контроль надежности на основании статистических данных по отказам группы однотипных изделий.
Использованию данной^ стратегии на практике должен предшествовать комплекс организационно-технических мероприятий, основные из которых следующие:
сбор и обработка статистической информации для оценки уровня надежности на основе статистических методов оценивания. Задача этого этапа заключается в получении достоверных оценок фактического уровня надежности;
разработка методики и определение допустимого уровня надежности;
разработка методики сравнения допустимого уровня надежности с фактическим;
разработка рекомендаций по поддержанию требуемого уровня безотказности.
Такими рекомендациями могут быть как конструктивно-технологические меры, так и эксплуатационные факторы (введение дополнительных работ по ТО, облегчение режимов эксплуатации и т. д.). В качестве показателя фактического уровня надежности может использоваться параметр потока отказов со (/), который удобно вычислять на основе статистических данных по эксплуатации парка однотипных изделий. Исходной информацией при этом является число наблюдаемых в процессе эксплуатации объектов, наработка объектов на отказ, число отказов объектов. В качестве критерия эффективности системы ТО при использовании стратегии по состоянию с контролем надежности используют один из комплексных показателей надежности, например коэффициент технического использования. Следует отметить высокую экономическую эффективность данной стратегии, поскольку ее применение 47
позволяет полностью использовать ресурс изделия. Однако это эффективно только в случае, если отказы изделия не приводят к большим потерям в производственной деятельности авиапредприятия.
Практическое использование стратегии по уровню надежности заключается в том, что через определенные промежутки времени (рекомендуется ежемесячно, ежеквартально и ежегодно) вычисляют значение параметра потоков отказов. Исходная информация при этом — число однотипных элементов N, число однотипных образцов п и наработка Т.
Уровень надежности однотипных элементов контролируют путем сравнения фактического числа отказов пф с допустимым пд. Допустимое число отказов можно определить по значению потока отказов эксплуатируемого оборудования. Повышение фактического числа отказов по сравнению с допустимым пд свидетельствует о существенном снижении надежности и необходимости разрабатывать мероприятия по ее повышению.
2.6. СТРУКТУРА И ХАРАКТЕРИСТИКИ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ ЭКСПЛУАТАЦИИ РЭО
Эффективность системы радиотехнического обеспечения производственной деятельности авиапредприятий в значительной степени зависит от уровня эксплуатационного обеспечения РЭО ГА. Совершенствовать техническое обслуживание РЭО следует путем автоматизации основных технологических процессов. Выполняемые в процессе ТО технологические операции контроля технического состояния РЭО, принятие решений об управляющих воздействиях на РЭО для поддержания требуемого качества функционирования РЭО представляют собой составляющие процесса управления ТО РЭО. Замкнутый цикл, состоящий из процедур контрольно-восстановительных работ, позволяет представить процесс ТО в формализованном виде. Подсистема управления техническим состоянием РЭО является составной частью технологического процесса радиотехнического обеспечения и управления полетами.
Входными сигналами подсистемы оперативного управления техническим состоянием РЭО (рис. 10) являются заявки на выработку управляющих воздействий для перевода РЭО в состояние, обеспечивающее максимальную эффективность ее использования в технологическом процессе радиотехнического обеспечения. В зависимости от содержания заявки подсистема вырабатывает соответствующий набор управляющих воздействий на РЭО или ее отдельные функциональные узлы. Состав управляющих воздействий в значительной степени определяется методами и стратегиями ТО. Управление техническим состоянием РЭО основано на применении стратегий ТО: по ресурсу, уровню надежности и контролю параметров в соответствии с ГОСТ 24212—80.
Информация в подсистеме управления техническим состоянием РЭО обрабатывается в автоматизированных системах контроля (АСК) и централизованной системе контроля и управления (ЦСКУ).
48
Рис. 10. Схема управления техническим состоянием РЭО
АСК используется для идентификации технического состояния РЭО, в ЦСКУ принимаются решения и формируются команды о проведении определенного набора управляющих воздействий для выполнения поступающих на вход подсистемы заявок.
Эффективность работы подсистемы будет зависеть от характеристик его отдельных звеньев. В общем случае выражение для эффективности можно записать в виде функционала
Эс-м|>(Г, /). (2-27)
где ф (5, 0 — функция эффективности звеньев подсистем; £ — вектор выходных характеристик звеньев.
В предположении аддитивности влияния качества функционирования отдельных звеньев на эффективность всей подсистемы оценку эффективности можно представить как
k
2 (2.28)
1
где 3i — эффективность £-го звена подсистемы: At — весовой коэффициент, определяющий влияние Z-ro звена на эффективность всей системы.
Критерии (2.27) и (2.28) можно использовать для синтеза и анализа альтернативных вариантов подсистем с учетом факторов, существенным образом влияющих на состояние комплекса радиотехническо
49
го обеспечения и управления полетами в целом. К ним можно отнести технико-экономические и временные потери из-за вывода РЭО как основных информационных звеньев из контуров управления для выполнения операций ТО и текущего ремонта.
При оценке эффективности отдельных звеньев и технологических операций, выполняемых в процессе управления техническим состоянием РЭО, наряду с обобщенными критериями можно использовать различные частные критерии. В качестве примера рассмотрим один из методов оценки эффективности контрольно-регулировочных операций в пределах стратегии ТО по фактическому состоянию с контролем параметров.
Технологические операции регулирования параметров РЭО представляют собой комплекс управляющих воздействий, направленных на восстановление требуемого уровня технического состояния РЭО при его ухудшении в процессе эксплуатации. Стохастический характер изменения параметров РЭО, статистический характер погрешностей из- . мерений, а также влияние ряда других субъективных и объективных факторов (например, временные свойства процессов регулировок, квалификация оператора и т. д.) приводят к тому, что процесс регулировок РЭО в общем случае характеризуется статистическими свойствами.
В качестве критерия эффективности контрольно-регулировочных операций можно выбрать известное отношение среднего времени безотказной работы оборудования, на котором проводятся контрольно-регулировочные работы Тооб, к среднему времени безотказной работы необслуживаемого оборудования То: W = Тооб/Т.
Эффективность регулировочных работ
W =--------> (2.29)
* । ппр
Л Лпр
где ппр — число предотвращаемых отказов; п — число отказов обслуживаемого оборудования; пв — число неисправностей, выявленных при техническом обслуживании.
При использовании стратегии ТО с контролем параметров пПр определяется числом контролируемых параметров РЭО, п — общим числом параметров, характеризующим работоспособное состояние РЭО, отношение ппр/п — методической достоверностью контроля DM, а отношение пв/ппр— инструментальной достоверностью контроля DK (см. гл. 3). Кроме того, выражение (2.29) не учитывает возможности появления события, заключающегося в возможном внесении неисправности при проведении контрольно-регулировочных операций вследствие ошибок контроля и некачественного проведения операций регулирования.
50
Учитывая эти обстоятельства, эффективность контрольно-регулировочных операций можно представить в виде
’ (23°)
1 — (рпр —<7вн)
где Рпр — вероятность предотвращения отказов по контролируемым параметрам РЭО путем их своевременной регулировки; <?вн — вероятность внесения отказов по контролируемым параметрам РЭО при их регулировке.
Проанализируем выражение (2.30) для выявления факторов, влияющих на эффективность контрольно-регулировочных операций. Для упрощения анализа целесообразно рассмотреть случай однопараметрического РЭО, когда его работоспособность полностью характеризуется одним параметром и производится его контроль. В этом случае методическая достоверность контроля DM = 1, а выражение для эффективности контрольно-регулировочных операций примет вид
-----!---- . (2.31)
1 Рпр + ^вн
Событие, происходящее с вероятностью рпр, будет заключаться в совместном выполнении двух независимых событий: правильного обнаружения вышедшего за пределы поля допуска контролируемого параметра с вероятностью 11 — 01 и регулировке его в поле допуска с вероятностью у. Следовательно,
Рпр = (1~₽)т> (2.32)
где 0 — вероятность признания неисправной системы в качестве исправной.
Аналогично получим
^вн^аО— у), (2.3.3)
где а — вероятность признания неисправной системы, в действительности находящейся в исправном состоянии.
Вероятность установки параметра в поле допуска определится как ь
Т = р>(£в)^в. а
где а и b — соответственно нижнее и верхнее значение эксплуатационного поля допуска параметра; А (£в) — плотность распределения отрегулированного параметра, которую в дальнейшем будем называть регулировочной функцией.
Регулировочная функция в значительной мере определяет качество операции регулирования, а ее вид зависит от многих факторов. К ним относятся: правило регулировки (например, регулировка параметра до номинального значения, регулировка до любого значения параметра внутри поля допуска); конструкция регулировочного органа и форма регулировочной характеристики; время, отводимое на выполнение регулировочной операции; квалификация оператора и ряд других факторов.
51
Таким образом, подставляя (2.32) и (2.33) в (2.31), получим следующее выражение для эффективности контрольно-регулировочных операций:
и ! о
1 - (1 - ₽) f А (5в) +а • 1 - f /1 (gB)
а ' а '
(2.34)
Процесс контроля для регулировки целесообразно осуществлять по предупредительному допуску на параметр, отличающемуся от эксплуатационного допуска на величину е (признак предотказового состояния).
Считая, что параметр и погрешность измерения распределены по нормальному закону с параметрами (т^ (I), (% (/)) и (тх — 0, ат) соответственно и принимая одно из правил регулировки, например, когда отрегулированный параметр будет распределен по нормальному закону с параметрами | |, выражение (2.34) примет вид:
1_
V2F
а
О|(0
е
1 а6(0
52
/b—e.—m.(t)—a (t)x x /a+е—mE(0—
ф -------S-------- — ф --------5----5---
\ )
[1_0f±^L)+0(^L.]l
I \ a5» / 1 <Чв 'I
(2.35)
где Ф (x) — функция Лапласа.
Проанализируем выражение (2.35) для выявления влияния правила регулировки параметров на эффективность регулировочных работ. Плотность распределения отрегулированного параметра Д (|в) в достаточной мере характеризует качество регулировочных операций, а вид ее в значительной мере определяется стратегией регулировки. Рассмотрим правило регулировки параметра до номинального значения. Пусть регулируемый параметр распределен по нормальному закону
1 2а? (О
a. ----------------е
1/2л<76(/!)
Регулировка параметра при идеальной контрольно-измерительной аппаратуре заключалась бы в установлении параметра £ отбракованных образцов РЭО в процессе контроля равными их номинальным значе-чениям (рис. 11).
Однако при допущении нормального распределения погрешности
измерения
/2(т, 0 = ——?-----е
У2лат(0
2а? (П
отрегулированный параметр будет распределен по нормальному закону (считаем £ и т независимыми и £в= £'„+?) с плотностью распределения:
(T-"W
НЫ=—=:-----е
У2л ат(0 где
Рис. 11. Процесс регулировки параметра в номинальном значении
2а? (О
53
При регулировке в поле допуска операцию регулирования осуществляют с таким расчетом, чтобы установить значение параметра в пределах поля допуска, т. е. при идеальной контрольно-измерительной аппаратуре отрегулированный параметр распределялся бы по полю допуска по закону равной вероятности:
1 b—а О
fi (с) —
а < с Ь\
b\ а<с.
С учетом погрешности измерения, распределенной по нормальному закону, плотность отрегулированного параметра можно вычислить с оо оо
помощью выражения f (|в) = f f (с, |в — с) de или f (£в) = | f (£в — — оо —оо
— т, т) dr.
Используя формулу композиции законов распределения, получим
Ш.) = f ft (Ъ-С) fl (С) de = J f(c)fa„-c)dc Ь — оо —оо
+ pi(c)№-c)d<H-f ft(c)ft(ta-c)dc. (2.36)
а b
Первое и третье слагаемые в выражении (2.36) равны нулю. Исключая их, получим выражение для плотности распределения отрегулированного параметра
1 Г 1 О/т2
= _!_ Г ф I ф / «zzb \
Ь—а |_ I от(<) / \ ат(0 I
Регулировки параметров заменой функциональных элементов РЭО наиболее характерны для нового поколения РЭО, выполненного на мик-роэлементной базе, когда параметр, вышедший за пределы поля допуска,.регулируется заменой печатной платы.
Можно предположить, что отрегулированный параметр будет иметь распределение аналогичное распределению параметра в момент начала эксплуатации РЭО
fi(c)=
У2л с,
„ «*2 с— тс
2aJ е с
где /пс = Вп-54
Рис. 12. Зависимость плотности распределения отрегулированного параметра от стратегии регулировки: / — до номинального значения; 2 — заменой функциональных элементов; 3 — в поле допуска
вочных работ
Учитывая погрешность измерения и применяя формулу композиции законов распределения, получим
оо -И~'»с)2 (SB~C)^
Г 1 2<Т« 2ат(0
Н5в) = -Г------
J 2лос ot (/) — оо
Известно, что при композиции двух нормальных законов распределения образуется нормальный закон с параметрами т%в = тс и = = + 0? (0> т- е- плотность распределения отрегулированного
параметра
-(Sb-^c)2
..... 1
У2«(<7»+<7*(0)
Наиболее эффективной с точки зрения достижения максимума эффективности регулировочных работ является регулировка параметра до номинального значения (рис. 12).
При применении регулировки внутрь поля допуска (рис. 13) повышения эффективности регулировочных работ можно добиться уменьшением погрешностей измерения.
Рассмотренный пример показывает, что качество операций, в данном случае операций по регулировке параметров РЭО, определяет эффективность всего процесса ТО. Кроме того, из изучения технологической операции эксплуатационного регулирования РЭО следует также, что на качество ТО существенно влияют характеристики средств технического обслуживания, в данном случае погрешности средств контроля.
55
2.7. УПРАВЛЕНИЕ ТЕХНИЧЕСКИМ СОСТОЯНИЕМ РЭО ПРИ РАЗЛИЧНЫХ СТРАТЕГИЯХ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
Суть управления техническим состоянием в процессе ТО состоит в уменьшении отказов РЭО в процессе эксплуатации. Найдем аналитическое выражение для параметра потока отказов при различных стратегиях ТО при описании интенсивностей отказов функциями следующих трех видов (рис. 14): X (/) = К (0 = *о + а/; X (/) = Хо + Ь (tx — t).
С помощью указанной кусочно-линейной аппроксимации возможно описание функции X (/) для систем, характеризующихся как внезапными, так и постепенными отказами.
Предотвращение отказов состоит в замене элементов РЭО. Следовательно, в произвольный момент эксплуатации t наработка элементов /пор после их последней замены будет случайной величиной. Обозначим плотность вероятности этой наработки через f (/х; /), тогда параметр потока отказов
t
О
Следовательно, изменяя наработку элементов РЭО по определенной стратегии, можно изменять параметр потока отказов. Каждая стратегия ТО будет при этом характеризоваться определенной плотностью / (/х; /). Другими словами, уп-
Рис. 14. Интенсивности отказов различных элементов:
равление параметром потока отказов осуществляется путем изменения наработки элементов системы. Однако при использовании стратегии ТО по состоянию управлять потоком отказов можно также и путем регулировки параметров без замены элементов. Это должно быть учтено в выражении для со (/) путем введения дополнительного сомножителя Р (/), т. е.
t
<>* (0 = ₽ (ОрЮ f (G; 0<Ю-о
Найдем плотность распределения наработки от момента последней замены i для случая эксплуатации по уровню надежности. Для этого весь период эксплуатации (0,/) разобьем на г одинаковых интервалов А/. Предположим, что наработка элемента принимает одно из значений 0, А/, 2Д/, ..., гД/. Если ни на одном из интервалов замен не произойдет, то наработка составит гД/. Вероятность этого
гДР
- J K(t)dt
Apl'nopS'AC П = е ° (2.37)
Определим вероятность того, что отказ и замена элемента произойдут на первом интервале, а в следующем периоде (г — 1) Д/ отказов не произойдет.
56
Эта вероятность
AG (r-l)Af
J X(t)dt — J K(t)dt Лр[^пор = (г — О Д'; 0 = 1 l~e° Je ° . (2.38)
AG
- J K(t)dt о
(2.39)
Событие, состоящее в том, что наработка составит (г — 2)Д/, может реализоваться следующим образом: на первых двух интервалах или последовательно произойдут два отказа, или отказ произойдет на втором интервале, а на дальнейших (г — 2) интервалах отказов не наступит. Вероятность этого события
I - J K(t)dt
Др [0юр = (г~2) /] = 1 J— е ° _ +е
2AG . (Г— 2)AG
/ J — f K(t)dt
AG II о
X \ 1 — е /J е
Аналогично для любого v-ro интервала может быть получена вероятность Дрэпер — VA0 О- Вычисляя вероятности противоположных событий, определенных выражениями (2.37), (2.38) и (2.39) как
(^пор < t) = 1 —Др Gnop — гД/j 0 »
и обобщая эти выражения для произвольного интервала V, получим.
P*(tnop<(r~vA0; 0 = 1- 2 Др(/пор = (г-0 Д<1. л.
х=0
Подставив в полуденный результат выражения (2.38) и (2.39) для бесконечно малых Д/, найдем функцию распределения времени наработки элемента /пОр:
G
-f KWdt
0
? Gnop
(2.40)
1 —e
1
Плотность распределения f (0, t) времени наработки определяем путем дифференцирования (2.40):
A(0; 0 =
t G >
— J A,(G)d* J K(t)dt
M*i)e ° +S(/i—Z)e°
0
где 6 (/x — t) — дельта-функция Дирака.
Данный результат позволяет найти параметр потока отказов для различных видов функции X (/):
при Х(/) = Хо
/i(G; 0 = | +
1 *’ Io t,>t,
следовательно,
t
<о (0 =f %0 [Хо е-^’+б (G—0 e-x«<‘]d/1 = X0. о
57
при X (/) = Хо+ati
(Xo + aG) e
+ 6(/i-0e
где Ф (x) — функция Лапласа.
При длительной эксплуатации (/ —> оо) из последнего выражения следует, что существует установившееся значение параметра потока отказов
t
Рис. 15. Зависимость параметра потока отказов от времени при управлении по различным стратегиям: / — с заменой только по отказам; 2 — с заменой по отказам и выработке ресурса; 3 — с заменой по ложной тревоге и отказам
I2 *0 2а Г
1 —Ф I Т7=“ I ’
L \ Д/2а /_
Математическое ожидание числа отказов за период (/ь t + tn) в установившемся режиме при эксплуатации N однотипных элементов:
п (М = ®ст гилг.
Следуя данной методике, можно получить выражения для параметра потока отказов в случае использования стратегии по ресурсу и стратегии ТО по состоянию с контролем параметров. Сравнительная информация о параметрах потока отказов при всех стратегиях ТО приведена в табл. 9.
В выражении (2.42) а—вероятность ошибки первого рода, т. е. вероятность ошибочного решения о замене тех элементов, которые проработали бы безотказно на предстоящем интервале контроля длительностью р—вероятность
ошибки второго рода, т. е. вероятность ошибочного решения о допуске к эксплуатации тех элементов, которые откажут в промежутке до следующего интервала контроля tK.
Полученные результаты проанализируем на основе приведенных выражений для со (/), а также графиков для © (/) при различных стратегиях технического обслуживания.
При использовании стратегии по наработке для всех видов функции X (/) существует установившееся значение параметра потока отказов. При X (/) — = const параметр потока отказов не зависит от времени (рис. 15, а), что
58
Стратегия ТО
Вид функции к (0
Установившееся значение <оСт
Таблица 9
Математическое ожидание числа замен
По уровню надежности
Х(/)=%0+а/1
X (/) = Лф
wict (О — Хо
____ А>о
®2ст(О = *о + е 2 1 —
<°1СТ (0 — *о
Лет — ®1СТ^И^о
С заменой по отказам и выработке ресурса
X (^)=Х04~^1
Лет —
По состоя- К (t) = Хо
нию с контролем параметров
% (/)=Х0+а/1
<МО=0*о
«2 (0 = 0 1*о + VeWa 2(1-аГ“*ф(:Г^=+*к1/-~)+ I Г £ L v==l W М I
(2.42)
п (^т) —
= т(а-—Х0/к)
при (m+ 1) > /к > min
свидетельствует о том, что замены элементов не изменяют параметр потока отказов, т. е. они неэффективны.
При использовании второго правила замен (с заменой по отказам и выработке ресурса) при X (/) = X = const параметр потока отказов также не изменяется, т. е. и в этом случае назначение ресурса для элементов подобного типа нецелесообразно. При X (/) = Хо + также существует установившееся значение параметра потока отказов (рис. 15, 6), которое стремится к Хо в случае замен только по отказам или к со2ст (О ПРИ заменах элементов по отказам и назначенному ресурсу. При этом введение предупредительных замен по ресурсу дает определенный выигрыш в надежности эксплуатируемого РЭО.
При использовании стратегии ТО по состоянию с контролем параметров также существует установившееся значение параметра потока отказов (рис. 15, в). При этом снижение параметра потока отказов происходит как за счет уменьшения числа предупрежденных отказов, так и за счет обновления элементов, заменяемых вследствие ошибочных решений с вероятностью а. При этом выличина со*/ = (1 — есть значение параметра потока правильно произведенных предупредительных замен элементов. Последнее обстоятельство еще раз подтверждает установленное ранее положение о том, что система ТО по состоянию с контролем параметров эффективна только в том случае, когда фактическое состояние РЭО определяется с помощью систем контроля, обладающих высокой точностью и достоверностью.
Приведенные результаты показывают, что при использовании любой из рассмотренных стратегий возможно управление параметром потока отказов эксплуатируемого РЭО, т. е. управление его техническим состоянием. Это управление может быть реализовано в технологическом процессе ТО в соответствии с структурной схемой рис. 2.9. Выходными сигналами являются заявки на выработку управляющих воздействий для перевода РЭО в исправное состояние. Состав управляющих воздействий определяется принятыми методами и стратегиями ТО. При этом наиболее эффективное управление возможно при использовании для контроля и управления централизованных систем контроля и управления ЦАСКУ).
2.8. ОБОСНОВАНИЕ ХАРАКТЕРИСТИК СИСТЕМЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
Основной задачей, которая возникает при разработке системы ТО для авиационного РЭО, является выбор и обоснование характеристик системы профилактических мероприятий. При этом под профилактическими будем понимать мероприятия, направленные на предупреждение отказов РЭО. Выбор определяется условиями оперативного использования данного типа оборудования, требованиями к надежности его работы, конструкцией аппаратуры, наличием резервных блоков или каналов и т. д.
После выбора типа системы профилактики необходимо определить основные характеристики этой системы: периодичность и длительность проведения профилактических работ, а также построить план-график выполнения профилактических операций различных узлов РЭО. Характеристики любой системы профилактики определяются наиболее важными требованиями к ней (например, достижение наибольшей эффективности использования РЭО, минимальной стоимости проведения профилактических работ и т. д.). Поскольку одна из основных характе-60
ристик любой системы ТО — периодичность, рассмотрим методику обоснования периодичности профилактических работ.
Обоснование периодичности ТО по критерию наибольшей эффективности использования РЭО. Основной задачей в данном случае является определение оптимальной периодичности работ. Оптимальная периодичность проведения профилактических работ действительно существует, так как увеличение времени между очередными профилактиками может привести к увеличению простоев РЭО из-за его отказов в процессе работы между очередными профилактиками. С другой стороны, при уменьшении периодичности профилактических работ хотя и уменьшаются простои вследствие внеплановых ремонтов, но возрастают простои РЭО при проведении профилактик.
За критерий эффективности использования РЭО в данном случае примем произведение коэффициента технического использования на вероятность безотказной работы в промежутках между очередными об-служиваниями, т. е.
Рэ.и = ^и Р (7"пр)- (2.43)
Коэффициент технического использования есть отношение математического ожидания интервалов времени пребывания объекта в работоспособном состоянии за некоторый период эксплуатации к сумме математических ожиданий интервалов времени пребывания объекта в работоспособном состоянии, простоев, обусловленных ТО, и ремонтов за этот же период эксплуатации.
Профилактические работы можно разделить на два вида: профилактический контроль и профилактическое восстановление, поэтому целесообразно раздельно рассмотреть методику обоснования периодичности профилактического контроля и профилактического восстановления. Профилактический контроль проводится для тех типов или элементов РЭО, в которых отсутствует явно выраженный процесс накопления неисправностей (например, радиооборудование с преобладанием непредо-твращаемых отказов).
Влияние периодичности профилактического контроля на эффективность использования радиооборудования можно определить по формуле (2.43) при условии, что р (/) — e-w, т. е.
Рэ.и —
ТР
+ Тс. п + Тс.в
Тпр.к \
Т'о.пФ /
(2.44>
где Гпр к — периодичность профилактического контроля; Тр — время работы радиооборудования; Тс п—суммарное время простоев, затраченное на профилактику; Тсв — суммарное время простоев, затраченное на восстановление.
Для сокращения записи при дальнейших преобразованиях выражения (2.44) введем следующие коэффициенты: /пк = (То.пф+Тв)/ТПр.к^ ак=Тп/То.пф; Ьк=Тв/Т0,Пф. Очевидно, что /пк характеризует частоту ТО, а коэффициенты ак и &к показывают относительные затраты времени, отводимого на профилактические и восстановительные работы,
61
т. е. определяют временные затраты на обеспечение 1 ч безотказной работы РЭО. Учтем, что на практике часто соблюдаются равенства:
Ж Т'о.пФ Лпф» Л>.В ~ ^В Лпф*> Тс.п ~ Тц
где пПф — число отказов профилактируемого радиооборудования за время Тр.
Учитывая принятые обозначения и допущения, выражение для эффективности использования радиоаппаратуры можно записать так:
1 / 1+*к \
Рэ.И = ' 1 —1—/т m А бХР ~ ™’
1 + аК/Пн + ^К \ mK /
Оптимальное значение периодичности профилактического контроля можно определить, исследовав полученное выражение на экстремум. После дифференцирования по тк получим
1 + *К Г 1 + *к1 Г 1+^к1
(1+^к + «к'Ик) ехр — ----- — лк ехр —--------Ь-0.
т к |_ тк J [ тк J
Из физического смысла следует, что
Г I 1+М тк ф 0, 1 + Ьк -=£ оо и ехр — (--- =# 0;
L \ J
14-Ьк (1 + 4~ Дк тк) — лн = 0.
тк
Следовательно,
ак тк—ак тк (1 -|-6к)— (1 —М2 — 0 •
Решив это выражение относительно тк, найдем оптимальную частоту приведения профилактического контроля
mKopt^----—
Тв ' ^о.пф.
П.пФ 14-4 —— Тп
(2.45)
Оптимальная частота профилактических проверок зависит от отношения Тп/То.пф и значений ак и Ьк (рис. 16).
Оптимальная периодичность профилактического контроля определяется подстановкой значения /nK(jpt в выражение для Тпр:
Т’о.пф+Т’в ЗТоп.ф
гпр .Kopt — ~
Шк°Р‘ 1 + V 1+(4То.пф/7’п)
62
Таким образом, наибольшая эффективность использования РЭО получается при частоте контроля, определяемой выражением (2.45):
Рэ.итах~П—ак О + М +
+ *к] 1 ехр
(2.46)
где d = I 1 +
Рис. 16. Зависимость оптимальной частоты профилактического контроля от удельных затрат
Таким образом, эффективность использования зависит от частоты контроля и удельных затрат ак и Ьк (рис. 17).
Как следует из выражения (2.46), эффективность использования зависит от характеристик надежности РЭО (среднего времени безотказной работы Т0.Пф, среднего времени восстановления Тв) и характеристик системы ТО (периодичности профилактического контроля Тпр.к). Следует отметить, что указанные зависимости получены при условии, что длительность профилактики известна и не меняется от одного ТО к другому
В том случае, если профилактика радиооборудования заключается в проведении восстановительных операций (профилактическая регулировка, настройка и т. д.), эффек-
Рис. 17. Зависимость эффективности использования РЭО от частоты профилактического контроля
тивность профилактических работ также может быть определена под-становкой р (Tav) в выражение (2.43). Однако вероятность безотказной работы в промежутках между профилактическими восстановле-
ниями в этом случае определяется при условии, что в аппаратуре преобладают предотвращаемые отказы, т. е.
Л {Тцр.в \ х . _
где Ф I --------- 1 — табулированная функция Лапласа.
\ а /
63
Поэтому выражение (2.43) для эффективности профилактических работ можно представить в виде
(2.47)
При выполнении условий Тпр.в « Ть!тъ и Тв « То, что всегда выполняются на практике, эффективность профилактических работ
1
Рэ.и = . .
1 "Г ав
Выражение (2.47) можно аппроксимировать формулой
Рэ и = ' 1+ав тв [! ~ ехр Ст»Я• <2 48)
где с, k, — коэффициенты аппроксимации, подбором которых можно добиться необходимой точности аппроксимации.
Например, если значение промежутков времени между профилактиками находится в пределах 0 < Тпр.в < TQ) то с = 0,7 и к = = (Т0/а) — 1.
Число профилактик, обеспечивающее оптимальное значение эффективности профилактических работ, получим, исследуя выражение (2.48) на экстремум. После дифференцирования находим
вв+ОДЫ*"1 (1 + ав тв)—ав ехр (—0,7т^) = 0. (2.49)
Оптимальная частота проведения профилактических работ (профилактических восстановлений) зависит от соотношения TQ/o и значений коэффициента аъ (рис. 18). Эти кривые — графическое решение уравнения (2.49). После нахождения по приведенным графикам оптимального значения /пВо t оптимальная периодичность профилактики:
^np.Bopt “ ^o/mB0pf (2.50)
Максимальная эффективность использования радиооборудования, получаемая при подстановке значения (2.50) в выражение (2.48).
Рэ.итах
[/ г°
1—ехр \—0,7т °
1 -f-aB mBopt
Эффективность использования РЭО зависит от частоты проведения профилактических работ и значений коэффициентов ав и отношения 70/сг (рис. 19).
Таким образом, эффективность использования авиационного РЭО, как и при профилактическом контроле, определяется параметрами надежности радиооборудования и характеристиками системы технического обслуживания.
64
Обоснование периодичности ТО по стоимости. Уменьшение затрат на эксплуатацию авиационного РЭО играет существенную роль в снижении себестоимости воздушных перевозок. Поэтому одним из основных требований, предъявляемых к каждой системе ТО, является требование минимальных затрат на их проведение. В зависимости от того, имеются ли данные об изменении параметра РЭО во времени, обоснование периодичности профилактических работ по критерию стоимости ТО проведем для двух случаев. Если неизвестна случайная функция изменения определяющего параметра во времени, то профилактические работы заключаются в периодической замене элементов, а задача — в определении периода профилактической замены элементов.
Если же указанная функция известна, необходимо обосновать периодичность профилактического прогнозирования (рис. 20).
Причем для обоих случаев имеется оптимальная, исходя из эксплуатационных затрат, периодичность профилактических работ.
При отсутствии информации о процессе изменения параметра в процессе эксплуатации будём считать, что отказы РЭО подчиняются нормальному закону с плотностью вероятности, описываемой выражением (2.2). Кроме того, предположим, что в аппаратуре преобладают предотвращаемые отказы, т. е. значение коэффициента характера отказов близко к единице.
3 Зак. 2262
Рис. 18. Зависимость оптимальной
частоты профилактического восстановления от отношения То/о
Рис. 19. Зависимость эффективности использования РЭО от частоты профилактического восстановления: — — —
Рис. 20. Зависимость прогнозируемого параметра от времени
65
В этом случае вероятность отказа элемента за время t:
i
1 Г
Q (О ------^=7- I ехр
G ]/ 2л J о
2а2 )
dt.
Так как вероятность отказа возрастает со временем, то желательно время между профилактическими заменами элементов выбирать наименьшим. Однако при слишком частой замене элементов возрастают затраты вследствие увеличения общей стоимости элементов и расходов по их замене. Следовательно, существует оптимальный промежуток времени между профилактическими заменами.
Определение оптимальной периодичности профилактических работ основано в данном случае на оценке стоимости затрат, приходящихся на час работы РЭО,
сс п+сс в (cv + N) (<вЛ. + ^)М
с°= тр = + т~р ’
где Сс.п и сс.в — стоимость профилактических и восстановительных работ; cv св — стоимость 1 ч профилактических и ремонтных работ; cN — стоимость одного элемента; м3 — число профилактик, проведенных за время работы РЭО Тр; ппф — число отказов профилактируемой РЭО.
Если взять время работы, равное промежутку времени между очередными профилактиками, и пренебречь вероятностью появления более одного отказа за это время, то выражения для стоимости затрат на 1 ч работы можно представить в виде
cyT'n-VcN N Q (Тпр.з) (св T'b+C/v) со =-------------+---------------------- .
7 пр.з 1 пр.з
Вероятность отказа радиооборудования Q (Тпр,3) за время Тпр,ъ:
Q (Гпр.з)-!-[!-<? (Гирл)]"- (2-51)
Выразив вероятность отказа (2.51) через нормированную функцию Лапласа, получим
+ Г1.+СЛ’ * +{1- / ГПр.з Го \^1| 0,5+0,50 1 - ) В (св Тв+су)
Т'пр.з
(2.52)
Это выражение позволяет определить оптимальный по стоимости производимых затрат период профилактических замен элементов. Так как непосредственное исследование выражения (2.52) на экстремум затруднительно, часто аппроксимируют выражение для q (Тар,3). Например, для случая, когда выполняется условие Т0/о > 3 и Т’пр.3< < 2а, плотность нормального распределения с достаточной для боль-66
шинства практических расчетов точностью аппроксимируется экспоненциальной функцией вида:
Яо (Т'пр.З— а1 (Т'пр.з)**2*
Коэффициенты а± и а2 определяются из следующих условий:
ч______1 [* / (^пр.з За)2 \
Яо (Л1р.з) — г.— I exp I —---------•--- I = a аа2-
аК2л J \ 2°2 /
О
2а
<?оГпр.з)2=-------С ехР — / П-^3 j dt = ai (2o)a*.
оК2л J k . 2а '
о
Так как при Тпр,3 < 2а всегда выполняется условие^ (Тпр.3) С 1» из выражения для с0 следует приближенное равенство Q (Тпр.а) ~ « [? (7’Пр.3)1Л'. Поэтому выражение (2.52) можно представить в виде
где Rp-~
cv Тп ~лГ”
+ (Лгр.зГ2 с0=-------------------------
Т’пр.З
+ cN — коэффициент, характеризующий затраты на профилак-
тическую замену одного элемента; /?в = ах (съТ3 + с$) — коэффициент, характеризующий затраты на устранение одного отказа.
Исследовав зависимость (2.88) на экстремум, можно определить значение промежутка времени между профилактическими заменами, который- соответствует минимальным f
затратам:
а* Г р
(2-и>
Значение Тпр,3 при Rn = 10 (сплошные линии) и Rn --= 100 (штриховая линия) может быть определено из рис. 21.
Если в процессе эксплуатации проводится профилактическое измерение параметров, возникает задача обоснования периодов времени между измерениями. По значению параметра в момент измерения выносят заключение о необходимости профилактической настройки, регулировки или замены элемента.
Очевидно, что и в этом случае существует оптимальная периодич
Рис. 21. Зависимость стоимости технического обслуживания от периода профилактических замен при cvTB4-+сл=2-102; «1 = 0,011; а2=3,8; Тср==17 500 ч; о=2986 ч
3е
ность профилактических измерений параметров. Действительно, в случае больших периодов измерений, хотя и уменьшаются затраты на выполнение измерений, но возрастают затраты на устранение отказов, вероятность возникновения которых увеличивается с увеличением периода между измерениями.
Обоснование длительности проведения ТО. Длительность проведения профилактических работ — одна из важнейших характеристик системы ТО и наравне с периодичностью влияет на эффективность использования авиационного РЭО. Поэтому исходными данными при определении длительности профилактики является заданная эффективность использования радиооборудования. Увеличение длительности профилактики до номинального значения приводит к увеличению времени безотказной работы вследствие предотвращения отказов, однако чрезмерное увеличение длительности профилактических работ может уменьшить готовность РЭО.
Эффективность использования радиооборудования определим, исследуя выражение (2.43):
t
Учитывая, что
^С.В^^В ЛпФ» Тр — То пФ Лпф,
и, сделав некоторые преобразования, выражение (2.54) представим в виде
t
То пФ То пф п
В том случае, если профилактические работы представляют собой регулярный процесс, эффективность их
То пФ 1
Т Т 1
1 —Л(1—₽)—
1 по
откуда
т0 пФ :-=-----—» (2.55)
1 а______
где d == Л (1 — Р) — коэффициент, характеризующий число предотвращаемых отказов и качество их устранения.
68
С учетом формулы (2.55) выражение для эффективности использования РЭО запишем как
Рэ.и-
1 +
- — (l~d 2j“-е ^° \ Г1Ю ,
Ти т
п
Исследовав полученное выражение на экстремум, можно найти длительность профилактики, которая обеспечивает наибольшую эффективность использования авиационного радиооборудования.
Если выполняются следующие условия: То S Тв; То t\ при Тп/Тп.о <1 1, то
(Jk) = IiLL_ Гв+Ojl (2 56)
x^'n.o/opt t [_ d tflT'nO J
Таким образом, если известны параметры надежности То, Тв, А,п и параметры, характеризующие систему профилактики Тп0, 0, /и, и задано требуемое время безотказной работы t, то по формуле (2.56) можно определить оптимальную длительность проведения профилактических работ из условия наибольшей эффективности использования авиационного радиооборудования. Эффективность использования зависит от коэффициента d (рис. 22). Как следует из рисунка, при d 0,8 наибольшая эффективность использования достигается при Та = Тп0. При меньших значениях коэффициента d увеличение длительности профилактических работ целесообразно только до определенных пределов, обеспечивающих их максимальную эффективность.
Зависимость эффективности использования РЭО от d свидетельствует о том, что любая система ТО должна строиться с учетом свойств
объекта эксплуатации и характеристик системы эксплуатации. Именно коэффициент характера отказов определяет приспособленность РЭО к предотвращению отказов, а вторая составляющая (1 — 0) характеризует качество средств контроля технического состояния. Следовательно, проведение профилактических работ с определенной длительностью целесообразно, если за определенный период работы РЭО в нем накопилось определенное число отказов, которые могут быть выявлены при заданной системе ТО.
Однако, если РЭО не приспособлено к предотвращению отказов (мало значение Л) или качество
Рис. 22. Зависимость эффективности использования РЭО от длительности технического обслуживания
69
предотвращения отказов низкое (велико значение 0), профилактика может привести к уменьшению эффективности использования РЭО. Еще больший отрицательный эффект возможен в случае, когда в процессе ТО не только пропускаются имеющиеся неисправности, но и неправильно определяется истинное состояние РЭО, в частности, если исправное РЭО будет признано неисправным. В этом случае возможно внесение неисправностей в РЭО в процессе ТО.
2.9. ОРГАНИЗАЦИЯ ПРОФИЛАКТИЧЕСКИХ РАБОТ
ПРИ ПРОВЕДЕНИИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ РЭО
Системы обслуживания, предусматривающие перерывы в использовании РЭО. Обслуживание с перерывами осуществляется в том случае, если по конструктивным и функциональным соображениям необходимо выключать радиооборудование для выполнения операций по ТО. В настоящее время к таким системам относятся многие типы авиационного РЭО. Во время эксплуатации радиооборудование в каждый момент времени может находиться в одном из трех состояний: использование, восстановление, профилактика. Поэтому качество ТО можно оценить либо коэффициентом использования, либо эффективностью использования радиооборудования. Максимальные значения параметров достигаются при оптимальных длительности и частоте профилактических работ. Оптимальные длительность и частота обеспечиваются соответствующим числом специалистов, которое определяется на основе общей производительности профилактических работ, равной vn = = 1/Тп.
При производительности одного человека vln = 1/Т1п необходимое число специалистов для обеспечения общей производительности профилактики г = vn/vln == Т1п/Тп. Если по каким-либо соображениям длительность профилактики Та должна отличаться от Тп.о, то число -специалистов определяется с учетом выражения (2.56):
г___________Tint________
т Г Лю (Т'в+О п ]
[ d m J
Таким образом, максимальная эффективность использования авиационного РЭО достигается при параметрах системы ТО, определенных по данной методике.
Системы обслуживания радиооборудования в рабочем состоянии. В том случае, когда условия оперативного использования не позволяют выключать радиооборудование для профилактических работ, организуется непрерывная или циклическая система технической эксплуатации. Для непрерывной эксплуатации необходимо иметь определенное число резервных блоков. Профилактические и восстановительные работы поочередно проводят на резервных блоках. Если обслуживаемая 70
Рис. 23. Временной график циклической системы обслуживания
Профи л анти- Готов-
Мотала и восста- юность к । рпвптп уу*/Г давление Хработе | Иаоота
I I , Тп.Ц I Тр.ц t
п л Профилактика \Ите\ Работа \и восстановление
IJ Tpu r L Tn.* "t
Рис. 24. Схема циклической системы обслуживания
аппаратура имеет резервный комплект, то используется циклическая система обслуживания. В этом случае профилактические и восстановительные работы выполняют на одном комплекте оборудования (подготовительный цикл Тп.ц), а другой комплект в это время находится в работе (рабочий цикл Тр.ц, рис. 23).
Каждый из комплектов имеет N рабочих и М резервных блоков. При организации технической эксплуатации по такой системе время восстановления отказов в рабочем цикле сокращается до времени, необходимого на замену отказавшего блока резервным. Длительный отказ в этом случае возможен только при отсутствии исправных резервных блоков. Данное положение распространяется так же на ТО РЭО на микроэлементной базе, в котором широко используется такой способ устранения неисправностей, как замена плат заведомо исправными с последующим ремонтом отказавших плат.
Восстановление? отказавших блоков, профилактика и контроль исправных блоков осуществляются во время подготовительного цикла (рис. 24).
Качество функционирования авиационного РЭО при такой системе обслуживания
Рэ.и — Ьц, k? Р Гр.ц) > (2.57)
где &ц — 7,р>ц/(Трец+7'п.и) — коэффициент использования РЭО; kr = Тр>ц/Тр — коэффициент готовности РЭО, если в рабочем цикле суммарное время исправной работы равно Тр; р (Тр>ц) — вероятность безотказной работы РЭО в течение рабочего цикла.
71
Если время безотказной работы и время восстановления радиооборудования описываются экспоненциальным законом, выражение (2.57) можно представить в виде:
/ Т'р ц \ / Тр.ц \
т ехр ( - —---- ехр —--------------
1 р.Ц \ 1 О.пф/ ' * о пф /
Гр.ц + Льц ^В.пф / ^п.ц \ / Гв.пф\
1 + I Л+“7 I ( 1 +“7 “ I
* о. пФ \ < р.Ц / \ 1 о пФ/
Полученное выражение показывает, что эффективность функционирования определяется параметрами надежности радиооборудования, а также зависит от соотношения между длительностью рабочего и подготовительного циклов. Очевидно, что выигрыш в эффективности определяется следующими обстоятельствами: повышением безотказности в рабочем цикле вследствие профилактики блоков в подготовительном цикле и улучшением восстанавливаемости откзавших блоков путем замены их отремонтированными во время подготовительного цикла.
Выигрыш в повышении безотказности в рабочем цикле можно количественно оценить, заменяя в выражении (2.11) Тп на Тп.ц и учитывая, что г = Тщ/Тп:
7’опФ=-------^—7------• (2-58)
1-Л(1-Р)-^-
Г1 ПО
Повышение восстанавливаемости в рабочем цикле
Н ~ТВ min/T'B»
где Тв min— время, требуемое на подключение резервных блоков в рабочем цикле; Тв — среднее время устранения отказов в подготовительном цикле.
Среднее время восстановления профилактируемого РЭО в рабочем цикле в зависимости от длительности подготовительного цикла определяется следующим выражением:
7'в.пф = Тв [Я + ехр (-Тп.ц/D (1-Я)]. (2.59)
Используя формулы (2.58) и (2.59), выражение для эффективности функционирования радиооборудования при циклической системе технической эксплуатации можно представить в виде
ехр — —— 1—Л (1—р)——|
_________________(____J L_____________rJ п.о .1)_______
Рэ.и ~ ' г ZTT Z -1 г ' / т \ т)
+т[1-Л (1-0)—lb+(1-W) ехР -Т3) I
\ * Р«Ц/ ( * °L гпо J у * в / j;
Параметры циклической системы технической эксплуатации можно рассчитывать по полученной формуле или по графикам, предварительно построенным на ее основе для различных случаев обслуживания 72
(рис. 25). Зависимость эффективности функционирования от числа специалистов для системы с теми же параметрами надежности приведена на рис. 26.
Анализ показывает, что при организации циклической системы технической эксплуатации существует оптимальное соотношение между длительностью подготовительного и рабочего циклов. Эффективность функционирования при такой организации профилактики определяется параметрами надежности эксплуатируемого РЭО (Го, Тв, А), параметрами системы эксплуатации (г, vln, vn) и соотношением между продолжительностью рабочего и подготовительного циклов.
Непрерывная система обслуживания (рис. 27). Она организуется для тех типов авиационного РЭО, которые имеют определенное число резервных блоков. При достижении определенного уровня эксплуатационной технологичности непрерывная система может оказаться очень эффективной для РЭО, выполненного с использованием плат с микросхемами. На эффективность РЭО при данной системе эксплуатации будут влиять такие эксплуатационные показатели, как число резервных блоков, периодичность Тпр и длительность Тп проведения профилактических работ и число работающих специалистов. Качество функционирования РЭО будем оценивать коэффициентом использования, значение которого, кроме перечисленных выше эксплуатационных факторов, зависит от следующих параметров: числа рабочих N, резервных блоков М и параметров надежности этих блоков То, Тв, А.
Рис. 25. Зависимость эффективности использования РЭО от длительности подготовительного цикла (Т0=4 ч; Тв = 2 ч; /7=0,5; Тр.ц = 8 ч; у=0,1)
Рис. 26. Зависимость эффективности использования РЭО от числа обслуживающего персонала
Рис. 27. Схема непрерывной системы обслуживания
73
Рис. 28. Зависимость коэффициента использования РЭО от числа специалистов
Рис. 29. Зависимость оптимального простоя РЭО от числа специалистов при непрерывной системе обслуживания
Выражение для коэффициента использования РЭО имеет вид:
I
м П X [W+(M-A)J {1-Л [1—ехр (-Гп/Гпо)]}
к_ [ ' + Н Т'п 7*0 пф/Т’пФ
=-------------------------------------------------:— > (2.60)
м П X [Я + (М-А)] {1-Л [1 —ехр (-Тп/Т’по)]} k=Q
п------------------------
Л==1 1 + Н (Лтф + Т'о пфЪ'ЛхФ
где X— интенсивность отказов блоков; р = 1/Тв— интенсивность обслуживания блоков.
Значение равно 0 при г = 0; р при г = 1; &р при k ^.г и гр при k > г.
Выражение (2.60) позволяет определить коэффициент использования РЭО в зависимости от надежностных показателей аппаратуры, числа резервных блоков, числа специалистов, а также от длительности и периодичности профилактических работ (рис. 28).
На рис. 28 приведена зависимость коэффициента использования от числа специалистов для случаев Т0Пф/Тв.Пф = 2,1, M/N = 0,1; 0,5. Из графиков следует, что при малом числе резервных блоков с увеличением числа специалистов коэффициент использования авиационного РЭО не увеличивается и, наоборот, при эксплуатации систем с большим числом резервных блоков он существенно возрастает.
74
Эффективность данной системы технической эксплуатации можно охарактеризовать также отношением простоя РЭО на профилактике к промежутку времени между очередными профилактиками: kn — = Tsn/T’np» где TSn =ТпТ1)Пф/Т — суммарное время простоя радиооборудования на профилактике.
При постоянной интенсивности профилактических работ интенсивность отказов профилактируемого радиооборудования, используя выражения (2.10) и (2.7), можно представить в виде Хпф = Х{1 —Ах х£1—ехр (------тт)]!' В свою очередь, интенсивность обслуживания
профилактируемого оборудования определяется временем простоя блоков на восстановлении Тъ и профилактике Т%п:
1 и
+ T’sn 1 + M'T’sn
Поделив полученное значение Хпф на рпф и произведя преобразования, получим
, / О Г2п \
^•пф X Т I Т'хп
-----= — \1-Л+Ле пр/ + ^г~. (2.61) НпФ Н 'пр
где S —vln гТпр.
Значения интенсивностей Хпф и рпф определены для случая, когда в процессе ТО применяют средства контроля, позволяющие без ошибок определять состояние блоков РЭО. Ложное бракование блоков приводит к увеличению длительности операций ТО, что можно учесть путем соответствующих поправок.
Для определения оптимального значения kn выражение (2.61) необходимо исследовать на экстремум, в результате чего получим
) 1 в “Vin гТпр
^nopt= 7^ »
vin * * пр * о
т. е. оптимальное значение Aiopt зависит от параметров надежности оборудования То, Тв, А, а также от числа специалистов г и производительности профилактических работ vln (рис. 29). В заключение отметим, что циклическая схема обслуживания применима для многих типов РЭО ГА, например, для радиомаяков системы посадки, так как они имеют резервные полукомплекты оборудования.
Глава 3
КОНТРОЛЬ технического состояния РЭО
3.1. РЭО АЭРОПОРТОВ И ВОЗДУШНЫХ ТРАСС
КАК ОБЪЕКТ КОНТРОЛЯ
В процессе эксплуатации РЭО можно выделить два этапа: непосредственного использования РЭО для решения поставленных перед ним задач и технического обслуживания РЭО. Оба этапа четко выделяются при эксплуатации наземного РЭО.
ТО призвано обеспечить исправную работу РЭО в процессе оперативного использования. При этом предполагается, что ТО должно быть организовано таким образом, чтобы РЭО было исправно как в момент поступления требований на его оперативное использование, так и в течение всего времени его оперативного использования, т. е. в РЭО не должно быть отказов как перед началом его оперативного использова-. ния, так и в течение всего времени оперативного использования. Следовательно, задача обеспечения работоспособного состояния заключается в поддержании параметров РЭО в пределах установленных допусков, а это означает, что контроль технического состояния предполагает определение значений параметров РЭО и сравнение их с установленными допусками. На основании сравнения контролируемых параметров с допусками выносится суждение об исправности (или неисправности) РЭО. Приведенные рассуждения позволяют дать определение контроля.
Контролем называется процесс установления соответствия между состоянием объекта и заранее заданной нормой путем восприятия контролируемых параметров, сопоставления их с уставками (границами допусков), формирования и выдачи суждений о результате. Таким образом, процесс контроля технического состояния РЭО поэтапный. Он включает в себя восприятие значений контролируемых параметров (получение информации о состоянии оборудования), сопоставление-значений контролируемых параметров с допусками и выдачу результатов сопоставления (логическая обработка полученной информации).
Контроль, т. е. процесс получения и обработки информации, устанавливающей соответствие состояния некоторого объекта предъявляемым требованиям и обеспечивающей принятие решения или выдачу управляющих воздействий, является неотъемлемой частью многих видов целенаправленной человеческой деятельности. Контроль — составная часть процесса производства любого вида продукции, подготовки 76
изделий к применению, ТО аппаратуры, технической диагностики и т. д.
Процесс контроля предполагает наличие объекта контроля, с одной стороны, и средств контроля, с другой. Будем понимать под объектом контроля любой тип РЭО, информацию о соответствии состояния которого предъявляемым требованиям надлежит получить, а под средствами контроля — любые технические средства, служащие для получения и преобразования этой информации. Поскольку процесс контроля немыслим как без объекта контроля, так и без средств контроля, под системой контроля будем понимать совокупность объекта контроля и средств контроля.
При изучении процессов контроля, а также при проектировании средств и систем контроля возникают следующие задачи:
предсказание ожидаемого результата процесса контроля в условиях, включающих элемент случайности;
синтез оптимальных средств контроля, т. е. выбор оптимальных с точки зрения результата процесса контроля параметров и элементов применяемых технических средств;
оптимальная организация процесса и системы контроля.
Решение этих задач предполагает формализацию исследования эффективности функционирования систем контроля.
Функционирование систем контроля носит стохастический характер ввиду стохастических свойств объектов контроля (в противном случае отпала бы необходимость контроля) и ограниченных точности и надежности средств контроля. Поэтому при формализации описания функционирования систем контроля для оценки их эффективности следует использовать математический аппарат теории вероятностей.
Следовательно, процесс функционирования систем контроля можно представить как некоторую последовательность операций, результаты выполнения которых для реальных систем контроля могут быть предсказаны лишь в вероятностном плане. Тогда понятие «эффективность системы контроля» должно быть отождествлено с понятием эффективности выполнения определенного множества операций.
Таким образом, решение задач, связанных с исследованием эффективности систем „контроля, предполагает решение следующих вопросов: выбора показателей эффективности; построения математической модели контроля; исследования полезности результатов выполнения операций; количественной оценки показателей эффективности системы контроля. При исследовании операций одной из основных задач является выбор такого показателя эффективности операций, который был бы достаточно чувствителен к тем параметрам операции, рациональные значения которых следует определить (задачи синтеза) или которые оказывают наиболее существенное влияние на успех или неуспех операции (задачи анализа). Вместе с тем показатель эффективности должен быть достаточно прост, чтобы его можно было сравнительно легко вычислить и проанализировать.
77
Задача контроля — установление соответствия состояния' изделия предъявляемым требованиям с последующим принятием решения или выдачей управляющих воздействий. Следовательно, показатель эффективности контроля должен, с одной стороны, характеризовать правильность подобного установления (и последующего принятия решения или выдачу управляющих воздействий), а с другой — быть связанным с характеристиками (параметрами) средств контроля и параметрами, характеризующими организацию системы контроля (объект контроля и средства контроля). Цель операции контроля — достижение некоторого определенного результата, поэтому естественно при исследовании операции контроля показатель ее эффективности оценивать вероятностью достижения желаемого результата. Одной из важнейших характеристик эффективности контроля является достоверность его результатов. Достоверность результатов контроля является обобщенной характеристикий информационных свойств системы контроля и по своей сущности есть доверительная вероятность объективности принимаемых при контроле решений.
Количественные оценки достоверности контроля могут быть различными в зависимости от целей контроля и характера решаемых задач. Следует отметить, что часто цели контроля сводят к одной, а именно: определение точности параметров или способности изделия выпол.-нять свои функции. Такое определение в какой-то мере справедливо для систем контроля работоспособности простых объектов.
Большинство современных систем контроля сложного РЭО относится к классу информационно-измерительных систем, поэтому и цели контроля должны исходить из общего толкования контроля как способа устранения неопределенности о техническом состоянии объекта.
В зависимости от вида контроля, а следовательно, от возможных решений, принимаемых по результатам контроля, основные цели контроля можно сформулировать следующим образом:
контроль выполнения основных функций объекта или отдельных узлов (контроль функционирования);
контроль определяющих параметров изделия (контроль работоспособности);
контроль, осуществляемый для определения места неисправности (диагностический контроль);
контроль для предсказания будущего технического состояния объекта или отдельных его узлов в будущем (прогнозирующий контроль);
контроль, выполняемый для обнаружения и замены элементов объекта контроля, параметры которых близки к предельно допустимым (критическим) значениям (профилактический контроль) и т. д.
В зависимости от целей, стоящих перед определенной системой контроля, основные задачи контроля следующие:
сортировка изделий по выбранным признакам; определение технического состояния изделия;
78
подготовка технически исправных изделий к применению по назначению:
подготовка технически неисправных изделий к ремонту;
прогнозирование технического состояния изделия на заданное время прогноза /.
Кроме перечисленных основных задач, в процессе контроля может выполняться и ряд других, например получение исходных данных для анализа степени совершенства конструкции и технологии изготовления изделий или статистических данных о влиянии условий эксплуатации на технические характеристики изделий и т. д.
Многообразие задач, стоящих перед системой контроля, определяется многообразием задач, выдвигаемых практикой. Действительно, существующие образцы систем контроля сложных динамических объектов производят не только определение технического состояния изделия в определенной момент, но и прогнозирование технического состояния изделия, а также фиксацию места неисправности, т.е. решают задачи прогноза и диагностики.
Естественно под достоверностью результатов /-й решаемой при контроле задачи DJ понимать степень объективности принятого решения (доверие к принятому решению) и в качестве оценки выбирать условную вероятность нахождения контролируемого признака в определенном состоянии при условии, что результат решения данной задачи контроля Yi соответствует этому же состоянию D1' — Р (h/Yi).
РЭО. Как объекты контроля РЭО характеризуются следующим: в процессе контроля радиотехнического оборудования контролируется большое число параметров;
контролируемые параметры характеризуются большим диапазоном значений;
большая часть контролируемых параметров удобна или сравнительно просто может быть преобразована к виду, удобному для измерений;
большая часть сигналов, насущих информацию о техническом состоянии радиотехнических систем, подвергается многократным преобразованиям.
