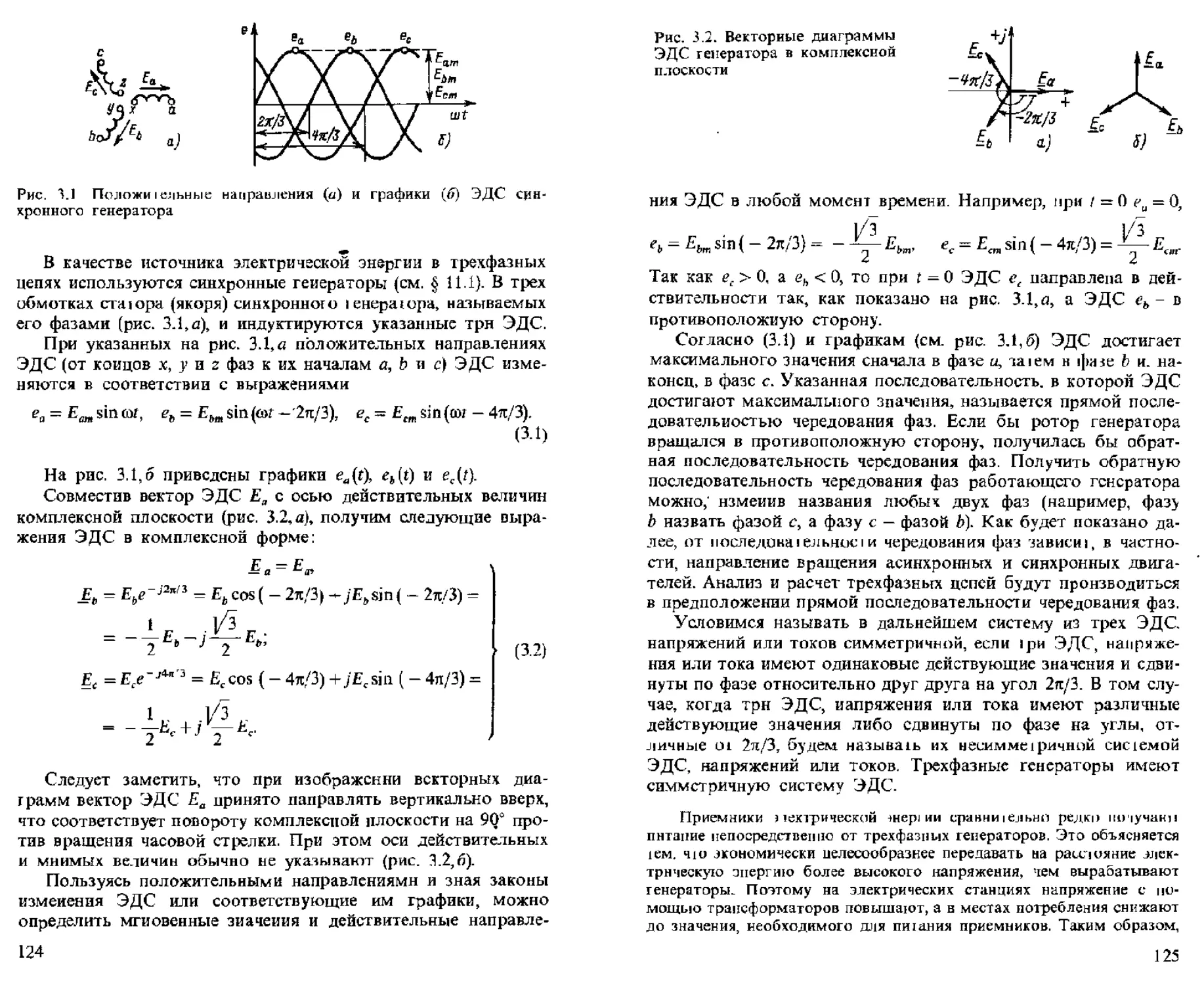
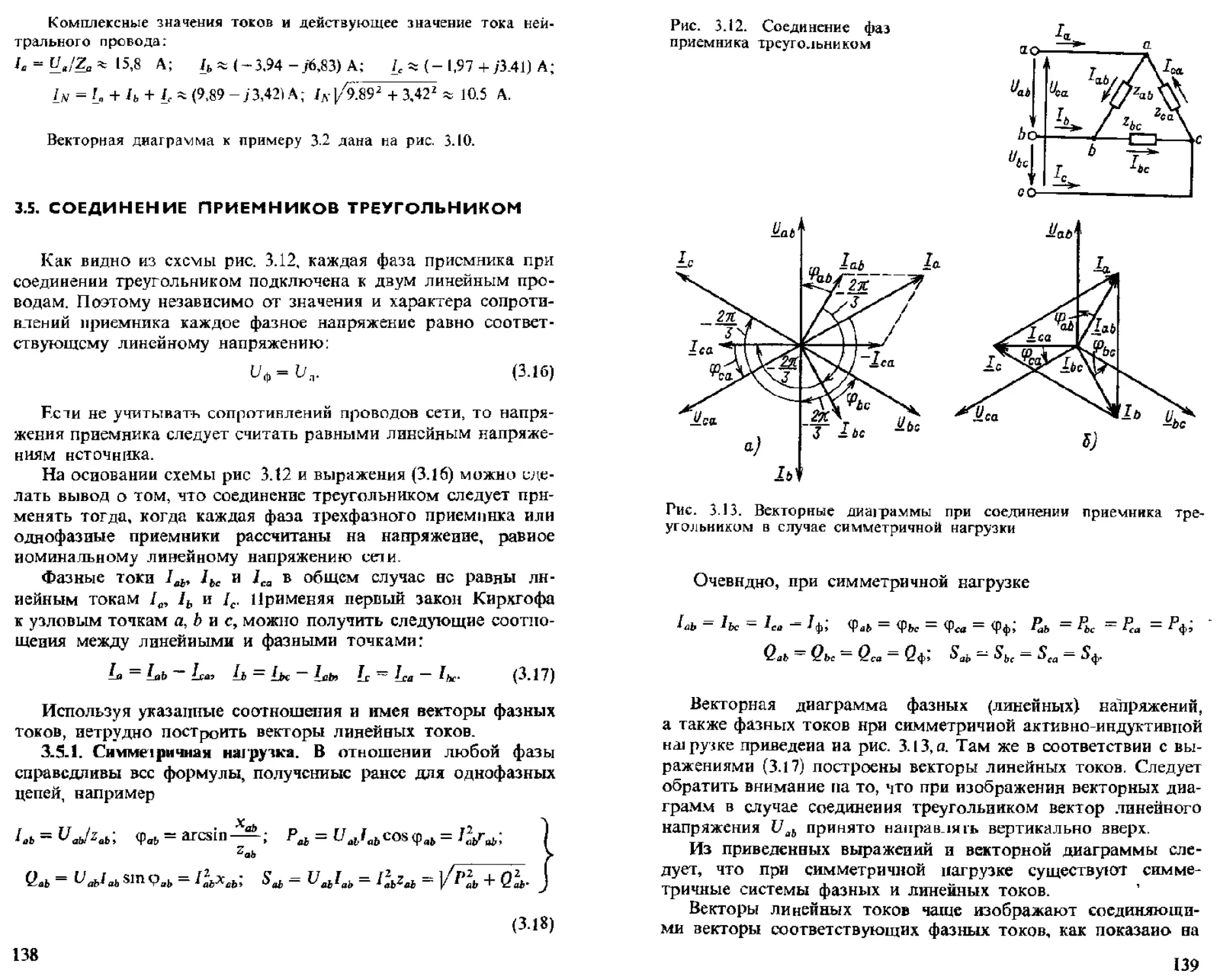
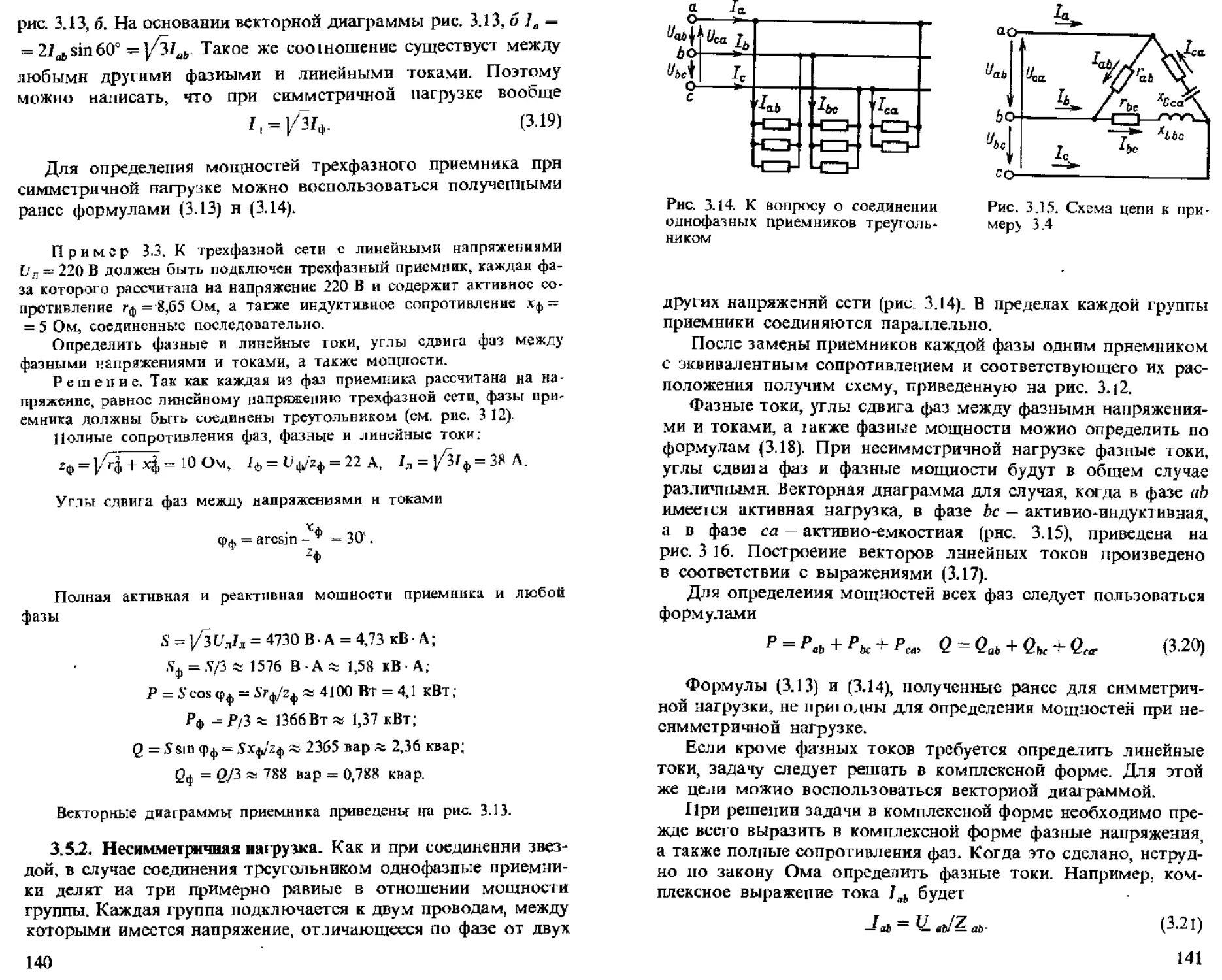
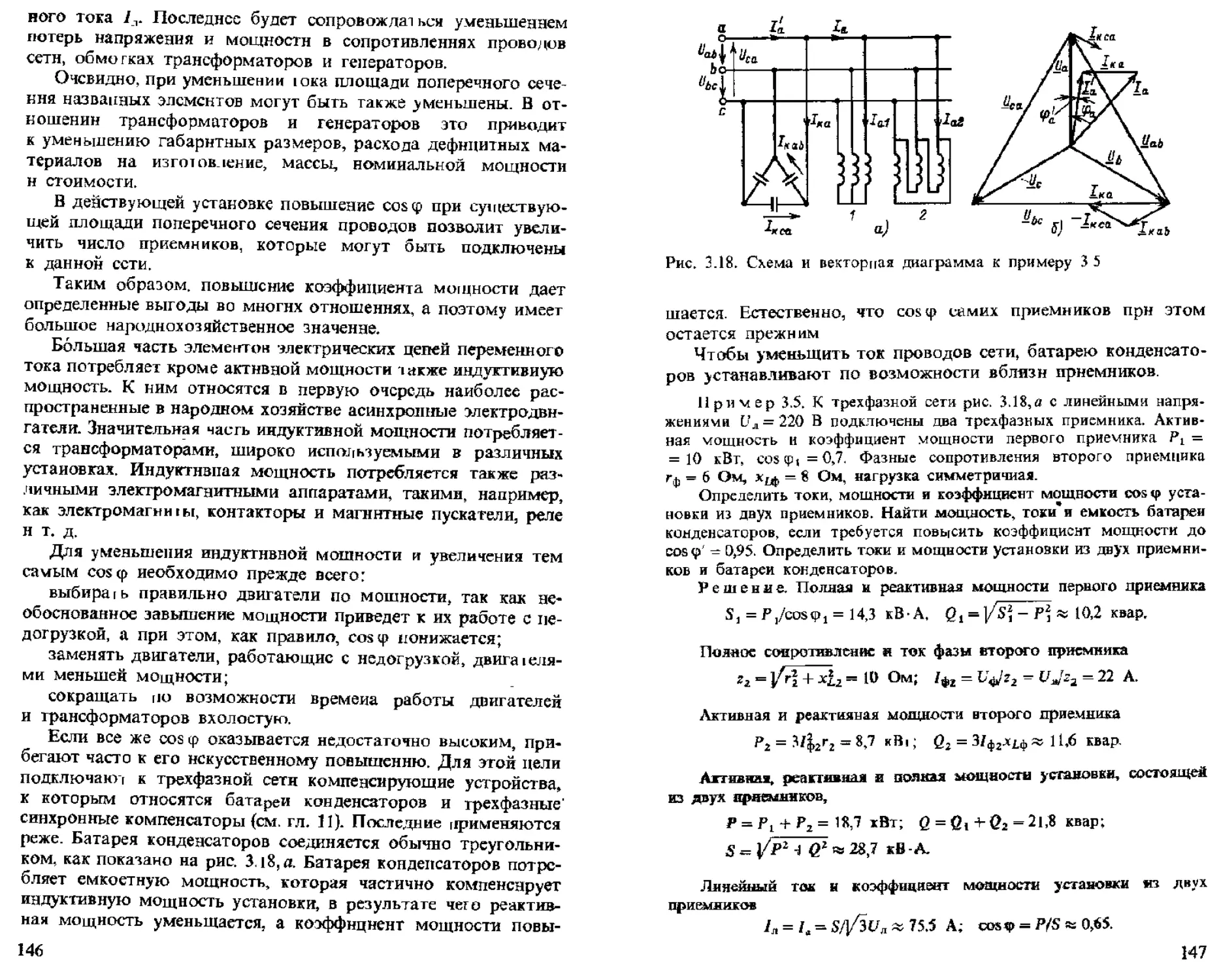
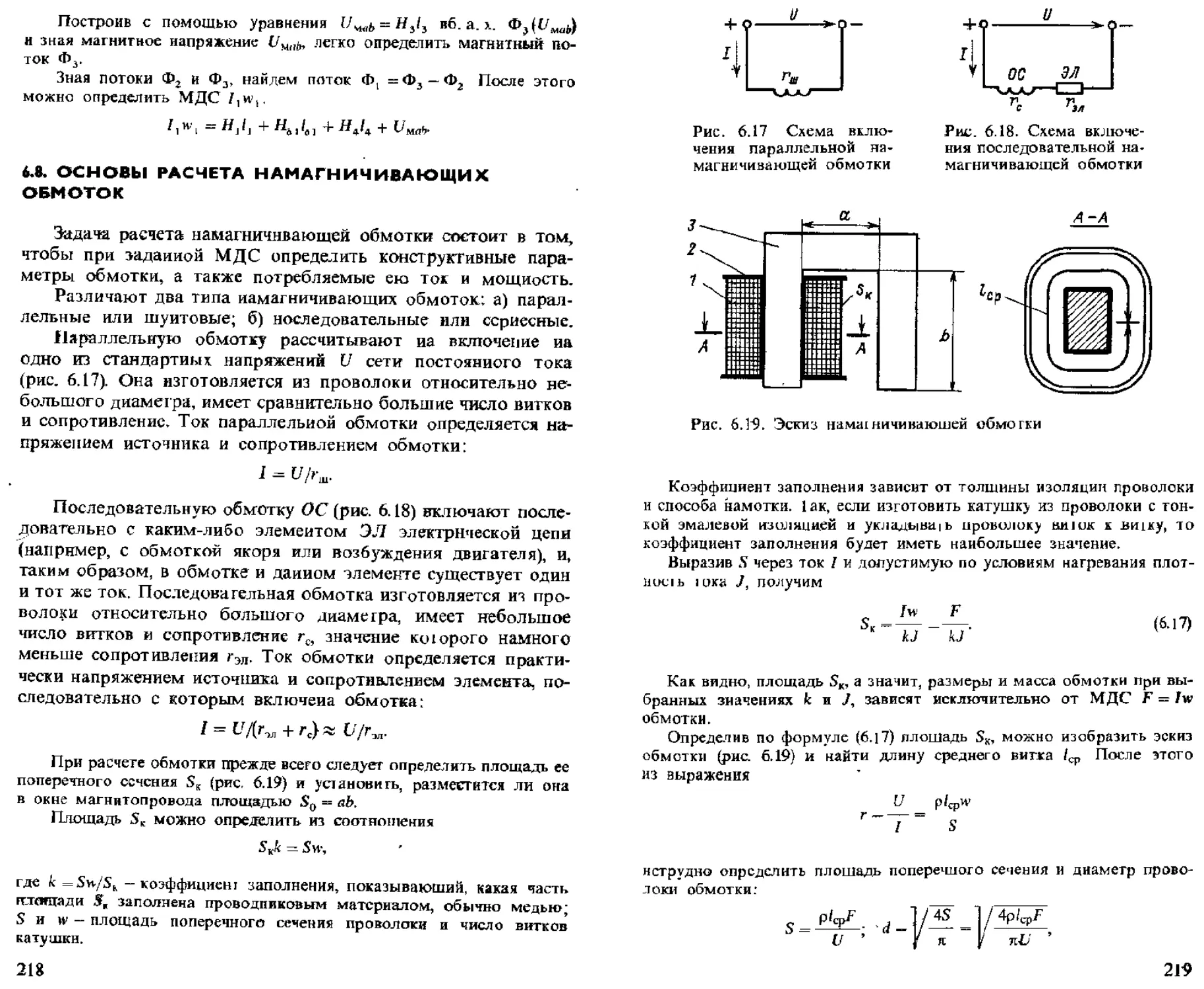
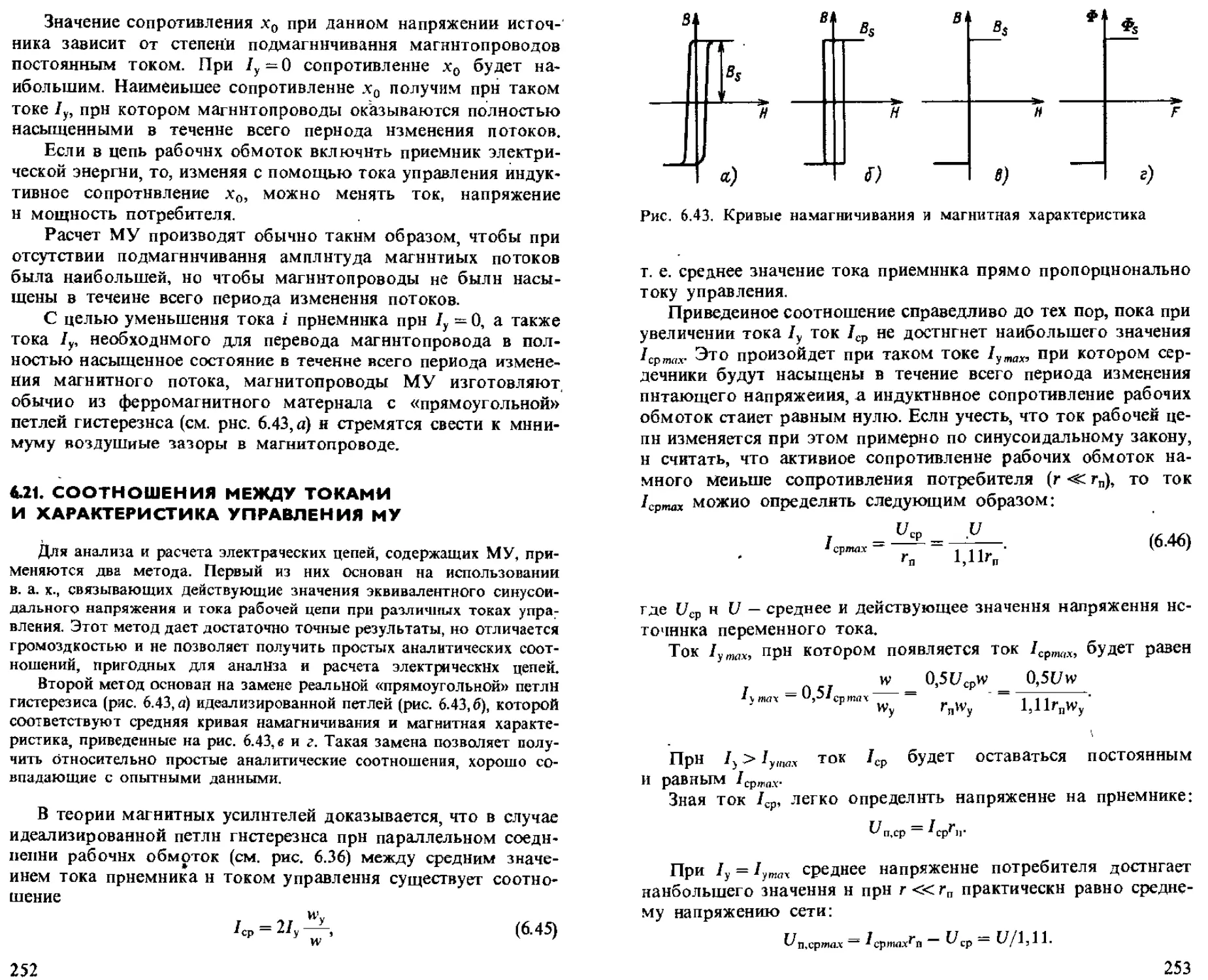
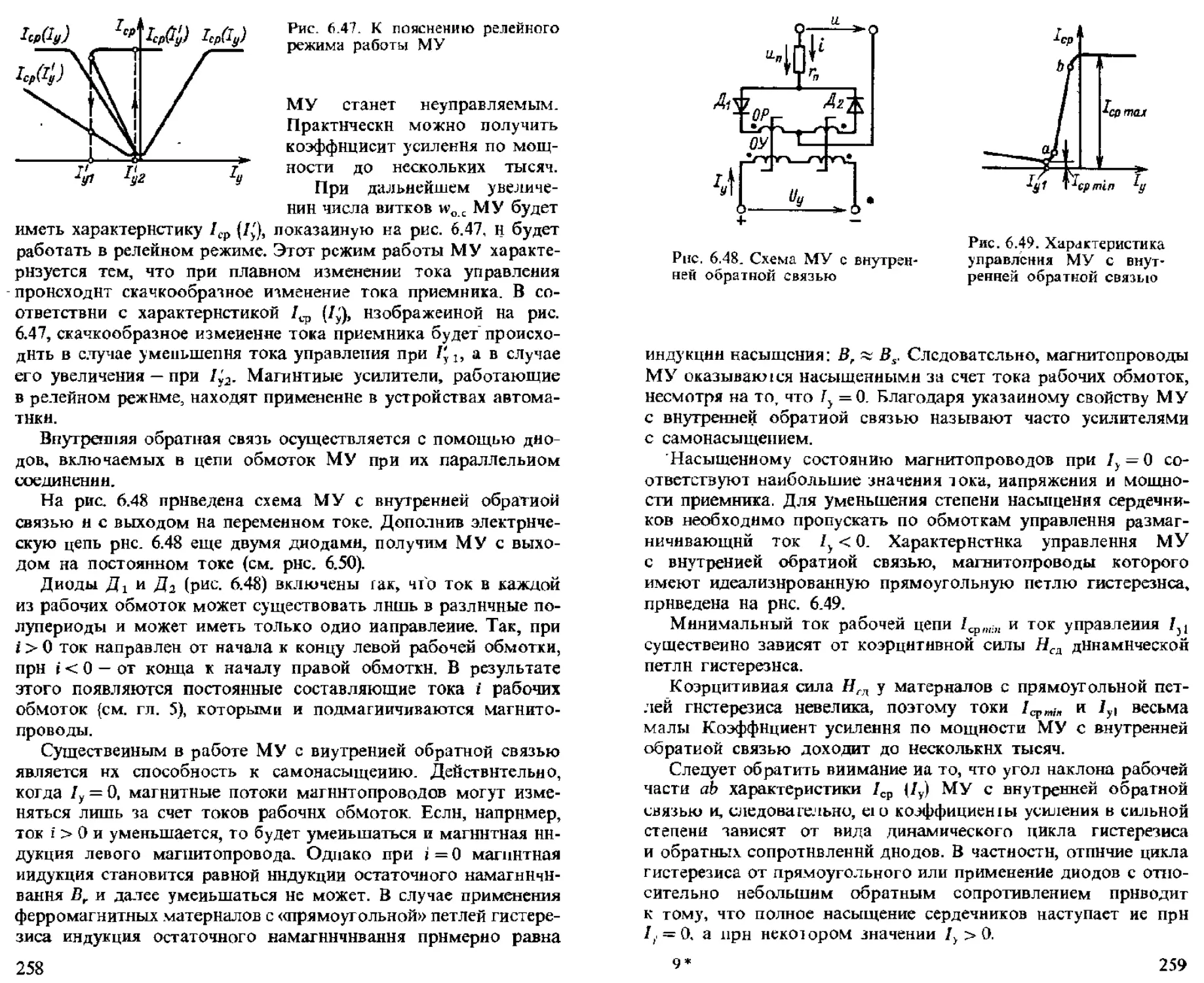
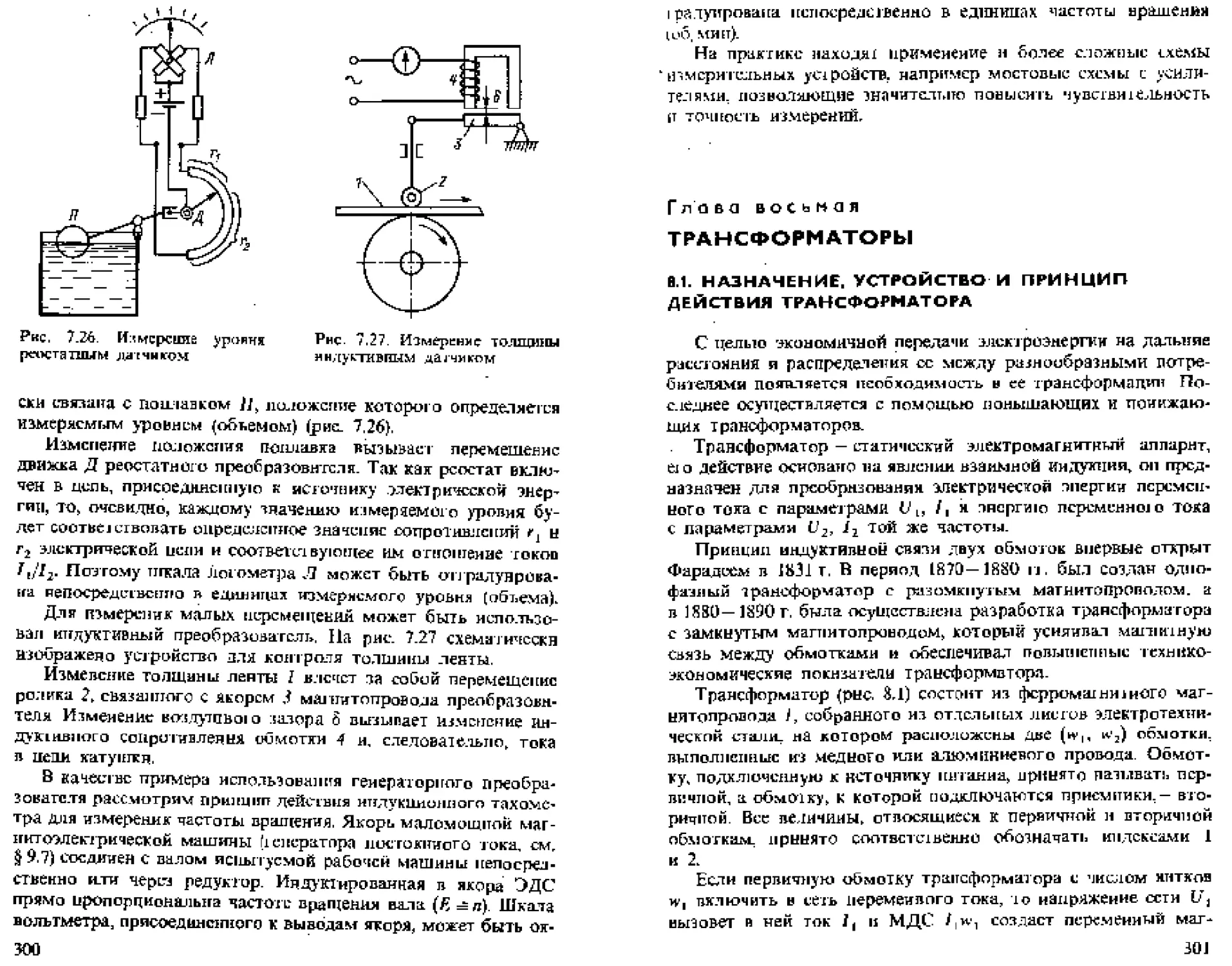
/























































































































































































































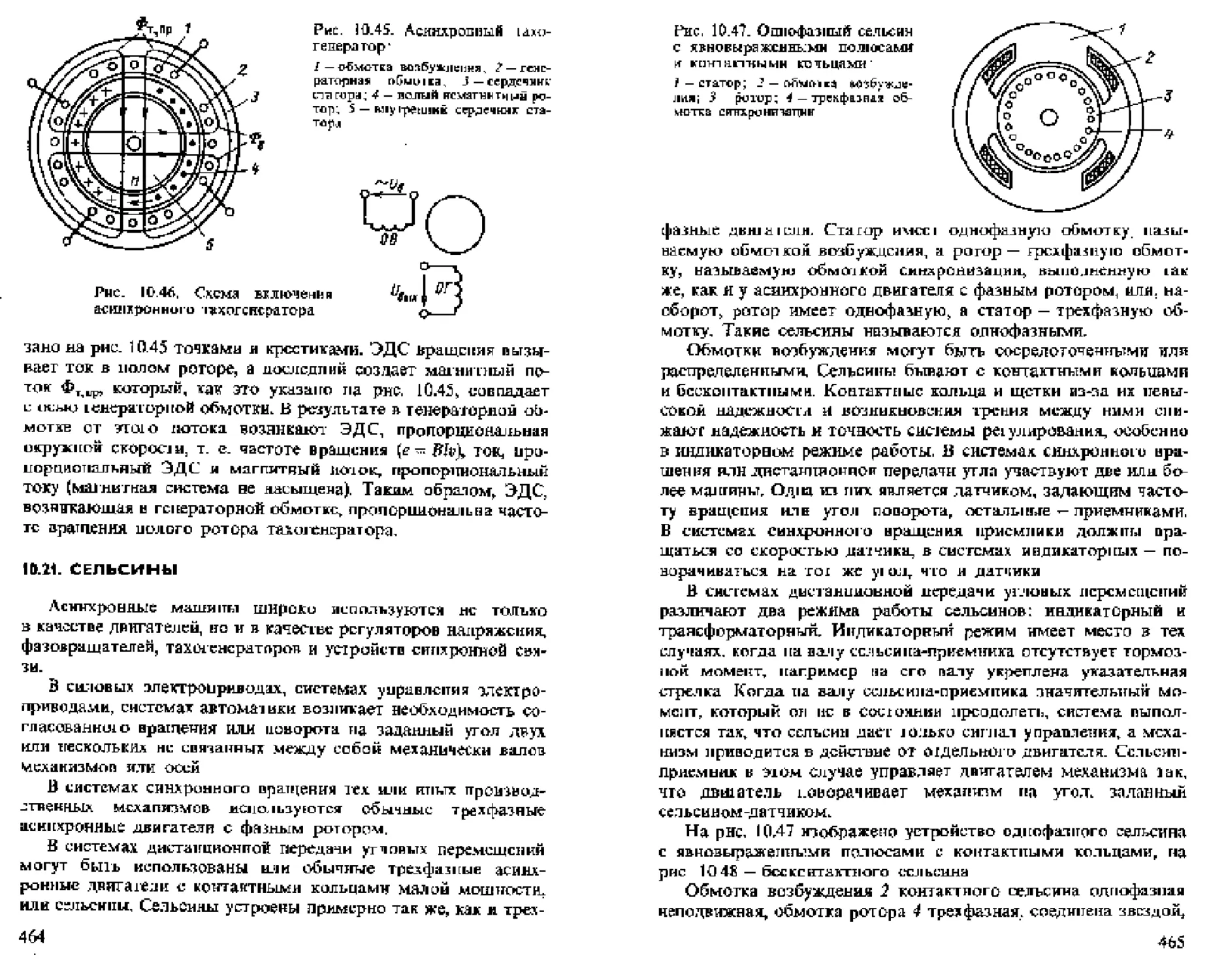









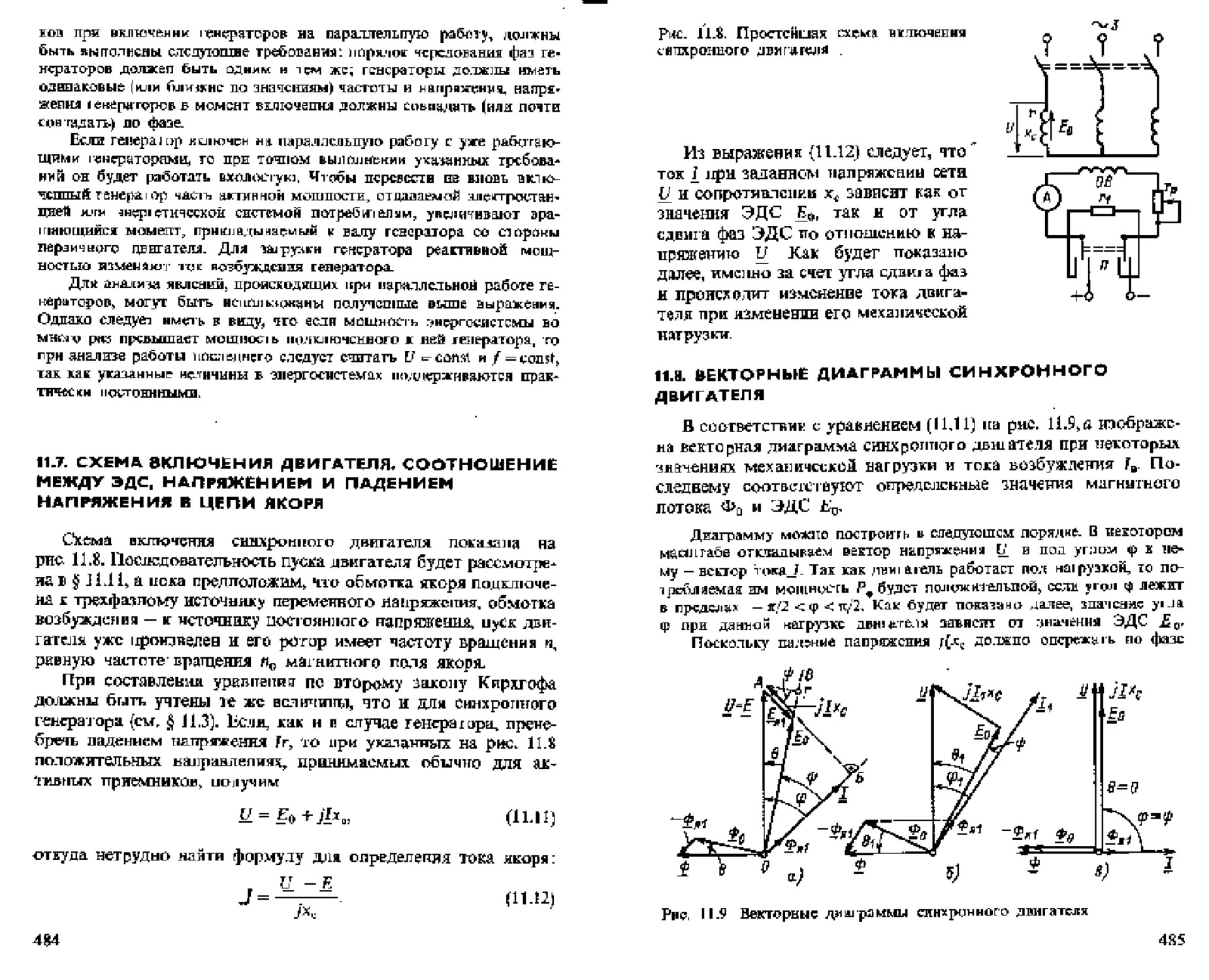












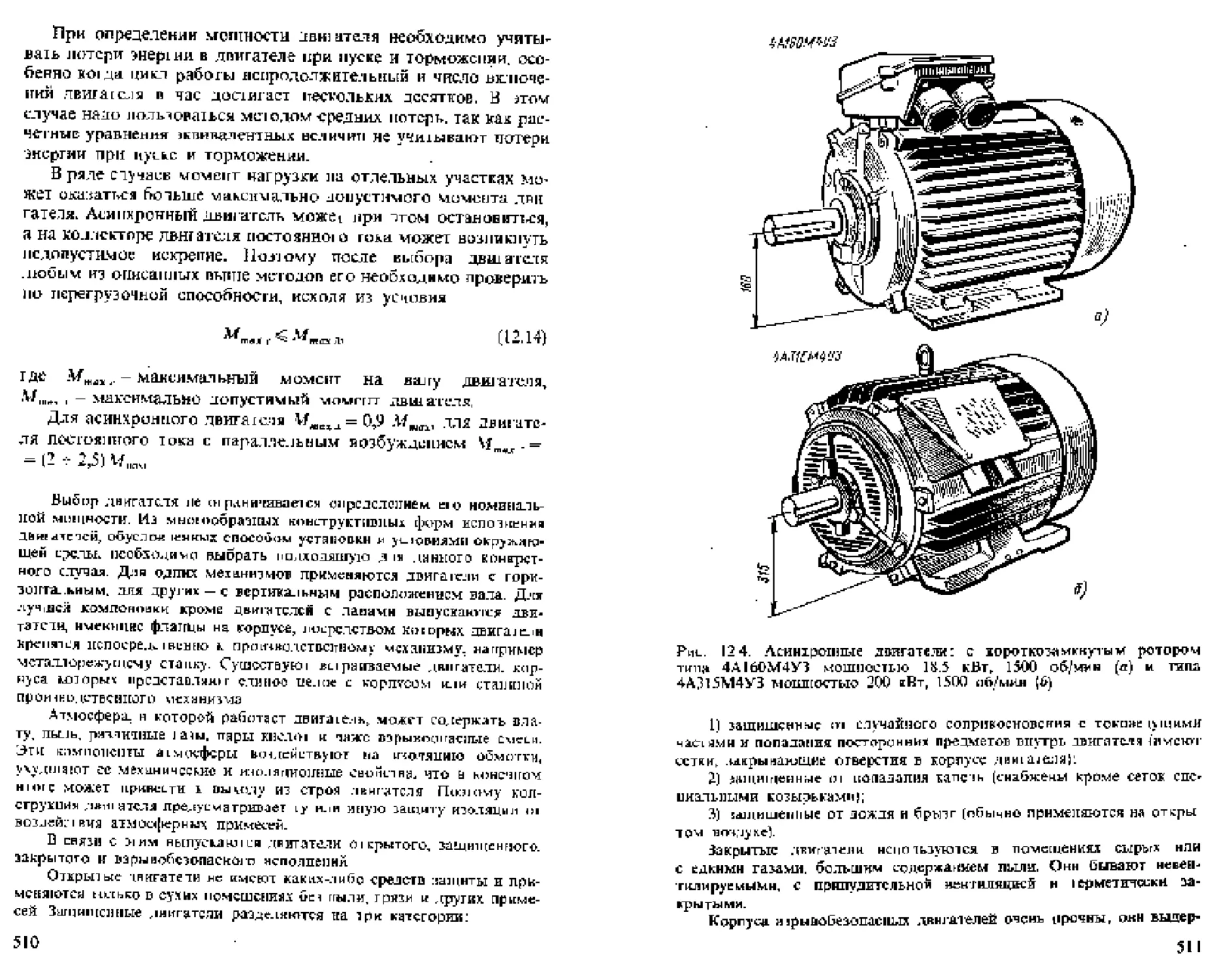

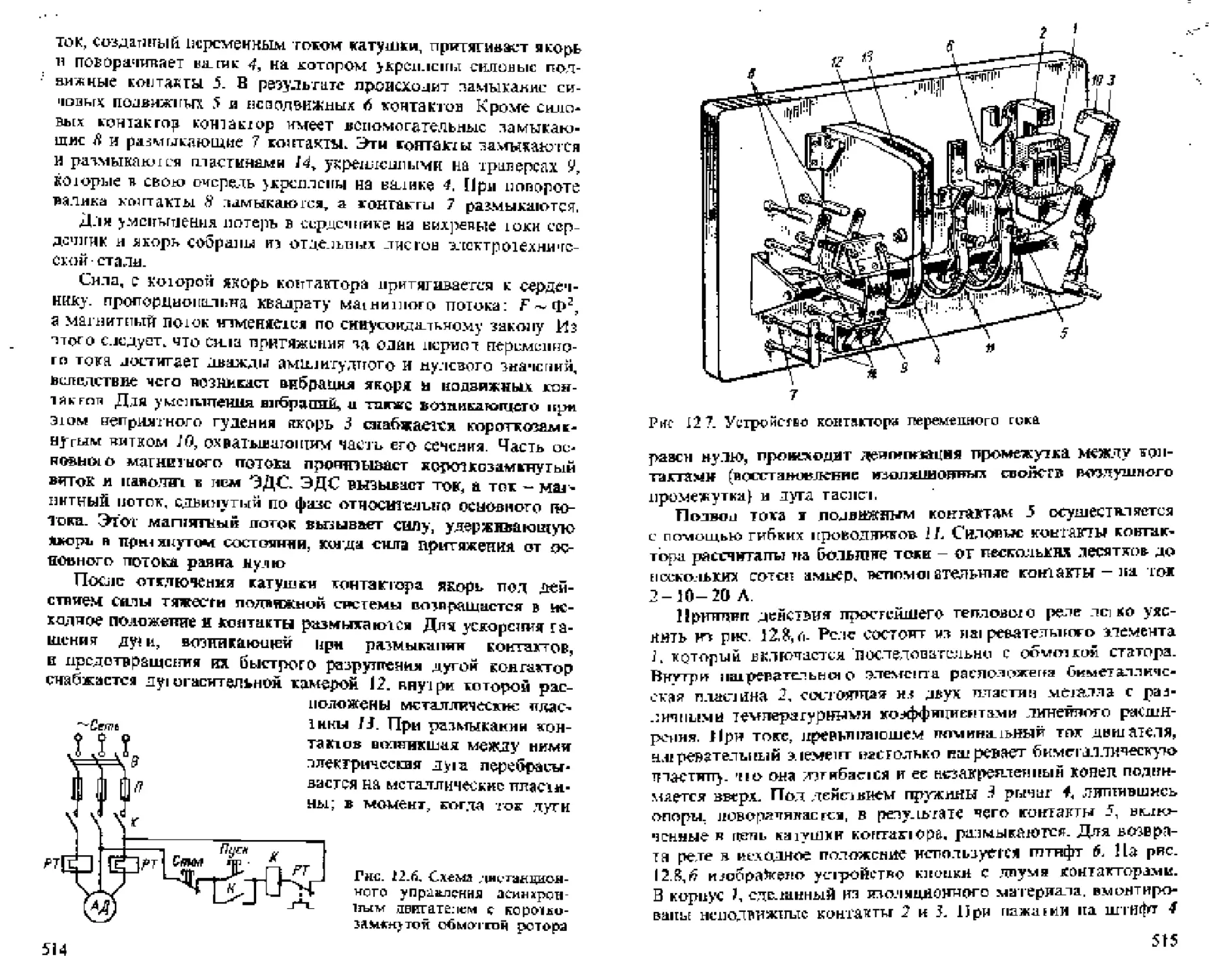




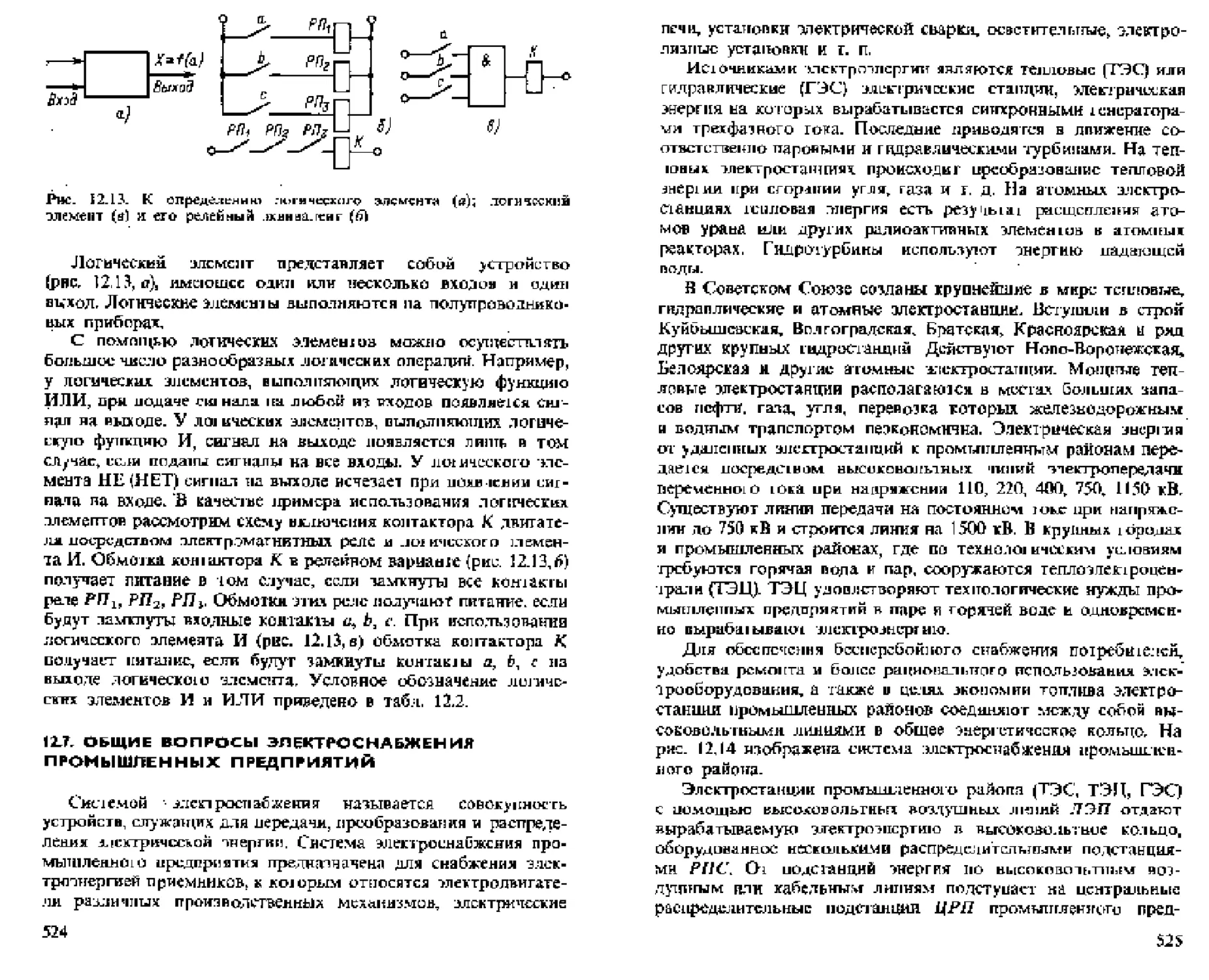
















Text
БЕК 31.21 Б 82
УДК 621.3(075.8)
Р ец е н з е нт Т>. Г. Меньшов
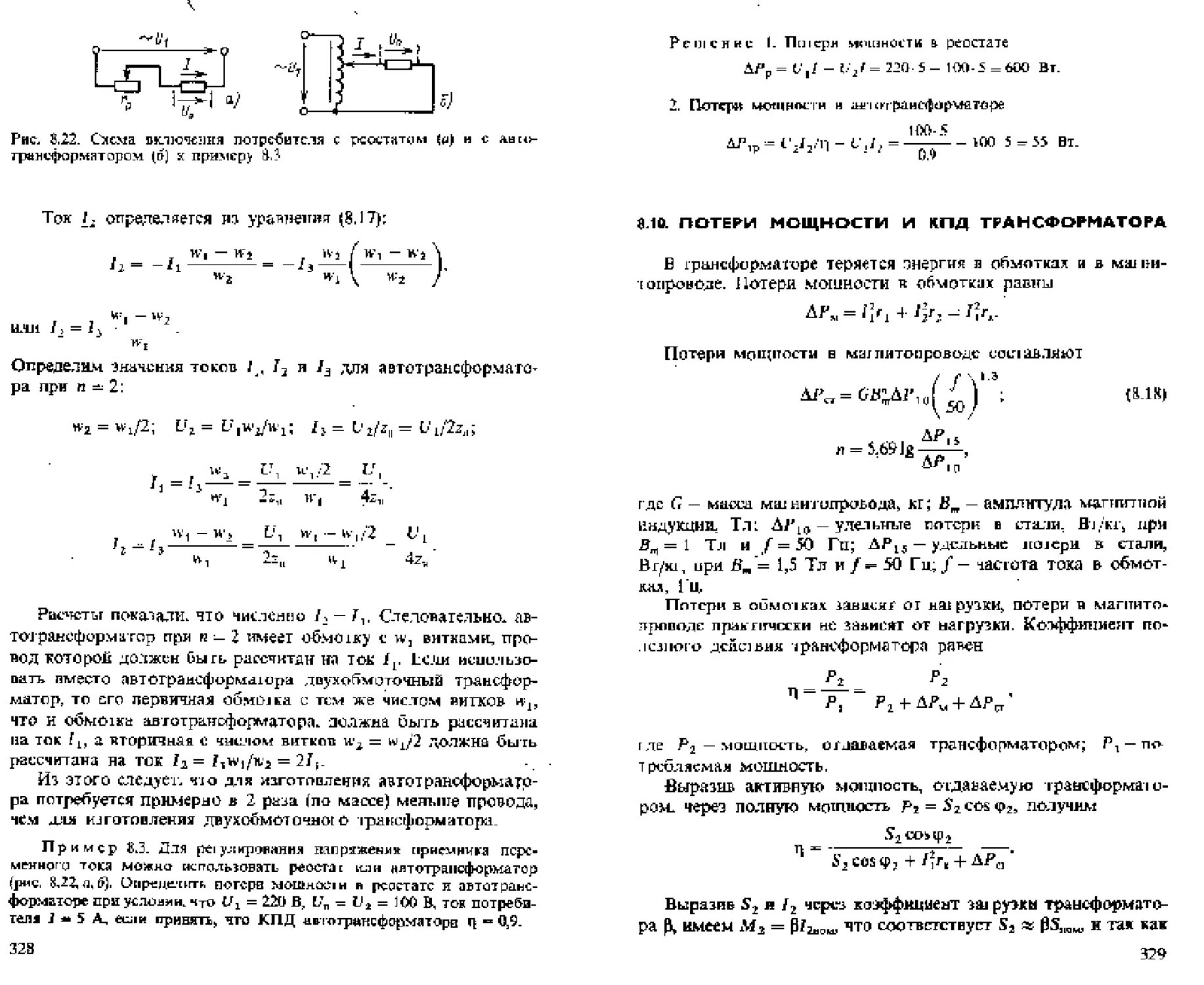
Борисов Ю. М. и др.
Б 82 Электротехника/Ю. М. Борисов, Д. Н. Липатов, Ю. Н. Зорин. Учебник для вузов. — 2-е изд., пере-раб. и доп, —М.: Энергоатомиздат, 1985.— 552 с., ил.
В пер.: 1 р. 50 к. 97000 экз.
Рассматриваются свойства, методы анализа и расчета электрических цепей постоянного и переменного тока, магнитных цепей, электрические приборы и измерения, трансформаторы и электрические машины, а также принципы выбора электродвигателя и аппаратуры управления и зашиты электротехнических устройств. Первое издание выпущено в 1974 г. Данное, второе, переработано и дополнено в соответствии с ныне действующей программой и замечаниями читателей.
Предназначается в качестве учебника по курсу «Общая электротехника» для студентов неэлектротехнических специальностей.
„ 23020100004)61
D — I - ДЛ-ОЭ
051(01)-85
ББК 31.21
6П2.1
© Издательство «Высшая школа», 1974 © Энергоатомиздат, 1985
ПРЕДИСЛОВИЕ
Предлагаемый учебник написан в соответствии с программой курса «Электротехника» для студентов машнностроиг тельных, горных^ металлургических и теплоэнергетических специальностей вузов. В нем учтен опыт преподавания в МВТУ им. Н. Э. Баумана на факультетах автоматизации ы механизации промышленности, а также конструкторском н энер-гомашиностронтельном, где изучение этого курса ведется с использованием элементов программированного обучения.
Основа глубоких знаний — это систематическая самостоятельная работа студента над курсом и умение применять теорию к решению практических задач. Для активизации работы над курсом учебник снабжен примерами и задачами, которые студент должен рассмотреть после проработки соответствующего раздела курса. Для самостоятельного решения задач рекомендуется использовать учебное пособие Д. Н. Липатова «Вопросы и задачи по электротехнике для программированного обучения» издания 1973, 1977, 1984 гг. Оно может служить-также для контроля знании студентов с помощью технических средств.
Работа по написанию учебника распределена между авторами следующим образом.
Главы 1 (кроме § 1.5), 3, 6 (кроме п. 6.5.5, § 6.6 и 6.10), 9 (кроме § 9.23) и 11 (кроме § 11.13) написаны канд. техн, наук, доц. Ю. М. Борисовым.
Главы 2, 4,-7 (кроме § 7.7 и 7.8), 10 и 12 написаны канд техн, наук, и. о. проф. Д. Н. Липатовым.
Введение, гл. 5, § 7.7, 7.8, 9.23 н 11.13 написаны канд. техн, наук, доц. Ю. Н. Зориным.
Глава 8 написана совместно Д. Н. Липатовым и Ю. Н. Зориным, п. 6.5.5, § 6.6 и 6.10 написаны совместно Ю. М. Борн-
3
совым и Ю. Н. Зориным, § 1.5 написан совместно рисовым и Д. Н. Липатовым.
Авторы благодарны преподавателям кафедры электротехники, электроники и электрооборудования МВТУ им. И. Э. Баумана за сделанные ими замечания по первому изданию книги.
Авторы считают своим долгом выразить благодарность рецензенту проф. Б. Г, Меньшову за ряд полезных замечаний, что несомненно способствовало улучшению учебника.
Особенно признательны авторы доц. Л. Е. Алехину, проделавшему огромную работу по редактированию рукописи учебника.
Замечания по учебнику авторы просят направлять по адресу 113114, Москва, М-114, Шлюзовая наб., 10, Энергоатомиздат.
Авторы
ВВЕДЕНИЕ
Одним из’основных направлений научно-технического прогресса является электрификация народного хозяйства. Она имеет огромное социальное и экономическое значение. Только при электрификации производства возможен рост производительности труда, повышение эффективности всех отраслей народного хозяйства, улучшение культуры производства и условий труда. В настоящее время невозможно дальнейшее развитие промышленности, сельского хозяйства, транспорта и т. д., а также улучшение бытовых условий трудящихся без расширения использования электрической энергии.
Электротехника является наукой о техническом использовании электричества и магнетизма в народном хозяйстве. Без достаточно глубокого знания электротехники невозможно пред^ ставить себе инженеров — создателей и руководителей современного высокоразвитого производства.
Интенсивное использование электрической энергии связано со следующими ее особенностями: возможностью достаточно легкого преобразования • в другие виды энергии (механическую, тепловую, лучистую и т. д.); возможностью централйво^ ванного и экономичного получения на различных электростанциях; простотой передачи с помощью линий электропередачи с малыми потерями на большие расстояния к потребителям.
Только после Великой Октябрьской социалистической революции стала осуществляться плановая электрификация нашей страны. В первые же годы Советской власти. В. И. Ленин говорил о том, что широкое использование электрической энергии является одной из предпосылок осуществления коренных революционных преобразований в экономике страны, а также создания материально-технической базы социализма и коммунизма. Это было высказано в его гениальней, ставшей впоследствии крылатой фразе: «Коммунизм — это есть Советская власть плюс электрификация всей страны».
План ГОЭЛРО, созданный под непосредственным руководством В. И. Ленина, был утвержден VIII Всероссийским съездом
5
Советов в декабре 1920 г. Ему придавалось настолько большое значение, что он рассматривался как вторая программа партии.
В плане предусматривалась программа-минимум электрификации страны. При этом учитывались как существующие, так и вновь строившиеся электростанции, а также основные линии электропередачи. План ГОЭЛРО предусматривал опережающее развитие электроэнергетики, т. е. создание энергетической базы индустриального развития страны. Он предполагал грандиозное по тем временам для нашей страны строительство 10 гидростанций и 20 тепловых электростанций общей мощностью 1,5 млн. кВт. Интересно отметить, что в Государственной комиссии по электрификации России Делались предложения о возможном энергетическом использовании таких великих рек России, как Волга и Ангара. План ГОЭЛР^-рассчитанвый на 10—15 лет, был не только выполнен, но и перевыполнен.
В настоящее время благодаря повседневной зароте Партин и Правительства в нашей стране достигнуты значительные успехи в электрификации народного хозяйства. По производству электроэнергии Советский Союз занимает первое место в Европе и второе место в мире. В 1983 г. в стране было произведено 1416 млрд кВт-ч электроэнерг.пи, что превысило-уровень 1940 г. в 29,5 раза. В том же году выработка электроэнергии на душу населения составила 5181,6 кВт-ч, что почти в 21,2 раза больше в сравнении с 1940 г. Значительно, а именно в 7,7 раза, повысилась энерговооруженность труда в промышленности.
Успешно развивается Единая энергосистема страны. В настоящее время она объединяет более 900 электростанций, которые имеют суммарную установленную мощность около 83 % мощности всех электростанций страны. Единая энергосистема страны продолжает развиваться. Она связана линиями электропередачи с МНР, Финляндией, Норвегией и Турцией. Развивается энергосистема «Мир» стран СЭВ. Единая энергосистема значительно повысила надежность и эффективность энергоснабжения страны.
' XXVI съезд КПСС поставил задачу дальнейшей, последовательной электрификации народного хозяйства. При этом было подчеркнуто, что электрификация является важным фактором научно-технического прогресса, повышения качественного уровня и эффективностгя’лроизводства, роста производительности общественного труда и народного благосостояния. В Энергетической программе СССР на длительную перспективу предусматривается опережающее развитие атомной энергетики. В европейской части страны, прирост выработки электроэнергии
6
предусматривается в основном за счет атомных электростанций. В Сибири, на Дальнем Востоке я в Средней Азии будет продолжено строительство мощных тепловых я гидроэлектростанций. ‘
В настоящее время жизненные интересы требуют разработки принципиально новых источников электрической энергии. В связи с этим ведутся научно-исследовательские и практические работы во проектированию атомных реакторов на быстрых нейтронах, использованию энергии прилива н отлива, по более полному освоению солнечной и геотермальной энергии и т. д.
С целью передачи электроэнергии в центральные районы страны с меньшими потерями осуществляется строительство уникалыалх линяй электропередачи сверхвысоких напряжений. Так, к концу 80-х годов будет введена в действие первая очередь линии электропередачи постоянного тока напряжением 1500 кВ Сибирь — Казахстан — Урал и линия электропередачи переменного тока напряжением 1150 кВ Экибастуз — Центр.
В одиннадцатой пятилетке предусматривается дальнейшее усовершенствование и развитие Единой энергосистемы страны, повышение надежности и качества электроснабжения народного хозяйства.
Научно-технический прогресс предусматривает широкую механизацию и автоматизацию производственных процессов. При высоком уровне энерговооруженности современных предприятий создание автоматизированных систем управления производственными процессами невозможно без значительного использования электротехнической аппаратуры и электрооборудования. В современных производственных машинах с помощью электротехнической апнаратуры осуществляется управление ее механизмами, автоматизация их работы, контроль за ведением производственного процесса, обеспечивается безопасность обслуживания и т. д. Следовательно, функции электротехнических устройств машин настолько значительны по сравнению с их механической частью, что именно они во многом определяют такие важные показатели, как производительность, качество н надежность создаваемой продукции.
Инженер-механик не должен заниматься проектированием и созданием электротехнической части производственных машин, однако он должен уметь квалифицированно эксплуатировать автоматизированные установки, принимать участие в разработке систем автоматизированного управления производственными процессами, грамотно использовать электротехническую аппаратуру и электрооборудование при проведении научных исследований. Все это возможно лишь в том случае,
7
если инженер-механик имеет хорошую электротехническую подготовку.
В курсе «Электротехника» осуществляется анализ явлений, происходящих в электрических и магнитных цепях. Изучаются вопросы, связанные с установившимися и переходными процессами, периодическими несинусоидальными токами в линейных электрических цепях. Определенное внимание уделено электрическим измерениям и электроизмерительным приборам. Изучается устройство, принцип действия трансформаторов и электрических машин. Рассматриваются пуск, регулирование частоты вращения, реверс, тормозные режимы, механические и электромеханические характеристики двигателей постоянного и переменного тока. Излагаются вопросы электропривода, аппаратуры управления, защиты электротехнических устройств.
Знание перечисленного материала дает возможность будущим специалистам не только свободно разобраться в устройстве и принципе действия разнообразной электротехнической аппаратуры, электрических машин и оборудования, но'и грамотно использовать их на практике. |
Особое внимание будущих инженеров хотелось бы обратить на возникшее противоречие между техническим прогрессом и окружающей средой, так как многие отходы производства в значительной степени шали оказывать отрицательное влияние на почву, воду, атмосферу и космос, что в го же время отражается на всех живых организмах и, конечно, на человеке.
К сожалению, приходится констатировать, что производство электрической знертии и ее преобразование в другие виды энергии могут приносить и приносят вред окружающей среде. Так, тепловые электростанции при сжигании топлива выбрасывают в атмосферу окись азота и углерода, двуокись серы и т. д. Эти электростанции требуют больших земельных площадей для золоотвалов (ишаков).
Работа самих гидроэлектростанций для окружающей среды безвредна. Однако создание значительных водохрани.шщ сказывается на микроклимате, т. е. может повыситься влажность, могут чаще наблюдаться туманы. Оказывается негативное влияние на рыбное хозяйство, а замедление течения рек приводит к загрязнению воды.
Атомные электростанции практически относятся к чистым предприятиям, однако необходимо решение очень важного вопроса - безопасного хранения их отходов.
Источники энергии прилива и отлияа, солнечной и геотермальной энергии, энергии ветра относятся к чистым и безвредным источникам.
Заметим, что значительное выделение теплоты при про
8
изводстве и потреблении электроэнергии может оказывать влияние на изменение климата.
В настоящее время изучается вопрос о. физическом воздействии как на живые организмы, так и на атмосферу электромагнитных полей, образующихся вдоль воздушных ЛЭП, так как радиус воздействия подобных полей достигает нескольких десятков метров.
В СССР и социалистических странах вопросам экологии уделяется большое внимание. Так, для борьбы с загрязнением атмосферы на электрических станциях, промышленных предприятиях и транспорте используются очистительные фильтры, механические золоуловители и т. п. Осуществляется переход на центральное теплоснабжение, производится электрификация быта, повышается беэотходность в промышленности, создаются мощные очистительные сооружения, замкну iue циклы использования воды, ведутся разработки сверхпроводящих и криогенных ЛЭП. С учетом загрязнения окружающей среды выхлопными газами двигателей внутреннего сгорания просматривается замена их на транспорте электрическими двигателями. Вопросы охраны окружающей среды должны постоянно находиться в поле зрения будущих инженеров.
Глава первая
ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПОСТОЯННОГО ТОКА
1.1. ПОЛУЧЕНИЕ И ОБЛАСТИ ПРИМЕНЕНИЯ ПОСТОЯННОГО ТОКА
Постоянным называется ток, значение и направление которого прн неизменных параметрах электротехнической установки остаются постоянными. В отличие от этого под переменным понимается обычно ток, значение и направление которого периодически изменяются.
На основе технико-экономических соображений электрическая энергия вырабатывается, на электростанпиях, распределяется между приемниками и потребляется последними преимущественно в виде энергии переменного тока (см. гл. 2). Однакф широкое применение имеет в настоящее время также и постоянный ток.
Для некоторых приемников постоянный ток является единственно возможным родом тока, а иногда его применение позволяет существенно улучшить технические и эксплуатационные свойства установок.
Электрическая энергия постоянного тока используется, например, для питания электролитических ванн, двигателей постоянного тока многих производственных маитин и механизмов, различных устройств промышленной электроники, авю-матнки и т. д.
Электрическую энергию постоянного тока получают в настоящее время чаще всего нз электрической энергии переменного тока с помощью полупроводниковых преобразовательных устройств. Реже для этой цели используют генераторы, приводимые во вращение электрическими и неэлектрическими двигателями, аккумуляторы, гальванические элементы н термогенераторы.
1.2. ЭЛЕМЕНТЫ ЭЛЕКТРОТЕХНИЧЕСКИХ УСТАНОВОК, ЭЛЕКТРИЧЕСКИЕ ЦЕПИ И СХЕМЫ
Основными элементами электротехнических установок являются источники и приемники электрической энергии, а также преобразовательные устройства.
10
С помощью источников тот или ивой вид энергии (энергия сжигаемого топлива, падающей воды, атомная и химическая энергия и т. д.) преобразуется в электрическую энергию. Приемники, наоборот, преобразуют электрическую энергию в дру-гие ее вида (механическую, тепловую, химическую, энергию светового излучения и т. д.). С помощью преобразовательных установок электрическая энергия одного вида преобразуется в электрическую энергию другого вида (энергия переменного тока — в энергию постоянного тока, энергия переменного тока одной частоты — в энергию переменного тока других частот И т. д.).
Кроме основных элементов электротехнические установки содержат большое число вспомогательных элементов, выполняющих разнообразные функции. К ним относятся, например, выключатели и переключатели различного назначения, аппараты автоматизированною управления, электроизмерительные приборы, резисторы для регулировании юка, напряжения и мощноши приемником, Чащи|ные устройства.
Вспомогательные элементы, не являясь в прямом смысле приемниками, потребляют некоторое количество энергии, что ухудшает коэффициент полезного действия (КПД) установок.
Основные и вспомогательные элементы соединяются между собой с помощью проводов и образуют в совокупности электрическую цепь установки.
Различные элементы электрических цепей обозначаются в технической документации и литературе согласно ГОСТ с помощью условных обозначений, некоторые из которых будут приведены по мере изложения материала книги.
Графическое изображение электрической цепи с помощью условных обозначений ее элементов называется электрической схемой цепи.
1.3. ЗАДАЧИ РАСЧЕТА И АНАЛИЗА ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ. ПАРАМЕТРЫ, ИСПОЛЬЗУЕМЫЕ ПРИ РАСЧЕТЕ И АНАЛИЗЕ
Задачи, возникающие при расчете электрических цепей, бывают весьма разнообразными. Одной из наиболее часто встречающихся задач расчета является определение напряжений, токов и мощностей различных элементов цепей при заданных их параметрах. Нередко возникает и другая задача, когда бывает необходимо найти значения параметров тех или иных элементов, например электродвижущих сил (ЭДС) источников, обеспечивающих получение требуемых напряжений, токов или мощностей.
11
Во многих случаях при расчете приходи гея определи» не юлько значения ЭДС, напряжений и токов, но и их направления. Объясняется это тем, что направления указанных величин характеризуют ряд показателей, которые могут представлять интерес при изучении электротехнического устройства. Например, направление тока в намагничивающей обмотке некоторого электромагнитного устройства, включенной в данную цепь, определяет направление магнитного поля, возбуждаемого этой катушкой. Определив при расчете электрической цепи направления ЭДС и тока или напряжения и тока некоторых элементов цепи, можно легко определить, какие из них являются источниками, а какие приемниками.
Кроме расчета электрических цепей часто возникают задачи их анализа, которые бывают также весьма разнообразными. Так, иногда требуется установить харектср изменения значений различных величин или соотношений между ними при изменении параметров цепи,
При рессмотрении вопроса о параметрах различных элементов электрических цепей необходимо учитывать следующее. Каждый элемент электрической цени имеет в общем случае несколько параметров, с помощью которых ыогут быть учтены электромагнитные и тепловые явления, свойственные данному элементу. Однако далеко не всегда необходимо принимать во внимание наличие всех параметров.
Например, при расчете и анализе установившегося режима работы цепи постоянного тока, содержащей катушку индуктивности, такой па-' раметр, как индуктивность, учитывать не следует. Объясняется это тем, что при постоянном токе индуктивность пе влияет па значение напряжений, токов и мощностей.
На значения напряжений, токов и мощностей при установившемся режиме в цепях постоянного тока оказывают влияние, а поэтому используются при расчете и анализе следующие параметры:
ЭДС Е источников электрической энергии, являющиеся причиной возникновения напряжений, токов и ыощиостей;
ЭДС электродвигателей и аккумуляторов (при зарядке последних), являющихся приемниками электрической энергии;
сопротивления г различных элементов электрических цепей, в том числе и внутренние сопротивления г0 источников, а Также приемников, имеющих в качестве параметра ЭДС. Выесто сопротивлений могут быть исиользованы соответствующие им проводимости g = l/r и gQ = 1/Го.
Элементы электрических цепей, имеющие в качестве параметров ЭДС, называются активными элементами, не имеющие ЭДС — пассивными элементами. Во многих случаях вместо
12
ЭДС и внутренних сопротивлении элементов указывается напряжение, подводимое от них к данной электрической цепи (см. рнс. 1.1, д).
При определенных условиях активные элементы могут быть либо источниками, либо приемниками электрической энергии. Соотношение между ЭДС и напряжениями активных элементов рассматривается в § 1.10 и 1.12.
В этом случае, когда при расчете и анализе не ясно, источниками или приемниками являются активные элементы, будем называть их источниками ЭДС и источниками с указанным напряжением.
Многие вспомогательные элементы электрических цепей имеют такие сопротивления, что они нс влияют практически на значения напряжений, токов и мощностей. К цнм относятся, например, контакты коммутационных и других аппаратов, электроизмерительные приборы, некоторые защитные устройства, соединительные провода небольшой протяженности и др. Подобные элементы на электрических схемах, предназначенных для расчета и анализа электрических цепей, обы*шо не изображают.
Элемент электрической цепи, характеризуемый одним параметром (при наличии у него и других параметров),-либо отдельные части элеыента, каждая из которых характеризуется одним параметром н изображается на схеме с помощью соответствующего условного обозначения от других частей, называются часто идеальными элементами. А электрические схемы, содержащие идеальные элементы, называют иногда схемами замещения.
1.4. НЕКОТОРЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ И КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ. ПОНЯТИЕ О ДВУХ ПОЛЮСЫ ИКАХ
С точки зрения расчета и анализа электрических цепей не имеет значения, с какими именно источниками, приемниками и вспомогательными элементами приходится иметь дело. Важно знать только их параметры и способ соединения друг с другом. Учитывая это, при изу’генни методов расчета и анализа цепей будем использовать в основном одни и те же условные обозначения для различных элементов, имеющих одинаковые параметры. Активные элементы будем обозначав в основном кружочками со стрелками внутри, указывающими направление ЭДС (рис. 1.1); для батареи из гальванических элементов используем обозначение, приведенное на рис. 1.1, б.
В сопротивлениях различных элементов электрических цепей происходит процесс преобразования электрической энергии в теплоту. Такие элементы называются резистивными и обозначаются прямоугольничками (см. рис 1.1).
13
Рис. 1.1. Примеры схем электрических цепей
Электрические цепи постоянного тока (как и переменного) и со-ответственно их электрические схемы бывают весьма разнообразными. Так, встречаются электрические цени неразветвленные (рис. 1.1, а, $ и разветвленные (рис. 1.1, в-б), с одним активным элементом (рис. 1.1, а, в, д) и с двумя (рис. 1.1, б. г) или с большим количеством активных элементов, линейные и нелинейные.
Линейной называется электрическая цепь, параметры которой не зависят от напряжений или токов в пени. Если параметр хотя бы одно, го из элементов нс остается постоянным при изменении напряжений или токов в цепи, то данный элемент и вся электрическая цепь называются нелинейными. Некоторые нелинейные элементы и цепи постоянного тока рссматриваются в § 1.16.
Часть электрической цепи, имеющая два вывода, с помощью которых она соединяется с другой частью цепи, называется двухполюсником. Рахтичают пассивные и активные двухполюсники. двухполюсники содержат только пассивные элементы, аыивные — ка* пассивные, так и активные элементы. Например, справа от точек а к Ь на рнс. 1.1, в расяоложена схема пассивного двухполюсника, венного с активным двухполюсником, ехала которого дана слева от указанных ючек. Справа и слева от точек с и d на рис. 1Л,г расположены схемы двух активных двухполюсников, а между этими точками - пассивный двухполюсник.
IX ПРОВОДНИКОВЫЕ И ЭЛЕКТРОИЗОЛЯЦИОННЫЕ МАТЕРИАЛЫ. СОПРОТИВЛЕНИЕ ПРОВОДНИКОВ И ЭЛЕКТРИЧЕСКАЯ ПРОЧНОСТЬ ДИЭЛЕКТРИКОВ
Токоведущие части различных элементов электрических цепей изготовляются из проводниковых материалов, которые бывают твер--дыми, жидкими и газообразными. Основными проводниковыми материалами являются металлы н их сплавы.
В большинстве случаев токоведущие части (проводники) изготовляются из проволоки круглого или прямоугольного сечения. Такне проводники используются, например, при сооружении линий электропередачи и электрических сетей, нагревательных устройств, обмоток элек i рических машин, различных электротехнических аппаратов и измерительных приборов.
Если проводник имеет одну и ту же площадь поперечного сечения по всей длине, го его сопротивление, Ом,
г = pits, (1.1)
где I - длина проводника, м; 5 — площадь поперечного сечения проводника, м2; р — удельное сопротивление материала проводника, См'М.
На практике часто пользуются единицами /, S и р в 1 м, 1 мм2 и 1 Ом • мм2/м = 1 мкОм • м соответственно.
При использовании тек или другик из указанных единиц следует помнить, что в обоих случаях удельные сопротивления не равны и находятся в соотношении 1 Ом-м = 10 6 Ом-ммг/м.
Кроме единицы сопротивления 1 Ом часто используют более крупные единицы: 1 килоом/1 кОм = Ю2 Ом) и 1 мегаом (1 МОм = = 10* Ом). /
Единицей проводимости g = 1Д явлне । ся 1/Ом = 1См(1 сименс).
Единицы удельной проводимости у = 1/р зависят от единиц удельного сопротивления. Когда единицей удельного сопротивления является 1 Ом м, единица удельной проводимости будет 1ДОм - м) — 1 См/м. Когда же единицей сопротивления является 1 Ом-мм2/м = 1 мкОм м, единила удельной проводимости будет 1 м/(Ом мм2) = 1 См-м/мм2. Соотношение между указанными единицами проводимости таково: 1 См/м — 1 См • м/м2 = 10е См • м/ммг.
Сопротивление металлических проводников при повышении температуры возрастает. Зависимость сопротивления от температуры выражается следующей формулой:
г2=г1[1 + а(г2-г1)].
(1.2)
где tj и t2 — начальная и конечная температуры, °C; и г. - сопротивления при температурах г, и сг. Ом; а — температурный коэффициент сопротивления, еС-1.
Сведения об удельных сопротивлениях и температурных коэффициентах проводниковых материалов приводятся в справочной литературе.
В зависимости от требований, предъявляемых в отношении значений удельного сопротивления, температурного коэффициента сопротивления, допустимой температуры нагревания, механической прочности и ряда других свойств, для изготовления токоведущих частей электротехнических устройств применяются весьма разнообразные металлы и их сплавы.
Так, для многих устройств находят применение материалы с относительно малым удельным сопротивлением. В первую очередь к таким материалам относятся медь и алюминий, имеющие при комнат
14
15
ной температуре удельное сопротивление соответственно 0,0175 и 0,0283 мкОм м, а также средние температурные коэффициенты 0,0039 и 0,004 °C-1 в диапазоне темпера iyp oi 0 до 100 °C
Из меди я алюминия изготовляют провода электрических ueiefi и линий электропередачи; медь получила широкое применение для изготовления обмоток электрических машин, различных электрических аппаратов и электроизмерительных приборов, а также контактов коммутационных и других аппаратов, При изготовлении контактов многих аппаратов используются часто серебро и его соединенна с другими металлами, а также вольфрам и молибден. Последние два металла вследствие своей тугоплавкости и большой механической прочности нашли широкое применение в электровакуумной технике для изготовления нитей нахала. Для коррозионно-устойчивых покрытий контактов используется в некоторых случаях золото. Сооружение контактных проводов передвижных приемников электрической энергии (например, электрических кранов) осуществляется в большинстве случаев из стального проката.
Постоянные и переменные проволочные разисторы общего назначения, шунтирующие и добавочные резисторы к электроизмерительным приборам и нагревательные приборы изготовляются обычно из различных сплавов, одной из ои1нчи1ельных особенностей которых являются их относительно большие удельные сопротивления. Основным сплавом для шунтирующих и добавочных резисторов является манганин, состоящий из меди, марганца и никеля. Манганин обладает очень малым температурным коэффициентом сопротивления, что необходимо для уменьшения влияния температуры на точность измерений. Константан, состоящий из меди н никеля, используется для нзГо-юнления постоянных в переменных резисторов и нагревательных приборов с рабочей температурой до 400 — 450 "С. Для на!ревательных приборов с рабочей температурой до 1000-1500 °C используются хромоникелевые, железохромоалюминиевые сплавы (нихромы и фехрали).
Электроизоляционные материалы (диэлектрики) обладают очень малой электрической проводимостью и служат для изолирования (от-делсЕия) токоведущих частей друг от друга, а также от металлоконструкций производственных и электрических машин, аппаратов и приборов, что необходимо для исключения возможности аварийных режимов (например, коротких замыканий), обеспечения надежности работы установки п безопасности ее эксплуа-гапии.
В настоящее время применяют множество различных электроизоляционных материалов. Так, для изоляции проводов, с помощью которых осуществляется питание электроэнергией приемников в заводу ских цехах, лабораториях, бытовых помещениях, применяются главным образом резина, бумага, поливинилхлорид.
Голые провода линий электропередачи изолируют от опор опорными или подвесными- изоляторами из фарфора илв стекла.
Провода обмоток электрических машин и аппаратов изолируют лаковым покрытием и иногда бумагой и хлопчатобумажной тканью, пропитанными различными лаками или компаундами, а также асбе-16
стом, стекловолокном, слюдой, эмалями и синтетическими материалами типа «лавсан».
Кроме малой проводимости электроизоляционные материалы должны обладать рядом других свойств, например достаточной электрической и механической прочностью, нагревоустойчивостью, малок гигроскопичностью.
Диэлектрики выполняют свои изолирующие функпии, пока напряжение устройства и, следовательно, напряженность электрического поля в диэлектрике данного устройства не превысят определенных знамений. Гели напряженность окажется больше некоторого критического значения, наступает пробой диэлектрика. Пробой различных (тверяжх, жидких и газообразных) диэлектриков вызван различными явлениями. Однако во всех случаях проводимость и ток диэлектрика недопустимо возрастают и он теряет свои изолирующие свойства.
Предельная напряженность поля, при которой происходит пробой диэлектрина, называется его электрической прочностью. Электрическая прочность зависит не только от свойств диэлектрика, но также от многих условий, в которых он рабогает, например от рода тога, скорости изменения и времени воздействия электрического поля, темпера(уры и влажности.
Сведения об электрической прочности диэлектриков- тфивОйятся з справочной литературе. В качестве примера укажем, что при длительном воздействии электрического поля с частотой f = 50 Гц электрическая прочность воздуха 2 — 3, дерева 2,5 — 5, резины мягкой 15 — 25, трансформаторного масла 16 — 20, фарфора 15—20 МВ/м
1.6. НАПРАВЛЕНИЯ ТОКОВ, НАПРЯЖЕНИЙ И ЭДС ЕДИНИЦЫ ИХ ИЗМЕРЕНИЯ
Для проведения расчета н анализа электрических цепей необходимо зна>ь не только значения заданных ЭДС, напряжений или токов, но и их направления, так как последние определяют знаки слагаемых в расчетных выражениях. В связи с этим следует напомни] ь о направлениях токов, напряжений и ЭДС, принятых в физике.
За направление тока принимают направление движения положительных зарядов.
За направление напряжения между какими-либо точками электрической цепи принимают папревление. в котором перемещались бы положительные заряды между этнын точками под действием сил электрического поля, т. е. от большего потенциала к меньшему.
За направление ЭДС между выводами источника или активного приемника принимают направление, в котором перемещались бы положительные заряды под действием сил стороннего поля, т. е. от меньшего потенциала к большему.
17
Так, в электрической цепи рис. 1.1, а потенциал течки а больше потенциала точки b (фв > фь), поэтому напряжение •направлено от точки а к точке Ь, а ЭДС Е — от точки Ь « точке а.
На участке amb, содержащем пассивные элементы, положительные заряды перемещаются под действием сил электрического поля от большего потенциала к меньше му; направления напряжения и тока на этом участке совпадают. На участке Ьпа, содержащем источник электрической энергии, положительные заряда перемещаются под действием ЭДС от меньшего потенциала к большему, направление тока на таком участке совпадает с направлением ЭДС и противоположно направлению напряжения.
Для удобства дальнейшего изложения будем называть указанные выше направления действительными направлениями.
Расчет и анализ любых электрических цепей может быть произведен с помощью основных законов электрических цепей: закона Ома, первого и второго законов Кирхгофа. Указанные законы испсиазуются также .для обоснования различных методов, упрогиаюнщх расчет и анализ цепей.
Запись выражений но законам Ома и Кирхгофа, различных методов расчета и анализа, а также расчетных формул производится с учетом определенных направлений как заданных величин (например, ЭДС, напряжений или токов), так и величин, подлежащих определению.
При расчете и анализе электрических цепей направления заданных и искомых величин указывают на схемах стрелками, считают их положительными (Е > О, U > 0 и I > 0) и поэтому называют положительными направлениями.
За положительные направления заданных и искомых величин при постоянном токе принимают их действительные направления. Биги они не очевидны, можно задаться положительными направлениями произвольно, так как от выбора или иных положительных направлений зависят лишь знаки ис-комых величин, а не их значения.
В качестве положительных направлений велитан, изменяющих свои действительные направления с течением времени, например при расчете или анализе цепей переменного тока, задают одно из двух возможных их направлений, с учетом которого и производят расчет.
Если в результате расчета или анализа какая-либо из искомых величии оказывается положительной, это означает, что она направлена в действительности так, как показано на схеме стрелкой; отрицательное значение искомой величины указывает на ее противоположное направление. Сказанное относится 1
1В
и к вели'вшам, действительные направления которых с течением времени изменяются.
В книге используется Международная система единиц (СИ), в которой основной единицей ЭДС, напряжения я потенциала является 1 вольт (1 В). Кроме единицы 1 вольт в практике используется единица 1 киловольт (1 кВ ~ 10’ В) и 1 милливольт (1 мВ — 10"3 В).
Основной единицей тока является 1 ампер (1 А). Для тока используются также единицы 1 миллиампер (1 мА — 10-3 А) и 1 микроампер (1 мхА- = 10-в А).
1.7. НЕКОТОРЫЕ ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ ЗАКОНОВ ОМА И КИРХГОФА ПРИ РАСЧЕТЕ И АНАЛИЗЕ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
Как известно, согласно закону Ома в замкнутой неразвет-вленной электрической пепи (см. рис. 1.1, а)
го + Г1 + Г2 + гэ
А в любом пассивном элементе пели, например с сопротивлением г2 (рис. 1.1,аХ
(1,4)
Выражение (1.3) справедливо ори совпадающих направлениях ЭДС Е и тока I, а выражение (1.4)-при совпадающих направлениях напряжения U и тока I, чхо и следует учитывать при нанесении на схеме стрелок, указывающих положительные направления в случае использования закона Ома.
Согласно первому закону Кирхгофа алгебраическая сумма токов ветвей, соединенных в любой узловой точке электрической цепи, равна нулю, т. е.
S/ = 0. (1.5)
Со знаком « 4-» в уравнение следует включать токи, положительные направления которых обрашеда к узлу, со знаком « — » — положительные направления которых обращены от узла (можно и наоборот). Например, для узла А (рис. 1.2)
Л + *2 + Ь - *4 - h = 0.
Согласно второму закону Кирхгофа в любом замкнутом контуре электрической цепи алгебраическая сумма ЭДС равна алгебраической сумме напряжений на всех резистивных элементах контура, т. е.
ЕЕ = Е/г. (1.6)
19
Рис. 1.2. К пояснению первого закона Кирхгофа
Часто в электрических цепях встречаются элементы, между выводами которых имеются те или иные напряжения U (например, напряжение сети, напряжение, снимаемое с делителя напряжения, и т. д.).
Учитывая эю, вместо (1.6) удобнее использовать следующую форму записи второго закона Кирхгофа:
ZE-SZr + SU. (1.7)
При этом ЭДС, напряжения и токи, положительные направления которых совпадают с направлением обхода контура прн составлении уравнения (1.7), следует включать в уравнение со знаком « + », а тс, положительные направления которых не совпадают с направлением обхода контура, — со знаком « —» (можно н наоборот).
Прн подстановке в уравнения (1.5)—(1.7) числовых значений ЭДС, напряжений и токов следует учитывать, что указанные величины могут быть как положительными, так и отрицательными, что повлияет па окончательные знаки перед ЭДС, напряжениями и токами.
Следует заметить, что уравнение (1.7) может быть применено и к такому контуру, который замкнут в геометрическом смысле. Это значит, что часть контура может проходить по стрелке, указывающей положительное направление напряжения между какими-либо точками. Таким образом, можно все! да записать уравнение для напряжения между двумя любыми точками электрической цепи.
При составлении уравнений по второму закону Кирхгофа следует включать в них либо ЭДС и падение напряжения во. внутренних сопротивлениях активных элементов, либо только их напряжения.
Например, для электрической цепи рис. 1.1, а по второму закону Кирхгофа можно иапнеать
Е — 1г0 + / (?"| + г2 + г3) либо
0 = /(г, + г2 + г,)- V.„.
Исключением является случай, когда уравнение составляется для контура, проходящего через активный элемент и стрелку, указывающую положительное направление напряжения этого же элемента. Только в этом случае в уравнение войдут ЭДС, 20
Рис. 1.3. К пояснению второго закона Кирхгофа
падение напряжения во внутреннем сопротивлении и напряже-ние данного элемента. Так, для той же цепи рис. 1.1, а получим F.-lrc + U^.
Пример 1.1. В замкнутом контуре рис. 1.3 Et « 100 В, £2 = 50 В, U, «120 В, [А, «80 В, г0,=г02 = 1 Ом, г, =9 Ом. гг«4 Ом, г3« = 15 Ом, /, «2 A, J2 = l A, /4 = 3 А.
Определить ток /, в ветви аже и напряжение Ue6 между точками е и в.
Решение. Выбрав положительное направление тока Z3 таким, как показано на рис. 1.3, и обходя контур по часовой стрелке, на основании второго закона Кирхгофа получим
£1 - Е, = Л (п + м -Ы'г + + IА - + иг.
После решения относительно тока 13 и подстановки числовых значений найдем f3 = 5 А. Так как ток 13 > 0, то он направлен, как показано на рис. 1.3.
При указанном на рис. 1 3 положительном направлении напряжения иы по второму закону Кирхгофа для контура вгдев получим — £г — — li (r2 + r02) + U2 + и^. В результате вычислений найдем 14.---125 В.
Поскольку Ugg < 0, то Фе < <р4 и действительное направление напряжения между точками е и в будет противоположным указанному на рисунке.
21
1.8. НАГРЕВАНИЕ ЭЛЕМЕНТОВ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
Тепловое действие электрического тока находит в технике широкое применение. Оно используется в бытовых и промышленных электронагревательных устройствах различного принципа действия, назначения н конструктивного исполнения, для целей электросварки, в осветительной технике, в устройствах автоматики, зашиты, измерительной технике и т. д.
Однако теплота, выделяемая в сопротивлениях многих элементов электрических цепей, бесполезно их нагревает н рассеивается в окружающую среду, а затрачиваемая на это энергия приводит к снижению КПД установок. Так, совершенно бесполезно нагреваются провода электрических сетей, обмотки электрических машин, различных электротехнических аппаратов и т. д.
Рассмотрим вопросы нагревания токоведущнх частей электротехнических устройств.
Как известно, согласно закону Джоуля — Ленца при постоянном токе энергия, потребляемая резистйвиым элементом с сопротивлением т в течение времени t и преобразуемая им в теплоту, определяется по формулам
U2
W=l2rt = Ult =---l — U2gt. (1.8)
Мощность представляет собой энергию в единицу времени, Р = — W/t. Учитывая это, получим следующие выражения мощности:
1‘ - l2r - VI - и2/г - U2g. (1.9)
Основными единицами электрической энергии и мощности являются соответственно 1 джоуль (1 Дж = 1 В-А-с) и 1 ватт (1 Вт = = 1 Дж/с = 1 В • А). Учи гывая принятую единицу для мощности в 1 Вт, электрическую энергию можно выражать в ватт-секундах (1 Дж = = 1 Вт с). Для мощности и .энергии используются часто более крупные единицы: 1 .киловатт (1 кВт = 103 Вт), 1 мегаватт (1 МВт = = 106Вт), 1 киловатт-час (1 кВт-ч = 3,6- 10s Вт-с).
При сравнительно небольших температурах, с которыми работают токоведущне части многих элементов электрических цепей (провода электрических сетей, обмотки электрических машин, аппаратов и др.), можно считать, что количество отдаваемой теплоты пропорционально разности темпера iyp токоведушей части и окружающей среды. В этом случае на основами уравнения тешгоного равновесия можно получить следующее выражение для установившейся температуры токоведушей части:
/уСТ — ~2 *" ^Ожр> (110)
где 1 г — количество теплоты, выделяемой за 1с в со^мэтивждвш токоведущей части, равное мощности, потребляемой-^элементом цени с сопротивлением г, Дж/с; А — теплоотдача токоведущей части, пред-спавляющая собой количество теплоты, отдаваемой в окружающую среду за 1с при разности температур в 1“С, Дж/(с-°С); /уСТ и /окр - установившаяся температура токоведущей части и температура окружающей среды, °C Теплоотдача зависит от конструктивных особенностей токоведущей части, ее поверхности и способа охлаждения.
Как вйдяо, установившаяся темнература (при данной температуре z^8p) зависит от потребляемой резистивным элементом г мощности и теплоотдачи,
Токоведущие части различных элементов электрических цепей должны быть рассчитаны так,.чтобы их температура /уСТ не превышала допустимых значений, которые определяются различными факторами. Так, наибольшая допустимая температура изолированных проводов определяется нагревостоикостъю изоляции.
Обеспечение заданной температуры при больших мощностях электротехнических устройств требует увеличения теилоощачи, что приводит к увеличению i абаритных размеров, массы и стоимости устройства.
Для обоснования применяемой дасто методики расчета токовсду-ших частей по нагреванию предположим, что мы имеем прямолинейный проводник, для которого выражение (1.10) может быть преобразовано к виду
е - J2pd I t° (111)
/уст- т'окр. "1"
где Ао — коэффициент теплоотдачи, представляющий собой теплоотдачу с 1м2 поверхности охлаждения проводника, Дж/(°С-с-м2); J - плотность тока в проводнике, А/м2; р - удельное сопротивление материала проводника. Ом м; d - диаметр проводника, м.
Как видно, при заданных значениях р, 4, Ао н установившаяся температура зависит от плотности тока в проводнике, Для получения той же температуры ty„ плотность тока проводвдков большего диаметра должна быть меньше.
Очевидно, можно задать шкую плотность тока (или такой ток в проводнике с данной площадью поперечного сечения), при которой температура проводника не превышала бы допустимого значения Этим часто пользуются при растете токоведущих частей по нагреванию. Так, па основании расчетпых и экспериментальных данных разработаны таблицы, в которых указаны площади поперечного сечения проводов и соответствующие им по условиям нагревания допустимые значения токов. Таблицы предназначены для выбора площадей поперечного сечения проводов электрических сетей.
Допустимой плотностью тока в проводнике пользуются обычно для предварительного или приближенного расчета по нагреванию катушек электрических маппш и аппаратов. В зависимости от условий охлаждения допустимая плотность тока при длительной работе многослойных катушек из медаых проводов с хлопчатобумажной, шелковой и эмалевой изоляцией принимается 1,5 — 3 А/мм2.
22
23
1.9. РЕЖИМЫ РАБОТЫ ЭЛЕМЕНТОВ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
При включении различного количества приемников, измене нии их параметров или сопротивла»» регулировочных рези сторон будут изменяться напряжения; токи и мощности в элек грической пени, от значений которых зависит режим работь цепи и ее элементов. Наиболее характерными являются еле дующие режимы работы: номинальный, согласованный, холо стого хода и короткого замыкания.
Номинальным называется режим, при котором данный эле мент электрической цепи работает со значениями различны; величин (тока, напряжения и др.), иа которые он рассчитан заводом-изготовителем и которые называются его номинальными (или техническими) данными. Номинальные данные указываются в справочной литературе, технической документация или на самом элементе.
Для различных элементов электрических цепей указываются различные номинальные данные. Так, основными номинальными данными генераторов являются номинальные напряжение, электрическая мощность, отдаваемая приемнику, и ток; основными номинальными данными аккумуляторов являются номинальные напряжение и емкость в ампер-часах; в качестве основных номинальных данных электродвигателей указываются номинальные напряжение, ток, механическая мощность, развиваемая двигателем, и частота вращения; для нагревательных приборов и осветительных ламп задаются номинальные напряжения и мощности, для резисторов — поминальные сопротивления и токи (или мощности). Следует обратить внимание иа то, что номинальные мощности и токи многих элементов электрических пенен (двигателей, генераторов, резисторов н др.) устанавливают, исходя из их нагревания до наибо.гьшей допустимой температуры.
С учетом номинальных напряжений и гоков источников н приемников производится выбор проводов и других элементов электрических цепей.
Согласованным называется режим, при котором мощность, отдаваемая источником или погребляемая приемником, достигает максимального значения. Это возможно при определенном соотношении (согласовании) параметров электрической цепи, откуда и вытекает название данного режима.
Под режимом холостого хода понимается такой режим, при котором приемник отключен от источника. При этом источник не отдает энергию во внешнюю цепь, а приемник ае истребляет ее. Режимом холостого хода двигателей считается ре-24
жим, возникающий при работе двигателей без механической нагрузки на валу.
Режимом короткого замыкания называется режим, возникающий при соединении между собой выводов источника, приемника или соединительных проводов, а также иных элементов электрической цепи, между которыми имеется напряжение. При этом сопротивление в месте соединения оказывается практически равным нулю.
Режим короткого замыкания является следствием выхода из строя изоляции, обрыва проводов, поломки деталей, небрежности обслуживающего персонала. При корогких замыканиях могут возникнуть недопустимо большие токи, электрическая туга, возможно резкое снижение напряжения. Все это может привести к весьма тяжелым последствиям, поэтому режим короткого замыкания рассматривают как аварийный.
Следует заметить, что энергетические установки работают чаще всего в режиме, при котором токи и мощности нс превышают номинальных значений, а напряжения близки к номинальным. Однако, как будет показано далее, при пуске и электрическом торможении двигателей и включении многих аппаратов (при переменном токе) в течение относительно короткого времени возникают токи, превышающие номиналные, что учитывается при расчете устройств по условиям нагревания.
1.10. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ С ОДНИМ ИСТОЧНИКОМ ЭНЕРГИИ И ПАССИВНЫМИ (РЕЗИСТИВНЫМИ) ЭЛЕМЕНТАМИ
Многие электрические цепи имеют лишь один источник знергии и то или иное число пассивных (резистивных) элементов. Это могут быть приемники электрической энергии и различные вспомогательные элементы.
Расчет и анализ неразветвленных и некоторых разветвленных цепей с одним источником и пассивными элементами производится с помощью закона Ома, первого и второго законов Кирхгофа, не требует совместного решения уравнений. Во многих случаях расчет и анализ осуществляются путем замены отдельных участков, а затем всей цепи одним элементом с эквивалентным сопротивлением и последующего перехода в процессе расчета к заданной цепи. В некоторых случаях целесообразно воспользоваться методом эквивалентного генератора (см. § 1.14).
1.10.1. Простейшая цепь с одним приемником. Допустим, что мы имеем простейшую неразветвленнуго электрическую цепь
25
Рис, 1.4. Схема простейшей электрической цепи (а) и внешние характеристики источника (б)
(рнс. 1.4, а). В этой пепн участок amb представляет собой простейший ПаССИВНЫЙ ДВуХПОЛЮСИИК, ЯВЛЯЮЩИЙСЯ Прнемниглы электрической энергии, участок anb — простейший активный двухполюсник, являющийся источником.
Необходимость изучения указанной цепи объясняется тем, что такие цепи часто встречаются на практике, а также тем, что к такой цепи могут быть сведены более сложные цепи, что обнетчает их расчет и анализ.
Для рассматриваемой электрической цепи по второму закону Кирхгофа можно написать
Е = /г0-|-/г; (1.12)
E = Ir0 + U. (1.13)
Из приведенных уравнений нетрудно получить формулу для определения тока и соотношение между напряжением н ЭДС источника:
I-JS/(r0 + r)-£/r,; (1.14)
V-E-Ir„, (1.15)
где г3 = г0 + г — эквивалентное сопротивление цепи.
Как видно, прн неизменных значениях ЭДС Е и внутреннего сопротивления г0 ток в цепи зависит от сопротивления г приемника. Напряжение источника U (равное в данной цепи напряжению приемника) меньше его ЭДС на падение напряжения 1-г0 во внутреннем сопротивлении источника.
Если умножить (1.12) н (1.15) на ток, получим соотношения между мощностями
El = I2r0 +1гг; (1.16)
UI = El~I2r0. (1.17)
26
Правая часть (1.16) содержит потери мощности во внутреннем сопротивлении 12г0 н мощность, потребляемую приемником 1г-г. Очевидно, произведение EI представляет собой мощность, вырабатываемую источником, т. с. электрическую мощность, преобразуемую им из другого вида мощности; например, если это генератор,—из механической мощности.
Если из вырабатываемой мощности вычесть потерн мощности во внутреннем сопротивлении источника /2г0, получим мощность VI, отдаваемую источником во внешнюю цепь, что нашло свое отражение в (1.17). Мощность, отдаваемая источником в данной цепи, равна мощности, потребляемой приемником, VI = 12г.
В связи с выражениями (1.16) и (1.17), а также схемой рис. 1.4, а необходимо обратить внимание на следующее. Вырабатываемая источником мощность определяется произведением тока на ЭДС, совпадающую по направлению с током, отдаваемая им мощность — произведением тока на напряжение, направленное внутри источника против тока; мощность, потребляемая приемником, определяется произведением тока на напряжение, совпадающее по направлению с током. Такие взаимные направления тока и ЭДС, а также тока и напряжения характерны для источников и приемников и в других электрических цепях. Учитывая это, выражения мощностей, вырабатываемых я отдаваемых источниками, а также потребляемых приемниками ыогут быть записаны следующим образом:
(1-18)
рОТд=££; (,19>
рПОТр=и£. (1-20)
Выражения (1.19) и (1.20) справедливы также и для сколь уюдно сложных активных двухполюсников, отдающих и потребляющих электрическую энергию.
Отношение мощности, отдаваемой источником, к вырабатываемой им мощности представляет собой КПД источника
°тд _ _ г
Ръыр Е го 4*
Пользуясь полученными соотношениями, нетрудно установить, как будут меняться значения тока, напряжения, мощности я других величии прн изменении сопротивления г, например, при подключении к источнику различных приемников или изменении числа параллельно включенных приемников. Если отключить приемник с помощью выключателя В (рнс. 1.4, а), то электрическая цепь и все ее элементы будут работать в режиме холостого хода. В этом случае следует считать г = х>. Из (1.14) видно, что прн холостом ходе 1=0. Вследствие этого оказываются равными нулю падение напряжения 1г0, потери мощно-
27
ста I2r0 и мощности El и U1. Так как !г0 = 0, то согласно (1.15)
Уменьшение сопротивления г приводит к увеличению тока /, падения напряжения 1г0, потерь мощности 12г0 н мощности EI. Напряжение U и КПД при этом уменьшаются.
Дли того чтобы можно было судить о характере изменения мощности приемника, выразим ее следующим образом:
р =/2г = £2-——L—(1-22)
(г„ + г)2
Анализ выражения (1.22) показывает, что с уменьшением сопротивления г мощность Рпотр возрастает и при г — г0 достигает максимального значения. Дальнейшее уменьшение г приводит к уменьшению Рпотр- При г - 0 Рпотр = 0- Максимальное значение мощности Рпотр соответствует согласованному режиму работы приемника. Нетрудно установить, что при согласованном режиме U = 0,5£, Рпотр = 0>5Рвыр, г] = 0,5.
С технико-экономической точки зрения согласованный режим является нерациональным, так как к приемнику поступает лишь половина вырабатываемой источником мощности. Согласованный режим используется в некоторых радиотехнических устройствах, в автоматике и измерительной технике, когда важно получить максимальную мощность приемника. Энергетические соображения при этом не имеют решающею значения из-за малого абсолютного значения мощности.
В промышленных установках, где приходится иметь дело со значительными мощностями, важно, чтобы к приемнику поступала основная часть вырабатываемой мощности, а КПД имел большое значение. Это имеет место при г » г0.
Именно такое соотношение сопротивлений и характерно для номинального режима работы энергетических установок. Так как при номинальном режиме г » г0, то [7НОм - 1номг » /ном^о и согласно (1-15) напряжение источника будет мало отличаться от его ЭДС-
Если выводы приемника окажутся замкнутыми накоротко, например вследствие выхода из строя изоляции, то электрическая цепь будет работать в режиме короткого замыкания. В этом случае во всех соотношениях, полученных ранее, следует положить г — 0.
Так как при номинальном режиме г »г0, то номинальный ток 1 =/иом определяется в основном значением сопротивления г [см. (1.14)]. Поскольку при коротком замыкании г — 0, то гэ = = г0 и ток короткого замыкания оказывается намного больше 28
номинального тока:
Л ~ £/го Ль
Естественно, что при коротком замыкании U = 1кг ~ 0 и Рпотр = U 1л = 0. Мощность Рвыр — Е1К значительно возрастет и целиком преобразуется в теплоту в сопротивлении г0. Последнее может привести к выходу из строи изоляции и даже к перегоранию проводов. В источнике, кроме того, наблюдается ряд других нежелательных явлений.
Простейшими аппаратами для защиты от возможных последствий коротких замыканий являются предохранители (П, и П2 на рис. 1.4,а). Предохранитель имеет плавкую вставку, представляющую собой короткий проводник с меньшей термической стойкостью по сравнению с другими элементами цепи. При коротком замыкании плавкая вставка перегорает и отключает поврежденный участок цепи. Плавкие вставки изготовляются в большинстве случаев из медной проволоки и имеют настолько малое сопротивление, что практически не влияют на токи, напряжения и мощность в электрической цепи.
В дальнейшем предохранители на схемах изображаться не будут.
Одной нз важнейших характеристик источников электрической энергии является их внешняя характеристика Щ1) Внешняя характеристика показывает, как зависит напряжение источника от тока нагрузки, подчиняется уравнению (1-15), при Е = = const и r0 = const представляет собой прямую линию (рис. 1.4,6, характеристика 1). На характеристике показаны точки, соответствующие режимам холостого хода, короткого замыкания и номинальному режиму работы источника.
Из соотношения (1.15) следует, что напряжение источника можно считать постоянным и равным его ЭДС ((/ = £ = const), если пренебречь внутренним сопротивлением г0 источника. В этом случае источник называют идеальным источником ЭДС. Внешняя характеристика идеального источника приведена на рис. 1.4,6 (характеристика 2).
1.10.2. Электрические цепи с последовательным соединением резистивных элементов. Последовательным называется такое соединение элементов, когда условный конец первого элемента соединяется с условным началом второго, конец второго — с началом третьего и т. д. Характерным для последовательного соединения является один и тот же ток во всех элементах. Последовательное соединение нашло широкое применение на практике. Например, последовательно с приемником г часто включается резистор гр для регулирования напряжения, тока или мощности приемника (рис. 1.5,а). Для расширения пределов измерения вольтметров последовательно с ними включают добавочные резисторы гл (рис. 1,5, 6). С помощью рео-
29
Рис. 1.5. Схема электрических цепей с последовательным соединением резистивных элементов
Рис. 1.6. Схемы электрических цепей с параллельным соединением резистивных элементов
стата, включаемого последовательно в различные ветви цепи двигателя постоянного тока, производят изменение его пускового тока или частоты вращения.
В общем случае при последовательном соединении п резистивных элементов (рис. 1.5, в) ток в цепи, напряжения на элементах и потребляемые ими мощности определяются следующими соотношениями:
7-1//Ёг,= (//г„ В,-/,, Pt = /Ut=I!r„ 1
где к = 1, 2,..., и — номер элемента; гэ = £гк — эквивалентное сопротивление цепи.
Напряжение и мощность всей цепи v=iu^iirk.
\
Соотношение между напряжениями, мощностями и сопротивлениями элементов
№ = Р*/Л = ru'rt,
где 1 = 1, 2, — номер элемента.
С помощью приведенных формул нетрудно выяснить характер изменения тока, напряжений и мощностей при изменения значений сопротивлении или числа включенных резистивных элементов. Например,, если увеличить число элементов, то эквивалентное сопротивление возрастает, а ток, напряжения и мощности ранее включенных элементов уменьшаются; уменьшается также н общая мощность.
Приемники электрической энергии последовательно, как правило, ис соединяются, так как при этом требуется согласование номинальных данных приемников, исключается возможность независимого их включения и отключения, а при выходе пз строя одного из приемников отключаются также остальные приемники. Чаще их включают параллельно.
1.10.3. Электрические цепи с параллельным соединением резистивных элементов. Параллельным называется такое соединение резистивных элементов, при котором соединяются между собой как условные начала всех элементов, так н их концы (рис. 1.6, а). Характерным для параллельного соединения является одно и то же напряжение V на выводах всех элементов. Параллельно соединяются обычно различные приемники электрической энергии н другие элементы электрических цепей, рассчитанные на одно н то же напряжение. При параллельном соединении не требуется согласовывать номинальные данные приемников, возможно включение я отключение любых приемников независимо от остальных, а при выходе из строя какого-либо приемника остальные остаются включенными.
Параллельное соединение применяется часто для расширения пределов измереняя амперметров (рис. 1.6,6): если ток 1 в электрической цепи превышает номинальный ток 7^ амперметра, параллельно с ним включают шунтирующий резистор г„г. Нередко параллельное соединение используют для уменьшения эквивалентного сопротивления какого-либо участка электрической цепи.
Токи и мощности параллельно соелпиензых ветвей (рис. 1.6, а) при U = const не зависят друг от друга н определяются по формулам
1к = V/r, = Ug,; rk = UI, =~U2/rk = V2g„ = 12л.
Ток и мощность всей цепи
7-Ug,-U/r,;
1 1 1
Р, -£р, - ОТ = I/f?, = U2g, = U2/r, = /2г„ 1 1
где g3 = £gs — эквивалентная проводимость; гэ = l/g3 — эквивалентное i
сопротивление.
31
30
Соотношения. между токами, мощностями, проводимостями и сопротивлениями:
4А = pk/pi gk/gi = n/rt-
При увеличении числа параллельно соединенных ветвей эквивалентная проводимость электрической цепи возрастает, а эквивалентное сопротивление соответственно уменьшается. Это приводит к увеличению тока I. Если напряжение остается постоянным, то увеличивается также общая мощность Р; токи и мощности ранее включенных ветвей ие изменяются.
1.10.4. Электрические цепи со смешашым соединением резистивных элементов. Смешанным, или последовательно-параллельным, называется такое соединение резистивных элементов, при котором на одних участках электрической цепи они соединены параллельно, а на других последовательно.
Смешанное соединение имеет место, например, при питании приемников с сопротивлениями rj и г2 по проводам электрической сети с сопротивлениями гя (рис. 1.7, а), при регулировании напряжения приемника г с помощью делителя напряжения (потенциометра) гд (рнс. а), в случае измерения вольтметром напряжения на одном из резисторов (рис. 1.8, 6).
Анализ и расчет электрических цепей со смешанным соединением резистивных элементов производится чаще всего путем предварительных их преобразований. Рассмотрим в качестве примера последовательность расчета электрической цепи, изображенной иа рис. 1.7, а.
Пример 1.2. В электрической цепи рис. 1.7,о U = 115 В, = = 20 Ом, г2 = 30 Ом, гл = 0,5 Ом.
Определить юки, напряжение ил приемников, мощности приемников, потери напряжения и мощности в проводах, мощность, потребляемую от источника.
Решение. Электрическая цепь рис. 1.7,а может быть заменена цепями, изображенными на рнс. 1.7, £ и в, в которых
гэ. = —~— = 12 Ом, г3 *» г3. + 2гп = 13 Ом.
Г1 +г2
Используя электрическую цепь, изображенную на рис. 1.7,в, определим ток I, а перейдя к цепям рнс. 1.7, а и б, найдем напряжение ил я токи /j и 1г:
I = U/r3 » 8,85 A; Uah = 1гэ1 = 106.2 В;
= ияь/г! * 5,31 A; I2 = UJr2 « 3,54 А
Мощности приемников и мощность, потребляемая из сети,
pi = « 564 Вт, Р2 = UJ, ъ 376 Вт,
Р = UI % 1018 Вт.
32
4Z4
Ряс. 1.7. Схема электрической цепи (al к примеру 1.2 и схемы эквивалентных ей цепей (6 и в)
Рис. 1.8 Примеры электрических цепей со смешанным соединением резистивных элементов
Потери напряжения и мощности в проводах 21„г„ = 8,85 В, 2/^л a 78 Вт.
Используя соотношения, полученные в примере 1.2, нетрудно сделать следующие важные выводы в отношении характера изменения различных величин при смешанном соединении резистивных элементов. С увеличением числа приемников в электрической цепи (см. рис. 1.7,а) сопротивления гЭ1 и гэ уменьшатся. Это приведет к увеличению тока J, мощности Р, потерь напряжения 21 гл и мощности 212гл. Из-за увеличения потерь напряжения в проводах снизится напряжение и как следствие этого уменьшатся токи и 12, а также мощности Р, к Р^
Чтобы напряжение приемников незначительно колебалось прн изменении нх числа или режима работы и было близким к номинальному, площадь поперечного сечеиия S Проводов рассчитывают по допустимой потере напряжения АС/ прн номинальном режиме из формулы
ли% = 100= -^100.
U ном v ном °
В электрических цепях различного назначения допустимая потеря напряжения лежит примерно в пределах 2—6%.
Из двух сечений проводов, определенных по нагреванию я допустимой потере напряжения, выбирают большее.
2 Электротехника -j-j
Рис. 1.У. Схема соединения резистивных элементов треугольником (а) и звездой (6)
Рис. 1.10. Схема мостовой цепи (а) и соответствующая ей схема после замены одного из тре-уюльников звездой (£)
1.10.5. Электрические цегш, содержащие соединения резистивных элементов треугольником. Под соединением треугольником (рис. 1.9,а) понимался такое, при котором вывод К1 одного нз элементов соединяется с выводом Н2 второго, вывод К2 второго - с выводом НЗ третьего, а вывод КЗ третьего — с выводом Hl первого элемента. Узловые точки а, b и с подключаются к остальной части электрической цепи.
Для упрощения анализа и расчета некоторых электрических цепей, содержащих соединения резистивных элементов треугольником, целесообразно заменить их эквивалентными резистивными элементами, соединенными звездой (рис. 1.9,6). Примером подобных электрических цепей являются мостовые цепи (рис. 1.10, а). Как видно, в мостовой цепи резистивные элементы образуют два смежных треугольника r^, ге„ и i\c, r^, rie) и ист ни одного элемента, который был бы соединен с другими последовательно илн параллельно. Это осложняет расчет и анализ электрической цепи. Одиако если заменить, например, резистивные элементы тл, гЬс и гсв, соединенные треугольником, эквивалентными элементами r0, гь н г, соединенными звездой (рис. 1.10,6), то получим цепь со смешанным соединением резистивных элементов, методика расчета которой была рассмотрена выше.
Замена треугольника резистивных элементов эквивалентной звездой должна производиться таким образом, чтобы после указанной замены токи в остальной части цепи, а также напряжения между точками at, Ьс и са остались без изменения.
С помощью законов Кирхгофа можно получить следующие формулы для определения сопротивлений эквивалентной звезды:
_ rabrca rab^ca ^ab^tc fca^hc
а г "v ’ rt ~ —• (1 -23)
гаЬ + гЬс + Гса Д /. г4 £ Г4
Иногда оказывается целесообразным заменить резистивные элементы, соединенные звездой, эквивалентным треугольником. Соотвс,-34
стзующие формулы можно получить путем совместного решения выражений (1.23).
Следует заметать, что для расчета мостовых цепей часто используется метод эквивалентного генератора (см. § 1.14 и пример 1.4).
1.11. ПОНЯТИЕ ОБ ИСТОЧНИКЕ ТОКА
В подавляющем большинстве случаев при расчете н анализе электрических цепей используют источники электрической энергии с параметрами Е и г0, т. с. источники ЭДС, либо источники с указанными напряжениями. Именно с такими источниками энергии и приходится чаще всего иметь дело на практике. Однако иногда оказывается целесообразным заменить источник ЭДС эквивалентным ему источником тока, параметрами киюрого являются неизменные по значению ток короткого замыкания 1К И сопротивление г0. Познакомимся с источником тока на примере электрической цепи рис. 1.4, и, в которой источник ЭДС заменим эквивалентным источником тока.
Источник тока следует считать эквивалентным в том случае, если после замены нм источника ЭДС значения тока /, напряжения U и от-таваемой источником мощности UI при различных значениях сопротивления г внешней цепи остаются без изменения. Очевидно, это условие будет выполнено, если источник тока будет иметь такую же внешнюю характеристику, какую имеет источник ЭДС.
Воспользуемся указанным соображением для обоснования структуры электрической цепи источника тока. Разделив левую и правую части уравнения внешней характеристики источника ЭДС (1.15) на сопротивление г0, получим
Ь/г0 = Е/г0-1, (1.24)
где Е/г0 =!к — ток короткого замыкания источника ЭДС, являющийся вместе с тем одним из параметров источника тока; U/r0 = = /() - некоторый ток, определяемый как частное от деления U на г0.
Решив (1.24) относительно Е/г0, получим E/r0 = C/r0 +1, или
Г' = 1в + 1. (1-251
Так как токи 10 и / определяются путем деления одного и того же напряжения U на соответствующие сопротивления, то в электрической пели с ис[очником тока должны быть две ветви с соединенными параллельно резистивными элементами г0 и г. Согласно (1.25) параллельно указанным ветвям должна быть включена третья ветвь, содержащая элемент с током 1Х.
Схема электрической цепи, эквивалентная приведенной на рис. 1 4,л, но содержащая источник тока, дана иа рис. 1.11, а. Элемент с током 1К в совокупности с резистором г0 к представляет собой источник тока.
2*
35
Рис. 1.11. Схема электрической цепи с источником тока (а) и внешняя характеристика источника тока (б)
Записав (1.25) в виде
/ = !к - 70 = 7К - U/r0, (1.26)
получим уравнение внешней характеристики 7(17) источника тока, которое представляет собой по сушеству несколько преобразованное уравнение (1.15) источника ЭДС. Уравнение (1.26) и внешняя характеристика, построенная с помощью этого уравнения (рис. 1.11,6), дадут при любом режиме работы цепи такие же значения тока 7 и напряжения V, как и в случае источника ЭДС. Убедимся в сказанном и рассмотрим попутно последовательность расчета простейшей цепи с источником тока (рис. 1.11,4 Будем считать, что параметры 7К, г0 и г цепи с источником тока, а также Е эквивалентного источника ЭДС известны.
_ гг0
При холостом ходе г = со, гэ =-----= r0, U - 7кгэ = 7кг0 > так как
г + г0
у источника тока I,r0 = Е, то и U = £; 1 = U/r = Е/r = 0.
гг0
При коротком замыкании г = 0, гэ --------~ 0, V = 7^ = 0, 7О =
г + Г0
= V/r0 = 0, 7 = 7К; поскольку у источника тока 1К = Е/г0, то и 7 = Е/га.
Как видно, токи I и напряжения V во внешней пепи источника тока при г = со и г = 0 определяются в конечном итоге по тем же формулам, что и в случае источника ЭДС. Это значит, что токи и напряжения источников тока и напряжения будут равны.
Для замены источника тока эквивалентным источником ЭДС и наоборот достаточно воспользоваться приведенной ранее формулой 7К = £/г0.
Источник тока удобно использовать для расчета и анализа, когда г0 » г. В этом случае можно считать, что при изменении сопротивления г приемника 70 « 0 и 1 % 7К. Напряжение V и мощность Р = VI, потребляемая приемником, будут, конечно, при этом изменяться, так как V = 1г я Ij и Р ~ VI яг Указанное соотношение сопро-
тивлений (г0 » г) может быть получено, если под г0 понимать сумму внутреннего сопротивления источника ЭДС и сопротивления некоторого резистора, включенного в цепь последовательно с источником.
Источник тока считается идеальным, если г0=со. В цепи с идеальным источником при любых режимах работы 7о = О, а I = 7К.
36
1.12. НЕРАЗВЕТВЛЕННАЯ ЭЛЕКТРИЧЕСКАЯ ЦЕПЬ С ОДНИМ ИСТОЧНИКОМ ЭНЕРГИИ И АКТИВНЫМ ПРИЕМНИКОМ I
Изучение соотношений в неразветвленной электрической цепи с одним источником и активным приемником (рис. 1.12) представляет большой интерес, поскольку подобные цепи имеют широкое распространение. Например, часто находит применение система электропривода генератор — двигатель, в которой двигатель постоянного тока подключается к генератору, служащему только для питания данного двигателя; очень часто двигатель получает питание от сети постоянного тока с указанным напряжением; к таким же электрическим цепям следует отнести аккумуляторную батарею, получающую питание при ее зарядке от какого-либо источника постоянного тока.
Для расчета и анализа неразветвленных электрических цепей с несколькими источниками ЭДС, в том числе и рассматриваемой цепи (рис. 1.12), можно ограничиться вторым законом Кирхгофа и иногда дополнительно законом Ома. Кроме источников ЭДС электрическая цепь может содержать элементы, между выводами которых имеются некоторые напряжения.
При указанных положительных направлениях ЭДС и Е2, а также тока I по второму закону Кирхгофа для цепи рис. 1.12 можно написать следующие уравнения:
Е, - Е2 = lr„, + Ir„2, Е, = 7r01 + U, — Е2 = Ir02 - U, из которых нетрудно получить формулу для определения тока, а также соотношения между ЭДС и напряжением:
/ = AzJL; (1.27)
Г01 +ГО2
17 =£,-7^; (1.28)
Е2=(7-/г02. (1-29)
Рис. 1.12. Схема неразветвленной электрической пепи с двумя источниками ЭДС
I 0.
37
Умножив (1.28) и (1.29) на ток, получим соотношения между мощностями
Ш-Е,Г-/2г01; (1.30)
ЕД = U1 - /2г03. (1.31)
Из (1.27) следует, что если Е2 > 0, a Et > Е,, то I > 0, т. е ток I будет направлен так, как показано на схеме. Поскольку в этом случае ток I и напряжение U активного двухполюсника artb направлены в разные стороны, а ток I и напряженно U ак-1 ивного двухполюсника amb совпадают по направлению, двухполюсник anb является источником электрической энергии, а двухполюсник amb — приемником. При неизменных г01 и r02 ток I зависит только от значения ЭДС Е2.
Выражения (128) и (1.30) не отличаются от полученных ранее выражений (1.15) и (1.17) н дают те же соотношения между напряжением V и ЭДС Еъ а также между отдаваемой VI и вырабатываемой ЕД мощностями источника, что и в пепн с пассивным приемником.
Из (1-29) следует, что ЭДС Е2 приемника меньше ei о напряжения V на падение напряжения 1г02 на его внутреннем сопротивлении г02.
Таким образом, между ЭДС н напряжением в электрической пепн существуют следующие соотношения: Е, > V > Е2.
Если из мощности, потребляемой приемником, вычесть потери мощности /2гС2 в его внутреннем сопротивлении гй2 [см. (1.31)], получим мощность Р1ф=Е21, преобразуемую яз электрической в другие виды мощности, кроме теплоты. Например* если эго электродвигатель,- в механическую мощность.
Следовательно, в рассматриваемой цепи справедливы такие соотношения между мощностями:
EjI>W>E2/, или р •> р = р > р ‘ выр ‘ ОТД I потр 1 пр-
Так как электрическая мощность, преобразуемая в другие виды мощности (кроме теплоты), выражается произведением юка на ЭДС, направленную против тока, то для нее может быть принята такая форма записи:
^пр=£Д- (132)
В данной электрической цени КПД представляет собой отношение мощности, преобразуемой активным приемником из электрической в другие виды мощности, кроме теплоты, 38
к мощности, вырабатываемой источником:
(1И)
Как будет показано в гл. 9, направление, и значение ЭДС двигателя зависят от направления и значения частот его вращения. Учитывая это, представляется интересным выяснить, как будут изменяться различные величины в электрической пепн рис. 1.12 прн изменении ЭДС Ег.
Как следует из (1.27), прн Е2=Е( / = 0, что соответствует режиму холостою хода двигателя и всей цепи. Прн холостом ходе падения напряжения Ir01, 1г02 и потери мощности /2г0|, (2г02 равны нулю и, как следует из полученных выше соот ношений,
Е^и-Е2, Ед = VI = ЕД = 0.
При уменьшении ЭДС Е2 ток / возрастает, что приводит к увеличению падений напряжения, потерь мощности н мощности. вырабатываемой источником ЕД; напряжение U и КПД при этом уменьшаются.
Для выяснения характера изменения мощности РБр выразим ее следующим образом:
Анализ (1-34) покалывает, что с уменьшением Е2 мощность Р||р сначала возрастает, при Е2 = ЕД2 достигает наибольшего значения, а при дальнейшем уменьшении Ег также уменьшается. Значение ЭДС Ег = ЕД2 соответствует согласованному режиму работы, который, очевидно, с энергетической точки зрения нерационален, так как мощность Pop составляет всего б,5Р8Ыр и соответственно q = 0,5.
При Е2 — 0 (что для двигателя соответствует частоте вращения, равной нулю) ток ограничивается лишь относительно небольшим сопротивлением г0] + г02 и может достигнуть недопустимо большого значения, равного I = = ЕД{гйх + г02).
Этот режим работы считается аварийным и называется ча-сю режимом короткого замыкания. Естественно, что при режиме короткого замыкания U — Ij02 и = Е2/г = 0.
Интересным является режим, возникающий яри изменения направления ЭДС Ej (что может произойти, например, оря изменении направления вращения двигателя). Для анализа цепи » этом случае мож-
39
но воспользоваться полученными выше выражениями, положив в них Е2 < 0. Учитывая это, из (1.27), (1.29) и (1.31) получим 1 > 1К, lr02 = V + + |£2| и ]2г02 = VI + \Е21\.
Как видно, ток получается больше тока короткого замыкания, падение напряжения во внутреннем сопротивлении оказывается равным сумме V и £2, потери мощности в нем получаются равными сумме потребляемой VI и вырабатываемой |Е27| мощностей и так как мощность, преобразуемая из электрической, Рир = Е21 < 0, то на самом деле в двухполюснике amb происходит преобразование мощности в электрическую из другого вида мощности, например, если это двигатель,— из механической мощности.
1.11 УРАВНЕНИЕ БАЛАНСА МОЩНОСТЕЙ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
В любой электрической цепи сумма мощностей всех источников электрической энергии должна быть равна сумме мощностей всех приемников и вспомогательных элементов.
Получив ранее выражения мощностей (1,9), (1.18) — (1.20) и (1.32), можно записать в общем виде уравнение баланса мощности для любой электрической цепи:
1Ж4+ZE4 =£Д4+1X4+X,Ir ('-35’
Уравнение (1.35) может быть написано как для действительных направлений ЭДС, напряжений и токов, так и для случая, когда некоторые из них являются произвольно выбранными положительными направлениями. В первом случае все члены в нем будут положительными и соответствующие элементы цепи будут в действительности источниками или приемниками электрической энергии.
Если же некоторые члены записаны с учетом произвольно выбранных положительных направлений, соответствующие элементы нужно рассматривать как предполагаемые источники н приемники. В результате расчета или анализа какие-то из них могут оказаться отрицательными. Это будет означать, что ка-коЙ-то из предполагаемых источников является на самом деле приемником, а какой-то из предполагаемых приемников — источником.
Например, если оказалось, что в соответствии с произвольно выбранным положительным направлением напряжения или тока какой-то предполагаемый приемник потребляет мощность Рпотр = Ц J < 0, то он на самом деле является источником и отдает мощность Ротд = I V / |.
Чтобы уравнение баланса мощности давало более наглядное представление о характере энергетических процессов, целе-40
сообразнее составлять его для действительных направлений ЭДС, напряжений и токов.
Следует обратить внимание на то, что при составлении уравнения баланса мощности нужно учитывать мощность активного элемента либо произведением UI, либо совокупностью произведений EI и /2г0.
Если (1.35) умножить на время, то получим уравнение баланса энергии.
1.14. РАЗВЕТВЛЕННЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ С НЕСКОЛЬКИМИ ИСТОЧНИКАМИ
Для расчета и анализа целей с несколькими источниками используются различные методы, некоторые из которых будут рассмотрены далее. В том случае, когда в разветвленной электрической цепи с несколькими источниками имеется группа ак-1ивных или пассивных элементов, соединенных последовательно или параллельно, следует для упрощения расчета и анализа заменить их соответственно одним эквивалентным пассивным или одним активным элементом. Иногда может показаться целесообразным использовать преобразование треугольника резистивных элементов в звезду.
1,14.1. Метод законов Кирхгофа. Используя первый и второй законы Кирхгофа, можно для любой разветвленной электрической цепи составить необходимое число независимых уравнений и путем их совместного решения найти все подлежащие определению величины, например токи. Решая совместно уравнения, можно установить также зависимость между какими-либо величинами: между током и ЭДС, между двумя токами и т. д.
Перед составлением уравнений необходимо показать на схеме положительные направления известных и неизвестных величин. Сначала следует составить более простые уравнения ио первому закону Кирхгофа, максимальное число которых должно быть на единицу меньше числа узловых точек. Недостающие уравнения следует составить по второму закону Кирхгофа.
В качестве примера составим схему уравнений для определения токов в электрической цепи, схема которой изображена на рис. 1.13. Будем считать, что ЭДС и напряжения с их направлениями, а также сопротивления известны. Поскольку данная цепь имеет пять ветвей с неизвестными токами, необходимо составить пять уравнений. Выбрав положительные направления токов 12, 13, и /5, для узлов а и б, а также для контуров агда, абга и бвгб при обходе последних по
41
Рис. 1.14 К пояснению метода контурных токов
Рис, 1.13. К расчету разветвленных электрических цепей с помощью законов Кирхгофа
часовой стрелке получим
~ ~ h (Г2 + Г02) — 1$Г5 + ^2-
1.14.2. Метод контурных токов. Метод контурных токов дает возможность упростить расчет электрических цепей по сравнению с методом законов Кирхгофа за счет уменьшения числа уравнений, которые приходится решать совместно.
Дадим обоснование указанного метода.
Любая разветвленная электрическая цепь состоит ит нескольких смежных контуров. Например, в электрической цепи рис. 1.14 таких контуров три: абега, бдвб и аедба. Каждый контур имеет несмежные ветви, принадлежащие лишь данному кошуру, и смежные ветви, принадлежащие также соседним контурам. Так, контур абега имеет несмежную ветвь вга и две смежные ветви ао и бе.
Допустим, что в каждом контуре рис. 1.14 имеется некоторый контурный ток, одинаковый для всех элементов контура. На рис. 1.14 коп-турные токи обозначены 1Ь и 1а1. Положительные направления контурных токов могут быть выбраны произвольно. Наложим на контурные токи следующее условие: контурные токи должны быть равны по абсолютному значению токам несмежных ветвей соответствующих контуров.
Если удастся найш контурные токи, то через них легко определить и токи всех ветвей. В силу наложенного условия токи несмежных ветвей следует определять так: если выбрать положительное направление тока несмежной вечви совпадающим с контурным током, то ток ветви должен быть равен.коитурному току; если же направить ток несмежной ветви против контурного тока, то ои должен быть равен контурному току со злаком «—». Так, токи в несмежных ветвях цепи (рис. 1.14) будут равны
Л - h> h = ~ In, Ie= ~ 1т-
Чтобы выяснить, как определять токи смежных ветвей, выразим ток Л через токи и и заменим последние контурными гоками: !, - Ц + /, = 1| — /ц. Аналогично найдем
l4 = li~lim ls =Лп“
Как видно, со знаком « + » должен быть взят ioi контурный ток, направление которого совпадает с направлением тока смежной ветви; контурный ток, направленный в противоположную сторону, должен быть взят со знаком « —».