Объективной необходимостью контроля технического состояния является изменение параметров авиационного радиооборудования по причинам изнашивания и старения элементов и разрегулирования блоков и узлов. Параметры, характеризующие качество радиооборудования, имеют стохастическую природу вследствие разброса параметров составляющих элементов. Разброс параметров элементов служит причиной того, что даже в начальный момент эксплуатации значения параметров оборудования являются случайными величинами. Случайный характер изменения этих величин в процессе эксплуатации приводит к тому, что параметры РЭО являются случайными функциями времени. Естественно, что в каждом фиксированном сечении по оси времени значения параметров приобретают свойства случайных величин.
79
Работоспособное состояние авиационного РЭО сохраняется до того момента времени, пока один параметр (или несколько) не изменится настолько, что его значение окажется вне пределов установленных допусков Ui и bi. При этом условие работоспособности оборудования по /-му параметру определяется как:
<4 < h < (3.1)
Для исправного оборудования указанное соотношение должно соблюдаться по всем параметрам. Качество работы оборудования в этом случае может быть охарактеризовано вероятностью нахождения всех ^го параметров в пределах установленных допусков
p=f(/5i. U......... d£4,..,, dlt. ... , dlN,
G
где f (61, 62» •••» £<••• блг) — совместная плотность распределения параметров оборудования, определяющих качество его работы; G — область работоспособности, в которой выполняется неравенство (3.1) для всех параметров оборудования.
Различные скорости изменения значений параметров и степень влияния значений отдельных параметров на работоспособность оборудования и различие в методах контроля приводят к тому, что контроль параметров производится с разными точностью и периодичностью. По ряду причин некоторые из параметров вообще могут не подвергаться контролю в процессе эксплуатации. Поэтому РЭО как объект контроля характеризуется системой случайных параметров. Можно выделить шесть групп параметров:
1) Zi — параметры объекта контроля, которые полностью совпадают с соответствующим параметром изделия и контролируются в условиях данного эксперимента;
2) Zu — определяющие параметры объекта контроля, которые полностью совпадают с соответствующими определяющими параметрами изделия, но в условиях данного эксперимента не контролируются;
3) Zni — определяющие параметры объекта контроля, которые являются функциями параметров первой группы Zni = f (4, Z\, ... zi).
4) Ziv — определяющие параметры объекта контроля, которые полностью совпадают с соответствующими определяющими параметрами изделия, но в условиях данного эксперимента не контролируются, а определяются по результатам контроля других параметров, т. е. 2 = Ф (%!, х2» •••»
5) Zv — параметры объекта контроля, которые являются аргументами параметров четвертой группы;
6) Zvi — параметры объекта контроля, которые не определяют показателей качества изделия, нов условиях данного эксперимента контролируются.
Контроль технического состояния РЭО в аэропортах ГА осуществляется при различных формах ТО, в процессе проведения восстанови-80
Таблица 10
Вид технического обслуживания Посадочная РЛС Радиомаяки системы посадки
Операции по ТО
Всего В том числе операции контроля Всего В том числе операции контроля
Оперативное После наработки 750 ч » » 2250 ч Полугодовое 28 30 17 11 18 23 12 4 13 21 28 48 11 16 18 20
тельных работ при возникновении отказов, а также при работах по установке и модернизации оборудования. Если оценить объем работ по контролю технического состояния в процессе эксплуатации, а также трудозатраты на операции проведения контроля, то окажется, что контроль технического состояния занимает большую часть объема работ по ТО радиооборудования аэропортов (табл. 10). Следовательно, как объект контроля РЭО характеризуется большой трудоемкостью контрольных операций.
Рассмотренная модель, когда РЭО представляется как единое целое, в котором в качестве признака технического состояния используется совокупность физических параметров, не единственно возможная. При другой модели контроля РЭО его также представляют в виде единого целого, однако признаком технического состояния является обобщенный показатель качества е (/). В этом случае работоспособное состояние РЭО выполняется при условии e(/ft) Ед, где Ед — допустимое значение качества. Возможно также построение модели РЭО как объекта контроля в таком виде, когда контролируется время до наступления отказа. Поскольку физическим проявлением отказа является момент пересечения случайной функции | (0, описывающей процесс изменения параметра РЭО, то описание модели в этом случае сводится к нахождению распределения времени наступления отказа (см. гл. 3).
3.2. ДОСТОВЕРНОСТЬ КОНТРОЛЯ технического состояния РЭО
В соответствии с рассмотренной моделью суждение о техническом состоянии РЭО выносится на основе обработки информации, полученной о значениях параметров. Однако полное заключение о техническом состоянии РЭО возможно вынести только при контроле всех параметров, характеризующих его состояние. Большое число этих параметров
81
и увеличивающаяся при этом трудоемкость контроля часто не позволяют проконтролировать все параметры. Следовательно, неполный кон-
троль—одна из возможных причин недостоверного заключения о техническом состоянии РЭО в процессе эксплуатации. Естественным способом повышения достоверности в этом случае является увеличение чис-
ла контролируемых параметров до такого числа, когда они полностью определяют техническое состояние РЭО.
Другой причиной возможных недостоверных заключений является несовпадение области работоспособности РЭО с допусковой областью. Уменьшение ошибочных решений при определении технического состояния в этом случае должно достигаться более правильным выбором допусковой области на параметры РЭО.
Ошибочные решения в оценке состояния РЭО, вызванные перечисленными выше причинами, носят методический характер и определяют так называемую методическую достоверность контроля. Особенность методических ошибок заключается в том, что в принципе они могут быть сведены до сколь угодно малых значений вышеизложенными способами. Существует, однако, еще одна причина возможных ошибок при оценке состояния РЭО. Сущность их заключается в стохастической природе контролируемых параметров и погрешностей измерения (рис. 30). Действительно, если измерение производится прибором, погрешности которого описываются плотностью распределения /2 (0> то вместо истинного значения контролируемого параметра | при контроле воспринимается значение этого параметра с погрешностью t, т. е. z = | + t.
При независимости контролируемого параметра | и погрешности измерения t условие, на основании которого выносится заключение о на-
хождении контролируемого параметра внутри допуска, представ-ляется в виде a ^.z = | + t ^.b. Однако границы допусков должны сравниваться с истинным значением параметра £, т. е. а Именно разница между истинным условием исправного состояния и фактически проверяемым условием служит причиной возникновения ошибочных решений при оценке технического состояния РЭО.
Действительно, если контролируемый параметр принимает некоторое значение или |2, т0 В03‘ можные результаты измерения распределяются вокруг этого значения в соответствии со случайным законом распределения погрешностей
г
Рис. 30. Плотность распределения контролируемого параметра (а) и погрешности измерения (б)
82
Таблица 11
Событие
Результаты измерения
Истинное значение параметра
1
2
3
4
В пределах допуска: a^z^Zb Вне пределов допуска: b<z<a Вне пределов допуска: b<z<.a
В пределах допуска: a^.z^.b
В пределах допуска:
Вне пределов допуска:
В пределах допуска:
Вне пределов допуска: Ь<£<а
измерительного прибора. На рис. 30 показаны кривые f2(2^i) и /(г/|2) условных плотностей распределения погрешностей измерительного прибора при условии, что значения контролируемого параметра равны или £2 соответственно. В табл. 11 приведены четыре взаимоисключающих события, возможных при оценке результатов контроля по данным измерительного тракта системы контроля.
Как следует из приведенной таблицы, 1 и 4-е события соответствуют правильному заключению о техническом состоянии радиоэлектронного оборудования, при реализации 2 и 3-го событий совершаются ошибки в определении технического состояния. При этом реализация 3-го события приводит к такого рода ошибкам, когда фактически исправное оборудование признается неисправным. Такие ошибки называются ошибками первого рода (другое название — риск изготовителя), обозначим вероятность их появления индексом а.
При реализации 4-го события фактически неисправное оборудование признается исправным. Такие ошибки называют ошибками второго рода (риск заказчика). Обозначив суммарную вероятность событий 1 и 4 через Ро и учитывая, что приведенные в табл. 11 исходы представляют собой полную группу несовместных событий, получим
Р о + а + Р= 1 >
откуда
Ро=1-(а + Р). (3.2)
При построении системы эксплуатации необходимо учитывать наличие ошибок первого и второго рода. При эксплуатации РЭО ошибки первого рода вынуждают проводить ненужные дополнительные контрольно-регулировочные работы. Наличие ошибок второго рода может привести к такому положению, когда к выполнению оперативных задач может быть допущено фактически неисправное РЭО. Ошибки второго рода могут привести к большим потерям при решении задач самолетовождения и управления воздушным движением.
Таким образом, наличие погрешностей контрольно-измерительных трактов в системе контроля может привести к ошибкам в определении технического состояния РЭО. В свою очередь, ошибочные заключения в определении технического состояния оборудования служат причиной
83
дополнительных материальных затрат при эксплуатации. При этом следует учитывать неравнозначность потерь, вызываемых ошибками первого и второго рода. При эксплуатации объектов авиационного РЭО допуск неисправных объектов к выполнению оперативных задач может привести к существенно большим потерям, чем потери, вызванные ошибками первого рода. Поэтому на практике применяются различные числовые показатели достоверности контроля. В дополнение к выражению (3.2) для достоверности контроля Ро, которую называют также достоверностью разбраковки, применяют еще следующие показатели достоверности:
Dn — достоверность определения исправного состояния РЭО, которая представляет собой апостериорную вероятность исправного состояния объекта, признанного исправным по результатам контроля:
D______Р~а_
— \ а
р—а+Р
(3.3)
DH — достоверность определения неисправного состояния, представляющая собой апостериорную вероятность нахождения объекта в неисправном состоянии, признанного неисправным по результатам контроля:
р—а
=.
Н Р-Р+а
(3.4)
Здесь р обозначена вероятность исправного состояния контролируемого объекта. Как следует из приведенных формул, достоверность контроля может определяться несколькими числовыми параметрами, однако все они вычисляются через вероятности р, а и 0. Причиной возможных неправильных заключений о техническом состоянии являются наличие ошибок первого и второго рода, значения которых входят в выражения для количественных показателей достоверности (3.2)...(3.4). Физической основой возникновения ошибок первого и второго рода служат погрешности контрольно-измерительных трактов системы контроля. Следовательно, уровень погрешностей контрольно-измерительных трактов систем контроля должен выбираться с учетом требуемого уровня достоверности.
Достоверность контроля зависит от точности контрольно-измерительных трактов применяемой системы контроля. Естественно, что числовые параметры достоверности контроля и точности измерительного тракта'системы контроля связаны между собой аналитическими зависимостями. Поставим задачу определить необходимую точность измерительного тракта исходя из требуемого уровня достоверности. При этом будем считать, что заданы значения ошибок первого и второго рода, которые в конечном итоге определяют числовые параметры надежности.
Получим предварительно выражения, определяющие вероятность ошибок первого и второго рода. Как следует из рис. 30, события, при 84
которых возможны ошибки второго рода, реализуются при совместной реализации двух событий: b а и а г Ъ. Следовательно, а < £ + t С Ь, или
a—l < t < b—g.
(3.5)
При известном законе распределения погрешности измерительного тракта системы контроля f2 (t) вероятность нахождения случайной ве-личины t в интервале, определяемой выражением (3.5), равна | f2 (t) х a—g
Xdi. Учитывая, что вероятность попадания контролируемого параметра в интервале & + определяется как (£) dg, и предполагая независимость погрешности измерения от измеряемой величины, вероятность ошибки второго рода при некотором значении контролируемого параметра g равна
6-5 /1(5)^ ( /а (0 dtdl.
Следовательно, окончательное выражение для безусловной вероятности ошибок второго рода можно получить путем интегрирования последнего выражения в интервале значений J-, определяемом неравенствами b < £ < а, т. е.
а ₽= f
‘о
Л (5)
оо Ь — £
ft(f) Adg + f Mg) J МО b a—I
dtdi.
(3.6)
Условием реализации ошибки первого рода является соблюдение неравенства b < г < а, т. е. z<.a иг >Ь, или t < а—g и t > b — g. Следовательно, если контролируемый параметр примет некоторое значение g, условная вероятность ошибки первого рода равна
fi (.№
а—В оо
f fz(t)dt+ f f2(t)dt
— OO b— I
(3.7)
а безусловная вероятность ошибки первого рода определится путем интегрирования по области работоспособного состояния РЭО, т. е.
Ь Г а—оо
a=f MS) f /2(0 dt+ J MO dt a |_ — oo b —£
di.
(3.8)
Из выражений (3.6) и (3.7) следует, что расширение поля допуска увеличивает ошибки второго рода и уменьшает ошибки первого рода, а повышение точности, влияющей на значения а и Р через плотность распределения [2 (/), приводит к одновременному уменьшению ошибок первого и второго рода.
85
Если в РЭО контролируется п параметров и каждый из них не зависит от других, то вероятности ошибок первого и второго рода определяются как
4=1-П (1—af); (3.9)
i=l
В=1- п (1-Pi). (3.10)
/=1
Если ошибки первого рода по каждому параметру (это верно и по отношению к ошибкам второго рода) равны, т. е. при = р2 — = ...рп ах = а2 = ... а:1, из (3.9) и (3.10) следует, что А — 1 — — (1 — а)п; В = 1 — (1 —р)п. Учитывая, что А <£ 1, В < 1, получим А — па, В = пр.
Таким образом, зная закон распределения контролируемого параметра f\ (|) и закон распределения погрешности измерения /2 (0, на основе выражений (3.6) и (3.8) можно решать два типа задач: определять необходимую точность измерительного тракта системы контроля и допуски на контролируемые параметры исходя из заданной достоверности контроля.
Следует, однако, отметить, что непосредственное использование полученных выражений для решения показанных задач затруднительно, так как в наиболее важных
Рис. 31. Номограмма для определе- Для практики случаях интегралы ния вероятности ошибок первого (а) вида (3.7) и (3.8) не выражаются и второго (б) рода через элементарные функции. По-
этому при практических расчетах используют графики, построенные на основе выражений (3.7) и (3.8). Распределение контролируемого параметра и погрешности измерения по нормальным законам приведены на рис. 31.
Чтобы показать взаимную зависимость четырех величин в двумерной координатной сетке при построении номограмм использован прин
86
1
цип формирования двух переменных относительно третьей в соответствии с выражениями;
----относительная погрешность измерения;
бд = — относительная допусковая погрешность измерения;
б = -^2— относительная ширина поля допуска, где Дд =—~~Ф -
2
половина ширины поля допуска.
Если известны характеристики объекта контроля, например, допуски на параметры а и b и характеристики средств контроля Д9 и og, то вероятности ошибок первого и второго рода определяются на пересечении соответствующих кривых приведенных номограмм.
В том случае, когда известны характеристики средств контроля Д9 и <jg, номограммы позволяют определить такие допуски на контролируемые параметры, при которых вероятности ошибочных решений аир не превышают установленных заранее значений.
3.3. МОДЕЛЬ КОНТРОЛЯ
ПРИ ДВУХ И ТРЕХ состояниях КАЧЕСТВА РЭО
Один из наиболее часто встречающихся видов контроля — контроль работоспособности, т. е. такой контроль, в результате которого принимается решение о принадлежности контролируемого РЭО к одному из двух возможных состояний: работоспособен (исправен) или неработоспособен (неисправен).
Для построения модели контроля, описывающей зависимость выходных характеристик системы контроля от свойств объекта контроля и системы контроля, весь процесс контроля представим в виде последовательности отдельных элементарных операций. Элементарные операции контроля производят последовательное преобразование контролируемого параметра. Примером элементарной операции служит усиление контролируемого параметра в процессе измерений, преобразование параметра из аналоговой в дискретную форму и т. д. В результате действия некоторой элементарной операции следующая операция воспринимает результаты преобразования контролируемого параметра всеми предшествующими операциями.
Обозначим через £ контролируемый параметр РЭО, через I1, I2,..., £*, ..., — результаты его преобразования одной, двумя, ...
к... п элементарными операциями (ЭО) контроля, выполненными последовательно. Поскольку при контроле работоспособности контролируемый параметр может находиться только в одном из двух возможных состояний — «Исправен» или «Неисправен», то вероятности состояний
87
контролируемого параметра перед началом контроля определятся как
Р°(1)=П£ € сх);
р®(2)=Р(Е £С2),
где Сх и С2 — состояния работоспособности и неработоспособности изделия по данному параметру; р° (1) — вероятность исправности изделия; р° (2) — вероятность неисправности изделия.
Любая k-я элементарная операция при контроле исправного состояния изделия может быть описана безусловными вероятностями состояний преобразованного параметра перед началом ее действия:
р?-1(1)=р
£ окг1
€ Ci
/t£— 1
£ Ci
где Dk j1 — исправное состояние преобразованного параметра после завершения k— 1-й элементарной операции; Dk~^x — неисправное состояние преобразованного параметра после завершения k — 1-й элементарной операции и матрицей переходных вероятностей
ьт= ^0) PhO) Я*/1) р*2(1)
' \secj / /=1,2.
Аналогично, k-я элементарная операция при контроле неисправного состояния контролируемого параметра изделия описывается безусловными вероятностями состояний преобразованного параметра перед началом ее действия:
рй- 1
ilk~ (2)=р ;
\б
е .
£ ^2 /
и матрицей переходных вероятностей
k „ Ph (2) Ph &
рк(2)= 11 12
° ^.(2)^(2)’
где
р‘(2)=Р^ * : ‘-=“2, /=-2.
' U £ сг )
88
Безусловные вероятности состояний на выходе &-й элементарной операции выражаются через безусловные вероятности состояний на ее входе и переходные вероятности следующим образом:
2 p*(i)=S 4=1 2
Р2 0)=2 pf-1 (В р*2 (0;
4=1
2
Р*(2) = 2 ^-*(2)^(2);
Z=1
2
P*(2)=SPi_1(2)p*2(2).
i = z
Рис. 32. Граф k-й операции контроля
Графически k-я элементарная операция при контроле работоспособности может быть представлена в виде стохастического графа (рис. 32).
Первая ЭО при контроле исправного состояния контролируемого параметра РЭО описывается безусловной вероятностью этого состояния р° (1) и матрицей-строкой переходных вероятностей
P1(l) = ||Ph(l)Ph(‘)||.
а при контроле неисправного состояния — безусловной вероятностью этого состояния р® (2) и соответствующей матрицей-строкой
Р1 (2) =|| ₽2! (2) ₽22 (2) ||-
При этом
р} (1)=р® (1) Р11 (1); Pl (1) =Р° (1) Pb (1);
Pt (2)=р° (2) р21 (2); р| (2) =ро (2) р|2 (2).
Следовательно, граф контроля имеет вид, изображенный на рис. 33.
Все п последовательно выполняемые элементарные операции можно заменить одной эквивалентной операцией контроля, для которой матрица переходных вероятностей есть произведение матрицы переходных вероятностей всех п элементарных операций, т. е.
2 2 2
₽<*-*+»>(г)= 2 2- ••• 2 ptA)p$+v1t('-).-.Pv+n1;
V1=1V2=1 vn_1=l V1 12 n~1
z=T2; i =”172; /=172, (311)
89
Рис. 33. Граф первой операции конт-
роля
Рис. 34. Эквивалентный граф конт-/ роля
Безусловные вероятности состояний на выходе операции контроля работоспособности определяются из выражения
р7(г) = Р* Р(г}-п) (гу. г=Т&}=ГЗ,
где pj/‘(r)= 2 Рг’Д2) Pi/'П) (г);
X = 1
p\i (г) — переходные вероятности первой элементарной операции; р™— эквивалентные переходные вероятности последующих элементарных операций, определяемые из выражения (3.11).
Эквивалентный граф контроля работоспособности изображен на рис. 34. Для того чтобы охарактеризовать качество операции контроля, достаточно определить вероятности р? (1), р£ (1), р“ (2) и pj (2) и для полного ее описания, т. е. для определения указанных вероятностей, необходимо знать вероятности р° (1) и р° (2), а также переходные вероятности каждой из элементарных операций, составляющих операцию контроля.
Условия работоспособности контролируемого параметра при контроле работоспособности задаются в форме нижнего и верхнего допустимых пределов (допусков), т. е. если £ £ Сх; то dH < | < dB, а если |в £ С2,
то -оо > В >dH. Тогда р° (1) = J’ dl-, р® (2) = 1 - f / (В) dl,
где f (В) — плотность распределения параметра РЭО.
Переходные вероятности любой элементарной операции контроля определяются по следующим формулам:
f fr (So ) f Фг (efe /Во) dzk dBo)
« U U VI1
рЛо)<*В*о db
H
90
Pji!(',)K=l —P*x(r);
dk-& в ъ0
f fr(tf) "f ’ <pr(e*/^)deftd^+ f fr
— °° dk
(') =------------*—?----------------------!L— x
dB 1 - f fr do) d£
н
dB-*0
(£o) f <Pr (e*/£o) dek d£ka dk — lk н s0
i - f Zr(Eo)^ dk
H
p»2(',)= 1 —p1i(O.
где r — 1, 2; d*, d* — соответственно нижний и верхний трансформированные допуски на параметр; £* — значение параметра, идеально преобразованного £-й операцией; е* = £* — — погрешность преобразования параметра k-й
элементарной операцией; V — значение параметра, реально преобразованного k-й элементарной операцией; /г(5о) — плотность распределения параметра, идеально преобразованного £-й операцией; фг (е*/£$) — условная плотность распределения ошибки преобразования.
Способы определения плотностей распределения fT (^) и Фг(е*/£о) Для любой элементарной операции контроля находятся из известных законов распределения параметра изделия и характеристик средств, реализующих операции контроля. Эти способы базируются на известных в теории вероятностей положениях. Например, указанные плотности распределения могут быть найдены как функции случайных величин. Однако определение плотностей распределения fr (|£), <ргХ х(е*/££) при k >2 затруднительно, хотя принципиально осуществимо.
Рассмотренная модель контроля работоспособности позволяет исследовать процесс контроля в зависимости от результатов выполнения любой элементарной операции (или группы операций), а также позволяет выявить степень влияния каждой элементарной операции на результаты контроля в целом.
Статистический граф контроля работоспособности позволяет оценить влияние качества этой операции на надежность проконтролиро-91
ванного РЭО. Действительно, вероятность исправного состояния РЭО после проведения операции контроля работоспособности
(1—Q) (1 — а)
(1_q)+<?P
(3.12)
где р (/) — вероятность безотказной работы при эксплуатации за время /. После преобразований (3.12) получим
1—Q
Ри.р (0 = , оп ь—\Р (0.
1 — Q ( J-«Н.к)
где &Н.К = 0(1 — а) — коэффициент несовершенства контроля.
В практике контроля авиационного РЭО имеются случаи, когда оценивают техническое состояние контролируемого объекта, контролируемый параметр которого находится в трех качественно различных состояниях. Например, качество работы радиотехнической системы посадки в соответствии с классификацией международной организации гражданской авиации ИКАО разделяется на три категории: первую, вторую и третью.
Ввиду стохастических свойств контролируемого объекта и контрольно-измерительной аппаратуры возникает задача оценки качества процесса контроля при трехальтернативном исходе или задача оценки достоверности контроля как степени объективности принятых при контроле решений.
Пусть £ — контролируемый параметр объекта, f (£) — плотность распределения параметра, причем параметр может находиться в трех состояниях (Е19 Е2, Е3), определяемых соответственно неравенствами:
— оо < g < а\ а <:Л < b\b < g < оо,
где а — граница состояний Ег и Е2\ b — граница состояний Е2 и Е3.
Обозначим через pt (i = 1.3) вероятность того, что контролируемый параметр находится в состоянии Тогда
Pi= f /«)<£; — оо (3.13)
ь p2=f f (5) <£; а (3.14)
P3=f f(£) ft. b (3.15)
92
В общем случае качество контроля может быть оценено при помощи матрицы вероятностей возможных при контроле событий
рц =
Р11 Р12 Р13
Р21 Р22 Р23
Рз1 Рзз Рзз
(3.16>
где pij — вероятность события, заключающегося в том, что параметр, находящийся в состоянии признается в результате контроля находящимся в состоянии Ej.
Легко видеть, что чем выше качество контроля, тем больше матрица (3.16) приближается к матрице вида
Pi
При 11 =
о
о
о о Рг О О Рз
где p19 р2, Рз — определяются выражениями (3.13...3.15).
В случае, если задана матрица потерь, связанных с ошибками при контроле,
II Си 11 =
о С12 с13
C2i О С23
С31 С32 о
качество контроля может быть оценено показателем средних потерь з з
Сср ~ 2 2 CfJ* Pit'
ы/=1
Абсолютная достоверность контроля
^0 = Р11 + Р22 + Рзз »
а достоверность f-го результата контроля /з 2 рц-/=1
Таким образом, для оценки достоверности контроля при контроле с трехальтернативным исходом необходимо определить вероятности Pi}. Пусть t — случайная погрешность контрольно-измерительной аппаратуры с плотностью распределения <р (0, а результат контроля у формируется в виде у = £ + /, т. е. существует аддитивная связь контро-' лируемого параметра и погрешности измерения. Тогда можно записать следующие выражения для определения вероятностей р^:
Рп= f f «>** J * *₽ at(li’.,Pi2= 5 f (6)Ь f6 ф (О dtdl-.
93
P13= f f(l) f p21=$ f(t)a $\(t) dtdi;
— oo b — & a —oo
b b—£ b oo
Pm=$ f (?) J <p (O dtdfr pM = f f (I) j' ф (0 dtd& a a—£ a b—£
P3! = f f (5) j 6 <P (0 dtd& p32 = J f (?) J* ф (0 dtdi;
b — oo b a—£
Рзз=Г/(5) 7 4(t)dtdb b b-l
Для наиболее часто встречающихся нормального и равномерного законов распределения контролируемого параметра и погрешностей измерения, могут быть получены явные аналитические выражения для величин Pij и D.
3.4. МЕТОДЫ ПОВЫШЕНИЯ НАДЕЖНОСТИ И ДОСТОВЕРНОСТИ КОНТРОЛЯ
Одной из основных характеристик системы контроля наряду с производительностью, стоимостью, надежностью, габаритными и массовыми характеристиками и т. д., является достоверность контроля, от которой в значительной степени зависит не только эффективность самого процесса контроля, но и эффективность использования контролируемого оборудования. Поэтому повышение достоверности контроля — одна из основных задач, стоящих как перед проектировщиками средств контроля, так и перед персоналом, их эксплуатирующим.
Принято выделять две составляющие достоверности контроля: инструментальную и методическую. Под инструментальной достоверностью контроля обычно понимают достоверность, обусловленную только погрешностями средств контроля в предположении идеальности метода контроля (полнота контроля, наличие косвенных измерений и обобщенных параметров и т. д.), а под методической — достоверность, обусловленную только методом контроля в предположении идеального «инструмента», т. е. средств контроля.
При определенных условиях D = DHDM, где Da — инструментальная достоверность контроля; DM — методическая достоверность контроля. Однако это верно лишь в некоторых частных случаях, в большинстве же случаев зависимость D от Da и DM имеет не такой простой вид. Тем не менее повышение как методической, так и инструментальной достоверности приводит к общему повышению достоверности контроля.
Прежде чем перейти к классификации методов повышения достоверности контроля, отметим следующее. Рассмотрение любого метода 94
повышения достоверности контроля имеет два аспекта. Первый заключается в том, что если применен какой-либо метод повышения достоверности контроля или предполагается его применение, то необходимо уметь оценивать его эффективность, т. е. определять, какое увеличение достоверности он вызовет и какие затраты при этом (аппаратурные, временные, стоимостные и т. д.) возникнут. Второй аспект состоит в в том, что иногда возникает задача выбора того или иного метода повышения достоверности, а также параметров аппаратуры, либо параметров алгоритмов обработки результатов контроля с тем, чтобы получить максимальную достоверность при ограниченных затратах, либо минимизировать затраты при заданной достоверности (задача оптимального синтеза системы контроля). Следовательно, в любом случае необходимо знать зависимости показателей достоверности контроля от параметров средств контроля и алгоритма обработки результатов контроля.
Построим возможную классификацию методов повышения достоверности контроля. Поскольку достоверность контроля имеет инструментальную и методическую составляющие, то целесообразно все методы повышения достоверности контроля разделить на две большие группы — методы повышения инструментальной достоверности контроля и методы повышения методической достоверности контроля.
Методы первой группы разобьем на подгруппы: методы, не связанные с введением избыточности в систему контроля (это не означает, что эти методы не предполагают определенных затрат); методы, связанные с введением временной избыточности в процессе контроля и не приводящие к усложнению средств контроля; методы, связанные с введением аппаратурной избыточности. Методы повышения методической достоверности разобьем на две подгруппы: связанные с объектом контроля и связанные с аппаратурой контроля (рис. 35). Произведем краткий анализ некоторых из перечисленных методов.
Методы повышения инструментальной достоверности контроля, не связанные с введением аппаратурной или временной избыточности, направлены на повышение безотказности аппаратуры контроля, не связанное с применением резервирования, включают весь комплекс мероприятий, направленных на снижение параметра потока отказов контрольной аппаратуры. К ним относятся выбор элементов с низкой интенсивностью отказов, снижение интенсивности отказов за счет рационально выбранных режимов работы элементов и т. д. Эти мероприятия достаточно полно освещены в учебниках по надежности.
Сущность метода повышения достоверности контроля путем изменения контрольного допуска по сравнению с гарантийным заключается в том, что изменение контрольного допуска приводит к изменению соотношений между риском изготовителя и заказчика. В случае, когда контрольный допуск сужается по сравнению с допуском, определенным по техническим условиям, значительно уменьшается риск заказчика и увеличивается риск изготовителя; в случае расширения контрольного допуска наблюдается обратное явление. Однако назначение оптимальных
95
Методы повышения инструментальной достоверности
Не связанные с избыточностью
Повышение безотказной аппаратуры контроля
Изменение контрольных допусков
Уменьшение дисперсии контролируемых параметров
Моноритарный ; метод
Введение временной избыточности введение аппаратурной избыточности
Профилактические работы на аппаратуре контроля -*> Резервирование аппаратуры контроля
s ' Повышение точ-
Многократный контроль с отбраковкой ности аппаратуры контроля
Применение фильтров
Многократный
контроль забракованных изделий Многоканальное измерение
Усиление сигналов Оптимальные алгоритмы обработки
Самоконтроль
введена е аппар i -тур но- временчой избыточности
Многократные измерения
-*> Оптимальные алгоритмы обработки
Последовательные алгоритмы обработка
Рис. 35. Классификация методов повышения достоверности контроля
допусков на контролируемые параметры не дает максимума достоверности разбраковки при контроле многопараметрического изделия.
Данный метод повышения достоверности контроля не требует введения временной избыточности в процессе контроля в аппаратуру контроля, но при его использовании необходима информация о законах распределения f (£) и f (/), в противном случае возможно уменьшение абсолютной достоверности контроля, либо при незначительном измерении резко возрастает риск изготовителя, что снижает производительность.
При уменьшении разброса контролируемых параметров резко снижается риск изготовителя и заказчика за счет концентрирования параметра внутри допуска. В пределе при f (|) 6 (|), где 6 (|) — импульс-
ная 6-функция, а-^-0, р ->- 0 при надлежащем выборе точности контрольной аппаратуры.
Методы повышения достоверности контроля, связанные с временной избыточностью, предполагают введение временной избыточности в процесс контроля, что приводит к снижению производительности контроля й увеличивает затраты. Проведение профилактических работ на контрольно-измерительной аппаратуре, во-первых, снижает параметр потока отказов, во-вторых, приводит к тому, что уменьшаются погрешности измерения контрольной аппаратуры. Все это, естественно, повышает достоверность контроля.
Многократный контроль с отбраковкой может применяться для повышения достоверности результата. Повторный контроль забракованных изделий, направленный на снижение ложного брака (риска изготовителя), достаточно распространен. Сущность способа заключается в 96
том, что после первой проверки, которая выполняется по суженным контрольным допускам, производится многократная проверка забракованных изделий. При каждой повторной проверке все негодные изделия будут браковаться, а некоторая часть забракованных ранее годных изделий будет переходить в категорию годных.
Мажоритарный метод контроля относится к методам повышения достоверности контроля с введением временной избыточности. Мажоритарный алгоритм контроля заключается в том, что производится п измерений контролируемого параметра, причем в общем случае имеется т исходов «результат измерения в допуске» и (п — т) исходов «результат измерения вне допусков». Если т~^ k, где k — заданное число, то принимается решение «годен», в противном случае принимается решение «брак». Методы повышения достоверности контроля, связанные с введением аппаратурной избыточности в аппаратуру контроля, предполагают усложнение контрольной аппаратуры, что приводит к повышению ее стоимости, снижению безотказности и ремонтопригодности, увеличению габаритов и массы аппаратуры.
Повышение общей безотказности аппаратуры контроля при помощи резервирования повышает достоверность контроля, следовательно резервирование узлов и блоков КИА может использоваться для повышения достоверности. Методы резервирования и влияния видов резерва и кратности резервирования на вероятность безотказной работы, от которой зависит риск изготовителя и заказчика, подробно рассмотрены в литературе по надежности. Резервирование существенно усложняет аппаратуру контроля, так как требует не только резервных блоков, но и индикаторно-переключающих устройств. Кроме того, отдельные виды резервирования повышают безотказность только по отношению к определенному типу отказа, поэтому наряду с выигрышем в риске заказчика, например, может наблюдаться увеличение риска изготовителя. В связи с этим применение резервирования может быть рекомендовано лишь при контроле ответственных изделий после тщательного анализа затрат и выигрыша от его применения.
Повышение точности контрольно-измерительной аппаратуры влияет на достоверность контроля, поскольку инструментальная достоверность контроля зависит от законов распределения (вида закона и его параметров) погрешностей измерения. Чем выше точность (меньше предельная погрешность измерения), тем меньше риск изготовителя и заказчика, тем выше абсолютная достоверность контроля, достоверность результатов «годен» и «брак».
Зависимости риска изготовителя и заказчика от точности (3.7), (3.8) показывают, что увеличение точности контрольной аппаратуры приводит к достоверности контроля. Данный метод повышения достоверности контроля достаточно эффективен, так как позволяет существенно уменьшать риск изготовителя и заказчика при увеличении точности контроля, однако повышение точности КИА увеличивает ее стоимость, затраты на обслуживание и уменьшает безотказность.
4 Зак. 2262 97
Применение фильтров в трактах контролируемых сигналов встречается, в частности, в автоматизированных системах контроля, где все физические величины приводятся к постоянному напряжению, удобному для измерения, в связи с чем в измерительных трактах возникают синусоидальные помехи. Таким образом, фильтрация синусоидальной помехи в измерительных цепях существенно повышает достоверность контроля, тем более что в принципе при применении достаточно громоздких фильтров эта помеха может быть сведена к нулю. Сложные фильтры удорожают аппаратуру, снижают ее безотказность, увеличивают габаритные размеры и массу. В то же время фильтрация не единственный путь избавления от нежелательного влияния синусоидальных помех, поэтому можно избежать применения фильтров, если воспользоваться другими методами повышения достоверности контроля.
Многократное параллельное резервирование измерителей и контроль по разным каналам заключаются в том, что измерение контролируемого параметра и сравнение результата измерения с допусками производятся в нескольких измерителях (измерительных каналах), а решение о принадлежности параметра к той или иной области принимается по совокупности результатов контроля каждым измерителем.
Одно из основных преимуществ данного способа контроля — возможность частично избежать влияния неизвестных систематических погрешностей измерения при контроле, кроме того, при данном методе контроля не снижается производительность системы контроля. К недостаткам этого метода следует отнести большую сложность аппаратуры, повышенную стоимость, габаритные размеры и массу.
Применение оптимальных алгоритмов обработки информации состоит в том, что для оптимизации некоторого критерия качества контроля производится обработка данных измерения по некоторому алгоритму, после чего результат обработки (оптимальная оценка) сравнивается с допусками и на основе этого сравнения принимается решение о годности или браке изделия по контролируемому параметру.
В качестве критерия оптимальности выбирают минимум среднего квадрата ошибки, т. е.
min
где § — контролируемый параметр; у* — оптимальная оценка контролируемого параметра.
Можно показать, что характеристики достоверности а и ₽ при контроле с получением оптимальной оценки равны соответственно аир без оптимальной оценки, но с установлением расширенного контрольного допуска.
Таким образом, оптимальная обработка сигналов в некоторых случаях эквивалентна изменению поля допуска. Применение оптимальной обработки усложняет контрольную аппаратуру.
98
1
3.5. ОЦЕНКА ПОКАЗАТЕЛЕЙ ДОСТОВЕРНОСТИ КОНТРОЛЯ РЭО
ПРИ МНОГОКРАТНОЙ ПРОВЕРКЕ С ОТБРАКОВКОЙ
В практике контроля качества некоторых видов РЭО встречается многократная проверка изделий, в частности двукратная. Цель многократной проверки— сокращение доли неработоспособных элементов аппаратуры. В этом случае элементы, признанные годными при первой проверке, подвергаются вторичной проверке, элементы, признанные годными при второй проверке, проверяются в третий раз и т. д.
Схема принятия решений при многократной проверке с отбраковкой приведена на рис. 36, на котором введены следующие обозначения: рг — вероятность того, что изделие находится в исправном состоянии по контролируемому параметру g; Да/ — приращение риска изготовителя после i-й проверки; — риск заказчика после i-й проверки.
Риск изготовителя а,- после проведения i-й проверки определяется как сум-i ма приращений риска изготовителя за все предыдущие проверки: ~ 2Да^.
/= 1 Обозначим: /0 (5) — плотность распределения контролируемого параметра;
— плотность распределения погрешностей измерения на i’-м этапе контроля; а, b— соответственно нижняя и верхняя границы поля допуска на контролируемый параметр.
Плотность распределения контролируемого параметра у объектов РЭО
т-т
П f <Р/(0)
/=ia-5
//-1 (5)
оо '= 1
f h> (6) П .1 <p> (0) dt}
-oo
а риск изготовителя и риск заказчика после проведения Z-й проверки соответственно равны:
i b Г/=и-|
а>- = 2 | fo(g) П f Фл(<л)Лл /=1а 1*=10-5
а—£ оо
J Ф, (0) dt} + У ф/ (0) dt} — оо Ь —£
d&
Pi
У /о(£) -00
Г « ь-5
П У 4i(t})dtt
4+У MS) b
Для часто встречающегося на практике случая, когда контролируемый параметр и погрешности измерений распределены по нормальному закону, а систематические погрешности измерений отсутствуют, т. е.
(&)=« («j. (3.19)
Ф|(0) = п(0,
Рис. 36. Граф принятия решений при многократном контроле 4*
выражения (3.17) и (3.18) после подстановки в них (3.19) и соответствующих преобразований приобретают вид:
(3.20)
2 dr
(3.21)
где k — (т^ — а)/(Ь — т^) — коэффициент несимметрии допуска; г —(Ь — —т^)/(Г^, кг=(т^ —а)/<Г&—нормированные верхнее и нижнее предельные отклонения параметра; Zj = atjlaj — нормированная погрешность излучения при /-й проверке.
При i = 1 выражения (3.20) и (3.21 для определения риска изготовителя и
Рис. 37. Зависимость рисков заказчика и изготовителя от числа проверок 100
) эквивалентны общеизвестным формулам заказчика, при i = 2 выражениям для определения риска изготовителя и заказчика при двукратной проверке.
Представляют интерес исследования влияния числа проверок на а$, р/ в случае равноточных измерений (гг = == ... = zy = ... =zt). На рис. 37 приведены зависимости .а< = / (0, =/(z)
при различных значениях гиг, вычисленные по формулам (3.20) и (3.21). Как видно из рисунка, риск заказчика pf резко падает с увеличением числа проверок тогда, как риск изготовителя а* при увеличении числа проверок существенно возрастает. В результате приведенного анализа получены выражения (3.20), (3.21), позволяющие оценить риск изготовителя и заказчика при многократной проверке изделий по контролируемому параметру.
Многократная проверка при контроле — весьма эффективное средство
уменьшения риска заказчика и повышения достоверности результата «годен». При увеличении числа проверок риск заказчика стремится к нулю. Однако с увеличением числа проверок существенно увеличивается риск изготовителя и снижается достоверность результата «брак».
3.6. ОЦЕНКА ПОКАЗАТЕЛЕЙ ДОСТОВЕРНОСТИ КОНТРОЛЯ РЭО ПРИ МНОГОКРАТНОЙ ПЕРЕПРОВЕРКЕ КОНТРОЛИРУЕМЫХ ПАРАМЕТРОВ
Достоверность контроля РЭО можно повысить многократной перепроверкой параметров, которые по результатам контроля признаются находящимися вне поля допуска. Поскольку по результатам каждой проверки возможно ложное бракование объекта контроля, то для исключения ошибок при принятии решения параметры, признанные находящимися вне поля допуска, можно проконтролировать дополнительно, изменяя при этом ширину поля допуска. Применение данного метода при контроле работоспособности позволяет добиться уменьшения риска заказчика вследствие сужения поля контрольного допуска и уменьшения вместе с этим риска изготовителя при перепроверках забракованных изделий.
Для оценки эффективности метода определим характеристики достоверности контроля — риска изготовителя и риска заказчика при контроле работоспособен с использованием указанного метода.
Пусть допуск на контролируемый параметр некоторого устройства задается своими нижней (а) и верхней (Ь) границами, а границы контрольного (приемочного) допуска соответственно и 6^, причем = а + 6, ~ b — 6. При мно-
гократной проверке забракованных по данному контролируемому параметру изделий плотность распределения после очередной i-й проверки определится следующей формулой:
fi (§)=
оо Га + б оо
f /(5) J ф (М) dy + f
— оо I — оо о —О
ф (y/l)dy di
rjifif (?) — плотность распределения КП до начала контроля; ф (y/i) — условная плотность распределения результата измерения у.
Можно показать, что при этом выражения для риска изготовителя а (п, 6) и риска заказчика р (п, 6) имеют вид:
ь
а(п, fi) = f / (б) а
f f(y/Ddy+°$ ф (<//£)</# 1 d£; — оо Ь— 6 I
(3.22)
₽(«. «)= 2 /=i
а Г / а + d 00 \ / — 1
J f(5) Il f Ф («//§) dy 4- j Ф(М)| dy X
- QO I \ ---------OO Ъ---d /
b—6 oo Г /а-^-6 oo \Z—1
x f ф(М)^ f (I) 11 j ^(y!l)dy + j y(yfe)dy\ X а-j-d b 1Д-°° b—6 /
d-d *1 )
X f tp(y/^dy pd, (3.23)
a-hd J J
где n — число проверок.
101
Затраты времени на контроль по сравнению с однократной проверкой в среднем увеличиваются в Q (п, о) раз, причем
п оо Га-р оо *1/
Q(n, 6)=2 I Н6) f 4>(y/l)dy+ У ф(М)Й <£• (3.24)
у — О — °° —00 b — б I
Проанализируем влияние числа повторных проверок и приращения границы поля допуска 6 на характеристики достоверности и производительности контроля а (п, 6), р (п, 6), Q (п, 6). Анализ будем проводить в предположении нормальности законов распределения контролируемого параметра и при отсутствии систематической погрешности измерения, что часто встречается на практике. В этом случае
f (g) = n(m6, а0; (3.25)
<р (0 = п (0, <if), (3.26)
где — математическое ожидание КП; — среднее квадратическое отклонение КП; (Jf — среднее квадратическое отклонение погрешности измерения.
Подставив (3.25), (3.26) в (3.22), (3.23), (3.24), после преобразований получаем:
а (п, А)
п
$(«, д)=2 /=1
(3.27)
~ оо _ 12
2 Лт-f- j’ е 2 dx г — Ь—у
2
Т2
2
(3.28)
„_1 оо _Л! Q(n, 6)= 2 J е 2 /=1
(3.29)
где г — (т^ — = (Ь — нормированная граница поля допуска;
г = — нормированное среднее квадратическое отклонение погрешности
измерения; А = 6/а& — нормированное приращение ширины поля допуска.
102
На рис. 38 и 39 приведены зависимости а (л, А), Р (n, A), Q (п, А), вычисленные по формулам (3.27)... (3.29) при типичных значениях г — 1,65 (соответствует 10 %-ному браку по КП) и г = 0,2. Анализ результатов вычислений по этим формулам показывает, что риск изготовителя существенно убывает с увеличением числа проверок и возрастает с увеличением Д; риск заказчика с увеличением числа проверок растет и резко снижается с увеличением Д. средний объем перепроверок монотонно увеличивается с ростом п и Д.
Сравнение значений>риска заказчика и риска изготовителя с их значениями при обычном однократном контроле показывает, что путем надлежащего выбора п и Д риск изготовителя и заказчика может быть значительно уменьшен (в десятки и сотни раз) при уменьшении производительности контроля в. 2...3 раза. Так, в случае, если г = 1,65; z — — 0,2, при однократном контроле» — = 0,02; р = 0,013, а при шестикратной проверке отбракованных изделий и суженном на 0,35 г допуске а (7; 0,35) = = 0,00034; Р (7; 0,35) = 0,00012.
При реализации требований к точности измерения контролируемых параметров, т. е. при синтезе измерительных трактов или выборе измерительных приборов, может оказаться, что выполнение требований к точности измерения некоторых параметров связано с значительными трудностями, такими, как отсутствие компонентов необходимой точности, высокая стоимость приборов требуемого класса, низкая их надежность, ограниченный диапазон условий работы и т. д. В этом случае достигнуть требуемой достоверности контроля параметра можно путем увеличения времени
Рис. 38. Зависимость вероятности ошибок 1 и 2-го рода а и ₽ от числа проверок
Рис. 39. Зависимость длительности контроля от числа проверок
контроля этого параметра и применения определенного алгоритма контроля, т. е. совокупности правил, по которым обрабатываются результаты измерения и принимаются решения о работоспособности. За счет введения некоторой временной или аппаратурно-временной избыточности и достигается повышение достоверности контроля. Применение специальных алгоритмов контроля для повышения достоверности контроля целесообразно и в том случае, когда в процессе контроля имеется некоторый резерв времени. При использовании этого результата и некотором усложнении аппаратуры контроля или программы контроля можно повысить достоверность, т. е. улучшить одну из основных характеристик системы контроля.
Алгоритмы контроля делятся на два класса: алгоритмы с фиксированным временем измерения и последовательные алгоритмы. К первым относятся алго-
103
ритмы, при реализации которых по результатам п измерений вычисляется оценка контролируемого параметра, а решение принимается по результатам ее сравнения с некоторым порогом. Последовательные алгоритмы, при реализации которых решение о продолжении или прекращении процесса контроля принимается на каждом из его этапов, позволяют получить выигрыш во времени контроля по сравнению с алгоритмами с фиксированным числом проверок (непоследовательными) при том же качестве процесса контроля.
Использование метода последовательного анализа для повышения достоверности контроля состоит в следующем. Область возможных значений контролируемого параметра (КП) разбивается на три зоны (рис. 40): зона принятия от точки ах до точки blt зона бракования от — сю до а2 и от Ь2 до сю, зона продолжения проверок от аг до а2 и от Ьг до Ь2 (а и b — нижняя и верхняя граница поля допуска).
Если после первой проверки измеренное значение параметра, являющееся суммой контролируемого параметра и погрешности измерения, оказывается в зоне принятия или в зоне забракования, то контроль прекращается и принимается решение соответственно о годности или браке изделия по данному контролируемому параметру. Если же результат измерения оказывается в зоне продолжения проверок, то производится вторая проверка, после которой также возможно либо прекращение контроля, либо следующая проверка и т. д. до тех пор, пока результат контроля не окажется в зоне принятия или забракования. При этом процесс контроля может продолжаться неограниченно долго. Поэтому будем рассматривать метод последовательного анализа «с усечением», когда фиксируется максимальное число проверок и при последней проверке результат измерения сравнивается с нижней и верхней границами поля допуска, т. е. последняя проверка аналогична обычному двухальтернативному контролю. Рассмотренный алгоритм
контроля назовем последовательным.
Методика определения риска изготовителя и заказчика при контроле методом последовательного анализа «с усечением» основана на том, что процесс контроля
Рис. 40. Расположение зон принятия решений
состоит из нескольких этапов и на каждом возможны как ложное бракование изделия по данному контролируемому параметру, так и ошибочное принятие решения об исправности изделия, т. е.
п п
а («)= 2 а1' ₽ 2 ₽«’
Рис. 41. Зависимость вероятностей ошибок 1- и 2-го рода а и от ширины поля допуска
где п—число этапов контроля (максимальное количество проверок);
ai» Pi—соответственно риск изготовителя и риск заказчика на i-м этапе контроля.
Следуя методике, изложенной в предыдущем параграфе, можно получить выражения для рисков заказчика и изготовителя, а также длительности контроля. Ввиду сложности полученных при этом аналитических выражений на рис. 41 приведены зависимости а и рот ширины зоны продолжения проверок при числе проверок п = 3 и п = 10, при нормированном значении половины поля допуска х = 1 и нормированном среднем квадратическом отклонении погрешности измерения z = 0,3. Анализ завися-
104
мостей а (п, А) и р (п, Д) показывает, что риск изготовителя и заказчика уменьшается с увеличением числа проверок, среднее время контроля возрастает с увеличением как п, так и Д, а зависимость а и р от Д при фиксированном п носит экстремальный характер. Функции а (п, Д) и р(п, Д) имеют минимум, причем значения Д, при которых он достигается, совпадают для а и р и зависят от х, z и п.
При каждом значении п имеется оптимальное значение Д = Aopt- Поскольку на максимально возможное число проверок всегда из тех или иных соображений может быть наложено ограничение, и поскольку при любых Д с увеличением п значения а и р не возрастают, то оптимизация последовательного алгоритма конт-1 а <Ш(Д) Л
роля заключается в определении AOpt из уравнения ' = 0 и установлении зоны продолжения проверки от — х — AOpt ДО — * + Aopt и от х — Aopt до х Aopt-
Рассмотрим другой алгоритм контроля работоспособности — последовательный мажоритарный алгоритм, который отличается сравнительно простой аппаратурной реализацией, что позволяет применять его без значительного усложнения аппаратуры контроля.
Суть алгоритма в том, что в процессе контроля многократно сравнивается результат измерения с контрольными допусками а&, и после каждого сравнения определяется общее число р попаданий результата измерения в пределы допуска. Если на очередном i-м этапе контроля это число становится равным заранее выбранному целому порогу $, принимается решение «исправен». Если число попаданий результата измерения вне контрольного допуска становится равным п—s, где п максимально допустимое число измерений, принимается решение «неисправен», если на этом этапе контроля указанные условия не выполняются, делается еще одно измерение. Поскольку п—s+s = п, на последнем этапе обязательно будет принято решение «исправен» или «неисправен». Таким образом, на i-м этапе: р == s— исправен, i—ц —и—s — неисправен, $+i — n< р< s — продолжить контроль. При реализации алгоритма контроля желательно выбирать параметры s, ak, bk не произвольно, а наилучшим образом относительно выбранного критерия, т. е. произвести оптимизацию алгоритма. В качестве критерия оптимизации мажоритарного алгоритма целесообразно принять средний риск R, выражение для которого при отсутствии потерь от правильных решений имеет вид:
R — Ci cc-f-q P“b^Q, (3.30)
где q, с2 — соответственно потери из-за ошибок 1 и 2-го рода; С — затраты на проведение контроля; Q — математическое ожидание числа измерений при контроле параметра.
Этот критерий учитывает не только потери от неправильных решений, но и затраты на увеличение продолжительности процесса контроля (последнее слагаемое выражение (3.30)).
Задача оптимизации последовательного мажоритарного алгоритма состоит в отыскании таких значений s, а&, при которых достигается минимальный средний риск:
^min = min {ci а <s> “Л bk)+c2 Р (s, ак, hh)+cQ (s, ак, bh)}.
Следуя данной методике можно получить выражения для а, Р и длительно-сти контроля Q, однако, как в предыдущем случае, они имеют громоздкий вид. Поэтому приведем результаты расчетов для случая, когда нормированное значение половины поля допуска х = 1,5, нормированное среднее квадратическое отклонение погрешности измерения z = 0,3, максимально возможное число измерений п = 3, a q = с2 — 1 и с — 0,3. При однократном измерении а = 0,041, Р = 0,0235, Q = 1, R = 0,094. При применении мажоритарного алгоритма указанные значения составляют а = 0,0198; 0 = 0,0242; Q = 1,36; R = 0,085. Таким образом, незначительное в среднем увеличение времени контроля параметра
105
позволило в 2 раза уменьшить риск изготовителя (при почти том же значении риска заказчика) и уменьшить средний риск.
Анализ позволяет сделать вывод о том, что последовательный мажоритарный алгоритм при определенных условиях является эффективным и может быть рекомендован для повышения достоверности контроля.
3.7. МЕТОДЫ ОТЫСКАНИЯ
ОТКАЗОВ В АВИАЦИОННОМ РЭО
Авиационное РЭО представляет собой системы многократного использования, т. е. такие системы, в которых при возникновении отказов призводится их устранение, а затем РЭО вновь используется по назначению. Контроль, проводимый для определения отказавшего элемента РЭО, называется диагностическим, а процедура отыскания отказа называется диагностированием. Следовательно, принципиальное отличие диагностического контроля от контроля работоспособности состоит в том, что двухальтернативная задача определения работоспособности превращается в многоальтернативную задачу при диагностировании.
При отыскании неисправности в первую очередь необходимо выработать правило разбиения РЭО на области, в одной (или нескольких) из которых находится неисправный элемент. Очевидно, что правило разбиения должно учитывать как характеристики РЭО (его конструктивные особенности, технологичность оборудования, состав элементной базы и т. д.), так и характеристики системы ТО (состав и свойства используемой контрольно-измерительной аппаратуры, квалификацию обслуживающего персонала и т.д.), а также условия использования РЭО (например, методика отыскания отказа в работающем РЭО может отличаться от методик отыскания отказа в РЭО, остановленном для проведения трудоемкой формы ТО). Эта особенность процесса диагностики приводит к тому, что при диагностическом контроле, как правило, приходится проводить контроль значительно большего числа параметров, чем при контроле работоспособности. Цель диагностического контроля — отыскание отказавшего элемента. Следовательно, при диагностике необходимо правильно выбрать глубину места поиска отказа. Например, в условиях эксплуатации достаточной глубиной места поиска отказа будет съемный блок, в то время как при ремонте поиск отказа необходимо проводить до нахождения отказавшего элемента внутри блока. '
Для формализации процесса диагностики необходимо разработать модель РЭО. В отличие от моделей РЭО при контроле работоспособности, когда РЭО представлялось в виде единого целого, модель РЭО при диагностике предполагает разбиение РЭО на отдельные элементы, функционально связанные друг с другом. Функциональная модель может быть построена на основе структурной схемы РЭО, однако она может отличаться от последней тем, что при построении функциональной моде-106
Рис. 42. Функциональная модель приемного устройства
ли разбиение РЭО на отдельные элементы должно определяться требуемой точностью локализации места отказа.
Функциональная модель РЭО для диагностики должна удовлетворять следующим требованиям:
каждый функциональный элемент модели имеет только один выходной сигнал при произвольном числе входных сигналов;
неисправным считается такой функциональный элемент РЭО, в котором при номинальных значениях входных сигналов значение выходного сигнала отличаются от номинальных, т. е. элемент считается неисправным, если при номинальных значениях входных сигналов на выходе элемента появляется сигнал, выходящий за пределы допуска;
при отличии от номинального значения хотя бы одного входного сигнала сигнал на выходе также отличается от номинального;
внешние входные сигналы принимают только номинальные значения;
если выходной сигнал некоторого элемента является входным сигналом для другого элемента, то номинальные значения их совпадают.
При построении модели предполагается, что известны номинальные значения и методы контроля всех входных и выходных сигналов, а также функциональные связи между элементами, которые соответствуют линиям связи структурной или электрической схемы РЭО. Кроме того, считается, что линии связи между функциональными элементами абсолютно надежны.
При построении функциональной модели выход любого элемента соединяется с любым числом входов, а вход каждого элемента может быть соединен только с одним выходом. Если на /-й вход i-ro функционального элемента подается внешнее воздействие, то эти воздействия не соединяются ни с одним выходом. Сигнал с некоторого функционального элемента, не являющийся выходным сигналом или входным сигналом другого элемента, называется свободным.
Для структурной схемы типового приемного устройства функциональная модель для диагностики, совпадающая со структурной схемой, представлена на рис. 42. Процедура поиска при анализе функциональной моделй существенно сокращается при условии, что в РЭО имеется только один отказ. При наличии нескольких отказов процедура диагностики также повторяется для нахождения всех отказов.
Неисправный элемент на основе функциональной модели определяется путем анализа таблицы или матрицы неисправностей. Таблица или
107
матрица неисправностей представляет собой квадратную матрицу с числом строк и столбцов, соответствующих числу элементов функциональной модели и числу выходных параметров этих элементов. Матрица неисправностей заполняется на основе анализа функциональной модели в соответствии со следующим правилом: в предположении, что отказал t-й элемент, на пересечении i-й строки и /-го столбца записывается символ 0. Нули записываются также на пересечении г-й строки с /-м столбцом, если на выходе /-го функционального элемента значение параметра также принимает недопустимое значение. В противном случае в элементах матрицы записывается 1.
Заполненная на основе этого правила матрица для отыскания неисправностей в радиоприемном устройстве, структурная схема которого приведена на рис. 43, представлена в табл. 12.
Следовательно, матрица или таблица неисправностей позволяет задать связь между множеством возможных состояний S, множеством контролируемых параметров Z объекта контроля и множеством решений 7? по оценке состояния РЭО по этим параметрам. Наличие построенной матрицы является достаточным условием для построения программы поиска отказавшего элемента и позволяет построить эту программу.
Программа поиска отказавшего элемента может строиться по последовательному, комбинационному методу или с использованием различных сочетаний этих методов.
При последовательном методе реализации программы поиска информация о состоянии элементов, представленная в матрице неисправностей, анализируется поочередно по каждому элементу. Последовательный метод может быть реализован с помощью жесткой или гибкой программы. Жесткая программа предусматривает неизменную последовательность анализа. При гибкой программе порядок каждой последующей проверки зависит от результатов предыдущей проверки. При комбинационном методе реализации процедуры диагностики логическая
Таблица 12
108
См2 Сн>1
Рис. 43. Схема поиска неисправностей по методу последовательного функционального анализа
обработка производится после ввода информации о всей совокупности параметров, характеризующих состояние всех элементов РЭО.
Программа диагностики реализуется одним из следующих способов: последовательно функционального анализа; половинного разбиения; с учетом времени и стоимости контроля параметров; с использованием информационного критерия; методом ветвей и границ.
Сущность способа последовательного функционального анализа состоит в том, что путем анализа РЭО в нем выделяют основные функции, контроль которых позволяет последовательно сужать место нахождения неисправного элемента. Например, при диагностике РЛС можно выделить следующие основные присущие ей функции: излучение высокочастотной энергии, прием и обработка высокочастотных сигналов, индикация информации, управление станцией и т. д.
Последовательность проверок приемника (см. рис. 42) при отыскании отказа методом последовательного функционального анализа состоит в следующем. Приемник выполняет одну функцию — прием сигналов. Выполнение этой функции возможно путем контроля выходного сигнала г, при этом могут быть два решения: приемник исправен (решение р0) или неисправен (рх). При решении рх, контролируя последовательно сигналы на выходе каждого каскада, в конечном итоге приходим к отысканию неисправного. Схема поиска по данному способу представлена в виде дерева функций (рис. 43).
После определения функции, которая не реализуется из-за неисправного элемента, дальнейшая процедура диагностики основана на отыскании этого элемента путем аналитического анализа устройств.
При использовании способа половинного разбиения последовательность контроля выбирается исходя из получения максимума информации при каждой проверке. При контроле РЭО, состоящего из N элементов, имеющих одинаковую вероятность отказа Р, каждая проверка разделяет РЭО на две части с п и N числом элементов. Среднее число элементов в той части РЭО, где окажется отказавший элемент,
m —рх (n/N)+P!l[(N-nm
где Pi = n/N, р2 (N — n)/N — вероятность того, что отказавший элемент окажется в одной или другой части РЭО соответственно»
109
Следовательно,
n2 , (N—n)* n2 + (N—n)2
tn —---4- ------= ------------.
N N N
Очевидно, что максимальное число т будет равно N/2, т. е. именно при половинном разбиении достигается минимальное число проверок. Максимальное число проверок М при использовании метода средней точки определяется из соотношения N = 2,м т. е. М = In JV/ln 2. Максимальное число проверок в случае безсистемного поиска отказа равно N — 1, следовательно выигрыш в сокращении максимального числа проверок при использовании метода половинного разбиения
М_________In N
N — 1 “ 1п2 (N — 1) ’
что для РЭО, состоящего из N = 100 элементов, дает выигрыш в 12,8 раза. С увеличением сложности РЭО этот выигрыш возрастает.
Процедура поиска по методу половинного разбиения для приемника, схема которого изображена на рис. 42, приведена на рис. 44.
При отыскании отказов пр способу функционального анализа и половинного разбиения не учитывается информация о вероятностях отказов и стоимости проверок элементов. При наличии такой информации последовательность отыскания отказов следует изменить с учетом того, что в первую очередь необходимо контролировать параметры, вероятность отказов которых наибольшая, а стоимость проверки (например, затраты времени) наименьшая, т. е. последовательность проверок определяется из условия
р (si) Р (s2) > P(s3) > p(sn)
Ci Cj С3
где р (si) и Ci — вероятности отказов и стоимости проверок элементов.
Способ построения программы поиска с использованием информационного критерия позволяет выбрать минимальное число параметров, контроль которых необходимо осуществить для отыскания отказа, и последовательность их проверки. Исходной информацией при этом является матрица неисправностей, которая транспонируется таким обра-
110
зом, чтобы столбцы соответствовали всем возможным состояниям объекта диагностики, а строки — выходным параметрам функциональных элементов, т. е. столбцы и строки в транспонированной матрице меняются местами.
Энтропия состояния РЭО до проведения контроля при равной вероятности отказов любого из N элементов р (s,) = 1/N равна
N
Р 1о& Р (si) = logs N.
I —I
Полученная формула позволяет вычислить объем информации, получаемой при контроле каждого параметра, и определить последовательность контроля в порядке убывания количества информации.
После контроля первого параметра, дающего максимальное количество информации, энтропия состояния объекта диагностики изменится. Поэтому следующим для контроля необходимо выбирать такой параметр, контроль которого принесет наибольшую условную информацию
/ (zhizh)^--Hh— Н (zh/zk)
относительно нового состояния РЭО после контроля первого параметра. Условная энтропия
И (zh/zk)=-.p (zh/zh) Hzh/zh+p (ZhiZb) H~hj Zft+ p (zh!zh) Hzhizh + +p(rh/z~k) H-^-,
где p (zh/zh) — вероятность признания РЭО исправным при контроле параметра zh\ Р (zh/zk) — вероятность признания РЭО неисправным при контроле параметра.
Эти вероятности определяются по матрице неисправностей как отношение числа тг единиц в Л-й строке относительно пг единиц в fe-й строке, пг2 — число единиц в Я-й строке относительно Af — т нулей в &-й строке, т. е.
Р (zklzh) = (m---m1)iN\ р (zh/zk)^m2iN; p(zh/zk^(M—т — т2) N.
Контроль каждого параметра, уменьшая энтропию, дает определенное количество информации о состоянии РЭО
zk ~ Нk >
где — средняя условная энтропия при контроле zA-ro параметра.
По результатам контроля каждого параметра РЭО может быть отнесено к исправному состоянию с вероятностью Pk (zA) и неисправному с вероятностью pk (zA). Поэтому средняя условная энтропия при контроле fe-ro
Нк^Рк (zk) ^zh+Pk (zk) Я-, где Н и Нг — энтропия состояния РЭО после контроля параметра zA.
Ш
Вероятности ph (zK) и pK (zK) определяются из матрицы неисправностей как отношения числа единиц и нулей в я-й строке к общему числу состояний:
т
Pk (г*) = m/N, ph (zk) = ——
где m — число нулей в строке.
Следовательно,
т N—т
Hk = — log2 rn+ —— logs (N—m),
а количество информации, полученной в результате контроля параметра zft,
4=log2A/ —2- log2 m— — W log2 (N—m);
N N
Условная энтропия:
Zft = logs = 10g2 (m-n1):
^Zft/7ft = log2'«2; tf-/Zft = log2 (N—m— m2).
Следовательно, количество условной информации
(тл тл m—тл m—tnx
-rp log2 -7 +-r-1- log2---i
N N N m
m2 m2 N—m— m2 N — m—m2 \
+ -7Г log2“--+ ---------log2---------
N N—m N N—m )
Следующий для контроля параметр выбирается по максимуму условной информации. Процедура продолжается до отыскания неисправного элемента.
Относительная громоздкость реализации этого способа требует иллюстрации его на конкретном примере. Пусть объект диагностики с пятью функциональными элементами прёдставлен функциональной мо-
Рис. 45. Функциональная модель объекта диагностики
делью на рис. 45, а матрицу неисправностей на основе этой модели — табл. 13.
Анализ функциональной модели и матрицы неисправностей показывает, что контроль параметра z5 не несет информации о месте нахождения неисправного элемента
112
Таблица 13
Si/Zl Z1 г3 24 *5
Si 0 0 1 1 0
s2 1 0 1 1 0
«3 1 0 0 0 0
*4 1 1 1 0 0
«5 1 1 1 1 0
Таблица 14
Zljsi *2 *3 $4 $5
21 0 1 1 1 1
22 0 0 0 1 1
23 1 1 0 1 1
24 1 1 0 0 1
(в пятом столбце матрицы нули), хотя является наиболее информативным с точки зрения контроля работоспособности. Транспортированная матрица представлена в табл. 14.
Энтропия до начала диагностики
H0=log2 5 = 2,32.
Вычислим количество информации при контроле параметров zx... ... . z4:
1 4
Zi = Яо_— log2 1 _ — log, 4 = 0,72; О о
72 = Я0—|-log, 3--^-log2 2=0,972; О о
/,=Я0—~ log, 4 —log2 1=0,72; О о
3 2
/4= яо—~ log2 3 —— log, 2 = 0,972. О о
Выбираем для контроля параметр г,. После контроля возможны следующие заключения о состоянии объекта диагностики по параметру z,:
z, в норме означает, что 1, 2 и 3-й элементы исправны, а неисправность кроется в 4 и 5 элементах;
z, не в норме означает, что отказали 1,2 или 3-й элементы.
На основе этих решений перестроим матрицу состояний (табл. 15).
113
стей с использованием информационного критерия
Дальнейшая процедура диагностики требует вычисления условного количества информации, получаемой в результате контроля параметров z4, z3, z4 при условии, что параметр z2 уже проконтролирован:
/2 2
/ (Zj/22)= — — logj—+ \ 5 о
2—2 , 2—2
+ — log,—+
+ — logs “7” + “7" l°gs“тЧ ==0,548;
о о о о /
( 2 2 2_2 2_2 2 2
-7^27+—!°g2—+т-1о^Т+ О Z D Z о о
/1 11 12 2 1 1 \
/(г4/г2)=— — log2—+ — log2— + — log2— +—log2— = 0,948.
\ О ZD ZD о D о /
По максимальному значению условной информации вторым выбираем для контроля параметр г4 и перестраиваем матрицу неисправностей (табл. 16).
На основе перестроенной матрицы вновь вычисляем количество информации, получаемой в результате контроля параметров zlt z5f при условии, что параметры г2 и г4 проконтролированы. Продолжая эту процедуру, всегда можно найти отказавший элемент (рис. 46).
Таблица 15
zi/st $4 $5 5| 5g 53
Z2 1 1 0 0 0
2i 1 1 0 1 1
23 1 1 4 1 0
24 0 1 1 1 0
Таблица 16
zi/si 54 51 52 5з
24 1 0 1 1 0
2l 1 1 0- 1 1
23 1 1 1 1 ’ 0
114
3.8. КОНТРОЛЬНО-ВОССТАНОВИТЕЛЬНЫЕ МЕРОПРИЯТИЯ И ПОКАЗАТЕЛИ ИХ КАЧЕСТВА
Контрольно-восстановительными мероприятиями (КВМ) в процессе эксплуатации будем называть мероприятия, заключающиеся в установлении состояния РЭО (контроле) и последующем воздействии на него на основании полученной информации (восстановлении). Под восстановлением будем понимать более широкий класс воздействия, чем в теории надежности, а именно, все воздействия, переводящие РЭО в требуемое состояние. К КВМ относятся: периодический контроль и восстановление хранящейся аппаратуры; контроль и регулировка определяющих параметров; восстановление отказавшей аппаратуры, контроль и восстановление при подготовке к применению и т. д.
При проведении КВМ на этапах контроля или восстановления, или на обоих этапах применяют контрольно-измерительную аппаратуру, имеющую ограниченную точность, надежность и быстродействие, поэтому КВМ никогда не бывают идеальными, т.е. при их проведении возможны ошибки, в результате которых РЭО не приводится в требуемое состояние.
В эксплуатации авиационного РЭО на параметры действуют две группы факторов: приближение значений параметров к уровням допусков вследствие старения, изнашивания и разрегулирования и управление этими параметрами путем установки их до некоторых (например, номинальных) значений. Вторая группа факторов по своей сути определяет процесс целенаправленного противодействия для обеспечения требуемого качества работы РЭО.
К качеству выполнения контрольно-восстановительных мероприятий предъявляются высокие требования.
Конечной целью КВМ является приведение оборудования в состояние работоспособности. Обозначим его через 3. Тогда качество КВМ можно характеризовать вероятностью того, что система после их проведения находится в данном состоянии Р (3). Можно пользоваться также для оценки качества КВМ вероятностью противоположного события р (3). В ряде случаев подобная оценка неудобна, так как показывает только, какова стала вероятность требуемого состояния, но не показывает, насколько она изменилась по сравнению с вероятностью этого состояния до проведения КВМ. В этом случае можно пользоваться следующей оценкой качества КВМ:
р ($)-/><,($) , ро (S)
К8 М р (S) р (S) ’
гдер0 (S) — априорная вероятность требуемого состояния.
Для определения показателей эффективности контрольно-восстановительных мероприятий построим модель КВМ с тем, чтобы выразить показатели эффективности через характеристики средств, реализую-
115
Рис. 47. Граф процесса контроля и восстановления
щих операции контроля и восстановления в зависимости от стратегий проведения КВМ.
Рассмотрим РЭО, на котором проводятся КВМ. Оно может находиться в двух состояниях: желательном S и нежелательном Г. Обозначим через Е событие, заключающееся в том, что перед началом КВМ изделие находится в состоянии S и через Е — событие, заключающееся в том, что перед началом КВМ изделие находится в состоянии Т. Очевидно, Е + Е = U, где
U — достоверное событие. Введя в рассмотрение вероятности указанных событий, получим
р(£) + р(Е)=1.
(3.31)
Обозначим через F событие, заключающееся в том, что по окончании КВМ изделие находится в состоянии 5 и через F — событие, заключающееся в том что по окончании КВМ изделие находится в состоянии Т. Тогда F + F=U\ p(F) + p(F)—1. Контрольно-восстановительные мероприятия являются идеальными, если при любом значении р (Е) р (F) = 1. Однако наличие различных видов априорной неопределенности при контроле и восстановлении на практике может привести к случаю, когда Р (F) < 1.
Представим процесс контроля и восстановления в виде направленного графа (рис. 47) и проследим зависимость вероятности р (F) от показателей, характеризующих операции контроля и восстановления. События на графе изображены прямоугольниками, а стрелки показывают взаимообусловленность событий. Рядом с прямоугольниками проставлены безусловные вероятности соответствующих событий, а над стрелками — условные вероятности, т. е. вероятности событий, в которые входят стрелки при условии осуществления предшествующих событий. На рисунке дополнительно введены следующие события:
С — событие, заключающееся в том, что изделие, признанное при контроле находящимся в состоянии 5, действительно в нем находится;
А — событие, заключающееся в том, что изделие, признанное при контроле находящимся в состоянии S, в действительности находится в состоянии Т;
В — событие, заключающееся в том, что изделие, признанное при контроле находящимся в состоянии Т, в действительности находится в состоянии S;
116
Д — событие, заключающееся в том, что изделие, признанное при контроле находящимся в состоянии Т, в действительности находится в этом состоянии. Следовательно,
а = р (Д/Е); 1—а=р (С/Е);
$ = р(В/Ёу 1-$ = р(О/Ёу
W^piF/Cy, l-W^piF/Cy,
Wt=p(F/B); \-Wt=p(F/By,
<h=P(F/A)'< l—qi=p(F/Ay, qt=p(F/D); l—q2=p(F/D).
Условные вероятности а, 0, 1 — а, 1 — 0 характеризуют качество первого этапа КВМ — операции контроля, а вероятности Wlt W2, qlt q2, 1 — Wlf 1 — IF2, 1 — (fr, 1 — <72 — качество второго этапа — операции восстановления или другого управляющего воздействия.
Воспользовавшись формулой полной вероятности с учетом (3.31), получим следующее выражение для вероятности р (F):
р(Е) = р(Е)(1Г1 + а(91-1Г1)] + [1-р(Е)| [<?2+₽ (1-W2-q2)]. (3.32)
Как видно из выражения, эффективность контрольно-восстановительных мероприятий зависит как от показателей качества первой операции — контроля (а, 0), так и от показателей качества второй операции — восстановления Ц72, qlt q2). Следует заметить, что полученное выражение является достаточно общим, однако оно не всегда пригодно для определения р (F), так как в некоторых случаях затруднительно выразить вероятности а, 0, IF2, qlt q2 через условные вероятности для отдельных параметров изделия.
Пусть состояние изделия однозначно характеризуется значениями одного определяющего параметра £. В этом случае для определения вероятности требуемого состояния после проведения КВМ р (F) можно пользоваться формулой (3.32). При этом под условными вероятностями а, 0, 1Г2, qlt q2 следует понимать соответствующие условные веро-
ятности определяющего параметра £.
Когда состояние изделия однозначно характеризуется значениями N независимых определяющих параметров, причем для того, чтобы изделие находилось в требуемом состоянии, необходимо, чтобы значения всех параметров соответствовали этому состоянию, вероятность требуемого состояния после проведения КВМ
м
р (Е) = П {Pt (Et) [W1i + ai!qli-Wli)] + 4=1
N
+ [l-p{(E)H?Si + ₽i(l-^2j-<?2i)J) П Pj(Fj), (3.33)
/•=Af4-l
где N — общее число определяющих параметров (ОП) изделия; М — число контролируемых и восстановительных параметров РЭО; pi (Е$ — вероятность требуемого состояния изделия по t-му контролируемому параметру до проведения
117
р( /
Граф операции контроля
Рис. 48.
КВМ; Pj (Fj) — вероятность требуемого состояния изделия по /-му неконтролируемому параметру после проведения КВМ; at, Pf> Wlit W2i, qu, q2i — услов-ные вероятности, характеризующие качество контроля и восстановления /-го контролируемого параметра.
Как видно из (3.33), выразить р (F) через условные вероятности для отдельных параметров затруднительно даже в случае независимых определяющих параметров. В связи с этим целесообразно определять показатели эффективности КВМ по следующей схеме:
параметры изделия классифицируются на контролируемые и неконтролируемые и выясняется зависимость их между собой;
для каждого контролируемого параметра или независимой совокуп-
ности контролируемых параметров определяются вероятности Pi (Et): а, р, W2, qu, q2i;
для каждого неконтролируемого параметра или независимой совокупности неконтролируемых параметров вычисляется вероятность требуемого состояния после проведения КВМ;
по формуле (3.33) рассчитывается вероятность р (F).
Для определения вероятностей pt (Et) : Pj (Ef), а также условных вероятностей Wlit W2i, qlit q2i рассмотрим операции контроля и восстановления, составляющие КВМ.
Рассмотрим контроль некоторого параметра РЭО. Операция контроля может быть представлена направленным графом (рис. 48). Пусть требуемое состояние изделия (например, состояние работоспособности) заключается в том, что значение параметра находится в пределах допуска с границами а (нижняя) и b (верхняя), т. е. Е = а Ь; р(Е) = р (а < £ < Ь). Тогда
Р (£)=//(£) 4g; (3.34)
ь р(Е)=1—J f&dl, (3.35)
' . а
гДе f (g) — плотность распределения определяющего параметра.
Условные вероятности а и Р определим через вероятности событий А и В, т. е. событий, заключающихся в неправильном принятии решений при контроле определяющего параметра: •
а = р(Л)/р(Е); (3.36)
₽=р(В)/р(Е) = р(б)/(1-р(Е)). (3.37)
118
Вероятности р (А) и р (В) есть не что иное, как вероятности ложных и необнаруженных отказов при контроле качества. Называют их еще риск изготовителя и заказчика или ошибки 1 и 2-го рода, если под отказом понимать нахождение параметра вне допуска. Задача определения этих вероятностей впервые была сформулирована и решена Н. А. Бородачевым для отбраковки детелей в машиностроении, причем предполагалось, что результат измерения представляет собой сумму измеряемой величины и погрешности измерения и последние независимы. В настоящее время имеется большое число работ, посвященных определению вероятностей ошибок 1 и 2-го рода при различных законах распределения измеряемой величины и погрешности измерения и при различных видах связи между ними.
Выражения для определения р (А) и р (В) при произвольных законах распределения контролируемого параметра и погрешности измерения и аддитивной связи между ними определяются формулами (3.6) и (3.8). Подставив (3.6), (3.8), (3.34) в (3.36) и (3.37), получим выражения для определения характеристик качества операции контроля аир.
В частном случае, когда контролируемый параметр и погрешность измерения распределены по нормальным законам f (|) = п (т*, а^); <Р (0 = п (0, at),
kr — l) , -----—-------Т2 Т2 z “ —
( е 2 dr + I е 2 dx
-оо •
Z
г
i е 2 dy
— kr
dy
г = (b — — нормированный допуск; k = (m^ — a)!(b — tn^ — коэф-
фициент несимметрии допуска; — нормированное среднее квадратическое отклонение погрешности измерения.
Для определения условных вероятностей IF2, q19 q2 представим графически операцию восстановления (рис. 49) в виде направленного графа. Указанные здесь вероятности означают следующее:
119
И7! — вероятность того, что при восстановлении изделие останется в требуемом состоянии при условии, что в процессе контроля оно было правильно признано находящимся в этом состоянии. Эта условная вероятность имеет смысл вероятности безотказной работы;
ЦР2 — вероятность того, что при восстановлении изделие останется в состоянии, противоположном требуемому, при условии, что оно в процессе контроля было неправильно признано находящимся в требуемом состоянии. Это — вероятность отсутствия самопроизвольного восстановления за время от окончания контроля до конца
P(CI
Рис. 49. Граф операции восстановления
КВМ. Если изделие по результатам контроля по данному параметру признается находящимся в требуемом состоянии, активных воздействий на изделие в частности восстановления данного параметра не производится, поэтому вероятности и IF2 характеризуют спонтанные изменения изделия, приводящие к переходу из состояния в состояние в результате например, флюктуационных процессов в изделии;
g2 — вероятность того, что изделие при восстановлении будет переведено в требуемое состояние при условии, что оно было правильно признано находящимся в состоянии, противоположном требуемому:
qx — вероятность того, что изделие при восстановлении останется в требуемом состоянии при условии, что оно было неправильно признано находящимся в состоянии, противоположном требуемому.
В случае, когда изделие в результате контроля признается находящимся в состоянии, противоположном требуемому, производятся активные воздействия на изделие со стороны обслуживающего персонала или системы автоматического восстановления, поэтому вероятности <7i, q2 характеризуют качество этих воздействий, т. е. показывают, насколько правильно они выполняются.
Определим условную вероятность Wr. Она имеет смысл вероятности безотказной работы и от характеристик аппаратуры восстановления не зависит. Тогда
t
lFi = exp
J Xj, (т) dx
где (т) — интенсивность выхода параметра изделия за границы требуемого состояния; t — время от окончания контроля данного параметра до окончания
120
Если КВМ проводится на однопараметрическом изделии, то t =0 и = 1, так как КВМ заканчивается. В противном случае для данного параметра зависит от последовательности контроля и восстановления. На практике можно считать, что ~ 1. Если t и X (т) достаточно малы, то можно принять значение ж 1.
Вероятность UZ2 есть вероятность отсутствия самопроизвольного восстановления за то же время /. Хотя самопроизвольное восстановление и нельзя считать абсолютно невозможным событием, однако можно принять = 1, так как случаи самопроизвольного восстановления аппаратуры очень редки (если не считать сбоев). Общей методики определения вероятности самовосстановления (или противоположного события) не имеется.
3.9. ПРОГНОЗИРОВАНИЕ ТЕХНИЧЕСКОГО СОСТОЯНИЯ РЭО
При принятии тех или иных решений, например, по управлению состоянием авиационного РЭО, как правило, основываются на определенном объеме априорной информации. Опыт показывает, что эффективность принимаемых решений и последующих действий тем выше, чем больший объем априорной информации при этом учитывается. Априорная информация v (/) должна учитываться на интервале времени т, в течение которого имеются априорные сведения. Причем, если обозначить момент принятия решения как Т, то желательно, чтобы множество значений, принадлежащих интервалу т, включало в себя время, как меньше Г, так и больше Т. В первом случае говорят, что необходимо знание предыстории развития процесса изучаемого явления, во втором — необходимо знать развитие процесса в будущем. Таким образом, в процессе информационного обеспечения процедур принятия решений в момент времени Т решаются задачи, связанные с устранением (полным или частичным) априорной неопределенности как при / > Г, так и при t < Т. Различие состоит лишь в технике обработки информации. Анализ данных в случае прогнозирования состояний или явлений более сложен, чем анализ данных прошлого опыта.
В понятия «предсказание» и «прогноз» будем вкладывать следующий смысл. Предсказание — предвидение таких событий, количественная характеристика которых либо невозможна, либо затруднена. Прогноз — высказывание, которое содержит указание на пространственный или временный интервал (конечной величины), внутри которого произойдет прогнозируемое событие. Таким образом, в дальнейшем нас будет интересовать второй аспект термина — прогнозирование применительно к прикладным задачам технической эксплуатации авиационного РЭО.
Рассмотрим перечень основных вопросов, которые возникают в процессе практического использования процедур прогнозирования. В соответствии с обобщенной структурной схемой, поясняющей взаимосвязь и очередность выполнения отдельных задач при прогнозировании (рис. 50), практическая направленность всех исследований задается блоком 1. Тем самым подчеркивается определенная сторона изучаемого явления, подлежащая исследованию. Блок 2 отображает этап работ, связанный с построением модели изучаемого явления.
Особенности модели определяют выбор методов прогнозирования, математический аппарат. В общем случае требования к показателям эффективности процедур прогнозирования задаются в блоке 3. Как правило, в методе прогнозирования уже заложен тот или иной критерий эффективности. В результате решения задачи синтеза определяется структура алгоритма обработки измерительной информации об объекте исследования. Назначение алгоритма прогнозирования— оценка интересующей характеристики на упрежденный момент времени.
121
Рис. 50. Структурная схема прогнозирования
На этапе теоретических исследований, кроме решения задач выбора моделей описания явлений, выбора метода прогнозирования и синтеза алгоритма прогнозирования, необходимо также решить задачу анализа алгоритма прогнозирования (блок 6—теоретический анализ алгоритма прогнозирования). На данном этапе оценивается эффективность синтезированного алгоритма прогнозирования для проверки того, как сказались разного рода допущения и аппроксимации на результирующие характеристики качества алгоритма прогнозирования.
Блок 9 характеризует этап практического применения алгоритмов прогнозирования (АП). В блоке 10 производится практическая оценка эффективности АП по определенным процедурам. В блоке 11 вырабатывается решение о том, удовлетворяет ли потребителя синтезированный АП. Если замечаний нет, то тогда продолжается практическое использование АП. В противном случае в блоке 12 принимаются решения о коррекции на этапах, посвященных теоретическим разработкам АП. Изменения могут касаться в основном блока 2, когда выбраны не вполне адекватные модели описания изучаемых явлений.
Следуя структурной схеме рис. 50, рассмотрим особенности содержания отдельных блоков применительно к задачам технической эксплуатации авиационного РЭО.
Говоря о блоке /, можно выделить два аспекта — прогнозирование технического состояния РЭО и прогнозирование надежности. Техническое состояние изделия определяется значением технических параметров, от которых зависит его работоспособность: коэффициентов усиления, выходного напряжения, входного сопротивления, чувствительности, мощности, производительности, точности и т. д. Изменение этих параметров обычно вызывается многими внутренними и внешними по отношению к данному РЭО причинами. В результате этих воздействий работоспособность РЭО в конечном счете нарушается.
Таким образом, при прогнозировании технического состояния РЭО производится оценка значения совокупности определяющих параметров (Хп). Причем, если каждый из параметров характеризует качественно отличные свойства объекта, то производится независимый прогноз параметров в отдельности, а решение о состоянии объекта принимается по совокупности решений о состоянии каждого параметра. Если же все параметры качественно отражают одно и то же свойство объекта, то на их основе векторная характеристика работоспособности РЭО определенным образом преобразуется в один скалярный обобщенный параметр, по которому оценивают техническое состояние РЭО. В качестве простейшего обоб-122
щенного параметра может выступать взвешенная аддитивная совокупность определяющих параметров
п
Т) (<) = 2 Ь1 xi (О. (3.38)
1 = 1
где bi — весовой коэффициент, учитывающий влияние t-го параметра; т| (/) — оценка обобщенного параметра, в целом характеризующего техническое п
состояние РЭО в текущий момент времени /, 26/ =1. Очевидно, что упрежден-ы
ная на время h часов оценка обобщенного параметра, вычисленная в момент времени t + А, будет определяться как
п
Т) (t + h) = 2 xi (N-Л), (3.39)
/==1
где X/ (/ + h) — упрежденная оценка /-го определяющего параметра.
Для того чтобы полностью задать блок 1 по рассматриваемому аспекту, необходимо задать:
интервал упреждения Л;
перечень определяющих параметров или вид обобщенного параметра для данного типа РЭО;
правило отнесения РЭО к одному из состояний — работоспособному или неработоспособному, с указанием границ допусков на параметры;
требуемую достоверность будущих оценок прогнозируемого технического состояния РЭО.
Можно считать, что при выполнении теоретических расчетов надежности РЭО (отдельных показателей) на стадии проектирования уже решается задача прогнозирования надежности, так как вычисляются будущие количественные характеристики изделий, которые в зависимости от точности расчетов, знания объективных механизмов износа и учета других условий будут проявлены изделиями на практике. Данные эксплуатации позволяют определить реальные показатели надежности.
Сравнительные данные статистических оценок среднего времени наработки на отказ TJ и теоретических оценок То могут существенно отличаться. Для повышения точности будущих оценок характеристик надежности на стадии проектирования РЭО применяют различные методы — ускоренные ресурсные испытания или испытания с наиболее вероятными для данного типа РЭО условиями эксплуатации.
При рассмотрении надежностных свойств РЭО центральное место занимает отказ изделия. Время наработки до отказа — случайная величина. Вероятностное описание времени наработки до отказа в теории надежности задают с помощью следующих законов распределения — Вейбулла, экспоненциального, гауссовского и др. Эти модели потоков отказов отдельных элементов РЭО или всего изделия в целом являются исходными для расчета количественных характеристик надежности РЭО. Кроме того, на этом этапе необходимо составить структурную схему РЭО для оценки надежности.
При выборе методов оценки прогнозируемых Надежностных характеристик (блок 4) руководствуются объемом исходных данных'блока 2. При этом применяют приближенный или полный методы расчета надежности, а также графоаналитический и корреляционный методы. Эффективным в последнее время считается метод оценки надежности на основе принципов имитационного моделирования с помощью ЭВМ. К основным достоинствам этого метода можно отнести возможность учета большего числа факторов, влияющих на надежность РЭО, большую структурную детализацию РЭО, а также в отличие от экспериментальных методов уточнения надежности РЭО, возможность оценить последствия отказов в ситуациях, которые трудно или невозможно воспроизвести на практике.
123
Задача синтеза алгоритмов прогнозирования количественных характеристик надежности (блок 5) при использовании известных методов оценки надежности не возникает. Содержание алгоритма составляют пункты отдельных этапов расчетных методик. Для вновь разрабатываемых методов необходимо определить последовательно выполняемые этапы, после реализации которых получают ту или иную количественную характеристику надежности.
Задача анализа алгоритмов прогнозирования надежности, как и задача синтеза, в рассматриваемом случае также не рассматривается, так как сам метод задает вид алгоритма и нет необходимости оценивать неточности в его реализации.
Говоря о блоках 5, 7 и 8, следует упомянуть, что точность оценок прогнозируемых характеристик надежности пока оставляет желать лучшего. Правда, эти оценки являются заниженными. Обычно реальные показатели надежности выше, чем расчетные. Последнее однако не означает, что нет необходимости совершенствовать методы оценки (расчета) надежности РЭО.
Прогнозирование технического состояния систем. Ранее подчеркивалось, что этот аспект прогнозирования связан с количественными оценками параметров, характеризующих техническое состояние РЭО.
Для раскрытия содержания блока 1 на рис. 51 представлен график одного из определяющих параметров РЭО. В момент времени Т решается задача прогнозирования технического состояния РЭО по определяющему параметру. За время т накоплена информация о поведении х$ (/). Здесь возможна постановка следующих двух задач. Учитывая данные о Xi (/) в течение времени т, а также значение Xi (Т) определяется прогнозируемое значение Xi (Т + h) с временем упреждения, равным h. Говорят, что это точечная оценка будущего значения определяющего параметра х$ (/). В этом случае целесообразно, чтобы алгоритм прогнозирования вычислял не только х$ (Т + Л), но и определял интервал разброса возможных значений xt (Т + h) и доверительную вероятность нахождения оценки Xi (Т + h) в интервале Дхдов (Г + А). Вторая постановка задачи связана с прогнозированием будущего технического состояния РЭО, когда будущее значение определяющего параметра относится к одной из областей возможных состояний. В этом случае необходимо задать допуски, ограничивающие области возможных состояний. На рис. 51 применительно к задаче двухальтернативной классификации технического состояния обозначены состояния А и Б. В первом случае Xi (Т + А) > Л, во втором 0 < Xf (Г + h) < Л, где Л — граница допуска.
При задании блока 1 необходимо не только оговорить тип решаемой задачи— интервальная оценка прогнозируемого параметра х$ (/) или прогнозирование технического состояния РЭО по параметру х$ (/), но и задать требование к точностным характеристикам формируемых оценок. К ним можно отнести величины Дхдов (Т + tyn и Рдов (Г + Л), среднюю квадратическую погрешность будущей оценки и ее смещенность относительно истинного значения, а также достовер-
ность оценки.
Вследствие стохастических свойств обрабатываемых данных прогнозируемые оценки и ошибки в оценке технического состояния также будут случайными. Наиболее полной характеристикой случайной величины является ее плотность рас-
пределения вероятностей (ПРВ). В данном случае также желательно получить ПРВ ошибок прогнозирования сох (Дх). Погрешность прогнозируемого параметра
Axf = xJ (T+A)-xf (Т+А),
где х* (Т + А) — оценка будущего значения f-го определяющего параметра на момент времени Т + А; х$ (Г + А) —
истинное значение определяющего па-Рнс. 51. Зависимость определяющего раметра в момент времени Т + А (в даль-параметра РЭО от времени нейшем индекс i будет опущен).
124
Рис. 52. Области значений прогнозируемого параметра
Тогда смещенность будущей оценки прогнозирующего параметра х (/) от истинного значения х (Т + h) (систематическую погрешность) можно определить как
mi (Л*) = J Дх(01 (Дх) d&x. (3.40>
-—оо
Дисперсию ошибки прогнозирования р2 (А*), или среднее квадратическое отклонение определяют по формулам:
р2 (Дх) = j [mr (Дх)-—Дх]2<*>1 (Дх) d (Дл); — 00
а (Лх)=]/р2 (Дх) .
На практике иногда рассчитывают лишь два из рассмотренных моментов т1 (Дх) и р2 (Д*)> причем получение этих результатов не связано с первоначальным поиском (с^Дх).
Кратко остановимся на достоверности результатов при прогнозировании технического состояния РЭО. Достоверность характеризует степень доверия к принимаемым решениям. Пусть будущее значение определяющего параметра хХ Х(Т + h) в момент времени Т + h объективно принадлежит области А (рис. 52) с вероятностью Р (А):
Р (x(T+h)£ хА) = Р(А).
С вероятностью Р (Б) будущие значения определяющего параметра х (Т + Л) будут принадлежать области значений Б, т. е.
Р(х(Т+Л) ех£)=Р(Б);
Р(А)+Р(Б)=1,
где хА и хБ — множество значений определяющего параметра, когда отсчеты х, либо х П;либо 0 х < П.
Рассмотрим также следующие условные вероятности.
1. р(х* (/+Л) е хл/х (/4-Л) £ хл)=р (А»М) -
125
величина, соответствующая вероятности событий, когда прогнозирующая оценка определяющего параметра х* (/ + h), вычисленная с помощью алгоритма прогнозирования в момент времени Г, будет принадлежать к области значений хА, т. е. классифицироваться как состояние А, если объективно определяющий параметр х (t + h) также будет принадлежать к области значений хА.
2. р (х* (/ + h) ЕЕ xBxl(t + h) ЕЕ хБ = р (Б*/Б) — величина, соответствующая вероятности событий, когда совпадают принимаемые решения о соответствии прогнозируемой оценки параметра х* (I + h) области значений хБ и нахождению параметра в момент времени t + h также в области значений хБ. Условные вероятности Р (х* (t + h) ZE хА/х (/ + Л) е Хд И р (х* (t + h) е хБ/ /х(/+Л)€Ехл или в другом обозначении р (Л */Б) и р(Б*/А) соответственно ха-рактеризуют собой ситуации, когда не соответствуют будущие оценки попадания параметра х* (Т + h) в ту или иную область значений (хА или х£) и истинное состояние параметра х (Г + h). С учетом введенных выше вероятностей достоверность принимаемых решений о будущем техническом состоянии РЭО вычисляем как
D (Л*) =------------------ (3.41)
1 ’ р(А»/Д) + р(А*/Б) 1 7
Р (Б*/Б)
D (Б*) =------ь—— ------, (3.42)
' ’ р(Б/Б)+р(Б*/Л) 1 ’
где р (Б*/Б)=р (Б*, Б)/Р (Б); р (Б*/А)=р (Б*, А)/Р (Я);
р (А*/А) = р (А*, А)/Р (А); р (А*/Б) = р (А*, Б)/Р (Б).
Приведем соотношения, с помощью которых можно по экспериментальным данным рассчитать оценки величин D (Я*) и D (Б*):
D = n^«M) + «^*/5) ’ (3’43)
п (Б*/Б)
D (Б*) =--------. (3.44)
V ’ п (Б*/Б)-{-п (Б*/А) 1 7
На примере величины п (А*/Я) поясним смысл отдельных составляющих в формулах (3.43) и (3.44). Значение п (А*/А) равно числу ситуаций, когда при достижении времени Т -J- h параметр объективно соответствует техническому состоянию РЭО Я, и ранее рассчитанное в момент времени Т упрежденное значение параметрах* (Т + Л) также принадлежит к области допустимых значений.
Как и при рассмотрении прогнозирования надежности РЭО, выбор и обоснование моделей при решении задач прогнозирования технического состояния занимают одно из центральных мест, что подчеркивается и расположением блока 2 в Начале структурной схемы рис. 50.
Более адекватным реальным условием следует считать утверждение о том, что по своей сути параметры РЭО, подлежащие контролю с целью прогнозирования технического состояния или его диагностирования в текущий момент времени, являются случайными величинами, а как функции времени — случайными процессами хотя бы потому, что внезапные отказы элементов РЭО — суть случайные события.
Как показывает анализ, при описании изменения определяющих параметров РЭО можно принять модель вида
Л(0=х(0+г(0+х(0. (3.45)
126
где х (t) — полиноминальная составляющая параметра, характеризующая его объективные изменения, обусловленные наличием необратимых физико-химических процессов старения (отображает объективную тенденцию развития определяющего параметра); г (/) — случайная составляющая объективного изменения определяющего параметра, которая учитывает неточность описания у (/) только с помощью составляющей х (/); % (/) — случайная составляющая у (/), которая обусловлена наличием мешающих воздействий контролю.
Исследования свидетельствуют о том, что для описания плавной тенденции изменения определяющих параметров РЭО можно принять функцию вида
х (f) = ao+fli t+a2 t*t (3.46)
гдеа3 — вектор параметров с неизвестными, но не случайными на интервале наблюдения значениями а0, а2.
Составляющие z (t) и % (t) отличаются спектром флюктуаций. В частности, спектр флюктуаций % (/) является более широким, чем спектр флюктуации составляющей z (/). Часто при вероятностном описании г (t) и % (/) пользуются гауссовской ПРВ с математическим ожиданием, равным нулю, и дисперсией, отличающейся от нуля.
Соотношение (3.45) можно видоизменить, если учитывать наличие внезапных и постепенных отказов. При этом полагаем, что имеются участки квазистационарности, когда ни внезапных, ни постепенных отказов нет, т. е. случайная функция у (/) флюктуирует вокруг условного нуля, соответствующего номинальному значению определяющего параметра (на рис. 52 этот участок соответствует интервалу тг). Рассмотрим пример, когда в случайный момент времени начинается «дрейф» определяющего параметра у (t)t наличие которого будем связывать с воз-никновением постепенного отказа. Изменение функции у (/) на интервале тх, т2 происходит с учетом того, что х (t) описывается формулой (3.46). Причем на отдельных интервалах наблюдения у (t), где имеет место постепенный отказ, отдельные или все составляющие вектора а3 могут меняться случайным образом. Учесть наличие постепенных отказов можно, если ввести в-рассмотрение случайную функцию k± (тх) параметра вида:
f 0, при t <. тг;
м*1)= , * , * (3.47)
( 1, при t тг.
Для учета наличия внезапных отказов можно ввести одну составляющую % (/), случайную как по времени появления, так и по уровню. Можно различать частичные и полные внезапные отказы. В первом случае характер изменения у (t) скачкообразно меняется на величину, которая не приводит к выходу за границу допуска П параметра у (/). Затем характер изменения у (fy может быть произвольным и в части описания тенденции х (/) описываться функцией вида (3.47). Во втором случае скачкообразное изменение у (t) приводит к выходу этой функции за пределы порога 77. Учтем возможность наличия внезапных отказов с помощью следующей случайной величины
( 0, при t < т2/;
M^i)= ' „ (3.48)
гдет2$ — случайный момент времени наступления 7-го внезапного отказа.
Учитывая соотношения (3.47), формулу (3.48) представим в виде
I
у (0=х (о kt (Tj)+z (t)+x (0 + 2 (r2i) 5 Ufa). (3.49)
Z=== 1
127
I
В формуле слагаемое 3 k2 (т20 £(//т2$) позволяет учитывать наличие несколь-х== 1
ких отказов. Анализируя (3.49), следует отметить, что случайный процесс изменения определяющего параметра у (/) имеет участки квазистационарности случайной длительности, для которых характерны свои значения составляющих вектора параметров, необходимых для описания составляющих х (/), z (/), х (/), £ (//x2i). Это обстоятельство значительно усложняет решение задачи прогнозирования технического состояния РЭО.
Отметим, что модель вида (3.49) задает непрерывное описание «дрейфа» определяющего параметра. Учитывая широкое применение цифровой вычислительной техники, модель (3.49) может иметь и дискретный аналог. Для этого необходимо задать дискретную сетку времени t.
Рассмотрим более детально особенности решения задачи синтеза алгоритма прогнозирования на примере метода наименьших квадратов (МНК). Этот метод применяется при решении прикладных задач сглаживания экспериментальных данных. В результате решения задачи синтеза алгоритма прогнозирования должна быть найдена структура выполнения вычислительных операций над исходными значениями определяющего параметра у (Ц) ', измеренными в дискретные моменты времени после реализации которой получают будущую оценку параметра у* (Т + h) на момент времени Т + h. На основе МНК синтезируем алгоритм оценки неизвестных параметров модели у (t), а затем, используя ряд соотношений, рассчитаем точечную или интервальную оценку прогнозируемого значения у* (Т + h).
Для простоты будем полагать, что модель у (/) на интервале наблюдения имеет вид:
у(0==х(0+г(0 + х(0;
х (t) — ao+a1 t+a2 t2.
Корреляционные характеристики случайной составляющей z (/) нас не интересуют, так как период дискретизации выбираем таким образом, чтобы время корреляции случайного процесса z (/) было бы много меньше периода дискретизации I. Тогда дискретные выборочные отсчеты производим с такой частотой, чтобы без потерь восстановить изменение функции x(t). В этом случае отсчеты у (ti) можно -считать независимыми. Для построения интервальной оценки параметра у* (7+ + А) необходимо будет заранее знать лишь р,2 (г) или оценку этого параметра Иг (г).
Следуя МНК, необходимо образовать следующую сумму, которая соответствует записи критерия, подлежащего оптимизации,
п
б (а3, h, «) = 2 (*«)“х (О)]2-
1=1
Формула подчеркивает, что при формировании точечной оценки прогнозируемого параметра у (/) нас будет интересовать лишь тенденция изменения функции у (t)t так как прогнозировать будущее значение составляющей z (/) нет —>
смысла, поэтому оценке подлежат лишь параметры а3 составляющей х (/), и эти отсчеты представляют разность у (it) — х (/$).
Для того чтобы минимизировать величину 6 (а3, А, п) относительно неизвест-—>
ных переменных вектора а3 при заданных Аил, необходимо составить и решить систему уравнений, состоящую из трех соотношений, полученных путем диффе-128
ренцирования и приравнивания нулю частных производных 6 (а3, А, п) по каждой из переменных а0, alt а2. В результате система будет иметь вид:
[У (h) —(«о+ai */)] =0’
Л. dx (а.) (3.50)
[У (Ji)-(«o+aUi + a2 <?)]--
i~\ аа*
Д d Г )
У [У (М-(ао+«1 ti + a2 /,)] Х (аз) = 0.
k i= 1 а*
Найдем решение (3.50). Для этого из третьего уравнения определим оценку
< = <((/)-«; C2~aJ Clt (3.51)
У . п , п
i = 1 1 1 VI 2
где т* (у) =------ ; Cj =— > /,•; С2 =— > .
1 п п п
I— 1 1= 1
Подставим aj в первое и второе уравнения. Решая их, получим:
а2 = 2 У* ai“^j У1^19 (3.52)
z-— 1 i — i
где Aj —{cq Cq [—— Cg -j- — C7 — — (^2^7— 'j •
\ / [ n n n \ J
Bi =-- ( C5Ce -C7) ‘[Ac, - *1 C5 + 1 (C2C6 - CjC,)!. \ ! Ln n n \ /]
Величины CX...C7 связаны соотношениями:
1 n 1 n
Cs=- 2 t3i> C*= — 2 ^.^ = 6!-^; Ce = C2-C4; €, = ^-0,.
n 1=1 n /=1
Подставим (3.52) в (3.51), тогда
(y)-c2 s yi Ai~ci 2 yi ^^yt Dt- (3-53> z-=l i-=\
где Dj ^ — — C2 z4f — Cr Bi. n
—>
Зная оценки вектора a J, можно рассчитать будущую точечную оценку тенденции изменения определяющего параметра в момент Т + h:
у* (/ + А) = а; + (Г+Л) + aj (Г+hY*.
5 Зак. 2262 129
С учетом (3.52), (3.53) у* (Т + h) представим в виде:
y*(T+h)^ 2 ViHitn, Л):
i = 1
Hi (п, h)^Di + Bi (T + h) + Ai (T -I hy. (3.54)
Из (3.54) следует, что алгоритм прогнозирования на основе МНК линейный. Отметим, что весовые коэффициенты Hi зависят от объема обрабатываемых данных п и шага упреждения h.
Решим задачу анализа алгоритма прогнозирования (3.54). При гауссовском характере случайных составляющих z (/) их (0 отсчеты наблюдаемого процесса у (t) также будут иметь гауссовскую ПРВ. Из сказанного следует, что ПРВ оценок у* (Т + Л) будет нормальной и характеризуется двумя параметрами mi {^* (7* + Л)) и ц2 {у* (Т + Л)}. Запишем соотношения для этих моментов ПРВ, причем процедура вычислений справедлива и в других случаях, когда ПРВ отсчетов у* (Т + h) не обязательно будет нормальной. Результаты приведем для случая, когда отдельные значения у (t) независимы. Данное допущение обосновывалось ранее. С учетом (3.54) будем иметь:
mi {у* (T+h)} — т, J 2( Hi |= .2 Ht т. (у,),
У1^х (//) + г (/^ + х (ti) — «o+ai ^i + «2 ~VZ (h) (ti), (3.55)
"h (yf) = mi (a0) + ti ml (щ) +tf {a2) + tn1 {z (/f)} + m1 (x (tt)).
В (3.55) математические ожидания значений m^z (Zf)) и mr(x (//)) равны нулю. Дисперсию ц2{у* (Т + h)} определим по формуле
Щ {у* (T+h)} = ^ | 2 Vi-н] - 2 н1 Ш (yt). (3.56)
I i= 1 J / = I
(4 {yi) = ("o) 4 tj p2 («1) 4 t* Ш (a2) 4-Щ (г) 4- Иг (x) •
В некоторых случаях достаточно вычислить по формулам (3.55) и (3.56) WjX X {у* (Т + h)} и ц2 {у* (Т + h)), чтобы задать ПРВ ©j {у* (Т + Л)}, если выполняются условия центральной предельной теоремы.
Запишем соотношения для статистических характеристик случайной ошибки прогнозирования Ду — (Ду) и ц2 (Ду) с учетом того, что
by^y(T+h)-y*(T-th). (3.57)
Подставим в (3.57) формулу (3.54), тогда
Ау=-у (T + h)~ 2J У1 Hi («. h). (3.58)
В (3.58) отсчеты yf и у* (Т + h) между собой независимы, поэтому смещенность оценки у (Т + h) относительно истинного значения определяющего параметра в момент времени Т h
nti {Де/} =ni! {у (74-й)} — mt {</* (Т4 h)} =«! («») +
+ (T+h)ml(a1)+(T+h)*m1(ai)- 2 ЯН«Л)«1(я)- (3.59)
/=1
130
Дисперсия случайной ошибки с учетом (3.56)
р2 {Ду) = ц2 {у (Т+Л)) + р.2 {у* (T+.h)} =p.2(a0) + /f Ш(а2) +
п
+ Н2 (*> + Н2 (к) + 2 H'i Н2 («//) • (3.60)
/=1
Зная априорно значения статистических параметров ПРВ ©j (z), ш* (%), o>i (ао)» (а1)> Ю1 (аг)> можно рассчитать интервальные оценки ошибок прогно-
зирования.
В заключение отметим, в каких случаях возникает необходимость в коррекции содержания отдельных блоков структурной схемы рис. 50 применительно к решению задач прогнозирования технического состояния РЭО с использованием алгоритма (3.54), хотя ряд замечаний будет справедлив и для других алгоритмов.
Главная причина состоит в несоответствии вида или параметров алгоритмов прогнозирования реальным моделям обрабатываемых данных, представленных выборкой объемом и, в результате чего возможны большие ошибки прогнозирования, которые превышают заданные в блоке 3 значения. Например, это возможно, если весовые коэффициенты в (3.54) подобраны в предположении, что обработке будут подлежать отсчеты yi, у которых детерминированная тенденция описывается полиномом второй степени, а на самом деле объективная тенденция изменения параметра у (t) подчиняется линейному закону, либо наоборот. При этом дисперсия ошибки прогнозирования будет меньше в том случае, если реальная степень полинома составляющей х (/) будет выше, чем та, на которую «настроен» алгоритм прогнозирования.
Возможна также ситуация, когда обучающая выборка алгоритма (3.54) состоит из отсчетов, принадлежащих различным интервалам квазистационарности.
Все сказанное выдвигает требования к разработке адаптивных алгоритмов прогнозирования, если, конечно, при априорной неопределенности будут большие ошибки прогнозирования, которые значительно скажутся на эффективности систем практического использования.
Глава 4
ОРГАНИЗАЦИЯ ЭКСПЛУАТАЦИИ
РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ
4.1. РОЛЬ БАЗ Spj&C В СТРУКТУРЕ АВИАПРЕДПРИЯТИИ
Роль баз ЭЙТ( выполняет РЭЙ£ сти авиапредщр разнообразиздйт ний радиотех^ оборудован^ постоянного^^ и значитель “
Базы ЭРТ го радиоэле? вигации и п ные трассы ос объектов, обо странство для тального в же оборудо ной связи меЖд д предприятий.^
Как видноЬйз^описания систем радиотехнического обеспечения полетов, средс^Шдионавигации, радиолокации и связи перекрывают, а зачастую и дублируют рабочее навигационное пространство, выдавая необходимую информацию для осуществления всех этапов полетов. Кроме этого, средства электрорадиосвязи и информации, являющиеся частью оборудования баз ЭРТОС, предназначены для обеспечения нормального функционирования всех служб и подразделений авиапредприятий. g
Таким образом, область деятельности баз ЭРТОС охватывает все службы и подразделения авиапредприятий, основой нормального функционирования которых является четкая работа РЭО. Базы ЭРТОС — подразделения эксплуатации электронного радиотехнического оборудования. Весь этот комплекс оборудования будем обозначать традиционным термином средства РТО и связи.
Производственная деятельность персонала баз ЭРТОС направлена на решение следующих основных задач: 132
еделяется значимостью тех функций, которые техническому обеспечению летной деятельно-^также высокой сложностью и совершенством, v асыщенностью эксплуатационных подразделе-рудованием, высокой стоимостью как самого технической эксплуатации, требованиями его вования и обновления, высокой квалификацией Эксплуатационного персонала.
яют сложный комплекс современного наземно-оборудования, предназначенного для УВД, на-олетов. Предприятия ГА, аэропорты и воздуш-различными типами наземных радиотехнических щих радиотехническими методами воздушное протия задач трассовой радионавигации, инструмен-г посадки, управления воздушным движением, а так-для осуществления радио, телеграфной и телефон-различными службами и отдельными объектами авиа-
обеспечения с помощью средств РТО и связи высокой степени безопасности и регулярности полетов и производственной деятельности отделов и подразделений авиапредприятий ГА;
организации осуществления ТО и ремонта средств РТО и связи для обеспечения высокой надежности и качества их работы;
обеспечения своевременного ввода в эксплуатацию новых образцов РТО и связи;
организации планового ремонта аппаратуры;
разработки и проведения мероприятий по предупреждению летных происшествий и предпосылок к ним, а также нарушений производственной деятельности авиапредприятий вследствие отказов и неисправностей средств РТО и связи;
контроля за правильностью использования и технически грамотной эксплуатацией наземных средств РТО и связи во всех отделах и подразделениях авиапредприятий;
совершенствования процессов ТО и ремонта средства РТО и связи;
автоматизации и механизации производственных процессов в подразделениях баз ЭРТОС;
внедрения в производство передового опыта, рационализаторских
предложений и изобретений;
организации технической учебы и повышения квалификации инженерно-технического состава баз ЭРТОС;
проведения политико-воспитательной работы и организация социалистического соревнования за непрерывное повышение качества и эффективности производственной деятельности отделов и подразделений баз ЭРТОС, а также укрепление сознательной трудовой, технологической и исполнительской дисциплины всего инженерно-технического персонала.
Еще более рельефно роль баз ЭРТОС в структуре авиапредприятий ГА проявляется при рассмотрении вопросов производственного взаимодействия баз ЭРТОС с другими подразделениями и службами (рис. 53).
Базы ЭРТОС функционируют в тесном взаимодействии с другими службами авиапредприятий, а также с отделами эксплуатации РТО и
Летная служба
Служба движения
Служба 'перевозок
Аэродромная служба
Служба аэронавигационной информации
Служба спецтранспорта
Финансовый отдел
,5
Отдел материально-технического снабжений
Служба ГСМ
Отдел капитального строительства
Планово-экономический отдел
Другие подразделения и службы
Рис. 53. Структура взаимодействия базы ЭРТОС с подразделениями
авиапредприятия
133
связи управлений ГА. Взаимодействие между службами осуществляется в соответствии с наставлениями, правилами, типовыми положениями, инструкциями и рекомендациями МГА и Центрального управления ЭРТОС.
С помощью электрорадиотехнических средств оперативной связи и управления базы ЭРТОС обеспечивают нормальное функционирование всех служб и подразделений, организуют и осуществляют ТО и ремонт этих средств. Службы, пользующиеся средствами баз ЭРТОС, обеспечивают сохранность и правильную эксплуатацию этих средств в соответствии с требованиями эксплуатационно-технической документации. Правильность эксплуатации и состояние технических средств баз ЭРТОС во всех службах и подразделениях контролируются командноруководящим и инженерно-техническим составом и в случае необходимости по согласованию с соответствующими службами или подразделениями база ЭРТОС организует и проводит техническую учебу персонала по правилам пользования средств РТО и связи.
Рассмотрим сущность взаимодействия баз ЭРТОС с конкретными службами и подразделениями авиапредприятий.
При взаимодействии со службой движения аэропорта база ЭРТОС выполняет следующие функции:
обеспечивает пункты управления воздушным движением комплексом средств РТО и связи, необходимых для контроля за движением воздушных судов, а также поддерживает постоянную работоспособность этих средств; ,
с помощью соответствующих средств обеспечивает бесперебойную двустороннюю связь между диспетчерским пунктом и экипажем воздушного судна, а также между взаимодействующими пунктами УВД;
согласует графики поставок средств радионавигации и УВД.