Нетрудно доказать, что контурные токи могут быть определены путем совместного решения системы уравнений, составленных по второму закону Кирхгофа, в которые вместо падений напряжения oi то-коз sei вей следует ввести паления напряжения от контурных токов с соответствующими знаками.
Уравнение по второму закону Кирхгофа при включении в него кошурных юков в общем случае имеет вид
Еь-Е'г+Е^ 0-36)
Для рассматриваемой цели (рис. 1.14) уравнения будут:
Е2= ~ !Го2 + Ai (r02 + r3 + rs) - 1щг5 + U;
Et-E2-ll[r0i +-r02 + rJ-hp-oj-Inir/,
0 = f|ll(»4 + Г5 +Гб)-!1Г^-111Г5-
При решении задач рассмотренным методом целесообразно выбирать положительные направления токов ветвей после определения кошурных токов. В этом случае можно выбрать положительные направления токов ветвей так, чтобы все они совпадали с их действительными направлениями.
1.14.3. Метод узлового напряжения. Метод узловою напряжения дает возможность весьма просто произвести анализ и расчет электрической цепи, содержащей несколько параллельно соединенных активных и пассивных ветвей, например цепи, схема которой изображена на рис. 1.15,а.
Препебрагая сопротивлением проводов, соединяющих ветви цепи, схему рис. 1.15, а можно заменить более удобной для рассмотрения (рис. 1.15,6).
В зависимости от значений н направлений ЭДС и напряжений, а также значений сопротивлений ветвей между узловыми точками а и b установится опраделенное узловое напряжение Предположим, что оно направлено так, как показано на Рис. 1.15, и известно. Зная напряжение U^, легко найти все Токи
Выберем положительные направления токов, например гак, как показано на рисунке. Тогда по второму закону Кирхгофа для контура.
43
42
Рис. 1.15. К пояснению метола узлового напряжения
проходящего по первой ветви, = Л (Г1 + г01) +
ожуда £i -
h = --------= (£, - UeJgi- (1.37)
ri 4- roi
Поступая аналогичным способом, нетрудно получить формулы для токов 12, 13 и /4:
Л = (Е2 + 17oil)g2, /3 ~(Ul - UBb)Si, /4 *=(U2 + Uob)g4. (1-38)
По закону Ома для пятой ветви
Is = и^ь/г, - Uags. (1.39)
ч
Для вывода формулы, дозволяющей определить напряжение ивЬ, напишем уравнение по первому закону Кирхгофа для узла а:
- /2 + /3 - /4 — /5 = О.
После замены токов их выражениями (1.37) - (1.39) н преобразований получим
v = Esgt ~ E2S2 + ll^s -gs+gi+gs+gt+gs
Формула узлового напряжения в общем случае имеет внд
(,.40,
2Л
Перед определением напряжения по формуле (1.40) следует задаться его положительным направлением. Со знаком « + » в (1.40) должны входить ЭДС, направленные между точками а и b встречно напряжению U^, и напряжения ветвей, направ-44
ленные согласно с 1/^. Знаки в формуле (1.40) не зависят от направления токов ветвей.
При анализе и расчете электрических цепей методом узлового напряжения целесообразно выбирать положительные направления токов после определения узлового напряжения. В этом случае положительные направления токов нетрудно выбрать таким образом, чтобы все они совпадали с нх действительными направлениями.
П р и м е р 1.3. В электрической цепи рис. 1 15, б Л, = 40 В, Е2 = 20 В, гС1 = r02 = 1 Ом, г, = 9 Ом, г2 = 39 Ом, г3 = 10 Ом, г4 = 30 Ом, г$ = = 15 Ом, U, =45 В, U 2 = 30 В.
Пользуясь методом узлового напряжения, определить токи В ВС1ВЯХ.
Решение. По формулам (1.37) — (1.40) при указанных положительных направлениях напряжения Uab и токов
Г' _ J — Е2/(г2 + г02) + п,/г3 - п2/г4 _ 2! g.
l/(rt + г0]) + 1/(г2 + г02) + 1/г, + 1/г4 -I- 1/г,
=(Е3 — U Bb/(rt + rOlj^ 1,85 A, I2=(E2 + Uab)/(r2 + r02) =
— 1,04 A; /3^(t/, - Uob)/r3 = 2,35 А; /4 = (U2 + Ueb)'r4 =
= 1,72 A; Is = UJr5 = 1,44 А
1.14.4. Метод наложения. Метод наложения основан на том, что в линейных электрических цепях ток любой ветви может быть определен как алгебраическая сумма токов от каждого источника в отдельности.
Расчет электрических цепей методом наложения производят в таком порядке. Из электрической цепи удаляют все источники ЭДС и напряжения, кроме одного. Сохранив в электрической цепи все резистивные элементы, в том числе и внутренние сопротивления источников, производят расчет электрической цепи. Внутренние сопротивления источников с указанными напряжениями полагают равными нулю. Подобным образом поступают столько раз, сколько имеется в лепи источников.
Результирующий ток каждой ветви определяют как алгебраическую сумму токов от всех источников. Для того чтобы результирующие токи совпадали с действительными направлениями, целесообразно выбирать положительные направления результирующих токов после определения токов от всех источников.
Метод наложения весьма удобен для анализа явлений, происходящих в электрических цепях при изменении их параметров.
Например, используя метод наложения, нетрудно определить характер изменения токов ветвей в цепи (см. рис. 1.15) при увеличении
45
b
Рис. 1.16. К пояснению метода эквивалентного генератора
ЭДС £( до Et'. Действительно, предположим, что при некоторых параметрах цепи до увеличения Ej установились токи, действительные направления которых совпадают с указанными на рисунке. Для решения задачи заменим мысленно увеличение ЭДС Ej введением в первую ветвь дополнительного источника с г0дОП - Он E10r = Е\ - Et. После этого удалим из цепи все источники, кроме источника с ЭДС Едоп, и определим действительные направления дополнительных токов от этого источника, которые очевидны.
Поскольку дополнительный ток первой ветви 7,J0I) будет совпадать по направлению с током для определения результирующего тока первой ветви следует воспользоваться формулой Л = +- МдОп-
На основании данной формулы можно сделать вывод о том, что при увеличении Ej ток будет возрастать. К такому же выводу можно прийти и в отношении токов других ветвей, кроме третьей.
Так как дополнительный ток третьей ветви 7ЗДОП направлен против тока 13, то для определения результирующего тока нужно использовать формулу 73 = 73 — /ЗДоп- В Отношении результирующего тока третьей ветви можно сделать такой вывод: при увеличении ЭДС Ег ток [у будет сначала уменьшаться, яри некотором зиаченив Et окажется равным нулю, а при дальнейшем увеличении Et изменит направление (73 <0) и по абсолютному значению будет возрастать.
L14.5. Метод эквивалентного генератора. Метод эквивалентного генератора дает возможность упростить анализ н расчет электрических цепей в том случае, когда требуется определить ток, напряжение или мощность лишь одной ветви.
Предположим, что требуется найти ток- / ветви amb некоторой электрической цепи (рис. 1.1 б, и), остальные элементы которой сосредоточены в пределах прямоугольника, представляющего собой активный двухполюсник А.
Согласно методу наложения ток I не изменится, если в данную ветвь ввести два источника, ЭДС которых Ег и £э равны и направлены в разные стороны (рис. 1.16,6). Ток I можно определить тогда как раз-46
пость двух токов 1 = 1-, — /j, где I{ — ток, вызванный всеми источника-х;л гвухполюеннка А и ЭДС Е; (рис. 1.16, в): /э — ток, вызванный только ЭДС Е3 (рис. 1.16, г).
Если выбрать ЭДС £j таким образом, чтобы получить /, — О, то зек / будет равен
! I
'о> + г
где Ги, - эквивалентное сопротивление двухполюсника Л относительно выводов а и й.
Так как при = 0 (рис. 1.16, в) активный двухполюсник А будет работать относительно ветви amb в режиме холостого хода, то между выводами а и й установится напряжение холостого хода У = и по второму закону Кирхгофа получим Е, = + Vx - Ux. Но по условию
Е, = Е,. поэтому и E3 = VX. Учитывая это, формулу для определения тока I можно записав в такой форме:
Еэ
(1.41)
В соответствии с (1.41) электрическая цепь рис. 1.16,а может быть заменена эквивалентной цепью рис. 1.16, д, в которой Е-, = Uxn гоэ стелу ст рассматривать как ЭДС и внутреннее сопротивление некоторого эквивалентного генератора. В результате возможности такой замены и возникло название изложенного метода
Значения Е, - Uх и г0, можно определить как расчетным, так п экспериментальным путем. Для расчетного определения Ux и г03 необходимо знать параметры элементов активного двухполюсника А н схему их соединения. При определении сопротивления гоэ необходимо удалить из схемы двухполюсника все источники, сохранив все резистивные элементы, в том числе и внутренние сопротивления источников ЭДС. Внутренние сопротивления источников с указанными напряжениями следует принять равными нулю.
П ример 1.4. В электрической цепи рис. 1.17, a U = 100В, £ = 40 В, /j = гл = 30 Ом, г2 = г3 = 20 Ом, г = 15 Ом, г0 - 1 Ом. Пользуясь ме-го.лэм эквивалентного генератора, определив jok 1 и напряжение
Решение. При отключенном резистивном элементе г (рис. 1.17,6) по закону Ома и на основании второго закона Кирхгофа
U U
I, = _ = 2 А, 12 = = 2 А,
После мысленного удаления из схемы рис. 1.17, б источников получим схему, изображенную на рис. 1.17,в. Глядя на эту схему, можно сделать заключение о том, что между точками а и b последовательно соединены три участка: участок с параллельно соединенными резисторами rj и г3; участок, на киюром параллельно соединены резисторы г2
47
Рис. 1.18. Схема последовательного соединения источников
Ь
"/*' Участок, содержащий только резистор г„. В соответствии с этим ““Р»™*"'™ ’идсалентного генератора (сопротивление
Цепи относительно точек а и Ь) будет Е *
„ _ Г1Г3 г2г4
rt>’ _ ~ ;---------1-------------- + г0 -д 25 Ом.
't + r3 г; + г4
По формуле (1.41) и закону Ома
1 = 7- “ = °-5 А- = 1г - 7,5 В.
1.15. СПОСОБЫ СОЕДИНЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
ИСТОЧНИКОВ
В тех случаях, когда поминальное напряжение нли номинальный ток и мощность источника электрической энергии оказываются недостаточными для питания приемников, вместо одного использую [ два или больше источников. Существуют два основных способа соединения источников; последовательное и параллельное.
Последовательное соединение (рис. 1.18) осуществляется обычно таким образом, чтобы ЭдС источников были направлены в одну сторону. Характерным для последовательного соединения является одни и тот же ток I всех источников на ко-торыи каждый их них должен быть рассчитан.
По второму закону Кирхгофа
1
Соединяя источники последовательно, можно получить бо-
Рис 1.19. Схема электрической цепи с эквивалентным генератором
лее высокое напряжение U на выходных выводах а и Ь, для чего и используется данный способ соединения.
Электрическая цепь рис. 1.18 может быть заменена цепью с эквивалентным генератором, имеющим параметры Е$ и гОэ (рис. 1.19). Согласно методу эквивалентного генератора ЭдС £, при холостом ходе (г = со, I = 0) должна быть равна напряжению холостого хода, Еэ = U*. Учитывая это, на основании второго закона Кирхгофа для цепи рис. 1.18 получим
Внутреннее сопротивление гОэ эквивалентного генератора равно сопротивлению цепи рис. 1.18 относительно сс выходных выводов, т. е.
гоэ = Xr0f
При параллельном соединении источников (рис. 1.20) соединяются между собой положительные выводы всех источников, а также их отрицательные вывопы. Характерным для параллельного соединения является одно и то же напряжение U на выводах всех источников. Для электрической цепи рис. 1.20 можно написать следующие уравнения:
1-1^ p = ipt = ui = uirt. 1 I I
Как видно, при параллельном соединении источников ток и мощность внешней цепи равны соответственно сумме токов и мощностей источников. Параллельное соединение источников применяется в первую очередь тогда, когда номинальные ток
48
49
I
Рис. 1.20. Схема параллельного соединения источников
и мощность одного источника недостаточны для питания приемников.
включают обычно источники с одинаковыми ЭДС', мощностями и внутренними сопротивле
ниями. Используя метод узлового напряжения, нетрудно показать, что в этом случае при <мключенной внешней цепи токи источников будут равны нулю, а при подключенной внешней цепи онн будут одинаковыми
Электрическую цепь рнс. 1.20 можно заменить цепью с эквивалентным генератором рис. 1.19. Положив в электрической цепи рис. 1.20 / = 0, что будет при г — х и g — \,'г = 0, по формуле (1.40) метола узкого напряжения получим
У. Etgax
----=^7—•
1
где #оэ = ^.Sck ~ внутренняя проводимость эквивалентного генератора.
Внутреннее сопротивление г01 эквивалентного генератора проще ьсего определить через проводимость гП) = l/g-0,.
1.16. НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПОСТОЯННОГО ТОКА
1.16.1. Начиненные элементы электрических цепей, их вольг-ампернде характеристики к сопротивления. Нелинейным элементом электрической цепи считается элемент, значения параметров которою зависят от значения тока данною элемента или напряжения на его выводах.
К нелинейным элементам электрических цепей относятся разнообразные электронные, полупроводниковые и ионные приборы, устройства, содержащие намагничивающие обмоткн с ферромагнитными магиитопроводамв (при переменном токе), лампы накаливания, электрическая дуга и др.
50
Рис. 1.21, Примеры вольт-амперных характеристик:
«-линейного элемента: б — лампы накаливания; в — полупроводникового толя; г — 1ранзистора (при различных юках базы), д — 1ерморез«сгора. а —
стабилитрона
Нелинейные элементы получают в настоящее время все более широкое распространение, так как они дают возможность решать многие технические задачи. Так, с помощью нелинейных элементов можно осуществить преобразование переменного тока в постоянный, усиление электрических сигналов, генерирование электрических сигналов различной формы, стабилизацию тока и напряжения, изменение формы анналов, вычислительные операции и т д. Нелинейные элементы широко используются в радиотехнических устройствах, в устройствах промыт; пенной электроники, автоматики, измерительной и вычисдигельной техники.
Важнейшей характеристикой нелинейных элементов является вольт-амперная характеристика (в. а. х.), представляющая собой зависимость между током нелинейного элемента и напряжением на его выводах: I(V) или Cr(Z).
Зависимость между током 1 и напряжением U любого пассивного элемента электрической цепи подчиняется закону Ома, согласна которому I=U/r. Поскольку у линейных элементов с изменением тока или напряжения сопротивление остается постоянным, их к а. х. не отличаются от прямой (рис. 1.21, а).
У нелинейных элементов в. а. х. весьма разнообразны и для некоторых из анх даны на рис. 1.21,6 — е. Там же приведены
51
Рис. 1.22. к расчету электрической цепи с нелинейным элементом графоаналитическим метолом элементом
условные графические обозначения соответствующих элементов. Общее условное обозначение любого нелинейного резистивного элемента показано на рис. 1.22, а.
Имея в. а. х. нелинейного элемента, можно определить его сопротивления при любых значениях тока или напряжения. Различают два вида сопротивлений нелинейных элементов; статическое и дифференциальное.
Статическое сопротивление дает представление о соотношении конечных значений напряжения и тока нелинейного элемента и определяется в соответствии с законом Ома. Например, для точки А в. а. х. (рис. 1.21,6) статическое сопротивление
Для расчета нелинейных электрических цепей, применяемся в болыпинщве случаев графоаналитический метод. Однако ес-•и з предполагаемом диапазоне изменения тока или напряжения нелинейного элемента его в. а. к. можно заменить прямой линией, то расчет можно производить и аналитическим мето-
Счедуе! ошетнть, что к той части электрической цепи, которая со гержит линейные элементы, применимы все методы расчета и пре-сч.разования электрических цепей, рассмотренные ранее.
1.16.2. Графоаналитическим метод расчета нелинейных электрических цепей. Предположим, что имеется электрическая цепь, схема которой приведена на рис. 1.22, а. В этой цепи нелинейный резистивный элемент г соединен с активным линейным двухполюсником А, который может быть любой сложности.
Расчет данной электрической цепи следует начать с замены активного двухполюсника эквивалентным генератором с параметрами £,= UK и г0, (рис. 1.22, о) согласно методу эквивалентною юнерагора. Для дальнейшего расчета целесообразно воспользоваться методом графического решения двух уравнений с двумя неизнесгными. Одним из уравнений следует считать зависимость 1 (U) нелинейною элемента, которой соответствует его в. а. х., приведенная иа рис. 1.22, в. Другое уравнение, связывающее тс же ток I и напряжение U, нетрудно получить по второму закону Кирхгофа. Применив его к цепи с эквивалентным генератором (рис. 1.22,6), получим
где ти и т( — масштабы напряжения и тока.
Дифференциальное сопротивление позволяет судить о соотношении приращений напряжения и тока и определяется следующим образом:
К нелинейным электрическим цепям применимы основные законы электрических цепей, т. е. закон Ома и законы Кирхгофа. Однако расчет нелинейных цепей значительно труднее, чем линейных. Объясняется это тем, что кроме токов и напряжений, подлежащих обычно определению, неизвестными являются также зависящие от них сопротивления нелинейных элементов.
52
Поскольку зависимость 1 ~ f (U) линейная, график /=/(£/) может быть построен по двум точкам (рис. 1.22,в). Например: в режиме холостого хода эквивалентного генератора 1 = 0 и и а; = Ez; в режиме короткого замыкания [7=0 и J = 1К =
Очевидно, искомые ток I и напряжение U определяются точкой S пересечения в. а. х. I (U) нелинейного элемента и графика эквивалентного генератора.
Если к двухполюснику будут подключены два нелинейных элемента г_ и г2. соединенные последовательно (рис 1.23,а), то перед расчетом согласно методике, изложенной выше, необходимо заменить як эквивалентным нелинейным элементом г3 (рис. 1.23, 6) с эквивалентной в.а. х. /(U) (рис. 1.23, в). Построение эквивалентной в.а. х. I(U) ириммвоммся на основании следующего соображения: при любом значении тока I напряжение U равно сумме напряжений и V2
53
U1 Ug U=Ut+U2 и
Рис. 1.23. К построению в. а. х. электрической цепи при последовательном соединении нелинейных элементов
нелинейных элементов (рис. 1.23, а), т. е.
U = ut + U2. (1.42)
Задавшись несколькими значениями тока I, по в. а. х. 1 (£7,) и 1 (£72) нелинейных элементов Г] и тг находят соответствующие напряжения Ut и U2, после чего согласно выражению (1.42) определяют напряжение U и строят в. а. х. 1(U).
На рис. 1.23, в показано в качестве примера определение при токе 1 напряжения U одной из точек (Л) в. а. х.
Когда двухполюсник представляет собой источник с заданным напряжением, после построения в. а. х. 1(U) можно при любом напряжении U найти ток /, а затем с помощью в. ах. ЩЦ) и 1 (£72) -напряжения Ur и U2.
При параллельном соединении двух нелинейных элементов (рис. 1.24) для построения в.а.х. 1(U) эквивалентного нелинейного элемента гэ(рис. 1.25) необходимо воспользоваться тем, что при любом значении напряжения U токи связаны соотношением
l=h+lz. (1-43)
Задавшись несколькими значениями напряжения U, по в. а. х. I, (£7) и 12 (t7) (рис. 1.25) нелинейных элементов Г1 и г2 находят соответствующие токи Ц и 12, после чего согласно (1.43) определяют ток 1 и строят в.а.х. 1{U).
При смешанном соединении нелинейных элементов следует сначала построить ВАХ участка с параллельным соединением элементов. После этого можно перейти к построению ВАХ всей цепи. Имея в распоряжении все ВАХ, нетрудно определить токи и напряжения всех элементов цени.
1.16.3. Аналитический метод расчета нелинейных электрических цепей. Предположим, что имеется некоторый нелинейный элемент, в. а. х. которого приведена на рис. 1.26, а. Если данный элемент должен работать на линейном участке cd в. а. х., то для расчета и анализа можно использовать аналитический метод.
Чтобы выясинть зависимость между напряжением н током участка cd и построить схему замещения нелинейного элемеи-
54
Рис. 1.24. Параллельное Рис. 1.25. К построению в.а.х.
соединение нелинейных электрической цепи при парал-
элементов дельном соединении нелинейных
элементов
Рис. 1.26. К расчету электрической цепи с нелинейным элементом аналитическим методом
та, работающего на данном участке, продлим его до пересечения в точке а с осью абсцисс и будем считать, что в точке пересечения напряжение U равно некоторой ЭДС Е. Для рнс. 1.26,а справедливо следующее очевидное соотношение:
Ob = Оа + ab = Оа 4- bxtg ₽. (1.44)
Выразив в (1.44) отрезки через соответствующие электротехнические величины и масштабы напряжения и тока, получим
UJm. =E/m. + IJm. lg P.
После умножения иа масштаб напряжения будем иметь
Ui-E + lJ^^E + Ij* (1.45)
где rd — дифференциальное сопротивление нелинейного элемента на участке cd его в. а. х.
Полученному уравнению (1.45) согласно второму закону Кирхгофа соответствует схема замещения amb (рис. 1.26,6) нелинейного элемента, работающего на линейном участке cd.
Допустим, что нелинейный элемент получает питание от эквивалентного генератора с параметрами Е3 и rm (рис. 1.26,6), 55
заменяющего некоторый активный двухполюсник. Тогда по второму закону Кирхгофа можно написать
~ Е = h (гоэ +
откуда
(1-46)
Используя (1.45) и (1.46), нетрудно решать многие задачи, связанные с расчетом н анализом нелинейной электрической цепи. Например, по (1.46) можно определить ток 1Х, а по (1.45) - напряжение Ux при заданных Е* rOi и г..
Если графическое определение ЭДС Е вызывает затруднение, можно найти ее, воспользовавшись выражением (1.45) и подставив в него известные координаты одной из точек участка cd.
1.17. МОСТОВЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
Широкое распространение в технике получили мостовые цепи. Один из вариантов такой цепи приведен на рис. 1.27, Выводы а и d резисторов rt -гл присоединены к источнику постоянного тока, к точкам b и с с помощью подвижных контактов (движков) присоединен некоторый приемник г5. Изменяя с помощью движков места подключения Ьпс приемника, можно изменять не только значения напряжения Us и тока Is приемника в широких пределах, но также и их направления. Действительно, переместив верхний движок к выводу а, нижний — к выводу d, согласно второму закону Кирхгофа и закону Ома получим U5 = U и /5 = 1//г5. Изменив положения движков местами, будем иметь Us = — U и Is = — Ujr5.
Нулевые значения напряжения Us и тока /5, или, как говорят, равновесное состояние моста, может быть прн таких положениях движков, при которых выполняется следующее соотношение между сопротивлениями:
V. ”Г2Г3- . (1-47)
Равновесное состояние моста используется для измерения сопротивлений. Если, например, в электрической цепи рис. 1.27 — элемент, сопротивление которого требуется определить, г2 = const, то, включив вместо приемника rs измерительный прибор (например, вольтметр с соответствующими параметрами) 56
Рис. 1.27. Схема мостовой электрической цели
и изменяя значения сопротивлений г3 и г4, можно добиться равновесного состояния моста, а затем по (1.47) подсчитать сопротивление i\.
Если г, — элемент, сопротивление которого изменяется под действием тех или иных величин (температуры, давления и др.), то при неизменных г2, г3 и г4 напряжение U5 будет также (вменяться. В этом случае измерительный прибор может быть отградуирован на значения величины, оказывающей воздействие на сопротивление гь и,
таким образом, оказыва-
ется возможным измерять неэлектрические величины.
Изменение напряжения 1/5 может быть использовано также в системах автоматического регулирования, например для поддержания величины, оказывающей воздействие на значение сопротивления на заданном уровне и с заданной степенью точности.
Для расчета мостовых цепей можно использовать преобразование треугольника резистивных элементов в эквивалентную звезду или наоборот (см. § 1.10). Однако для этой цели целесообразно воспользоваться методом эквивалентного генератора (см. § 1.14), особенно если в цени имеется нелинейный резистивный элемент.
1,18. ПОНЯТИЕ ОБ ЭЛЕКТРИЧЕСКОМ МОДЕЛИРОВАНИИ
В некоторых случаях физические процессы и соотношения различных объектов неэлектромагнитной природы описываются большим числом уравнений, вследствие чего их расчег и анализ становятся чрезвычайно затруднительными. Они особенно осложняются, когда объекты содержат нелинейные элементы, так как прн этом приходится иметь дело с нелинейными уравнениями. В этих случаях для облегчения расчета и анализа используется моделирование, под которым понимают замену реального объекта его моделью. Особая ценность моделирования состоит в том, что оно позволяет произвести всесторонний экспериментальный анализ модели, а затем использовать результаты анализа при разработке объекта. Про-
57
изводить экспериментальный анализ непосредственно объекта ие всегда возможно хотя бы потому, что объект находится еще в стадии проектирования или имеет очень'большие размеры.
Чаше всего для замены объектов пеэлектромагнитпой природы используются электрические модели, г. е. применяется электрическое моделирование. Объясняется это тем, что электрические модели отличаются простотой изготовления, возможностью легко н в широких пределах изменять их параметры, небольшими 1 абарнтными размерами, простотой и точностью измерений. Электрические модели используются для расчета и анализа механических, гидравлических, пневматических н других объектов.
Основой для создания модели являются следующие соображения: соотношения между электротехническими параметрами модели должны описываться такими же по структуре уравнениями, что и для реального объекта; при замене различных величин в уравнениях модели соответствующими величинами реального объекта (с учетом коэффициентов, связывающих их) должны получиться уравнения реального объекта.
Для разработки электрической модели исследуемою объекта необходимо: составить систему уравнений исследуемого объекта; разработать схему электрической цепи модели, которая подчиняется уравнениям, подобным по структуре уравнениям исследуемого объекта; определить, исходя из возможностей для проведения эксперимента, параметры модели.
В качестве примера рассмотрим методику разработки и использования электрической модели для простейшего случая — балки, лежащей свободно на двух опорах (рис. (.28, а).
Как известно, для балки, лежащей на двух опорах, справедливы следующие уравнения:
Р = РА +Рб; (1-48)
Р‘-РТ“Р(1-у} <149)
где Р - сила, действующая на балку; Рл и Fs - оиды реакций опор; I, и 12 - расстояния между местом приложения силы Р и опорами; 1~ « /j + /2 — расстояние между опорами.
Аналогом силы Р, действующей на балку, можно считать в модели напряжение V некоторого источника электрической энергии. Сили реакции опор Рд и ₽е возникают в результате действия силы Р. Аналогом сил Ра и Рб можно считать напряжения Ua я U& возникающие на резисторах rt и г2 в результате действия напряжения V источника; чтобы уравнение модели было подобно уравнению исследуемого объекта few. (L48)], резисторы а г2 должны быть соединены после-
58
лива itJibHu. Учитывая что, для модели получим
U = UA + US. (t.50)
Как следует из (1.49), значения сил РА и РБ зависят от соотношения расстояний /р /2 и /. Для последовательного соединения резисторов г, и г, при указанных на рис. 1.28,6 обозначениях можно написать соотношение, подобное (1.49), т. е.
иА = и^, (1.51)
1 де г — rl + r2 = const.
В силу подобия соо1ношений (1.50) и (1-51) соотношениям (1.48) и (1 491 можно утверждать, что электрическая цепь, схема которой приведена па рис. 1.28, б, является электрической моделью балки на двух операх. Очевидно, аналогами расстояний I,. 1г и I в модели являются соответственно сопротивления резисторов гь тг и г.
Для того чтобы можно было производить исследование объекта (балки на двух опорах) с помощью электрической модели (рис 1.28,6), необходимо выбрать значения параметров модели. Это делается с помощью масштабных коэффициентов, представляющих собой отношо ине величин-аналогов изучаемого объекта и его модели. Для однотипных величин масштабные коэффициенты должны быть одинаковыми.
В рассматриваемом случае масштабные коэффициенты выражаются следующим образом:
Р Ра Рб I h G
гпр = — =-----=------. т, = — •= — = — — const.
и иА иЕ 1 г гх г2
Очевидно, чю если все величины в уравнениях электрической моде-ш (1 50) и (1.51) заменить величинами-аналогами исследуемого объекта к соответствующими масштабными коэффициентами, ю получим Уравнения исследуемого объекта (1.48), (1 49).
Масштабные коэффициенты могут иметь различные значения и выбираются, исходя из имеющихся возможностей для создания модели.
59
Например, если сила Р — 1000 Н, а для построения модели имеется источник с напряжением U ~ 100 В, то масштабный коэффициент тР может быть принят тр^ 1000/100= 10 Н/В.
С помощью электрических моделей различных объектов можно решать самые разнообразные задачи их расчет^ и анализа. Так, в рассматриваемом примере можно получить на основании экспериментальных данных зависимости РА =/(!,) и Р& прн / = const и Р = = const. Для проведения экспериментального исследования несколько изменим и дополним схему (рис. 1.28, б) электроизмерительными приборами и делителем напряжения (потенциометром) гд (рис. 1.28 в). Последний служит для поддержания при проведении эксперимента U = const и I = С01Ы.
Изменяя положение движка потенциометра г—г, + г2. необходимо фиксировать в каждом его положении значение напряжения Uл.
Подсчитав для каждого положения движка согласно закону Ома Г] = Ua/1 и используя выражения (1.50) и (1.51), можно построить графики зависимости иД^) и Воспользовавшись масштабными коэффициентами, нетрудно перейти к графикам РД/,) и Рб(\\
Для построения электрических моделей могут быть использованы также электрические деци с источниками тока.
Глава вторая
ЭЛЕКТРИЧЕСКИЕ ЦЕПИ СИНУСОИДАЛЬНОГО ТОКА
2.1, ПОЛУЧЕНИЕ СИНУСОИДАЛЬНОЙ ЭДС. ОСНОВНЫЕ СООТНОШЕНИЯ
Электрические цепи, в которых значения н направления ЭДС, напряжения н тока периодически изменяются во времени по синусоидальному закону, называются цепями синусоидально! о тока. Иногда их называют просто цепями переменного тока.
Электрические цепи, в которых значения и направления ЭДС, напряжения и тока периодически изменяются во времени по законам, отличным от синусоидального, называются цепями несинусоидального тока.
1'еиераторы электрических станций переменного тока устроены так, что возникающая в их обмотках ЭДС изменяется по синусоидальному закону. Синусоидальная ЭДС в линейных цепях, где содержатся резнстивные, индуктивные н емкостные элементы, возбуждает ток, изменяющийся по закону синуса.
60
Возникающие при этом ЭДС самоиндукции в катушках и напряжения на конденсаторах, как это вытекает из выражений
di _ du, Л' ‘~СЛ'
также изменяются по синусоидальному закону, так как производная синусоидальной функции есть функция синусоидальная. Напряжение на резистивном элементе будет также изменяться по синусоидальному закону, так как
и = ir.
Целесообразность технического использования синусоидального тока обусловлена тем, что КПД генераторов, двигателей, трансформаторов и ливни электропередачи при синусоидальной форме ЭДС, напряжения и тока получается наивысшим по сравнению с несинусоидальиым током. Кроме того, при иных формах изменения тока из-за ЭДС самоиндукции мо-iyi возникать значительные перенапряжения на о i дельных участках цепи. Важную роль играет и тот факт, что расчет цепей, где ЭДС, напряжение и ток изменяются синусоидально, значительно проще, чем расчет цепей, где указанные величины изменяются по несинусоидальному закону.
Рассмотрим механизм возникновения я основные соотношения, характерные для синусоидальной ЭДС. Для этого удобно использовать простейшую модель — рамку, вращающуюся с постоянной угловой скоростью со в равномерном магнитном поле (рис. 2.1, а). Проводники рамки, перемещаясь в магнитном поле, пересекают его, и в них иа основании закона электромагнитной индукции наводится ЭДС. Значение ЭДС пропорционально магнитной индукции В, длине проводника I и скорости перемещения проводника относительно поля г,:
е = Blvt.
Выразив скорость vt через окружающую скорость v и угол т, получим
е = Bfosina— Emsina.
Укм а равен произведению угловой скорости рамки со на время t:
a = a>t.
Таким образом, ЭДС, возникающая в рамке, будет равна е = Em sin at =* Em sin cot. (2.1)
61
Рис. 2.1. Модель, поясняющая возникновение синусоидальной ЭДС (л); графики мгновенных значений ЭДС (6)
5
вх=в^ sine.
о
Рис 2.2. Устройство синхронного генератора (а) и график распределения магнитной инлукпии под полюсом генератора (6)
За один поворот рамки происходит полный цикл изменения ЭДС.
Если при t = О ЭДС е не равна нулю, то выражение ЭДС записывается в виде
е = Е„ sin (of + ф),
где е - мгновенное значение ЭДС (значение ЭДС в момент времени г); Ет — амплитудное значение ЭДС (значение ЭДС в момент времени at + ф = л/2), (юг + ф) - фаза; ф - начальная-фаза. Фаза определяет значение ЭДС в момент времени I, начальная фаза — при t - 0.
Время одного никла называется периодом Т, а число периодов в секунду — час ютой f:
/=1/Т
Единицей измерения частоты является с'1, или герц (Гц). Величина щ = <x/t = InjT ~ 2itf в электротехнике называется угловой частотой и измеряется в рад/с.
Г рафик зависимости ЭДС е от времени изображен на рис, 2.1, б (сплошная линия — дляф = 0, пунктирная - дляф 0).
Частота вращения рамки п и частота ЭДС f связаны между собой соотношением
со = 2тг/ = пи/30,
откуда
/=«/60,
Электрическая энергия вырабатывается синхронными генераторами электрических станций в виде энергии переменного (синусоидального) тока с частотой 50Гц в Советском Союзе и странах Европы и 60 Гц в США.
Синхронный генератор1, устройство которою показано на рис. 2.2, а, состоит из неподвижного статора /, в котором уложена обмотка 2, и вращающегося ротора 3, представляющего собой электромагнит.
Магнитное поле вращающегося с постоянной частотой ро-юра пересекает проводники обмоки статора и наводит в них переменную ЭДС. Чтобы ЭДС при постоянной частоте вращения ротора изменялась синусоидально, воздушный зазор между полюсами ротора и поверхностью статора должен иметь 1акую форму, при которой магнитная индукция вдоль зазора изменялась бы по синусоидальной зависимости (рнс. 2.2,6)
Д, = В,, sin ос, (2.2) .
Амплитудное значение ЭДС будет яри а — 90е, когда ось ротора {а, а), где В = В„, совпадает с осью (б, б) проводника обмотки статора.
Выбор частоты промышленных установок 50 Гц в СССР и странах Европы и 60 Гц в США обусловлен технико-экономическими соображениями. При меньших частотах габаритные размеры, масса и стоимость трансформа юров и машин выше, заметно мигание света осветительных приборов и т. п. При больших частотах в трансформаторах
1 Подробно устройство синхронного генератора изложено в гл. 11.
63
62
и машинах увеличиваются потери энергии, повышается падение напряжения в проводах вследствие возрастания индуктивного сопротивления и т. п.
Для питания энергией высокоскоростных асинхронных двигателей при частотах до 500Гц используют многополюсные синхронные или индукторные генераторы, для нагревательных установок и высокоскоростных асинхронных двигателей при частотах до §000 Гц - специальные индукторные генераторы. Переменный ток высокий часЮ1Ы (от тысяч до нескольких сотен миллионов герц) для радиотехнических и других установок получают с помощью ламповых или полупроводниковых генераторов. Принцип действия генераторов основан на возникновении синусоидальных колебаний в кон гуре с емкостью и индуктивностью
Целесообразность применения энергии переменного тока вместо постоянного тока обусловлена многими технико-экономическими причинами. Приведем некоторые их них.
Источники энергии переменного тока — синхронные
генераторы—дешевле, надежней и могут быть выполнены на значительно большие мощности и более высокие напряжения, чем генераторы постоянного тока.
Энер1ия переменного тока одного напряжения легко преобразуется в энергию переменного тока другого (высшего или низшего) напряжения с помощью относительно простого, дешевого и надежного аппарата - трансформатора, что очень важно при передаче энергии на большие расстояния.
Приемники электрической энергии, такие как осве!И1ельные приборы и электрические печи, в которых используются проволочные нагреватели постоянною и переменного тока, мало различаются по своим технико-экономическим показателям, однако двигатели переменного тока дешевле и надежней двигателей постоянного тока.
Следует отметить также широкое применение нагревательных устройств для плавления металлов, поверхностной закалки и т п., принцип действия которых основан на использовании переменного тока.
2.2. ДЕЙСТВУЮЩЕЕ И СРЕДНЕЕ ЗНАЧЕНИЯ СИНУСОИДАЛЬНЫХ ТОКА, ЭДС И НАПРЯЖЕНИЯ
Для установления эквивалентности переменного тока в отношении энергии и мощности, общности методов расчета, а также сокращения вычислительной работы изменяющиеся непрерывно во времени токи. ЭДС и напряжения заменяю! эквивалентными неизменными во времени величинами. Действующим или эквивалентным значением называется такой неизменный во времени юк, при котором выделяется в резистивном элементе с активным сопротивлением г за период то же 64
количество энергии, что и при действительном изменяющемся синусоидально токе.
Энергия за период, выделяющаяся в резистивном элементе при синусоидальном гоке, т т
w = J i2r dt~ j I2 sin2 at r dt. о v
При неизменном во времени токе энергия
И/ = /2гТ
Приравняв правые части
!2rT- J I2sin2mtrdt,
о
получим действующее значение тока
I = Р-8,1,2 щ| dl = = °'707'”
I т о ]/2
Таким образом, действующее значение тока меньше амплитудного в |/2 раз.
Аналогично определяют действующие значения ЭДС и напряжения:
Е-Е.//2, У=1/„/)/2.
Действующему значению тока пропорциональна сила, действующая на ротор двштеля переменного тока, подвижную часть измерительного прибора и т. д, Когда говорят о значениях напряжения, ЭДС и тока в цепях переменного тока, имеют в виду их действующие значения. Шкалы измерительных приборов переменно! о тока отградуированы соответственно в действующих значениях тока и напряжения. Например, если прибор показывает 10А, то это значит, что амплитуда тока
Im=|/2I= 1,41-10= 14,1 А,
н мгновенное значение тока
i = Im sin (ait + ф) = 14,1 sin (от + ф).
При анализе и расчет выпрямительных устройств пользуются средними значениями тока, ЭДС и напряжения, пол которыми понимают среднее арифметическое значение соответствующей величины за
3 Электротехника £5
полпсриода (среднее значение за период, как известно, равно нулю): 7/2 Л
2 С 2Е_ Г 1Ет п 2Е_
£ср = — I E_s(no)f dt ==--- I sincof dwt ~— |cos<m|°------------
p T J m По J По 1 l’’ я
= 0,637Em.
Аналогично можно найти средние значения тока и напряжения:
Отношение действующего значения к среднему значению какой-либо периодически изменяющейся величины называется коэффициентом формы кривой. Для синусоидального юка
Е I U тс
кф = -^ = 5- = т;-----------г =,’П
^ср Лр L ср 2у 2
2.3. ВЕКТОРНЫЕ ДИАГРАММЫ
Для упрощения анализа и расчета цепей переменного тока целесообразно использовать векторы.
В электротехнике векторами изображаются изменяющиеся синусоидально ЭДС, напряжения и токн, ио в отличие ог векторов, которыми изображались силы и скорости в механике, эти векторы вращаются с постоянной угловой частотой о и не означают направление действия.
Допустим, что радиус-вектор ОА (рис. 2.3,«), представляющий собой в определенном масштабе амплитудное значение ЭДС Е„, вращается с постоянной угловой частотой о —2т:/ против часовой стрелки. Проекция вектора ОА на вертикальную ось (ось у) будет равна
Оа = О A sin а.
Выразив ОА через амплитудное значение ЭДС Ет и а через юг, получим выражение мгновенного значения ЭДС, изменяющейся синусоидально:
е = Е„ sin юГ.
График мгновенных значений ЭДС изображен на рнс. 2.3,6. За начало отсчета выбран момент времени, когда радиус-вектор совпадает с г орнзоитальиой осью (ось х).
Если в момент г — 0 радиус-вектор О А совпадает с линией, расположенной под углом ф к оси х, то проекция Оа' и, следо-66
Put. 2.3. Вращающиеся векторы (а) и график мгновенных значений синусоидальной ЭДС (б)
вательно, ЭДС будут соответственно равны
Оа' = О A sin (cot + ф), е= Emsin (cot + ф).
Аналогично можно представить в виде векторов, вращающихся против часовой стрелки с постоянной угловой частотой w, напряжение и ток.
Расчет цепей синусоидального тока производят в действующих значениях ЭДС, напряжений и токов. При этом суммирование Е, U, I проще осуществить с помощью вращающихся векторов, вместо того чтобы, сложив мгновенные значения е, и, i, определить действующие значения результирующих Е, U. I интегрированием гармонических функций. Адекватность этих действий можно обосновать так.
Допустим, что в каком-то узле цепи переменного тока (рис. 2.4, а) известны значения токов ц н i2-
Требуется определить ток I.
На основании первого закона Кирхгофа мгновенное значение тока
! = *1 + <1, г е.
i = Г,„sin (tor +1|>,) + f2„sin (tot +- ф2).
Ток i можно определить аналитически путем тригонометрических преобразований или графически сложением графиков
3*
67
Рис. 2.4. Сложение синусоидальных токов с помощью векторов (а): графики мгновенных значений токов (б)
мгновенных значений токов н 12, как это сделано на рис. 2.4,6. Результирующий ток также изменяется синусоидально и в соответствии с рис. 2.4, б
‘ (rat + ф).
Значительно проще произвести сложение токов ц и i2, если изобразить амплитуды токов в виде векторов и сложить их по правилу параллелограмма. На рис. 2.4, а амплитуды токов 11п| и 12т изображены в виде векторов под углами начальных фаз \|/! и ф2 относительно оси х. По прошествии времени t векторы повернутся на угол а = cot. Проекции амплитуд на ось у составят
‘1 =/i„sin(o>t4 ф,);
<2 = 12„8т(ш(+ф2).
Сложив векторы /]т и 1^т по правилу параллелограмма (см. рис. 2.4, а), получим амплитуду результирующего тока 7т. Сумма проекций токов 71т и 12т равна проекции резулыирукэщего тока
Полученное выражение соответствует первому закону Кирхгофа для рассматриваемого узла цепи (см. рис. 2.4, и). Из 68
Рлс. 2.5. Векторная диаграмма напряжений
рис. 2.4. а видно, что взаимное расположение векторов /1т, 11т и 1т в любой момент времени остается неизменным, так как они вращаются с постоянной угловой частотой со. Аналогично можно определить сумму нескольких изменяющихся синусоидально с одинаковой частотой напряжений или ЭДС. Например, в последовательной цепи переменного тока действуют три напряжения:
wi = Hlmsin (юг + Ф1);
'<2= ’in+ Ф2);
1|3= Uj.sin (<i>t+ ф3).
Сумму напряжений можно определив пу-
тем сложения векторов их амплитуд (рис. 2.5)
+ ^3™
и последующей записи результирующего напряжения и = = Um sin (cot + ф).
Совокупность нескольких вращающихся векторов, соответствующих уравнениям электрической цепи, называехся векторной диаграммой.
Обычно векторные диаграммы строят не для амплитудных, а для действующих значений. Векторы дейс!вующих значений отличаются от векторов амплитудных значений только масштабами, так как
1-IJV2.
При построении векюрных диаграмм обычно один из исходных векторов располагают на плоскости произвольно, остальные же векторы — под соответствующими углами к исходному. При этом в подавляющем большинстве случаев можно обойтись без нанесения осей координат х и у.
69
2.4. ЦЕПЬ, СОДЕРЖАЩАЯ РЕЗИСТИВНЫЙ ЭЛЕМЕНТ С АКТИВНЫМ СОПРОТИВЛЕНИЕМ г
В общем случае электрическая цепь переменного тока может содержать резистивные, индуктивные и емкостные эле
менты. параметрами которых соответственно являются сопротивление г, индуктивность L и емкость С. Диализ и расчет таких цепей значительно сложней, чем цепей постоянного тока. В цепях постоянного тока индуктивные и емкостные элементы проявляют себя только в моменты включения, отключения це-
пи или изменения ее параметров, когда изменяется ток и появляется ЭДС самоиндукции е = Ldi/dt в индуктивном элементе и напряжение ис = —jidt на cmkocihom элементе.
В установившемся режиме ток в цепях постоянного тока не изменяется и ЭДС самоиндукции равна нулю, а напряжение на
емкости ис соответствуй какому-то постоянному значению.
В цепях переменного тока происходит непрерывное изменение напряжения и.тока, в результате чего возникает изменяющаяся во времени ЭДС самоиндукции е н напряжение на емкости ис-
Таким образом, режим работы цепи переменного тока определяется не только сопротивлением г, но индуктивностью L и емкостью С. Прежде чем разбирать общий случай цепи с г, L и С, остановимся на частных случаях.
Рассмотрим цепь, содержащую только резистивный элемент с активным сопротивлением г. Под ак(ивиым сопротивлением
понимаю г сопротивление проводников переменному току. Вследствие вытеснения тока к поверхности проводника сопротивление проводника переменному току больше, чем постоянному. При малых частотах (несколько десятков и сотен герц) увеличение сопротивления незначительно и активное сопротивление определяется по той же формуле, что. л сопротивление постоянному току. При частотах в coihh тысяч и миллионы герц активное сопротивление может оказаться намного больше сопротивления постоянному току и для его определения используют соответствующие формулы.
Мгновенное значение тока в цепи с активным сопротивлением (рис. 2.6, д) определяется по закону Ома:
i = и/г.
Выразив и через амплитудное значение u = U'm sin <ot,
70
Рис 2.6. Электрическая цепь, содержащая резистивный элемент с активным сопротивлением г (а), ее векторная диаграмма (6) и графики мгновенных значений и, г, р (в)
получим
U„ sin cot --------------= Ди sm cot,
(23}
где
г. - UJr.
Разделив левую и правую части на |/2, получим закон Ома для цепи с активным сопротивлением, выраженный через действующие значения напряжения и тока,
I = U/r.
Из выражения (2.3) следует, что ток и напряжение совпадают по фазе. Векторная диаграмма цепи изображена иа рис. 2.6,6, а график мгновенных значений тока и напряжения — на рис. 2.6, и.
Мгновенная мощность цепи равна произведению мгновенных значений напряжения и тока:
р - hi - L7„ sin cot I„ sin cot.
Из графика мгновенной мощности (рис. 2.6,в) видно, чю мощность изменяется от нуля до Р„, оставаясь все время положительной. Это означает, что в цени с активным сопротивлением энергия все время поступает из сети к приемнику г и необратимо преобразуется в нем в теплоту, которая нагревает сопротивление и рассеивается в окружающей среде.
71
Среднее значение мощности за период
р 1 f _ J. 1 f i; г _;_2 J. UnJm fl COS 2(0Z , Um!„
Pcp 1p dt = 1 U«I>»S!n wt dt = 1----;----dt = ~^T~-
1 0 1 6 1 0 2 2
Выразив амплитудные значения напряжения и тока через действующие значения, получим
После подстановки U = 1г будем иметь
Рср = UI = I2r = Р. (2.4)
Из выражения (2.4) вытекает, что среднее значение мощности есть электрическая мощность, которая преобразуется в активном сопротивлении в теплоту. Такую мощность называют активной и обозначают символом Р.
К приемникам активной мощности относятся также электрические двигатели, в которых электрическая мощность преобразуется в механическую мощность, развиваемую двигателем на валу.
Активная мощность измеряется ваттметром, включенным соответствующим образом в электрическую цепь переменного тока.
15. ЦЕПЬ, СОДЕРЖАЩАЯ ИНДУКТИВНЫЙ ЭЛЕМЕНТ С ИНДУКТИВНОСТЬЮ L
Обмотки (катушки) электрических машин, трансформаторов, магнитных усилителей, электромагнитов, реле, кон (акторов, индукторов электрических нагревательных устройств и печей переменного тока обладают значительной индуктивностью. В радиотехнических устройствах индуктивные катушки используются для образования колебательных контуров, электрических фильтров н т. п. Параметрами катушек являются активное сопротивление г и индуктивность L. Изменяющийся во времени ток наводит в этих катушках ЭДС самоиндукции, которая по значению во многих случаях заметно больше, чем падение напряжения на активных сопротивлениях.
Рассмотрим вначале катушку, активное сопротивление которой настолько мало, что им можно пренебречь.
Для выяснения процессов, происходящих в цепи с индуктивностью (рис. 2.7, а), допустим, что ток в индуктивности изменяется синусоидально
I = Im sin (»t. (2.5)
72
Рис. 2.7. Электрическая цепь, содержащая индуктивный элемент с индуктивностью L (а), ее векторная диаграмма (6) и графики мгновенных значений и, i, р (в)
Ток вызывает в индуктивности ЭДС самоиндукции
eL= - Ldi/dt. (2.6)
Уравнение, составленное по второму закону Кирхгофа для данной цепи, имеет вид
et= -и. (2.7)
Выразив eL и < через их значения из (2.5) и (2.6). найдем напряжение на индукшвности:
dlm sin cot и = L--------.
dt
Выполнив операцию дифференцирования, получим
и = (aUmcos(Dt = coL/msin (ojf + у | = <7ж81п( + у L (2.8)
Из сравнения выражений (2.5) и (2.8) можно сделать вывод, что ток в цепи с индуктивностью и напряжение иа индуктивности изменяются по синусоиде, а напряжение опережает по фазе ток на угол 90°.
Векторная диаграмма цепи с индуктивностью изображена на рис. 2.7,6, а графики мгновенных значений тока и напряжения - па рнс. 2.7, в.
Напряжение и ток в цепи с индуктивностью, как следует из
73
выражения (2.8), связаны соотношением Um = toUml
откуда
Im = UJuL (2.9)
Разделив левую и правую части (2.9) на |/2, получим закон Ома для цепи переменного тока с индуктивностью.
17 О
I =---= —,
U)L Xl
где xL= oL = ZnfL — индуктивное сопротивление, Ом.
Представив в (2,7) ЭДС самоиндукции и напряжение векторами, получим уравнение цепи в векторной форме для дей-С1куюших значений
£ - - 17,
или после замены напряжения произведением тока и индуктивного сопротивления
£ - - IxL.
Таким образом, ЭДС самоиндукции может быть выражена через ток и индуктивное сопротивление. Такой способ выражения ЭДС во мшлих случаях значительно упрощает анализ цепей с индуктивностью.
Мгновенная мощность цепи с индуктивностью равна р = ui = I„, sin cot Lr„ sin ^cot + sin 2oit = UI sin 2cot =
= P„ sin 2om.
Мгновенное значение мощности (рис. 2.7,в) изменяется синусоидально с частотой, в 2 раза большей частоты тока. Амплитудное значение мощности
P»=W-
Легко показать аналитически и из графика рис. 2.7, в, что среднее значение мощности за период (активная мощность) равно нулю:
1 Г
Р = —J uidt — 0.
74
Для пояснения энергетических процессов в цепи с индуктивностью используем график рис. 2.7, в.
В интервале времени от t = 0 (точка 1) до t = Т/4 (точка 2), когда 1 ок в цепи возрастает от 0 до электрическая энергия из сети поступает в индуктивность, преобразуется и накапливается в ней в виде энергии магнитного поля.
Наибольшее значение энергии магнитного поля будет в момеш времени, соответствующий точке 2, когда ток достигает амплитудного значения.
2
Можно показать, что эта энергия равна заштрихованной площади графика p=f(t} в интервале времени между точками 1 и 2 (отмечена знаком « + •>. Действительно,
Т>4
Г4 с U 1 VI U I
f ui dt — " sin2o>[ -cos2ol|„т'* = =
о J 2 2 • 2со 2св
о
_ !”Xl - - № 2о 2о 2
В ин,ервале времени между точками 2 и 3 ток в цепи убывает. Энергия магнитного поля преобразуется в электрическую энергию и возвращается в сеть. В момент времени, соответствующий точке 3, ток и энергия магнитного поля равны нулю.
Энергия, отданная в сеть, равна заштрихованной площади графика [> = Де) в интервале времени между точками 2 и 3 (отмечена знаком « - »). Из графиков рис. 2.7, в видно, что площади, определяющие запасенную и отданную энергию, равны. Следовательно, энергия, накопленная в магнитном коде индуктивности в первую четверть периода, полностью возвращается в сеть во вторую четверть периода.
В следующую четверть периода в интервале времени между точками 3 и 4 изменяются направления тока и мщнтного потока. Происходит процесс, аналогичный процессу в первую четверть периода: энер-1ия из сети uuciynaeT в индуктивность и накапливается в ней в виде энергии магнитного поля. В последнюю четверть периода в интервале времени между точками 4 и 5 энергия магнитного поля возвращается в сеты
Таким обрезом, в цепи с индуктивностью происходит непрерывный периодический процесс обмена энергией между сетью (источником энергии) и индуктивностью.
75
2.6. ЦЕПЬ, СОДЕРЖАЩАЯ ЕМКОСТНЫЙ ЭЛЕМЕНТ С ЕМКОСТЬЮ С
В радиоэлектронных устройствах емкость является элементом колебательных контуров, фильтров, элементом связи между контурами и т. п. В силовых установках конденсаторы используют для улучшения коэффициента мощности, как элемент колебательного контура высокочастотных установок для закалки и плавки металлов. В любой электрической установке емкости образуются между проводами, проводами н землей и другими элементами токоведущих конструкций.
При большой протяженности проводов емкость может оказаться значительной, и при расчете цепей даже низкой, например промышленной, частоты ее необходимо учитывать. В высокочастотных цепях даже небольшие емкости оказывают существенное влияние на режим работы цепи и их необходимо учитывать.
Ток в цепи с емкостью (рис. 2.8, а) представляет собой движение зарядов к ее обкладкам:
i — dq/dt. (2.10)
Выразив в (2.10) заряд q через емкость С и напряжение на емкости «с, из выражения
С = q/uc получим
i = С duc/dt.
Напряжение на емкости изменяется синусоидально:
и = ис= (/„sincot. (2.11)
Тогда ток в цепи
dUm sin cot | = с л
Взяв производную, получим мгновенное значение тока в цепи с емкостью:
i = coCl/mcos(Dt = Im sin (cot 4- n/2). (2.12)
Сравнивая выражения (2.11) и (2.12), можно сделать вывод, что ток в емкости опережает напряжение на емкости по фазе иа 90°.
Векторная диаграмма цепи с емкостью приведена на
76
Рис. 2.8. Электрическая цепь, содержащая емкостный элемент с емкостью С (а), ее векторная диаграмма (б) и графики мгновенных значений u, i, р (в)
рис. 2.8, б, а график мгновенных значений тока и напряжения — на рис. 2.8, в.
Напряжение и ток в цепи с емкостью, как следует из выражения (2.12), связаны соотношением
I. =
откуда
1/юС
(2-13)
Разделив левую и правую части (2.13) на }/2, получим закон Ома для цепи с емкостью:
С/ _ С/
1/юС
(2-14)
где Хс — 1/юС — емкостное сопротивление, Ом.
Таким образом, напряжение на емкости в цепи переменного тока может быть выражено через произведение тока иа емкостное сопротивление:
U = Uc = 1хс.
Мгновенное значение мощности р в цепи с емкостью равно произведению мгновенных значений напряжения и тока:
р = ui~ L/msincot/m sin (cut + л/2) = —sin 2(ot =- UI sin2(ot =
= Pm sin 2ot.
77
Из полученного выражения вытекает, что мгновенная мощность изменяется по закону синуса с частотой, в 2 раза большей частоты тока, и ее амплитудное значение
р„ = VI.
Среднее значение мощности за период (активная мощность), как видно из графика рис. 2.8,в, равно нулю:
Р = — I widt -- 0.
Для пояснения энергетических процессов в цепях с емкостью воспользуемся графиками, изображенными на рис. 2.8, в. В первую четверть периода, в интервале времени между точками 1 и 2, напряжение на конденсаторе возрастает, происходит заряд конденсатора: электрическая энергия из сети поступает к конденсатору и накапливается в нем в виде энергии электрического поля. Накопленная энергия равна заштрихованной площади, ограниченной кривой p(f) (отмечена знаком « 4- »), и составляет
Т/4 T/4
f , f LUm • l^C
jyc= uidt = sm2(Dtdt = —~.
о 0
В следующую четверть периода, в интервале времени между точками 2 ц 3, ток изменяет направление, а напряжение на конденсаторе убывает. Происходит разряд конденсатора; энергия электрического поля возвращается в сеть. Энергия, возвращенная в сеть, равна* площади, ограниченной кривой p(t) (отмечена знаком « —»>
Из графиков рис. 2.8, в видно, что площади, определяющие запасенную и отданную энергии, равны. Следовательно, энергия, накопленная в электрическом поле емкости в первую четверть периода, полностью возвращается в сеть во Вторую четверть периода.
В следующую четверть периода, в интервале времени между точками 3 и 4, изменяется полярность напряжения на обкладках конденсатора. Происходит заряд конденсатора: электрическая энергия из сети поступает к конденсатору и накапливается в нем в виде энергии электрического поля. В последнюю четверть периода, в интервале между точками 4 и 5, происходит разряд конденсатора: энергия электрического поля возвращается в сеть.
Таким образом, в цепи с емкостью, так же как и в цепи с индуктивностью, происходит непрерывный периодический процесс обмена энергией между сетью и конденсатором-
7%
2.7. ЦЕПЬ, СОДЕРЖАЩАЯ КАТУШКУ С АКТИВНЫМ СОПРОТИВЛЕНИЕМ г И ИНДУКТИВНОСТЬЮ L
Реальная катушка (обмотка) любого электротехнического устройства обладает определенным активным сопротивлением г и индуктивностью L. Для удобства анализа таких цепей катушку обычно изображают в виде двух идеальных элементов — резистивного г и индуктивного L, соединенных последовательно (рис. 2.9, а). Используя выводы, вытекающие из анализа идеальных цепей, участок цепи с индуктивностью L будем рассматривать как участок, обладающий индуктивным сопротивлением хь Уравнение напряжений, составленное по второму закону Кирхгофа для цепи с г и L, имеет вид
и = иг + UL.
Выразив напряжения иг и через ток и сопроти-
вления участков цепи г и хь получим
и = Imr sin юг + 7mxLsin I юг + — 1
Рис. 2.9. Электрическая цепь, содержащая катушку индуктивности г и L (а), ее векторная диаграмма (б), графики мгновенных значений и, г, р (в), треугольники мощностей и сопротивлений (г, д), графики мгновенных значений pl (е)
79
где ur = Imr sin (О! — напряжение на ап инном сопрей инлении (активное напряжение), совпадающее по фазе с током; н£ = = ^Oix£s’T1 ((,)* + я/2) — напряжение на индуктивном сопротивлении (индуктивное напряжение), опережающее ior но фазе на W.
На векторной диаграмме (рис. 2.9,6) вектор Сг совпадает с вектором тока, а вектор (У£ опережает вектор тока на 90”.
Из диаграммы следует, что векюр напряжения cein равен геометрической сумме векторов V, и [7£:
и = иг + UL,
а его значение
и=/иУ+иьг.
Выразив напряжения через ток и сопротивления, получим i7=/(Ir)2+(Ix/ = 4/PT7?.
Последнее выражение представляет собой закон Ома пепи г, Xl-
U _ U ~ /г’ + х? ~ г ’
где z = |/г2 + х£2 — полное соиро1ивление цепи, Ом.
Из векторной диаграммы следует, что напряжение цепи г, ^опережае] но фазе ток на угол <р и его мгновенное значение и = Um sin + <р)
Графики мгновенных значений напряжения и тока цепи изображены на рис. 2.9,в.
Угол сдвига по фазе <р между напряжением и вызванным им током определяют из соотношения
Как видно, cos <р и, следовательно, угол <р зависят только от парамезров цепи г и хи
Разделив стороны треугольника напряжений на ток, iioiy-чим треугольник сопротивлений (рис. 2.9,6). Сторопы треугольника сопротивлений представляют собой отрезки, а не векторы, 80
так как сопротивления есть постоянные, не изменяющиеся синусоидально величины.
Мгновенная мощность цепи с г и L равна произведению мгновенных значений напряжения и тока:
р = ui = fm sin an Um sin (or + <p).
Средняя мощность за период
P4> = yJul sin tot-sin (юг + 9)Л.
О
Выразив произведение синусов через разность косинусов, после почленного интегрирования получим
Л-р = — J—y^fcoscp - cos(2oH 4- (р)] dt — UI cos (p. (2.16) о
Подс1икив в (2.16) вместо cos <р ею значение из (2.15), получим
Ptp= L7Icos<p= Ш- = 12г = Р. (2.17)
Из (2.17) вытекает, что среднее значение moiuhocih н цепи с i и L есть активная мощность, которая выделяется в активном сопротивлении г в виде теплоты.
График мгновенной мощности изображен на рис. 2.9, в.
Для анализа знер[ ei ических процессов в цепи г, L мгновенную мощность удобно представить в виде суммы мгновенных значений активной ра = игг и реактивной (индуктивной) pl-^i) мощностей;
Р = Р* + Рт-
Графики ра (t), pi. (О изображены на рис. 2.9. е. График pa(f) аналогичен графику для цепи с активным сопротивлением (см. § 2.4), а график pL (f) — для цепи с индуктивностью L (см. * 2.5).
Таким образом, энергетические процессы в цепи с г, L можно рассматривать как совокупность процессов, происходящих в цепях только с активным сопротивлением г и только с индуктивностью L.
Из графика р. (1) видно, что активная мощность непрерывно поступает из сети и выделяется в активном сопротивлении
81
в виде теплоты. Она равна
Т
р = у ]Lsi"2 “/ Л = UI cos ч1'
Мгновенная мощность рь обусловленная энергией магнитного поля индуктивности, циркулирует между сетью и катушкой. Ее среднее значение за период равно нулю:
7
pl = Jsin sin ^сог + у) Л = 0.
2Л. ЦЕПЬ, СОДЕРЖАЩАЯ РЕЗИСТИВНЫЙ И ЕМКОСТНЫЙ ЭЛЕМЕНТЫ
Используя выводы § 2.6. участок цепи с емкостью С будем представлять как участок, обладающий емкостным сопротивлением xt. В этом случае уравнение напряжений цепи (рис. 2.10, а) имеет вид
V = йг + ис.
На рис. 2.10,6 изображена векторная диаграмма цепи г и С. Вектор напряжения Ur совпадает с вектором тока, вектор Uc отстает от вектора тока на угол 90°. Из диаграммы следует, чю модуль напряжения, приложенного к цепи, равен
U = \/uf+ ис2. (2.18)
Выразив U, и Uc в (2.18) через ток и сопротивления, получим
i- = rW + (W, откуда
и = 1Уг2 + хс2.
Последнее выражение представляет собой закон Ома цепи г и С:
У Г2 + хс2 2
где z = J/r2 + хс2 — полное сопрогивление, Ом. 82
Рис. 2 10 Электрическая цепь, содержащая резистивный г и емкостный С элементы (л), ее векторная диаграмма (б), графики мгновенных значений и. !, р (в), треугольники мощностей и сопротивлений (г и di
Из векторной диаграммы следует, что напряжение цепи г и С отстает по фазе от тока па угол <р и его мгновенное значение
и = Um sin (<вг - <р).
Графики и(t), i(t) изображены на рис. 2.10,в. Разделив стороны треугольника напряжений (рис. 2.10,6) иа ток, получим 1реугольник сопротивлений (рис. 2.10,Э), из которого можно определить косинус угла сдвша фаз между током и напряжением
COS ф = - = L =^.. (2.19)
- 1/г2 + кс2
Мгновенная мощность цепи
р = ui = /т51П(£)Шт sin (ft#—ф).
Средняя мощность за период
PLp = J, dt - -у J 2„ЬГМ sin cot sin (at - ф) rft - L7 cos ф. (2.20)
Подставив в (2.20) вместо созф его значение из (2.19), получим
р._ = Ш cos ф = Щ — =/2г = Р. (2.21)
Р Z
83
Таким образом, среднее значение мощности цепи с г, С, так же как и цени с г, Ц нредаавляе! собой активную мощность, которая выделяется в активном сопротивлении г в виде теплоты.
На рис. 2.10, я изображен график мгновенной мощности цепи с г, С.
Энергетические процессы пепи с г, С можно рассматривать как совокупность процессов, происходящих отдельно в цепи с г и С. Из сети непрерывно поступает активная мощность Реактивная мощность, обусловленная электрическим полем емкости, непрерывно циркулирует между источником и пепью. Ее среднее значение за период равно нулю.
2.9. ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ г, L И С
Уравнение напряжений для пепи рис. 211, а имеет вид
й = йг + uL+ йс.
(2.22)
Векторные диаграммы для пепи рис. 2.1 ],а изображены на рис. 2.1J, б и в. Вектор напряжения на активном сопротивлении Ur совпадает с вектором тока, вектор напряжения на индуктивности UL опережает вектор тока на 90°, вектор
Рис. 2.11. Электрическая цепь, содержащая пос.тедова1ельно включенные г, L и С (а), ее векторная диаграмма (б), треугольники сопротивлений и мощностей (в и г) цепи при > Хс, векторная диаграмма (д), треугольники сопротивлений и мощностей (е и ле) цепи при хс > Х[_
84
напряжения на емкости Uc отстает от вектора тока на 90\ Следовательно, между векторами напряжения на индуктивности и емкости образуется мол 180и.
Если xL> xt, то и UL> и векторная диаграмма буде; иметь вид, изображенный на рис. 2.11,6, а 1реуюльник сопротивлений - на рис. 2.11, я, j де х = xL - хг. Если хс > х(
Рис. 2,12. Эквивалентные схемы цепи, изображенной на рнс. 2 11, а: а - хт > хс; б - хс > х^; в -~Ч = хс
то UC>UL и векторная
диаграмма будет иметь вид. изображенный на рис. 2 11, <), а треугольник сопротивлений - на рис. 2.11, е, где х = хс - xL. Значение напряжения, приложенного к цепи,
С/ = |/((/г)2 + (1/£- ис)2. (2.23)
Выразив в (2.23) напряжение через ток и сопротивления, получим
V - /(Jr)2 + (1XL - Ixc)2 ’ I ]/r2 +(х,-хг)1.
Последнее выражение представляет собой закон Ома для последовательной цепи г, L, С:
V
V'r2 + (xt-.lc)2
гте ’ — [/г2 + (х£— хс)2 = }/г2 + х2 — полное сопротивление цепи, Ом; х — реактивное сопротивление пени. Ом.
На основании проведенного анализа цепи, состоящей из последовательно соединенных г, L, С, можно сделать следующие ВЫВОДЫ.
Если xL> хс, то напряжение сети опережает по фазе ток на угол гр:
и = U„ sin (<вг + <р).
Цепь имеет активно-индуктивный характер.
Цепь может быть заменена эквивалентной цепью, изображенной на рис. 2.12,а. В эквивалентной схеме гу = г. ху — vt —
Если хс > ху то напряжение сети отстает по фазе от тока на yi ол <р:
и — U„ sin (шг - <р).
85
Цепь имеет активно-емкостный характер.
Цепь может быть заменена эквивалентной цепью, изображенной на рис. 2.12,6. В эквивалентной цепи г. = г, хэ = хс -
2.10. АКТИВНАЯ, РЕАКТИВНАЯ И ПОЛНАЯ МОЩНОСТИ ЦЕПИ
Умножив стороны треугольников напряжений (см. векторные диаграммы рис, 2.9,6, 2.106, 2.11,6) на ток 1, получим треугольники мощностей.
Стороны треугольников мощностей соответственно означают:
Р s ЦД = /2г - активная мощность цепи, Вт, кВт (рис 2.9, г, 2.10,г, 2.11,г и ж);
Qt= U[i = l2xL — реактивная индуктивная мощность цепи, обусловленная энер< ией магнитного поля, вар, квар (рис. 2.9, г);
Qc = = 12*с ~ реактивная емкостная мощность цепи,
обусловленная энергией электрического поля, вар, квар (рнс. 2.10,?);
Q = Ql - Qc = I2x - реактивная мощность пепи, вар, квар (рис 2.11,? и ж), это та мощность, которой приемник обмени-
вается с сетью;
S = UI = I2z — полная мощность пепи. В • А, кВ • А (рис. 2.9, г, 2.10, ?, 2.11, ? иг ж);
г Р
cos <р = коэффициен! мощности цепи (рис. 2.9, г,
2.10,г, 2.11,г н ж).
Из треугольников мощностей можно установить следующие связи между Р, Q, 8 и cosq>:
P = Scos(f>= Ц/cosep;
Q = 8 sin ср = UI sin ф;
s=y>2 + e2 - иi.
За единицу активной мощности принят ватт (Вт) или киловатт (кВт), реактивной мощности — вольт-ампер реактивный (вар) или киловольт-ампер реактивный (квар), полной мощности — вольт-ампер (ВА) или киловольт-ампер (кВ А).
Реактивные (индуктивная, емкостная) мощности, обусловленные соответственно энергией магнитного поля индуктивности и электрического поля емкости, не совершают никакой полезной рабо!ы, однако они оказывают существенное влияние на режим работы электрической цепи. Циркулируя до прово-86
Рис. 2.13. Схема включения приборов для измерения активной, реактивной и полной мощностей цепи, а также ее параметров
дам трансформаторов, генераторов, двигателей, линий передач, они нагреваюI их. Поэтому расчет проводов и других элементов устройств переменного тока производят, исходя из полной мощности S, которая учитывает активную и реактивную мощности
Коэффициент мощности имее1 большое практическое значение' он показывает, какая часть полной мощности является активной мощностью. Полная мощность и коэффициент мощности наряду с другими параметрами являются ресчетными величинами и в конечном счете определяют габаритные размеры трансформаторов, генераторов, двигателей и других электротехнических устройств.
Измерение активной, реактивной, полной мощностей и coscp, а также параметров цепи, например г и L, можно произвести с помощью ваттметра, амперметра и вольтметра, включенных в цепь по схеме, изображенной на рис. 2.13.
Ваттметр измеряет активную мощность Р пепи. Полная мощность цепи равна произведению показаний вольтметра и амперметра.
Реактивную (индуктивную) мощность и коэффициент мощ-ности цени (рис. 2.13) определяют расчетным путем по формулам
Q = /s2 - Р2, cos <р = P/S.
Активное сопротивление находят из формулы
P = i2r, откуда
Г = Р/Р.
Полное сопротивление пепи
z = U/I.
Индуктивное сопротивление
= ]/д2 - г2.
87
Индуктивность L определяют из формулы xL = 2я/4
О1куда
Пример 2.1. Приборы, включенные в цепь рис 2.13, показывают- Р - 500 Вт, I = 5 А, О = 400 В.
Определить активное сопротивление г и индуктивность цепи L, если частота сети f - 50Гц.
Решение. Активное соиро|ивление цепи
г = р//2 = 5OO/52 = 20Ом.
Индуктивное соиро|ивление цепи
-Ч.- V’2 - г = |4ЦТ)" - Г2 = 1/(400/5)’ - 20! - 77,5 Ом.
Индуктивность цепи
Пример 2,2, Определить ток, полную, активную и реактивную мощности, а также напряжения на отдельных участках цепи, изображенной на рис. 2 11,а. если г = 40Ом. Е=О,382Гн, С = 35.5мкФ, 11 = = 220В. частота сети/ = 50Гц.
Решение. Индуктивное сопротивление цепи
л£= 2л/Г= 2-3,14-50-0,382 = 120Ом.
Емкостное сопротивление цепи
1 10б
хг =------=---------------= 90 Ом
2ж/С 2-3,14-50-35,5
Полное сопротивленце цепи
Z = /г2 +К£- хс)2 = /402 + (120 - 90? = 50 Ом
Ток в цепи
2 = 17/z - 220/50 = 4,4 А.
Коэффициент мощности цени
cos ф = r/z = 40/50 = 0,8.
Потная, активная и реактивная мощности:
$ = 07 = /22 220 4,4 = 4,42 • 50 = 970 В - А.
88
P = Sc<^q = l2r~97Q Q,8 = 4,42 40 = 775 Вт;
Q » Ssin <p = I2(xL~xc) = 970-0.56 = 4,42(120- 90) = 580вар.
Напряжения на оцелышх участках цепи:
ГД = 1г =4,4-40 = 176 В.
t';.=-/-XL=4,4 120 = 528 В;
С'с = -4,4 90 = 396 В.
Пример 2.3. Определить характер нагрузки. полную, актвную и реактивную мощности цепи, в которой мгновенные значения напряжения и тока составляют
к = 282 S3п (см + 60'),
I = 141 sin (ш? + 30°).
Решение. Угол начальной фазы напряжения (ф( = 60") больше, чем тока (ф2 = 30"), поэтому напряжение опережаег ио фазе ток на угол ф = ф, - ф, = 60 - 30 = 30е и назрузка имеет активно-индуктивный характер
Полная мощность цепи
U I 282-141
S=U1 = =---------= 20 000 В • А.
/2 |Л 1,41-1,41
Активная мощность цепи
Р = Scoscp = 20 000 cos 30- = 20 000 (j/3/2) - 17 300 Вт
Реактивная мощность цени
Q = 5 sin <р == 20 000 sin 30° = 20 000 • 0,5 - 10 000 вар.
2.11. ЗАКОНЫ КИРХГОФА В ВЕКТОРНОЙ ФОРМЕ
Анализ и pacaei сложных цепей переменного тока, так же как и цепей постоянного тока, производятся с помощью уравнений электрического состояния, составленных по законам Кирхгофа. Для цепей переменного юка во многих случаях целесообразнее записывать уравнения электрического состояния цепей по законам Кирхгофа в векторной фирме. На основании уравнений, записанных в векторной форме, легко построить векторную диаграмму.
Согласно первому закону Кирхгофа сумма токов в узле равна нулю при любом законе изменения токов во времени Si = 0. Для замкнутого контура электрической цепи может быть записано уравнение по второму закону Кирхюфа, связы-
89
кающее мгновенные значения ЭДС, токов и напряжений независимо от того, по какому закону изменяются эти величины:
Ze = Sir 4- Su.
В цепях синусоидальных ЭДС ток и напряжение изменяются синусоидально, поэтому они могут быть представлены вращающимися векторами и законы Кирхгофа записаны в векторной форме.
Первый закон-. Геомщрическая сумма токов узла равна нулю:
Sf = 0.
Второй закон'. Геометрическая сумма ЭДС при обходе по замкнутому контуру равна геометрической сумме произведений токов на полные сопротивления соответствующих ветвей коптура плюс геометрическая сумма напряжений, действующих в контуре:
vr-yiz + \_c-Vr*V/v , т,;
Знаки перед соответствующими членами уравнения определяются так же. как и для цепей постоянного тока: при совпадении направлений Е, /, U о направлением обхода контура перед соответствующим членом уравнения проставляется знак плюс, при несовпадении — знак минус.
2.12. РЕЗОНАНС НАПРЯЖЕНИЙ
Известно, что в механической системе резонанс нащупает при равенстве собственной частоты колебаний системы и частоты колебаний возмущающей силы, действующей на систему. Колебания механической системы, например колебания маятника, сопровождаются периодическим переходом кинетической энергии в потенциальную и наоборот. При резонансе механической системы малые возмущающие силы могут вызывать большие колебания системы, например большую амплитуду колебаний маятника.
В нспях переменного тока, где есть индуктивность н емкость, могут возникнуть явления резонанса, которые аналогичны явлению резонанса в механической сищеме. Однако полная аналогия — равенство собственной частоты колебаний электрического контура частоте возмущающей силы (частоте напряжения сети) — возможна не во всех случаях.
В общем случае иод резонансом электрической цепи пони
90
мают такое сосюяние цепи, когда ток и напряжение совпадают но фазе, и, следовательно, эквивалентная схема цепи представляет собой активное сопротивление. Такое состояние цепи имеет место при определенном соотношении ее параметров г. L. С, когда резонансная частота цепи равна часюте приложенного к ней напряжения.
Резонанс в электрической цепи сопровождается периодическим переходом энергии электрического поля емкости в энер-1 ию магнитного поля индуктивноеIи и наоборот.
При резонансе в электрической цепи малые напряжения, приложенные к цепи, могут вызвать значительные токи и напряжения на отдельных ее участках В цепи, где г, L, С соединены последовательно, может возникнуть резонанс напряжений, а в цепи, где г, L, С соединены параллельно,—резонанс .токов,
Рассмотрим явление резонанса напряжений на примере цепи рис. 2 11, а.
Как отмечалось, при резонансе ток и напряжение совпадают по фазе, т. е. угол ф = 0. и полное сопротивление цепи равно ее активному сопротивлению.
7 = j/r2 + (xt-xc)2 = r.
Эю равенство, очевидно, буде] иметь место, если х( = xt, т. е. реактивное сопротивление цепи равно нулю:
х - xL- хс ~ 0.
Выразив хт и хс соответственно через L, С и /, получим
2n/L=^
откуда
2л|/ LC
где f - частота напряжения, подведенного к контуру; /рез - резонансная частота.
Таким образом, при xL—хс в цепи возникает резонанс напряжений, так как резонансная частота равна частоте напряжения, подведенного к цепи,
Из выражения закона Ома для последовательной цеди
91
Рис. 2,14. Векторная диаграмма (а) и графики мгновенных значений и, I, р (б) цепи рис. 2.11, а при резонансе напряжений
вытекает, что ток в цепи при резонансе равен напряжению, деленному на активное сопротивление:
1 =
Ток в цепи может оказаться значительно больше тока, который был бы при отсутствии резонанса.
При резонансе напряжение иа индуктивности равно напряжению на емкости;
Ixt = Ixc =U,- Uc.
При больших значениях xL и хс относительно г эти напряжения могут во много раз превышать напряжение сети. Резонанс в цепи при последовательном соединении потребителей носи! нашание резонанса напряжений.
Напряжение па активном сопротивлении при резонансе равно напряжению, приложенному к цепи:
U, = lr — U.
На рис. 2.14, а изображена векторная диаграмма цепи рнс. 2.11,а при резонансе напряжений
Диаграмма подтверждает тот факт, что ток совпадает по фазе с напряжением сети и что напряжение на активном сопротивлении равно напряжению сстн.
Реактивная мощность при резонансе раина нулю:
Q = Ql-Qc=Ul1 -UcI = O,
так как UL= UC-
92
Полная мощность равна активной мощности:
S = |/>2 + е1 = Р,
так как реактивная мощность равна нулю.
Коэффициент мощности равен единице:
coscp = P/S = Г/2 = 1.
Поскольку резонанс напряжений возникает, когда индуктивное сопротивление последовательной цепи равно емкостному, а их значения определяются соответственно индуктивностью, емкостью цепи и частотой сети,
Резонанс может бьпь получен или путем подбора параметров цепи при заданной частоте сети, илн путем подбора частоты сети при заданных параметрах цепи.
На рис. 2.14, б изображены графики мгновенных значений тока i, напряжения и сети и напряжений «ь ис, иг на отдельных участках, а также активной р = iu, и реактивной pL= йц. pc = iuc мощностей за период для цепи рис. 2.11, а при резонансе напряжений. С помощью этих графиков можно проследить энергетические процессы, происходящие в цепи при резонансе напряжений.
Активная мощность р все время положительна, она поступает из сети к активному сопро!ивлению и выделяется в нем в виде тепла. Мощности pL и рс знакопеременные, и, как видно из графика, их средние значения равны нулю.
В момент времени t =0 (точка 1 на рис. 2,14,6) ток в цели t = 0 и эиершя магнитного поля 1Уь=гО. Напряжение на емкости равно амплитудному значению U„c, конденсатор заряжен и энергия его электрического поля
В первую четверть периода, в интервале времени между точками 1 н 2, напряжение на емкости и, следовательно, энергия электрического поля убывают. Ток в цепи и энерзия магнитного поля возрастают.
В конце первой четверти периода (точка 2) ис = (У, WC = Q. i = ln, Wl=I^L/2.
Таким образом, в первую четверть периода энергия элек-трического поля переходит в энергию магнитного поля.
Так как площади pc(t) и р£(г), выражающие запас энергии соответственно в электрическом и магнитном полях, одина-
93
U,I,r,x
Рис. 2.15. Графики зависимости I, г. хс. xij, U„ Ь/, Uс от частоты цепи, изображенной на рис 2.11, а
ковы, вся энергия электри-ческо! о поля компенсатора переходит в энергию магнитного поля индуктивности. Во вторую четверть периода, в интервале между точками 2 а 3, энергия магнитного поля переходит в энергию электрического поля.
Анало! ичные процессы происходят и в последующие четверти периода.
Таким образом, при резонансе реактивная энер1ия
циркулирует внутри контура от индуктивности к емкости и обратно. Обмена реактивной энергией между источниками и иепыо не происходит. Ток в проводниках, соединяющих источник с цепью, обусловлен только активной мощностью.
Для анализа цепей иногда используют частотный метод, позволяющий выяснить зависимость параметров цепи и других величин oi частоты.
На рис 2.15 изображены графики зависимости U I.
от частоты при неизменном напряжении сети.
При f = 0 сопротивления - 2itfL = 0, Xf — 1 /2я/С = х, ток 1 = О, напряжения Ur-!r — 0, L'c = L'. При J =/рез xl-xc< i-
= U/г, Uс - Uc, Г, = U. При f -* спх[_~* со. хс -»0, U, ~*0, 17с-» О, ^L~* -+U.
R интервале частот от/ = 0 до/ = /^ нагрузка имеет активно-емкостный характер, ток опережает по фазе напряжение сети. В интервале часто! oi/= /^з до/-»<х> ншрузка носит аюивно-нндуктивный характер, ток отстает по фазе от напряжения сети.
Наибольшее «качение напряжения на емкости получаеюя при частоте, несколько меньшей резонансной, на индуктивности — при частоте, несколько большей резонансной.
Явления резонанса широко используются в радиоэлектронных устройствах и в заводских промышленных установках.
Пример 2.4. Определить частоту сети, при которой в цепи рис. 2.11, а возникает резонанс напряжений. Определить также, во сколько раз напряжение на индуктивности больше напряжения сети при резонансе, если цепь имеет следующие параметры:
г = 20Ом, Г=0,1Гн, С = 5мкф.
Решение. Резонансная частота
--- =-------- - = 224 Гц. 2л/ГС 2-3,14|/0,Г51СГ6
94
Индуктивное сопротивление цепи при резонансе
XL-2л/рез^- - 6^8• 224 • 0,1 = 140Ом.
Напряжение на индуктивности при резонансе
Ul Ixl r. xL 140
= —, bi- и — = b----------= 717.
b Ir r 20
Напряжение на индуктивности при резонансе в 7 раз больше напряжения сети.
2.13. РАЗВЕТВЛЕННЫЕ ЦЕПИ
Параллельное соединение приемников. Вначале рассмотрим j рафоаналитнческий метод расчета цепи с параллельным соединением потребителей (рис. 2.16,а). Для такой цепи характерно то, что напряжения на каждой ветви одинаковы, общий ток равен сумме токов ветвей.
Ток в каждой ветви определяется по закону Ома:
U U 17
/. - - —? '< 7 т — —" » /1 — —" - (-^дз >
У?2 + хи2 У'2 + ха2 Уг1 + (хо - хс])2
> Хс;)-
Угол сдвига ф между током каждой ветви и напряжением определяют с помощью со$ф:
СО5фз - ------- •
|/ г3 + (х13 ~ хСз)
Рис. 2.16. UeiJb с параллельным соединением потребителей (а) и ее векторная диаграмма (б)
95
Общий ток в цепи, как следует из первого закона Кирхгофа, равен геометрической сумме токов всех ветвей:
Г = 4- 1г 4-7Э.
Значение общею тока определяют графически по векторной диаграмме рис. 2.16,6.
Акзивная мощность цепи равна арифметической сумме активных мощностей всех .ветвей;
Г-Р1 + Р2 -bPj.
Реактивная мощность цепи равна алгебраической сумме реактивных мощностей всех ветвей:
е=Ёе>.
причем реактивную мощношь ве!ви с индуктивностью берут со знаком плюс, ветви с емкостью - со знаком минус.
Для цепи рис. 2.16 реактивная мощность равна е = еы-есг + еи-есз.
Полная мощность цепи
S = ур2 b Q2.
Угол сдвига <р между общим током и напряжением определяют из векторной диаграммы или из выражения:
coso = Р/S'.
1 рафоаиалитический метод не удобен для расчета разветвленных цепей; он отличается громоздкостью и невысокой степенью точности.
Для анализа и расчета разветвленных цепей переменного тока используют проводимости, с помощью которых разветвленную цепь можно преобразовать в простейшую цепь и аналитически рассчитать токи и напряжения всех ее учаечков.
В цепях постоянного тока проводимостью называется величина, обратная сопро1ивлению участка цепи:
g=l/r
и ток в цепи выражается как произведение напряжения на проводимость:
I = Ug.
96
Рис. 2.17. Электрическая цепь (а), ее векторная диаграмма (б) и эквивалентная схема (в); векторная диаграмма цепи при резонансе юков (<)
В цепях переменного тока существуют три проводимости — полная, активная и реактивная, причем только полная проводимость является величиной, обратной полному сопротивлению последовательного участка цепи.
Выражения проводимостей в цепях переменного тока можно получить следующим образом.
Ток в каждом неразветвлещюм участке цепи раскладывают па две составляющие, одна из коюрых ecib проекция на вектор напряжения (активная составляющая тока ij, а другая - на линию, перпендикулярную вектору напряжения (реактивная составляющая тока 1р).
Активная составляющая тока определяет активную мощность
Р — VI cos<p= UIa;
реактивная составляющая тока - реактивную мощность
Q = U / sin ср = (71р.
Из векторной диаграммы цепи рис. 2.17, а, изображенной на рис. 2.17,6, следует, что активная составляющая тока равна
Величина
называется активной проводимостью вещи.
Реактивная составляющая тока lt равна
V х,
(1р = /| sin ф( ---------— (Zxt/zf - Ubi-
4 Электротехника
97
Величина
b, = XiJzj = Ьц
называется реактивной проводимостью ветви цепи с индуктивностью и в общем случае обозначается bL.
Аналогично определяют активную g2 и реактивную Ь2 проводимости второй ветви цепи:
/2а = I2 cos Ф2 - U/z2 r2/z2 - Ug2; g2 - r2/zl;
/?р =/, sin q>2 = U/Zj-xc/23 = Ub2; b2 = bC2 = xC2/z2.
Реактивная проводимость ветви с емкостью в общем случае обозначается Ьс.
Вектор тока первой ветви равен геометрической сумме векторов активной и реактивной составляющих тока'
Л — Ла ~1“Лр’
а "значение тока
Л “ V Ла + Лр-
Выразив составляющие тока через напряжение и проводимости, получим
л=
где = l/z1 = j/gi -I- b^j - полная проводимость ветви.
Аналогично определяют и полную проводимость второй ветви:
У2 = 1/г2 = )/^+^.
Эквивалентные активную, реактивную и полную проводимости цени получают следующим образом.
Вектор общего тока цепи равен геометрической сумме векторов токов Л и /2;
/=/, +11
и может быть выражен через активную и реактивную составляющие тока и эквивалентные проводимости всей цепи:
/ - Л + jp -{7g, +I7fe, = = U/z3.
Активная составляющая общего тока (см. рис. 2.17,6) равна арифметической сумме активных составляющих токов ветвей:
+ <Jgt + Ug2- V(gt +g2)- Ug* (2.24)
а реактивная составляющая — арифметической разности реактивных составляющих этих токов:
/р - Лр - ЛР= VbLf - UbC2 = U(bLl - bC2) = Ub,. (2 25)
98
Рис. 2.18. К расчету разветвленной цепи с использованием проводимостей
s)
Из выражений (2.24) и (2.25) следует, что эквивалентная активная проводимость цепи равна арифметической сумме активных проводимостей параллельно включенных ветвей:
g? = gi + gz + ••• (2-26)
а эквивалентная реактивная проводимость — алгебраической сумме реактивных проводимостей параллельно включенных ветвей:
= (’Ll 4- br2 + • • • + 4- Ьсч. (2.27)
При этом проводимости ветвей с индуктивным характером нагрузки берут со знаком плюс, ветвей с емкостным характером нагрузки — со знаком минус.
Полная эквивалентах проводимость цепи
p, = l/z, = ]/sFTbJ. (2Л8)
По эквивалентным активной, реактивной и полной проводимостям можно определить параметры эквивалентной схемы (рис. 2.17, в) цепи.
Эквивалентные активное, реактивное и полное сопротивления цепи определяют с помощью выражений
*3 = 1/К» г, = &4, =1>Л2-
Необходимо отметить, что если ^Ьь>^Ьс, то эквивалентное сопротивление х, будет индуктивным, если £ Ьс > £ ~ емкост-
ным.
Смешанное соединение потребителей. Расчет цепи при смешанном соединении потребителей (рис. 2.18, а) может быть произведен путем замены ее простейшей эквивалентной цепью. Для этого вначале определяют активные, реактивные и полные проводимости параллельно включенных ветвей: g2, g2, bt, b2, yt, _v2.
Затем находят эквивалентные активную, реактивную и полную проводимости параллельного участка цепи:
= + gz‘, Ь3 = Ь, +Ь2;
Ь = + b>-
4*
99
Далее определяют эквивалентные активное, реактивное и потное сопротивления параллельного участка пепи:
Ъ - 8**; хэ = Ь^э; = >/Уэ-
В результате расчетов цепь может быть заменена эквивалентной цепью (рис. 2.18,6). где все сопротивления включены последовательно. Общие активное, реактивное и полное сопротивления цепи равны
Гоб = Гэ + Г.
Лоб = Л ±
-об e l'' гоб + Л’об-
Цепь приобретает простейший вид, изображенный на рис. 2.18,в. Общий ток цепи определяют по закону Ома:
! - и/г°&
Напряжение между точками а и Ь
Uab = IZ3 = 1/У3.
Токи в параллельных ветвях равны 1; = ^аьУ>, Л ~ ^аЬУ2-
2.14. РЕЗОНАНС ТОКОВ
Резонанс токов может возникнуть в параллельной цепи (см. рис. 2.П,й), одна из ветвей которой содержит ,L и г, а другая Сиг.
Резонансом токов называется такое состояние цепи, когда общий ток совпадает по фазе с напряжением, реактивная мощность равна нулю и пепь потребляет только активную мощность. На рис. 2.17, г изображена векторная диаграмма лепи рис. 2.17, а при резонансе токов.
Как видно из векторной диаграммы, общий ток цепи совпадает по фазе с напряжением, если реактивные составляющие токов ветвей с индуктивностью и емкостью равны по модулю:
Лр = 12р-
Общий реактивный ток цепи, равный разности реактивных токов ветвей, в этом случае равен нулю;
Ър-Ьр-О.
Общий ток цепи имеет только активную составляющую, равную сумме активных составляющих токов ветвей:
= Ла + Ла-
100
Выразив реактивные токи через напряжения и реактивные проводимости, получим
UbL= Ubc, откуда bL = bc-
Итак, при резонансе токов реактивная проводимость bsibh с индуктивностью равна реактивной проводимости ветви с емкостью.
Выразив bL и Ъ(_ через сопротивления соответствующей ветви, можно определить резонансную частоту контура:
1
xL хс 2г. fL 2т. f С
= Ч + */ ’ ТТнгт.аР " ~7~7 i V ’
Г1 + 2е/С ) откуда
В идеальном случае, когда =г2 =0,
При резонансе токов коэффициент мощности равен единице:
cos ср = 1.
Полная мощность равна активной мощности:
8 = Р.
Реактивная мощность равна нулю:
Q-Qi-Qc = <i.
Энергетические процессы в цепи при резонансе гоков аналогичны процессам, происходящим прн резонансе напряжений, которые были подробно рассмотрены в § 2.12.
Реактивная энергия действует внутри цепи: в одну часть периода энергия магнитного поля индуктивности переходит в энергию электрического поля емкости, в следующую часть периода энергия электрического поля емкости переходит в энергию магнитного поля индуктивности. Обмена реактив-
101
ной энергией между потребителями цепи и источником питания нс происходит. Ток в проводах, соединяющих цепь с источником, обусловлен только активной мощностью
Для резонанса токов характерно, что общий юк при определенном сочетании параметров цепи может быть значительно меньше токов альной цепи, когда г, = г2 = О равен пулю, а токи ветвей
Рис. 2.19. Электрическая цепь (л) и графики зависимости Д., lL-.
1С и 1 от частоты f (^)
в каждой ветви, Например, в ид (см. рис. 2.18, а), общий ток
с емкостью и индуктивностью существуют, они равны по модулю и сдвинуты по фазе на 180е. Резонанс в цепи при параллельном соединении потребителей называется резонансом юков.
Резонанс токов может быть получен путем подбора параметров цепи при заданной частоте источника питания или путем подбора частоты источника питания при заданных параме-ipax депи.
Представляет интерес влияние частоты источника питания на значения токов в цепи, например в цепи, изображенной на рис. 2.19, и,
Ток в ветви с индуктивностью обратно пропорционален частоте:
1,-U/lTtfL,
а ток в ветви с емкостью прямо пропорционален частоте: Ic=U2nfC.
Ток в ветви с активным сопротивлением не зависит от частоты1:
I, =
Век юр общего тока в цепн равен геометрической сумме векторов токов ветвей:
i-K + k+lc,
1 Если пренебречь влиянием вытеснения тока к поверхности проводника.
102
а значение тока
i=l/i;+(iL-icr-
При f = 0
Z£=x; Zt-0; lr = U/r; I = x>.
При / = /р„
Z£=/f; / = /,= с;>.
При f -n
/L->0; 7c-x; 1 =—; 7—»cc. ' r
Графики зависимости Ir. 7t, и I от частоты изображены на рис. 2.19,6.
Большинство промышленных потребителей переменного тока имеют активно-индукм ивный характер; некоторые из них работают с низким коэффициентом мощности и, следовательно, потребляют значительную реактивную мощность. К таким потребителям относятся асинхронные двигатели, особенно работающие с неполной нагрузкой, установки электрической сварки, высокочастотной закалки и т. д.
Для уменьшения реактивной мощности и повышения коэффициента мощности параллельно потребителю включают батарею конденсаторов
Реактивная мощность конденсаторной батареи уменьшает общую реактивную мощность установки, так как
Q =Ql~ Ce-
il тем самым увеличивает коэффициент мощности.
Повышение коэффициента мощности приводит к уменьшению тока в проводах, соединяющих потребитель с источником энергии, и полной мощности источника.
Пример 2.5. Определить емкость кон-денсатора, прн которой в цепи рис. 2.20 возникает резонанс токов, если х£ — 40 Ом, ?•_ - 30 Ом, г2 - 28 Ом, f = 1000 Гц.
О-
Рис. 2.20. Электрическая цепь к примеру 2.5 о-
103
Решение. При резонансе гоков реак1инная мощность цепи равна нулю:
Ql~Q<.=V- или Ql~ Qc-
. Vz , V2
(>L= l‘,xL- Sc - H»-c - -r—< v:
r, + xL r2 + xf
I)2 U2
- -----т 40 = —z-----—
302 +402 282 + at-
x(-= 17.75 Ом.
Емкость конденсатора
’ C 2itfC ’
1 1•10&
------=------- ----------------- 9 мкА. 2nfx( 2 3,14-1000-17.75
2.15. ПОНЯТИЕ О КРУГОВЫХ ДИАГРАММАХ
Иногда для анализа цепей переменного тика целесообразно использовать кру| овые диаграммы.
Для любой электрической цепи може1 быть изображена векторная диаграмма токов и напряжений.
Векторная диаграмма, в которой геоме1рическое место точек конца вектора тока или напряжения представляет собой дугу окружности при изменении парами ра какого-либо одного элемента электрической цепи и неизменном напряжении, приложенном к цепи, называется крутовой диаграммой.
Рассмотрим векторную диаграмму простейшей электрической цепи (рис 221,а) и покажем, чго она является круговой диаграммой. Уравнение напряжений цепи имее: вид U = Ur + н- Lrt = Ir + IxL. Векторная диаграмма изображена на рис 2.21, 6. При изменении значения xL одновременно изменяются значения тока, ^)ла 9 и напряжений U, и UL, по угол между векторами Ur и UL остается неизменным и равным 90°. На рис 2.21,6 пунктиром изображена векторная диаграмма цепи для x‘L > при этом
ф' > ф, U", <U,y U'L> иь Г < I.
Так как катеты прямоугольного треугольника напряжений Ur и Ul изменяются, а гипотенуза U остается неизменной, то вершина прямого угла и, следовательно, конец вектора напря-104
Рис, 2 22. Электрическая иепь (а) и ее круговая диаграмма (б)
жсния С'г будет описывать дугу окружности. Легко показать, что и коней вектора тока в этом случае будет описывать также дугу окружности. Действительно, если напряжение U = 1г, а значение сопротивления резистора г остается неизменным, то вектор тока I = Ur/r будет описывать jyiy окружности, так же как и конец вектора напряжения йг (рис. 2.21,в).
При xL = 0 ф = О, I = Ujr-, при Xl> 0 0 < ф < 90',
при xL=<x> 1=0. ф=90”.
В системах автоматическою управления находят применение фазовращательныс мосты, анализ и расчет которых удобно производить с помощью круговых диа1рамм. Рассмотрим мостовую цепь, изображенную на рис. 2.22, а, и покажем, что при изменении одного из параметров цепи, например значения сопротивления резистора г, при условии, что г, = г2, напряжение между точками цепи а, b остается неизменным по модулю, но изменяется по фазе.
На рис. 2.22,6 изображена векторная диаграмма цепи рис. 2.22, а при двух значениях сопротивления резистора г' < г.
105
Напряжение Uab, как это следует из уравнения Кирх| ифа,
Из векторной диаграммы рис. 2.22,6 видно, что значение напряжения при изменении сопротивления резистора г ociaeicM неизменным, а его фаза изменяется.
2.16. РАСЧЕТ СИНУСОИДАЛЬНЫХ ЦЕПЕЙ
С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНЫХ ЧИСЕЛ
В практике расчета цепей переменного тока широко используются комплексные числа
Комплексными числами и векторами на комплексной плоскости изображаются изменяющиеся синусоидально ЭДС, ток и напряжение, а также полные сопротивление и проводимость, полная мощность и некоторые другие параметры цепи.
Использование комплексных чисел при расчете электрических пеней переменного тока позволяет заменить графические действия над векторами алгебраическими действиями над комплексными числами Кроме того, при использовании комплексных чисел возникает полная аналогия записей уравнений по законам Ома и Кирхгофа «.методов расчет цепей переменного тока с цепями постоянного тока.
В цепях постоянного тока в уравнения входят действительные значения Е. U, I, г, в цепях переменного тока - комплексные значения U, Е, L, Z.
Как известно из курса матемагики, комплексное число С — о + Jb, где j — |/ — 1, имеет две составляющие — лейсши гельную а и мнимую Ь, которые являются координатами точки на комплексной плоскости (рис. 2 23, а). Комплексная плоскость представляет собой прямоугольную систему координат. По одной оси. называемой действительной и обозначаемой ( ], ( — 1. откладывается действительная составляющая комплекса ta). по другой оси, называемой мнимой и обозначаемой (+Д (—Д — мнимая составляющая комплекса (Ь).
Комплексное число обозначается чертой под буквенным обозначением. Комплексное число может быть представлено вектором, длина которого является модулем комплекса, а положение определяется углом а относительно положительной действительной оси комплексной плоскости (рис. 2.23,я).
Выразив о и Ь через модуль (длину вектора) и угол, можно записать комплексное число в тригонометрической форме:
С - а + jb = с cos а + jc sin а.
где с = \/а2 тЪг - модуль комплексного числа
106
Рис. 2 23 Изображение комплексного числа на комплексной плоскости (а), сложение (б) и умножение (в) комплексов
Согласно формуле Эйлера комплексное число можно записать в показательной форме:
С ~ се>*.
(ле с — основание натуральных логарифмов
Рассмотрим основные геометрические операции над векторами и алгебраические лейст вин над комплексными числами, их изображающими
Сложение двух комплексов .можно произвести аналитически:
£-£т +£г-(«т + ^} + (аг +jbl} = {ai + а2) +j(b, +b7)-a+Jb или графически по правилу сложения векторов (рис. 2.23,6}.
Произведение двух комплексных чисел, изображающих векторы Сг и Сг> являекя комплексным числом, которому соответствует вектор С
с СтО - c.H’Qe* = CjC2eHe+fl = се".
Вектор комплекса произведения двух векторов имеет длину, рав1 ную произведению модулей, а его положение относительно действительной положительной оси определяется суммой углов векторов сомножителей (рис. 2.23, в).
Новый вектор, возникающий в результате умножения комплексного числа £ = се” на + j или —у. имеет тот же модуль с, но повернут на 9<У относительно исходного вектора: в одном случае — против часовой стрелки, в другом — по часовой стрелке.
Действительно, векторы + j и -j в показательной форме могут быть записаны следующим образом:
j - 1е^
107
Тогда
Cj = е^7 = = се/(а+9<>°\
С(-]) - ce“(-j) =- = Г6Л«~«П
В результате деления двух комплексных чисел получаеюя комплексное число
- с2 <-г
модуль которого равен частному от деления модулей, а угол - разности углов исходных комплексов.
2.17. ИЗОБРАЖЕНИЕ НАПРЯЖЕНИЙ И ТОКОВ КОМПЛЕКСНЫМИ ЧИСЛАМИ И ВЕКТОРАМИ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ
Запишем комплексное число в виде
Jm = = I™ ws Я + }lm sin a
Допустим, ню вектор комплексного числа 4» вращается с постоянной угловой частотой о и уюл а - со/ + ф. Тогда
l-= = I„cos(a)t + +)+jImsin(<o! + ф).
Слагаемое /mcos (cof + ф) представляет собой действительную часть комплексного числа и обозначается
/„cos (о>г + ф) = Re V"'’*1.
Слагаемое Imsin(wt + ф) есть коэффициент при мнимой части комплексного числа и обозначается
/msin (го/ + ф) =
Легко видеть, что коэффициент при мнимой части комплексного числа представляет собой выражение мгновенного значения синусоидально!о гока
• = /„sin (oil + ф)
и является проекцией вращающегося вектора 1т на мнимую ось комплексной плоскости
Синусоидально изменяющиеся по времени величины изображаются на комплексной плоскости для момеша времени
108
г — 0. Тогда комплексная амплитуда /т записывается в виде
I» -
1де 1т - комплексная амплитуда; 1т - ее модуль, а \|/ - угол между вектором £„ и действительной осью.
Таким образом, комплексная амплитуда изображает синусоидальный ток на комплексной плоское!и для момента времени I = 0.
Допустим, что в электрической цепи мгновенные значения напряжения и тока имеют выражения
и = (/„sin (cor + ф,);
l = Zmsin(rnr + *!).
Комплексные амплитуды напряжения и тока должны быть записаны в виде
И. = и.е"-;
|де U„ н 1т - соответственно модули комплексных амплитуд напряжения и тока; ч|/, и ф2 - начальные фазы Um и /т относительно действительной оси (углы начальных фаз)
Обычно принято выражшь в виде комплексных чисел не амплитуды, а действующие значения напряжений и токов-
Рис. 2.24. Изображение напряжения и тока в виде векторов на комплексной плоскости (а и б) электрических цепей (б и г)
109
Если Ф1>ф2’ то векторы напряжения и тока расположены на комплексной плоскости так, как показано на рис. 2.24, а. Напряжение опережает по фазе ток, так как векторы вращаются против часовой стрелки и, следовательно, цепь имеет активно-иидуктивиый характер (рис. 2.24,g).
При \|/2 > \|/i (рис. 2.24, б) ток опережает по фазе напряжение и цепь имеет активно-емкостный характер (рис. 2.24, г).
2.18. КОМПЛЕКСНЫЕ ЗНАЧЕНИЯ ПОЛНЫХ СОПРОТИВЛЕНИЙ И ПРОВОДИМОСТЕЙ ЦЕПИ. ЗАКОН ОМА В КОМПЛЕКСНОЙ ФОРМЕ
Разделив комплексное напряжение иа комплексный ток, получим комплексное полное сопротивление
где z — U/[ — модуль полного сопротивления; ф — угол сдвига фаз между током и напряжением.
Выразив комплексное значение полного сопротивления в тригонометрической и затем в алгебраической форме, получим:
для цепи с активно-индуктивным характером (рис. 2.24,
Z = ze^ = zcostp + jzsincp = г + jxL:
для цепи с активно-емкостным характером (рис. 2.24, г), ф2 > Фп
Z — ze~K = z cos ф — jz sin ф = г — jxc,
где г = z cos ф, х£ = z sin ф, х? = z sin ф — соответственно активное, индуктивное и емкостное сопротивления цепи.
Закон Ома в комплексной форме:
I = У!?,
где Z = г + ух/ для цепи, состоящей из последовательно включенных активного г и индуктивного xL сопротивлений; Z = г — —jxc для цепи, состоящей из последовательно включенных активного г и емкостного х£- сопротивлений.
Полная проводимость в комплексной форме записывается следующим образом:
ПО
для цели, состоящей из последовательно включенных активного и индуктивного сопротивлений,
Y = — = 1 = <г = r ~JXl -
- U Z r+jxL (r+jx^r-jxi) r2 + x^ г xL
~-r-j^r=g-jbL;
для цепи, состоящей из последовательно включенных активного и емкостного сопротивлений,
„ 1 1 1 < , . Хс
1= 7Г“у = , ;г .2 '.т-г+А-,
' — JXc X X
где g и Ь — соответственно активная и реактивная проводимости цепи.
2.19. ЗАКОНЫ КИРХГОФА В КОМПЛЕКСНОЙ ФОРМЕ
Первый закон Кирхгофа гласит, что алгебраическая сумма мгновенных значения токов в любом узле цепи равна нулю:
Li = 0.
Выразив мгновенные значения токов через их комплексные выражения, получим первый закон Кирхгофа в комплексной форме:
Н=о.
Сумма комплексных значений токов в любом узле цепи равна нулю.
Поскольку комплексные значения токов состоят из действительных и мнимых частей, очевидно, должны быть равны нулю отдельно сумма действительных и сумма мнимых частей комплексных значений токов в узле цепи:
E/costy = 0, ЕГыпф = 0.
Для любого замкнутого контура цепи переменного тока может быть-составлено уравнение мгновенных значений ЭДС, токов и напряжений по второму закону Кирхгофа:
Ее = Ег> + Ей.
Выразив ЭДС, токи и напряжения в комплексной форме, получим второй закон Кирхгофа в комплексной форме:
^E^IZ + ^U.
111
Сумма комплексных значений ЭДС при обходе замкнутого коитура равна сумме произведений комплексных значений токов на соответствующие комплексные значения полных сопротивлений и сумме комплексных значений напряжений.
Комплексные £, С и / имени знак плюс, если принятые направления этих величин совпадают с произвольно выбранным направлением обхода контура, и знак минус, koi да направления противоположны.
Необходимо отметить, что равенство суммы комплексов правой и левой частей уравнения не означает равенства их модулей. Должны быть отдельно равны суммы действительных и мнимых составляющих комплексов левой и правой частей уравнения.
2.20. ВЫРАЖЕНИЕ МОЩНОСТИ В КОМПЛЕКСНОЙ ФОРМЕ
Полная мощность цепи переменного тока равна произведению действующих значений напряжения и тока:
S = UI.
Казалось бы, выразив напряжение и ток в комплексной форме, можно получить комплексное значение полной мощности. Однако перемножение комплексных значений напряжения и тока не дает реальных полной, активной и реактивной мощностей пепи.
Комплексное значение полной мощности, отражающее реальные мощности в цепи, получится, если умножить комплексное значение напряжения на сопряженное комплексное значение тока:
s = ui*.
Сопряженное комплексное значение тока / * отличается oi I знаком перед мнимой частью. Если комплексное значение тока / = е'*, то сопряженное ему комплексное значение /* = 1е~&.
Покажем, что комплексное значение мощности отражает реальные мощности в цепи.
Допустим, что комплексные значения напряжения и тока какой-то цепи и,мею1 выражения
U= Ue*1; 1 = 1е#г.
Комплексное значение полной мощности
S=Ul_* = Ue^4e~^'-= = Se*.
112
Выразив комплексное значение полной мощности в тршо-нометрической, а затем в алгебраической форме, получим
S = S cos ср + jS sin ф = Р + jQ,
где 5 cos ф — Р — активная мощность цепи; 5 sin ф = Q — реактивная мощность цепи; S = |/p2 + Q‘ - полная мощность.
Следует отметить, что при активно-индуктивном характере нагрузки (ф; > xj2} знак перед jQ положительный, при активно-емкостном (ф2 > — отрицательный.
2.21. РАСЧЕТ СЛОЖНЫХ ЦЕПЕЙ
При расчете сложных цепей с одним источником (рис. 2.25, а) целесообразно использовать метод преобразования сложной цепи в простейшую эквивалентную цепь.
Вначале записывают комплексные значения полных сопротивлений отдельных последовательных участков цепи:
Zi — Tj — Z2 ~ гг +J(XL2 ~
Z> - гз + Zt = '4 +
Затем определяют комплексное значение полного эквивалентного сопротивления Z^ участка пепи между точками ab:
ZiZi ~ab = ^Z2 + zs
= rab + jxolr
В результате цепь может быть преобразована в эквивалентную, изображенную иа рис. 2.25, б, где сопротивления Z,, Zaj, и Z4 включены последовательно.
Комплексное значение полного сопротивления всей пепи
Zofirri = Zt + Z^ + Z4 = r J + j(xli — XCI) +
+ rat> + j.x^ + r4 +jxu = (fl У + r4) +
+ j(*LI — -4 l + Xab + xfd) ~ rcAlV + ./Хобш-
Таким образом, эквивалентная схема цепи будет иметь вид. изображенный на рис. 2.25, в.
Общий ток цепи
Ь = C/Zo6111.
113
Рис. 2.25. Сложвая цепь (а) и ее эквивален |ные схемы (б, в)
Напряжение Uat, между точками ab
иаъ = = U- hz, - IZ4.
Токи 1_2 и /3 на основании закона Ома
= /з-^2э-
Полная мощность цени
S=UI* = P + jQ.
Для проверки правильности решения целесообразно построить векторную диаграмму, а также подсчитать активную и реактивную мощности всех участков цепи и сопоставить их с результатами, полученными при помощи формулы комплексного значения мощности.
Расчетные значения токов и напряжений изображают в виде векторов на комплексной плоскости. Затем строят векторную диаграмму напряжений по уравнению
у = yt + с/дЬ + ил = yz. + 1^ + bZ4
и векторную диаграмму jokob по уравнению
I, = I, + ь
Если взаимное расположение векторов токов и напряжений па отдельных участках цепи соответствует характеру нагрузки и мноюугольыики напряжений и токов получаются замкнутыми. значит, решение правильное. Векторная диаграмма токов и напряжений цепи рис. 2.25, а с параметрами, заданными в примере 2.6, изображена на рис. 2.26.
Активная мощность всех участков цепи должна быть равпа
114
Рис. 2.26. Векторная диаграмма цепи, изображенной на рис. 2.25. а
действительной части Р комплексного значения полной мощности:
Р = + l$r2 + Z|r3 I I2,г,.
а реактивная мощность - мнимой части Q комплексного значения гпт.тнчой мощности:
Q = /рКц - + 11х£2 — НХС2 + + ^1ХЬ4-
При выполнении этого условия решение следует считать правильным.
Пример 2.6. Определить токи Ц, Ц, 23, напряжения L'lr L’^ и L’* цепи, изображенной на рис. 2.25, а. Построить векторную диаграмму токов и напряжений, а также определить активные и реактивные мощности цепи.
Паржмегры деци: г, = 15 Ом, тг = 30 Ом, ri = 60 Ом, г4 = 10 Ом, X£i=35 Ом, = 20 Ом, Хц =. 80 Ом. хи = 25 Ом. хс( = 20 Ом, х<-2=60 Ом Напряжение сети 17 = 300 В.
Решение. Комплексные значения полных сопротивлений последовательных участков цепи
Zt - 15 + 7(35 - 20) • 15 + j 15, Z, - 60 +j 80,
Z3 - 30 + 7(20-60> = 30-j40, Z4 = 1-0+725.
Комплексное значение полного сопротивления участка цепи между точками ab
= ZjZ'-~ 46,4-/20,6.
z2 + z3
Комплексное значение полного сопротивления всей цепи
Zoom - Zx +2Л + Z4 - 711,4 +7 19,4.
Вектор напряжения сеж совмещают с положительной действительной осью комплексной плоскости L/ = = 300
Комплексное значение тока /,
^=-^— = 3,9 It~^3,92 + 1,052-4,04 А.
115
Напряжения и С'4 равны
^ = /^=159-/130; Uob~ 200,6 В;
Ut = 74,5+742,5; U, =86 В;
Lr« = Z,Z* « 64,8 + /87; (/4 = 109 В.
Токи _/2 и 1} составляют
!2=L'aft/Z2=4+jl; Л =4,1 А;
-0,1-72,05, /3 =2,1 А.
На рис. 2.26 отложены комплексные значения токов и напряжений. На том же рисунке изображена векторная диаграмма напряжений и токов Векторная диаграмма напряжений строится на основании /равнения, составленного по второму закону Кирхгофа-
u = + ^ + гу4,
а векторная диаграмма токов - на основании уравнения, составленного по первому закону Кирхгофа: £, =/2 + 7 3
Полная мощность цепи
J = IZ(*~P+/6= 1170 В: +7318 вар.
Активная мощность всех участков цепи
Р _ /2Г[ + /2Г2 + /2Гз + !-гл = 1170 Вт
равна действительной части комплексного значения полной мощности.
Реактивная мощность всех участков цепи
2-2|x£l - Jjxcl +^х£г + 7^х£3 + = 318 вар
равна мнимой части комплекса полной мощности.
Следовательно, задача решена правильно.
Пример 2.7. Определить характер нагрузки и параметры эквивалентных цепей схем, изображенных на рис 2 27,а и б. если х/ > хг.
116
Рис 2 28. Сложная цепь с несколькими источниками (д); действительные (положительные) направления ЭДС, напряжении и тока генератора (б), приемника (в)
Решение. Характер нагрузки легко определить путем анализа реактивной мощности цепи
а) Для пели рис. 2.27, д: так как I = ]/l2 + 21, то I2 < I и, следовательно,
Qc = 2z-V < Ql = l2xL.
Характер нагрузки цепи активно-индуктивный Эквивалентная схема цепи изображена па рис. 2.27, в.
Параметры эквивалентной схемы: Z1K = +jx^ — гэк + /хЭ|(
б) Для цепи рис. 2.27, б: так как xL > хс, то < !г = — и
ес-/^с=12с»>е1=/;^=Л1'л . Xl v
Характер нагрузки цепи активно-емкостный. Эквивалентная схема пепи изображена на рис. 2.27,г.
Параметры эквивалентной пепи схемы: ZM = Z,,b + г — г— jx,f.'
Расчет сложных пеней с несколькими источниками производится теми же ме> одами, что и цепей постоянного тока: методом непосредственного использования первою и второго законов Кирхгофа;
методом контурных токов:
методом двух узлов;
методом эквивалентного генератора и т. п.
Рассмотрим первый метод на примере цепи рис. 2.28,а.
Поскольку цепь имеет три ветви, неизвестными являются три тока. Для их определения необходимо составить трн уравнения.
Прежде чем составлять уравнения, следует указать на схеме действительные (положительные) направления ЭДС и напряжений источников в соответствии со схемой их включения.
За действительное (положительное) направление ЭДС и ю-ка в обмотках генераторов принимают направление от конца
117
к началу обмотки (рис. 2.28,6), напряжения, наоборот, — от начала к концу.
Если внутреннее сопротивление источника мало и им можно пренебречь (Z = 0), то
£ = (2..
Затем необходимо указать произвольно предполагаемые направления токов в каждой из ветвей, выбрать произвольно направление обхода контура и составить необходимое число уравнений.
Первое уравнение составляют по первому закону Кнрхгофа:
-J, +J1.
второе и третье уравнения — по второму закону Кирхгофа. Одно из них составляют для контура aeda (направление обхода контура по часовой стрелке):
-£1 = — /1Г, +Н^с-1зГ3 -ЛзХ^-У;
другое — для контура abca:
Ei + Е, = - (2r2 -jhx^ — JIrxCl + /jrp
Из совместного решения уравнений определяют комплексные значения токов _/р_/2 и_/3.
Проверить правильность решения задачи можно с помощью векторной диаграммы или баланса активных и реактивных мощностей. Для этого необходимо подсчитав активную и реак1ивную мощности, развиваемые источниками и потребляемые всеми элементами цепи. Для расчета активной и реактивной мощностей приемников, как указывалось, используют формулы Р = l2r, Ql — IZX[_, Qc - I2xc.
Труднее определять соответствующие мощности источников, так как в сложных пепях некоторые из источников могут работать в режиме приемника.
О режиме работы источника нельзя судить по взаимным направлениям тока, ЭДС или напряжения, как это было в цепях постоянного тока. В цепях постоянного тока в результате решения задачи определяются ие только значения, но н действительные направления токов, что дает возможность по взаимным направлениям тока, ЭДС или напряжения источника суди|ь с режиме его работы, поскольку мощность Р = UI, Р = = Е1.
В цепях переменного тока активная и реактивная мощности равны соответственно Р = Ulcostp; Р — Elcoscp; 6=Wsinq>; 2==E/sinq>, т. е. зависят ие только oi взаимных направлений
П8
токов, ЭДС и напряжений, но и косинуса и синуса соответственно, угла сдвига <р по фазе между током н напряжением или током и ЭДС, который в сложных цепях может быть больше 90°.
Режимы работы источника по активной и реактивной мощностям могут быть установлены при соответствующих взаимных действительных (положительных) направлениях величии Е, I и U, I по знакам активной и реактивной мощностей, развиваемых источником, полученным в результате расчета электрической цепи.
Для источника; работающего в режиме генератора, действительные (положительные) направления Е, I и U, I соответствуют указанным на рис. 2.28,6, работающего в режиме потребителя - иа рис. 2.28, в.
Если в результате расчета активная и реактивная мощности для рис, 2.28,6 и в оказались положительными, то действительно в первом случае источник работает в режиме генератора (отдает активную и реактивную индуктивную мощность), во втором — в режиме потребителя (потребляет активную и реактивную индуктивную мощности. Если же значения мощношей оказались отрицательными, то в первом случае источник работает в режиме потребителя, а во втором — в режиме генератора.
В разветвленных цепях с несколькими источниками после ианесения произвольно положительных направлений токов в ветвях, что необходимо для составления расчетных уравнений по законам Кирхгофа, уже условно определены режимы работы источников. Например, для цепи рис. 2.28, а предполагается, чю источник с ЭДС Et работает в режиме генератора, а источники с ЭДС Е2 и напряжением 17 — в режиме приемника. Если же направления токов изменить, то изменится н предполагаемый режим работы источников. Естественно, что от выбора направлений токов действительный режим работы источников не изменится.
Как уже говорилось, действительный режим работы источников будет установлен после расчета электрической цепи и определения мощности каждого из источников. Допустим, мощность источника с ЭДС Et цепи (рис. 2.28, а) оказалась положительной, источника с ЭДС Е2 — отрицательной, источника с напряжением U — положительной. Это означает, что источник с ЭДС Ej работает в режиме генератора, как и условно предполагалось, источник с ЭДС Е2 работает в режиме генератора, а не в режиме приемника, как эго предполагалось до получения результатов расчета, источник с напряжением U работает в режиме приемника, как и предполагалось.
119
2.22. ЦЕПИ. СВЯЗАННЫЕ ВЗАИМНОЙ ИНДУКЦИЕЙ
Когда две катушки /, 2 (рис. 2.29, а) расположены достаточно близко, так что часть Ф12 магнитного потока Ф, (Ф] — Ф,' + + Фи), создаваемого током первой катушки, пронизывает вторую, а часть Ф21 магнитного потока Ф2(Ф2 = Ф2 + Ф21)> созда’ ваемого током второй катушки, пролизывает первую, между катушками возникает магнитная связь 1. На схемах магнитная связь обозначается фигурной скобкой и буквой М (рис. 2.29,6).
Магнитная связь между катушками проявляется в том, что при изменении тока в катушках изменяются магнитные потоки и в катушках кроме ЭДС самоиндукции dftjdt, е2 =
- — w2d<I>2/dt возникают ЭДС взаимной индукции: во второй катушке - от потока Ф12 eJ2 =-в-2 ^Ф12/Д, в первой - от потока Ф2] е21 = -w2
Явление наведения ЭДС во втором контуре при изменении тока в первом называется явлением взаимной индукции.
Рассмотрим контур, состоящий из двух соединенных последовательно катушек, согласно (потоки Ф,, Ф2 действуют в одном направлении) и встречно (потоки Фх, Ф2 действую! встречно).
Для обозначения согласного или встречного включения начала обмоюк обозначаются жирными точками (рис. 2 29,6). Предполагается, что направления намотки ка«ушек одинаковы (рис. 2.29. а).
Результирующая ЭДС, возникаюшая в контуре при изменении тока в нем;
при согласном включении (рис. 2.29,6)
= + е2 + £,!2 +- ^1; (2.29)
при встречном включении
<•» = «,+ е2 ~eii ~«21- (2.J0)
ЭДС самоиндукции и взаимной индукции могут быть выражены соответственно через индук1ивность Lu взаимную индуктивность М. Если индуктивность /.устанавливает количественное соотношение тока в катушке и создаваемого им потоко-
1 Картина магнитных полей значительно сложнее, чем та, что условно изображена на рис. 2.29,а для пояснения явления взаимной индукции. Предполагается, что Ф!2 и Ф;1 - эквивалентные магнитные потоки, сцепленные соответственно со всеми витками w2, н>,.
120
a) S)
Рис. 2.29. К пояснению явления взаимной индукции (а), эквивалентная схема (5)
сцепления L & Т/Д то взаимная индуктивность М устанавливает количественное соотношение между током первой катушки и создаваемым им потокосцеплением со второй катушкой М12— TJ2//, и соответственно М2]
Выразив в (2,29) и (2.30) соответствующие ЭДС через L и
М и имея в виду, что М12 = M2i = М, получим 1:
при согласном включении
di di di Л di
L,K— = L.-~ + L>— + 2M —; dt 1 dt 2 dt dt
(2.31)
при встречном включении
di di di dt 1 dt + 2 dt
— 2M~. dt
(2.32)
Сократив (2.31), (2.32) на di/dt, получим эквивалентные значения индуктивности контура L,,:
при согласном включении
— Lj + Lj + 2Л/ = + L2 + 2fc]/ Lj L2. l2.33)
при встречном включении
2.W = Ц 4- L2 - 2k[^L2, (2 34)
1 Тик как магнй|Иыс поюки Ф12, Ф21 расположены в одном и юм
же пространстве, магнитные сопротивления RM потокам будут одинаковыми и тогда Ф12 =^iWi/KM, Ф21 =Подставив Ф12 и Ф21 в выражения М12 и Л/2„ получим М12 - Л/21 = Н',и'2/Лм - М.
где
М 1 /Ф12Ф21 уЦЦ ~ К ф1фз
— коэффициент магнитной связи между контурами. Так как Ф12 < Ф<. Фи < Фг» то & < 1.
Умножив правые и левые части выражений (2.33). (2.34) на ю, получим:
при согласном включении LJKw = + L,to + 2Ма>. или
х» = X, + хг + 2л,,; (2.35)
при встречном включении
ЛЭЕ - *1 + х2 — ^ХМ’
(2.36)
где — эквивалентное индуктивное сопротивление двух контуров, связанных взаимной индукцией; xlf х2 — индуктивные сопротивления, обусловленные индуктивностями и L2; хм — индуктивное сопротивление, обусловленное взаимной индукцией М.
Эквивалентное активное сопротивление в обоих случаях
ГЭК = Г1 + Г2-
Таким образом, электрическая цепь, состоящая из двух последовательно включенных, связанных взаимной индукцией катушек (рис. 230, д), может быть заменена эквивалентной цепью, изображенной на рис. 2.30,6.
Определение токов в параллельно включенных катушках с г и L, связанных взаимной индукцией (рис. 2.30, в), производится с помощью совместного решения двух уравнений, составленных по второму закону Кирхгофа,
М (ri +Л’1) +JJXM = 4L ;
L1 (Г 2 ~}Х2) + Il)Xv = U.
Общий ток
В сложных электрических цепях, когда две катушки, связанные взаимной индукцией, включены в разные ветви цепи 122
Рис 2.30 Последовательнее (а) и параллельное (в) включения катушек, связанны* взаимной индукцией, эквивалентная схема (б) последовательной цепи л; узлы сложных цепей с взаимно связанными индуктивностями (г и б)
(рис. 2.30, г, д), напряжение U i имеет две составляющие, обусловленные собственной и взаимной индуктивностями:
для схемы рис. 2.30, г
ki = I1A1 + Ыхм;
для схемы рис. 2.30, д
LLi =hJxi ~
Знак плюс перед означает, что направление тока /2 такое же, что и тока /j: от начала к концу катушки. Во втором случае ток [2 имеет направление от конца к началу катушки, а ток /1 — от начала к концу катушки, поэтому перед /г/x.w стоит знак минус.
Глава третья
ТРЕХФАЗНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
Х1. ПОНЯТИЕ О ТРЕХФАЗНЫХ ЦЕПЯХ
И ИХ ПРЕИМУЩЕСТВА
Трехфазной называется электрическая цепь, в ветвях которой действуют три одинаковые по амплитуде синусоидальные ЭДС, имеющие одну и ту же частоту, сдвинутые по фазе одна относительно другой на угол 2тс/3(120‘).
123
Рис. 3.1 Положи 1ельные направления (а) и графики (б) ЭДС синхронного генератора
В качестве источника электрической энергии в трехфазных цепях используются синхронные генераторы (см. § 11.1). В трех обмотках стаюра (якоря) синхронного (енераюра, называемых его фазами (рис. 3.1,а), и индуктируются указанные три ЭДС.
При указанных на рис. 3.1,а положительных направлениях ЭДС (от концов х, у и г фаз к их началам а, b и с) ЭДС изменяются в соответствии с выражениями
е. = E„sin<M, f, = E,_sin(0>r-'27r/3), ес = Е,.мп(<и - 4тг/3).
(3.1)
На рис. 3.1,6 приведены графики ea(t), eb(t) и ес(г).
Совместив вектор ЭДС Е„ с осью действительных величин комплексной плоскости (рис. 3.2, а), получим следующие выражения ЭДС в комплексной форме:
Ea = Ea, Eb = Ef,e-j2”/3 = Ehcos( - 2я/3) —yE„sin( - 2тс/3) =
(3.2)
Ес =Есе = Eccos (- 4тс/3) + )Ecsin ( - 4л/3) =
Следует заметить, что при изображении векторных диаграмм вектор ЭДС Еа принято направлять вертикально вверх, что соответствует повороту комплексной плоскости на 9Q0 против вращения часовой стрелки. При этом оси действительных и мнимых величин обычно не указывают (рис. 3.2,6).
Пользуясь положительными направлениями и зная законы изменения ЭДС или соответствующие им графики, можно определить мгновенные значения и действительные направле-124
Рис. 3.2. Векторные диаграммы ЭДС генератора в комплексной плоскости
ния ЭДС в любой момент времени. Например, при / = 0 ги = О,
<» = Еь^ sin ( - 2л/3) - - ~ Е^. er = £,„ sin ( - 4ж/3) = Е<„г Так как ес > 0. a eh < 0, то при t = 0 ЭДС ее направлена в действительности так, как показано на рис. 3.1,а, а ЭДС еь - в противоположную сторону.
Согласно (3.1) и графикам (см. рис. 3.1,6) ЭДС достигает максимального значения сначала в фазе и, та!ем н фазе Ъ и. наконец, в фазе с. Указанная последовательность, в которой ЭДС достигают максимального значения, называется прямой последовательностью чередования фаз. Если бы ротор генератора вращался в противоположную сторону, получилась бы обратная последовательность чередования фаз. Получить обратную последовательность чередования фаз работающего генератора можно,' изменив названия любых двух фаз (например, фазу b назвать фазой с, а фазу с — фазой Z>). Как будет показано далее, от последока!ельнос। и чередования фаз зависи), в частности, направление вращения асинхронных и синхронных двигателей. Анализ и расчет трехфазных цепей будут производиться в предположении прямой последовательности чередования фаз.
Условимся называть в дальнейшем систему из трех ЭДС. напряжений или токов симметричной, если |ри ЭДС, напряжения или тока имеют одинаковые действующие значения и сдвинуты по фазе относительно друг друга на угол 2п/3. В том случае, когда трн ЭДС, напряжения или тока имеют различные действующие значения либо сдвинуты по фазе на углы, отличные О1 2л/3, будем называть их несимме1ричной сисюмой ЭДС, напряжений или токов. Трехфазные генераторы имеют симметричную систему ЭДС.
Приемники >юктрической -tHepi ии сранни |ельнп редки тиунино питание непосредственно от трехфазных генераторов. Это объясняется 1ем. чю экономически целесообразнее передавать на расстояние электрическую энергию более высокого напряжения, чем вырабатывают генераторы. Поэтому на электрических станциях напряжение с помощью трансформаторов повышают, а в местах потребления снижают до значения, необходимого для шпания приемников. Таким образом,
125
в большинстве случаев приемники получают питание от трех вторичных обмоток трансформаторов, которые подобно генераторам имеют практически симметричную систему ЭДС. Условимся, говоря далее о трехфазных источниках, нс учитывать, чем создаются ЭДС — генераюрами или трансформаторами.
От трехфазного источника получаю! цщание как ipex-фазпые, так и однофазные приемники электрической энергии, а также различные трехфазные и однофазные устройства для преобразования переменного тока в постоянный.
Трехфазпый приемник можно рассматривать в простейшем случае как устройство, состоящее из трех двухполюсников с одинаковыми параметрами, рассчитанное на подключение к трем проводам трехфазной сети, между которыми имеются три напряжения, сдвину!ые о!носиге!1ьно друг друга по фазе на угол 2л/3. Отдельные двухполюсники трехфазного приемника называются его фазами. К трехфазным приемникам относятся, например, большинство электродвигателей переменного тока, крупные электрические печи, некоторые электромагниты.
Однофазный приемник можно рассматривать как двухполюсник. рассчитанный на подключение к двум проводам сети, между которыми имеется, естественно, лишь одно напряжение. К однофазным приемникам относятся осветительные лампы, электрические нагревательные приборы, двигатели переменного тока небольшой мощности, многие .электромагниты и др.
Трехфазные электрические цепи имеют ряд преимуществ по Сравнению с однофазными: возможность получения вращающегося магнитного поля и использования наиболее простых, надежных и дешевых асинхронных электродвигателей; меньший расход проводниковых материалов на сооружение линии электропередачи и электрических сетей; лучшие экономические показатели трехфазных генераторов н трансформаторов; возможность подключения к трехфазиому источнику или трехфазной сети приемников, рассчитанных на два различных по значению напряжения. Благодаря своим преимуществам трехфазпые цепи получили исключительно широкое распространение. Электрическая энергия вырабатывается на электростанциях, распределяется с помощью линий электропередачи и электрических сетей между приемниками н потребляется последними главным образом в виде энергии трехфазного переменною тока.