Служба движения, в свою очередь, предоставляет необходимое время инженерно-техническому составу базы ЭРТОС для выполнения работ по оперативному и периодическому ТО средств УВД. Сотрудники -службы движения проходят соответствующие инструктажи и сдают зачеты по правилам практического использования средств УВД, совместно с летной службой и базой ЭРТОС организуют и осуществляют летные проверки средств УВД.
Взаимодействие базы ЭРТОС со службой перевозок аэропорта заключается в оснащении рабочих мест службы средствами связи, поддержании их работоспособности и контроле правильности использования этих средств. Служба организации перевозок несет ответственность за правильность эксплуатации средств РТО и связи и их сохранность.
База ЭРТОС оснащает аэродромную службу аэропорта средствами оперативной связи и поддерживает их в работоспособном состоянии. Аэродромная служба выполняет для базы ЭРТОС работы по содержанию рабочих зон курсовых и глиссадных радиомаяков инструментальных систем посадки в соответствии с требованиями руководящих документов (требования к высоте растительного и снежного покровов, ук-134
лонов и неровностей рельефа местности). Четкость и качество работ, выполняемых аэродромной службой для базы ЭРТОС, сказываются на качестве работы радиомаячных систем посадки. Так, например, чрезмерная толщина снежного покрова в рабочей зоне глиссадного радиомаяка может привести к недопустимому искривлению плоскости глиссады, что непосредственно влияет на безопасность посадки. Высокая трава перед антенной курсового радиомаяка метрового диапазона может привести к искажению электромагнитного поля вдоль оси ВПП и к недопустимому рассогласованию инструментальной линии курса с осью ВПП в районе опорной точки.
Одна из основных задач базы ЭРТОС — установка и обеспечение работы средств радионавигации и УВД в соответствии с требованиями регламента средств управления и радиотехнического обеспечения полетов и других нормативных документов. Учет информации о наличии, состоянии, остановках и замене указанных средств осуществляет служба аэронавигационной информации аэропорта.
При взаимодействии со службой спецтранспорта аэропорта база ЭРТОС обеспечивает первоначальную установку автомобильных радиостанций на спецтранспорт, производит текущий ремонт и регламентные работы автомобильных радиостанций и средств оповещения. Служба спецавтотранспорта аэропорта обеспечивает базу ЭРТОС спецмашинами, необходимыми для решения производственных задач.
База ЭРТОС совместно с финансовым отделом и отделом материально-технического снабжения авиапредприятия составляет перечень запасного имущества и материалов, подлежащих хранению в расходной кладовой, исходя из месячной потребности и местных условий; производит списание основных средств РТО и связи в соответствии с указаниями МГА.
База ЭРТОС совместно с отделом материально-технического снабжения авиапредприятия составляет заявки на материально-техническое обеспечение в установленные органами снабжения МГА сроки, осуществляет контроль за поставками средств РТО и связи. Отдел ма-терильно-технического снабжения авиапредприятия осуществляет материально-техническое обеспечение базы ЭРТОС. Необходимые для эксплуатации объектов РТО и связи горюче-смазочные материалы (ГСМ) поставляет по заявкам базы ЭРТОС служба ГСМ аэропорта.
Объекты РТО и связи баз ЭРТОС строятся по утвержденным проектам отделом капитального строительства авиапредприятия совместно со строительно-монтажными организациями. При этом представители базы ЭРТОС осуществляют постоянный надзор за строительством объектов РТО и связи.
' Отдел капитального строительства контролирует правильность и качество выполнения строительно-монтажными организациями работ по прокладке новых кабельных линий связи (при сдаче линий связи в эксплуатацию контролируется паспорт трассы, электрический паспорт, монтажная и рабочая документация), и капитальному ремонту находя-
135
щихся в эксплуатации антенно-фидерных и линейно-кабельных сооружений в соответствии с проектно-сметной документацией.
Метрологическая служба авиапредприятия (базовая поверочная ремонтная метрологическая лаборатория) решает задачи метрологического обеспечения производственной деятельности баз ЭРТОС, осуществляет контроль за исправностью средств измерения, выполняя их периодическую поверку в соответствии с ежегодными графиками.
Пожарная охрана авиапредприятия обеспечивает и контролирует противопожарное состояние объектов базы ЭРТОС в соответствии с наставлением по пожарной охране. База ЭРТОС несет ответственность за противопожарное состояние всех объектов РТО и связи, составляет и содержит в исправном состоянии комплект пожарных средств объектов базы в соответствии с требованиями оснащения пожарным инвентарем. Сохранность имущества РТО и связи и ограничение доступа посторонних лиц на объекты баз ЭРТОС обеспечивает военизированная охрана авиапредприятия.
База ЭРТОС совместно с планово-экономическим отделом авиапредприятия разрабатывает годовую производственную программу, которую утверждает командир авиапредприятия.
4.2. КЛАССИФИКАЦИЯ И СТРУКТУРА БАЗ ЭРТОС
База ЭРТОС — одно из основных подразделений эксплуатационного авиапредприятия. В зависимости от класса данного авиапредприятия и выполняемого общего объема работ базы ЭРТОС также подразделяют на классы. Все эксплуатационные авиапредприятия (аэропорты) подразделяют на пять классов в зависимости от годового объема выполняемых работ, эквивалентного числу выпусков — приемов воздушных судов. В соответствии с этим и базы ЭРТОС подразделяют на пять классов. В аэропортах 5-го класса обычно эксплуатируется незначительное число объектов РТО, недостаточное для организации базы ЭРТОС, и образуются группы по эксплуатации средств РТО и связи. Они подчиняются базам ЭРТОС головных (базовых) аэропортов.
Структура баз ЭРТОС определяется общим количеством и номенклатурой находящегося на эксплуатации оборудования РТО и связи. Для каждого конкретного авиапредприятия в зависимости от его класса, объема работ и в соответствии с типовыми положениями о базах и группах по эксплуатации средств РТО и связи, утвержденными ЦУЭРТОС ГА, разрабатываются структура и штатное расписание базы ЭРТОС.
Эксплуатируемое на базах ЭРТОС оборудование разделяется на две основные группы: радионавигационное, включающее также радиолокационное оборудование УВД, и связное. В соответствии с этим в производственном комплексе базы ЭРТОС выделяются два основных производственных подразделения: узел радионавигации и узел связи. 136
Рис. 54. Структура баз ЭРТОС 1 и 2-го классов
В аэропортах 4-го класса все оборудование РТО и связи объединяется в один общий узел радионавигации и связи, организационно-производственная структура которого и представляет собой базу ЭРТОС 4-го класса. В аэропортах 3-го класса базы ЭРТОС имеют более сложную структуру, включающую узел радионавигации, узел связи, группы (бригады) трудоемкого ТО, ремонта и монтажа и организационнотехническую группу.
Наиболее полной и сложной структурой характеризуются базы ЭРТОС 1 (а) и 2-го (б) классов (рис. 54). В таких базах два основных производственных подразделения (узлы радионавигации и связи) дополняются производственно-технологическим подразделением — ремонтно-эксплуатационными мастерскими (РЭМ). Кроме того, имеется звено для производственной связи, ТО и ремонта средств радионавигации и связи приписных аэропортов (5-го класса) силами узла радионавигации и РЭМ. Организация и планирование производственных процессов базы ЭРТОС осуществляются организационно-техническим отделом, подчиняющимся начальнику и главному инженеру базы.
Рассмотрим кратко структуру основных подразделений базы ЭРТОС. Узел радионавигации включает в себя совокупность объектов узла радионавигации и инженерно-технический состав, обслуживающий эти объекты. К объектам узла радионавигации относятся:
система посадки самолетов по приводным радиостанциям и маркерным радиомаякам (ОСП);
137
радиомаячная система посадки самолетов (РМС);
радиолокационная система посадки самолетов (РСП);
автоматические радиопеленгаторы (АРП);
радиотехническая система ближней навигации (РСБН);
обзорные радиолокаторы (ОРЛ);
отдельные приводные радиостанции (ОПРС);
автоматизированная система УВД и оборудование командно-диспетчерского пункта.
Инженерно-технический состав узла радионавигации объединен в дежурные смены, состоящие из личного состава объектов и групп оперативного технического обслуживания. Аналогично узлу радионавигации узел связи включает объекты связи и эксплуатационный инженерно-технический персонал. В узел связи входят следующие объекты: передающий и приемный радиоцентры (ПРДЦ, ПРЦ); радиобюро (РБ); телеграфный узел; автоматическая телефонная станция (АТС); оборудование внутриаэропортовой радио- и проводной связи (ВПС); аппаратура звукозаписи (АЗЗ); информационно-справочная аппаратура и др.
Ремонтно-эксплуатационные мастерские (РЭМ) служат для обеспечения технологических процессов трудоемких форм ТО объектов узлов радионавигации и связи, а также для выполнения ремонтных и монтажно-установочных работ на оборудовании РТО и связи. РЭМ включает следующие подразделения:
участок ТО и ремонта средств РТО и связи, включающий производственные группы (бригады) трудоемких видов ТО, группы средств радионавигации и рдиолокации; радиомаячных систем посадки и отдельных приводных радиостанций; средств связи; устройств отображения на КДП; дизельных агрегатов. Кроме трудоемких видов профилактического обслуживания, крупные базы ЭРТОС могут выполнять некоторые виды ремонта оборудования РТО и связи;
участок монтажно-установочных работ и изготовления нестандартного оборудования, выполняющий слесарно-механические, сварочные, столярные и другие работы, а также ремонт инвентаря, изготовление запасных частей, инструмента и нестандартного оборудования для объектов РТО и связи;
участок подготовки производства и комплектования, который предназначен для решения таких вопросов обеспечения основного производственного процесса, как снабжение всех участков и производственных групп (бригад) инструментом; доставка к местам выполнения группами РЭМ трудоемких видов технического обслуживания и текущего ремонта необходимого оборудования, запасных частей и материалов; учет и анализ расходов материально-технического имущества в процессе производственной деятельности РЭМ; определение потребностей, составление заявок и комплектация запасных частей и материалов, необходимых для технического обслуживания и ремонта средств РТО и связи с учетом типов оборудования и видов трудоемких форм его технического обслуживания.
138
Три рассмотренных подразделения базы ЭРТОС — узел радионавигации, узел (связи и РЭМ — составляют производственно-технологический комплекс базы, координацию оперативного функционирования которого осуществляет сменный старший инженер базы ЭРТОС. Он же осуществляет оперативное руководство работой объектов РТО и связи, анализирует (замечания летного и диспетчерского составов по работе этих средств р принимает необходимые меры по устранению отказов и неисправностей.
Функции управления производством базы ЭРТОС выполняет организационно-технический отдел. Он осуществляет технико-экономическое планирование процессов базы, нормирование труда, различные виды производственного учета и отчетности. В отделе имеется несколько групп, решающих конкретные задачи:
планирование и организацию всех видов ТО и ремонта оборудования РТО и связи; внедрение прогрессивных методов технической эксплуатации и нового оборудования; обеспечение производственных подразделений необходимой технической, технологической и ремонтной документацией на все типы оборудования и все виды технологических процессов; анализ надежности средств РТО и связи; информационное обеспечение производственной деятельности осуществляет группа надежности, технической эксплуатации и информации;
распределение работ между исполнителями и контроль соблюдения технологии и качества выполняемых работ; разработка планов оснащения баз ЭРТОС новыми средствами навигации и УВД; внедрение научной организации труда и сетевого планирования и управления. Совершенствованием системы технико-экономического планирования, учета и анализа производственной деятельности базы ЭРТОС на основе применения современной вычислительной техники и т. п. занимается группа технико-экономического планирования, нормирования, учета и отчетности;
анализ рекламационных актов на отказавшее оборудование; разработку мероприятий по устранению последствий конструктивно-производственных дефектов эксплуатируемого оборудования; разработку документации для изготовления в РЭМ нестандартного оборудования выполняет конструкторская группа.
Могут быть и другие группы, такие, как, например, группа организации качества ТО и внедрения системы бездефектного труда. В случае необходимости при концентрации усилий для ускоренного решения специфических производственных задач в организационно-техничес-ском отделе могут организовываться соответствующие группы.
4.3. ПЛАНИРОВАНИЕ И УПРАВЛЕНИЕ ПРОЦЕССОМ | 1
ЭКСПЛУАТАЦИИ РТО В БАЗАХ ЭРТОС j *
I
Выполнение основной задачи баз ЭРТОС по своевременному и высо- j некачественному обеспечению полетов воздушных судов и производственной деятельности авиапредприятий с помощью соответствующих наземных средств РТО и связи и поддержание надежного функционирования этих средств в пределах установленных ресурсов и сроков службы обеспечиваются процессом технической эксплуатации средств РТО I и связи. ,z
Техническая эксплуатация оборудования баз ЭРТОС — сложный ( процесс, предполагающий наличие трех основных составляющих: планирование технической эксплуатации средств РТО и связи; организация процесса технической эксплуатации средств РТО и связи; реализация мероприятий по технической эксплуатации средств РТО и связи.
Планирование технической эксплуатации средств РТО и связи яв- I ляется основной частью планирования производственной деятельно- ' стью баз ЭРТОС — технико-экономического и оперативно-производственного планирования. Технико-экономическое планирование осуществляется в виде перспективных планов работы базы на пятилетку, а также годовых производственных планов, разрабатываемых на каж- < дай год с поквартальным планированием. Годовой производственный план — основа производственной деятельности базы ЭРТОС. Головным разделом годового производственного плана базы ЭРТОС является план производства продукции базы (производственная программа). ।
Поскольку основной продукцией базы ЭРТОС являются результа- । ты определенного комплекса работ по ТО, ремонту и наработке средств РТО и связи, позволяющих получить высокий уровень обеспечения по- . летов и других видов производственной деятельности авиапредприя- ’> тий, то годовой план производства продукции базы ЭРТОС разрабатывается на основе планов наработки, ТО и ремонта средств РТО и связи.
Планы наработки, ТО и ремонта составляют на все средства РТО и связи объектов базы ЭРТОС и приписных аэропортов местных воздушных линий начальниками объектов и ответственными за оборудование * местных воздушных линий. При разработке этих планов используют; информацию о количестве и типах находящихся в эксплуатации (и на хранении) средств РТО и связи и об их техническом состоянии; данные о предполагаемой наработке средств РТО и связи в течение года и по отдельным месяцам (эти данные связаны с интенсивностью полетов, метеоусловиями и т. п.); требуемую периодичность проведения ТО и ремонта на каждый тип оборудования; данные о специфических особен- j ностях и производственных мощностях ремонтных подразделений; сроки и трудоемкость проведения запланированных летных проверок средств РТО и связи базы ЭРТОС. Образец плана наработки технического обслуживания и ремонта средств РТО и связи базы ЭРТОС приведен в табл. 17. j
140
Таблица 17
1 План
Наработки, технического обслуживания и ремонта! средств РТО (план технической эксплуатации)
Утверждаю
Начальник базы (узла) ЭРТОС
и связи
19-
(Наименование объекта) базы ЭРТОС
«------»
на 19-----г.
Наименование оборудования и заводской номер
Кол-во отработанных часов с начала эксплуатации (после капитального ремонта) на 01.01
19 г.
Наработка в часах
Вид технического обслуживания
Январь
Декабрь
. к
Срок проведения ремонта
Е *
Е
ф1'
5
32
33
27
28
29
6
в 3
5
1
2
3
Р-820 №0145613
1986
25000
35000
400
ТО4
19----г.
400
4800
СТО
Начальник объектам
«
В годовом плане производства продукции (производственной программе) базы ЭРТОС общий объем продукции базы оЙрё^еляется суммированием общих объемов по ТО и ремонту; радио-, телеграфно-телефонному обмену сообщениями и выполнению дополнительных работ. План разрабатывается начальником базы ЭРТОС сОвмё^гно с плановым отделом, утверждается начальником эксплуатационного авиапредприятия, в которое входит данная база ЭРТОС. Образец родового плана производства продукции (производственной программы) приведен в табл. 18.
Для обеспечения выполнения основного производственного плана базы ЭРТОС на основе планов наработки, технического обслуживания и ремонта средств РТО и связи разрабатываются оперативно-производственные планы на каждый месяц или декаду. В йих отражены следующие виды работ: ТО средств РТО и связи; ремонт оборудования; ввод в-эксплуатацию новых средств РТО и связи; замена (демонтаж) устаревшего оборудования; дополнительные работы; организационно-технические мероприятия; техническая учеба. Форма оперативно-производственного плана приведена в табл. 19.
141
а б л и ц a 18
Элементы программы Объем продукции, приведенные/единицы
годовой I по кварталам IV
II 1 1
Техническое обслуживание и 42260,2 10309,9 10481,6 10804,2 10664,5
текущий ремонт Дополнительные работы 7956,8 1968,5 1978,3 2076,1 1933,9
Обработка телеграфных сообщений Обработка радиосообщений 9385,1 3169,1 2259,1 2215,0 / 1741,9
3157,6 852,6 772,3 ! 831,6 701,1
Прочая продукция 1920,0 381,4 345,9 / 613,8 378,9
Общий объем работы 63679,7 16681,5 16037,2 16540,7 15420,3
Оперативно-производственные планы позволяют доводить задания до конкретных исполнителей, оперативно подготавливать и контролировать выполнение текущих технологических процессов, своевременно устранять предпосылки к невыполнению плановых заданий в срок, т. е. осуществлять оперативное управление процессом эксплуатации РТО в базах ЭРТОС.
Таблица 19
У тверждаю
Начальник узла (старший инженер РЭМ)
«-----»----------------19---г.
План работы объекта-----------------
на 19_____________________г.
месяц
Наименова- . ние работ Срок исполнения Исполнитель Трудоемкс План эсть, чел-ч Факт Отметка об исполнении
Руководитель объекта___________________'
19
142
Оперативно-производственные (или оперативные) планы служат основой для централизованного оперативного руководства всем комплексом эксплуатационного процесса базы ЭРТОС, являющегося весьмга сложным многоплановым процессом. Сложность процесса эксплуата-. ции средств РТО и связи в базе ЭРТОС обусловлена рядом специфических особенностей: большим количеством разнотипного оборудования, выполняющего различные функции и отличающегося конструкцией, элементной базой, эксплуатационной технологичностью, особенностями обслуживания, регулировок, настроек, ремонта; территориальной удаленностью, объектов управления от центрального пункта (КДП) и их рассредоточенностью; разнообразием планируемых к выполнению производственных, процессов, требующих наличия исполнителей различной квалификации, применения разнообразной контрольно-измерительной аппаратуры, приспособлений, деталей, материалов и т. п.; необходимостью своевременной замены устаревшего и ввода в эксплуатацию нового оборудования и его освоения; сложностью связей, зависимостью и влиянием других подразделений и служб авиапредприятия на качество функционирования базы ЭРТОС.
Непосредственная реализация мероприятий по технической эксплуатации средств РТО и связи осуществляется обслуживающим персоналом узлов радионавигации и связи и бригадами (группами) РЭМ. Руководство и управление производственным процессом можно представить следующей иерархической структурой:
организация и руководство непосредственным выполнением работ производственного процесса в узлах радионавигации и связи и бригадах ТО и ремонта. Начальники узлов и руководители бригад распределяют плановые работы между исполнителями, организуют их выполнение и контроль, проводят оперативные разборы и др.;
централизованное оперативное управление процессом эксплуатации всех объектов радионавигации, УВД и связи (обеспечивается выполнение текущих плановых заданий производственной программы базы и высокое качество радиотехнического обеспечения летной деятельности авиапредприятий);
координационное руководство деятельностью всех подразделений для обеспечения выполнения основных функциональных задач базы ЭРТОС в комплексе эксплуатационного авиапредприятия (осуществля:-ется начальником и главным инженером базы ЭРТОС).
Исходя из сложности процесса эксплуатации средств РТО и связи ® базах ЭРТОС и учитывая высокие требования к четкости и качеству функционирования средств обеспечения самолетовождения и других видов производственной деятельности авиапредприятий, весьма целесообразным является реализация централизованного диспетчерского оперативного управления текущим процессом эксплуатации в базах ЭРТОС.
Диспетчерское оперативное управление обычно осуществляется сменным инженером базы ЭРТОС с центрального пункта на КДП, обо-143
рудованного необходимой аппаратурой для управления Объектами, группами, бригадами и другими подразделениями, участвующими в общем комплексе эксплуатационного функционирования базы ЭРТОС.
Основные обязанности сменного старшего инженера базы ЭРТОС следующие: i
ежедневный контроль за выполнением плановых работ по ТО и ремонту оборудования радионавигации, УВД и связи для обеспечения его безотказной и качественной работы; [
управление автоматизированными объектами и контроль их работоспособности; /
оперативный анализ отказов, замечаний летного и диспетчерского состава о работе средств РТО и связи и принятие необходимых мер по восстановлению их работоспособности (при этом необходимо немедленно докладывать руководителю полетов и руководству базы ЭРТОС о нарушениях в работе средств РТО и связи, могущих повлиять на безопасность и регулярность полетов); ;
запись в специальный журнал всех изменений в работе средств РТО и связи (смена курса посадки, проверка работоспособности автоматизированных объектов и т. п.), замечений летного и диспетчерского состава о работе средств РТО и связи, замечания по работе смены, принятые меры, распоряжения руководства базы ЭРТОС, подлежащие передаче по смене.
Руководители базы ЭРТОС осуществляют управление и контроль за ходом производственного процесса с помощью ежедневных, еженедельных и ежемесячных разборов, проводимых на объектах (начальниками объектов) в узлах (начальниками узлов) и на базе (начальником или главным инженером базы). На разборах рассматривают и анализируют особенности работы и надежность объектов, ход выполнения производственных планов, ставят задачи на последующие периоды работы и рассматривают вопросы обеспечения успешного выполнения, планов, трудовой дисциплины, политико-воспитательной работы, охраны труда.
4.4. ЭКСПЛУАТАЦИОННАЯ ДОКУМЕНТАЦИЯ
Эксплуатационная документация рассматривается как неотъемлемая часть радиотехнического оборудования, так как от качества и полноты документации зависят уровень и правильность изучения и технической эксплуатации самого оборудования. Эксплуатационная документация предназначена для изучения средств РТО и связи и правил, их эксплуатации (использования, ТО, транспортировки и хранения), а также для организации правильной эксплуатации и необходимого учета средств РТО и связи. Эксплуатационные документы оформляются в соответствии с требованиями единой системы конструкторской документации.
144
В основном средства РТО и связи представляют собой сложные наземные объекты, состоящие из нескольких подсистем-изделий. В зависимости от специфики использования конкретного объекта на этапах его разработки определяют необходимость разработки эксплуатационной документации по определенной структуре. Например, для диспетчерского радиолокатора типа ДРЛ-7С, состоящего из основного оборудования, установленного на объекте, и выносного индикатора кругового обзора (ВИКО), расположенного на КДП, необходима эксплуатационная документация для оборудования объекта в целом и отдельно документация'для ВИКО, позволяющая обеспечить производственные процессы эксплуатации радиолокатора ДРЛ-7С как непосредственно на объекте, так и на КДП.
Если все подсистемы оборудования объекта установлены в одном помещении (например, моноблок приемника или передающее устройство радиоцентра) и для его ТО и эксплуатации не требуется документация на каждое изделие, входящее в данный объект, то эксплуатационную документацию целесообразно выполнять в виде одного комплекта. В основном эксплуатационные документы разрабатывают на изделие (средство РТО и связи) в целом независимо от наличия эксплуатационных документов на его составные части (подсистемы), последние же разрабатывают только в технически обоснованных случаях. При этом в общей эксплуатационной документации на все изделие даются ссылки на документацию составных частей.
Поставляемые с оборудованием РТО и связи эксплуатационные документы должны быть рассчитаны на обслуживающий персонал соответствующей квалификации и прошедший специальную подготовку по техническому использованию и обслуживанию данного оборудования.
Эксплуатационные документы представляют в виде текстовых документов (технические описания, паспорта, инструкции и т. п.), документов, содержащих таблицы, спецификации, ведомости и т. п., и иллюстративного материала (схемы, чертежи, рисунки, фотографии).
Основным документом на изделие является формуляр, или паспорт. Формуляром снабжаются средства РТО и связи, для которых необходимо вести учет их технического состояния и данных о времени работы, неисправностях и др. Формуляр в общем виде содержит:
общие указания для обслуживающего персонала по эксплуатации изделия и по ведению формуляра;
общие сведения об изделии (наименование, обозначение, дата выпуска, заводской номер и т.п.);
основные технические характеристики;
сведения о комплектности;
свидетельства о приемке, консервации, упаковке;
гарантийные обязательства изготовителя и сведения о рекламациях;
сведения о хранении, консервации и расконсервации;
145
правила учета работы и неисправностей средств РТО и связи при его эксплуатации;
правила учета технического обслуживания;
информацию о периодическом контроле основных эксплуатационно-технических характеристик; I
указания о проверке измерительных приборов; /
сведения об изменениях конструкции изделия и замене его частей, произведенных в процессе эксплуатации и ремонта; о категории изделия; ремонте и результатах специальных инспекторских проверок.
В зависимости от назначения, конструкции и эксплуатационных особенностей средств РТО и связи содержание и структура формуляра могут изменяться — некоторые разделы могут быть объединены, видоизменены, упрощены или добавлены. Например, для сложного оборудования, выполненного на новой элементной базе и обеспечивающего решение ответственных задач радионавигации и инструментальной посадки самолетов, целесообразно дополнительно ввести разделы, связанные с регистрацией и анализом повторяющихся отказов и замечаний по специфике эксплуатации оборудования.
При учете неисправностей необходимо записывать дату и наработку оборудования, характер и причину отказа, принятые меры по устранению отказа, время, затраченное на восстановление работоспособности оборудования и др. Обычно для сложных изделий к формуляру прилагают отдельные документы (журналы, таблицы, схемы и др.), дополняющие содержание разделов формуляры. С учетом отраслевой специфики использования и эксплуатации средств РТО и связи в базах ЭРТОС предприятий ГА руководящими органами (ЦУЭРТОС и отделами ЭРТОС управлений ГА) разработан ряд эксплуатационно-технических документов, которые надлежит вести и в процессе эксплуатации. К эксплуатационно-технической документации объектов РТО и связи относят:
структурную схему объекта;
схему электропитания объекта;
план и схему соединений АФУ;
журнал (таблицу) кроссировочных соединений;
выписку из инструкции по резервированию средств РТО и связи; инструкцию по технике безопасности и пожарной охране;
план эвакуации людей и имущества при пожаре;
правила технической эксплуатации радиотехнического оборудования и связи (ПТЭРТОС ГА);
технические описания и инструкции по эксплуатации средств РТО и связи;
формуляры на изделия;
регламенты и технологические карты ТО средств РТО и связи;
карты контрольных режимов средств РТО и связи, таблицы настройки;
146
таблицы радиоданных, разрешенных для использования (объекты радиосвязями навигации);
оперативный журнал сменного дежурного инженера (техника) объекта; |
журнал технического обслуживания и ремонта средств РТО и связи;
журнал учета наработок, отказов и неисправностей средств РТО и связи;
журнал проверок оборудования АТС аэропорта;
журнал учета повреждений АТС;
журнал учета заряда аккумуляторных батарей;
журнал приема, выдачи и учета переносных радиостанций внутри-аэропортовой связи (РЭМ);
журнал ремонта средств РТО и связи (РЭМ);
должностные инструкции работников объекта;
план работы объекта на месяц;
график работы дежурных смен (дежурных специалистов);
график технического обслуживания оборудования объекта;
опись оборудования и имущества объекта.
Основными эксплуатационно-техническими документами базы ЭРТОС являются:
удостоверения годности оборудования к эксплуатации;
разрешения на право эксплуатации радиоизлучающих устройств;
журнал учета радиоданных радиоизлучающих средств;
журнал учета изменений и дополнений к регламентам аэронавигационной информации по воздушным трассам СССР;
журнал учета остановок объектов РТО и связи;
журнал наличия и перемещения средств РТО и связи;
журнал учета средств измерений;
журнал регистрации изменений линейно-кабельных сооружений аэропорта;
акт на передачу оборудования;
акт приемки в эксплуатацию объекта базы ЭРТОС;
акт приемки в эксплуатацию изделия;
акт летной проверки диспетчерского канала авиационной воздушной связи метрового диапазона;
акт технического (качественного) состояния средств РТО и связи, подлежащих продлению ресурса (срока службы), ремонту или списанию;
рекламационные акты;
акт расследования причин отказа объекта базы ЭРТОС;
протокол наземной проверки и настройки оборудования;
протокол электрических измерений кабелей связи;
список кабелей связи и управления;
протокол измерений защитного заземления;
протокол измерений сопротивления изоляции электрических кабелей.
147
Приведенные перечни эксплуатационно-технических документов и указания к их оформлению содержатся в правилах технической эксплуатации наземных средств РТО и связи. 1
4.5. ВВОД В ЭКСПЛУАТАЦИЮ СРЕДСТВ РТО И СВЯЗИ J
Ввод в эксплуатацию средств РТО и связи является, комплексом мероприятий, связанных с выполнением ряда трудоемких’этапов работ. На выполнение таких работ необходимо разрешение соответствующих органов государственного санитарного и технического надзора и технической инспекции профсоюзов авиапредприятия до начала» работ по строительству новых или реконструкции уже находящихся в эксплуатации объектов.
Комплекс работ по вводу в эксплуатацию средств РТО и связи предполагает выполнение следующих этапов:
поставка и осуществление контроля за поставками средств РТО и связи на авиапредприятие. Этот этап работ организуют органы материально-технического снабжения и начальник базы ЭРТОС;
надзор за выполнением капитального строительства (или реконструкции) объекта РТО и связи;
приемка объектов РТО и связи в эксплуатацию;
выполнение монтажно-наладочных работ средств РТО и связи;
наземные технические проверки средств РТО и связи;
летные технические проверки средств РТО и связи;
оформление документов на завершение ввода средств РТО и связи в эксплуатацию.
Строительство объектов РТО и связи осуществляется согласно утвержденным проектам силами подрядчиков — строительно-монтажными организациями. Поэтому чрезвычайно важным для базы ЭРТОС является осуществление технического надзора за качеством и своевременностью выполнения работ по капитальному строительству. Для этого приказом авиапредприятия назначаются специалисты авиапредприятия по техническому надзору и представители базы ЭРТОС, которой будут переданы строящиеся объекты.
Объекты РТО и связи при завершении работ по их строительству или реконструкции и подготовке к эксплуатации и оперативному использованию предъявляются к приемке. Приемка объектов РТО и связи в эксплуатацию организуется в соответствии с действующим законодательством и регламентирующими документами. Приемка осуществляется на двух уровнях: сначала заказчиком (авиапредприятием) от генерального подрядчика (исполнителя работ по капитальному строительству и монтажу), затем авиапредприятие предъявляет объект для приемки в эксплуатацию Государственной приемочной коми сии.
Объекты для приемки в эксплуатацию предъявляются после выполнения всех строительно-монтажных работ и работ по благоустройству 148
территории при подключенной системе инженерного оборудования зданий к внешним сетям (водоснабжения, отопления, канализации, электроосвещения и т. д.) и при полной готовности средств РТО и связи объекта к оперативной работе.
Без испытаний и проверки работоспособности смонтированных на объекте средств РТО и связи и другого вспомогательного оборудования, при наличии неузаконенных в установленном порядке изменений утвержденного проекта, а также при недоделках, препятствующих нормальной эксплуатации объектов с точки зрения обеспечения их нормального функционирования, обеспечения безопасности труда и требований промышленной санитарии принимать в эксплуатацию объекты РТО и связи запрещается.
На первом этапе приема объекта (рабочими комиссиями авиапредприятия) генеральный подрядчик обязан представить следующую документацию:
перечень организаций, участвующих в строительно-монтажных работах, с указанием конкретных работ, выполненных каждой организацией;
комплект рабочих чертежей объекта;
документы (технические паспорта) на использованные при строительстве объекта изделия и материалы;
акты испытаний смонтированного оборудования, электроустановок, электросетей, телефонных сетей, защитных устройств и т. п., а также другую документацию, которая после приема объекта должна храниться на авиапредприятии.
Рабочая комиссия авиапредприятия составляет акты готовности к приемке в эксплуатацию зданий, сооружений и оборудования объектов (или акт готовности к комплексному апробированию средств РТО и связи), а также акт готовности к приемке в эксплуатацию в целом государственной приемочной комиссией.
Государственная приемочная комиссия работает по программе и графику, разработанным заказчиком, и составляет акт государственной комиссии по приемке объектов РТО и связи в эксплуатацию. Дата подписания акта является датой приема объекта в эксплуатацию и перехода его на баланс авиапредприятия. Приказом начальника авиапредприятия принятый в эксплуатацию объект закрепляется за соответствующими подразделениями (узлом) базы ЭРТОС. В некоторых случаях при установке средств РТО и связи, не требующих капитальных затрат, монтажно-наладочные работы выполняются силами базы ЭРТОС. При этом могут организовываться монтажно-установочные группы РЭМ. Оборудование устанавливается в соответствии с эксплуатационной документацией завода-изготовителя, а ввод в эксплуатацию средств РТО и связи осуществляется в соответствии ПТЭРТОС ГА и оформляется актом приема в эксплуатацию изделия.
Правила сертификации оборудования. Каждый образец оборудования должен пройти в установленном порядке и необходимом объеме
149
предварительные (заводские), государственные и другие виды испытаний. Цель предварительных (заводских) испытаний РЭО в части его сертификации — определение соответствия оборудования и его эксплуатационной документации требованиям норм годности к эксплуатации и доведения их до уровня этих требований. По результатам этих испытаний оформляются акт заводских испытаний и таблица соответствия, являющаяся документом, подтверждающим соответствие оборудования нормам. Кроме того, оформляется общее заключение по оценке соответствия оборудования действующим нормам в ожидаемых условиях эксплуатации. После предварительных испытаний оборудование получает временный сертификат годности и начинаются испытания для получения сертификата годности, которые состоят из государственных и эксплуатационных испытаний с целью допуска РЭО к эксплуатации.
Предъявление образцов РЭО для государственных испытаний проводится министерством (ведомством), разрабатывающим устройство и осуществляющим его серийное производство. Цель государственных испытаний оборудования — контрольная проверка и подтверждение соответствия оборудования и его эксплуатационной документации требованиям норм. Перед государственными испытаниями выдается временный сертификат оборудования. Приемка оборудования на государственные испытания осуществляется и оформляется актом, который должен содержать оценку полноты выполнения заводских испытаний, соответствия оборудования документации, готовности оборудования к проведению государственных испытаний.
Государственные испытания проводят при наличии временного сертификата. При этом должны быть разработаны план-график проведения всех видов наземных и летных испытаний образца. Результаты испытаний оформляют актом государственных испытаний, в заключении которого должны содержаться подтверждение соответствия оборудования данного типа действующим нормам, предложения о возможности и условиях допуска оборудования данного типа к эксплуатации, материалы, подтверждающие выводы и заключения акта.
По всем недостаткам, выявленным в процессе государственных испытаний, разрабатываются и выполняются мероприятия по устранению недостатков. По окончании государственных испытаний на оборудование выдается временное удостоверение годности.
Эксплуатационные испытания. Цель эксплуатационных испытаний оборудования — качественная проверка и подтверждение соответствия оборудования и его эксплуатационной документации требованиям норм в реальных условиях эксплуатации. Эксплуатационные испытания проводятся комиссией заказчика при наличии Временного сертификата и Удостоверения годности. Виды проверок, объем испытаний, число серийных экземпляров оборудования для проведения эксплуатационных испытаний оборудования определяются программой, которая подлежит согласованию с Госавиарегистром СССР. Результаты испытаний заказчика оформляются заключением, которое должно содержать 150
оценку готовности к эксплуатации оборудования и его эксплуатационной документации в реальных условиях эксплуатации.
По окончании государственных эксплуатационных и дополнительных испытаний, если они проводились, головное предприятие-разработчик уточняет Таблицу соответствия и согласует эксплуатационную документацию, оформляет и согласовывает заключение, устанавливающее первоначальный ресурс, срок службы, ресурс и срок службы до первого ремонта с обоснованием сохранения уровня готовности к эксплуатации оборудования в пределах назначенного ресурса и срока службы, после чего РЭО может быть допущено к эксплуатации на авиапредприятиях ГА.
Необходимым и обязательным условием допуска оборудования к эксплуатации в ГА (выдача удостоверения годности к эксплуатации) является его соответствие требованиям действующих норм, что удостоверяется сертификатом годности к эксплуатации данного типа оборудования, выданным Госавиарегистром СССР.
Эксплуатация оборудования должна проводиться в соответствии с утвержденной нормативно-технической документацией персоналом, который прошел специальную подготовку и допущен к работе в установленном порядке. Оборудование обслуживается в соответствии с установленными регламентами ТО. Ответственность за поддержание оборудования на уровне, соответствующем действующим нормам, несет предприятие-владелец оборудования.
4.6. ОХРАНА ВНЕШНЕЙ СРЕДЫ И ТРУДА
ИНЖЕНЕРНО-ТЕХНИЧЕСКОГО СОСТАВА БАЗ ЭРТОС
Эксплуатация оборудования РТО и связи баз ЭРТОС характеризуется наличием значительного числа вредных факторов, таких, как электромагнитные излучения в различных диапазонах волн, шумы, вибрация, высокие электрические потенциалы, вращающиеся механические устройства, токсические вещества и т. д. Эти факторы, кроме непосредственного вредного влияния на здоровье людей и окружающую среду, негативно отражаются на таких функциях инженерно-технического персонала, как внимание, быстрота реакции, что может сказаться на эффективности работы средств УВД навигации и посадки самолетов, а следовательно, на безопасности и регулярности полетов.
Для охраны окружающей среды и обслуживающего персонала, а также других людей, находящихся в зоне действия средств РТО и связи баз ЭРТОС, использование и работа этих средств регламентируются одним из руководящих документов служб ЭРТОС — Правилами техники безопасности при эксплуатации радиотехнического оборудования и связи на объектах баз ЭРТОС предприятий гражданской авиации.
Для обеспечения безопасных условий труда на базе ЭРТОС все должностные лица, ответственные за технику безопасности, обязаны:
151
знать перечень опасных и повышенной опасности работ, выполняемых обслуживающим персоналом;
обеспечить все объекты и участки работ правилами, инструкциями и иллюстративными материалами по технике безопасности;
обеспечить все объекты и участки работ необходимым количеством защитных средств и средств первой помощи;
следить за исправностью ограждений, защитных средств и приспособлений;
обучать работников базы ЭРТОС правилам безопасного ведения работ и контролировать соблюдение этих правил;
запрещать работу в условиях, явно опасных для жизни и здоровья обслуживающего персонала, немедленно извещая об этом вышестоящих должностных лиц;
запрещать пользоваться неисправными инструментами и средствами индивидуальной защиты.
Ответственность за организацию работ по охране труда, состояние техники безопасности и изучение всеми работниками правил техники безопасности несет руководящий состав базы ЭРТОС. Непосредственная организация охраны труда при обслуживании средств РТО и связи осуществляется начальниками узлов и объектов баз ЭРТОС. Постоянный контроль за соблюдением правил охраны труда и производственной санитарии на рабочих местах возложен на начальников объектов и непосредственных руководителей работ. Инженерно-технический персонал, прошедший проверку знаний правил по технике безопасности и допущенный к эксплуатации средств РТО и связи, несет ответственность за соблюдение этих правил.
Из числа специально подготовленного персонала базы ЭРТОС должно быть назначено лицо, ответственное за общее состояние эксплуатации электрохозяйства базы ЭРТОС и выполнение правил техники безопасности. Лицо, ответственное за электрохозяйство, обязано обеспечить:
безопасную и надежную работу электроустановок;
внедрение новой техники, способствующей более безопасной и эффективной работе электроустановок;
организацию и своевременное проведение испытаний и профилактического обслуживания и ремонта электрооборудования, аппаратуры и сетей;
обучение, инструктаж и периодическую проверку знаний обслуживающего персонала;
наличие и своевременную проверку защитных средств и пожарного инвентаря;
выполнение предписаний Госэнергонадзора в установленные сроки;
организацию и своевременное расследование аварий при работе электроустановок, а также несчастных случаев от поражения электрическим током.
152
Выполнение санитарно-технических мероприятий и осуществление контроля за состоянием производственной санитарии на объектах баз ЭРТОС возлагается на санитарно-эпидемиологические станции предприятий и медико-санитарные службы управлений ГА.
Каждый работник базы ЭРТОС при обнаружении нарушений правил техники безопасности или неисправности оборудования или защитных средств и приспособлений, особенно представляющих опасность для окружающих людей и оборудования, обязан немедленно сообщить руководству и принять меры по устранению обнаруженных нарушений при условии строгого соблюдения правил техники безопасности. При несчастных случаях необходимо немедленно принять меры по оказанию пострадавшему первой помощи. Все несчастные случаи, связанные с эксплуатацией оборудования РТО и связи, расследуются и учитываются согласно действующим положениям. Принимаются меры по предотвращению подобных случаев.
Весь комплекс работ по охране внешней среды, труда и производственной санитарии на всех объектах и участках базы ЭРТОС должен быть направлен на исключение вредных воздействий эксплуатируемых средств РТО и связи на окружающую среду, обеспечение безопасных и здоровых условий труда. Это приводит к уменьшению травматизма и утомляемости обслуживающего персонала и позволяет повысить эффективность использования радиотехнического оборудования, а следовательно, безопасность и регулярность полетов.
4.7. ПЛАНИРОВАНИЕ ТРУДА НА БАЗЕ ЭРТОС
На основании информации, содержащейся в производственной программе базы ЭРТОС, планах наработки, технического обслуживания и ремонта средств РТО и связи и других производственных документах разрабатывается план по труду.
Он включает следующие показатели: численность работников; производительность труда; фонд заработной платы.
Основной задачей планирования при разработке плана по труду является обеспечение повышения производительности труда и превышение темпов ее роста над темпами роста заработной платы. Плановую производительность труда рассчитывают на основе установленного общего объема работ по базе ЭРТОС и запланированной численности работников (общее число рабочих, инженерно-технических работников и служащих). Производительность труда в каждом случае определяется делением соответствующего объема продукции, выраженного в приведенных единицах, на численность работников.
Производительность труда можно определить в расчете на одного непосредственного исполнителя работ (без руководящего состава, служащих и вспомогательного персонала) и на одного работающего (при этом учитываются все категории сотрудников). Полученные таким об
153
разом показатели производительности позволяют оценить влияние различных групп работающих на общий уровень производительности труда.
При расчете роста производительности труда необходимо оценить возможность уменьшения трудовых затрат — сокращение численности работающих той или иной категории. А это осуществимо при соответствующих условиях, таких, например, как сокращение времени простоев средств РТО и связи на техническом обслуживании; повышение степени автоматизации производственных процессов; увеличение объема работ по техническому обслуживанию аппаратуры; увеличение объема электро-, радиосвязной информации; внедрение новых прогрессивных методов эксплуатации объектов РТО и связи; совершенствование системы управления производственными процессами; сокращение непроизводительных потерь рабочего времени и т. п. Тщательный учет приведенных факторов повышения производительности труда позволит определить экономию трудовых затрат по сравнению с первоначальными, и по разности их значений можно вычислить новую производительность труда.
От качества анализа технико-экономических факторов зависит определение значимости того или иного фактора, влияющего на рост производительности труда и изменение общей производительности труда при реализации соответствующих факторов.
Потребность базы ЭРТОС в кадрах вычисляют при составлении балансового расчета числа работников всех категорий, необходимого для выполнения производственной программы и с учетом существующего числа сотрудников и штатного расписания.
Далее определяют плановый фонд заработной платы базы ЭРТОС как сумму фондов заработной платы по категориям работников. Труд рабочих баз ЭРТОС оплачивается по тарифным ставкам с ежемесячными премиями за выполнение и перевыполнение планов, труд руководящего состава, инженерно-технических работников, служащих и вспомогательного персонала — в соответствии с должностными окладами.
Планирование заработной платы предполагает также определение средней заработной платы работников, для чего к фонду заработной платы необходимо добавить выплаты из фонда материального поощрения.
Расчет показателей плана по труду завершается сопоставлением темпов роста производительности труда и средней заработной платы. При этом рост темпов производительности труда должен опережать темп роста средней заработной платы. Помимо рассмотренных основных составляющих плана по труду, разрабатывается также план повышения квалификации работников.
154
4.8. ОБУЧЕНИЕ И ВОСПИТАНИЕ ЛИЧНОГО СОСТАВА
Обеспечение своевременного выполнения всех производственных планов авиапредприятий зависит от уровня профессиональной подготовки и морально-политических качеств личного состава баз ЭРТОС.
В соответствии с фактической квалификацией и численностью сотрудников базы ЭРТОС составляется план комплектования подразделений кадрами, а также план обучения личного состава — план переподготовки, повышения квалификации и совершенствования знаний работников всех категорий и групп. Эти планы являются составной частью плана базы ЭРТОС по труду.
Основной производственный процесс баз ЭРТОС — техническая эксплуатация средств РТО и связи — должен выполняться специалистами соответствующей квалификации, прошедшими общетехническую и специальную подготовку в высших и средних учебных заведениях гражданской авиации или других ведомств по аналогичным специальностям, а также прошедших стажировку в авиапредприятиях ГА или подготовку и обучение по индивидуальным планам. Обучение специалистов в высших и средних учебных заведениях ГА осуществляется в соответствующих объемах по утвержденным учебным планам и программам. Стажировка специалистов баз ЭРТОС проводится в соответствии с положением и программой, разрабатываемыми ЦУЭРТОС. Особенности и специфика стажировки выпускников учебных заведений ГА определяется положением МГА СССР о стажировке молодых специалистов ГА. Для определенной группы работников баз ЭРТОС составляются индивидуальные планы повышения квалификации и стажировки в зависимости от уровня их профессиональной подготовки.
Учитывая важность качества подготовки специалистов, руководство их стажировкой осуществляется наиболее опытными и высококвалифицированными инженерно-техническими работниками авиапредприятий.
После стажировки специалисты допускаются к самостоятельной работе по эксплуатации средств РТО и связи только после сдачи зачетов квалификационной комиссии, определяющей и констатирующей знания специалистами своих должностных обязанностей; конструкции, технических характеристик, особенностей функционирования, а также правил и практических навыков по технической эксплуатации средств РТО и связи; правил техники безопасности; наставления по пожарной охране. Кроме деловых качеств специалиста, учитываются его морально-политические, волевые качества и дисциплинированность. Эти требования обусловливаются не только общественными нормами для советского специалиста, но и спецификой работы, заключающейся в том, что в эксплуатации находится сложное радиоэлектронное оборудование, обеспечивающее безопасность и регулярность полетов, требующее поддержания постоянной работоспособности и высокой надежности.
155
Допуск специалистов к самостоятельной работе на объектах РТО и связи оформляется специальными распоряжениями, и ежегодно проверяются их знания по правилам технической эксплуатации.
4.9. НАУЧНАЯ ОРГАНИЗАЦИЯ ТРУДА В БАЗАХ ЭРТОС
Научная организация труда (НОТ) — совокупность мероприятий по организации труда, основанных на достижениях науки и техники и передового опыта и направленных на повышение эффективности использования производственных фондов, материальных и трудовых ресурсов базы ЭРТОС. Мероприятия по НОТ можно разделить на две основные группы: планирование научной организации и повышение эффективности труда; управление качеством технической эксплуатации средств РТО и связи.
В процессе выполнения плановых заданий базы ЭРТОС необходимо осуществлять систематический анализ производственной деятельности всех элементов и участков производства для выявления резервов, позволяющих повысить эффективность производства и перевыполнять плановые задания. Технико-экономический анализ производственной деятельности базы ЭРТОС является основой современной системы планирования и руководства производственным процессом, позволяющим выявить возможности повышения производительности труда, увеличения объема производства и снижения эксплуатационных затрат. Такой анализ проводится на основе сопоставления плановых и фактических значений производственных показателей данной базы ЭРТОС, а также передовых баз ЭРТОС для выявления негативных явлений и возможностей улучшения производственного процесса и внедрения передового опыта в организации труда и совершенствовании технологических процессов эксплуатации средств РТО и связи.
На основе результатов технико-экономического анализа производственной деятельности базы ЭРТОС с учетом рекомендаций по использованию перспективных научно-технических разработок и возможностей автоматизации производственных процессов разрабатывается план научной организации и повышения эффективности труда по таким направлениям, как внедрение прогрессивных технологических процессов эксплуатации средств РТО и связи, а также автоматизации и механизации этих процессов; совершенствование организации труда, системы планирования и управления производством (в том числе внедрение автоматизированных систем управления производством); научная организация труда всех категорий работающих — инженерно-технических работников, рабочих и служащих.
Одна из важнейших задач производственной деятельности базы ЭРТОС — обеспечение высокого качества технической эксплуатации средств РТО и связи — качества труда на базе ЭРТОС. Качество труда определяется техническими, организационными, экономическими, 156
социальными и политике-воспитательными факторами. Естественно, что и управление качеством труда на базе ЭРТОС осуществляется путем обоснованного, целенаправленного воздействия на эти факторы.
В настоящее время основной формой организации управления качеством труда является так называемая система бездефектного труда, основанная на принципах воспитания у каждого исполнителя стремления к качественному выполнению работ и личной ответственности за соблюдением технологической и служебной дисциплины труда; на создании производственно-технических и моральных условий для качественного выполнения производственных заданий ^постоянном повышении квалификации исполнителей и освоении передового опыта, приемов и методов труда; управлении уровнем качества труда с помощью количественной оценки качества труда исполнителей, моральном и материальном поощрении высококачественного труда; соревновании исполнителей за качественный труд и гласности результатов соревнования и качества труда.
При работе по системе бездефектного труда каждый исполнитель обязан выполнить работу качественно, в установленные сроки, убедившись с помощью самопроверки и самоконтроля в отсутствии дефектов и в полном соответствии состояния оборудования РТО и связи требованиям руководящих документов, после чего выполненная работа предъявляется ответственному приемщику (руководителю). Ответственный приемщик должен проверить предъявленные результаты работы и оценить качество выполнения работы. При высоком качестве выполнения работы в карте-наряде (или другом документе) делается отметка а принятии работы с первого предъявления, в противном случае при обнаружении дефектов, отказов и неисправностей средств РТО и связи — работа не принимается и возвращается для устранения обнаруженных несоответствий, установленным требованиям, а выявленные нарушения фиксируются в журнале учета дефектов труда.
Качество работы может оцениваться коэффициентом качества к, номинальное значение которого принимается равным единице: к = 1 — — ^сн». гДе ксн — суммарный коэффициент снижения оценки качества труда, представляющий собой сумму коэффициентов снижения по всем видам работ исполнителя. В некоторых случаях для оценки качества труда используется коэффициент качества /с*, учитывающий не только недостатки в работе исполнителей, но и достигнутые успехи в повышении качества труда:
K»=i_^Hel +2яп>, * /
где Hci — нормативный коэффициент снижения качества за нарушение i-го требования комплексной системы управления качеством; Hnj — нормативный коэффициент повышения качества за /-достижение по улучшению качества.
На основании коэффициентов качества труда исполнителей рассчитывают коэффициенты качества участка, узла, смены, бригады, по которым выводится результирующая оценка качества труда всей базы
157
ЭРТОС за определенный промежуток времени. Анализ качества труда исполнителей, коллективов и руководителей проводится в День качества. По результатам этого анализа составляется бюллетень качества, подлежащий изучению и обсуждению в подразделениях базы ЭРТОС.
Для повышения эффективности качества функционирования базы ЭРТОС в ее организационной структуре создаются и развиваются бригадные формы организации и оплаты труда, которые позволяют повысить производительность труда инженерно-технических работников, сократить сроки выполнения работ по ТО и ремонту РТО, повысить качество и надежность работы средств радиотехнического обеспечения полетов.
Положение о бригадной форме организации труда разрабатывается с учетом специфических особенностей конкретной базы ЭРТОС. При определении численности и состава бригады ТО и ремонта необходимо исходить из степени оснащенности базы ЭРТОС средствами РТО и связи; квалификации инженерно-технического состава; географических, метеорологических, транспортных и других условий базового аэропорта и обслуживаемой зоны.
Материальная заинтересованность бригады в конечном результате труда реализуется за счет оплаты большего объема продукции, выполненного меньшим числом членов бригады.
4.10. СБОР И АНАЛИЗ ИНФОРМАЦИИ ОБ ОТКАЗАХ
СРЕДСТВ РТО И СВЯЗИ. ДОРАБОТКА ОБОРУДОВАНИЯ
Средства РТО и связи без ЭРТОС — восстанавливаемые системы длительного использования, и одной из важнейших задач технической эксплуатации этих средств является сохранение основных свойств надежности (безотказности, ремонтопригодности и долговечности) в заданных пределах в течение всего периода эксплуатации.
Безотказность — одно из основных свойств надежности и может определяться такими показателями, как вероятность безотказной работы, средняя наработка до отказа, интенсивность отказов, средняя наработка на отказ. В эксплуатационной практике баз ЭРТОС наиболее наглядным показателем безотказности средств РТО и связи служит средняя наработка на отказ То, определяемая отношением наработки восстанавливаемого объекта к математическому ожиданию числа его отказов в течение этой наработки.
Ремонтопригодность оборудования оценивается также с помощью размерного показателя — среднего времени восстановления работоспособного состояния Тв, определяемого математическим ожиданием времени восстановления работоспособного состояния. Долговечность характеризуется такими показателями, как назначенный ресурс (суммарная наработка объекта, при достижении которой его применение по назначению должно быть прекращено), назначенный срок служ-158
бы, а также средний ресурс (математическое ожидание ресурса) и средний срок службы. Долговечность может оцениваться с помощью времени наступления предельного состояния объекта — такого состояния, при котором дальнейшее применение объекта по назначению недопустимо или нецелесообразно. Время наступления предельного состояния можно оценить, например, с помощью изменения основного показателя качества оборудования — показателя безотказности, для чего необходимо установить устойчивое, например в течение года, снижение средней наработки до определенного уровня по отношению к номинальной. Такое снижение и будет означать достижение эксплуатационным оборудованием предельного состояния.
Кроме единичных показателей надежности, для оценки эксплуатационных свойств средств РТО и связи используют комплексные показатели надежности, в частности коэффициент готовности кг.
Систематическая оценка показателей надежности средств РТО и связи и сравнение результатов оценок с требованиями технических условий осуществляются на основе статистической информации, получаемой на базах ЭРТОС. Наличие такой информации позволяет анализировать причины отказов и неисправностей оборудования для выявления элементов, узлов и блоков оборудования с низкой надежностью, а также факторов, ухудшающих ремонтопригодность и долговечность эксплуатируемого оборудования. Результаты такого анализа служат основой для разработки мероприятий по устранению причин отказов и неисправностей оборудования и рекомендаций по повышению ремонтопригодности и совершенствованию системы ТО средств РТО и связи баз ЭРТОС.
Первоначальная информация об отказах и неисправностях регистрируется на объектах РТО и связи в журналах учета наработки, отказов и неисправностей изделий (табл. 20), в которых с помощью условных обозначений указывается причина их выключений: «Д» — по распоряжению сменного старшего инженера или другого должностного лица; «ТОР» — для выполнения технического обслуживания и ремонта оборудования; «Рез» — переключение на резервный комплект; «01» — отказ изделия; «02» — отказ источников электропитания; «03» — отказ линии управления и связи; «04» — отказ из-за неправильных действий обслуживающего персонала; «05» — отказ из-за воздействия метеорологических факторов. В графы 9... 10 журнала заносят данные, характеризующие отказ объекта (или канала связи) в целом по указанной общей классификации причин «01»...«05».
В графы 11 ...16 записывают данные, непосредственно характеризующие отказы или неисправности изделия в соответствии с конкретной классификацией причин этих отказов или неисправностей: «1» — отказ электровакуумных приборов; «2» — отказ полупроводниковых приборов; «3» — отказ резисторов; «4» — отказ конденсаторов; «5» — отказ моточных изделий; «6» — отказ по причине нарушения изоляции соединительных кабелей, высокочастотных кабельных разъ-159
Таблица 20
Журнал учета наработки, отказов и неисправностей изделий
(наименование объекта, аэропорта) Начат « -----------------------------»-------------19----г.
емов, монтажных проводов; «7» — отказ коммутационных элементов; «8» — отказ механических элементов, таких, как редукторы, шестерни, подшипники ит. п.; «9» — отказ антенно-фидерных устройств; «10» — отказ по причине расстройки или разрегулировки оборудования; «11»— отказ по невыявленным причинам. При этом регистрируются время появления отказа, время окончания восстановительных работ, трудозатраты на восстановление, место отказа, а также вспомогательная информация, например способ выявления отказа (по сигналам автоматического встроенного контроля, по сообщению экипажа ВС, путем осмотра и т.п.), обстоятельства обнаружения отказа или неисправности (в процессе работы оборудования или при проведении технического обслуживания); способ восстановления (замена элемента, регулировка параметра и т.д.).