126
3.2. СПОСОБЫ СОЕДИНЕНИЯ ФАЗ ИСТОЧНИКОВ И ПРИЕМНИКОВ. ПОЛОЖИТЕЛЬНЫЕ НАПРАВЛЕНИЯ ЭДС, НАПРЯЖЕНИЙ И ТОКОВ
Чтобы уменьшить число проводов, которыми соединяются источник и приемники, и сократить тем самым расход дефицитных полупроводниковых материалов и затраты на сооружение линий электропередач и электрических сетей, отдельные фазы источников соединяют между собой звездой или треугольником.
При соединении звездой (рис. 3.3) концы х, у и z трех фаз объединяют в одну общую, так называемую нейтральную точку Nv При соединении треугольником (рис. 3.4) конец х одной фазы соединяют с началом Ъ второй фазы, конец у второй фазы - с началом с третьей фазы, а конеп z третьей фазы - с началом а первой фазы. В обоих случаях начала а, b и с трех фаз с помощью трех линейных проводов подключаются к приемникам электрической энергии, которые также соединяются звездой или треугольником (см. рис. 3.7 и 3.12).
Следует заметить, что способы фаз источников и приемников могут быть как одинаковыми, так и различными. При соединении фаз источника в приемника звездой иногда применяется нейтральный провод, соединяющий нейтральные точки Nj и N источника и приемника (см. рис. 3.3 н 3.7).
Может показаться, что при соединении фаз источника треугольником в замкнутом контуре возникает ток даже при отключенных приемниках. Однако это не так, поскольку Ед + + Еь + Е^ = 0 (см. рис. 3.2).
Рис. 3.3. Схема соединения фаз 1енератора звездой
Рис. 3.4. Схема соединения фаз генератора треугольником
127
Электрические цепи при соединении источника треугольником и звездой без нейтрального провода называют трехпро-водными, при соединении источника звездой с нейтральным проводом — четырехпроводиыми.
В трехфазных электрических цепях различают фазные и линейные напряжения и токи.
Фазными называются напряжения между началами и концами отдельных фаз источника или приемника.
Под фазными понимают токи в фазах источника или приемника. Например, на рис. 3.3 фазными напряжениями и токами являются Vi U'„ Ia, 1Ь и 1Г. На рнс. 3.4 фазные напряжения и токи обозначены V'a, U'b, U’c, Iba, 1сЬ и lac.
Линейными называются напряжения между началами фаз источника или приемника либо между линейными проводами. Линейными токами являются токи в трех линейных проводах, соединяющих источник и приемник. Так, на рис. 3.3 и 3.4 ли-йейными напряжениями и токами являются Vab, Ube, Ue<t, 1а, 1Ь и 1С.
При анализе и расчете трехфазных цепей большое значение имеют положительные направления ЭДС, напряжений и токов, так как от их выбора зависят знаки в уравнениях, составленных по законам Кирхгофа, и, следовательно, соотношения между векторами на векторных диаграммах.
За положительные направления ЭДС источника принимают направления от концов фаз к нх началам (см. рис. 3.3 и 3.4). Как это обычно делается для источников, фазные токи направляют согласно е ЭДС, а фазные напряжения - в противоположную сторону.
Линейные напряжения направляют следующим образом: напряжение — от а к b, ~ oi b к с, Uca - от с к а. Линейные токи во всех линейных проводах направляют к приемникам.
Фазные напряжения и токи приемников направляют в одну и ту же сторону (см. рис. 3.7 и 3.11), как это обычно делается для приемников. Ток нейтрального провода Ц направляют от приемника к источнику (см. рис. 3.3 и 3.7).
3.3. СООТНОШЕНИЯ МЕЖДУ ФАЗНЫМИ И ЛИНЕЙНЫМИ напряжениями источников. НОМИНАЛЬНЫЕ НАПРЯЖЕНИЯ
Фазные напряжения источника отличаются от его ЭДС вследствие падений напряжения во внутренних сопротивлениях источника, а напряжения приемника отличаются от напряжений источника за счет падений напряжения в сопротивлениях 128
Рис. 3.5. Векторные диаграммы фазных и линейных напряжений при соединении источника звездой
проводов электрической сети. Вопрос об учете влияния падений напряжения в проводах сети на напряжения приемников будет рассмотрен в § 3.8. Пока же для упрощения анализа соотношений в трехфазиых цепях будем пренебрегать указанными падениями напряжения.
Применяя второй закон Кирх1 офа поочередно ко всем фазам, при сделанном допущении и соединении источников звездой (см. рис. 3.3) получим
= Щ = ^С = ЕС. (3.3)
На основании выражений (3.3) можно сделать вывод о том, что если генератор имеет симметричную систему ЭДС, то его фазные напряжения тоже симметричны, а векторная диаграмма фазных напряжений (рис. 3.5, а) ие отличается от векторной диаграммы ЭДС генератора (рис. 3 2, б).
На основании уравнений по второму закону Кирхгофа для контуров Niab^il, N1bcN\ и Л\с«Л\ (см. рис. 3.3) нетрудно получить следующие уравнения, связывающие линейные и фазные напряжения:
uab = u;a-y:b, и* = хд - с; и,, = (з-4)
Используя (3.4) и имея векторы фазных напряжений (рис.
3.5, л), можно построить векторы линейных напряжений Uai,.
« и...
Из векторной диаграммы рис. 3.5, а следует, что при соединении источника звездой линейные напряжения равны и сдвинуты по фазе относительно друг друга на угол 2л/3. Векторы
5 Электротехника 129
Рис. 3.6. Векторная диаграмма фазных и линейных напряжений при соединении источника треугольником
линейных напряжений изображают чаше соединяющими векторы соответствующих фазных Направлений, как показано на рис. 3.5,6. Из век|Орной диа1раммы рис. 3.5,6 следуе!, что
U.„ -2U, sin 60” = ],6иг (3.5)
Такое же соотношение существует между любыми другими линейными н фазными напряжениями. Поэтому можно написать, что вообще при соединении источника звездой
l/л (S.6)
Выражения (3.3) справедливы и при соединении источника треугольииком (см. рис. 3.4). Непосредственно из. схемы рис. 3.4 следует, что линейные напряжения равны соответствующим фазным напряжениям;
= Ш Uca=U‘c- (3.7)
Можно написать, что при соединении источника ipeyio.ib-ником вообще
Г, = С/ф. (3.8)
Векторная диаграмма фазных и лилейных напряжений при соединении источника треугольником приведена на рис. 3.6.
На основании изложенного можно сделать следующие выводы.
Независимо от способа соединения фаз источника между линейными проводами трехфазной цепи существуют три одинаковых по действующему значению линейных напряжения, сдвинутых по фазе относительно друг друга иа угол 2л/3. В случае соединения фаз источника звездой линейные напряжения оказываются в ]/ 3 раз больше, чем при соединении фаз того же источника треугольником.
В четырехпроводной цепи кроме трех линейных напряжений между линейными проводами и нейтральным проводом имеются три фазных напряжения. Последние в j/з раэ меньше линейных напряжений и сдвинуты по фазе относительно друг 130
друга также на угол 2д/3. Фазные и линейные напряжения не совпадают по фазе.
Наиболее распространенными номинальными напряжениями приемников переменного тока являются напряжения 380, 220 и 127 В. Напряжения 380 и 220 В используют преимущественно для питания промышленных приемников, а напряжения 220 и 127 В — для быювых приемников. Напряжения 380, 220 и 127 В считают также номинальными напряжениями трехфазных электрических сетей. При линейном напряжении 380 В фазное напряжение четырехпроводной трехфазиой сети 380Д/3 = 220 В, а при линейном напряжении 220 В оно составляет 220/|/з = 127 В. Наличие в четырехпроводных сетях линейных и фазных напряжений дает возможность подключать однофазные приемники, рассчитанные на два напряжения, па-пример ня 380 и 220 В или 220 и 127 В.
3.4. СОЕДИНЕНИЕ ПРИЕМНИКОВ ЗВЕЗДОЙ
Как видно из схемы рис. 3.7, при соединении звездой фазные напряжения приемника Ua, Uh и Uc ие равны линейным напряжениям и Uca. Применяя второй закон Кирхгофа
и к контурам aNba, bNcb и cNae, можно получить следующие соотношения между линейными и фазными напряжениями:
Uab=Ua-Ub, Ubt = Ub-U{, Uca=Uc-Uo. (3.8а)
Пользуясь соотношениями (3.7) и имея векторы фазных напряжений, нетрудно построить векторы линейных напряжений (рве. 3.8).
Если не учитывать сопротивлений линейных проводов и нейтрального провода, то следует считать комплексные значе
ния линейных и фазных напряжении приемника равными соответственно комплексным значениям линейных и фазных напряжений источника. Вследствие указанного равенства векторная диаграмма напряжений приемника не отличается от векторной диаграммы источника при соединении звездой (см. рис. 3.5, б и 3.8). Линейные и фазные напряжения приемника, как и источника, образуют две симметричные системы напря-
5*
Рис. 3.7. Схема соединения фаз приемника звездой
Ш
Рис. 3.8. Векторная диаграмма при соединении приемника звездой в случае симметричной на-1рузхи
жений. Очевидно, между линейными н фазными напряжениями приемника существует соотношение, подобное (3.6), т. е.
и. = ^Vt. (3.9)
Как будет показано далее, соотношение (3.9) справедливо при определенных условиях так же в случае отсутствия ней-зрального провода, т. е. в трехпроводной цепи.
На основании указанного соотношения можно сделать вывод о том, что соединение звездой следует применять в том случае, когда каждая фаза трехфазного приемника или однофазные приемники рассчитаны на напряжение в |/з раз меньшее, чем номинальное линейное напряжение сети.
Из схемы рис. 3.7 видно, что при соединении звездой линейные токи равны соответствующим фазным токам:
I» = h- (3-10)
С помощью первого закона Кирхгофа получим следующее соотношение между фазными токами и током нейтрального провода:
(3.11)
Имея векторы фазных токов, с помошью (3.11) нетрудно построить вектор тока нейтрального провода.
Если нейтральный провод отсутствует, то, очевидно,
[а + Lb + /г = 0.
3.4.1. Симметричная нагрузка. Нагрузка считается симметричной, когда равны в отдельности активные и peaxi инные сопротивления всех фаз:
= гь = гс н ха = хе = х0
где ха = хи - xVn и т. д.
Условие симметричности нагрузки может быть записано
132
также через комплексные значения полных сопротивлений фаз’ Z„ = Zj, = Z.
Симметричная нагрузка трехфазнон цепи возникает при подключении к сети трехфазных приемников (см. § 3.1).
Будем считать сначала, что при симметричной нагрузке имеется нейтральный провод.
В отношении любой фазы справедливы все формулы, полученные ранее для однофазных цепей. Например, для фазы а
= *₽. = arcsilt--": Ра-UJ.cos<p.- I
,------ ) (3-12)
6. - U.I. sin <р. - Jix;-. S. - U.I. -14, = /Р,2 + ft. I
Так как в чстырехпроводной цепи =
= Сл/{/3, то, очевидно, прн симметричной нагрузке
'. = '» = < = 1ф( 9. = <рь = >Р.- = <Р.|.: р. = р1, р.-рф;
е.=е,=е.=еФ; s„=s,=sc=s,.
Векторная диаграмма при симметричной активно-индуктивной нагрузке приведена на рис. 3.8.
Из приведенных выражений и векторной дна) раммы следует, что при симме!ричной нагрузке образуется симметричная система токов, поэтому ток в нейтральном проводе 1_N = 70 + + h + 1е - 0.
Очевидно, отключение нейтральною провода при /w = 0 не приведе! к изменению фазных напряжений, токов, углов сдвига фаз, мощностей и векторной диаграммы. Даже при отсутствии нейтрального провода фазные напряжения оказываются равными С/ф = 17я/|/3, т. е. тому напряжению, па которое рассчитаны фазы трехфазпого приемника.
Из сказанного следуем что прн симметричной нагрузке в нейтральном проводе нет необходимости и при симметричной нагрузке нейтральный провод не применяется.
Мощности трехфазного приемника могут быть выражены так:
Р = ЗРф = 31/ф/фСО8фф; g - 3g4 =3 С/ф/ф sin <рф; 1
S- 35ф = 30ф/ф = |/'Рг+е2. J (313)
В качестве номинальных напряжений н токов трехфазных приемников указываются обычно линейные напряжения и токи. Учитывая это, мощности трехфазных приемников целесообразно также выражать через линейные напряжения и токи. Заме-
133
инв в (3.13) фазные напряжения и гок согласно (3.8) и (3.9), получим
Р-|/31/л/,со8<рф; б - |/ЗС'7, sin <рф; I s-fiuj.. ( ( ’
Пример 3.1. К трехфазной сети с линейным напряжением ил = — = иы = Uea ~ 380 R должен быть подключен трехфазный прием-
ник, каждая фаза которого рассчитана на напряжение 220 В и имеет активное сопротивление Гф = 10 Ом, а также индуктивное сопро1ивле-ние Хф= Ю Ом, соединенные последовательно.
Определить фазные токи, углы сдвига фаз между фазными напряжениями и токами, а также мощности.
Решение. Так как каждая из фаз приемника рассчитана на напряжение, в |/з раз меньшее номинального напряжения сети, то приемник должен быть соединен звездой (см. рис. 3.7). Поскольку нагрузка симметричная, нейтральный провод подводить к приемнику не следует.
Полные сопротивления фаз, фазные токи и углы сдвига фаз между фазными напряжениями и токами
- ХФ
фф = arcsin----= 45
2ф
—^—=15,6 А.
|/Ь*
Полная, активная и реактивная мощности приемника и любой фазы
S = 1/31Л,Ул ъ 10250 ВА = 10,25 кВ А;
5Ф= S/3 % 3416 В 'А 3,42 кВ А;
Р - S cos фф = S » 7270 Вт - 7,27 кВт,
2Ф
Рф - Р/3 % 2426 Вт Я 2,43 кВт;
e=Ssinfc-S^r« 7270 вар-7,27 шар;
2Ф о
Q — — 2426 вар л 2,43 квар.
Векторная диаграмма приемника приведена на рис. 3.8.
3.4.2. Несимметричная нагрузка. Нагрузка считается несимметричной, когда сопротивление хотя бы одной из фаз не равно сопротивлениям других фаз. Например, нагрузка будет несимметричной, если га = гь = гс, хд = х6 / хс. В общем случае при пе-134
симметричной нагрузке является полное отключение одной или двух фаз.
Несимметрична я нагрузка возникает обычно при подключении к трехфазной сети однофазных приемников (см. § 3.1). Последние могут иметь различные мощности, могут распола-1а1ься территориально в разных местах (в различных помещениях, на разных этажах и т. д.), могут включаться и отключаться независимо друг от
Рис. 3.9. К вопросу о соединении однофазных приемников звездой
Друга.
Когда имеется несколько однофазных приемников, для более равномерной загрузки линейных проводов сети их делят иа три примерно одинаковые в отношении мощности группы (рис. 3.9), называемые фазами приемников. Одни выводы приемников различных фаз подключают к трем различным линейным проводам сети, а другие выводы приемников всех фаз — к нейтральному проводу. 'Гак как все приемники рассчитаны на одно и то же напряжение, то в пределах каждой фазы они соединяются параллельно.
Если в пределах каждой фазы приемники заменить одним приемником с эквивалентным сопротивлением и расположить их соочвегетвующим образом, получим схему, приведенную иа рис. 3.7.
Особенностью электрической цеди при несимметричной нагрузке является то, что она должна иметь обязательно нейтральный провод. Объясняется это тем, чю при его отсутствии значения фазных напряжении приемников существенно зависят от степени иеснмметрии нагрузки, т. е. от значении н характера сопротивлений приемников различных фаз. Поскольку последние могут изменяться в широких пределах при изменении числа включенных приемников, существенно могут изменяться и фазные напряжения. На одних приемниках напряжение может оказаться значительно больше, а па других - меньше фазного напряжения сети ип/ |/з, т. е. того напряжения, на которое рассчитаны приемники. А это недопустимо.
Для иллюстрации сказанного иа рис. 3.10 приведена векторная диаграмма цепи рис. 3.7 с несимметричной активной нагрузкой фаз при наличии нейтрального провода, а иа рис. 3.11 - диаг рамма гой же цепи при его обрыве. Из сравнения
135
Рис. 3.10. Векторная диаграмма при соединении приемников звездой в случае несимметричной нагрузки и при наличии нейтрального провода
Рис. 3.11 Векторная диграмма при соединении приемников звездой в случае несимметричной нагрузки и обрыве нейтрального провода
диаграмм отчетливо видны последствия обрыва нейтрального провода.
Необходимость нейтрального провода становится особенно очевидной, если представить себе, что при отсутствии нейтрального провода отключили все приемники, например, фаз а и Ь. Очевидно, напряжение фазы с при этом окажется равным нулю, так как фаза с окажется также отключенной. Если вообразить, чю имеется всего пипп. один однофазный приемник, рассчитанный на напряжение Ул/1/з. то при отсутствии нейтрального провода ею попросту было бы некуда включить.
Для повышения надежности соединения приемников с источником с помощью нейтрального провода в цепи последнего не ставят выключателей и даже защитных устройств, например предохранителей.
Фазные токи, у(лы сдвига фаз между фазными напряжениями и токами, а также фазные мощности при несимметричной нагрузке в цепи с нейтральным проводом будут в общем случае различными. Все они могут быть определены по приведенным ранее формулам (3.12). Для определения мощностей всех фаз следует воспользоваться выражениями
Р-Ра + Рь + Рг Q = Q, + Qb + Qc- (3-15)
Очевидно, формулы (3.13) и (3.14) ие пригодны для определения мощностей при несимме1ричиой нагрузке.
Если требуется определить ток 7Л нейтрального провода, то следует решать задачу комплексным методом. Можно также определить ток по векторной диаграмме, которая, естественно, должна быть построена в масштабе.
136
При решении задачи в комплексной форме необходимо прежде всего выразить в комплексной форме полные сопротивления фаз и фазные напряжения. После этого нетрудно найти комплексные выражения фазных токов. Например, комплексное выражение тока /л будет равно [а =
Комплексное значение тока в нейтральном проводе определяют по формуле (3.10).
Комплексным методом можно воспользоваться и для определения фазных мощностей. Так, мощности фазы а будут равны
5, = ИЛ, Р.~ Re \, С. = Im S„ S. - l/P; l-Q2„.
Пример 3.2. В электрической цепи рис. 3.7 линейные напряжения l/д = 220 В. В фазе а включено параллельно 20 ламп, в фазе b - 10 ламп, в фазе С - 5 ламп. Номинальное напряжение и мощность каждой лампы равны 1/,юм — 127 В, Рип^ = 100 Вт. Определив фазные токи, ток каждой лампы и ток нейтрального провода
Решение. Учитывая, что лампы имеют только актилное сопротивление, из формулы мощности найдем номинальный ток лампы, а по закону Ома - сопротивление лампы-
Лом - Рном/С'ном = 100/127 ъ 0,79 А, 'ном = ^номДисм = 127/0,79 161 Ом.
Зная сопротивление лампы и число ламп в каждой фазе, нетрудно определить сопротивление фаз, а затем фазные токи:
, % 161/20-8.05 Ом, г** 161/10 - 16,1 Ом, 161/5 = 32.2 Ом, = Uu/ru =,127/8,05 х 15,8 А,
1Ь зг 7,9 А, 1( * 3,95 А.
Так как при ия - 220 В напряжение на лампах равно их номинальному напряжению, т. е. 127 В, то каждая лампа будет потреблять ток. равный номинальному, т. е. 0,79 А.
Для определения юка в невральном проводе решим задачу комплексным методом. Так как при сделанных ранее допущениях комплексные значения фазных напряжений приемника равны комплексным значениям соответствующих ЭДС [см (3.2)]. то
Са=Са = 127 В, Ubcos(-2n/3)+jUbsin(-2n/3) = -63,5-/110 В, cos ( - 4я/3) + jUt sin ( - 4л/3) = - 63,5 + j HO B.
Комплексные значения фазных сопротиалений. Za = 8,05 Ом. Z6 = 16,l Ом, Zc==32,2 Ом.
137
Комплексные значения токов и действующее значение тока нейтрального провода:
^ = ^«/^,*15,8 А; (-3.94-/6,83) А; Л % (- 1,97 + /3.41) А;
I_N = f„ + !b + [с (9,89 -/3,42) А; /Л-/9.892 + 3.422 10,5 А.
Векторная диаграмма к примеру 3-2 дана на рис. 3.10.
3.5. СОЕДИНЕНИЕ ПРИЕМНИКОВ ТРЕУГОЛЬНИКОМ
Как видно из схемы рис. 3.12, каждая фаза приемника при соединении треугольником подключена к двум линейным проводам. Поэтому независимо от значения и характера сопротивлений приемника каждое фазное напряжение равно соответствующему линейному напряжению:
(3.16)
Ести не учитывать сопротивлений проводов сети, то напряжения приемника следует считать равными линейным напряжениям источника.
На основании схемы рис 3.12 и выражения (3.16) можно сделать вывод о том, что соединение треугольником следует применять тогда, когда каждая фаза трехфазного приемника или однофазные приемники рассчитаны на напряжение, равное номинальному линейному напряжению сети.
Фазные токи 1Ьс н 1еа в общем случае вс равны линейным токам 10, 1Ь и 1С. Применяя первый закон Кирхгофа к узловым точкам а, b и с, можно получить следующие соотношения между линейными и фазными точками:
Ь = Г = Д.-Л.. (3.17)
Используя указанные соотношения и имея векторы фазных токов, нетрудно построить векторы линейных токов.
3.5.1. Симме1ричная нагрузка. В отношении любой фазы справедливы вес формулы, полученные ранее для однофазных цепей, например
I.b = VJz.b; <p., = arcsin—; Рл = Ud,l.scos<p., = |
Zab S
CLb = ^atJab SIn 9ob = ^abXeb> $ab ~ ab^ab ~ = + Qab' J
(3-18)
138
Рис. 3.12. Соединение фаз приемника треугольником
Рис. 3.13. Векторные диа)ра.ммы при соединении приемника треугольником в случае симметричной нагрузки
Очевидно, при симметричной нагрузке
Ль ~ the ~ ^са ~ ^ф, фо*> = фЬс = ф«а = фф, ^аЬ ~ ^Ьс ~~ ^ея ~ ^Ф’ Qab ~ Qbc — Qca ~ — Sbt = Sca = Зф.
Векторная диаграмма фазных (линейных) напряжений, а также фазных токов нри симметричной активно-индуктивной на1рузке приведена иа рис. 3.13, а. Там же в соответствии с выражениями (3.17) построены векторы линейных токов. Следует обратить внимание на то, что при изображения векторных диаграмм в случае соединения треугольником вектор линейного напряжения Uab принято направлять вертикально вверх.
Из приведенных выражений и векторной диаграммы следует, что прн симметричной нагрузке существуют симметричные системы фазных и линейных токов.
Векторы линейных токов чаще изображают соединяющими векторы соответствующих фазных токов, как показано на
139
рис. 3.13, б. На основании векторной диаграммы рис. 3.13, б 1а = = 27^ sin 60° = |/37а6. Такое же coot ношение существует между любыми другими фазными и линейными токами. Поэтому можно написать, что при симметричной нагрузке вообще
/,=ТЧ- р-19’
Для определения мощностей трехфазного приемника при симметричной нагрузке можно воспользоваться полученными ранее формулами (3.13) н (3.14).
Пример 3.3. К трехфазной сети с линейными напряжениями 1,'л = 220 В должен быть подключен трехфазный приемник, каждая фаза которого рассчитала на напряжение 220 В и содержит активное сопротивление гф=-8,б5Ом, а также индуктивное сопротивление Хф — = 5 Ом, соединенные последовательно.
Определить фазные и линейные токи, углы сдвига фаз между фазными напряжениями и токами, а также мощности.
Решение. Так как каждая из фаз приемника рассчитана на напряжение, равное линейному напряжению трехфазной сети, фазы приемника должны быть соединены треугольником (см. рис. 312).
Полные сопротивления фаз, фазные и линейные токи:
4= 10 Ом’ 1<!> = ^ф/2ф = 22 А’ = 1//3^ф = 38 А.
Углы сдвига фаз между напряжениями и токами
<рф = arcsin - * = 30 .
2Ф
Полная активная и реактивная мощности приемника и любой фазы
S = У3ил!л = 4730 В- А = 4,73 кВ А;
5ф = 5/3 а 1576 В-А % 1,58 кВ-А;
Р = Усо$срф = 3>ф/2ф ss 4100 Вт =4,1 кВт;
Рф -Р/3 * 1366 Вт % 1,37 кВт;
Q = .Ssm фф = $Хф/гф ~ 2365 вар * 2,36 квар;
= 6/3 * 7&8 вар = 0,788 квар.
Векторные диаграммы приемника приведены ira рис. 3.13.
3.5.2. Несимметричная нагрузка. Как и при соединении звездой, в случае соединения треугольником однофазные приемники делят иа три примерно равные в отношении мощности группы. Каждая группа подключается к двум проводам, между которыми имеется напряжение, отличающееся по фазе от двух 140
Рис. 3.14. К вопросу о соединении однофазных приемников треугольником
Рис. 3.15. Схема цепи к примеру 3.4
других напряжений сети (рис. 3.14). В пределах каждой группы приемники соединяются параллельно.
После замены приемников каждой фазы одним приемником с эквивалентным сопротивлением и соответствующего их расположения получим схему, приведенную на рис. 3.12.
Фазные токи, углы сдвига фаз между фазными напряжениями и токами, а 1акже фазные мощности можно определить по формулам (3.18). При несимметричной нагрузке фазные токи, углы сдвша фаз и фазные мощности будут в общем случае различными. Векторная диаграмма для случая, когда в фазе ab имееюя активная нагрузка, в фазе Ьс — активио-индуктивная, а в фазе са — активио-емкостиая (рис. 3.15), приведена на рис. 3 16. Построение векторов линейных токов произведено в соответствии с выражениями (3.17).
Для определения мощностей всех фаз следует пользоваться формулами
р=/.» + е=еЛ+е„+е„ (wo>
Формулы (3.13) и (3.14), полученные ранее для симметричной нагрузки, не пршодны для определения мощностей при несимметричной нагрузке.
Если кроме фазных токов требуется определить линейные токи, задачу следует решать в комплексной форме. Для этой же цели можно воспользоваться векторной диаграммой.
При решении задачи в комплексной форме необходимо прежде всего выразить в комплексной форме фазные напряжения, а также полные сопротивления фаз. Когда это сделано, нетрудно по закону Ома определить фазные токи. Например, комплексное выражение тока будет
J^U^. (3.21)
141
фазы ab будут равны
Рис. 3.16. Векторная диаграмма фазных и линейных напряжений и токов при соединении приемника треугольником в случае несимметричной нагрузки
Линейные токи определяются через фазные с помощью выражений (3.17).
Комплексным методом можно воспользоваться и для определения фазных мощностей. Так, мощности
SaI> = LLJAb, Qab
= Im S.,; = |/р2л + 6’t. (3.22)
Рассмотрим, как будут изменяться значения различных величин в электрической цепи рнс. 3.15 при изменении сопротивления приемников. Например, если при xCcalr^ = const увеличить вдвое сопротивление zca, то ток 1(а уменьшится, а угол срГЙ ие изменится (см. рис. 3.16). Очевидно, при этом уменьшатся и токи 10, /£, а также мощности Рса, 0са, Sca. Токи 1аЬ, углы <Ра6, Фьс, а также мощности Р& 0^ Р^, Q^, останутся по-
стоянными. При отключении фазы са сопротивление zca = со, 1са - 0, токи !bc, 1Ь, а также углы «р^ ср^ ие изменятся, а токи Ц и 1С уменьшатся и_/о = -J*.
Пример 3.4. В электрической цепи рис. 3.15 Ua = 220 В, гаЬ = = 40 Ом, гЬс = 17,3 Ом, = 10 Ом, гса = 8,65 Ом, хСго = 5 Ом.
Определить фазные и линейные токи, а также мощности.
Решение. Условимся определять линейные токи аналитически, для чего будем решать задачу комплексным метолом. Поскольку вектор линейного напряжения ил при соединении в треугольник принято обычно направлять как вектор ЭДС Еа вертикально вверх (см. рис. 3.2,6), для определения комплексных значений линейных напряжений можно воспользоваться выражениями (3.2). Получим
V.* = Vat, = 220 В,
Уъ< = t/fcCOs(-2K/3) + j'UlKS!n(-2it/3) = -ЦО -/190 В,
К<« = ^cacos(-4ir/3) + Д/^хЦ-Ди/З) = - 110 + /190 В.
Комплексные значения полных сопротивлений фаз
2^ = 40 Ом, Zbc= 17,3+/ЮОм, Z £а = 8,65 —/5 Ом.
142
Комплексные и действующие значения фазных и линейных токов:
/к-1/9,52 + 5,52 « 11 А;
'..= -19+111 А; = |/19! + 1Р » 22 А;
L. = ~ 24,5 - JI 1 А; 1.x 26,9 А;
h = L* - Lab * - 15 — >5,5 А; 1Ь ft 16 А;
h = Lea -Lot* ~9’5 + J16,5 A; lc ft 19 A.
Далее можно решать задачу, не прибегая к комплексному методу. Активные, реактивные и полные мощности фаз;
^Ь = Л2Ль= 12ЮВт; = 2090 Вт; Рм = 4190Вт; Qab = 0; Qtc = = lic^Lbc = 1210 вар; Qca = 12еахСсв = -2420 вар; Sab = Pab = 1210 В • А;
= 2420 В • A; See = = 4840 В • А.
Общие активные н реактивные мощности:
р = р,„+р., > р.. = '49'>вт: е = еЛ + ек + е.= -пю»р.
Углы сдвига фаз между фазными напряжениями и токами
Ф . = 0, ф4с = arcsin = 30% <р<а = arcsin = - 30°.
Zbe zea
Векторная диаграмма приемника дана на рис. 3.16.
3.6. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ С НЕСКОЛЬКИМИ ПРИЕМНИКАМИ
От трехфазното источника или от трехфазной сети обычно получают питание несколько приемников. Это могут быть как однофазные, так и трехфазные приемники.
При выборе способа соединения фаз трехфазных приемников и подключения однофазных приемников следует исходить из того, чтобы на фазах трехфазных приемников и на однофазных приемниках были те напряжения, на которые они рассчитаны.
Предположим, что в четырехпроводной трехфазной цепи (рис. 3.17) линейное напряжение 17 л — 220 В, а фазное соответственно = = и,/]/з = 127 В.
Если каждая фаза трехфазного приемника 1 рассчитана на 127 В, трехфазного приемника 2 - на 220 В, каждый приемник в группе однофазных приемников 3- на 127 В, однофазный приемник 4— на 220 В,
143
Рис. 3.17. Схемы включения приемников в трехфазную сеть
а однофазный приемник 5 - на 127 В, то приемники должны быть соединены и яхлючены, хах показало на рис. 3.17.
Если бы имелись три группы однофазных приемников и каждый из приемников был рассчитан на напряжение 220 В, то эти группы следовало бы соединить треугольником и включить э сеть, как включен приемник 2. Если бы сеть была трехпроводной с линейным напряжением 220 В, то включить приемники ? и 5 в ну сеж было бы невозможно.
Следует обратить внимание на то, что в качестве номинальных напряжений трехфазных приемников указываются часто два напряжения, отличающиеся одно от другого в уз раз, например 380/220 В. При этом низшее напряжение — это то напряжение, на которое рассчитана каждая фаза. Два напряжения означают, что приемник может быть включен как в ость с линейным напряжением 380 В, так и в сеть с линейным напряжением 220 В. Очевидно, прн напряжении сетн 380 В приемник следует соединить звездой, а при напряжении 220 В - треугольником.
Если в группу приемников входит хотя бы один приемник, создающий несимметричную нагрузку, то вся нагрузка будет также несимметричной. В этом случае токи группы приемников следует определять по первому закону Кирхгофа. Например, комплексное значение тока [. в электрической цепи рис. 3 17 бу де» равно = /я1 + fa2 + /а3 +
Общие мощности цепи определяются по очевидным формулам
P = Pl + P2+
e=ei+e2+- . <з.гз)
|де в общем случае Q} — — Qc} и i. д
При расчете в комплексной форме цепи с несколькими приемниками следует помнить, что фазные и линейные напряжения четырехпроводной сети не совпадают по фазе.
144
Если электрическая цепь содержит только трехфазные приемники, то общая нагрузка группы приемников будет симметричной. В этом случае токи группы приемников проще всего определить через мощности.
Определив согласно (3.23) активную и реактивную мощности группы 1рехфазных приемников, нетрудно найти полную мощность, а затем ток группы приемников:
S=l/Pi + e2, . (3 24)
Через мощности можно найти также угол сдвига фаз между фазными напряжениями и токами группы приемников (или эквивалентного приемника):
. Q
Оф = arcsin у
3.7. КОЭФФИЦИЕНТ МОЩНОСТИ И СПОСОБЫ ЕГО ПОВЫШЕНИЯ
Площади поперечного сечения проводов линий электропередачи и электрических сетей, обмен ок электрических машин, трансформаторов, электротехнических аппаратов и приборов выбираются, исходя из наэренания. по значению тока в них, который при заданном напряжении переменного тока прямо пропорционален полной мощности S. А энергия, преобразуемая из электрической в другие виды (в механическую, тепловую и т. д.) и используемая в большей части для практических целей, пропорциональна активной энергии и соответствующей ей активной мощности Р.
Как известно, между указанными мощностями и реактивной мощностью существуют соотношения
P = Scos<p; 5 = [/РГ+е5.
Входящий в первое выражение cosq> называется коэффициентом мощности и показывает, какую часть полной мощно-стн составляет активная мощяоСэь: cos <р = P/S - Р/]/?г Q2.
Считая, что активная мощность установки, значение которой зависит в основном от мощности приемников, остается постоянной, выясним, к чему приведет увеличение коэффициента мощност и установки.
Как следует из приведенных формул, при увеличении costp мощность S уменьшается. При Р — const это может происходить лишь за счет уменьшения реактивной мощности О установки. Снижение мощности S приводит к уменьшению линей-
145
ного тока i-,. Последнее будет сопровождал ься уменьшением потерь напряжения и мощности в сопротивлениях проводов сети, обмотках трансформаторов и генераторов.
Очевидно, при уменьшении юка площади поперечного сечения названных элементов могут быть также уменьшены. В отношении трансформаторов и генераторов это приводит к уменьшению габаритных размеров, расхода дефицитных материалов на изготовление, массы, номинальной мощности и стоимости.
В действующей установке повышение coscp при существующей площади поперечного сечения проводов позволит увеличить число приемников, которые могут быть подключены к данной сети.
Таким образом, повышение коэффициента мощности дает определенные выгоды во многих отношениях, а поэтому имеет большое народнохозяйственное значение.
Большая часть элементен электрических цепей переменного тока потребляет кроме активной мощности также индуктивную мощность. К ним относятся в первую очередь наиболее распространенные в народном хозяйстве асинхронные электродвигатели. Значительная часть индуктивной мощности потребляется трансформаторами, широко используемыми в различных установках. Индуктивная мощность потребляется также различными электромагнитными аппаратами, такими, например, как электромагннгы, контакторы и магнитные пускатели, реле н т. д.
Для уменьшения индуктивной мощности и увеличения тем самым cosep необходимо прежде всего:
выбирагь правильно двигатели по мощности, так как необоснованное завышение мощности приведет к их работе с недогрузкой, а при этом, как правило, costp понижается;
заменять двигатели, работающие с недогрузкой, двига!елями меньшей мощности;
сокращать ио возможности времена работы двигателей и трансформаторов вхолостую.
Если все же cos ip оказывается недостаточно высоким, прибегают часто к его искусственному повышению. Для этой пели подключаю! к трехфазной сети компенсирующие устройства, к которым относятся батареи конденсаторов и трехфазные' синхронные компенсаторы (см. гл. II). Последние применяются реже. Батарея конденсаторов соединяется обычно треугольником, как показано на рис. 3.18, а. Батарея конденсаторов потребляет емкостную мощность, которая частично компенсирует индуктивную мощность установки, в результате чего реактивная мощность уменьшается, а коэффициент мощности повы-146
Рис. 3.18. Схема и векторная диаграмма к примеру 3 5
шается. Естественно, что costp самих приемников при этом остается прежним
Чтобы уменьшить ток проводов сети, батарею конденсаторов устанавливают по возможности вблизи приемников.
Пример 3.5. К трехфазной сети рис. 3.18,а с линейными напряжениями 17д=22О В подключены два трехфазных приемника. Активная мощность и коэффициент мощности первого приемника Pt — = 10 кВт, costpt = 0,7. Фазные сопротивления второго приемника Гф = 6 Ом, хдф = 8 Ом, нагрузка симметричная.
Определить токи, мощности я коэффициент мощности cos 9 установки из двух приемников. Найти мощность, токи я емкость батареи конденсаторов, если требуется повысить коэффициент мощности до cos 9' - 0,95. Определить токи и мощности установки из двух приемников и батареи конденсаторов.
Решение. Полная и реактивная мощности первого приемника Sj = Pj/costPt = 14,3 кВА, 0, = ]/S^ - Р| ss 10,2 квар.
Полное сопротивление и ток фазы второго приемника +~“ 1® Ом; _ и^’г3 = 22 А.
Активная и реактияная мощности второго приемника
Р2 = 3$гг2 = 8,1 kBi; 02 = 3/ф2л£ф« 11.6 квар.
Активная, реактивная я полная мощности установки, состоящей из двух преемников,
P = PL + PZ = 18,7 кВт; 0 = 0t -2Е8 квар;
S = J/Р2 4 02 * 28,7 кВ - А.
Линейный ток и коэффициент мощности установки *з двух приемников
/л = /4 = ЭД/3(/Л « 75.5 A; cos9 = P<S « 0,65.
147
Мощности установки из приемников и батареи конденсаторов Р' = Р=18,7 кВт; S =p/cos<p'= 19.68 кВ А;
Q' ~ |/S2 - Р’2 = 6.13 квар.
Линейные токи установки из приемников и батареи конденсаторов, мощность и линейные токи батарея конденсаторов
1'3 = Га - V/1/3 U, = 51,7 A; QK = Q - Q' » 15,67 квар;
в,//з Uj, - 41,2 А.
Фазные юкн и сопротивление фазы батареи конденсаторов
= 4.лДА = 20,8 А; хк ф = С^//К,ф - ил/\ф = 10,58 Ом.
Емкость одной фазы и всей батареи конденсаторов Ск.ф« 1/2л/хкф= 30 мкФ; С^ = ЗС(ф=90 мкФ.
Векторная диаграмма цепи рис. 3.18, о приведена на рис. 3.18, б. На диаграмме показаны только те юки, которые определяют ток Га (т. е.
и 1^), а также токи, определяющие ток (т. е. lgah и /KfJ.
3.8. ВЛИЯНИЕ СОПРОТИВЛЕНИЙ ПРОВОДОВ СЕТИ НА НАПРЯЖЕНИЯ ПРИЕМНИКОВ.
ПОСЛЕДОВАТЕЛЬНОСТЬ РАСЧЕТА.
При изменении числа приемников, подключенных к трехфазной сети, изменяются падения напряжения в сопротивлениях проводов сети, в результате чего напряжения приемников нс остаются неизменными.
При симметричной нагрузке и равенстве сопротивлений проводов сети падения напряжения получаются одинаковыми, в результате чего фазные и линейные напряжения приемников оказываются симметричными. В отличие от этого при несимметричной нагрузке падения напряжения в сопротивлениях проводов сети получаются неодинаковыми, что приводит к несимметрии фазных и линейных напряжений приемников.
Для уменьшения колебаний и степени несимметрии напряжения приемников площадь поперечного сечения проводов электрических сетей выбирают нс только по нагреванию, но и по допустимой потере напряжения. Учитывая относительно небольшую потерн» напряжения в сопротивлениях проводов при нормальной их загрузке, часто принимают линейные и фазные напряжения приемников симметричными даже при несимметричной нагрузке.
Рассмотрим последовательность расчета трехфазных цепей с учетом сопротивлений проводов, считая, что заданы симметричные напряжения в начале электрической сети.
148
При симметричной нагрузке и соединении приемника звездой следует определить эквивалентные фазные сопротивления, включающие в себя сопротивления приемника и проводов. После этого нетрудно определить фазные токи, а затем фазные напряжения приемника. Для определения линейных напряжений приемника следует воспользоваться формулой (3.9).
Если при соединении звездой нагрузка несимметричная, необходимо решать задачу в комплексной форме. Прн этом целесообразно использовать метод узлового напряжения. Определив напряжение между ней'ралышми точками Nt и N (см. рис. 3.3 и 3.7) трехфазного источника и приемников, можно найти фазные токи и напряжения, а затем -линейные напряжения.
При симметричной назрузке и соединении треугольником следует, используя комплексный метод, найти активное и реактивное сопротивления эквивалентной звезды. Далее задача решается в порядке, изложенном выше для соединения звездой. Фазные токи при соединении треугольником определяют по формуле (3.19).
Если при соединении i peyi ольником нагрузка несимметричная, то следует воспользоваться комплексным методом и решать задачу в такой последовательности: преобразовать треугольник сопротивлений в эквивалентную звезду; определить эквивалентные сопротивления, включающие в себя сопротивления эквивален i ной звезды и проводов; преобразовать чнезду с эквивалентными сопротивлениями в эквивалентный треугольник; с помощью закона Ома определить фазные токи, а зная их и используя выражения (3.17), найти линейные токи: в заданной цепи с соединением приемников треугольником определить по второму закону Кирхгофа фазные напряжения приемников, после чего по закону Ома вычислить их фазные токи.
Глава четвертая
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ
4.1. ОБЩИЕ ВОПРОСЫ И ОПРЕДЕЛЕНИЯ
Процессы, протекающие в электромагнитах, механических и тепловых системах прн переходе из одного установившегося (стационарного) состояния к другому, при котором энергия системы (соответственно энергия электрического и магнитного полей, кинетическая энергия и тепловая энергия и обусловливающие их величины — напряжение, ток, скорость и температура) изменяется, называются переходными или иеустаповивши-мися процессами.
Процесс перехода от одного установившегося состояния к другому протекает не мгновенно (скачком), а постепенно в те
149
чение определенного времени в силу того, что энергия скачком изменяться не может и, следовательно, не может изменяться скачком обусловливающая ее величина. Если предположить, что энергия изменится мгновенно за время г — 0, то мощность, необходимая для этого,
оказалась бы равной бесконечности, а источников с бесконечной мощностью в природе не существует.
В электрических цепях, содержащих в общем случае резистивный, индуктивный и емкостный элементы, переходный процесс возникает при включении, выключении и изменении параметров цели. Такие действия в общем случае называют коммутацией электрической цепи или просто коммутацией. После коммутации изменяется энергия индуктивного Wl~I2L/2 и емкостною Wc — CLi2/2 элементов. Поскольку энергия мгновенно изменяться не может, следовательно, ие может изменяться мгновенно ток в индуктивности и напряжение иа емкости. Из этого вытекают два важных положения (их называют законами коммутации), без знания которых невозможно рассчитывать-и анализировать переходные процессы в элек । рических цепях.
Первый закон коммутации: ток в ветви с индуктивностью после коммутации ь(0+) (включение, отключение, изменение параметров цепи) при i = 0+ имеет то же значение, что и до коммутации i/.(0_):
ММ=«О-).
Второй закон коммутации: напряжение иа емкости после коммутации пс(0+) при t = 0+ имеет такое же значение, что и до коммутации:
ис(0+) = нс(О_).
Диалогичные законы есть и в механике, например скорость тела (массы) после начала действия силы при t = 0+ равна скорости до начала действия силы.
При расчетах переходных процессов используют так называемые начальные значения тока и напряжения в ветвях цепи, которые в совокупное! и с законами коммутации позволяют определить постоянные интегрирования. Под начальными значениями тока и напряжения понимают их значения до коммутации при t = 0_. Необходимо отметить, что ток в ветви толь-
150
Рис. 4.1. Зависимости i(t), е(/) (6) при подключении идеальной ка-। ушки с иидук [явностью L (а) к сети с постоянным напряжением
ко с одним резистивным элементом изменяется скачком по той причине, чю энергия в нем не накапливается, а все время преобразуется необратимо в теплоту и ее значение w = uit пропорционально времени, а мощность р — dwjdi = ui имеет конечное значение.
Общность переходных процессов в механических системах и электрических цепях можно проследить на примере протекания процесса при действии силы F па тело с массой m и при включении индуктивного элемента с индуктивностью Ьк источнику с постоянным напряжением.
Известно, что сила, действующая да тело, связана с массой и ускорением законом Ньютона
F=*mdv/dt, (4.1)
откуда следует, что постоянно действующая сила вызывает движение тела С ускорением, равным
dvfdt = Ffm. (4.2)
Скачкообразное измеиеяие скорости тела, когда dvfdt = со, невозможно, так как сила может иметь конечное, а не бесконечно большое значение.
При включении идеальной катушки (г = 0) с индуктивностью Ь(рис. 4.1,а) под действием напряжения сети в ней возникает ток и ЭДС самоиндукции. Идеальные индуктивности существуют реально — это обмотки электромагнитных исследовательских устройств элементарных чашиц, выполненные из сверхпроводящих материалов, сопротивление которых при криогенных температурах равно нулю.
Из выражения, составленного по второму закону Кирхгофа,
U = - е = L di/dt (4.3)
вытекает, что скорость нарастания тока равна
difdt = UfL, (4.4)
151
откуда
Сопоставляя (4.1) и (4.3), можно заключить, что индуктивность по своему действию аналогична массе в механической системе.
Из выражения (4.4) следует, что при определенном конечном значении U скорость изменения тока в индуктивности имеет определенное конечное значение. На рис. 4.1, б изображены графики тока i и ЭДС е при включении цепи но рис. 4.1. а.
В системах автома1ического управления часто происходит нарушение установившихся режимов и они практически работают в условиях переходного режима. В большинстве систем автоматического управления используются электротехнические устройства, поэтому необходимо рассмотреть переходные процессы хотя бы в простейших электрических цепях.
4.2. ПОДКЛЮЧЕНИЕ КАТУШКИ С г. L К СЕТИ С ПОСТОЯННЫМ НАПРЯЖЕНИЕМ
Схема замещения реальной катушки (рис. 4.2, а) представляет собой последовательно соединенные резистивный г и индуктивный L элементы.
После включения выключателя (рис. 4.2, а) в цепи возникают ток и ЭДС самоиндукции. Уравнение для цепи, составленное по второму закону Кирхгофа, имеет вид
е = ir - U.
Выразив в уравнении е через е = — Ldi/dt,
получим
е = -Ldi/dt - ir - U. (4.5)
Разделив почленно (4.5) на г, получим
Ldi U
71T + i = T’
152
Рис. 4.2. Зависимости /(/), e(t) (б) при подключении катушки г. L (л) к сети с постоянным напряжением
или
di U
Т-г 4- i = dt г
(4.6)
где Т= L/r — электромагнитная постоянная времени, с.
В результате решения дифференциального уравнения (4.6) методом разделения переменных получим
Выражение ’(4.7) в показательной форме будет’иметь вид
U ----i = Ae-'^
(4.8)
где А — постоянная интегрирования.
Постоянную интегрирования определяют на основании первого закона коммутации.
При t = 0 j(O+)=t(O_) = O;
А - V/г.
После подстановки в (4.8) значения А и решения его относительно i получим уравнение тока в цепи г, L
l = {4.9)
где JVCT = U/r - установившийся ток в цепи после окончания переходного процесса.
Подставив в (4.5) значение тока из (4.9), получим уравнение ЭДС самоиндукции е, возникающей в индуктивности: e^-Ue-^. (4.10)
153
На рис. 4.2,5 изображены графики тока i(t) и ЭДС <-(г) при включении цепи рис. 42,а.
Легко показать, что касательная, проведенная к кривой тока в начале координат, отсекает отрезок на линии установившегося значения тока, равный постоянной времени цепи Т. Действительно, как вьиекает из выражения (4.5), при f = 0 и i = 0
di/dt = U/L= tga.
Из рис. 4.2,6
tg а — /ует/7
После подстановки получим
и/L = ;5.ст/г = и/гт, отсюда
T—L/r. (4.11)
Постоянная времени характеризует темп нарастания тока в цепи. Она завися i юлько от параметров цепи и позволяет без расчета и построения графиков оцениib длительность переходного процесса.
Длительность переходного процесса, как видно из выражений (4.9) и (4,10), теоретически равна бесконечности. Практически же
при 1 = 37 » = 0,95Дст;
цри г = 47 ( = 0,98/>и;
при < = 57 / = 0,993/)М.
Обычно считают, что длительность переходного процесса составляет
t = (3 -г 4) 7.
В практике расчетов переходных процессов в электрических цепях используют известный метод решения линейных дифференциальных уравнений с правой частью. Результат решения дифференциального уравнения равен сумме частного решения неоднородного дифференциального уравнения и общего однородного уравнения (когда правая часть исходного уравнения равна нулю). Для использования этого метода действительный (переходный) ток в ветви в соответствии с уравнением (4.9) представляют как сумму двух составляющих
* = *уст *св» (4-12)
154
где iycT - установившийся ток, т. е. ток, который устанавливается в цепи после окончания переходного процесса; iM — свободный ток - ток, действующий только в течение времени переходного процесса.
Выразив в дифференциальном уравнении (4.5) ток через две составляющие, получим
+ies)+<iyn+=и- (4лз)
Так как в установившемся режиме ,св = 0, то уравнение (4.13) приобретает вид
+ ЦсА" —
и.
(4.14)
Ток в установившемся режиме есть величина постоянная, и его производная
^. = 0. dt
Тогда из (4.14) следует, что
1ус[ = U/т = 7ус1.
Вычитая (4.14) из {4.13), получим дифференциальное уравнение для свободного тока
L dijdt + i^r = 0. (4.15)
Решением этого уравнения является выражение
i, = Л< (416)
где р - корень характеристического уравнения
pL+ г = 0,
'=4=4 (4Л7)
Таким образом,
’св = Ле-'/т
Действительный ток в цепи в переходном режиме
f = fyCT + Ле-г/т= L//r+ Ае-чг. (4.18)
155
Значение А определяют из начальных условий: при t = 0 i(0+) =/(0_) = О и
А = - U/г.
Подставив значение А в (4.18), получим такое же уравнение для тока в цепи, как и при решении дифференциального уравнения методом разделения переменных:
V U | = -----
Из изложенною вытекает, что установившийся ток определяется с помощью закона Ома, как в этом случае, или в разведенных цепях с помощью законов Кирхгофа, а свободный -из решения исходного дифференциального уравнения без правой части.
4.3. ПОДКЛЮЧЕНИЕ РАЗВЕТВЛЕННОЙ ЦЕПИ С РЕЗИСТИВНЫМ И ИНДУКТИВНЫМ ЭЛЕМЕНТАМИ К СЕТИ С ПОСТОЯННЫМ НАПРЯЖЕНИЕМ
После включения выключателя (рис. 4.3, а) в пепи возникает переходный процесс. Поскольку в цепи действуют три тока, необходимо составить три уравнения по заколам Кирхгофа:
i = ii+i2; (4.19)
e = ir-t-i2r2 - U; (4.20)
e = i2r2-V1. (4.21)
Совместное решение уравнений относительно тока i2 дает
Выразив е через — L di-Jdt, получим дифференциальное уравнение
+ г di2 / r2rt +r2r rrt \ _ U rrl dt \ rr, ) 2 r
(4.21a)
Решением дифференциального уравнения без правой части (для свободного тока) будет выражение
1'2св =
156
Рис. 4.3. Зависимости j(fl, »j (t), <?(Г) (б) при включении раз-
ветвленной цепи г, L (а| в сеть постоянного тока, эквивалентная относительно постоянной времени Т цепь (в)
Значение р определяют из характеристического уравнения
L—-----р 4-
гг.
= 0;
Р= -
Ц* I т" П
где Т------------------постоянная времени пепи.
Г2Г1 + Г2Г + rri
Как видно, постоянная времени цепи определяется параметрами всех ее элементов, а ие только ветви с индуктивностью.
Ток i2 в переходный период будет равен
iz =*2уст + ^-‘/Т-
Принужденный ток определяют из выражения (4.21а), в котором при г = со di2/dt = 0 и
Таким образом,
G = ^2уст 1 Ае-'/’г.
Значение А определяют с помощью первого закона коммутации: при f = 0 i2 (0t) = »г(0-)в 0 и
A e -12усг-
157
Ток i2 в переходный период будет равен
(4.22)
Подставив в (4.21) значение тока i2 и его производную, получим выражение для тока
(4.23)
где
Ur:
После подстановки i2 и в (4.19) найдем выражение для тока it
^ст И уст — ^нач) е
(4.24)
где
<(>, 1гд)
Выражение ЭДС е можно получить из (4.21) после подстановки в него вместо i2 и их значений из (4.23) и (4.22):
U
— енач(
(4.25)
Па рис. 4.3,6 изображены графики токов i(t), ц(г), i2(t) и ЭДС е(г) при включении цепи рис. 4.3,а (при г[=‘Г2)-
Следует обратить внимание на то, что расчет токов в ветвях разветвленных цепей с одним накопителем, например катушкой с индуктивностью L, можно значительно упростить и выполнить без составления и решения уравнений (4.19) — (4.21). Это можно сделать, если предварительно определить постоянную времени Г цепи с помощью эквивалентной схемы (рис. 4.3, в). Для этого все резистивные элементы заменить одним эквивалентным относительно индуктивного элемента. Цепь, эквивалентная рис. 4.3, а, изображена на рис. 4.3, в. Цепь эквивалентна только в отношении постоянной времени Т.
Эквивалентное сопротивление цепи составит
15S
U
Г —~
Постоянная времени эквивалентной цепи т L L(r + г,) г„ r2r + r2r, i гг.
имеет то же значение, что и реальной-
Зная постоянную времени и определив начальные н установившиеся значения токов в ветвях, легко написать их выражения для переходного процесса в цепи. Они будут такими же, как и ранее полученные из решения системы уравнении.
Пример 4.1. Определять начальные в установившиеся значения токов i, ip i,, ЭДС е, постоянную времени и длительность переходного процесса при включении цели рис. 4.3, а в сеть постоянного тока Параметры цепи: г = 2000 Ом, г, = г2 = 3000 Ом, V = 200 В, L— 0,1 Гн.
Решение. Начальные значения токов:
л , U 200
I Juan — О’, „ан — I 1 нач — ш -------— 0.04 А.
2нач , нач 1яач 2ООО + ЗООО
Начальное значение ЭДС
£«=1^, = 0,04-3000 = 120 В.
Установившиеся значения токов и ЭДС:
U 200
' 3000-3000
— 2000 +-------
г2 3000 + 3000
!-h„r 200 - 0,057-2000
~L ~ 3000
- liy„r _ 200 - 0,057-2000
200
——- = 0,057 А;
3500
а: 0,0285- А;
3000 £,ст = 0.
0,0285 А;
и
Постоянная времени контура
т Цп+г) 0,1(3000 + 2000)
- ггг| +r2r + r,r “ 3000-3000 + 3000-2000 + 3000-2000
= 2,38 -10"5 с.
Длительность переходного процесса
<=4Т=9,6.-1(Г5 с.
159
4.4. ПОДКЛЮЧЕНИЕ КАТУШКИ С г, L К СЕТИ С СИНУСОИДАЛЬНЫМ НАПРЯЖЕНИЕМ
Уравнение для цепи рис. 4.4, д, составленное по второму закону Кирхгофа, имеет вид
е = ir — и. (4.26)
Выразив в (4.26) напряжение и через амплитудное значение и ЭДС е - через индуктивность и скорость изменения тока, получим дифференциальное уравнение
L di/dt 4- ir = U„ sin (cot + ф).
Решение дифференциального уравнения для свободною тока
L di-Jdt + = О
имеет внп
- Aept.
Показатель степени р определяют из характеристического уравнения Lp 4- г = 0:
г 1
р~ ~7.~ ~т
где T=L/r — постоянная времени пепи.
Ток в цепи в переходный период
1-1усг4-Ле-<'г. (4.27)
Принужденный ток в цепи после окончания переходного процесса определяют по закону Ома:
*уст = sin (tot 4- ф — ф), где
z = |/ г2 4- хД ф = arccos —.
Значение А определяю! из (4.27) с помощью перкою закона коммутации: при t = 0+ i(0+) = i(0_) = 0 и
0 = —— ап(ф — <р) 4- А,
160
a.)
Рис. 4 4. Зависимости i(t), iycT(t), iCB(i\ u(t) (б) при подключении иепи r, L (а) к сети с синусоидальным напряжением
от куда
U
А —-----— sin(x|/ - ф).
После подстановки А в (4.27) получим
17
i=-----sin(cot + ф - ф)---х1п(\|/-ф)е ‘-Т (4.28)
Из анализа (4.28) вытекает, что характер переходного процесса зависит от ф и ф. На рис. 4.4,6 изображены графики мгновенных значений напряжения, установившегося, свободного и полного токов при включении цепи рис. 4.4. а. Следует отметить, что если в момент включения при г = 0+. ф-ф = = 0, или ф = фто принужденный ток равен нулю, поэтому свободный ток ие возникает и в цепи после включения сразу наступает установившийся режим.
4.5. ОТКЛЮЧЕНИЕ КАТУШКИ С г, L ОТ СЕТИ С ПОСТОЯННЫМ НАПРЯЖЕНИЕМ
Допустим, что до отключения в цепи рис. 4.5, а был установившийся ток 1 = Ujr и энер1 ия магнитного поля катушки составляла
PL/2.
Казалось бы. после размыкания выключателя ток должен мгновенно прекратиться. Однако на основании nepsoi •> закона комму шции при t = 0+ ток сохраняет свое прежнее значение.
6 Электротехника 161
Рис. 4.5. Отключение цепи г, L (а) от сети постоянного тока: без разрядного резистора (с), е разрядным резистором (6); зависимости i(t) (в) и иДг) (г) при отключении цепи г, L с разрядным резистором
Возникает как будто несоответствие: цепь разомкнута, ток есть. В действительности прн размыкании выключателя нроис« холит следующее. Ток уменьшается, и в катушке индуктируется значительная ЭДС. При этом напряжение между контактами выключателя, равное сумме напряжения сети и ЭДС самоиндукции, пробивает воздушный промежуток между контактами - возникает электрическая дуга и электрическая цепь оказывается замкнутой. По мере увеличения расстояния между контактами сопротивление дуги возрастает, ток и ЭДС уменьшаются и цепь оказывается разомкнутой. За аремя переходного процесса энергия магнитного поля катушки выделяется в виде теплоты в электрической дуге и сопротивлении- sai ушки.
Переходный процесс в этом случае получается довольно сложным вследствие того, что сопротивление дуги нелинейное и изменяется во времени (ej о анализ выходит за рамки данного учебного пособия).
Отключение цепи с индуктивное i ью вызывает обгорание контактов размыкающего устройства н появление значительных ЭДС и напряжения на-выводах катушки, превышающих в несколько раз напряжение сети (это может привести к пробою изоляпин катушки).
Во избежание этого в силовых цепях, обладающих значительной индуктивностью (обмотки возбуждения генераторов и двигателей постоянного тока, синхронных двигателей, магнитных плит и т. п.), параллельно обмоткам включают разрядные резисторы (рис. 4.5,6).
В этом случае после отключения выключателя катушка индуктивности (г. £,) оказывается замкнутой на разрядное сопротивление гр. Ток в цепи будет убывать значительно медленнее. По этой причине значение возникающей ЭДС будет существенно меньше, чем без разрядного резистора, и возникшая слабая 162
дуга исчезает почти мгновенно. В последующих рассуждениях и выводах предполагается, что дуга между контактами не возникает и цепь размыкается мгновенно.
Уравнение цепи, составленное цо второму закону Кирхгофа, имеет вид
e = i(r + r„). (4.29)
Заменив е в (4.29), получим
Ldi/dt + i(r + гр) = 0. (4.30)
Решением дифференциального уравнения будет выражение i = Aepi. (4.31)
Из характеристического уравнения pL+ (г -|-Гр) = 0 определяют показа]ель степени р:
Подставив это выражение в (4.31), получим i - Ае~'‘т,
где Т— L] (г + гр) — постоянная времени цепи.
Значение А определяют из начальных условий иа основании первого закона коммутации: при t = 0+
i = = и A = U/r.
Выражение тока в цепи имеет вид
1 = — (4.32)
Г
Подставив в (4.29) значение i из (4.32), получим ЭДС е = — (г + гр) е-*/7- /нач (г + гр) е~г1т.
Напряжение иа выводах катушки равно напряжению на разрядном резисторе:
- ir _ г *-чт = / г e~tlT ик — ,гр — — 'ре ~ *нач’ р
В начальный момент при t=0+
«иач = + гр)> <4'33)
6* 163
ик,нач ~~ 1начгр- (4.34)
Из выражений (4.33) и (4.34) вытекает, что начальные значения енач и Wj-лач зависят от сопротивления разрядного резистора. При больших значениях гр онн MOiyi оказаться чрезмерно большими и опасными для изоляции установки.
Па рис. 4.5,в изображены графики /(/) и uK(i) катушки после отключения цепи для двух значений гр, гр > г'р.
На практике обычно выбирают гр в 4—8 раз больше собственного сопротивления обмотки индуктивной катушки:
гр = (4-8) г. (4.35)
Пример 4.2. Определить начальные значения ЭДС самоиндукции и напряжения на катушке при отключении цепи, изображенной на рис. 4.5,6, для двух значений гр. а) гр = 4г; б) гр=20г. Параметры цепи: г = 100 Ом. U — 400 В.
Решение. Начальное значение тока в катушке
/н„ = U/r = 400/100 = 4 А.
Начальные значения ЭДС.
а) Еиет = (г + гр) = 4 (100 + 4-100) = 2000 В;
Е\,нач ~ Лнчгр = 4- 400 = 1600 В;
б) Е110ч = lIW,(r + Гр) = 4(100 + 20-100) = 8400 В;
Ь'к.мч = /Н1Чгр = 4-20-100 = 8000 В.
4.6. ПЕРЕХОДНЫЙ ПРОЦЕСС В ЦЕПИ ПРИ ИЗМЕНЕНИИ ЕЕ ПАРАМЕТРОВ
Рассмотрим переходный процесс в цепн, вызванный изменением ее параметров, например изменением сопротивления в одном из участков цепн, изображенной на рис. 4.6, о.
До замыкання выключателя ток в цепи г _ и
После замыкания выключателя
Лег = U/r-
Тяким образом, при замыкании выключателя в цепи возникает переходный процесс, в течение которого ток изменяется ОТ /дач ДО /уст-
164
Рис. 4.6. Зависимости /(г), р(/) (о) при изменении параметров цепи г. L (й)
Уравнение цепи, составленное по второму закону Кирхгофа, имеет вид
Ldi/dt + ir = U. (4.36)
Решением уравнения без правой части (для свободного тока)
Ldic„/dt + itBr ~ О
будет выражение
iCB = Ае*.
Из характеристического уравнения Lp + г = 0 определяют показатель степени р:
г 1
Р ~ L Т
Общий ток в цепи
Z =муст 4-4е",/Г. (4.37)
где Z)CI - 1}СТ - U/г.
При Г = 0+
Послс подстановки А в (4.37) получим уравнение для тока в переходный период:
Подставив i из (4.38) в (4.36), получим выражение ЭДС
На рис- 4.6, б изображены графики i и е переходного процесса в цепи рис. 4.6, a
Пример 4.3. Определить начальное значение ЭДС е в индуктивности цепи, изображенной на рис, 4.6, я. при замыкании выключателя.
165
шунтирующего резистор rt. Параметры цепи: t = 1000 О.м, г, = = 4000 Ом, U = 200 В.
Решение. До замыкания выключателя ток в пепи
U 200
/=--------------------= 0,04 А.
r + rt 1000 + 4000
После замыкания выключателя ток должен сохранить прежнее значение при г —0(, тогда
0,04 А.
Из уравнения, составленного по второму закону Кирхюфа, определяем начальное значение ЭДС е:
е - ir - V;
при f =0t
e—Eai4 = 1начг- U -0,04-1000 - 200 =- - 160 В.
4.7. ПОДКЛЮЧЕНИЕ ЦЕПИ С ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫМИ РЕЗИСТИВНЫМ г И ЕМКОСТНЫМ С ЭЛЕМЕНТАМИ К СЕТИ С ПОСТОЯННЫМ НАПРЯЖЕНИЕМ
Допустим, что до включения цепи конденсатор был нс заряжен. После замыкания выключателя (рис, 4-7, а) конденсатор начнет заряжаться, в результате в проводах возникнет ток и между обкладками конденсатора появится напряжение ис.
Уравнение цепи, составленное по второму закону Кирхгофа, имеет вид
0 = ir + ис - V. (4.40)
Так как ток в цепи
i = dq/dt.
а заряд q = Сис, то
i = С duc/dl-
Подставив выражение тока г в (4.40), получим
Cr dujdt + ис = U. (4.41)
166
Рис. 4.7 Зависимости i(f), urff) (б) при подключении иепи г, С (а) к сети с постоянным напряжением
В эюм случае, так же как и при анализе переходных процессов в цепях с индуктивностью, напряжение на емкости в переходный период состоит из двух слагаемых:
«С = «С уст + «Сев, (4.42)
где «с-уст - напряжение на емкости после окончания переходного процесса; иСсв - свободная составляющая напряжения, которая после окончания переходною процесса обращается в нуль.
Дифференциальное уравнение (4.41) без правой части
Cr duecB/dt + uCct = O
имеет решение
“с.. = 4<-"
(4-43)
Показатель степени р является корнем характеристического уравнения Сгр +1 = 0:
1 1
р - гс т-
где Т— гС ~ постоянная времени цепи, состоящей из последовательно включенных г и С.
Подставив в (4.43) р = — 1/7^ получим
цСсв = Ле-,/т
Напряжение на емкости
Uc-Uc,„ + Ae-,rr-
После окончания переходного процесса (заряда конденсатора) ток в цепи прекратится и, как вытекаег из выражения (4.40), напряжение на емкости окажется равным напряжению сети:
Ис уст = V-
Значение А определяют с помощью второго закона коммутации: при t = 0+ ur = 0.
167
Таким образом, напряжение на емкости в переходный п ериод
ис — U - Ue-< г. (4.44)
Подставив ис в (4.40), получим выражение для тока
И
(= - с-'Т (4.45)
г
На рис. 4.7,6 изображены i рафики напряжения на емкости ис и тока I при включении цепи рис. 4.7, а.
Пример 4.4. Определить постоянную времени и длительность, переходного процесса при включении цепи, изображенной на рис. 4.7,а. Параметры цепи: г- 10000 Ом, С = 80 мкФ.
Решение. Постоянная времени цепи
Т= гС - 10000-80-IO"6 - 0,8 с.
Длительность переходного процесса г- 47- 4-0,8 -3,2 с.
4.8. РАЗРЯД КОНДЕНСАТОРА С НА РЕЗИСТИВНЫЙ ЭЛЕМЕНТ г
После размыкания выключателя (рис 4.8, л) напряжение вызовет в цепи ток i и конденсатор начнет разряжаться. Энергия электрического поля за время разряда преобразуется в теплоту в сопротивлении г. Уравнение цепи, составленное по второму закону Кирхгофа, имеет вид
0 = ис — 1Г- (4.46)
Выразип в (4.46) ток через емкость и напряжение на cmkoci и, получим
так как i = - С du^/dt (рис. 4.8, а).
Решением дифференциального уравнения будет выражение
ис — Aefl
Значение р определяют нз характеристического уравнения Ci-p + + 1—0'
1 1
где Т=гС - постоянная времени цепи.
168
Рис. 4.8. Зависимости i(t), u^t} (6) при отключении цепи г. С (а) от сети с постоянным напряжением
и) 0 S} *
Значение А определяют с помощью второго закона коммутации: при t = 0+ = U и
А - U.
Таким образом, напряжение на емкости при разряде конденсатора = (4.47)
Уравнение для юка в цепи получают после подстановки ис в (4.46): ( = — е-'т. (4.48)
На рис. 4.8,6 изображены графики тока в цепи и напряжение на емкосчи при разряде конденсатора.
4.9. РАЗРЯД КОНДЕНСАТОРА НА КАТУШКУ С г, L
Допустим, чю конденсатор С (рнс. 4.9,о) был включен в сеть постоянного тока и, следовательно, заряжен до напряжения сети U.
После переключения выключателя из положения а в положение б конденсатор окажется замкнутым на цепочку г, L. Под действием напряжения на конденсаторе ис в цепи возникнет ток и конденсатор начнет разряжаться Уравнение пепи, составленное по второму закону Кирхгофа, имеет вид
f-ir ис. (4.49)
Выразив в (4 49) е через ток и индуктивность е = - L difdt.
а ис — через ток и емкость „ . < dt if.,
" -СЧГ- -е=-т]-
получим
di 1 f
-------ir---------I dt ~ 0.
dt C J
169
Рис. 4.9. Зависимости i(t) при апериодическом (б) и колебательном (в) разрядах конденсатора на сопротивление г и индуктивность L цепи (я)
Взяв производную от левой и правой частей уравнения, получим дифференциальное уравнение второго порядка без правой части
d2i г di ।
dt2 + L dt + CL
(4.50)
Решением дифференциального уравнения являеюя выражение i=AleJ" + A2e'’1‘. (4.51)
Корнями характеристического уравнения р2 = ® будут
i) ~-CL
Обозначив r/2L = p и 1/LC = <0q, получим
Pi.2= -₽±|/р2'«>о= - Р±У. где y = l//pr^toj.
Значения At и А2 определяют из начальных условий с помощью первого и второго законов коммутации.
По первому закону коммутации при t=04 i=0 и из (4.51) вытекает,
А1——А2. (4.52)
По второму закону коммутации при г=0г И( =и.
Таким образом, в первый момент после замыкания цепи, как следует из (4-49), ЭДС равна - U, так кая ir = 0.
е = - L di/dt — -V,
170
откуда
Л/Л = U/L.
Производная тока по времени из выражения (4.51) будет равна di/dt = А1р,ер,‘ 4- 42p2ePi' = L'/L.
При t - 0+
diPi + А2р2 = Wf*
(4.53)
Из совместного решения (4.52) и (4.53) получим
U
*! = —-------~А2.
ЦР1 ~ Pi)
Выразим Pj и р2 через р и у:
L U
А. =----. А2 =---------.
' 2Ly 2 2Ly
Следовательно, выражение для тока в переходный период будет иметь вид
------et>.<--------
2Ly 2Ly
(4.54)
Характер переходно! о процесса зависит от соотношения параметров г, L, С цепи и определяется корнями характеристического уравнения.
При l/CL<(r/2L)2 корни будут действительными:
Pi-----Р + 7, Р2 = ₽-7
и переходный процесс будет иметь апериодический характер: г — „( - I* * у!« _ е " Ш + Y) ’ , 4.
2Lye 2Ly '
Графики тока для этого случая изображены на рис. 4.9,6.
При (r/2L)2 < l/LC корни характеристического уравнения оказываются комплексными сопряженными:
Pj--|3 + /co, р2=-Р-М
где р - r/2L, w = ]/l/LC (r/2Q2.
Значения .4, и А2 в этом случае будут равны и V а. ----------------------; а2 = --—.
2ju)L 2ую£
171
Подставив значения р{, р2 и Л,, Л2 в (4.51), получим
i = . г^( Р гъ>> __ “j"» '1-—_feJ“' — е”e~f' =
2faLL j 2/wLl
—-------e p,2/sin<at = -sinare a‘.
2J<dL (»L
(4.55)
На рис. 4.9,в изображен график i(0- Ток изменяется по закону, представляющему собой произведение синусоиды с амплитудой U/coL на показательную функцию. В идеальном случае, когда г = 0, возникнут синусоидальные колебания с неизменной амплитудой.
Действительно, при г = 0. |3=0, ш=о0 ток
U i------sin<ool,
cj0L
(4 56l
а частота и период незатухающих колебаний
соо —Т-= 1//= 2п/о?0
На рис. 4.9,в пунктирной линией изображен график незатухающих колебаний.
4.10. ЭЛЕКТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ МЕХАНИЧЕСКИХ И ДРУГИХ СИСТЕМ
Разработка новых сложных механических, гидравлических и других систем связана со значительными трудностями, состоящими в том, что нет гарантии получения требуемых расчетных величин и нет возможности провести экспериментальные исследования системы, поскольку оиа не выполнена в натуре. Поэтому при разработке той или иной системы прибегаю! к созданию физической модели системы. Результаты исследования модели позволяют выяви 1ь действительные характеристики и дать рекомендации для корректировки параметров системы с целью получения оптимальных характеристик. Наиболее простыми и универсальными моделями для исследования как стационарных, так и переходных режимов механических и других систем являются электрические модели, представляющие собой электрические цепи с резистивными, емкостными и индуктивными элементами, в которых аналогами исследуемых величин являются ток, напряжение, индуктивность и емкость. Выполнение электрической модели и проведение ее исследования нс связано с какими-либо техническими трудностями и не требует значительных затрат. Создание же механи-
ческой модели связано со значительными трудностями и капитальными затратами.
Электрическая модель будет соответствовать реальной системе, если математическое описание модели и системы одинаковое.
Рассмотрим электрическую модель механической системы, изображенной на рис. 4.10, а. Механическая
Рис. 4.10. Механическая система (а) и ее элек1рическая модель (б)
система состоит нз тела 2 с массой т, пружины 1 и воздушного демпфера 5, состоящего из поршня, расположенною в цилиндре. Допустим, тело 2 удерживалось в неподвижном состоянии внешней силой, когда пружина I была ненапряженной. После удаления внешней силы под действием силы тяжести система придет в движение. Тело начнет опускаться, пружина — растягиваться, появится демпфирующая сила демпфера. Возникнет переходный процесс, который постепенно затухнет и система снова окажется в неподвижном состоянии. Электрической моделью рассмотренной механической системы является электрическая цепь с резистивным, индуктивным и емкостным элементами, изображенная на рис. 4.10, 6. так как дифференциальное уравнение переходного процесса этой цепи при подключении ее к источнику с постоянным напряжением аналогично дифференциальному уравнению переходного процесса механической системы.
Уравнение движения механической системы имеет вид
F - F, - F2 = т dv/dt.
где F — сила тяжести массы; F, = ktx - упругая сила пружины; F2 = к2с — сила, развиваемая демпфером; х - перемещение тела от начального положения; v — скорость тела.
Таким образом, для механической системы
F = kJx + k2v+m dv/dt. (4.57)
Уравнение переходного процесса электрический цепи
С' = мс 4- иг 4- uL— — j i dt 4- ir 4- L di/dt. (4.58)
Из сравнения уравнений (4.57) и (4.58) следует, что напряжение U, приложенное к цепи, является аналогом силы F, приложенной к механической системе, напряжение ис на емкости —
173
аналогом силы, развиваемой пружиной, ток i цепи — аналогом скорости v, иг — аналогом силы, возникающей в демпфере, индуктивность L— аналогом массы te.ia т.
Таким образом, благодаря единству уравнений электрической цепи и механической системы исследование явлений в механической системе может быть произведено с помощью исследования переходных процессов электрической цепи. Характер переходного процесса механической системы, так же как и ее электрической модели, может быть апериодическим или колебательным. В механической системе он определяется соотношением массы тела, упругости пружины и демпфирующей силы демпфера, в электрической модели, как это доказано в § 4.9, — соотношением параметров цепи г, L, С.
Результаты решения уравнения электрической цепи будут отображать характер и длшельность переходного процесса механической системы, если соблюдены соответствующие соотношения между параметрами механической системы и ее моделью — электрической цепью. Соотношения устанавливаются посредством масштабных коэффициентов. Значения и размерность масштабных коэффициентов можно установить, если разделить почленно уравнение (4.58) на уравнение (4.57).
В результате получим
^=[Мг]В/Н;
£ = [««mJ Ом мДН • с) А с/м = В/Н;
Г 1 _ Г L di/dt "I _ |_ т dv/dt J [ m dvjdt J
= ["J"*,*] гн м/(Н с) А • сг/(с м) = В/Н.
Выразив в уравнении (4.57) соответствующие величины через масштабные коэффициенты, получим уравнение электрической цени с учетом масштабных коэффициентов
U _ ис ri Ldi/dt
mr mF mk2m„ '
Глава пятая
ПЕРИОДИЧЕСКИЕ НЕСИНУСОИДАЛЬНЫЕ ЭДС, ТОКИ И НАПРЯЖЕНИЯ
В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ
5.1. ПРИЧИНЫ ВОЗНИКНОВЕНИЯ ПЕРИОДИЧЕСКИХ НЕСИНУСОИДАЛЬНЫХ ТОКОВ И НАПРЯЖЕНИЙ
В предыдущих главах был рассмотрен расчет и анализ электрических цепей синусоидального тока. Однако иа практике прн генерировании, трансформации, распределении и потреблении электроэнергии возникают искажения формы синусоидальных ЭДС, напряжении и токов.
Рассмотрим основные причины возникновения периодических несннусоидальных токов и напряжений.
Несинусоидальные токи в цепях возникают при синусоидальных ЭДС и напряжениях источников электрической энергии, если цепи содержат нелинейные элементы. Так, в катушке с ферромагнитным магнитопроводом, которая является нелинейным элементом, при синусоидальном напряжении сети ток несниусондальный. Подобное явление наблюдается в промышленных городских сетях, когда в качестве осветительных приборов используются люминесцентные лампы, имеющие нелинейные вольт-амперные характеристики. На рнс. 5.1 показана схема включения люминесцентной лампы Л в сеть синусоидального напряжения с ограничивающим дросселем L, работающим в лниейиом режиме, а также приведены графики юка и напряжения иа лампе.
Нелинейные элементы широко используются в электрических цепях автоматики, управления, релейной зашиты и т. д. Зги нелинейные элементы (стабилизаторы напряжения, умножители и делители частоты, магнитные усилители и т. п.) приводят к искажению формы кривых напряжения или тока.
Известно, что постоянный ток в энергетической электронике получают преобразованием переменного синусоидальною юка с помощью выпрямителей, в которых используюгся нелинейные элементы — диоды (полупроводниковые, электронные и ионные). Естественно, что в таких электрических цепях возникают как иесииусоидальиые токи, iax и несинусоидальные напряжения. На рис. 5.2 приведены временные диаграммы напряжений и токов однонолупериодного, двухполупериодиого и грехфазного выпрямителей, работающих иа резистивную нагрузку.
175
Рис. 5.1. Схемы включения и временные диаграммы тока и напряжения люминесцентной лампы
Рис. 5.2. Временные диаграммы напряжений и токов в нагрузке однонолупериодного (а), двухпо-лупериодного (б) и трехфазною (в) выпрямителей
В настоящее время широкое распространение получила импульсная техника, т. е. отрасль радиоэлектроники, в которой для решения определенных задач использую! импульсные устройства. Режим работы подобных устройств характеризуется чередованием времени работы и пауз. Формы импульсов напряжении в импульсной технике весьма разнообразны. Основное распространение получили импульсы треугольной, прямоугольной, трапецеидальной формы н др. (рис. 5.3, а — в). В связи с этим появилось значительное разнообразие схем импульсных генераторов несипусоидальных колебаний. Такие генераторы называю юя релаксационными, т. е. их форма колебания выходных сигналов в значительной степени сличается от синусоиды
Например, к релаксационным юнераторам относится генератор пилообразного напряжения. Пилообразные импульсы напряжения (рис. 5.4) используются в устройствах сравнения, для горизонтальной развертки электронного луча в электронно-лучевой трубке, в радиолокационной и радноизмернтельной технике и т. д. Для формирования прямоугольных импульсов напряжения, широко применяемых в различных схемах импульсной и вычислительной техники, используююя релаксационные генераторы — мультивибраторы.
Появление в электрических цепях несинусоидальных напряжений и токов может привести к весьма нежелательным последствиям. Несинусоидальные токи вызывают дополнительные потери мощности, ухудшают характеристики двигателей, создают большие помехи' в линиях связи, каналах телемеханики и т. д. Заметим, что допустимое содержание i ар-176
Рис. 5.3. Формы импульсов напряжений, используемых в импульсной технике:
а — треугольного; б — прямоугольного: в - трапецеидального
'[ДАЛ t
Рис. 5.4. Временная диаграмма пилообразного напряжения
моник оценивается коэффициентом гармоник кг (см. с. 181). Так, согласно ГОСТ 13109-67 (нормы качества электрической энергии) для промышленных сетей кгС 5%, т. е. в этом случае кривая напряжения иа экране осциллографа визуально не отличается от синусоиды и это напряжение длительно допустимо на выводах любого приемника электрической энергии
5.2. СПОСОБЫ ПРЕДСТАВЛЕНИЯ ПЕРИОДИЧЕСКИХ НЕСИНУСОИДАЛЬНЫХ ВЕЛИЧИН
Периодические песинусоидальные величины могут быть представлены временными диаграммами, тригонометрическим рядом Фурье, а также эквивалентными синусоидами. Наиболее наглядными, дающими полное представление о иесииусоидаль-нон величине являются временные диаграммы, т. е. графики зависимости мгновенных значений от времени (рис. 5.2-5.4).
Несинусоидальные ЭДС, токи и напряжения, с которыми приходится встречаться в электротехнике и промышленной электронике, являются периодическими функциями, удовлетворяющими условиям Дирихле и, следовательно, могут быть представлены тригонометрическим рядом Фурье:
/(cot) Ло + /4Imsin(cot + \|/2) + 42msin(2cot | \j/2) f ... +-
+ 4lmsin(tal + i|zt)+ ....
где Лс — постоянная составляющая; Л(М$т(cot + 4*1) — основная или первая гармоника, частота которой со = 2п/Т равна
177
частоте исследуемой несинусоидальиой величины; Лкаг$ш(к<ш + + Фь) - высшие к-е гармоники; и — амплитуды и начальные фазы к-х гармоник.
Тригонометрический ряд может быть представлен как в виде суммы синусов (синусный ряд), так и суммы косинусов (косинусный ряд) гармонических составляющих.
В зависимости от характера реальной кривой тригонометрический ряд может ие содержать постоянной составляющей, четных или нечетных высших гармоник, а также начальных фаз. Например, тригонометрические ряды Фурье некоторых иесинусоидальиых напряжений имеют шгдг напряжение иа нагрузке при одиополупериодном выпрямлении (см. рис. 5.2, а)
и(г) = —J + cosojf — cos2iat ——cos4<nt + ...V
напряжение на нагрузке при двухполупериодцом выпрямлении (см. рис. 5.2,6)
2L7 / 2 2 2 \
u(t) —----114—cos2coi-------cos4o)i+-—со&6ом — ... I;
л \ 3 15 35 /
напряжение па нагрузке при трехфазном выпрямлении (см. рис. 5.2, в)
U(t)= 1 + —-COS 6<Dt - 2_cos12ci)Z +
'' it 35 143
2 \
4- —T—COS (8(or - ... 1;
323 /’
напряжение треугольной формы (см. рис. 5.3, а)
8L' /11 1
n(f)=---=— sincot- sin3c£l + —sin5cot-------яп7сш+ ..
4' я2 \ 9 25 49
напряжение прямоугольной формы (см. рис. 53,б)
w(t) =--s|n Qrf + _L s;n 3iot 4- sin 5(ot 4- —sin 7(&l + ...
В практических расчетах цепей с иесииусоидальными. ЭДС, токами н напряжениями их мгновенные значения Приближенно 178
7,5 1,25
G>75 0j5 0,25
Ош 5ш 5ш 7ш 9ш ш
Рис, 5.5, Диаграмма амплитудно-частотного cneKtpa
О ш -Зш 5ш 7ш Эш ш
Рис. 5,6. Диаграмма фазоча-
стотною спектра
отображают конечным рядом Фурье (3 — 7 членов ряда). Число членов ряда определяется необходимой точностью расчета.
Характеристика иесннусоидальных величин, представленных рядом Фурье, может быть осуществлена графически с помощью диаграмм амплитудно-частотного (рис. 5.5) и фазочастотного (рис. 5.6) спектров. Данные диаграммы характеризуют форму несинусоидальных кривых, причем первая диаграмма показывает спектральный состав по амплитудам, т. е. представляет зависимость амплитуд гармоник в относительных единицах от частоты, вторая диаграмма выражает зависимость иачалыпях фаз гармоник от частоты.
Периодические несинусоидальные ЭДС, напряжения и токи могут быть представлены так же эквивалентными синусоидами (см. § 5.5).
S.3. ОСНОВНЫЕ СООТНОШЕНИЯ для НЕСИНУСОИДАЛЬНЫХ ВЕЛИЧИН
5. 3.1. Максимальные значения несияусондальных величт. Под максимальными значениями несинусоидальных ЭДС, токов или напряжений подразумевается их наибольшее мгновенное значение (см. рис. 5.2, 5.3).
5. 3.2. Действующие значения несннусоядальных величин. Под действующими значениями иесииусоидальиых ЭДС, токов и напряжений, как и для синусоидального тока, понимается их среднеквадратичное значение за период. Так, действующее значение песинусоидальпого тока
/ = Утр'3
(5.1)
179
где ;(t| = + t,„ sin (юг + Ф i)'+ f 2. sin (2<ot + ф2| + + />™sin(fa»t + 'W-
После интегрирования получаем
где 12,1К - действующие значения токов первой, второй, /с-й гармоник, т. е.
Л-М/2; =
Следовательно, действующее значение несинусоидального тока практически определяется как корень квадратный из суммы квадратов постоянной составляющей и действующих значений всех последующих гармоник. Аналогично действующие значения ЭДС и напряжений будут
е=)/е5 + е?+е’ + ...Е,2:
- и = /uj + и; + (7= +
Действующие значения несинусоидальных напряжений и токов измеряются приборами электродинамической, электромагнитной и электростатической систем.
Пример 5.1. Определить действующее значение косинусоидальною напряжения u{t) = 100 + 80яо (u»i + 30°) + 60sin (3tor +20") + + 50sin (5toi +45°).
Решение. V = + Uf + Vj + U2.~
5. 3.3. Средние значения вееииусондальных величин. Существуют следующие лонж ня средних значений несинусоидальных гоков, ЭДС и напряжений.
Среднее значение несинусоидального тока за период, коюрое равно его постоянной составляющей,
Среднее значение по модулю нссинусоидального тока за период ^ч>. мод = ~ J U (О I dt.
о
Таким же образом может быгь осуществлена запись средних значений несннусоидальных ЭДС, напряжений.
180
Средние значения несинусоидальных напряжений и токов измеряются магнитозпектрнческими приборами без выпрямителя, средние значения по модулю — магнитоэлектрическими приборами с выпрями-1елем,
5. 3.4. Коэффициенты, характеризующие иесинусоидальные величины. Формы периодических несинусоидальных кривых могут характеризовать следующие коэффициенты (в скобках приведены значения коэффициентов для синусоидальных токов).
1, Коэффициент амплитуды ка = !т/Цка = 3,41).
2. Коэффициент формы к^ = I/icpiW3(k^= I.U)
3, Коэффициент гармоник кТ = ^11 + /з + . ..Щ (кг — 0)
4 Коэффициент среднего значения к^ = Icp/!m tk^ — O)
5 Коэффициент искажения кя = /,/)//* 4- f2 + J22 + ••(^li-
ft, Коэффициент пульсаций ka = (см. § 5.7),
Коэффициенты к„, кф характеризуют форму- периодических кривых, т, е, их отличие от синусоиды, и используются в силовой электротехнике, радиотехнике и т л. Коэффициенты к, и ки являются показателями качества электрической энергии энергосистем. В энергетической электронике при оценке результатов преобразования переменного синусоидального тока в постоянный используются коэффициенты кер и кп.
5.4. ПОНЯТИЕ О РАСЧЕТЕ АКТИВНОЙ И ПОЛНОЙ МОЩНОСТИ ЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ ПРИ НЕСИНУСОИДАЛЬНЫХ НАПРЯЖЕНИЯХ И ТОКАХ
Для электрических цепей при несинусондальных напряжениях н токах мгновенная мощность определяется как р(г) = = n(Z)i(t). Активная мощность, как и для синусоидального тока. есть среднее значение мгновенной мощности за период:
г =ур(Ол = у J" I') *(')* о о
После подстановки значений и(г) и Цг), имеющих одинаковый гармонический состав, получим
Р= U010 + l^/jcostpj + ... + cos<pfc,
< де L\, !к - действующие значения напряжения и тока А-й гармоники; — угол сдвига фаз между напряжением и током к-й гармоники:
<Рь = - Фь-
Следовательно, активная мощность при несинусондальных напряжениях и токах равна сумме активной мощности по
181
стоянных составляющих и активных мощностей всех гармонических составляющих тока и напряжения.
Полная мощность
S = UI,
где U н I — действующие значения песипусоидальных напряжения и тока.
Пример 5.2. Определить активную и полную мощности линейной электрической цепи при несинусоидальных напряжении и(г) и токе
и (г) = 30 -*• 25,9 sin (сог — 1Г40') + 6 sin (3cot + 53°5(У);
i(i) - 10 + 3 sin (at - 40°) + O,9|/2sin(3cor + 125°).
Решение. Активная мощное 1ь
it = U0Il] + UJi С08ф, + L'3/3C0S(p3 =
25J 3
= 30.10 + —~—ecs [ - 1ГЧО' - ( - 40/] + |/2
6 0,91/2
+ ^ cos(53L50'- 125°) g 336 Вт.
/2 [Д
Полная мощность
S = VI.
Действующие значения напряжения и тока
Следовательно, S = 35,3-10.3 = 363.6 В А.
5.S. АНАЛИЗ ЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ ПРИ НЕСИНУСОИДАЛЬНОМ НАПРЯЖЕНИИ ИСТОЧНИКА ПИТАНИЯ
Известно, что к линейным электрическим цепям применим метод наложения. В соответс1нии с этим запись периодического несипусоидалыюго напряжения источника энергии рядом Фурье дает возможность представить его несколькими последовательно соединенными и одновременно действующими источниками ЭДС нли напряжений и осуществлять анализ электрического состояния цепей на основе метода наложения.
182
ei~Emi sinwi
e2~^m2 stn^coi
Рис. 5.7 Электрическая цепь с источником несинусоидальиой ЭДС (а) и ее схема замещения (б)
Рис. 5 8. Временные диаграммы ЭДС источников
Рис. 5 9, Частотные характеристики индуктивного И 6МКОС1 НО! о элементов
Например, рассмотрим электрическую цепь рис. 5.7,а, в которой к источнику с несииусоидальной ЭДС
e(t) = Ео + Е)т sin о»? + E2Msin2e>r
подключены последовательно резнстивпый, индуктивный и емкостный элементы.
С учетом вышесказанного в рассматриваемой электрической цепи ЭДС e(t) может быть представлена тремя ЭДС (рис. 5.7,6). Графики E0(t), а также e2(t) и e2(t) изображены на рис. 5.8. В соответствии с методом наложения данная электрическая цепь рассчитывается как цепь, в которой действуют три независимые ЭДС. При этом определение тока и напряжений от ЭДС £0 осуществляется, как при расчете цепей постоянного тока, a oi ЭДС е, и е, - как при расчете цепей синусоидального тока. При расчете цепи от ЭДС е2 и ЭДС более высших гармоник необходимо производить пересчет значений xL и хс, так как они зависяг от часюты (рис. 5.9).
В анализируемой электрической цепи постоянная составляющая ЭДС Ео не вызывает установившегося тока, так как сопротивление емкостного элемента при постоянном токе рав
183
но бесконечности (рис. 5.9). Определяем ток и напряжение в электрической цепи с ЭДС et и е2.
Для первой гармоники
Л- = —— = ._________*_ - - , ; Ф, = arclg----------.
-i |/r= + (mt. - 1/mC)2 '
В общем случае <pk = — ф4|-, тогда = фЬе — 9ь а для
первой гармоники фи = к|г1е - фр
Для второй гармоники i2 =/2msin (2cot + <р2), где
, Ег» . laL-l/laC
^2|Я---------> =т . <02 — arctg ,
2 г |/r2 +(2o>L- 1/2аС)2 Г
'I'J! ~ Ф2. - Ч>2-
При этом ток цепи i —10 + + 12 и так как 10 = 0, то i — = 6 4- i2, т. е. i(t) = Iim sin (юг + ф,) + I2m sin (2о: + ф2)-Действующее значение тока цепи
; = ]/ПЗ\77^¥ И\у5/
Напряжение wr резистивного элемента совпадает по фазе с током пепи и в общем случае
иг = Vo, + «ir + wir, а так как Lr0, = 70г = 0, то м, = и1г + u2r, т. е.
“.(О - sin (mt + <h)+ l'j„sin(2mt + v|t=),
где и^-Ц-г; V2„ = l2^-.
Аналогично могут быть определены значения uL н ис: °t(0 = JlmXLsin(Of -b'I'i +я/2) 4- + ^2 + л/2);
“с(0= (юг 4- i|fj - я/2) + I2nt X-sin (2d>z + ф2 - л/2).
Определение гармонических составляющих токов /, и i2, а также напряжений uF, uL и ис можно также осуществить с использованием комплексных чисел.
184
Пример 5.3. Несинусоидальная ЭДС e(t) линейной электрической цепи рис. 5.7, а изменяется по закону е(0 = 200 + 180 sin («г -— 30s) + 120sin 3cot. Параметры цепи: г = 6 Ом, х^= o>L = 2 Ом, хс = — 1/ооС = 18 Ом. Определить мгновенное, действующее значение тока з цепи и действующее значение напряжения на участке цепи ab.
Решение. По отношению к постоянной составляющей ЭДС Ео = 200 В сопротивление конденсатора равно бесконечности, т е. хс — = 1/(оС = 1/0-С = со. Следовательно, постоянная составляющая тока 70=0
Расчет первой гармоники:
полное сопротивление цепи
z = |/r2 +(O)L- 1/wC)2 = j/б2 Ч- (2 - 18)2 = 17Ом;
уюл сдвита фаз между ЭДС и юком
aL-1/шС
ср, = arctg - = — 69е20';
так как cpj = ф£, — Фк» го
Ф1. = Ф1г-Фг = — 30 —( — 69"2(У) = 39п2О';
амплитуда и действующее значение первой гармоники тока
Е-~ = 180 =10,5 Л; /,=
17 |/2
М 75 Л;
мгновенное значение тока
i, = 10,5 sin (см + 39°20/);
действующее значение напряжения на участке ab
Расчет для третьей гармоники’ полное сопротивление цепи
z3 = |/r2 + (3wL- 1/ЗсоС)3
т. е. для данной гармоники наблюдается резонанс напряжений, а следовательно, угол сдвига фаз между ЭДС е3 и током
3oL — i/3cjC
Ф3 = arctg---------------= 0;
амплитуда н действующее значение тока
Е. 120 Iin 20
= -— = 20 А; 73=^- = —
-з 6 |/2 |/2
185
мгновенное значение тока
i3 = 20 sin Зоя;
• действующее значение напряжения на участке ab
С,.,3 - 'i V'2 ' (3“Ц! - 14.3 /б2 + 62 - 121,3 В.
. Расчет общего тока: мгновенное значение тока в цепи
|(г) = 10,5 sin(at + 39°20/) + 20sin3cjt;
действующие значения тока в цепи и напряжения на участке ab
I = ]/Г‘ + = 1/7.S2 + 14.32 = 16,1 А;
и.б “ V't'J-i * V2.n ~ |/47,2! + 121,32 - 130.1 В.
В ряде случаев при проведении практических расчетов периодические иесинусоидальные ЭДС и напряжения можно* представить эквивалентными синусоидами: так, при иАученнв^ нелинейной электрической леей, т. е. цепи, содержащей катушку? с ферромагнитным магнитопроводом (см. гл. 6), песипусоит дальный ток заменяется эквивалентной синусоидой. Подобна» замена осуществляется так, чтобы действующее значение экга| валентной синусоиды ЭДС или напряжения равнялось дейЗ ствующему значению иесинусоидальиой величины. л
При определении, например, действующего значения эквивалентной синусоиды напряжения иж путем обычного интегрирования по формуле, аналогичной (5.1), ее амплитудное значение
и„ = ]/2У„.
Мгновенное значение эквивалентной синусоиды напряжения «я = Сэюп sin cot,
где со = 2х/Т.
Расчет цепи ведется так же, как и цепей синусоидального тока, т. е. ток в цепи
Активная мощность цепи.
Р = U,К1Ж COS фзк..
где cos фэ> = r/z.
186
5.6. ВЛИЯНИЕ РЕЗИСТИВНОГО, ИНДУКТИВНОГО И ЕМКОСТНОГО ЭЛЕМЕНТОВ ЦЕПИ НА ФОРМУ КРИВОЙ ТОКА. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
Предположим, что в электрических цепях рис. 5.10, а—в несинусоидальное напряжение u(t) содержит основную и высшие гармонические составляющие. При резистивной нагрузке (рис. 5 10, а) токи всех гармоник совпадают по фазе с соответствующими гармониками напряжений и форма кривой иесинусои-дального тока аналогична форме кривой напряжения u(t).
В цепи рис. 5.10,6 амплитуда тока основной гармоники определяется как Ilm — Ulm/a>L. а амплитуды токов всех последующих гармонических составляющих Itm = Ukn/k(oL.
Так как сопротивление индуктивного элемента увеличивается с переходом к высшим гармоникам, то амплитуда каждой гармоники, тока будет уменьшаться обратно пропорционально порядку гармоники и высшие гармоники тока будут проявляться в мепьшей степени в общей кривой тока. Таким образом, кривая тока меньше отличается от синусоиды, чем кривая напряжения. Аналогично в цепи рис. 5.10,в амплитуды токов основной и высших гармоник определяются как
Ikm= w’c'
Так как сопротивление емкостного элемента уменьшается с переходом к высшим гармоникам, то амплитуды гармоник юка буду! увеличиваться пропорционально порядку гармоники, форма кривой тока будет искажаться еще больше в сравнении с кривой напряжения.
Поскольку с ростом частоты сопротивление индуктивного элемента увеличивается, а емкостного уменьшается, в электрической цепи рис. 5.7, а может возникнуть резонанс напряжений либо для первой, либо для одной из высших гармоник. Условие возникновения резонанса напряжений для некоторой fc-iap-моники
k(oL = 1 jkasC.
Рис. 5.10 Схема электрических цепей к рассмотрению влияния их элементов на форму кривой тока
187
При этом амплитуда тока резонансной гармоники может значительно превысить амплитуды тока всех остальных гармоник (см. пример 5.3), а на участках электрической цепи как с индуктивным, так н с емкостным элементом могут возникнуть перенапряжения. В электрических цепях несннусоидального тока при параллельном соединении катушки и конденсатора возможно возникновение резонанса тока либо для первой, либо для одной из высших гармоник с присущими данному резонансу явленпями.
5.7. понятие ОБ ЭЛЕКТРИЧЕСКИХ ФИЛЬТРАХ
Как следует из временных диаграмм, приведенных на рис. 5.2, а —в. выпрямленные напряжения имеют пульсации. Данные напряжения содержат как постоянную, так и гармонические составляющие. Однако амплитуды гармонических составляющих достаточно быстро уменьшаются с увеличением номера гармоники. Поэтому при анализе выпрямительных устройств часто можно ограничиться paccMoi рением лишь одной основной гармоники. В связи с этим пульсации выпрямленного напряжения оценивают коэффициентом пульсации кп, который представляет собой отношение амплитуды основной гармоники к постоянной составляющей U*, т. е.
к. = VrJUa.
Коэффициент пульсаций зависит от качества выпрямительной схемы. Чем меньше Лп, тем форма кривой выпрямленного напряжения ближе к горизонтальной линии. Для однополупе-риодной схемы выпрямителя = 1,57, для двухполупериодной схемы fcn = 0,67, для трехфазной схемы кя - 0,057. Наличие пульсаций выпрямленного напряжения ухудшает работу потребителей. С целью их снижения применяются сглаживающие фильтры, которые включаются между выпрямительной схемой и потребителем Сглаживающим фильтром называется устройство, предназначенное для уменьшения переменной составляющей выпрямленного напряжения. Эффективность действия, сглаживающего фильтра характеризуется коэффициентом сглаживания fcc, т. е. отношением коэффициента пульсаций на входе фильтра fcnBI к коэффициент пульсаций на его выходе
^П.3х/^П,ВЫК'
* Иногда рассчитывают как отношение удвоенной амплитуды (размаха пульсаций) к постоянной составляющей.
188
Рис. 5.11. Схемы электрических сглаживающих фильтров: а — емкостный; 6 — индуктивный; в — Г-образный
Рассмотрим некоторые виды сглаживающих фильтров (рис. 5.11, а-в).
Емкостный фильтр (конденсатор) по рис. 5.11,я включается параллельно нагрузке. Он шунтирует нагрузку по переменной составляющей тока.
Необходимо, чтобы емкостное сопротивление фильтра для основной гармоники о0 Г пульсаций было много меньше сопротивления нагрузки, т. е.
1
Тогда параллельное подключение конденсатора к нагрузке снижает переменные составляющие напряжения на ней, тем самым снижается коэффициент пульсаций выпрямленного напряжения.
Индуктивный фильтр (рнс. 5.11,6) включается последовательно с нагрузкой и представляет собой большое сопротивление для переменной составляющей тока. Для удовлетворительного сглаживания необходимо выполнить условие
*><»,.1ф » ги.
При таком условии значительно уменьшаются гармонические составляющие тока i(t) и коэффициент пульсаций напряжения на нагрузке существенно снижается. При малом значении Гф постоянная составляющая тока Jo на нагрузке изменяется незначительно.
Для лучшего сглаживания на практике используются более сложные фильтры, например Г-образный LC-фильтр (рис. 5.11, в). При создании такого фильтра необходимо, чтобы
<ас 7-ф»г„ и 1/ш0,,Сф«г,.
Влияние элементов этого фильтра аналогично двум вышерассмотренным. При многозвенных Г-образных LC-фильтрах,
189
Рис. 5.12. Схемы простейших резонансных фильтров
Фильтр
состоящих из двух, трех и т. д. отдельных фильтров, можно получить высокий коэффициент сглаживания (кс> 100).
Помимо сглаживающих фильтров в практике используются резонансные фильтры.
Работа резонансных фильтров в электрических цепях несн-иусоидального тока основана на создании условий для возникновения явлений резонанса тока или напряжения для определенных гармоник. Например, если в общей форме кривой несннусоидального тока на нагрузке необходимо выделить кривую тока к-и гармоники, можно использовать резонансный филыр рис. 5.12, а, параметры которою Тф и Сф подбираются таким образом, чтобы создать условия резонанса напряжения именно для к-н гармоники. В этом случае сопротивление фильтра для тока Л-й гармоники становится значительно меньше, чем для токов других гармоник, что и позволяет выделить на нагрузке ток к-й гармоники. Таким образом, рассматриваемый фильтр позволяет выделить ток определенной частоты. На практике подобные фильтры обеспечивают выделение тока в определенной полосе частот, поэтому оии называются полосовыми. И наоборот, если есть необходимость исключить на нагрузке ток к-И гармоники несннусоидального тока, то используется фильтр по рис. 5.12,6. Параметры фильтра Ц и Сф подбираются такими чтобы для fc-н гармоники создать условия резонанса тока. В этом случае для тока к-a гармоники проводимость фильтра почти равна нулю и ток этой гармоники на нагрузке или резко уменьшается, или полностью исключается. Такой фильтр называют заградительным илн фильтром-пробкой для к-й гармоники.
5.8. ПОНЯТИЕ О ДИФФЕРЕНЦИРУЮЩИХ, ИНТЕГРИРУЮЩИХ И ИЗБИРАТЕЛЬНЫХ ЦЕПЯХ
Дифференцирующей цепью называют линейный четырехполюсник, у которого выходное напряжение пропорционально производной входного напряжения. Принципиальная схема 199
Рис 5.13 Схема дифференцирующей цепи (д) и временные диаграммы (б, в) при дифференцировании прямоуюльных импульсов
дифференцирующей rC-цепи приведена на рис. 5.13, а. Выходное напряжение ивык снимается с резистора г. По второму закону Кирхгофа
к„ - и, + - n +-L р dt. (5.2)
Так как «,ы, = ri, то u„ = и,„ + — u,UI dt, или rC J
1
7 г ТГ^вых-
di гС
Параметры rC-цепн выбираются так, чтобы сс постоянная времени т = Сг была достаточно мала. В этом случае
^ВЫХ 1 ~ 1
77 7^-Ивых’ 7. ~ 7Г ^вьв»
dt rC dt гС
а следовательно,
Заметим, что дифференцирование будет тем точнее, чем меньше т, но при уменьшении г снижается выходное напряжение ивых. При подаче на вход дифференцирующей rC-пепи ряда прямоугольных импульсов рис. 5.13,6 форма выходного напряжения будет иметь вид. представленный на рис. 5.13, в.
На практике дифференцирующая пепь может быть использована в импульсной технике для формирования коротких запускающих импульсов в разнообразных электронных устройствах.
Интегрирующей цепью называют линейный четырехполюсник, выходное напряжение которого пропорционально интегра-
191
Рис. 5.14. Схема интегрирующей цепи (а) и временные диаграммы (б, в) при интегрировании прямоугольных импульсов
лу входного напряжения. Схема интегрирующей rC-цепи показана на рнс. 5.14,а. Выходное напряжение снимаеюя с конденсатора С. Исходным остается уравнение (5.2). Однако
в этом случае нВЬ11 = — $idt, а гак как i = CduBliX/dt,
то
Параметры rC-цепн подобраны так, что rCduBUK/dt » ийЬ1К, а следовательно.
нлн
и„ % rC du^Jdt,
1 г ивых ~ ~r(J
Заметим, как н прн дифференцировании, чго чем ючнее проводится интегрирование, тем меньше выходное напряжение ивы\- Форма выходного напряжения интегрирующей rC-цепи прн подаче на вход сернн прямоугольных импульсов (рнс. 5.14, б) показана на рнс. 5.14, в.
В импульсной технике интегрирующие цепи могут быть использованы с целью увеличения длительности импульсных сигналов.
Электрические цепи с использованием емкостных и резистивных элементов называются частотно-зависимыми цепями. В качестве примера подобной цепи может быть рассмотрена избирательная г С-цепь по схеме моста Внна. Схема моста Внна представлена на рис. 5.15, а. Анализируя работу данной избирательной пени, можно отметить, что выходное напряжение w,MX (/) прн низких и высоких частотах стремится к нулю. В первом случае это обусловлено наличием конденсатора С(, а именно: так как xCi = IjlitCif, то при f -»0 хС|-*сс. Во вто-
192
Рис. 5.15. Схема моста Вина (о) н его частотная характеристика (б)
ром случае происходит шунтирование выходных выводов схемы конденсатором Ci, т. е. хс2 — l/lnCif прн / -» со, хс2 -* 0. Получение
максимального выходного напряжения возможно прн условии г‘=Г2вг и Cj = С2 = С прн так называемой квазнрезонанс-ной частоте ш0 « 1/гС, при этом f0 = е>0/2л. Зависимость выходного напряжения от частоты представлена на рнс. 5.15,6.
Избирательные rC-цепи широко используются в избирательных усилителях.
Глава шестая
ЭЛЕКТРОМАГНИТНЫЕ УСТРОЙСТВА
А. МАГНИТНЫЕ ЦЕПИ С ПОСТОЯННОЙ
МАГНИТОДВИЖУЩЕЙ СИЛОЙ
6.1. ПОНЯТИЕ ОБ ЭЛЕКТРОМАГНИТНЫХ УСТРОЙСТВАХ И МАГНИТНЫХ ЦЕПЯХ
Работа многих .электротехнических устройств основана на использовании индукционного и силового действия магнитного поля.
Индукционное действие магнитного поля состоит в том, что в катушке, пронизываемой переменным магнитным потоком. а также в проводнике, движущемся относительно магнитного поля, индуктируется ЭДС. На использовании индуктированных ЭДС основан принцип действия генераторов, трансформаторов, многих приборов контроля, управления и автоматизации производственных процессов. Силовое действие магнитного поля заключается в том, что на электрические заряды, проводники с токами и детали из ферромагнитных материалов, находящиеся в магнитном поле, действуют электромагнитные силы.
Использование силового действия магнитного поля лежит в основе принципа действия элекгродви! ателей, электромагнитов, многих электроизмерительных приборов и электро|ехниче-
7 Электротехника 193
ских аппаратов. С помощью электромагнитных сил осуществляется управление движением заряженных частиц в электронно-лучевых I рубках, электронных микроскопах, ускорителях заряженных частиц.
Электротехнические устройства, принцип действия которых основан на использовании индукционного или силового действия магнитного поля, называются электромагнитными.
Для получения требуемой ЭДС или силы в электромагнитном устройстве должно быть создано магнитное поле определенной интенсивности и направленности действия. С этой целью в каждом электромагнитном устройстве имеется магнитная цепь (магнитная система), состоящая нз магннтопрово-да, выполняемого в общем случае из различных ферромагнитных материалов, и одной или нескольких намагничивающих обмоток
Чюбы многие электромагнитные устройства могли выполнять те функции, на которые они рассчитаны, в их магнитопро-воды приходится вводить воздушные зазоры. В некоторых электромагншных устройствах вместо намагничивающих обмоток используются постоянные магниты.
С помощью намагничивающих обмоток, по которым во время работы устройства пропускаются токи, либо с помощью постоянных магнитов в пространстве возбуждается магнитное поле. При этом ферромагнитный материал магпитопровода намагничивается, в результате чего магнитное поле магнитопровода значительно усиливается и становится намного более интенсивным, чем поле вне магнитопровода. Поскольку магнитное поле оказывается сосредоточенным в основном в магнито-проводе, можно, придавая ему соответствующую конфигурацию, сконцентрировать магнитное поле в нужном объеме электромщ нитного устройства.
Зиачи1ельное усиление магнитного поля за счет свойств ферромагнитного материала позволяет (при заданной интенсивности магнитного поля) намного уменьшить ток, мощность, габаритные размеры и массу намагничивающих обмоток, а также массу и стоимость постоянных магнитов, используемых иногда вместо намагничивающих катушек,
В зависимости от назначения и технических данных электромагнитных устройств их магнитные цепи бывают весьма разнообразными и отличаются родом тока, конструктивными особенностями, габаритными размерами, а следовательно, и массой,
На рис. 6.1 в качестве примера показаны магнитные цепи некоторых электромагнитных устройств. Цифрой 1 обозначены ферромагнитные части мщнитоцроводов, цифрой 2— воздуш-194
Рис. 6.1. Примеры магнитных цепей:
а - машины постоянного гока: б и « — электромагнитных реле; г и д — тормозных электромагнитов; е — магнитоэлектрического измерительного пря
ные зазоры, цифрой 3 — намагничивающие катушки, цифрой 4 — постоянный магнит.
Различают магнитные цепи с намагничивающими обмотками для возбуждения магнитного поля (рис. бЛ.а—д) и с постоянными магнитами (рис. 6.1, е), неразветвленные (рис. 6.1, б, е) и разветвленные (рис. 6.1,а-б), с одной (рис. 6.1,6—б) и несколькими (ряс. 6.1, а) намагничивающими обмотками, симметричные (рис. 6.1, а. г, д) и несимметричные (рис. 6.1, е), с однородным и неоднородным магнитопроводом.
Симметричной считается магнитная цепь, ветвн которой, расположенные по обе стороны от линии ab, проведенной через узловые точки разветвления потоков, выполнены из одинаковых материалов и имеют одинаковые геометрические размеры. В том случае, когда в указанных ветвях имеются намагничивающие обмотки, дополнительным условием симметрии являемся равенство из магнитодвижущих енл (МДС) (см. § 6.2). Если одно из указанных условий не выполняется, магнитная цепь считается несимметричной,
Магнитопровод считается однородным, если ои иа всем протяжении выполнен из одного и того же ферромагнитного
7*
195
материала и имеет одинаковую площадь поперечно! о сечения.
Магнитными цепями с постоянной МДС называются цепи, магнитный поток которых возбуждается намагничивающими обмотками, питаемыми постоянным током, либо постоянными магнитами.
4.2. ОСНОВНЫЕ ВЕЛИЧИНЫ, ИСПОЛЬЗУЕМЫЕ ПРИ РАСЧЕТЕ И АНАЛИЗЕ МАГНИТНЫХ ЦЕПЕЙ.
ЗАДАЧИ РАСЧЕТА И АНАЛИЗА
Магнитное поле в любой его точке характеризуется по интенсивности и направленности действия вектором магнитной индукции В. За направление магнитной индукции принимается направление, указываемое северным полюсом магнитной стрелки, помешенной в данную точку поля.
Магнитное поле может бьпь изображено с помощью линий магнитной индукции, касательные к которым во всех точках поля совпадают по направлению с век юрами магнитных индукций.
Магнитное поле считается однородным, если векторы магнитных индукций во всех точках имеют одни и те же значение и направление. В противном случае поле считается неоднородным. Для определения направления магнитного поля проводника (рис. 6.2, а) и обмочи (рис. 6.2,6) пользуются правилом правоходового винта. Магнитное поле постоянного магнита (рис. 6.2,в) направлено вне магнита от северного полюса N к южному S. При некотором удалении от боковых краев полюсов поле в воздушном зазоре между полюсами магнита (а также электромагнита) можно считать однородным.
Величиной, служащей для интегральной опенки магнитною поля, является магнитный поток, представляющий собой поток вектора магнитной индукции сквозь поверхность. Магнитные потоки сквозь элемент поверхности dS (рис. 6.3) и поверхность S будут
е!Ф = В dS-Bcosa dS; Ф=^Всоза dS. (6.1)
Когда магнитный поток проходит сквозь плоскость, расположенную перпендикулярно линиям магнитной индукции однородного поля, в (6.1) следует положить В = const и сояа=1. Тогда поток
Ф = В5. (6.2)
Единицами магнитного потока и магнитной индукции являются 1 вебер и 1 тесла (1 Вб - 1 В с, 1 Тл = 1 Вб/м2 = 196
Рис. 6.3. К определению магнитит о иоюка
= 1 В с/м2). Иногда для расчета используют устаревшие единицы магнитного потока и магнитной индукции 1 максвелл и 1 гаусс (1 Мкс = 10"8 Вб, 1 Гс = 10-4 Тл).
Степень участия среды в образовании магнитного поля характеризуется абсолютной магнитной проницаемостью среды, равной
(6.3)
ие р.о — матичная постоянная; ji, — относительная магнитная проницаемость.
В системе СИ единицей ц0 и щ является 1 генри/метр = - I Гн/м. где 1 Гн = 1 Ом с - единица индуктивности.
Магнитная постоянная цп -4тг lO-7 Гн/м.
В электротехнике все вещества разделяют на ферромагнитные и неферромагнитные. К первым щносягся шаль, никель, кобальт и их сплавы с различными присадками Забега несколько вперед, и/мегим, что у ферромагнитных материалов при определенных условиях » 1 и ца >•>
197
У неферромагнитных материалов, к которым относятся, например, медь, алюминий, дерево, пластмассы и воздух, ъ 1 и
* Но-
При расчете и анализе магнитных цепей пользуются обычно величиной Н, называемой напряженностью магнитного тюля. Зная последнюю, можно определить магнитную индукцию
В = раН. (6.4)
Напряженность магнитного поля — величина векторная. В однородных по всем направлениям средах векторы В н Н по направлению совпадают.
Единицей напряженности магнитного поля является 1 Л/м. Част о при расчетах используют более крупную единицу 1 Л/см (1 А/см = 102 А/м).
Напряженность магнитного поля связана с токами, возбуждающими поле, законом полного тока, согласно которому линейный интеграл вектора напряженности магнитного поля вдоль замкнутого контура равен алгебраической сумме токов, охватываемых этим контуром:
= (6.5)
Величину 2/ называют полным током или магнитодвижущей силой (МДС) и обозначают буквой F.
Со знаком «+» в (6.5) следует включать токи, положительные направления которых связаны правилом правоходового винта с произвольно выбранным направлением обхода контура интегрирования.
Если, например, контур интегрирования проходит внутри обмотки с числом витков w (рис. 6.4, а}, то при обходе контура по часовой стрелке F — iw. При обходе по часовой стрелке контура, проходящего внутри двух обмоток с различными направлениями токов (рис. 6.4,6), F = — l2wi-
Рассмотрим в качестве примера магншное поле в сечении замкнутого кольцевого магнитопровода из однородного материала (рнс. 6.5). Линии магнитной индукции в кольце из любого материала при равномерном распределении витков представляют собой концентрические окружности. Выбрав за коитур интегрирования линию магнитной индукции с радиусом р, получим
f Н cos ad/ = Н - 2лр = Iw,
откуда
Н = Iw/гпр. (6.6)
198
Если известна магнитная проницаемость ца материала кольца, то магнитная индукция будет В = цаН = цД»/2лр.
Как видно, наибольшая магнитная индукция будет при р = — рь наименьшая — мри р = р2. Если а «ас рср — (pi + ра)/2, то магнитные индукции при pt и р2 буду1 отличаться незначительно. В этом случае магнитное поле можно считать практически однородным и определять магнитные индукцию и поток по формулам
в-'. Ф = К = ±22ТА (6.7)
2лрер 2лрСр
На основании выражений (6.6) и (6.7) можно сделать следующие выводы.
Если F = Iw представляет собой МДС, то напряженность Я можно рассматривать как удельную МДС, приходящуюся на единицу длины контура интегрирования. При изготовлении-колец (рис. 6.5) из материалов с различными значениями напряженность Н будет одной и той же, а значения ма|нитной индукции В и, следовательно, магнитного- потока Ф будут различными. Из сказанного следует, что напряженность Н является величиной, характеризующей систему проводников с юками, возбуждающую магнитное поле, а не само ноле.
Предположим, что кольцо (рис. 6.5) выполнено из неферро-магнитного материала, у которого цг1 1 и ц01 « р0. Тогда для получения заданной магнитной индукции В согласно (6.7) потребуется МДС
= В’2лрср/ря, -В-глр^цо.
Если же изготовить кольцо из ферромагнитного материала, у которого ц,2 » 1 и цс2 = М,2Цо >> Ро> получим те же значения
Рис 6 4. К" пояснению закона полного- гота
Рис. 6.5. К расчету магнитного-поля замкнутого* кольца
Г 99
магншной индукции и следовательно, магнитного потока при МДС
/2w = В. 2irpcp/gr2p0.
Сравнивая выражения МДС в обоих случаях, нетрудно установить, что l2 = I т. е. 72 « / 1 Приведенный пример подтверждает высказанное ранее положение о том, что изготовление магнитонровода из ферромагнитного материала приводит к существенному уменьшению тока, а значит, мощности, габаритных размеров и массы намагничивающих обмоток.
При расчете магнитных цепей приходится решать две задачи : наиболее часто встречающуюся прямую задачу и обратную задачу. Прямой'считается задача, когда по известному ма1ни|-ному потоку или магнитной индукции участка магнитопровода определяют МДС млн ток намагничивающей обмотки. При решении обратной задачи, наоборот, МДС или ток считаются известными, а определению подлежат магнитный поток или магнитная индукция. При решении как прямой, так и обратной задач геометрические размеры и данные ферромагнитных материалов магнитопровода обычно считаются известными.
Кроме расчета нередко приходится решать задачи анализа магнитных цепей. Например, интересным и важным является вопрос о характере изменения магнитного потока при изменении МДС обмо1ки либо при изменении воздушного зазора в магиитопроводе, геометрических размеров ыагнитопровода и т. д.
6.3. СВОЙСТВА ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ
Свойства ферромагнитных материалов оценивают обычно по кривым намагничивания, представляющим собой зависимость магнитной индукции от напряженное! и магнитного поля В (Я). Кривые намагничивания получают опытным путем Напряженность изменяют за счет изменения тока намагничивающей обмотки, расположенной на испытуемом образце. Определение напряженности производят с помощью закона полного тока. Для определения магнитной индукции используют индукционное цействие машитного поля.
Если ферромагнитный ма1ериал был размагничен, то при увеличении напряженности Н магнитная индукция В изменяется в соответствии с кривой 1 первоначального намагничивания (рис. 6.6). Последней соответствует на том же рисунке кривая 2 изменения магнитной проницаемости рв(Я), построенная согласно формуле цл = В/Н.
При относительно небольших напряженностях, когда материал еще нс насыщен (участок Оа), увеличение Н сопровождается значительным увеличением В. Именно на этом участке ц0 = В/Н» ц0 и 200
Рис. 6 6 Кривые намагничивания В(Н) и зависимость pa(Zf) ферромагнитного материала. Зависимость для воздуха
р, »1. Максимальному значению магнитной проницаемости соотвег-щвует точка А, которая может быть получена, если через начало координат провести касательную к кривой 1.
С увеличением Я на участке ah материал все более насышаегся и темп роста В снижается.
Па участке Ьс, соответствующем значительному насыщению ферромагнитного материала, увеличение напряженности приводит лишь к весьма малым приращениям магнитом индукции. Последняя возрастает на этом участке примерно в той же степени, что и в случае катушки без ферромагнитного магнитопровода (прямая 4 на рис 6.6). Хотя при любых значениях напряженности ферромагнитного материала >ц0 к ц, > 1, при Я -* со р0-»Ио и ц,—> 1.
При уменьшении напряженности магнитная индукция изменяется в соответствии с кривой 3 Любому значению напряженное! и при ее уменьшении соответствует большее значение магнитной индукции, чем при увеличении Н. Если напряженность уменьшить до нуля, материал окажется намагниченным. Магнитная индукция Вг при Н = 0 называется индукцией остаточно: о мама! ничивания. Чтобы получить В < Вг, нс-обходимо изменить направление напряженности в материале, что осуществляется путем изменения направления тока намагничивающей обмотки. При некотором значении I <0 и Не<0 получим В=0. Напряженность Пс называется коэрцитивной силой.
Если периодически и весьма медленно изменять напряженность от + Я|Идо — Н1Я1, то после нескольких циклов перемагничивания магнитная индукция будет изменяться в пределах от + Btm до — В11И в соответствии с кривой I на рис. б.7,д, называемой статической петлей магнитного гистерезиса. При разных пределах изменения иапряженно-ши получим семейство статических симметричных петель магнитного гистерезиса Существуют некоторые напряженности + = +HS и
— Нт = — Нр при превышении которых площадь, шраниченная петлей гистерезиса, остается постоянной. Петля гистерезиса 2 называется в этом случае предельной, а магнитная индукция В5 — индукцией технического насыщения. Значения В, и Нс определяются по предельной негде гистерезиса.
Fcth соединить вершины статических петель гистерезиса, то получим основную кривую намагничивания 3, незначтельно отличающую-
201
Рис. 6.7. Симметричные циклы магнитного ымлерезиса и основная кривая намагничивания
ся от кривой первоначального намагничивания. Основная кривая на» магничиваяяя нЕпользуется при расчете магнинтеги цепей. Наибольшее значение магнитной проницаемости цв определяется по основной кривой.
Различают магнитно-мягкие, и магнитно-твердые ферромагнитные материалы. К магнитно-мягким материалам относятся частое железо. у| леродистые электротехнические стада, сплавы железа и никеля, некоторые химические соединения’железа. Магнипго-мягкяе материалы характеризуются- относительно' малой величиной Нс и н^элыиоя пло-шашню циютеяв гистерезиса (кривые I и 2 на рве. ft. 7, б). Магнитно-мягкие материала!- г^ймекявзтея для изготовления магнитных испей электрических маыяя^ трансформл-гариа, лк;ктроизмеритк.тышх приборов и разнообразных электротехнических аиваратов- Магнитно-мягкие материалы с малым значением В, (кривая 1 на рис. 6.7,6) при по» стояыдом токе дают возможность- в широких пределах изменять магнитный поток. Некоторые магнитно-мягкие материалы при соответствующей технплогин обработки позволяют получить «прямоугольную» петлю гистерезиса (кривая 2). Материалы с «прямоуготть-ной>> петлей- характеризуются весьма малыми итачеаиями Я, к большим знлчеяяем В*, блжзкнм к В,. Матшетно-ммгкие материалы с «прямоугольной»- петлей гистерезиса нагадят широкое, примкнемте в устройствах автоматики и вычислительной- техники.
К магныъшэ’-твершьг материодага отнэсягса. сплавы железа с? алюминием. хромом и вольфрамом, содержащие различные присадки. Магиитис-твердые материалы (кривая 3 на рис. 6.7. б) характеризуются относительно большими значениями В, и Ht и применяются для изготовления постоянных магнитов.
м. ДОПУЩЕНИЯ И ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ ОСНОВНЫХ ЗАКОНОВ МАГНИТНЫХ ЦЕПЕЙ
ПРИ РАСЧЕТЕ И АНАЛИЗЕ
Предположим, что имеется некоторая ма1ни1ная цепь «рис 6.8, а), содержащая несколько участков из ферромагнитного материала с различными площадями поперечного сечения
S2 ...) и длинами (Zr I, ...). участки Zt н /4,12 и Zs разделены воздушными зазорами.
Магнитные поля, возникающие под действием МДС обмоток, принято подразделять на основные поля, характеризуемые основными магнитными потоками фр Ф2 и Фэ, и на поля рассеяния, характеризуемые некоторыми эквивалентными магнитными потоками рассеяния ФГ1 и Фр2 (рис. 6.8, а). Основными называются магнитные поля, линии магнитной индукции которых на всем протяжении проходят по магиитопроводу. Линии магнитной индукции полей рассеяния замыкаются вокруг витков соответствующих катушек, проходят большей частью по воздуху и не пересекают витков других ка1ушек. Эквивалентный магнитный поток рассеяния можно определить следующим образом:
и'Ф' + И'"Ф" + ... Vp
|де Ф’, Ф" и т, д. — магнитные потоки поля рассеяния, пронизывающие 'гасти wн" и т. д. общего числа витков w обмотки. Величина *Рр = н>Ф' + и^'Ф" + ... называется потокосцеплением обмотки.
Если степень насыщения ферромагнитного материала и воздушные зазоры невелики, то эквивалентные магиитиые потоки рассеяния можно не учитывать, как мы и будем поступать в дальнейшем. При таком допущении магнитный поток любой ветви магпитопровода на всем ее протяжении следует считать одним и 1ем же. Кроме того, при анализе и расчете магнитных цсией принимают обьнию следующие допущения: ие учитывают выпучивания линий магнитной индукции в воздушных зазорах, а также их искривлений в узлах разветвления потоков и местах резких перегибов магнитной цепи, считая, что конфигурация линий магнитной индукции совпадает с конфигурацией магнитной цепи (рис. 6.8,5); принимают, что во -всех точках площади поперечного сечения любого участка магнитной цепи напряженности магнитного ноля, а значит, и магнитные индукции имеют одно и то же значение. Учитывая это, при анализе и расчете магнитных цепей выбирают контуры, совпадающие
203
со средней линией магнитной индукции, показанной на рис. 6.8,в пунктиром.
Прн расчете и анализе магнитных цепей большое значение имеют положительные направления магнитных потоков и напряженностей магнитного поля, так как в зависимости от них выбираются знаки перед указанными величинами в уравнениях, Положительные направления указываются на расчетных чертежах стрелками,
В случае одной намагничивающей обмотки за положительное направление магнитного потока принимают направление, связанное правилом правоходииого винта с положительным направлением тока намагничивающей катушки. В том случае, когда положительное направление магнитного потока не очевидно, что может быть при наличии нескольких намагничивающих обмоток, можно задаться им произвольно. Действительное направление магнитною потока выявляется в этом случае в результате анализа или расчета.
За положительные направления магнитных индукций магнитного поля следует принимать, очевидно, направления, совпадающие с положительными направлениями соответствующих магнитных ноюков. Учитывая это, на расчетных чертежах нет необходимости указывать положительные направления всех величин (магнитных потоков, индукций и напряженностей). Достаточно указать, например, только положительные направления магнитных потоков.
Одним из важнейших соотношений для разветвленных магнитных цепей является соотношение между магнитными потоками, согласно которому алгебраическая сумма магнитных потоков ветвей, сходящихся в узле разветвления потоков, равна 204
нулю:
Еф = О. (6.8)
Магнитные потоки, направленные к узлу разветвления потоков, входят в (6.8) со знаком « + », направленные си узла — со знаком «—» или наоборот. Например, при указанных на рис. 6.8, е направлениях потоков для узла a ф3 4- ф2 — Ф3 = 0.
Уравнение (6.8) называют иногда первым законом Кирхгофа для магнитной цепи.
Наряду с уравнением (6.8) при анализе и расчете магнитных попей широко используется закон полного тока (6.5), который применительно к магнитным цепям соответствующим образом преобразуется. Согласно закону полно) о i ока (6.5) для контура bmkanb при обходе его по часовой стрелке
£HcOS7 dl — /jWj — f2w2.
Заменив интеграл суммой интегралов по участкам и унизывая, что в пределах любого участка с одной и той же площадью поперечного сечения Н = const, а также что на участках, где положительное направление напряженности И совпадает с направлением обхода контура, cost — 1, а те не совпадает, cosct= — 1, после преобразований получим
+ Нй31й1 + Н41^ — Н212 — Н&21ц2 ~ H5ls = — I2w2.
В общем виде закон полного тока для любою замкну) oi о контура магнитной цепи
(6.9)
Со знаком « + » в (6.9) следует включать напряженности, положительные направления которых совпадают с направлением обхода контура, и токи, положительные направления которых связаны с направлением обхода контура правилом правоходового виита.
Как было показано ранее, напряженность Н можно рассматривать как удельную МДС, необходимую для создания магнитного потока иа единице длины контура интегрирования. Тогда, очевидно, произведение HI можно рассматривать как МДС, необходимую для создания магнитного потока иа участке магнитной цепи длиной /. Величину HI называют разностью скалярных магнитных потенциалов и иногда магнитным напряжением: Hl-U^- На участке магнитной цепи, не содержащем намагничивающей обмотки, положительное направление магнитного напряжения совпадает с направлением напряженности.
Если в выражении (6.9) МДС F = ZIw уподобить алгебраической сумме ЭДС, а Hi = Е17м — алгебраической- сумме на
205
пряжений в электрической цепи, то оно окажется сходным со вторым законом Кирхгофа для электрической цепи. Выражение (6.9) называют иногда вторым законом Кирхгофа для магнитной цепи.
Уравнение (6.9) может быть применено и к замкнутому в геометрическом смысле контуру. Это значит, что часть контура может проходить по стрелке, указывающей положительное направление магнитного напряжения между какими-либо точками контура Указанная особенность уравнения (6.9) позволяет легко найти магнитное напряжение между интересующими нас тачками магнитопровода.
Найдем, например, магнитное напряжение между точками к и b (см. рис 6.8,е) Выбрав положительное направление искомого магнитного напряжения например, как показано на рисунке, и обходя контур abka по часовой стрелке, получим
откуда
^м*ь = //Л + ^,/в1 + ял.
Для определения и^кь можно воспользоваться также контуром bmkb или bkanb. Например, при обходе по часовой стрелке контура bmkb найдем, что = 7,™, —
Как видно, в случае, когда контур проходит через участок, содержащий намагничивающую обмотку, в выражении магнитного напряжения появляется МДС обмотки.