Ежемесячно подводятся итоги по суммарной наработке изделия, общему число отказов объекта; суммарному времени восстановления работоспособности и общих трудозатрат на восстановление работоспособности средств РТО и«связи, а также число отказов, распределенных по причинам 10 ...05. На автоматизированных объектах графы 3...6 не заполняют, графу 7 заполняют по показаниям счетчика часов работы в конце месяца или при возникновении отказов. На основе информации, содержащейся в журналах учета наработки, отказов и неисправностей, 1 раз в год данные по надежности каждого изделия обобщаются и заносятся в карту-накопитель отказов и неисправностей. В соответствующих графах приводят сведения о наработке оборудования с начала экс-160
плуатации изделия, а также сведения о наработке на один отказ и одну неисправность, данные о числе отказов и неисправностей по 11 вышеуказанным группам причин, а также общее число отказов и неисправностей за год.
Система сбора и анализа информации о надежности оборудования РТО и связи, кроме рассмотренных этапов, выполняемых в базах ЭРТОС, предполагает осуществление завершающего этапа централизованного сбора и анализа информации по всему множеству эксплуатируемых средств в головных научно-исследовательских центрах разработчика и заказчика радиоэлектронного оборудования. Исходной информацией для завершающего этапа является информация, поступающая из эксплуатационных предприятий (баз ЭРТОС) и содержащаяся в стандартных Карточках учета неисправностей (отказов) наземного радиоэлектронного оборудования. Карточки заполняются на каждый отказ или неисправность на основании первичной информации о технической эксплуатации и надежности объектов баз ЭРТОС и высылаются в центр сбора и обработки информации.
Одним из основных требований, предъявляемых к карточкам учета неисправностей и отказов, является полнота и достоверность представляемых данных, на основании которых центром сбора информации периодически выпускаются информационные бюллетени по статистическим данным об отказах и неисправностях наземного РЭО.
По статистическим данным определяют различные показатели надежности средств РТО и связи. Наработка на отказ — отношение суммарной наработки средств РТО к суммарному числу этих средств
N I N
To^^ti ^nt, i=1 I i=l
где ti — наработка одного экземпляра РТО за период эксплуатации; — число отказов за период эксплуатации.
Статистическое значение среднего времени восстановления
N I N (
Тв = 2 2
Z=1 / z=l
где Тв i — время восстановления i-ro отказа или неисправности; гц р — суммарное число отказов и неисправностей за период эксплуатации.
Коэффициент готовности
Ъ = Т9/(Т9+ТВ).
Последующие задачи ЦУЭРТОС, эксплуатационных предприятий и научно-исследовательских организаций ГА и соответствующих организаций разработчиков и изготовителей радиоэлектронного оборудования заключаются в том, чтобы на основе анализа разработать научно-техническое обоснование: технических требований к изделиям РТО и связи; назначенных ресурсов и сроков службы оборудования; техно-6 Зак. 2262 161
логических карт, сроков и трудоемкости различных видов технического обслуживания РЭО, объемов запасных частей; рекомендаций, направленных на повышение надежности и конструктивно-схемное совершенствование аппаратуры наземного РЭО и методов его ТО, которые реализуются в виде бюллетеней по доработке средств РТО и связи.
Доработка оборудования рассматривается как конструктивно-эксплуатационные изменения средств РТО и связи, к которым относятся: конструктивные изменения отдельных узлов и блоков оборудования, а также его электрических и монтажных схем;
изменение компоновки и комплектации РЭО;
замена деталей, узлов и блоков новой их модернизацией;
применение новых материалов и приспособлений при выполнении ремонтных работ на РЭО.
Бюллетени по доработкам, направленным на устранение конструктивных и производственных несовершенств средств РТО и связи, составляются разработчиками аппаратуры и вводятся в действие указаниями МГА. Выполнение доработок по бюллетеням завершается составлением соответствующего акта и записью в формуляр изделия. Работы по бюллетеням выполняются в соответствии со специальным указанием представителями завода-изготовителя или специалистами базы ЭРТОС.
4.11. МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПРОЦЕССА ЭКСПЛУАТАЦИИ РЭО
Метрологическое обеспечение (МО) представляет собой установление и применение научных основ, правил и норм, необходимых для достижения единства и требуемой точности измерений. МО включает комплекс мероприятий организационного, научного, технического и нормативного характера, выполняемых с целью обеспечения требуемого качества работы РЭО при минимуме эксплуатационных затрат. Общие правила и нормы МО регламентированы стандартами государственной системы обеспечения единства измерений и другой нормативно-технической документацией.
Организационной основой МО является Метрологическая служба СССР, состоящая из государственных и ведомственных служб.
В состав метрологической службы ГА входят метрологический отдел МГА; головная организация метрологической службы; базовые поверочно-ремонтные метрологические лаборатории (БПРМЛ); метрологические службы предприятий, организаций и учреждений ГА, где нет БПРМЛ; лица, назначенные ответственными за метрологическое обеспечение; специалисты, привлекаемые к решению задач метрологического обеспечения.
Основными задачами метрологической службы МГА являются проведение в масштабах отрасли единой технической политики, разработ-162
ка и внедрение общих принципов и методов оценки выполнения установленных положений, требований, норм и правил, обеспечивающих единство и требуемую точность измерений при разработке, производстве, испытании, эксплуатации и ремонте авиационной техники, контроле и оценке показателей ее качества, проведении научных исследований. Цель МО — обеспечение безопасности полетов и безопасных условий труда, выявление и удовлетворение потребности ГА в средствах и методах измерений, отвечающих современному техническому уровню с необходимой точностью и достоверностью измерений.
Головной организацией метрологической службы ГА является Государственный научно-исследовательский институт ГА, в котором имеется метрологический отдел. Базовые организации метрологической службы ГА— головные научно-исследовательские институты, по направлениям своей деятельности имеющие в своем составе метрологические подразделения. Организация МО в управлении ГА осуществляется заместителем начальника управления по эксплуатации авиационной техники.
Головная и базовые организации метрологической службы ГА осуществляют организационно-методическое и научно-техническое руководство работами по метрологическому обеспечению с целью обеспечения требуемого качества производственных процессов на предприятиях, заводах и в учреждениях ГА.
Проведение основных работ по метрологическому обеспечению воз-лагаетсй на базовые поверочно-ремонтные метрологические лаборатории, которые осуществляют ведомственную проверку и ремонт образцовых средств измерений, а также рабочих средств, которые не поверяются непосредственна на авиапредприятиях. На авиапредприятиях, где отсутствует базовая поверочно-ремонтная метрологическая лаборатория, организация метрологического обеспечения осуществляется руководителями структурных подразделений. Метрологические поверки средств измерений производят специалисты, прошедшие специальную подготовку. Эти специалисты выполняют обычно поверку простых средств измерений, перечень которых определяется по согласованию с заместителем начальника управления, ответственным за работы по метрологическому обеспечению. -
В обязанности ответственного за МО в авиапредприятиях ГА 'входит:
контроль за состоянием и применением средств контроля, соблюдением во всех структурных подразделениях авиапредприятий метрологических правил, требований и норм;
проведение анализа состояния МО, разработка планов и предложений по его улучшению и совершенствованию. Обобщение заявок на получение средств измерений;
разработка графиков поверки средств измерения, принадлежащих предприятию, в центральной метрологической лаборатории и органах Госстандарта, контроль за своевременным выполнением графиков службами ЭАП;
6». 163
организация хранения средств измерения в соответствии с установленными требованиями. Обеспечение постоянной исправности средств измерений и готовности к применению.
Задачи метрологического обеспечения эксплуатации авиационной техники решаются на всех этапах ее разработки, производства и испытаний. При этом добиваются удовлетворения научно обоснованных требований по метрологическому обеспечению авиационной техники. В этой работе важное место занимает метрологическая экспертиза и надзор за средствами измерений.
Научной основой метрологического обеспечения авиационной техники является метрология, которая исследует организационно-технические принципы метрологического обеспечения, общие закономерности измерений, решает задачи по изысканию новых методов и средств контроля, принципов обеспечения единства и требуемой точности измерений, разрабатывает научные основы эксплуатации средств измерений и контроля.
Технической основой метрологического обеспечения авиационной техники являются система эталонов единиц физических величин, система передачи размеров единиц от эталонов всем средствам измерений, система обеспечения авиапредприятий средствами измерений и контроля требуемой точности, система поверки и аттестации средств измерений.
При проверке метрологического обеспечения авиапредприятия контролируют: состояние, содержание и применение средств измерений; подготовленность личного состава к проведению метрологического обслуживания авиационной техники; организацию и качество выполнения поверок и ремонта средств измерений; соблюдение требований по своевременности и полноте метрологического обслуживания авиационной техники и т.п.
Выполнение комплекса научных, технических и организационных мероприятий, направленных на обеспечение единства и необходимой точности измерений параметров авиационной техники, позволяет существенно повысить эффективность ее применения, а также безопасность и регулярность полетов в ГА.
Важным этапом метрологического обеспечения является метрологическая экспертиза и надзор за средствами измерений. Метрологическая экспертиза направлена на обеспечение правильности технических решений по метрологическому обеспечению процесса эксплуатации. Это достигается путем оценки соответствия состава контролируемых параметров требуемым показателям достоверности контроля, оценки допусков на контролируемые параметры характеристикам работоспособности РЭО, выбора точности контрольно-измерительных трактов систем контроля, оценки влияния контрольно-измерительной аппаратуры на эксплуатационные показатели с учетом экономических факторов. 164
При проведении метрологической экспертизы в необходимых случаях должно быть вынесено заключение о целесообразности применения или разработки других средств измерения, например, если применение определенных приборов не позволяет обеспечить требуемое качество метрологического обеспечения или приводит к большим экономическим затратам. Наибольший эффект может быть достигнут, если метрологическая экспертиза проводится на всех этапах жизненного цикла РЭО; при разработке, в процессе изготовления и при эксплуатации. Допуск к применению в процессе эксплуатации авиационного РЭО должны получить только средства измерения, которые могут успешно эксплуатироваться в конкретных условиях работы РЭО. Следовательно, наиболее успешное решение задач метрологического обеспечения процесса эксплуатации возможно в том случае, когда система метрологического обеспечения разрабатывается как комплексная часть всей системы эксплуатации и вместе со всей системой эксплуатации обосновывается одновременно с разработкой самого РЭО.
Органами метрологической службы в процессе эксплуатации осуществляется надзор за средствами измерений. В соответствии с нормативными документами для полного охвата средств измерений метрологическим контролем они должны представляться на поверку по утвержденным графикам. На поверку средства измерений представляются исправными, укомплектованными и с заполненной служебной документацией. Правилами установлены случаи, когда средства измерения должны представляться на поверку в обязательном порядке: после проведения ремонтов; после истечения сроков очередной поверки; при повреждении поверительного клейма или отсутствии документов, подтверждающих выполнение очередной поверки; при наличии больших погрешностей измерений или сомнения в точности показаний.
Ответственность за контроль и выполнение плана ремонта и графика поверок средств измерений, находящихся на радиотехнических объектах службы ЭРТОС, включая и приписные аэропорты, возлагаются на специалистов, прошедших специальное обучение по метрологии.
Поверка рабочих средств измерений производится согласно соответствующим инструкциям и методическим руководствам МГА. При поверке устанавливают соответствие измерительных приборов требованиям ГОСТ и технических условий, которые определяют правильность их показаний путем сравнения с образцовыми приборами. В результате поверки определяют поправки прибора, дают его градуировочную характеристику и оценивают годность прибора.
На поверенные приборы выдается поверочное свидетельство установленного образца, а на забракованные — извещение о непригодности. Поверочное свидетельство содержит поправки прибора или результаты его градуировки, которые используются при работе с ним. Приборы, признанные годными, клеймят государственным поверительным клеймом (ведомственным поверительным клеймом) и индексом бюро поверки, поверившего приборы. В соответствии со специальным перечнем
165
поверке подлежат рабочие средства измерений и контрольно-измерительная аппаратура (КПА), находящиеся на эксплуатации в авиапредприятиях-и учреждениях ГА. Применение указанных в перечне средств измерений и КПА, не поверенных в установленные сроки, запрещается.
Поверку многопредельных и комбинированных средств измерений, постоянно используемых для измерения одной физической величины на одном диапазоне измерений, производят не по всем параметрам, а только по специальным указаниям начальников управлений ГА, согласованным с метрологическим отделом МГА.
Перед отправкой на проверку на средствах измерений выполняются регламентные работы. Приборы должны быть исправны, укомплектованы всем имуществом и документацией, необходимыми для поверки. В паспорте (формуляре) должна быть произведена запись: «Опробован, годен, к проверке»,,заверенная подписью должностного лица подразделения, ответственного за средства измерения, с указанием даты.
Средства измерений считаются поверенными, если имеются: четкий оттиск действующего поверительного клейма МГА или Госстандарта; свидетельство (аттестат) установленной формы с указанием даты поверки; на приборах или в паспортах (формулярах) четкий оттиск клейма ОТК приборостроительного предприятия. Срок очередной проверки таких средств измерений и КПА определяется по перечню. Датой последней поверки считается дата выпуска (приемки представителем заказчика).
Кроме того, каждый поверенный прибор и КПА должны быть опломбированы закрепленным клеймом поверочного органа или приборостроительного предприятия. На некоторые приборы поверочные свидетельства не выдаются, и признаком их годности служит клеймо. В результате износа и естественного старения приборов их характеристики изменяются или они оказываются вовсе непригодными для работы. Приборы нуждаются в периодической поверке. Необходимость повторной поверки определяется не только сроками, прошедшими со времени поверки, но и состоянием прибора, которое можно оценить при внешнем осмотре и сопоставлении его показаний с эталонными.
Глава 5
ЭКСПЛУАТАЦИЯ РЭО В УСЛОВИЯХ ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ
5.1. ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ РЭО
По характеру проявления отказы принято классифицировать на внезапные, постепенные и перемежающиеся. Последние во время инструментальных проверок остаются неподтвержденными. При рассмотрении причин перемежающихся отказов обычно предполагают, что они обусловлены колебаниями влажности, давления, температуры, питающих напряжений и т. д. Поэтому меры борьбы с ними должны предусматриваться при конструировании оборудования. Вероятность их возникновения при эксплуатации может быть снижена до приемлемого значения за счет конструкторских решений.
Однако в настоящее время для авиационного РЭО характерно, что большую часть от всего числа составляют именно перемежающиеся отказы. Так, например, на основе обширного анализа 98 типов, зарубежного бортового РЭО из общего числа 1,2 млн. отказов 55 % классифицируются как неподтвержденные во время инструментальных проверок.
Основной причиной неподтвержденных отказов авиационного РЭО является влияние электромагнитных помех (ЭМП). Будучи внешним по отношению к отдельному радиосредству фактором, ЭМП, как правило, не приводят к необратимому изменению технического состояния РЭО,. но могут значительно влиять на качество его функционирования.
Для ГА характерно, что процессы применения оборудования по назначению и технического обслуживания разнесены во времени. При обосновании профилактических мероприятий основной предпосылкой является то, что существенные факторы реальной эксплуатации необратимо изменяют техническое состояние оборудования. Однако причиной ухудшения качества функционирования РЭО может быть влияние помех.
Восстановительные работы и профилактические мероприятия проводятся либо после возникновения отказа РЭО, либо в заранее обусловленный момент времени. Конечная их цель:— привести РЭО в состояние, в котором с заданной вероятностью гарантируется требуемое качество функционирования в течение времени до следующего ТО. При этом влияние помех не всегда учитывается. Аварийные восстановления проводят сразу после того, как зафиксирован отказ. Заключение об отказе делается по замечаниям экипажей и диспетчеров на основе
167
наблюдения за качеством функционирования РЭО во время применения его по назначению, т. е. при работе под воздействием помех. Таким образом, причиной большого числа неподтвержденных отказов является то, что может гарантироваться не требуемое качество функционирования РЭО, а некоторое его состояние, в котором оно функционирует, с требуемым качеством при отсутствии помех. Отказ же фиксируется по ухудшению качества функционирования в реальных условиях, когда радиосредство подвержено влиянию помех.
При использовании РЭО по назначению (обеспечение безопасности и регулярности воздушного движения) причины отказа безразличны, так как последствия его одинаковы независимо от того, чем он вызван— изменением состояния РЭО или влиянием помех, что и отражено в руководящих документах ГА. С экономической точки зрения неучет влияния помех также недопустим. Если отказ зафиксирован, то считается что он вызван недопустимым изменением состояния РЭО. Эти приводит к необоснованным затратам на демонтаж и инструментальную проверку оборудования в случаях, когда отказ обусловлен воздействием помех. Кроме того, следует отметить, что наиболее распространенный метод повышения надежности оборудования — резервирование в случае отказов по помехам неэффективен, так как помеха влияет и на основное и на резервное оборудование.
5.2. ВЛИЯНИЕ ПОМЕХ НА КАЧЕСТВО
ФУНКЦИОНИРОВАНИЯ РЭО
Требования к качеству функционирования РЭО определяются его назначением. Для обеспечения требуемого уровня безопасности и регулярности полетов действия экипажей и диспетчеров службы движения направлены на то, чтобы обеспечить непрерывное соответствие воздушной обстановки принятой организации воздушного движения. РЭО ГА— средства сбора, обработки и отображения информации о воздушной обстановке. Качество функционирования радиосредств ГА должно оцениваться достоверностью информации, получаемой экипажами ВС и диспетчерами службы движения.
Достоверность информации определяется состоянием всех составляющих радиоканала. Следовательно, помимо технического состояния радиопередающего (Прд) и радиоприемного (Прм) устройств, качество функционирования РЭО ГА определяется и состоянием канала распространения, т. е. условиями распространения и параметрами воздействующих на приемник электромагнитных помех. В первую очередь необходимо выбирать критерий качества функционирования, чувствительный к изменениям всех этих факторов.
В ГА требования к достоверности информации определяются соответствующими нормативными документами. В зависимости от вида РЭО нормируются различные показатели. Для радиолокационных сис-168
тем, работающих в режиме обнаружения, задаются вероятности правильного обнаружения и пропуска цели. Для средств радиолокации, работающих в режиме УВД, и радионавигационных систем задаются средние квадратические ошибки измерения навигационных параметров. Для радиотелефонных систем достоверность передачи информации определяется разборчивостью речи. Все эти показатели в основном определяются отношением сигнал/шум + помеха на выходе демодулятора приемника двых, которое и примем за критерий качества функционирования, условие работоспособности:
<7овых ^ДОП. ВЫХ • (5.1)
По известным зависимостям ^вых = <р (</вх) для различных демодуляторов можно определить допустимое отношение q на выходе линейной части приемника, т. е. условие (5.1) можно переписать в виде
Qвых > <7доп > (5.2)
где (/доп — допустимое значение q на выходе линейной части приемника, задаваемое исходя из назначения радиосредства.
В случае, когда все виды помех отсутствуют, качество функционирования РЭО определяется отношением мощности сигнала к мощности собственного шума приемника. Приемник работает в линейном режиме, поэтому, пересчитав мощность шума к входу, можно рассматривать это отношение на входе приемника, т.е.условие (5.2) можно записать как (^с^ш)вх ?доп*
Мощность собственного шума приемника полностью определяется его техническим состоянием. Мощность сигнала на входе зависит от технического состояния передатчика, вида модуляции и условий распространения. Условия распространения изменяются относительно медленно и поддаются прогнозированию. Учитывая, что требуемое качество функционирования должно обеспечиваться независимо от условий распространения, их можно учесть исходя из вероятного худшего случая. Поэтому в рассматриваемом случае, задавая ограничения на мощность излучения и параметры модуляции Прд и реальную чувствительность приемника, можно добиться выполнения неравенства (5.2) с требуемой вероятностью и исключить причины перемежающихся отказов.
При взаимодействии ЭМП в каскадах приемника может возникать нелинейное взаимодействие сигнала и помех, в результате чего приемник оказывается восприимчив к отдельным помехам, частоты которых значительно отличаются от частоты настройки приемника. В этом случае
Рс
<7 вых— Г -j * (5.3)
Ли "b^n.n 4“ ф I Рс|
L i J
169
где Рп i — мощность помех, воздействующих по i-му неосновному каналу, обусловленному нелинейностью каскада приемника; k} — восприимчивость приемника к помехам по t-му каналу приема; Рп.п — помехи в полосе пропускания приемника; ф — функционал, описывающий алгоритм обработки сигнала в приемнике.
Кроме вида модуляции, мощности излучения передатчика и условий распространения качество функционирования РЭО зависит от помехоустойчивости алгоритма обработки сигнала,параметров сигнала и помех и технического состояния приемника. Причем техническое состояние приемника характеризует не только Рс и Рш, но и восприимчивость приемника к различным видам помех.
Для конкретного радиоканала улучшить качество функционирования можно увеличением мощности передатчика и улучшением чувствительности радиосредств, входящих в канал. Однако передатчик одновременно является источником помех для другого РЭО, входящего в комплекс радиосредств УВД. Увеличение его мощности приводит к увеличению мощности помех на входах приемников комплекса. С улучшением чувствительности приемника одновременно увеличивается его восприимчивость к помехам. Учитывая, что не все основные факторы, определяющие значения параметров, входящих в (5.3), нормируются и контролируются в процессе эксплуатации, можно сделать вывод, что мер, принимаемых в настоящее время для обеспечения требуемого качества функционирования РЭО, недостаточно.
Помехоустойчивость РЭО определяется алгоритмом обработки входного воздействия, поэтому повысить качество функционирования можно путем выбора более помехоустойчивых алгоритмов обработки сигнала, т. е. оперируя <р в (5.3). Наиболее перспективны оптимальные методы приема, которые с развитием элементной базы находят все более широкое распространение. Однако на стадии эксплуатации структура РЭО, определяемая алгоритмом обработки входного воздействия, изменениям не подвергается. Эта мера должна предусматриваться на стадии проектирования на основе изучения вероятных помеховых ситуаций, встречающихся в условиях эксплуатации.
Другой мерой является уменьшение Рп.п и Рпь Среди ЭМП можно выделить помехи, обусловленные излучением РЭО, составляющего комплекс радиосредств УВД. Их влияние значительно уменьшается при рациональном распределении рабочих частот радиосредств, т. е. используя частотно-территориальный разнос.
Из (5.3) следует, что качество функционирования РЭО значительно зависит от значений параметров, определяющих его техническое состояние. Влияние помех можно рассматривать как эквивалентное изменение параметров радиосредства. Проиллюстрируем это положение примером. Допустим, что на вход приемника воздействует широкополосная помеха с равномерным спектром, что, естественно, приводит к ухудшению качества функционирования. Такое же ухудшение могло возникнуть и при отсутствии помехи вследствие ухудшения реальной чувство
вительности приемника. При анализе качества функционирования в данном случае можно положить, что помеха отсутствует, а качество понизилось вследствие эквивалентного ухудшения чувствительности приемника.
Такой подход позволяет обоснованно выбрать контролируемые параметры РЭО и назначить эксплуатационные допуски на них с учетом воздействия помех. Сохраняя сложившиеся в теории эксплуатации методы, применимые к факторам* вызывающим необратимое изменение состояния, можно' учесть внешний по отношению к РЭО фактор эксплуатации — влияние помех, который к необратимому изменению состояния не приводит:
Однако указанный подход, как и два предыдущих метода, в качестве необходимого условия требуют достоверного прогноза помех. В условиях воздействия ЭМП прогноз помеховых ситуаций имеет то же значение, что и достоверный прогноз технического состояния, так как это две равноправные составляющие, определяющие качество функционирования РЭО.
Следует отметить, что уровни и частоты помех определяются множеством случайных факторов, влияние которых рассредоточено в пространстве и времени. Поэтому прогнозирование помеховых ситуаций— чрезвычайно сложная многоплановая задача, требующая большого объема статистических исследований, результаты которых быстро устаревают по мере ввода в эксплуатацию новых радиосредств. Обеспечить достаточно полный и достоверный прогноз ЭМП в ряде случаев невозможно. Исходя из этого наиболее перспективным является метод оперативного изменения параметров РЭО в соответствии с изменением помеховой ситуации на основе непрерывного измерения параметров помех.
5.3. ВОСПРИИМЧИВОСТЬ ПРИЕМНИКА К ПОМЕХАМ БОЛЬШОГО УРОВНЯ
Под воздействием интенсивных помех, вследствие нелинейности характеристик каскадов, приемник оказывается восприимчив к некоторым ЭМП, частоты которых значительно отличаются от частоты настройки приемника. Поэтому для анализа-вероятных источников помех необходимо в первую очередь представить механизм образования неосновных каналов приемника и оценить восприимчивость по каждому из них. Для этого выберем метод описания вольт-амперных характеристик активных элементов, работающих в нелинейном режиме. При решении задач исследования качества функционирования РЭО в условиях помех предпочтение следует отдать аппроксимации нелинейных характеристик степенным полиномом. При этом, когда на вход элемента воздействует сумма гармонических или узкополосных помех, его выходной ток достаточно просто представляется в виде тригонометриче-
171
ского ряда. Например, при воздействии на вход элемента, характеристика которого аппроксимирована степенным полиномом третьей степени
i вых — 5» «Вх+62 «вХ + &з «|х ' (5-4)
суммы двух гармонических колебаний cos 2jift t и U2 cos 2rfet, ток на его выходе представляется суммой составляющих некоторой амплитуды с частотами со2; ± ©х ± <о2; ± 2^ ± ©2; ± 2©а ± ®х, ©?, ©2> ®1, ®2-
Степень полинома выбирают исходя из возможности описания интересующих нелинейных явлений, стараясь, чтобы она по возможности была наименьшей. Наибольшая степень аппроксимирующего полинома определяет наивысший порядок неосновного канала, который при этом можно описать. Обычно степень полинома выбирают не более 5.
Рассмотрим нелинейные эффекты, возникающие в приемнике при воздействии помех в случае, когда характеристика элемента аппроксимирована степенным полиномом. При воздействии интенсивной помехи с частотой, близкой частоте основного канала, в приемнике может возникать эффект блокирования, проявляющийся в уменьшении усиления полезного сигнала.
Блокирование возникает в основном в усилителе радиочастоты из-за нелинейного закона изменения коэффициента передачи полезного сигнала под действием помехи значительного уровня. Количественно эффект блокирования оценивается коэффициентом блокирования кбл, который определяется как отношение изменения амплитуды выходного тока на частоте полезного сигнала Д/вых при блокировании к амплитуде того же тока /вых при отсутствии блокирования. При третьей степени аппроксимирующего полинома коэффициент блокирования
Д'вых З53 «бл = -----
'вых
где Uu — амплитуда колебания помехи.
Коэффициент кбл возрастает пропорционально мощности помехи и отношению b3lblt характеризующему степень нелинейности характеристики УВЧ. В свою очередь, мощность помехи зависит от коэффициента передачи входной цепи на частоте помехи, т. е. расстройки помехи относительно частоты сигнала и избирательности входной цепи.
Перекрестной модуляцией называют нелинейный процесс модуляции полезного сигнала по закону изменения колебания помехи, обусловленный действием помех с частотой вне основного канала (обычно помехами, воздействующими по соседнему каналу). Количественно перекрестная модуляция оценивается тем же методом, что блокирование. Различие состоит в том, что сигнал и помеха амплитудно модулированы с коэффициентами т0 и тп частотами Fo и Fn, а эффект блокирования определяется после детектирования. Коэффициент перекрестной модуляции определяется как отношение приращения амплитуды 172
(5.5)
тока с частотой Fn к амплитуде тока полезного сигнала в отсутствие помехи:
кп.м —
Fn 2 /^Д
/ Ьг тс
(5.6)
Нетрудно видеть, что (5.6), за исключением параметров модуляции, определяется теми же параметрами, что и (5.5).
Чтобы характеризовать свойство приемника принимать слабый полезный сигнал в присутствии помехи большого уровня, пользуются понятиями динамического диапазона по блокированию и перекрестной модуляции, которые определяются выражениями:
^бл —201g £/п.блдоп/Го;
^п.м = 20 lg Vn>n>Mflon/Vo,
где Un — максимально допустимая амплитуда блокирующей помехи на и. ил ДОп
входе УВЧ, определяемая допустимым ^бл*> п « —максимально допусти-
и доп
мая амплитуда помехи на входе УВЧ, определяемая допустимым яп м; (70 —
реальная чувствительность приемника.
Нелинейность характеристик активных элементов каскадов приемника обусловливают его восприимчивость к помехам, воздействующим по комбинационным и интермодуляционным каналам приемника.
Комбинационные каналы образуются в смесителе за счет нелинейного взаимодействия колебания помехи с колебанием гетеродина или их гармоник. При этом частота результирующего колебания должна совпадать с промежуточной частотой приемника, т. е. удовлетворять уравнению
I pfu ± qfv I—/п.ч>
(5.7)
где fu> fv, /п.ч — соответственно частоты помехи, гетеродина и промежуточная частота приемника; р, q — целые числа, их сумма называется порядком комбинационного канала. Максимальный порядок канала определяется степенью полинома.
Если в приведенном примере (5.4) под UBX понимать сумму колебания помехи и гетеродина, то на выходе нелинейного элемента получим комбинации /п ± fr', 2fn — fT; 2fr — fu, т. e. соответственно комбинационные каналы второго и третьего порядка.
Количественно комбинационные каналы характеризуются восприимчивостью, под которой понимают уровень помехи с частотой, удовлетворяющей уравнению (5.7) и создающей на выходе линейной части приемника такой же эффект, как и полезный сигнал;, равный реальной чувствительности приемника.
173
Можно показать, что при оговоренных ранее условиях уровень помехи на входе приемника^ при котором ее эффект такой же, как и полезного сигнала, выражается
^пр+<?
1
*п(Л V Bp+'U'-1’
(5.8)
где Um г—амплитуда колебания гетеродина; ВР+д= —
коэффициенты передачи преселектора соответственно на частотах помехи и сигнала.
Из выражения (5.8) видно, что восприимчивость зависит от расстройки и амплитуды помехи. При воздействии на приемник двух и более помех большого уровня в приемнике могут образовываться комбинации по интермодуляционным каналам приема.
Уравнения для частот помех, воздействующих по этим каналам, имеют вид
i Pl fm i Pzfnz ± • • • ± Pkfn.K~fc>
± Pi fni i P2/112 ± • • • ± Pk /п.к=/пр-
Если на приемник воздействует не больше двух мощных помех, то частоты помех, образующих наиболее опасные каналы приема, удовлетворяют следующим уравнениям:
i Ail i fm~fc> (5.9)'
2fnl-fn2=fc; (5.10)
/П1-/п2 = /п.Ч. (5.Н)
Уравнения (5.9) и (5.10) определяют интермодуляционные каналы второго и третьего порядков, образующиеся в УПЧ, а (5.11) — второго порядка, образующиеся в смесителе.
Количественно интермодуляционные каналы приема характеризуются уровнем двух мешающих колебаний, которые, будучи приложены совместно к входу приемника, создают на его выходе такой же эффект, как и при действии одного сигнала с амплитудой, равной чувствительности приемника. Более удобной является нормированная характеристика — отношение произведения этих уровней к квадрату уровня сигнала.
Можно показать, что указанные характеристики интермодуляционных каналов вида (5.9)...(5.11) приближенно определяются выражениями:
D1±1 = l,41-Юз
5рс 51 510 (f) 52о (f) &2
D-=2'1"‘T^ кос
(5.12)
Г (/) *2 (/)
174
где £ocJ ^oi> ^02 — коэффициенты передачи входной цепи на частотах сигнала и помех соответственно; k19 k2 — коэффициенты передачи преселектора на частотах помех.
Следовательно, основными параметрами помех, определяющими восприимчивость к ним приемника, являются частотная расстройка и амплитуда. Реальные помехи — случайные процессы со случайно изменяющейся амплитудой. Их амплитудные свойства можно характеризовать распределением энергии по частоте, т. е. энергетическим спек-.тром или функцией корреляции. Эта же характеристика отражает частотные свойства помехи. Кроме того, в соответствии с принятым критерием необходимо знать мощность помехи, которая определяется путем интегрирования ее энергетического сектора.
При известных энергетическом секторе сигнала и помехи и характеристиках приемника, пользуясь методами статистической радиотехники, можно получить соотношение сигнал/шум + помеха на выходе линейной части приемника, т. е. оценить качество функционирования информационного канала.
5.4. АНАЛИЗ ПОМЕХ, ВОЗДЕЙСТВУЮЩИХ НА РЭО
Непреднамеренные помехи имеют различные источники происхождения, которые в значительной степени определяют их характеристики. Поэтому в литературе распространена классификация ЭМП по источникам происхождения (рис. 55). В зависимости от соотношения между шириной энергетического спектра и полосой пропускания приемника методы определения характеристик процесса на выходе приемника принципиально различны. В соответствии с этим можно предложить классификацию помех на широкополосные, узкополосные, гармонические и импульсные.
Рис. 55. Классификация электромагнитных помех по источнику происхождения
175
Если ширина энергетического спектра помехи много больше эффективной полосы пропускания приемника (ДД, AFnp), то р некоторой точностью можно считать спектр помехи равномерным в пределах полосы пропускания. Такие помехи по своему действию аналогичны воз-.действию на приемник белого шума. Помехи, для которых выполняется А/э AFnp, будем относить к широкополосным. Для оценки их влияния на качество функционирования РЭО достаточно знать эквивалентное значение спектральной плотности помехи. у
Для помех, ширина энергетического спектра которых уже или сравнима с полосой пропускания приемника, предположение о постоянстве спектральной плотности будет несправедливо. Такие помехи (Д/э
ГПр) будем относить к узкополосным. Для оценки их влияния на качество функционирования РЭО необходимо знание энергетического спектра или функции корреляции. Кроме названных выше типов помех, на практике часто встречаются гармонические и импульсные помехи, для оценки влияния которых используют математический аппарат, отличающийся от применяемых в двух предыдущих случаях. Поэтому гармонические и импульсные помехи выделим особо. Воздействующие на радиосредства комплекса РЭО УВД помехи можно разделить на два вида: внешние по отношению к комплексу и внутрикомп-лексные, т. е. помехи, обусловленные излучением радиосредств, входящих в комплекс.
В идеальном случае составляющая качества функционирования, обусловленная влиянием ЭМП, будет определяться уровнем собственных шумов, естественных и индустриальных помех, а также помех, обусловленных излучением внешних по отношению к комплексу радиосредств. Собственные шумы приемника обусловлены флюктуациями напряжений и токов в активных элементах, а также в резисторах и активных составляющих комплексных сопротивлений. Любое активное сопротивление, а также активные составляющие комплексных сопротивлений, являются источниками широкополосного шума, который с вы--сокой точностью можно считать нормальным белым, т. е. со спектральной плотностью
N = kTR,
где k = 1,38 10—23 Дж/град— постоянная Больцмана; Т — абсолютная температура, К; R — активное сопротивление элемента, шумы которого определяются.
В соответствии с этим в качестве математической модели, описывающей собственные шумы приемника, можно принять нормальный белый шум с функцией корреляции
k 6 ’
где у0 — спектральная плотность собственного шума приемника; 6 (т) — дельта-функция Дирака, 6 (0) = оо; 6 (т =/= 0) = 0.
176
Характеристики естественных и индустриальных помех описаны в справочной литературе.
Аэропорты в основном располагаются вблизи крупных городов, что обусловливает наличие внешних излучений по отношению к комплексу РЭО УВД. К такого вида помехам прежде всего следует отнести излуче
ния радиосредств радио и телевизион-
ного вещания, средств радиорелей- Рис. 56. Спектр частот внешних ной связи, радиосредств других мини- помех стерств и т. п. Большое количество
РЭО, используемого в различных отраслях народного хозяйства, не позволяет провести подробного анализа их совокупного излучения. Кроме того, для различных диапазонов как уровни, так и частоты помех будут различны. Поэтому необходимо принять наиболее общую модель, не требующую закрепления конкретных частот за от-
дельными радиосредствами.
Исходя из этого в качестве модели внешних помех можно принять отрезок белого шума со спектральной плотностью, определяемой усредненной энергией реального воздействия в рассматриваемой полосе час-
тот (рис. 56): No = S7Vi&ft/tfz — А). Комплекс РЭО УВД включает в 4= 1
себя радиосредства различного назначения, работающие практически во всех диапазонах частот. Классификация их по назначению приведена в гл. 1. Следует отметить, что применяемые в ГА средства радиолокации работают на таких частотах, что полоса (0,1 f0... 10 /0) чаще всего не попадает в область рабочих частот РЭО навигации и связи.
Средства радионавигации и радиосвязи работают в непосредственно примыкающих друг к другу диапазонах частот. Их излучения могут оказывать взаимное влияние на качество функционирования. Характеристики средств радионавигации и радиосвязи, используемых в настоящее время в ГА, даны в прил. 1... 3.
В системах радионавигации применяются следующие виды сигналов: тональной телеграфии, балансно-модулированный двумя частотами, AM постоянной частоты и AM речевым сообщением. Средства радиосвязи ГА используют сигналы амплитудной, однополосной и частотной модуляций. Модулирующим является речевое сообщение.
Спектры этих сигналов можно представить в виде суммы широкополосных, узкополосных и гармонических составляющих. Однако в зависимости от вида модуляции вид узкополосных составляющих будет различным. При воздействии по одним и тем же неосновным каналам приема узкополосных помех, обусловленных излучениями различного РЭО, влияние их на качество функционирования будет различным. Это значительно осложняет анализ в общем случае. С этих позиций целесооб-
177
разно выбирать обобщенную математическую модель узкополосной помехи. Тогда рассматривая конкретную помеховую ситуацию,/можно исходить из результатов общего анализа, принимая параметры модели в соответствии со значениями характеристик реального воздействия.
В качестве модели удобно использовать спектр, получаемый при прохождении белого шума со спектральной плотностью No через линейное звено с гауссовой характеристикой /
Е (/ДР = ехр Г-я (/~/о)2 ], /
L J
где /о — центральная частота; Д/ — эффективная полоса звена.
Соответственно спектральная плотность и корреляционная функция процесса на выходе звена имеют вид:
[/ f____f \2“l
\ д/ J
k (т) =#0 Д/ ехр [ — л (Д/т)2 cos 2л/0 т] = Д2 р (т) cos 2л/0,
где о2, /0 и Д/ — выбираются эквивалентно; р (т) = е“"ат2; а = лД/2.
Кроме перечисленных факторов, необходимо различать помехи по мощности, так как при воздействии помех малой мощности усилительные каскады приемника работают в линейном режиме, а помехи большой мощности вызывают нелинейные эффекты в приемнике.
Из приведенных сведений следует, что для подробного анализа влияния помех на качество функционирования РЭО необходимо знать следующие основные характеристики ЭМП, которые должен содержать прогноз ЭМП:
центральные частоты энергетических спектров узкополосных помех;
ширину энергетического спектра каждой узкополосной составляющей;
мощности гармонических и узкополосных составляющих;
мощность шумов и широкополосных помех в полосе пропускания приемника.
Перечисленные параметры ЭПМ можно определить из анализа характеристик выбросов процесса на выходе линейной части приемника, что открывает перспективу методов оперативного измерения необходимого набора параметров помех непосредственно при использовании РЭО по назначению.
5.5. УМЕНЬШЕНИЕ УРОВНЯ ВЗАИМНЫХ ПОМЕХ
ПРИ РАЦИОНАЛЬНОМ РАСПРЕДЕЛЕНИИ РАБОЧИХ ЧАСТОТ
Рассмотрим задачу рационального распределения частот на примере системы авиационной воздушной связи. Система авиационной воздушной связи предназначена для организации прямой, оперативной и 178
устойчивой двусторонней связи между диспетчерскими пунктами и экипажами ВС непрерывно в течение всего полета. Для авиационной воздушной связи выделен диапазон 118... 136 МГц с шагом сетки частот через 25 кГц. Этот диапазон разбит на ряд поддиапазонов. Распределение радиоканалов по поддиапазонам определяется их назначением.
Документы ИКАО предполагают, что между наземными радиосредствами, работающими на одной частоте, должен быть обеспечен пространственный разнос, полностью исключающий взаимные помехи, которые могут возникать при прямом распространении радиоволн. Известно, что два ВС находятся на границе прямой видимости, если расстояние между ними
Srp=4,i2(Vh1+VftD, (5.13)
где hi, hi — соответственно высоты полета ВС, м.
Если расстояние между ВС меньше Згр, то при работе на одной частоте их радиосредства будут создавать взаимные помехи. Следовательно, для исключения взаимных помех расстояния между радиостанциями, работающими на одной частоте, должны выбираться с учетом (5.13) при максимальных высотах полета обслуживаемых судов Люах.
Вследствие неидеальности частотных характеристик приемник оказывается восприимчивым к помехам по соседнему каналу. Для исключения помех задается минимально допустимый разнос S0K между радиосредствами, работающими на соседних частотах сетки. Кроме того, при распределении частот необходимо исключить возможность возникновения помех по интермодуляционным каналам. Помехи по комбинационным каналам низких порядков исключаются соответствующим выбором промежуточных частот. Для предотвращения интермодуляционных помех высоких порядков необходимо соответствующим образом выбирать частоты передатчиков, сосредоточенных в районе аэродрома.
Таким образом, при присвоении частот радиостанциям авиационной воздушной связи необходимо обеспечить частотно-территориальный разнос по совмещенному и смежному каналам, а для групп радиостанций, находящихся на территории аэропорта, выполнять требования по частотному разносу, предотвращающему интермодуляционные помехи третьего порядка. Оптимальным является решение, когда удовлетворяются перечисленные условия и наиболее экономно используется частотный ресурс.
5.6. ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ
ИНФОРМАЦИОННОГО КАНАЛА, ФУНКЦИОНИРУЮЩЕГО
В УСЛОВИЯХ ПОМЕХ
В комплексе РЭО, содержащем L передающих устройств (число приемников не имеет значения, так как их излучением можно пренебречь ввиду малости), один передатчик является источником сигнала, ос-
179
тальные — источниками помех. Процесс изменения отношения сигнал/ шум + помеха на входе некоторого приемника 0 (/) будет дискретным, число состояний 7
N '
1=0 /
где — число сочетаний из (L — 1) по /.
Различные передатчики работают независимо, кроме того, во многих случаях последующие моменты включения и выключения одного и того же передатчика можно считать независимыми. При этом процесс 0 (/) будет дискретным полумарковским. При заданном начальном состоянии он полностью определяется матрицей вероятностей перехода {л^} и матрицей условных плотностей вероятности времени пребывания процесса в состоянии при условии, что следующим будет состоя-ние Ъ} — {fa (/)}. Предполагается, что прогноз помех известен, т. е. известны элементы матриц {л^} и {fa}.
Условная вероятность того, что в момент времени t процесс находится в состоянии О;, если в момент /0 он находится в состоянии О/,
N t
0i;(O = So1’i(O+ 2 л,-*]’fu(T)0w(i—T)dT. 0<«, j^N, k= 1 о
oo
где ди = 1; при i — j; 0 при i j\ (/) = 1 — Ft (t) = j co; (/) dt\ (Of = N 1
~ 2 (0 — безусловная плотность вероятности времени пребывания про-
/= о
цесса в состоянии v.
Каждому состоянию процесса 0 (0 соответствует некоторое значение ?вых» которое в зависимости от технического состояния РЭО будет превышать или не превышать предельно допустимое значение, выбранное из условия обеспечения требуемого качества функционирования. Следовательно, область состояний 0 (/) можно разделить на два непере-секающихся множества: Е — множество состояний, в которых обеспечивается заданное качество — область работоспособности, и £ — где это условие не выполняется — область отказов. Без ущерба для общности можно считать, что первые k состояний принадлежат к области £, а последующие (N — k) области £. Начальным является состояние 0о (рис. 57).
Распределение времени до первого выхода процесса из области £ при'условии, что в начальный момент он находился в состоянии 0О — £0 (0 при принятых ограничениях является распределением времени до отказа, т. е. наиболее важной эксплуатационной характеристикой— вероятностью отказа обусловленного воздействием помех. Это распределение удовлетворяет системе уравнений 180
Рис. 57. Изменения отношения сигнал/(шум4-помеха) во времени (а) и при воздействии одной помехи (б)
k t N
к, (О = 2 f —ЛЧ Fi! <U> du+ 2 nii FH W ’ /=oo /=£-4-1
/=бЛ t
где Fij = j fij (x) dx — функция распределения времени пребывания про-о
цесса 0 (/) в состоянии 0$ при условии, что следующим будет состояние 'О’у.
Из сказанного следует, что вероятность безотказной работы, помимо характеристик процесса fr (/), т. е. прогноза помех, определяется соотношением областей 0, k и k + 1, N. Можно показать, что это же справедливо и для функции готовности.
В свою очередь, соотношение областей Е и Ё определяется состоянием приемного и передающего устройств РЭО, входящего в канал передачи информации, т. е. в зависимости от их состояния в одной и той же помеховой ситуации информационный канал может быть классифицирован как работоспособный и как отказавший. Пусть на приемник воздействует одна помеха, под влиянием которой требуемое качество обеспечивается с вероятностью Рк0, значение которой определяется состоянием РЭО, входящего в информационный канал. После прекращения действия помехи информационный канал возвращается в работоспособное состояние. Известно, что время действия помехи тп распределено по экспоненциальному закону с параметром р, а интервалы, когда помеха отсутствует ти, также имеют экспоненциальное распределение с параметром X, т. е.:
/(тп) = це“ЦТп. /(Ти) = Хе-^и
Параметр потока помех v = Хр/(Х + р). При оговоренных услови’ ях под воздействием помехи отказ наступает с вероятностью Рм, т. е. параметр потока отказов v' = (1 — Рм)- Так как параметр
181
распределения длительности помехи (т. е. времени восстановления) остается прежним, то значение V можно найти из условия:
Ы
“ГТ" (1~Р*о),
X' р Л/ + р
откуда получим
Г =
typko ц+Х(1—Pk0)
Коэффициент готовности.
(11(1— рм) Л г — .
g + %
О-
Соответственно вероятность безотказной работы ^)=“р{~ТнЪ:)
Таким образом, при известном прогнозе помех значения эксплуатационных характеристик полностью определяются состоянием РЭО, входящего в информационный канал. При известном прогнозе помех задача определения эксплуатационных характеристик сводится к определению Ph0.
Рассмотрим влияние параметров РЭО и эксплуатационных допусков на назначение Рм в различных помеховых ситуациях.
Условие работоспособности (5.2) для некоторой помеховой ситуации, когда на приемник воздействуют широкополосная помеха со спектральной плотностью и узкополосные помехи суммарной мощностью Рп на выходе УПЧ, можно записать так:
Рс________Р° (5 141
ДАЛо+Д/эЛ/х+Рц '
где Д/э — эффективная полоса пропускания УПЧ; — спектральная плотность собственного шума приемника; Ро — реальная чувствительность приемника, определенная из условия обеспечения ^дОП-
Статистические данные позволяют считать мощность сигнала на входе и реальную чувствительность приемника распределенными по нормальному усеченному закону, где усечение определяется эксплуатационными допусками на мощность передатчика и чувствительность приемника (рис. 58). Следовательно, величины, образующие правую и левую части неравенства (5.14), будут иметь усеченное нормальное распределение. 182
Вероятность выполнения неравенства (5.14)
pko = jWc(y) F0(y)dy, D
где Wc (у) — плотность вероятности величины, входящей в правую часть неравенства (5.14); Го (у) — функция распределения левой части неравенства (5.14); D — область, где соблюдается неравенство Wc (у) F0(y) > 0.
Рис. 58. Распределение мощности сигнала на входе и реальной чувствительности приемника
На рис. 59 приведены графики, рассчитанные для разных значений (Ni + / Nq = у при различ-
\ Д/э//
ных значениях р0, 0С, где 0О = = Ас/сг0; рс = Дс/а0; Дс, До — соответственно эксплуатационные допуски на мощность излучения и чувствительность; о0 — дисперсия чувствительности. Эти графики позволяют в зависимости от мощ-
Рис. 59. Зависимость относительных эксплуатационных допусков от мощности помех:
Р ко—0,95; ------Рко=О,8;
- ------Рко=О,7
ности воздействующих помех определить допуски на мощность и чувствительность РЭО, при которых обеспечивается требуемое значение PkQ.
Таким образом, для обеспечения требуемого качества функционирования РЭО номинальные значения параметров радиосредств и эксплуатационных допусков на них должны выбираться исходя из того, в какой помеховой обстановке предстоит работать РЭО, входящему в информационный канал.
5.7. ОБОСНОВАНИЕ ТРЕБОВАНИЙ К РЭО ПРИ ОГРАНИЧЕННОМ ПРОГНОЗЕ ПОМЕХ
Для оценки влияния помех в первую очередь необходимо знать расстройки каждой из узкополосных ЭМП относительно частоты настройки приемника. Большое количество РЭО, входящего в комплекс радиосредств УВД, а также изменения частот и введение дополнительных радиоканалов затрудняют проведение подробного анализа. Поэтому во многих случаях прогноз помех может быть либо ограниченным, либо отсутствовать вообще. В каждом случае можно использовать вероятностную модель распределения частот и требования к РЭО предъявлять исходя из частотного анализа электромагнитной совместимости.
183
При вероятностном подходе невозможно жестко закрепить каждую из частот, поэтому необходимо обосновать вид распределения (плотность вероятности либо функцию распределения) изучаемых частот внутри выделенного диапазона. При полном отсутствии информации используют равновероятную модель. Тогда плотность вероятности частоты помехи в пределах одного выделенного диапазона
W(fn)=-f-----.
/п max—/п mln где /птах и fn mln—соответственно максимальная и минимальная частоты рассматриваемого диапазона.
Комбинированные каналы приема. Обычно при анализе комбинационных каналов приема супергетеродинного приемника с несколькими преобразователями учитывают только каналы, обусловленные первым преобразованием, так как последующими можно пренебречь ввиду их малости. Поэтому из (5.7) можно получить следующее выражение для частот комбинационных каналов:
/к = 1<?/г±/п.ч1/Р. (5.15)
где/г — частота первого гетеродина; /п.ч — первая промежуточная частота.
В зависимости от способа получения промежуточной частоты fK будет по-разному зависеть от частоты настройки приемника /0. Если fnp образуется как сумма частот сигнала и гетеродина, то из (5.15) получим
/ 1 \ q I
/к~ /п.ч! ± 1) "~/с ’
\ Р / Р I
Для разности частот при нижней настройке гетеродина
/к= I /с /п.ч f i l') ।*
Ip \ p / I
Приведенные зависимости позволяют, задаваясь р и q, получить участки диапазона рабочих частот приемника (fCK min, ... /Скшах), в пределах которых могут воздействовать помехи по комбинационному
Рис. 60. Частотная диаграмма для комбинационных каналов приема 184
каналу соответствующего порядка. Кроме того, эти же зависимости позволяют выделить участки диапазонов частот передающих устройств (/к mln -/к max). W ИХ ИЗЛуЧвНИЯ могут привести к помехам по соответствующему комбинационному каналу (рис. 60). Пользуясь приведенными зависимостями, можно выделить вероятные источники помех по комбинационным каналам приема.
Восприимчивость приемника по комбинационным каналам приема
резко уменьшается с увеличением порядка комбинационных частот. Поэтому при анализе влияния помех ограничиваются рассмотрением наиболее опасных, т. е. каналов малых порядков.
Учитывая полосу пропускания ПЧ можно записать условие для частоты помехи на входе fa, когда ее комбинация с частотой гетеродина попадает в полосу УПЧ приемника Д/П.ч: 1/п — /к| < Д/п.ч- Считая характеристику УПЧ прямоугольной, что оправдано в большинстве случаев, вероятность поражения приемника по комбинационным каналам
РК=Р1Р2Р3, (5.16)
где Pj — вероятность попадания комбинации в полосу УВЧ; Р2 — вероятность того, что помеха лежит в диапазоне /Пкт1п ••• /актах! Рз — вероятность того, что частота настройки приемника находится в диапазоне /cumin---/сктах-
При равновероятном распределении частот помехи и настройки приемников
р __ /пк max —/пк min . р /ск max fск mln
При известных Д/э вероятность
/птах—/nmin /стах—/с min
Д/п-ч и ширине энергетического спектра помехи
р_______А/пч4~ А/э
/п.к max /п.к min
Если на вход приемника воздействуют т независимых помех с равномерным распределением частот в диапазоне f п min--7n max, что вероятность ТОГО, ЧТО ЧаСТОТЫ ПОМеХ ПОПадуТ В ДИапаЗОН fn.Kmln ••• /п-ктах, можно определить на основании теоремы о повторении опытов:
Р*т=Спт (5.17)
где С" =----—-----— число сочетаний из т по п.
т (т — п)\п\
Вероятность того, что комбинация частоты хотя бы одной из помех с частотой гетеродина попадает в полосу УПЧ, определяется аналогично:
р!п= S (5.18)
/— 1
Тогда с учетом (5.16) ...(5.18) вероятность поражения приемника по комбинационным каналам при воздействии на его вход т помех
т
Рк=Рз 2 Р‘2три- . (5.19)
х==1
При работе радиоприемного устройства в комплексе возможно ухудшение качества его функционирования одновременно по нескольким комбинационным каналам. Интегральная оценка вероятности пораже-
185
ния по комбинационным каналам в этом случае может быть получена в следующем виде:
<5-20> i
где -— вероятность поражения по i-му комбинационному каналу; Uhi — ве-совой коэффициент, обратно пропорциональный восприимчивости приемника по *-му каналу и нормированный таким образом, что 2afci = l.
i i
Интермодуляционные каналы. Частоты помех, воздействующих по наиболее опасным интермодуляционным каналам, определяются выражениями:
± Ап ±/п2 = /с; (5.21}
2fni-fn2 = fc; (5.22)
fnl /п2“/пЧ- (5.23}
Зная диапазон ВОЗМОЖНЫХ ИСТОЧНИКОВ помех fnlmin ••• fn2max и /п2тглп ... /п2 max, нетрудно получить плотности вероятностей этих комбинаций W (?и1+1), (Ап-i), W (/и2-1). Это позволяет определить ве-
роятность поражения приемника по наиболее опасным интермодуляционным каналам. Ухудшение качества функционирования РЭО наступает, когда частота интермодуляционной комбинации попадает в полосу пропускания УПЧ приемника.
Для каналов, определяемых (5.21) и (5.22), вероятность
^симтах ^с+д^пч./2
Р им i = 7 ----------- f dfc f W(fwt)dfaM,
/сим max—/сим min J J
'симтШ 'с*“д^п.ч/а
где W (/им /) — соответствующая плотность вероятности.
Для частот, определяемых выражением (5.23),
^П.Ч^"Д^П.ч/2
^им/ = J* (/имг) d/имь
^п.ч Д^п.ч/г
Суммарная вероятность поражения по интермодуляционным каналам определяется аналогично (5.20)
м
^им= 2 (5.24)
4=1
W Р/ — нормированные весовые коэффициенты.
Общая оценка радиоприемника с точки зрения поражения помехой может быть выражена как Р = АРК + ВРиМ. Коэффициенты А и В определяют по экспериментальным данным. Обширные статистические 186
исследования показывают, что их соотношение в общем случае А/В = = 1/6. Полагая Я + В = 1, получим
Р=0,143Ра+0,857Рим,
где Рд и Рим определяются из (5.20) и (5.24).
Полученная вероятность позволяет сравнивать различные РЭО по вероятности отказа вследствие помех и выбирать радиосредства, для которых эта вероятность минимальна.
5.8. ОПЕРАТИВНОЕ РЕГУЛИРОВАНИЕ ПАРАМЕТРОВ
Возможности обеспечить полный и достоверный прогноз ЭМП ограничены, поэтому наиболее перспективный путь улучшения качества функционирования РЭО в условиях помех — оперативное изменение его параметров на основе непрерывного измерения параметров помех. В настоящее время вопросы, связанные с реализацией этого направления, находятся в стадии разработки. Остановимся на одном из возможных путей улучшения качества функционирования РЭО за счет регулирования его параметров в процессе работы.
При обосновании мощности передающего устройства дальность принимается максимальной, поэтому на практике часто встречаются ситуации, когда полезный сигнал обладает достаточной мощностью, превышая в несколько раз реальную чувствительность приемника, но из-за наличия мощных помех заданное качество приема не обеспечивается. В этом случае одним из возможных путей улучшения качества функционирования является снижение чувствительности приемника. Рассмотрим этот вопрос подробнее
на примере интермодуляционного канала третьего порядка 2/п1 —
f па = fc-
Образование этого канала чаще всего происходит в УВЧ приемника. Считая помехи и сигнал синусоидальными, выражение для амплитуды тока интермодуляционной составляющей на выходе линейной части приемника можно записать так:
/им= +
\ 4
+ 4-МРа^а)*п.ч.