Следует заметить, что если в выражении мщнитного напряжения = Hl заменить Н на В/ц0, а В — на Ф/$, то получим
= ФКМ,
гле RM = //)i0S — магнитное сопротивление участка магнитной цепи.
Уподобив ф току, a RM — сопротивлению электрической цепи, можно считать, что выражение Uu = ФЛМ аналогично закону Ома для пассивного участка электрической цепи. Очевидно, любой член в левой части (6.9) может быть заменен выражением Ф/?м.
6.5. НЕРАЗВЕТВЛЕННЫЕ МАГНИТНЫЕ ЦЕПИ
6.5.1. Основные соотношения. Пусть имеется неразветвлен-иая магнитная цепь (рис. 6.9, а) некоторого электротехнического устройства. Во всех участках неразвезнленной цепи магнитный поток имеет одно и то же значение, поэтому Ф = В151-206
= B2S2 = ...=ВЬВ&, откуда Bi/B2 = S2/Sp Bi/Bb^Sb/S1 и т.д. Как видно, в неразветвленной пепи отношение магнитных индукций участков обратно отношению их площадей поперечного сечения.
Чтобы установить соотношения между напряженностями различных участков магнитных цепей, воспользуемся кривой намагничивания (рис. 6.9,6). Как видно, для создания магнитного потока на участках, материал которых иасышен, требуется значительно большая напряженность магнитного поля, чем на участках, материал которых нс насыщен. Например, если В3 = = 2ВР то H3>2HV
Особенно большие напряженности требуются для создания магнитного потока в воздушных зазорах. Так, при В6=В3 Я8Мо = ЯзНоНгз, откуда Н8 = Н3Нгз- Обычно ц,3 » 1, поэтому при В8 =В3 Н8 » Яд.
На основании (6.9) для магнитной цепи рис. 6.9,а можно написать
+ H2l2 + H3l3 + Hs/s + = Iw. (6.10)
Так как Н = а ф = BS, то из (6.10) следует, что чем больше длины участков магнитной цепи, тем большая МДС
207
требуется для получения заданного магнитного потока. К увеличению МДС приводит также уменьшение площадей поперечного сечения участков, так как при этом возрастают магнитные иидукпии и, следовательно, напряженности. Если увеличивать длины или уменьшать площади поперечного сечения прн заданной МДС, го это приведет к уменьшению магнитного потока. Особенно большое влияние на значение МДС при Ф = const и на значение магнитного потока прн Iw = const оказывают изменение длины или площади поперечного сечения воздушного зазора.
Для выявления влияния параметров магнитной цепи иа магнитный поток и МДС удобно воспользоваться приводимым ниже выражением (6,11), которое называют иногда законом Ома для магнитной цепи. Это выражение нетрудно получить из (6.10), если заменить в нем каждый член левой части выра-Ф1
жением —— = ФЛМ с соответствующими индексами:
_ h h + + U
Ра2$2
Iw Iw
=----------------------------- --, (6.11)
«Ml + «м2 + «м3 + «мВ + ^м4 «м
где + Rm2 4 «мз + «м& + «М4 — магнитное сопрочинле-
ние иеразветвленной магнитной цепи, равное сумме магнитных сопротивлений отдельных ее участков.
При анализе магнитной цепи с помощью ныражения (6.11) следует помнить, что вследствие непостоянства величии цл), ця2, Раз и Ца* зависимость Ф(/ю) получается нелинейной, а также что сопротивление RMls обычно превышает сумму остальных сопротивлений.
6.5.2. Последовательность расчета. Чюбы ознакомиться с последовательностью решения прямой задачи, обратимся к следующему примеру
Пример 6.1. Определить МДС и ток обмотки, если в воздушном зазоре магнитной дени рис. 6.9,а требуется получить В8 = 1,4 Тл Число витков обмотки w = 1000, кривая намагничивания стали приведена па рнс. 6.9,6.
Решение. Разбив магнитную пень на участки, находим их длины и площади поперечного сечения: —252,2 мм, Sj - 1200 мм3, 12- 117,5 мм, S2 — 800 мм2, /3=50мм, S3 = Ss = S4 = 600 мм2, f4 = = 83 мм, ia = 2 мм.
Дальнейшее решение условимся проводить в единицах СИ.
208
Магнитный поток и магнитные индукции Ф—В65О = = 1,4'600-10 Вб, Bi = ф/51 = 0,7 Т.1, аналогично В2 0,93 Тл; В3 = = ВЛ = В6 = 1г4 Тл,
По кривой намагничивания находим Ht - 3 А/см = 300 А/м, Н2 -= 400 А/м, Н3 = Н4 =* 3000 А/м,
Напряженность магнитного поля в воздушном зазоре
И>=8«/И»=-~7^ = 11210* А"'м-
4л-10
МДС и ток обмотки
IW = HJ, + Н212 + НЛ, + 14) + НЯ1А =
= 300-252,5 4- 400-117,5 + 3000-133 + 112-10*-2-10’ ' =
= 75,8 + 47 + 399 + 2240 = 2762 А,
или Iw = XHC[ICJ + Н516 = 522 + 2240 = 2762 А, т. е. I = Iw/w +
+ H6lf,)/w = /ст + Js = 0,522 4 2,24 - 2,762 A.
Как видно, несмотря на малый воздушный зазор наибольшие составляющие МДС и тока обмотки необходимы для создания магнитного потока именно в воздушном зазоре.
Чтобы ознакомиться с последовательностью решения обратной задачи, допустим, что в той же магнитной цепи (см. рнс. 6.9, а) требуется найти магнитный поток ФЛ при заданной МДС (Iw)x.
Решить эту задачу путем однократного применения уравнения (6.10) не представляется возможным, так как оно содержит четыре неизвестные величины: Н1? Н2, Н3 — Н^ и Н&. Нельзя решить задачу и с помощью формулы (6.11), поскольку в ней кроме магнитного потока Ф неизвестными являются также магнитные проницаемости ц01, цо2 и ца3 = ца4.
OGpaiHwe задачи решают в таком порядке:
1) задаются несколькими значениями магнитного потока и, решая несколько раз прямую задачу, находят соответствующие этим потокам МДС обмотки;
2) строят магнитную характеристику, представляющую собой зависимость mhihmihoio потока от МДС обмотки Ф(/п) (рис. 6.9, в);
3) пользуясь магнитной характеристикой, находят мш -нитный поток Фл по заданной МДС (Iw)x.
Наибольший магнитный поток, которым следует задаваться, можно определить, считая, что Я, = Н2 = Н3 = Нл = 0, а‘заданная МДС расходуе|СЯ лишь для создания магнитного потока в воздушном зазоре.
6.5.3. Магнитные характеристики. Кроме указанной выше зависимости Ф(/и|) под магнитной характеристикой понимают
209
Ф = 0 lf2>0
Рис, 6.10. Магнитные характеристики при различных воздушных зазорах
также зависимость магнитного потока от тока обмотки Ф(1).
Магнитные характеристики применяют не только для решения обратной задачи расчета магнитных пепей. Их широко используют также при анализе работы и расчете многих электро--магнитных устройств, например генераторов, двигателей и др.
Соотношение между магнитным потоком и МДС или током и, следовательно, конфигурация магнитной характеристики существенно зависят от параметров магннтопровода, особенно от длины воздушною зазора.
Если магиитопровод имеет одинаковую площадь поперечного сечения по всей длине и не имеет воздушных зазоров, то магнитные характеристики Ф(/и) и Ф (/) совпадают с основной кривой намагничивания В(Н), так как в этом случае Ф = В5, а I = Hl/w.
Для получения того же магнитного потока при введении в магнитную цепь воздушного зазора требуются значительно большие значения МДС и тока, поскольку в данном случае I = = (Ш + Hj^/w и обычно Нь » И. В соответствии с этим магнитные характеристики Ф(Уи^) при различных воздушных зазорах выглядят, как показано па рис. 6.10. В другом масштабе по оси абсцисс они представляют собой магнитные характеристики Ф(/), так как I = (Iw)/w.
Как видно, при увеличении воздушного зазора магнитные характеристики все более спрямляются.
6.5.4. Индуктивность и взаимная индуктивность. Как известно, индуктивность, через которую может быть определена ЭДС, индуктируемая в обмотке электромагнитного устройства, выражается следующим образом-. L = <№/dI.
Если обмотка не имеет ферромагнитного магннтопровода, то между потокосцеплением Т и током I существует линейная зависимость, а поэтому L = (W/dl = ТД = const.
Когда обмотка имеет ферромагнитный магннтопровод, то, не учитывая потоков рассеяния, можно считать, что один и тот же магнитный поток Ф сцеплен со всеми витками w катушки. Тоща Т = нФ и L = c№/dl = wd&/dl.
210
W Л If
a) 5) в) Uu г) Um
Рис. 6.11. К пояснению аналогии методов расчета магнитных и электрических цепей
Чтобы рассмотреть особенности индуктивности обмотки с ферромагнитным магнитрпроводом, обратимся к магнитным характеристикам Ф(7), приведенным на рис. 6.10.
Пока ферромагнитный материал не насыщен, между магнитным потоком н током существует примерно линейная зависимость. а поэтому L = wd&/dl ъ кФ// % const. Значение индуктивности в этом случае, особенно при 16 — 0, намного превышает значение индуктивности такой же обмотки без ферромагнитного магнитопровода.
По мере насыщения ферромагнитного материала индуктивное ь уменьшается, а когда наступает полное насыщение ферромагнитного материала, она становится равной индуктивности такой же обмотки без ферромаг ни 1 hoi о мт нитопровпда.
При введении в магпнтопровод воздушного зазора или при его увеличении индуктивность уменьшавши и может быть принята примерно постоянной в большем диапазоне изменения тока.
Все сказанное об особенностях индуктивности обмотки с ферромагнитным магпитопроводом в полной мере относится и к взаимной индуктивности двух обмоток, расположенных на общем магнитопроводе.
6.3.5. Аналогия меюдов расчета магнитных и электрических цепей. Так как при анализе и расчете магнитных цепей используются законы, подобные законам Ома и Кирхгофа для электрических цепей, то для большей на| ладности иногда заменяют магнитные цепи их схемами замещения, подобными схемам замещения электрических цепей.
Рассмотрим возможность такой замены на примере простейшей М41нигной цени, изображенной на рис. 6.11, а.
На основании закона полного тока
7н> = Hl + Н& = + UMfi ФЛМ + ФЛм6. (6.12)
211
Подобное по структуре уравнение можно написать н для некоторой электрической пепи (рис. 6.11,в):
£ = (/,+Ur0=/1r + /1r0. (6.13)
В уравнениях (6.12) и (6.13) величинами-аналогами являются: МДС Iw и ЭДС Е; магнитный поток Ф и ток магнитные напряжения См _ Ш — ФЯЧ, 1/мб — Hjb = ФеЯм и электрические напряжения 47г =
I,r, U,о — /]Го; магнитные сопротивления RM, RMs и электрические сопротивления г, го.
Следует заметить, что значение магнитного сопротивления зависит от напряженности магнитного поля, а поэтому является нелинейным. В соответствии с этим нелинейным должно быть и сопротивление г.
Схема электрической иепи, соответствующая уравнению (6.13), приведена на рис. 6.11,в, а схема замещения магнитной цепи, соответствующая уравнению (6.12).-на рис. 6.11.6.
Учитывая подобие схемы замещения магнитной цепи и схемы нелинейной электрической цепи, для решения обратной задачи расчета магнитной цепи можно воспользоваться методом, изложенным в § 1.16, основанным на графическом решении двух уравнений с двумя неизвестными, Для этого необходимо рассчитать и построить график зависимости Ф(УМ) для нелинейной части апб схемы замещения магнитной цепи; рассчитать и построить график зависимости Ф = /(См) для линейной части атб схемы замещения магнитной цепи.
Точка пересечения А указанных графиков (см. рис. 6.11, г) определит значения магнитного потока Ф и магнитного напряжения С'м.
Зависимости Ф(С'М) и Ф = /(С'м) называются вебер-амперпы-ми характеристиками (вб. а. х.). Их построение производится с помощью уравнений, составленных по закону полного тока, для контуров, в которые должно входить интересующее нас магнитное напряжение LrM.
Так, для расчета вб. а. х. ф(им), изображенной на рис. 6.11, а, необходимо составить уравнение для контура апба (рнс. 6.11,6), которое будет иметь рид
О = ФКМ - UM = Ш - ич,
откуда U4 = ФКМ = HI.
Расчет вб. а. х. производится в такой последовательности: задаются несколькими значениями магнитных потоков Ф, по формуле В — Ф/'S определяют соответствующие значения В, после чего по кривой намагничивания В(Н) находят напряженности,• далее по приведенному выше выражению нодсчщываюг магнитные напряжения Щ.
Чтобы рассчитать вб. а. х. Ф = показанную на рис. 6.11,?, следует составить уравнение для контура атба:
Iw = ФКМЙ + U4 = На(6 + С'м,
212
откуда
Сч = /и-Ф/?чд^/и-Яа/0.
Так как RM0 =/6/p0Sd = consi, го график Ф= /(С\,) представляет собой прямую линию и может быть построен, например, по следующим лвум точкам: I) при Ф=0 U^Iw, 2) при Ь\, = О Ф = /и’/Лмь.
Koi да магнитопровод имеет (кроме воздушного зазора) несколько участков с различными площадями поперечного сечения или магериалами, их необходимо заменить предварительно одним участком, имеющим эквивалентную вб. н. х. Ф([/м). Замену следует производить, исходя из того, что при последовательном соединении участков во всех участках существует один и тот же магнитный поток.
6.6. НЕРАЗВЕТВЛЕННЫЕ МАГНИТНЫЕ ЦЕПИ С ПОСТОЯННЫМИ МАГНИТАМИ
Как было сказано ранее, в некоторых электромагнитных устройствах для возбуждения магнитного поля используются постоянные магниты. Примером этому могут служить генераторы и двигатели постоянного тока небольшой мощности, некоторые измерительные приборы, реле, устройства автоматики и др.
Предположим, что кольцевой магнит (рис. 6.12,д) выполнен из магнитно-твердого материала, имеет одинаковую площадь поперечного сечения по всей длине и предназначен для создания магнитного поля в воздушном зазоре. Чащь предельной петли гистерезиса ферромагнитного материала В(Н), называемая кривой размагничивания, приведена на рис. 6.|2,б. Именно эта часть петли гистерезиса и используется для расчета магнитной цепи.
Поскольку намагничивающей обмотки нет (/н =0), очевидно, при отсутствии воздушного зазора (Zx =0) согласно закрну полно: о тока Н! = 0 и В = Вг.
При введении в магнитную цепь воздушного зазора
0 = HI + + С
откуда
17м= —1/М8 и # = ~Hsls/L . (6-14)
Так как магнитное поле r воздушном зазоре создается по-сюянным магнитом, вектор напряженности Но должен совпа-
213
Рис. 6.12. К анализу соотношений в нсразвствлснной магнитной цепи с постоянным магнитом
Рис. 6.13. К пояснению методики рвсчета перазветвпенной магнитной цепи с постоянным магнитом
дать в воздушном зазоре с вектором магнитной индукции В, а поэтому следует считать Uм5 = > 0. Тогда согласно (6.14)
в ферромагнитном кольце получим — HI < 0, и, следовательно, введение воздушного зазора приводит к размагничиванию ферромагнитного материала кольца. Введение воздушного зазора действует подобно созданию Я < 0 с помощью МДС обмотки, которая могла бы быть расположена на кольце.
Для расчета магнитной цепи необходимо прежде всего:
1) рассчитать и построить вб. а. х. Ф(С\.) — Ф(Я/) ферромагнитного кольца;
2) рассчитать и построить вб. а. х. Ф((7м8) = Ф(Н5/5) воздушно! о зазора;
Так как В = Ф/5, а Н = то график Ф(С/М) на рис. 6.13 будет ана.Г|О| и чей i рафику В(Н) на рис. 6.12,6.
В воздушном зазоре и^—Нг1-л = ФЯмб и, очевидно, график Ф(^'мг) представляет собой прямую линию, проходящую через начало координат (рнс. 6.13). Для определения магнитных потока Ф и напряжения (7М целесообразно построить график | Ф | = = /(—являющийся зеркальным отображением графика Ф(С\15) относительности оси ординат (см. рис. 6.13).
Точка пересечения А графиков Ф([/м) и |Ф|=/(— L’mJ) определит значения Ф и Далее нетрудно найти магнитную индукцию 5—Ф/5, магнитное напряжение = —UM>0, по кривой намагничивания (рис. 6.12,6) напряженность магнитного поля Н н напряженность магнитного поля воздушного зазора Н8 = В/ц0 = 17м&//5.
На основании изложенного выше можно сделать следующие выводы о влиянии параметров постоянного магнита на значения магнитного потока Ф н магнитного напряжения Uu.
Выбор ферромагнитного материала для изготовления постоянного магнита с большим значением Нс (при Br const) или с большим значением Вг (при Нс - const), а также увеличе-214
ние длины I или площади поперечного сечения б Mai нита цак>| возможность получить большие значения Ф и UM.
Для уменьшения габаритных размеров постоянного магнита стремятся производить разработку электромагнитного ус|ройс1на 1аким образом, чтобы получить в воздушном зазоре наибольшее значение энергии магнитного дола, что имеет место при наибольшем произведении ВН и соответствует определенной точке Л на кривой размагничивания.
В заключение следует сказать, что, исходя из техннко-экономических соображений, в электромагнитных ущройствах с постоянными магнитами последние составляют обычно лишь часть ма| нишпровода. Остальная ее часть выполняется из магнитно-мягкого материала и содержит обычно воздушные зазоры Для расчета такой магнитной депи должна быть построена эквивалентная вб. а. х. Ф(С\1)Г), а затем график |Ф| = = с учетом всех участков магнитной цепи.
6.7. РАЗВЕТВЛЕННЫЕ МАГНИТНЫЕ ЦЕПИ
6.7.1. Основные соотношения. Когда в разветвленной магнитной цепи магнитные потоки возбуждаются одной обмоткой, направление нх при заданном токе определяйся однозначно по правилу правоходового винта. Если же для возбуждения потоков используется несколько обмоюк, то магнитные потоки могут быть направлены по-разному в зависимости от направлений и значений МДС обмоток, а также от параметров магнитопровода.
Рассмотрим в качестве примера возможные направления магнитных потоков в магнитной пепн, изображенной на рнс. 6.8.
При > 0 и Г2 = 0 магнитные потоки Ф, и Ф3 будут направлены так, как показано на рисунке (Ф, > 0 и Ф3?0),а поток ф2 - в противоположную сторону (Ф2 < 0). При I( = 0 н 12 > 0 потоки Ф2 > 0 и Ф3 > а Ф, <й
Изменяя при /, = const или /2 при — const, можно получить Ф1 $ 0 и Ф2 $ 0; магнитный поток Ф5 при любых токах /1 > 0 и /2 > 0 будет направлен так, как показано на рисунке.
Так как в каждой ветви разветвленной магнитной цепн магнитный поток имеет одно и то же значение, между магнитными индукциями, а также между напряженностями участков любой ветви существуют соотношения, полученные ранее для иеразветвленной цепи.
Рассмотрим соотношения между напряженностями, маг-
2/5
Фг,Нг 5---- (L --------
По закону полного тока
Рис. 6.14. К анализу соотношений в разветвленных магнитных целях
нитными индукциями и потоками двух ветвей a/nb и anb, не содержащих обмоток (рис. 6.14). для контуров amba и anba имеем
HL1L- Щ«,-0 и н,/. О'
Из полученных уравнений следует, что
Я./»2 =
(615)
Если /j = 12, то независимо oi площадей поперечною сечения и S2. а также марки ферромагнитных материалов ветвей получим = Н2. Если ветви выполнены из одинакового ферромагнитного материала, то при Н^Н2 и 3,—32. Магнитные потоки ветвей в случае Bj = В2 будут равны лишь прн равенстве площадей, так как Ф2 = BtSt, а Ф2=В252.
Еслн в магнитной цепи /t > 12, то согласно (6.15) Я, < Я, и, следовательно, В,<В2. Количес1венное соотношение между потоками зависит от соотношений между ипдукпиямн и площадями .
_ 3^, Ф2 “ B2S2'
Может оказаться, например, что Ф2 > Ф2 при 3А < В2.
На соотношение напряженностей, магнитных индукций и потоков существенное влияние оказывают воздушные зазоры. Допустим, что во вторую ветвь введен воздушный зазор длиной /8. Тогда
(6.16)
Так как обычно Я6 » Я2, вместо (6.16) можно написать.
HJ, =я2/2 + нй4,
откуда следует, что при = l2 HL > Я2; как правило, Я8/й в несколько раз превышает Н212, поэтому напряженность Н2 в ветви с воздушным зазором в несколько раз меньше напряженности Яг
216
Рис. 6.15. Разветвленная симметричная магнитная цепь
Рис. 6.16. К расчету разветвлен^ ной симметричной магнитной
цепи
6.7.2. Последовательность расчета симметричных магнитных цепей. Предположим, что имеется разветвленная симметричная магнитная цепь (рис. 6.15) некоторого электромагнитного устройства.
В силу симметрии магнитной цепи и выражения (6.8) можно утверждать, что
ф{ = ф2 = ф/2.
Вследствие простого соотношения между магнитными потоками расчет разветвленных симметричных магнитных цепей производится практически в том же порядке, что н расчет неразие тленных магнитных цепей.
Обычно при расчете симметричную магнитную цепь делят мысленно на две одинаковые части но оси симме1рии uh и производят расчет одной ее половины (рис. 6.16).
6.7.3. Последовательность расчета иеснмметрачных магнитных цепей. Некоторая сложность расчета несимметричных магнитных цепей объясняется тем. что количественные cooi ношения между магнитными потоками ветвей остаются неизвестными до определения потоков
Расчет несимметричных магнитных цепей производится графоаналитическим методом с использованием соотношения между магнитными потоками в разветвленных цепях (6.8), закона полного тока 16.9) и вб. а. х.. методика расчета которых была рассмотрена выше. В зависимости от исходных данных последовательность расчета несимметричных цепей несколько изменяется.
Рассмотрим и качестве примера последовательность расчета магнитной цепи, изображенной на рис. 6.8, если требуется определить МДС /(Wj при заданной машинной индукции 3i2 и известной МДС l2w2.
Зная BS2, нетрудно найти магнитный поток = Ba2Sb2, а затем подсчитать магнитное напряжение
— ^2W2 ~ hi2^2 ~ ь2^2 ~ hi5/5
217
Построив с помощью уравнения вб-а-х-
и зная магнитное напряжение U^it» легко определить магнитный поток Ф3.
Зная потоки Ф2 и Ф3. найдем поток <!\ = Ф3 — Ф2 После этого можно определить МДС l}w}.
6.8. ОСНОВЫ РАСЧЕТА НАМАГНИЧИВАЮЩИХ ОБМОТОК
Задача расчета намагничивающей обмотки состоит в том, чтобы при заданной МДС определить конструктивные параметры обмотки, а также потребляемые ею ток и мощность.
Различают два типа намагничивающих обмоток: а) параллельные или шунтовые; б) последовательные или сериесные.
Параллельную обмотку рассчитывают иа включение иа одно из стандартных напряжений 17 сети постоянного тока (рис. 6.17). Она изготовляется из проволоки относительно небольшого диаметра, имеет сравнительно большие число витков и сопротивление. Ток параллельной обмотки определяется напряжением источника и сопротивлением обмотки:
1 = U/г,».
Последовательную обмотку ОС (рис. 6.18) включают последовательно с каким-либо элементом ЭЛ электрической цепи (например, с обмоткой якоря или возбуждения двигателя), и, таким образом, в обмотке и данном элементе существует один и тот же ток. Последовательная обмотка изготовляется из проволоки относительно большого диаметра, имеет небольшое число витков и сопротивление гс, значение коюрого намного меньше сопротивления гэл. Ток обмотки определяется практически напряжением источника и сопротивлением элемента, последовательно с которым включена обмотка:
I = U/(r^ + rc}^ С/г,л.
При расчете обмотки прежде всего следует определить площадь ее поперечного ссчсния $к (рис. 6.19) и установить, разместится ли она в окне магнитопровода площадью So = ab.
Плошадь SK можно определить из соотношения
= Sw,
где /с =5и/5к - коэффициент заполнения, показывающий, какая часть гг.тсицади S, заполнена проводниковым материалом, обычно медью; S и w - площадь поперечного сечения проволоки и число витков катушки.
218
Рис. 6.17 Схема включения параллельной намагничивающей обмотки
Рис. 6.18. Схема включения последовательной намагничивающей обмотки
Рис. 6.19. Эскиз нами: начинающей обмогки
Коэффициент заполнения зависит от толщины изоляции проволоки и способа намотки. 1 ак, если изготовить катушку из проволоки с тонкой эмалевой изоляцией и укладыва|Ь проволоку виюк к ви1ку, то коэффициент заполнения будет иметь наибольшее значение.
Выразив S через ток 7 и допустимую по условиям нагревания плотнишь юка J, получим
/н F
SK------------.
kJ kJ
(6.171
Как видно, площадь SK, а значит, размеры и масса обмотки при выбранных значениях к и J, зависят исключительно от МДС F = Jw обмотки.
Определив по формуле (6.17) площадь $к, можно изобразить эскиз обмотки (рис. 6.19) и найти длину среднего витка После этого из выражения
17 _ р/срн> Г_Т= 8
нетрудно определить площадь поперечного сечения и диаметр проволоки обмотки:
s = TV. JW
и ' У к У TtU ’
219
а затем ток, мощность, чисто витков и сопротивление обмотки:
p/ri,JF
/ = = ------; Р= l// = p/c.,JF;
U f
F U С I'2
I I р'ср^
Как видно из полученных формул, при повышении напряжения обмотки ее число витков и сопротивление возрастают, а ток, площадь поперечного сечения и диаметр проволоки уменьшаются. Мощнис| ь обмотки не зависит от напряжения, а при уветичении МДС она возрастает.
Исходной величиной при расчете последовательной обмотки является ее ток. Зная МДС и юк, легко определить число витков: W= = F/l, а далее найти и другие величины
Пример 6.2. Установиib, разместится ли обмотка, МДС которой была определена в примере 6.1, в окне магнмтопровода (см. рис. 6.9, а), если допустимая цлоыкхль тока J = 2 А/мм2, а коэффициент заполнения к = 0,5.
Решение. По формуле (6.16) площадь, занимаемая обмоткой в окне магннтопровода.
Iw 2754
S, =---=---------- 2754 мм2.
Jk 2-0,5
Площадь окна магнитопровода (см. рис. 6.9, д)
So = 110-95 = 10450 мм2.
Так как < 80, то обмотка разместится в окне магнитопровода.
6.9. ТЯГОВОЕ УСИЛИЕ В ЭЛЕКТРОМАГНИТНЫХ УСТРОЙСТВАХ
Многие устройства снабжаются электромагнитами, у которых подвижная часть магнитопрозода (якорь) отделена от его неподвижной части воздушным зазором. При подключении намагничивающей обмотки к источнику электрической энергий1 возбуждается ма!нигное поле, возникает электромагнитная сн-’ ла, действующая на якорь, и он, преодолевая силу тяжести, действие пружин и т п„ притягивается к неподвижной части магнитопровода.
В результате перемещения якоря электромагнитное устройство выполняет те функции, иа которые оно рассчитано: проис-
220
Рис. 6.20. К определению подъемной силы злектро-мэ| нита
ходит подъем грузов, растормаживание механических тормозов, переключение контактов коммутационных аппаратов, переключение вентилей в гидравлических системах управления и т. п.
Между работой электромагнитных сил и изменением запаса энергии магнитного поля существует зависимость, по которой можно определить электромагнитные силы, действующие во многих электромагнитных устройствах. Воспользуемся указанной зависимостью для определения тягового усилия F электромагнита (рис. 6.20).
При подключении катушки к источнику электрической энергии происходят весьма сложные процессы: так как катушка J обладает индуктивностью, то ее ток после подключения и, следовательно, магнитный поток магнитопровода, энергия магнитного поля и тяговое усилие, действующее иа якорь I, будут возрастать постепенно. Когда тяговое усилие станет больше сил сопротивления движению якоря (силы тяжести, сил сопротивления пружин и т. п.), якорь начнет перемещаться в направлении к неподвижной части магнитопровода 2 с ускорением, зависящим от значений тягового усилия, сил сопротивления перемещению и массы перемещающихся частей; уменьшение воздушного зазора, вызванное перемещением якоря, окажет влияние иа характер изменения почти всех перечисленных выше величин; тяговым усилием соверши «ия работа, связанная с перемещением якоря.
Определение тягового усилия с учетом всех перечисленных пропессов представляе! значительную сложность. Поэтому тя-1 овое усилие определяют часто приближенно, исходя из следующих соображений:
в обмотке и воздушном зазоре существуют соответственно установившиеся значения тока 1 и магнитной индукции В5;
при изменении воздушного зазора на dl6 магнитная индукция остается постоянной.
221
Учитывая последнее, следует считать, что механическая работа, связанная с перемещением якоря, совершается за счет изменения энергии магнитного поля воздушного зазора вследствие уменьшения объема последнего.
На основании этого и имея в виду, что в магнитной цепи (рис, 6.20) два воздушных зазора, можно написать
r2
FdL=—^—2dV6,' или F dl6 =-^2S&dl6, (6.18)
2р0 2Но
где Д?/2ц0 — энергия магнитного поля в единице объема воздушного зазора; 2dK8 = 25, dl& - изменение объема воздушных зазоров при перемещении якоря иа dl6.
Из (6.18)
F=-^Ss. (6-19)
Ио
Тяговое усилие, приходящееся иа один воздушный зазор,
Fi = — Sg. 2р0
(6.20)
После изготовления и испытания электромагнита, рассчитанного ио формуле (6.19) или (6.20), можно ввести необходимые уточнения.
Пример 6.3. Определить магнитную индукцию в воздушном зазоре электромагнита (см. рис. 6.20), при ко юрой возникает тяговое усилие F = 240 Н.
Решение. Иэ формулы (6.19)
! Тл.
1' 36 \ 15 20 10 ‘
Определив магнитную индукцию, можно найти МДС катушки и произведи ее расче!.
Б. МАГНИТНЫЕ ЦЕПИ С ПЕРЕМЕННОЙ МАГНИТОДВИЖУЩЕЙ СИЛОЙ
6.10. ЯВЛЕНИЯ, ПРОИСХОДЯЩИЕ В МАГНИТНЫХ ЦЕПЯХ ЭЛЕКТРОМАГНИТНЫХ УСТРОЙСТВ ПЕРЕМЕННОГО ТОКА, И НЕКОТОРЫЕ ИХ КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ
Магнитными цепями с переменной МДС называются цеци, магнитный поток которых возбуждается намагничивающими обмотками, питаемыми переменным током.
На рис. 621, а приведена магнитная цепь некоторого электромагнитного устройства переменного тока. При подключении намагничивающей обмотки к источнику синусоидального напряжения МДС iw катушки возбуждает основной магнитный поток Ф и поток рассеяния Фр (см. § 6.4).
Поскольку напряжение источника изменяется, будут изменяться МДС w, магнитные потоки Ф и Фо и в обмотке будут индуктироваться ЭДС самоиндукции
е = — wd&/dt; ер = ~wd^p/dt.
На основании второго закона Кирхгофа для мгновенных значений величин
и—— е — ep + i>i, (6.21)
о I куда
. _ » + е + ер _ и - н-йФ/Л - wd<bp/dt
Г1 rt
Как видно, ток обмотки при синусоидальном напряжении зависит не только от напряжения и сопротивления rt обмотки, но также и ог ЭДС е н ер. В гл. 2 было показано, что наличие
Рис. 6,21 Обмотка с ферромагнитным магнитопроводом (а) и упрощенное ее изображение (6)
223
ЭДС самоиндукции приводит при переменном токе к уменьшению действующего значения тока. Очевидно, обмотки электромагнитных устройств переменного тока должны иметь меньшее сопротивление для получения заданного тока, чем обмотки аналогичных электромагнитных устройств постоянного тока, в которых ЭДС не индуктируются.
Если обмотку, рассчитанную на определенное действующее значение переменного напряжения, подключить к такому же по значению постоянному напряжению, то ток обмотки окажется недопустимо большим.
У большинства электромагнитных устройств с ферромагнитным магнитопроводом существуют следующие соотношения между максимальными значениями потоков и ЭДС: Фт » - » Фр|Я, а поэтому и Ет » Ерт; кроме toi о, обычно Еп » 1тгх. Учитывая это, можно сделать вывод о том, что наибольшее влияние на значение тока катушки оказывает ЭДС е от основного магнитного потока Ф
При питании обмотки переменным током от источника потребляется большая активная мощность, чем потери мощности в активном сопротивлении rj обмотки, равные ДРобм = /2г1. Дополнительная мощность, потребляемая от источника, вызвана потерями на гистерезис ДРТ, возникающими вследствие явления гистерезиса при изменении магнитного потока, и потерями иа вихревые токи ДР8, вызванными вихревыми токами «в, возникающими под действием индуктируемых в ферромаг-ИИ1НОМ материале магннтопровода вследствие изменения в нем MaiHHTHOio поюка (см. поперечное сечение магнитопровода иа рис. 6.22, а).
Пути, по которым циркулируют вихревые токи, установив весьма затруднительно, так как они зависят от конфигурации сечения магнитопровола, распределения по сечению магнитной индукции и микроструктуры ферромагнитного материала. Для определения направления еа можно воспользоваться правилом Лейпа. Если, например, Ф>0 и возрастает (рис. 6.22,а), то ее будет направлена в сторону, противоположную указанной на рисунке.
Потери мощности в обмотке ДРобм называют потерями в меди, поскольку обмотки изготовляются чаще всего из медной проволоки. Потери мощности ДРС = ДРГ + ДРВ называют потерями в стали или в магиитопроводе.
Потери ДРобм приводят к совершенно бесполезному нагреванию обмотки, а потери ДРС — магнитопровода.
Как извешно, потери энергии в единице объема ферромш-иитиого материала за один цикл перемагничивания пропорциональны площади петли гистерезиса.
224
Рис. 6.22. Сечение магнитопровода из сплошного материала (а) и из отдельных листов (б)
Площадь петли гистерезиса и, следовательно, потери энергии зависят от свойств ферромагнитного материала, максимального значения магнитной индукции, до которой намагничивается материал, а также от частоты перемагничивания. Статическая петля гистерезиса 1 (рис. 6.23), получаемая при весьма медленном изменении напряженности магнитного поля, соответствует наименьшим потерям энергии И'%, равным практически потерям па гистерезис И%). При увеличении частоты перемагничивания площадь петли и потери энергии возрастают, что объясняется увеличение потерь иа вихревые токи. В этом случае И'сп = МИцо + Для тех же материалов и максимального значения магнитной индукции, что и статическая петля гистерезиса / иа рис. 6.23, приведена динамическая петля гистерезиса 2, соотвегствующая некоторой частоте перемагничивания при переменном токе.
Зная объемы V отдельных участков магиитопровода и соответствующие потери энергии можно определить потери энергии во всем магнитопроводе, а чиая частоту переменного тока, — потери мощности в нем. Однако потери энергии и мощности таким образом в инженерной практике не определяют, так как для этого необходимо было бы иметь набор динамических петель гистерезиса для различных материалов, максимальных значений магнитной индукции и частот перемагничивания. Практические способы определения потерь мощности в стали ДР- рассматриваются в § 6.13.
Для уменьшения потерь на перемагничивание ЛРГ магнитопроводы электромагнитных устройств, работающих па переменном токе, изготовляют из магнитно-мягких ферромагнитных материалов с узкой петлей гистерезиса. Для уменьшения потерь на вихревые токи ДРВ магнитопроводы устройств, работающих при переменном токе частотой 50 Гц, изгото-вляют-ие из сплошного материала, как показано на рис. 6.22, а, а яз отдельных изолированных друг от друга стальных листов (рис. 6.22,6) толщиной d = 0,35 ч- 0,5 мм. Эю приводит к увели-
8 Электротехника 225
Рис. 6.23. Статический (7) и динамический (2) циклы магнитного гистерезиса
чению сопротивления магии-топроврда вихревым токам и к уменьшению этих i оков. С той же целью в листовую электротехническую сталь добавляют до 4,8% кремния. Изоляция листов осуществляется Путем оксидирования или с помощью лаков. В измерительных устройствах и при более высоких частотах применяется более тонкая листовая электротехническая сталь, а также магиитоди-электрикн и ферриты.
Чтобы составить представление о влиянии толщины листов, из ко-
торых изготовляется магнитопровод, на потери мощности в нем, воспользуемся выводом, приводимым обычно в литературе по теории переменного тока На основании указанного вывода можно сделать за
ключение о том, что при постоянных значениях частоты переменного тока f и максимальной магнитной индукции Вт потери мощности в одном листе АРВ л магнитопровода длиной I и высотой поперечного сечения h (см. рис. 6.22,6) примерно пропорциональны третьей степени толщины листа d, т. е, АРВ kds.
Если магннтопровод состоит из п листов, то, очевидно, потери в нем будут ДРВ = knd3.
При уменьшении толщины листа, например, вдвое для получения той же площади поперечного сечения магнитопровода (без учета изоляции между листами) необходимо число листов увеличить также в 2 раза. Тогда потери мощности в магнитопроводс составят
Как видно, уменьшение толщины листов приводит к сущесг-. венному уменьшению потер» мощности от вихревых токов.
Изготовление магиитопроводов нз отдельных изолированных листов является одной из важнейших конструктивных особенностей устройств, работающих на переменном токе. В отличие от это1 о магнитопроводы электромагнитных устройств постоянного тока изготовляются, как правило, из сплошного ферромагнитного материала. Исключением являются некоторые части магиитопроводов электромагнитных устройств постоянного тока, которые по условиям работы подвергаются периодическому перемагничиванию.
Рассматривая конструктивные особенности электромагнитных устройств переменного тока, следует остановиться на 226
Рис. 6.24. К пояснению назначения короткозамкнутого витка
электромагнитах, с помощью которых создаются тяговые усилия в различных устройствах. Когда магнитный поток, созданный под действием МДС втягивающей обмотки, падает до нуля, исчезает и тяговое усилие электромагнита. Естественно, что из-за сил тяжести, действия пружин и т. д. якорь стремится отойти (или отходит) от неподвижной части магнитопровода. Когда'магнитный поток возрастает, якорь снова притягивается и т. д, В результате возникают колебания якоря, амплитуда которых зависит от частоты и амплитуды напряжения источника, сил сопротивления перемещению и инерционности всех подвижных частей. Колебания якоря сопровождаются значи-1ельным шумом, в результате колебаний может нарушиться соединение контактов коммутационных анпараюв и т. д.
Чтобы исключить это, ториевая часть стержней магнито-провода разрезается и часть площади поперечного сечения стержня 1 охватывается короткозамкнутым витком 2 (рис, 6.24). Магнитный поток Ф, созданный под действием МДС намагничивающей обмотки, делится при этом на две части: одна из них Ф' проходит через площадь стержня S', охваченную короткозамкнутым витком, другая Ф" — через площадь S".
Магнитным потоком Ф' в короткозамкнутом витке индуктируется ЭДС взаимной индукции ек = - под действием которой в витке возникает ток iK. В результате действия МДС намагничивающей обмотки и короткозамкнутого витка через площадь S’ будет проходить результирующий магнитный по-юк Фрез, коюрый огличается от потока Ф' как по значению, так и по фазе. Так как ма1ни1нын поток Фг„-. не совпадает по фазе с потоком Ф’, он не будет совпадать по фазе и с потоком Ф". Вследствие этого оказывается, что когда Ф" = 0, Фре1 / О и наоборот. Таким образом, общий магнитный поток стержня и, следовательно, тяговое усилие никогда не снижаются до нулевого значения, благодаря чему и устраняются указанные выше недостатки.
8* 227
6.11. ФОРМЫ КРИВЫХ ЭДС е, МАГНИТНОГО ПОТОКА ф, ТОКА I И МГНОВЕННОЙ МОЩНОСТИ р ИДЕАЛИЗИРОВАННОЙ ОБМОТКИ
В соответствии с уравнением (6.21) обмо1ка с ферромагнитным магнитопроводом (см. рис. 6.21, а) может быть заменена для удобшва анализа устройством, изображенным на рис. 6.21,6. Часть этого устройства, состоящую из обмотки, расположенной на ферромагнитном магнитопроводе, будем называть в дальнейшем идеализированной обмоткой.
Предположим, что к идеализированной обмотке подведено напряжение и' (см. рис. 6.21,6), изменяющееся по синусоидальному закону:
u'= l^sin (со/+ я/2). (6.22)
Так как согласно второму закону Кирхгофа и' = ~ е, то е = Е„ sin (о/ — я/2), (6.23)
где* Еж = [7^ и, очевидно, Е - V.
Чтобы получить закон изменения магнитного потока, воспользуемся выражением е - — wdtb/dt, из которого после замены ЭдС согласно (6.23) найдем
fe , f E_sin(cor - >г/2) Е_
Ф = - I—dt = — ----------------dt =----sinart + Фо,
J w J w cow
(6.24)
1де Фо- посюянная составляющая основного магнитного потока.
Так как напряжение и' не имеет постоянной составляющей, то не будут иметь постоянных составляющих также ток i и МДС /и’. Поэюму следует считать, что и Фо = 0. Величина представляет собой амплитуду магнитного потока
- Учитывая сказанное, вместо (6.24) окончательно будем иметь
Ф = Ф„,31псоГ. (6.26)
На основании получениях соотношений для идеализированной обмотки можно утверждать, что независимо от свойств ферромагнитного материала и особенностей магннтопровода, 228
Рис. 6.25. К вопросу построения графика тока идеализированной обмотки
в частности от того, есть или отсутствует воздушный зазор, справедливо следующее;
при синусоидальном напряжении it' ЭДС е н магнитный поток Ф изменяются также по синусоидальному закону;
при указанных на рис. 6.21 положительных направлениях ЭДС отстает по фазе от напряжения на угол л, а от магнитного потока - на yi ол л/2;
амплитуда магнитного потока прямо пропорциональна амплитуде ЭДС, а значит и амплитуде напряжения, поскольку Е. =
изменение числа витков w или частоты переменного тока f = со/2>г при заданном значении Um приводит к изменению амплитуды магнитного потока Фж.
Из выражения (6.25) нетрудно получить широко распространенную формулу действующего значения ЭДС
/а
2л
1/2
или окончательно
Е — 4,44муФт = 4,44м’/ВЯ1£. (6.27)
Чтобы построить график г(г), можно воспользоваться графиком Ф(г) и магнитной характеристикой ф(«) обмотки (рис. 6.25).
Для построения графика Ф(£), который не зависит от свойств ферромагнитного материала н параметров магнитопророда, следует воспользоваться выражениями (6.25) и (6.26), учитывая, что Еж = 1/ж.
Магнитную характеристику Ф(1) можно построить путем расчета магнитной цепи (рнс. 6.21,6), используя в качестве кривой намагничивания В (Н) динамический цикл гистерезиса, соответствующий заданной частоте / и амплитудному значению, магнитной индукции Вж, зависящему согласно (6.27) и равенству Е = U' от действующего значения напряжения С". Рассмотрим последовательность расчета магнитной цепи (рис. 6.21,6),
229
.считая, что /г = 0, а / - общая длина средней лиини магнитной индукции.
Задавшись, например, магнитным потоком Ф,, определяем магнитную индукцию по кривой намагничивания
В (Н) находим напряженность магнитного поля с помощью закона полного тока для мгновенных значений напряженности и тока Wjf = iEH- подсчитываем ток ii=Hll/w. Чтобы построить магнитную характеристику, необходимо проделать указанные операции для различных значений магнитного потока в пределах периода его изменения. Поскольку Ф = BS, а i = = Hl/w, магнитная характеристика будет подобна динамической петле гистерезиса.
Построение графика i(t) с помощью (рафиков Фр) и Фр) (рис. 6.25) может быть произведено в таком порядке. Задаемся, предположим, временем =0; пользуясь (рафиком Фр), находим Ф^ =0, а используя график Фр), определяем ток ц; в системе координат i, t при tt = 0 откладываем значение тока ip Задавшись временем t2 = Т/4, по графику Фр) находим Ф2, а по графику Фр) — ток i2. В системе координат I, t при t2 = = Т/4 откладываем значение тока (2. Для построения графика i'/[ необходимо определить iqkh при различных значениях времен в пределах периода Т.
Изучив рассмотренную методику построения i рафика j(t), нетрудно сделать заключение о том, что для построения указанного графика нет необходимости строить график Ф р); достаточно иметь зависимость Ф р) и динамический цикл гистерезиса. График Ф (1) был использован для большей наглядности.
Как следует из выражений (6.22), (6.23) и (6.26), □ также графика ip), при синусоидальных и', е и Ф гок i идеализированной обмотки получается несинусоидальным. Можно показать, что он будет тем сильнее отличаться от синусоидального, чем больше степень насыщения ферромагнитного материала маг-иитопровода при амплитудном значении магнитного потока и шире динамическая петля гистерезиса.
Построение графика i'(t) при наличии воздушного зазора (/5 0) отличав (ся лишь тем, что для определения тока i' следует использовать закон полного тока в виде HI + + W5fg = i'w.
Чтобы составить представление об изменении максимального тока обмотки прн введении воздушного зазора в магнитопровод, запишем уравнение по закону полного тока для максимальных значений напряженностей н тока Н„ах1 4- —
= I'^w.
230
Рис. 6.26. Графики «'(/), i(t) и p(t) идеализированной обмотки
Последнее уравнение можно переписать в такой форме:
ит„1 - HsJt = + l„.w,
где - И„„1, /„„w = Очевидно, Гтш = 1^, + Ilm.
Как известно, при = В„ HiM » Hmf4. Поэтому даже прн воздушных зазорах Н&т1-Л > HmaJ (см. пример 6.1), следовательно, и />„ > 1твх. Таким образом, ток при 18 ф 0 обычно больше тока при I,, = 0 на
Нетрудно показать, что график i'(t) при ls 0 меньше отличается от синусоиды, чем график i (t| при 1g = 0. Действительно, согласно закону полного тока для мгновенных значений напряженностей н токов HI + Н5/г = i'w = iw + i^w. Очевидно /' = i + is.
Если имеет то же значение, что при 4 =0, то фи также не изменится. Поэтому график i (г) несинусоидального тока останется прежним. Поскольку зависимость фр) для воздушного зазора линейная, а Ф(Н представляет собой синусоиду, ток 4 будет также синусоидальным. Суммирование токов i и % для получения графика f (г) приведет вследствие этого к тому, что график j'(f) будет меньше отличаться от синусоиды, чем график >(') при 1,-0.
Из графика тока (рис. 6.25) следует, что прн Ф = 0, а значит, при и' = ± СП ток I не равен нулю, что является признаком потребления обмоткой активной мощности. Чтобы составить более отчетливое представление об энергетических процессах идеализированной обмотки, обратимся к рис. 6.26, на котором приведены графики и' (0, i(t), а также график мгновенной мощности р(г), построенный в соответствии с формулой р = ui.
Каи видно, в течение большей части периода р > 0. Поэтому если подсчитать потребляемую активную мощность
ю окажется, что Р' Ф 0. Поскольку идеализированная обмотка не имеет активного сопротивления, следует признать, что активная мощность идеализированной обмотки равна потерям мощности в ферромагнитном материале магнитопровода, Р' = = &РС. Таким образом, в отличие от обмотки без ферромаг
231
нитного магнитопровода идеализированная обмотка с ферромагнитным магнитопроводом кроме реактивной мощности, необходимой для возбуждения магнитного потока, потребляет еще и активную мощность, вызванную процессами, связанными с перемагничиванием ферромагнитного материала и возникновением в нем вихревых токов.
&12. ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ИДЕАЛИЗИРОВАННОЙ ОБМОТКИ
Если согласно методике, изложенной в § 6.11, определить максимальные значения токов 1„ах при различных значениях напряжения U'„ и воздушного зазора можно построить в. а. х. 17„ (/«<,*) идеализированной обмотки (рис. 6.27).
В отличие от обмоткн магнитной цепи с постоянной МДС, ток I которой при неизменном напряжении U ие зависит от длины воздушного зазора, ток 1тах обмотки с переменной МДС при неизменной амплитуде напряжения Um существенно зависит от воздушного зазора и при увеличении последнего значительно возрастает. В соответствии с зтнм свойства обмотки с постоянной МДС характеризуются при различных воздушных зазорах одной н той же в. а. х., тогда как свойства обмотки с переменной МДС характеризуются при различных воздушных зазорах различными в. а. х.
Если в. а. х. обмотки, питаемой постоянным током, предста-вляютсобой прямую линию, то в. а. х обмотки, питаемой переменным током, существенно нелинейны. ] 1оследнее объясняется тем, что магнитный поток Фт связан с напряжением 17^ линейной зависимостью, а с током 1твх — нелинейной зависимостью.
Пока ферромагнитный материал магнитопровода не насыщен при напряжении [7^, что соответствует примерно синусоидальному закону изменения тока i(t), в. а. х. примерно линейны (см. на рнс. 6.7 в. а. х. в диапазоне от 0 до Cmt). По мере насыщения ферромагнитного материала при [7^ темп увеличения тока 1тах все более возрастает по сравнению с темпом увеличе-
Лпах
Рис. 6.27. Вольт-амперные характеристики идеали-
зированном катушки при различных воздушных зазорах
232
ння напряжения U'm, а график i (г) все больше будет отличаться от синусоидального.
При увеличении воздушного зазора кривизна в. а. х. в области перехода ферромагнитного материала в насыщенное состояние уменьшается, в. а. х. все более спрямляются. Диапазон изменения тока, соответствующий примерно линейной зависимости (7max) и синусоидальному изменению тока i (t), при увеличении воздушного зазора расширяется.
6.13. ЭКВИВАЛЕНТНЫЙ ТОК И ВЕКТОРНАЯ ДИАГРАММА ИДЕАЛИЗИРОВАННОЙ ОБМОТКИ
С целью упрощения расчета и анализа магнитных цепей переменного тока песипусоидальпый ток обмотки заменяют эквивалентным в отношении действующего значения синусоидальным током. Такая замена позволяет использовать для расчета и анализа метода, изложенные в гл. 2 (в частности, комплексный метод), а также производить построение век-, торных диаграмм.
Для определения действующего значения I эквивалентного синусоидального тока можно было бы воспользоваться выражением, приведенным в гл. 2,
для нею необходимо предварительно построить график j(t) не-синусондальиого тока согласно методике, изложенной в § 6.11. Однако указанный способ определения тока I практически непригоден, так как, не говоря уже о его сложности, для этого потребовалось бы иметь набор динамических петель гистерезиса для разных частот и максимальных значений магнитной индукции.
Практические способы определения действующего значения I эквивалентного синусоидального тока будут рассмотрены далее, а пока будем считать, что он уже известен, н рассмотрим векторную диаграмму идеализированной обмотки (см. рис. 6.21,6), Последнюю (рис 6.28) нетрудно построить, используя выражения (6.22), (6.23) и (6.2б), а также тот факт, что идеализированная обмотка потребляет кроме реактивной (индуктивной) мощности также и активную мощность. Учитывая это. можно утверждать, что эквивалентный синусоидальный ток будет отставать по фазе относительно напряжения и' на некоторый
233
Рис. 6.28. Векторная диаграмма идеализированной обмотки
угол <p', который можно определить из формулы
Р = ДРС = VI cos ф'.
Ток I можно разложить на две составляющие: активную составляющую 1а, обусловленную потерями мощности ЛР<. в ферромагнитном магнитопроводе, и реактивную (индуктивную) составляющую 7р, необходимую для возбуждения основного магнитного потока; последней соответствует реактивная (индуктивная) мощность <2
Очевидно __________
I = ]/Ч + Д. (6.28)
В магнитных пенях, особенно при наличии воздушного зазора, ток 1р и мощность Q’ обычно намного превышают ток 1а и мощность Р’ = АРС. В соответствии с этим угол 5, называемый углом потерь, составляет обычно несколько градусов, а угол ф' близок к 90°.
Активная и реактивная мощности идеализированной обмотки могут быть выражены следующим образом:
Р' = АРС = 1/7 cos ф' = VIa; (/ — VI sin ф' = VIр. (6.29)
Реактивная мощность необходима для возбуждения магнитного потока как в ферромагнитной, части магннтопровода, так и в воздушном зазоре. Поэтому она может быть выражена так:
Q' = & + & = U'I„ + VI. = VIp, (6.30)
где Qc = VIp,c и /(и - мощность и ток, необходимые для возбуждения магнитного поля в ферромагнитной части магнитопровода; 6g = [778 и 16 — мощность и ток, необходимые для создания магнитного потока в воздушном зазоре.
Ток I идеализированной обмотки определяют часто через его составляющие 1а и 1р которые для ферромагнитной части магнитопровода находят через соответствующие мощности:
l.= P-/U’^APJU', I„ = QJU’. (6.31)
Реактивная составляющая тока Is определяется по формуле J — _ ^3*^5
S w ]/2»м,
(6.32)
234
Мощности Р' — АР<. и Qc находят следующим образом: Р' = АРС = Рт, Qc — Qy^, (6-33)
где р и 2уД — удельные потери мощности и удельная реактивная мощность, т. е. мощности, приходящиеся иа единицу массы магннтопровода, Вт/кг и вар/кг; т — масса магнитопровода, кг.
Для определения удельных, потерь мощности пользуются иногда следующей формулой, полученной на основании обобщения опытных данных:
P = PioB^(4-Y'3, (634)
Pi 5
где п = 5,691g—pi 5 и pj 0 — удельные потери мощности при Р1.0 ’ ' ,
частоте 50 Гц и максимальных значениях магнитной индукции 1,5 и 1,0 Тл, Вт/кг. Показатель степени п в формуле (6.34) для многих ферромагнитных материалов близок к двум. Формула (634) пригодна для расчетов при изменении Вт от 0,5 до 1,6 Тл и / от 10 до 100Гц.
Так как магнитная индукпия Вт пропорциональна напряжению U', а п * 2, можно сделать вывод о том, что при увеличении напряжения U' потери мощности в магиигопроводе существенно возрастают. Из формулы (6.34) следует также, что потери мощности в значительной степени зависят от частоты переменного тока.
Если отсутствуют сведения об удельной реактивной мощности, то реактивный ток 7р е может быть определен приближенно с помощью выражения действующего значения тока, приведенного в гл. 2, и графика ipc(t) (рис. 6.29), построение которого производится в той же последовательности, что и графика 1(0 (см. рис. 6.25). Для построения графика ip,c(0 необходимо использовать магнитную характеристику Ф (ipc), расчет которой следует производить с помощью закона полного тока, используя основную кривую намагничивания.
Как следует из графика 1р,с(0 (рис. 6.29), при Ф = 0 (что соответствует и' — ± ток ip с = 0. Это является подтверждением того, что эквивалентный синусоидальный ток будет в данном случае действительно чисто реактивным.
Задача расчета значительно упрощается, если при амплитудном значении напряжения и' ферромагнитный материал магии-топровода не насыщен или незначительно насыщен (участок 1-2 рис. 6.29). В этом случае ток ipc можно считать синусоидальным и график ip c(i) ие строить. Из расчета магнитной цепи достаточно найти амплитуду тока IPtCm, после чего легко
235
Рис. 6.29. К построению графика реактивной составляющей тока
определить его действующее значение по формуле 1рс = = 1р.ст/]/2.
В некоторых случаях для определения эквивалентного синусоидального тока катушки пользуются кривой намагничивания ферромагнитного материала при переменном токе Вт(Н~), представляющей собой зависимость амплитуды магнитной индукции от действующего значения напряженности магнитного поля, соответствующей действующему значению тока катушки. Г рафик Вт (ЯД аналогичен основной кривой намагничивания и отличается от последней только количественными соотношени-
ями между напряженностью и магнитной индукцией.
Учитывая, что Н ~ и I соответствуют эквивалентным синусоидальным напряженности и току, по закону полного тока для однородного ферромагнитного участка магнитной цепи (рис. 6.21,6) можно написать
(6.35)
откуда нетрудно найти ток I. Реактивную составляющую тока можно определить по формуле (6.28), если предварительна найти активную составляющую.
Если магнитопровод содержит несколько ферромагнитных участков и воздушных зазоров с различными площадями попе-1 речного сечения, то активную и реактивную составляющие to-j ка I следует определять по формулам
£^ах» fp,c Х^Р.С*’ I t
А> = X = + Ai
(6.36).
где х — иомер участка из ферромагнитного материала, х »
*1, 2, ..., к; у — номер воздушного зазора, у = 1, 2, ..., п;
236
токи 1ЛХ и /р, сх определяются согласно методике, изложенной выше при рассмотрении магнитной цепи (см. рис. 6.21, б), ток /5у — по формуле (6.32).
В заключение следует обратить внимание на то, что с увеличением воздушного зазора в магнитопроводе при 17' = const ток 1Ь и мощность 6g значительно возрастают, тогда как токи /а и /р с, а также мощности Р' = &РС и <2с остаются без изменения.
6.14. СХЕМА ЗАМЕЩЕНИЯ ИДЕАЛИЗИРОВАННОЙ ОБМОТКИ И ПАРАМЕТРЫ СХЕМЫ ЗАМЕЩЕНИЯ
Имея векторную диаграмму (см. рис. 6.28) и соотношение (6.28), нетрудно представить себе, что идеализированной обмотке соответствует схема замещения, приведенная на рис. 6.30. Индуктивный элемент х0 в схеме замещения, обусловлен реактивным током /р и мощностью Q', резистивный элемент г0 — активными током /а и мощностью Р' = АРС.
Очевидно, мощности идеализированной обмотки могут быть выражены через сопротивления схемы замещения следующим образом:
Р = А/', = I2,,, = V'2/rri, Q' = I2x0 = U'2/x„. (6.37)
Так как реактивный ток /р = 17'/х0, особенно при наличии воздушного зазора в магнитопроводе, значительно превышает активный ток /а = U'/r0, то индуктивное сопротивление х0 оказывается намного меньше активного сопротивления г0: очевидно, полное сопротивление z0 схемы замещения идеализированной обмо1ки
1 1
° у° 1/(1Ао)2 + (1А)2 °
Используя методику определения тока I, изложенную в § 6.13, можно вычислить токи при различных напряжениях 17' и воздушных зазорах /5 и построить в. а. х. 17'(/), связывающие действующее значения тока и напряжения. Указанные в. а. х. будут аналогичны по виду в. а. х. на рис. 6.26 и будут иметь указанные ранее особенности.
Имея в. а. х. идеализированной обмотки и пользуясь законом Ома, согласно которому z0 = U'/I « х0, можно построить график зависимости полного сопротивления схемы замещения идеализированной обмотки от напряжения на ее выводах
237
гокхо‘
Рис. 6.31. Зависимость z0(U')^s ss Xq(V') идеализированной обмотки
Рис. 6.30. Схема замещения идеализированной обмотки
Рис. 6.32. Зависимость и х0(/5) * -о(^) идеализированной обмотки
Z0(l/') % X0(Uy Такой график для одного из воздушных зазоров приведен на рис. 6.31.
Как видно, в отличие от электромагнитных устройств с
постоянной МДС, у которых сопротивление обмотки не зависит от напряжения на ее выводах, у электромагнитных устройств с переменной МДС полное сопротивление обмотки (равное примерно ее индуктивному сопротивлению) с увеличением напряжения изменяется. Пока напряжение относительно невелико и материал магнитопровода не насыщен, сопротивление обмотки остается примерно постоянным; по мере увеличения напряжения и степени насыщения ферромагнитного материала сопротивление значительно уменьшается.
Представляет интерес характер изменения тока и сопротивления идеализированной обмотки при увеличении воздушного зазора в магнитопроводе.
Пренебрегая активной составляющей тока ввиду сти, можно написать
его мало-
+ Ц = ' р.с +
(6.38)
Сопротивление катушки будет
г V
-*0 — Ар — •
А>.е +
(6.39)
С увеличением воздушного зазора при U' = const все члены в правых частях выражений (6.38) и (6.39), кроме длины воздуш
238
ного зазора 16, остаются постоянными. Графики зависимостей /р(/5) % /(/6) и х0(4) * zo(h\ построенные в соответствии с выражениями (6.38") и (6.39), приведены на рнс. 6.32.
В отличне от электромагнитных устройств с постоянной МДС, у’ которых с увеличением воздушного зазора при U = = const сопротивление н ток обмотки остаются постоянными, у электромагнитных устройств с переменной МДС увеличение воздушного зазора приводит к значительному уменьшению сопротивления и увеличению тока.
Последнее во многих случаях является весьма нежелательным, так как приводит к увеличению габаритных размеров обмотки, потребляемой индуктивной мощности и к ухудшению энергетических показателей электромагнитных устройств. Поэтому, например, в трансформаторах, магнитных усилителях н двигателях переменного тока стремятся воздушные зазоры свести к минимуму. У электромагнитов различных электротехнических аппаратов, у которых воздушный зазор необходим, исходя из принципа их действия (тормозные электромагниты, контакторы, реле и др.), приходится специально рассчитывать обмотку по нагреванию с учетом повышенных значений начальных токов, возникающих в момент подключения обмотки к источнику, когда подвижная часть магнитопровода — якорь — еще не притянулась к неподвижной части магнитопровода и воздушный зазор не ликвидирован. Для таких устройств в справочной литературе указывается обычно наибольшее допустимое число включений в час, на которое рассчитана обмотка, исходя из ее дополнительного нагревания начальными токами.
Однако зависимость тока и сопротивления обмотки переменного тока от воздушного зазора ие всегда оказывается нежелательной. Указанная зависимость широко используется в устройствах автоматики и измерительной техники, примером чему могут служить индуктивные конечные и путевые выключатели, индуктивные датчики для измерения неэлектрических величин.
В § 6.13 было сказано, что показатель степени п в (6.32) для многих ферромагнитных материалов близок к двум. В этом случае при f — const ДРС = kU'2 и согласно (6.37) получим
_ и'2 _ и'[ - 1 г° - ДР. ~ kU1 к '
Таким образом, сопротивление г0 схемы замещения почти постоянно и зависимость С7'(7а) близка к линейной.
239
6.1S. СХЕМЫ ЗАМЕЩЕНИЯ, ВЕКТОРНЫЕ ДИАГРАММЫ И МОЩНОСТИ РЕАЛЬНОЙ ОБМОТКИ
С ФЕРРОМАГНИТНЫМ МАГНИТОПРОВОДОМ
После замены иесннусоидального тока идеализированной обмотки эквивалентным синусоидальным током дзя реальной обмотки (см. рнс. 6.21,а) на основании второго закона Кирхгофа можно написать следующее уравнение:
U = - Е + Ir i - Ер = L/' + 1г х - Ер. (6.40)
Возникшая от магнитного поля рассеяния ЭДС Ер учитывается обычно как падение напряжения в индуктивном сопротивлении:
ЕР = ~JLXi----
где Lt и Xj = coLi — индуктивность и индуктивное сопротивление, обусловленные полем рассеяния.
Так как линии магнитной индукции поля рассеяния проходят преимущественно по воздуху, можно считать Li = const и %i = const.
После замены в (6.40) комплекса ЭДС Ер его выражением получим
U = U' + Ir i + Дх,. (6.41)
Дополнив в соответствии с уравнением (6.41) диаграмму, изображенную иа рис. 6.28, векторами падений напряжения, получим диаграмму реальной обмотки с ферромагнитным магнн-топроводом (рис. 6.33).
В соответствии с (6.41) и векторной диаграммой (рис. 6.33) можно получить схему замещения реальной обмотки, дополнив схему замещения идеальной обмотки резистивными гх и индук-тивным Xj элементами, соединенными последовательно. Схема замещения реальной обмотки дана иа рис. 6.34.
Как следует'из уравнения (6.41) и векторной диаграммы рис. 6.33, вследствие падений напряжения /Г] и Ixi напряжение U’ = Е оказывается меньше напряжения U, подводимого к обмотке. С изменением тока I, вызванным, например, изменением воздушного зазора, напряжение U', ЭДС Е и магнитный поток Ф будут изменяться. При этом ток I будет изменяться в меньшей степени, чем в случае идеализированной катушки. Следует, однако, иметь в виду, что при нормальных условиях работы многих электромагнитных устройств напряжение U' = Е зиачн-тельно превышает падения напряжения Irt и 1х{ и близко к на-240
Рис. 6.33. Векторная диаграмма реальной обмотки
Рис. 6.34. Схема замещения реальной обмотки
пряжению U. В соответствия с этим полное сопротивление схемы замещения идеализированной обмоткн z0 « хо (см. рис. 6.31) значительно превышает сопротивление zt = + х2
н близко к эквивалентному полному сопротивлению z реальной катушки.
Активная н реактивная мощности реальной обмоткн отличаются от соответствующих мощностей идеализированной обмотки и могут быть выражены следующим образом. Активная мощность
P=UI cos ср. (6.42)
Из векторной диаграммы рис. 6.33 следует, что l/cos<p = = Irt + l/'coscp’.
Учитывая это, активную мощность можно выразить так: Р = /2г, + U'l cos ф’ = /2Г] + U'U = ДРобм + АРС. (6.43)
Как видно, активная мощность Р, потребляемая реальной обмоткой, равна сумме потерь мощности в обмотке (ДР^,) и потерь мощности в ферромагнитном магиитопроводе (APj.
Аналогичные выражения можно написать и для реактивной мощности:
Q = Ulsin ф = I2Xi + U'l sin ф' = I2xx 4- U'l? = <2P 4- Q'. (6.44)
Мощность Qp необходима для возбуждения магнитного по-
241
обмотки с последовательным соединением резистивных и индуктивных
элементов
Рис. 6.36. Простейшая.схема замещения и векторная диаграмма реальной обмотки
ля рассеяния, мощность Q' — для возбуждения основного магнитного поля.
Как известно, параллельно соединенные элементы электрической цепн могут быть заменены эквивалентными элементами, соединенными последовательно. Учитывая это, в схеме замещения рис. 6.34 элементы г0 и х0 можно заменить последовательно соединенными элементами г01 нхп и получить более простую схему замещения реальной обмотки, изображенную на рис. 6.35, о. Так как х0 «г0, то после указанной замены получим rOi « х01 (см. гл. 2). После объединения резистивных, а также индуктивных элементов в схеме рис. 6.35, о получим еще более простую схему замещения реальной обмотки (рис. 6.36, а). Естественно, что в последней схеме сопротивление х = х01 + х( намного больше сопротивления г = г01 + гр Векторные диаграммы, соответствующие схемам замещения рис. 6.35,а н 6.36, а даны иа рис. 6.35,6 и 6.36,0.
4.U. ОПРЕДЕЛЕНИЕ ТОКА, МОЩНОСТЕЙ, ЭКВИВАЛЕНТНЫХ СОПРОТИВЛЕНИЙ И УГЛА СДВИГА ФАЗ МЕЖДУ НАПРЯЖЕНИЕМ И ТОКОМ РЕАЛЬНОЙ ОБМОТКИ
Поскольку схема замещения реальной обмотки с ферромагнитным магннтопроводом (см. рнс. 6.34) представляет собой смешанное соединение различных по характеру линейных и нелинейных элементов, определение тока, мощностей, эквивалентных сопротивлений и угла сдвига фаз тока относительно напряжения источника реальной обмотки значительно осложняется.
Предположим, что при заданном синусоидальном напряжении U источника требуется получить в магнитопроводе с известными геометрическими размерами магнитный поток Ф.
Определение указанных выше величин может быть произведено методом последовательного приближения в следующем порядке.
Так как в сопротивлениях rj и х, (см. рис. 6.34) теряется часть напряжения, то принимают напряжение V несколько меньшим напряжения U источника. Пусть, например, V = = U ' = 0,9</. Задавшись напряжением U (, из формулы (6.27) нетрудно определить при потоке Фж число витков w катушки.
Далее, в соответствии с методикой, изложенной в § 6.13, следует найти токи /а, 7р и I.
Зиая ток I, нужно задаться (исходя из нагревания) плотностью тока J и подсчитать площадь поперечного сечения проволоки катушки. Задавшись коэффициентом заполнения (см. § 6.8), необходимо изобразить эскиз катушки, определить длину среднего витка, а затем сопротивление rt катушки.
Сведения об определении индуктивного сопротивления рассеяния Xi можно найти в литературе по расчету соответствующих электромагнитных устройств. Рели степень насыщения ферромагнитного материала при максимальном значении магнитной индукции и воздушные зазоры в магнитопроводе невелики, то для ориентировочного определения сопротивления Xj можно воспользоваться формулой
Для дальнейшего расчета целесообразно использовать комплексный метод. Совместив, иапример, мысленно ось мнимых величии с вектором напряжения С/, следует выразить напряжение (7/, а также токи /а, /р и I в комплексной форме.
243
Очевидно,
v; =ju;. t,=jh, ZF = /P.
l = L + lF
Далее, используя (6.41), нетрудно найти расчетное комплексное значение напряжения V j источника, соответствующего напряжению U I, а затем его действующее значение.
В результате расчета может оказаться, что полученное напряжение Vt источника значительно отличается от его заданного значения V. Тогда следует задаться другим значением напряжения U. Обозначим его V2’. Для выбора напряжения 1/2' целесообразно воспользоваться методом пропорциональных величин, хотя он применим, строго говоря, к линейным электрическим цепям. Согласно указанному методу
Расчет в изложенной последовательности следует производить до Определения расчетного значения напряжения источника с требуемой степенью точности. •
Когда определение напряжения U будет закончено, используя комплексный метод, нетрудно определить мощности обмотки Р, Q и S, угол сдвига фаз ср между током I н напряжением 17, а также эквивалентные полное z, активное г и индуктивное х сопротивления обмотки, соответствующие схеме замещения, приведенной на рнс. 6.36.
Произведя аналогичные расчеты прн различных значениях напряжения [7 и воздушного зазора /5, можно построить в, а. х. 17(1) и графики 2(17), 7(/6) и z(/8) реальной обмотки. Поскольку ток реальной обмотки определяется в основном реактивной составляющей тока /р, а падения напряжения в сопротивлениях г, и xL невелики, в. а. х. и указанные графики окажутся аналогичными приведенным на рис. 6.26. 631 н 6.32.
Как было показано в § 6.15, в схеме замещения рнс. б.Зб.а х = х01 + Xj » г0| + = г. На основании этою часто для упро-
щения анализа соотношений электромагнитных устройств, особенно когда в магнитопроводе имеется воздушный зазор, сопротивлением г = r01 + rj пренебрегают и считают, что обмотка с ферромагнитным магнитопроводом представляет собой элемент с чисто индуктивным сопротивлением х = х01 + + xtfcx01. Естественно, что конфигурации в. а. х. при раз
.244
личных воздушных зазорах, а также зависимостей тока и сопротивления от воздушного зазора при этом остаются аналогичными приведенным на указанных выше рисунках.
6.17. ФЕРРОРЕЗОНАНСНЫЙ СТАБИЛИЗАТОР НАПРЯЖЕНИЯ
Вследствие падения напряжения в сопротивлениях источника и проводов электрической сети' напряжение приемников не остается постоянным. Для уменьшения колебания напряжения некоторые приемники снабжаются стабилизаторами напряжения. Существуют различные стабилизаторы напряжения. Одним из них является феррорезонансный стабилизатор.
Электрическая схема простейшего феррорезонансного стабилизатора напряжения и в. а. х. U2 (7д), U ((Г) его элементов Х£ и х^ t приведены на рис. 6.37 и 6.38; в. а. х. С'2 {1с) элемента хс дана на рис. 6.39. а. Выводы ab стабилизатора подключаются к источнику синусоидального напряжения, выводы cd — к приемнику электрической энергии.
Стабилизирующее действие стабилизатора напряжения объясняется тем, что в. а. х. U2(li) обмотки 2 с ферромагнитным магнитопроводом имеет участок fg (см. рис. 6.38), на котором при изменении в широких пределах тока /£ напряжение обмотки U2 и. следовательно, приемника изменяется незначительно.
Для получения лучшего стабилизирующего эффекта обмотка 1 с ферромагнитным магнитопроводом должна быть рассчитана так. чтобы при наибольшем напряжении на ней ферромагнитный материал магнитопровода был не насыщен и в. а. х. обмотки (I) была практически прямолинейной. С этой целью магнитопровод обмотки I выполняется, в частности, с воздушным зазором.
С целью упрощения анализа соотношений в цепи стабилизатора напряжения будем считать, что: обмотки I и 2 лщеализированные и, кроме того, отсутствуют потери мощности в магнитопроводах; несн-нусоидальные токи катушки заменены эквивалентными синусоидальными; приемник отключен.
Рис. 6.37. Схема феррорезонансного стабилизатора напряжения
Рис. 6.38. В. а. х. индуктивных элементов хд и х^
245
Рассмотрим, что происходит в цепи стабилизатора при изменении напряжения V источника, считая пока, что конденсатор с сопротивлением хс отсутствует и / =
Допустим, что напряжение U увеличилось на Д1Л Это приведет к увеличению тока / =/^на Д/= Д/^и напряжений L'j и иг соответственно па Д17[ и Д1/2. Очевидно, при сделанных допущениях At/t + + Д1/2 = Д1Л
Как следует из рис. 6.38. при изменении напряжения источника U напряжение U2 на обмотке 2 изменяется незначительно; изменение напряжения U приводит в основном к изменению напряжения С, обмотки /.
Участку fg в. а. х. l/2(/i) обмотки 2 соответствует при отсутствии конденсатора значительный ток обмотки 1 и источника, что нежелательно. Для уменьшения тока обмотки I и источника параллельно с обмоткой 2 включают конденсатор.
Для выявления соотношения между приращениями входного U и выходного U 2 напряжений стабилизатора при наличии конденсатора произведем следующие преобразования: заменим мысленно парал-лельносоединеиные обмотку 2 и конденсатор эквивалентным элементом хзк, имеющим соответственно эквивалентную в. а. х. U2 (I); заменим элемент х^. и обмотку 1 эквивалентным элементом хэт|, имеющим в. а. х. U (I).
Построение в. а. х. С/2(0 производится на основании следующих соображений: так как ток lLотстает по фазе относительно напряжения U 2 на угол к/2, а ток /с опережает указанное напряжение на такой же угол, то при любом напряжении U2 между токами должно существовать соотношение: I *= \Il~Ic\-
В. а. х. 1/2(/), построенная в соответствии с указанными соотношением с помощью в. а. х U2[Ii) и 1/; (/<;), приведена на рис. 6.39,а. Резонанс токов в цепи наступает при напряжении U2 = Uk, при котором II- 1с и 1 в 0. Участок к!0 в. а. х. U2 (1\ иа котором /t< 1С, приниматься во внимание и изображаться Построение в. а. х. U (/) производится на основании следующих . соображений: поскольку напряжение С'2 (при IL > [с] и напряжение
Рис. 6.39. К построению в. а. х. 1/2 (/) и U (/) феррорезонансного стабилизатора напряжения
246
U опережают ток I на угол я/2, при любом значении тока / между напряжениями существует следующее соотношение:
U = + и2:
В. а. х. U построенная в соответствии с указанным соотношением
с помощью в. а. х. [/,(/) и l/2 (I), дана на рис 6.39,6.
Как видно, при значительном изменении напряжения источника ДС = 17"— U' выходное напряжение изменяется на относительно небольшое значение Д172 = 17$ —
Путем небольшого усложнения электрической цепи стабилизатора напряжения можно получить практически неизменное напряжение U2 при колебании напряжения источника.
Феррорезонансные стабилизаторы просты по устройству, надежны в работе, имеют относительно небольшую стоимость и практически неограниченный срок службы. К недостаткам следует отнести неевну-соидальность формы кривой выходного напряжения и относительно большую массу.
В. МАГНИТНЫЕ ЦЕПИ С ПОСТОЯННОЙ И ПЕРЕМЕННОЙ МАГНИТОДВИЖУЩИМИ СИЛАМИ
6.18. ПОНЯТИЕ О ДРОССЕЛЯХ НАСЫЩЕНИЯ И МАГНИТНЫХ УСИЛИТЕЛЯХ
Магнитными цепями с постоянной н переменной МДС называются цепи, магнитный поток которых возбуждается обмотками, некоторые нз которых питаются постоянным током, а некоторые переменным.
В § 6.16 было показано, что обмотку с ферромагнитным магиитопроводом можно рассматривать как элемент с чисто индуктивным сопротивлением, значение которого существенно зависит от длины воздушного зазора.
Если обмотку с ферромагнитным магнитопроводом включить в цепь какого-либо приемника, то, изменяя длину воздушного зазора, можно регулировать ток, напряжение и мощность приемника. Однако необходимость изменения длины воздушного зазора приводит к усложнению конструкции и затрудняет автоматизацию процесса регулирования. Поэтому в настоящее время получил распространение другой способ изменения индуктивно! о сопротивления обмотки с феррома! нитным магнитопроводом, заключающийся в подмагничивания магнито-провода дополнительной обмоткой, питаемой постоянным током.
247
Обмотку с ферромагнитным магнитопроводом, сопротивление которой изменяют путем подмагничивания магиитопрово-да постоянным током, называют управляемым реактором (дросселем насыщения). Дроссели насыщения применяются, например, для регулирования, частоты вращения двигателей, освещения, в выпрямительных установках с регулируемым напряжением.
Одна из важнейших особенностей дросселей насыщения состоит в том, что при определенных условиях приращения тока, напряжения или мощности приемника, включенного в цепь катушки переменного тока, оказываются значительно больше приращений тех же величии обмотки постоянного тока. Указанная особенность позволяет использовать дроссели насыщения в качестве усилителей.
Дроссели насыщения, разработанные с учетом некоторых специфических требований, предъявляемых к усилителям (линейность характеристики управления, быстродействие и др.), н предназначенные специально для усиления сигналов, называются магнитными усилителями (МУ).
Магнитные усилители получили в настоящее время достаточно широкое распространение, так как имеют ряд достоинств. Они могут быть изготовлены на любую мощность, имеют практически неограниченный срок службы, надежны в работе, допускают значительные перегрузки, не нуждаются в постоянном наблюдении и уходе, дают возможность усиливать одновременно несколько сигналов. Недостатком МУ по сравнению с электронными усилителями является их- большая инерционность.
6.1$. УСТРОЙСТВО МУ
Один нз вариантов устройства МУ показан иа рис. 6.40, а. Магнитный усилитель состоит из двух ферромагнитых магиитопроводов, на каждом из которых расположены рабочая обмотка ОР н обмотка управления ОУ. Для уменьшения потерь мощности магнитопроводы изготовляют из отдельных стальных листов. В некоторых случаях применяют ферритовые магнитопроводы. Рабочие обмотки соединяют, как показано на рисунке, параллельно либо последовательно и подключают к источнику переменного тока. В цепь рабочих обмоток включен приемник электрической энергии гп. Обмотки управления соединены последовательно и получают питание от источника постоянного тока. Существенным является то, что обмотки управления включены встречно. Это дает возможность значительно уменьшить переменную составляющую тока в цепи
248
управления, возникающую из-за магнитной связи между обмотками. Часто вместо двух обмоток управления Му снабжается одной. Чтобы уменьшить переменную составляющую тока в цепи управления, обмотка должна охватывать в этом случае сразу два стержня магиитопроводов. Цепь обмоток управления является входной цепью МУ, цепь рабочих обмоток — его выходной цепью.
Магнитный усилитель, изображенный на рис. 6.40, о, называется усилителем с выходом на переменном токе. Если приемник рассчитан на питание постоянным током, то его включают в цепь рабочих обмоток через выпрямительный мост (рис. 6.40, б). Магнитный усилитель в этом случае называется усилителем с выходом на постоянном токе.
Кроме магиитопроводов прямоугольной формы МУ имеют магнитопроводы круглой и овальной формы. Вместо двух магнитопроводов некоторые МУ имеют Одни трехстержиевой.
Обычно МУ снабжают несколькими обмотками управления, что дает возможность усиливать одновременно несколько сигналов, а также воздействовать на свойства и характеристику МУ. В зависимости от назначения обмотками управления присваиваются соответствующие названия (обмотка управления, обмотка обратной связи по току, обмотка смещения и т. д.).
249
6.20. ПРИНЦИП ДЕЙСТВИЯ МУ
Для выяснения принципа действия МУ рассмотрим зависимость тока i рабочей цепи от степени подмагничивания магнитопроводов постоянным током управления 1у Будем считать сначала, что потерн мощности в магнитопроводе, потоки рассеяния и активные сопротивления рабочих обмоток и потребителя равны нулю. На основании известных соотношений для идеализированной катушки с ферромагнитным магнитопроводом можно утверждать следующее.
Если- напряжение источника изменяется по закону
и = Um sin (сиг + л/2),
то при сделанных допущениях et=e2 = - и = £msin(cot — я/2)
Ф2 = Фт sin cot + Фо;
Ф2 = Фтзт<оГ —Фо,
где Фо — постоянная составляющая магнитных потоков; при отсутствии подмагничивания постоянным током (/у = 0) Фо = 0.
Следует обратить внимание на то, что при сделанных допущениях амплитуда магнитных потоков Фи зависит исключительно от значения напряжения нет очника неремеииого тока и, в частности, не зависит от степени подмагничивания магнито-проводов постоянным током.
Для построения графика рабочей цепи МУ необходимо иметь графики Ф,(г) и Ф2(г). а также магнитные характеристики Ф,(Г,) и Ф2(Г2), где Fi и F2 — результирующие МДС обмоток, расположенных на первом и втором магнитопроводах.
Графики Ф,(г) и Ф2(г) можно построить по приведенным выше выражениям. Для построения магнитных характеристик необходимо произвести расчет магнитной цепи.
На рис. 6.41 приведены графики Ф^ГД Ф2(ГД а также графики Ф,(0, Ф2СО, Fi(t) и F2(f) для случая, когда подмагничивание магнитопровода отсутствует (Фо = ОХ Построение графиков F,(/) и F2(t) производится в таком порядке. Задаемся, например, магнитным потоком Ф’1 = Ф2 = Ф', после чего по графику Ф] (t) находим время а по графику Ф1 (F|) — МДС F’i = F2 = F'; в системе координат F>, 1 прн времени f откладываем МДС F\.
Когда подмагничивание магнитопроводов отсутствует, =itw и F2 — i2w. Сложив МДС. получим FL + F2 - (j, + f2)w.
Но г, + i2 = 1, поэтому Fj + F2 = fw, откуда i = (F, + F2)/w.
Как видно, ток i рабочей цепи пропорционален сумме МДС. Сложив МДС F, и Л2 при различных значениях времени, получим график 250
Рис. 6.41. К построению графика тока рабочей цени МУ при /у = 0 и Ф9 = О
Рис. 6.42. К построению графика тока рабочей цепи МУ при 7у # 0 и Фо О
F, + F2 представляющий собой в другом масштабе график тока i(t).
Графики Ф! (Fj), Ф2 (F2), з также графики Ф1 (t), Ф2 (г), F, (г) и F2 (О при подмагничивании магнитопроводов постоянным током приведены на рис. 6.42. Построение графиков Fj(r) и F,(/) производится в порядке, изложенном выше. При подмагничивании магнитопроводов F( » = iYw 4- lyWy и F2 —i2w —lyWy.
После сложения МДС получим F, + F, =(t] +i2)w = iw, откуда, как и раньше, i — (Fl +
График Fj 4- F2 = f(t) на рис. 6.42 в другом масштабе представляет собой график тока i(t).
Сравнивая графики i(r) МУ без подмагничивания и с подмагничиванием, видим, что во втором случае максимальное значение тока i заметно больше. Наибольшее значение максимального тока получается тогда, когда магнитопроводы полностью насыщены в течение всего периода изменения потоков.
Если несинусоидальный ток i рабочей цепи заменить эквивалентным синусоидальным током, то последний будет сдвинут по фазе относительно напряжения источника на 90. Учитывая это, рабочие обмотки можно рассматривать как элементы, имеющие некоторое индуктивное сопротивление .х0, связанное с действующими значениями напряжения и эквивалентного синусоидального тока рабочей цепи соотношением *0 = Ujl.
251
Значение сопротивления х0 при данном напряжении источника зависит от степени подмагничивания магиитопроводов постоянным током. При /у=0 сопротивление х0 будет наибольшим. Наименьшее сопротивление х0 получим при таком токе /у, прн котором магннтопроводы оказываются полностью насыщенными в течение всего периода изменения потоков.
Если в цепь рабочих обмоток включить приемник электрической энергии, то, изменяя с помощью тока управления индуктивное сопротивление х0, можно менять ток, напряжение и мощность потребителя.
Расчет МУ производят обычно таким образом, чтобы при отсутствии подмагничивания амплитуда магнитных потоков была наибольшей, но чтобы магннтопроводы не были насыщены в течение всего периода изменения потоков.
С целью уменьшения тока i приемника прн 1у = 0, а также тока /у, необходимого для перевода магннтопровода в полностью насыщенное состояние в течение всего периода изменения магнитного потока, магннтопроводы МУ изготовляют обычно из ферромагнитного материала с «прямоугольной» петлей гистерезиса (см. рнс. 6.43, а) н стремятся свести к минимуму воздушные зазоры в магнитопроводе.
6.21. СООТНОШЕНИЯ МЕЖДУ ТОКАМИ И ХАРАКТЕРИСТИКА УПРАВЛЕНИЯ МУ
Для анализа и расчета электраческих цепей, содержащих МУ, применяются два метода. Первый из них основан на использовании в. а. х., связывающих действующие значения эквивалентного синусоидального напряжения и тока рабочей цепи при различных токах упра^ вления. Этот метод дает достаточно точные результаты, но отличается громоздкостью и не позволяет получить простых аналитических соотношений, пригодных для анализа и расчета электрических цепей.
Второй метод основан на замене реальной «прямоугольной» петли гистерезиса (рис. 6.43, а) идеализированной петлей (рис. 6.43,6), которюй соответствуют средняя кривая намагничивания и магнитная характеристика, приведенные на рис. 6.43, в и г. Такая замена позволяет получить относительно простые аналитические соотношения, хорошо совпадающие с опытными данными.
В теории магнитных усилителей доказывается, что в случае идеализированной петли гистерезиса прн параллельном соединении рабочих обмоток (см. рис. 6.36) между средним значением тока приемника н током управления существует соотношение
1ср = 2/у (6.45)
252
Рис. 6.43. Кривые намагничивания и магнитная характеристика
т. е. среднее значение тока приемника прямо пропорционально току управления.
Приведенное соотношение справедливо до тех пор, пока при увеличении тока 1у ток /ср не достигнет наибольшего значения Црт«х- Это произойдет при таком токе 1у„ах, при котором сердечники будут насыщены в течение всего периода изменения питающего напряжения, а индуктивное сопротивление рабочих обмоток станет равным нулю. Если учесть, что ток рабочей цепи изменяется при этом примерно по синусоидальному закону, и считать, что активное сопротивление рабочих обмоток намного меньше сопротивления потребителя (г << гп), то ток Цртах можно определить следующим образом:
(б46)
где 1/ср н U — среднее и действующее значения напряжения источника переменного тока.
Ток 1утах, при котором появляется ток 7cpmiM, будет равен w 0,5Ucdw 0,5Uw j = 0 57 ---= р - =_________-_____
1 \ max — ситах , . .
Wy rnIVy l,llrnWy
Прн 7y > Iyinax ток 7cp будет оставаться постоянным и равным 1ср„ах.
Зная ток 1ср, легко определить напряжение на приемнике: п.ср = ^CjZir
При 7у = 1утах среднее напряжение потребителя достигает наибольшего значения и прн г « гп практически равно среднему напряжению сети:
^n.cpma.x ~ ^сртахгп ~ ср = L7/1,11.
253
Рис. 6.44. Характеристики управления МУ
Важнейшей характеристикой МУ является характеристика управления, представляющая собой зависимость между токами /ср и /у. Характеристика управления МУ, построенная в соответствии с (6.45) и замечанием в отношении наибольших значений 7Сртпх и lymax, приведена иа рис. 6.44,д. Изменение направления тока /у не оказывает влияния иа ток рабочей, цепи, поэтому характеристика /ср (7у) симметрична относительно оси ординат. При изменении напряжения U или сопротивления гп будет соответствующим образом изменяться ток 1сртах, а также ТОК /утпя'
Вследствие того что кривая намагничивания ферромагнитных материалов отличается от идеализированной, а также из-за потоков рассеяния характеристика управления реального МУ (рнс. 6.44,6) несколько отличается от рассмотренной. Однако если магнитопровод МУ выполнен из материала с «прямоугольной» петлей гистерезиса, то характеристики отличаются незначительно и практически можно пользоваться идеализированной характеристикой управления рис. 6.44, а.
Следует отметить, что при 0 < /у < 1утах форма кривой тока рабочей цепи i(t) МУ существенно несинусоцдальна. Она зависит от способа соединения рабочих обмоток, значения сопротивления цепи управления и может быть весьма разнообразной.
6.22. КОЭФФИЦИЕНТЫ УСИЛЕНИЯ МУ
Одними из важнейших величин, характеризующих усилители, являются их коэффициенты усиления. Различают коэффициенты усиления по току, напряжению и мощности.
Коэффициент усиления МУ по току представляет собой отношение приращения тока приемника к прнрашенню тока управления. Он может быть определен с помощью характери-254
стикц управления (см. рис. 6.44, а) таким образом:
= (М7)
Д/у *yl~ly\
Если считать характеристику управления идеальной и заменить в (6.47) /ср2 и 7ср| согласно (6.45), то получим
/с, = 2wy/w. (6.48)
Как видно, коэффициент усиления по току есть величина постоянная для данного МУ.
Коэффициент усиления МУ по напряжению представляет собой отношение приращения напряжения приемника к приращению напряжения обмотки управления:
_ А^и-ср _ гд(^ср2~~ ^cpl) _ &
At/y ‘ гу
Если заменить fc, согласно (6.48), то
Кроме зависимости от параметров МУ коэффициент усиления по напряжению зависит от сопротивления гп приемника и возрастает при его увеличении.
Коэффициент усиления МУ по мощности представляет собой отношение приращения мощности приемника к приращению мощности обмотки управления:
. _ _ гЛ^г-12^)
' ЛР,
Если заменить средине токи приемника токами управления согласно (6.45), то
. 12 I г 4lVy г„
= kf — = kukt = —\.
р гу w2ry
Коэффициент усиления кр зависит как от параметров МУ, так и от сопротивления приемника. При увеличении гп коэффициент усиления возрастает.
Коэффициенты усиления по мощности МУ, выполненных согласно рис. 6.40, доходят до 200.
255
6.23. ОБРАТНЫЕ СВЯЗИ В МУ
В настоящее время во многих электротехнических устройствах широко применяются обратные связи. Обратная связь — это такая связь, при которой воздействие от последующих звеньев системы передается какому-либо из ее предшествующих звеньев. Различают положительные и отрицательные обратные связи. При положительной обратной связи увеличение значения какой-либо величины на выходе последующего звена приводит к увеличению результирующего воздействия на входе предшествующего звена. При отрицательной обратной связи повышение выходной величины приводит к уменьшению результирующего воздействия иа входе. Обратные связи именуются по роду той величины, в зависимости от изменения которой оии оказывают воздействие иа вход предшествующего звена. Так, существуют обратные связи по току, напряжению,
скорости, ускорению и др.
Обратные связи дают возможность изменять свойства к характеристики устройства в желаемом направлении. В магнитных усилителях обратные связи служат, в частности, для увеличения коэффициентов усиления.
В махнихных усилителях различают внешнюю и внутреннюю обратные связи. Внешняя обратная связь осуществляется в большинстве случаев с помощью специальной обмотки
Рис. 6.45. Схема МУ с внешней обратной связью и с выходом на переменном токе
обратной связи.
На рис. 6.45 приведена схема МУ с внешней обратной связью по току, в которой постоянный по направлению ток ioc об-
Рис. 6.46. К построению характеристики управления МУ с внешней обратной связью
256
мотки обратной связи ОС равен по абсолютному значению изменяющемуся по направлению току i прнемннка.
Магнитный усилитель показан на рис. 6.45 в виде его условного изображения. Здесь, как и в дальнейшем, будем считать, что все обмотки намотаны в одном направлении, а их начала обозначены точками.
Обмотки обратной связи ОС должны быть включены подобно обмоткам управления ОУ, т. е. встречно. Для изменения интенсивности действия обратной связи можно шунтировать обмотки ОС резистором.
Если приемник рассчитан иа питание постоянным током, его следует включить за выпрямительным мостом, непосредственно в цепь обмоток ОС.
Если имеется характеристика управления 1ср (1у) МУ без обратной связи (рис. 6.46), то нетрудно построить характеристику управления 1^ (1у) МУ с обратной связью.
Действительно, для любого тока /ср МУ без обратной связи можно- написать •
Кп.с = /уиу, . .(6.49)
где F„ с — МДС, создаваемая постоянным током.
Для получения того же тока /^ усилителя с обратной связью необходимо иметь такую же МДС постоянного тока. Но в этом случае она создается двумя обмотками:
Fn.C = IyWy "Ь Лр^О.С- (6.5О>
Приравнивая правые части (6.49) и (6.50) и решая относительно /у, получим
1у = 1у — /сри,ос/в’у. (6.51)
Расчет характеристики /ср (/у) можно произвести в следующем порядке. Задаемся током /ср и по характеристике /ср(/у) находим ток /у. Зная /ср и /у. по формуле (6.51) подсчитываем ток /у, соответствующий току /ср. Характеристика (/у) приведена на рис. 6.46.
Характеристика /ср (/у) в отличие от характеристики /ср (Л) несимметрична. В области /у>0, соответствующей положительной обратной связи, угол наклона характеристики управления по отношению к оси абсцисс увеличивается, что приводит к Повышению коэффициентов усиления МУ. В области /у < 0, соответствующей отрицательной обратной связи, угол наклона характеристики и коэффициенты усиления уменьшаются. Можно так подобрать число витков w0o что участок ab характеристики 1ср (Гу) будет перпендикулярен оси абсцисс и коэффициенты усиления возрастут до бесконечности. Однако при этом
9 Электротехника 257
Рис. 6.47. К пояснению релейного режима работы МУ
МУ станет неуправляемым. Практически можно получить коэффициент усиления по мощности до нескольких тысяч.
При дальнейшем увеличении числа витков wo с МУ будет
иметь характеристику Icp (7(1, показанную на рис. 6.47. н будет работать в релейном режиме. Этот режим работы МУ характе-
ризуется тем, что при плавном изменении тока управления происходит скачкообразное изменение тока приемника. В соответствии с характеристикой 7ф (7(), изображенной на рис. 6.47, скачкообразное изменение тока приемника будет происходить в случае уменьшения тока управления при 7'а в случае его увеличения — при Ц2. Магнитные усилители, работающие в релейном режиме, находят применение в устройствах автоматики.
Внутренняя обратная связь осуществляется с помощью дно-дов, включаемых в цепи обмоток МУ при их параллельном соединении.
На рис. 6.48 приведена схема МУ с внутренней обратной связью н с выходом на переменном токе. Дополнив электрическую цепь рнс. 6.48 еще двумя диодами, получим МУ с выходом на постоянном токе (см. рнс. 6.50).
Диоды Дх и Д2 (рис. 6.48) включены гак, что ток в каждой из рабочих обмоток может существовать лишь в различные по-лупериоды и может иметь только одно направление. Так, при i > 0 ток направлен от начала к концу левой рабочей обмотки, прн i < 0 — от конца к началу правой обмоткн. В результате этого появляются постоянные составляющие тока i рабочих обмоток (см. гл. 5), которыми и подмагничиваются магнито-
проводы.
Существенным в работе МУ с внутренней обратной связью является нх способность к самонасыщеиию. Действительно, когда 7, = 0, магнитные потоки магиитопроводов могут изменяться лишь за счет токов рабочих обмоток. Если, напрнмер, ток J > 0 и уменьшается, то будет уменьшаться и магнитная индукция левого мапштопровода. Однако при i=0 магнитная индукция становится равной индукции остаточного намагничивания Вг и далее уменьшаться не может. В случае применения ферромагнитных .материалов с «прямоугольной» петлей гистерезиса индукция остаточного намагничивания примерно равна
258
Рис. 6.49. Характеристика управления МУ с внутренней обратной связью
Рнс. 6.48. Схема МУ с внутренней обратной связью
индукции насыщения: В, % Bs. Следовательно, магнитопроводы МУ оказываююя насыщенными за счет тока рабочих обмоток, несмотря на то, что I =0. Благодаря указанному свойству МУ с внутренней обратной связью называют часто усилителями с самонасыщепием.
Насыщенному состоянию магнитопроводов при 1у = 0 соответствуют наибольшие значения тока, напряжения и мощности приемника. Для уменьшения степени насыщения сердечников необходимо пропускать по обмоткам управления размагничивающий ток 1у < 0. Характеристика управления МУ с внутренней обратной связью, магннтопроводы которого имеют идеализированную прямоугольную петлю гистерезиса, приведена на рнс. 6.49.
Минимальный ток рабочей цепи /ср„(;„ и ток управления 1у1 существенно зависят от коэрцитивной силы НС2 динамической петли гистерезиса.
Коэрцитивная сила Нгл у материалов с прямоугольной петлей гистерезиса невелика, поэтому токи и lyf весьма малы Коэффициент усиления по мощности МУ с внутренней обратной связью доходит до нескольких тысяч.
Следует обратить внимание иа то, что угол наклона рабочей части ab характеристики /ср (/у) МУ с внутренней обратной связью и, следовательно, ею коэффициенты усиления в сильной степени зависят от вида динамического цикла гистерезиса и обратных сопротивлений диодов. В частности, отпнчие цикла гистерезиса от прямоугольного или применение диодов с относительно небольшим обратным сопротивлением приводит к тому, что полное насыщение сердечников наступает ие прн I. = 0. а прн некотором значении 1У >0.
9*
259
. 6Л4. СМЕЩЕНИЕ В МУ
В некоторых случаях оказывается необходимым сместить характеристику управления /ср (/у) МУ вдоль оси абсцисс, чтобы получить требуемые значения токов рабочей цепи при заданных значениях токов управления. Например, иногда бывает необходимо у МУ с внутренней обратной связью иметь минимальный ток ILP,„in при /¥ =0 или у МУ с релейной характеристикой получить скачкообразные изменения тока рабочей цели при иных токах управления, чем на рис. 6.47.
Рис. 6.50. Схема МУ с внутренней обратной связью и обмоткой смешения
Рис. 6.51. К построению характеристики управления МУ с внутренней обратной связью и обмот-
кой смещения
Для смещения характеристики управления вдоль оси абс-писс используют специальные обмотки смешения ОСМ, питаемые постоянным током. Схема магнитного усилителя с внутренней обратной связью, выходом на постоянном токе и обмоткой смещения приведена на рис. 6.50,
Если имеется характеристика 1ср(1у) МУ без смещения (рис. 6.51), то легко построить характеристику /ср(/у) МУ со смешением, пользуясь следующей формулой, аналогичной формуле (6.51):
Ту = /у IcMWc>t/wy (6.52)
Очевидно, при 7СМ > 0 характеристика /ср(/у) сместится относительно характеристики /ср(/у) влево на /CMw’CM/wy (рис. 651), при /см < < 0 — вправо.
260
6.25. ПОНЯТИЕ О ДВУХТАКТНЫХ И ТРЕХФАЗНЫХ МУ
Существует много вариантов конструктивного исполнения и схем включения МУ. Так, иногда возникает необходимость в том, чтобы изменение направления тока 7У сопровождалось изменением направления тока приемника постоянного тока либо изменением на 180° фазы тока приемника переменного тока. В этих случаях применяют так называемые двухтактные или реверсивные МУ.
С помощью двухтактного МУ можно получить характеристику управления, изображенную на рис. 6.52. При этом отрицательное значение тока /ср при < 0 означает изменение иа 180° фазы тока приемника в случае МУ с выходом на переменном токе (рис. 6.53) и изменение направления тока приемника в случае МУ с выходом на постоянном токе.
Двухтактные МУ получают путем соответствующего соединения однотактных усилителей. Одна из схем двухтактных МУ приведена на рис. 6.53.
Для повышения коэффициента усиления в цепи двухтактного Му применена внутренняя обратная связь. Обмотки смещения позволяют получить (при неидеитичности характеристик управления однотактных
МУ
Рис. 6.52. Характеристика управления двухтактного МУ
Рис. 6.54 Схема расположения сердечников и обмоюк ipex-фазного МУ:
2 и 11, 4 и 9, 5 и 8 — магнитопроводы трех фаз; / и 12, 3 и Ю, 6 и 7 — рабочие обмотки трех фаз; 13 — обмотка управления
261
•МУ) лри Iу = 0 тс® приемника = Последнее осуществляется путем воздействия на резистор г^.
Для регулирования тока, напряжения или мощности эрсхфазных приемников используются трехфазные МУ либо три однофазных. Трехфазные или однофазные МУ, соединяемые по трехфазным схемам. MOiyr Иметь ныход также и на постоянном токе.
Расположение магнмтоироводов и обмоток одного из питов трехфазного МУ показано на рис. 6.54. Каждая фаза трехфазного МУ имеет два магнитопрсвода, на которых размешены рабочие обмотки. Для улучшения охлаждения рабочая обмотка, расположенная на каждом магнитопроводе. разбита на две секции, размешенные в двух стержнях маг-нитоировода. Обмотки управления различно! о назначения охватываю! шесть стержней магнигопроводон всех фаз.
Глава седьмая
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ И ПРИБОРЫ
Для наблюдения за режимом работы электрооборудования и учета электроэнергии, вырабатываемой генераторами и потребляемой приемниками., в электрические цепи включаю! различные измерительные приборы. Эти приборы измеряют ток, напряжение, мощность, соаф, частоту, электрическую энергию и т. д. Некоторые электроизмерительные приборы применяют для определения состояния электрооборудования (контроль изоляции, измерение сопротивлений).
Приборы для электрических измерений отличаются высокой чувствительностью, большой точностью, простотой и надежностью. Благодаря этому электроизмерительные приборы и настоящее время используют для измерения мнозих меэлектриче-ских величин (например, измерения деформации изделия, его толщины, температуры и т. п.), для контроля и автоматизации различных производственных процессов, а также при экспериментальных исследованиях в различных отраслях науки и техники.
7.1. СИСТЕМЫ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ НЕПОСРЕДСТВЕННОЙ ОЦЕНКИ
В электротехнической практике наиболее широкое распространение получали измерительные приборы непосредственной оценки (прямого отсчета).
В электроизмерительном приборе этого типа независимо от назначения и принципа действия имеются электрические цепи и измерительный механизм. В простейшем приборе, например 262
Рнс. 7.1. Устройство электроизмерительного прибора магнитоэлектрической системы
величины.
в амперметре, катушка его включается последовательно в ветвь электрической цепи, где необходимо измерить ток. В более сложных приборах измерительные цепи содержат кроме катушек конденсаторы, резисторы и т. п.
Измерительный механизм прибора имеет подвижную часть, каждому положению которой соответствует определенное значение измеряемой величины. С подвижной частью связаны стрелка или другое указательное устройство (световой луч, цифровой счетный механизм). Перемещение подвижной части измерительного механизма происходит в результате взаимодействия магнитных (или электрических) полей в приборе. Эм взаимодействие создает вращающий момент Мяр, зависящий от значения измеряемой
Вращающий момент должен быть уравновешен для юю, чтобы подвижная часть вместе со стрелкой занимала определенное положение, соответствующее значению измеряемой величины, В большинстве случаен противодействующий момент в электроизмерительных приборах’ создается механическими элементами (пружины, растяжки н др.). Значение этого момента пропорционально углу закручивания пружины. При установившемся отклонении М|р — Мпр.
Чтобы подвижная часть прибора после внезапного нарушения равновесия моментов, вызванною измеиелеем измеряемой величины, без колебаний заняла новое положение, электроизмерительные приборы обычно снабжаются успокоителями (демпферами).
По принципу действия различают следующие системы электроизмерительных приборон: магнитоэлектрическую, электромагнитную, электродинамическую, индукционную и др.
7.1.1. Магнитоэлектрическая система. Принцип действия магнитоэлектрических приборов основан иа взаимодействии магнитного попя постоянного магнита и обмотки с гиком. В воздушном зазоре 1 (рис. 7.1) между неподвижным стальным
263
цилиндром 2- и полюсными наконечниками NS неподвижного постоянного магнита расположена алюминиевая рамка с обмоткой 3, состоящей из w витков изолированной проволоки.
Рамка жестко соединена с двумя полуосями О и О', которые своими концами опираются о подшипники. На полуоси О закреплены указательная стрелка 4 и две спиральные пружинки 5 и 5', через которые к катушке подводится измеряемый ток /, противовесы 6. Полюсные наконечники NS и стальной цилиндр 2 обеспечивают в зазоре 1 равномерное радиальное магнитное поле с индукцией В. В результате взаимодействия магнитного поля с током в проводниках обмоткн 3 создаеюя вращающий момент. Рамка с обмоткой при этом поворачивается и стрелка отклоняется на угол а. Электрома! иитиая сила F3M, действующая на обмотку, равна F3M — wBH.
Вращающий момент, создаваемый силой F3M,
Мвр = Г™* = wBlld = Ctlir
где d и I — ширина и длина рамки (обмотки); Ci - коэффициент, зависящий от числа витков w, размеров обмотки и магнитной индукции В.
Повороту рамки противодействуют спиральные пружиики 5 и 5', создающие противодействующий момент, пропорциональный углу закручивания а:
Мпр = С2а,
где С2 — коэффициент, зависящий от жесткости пружинок. Стрелка устанавливается иа определенном делении шкалы при равенстве моментов Мвр = Мпр, т. е. когда С1/ = С2а.
Угол поворота^ стрелки
пропорционален току. Следовательно, у приборов магнитоэлектрической системы шкала равномерная, что является их достоинством.
Направление вращающего момента (определяемое правилом левой руки) изменяется при изменении направления тока. При включении прибора магнитоэлектрической системы в цепь переменного тока на катушку действуют быстро изменяющиеся по значению и направлению механические силы, среднее значение которых равно нулю. В результате стрелка прибора не будет отклоняться от нулевого положения. Поэтому эти приборы нельзя применять непосредственно для измерений в цепях переменного тока.
264
В приборах магнитоэлектрической системы успокоение демпфирование) стрёлки происходит благодаря тому, что при перемещении алюминиевой рамки в магнитном поле постоянного магнита NS в ней индуктируются вихревые токи. В результате взаимодействия этих токов с магнитным полем возникает момент, действующий иа рамку в направлении, противоположном ее перемещению, что и приводит к быстрому успокоению колебаний рамки.
Измерительные приборы ма1ниюэлек1рической системы находят применение также при измерениях в цепях переменного тока. При’ этом в цепь подвижной катушки включают преобразователи переменного тока в постоянный или пульсирующий ток. Наибольшее распространение получили выпрямительная и термоэлектрическая системы.
На рис. 7.2, а показана принципиальная схема для измерения переменного тока прибором выпрямительной системы.
Измерительный прибор включен в диагональ AR моста, собранного из четырех выпрямительных полупроводниковых элементов. При переменном токе в диагонали АВ возникает пульсирующий ток, не меняющий своего направления. Этот ток, взаимодействуя с магнитным полем постоянного магнита, создает изменяющийся по значению, но действующий в одном направлении вращающий момент, пропорциональный току I.
Отклонение стрелки прибора пропорционально среднему значению вращающего момента за период, а следовательно, среднему значению тока. Если в цепи действует синусоидальный ток, то шкалу прибора можно отградуировать в действующих значениях тока, поскольку между средним и действующим значениями тока существует определенное соотношение. При отклонении формы кривой тока от синусоиды правильное измерение действующих значений при указанной выше градуировке шкалы оказывается невозможным.
В приборах термоэлектрической системы в качестве преобразователя используется термопара I. Измерительный при-
Рис. 7.2. Схемы включения магвитоэлектрических приборов выпрямительной (а) и термоэлектрической (б) систем в цепь переменного тока
265
бор 2 соединен со свободными донцами термопары, я рабочие концы, образующие ее горячий спай, нагреваются измеряемым током проволочного ндгревихсльпого элемента 3 (рис. 7.2Т б),
Ка.шчесгво тегсигты Q, выде-тэшпи в пагреидтеле, пропср-ционаяьжг квадрату действующе! о лхачетшя тока. Теьягература нэтрена горячего спая термопары и се ЭДС находятся в прямой зависимости от Q В связи с Э1им (пхлоиеяве стрелки измерительного прибора. просюрцнииалыгае ЭДС термопары, также находится в прямой зависимости от квадрата действую-птего значения гика.
Вольтметры и алгпсрмстры выпрямительной и термоэлек-фичсскотг системы применяются для игмеретгий в цепях. переменного тока как промышленный ток и повышенных часгот.
Досюипетва приборов м&гхш.то:шектрвческой системы: точность цок^зшшм, мхтая чувезшгтгытастъ к посторонним магнитным полям, 1кзЕЕач1ггельн0е испрсбйклгме мопшости, равно-мерщкть гикали. К недостатгдм следует огнести тгеобходяьюсть применения специальных преобрвзоватслеи при измерениях я цепях переменней о тока и чувства дельность к перегрузкам (ллЕкне токопроводящие пружинки 5 и 5' ит фосфористой бронзы при перегрузках ишреваются и изменяют свои упругие свойства}.
7,1.2, ЭлеЕгромяпоглия система, Пркндад девегвия тглея-громагиитяых приборов ископан ла тггягиванни стальною сир-лечттика п неподвижную обмотку с тенге»*. Неподвижный jjtc-мсит прибора — обмотка 2, вышхтииипая из изолированной цргшо.'шкщ включается в элек1рл.ческ.ую цель (рис. 73).
Подвижный :)лемспт — сталыюй сердечник 2. имеющий форму лепестка, — эксцентрично укреплеа на оси (7. С згой же осью жестко соединены указательная стрелка 3, спиральная пружинка < обеспечивающая противодействующий момент, и поршень 5 успокоителя. Ток 7 в витках обмотки 2 образует маптиттгьтй поток, сердечник 2 намагничивается И втягивается в обмотку. Прв этом ось Q поворачивается и стрелка прибора отк.1оияс1ся па угол х
Магнитная индукция Я в сердечмшсс (ври отсутствия насыщении) пропорциональна току обмоткн. Сила F, с которой сердечник втягивается я обмогку, зависит от тока и магнитной индукции В в сердечнике. Приближенно можно принять, что сила Г, а следовательно, н обусловленный ею вращающтгй момент пропорциональны квадрату тока в катушке:
М^ = С12.
266
Рис. 7.3. Устройство элек1рп-измсритс.тыюго прибор электромагнитной системы
Противодействующий момент, уравновешЕвающий вращающий момент, пропорционален углу а. В емзя с этим угол отклонения стрелки находится в квадратичной зависимости от тока; шкала прибора оказывается исрчсвнсмерыой, Дли успокоения подвижной чаши прибора обычно применяют воздушный демпфер. Он состоит нт пялмядра 6 и.порштш 5, шток которого укреплен па оси О. Сопротивление воздуха, оказываемое перемещению поршня в цилиндре, обеслечЕ'-нас1 быстрое успокоение стрелки.
Достоинства приборе» электромагнитной системы: простота конструкции, аршодноегь для измерения в ценил носюян-Еююнлеременногогока, надежность в эксплуатации. К недостаткам относятся неравномерность шкалы, влияние посторонних магнитных полей на точность показаний. Пгт пйинее обусловлено тем, что магнитное поле обмотки рааюиожсао в воздушной среде и поэтому е: о махнитазя индукция вевеяика.
Для осиблспмв влянни лосторонши магнитных тая и некоторых прибораj на <д» иодаажяой части (рис. 7.4) удрмидпд два оцв-паховых сердечника, гаядый из которых размещен и матятяри лсше ео<>1'11С1сгвую11(еп обмотки (fa 2), которые включены между собой последовательно. Направление яамотхн обмоток исполнено так, что их ма!нн1ные ноля Фх и Ф: палравлезш в противоаоложные стороны. Моменты, созданные мвгнкгиьгми нолями каждой обмотки, действуют на [дз= ссн.'шсэш — AfBp. Dul*i ороннее мах нмтное inuje ФБ(|
ослабляет поток ф(, по усиливает поток Фг. В результате общий вращающий момент 5fU[1 ошаекя иензмениВЕМ и зависит' от измеряемою чока 7. Приборы такой коиСХрунемИ назыьаюпЛ! acjti'i и четким н, Для уменьшения погрешности намерений. нноеммон посторонними магнитными полями, некоторые приборы экранируют, помещая их В стильные корпуса.
7,1.Х Элеккроднвамвчесжая система!. Приборы этой системы (рис. 7.5,41 состоят кэ двух обмоток: аетодвижмот J и подвижной 2. Подвижная обмотка укреплена па оси ОО' и расположёна внутри аечюдвижной обмотан. На оси ОО подвижной об-
267
Рнс, 7.4. Устройство асгатнчсскси-о прибора элехтрскызгннютй системы
Рис. 7.5, Устройство члсгтроизмери лглкнпго прибора члсктродниа-мичесгон системы (а); к ианснснию принципу действия прибора (йу мотки укреплены указательная стрелка 3 и спиральные; пружинки. 4 и 4', через которые подводится ток к обмотке 2J Эти же пружинки создают противодействующий момент М^' ирсаорцнопальный углу закручивания а. Принцип дейегяия прибора (рис. 7.5,ф осношш па взаимодействии тока /± под-.
268
пмжиом обмотки с магнитным потоком <1^ неподвижной обмотки.
При постоянном токе электромагнитная сила F*,. действующая па проводники подвижной обмотки, ирешоричональна току И махнитному потоку Ф,. ПОСКОЛЬКУ ПОТОК Ф) проплрнис?-нялен току J, неподвижной обмоткн, вращающий момент* действующий на подвижную обмотку, пропорционален прп-изйедспию токов обмоток:
Мч> = СФ1/г = CiU31
где С и <” — коэффициенты пропорциональности, При переменном токе вращающий момент пропорционален произведению мгновенных значений tokos:
ij = /lesin(in и i2 = 751Ч sin |гяг + 40-
Ппказанис прибора в этом случае определяется средним за период значением вращающего, момента:
1 г
*=сыг<™ф-
• о
Здесь С — коэффициент, зависящий от *шсла витков, геометрических размерен и расположения катушек; и 7, — действующие значения токов в обмотках: ф — угод сдвиха фаз между векторами токов и
При равенстве момента IAf np-= *W,ip) подвижная обмотка отклоняется па угол а и схрелка указывает иа шкале числовое значение измеряемой электрической величины. Для успокоения подвижной части прибора используют воздушные демпферы, Эчектри динамические приборы применяют для измерения мощности, така и нахгрнжения в цепях переменного гока.
Приборы электродинамической сиогсмы обладают высокой точностью (обусловленной отсутствием Ферромагнитных сердечников) и могут быть использованы Для измерения хзектри-ческюс величин в целях поетокиното и переменного тока. Недостатками приборов являнгхея чунстлителытость к 1хсрсгрузк.ш 1: влияние посторонних магнитных полей на точность измерений. Приборы згой системы используются в качестве амперметров, вольтметров, и ваттметров.
В тех случаях, когда подвкжлая система должна рзэвивать повышенный вращающий момент (например, в елмолишущем приборе), вместо приборов :1.1сктртдииамической системы применяют приборы Ф^ррохщломической системы (рис 7.6)
269
Рнс. 7,6, Устройство элекп роизмерителъпо-го прибора ферродк-намитеской системы
Они отличаются от злектропннамнчь-сблх приборов наличием ферромагнитного серлсчнажа J, на котором помещены обмот-гн 2. и ферромагнитного цилиндра 3. В зазоре между сердечником J и цилиндром J расположена подвижна* обмотка Наличие {.ерлечннков усиливает магнитные поля обмоток и вызывает увеличение вращающего момента. Точность ферродвзгамнчс-сжил [|рнборов ниже, чем точность электродинамических приборов.
7.1,4. Индукционная система. Принцип действия тгндукциотшых приборов поясним на упрощен пой схеме устройства однофазного счетчика перемеппо-
ю тока (рис, 7.7, о-л).
Основными элементами прибора являются: трекстеращевой электромагнит 1 с обмоткой 2„ имеющей балыпое число витков из тонкой проволоки: 11-образный электромагнит 5 с обмоткой 4, имеющей небольшое число вигкоп из толстой проволоки; алюминиевый диск 5, который может вращаться вокруг оси 6.
Обмотка 2 включасзек параллельно измеряемой пени, а обмотка 4 — последовательгго с этой цепью.
ТоК /а п катушке 4 образует магнитный лоток Ф|, который дважды пересекает алюминиевый диск 5. Ток /2 в обмотке 2 создаст магнитный поток, часть которого Фг также ироиизы-иаст диск 5 (поток Фг замыкается по стальной скобе 7).
Ток fj и иапркжевие U сдвинуты по фазе на угол ф, значе-
ние которого опрсдсляетсм характером нахрузкц, присоединенной к липни J/. Ток 72 благодаря большой индуктивности обмотки 2 отстает по фазе от напряжения U ва угол, близкий к 90\ Магнвтиые потоки Ф£ и Ф2 совпадают по фазе с вызвавшими их токами 7] и 12 (рве. 7.7, г). Поток Ф, пропорционален току нагрузки 7и а поток Ф2 — напряжению сети.
Переменные потоки Ф, и Ф2 индуктируют в алюминиевом диске ЭДС £( и £г. отстающие по фазе от этих потоков на 90s'. ЭДС £j и £3 вызывают в диске токи /д] u 7j2, которые можно счихап. совпадающими но фазе с вызвавшими вк ЭДС. Примерная: картина распределения токоп в диске показана на рис. 7.7, у.
MiHonciTHoe значение силы £-,ч. действующей па элемент диска с током равно
7=- ЛФгл =- АФЛ sin сЦ 7^ sin (<ог +
270
Рис, 7.7, Устройство .лиехтроизмсрнЕёлыгого прибора нпдужцианмом системы (а, б, #); реберная диаграмма, поясняющая иршщки действия прибора (а)
где к — коэффипвепт пропорцвоиа-тьпости; ф — угол сдвига фаз между потоком Ф и гаком /л.
Среднее за период значение силы j’ju
Fqj = — й =f ——Jsin W sin(<Bi + ii|>) dt ~ &23>/Acos ф,
о о
(7.1)
Нз векторной диаграммы видно, что yi-льа между потокам Фк и током /Jt ц между потоком Ф2 и током /дз равны 90% угод между потоком Ф| и током составляет (180 —ср), а угод между потоком Ф2 и током Лц равен ф.
Учитывая это и исходя из (7.1), находам, что сиды взаимодействия магнитных потоков Ф1 и Ф2 с токами ГЛ1 и /Л1 создают результирующий момент, вращающий диск:
МВр = Сх4>д/д2 cos (180° - ф) + С1Ф37Л| cos (р =
= С'Ф1Ф2 cos(180° - ф) + C'tpjfpjcosqi w CLr/( coscp =СР,
(7.2)
271
Где С'. Сц С2 - коэффициенты пронорциомазыюсти; Р — активная мощность, потребляемая нагрузкой.
Из (72) следует, что нращающий момент, действующий на диск счетчика, пропорционален мощности Р.
Для создания противодействующего момента предусмотрен, настоянный магнит 3 (рис. 7.7. л и 6). При вращении диска поле тюсгоятшого магнита индуктирует в мем пихревыс токи, которые в соответствии с законом Ленда противодействуют вращению диска. Поскольку значение вихревых таков пропордио-палыю частоте вращения диска я, противодействующий момент также пропорционален и:
Ч1р = Соп
- Так как вращающий момент М^, при установившейся частоте вращения диска уравновешивается противодействующим моментом Мпр, из формул (7,1) и (7.2) следует, что частота вращения диска пропорциональна мощности Р:
Число оборотов Аг, яоторое диск сделает за время т, будет пропорционально энергии tV, полученной нз сети нагрузкой зв это же время:
2V = ( и dt = -5 (Р dt = £- W'.
о Со а С] :
Величина W/N — С^С называется постоянной счетчика и представляет собой .электрическую энергию,, соответствующую одному обороту диска.
Счетчик снабжается счетным механизмом, связанным червячной передачей с осью диска. Измеряемая счетчиком энергия отсчитывается но показаниям счетного механизма.
7Х ПОГРЕШНОСТИ ИЗМЕРЕНИЙ. НОМИНАЛЬНЫЕ ВЕЛИЧИНЫ И ПОСТОЯННЫЕ ПРИБОРОВ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
7.2.1. HoipeninocTii измерении и элсК1ро«зпм‘р»г1елыгых приборов- Показания электроизмерительных приборов несколько 01-лнчаются от действительных значений измеряемых величин. Это вызвано цсоостоянствои параметров измерительной цепи (изменение температуры, индуктивности и г. гт.Х несовергпен-272
L-тяом «омструкгтии измерительного механизма (наличие трения н т. д.) и влиянием внешних факторов (внешние магнитные it электрические ноля, изменение температуры окружающей среды и т. д.).
Разность между измеренным и действительным Aj зна-челнами контролируемой величины называется абсолютной погрешностью измерения:
ДА = Л„ - Ал.
Если не учитывать значения намеряемой величины, то абсолютная погрешность не ласт представления о степени точности измерения. Действительно, предположим, что абсолютная погрешность нри измерении напряжения составлаег ДСГ Ml Если указанная погрешность получена при измерении напряжения в 100 В, то измерение произведено с достаточной степенью точности. Если же погрешность ДСГ = 1 В получена прн измерении hue]ряжения в 2 В, то степень точности псдостаючна. По-этому погрешность измерения принято олспивать не абсолютной» а относительной погрешностью.
Относительная погрешность измерения предсталливт собой-отношеиие абсолюшой погрешности к действительному значе^ нию измеряемой величины, выраженное в процентах:
т=^1100 = -‘4"7'4;, 100. (7.3)
,4j
Поскольку действительное значение измеряемой величины при измерении не известно, для определения Д4 и у можно воспользоваться классом точности прибора, представляющим собой обобщенную характеристику средств измерений, определяемую предельными допустимыми погрешностями.
Амперметры, вольтметры и ваттметры подразделяются на восемь классов точности: 0,05; 0,1; 0,2; 0,5: 1,0; 1+5; 2,5; 4,0, Цифра, обозначающая класс точности, определяет наибольшую положительную или отрицательную основную приведенную погрешность, которую имеет данный прибор.
Под основной приведенной погрешностью прибора понимают абсолютную погрешность, выраженную в процентах по отношению к поминальной величине прибора:
Ул„ = AL (00 = - 100. (7.4)
•'Ч mW 'Т ИЯМ
Например. прибор класса точности 0.5 имеет Упр = ± 0,5 /£.
Погрешность уир называется основной, так как она гаранти
273
рована в тюрмальлых условиях, иод которыми понимают тема пературу окружающей среды 20 4С, отсутствие внешних .маг-; ннтных полей, соответствующее положение прибора н т, д. При других условиях возникают дополнительные погрешности. Погреши ость Угф называется приведенной, потому что абсолютная погрешность независимо от значении измеряемой величины, выражается в пропентах по отношению к постоянной величине Л
Сравнивая (7.3) н (7.4), нетрудно получить
7=Угц>-^— П-5)
Из (7.5) следует, что относительная погрешность измерения зависит от действительною значения измеряемой величины н возраста?! при ее уменьшении. Вследствие этого надо стараться по возможности не пользоваться прн измерении начальной частью шкалы прибора. В случае необходимости измерения малых величин следует применять другие приборы,
Пример 7.L Номинальное напряжение вольтметра СГИС1М = = 150 В, ялаее точности 1,5. С помощью вольтметра измерено напряжение U = 50 В.
Определить абсолютную н относительную величину погрешности Измерения, а также дейегыпельвое значение .напряжения.
Решение. Абсолютная погрешность измерения
= =.±hL2?’ = ±125 в.
100 1СЮ
Действительное значение напряжений может лежать в пределах
U,= U,-A U =(50 ±2,25} В,
Относительна* погрешность измерения
ДУ +125
у-- -100----=—i- =. (4,72 л-4,31) %.
г t/д 5O-2J5 ' ’ J/,t
7.2.2, Номинальные миигагяы првборов. Номинальными напряжением t/воч, током /ты и мощностью Дим соответственно вольтметра, амперметра и ваттметра называются наибольшие напряжение, ток и мощность, которые могут быть измерены перечисленными приборами.
Номинальная мощность ваттметра а отличие 01 его номинальных напряжения и тока указывается не всегда. Для ваттметра номинальное напряжение представляет собой наибольшее 274
напряжение, па которое может бъпъ включена обмотка напря-же!гия; номинальным Током является наибольший ток. на ко-хмрыи рассчитана последовательная обмотка.
Если номинальная мощность ваттметра не дана. То ее мож-_чи подсчитать 1£о номинальному напряжению и току;
Р = п Г
1 HOW — 1-1 паи1 ппЧ"
7.2.3. Пдо(ожнде приборов. Постоянная (цезза деления) пр тора представляет собой значение измеряемой величины, нышвающее отклонение подвижной части прибора на одно деленье зихлды. По-. । ояпныс вольтметра, амперметра и вип метра могут быть определены следующим обратом:
Q- = Ц1вм/Аг. вивьт на одно «доение;
Q ~ Люм/Аг, ампер на одно деление,'
<>в^ю*тЛгсжг/Лг ватт па одно деление.
гас Л’ - число делений шкалы соответственно вольтметра, амперметра л ж-д j-t метра.
Пример 7.2. Ваттметр nvetpi поминальное напряженке UJlflM--» = 150 В, номинальный ток 5Я(У- = 5 Л, число делений шкалы Л' = 150.
Определить номинальную мощность и постоянную иаттметра, j 1акже его показание. ешн при измерении мушности подвижная часть отклонилась на W = 60 делений.
Решение. Номинальная мощность ваттметра
и™.:= аом^aost = 150 5 = 750 Вт.
Настоянная ваттметра •.
ср = РцаиЛУ = 75Q/J50 = 5 Вт/дсл.
Показание ваттметра при о!кловенни его подвижной части на .V = 60 делении
Р^С? К-5.Ы = 300 Нт.
7,2*4. Чувствительность приборов. Под чунствитедытоегью приборов понимают число деления шкалы, приходящееся на единицу измеряемой велЕЧИЯы. Чувсмвктельносгь вольтметра» амперметре и ваттметра может быть определена следующим образом:
Sc-= дедеыий па вольт;
5? = У'7Коч, делений па ампер;
Л’ i<> = — — ---------, делений на вап.
р /г j J илм< ном
Очевидно, что S — 1/С
275
Таблица 7.1
Род нэмерягм-он величины
HaiBaeiHt лриборл
Условное обозначение
Тох
Напряжение
Электрическая мепцностъ
Элеягркчсская энергия
Сдвиг фаз
Частота . Элек!рнчсскос сопрогиалсннс
Амперметр Мил дна м иер метр Микроамперметр Вольтметр Милле волы мегр Ваттметр Киловаттметр Счетчик кило выт-часов Фазометр Частотомер Оммегр Мегаомметр
mA
mV W «W
nWh ' Ф
Як Si
MU
Таблица 7.2
Система прибора
Условное обогни нише
МагпнтоэдсктрнческЕиг;
с подвижном рамкой и механической противодействующей силой
с зюдвижпьгми рамками бел механической Eipo-тнводейсгАующей силы (логомечр)
Электромагнитная:
с механической про]иводсйствую;цсй силой
fie* механической протнводейечвуюшей силы (.югомстр)
Электродинамическая (без экрана);
с механической противодействующей силой
механической протнводейсшукнисй силы (логометр)
7.2.5. Условные обошачепня злеигронтмершелвных приборов» На лицевой стороне электроизмерительных приборов изображен ряд условных обозначений, позволяющих правильно выбрал» прибор и даютих некоторые указания по их эксплуатации.
276
Та блм г|д 7,3
Условное л [>о значение
Г’асшифрОй'и О обоэнлченнч
Прибор постоянней о хоиа
Прибор постоянною и переменного тока
Прибор переменною тока
Прибор трекфазиого тока
Прн&ор класса точности |„5
Измерительная цепь нзолнрувдна о г корпуса н нспы* тана напряжением 2 кВ
Осторожно! Прочность июля дни измерительной цепи нс соответствует нормам
Рабочее положение шкалы наклонное, под углом 60 е к горизонту .
Рабочее положение шкалы горизонтальное
Рабочее положение шкалы вертикальное
Исцол1геиис прибора я зависимости от условии эксплуатации (свойств окружающей среды)
Категория прибора по степени защищенности от внешних магнитных полем
Согласно ГОСТ пн. лицевой стороне црнбора должны бить изображены:
а/ условное обозначение единицы измерения или измеряемой величины либо начальные буквы наименования прибора (табл, 7J);
б) условное обозначение системы прибора (табл. 7.2);
п) условные обозначения рада тона и числа фаз, класса точности прибора, пспытатслLTioi о напряжения изоляции. рабоче-ю положения прибора, исполнения прибора в зависимости от условий эксплуатации, категории прибора по стелена защищенности от внешних магнитных полей (табл. 7.3).
73. САМОПИШУЩИЕ ПРИБОРЫ. ОСЦИЛЛОГРАФЫ
73.1. Самопишущие приборы. Для записв измеряемых величия (тока, напряжения, мощноегя я др.) в течение длительных промежутков времени используют регистрирующие (самопишущие) приборы.
Снмопжпусцгё прибор имеет измерит-ельный механизм одной из рассмотренных выше систем (в большинстве случаев ферро динами ческой) я специальное устройство дли записи по-казаниЙ. Записывающая часть прибора аежазаня на рис. 7.8.
Рулон бумажной ленты J, надетый на ролик 2, в процессе работы прибора перемещается с постоятшпй скоростью и перематывается аа ролик 3. Перемещение румажяой (диаграммной) ленты производится при помощи маломощного двигателя (ня рисунке пс показан), связанного с валиком 4. С осью 5 подвижней частя измерительного прибора (на рисунке также пе показанного) через рычаг б связана стрелка прибора 7. Непрерывная запись есущссталяется пером расажыюженным на конце стрелке, в фиксируется я виде кривой на бумажной ленте. Положение стрелки с пером отфвддояется. значением измеряемой величины,
Рве. 7.8. Устройство самопишущего пребора
Рнс. 7.9. Устройство магинтоэлек-тркчсского осциллографа
278
73,2. Светолучевые исжллографы. Снетдетучимж осциллограф нрелвазначен для наблю-деегмя и фотографирования быстро прсттекаюпптя з-теЕтргттесктпс процессов. Основным ътсмсптом осциллографа линяете я осциллографический гальванометр, принцип действия которого аналогичен прибору мюшпизлек' 1ричсекой системы.
Б узкой щели между полюсами постоянного магнита jV5 (рис 7£| помещена ыа раегхжках подвижная петля / из топкой бронзовой продолжи. На петле укрстисж» зеркальце 2.
В результате взаимодействуя гояэ ист ли с толем мйгтнтгз петля и зеркаяы^ тяюрачинактгея. Благодаря малой инерционности полаижттой системы прибора зеркалъпе поворачивается иа угол, значение которого пропорциогталыто мгновенному значению тока. Луч свети 3 от лампы с точечным нахалом, сфокусп ровАн кы м смимчеекой системой в узкий пучок, падает ьа зеркальце. Отразившись от него, луч ыдает па фотобумагу 4. движущуюся £ ызстошшэй скоростью. При этом луч света, действу» на светочувствительный слой фотобумаги, оставляет на ттеи егтед — кривую тока, которая носит название осцилло граммы,
7.4. ИЗМЕРЕНИЕ ТОКА И НАПРЯЖЕНИЯ
7^d. Меры твырмтссл-и» вын*нпг. М.месгна, сн» сун'ссч »тн> е. на-HjTHwyi, меру i-твды I Мт мерз времени I с. Эпьтсжа эти мер хранятся в пшро-ялд вомеЕвеяиях е определеввымп влажностью и температурой. ЗГВ -.Н-ЮЮНЬГ яетбкпднмы ДЛИ CCHWCTWKHH4 и размеров или параметров другим средствам изм^еиив, используемым в промышленности.
С той же целью существуют к меры злек/ряческит величин. Меро тока устанавливается с помощью токовых ьееов. оЕ1ре;|ДЛяющн» силу няггтмодействия звук последовательно включенных катушек с током. Подвижная катушка прикреплена к коромыслу весов я находится внутри неподвижной. Cwjra ыэаима-действня урааловешивастся тт&лонны-ми гирями.
За адшкцу принят ток в 1 Л. врн котором весы иазодетея и рннжжехнм.
Мера ЭДС —ЭДС исфмальнрго элемента. Нормальный элемент развивает гюстояиную ЭДС > течение .ижlc-ihhoe t> времени, кенурия составляет прк ZO’C 1,0185- 1,0187 В.
Мерой хсектрическсмо сопроти^еиия являются образцовые резисторы. Образцовые резисторы выполняются из мангаиннавои проволоки, намотанной бнфилярпо на латунный или фарфоровый цилиндр. Они выполняются на значения резисторов от 0,00001 до 100000 Ом.
Мера инлухгнвжяггн — образцовые кзгушгн, выполненные из медного прокола, намотанного на плвст^зсспеый и.ти фярфорпньгй пфкаи.
279
Они выполняются на значения индуктивности от 0,0001 да 1 Гп.
Мера емкости - 0&ра:!лс!въ1с конденсаторы с плоскими иди цилиндрическими пластинами с воздушной sltjh слюдяной изоляцией между ними.
1.4,2, Методи измерений. На практике применяют различные методы измерен лк электрических величин, Наибольшее расп рос ранение в электроизмерительной технике получил метод непосредственной опенки. JJpw ие[ю.тьзпяамии этого метода числовое значение измеряемой величины опрсдслязот непосредственно по яп калан ню прибора, шкаля которого отЕрядунранана в единицах измеряемой величины, К подобным измерениям относят tirtpeделение това но ссоказаиню ам-. иермесра, напряжения по иокачинию вольтметра, мощности по покаь а-ни»о ua i-t метра, сопротивления ин 11акаднпню омметра, сстзф по показанию фазометра и т. д.
В некоторых случаях электрическую величину приходится определять косвенно - по данным измерений других электрических величин. Так, значение соя<р находят по измеренным величинам мощности Л напряжении (7 и тока J, значение сопротивления - но измеренным величинам L' н 1 и т. д. Это - косвенный метод измерения.
. В пзМЁрн-tJbHOH технике и особенно в автоматических устройствах широко используется метод сравнения, В основе этого метода лежит сравнение измеряемой ыынчниы с известной идентичной физи* ческсж величиной, Из области нсэлсктрических измерений можно, например, указать н.знесгный способ определения при помощи чашечных весов массы (веса) какого-либо предмета путем сравнения его с массой (весом) гирь в момент ранноиссия.
В электроизмерительной технике радличнют две разновидности метода сравнения: мостовой н кимпенсчщноиный. Примером мостового метода является измерение сопротивления нрн помощи четырекпле-чей мостовой схемы. Примером компеисациокного метода мажет еду-жить измерение напряжения путем сравнения с известной ЭДС нормальною t.icMCHia. Методы сравнения отличаются большой точностью, на техника этих измерений сложнее, чем измерений методом непосредственной оценки.
7.4.3. Измерение тока, Для измерения тока в какой-либо цепи последовательно в цепь включают амперметр. В установках постоянного тока для этой цепи прпменкются главным образом приборы магнятоэлекгрической системы и реясе — приборы электромагнитной системы. В установках переменною тока используются преимущественно амперметры электромагнитной системы, Для уменьшения погрешности измерения необходимо, чтобы сопротивление амперметра (или полное сопротивление амперметра и шунта! было на два порядка меньше сопротивления любого элемента измеряемой пени.
Для расширения предела измерения амперметра | в к раз) в цепях постоянного тока служат шунты-резисторы, включаемые параллельно амперметру (рис. 7,10, а).
280
Рве. 7.10. (демы присоединения шунта i амперметру (а) и добавочного резистора к вольтметру {6}
Сопротивление шунта определяется из соотношения гш(^и»й± — ^a-iJ ~
где — наибольшее значение тфеа в контролируемой цепи 1нредел измерения тока амперметром при наличии шунта);
— предельное (номинальное) значение тока прибора при отсутствии гиунта.
L
Отсюда гш = г,----:---.
ДиОЛ II
Значение тока 1 в контролируемой цепи при существующей нагрузке определяется из соигпошсния
где /и — показание, амперметра.
Шкалу амперметра часто градуируют с учетом включенного шуитм; геи да значение измеряемого тока I отсчитываемся непосредственно ПО шкале прибора.
В цепях переменного тока ддк расширения пределов измерения амперметров используют трансформаторы тока {см. гл. 8)*.
Измерение напряжения. Для измерения значения напряжения на каком-либо элементе электрической цели (генераторе, трансформаторе, пагрузке) к выводам хтсмспга присоединяют
* Индухтивпостъ катушки амперметра при переменном токе зависит от значения тока; соотношение токов в катущке' амперметра и тунге здесь не остается постоянным. Ло.?тому шулты в цепял переменного тока вс применяются.
2SJ
соотношения
вольтметр. Для уменьшения погрешности измерения необходимо, чтобы сопротивление вольтметра {или общее сопротивление вольтметра и добавочного резистора} было ] ш два порядка больше сопротивления любого тлемента измеряемой цели. 1
Для расширения предела измерения вольтметра (в А: раз} н цепях напряжением до
500 В обычно применяют добавочные резисторы, включаемые последовательно с
обмоткой вольтметра (рисе 7,10, б). Сопротивление добавочного резистора определяют из
где 0мж — наибольшее звачснас измеряемого напряжения (предел измерения напряжения .вольтметром при наличии добавочного резистора); ^„—предельное (номинальное) значение напряжения прибора тури отсутствии добавочного резистора. Отсюда
, =г
J L',.
Значение фактически измеряемою напряжения С определяется ИЗ ОООТПОШСТГИЯ
С
Г-‘ + Г’ = к, П = ки„
Г,
где Сга — показание вольтметра.
Шкалу вольтмеАра градуируют с учетом включенного добавочного резистора.
В цепях переменного тока высокого напряжения для расширения пределов измерения вольтметров применяют трансформаторы напряжения (см. гл. 8).
7.4.5. КоютеясацнонньЛ метод измерения. Для измерения малых значений (от долей до нескольких вольт) ЭДС и напря-
2S2
женнй с высокой точнпст1.ю используется компенсационный метод измерений, основанный па сравнении неизвестной ЭДС Ел или напряжении с известными. Приборы исясиндуюхцие этот метод измерения, называются компенсаторами. Принциниаль' ная схема компенсатора постоянного тока изображена на рис. 7.11. Компенсатор состоит аз двух магазинов резисторов (набор образцовых резисторов со штыревыми контактами) гЛ и г* источника с ЭДС Е и нормального элсмепга с ЭДС Ew> peiy.m-ровочного резистора гр.
Измерение производится следующим способом. Переключатель Л устанавливают в положение /, затем с помощью резисторов гр и Г|у устанавливают такие значения 1р в гАЧ при которых показания гальванометра равны нулю* а это будет', когда = еа- м
Далее переключатель Л устанавливают в положение 2, изменением сопротивления гя снова добиваются, чтобы гальванометр показывал нуль. Это, очевидно» будет при условии, когда
= (7.7)
Из отношений (7.6) н (7.7) определяется значение неизвестной ЭДС £д:
_ E.V Р F 'л
— - - откуда Ва = Е,—.
гх Ьд fl¥
Как вытекает из изложенного, сравнивается неизвестное значение напряжения U = 1^х = 1,л с изаестным 1рГ^ = А\-, причем ток 1р измеряется косвенным путем:
Jp = -ЕкАк-
Точность измерений ззвнент в Большой степени от чувствительности гальванометра., точности резисторов и стабильности ЭДС нормального элемента.
Существуют компенсаторы переменного тока. Поскольку по существует нет очника переменного тока с неизменной амплитудой подобно нормальному элементу постоянного тока, рабочий ток в ком пенса горах переменного тока устанавливается с помощью амперметра, что существенно сняжает точность измерений. Компенсаторы переменного тока позволяют измерять не только значение измеряемой величины, но и его фазу.
Компенсационный метод измерений используется для гтрп-веркн приборов высокого класса, а также для измерения тока н соиротнвленгги резисторов.
2S3
7J. ИЗМЕРЕНИЕ МОЩНОСТИ И ЭНЕРГИИ В ЦЕПЯХ ПЕРЕМЕННОГО ТОКА
7.5.1. Измерение актниной мощности в цепях однофазного тока. Для измерения мощности Р служат ваттметры электроди-
намической системы; схема включе-нак ваттметра изображена на рис. 7.12. Неподвижная обмотка J—/ .прибора называется токовой и включается в цель последовательно. Подвижная обмотка 2—2 называется обмоткой напряжения и включается в цепь
параллельно.
Рис. 7,12, Схема млщ- Ток/2 в обмотке напряжения 2—2 кення ваттметра пропорционален напряжению 17 кон-
тролируемой цени и совпадает с ним по фазе1, а ток Л равен чоку / нагрузки. Момент, действующим на подвижную обмотку, равен
Мир = CU{ cos ср = СР,
где С — коэффициент прооорцноиальЕгости.
Поскольку противодействующий момент Л/||р пропорционален углу поворота а стрелки; отклонение стрелки пропорционально измеряемой активной мощности Р.
Для правильного включения ваттметра один из выводов тиковой обмотки и один лэ выводов обмотки напряжения отмечают звездочками (*}. Эти выводы, называемые г^нерплюрны.чн, необходимо включать со стороны источника питания,
Следует отметить, что электродинамическими ваттметрами можно измерить также мощность в цепях постоянною тока. .. 7.5.2. Измерите активной и реактивной мощностей в цепях грехфязшно тока, Для измерения мощности трехфазного приемника применяют различные схемы включения ваттметров.
При симметричной нагрузке активную мощность /' можно измсрип. одним ваи метром, включенным по схемам рис. 7.13,11,6.
Общэа мощность потребителя
Г = Зк;
где И’ — показание ваттметра.
1 Ток совпадает по фазе с напряжением, потому что пень обметки напряжения ваттметра обладает практически чисто активным сопротивлением.
284
При неснммстри’шпй нагрузке мощность трехфазного приемника можно измерить тремя ваттметрами {рис. 7,13,4).
Общая мощность приемника п этом случае р ир, + w2 + w3.
В трех проводных системах трехфа.злого гока при симметричной н несимметричной нагрузках и любом способе соединения ттрнемников широко распространена схема измерения мо-(тсности. двумя ваттметрами (ряс. 7,J4,fl). На згой схеме токовые обмотки ватх-мегров включены я линейные провода 4 иВ, а обмотки напряжения — иа линейные напряжения и t'KC1-
Докажсм, что сумма показаний ваттметров* включенных во схеме рис 7.14, а, равна активной мощности Р трехфазного приемника
Мгновенное значение общей мощности грехфазнога пркемннгн, соединенного звездой,
р - 1^1.4 4 4 eq-J?.
Так как
г.4 + iff I if - О*
10
'с = - (м + 'в).
* Токовые обмотки могут бы!ъ выгочены к в другие линейные провода, иапрв.мср М и f. При этой параллельные обмотки ваттметров включаются на лнпейные [7^ н б'с»
285
Рис. 7.14. Схема включения двух иагшЕмрин для измерения актинон мощности в трехфазиых сетях (и) и некюрная диграмма, »оясням>-щая измерение активной пошлости двумя ваттметрами (С)
Подставляя значение if в выражение дли р, пелуямем
р = ил1А 4- Wfltfl - ur(t 4 1- сд) = (ел - ur) !4 4- (нд - Uf) сд = «.«{lii,* + иДС1р.
Выразив мгновенные значения и и j через ил амплитуды, можно кан ь и Среднюю (ani ивную) м<мц>иХ.*^ь:
т
^ = у|рЛ,
41
которая составит
I* = и.4г/и«ов(^г/м:, +
Так как [/хс. С'дс, /д и 7д -сыугвеп.тв«нко линейные напряжения и токи, то полученное ныраженис справедливо и при соединении потребителей треугольником. .
Следовательно, сумма показаний двух ваттметров действительно ранил активной мощности трекфазного приемника.
При симметричной нагрузке
Ъ = = bje = 17л.
Из векторной диаграммы (рхс. 7.14,6} получаем..чю угол а между векторами и Lr4t- ранен — ?0°, а угол fi между векторами 7В и UBC составляет <р । 30'.
Б рассматриваемом случае показания ваттметров можно выразить формулами
= 1>тл/яcos(<р - 30a); И'2 = и;|/лсо4(ф К ЗСУ).
286
Рис. 7.3 5. Схема включения ваттметра для измерения реактивной мошпости в трехфэзиой сети одним ваттмс1р<1м (д) н векторная диаграмма (б)
Сумма показаний ваттметров
}lj + И',г2 = U,/,[cos(<p - Xf) + <яч(ф + 30s)] = ]^3f^JBcos(p.
По разности показаний ваттметров можно определить реактивную мощность симметричном трехфатиой сисгеми:
W] — = t/д/.э [ws(q* — 30r) — cos (*p + 30!)] = 17,71 sin ф =
Отсюда
0 = (H'l-TW'x
При симметричной ая-тивнон нагрузке (v = 0) показания обоих ваттметров будут одинаковыми. При смешанной симметричной нагрузке н ф > 60" показание одаого из ваттметров Будет отрицательным
Прн симметричной нагрузке реактивную мощность б трехфазной системы можно измерить одним ваттметром (рис. 7.15,а), В этой схеме токовая обмотка ая-тточена в лешсннын привод Л, а параллельная об-mu'lk& напряжения — на нинейиое напряжена: С'ке. И* неггорной диаграммы (рис. 7.15, oj следует, что попадания ваттметра
И= Ljb £j<x»(90-4>)= ил11ыпф.
Умножая показание ваттметра на ]/3, получаем значение peart кипой мощности <2 трехфазной сети прн симметричной нагрузке.
7.5.3. Измерение электрической энертня в цепях переметшего тока. Для измерения энергии в цепях переметптогп тока применяются однофазные и трехфазные счетчики индукционной системы. Схемы включения однофазных счетчиков для тпмере-
[ Ваттметры, как правило, снабжаются встроенным всрсключатс-лем, позволяющим изменить фазу тока в одной из обмоток прибора (чище всего токовой). Это устройства да<?г возможность производить отсчет показаний прибора при <р > 60", когда стрелка отклоняется влево до упора.
287
Рнс, 7;1Ъ. Измерение активной энергии в трехфазпой сети трех-XiwMcsjTWWM -ffT) н двукэлемен !ним (6) счетчика мн
вил ахт®иой--теергян в однофазной -и трекфаэиой цепях авалсичпиитяемвм включения вд i j метров» представленных на рас. 7.12, 7.13.
В треафцлввгх'Цепях активную энергию Ив измеряют трелили четыре* элементными трехфазными счетчиками. Трех элементные счетчики конструктивно представляют собой три из-мсритсльпые системы однофазных счетчиков, имеющих общую ось. Трехэлсмснттп.те счетчики (рис. 7.16, а) используют в четы-рехпроведных цепях трехфазного тока.
Для измерения активной энергии в трехпроводниковых цепях применяют двухэлементные счетчики (рис. 7.16,5), объединяющие измерительные системы двух однофазных счетчиков. Обмотки этих систем включают по рассмотренной рапсе схеме двух ваттметров (см. рис. 7.14, а).
Реактивную энергию 17 ври симметричной нахрузке фаз трехпроводной сети можно измерить при помощи двух одно-фазных счетчиков» обмотки которых включены по схеме рис. 7.14. Значение l-K находят как разность показаний счетчиков, увеличенную в |/з раз. Кроме того, применяют специальные трехфаэные счет'шки реактивной энергии, используемые как при симметричной, гак и прн несимметричной нагрузках фаз.
7.6. ИЗМЕРЕНИЕ СОПРОТИВЛЕНИЙ
Встречающиеся п хтектротсхииге резисторы по значению их сопротивлений можно условно разделять на малые (до 1 Ом), средние (от 1 до 10 Ом) и большие (свысце 10 Ом). В зависимости от значения измеряемого сопротивления используются различные средства и методы измерения.
7.6.1. Измерение coopcnmsnctsiB амперметром в вольтметром. Наиболее просто сопротивление резисторов можно измерить с помощью амперметра и вольтметра. Применяются две схемы включения приборов, указэгпгыс на рис. 7.17, а и 5.
Анализ этик схем с помощью уравнений Кирхгофа показывает, что для получения более точных результатов при измерении средник и больших сопротивлений следует применять схему рис. 7.17,6, а при измерении небольших сопротивлений — схему рис. ?.17тй. Искомое сосротнвлепие определяемся по формуле
- U}1,
где Си/ — показания приборов.
7.6.2. Измерение соаротиаиншин омметром. Для непосредственного измерения сопротивления резисторов применяют омметр, состоящий ил магнитоэлектрического миллиамперметра, последовательно с обмоткой которого га включается добавочный резистор гл и источник пытания (батарея) с ЭДС £ и внутренним сопротивлением г0 (рис. 7.17, л).
При постоянстве ЭДС Е показание прибора зависит золько от гх: каждому значению измеряемого сопротивления соответствует определенное значение тока 1Х в пени:
?_______
('« 4- га -I- гс) + г.
Рнс. 7.17. Измерение небольших (и), средних н больших (6) сонро-гнвлеияй амперметром и вольтметром; Намерение сопротивлений Омметром (*) .
10 Электроге>.нй1а 2^89
Рис. 7.19. Измерение соцрознн-
лекий мОСЮвым Прибором
Это позволяет отградуировать шкалу прибора непосредственно в омах.
Ввиду того что ЭДС £ источника питания может изменяться в процессе эксплуатации прибора, значение тока неоднозначно определяет измеряемую величину.
На практике применяют омметры, я которых отклонение стрелки нс зависит от значения ЭДС (напряжения) источника питания. В качестве измернтглыюго механизма здесь используется логометр — прибор, у которого отсутствует* механическое устройство для создания иротиводейетвующего момента. В логометре равновесное положение подвижной системы определяется отяои1впием токов в двух подвижных и жестко связанных между собой обмотках — рамках (рис. 7.18).
Обмотки J и 2 находятся я магнитном поле постоянного магнита /V5 и присоедиаены к общему источнику питания. В пень одной обмотки включено измеряемое сопрозинлспис гх_, а в цепь другой обмотки - постоянное сопротнвление г. Токи Г] и Ь п катушках создают два я раздающих момента, действующих на подвижную <1аеть прибора, значение которых зависит от положения катушек в пространстве:
Л/(=1гЛ(а) и
где а - угол отклонения плоскости обмотки ! относительно оси ОО'.
Моменты Л/1 и М 2 л а правде лы встречно. Подвижная часть прибора приходит в равновесное состояние при т. с.
при
290
Отсюда
ми
Таким образом, каждое положение стрелки прибора со-охвехствует определенному отношению токов Jx/ij. В риссма-триваемом омметре это отношение однозначно зависит от измеряемого сопротивления \ и не зависит от напряжения С/ источника питания.
Для измерения больших сопротивлений (например, сопротивления изоляции проводов) служит мегаомметр. Он отличается от омметра гем, что в качестве источника питания здесь используется магнитоэлектрический генератор, приводимый во вращение рукой. ЭДС генератора достигает довольно высоких значений (500—2000 В), благодаря чему мегаомметром можно приближенно измерять- сопротивления, исчисляемые мегаомами.
7.6.3. Измерение сснфотявлсннй, шдукгнввосз ей в емкостей мостовыми приборами. Для более точного измерения сопротивлений применяют мостовые схемы. Простейшая схема моста постоянного тока локалала на рис. 7.19.
В три плеча моста включены сопротивление г[л г2 и г3, в чехвертое плечо - измеряемое сопротивление гх. К точкам 4 н В присоединен источник питания, между точками С н D включен магнитоэлектрический гальванометр Г. Изменяя сопротивления г,, г2 и га, можно побиться равновесия моста, при котором ток в цепи гальваномстра отсутствует. В этом случае напряжение между то'хками С и D равно пулю, токи в соххритавленимх гх и г2 одинаковы, токи в сонротивлеапях г3 и гх также равны между собой.
Учитывая это, можно ааииштхь
Mi =Г/3> >1^ = 1^
Разделив почленно полученные уравнения, находим
Отсюда
Для измерения значений L индуктивных н С емкостных элементов используются уравновешенные мосты переменного тока (рис, 7,20, « t>).
10* 291
Рнс 7,20, Мост переменного тока (л) и мост для измерений значений емкостей (£}
Мост буд^г уран повешен (показание гальванометра Г рапчо кулю) в том случае, когда
-hZ.^JiZy JtZ2=J,Z4,
опгудд
ZJZ2=Z,3/Z4. <7.К)
Следовательно, ZjZ^ZjZ^, или.в показательной форме
2 2 1 — 2_г. е? **2 +*а|
Это условие будет выполняться, соли
Zj24 = 32Zj И <р( + <р4 = <Pj + фл.
Таким образом, плечи моста должны иметь, например, или
“1 = г1^ М = 'Т 2 2 " КЬ 23 “ ХО
тогда
<pt + cp4 = 0 + 0 = 0 и 92 + q>3 = jt/2 + ( - jt/2) = О, или
Zj = *Ch -з ~ ХС2>< г2 = г2^ ^4 = ГЛ,
тогда — п/2 +0=0— к,/2.
На рис, 7.20,6 изображена сясма моста переменного тока для измерений значений емкостей, в которой Сх — измеряемая емкость. Со — известная образцовая емкость, гг и г3 — образцовые регулируемые резисторы. Пуюм подбора и г2 устанавливают равновесие моста, а затем нэ соотношения
292
(7.В) оиреаеляют значение искомой емкости Сх: l/2n/CQ _ 1/2я/Сл
откуда
— ^Огз/1'2’
7.7. ЭЛЕКТРОННО-ЛУЧЕВОЙ ОСЦИЛЛОГРАФ
Электронно-лучевой осциллограф исполъзуетсл для визуального наблюдения, измерения и регистрации формы и параметров 3.ICKI ричеикнх сигналом в диапазоне частот от постоянною тока до десятков мегагерц.
Эдекхронно-лучеиые осциллографы обладают высокой чувствительностью и малой инерционностью, подразделяются на универсальные, запоминающие, специальные и др,, могут быть одно-, двух- R многолучевыми.
Функциональная схема .ъэсктроптго-лучевого осциллографа приведена на рис. 7.2L Основным узлом осциллографа является вакуумная злектронно-лучсвая трубка ЭЛТ, которая преобразует электрические сигналы в световое изображение; Катод 2, подогреваемый питью лакала I, ивляется источником свободных электронов, которые формируются в электронный луч
Рис. 7,21, Функциональная сима электронпо-лучсвого осинллргра||и
293
и фокусируемся первым анодом 4 иа экране £ ЭЛТ. Ускорение электронов луча осуществляется вторым анодом 5. При соударении электронов с экраном 8 их кинетическая эпергия преобразуется в световое излучение посредством катололюминофо-ров, г, е. Вещес тв, светящихся под действием бомбардировки их электронами. Время послесвечения (после прекращения действия электронного пупа) может составлять от 0,05 до 20 с и более.
Изменяя отрицательный ногеппиал электрода 3 по отношению к катоду, можно воздействовать на значение тока электронного луча, а следовательно, и яркость свечения изображения на экране.
Управление .пупом Э-^Т осуществляется посредством трех каналов управления х, у, z, которые обеспечивают получение развернутого изображения исследуемого электрическою сигнала в функции времени. Канал у осуществляет вертикальное отклонение луча по оси у системы грординАт и непосредственно связан с исследуемым сигналом. Капал л обеспечивает горизонтальное О1клоис1гие луча но ось времени л Системы координат. Канал z управляет яркостью луча.
Для создания линейного масштаба по осн времени к необходимо равномерное перемещение электронного луча по горизонтали, что обеспечивается подачей ив горизонтально отклоняющие пластины 7 ЭЛТ лннейпо нарастающего напряженья развертки (рве. 7.22,<?}, Если прн этом отсутствует напряжение на вертикально отклоняющих пластинах б, на экране осциллографа появляется горизонтальная линия. При одновременной подаче аес.чсдуемого напряжения (рис. 7.22, а) на пластины б и напряжения развертки на экране осциллографа появляется осциллограмма (рис. 7.22, дающая полное предстанлсппе □ форме, амплитуде, частоте исследуемого напряженья.
В канале х частота итератора развертки недостаточно стабильна. Для получения устойчивого изображения па экране осциллографа всобходимо выполнение равенства Тх=иТ , тле Тл - период напряжевия развертки, Т, — период исследуемого напряжения, п = I, 2. 3,,, Это равенство обеснечввается устройством синхронизации, которое «подстраивает» частоту генератора развертки под частоту исследуемого напряжения.
294
Если «подстройка» производится исследуемым сш налом, то опа называется «внутренней синхронитацией», если oi какого-либо друюю сигнала - «внешней синхровязанией».
Уси_1и1сль в канале х обеспечивает линейно нарастающее напряжение заданного значения {до несколькихсотен вольт).
Канал у выполняет ио существу функции усилителя. Чтобы он не влиял на режим работы исследуемой электрической цепи, используют катодный повторитель, имеющий значительное входное сопротивление. Так как исследуемые напряжения изменяются в широком диапазоне, для обеспечения оптимального напряжения па выходе данного канала на его входе предусмотрен аттенюатор (делитель напряжения). Для исследования фронтов импульсов напряжений няелеио устройство - линия задержки,
С пелью определения масштаба осциллограмм по осям абсцисс и ординат в осцнллогрш]ю предусмотрены калибраторы ДЛНТСЛЬПОСГИ и амплитуды.
Значительный интерес представляют запоминающие осциллографы, предназначенные для регистрации однократных и редко новторяюшихсм сигналов. Их скорости записи — до 4000 км/с, при уровнях сигналов десятки милливольт - сотни вольт. Так, универсальный осциллограф С8-12 имеет время воспроизведения ранее записанных процессов 40 с, время сохранения записи 7 ч.
7J. ПОНЯТИЯ ОБ АНАЛОГОВЫХ И ЦИФРОВЫХ ПРИБОРАХ
7.8.1. Аналоговые электронные вольтметры. В радиоэлектронных цепях к uu.th] MBjpa.w, как к .'tpyj n.vi нзмерн । е.1ьньсм приборам, предъявляются повышенные требования, такие как ничтожно малое потрсб-. 1ЕНИЕ МиЩНОСЧ И. ЧйС| ОГНЫН jlMiJIU.'KJH Hi МЕрИ ВМО! О ИД 11 рЯЖвН НЯ ОТ ЁДН-1Ш1 герц до сотен мегагерц, н я то же время слабая зависимость показаний от частоты измеряемого напряжения, высокая чувствительность и т. .j. ^Угнм требованиям не соответствуют стрелочные иолы-метры. которые осушествлязот пспосрсдствспиуто оценку (прямой отсчет) измеряемого напряжения, Вьспепергчштендым требованиям удовлетворяют аналоговые члектринные вольтметры, использующие усилители измеряемых напряжений.
С учету чачен ил электронные вольтметры подразделяются на вольтметры; постоянного и переменно] о тока, импульсного напряжения, универсальные и др. Функциональна* схема универсального аиа-;юн»ычо электронного вольтметра представлена на рис- 7,23- Данный вольтметр явлэегс» универсальным, 1. е. предназначен для измерений я цепях кмг постоянного, так я переменного тока.
295
Рис- 7.23. Функциональна* схема универсального диалоговою злек-гронного вольтметра
Рве. 7.24. Функциональная схема электронного цифровою вольтметра с время-ампу.тъеимм иреойрц.-чоианисм
Прибор состоит из двух входных устройств: ареобрааовагеля, усилителя постоянною тока и магнитоэлектрического измерителя. Входное устройстве! представляет собой высокоомный реэ нс-t мвный делитель напряжения, служаЕций ятя изменения пределов измерения вольтметра, Преобразователь (де-i ектор) - устройство, преобразующее переменное напряжение я постоянное,- используется прн измерении в пенхх переменного тока.
С целью повышения чувств кты к кости вольтметра осуществляется усиление постоянного тока, для чего используются усилители, которые «бесгсчнякют постоянство коэффициента усиления. Магнито-злек-1 рнчс-ский измеритель - прибор магнитоэлектрической системы, В большинстве случаев шкала электрон ноги вольтметра отградуирована в действующая значения синусоидального напряжении. К недостаткам электродных приборов относятся: значительные ногрсшвосгв (1-4%) и габаритные размеры, для их работы требуются вспомог а тельные зкт очники инталия.
7.11*2* Цифровые змерттсльвые приборы. В настоящее время в технике радиоэлектронных измерений используются цифровые измерительные приборы (ЦИП), которые преобразуют измеряемую величину л дискретные или квантовые значения, осуществляют цифровое кодирование и выдачу результатов из-
ме рений в цифровом виде, К преимуществам ЦИП можно отнести: достаточно широяий диапазон измеряемых величин с высокой точностью измерений» возможность представления результатов измерения в цифровом виде; запись их ииф-ропечатающим устройством, а также ввод получаемой информации об измеряемых величинах в ЭВМ.
Ознакомимся с работой ЦИП на примере электронного цифрового вольтметра с время-нмцульсыым преобразованием, при котором измеряемое напряжение U, вначале преобразуется во временной интервал, а затем пая схема данного вольтметра
Рнс. 7.25. Временные диаграммы х ппэснекню принципа действия цифрового вольтметра
в цифровой вид. Функциоиаль-представлена на рнс. 7,24. Ос-
новными узлами цифрового вольтметра, которые осуществляют связь измеряемого напряжения с времештым интервалом» являются: два сравнивающих устройства, генератор линейно нарастающего напряжения ГЛИН и триггер. До подачи на входное устройство измеряемого постоянною напряжения 17, устройство управления обеспечивает сброс прежних показаний счетчика, запускает ГЛИН, а также устанавливает триггер в положение «О». Напряжение 17, подается на входное устройство (делитель, напряжения), зачем усиливается усилителем постоянного тока и подастся на вход 2 сравнивающего устройства /7. Вход 2 сравнивающего устройства 7 заземлен. На входы 7 сравнивающих устройств I и II подастся линейно вара-стаюшее напряжение и,, (рнс. 7.25), При равенстве входных ва-пряжелий ердвнввающие устройства на своих выходах вырабатывают короткий импульс. Таким образом, первый импульс возникает от сравнивающего устройства 7 (w„ = О), второй импульс — от сравнивающего устройства /7 прв = С’,. При этом первый импульс посредством триггера обеспечивает начало работы ключа н на счетчик поступают импульсы с генераюра счетных импульсов с периодом времени 7\. При подаче на
триггер второго вмпульса ключ закрывается, а следовательно, прекращается счет- импульсов. Таким образом, осуществлено как сравнение измеряемого напряжения с линейно нарастающим напряжением и|С, гак и преобразование ею во временной интервал 7\.
297.
Показания устройства цифрового отсчета определяются следующим образом:
С'х — tgp7\.N,
глс TY — период импульсов генератора счетных импульсов; N - число импульсоп.
При выверке нуля прибора необходимо заземлить вход усилителя постоянною j-ока» а при градуировке его вход подклю-’iacicK к калибратору, т. е. источнику ка;шброва1Епого напряжения. Если появляется необходимость измерения переменного напряжения» последнее после делителя подается на преобразователь, х де преобразуется в иоигояЕтное, после чего подается на вход У сил hi и j я постоянного сока. Цифровые вольтметра обеспечивают высокую скорость преобразования (до тысячи измерений в, секунду), а также малую погрешность измерения (001-0,001%) в диапазоне измеряемых напряжений от 0,1 мкВ до 1000 В. К недостаткам цифровых вольтметров, как и в целом ЦИП, можно отпссти их сложность и высокую Стоимость.
7,9. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Все более широкое распроираиеиие получают :шектриче-ские методы измерения нехлектрических величин. Указанные методы основаны на преобразовании нсэлсктрической величины в электрическую. Элемент измерительного устройства» пыпо.тняюшиц эту функцию, называется первичным измерительным преобразователем.
Преобразователи разделяются иа две основные группы:
I) параметрические преобразователя, в которых измеряемой нс-ьгсктричвская всличипа воздействует на резистивный, или индуктивным, или емкостный элемент так, что каждому значению неэлекзричоскоя величины соогветствус! определенное значение л, или 1, или С активней о, индуктивного «ли емкое!-|[(И’о .элемента электрической целя измерительного устройства. При измене Л ИИ измеряемой иезлодритЕеской величины в той же степени изменнется г, или L, или <Г;
2) генераторные Преобразователи, которые преобразуют ит-мсряемую аезлекгрическую величину в ЭДС.
Наиболее распространенными параметрическими датчиками являются:
а) реостатные преобразователи, в которых измеряемая яе-электрическай величина (нэнрнмср, линейное или угловое перс-298
мещепме) вел действует на движок, изменяя его положение и тем самым сопротивление реостата;
б) преобразователя с терморезииторалш, ярсдпа.шачспиыс для измерения температуры и основанные на зависимости сопротивления проводников и полупроводников от температуры;
в) проволочные преобразователи или эензорезисторы, основанные на изменении сопротивления юиьой констан швей проволоки при ее деформации (предназначаюген для измерения деформаций и. следовательно, сил. их вызывающих);
г) емкостные преобразователи, представляющие собой плоские или цилиндрические конденсаторы, емкость которые изменяется пол действием измеряемой неэяеттрнческой величины (предназначаются .для измерения перемещений, механической силы. тодткипы диэлектрика, содержания влаги и т. л);
д) индуктивные преобразователи, оеповаппьЕС на изменении индуктивности катушки при перемещении ее сердечника (или изменении воздушною зазора) иод действием измеряемой неэлектрической величины: силы, давления, линейного перемещения;
е) фотоэлектрические преобразователи, использующие чувствительность фегтоприемннков к падающему на их поверхность световому потоку.
Параметрические преобразователи требуют налнчня вено-мем этельиш о источника электрической энергии.
К генерал орным преобразователям относятся:
а} термоэлекхрическне преобразователи, чувствительным элементом которых является термопара (служат для измерения темпера; уры);
б) индукционные преобразователи, в которых измеряемая механическая величина преобразуется в тшдуктнроваштую ЭДС;
в) ньезоодектрические преобразователи, в которых используется появление электрических зарядов на поверхности некоторых кристалических диэлектриков (кварц и др.) под влиянием механических давлений.
Один и тот же тип преобразователя может быть применен для контроля и измерения различных пехчекэрических величин, и, наоборот, для измерения какой-либо неддектрической величины могут быть использованы преобразователя различных типов.
Рассмотрим несколько простейших примеров измерения лс-электричсскил величии.
Лрн измерении уровня (объема) жидкости в каком-либо резервуаре подвижник часть преобразователя обычно мехвнпче-
299
Ркс. 7.26. Измерение уроям» реостатным дачником
Рнс. 7.27. Измерение толщины индуктивным датчиком
ски связана с поплавком JJ, положение которого определяется измеряемым уровнем (объемом) (рис. 7.26).
Изменение положения подлавка вызывает перемещение движка Д реостатного преобразователя. Так кэк реостат вклю-чен в цель, присоединенную к источнику электрической энер-гиц, то, очевидно, каждому значению измеряемого уровня будет соотве1ьтволать определенное значение сопротивлении fj и гг электрической пели и соответствующее им отЕгошеиие гокоо /(//j. Поэтому пгкала логометра Л может быть итградунрова-tra непосредсгвептю в единицах измеряемого уровня (об7,ема).
Для измерения малых исрсментеций может быть использовал ипдуктйвный преобразователь. На рис. 7.27 схематически изображено устройство для контроля толщины ленты.
Изменение толщины ленты 2 влечет за собой перемещение ролика 2, связанного с якорем 3 маллгтопровода прелбразокн-теля Изменение воздучивою зазора 6 вызывает изменение ин-дук1ив1юго сопротивления обмотки 4 и, следовательно, тока в цеди катушки.
В качестве примера использования генераторного преобра-Зовагс.тя рассмотрим принцип действия итгдукимошюго тахомс-тра для измерения частоты вращения, Якорь маломощной магнитоэлектрической машины [1 оператора постоянного тока, см, 19.7) соединен с валом испытуемой рабочей машины непосредственно и.ти через редуктор. Индуктированная в якоря ЭДС прямо пропорциональна частого вращения вала (£ = л). Шкала вольтметра, присоединипюго к выводам якоря, может быть ох-300
। рй.тунровапа непосредственно в единицах частоты вращения юб, мнет).
На практике находя! применение и более сложные схемы измерительных устройств, например мостовые схемы с усилителями, позволяющие значительно повысить чузспииельность п точность измерений.
Г ла в а восьмая
ТРАНСФОРМАТОРЫ
В.1. НАЗНАЧЕНИЕ, УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ТРАНСФОРМАТОРА
С целью экономичной передачи электроэнергии па дальние расстояния и распределения со между разнообразными потребителями появляется необходимость в ее трансформации Последнее осуществляется с помощью повышающих и понижающих трансформаторов.
Трансформатор — статический электромагнитный апларнт, ею действие основано па явлении взаимной индукции, он предназначен для прсобрнзпвания электрической энергии переменного тока с параметрами Cls /, я энергию переменною тока с параметрами С2, той же частоты.
ПриЕщил индуктивной сияли двух обмоток впервые открыт Фарадеем в 1831 г. Б период 1870— 1880 п. был создай одно-фазный трансформатор с разомкнутым матнитопропллом. а в 1880—1890 г. была осуществлена разработка трансформатора с замкнутым магпитопроводом, который усиливал махиихную связь между обмотками и обеспечивал повышенные технихо-экономические показатели трансформатора.
Трансформатор (рнс. 8.1) состоит ил ферромахнихиого маг-нитопропода 1, собранного ил отдельных листов электротехнической стали. нЯ котором расположены две (**(, w-'2) обмоткн, вътполпсиехыс из медного или алюминиевого провода. Обмотку, подключенную к источнику питаниа, принято называть пер-личной, а обмсику, к которой Езодключаются приемники,— вторичной. Все величины, относящиеся к первичной и вторичной обмоткам. принято соответственно обозначать индексами 1 и 2.
Если первичную обмотку трансформатора с числом htitkos Wi включить в сеть перемеивого тока, хо напряжение сети 17а вызовет я ней ток /( и МДС /,w, создаст переменный маг-
301
Рнс. Я.I, К пояснению yeipuwcrRa и принципа дейС1яия трансфор-маюра
ннтный поток Ф. Переменный магнитный поток Ф создаст в обмотке ц>1 ЭДС Е(, а в обмотке И'2 ЭДС £2. Котла есть нагрузка, электрическая пень вторичной обмотки оказывается замкнутой и ЭДС Е2 вызовет в ней ток Таким образом, :mcr* зричсская энергии первичной цепи с параметрами / и частотой/будет преобразована в энергию переменного тока пторвчноа цепи с параметрами ГЛ, и /,
Митогенные значении ЭДС первичной и вторичной обмоток, как следует из явления электромапштной индукции имеют выражения
е, — - и х й?Ф/Л, е3 — — м'2 е/Ф/rft,
их действующие значения (при синусоидальном изменении) соответственно равны
Ех =4±44*1/Ф,-; (КП
£^4,44^.^, {8.2}
Разделив значения ЭДС первичной цепн на соответствующее значение ЭДС вторичной пепи, получим
Величина л называется коэффициентом трансформации трансформатора. Электрическая энергия из первичной цепи во вторичную а трансформаторе передается посредством перемси-вото магнитного потока, поскалъсу тальвавичеСЕня связь между
302
первичной и вторичной обмотками трансформатора отсутствует. Отношение значений ЭДС Ei и Е2 равно отношению чисел витков первичной в вторичной обмоток.
Для выяснении соотношения между первичшлм и вторичным напряжениями необходимо высказать следующие соображения.
Во-первых, кроме основного мвптитпого погожа Ф или просто магнитного потока трансформатора, как далее мы его будем называть, который полностью распилахается в ферромвг-ннгном сердечнике и пронизывает* все витки первичной и вторичной обмоток, так первичной обмотки создаст магнитный поток рассеяния ФрР Поток рассеяняя в тлнчис от основного охватывает иагки только первичной обмотки и, как это видно па рис. 8.1, располагается главным образом в немагнитной среде (воздушном пространстве или трансформаторном масле, окружающем обмотку). Этот поток создаст в первичной обмотке ЭДС £р|. Во-вторых, первичная обмотка обладаег определенным активным сопротивлением. Поэтому, как вытекает из уравнения электрического состояния первичной ueun
tf , = -Е, -£pi+J,r1T (8,4)
значения наттряжепвя бгг в ЭДС £\ не равны, ЭДС Е, меньше напряжения на значение падения напряжения, обусловленное ЭДС £р1 и активным сопротивлением обмотки.
Однако эта разность невелика, н если ею превебр©чь, тс можно допустить, что
Г/i ж -£ь или | ]ж[Е( I, или ж Ер
Прв работе грансформагорв с нагрузкой в его вторичной обмотке действует ток Т2. Ток вторичной обмотки участвует в создан я а основного магпвтпого потока Ф, в также создаст поток рассеяния Фр2, расположенный в немагнитной среае, как ФрН и ваводяшии в :пеа обмотке ЭДС £р2'
Напряжение L\, как вытекает из уравнения электрического состояния вторичной лени
GTj = Ej + Ер2 — £згзт (8.5)
меньше ЭДС Е2 значение падения напряжения, обусловленное ЭДС £Р2 и активным сопротивлением обмотки. Однако эта разность невелика, и если ею пренебречь, то можно считать, что
172 « Е,.
303
Гис. 8.2, Условные обозначения Однсфн Э110ГО I pa HOjxjpMSI Dpa
Подставив в уравнение (8.3У вместо Е, и Е2 соотпетст вселю напряжения £,’, я t'2, получим
откуда следуех, что l/2 = = С’,/и.
Поэтому можно считать, что коэффициент трансформации трансформатора представляет собой On tot лечче значений первичного напряжения к вторичному, Соотношение между ттер-вмчтлм и вторичным токами можно определить из равенства вервичной н вторичной мощностей. Действительно, если пренебречь потерями активной мощвоств в обмотках и реакгввпон мощностью, обусловленной главным магнитным потоком н потоками раесскпия трансформатора, то
b'Ji = UiG’
оттуда
и, слеловаге.1ьпо,
fj =±. Цп.
Однофазные Трансформаторы Eia схемах ьтекгрнческйх цепей итображаются так, как это указало на рис. 8.2, в—а. Начало н кОЕгец первичной обмотки оболватаются большими буквами: начало 4, конец X, вторичной обмотки — малыми буквамнгнача-ло д, конец х, Предполагается, что направление намотки от начала к концу отплечгельпо маи!итопроиода обеих обмоток одиндкоиос пли во часовой, -или против часовой стрелки.
а.Х ОБЛАСТИ ПРИМЕНЕНИЯ ТРАНСФОРМАТОРОВ
Передача электрической энерхвн большой мощноств на белыпке расстояния технически возможна и зкштомическн целесообразна при малых сечениях проводов линии передачи и м&ххык потерях эверсии в них. Сечение проводов и вотерм 304
мощиосги я мих определяются током, а та при эадавной мощности, как известно, завистгг от папряжсния:
S = LL
ЕсгсстъСиво, ‘few выше напряжение. тем меньше ток, сечение проводов и потери мощности.
Напряжение скнхроппьтх генераторов электрических станций отвосителмю псвелако: 15000 - 24 000 В, сечение проводов и потери мощности в проводах линии передачи прн этом .напряжении были бы ельшком велики. Поэтому гса. здекернческик станпнях с помошью трансформаторов напряжение повышают до 110000 — 750000 В и электроэнергию передают при таком напряжении к местам потребления. Эвергия столь высокого напряжения не может быть непосредственно использовала подавляющим числом потребителей, поскольку они рассчнгавы ио техниво-экономическим соображениям и условиям безопасности для работы прн относительно низком напряжении — порядка 220-380 — 500 В. Следует отметить, что имеется довольно широкая группа потребителей, работающих при напряжении 10 (6) кВ. Пол ому в местах потребленья электрической энергии (в конце лвиин передачи) напряжение понижают по требуемых значений также с помощью трансформаторов. Это одна из основных областей применения трансформаторов, где без них обойтись невозможно.
Трансформаторы широко всиользуются чо всякого рода нз-мервтельнЫК устройствах, радиоприемниках, телевизорах, осциллографах, для местного освещевня и т. п. В этих случаях трансформатор преобразует вмеющееся стандартное напряжение электрической сети в напряжение другого значения, которое необходимо для пи талия отдельных элементов электротехнических устройств. Во многих случаях трансформаторы имеют несколько обмоток. Трансформаторы используются в сварочных в электротермических установках. Трансформаторы широко используются прн измерении тока, напряжения и мощности в электрическая цепях с большим напряжением или с большими токами. Они называются измерительными. Существует много специальных трансформаторов, работающих во всякого рода автоматических установках, напряжение на их обмотках во многих случаях несияусоидальное. В этой книге рассматриваются травеформаюры, работающие п цепях синусоидального тока.
АГ РЕЖИМ ХОЛОСТОГО ХОДА ТРАНСФОРМАТОРА
Режим холостого хода тралсформатора имеет место, когда разомкнута цепь его вторичной обмотки, а обмотке пет тока и ока не оказывает влиянии на режим работы первичной обмотки. В режима холостою хода процессы, происходящие в трансформаторе, аналогичны процессам в катушке с ферромагнитным магнатонроводом, которые подробно рассмотрены и разд. Б гл 6. Дополнительно к материалу, упомянутому в и. б. применительно к трансформатору необходимо добавить следующее,
Мшъмтемройод трансформаторов собирается из отдельных гцктсгв яадпротехвической стали топтаной 0.35-0,5 мм, между которыми сеть нзеляаиоякэя нрослойжа в визе лака, окапаны ила клея. Потери -эдсктрическеи энергии в матнитопрово-де нвшь'сикм а, £.тстюватсл£яэ, всвеляк и ток /а, обусловленный этими шглряын. Воздушный зазор маппгтопровода, гшреде-.гяемый качествам обработки отдельных листов и качеством сборка, олЕоситедьаэ яеэелш- Листы слоев м^гпктопровсда есстрвются вцавдестку: лослсдуютвпй слой нерекрьтвает воз-дутнде промежутки в стыках листов предыдущего слоя, что приводи! е существенному у^яннс»»"". эквивалентного воздушного зазора магнит осроаодд трансформатора (подробнее -в § R.12). По этой причине ньмэгнггчиваюисвй ток Jp трансформатора 1 ток холостого хода трансформатора, равный
i»=kV+V.
невелики. Ток холостого кода составляет всего 5 — 10% ломи-нальшио значения.
Необходимо отметить, что ток % значительно меаынс 1р, Поэтому при анализе работы и в расчетных формулах часто принимают
А,® А"
Следует обратить ъымммше на то. что петля персма! ннчи-вдыня жаектротемнвческон стали магннтопряводмлэ трансформаторе» опюсигслыю «узках* (ряс. 8.3) я значение амолитуды маг-ннтвем ицдушми В„ для обычных трансформаторов выбирается в пределах 1,2 —1,6 Тл, что соответствует вримерш точке кривой нама. ничняанмв, лежащей па *аоленс», поэтому в пределах изменения В от 5 = 0 до F = В„ зависимость юка от магнитной индукции примерно линейная Поскольку магиагнык поток и, следомтсльио, магнитная нндукаия изменяются Силусон-дальпо, намагничивающий ток также будет изменяться ло ла-306
хону, близкому к сивусондаль-ному. В дш;;ейшсм буде.м счн-та гь, ч ю юк колос 101 о кода изменяется но синусоидальному закону. На рис. Я .4 изображены схема замещения !.«} и кеетор-ии диаграмма (б) трансформатора при холостом ходе i£2 на рисунке не показана}. В схеме замещения г0 - активное сопро-лньленяе, потеря мощности в котором равны потерям мощности в магнитопроподе трансфор
Рис Я.З. Кривая нам4н иишидсая тршсфмрмипрной стаж
матора, х0 - нпдуктяв1тсе со-протипле|гие первичной абмот-ки, обусловленное основным магнитным потоком, — активное сопротивление первичной обмотки, Xi — индуктивное сопротивление первичной обмоткн, обусловленное потоками рассеяния.
Уравнение электрнчесяого состояния первичной цепи трансформатора при холостом холе
бд — — Ею + (ioTj -Ьjfuj.Xj.
Напряжение на выводах вторично# обмотки при холостом ходе грансформагора
Оиылг л.-и.1снглгут«э лойй. Для выяснения соответствия действи-ic.jbHbix значений тока холостого хода, потерь моищосги ь мах нит «проводе и коэффициента трансформации расче»ным
Рис. 8.4. гаметздня (о) и векторная дхагримма (ff) юлоо
‘joro ходя трансформвтвря
307
А7. ТРЕХФАЗНЫЕ ТРАНСФОРМАТОРЫ
Сп.эдааие хрсхфаитых трансформаторов оиюсится к периоду 5889- 1ЙУ1 л. Первые промышленные образцы трансформаторов созданы выдающимся русским электротехником М. О. Дсслнио-Добропагтъским
ТрскфазныЙ трапсформаюр состоит из трех однофазных, hiai питопроьоды которых объединены в один общий трех-етсрткис.-лгй ipnc. S.17. й). Денстедз^льно, сели три однофазных лвугобмокншых трансформатора расхх сложить. как изображено на рис. 54,17. а, а их первичные обмотки соединить Звездой (рис. В.17.5) и подключить к Ерскфазной сехм. то п них возникнут хоки холосюгй 5о.да, Токи будут HMCxh одинаковое значение но будут сдвинуты отниснтсльяо Друг друга на 120' (рис, 8.17,е). Матншиыс потоки, создаваемые токами, также будут сдвинуты па 120". Сумма махнитпых потоков, хак же как л токоа, будет ранца нулю. Вели объединить -три. стержня /ВС идЕгофазных трансформаторов в один, то в эхом стержне мах -питетого потока не будет и надобность в нем о[падает. В ре-spjiuaie образуется хрехфатчый трансформатор (рис. 8.1?,г). Однако изготов.чепие такою трансформатора технически и тсх-
Рнс. 8.17. К нояслспин» езбразоваимя трехфазлохи трацсфор.ма итрк 322
дологически затруднено. Дейигвигельао, гораздо удобнее рас-по.южи1ь стержни mai ми । oupoBOja в одаой плоскости, как изображено на рис, S-, 17,с>. По существу ничего гте изменятся. Однако при 7TOVT немного умгпт.1тгигся длина магнитопровода для среднего стержня Л. Это несколько иарушш симмирию магнитпгрпводи тринсформаюра и иринсдС! ь~ тому, что на-магнячи1зан>з1(пи ток (ток холостого хода} обм01ки среднего стержня Я будет иссколько меньше, чем обмоток стержней .4 и Г Однако асимметрия нс имеет практического значения.
Итак* трехфаэный двухобмоточньш трансформатор (рис. 8,17. д) имеет один трехстержяевом мапттолропол с двумя обмотками на каждом из стержнем. Каждая фата трсхстсржно вето трансформатора представляет собой но существу однофазный трансформатор. Поэтому анализ работы и расчет 1рсхфаи[ых (рансформаюров при равномерной нагрузке каждой фазы аналотичны однофазным и схема замещения и so-бра ждется ятя одной фазы.
Начала II kohw первичных обмоток пйикичаклся большими буквами - соответственно ЛА’, ВК CZ, вторичных обмоток — малыми буквами дх, бу, сг. Фазы вторичных обмоток, так же как и первичных, могут быть соединены звездой или треугольником.
0.8. ПАРАЛЛЕЛЬНАЯ РАБОТА ТРАНСФОРМАТОРОВ
Для преобразования •К1сятрнчм:гой чнер! ни высокого напряжения на ।еррн горни отдельных промышленных предприятии, цехин или рядом с ними устянянтиняклс» 1раниформагоры, понижающие напряжение ДО 220. 380 пли 500 В. при кщарцм paGiuawi большинство потреби re.ieft.
С ислыо сокращения .члины пранидов низковольтных сетей, а оееи имени значительное сечспяс. и бсспсрсбошЕого енабкения ыек»ро-jEicpriTcti приемнике* нелЕстюбразпо усванаьлипать нс одип тралсфор-малэр на одни цех или промышленное лредирняие, а нескольЕЕО «! RKTHwu rh щ параллельно При аварийном выходе из строя или при-фЕслактытсском ремонте о.тячп> из них остальпые обеспечат элсктро-sweps ней приемники. С той *с целью (ихисребойнси о снабжения про-МЫШ.ТСЛИЫХ Предприятий на глЛеКГрИЧССКЛК СГЯНЕСНяц усг^нии.1ли^к>1ся несколько трансформаторов, включенных параллсило. На рнс. 8.1й,о г <г;6ряж?на •.cml днях нАрал.телыю включении» ареяфа^ных 1ранс-форматоров.
Для нормальной работы параллельно включенных трансформаторов не<и5хс>.т1|МП. *1 (н5ы при холостом холе н их обмотках не возникало тль называемых урилнительных токов - это будет прн условии, если линейные ла[;ряжс[|ия первичны* и нюринных обмоток трансфор-мс юрив cuvj uej eiuejujo одиняковье по модулю и вторичные линейные
nit»KjQ совпадают no ijww) ЭДС p, действует прошв кгег i0 при убы-Манн магнитного кпгока и направлении тока jfl. Эго соролеллипо для любого моченлц ерсм&ни. Прн колсхтом ходе трансформатора. ксила магнитный поток силится только током j, =i0, ЭДС rL дейстнуст против гока в nepuH'oiofi обмотке <j или согласно с лим.
Следует отмстить, что прл синусоида.] ином пдпряжекин па пср-ришой обмотке и, магнитный: поток Ф(1|>Х напряжение w2 л ток I, изменяются также го сннусоида-пьниму закону независимо от того, насыщен или дет maj нитспровол трансформатора, о гр время как ток вторничной обмотке г£ и гак to.40t.joi о кода гл будут иметь синусоидальный характер то-гико при ненасыщенном магнн!опроэод& 1р;шс-формагрра.
В.». ВНЕШНЯЯ ХАРАКТЕРИСТИКА ТРАНСФОРМАТОРА
Заииснмость напряженно на вторичной абмогкс трансформатора от тока нагрузки Ь2 =/(/->) при U, —coast и cos<p: = = const называется внешней характеристикой, Из уравнения (R.15) для упрощенной и?ми замощения храисформозора следует, что с изменением юна ио вторичной обмотке (тока нагрузки А) напряжение на вторичной обмотке нзмевяезся, Значение напряжения на вторичной обмотке определяется нс падением напряжения. а потерей напряжения о обмотка:?. Потеря напряжения сеть арифметическая разность между первичным и приведенным eiopwHBbiM напряжением
ДЪГ2 = t/| — Uj.
При отсутствии нагрузки (7а = 0) напряжение па вторичной обмотке (/2 = Lr2<) =k'j. а нескольку напряжение (/1 нс зависит от нагрузки, то ALrj cctf> изменение напряжения L'j по сравнению с его значением при холостом ходе Lrj0, или
Lr;fl * с;; лог2 = и,„ -
откуда
1Л =G';o-Al'i.
Потеря напряжения определяется из векторной диаграмма упрощенной схемы -замещении трансформатора (рис & 1->:
ЛСг; - 1г| - t/i = OB' - ОЛгОВ - ОЛ - АВ\
ДОГ3' = J^cos сра + fj^sintp, =
= /1(rKco4tp2 -F- ткь1п<р?):
ALr2 = AUi/n. (8.!б)
320
Е*»с 8.14. Всктормяя лил; (//) упрощенной схемы имстиенмя (у) транс^юргиаторя
Pml Fi 15 DiieuiEiHc характернс-гикн 1рансформаюрс1П срсдлсн И йО.1ЫЦ0Й МОЩНОСТИ
Гис. 8.16. BireuncHC характерней гиьН трансформатора малой МОЩНОСТИ
На рис 8.15 изображен j инсшнис характеристики трансформатора при различных гтпачепняч коэффициента мощности потребителей. Изменение напряжения Ъг2 во многом зависит, как это видно из выражения (8,16), не to.ti.vo от значений г*. со$«р2, по и от соотношения значений г„ и тк Изображенные впешпне харзктерщчикм (рис. 8.15) справедливы для трансформаторов средней и большой мощности, у которых ск мала и хь > /•„. У трансформаторов малой мощности с, отиоситс'съпи велико я tK> хк Поэтому mvreircioic напряжения У них более ima-uriель-ное к взаимное расположение внешних характеристик при различных значениях коэффициента мощности потребителей существенно отличается от трансформаторов большой мошпости. Примерные внешние характеристики трансформаторов малой мтшюсгн при различных значениях со&ср, изображены на рнс. 8.16,
).-||?1Г1 [ни схннка
321
3. Потери мощтхти в ми нитопровпде трансформатора дг„ = йлР1Л(4-)"'
уменьшатся, тан: кйе лоичатсль степени гг ч 2, а ноказагедь пспсни частоты f ранен 1,3.
а.5. МГНОВЕННЫЕ ЗНАЧЕНИЯ токов и напряжений ТРАНСФОРМАТОРА
Для । и «мнения процессов, ироисходящмж н трапсформа гцтрс-, которые мы рассматривали с использованием действующих значений j it-кои н напряжении с их традиционными положнтсдышмн направлениями, nojreJHt) рассмотреть графики мгновенных значений действительны* яетичии и,, w2, iz н iJe (рис. $.12), которые можно сапнсать
с лпмошьго осциллографа,
Графики мгЕювеячмх значений ЭДС г, и г, nocipocnu расчетным луте.ч Можно ЭДС л записать ня пеци-пюграфе- но ода эт«ю трансформаюр надо снабдить дотолпнгеаыюк тгевагружеипой обмоткой. Измерительные устройею светолучевого осшшлеирафа нхесют Miuqyio HHepuMonuGLix и могут зяписиыгь на фоч ^бумаге mi повезшие значении напрлжеянй и токе?»,
Измерительные устройства псинл.ютряфэ для измерений тока
выключаются как амперметры, а напряжения — как вольтметры (рис. 8.13).
Если дейстнитсльпое на-праплспие писа (движение положительных зарядов) такое, так указано на рне. 8,13,— or точки 41 к точке |cdotbctctmwho от 4 г « £j.| нзмернтсльною устройства, те знмч^пнл тока запн-сьазмпч зы1пе <кн жуемся» (вели бы aMiiepirfCTp м*п рсагж-рстлать да мгновенное значение тока, то сто стрелка отклонялась бы вправо), при обратном направлении — ниже ос-н (стрелка амперметра отклонялась ииско}. Если действительное даиравле-
РВС й.12. Грлфнаи (осциллограммы) МГНОБЭДИЫК ЗЦДчекиЁ ЮК-OB н Напряжений трансформатора
31b
Рис. & 13. Схема включения приборов для оецюлогряфнрзчзнна мгновенных 5иаченнй токов и напряжений трансформатора
нне напряжении тагос, нах указало на рис- S-13, т. е. точка /4jjj измерительно! о устройств! кисет положительный потенциал, а точка Bgj - от-рилатедьыый (исюгнгчствеиио Ли — положительный. Би - отрицательный), значения напряжении чалтсызяюгся чыюе осн времени (сели бы вольтметр мог реагировать на м! новеииое значение напряжения. то сто стрелка отелотилясь бы вправо), при образной полярности - ниже осн времени (стрел ia оольтмстрь цполшадасъ бы нлсаи). Из графиков рис 8 12 следует, что ток в нервнчвок обмотке ij отстает от валря-iKewHo.«j па угол, зн***ехие иоторого обуслоимми пярастрами трансформатора zK и потребителя = гв + jj]r.
Вторичное напряжение Wj отстает фазе от налриженля сети г<, на уюл, обусловленяык модным ишротив-зсинем трансформатора :г Для идеи гизнронаиного трансфер* a i ира Zt —0 оып ьиннадакэт. Ток н-мзрнчной обмотки 1Л «летает от шпр^женкн о2 па угол, определяемый параметрами лагруон z„.
Далее из граф™я следует, что большую часть временя первой половины периода, когда ток г, направлен от начала к концу первичной обмотки, ток tj чп нЮричиой обмотке напралтсл от гонца к началу, Большую часть времени ни>р<>й полоаяны периода, когда ток j, направлен от конца к началу, тск it направлен от начала к концу обмотки, Из .чтото следует, что МДС вторичной обмотки ;2w3 большую часть времени периода направлена протии МДС первичной обмотки гр^л что согласуется с правилом Ленив. Разность МДС первичной и вторичной обмогок равна МДС тока холостого хода. График юка Г|П(;) можпо построить па осноианки уравнения
— f,Wj - liW1
млн записать на осциллографе прн разомкнутой вгоричний обмотке •»ранр|н>рматора. когда i2 = 0. При работе с нагрузкой, кая «6 иом уже говорилось, мнгнктяый поток создастся МДС первичной н вторичной обмоток н травило Лсяиа уегэндллииэст ен»ь между магнитным ползком Ф(зр) трансформатора н £ДС первичной н люрнчкой обмоток, так как
fj -= - w, ЙФ/Л, г2 = — W2
Как видно из рнс, 8.12, ври всчрасглкии тока fu (сели пренебречь активной состаиляюшси грга холостого холл, to магнитным поток Ф
319
Pec. 8.11. Схема трэпс^х’р-м а гора к примеру R.I
Мошаость, измеряемая ваттметром, есть мотпностъ. всск потер!. -энергии в трансформаторе, Однако из-за малого значения напряжения на первичной обмен ке и, следоиагслътю. малого значения амплитуды ММ нит-нон индукции. что вытекает из
выражения 171х = Е1В = 4,44 и^/В^ст, потери мощности п магнп-
тоЕроводе, которые примерно гтропорпио1тальиы квадрату амплитуды магнитной индукции, намного меньше, чем лри номинальном напряжении, и значительно меньше потерь в обмотках трансформатора ара номинальном токе ними можно пренебречь. Таким образом, ваттметр фактически измеряет мощность потерь в обмотках трансформатора ири номинальной нагрузке.
ДА = fla'l + = /Lri +
а тп как
fie = hw и r2 = гап2т
откуда определяется значение
гх = АА/ЛЛ
Значение полного сонретиидеаня определяется ао показаниям вольтметра и амперметра и доставляет
"к = б lJt/I Is = L'
Значение: идукгивмогр сопротивления определяется из выражения
В трансформаторах мной мощности (10 — 500 Вт} г* > средней гс < xtr большой гк« х^.
Пример 8.1. Как изменятся амтнчуда магнитной индукция, ток холостого хода, напряжение на яторичгой обмотке, токи во дю-рнчной к нерйи’ший обмотка» трансформатора, а также мощноссь. потребляемая трансформаторам, и потери мощности я магнию^гроводе трансформатора, если уменьилдь число енткои первичной ибмотки на 5- 1!)% (выключатель Д переключить >п положения а в положение б. ряс. ЙЛ1Р
ЗГ6
Решение. 1. Ках вытекает ч'5 нырижения
L-J %£, =4.44/ч-.ВЛл.
i.pii уменьшении числа витхоз псрви^ггон сбмаснн H t увеличится ам-гпитуда магнитной индукции Вк в шгцитопроводс гр^нсфйрмагора, так гак остальные величины, входящие в ураниЛне, не изменятся.
2. Как вытекает и-* выражения
в. - И.А.
увеличится значение а.мгии-:уды напряженности мнгнисщи о поля и магншгнграооде.
3. Из закона полнен о тока
Wvi.n/n "Ь ;
следует, что с увсли'книсм Ри увеличится и ток холостого xa.w fQl.-4. Нхнряжемне на вторнптой обмотке t/j. унеличнгсв, что вытекает на выражения
- С.', Hj/w,.
5. Ток во вторичной обмотке i2 увеличится, что цледув! ид закона Ома,
ti =
(i. Ток в первичной оБмстте f, и мощность, тнребляемая трансформатором Я увеличится, что слелуе> иа закона сохранения чнергай,
Рг = f,L\
или на уравнения
Л - Л + ij-
7, Потерн Moiiniocrw ь магиитогроволс трансформатора возрастут, поскольку они пропорциональны примерно квадрату аьшлитуды магнитной индукции, а она увеличилась,
Пример 12, Как изменятся напряжение вторичной обмотки, ток холостого хода и потери шпщости э мапзит&прово.те. гранкформато-ра, рас с читали а го дли работы в сстн у чаенггой f • 50 Гп, селя его вмючить и сеть с частотой f-= 100 Гц того же значения первичного напряжения?
Решение 1 Как лькекает из выражения с *£, =4,44и];в^;.„ с увеличением частоты/уменьшится значение ямл,виту.ты ма1нигнпй индукции В„. стедоиасетьио, и напряженности .магнитного поля н ™ка холасюго хода - (ГЛя1п =
2. Напряжение вторичной обмотки не изменится, так как «но определяется из соотношения
D’, =г I/,
317
Рис. Схема здмещенля трапсформят<гря
rt jif ri *2
Рис. Я.О. Упрощенпая сасмя за-маиенчя тране^ормэзеря
Упрощенная схема заменилия трансформатора может бшь получена и .другим путем, который и рассмотрим.
Выразив Et н 1Й.8) через Г,.(Ег - Ере,.^ = £j/n) и решил урдичс-ЙИе ОТПОСИТ&ЛННО Ь\ ЛО.туЧНМ
Л =1:2||! + -| Я2^и
Гктдстяояв Это значение £х в (8 7k, получки
У L = — С2я - /паи - J/jXjfl 4- -Hli*!- (8. 12)
Если пренебречь током холостого ходя (J1D = 0), то из (8,11) следует, что
it "
• Подставка это значение J| в (8.121 получим
41 - - 4гк - -/Ь*** - brifa (8,13)
Выразив Ь’г и 12 в (S.i3> через их приведенные значения L'j = = — (•';» И Г2 — Jj.’ft, откуда t’j = — £-'1,Zij я 7j = - f'tn (знак минус гтс-яанлеа вслед ст вне тою, что во вторичной о&мхгип: ток 1, направлен от начала t гонту, напряжение — от конца к началу а в схеме замещения эти направления иэ-менсны на сбрцзные), вспучим (2. ( ’ L., +•
+ т£х3«а + +ji7ixj.
Обозначив rXHz—rJ и ХдЛ:».\2'. получим
1/| = (>2 + fi/j +j!iX! 4 Jjri +j£xj = i/i + ij (r, 4-Tj) + + ^1 =
= U2 + Г4гг 4- ® I7't + JiZj;
Этому уравнении соотьс-ствуст уирогцецпая схема замещения трансформатора, шойраигеннв!? па рис 8.9.
На осмоданЕш закона Ома применительно к упрощенной схеме замещения можно записать
314
Рнс. S.JO. Схема опыта ворот-«ого замыкания (а), схема замещения трансформатора прн <о-ропсом замы гании (б)
где г* ~ гу + г] — активное сопротивление обмоток трансформатора; — Jfx + ,Xj — йндуктнппое ссмтрогКВЛеиве 0OMOTQK граясформзтпра; — приведенное значение активного сопротивления нагрузки; .г,1 — приведенное значение шщуктнвного сопротивленхя нагрузки,
Напрсжсшсс ни выводах вторичной обмотки трансформатора
L' ; = С t -_/2\ (8.15)
Падение напряжения н обмотках трансформатора
iU = L'i-^ = Jr2Z„
где Z,. да г, + jxx — ладное сииротнвденне обмоток трансформатора.
Сопротивления гг и хк определяются из опыта короткого замыкания, поэтому их. называют параметрами коро ткого замът-каЕ:ни трансформатора.
Ойьгт короткого замядеэния. Для выяснения соответствия зЕшчений расчетные данных сопротивлений гу и лк их действительным проводят опыт короткого замыкания. Опыт проводят и для определения.гг н хс когда их расчетные значения не известны,
Схема опыта короткого замыкания изображена па рис. S.10sa, Значение подпето сопротивления обмоток трапсформа-юра гЕ составляет всего 5-15% сопротивления нагрузки, и если бьь вторкчпая обмотка скаталась замкнутой накоротко при номинальном напряжении па первичной обмотке, то в обмотках трансформ агора возник бы опасный для обмоток ток, больший поминального примерно в 10-20 раз.
Поэтому опыт проводят следующим образом После сборки схемы опыта с помощью какою-либо регулятора" напряжения усганялливаюг напряжение на первичной обмотке такого значения, при ктором так в обмотках равен их номинальным значениям. Напряжение ири этом окажется не более 5-15% номинального. Это шшряженис называют напряжением короткого замъгкзийя и обозначают 6%. Затем записывают л оказание приборов. На рис. 3.1Q, б воображена схема замещения при опыте короткого замыкания.
315
л Ц х, । л _/ [ Г} ль
СЖт
Рис. 8.7, Схема трансформатора
путем построений нескольких
т. с. вторичный ток по отношению jc первичному является размагничивающим, что соответствует правилу Ленца.
Определить значения величин, вл едящих в уравнения (9 7), (SS),(8.l1)s например U2 vt 12. при заданном значении нагрузки или построить график зависимости U2 от fi возможно графически акторных диаграмм, что сопря-
жено со значительной затратой времени и погрс1гтиостью, связанной с неточностью графических о<хпроений. Поэтому для анализа и расчета трэнсформаторей используется схема замещения, в которой действительная магии i пая связь между первичной и вторичной обмотками заменена гальванической, н результате чего возникает еди-гая электрическая цепь переменного тока,'позволяющая аналитически определить упоыяаузыс выше Rirличины. Схема замещения может быи» лояучеиа следующим образом.
На рис. 8.7 изображена схема трансформатора, в которой ак-тинные сопротивления Гц гг и индуктивные сопротивления Xj Я х3 первичной и вторичной обмоток вынесены, магнитная связь осуществляется между идсалязврояаннымн обмотками н1, и в’2, в которых действуют ЭДС £, и Е2 от Основного магнитного потока. Трансформатор, в каюром г,, хх, х- равны нулю, называется идеализиррванньм; он обведен па рис. ¥,7 пунктирной линией. Для образования гальванической связи, казалось бы, необходимо соединить ючки пл' и бй (рис. 8.7). Однако делать этого нельзя, так как значения ЭДС Е । и Ь - нс одинаковы н в результате возникло бы вороткое замывание. Поэтому вначале надо уравнять пататомалы точек ad и 65\ т. е. ввести вместо лейсгБЛтедького значения ЭДС Е2 сто Приведенное мачо ние Fz, вместо действительного тока /z - его приведенное значение fj. В результате реальный трансформатор заменяется тралсформатором с одинаковым числом витков первичной н вторичной обмоток. Приведенное значение ЭДС
Ej == El = EjH-’j/w7» — Ejn.
Приведенное значение (абсолютное) тока 72, как эю вытекает из уравнения (8.11), равно 12JjU'j/w,. Это we можно доказать исходя из того, что мощность (тлекгроматнипгая мощности), воспринимаемая вторичной обмоткой <л первичной, в схема замещения должна иметь то же значение. что и в реальном 312
i рансфор.чат о ре:
К21, = Г.Щ-1{,
откуда /,'-/!—. IVj
Поскольку я схеме замещения действуют приведенные значения £1 к //, отличные от действительных. необходимо приве-с1и и значения параметров вторичной цепи к первичной- В противном случае схема замещении не будет отражать реальные-ь'оотн01пе1тмя н трансформаторе.
Приведенные значения параметров вторичной цепи определяются нз закона сохранения энергии: потери мощности а ая’-jH0hom сопротивлении и реактивная мощность илдужтивио-0 сопротивления схемг-г замещения должиьг быть соответственно такими же, как я реальных гг и д2 вторичной обмотки [рансформэтора. Приведенные значения определяются из соот-Н0Н1Г1ТЦЙ
Jlri = Нх2 - Jhi; = J&,
о ткуда
Г2 = Tjrt Х'з = Xjrt 2Я — Zrfl2'
Приведенное значение напряжения на вторичной обмотке-трансформатора
L' j = Lr2w1/w2 = - D\n.
На рис. 8.8 изображена схема замещения трансформатора. Ветвь схемы замещения об, в которой действует называется дамаптичиваюгиеи, ее параметры г0 н х0 были рассмотрены при изучении xcuiocivro хода трансформатора. Схема замещения представляет собой разветвленную электрическую пень переменного тока, что несколько усложняет расчеты, поэтому в практике обычно нользуююя упрощенной схемой замещения. В упрошенной схеме замещения намагничивающую ветвь лб переносят к выводам первичной обмотки. Это вносит него--оръте погрешности из-за паления напряжения л л, и _Yj Однако падение наттряжсЕшя столь мало, что им можно пренебречь. Д.-1Я больнптнетва храисформаторов, как об этом уже говори.-лось, ток холостого хода /10 невелик и им можно пренебречь. Поэтому в упрощенной схеме замещения [рис. Я.9) предлола-гаетел, что 7,0 = 0 и /, и намагмичивающам ветвь па схеме 4с указывается.
313
гисыьать в виде
Ь_/2н>’2(8.10)
а Г10ч7 n gluuix случаях называть МДС тока холостого хода, В других — просго результирующей МДС, так как в общем случае зге совсем не одно и то же.
Необходимо отметить, лю-исртых, чго физические явления Э трансформаторе довольно сложные и их нельзя объяснять, если допустить, что h3 и Фт нс зависят от нагрузки.
Как, наорнмерх объяснить в тгом глучас, гмхтьзупсь уравнением {8.7а), почему с изменением тока Л изменяется ток //’ Невозможно, И лспствнтслы1ис1и jok /] изменяется потому, чзо изменяется ЭДС Это вытекает из (&7а). В выражении (8.7а) величины I--1!» ?j, Х| ис зависят от тока /2 и с сто изменением остаются неизменными, Следовательно, f( есть функция Е,, а она вызвана магнитным потоком Фт(£ = 4,44и7'Ф„)., Магимл1ыя поток изменяется в результате действия МДС /2и2. Во-вторых. при haipynsax, значительно превышающих поминальные, например коротком замыкании, .магнитный поток пампою меньше, чем лрн номинальном режиме, и все сделатгные втятце допущения привели бы к недопустимым погрешностям в расчетных формулах. Раздели в правую и левую части уравнения (8.10) иа ид и решав его отноентелыго тока /ь ислучим
Ь =l10 - = 1™ -ь G, (8-П)
raejj - —_Ли-2-тг( - приведенное значение тока вторичной обмотки.
Из уравнения (8.11) пытсхает, во-первых, то. что ток в первично» обмотке имеет две еоетавляюгштс. ток холостого хода и ток, ооуелздыеиным нагрузкой. н: во-вторых, поскольку на-магмЕЧивзкишш ток (ток холостого хода) пе зависит от нагрузки, с изменением тока /2 и той же статени изменяется ток J(, что ранее было докатано с помощью закона сохранения энергии. Д.ш качественною анализа и получения относительных количесгвенкых саотиоигевил трансформатора с нагрузкой полезло использовать векторную два: рдмму, которая является графическим сп обряжением уравнений тлеет ряческигп «нггоя-ния (8-71, (Я.8) первичной и этсричной цепей, трансформатора тг уравнении токов (8-11).
На рис. 8.6 изобрижека векторная диаграмма при Z u r„ + + jx,, Необходимо Отметить два важных положения, вытекающих из векторной диаграммы и рис 8 1. Первое: напряжение вторичной обмоткн почти со№адает по фазе с первичным (для 310
гне а.б. векторная диграмма нагруженного трансфирматэра
идеализированного 1раясф°Р‘ матера совпадает течно' Вто. рею: ток вторичной обмотки нахаднтсл почти в протизюфазе с таком первичной обмотки Это означает, что МДС вторичной обмоткн большую часть периода переменного тока яв- -ляетоя размагничивающей отно-сигелъпс МДС тока первичной л обмотка (см. рйс. 3,6).
Дсйсткятглътю, если напряжение ы — sia ал и паправ-
леио от начала к гонку первичной обмотки, то, как эго следует из векторной диаграммы, нагтрпкепяе можно записать гак: мг = СГ2я,яи (ея — тг) (угол несколько больше я, ДЛЯ идеализированного трансформатора точно тО, но оно направлево от кснща к началу вторичгюи обмотки. Если направление действ г я принял, таким же. как j7t,- 01 начала ь концу, го выражение w2 следует запасать в таком виде: мг = - 0lB1 sin (cut - я) или и± = b'jM sid сиг. Отсюда следуй!, что в первую часть периода начала обменов имеют положительный потенциал относительно своде кондов, а во вторую часть периода — отрицательный, а это означает, что н2 и ut почти совпадают по фазе (для идеализированного трансформатора совпадают точно).
Ток в первичной обмотке имеет выражение ц — sin (см -— и направлен от |[ача_1а к концу обмшки, ток во в гориллой обмогкц, как эго следует из векторной диаграммы, равев i j = /Iesin {uw - я>] — it) (угол несколько больше л, если же пренебречь током холостого хода /0, то точно х). Следовательно, когда то* (движение иоложктелмгьтх зарядов) в дервичной обмотке НИЩМИДСП U1 ГЛЧсЦТД К воину, ТО ВО ВТОРИЧНОЙ — от Я0П-т»а к началу и наоборот. Таким образом, мгновенное значение результирующей МДС трансформатора равно почти арзфме-тияеосой развоггв (см рае. 8.12) МДС первичной и вторичной обмоток
fjtfj — ^2*:2 e
311
Рис. S.5. Схема опыта жлостого трансформатора
данным вновь спроектированного и изготовленною трансфор’ матора проводят опыт холостого хода. Этот опыт иногда проводят хтя выяснения указ ап 1тш выше параметров трансформаторов. паспортные данные которых отсутствуют. Схема пинта холостого ходя изображена па рис, £.5, В соогиетсхиин с паспортными данными трансформатора устанавливают напряжение на первичной обмотке, равное номинальному значению, после чех о записывают показания приборов. Амперметр измеряет ток хесюстого хода /10. ваттметр - потери мощности В Трансформаторе Д-Р;г & Д/1,^. Отношение покаллннй вольтметров равно коэффициенту трансформации |рапсформа1 ора п ъ Ut/V3. Поскольку ток холостого хода и активное сопротивление первичной обмотки малы, потери в пей незначительны и намного меньше потерь н магинтопроведс трансформатора По -Этой причине можно считать, чю ваттметр измеряет мош-етОсть потерь в маюнгсюронопе трансформатора. На основании опытных данных можно определить <rD] л№а№а таюже значения тока и Ja. Если пренебречь и ха {так гак г «г0 и х, « лД то
= АР0//аи; 7g = О
л о — И -о — » COs ?о ~ гаАо >
<jo«o»4>a-
tA РАБОТА ТРАНСФОРМАТОРА С НАГРУЗКОЙ
Для анализа раболы трансформатора с яагрулкоЗ уравнения электрическою состояния первичной (8.4) « вторичной |8.5) испей записывают в я ндс
1\ г- -£х -1- У,г. +Д1Х„ '(8.7)
из которого следует, что ток в первичном о&мотке трансформатора равен
£.+£1
f, 4-yXi
(3-7а)
308
V i = £2 “Ji'j _iZjX3, (8.8)
в которых j(iXi = -£,t и jlixi = -£pI, где x, и xa - индуктивные сопротивления первичплй и вторичной обмоток, обусловленные потоками рассеяния.
Как уже гопормлось выше, при работе грамсформатора с нагрузкой (см. рис. 8.1) во вторичной обмотке действует ток /2 и основной магнитный поток создают МДС обеих обмоток. Так кик нолоасателысые направлен ди действующих значений токов в первичной и вторичной обможах одинаковые от начала к концу (см. рис, 8.1), то основной манитяый поток обусловлен суммой МДС. Сумма МДС. она векторная, заменяется одной результирующей:
Iwt + 1_2пг (8.9)
При холостом ходе /, = 0 и
я создаваемый .этой МДС магнитный лоток Фя = ФтС. Значение ЭДС Ею, индуктируемой этим потоком, как следует из уравнения (8,6). почти равно (Л, так как ток холостого, хода /|р мал и падение напряжения от него в н и Х] пренебрежимо мало
При изменении нагрузки изменяются ЭДС £(, млииг-ный поток и резулыжрутащан МДС тревеформаторэ. Однако, как уже об этом говорилось, падение напряжения в пераичной обмотке как при холостом коде, гак R при пД] pys-ке невелико и практически можно допустить, что Еу —Е10 = tf, и ЭДС не зависит от нагрузки.
Если ли допустить, то необходимо предположить, что магнитный поток и создающая сю МДС также не завися г от нагрузки и имеют те же значения, что и при тлгтгнггоч ходе:
о>.= *™» “ - fin"!-
Такое допущение намного упрощает анализ работы трансформатора и не вносит существенных погрешностей в расчетные формулы, Поэтому уравнение МДС (8.У) принято з&-
309
Первичная ve'm
J*hc Я.1Я. Пяраллсльяое соединение трехфэзнык трансформаторов (д\ векторные диаграммы (6) к пон-нскню группы соединения обмоток трансформатора 1/.
/'*•
напряжения совпадаю! гго фазе, т е. у4||)=: (i> Действителхмо, из
уравнения хиктри’кексм о состояпнл вторичной пени ггараллстыю вклиненных траи^юрчвторов, составленною но второму загону Кирхгофа,
i'fliij " Xji i г, + 1? р и<;) Jjj, (Ze ।j, + £l.,i, 4- Zd ;1J — 2rp J •• о
екгтскаст, sin
и «гот С'црш • L'.iiijj. fP Лр 0.
Указанные условия выполняются сети трапсформа! оры имени одинаковые схемы соединения нерннчных н игорч'хиъп обмоток и схемы образовав^ одипакосыы способом — звездой: нулевая точка ны полиена путем объединения тин концов (рис. Ld.itl, иди начат обчн!-ток; треугольником; начало обыптти фазы соединено с зонном обмотки фалы Я, начало езбматти фазы S — с конном ибмотгн фазы С и начало обмогги фазы С — с тонном ибчптга фазы л (рею. 8.19, в), или коней обмотки фазы J с началом обмотки фолы В и ь. л. Все ото выражено в ipy-me сосдлненин трансформаюра, ука* зияния б его иаспорте- Группа спсдниелия определяется умом между векторами линейных напряжений первичной и вторичной обмотем трансформатора, В паспорте трансформатора j руппа соединений указывается не значением угла, а временем, кпторос будут покачивать 324
Рис. S.19. К псяс'н.?нян1 jpj-iiuw соединелия при соединении обмоток траЕ1сформяторя
Рис. Я 20, Упрощенная схема «нмрцсння лну» параллсльсю вклыченныл । рани[к>рча го-
viitw, когда у> о.т между стрелками часов соответ ечнует углу между линейными ШПрЯЖСНИЯМИ ЦИНИЧНОЙ И ВТОРИЧНОЙ обмСТОК. Д.19 лен о ЫИМИЦйЮГ вектор ЛНЕЮЙНОГЗ Е1ДПрЯЖСЕПГЯ первичной 1>бмОТ ЙЛ с мн-ПУТПОЙ стрелкой часов и усганакцикаю! ее на цифре 12. а вектор лн-нейясио напряжения вторичной обмотки совмещаю г с часовой стрелкой Например. при соединении обмоток УД’, как изображено на рис, 8-13, й, векторы лннейнш напряжений совпадают (рис. S.18. й) — это соответствует 12 "iacam, Груни* соединения |ранЕ.|[ч>рма ।wpa 12, и на его jtacjjopie будет написало YyY-12. Когда первичная обмотка соединена звезлон, а вторнчнаа j peyj o.i&hhkom, как изображено па pi-vc. 8.i9, и, из оекгйрЕЮй диаграммы рмс Я 19, б следует, чачз будет группа соединения 11.
•..в Советском Сенти: вын/СКИОТСЯ трансфер ми торы грех ipyuji ео-еднненмя Y'V-IZ, У..’Тл-12. V.-VI1
Для i'cjj<> ’ ч: обы нагрузка между иараллс.11»Е!О работцгспцимн трансформаторами распределялась пропорционально ьсх номинальным м1?1цнОСТЯМ, трйЕЕСформзторы цйЛжНЫ ИМСН. олнциконо? чначение напряжении короткого замыкаияя.
Из ynpcHiteKHcijj Стены замещении днух пиралЛельнО ВКЛЮТСННЫХ трансформаторов (рис. R.20J следует, что
325
oriy.ia
j2 111 _ Jк |.'•I _ izi -ini |t.' Ui
Гсж трансфер via шры ibjciqj одняаковые значения k»i]> = ^2и(irtill = ~ Jhi^k^i = t'n
IO
C' 111 _ f 2 (I ( _ i h 111 ^2 i±j Сиз, Лн{;,
Лараяле.тъио вклиненные трансферу а лоры имеют одинаковые значения лернхчных и вторичны* НЯГТрЯЖИШЙ, поэтому
G|li Ля |Л 2К Р 3 5„|П
JH2! Лп|3|/'Р1кГЗ
Уе.тонмя нормальной napi-i.is.iknoH работы однофазных трансфпр-митеррп тс же что я 7}>сх||>а.-^ых, .Линейное цалрллснис «мчмфаяьли традсформагора. есть напряжение мелкду началом и концам соатвет-CiajHiuieii ермотви.
де. АВТОТРАНСФОРМАТОРЫ
Автотрансформатор - одкоибмоточ1тмй трансформатор. От двухобмоточного отличаете! icm, что втори’тнал обмотка является частью пернача ом и, естественно. обмотки имеют не только магнитлуто, по и гальваническую гвяче.. Автсирансфор-маторы бывают оляофазныс и трехфазныс. На рис. JJ21 изот бражеча схема однофазного аптотраииформатора. В автотрансформаторе :>.1сктрнческия энергия из первичной пени во вюрмчиую передастся и через гальваническую спять, И посредством иеромештого мат НИТ1Т0ГО пошка .Автотрансформатор целесообразно применять ири малых ко-эффициентах трансформации (п 2). При малых коэффгпгиентя* [рэисформацни ла. ИЭ1 отопление обменки требуется значительно меньше (по массе) провода, там на изютов-тение двухобмоточиою трансформатора (при л = 2 примерно н 2 раза). Прн itom несколько снижается масса мштнгтопровода. По этой причине автозранифор-матор значительно дешевле, меньше иеснт и имеет больший КПД. чем двухобмоточный. Однако автотрансформатор нельзя применять там, где по условиям техники йетопасыости или другим причинам недопустима гальваническая связь между первичной и вторичной обмотками.
326
Рис.. Я,21, Схема автотрыифар-va ।<зра
Автотрансформатор часто используется в лабораторной практике, при провс^енЕЯ всякого рода тасперямипалып® нсследопгишй, п качестве регулятора напряжения. Такой авто-
't ран оформи гор имеет подпижный скользящий контакт л ('рис. S.21), который касается обмотки, для лето последняя ли-
пгена изоляции ни ходу подвижного скользящего контакта.
Напряжение С2 сцреде.тяеих как и хи обычного диукоб-моючлого трансформатора, тп соотношения
с 1 куда
(А - С, н'/ч,.
Ток нагрузки
Ток Ij определяется из уравнения МДС. Если пренебречь током холостого хода, а это не вносит существенных погрешностей. то
/3 (КД - W2) + ^2М’2 = 0.
(8.17)
Подставив значение тока f2. равного
получим
7Г = - (3 нун'р или = A H'j/Wp
Значение тока ?j можно определись также из закона сокращения энергии Если пренебречь потерями мОШносгн в трачс-формиорс, та
Ч' ч
L’jA — А2/, — L", ! j, откуда
ti -
327
Рнс. 8.22. Схема включения потребителя с реостатом №) и с ш<>-грансформатаром (б) к примеру 4,3
Ток определяется из ураитвдтяя (8,17):
LLU1
Определим энзчония токов 73 и J3 для автотрансформатора прн п =ь 2:
*2 = ^1/2; = L'iWj/Hj;
L'iMi — 1Л/2гл;
4х„
^./2
4а.
Растетъг покатали, что численно Л - 7,. Следовательно. ав-тогрянсформагор при и — 2 имеет обмсику с w, витками, провод которой должен быть рассчитан на ток /г Если исиильзо-пап* вместо автогрэнсформаюра двухобмоточный трансформатор, то его первичная обмемка с тем же числом витков н:р что н обмохка автотрансформатора. должна быть рассчитана на ток !l, а вторичная с числом витков н'2 = wx/'2 должна быть рассчитана на ток /2 = ZtWj/iva = 27(.
Из этого следует. что для изготовления автотрансформатора потребуется примерно в 2 раза (по массе) мепъпте провода, чем для изготовления двухобмоточного трансформатора.
Пример 8.3. Для pti улироиання напряжения орнемнуга перс-менногу тока можно использовать реостас или автотрансформатор (рмс, 8,22.л.б). Оиреце'оль погерв мошнехми п ренегате и автотрансформаторе при условии, что Ux = 220 В, L’n = U± = 100 В. тов потребителя J *• 5 А, если принять, что КПД автотрансформатора Q = 0,9.
328
Решение I. Птерв мощности & реостате
Д/*Р = С'|/ - l/J = 22Q- 5 — 100-5 =600 Вт.
2. Потери мсм|н<*стн и лич “трансформаторе
100-5
ДЛр « i'xJj-’n - f Л = - 100 5 = 35 Вт.
8.10. ПОТЕРИ МОЩНОСТИ И КПД ТРАНСФОРМАТОРА
В трансформаторе теряется энергия л обмотках и в мшви-топроводе. Потери мощности в обмотках ранни
ЛЛ, = 4- 1]г,^гл.'
Потери мощности в мат литопроводе col-i ав.ЗЯЮТ
Л1-„=йВ^Г1л^)'Э; (а.1К>
ДР|4
где (7 — маиса мшннтипрсвода, кг; — амплитуда магиитнпй Индукции. Т.н Д7’10 — удельные потерн в стали. Вэ/кг, при В„, = 1 Тл и (= 50 Гп; ДР15 — удельные мснсри в стали, Вг/кх, иря = 1,5 Тл и f - 50 Гц; f - lacrura тока в обмотках, Гц.
Потери н оимо'1ках Аавмсяг от наг рузки, потери и магнито* проводе практически не зависят от нагрузки. Коэффициент по* .юного действия трансформатора равен
л р, рг + ир^ + лр„'
где Р2 — мощность, отдаваемая трансформатором; Ря-потребляемая мощность.
Вьфлзш активную мощность, отдаваемую трансформатором. через полную мепгшостъ p^Szcos^, получим
S2co»(p2
11 S’jCOSCPj + Лг, 4- ЛРа '
Выразив S\ я /2 через коэффициент зат рузки трансформатора р, имеем М2 = Р^и, что соответствует S3 ® 03,ям, и так как
329
Рнс. 823. Зависимость КПД трнисформатора от коэффициента загрузки
С'2 Sr 1- J4OM- получим
_______(Wi™, ™<Pj_______
₽Sw«c»s Фг Л'\Р1 + ’
(8.19)
где ЛЛ — AFb,„ - .'2 j,1: — потеря мощности я обмотках 1СрИ поминальной нагрузке; ДРя- - потери мощное, i и в магнитовро-воде при номинальном нллряженжг.
На рис, 3.23 иАсбражены i рафики зависимости КПД от коэффициента загрузки траксформаюра при различных значениях costpj.
Трансформаюри большой мощности при номинальной нагрузке и cosip2 = l обладают- высоким К11Д. доходящим до O,9S-U,99. Трансформаторы малой мощности имеют КПД примерно 0,82 • 0.9.
а.п. технические данные Трансформаторов
В катале! ах л в паспорте трансформатора сообщаются технические данные, необходимые для норчх-и.ипй эксплуатация траеюформаторд В чих даем: тип трансформатора; аомниалъ-ьая мощность 5Ч,)М, kR А; диисягюе номинальное напряжение лервичетой t'lliaM. кВ, и вторичной Г\|ип1, кВ, обмоток; потери мощности прн холостом ходе ДР0 - А/‘ст, кВт, потери мощности при коротком зямыкайии ЛРК( кВт; напряжение коротко) о замыкания, % номинального соответствующей обмотки иг; КПД при полной и половине номинальной ьахрузке при coscpi=l я группа соединения. Например, ТМ-10С/6 означает: ТМ - трансформатор с трансформаторным маслом, естественным воздушным охлаждением, 100 - номинальная мощное еь, кВ • А, б — поминальное напряжение обмотки пьгешега напряжения, кВ. Номинальная мощность 5’11С1М = |/3 —
мощность, которую может охдааать трансформатор дли
тельно (весь срок работы) при любом cos<pl( нагреваясь гри .этом до допустимой температуры. Актитшая же мощ-i[OCTbt которую может длительна отдавить трансформатор, зависит or коэффициента мощное гя потребителя, гак как она равна Р = 5limi cos ср, В СССР принят ы следующие напряжения высоковольтных сетей: 3, 6, 10, 20, 05. 110, 150, 220. 330. 100 и 750 кВ, низковольтных сетей 127. 220, ЗзО, 500, 660 В. R соответствии с )тим установлены номинальные напряжения транефирма юрод — они кыте на 5“'о напряжения сетей, Например, 1’11ВДМ =6,3 кВ, С'ы™ = 400 В; О'|||П„ = 10,5 кВ, = 525 В,
На основании технических данных можно определить номинальные токи первичной и вторичной обмоток и параметры схемы замещения одной фазы трехфалчогп трасгсформа гора Номинальный ток. Л,
Полное сопротивление обмоток трансформатора
активное сопротивление обмоток г, = Д^г/З/ьтм.^; индуктивное' солротивлетпте л\ = j/z* - rj.
Параметры намагничипаюшей истин схемы замещения: полное сопротивление zq = ^я^ф/Гко: активное г0 = ДРо/И^; индуктивное л0 = f/zo -
Для трансформаторов малой мошноенн з паспорте указываются номинальная .мощность и номинальные напряжения.
Пример 8.4. Трсхфазньгй трансформатор при токе нагрузки 1450 А и сой о - О,й язнел допустимую тстагюэимиуюсзч тйыпературу Опре-le.iM-ib номинальную мищноечь грансформччтцрч я апинную мощность, отдаваемую трансформаторам, сс.ти номинальное вторичное напряжение еюставляет 400 В.
Решение 1. Номинальная MOHxeiOCi ь 1ралсфо0м.пй(0г1
Sa0M = к''?= 1 Д'» -400 • 1450 - 10» кВ • А.
2. 4<-1ианак м45ш>нк-1 ь, шдАваемал трансформатором, р = £Яом= !WJ'0,8 »Вт-
331
В.«2- КОНСТРУКТИВНОЕ ИСПОЛНЕНИЕ ТРАНСФОРМАТОРОВ
Трансформаторы малой \-:ошпости до 50 1000 Вт ирнменйются в радиоприемниках, телевизорах, Mai нинх^он^х. осiем.г.кл рвфкх, мио-ги! шмерипельных устройствах, системах регулирования и т. п. Они бывают одаооб.чоючные, цнухоомчиочныс н многообмоточные, На рис 8.24 нюбражен трансформатор малой мощности
МапЕИчОПровод трансформатора можен иметь [П нлн П-пбра!-ную форму (рнс. К.25. А.ё).
Площади» сечения окна мя1ннто1грояода вдаца имеет прямоугольную форму с соотцогиснисм сторон £>.чд - 1,5 -г 2.5 {см. рнс R.24). Прн талой форме магпптоироьод nuwi шинемшую массу и. следователь-но, меньше ногерн энергии п неч по сравнению с квадратной формой окна. Обмотка выпотиястся из медною провода груз irn и или прямоугольного сечения, чаще нсек: с эмалевой изоляцией, В отдельных случая* применяются и другие изоляционные материалы Обмен «а укладывается плотными рядами на заранее нэгстговленный каркас {рис, 825,*) яд длеирокартона. тесстрлутн или пластмассы Между от-дельиычл обмотками прокладывается слой изоляции из бумагк, ла-е Оте а ни нли другого шоляциопеюсо материала Г7<ные нэгстго&-1ення обмоток производится оборка jрапсфирматора. Если магннгопрозод имеет П-обраэяую форму (рис 8.25, 6) то часть пластины Л? вставляется в обмотку поокрешо то сверху, то сниЗ), а к н»лн и klhhe нро-меж>!кн между ними сверху-и сшпу вставляются части адалины Af. При такой сборке последующий слой перекрывает место стыки предыдущего слоя. Сборка ма: кннл ревота трансформатора имеющего ill-обршиую форму мн1'чмт-0провода (рис. 8.25,-и). производитсн и iom же порядке. Естественно, что в этом случае пластина К" всл является н обмотку своей средней частью
Трансформатор с Ш-обралчым чапЕЯТОпроводом'называют броневым, поскольку СТО обмотки С двух Cldpi>H сикачены ’.тагнитоирово-
□см Сборка мапштопровода внахлестку - иоследуклнин слон перекрывает стыки (асндушныс промежутки) предыдущего слоя - существепЕЮ уменьшает эквноа-:1«г1ным воздушный чачор маткнтопрояо-да, что приводит е тначитсльпому спи-жеиии тока хо.юсюю хода граксфорча-гОра. Кроме гсп о, такая сборка чнйчи-
Ркс. 8 24. Однофазный трансформатор малок мощности:
Г — магнкторпоьяд, 2 — карилх. 3 - Иерстчьыл л&ческа: •* - азоляцасякаа ароЕлалка между неренчаоё а вторкчкей обмотками; 5 — вторичная обмотка
332
J^kc-. 8.*f, Формы магпитолроагдов jpaMciftopfHatopoa Ma.itjil vuu-
PHutH la. 6. ?> и каркас катушки трансформатора (и)
тетьио повышае.1 мема ин ческою прочность врынсформатори и удобство крепления его мцгнитспровога.
Для придания магиигплрпвс],iy неопходнмой чсхяяичссхой прочности и устранения «гудения-* после сборки и.гасгины мат нн гоирс-во-•|я СТЧГКВАКГТСЯ С ПОМОЩЬЮ поперечных пластин и болтов
Уменьшение пининя-тен-иАпто воэдушлого зазора можно обызенить .-ем, ЧТО магнитный ПОТОК обходит BDJ.lVtlJUhJH tiptjMC«yror стыка через рядом расположенные пластины. нс имеющие в этом месте стыка 'рис. 8.26). В последнее время стали широко ири-менятнех ма.гнитопро’ ноли из ck.ncciniLiv пластин, состоящие и* днут половин (.рис. 1.25, Иоверхнехти синрикосноиспия каждой лалиьнпы д-ja уменьшения ча-<ора иглифуются. 1акис две части ьс(ан.гхк>тся в oRvcitxh и крепятся Для уменьшении патокой рассеяния, з следовательно, индуктивных си-гготпни.гений обмоток на каждом каркасе в случае П-оОразной формы рис. 8.25. и,укладывается ко посоиине ннттоя первичной и вторичной do.moeox. ТЪньче сборки половины обмоток соединяклся нсследи-Laie.ihHo согласно. В трансформаторах с Ш-ибраэиой фирмой ЧЯГЕ1И-гопровода все обметкн находятся ни одном каркасе. Трансформатор MCLtuit whholim ичдат естественное воздуиькзе охлаждение.
Для проведения пеякога рола исследований иногда сребумгся : ДИНцформнторЫ МЛ.ТОЙ МОЩВОСТИ С О1.-1гГЧНЫМИ 1>Г СТМН.ТарТИЫХ 1IB’ |рялсииями первичной и вторичной обмоток. В этом случае можно ралчигагь и ичг-отоиить траесформатор СВОИМИ силами. В хачестие \£Л1 нитспровода можно ит.с^ьзииать магпнтоировод сткрмг нс одних к yinjipex'kicHHK) транзформаторов
Инжснсрам-мдшипостроягьлам едни ли придется обслужив at ь :-етаповви с трансформаторами срсдисн и большой мощности. ГЕо^го-чу здесь будег рассмотрело 10!тструмтавиое исполнение гр^ксформа-торов средней (20- 500 кВ А) и бощиюн (до *00000- 10СИХХХ) кВ А} Мошпости а самом общем виде.
Рассмотрим копструктивкое исполнение трехфазных трансформаторов. Форма uaj ннто!1ровоЛ11в всех ТрДпСфоркиатаров Одинаковая -1 рсхстержнекАд (<_м. рнсд 8.(7. дК Магаитопровод имеет три стержня, па лотирых располагаются первичные и вторичные обмотки трех фад ;1 дая ярма Д, Е, объединяющие стержни в единый маг1п«тсгп|Н>ви.и Площадь сечення стержней определяется из уравнении L' ж Е =
333
Рис Я 26- Расположение ли-
ний Mat ни । uni о потока ь месте сл»гки nrwcraii matehi-топровода
Рнс, 8.2И. Пластаны магнито- iptriMua трехфа-snoro трансформатора
Рнс, S.2-7. К пояснению ланисн-мостн длины вятка обмен кн грянс-^н>рма гора от формы и.шапи сеченая стержня магнитопроалла при ci.iHiiv и том же. значении площади.
Окружность д' соответствует иряяо-у Олькой форче сечения д' Окружность й' соотнсцтдует тгвэ.Трт гной форме w-icnux 5; окружялсп / соответствует крестоооЕЫЛЯАй форме сечения «; лсрую иски./ соответствует с । j ^еачатой ферме сеченгк 4
= 4,44^,Дв£ст. Форма площади ссчсния, как ныгскает из ттрй формулы, казались бы, ис оказывает нцепкого вликния на конструкцию ц параметры трзпеформасорц, Одла к о ^юрма сечепия существенно tonwswT на затраты меди пя оёмпюг, мзссу, ctdrmihcib и параметры чрдоиформдгора- Течения проводов ибмоток трансформаторов средней н большой МОЩНСЗС1И исчисллол-я десятками и сотнями квадратных миллиметров; что шипы квндратпой титл прямоугольной формы. На-коить такой провод на сердечник с прямоугольной формой сечения, т«к чтобы он прилегал к сторонам сердечника, невозможно При изгибе провода под зримым углом иронзщпла би не.'кнгустимая дефор-мадзЕя провода, да н иемогахь ебмотку значительно проще па шаблон с круглим сердечником, чем с прямоугольным. ]Jo этим причинам ка-ryuixM -1рннсформаi<тртв средней 1с б«-1ыипй мощностн всегда круглые. Это определяй! и форму сечения стержней трансформатора. Проше и дешевле «лотовитв мш нн-тоарооод с 1гряыоуголвиой или квадрат* noil формой плошали сечения ipwc Я27.я,б). Однаии при этом, как гггез видно ii4 pttc. tf.27, ,j,inHa внтка и, с.зедиватсльпо. SQipaiw обмоточнщ о мшернала будут гораздо бодьтс. чем ори крестовидной (рис 8.27. с] и тем более.при ступенчатой (pit. 8.27,с} форме площади сскиня, Кроме того, между обмоткой и стержнем будут большие пустоты, а ре-зулыате чего возникнут зиачнимьннгс потоки расренвапил и обмотки будут иметь леди,густимо болыицс ицдукгнняыс сопрслие-зенкя,
Исс ото привело к тому, чтс по экономическим и техническим со*
334
Рис, 8,29, Силомэй грехфазный :ращф1рмагор ТМ-320/10:
I — м аг ин топ |» вад; 2 — лбылти чыстиегс вапркжетяг. J— свистке вчмяо iJii । Jpwwsuua; 4 саадыюй бак: залп ценный j pa т?[юр\1Л i ирным шс.к:м, ,? — □рмоцныг изоляторы для вызола вовдог рБмсие высшего ыаиражслия: i5 — тгрохсг,тныс нчсл#т<>[м для вывода потов обвгготти няэепсго напряжения; " - ыфчжлю'В'гель для нч*«негсмй ис-^фь1 turenrjt чрЛ1»сфс>р*®ПП1; Л - охлаждавшие трубы; 0 - расширительный бачек; J0 — измеритель маала: JJ — зпв-вочное отверстие с пробкой
отражениям трансформаторы средней мощное,-™ иылоднчтгея с трс-croBHyiHOH, а Бсшыион мепцноста — со ступенчатой формой плошпдв сечения стержней. Ярма имею" прямоугольную форму площади сечения. Мш нктанровад со^ираечея на отдельных тонких листов (0,55— 0,5 мм) злскггротсхничсскон стали ннадлктжу по тем же причинам, чго и в трансформаторах малой мощности. Каждый слей mmi-hmt<»i ipoucjia cociqhj- hs о-сле.тьнык uhciob (ptiii 8 2S), при сборке отдельные паегги' послслую1гся’о слоя располагаются так, чтя» пин tiepeapwaator стыка листов предьщучцего сто*, Магннтолрояод с об*««*л**н располагается о стальном бакс, наполненном трансформаторным маслом, Трдн^фор-
335
матерное waLJii выполняет роль охлаж-.цающси срспы 11 изолятора ках между витками, так н между, обмоткой и мяг-ЕЕИГОПрОПОДОМ.
Ня рис 8.29 изображен трансформатор мощностью 320 кВ - А. Ба* траисфор-мдюра j ср ист плески закрыт, а изменение обкома масла, ьызаакное юлебаниямн температуры, компенсируется маслорас-шррнтезгкнъгм бачком 9. В магнигстпро-нолс и обмотках трансформаторов образуются значительные потерн зпергин, нагревающие трансформатор И если но-нср*ностъ бака недостаточна», трансфор-
матор будет 11ере1*реяагься. Поэтому бак 1рансформйторов снабжается радлатирами в виде труб Я. гунгсетвеипо уиличнваюшнын поверхность отлаащеиия. В трансформаторах больший мощности и этого недостаточно. Действительно, допустим, мощность трансформатора 270DC0 кН-А и КПД 98%, ^виюкагсльно, потери мощности к мем составляют 5400 хВт, Такие трансформаторы охлаждаются с помощью водяныя маслоохладителей, ьоюрыс иронуикается '(зрячее
масло трансформатора. Выводы концов обыспок (-рихсформатора осутцрлвляются с ЛОМЗНПНЮ проходпык фарфоровых изоляторов 5, б' (рис. S.29X
В условиях дксипуцтяцнн иногда аначгннс напряжсЕшя первичной обмотки окачырлстся ниже Е!орм<ыьного и тогда над ряжен не на вторичной (напряжение прием никое) будет ниже номинального. Это существенно ухудшает их работу. Для поддержания вторичною напряжения в пределах номинального трансформаторы Снабжаются устрсн-сгиом д.1я изменения коэффициента трансформации. Обмотка высшего напряжения каждая фаты имеет три вывода (рис. 8 30}, которые гюл-ключени к переключателю 7 (рис Я 29) Переключатель может -замывать концы Д',. У,, Zp или Y3, ‘c'j, ifA. или Xt, У3. Ия. В результате будет изменяться вочффн1ЕнсЕ1т трахЕсформ4i(нк и. следовательно, напряжение Lea ышричнон обмеике при ксеезмсешом первичном, Следует имп>гп>, что трансформаторы содержат большое х-олц-кство трачс-)|юрм!1 торного масла (до нескольких десяткой тонн) н представляют большую иожнриую опасность. Ди «прянндсняя последс-шми идоннк-шего пожара под тралеформаюром всегда есть бетонння мпслосбор-ныя яма, нэкрьттэл cei-nsH, на которую насыпан iравны. В случае у i ечкп и возгорания маша оно через гравии етекзет а маслосборную яму, г.пламя из-за сетхн и гравия в яму не проникает Qi>:3hhkhkim пожар быстр» днквидирустса.
336
8.11 ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ
Для растпиречпя пре де Ю8 измерения измерительных приборов в цепях переменною тока высокою напряжения используются трансформа юры напряжения и [рансформаторы тока. Расторгнете пределов измерения с помощью добавочных резисторов и шунюв в этих цепях неприемлемо по тон причине, что обметки измерительных приборов находились бы псэд высоким напряжением и эксплуатация их представляла бы большую опасность для обслуживающего персонала Возникли бы большие трудности по выполнению надежной изоляции измерительных приборов.
Для iaiijMTbi высоковольтных спей Li оборудовании используются всякого рода реле шщиты» которые включаются в сеть так же, как я измерительные приборы, - с помощью трансформаторов тока и напряжении.
При илхользоваетии измерительных трансформаторов измерительные приборы и реле подключаются к иторпчной обмот-ке нзятеритсльнсно транефор’^ятлря. ня.лйм-но изолированной от первичной высоковольтной обмотки. Вторичные обмотки вьтолгтяются на малые яапряжсЕ,ия, не опасные для обслуживающего персонала. Расширение пределов измерения амперметров прн использовании шунтов в пенях иеремечЕтого тока приводит к существенным погрешностям из-за индуктивностей обмотки амперметра и шунта. По этой причине для расширения пределов измерения амперметров всегда используются трансформаторы тока независимо от значения напряжения измеряемой цепи.
Схема нключеиия вольтметра с трансферта! ором напряжении изображена на рис. 8.31. Трансформатор напряжения устроен так же, как и обычный трансформатор. Для нею справедливы соотношения
b’i w’t ,, .. w,
— «-----= = л.. ОТКУДА
Е; »-2 ' ».
" Если трансформатор напряжения выполнен как обычный трансформатор, то возникают знаки 1ельньте погрешности измерения из-за тою. что L\ Е\ и I.'4 / по причине падения напряжения в его обмотках. Для повышения точности измерения необходимо уменьшить падание напряжения в обмотках трансформатора.
Цостнглезсй эго стсдукяцлм обра-<!»м- К вторичной оОмоткс трансформатора напряжения подключаются обмен ни вольтметров, об-
337
мотки напряжения ваттметров и счетчиков, обмотки реле зашиты. Указанные обмотки обладают >1Я'пгтсньчымн сокрогмв.чепиямн, и сс-лл их количсечво ограничено, та трансформатор работает практически в режиме холостого хода. Пхченис напряжения во ыоричней обмотке столь мало, что Г; j = £2. Так как /2 г О, падение напряжения ь первичной обмотке обуслоь-тено только током ко.’юстого хода
1акмм образом, иолмшепие точности измерений сподитст к уменьшению гика холостого кода граясформатрра,
Реактивная составляющая тока холостого хила i? определяется из уравнения /P*-L = Ясг^ст + Гн; уменьшение достигается тем. что магяитодровод ны подтеле its нз высококачественной элеятротЕхниче-си«й стали с высокой магнитной ироиипаамостью pJC1. Кроме того, трансформатор р&ссчитываегся для работы с малым значением амплитуды магнитной индукции — околи 0,4-6,8 Тл. Вее это существенно снижает напряженность магтгигжи'о поля ь стали Яп = J?,4ial-i и ь a«j-душном зазоре Пп = Дфа магнатопроиола и, есла-чвенно, снижает реактивную составляющую тока холктого хо.'щ, С гой же нельм магнн-толрешпд трзусформагора нылодпяетия с минимальным значением встлугиного запора, чт>.? лоетнгаел-и высоко качественной обработкой пластин и оборкой мэгнит&презяо.та. Активная составляющая ?а «бус-лоьлечя потерями в стали мяглитсиронола. Fe уменьшение достигается тем, что для магнитсгдрсво.ца «пользуется сталь е малыми значениями удельных потерь Д/*1а, AP1S н, как у*.₽ было сказано, :ранс-формаюр работает лрн малых зклчелимя Лв.
При выполнении указанных выше условий вторичное напряжение трансформатора пропорционально первичному:
Однако абсолютной точности получить невозможно, и 1рапсфор.маторы напряжения имеют опредслеяиую пргреш-юегь, так же как и n.sмерительные приборы. По точности из--терений трансформаторы делятся на классы точности: 0,2; 0.5; ! и 1
Трансформаторы напряжения бывают едпефазиые и трсх-разные. На паспорте трансформатора указываются нимнналь-1йя мощность, номинальное первичное 1/|ис1Н и вторичное шпряжешгя, класс точности. Вторичное папряжспне (у грех-одных лилейное) всех трансформаторов 100 В, Иачн-чо первач-гой обмогки обозначено буквой Л, конец—У, начало — вто-1ичной л, конец — ,х.
Схема включения амперметра с трансформаторам така изо-ражева на рис, 8.32, в. Первичная обмотка трансформатора ключела в электрическую цепь, и ток в нем определяется со-3&
Рнс;. Я.31. Схема включения Bci.rtKiMccpi с трансфер маторйм направили
противлением лрисмииков и, естественно, не зависит от тока во вторичной цели, це включен амперметр. Обмотка имеет несколько витков и выислнева из провода значительного сечения (соответствен] нт тойу цепи), К выводам вторичной обмотки, имеющей значительно большее количество витков, чем сервич-тгая. и рассчитанной па ток 5 А, подключаются последовательно обмотки амперметра, токовые обмотки ваттметра, счетчика, реле защиты. Сопротивление обмоток незначительное, и если ик количество невелико, то трансформатор работает в режиме короткого замыкания. Из уравнения МДС
fjWj + /2^'г = 71Он'1
следует, что если бы намагничивающий ток 71а был равен нулю. то
н 7, — 7г — = iiKj.
н2
Так как i рансформатор тока работает в режиме короткого замыкання, то для создания токи во вторичной цепи 5 А требуется небольшая ЭДС и. слсдовахельно, небольшой маг-][И!мый ноток и создающий сю намагничивающий ток. Однако дли повышения точности измерения принимаются дополнительные меры к его снижению. Эти меры anajioi инны тем, что были рассмотрены применительно к трансформатору дапряжс-ния. но в этом случае достаточная точность измерений прн вы-
Рнс. 8.32. Трансформатор тика (а), обозначение трансформа пэра юна (ф, схема включения амперметр? с траясформачором тока (.в)
339
ждется up и возрастании
Гис. Я.ЛЗ, к поясиекню работы трансформатор тога лры рачсчклутой нт» рнчной Обмстггс
яалиенил рассмотренных питие мер получается, если амплитуда мазнигной индукции для -jpatre-сорматара тока выбирается в пре-
делах 0,06 — 0,1 Т.п
Необходимо отметить, что точность измерений существенно сни-сопротмвлсиия вторичной цени
траноформаюра. Действительно, для создания того же тока во
вторичной обмотке патрсбуюген большие ЭДС и, саедсаатедь-ио, магнитный лоток и намагничивающий юк. Возросший па-матничивающий юг нарушит пропорциональность между первичным н вторичным токами Обрыв вторичной цепи представляет серьезную опасность для обслуживающего персонала вследствие ипявзения па вторичной обмотке большого иапр*’
ження и возможности выхода из строя Трансформатора.
Это объясняется тем, что МЦС первичной обмотки определяется током приемников -энергии и не ••няисит oj кзс. за.мхнус« к.тн разомкнута яторичиая обмотка Кпг.аа вторичная обмотна адмклута, вял создаст МДС /5*> налрав-чечнуто цршив 1^, к результирующая МДС, которая практически равна ил разности, будет созаанать магияiиуда индукцхвд всего к 0,06- 0-1 T.j (точка и рис. 833) При разомкнутой B'l орнчиой обмотке (/гкт, = 0) маг.энная индукция возрастает до значении f ,5 -2,0 Тл, что пня встствуеа точке й. M*j нитяая индукция BtnjM-стает a 10 — 20 раз, чю приведи к появлению большою напряжения ла вюривдой обмогкс и резкому возрастанию (к [00-400 раз] потерь н малли .нгроводе Дчя прелат вряшспвя ргчечецны* нсприлт тютей перед тем как отсоединить на ремонг иля проверку измернгсльмый прибор, сюричауго цбматку трансформации. тога необходимо замкнуть накоротко персмЫЧХОн.
В паспорте трансформатора тока указываются номинальные гот первичной JldL,a и вторичной (on обычно 5 А) об-моток, класс точности, максимальное значение сопригиплення и минимальное значение коэффициента мощности обмоток приборов, ахлючасмых во ыоричтгую обмотку* при которых ) арантирустся указанный класс j очи эст и. а также напряжение, па которое рассчитала его идоляция Начало первичной обмотки трансформатора гика обозначается буквой Л3, конец - буквой Лг, вторичной: начало - Иь конец - И2,
Необходимо отмегить, чю хроме погрешности измерения но колффнииечту трансформации (по модулю измеряемой ве-
340
Рис. S.J4. Схема включения амперметра, вольтметра. аэттыстра с тряис-форМЯ торами И^тряженкв и трк.ч
личины) есть г« погрешность по уму но той же причине: паде* ние напряжения в обмотках. Погрешносхь объясняется тем, что направление вектора призсдсЕНЕши вюричного напряжения ire сой падает с направлением лектора первичного папряжсЕшя трансформатора напряжения и направление вектора приведен-пою тока вюритиой обчотки не совпадает с направлением сектора первичного тока трансформатора. Узловая погрешность составляет всего несколько минут и проявляет себя только при измерении моецности, опергим н {фазы,
На рис. 8.34 нвображепа схема включения измерительных приборов и иамсригельных-зрансфсрмагороя для намерении тока, Етапряжхтшя и активной мощности. Для защиты обслузкк-ваЕощсго персонала от действия -высокого напряжения в случае Eipo&DH изоляции между обмотками или високопол1,тзюй об. мо । кой и корпусом корпус и одни конец вторичной обмотки измерительных трансформаторов надежно Mjcwutioiex. Цена деления измерительных приборов определяется следующим образом.
Необходимо отметить, что прн определении цены деления измерительных приборов под коэффициентом Трансформации измерительных трднефоруагоров nnriHMaioi отношения
для трансформатора напряжения - номинальных значений напряжении первичной и вторичной обмоток
для траЕюформатора тока - иомпгтальпых шзчепнй токов первичной и вгоричыои обмоток
Цена деления амперметра
где СА - цена деления амперметра; СА - цена деления ампер, митра с трансформатором тока.
341
Ценз деления вольтметра
= = Св = Сд ——.
н 2 [• 211
Гдс си — иена деления польхмехрн: С'в - иенэ дслоехия вольтметра с трансформатором напряжения.
Ценя деление вапметра
СВТ-СВДЛ, - Со,
где С5| — AtwL делений ваттметра, С>. — пена делен»» ваттметра с трансформаторами гака и напряжения.
Глию девятая
МАШИНЫ ПОСТОЯННОГО ТОКА
9.1. НАЗНАЧЕНИЕ И УСТРОЙСТВО МАШИН ПОСТОЯННОГО ТОКА
Мздхихпд постоянною тояа исио.ц.з>,ют в качестве генераторов и дэшатслс».
Элзктраческая эяергнх постоянною тока, вырабатываемая генераторами» служит лив топания двигателей постоянного тока, электролнтичееккл ванн» элсктромагангов различною из-аяачевп», аппаратуры управления и контроля и т д, В настоящее время хслераторы постоянного гота во июиа установках демеидог хюитупроводликовьтми преобразователями переменного тока в постоянный
Днитатали постоянного тока тгримещпот па транспорте для привода некоторых металлорежущих станков, прокахных станов, |[одьсмно-трян<!лортных машин, экскаваторов и г я Олпой ms равнейших причин прн.че1тсиия двихатслей постоянною тока вместо наиболее широко распростраисзгньтх асинхронных дйига!слсй (см. гл. tO) является возможность плавного регулирования тастотм вращения в Хх1ирхжом ZJjiaxiasoJlE и получения желаемых механических характеристик д(М) (см, & 9.UI.
leEiepaiopw и двигатели ирстояхейосо тока устроены одинаково. Неподвижная част ь машины, патысаемал статором (раю. 9.1, а), состоит из массив ноги стальпото корпуса J, к которому прикреплены главные 342
I'JJC. ?-1. Устронстэо (ст) II ЯкТфк (») ViaillMHW ПОСТОЯННОГО TOE.li
гнмкм-ы 2 и .1С1и'\лниг11лы1ые полюсы б. Исходя из тс*ннла1ичес1гих-I! других соображении главные полюсы иэютодляют чаше га отдельных стальных листов; иногда иг изготовляют сткииными Из <гг-ле еьнъгх листан лило исшитыми н.п ОТОВЛЯЮТ И дополнительные ПОЛЮСЫ. Перечисленные детали статора я&ляютгя также и де-талямр его мигни'гспроно.тд. На ।лапник полюсах размещают катушки одной или легкольких обмоток возбуждения .?. на дополни ie.ii»nbn полюсах — кд-пиши ’ пбм<нвк дололните.тъиыз полюсов.
Ь полшипнигояыс щигая. прикреплении* с торцевых сторон * корпусу, расположены подшипнггн, несущие вал 4 вращающейся части мякины, нлчыиаемой якорем (рис. 9.1.и в г). На валу закреплен цн-лнпзрнчсскии сердсчинс якори ч кспирый для уменьшения потерь moihhdciи от перемагничивания и яихренмк локои набирают из стальных пистон, Is палач, раеилюжен^ых по поверхности якоря, у.ш-агена обмотка якоря 4. Так же, тяг o(iwitny жибуждепия и обмотку ,1рг1олнн'|<льиь1к еюлюссв. ее изготовляют из медное« ишлнроаангюго проводя. Выводы от убита якоря ирисоедиЕипот к расположенному на валу коллектору 9 Ноцтсзннй npc.iL ।ан.1яп собой иилипдр. СОСТОЯЩИЙ из медных iLtlCTiHi ИЗОШРОВЙППЫХ ЛРУ'Г ОТ дру|а И <11 ВОЛД. К коллектору с TioMciiikKj up;жик прижимаются графиты?, yro iKHti-трафитые или метатлографи!ные ni.eiKii JO. Щетки расположены к снсциялкных mei кодержатотях.
Обмотка нолйгжления машипм гпижис» л<к кгнняым током г служит Л1я салдання основного мнг-ннтжио iklts, показанного из рис 9 J а условно с помощью двух липни магнитной нн.чукинн, h:s-ООраженлЫХ и\ьхтиром.
T.ijvHnwc: no.i6<n_xi iftie-ur полюсные чякенечнмкн ii, служащие для ьетучепия по ботылей части окружности якоря одною д ips-o же »ci:i-jviuhoi о лаюра меи£д% сердечником якоря н главными лотеосэмн. Это LieDrixO/IKMi) ;;дя 1пыучен1щ на ООЛЫИСН части окружное!н «коря одной а той же магнитной индукции, а в проводниках обмотки якоря — ио-ятойпной по эозченню ЭДС. Д<мк»лнк1е.1ьные полюсы предназначены тли уменьшения искрения под щетклми (lm. § 9.5).
343
C jjtJMQrubio KO-'j/ieuTOpa H iiieioK вращающаяся обмоткн якоря соединяется с внешней электрической цепью, О др>1ич важных назначения д коллектора и щеки будет юеораться t § 1-2.
На рис. 5,l,cr ।ioкоднээ мйшина достоянного тока с дятчя т.тавнм-мИ ita.rtoca.4H. В зависимпеги от мощности и ианрятспня машины могут иметь и большее число пеиюсов. JJpn тюм состав iL-гвенно увеличиваются ЧИСЛО яоиплехии» гистовг н JOnaiJitJie.iMihJI полюсов. Крепление MatiiHiTiii к фундаменту, специальным салазкам или мстал-ciOKCMCipyKtvro с-еуыеетмястся е помощью -tan 22. Корпус некоторых машин снабжается .тля крушения слециллы1ыми флнлпамп.
J.Z КРАТКИЕ СВЕДЕНИЯ ОБ ОБМОТКАХ ЯКОРЕЙ.
ПРИНЦИП ДЕЙСТВИЯ МАШИН ПОСТОЯННОГО ТОКА
Прежде чем рассматривать обмотки якорей, необходимо обратить внимание на следующее. Благодаря полюсным иако-петаккам магнитная индукция в воздушном задоре распределяется примерно ио трапецеидальному закону (рис. 9.2,« и б|. У поверхности якоря при о.—О магнитная инлукпия Л=П; с увеличением а магнитная индукция сначала возрастает, под большей частью северного полюса имеет лостотяьос значение, а при а = 180е уменьшается до нуля В пределах от т = 1Й0: до 360е Mai 1гктцая индукция изменяется по такому же закону, но условно считается отрицательной.
Направление ЭДС проводника, находящегося в пазу махпи-тояровода якоря, огтрепгляется но правилу правой рукн. а ее значение 3 - по формуле
(9.1)
где В •-магнитная индукпия. Гл; {-длина проводника, м; г — скорость перемещения проводника, м/с.
Очевидно, ирн t = const eJip ~ АВ и график В |а} в другом масштабе представляв епбой iрафик елр in). Изменение знака ЭДС й означает изменение ее наираилечня по сравнению с положительным направлением, показанным ня рис. 9.2 д.
Если и пазах, находящихся под северным полюсом, имеемся несколько проводчиков, то ЭДС всех ироподвиков будут иметь, очеапдне, одно и то же кянравлснче; во всех Г.рсволпл-ках яворя у южною полюса ЭДС будут направлены в пригиво-пн>Л0кную сторону.
9.2.1. Устройство обмоток якорей. Обмсикц якорей машин по-стдохного тока состоят ш отдельвых секций, имеющих одинаковые ш£Иг*1гттса. Каждая «кидя рахмешаеч-ея в двух магпнтоиропо* да якоря, нздодяшнхея под разными полюсами. Часть секции, распо-344
i:nc 9,2, нопрссу распределении магнитной индукции в воидутл-j-om зазоре к характер изменения 'ЭДС приводим»™
Рис. 9.4. Сессии волновой обмотки якоря
P5IC £3. ССКИРЯ Л«Т,Х1К>М об-\|ОТКИ якоря
. tc-лчнчая и i>,.ном пазу. иззыпастся сскииоштой стороной. Ниаоды каждой секции присоздштяются к двум коллекторным пластинам, к каждой и., stiiiipbu HpinLturjintiaetta еще цо одному шведу от друтил сскинй.
В oi' номцна.тьн1,гх значений мощности, палряжспия
и частоты вращения палодят применение различные 1ниы обмотои якорей Простейшими из них являются петлевая и волновая обмотки, Двуиштаовыс секции указанных обмоток тгокнзяны cwiacicrпенни на put. 9.3 и 9.4. Петлевая и подпевая обмотки отличаются порядком соединения о коллекторными платинами и друч с jjjiyioM.
На рис. 9.5 приведен эскиз упрошенной машины пост миног о ока, имеющей npovTciiiciy-о убмсысу якоря, состоящую всего из четырех секций, каждая из колорит имеет по одному ви1ку; секции размешены в налах Р — 4 магнигсшройода якоря,
Для удобства изготовления н монтажа обмотки в каждом пазу размещают обычно в два сдоя сскщшнные стороны, принадлежащие двум сстиям 1'екг|и<1иньге стороны, вакодятнсся а верхнем слое, обо-jHT'icjiH ла рве, 9,5 теми ж? цифрами / -4, что и пазы; находящиеся н нижнем слое — пифрамн J —4',
Па рис 9.6 лапа развернутая на ттлосксктн схема рассматриваемой обмотан, а на рис. 9.7 - более простое се изображение, ня котором секчттн обиутхи заменены катушками
345
Рнс. 9 5, Эстоп упрощенной машины постоянного тока
Phl, 9.(5 Рлиернуия схема об» МОТКИ якоря
Рис. &.?. Упрощенная схемп обмотки якоря
Как нетрудно устяноэ1П* по приведенным рисункам, рас* гмнтрнвасмзя обмен ка окатывается замкну । ой. что является характерным я для ,ipyi ик обмоток якорей ыапгнк постоянного
При указанием на рис 9.5— 9,7 положении обчотяи н коллектора щетки делят обмен-ку-
на inc параллельные вегвн:
И шетка Щ2, ипл-нгк-торная пластина У, секция 3', коллекторная иласчиня 7/. секция 2--#', коллекторная н.-щетяпа HI. щет-. ка Ш) :
2j щетка ЩД коллекторная пластина I. секция 2‘ —< коллектор-, пая ir-истииа /И секции J -J. коллекторная плас-шни У/J, щетка /[,!.
Как видно, каждая пар^'м^льип сотилисиная ветвь содержит по две секции с одинаковым направлением ЭДС. Очевид* 346
но, ЭДС между метками равна ЭДС любой параллельной нетзи. т. с.
‘'“«run М
R рассматриваемом положении якоря е - емр - 2₽е.
При ЭТОМ ЩС1КЯ Щ2 имеет меньший потенциал, чем гцеткя 1Ц1. ЭДС е направлена oj 1Ц2 к Щ!
С помощью приведенные рисунков можно усхаиовиец что при вращении якоря происходи 1' Следующее: секции поочередно переходят из одной параллельной ветви в другую, что сопровождается изменением направления ЭДС в сеяниях на fipo-тллслЕолоипзос; в процессе перехода в другую параллельную печвь секции па короткое премя .замыкаются тетками накоротке. однако ЭДС в этом случае в секциях ив индуктируется, так как сеянии находятся при этом на липки at> (см. рис. 9.5>_ где магнитная индукция 0 = 0; число секпий в параллельных вст-пяз в рассматриваемой машине изменяется от I до 2. вследствие чего измепязтея и значение ЭДС между тетками: j-aitpaB.ieiDic ЭДС между щетками остается постоянным.
Например, если из указанного на рис. 9.5 —9.7 положения повернуть якорь на 45:, то в первой параллельной bcjbh останется секция Г-3', во второй — секция Г-3; секции 2—4' jj 2'-4 будут замкнуты, тетками накоротко; ЭДС между тетками будет с1 — с™, = ес.
Й большинстве случаев якорь машин постоянною т№ мыеег нс -стырс паза в которые закладывается обмотка якоре, нс четыре «к-□ tin и xn.i.'icKTopFf ьц: и.тасти ны, а чнгячиТсльнр болынее их число; кроме it'io. ссьпив состоят обычно аз нескольких витков. Вследствие этого -г.l?jыныеjил нлч(жныи tiслучить намнеи о биаыную ЭДС между щетками. а значение ЭДС при вращении якоря остается практически । ir. 13 з (ei । ним.