4 /
где Z>3, Ьо — коэффициенты проходной характеристики активного элемента УПЧ, аппроксимированной степенным
Рис. 61. Зависимость значения сигнал/ (шум+помеха) от чувствительности приемника
187
полиномом пятой степени; fc10, fc20 — коэффициенты передачи входной цепи на частотах /П1 и /п2 соответственно; £п<ч — коэффициент передачи тракта ПЧ на промежуточной частоте.
Так как общепринятая методика снятия трехсигнальной избирательности предполагает равенство амплитуд помех, будем считать иг = U2 = U.
Амплитуда сигнала на выходе линейной части приемника
/о = ^^0 ^П.Ч »
где bi — крутизна характеристики активного элемента УВЧ; k2 — коэффициент передачи входной цепи на частоте сигнала; U9 — амплитуда сигнала на входе приемника.
Предположим, что амплитуды сигнала и помех на входе приемника уменьшены в с раз. Тогда с учетом принятых ограничений выражение для отношения сигнал/шум + помеха на выходе линейной части приемника следующее:
cb0 U \ „
я =—г ........- (5.25)
1/ ь3 k* с» уз+_16в *4 иь )+(с Уйш.з.Л’+ИЗ,
где 1ш — эффективное значение собственного шума приемника; «ш.в.и — эффективное значение внешних шумов на входе приемника; kr = k^k, k2, ’= k2Jk.
Для приемников метрового диапазона, как правило, гш.в.и 1ш и (5.25) можно переписать в виде:
<?=()/ I b1kik2c*Ui/UttJ+-^-
где qQ = Zo/i’m — отношение сигнал/шум на входе приемника.
Из рис. 61 видно, что при достаточном q регулировка чувствительности приемника приводит к росту q, т. е. к улучшению качества функционирования.
Оптимальное значение с, при котором q принимает максимальное значение, может быть получено из уравнения
_3
4
Ьз
U2
V ^с2—+
и*
klk* С*~7Г
0.
4
^0
Так как комбинационные каналы приема образуются также вследствие нелинейностей характеристик и мощность комбинационной сос-ставляющей нелинейно связана с отношением сигнал/шум + помеха, то при условии запаса по мощности сигнала их влияние таюке можно уменьшить путем регулирования чувствительности приемника.
Глава 6
РЕМОНТ РЭО АЭРОПОРТОВ И ВОЗДУШНЫХ ТРАСС ГА
6.1. ОСНОВНЫЕ ПОНЯТИЯ и ОПРЕДЕЛЕНИЯ
Под ремонтом техники понимают комплекс операций по восстановлению исправности или работоспособности изделий и восстановлению ресурсов изделий или составных частей. Необходимость проведения восстановительных операций в период отработки РЭО установленного общетехнического ресурса связана с тенденцией к ухудшению его эксплуатационно-технических характеристик под влиянием внешних и внутренних дестабилизирующих факторов. Действительно, в процессе эксплуатации по мере выработки ресурса РЭО снижается надежность и ухудшается качество его работы, возникают отказы и неисправности. Проведение ремонтных операций направлено на устранение выявленных отказов и неисправностей, а также на восстановление технического ресурса РЭО. Различают виды, методы и стратегии ремонта техники (ГОСТ 24212—80).
Вид ремонта — ремонт, выделяемый по одному из признаков (этапу, периодичности, объему работ, условиям эксплуатации, регламентации и т. п.). По периодичности и объему вида ремонта РЭО подразделяют на капитальный, средний, текущий и аварийный. Капитальный ремонт выполняется для восстановления исправности и полного или близкого к полному восстановлению ресурса изделия с заменой или восстановлением любых его частей, включая базовые.
Средний ремонт направлен на восстановление исправности и частичное восстановление ресурса изделий с заменой или восстановлением составных частей ограниченной номенклатуры и контролем технического состояния составных частей.
Текущий ремонт осуществляется для обеспечения или восстановления работоспособности изделия и состоит в замене и (или) восстановлении отдельных частей.
Аварийный ремонт — неплановый ремонт, выполняемый для восстановления исправности составной части изделия после его повреждения, вызванного внешними воздействиями, не предусмотренными в нормативно-технической документации для нормальных условий эксплуатации.
Вида ремонта в основном отличаются по объему и срокам выполнения контрольно-восстановительных и технологических операций. Так, объем и периодичность выполнения капитального и среднего ремонта
18»
РЭО, как правило, устанавливаются в соответствующей эксплуатационно-технической документации каждого вида изделия. Статистический характер объема и сроков выполнения восстановительных работ при текущем ремонте РЭО является следствием стохастических свойств процесса возникновения отказов во время эксплуатации.
Стратегия ремонта — система правил управления техническим состоянием изделия в процессе ремонта. Организация ремонта и ремонт РЭО проводятся в пределах концепций двух стратегий ремонта — по наработке и по техническому состоянию.
При ремонте по наработке объем разборки изделия и дефектации его составных частей назначается единым для парка однотипных изделий в зависимости от наработки с начала эксплуатации и (или) после капитального (или среднего) ремонта, а перечень операций восстановления определяется с учетом результатов дефектации составных частей изделия.
Стратегия ремонта по техническому состоянию изделия представляет собой систему правил, согласно которой перечень операций, в том числе разборка, определяется по результатам контролй изделия в момент начала ремонта, а также по данным о надежности этого изделия и однотипных изделий.
Документ, устанавливающий стратегии, количественные характеристики видов ремонта, порядок их корректировки на протяжении срока службы с начала эксплуатации до списания изделия, получил название программы ремонта. Наряду с программой ремонта выпускаются и применяются специальные бюллетени. Бюллетень — нормативнотехнический документ, подготовленный разработчиком или изготовителем изделия и содержащий перечень и порядок выполнения операций, не предусмотренных в действующей эксплуатационной и ремонтной документации, или изменения этой документации.
Технологический процесс ремонта предусматривает образование специального фонда изделия, который включает в себя следующее.
Ремонтный фонд — изделия и комплектующие элементы, изъятые из сферы использования по назначению вследствие отработки ресурса (срока службы) до капитального или среднего ремонта или между ремонтами, отказа, повреждения или по результатам диагностирования, ремонт которых технически возможен и экономически целесообразен.
Обменный ремонтный фонд — создаваемый предприятиями-изготовителями запас готовых изделий, блоков, приборов, узлов, деталей, элементов, расходных и других материалов для восстановления конкретных типов эксплуатационной техники и поддержания их исправного состояния в гарантийный период эксплуатации.
Обменный фонд представляет собой постоянный и систематически пополняемый запас исправных агрегатов, блоков, функциональных узлов изделий для замены отказавших элементов в процессе эксплуатации РЭО с целью сокращения продолжительности ТО или ремонта. 190
В зависимости от особенностей организации и выполнения ремонта РЭО применяют различные методы ремонта техники. Метод ремонта — совокупность технологических и организационных правил выполнения операций ремонта. Методы ремонта классифицируются по организационным и технологическим признакам на поэтапный, поэтапно-блочный, непрерывный, стендовый, индивидуальный и бригадный, по признаку сохранения принадлежности комплектующих элементов — на необезличенный, смешанный, агрегатный.
Поэтапный метод ремонта предполагает разделение объема ремонта РЭО на части и выполнение их поэтапно, дополнительно к объемам определенных видов ТО. Поэтапно-блочный метод также предусматривает поэтапные выполнения плановых ремонтных операций дополнительно к объемам определенных видов ТО. При этом разделение РЭО производится по системам, агрегатам, функциональным узлам или зонам конструкции.
Метод непрерывного ремонта совмещает процесс ремонта отдельных плат, узлов, блоков РЭО с процессом ТО РЭО и по сути является дальнейшим совершенствованием поэтапно блочного метода. Проведение плановых восстановительных-операций при проведении оперативного ТО малой периодичности приводит к равномерному распределению работ в течение года и повышает эффективность использования РЭО.
Метод индивидуального ремонта — метод ремонта РЭО, при котором один исполнитель выполняет все операции ремонта. Метод бригадного ремонта в отличие от индивидуального предполагает проведение восстановительных работ бригадой исполнителей, специализированных по отдельным операциям. Стендовый метод ремонта — метод, при котором весь комплекс технологических операций ремонта РЭО выполняется на одном рабочем месте.
При необезличенном методе ремонта сохраняется принадлежность восстановленных составных частей определенному конкретному изделию, т. е. комплектирующие элементы (блоки, узлы) после восстановления устанавливаются на РЭО, с которого были-демонтированы при дефектации. Достоинство этого метода — сокращение времени на настроечно-регулировочные работы после окончания ремонта. Вместе с тем применение необезличенного метода приводит к увеличению длительности ремонтного цикла РЭО и снижению производительности труда обслуживающего персонала.
Обезличенный метод ремонта — метод, при котором не сохраняется принцип принадлежности восстановленных элементов (блоков, узлов) к определенному экземпляру РЭО, что позволяет сократить продолжительность ремонтного цикла. Возможность комплектации отремонтированными элементами РЭО из обменного фонда, в свою очередь, приводит к увеличению времени на регулировку и настройку РЭО и предъявляет повышенные требования к квалификации обслуживающего персонала.
191
Смешанный метод ремонта позволяет производить комплектацию РЭО частично своими отремонтированными элементами и комплектирующими элементами однотипных РЭО. При этом, как правило, не обезличиваются наиболее важные функциональные узлы (блоки) ремонтируемого РЭО, а также элементы, после замены которых требуются трудоемкие работы по настройке, юстировке и регулировке изделия.
Агрегатный метод ремонта предполагает предварительное объеди-I нение элементов РЭО в укрупненные функциональные узлы—агрегаты.
Под агрегатом при этом подразумевается сборочная единица, обладающая свойствами полной взаимозаменяемости, независимой сборки и самостоятельного выполнения определенной функции в изделиях различного назначения. Агрегаты заменяются как в плановом порядке, так и при отказе РЭО.
Порядок организации и проведения ремонта по агрегатному мето-, ду, включающий перечень заменяемых агрегатов, комплектующих элементов, порядок проведения замен и т. д., регламентируется соответствующей нормативно-технической документацией. Выбор видов, методов и стратегий ремонта РЭО в значительной степени зависит от степени ремонтопригодности РЭО, квалификации обслуживающего персонала, производственной базы, требуемого уровня эффективности ремонтных операций и др.
Эффективность системы ремонта — свойство системы ремонта выполнять функции по поддержанию и восстановлению исправности или работоспособности техники с определенными затратами времени, труда и материальных средств.
6.2. РЕМОНТОПРИГОДНОСТЬ РЭО
И МЕТОДЫ ЕЕ ОБЕСПЕЧЕНИЯ
Эффективность системы ремонта во многом определяется степенью ремонтопригодности восстанавливаемого РЭО. Под ремонтопригодностью понимают (20] свойство объекта, заключающееся в приспособленности к предупреждению и обнаружению причин возникновения отказов, повреждений и поддержанию и восстановлению работоспособного состояния путем проведения ТО и ремонта. Основными показателями ремонтопригодности являются: вероятность восстановления РЭО в заданное время, среднее время восстановления РЭО, средняя трудоемкость' восстановления РЭО, средняя стоимость восстановления РЭО.
Вероятность восстановления Рв (/) в заданное время — вероятность того, что время восстановления РЭО 4 не превысит заданного t:
Palfi=P(t^t)=P* (О,
т. е. вероятность восстановления РЭО в заданное время является интегральной функцией распределения случайной величины 4-192
Среднее время восстановления (продолжительность ремонта) математическое ожидание случайной величины tB:
Т'В=Л1[ГВ] = ]* tBf(tB)dt, О
где f (/в) — плотность распределения продолжительности ремонта.
Средняя оперативная продолжительность планового (непланового) ремонта данного вида определяется как математическое ожидание продолжительности текущего ремонта за определенный период эксплуатации или наработки. Среднюю оперативную продолжительность ремонта можно определить графически — как продолжительность критического пути сетевого графика ремонта, либо используя статистические данные. По статистическим данным определяются и значения техникоэкономических критериев ремонтопригодности.
Средняя оперативная трудоемкость ремонта данного вида — математическое ожидание трудоемкости ремонта данного вида за определенный период эксплуатации или наработки:
F L ^Tpf= 2 S f=l z=i
Среднее время, затрачиваемое f исполнителем на выполнение I операций ремонта,
1 т
7=1
где — значение оперативного времени, затрачиваемого исполнителем на выполнение I операции при ремонте, при /-м наблюдении; т — число наблюдений; Г, L — число исполнителей и число операций для данного вида ремонта соответственно.
Средняя оперативная стоимость ремонта данного вида
= СТ.З I +СЗ.Ч{ "ЬСмр
где Ст 3—стоимость трудозатрат; Сз ч —стоимость запасных частей; Сы^ — стоимость расходных материалов. \
Наряду с оперативными значениями критериев оценки эффективности t-го вида ремонта иногда определяют средние суммарные их значения при г видов-ремонта и числе проведенных ремонтов i-ro типа tit за время наработки t. Например, средняя суммарная оперативная про-Г
должительность ремонтов Тр = 2 Тр. rti. Аналогично определяются
средняя суммарная оперативная трудоемкость и стоимость ремонта: Ср = 2 ^Ср.я^; Sp == 2 Sp^ti.
7 Зак. 2262 193
В некоторых случаях удобно использовать удельные значения Ср, 7Р, Sp за период эксплуатации t:
К показателям ремонтной технологичности РЭО относят коэффициенты: доступности, взаимозаменяемости, легкосъемности, унификации и стандартизации.
Коэффициент доступности оценивает приспособленность конструкции РЭО к проведению ремонтных технологических операций. Он определяется как отношение основной трудоемкости выполнения операций ремонта к сумме основной и вспомогательной трудоемкости:
S'“'+S<" ’
где S?°) — трудоемкость, определяемая трудозатратами на выполнение основных операций одного ремонта РЭО; — трудоемкость, определяемая трудозатратами на выполнение вспомогательных операций одного ремонта.
Коэффициент взаимозаменяемости характеризует степень адекватности однотипных узлов, плат блоков РЭО и обменного ремонтного фонда. Он представляет собой отношение оперативной трудоемкости замены сборочных единиц или деталей РЭО без учета регулировочных к оперативной трудоемкости сборки РЭО в процессе ремонта с учетом этих работ:
~ 5дм/(5дм + 5П) ,
где 5дм — оперативная трудоемкость демонтажно-монтажных работ по замене сборочных единиц (плат, узлов, блоков) и деталей РЭО в процессе ремонта без регулировочных работ РЭО, проводимых после их замены; 5П —7 оперативная трудоемкость регулировочно-настроечных работ, проводимых после замены сборочных единиц и деталей РЭО в процессе ремонта.
Коэффициент легкосъемности — отношение оперативной трудоемкости демонтажно-монтажных работ на ремонтируемом РЭО и оперативной трудоемкости этих работ на прототипе
^Д^^дм /^дм»
где 5дм — оперативная трудоемкость демонтажно-монтажных работ при ремонте той или иной сборочной единицы (плата, узел) и деталей ремонтируемого РЭО; S™ — оперативная трудоемкость аналогичных работ на принятом прототипе.
Коэффициент унификации (стандартизации) — отношение числа унифицированных (стандартизованных) сборочных единиц изделия и его унифицированных (стандартизованных) деталей, не вошедших в состав сборочных единиц Л4у(с), к общему числу его соответствующих составных частей 2Исб:
(с) — у (С) /2Л4Сб.
194
Требуемый уровень ремонтопригодности РЭО обеспечивается в основном на этапе разработки и изготовления. На этапе эксплуатации характеристики ремонтопригодности совершенствуются путем проведения схемно-конструктивных доработок по бюллетеням разработчиков и изготовителей РЭО. Уровень ремонтопригодности, характеризуемый рассмотренными выше показателями, определяется и обеспечивается с учетом следующих требований ГОСТ 19152—80: потребности РЭО в операциях ТО и ремонта; технологичности конструкций РЭО при ремонте; квалификации исполнителей.
Ремонт РЭО позволяет уменьшить число отказов в процессе эксплуатации. С этой целью при разработке РЭО должны применяться блоки, узлы, платы с высоким уровнем показателей долговечности, безотказности и сохраняемости.
Требования к технологичности конструкции учитывают степень контролепригодности, доступности, легкосъемйости, взаимозаменяемости и восстанавливаемости разрабатываемого РЭО. Доступность и легкосъемность сборочных единиц (блоков, плат, узлов) РЭО обеспечиваются их рациональной компоновкой, позволяющей выполнять операции ТО и ремонт отдельных составных частей без демонтажа других узлов, конструктивно объединённых в отдельный блок; рациональным расчленением составных частей (в том числе применение блочного принципа компоновки РЭО); размещением разъемов для внешних диагностических средств, позволяющих контролировать техническое состояние составных частей РЭО без дополнительных демонтажно-монтажных работ; применением способов крепления и соединения блоков и узлов, обеспечивающих минимальные затраты времени при их монтаже и демонтаже в процессе проведения операции ТО и ремонта.
При этом должны быть стандартизованы и унифицированы составные части РЭО и необходимый при ремонте специальный инструмент, обеспечиваться преемственность технологических процессов ремонта. Должны быть предусмотрены меры по обеспечению эргономических характеристик РЭО и безопасности выполнения ремонтных операций.
Требования к квалификации персонала при ремонте РЭО направлены на ограничение потребности в высококвалифицированных исполнителях в процессе ремонта. С этой целью при разработке и дальнейшем совершенствовании РЭО должны предусматриваться автоматизация контроля технического состояния и диагностирования РЭО, а также механизация работ по ТО и ремонту. Должны быть четко обозначены места контроля технического состояния РЭО, регулировки блоков и узлов, обеспечиваться логическая последовательность и удобство выполнения операций ремонта, исключающие возможность неправильного выполнения монтажно-демонтажных работ. Эксплуатационно-ремонтная документация должна обладать четкостью и лаконичностью изложений.
Обеспечение ремонтопригодности РЭО направлено на снижение затрат времени, труда и средств на ТО и ремонт для повышения эффективности использования РЭО в процессе эксплуатации. При разработке 7» 195
мероприятий по обеспечению ремонтопригодности изделий исходными данными являются показатели ремонтопригодности (в том числе ремонтной технологичности), указанные в требованиях заказчика и в технических заданиях на разработку новых изделий. Обеспечение ремонтопригодности осуществляется на всех стадиях разработки новых и модернизации серийно выпускаемых изделий. На этапе проектирования проектная организация составляет программу обеспечения ремонтопригодности в процессе разработки изделий РЭО. Задача проектной организации — оказание помощи конструкторским подразделениям в решении практических задач по обеспечению ремонтопригодности на всех стадиях разработки РЭО.
Программа обеспечения ремонтопригодности является составной частью программы обеспечения надежности и качества изделий и должна соответствовать отраслевым нормативно-техническим документам. Работы по обеспечению ремонтопригодности РЭО проводятся на основе количественной и качественной оценки ремонтопригодности на всех стадиях разработки. Основными методами количественной оценки ремонтопригодности изделий являются метод использования зависимостей и пооперационный метод.
Метод использования зависимостей предполагает исследование и анализ зависимостей показателей ремонтопригодности от конструктивных характеристик РЭО, целевого назначения с целью прогнозирования значений показателей ремонтопригодности разрабатываемой РЭО. Пооперационный метод базируется на учете и анализе каждой возможной операции ТО и ремонта с точки зрения необходимости, периодичности выполнения и технологичности изделий РЭО с одновременной оценкой затрат времени, труда и средств на их выполнение. Реализация пооперационного метода предполагает выполнение, выявление, учет операций ремонта по элементам (сборочной единице) изделия; предварительную оценку продолжительности, трудоемкости и стоимости каждой операции ремонта на основе результатов хронометричных данных проведения этих операций на аналогах, прототипах, макетах и опытных образцах, составление эксплуатационной и ремонтной документации.
Один из эффективных путей оценки ремонтопригодности РЭО — проведение и анализ результатов испытания РЭО на ремонтопригодность. Целью испытаний на ремонтопригодность является установление экспериментальным путем степени соответствия конструктивных решений разработанных опытных образцов требованиям эксплуатационно-технической документации.
В процессе испытаний РЭО на ремонтопригодность в качестве источников информации используют хронометражные наблюдения за выполнением операций ТО и ремонта, нормативы затрат времени, труда и средств, установленные при проведении подобных операций на аналогах или прототипах, нормативы времени микроэлементных движений человека для выполнения подобных операций в соответствии с тре-196
бованием установленных стандартов, а также схемы, диагностические программы и др. Результаты испытаний РЭО на ремонтопригодность каждого вида ТО или ремонта заносят в протокол испытаний. Заключительный отчет, составленный по результатам испытаний наряду с подробными сведениями об изделии, описанием программы, методики и протоколов испытаний, должен содержать также выводы о степени соответствия изделия требованиям нормативно-технической документации по ремонтопригодности и рекомендации по доработке изделия, средств ТО и ремонта, эксплуатационной и ремонтной документации и совершенствованию системы технического обслуживания и ремонта в целом.
6.3. КАПИТАЛЬНЫЙ И СРЕДНИЙ РЕМОНТ РЭО
Периодичность и объемы капитального и среднего ремонта РЭО устанавливаются в зависимости от срока службы, наработки или технического состояния в соответствии с эксплуатационно-технической документацией. Ремонт РЭО выполняется ремонтными предприятиями ГА на основе договора, заключаемого с эксплуатационным авиапредприятием. Основным документом, определяющим программу среднего и капитального ремонта РЭО на планируемый год, является план технической эксплуатации РЭО, на основании которого начальник базы ЭРТОС предприятий ГА представляет в управление ГА заявку на ремонт РЭО. В плановом порядке РЭО подготавливается и сдается в ремонт после отработки установленного межремонтного ресурса или по истечении межремонтного срока службы. Перед отправкой в ремонт оценивается техническое состояние РЭО специальной комиссией специалистов баз ЭРТОС ГА. Результаты комиссии оформляют актом технического состояния РЭО. В отдельных случаях, когда РЭО не .выработал установленный ресурс или срок службы, но по своему .техническому состоянию требует среднего или капитального ремонта, в акте указывают причины преждевременного выхода его из строя.
Ремонт РЭО выполняется на ремонтных заводах ГА или его зональных производственных участках. Капитальный ремонт РЭО, как правило, производится на специализированном ремонтном предприятии. В отличие от капитального средний ремонт оборудования может быть выполнен на местах базирования РЭО силами ремонтных бригад ремонтного предприятия с участием эксплуатационного персонала РЭМ. При среднем ремонте РЭО отдельные его блоки, узлы могут подвергаться капитальному ремонту. Средний ремонт включает также замену изношенных или поврежденных элементов РЭО.
После проведения ремонтных операций проверяют техническое состояние, выполняют, комплексную настройку и регулировку РЭО. Технологический процесс ремонта РЭО включает в себя следующие этапы:
7в Зак. 2262
197
приемку в ремонт РЭО и хранение ремонтного фонда;
общую дефектацию комплекта РЭО;
демонтаж блоков, сборочных единиц, узлов РЭО, последующая их разборка и дефектация;
ремонт типовых деталей, узлов, плат сборочных единиц;
сборку блоков, узлов и РЭО в целом;
комплексную послеремонтную проверку технического состояния РЭО, настройку, регулировку;
оформление соответствующих ремонтных документов; консервацию, упаковку, хранение, транспортировку. Технологический цикл ремонта начинается с приемки РЭО. После приемки съемное оборудование демонтируется и доставляется в цех ремонта РЭО. Несъемное оборудование (кабели, переходные разъемы и т. д.) дефектируется и ремонтируется непосредственно на РЭО. Снятые блоки и съемные узлы подвергаются первичной обработке для очищения поверхности конструкции от пыли и грязи. Затем производится разборка оборудования и организуется несколько линий ремонта.
Последовательность операций в. каждой технологической линии практически одинакова. Вначале выполняют разборку радиоэлектронных устройств до узлов и промывку их специальной смесью и очистку, затем—дефектацию узлов и деталей изделий с составлением дефектной ведомости. Согласно дефектной ведомости проводится ремонт узлов и самой конструкции блоков. Выполняются ремонтные работы, заданные перечнем обязательных для данного оборудования работ. В последующем выполняют доработки, окраску, восстанавливают надписи. Затем следует сборка и регулировка отдельных узлов и агрегатов. Проверка качества ремонта отдельных агрегатов и узлов проводится инженерами отдела технического контроля (ОТК).
На следующем этапе осуществляются сборка и регулировка блоков РЭО, испытание их на соответствие нормам, контроль силами ОТК, комплексирование блоков и регулировка их в комплексе. Испытание агрегатов на соответствие техническим условиям проводится на специальных стендах. После этого оборудование поступает в цех сборки для последующего монтажа на РЭО.
Комплектность и правила составления ремонтной документации устанавливаются стандартом.
6.4. текущий РЕМОНТ РЭО.
ОСОБЕННОСТИ РЕМОНТА РЭО, ВЫПОЛНЕННОГО
НА МИКРОЭЛЕМЕНТНОИ БАЗЕ
Текущий ремонт РЭО производится в ремонтно-эксплуатационных мастерских баз ЭРТОС ГА. Процесс восстановления отказавшего РЭО, как правило, состоит из двух этапов работы: восстановление требуемого качества функционирования отказавшей РЭО путем нахождения и 198
замены неисправного узла (платы); текущий’ ремонт отказавшего узла (платы) путем замены неисправного элемента (или группы элементов). Технология восстановления РЭО изложена в эксплуатационно-технической документации конкретных изделий и в общем случае состоит из следующих последовательно выполняемых операций:
подтверждения заявки на ремонт (набор технологических операций по контролю работоспособности РЭО);
выявления неисправного канала (тракта) РЭО;
поиска неисправного блока или узла (группы плат) в зависимости от конструктивного оформления и расположения элементов, входящих в неисправный канал РЭО;
определения неисправной платы;
замены отказавшей платы;
выходного контроля качества функционирования РЭО после восстановления.
При выполнении технологических операций восстановления (текущего ремонта) РЭО необходимо учитывать ряд специфических особенностей построения блоков и узлов наземных РЭО, выполненных на микроэлементной базе. Наземное РЭО построено в основном по функционально-блочному принципу. Блоки и функциональные узлы состоят из набора типовых плат, содержащих несколько десятков цифровых, аналоговых микросхем или микросборок и микромодулей. Платы имеют врубные колодки (разъемы) с контактами контрольных разъемов. Принципиальные схемы на платах выполнены, методом печатного Монтажа. Для пылевлагозащиты использованы лаковые покрытия. Шйы не унифицированы по расположению контактов разъемов цепей питания, цепей подачи входных и снятых выходных сигналов. Габаритные размеры плат, а также число контактов и разъемов различны даже Ь пределах одного типа РЭО. По схемным особенностям встречаются платы цифровые (логические), аналоговые и цифроаналоговые. По виду используемых логических схем платы, бывают многовыходные комбинационные; с запоминающими элементами в виде триггеров; с опёра-ционными элементами в виде счетчиков, сдвиговых регистров; дешифраторов, сумматоров.
Имеется ряд специфических особенностей .построения платив том числе по плотности монтажа, чувствительности К внешним механическим, температурным, электростатистическим воздействиям, ограниченному числу возможных перепаек, разбросам выходных параметров-микросхем и др.
Поиск и замена неисправного элемента на плате проводятся последовательно путем определения неисправного канала платы, группы элементов (функционального узла), где находится неисправный элемент, неисправного, элемента на плате, замены неисправного элемента^ выходного контроля исправности платы после операции текущего ремонта. Отремонтированная плата, используется для восстановления РЭО, либо пополняет комплект ЗИП (Возвратно-обменный фонд РЭМ). 7в* 199»
Для ремонта отказавших плат, выполненных на микроэлёментной базе, требуется стационарное рабочее место с соответствующим стендовым оборудованием и контрольно-поверочной аппаратурой. Требования, предъявляемые к помещению и рабочему месту, приведены в технических рекомендациях в соответствующих отраслевых стандартах.
При поиске отказавшей микросхемы (микромодуля) на неисправной плате необходимо учитывать следующие факторы:
сложность и особенность монтажа элементов на плате;
число выведенных контрольных точек и их информативность при поиске отказавшего элемента;
возможность создания временных контрольных точек для получения информации о техническом состоянии элементов или групп без нарушения (повреждения) монтажных соединений и токопроводящих поверхностей платы;
типы логических элементов на плате — цифровые, аналоговые, цифроаналоговые;
особенности построения логических схем на плате — многовыходные комбинационные схемы, последовательностные с операционными элементами (счетчики, сдвиговые регистры и т. д.);
число и виды входных и выходных сигналов, необходимых для диагностики платы и ее элементов;
вид используемого режима для проверки технического состояния платы (статистический или динамический);
состав контрольно-измерительной аппаратуры, необходимой для диагностики состояния платы или ее отдельных элементов.
Технологические операции по выявлению места неисправностей отказавшей платы условно можно разбить на следующие этапы:
1) подготовительные работы:
анализ принципиальной схемы и выявление схемно-конструктивных особенностей диагностируемой платы;
определение программы поиска отказавшего элемента (группы элементов);
выбор, установка и подготовка к работе необходимого контрольноизмерительного оборудования и вспомогательных технических средств диагностики и ремонта;
2) диагностические работы:
- установка платы на стендовом оборудовании стационарного рабочего места текущего ремонта плат;
внешний осмотр технического состояния плат для выявления нарушений монтажа (изломов выводов микросхем в местах их пайки к плате или у корпуса микросхемы, расслоений и трещин печатного монтажа проводников, характерных внешних проявлений отказа дискретных элементов: резисторов и других элементов навесного монтажа и т. д.);
анализ причин, вызвавших нарушения печатного монтажа, и появление отказов дискретных элементов;
200
выполнение диагностических работ по составленной программе поиска отказавшего элемента или группы элементов;
3) выполнение технологических операций текущего ремонта платы (замена отказавших элементов, устранение нарушения монтажа и т.д.);
4) технологические операции по выходному контролю исправности отремонтированной платы.
Отдельные технологические операции перечисленных этапов целесообразно выполнять в такой последовательности.
Отказавшую плату необходимо установить (закрепить) на специальном держателе стендового оборудования. Конструкция держателя должна обеспечивать надежное крепление и удобство проведения ремонтно-диагностических технологических операций. При внешнем осмотре выявить нарушения монтажа. Проанализировать причину выявленного внешним осмотром отказа, приведшего, например, к выгоранию резисторов и других навесных элементов, и учесть при составлении программы диагностики платы. В остальных случаях, если причиной нарушения монтажа не был отказ элементов платы, устранить нарушение монтажа. Отремонтированную плату подсоединить к контрольно-измерительной аппаратуре стендового оборудования и подготовить к работе контрольно-измерительную аппаратуру, после чего проконтролировать исправность платы.
Если по результатам контроля определяют, что плата неисправна, то составляют программу поиска отказавшего элемента или функционального узла. Программа диагностики составляется также в тех случаях, когда неисправность платы нельзя выявить путем внешнего осмотра.
Программу поиска неисправностей можно составить следующим образом. Предварительно анализируют принципиальную схему платы для выделения в ней отдельных каналов и функциональных узлов. Под каналом подразумевается группа функционально связанных между собой элементов и узлов платы, которые преобразуют поступающую на входные клеммы разъема платы информацию и имеют одну выходную клемму разъема. Предполагается, что отдельные элементы и узлы различных каналов платы могут иметь между собой функциональные связи. Если подобное разделение платы на каналы невозможно, то можно принять в качестве канала элементы принципиальной схемы всей платы.
Выделенные каналы разбивают на схемно-конструктивные узлы, т. е. группы последовательно соединенных логических и схемных элементов канала платы, число выходов которых больше единицы. К схемно-конструктивным узлам можно также отнести отдельные логические элементы, на которые одновременно подается несколько входных сигналов платы й выходных сигналов других схемно-конструктивных узлов. При составлении программы отказы диагностируют в следующей последовательности: определение неисправного канала
201
(каналов) платы, поиск неисправного схемно-конструктивного узла в канале и отказавшего элемента.
г Если при поиске отказавшей платы в РЭО контроль выходных сигналов платы позволяет определить неисправный канал, то программа поиска отказа составляется для группы элементов данного канала платы. Если в процессе диагностики РЭС нельзя однозначно определить неисправный канал, то предварительно составляют программу поиска неисправного канала, предусматривающую последовательную проверку выходных сигналов каналов платы на стендовом оборудовании.
, Неисправный элемент канала платы можно определить, используя известные методы диагностирования и учитывая схемно-конструктив-йые особенности РЭО, выполненного на микроэлементной базе (методы «половинного разбиения» схемы, «групповых проверок», «поэлементной проверки» и т. д.).
Для удобства выполнения диагностических операций предварительно составленную программу поиска неисправного элемента канала пла-ты Удобно изобразить графически.
Для реализации программы поиска неисправного схемно-конструк-тйвнргр узла необходимо использовать данные карт режимов отдель-Йкх элементов диагностируемой платы. Такие карты вэксплуатационно-1гёкнйческой документации в основном приведены для аналоговых схем. Для цифровых схем карты режимов с указанием выходных сигналов элементов при известных входных стимулирующих сигналах в эксплуатационно-технической документации, как правило, не приводятся. В этоМ случае необходимо составить карту режимов для диагностируемого канала (или всей платы) путем определения реакций отдельных ЙЙфровых элементов на входные воздействия с учетом их принципа Действия. Указанные подготовительные работы можно выполнить для двух режимов проверки технического состояния элементов: статистического й динамического. В первом случае в качестве входных стимулирующих сигналов используются высокий (логическая 1) и низкий (логический 0) потенциалы. Во втором случае используются периодические сигналы типа меандр, например, с частотами 1 или 100 кГц.
Особенности диагностики отдельных микросхем. Сйгнай на выходе логического элемента зависит от наличия уровней логических «1» и «0» на входах и временного положения этих сигналов относительно друг друга. При контроле цифровых узлов используются три режима работы: статический, динамический и потактовый контроль. При контроле в статике исключается влияние временного фактора. В этом режиме проверяются правильность установки исходного состояния, правильность выполнения логических операций элементами «И», «ИЛИ», «НЕ» и более сложных схем, включающих дешифраторы, сумматоры, коммутаторы.
Потактовый контроль предусматривает остановку процедуры контроля после каждого шага программы диагностики микросхемы. В этом рёжйме оценивается правильность выполнения логических функций 202
с участием элементов памяти: счетчиков, делителей, запоминающих устройств. Как правило, потактовый контроль позволяет оценить работоспособность всего устройства и выявить места локализации неисправности. Недостаток этого режима работы заключается в том, что отсутствует информация о самом процессе выполнения данного шага программы: амплитуде и временном положении управляющих и синхронизирующих сигналов. Наличие такой информации позволило бы однозначно выявить отказавший элемент или микросхему. От этого недостатка свободен контроль в динамическом режиме, т. е. в процессе работы устройства в режимах, близких к рабочим. Такой режим задается с помощью специальных имитаторов, набором стандартных генераторов или при работе платы в составе штатного оборудования. В этом режиме производится проверка наличия амплитуда, длительности и временного положения всех сигналов, поступающих на микросхему, а также выходного сигнала. Контроль отдельных микросхем можно выполнять в следующем порядке:
уточняют справочные данные маркировки выводов и логику работы микросхемы, обратив особое внимание на полярность и фронт срабатывания импульсов, подаваемых на входа микросхемы;
определяют по принципиальной схеме контролируемой платы логику работы микросхемы в заданном режиме включения. Анализируют характеристики сигналов, поступающих на входа микросхемы (частота поступления, момент прихода и др.);
контролируют уровень сигналов, начиная с определения значения питающих напряжений на выводах микросхемы, и измеряют уровни сигналов на тех входах, сигнал на которых не изменяется в течение всего процесса работы, но определяет режим использования микросхемы в данном устройстве;
контролируют уровень и временное положение сигналов, поступающих на входа микросхем и выходного (выходных) сигналов;
сравнивают результаты измерения сигналов с требуемыми значениями этих сигналов.
Несоответствие работы реальной схемы теоретическим предположениям рассматривается как отказ, причинами которого могут быть:
несоответствие характеристик входных сигналов (источник отказа находится вне данной микросхемы) допускам на них;
отсутствие выходного сигнала, либо недостаточная амплитуда при правильной комбинации входных сигналов. Одна из причин этой ситуации — отказ выходного ключевого каскада микросхемы. Вторая причина — слишком большая нагрузка следующих каскадов. Уточнить причину отказа можно путем отсоединения выходов микросхемы от нагрузки и измерения сигнала непосредственно на выходе. Если и в этом случае сигналы отсутствуют или имеют недостаточную амплитуду, необходимо заменить микросхему. Если отказ вызван повышенной нагрузкой, то необходимо найти причину этого. Чаще всего источником 203
. является наличие токопроводящих мостиков между дорожками печатной платы или выводами микросхем.
Наиболее часто для контроля плат используют осциллограф. При работе цифровых устройств используются импульсы, длительность .которых может составлять 0,1—0,01 мкс. Для неискаженной передачи этих сигналов на вход измерительного прибора необходимо использовать коаксиальный кабель с минимальной длиной некоаксиальных выводов.
Напыленные проводники печатных плат имеют предельно допустимое значение тока, соизмеримое с реально протекающим при работе устройств. Даже частичное повреждение токоведущих дорожек может быть источником отказа. Поэтому съем сигналов с помощью различных острых наконечников типа иглы необходимо производить только в местах большого сечения (места паек, выводы микросхем и т. д.).
Выводы микросхем и отдельные дорожки печатных плат расположены близко друг от друга, что может привести к короткому замыканию между ними при проведении измерений. В ряде случаев это может быть причиной выхода микросхемы из строя. Для микросхем транзисторно-транзисторной логики наиболее опасными являются следующие ситуации: а) замыкание между собой двух или нескольких выходов; б) замыкание выхода микросхемы на источник питания; в) замыкание входа и инверсного выхода логического элемента. Первые два случая приводят к отказу выходных ключевых каскадов микросхем, а третий— к переходу микросхемы в режим генерации, что сопровождается резким увеличением потребляемой мощности, и отказу микросхемы в результате перегрева.
Выводы микросхем некоторых серий не выдерживают больших механических нагрузок, что следует учитывать при подключении того или иного вывода к контрольно-поверочной аппаратуре.
При выполнении перечисленных выше технологических операций текущего ремонта РЭО целесообразно использовать как встроенные контрольно-измерительные приборы и сигнальные устройства, .схемы внутреннего контроля РЭО, выведенные на передние панели шкафов, блоков, так и контрольно-поверочную аппаратуру общего и специального назначения (имитаторы, генераторы тестовых сигналов и др.), входя-it щую в штатное оборудование изделия. Опыт эксплуатации показывает, что при выполнении технологических операций по отысканию неисправной платы обслуживающий персонал сталкивается с трудностями из-за отсутствия диагностических устройств и приспособлений, а также передвижных стоек для размещения контрольно-измерительной аппаратуры. Указанное оборудование должно создаваться в процессе разработки РЭО или заводами ГА, а также в процессе изобретательской и рационализаторской работы инженерно-технического состава баз ЭРТОС. Одним из примеров указанного оборудования является логический диагностический пробник. При большом объеме ремонтируемых плат необходимо создавать автоматизированные средства диагностики 204
Глава I
СРЕДСТВА ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
7.1. СРЕДСТВА КОНТРОЛЯ
ТЕХНИЧЕСКОГО состояния РЭО
Под средствами технической эксплуатации следует понимать комплекс устройств, приспособлений, приборов и оборудования, используемых в процессе технической эксплуатации. Разнообразие видов работ, выполняемых в процессе эксплуатации, приводит к необходимости использования на различных этапах эксплуатации разнообразных средств контроля и измерений, средств механизации при монтаже и перемещениях РЭО, средств энергопитания и т. д.
Качество средств технической эксплуатации существенным образом влияет на характеристики всей системы эксплуатации РЭО. Например, качество контрольно-измерительной аппаратуры влияет на характеристики процесса предотвращения отказов и эффективность использования РЭО. Совершенство средств эксплуатации влияет на длительность и качество ТО. Более того, отсутствие средств эксплуатации требуемого качества может сдерживать внедрение прогрессивных методов эксплуатации. Так, отсутствие до настоящего времени эффективных средств автоматизированного контроля — одна из причин медленного внедрения методов эксплуатации РЭО по фактическому состоянию. Классификация средств эксплуатации может осуществляться по различным признакам. Один из наиболее существенных — разделение их по назначению. Из всего разнообразия средств эксплуатации рассмотрим средства контроля технического состояния и средства питания авиационного РЭО в аэропортах ГА.
Анализ РЭО как объектов контроля показал, что в процессе эксплуатации приходится измерять множество параметров различной природы в широком диапазоне частот и значений этих параметров. Для их измерения и контроля используют обширный комплекс контрольно-измерительной аппаратуры общего назначения. Сюда входят различного типа осциллографы, вольтметры, амперметры, генераторы сигналов и т. д. В авиапредприятиях ГА используется большое число измерительных приборов общего назначения.
Однако наличие аппаратуры общего назначения не позволяет в полной мере удовлетворить требованиям эксплуатации. Высокие требования к обеспечению готовности РЭО приводят к необходимости применять специальные средства измерений и контроля. Это связано с тем, что контроль технического состояния РЭО с помощью аппаратуры об-205
щего назначения часто занимает недопустимо много времени и не позволяет оперативно контролировать функционирование эксплуатируемого РЭО. Данное положение усугубляется для тех типов РЭО, которые взаимодействуют с бортовым оборудованием. Поэтому специальная контрольно-измерительная аппаратура по своему принципу действия должна имитировать сигналы бортового оборудования. Контрольно-измерительная аппаратура, в которой вырабатываются сигналы, необходимые для работы наземного РЭО при его взаимодействии с бортовым, позволяет осуществить функциональный контроль работы наземного РЭО.
В настоящее время аппаратура специального назначения находит широкое применение в эксплуатации. Примером такой аппаратуры является имитатор самолетного ответчика для проверки аппаратуры обработки и отображения вторичной радиолокационной • информации. К аппаратуре специального назначения относятся также различные измерительные приборы, придаваемые к РЭО для измерения некоторых параметров, например мощности.
Однако наличие обширного класса контрольно-измерительной аппаратуры общего и специального назначения не позволяет решать все вопросы эксплуатационных измерений. Поэтому в процессе эксплуатации используют различные контрольно-измерительные стенды. Необходимость их использования определяется тем, что в процессе ремонта, настройки и регулировки отдельных блоков РЭО на него следует подавать необходимые питающие напряжения, а также сигналы входных воздействий (стимулирующие сигналы) и подключать требуемые нагрузки. Сущность проверки блоков РЭО с помощью стендов состоит в том, что контролируемый блок устанавливается на стенд, в котором предусмотрена подача всех входных сигналов и питающих напряжений, т.е. производится имитация работы контролируемого блока в составе полного комплекта РЭО. Качество контроля блока в этом случае будет существенно зависеть от точности имитации. Эксплуатация в аэропортах ГА многих типов РЭО требует разработки универсальных стендов, которые были бы пригодны для контроля нескольких типов РЭО.
Требования высокой оперативности контроля РЭО при минимуме затрат на проведение операций контроля вызывают необходимость nett пользования систем автоматизированного контроля (АСК). Существенная особенность АСК РЭО аэропортов — необходимость дистанционного централизованного контроля, что обусловлено'большим числом типов РЭО, размещенных на сравнительно большой территории аэропорта.
Спецификой многих типов РЭО ГА является то, что достоверное заключение о пригодности их для решения оперативных задач не может быть дано по результатам контроля параметров в отдельности или в совокупности. Данное обстоятельство объясняется тем, что многие из типов РЭО аэропортов ГА являются комплексными информационными системами, причем конечным пунктом обработки передавае-206
май ими информации служат ЛА, пространственное положение которых непрерывно изменяется. Методами наземного контроля часто не представляется возможным измерить параметры электромагнитного излучения радиотехнических комплексов, потому что они могут существенно отличаться в месте их окончательной обработки (на борту ЛА).
Що указанной причине дополнительно к наземным методам контроля приходится проводить летные испытания радиотехнических комплексов. Они осуществляются по специальной программе комплексом контрольно-измерительной аппаратуры, устанавливаемой на борту самолета-лаборатории. Сложный комплекс самолета-лаборатории также относится к числу средств контроля РЭО.
7.2. СИСТЕМЫ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ АВИАЦИОННОГО РЭО
Все расширяющаяся область применения авиационного радиооборудования приводит к его усложнению. В свою очередь, необходимость контроля большого числа параметров при помощи серийных измерительных приборов снижает эффективность использования сложного радиоэлектронного оборудования, так как увеличиваются простои оборудования во время контроля.
Действительно, для достоверного заключения о техническом состоянии радиоэлектронного оборудования требуется достаточно полный контроль. При этом в сложном оборудовании приходится контролировать большое число параметров. Это обстоятельство, как следует из выражения для коэффициента готовности кг = Т0/(Т0 + Тв), где То и Тв — среднее время безотказной работы и среднее время восстановления, соответственно, приводит к существенному снижению готовности РЭО.
Операции по контролю составляют значительную, часто большую часть трудозатрат по изготовлению нового и по эксплуатации существующего РЭО. Поэтому необходима автоматизация контроля технического состояния на всех этапах эксплуатации авиационного оборудования. Автоматизация позволяет повысить эффективность использования оборудования, уменьшить затраты по технической эксплуатации и использовать труд менее квалифицированных работников.
Снижение затрат достигается также вследствие того, что применение АСК сокращает непроизводительную работу РЭО, что объясняется как высокой скоростью контроля параметров, так и тем, что анализировать результаты контроля можно по окончании всех контрольных операций при выключенном оборудовании, пользуясь информацией, зафиксированной в запоминающем устройстве системы. Преимуществом автоматической проверки являются более высокая точность и объективность контроля. В некоторых случаях контроль РЭО невозможен . без применения автоматических контрольных устройств (например, 207
контроль процессов, опасных для жизни или здоровья обслуживающего персонала). Малая длительность операций по контролю позволяет производить более частые проверки и заметить тенденцию к изменению параметров во время эксплуатации, т. е. прогнозировать отказы РЭО. I
Степень автоматизации систем контроля можно характеризовать коэффициентом к = та/тр, где та — среднее время работы системы контроля в автоматическом режиме; тр — среднее время, необходимое оператору для выполнения операций контроля вручную. К автоматическим относятся системы, в которых ручное управление составляет менее 2 % общего времени контроля. В настоящее время наибольший интерес представляют автоматические и автоматизированные системы контроля. Использование АСК позволяет получить выигрыш в стоимости эксплуатации и длительности контроля, которая возрастает при увеличении числа контролируемых параметров.
Суть контроля состояния РЭО состоит в установлении соответствия между контролируемыми параметрами и нормами на них. Процесс контроля заключается в восприятии контролируемых параметров, сопоставлении их с нормами, формировании и выдаче результата сопоставления. Результатом контроля является информация о параметрах контролируемого оборудования. Она может быть представлена в.виде сигнала о состоянии контролируемого параметра — «в норме» или «не в норме». Если состояние оборудования по данному параметру оценивается большим числом исходов, результатом контроля является информация о нахождении параметра в некотором диапазоне значений. Примером такого контроля может служить контроль деталей (например, сопротивлений, конденсаторов) для сортировки по нескольким группам номинальных значений.
При помощи АСК контролируют РЭО, в котором имеются элементы, работающие на различных физических принципах: механические и электромеханические, электронные, гидравлические, оптические, радиоактивные и др. Контроль каждого из них имеет свои специфические особенности. Однако существует ряд функций, присущих всем АСК: восприятие контролируемых параметров; реализация норм на контролируемые параметры; сопоставление контролируемых параметров с установленными нормами; формирование суждений о состоянии параметра; выдача результатов контроля; автоматическое управление АСК. Восприятие контролируемых параметров в АСК РЭО осуществляется при помощи датчиков.
Если объектом контроля являются элементы, параметры которых представляют собой электрические величины (токи, напряжения и т.д.), то датчики АСК непосредственно воспринимают их. Если объектом контроля' являются элементы, параметрами которых служат механическое перемещение, давление, температура, размеры зазора и т. д., то они преобразуются в электрические величины. Последнее объясняется 208
большими преимуществами и универсальностью метода контроля неэлектрических величин путем преобразования их в электрические.
I Реализация норм на контролируемые параметры в АСК осуществляется либо в виде фиксированных значений непрерывных величин, либо в дискретном виде. В последнем случае норма на каждый параметр задается в виде некоторой дискретной кодовой комбинации. Значе-нияконтролируемых параметров сопоставляются с нормами на них также либо в непрерывной, либо в дискретной форме. Результатом сопоставления является суждение о состоянии объекта контроля.
результаты контроля зависят от цели контроля и могут быть представлены в виде абсолютных значений параметров или их статистических! характеристик, регистрации отклонения контролируемых пара-метррв от допусков. Поскольку в АСК процесс контроля осуществляется автоматически, одной из функций АСК является автоматическое управление всем процессом контроля радиоэлектронного оборудования. Кроме общих функций, некоторые АСК выполняют ряд дополнительных: промежуточные преобразования и измерения контролируемых величин, формирование испытательных сигналов, воздействующих на объекты контроля, математическая обработка контролируемых величин, самопроверка работы АСК, операции на выявление ухода параметров ит. д.
Промежуточные преобразования контролируемых параметров заключаются чаще всего в преобразовании величин одной физической природы в величины другой физической природы (преобразование неэлектрических величин в эквивалентные им электрические). Кроме того, к- промежуточным преобразованиям относятся преобразования контролируемых параметров, необходимые для согласования режимов работы различных устройств АСК. 1
Измерение параметров присуще не всем АСК. В относительно простых АСК измерение параметров не предусматривается, а производится только сопоставление контролируемых параметров с установленными нормами. Получение и формирование испытательных сигналов чаще всего необходимы в том случае, если АСК предназначен для контроля параметров неработающего оборудования или пассивных параметров. Под пассивными понимаются такие параметры РЭО, которые не являются энергетическими величинами (чувствительность приемного устройства, частота, сдвиг фаз, величина емкости, индуктивности и т.д.). Контроль активных параметров связан с контролем энергетических величин (сила тока, напряжение, мощность, давление и т.д.).
Испытательные сигналы подаются на объект контроля и вызывают соответствующие сигналы реакции, по которым судят о состоянии объекта. Необходимость в выполнении ряда дополнительных функций возникает также в том случае, если состояние объекта контроля характеризуется большим числом параметров, допуски на изменение которых зависимы между собой. В таких радиоэлектронных системах отказы возможны не только при отклонении параметров элементов от уста-209
новленных допусков, но и при некоторых сочетаниях значений параметров элементов, неблагоприятно влияющих на исправность радиоэлектронной системы. В этом случае АСК должна анализировать влияние параметров в момент контроля на работоспособность системы. Кроме того, при помощи АСК возможно прогнозирование отказов. I
Полученную информацию о состоянии контролируемого оборудования можно использовать для выработки управляющих воздействий, которые предотвращают аварийные ситуации включением резервного комплекта, сигнализацией, автоматической регулировкой параметров и т. д. В некоторых АСК предусматривается регистрация результатов контроля, например, при помощи записывающих устройств, устройств памяти и др. Существуют АСК, которые по определенной программе позволяют производить отыскание неисправных элементов.
Применение АСК для контроля радиоэлектронного оборудования будет эффективно в том случае, если АСК исправна, в противном случае возможна неправильная оценка состояния радиоэлектронного оборудования. Чтобы исключить данное положение, во многих АСК для их проверки предусматриваются устройства самоконтроля. Введение АСК должно способствовать улучшению эксплуатационных показателей, уменьшению трудозатрат на техническое обслуживание, повышению достоверности контроля, увеличению скорости контроля, уменьшению простоев радиотехнического оборудования.
Для достижения этих целей АСК технического состояния РЭО аэропортов должна решать следующие основные задачи:
определение технического состояния радиооборудования в заданный момент времени;
прогнозирование технического состояния РЭО на требуемый период времени;
определение требуемых управляющих воздействий для обеспечения необходимого уровня надежности авиационного РЭО;
выдача статистической информации для сбора и последующей обработки данных по отказам РЭО.
Структурное построение АСК должно обеспечивать возможность ее использования в процессе оперативного контроля технического состояния (контроль работоспособности), а также возможность использования при ТО по трудоемким формам, в том числе при выполнении этих форм обслуживания бригадами РЭМ.
Ввиду специфических условий эксплуатации радиооборудования аэропортов ГА (большое число контролируемых объектов, размещение объектов на сравнительно большой территории, трудн©доступность некоторых объектов и т. д.) сбор, и анализ оперативной информации целесообразно осуществлять централизованно, в одном месте (например, на месте дежурного инженера или техника командно-диспетчерского пункта). Вместе с тем АСК должна выдавать информацию о техническом состоянии в месте установки радиотехнических объектов при вы-210
флнении на них работ по трудоемким формам обслуживания, а также во время восстановления работоспособности этих объектов при возникновении отказов.
А Таким образом, структура технической эксплуатации РЭО с использованием АСК должна обеспечивать управление его техническим состоянием по двум замкнутым контурам управления. Управление техническим состоянием в такой системе эксплуатации состоит из следующих основных этапов:
получения информации о фактическом техническом состоянии оборудования;
анализа информации для определения технического состояния в заданный момент времени;
определения требуемых управляющих воздействий (подстройка, регулировка, замена элементов и т. д.) для восстановления исправной работы в случае отказа РЭО;
прогнозирования технического состояния РЭО на требуемое время;
анализа информации для получения рекомендаций по повышению уровня надежности путем конструктивных и технологических усовершенствований РЭО.
Следовательно, управление по первому контуру должно осуществляться инженерно-техническим составом аэропортов ГА, управление по второму контуру — совместно с предприятиями промышленности и инженерно-техническим составом ГА.
Техническое состояние авиационного РЭО в такой системе эксплуатации будет управляемым процессом со стороны диагностической системы управления. АСК можно классифицировать по разнообразным признакам, например, по назначению и области их применения. Особый интерес представляет классификация АСК по признакам, которые характеризуют внутреннее строение и являются общими для АСК различного назначения. Различают АСК с одно- и многократным использованием устройств канала контроля (рис. 62). В АСК с однократным использованием устройств канала контроля для каждого параметра применяется индивидуальный канал, в АСК с многократным использованием устройств канала контроля отдельные устройства применяются для контроля многих параметров.
В зависимости от вида (непрерывный или дискретный) представления контролируемого параметра и допуска на него АСК разделяют на непрерывные и дискретные. Если контролируемые параметры имеют несколько допусков, то по способу их сопоставления различают АСК с параллельным и последовательным сопоставлением, причем в последнем случае контроль осуществляется как с использованием результатов предыдущих сопоставлений, так и без них.
Если состояние контролируемого оборудования оценивается по результатам контроля совокупности контролируемых параметров, то такие АСК называются АСК с выдачей результатов по совокупности контролируемых параметров. В отличие от них существуют АСК с выдачей 211
Рис. 62. Классификация автоматизированных систем контроля
результатов контроля по каждому контролируемому параметру. АСК можно разделять по способу связи их с контролируемым оборудованием.
Конструктивно АСК могут быть совмещены с контролируемым оборудованием и, следовательно, представлять с ним единое целое, но могут быть выполнены отдельно от него, имея внутри только отдельные встроенные элементы, например датчики. АСК состоит из следующих устройств: реализации норм на проверяемые параметры УРН, сравнения значений контролируемых параметров с нормами на них УС, формирования суждения о состоянии контролируемого оборудования УФС, выдачи результатов контроля и автоматического управления УВРК датчиков Д (рис. 63).
Устройство автоматического управления определяет программу контроля и управляет работой остальных устройств АСК: обеспечивает последовательное соединение различных устройств между собой, ввод допусков на контролируемые параметры, вывод результатов контроля и т. д.
Программа контроля может быть заданной или меняться при контроле различных типов оборудования. Заданная программа реализуется выбором соответствующей схемы устройства автоматического управления. Если программа меняется при контроле различных типов оборудования или в зависимости от результатов предыдущих операций контроля, то информация об этом хранится в запоминающем устройстве АСК, чаще всего в виде дискретной кодовой комбинации.
Рис. 63. Структурная схема АСК 212
I Необходимость в изменении программы при контроле состояния Сложного РЭО вызвана стремлением сократить число проверяемых параметров. Поэтому первоначальным этапом контроля чаще всего является контроль выходных параметров укрупненных функциональных блоков и только при отклонении их параметров от допусков програм-ма\контроля меняется с целью контроля параметров неисправного блока .\
Воспринимаемые датчиками контролируемые параметры подаются в устройство сопоставления, куда одновременно поступает информация о допусках на них. Так как контролируемые параметры чаще всего являются электрическими величинами (или преобразуются в эквивалентные им), то информация о допусках на них также задается в виде эталонных электрических величин.