Следует заметить, что значение ЭДС между тетками зависит от места расположения последних. Для получения нарполь-щей ЭДС шетки следует устанавливать таким образом, чтобы ЭДС всех секций в пределах одной параллельной ветви были направлены в одну и ту же сторону (см. рис. 9.7). Этому усло-инк» уповлетворяет установка щеток па геометрической нейтрали. дол которой поиммают линию, проходящую через ось ма-игигты и гс точки поверхности «хоря, где магнитная инлукпия но ся главных полюсов равна нулю. Геометрическая нейтраль ЛЬукполкэсноЙ МйПТйНЫ расположена перпендикулярно оси 1 зазцых полюсов. На рис 9.5 это линия at Следует учесть, что лыражение «установка щеток на геометрической четГтралн» яп.!яе1ся условным м ид самом деле означает, что щетки дол
И7
жны располагаться в зяяом месте. чтобы оли замыкали накоротко секции, находящиеся на геометрической нейтрали,
При c irhiv шаток с leoMerpнасекой пейфали ЭЛС между тезками уменьшается. так как в параллельно июлннсЕЕиих- ветвя* появляются секции с противоположными напрязтепнями ЭДС Например, если щетки машины, обмотки которой изображена кз рис. 9.7Г услатжигь на коллектирнме пластины 11 и Л' ю ЭДС между щечками будет равна liy.IKL
9.2.2. Лршщно действия генератора. Допустим, что якорь машины (см. рис. 9,5) врашастся с помощью какого-то двигателя-в направлении, указанном стрелкой. Если щетки генератора со-едншгть с каким-либо приемником г, то под действием ЭДС генератора. в обмотке якоря и приемника появится чтж, приемник начнет потреблять электрическую энергию, а машина будет со отдавать, т. е. будет работать в качестве генератора, естественно, что электрическая энергия, вырабатываемая генератором, ирсобралуегся из механической энергии двигателя, вращающего якорь генератора.
Направление тока в проводниках обмотки якоря генератора совпадает, конечно, с направлением ЭДС проводников и при вращении якоря изменяется. Однако с помощью коллектора эгшендюшМся по направлению сок проводников преобразуется в неизменные но направлению гики параллельных ветвей и ток апепгней пени га, называемый током якоря. Согласно первому закону Кирхгофа для рассматриваемого генератора Гв = =-2ioa₽. Машины постоянного тока могут иметь число параллельных ветвей больше двух. Обозначив в общем случае число параллельных векши 2а, получим
h - 2flI1Jtp. (9.3»
Если воспользоваться правилом левой руки, нетрудно уста-noDHTfi. что 1снсратор развивает электромагнитный момент, направленный против направления прашевия, т. с. является тормозящим.
Изменение полярности щеток и, следовательно. направлений ЭДС, напряжения и тпха во внешней пели генератора возможно произвести одним из двух способов:
I) изменением направления магнитного поля главных ПО.иосов, что осуществляется изменением направления тока обмотки возбужден ня, располагаемой на главных по-тесак;
2» изменением направления вращения якоря гсЕгератора С помощью приводного двигателя.
Обычно используется первый способ.
348
9.2*3. Принцип действия двигателя. Предположим, что шорь той же машины (см. рнс. 9.5) неподвижен. Если oi Источника постоянною юка подвести к якорю двигателя напряжение, нэ-ири-лер указанной на рис. 9.5 полярности, то но внеищей пени и к обмотке якоря возникнут юки, Ешправлспие хоторыч будет противоположным укатанным на рисунке. С по.мошыо правила левой руки можно установить, чхо на якорь будет действовать вращающий "итеитрочагнитный момеы и якорь начнет нрэ-тахься против часовой стрелки, При вращении в обмотке якоря возникнет ЭДС, которая согласна правилу правой рухя будет । га правлена, как указано на рис, 9.5, г е. против лака двигателя. Противоположные направления тока и ЭДС говорят о том, что в машине происходит преобразование злсктрическон энергии в механическую. Двшанш разгонится до такой ла* стотът вращения, при которой сю момент схакст равным моменту. обусловленному нагрузкой.
Говоря о принципе действия двигателя, нельзя не остановиться на назначении коллектора в этом случае, Коллектор необходим ддн тихо, чтобы неизменней по направлению ток внешней цепи преобразовывать в изменяющийся по направлению ток в проводниках обмотки якоря при его вращении. Только благодаря коллектору ток всех проводников, нахотящихся под одним полюсом, имеет одно и тс же направление. Вследствие этого остается неизменным и направление врашаимцею момента. развиваемого двигателем.
Для изменения направления врашенин дни1Я1еля необходимо изменить направление развиваемого им вращающего мс-мента. Это можно сделать одним из двух способов:
I) изменением полярности напряжения, подводимого к якорю двигателя ii, следовательно, направления тока якоря;
2) измеиеиием направления магнитного потока главных полюсов.
Обычно используется первый способ,
Рассмотрев принципы действия генератора и двигателя, Можно сделать вывод о том* чти машины □□стояштоги гока обратимы. Эго значит, что при определенных условиях генераторы могут работать в качестве двигателей и наоборот, Возможность дзлгателей работать в качестве генераторов и, елсдо-ва'геп.ио. разливать тормозящий мс.ченх широко используется на практике (ем. § 9.19).
349
ЭДС ЯКОРЯ и электромагнитный момент машин постоянного тока
Как было показаао ранее. ЭДС проводчика обмотки якоря определяется по формуле
При вращении якоря ЭДС сгр изменяется п соот®етс1Вин с графиком, цриясдсгтнктм на рис. 9.2,6. Сроднее значение ЭДС проводника ^пр.ср при сгп гтереметиении в пределах полюсного деления можно определить через среднее значение магнитной индукики (см. рис. 9,26}: епр(.р *- й^г.
Если обмотка якоря имеет V проводников и' 24? параллельных ветвей, то число последовательно соединенных проводников в каждой параллельной ветви будет Ы1а. Тогда среднее значение ЭДС матптгаы
Е=д JtA м
г 2а
Среднее значение магнитной икдукияи
Ф
(9 5}
где Ф — магнитный поток одного полюса, Вб; Df —диаметр якоря, м; 2р — число полюсов машины. •
Величина л (!>.5j представляет собой поверхность
сердечника якоря, приходящуюся на одни полюс.
Линейную скорость itpuno.TinjKOB г можно определить по формуле
л О."
60 '
(9.6)
тде л—частота вращения якоря, об/.мин.
После замены в (9.4) магнитной Индукции В^р и скорости г согласно (9.5) и (9.6) получим
£ = - Л Фи - А-,Фп. (9.71
а 60
р i\
где ке~ -- — кизффилиепт ЭДС, зависящий от конструк-d би
тивтиях особенностей МЛШины.
Как видно, ЭДС прямо цроцорииопалъна произведению
МЗсшггного потоке! на частоту вращении. По формуле (9.7)
350
мотто определять как ЭДС генераторов, так и ЭДС двигате-лей-
Электромагнитная сила в ньютонах, действующая ла проводник обмотки якоря, определяется соотношением
пр = ^пр = ^я/2Й!
где /аг - ток проводника, равный току параллельной ветви, А; f. - ток якоря, А,
При вращении якоря сила, действующая на проводник, изменяется.
Среднее значение силы матю определить через среднее ‘.начснис Магнитном индукции:
' npqi — BCpf/J2ii.
Средний тлектромагнятиый момент, Н м, действующий на якорь.
После замены п (9.8} магнитной индукции Д-р согласно (9.5} получим
р N
«».= - . фЛ’*«фг,.
U 2л
(9.9)
р W
.ле = ——--------козффицисш момента, зависящим от кон-
rt 2л
структивиых особенностей машины.
Как видно, момент электромагнитный прямо пропорииона-.jcjt произведению магнитного потока на ток якоря. По форму-ic {9.9) можно определять как момент генераторов, так и момент двигателей.
Если момент выражен в нЫФТОно-мсграх, то между коэффициентами кв и ксуществует следующее соотношение:
I9J0)
Электромагнитный мпмеш ,W.IMJ вызванный взаимодействием мапыиюю испою! и тока якоря и определяемый до формуле (9.9), отличается от момента М, развиваемого машиной на ва.ту, вследствие трения в подшипниках, вращающегося чкоря о воздух и вентиляционных потерь. Так как указанные лвамомеша агдичаются незначатепъно, будем в дальнейшем мигать ня равными н обозначать .W.
351
*4 ЯВЛЕНИЕ РЕАКЦИИ ЯКОРЯ в МАШИНАХ ПОСТОЯННОГО ТОКА
При работе генераторов и ,iamareiei< ftp* нагрузки (вхолостую) ток к обмотке якоря огсу iL-Tnycr |цти весьма мп) и матниглие нале машины возбуждается только МДС обмоткн вотбукдения (рнс. 9 Поле оказывается симме>рхчным относительно осн главных jio.twloi*. R секциях обдплхн якоря, находящихся на 1еомг1ричсской нейтрали ГН и .‘|дмы*»смык щетгамк накоротко, ЭДС нс индуктируется.
Следует обратить внимание на го, что в данном )1ярагрмфе про водянки обменки якоря расположены ус.-кшнп не в пазах магнитопро-возга якорч, как ото двпаюг на uhvom деле, а на поверхтнтгн якоря; креме того, условно не riosaiau коллектор, н шеткм кмслюгся нспас-редстттенни проводников обмоткн «коря,
При работе машины с нагрузкой в обмотке якоря возникает тое и магнитное ноле машины ваабукда^гея МДС обмотки вотбужде-Uku, liLK н МДС обмоткн якоря.
Рнс. 9.В К пояснению явления реакции яяоря
352
рис. 9 У. К устройству кимяегкл Л110ГБ91ОЙ обмОТКИ
Воздействие МДС обметен якоря на магнитное иоле машины
^йиолтлгй якоря
называется реакцией яьоря. * s
Рассмотрим реакцию якоря в наиболее час i w кигтречаюшемся случае расположения щеток на геометрической нейтрали,
На рис, 9,Я. б показано магнитное поле, обратоньнн+че ион дей-стниек МДС обмотки якоря: □ па рис. 9.8,« — результирующее магнитное поле меняны Указанные на рис. 9.8. в напри плелни токов обмотки якоря cooTEcrciRjHiT указанием гл« же направлениям вращения генератора н двигателя. R случае расположения шпик ЕЗЭ геометрической нейтрали н£л»ня«аег поперечин» рейкцмл якоря, харисэернзуемзч тим, ио 1>сь симметрии ноля. резкими якоря (рис 9 S б> перненлнкулярна оси । шины». поносов. В релу.тьтатс действия поперечной рсакпин яио ря магнитное «пне машины ов«чыиае1Сн несимметричным относите н»-нг<> пей главных nti.Tx>coii [рис. у.8,в). Под г>,иыч ьрисм кид.-ioro полюса магнитная иидукпия увеличивается, пол другим уменьшается. Физическая нейтраль ФН. пол которой попинают .тинию, проходящую тсреч скъ машнпы и точки новерхпоств якоря, где магнитная ишiyкипя pezj •ibriipyHJiJiti о поля ранка кулю, смешается у генератора по няпра-H.icKkiio ьрашсиня. у дни!атеясн — нрошл иаправтсния вращения Ирм отсутствии чока якоря физическая пейтра-н» совпадает с ।еомв1рнтс-сьой (рис 9.S п) В результате тейпьия реакции якоря в секциях обмос-ю якоря, рзсполохгенных на геометрической [itiiTps :rxi, влтнцкаег ЭДС. Между коллективными птастниачн присос тнеиными к секциям, ка-\1'дян-имся в усиленном магнитном иоле 1.таоных полюсов. пошляется лсзыицжч-ис HiupaicttHU. ч-ц> может принес) и к возЕПГХНОденпк» дуги между «.ui ^торным»] плен- живмя. 1Ья устранения искежчиин магпит-jiuid поля пол полюсами крупные .машкпы, рийпаюшие с часгмми и п1|Нчигвлы1ЫМИ перм рузками, сиябжакися ыомпскеилноилой об-JiIijikoB. IJcc icahhijo таклатынанм в пази полюсны* пакоиочикш?^ 1’вис и ылдцияют иоследоватйиънь е обмоткой якоря, в результате чею соц-щегся магнглкое поле я ;юие рлсполождк|1я ни^юсов, прсин-вопололДесч tjo направлению лолео релкпин якоря.
Влияние поперечной реакции якоря па pejj.ik-j иругсиисц чатипюс ль.i;? ihhhlhf от степени насышеиня ферроматЕйпншо материки магнитной нам и значения н>ки якоря. В o&ioevf случав из Эй дяемгненин ферромагнитного материал чгт ннтегзя иЕглукцКЯ пол одним краем полюса визрастаег меньше, пем уменьшается iio.i другим; н результате магнитный лоток машины несколько умсяыныекся. Однако при на-|_тузках. на которые рин.'чмтьЕваки'ся машины пре нормальцык усяо-няях их работы, магнитный поток изменяв tud tia отмосш'с-аьно пебо.ть-ojoe значение, поэтому вл лян ле поперечной fkzbkiihb нь-иря ин m:uhhth<w иоле про расчетах чмеги не учитывали.
(2 Электру'-ii.Hta 353
^ЯВЛЕНИЕ КОММУТАЦИИ В МАШИНАХ ПОСТОЯННОГО ТОКА
Под коммутацией r машина* постоянною тока понимают процесс переключения секций об.могкн якоря из Одной гтарал-лелэной вогни в цру[ узо, сопровождающийся пзменеЕзкем ita-правления тока в секциях. Направления и и гачен ия тока коммутируемой (переключаемой! секции я раздичгп.гк ее положениях оптослтелыго пеппллижной щелки показана па рис. 5.10.
В ре:<у.1ьтцтс изменения имел к коммутирующей секции иозникяе! ЭДС сямоиндукции ej..
Для увеличения механической прочности щезак их ширину виби-paEOi обычно больше ширины коллекторной даястнпы. Веле, нивис •шло теткой вамыкакпея накоротко и оврсмсЕПto KOMMj-iHpysoTea несколько секций Послед]!ее иы^ьгинст в каждой секции ЭДС взаимной £>н.чукции c.w, Кроме joi и. в сеянии возникает ЭДС *’г визывлемдя ирм! гением секции н магнитном енхче поперечной реакции якоря.
Сумма перечисленных ЭДС невелика. Однако, поскольку секцпя замкну id щщкой накоротко, это приводит к заметному дополнительному гоку н замкнутом контуре секции, в резуль-тале чего плотнить тока под щеткой становится неодинаковой. Под сбегающим краем щетки зыецностк тока возрастает, что приводит к искрению под щеткой, особенно ишенсивллму п моменх размыкания секции. Если нс принять специальЕнлх мер для улучшения условий коммутапии (уменьшения искрения лид щетками), то наиболее отвеитистптая часть машины — кол-лектор — через неиродолжительнос время выйцез ит строя.
Для улучшения коммутации машины мощностью 1 кВт и более снабжаются дипплиительньхмн полюсами (рис. 9.11). В машинах с доттолши'слып.тми полюсами щетки устапаали-лаюг на геометрической нейтрали. С помотью дополпи-
Рис. 9.10 К гояеиелию явления коммутации
354
гелысых полюсов и кшс коммутации создаихся магпитпос ноле, в результате чего в коммутируемых секциях индуктируется ЭДС, компенсирую-тая ЭДС ew и ег Так как ЭДС е\, ем н е( зависят от тока якоря, ю для их компенсации при различных нагрузках обмотку дополнительных полюсов включают поеледсва-гельно с якорем, Вследствие насыщения досюлнвтелъпмх полюсов при перегрузках маиттпл условия коммутации ухудшаются и иод щетками появляется недопустимое искрение. Наибольший допустимый ток машин постоянного тока определяется условиями коммутации и лежит для различных маптин в пределах (2-=-3] f |(ем, где J„ehf — номинальный ш машины.
Так как ЭДС ер возни касс вследствие вращения якоря в мат-хгипгом иоле реакции якоря, то для се уничтожения с помотцъю МДС дополнительных полйэсов должно быть создано магнитное ноле, от вращения в котором возникла бы ЭДС, направленная против tp. Учитывая характер изменения результирующего Mai нитпого поля ири нагрузке генератора и двигателя с указанными направлениями их вращения (см. рис. 9S. 6), следует сказать; полярность дополнительного полюса генератора должна быть такой же, как последуютпего за нём по направлению вращения хлаввого полюса (рис. 9.11); полярность допол-нихельного полюса двигателя должна быть такой же, как лред-шествующехо ему по направлении? вращения главного полюса. Выбирая соответствующее значение МДС обмотки дополнительных полюсов, можно скомпенсировать также ЭДС е^Н ем.
S.6. КЛАССИФИКАЦИЯ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА ПО СПОСОБУ ВОЗБУЖДЕНИЯ. СХЕМЫ ВКЛЮЧЕНИЯ ГЕНЕРАТОРОВ
Свойства операторов постояхшого тока зависят от чисш и сххособа подключения обмоток возбуждения или, как говорят, от способа возбуждения генераюроз. В зависимости ит сххосо-па возбуждения различают:
I) гсксраторгд независимого возбуждения:
2} операторы параллельного возбуждения (ранее тунговые];
3) генераторы смешанного возбуждении (ранее ком-пиуплпыщ
555
Рис.’9.12. Схема вкдючетя ie-НСраТОра независимо! <» возбуждения
Главный M44J ИНГЛЫЙ 1ЮГС.ТЯ ГС-
нррагора независимого возбуждения {рнс, 9.12) возбуждается расположенной па иянных полкюцх обмоткой меланисимого жтзбужцення ft, — Л3. Последняя получает
питэпне от постороннего источника хтекзрической энергии постсын-погг! чока небольшой мощности. Номняа-чъное иаиряжспие обмотки возбуждения выбирают лнЕ»> равным, либо яшм да чсныинм ночи-ннлызого напряжения якоря Я| — Яг генератора.
Цепь обмотки возбуждения №(-т-1!Г- генератора иарялдсльпото возбуждения {см. рис 9JGJ ькдютагот параллельно якорю Л, Я2 от которого она н получает питание. Обмотку «озоуждепни рассчттд-
нчеот в -ш»м случае на то жв напряжение, что и икирь генератора.
Магнитный пелен: Ф генератора смегпаппого впчбужлелия (см, рпс. 9,1$^ возбуждается расно.тоженнычн из гланных лолисая двумя обмотками: обчотвОЙ наряллсЛЬнсло возбужнения W\ - П7Х w обмоткой восЛелонатсльнгич» возбуждения С, - Ct. Последнюю включают либо так. как ношчино па рии $.19, к цепь приемника гл, .тбо после-дователын’ <; якорем. В большинстве случаев.обмотки параллельного к пос.|едовят£Пкьюг ti возбуждения иг.'по'йют «л ласЕЮ- 1 е. таким образом, что&ы ня. МДС совпадали по яапраяламю.
Обмотки независимого и параллельного возбуждения существенно отлучокгтся от обмотги последовjгс-тыпзго втБуждеэ1Ия в конструктивном отнеигеенни Обмотки нелависими! о и параллельного возбуждения наготой плотен ин провода отаосн1ыьею малого диаметра, имеют сравнительно большие числа энное и сопротивления, В ог.ир|ие от :#тог& обмотка последоаатслыцц о возбуждения нш отовлквтся нэ провода оттл-итильсо Оо.чьгцого диаметра, имеет небольшое число витков и содротнвлсняе. Например, у машин мощностью ст $ до 100 кВт пл нанр^жииге 220 В обмотки параллельною возбуждения имеют со-О1 втлвешап сопротивления пори/ ка ?00- S0 Ом, тогда как обмотки пис-.1едомтел11нсио возбуждения ннрлдкз 0,01-0,001 Ом. Площадь поперечное о «гченнд ироноца для изготовления последова гсльпой обмотан выбирают cab-two диаметра, чтобы обмотка нс перегревалась ПОЛ действием таил приемника
Fl цепи обмоток возбуждения (см. рнс. 9.12, £.16 м имеется реостат Гр. оузмтщий .тля изменения тока яоибуждепия /В1 что необходимо в конечном mole для регулирования напряжения г/ да вьгнодах гсперантра п приемника. Сопротивление нагрузки гг c-iejjei рассматривать как некоторое .эквивалентное сопротивление, ^мсияютдп: группу приемников, получающих питание <<j е спсра про.
R цскогорык установках находят iipHMcncEfW трсхс'бмо'шчньтс «снсраторы, ммстошае пг.мозкк нсзаанскмсго. парад.ie.ibnoTO и номе-довательнв’гп возбуждения. Они имеют псобые свойства и характеристик*.
356
97. свойства и характеристики генераторов НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Свойства э тек греческих мяшпи постоянного и переменного 1'OKfl, прелстапля!ог]|нс иггтсрсс с точки трепня практического использования машин, в значительной мере определяются к* характеристиками, каждая нз которых представляет собой график папнсимссти между дпумя важнейшими величинами.
Ovi3OH!Jb!MH XLipUK'iepMCiUftiAUl ГСНСрИJOpUS ПОСТОЯННОЮ ТОКИ квляеотся характеристика холисгою хода, внешняя и регулировочная характеристики.
У.7Л, Характеристика холюстого ходя. Характеристика холостого кола £(/ь) генератора пезаписимого возбуждения «рис. 9.12) представляет собой аагигскмость ЭДС якоря от тока оАчоткя аоабудадекня при работе генератора вхолостую (при* «метик отслючеп, / = О) и изгсоп’Т Опа даст представление о том, как 1твс1бходимо итмспяп, ток побуждения, чтобы полу’ чаи» тс или иные зпачсиий ЭДС icncpaiopa.
(’гм ,1иснп Нырнженинл (0.7.1 Е = КсФн. 11ри холостом холе генератора независимого возбуждения Ф — f, (/5ivJ — f, (JB), пп-чточу
Измснал с ею.чощьн* реостата ?'р ток (в, можно изменять \iaj ч1И]][ьхй (1О10Е Ф Ti, слсдоваюльЕЮ, ЭДС А. генератора.
Если магнитная исть машины fibuta поЛеюстыо римагничсия, та про уик.|К«ении тога созсуждсЕзил зависимость (Ь(ГП) пред11авляется кривом ? (рнс. 9,1.5т, подобной крлаой памагшпнвмЕИЯ. 11оско-н*^у при .'j- xonfit ЭДС прямо прогоргП1анм.,:хня MUtHHiHo.wy истоку, график <Т> [Ttj пргдегин.и.-! собой в другом м»сштабс по оси ориинл хараиле-рпггкку холостою ярда Е(Ц-
Киждаму зизчепшо нря его умьныигнил <хрцуа.ч 2f со- •
ответствуют ксетааыси большие шачепия потока Ф в ЭДС ±. чем при увеличении тока: при 7Г = П генерй-i ор ммссг небп.чьпн^ eiorurt йсгачоч-ШУ'О Н&ЫЙ1 ннчкнЫнпЯ Фо Я соответствующую ему ЭЛС £с. Обычно Ф(. = (О.О2-гО,0^)Ф,ики и Ео-(0О2-гГ11Х,)£11ПМ, где ФВ1вм и - маг-Eihihkih iio'ioit и ЭДС, €0отктсткум(|(не номинальным jantrtJM гвне-ртора,
За расчезную принимают обы'шо характеристику Л распо-.трйеенцукз между характеристиками ( и 2, Точку /), елптвег-стпукнцро лпмнеялъегым данным генератора, выбирают при расчет? на «колене» (в зоне наибольшей кривизны) характеристики холостою хода. Выбирать точку Л а области значительною насыщения ферромагнитных материалов нецелесообразно, гая как дто прпис.днт к •лиячц'1'е.1ьи<»чу уне-тичеилго тока, мош-
357
Рнс. 9,14, Внешние харлыерп-стиыг । снсряторй lli.iaaiiLjr.itn ii возбуждения
Flic. 9i3 XlpiKi еристнки ?o-лостого хода rejtepaiupa ке.мвн-см мот рсвоуждепия
шмди и габаритны* размеров обмотки возбуждения при незна-ямгс.плюм увеличении ЭДС
4.7.2. Влепмш хйрактертеппгэ, Внешняя характеристика Ь(2) генерэюра постоянного тока нспаииспмо] о возбуждения представляет собой зависимости напряжения иа выводах генератора лт тока нагрузки при — coast и я = const.
Зависимость Ъ1 (7) может быть получена на □сповагтхп уравнения, составленного по ыорому закону Кирхгофа для пепи якоря генератора, согласно коюрому
и-.Е-1г. = £-1,„ (911)
где Гй -• ток якоря, равный току 7 приемника; г, — сопротивление якоря, нключающее и себя сопротивление обмоткн якиря, щеточного контакта, обмшки дополнительных полюсов и компенсационной обмотки (если она имеется).
Так как у генератора независимого возбуждения по условию fp— const, то пренебрегая реакцией якоря, следует считать Ф ~ const» а значит, И Е — const. ПрН ЭТИХ ус юанях внешняя характеристика Lr(J) представляет собой прямузо линию (характеристика I Era рис, 9.14).
Если в ураанс!ги1т (.9,11) заметит. напряжение согласно Уакону Ома выражением 17 — /г,,. а шеи решить его шноситслкио тока, то получим
1 = ^—. (9.12}
Как лидао из (912) и (9.11). при работе генератора лхоло-cryaj (гт = ос)? _0 и U — L\ - £ (рис. 9.14). С увеличением числа подключенных приемников эквивалепттюе сопротивление г„ уменьшается, что вызывает увеличение тока нагрузки I, надо-
55«
PjIC. У.15. ЕЧгулировечняя ка-рактсристикя leHeputipj независимого возбуждения
шт напряжения Jrt в сопротивлении rt и епкялжке наиряже-11 км (л
Вследствие реягции якезрх маптатныК поток и ЭДС несколько }меньшаются при увеличении ншрупл. что приводит s гк>пилннтсль-дому снижению напряжения. Ви сидмя хьрлк1Ернсп1ка при этом получается непрямо,! клен ной (харанеристика 2 на рис- *> Т4)_ Для получения и ним случае номинальною напряжения лрн тоге необходимо )'огат|я*-'|нна1ь при холостом ходе ne«ir<i.ibito большую эдс. i; = £.
Относительное изменение выражения генератора
, бГ, t^irnu . (V.
Awjrou =-------—--------100
сравнительно невелико н равно примерно 5—10%.
Если 1.рн холостом ходе устанавливать различные значения ЭДС, а затем увеличить нагрузку генератора, то можно лалу-нить семелств.т внешних характеристик, подобных характеристике 2, например характеристики 5 и 4 пз рис. 9.14.
9.7.3. Регулнровошая харякгерясгакп. Регулировочная ха* рактсрнстика 7, (Л представляет собой зависимость тока всвбу-ждс|[нм от тока нагрузки при л = const и 17 = const. Она nb-казывяст, как необходимо изменять ток возбуждения ирв изменении тока пагрузки, чтобы поддерживать напряжение.
Возможность поддержания напряжения путем изменения гпка 70 иытскас! из уравнения (9.11}, Как видно, для этого необходимо соитвегствуютиям образом изменять ЭДС, ним можно сделать путем изменения тока JB.
Регулировочная харикгористнта гспсратира (рас. 9.15} иелн-лст!на, что лбъяеиясюя иелииеипостъю внепиген характеристики и характеристики холостого хола.
Нслоигатком генератора езезависимого возбуждения является нч дго он требует постороннего источника электрической Л|сргяч для питания обмотки возбуждения. От указанного ис-•тостатка спобо.щы генераторы napajjjie.7bHoro и смешанного возбуждения.
359
9.В. СВОЙСТВА И ХАРАКТЕРИСТИКИ ГЕНЕРАТОРОВ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
9.8.1. Характеристика холостого хода и ирсщесс сачовозбу-ждеивя. Как эдддо рис. 9.J6, oi якоря генератора параллельного поэбу:ьдення получают питание приемник электрической энергии и Обмотка возбуждения Ш -Щ-у Соыааю первому закину Кирхгофа
Л = I н- Га
Мощнос1ь Р„ и ток обмотки воэбуждения незелияи, Обыэ-но Р„™ = (0.05^ С,05) Рт и Гш ч (0,02 + 0,05) х где Р|пя и — номинальные моше]ость и ток генератора; Р iidm н 4,Ы1М1 — мощность и ток возбуждения при номинальном режиме работы генератора.
При холостом ходе 1 — 0 и в обмотке якоря возникает весьма небольшой ток I, = It. На основании второго закона Кирхгофа при холостом ходе L’ = Е - = Е —
Падением сопряжения Inrf ввиду его малоам можно пренебречь и считать, что при холостом холе U — Е. Так как при но-досгом ходе той Jr—ls невелик, реакцию якоря можно нс учитывать. R этом случае, как и для итератора независимого возбуждения,
ф=Л(/.-.)=Л W, £=W,(M
Очевидно, связь между Ф и 1*, а также между Е и /ъ -ганнеит от параметров генератора а совершенно не зависит оз того, откуда получает имшняс обмотка возбуждения. Поэтому генератор параллельного возбуждения имеет характеристику холостою хода E(fJ (рис. 9.17), подобную характеристике хсператора независимого возбуждения.
Особенностью генератора дэршшелъпото возбуждения является тл, что он работает по принднпу самовозбуждения. Для тою чтобы генератор возбудился, должны быть выполнены два условия:
1) генератор должен иметь магнитный поток оиаточлого нами ничиоаяия Фо;
2) обмотка возбуждения должна быть подключена к якорю так, чтобы ею создавался магнитный поток, совпадающий по направлению с потоком остаточного ннмшпичиваиия.
360
Einc. 9,16. Схема включения । e-ncjwrctp;' t!:ipa.;:.ie:ihH U о иснбуж-. ЛЕНИН
Рис. 9 I7. К ци&сне»^ю процесса сеиерасора. Пара. UiEJtbJ । иjo истСуждения
Hpccicvc С.1м<>ви:.6уждииих МОЖНО ПОЯСНИТЬ следующим
Лк] jiHT5JLiM потоком Фв н обмане икарн индуктируется ЭДС FB, irtvi дгщ.'гнием rmiipciR л лбмптъг ктбу-жзения BOtniitdSI ТОК У>в, ВОзбу-ждаюший магнитный понж <1^ л- Фо. Погоном Ф, > н обмен не якоря ичдук-ги|>уе1ся УДС L, > ±,в, под лейсгнием которой в обмотке возбуждения возникает ток (Т[ > fno, вызывающий малинный поток фд > Ф], н т. д
Чтоб решить вопрос о том, до KHI-MI упанилнвшихся значений ЭДС Л’ и тока Гэ н<нбу,|н1ся генератор. запишем но второму закону Кирхичфа уравнение тиия нереюднеп о процесса самсрозбукгленик
Лн rfie
jfr rir '
(9.13)
где Ly И Св - ИНДуггнишюз И обмоток якоря И возбуждения; Гя dlVcfl и Д Jjn/Jt •• ЭДС самоиндукции, пени и кающие о обмотках якоря к во<-суждсиня eoe.iL'isHe изменения тока ip.
Когда процесс* самовозбуждения закончится, rff^: =0, г, = JR, а » = К н ямеьто (9.13) можно написать
^в(г* + ’’в* Гр1 = ?гХг
Таким образом, процесс самовозбуждения ьакопдится кв ла, келда Эде станет раиной кадснию напряжения в сопротивлениях пеги якоря li 0IJMU1-KH возбуждения,
Установийшиесл значения F. ц Jn гри заданном. <.4jiip<nws.,tcnrn гр нетрудно найти |рафичся.кнм лугом, .*|ди чё1о необходимо знать харак-геримнку золостогс' кода Е(/и) и ж1.-1ы--амлй|>ц}чо характеристику (,,Lr =/((,) (рис. У, 17'}. При равных значениях Ег по-tjhhm счзспве!-ыяснпо ыссто.чнхо всльт-ампсрпых яарашернстик г--/Ун). Устяно-ьцзшнеся зпя’кння Е н (в определяются тачками пересечения характеристики холостого хода н оольт-амперных характеристик,
361
9,8,2. Вкеимия характеристика. На основании второю закона Кирхгофа (рис. 9.16) L’ — Е — 7,гн. Но /„ = J + /п> полому Ег = Е - /гм - /,гу.
Падением напряжения можно лрсЕгсбрсч!.. Тогда
с; = е - 1г;
После замены в последнем уравнении напряжения согласно выражению L? - /г„ и решения оикхжтельтге» тока получим
Е
!=- (9.14)
гл4-гп
Как видно, уравнение внешней характеристики и формула для определения тока нагрузки имеют такой we вид, как для генератора независимого возбуждения. Однако напряжение U и ток I генератора параллельного возбуждения будут изменяться по-иному при изменении сопротивления гп. Объясняется :зтп тем, что у 1еисрагора параллельного возбуждения ЭДС не остается постоянной. Действительно, изменение сопротивления гч будет приводить к изменению тока f и напряжения (.'. Но так как
а Е то при этом будет изменяться также ЭДС Е. При юлостгм ходе генератора (г„ = "О, I =0)
Предположим, что при холостом ходе значения Е и 7± определяются точкой J (см. рис. 9.17). Поскольку ферромагнитный материал магнитной цепи насыщен, сначала при уменьшении согротнпления гп числихсль в (9.14} уменьшается медленнее знаменателя и ток ! возрастасз до (рис. 9 18); напряжение U снижается как из-за увеличения падения напряжения /гл. так и вследствие уменьшения ЭДС При некотором сопротивлении г„ ток возбуждения уменьшится до значения fn.i ь ферромагнитный ма^гриал окажется ненасыщенным Поттому при даль-лейтнем уменьшении г0 числитель в (9.14) будет уменьшаться быстрее знаменателя и гок I будет спадать. Несмотря на уменьшение падения напряжения }га напряжение будет продолжать снижаться из-за значчтельною уменьшения ЭДС £. Таким образом, при уменьшении сопротивления приемника т„ напряжение непрерывно снижается, ток I сначала возрастает, прн некотором сопротивлении гп достигает максимальною зна-362
Hue SL1Я. внешние карактср([-с!ики ечератароз ларлллс/ль-uoro (/) н независимого (2|
чсния j1^, а прн дальнейшем уменьшения /., уменыластся. Максимальный [ок достав1иет /mJa — (2 -г 3) /Ч(1Ч. Внешняя харзктсрис1икэ / генератора параллельною возбуждения прицелена на рис. 0JS. Там же папа ,]ля сравнения характеристика 2 генератора незакисимогл возбуждения
Из-за сиижегти! ЭДС напряжение генератора парап-юынл о возбуждения уменьшается при увеличении нагрузки и большей степени, чем у гспсраюра независимого возбуждения. Эго является одним ил сто недостатков. Обычно
= 1 ' 100 = 10 -г 15
Прн коротком замыкялнн 1>(1 - 0) [;=0 н 1п^О;в якоре будст^ш-пуктироня!нсн кеиплыим ЭДС £0 от потока остаточно!и намагничн-вания, поэтому ток tnpoiKtiju ламиидлня I — J, = нс можйг быть uii.jbUiHM. Обычно 'к<1пих. Следует, однако обратить внимание на то, что при внс-шшам коротком замыкании п течение нскСиСрОГО времени может сутсстнлвать н>к, ьо много раз превышающий номинальный. Jifl объясняется инерционностью, нносиыпй обмоткой возбуждения, и!-.ш плороЙ магнитный поток и ЭЛС «хпря не могут мгззовезпю уменьшиться ди 5начений. определяемых остаточным нами начинанием
9.&3. Регулирчвачнам харис!ернешка. Регулировочная кар^шЕрн-стпка генератора ппрал чс.гыюго но^буждения не огличается по виду ш харяхтерип ик итератора независимого венбужлення (см рис. 9.15). Однако поскольку у генератора параллельного возбуждения члнрняге-[:вв U меняется в оолылнх пре ie.iax, леоияодимс» и больших пределах изменять и тук исиоуждеиия с поменцькт pnjciaia гР.
9-Л СВОЙСТВА И ХАРАКТЕРИСТИКИ ГЕНЕРАТОРОВ СМЕШАННОГО ВОЗБУЖДЕНИЯ
Су-шественныи нелостшчне генератора параллельного волбу-жлеиим, заключающийся в отноептелшто большом измспсегии Напряжения при колебаниях нагрузки, легко устраняется у генераторов смешанного возбуждения с иомощшо второй, последовательной обмотки тютбуждсЕшх С, - С2 (рис. 9.19).
363
Гис. 9.J1}. Ос*™ включения гс-iret.ii । ора «. мсгпл] того визбуж;|Е-пиь
Рнс. 9,10, Внешние Хйрак I epin.-тиел I Енератпра смсшанпси о возбуждения
9.9.1. ХараигкрЯСТИКД ТОЛФСПНО жО-ха. Tai как при ХОЛОСТОМ XOJC {/=0) обмотка roci&'jouал‘лч.чсмо возбуждения нс врвлнмае! участия б образовании мш ннгнгио лотсе-л. то харавгтерис’1»1>са »«лоьто>о хода !Енератппа смсшалпого возбуждения нс отличается ст характерт-шки генератора паралдельншо ни<бужлсиия (см рис 9]7). Пропест: lhmo-В02б2-ж.415ии« icHcpHTnpii CMCinaJiKoro ытВуткдсння гтрч холостом холе i»piri-"L-:ii"T r том же порядке, ч1<з и 1Ч!нератора параллельно!u ui>ifi* ЖДСМИЯ.
9.9.2. (Злейшая мзрэетертстикя. f]<5 основ ашш второе о закона Кирхгофа (рис. 9.19)
0=£-/яг„-Jr, (9.15)
где rv — сопри j тле: шс поел сдои ательн Ой обмепки
Так как I, — 7 I /Ек то вместо (9.15) поручим
Если преиеЯречь. как ti jkijecc, палегпкм чапряясенИй Лр;,, го
C-L-J(rB+rJ. (9.161
Заменив в [9.16) напряжение согласно выражиняго (.’-Ir,,, нетрудно получить формулу для така:
Е
I -----------. (9 17)
rt + гь + г ,
Равенства (9.16] и (9.17) отличаются от соси вегсевукмпкх равенств для генератора иараллслыгсго попбужленик наличием сопротивления г; Однако обычно гс«га, поэтому влияние этого сопротгпьлеыия на измслетнге Етапряжения и гохн при колебаниях [iarpyiKiT можно не учитывать. Существенным яваиег’ 364
Рис 921. Рсгулирпрочная характеристика е eitejUTOpa смешанного ролбуждсния
ся то. яго последовательной обмоткой ___________________
ссылается дополнительная МДС, про- <7 у
иорциони.чышя току патрулей, 113-311 ко-
юрий мсннстся ма1ТЕит:птй поток и ЭДС генератора. Последнее нетрудно установите. с помоткыо лырзжепин
ф “Л (Лл'» +
h “W 1(Л^'в+ bt-J- + MJ.
Выполнив обьсотку (?] - С2 с соотаетствумпигм числом ВИТКОВ wc. М(1Ж11(1 получить при l|O.Mii]iajlbHCIM ИЖС 1(3 же ПИ’ пряжение L', что и ори холостом холе [характеристика Г на рис. 9.20), Как видно, с увеличением юкд / напряжение V достигает наибольптаго значения, после чего снижается. Последнее объясняется увеличением степени насыщения ферромагнитных материалов мае нищий цени. Послсдовашльнал обмерка при соо ГВСГС1 ауюшем выборе числа витков дает возможность получить весьма небольшое изменение напряжения генератора.
В том случае, когда по условиям работы, например, прн дуговой ЭЛетЕрЕКЕваркс, требуется иметь значите,ibhoc снижение напряжения, последовательную обмотку включают встречно по отпошепшо > параллельной работе DioMy парне. 9.20 aitnareCibyei хйракт ернеч йка 2.
9.9.3. Регулировочная характеристика. Если необходимо поддержать напряжение генератора, следует с помощью реостата rt изменять ток I, в соответствии с рех улировочной харакгери-i емкой, изображенной на рис 9.21.
9,10. СРАВНИТЕЛЬНАЯ ОЦЕНКА И ТЕХНИЧЕСКИЕ ДАННЫЕ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Одной из особенностей и главнейших псктсинств генератора независимые) ьо^бужценкн яилнагсн возможность с помощью обмш-кн Ынбуждекин измена к а пгирогнх пределах значение напряжения генс-раторл, а также его полярность. Указанна» но^можность используется, на пример.' в применяемой в различных областях техники системе гепе-рагор •• двигатель, клорая позволяет с помощью iенерДЕи^а осущесг-й.’еять изменение нашиты аращвнин .'i^HraiejEJi в широком длацазоне, а также напряяленыс его вращения (см. § О ,9).
365
К особенностям генератора псззы'снмого возбуждения с гслуст лт-игст и т;<гжс отноьио Ельни HEfxj.bicujE и.+менсние напряжения ори ИЗМС* неким иагрузхи 1 енврагора. Очевидным пезоетатком генераторов незаяигимого возбуждения является необходимость в дополни* тельцом источнике посеояенюго тока для питания обмотки возбуждения.
Говоря о генераторах нвзаьисимп, о побуждения, следует упомянуть о тологспсраторал постоянного тока Последние првдегаачяют собой 1ейвра1оры небольшой мощности (о€ычею до нескольких ватт], С-тгжа щпс Л-'гя косвен ноги измерения частоты йрДЩениЯ IiCJtOB маШ1Ш и механизмов с целью се контроля или для автоматизации работы ус анпиои в хаынсимпсти гп частоты вращения Малгитпос поле некоторых тахогенераторов возбуждается обмоткой возбуждении, некоторый - постоянными магнитами.
Как известно, у |'внерятЕ1ров независим то возбуждении Фа couxt, а поэтому 1 % k/Гл tn. Так как к тахогенератору подключается обычна небольшая ла! рузка (например, вольтметр), то и = £ — Е. Таким образом, и -z [/Д. Ках нипно, измеряя, например, напряженке талсяелераюра с помощью вольтметра, можно косвенным путем контролировать частчпу ВраЩенЛЯ.
Геисраюры параллельно! и ылзиуждемни [((лки.или нрлизколм i& ре.улмроваляе напряжения при поминальном токе нагрузки путем изменения тока возбуждения а огнодивльно небольших пределах — or 0|па1 примерно до ОДЭЬ'щ^. Кроме того, у генераторов параллельного возбуждения G-'tfVKuo измен «гь лоллрноетъ напряжения на выводах якоря, а знатеине напряжения в сильной степени зависит от нагрузки rcHcpaj орд. Бесспорным достоинством генератора параллельного возбуждения является то, что нет необходимости в дополнительном источнике для питания обмотки возбуждения.
Генератор смешанного возбуждены отличается от генератора па-pajuie.JbHOi'Cf возбуждения только тем, что нз-за последовательной обмотки напряжение на его выводах изменяется незначительно прн изменении нагрузки. Следует заметить, что в настоящее время почт все генсра'''оры снабжаются пос.зйгювапдль'нуй обмоткой возбужден ня с небольшим числом витков, что дает возможность получать более стабильное напряжение прн изменении нагрузки.
Генераторы параллельного и смешанного возбуждения применяются для питания обмоток якорей псревсрсилпыл двигателей по-с, оякншо тока с небольшим пределом регулираваклн частоты вращения. обмоток тлбуждЕяня синхронных генераторов и двигателей, электрических сетей постояшюго тока, вапн для гальванических покрытий, агрегатов для зарядки аккумуляторов, подьемнык электромаг-hhiob ит ;i П нлсгсигнйв врвмя вех б-пиее гинргА'О вместо генераторов для питания различных приемников постоянного тока используются полупроводниковые преобразователи.
В справочной литературе лрмводяген следующие оскоиные техни-че-лене дачньсв геиЕрлторпв: тип генератора; номинальная (отдаваемая электрическая) мощность, кйТ; номинальное напряжение. В; номинальная чистота вращения, об/мнп; КПД, %; номинальный icit, А. Кроме того, прнводатса ряд других сведений, я частности сведения
366
о способе возбуждения. Если otJMoiKH возбуждения выполнена на напряжение, отличающееся от напряжения обмоши икезря, .цнюл-нительио укалываются номинальные напряжение и нж обмотки возбуждения,
?Л1. КЛАССИФИКАЦИЯ ДВИГАТЕЛЕЙ ПО СПОСОБУ ВОЗБУЖДЕНИЯ. СХЕМЫ ВКЛЮЧЕНИЯ ДВИГАТЕЛЕЙ И ПОЛОЖИТЕЛЬНЫЕ НАПРАВЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ, МОМЕНТА. ТОКОВ И ДРУГИХ ВЕЛИЧИН
Сяоистна и характеристики двшахелей достоянши о зока су-щсстлспгтп зависят от того, как меняется магнитный поток двигателей при изменении их механической нагрузки Характер изменения магнитного потока зависит в сплтл очередь от числа л способа включения обмоток возбуждения, т. с. от способа возбуждения двигателей. В зависимости от способа возбуждения различают:
1} двигатели независимого возбуж-ьения:
2) цып а । ели перц-члелытогп возбуждения (ранее шунтовые);
3) двигатели nocjiCHOBaicjjLnoro позбуждечия (ранее сериесные);
4) двигатели смешанною возбуждения (ранее компаундные).
Двигатели незави-ьнмого визбмж.чингия находят применение. ьогда обмен-кн ягоря н возбуждения должны получать питание от различных IltrO'IHHKCD ПОСТОЯННОГО TOKO. ЭТО MCJKC I 6wjb H интчас нсщъгыснмния двкгамыен ЗничН1е.1ЫИ>Й muriHWTF. обмотку яноря которые изготовляют обычно на более высокое напряжение, чем обмелку нечбуж-.ц.'-ЧК1. Кроме того, |Kil;it.ibHoc ишанне обмоток якоря к возбуждения применяется для расширения лиапазопа регулировании частсны врлг jiicHHn и улучшения качества перешли игл процессов ггускн. торчс:*С£1И£ Л реверса ,'1цнгя1'елей.
При изложении материала сизчх.а будут раехмшрецнг свойства и хараичерииткм дннпггелеК нарюислъного, последовательного и смешанного возбуждепня. получакнпия питание сн нсючни1тн (ui спи) - неизменным напряжением, а далее, в конце S 9.18, — свойства и характеристики двигагс-'г» независим ого возбуждения обмотка якоря которого питается от источника с изменяемым напряжением.
Для более четкого представления о том, чем отличаюгия двигатели параллельного, послсдоватс-тт-пого н смешанною возбуждения, будем рассматривать их совместно предполагая д.w удобства сравнения, что раллнчЕтые двигатели имеют одинаковые номинальные данные (и частности, номинальные mSj -нитные потоки Фц|ЯИ, токи якоря /Я.|1(1Ч. моменты Мм(1Ч н частстп.г вращения иН41Ч).
367
На рис. 9.22 ЕфикЕлена схема включений двигателя смешанного мпчйуждения Магнитное поле двигателя чеибужчвется двумя обмотками: обмоткой параллельного эезбужлення njt.- Ш2 и обмоткой последовательного вочСужд&пня С; - С2. В двигательном режиме работы trfiMtiicH включены согласно. Кзж и у генератором, обметки параллельного я послсловатетьмо-ю возбуждения суидапаенио отлн-•faioTcjr в гонсч-руктиппом отношении (см. § 9.7).
Имея схему включения двигателя смешанного возбуждения (рис. 9.22), нетрудно представить сеБс схемы включения двух других двигателей. Исключив мысленно
Рнс. *2.22. Схем* нкл!0ЧСЕ1НЛ jlRMtl-l I С.1Я CMCItm нногп воз-буж.чечия
обмотку — Cj. получим схему включения ; 1,ин1 деели параллельпо-ю 1нн5>ждения; исключив цепь обмоткн 1UL-IH2> поручим схему вдедкзчения дни а 1еля иос.1едонагелыюго возбужлсзсия.
Q цель якоря двигателей включают реостат г, служащий ,ця пуска двяште.гсн. Им же ичл^лухл сн иногда для регулирования частоты вра-щепяя. Реостат гр пыючают в лени дню шелеп параллельного или CMCI-KINHOI О возиуж (СИНИ Jh!lJb Б том случае, если необходимо резу.Ш-ровгтъ частоту ppaintfErnsi ггутсм ичменениы машнтиого потока.
Направления такой якоря 7Г, возбуждения Г&. тока I, потребляемого из сети (ряс. 9.22), магнитного потока Ф. ЭДС Е. wo-мента Af if частоты вращения п двигателя зависят ог полярности напряжении иа иъиюдах обмелок якоря и зизбужденяя. d также от того, н циггателытом или каком-либо из гормознык режимов работает илектридашахсль.
ylsHtarcjjLiJLiM [lujaiuacjся режим, прн коюром направление чаитохи вращения л якоря определяется направлением дей-(ш*.мя моменха М детанеля. Нри установитипемся движении момент xtf двигателя уравнойет!П1пается статическим моментом М .. возникаю! ним па палу двигателя под действием производственной машины. В двихахельаом режиме работы статический режим является тормозящим и направлен против направления частоты вращсЕ1ия п. Тормозные режимы рассматриваются в § У.1Е*.
Поскольку направления токоя, магнитного потока и дру| их указанных выше вези чип могут быть раз яичными, целесообразно для упрощения анатшза работы двигателей условиться о положительных направлениях этих величин, За положитсль-
368
ное направление частота вращения я якоря прямом ольо из двух возможных се направлений, например то, которое указано на рис, 9,22, За положительные |[аграплеиия других величин примем их действительные направления при указагптом направлении нрагцевиА яяоря и рабепе электродвигателя в двнга-телт.иом режиме. Следует обратить внимание на ю. чти гок якоря Д направлен при этом от Я) к Я2, а ЭДС L — от Я2 к J?ls 1. е, против тока якоря и напряжения (cat, принцин действия двигателя в § 9.2)
9.12, ЗАВИСИМОСТИ ТОКОВ ОТ НАГРУЗКИ ДВИГАТЕЛЕЙ. СООТНОШЕНИЯ МЕЖДУ ТОКАМИ
Ток иогбужлення ,1вм1лгс1сй параллельного н смешанного возбуждения определяется по талонv Ома Ja L’। Гр) и. очевидно, не •Няш-ЧТ Ги HArpyicn диигы 1 елей
Чтобы вылепить, как зависит ток якоря от нагрузки, можно всс-лОЛЫЛВОТьСЯ НЗи&иныМ [юЛг'жениам о и-м, что нрн усгнюннишемси режиме, характеризуемом постоянной частотой вращения (и = const}, момент 5f. раишыемый двигателем. лчллси бьиь раьен мимешу ю-iipo iMH.itHHH Mf на его налу, т. е, Af< “ М = ЬздФГа
Прн работе деигэтсля вхолостую АД - 0 и. следовательно .М - 0. Лослс.-шее мСжег бьпн ЛИШЬ я ЮМ случае, kuiJia Дт = 0. Увеличение момента сопротивления ML приводит при установившихся режимах е iiJcnueiCTBj юшему увеличению мпмеша И iwia ,е т. а л начну и ’ici-ГЦ I}, По значению 1ОХЯ lt МОЖЯП судна ь о степени загрузки ДЯШ’ЙТС-ля. С точки зрения законов электрических пепси изменение тока uGhHCHH^jLjt icu, 4 10 при шменгеч!! Haj ручки дни1 a i ели менле’тя сч о ЭДС £' (см, $ 9.161.
Тик !, потребляемый .iauj a i c.ibm параллельно! о н смешанно! о нпобужденкя ич oc'i и. пгфе,utjяется ни неряомх* сикону кирхгофл:
л. очевидно, при изменении нагрузки также изменяется.
Ток возбу&лелия fn имеет относительно небольшое значение. Для [виг'аэтлеи хющчосчъю nr 5 до 100 сВт он рянсн примеряй {0/15— 0,02j <юч. Поэтому при расчетах им тасто пренебрегают, ствтня, что при iiOmhhxtj.hoh ни pjrite 7В.|,..П| Дтя двигателей последовательного ионЗужлгння при jiKiGwi нагру.лД’! Д = J.
W. ЗАВИСИМОСТИ МАГНИТНОГО ПОТОКА ОТ ТОКА ЯКОРЯ ДВИГАТЕЛЕЙ
Как указывалось, свойства н иарак-iврис-гпки различных двнгдте лей icocroHHHDio зега зависят от характера изменения их магЕ!ипЕого гни она при нлмененми bdi рузки. Поскольку ЗЕ>аче11не тока якоря мрак-
369
РнС. 9.2.1. ЗавкСи мОСтЗ) Ф(/„) ЦВИ-raie.ieii постоянного тока
теризует степень загрузки дэи* гятмя. рассмотрим зависимости Ф(/ж1 различных .читателей
У двигате.гя нараллсльпо-гч1 возбуждения Ф = Д (/иц'ш> = = f (1Д Гах как у двигателя параллельно! о ninfiy*,-icKHs ток I, = const, то н Ф = coast ж. Кривая Ф (/я) двигателя параллельного во.збуж.тсния приведена на рнс $.23 (прямая Ш).
У jiHma ie-тя псктлсловатсль-кого возбуждения Ф =/i
=/(Л) Прн работе дны1нгсяя вхолостую У, = У н Ф = 0. G увеличением najpyi*»i ток 1„ а значил, и магнитный поток Ф итрасгают. График Ф (I,) двигателя прцпелотатслыюго возбуждения (рнс. 9.23, кривая С) нало.мняает по решу кривую памэгЕютявалия стали.
У л»}1гат<гтч смешанного возбуждения Ф -.Шлп ш + /к>ч) При холостом ходе (/5 О) ,1.ВИ1а1е.Ть имеет кпнеччое значение магнитного потин Фф который возбуждается в этом случае только МДС обмотки параллельного возбуждения. С увеличением гока якоря Min ни । ный исток ногрйегаег (рис. 9.2j, цриная X}.
Гели vox «коря двигателя смешанного возбуждения изменит направление по сравнению с указанным на рис. 9.22. кт иоие ювагшвиля обмотка 6yij.6r размагничивать чяиемну н при некотором токе /Я1 <0 окажется, что Ф = 0. Kat будет показано далее, ток Г, <0 соответствует генераторному режиму работы :ujcripc>MBniarc.iB.
Представляет биллион интерес соотеюшспис между магнитными пигогамн лангатс.тсй при работе двигателей с itepej руисами (/„ > так ЕаЕ от значений мшнигных наклон .'(кпгитолси зависят значения их иомен/ая [см. ныраженис (9 91J, Как следует из рис. 9.23. при 7f2 > /?.точ Фс > Ф„ > Фш.
9.К ЗАВИСИМОСТИ МОМЕНТА ОТ ТОКА ЯКОРЯ. ПЕРЕГРУЗОЧНАЯ СПОСОБНОСТЬ ДВИГАТЕЛЕЙ
^ннсичостъ между моментом и током якоря oiipeje.ixEJLK ныра-жсписм 19.9):
М = А:„Ф/Н
Так как у двигателя jiapa_j.ic.n>Hin вшбуж гения Ф = const, до jW = ЛцФ/, kJ,. Зависимость W(7J двигателя параллельного возбуждения ггрмвадеаа на рнс. 924 (прямая Ш).
При 01Н£1<.-кте.1ьно Екбольшик нагрузках uunidje.in 1кк-.гсловатсл1>-ног<1 нопбужления фврромаЕ и к гны й материн.г мнгнктпой цепи дьнгате-
* Эдкь и и .'ичьЕЕСитеч ИЗМС1ЕСПИС магнитною потока из-за реакции якоря ис- учитывается
370
ля нс ППГЫП1РП При этом магнитный поток примерно ирсц1чрн.щ>"4-лен току яхоря (см рис 9.2Х кривая Q и можно написать
Ф = ХЛ/Я.
Учитывая эго, получим М = кifki/g = По мерс насышС' ния магнитной пени указанная квадратичная зависимость нарушается. Однако н в этом случае увеличение тока сопровождается более высоким гсмиом увеличения момента (рнс. 924, кривая С}. Кривая Л/(/я} двигателя смененного возбуждения располагается между зазвсимостя-ми двигателей параллельного и последовательного возбуждения.
Для получения требуемых врсмсп пуска и электрического торможения приходится устанавливать определенные пусковые и тормозные моменты двигателей, которые обычно преяыигвю!' номинальные значении, irytinjKhiM и l upMo-jHhrM моментам соответствуют пусковые в тормозные токи, которые также бывают больше номинальных. В свезя с этим интересно сравнить соотношения между моментами при 7а> > unbti а также соспноепсния межчу токами при М > Мяоы различны! двигателей.
Как следует вз рис. 9.24, при токе 7Л > /а, m Мс> М,> М1|Г. Больший момен-j при 7e> Jf тюи яи.1ястся одним нз преимуществ двигателя последовательного возбуждения: од дает возможность, палрямер, произвести запуск двигателя в меньшее время. Если сравнить токи дви!а-телей прн М > Мцоы, то окажется, что/41в-
Возникает вопрос о том, какие ыакеимальпые моменты в токи могут быгь дспгущеиы в ггченис короткого времени для двигателей пос-юяппого тока или какова их кратковременная перегрузочная способность по току 1, = я по моменту w
TTepefрузочнал способность двигателей постоянного юга ио току определяется условиями коммутации в составляет Xj = 2 4-3 (см. £ 9,6). Так как момент двигателя параллельного возбуждения прямо пропорционален току яюря. то, очевидно, для него Хи — X;. Поскольку пра 2, > Jjj.uuLt Aft.> Мш > Mt, такое же соотношение справедливо и для перш рулонных С1с.н.«юноссек различных , iawj а гс. icfi но моменту, т. с. ^’iMC > А.Иь> ^.VUJ-
Кратковременные пера рузки двигателей, возпияающне, например, прн их пуске».еле»тричссхом торможении н н других случаях, должны быть учтены при аыборе двигателей по мощности.
371
9.15. СООТНОШЕНИЕ МЕЖДУ НАПРЯЖЕНИЕМ, ЭДС И ПАДЕНИЕМ НАПРЯЖЕНИЯ В СОПРОТИВЛЕНИЯХ ЦЕПИ ЯКОРЯ. ФОРМУЛА ТОКА ЯКОРЯ
Соотношение между напряжением, ЭДС и падей кем напряжения в сопротивлениях цепи якоря определяется па основании второго икона Кирхгофа, согласно которому (см. рис. 9.22)
Г = Е + I, (гя + г) = А-.Фи + 1„ (га 4- г). (9.18)
Будем -считть, что у двигателей последовательного л смешанного возбуждения сопротивление гж nutto'caci в себя хакже и сопротивление последовательной обмотки.
. Из (9.18)
Как видно, ток якоря зависит не только от напряжения сет и сопротивлений цени якоря, нп и от ЭДС, ипдук1ируемой в обмотке якоря П.ри работе дви! ат спя вхи кцлую Af = Мс = С и, как было показано ранее, 1Я = 0. Из (9.19) следует, что ток можех быть равен нулю лишь в том случае, когда Е = L'. При увеличении нагрузки двигателя ток f„ возрастает, что можно объяснить только уменътгеиием ЭДС Е. Поскольку у двигателя параллельного возбуждения при увеличении иа)руЗкн магнитный поток пс изменяется, а у двигаюлсй нослсаовательНйГС и смешанного возбуждения он увелианийехся, уменьшение ЭДС может происходить лишь вследствие снижения частоты вратпе-ння двигателей.
9.16. ЕСТЕСТВЕННЫЕ МЕХАНИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ
Одной из важнейших характеристик электродвигателей постоянного и переменного тока является механическая яаракте-рисхххка л (Af), представляющая собой зависимость частоты вращения двигателя от развиваемого им момента. Учитывая, что при устзионявкгемся режиме работы момент двигателя равен моменту сопротивления па его вату (Af - MJ, можно сказать, что механическая характеристика дает представление О характере и степени изменения частоты вращения двигателя от его механической нагрузки. Поскольку к характеру и степс-372
нн изменения час гиты врашегпгя двигателя предъявляются со стороны различных нринзвидс1вснных машин и механизмов разные требования, механические характеристики двигателей предстали лют большой практический интерес, Кроме механтпе-ских характеристик зпачите-тытый интерес предстаплятпт тлек-i ромехапичсскис харахтсриг-тики. Применительно к двигателям jjocrujiiijioi o тока — что зависимость частоты вращения ст тока якоря г?(/я). Э.'Н’кхримсхацмческая характеристика даст возможность производить ряд расчетов, ивязнлиых о выбором двигателя i: других элементов ею электрической цени по iiaipcBaejwio.
Механическая и элекхромеханическая характеристики считаются естественными, если к двигателю подведено напряжение, ранное номкндльному. а и пели двигателя нет каких-либо допсынигедьти,!! резистивных элементов,
Ураппспкс естественной ъ-гектромехачичесвон характеристики двигателей нетрудно получип» из (9.18k perinin его опгоси-•ic.iwsr» частоты вращения к считая, что г - 0, тр -0 и Г,’ - L’nc^:
к,Ф (ГФ
(9.2(1)
Заменив в (9.20) ток fH согласно (9.9). получим уравнение со сствсяпзой мехаejbческой хэракхсрисхикн:
t M'S.
(9.2t)
Несмотря ir;i то что урдппктия (9 26) и (9.2EJ справе,т.ттгвы Л1Л всех двигателей посгоягнтого тока, тлсктромсха]Г|!чсскг1е и механические характеристики дднгатетей существенно отпи-ниогия друг иг друза iio объяснятся рьа1и*:пьгч чарзюсрочз изменении м;и uhihde о иСнока
Так как у двиЗНеСый постоянней О возбуждении Ф = =
- const, то электромеханическая и механическая характеристики двигателя прямалипейлы (рис. 9.25. характеристики Ш). При работе двигателя вхолостую (Л/ = Л/Е - 0 и (1) двигатель имсез часхоху вращения холостого хода, которая определяется первым членом уравнения (9.20) или (9.21): я,,гп ~ L/К^Ф.
При увеличении тзагрузки двигатели его часгоха врйшеиия уменьшается за счет узс-яичскил падении напряжения В сопротивлении гл. Изменение пли перепад частоты вращения при какой-либо нагрузке опредслясген вторым членом уравнения (9.20) или (9.21): ’
Дга = ии — ч =--— — -.
0 А-„Ф кек^Ф~
373
Рнс. 9,25, ЕсТССТВСННЫе ч.1ек1ромсханичес;кнс ItJ-} и мсхаыичесьис (о) xapax'j ериь iHiciT авкгатс.тей постоянного нчка
Изменение частоты вращения в процентах при переходе от холостого хода к номинальной нагрузке Длтч<% = 100(nttll -- НнггЛ/лспп -;у1я двигателей параллельного возбуждения мощностью dt 5 ди 100 кВт невелико и лежит п пределах примерно ОТ 11 ДО 3,5/0 соответственно.
Учитывая небольшое изменение частоты вращения, говорят, что двигатель параллельною возбуждения имеех «жесткие» cvi сствсЕптыс тлегтромеханическую и механическую характеристики, чей является важнейшим его свойствоы,
Следует заметшь, чю вследствие реакции якоря есте* ствсииис хтсктромскатгическая и механическая характеристика дни1К[с.'1я несколько отличаются от прямолинейных, а изменение частоты вращения несколько меньтпе. чем указано выше.
Одна из особенностей двигателя последовательного возбуждения СОСТОИТ В low, 1по он tic может работать вхолостую. Действителыго, если М = 0. ю J — 0 л Ф — 0. Как видна из
(9.20) или (9.21), при этом й-* х. т. е, частота вращении двша-теля беспредельно увеличивается
При увеличении нагрузки двигателя последовательного возбуждения возрастаю! иадснис иаЕгряжеиил в сопротивлении и мшиятиий поток. Как c,iejyet из (9 20). последнее приводит к jtnu.iHurcjjLtJOMy снижению частоты вращения. Полому э-тектромехаиическая и механическая характеристики дэигателя последовательного возбуждения (рис. 9.25. характеристики С?) получаются более «мягкими*, чем у двитагелл иарнллелъниго возбуждения, Но мере насытнетшя магнитной цепи жесткость харахтеристяк нозолегаст'
374
Двигатель смешанного возбуждения при работе вхолостую имеет магии-Штин поток Фо (см. рис. 9.23), которому соответствует частота вращения холостого хода нг*. = С7^Ф0.
Обычно МДС параллельной обмотки выбирается гак, чюбы иолучмгЕ» Нии порядка 1,5 п|!им.
При увеличении нагрузки дпигателв смешанного возбуждения его частота вращения уменьшается из-за увеличения магнитного пот-ока в падении напряжения в сопротивлении якоря. Электромеханическая и механическая харакюрислики двигателя (рис. 9 25, характеристики К) получаются менее «жесткими», чем у ДВИТЯ1еи1я параллельною возбуждения, у которого Ф = =- const, по более «жесткими», чем у двигателя последова ссль-iroro возбуждения, у которого масниишй поток изменяется п более широких пределах (см. $ 9.14).
При изменении нагрузки даигатслсй постоянное о тока происходит следующее. Предположим, например, что двигатель последовательного возбуждения работал с моментом .'/1 = Ла'.1 к часютсй вращения лх; моменту соответствовал ток /я] (см. рис. 9.25), Предположим далее, что момент статического сопротивления возрос и стал равен М<2>Мй1. В первое мгновение после увеличения мометгта сопротивления из-за механической инерционности двигателя частота праптеиия ле изменится и будет равна и,. Вследствие этого itc измелятся ЭДС Ех, ток /;(1 и момент Aft двигателя. Поскольку М<2 > М1} начнется переходный протесе, при котором частота прагцетшя и ЭДС будут уменьшаться, а ток и момент будут возрастать, Установившийся режим i гасту пит при частоте вращения и-,, при которой наа-уннг равенство М2 = Af.*
Построение естественных характеристик двигателя параллельного возбуждения может быть произведено но уравнениям (9.20) и (9.21). Величину й,Ф определяют обычно нэ (9.20Х подставлял в него дг = п„у^ и - 7Я0Ч.
Воспользоваться выражениями (9.20) и (9,21) для построения естественных характеристик длнгателел лослелопателълого н смешанного возбужлсиия не представляется возможным. гак как малинный поюк л их двш aie/ieO не остаемся постоянным, а закон его изменения обычно не известеп. Поэтому для ука-здгтптл двигателей естественные э.1сктромсхаЕ|Ичссклс характеристики м?(Г) приводятся в jcaiajieuax. Там же дается зависимость момента на налу от потребляемого тока: М{/). Имея яД/} и W(f), тзсгрудЕЮ лостроизь естествен г! ыс механические характеристики г,(М).
В том случае, когда сведения □ сопротнвлсеши якоря <гтсуг-ствукл, оно можй! быть определено приближенно из формулы
375
(9.22), полученной иа основании следующего соображения: при нонинальной нагрузке двшасе ]я истеря мощности в сопротивлении мкори составляет некоторую часть общих потерь мощности в двигателе, т. е,
(9 32)
где ^кг», — номинальная (механическая) мощность дбиейкля, кВт; 1]ги-Х11Д двигателя при номинальной нагрузке; ct - кп>ффиц1гв!ттк покатт.т!за;о1т’исг, клтгую часть обмпгх потерь состалляют потери мощности л сопротивлении якоря ru
Обь!Ч![о принимаю': для дэюателен параллельного возбуждении а—0.5; ддк двигателей смсшаенюго возбуждения х —0,6: для двигателей последовательней о возбуждения х=0,75.
Пример 9J Двигатель паралтсигого возбуждения имеет i';te-лукшенр номинальные данные; tr,]rftl = 220 В, Г,,™ -- 10 кВ-j, = = 1100 об/мип, 1111ГЯ -• 53 л, ту,,,., - 0,&ft •
Определить ЭДС якоря при номинальном режиме работы двита-rtuiR. ritJcipoHih ес i cci rit нную лгеелм и ческу кт ха рыкт ер LtC j нку rjihjarc-ля.
Решение. Из формул (9.22) я (У 19), полагая г=.у. пойдем
’ /„,).Н)*<ь 0,3 Ом,
*||ПИ \ Пвоы /
Сном = Ь' - <н™^1 я» 204 В.
Иа уроиаиис (9.20} при л,^, 1Я0М и уравнении (9 10) шзлучмм
Д Ф^ =1X185,. АиФ = -^-s 1,76.
" 0,105
Уравнением естественней мсхлюг1схкай характеристики будет
Мт, J^w*5
220.
0,183
- .JIlW % 1200 - 0,92 М.
0,145-1.76
Для построения харахтернегн-ки лостаточкр лнагь координаты ее двух точек, Ннгтример, прн реаяме холостого хода .V = 0,
Рис. 9.26. Механические характеристики двигателя гтараляслыюго возбуждения к примерам 9.1 $2 и 9.4
376
л, = л0 = С//йгФ ar 1200 об/мин; при номинальном режима л = м|тч — = 1100 об/мин и
Естественная механическая характеристика двигателя приведена на рнс. 9.26 (характеристика 1).
9.17. ПУСК ДВИГАТЕЛЕЙ
Пуск ДВН1 QTCJJCH постожпюго тока проитподлтря С П0-мищыо реостата г, включаемо! о в цепь якоря лвигитсля (см. рнс. 9.22}, Необходимость в пусковом реостате может' бить пояснена с цемишыс г|юрму.1ы гика (9.19).
В первое мгновение после подключения д в шанеля к сети ri = 0 а £ = \,Фл = 0. Поэтому без учета влияния индуктивности якоря начальный ттускопри ток ятсоря будет /м ,, — Сг/(гя I г).
Если производить пуск двигателя без пускового реостата (г - 0), тс начальный-пусковой ток будет огранютниаться лисп, небольшим сопротивлением якоря, например идя двигателей мищноегьёо от 5 до 100 kBj окажется в 10—50 раз больше номинально! о 1. Такой ток медоиусгим прежде всею по условиям коммутации двигателя, так как при этом возникает недопустимо интенсивное искрение пол щетками. Кроме того, прн саком токе лиигатсль развевает слишком большой ипча.^ьпътй пусковом момеш, который .может' привести к недопустимым уикорешЕя.м и поломке механизмов. Пуск дкшаселн без пусковою рсосхнха при шианим о< сети относихмельно небольшой мощности сопровождается снижением напряжения сет, что ухудшает условия работы других потребителей.
Рассчитав соотпегствутощим образом сонро1нвдспие пускового реостата, можно ограничить начальные пусковой ток и пусковой момент до требуемых значений. 11рн увеличении частоты вр-шцепил якоря ЭДС возрастает, что приводит к уменьшению тока и момента. Это и от еоляет постепенно уменьшать сопротивление пускового релстдга г п процессе пуска двмгате-1Я.
Обычно полное иопрспивление пускового реостата г разбивают на несколько ту пеней (рас. 9.27, о}, число которых определяет число искусственных электромеханически* п механических характеристик, на которых двигатель работает при пуске.
1 В дейс1иигель]1зсти из-за индуктивное гн обмотки якоря нуско-tsofi тох несколько мепыпе укизалиых значении.
377
Уравнение искуосгвсиныч плектромехапттческид я механических характеристик (рис, 9.27) нструцно иш^учить из (9.20) и (9.21), заметив в них г, на г, + г:
Сг Д(г,-Ьг) «и = . _ “ -_ - 1
“ *> М-Ф’
Характер изменении mbihhihoio ишока при изменении нагрузки не зависит от сопротивления цепи якоря, вследствие чего искусственные характеристики двигателей имеют те же особенности, что и естественные. Исключением является лишь то, что большим добавочным сопротивлением реостата в цепи якоря соответствуют при том же токе /ж или моменте М меньшие частоты вращения и, слодоваталъпо, более «мягкие» характеристики. Эсе искусственные характеристики двигателя параллельно! о возбуждения (рис. 927,6}, а также смешанного возбуждения (рис. 927, в) проходят через одна а те же точки холостого хода. У двагэтелей последовательного возбуждения независимо от значения добавочного сопротивления цепи якоря при М = JWC -» О 1Я —* О, Ф — О, а и оо (рис. 9.27, г).
Расчет ступеней пускового реостата и их выключение в процессе пуска производятся таким образом, чтобы момент двигателя изменялся в заранее выбранных пределах — между максимальным (51*) и минимальным (М2) значениями, которым соответствуют токн якоря Л и 7S. При подключения двигателя к сети в цепь якоря должны быть включены все ступени реостата, чему соответствует на характеристике / п = 0, Г, = /j и Af = М,. Так как Aff > начнется переходный процесс, при котором частота вращения и ЭДС будут возрастать, а ток и момент уменьшаться. При п = ян I, = 12 и Af = Mj ступень реостата с сопротивлением г* выключают, следствием чего является переход двигателя на характеристику 2 и увеличение тика якоря и момента до значений Л = Л н М = Mt.
Далее следует разгон двигателя ио характеристике 2 и т. д. Установившийся режим наступает на сетсстве1тпой характеристике при частоте вращения лс, при которой М — JWe. Во многих промышленных установках выключение ступеней пусковою ресютата производится эвюматически.
Oi выбора значений моментов W, и М3 зависят время пуска, число пусковых ступеней реостата и плавность пуска. Наименьшее значение момента М4 должно быть больше М.. С точки зрения нормальной работы двигателей наибольшее значение момента определяется условиями киммул-зупти; 378
Рус. 9.27, Схема пускового реостата (л) и иугконме механические характернееикн диие&тсл₽н (й, я, г)
очевидно, двигатель последовательней о возбуждения может иметь 6o.Ti.inee значение моменй М t (см. £ 9.14).
При пуске двтй гелей параллельного и сметнантюго возбуждения сопротивление гр (см. рис. 9.22) выключают, чтобы производить пуск при большем значении магнитного потока. Как следуш из формулы Л£=АыФ./1> это дает возможность получать требуемые значения момеша 2Иг при меньшем токе чморя.
Для расчетов, связанных с пуском, и нестроении искусственны! элеятрпмелэпвчиких я меланивескнх яарэхтеристик двигателя параллельного возбуждения можно воспользоваться уравнениями (9.23).
Чтобы можно было использовать выражение (9.23) для двигателей последовательного и смешанного возбуждения, заменим в нем ^,Ф ее выражением из (9.20). В результате получим
и - Л/г,
(9.24)
Расчет искусственней электромеханической хдрагггрнстикн по уравнению (9.24) принхво-гят в слсдутмдсм порядке. Задаются таком якоря /в^ пользуясь сстистиенчой хзеттромеханической характеристики 'iBiiiajaui nJ/), по току ! = 1, яйлолиг частоту вращения по уравнению 19.24) и<хчсчк1ывагот частоту нрницении лп> соотаетсттуло-гпуто току /и. Рассчитан характеристику ч зиая таниимчосЕь ,W(J) дын aj-еая, нетрудно построить нск-улливнлусо мсхлЕМ-ссскую ларавтс1 ристмку ли(.И).
Пример 9.2- Для двигателей примера 9 1 определить полное со-прогивчсЕгис Е1)С1гон(|| и реостата г. сспи ipctneicjf гг«г.|учн-|ь начальный njCKDbOfl МОМСЛТ М|| = 2,Л М,|ПМ- Построить ИСЬу'ССТВСЕ1ИуК1 чехакнче-ск>н1 характеристику двигателя с сопротивлением г.
Решение V дИнТагеля паря.'1ле.1ьнт>ЕО побуждения ТОЕ прямо
379
ispi'HOpHHCiia.ieu моменту. Поэтому Мшъный пусковой то-к будет
" 2,5Wll™_2,5Jai.,„-2.5 53 i 1.12 А. jW-iiciw М |к|]|
Полное с«1ггротз1в.7ение иусцшого реостата г • 1.37 Ом нршлсм mi (9 19К положи! £ •= 0.
Исхусстенняя механическая хараггерггстнва ввягагв-ы подчиняется уравнению
220
,1^Л(Ф2 (1.185
.М(0,Л+ 1,3^ 0,18ft’ I 7fi
5.Е 5f.
Механическая характеристика, с<инкеги1ву[ошая г J..47 Ом, ляна на рис. 9.2fi (характеристика 2).
9.1S. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ
Д.!я получения высокой прои<н<1.читс:п1,п0сти и хрсбусмой точност и или шероховатости обрабтки ичделич, остановки ис-пагнй!е.;1Ь!к:го органа производственной машины в нужном месте с здда1пи>й стеисныо точности и j i. приходится принудительно изменять чдетоту вращения или скороесъ линеиио-। о перемещения исполнительного органа, Принудигелнпос гп-меислис чистоты вращения или линейного перемещения исполнительною органа нрои'зиодстйеннон махинж«т п cooTBticiuHH с требование.’.! ироипйолствинпого процесса назидается pel уди-poijajiwev СКОрОСХХ!.
У иисгоягиее время взамен коробок скоростей. варииторив ч т. н. Bix больше применяется электрическое рсхулированле яас“О1Ь1 врьшетшя, ъ основе которою .лежит использование ис-к-усстпепныл, механических характеристик электро^визаих^еи. Электрическое регулирование частоты вращения приводит к упрощению, облегчению и удешевлечию механической части машин н механизмов, упрощению управления, возможност получения плавного регулирования часюгы вращения в нгиро-ком диапазоне.
При питании двигателей от источника шлггоятгиого напряжения (см. рис, 9,22) частоту вращения можно регулировав следующим образом; 1) изменением сопротивления пепи якоря; 2) изменением птгачения магнитного потока,
Еигсстпечно, что второй метод регулирования применим лии'Ъ к двихагелям параллельною и смешанного возбуждении.
Для pci улнрояаним часто™ вращения путем изменения сопротивления дени якоря обычна испадьэуют тот же реостат, 380
•ii-n н для пуска двигателя. Например, с помощью рсоссата, .та которого на 9 27 изображены механические харамернст-•,-и. прн моменте можно получить частоты вращения
н4. г;5 и /е6. В том случае, когда необходимо иметь и другие частоты вращении, реостат снабжают дополнительными ступенями сопротивлений Реостат, кспольауемый как для пуска, ик и для регулирования частоты вращения, находится в 01ношс-рнн нагревания в более тяжелых условиях, чем реостат, служа-щпй To.TE.Ko для пуска,
При изменении сопротивления в цени якоря происходит с [сдующсе Допустим, что двигатель пАра.оюдыгою. послсдо-saieilbHOJo или смешанного возбуждения рдбошсх □ естественной харякхерисхикс с моментом М = М4 и частоюй вращения нс (см, ряс, 9.27Y В первое мгновение после включения s пень якоря реостата с сопротивлением г —гх+^+гг из-sa инерционности двигателя частота вращения не изменяется. Увеличение сопротивления при пснэмстлтой частоте праптения приводит к уменвп!енпю тока якоря, а значит, и момента дии-«ашля. При частоте пратпения л4 дьигаае.ш иерейдет иа характеристику I и будет развивать момент Ms. Так как М, < .Мс, то начнется переходный процесс, при котором частота вращения двигателя Будет снижаться. Это вызывает уменьшение ЭДС, я следовательно, увеличение тога якоря и момента двш актин Установившийся режим наступает при частоте вращения н4, при которой М - Мг.
Рассматриваемый способ регулирования частоты вращения не требует сложного оборудования и дает возможность ш>лу-чч1ь любую лохижсштусо частоту вращения при заданной нА’ । рузке. Однако он имеет и существенные недостатки. Одними из in них являют сн «мягкие» мскусстнсшгыа механические характеристики, благодаря чему час-имя яращепия при датгнрм сопро-1и*'тенни сильно згвиент от нагружи двитатсля. «Мягкие» характеристики затрудняют получение требуемых, особенно kiiiKin частот вращения при различных нагрузках. Друзой недостаток заключается в гим, что регулирование частоты вращения сопровождается потерями мощности в реостате, ко-jорые возрастают' до мерс увеличения сопротивления г и сЕгнжечкя частоты вращения,
У множив правую в левую части уравнения (*>.ГЯ) чз ток якоря, но-. ivjti.M уравнение баланса мощности испн «коря
иц-ш, + iiir, + п
j- Е'I1, — ЧРНГНОСТК тютр?б.-исмвя нн ой гы; fj, — э.1«ктрома1иитняя *HKilEiOCTE. Т с МОЩНОСТЬ, ЦрСООрЯЩСМая Электродам!ЯГСЛСМ нз ЭлСХ-
зиг
Piw. 9.2Я ^лек171ом£саимчеекэя характеристика л«(1) и зависимость jWi'T) (и); мехаянтахие характеристики п(М) двигателя последовательного мозбуждепив к □рвмерам 9.3 и 9.5 (6}
греческий в механическую; (ги + г) — потери мощности в сопротив.чс-пиях нспи якоря.
Так как при работе двигателя с М = М( = const tor якоря ие jhbh-ент от с£.1прС1тпн.1ен11л в целя зверя, то при увеличении госледпего мощность Ci'/H остается постоянной. Происходит лишь сс псрсряспре-деленне с увеличением сопротивления г и снижением частоты вращения электромагнитная мощность уменьшается, а потерн мощности возрастают При я-г О Е!„ -»<Х a 72(re + z) -* 1/1.. Значитьлъпыс потерн мощности н цени явора приводит к снижению КПД установки.
Пример 9 3. Двигатель последовательного возбуждения имеет следующие технические данные. l’HJM=22O В. Рнач = 8.5 кВт, п!юи = 770 об/мин, 1^ = 50 А Сопротивление якоря г. = 0,75 Ом. Есте-ствеппая электромеханическая харахтеристнка ие (7) и зависимость М (/) дины иа рнс. 9.2В, а.
Построить естественную механическую характеристику л,(.И). Определить сопротивление резистора г, который необходимо вклю-чИ1ь в цепь якоря, чтобы прн моменте jtf = 50 Н-м гюдучнтъ частоту врлшения п = 600 об.’мнн. Пгялроить искуественЕ1у1О механическую характеристику ;ju[5fX cootbctciвующую сопротивлению г.
Решение. Естественную механическую характеристику п4.(Л1) (рис. 9.2Я./Г| строим с иомощыо графиков гг,(1) и М(/).
По «данному моменту М = Stl П-м с иомошыо кривой Af(/) па-ходим ток J =29 А = 7И. после зсто по хирастерньтике >гД/) определяем частоту вращения л, • 3050 об.мин. Из формулы (9.24). полстнинв в нее ГГц = (ИЛ об/мин, Д = 29 А и ли — 1050 об-’мип, определяем, что сопроти-М!№<е г = ?ф? Ом
Расчет иску ссгвснной мсхлннчсопн харам еристнки производят в следующем порядке. Задаются моменты, например ЛХ = 100 1Т-м, зю кривой М (J) определяют ток / = 4В Л = пользуясь х;<рястернст'нкой 382
(Jk по току J = 4b Л находят - 7ЯС ой чин По |]юрчузс (9 24) .чгрслеляют 'HdciO i v вращении =212 об/мни
Исвуссгяенняя чечипв'гсекая характеристика jjn(.W) приведена на р:к. <28.о.
Для регулирования числены вращения двигателей парал-.ig-i.noro и смешанного возбуждения путем изменения магнит» япгг> потока в цепь шунтовой обмотки включэюг реостат г им. рии. 9.22). Изменение сопротивления последнего приводит к изменению тика /н и, с.'|стопатстк1то, магнитного потока,' При реагировании часипы вращения указанным метолом резистор г из цени якоря обычно выключают
Рассмотрим бсыес подробно данный метен применительно к двигателю параше зьиою возбуждения Зависимость между частотой крашения и мгинитным потоком при М = силм огре» теляется уравнением (9.21).
Чтобы можно было С0С1йвнть представление о характере шмепетшя частотъ- вращения, на рис. 9.29 приведены зависимости !Г(Ф).
Ках видно, при работе дингитсля вхолостую (М, — А/ । — (1) с ’/мепыпезтисм магнитною потока часзозд вращений возрастает и при Ф-»0 п-»х Если же двигатель нагружен (М = = Ме т* 0|, то етрм уменьшении магнитного потока частота прз* пения сначала возрастает, а затем, доетиигув максимальною значения, уменьшается. Одна и та же частогя вращения в случае М = Мс т*0 может быть получена при двух различных значениях магнитного потока Однако рабочей областью, в кою* рой обычно производится регулирование частоты вращения, является областз., соотаетстпуюзцая большим магнитным потокам. где с умеп1.тп21[исм потока частота вращения возрастает.
На основании выражения W = А.^Ф/, можно также слетать ВДАМЫМ ПЫПОД □ ГОМ, 4 10 При М = Afc = const И умент»[т!ег1ин магнитного пшика юк 7, возрастет. Это необходимо учиты-ban. при выборе четности пвпгателя
Иг уравнения (9.21) следует, что механические характеристики двизагтя параллельного возбуждения л(М) при разлитых ’НЛчениях магнитного потока прямолинейны, меньшим значе иия.м магнитных потоков соответствуют большие частоты вращения и более «(мягкие» механические характеристики (рис. 9 30). Налримгр, установив ПОТОКИ Фь Ф2 и Ф5. получим при моменте сопротивления Мс частотзл вращения иь иг и flj.
Передал <п одной мемэличоскри хлрч*герметики к другой пропело . ит не при постоянной hucioie вращения, а ь сиотьеклаии с так пэзы-iincMoti лнтнмччсскснг хирякнернстигой л(М). показанной лл рис У.30
383
Рис 9 29, Зависимости я(Ф) двигателя параллельного возбуждения При paiTB'BiLTX момента!
Рис. 9—50. Механические ларак-герис-iпни лиимтсля параллель-пото кояПужлсиия при различных магнитны; потоках
пу*-.кi«рим. Э10 объясняется тпачительнай индуггинностыс обмотки ночбужделия. из-за которой ичмекснис магнитного потока лроисш-ип нс млюйянкк a постепенно. олЕюсремеино с увеличением тастотьг прошен ин.
Одним из досюинств рассмотренною способа рсгулмропа-шт частоты нрашенин авлмсгся его ткономнчпоспь, гак как дл-лол 11ителтльи потери мошиостл в регулировочном реостате неьелмки. К достоштстяам cneuyei о гнести также лостаючио «жесткие*' механические характеристики, что облегчает получение нужных •часто! вращения при различных нагрузках.
Ссрьсчгалм недостатком следует считать то, ко регулирование чаишы вращения путем изменения магнитного потока можно иронзЕпдить лишь в области лперх от естественной механической характеристики
Пример 9.4. Определиib. во сжачькб рлч необходимо уменьшить магнитный поток двигателя примера 9.). чтобы дри .иемснтс Л/ - 45 И м получить часкну «ряшспия ft,, 1600 <ю.‘мнн, У становить,' не будет ли пеpei рева 1 нся двигатель при ;и1итсльпой работе с неллб-natuusi полисом. Построить лекусетвеазпую механ>зчеь1гуга характеристику, соответствующую tK-.'ia6,ici]nowy ютану.
Реше ссие.Заменнн в (921) fcy череч k^/O.LOi и учитывая, что «аг-питлый iidtok ч частота арашенич соотэстствули искусетвелпой меха-ннчехъон характерисанке, найдем
С I /Г~Ь V О,105.Игх --
При номинальном магнй1ис»м потоке — O,1S5 Таким образом, мвжитный пою к необходимо уменьши 1ь к
При работе с «L-jafi зелиыч потоком
, М М- 0.105 45 0.105
/„=-------" ------------5 36 Л.
4% М’„. 0,1Л2
Так как ток якоря меньше номинального. то дыпагелъ персре-иагься не будет
Искусственная vesauw'FC'.t.iH характеристик? с пслао.ташым потч-ком подчиняется уравнению
L- 220 Л1-0.У
п,,» ----------т= ----------------t 166?-1,8 М
54Ф„ ЬЛлгФй 0,132 0,132-1,26
и tana па рис. 0-26 (характеристика J)
Как было отмечено выше, серьезным ислостшком регулирования чистоты вращения путем изменения сопротивления в цепи якоря при обычных темах включении двигателей (см. рис 9 22) является сложность получения егрм различных ншруз-•<ах пониженных частот вращения из-за слишком «мягких» механических характеристик.
Для устранения этого нслоспизд находят применение разумные другие снссобы получения искусственных механических характеристик; отличающихся большей «жесткостью».
Налримсц ,>«»н«иьяо тастп применяется тгщенииомстричсскче вкЗЕочсиие двигателей, при котором якорь двигателя подключается к целителю ннпрвжаннл (потенциометру), с помощью которого можно г[о'гуча!ь иеншжеипме напряжения ил выводах якоря н как следствие ’-пониженные частоты гм» нращелия при достаточно «жиякюы механических характеристиках. Следует- заметить, что с увеличением нагрузки напряжение якоря при лотепциомстрнческом включении син-rt,aeicM. а это приплдлт к уменьшению '(жссткосли» «.араьтсрнстик,
В случаях особо высоких требований к «’ткесткос!н» механических хнрактеристк находят применение различные вариалты систем с регутируемым напряжением, подводимым к якорю jam йтеля.
Простейшая схема олнию из яариаиюв 1акои системы (системы генератор - двигатель, Г-Д) приведена па рис. 9,31 В этой системе якорь двтателя ЯД независимого возбуждения Сислипсн с якорем юнератора Я1' независимого побуждении, ыморый приводится ВО вращение приводным лпига гслим Д/J. Обмотки возбуждения двигателя ОВД н генератора ОВГ полу-4UJOT липшие от постороннего источника постоянного тога через ресмлат *"( и потенциометр г:.
Перед пуском двигателя необходимо установить даажкн реостата гг и потенциометра ri в положения, уяазатптыс ыц
13 ’B.necrpcisxt'uiLj
1'нс. 9 31 Схема iipot гейшей системы генератор • ,'inu! .<ГСЛЬ
Рис 9 52 Ме&иннчсскис характс-ркспякн JbltJiieJIR В СЯ€Т?ме ГЕ-нератор —двита lE.ib
рис. 9.31, и произвести пуск двигателя ДП. При лом МДС обмохки ОВД создаем наибольтгтия магнипЕый поток Фд двигателя, а мшнитпый поток Фг генератора и, с-тсдопательяо, его ЭДС Ь, равны кулю. Очевидно, icpw этом якорь двигателя ЯД □cjaitE!lh н покое
Для пуска дви!зтс.пя следует переместить движок хеогепцно-мчра г, из указанного положения, например, влево, lei да от-ник-iej' тик fb , МДС обмотки (Jtil Ссылает магнитный поток Ф, генсраторщ появляются ЭДС Е, И ток 1а. Благодаря взаимодействию тока /в и магиитнохо нитка Ф_, двигателя якорь ппслелчею ЯД приходит во вращение.
Уравнение механической хлрлк1еристики л(Д/) двигателя в системе Г-Д выводится аналогично уравнению (9.21) и цмеех вид
к,
и = —
- и0 - Ди.
(Я.25Э
Как видно. механическая харакхсристика л(М) представляет собой прямую Линию. Вследствие небольшого суммарною сопротивления г,+гА механическая характеристика получается достаточно жесткой
Регулирование частоты вращения двигателя .можно про-извСх!Е!ТЬ двумя Способами;
1) изменением 'ЭДС icncpaiopa £, ири Фл — const;
2) изменением магнитнии) истока ф, двигателя при £, = = const.
Второй способ pei улироаанпя част ты праснеиия был рассмотрен ранее, поэтому осхаЕювнмся только па первом способе.
386
Из (9.25) следует, чю при уменьшении ЭДС гспсраюря с помишью лотенпиомстра г4 будет изменяться только первый ччен уравнения, определяющий частоту вращения холостого кода лп Biopofi член уравнения Дч, которым определяется изменение частотк вращения, вьпиатшос нагрузкой, Судет оставаться неизменным Таким обратом, механические характеристики нри различных значения* ЭДС генератора представляют собой семейство параллельных линий (рис. 9.32) и, например, при момента Мс сказывается возможньтм по.чучнтъ частоты вращения я,, г2. л3 и я4.
Кроме широкого диапазона регулирования чааош вращения система Г Д имеет- ряд других достоинств. Одно вз них состоит в том, »:го управление двигателем осуществляется путем воздействия на дени обмоток возбуждения, мощности которых относительно невелики.
Если переместить движок мотенципмстра из указанного положен ня вправо, изменится направление тока Г. г, ЭДС £( я в итоге — напряжение вращения электродвигателя.
Исгтп-inyse дчя питания обмотки возбуждения генератора какой-либо регулируемый суммирующий усилитель (например, зтектромашиннмй, магнитный или электронный) и иримепив в системе обратные связи, можно дополнительно повысить жесткость механических характеристик и изменять их конфигурацию.
К основным недостаткам системы 1— Д следует отнести большое число машин, сравнительно низкий КПД, зиачи* телытыс гнбяри~иыс размеры и высокую стоимость.
С развитием полупроводниковой техники' оказалось возможным избавиться от недостатков, присущих системе Г-Д, путем использования вместо i емератора с приводным двигателем полупроводникового (гиристорного) преобразователя переменного тока в постоянный с регулируемым напряжением, 13 системах с тиристорным преобразователем можно получить характеристики, аналогичные характеристикам систем Г-Д.
В настоящее прсми уже работает большое число систем с тиристорными преобразователями на различные мощности и я различных областях техники. Их число будет в дальнейшем увеличиваться
ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЕЙ
Как известно, для сокращения времени торможения при остановке производственных машин и механизмов часто применяются механические тормоза Сокращение времени тормо-
13 *
387
жения, особенно а случае лспродалжитшпшого цикла работы, приводит- к сушеетпенному повышению производительности машин и мсхянпзмоп. Недостатками механических тормозов яллямлсн быстрый'износ трущихся поверхностей, сложность и необходимость периодического рсхулирования тормопяшсю усилия,• необходимость дополнитьльио! о меыа для размещения тормоза и его соединения с механизмом.
Вес перечислении с недостатки устраняются, если для указанных пелен 1шес<о механического тормоза использовать свойства ruTCK’iponnHTAJCJTeti работать в тормозных режимах, j. с. работать по существу в хачсстпе генератора я развивать нс вращающий, а тормозной момент.
Во MiTorux подъемно-транспортных машинах [кранах, лифтах, эскалаторах и т. д.), где возможно движение под действием сил тяжести, с помощью тормозного момента электродрига-ге-ля обеспечивается постоянная, установившаяся скорость оиу-СКнЕгна грузов,
Э'1ектродвягатели постоянного тока могут работать в трех тормоптых режимах:
в режиме противовключения;
в генераторном режиме с отдачей энергии в сеть;
в режиме динамического торможения.
В любом из тормозпмх режимов ътекхролвигагсль работает как генератор, преобразует, иаиример. кинетическую энергию движущихся частей либо потенциальную энергию опускающегося трупа в электрическую энергию.
9.19. L Режим тфопгвешыиочешя. Режим прптивовключеаня Представляет собой режим, в котором якорь двигателя под действием внешнею момента либо запаса кинетической эпер-
3SS
гин вращается в направлении, противоположном гому, и котором он должен был бы вращаться при данной схсми l-i о включения в двигательном режиме (или вхолостую).
Нежим про1мвсжк.1К5ченлЯ удобно ПОЯСНИТЬ tta примере груЗО-|юдьемиого механизма, где этот режим может Сш-кь нснолыован для опусездик С tUJCIOMMHOft скоростью грузов. Предположим, 410 L IIO-мошыо двигателя пяра.ч.1сл и hoi xj, носзедьвателыюгс или смешанного нодбужцепяя. ьмточепного по схеме рид 9-22 и, работающею в дпига-тсть-ном режиме с моментом И = и чаетотай крашения п, поднимается груз (рис.. 9J.3). Момент \f обусловлен силой тяжести 1рузд, । рение в передаче j:c учитывается
Гьди при рубеле двигателя с частотой вращения л в цепь якоря иьлючнть реостат ’ 4 доепптнн большим сопротивлением (см. рие. 9.22). то пвигатсль перейдет на несу ехт венную характеристику и о первое mi нонснис бучез развивать момент Мг Поскольку Wt < Мс, частота вращения нечист умсьыпагьс*, чп> бу'&т сопродождаться узс-;-,1<чонием1 момента двигателя Как видно. прн rt = 0 Л#а < iVfc. Полому после остаиорхч лвтатеиь под действием момента Л^, вызванною смой тяжести груза, начнет врзшаться * прети нет о. южную сторону (л1 < 0), a rpyi буде| опускаться
Так как Е = £сФв. то изменение направления вращения приводит к изменению направления ЭДС якоря н следует счнпги. Е < 0. Как видно из формулы (9,19),
Г U + IEI
мрк Е <0 -14>« не изменяет своего ыаправ-'чнн» (4, > О), вследствие чего tie изменяет поправления и момея г двигателя (Д4 > 0). поскольку М = = ^.ч<Мя-
Т&в как при ч<0 мсмент наириьтен против частоты ирищьиня п якорь вращается в направлении, ир<инвоеюлож[ЕОМ двигательному режиму, зпехгроднигатель работает в тормозном режиме прогиво-включення.
С увеличением (гг( в режиме противовключения возрастает |й(. что приводит с унелнчЁйию гожа н момента двигателя- Меканяческие (см. рис. 9J3) и •злгагромрянические характеристики двигателя в режиме лротииоюгзначения подчинятоюя уравнениям (9.23) и (924), являются продолжением чарактернстик двнгате.'сь№ю режима и расио.та-гдя-чея в [V квадранте. Усшхоииитийся режим naci yiiaei при частоте dji.i । пени я в(. мри которой М = Мс
Изменяя значение Юиротивлепкя peoci'UJM г, можно получить различные скорости опускания груча. Однако, как нн.те, хоракз-ернстияи при работе в режиме противовключения получаются елрпгком «мягкн-.мцн, вслсдсгние че1 о частота вращенья в сильной степени зависит от нагрузки.
Так как в режиме иротизовклиэчеиня ток и ЭДС якоря сов-падшот по направлению (1, >0, а Е<0. рис. 9.22). то двигатель
3S9
Рнс 9. J 4 К исю.тьзованню режима про шипвиючения _=ия кыемм1КЕ!И4 Цремеки TOp'..vjAf.e-иия дпитателя
работает но существу в качестве генератора и преобразует потенциальную энергию опускающегося «рула в электрическую энергию, которая равна ' | Е!„ = < |. Последним
в свою онгрсль преобразуется в теплоту в сопротивлениях г, В г цепи якоря В этих же сопрот ивлениях расходуется энергия Uij, потребляемая цепью якоря из сети,
Пример 9,5, Опрспечюь сопрш питайте |>е:яилора, который нс-обходимо вкиочм-сь в цепь якоря .чвитие.ia примера 9 3, чтобы в режиме противснkjночевия варм монете Я<> Н и получить частоту ирл-1ЦСШ1Я 200 об/мин.
Ре|Г|спнв. Моменту М = SO Н-м но фифику W(7) соотвотстйуе-i 1 ок 7 = 4) Л. а последнему ни «нрзктерисгккс пДЛ — частота вращения Л1,-Я6О «нЗ'мив (см. рис.
Испопьзул формулу (У.24) и учитывая, что при работе в режиме противовключения спсдуеа считать пн <0, г, е. —200 об.'МИл, получим г = 5.4 Ом.
Режим противовключения ксполмуеюя чисто для уменьшения времени торможения при остановке дя шитая я и сисднпен-huj u с нл\{ механизма.
Допускам, что якорь двигателя смешанною (рис. 9.34|, гдралле.ть-иого w-jh посчсдовахмыюто шгиЧждении вхлгочеп черса контакты В, работает в jbwj d i елыюм режиме с Чистотой враз нения л > 0, моментом Af :> U, гикснЛ якоря f, > 0 и ЭДС якоря F > О
Если не тремя работч помгагитя разомкнуть коль<*с1ы В и <а«к-путь контакты If, ю согтасни ктороыу isKony Кнр»гофа
(, I £ „
- < 0.
Так как to*, якоря ичмсиЛЫ направление то шмяастствсн-
по взменнт направление и маменз дзпгате.пг (AJ < 0). Последнее должно принести в конечном КТО г с к изменению вращений Якоря двигателя.
Однако в течение некоторого времени пол действием tanstca кине-гнческой энер1ин он буцет враирегься и прежнем награмснил. чго н со<зтвеи.гнуст режиму прсиивонкгдсченпч дэисителч, Под действием
390
Рис. 9.35. К iKHiciieciHio тормо*ного генераторного режима с отдачей ancpi нн в сеть
тормо shcji tj момента двеявтвл ь и механизм ерзянн сельпо быстро <к-та-ноаягея. Прн н - D двигатель должен быть отключен. иначе on pairo-mu i-ся и протввопо гпжнусо сторону
9.19.2. Геяераюрный режим с отдачей энергия н сети Гейера юрным режимов с отдачей энергии в сеть называется режим, в котором двигатель пол действием внешнего момента либо запаса кинетической энергии вращается с чаегото£ц большей частоты вращения холостою хода в том же паттравде-
гии, н котором он должен был 6tj прдщиыся при данной схеме ci о включения к дви1 ателъном режиме (илтт вхолостую).
Предположим, что двигатель параллельного козбуждепия, включенный хоитактами R ио схеме, иэображчннон на ряс. 9.34, работает ни естественной харсктсрнсти1гв и перемещает грузовую тележку (рис. 9 35, а и -5). К«:гда тележка нцходигся да гори«он ильном участке tjy-ти ab статически момент AJ,। вызван силой совративлеиня движению, обусловленной треи нем и зависящей пт силы тажссти Г гележжи м rpv-13. Элсктргщшгатсть paooiaei при этом и дьигатсльном релине с л, <л„. О < 2( < .7, 1в1 > U М( = MLl > О,
К di да тележка оЕсажегся на крнно [инейном учалке пути статический момент будет обусловлен как силом сопротивления движению, вызванной триннем и зависящей от составляющей F, силы гяжестн Г т ележки и груза, ж и движущей силой равной другой ее состав-лвчнцей (рис 9 35 б). По мере продвижения тележки по учыству сала сопротивления движению будет умсиьнгаткся, а движущая сила возрастать. Естественно, что это приведет к уменьшению статический мо-Metiia и увеличению чаооты вращения двигателя.
391
При достаточно большой млад; тележки к i рула в иеколдом положений -щчежки ла учаьлкс Ьс длнжутая сила окажется больше силы соирзгн'елслвя движению. вследствие 'кго статический мемею тис-нит направление (А?,. <0) и г^еврагитсл в движущий, Гак как действительные направления каментов буду! при зтом совпадать (М > 0, а W£ < 0, см. рис. 9.Л4). то будет ггронсходитъ ра-лон двигатели и тетеж-ки под действием укатанных двух моментов, Когда частота вращения достигнет и0, окажется, что Е г L’, 1а = 0 н М — 0 О;щако частот вращения будет продолжать возрастать, поскольку cymecrayei движущий момент Me- При л > % Еюлучнм £ > Lr, Js С 0 я А/ < О Таким об разом, снова в скит пхнет момент двигателя, но теперь он будет тормозным Установившийся режим настудит па наклонном участке сути erf, прн частоте вращения л2 > и0, при которой М2 = < Q
Послольку при М<0 момент направлен против направления частоты вращения (л > 0, .W < 0), а якорь ярлшастся в iy же сторону, *го и в цвлгпгельпом режиме с частотой rt>nl?, :к1ектродвигатель работает, по определен як*, э тормозном геиераюрном режиме.
Изменяй сопротивление реэастора н цепи якоря, мсжею регулировать частоту вращения в генераторном режиме и получать, например, час|«1ъг вращении и и,.
При работе лвигателя в юяераторном режиме ЭДС и ток якоря совпадают но направлению (Е>0, а /ч<0); это значит, по двигатель работает по существу п качестве генератора. Вы-рабэтывэемая нм энергия, равная |Е7,,г|, отдаепзг в сеть по-стоянаою тока и частично преобразуется п тешспу в сопротивлениях цепи якоря. Очевидно, достоинством генераторного режима является ого .>кономич1тость. К недостаткам оислует отнести ю, что рехудиролание частоты вращения можно про* изводить лишь в области, где л > пъ.
Генераторный режим дишателя параллельного вотбуждения широко используется и грузоподъемных машинах. при опускании 1рузов, преодолевающих трение в мсхаятвме.
Л р и w ер 5,6. Определить частоj-y вращения двигателя ирнмера 9.1 в генераторном режиме при моменте М = 90 Н-м, есин » цепь якоря хклточги регхлнт е сонрогмыспием г = 0,5 Ом
Ре ificn и е, Иссюлыуя ураиненнг (9.23).и учгттывая, чю при работе к сенсряторном режиме олелует считать М 0, т е. — Ч0Н-М. получим ли* 1412 рб/млп.
Дэшатсяг. последовательного возбуждения нри обычной схеме его включения (см. рис. 9.34) работать а генераторном режиме с отдачей -лгергми в сеть нс мржет. Это объясняется тем, что генераторный режим может возникнуть прн А’> [/, что ь свою очерель возможно, если и> яе. У двигателя же по-с.'1сдопательного возбуждения г^- х
У двигателя смешанною возбуждения в генераторном рс-
392
жиме последовательная обмотка размагничивает элелтролвига-ie.fi. л цри токе < О (см рис. 923) мшннтныи поток двигателя становится рапным пулю, а ехмласио 19,20) при Ф = 0 л= <с.
Момент двигателя Л/=АуФ), может быть равен дулю п двух случаях: 1) при —0 и »— н^, что соитветаиует режиму холимого хода. и 2) хгри /0 = /Л1 н п = сс, когда Ф - 0.
Очевидно, при увеличении частоты вращении в генераторном режиме момент двшптеия будет сначала возрастать (см. рис. 9,35, характеристика I), при некоторой ’laejore вращения достигнет наибольшего значения Afj, а при дальнейшем уведи-' чаши частоты вращения будет уменьшаться О|раииченное зЕичекне наибольшего момента Af, затрудняет практическое использование (снсраюриого режима смешанного возбуждо .чьи. Если при работе двигателя п гсисраюрвом режиме после-довательлую обмотку выилючнтц. то двигатель будет иметь 'зехачичоскухо характеристику 2, как у двигателя пара.-псльного г отчуждения.
9.19.3. Режим ДЯИВМИЧ(М!КО1О ТОфМО'ЖСЯНЯ, дИНЛМИЧСС-
кого юрможейия возимкаст’при отключении якоря двигателя <н сети я замыкании erv на резистор, называемый резистором длнлмическ'ого торможения.
Естестпепяо, чю поскольку злектроддшате.ть работает ирм этом по сущсишу как генератор, он развивает тормозной Момент (см. принцип действия генератора в $ 9.2) Вырабатываемая им Ацентрическая .л it pi ил расходуется □ синротивлетгии динамического торможения м частично в сопротивлениях якоря двш ателя.
Обмотки шпбуждепия рябинных дьнгателси кключакутся прн дкна.мичееком торможении по-разному. Обмшхи возбужденна пвша-I'Jicii параллельного и смешанно! о ьоэбужделия осгакгеся включенными в сеть: чтобы последовательна* обмотка двигателя смешанного izHCiyw.'ieima jic разии ничмиала машину, се следует отключить. Дьта-|т гь послед плате тьгюго вшбужленля может работать пак с осзавн-чкмым возбуждением, так и с сямов1т.|буждепиеи. В первом случае об* Менка uiHjlLIIOTOCTCf к Cfiя через резистор L большим сопротивлением, который должен быть рассчитан на зпачктсльную мощность. Прн ра-ёоге с самовозбуждением обмок* побуждения включается последи* стелимо с яьарсм при £_т>б.1н>дснии условий, необходимых дли само-иозпужлчиня (ем. § '
Развиваемый двигателем тормозном момент зависит при прочих равных условиях от ссшротюцтепил резистора щитами* чсского торможения.
Режим динамического торможения используется е боль-тдштстве случаев .тля уменьшения времени торможения двига-
393
теля и механизма при. ик остановке Однако этот режим может быть исиользопан с успехом и для получения установившейся частоты вращения при движущем внешнем моменте.
9.20. ПОТЕРИ МОЩНОСТИ И КПД МАШИН ПОСТОЯННОГО ТОКА
Преобразование электрический энергии в механическую с помощью двшателей и механической п электрическую с помощью генераторов сопровождается потерями энергии, чему соогвегсгвугот определенные потери мощности, От значении потерь мощности зависи i вдж!гей|пнй энергетический показатель машин постоянного тока - их КЦД Потери мощности в мангинйХ Привозят к их назреванию.
В ьихшямач постоянно! ч icihs различаю; с_'|сдуюшие основные виды luirepi. мощности:
I, Потери moiuhwlih я сопро1ивлекяй1 цепн якоря: = JКак
пндеео, потери мощности ДГ, завися! от нагрузки машины. Поэтому ил нлчыяают переменными потерями мощнос1-н,
2, Потери MOiiiHiK-tK а стали Д^с, вызванные главным образом вихревыми тиками и перемагничиванием магниплтровода якорм при его вращении. Частично чти потерн води икают из-за вихревых токов я поверхностном слое поднесли* нахонелников, кыэааниых путьсаивен МЗП1ЛТНОГО потока при вращении якоря.
1 Механические щтгерн мощное; н причинен которых
является трение в иопшилпиках. hictok о коллектор, врвшзтошихся частей о ычндук,
4. Потери мощности в цели параллельной или независимой обмотки возбуждения; ДДН = (.rJ, =
Потери при нзмепении нагрузки машин меняются
нечгичнтслыю. ьичЕлствис чего нх называют постоянными потерями МОЩПОСТк.
КПД машин □ощияпного тока
1 дс Р2 - полезная мощность машины (у leaeparupa - эго электрическая мошвосп.. отдаваемая приемнику, у дэншеля — механическая мощность иа налу); Pt — подводимая к машине мощность (у генератора — это механическая мощыоитъ, сообщаемая ему первичным двигателем, у двигателя - мощность, потребляемая им от источника постоянного юка; соли генератор имеет независимое возбуждение, то /*| включает в себя также мощность, необходимую для литания цепи обмотки возбуждения).
5W
Очевидно, мопегпэсть может быть выражена следуют ни и образом:
Ft - + SAP,
где ДР — сумма перечисленных выше потерь мощности.
С учетом послсдшяо выражения
*1 = Рг//Л> + SAP],
Когда машина работает пхо чистую, ;клегиИ1я мощность Р2 равна нулю и р — П Хяраггер изменения КПД при увеличении niTjicif-ий мощности зависти
Рис. 9 "56 Зависимость КПД мантии ПОСТОЯННОГО HtJca от полезной мощности
ог значения и харак-
тера изменении |югер* мощности. Примерила график зависимости г| (Р2) приведем на рис. 9.36.
При увеличении полентой мощности КПД сначала возрастает при некотором значении Р2. достигает наибольшего значе-
ния, а затем уменьшается. Последнее объясняется значи-
it-.tbuHM увеличением переменных потерь, пропорциональных квадрату тока. Машины расстиЕываюг обычно таким обратом, чтобы наибольшее значение КПД находилось в области, близкой к поминальной мощности /*а1им. Номинальное значение КПД машин мощностью от 1 до |<Ю кВт лежит примерно □ пределах от 0,74 да 0,92 соответственно.
9.21, СРАВНИТЕЛЬНАЯ ОЦЕНКА И ТЕХНИЧЕСКИЕ ДАННЫЕ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Дишасели псланнсн.чого и параллельного вилбуждсии» имеют ижестаукгч ест остевую механическую характеристику, вследствие чс-ici ик применяют, Ki.trда требуется незначительное изменение частоты чрлшеник нрн изменении j।агрузки. Следует заметить, что многие из указанных дкшаяелей снабжаются лоткиншелыЕО последовательной ;,Gmoikoh возбуждения, eicdo imjiuj МДС которой направлена астречно <г« отвосченякз к основной сбькп ке возбуждения. Пхтичис ТИМОЙ обмотки принудит £ пскоторому увсличеньИО «^жесткости.» естественной Механической харашеристики.
Двигатс.|Н независимого и параллельного возбуждения приме-ИЯ.-СДСИ ГЭ2ЖС В Тр.Ч случаях. ЕОГ.ЧЛ аНЙШПНИ момент МОЖСГ fihllh Kilh тормозящим, так и движущим В этом случае nimiMie-ib будет автомн-.мксски ncpeiojiHii» из двигал ел ьлого режима работы в гпрулзлой ге-нератерный иди напорот.
Диигателн лослс.'ювательлаго иозбужлсЕвч имеют лмягхуюл естественную механическую характеристику, которая в некоторых случаях |н>лримср, на кранах, на элнстротранспоргеЬ оказывается наиболее подходящей, прн офемещагни дикнх грузов частота врашснш дйига-
395
теля автоматачески зпатательни повышается. что приводи! к повышению проиднплитсЛьног! и механизмов. Oco$®]ijiocj ню двигателей пОч.сЕЛ0»ательн<1гс возбуждения ЯВЛЯСЛ-я нсвозможнооть из работы вхолостую
Двигатели смешанного нозбужлециа имсгот более «мягкую1? есле-стяслиую кмроктериш-нку, псы цитп ги^ч параллельного (или мешниси-мо о) возбуждения, ио оодае «жесткую-., чем дьигиела и«кд;с.ювлтс.ть-ного возбуждения. В ш.гнчис or двигателей последовательно! о возбуждения <?Е1Л могут.работать вяодостую.
Двигатепл смешанного и особенно пис-юловательнсго ночбужде-чия допускают большую кратковременную перегрузку но моменту ип сравнению с двигателями парадлк.тьчого возбуждения. Это jiu.ibo.isct производить и* пуск н торможение в более короткое время А при о.'9>яакоойх« иречепн дин «кидывмотс* меньше мгружелнччн ек> току.
Благодаря возможности исяольнов&ния пот-енцномстрнчкии* сжсм вьчюченкя все лвшагспи постоянного тока имсеот лучшие свойства' ъ отношении регулировании нилоты вращения по сравнению с иаибо-лге распр1к,-!раислпы.чи ясинхропньгми двигателями (см. гл. J0). Когда потенцномстрнчаскне схемы вк-Тючсаия'ке обеспечивают кеоБеодимо-1о диапазона регулирования частоты вращения, для двжагс.тен с пем-ниенмым вялоуждепием испопьзутсчеа различные системы с рау.т-руемым шспражсЕшам длч питании обмотки якоря.
В справочной литературе приводятся следующие теллннсскис данные двигателей постоянного тока: тип двигателя; номинвлыия (механическая) мощность, кВт; поминальное напряжение, У; помичялхпая частота вращении, об/мпп; номннадъпый ток, А: поминальный КПД, иамсит инерции ротора, кг-м3.
Если обмепва ью'.йуждеиаа выполнена на напряжение, отличающееся ст паиря-л-ення обм<мен якоря, дополпительис? укаляпjmjjls иомипалъныс напряжении и ток обмоем к возбуждения.
Кроме псрсчи1Ыеннмх съедений указываюiся иногда и ряд друхнк, например способ возбуждения, режим работы (см. гл. 12), допу€1имыс крапивременньн: лера ручки и т. л.
9.12. УНИВЕРСАЛЬНЫЕ КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ
Для прнвелд 'jJicsiponhCiрумента, (инейных маш^н, небольших еентиляторон, пылесосои, в устройствах автомат ики к т. д находят применение lo.nneirгорные двигатели малой мощности, рассчитанные на питлдис от cejH кая постоянного, так н однофазно!п переменно]к гокз частотой 501'11. Уяпнерсаяьпие коллекторные двигатели устроены принципиально так же, как двутполюсные ^ьюнтелн поегтичисто тела.
Для получения большего лрашшощегч момента угол сдвига фат между магпитным потоком д.мбуждепня и т ором якоря должеи быть минимальным С -этой целью укиверсальныс двигатели изготовляются С ПОСЛСДОВйх^ЬЦОЙ обмоткой возбуждения.
Вращающий момент двигателей и при пшаимн псремегкым током лалраклеч все время в одну н ту же сторону, т&я как одлсжрсмсп-396
но с изменением ъапрадлзпня потока происходи г изменение наприя-ic-ji:ii тока якоря. Реверс днигателей производится пугем переключения рбмснтси якоря либо обмотки ао(бужибння.
Так гак прн iehijhrm переменным током возникав! пулъсиру»о1нин магнитный поток, го мат ни foupoDou статора мчгптп1ьияе(ся в отличие ст дэшателей постоянного тлва нз йтивлизых стальные листов.
Достоинство универсальных коллекторных питателей по сравнению с асиихроцнымг н синхронными дьнгатслями состоит и юм, что они позволяют при переменном токе чкетогий 50 1’ц получать частоты вращения более 3000 иб/мин.
К недостаткам по сравнению с двигателями постоянного i-ока следует отнести Позли: низкий КПД н ухудшенные условия коммутации Последнее является основной причиной, препятствующей широкому распространению коллекторных лчнга!е_'1ей переменного тока прн средних к болим их м<мл.ноетях,
*/2Э. МИКРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Микродвигатели постоянною тока исполълутотся в разно-образных автоматически! устройствах с иеткш пряпншин мгха-?!!имовт а также преобразования электрического сыпала в ме-лалическое перемещение дала (исполяительпыс дьшагели). Их принципиальное устройство аналогично устройсзьу машин пос-юянного токи. Олгозиин магнитный поток двшагелей создается или посредством обмоток возбуждения, или постоянными мш нитами (рис. 9.3?,л, б), Двигатели рдтличаюшя •то кинс!рукцнй якоря и сктдраздс.сяются ня микродвигателя с якорем сбытого хини, с колым якорем, иссназовым якорем и с печатной обмоткой нкоря.
В мнкродвигатс-;1хх с якорем обы'шого Tin.a обмотка якоря у ьмнлыиш।сн № лазах его мхгнигопроыОда, конструкция которого ала» югнчлз ювегрук'хиа икиря малин not.гояктлл о тока
В «лкродвигатстям с полым якорем последний нънюлпен в виде стакана 4 (риг. 9.37, б, Л). Обмотка якоря рыщ щипается ла ловерхнист а якоря в зал няне геи зноксидцпм смолил Cckjuik обмотки соединены с »1)л.1Г1сториымн пллстииам.и. Такое расположение ломеггхи, когда оча нс иалолиггя и фйрромагдятхом материале, резко снижжт ее лидук-'Кьзлзсть, что улуч!пас1 условия коммутации двигателя Практически oji patjojает без искрения. Криме того, снижения момента ннер--'иц полото якорн ь сравнении с якорем обычною ititia повышается ёь.стрслсйявке двигателя. Опивки недостатком таких микродвигателей является увеличенный воодушиын mop |рыс 9.37,a.6t и срайНе-ВСен с обычными двягатсляыи ппегояшюго тока, но влечет тд собой }асле!чс11нс МДС 1гбмотки возбуждения, А ото в свою очередь ебулло-4.1ивает увеличение габаритных размеров и массы двигателей. Мнкрс-лвкгатеяи с якорем обычного типа и с полым якорем mouihck-i ыо см k Ди 15 Bi имеют КПД 0,1-0,45
397
+ > ? i. Г тле
Рнс. 9 37. Упрощенная конструкции микродвигателя постоянного юси с полым якорей и элекгромагнитным возбуждением (я) н с возбуждением от постоянного магнита ($):
i - ксцдаус, 2 стами. ьмбутклегм»; J ичлкк.; 4 - полы№ stnpt.1, 5 - ферро магнитный сердечник, 6 • постоянный маткин ? - rojL’jetTop; S — м_т
R микродвигатели с беслалокзлм якорем (рис 9 ЗЯ) обман яд якоря ук-.1адь[вастся о два слон непосредственно на его поверхности и заливается .пюкенлнон смолой с ферромагнитным наполнителем. Подобные двнгнте.тм обладают высоким быстродействием, чю обусловливается значительной магинтпой индукцией r воздушпом зазоре И малым моментом mi ср дни лепра Глгггадсувыс якоря стали ядясщить □рпмецелне не только в мнкродйк1а1ел?я, ио и s донгате.1>д малой и средней мощности.
Микродвигатели с печатной обмотьгон якоря выпслпяются как с дасЕоьим, тдк н с цилиндрическим якорем,
3 машинак с дисковым якорем (рис 9.39) печатная обмотка якоря д.'кктроялмичестим способом наносится на гонком диске 1 керамики, текстолита и др, Проводники 2 печатной обмотки pacucuiaiаются ра--диальни с двух сторон диска н гальванически соединены между собой через отверстия 3 в ллеже. На рис. 9.40 ,'Ана упрошенная конструкция микродвигателя с печатным дисковым якорем. Вращающий момезт мягродвнз атсля, как и двигателя с якорем обычней о типа, обусловлен вяанчодсйствием проводинуоа с током обмотал якоря с основным магнитным потоком. Магпнтиый згезтог может создаваться кив постоянными магнитами, так и .ысктромагпитамн, пиорыс располагают--еа или но одну сторону писка !, или симметрично с обеих сторон. При одпосторонц₽м расположен» сюь-гоякиых магнитов 2 (рнс, 9,40) с другой стороны диска jciанавливасгся стальное кольцо 4. Постоянные магниты нмио-1 полюсные наконечники J. Вращающий момент действует В 1ШССКОСГИ ДИОЮВочП якоря. Мякродоит 41OW с печатной обмоткой якоря могут илгутомитться как с коллектором, так и беа нею. В последнем случае роль коллмпора выполняет сама забминг*, по которой скользят ссребрянсырафитовыс щетки.
Микродвигатель с цнлвпдричЁСХлм исчагным якорем (рнс 9,41) кокструктнани выполнен как микродвигатель с полым хкезрем. Печатная обмотка ? наносится на обе стороны полого якоря 2 и элсктряче-скн сэлзанд с коллектора и, Свойства этих микродвигателей аиадо-гн*»1И1 свойствам двигателей с полым «карем,
К прсиыущклкам микродйк1агслсн с печатными обмотками яко рей относятся; малый момент ннсрпкнг а следовательно, высокие 398
Рис. 9.39. Дисковый нелрь о ПфЫ-ННЖ обмоткой
Рлс. 9.J&. ТТрнни.ипла.тънуя схеме! уст рейс' ка мыкродви I -ч I е.ул с иеспазовим якорем:
1 Ilfl.TillC, 2 — ПИШИ обмотки Ц1О-l>«. J -->|1.>сйиднэя cm-jjiu; -У — сгр-jeiurrn uMJpi
Рис. 0.4Л. Упрошенная конструкция микродвигателя с печатном .чисгокьш якорем
Рис 9.41. Цилмнлричес1гкй ккорь с иечагией обмоткой
GhicipthjeitcTBHC» улучшенные усилия коммуianna, что увеличивает их перегрузочную способное.-!ь; малые габаритные размеры и массг; повышенная напсжность. К псзтос! агшш микролйигатслсй с печатной обмоткой бел колтсктор» мгмию огиссгн меныдкЁ ерик службы и.ч-зн износа прпви,1ни»оэ печатной обмотки оч jpenzs шешк.
В ИСЛОЛИИТСЛьаЫХ ,ЛВИ1а1СЛЯХ ПОСТОЯННОГО тока, ДЛЯ которых характерны частые пуски, остановки и реверсы, различают два способа управления — якорное и полюсное (потоком возбуждения двигателя} (рис, 9.42}.
В практике более широко используют якорное управление [рис. 9.42, ti), при котором обмотка якоря цоэт.тючаекя » на-прижешпо управления ГЛ,, а обмотка равных полюсов — в сети постоянного тока с напряжением С'п. Регулирование частоты вращения якоря осуществляется изменением напряжения Ur
При полтосном управлении двигателя (рис. 9,42.6) к напряжению управления подключается обмотка главных полто-ссв, к сети постоянного тока - обмотка якоря. Регулирование часкыы врашепия якоря производится также изменением на-
399
а}
Рнс. 9 42 CWMhJ RV.IW'tCJJMS ЛСИВ.Т-ЛИГСтШОГО ДНИГЧТСЛЯ ПОСТОЛЯИИГС1 ioca- якорное управление (а), ни niccmie управление (»й
Рнс. 9.43. Механические характеристики исполнизельного двига-геля пост-олпнсчо тохи: якорное- управление (д), подослав управление (/?}
гфнжения управления, ио а угом случае уже за «чет тменелпя магнитил о потока двигателя,
В исьссязитсльных двисателях. постоянного тоед маглнтяая цепь не ыасъииспа, в связи с чей реакиля якоря практически не оказывает влияния па их рабочие характеристики. Построение меланичестгвл харзкгсристлк для микродвигателей принято осуществлять □ относительных единицах па основе следующих уравеенкш:
Для двигателей с ЯКориым управдсяием
М* = С* — и»;
для двигателей с полкхшътм упрявзсаисм
Мф = Сг*(1 -
где С'* = t7y/C/B — коэффициент связи; Л-f* = Mfl4„ — относительное энаяенае момента; Ма — момент, развиваемый дьн-гате.'хем при пуске, т. с. пш — 0 при Lr, = 1; л, = л/ла -
400
относительная частота вращения; - частота вращения при холостом ходе двигателя и Ьг, = 1.
На рис. 9.43 показаны ссмейсгва механических характеристик 5f*(nB) при Lr*.= const: дня исполнительных двигателей с икорным управлением - рис. 9.43, а, с полюсным управлением — рис. 9.43,6.
Глава десятая
АСИНХРОННЫЕ МАШИНЫ
ЗЦ. УСТРОЙСТВО АСИНХРОННОГО ДВИГАТЕЛЯ ТРЕХФАЗНОГО ТОКА
Асинхронный двигатель ! рехг[заз1гсго тока представляет собой электрическую машину. служ’аи!ую для преобразования электрической энергии трехфалппго гока п механическую. Благодаря простоте устройства. высокой надежности а лкенлуата-цпн и меньшей стоимости по сравнеяню с другими двигателями асинхронные дВЕгатьли -трехфазпого гока паши широкое применение а промышленности и сельском хозяйстве. С их помощью приводятся в движение металлорежущие и деревообрабатывающие станки, подъемные краны, лебедки, лифты, эскалаторы, насосы. вентиляторы и другие мсханкэмы.
На рис. 10.1 изображен продольный (а) и поперечный (6) разрезы асинхронного двигателя грехфаэппго тока, а также части сердечников ротора и статора с пазами и обмотками (в).
Двигатель имеет две основные чает и ‘ неподвижную — ста-юр и вращающуюся - ротор. Статор состоит нт корпуса ?. представляющего собой основание aceto двигателя. Он должен обладать достаточной механической прочностью и выполняется из стали, чугуна или алюминия. С пояющьк/ ,ian <? двнтятелг. крепится к фундаменту или непосредственно к станине производственного механизма. Существуют и другие способы кре* п тения двигателя к производствештому мехщтмэму.
В корпус 1 вмонтирован сердечник 2 статора, представ тяготи ий собой полый цилиндр, на пиутренвей поверхности которого имеются лазы 3 с обмоткой статора 4. Часть обмепки 4', находящаяся вне паэов J, называется лобовой, она отогнута к торцам сердечника статора; Так как в сердечнике статора действует переменный магнитный лоток и на статор действует момент, развиваемый двт1гятс.чем, сердечник должен изготовляться ю ферромагнитном о материала достаточной механической прочности, Для уменьшения потерь от вихревых токов
-401
Pnc. It.I. Продольный (й) л поперечный (ol рааречы асинхронного .•чштятсля, честя есрлсчпикок ротора и статора с вузами и об-могкой (#)
серпечимк статора сгпира.-от из отдс.ты1ьтх лиигсзв (толщиной 0.35-0,5 мм) элекхрогек ни ческой •стали it каждый лист изолируют лаком или другим изоляционным материалом.
Обмотка статора выполняется в основном кп «золироваи-ИОТО МСДПОГО прово.’й Кру1ЛОГО иди стрямоу1 ильного ССЗСПИЯ, реже - из алюминиевого провода. В качестве изоляции проводов друг от прута исггольз)юг бума>у, хлопчатобумажную ткань, пропитанные различными лаками, слюду, стекловолокно и различные лмали. Для иаоляпии проводов обмотки оз сердечника статора служат элек1роизоляило]!пый sapjon, слюда, acSeci, стекловолокно.
402
& последнее время ;unJ изо лицин обмоток асинхронных двжжелеё пизкогд напряжения применяют лавсан с *+легтро-изоляционным картоном, .пи лркгатедей вьн-тпе.яо напряжения— пленки на слюдяной ос-ниве. На рис. 102 изображены разрезы лазов о обмоткой ста-торов жсннхронд±4л двигателей НИЗКОГО (fl) Н ЙЬГСОЕОГО (S) HftltfM-ЖЪННН.
Обозначения на рис 10.2, а: ! — провод с .«малевол и'чхля-цвс/f маржи ПЭТВ-1; 2, J - пазовая к м&жсекшюнная изоляции из пленкозлектрокартона us лавсане тошшной С-27 мм Обозначении па рис. 10.2,-5, 1 — провод мкдиъгй; 2 — витгойая кн; Л 4- пазовые л мек-гкхпионн
Рис. 10 2, Разрез паза с обмоткой с гй юра асинхрогшого двигателя прн номинальном напряжении до 5JHJ В (я) н 6000 В (б)
Iоляцни иа поликарбпнатовоа плен-। изоляции из слюдяной ленты иа
терморсаинчном лаке; 5— клип на дерева твердых город.
Обмогка статора состоит из трех отдельных частей, назы-ваемтлх фазами. Фазы могуг быть соединены между собой звездой или треух ельником. Начала обмоток будем обозначать на схемах буквами /I. В; С, конпы - X, У, Z, Обмотки двигателей малой и средней мощности кзютэЕдякл на напряжения ЗЯО/220 и 220/127 В. Напряжение, указанное в числителе, соответствует соединению обмоток звездой, в знаменателе — треугольником. Таким образом, адьш н тот же двигатель при со* отвсгсгвуютсй схеме соединения его обмоток может быть зкямэчен в сеть на любое указанное в паспорте напряжение. Существуют цвигг.т»ли на 500, 660 и H40 В.
Двигатели высокого напряжения изготовляют на напряженно 3000 и 6VOO В,
На корпусе двигателя имеется ласка с зажимами, с тто-мишью которых обмотка присоединятся к трехфазной сети. К каждому зажиму подключен сосиветствующий вывод обмотки. Для зажимов приплы следующие обозначения* зажимы, к которым подключены начала обмоток, обозначают буквами СГ, 02 и С5, гонцы обмоток - соответственно С4> С5 и С6.
Сердечник 5 ротора (см. рнс. 10.1) представляет собой цилиндр. собранный, тая же как и сердечник статора, из отдельных листов электротезшической стала, в котором имеются пазы б с обмоткой 7 ротора.
Обмотки ретора бьгвяют двух видов — короткозамкнутые и фазные. Соответственно -Этому различают асинхронные дзн-
403
(л), гороткозамкиуъин обмотка гатели с короткозамкнутым и фазным ротором (с контактными килышмиХ Па рис. 10,3, я изображен корот-козямкнутый ротор, • на рис. 10.3,6- короткозамкнутая обмотка. Короткозамкнутая обмотка состоит из стержней I, раеполсикбиных к на:<ахт и замыкающие ко леи 2. Стержни приоосдилепы к замыкающим копытам, в результате чего обмотка оказывается короткозамкнутой. Стержни и ымьткаюшие хольпа в од-енх двигателях изготовляют из меди, в других — из алюминия, п третьих — из бронзы и т, л, Алюминиевую обмшку получают путем заливки л пазы жидкого алюминия. По внешнему виду (ряс, 10.3, 6) короисозамкпутая обмотка напоминает беличье колесо, поэтому ее иногда называют «беличьей wiej-кой». На ряс. 10.4 изображен фазный ротор (с контактными кольцами).
Фазную обмотку ротора выполняют так же, как и обмохку статора. Опа всегда соеаяпяется звездой, Начала фаз обмотки присоединяют к контактным кольцам / (рис, 20.4К которые изготовляют из пали или латуни п располагают на валу двигателя. Кольца изолированы друг от друга, а также от вала двигателя. К кольпам прижимаются пружинами мсталлогра-фитгьте щетки 2, расположенные в неподвижных щетколержа-icl'ijjk. С -помощью контактных колеи и щеток в цепь ритора включается дополнительный резистор г... который является или пусковым (для увеличения пусховох о момента я одновременного уменьшения пускового тока) или регулировочным (для изменения частоты вращения ротора двигателя).
Вал ротора 9 (см. рнс. 10.1) изготовлен пз стали и npaniaeicH в шариковых или роликовых подшипниках /0. Подшипники укреплены в гтоли1мш1икопых щитах 1/, которые изготовленш из чугуна или стали и прикрепляются к корпусу болтами.
404
дл z6 os уф й) f)
Рио. 1115. ря«срну)Ия схема обмотки статора лсмнхромнгмл лиитатсля (.йк секции обмотки (5)
CctejiJiniiHiie отдельны* ирнызднцков одной физы обмотки между собой и втякмное расположение обмоток всех трех фаз статора можеео проследить-с помощью развернутой схемы обмоткн статора двухпо-Л1 ос по го ясннхрон-кн'С] дета г дли, и.чпПраженпой иа рис. 10.5. «. Обозначения па рисунке; kD — длина внутренней окрукпости сердечники стцтори; Г - длина сердечник» статора, цифры от 1 до 24 - лазы.
Фача 4 - X патшистся с проводника, лежащего в пазу i- Первый проводник с помощью лобовой части еГшотги Лх соединен с проводником, лежащим в пату /.?, лоспедиий в свою очередь с помощью лобовой части обмотки ,'7j соединен с проводником, .TCjKtnrjHM в налу 2, ит.д, Конец обмоткн соединен с проводником, лежащим в пазу 1й. Таким образом. фаза 4 — X занимает восемь пилон. Аналогичным образом сочиняются проводники фаз 1? — К и С — Z. Из рнсуяк» нид-ло, что начала к щзнцы и.-щой фазы двухполюсного лиигатеяя сдвинуты в пространстве относительно другой иа восемь пазов, что составляет 1/? окружное] и, т. с. 120:.
ЧаСГь обмоткн, выделенная иа рис. 10,5,п жирной линией, iraiw-ВЗСТСЯ секцией. ОбыЧТЕО секция COLTISH!- ле из ОДПОГО витка, san на Phl. 30.5,-сг. а из Bccru-Jbitnx витков {рнс. [0.5,w> Таит^сеадии изгото-И-СЯ1ОТ на шаблонах, потом их тонируют и придают им нужную форму. Секции укладывали в пазы и закрепляют с помощью дсреяянпыя клицнен. После того как е« секции уложенье, и* соединяют в соответствии с ра-чиернузой схемой обмерки статора лвистели. Наряду с олнослойпымн обмел ками (см. рис. 10-5,<Д когда в пазу расположена ч'’гнв старина одеюй CCKUWH, применяют двухслойные обмотки, с из-адом пазу которпг расположены две стороны двух секций.
1едлоп«иг инертин, возникающая в двигателе в результате потери ллсктрнческой энергии в его обмотках и магнитолрово-де. нагревает двшателъ. Для увеличения теплоотдачи ротор снабжен крыльчаткой 12 [хм. рис. 10.1). прикрепленной к за-
405
мыкаюшим ко.ileum короткозамкнутой обмотки. Крыльчатки обесииЧИЪЙС! интенсивное движение ВОЗДХХа внутри И СНАРУЖИ двитйтс.тя. Ни рне. W.I стрелками указано направление движения воздуха через двигатель.
142, ВРАЩАЮЩЕЕСЯ МАГНИТНОЕ ПОЛЕ
Допустим BUU'ILLJC, что все проводники одной фазы OOJOOIKH статора двухиодюснот о асинхронного двигателя размещены в двух диаметрально протиюпопожных пазах и в обмотке действует постоянный гак
Магнитное негде, созданное лжам одной фазы зикий абмог-ки, будет иметь картину, изображенную на рис. 10.6. Магнитная цепь двигателя содержит ферромагнитные участки - сердечник статора и ротора и воэлушный зазор между ротором и статором.
Для любой линии ыатнитдия индукции по закону подпого тока .можно написать
2ад г - EU. (10.1)
где /(о, //Г| — напряженности магнитно! □ iro.m соответственно в попдуптом задоре и п участках ссрлечникоп ротора и статора (1^): Iw — МДС одезой Е^азы обмотки.
Следует отметить, что 8 и Н а различных учаезках сердечника статора и ротора неодинаковые, например в Зубцах между' пазами статора, и также ротора они имеют наибольшее значение, поскольку сечение магнитозгровода п зубках наименьшее.
Тск казс Н - В/рн, я ра(.1 ?,< Цф, то Нст и, следовательно,
2НЛ» (10.2)
Поэтому ДЛЯ упрощения анализа картины магпиттгого поля асинхронного двигателя можно полагать, что
2 Hp/0 1/нч
откуда
(10.3)
и MaiEiHiitHH индукция в воздушном зазоре
(10.4}
Поскольку воздушный зазор одинаков по всей длине, из выражений (10.3), (10.4) взлтекает, что напряженность и магнитная индукция вдоль всего Зазора будут иметь соответственно 406
Рнс. ]0,6. Картина магнитного пом. писанною гаком одной фазы ничони двухполюсного асинхронном'» двигателя
одинаковые тиачзпия. На рис. 10.7, « изображен график распределения магнитной индукции в воздушном зазоре, для наглядности окружности сердечников статора и ротора развернуты и линию. Такой прямоугольный гра
фик распределения магнитной вндувзши пспрш одем; двигатель имел бы пипкий КПД и неудовлетворительные характеристики.
Наилучшяе показатели двигатель имеет, когда магнитная
индукция в воздушном зазоре распределяется по синусоидальному закону. Для получения графика, близкого к синусоиде, проподники одной фазы обмотки укладывают в возможно большее число лазив и выполняют обмотку с укороченным шагом. Если, например, одной фазой обмотки занято 10 иязов то график магнитной индукции* будет иметь вид. изображенный на рис. 10 7,6. Этот график значительно ближе к синусоиде (изображена пунктирной линией), Получить идеальную синусоиду невозможно. Однако практически график распределение магнитной индукции в воздушном зазоре принимают за синусоиду.
Проводники второй и третьей фаз обмотки создают аналогичные магнитные поля, по сдвинутые в пространстве на угол 120'’. Если о.лну фазу обмотки подключить к с^тн однофазного тока, где напряжение изменяется во времени ашуспидл.1и>ноФ то магнитов поле будет изменяться во времени синусоидально с чистотой тока ости. Таким образом, магнртпос поле, созданное синусоидальным током одной фазы, распределяется вдоль воздушного зазора примерно синусоидально, неподвижно в пространстве и изменятся во времени
Обмотка статора асинхронного двигателя соединяется звездой или треугольником м подключается к сети трехфаэного тока. Поскольку каждая фаза обмотки имеет одинаковое число витков н они симметрично расположенье по окружности та гора их сопротивление и амплитуда тока будут одинаковыми, но токи в фазах обмотки будут сдвинуты во времени относитель-
Предполагаст^'л, что магнюная система ire насыщена.
407
Нес 10 7 Гря<|иткя распределения магнитной и «лука щи р поодушлом ангоре асиихронnotq дангатели: □Смотка фазы заполняв! ,ma паза (сг) н десять na.juK (S)
Рис. lot- Полсягп it ih.Hhtc яа-ираи-гения токов фа! оймстпгн отпора г соответствующие ИМ положисельныс инправления axi-пдлтуд ми ин к1ых iiit,iyi;uirii фаэ обмотки с iai ора чнухпотгоспото acMRxpoJIEtoro двигателя
но /spyj друга ня 120”. Токи каждой фааы обмотки СОЗдгщут мдгшиные поля, которые, очея^дно, будут сдвинуты 0О времени нэ тот же угол. В результате сложения магнитных полей всех фат образуйся общее магнитное поле лвигатедя. Магнитная яилукпия результирующего м&нмпюгр поля окалывается расиредслсппоя вдоль воздушного тазори пп де по синусоиде, ее амплитуда не изменяется во времени и а 1 5 раза больше ам* плиту цы мигтгмтиой индукции одной фазы Результирующее магнитное ноле яратиаетса с постоянной часлотай.
Для доказательства образования вратаюшеюся магпитно-io доля воспользуемся графоаннлкшчсскям методов!, с помощью которого occipoiiM картину махннтплго поля для нескольких моментов времени периода переменкою тока.
На рис. Ю8 изображены патоХсительныа направления токов в фазах .обмотки статора и соответствующие ям положи-1сльтгтле найраалслия амплитуд магнлптчх индукций дяухпо-ЛЮСлого асинхронного двигателя, а па рис. 10.9-графики мгновенных зиапснкй гохов в фазах обмеики статора,
В момепт Бремени /=-0 (точка 1 па рис. 10.9) гок в фазе 4 равен нулю и она не создает магнитного поля. Магмитвдвя-
408
жушие силы, создаваемые та» ками фаз Л и С равны 1
jBw — i(W = Jmu'gjn 60’ =
1/3 i/з
= = B_ -^- = Вв = Bt.
Рис. 10.9. Графики ччиовеиных итачснян токов а фазах обмотки ста гора
Ток фазы С положительный и, слЕдовател^не, направлен от начала к концу оэмогод ток фазы В отрицательный, и его действительное направление будет от «гонца к началу обмотки. На рис 10 10, о изображена жар» тина ыаптягкого поля и вектор*
лая диаграмма дли моменгл времени, соответствующее точке J рис. 10.9.
Амплитуда результирующего ноля
2В„стЗи‘=2И„12сж30:=2нД3 1'2_2Я"- (,0,)
На рис. 10.10,6 и я изображены кархины мзхфпных нолей и векторные диаграммы для моментов времени, соответствующих точкам 2 и 5 (гм. рис, Ю.9> На рис 10,10, г - е приведены ] рафики распределения магнитных 1птдукцн?1 идоле, воздушно! о зазора двигателя (хР — длила внутренней окружности сердечника статора), образованны* током каждой фазы, и резулыи-руютпего плля соответственно для моментов времени, отмененных точками J. 6, 7 {см рис 109) Пункзирнымм ПМЫИМИ (пютлачепы маннпныс индукции., соответствующие ПОЛОЖИ-•елглтым направлениям 10КЯ При ice амплитудных значениях, ил;№ш1)ыю1 линиями — магнитные индукции, •соотпетстпузощие aJjCTSHicibHBXM наиравлениям тока Для момента времени, со-1>(нстс-1вукйцего точке 5 (см. рис 10.9), ток фазы Л положительный и равен амплитудному лиа^сишс, гожи фаз В И С ОТ-рчиательные п равны половине амплитудного значения. Поэтому амплитуда магнитной, индукции фазы Я составит 3_ ц iрафик поля совладает с положительным палрав.хеннсм маг-«штык индукций, амплитуды магнитной индукции фаз Л и С составят BJ2. а нх графики будут повернуты на 1SO; по отношении) к положительным направлениям РстуллтируЕощсс
Прел по .тягает с я, ч,и магнитная нс насыщена (5 —/н'Х
409
Рис. 10. 10. К пояснений! обра.нгкиння вращающегося магин1нпщ
ПОЛЯ ДВУХПОЛЮСНОГО ЗСИПХрОТПЮТО ДИМСкГ1ЕЛЯ
магнитное ноле j3p можно получить путем сложения маг -ннтных нолей всех фан
Сравнивая картины магнитных полем и векторные диаграммы, легко убедиться в том, что за время Т/З результирующее магнитное поле двухполюсного асинхронного дви-гачеля повернется о пространстве на 120s, оставаясь неизменным до амплитуде. За время одного серноца поле повернется на 36O0 (2п), т. с. сделает один оборот
Угловая скорость ноля
тп ш 2я/ Г. (10.61
Период, частота и угловая частота переменного тока свя-
1 Предполагается, что малатная система не насыщена
410
Pie?. ЮЛ Картина. ми нигцого пеня чстырсхпслк1снаго ясннхрон-'н|>| о 7;ин1 a je.sa
3<ТНЫ CnOTirOlUCJIHUJkl
7 - l//t -2л/ш (10.7)
Подставив в (1G.6) вмести Г его значение из (10.7), получим (О = о0. , (10 8)
Выразив ш0 через частоту вращения ноля лп в об/мин, а ш - через частоту /,
получим
«€ = 60Л (109)
Из выражения (10.9) следует, что частота вращения маг. питных нолей всех лпук полюсных асинхронЕгых ABHiuic.ieii, включенных в промышленную сеть, составляет
лс — 60- 50 = 3000 об/мин.
Двшатели выполняются не только с двумя, но и с четырьмя, шестью, восьмью и т. д. полюсами; d общем случае очи Имеют р пар полюсов. Обмотка каждой фазы статора таких двигателей соею иг из нескольких частей которые сосдиниклся между собой параллельно или последовательно
На рис 10.11,а показана обмотка асинхронною двигателя С четырьмя полюсами (р = 2). На рис. 10.11,6 — £ изображена картина результирующего магнитного ноля двигателя соответственно 1щя моментов времени, отмеченных точками 7, 2. 3 (см.
411
рис. 10.9). Точками и крестиками обозначены направления гика для укизапнык моментов времени.
Из рис. 10.1 j следует, что двигатель имеет четыре полюса и за время одного периода его ноле поверяется в пространстве па а0 = 180', а в общем случае - на 360'' .р. В начале исрио.ш полюс Л" нахсди.чся вверху, в койне периода он оказался внизу.
Угловая скорость ноля
с^Зк/Тр.
Подставив вмеего Т его лпачепис мт (10.7}
и выразив Ву через чаемну вращеиия ноля »0, a m - через ча-иогу/г, получим
2нл₽ 2nft
60 р ’ откуда
n0=6(v>. (гаи)
Двигатели ср=2 будут иметь л&= 1500 об/мин, с р-3 я„ = 1000 об/мин, с р-4 л0 = 750 об/мип, с р = 5 н0 = = 600 об/мин и т. д.
В nacuopiHbJx данных обычно задается номинальная частота вращения двшалхия л|Г(|М. При решении задач и анализе ра-бопд двигателей, где необходимо знать nQ> его выбирают каж ближайшее большее из уклатшмя Пра J\ = 50 Го.
Например, = 1460 об/мин соответствует п0 = — 1500 об.'МИ!!, пноц — 960 об/мин — л0 = 1000 об/мин.
При расчетах некоторых сложных систем, насриыер -электрического вала и сельсинов, пользуются электрическими (а) и механическими (ае) углами: ct0 - ухол поворота поля статора за тремя /:
icQ=<jor, U0.12)
а - угол поворота вектора иаггряжепня обмотки статора за тот же промежуток времетги;
а = о>г. (10-13)
Полегании а (10,12} вместо t его значение из (10,13)
= 1йоя/ю,
412
;i шт™. nijpanwn fi>n через w а соответствии с (10.10):
Зе - -р □>
получим
(10.14)
1W. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
В обмотке статора, включенной в ссеь хрслфазиого тока, ;юд исйствисх! папряжсття возникает переменный ток, коюрый создаст вращающееся магнитное ноле. Магнитное ноле Пересе-xaci проводники обмотки ротора и павонит в них (на иснива-ним закона электромах ни х ной индукции t-fi(r) переметшую ОДС, направление которой определяется tio правилу правой руки и указанона рис. 10.12 крестиками. Поскольку обмотка ротора замкнута, ЭДС вызывает в пей ток того же направления.
В результате взаимодействия тока ротора с вращающимся мхинитмым нолем (.на основании закона Ампера F — В.ГГ) позпи-iucx сила, действующая на проводники ротора, направление кохорой определяется но правилу левой руки Си.ш создает момент, действующий и ту же сторону
Пол действием момента ротор приходит в движение к посте разбеха вращается в том же направлении, чт о и мюнитнис .юле, с несколько мепыней ластотои пра|цеиия, чем поле:
и = (0/92—0,98) и^-
Rce сказаЕиюе о принципе действии асинхронною двигателя справедливо, если обмотка ротора выполнена из ферромш низкого материала l теми же магнит ними свойствами, что и сердечник ротора. В действительности обмотка ротора выполняется из неферримах нигного материала (меди иля алюминия), поэтому магнитная гндукцич в пазу с проводниками намыло меньше, чем в зубцах. Основная сила, вызывающая момент вращения, возникает в результате взаимодействия магнитного доля ротора с вращающемся магнитным полем статора н приложена к зубцам ротора. На проводник действусх только небольшая схша. Однако для анализа работы двихатсля и цозхучс-имя расчетных уравнений обычно счигдюг, чго н основе
* Дяя наш aifieft обхцего иазнатсиил
415
Рнс. 10.12. К пояснению принципа действия асн[|крсмгпого двигателя
принципа действии асинхронного двигателя лежит закон Ампера - йзаимодействие проводника с током и ма! нитнего поля. Такая трактовка закономерна, поскольку результаты расчета при этом ел в падают с получе1П1ътмм ю принципа взаимодей-егвия маиситпых полей ротора и статора.
10.4 ЭДС ОБМОТКИ СТАТОРА
Вращающееся магнитное поле, распределенное смнусои-ДЯ--П.Г10 плолъ иоздушного зазора, пересекает проводники обмотки статора и панодит в них переменную, изменяющуюся синусоидально во времени ЭДС £,.
Среднее значение ЭДС в одном витке можно определить с помощью закона электромагнитной индукции:
(10.15) где tfip — среднее значение магнитной мпдукпии вращающеюся магнитного ноля; (—длина проводника обмоток пацзра; rt. — скорость движения ми нитиого поля относительно проводников обмотки статора.
Скорость движения магнитного ноля
nD*j0
60 '
(Ю 16)
|дс D - внутренний диамегр серценезика статора: = — 60/j. Р - частота вращения магнитного поля.
Подставив в (10.15) вместо г0 его значаще из (10.16), ПОЛУЧИМ
£^р = 2 Вгр/
где /JCo(i;P/2p = Ф — магнитный те.ч я.
С.зе доватсл ыто,
nD 60/\
60 р поток одного полюса двига-
£^р = 4Ф/Р
41-4
Рлс 10.13. Раелоложелне секций фа!ы обмтхи шпора двшaiе.m (tr); нстюки расиекния шстора и |нгт1>ры {•£)
Выразим Е'р через денствуютнее значение Е7
2£_ 21/2К „ _
------= ---------*ЛФ. (IftJT)
JC Л
Hi выражения 110.17) вытекает, что действующее значение ЭДС в одном витке фазы обмотки двигателя
Е" =—^=4ЛФ= 4.44 Л <Ф.
Если бы оси секций одной фалы обмотки совпадали, ю результирующая ЭДС Е, одной фалы обмою равнялась бы произволению ЭДС одною нитка £' на число питков фана;
Е3 = Е'и\ =4,<44/11г1Ф. (10 18)
Полученное выражение ЭДС имеет тот же вид чю и пля трансформатора. O.uiaxo в chhjh с scm, чю фаза обмотки статора состоит ю пескотькик секций, pac.no юженных в разяьпс пазах (рис 10 13,а) и сдвинухых в пространстве па угол й, ЭДС в каждой секции будут сдвинуты вп времени также на уЮД 0. Зеэсдствис jjuio результирующая ЭДС одной фазы обмотки будет онреаеляться не арифметической, а теимегрическои суммой ЭДС секций.
Поэтому в выражение (10,1В) вводится поправочный коэф-флдиепт й6], равный отнотпеиию модуля теометрической суммы ЭДС секций обмотки к арифметической сумме:
lEF'L.OT
Этот коэффициент |[и5ывае|Ся обмоточным.
41S
Следует отметить, что обменКИ выполняются с укороченным шагом, что приводит к увслкчселею угла fl. Обмоточный козффипиент к0( =0,914-0,95.
Таким образом, расчехная формула ЭДС обмотки статора имеет ПИД
£, 4,44/jп,Фк9].
Кая вытекав! из уравнения х-гскхричсского раппопесня цепи статора, коюрое имеет tui же вид, что и уравнение первичной пени трансформатора,
L1 j = +_/ir j +
и если пренебречь 1шдсе1исм сопряжения п обмотке статора, т о ЭДС будет равна напряжению на обмотке статора:
Lrx =£, =4,44/>(ФкО1 (10.15)
1Q.S, ЭДС. ЧАСТОТА ТОКА РОТОРА, СКОЛЬЖЕНИЕ
Mi выражения (ID 11) следует, что частота тока статора пропорциональна частоте вращения магнитного ПОЛЯ, созданного током статора:
_fL=nQp/60. (10.20)
Так как рит ор вращается в сторону поля (рис. 10,14). частота пересечения его обмотки магтгнтным полем будет определяться разностью частот вращения магнитного поля и роюра. По аналогии с (10.20) частота хока ротора
Л=И0-л)Г/би. (10.21)
Mj отношения (10.20) к (10.21)
fl//2 = Л/1"О “ ")
получаем выражение часилы юка ритора
Л к - л).Ч =Л*> (1022)
хде л — скольжение:
.» = («„-л)/л,. (10.23)
Скольжение — величина безразмерная, представляющая собой частоту вращения ротора относительно поля статора, выраженную в долях частоты вращения поля статора. Когда. ро-
416
Рис, 10.14, К иияснеишо скольжения л частоты тока рстпра
тор неподвижен (л = О), $ = (м0 - 0)Дто = 1;
Если ротор вращается с частотой cjojia, то
л =(лЛ = 0; /2 = /1з = /г-0 = (1
Прн неподвижном роторе его обмотка относительно доля находится в гсх же условиях,,что и обмотка статора. Поэтому ЭДЕ обмотай ротора может быть определена тк> аналогичной формуле, что и ЭДС обмотки статора:
E1r _4,44/(W^fc02, (10.24)
где н. — число витков фазы обмотки ротора' jtfrJ — обмоточный коэффициент обмотки роюра.
Кое да ротор вэатпается,
Е3 = 4,44/>гФАа2. (10.25)
Ит отношения (10.24) Н (10.25) вытекает, что
(’0-26)
Подставив в (1026) вместо [, е| ° значение из <10_22>, получим
^ = Ь\=Л^'. =Ез,Л (10.27)
Таким образом, ЭДС обмотки ротора пропорциональна скольжению.
При п = О $ = 1, £2 = £1В; при я - х - О, Е, = 0
104. ИНДУКТИВНЫЕ СОПРОТИВЛЕНИЯ ОБМОТОК СТАТОРА И РОТОРА
Ток обмотки статора создает ярапшюшийсм мах нитный лоток, основная часть которого® (см. ряс. 10.15,6) слеплена с обмоткой спа Юра и ротора, а небольшая часть Фр1 только с обмоткой статора. Этот магнитный поток- лаэывзстси потоком рассеяЕшя. Поток рассеяния Фг( наводит в обмотке стаго.
14 Элекэро1ем«и«а
417
ра ЭДС Ер1, которую можно определись с помощью выражены
Ер, - .Ч'рЛт-
Для облегчения анализа работы дыпэселя и упрощения расчеши ЭДС зыражают обычно через индуктивное сопротивление И ток обмотки:
Epi = - k’pl = - Jj,,
где л, = 2x_fxLj, Lj = Tpi/J । — индуктивное сопротивление и индуктивность обмотки статора, обусловленные потоком рассеяния
Аналсничная картина имеет место и в обмотке ротора Индуктивное сопротивление обмотки ротора, обусловленное потоком расссншш Фрд, равно
x2i=2x/2L2, (10.28)
где L.2 =
Подставив в (JОД8) вместо его значение иэ (10.22), получим
НИИ
K2s = Jr2s, (10.28а)
1 де л2 - индуктивное сопротивление рассеяния фазы обмотки неподвижного ротора,
Следовахельно, индуктивное сопротивление обмотки ротора прямо пронорциова.тыг0 скольжению.
107. ТОК И ЭКВИВАЛЕНТНАЯ СХЕМА ФАЗЫ ОБМОТКИ РОТОРА
Ток фазы обмотки ротора
Подставив вместо Ег и х2г юс значения из (10.27) и (10 28,о), получим
Е1к.т
(1029)
4J3
Ph?. 10-IS Реальная la) и яг-вкшгтслтная (£j> схсгл* фазы обчотки ротора (6)
а затем, разделив числитель и знаменатель на $, получим
(10.30)
где Ез* и лг2 — ЭДС и индуктивное сопротивление рассеяния обмотки неподвижного ротора, когда частота f2 = fx.
В (10.3(f) т^з можно выразить следующим образом:
Toi ла
Сравнивая (10 31) с выражением тока вторичной обмоткн трансформатора (t.l 1а). легко установить, что величину г2{1 -— s)/.7 можно рассматривать как активное сопротивление потребителя, подключенное го вторичной обмотке трансформатора. Таким обратим, эквивалентная схема фады обмотки ротора будет иметь тот же вид. что и схема замещения вторнчтюй обмотки трансформатора, в которой вместо rlt включено сопротивление Г2 (1 — к)/?.
На рис. 10.15,а изображена реальная, а на рис. 10.15,6 - эквивалентная схемы фазы обмотки рит ора астппсропнтмо двигателя.
В эквивалентной схеме япачемня £2„ л3 и 12 соответствую! неподвижному ротору, хотя в действительности ротор вращается, чти учитывается включением в цепь эквивалентного сопротивления г2(1 — х)/>.
Опгашсние —А- назывался по аналое и» о трансфор-матером коэффициентом трансформации асинхронного двигателя.
14*
419
МАГНИТОДВИЖУЩИЕ СИЛЫ ОБМОТОК СТАТОРА И РОТОРА. ТОК ОБМОТКИ СТАТОРА
Ток обмен ки ротора coj.oaej магнитное поде, расположеи-нос в тем же MaiH^ionpouoae, чти и магнитное поле, созданное ГОКом обмотки Ciaiopa. Поэтому результирующий мшнитный поток двигателя будет определяться МДС обеих обмогоэг:
у Л.»'. + 2 ;:n,v: - 1'0.32)
Может показаться, что, носкольку ротор вращается, магнитные паля ротора н статора и сатдающве их МДС вращаются с разными частотами и выражение (10.32} несправедливо. В действительности маплпные поля ротора а статора вра-тпагспся в пространстве с одинаковой частотой и, слсдола-тслыщ, неподвижны относительно друг npyi а. Это легко доказать. Частота вращения ноля ротора иОр в пространстве складывается из частоты грдшеиня ротора к частоты вращения поля ротора относителыго ротора:
Пор = н + 6<Уг./р.
Выразив л через и0 и s, a J2 — через fzs, получим
»0р - я0 - + 60/, s/p = п0 - Hfts + hos - л0.
Геометрическая сумма МДС для удобства дальнейшего анализа выражается через произведение Го»,, о котором 7(, - ток фаты обмотки статора при холостом ходе двигателя, Кохдд двигатель работает вхолостую, роз up вращается с частотой магнитного поля и ток обметим роюра равен нулю. Предоолагается идеальный холостом кол, а он имеет место, когда потеря мощвосги на трение в подшипниках и ротора о воздух ранни нулю. При реальном холостом ходе п«л0.
Ток холостого хода, как и в трансформаторе, имеет две со-сгааляющие: ?„ — намаз ничшзающяй ток и ?4 - тик, обусло-клечный потерями в сердечнике статора двига|с.тя:
Магиаговровод асинхронного двигателя имеет воздушный зазор между ротором и статором, лтиркня которого должна
* Преллшягается двигатель с фазным ротором.
42 О
быть .такой, чтобы ротор прн вращении не задсаал сердечник статора- Воздушный зазор составляет: для маншм малой мощности 0,2 — 0,5 мм, средней мощности 0,5 — 1 мм н большой мощности 1—3 мм. В трансформаторе кс зазор в магюгтойро-ваде намного меньше и обусловлен голые неточностью сборка м обработки. По этой, причине намагнЕЧЕвздошай ток асинхронного двигателя значительно больше, чем у трансформатора, и составляет 25-50% номинального тока двигателя:
fp=['O,25 <-M'hW-
Тик 7Х намного меньше _/р, поэтому часто считают, что 7Г( ® 7(н
Разделив почленно выражение (10.32) па 3w|/2, получим
Отсюда
(10.33)
где /, = -/iWj/h, — юк'фазы обмотка ротора, приведенный к обмотке статора.
Таким образом, ток фалы обмотки статора складывается из тока холостого кода и приведенного тока обмотки ротора. Результирующий 'лагпитзгыя потох двигателя обусловлен взаимным действием МДС обмоток статора и ротора, причем, как я в трансформаторе, МДС обмотан ротора является размагничивающей относительно МДС обмотки статора.
с вменением на1рузкн изменяется ток ротора и создастся впезат-лепне. что должны измениться результирующая МДС и создаваемый ею мшнкгный доюк Однако в дснствитсльностн рсчулы-яруюьцдя МДС /ewt и магнитный поток почти не зависят от нагрузки. С изменением тока ротора в тон зс степени изменяется и ток статора, а резуль-| иртъгчи.ця МДС почти не изменяется. Относительна налам зависимость магнитно п потока и, следовательно. создающей его МДС (/ь»|1 от тока ротора (нагрузки на валу двигателя) вытекает из (10. И). Действительно, есля пренебречь палением напряжения в обмотьс ста* гора. ТО ЭДС Е, будет равна напряжению сети:
V,
El.ih напряжение сети не зависит от нагрузки, то и матнипЕык поток также ие Судет зхьвисеть от нагрузки.
Одлако следует отмстить, что в период пуска асинхронного двигателя е короткозамкнутым роюром ток в цепи статора ггреаышаег
421
ссминальный в 5— 1 рал Вслсдсгзяс щпго падение н&пряженмя » обметке статора стззовЕггсй существенным! £<Lr, и магнитный поток дянгагсля оказывается шычнтельно меньше номинального.
<».». ЭЛЕКТРОМАГНИТНАЯ МОЩНОСТЬ И ПОТЕРИ В АСИНХРОННОМ ДВИГАТЕЛЕ
Мощность, потребляемая двигателем из сети, определяйся но формуле
Pj = [/З Ujf, cosy,.
Часть в гой мощности (рис, 10.16] юрястся в обмотке статора:
& часть. il\), СОСТ&&ДЯС1 истери в сердечнике статора uj перс-магни чиваггия и ввхревьи токов.
Мощность, передаваемая вращающимся магнитным полем ротору, называется электромагнитной мощностью и состаяляет
= Рг - ДР^ме - APcti = 3W2 соь +, (10 4}
Часть электромагнитной мощности теряется в обмопсе poiopa:
AJ’neui = 3J|rz, (10.35)
а часть, ДР^, составляет потерн в сердечнике ротора от гистерезиса и перемагничивания.
Мощность, преобразуемая в механическую, равна
Р-и-Р^-ЛР^-А?^ (10.36)
Небольшая часть механической мощности теряется на тре-
пне и подшипниках ротора
о воздух н вентиляцию.
Мощность, развиваемая двигателем на валу,
PR=P_ (10.37)
Все потери мощности, кроме вентиляционных, которые представляют собой затраты мощности на продувание воздуха внутри двигателя с целью лучшего охлаждения, превращаются в теплоту r нагревают двигатель.
Рис. 10.16 Потери мощности в асинхронном двигателе
412
to.to. МОМЕНТ, РАЗБИВАЕМЫЙ ДВИГАТЕЛЕМ
Известно, что мощность равна произведению момента на частот)' вращения:
Р = М<а.
В асинхронном двигателе произведение электромагнитного моменга. возникающего в результате взаимодействия тока ротора с магнитным полем, на частоту вращения поля представляет собой электромагнитную мощность:
(1038J
Механическая мощность, развиваемая двигателем, равна произведению электромагнитною момента на частоту вращения роюрэ:
- Л,.- (Ю »)
Если пренебречь потерями мощности в сердечнике ротора вследствие их малости отосительно потерь в обмотке ротора, то разность электромагнитной и механической мощноеicm, как следует из (10.36), будет равна потерям мошвООи в обмотке ротора]:
Р„ ~ Ли» = - 3^га (10.40)
Подщаиив в (10,40) вместо мощности их значения из (10 33) и (10.39J, получим
•WjmWo - .^<0= Зф:,
откуда
Заменив (йа - :в через &ios; что вытекает из (10.23), получим выражения электромагнитного момента
(10.41)
«М
1 Короткозамкнутая обиогка ротора имеет не три, л т фаг. Для ойщипстя выводов обмотка ротора приведена к трем фазам, тоторые имеют обмотгн сгагора а ротора лам: алел л е фазным ротором.
4-23
и тм J рома! i! HTiTC'i мощности
3/ir, Лм = (10.42»
5
Момент, развиваемый лвиглгелем на валу, буж-j мсныпе электромагнитно! о момента на величину ДМ^, обусловленную силами трения в иедшипликэк, ротора о воздух и вешили-ИНОНнымн потерям и:
М - М,ы - А.ИМ„.
Потери момента для асинхронных двигателей средней и большой мощности относительно малы, и ими обычно пренебрегают, В практических расчет часто принимаю!, что
M=Ww И 0.43)
В выражении (10.41) отсутствуех магнитный поток, что ид первый ви нал противореча! лрюнсипу действия дмп-дтеля. Однако легко иоказатъ, что тю нс так: магнитный поток вошел в уравнение в неявном виде.
Выразив в {10.41) потерн мощности в обмоисс /?>•, черет ЭДС. ток и cosijf, ротора
3/^2 = 3Ej/3cos(h?J /3) = SE^cos^,
Подучим
Подставляя в (10,44) вместе ЭДС t’j ее значение и* (1027) н учитывая (10.42), получаем
ЗЯт^сояуу, 3-4,44/1в1гФ^,21лсо&4г2 .... .
Д1 —-------- ------=----------------------— СФ/» cos dr,.
wos <□„
(1О4_-5>
где С = 3'4,44fj w2fcC2/<xfci — конструктивный коэффициент, обус-ловливаюшвй момент двигателя.
Используя выражения 110.44), (10.42), можно получить два соотношения:
потери в обмотке ротора
424
механическая мощность, развиваемая двигателем,
- 4
Из этих выражений вытекает, по прн неподвижном роторе, когда л = 1, вся электромагнитная мотнегость прсобразусЕсн п теплоту в обмен ко ротора, а механмчсеиая мощность равна пулю. Прн номинальном режиме работы, козла а 0,02 -0,08, дочти вся электромагнитная мощност ь (0^2- 0,98) преобразуется в механическую и только небольшая ее часть (0,02-0,08) преобразуется п теплоту в обмотке ротора,
19-ТЬ СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Дня анализа работы асинхронного двигатели пользуются схемой- замещения. Схема замещения асинхронного двигателя аналОЕична схеме замещения трансформатора и представляет собой электрическую ексму, в коюрой вторичная цель (обмот’ ха ро(орл) соединена с первичной лдпъю (обмоткой статора) гальванически вмкю магнитной связи, существующей в двигателе
Основное отличие асинхронного лвигггс.тя от трансформатора в ояср| егячесиом отношении loctohj в следующем. Если в трансформаторе энергия, переданная переменным магнигЕнлы полем ио вторичную цель, поступает к потребителю в силе электрической энергии, то в асинхронном двигателе энергии, переданная вращающимся маЕинтнътм полем ротору, нреобря-•зуегся в механическую и отдастся валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, переддвас.мме ма1 ни'тяым полем но вторичную цель трансформатора и ротору двигателя, имеют одинаковые выражения:
Ртм = Рх - ДР,
В трансформаторе эдектромагнитпая мощность за вычетом потерь R0 вторичной обмотке поступает к по греби тедю:
Р2 = P-.W - ЗФг - З&'а/а 40s ф2 = 3/£гп = }Г22г'п, (10.46)
где rt1 - сопротивление потребителя.
В асинхронном двигателе электромагнитная мощность за вычетом потерь п обмотке ротора превращается в механическую мощность:
Р3 = Р^в = Ру - 3/^2 - Р™ - (W47)
425
Рис. 10.17. Сима замещении аскнхропносо ДЫ£-гвтел«
Псдстдвив в (10.47) вместо ее значение нз (10,42), Получим
р„. = 5'1 '';i ' i! =. л,1 И—-11 = з/>; = зг.Ч (1U.4SJ Л Л
’ I - А-
Где r3 = гj — s
Сравнивая выражения (10.46) и (IO.dK), можно заключить, что
Таким образом, потери мощности в сопротивлении г- чис-.’сЕзно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление гшрузки Гп на гj = га (1 — s)/s, получим схему замещения асинхронного двигателя (рнс. 10.17) Все остальные элементы схемы замещения аналогичны ссютвегствующим элементам схемы за-мс1цения трансформатора, гь — активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки статора; ггп х2 — мрнведенньгс к обмотке ста юра активное осиротив ленке и индуктивное сопротивление рассеяния фазы обмана ротора.
Приведенные значения определяются гак же, как и для трансформатора:
Г2 = г1** • *2 = Х2* '
где к = Е]/£3к — L!i^£2, — коэффициент трансформации двигателя.
Мс^&т возникнуть сомнение в влможиосги использовании гальванический связи испей ciajopa и ротора в схеме замещения, поскольку частоты в Э1их цепях па первым взгляд нс одн-на.кс®ы. Первач часть схемы замещения представляет собой ж-нивалс1пную схему фазы обмотки ротора, которая, как было показано n [0.7, приведена к частоте тока статора R реальном же двщатсле в отличие от схемы замещения частоты тока ротора и статора не одинаковы.
426
10.11 МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
Механической аагьаггеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двягателем при установившемся режиме работы: я - или $
Механическая характеристика гитяегся одной из важнейших характеристик двигателя. Прн выборе двигателя к производственному механизму ю множества двигателей с различными мсканичссюшн характеристиками выбирают тот, механическая характеристика которого удоилегворяет требованиям мекания-
Уравнение механической хараттсриотики асинхронного двы- ателя может быть получено на основании формулы (10.-41) и схемы замещения
С помощью схемы замета шя [см. рис. t0.17> определяют приведенный ток фазы ротора: *
где
т=г.+^!-Д .
S S
Порученное зг-ачсние тока 7J надставляют в уравнение момента (10.41), в котором предварительно /, и г2 заменяют через их приведенные •’яачетшя:
М- (10.50)
4Dt(ft
После [louciaHOBKM получим
Выражение (10.51) представляет собой уравнение механической характеристики, поскольку оно связывает момеш и скольжение двшагсля. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя - постоянны' и нс за-
1 Сопротивление rt завися: от частоты н. следовательно, от з, но дли двигателей общего назначения изменение rz незначительно.
427
Phi.. 10 IS Механическая хар?л-терке гика аситр&кного ibhim-
ТСЛ1
висят от s и AJ. Располагая Лара мех рами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид, пзобра-жеппый на рис. 10.18.
Олиако необходимо лтме тить, что после включения двигателя п нем происходят счок-иче переходные- злектромагнит-иые процессы. В icx случаях, когда время разбега оказывается соизмеримым с временем
хлегс1ромагпит1тых процессов, механическая характеристика двигатал а период разбега может существенно отличаться от статической.
Одной из важных wick характеристики, представляющей интерес при анализе работ * выборе двигате?1я, янлйется точка, где момент, разпивасмыЗ двигагелсм, достигает наибе ibuicro -значения.. Эта точка имеет координаты гт^,, s^,
Значение критического скольжения 5Ж₽ При котором двигатель развивает максимальный (критический) момент легко определить, если взять производную ilM.fds выражения (ЮЛ) н приревчя'гь ее нулю.
Песне .тиф<]>гре'дцироьаммя и последующих преобразовании выражение будет иметь следующий вил
-Л> = ± Т-^~ 7‘ (]0-5^
!•• + v
тле »,®т,+ .<.
ГТолставия вместо я в уравнение (10.51), получим выражение максимального момента
___ -1Ь' >ф _
Х(г< ±1-4 +
(10.53)
Необходимо отметить, что нт выражений (10.51) - (10.53) вытекав! следующее,
Момеиз, развиваемый дяингтслем, при любом скальжыпш црсщсримодачЕн квадрату напряжения. Максимнл1Л1ыЭ момент пропорционален квадрату напряжения и не завися! от сопротивления пели ротора. Критическое скольжение пропорционально сопротивлению цепи ротора н пе зависит от напряжения сети.
Полученные выражения удобны ятя анализа, однако из-за
428
отсутствия в каталогах параметров г,х к,. х2 их использование для расчетов и построения характеристик заiрудиено.
В практике обычно пользуются уравнением механической характеристики, с пометы© которсч о мофяо произвести необходимые расчеты и построения, исиользкя только каталожные данные.
Активное сопротивлении обмотки статора, г, значительно .меньше остальных сопрел ирлепяй цепи статора и ротора, я им обычно пренебрегают. Тогда выражения (10.51) - (Ю53) будут иметь вид
w - + х/] ’ (1054)
Ър- ±Г2/Лх1 ((0.55)
м =2^ 2га0хк (10.56)
Упрошенное уравнение механической чарактернстякм пазу, чается из совместного решения уравнений (10,54) —(10.56)-.
2М W----------mr . (1057)
$/S( + Vj/к
Значение Мвв определяется из отношения .МИ„/М1НП1 = X, укатываемого в каталогах, a s^, — пд ypaeuciuM (10.57), если рс-шить сто относительно и вместо текущих значений s к М подставить их поминальные значения, которые легко определить но паспортным ианным:
».„-.'.„.(х±07ЛТ), (inss,
где 5ъоМ (»iti — ч|С]М),-л^, л —
Следует отметить, нов золе от .И = 0 ди М & 0,9МП1й< механическая характеристика близка к прямом линии. J Поэтому» например. при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линяю, проходящую через точки И = Q. н = я0 и nklDM. Уравнение мехатгичсскон характеристики п этой части будет
10.13. ПАСПОРТНЫЕ ДАННЫЕ ДВИГАТЕЛЯ. РАСЧЕТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
Расчет и построение механической характеристики производят по каталожным данным двигателя.
В каталоге приводятся следующие данные: тип лншаюля, ^НС<М' ^rw«> ЛеОМ'
Для двигателя с короткозамкнутым ротором дополнительно даются отношение пускового момента я номинальному (Мя/MmmJm отношение пускового тока к номинальному (/п//вои); для двигателя с фазным ротором — напряжение между кольцами при неподвижном и разомкнутом роторе £/21=£2i и номинальный ток роюра ^JM. Буквенные и цифролыс обозначения тина двигателя позволяют, например, судить о назначении двигателя, его габаритной мощности, числе пар полюсов и т, д, Поскольку существует большое число типов двигателей и В каталогах дзеты пояснения, что означает каждая буква и цифра, останавливаться на лом в кыш с пет необходимости.
Номинальной мощностью Рцпм двигателя общего назначения длительного режима работы называется мощность, которую двигатель может длительно развивать на валу, нахреваясь при этом до допустимой температуры, обусловленной классом изоляции его обмоток, В двигателе возникают' потери мощности, которые нагревают его. Вначале, когда двигатель имеет температуру окружающей среды, большая часть мощности позорь расходуется на повышение его температуры, а меньшая рассеивается в окружью пую среду, С повышением температуры двигателя большая часть мощности потерь рассеивается в окружающую среду. По прошествии определение! о времени наступает тепловое равновесие: вся мощность потерь, выделяющихся в двигателе, рассеивается в окружающую среду, и температура двигателя иря заданной нагрузке остается неизменной. Повышение температуры двигателя выше допустимой вызывает ухудшение механической и электрической прочности изоляции. При этом изменяется структура изоляции и в Конне концов происходит ее пробой и выход двигателя из строя. Можно ли нагружать двигатель мощностью больше номинальной? Можно кратковременно, если цо этого двигатель работал с недогрузкой йен» температура была ниже допустимой. Длительность и степень перегрузки в совокупности должны быть такими, чтобы в результате температура двигателя нс превышала допустимую
На паспорте двигателя обычно указываются два значения номинального папряжогня, например, 380,220 В. Это означает, что данный двшателъ рассчитан для работы с напряжением на 430
Pile. 10.19. График зависимости потока двигателя от нэишыычи-аающего тока (а]; механическая характеристика лвнгатсля е- учетом пускового момента Arfl(J заданного в каталоге (й)
фазе его обмоткн 220 В. Для включения двигателя а есть с линейным напряжением 380 В его обмотки соединяются звездой, а з сеть с линейным напряжение^ 220 В — треугольником. Сп-ответстаеино указываются и два значения линейною номинального тока обмотки статора для соединения звездой и треугольником. Далее a на пицце прикидки;* номинальные значения частоты вращения. КПД пИ;-ч, коэффициента мощности сси<р1ГОИ, которыми обладает двягдтель при номинальной нагрузке на ею валу. Прн этом предполагается, чю напряжение в частота соответствуют паспортным данным.
Следует отметить, что длшельяая работа двигателя лри панытен-ноы или нониженьом напряжение недопустима, особенно прн номинальной нагрузке на сто вд.у. В том и другом случае гок в обмотка» octtjHBaeicK больше ЕНШЕпадыгого, двигатель перегревается и отходит лэ строя. При повышении напряжения, как следует из выражения
С е+ ft f, =4.44/1*1^01.
в той же степени возрастает и магнитный поток В результате, как вилки н.1 кроной наюггшчнвання (pwc. ЮЛО.чД, чначнгельпо вырастают ток намагничивания ip и, следовательно, ток обмоткн статора
Яри пониженна напряжении магнитный поток уменьшается х. как видно из выражений
АГ = СФ^стефг,
бозраегзгог выше номинального ток ротор» f2 н. следовательно, ток статора /х, так как cos^2 изменяется незначительно.
Кроме кип, при понижении напряжения сушее!аснио уменьшаются пусковой н макснмн_1ьнь[й монеты лннгаселя, так как они пропорциональны квадрату напряжении.
Работа двигателя допустима при колебании напряжения в сети пе белее ±5’/,
Влияние отклонения частоты сети от нлмннальдого значения на режим работы двигателя рассматривать пс булсм, гак как ощутимых
431
чзмспенмй частоты в мощны*-силовых системах промышленных райо* ион не наблюдается.
Мощность, потребляемая двигателем ил сети, при номк-иалькоО. н. любой другой нагрузке может быть определена по формуле
— Р2/П = |/Й'/СО5ф.
Отношспие М/М|ЮЫ характеризует перегрузочную способность двигателя.
Расчех механической характеристики двигателя обычно производят с помощью упрошсЕлтого уравнения механической характеристики (10.57), в котором М В к — координаты механической характер ист ики двнгаюля, и Sq, — его параметры
Значение Мил< определяют по формуле
955ОР
-[Н'М].
., 975Р,ЮИ . _ , .
А----- -[MC-mJ-a
(10.58а)
а 5ьр — по формуле (10.58).
Полученные значения и $1р подставляют в уравнение (10.57), задаются радом значений з и подсчитывают соответствующий момент, а по формуле л ~ яи(| — s) — частоту вращения [см. (10.23)]. Необходимо обратить внимание нн то, что расчетное значение момента М„ при s = 1, который называется начальным пусковым моментом асинхронного короткозамкнутого двигателя, обычно меньше действительного значения указанного в катален е, и мехавическая характеристика в згие 5 % 0,7 -? 0,9 имеет «провал», где Л1П,, < Л/J (рис. 10.19,6). Причиной этого являются неточность расчетною уравнения и такие неучтенные явления, кая, например, вытеснение тока ротора к поверхности проводпика н влияние гармонических составляющих вращающегося магнитною поля двигателя. Практически расчетную механическую характеристику корректируют так, как изображено оуиктирнай линией на рис. 10,19,6.
Расчет н построение графика зависимости тока фазы обмотки ротора от скольжения 12=/(я) (рис. 10.19) для двигателя с контактными кольцами наиболее просто произвести, если воспользоваться выражением (10.41),' из которого следует, что
В уравнение (10.59) подставляют значения j н М, полученные из расчета механической характеристики, и определяют
432
J2, Активное сопротивление фалы ротора входящее в это выражение, можно определить из (1041), если вместо гекушнх значений М.. ч и J- подставить в него их номинальные значения и решить огноси~адьно гг:
Однако на практике Fj определяют чаше нт выражения (1С.29). в котором следует положить s = л|1ам7г = f1PIDU, а членом хг.5 пренебречь ввиду вс о относительной малости по сравнению с Fj. С учетом сделанных замечании расчетная формула прм-обрствет вял
,, _ Л'^. (10.59а)
Р З/днО’.г
Корень ,<< трех появился в выражении (10 59а) вследствие юго, что и каталоге дано линейное значение е2|,
С помощью графика зависимости тока ротора от скольжения производят выбор сечения, материала н конструкции пусковых и регулировочных реостатов.
Расчет и построение графика зависимости тока статора ,г от скольжепня довольно сложны; практически такой график редко используется, и поэтому методику его расчета мы опускаем.
Расчс" в построение механической характеристики и зависимости f2 =.f(s) приведены а примере 10.2.
10.14. ПУСК АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Для пуска двигателя его обмотку статора подключают к хрехфазиой сете с помощью выключателя. Схема включения двигателя изображена на рис. 10.20, и. После включения выключателя происходит разюн двигателя. При тгом момент, разливаемый дакгателем, Л/ И ток £ его обмотке статора I изменяются в Соответствии с графиками, изображенными па рас. 10.20,6. Двигатель разгоняется ло установившейся частоты вращения, при которой момент, развиваемый дишателем, равен моменту сил Сопротивления на его валу.
В условиях нормальной работы момент на налу двихакеля может изменяться п довольна широких пределах, однако, если момент окажется больше М№ахт двигатель остановится. Обычно считают. что допустимые изменения находятся в пределах от
433
асинхронного даягдтсля с кПрспяо-замкнутой обмоткой статора (<т); механическая харнктеристака н зависимость тока стаюра or сглльжгпня (/>)
W-Одс М = (0,8 ч-0,9) Л/„щ.. Естественно, имеется в виду работа и зоне характеристики, где s
Одпако следует заметить, что дательная работа лвиписля допустима при моментах на eto валу, не: 1грерышающих номинального зндчепия.
Если оказалось, что двигатель вращается не в требуемом кагравлеипр. то для изменения направления прощения ротора необходимо изменить порядок подсоединения обмотки статора к сети: начало обмотки Ci (рис, 10.20,с) соединять с нипейным проводом В, начало обмотки С2 - с проводом Л, начало обмотки С.1 ост-лпигь соединенным с проводом С. Прп ном изменится порядок чередования фаз, что npmcaei к изменению направления вращения магнитного поля статора и. следовательно, ротора,
К недостаткам такого пуска относятся: ]) относительно мальиг пусковой момеггт: Мг “(М -г !»6)Л/||га; 2) относительно большой пусковой юк: i„ =(5 - 7)JIIC1M.
Из-ха первого недостатка иногда приходится выбирать двигатель большей мопшостн, чем это требуется по условиям работы при установившемся режиме, что экономически нецелесообразно. Действительно, если график момента сил сопрсни-пления на валу А1Г имеет вид, изображенный на рис 10.20,6 пунктирной линией, то после включения двигателя его ротор осгалется неподвижным, так как М<в>Л/„. хотя МЯ111 > и го условиям нормальной работы даягатедь подходит;
^e.wi ^»ок'
Б-элыпоЗ ток в периоды пуска двигателя может вызвать значительное гдденпе напряжения в сети малой мощности, что 4'4
Cetnt
Rue. Схема пуска асинхронною двигателя с доратходемкну-ток обмпкон ротсра: с добнноччыы сопротивлением н ценя обмотки nviopa (cj } в нереключення фал обмотки со звезды на гре> угозгьнше (в); механические характеристики двигателя при та 0 я гя^ =#й (Д) и при соединении обмотки статора звездой * треугольником (г!
iwGjjaicjjpKMTHO скажется на работе других потребителей, включенных в сеть, Е1апример вызовет мигание осветительных приборов и т. д. Однако следует отметить, что в настоящее время заводские спи имеют большое еечепве, поэтому падение напряжения, возникающее при пуске двигателя, дказываегся несущественным
Большой пусковой тоя ограничивает допустимое число пусков (включений) двигателя в час. Прн большом числе включений в час даже мало 'загруженный в установившемся режиме двигатель из-за больших пускоямк токов может перегреться и выйти из строя.
В малрмошных сетях, сечение проводов которых невелико» а протяженность значительная, для ограничения пускового тока применяют пуск с активным ялм индуктивным ерпропгапс-нис-м, включенным в цепь обмотки статора (рис. 10.21, а), или пуск с переключением обмотки со звезды на треугольник (рис, .10.21,я).
Перед пуском выключатель ffT (рис. 1021,в) устанавливают в выключенное положение, затем включают выключатель ВР После оиончанмя разбега ротора двигателя включают выключатель В2, чем псуптпруюТ добавочные пусковые резисторы. Соответстпукицнм подбором сопротивления гд можно ограни, читъ пусковой ток до любого необходимого значения. Однако
435
не следует забывать, что олиоврсмслпл уменьшаются пусковой и критический моменты из-за снижения напряжения на обмотке статора, вызванного падением напряжения на сопротивлении Гд,
На рис. 10.21,6 изображены механические характеристики двигателя при гл=0 (кривая J) и га^0 (кривая 2)
Пуск двигателя с переключением со звезды па треугольник возможен, когда обмотка статора может быть соединена звездой и треугольником и напряжение сети соответствует соединению обмотки статора треугольником. Например, лвигатс.чь имеет номинальное напряжение 360/220 В. а напряжение сети 220 В. Установив предварительно Выключатель (см. ' рнс. 10.21,в) н положение а, что соответствует соединению обмотки статора звездой, выключателем В, включают двигатель а есть. После окончания пуска выключатель В2 перекидывают в пело-жеьяс 6, благодаря чему обмотка статора сказывается соединенной треугольником. Напряжение на фазе обмоткн статора во время пуска будет меньше номинального в ^/3 раз, например при напряжении 220 В опо составит 22(1/|/з — 127 В Вследствие этого ток фазы уменьшится в той же степени, а поскольку линейный тох больше фазного в раз, пусковой лннайпый ток прн таком способе пуска будет меньше по сравнению с прямым пуском в 3 раза. Одновременно в 3 раза уменьшатся пусковой н максимальный моменты, так хак они пропорциональны квадрату фазного напряжения.
Значение критического скольжения ле изменится, так как оно не гдиксет от напряжения. На рис. 10.24,г изображены механические характеристики двигателя, соответсзнуюппге схеме включения треугольнвком и пусковой схеме звездой.
Ввиду значительного сжижения пускового момент а указанный способ пуска возможен ю.1ь:<о при малых момен1йх сил сопротивления па валу двигателя.
Пуск двигателя с фазным рохором (контактными кольцами) (рис. 10.22) осуществляется подключением обметки статора к сети с предварительно введенными в цель ротора добавочными резисторами гл, По мере разгона двигателя резисторы rj с помощью движка выводятся и по окончании пуска сопротивление резистора обращается в нуль, а обмотка ротора оказывается замкнутой накоротко, как н у двигателя с короткозамкнутым ротором. Введение добавочного сопротивления в пепь ротора при пуске асинхронного двигателя с контактными кольцами позволяет увеличить пусковой момент вплоть до максимального значения и олноирсмепио значительно снизить пусковой ток. Это является одной из главных причин, почему вместо 436
? ?. т
Fn£. 10.22. Схема ак.-ж>чения зсипхродэсто дтмла-теля с фазным рптцром (контактными гольцами)
асинхронных двигателей с короскоза.мкнугым puiOpONf примсиякноя двигатели с фазным ротором.
Значение пускового тока можно найти из выраисспия (20.ЭО), в которое следует подста-ЙИТ1. Г, Н J” 1:
Л. - —--- (10*0)
И 2 i d + s
CoOTPeTCTFtyinniHM подбором шачення г_, можно получить любое требуемое значение пустгозюго тока ротора иг следователь гю, пусковою гока статора, гак как
i J и ~ 'и "* ^2н-
Влияние сопротивления Г1 т,а значение nycxoaoi □ момента можно ВЫЯСТ1ИТ1, с помощью выражения (1054). в которое необходимо подставить г । И « - 1:
Из ьырд'А'е1ЕЧ?' (10.61) вытекает, что введение добавочного сопротивления лл до определенны» его значений вызывает увеличение пускового момента Наибольшее значение* Л/„, равное .4,,,. будет, когда + - кк:
Дальнейшее увеличение сопротивления выбывает уменьшение пускового момента.
Уменьшение лускового момента до требуемою значения с помощью резисторов используется в некоторые механизмах для выбора люфтов и устранения уларов при пуске механизма.
Определение с помощью выражений (10.60) и (f0.6l) невозможно, так как в каталога* подаются значения х2 и хг Рас-че! пускозого сопротивления га при заданном значении производят с использованием искусственной механической ларак- срисгики. Уравнение искусстве1гной'(рсостагт1ой) механической характеристики ,пвига1еля с лобааеннымн резисторами в цени poiopa имеет тот же вил, что и уравнение ccTuCiBewiwm харак-
437
тспистики, разница лишь в значении sfcp,„
Мм -----------------
Критическое скольжение равно;
для ©стеигвеиЕгоя характеристики
для искусственной характеристики
_ г 2 + ГД Я-Ф В -
(10.62)’
(10.63)
(J 0.63а)
В уравнсЕане искусственней механический характеристики вместо текущих значений М я я подставляют заданные знцче-ния пускового момента ,ЧИ и j = 1:
Sf.x/l *" 1.'*гг1.в
110,64)
откуда определяют критическое скольжение и. соогвстствую-niee искомому пусковому сопротивлению:
SaicM из. отношений критических скольжений естеспзснпой (10,63) и искусственной (10.63а) механических характеристик определяет искомую величину
(10.65)
Пусковой ток ротора, соответствующий заданному пусковому моменту, находят нэ выражения (10.59), в которое подставляют М — Л(о и д = 1:
/ WntrtL, i 3(,з + гУ
(IO.65a)
43S
Рис. I Cl.2.1. Схема аьгоматического пуска асинхронное дамгателя с. ы»шан1нымк кольцами (и); механические харакгсрастяи двигателя ирм пуске (£)
Пример 10.1. Определи!ь .1 качение добавочного сопротивления, котстрсн; нади иг.-и^унть в цепь обмотки ругкрд, чтобы пусковой момент составил
Паспортные да:-гныс двигмеля: ГИ0Ч1 = 20 кВт, чМ1Я| = 1420 (й/мин, нам — 380/220 В, Тюм = Мцаи/Мпот = 2,4 Е^. = 193 В, = 68 А,
Решение. Значение гд определяется нз выражения (10.65)-
Значения г2, $е згМ в (10.65} определяются; т2 - ю (10.5911}, j — из (10.58), Sjp, — нз (1064), в кспорых :шачення яи0М - нз (10.23},- из (10.58 a\,Wlt - из (J0.57).
После подстановки паспортный дишыд двигателя к угнанные выше выражения получим: 5^ = 0,053, Wm„-324 Нм, sip = 0^42, 14, а - । ,53, т, = 0,087, J-J = 0,476 Ом
В chl.-hs.si ах автоматического управления, где пуск осуществляется дистанционно, пусковое сопротиидекие гт по мере рачгони двн|дтеля уменьшается нс плавно, я ступенями е еюмощыо релейно-яонтак-горных аппаратов.
Перед пуском дякпателя (рис. 1023,11) вонтаят^п kcihiакторов1 К, и 3Cj разомкнуты м и цель ротора яключедо пусковое сопротивлекие, ранное сумме гЛ1 +г„г, которому cqotwtciнуег реостатная характерн-СТНМ1 г (рис. 10.23,6)
1 Описание устройства к принципа действия вонтихтора дано н 5 12.5.
4.39
После включения обмоти стдтора в t'ci ь контактами кинтактора К, ротор .чнигатсля начинает разгоняться, ДВИТИФЛЬ работает иа «н-ракгермепгке !. После постижения частоты вращения, амиттетствую-jiicii точке a, t двигатель ра-лаиаает моменч Мр колканты контактора KL автоматически чамыкаются и нмглю’сают сопротивление rjr Вследствие этен« лвнгате.ть начинает ра5ота1ь ня •чсханиче^кс.й харак-тсрзстняе 2, соотоеЕс-иующсн сопротивлению г-,:- Двигатель ри.ио-Еиеется от частоты вращения, соответствующей точке о, до частоты крашения, ссютвететвующей точке е. При достижении указанной частоты вращения автоматически замыкаются коитдкт Ы коптах гора Мг и днигатсль начинает работать ни ссгестненной характеристике 3 я точке у и рятгоЕЕяется до установившейся частоты яра 1пснмя лтсг. гл-crTBfiTciвуюшен моменту сил сопротивления Мс на его валу.
Легко показать, что отношение скольжений на'естесгиеннон и искусственной (реостатной) мехаяичссквх'характеристиках гтрк одном и том же моменте, цанрнмср Л1г (рнс. T&23.6J, раине отношению сопротивлений цепи ротора:
!Ъ'Ч - s.'s, fj.
Действительно, приравняв пряные части уравнений ecievracHiiofl (1'0.57) п искусственной (10.62) механически* жаракгерищлк н сократив на .получим
х.'-1'кВ + Зир/'С = Ги/^р_л + -*кр, а,,|<Ц1
откуда
" 4*'fip.n> мяч
41 -Si = н ' г2/ 4 rjA
7>пэ выражение част иепо.тьчустся ир-н графоаналитическим рас-чепе студней nycktiHoro реллдта.
fO.fS. ДВИГАТЕЛИ С УЛУЧШЕННЫМИ ПУСКОВЫМИ СВОЙСТВАМИ
Для механизмов, имеющих тяжелые услсаия пуска, 1дс по ряду причин желательно негтпльзовагь.асинхрониый двигатель с Короткозамкнутым реи стром, применяются двигатели с улучшенными пусковыми свойствами: большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения, Эти двигатели отличаются от двигателей нормального исполнения только устройством короткозамкнутой обмотки ротора. Одни ия них снабжены двумя самостоятельными обмотками типа «беличьей клетки» (рис. 10.24, и), другие имеют более глубокие пазы ротора (рис. (0,24,6). в 'которые уклады-
440
Pik. 10 24. Двигатель с улучшеннымй пусковыми свойствами; с днайнин «беличьей клегкойю (д), с iлубоким пазом (£)
ваел'Л коротк<илмкпутал о&.могкэ, имеющая в отличие от обычно! стержни с большим отноптеимем высоты к ширине, третья обладают повышенным сопротивлением стержней обмотки. Первые называются двигателями с двойной «беличьей клеткой», вторые — с глубоким пазом, третьи — с повышенным скольжением. Рассмотрим процессы, происходящие при пуске двигахелн с двойной «беличьей клеткой»
Обмотка / (рис. 1024. п) имее! мечынее активное сопроти-ьление по сравнению с обмоткой 2, тик как она большего диаметра и выполнена из материала с меньшим удельным ссиро-!явлением (медь), чем вторая (латунь}. Схержни обмотки J расположены в холше ферромагнитною сердечника ротора, стержни обмотки 2 — ближе к возаушному зазору В результате этого при пуске магнитное поле, образованное токами обмоток, распола! аегся примерно т ак, как показало на рис 10,24,
Из рисунка следует, что мах ниткый поток, слепленный с обмоткой /, больше, чем машигный поток, еиелденный с обмоткой 2, слелопатсльно, индуктивность первой обмотки будет |&кже больше.
В первый момент пуска (s-- 1] индуктивное сопротивление обмоток будет иметь наибольшее значение, так как
л3 *= 2nfaL=
и гокораспределсЕхие между обмотками будсг определи 1ь*.я главным образом ия индуктивными сопротивлениями, Поскольку индуктивное сонрогивлеиие первой обмотки значительно больше, чем второй, ток в ней, как следует из закона Ома для роторной цепи (1029), будет значительно меньше по сравнению с юком второй обмотки. Таким образом, основной
441
момент будет возникать в результате действия тока пторой об* мотки,, Имеющей значительное активное сопротивление. По мерс разгона двигателя уменьшаются частота тока ротора и ик-дуг1ив11ые сопротивления обеих обмоток, что вызывает лере-расирсделенве чока в обмотках: в первой обмотке ток увеличивается, во второй уменьшается. После окончания разгона частот» тока ротора становится настолько малой (0.5 — 5 Гц), чю индуктивное сопротивление обмоток оказывается намни и мсиыпе мл активного солротиндения. вследствие чего весь ток ротора праыичсски будет располагаться в первой обмотке, aiflBBiioe сопрО1ивле1тие которой значительно меньше, чем пторой. Таким образом, роль рабочей выполняет первая Обмотка, роль пусковой — вторая. Получается картина, подобная пуску двигателя с контактными кольцами и ввсдстпгым в дель ротора добавочным сопротивлением.
Аналогичная картина возникает и в обмотке ротора пысагеля . с глубоким пазом. Стержня обмпгхн ротора можно представить со-сеошшми на г ял а рлггплплшемных по высоте лаза проводников. Проводники. лежащне в нижних слои ним оссватыпаются большим чаг-нкгны.м потоком, чем проводники d верхних слоях. И результате ннлуктнвпос1 ь н индуктивна сопротивление нажПих слив сказывается 6o.ii.iiie. чем верхних, В первый момент пуск» (.s = 1J индуктивное со-лршявление пнжнмх слоев значительно больше сопри-шщснся верхних и ток вытесняется в верхние слои стержня, что равшк-нльЕЮ увеличению активнт о сопротивления обмоткн ротора. По мерс разгона двигателя уменьшается кндугтив1Т<№ сопротивление н происходит перераспределение тока но высоте ст ертгия обмот кн. После окончняня пуска инлуктввное сопротивление станодипя незначительным и 1<>к равномерно распределяется по всему стержню, что рапипснльно уменьшению активного сопротивления обмоткн ротора. Таким образом, при пуске дли! а геля автома! нчсски изменяется ахти внос сопртл н-гигсине обмоткн ротора; и начале пуска сопрогинленнс з!1ачитыьно бо.чыие, чем после окончания пускн_
te.1t. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
Для получения наибольшем производительности, точности обработки иди ятгьц показателей исполнительный орган производи 1ВСП1Г0Г0 мехаегизма должен вращаться иди перемешаться поссупательыо с ссхявегетвуиицей этому оптимальному режиму скоростью, В связи с лям возникает яеобходимость принудительною регулнроватгя скорости исполнительною органа в соответствии с технологическими требованиями. В недалеком прошлом ра улярованис скорости осуществлялось с помощью коробок скоростей, механических вариаторов и т. п.
442
Рнс. 10 25. С«смэ соелзшсияя обмоткн стаюрл двузскоррсгно! о jtcuirxрепного двигателя при двух (и) и четырех (6) полюсах
Перечисленные способы имеют ряд существенных недостатков, одним из которых является усложнение книсмятеке механизма, другим - отупетп!атос регулирование и т. г. По этой причине в настоящее время широко использовать регулировочные свойства двигателя — регулирование скорости механизма путем изм?1гсиня частоты вращения двигателя, что привело к значительному упрощению кинематики устройства и управления, удешевлению механизма, осуществлению плавного регулирования скорости.
Рассмотрим вначале возможные способы регулирования частоты вращения ротора асинхронного двигателя с коротко-замкнутым ротором. Как известно, частота вращения рягора п нормальном режиме работы несколько меньше (на 2-Я%) частоты вращения магнитного ноля. Поэтому изменение частоты вращения магнитного поля вызывает изменение в той же степени и частоты вращения poiopa двигателя.
Из выражения частоты вращения магнитного ноля
«о = бОЛ/р
вытекают два наиболее распространенных способа регулирования частоты вращения: J) измвекнисм числа пар полюсов jj; 2) изменением чистоты Ц напряжения источника.
Регулирование изменением числа пар полюсов осуществляется изменением схемы соединения обмоткн статора с помощью переключателя. Обмигка каждой фазы двухскоростно-гп асинхронного двигателя состоит из нескольких частей, которые соединяются между собой параллельно иди лослело-влтелъпо- В результате образуются разные числа пар полюсов. Ла рис. 10.25,0 изображена обмотка одной фазы статора, имеющая две части, которые «зединетпл между собой параллельно, на рис. 1'125,г» — последовательно.
44?
Рис. to.26. Мсхаиича-кш; марактерищики nriyxcvjptKiHtirci асинлрин-hofo двигателя с корейкгнамкнутоЙ обменной ротора с iюстоя[!ГГЬ(м МОИС1ГТОМ (д) U ПЛС.-ПМТЧ310Й МОЩИ(И,’ТЫ0 (tf)
Рассмохрев картины магнитного поля, созданною iokom обмотки одной фазы статора дня какоГОЮ момента времени, легко убедиться, чю на рчс 10.25,а обмотка обрадует p=L, а на рис 10.25,0— р = 2 пар полюсов. Обмотки статора Двух других фаз. сдвинутые в пространстве на электрический угол в 120-. соединяются так же, как и первая. Результирующее маг-нитЕтое Поле, естественно, будет иметь столько же пар полюсов, Сколько и поде, созданное одной фазой обмотки. Необходимо ЗАмегить, что никаких переключений обмотки ротора не производится: ток обмотки ротора всегда образует столько пар полюсов, сколько их создано обмоткой статора. Рассмотренный способ дает возможность' получить только две скорости, отличающиеся по значению и 2 раза, что является его существенным недостатком,
Отечественная промышленность выпускает двухскоростныс асинхронные двигатели со следующими частотами вращения магнитных полей: 3000/1500; 1500/750; 1000/500 об/мин и др, Механические хараь гсристнки двухскоростнсчо двигателя изображены парне. 1026 Значении максимальных момент он будут равными (рис. 10.26,л), соли равны магнитные истоки двигателя для первого и второго способов соединения обмогок, в противном случае (рис. (0.26.6) они нс раипн. Как следует и? ьыражеиия
^Г|ф ъ
мгинитлые погики будут равными, если остается неизменным отношение С.(|ф/71 Л™ первой и второй схем соединения обмоток.
ТрсхскОрОСтные и чегырекскоростныс двигатели имеют по две независимые Обмотки статора, одна из которых образует две скорости, а друган в трехскороьгном двигателе - одну, 444
Рис, 10.27. Структурная схема часгошого регулировании скорости асинхронною двигателя с ropoi ксзамкнутим роторам с машинным (л) и статическим (5) преобразователями частоты
в чстырсхскорост11ом двигателе - дне скорости. Могут быть двигателя со следующими частотами вращения nfl: трсчски-ростиыс — 1500/1000/7,50, 1000/730/500 фб/мии; чсгырехско-ростные - 3000/1500'1000/500, 1500/1000/750/500 иб/мин.
Для регулирования частоты вращения ротора изменением частоты тока статора необходимо имсть отдельный источник или преобразователь энергии и регулируемой частотой До последнего времени в качестве источника энергии гспользовииг^ синхронные. асишроитп.ге или индукционные гсисраюры. При ттом установка (рис 10.27.xr) состояла из нескольких машин: приводного асинхронного в ли синхронного двигателя 1, работающего с постоянной чистотой вращения синхронного генератора 2, механического или электрического регулятора скорости 3, асинхронного двигателя 4 и исподнихельного механизма 5. Частота Д напряжения в обмотке статора синхронного генератора равна
fi = Р^/'бО
При изменении частить! вращения симхроююго гснсраюра шмонается частота j\ и, следовательно, частота вращении ро-тора асинхронного короткозамкнутого двигателя 4 в исполнительного механизма 3. На рис. 10-2Я изображены механические характеристики асинхронного двигателя при частотном регулировании скорости. Предполагается, нос изменением частоты в такой же степени изменяется н напряжение, а их отношение остается постоянным. Тахой способ позволяет получить
445
Нис. 10.2&. Механические харак-it-рнстнки асинхронного дпнгягелм при члс^гиирм регулировании скорости
□гпрокнн диапазон и плавное регулирование частоты вращения, однако он имеет плохие техника-экономические показа-кдтгтальные вложения и т. п.,
В настоящее время разработаны статические преобразователи частоты на тиристорах, обладающих высокими технино-эко-номнчсскимн иика^а|слями Структурная схема такой установки изображена на рис. 10.27,6 Здесь У — статический преобразователь. 2 — асинхронный дшма1сль; 3 — исполнительный механизм.
Существуют также другие, мало распространенные способы регулировакнн частоты вращения короткозамкнутого двигателя, например изменением напряжения на обмотке статора. В качестве регулятора шзюльзуетия индуктивное регулируемое сопротивление, нкдюченнос л цепь обмотки статора (например, скловои магнитным усилитель).
Регулирование частоты вращения ротора асшироынш-ц двигателя с фазным ротором в большинстве случаев осуществлялся путем введения в цепь обмотки ротора доисишительно-то сопротивления (см. рис. 10.23).
Как следует из (10.55) и (10.56), добавочное сопригивлсннс в пени обмотки ротора увеличивает критическое скольжение и не влияет на значение максимального момента Искусственные (реостатные) характеристики двигатели рассчитывают с помощью уравнения (10,62).
Из рис. 10.29 спoiиными линиями изображены естественные и искусственные механические характеристики асинхронного двшахгчя для ратлилпьгк значений добавочных сопротивлении в нетш обмотки poiopa Иг кривых следует, что нри заданном моменте на валу Л/с частота вращения ротора ня каждой механической характеристике будет разном (д„ л2,
Для выбора регулировочного м пускового реостатов тю бя- реву необходимо знать значения ими в роторной пепи двигателя. Для определенна тока используют тот факт, что юа ротора определяется моментом двигателя и не зависят от значения добавочного сопротивления в ЦШИ обмотки ротора. На-446
Рнс 10 29 Естигвагныс л исгуял венные (реостатные) меяантнгевне харлктернсгнки, а также л***сихвдстя токл ротора от сколькеаия асинхронного двигателя с кинтаи-шыми кольцами
пример, моменту МЕ (рнс. 1029) но естественной и искусственной характеристиках соответствует один и тот же ток Это положеггие можьс доказать аналитически.
Момент, развиваемый двигателем, равен:
па естественной лараггеристяке
зНг, W =±— а \
«fls
на искусственной характеристике
Ми
о>0уи
Допустим, что А(^МИ~ Ws. Тогда Ifjr, ЗГ1цд(гг trj <0^-’ Wp5„
Выразив ь/5н тереч сопротивления цени ротора, нолучнм
MG + rJ
(гг+ Г,)т2
1
<547
К недостачам рсосгагЕшго способа регулирования частоты вращения относятся значительные ноюри энергии о регулировочном реостате, малая жесткость механических характеристик: небольшое изменение мймеыа на ваду вызывает знача-тельное мзмененне частоты вращения, а также невозможное! ь получения плавного регулирования. Рассмотренный способ используется в системах, где работа на реостатных характерист-кал нспродалжительпа.
Прнмер 10.2. Раил к i а ь и псм.|роигь сысствслную к искусству кую механические характеристика, а также зависимости тока ротора от скольжения аеннхроннсно днигагьтя с фазным ротором при г, — 0,0В Ом.
Паспортные данные двигателя: Риоч - 60 kBi, пяом - 72G об/мин. M«wc/^inM = ^2* — 175 В» /гнои — 216 А.
Решение. Естественная и Ескусственнан механические >нрнкгс-ристики рассчитываются н затеи строятся на основании уравнений (1057) и. (10,62):
М------—=гт— и М„
+- 5/Уф
2М„л ®гр,»$н + 3ц/$кр и
Значения J^e определяются ез (Ю.5-На\ IJ0.5BK (I0.6S), а г2,
входящее ь (10.65), _ на [10.59а). ГТсэсле подеэ апейкн паспортных данных в уппатак формулы получим = 1760 И-м, .\.р = 0,166, „ =
-0^S, г2 = 0,0187 Ом, хВЩ1 = 0.04,
Ппдсгаеляя значения з (например, 0,004; 0,1: 0,2; 0,4; 0,6; 0,S; 1) в уравнения fl0.57) и (10,64). определяем соогвстствутошпе нм значения •М и iWB, Результаты расчета сводим а таблицу-
Механические характеристики ч(М), з(Л7), построенные по результатам расчет*, изображены па рис. 1(129 ситонжмми инннямн (и - при т = 0. б - прн Гд = 0,08 Ом).
'^алиснмость. Г2 от * определяется из (10 59)
С = 11р„ г, _ (к J„ _ [/ "Р" 'п * °-
Подставляя я (1О.59| значения s. г, соответствующие им значения М н iWtt и* упомянутой выше таблицы определяют 7} н 1;в. Результаты расчета заносят э таблицу. На рис 10.29 пунктирными линиями изображены пострежнные па результатам расчета графнги 1, и f2n (графах е - для г = 0, график г — для гя - 0,08 Ом)
Пример 10,3. Определить сопротивление, которое нужно включить а цепь ротора, чтобы двигатель вращался с частотой и _ = 650 об/ман и разлива. i моменг М = 200 Н и.
Паспортные данные двигателя: РПС1М т- 22 кВт, ^«,*1 = 380/220 В, «ком'-72^ обг'мии, Мигв/М|Г0КАк*3, Е2К=1Ч7 ft, <iML„ = 7C.5 А.
448
Решение. Искомое значение гл определяется н-? (1065)'
Значения rt, з^,, опрсделяино! из (10.59а). (10.5В) н (10.62), й котором .Ин - 200 Н м, )/„„ • из tiO.SSai, ли = (ла -*„)/«,>. тле « = = 650 об/мин.
После iwkyshofich ч указанные формулы соответствуют»*» значений паспортных дашсых длигазенч потупим. г2 =0,0582 Ом. s,IU4 — = 0.016. = 8П Н-м,5ц.= 0,21,^ - 0.133. .s^,, = 1,15, гя = 0.26 Ом.
10.1Т. ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ
Работа мнслих производственных механизмов coCiOHT in трек лаиов пуска в хеш, технологической операции л останова. Пос id отключения двшателя останов (торможение) происходи! под действием сил трения, при этим кинетическая энергия движущихся часхсй выделяется в аиде теплоты а узлах трения механизма. В тех случаях, ксяда запас кинетической энериии велик, а силы трения малы, время торможения может составить десятки секунд и даже минут.
Сокращение времени торможения, особенно котла время торможения технологической операции мало и исчисляется мм-нутами или секундами, может значительно повысить производительность механизма, так как i/рн торможении обычно полезной работы не совершатся, Поэтому для сокращения времени торможеаня раньше применялись механические тор моза.
Транспортные устрпйыва (электровозы, лебедки, мостовые краны, экскаваторы, эскалаторы и др.) отличаются тем, что в них возникают условия, когда пвд действием сил тяжести они могут развивать недопустимо высокие скорости. Для поддержания скорости sei запанном уровне в этих условиях раньше использовались рабочие механические тормоза, которые обычно спешит пл Е1сиидвижиьтх тормозных колодок, прижимающихся силами пружины или другими способами к тормозному диску или барабану; в результате трения между колодками к диском возникает тормозной mdmcjii. Механические тормола имеют ряд существенных недостатков, главными ил которых являются быстрым износ трущихся поверхностей, трудность регулирования силы I рения, значитетьт1ос место, занимаемое тормозом, и г. з. Оказывается, двигатель можс! выполнять функции механических тормозов, работая при этом в том или ином тормознем режиме.
В настоящее время широко нспользуются тормозные свойства лйиппедя, что во маогнх случаях дозволила отказаться <и
15 'Хюкгратвышхл 449
Рнс 10 30 К !!О»СНСЕ1И!<» тормозных режимов pafitJrhl ченнхров-нсго шзш are.-is:
ч — ««лфатрриый тормлхиой режчн; о — рс*км про '•инавхлючеик!
механических тормозов. Механические тормоза необходимы как запасные или аварийные, если откажет электрическое торможение, а т'вкжо для удержания механизма а неподвижном состоянии
Асинхронный дви1зтелъ может работать л следующих тормозных режимах:
1) генераторном с’отдачей энергии в есть;
2) протнаовк-почепия,
3) . динамического торможения и др.
Во всех JopMoariiiTx режимах двигатель развивает момент, действующий в сюроЕзу, противоположную направлению пра-щеьшя ротора, поэтому ли называется тормозным моментом. Под действием этого момента в одних случаях происходит быстрей останов, п других - поддержание заданной cxopociM.
Генераторным тормозным режимом называется режим работы двшагсля, когда под действием внешнего момента рспор да»сгателя вращается в том же направлении, что и магнитное поте, но с большей частотой вращения. Паправ.чсЕтне возникающей пря этом ЭДС в обмотке ротора определяется по правилу правой рукн и указано па рнс. 10.30, д. Поскольку обмотка роюра замкнута, в ней пптрцКАег ток того же направлеЕгия, 11 результате взан-модснстпия тока ротора с вращающимся магнитным почем создаются сила и момент, направленные в сторону, противоположную вращению ротора (рис. 10 Мп), что легко определить с помощено правила левой руки.
Тормозной режим противовключения возникает в том случае. когда под действием впекшего момента. приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля На рис. 10.3С,б показаны направления ЭДС и тока ротора, а танке направлении действия шы и момента при тормозном режиме прел иаепключеняя.
450
Рис. 10.3L Схемы соединения обит-ек статора при линамическом торможении
А
Для получении режима пинамического торможения обмотку статора отключают от сети трехфазного тока к подключают на врем» юрможепия к источнику энергии постоянного тока по одной из cxev, изображенных иа рис. 10.3!.a — j. IJo-стпяпный юк создаст неподвижное в пространстве магнитное пале, картина которого для схемы рис. 1031, а двухполюсного лвигазеля изображена на рис. 10.32.
Если ротор вращается, например, по часовой стрелке, то его проводники пересекают неподвижное магнитное осле и в них возникает ЭДС, а следовательно, ток указанного на рнс 10.32 направления, В результате взаимодействия така ротора с неподвижным магнитным полем возникают сила н момент, действующие на ротор в направлении, нренивогтоложном направлению вращения ротора
Кроме рассмотренных тормозных режимов сушестпутот и друз не, например конденсаторное торможение. Конденсаторное торможение осуществляется по схеме, жюбрыженноЁ па рис 10 33 После отключения от сети обмотка статора оказы-ваигся замкнутой на конденсаторы. Энергия махнитного поля jfiMia 1еля и электрического поля конденсатора возбуждает в цепи |рскфаэный ток. Маттгятиос поле двигателя, образованное этим током, вращается в ту же сторону, что н ротор, по с меньшей частотой, чем ротор, В результате в обмотке ротора возникают ЭДС, ток п тормозной момент. Этот режим анализ нчен генераторному тормозному режиму работы двшагсля. По мерс торможения энергия магнитного и электрически о долей уменьшается, превращается в теплоту в обмотках и тормозной момент убывает.
Дня анализа тормозных режимов воспользуемся уравнением механической характеристики двигателя
451
Рис. 10.32 К пояснению режима динамического торможения асинхронного двигателя
'~У ГН
I’MC. 10.3J. Слема лк.цочснна ЛВИ1ЯТСЛЯ прн кон.rental езрном торможении
В Диш пильном режиме скольжение поменяется в пределах от .ч - I до 5 = 0 и механические харакссристиктт рлсполаг яютси п квадранте I (графики 1 я 2 иа рис. 10.34). Если в уравнение подставлять значения 5 больше единицы и меньше пуля, то механическая характеристика окажется соотвегспвснно в кпадрдн-тах /Ун II. В квадранте Л ротор праттается в сюропу поля, но с большей частотой в квадранте /к—пртин нлчя Та-
ким образом, участок механической характеристики, расположенный в квадрате П, соответствует генсра-горному тормозному режиму, в квадранте IV - тормозному режиму противовключения.
Возникновение тормозных режимов можно пояснить на примере простейшего устройства - лебедки. Барабан ? лебедки (рис. IQ35), но котором уложен канат с нодвешеиньтм на конце грузом (?, через систему зубчатых передач связан с валом дви’ гателя 1.
Напомним вначале известное из механики положенно. Допустим, что ]руз удиржипоется на каком-то расстоянии oi земли механическим тормозом. Как поведет себя лебедка, ес.и отключить тормоза, пе включая двигатель. Груз будет- опускаться. если момент, развиваемый грузом М,р, окажется болипе момента сил трепня М1р во всех звеньях механизма. Система останется в покое, сели момент сил г рения окажется больше момента песд груза,
Рассмотрим, жак будет вести себя лебедка, когда механические тормоза отключены и двигатель включен в есть таким образом, что его магнитное поле вращается в сторону, соответствующую опусканию груза (рнс. lU.35,a). В этом случае двигатель создаст момент, действующий согласно с моментом, развиваемым грузом, и начнет разгоняться, а груз опускаться. До какой частоты вращения рал снится двигатель?
При Мтр > Игр двигатель будет работать л двигательном режиме с частотой вращения, соответствующей точке ст харяк-452
херпсгики 2 (см. рис. 10.341, и развивать момент, разный
М = Мг> - Mjp
При МфЪ-Мгр избыючнь’й момс1гт, равный
W = .WB.lf = jWip- Ма„
иставиг ротор нращатъся с частоюй. болыггей it,,. Двигатель будет работа)ь в ienepaiopnoM режиме с чдезиюй вращения, соответствующей точке о характеристики 2, и развивая ТОрМОЭ-ПОЙ MOMCHi
ЛГ = МЕ)п-
Этот режим называется генераторным питому, что энергия, поступающая с валу двигателя (потенциальная энергия опускающегося грузя), возвращается та вычтем ишерь энергии в двшйгеле в сеть. Мотииосгь на валу двигателя, обусловленная пси енциальной энергией опускающеюся трупа (развиваемая изб ьи очным моментом j,
Р, = — Меи1.
Рис 10.34. Ес-гест аенпая (/) и рео-слтпая (2) меяапнческис характеристика двигателя; динамический и конденсаторный ренины
Гор?Л>женИЯ
Электромагнитная мощность, передаваемая статору двигателя,
Р™ = -.Чо5 = Г, - АРг.
Рнс. 10.35. К пояснению генераторного юрмозиого режима (л) X режима лроивоэключенви (6")
' Знак « —» в выражениях для Ра н указывает на ю, что дни) a t ь: сь потребляет энер1ию с валя и что злегтромагнитндй мощность ncptviwiCA зращаютимся целей от ротора к статору.
433
Мощность, отдаваемая двигателем в сеть,
Р, = Р.т — А/’,.
Тормозной режим противовключении возникает следукипим образом.
ЕСЛИ после отключении тормозов включить двигатель п есть так, чтобы сто магнитное поле вращалось в щорону подъема груза (рис 10.35,6), го трут будет поднимания, когда
Wm > Мгр +
где Мп - начальный пусковой момсиг двигателя.
Если же
мгр>ми + -|и1р,
то ротор двигателя начнет вращаться в сторону спуска груза против поля к достигнет частоты, соответствующей толке п характеристике Z (см. рнс. 10 34), где Л/гр = М + Мтр.
Таким образом, возникает тормозной режим притнвовклю-ченвя. В этом режима дпнгатель одновременно потребляет энергию R3 сети я с вала, и вся энергия вьиелмегся в двигателе в виде теплоты Мощность па ваду двигателя
Рв = М(-о)Н - Мы.
Электромагнитная мощносхь
Рм = М а>„
положительная, сясдова цельно, как и в дВш агйцьнОм режиме, она передастся вращающимся полем от статора к ротору.
Мощность, потребляемая дакгиелсм из сети,
Р = Гзы + АРР
Мощность, выделяющаяся в роторе в виж теплоты,
ДР 2 — Ра + Р,1(
Быстрый остапов двигателя и связанного с «нм мехйнннма может быт, ocyuj.ecin.jeK но схеме, изображенной на рис. 103b. Переключатель позволяет ркл^очать двигатель ли вршцення лс часовой стрелке и против часовой стрелки. Если в положении а лсрск.(юч41ечн ритор вращается по часовой стрелке, то прн положения 6 он вращается против часовой стрелки.
На рис 10.37 тоАр&жены механические lApakjернстикн двигателя. Если в положении в переключателя механическая лнраггсрис1Н1са располагается в первом в четвертом квадрантах, то в положении б перс-
454
-n
Рис 10.36. Сясмя включения дрнгачепя для иуущ«тклечня гррмнженпв И|н'т1.м1»йвк;1юче-
Рис. 60.37. Мс^акичссютс харак-теркетнгп, поясняющее процесс торможения
ключатст* чаракчерисгига будеп расползаться во втором в третьем к&адралтах. Предположим, тго переключатель находится и полсаеиин а и ;iRHi'H'ie.'iK рапанмется дн усгановнвшейся частоты вратненнв, соответствующей Т1.ТЧГС I мсхаиячОСкин характеристики (рнС. 10.3?}. После технологической операции переключатель иереводлт л положение й. При ном Maj имя ное поле мгновенно изменит направление вращения. а ротор по ахсриин будет нрпдгчпкать вращаться d ту же сто-рону. Дан1ате.1ь едеждеся а режиме противовключения (и точке 2 механической характсрнс1ию1). Пил. действием тормозного момента дви1ате.1ь бистро остановится. В тот момент, пяда ротор достигнет частоты вращения, ратной пулю (толка .<), двигатель необходимо oi-к.1[О'[нть от сети, я противном случае pojop разгонится в обратном направлении.
Меюдикя расчета сопротивлений реостатов в цени роторе, pac'icia н носхрссния мечантгческнх характерми их дыиателя, работающего в тормозных режимах, такая же, ках и для двигательного режима.
Расчет и построение механических характеристик двигателя, работающею в режиме динамического и конденсаторного юр-моженин, выходит за пределы программы намного курса. Однако д_тя ознакомления па рис. 10.34 приведены механические характеристики двигателя при динамическом и конденсаторном торможении (соогвстсгвенис графики J и 4).
1Ф.1& ЭНЕРГЕТИЧЕСКИЕ ПОКАЗАТЕЛИ АСИНХРОННОГО ДВИГАТЕЛЯ
Важными в энергетическом отношении характеристиками двигателя являются лависнмоС1ь КПД т) И коэффициента МОЩНОСТИ со$9 от нагрузки на его ваду. КПД двигателя равен i>i-ношению МОШНОС1Н, отдаваемой двигателем с нала, Р, к мощ-
455
IT0CIW. потребляемой двигателем ил сети, f’j.
_ Л _ Л _
11 Р, Р. + Л1>
ще ДР - потери мощности й jbiij a i еле.
Как было покачало к $ Ю.9.
АГ - ЛГиСн| + + ДР,-, । + ЛЛп2 + AP«=v
Потсри мощности в двигателе можно ратдсли1ь ла дис части: петь
ДР^ЛГи1 + ДРи2 + ДРмк
почти пс лаписит ОТ НЭГруаки и насыпается плстояштыми потерями, другая vacTj»
ДРм = ЛР^м! I Л/’Ли,
зависит от нагрузки и тгалынается переменными потерями.
Заяпснмость КПД OI нагрузки нзобралена на рис HJ3&, |дс нагрузка дана в о-гносмтслытых единицах.
Как видно из трафика, КПД в -зоне нагрузок от 0,4 до 1,2 изменяется относительно мало, что является благоприятным в энергетическом отношении.
Коэффициент' мощности двигателя равен о г ношению акз напои мотиности, потребляемой двигателем из сети, к полной мощности;
cos(f> = Рt/Sj = Рк/|/Р; I- й;. ЦО.бЬ)
Реактивная мощность 2 складывается из мощности Q,. обусловленной главным магнитным потоком, и мощности Йг-<и5у'с.[оилсп1той потоками рассеяния:
2, = Ф* 1 +Ф1-
где х0 - индуктивное сопротивление, обусловлен нле главным магнитным потоком, л,, хг -индуктив! iue сопротинленм я, обусловленные потоками рассеяния обмоток с татора и ротора.
Рнс. 10.38, Зависимость и, сокр от нагрузки аеннзронкрго двигателя
456
Поскольку i 1Двный маг и ит] tuil иоток намного больше |ю-тикив рассеяния и почти «с зависит от нагрузки. реаьливная мишиость. потребляемая _цзш Этелем ит сети, мала завист от нагрузки и, как следует из выражения (10.66), cos(p существенно 1пмс]|ястся при изменении ширузки На рнс. ICIA8 изображен график зависимости cos.9 от нагрузки на валу двигателя. Из графика видно, чю при малых ншрузках егкер допо.чьло низкий, что является в энергетическом отпсиисипи весьма неиьт-I однЫм.
У лвшатедей средней мощности (I 100 kBij при номпилл1>-Рой нагрузке КПД ()||У>, - 0,7 — 0,9, ииьи>||ВМ —0,7 -г 0.9; у двш а-телей больший мспниостн (больше 100 кВт) КПД TjliiS4 = . 0,9 -=- 0,94, cos ip„uw - 0,8 -5- 0,92
10.19. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
В системах автоматического управления, битовых приборах и ир£эмьпн.тет1пи> устройствах находят применение одпофачные асинхронные двигатели малой мощности. Для питания однофазных двигателей требуется однофазная сеть, имеющая дм провала вместо трек проводов трехфазнои сети, что дает- в одних случаях жопэмичсскую выгоду, п других - удобство п -ко плуатации. Однофазные двигатели гтримсняюкм и в установках средней мощности (несколько десятков киловатт), где тх ис-польЗОЬЛННа пеллгоооразно экономически <двэ .провода ямсечо ]рел) и пс» условиям зкеплуатапии» например в транспортных устройствах шахт. Среди большого разнообразия однофазных автателей наибольшее распространение получили .1лизи|сш е короткотамкЕ1уюй обмоткой рснира: ротор и его обмохка выполнены так же как и у трекфазиыл двигателей. Статор таких двигателей бывает с явноныраженньгмн полюсами и корот-1!ОЗамкт1угым витком (рис. 10.39,н) - его далее будем называть двигателем А и с меявноныра.ж-с1т]|ыми полюсами и днумя обмотками (рис 10.39,6) сто далее будем назыпдп. двигателем 4*.
Двигатели имеют рабочую / и пусковую 2 обмотки. Работая обмотка двигателя Л (см. рис. Ю.39,<2) состоит из определенною числа витков изолированного провода и включается в сеть однофазного тока. Пусковая обмотка имеет всего один виток толстой проволоки, охватывающей часть сечения полюса.
Рабочая и пусковая обмотки двигателя Ь (рис. 10.39,t?) расположены и пазах, как и у трехфыных двигателей. Обмотки едпипуты в пространстве па 90: Рабочие обмотки ! двигателей
457
г i
Рис. 10.39. Устройство ОднОфйЯЧЫЛ асинхронных ДЧНГМТСЛСЙ с ко-ротксза МЕ11УТЫМ ВИТКОМ (а} Н С идСхОвий обми ИТОН (й)
АНЬ включаются s есть однофазного тока. Тот, возникаюшпи в обмотках J двигателей, создает неподвижное в пространстве пульсирующее с частотой Сеги магнитное пале, которое наводит в обмотке ротора ЭДС и ток. Однако легко показать, ис-иолкзуя правила правой и четой руки, что в результате вэаимо-дсйсхиня тока ротора с магнитным полем возникают силы (рис. 10,40, д), результирующий момент которых относительно оси вращения оказывается равным нулю. Без дололпитсльтшх устройств двигатели ле развивают момента ч самостоятельно разогнаться не могут. Если же ротору внешним усилием ири-дать небольшую скороитъ, он начнет развивать момент и разгонится самостоятельно до установившейся скорости, определяемой моментом нагрузки, Это объясняется тем, что в обмотке ротора аследствяе того, что опа пересекает магнЕ1-ное поле, возникают' еще одна ЭДС в ток и в результате взаимодействия этого тока с полем статора создается вращающий момент. Дли выяснения характера зависимости n=/(W) (меяа.-нической характеристики двигателя) производят разложение пульсирующего магнитного потока на лоа вращающихся нот о-ка. Неподвижный в пространстве, изменяющийся во времени синусоидально магнитный поток эквивалентен двум одинаковым неизменным ио значению и вращающимся в ралгие стороны с постоянной угловой частотой магнитным потокам (рис. 10.40,6), которые равны половине амплитудного значения неподвижного потока.
Докажем справедливость такой эквивалентности. Результирующий магнитный поток (см рис. 10.40,6) равен термешчс-СКОЙ сумме еосгавляннцнх Ф и Ф2
Ф -Ф, + Ф2.
45К
Рис. 10,40, К пояснению нринцяпа денетвик однофазно'и двигателя (a) ir (г5); механические характеристики однофазного асинхронного двииначл 1>;
Так как <J>, = Ф2 = Ф^/2, ТО
Ф i. 2Ф] ст (90' - <nt) - 2Ф„/2«и(90с -cvi) — Ф„51г tat.
Разложив тмим образом неподвижный р пространстве изменяющийся но времени по закону синуса магнитный поток Ф на дна вращающихся к разные стороны с одинаковой утло* аой частотой истока, можно рассматривать однофазный дома-голь как состоящий и? двух трехфазных леи! щелей с одним налом. У одного ю них поток Фх вращается по часовой стрелке (прямое поле), у другого поток Ф2 вращается против часовой стрелки (обратное поде). Каждый из двигателей развивает мв-мент, действующий в сторопу вращения магнитного поля, и имеет механическую характеристику, как н двигатель трех-фазпсио тока (ряс. 10.40, f0 Результирующий момент, создаваемый днигашлем. будет равен сумме моментов;
Л/ = Л1Х + Мг.
Из рис. 10-40, в видно, что при и - й момсн । М -- 0. Дл я Создания начального момента и улучшения механическом характеристики двигатель Л снабжен кори незамкнутым иигком 2 (см. рис. 10..19, д), а в [ишь пусковой обмотки 2 двигателя Б (см. рис. 10.J9, б) [.оспедовательио включается жояденсагор С (рис. 10.41. а). По этой причине такие однофазные двигатели наэыгшюг коядекгеаторными. Короткозамкнутый виток двигателя А и пусковая обмотка конденсаторного двигателя Б создают лополнкчельнме магнитные потоки.
Пл рис. 1041,6 изображена векторная диаграмма дня двигателя А. а иа рис. 10.41,в —для конденсаторного двигателя Б.
459
Рнс I0.4J, Слсма вьлнзчсния одлофааншо колдеисагирного асинкроя-hcwo двигателя (а); яеетордыс диа1 р^ммы, поясняющее принцип дейстиия однофазного асинхронного двисате.чя с коротаога.мкнугым ангиом ((Г) а кондепсаторногп (?)
Часть главноги магнитного похока Фсцепленная с короткозамкнутым витком, наводит в нем ЭДС Ег Эта ЭДС вызывает в витке ток окпаюхдий по фазе от ЭДС Е, на уго.1 Ток в Свою очередь создаст магнитный поток Фг. Результирующий поток «К равный геометрической сумме потоков Фъ и Ф'. отстает Ни фазе от главних и ииниа на уход ф.
Емкость конденсатора, вк-ночсцпого последовательно с пусковой обмоткой двигателя (Б), подбирают такох о значения, при котором его емкостное сопрохивлепие больше индукттгатюго сонротнпления пусковой обмоткн. В результате ток в пусковой обмотке будет опережать ио фазе напряжение на угол <ри, а в рабочей обмотке отставать си него на угол <рг Каждый из токов создаст магнитный поток, сдвиг по фате между которыми солгавит
Ф = И'и + <Рр.
В двигателе А с кпроткозамкнутым витком дополнительный поток Фв сдвинут в пространстве па угол G (см рнс 10.39. и) н ххо фале иа угол ф (си- Р*с. 10.41,6}. В конленса хорном двигателе Б поток Ф„ сдвинут в прос транстве на ух oil 90 и по фазе на угол ф (см. рис. 10.41.е), Основной и лополнц-телы-ый магнитные потоки создйхох результирующий поток, который врашаехся, так же как в трехфалпоч двихатслс. с по-стияннои частотой, но амплитуда ех о магнитной индукции в отличие ох хрекфахного двххгатсля не остается ixoctoatihoA. В результяхе принцип действия однофазного двшатсля можно объяснить так же, как и трехфазнохо двигателя.
Опчинкновенме вращающегося мхи битного поля покажем, например, для немшеныхторного двшателя Б. Допустим, что ннлуЕтипиос-i ь рабсизй м пускежой обмоток и емкость кондексагора подобраны ихкн-ма, что кхк рабочей обмоткн отстает, а юк пусковой обмотки опсрс-
4G0
Гис. 10.42. К нпмснению образования вращающегося магнитного по.тя однофазного конденсаторного дАмга-it.ij (а — г)) и мскагписскнс наракгеристнкн отнофачного двигателя (с)
жасг по фазе напряжение 41 угол 45<. График шнопеннш значении токов обмоток при этом будет иметь и ид, изображенный на рис. 1042, а. Картины результмрунлдего магнитного нилх двигателя для моментов времени периода перемен чого тока, отмеченных -ючками 1-4 (рнс, 10.42,(4, изображены соспьетстиенно да рис 10.42,6 - А Картина маи1нтпого поля в конце периода (точка .5) будет такой же, как н в начале периода (точка /'],
Сршннвая картины результирующего ruwi ни i hoi о поля д.тя различный. иомен। ов времени периода переменного тента, .iei ко убедиться в -1ом, что результирующее магнитное доле двухполюсного кондвиса-торного двигателе враеддегея и за один период iicpcMeitijoro тока со-нершает один обсрот.
Примерный вид механической характеристики однофазного коидепса! ирного двигателя изображен ла рис. 10.42, £.
В сисземах автоматики применяются однофазное двигатели малом мощности (несколько влипни и десятков ватт) с повышенным сопротивлением коригкозамтптутой обмотки ротора. Эти двигатели имеют две обмотки статора и устроены так же, как я конденсаюрные однофазные двигатели, ио отличаются гем, что их. обметка ротора имеет эпачителъпо большее сопротивление В отличие <п однофазного пи двшатели обладают тем свойством, что при включении лишь одной обмотки стйто
Рис lfi.43. С%емл включения од^юфамюго конденсаторного двигателя для peiyjttipcfMHH, чистоты вращения (а) н его регулировочные механический харашсрнсяики (5)
i*sc. 'U.44. Оддофазкый aoiH-яронниИ двигатель с полым ротором
ра ротор не может разогна)ь£я самостоятельно даже в том случае. когда ему сообщена начальная скорость.
Сопротивление обмотки ротора подбирают такой величины, при которой критическое скольжение составляет 1,5-2, в результате чет о ирн одной включенной обмотке составляющие моментов Ml и AG имени вид, изображенный лунггнр-
яыми линиями на рис. 10.40, ег. Результирующий момент АГ, равЕ1ь:й сумме составляющих моментов, как видно из рнс. 10.40,3. при любой скорости будет тормозным.
Когда же включены обе обмотки, нахфимср, но схеме, изображенной па рис. 10.43,0, двигатель paftuiaci [ак же, как конденсаторный, и развивает движущий момент.
Указанные двигатели коротпи гем, что поуюахкм регулировать путем изменения амплитуды или фазы напряжения tia одной из обмоток, частоту вращения ротора в значительном диапазоне. Нд рис, 10.43, и изображена одна ия возможных схем включения, а на рис. 10.43,P - механические характеристики такого двшдгеля. Обмотка возбуждения через конденсатор С подключена х сети с напряжением U,, сойотка управления ОУ через потенциометр гп - к сети с напряжением 1/г. Напря-
жении могут был. одинаковыми или различными по значению. Регулярованмс частоты вращения осуществляема измсяс1л:ем напряжения на обмотке ОУ с помощью потенциометра Гц.
462
Остановимся гратко па двигачелях с полым ротором (рнс. 10.44). Они moijt быть однофазными, двухфазными и трехфазпымн. Статор л обметка статора таких двигателей цыполнлются cijcn^ciciseiino так х |рехфазши или однофазных дтплелях, ротор же представляет собой ly.ihiit цилиЕир, н:п еггоалепиын из пигуки, меди ила алюминия к расположен в зазоре ссртсчника статора. Двигатель состоит из корпуса С внешнего * и внутреннего сердечинков статора, между ко торыми раснулолеп полый potop 4. обмотки ечэгора тмглипни-гелшх Шйтов лала 7 и полгминияков 3. Принцип действия а ларакгеристЕкм папойнън двигателей аналогичны принципам действия в характеристикам двигателей с короткозамкнутым ротором. Главное их отличие — малая инершюннскль ротора, что очень важно а системах.' бьктрл реагирующих ru вводимый с«-*ал.
10^20. АСИНХРОННЫЙ ТАХОГЕНЕРАТОР
Тахогенератор — злектрическая машина, преобразующая ча-croiy вращения б электрический сигнал Зависимость напряжения на выходе тахогенератора от частоты вращения аазътиается выходном характеристикой. В идеальном случае .эта зависимость прямая. Тахогенераторы нсполызузотсй для измерения частоты вращения, выработки ускоряющих и замедляющих сигналов, для очерапии дифференцирования,
Талогеиератор устроен так же, как однофазный асинт-ройный цицгателъ с полым newai китыым ротором (рис. 10.44 и 10.45), В падал щатора уложены две сдвинуiue в пространстве на 907 обмотки: возбуждения ОН (/) и выходная генераторная ОГ (2). Схема включения тахогенератора изображена на рис. Ю.46.
Ток обмоли возбуждения, включенной в сеть переменного тока с напряжением Lr„ создает неподвижный з пространстве пульсирующий с частотой сети магнитный поток Фв, Этот ис-ток пронизывает хело полого немагнитного ротора и генераторную обмотку. При неподвижном полом ротора ЭДС в генераторной обмотке tic возникает в силу того, что магнитный лоток расположен перпендикулярно лей обмотке. Тох, возникающий в иолом роторе, создаст махннтпый п<пок, направленным против потока дозбужаения, уменьшав! его значение, ио tic изменяет его положения. Это происходит потому, чхо из-за большого немагнитного зазора (два воздушных промежутка и стенка немагнитного ротора) индуктивное сопротивление полого ротора невелико и поэтому юк н полом роторе соппадаст ПО фазе с ЭДС.
Когда же полый ротор вращается, в результате пересечения им магнитного потока возбуждения Ф» в нем возникает ЭДС вращения, направление ее для какого-то момента времени ука-
463
зана на рис. 10.45 точками я крестиками. ЭДС вращения вызывает ток в иолом роторе, а шхшедлий создает магнитный поток ФЬ1|₽, который, как это указано ла рис. 10.45, совпадает с осью генераторной обмоткн. В результате в генераторной ob-моткв от этою потока возникают ЭДС, пропорциональная окружной скорости, т. е. частоте вращения (е- той, про-iioptiHOTiS-iTbHbrtt ЭДС и магпитный ио-юк, пропорциональный тсху ^Магнитка» система ве лжгыщачау Такам образом, ЭДС, возникающая в генераторной обмотке, пропоринональЕза частоте дратпення полого ротора тахогенератора.
10.11. СЕЛЬСИНЫ
Асинхронные машины широки используются нс только з качестве двигателей, но и в качестве регуляторов напряжения, фазовращателей, тахогенераторов и устройств енпяронноЭ связи.
В силовых злехтроирнводах, системах управления злектро-прмБодаыи, системах автоматики возникает необходимость согласованною вращения или поворота иа заданный угол двух или тгескольких нс связанных между собой механически валов механизмов или осей
В системах синхронного вращения тех пли иных производ-лгяенных механизмов используются обычные трехфазяые асиЕЕхронНЬхе двигатели с фазным ротором,
В системах дистанционной передачи угловых перемещений могут быть использованы или обычные трехфазшае асинхронные двигатели с контактными кольцами малой мощности, или сельсины. Сельсины устроены примерно тая же, как и трех-
464
Рис. 10.47. Опи&фазцый сельсин с явноЕыражсинкмм полюсами и кин!игтнымн гольцами' !—етатср; ’ — c»ffticnt5 лая; 5 ритор; 4 — трекфиядх о&-4WTR8 CHTDLfWHHiaTTHir
фазные двша।шт. Статор hxicci однофазную обмотку называемую обмоткой возбуждения, а ротор — грекфазную обмотку, называемую обменной синхронизации, выполненную iat же, как и у асинхронного двигателя с фазным ротором, иля. наоборот, ротор имеет однофазную, а статор — трехфазную обмотку. Такие сельсины называются однофазными.
Обмотки возбуждения могут быть оосрелоточечтгътми или распределенными. Сельсины бывают с контактными кольцами и бесконтактными. Контактные кольца и щетки из-за нк невысоком надежности и возникновения трения между ними снижают надежность и точность системы peiулирования, особенно в индикаторном режиме работы. В системах синхронною вращения мн днетдипноннов передачи утла участвуют две или более машины. Одна ил них является датчиком, задающим частоту вращения иле угол поворота, остальные — приемниками. В системах синхронного вращения приемники должны вращаться со скоростью датчика, в системах индикаторных — поворачиваться на ген же yi од, ч то и датчики
В системах дистанционной передачи уиюных перемещений различают два режима работы сельсинов: индикаторный и трансформаторный. Индикаторный режим имеет место з тех случаях, когда па палу сельсина-приемника отсутствует тормозной момент, например на его пату укреплена указательная стрелка Когда иа валу ссльскиа-приемпика значительный момент, который од нс в Сосюинии преодолеть, система выполняется так, что сельсин дает юлько сигнал управления, а механизм приводится в действие от отдельного двигателя. Ссльсии-приемшш в мои случае управляет двигателем механизма зак, что двшатель ьоворачиваег механизм па угол, заданный сельсином-датчиком.
На рнс. Ю.47 изображено устройство однофазного сельсина с явнозыражетпгымп полюсами с контактными кольцами, на рис 10 48 — бесконтактного сельсина
Обмотка возбуждения 2 контактного сельсина однофазная неподвижная, обмотка ротора 4 трехфазная, соединена звездой,
4Ь5
Рнс. 10.48. Бесконтактаый сельсин:
I — ыйпгигг|Прс»оя iwjflxa шлч>асдепин; 2 цемгихшглый цилиндр; сердечная пнюрь; 4 — тресфазгы обмотта сняхронншпгн; J — обмотка всга-буж>и1нц; б - сердечиш porijpa; 7 — лемигыитавя прокладка
хри конца обмотки припаяны к контактным кольцам, устано-пленным на оси ротора. Однофазная обмотка позбужлсиня 5 битков । актцого сел глина также пеполвиж!та, iro магнитный поток возбуждения, создаваемый ею, поворачивается при повороте ротора. Грехфазн&я обмохка ритора 4 бесконтактного сельсина, уложенная в пазах статора, неподвижна.
Принцип действия сельсина с контактными кольцами (см. рис. 10.47) состоит в следующей. Ток обмотки возбуждения, подключенной к сети перемеггиого напряжения U, создает неподвижный в ироехрансгвс пульсирующий с частотой сети магнитный поток Фв. Махнитный исток пронизывает трехфалпунэ обмотку и наводит в каждой се фазе лсрсмскпую ЭДС той же частоты, чтс и я обмотке возбуждения. Значение ЭДС обмотки каждой фазы зависит от вз&нмыох о расположения трехфазлой обмотки относительно MajHHTHDxo истока Фд однофазной.
Допустим, трехфазная обмотка расположена так, как эго из-обрАлгено на рис 10 4?, а, В этом случае обмотка фазы ЛЯ будет пронизывйлля веем потоком возбуждения и в пей И03ЯЯК-пет наибольшая ЭДС, обмотки В У и CZ, как это видно из рнс. 10.49. <з. проылЗынаются меньшим потоком и в гт возникнет ЭДС меньшая, чем в фазе Л.У. Если повернуть ротор сельсина на угол а, то изменится взаимное расположение грсх-фазвой я однофазной обмоток и, естественно, изменятся значения ЭДС, наводимых в обмотках фаз. Например, если повернуть ротор па 90*. jo магцнпгый поток, спеттлештый с обмоткой фазы ЛХ, будет равен нулю м ЭДС в ней возникать не будет. Легко показать, что, если при а = 0 обмотки расположены, как на рис. 10.49, а, то при повороте на угол а ЭДС каждой фазы
466
t.
Рис. FC пояснению принципа действия сельсина
будут иметь след^юптпе выражения:
Ел = Е coi Oti
£B = Ecos(a+ !20v),
£c = Ecos(ct + 240'),
где E — действующее значение ЭДС, возникающее в фазе обмотки Л X при с. = 0.
Таким образом, значения ЭДС фаз трехфазной обмотки о.цгофагтяЕ о сельсина зависят от угла а- во времени же они со-в падают но фазе,
Принцип действия бесконтактного сельсина ничем нс отличайся от контактного Разиина лишь в том, что и контактном сельсине ловорачичается ротор l трехфазнай обмоткой относительно неподвижного патока возбуждения, в бесконтактном поверчивается ротор с потоком возбуждения относительно неподвижной трехфазной обмоткн статора.
В хрехфазнъп сельсинах, где обмотка возбуждения трехфазная и подключен» к i-рехфазной сети, действует вращающееся маггптюе no ic с неизменном амплитудой и значения ЭДС в фазат синхронизирующей обмотки пс зависят от угла поворота, измспяипся лишь фазы ЭДС во времени.
Схема соединения салъсина-датчмка и сельснпа-прмсмпкка для дистанционной передачи угла поворота изображена на рис. 10.50. До поворота ротора с льсиыа-датчнка ЭДС в каждой фазе трехфазнмх обмоток исльенна-датчика и сельсина-приемника совпадали но фазе н ток и их обмотках «псухствов&л:
£ло-Еио = 0.
467
Рис. 10.50. Схема включелия сслкннов для дистанционной передачи угла поворота
Рис, 1’0.51, Схема включения с?лксннгш, работающих в трапс-।|юрма горном режиме
При повороте датчика на угол а. в каждой фазе появится ток. так как ЭДС фаз ив совпадают по фазе, например в фале -4
Ток взаимодействует с магпиттгьтм потоком возбуждения соответствующею сельсина, п результате чех о возникает момент, который стремится поверт1угь ротор сельсина-приемника на jot же угол, па который повернут датчик, момент же, действующий на ротор датчика, стремится плперпуть его в исходное положение, иогда. = О. ДаТНИК удерживается спешней сидом в положении а.,, приемник поворачивается на уюд лг. Точность отработки утла а,, зависи т от момента сил сопротивления на валу приемника,
Если М\ = О, то = aj, если # 0, го лп < Трансформаторный режим рабохы сельсином осуществляется пи схеме, изображенной ил рис. 10.51. В зтом режиме работы в однофазной обмотке сельсина приемника возникает ЭДС, арщюрцио-надьная углу поворота сельсина-датчика.
Когда уюл поворота сельсина-датчика а„ = 0, токи в фазах имеют такое значение, что ось создаваемою ими результирующего магнитною поля и в сельсине-датчике, и в сельсине-приемнике совпадает с осями соответственно ОВД и ОВД. В результате а обмотке ОВП сельсина приемника возникает наибольшая ЭДС, равная примерно напряжению обмотки ОВД, При угле ссл # 0 значения токов в фазах обмоток будут иными и ось создаваемого ими магнитного поди пс будет совпадать с осью ОВП и в ней возникнет ЭДС меньшего значения, чем при 1д = 0. Когда угол а., = 90 , ось результирующего магнитного доля будет перпендикулярна осн обмотки ОВД 463
иедьсииа-гтрнемннка и ЭДС в кел окажекя равной нулю. В системах автоматического управления удобнее, чтобы при согла-сопашнэм положении роторов датчика и лркемника был нулевой сигнал. Для этого при согласованном положении оси нлЛьсинов расииложсны иод углом 90' и yio.i поворота ротора даишка ап отсчитывается от этого положения. Напряжение Tia выходе сельсина приемника в лом случае имеех выражение
L6|,ц % Е bin Х|.
10.22. ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР
Вращающийся |паиор<иный» трансформатор — электрическая Минина — но устройству подобен асинхронному двшате.тн» с контактными кольцами, предназпачеЕЕ для преобразования угла поворота его ротора к напряжение, пропорциональное некоторой функции поп! утла. ВращаЕошиеся трансформаторы подразделяются на синусные, нн-□рнженне на выходе которых нргнюрцнонально синусу иЛИ КОСИЕЕуеу yijta поворота ротсра. линейные, tic напряжение на ныло,и: лроиор-□ио!!алы10 углу поворота, я на трансформаторы-построители, напряжение которых пропорционально корню кха.чратнс>му их Суммы квадратов напряжений па входах
!'»«- с 4/uJIK +
Для получения указанны! выше зависимее гей выхопного напряжения от угла поворота может быть использована одда и та же машина с лнумя обмогкдмн на статоре и двумя на роторе при соответствующих схемах их включения Вращающиеся |ранеформа1пры прнме-л я клея в система* автоматического управления, в устройствах вычис-,'щтсльной тсхнняи для решении 1ес1мефических и грю ономйфйчесйи* задач е т. д
В iiAiax сердечника статора (рис. 10.52) уложены две сдвиЕ1утыс на 90: обмотки И Я X. В пазят ротора также уложены дне сдвинутые ня 90' oGmejikh Cui. Коппы обмоток ротора соединены так, как изображено на рис. 10.52, и именаi гр и вывода, кптцрыв припаяны к трем контактным кольцам, установленным на оси ротора,
Рачх-мсприм синусно-косинусный режим работы вращающегося трансформатора, В злом случае иа обмеику вшОуждения 8 m'sjaeiCH Eiepeveumw напряжение C'BV Напряжение вычеавнст так и обмогкс, я последний - переменный магнитный поток >1’я, проннзываюший обмотки ротора ('• и 5. Продольные составлявшие потоков обмоток С н 5. □б^словлиьаюшне ЗДС. волнигаютукз в них. лак 'иО C.ic.iyei ns негторкой диаграммы рис. 10.52, соответственно равны
ФкГ = Фя sш а.
СледоБателыго, если для сюмпгкн ваАбужления спране,'и1нва выражение
а Е„ 4,44н-^/ФЛГ1
469
Рис 10.52. К иолсненин! ус 1ройс ikj и принципа цейстдни поворотного 1рансформаюра
то для оомоюк С и X
l/$ =s Е$ = 4,44ну/Фя vos а = Ьд^со? я;
I.11- г t'c = 4.44 л-c/<!>„ звд з = £.Я|<- sin з.
Вес ото справедливо при холостом ходе, not да к обмогкам С н 5 Е(6 подключены ио । petiи iejiи н tor н оБмотка» ранен нулю. В лей-стпнтсдьнсчти патрулей существует, в обмотках действует lot который создает магпитпьгй поток, сушесгаеоно искажающий :<кгон изменения ВЫХОДИМ* лаирЯженнн. Компенсация лгих патокой осуществляется с помошыо комлспсаинотЕпой обмотки, которая памыкаегсн в одних Случаях нПхорн с по, и ору, их — на какое-то сопротивление.
10.23. ПОНЯТИЕ О ЛИНЕЙНОМ ТРЕХФАЗНОМ АСИНХРОННОМ ДВИГАТЕЛЕ
Для линейных перемещений элементов производственных механизмов находят Ехрмменение .'(инейные двшэсели, в юм числе и лилейные трехфазные асинхронные двигатели. Принцип действия люгейтгнгс трехфазнъгх двигателей основан на явлении вооликносетгия бегущего магпитлого поля, создаваемого током неподвижном трехфазной обмотки В трехфазном двигателе с пращаюшимся ротором МД| нитное ноле Ф вращаекя с достоянной частотой вращения п0, в линейном: трехфазком двигателе магнитное поде Ф [рис. 30.53,6) перемещается с иостояп--ной скоростью г0.
470
него трехфазного дзигйтсдя (£), линейный трстфазный двигатель (в)
Verрoiler ап л.п. югп тпяыг.нта гтннейилгл ягм1скргп1нпгп тред» фамюго дпигателз, можно наглядно !]рсдсгани!ь, если мысленно paspcsaib двшшедь с нращанлцимСн ротором ПЛОСКОСТЬЮ «о, проходящей через ось вращения (рис. 10.53, и), И развернуть до на горю(мггадьиую плоскость (рис. 10,53,6). В линейном двшателе (рнс, 10,53.6): 4 - не подвижный сердечник статора, J - обмотка статора, 2 — корергкезамкпугия обмотка ритора, I сердечник ротора. Скорость перемещающего магнитного ноля, м/мкл,
и0 = kDhq _ Г- 60//р, где (— длина хземсига линейною днигакля.
В зависимости от требуемого пути перемет1тет1ия лодпижио-ю ритора статор лннеииото двигателя (рнс, 10-53,4) составляется из пристыкованных один к другому нескольких гзлсмсе)-тлрнш двигателе^ изображенных на рис. 10.53,6, роюр же имеет длину одного тлемезнарниго двигателя. Ротор двига1еля переметиается по гагтравлиюшим так, чю воздушный зазор между статором и роюром сохраняется неизмештым.
Глава одиннадцатая
СИНХРОННЫЕ МАШИНЫ
11.1. НАЗНАЧЕНИЕ И УСТРОЙСТВО СИНХРОННЫХ МАШИН
Синхронные машины иснользуЕптея в качестве генера юрин. двигателей и синхронных комцс[1€дтароп. Устанавливаемые на тепловых злек1риС|анциял юисрагпрьт приводятся во врашенис парэдьгмн турбинами и нагыьамлсм зурбогсисратпрами. Синхронные генераторы гизроэлепроа-амиий прашаготся с помощью гидротурбин н носиг название гидрогенераторов. Кроме эд^кгростаиций синхронные генераторы находят применение в }стшпэнкак, требующих автономно! и источника олсктро-Энергин. Примером могут служить авилмоСнлыппс хтектрпле-ские траны, на которых сикхротппле генераторы приводятся во враптепяе двигателями внутреннего сгорания.
Области применения скнхроЕшых двигателей расс.мтрн-вэмггся после-изучения их свойств в § 11.12.
СинхропЕзый компенсатор представляет собой машину, нредналнатсплую для повышения коэффициента мощности тлект]ютехнических усЕНновок {см. 3.® и 11.10).
Трсхфачиьте синхронные генераторы. дптггатеди 1! СИн-хро.шьсе компенсаторы имени в принципе одинаковое устройство.
НегтолвижЕгая часть машины, на.1ьсвасмля сгаторс?! (рис. Ll.J.ir). состоит из стальною H IM vyi увного корпуса I. s ИСиорим закреплен ць<л кн. ip и dCLKii н ссрпсчкик 2 статора Для уменьшения потерь на перс-мне ннчияачис и вихревые токи ею набирают яз листов псктротсхии-чсскои стали В начал сердечника статора уложспа трехфазпая обмен кд 3, выполняемая так же, таг. И обмотка tiiiupa йсинхргданык -ipwi лтс-лей. Сердечник статора ь сивцеопнЕжтн с обмоткой статора па-швеек-я якорем машннм. В 10.41 rrxiriкиковых шитая, ЕЗрикрелленных с тирцеяых ciopnH к KopTij-cy либо в стояках, закрещенных на фундаменте, распо* ложеннг подшиппики, несущие нал 4 иря|Е|нюн1сйся части машины — ротора или «lEjysiopa. Синхронные генераторы гидролзекгрскганкна ькиллтют обычно < вертикальным расиплчзж-еннем еи-ia, На валу размешен цилиндрический сердечник 7 ротора, выполняемый из ciejiciiji-пой стали. В пазах сер.ц-нямка ротора уложена Обмотка яоабуэсдЕиия S. питаемая жжгояннмм током. Для присоединения обмотхи нозбужле-ннк г АНСШ1КЙ электрический цепи на валу укрсЕынит дна изолированчыл лру) от друга н от вала ко!!такг!1ых кольца rt, к го-торим лружиннмн прижимается и&юдвнжньгс тетки 5, Обмотка S L.'iyatiiT дтя возбуждения скнончога магнитного поля машины.
Питание обмоткн возбуждения сю-ущсстетястся от гезЕераюра ни-стояпЕЮГО тока {ио:1иулитг.чяХ кал которого соедниеи с еа.|пм синхронией машины, гл mt.ijnpoHoiiriisoDoro ноеибраюнатыя переменного 412
Fvc I 1.1 Уиройгдо синхронной мннжны t. неиьпоыдражсвРЕЫМП fW.WiWH (л) к ротора МЯШИ11Ы С ячЕЮвыршкеняымИ полюсами (6j
тока D постоянный либо <К1 Других ИСТОЧНИКОВ ’ tiOLinaillllHO тока. Мощность для питания обмотки ишб»ждения составляет I — Л’.„ мрщ-Н<НТН МЦ1КИНЫ.
На рнс. 11.1.iT iini-HisiH pu-ipfi пиухплипснлй синхронной машины •- иЁаииоБыражсЕ1Г1Ы'|1п шыюьамн ротора Такне машины шнлиалжот па частоты праще.Я1Я 3000» [500 я 1000 об мил. Машины, пре.чнщма-dsnituc для работы с меньшими частотами нрашсыги (750, <з00. 5<Ю пб.мин и I. д.), имеют ябпоригриткеиные ihvuocli, число которых ism Мальте, «сч мены.<е чаетогя вряиЕения. Ila рис 1Н.& покгмна устройство ротора и<и.ъмнп0.1госпсй машины с ивнаныражеинымн по-•знх:амн. Риюр впнсди в окружность 5, представляющую собъй »с.|Ои-нд BKyjpeitiWJl-0 oxprft'Hticih ьердечкика статора. Якнонырнжонные го-TiacLi 1 и+i oiOB.ixKjf из стальных .ihcicih шш реже массивными ;i закрепляют па ободе - puuspa. Обод ротора в сопщуинисщ с яь-чрныряженяымя полюсами лрс.74тая_'1зи)। и>б;зй cepjc'nt»^ ротор». Oi-делышге катушки (.h'mci-i км воабужделня 3, расположенные лэ явдовы-ражемных шетюсах, соединены между собой так. что ьтнерные и южные полюсы чередуются Грсхфазлая обмен кл якоря синхронных машин выполняется таким оирлчом. что возбуждаемое ею нрщцаю-шссся мн1нитное лоле имеет такое же числа it&.uocoD, как ротор.
И устройствах ангсма) икн, измерительной техники, записи н вое* премгзвеленин .звука применяются синхронные двигатели мадий чощ-nociH [микродвигатели], устройство которых расема рниается ь i; II.I?.
11,2, ПРИНЦИП ДЕЙСТВИЯ СИНХРОННЫХ МАШИН. ЯВЛЕНИЕ РЕАКЦИИ ЯКОРЯ
11.2.1. Прннщив действия генгрэгарз. Fc.th oomotkj возбуждения । снсратора подклточигь к источнику ппотояииои нэка, хо МДС обмоткн будет создано основное мне интаоС пале, характеризуемое мА1нятным потоком <!>о и покалагаЕос на
47 Я
J
Рис. ИЛ Векторная диаграмма ЭДС на-
рлс 11Л, а с помощью двух линий магнитной индукции, Езобрэжеаных пункти-ром. При вращений ротора с помощью первичного двигателя магнитное поле будет также вращаться.
Так как катушки фак обмотки якоря имеют одинаковые числа витков и сме-
щепы в пространстве отплсителъпо друг друга на 120". то при вращении Ми-
шины ЕИ1НОГО ноля в грех фазах будут
ИнД}К1ИрОвЯ1ьСя. 1ри ЭДС. одинаковые но амшпиудс и чайо-
те, сдвинутые по фазе относительно друг друга также на >iom 120". Чтобы при постоянной частоте врашения ЭДС изменя-
лись по закону, близкому к синусоидальному, магнитная вн-
дукиня вдоль воздушного зазора, разделяющего маглитогтро-воды статора и ротора, должна быть распределена также примерно но еннусоидальыому закону. В машинах с явновыра-жешгыми полюсами это достигается за счет неодинаковою
всюду питого зазора между сердечтппсом статора н полюсными наконечниками 4 (см. рис. 11.1,6), в машинах с неяэно&ыра-жсежымн полюсами - за счет соответствующего распределения общи км возбуждения но лазам сердечника статора.
Векюрняя диграмма ЭДС генератора дана па рис. 11.2 Действующее значение и час юта синусоидальной ЭДС, индуктируемой в фазе обмотки якоря, могут быть определены, как и а асинхронном двигателе, по формулам
Ео- 4,441.(11,1)
/ = рл/Ш
1112)
Л-т лнлучския ыаидареной частоты 50 Гн при различных чаепития ррагцення синхронные генераторы H3i стоил я юте с ручными числами пар полюсоь. Так. турбогенераторы изготовляются в большип tiec 4_|учаса на частоту вращения 3000 об/мин и нмеюг одну itapy полюсов (j? - L). Изтогов.тение |урбо1внераторов на наименьшее число пар utciHiLOB и соответственна на наибольшую частоту ьращення нс уменьшить габаритные размеры, массу н ст оимость генераторов. Частота вращения i идрси енеригнрив определяется в основном высотой напора воды и для различных стапиий лежит в пределах ог 50 ди 750 об/мин. тго соответствует числам пар шыккон от 60 по 4
Если к обмотке якоря подключить приемник электрической энер|Ди, ю пил дсйс1висм ЭДС в фатах обмотки якоря и приемника полнятся токи; lenepaiop начнет отдавать приемнику электрическую энергию.
При работе генератора с нагрузкой МДС трехфаэной обмотки якоря пообузкдавтся вр&шакнцееся магнитное ноле яко-
474
ря, характеризуемое магнитным потоком Фя. частой вратцапия которого равна частоте вращения ротора, г. е, и0 — л— 60//р; взаимное рэсподожсезис осей магнитных полей якоря и ротора при данной нагрузке генератора оснипса неизменным.
Пол действием ноля якоря результирующее иоле генератора при изменении ею нагрузки будет также изменяться что сжязывает в । и ял не в конечном итоге па значение напряжение генератора Воздействие поля яяоря па результирующее ноле чдтпииы называется реакцией якоря
В результате взаимодействия магпитншО потока Фя и проводников обмозки возбуждения 1или полтосод намагниченных сердечников якоря и ротора} па риюр действует хтекхромаг-нитный момент» направленный у генератора против направления частоты вращения ротора и являющийся тормозящим.
Значение электрикai Шлиогч момента, интенсивность и характер действия реакции якоря зависят кроме лтачсЕПГЯ тока якоря от характеры солротнв.тсчня иряемдикол. Объясняется тю тем, что при изменении характера сопротивлении приемников изменяйся взаимное расположение осей магнитны I потоков Фя и Фь.
На ри*-'. 11.3,в лривсдея :)CkS3 упрощенной модели синхронл&й ма-сикнье. на котором каждая фл;м обмотки якоря .вменена одним вит-ком; ротор epatiiAciLH с частотой вращения и пол дейсгвисм первично-
475
j о лии । атетя; магнитное иоде якоря изображено ,u« случая. когда iof фа.чи сп имеет ма»снча.1»1сс значение, ви.хедстпис чего ось КК' ноля якоря Ф, перпендикулярна плоскости каryuirn фазы ах; ось mmr магнитного поля ротора Фа совпадает с осью К К поля якоря, чго со-снвЕн-ткусг случаю, при котором ЭДС фазы ах отстает от тока этой г|ч*зы кп угол 90“. Последнее возможно при чисто емкостной пагручге генератора, если нс учнтыеаьь актирного сопротивления фазы ах.
Нетрудно установись, чгп несмотря па ихтичие тона жоря и ыах-ннткого потока Фя при чисто емкесчной нагрузке злектрома!нигньщ момент jenepaTopa равен нулю, пол действием щэдя якоря генератор подмагничивается.
Можно лока.чать, тто и при чиСго индуктивной nat рузне 1енсрато-ра иеггромагнитиый момент будет также равен нулю. Только в этом Случае полем якоря 1гнсратор будет размыгннчияаться.