В сравнивающем устройстве контролируемые параметры сопоставляются с допусками, в результате чего получается сигнал, несущий информацию о состоянии параметров относительно установленных допусков. Существуют сравнивающие устройства для сопоставления дискретной или непрерывной информации. При сравнении контролируемого параметра в дискретной форме допуск на этот параметр задается в виде эквивалентной значению параметра дискретной комбинации. Дискретная форма сравнения параметров и допусков более универсальна и позволяет достигнуть большей точности контроля. При сравнении контролируемых параметров и допусков, представляемых в непрерывной форме, в устройстве сопоставления непосредственно сравниваются электрические величины.
Формирование результатов контроля происходит в устройстве выработки суждений о состоянии контролируемого оборудования. Следует отметить, что в некоторых АСК состояние контролируемого оборудования определяется сигналом на выходе устройства сравнения (например, если число состояний выходного сигнала устройства сравнения равно двум). В более общем случае состояние контролируемого оборудования оценивается в устройстве выработки суждения.
Устройство выдачи результатов контроля предназначено для представления результатов контроля в виде, наиболее удобном для последующего использования. Функции, выполняемые устройством выдачи, зависят от конечной цели контроля. В зависимости от назначения различают следующие типы выходных устройств АСК:
индуцирующие выходные устройства сигнализируют оператору о состоянии контролируемого оборудования и осуществляют только кратковременное хранение и выдачу результатов контроля;
регистрирующие выходные устройства фиксируют информацию о состоянии контролируемого оборудования таким образом, что возможно последующее многократное использование данной информации.
Сортирующие выходные устройства отличаются от регистрирующих тем, что они дополнительно производят обработку информации по некоторым заранее заданным признакам.
213
Информация о состоянии контролируемого оборудования может быть выдана в дискретной или непрерывной форме. Соответственно этому выходные устройства называются дискретными или аналоговыми.
Представленная обобщенная структура АСК не в полной мере характеризует их сложность. В действительности же стремление возложить на АСК широкие функции по сбору, восприятию, обработке и выдаче информации о состоянии таких сложных объектов, каким является авиационное РЭО, приводит к тому, что совершенные АСК представляют собой достаточно сложные специализированные электронные вычислительные машины.
Особый интерес представляют АСК, предназначенные для контроля РЭО, рассредоточенного на территории аэропорта (рис. 64).
Наличие многих типов РЭО и требование оценки их состояния как в месте установки РЭО (что необходимо, например, при проведении текущих ремонтов), так и на центральном пункте контроля (что требуется для оперативной оценки состояния РЭО и управления на этой основе его работой) приводят к необходимости установки микроЭВМ на объектах, а центральной системы контроля и управления на пункте управления.
Расположение микроЭВМ непосредственно на объекте позволяет упростить систему связи их с центральным пунктом управления и уменьшить между ними потоки информации. На каждую ЭВМ на объекте возлагается задача обработки информации о техническом состоянии данного объекта. В этом случае на центральный пункт выдается только обобщенная информация. Центральная ЦВМ осуществляет окончательную обработку информации и управляет работой всех ЭВМ на объектах.
214
I Функции по обработке информации между микроЭВМ на объектах и центральной ЭВМ распределяются из условия решения конкретных задач, поставленных перед системой контроля и управления техническим состоянием РЭО.
7.3. ПУЛЬТ ИНЖЕНЕРА
^КОМАНДНО-ДИСПЕТЧЕРСКОГО ПУНКТА
Пульт инженера командно-диспетчерского пункта (ПИКДП) предназначен для телемеханического контроля и управления наземными радиоэлектронными средствами обеспечения полетов в аэропортах ГА при посадке на ВПП с двух направлений. С помощью ПИ с КДП осуществляются следующие функции:
подаются команды телеуправления на радиоэлектронные объекты через комплекс устройств телемеханики ТМ-320;
контролируется техническое состояние РЭО и комплекса устройств телемеханики ТМ-320;
прослушиваются каналы УКВ связи и устройств магнитной записи; контролируется работа УКВ пеленгаторов;
осуществляется оперативная громкоговорящая связь со службами аэропорта.
Число контролируемых объектов, обслуживаемых одним пунктом управления, равно 12. Это число уточняется в зависимости от числа радиоэлектронных средств для конкретного аэропорта.. Максимальная протяженность линий связи 10 км. Объем информации одного контролируемого пункта не менее: телесигнализация — 20 параметров; телеуправление — 20; телеизмерение — 18. Основная погрешность устройства телеизмерения без датчиков и воспроизводящих устройств не более 1 %. Время передачи одного сообщения телесигнализации без регистрации равно 1 с, время передачи одной команды 1 с, скорость передачи 50 бод, время передачи телеизмерения 1 с. Одновременное воспроизведение информации телеизмерения параметров на аналоговых приборах — не менее 10, число каналов оперативной громкоговорящей связи — 20, число телефонных каналов: запоминаемых — 60, обычных — не ограничено. Номинальное напряжение питания переменного тока 220 В, частота 50 Гц. Потребляемая мощность полукомп-лекта: пункт управления 3,5 кВт; контролируемый пункт 0,5 кВт.
Основное звено ПИ КДП — устройства телемеханики ТМ-320. Аппаратуру пункта управления комплекса ТМ-320, пульт управления инженера и панель отображения устанавливают на КДП. На каждом контролируемом радиоэлектронном объекте размещены один шкаф аппаратуры контролируемого пункта комплекса ТМ-320 и стойка нормализаторов.
Комплекс ПИ КДП (рис. 65) состоит из пульта управления инженера ПУ И, панели отображения информации ПО, аппаратуры пункта уп-215
Рис. 65. Структурная схема пульта
равления ПУ комплекса устройств телемеханики ТМ-320, аппаратуры контролируемого пункта КП комплекса устройств телемеханики ТМ-320, устройства сопряжения радиоэлектронных объектов с комплексом ПИ КДП (стойки нормализаторов СН).
ПУИ — центральное связующее звено между комплексом устройств телемеханики ТМ-320, кроссировочными шкафами и панелью отображения. Он служит рабочим местом сменного инженера КДП. Общее число планшетов на ПУИ составляет 19, число планшетов управления и контроля за техническим состоянием РЭО-14. Напряжение питания постоянное — 24 В, переменное — 6 В, 50 Гц, потребляемая мощность — 400 Вт, габаритные размеры — 2200 х 1500x700.
ПУИ состоит из левой и правой секций и столешницы. На правой секции расположены девять планшетов управления и контроля за техническим состоянием радиоэлектронных объектов. Десятый планшет служит для управления комплексом устройств телемеханики ТМ-320 и источниками питания. На левой секции расположено семь планшетов управления. Правая секция ПУИ соединяется с комплексом устройств телемеханики ТМ-320. Соединение аппаратуры пункта управления комплекса ТМ-320 с аппаратурой контролируемого пункта комплекса ТМ-320, расположенной на радиоэлектронном объекте, осуществляется по телефонному кабелю. Левая секция ПУИ не сопрягается с комплексом устройств телемеханики ТМ-320 и обслуживает радиоэлектронные объекты, расположенные сравнительно недалеко от ПУИ. Сопряжение с объектами производится по кабельной линии связи.
Все планшеты управления выполнены съемными и собраны на специальном каркасе. На планшетах управления расположены кнопки включения (выключения) радиоэлектронных объектов, лампы, сигнализирующие о его состоянии, а также кнопки управления и лампы сигнализации режимов работы комплекса устройств телемеханики ТМ-320. Связь планшетов управления с ПУИ обеспечивается через разъемы. Конструкция и схемы планшетов управления и контроля состояния радиоэлектронных объектов выполнены однотипно. На каждом планшете расположено необходимое число элементов управления и сигнализа-216
ции, а электрические цепи от них на всех планшетах проходят через одноименные контакты соединительных разъемов.
Панель отображения (ПО) служит для выполнения следующих функций:
приема информации от комплекса устройств телемеханики ТМ-320 о состоянии двухпозиционных параметров контролируемых радиоэлектронных объектов и отображения их в виде кратких названий на специальных световых индикаторах;
индикации на миллиамперметрах М284-К абсолютных относительных значений параметров телеизмерений (по выбору сменного инженера) в аналоговой форме;
индикации на модели ВПП курса взлета и посадки ЛА в текущий момент времени.
ПО имеет следующие технические данные: число табло световой индикации—12, число измерительных приборов — 10, максимальная потребляемая мощность одним световым индикатором — 36 В-А, габаритные размеры панели отображения информации — 2200 х 1850Х X 560 мм.
Конструкция светового индикатора позволяет выдавать следующую информацию:
наименование радиоэлектронного объекта;
аварийное состояние блока (узла) радиоэлектронного объекта; аварийное состояние радиоэлектронного объекта;
аварийное состояние блока питания стойки нормализаторов;
аварийное состояние устройств резервного электроснабжения, а также возникновение пожара на объекте, нарушение охранной сигнализации, включение огней заграждения, отсутствие напряжения питающей электросети.
Название включенного для функционирования радиоэлектронного объекта сигнализируется тремя цветами, при этом зеленый цвет означает, что один комплект РЭО находится во включенном состоянии, исправен, а второй — исправен и находится в резерве, желтый — один комплект радиоэлектронного объекта включен, исправен, но резерва нет; красный — оба комплекта включены, но неисправны.
Панель отображения имеет проводную связь с комплексом устройств телемеханики ТМ-320, а также с пультом управления инженера. Информация об изменении контролируемого параметра комплексом ТМ-320 преобразуется в электрические сигналы и подается на соответствующую лампу светового'табло, которая мигающим светом выдает сигнал о параметре, изменившем исходное состояние. Логику работы светового индикатора обеспечивает блок обобщения информации» Для индикации направления взлета и посадки ЛА на панели отображения предусмотрен макет ВПП. Подсвет одного из концов ВПП включается одновременно с включением в работу соответствующей ближней приводной радиостанции.
217
Стойка нормализаторов предназначена для сопряжения комплекса ПИ КДП с контролируемым радиоэлектронным объектом при выполнении функций телесигнализации и телеуправления. Стойка нормализаторов имеет следующие технические данные:
телесигнализация: вид входного сигнала — постоянное напряжение 24 В, переменное напряжение 6,3 В, 50 Гц, вид выходного сигнала — постоянное напряжение 24 В;
телеуправление: вид входного воздействия — замыкание и размыкание контактов пульта управления инженера; напряжение питания — 220 В, 50 Гц, потребляемая мощность 800 Вт, габаритные размеры 1000 X 600 X 289 мм.
Стойка нормализаторов установлена в шкафу, на поворотной раме которого расположены легкосъемные печатные платы. Она состоит из блока сопряжения и источников питания с автоматом резервирования.
Блок сопряжения представляет собой устройство, осуществляющее согласование параметров телесигнализации и телеуправления между контролируемым объектом и пультом управления инженера комплекса ПИ КДП. Он состоит из печатных плат, на которых размещены ячейки согласования. Питание стойки нормализаторов обеспечивается от резервируемого источника питания нестабилизированного напряжения 24 В. Резервирование источников питания осуществляется автоматом резервирования при пропадании напряжения на основном источнике питания.
7.4. ЛОГИЧЕСКИЙ ДИАГНОСТИЧЕСКИЙ ПРОБНИК
Развитие дискретных методов обработки информации привело к тому, что большая часть функциональных узлов современного РЭО работает на дискретном принципе. Основным средством измерений в дискретных схемах до настоящего времени являются осциллографы. Однако использование осциллографов в эксплуатационных условиях, особенно в процессе поиска неисправностей, часто затрудняется по чисто практическим причинам (трудоемкость доступа к элементам, сравнительно большие габаритные размеры осциллографа и т. д.). При современных способах измерений чаще всего при контроле сигнала в определенной точке аппаратуры должен быть обеспечен гальванический контакт этой точки с входом осциллографа. Технология изготовления плат РЭО предусматривает наличие защитного покрытия. Для обеспечения гальванического контакта это покрытие приходится снимать. В результате снижается надежность эксплуатируемого РЭО и увеличивается время измерений. Поэтому для эксплуатации современных типов РЭО необходима малогабаритная контрольно-диагностическая аппаратура, свободная от перечисленных недостатков. Удачным образцом такого прибора является логический диагностический пробник, 218
разработанный инженером кафедры технической эксплуатации и ремонта авиационного РЭО КНИГА В. А. Белоцерковским.
Диагностический логический пробник (ДЛП) предназначен для определения места отказа с его локализацией как на легкосъемном узле, так и на межблочных соединениях и разъемах. ДЛП спроектирован для диагностики логических узлов, выполненных на транзисторно-транзисторной логике (ТТЛ), уровень логической единицы у которой равен 2,4—5 В, а уровень логического нуля 0 — 0,4 В. Однако при небольших доработках возможно изменение уровней контролируемых сигналов «0» и «1», что позволит использовать ДЛП для контроля устройств, выполненных на другой элементной базе.
При измерениях в статистическом режиме ДЛП позволяет выявить и индуцировать следующую информацию:
наличие гальванического контакта между наконечником щупа и контролируемой точкой. Информация о наличии контакта позволяет уменьшить повреждение защитного покрытия, затраты времени на эту операцию и снизить возможность повреждения печатных проводников и выводов элементов;
наличие логических уровней «0» и «1» на выводах элементов и печатных проводниках, что позволяет проверить исправность в статистическом режиме логических элементов;
наличие сигналов, уровень которых лежит между уровнями логических «0» и «1», что свидетельствует об отказе одного из элементов, связанных с данной контрольной точкой;
прохождение потока импульсов в контролируемой точке. Этот вид информации позволяет сделать вывод о наличии помеховых сигналов, если по условиям работы РЭО их не должно быть. Вторым вариантом использования такой информации является качественный контроль трактов прохождения сигнала. Точки, где сигнал исчезает, могут указывать на место отказа. При измерениях в динамическом режиме повторяются функции, описание которых дано в первом и третьем пунктах. Кроме того, ДЛП дополнительно позволяет выполнить следующие операции:
сравнение временных характеристик импульсов (длительность периода следования) с заданными на наборном устройстве и выдачу трехальтернативного результата сравнения на индикацию. Это позволяет произвести быстрое сравнение временных характеристик импульсов в контролируемой точке с требуемыми по техническим условиям;
в потоке импульсов контролируемой точки осуществить поиск и индикацию наличия импульса с заданными характеристиками. Наличие такого режима измерения позволяет путем подачи на вход дополнительного сигнала проконтролировать прохождение импульса с заданными характеристиками по диагностируемому тракту без вывода объекта из процесса обычного функционирования;
в потоке импульсов контролируемой точки осуществить поиск и индикацию наличия импульсов, временные Характеристики которых не 219
соответствуют заданным на наборном устройстве. Назначение такого вида измерения — контроль выполнения периодических функций (правильность работы системы синхронизации, отсутствие в ней сбоев и др.).
В ДЛП предусмотрен также неконтактный способ съема сигнала для выполнения операций, указанных в последних трех пунктах. Съем сигнала в этом случае возможен с печатных проводников, прямолинейный участок которых не менее 7 мм при ширине не менее 0,5 мм, а также с неэкранированных проводов с толщиной изоляции не более 0,5 мм.
Использование неконтактного способа контроля позволяет существенно (в 3...5 и более раз) снизить время проведения каждого измерения за счет исключения операции разрушения защитного покрытия и последующего его восстановления. Этот способ имеет и ряд других преимуществ по сравнению с контактными методами контроля, так как становится практически невозможным замыкание проводников и выводов узла при подключении, а также не вносятся помехи работе устройства при проведении измерений.
В ДЛП предусмотрен ряд дополнительных функций: выход на осциллограф, на который в зависимости от необходимости подается сигнал либо прямо со съемного щупа, либо после восстановления сигнала при неконтактном съеме. Это позволяет значительно расширить возможности ДЛП и осциллографа.
В настоящее время для диагностирования используются осциллографы, которые входят в состав штатных устройств РЭО.Для обоснования целесообразности дополнения штатного контрольно-проверочного оборудования ДЛП необходимо провести сравнительный анализ эксплуатационно-технических характеристик ДЛП и осциллографа. Одно из наиболее важных преимуществ ДЛП по сравнению с осциллографом— вынесение индикатора непосредственно на щуп для подключения к контрольной точке. Это позволяет снимать информацию, не переводя внимания с точки подключения на индикатор, расположенный в стороне (как это происходит при работе с осциллографом). Переключение внимания не только увеличивает время съема информации, но и повышает вероятность соскальзывания щупа с малоразмерной контрольной точки, что искажает результат измерения и может привести к повреждению печатных проводников и выводов радиоэлементов или к их короткому замыканию.
В процессе проведения измерений осциллограф требует подстройки изображения для удобства наблюдения сигнала. Для этой же цели на соответствующий вход осциллографа подается синхронизирующий сигнал. Подключение к контрольной точке и точке синхронизации и их удержание во время проведения измерений производятся вручную, что в условиях эксплуатации РЭО не всегда может выполнить один человек, и исключается возможность подстройки изображения на индикаторе. Это указывает на необходимость участия в измерениях двух человек при использовании осциллографа. ДЛП лишен указанного недостатка — условия измерения и наблюдения результатов измерения не 220
требуют синхронизации, а настройка ДЛП производится перед проведением измерения, ’это позволяет выполнять измерения одному человеку.
ДЛП позволяет последовательно анализировать непериодические
Рис. 66. Структурная схема диагно стического пробника
импульсные последовательности
(например, встроенные тестовые программы самоконтроля), а с помощью осциллографа подобный анализ провести затруднительно. ДЛП позволяет выявить единичные сбои в работе, если они выра-
жаются в появлении импульса в непредусмотренные моменты времени или в его отсутствии в заданный момент. С помощью осциллографа такой вид измерений возможен только при большой частоте появления сбоев. Сравнительные характеристики процессов измерений при использовании осциллографов и ДЛП приведены в табл. 21.
ДЛП имеет четыре канала: контроля уровня сигнала КУС, восстановления сигнала ВС, контроля временных характеристик КВХ и индикации (рис. 66). Канал контроля уровня сигнала предназначен для определения уровня, к которому принадлежит напряжение в контролируемой точке. Различают четыре уровня — отсутствие гальванического контакта с контрольной точкой (уровень определяется дополнительными смещениями, подаваемыми на щуп), логический нуль (диапазон напряжений 0... 0,4 В), логическая единица (диапазон напряжений 2,4...5 В), помеховый уровень (диапазон напряжений 0,4 ... 2,4 В).
Таблица 21
Технические характеристики Осциллограф ДЛП
Время готовности к работе после 15 5 2 с
включения, мин Длительность анализируемых импульсов:
минимальная, мкс 2 20 2
максимальная, с 16 0,5 20
Среднее время выполнения одной опе- 15...40 15...40 5...15
рации измерения, с
Входное сопротивление, МОм 1 1 10 кОм
Наличие режима неконтактного съема Отсутствует Отсутствует Имеется
сигнала
Мощность, потребляемая от сети 40 30 8
220 В, 50 Гц, Вт
Масса прибора, кг 45 4,5 2,0
Габаритные размеры, мм Стоимость, руб. 274X182 X Х440 245Х90Х Х370 190Х90Х Х250 300-400
1014 610 (ориентировочно)
221
Канал восстановления сигнала позволяет по сигналу, принятому неконтактным способом, восстановить импульсы до вида, который они имеют в контролируемой точке.
Канал контроля временных характеристик предназначен для анализа заданного параметра импульсной последовательности (Длительности положительного или отрицательного импульса, периода следования) на принадлежность одной из следующих градаций: больше заданного, меньше заданного или соответствует заданному. Кроме того, в канале предусмотрен режим целевого поиска в поступающей импульсной последовательности только импульсов, длительность которых либо соответствует заданной, либо отличается от заданной.
Канал индикации предназначен для запоминания результатов из-, мерения каналов контроля уровней сигнала и канала контроля временных характеристик и организации последовательного вывода результатов контроля на семисегментный индикатор в виде соответствующего мнемонического знака.
7.5. УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ
И РЕМОНТА РЭО НА МИКРОЭЛЕМЕНТНОЙ БАЗЕ
Стенд предназначен для диагностики и ремонта плат, съемных блоков и других изделий наземного РЭО (Корень-АС, АРП-75). На стенде производится диагностика плат источников питания (стабилизаторы напряжения, тока, преобразователи напряжения) и плат обработки и преобразования информации (аналоговые, цифровые). При необходимости стенд может быть использован для контроля и ремонта других изделий, находящихся на эксплуатации в базах ЭРТОС, таких,, как радиостанции «Баклан-5 (20)», «Ландыш-5 (20)» и др.
Стенд позволяет:
размещать, подключать и проверять оборудование любого вида, при этом может одновременно проверяться только один вид оборудования;
подавать питающие напряжения и стабилизирующие сигналы на проверяемые платы, съемные блоки и изделия через пульты-модули, а также обеспечивать питание аппаратуры вспомогательными вторичными напряжениями и индикацию их наличия;
контролировать питающие напряжения 220 В, 50 Гц; выходное напряжение и ток стабилизированного выпрямителя ВСС-10 27 В (0... 10), А; токи потребления проверяемого оборудования от питающих сетей;
обеспечить защиту цепей питания оборудования от перегрузок.
В состав стенда входят: центральный стол, левая и правая стойки, стеллаж, стойка технологическая, передвижной диагностический пульт, выпрямитель стабилизированный, пульт-модуль проверки источников питания,. пульт-модуль проверки аналоговых цифровых плат, пульт-модуль проверки радиостанций «Баклан», «Ландыш», ра-222-
ма-подставка, комплект соединительных кабелей, комплект измерительных щупов.
Принцип построения стенда при проверке плат, съемных блоков и других изделий, входящих в состав наземных средств УВД, основан на использовании сменных пультов-модулей проверки оборудования (МПО). Каждый МПО содержит приборы измерения режимов работы оборудования, органы коммутации, сигнализации и схему внешних соединений одного или нескольких видов РЭО, что позволяет путем включения соответствующего МПО в схему стенда подготовить его к диагностированию данного вида оборудования и проверке его на соответствие нормам основных технических параметров. Такой принцип построения стенда позволяет в перспективе увеличивать номенклатуру проверяемых на стенде изделий, а также исключать устаревшие и снятые с эксплуатации изделия, путем изготовления новых МПО, либо исключая МПО с устаревшими изделиями.
Основным рабочим местом стенда является центральный стол, предназначенный для размещения проверяемого оборудования, контрольно-измерительной и контрольно-поверочной аппаратуры, установки соответствующего МПО, включения, регулировки и контроля питающих напряжений, подключения общих питающих напряжений. Центральный стол выполнен в виде сварного металлического каркаса из труб прямоугольного сечения и съемных металлических стенок, выполняющих роль обшивки.
В центральный стол входят: ящик выдвижной, левый боковой короб, правый короб, головка стенда, панель контроля, панель управления и автотрансформатор. Над горизонтальной столешницей центрального стола расположены головка, в которой размещается панель контроля и ячейка под комплексный пульт-модуль. В нише под столешницей находятся панель управления и ящик для хранения инструмента.
Левая стойка предназначена для размещения стабилизированных выпрямителей, обеспечивающих питание стенда и пультов-модулей необходимыми напряжениями постоянного тока, а также для установки контрольно-измерительной и контрольно-поверочной аппаратуры, необходимой для проверки оборудования и плат. Стойка представляет собой конструкцию из труб прямоугольного сечения и имеет полки, изготовленные из древесно-стружечной плиты и облицованные декоративным бумажно-слоистым пластиком.
Правая стойка предназначена для размещения выпрямителя, обеспечивающего питание проверяемой аппаратуры напряжением 27 В постоянного тока. Разъем для подключения стойки к центральному столу выведен на левую стенку короба стойки. Стойка представляет собой конструкцию из труб прямоугольного сечения и имеет полки, облицованные декоративным бумажно-слоистым пластиком.
Стеллаж предназначен для хранения пультов-модулей и рам-подставок, которые располагаются на соответствующих полках. В шкафу 223
стеллажа хранят комплект кабелей, измерительные щупы, переходные жгуты и эксплуатационную документацию. Стеллаж представляет собой сварную металлическую конструкцию из труб прямоугольного сечения. Боковины стеллажа и дверцы шкафа выполнены из листовой стали.
Стойка технологическая предназначена для размещения контрольно-измерительной и контрольно-проверочной аппаратуры. Она представляет собой сварную конструкцию из труб прямого сечения. Под нижней полкой размещен выдвижной ящик для хранения инструмента. На стойке имеются розетки «220В» и клемма заземления.
На передвижном диагностическом пульте выполняют операции по отысканию неисправностей и проводят регламентные работы. В состав передвижного диагностического пульта входит передвижная технологическая стойка, на которой установлены осциллографС1-65, вольтметр ВУ-15, коробка коммутационная распределительная, пластина для снятия статистического электричества, планшет-кассета с электропаяльником, комплект измерительных щупов, переносная лампа подсвета, трансформатор 220 В/36 В/6 В.
Коммутационная распределительная коробка обеспечивает одновременную подачу исследуемого параметра на входы всей контрольноизмерительной аппаратуры, а также подачу синхроимпульса и напряжения на исследуемые блоки. Стойка комплектуется специально разработанными измерительными щупами и переносной лампой подсвета внутри шкафов оборудования. Передвижная технологическая стойка выполнена в виде сварного металлического каркаса из труб прямоугольного сечения, на ней имеются две полки и два ящика для хранения инструмента.
Выпрямитель стабилизированный предназначен для питания проверяемой аппаратуры и цепей стенда напряжением постоянного тока 27 В. Выпрямитель является самостоятельным изделием, входящим в комплект стенда. Пульт-модуль проверки плат источников питания наземных радиотехнических средств УВД, навигации, посадки (Корень-АС, АРП-75 и др.) выполнен в виде отдельного съемного блока и подключается к стенду с помощью ножевого разъема типа РП 14-ЗОЛ, через который подаются питающие напряжения на модуль.
Модуль в стенде фиксируется с помощью ручек-замков, при закрытии которых обеспечивается надежный контакт в разъеме. Корпус пульта-модуля прямоугольной формы выполнен из листовой стали. На лицевой панели пульта-модуля расположены:
разъемы А и Б типа РП-15-32ГВВ, с помощью которых проверяемая плата подключается к пульту-модулю;
наборное поле из гнезд, обеспечивающее подачу питающих напряжений, входных сигналов, подключение нагрузки к проверяемой плате;
два галетных переключателя, которые изменяют нагрузки на выходе проверяемой платы;
224
два реостата, плавно изменяющих ток нагрузки при проверке плат преобразователей напряжения;
два измерительных прибора: для контроля тока нагрузки стабилизаторов напряжения (0...10А) и для контроля тока нагрузки преобразователей напряжения (0...1А);
тумблер ВЗ для подачи питания к наборному полю питающих напряжений (+27 В,—27 В, + 37 В, —37 В);
лампа Л1 СМ-28 для сигнализации о включении пульта-модуля, гнезда для подключения нагрузки и подачи питающих напряжений к наборному полю.
Пульт-модуль проверки цифровых и аналоговых плат служит для подачи питающих напряжений на проверяемую плату, тестовых сигналов и стимулирующих сигналов, подключения эквивалентов нагрузки к функциональным узлам проверяемой платы, подключения измерительных приборов к любому контакту выходного разъема проверяемой платы.
Пульт-модуль проверки радиостанции «Баклан» выполнен в виде отдельного съемного блока. Он предназначен для проверки радиостанции на соответствие нормам и одновременно служит эквивалентом нагрузки передатчика радиостанции. Пульт подключается к стенду с помощью ножевого разъема типа РП14-30Л, через который подаются питающие напряжения на модуль. Фиксация модуля в стенде производится с помощью ручек-замков, при закрытии которых обеспечивается надежный контакт в разъеме. Корпус пульта-модуля прямоугольной формы из листовой стали.
На лицевой панели пульта-модуля расположены пульт дистанционного управления радиостанции «Баклан», два стрелочных прибора для измерения тока в эквиваленте антенны и глубины модуляции, стрелочный прибор для измерения потребляемого радиостанцией тока, разъем для подключения радиостанции к пульту-модулю, ВЧ разъем «Эквивалент» для подключения выхода приемопередатчика к эквиваленту антенны, ВЧ разъем для подключения внешнего генератора, клеммы «ЛАР» для подключения ларингофонов или звукового генератора, клеммы «Тел» для подключения телефонов; разъемы «Тел» для подключения абонентской гарнитуры, кнопка и выключатель «Передача» для включения станции в режим передачи; лампа СМ-28, сигнализирующая о включении радиостанции в режим передачи, выключатель «Вкл», с помощью которого производится подача напряжения +27 В на радиостанцию «Баклан»; лампа СМ-28 «27В», сигнализирующая о наличии напряжения +27 В; выключатель для проверки ламп подсвета пульта управления радиостанции «Баклан»; переключатель («1А-0.5А») для изменения пределов измерения тока в эквивалентах антенн, переключатель для выбора вида измерений, производимых на пульте-модуле; ручка «Уст. нес.» для установки уровня несущей при измерении глубины модуляции; клемма «Изм. искаж.» для подключения измерителя
225
нелинейных искажений; арматура «10А» предохранителя для защиты пульта-модуля по сети + 27 В.
Рама-подставка предназначена для установки и подключения печатных плат, выполненных на микроэлементной базе к испытательному стенду. Она представляет собой основание, на котором установлен поворотный диск. На диске неразъемно крепятся стойки, на которых с помощью оси и штока установлена рама с унифицированными направляющими для различных типов печатных плат. Рама свободно поворачивается вокруг оси на 240° с фиксированными остановками через каждые 30°. Установка рамы в фиксированное положение обеспечивается кнопочным фиксатором. Это позволяет работать с печатной платой как со стороны печатного монтажа, так и со стороны элементов. В раме предусмотрено посадочное место на монтажной пластине для крепления различных типов разъемов, применяемых в печатных платах многих типов РЭО.
Поворотный диск вращается вокруг оси на 360° с фиксированными установками через каждые 30°. Фиксация обеспечивается рычагом, установленным на основании. Горизонтальное поворотное устройство и поворотное устройство рамы позволяют разворачивать и устанавливать печатную плату под любым углом к оператору.
7.6. МЕТОДЫ И АППАРАТУРА
ЛЕТНОГО КОНТРОЛЯ РЭО
Работоспособность наземных радиотехнических средств обеспечения полетов характеризуется соответствием их эксплуатационных характеристик установленным нормам. Один из методов установления соответствия — летный контроль средств РТО и связи. Он основан на испытательных полетах (облетах) самолетов-лабораторий, которые проводятся по соответствующим программам. В процессе испытательных полетов измеряются необходимые параметры и обрабатываются данные для определения внешних характеристик наземного РТО. Номинальные значения внешних характеристик РТО и допустимые значения их погрешностей обычно определены требованиями соответствующих технических условий и стандартов. После сопоставления результатов летных испытаний с требованиями технических условий и стандартов делается заключение о соответствии внешних характеристик РТО установленным нормам.
Летные проверки средств РТО и связи баз ЭРТОС организуются и контролируются постоянно действующими комиссиями, возглавляемыми заместителями командира объединенного авиаотряда по организации летной работы. Летные проверки наземных средств в базах ЭРТОС выполняются самолетами-лабораториями специализированных авиаэскадрилий в соответствии с годовыми планами-графиками. Работу эскадрилий в закрепленных за ними зонах организует старший ин-226
женер-инспектор отдела ЭРТОС управления ГА, за которым закреплены самолеты-лаборатории.
Периодичность, объем и технология выполнения летных проверок наземного РТО определяются инструкцией по организации, планированию и о порядке выполнения летных проверок средств радиотехнического обеспечения полетов и связи в соответствии с руководящими программами и - методическими указаниями по летному контролю средств РТО и связи. Результаты летных проверок оформляются соответствующими актами. Помимо трудоемких плановых периодических летных проверок оборудования РТО и связи, с помощью самолетов-лабораторий осуществляется также ежедневная проверка качества работы наземных РТО с помощью рейсовых ВС. При этом командир ВС сообщает результаты оценки характеристик средств РТО и связи руководителю полетов аэропорта и эти сведения записываются в Журнал отзыва диспетчерского состава о работе средств РТО. Для летных проверок используют самолеты-лаборатории, оборудованные различными специализированными комплектамй аппаратуры: '
летно-испытательными комплексами ЛИК-1 и ЛИК-2, выполненными на базе стандартного бортового РТО, позволяющего производить летный контроль радиомаячных систем посадки I категории и радиомаяков РСБН с записью информации на шлейфовые осциллографы типа К20-22;
аппаратурой летного контроля АЛК-70, предназначенной для летной проверки систем посадки I, II и III категорий с записью информации на шлейфовый осциллограф К12-22;
аппаратурой «Стандарт-2», предназначенной для летных проверок параметров радиотехнических систем посадки, ближней навигации и средств УВД с автоматической обработкой данных облетов на бортовой ЭВМ и получением результатов непосредственно в процессе контрольных полетов самолета-лаборатории.
Различают контрольную и инструментальную летную проверки систем посадки. Контрольная проверка проводится ежедневно с помо-мощью рейсовых самолетов на уверенное срабатывание бленкеров указателей системы посадки и правильность положения курсовой линии и глиссады планирования, а также отсутствие их искривления. Инструментальная летная проверка систем посадки выполняется самолетом-лабораторией в соответствии с Руководством по летной проверке радиомаячных систем посадки для выявления соответствия внешних характеристик курсового и глиссадного радиомаяков нормам ГОСТ и стандартов ИКАО и поддержания этих характеристик в пределах установленных допусков.
Внешние характеристики посадочных радиомаяков представляют собой параметры усредненной линейной зависимости:
/к (*)=/ok+Sk*;
/г tty—/ог-т"5г0,
227
где Ф и 6 — угловые отклонения ВС относительно номинальной линии курса и глиссады; /к (Ф), /г (0) — значение разности глубины модуляции (РГМ) сигналов на выходе курсового и глиссадного приемников; /0K, /ог — смещение линий курса и глиссады; SK, Sr — крутизна зон курса глиссады.
Аппаратура летного контроля позволяет получать на борту самолета-лаборатории и записывать в виде линий на ленте шлейфового осциллографа значения РГМ в каждой точке траектории полета и соответствующие угловые положения ВС. По результатам летного контроля курсовых радиомаяков определяются следующие основные параметры: положение линии курса относительно оси ВПП; искривления линии курса; ширину курсового спектра; зону действия и дальность действия радиомаяка; уровень вертикальной составляющей электромагнитного поля радиомаяка; правильность действия системы автоматического допускового контроля. Для глиссадного радиомаяка проверяются: угол глиссады планирования; наличие и характер искривлений линии глиссады; положение границ полусекторов глиссады; дальность действия; зону действия; правильность срабатывания системы автомати
ческого допускового контроля.
В измерительных комплексах самолетов-лабораторий различных модификаций для контроля систем посадки устанавливается следующая
аппаратура: эталонные курсовые, глиссадные и маркерные приемники; УКВ радиостанции для связи с оператором теодолита; компенсацион-
Рис. 67. Струк1\рная схема аппаратуры летного контроля
ная приставка, обеспечивающая возможность пилотирования самолета-лаборатории по «нулю» индикатора пилота при полете по краям секторов; регистрирующая аппаратура (шлейфовые осциллографы); электронный осциллограф контроля формы сигналов; электронные часы для синхронизации временных меток. Наземные контрольные пункты для определения углового положения самолета-лаборатории в горизонтальной и вертикальной плоскостях оборудуются теодолитами и УКВ радиостанцией, а также телеметрическим устройством передачи данных от теодолита на борт самолета-лаборатории об его угловом положении.
В качестве примера рассмотрим работу измерительного комплекса аппаратуры летного контроля (АЛК) самолета-лаборатории (рис. 67).
228
Входные сигналы курсового и глиссадного радиомаяка, принятые антенно-фидерной системой (АФС) измерительного комплекса, поступают на вход двух комплектов приемных устройств бортового оборудования КУРС-МП-2. Сигналы с выходов курсового КРП и глиссадного ГРП приемников поступают на измерительные приставки ПИК. и ПИГ, предназначенные для выдачи тока компенсации на пилотажный прибор пилота КППМ, позволяющий вести ВС по «нулю» КППМ при полете по краям секторов зон курса или глиссады. С измерительных приставок сигналы курса и глиссады поступают на шлейфовые осциллографы ШОК и ШОГ для записи изменения сигналов на ленту (рулонную фотобумагу).
Сигналы с выхода измерительных приставок поступают на стрелочные индикаторные приборы для визуального контроля сигналов и на переключатель прибора пилота ППП, позволяющий подключать КППМ к первому или второму комплекту КУРС-МП-2. Сигналы автоматической регулировки усиления (АРУ) с приемников КУРС-МП-2 подаются на выходы усилителей этих сигналов УАК и У АГ и далее на шлейфовые осциллографы для записи на ленту и измерительный прибор, подключенный к курсовому или глиссадному каналу усилителя АРУ. По значению напряжения АРУ приемников оценивают уровень сигнала на входе приемных устройств.
При пролете самолетом-лабораторией зоны действия маркерных радиомаяков сигнал с выхода маркерных приемников МРП поступает на шлейфовый осциллограф для записи, а также на электрозвонок и сигнальные лампы. Для записи и контроля траектории полета самолета-лаборатории используется канал траекторной записи. Сигналы с траекторной информацией от наземной части устройства траекторной записи принимаются УКВ радиостанцией PC и далее через блок частотного дискриминатора ЧД подаются на шлейфовые осциллографы для записи траектории полета и на стрелочный прибор для визуальной индикации. Для синхронизации временных меток используются электронные часы ЭЧ.
Для оперативной оценки характеристик систем посадки непосредственно в процессе облета используется информация от контрольных стрелочных приборов. Информация, записанная на ленте шлейфовых осциллографов, обрабатывается на земле «вручную» или с помощью ЭВМ по соответствующим ^алгоритмам обработки данных.
Применение в измерительных комплексах самолетов-лабораторий шлейфовых осциллографов обусловливает ряд недостатков существующих неавтоматизированных методов определения выходных характеристик систем посадки, таких, как низкая точность регистрации контролируемых параметров и значительные погрешности, вносимые в окончательные результаты при ручной обработке информации. Процессы обработки информации, записанной на фотолентах шлейфовых осциллографов, весьма длительны и трудоемки. Данные облетов записываются в графической форме, а не в числовых значениях, что не позволяет не-
229
посредственно использовать для обработки и анализа цифровую вычислительную технику. Результаты измерений, записанные на фотолентах, не могут быть использованы непосредственно в процессе облета
Рис. 68. Структурная схема бортовой радиомаяков для корректирующих системы измерения и регистрации воздействий, что в значительной степени снижает эффективность летных испытаний систем посадки.
Повышение точности измерений сигналов курсоглиссадных радиомаяков и эффективности использования самолетов-лабораторий можно достичь с помощью методов и аппаратуры дискретного цифрового измерения и регистрации параметров летного контроля (рис. 68). На вход коммутатора К от приемников системы посадки поступают контролируемые параметры, которые поочередно подаются к аналогоцифровому преобразователю АЦП. В АЦП измеряется параметр и выдается его цифровой код на транскриптор Т. Последний формирует импульсы для цифропечатающего механизма ЦПМ (печать номеров и измеренных значений параметров на бумажную ленту).
Синхронизацию и управление работой всех узлов осуществляет блок управления БУ. Дискретные системы автоматизированного контроля и регистрации сигналов систем посадки являются более перспективными для использования в комплексах самолетов-лабораторий, что обус-
ловлено следующими преимуществами: возможностью автоматического измерения необходимого числа контролируемых параметров с высокой степенью точности; автоматической регистрацией результатов измерений в цифровой форме на бумажной ленте; возможностью использовать отпечатанную на ленте информацию для анализа качества работы радиомаяков в процессе облета; возможностью непосредственного использования ЦВМ для обработки результатов измерений.
В измерительном комплексе «Стандарт-2», кроме традиционных каналов записи информации на ленты шлейфовых осиллографов, осуществляется автоматическая обработка данных облетов с помощью бортовой ЭВМ. Эго позволяет получать оценки характеристик глиссадных радиомаяков непосредственно в процессе летных проверок и принять решение о необходимых регулировках наземных радиомаяков и возможных корректировках процедуры летного контроля.
Применение бортовых ЦВМ в измерительных комплексах самолетов-лабораторий позволяет решать также вопросы летной проверки новых микроволновых систем посадки (МСП) со сканирующим лучом.
Угловая информация в МСП определяется значением временного интервала между импульсами прямого и обратного хода луча. Временной интервал между импульсами, выделяемый в бортовом приемнике МСП, пропорционален текущему значению углового положения (0) ВС
230
относительно номинальных линий курса и глиссады. Пропорциональное кодирование угловых данных МСП выражается зависимостью
0=£-i
где t — разность между отметками времени прямого и обратного хода лучей; 0 — угловое положение бортового приемника в градусах; k — постоянная масштаба в мкс/градус; ta — начальное время, соответствующее нулевому отклонению приемника от номинальных линий курса, глиссады.
Задача измерительного комплекса самолета-лаборатории при контроле МСП — исследование зависимостей время-угол для курсового и глиссадного радиомаяков МСП, которые получены на основе общей линейной зависимости:
1ок+*1ф;
<г= 0>
где Ф, 0 — усредненные условные отклонения ВС относительно номинальных ли. ний курса и глиссады; /к, tT — усредненные измеряемые бортовым оборудованием МСП временные интервалы; /ок. ^ок — начальное время, соответствующее нулевому отклонению от номинального курса и глиссады; klt kt—постоянные масштаба для курсового и глиссадного радиомаяков.
Алгоритм статистической обработки информации при летном контроле МСП' целесообразно реализовать на основе методов наименьших квадратов и нарастающего объема информации. Основные параметры можно оценить в соответствии с формулами, определяющими коэффициент масштаба для преобразования данных во временные (крутизна зоны):
смещения номинальных линий курса и глиссады МСП
Г0=7—60;
искривления направленного излучения
2a=at)<r=^.
В приведенных формулах tt и 0, — текущие значения измеряемых временных интервалов и углов; п — общее число измерений на исследуемом участке траектории; crt — среднее квадратическое отклонение измеряемого временного интервала; рк — коэффициент корреляции величин время — угол.
Структурная схема аппаратуры летного контроля МСП (рис. 69) включает блок управления измерительного комплекса БУ; аналого-цифровой преобразователь АЦП; ключевые схемы в аналоговых и циф-231
Ашогобые параметрьГ
Дискретные лараметрь*
Сигналы синхронизации от при^ емника. мсп
Рис. 69. Структурная схема аппаратуры летного контроля МСП
ровых каналах КС-1 и КС-2-, вычислительное устройство ВУ, состоящее из оперативного запоминающего устройства ОЗУ, арифметического устройства А У и устройства управления УУ; долговременное запоминающее устройство ДЗУ с блоком ввода дополнительных данных Б ВД\ цифропечатающее устройство ЦПУ. Аппаратура лет
ного контроля микроволновой системы посадки выполняет автоматиче-
ское измерение параметров летного контроля, математическую обработку данных контроля и регистрацию результатов на бумажную ленту.
Особенность аппаратуры контроля МСП — отсутствие сложных коммутирующих устройств вследствие временного разделения сигналов курсовых и глиссадных радиомаяков МСП. Дискретные значения сигналов радиомаяков принимаются приемником МСП с частотой обновления данных, заданных форматом последовательности сигналом МПС, и в виде числового кода вводятся непосредственно в ОЗУ вычислительного устройства.
Программное устройство блока управления обеспечивает управление ключевыми схемами, измерением и накоплением информации, циклами математической обработки данных, а также выводом и регистрацией результатов на ЦПУ в соответствии с требованиями к конкретным участкам рабочей зоны микроволновой системы посадки
и этапами летного контроля.
7.7. КОНТРОЛЬНО-ИСПЫТАТЕЛЬНЫЙ ГЕНЕРАТОР АВТОМАТИЧЕСКИХ РАДИОПЕЛЕНГАТОРОВ
Контрольно-испытательный генератор предназначен для контроля общей работоспособности, проверки точности и привязки автоматических радиопеленгаторов при их установке. Автоматические радиопеленгаторы служат для определения пеленгов ВС, оборудованных УКВ радиостанциями. Пеленг используется диспетчером для опознавания ВС, экипаж которого ведет передачу.
Рис. 70. Структурная схема контрольно-испытательного генератора
232
На рис. 70 представлена структурная схема контрольно-испытательного генератора (КИГ). Он состоит из задающего кварцевого автогенератора ЗГ, резонансного усилителя РУ мощности, генератора гармоник ГГ, фильтра Ф, стабилизатора Ст. Генератор гармоник пре-
образует синусоидальный сигнал кварцевого автогенератора в линейный спектр гармоник, отстоящих друг от друга на интервал, равный частоте автогенератора. Высокочастотные колебания с генератора гармоник через симметрирующее устройство поступают в антенну КИГ и излучаются в эфир. Эти колебания на частотах диапазона автоматического радиопеленгатора принимаются его антенной и используются для контроля общей работоспособности радиопеленгатора.
Антенна КИГ располагается на расстоянии до 100 м от места установки радиопеленгатора в северном направлении по отношению к месту его установки или под углом, кратным 45. Для проверки точности работы автоматического радиопеленгатора включают КИГ и поворотом антенны радиопеленгатора устанавливают нулевое значение на индикаторе пеленга. Затем совмещают нулевое деление шкалы лимба поворотного устройства антенны радиопеленгатора с визиром и закрепляют лимб стопорным винтом. Вращая антенное устройство радиопеленгатора, определяют пеленг на КИГ через каждые 22,5° и на каждом из 16 румбов вычисляют инструментальную погрешность (Д) как разность между углом, отсчитанным по лимбу поворотного устройства и отсчетом, снятым по шкале индикатора пеленга. Зная инструментальную погрешность на каждом из румбов (А]; Д2,... Д1в), вычисляют среднеквад-
S (А,)2, где и—число измерений. Эта i— 1
погрешность не должна превышать погрешности, установленной для конкретного радиопеленгатора.
7.8. СРЕДСТВА ЭЛЕКТРОСНАБЖЕНИЯ РЭО
Система электроснабжения аэропорта предназначена для обеспечения бесперебойной подачи электроэнергии к технологическим потребителям, расположенным на его территории.
Электроснабжение аэропортов, аэродромы которых оборудованы категорийными (по посадочному метеоминимуму норм ИКАО) системами посадки и светосигнальным оборудованием, как правило, должно осуществляться не менее чем от двух независимых внешних источников по независимым линиям электропередачи. Перевод электроснабжения этих аэропортов с одного источника на другой осуществляется автоматически. Электроснабжение аэропортов, аэродромы которых оборудованы некатегорированными системами посадки, должно осуществляться от двух независимых источников, один из которых—резервный может быть выполнен на автономных источниках питания.
Система электроснабжения РЭО должна отвечать требованиям Правил устройства электроустановок, а степень надежности электроснабжения должна соответствовать категориям, указанным в табл. 22.
8 Зак. 2262 288
Таблица 22
Тип РЭО
Категории по степени надежности электроснабжения
Первая особая
Первая
Оборудование систем посадки (ОСП): ближняя приводная радиостанция с маркером (БПРМ) дальняя приводная радиостанция с маркером (ДПРМ) Некатегорированная система посадки: курсовой радиомаяк (КРМ) глиссадный радиомаяк (ГРМ) ближний маркерный радиомаяк (МРМ) дальний МРМ Система посадки I категории: КРМ ГРМ ближний МРМ дальний МРМ Системы посадки II категории: КРМ ГРМ ближний МРМ дальний МРМ Командно-диспетчерские пукты: КДП I.. .V разрядов: средства авиационной воздушной связи средства авиационной наземной связи автоматическая телефонная станция (АТС) диспетчерские пункты с выносными индикаторами стартовый диспетчерский пункт (СДП): средства авиационной воздушной связи метеооборудование Средства РТО: обзорный радиолокатор посадочный радиолокатор обзорно-посадочный радиолокатор диспетчерский радиолокатор радиолокатор обзора летного поля автоматические УКВ радиопеленгаторы метеорологический радиолокатор МРЛ радиомаячная система ближней навигации + + + + + + + + + + + + + + + + + + + + + + + + + + +
Примечания. 1. Первой особой категории соответствует электроснабжение РЭО от трех источников (два независимых внешних и третий — аварийные агрегаты).
2. Первой категории соответствует электроснабжение РЭО от двух источников (один — внешний независимый, другой дизель-электрический агрегат).
234
Трансформаторные подстанции, питающие категорированные системы посадки, а также объекты УВД, навигации и связи, как правило, должны получать электропитание от двух независимых источников по независимым кабельным линиям. Трансформаторы в трансформаторных подстанциях должны иметь устройство автоматического ввода резерва электропитания по низкому напряжению.
Категорированные системы посадки, а также объекты УВД, радионавигации и связи независимо от наличия второго внешнего источника должны обеспечиваться резервным электропитанием от автоматизированных дизель-электрических агрегатов.
Характеристики и методы эксплуатации аккумуляторов. Электрические аккумуляторы являются химическими источниками постоянного тока, запас химической энергии в котором создается во время процесса, называемого зарядом от другого источника постоянного тока.
Аккумуляторы состоят из положительных и отрицательных пластин, погруженных в раствор электролита, налитого в специальный сосуд. В зависимости от состава пластин и раствора электролита аккумуляторы делятся на кислотные и щелочные. Пластины кислотных аккумуляторов различны по конструкции, но все они состоят из свинцовой решетки и активной массы, которая заполняет пространство между решетками. Активная масса служит для окислительно-восстановительных процессов и изготавливается из свинцового порошка и окислов свинца. В процессе заряда на положительной пластине образуется двуокись свинца (темно-коричневого цвета), а на отрицательной — губчатый свинец (серого цвета).
Для увеличения емкости аккумулятор собирается из нескольких положительных и отрицательных пластин. Положительные пластины перемещаются между отрицательными, поэтому последних всегда на одну пластину больше. Пластины одноименной полярности ушкамй привариваются к соединительным полосам. Для уменьшения внутреннего сопротивления аккумуляторные пластины размещают как можно ближе друг к другу.
Электролитом для свинцовых аккумуляторов служит раствор аккумуляторной кислоты с дистиллированной водой. Техническая серная кислота, вода из водопровода, реки непригодны для приготовления электролита из-за наличия химических веществ, вредных для работы аккумуляторов. Номинальное напряжение свинцового стационарного аккумулятора любой емкости принято считать равным 2 В. Для получения требуемого напряжения аккумуляторы соединяют последовательно, образуя аккумуляторную батарею, а для получения необходимой емкости при разряде аккумуляторные батареи соединяют параллельно.
Стационарные аккумуляторы типа С эксплуатируются в условиях, когда разряд длится от 3 до 10 ч. Аккумуляторы типа СК допускают разряд в течение 1...2 ч. Разряд аккумуляторов типа С производят до напряжения не ниже 1,8 В. Аккумуляторы типа СК отличаются от ак-8* 235
кумуляторов типа С только усиленными соединительными полосами. Основные электрические данные аккумуляторов типа С (СК) приведены в табл. 23. Для заливки аккумуляторов используется электролит плотностью 1,18 при t = 25 °C.
Эксплуатация аккумуляторов осуществляется по способу заряд-разряд, для чего обычно устанавливают две группы аккумуляторных батарей. Одна группа включается на разряд, вторая на заряд и по окончании заряда находится в резерве. Батарея после окончания разряда находится в резерве. Перед зарядом батареи проверяют: напряжение на элементах, плотность электролита, уровень электролита. Напряжение зарядного агрегата должно быть всегда выше напряжения батареи. По мере роста противоЭДС батареи ток заряда снижается, поэтому напряжение зарядного агрегата необходимо повышать. Заряд оканчивается, когда напряжение заряда и плотность электролита достигают максимума и в течение 1 ч остаются постоянными. Во всех элементах происходит интенсивное газообразование.
В процессе эксплуатации в нижней части аккумулятора образуется так называемый шлам, который может привести к короткому замыканию пластин. Быстрое образование шлама вызывается систематическими перезарядами или недозарядами, глубокими разрядами, загрязнением электролита примесями. Большим недостатком аккумуляторных батарей является наличие саморазряда, для снижения которого необходимо хорошо изолировать сосуды элементов от стеллажей и поддерживать частоту сосудов от осевших паров кислоты, не допускать выброса электролита.
Щелочные аккумуляторы выполняются закрытыми. Они более прочные, не боятся перегрузок, коротких замыканий, работают в широком диапазоне температур, плотность электролита при зарядке и разрядке не меняется. Наиболее распространены кадмиево-никелевые и железоникелевые щелочные аккумуляторы. В них положительные и отрицательные пластины помещены в стальной сосуд и залиты электроли-
Таблица 23
Тип аккумулятора Зарядный ток, А Номинальное напряжение, В Номинальная емкость, А-ч Тип аккумулятора Зарядный ток, А Номинальное напряжение, В Номинальная емкость, А*ч
ЗСТ-65ЭР 6,5 6 65 ЗСТ-215ЭР 21,5 6 215
ЗСТ-80ПМС 8,5 6 80 6СТ-55ЭМ 5,5 12 55
ЗСТ-95ПМС 9,5 6 95 6СТ-75ТРС 7,5 12 75
ЗСТ-ПОПМС 11,0 6 НО 6СТ-90ЭРС 9,0 12 90
ЗСТ-150ЭР 15,0 6 150 6СТ-105ЭРС 10,5 12 105
ЗТСТ-150ЭРС 15,0 6 150 6СТМК-128МСУ2 10,0 12 128
ЗТСТ-150ТРС 15,0 6 150 6ТСТ-132ЭРС 13,0 12 132
236
Таблица 24-
Тип аккумулятора Номинальная емкость, А-ч Номинальный ток заряда, А Ток разряда
при нормальном восьмичасовом режиме при одночасовом режиме
АКН-2,25 2,25 0,56 0,28 2,25
АКН-10 10 2,5 1,25 10
НКН-22 (ЖН-22) 22 5,5 2,75 22
НКН-45 (ЖН-45) 45 11,25 5,65 45
НКН-60 (ЖН-60) 60 15 7,5 ' 60
НКН-100 (ЖН-100) 100 25 12,5 100
ТОМ из щелочи. Активная масса отрицательных пластин у аккумуляторов типа КН содержит калий и железо, а у аккумуляторов типа ЖН только железо и его окислы. Активная масса пластин засыпается в пакеты из тонкой стальной перфорированной ленты с очень малыми отверстиями, необходимыми для взаимодействия с электролитом.
Активная масса положительных пластин состоит из окислов никеля, смешанных с графитом для повышения ее электропроводимости. У аккумуляторов типа КН крайние пластины — положительные, их на одну больше, чем отрицательных. Они прижаты к стенкам сосуда, поэтому сосуд находится под положительным потенциалом. В аккумуляторах типа ЖН больше отрицательных пластин, чем положительных, и поэтому сосуды их находятся под отрицательным потенциалом. Электрические данные некоторых щелочных аккумуляторов приведены в табл. 24.
В щелочных аккумуляторах электролитом является раствор едкого калия или натрия с добавлением едкого лития плотностью 1,21. На калиевом электролите аккумуляторы могут работать при температуре от —20 ... +35 °C, а на натриевом — при температуре 0...45 °C.
Щелочные аккумуляторы имеют три режима заряда: нормальный, усиленный и ускоренный. Эти режимы отличаются временем заряда и значением тока заряда относительно номинальной емкости батареи. Аккумуляторы типа КН можно заряжать токами, во много раз меньшими нормального зарядного тока, соответственно увеличивая время заряда. Для аккумуляторов ЖН снижать зарядный ток более чем на половину не рекомендуется. Систематические недозаряды ведут к снижению рабочей емкости аккумуляторов.
Измерение напряжения аккумуляторов во всех случаях (в том числе и при определении степени разряда) осуществляется при нормальной нагрузке. В настоящее время для питания некоторых типов аппаратуры применяют герметичные никель-кадмиевые аккумуляторные батареи. На примере аккумуляторной батареи 9НКГ-110СА рассмотрим устройство и принцип работы герметичных аккумуляторов. Бата-
237
рея состоит из девяти никель-кадмиевых герметичных аккумуляторов НКГ-ПОСА, соединенных между собой последовательно медными никелированными перемычками. Аккумуляторы в батарее крепятся по вертикали четырьмя пластмассовыми прижимными накидками, связанными с дном корпуса батареи при помощи четырех пластмассовых вертикально расположенных распорок и шпилек.
Для силовой опоры аккумуляторов при их закреплении в корпусе вварены три упорных кронштейна. Между кронштейнами и передней стенкой корпуса размещены электрические жгуты по всем четырем разъемам. Для электрической изоляции батареи внутренняя поверхность стенок корпуса оклеена стеклотканью. Верхняя часть стенок корпуса снабжена фланцем, в котором имеется канавка по замкнутому кругу. В канавке размещена уплотнительная резиновая прокладка. Крышка крепится к корпусу винтами с потайными головками. На дно корпуса батареи уложен датчик утечки электролита. Датчик состоит из двух пар пластин. Две нижние пластины из никелевой фольги соединены между собой. Две верхние пластины из никелевой сетки завернуты в сепаратор из хлориновой ткани и перфорированного винипласта и также соединены между собой. В аккумуляторе НКГ-ПОСА помещены 15 положительных и 16 отрицательных электродов. Каждый электрод состоит из двух металлических пластин толщиной 0,75 мм.
Разноименные электроды отделены друг от друга сепаратором. Блок положительных и отрицательных электродов изолирован от остального корпуса аккумулятора винипластовой прокладкой. Для защиты аккумулятора от перезаряда в нем предусмотрен индикатор конца заряда. Чувствительным элементом индикатора является металлический сильфон. Верхним контактом ИКЗ служит винт с припаянным колпачком. К нижней части сильфона приварена глухая втулка, к которой припаян нижний контакт индикатора. По мере нарастания давления внутри аккумулятора во время заряда сильфон сжимается. При этом нижний контакт перемещается в вертикальном направлении. При достижении заданного давления контакты замыкаются, что служит сигналом для отключения аккумулятора от зарядного устройства. В качестве электролита в аккумуляторе применяется раствор щелочи, который в основном находится в порах электродов и сепаратора.
Основные химические процессы, протекающие в никель-кадмиевом аккумуляторе, описываются уравнением
2Ni (ОН) +cd (ОН)2 , Р ’ * Cd+2NiOOH+2H2O.
разряд
При заряде аккумулятора на отрицательном электроде в случае его полного, заряда начинается выделение водорода по реакции 2Н2О + + 2е -> 2ОН“ + Н2. Для устранения выделения водорода в герметичном аккумуляторе емкость отрицательного электрода выбирается в 1,2 ...1,6 раза больше емкости положительного электрода. В этом слу-238
чае к моменту полного заряда положительного электрода (окончание заряда аккумулятора) на отрицательном электроде всегда имеется некоторый избыток гидроокиси кадмия и выделение водорода оказывается невозможным.
На положительном электроде в конце заряда герметичного аккумулятора наряду с основным процессом образования NiOOH идет выделение кислорода: 4ОН- -> 2Н2О+О2 + 4е. Выделившийся при заряде на положительном электроде кислород при разряде поглощается отрицательным электродом, в результате чего уменьшается давление в аккумуляторе.
Преобразовательные агрегаты. Для питания отдельных объектов РЭО применяется напряжение переменного тока частотой 400 Гц, поэтому на таких объектах устанавливают преобразователи. Они предназначены для преобразования трехфазного тока частотой 50 Гц в трехфазный ток частотой 400 Гц (при синхронной скорости вращения). Устройство и принцип работы преобразователей рассмотрим на примере наиболее часто используемого преобразователя ВПЛ-30МДП-Т/230-4/400.
Номинальные значения параметров изделия следующие: напряжение питающей сети 380 или 220 В; частота питающей сети 50 Гц, потребляемый ток 80 или 140 А, частота вращения 2920 об/мин; потребляемая мощность 42 кВт, выходная мощность 30 кВт, выходное напряжение 230 В, ток нагрузки 94 А, частота на выходе 390 Гц, коэффициент мощности нагрузки (cos ф) 0,8 (индуктивный). Ротор преобразователя вращается по часовой стрелке, если смотреть со стороны контактных колец.
Изделие выдерживает 10% -ную перегрузку по мощности в течение 1 ч при номинальном напряжении генератора и 50 % перегрузки по току в течение 2 мин.
В преобразователе предусмотрены автоматическое и ручное регулирование напряжения, а также переход с одного вида регулирования на другой. При изменении симметричной нагрузки со значением совф = 0,8 (индуктивная) в пределах0... 100 % номинальной напряжение генератора автоматически поддерживается с точностью ± 1 % от среднерегулируемого значения. Под среднерегулируемым значением понимается полусумма наибольшего и наименьшего значений напряжений, замеренных при проведении испытания.
При установившемся тепловом режиме и одном и том же значении нагрузки агрегата, лежащей в пределах 0 ... 100 % номинальной (при cos ф = 0,8), нестабильность выходного напряжения генератора не выходит за пределы ±1% от установившегося значения. Установка выходного напряжения может изменяться от,95 до 105 % от номинального значения при симметричной нагрузке.
Агрегат работает при несимметричной нагрузке до 25% от номинальной. При этом отклонение линейного или фазового напряжения по отношению к другим линейным или фазовым напряжениям не долж-239
но превышать 10 % номинального значения. Агрегат обеспечивает запуск непосредственным включением ненагруженного асинхронного двигателя мощностью 2,8 кВт. При этом перед включением двигателя нагрузка на генераторе должна быть не более 85 % номинальной. При внезапном изменении нагрузки от 100 до 50 % или от 50 до 100 % максимальное изменение напряжения генератора не превышает 15 % номинального в течение 0,1 с. Время восстановления напряжения генератора не более 0,75 с. При понижении напряжения питающей сети на 20 % от номинального значения частота генератора при номинальной нагрузке должна быть не менее 375 Гц.
Комплект кабельных сетей преобразователя обеспечивает подключение его к питающей сети на расстоянии до 15 м, нагрузки на расстояние до 25 м и пульта дистанционного управления на расстояние до 40 м. Допускается дистанционное управление агрегатом на расстоянии до 300 м.
В состав изделия входят преобразователь, силовой щит, щит управления, пульт дистанционного управления. Преобразователь состоит из асинхронного двигателя, синхронного генератора повышенной частоты и блока возбуждения. Силовой щит представляет собой сварной кожух с двумя откидывающимися крышками, на котором установлены автоматы переключений, панель переключения обмоток двигателя, предохранители, контакторы, трансформаторы тока, панель ввода, сигнальные лампы.
Щит управления включает в себя аппаратуру и приборы, обеспечивающие контроль работы агрегата и питания сети. С щита управления обеспечиваются пуск и остановка агрегата, ручная регулировка и установка напряжения (при автоматическом регулировании), параллельная работа двух агрегатов. На передней панели щита управления установлены: индикатор, вольтметры, амперметр, переключатели, сигнальные лампы, предохранители, микродвигатель с потенциометром. Внутри щита расположены в виде отдельных съемных элементов: блок реле, реле безопасности персонала, предохранитель, трансформатор, панель переключения обмоток трансформатора, конденсаторы. На задней стенке щита управления установлен блок корректора напряжения.
Пульт дистанционного управления, устанавливаемый на расстоянии до 300 м, предназначен для пуска и остановки преобразователя, контроля и установки напряжения на шинах генератора.
Кабельная сеть преобразователя состоит и трех силовых кабелей и кабеля дистанционного управления. Один из трех силовых кабелей служит для подключения нагрузки, два других предназначены для подключения к сети.
Схему преобразовательного агрегата можно разделить на две составные части: схему преобразователя ВПЛ-30 М со статической системой возбуждения и блоком корректора напряжения и схему управления и контроля. Преобразователь состоит из синхронного генератора и асинхронного двигателя, выполненных на одном валу и в общем кор-240
пусе. Схема соединения обмотки статора генератора — звезда с выведенной нейтралью. Для питания обмотки индуктора постоянным током служит система статического возбуждения, выполненная в отдельном блоке. Блок корректора напряжения состоит из корректора напряжения и устройства параллельной работы. Корректор напряжения предназначен для поддержания напряжения генератора на заданном уровне с определенной точностью.
Преобразователь может работать на нагрузку как автономный источник энергии, а также параллельно с агрегатом такого же типа и с ди-зель-электрическим агрегатом, допускающим параллельную работу. Для обеспечения нормальной параллельной работы агрегатов необходимо, чтобы активные и реактивные составляющие мощности, отдаваемой параллельно работающим агрегатам, распределялись между ними пропорционально. В противном случае один агрегат будет недогруженным, а другой перегруженным, что может привести к выходу последнего из строя.
Статическая система возбуждения с корректором обеспечивает поддержание напряжения на клеммах агрегата с точностью ±1 % при любых индуктивных нагрузках с cos ф от 1 до 0,8.
Схема управления и контроля обеспечивает пуск, установку, изменение напряжения, ручное и автоматическое его регулирование, параллельную работу агрегата, дистанционное управление агрегатом (пуск, остановку, изменение установки напряжения), защиту сети от короткого замыкания в обмотках двигателя, защиту генераторов от токов короткого замыкания, контроль работы агрегата.
Защита генератора от перегрузок и токов короткого замыкания обеспечивается тепловой защитой в автомате переключения. Кроме того, осуществляется постоянный контроль сопротивления изоляции цепей генератора по индикатору.
Дизель-генераторные установки. Они могут использоваться в качестве основных и резервных источников питания. Наиболее широко распространены автоматические дизель-генераторные установки. Основным оборудованием автоматизированной дизель-генераторной установки являются дизель-генератор с устройствами и приборами системы смазки, охлаждения и автоматики, щит основных устройств управления и контроля, выпрямитель, топливные расходные блоки, щит вспомогательных устройств. Для нормальной работы в дизель-генера-торе применяются две замкнутые системы охлаждения и смазки. Для циркуляции охлаждающей жидкости и масла в системах применяются водяной и масляный насосы. Для поддержания готовности дизеля к пуску вода и масло подогреваются электронагревателем.
Для поддержания постоянного уровня масла в поддоне предусмотрен бак долива масла. Уровень масла в поддоне картера автоматически регулируется с помощью поплавкового устройства. Для обеспечения длительной работы двигателя без смены масла масло тщательно очищается от механических примесей, образующихся при работе двигателя.
241
Во время работы дизеля контроль уровней охлаждающей жидкости, масла, топлива, температуры, давления и частоты вращения осуществляется приборами автоматического регулирования: комбинированным реле (автоматическое управление температурой и давлением в охлаждающей и масляной системах дизеля); центробежным реле, которое является датчиком скорости вращения коленчатого вала дизеля; аварийным стоп-устройством, предназначенным для автоматического или дистанционного управления остановкой дизеля.
Напряжение с генератора на нагрузку поступает через автоматический выключатель АВ и контактор КТ через предохранители П (рис.71).
Контрольно-измерительные приборы контролируют напряжение на выходе генератора, ток, потребляемый нагрузкой, и частоту. Постоянное напряжение автоматически поддерживается на зажимах генератора трехфазного тока блоком регулирования, установленным на генераторе, и электромагнитным корректором блока контроля (БК), установленным на специальном щите.
Блок регулирования выполнен по схеме фазового компаундирования. В состав схемы входят трехфазный линейный дроссель (Др1, Др2, ДрЗ) с воздушным зазором, блок конденсаторов С1, три трехфазных трансформатора тока ТТ. Дроссели Др1, Др2, ДрЗ с емкостью С1 настроены в резонанс на частоту 50 Гц. Трансформаторы ТТ работают с подмагничиванием и имеют по четыре обмотки. Напряжение на обмотку возбуждения генератора ОВГ подается с селенового выпрямителя СВ1. Чтобы обеспечить при пуске устойчивое самовозбуждение генератора, на обмотку 3 трансформатора ТТ подается напряжение от резонансной цепи Др1; Др2; ДрЗС1, которое трансформируется в обмотку 2 и выпрямляется выпрямителем СВ1.
Рис. 71. Электрическая схема дизель-генератора 242
При включении нагрузки на генератор по обмотке 1 протекает ток нагрузки, который трансформируется в обмотку 2, увеличивает ток возбуждения генератора. При изменении тока нагрузки меняется ток возбуждения генератора, компенсируя падение напряжения в генераторе, вызванное реакцией якоря. Однако вследствие зависимости напряжения генератора от частоты его вращения и температуры схема фазового компандирования не обеспечивает стабильного напряжения на выходе генератора. Для создания стабильного напряжения используют электромагнитный корректор напряжения который через обмотку подмагничивания 4 компандирующих трансформаторов тока ТТ воздействует на схему возбуждения генератора. Напряжение с выхода генератора через автотрансформатор подается на магнитный усилитель МУ и на измерительную цепь. Измерительная сеть состоит из линейного Л Др и нелинейного дросселя НДр и конденсатора С2. Применение нелинейного дросселя в измерительной цепи позволяет ей реагировать только на изменение напряжения и не реагировать на изменения частоты сети в пределах 48...52 Гц.
Незначительное увеличение напряжения на клеммах генератора вызывает резкое увеличение тока нелинейного дросселя измерительной цепи, который через выпрямитель СВЧ управляет работой (МУ). Магнитный усилитель через выпрямитель (СВ2) увеличивает ток подмагничивания ТТ. С увеличением тока подмагничивания уменьшается вторичный ток ТТ, следовательно, уменьшается ток возбуждения и снижается напряжение на клеммах генератора. При этом процессы в электромагнитном корректоре происходят в обратном направлении.
Автоматический пуск дизель-генератора осуществляется со специального щита, на котором расположены органы управления электродвигателями подкачки топлива, приточной и вытяжной вентиляции и сигнализации об аварийном состоянии вспомогательных устройств.
Аккумуляторные батареи стартера и питания цепи автоматики эксплуатируются в режиме подзаряда. Выпрямительное устройство для заряда аккумуляторных батерей подключается к силовому щиту низкого напряжения.
Бензоэлектрические агрегаты. Они могут использоваться для заряда аккумуляторных батарей, питания сети освещения и других потребителей постоянного тока. В состав агрегата входят генератор постоянного тока и бензиновый двигатель. При эксплуатации РЭО в условиях, где отсутствует сеть переменного тока, бензоагрегаты устанавливаются стационарно. Бензоагрегат устанавливается на прицепах и имеет следующие технические характеристики:
Мощность генератора, кВт...............1 (ток постоян-
ный) Напряжение генератора, В . . .30 (номинальный
ток 33,3 А) Двигатель типа 2СДв....................... 1,471 кВт
Частота вращения, об/мин................... 3000
243
Расход топлива при номинальной мощности, кг/ч............................................ 0,86
Расход масла при номинальной мощности, кг/ч 0,04
Двигатель, спаренный с генератором, крепится к основанию на трех I амортизаторах. Соединение двигателя с генератором осуществляется посредством фланцев. К корпусу генератора крепится блок управления, в котором размещаются аппаратура управления и регулирования, измерительные приборы и другие элементы электрической схемы. Топливный бак располагается над блоком управления и крепится к корпусу j двигателя. Топливо через кран самотеком поступает в карбюратор. С обратной стороны агрегата размещаются магнето, глушитель и панель для подключения кабеля нагрузки. На блоке управления размещаются амперметр постоянного тока, вольтметр, ручка шунтового реостата, ручка выключения нагрузки, автомат с токовой защитой.
В агрегате применяется генератор с шунтовым возбуждением. Электрическая схема агрегата (рис. 72) содержит три цепи: работаю- j щую на внешнюю нагрузку, возбуждения генератора постоянного тока и для пуска двигателя от стартерной аккумуляторной батареи.
Электрическая цепь агрегата при работе на нагрузку состоит из положительной клеммы + V панели вывода, выключателя нагрузки АЗ (автомата токовой защиты), шунта амперметра ША, проходных кон- I
денсаторов ЗК и 5/(, якоря генератора Г, переходных конденсаторов ’
6К и 4К, отрицательного зажима — >7 панели вывода. Для контроля тока нагрузки и напряжения* вырабатываемого генератором, применяют амперметр и вольтметр. Электрическая цепь возбуждения гене- ( ратора состоит из шунтовой обмотки генератора ОШ, проходного конденсатора 1К, шунтового реостата Р, положительного зажима панели вывода, проходного конденсатора 2К, сериесной обмотки ОС генератора. I
При пуске агрегата от стартерной аккумуляторной батареи генера- | тор имеет компаундное возбуждение, состоящее из двух параллельных цепей: сериесной, включающей положительную клемму + С панели ! вывода, проходной конденсатор 2К, сериесную обмотку ОС, проходные конденсаторы 5К, 6К, 4К, отрицательную клемму — fl, шунтовый, включающий перемычку П, положи-
♦Шо- - Q+C <}+Я ~Я" 1 Ия „ Г ' ша (а) 1 (7) 2к\^ 5К 6К Н- ОС т ОШ Рис. 72. Электрическая схема бензо-электрического агрегата тельный зажим +Ш панели вывода, шунтовый реостат Р, проходной конденсатор 1К., шунтовую обмотку ОШ. В агрегате применяется двига-т ель с воздушным охлаждением, од-ноцилиндровый, с петлевой кривошипно-камерной продувкой. Двига-тель р аботает с электрическими генераторами постоянного или переменного тока мощностью 750... 1000 Вт.
244
\
Двигатель снабжается центробежным регулятором оборотов, автоматически поддерживающим частоту вращения вала двигателя в заданных пределах при изменении нагрузки от 0 до 100%. Регулятор оборотов через систему рычагов воздействует на дроссельный золотник карбюратора и, открывая или закрывая его, регулирует поступление в цилиндр такого количества топливной смеси, которое соответствует нагрузке. На коленчатом валу установлена крыльчатка вентилятора, обдувающая головку и цилиндр двигателя.
Двигатель работает на смеси автомобильного бензина А66 и А72 с маслом АСп-10, АКп-10 с присадкой СК-3. Смесь составляется в следующем отношении: 1 часть масла и 25 частей бензина. Для этого 50 % бензина тщательно перемешивается с маслом, затем доливают остальные 50 % бензина и вновь смесь перемешивают. Составленная смесь через воронку с сеточным фильтром заливается в бак для топлива. Для остановки двигателя выключается нагрузка и перекрывается топливный кран. В аварийных случаях для быстрой остановки двигателя выключается зажигание нажатием кнопки на магнето.
7.9. ПРОЕКТИРОВАНИЕ СИСТЕМЫ ЭКСПЛУАТАЦИИ
АВИАЦИОННОГО РЭО
Задача проектирования системы эксплуатации РЭО возникает при создании или модернизации баз ЭРТОС авиапредприятий ГА, а также при изменении состава эксплуатируемого РЭО, например, при замене устаревшего оборудования новыми образцами. Цель проектирования — разработка проекта системы эксплуатации, которая должна обеспечивать требуемое качество радиотехнического обеспечения производственной деятельности авиапредприятий.
Основные этапы проектирования системы эксплуатации РЭО следующие.
1. Разработка и анализ требований к системе радиотехнического обеспечения производственной деятельности авиапредприятия. На данном этапе необходимо сформулировать и дать описание требований, которым должна удовлетворять система радиотехнического обеспечения производственной деятельности. При решении этой задачи необходимо исходить из функционального назначения авиапредприятия, видов и объемов авиационных работ, которые предстоит выполнять данному авиапредприятию, парка эксплуатируемых самолетов и вертолетов, условий работы авиапредприятия (например, круглосуточное функционирование или работа только в дневное время и т. д.). В процессе анализа необходимо выяснить требуемую дальность действия различных типов РЭО, вопросы перекрытия зон действия с соседними авиапредприятиями и т. д. При разработке требований к системе радиотехнического обеспечения им по возможности следует дать количественную меру. При
245
этом требования к системе эксплуатации РЭО должны исходить из анализа требований к безопасности и регулярности полетов.
На этом этапе должны быть выработаны критерии и установлены количественные требования к показателям эффективности системы радиотехнического обеспечения. Такими критериями могут быть эффективность радиотехнического обеспечения, требования к точности, надежности, готовности, эффективности использования РЭО и т. д. Обоснование требований должно производиться с учетом экономических факторов.
2. Выбор и обоснование состава РЭО. Цель данного этапа проектирования — обоснование состава РЭО, который может выполнить задачи радиотехнического обеспечения с требуемым уровнем эффективности. При этом должны быть сформулированы требования к характеристикам РЭО, на основе этих требований выбран состав РЭО и произведено сопоставление характеристик РЭО предъявляемым требованиям. Если по результатам сопоставления действительные характеристики некоторых образцов РЭО не удовлетворяют требуемым, должны быть сформулированы требования к модернизации существующих или созданию новых образцов РЭО.
3. Обоснование и выбор стратегии технического обслуживания РЭО. При решении данной задачи необходимо провести анализ приспособленности РЭО к обслуживанию по различным стратегиям. Результатом анализа является классификация объектов РЭО в целом и их отдельных блоков и узлов по стратегиям ТО. Если некоторые типы РЭО, его отдельные блоки и узлы окажутся не в полной мере приспособленными к ТО по фактическому состоянию, следует дать оценку возможности доработок РЭО с целью наиболее полного использования стратегии обслуживания по фактическому состоянию. На этом же этапе необходимо определить основные характеристики выбранной стратегии ТО. В частности, при эксплуатации РЭО по состоянию с контролем параметров должен быть обоснован перечень контролируемых параметров, допуски на каждый параметр, способы контроля параметров, а также обоснована контрольно-измерительная аппаратура. Необходимо также проанализировать организационные формы контроля, обосновать перечень параметров, подлежащих дистанционному контролю, методы и -формы управления РЭО по результатам дистанционного контроля.
4. Обоснование метода организации технического обслуживания РЭО. На данном этапе необходимо проанализировать РЭО с целью выбора метода ТО. При этом прежде всего следует дать оценку возможности проведения ТО без перерывов оперативного использования РЭО. Если такая возможность отсутствует по причинам конструктивных особенностей РЭО, то выбирается метод ТО, предусматривающий остановку РЭО для ТО. При этом необходимо обосновать характеристики этой системы, в том числе простои РЭО при ТО и состав требуемого для эксплуатации РЭО персонала. При выборе цикличного или непрерывного метода ТО необходимо определить оптимальные характеристики: дли-246
тельность. подготовительного цикла, состав обслуживающего персонала, требуемый обменный фонд и т. д.
В заключение необходимо дать количественную оценку качества ТО ( при оптимальных характеристиках системы ТО и отклонении этих характеристик от оптимальных.
5. Выбор и обоснование средств технической эксплуатации. На данном этапе необходимо обосновать и разработать требования к проектированию служебных зданий и сооружений базы ЭРТОС. Требова-। ния к служебным зданиям и сооружениям — основа для их проектиро-' вания в организациях строительного профиля. В требованиях к проекту необходимо определить перечень средств технической эксплуатации и дать рекомендации по их размещению и использованию в технологическом процессе эксплуатации РЭО.
6. Разработка проекта эксплуатационной документации. На этом этапе проектирования необходимо дать анализ эксплуатационной документации, придающейся к выбранному составу РЭО. Кроме того, долж-' на быть разработана документация по обеспечению технологического процесса эксплуатации всей совокупности выбранных для эксплуатации объектов РЭО, а также разработаны инструкции для всех категорий эксплуатационного персонала базы ЭРТОС. Один из основных эксплуатационных документов — регламент ТО. При разработке рег-। ламентов ТО с периодическим контролем перед разработчиками возникает задача обоснования и выбора технологических операций, реализация которых в процессе ТО позволит обеспечить заданный уровень эффективности функционирования радиотехнических систем по обеспечению производственной деятельности авиапредприятий. Выбор определенного набора технологических операций по ТО конкретного типа РЭО с проведением предварительного многоуровневого анализа по вы-г явлению факторов, накладывающих специфические особенности на про-
цесс организации технического обслуживания. К такого рода факторам можно отнести:
особенности оперативного использования РЭО диспетчерской службой, экипажами ВС и другими службами аэропорта;
степень влияния отказа РЭО или отдельных ее блоков на безопасность и регулярность полетов;
конструктивные особенности РЭО;
схемные особенности и надежностные характеристики функциональных узлов, плат, элементов РЭО;
особенности схем резервирования РЭО в целом или отдельных функциональных узлов;
степень контролепригодности изделий (наличие встроенных или дистанционных средств контроля технического состояния РЭО, показатели методической и инструментальной достоверности контроля);
возможность проведения технологических операций регулирования параметров РЭО.
247
Работа по обоснованию и выбору необходимых технологических операций проводится в несколько этапов. На первом этапе определяется функциональная значимость РЭО в процессе обеспечения летной деятельности авиапредприятия. На втором этапе классифицируются блоки, функциональные узлы, платы РЭО с учетом их надежностных характеристик, схемно-конструктивные особенности, показатели контролепригодности, степень автоматизации, возможность использования регулировочных органов. На третьем этапе проводится непосредственный выбор технологических операций на основании данных, полученных на первых двух этапах. Исходя из особенностей оперативного использования РЭО экипажами ВС, диспетчерской службой и другими службами авиапредприятия, а также оценивая степень отказа РЭО на уровень безопасности и регулярности полетов, предлагается распределить РЭО на следующие основные группы.
Б — радиотехнические средства, отказ которых может привести к возникновению опасных, аварийных или катастрофических ситуаций. Опасная ситуация — ситуация, при которой переход ее в аварийную или катастрофическую ситуацию может быть предотвращен своевременным и правильным действием экипажа или диспетчерской службы, в том числе немедленным изменением плана, профиля или режима полета. Аварийная ситуация характеризуется необходимостью экстренной посадки ВС и требует высокого профессионального мастерства персонала службы движения и экипажа для предотвращения гибели людей и потери самолета. Катастрофической называют ситуацию, при которой практически невозможно предотвратить гибель людей и потерю самолета.
Р — радиотехнические средства, отказ которых может привести к нарушению регулярности полетов (задержка и отмена рейсов).
У — радиотехнические средства, отказ которых может привести к усложнению условий управления воздушным движением или производственной деятельностью авиапредприятия.
Н — радиотехнические средства, отказ которых не приводит к перечисленным выше последствиям.
На втором этапе классифицируют блоки, функциональные узлы, платы по схемно-конструктивным признакам. На основании такой классификации целесообразно выделить следующие группы:
М — электромеханические узлы изделий (блоки, функциональные узлы), требующие периодической чистки и смазки, или блоки, подлежащие периодической замене;
Э — блоки, функциональные узлы, платы, не обладающие признаками изделий группы М, которые, в свою очередь, можно классифицировать по признаку элементной базы, на которой они выполнены (собранные на элементах, обладающих тенденцией к изменению своих параметров образуют 1-ю признаковую группу, собранные на микро-элементной базе без явно выраженной тенденции к изменению параметров образуют О признаковую группу).
248
\
Блоки, функциональные узлы, платы, относящиеся к группам М и Э, можно разделить на контролепригодные и неконтролепригодные. В свою очередь контролепригодные блоки, функциональные узлы, платы могут быть охвачены автоматизированным и неавтоматизированным контролем. Кроме этого, следует различать контролепригодные блоки, функциональные узлы, платы по признаку возможности поддержания заданного технического состояния путем применения технологических операций регулирования и устройства, не отвечающие этому признаку.
На третьем этапе на основании проделанного анализа выбирают один или несколько наборов технологических операций, соответствующих конкретному набору признаков РЭО, выявленных на предыдущих этапах. Можно выделить следующие наборы технологических операций:
1) смазка, чистка или замена электромеханических или других узлов после периодического контроля их технического состояния;
2) плановые работы по чистке, смазке или замене электромеханических узлов, техническое состояние которых не подлежит контролю в процессе эксплуатации;
3) проведение плановых предупредительных замен блоков, функциональных узлов, плат изделий, не обладающих признаком контролепригодности, при росте интенсивности отказов вследствие старения или износа;
4) проведение замен блоков, функциональных узлов, плат изделий после обнаружения их отказа;
5) проведение углубленного периодического допускового контроля технического состояния блоков, функциональных узлов, плат изделия;
6) периодический автоматизированный допусковый контроль технического состояния блоков, функциональных узлов, плат изделия;
7) углубленный контроль технического состояния блоков, функциональных узлов, плат с установкой предупредительных допусков или прогнозированием технического состояния на момент последующего контроля;
8) аналогичные приведенным в пункте 7 работы с применением автоматизированного контроля;
9) регулировки параметров блоков, функциональных узлов, плат по получению необходимой информации при выполнении наборов технологических операций 5 и 6;
10) планирование и регулировка параметров блоков, функциональных узлов, плат по результатам выполнения наборов технологических операций 7 и 8.
ПРИЛОЖЕНИЕ 1
Состав и основные характеристики средств радионавигации и посадки
Тип РЭО Назначение Основные характеристики Состав наземного оборудования Элементная база Бортовое оборудование, взаимодействующее с данным РЭО
Радиотехническая система ближней навигации РСБН—4Н Определение текущих координат ВС на земле и на борту Диапазон частот — СВЧ, число каналов 88, дальность действия при высоте полета 5000 м — 250 км, при высоте полета 12 000 м — 380 км, пропускная способность 100 самолетов, точность определения координат на ВС по азимуту ±0,25°, по дальности ±200 м Антенно-фндерная система, азимутально-дальномерный радиомаяк, контрольно-выносной пункт, источники электропитания, выносной индикатор кругового обзора, пульт дистанционного управления Лампы РСБН-2С РСБН-7С
Приводная радиостанция ПАР-7 Радионавигация ВС, оборудованных радиокомпасами, может быть использована в качестве радиостанции связи Диапазон частот — средневолновый, даль ность действия в телефонном режиме 360... 650 км, мощность излучения 300... 1200 Вт Антенная система, два передатчика ПАР-7, пульт дистанционного управления, система электропитания Лампы Радиокомпасы
Радиомаячная Выдача экипажем Число каналов КРМ— Курсовой и глис- Полупро- Оборудова-
система посадки СП-70 снижающихся ВС непрерывной информации о положении ВС относительно заданных курсового направления и траектории снижения 40 в диапазоне частот 108...112 МГц, мощность передатчика 200 Вт, дальность действия 45 км Число каналов ГРМ— 40 в диапазоне частот 328,6...335,4 МГц, мощность на выходе 18 Вт, дальность действия 18 км садный радиомаяки и маркерные радиомаяки, аппаратура дальнего контролирования положения линии курса, передвижная автолаборатория водники 7 ние систем посадки
Радиомаячная система посадки СП-75 Выдача экипажам снижающихся ВС непрерывной информации о положении ВС относительно заданных курсового направления и траектории снижения Число каналов КРМ— 40 в диапазоне частот 108,1... 111,95 МГц, мощность на выходе передатчика 5 Вт, дальность действия 45 км Число каналов ГРМ— 40 в диапазоне 329,2... 335 МГц, мощность на выходе передатчика 1,8 Вт, дальность действия 18 км Курсовой и глиссадный радиомаяки, пульт оперативного управления, шкаф дистанционного управления, маркерные радиомаяки Полупроводники Оборудование систем посадки
ПРИЛОЖЕНИЕ 2
Состав и основные характеристики средств УВД
Тип РЭО Назначение Основные характеристики Состав наземного оборудования Элементная база Бортовое оборудование, взаимодействующее с данным РЭО
Комбинированный диспетчерский, обзорный и посадочный радиолокатор ОПРЛ-4 Посадочный радиолокатор РП-4Г ю СП Контроль и управление движением ВС на расстоянии до 35 км и для наведения ВС на ВПП, управление посадкой Контроль и управление ВС, идущими на посадку на расстоянии до 30 км Диапазон частот — СВЧ, импульсная мощность передатчика 150 кВт, длительность импульса 0,5 мкс, дальность по индикатору кругового обзора 30 км, по посадочному индикатору 15 км Диапазон частот — СВЧ, импульсная мощность 2X150 кВт, длительность импульса 0,5 мкс, точность определения координат на Антенная часть, аппаратура обработки сигнала, комплект соединительных кабелей Антенная система, аппаратная часть РЛС, индикаторы Полупроводники, микросхемы Полупроводники, микросхема —
Тип РЭО Назначение Основные характеристики
Метеорологический локатор МРЛ-1 Автоматический УКВ радиопеленгатор АРП-75 Автоматический УКВ радиопеленгатор АРП-6 Радиолокатор обзора летного поля Наблюдение метеорологической обстановки, обнаружение облаков, осадков, а также турбулентных атмосферных образований Определение пеленгов ВС, оборудованных УКВ радиостанциями и находящихся на связи у диспетчера Определение пеленга ВС относительно места установки антенны пеленгатора в момент работы на его борту передатчика УКВ радиостанции связи Обзор поверхности летного поля дальности 30 км, по курсу 2°, по высоте 1,5°, по дальности 250 м Диапазон частот — СВЧ, мощность передатчика: 1-й канал—65 кВт, 2-й канал — 210 кВт, дальность действия: 1-й канал —до 10 км, 2-й канал — до 300 км Диапазон частот — УКВ, число одновременно пеленгуемых ВС 4, дальность пеленгования при высоте полета 3000 м — 180 км, точность определения пеленга 1° Диапазон частот • — УКВ; число одновременно пеленгуемых ВС — 2; дальность действия при высоте полета 1000 м — 80 км, 3000 м —150 км; точность определения пеленга не хуже 3° Диапазон волн — миллиметровый, мощность передатчика 24 кВт; длительность импульса
Продолж. прил. 2
Состав наземного оборудования Элементная база Бортовое оборудова. ние, взаимодействующее с данным РЭО
Два приемопередатчика, антенная система, аппаратура обработки сигнала, индикаторы кругового обзора Лампы, полупроводники —
Антенная система, приемоизмерительное ные устройства, контрольно-измерительная аппаратура, радиостанция связи с ВС Полупроводники Бортовые УКВ радиостанции
Антенная система: приемоизмерительное устройство; конт- рольно-измерительный генератор; радиостанция связи с ВС Лампы, полупроводники То же
Антенная система: высокочастотная головка; низкочастотная аппаратура; Лампы Бортовые УКВ радиостанции
Диспетчерский Предназначен для радиолокатор контроля воздушно-
ДРЛ-7СМ го пространства в
аэропортной зоне с " целью регулирова-
ния воздушного движения и вывода самолетов в зону действия ПРЛ
Трассовый ра- Предназначен для диолокатор использования в ка-
АТСР-22 честве источника ра-
АТСР-44 дислокационной ин-
формации в системах управления воздушным движением
Посадочный ра- Контроль с земли диолокатор ПРЛ-7 за выдерживанием линии посадочного курса и глиссады планирования ВС на последней прямой
Трассовый ра- Использование в диолокатор качестве источника
ТРЛК-Ю радиолокационной
(Скала-М) информации автома-
тизированных систем управления воздушным движением в районах диспетчерской службы оо.
0,05 мкс; дальность минимальная 100 м, максимальная 8 км
Диапазон частот — СВЧ; длительность импульса 1...2 мкс; мощность • передатчика 230 кВт; дальность действия 60... 100 км (в активном режиме 150 км)
Диапазон частот — СВЧ; мощность передатчика АТСР-22 — 2,5 мВт, АТСР-44 — 0,5 мВт; длительность импульса 3 мкс; дальность действия АТСР-22—~250 км, АТСР-44----150 км
Диапазон частот—сантиметровый; мощность передатчика 70 кВт; дальность действия 20...60 км
Рабочие частоты — СВЧ; диапазон; длитель ность импульса 3,3 мкс; мощность передатчика средняя 3,6 кВт; дальность действия при высоте полета 6000 м — 250 км, 20 000 м—400 км; точность определения координат по дальности 250—300 м, по азимуту 8°
комплект индикаторов; блок управления
Два комплекта: приемопередатчик, приемник ответа, индикатор кругового обзора, УКВ радиостанция, антенная часть
Антенная система, группа приемника, группа передатчика, пульт дистанционного управления
Антенная система, приемопередатчик, приемник ответа, аппаратура СДЦ, индикаторы курса и глиссады, УКВ радиостанция
Посадочный радиолокатор, вторичный радиолокатор «Ко-рень-С»; аппаратура первичной обработки информации «Обзор», стойка модемов
> Самолетный ответчик
Лампы, полупроводники, микросхемы Самолетный ответчик
Лампы То же
Лампы, полупроводники, микросхемы Самолетный ответчик
g
Приложение з
Состав и основные характеристики средств связи
Наименование и тип Назначение Основные характеристики Состав наземного оборудования Элементная база Бортовое оборудова. ние, взаимодействующее с данным РЭО
Радиостанция Р-824М Беспоисковая бес-подстроечная радиотелефонная связь Диапазон частот — УКВ; число фиксированных частот 601; мощность на выходе передатчика 250 Вт; чувствительность приемника 10 мкВ; дальность связи при высоте полета 500 м—90 км, 10 000 м— 350 км Передатчик, возбудитель и приемник, пульт управления, пульт дистанционного управления, антенная система, источники электропитания Лампы УКВ радиостанции
Радиостанция Беспоисковая и бес- Диапазон частот — Передающее и пи- Лампы, УКВ радио-
«Спрут-1» проводная радиосвязь с экипажами УКВ; число фиксированных частот 720, мощность на выходе передатчика 200 Вт; чувствительность приемника 3 мкВ; дальность связи при высоте полета: 500 м — 90 км; 5000 м— 230 км; 10 000 м—-350 км Диапазон частот — тающее устройства, радиостанция «Ландыш-5», центральный пульт управления, радиоприемник Р879м, антенная система, источники электропитания полупроводники станции
Радиостанция Однополосная ко- Р ад иопередающее Лампы, КВ радио-
Р-140М-1 ротковолновая радиосвязь КВ; число фиксированных частот 285 000; мощность на выходе передатчика 850 Вт; чувствительность приемника 1,3 мкВ; дальность связи в телефонном режиме устройство с комплектом антенн; радиоприемное устройство Р-155П; пульт управления полупроводники станции
Радиостанция Обеспечение связи 1000... 1500 км, в телеграфном—2000 км Диапазон частот —
Р-405М между пунктами управления КВ; число фиксированных частот: 1-й канал — 134; 2-й канал —- 101; мощность передатчика: 1-й канал — 2,5 Вт; 2-й канал — 1,2 Вт; чувствительность приемника: 1-й канал — 2 мкВ, 2-й канал— 5,5 мкВ; дальность связи 45 км
Радиостанция Радиосвязь диспет- Диапазон частот —
«Щегол» чера с экипажами ВС, выполняющих полеты в районе аэродрома и на МВЛ УКВ; число фиксированных частот 720; мощность на входе передатчика 5 Вт; чувствительность приемника 3 мкВ
Радиостанция Радиосвязь диспет- То же; чувствитель-
«Баклан-РН» чера с экипажами ВС ность приемника 2,5 мкВ
Радиостанция Беспоисковая, бес- Диапазон частот —
«Ястреб» подстроечная и теле- КВ; число фиксирован-
графная радиосвязь по наземным и самолетным каналам на МВЛ ных частот 159 990; мощность на выходе передатчика 60 Вт, чувствительность приемника 5 мкВ
Радиоприемник Прием сигналов ра- Диапазон частот —
Р-250М2 диопередающих станций; станций, работающих в телеграфном и телефонном режимах КВ; число поддиапазонов 12, чувствительность приемника 3 мкВ
Радиоприемник Радиосвязь на ра- Диапазон частот —
to Р-155П диолиниях большой КВ; число поддиапазо-
Сл сл протяженности нов 6
Два по л у комп лек- Лампы КВ радио-
та: приемопередающее устройство метрового и дециметрового диапазонов; антенная система, телефонные и телеграфные блоки; устройства электропитания станции
П риемоперед ающее Полупро- УКВ радио-
устройство «Ландыш-5»; выносной пульт управления; УНЧ, антенная система водниковая станции
Приемопередатчик «Баклан-5»; микрофонный усилитель; УНЧ, антенная система То же То же
Приемопередающее Лампы, КВ радио-
устройство, пульт дистанционного управления, антенная система, устройство электропитания полупроводники станции
Радиоприемник; выпрямитель; преобразователь напряжения Лампы То же
— Лампы, полупроводники Радиостанции
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Барзилович Е.Ю. Модели технического обслуживания сложных систем. М.: Высшая школа, 1982. 232 с.
Барзилович Е. Ю., Каштанов В. А. Некоторые математические вопросы теории обслуживания сложных систем. М., 1971. 271 с.
Белоконь Р. Н., Кузнецов А. Н., Новиков В. С. Математическая модель контроля //Основные вопросы теории и практики надежности. М.: Сов. радио, 1975. 408 с.
Вентцель Е. С. Теория вероятностей. М.: Физматгиз, 1962. 564 с.
Винер Н. Кибернетика. М.: Сов. радио, 1968. 326 с.
Гнеденко Б. В., Беляев Ю. К., Соловьев А. Д. Математические методы в теории надежности. М.: Наука, 1965. 524 с.
Гаскаров Д. В.,Го л и н к е в и ч Т.А., Мозгалевский А. В. Прогнозирование технического состояния и надежности радиоэлектронной аппаратуры. М.: Сов. радио, 1974. 224 с.
Дедков В. К., Северцев Н. А. Основные вопросы эксплуатации сложных систем. М.: Высшая школа, 1976. 406 с.
Дружинин Г. В. Надежность автоматизированных систем. М.: Энергия. 1977. 536 с.
И в а х н е н к о А. Г., Л а п а В. Г. Предсказание случайных процессов. Киев: Наукова думка, 1971. 416 с.
Кузнецов А. А., Дубровский В. И. Эксплуатация радиооборудования аэродромов и трасс. М.: Транспорт, 1981. 224 с.
Кузнецов А. А., Дубровский В. И., Уланов А. С., Эксплуатация средств управления воздушным движением. М.: Транспорт, 1983. 256 с.
Кудрицкий В. Д., Синица М. А., Ч и н а е в П. И. Автоматизация контроля РЭА. М.: Сов. радио, 1977. 256 с.
Каннингхем К., В. Коне. Методы обеспечения ремонтопригодности. М.: Сов. радио, 1978. 312 с.
Левин Б. Р. Теоретические основы статистической радиотехники. Т.1. М.: Сов. радио, 1969. 752 с.
Михайлов А. В., Савин С. К. Точность радиоэлектронных устройств. М.: Машиностроение, 1976. 276 с.
Новиков В. С. Техническая эксплуатация и надежность авиационного радиооборудования. М.: Транспорт, 1970. 232 с.
Основы теории надежности и эксплуатации радиоэлектронной техники. Под ред. Шишонка Н. А. М.: Сов. радио, 1964. 552 с.
Правила технической эксплуатации наземных средств радиотехнического обеспечения полетов и электросвязи гражданской авиации. М.: Воздушный транспорт, 1978. 228 с.
Румянцев Е. А. К теории управления надежностью авиационной техники при различных стратегиях ее эксплуатации// Исследования по эксплуатации авиационной техники. М.: ВВИА им. Н. Е. Жуковского, вып. 1306, 1976. 268 с.
Силин В. Б.,3 аков р я ш и н А. И. Автоматическое прогнозирование состояния аппаратуры управления и наблюдения. М.: Энергия, 1973. 335 с.
Тихонов В. И. Статистическая радиотехника. М.: Сов. радио, 1966. 678 с.
ХодаковскийВ.А. Надежность радиотехнических устройств при отсутствии электромагнитной совместимости // Основные вопросы теории и практики надежности. М.: Сов. радио, 1980. 327 с.
Чуев Ю. В., М и х а й л о в Ю. Б., К у з ь м и н В. И. Прогнозирование количественных характеристик процессов. М.: Сов. радио, 1975. 398 с.
Электрические методы автоматического контроля. Под ред. К. Б. Карандее-ва. М.: Энергия, 1965. 384 с.
Я н ч Э. Прогнозирование научно-технического прогресса. М.: Прогресс, 1970. 568 с.
256
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А И
Агрегаты: бензоэлектрические 243 дизель-генераторные 241 преобразовательные 239 Излучение: радиационное 17 СВУ, уровень 12 электромагнитное 17
Аккумуляторы: кислотные 236 никель-кадмиевые 238 щелочные 237 Избыточность: аппаратурная 96 временная 96 Интенсивность:
Алгоритм: контроля последовательный 105 контроля мажоритарный 97 обработки информации 231 выявления неисправностей 31 отказов 26, 56 потока мощности 11 Испытания: государственные 18
Б заводские 1'8 летные 17
База ЭРТОС 132 , программа производственная 141 Бюллетень 190 наземные 17 К
В Канал приема интермопуляционный
174, 186
Вероятность: отказов определяющая 31 предотвращения отказов 31 — информационный 179 комбинационный 179 Классификация: баз ЭРТОС 136
Г помех 75
Генератор контрольно-испытательный 232 РЭО 4 средств эксплуатации 205 — контроля 211
Граф: операции контроля 118 восстановления 120 принятия решений 116 Контроль: длительность 105 достоверность 79, 81, 94 летный, аппаратура 226, 229 прогнозирующий 78
д работоспособности 78 технического состояния 76
Документация эксплуатационная 144 Документы руководящие 3 Журнал: функционирования 78 Коэффициент: взаимозаменяемости 194
обслуживания и ремота РТО 147 отказов и неисправностей 147 проверок оборудования 147 регистрации измерений 147 учета наработки 147 — остановок 147 — средств измерений 147 готовности 9 стандартизации 194 характера отказов 30 эффективности ТО 27 Категория: аэропорта 19 системы посадки 19
257
л
Линеаризация статистическая 25
М
Мастерские ремонтно-эксплуатационные 137
Модуляция перекрестная 172
О
Обеспечение метрологическое 162
Оборудование радиолокационное: база элементная 6 доработка 21 классификация 5 модель 81
— функциональная 107 модернизация 21 регулирование 247 состояние исправное 28
— неисправное 28
— предотказовое 28 сертификация 149 хранение 21
Осциллограф: шлейфовый 228 электронный 221 Отказ: внезапный 167 непредотвращаемый 29 постепенный 167 перемежающийся 167 предотвращаемый 29
Обслуживание техническое: график 147 длительность 68 метод 22 — половинного разбиения ПО — повышения достоверности контроля 96 — поточный 22 — централизованный 22 прогнозирование 121 Отношение: сигнал/шум 181 сигнал/шум+помеха 181
Охрана:
труда 151
внешней среды 151
Ошибка:
первого рода 58
второго рода ’58
Ответчик самолетный 253
Оценка соответствия 17
П
Параметр, распределение нормальное 86, 99
258
Пеленг 252
Погрешность, измерение 7
Подготовительный цикл, длительность 71 Показатель:
качества интегральный 11
— единичный 9
Помехи:
анализ 175
взаимные 17, 178
прогнозирование 183
электромагнитные 169
Помехоустойчивость 170
Правила:
техники безопасности 18
эксплуатации технической 18, 146
Приставка измерительная 229
Пробник диагностический 218
Процесс:
накопления отказов 27
предотвращения отказов 28
— регулярный 33
— случайный 32
Р
Радиоприемники:
глиссадный 229
курсовой 229
Р-250М2 255
Р-155П 255 ,
Радиостанции:
Баклан 225, 255
приводные 13
Р-824М 254
Р-140М 254
Р-405М 255
КВ 3
Спрут 254
УКВ 4
Щегол 255
Ястреб 255
Радиокомпас автоматический 4, 250
Радиопеленгаторы автоматические 5, 10
Радиомаяки 18
Резервирование 168
— автоматическое 19
— каналов контроля 96
Ремонт:
аварийный 189
капитальный 189, 197
программы 196
— поиска неисправностей 108
средний 189, 197
текущий 189
Ремонтопригодность 192
с
Свидетельство поверочное 166
Система:
антенно-фидерная 229
ближней навигации 4, 250
автоматизированного контроля 207
посадки микроволновая 231
ТО и ремонта 245
эксплуатации, проектирование 245
Ситуация:
аварийная 248
опасная 248
катастрофическая 248
Служба метрологическая 162
Совместимость электромагнитная 17
Спектр энергетический, ширина 176
Способность пропускная 8
У
Управление воздушным движением 3
Условия климатические 15
Устройства:
выдачи результатов контроля индицирующие 213
-------регистрирующие 213
-------сортирующие 213
Ф
Фонд: обменный 190 ремонтный 190
Функция:
корреляционная 178 регулировочная 51 случайная, лианеризация статистическая 24
—, ожидание математическое 25
Ч
Частота:
диапазон 5, 252
настройки 169
промежуточная 184 рабочая 19 спектр 177
Э
Экспертиза метрологическая 164 Эксплуатация техническая: ----, процесс технологический 48 ----, радиотехническое обеспечение производственной деятельности 20, 48, 245 ----, средства контроля 205 условия 15
Энергия, плотность потока 11
Энтропия условия 111
ОГЛАВЛЕНИЕ
Глава 1. Радиоэлектронное оборудование аэропортов и воздушных трасс ГА как объект эксплуатации................................... 3
1.1. Использование РЭО для обеспечения производственной деятельности авиапредприятий ................................................... 3
1.2. Выбор и обоснование состава РЭО. Размещение РЭО аэропортов и воздушных трасс...................................................7
1.3. Условия эксплуатации РЭО......................................15
1.4. Оценка соответствия РЭО нормам годности к эксплуатации.......17
Глава 2. Основы теории эксплуатации РЭО .........................20
Э 2.1. Основные характеристики процесса эксплуатации..................20
Ь*2.2. Процессы накопления и устранения отказов.......................23
2.3. Эффективность технического обслуживания.......................33
2.4. Стратегия технического обслуживания по наработке..............38
2.5. Стратегия технического обслуживания по состоянию..............45
2.6. Структура и характеристики технологических процессов эксплуатации РЭО..............................,.............................48
2.7. Управление техническим состоянием РЭО при различных стратегиях технического обслуживания.....................................56
2.8. Обоснование характеристик системы технического обслуживания . 60
2.9. Организация профилактических работ при проведении технического обслуживания РЭО...................................................70
Г л а в а 3. Контроль технического состояния РЭО...................76
3.1. РЭО аэропортов и воздушных трасс как объект контроля .........76
£ 3.2. Достоверность контроля технического состояния РЭО.............81
а 3.3. Модель контроля при двух и трех состояниях качества РЭО......87
Г 3.4. Методы повышения надежности и достоверности контроля.........94
3.5. Оценка показателей достоверности контроля РЭО при многократной проверке с отбраковкой.............................................99
3.6. Оценка показателей достоверности контроля РЭО при многократной перепроверке контролируемых параметров........................101
3.7. Методы отыскания отказов в авиационном РЭО...................106
3.8. Контрольно-восстановительные мероприятия и показатели их качества ...............................................................115
3.9. Прогнозирование технического состояния РЭО...................121
Глава 4. Организация эксплуатации радиоэлектронного оборудования 132
4.1. Роль баз ЭРТОС в структуре авиапредприятий...................132
4.2. Классификация и структура баз ЭРТОС..........................136
4.3. Планирование и управление процессом эксплуатации РТО в базах ЭРТОС.............................................................140
4.4. Эксплуатационная документация ...............................144
4.5. Ввод в эксплуатацию средств РТО и связи......................148
4.6. Охрана внешней среды и труда инженерно-технического состава баз ЭРТОС.............................................................151
260
4.7. Планирование труда на базе ЭРТОС............................153
4.8. Обучение и воспитание личного состава.......................155
4.9. Научная организация труда в базах ЭРТОС.....................156
4.10. Сбор и анализ информации об отказах средств РТО и связи. Доработка оборудования ........................................... 158
4.11. Метрологическое обеспечение процесса эксплуатации РЭО .... 162
Глава 5. Эксплуатация РЭО в условиях электромагнитных помех. . .167
5.1. Особенности эксплуатации РЭО................................167
5.2. Влияние помех на качество функционирования РЭО..............168
5.3. Восприимчивость приемника к помехам большого уровня.........171
5.4. Аналйз помех, воздействующих на РЭО.........................175
5.5. Уменьшение уровня взаимных помех при рациональном распределении рабочих частот.............................................178
5.6. Эксплуатационные характеристики информационного канала, функционирующего в условиях помех .................................. 179
5.7. Обоснование требований к РЭО при ограниченном прогнозе помех. 183
5.8. Оперативное регулирование параметров........................187
Глава 6. Ремонт РЭО аэропортов и воздушных трасс ГА..............189
6.J. Основные понятия и определения..............................189
'ZL 6.2. Ремонтопригодность РЭО и методы ее обеспечения..............192
• 6.3. Капитальный и средний ремонт РЭО..............................197
6.4. Текущий ремонт РЭО. Особенности ремонта РЭО, выполненного на ми-кроэлементной базе............................................198
Глава 7. Средства технической эксплуатации ......................205
7.1. Средства контроля .Технического состояния РЭО............ . .205
7.2. Системы автоматизированного контроля авиационного РЭО ..... 207
7.3. Пульт инженера командно-диспетчерского пункта...............215
7.4. Логический диагностический пробник..........................218
7.5. Универсальный стенд для контроля и ремонта РЭО на микроэлемент-ной базе........................................................ 222
7.6. Методы и аппаратура летного контроля РЭО....................226
7.7. Контрольно-испытательный генератор автоматических радиопеленгаторов .........................................................232
7.8. Средства электроснабжения РЭО...............................233
7.9. Проектирование системы эксплуатации авиационного РЭО........245
Приложения 1...3..............*..................................250
Список использованной литературы ............................... 256
Предметный указатель........................................... 257
Учебник
Владимир Стефанович Новиков
Техническая эксплуатация авиационного радиоэлектронного оборудования
Указатель составил В. С. Новиков Переплет художника В. А. Сергеева Технический редактор М. А. Шуйская Корректор-вычитчик С. М. Лобова Корректор Л. А. Петрова
ИБ № 3473
Сдано в набор 02.12.86. Подписано в печать 04.05.87. Т-00502.
Формат 60Х84,Лв- Бум. офсетная № 1. Гарнитура литературная. Офсетная печать. Усл. печ. л. 15,44. Усл. кр.-отт. 15,44. Уч.-изд. л. 18,54. Тираж 5700 экз. Заказ 2262. Цена 1 р. 10 к. Изд. № 1-1-1/17 № 2685.
•Ордена «Знак Почета» издательство «ТРАНСПОРТ», 103064, Москва, Басманный туп., ба
Московская типография № 4 Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли. 120041, Москва, Б. Переяславская, 46
Государственный комитет СССР по делам издательств, полиграфии и книжной торговли
ОРДЕНА «ЗНАК ПОЧЕТА* ИЗДАТЕЛЬСТВО «ТРАНСПОРТ*
Готовятся к изданию книги:
Сосновский А. А., Хаймович И. А. Радиоэлектронное оборудование летательных аппаратов: Справочник. — М.: Транспорт, 1987. — 27 л. — (В пер.): 1 р. 90 к. 10 000 экз.
Рассмотрены функции радиоэлектронного оборудования самолетов и вертолетов, факторы, определяющие его состав и принципы комплексирования. Приведены сведения о радиоэлектронных устройствах связи, навигации и посадки. Главное внимание уделено принципу действия, параметрам, структурному построение составу аппаратуры и антеннам, а также компоновке бортовых радиоэлектронных устройств.
Для инженерно-технических работников, связанных с эксплуатацией радиоэлектронного оборудования летательных аппаратов.
Флеров А. Г., Тимофеев В. Т. Доплеровские устройства и системы навигации. — М.: Транспорт, 1987. — 14 л. — 75 к.
Изложены физические основы, принципы построения, навигационное применение, анализ погрешностей, особенности технической эксплуатации современных и перспективных доплеровских устройств и систем навигации.
Для инженерно-технических работников эксплуатационных предприятий гражданской авиации; может быть полезна студентам авиационных вузов.
Заказы принимаются
отделениями издательства «Транспорт», центральным магазином «Транспортная книга» (107078, Москва, Садовая Спасская ул., д. 21). Отдел «Книга—почтой» указанного магазина (113114, Москва, 1-й Павелецкий пр., д. 1/42, корп. 2\ и отделения издательства высылают литературу наложенным платежом.
Государственный комитет СССР по делам издательств, полиграфии и книжной торговли
ОРДЕНА «ЗНАК ПОЧЕТА» ИЗДАТЕЛЬСТВО «ТРАНСПОРТ»
Имеются в продаже книги:
Автоматизация процессов управления воздушным движением: Учеб, пособие для вузов / Под ред. Г. А. Крыжановского. — 1981. — 399 с. — 1 р. 10 к.
Давыдов П. С. и др. Авиационная радиолокация:. Справочник / Под ред. П. С. Давыдова. — 1984. — 224 с. — 1р. 40 к.
Дунина Р. А., Наумов А. Н. Авиационное и радиоэлектронное оборудование самолета Як-18Т: Учеб, пособие для летных училищ ГА. — 2-е изд., перераб. и доп. — 1982. — 168 с. — 35 к.
Кузнецов А. А. и др. Эксплуатация средств управления воздушным движением: Справочник. — 1983. — 256 с. — 1р. 60 к.
О л я н ю к П. В. и др. — Радионавигационные устройства и системы гражданской авиации. — 1983. — 320 с. 1 р. 10 к.
Продажа производится
отделениями издательства «Транспорт», центральным магазином «Транспортная книга» (107078, Москва, Садовая Спасская ул., д. 21). Отдел «Книга—почтой» указанного магазина (113114, Москва, 1-й Павелецкий пр., д. 1/42, корп. 2) и отделения издательства высылают литературу наложенным платежом.