Если при г?х же токах якоря вдерузка будет aJtinBKo-сцгоспюй. взаимное расис.т-пхенис осей магьнтныя потоков изменился: ось jh*i' махикгного потока ротора сместится на иекснорый угол в направлении вращения рок>ра (рис. 11..?,£}. Всшщк-гннс тгого на ротор начнет jcScTDObaih гормпзяший 'ыектромагии1нын момент №*,, в чем тгегкд убедиться с помощью правила левой руки (или рассмотрев взаимодействие полюсов намагниченных сердечников якоря н репорт). Как видно. Грн ак1кнни-смкиС111ПЙ нагрузке ПОДО ДЕОря имеет составляющую, подмагничивающую генератор.
3 случае яятивночщаукгнинай нагрузки также итникает тормозной момент, а поле кеерв размагничивает генератор.
11.2.2, Пранцип действия двшателя. При работе синхронной машины в качестве двигателя обмотка якоря подключается к источнику грехфазного тога, и результате чего возникает вра1|(дюн(ийся магнитный поток Ф,. После разгона ротора до частоты вращения л, близкой к частоте прашеиня поля якоря (см. § 11.10), его обмотка возбуждения подключается к источнику достоянного тока ft возникает магнитный поток Фо. Благодаря взаимодействию магнитного оохока Фв и проводников обмотки ротора (или полюсов намагниченных сердечников якоря и ротора) возникает вращающий ?дектрошгиитньхй момвнт MJM, действующий на ротор, и он втягивается в синхро-назм, т. е. начинает вращаться с частотой вращения, равной частоте вращения и0 магиятнего поля якоря.
Лоложепче осн rwrf магнитного поля poivpa относительно оси ККГ поля якоря я значение момента М.*, зависят от нагрузки двигателя. Так, при работе центах едя в режиме ндеальнох о холсктого хода ротор занимает положение, потачанное на рис. 113, о, при котором электромагнитный момент равен пулю. Некоторой механической нагрузке двигателя соспнстст-вуех положение рот ора, изображенное на рис. 11.3, я, которому соотетстнует опрежленный вращающий момент М,ч.
476
Значение гона якоря, HiJiertCKBuOCjb и характер действия р СЯКНИ И якоря зависят при МЛ1 = ссп?г от значения ЭдС £0, которая опреде-.некч чнцче-ннем сохи снийужчекпя hin. $ 11.10). С.тпуст заметить юлио что когда двигателе, потребляет ог источника голмго индуктивную Ч.1Ц яггипно-индуктияную МО1ЦН1К-1Н. ПОД действием ПОТ( акс, ря лвнтатачь подмагничивается (рис. 11 З.л и е): в случае потребзепнд емкостной или ьнтгннни-емкосгной мощности ,1ан1йте.1ь ieo;i. дейсгписм ноля якоря размагничивается.
Как и у других машин, у асинхронных чапгип электромагнитный момент незначительно отличается от момента, разам -васмого машиной на валу, Поэтому .тля простаты анализа будем считать ах в далы1ейтпем равными м обозначать М.
Существенной особенностью синхронного двигателя в отличие от асинхронного яплястся то, чю вращакниий момент возникает у iwrn в там случае, когда частота вращения ротора и раппз частоте нрашених и,-, магнитного поля якоря. Объясняется ло тем. что ток в обмотке возбуждении синхронного питателя появляется не в результате «лскхромагнитной индукции (как в обмотке ротора ясне прочного двигателя), а вследствие питания обмотки возбуждения от tiouioponweio источника постоянного тока.
Частота вращения магнитного поли якоря, а значит, и ротора синхронного двигателя определяется ио формуле «„ = « = - W/F-
Для получения различных частот вращения синхронные двигатели изюнэвляют с различными числами полюсов. При час-тсмс J—50 Гц частоты вращения Gy.jyi 31Щ 1500, 1000, 750 об/мнп и т. д,
Принцип действия синхронных сомненеяторов рвссмачрнкаеЕся в § 11.10.
11.3. СХЕМА ВКЛЮЧЕНИЯ И ОСНОВНЫЕ ЗАВИСИМОСТИ СИНХРОННОГО ГЕНЕРАТОРА
Схема включения синхронного i еяератора приведена на рис. 11.4. Трекфазиая обмотка якоря генератора 0Я подключается к приемникам элск1ркчес-1йй энергии, которые в зависимости от нх номлнальио-ю напряжения и напряжения гснср&тора moi yi быть соединены как звездой. 1мк к треугольником. Под сопротивлениями гт н лл на рис. 114 следует нанимать эквивалент ьи сопротивления группы преемников, получающих инганне от генераюра. ;
В цель обмотки возбуждения ОВ кснершира. питаемой постоянным током, включен ризстаг г^, служащий для pet/пирования тока возбуждения ь л конечном н roi к — напряжения Сг на Bhiuc/iix дб-мапсн якоря генергтор^.
Для упрощения анализа coenroiпений синхринною генератора, как и двигателя, будем считать, что мы имеем машину с Етеявповыраженными полюсами, ферромагнитные материалы
477
оя
Рис 11.4. Приезд шал схема включения синхронного гене- • ратора
которой при любых режима* работы остаются ненасыщенными. При таком допущения можно считать, что в машине суще-ствукп независимо три магнитных потока, каждый на которых прямо пропорционален соответствующей МДС: основной магнитный ноток Фу, прямо пропорциональный МДС обмотке зозбужденпя. потоки рассеяния
Ф-, и реакции якоря Ф„ прямо пропорциональные МДС обмотки якоря.
С целью иссгроспия векторных дишрамм и выявления свойств синхронною генератора необходимо прежде всего составит!, уравнение по второму закону Кирхгофа для цепи якоря двигателя. При составлении уравнения необходимо учесть
следующее.
11ц. I дгисттпиим МДС обмотки возбуждения полиптает ОСНОВНОЙ магнитный поток которым в каждой фазе обмотки якоря индукшрусгся ЭДС Ео, Ток якоря 1 вызывает в активном сопротивлении г фазы падение напряжения 1г. МДС обмотки якоря вотбуждаех ноток рассеяния фр< которым в об-мотке якоря индуктируется ЭДС самоиндукции Ег Последнюю можно заменить падением напряжения Ep=fxR> где хр = етД и Lp — индуктивное сопротивление и индуктивность, обусло-влепггые полем рассеяния.. Как известно, НДС обмоЕки якоря возбуждается магнитный лоток Фя, пол действием ынорого изменяется результирующее uo.ic машины, Явление реакции якоря можно учесть, введя в уравнение ЭДС £„ индуктируемую в обмотке якоря полем якоря или замспяюпгим ее падением напряжения Е, - /л„ где х, = <г)£, и L, - индуктивное сопротивление и индуктивность, обуславлентпде полем реакции якоря. ЭДС Е,, и £ч могут быть заменены эквивалентной ЭДС якоря t’jh коюрая равна £Я1 — Ер + Et - ,r (хр -f- х*) - 2хс.
Сопротивление xq— хр-и х, называется сицхроппчм сопротивлением. При сдадапчьи ранее допущениях при любых нагрузках генератора счодуст считать = const.
Для упрощения дгльнейшг! о изложения условимся считать, что жвивалсЕгтЕгой ЭДС £я| соответствует некоторый вращающийся магнитный поток якоря <t*xj, эквивалентный в отношении создаваемой им ЭДС потокам Фр и Фя.
Учитывал сказанное, для любой из фаз обмотки якоря (см. рнс 11.4) можно написать; £0 — I(r + i/xc + (Д
Обычно сопротивление г значительно меньше Поэтому
478
при качественном анализе явлений в синдромных машинах сопротивление г можно ие учитывать. Тома
>:0=;/тс-ь и. (1IJJ
Напряжение на выводах генератора и приемника может быть выражено в соответствии с затоком Ома :
U = JZn = Jr1L+jrxu.
Заменив в £11.3) напряжение его выражением, гслучим
Еа = jL*i + Ijn + jbn- (11-4)
Из уравнений (11.4) л (11.3)
V - £d - jfxt. 111.6)
Углы сдвига фаз между ЮКОМ И напряжением tp, гоком и ЭДС 4 определяются по формулам
ср - arcsin Х"; ф = arcsin L Хп.
2П Z
Зная ЭДС, напряжение, ток и углы слинга фаз, нетрудно найти мощности генератора, Например, элспромшшыная мощность Р-g^ вырабатываемая генератором, н активная мотц-ность отдаваемая им приемнику,
= ЗЕо/cosiJr; (11.7)
3LfJcos([>. (U.S)
М г» ты пгт r отличается от мощности на значение по-
терь мощности в активном сопротивлении обмотки якоря: +- Л/’н - 317) cos ср -I- 3/2г„.
Как следует из приведенных формул, ток, напряжение, углы сдвига фаз и мощности зависят при заданных значениях Яо и хе иск.1К>чительпо от значении и характера сопротивлений приемника. Напряжение Lf пя выводах генератора отличается от ЭДС Е„ за cxei паления напряжения в сопротивлении хв.
ПЛ ВЕКТОРНЫЕ ДИАГРАММЫ СИНХРОННОГО ГЕНЕРАТОРА
Уравнение (11 6) не дает возможности составить представление о том, как изменяете* напряжение при изменении нахрузки генератора. Для выяснения ttoiu следует построить векторные диаграммы при различных нагрузках.
479
Рис И,5 Векторные диаграммы синхронное о генератора
Построение векторной диаграммы можнл начать с вектора ЭЛС Е& (рнс. 11.5. л). Зная, что к генератору поцключвш. например, актнвно-индуктявийк иагрузга, пол углом <jf к нектару ЭДС £а ат^лалыкаеы вектор тог*_Г. Под yi .Юм v к вектору тока_/ следует провести линию СМ, па которой в гм-1кнейи1вм будет расположен век-юр напряжения генератора Lr. Так кав токД по^тжен огчттааатЕ» по фаге ня «ХГ от индуктивного падения напряжения то bj конца мггтора ЭДС £0 сле-дуег опустить перпендикуляр fifl на вектор тока. Точвв Г определит кояс! н начя.к> де кт Оро в напряжения К к падения напряжения Ххс-Н соответствии с (11.6] сумма векторов напряжения [7 н падения напряжения j/jcc должна быть равна вектору ЭДС Ео.
Считывая, что носюлдные по значению придающиеся магпитвыс потоки могут быть заменены лквнылептиыин пульсирующими потоками, н^менякпцммися во времени но еинусоидадькому закону, на -яек-юриой диаграмме рис. 11.5,и можно изобразить векторы потоков Фо и Фяь л сахже иект&р,рсзультнруки(ии 11 поюи Ф. снсплснжд и с обмоткой якоря Чтобы выяснить связь между векторами указанны* потоков, обратимся к уравнению (11.6}:
Ег — £ц — jix с = Еп + Ь.н
ЭДС £<| и £я|, индуктируемые по соками Ф 0 н 41Я1, можно эамс-нн1ь '4тивалеЕ1тиой ЭДС якоря £, индуктируемой результирующим потоком Ф, LT = Е « Ер + Е<| _
4М
Тах хак ЭДС проЕоринона.пьны сх’яэтветстпующнм мэгнкгкыи потокам, то вместо 1С'миьедиего выражения можно наннс-гнь
В соответствие с (11-9) на рис, 11,5,а произведено знхп-роеяие вектора результирующего потока <Ь, Как видно, все ЭДС отстают от соответствующих потоков па W2. Магнитный iuit-ok Ф TJ совпадает по фазе с возбуждающим его тоном 7
Из подобия греугалыгиков ОБГ и О ДЖ (рис. 11.5, а) выге-каст, что ЭДС £с. сдвн1тута по фазе относительно напряжения (2 на такой же угол 0, на какой магактаый лоюк Ф Q едмшут по фазе отнасиютьнй потока Ф . Тот же угол 9 при данной нагрузке генератора существует и между нроС1-раиствеянъпин векторами МДС i’o и £ (рис. 115,5), а значит, и между осями ыат нмтныя потоков Ф 0 и Ф генератора
Рассмотренная диаграмма (рис. ИДи) соответствует дктив-но-мпду1стиниой нагрузке. На рис 11.5, в и г ттрнпедсны диаграммы, построенные для тек же ЭДС и тока [, что па рис. 11.5r<i, но дчч активной и ахтиЕпо-емкостпой нагрузок. Диаграмма, изображенная на рис. соответствует работе генератора вхолостую.
При работе генератора вхолостую приемники отключены, и в полученных ранее выражениях следует считать хв=-ю. В этом случае 2 — 0, поэтому fcte =0, (' = Еу, Ф — Фв.
Увеличение количества, подключенных к генератору приемников (уменьшение сопротивления гп) приводит к увеличению тока Г, в результате чего Гхс и Фа, также вырастают. Ках видно из векторных диаграмм, при увеличении активной и особенно актизно-индуктЕвнон нагрузки магнитный поток Ф н напряжение О’ уменьшаются, тогда как при увеличении активно-емкостной нагрузки они возрастают. Угод 0 при увеличении нагрузки генератора во всех случаях увеличивается.
11.5. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИНХРОННОГО ГЕНЕРАТОРА
Для оденк* силйотв емнхроняых гсисраторнш используют тс же ха-puriepHCTHKH, что в для генераторов постоянного тока. Только условия, прн которых определяются внешняя н регулировочная хармтсри-CTHEU, несколько ДОПОЛНЯЮТСЯ.
11,5,1, ХарактВрвСгшеа холостого кода, Основной магнитный поток синхронного генератора является функцией тока Возбуждения, т. & Фу (/„).
16 Электротехника
Рис. 11.7. Регулировочные характеристики синхронного геие-рнторн
Рис. 11.6. Внешни? характеристик синхронною гсмсритора
Если я (11,1) тамевнгь/согласно {112), а магнитным поток записать как функцию тока воз&уждения . получим
i,: -4,441™ ^фзад. (11.10)
Изменяя с помощью реостата гр (см. рис. 11.4) тш 1Т, можно менять тем самым лоток Ф., и, следовательно, ЭДС Ео. Характеристика холостого хода синхронного генератора Ео(7») не ог-лнчается от характеристики холостого хода i операторов по* стоянного тока (см. рис, 9.13) и определяется при тех же условиях, т. е. при J = 0 и п = const
11.52» Висшшс характеристики. Как говорилось ранее» внешняя характеристика хенератира независимого возбуждения Up) оиредсляется при следующих условиях: л = const и /( = = сопп. Так как напряжение синхронного генератора зависит при прочих равных условиях еще от характера нагрузки, то до* полпителъяым условием, при котором следует определять bhcuiheoio характеристику синхронного генератора, должно бьпь постоянстзо коэффидненха мощности, т. е- созф —conat.
Внешние характеристики сйнхрсннсго генератора при активной (ф = О), активпегип.дуктаввой (ф > 0) и ыстнвпо-емкосг-ной (q> <О) нагрузках приведены на рнс. 11.6. Они являются наглядной иллюстрацией того, что говорилось в § 11.4 о влиянии характера нагрузки на напряжение генератора.
Огноснтельнбе измстгеиие напряжения генератора, %, оценивают по формуле
1Л - U,
100= -5^100,
где 1/х — палряжепие генератора при холостом ходе (/ = 0)> рая* 482
ное ЭДС; D'1IC1M — напряжение прн номинальной нагрузке (Г = ~ fncrj)-
В случае наиболее часто встречающейся ак-пгено-иядуктив-НОЙ нагрузки при COS ф Я; 0,8 относительное изменение напряжения ibtKiot у некоторых генераторов доходит до 35 — 45 %.
11.5.3. Регулировочные харянтцнгСтюсн. Естественно, ЧТО поскольку напряжение синхронно! о генератора изменяется при изменении ншрузки в значительных пределах, необходимо принимать меры для уменьшения изменения напряжения. Это-j о можно добиться, очевидно, за счет соответствующе! о Евме нения ЭДС генератора путем воздействия на его ток возбуждения fj. О том, как и в каких пределах необходимо изменять ток возбуждении при изменении тока нагрузки генератора, чтобы поддерживать [7 = const, н дают предстанленне регулировочные характеристики (рис. 11.7).
Дополнительным условном, при котором должна определяться каждая го характеристик (кроме п - const), является соаф= coast.
Ofoiytr обратить внимание па то, что для нормальны* условий работы, приемников электрической энергии необходимо поддерживать напряжение и частоту синхронного генератора на заданных уровнях. Для этого синхронные генераторы снабжаются в большиистве случаев регуляторами, управляющими напряжением н час! отой вращения генераторов к всздейстьукнцЕМЕ-па ток возбуждения генераторов и момент первичного двигателя.
11.6, ПАРАЛЛЕЛЬНАЯ РАБОТА ГЕНЕРАТОРОВ
Одиночно работающие синхронные генераторы нсз-рачаются сравнительно редко. Они нелользуются в элспрнфнцнрованных передвижных установки, па небольших сельских электростанциях к в ряде других случаев. На крупных аискчроссанцлня устанавливают, кал пра-лило, несколько генераторов, включаемых параллельно н работают, их па общую нагрузку Это ,taei возможное! ь увеличить мощность электростанции, повысить надежность электроснабжения иО1ребягелей и экономичность электростанции. Прн уменьшении обшей ншрузкн сташши часть генераторов и нерв-нчпых двигателей может быть оста-нинленщ вследствие чего оставшиеся будут работать с большей нагрузкой и более высоким КПД С целью повышения надежности элск-троенабнения s экономичности несколько меЕтростаттций соединяют между собой в энергетическую систему. *
Aicjikwchhc генераторов па параллб- ьную pafiuiy sh.isctct весьма серьезной в ответственно* :<адачгй, так как црв неправильном включении moi yr возникнуть недопустимо большие itjw, представляющее onac.Htx.-ih гак для самих генераторов, так и для других чпемоптоо здекгроибпрудоианкл. Чтобы ев возникало недопустимо больших то
16-
483
вод при иключенни генераторов иа параллельную работу, должны быть лмполнсны. следующие требования: порялос чередованы! фаз генераторов должен быть одним и icw же; генераторы должны иметь одинаковые (или блиюнс по значениям) частоты и напряжении. напряжения lenepuTopcB в момент велючзпня должны совпадать (иля почти сов-гадать) по фазе.
Если renepaitip включен на параллельную работу с уже работающими генераторами, го прн точном вылгшнъкии указанных требований он будет работать ьхол<>егук1, Чттоы перевеете ив вновь нкаю-чеппый rewepai ор часть активной мошпости, отдаваемой :и1е<тростйН’ идей или знер|Фтнчссхой системой потребн'1йпим, увеличивают эра-1Г1ян1Г11ийг» монет, гтрнпиадынармый к валу генератора со стороны перзичнугс двигателя. Для ииру^кн генератора реактивной мощностью нзмеьйю]' -гц к возбуждения генератора.
Дли анализа явлении, происходящих при параллельной работе ге-нйратсров, могут быть нелгшыижачы полученные выше выражения. Однако следуез иметь, в виду, что если мощность энергосистемы во MMCiv раз превышает мощное! в иодклгачскного к лей теператора, то прн анализе работы последнего следует считать EJ =-const и / = const, так как угаданные не-'гнчины в энергосистемах поддерживаются срак-тнчески ностоннными.
11.7. СХЕМА ВКЛЮЧЕНИЯ ДВИГАТЕЛЯ* СООТНОШЕНИЕ МЕЖДУ ЭДС, НАПРЯЖЕНИЕМ И ПАДЕНИЕМ НАПРЯЖЕНИЯ В ЦЕПИ ЯКОРЯ
Схема вкггрчсттия синхронного двигателя показана на рис 11.8. Последовательность пуска двигателя будет рассмотрена в $ J 1.11, а пека предположим, что обмотка якоря подключена к трехфазлому источнику переменного напряжения, обмотка возбуждения — к источнику постоянного напряжения, иуск двигателя уже иртпяелев и его ротор имеет частоту вращения п, равную частоте- вращения лс магнитного поля якоря.
При составления уравнения по второму заколу Кирхгофа должны быть учтены ie же нсличюты, что и для синхронного генератора (см, § 11.3). Если, как и п случае генератора, пренебречь падением напряжения 1г, то при указанных на рис. 11.8 положительных направлениях, пронимаемых обычно для активных приемников, получим
= (11-Н)
откуда нетрудно найти формулу для определения тока якоря:
U — Е
J= ~ (И-12)
jxu
484
Рис. 11.8. Простейшая схема втлючеиия синхронного ДВЯГДГеЛЯ .
Из выражения (11.12) следует, что ток J лрн заданном напряжении сета U и сопротивлении xt зависит как от значения ЭДС ^0, так и от угла сдвига фаз ЭДС по отношению к напряжению U Как будет показано далее, именно за счет угла сдвига фаз и происходит изменение тока двигателя при изменении его механической нагрузки.
11.8. ВЕКТОРНЫЕ ДИАГРАММЫ СИНХРОННОГО ДВИГАТЕЛЯ
В соответствии с уравнением (11.11) на рнс. 11.9,а изображена векторная диаграмма синхронного двшателя при некоторых значениях механической нагрузки и тока возбуждения Последнему соответствуют определенные значения магнитного потока Фо и ЭДС £0.
Диаграмму можно построить в следующем порядке. В некотором масштабе откладываем вектор напряжения (7 в под углом <р к нему - вектор токаJ. Так как люп ai-елъ работает пол naipyaitcii, то потребляемая им мощность Р, будет псиклкиз-йпъпой, если угол <# лежит в предела* — ir/2 < <р < гс/2, Как будет покатано далее, значение уиа гр при данной нагрузке двигать.иг зависят от значения ЭДС Jj0,
Поскольку пиленые напряжения ;(хс до.тжпо опережугь по фате
Рнс. 11.9 Векторные диаграммы синхронного двигателя
485
ток/ ня 90; нз концаясггора напряжения С7 следует опустить перпендикуляр Д£ нм нсктор гова_7. Па линии АН должны быть расту,юттсны всжгор н1дси^я напряжения и конец вектора ЭДС Eq. В со*
озвегстнан с уравнением (IJ 11) сумма Ьекгерои ЭДС h0 F ла-,гения напряжения должна бьнь рання веггору напряжения U.
Как и в случае синхронного генератора, магнитные потоки двигатели Фо. ф,] и Ф пропорциональны ЭДС £>ь _Е, и F. = I/ Одаако ь отличие от генератора вектор результирующего магнитною потока дяигятсля должен определяться соотношением Ф т Фв - Ф1(.
Последнее вытекает из выражения (11.Щ которое может был. переписано следующим образом; U — Е = £а 4- Дхв = Ев - Ея1,
If.9. УГЛОВАЯ И МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ СИНХРОННОГО ДВИГАТЕЛЯ
Для синхронного двигателя можно написать такие же по виду выражения мощностей, как и для синхронно) о хсисратора. Однако применительно к двигателю они будут иметь иные значения.
У двигателя Fe = 3 Lrf cos ср представляет собой мощность, потребляемую им ю трехфазной сети, Вычизая нз этой мощно* епг потери мощности в обмохке якоря, получаем злектрсмаг-аигную мощность, г. е. мощность» преобразуемую из электрической п механическую, развиваемую вращающимся ротором:
Р,м - - if» = 3&’Г cos ф — Н2г = ЗГ0/ cos ф.
Электромагнитный Момент синхронного двигателя может быть выражен через мощность п угловую скорость w = = ля/50 роюра:
М = Р^'ы.
Заменив мощность Р-м ее выражением, иолучим
Ехын из точки И векторной диаграммы (рис. 119, а) опустить перпендикуляр ЛГ па линию ОВ, го можно получить следующее равспстгпо;
IСО5 ф = L sin 0ДР
Заменив / cos $г в (11,13) его выражением, получим
3£ I' м = q ' sin а. (11.14)
<дхс
Как видно, при постояпт1ых значениях U, £, о> у xL момент двигателя прямо пропорционален sinO. Зависимость .W (9) называется угловой характеристикой синхронного .двигателя и приведена па рве. 11.10 в нервом квадранте.
В пределах пт 0 = 0 до 0 = 90' расположена ус ойчиййя часть характеристики, называемая так потому, что именно здесь возможна устойчивая работа двигателя с различными «сметами сопротивления. Любое изменение момеята сопротивления Afc при работе на устойчивой части характеристики приводит к такому изменению момента двигателя М, прн котором неизбежно наступает равенство моментов М и AfL, На устойчивой части характеристики расположена точка А, соответствующая номинальному режиму работы. При поминальном режиме frri-u —2.0 -г- 30s.
Максимальный момент, который в состоянии развивать двигатель, наступает при 0 — 90°:
Если момент сопротитьтсиия Мс окажется больше момента Мик, jo двигатель не в состоянии будет его уравнетгеить и остапопится.
Отношение Мди/Мши называется перегрузочной способностью двигатель в ддя различных двшателей лежит в пределах 2-5,2.
Перегрузочная способность может быть irpm. необходимости увс-лйчеиа за счет повышения ЭДС £а Из выражения макснма-jbHoro момента следует, что последний и, следовательно, перегрузочная онособ-ность синхронного двигателя пропорциональны первой степени напряжения в отлепи? ог асинхронного двигателя, у которого опа пропорциональна квадрату напряжения. Hi этого следует, что синхронные □еигатсли менее чувствительны к изменению напряжения, чем асип-кроцпие.
Следует обратить внимание на то. что длительная нагрузка двигателей, превышающая поминальную, недопустима, так как дишатедь при этом будет перегреваться. Яотможпая кратковременная перегрузка должна быть учтена прн выборе диш атсля по мощности.
Рассмотрим явления, происходящие при изменении нагрузки двигателя. Допустим, что двигатель работает е моментом Jrf = Afc и углом 0 (см рнс. 11.10), чему соответствует векторная диаграмма, из-
487
м.
Рнс. 11.10. Угловая характеристика синхроппото )1ЕН1ГИТСЛЛ
I--------—?—I
i I *
_____________I I 3
Pre. 11 И Механическая xa-ракте-рнсгика синхронна n дви-гате.1я
обряженная па рнс, 11,9, д. В результате изменения момента сопротивления, например, от Ме дез Мс> .Иг происходят кратковременное снижение частоты вращения репера, что еопровохдаетсн еоотвегечвую щнм изменением частоты индуктированной ЭДС Ео и, следоваз-ельно, частоты вращения векюря ЭДС Ло на векторной диаграмме В результате этою возратает угол слазпя фят +> ЭДС 2;„ отиаситсльпо напряжения (7 и как иэелствие уве.тчнваюпл* ток I, далекие напряжения fsL> момент М н моивин- н Рф и
Перечисленные величины возрастают до чех нор, пока при некотором угле fl । (ем. рис 11.9,ё и 11.10} момент двигатели Мf ис сравняется с Кметтом tonpoTWbjicwHx МС1 Пущ Мх - Mtl частот иратдепия ритора снова ст а пет ранной чаелзге врашення поля якоря:
□ = ГЦ = &0/,/Т.
Прз умеяыиснии момента сопр<я падения 9 и, слй.итватслъло, значения I, Г^, Af, Рд и PJS1 так*с уменьшаются, а при 6=0 все «ни, кроме I и У.Ге окапывзются рапными н>.|Ю. Векторная диаграмма для случая 8 - 0 ока на рнс- 11.4,« Ка< видел, прн 9^0 двигатель потребляет чисто кщукгнвный тон. Нетрудны устаповизь, что если бн двигатель был вотбужаси до ЭДС £(, - L’, го при 0 = 0 ток I был бы равен ну,ио
Так как при изменении нагрузки двигателя происходит лишь относительно небольшое смещение ротора относительно вращающегося поля (изменение угла ОХ то механическая карав-териС1и1П1 синхронного двигателя представляется линией, параллельной оси абсцисс (рис 11.11}, Двигатель имеет постоянную частоту прашения при изменении момента вплоть до максимального значения.
Синхронные двигатели могут рабиштг, кроме двигатслыто-го режима в тормозном генераторном режиме с отдачей энергии в есть Генералеркык режим возникает в том случае, если к валу дви1 ателя приложить нс тормозящий, а ьрашающий мо-
488
мент. Двигатель в генераторном режиме представляет собой ни существу генератор, работающий параллельно с сетью.'Уtдо-пая и механическая характеристики двюате.тя в генераторном режиме приведены соответственно на рис. НАС и U.II в третьем и втором квадрантах.
It.fO. РЕГУЛИРОВАНИЕ РЕАКТИВНОГО ТОКА И РЕАКТИВНОЙ МОЩНОСТИ СИНХРОННОГО ДВИГАТЕЛЯ
Существенной особенностью скихрониих двигателей является ю, что они. работая с мсхцезичсской нагрузкой. яозво лйюг в широких: пределах изменять потребляемый из сети ре активный ток и реактивную мощность. Осуществляется это пу тем изменения тока возбуждения 7П о помощью реостата гр (см, рис. U.8).
Прв.ткыпжим что двигатель работает прн кпитоянним момеш& статического сопрт нилення (Мс ' const} и что Е1сксторому току возоу ждепия ;в1 соответствуют ЭДС Ей|,тп< углы <pt и (3t (рнс 11
Прямым следствием изменения гота Д явгтегся изменение магнитного потока Фа, а значит, и ЭДС 1Га; нослвлям приводит в изменению а ежа якоря i Так как М = const, то при различны* 7И момент двигателя Д/ и мощность Р-» будут оставаться также неизменными, поскольку при устаноинщпихс* режимах работы с различными токами ЛГ iVfc const, а Л'п, = Л/ш. Роли не учнгывагь гпм-ерь uomffOCTft /2г. го можно счшать Ес&нзмешюй и мощность
5СГ£\
Из выражения Pw=Wto и (11 14) следует, что -----------— ыя0.
Очевидно, мощность Р)и поскмниой при изменении тока возбуждения, если ГцsiiiВ ~ const. Последнее означает, чти 1е<1мсгрическнм местом концов негчзроа ЭДС прн тпмеЕ1еннн тока /, является чниия /!й, иара_(.1аль(1ая вектору напряжения Г,
На основании выражения Рф = 1Ш сси tp можно сослать »ын1ы О ГОМ, ’ЕГО МОЩНОСТЬ Рф будЙГ tTOCT OSJ СВОЙ, если /С05ф « const, т с.« ли «.хлщггсн иоСГОЯЕПЕОН зктинная секла».1ЯЮЩНЯ гока. ГепмвгрЯЧеским местом гонцов вектора rasa 1 при измспсееиН тока Ja является, очевидно, линия ВГ, перпендикулярная ьекюру иапряжепия G .
Чюбы составить прслстакЕснме о влиянии тока 1„ на репк-сивньсй tOK и реактивную мощность авигателя, на рнс. 11.12.4 совмещено несколько векторные диаграмм для различных тсн коп возбуждений.
При некотором токе воэбуждеиия ?я? > 19Х двигатель имеет ЭДС £ 02 и токJ2, совпадающий по 4^’’^ t напряжением (tp2 =
-QJ. Реактивные схнемвляхчпие тока якоря и потребляемой
I? Электрете смы 489
1*ис. 11.12. Векторные диаграммы сишронного двигателя при различных токах возбуждения lirl и U-обрачныс характеристики при £Щ'<Л*<НЬ!* MOtiyiUCJU. (Й)
Рис. 11.13. Рсггор-нзя аваграммясйн-ХРСЕГГОГО KUMI1BH-сатпра
двигателем мотцпости в этом случае рампа пулю. При лсдовозбужденнн (Zt] < и ^tu < £<м) двлгалшь имеет индуктивные еосгав.тяющие юка (<р, > О| и иитреблиемой мощности, а при иеревдебужденни (/,> > Л? и Еоз > Еоз) - емкостные состатитяю-тгте тока (<рг < 0) и потребляемой мощности.
При т]€дппгабуждсЕ1ии поц действием индуктивной составляющей тока дви! атсль дополниj ельно нид-
магничкчаегся, при иеревозбуждении пол действием cvxocthok составляющей тока размагничивается Ctedctjii лолмагиячиваашя или размагличлва-мая дакйД1бля такова, что при всех
значениях тока возбуждения в обмотже якоря возникает результирующая ЭДС Е» действующее значение которой остается неизменным, так как Е — Lr.
Зависимость if (if,), дсказы&ающая, как ц.уиеляеюн jok яхора 1 при H'JMejuHttH ток,» нпнБуждення /в н спучас постоянней мощности, начы-uaei'ca И-о^рачной xaparitpwLTHxnii синхронного .твхгзтсля. Несколько таких характеристик для риэли’гныч значений мотдностсн приведены на рис. Ii.12.i6. Мппималшие ателия юков J получаются при СО5 ф — I. Область, раСпО.южЕннйх Слева ш нунп ирной линии, со-
494
птвелствуег работе с токами, отекающими по фазе от напряжения, сирина-с токами. опережающими напряжений
Сиойстао перевоз буждеп пог о синхронного двигателя потреб-.зять кроме актинпой составляющей тока и активной мощности ймкоспнуЕО сосгавзиющую тока и емкостную мощность, используют для 11ов1лис’!1ия (компсЕ1сацни) коэффициента мощности jpyinx нотробигслсй, создающих активтю-иидуктивную нагрузку системы, Используя указанное свойсево синхронных двигателей, оказалось возможным создавать ииЕиропиис машины, насыпаемые синхронными компенсаторами. Синхронный компе пса iop представляет собой по существу си!гх-ринный двигагелц рассчитанный па работу с перевозбуждением без механической нигру пси и предназначенный специально для улучшения коэффициента мошнос^и. -Lc.ih не учшывгпь отпосительтю пебатытппс потерь мощности в синхронном ком-испсаторг, мпже'о считать, что ям потребляются из осте трех-фазнО! о тика чисто емкостный ток и емкостная млецплстъ. Векторная диаграмма синхронного компенсатора прн таком допущении приведена на рис. 11,13.
11.11. ПУСК СИНХРОННОГО ДВИГАТЕЛЯ
Предположим, что обмотка якоря синхронного двигателя подключена к сети трехфаи[О1е юка, обмотка возбуждения — к нсточннху ио-CIDhiihOio тока, а ротор неподнижен. МДС обмотки якоря будет СО-злнно врагнатопгссся магнитное пате, благодаря взаимодействию которого с проводниками ротора на последний будет действовать момент. Направленно монета зависит от положения вращающеюся доля СиноСяjс.:ьно рекорд н прн врашеннм пола будет иумгняться. Скя-уйрееос иллюстрируется рис. 11.14, глс вращающееся пале якоря условно тамекеио вращающимся кольцевым мазнитим, я рапор — постоянным мягнюом. Пегяьнсимо от числа полюсов синхронного двигателя пре частоте сети 5D I и направление момента, действующею на не1!п?!ьижный ротор, изменивj-lte 1 ftft pat в секунду Ткгтедстнци большой частоты изменения ндприи.тення момента и значительной нперцноЕЦЕоеги ротора последний гес сможет прийти во вращение.
Если предварительно разогнать ротор до частоты вращения е*. близкой к частоте вращения ц, поля якоря, а татем подключить обмогку визбуждеыия к источнику nociояьного гика, то пол действиевк момента двигателя частота вращения ротора дополнительно возрастет и наступит равенство: «“««. Ротор будет ирашш ься далее синхронно с нолем якоря.
Для разгона синхронного двигателя используют так ндзчг-васмий асинхронный пуск синхронного двигателя. С этой целью ротор снабжают кроме oGmojkh возбуждения 1
17'
491
/2
ПТ
Pnc, Li 1з Пусковая опчотка eisiixpOHriiiio дингитсля с яьнсьыра-ЖСШГЫМВ полюсами |е} к его механическая чарлктсристика (6)
(рис. JI.I5, л) пусковой обмоткой. Последняя состоит из стсрж-нвй 2, уложенных в пазы полюсных наконечников и замыкаемых с ториевых сторон накоротко ссгмеитдми J, Пусковая обмотка поддана короткотамкнутой обмотке ротора асинхронного двигателя.
flyer двниге-ц может бить tijxjKTiwacii по схеме, итсюряжапюй па рнс. 11.8. в следующем ciopmuc. Обмеики. ротора с помощью tiepc--гючатсля Л замыкается на резнлор г,, после чете и5м|мка якоря □одключае1Г1г к трехфазлой cent Разгон ротора синхронного ajwrajc-ля, -tiit же как н асибсхронного. происходи! чя счет взаимодействия хращиощетося лидн якоря и проводников короткода.мкну гой (иуско* вой) обмоткн, я которой НОд действием надув I ирсчганныц ЭДС to:inj<-какз-i токи. Когда poinp разгонится до чаелиы вращении, бднчкои г частоте вращения щ>л) якоря, обмотку кетзбуждепня oi к.почиют от резистора и подключают к птичнику постоянного пжи. Для контроля часики вращения рснора mwkho испслазсь^'ь амперметр 4 с нулем посредине шкалы, чистота колебаний сч-рутки которого уменьшается по мере pi.iiрча ротора Обысику нпгЛуждагая лодс.гючяют к рсзис-нк-ру в период разгона ротора дли того, чтобы предохранить ее nni.iH-цию or пробоя недопустимо большим напряжением, которое может вепкнтнуть на дыво.ххя обмоткн при iijlitc лвнтате.дя.
Поскольку синхронный двигатель пускается как асинх-poiniMir, Он н.чост в период ЛуСка свойства асинхронного лвнгл-49?
теля, в частности McxasirnjctKyEo характеристику, тпображскиую ня рис. 11.1.5,0, Ках л-ДОСгно. чюбы можно было лроизкести пуск лвггателя. должно быть выполнено соотношение JW., > Mt, Однако для пуска синхронного двигателя этого оказывается недостаточно. Установлено, чю двшhicl.il надежно входит si спихронмам, сели подключение обмсиКи возбуждения к нс-[U4LHLKJ постоянною юта происходи 1 При скольжении J 5$ 0,05 (частота вращения и 5=О,95яо). Момент двигателя ,WK, соотяет-стнуютиии г — 0,65. насыпается гипдньтм Для того чтобы двзи а-Te.Tii мог разогнаться до скольжсешн л ^0,05. должно быть выполнено. очевидно, условие Л1П, > Af с,
Соо1ношсния между кусковым, входным и номинальным моментами лежат для различных двигателей примерно в следующих пределах:
- 6,7 - 2,9; М„/- 0,6 -г 2Д.
При непбхй, 1имосги ограничения пускового тока или пусконого момента синхронного пишите.ih можно HCiHLibiouajL те же способы, чк» а случае пуска аснтс^о-ошЕсг-о двигателя v короткозамкнутым ротором.
11.12. СРАВНЕНИЕ СИНХРОННЫХ И АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Чтобы CK.-IUHCH9MJI. йибчЗр 1ГЗ CIIItXpOHEIOM ИЛЕ! ЯСИЕЕХрОИНОМ ЛИ-г а теш? для приведения ко вращение ин о инн нло!'с? производственного механизма, необходЕмо иметь в аилу слсчующ«.
Обмоткн статора обоях двигателей получают питание от сети грехфачио1 о переменн<>| о тока. Для питания обмоткн возбуждения синхронного двигателя требуется, кроме пл о, hl-i-очник хчекгричк-кой >нер1 ни noci iiniicioro гока. правда, относительно нстхзльнпэй мощности.
ACH£!XpOI[IJD[M ПУСК СИККрОИЕЗЬИ ДВИГЯТСЛСЙ HWKfi.ihKO С.КТЖШЖ IIV-ска ясннхронных двЕ«агелей с корогкозамыгутым ротором. Н отношении пусковых LKoidcsu асинкрилные диаиагелн с фазным ротором имеют весьма существенные преиму-щес.-! и& перед синхронными ;jvmi а-1С-!ЯМИ.
Частота вращения синхронных двигателей остается постоянной при иамегкпии Езагрузки, юма как у асинхронных двигатслсЁ! даже при их работе ла естественной х а рак герис-i itxe <>яа n«kiXjaK* изменяется.
Лсипкронньгс лвигатс-ти дмнтг иозможеюсть регулировать частоту вращения раз.тичЕ1ЫМВ способкмм, ржжмотренными н и. 10. Иеполью-яание нехегюрых на этих способов для регулирования тадрги вращения синхронных ,'iani attjiefi в пр ин пипс невозможно, а некоторых связано с большими гоиструксявными и -Ж'[[луэтэцио1тк>^н трудцосгя-
493
мн. Учитывая это следует имечь н н*лу. что синхронные двитателк отноешся « .i.b-hjякеляч с нерегулируемой часкш'ий вращения,
Воздействуя на гох возоу»иения синхронного двигателя. можно в широких пределах н:менягъ ei г? коэффициент моштсостн Можно, в час,носгн, заставить синхронный двигатель рабсиать с со$ф = 1, а тикке с опережающим ьохом. Писктисс может быть исгользонако для улучшения коэффициенте мощности других mupeoHJcjeii, нитаю-itinw от той же cent. В сынчие ui iivio асинхронный двигатель прслстаолет собой акитнп-им |уь-1ивную нагрузку и имеет acei w соч Ср < J
Из-за малик потерь мощносгн я роторе, а также в обмотке отпора Прн paGtrie с ннгескнм cos ф КПД СИНХрониы* .imjti aie 1 ей оказы-яаегся больше. а масса и raoapitj ные размеры меньше. чем у аеннх-рокньы двигателей
Учитывая указанные доитонпстпа синхронных Дии ихслсй. стараются возле, где это возмажгго, вместо асинхронных дотацией применять rsnixponiThie. Они применяются обычно я установках средней и большой мощности при редких пусках, я случали., когда не ]реоустся тзектрлческою pci улнроинпия ЧИСТОТЫ вращения. Синхронные дни! алии пило Jb’jyjoicM, например, для припала пасоссь. компрессоров. вешиляторок тенераюров ио-стояпного тока преобразовжсльпых установок.
и, 13. СИНХРОННЫЕ МИКРОДВИГАТЕЛИ
Синхронные микролвш aie.iM — электрические машины малой мош ностн от десятых дилен ватта до сотен ватт. Частота вращения роторов мтткродвща1елсн, как и обычных синх-рптгнътх двигателей, нс зависит лт нагрузки и равна часто1е вращающегося мат ниi ноги поля и —бО/.р. По лтой причине синхронные микродви! нтелн используются для приполз различных ycrpuiiciB, частота вращения Koiopt.ix должна сохраняться ьеизмскший и пропоринФца-цзной частоте питающей сети, К таким устройствам относялса шемопшиущпе приборы* электрические часы, тиноустатювки и 1. и. Существуют как грехфазмые, гак н однофазные синхронные мнкродвигатети. Вращающееся магнитное ноле грехфазпых it однофазных двигателей создастся с помотпью обмоток статора, которые не oi-личаюгся ш обмоток статора соо1вс'гс1ву1оптих трехфазных и однофазных асинхронных двигателей.
Регеры синхронных микридви!атслей ire имеют обмоток возбуждения, а следовательно, и скользящих хпектрическпх контактор, что значительно упрощает Их конструкцию и поиы-шаег надеж кость эис1иуагацнн. Отпадает необходимость в источнике постоянного тока. Ио конструктиппп.му исполнению 494
Рис. 11.17. Пксконые и неканк-ч«кая характеристики иинхрои-него микро.ч пигшеля с носюяi[• пымн магнитами
t*KC. 11. 16. Конструкция pOTCfpd синхронного мигролвигатсля с
ПОСТОЯНЕН! 41’ МАГНИТИМ И
ротора микролвш ателк подразделяются R8 двигатели с ло-еюянйыми машшамн, 1 истереэнспые и реактивные.
11.13.1. Микродвигатель е тлтпнннымн магнитами. По существу такой микродвигатель отличается от обычною синтронного двигателя ioit>*u । ч । <1 :л<11нп1нис иоле его ротора сознается постоянными магнитами J. расположенными па »и.ту (рис. 11.16). Для получения пу-С’Еовсно момента в лазах полюсных наконечников у.кгжена пусковая оБхтигка 2, как к у обычного синхронного двигателя.
В период тускл ;iRHar?Lib patio iaer как ас ш si репный г развивает мгмеш jHa; обусловленный взанмалсйсгнясм ярашающаося магнитно! о поля с током пусковой обмепкн ротора, вызванным ЭДС от ярцн|ню!це1 оск маз нич лого поля. Однако при пусто соз.ляется а тормозной момент ,Wlh иочннннинеине которого можно объяснить следующим образом. Магнитный поток |их.-ы>ян№го магнита ротора при вращении ntpeevk-aer прошздипки обмотта статора и наяодит в них ЭДС. пропорциональную частоте нраЕцепмя ротора ЭДС вызывает н обмепке е га юза ток той же частоты. Взачыолейегвне *гого тока с магнитным i/li.jem iincioiiiiioi о магнита ротора и оозггаст тормозном момент.
Pc‘iy.ih.inpjj«UHtt момент, развиваемый двигателем при пуске, равен Л(р = Ма -ь Мт. Графики мичекгоо -Wa, М, и Мр двигателя прсд-LTjobiCHM на рис. 11,1?. Характеристика рету.чя। ирующего момента имеет прова.1 н области малых частот вращения, что необходимо иметь в. виду при выборе лвш ате.тя по пусковым сеюйствдм.
При дос । нж€1пги ротором чнс.-ю1ы иращения. близкой к синхронной. ротор входит в синхронизм к дингятелк чичинаег рабозать как силхронньЕЙ, т с имеет чаенпу вращения, ис зависящую Oi eic кя-1ручки. В „ом случае развиваемый двигателем момент Jbfu обусловлен взаимодействием мАГЕЕМТЛЫХ по.'ге-й пскчтшяныз мй| пиши ротора и зратиающсгося rm.’is et агора.
Смнхрициые микро,'1»я1 асели с постоянпыхси маппетами по сравнению < j нгсереонснымм н реахт милыми нменл более высохни КПД, со:ыр и Фначи1елънО устойчивее в работе. Однако они бОЛСС дорогие К имеют aiH<>L:ni4LibltO ОО.ТЫПОй гтуекфрон ток
495
Рнс. 11.18. Конструкция рогора LUHIJMaillOl l! |HCTCpCJHCElOl'<3 MH-К|№,1 ВЧГ5 re.TH
Рис. I 1,10. Moje.lb LHHXPQHIJOTO rSlClEfWiH^-HOro МИ К pO,1 Bit I ЯТСЛЯ ДЛЯ inaCHL'HHS возиикнонения вращаю i»ei о vowtEira
11.1,1.2. Гистерезисный и и к рн)двигатель. Гистерезисный микродвигатель представляет соБон сидхропный лвнгатель с цилиндрическим рОГОрищ ОСЗ ОБМОТКИ, U ПОСТОЯННЫМ ОСТЕПО’ШЫХ! мш НИТНЫМ ПОТОКОМ и асинхронным Таскеги. .
Ротор Еисгерсчнсното микродвигателя (рнс. 11 llsj cocioht из мас-сивиого кольца J, ил»отопленного из мапзлтпо-.1ы:рлого материала и алK>Mtfниссой иля стальной тулки 2. При пуске прашающий момент MHrpO3EHTlli|J« обусловлен ГИК явлением I нсгертзиса прн исрсмагии-•чдаапвн члэтсрйида ротора, так и асиняролным по-
метой, Волгихиоьснис гистерезисного момЬ«па микродвигателя можно пояснить с помощью ё1 о модели, приведенной на рис. 11.1У.. где вращающееся магнитное поле стаюря условно заменено кольценыч вращающимся мазншои 2. Рон>р двигателя при иама(иични5<нии жсшъла J предъявляет собой постоянный магнит, ь Kiu пром ось га-чагличквания из-за явления гистерезиса отстает <н «н:н вращающегося магни тного поля статоре, Огсгананис я-ардперизустся уч лом гнетере-лисногэ еде Hi а 0г и обуслоалинаст сознихновсиие iahi спинальный j н-<л*срсзасных сил ?|Т а е.гг.ювагельт». и гистерезисною момент Af,. Silt сак эначстТие ли 6Г связано гольго со Си«йс1 вами ма|ерналз ро-iopa, го Мг ик-'1ястся посланным по значению для коннретпого лвн1а-тспя и 1ем больше, чем шире петля । истерсэнса Mai нитне-твердою ма-териэлц ротора.
Кроме момента \fr в двнгнтслс, как и в аснпзроинчм. возникает асигарзиный ыомепт \fi0 что можно <»б>ясиитъ слечуюшмм образом. 'Сак каь- ротор предстдв.тк!г собой гик бы хореи кспамкпутую обмотку со значительном активным сипрогивделиЕм, то в пем аегзиякаст ’ЗДС Л2-= L.ц£ от apfliunjomei оса магпнтиию гтоля crajopa, которая выбывает гок а роторе. В результате взаимодействия jhu ротора с нра-ншющамсх магягпзым молем возникает момепи .’if,,. Результирующий момент питателя Мр- Ч/, +.W» (рис. 1 1,20>.
Косди частота аратсния ptrnjpa окдоеюя близкой к частоте вращения магнитного ноля статора, ротор войдет а синхронизм и дыь а-тс.ть будет рабо!нтъ как синхронный. Момент, развиваемый jBniaia-496
Рнс. ] 3.20. Пусковые и механическая характеристики синхронного гистсрсзисншс микраднн-rarc.ii
Нис. II 21 Модель синхроний! о реак । и hhoj о ми хроданг а тела для пояснения возиикисзскня вращающего момента
дем при синхронной чнсгспе Вращения ротора ,4^ обустонлен »«имолсйсгл^*е.м магнитного потока остягечит п намаз иичнпания ротора н арашаюспсккн Mat нн1 hoiп потока статора. Гистерезисные мк-KptiAhiHiaitTn в зависимости ст накрутки на налу могут работать как э синхронном, так и в асинхронном режиме. Пели на! рутка характеризуется- кривой Я (рнс-. 11.20), двигатель будет работать н синхронном режима При этом стскроннь'и режим рйСини донготе.тя будет получаться автоматически, если противодействующий momwi па валу лыиателя не превышает сю i нстереоисного момента, т. с, М,ф=5 Мт. Прн на«ру:(ке а вяде кривой Ь'(-Ч||? > MJ ziuHiate.TL будет работать в аеиплроипом режиме. При ттом • возпихатот значи, с.шиьгс потерн ?нсргнн на перемагничивание роторе и КПД двигателя резко cti»-лается.
Гистерезисные синхронные микродвигатели палежвы в работе, имеют большой пусковой момент и малый пусковой ток, нисокчй КПД (г? — 0^3 : 0,6), плавно входят я синхронизм. К недостаткам мож-гю отнести низкий стиир г 0.4- С15 и трудоемкость ©йрайшки мат нигло-гнерлых материалов, из которых вы|1синено калию двигателей.
11.13.3. Peak—ивный хшкродмгятель. В pcasi mbhitm микродвигателе рабочий момент возникает благодаря различию миснненых ироьо-aiiMixiefi ротора по сто по।серенной и лродсмыюй осям На рис- 11 21 показала моде-и- реактивного двчгитс.зя. причем «решающееся поле ciaiopd условно заменено кольцевым врашаияпимся магнитим /. Так кав ротор 2 стремйт:я занята по.лгжение. ири клером мзпЕнтная iiein. пмеег наименьшее магнитное wiripoi индснис, оохаллючея танген-лиальньзе силы А'г, а следоватслыю, и вращающий момент 5f. itattpaa-.'LCKWbiH и Ciopoily вращении магнитного гго.гм Liaiupa.
Основные конструкции роюроь микродвигателей прннедеиы на рис. 11.22. Ротор со впадинами (рис. И.22.и) собирается из отленькки .•тегов электротехнической стати Для пучка дитагеля ротор имеет К1)рО1К0.АмКНуту1С обмотку типа беличьей КЛСТ«И. Po<ltlp и:1 сплошного ферромш нитно! о матерняя 1рие. It.22 о) пусковой обмотки нс имеет. Пусковой млмеш создастся в регулы^е йзаимолействил вращающегося магнитного ин-та статора е внхреаыми соками, тсдуктиро-яанными и роторе. Реактивные микродвигатели нмскп .юстатсыно простую хонсхрукикю. тталгжиь! с» работе.
497
РиС. 11,22, Копструвцяя ро Горов vMBtpoHKwx. реакгийн«5> Л-СИКрОЛйн; а гелей
К их недостаткам можно отнести: небольшой мня-имальныи момент, иизкий сек tp (менее 0,5J. значительные габаритные (химеры, что объяснаегья большим спирт пилением магнитной цели двигателя. Кроме того, мнвродвн!arc'FH весьма чувстзиниьны к колебаниям иа-1гря»сиЕЯ сети.
ELt3x4. Шаговые мнк|м>дпеятелн. В шаговых микродвигателях пи-Т4ЧИС О6МОТОК СТйырл МОЖСТ ОСуЩСС! ШИТЬСЯ til К ОДНОПОЛЯРНЫМИ, так я ряшополярныыз прямоугольными нмпулъеамн напряжения. Данные микродвигателе мшу с быть названы импульсными. Опи широко приме иютси п приводах мекай нам ок. в которых необхилимо осущестнлять стэрт-отоиное чи непрерывное движение, например в лентопротяжных усгройсгвах с целью киодн и вывода информации, привода* различных станкоа с программным управлением, счетчиках И I. л.
Рассмотрим иринпип работы двигатели на примере работы uiaio-вого мвкродви1ятс™я с постоянными магнитами, которые называются закткс магиитоэлек ьрнчснгими (рис 11 21). С-гятор двигМЕля имеет ЯЬ-ювыражвнныс полюсы с обмепками возбуждения i и 2 (рис. ll.23.ct) Обмткя возбуждении мокет быть выполнена днук-, четырех- и j. д. полюсной, В дассма1рнинсмом jamaieut- она чстырсхлолюсная. Ро-lop — постоянный магнит, При лодачс 1грямоутолы1ых нм пул елок на-прявхпня зала н чой последона is.ikhucth на обмотки дспбуждсния и изменении в них iOKtift ftt( и как иогачно па рис. 11.22, г. ось осщянпмл магнитного потока скачкообразно поворачивается иа SO'
498
грис 11.2?, я-*1- Пхя1 лейст кем момента, который возникает в рету.пь-raje взанмоденстБия магнитны» нолей L-гвтора, со:лда?м«мо1 ц обметкой возбуждения и ротора как постоянного магнита, ротор поворачивается также на 90", т. с. на одно полюсное деление. Рассмогрезшая слеогэ DcpcK-TfO’icnns двух обмоток возбуждений иазыйае|-ея схемой чешреагактггой ратиополярной гоммутапии. Fl.ih обмткл тнйуэон:-jif’k l<vi;uihii полярность полюеоо, чередующихся в соответствии с рнс, 11.23,0 — 6, вращение ротор» будет 1жу|цес1яля-1ьСЯ против часовой cipe.tKM Д.гя уменьшения шага или поносною делении шеюные микро. IRwraitin ХХ1ГНКСНЯКК!СЯ Кгмоюпатюспыии, при'км число почвдеов ротора равно числу почюст* статора LUai двигателя, т с угол пово-ре и ритора та одни такт, может быть определен как
ЗЬО
а™ = —<
। ле Д чисто тактов о одном пиклс. р — число ияр иолнкон.
Частота пряше-сия ротора, о&.'мил, с учетом частоты подачи импульсов
60/ н =----.
*•?
где J—частота ночами импульсов Гл.
Глава двенадцатой
ЭЛЕКТРОПРИВОД, ВЫБОР ДВИГАТЕЛЯ, АППАРАТУРА УПРАВЛЕНИЯ,
ЭЛЕКТРОСНАБЖЕНИЕ, ВОПРОСЫ ТЕХНИКИ БЕЗОПАСНОСТИ
12.1. ОБЩИЕ СВЕДЕНИЯ СБ ЭЛЕКТРОПРИВОДЕ
Электро привод определяется как электромеханическая- система. состоящая из •э.1екгродвигателы1ато. преобразовательного, передающего и управляющею устройств, предназначенная д.ш приведения в движение исполнительных органов рабочей машины в управления зтнм движением. В отдельных сшучаих п этой системе могут отсутствоват!, прсоираюнателъное и передаточное усгройстяз. Бла1 одари преимуществам по срап-KCHMJO с другими видами приводов он нашел иаибплыпсс распространение и ггромышченностп и является основным средством механиsaijjui и автоматизации производственных маткин и процессов. Степень совершенен^ электропривода определяет в конечном счете производительность труда.
499
Теория ттетгтропривода охвахывасЕ meioihc вопросы. знание которых позволяет рассчитать и выбрать элементы электропривода, а также разработать схему автоматическою >правло ння как Диш ач'с-Есм, так и всем проиэчодственным процессом п соответствии с технологическими требованиями.
К ЭТИМ вопросам относятся:
□ I механические характеристики мсетропртгволоя в двигательном и тормозных режимах;
и) регулирование частоты врашення Х1ск1ро1гриводоп<
в) переходные процессы в электроприводах:
г) расчет пусковых тормозных и регулировочных резисторов;
д| определение мощности хтсктродпнгатеяя к выбор его по каталогу к
с} разработка схемы управления двигателем и всем про-ИЗВЭ11СТВС11Е1ЫХТ процессом;
*) выбор алскт ричссяпи аппаратуры управления.
Вопросы, отмеченные в ян. а, б, г, были затронуты в достаточном щтя данного курса объеме в гл. 9-11 и здесь рассматриваться ис будут.
1X1 ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРОПРИВОДАХ
процессом [!аз!.Енается процесс перехода электропривода от одного устаезовивтпегося состояния к другому, когда .одновременно изменяются скорость, момсезт и тот двигателя, а также • скорость и моменты всех звеньев ки нематической цепи, соединяющей д питатель с рабочим органом механизма.
К переходным процессам относятся пуск, торможение и реверс электропривода, переход с одной скорости на другуто, а также процессы, вызванное изменениями момента eij валу двигателя, изменением напряжения сети. Характер протекания и длительность переходного процесса в ряде производственных механизмов определяют производительное! ь, особенно когда длительность рабочего цикла соизмерима с Временем разгопа к торможения,
Кроме того, потери энергии в двигателе при пуске и торможении испуг оказаться соизмеримыми с потерями в установнв-шится режимах. Поэтому при определении мощности двигателя необходимо учитывать потери при пуске и торможении, осо&еино когда число пусков и торможений и час относительно велико.
Характер Н .длительность переходною процесса апреде-
500
зяютск MOMCinoM двигателя, моментами сил соприtнвлення 11рения, резания, деформации к т.п.), массами и моментами зл<ерции движущиеся тел Зависимости /г. М, 2 oi времени и про-должилсльность псрсходисно промесса можно олределттть с помощью известного и механики уравнения движения.
Для nocrynaTEjKiiuj о движущегося тела
2‘ - Гс - Hidr/rft. (12.1 j
Для прашающе/ ося тела
.И - .W,. - J dui;tl! 112.2)
В формулах 112.1) н (12.2) приняты следующие обозначения: F, W — движущая сила и движущий молкент, Н. Нм; ('t, И-- сила и момент сопротивления. Н, Н-м; m, J — масса и момент инерции зела, кг, кг-м2; к, о», i — скорос!ы узловая скорость и время, м/с, рал/с. с.
Уравнения движения соотвстшвуют одному нисгупателтлю движущемуся или вращающемуся телу. Любой, даже самый Простейший производственный механизм, например изображенный иа рис. 12.1, состоит не из одного, и из нескольких ли»-жушнхея или ерагидтонщхся с различными частотами тел (шестерен, валов. lUKvnoi и i. д.). Прттому при расчете переходных процессов электроприводов потребовались бы составить И С0-пмсспсо решить столько уравнений. Ск-аггько ласкьсн с различными скоростями имеет механизм. Для упрощения задачи вес .моменты иисэчии, моменты сил сопротивления и движущие моменты приводят к одной скорости — обычно к скорости пала двигателя; в результате ,л<мо все зренья миланозм-а имению/ одним -jKviuaaeiiTiUiiM звеном. для которою составляю! и затем решают одно уравнение движения. Дпнамичс-схис свойства иквнвалеятпого звена будут такими же. как и механизма. если:
а) кинетическая r>ncpi им эквивалентиою 2вена ралиа кинетической гшерхии псех зьенъеп механизма;
6) мешиости на валу тквнналенттюго звена, обусловленные дяижущмь/ моментом и моменгалш сил eonpouiBтений, тс же. ко и соотвс1С1зук>щис моптпощи, передаваемые звеньями механизма.
На основании этих условий .^тя системы, сосиояшен ил ft .звеньев, можно кяиисптъ
Рис. 12.1. Кинймашчссь'пя схема механллмд (й); пояспения х графо-йна.итнческому метод}' расчета времен* переходного процесса (5)
Разделил почленно на <а„ получим
f Mfc У
X '
+ Л
где /,«, о)., — момент нкерции и угловая скорость вращения эя-ривалентного чвеид; cjq — момеггт инерции и угловая скорость двшэгеля; J„ Jz>Jt — мометгты инерции звеньев мела иилмд, вращающихся соответственно с угловыми скоростями <й|, UJZ1 ..., CQj,
Если скорость эквиваленгного звена равна скорости двигателя. то
Эквивалентный момент тгнериин J„ обычно обозначают J И называют моментом инерции всех звеньев механизма, включая и момент инерции двигателя.
Момент Ж1 сопротивления, приведенный в ьа.чу двигателя, С учетом КПД механизма для случая передали эиерзии от двигателя к McxjTnnMy определяется и? СООхношения
Л.п₽ - Л-УЛ > кли Ме „рсй„г = -МХ/П'
502
Oictoja
UK 1
=лл, co, T|
где jWcjip - момент сил соиротявлет1ия, приведенный к валу двшахедл, имеютпего угловую скорость «>л; - момент сил
сопротивления idcki имеющего угловую скорость Г} - КПД передали.
Уравнение движения эквивалентного звена пя двигательного режима работы и реактивного момента сил сопротивления [момент трения., резания и т. и.) будет иметь вид (12.21, где Л( - momceit, развиваемый двшахелем; J -момспе инерции всех звеньев; .Vfc —момент сил сопротивления на валу дпи-гатсля.
Пример 12. L Двигатель чсре< систему нкстсрсн приводит в движение барабан (рис. 12.1, и). Частота пращеник двигателя п = = 1000 »6'mhiC, частота вращения барабана ?j = 100 об/мнн Момент сил сопротивления ня чипу барагпна W, = 400 II • м, МОМСПТ инерции барабана /я = 250 зг • м2.
Определить приведенные к налу двигателя момсн-i инерции барабана и моимент сил сопротивления, cc-ih КПД передает л = 0Л
Решение инерции барабана, ирнледыиий ж валу
лвигаге-лг.
•= 2,5 кг-м1.
Момент сил сстротивлепия, приведенный к валу двигателя,
.wt = м;-
1 100 1
- = 400-----
1 1000 0.8
113. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РАЗГОНА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА
Определение времени разе она и торможения электропривода производится путем решения ураилслия движения. Однако аналитический расчет связан с рядом |рудностей. обусловленных гем, «ис момент сил соиршнзленЕЯ и движущий момент в большинстве случаев являются сложной функцией скорости. На практике широко используются приближенные графоаналитические методы расчета, и основе которых лежат графические решения урапегения движения. Рассмотрим один ш втнх методов.
503
It Уравнении движении (12.2) бесконечно mxilic приращения Ли. Л заменяют малыми конечными прирашеиилми Диг At. а М л .tfc - сред!гимн значениями в пределам участка CKopocui Деи:
Мер - AfL.LT = J Aoj-'Aj,
(12 31
шкудц
J
LT -
(12.4)
Подставив еа = —, получим
JjcA*i J Дп
- JO(.MC], - «„„) “ »,55(ifIp - М5 [р1'
где At — время разгона хюктронривода на участке частоты вращения Дм; J — момент инерции системы; Л/ср — средний момент на участке чистоты вращения Дл; Afulf(1 - средний момеят сил сопротивления на участке частоты вращения Дп.
Исходными дым расчета являются механическая хэракхери-стика двигателя и график иочюпа сил сопротиптеиия (рис. 12.1,5).
Графики рлчбнтаают на учаслси Ля- Определяют средние тда-чения Й и Мс ни каждом из участков, а затем ио формуле (12.5) оценивают время на кладом ит участков Время разгона хтектропр1пюла равно сумме времен на каждом ич участков:
tp - Лг, | Лг? + ... + Аг». (126)
Пример 12.2. Определить время pairofia хчек I рензризитда. Ме*а-пичеекзл харавтерис-ьихд дянхатедя и iрафик момента сил сопротивле нни на вллу |1ни:атс1Я изображены иа рис 12 1,6 Mnweiti инерции приполз 2 = 0,4 кт mj.
/сшеиве Усталсшйдшань'м чагдил иращь’ния (У’релсллстся тез-кой пересечения графиков n J (М\ n=f(Mc] к составляет гц...,— -• ?(й еб^мин График делится ня ес*/к (» данном случае) узасткоь CKtipiK'tx с Дл = !00 об/мин
Определяем средние значения AJ и ,Ие на каждом и* участке®. Подсчитываем время ii па каждом hi участии»
На первом участке
2 Дн 0.4' 100
й/, --------------------- -0,1.11 с.
1 9^5(.ИФ! 9,55(52-30)
Таблица 12.1
4 b б
РепЛьтаты расиста на остальлмж
72
26 0,091
Ь6 1 94
30 । 32
0,075 0,067
56
0,231
участки сведены к табл. 12.1.
Пре.ия разгона злекфодриводя г - = О.Я2Я с.
1
Время торможении хтектроприипда опрезсляссся пак же, »лк и время рмгона! разпниз и том, что монет двигателя тормозной и /wHctHjei таь же, хак ii момент сил сопротивления,-нреттав лэижпи’*;
J Дгг
12А ОПРЕДЕЛЕНИЕ МОЩНОСТИ ДВИГАТЕЛЯ. ВЫБОР ДВИГАТЕЛЯ ПС КАТАЛОГУ
Определение мощности двигателя длй проятводствеыиого механизма выполняется в соответствии с нагрузкой на его валу по условиям аагрепа. После того как двигатель выбран по условиям нирева по каталогу* его проверяют по пере1руэочиой способности и условиям пуска.
За время работы теплота. обусловленная потерями мощности в двигателе. нагребает его Допустимая же температура двжателя определяется классом изоляции его обмоюк и нс доли: на цревытлдть опреде-Teiritoго значения, установленного завопом-илотояитслсм.' Необходимо выбрать такой двигателе, по номинальной мощности. при которой он бы нагревался ш время работы до температуры, не п^пск-ходящей допустимую Превышение допустимой температуры приводит к потере изолинией электри'1ескс1Й и механической прочности и к выходу двшатетя из строя.
Завышение мощности двигателя связано с доиолнительны-ми KatJHja-tbHWMR затратами, увеличением расхода энергии па единиц! продукции. а для асинтроплых двигателей, кроме то-ю,- с ухудшением коэффициента мощности,
По характеру работы вес производственные механизмы разделяются на чпыре основные ipynnw
1) механизмы, |>аботающие длительно с постоянной натрут-коЯ-
505
2) механизмы, работающие длительно с изменяющейся на’ IруЗгай;
3; механизмы, часть времени производственного цикла работающие, другую <ькль находящиеся в нсппдйижном сои гоя-пин 1пои1орио-1фатковремлл(ий характер работы);
4] механизмы, работающие дссго несколько секунд или минут. а затем длительно (деся!ки секунд или минут) находящиеся с неподвижном состоянии (кратковременный характер работы}.
В соо!встствшг с характером работы производственных механизмов установлены три основных номинальных режима двигателей: иродолж ягельный, иопторно-к ратковременный и кратковременный.
При продолжительном режиме (рис. 12.2,а) за время работы двигатель успевает иырстъея до установившейся температуры. При повторно-кратковременном режиме (ри£. 12.2,р) за время работы гр двигатель нс успевает- нахрсться до устшговитпенся температуры, а за время паузы /0, когда он отключен от сети, не успеет ок шлиться до температуры окружающей среды т„. „ Однако пп прошествии нескольких циклов температура будет колебаться между наибольшими и наименьшими значениями, кот орые далее остаются постоянными. Основной характеристикой этого режима является относительная продолжительность включения, %
где 4^ <о, Гц — coojbciL-твепно ннюрвалы рабсиы, паузы и никла.
Ира кратковременном режиме 1рис. 12.2. в| за время рабси ы гр двигатель ае успевает нагрехься до установившейся темнера-турьц а за время паузы г0 успевает окладиться до температуры окружающей среды с,
Каждый двигатель может работать п .тюбом из перечисленных режимов. Однако для получения наилучтпик эхономиче-скмх показателей электротехническая промышленность изгою-аляет двшнг&тя, специальна ттредназначеггные its а) продо.ь жительнсни режима; б| понторао-краткопремениа! о режима; и) кра1копременногс режима
Для двигателей ярододжигальвото режима в каталогах задается номинальная мощность бет хаких-.тибо оговорок о времена работы Для двигателей повторзю-кратковрсменного режима в катален ах указываются помпидльныс значения мощ-
5W
Ркс. 12.2 Нагрузочные грфиии н н-шененне землературы двигателя при длительном (й); иовзсрнп-^рагконпемЕнном (6) и кратковременном (i?) режимах риГииы
гости ссютвстстпстиго для ПВ-15. 25,40 и 60*< При этом время никла не должно превышать 10 миег, В противном слуще режим работы считается продолжительным. Для доке Этелей кратковременного режима я каталогах задаются несколько времен работы и ссхттветстврощис им номинальные мощности.
В основе выбора мощности двигателя любого режима работы лежит мегом средних потерь. Он основан на сравнении средних потерь мощности двигателя за цикл работы с потерями при номинальной натруске ДР1ЮМ
Средние потери определяются из выражения
где йЯц — потери :тсргнн в долгаic.it за никл; Тц - время никла; ДР;Г| - истери энергии в двигателе за время т(, в течение которого двигатель работает с неизменной нагрузкой Р;; Д4, — потери :>исргии при цуСкС И ЮрМОЖбНИН
Если средние потери та ттикл работы ис ирсвышакк потерь при номинальной нагрузке, то средняя темпершура двигателя не будет превышать дояустимую и, сдедоваюьно, двигатель выбран правалъпо.
Таким образом, условия выбора двигателя
Однако исгтолЕ.зовалис меюдя средних потерт* в некоторый случаях татру,пело m-за отсутствия необходимых сведений о двигателе в каталогах.
В практике птирокп применяется другой, более простой метод эквийдлеппгых величин (тока, момента или мощности! Мс-
507
toj зквивалентного юка основан на том, чсо действительный ток двигателя при ратных накрутках заменяется эквивалентным током неизменного значении 1,к, стлгогппим за рабочий цикл те же потерн в двигателе, что и действительный ток.
Потери мощности а двигателе складываются из постоянных (не зависящих от нагрузки) АРК и переменным ДР. потерь:
ДР - ДР. + ДРК - ЛД 4- /V. (12.7)
К постоянным относятся потри в магнптопроводс и механические потери, к переменным - потери в обмотках
В двигателе посгоянеюго тока с цараллслытыч возбуждением к переменным лагерям относятся потери в цепи якоря, остальные потери, в том. числе и потери в оймогке возбуждения, шляются постоянными В асинхронном двигателе переменными потерями следует счи1а;ь потери в обмозках ротора и статора.
Потерн МОШН0С1И а даигателе за иикл работы равны сумме потерь па каждом из участков (рис, 123.«).
(ДРК + /?г)г2 + (Д/\ + />)г2 4- . . - (ДРУ Г 7 Л) г,-
Так как АР s(jl-i-r2-i-i^+ к.
то
ЗОЯ
Zf/Ti + + f^-f3 4- ... -fM=r/u.
откупа
(12.Я)
Прн правильном выборе двнгзтс чя должно соблюдаться условие
(12.»)
Метод эквивалентного тока пригоден для любого дат аге-ля. однако его использование свяшно с необходимостью построения графика зависимости тока ат времени аа рабочий цикл механизма.
Учитывая, что дня двигателей постоянного тока с параллельным возбуждением Л/= twO/B =• <7М. а дчя двигателей переметшего тока М •= =е в «?не рабочей части
характеристики (в области от s - 0 до * s: лкр) можно перейти от окпивалентного тока к эквииалептисму моменту, цели в (12.il ток выразить через митинг:
Тогда условием выбора будет
-W,,.
(12-11)
Для приводов, скорость двигателей которых не роулирует ся и мало зависит от назруэки (двигатели постоянною тока с парад 1сльньгм возбуждением, асинхронные двк1агелн с корт ко замкнутым ротором и сиЕ1хроннЫ8 двигатели трехфатио-гс тока), мопиюсть
Р - &>Л1 t C.W
примерно пропорциональна моменту.
Выразив в (12.10) М череп р, получим расчетную формулу для зквнвалентпой мощности
Номинальная мощность выбранного двигателя до.ткна удовлетворять условию
Р^ > Р^.
(12. В)
509
При определении мощности двиз отеля необходимо учитывать потери энерти в двигателе прн пуске И торможении, особенно soi да цикл работы непродолжительный и число включений лвигассдя п час достигает Етео'олькнх десятков. В ттом случае надо пользоваться методом средних потерь, так хак расчетные уравнения эквивалентных величин не учитывают потери Энергии при пуске и торможении.
В ряде случаев момент нагрузки ла отдельных участках может оказаться ботьше максимально допустимого момента дин гате.тя. Асинхронный двигатель Moaret при тгом остановился, а иа коллекторе двигателя постоянною гока может возникнуть недопустимое искрение. Полому после выбора двшотеля любым и? описанных пкппе методов его необходимо проверить но перегрузочной способности, исходя из уечовия
(12.14)
где МШЯ1,.- максимальный момент на валу двигателя, А/111и., , - максимально допустимый момггп- двигателя,
Для асинхронного двигагсчя W<BeiJ= 0,9 Л<М1, для двигателя постоянного тока с параллельным возбуждением
= (2 : 2,5) W,m,
Выбор двигателя не енрлничивается определением «о hombeixik-1ЮЙ мощности. Из мнсяообразтсых конструктивных фурм КСПОТНЕИЙ» двиитетей, обус.тгм iewkwk способны устаи-оскн л j^ioshamii окружчгд-щей ерсльн необходимо выбрать иалходяшую д m данного конкретного случая. Для одпкх механнзмот применяются двигатели с гори-зо1ста..1кным. для друга* —с вертикальным рзеиолоэсеинем вала. Для лучшей комлоноанч кроме двигателей с панами выпускаются две-тзтети, имеющие фланцы на корпусе, лиерслством х«мс>рых двигалын крепятся нспосре.х». 1виино к проичад.тетоатному механизму: наггрнмср чсталле^ежушему станку. СГуизсстаую! лираиваемые дмиатели. корпуса которых представляю г единое не.к» с корпусом или станиной Проши о.ЕСТВСИПОГО механизма
Атмосфера, н которой работает двиг-не.-нч может содернгять плату, пыль, ритмгание iatn. пари xhc.toi я паже гсфыисоиаепые смеси. Эти кпьтпопситы а1мосфсры Енллеиствуют на ичатлпию оомсттм, yxynuiaioT ес шханичссвио и шо.1яг|иоиные свойства, что а венечном нюгс может привести г Dbiuviy из строя .ткнг^тсля По:яому кол-струкийя ;>*in атсля предусматретоет iy н-m иную защиту изоляции «> воздвиг! вча атмос<[!ерных примесей.
В связи с мим HBtnycuiHJiся двигатели оi крытого, зашнщенрюго. закрытого и взрывобезопасного исполнений
Открытые тпигатедй ле имеют каких-либо средств защиты и лрк-МСЕЕЯЮТСЯ НСТЬКО D сухих 11ОМСШСЕ1НЯД VE1 ггы.ти, грязи и других примесей Зил]ип[слЕ1ые диигатсли ра-эде.тютря на три категории:
510
Pm.. 124. Асинхронные доигатели: с короткое мккутым ротором тип» 4А160М4У1 мощностью 1&.5 кВт, 1У.Ю g6/m*u (а) и типа 4А,1!5М4УЗ мошпостыо 200 «Вт, 1500 нб/ымл (6)
11 зашишснв^с sti случайного солрибосновсиня с тексте ixhihmw частями и попадания посторонни» предметов мгутръ заигатьяч (имеют сетки, чакры чающие отверстия в корпусе дичи ачаля):
2) !,ми»1г1енные ш иолазалил кале чь (снабжены кроме сеток спс-иипьпыми козырьками);
3) siiJiHiueiiиые от дождя н бръпг (обычно применяются иа откры том Но-щуке).
Закрытые .mwmcjiH нсио тыуклся в помещению сыръг* нпи с едкнмн газами, большим содержанием пыла. Онн бывают невеи-тклируемымн, с принудительной нентилщдай н ।ермелзпескн оа-крчитыми.
Корпусу иjpHBoBeacinaciibn двигателей очень прочны, окн выдер-
311
Рис. 12.5, Асятрочньда дзпгагел^ е коротхол^мкиутым ротором |ипя 4ЛН1ЯОК(4УЗ мощностью 37 к0г, I5W об/мян
живают вэрын газов внутри двигателя и усз-рссны так, ч-то л.'щмя взрыва нс выходят а сщзужаюшую атмосферу
На рис. 124, о, о и 12.5 изображены агаи*£<м±к<ые .-iEHra.re.ia с kq-ратхазамкнутымн обмотками ротора типа 4А160М4УЗ, 18,5 кВт, 1500 об/мин (рис. 12.4, а}; типа. 4A315M4V3. 2У0 кВ», 1500 об/мнзт (рна, 12.4, б)р типа 4АН180М4УЗ, 37 кВт, 1500 оЦ/мнн (ряс. 12.5).
ЦрпмсрИЗ. Определись мощность и р-мбрзть двигатель по ка-таладу для привода ирдадродственкош механизма. Графи» момента статетеской иагрузга, приведенной ж валу дииыттсля с уче-шм потерь и передаче, юпоражеп иа рнс. 12 3 б По технолог ичеегюн условиям следует- ясясльзо-ва-i j, яслнхрогвий днпгвтсль с иорутхотдмкнутым ро-1«ром. Частота нрашензд п • 145G об/мин. Ппмсшснне, где будет работать датутс-ть, — сухей, без пылях г ряди. Предпота! ается установка дэигагедч на лапах ни фундамвЕие.
Решение. Эквнпа.зеп;иый момелг
«.=ж
1 + 6О3-2 +S02 2 + 171FT
4 2 2 + 2
110 Н-м.
Э13ИВЛ.1ен1няя MOiHFiyci b
45 50"
11U-1450
9550
= It,7 кВт.
Пи устоэилм работы о сиогобу установки избираем и» каталогу дви1агсдь ближан1чсй большей чошлосчя. Каталожные данные выбранного двш атстя: 17 кВт, 3SQ/22O □, = 0.895, «з? = ОЛ?.
(и = 7Аюма ^э/-^«ом = 1’^- -37«.и/'^тил» = А = 2, 143® об/мин.
512
Номинальный момент дЕитатс.-m
Максиматъчкж iериписсхийF момент M«z = > = 2)13 = 226 II м.
Майенмалитый cihi нчесвий mom-chi
М( - 170 Н м
Па перегрузочной шос-обиости -гни, aie_ib проводит. -tax san выло тнястся ус.н;ьие
0,9-tf.n,, = 204 > Мь = J 70,
115. АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ и простейшие СХЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
Наиболее распространенная схема листантгаоппог □ управления асинхронным двигателем с короткозамкнутым ротором изображена на рис 12.6.
Защита силовых цепей н лвнгателя от коротких замыканий псутцЕСгвляется плавкими предохранителями П, защита ДВИГа тетя от [icpeipeBa, вызванного перегрузками или другими причинами.-тепловым реле /’Г- Включение и отключение двигателя производится хлектромагнитпым аппаратом - контактором К. Для Пуска и останова использованы две кнопки, //уск ы Стоп. Выключатель Л служит для снятия напряжения с установки после окончания рабочею дня или при ремонте
Рассмотрим устройство и принцип действия аппаратов > правления, иснолът0лаЕН£ых в лапиой схеме.
Контактор — силовой электротехнический аппарат, посредством которого осуществляются включение и отключение силовых цсисй: двигателей, электрических печей и других устройств.
В некоторых случаях вместо контактора используются автоматы или occjcoHiaKTHwc системы включения иа тирисюрах.
Контакторы бывают переменного я мостояниого тока.
На рис. 12.7 изображен трехполюсный контактор переменною тока. Электромагнитная система контактора состоит ич кагуцгки 1, неподвижного сердечника 2 н якоря 3, укрепленного ла палнхе 4. После включения катушки в сеть мй1Нмтзшй по
013
ток, создатпгый переменным током катушки, притягивает якорь н поворачивает налик 4, на котором jKpen.icin.T енлоные подвижные контакты 5. В результате происходит замыкание си-човык подвижтгъгх 5 и нсзол&ижных б контактов Кроме силовых контакту кошакхор имеет вспомогательные замыкающие Л и размыкающие ? контакты^ Этн контакты замыкаются и размыкаю хся пластинами 14у укренледпыми на тралерсах У, которые в свою очередь укреплены на валике 4. Ирм повороте налика кмггакты S замыкаются, а контакты 7 размыкаются,
Для у.мспытхення потерь в сердечнике на вихревые юки сердечник и якорь собраны иэ отдельных листов хтсктрспехничс-схои-стали.
Сила, с кохорои якорь контактора притягивается к сердечнику. пропорциональна квадрату махнихлого потока: F ~ Ф2, а магнитный поток нлменяехся по синусоидальному закону Из лтого следует, что сила притяжения за одни период переменного тока достигает дважды амплитудного и нулевого значений, вследствие чего пезлнкгст вдбрацня якоря и надвижных коя-тякгптя Для уменьшения BirbpaonB, и tuitvc возникающего при эхом неприятного гудения якорь 3 снабжается короткоздмЕ-нугыы витком 10, охватыишоптим часть его сечения. Часть ос-ribhdio магнитного потока проптпыэдст короткозамкнутый вяток и панолит в нем ЭДС. ЭДС вызывает ток, а ток - магнитный ноток, сдвинутый по фазе относительно основного потока. Этот магнитный поток вызывает сипу, удерживающую яжорь я приз яиутом состоянии, когда сила аритяженик от ос-новного потока равна нулю
После отключения катушки контактора якорь под действием Силы тяжести подвижной системы оозпращистся в ис-кадпое положение я Контакты размыкаются Для ускорения гашения дуч и, возникающей при размыкании контактов, в предотвращения их быстрого разрузпения дугой конгахтор снабжается ду1огаснтельной камерой 12. ннухри которой рас-сены металлические плас-Н. При размыкании кон-в возникшая между ними зическия jyia перебрасы* 1 на металлические пласта-момент, когда ток дуги
Гнс. 12.6. Сх-емз .чнх-такшхоя-чого управления асинхронным двигателем с коремки-замкн^той обмотгой ротора
514
Pm? 12?. Устройстве кс-нтяпора переменного гока
равен нулю, npein.^f'JUT деятппэдия промежутка между трл-тзгтямм (восстажжленне ньолхииояньгх свойств мкз.чушного промежутка} и луга гаснет.
Подвои тока ж лодвижяым контактам 5 осуществляется с помощью гибких проводников 1L Силовые коигяв7Ы контактора рассчитагты па Большие теки - от песгпльжм десятков до нескольких сотен амиер, hctiomoi атеяьные контакты - ла гож 2-10-20 Л
Нрнтппш действия простейшего тепловою реле ле, ко уяснить иг рис. 12. Л, Ci- Реле состоит in нагревательного элемента J. который включается последовательно с обменной статора. Внутри нахреРательнсч о э-техпмгта расположена биметаллическая пласт йна 2, состоящая нэ двух пластин металла с различными температурными коэффициентами линейного расширения. Прн токе, лревьлиаюшем поминальный ток двигателя, н.п резательный элемент настолько вшревает бимет аллическую таетжтту. чю она иттябасюя и ее незакрепленный колеи поднимается вверх Пол действием пружины 3 рычит <, литпившнсь опоры, ловсрйпяяасгс!, в результате чего контакты 5, включенные в ггепь кагушхи коггтаЕтора. размыкаются. Для возврата реле в исходное положение используется гптнфт б. 11а ряс. 12.8,й изображено устройство кионкн с лпумя контакторами. В корпус J, СЛЕ.1НННЫЙ ил изоляционного материала, вмонтированы нсиодвнясиътс контакты 2 и 3. Upw пажжии на штифт 4
5fS
в)
Рйе 12.8. Устроисмо тепловою реле (л). к«олга с двумя контактными элечеитамя (6)
кнопки неподвижные контакты 2 замыкаются, а контакты 5 размыкаюгск подвижным металлическим мостиком 5. Пружина fi возвращает кнопку в исходное наложение, В схема управления (см. рис. 12.61 применены дне кнопки 1 Пуск и Стол.
После ознакомления с устрюйсгвом и принципом действия аппаратов можно рассмотреть работу схемы управления (см. рис. 12.6) прн -включении и отключении двигателя.
Однако прежде чем рассматривать работу схемы, необходимо обратить внимание на следующее.
Нее элементы аппаратов имеют установленные ГОСТ графические изображения и названия, наиболее распространенные из которых приведены в табл. 12.2.
Всем элементам одного и того же аппарата присваивают одинаковое буквенное обозначение,
Замыкающим контактом элей ромагиитыого аппарата называется такой контаи, который разомкнут при отсутствии тока. в его катушке, а в аппаратах, не имеющих катушек (кнопочные станции, путевые выключатели и г и.),-при отсутствии внешнего воздействия, Размыкающий коггтакт при этих условиях замкнут.
При нажатии па кнопку Пуск катушка контактора К получает питание, якорь контактора притаивается и в результате силовые контакты контактора замыкаются и подключают дпи-татель к сети. Одновременно с этим замыкается блокировочный контакт контактора и шунтирует кнопку /7у<х чю позволяет отпустить кнопку, не прерывая пн1ания катушки контактора. Для останова двигателя нужно нажать на кнопку Сппн. При этом цепь катушки коатшеторл размыкается, якорь контактора отпадает и епт силовые контакты размыкакнея и отключают двигатель от сечи. В случае перегрузки двигателя срабатывает тепловое реле и своими кпнтак1ами ^/размыкает цепь катушки контактора, что приводит к отключению двигателя.
516
| J [,i км1-н^*анхе
1 Рсюслср иссюянлый
Редисто]' регулируемый (реое,ai)
L 1рса<>дринн I'e.'ii. плавкий
К о нта к 1 bi КПОП1Л1 с симсгвдпирагом: а) с эа^гывшк’игнч контактом б) с размыкающим контактам
KoiiTttTi’M tyi-eiMsro выключателя;
а) заминающий
6) размыкающий
Нтиахты к вспомоги i ельиы с контакта кол-икгора. nj4FHTe;ii, реле: а) 1ячьизюн[ин б) разим санкций
Обмитка контактора или реле'
Замыкающие коптиктнг реле времени с ви-лержкой: а) при замыкании о! прн риамь№ани1!
Ратмыкаюспие контакты реле времени с вы-□ержкой: з> при раз.\зык;шии й) при замыкании
Лигнческий элемент И
517
Продолжение табл 12.2
Обозначение
Наименование
Логический момент ИЛИ
Логический элемент НЕ (НЕТ)
На рис. 12.9 изображена схема управления асчЕгхрониым дв;и атадсм. предусматривающая динамическое торможение, Кроме опчеанзшл аьш; аппаратов слсма содержи г з.гсктроыаг-нигнос реле времени н контактор Л с помощью испорото обмотка статора двигателя включается в есть постоянною гока для осуществления динамического торможения.
Принцип действия и устройства электромагнитного реле времени можно ноясегить, используя сто эскизное изображение на рис. 13,10, a Kai ушка реле 7, включенная В сеть постоянного тока, создает магнитный поток Ф, под действием которого якорь 2 быстро притягивается г сердечнику 3 При этом контакты 4 замыкаются, а контакты 5 размыкаются Если казушку реле / отсоединить от сети, то якорь 2 возвратится в походное положение под действием пружины б не сразу, а с некоторой выдержкой времени. Эю происходит потому, что после отключения катушки магнитный поток ф начинает убывать к в результате в короткозамкнутом витке 7 (модная гильза) возникают ЭДС е ток. Последний, создает поток, ранее создаваемый ютом катугдки J. Однако вследствие потерь энергии в медной гильзе (f2r) магнитный лоток будсг убывать, и к<мдд создаваемая им сила F окажется меньше йыы пружины б, якорь реле возвратится в исходное положение. При -.пом контакты 4 размыкаются, а контакты .я замыкаются.
Таким образом, с момента отключения катушки реле переключение контактов происходит нс сразу, а спустя определенное время, навиваемое выдержкой времени. Регулирование выдержки времени осуществляется изменением натяжения пружины 6 с помощью гайки Я. Кроме описииного в системах автоматического управления применяются н iipyi не реле времени! механические, пневматические, электронные а моторные.
Рассмотрим работу схемы, изображенной па рнс. 12.9. При нажатии на кнопку Луск срабатывает контакюр Л и своими
518
Рве. 12.9. Cicmi упраявсния кшороопым люиателем с торопко-замкнутым роюром и дяпгаммчесЕММ горм^^еингм
Рис. 12.11), Э-|ежтромагни-1ное pc.ic времеил (ц). промежуточное реле персмсямон'' [оьа (.о)
главными к<датаггамй включает двигатель в сеть, Один из вспо.мо! ательных контактов контактора л шуттгруст кнопку Пуск, а другой подключает обмотку реле времени Р& ж сети постоянного гока. Якорь реле притягивается к тяганные с ним контакт ь шепя катушки контактора Г замыкаются. Однако контактор не срабатывает, так как цель его катушкм разомкнута контактами кнопки Стоп и контактора Л.
S19
Для останова дни агеля нажимают на кнопку Сшон Контакты кнопки н пепи катушки хонгакгора .7 размыкаются, контактор срабатывает, его силовые контакты ралмыкаются и отключают Дйтатель от сети переменного тока- Другие контакты кнопки Стон замыкают пепь катушки контактора 7, контактор срабатывает и своими силовыми контактами подключает обмотку статора двигателя к сети постоянного тока. Своими вспомогательными контактами контактор шунтирует кнопку ("топ, Возникает динамическое торможение, и двигатель быстро останавливается Одновременно с размыканием силовых контактов контактора Л размыкается и его вспомогательный контакт в пели катушки реле времени РВ. Реле начинает отсчет времени. По прошествии определенного времени, на которое оио рассчитало, якорь реле отиадаг! и размыкает свои контакты в цепи катушки контактора Т. Контактор Т срабатывает — размыкает свои силовые контакты и отключает двигатель от сети постоянною тока. Схема возврашаегся в исходное положение — она снова I оюва к очередному пуску двигателя. Время выдержки реле времени РВ должно быть несколько больше времени торможения, в противном случае динамическое торможение прекратится раньше, чем дпкгатсль останов ится.
Замкнутые вспомогательные контакты контактора Т в цепи катушки Л и вспомогательные контакты контактора Л в цели катушки Т предотвращают возможность одновременного включения контакторов Т и Д Сопротивление гд ограничивав! значение тока при динамическом торможении.
В системах автоматически □ управления находят широкое применение электромагнитные рече mi noaeinioro действия. Они используются как промежуточные реле и как токовые реле, реле напряжения соотиештвсшто для токовой и нулевой защит Реле имеют бллыпое разнообразие конструктивных форм исполнения, однако устройство и принцип действии этих реле такие же. как у электромагнитно! о рсяс в]земени. только у них нет дополнительной короткозамкнутой обмотки, поэтому якорь отпадает сразу же, как только обмотка отключается от Ости. Реле бываю! переменного и постоянного тока, с катушками, рассчитанными для параллельного и Поспелова 1ельного включения в цель. На рис 1? 10,б изображено электролш нмт-лое реле переменного тока.
Описанные выше аппараты используююя нс только для управления пуском, торможением и регулированием часто хы вращения двшатсля, но также для автоматизации производственных механизмов и поточных линий в соответствии с технологическими требованиями. При этом кроме различных кон-520
Рис. 12.1L Индукционный путевой выключатель
тактород r реле применяются ы другие аппараты — путевые выключатели, элсж-тромагннты, команлоаппаратьг, различные датчики и т п Наиболее часто управление промхподствеятымм механизмами осуЩССГВЛЯСЧСЯ II функции пути (положения отдельных узлов механизма) или времени действия уиюд В этом случае используются пузевыс выключатели, реле времени. промежуточные реле.
Существуют механические путевые выключатели, фотовыключатсли и ин-дукпяонньге выключатели. Принцип дей
ствия механических путевых выключателей аналогичен действию кнопок Пуск и Стоп. На кнопку воздействует человек, на рычаг путевого выключателя — выступ, укрепленный на элементе механизма. Принцип действия индукционного выклю-чатечк (рис. 12 11) заключается в следующем
Kaiyiuhd L пипидинжио! и сердечника ! соединена napajj-дельнс с конденсатором С и через катушку промежуточного реле PH включена в спь переменного юна Параметры L и С Подобраны так, ЧЮ цель находигСи в Состоянии резонанса токов, когда, магнитная цепь сердечника 1 замкнута {якорь 2, связанный с механизмом, занимает положение, указанное на рис. 12.11); пследетвис этого ток п катушке реле относительно мал и якорь реле ис притянут. Когда же подвижный якорь 2, связанный с элементом механизма, -займет положение, указап-ное пунктиром, магнитная цепь сердечника 7 окажется разомкнутой и индуктивность катушки L резко уменьшится. Резонанс в детпг нарушится, ток о катушке реле PJ7 резко возрастет, его
якорь притянется.
Таким образом, импульс возникает в том случае, когда один элемент механизма занимает опрвделегптое положение относительно друкм о. Эю и есть управление а функции пути (положение механизма). Автоматизация в функции пути и времени можег бькь пояснена на примере простейшего механизма, изображенною на рве. 12 12.о. Элемент мсхагппма ЭМ по технологическим условиям после нажатия на кнопку ГТусх должен совершать возвра1но-посгупател1.тгое движение из левого в лразос положение в наоборот до шх пор. пока пе нажмут на кнопку Сим. При этом и каждом из крайних положеггий механизм ЭЛ/ должен оставаться в состоянии покоя несколько секунд, например в леяом — 20 с, в правом - 40 с. Элемент механизма через систему игрецам приводится з действие асинх-
18 O.ieicipivie« п икз
521
Диерез
feci
ffiJP ] X8t
Рис. 12.12. Механизм (я), силовая схема (б) н ух®мя управления и фунггщи пути В йрймеин («)
религии короткозамкнутым двигателем, силовая схема которого изображена на рве. 12.12,6 Схема управления, обесиичиваиэ* щкя заданный режим работы ЭА/ изображена на рис. 12.12, д.
Допустим, что перец иуском 3W должен наладиться в негодном левом положении. Прн нажатии на кнопку Пуск срабатывает реле РП к одним своим контактом шунтирует иголку Дуся, а через другой полает напряжение ira остальную часть схемы управления. В результате катушка реле времени PDl получает питание, так как контакт путевого выключателя КВХ в цепи катушки реле PBt замкнут вследствие того., что выступ'ЭЛТ действует на рычаг путевого выключателя КВр Реле начинает отсчитывать время Обмотки остальных аппаратов питания не получают, так как контакты соответствующих аппаратов в цепях их катуптек разомкну i и После отсчета заданного времени реле PBj замыкает свой контакт в цепи ка-тупгки контактора В, контактор срабатывает и своими силовыми контактами включает двшапшь в сеть; ЭМ начинает перемешаться вперед. Вспомсиагельный контакт контактора шунтирует контакты реле РВ>, Это сделано для того, чтобы нс было прервано питание катушки котгтактора В после того, как выступ / эм сойдет с рычага КВ, и его контакты в цепи катушки РВЯ разомкнутся
После того, как 3Mf перемещаясь вперед, займет правое положение, выступ. ЭМ нажмет ка. рычаг нулевого выключателя КЛ2, Иры этом один из контактов КВ2 в цели катушки контактора В размыкается, контактор срабатывает и отключает двигатель, Другой контакт ХВа в цепн катушки реле времени РВ2 522
замьткается и реле налипает стечет времени. После отсчета времени, а течение которого ЭМ должен пахолитъея в неподвижном состоянии, контакты реле РВ2 замыкаются н включают катулгку контактора Н (контакт в ее цепи замкнут» гак как высгуп i Э.М не действует на рычаг KBJ. Силовые контакты контактора Н включают двигатель, и ЭМ начинает перемещаться влево. Одновременно блокировочный контакт Н шунтирует контакты репс РВ2 я В для того, чтобы катушка Н не лишилась питания из-за размыкания контактов реле РЯг, когда выступ J ЭМ сойдет с рычага JCfi2. Прн постижении ЭМ крайнего левого положения выступ / ЭЛ/ нажимает на рычаг ALBj, один его контакт отключает катушку контактора Н и двигатель останавливается, а другой Kuaiati включает катушку РВ,. После отсчета времени, соответствующего времени необходимой стоянки в левом крайнем положении, реле 7’5Х срабатывает и включает контактор В. Происходит включение двигателя, и ЭЛ/ начинает перемещаться вправо. Таким образом, механизм будет работать до тех пор, пока не нажмут на кнопку Стой. После нажатия на кнопку Стол катушка реле РП лишается питания и контакты РП отключают катушки всех аппаратов. В результате двигатель отключается от сети и остана-вливается.
116, БЕСКОНТАКТНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Релейно-контакторные системы управления, несмотря на из широкое распространение, обладают существенными недостатками, обусловленными в первую очередь тем, что аппараты управления имеют движущиеся части и подвижные замыкающие и размыкающие кон1ак1ы. Кошакты и подвижные части довольно быстро изнашиваюгеи, что приводит в нарушению соединения между контактами и выходу нз строя некоторых аппаратов Я всей схемы управления. Особенно сильно недостатки релейяо-коптакторных систем проявляются прн автоматизации сложных технологических процессов, поточных линяй и т. п., где используются сотни, а иногда и тысячи контакторов, реле, путевых выключателей и др. Вероятность нарушения коп* тактов становятся пест.мл существенной и работа системы — ненадежной.
В последнее время появились и быстро внедряются бесконтактные аппараты, называемые jioi ическимн Элементами. Логические элементы ж имскп движущихся частей, подвижных коя-гакюв и обладают значительным сроком службы. Системы автоматического управления с логическими элементами несравненно надежней, чем рс.эсйно-контактирные системы.
18*
523
Рис. 12.13. К определению .-югнчесхсич» элемента (я); логический элемент (а! и его релейный .шин аа. ген г (б)
Логический элемент представляет собой устройство (рнс. 12,13, о), имеющее одни или несколько входов и один выход. Логические элементы выполняются па полупроводниковых приборах.
С помощью логических элементов можно осущесттшпъ большое число разнообразных лотмчсскнх операции. Например, у логических элементов, выполняющих логическую функцию ИЛИ, йрм подаче сигнала на любой и? ртодсв ПОЯВЛнехся Сигнал на выходе. У логических элементов, выполняющих логическую функцию И, сигнал на выходе появляется л нить я том случае, если податгы сигналы на все входы- У логического элемента НЕ (НЕТ) сигнал иа выходе исчезает при uomb ichhh сигнала па входе. Б качестве примера использования логических элементов рассмотрим схему включения контактора К двигатели посредством элеятрэматнитньи реле и логического лтсмен-та И. Обмотка кош актора К в релейном варианте (рис. 12.13,6) получает питание в том случае, сели замкнуты все контакты рале РП1Я РП2, РЛ». Обмоткн этих реле получают питание, если будут замкнуты входные контакты о, Ь, с. Прн использовании логического элемента И (рис. 12.13, в) Обмотка контактора К получает пнталис, если будут замкнуты Контакты a, t>, с на выходе логическою элемента. Условное обозначение литических элементов И и ИЛИ приведено в табл. 12.2.
12.?. ОБЩИЕ ВОПРОСЫ ЭЛЕКТРОСНАБЖЕНИЯ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ
Системой • электроснабжения называется совокупность устройств, служащих для передачи, преобразования и распределения электрической энергии. Система электроснабжения пра-мытлеююю предприятия предназначена для снабжения элск-троэтгергией приемников, к которым относятся электродвигатели различных производственных мсхагшзмон, электрические 524
печи, установки электрической сь&ркн, осветительные, элеетро-лизпыс установил! к г. п.
Источниками хлсктрстшсргин ЯВЛЯЮТСЯ тепловые (ГЭС) или гидравлические (ГЭС) электрические станции, электрическая энергия иа ко торых вырабатывается синхронными хенерагора-ми трехфатного гока. Последние приводятся в движение соответственно пдро«ымн и гидравлическими турбинами. На теп-юных электростатгиях происходит преобразование тепловой энергии при сгорании угля, газа и г. д. На атомных электростанциях ииловая ллергня есть резухыах расщепления атомов урана или других рххлиоактивньтх элементов в атомным реакторах. Гидротурбины используют энергию падающей ПОДЫ.
В Советском Союзе созданы крупнейшие в мире тепловые, гидравлические и атомные электростанции. Вступили в строй Куйоытсзская, Волгоградская, Братская, Красноярская и ряд других крупных гидростанций Действуют Нопо-Вороиежская, Белоярская я другие атомные ьзектростатщии. Мощные тепловые электростанция располатякисн в мостах больших запасов нефти, газа, угля, перевозка которых железнодорожным и Еодтп.гм транспортом неэкономична. Электрическая энергия от удаленных электростанций к промышленным районам пере-дяехся посредством аысиконолыных чнний электропередачи переменною Юка при напряжении ПО, 220, 400, 750, 1150 кВ. Существуют линия передачи на постоянном юкг при напряжении до 750 кВ и строится линия яа 1500 кВ. В крупных i «родах и промышленных районах, где по технолси ическим условиям требуются горячая пода и пар, сооружаются теплоэлектроцентрали (ТЭЦ). ТЭЦ удовлетворяют технологические нужды промышленных предприятий в паре я горячей всас н одновременно вырабнываюх электроэнергию.
Для обеспечения бесперебойного снабжения иотребшелей, удобства ремонта и более рационального использования электрооборудования, а также и целях экономии топлива электростанции ьрОмыплеыных районов соединяют между собой высоковольтными линиями в общее энергетическое кольцо. На рис. 12,14 изображена система :п1сктроспабжения цромъшьтсн-лого района.
Электростанции промышленного райопя (ТЭС, ТЭЦ, ГЭС) с цомощью высоковольтных воздушных линий .7ЭП отдают вырабатываемую электроэнергию л высоковольтное кольцо, оборудованное несколькими распредели’тсл-ыпдмн подстанциями РИС. Oi подстанций энергия ио высоковольтным яоэ-дуцпгым пли кабельным лилиям подступает на центральные распределительные подстанции ЦРП промышленного пред-
525
Гис, 12.14. Схема эле*троспа&жения про.лыштеи1югс района
лсаия и электрооборудования
Рмс, 12,15. Схема члевтроенаб-ження промышленного Пред-при*тня
приятия и далее к распределительным пунктам РП цехов предприятия. Представление о системе хдектроснаб-промышленного предприятия можно составить, .рассмотрев примерную электрическую схему рис. 12.15 и соответствующий ей twin расположения электрооборудования (рис. 12.16).
Тедератор Г электрической станция вырабатывает энергию при напряжении б, 10,15, 24 кВ. Энергия поступав к повышающему трансформатору Г|т который иовышаст напряжение до 110* 220, 400, 500, 750 кВ. Энергия высокого напряжения через выключатель ВЛГ и разъединитель Р с помощью лнеии элек-
тропередачи ЛЭП поступает в районную распределительную додстаицню РПС, О1 распределительной подстанция энергия с помощью кабеля ялы воздушной лилии передаче ЛЭП через разъединитель Р и выключатель ЯМ поступает к понижающе-му трансформатору Т5 центральною распределительного пункта ЛРП промышленного предприятия, преобразующего энергию до напряжения 6, 10, 35 кВ. От трансформатора энергия поступает на шины распределительного устройства РП и отту-
Рис 12 16 План распаложс&кя элепрооборуловвяня системы электроснабжения промышленцаго предприятия
да через соответствующую аппаратуру — в цеховой распределительный пункт РПГ и котором электрическая энергия е помощью понижающего трансформатора Т3 исиыжаегся до напряжений 127, 220, 330 или 500 В и поступает на типы РП. От глин Р77 энергия подводится к потребите чям; двигателям Д. -электрическим печам ЭЛ, осветительным приборам Л и т. и.
Рассмотрим казпачггне основных элемешов системы электроснабжения.
Линия электропередачи предназначена для передачи элск-ароэнергив от мсточншса к потребителю. При больших расстояниях она выполняется в виде возпушной липки, я которой энергия передается по голым алюминиевым или сгалеалюмп-нисвым (иногда медным) проводам, подвешенным с помощью изоляторов к мстал-’шческим или железобетонным опорам. На территории городов, рабочих поселков, заводов снабжение потребителей осуществляется с помощью кабелей, проложенных в земле в траншеях или кабельных каналах. Воздушные лапин в 'п.-u случаях предстанлялв бы существенную опасность и создавали бы большие неудобства щи транспорта и т. IL
527
526
Сечение проводив линии электропередачи и потери мошпо-стн в лея определяются значением тока:
J--.p .
1/ЗСсо$9
Таким образом, чем больше напряжение, тем меш.ше ток, а следовательно, сечение проводок и потери мощности в проводах:
др = з/Ч
где /•„ - сопротивление проводов.
Для передачи энергии большой мощности иа значительные расстояния выбирают напряжение такого значения, дрм котором потери ыкргки, стоимость проводов и всех элементов (опор, изоляторов и т. п.) линии электропередачи оказыпаются наименьшими. В большинстве случаев экономически выгодное панряжение линии электропередачи оказывается значительно вълпе напряжения энергии, вырабатываемой генераторами электростанции.
Повышающий |раисформатор служит для повышения _епе-раторнсмо напряжения до необходимого значения напряжения липни электропередачи.
Понижающие трансформаторы РП заводов понижают напряжение до значений, на которые рассчитаны заводские потребители. Погрёбшелн малой н средней мощности обычно выполнены на одно мз стандартных напряжений: 220» 380 и 500 В.
Двигатели большой мощности, например двшашди компрессоров, насосов, воздуходувок, прокатных ставов, выполняют па напряжения 3,6 и 10 кВ.
Выключатели высокого напряжения служат для включения и отключения линии электропередачи или отдельных высоко-ВОЛЬТНЫХ потребителей дежурным персоналом, а также для автоматического отключения при корогких замыканиях и других аварийных режимах. При размыкании контактов ВЫС0КО-водымых выключателей вследствие высокого напряжения н большой мощности между янми пезшткает электрическая дута бешлпой разрушительной силы, осабспЕю при {мключении лицин ирн коротким замыкании. Для гашения дуги выключатели снабжены специальными дутогаситалт.ньгмя устройствами. В противном случае электрическая дуга при отключении могла бы разрушил, кошары в вывести из строя весь выключатель. Применяются миогообьемпьте л малопбъемпые масляные выключатели различных конструкций. В настоящее время широко распространены воздушные выключателя, в которых гашение 528
дуги осуществляется сжатым аоэдухом, выдувающим дугу из промежутка между контактами. Разъелияители служат дия снятия напряжения с отдельных участков линии передачи или с от-дельтпдх элементов высоковольтного оборудования и создания пидимем о разрыва. Это необходимо для обеспечения полной бгзоиасности при ремонт высоковольтного оборудования. Разьединителп не имеют устройств для гашения электрической дутм, поэтому снятие и последующая подача напряжения с их помощью может бы । ь осуществлена только при отсутствии тоны в линии Исключением являются цепи енлоиых 1рапсформа-торов до определенной мощности.
12.8. ВНУТРИЦЕХОВОЕ ЭЛЕКТРОСНАБЖЕНИЕ
Питание пековых сетей низкого напряжения осуществляется ' от РП. Б цеховом РП (рнс. 12.17) установлены один или несколько понижающих трансформаторов 3, работающих параллельно. В целя ебмотки высокого напряжения трансформаторов устанавливают разъединит ель J и плавкий предохранитель 2 (для трансформаторов мощностью до 320 кВ‘А}. Для трансформаторов большей мотнпосги вмесю плавких предохранителей устанавливают высокооолыный включатель с соответствующей махсималыюй зашитой яти разъединитель мощности Вюрнчная обмотка трансформатора подсоединена к низковольтным шинам 5 распрсделшедьного устройства Б качестве отключающей аппаратуры в цепи этой обмотки обычно устанавливают воздушные аи j о маты 4 От шин PH электроэнергия поселяет непосредственно к крупным по-1ребгпелям S, распределительным шкафам 9 идя шинным сборкам 10. Для отключения л патпяты от коротких замыканий каждая из отходящим линий снабжена выключателем бт 7. В отдельных случаях устанавливают измерительные прнбо-
Рнс. 12.17, Схема цехового распределительно! о трансформаторного пункта
529
Риг, 12.iX Конструкция шинной сборки
ры — амперметры» счстчихн, Питание распределительных щит-кол а шитых сборок осутцеств.ояется посредством пзодиро-наптгых медных или алюминиевых проводов, уложенных в стальных грубая, иди кабелей, проложенных в стенах и конструкциях здания нли в кабельных каналах.
Существует большое разнообразие конаруктивных форм Исполнения силовых и осветительных распредй.тнтелы1ыя шкафов.
Распределительные шкафы устанавливают у ггеи и колонн ьеха вблизи оборудованил, которое данный щит снабжает элск-530
тркт-исргдсй. Проводка от шкафе к потребителям выполняется изолированным проводом в стальных трубах иля кабелем, которые прокладываются в полу.
В настоящее время для питания станочного и другого обо-рудолатгия машиностроительных заводов находят широкое применетгае нтн.-ше сборки, Шинные сборки (рис 12.1В) состоят на сального кожуха j, внутри которою в изоляпионпых стойках 2 укреплены стальные или алюминиевые шипы 3. К шинам иа расстоянии (1,3-1 м приварены штыри 4, к которым присоединяют проводя потребителей. Шинные сборки укрепляют на степах и колоннах цеха да высоте 2,5 и. На рис. 12.19 изображены шинные сборки I и подводка 2 от нит к металлорежущим станкам 3.
12Л- ВЫБОР СЕЧЕНИЯ ПРОВОДОВ
Электрический ток в проводнике пагревает его. Температура проводника, с одной стороны, определяется энергией i Jft, выделяющейся в нроволпвте, а с друюй стороны, — условиями 1сш1оотдати поверхностью проводника в окружающую среду. Температура проводника увеличивается до тех сер, гока не на-ступит равенство между энергией» рассеиваемой я окружающую среду, и энергией, выделяющейся в проводнике. Предельно допустимая температура проводов с изоляцией определяется свойствами изоляции, а голых ороводов и основном надежностью контактных соединений.
Изоляция проводов к кабелем быстро теряет свои нзоля-диоппыс и мекдяическмс свойства при длительной работе с температурой выше допустимой. Для проводов и кабелей е резиновой или пластмассовой изоляцией предельно допусги-мач температура составляет 55 С, для кабелей с бумажной изоляцией ЯО С, для гп.тык медных проводов ?0’С, Ссчсняе проводлп выбирают таким, прн котором провод нагревается не выше допустимой температуры. Наибольшие допустимые тока для голых и изолированных проводов различных марок лапы а справочной литературе Предполагается, что reuncpaiypa окружающей среды для проводов п помещениях 25 °C, дня кабелей, проложенных а траншеях, 15 С.
Выбор сечекяя проводов производят ии основании расчетного тока. Провод выбирают такого гх-чення, прн котором допустимый ток Гл больше рдсчстнсм о тока Гр илн равен ему:
Ъ^ГР- (12,15}
531
Расчетный tor отдельного приемника трехфдэного тока озерсделяется но формуле
Р Ж,пчсоя q\D!ArrtW
где PBryJ, L’-OM. tos<pB1J„, Tl,^ - соотяе1ствепно номинальные мощность, напряжение, коэффициент мощности. КПД приемника.
Когда группа прнсмкнхои работает, например, от одного распределительного щитка, определение расчетного тока провода, подводящего энергию к этому щитку, походя из суммы поминальных мощностей всех приемников, привело бы и значительному щи ыш ей изо сечения провода. Дело в том, что не вес потребтсли одноврсмсгпго включены п сеть и ire вое включенные приемники работают с номинальной н£|рупкой.
Для определения расчетного тока группы приемников существует несколько методов. Одни ю них используются для i руины М3 15 — 20 и более приемников, другие —для зруппы всего в песханько приемников.
Рассмотрим метод определении расчетного тока большой группы потребителей (более 15-20).
Расчетный ток грузшы приемников в этом случае определяют с учетом коэффициента спроса и расчетного котффа-циевта мощности сов<рр данной категории яриемникон.
Вначале определяют усгаилпленную активную мощность группы приемников как сумму номинальных мощностей всех потребителей:
Затем находят расчетную мощность.
Р„=^,. (12.18)
По расчетной мощности определяют полную расчетную мощность:
Где со5фр- расчетный коэффиииею мощности данной категории ттрнемыиков.
Расчетные коэффициенты спроса и коэффициенты мощности даются в справочной лиюратуре. Например, для станочного 532
оборудования йг- 0.22, cosф{1^0,65; для промышленной вснш-.'жции kc = 0-7, соь<рр = и,8.
Расчетный rot определяют по формуле
• {12.20)
V U'JiaM
После выбора сечения провода ио nflj реву необходимо про-итвести проверку пл допустимую noj-ерю напряжения.
При злгчигсльнсч! ирочжкеилостн проводов напряжение по-цкбигелей может оказаться существенно ниже номинального.
Допустимая потеря напряжения в проводах дзя различных установок ite одинакова, но не превышает 4 —6% номинального напряжения. Ecus if/ окажется больше допустимой, то выбирают провод большего сечения.
Пример 12.4. Выбрать сечечк: прокола марки ПРТО, проложенного и слшьой трубе дла пвталЕЯ трсифа^ного асинхронною днм-гатсля с коротко:1амкну1Ъ1м ротором. Паспортные донные двигателя: /’чем - ЗУ сНт, 1/5ЮВ - Mty22C> В, - ОД с<м - 0.84, наприжетше с₽ги 1R0 В
Репкине. Номинальный lot jjeKiartui
Расы Ю00 20 1000
=T73’S07t>.«.eS4 4” Л
Сечение провода выбираем н-; услоииа
Аа = Люм-
Ближайшнй больший допустимы:! ток 55 А cooiRcrvifiyei сечению провода 10 им2
12-10. ВОПРОСЫ ТЕХНИКИ ВЕЗОПАСНОСТИ
Э.и:ктрмче1Л£ие установка при неправильней их зкеплуатапии и нс соблюдении прлякьп QdpicacHot'CM дане при отт?снч е.чьно шиком напряжении могут представлять большую опасность jj.-eh иорог.ья, а иногда н «пхни че.шьека. Электрический ток, проходящий через тели человека, в чаинсихюсти от ею значения сопровождается блиегнЕнны-\<н ощущениями, судорогами, сильными Gti.-ими шк параличом отдельных органои. Электрпесни дуга «ожег вызвать сущее!ленные охопг в металлизацию коки челонета
Степень поражения члежтрнческмм током зависит от значения, дплтслькосги к частоты трка, от того, по каким частям тела проходит ток. s также от индивидуальных свойств человека. Панбитее еншеным ла.1яется ток промышленной частоты, который доже лрл значении 6,05 А может вызвать смертельный исход.
513
.Наиболее опасное поражение иозникаст, когда ток проходит через мозг и сердце.
Значение тока, прокодкщегй через тело человека, miua&utcrc под цаиряженнс, определяется значением напряжения и сопротивлением тела человека. Сопротивление теле человека заносит от миогик фак-io-роь. СОСТОЯНИЯ КОЖНОГО ПОКрОСЛ; Площади ГТОВСрКПОСТИ СПИрИГОСНСВО' ни» тела с токойепушимн частями, лснхолпгичссгого состояния организма. Сопротивление человека изменяете, в довольно широких пределах — оз- нескольких тысяч до нескольких сотен Ом. Наименьшее сопротивление человек имеет к сырой запыленной среде, при высокой температуре окружающей среды, еогдд вес тело покрыто обильным потом и сильно загрязнено По п ому говорить о каком-то без&паспом значении напряжения довольно трудно. Практика показывает, что и наиболее тяжелых условиях можно считать безопасным напряжение чиже 12 В, л сухих. мачо засрязнекнык помещениях — ниже- 36 В.
По степени опасности, «бусиомсииой харак игрой протэодстви и ию'сяннем окружающей среды, все помещения делятся на три категории: без повилценной опасности, с ирвыигрнной опасностью и особо опасные.
К первой категория относятся помещения сухие, отал.чнкаемыс. с токонепройодягними полами и относительной плзжискпъю нс более 60%.
Характсрпымн признаками помесцепий с иезышешюй опасностью ян.гйютсл высокая влажность, сревьш]амццня 75 й/ тпкоттроводящие полы и температура выше -f-30'С.
Признаками особо опасных помещений считаются вьюшшя д.таж-ноетьч близкая к 1(М1%, кммячаск» шттииняк средь w s. n.
Токопроводящими ечнгаюгся грязные или сырые деревянные, бетонные. жслеэсгбешнныс полы или полы мт металлических плит. К ие-эокоорооодяи1нм относятся сухие и чистые деревянные, асфальтированные и бетонные полы.
Безопасные условия -эксплуатации гэбеопсчиваются рядом мероприятий, нремуч'мотрецпых техникой безопасности. Основными ит них являЮ1ся. а) зашита с нпмощью соответстиующнх ограждений всех гокевсдущих частей; б) сооружение зашнтмото заземления и взмулвння элементов оборудования, к которым может прикасаться человек. нормально ас паходнпгнхея под напряжением, но могущих попасть в аварийных случаях под напряжение; и) применение изтнрующих падегя-вок, резиновых рукаииц и бот, нзолврутощик штанг н т. к
Защитное заземление и зануление нредиазначепы для того, чтобы снизить значение тока, проходни[его через тело чвлоиска, если он окажется под кяпряжстгаем.
Заводские сети iрехфалного тока бывают трсхлроэо^!нымц и четы реяпроводпыыи и получают -DJiepj-wio от трансформаторов. Нейтраль трансформатора в трехороводной сети изолировала (не соединена с эсидейу Нейтраль трансформатора в чстьгреяпроводпай сети: соединена с нейтральным проводом и наглухо соединена с землей
Рассм.нрим вначале причину возннкноисния н способ устраненки опасноеч< для че.-ювекя в трехдроаодных системах с изолированной лей]ра.тью,
534
Рнс. 12.20. К пояснению причины возникновения опасности для обслуживающего персонала при пробое изоляции
На р*ю 12 20 изображены прои'пьодственчъгй мезаннчм ), ijuraw-исвын двигатель 2, прикрепленный непосредственно г механизму, за долезая сеть 3 и емзостп С^, Сд, Сс между каждым пз проводов заводской сети в землей. Провод сети в земля, между которыми находится инфляции, обладаю г oiipe/KUieHHtiii емк(м.тьк>. Прн Значительнл.? протяженности заводсвой сети емкость оказывается значительной, н сс емкостное сопротивление - соизмеримым с сопротивлением тела человека. Элекчричедоое оборудован не и сом чиС-чс н /i.HHiiiit.ib, части устанавливают, как изображено на рис. 12.20. непосредственно ня производственном механизме В пормапьпых. условиях ocq токоьедуадне части ЯПЛЯратсн я дннгагслсй надежно Изолированы от- ме(а.и1ических корпусов и сопрнхосновсЕнс человека с производственным механизмом нс iipe/tclabiiaer никакой опасности. Однако в случае пробоя изоляции электрический провод через л-акреж/генчую ихп.тяцкк! ес^|нчн г-си непасредсто&ню с харпуслиг машины г человек, коснувшийся 1ро*тиии1.ствен±{ог13 механизма, оеаается соедшкилым с одтшм из про-яодов заводской электрической сети (нм рнс. 12 20 с проводом Л)> Казалось бы, при этом человек ис гюнвдет под напряженно, так как он гийктся лнтгц. одного TrpofKT'ia. Дейстнительнщ человек не окажется под напряженном, если он стоит на сухом голу с хорошими изоляционными свойствами. Однако в бо.сьнгннстга; случаев рол щшасный н Kopoiun ссждинек с землей. Поэтому нога человека через пол, землю ч далее через емкости С^и Q-будут соединены с другими приводами (рве. 12.20}. В результате человек овдчестея включенные параллельно емкости к между ею рукой и ногами будет напряжение, которое ньиовст в человеке опасный ТОК.
Человек может быть поражен юном.
Для устранения такой опасности станину производственного механизма необходимо наделаю соединить с землей — заземлить (рис, 12.21).
Заземлитель 3 представляет собой систему стальных труб, упо-«с шип в земле и имеющих v ней хороший kohtuki. В этом случае тело человека оказывается включенным параллельно чачеьи1хгелю Так
555
Рис. 12.21- К лоясиекию роли защитного заземлений
Рис, 12.22- Расположение залсмляпмюдх труб и на-XHC'i'fiajitS цеха промыт лепного прсопрцяш*
где; сопротивление :шзсмлИТйЛя 3 вс много рв.1 меньше сопротивлении тела человека, то при нарушения изоляции черт! тело будет нроходигь трт ничтожно малого -зиачЕ-нич. совершенно белопйсяы-й для здоровья человека
В четырех проводной системе трех-фнзного тока нейтральный (нулевой) провод надежно заземляется в с целью беэ-crttHKtwra проюводится зануление корпусов зьектрооборудовання - присоединение последних к нейтральному цро-B<1J IJ,
Пробой изоляции л этом случае
приводит к короткому замыканию, что вызывает с г оранж плавких вредолрапителей я отклонение Тчерсжденнщ с угасла. Заземление и зануление обязательны по всех пронзводцгкЕВьге jjtiMcmciCHfti, in,с напряженно 127 В к выше, за ис
кгючекнсы сухих конторских номепкттй с деревянными подами, где заземление к заяу-Псккс обпатепьны лишь при напряжения 1В0 & и выше. Заземлению илн занулению подлежат корпуса двигателей, стаппды станков, конструкции рэсиредслкт£ТЫ1ых устройств, осветительная яр матера, корпуса и магии щнроподы грансформалзров н т. □. Система заземлйюшнх устройств цеха промышаешеоиг предприятии изображена на рис. 12 22
Система состоит из труб У, забнгыв я землю стальной полосы 2. соединяющей труби между собой л с контуром заземления J. Стальные полосы хон-jypa заземления проыд-чывйются п$ Стеням зданий или к кабельных каналах, они докиы иметь сечение нс менее 4S мм\ а все соедцнеин» обяхатсп.ьй<,> додели* бытъ гаарпымм К заземляющему (зануляющему) яоптуру J с помощью стаяшьп подосок речением нс менее 24 мм* присоединяются корпуса и ааиниц
юдлсжаш1Е& залсмпспию
336
12.11. ОКАЗАНИЕ ПЕРКОЙ ПОМОЩИ
Het-част сиде случаи с людьми при гишьюнанпн электрическими установками в olhiuhiim происходят вследствие нарушения нмн элементарных правил техники безопасности.
Приняла I&XJJBKH безопасности реирешиил выполнять ремонтные работы в vicMpo/ctanomiax только людям, специально обученным, например злектромонтсрам. штюрыг хорошо знают лр*»и.та техники бечопленоеги и используют при ремонте необходимые -защитные средства, Нельзя допуска.! ь к работе с элсттрн"ксгнм оборудованием о за-нодских или лабораторных устячовкак людей, нс прошелпгня пишет-ствуюший wHcipyri аж по технике бстопаснск н.
Ьсли человек окалился под действием электрическом! «ока, песо-ходим» немедленно спять напряжение с установки или участг» -j-iex-тргтескон сети, с которыми од сопрнкасас!ся. Длх ггого нужно ОТКЛОНИТЬ ближайший BNKJlHJHdlCJib иЛН спять предохранители, если не известно, где инн находятся, то провод» следует отиестк от пострадавшею или просто оборнагь В тех случаях, когда перечисленные мере-сфн>пня выполнить невозможно, необходимо отделить самого Eiocipa-ддвшего ст *.1ектрлческой устапевгн. Оснзмкаюткй помощь пострадавшему должен nojih.ioHu ihcx сухой одеждой, рсзкновычтн перчатками, сухими ДИСВЙМН нт. Д, D Противном случае он сам может быть поражеи злектрнчссиим током. При оказании иомони нажко предотвратить падение пострадавигсго, поскольку после снятия напряжение человек можс-i потерять равновесие, yrruciь н получить серьезную ривму. Если после прекращении действия пока пострадавший оахо-дится в бедсозьателыюм состоянии, необходимо немедленно вызнать врата. До прнхо/е врача следует расшЕгнугк стесняющую дыхание одежду, обеспечить доступ свежего воздуха, упожи!ь пострадавшего на спину, подложив под нсто мт-кую одежду. В тяжслыя случаях пора-жспий, когл» чел™м: не проявляет гричнакси дыхангц ялн дышн ! судорожно, следует до прихода врача начать ncjiaih искусствсгпсос дыхание
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Лвтотралсфпрмагор Э26
Лп нвный элемент электрической цепи 12
Ампер I?
Амперметр 262, 280
Амплитуда 62
— комплексная 1СЙ
Б
Беличья клетка 404, 440
В
Выт 22, Кб
Ваттметр 82, 284
Вебер 196
Вегглрняя лпагрэмМЛ 66, 69
— — синхронного гсг-ерагора 479
— - — дып^чаля 495
Внешняя характеристика трапе-форматора 120
Вотьт 19
Вольтметр 282
— (налоговый алсктрояпий 295
Вращающееся мзпипвое поле 406
Выбор двигателя 505, 510
Выыючатеда высокого напря-аехгая 528
Генератор постоянного тока 342 — — — незапиенмагс! возбуждения 355
— — — параллельного возбуждения 355
— — — смешанного возбуждения 355, 356
-- релаксационный J76
- синхронный 63, 472
— — ДВУМ юльосямй 473
— — трегфазныц 472
Главный полях 342, 343
Графический метод расчета не-ляпейных магнитны* ценен 211 — — — — э-тсктрнческих цепей 52
538
Д
Двигатель асинхронный 401, 413
— — двухполюсный 40В, 411
— — однофазный 457
- - трехфдмнын 401
— — — жнейный 470
— независимого возбужденна 367, 315, 39S
— нараллелыгого воябуждепия 567, 369, ЭТО, 373, 375, 379, 383, 395
— последовательного яозбужде-ния 367, 370, 374, 375, 395
— смешанного возбуждения 367, 369, ЗХ 315, 396
— универсальный коллекторный 396
Двухполюсник 14
— активный 14
— nactiMBBuit 14
Действующее значение комплексное 109
— — иееннусоидальйого напряжения F79
- — — тога 179
— — ыесепуеоидалыюйфулЕцин 179
- - - ЭДС 179
— — сннусодзальпой функции 108
----ЭДС 229
Дясоуль 22
Диаграмма круговая 104
ДЯХ1СКТриКВ J6
Дополнительный по.iiw 343 354
Дроссе 1ь насыщений 248
Е
Емкостный элемент 76
3
Закон Джоуля-Лейпа 22
- Ома 19, ,80, 82, 85
— — в комплексной форме НО - — для магнитом цепи 208 - полного тока 198, 205
Законы Кирхгофа 19. 41 - - в векторной форме 89 - - в комплексной форме IU — — ц.1я магнитной цепи 203 — коммутации 150
Защитное за?смле>«е 534
- зануление 534
Значение снкусондальиой величины амплитудное 63
- — — дЕЙстаующес 65
_ _ _ среднее 65
И
И^ееальныЙ источник тока % - - ЭДС 29 - элемент .тлектрпчесвой пени 13
Измененкв иалряження генеря-гора постоянного тока 359 — — трансформатора 32U Измерительная цель 262 Измерительные приборы непосредственной оценка 262
Измери^ьный механизм 263 .. _ ммгннгйзлектряческий 264 И^мерлте.тьпыйманннаи элект-
^динамически и 26В
— — алектромагяи гный 266
и и иуетппяпсть нзаимтмя 210, 211
— собственная 21U, 211 Индуктивный элемит Инту»пни ВТЯИМ7МЯ 120 - технического насыщения 201 Источник злекгрвчгстой .чиергяп 10, 11
К
Классы точно?™ 273
Коллектор 343, 349
Коммутация 354
Конденсат Сф снихроиный 472, 491
Комплексное значение мощности 112 - — напряжения 109 — — подмою сопротншеекяя
НО, 113 — — полной прейодамосгн 110, ill
---- тока 109
— число 106, 107
Контакт эамыкаю:цяй 516
— размыкающий Л 6
Контактор 313
Коэрцитивная сила 201
Коэффициент амплитуды 181 — гармоник 181, 177 - искажения 131 — мошноста В6; 87, 145—147 — - дви1ателя 456 — обмоточный 415 — нолезлото дсйстмгя источника 27
— — — машин постоянного тока 394
Коэффициент полезного действия трансформатора 329 — пульсаций 181, 188 — сглаживания 188
— сопротивления температурный 15
— среднего значения 181
— трятгефор мании асинхронного двигателя 419
— — трансформатора 302, 304
- — — измерительна! о 341
— усиления магнитного усилителя 254, 255
— формы 181
— — врмвпй 66
Криви намагничивания 200
— размагничивания 213 Л
Линн» :с1ектропередачн 527
Логический элемент 513
Логометр 290
М
Мшнитми индукция 196, 19$, 199
— ностояппи 197
— проницаемость абсалютная 197, 202
---- относительная 197
Магчн1мяя пял, 194
— — нераззетвленвая 206, 213 — - несимметричная 193, 217 — • • с одной намагничивающей обмоткой 194
— - — переменной МЛС 223, 247
— — - постоянной МДС 196,
247 ____
— — — постоянным магнитом
195
_ _ симметричная 195, 217
Магнитное напряжение 203
— поле 193
— — основное 203
— — рассеяния 203
539
МаиЕНПЮ-мяпсие ерналы 202
Магнитио-твердые ма горня ты 202
Магнитные характеристики 210, 22i> •
Магчктиый ПОТОК 1%
- - рассеяния эквивалентный 203
— усилитель 248, 249
---двтактпыЙ 261
— — грсчфазнын 262
Mat ни^.одвижушя.я сила 198
Мха iiHToupuiHvi 194, 226
Максимальный момеш асинхронного двигателя 42Я
М-сры электрических величин 279
Мсгоп аналитический расчета нелинейны; электрических пеней 54
— графо-аналитический расчета . келнненных тпсктрнчсскнх ЦС- -гей 53
— законов Кирхгофа 41
— контурных токов 42
— наложения 45
— nctiocpcju-1 венной оценки 280
- сравнения 280
— - компенсационный 2fi0, 2R2, 283
- — мостовой 280
— средних потерь 507, 510
— узлового напряжении 43
_ .^кпипалентног-о генератора 46
— эквивалентных всг^чцц 507
Механическая харакгерлдгнЕа
двигателя 386
Микродвигатель постояппото гока 397
— сннл.раняый 494
- гистерезисный 496
— - релЕТминын 497
— — с аостояниимн магинламн 495
— - шаговый 495
Момент врьигакннин 264, 269, 271
— нперпии эквивалентный 502
— лусховоиасапхрошюго длнга щля 437
сил сопротивления 503
- электромагнитный 331, 423, 428
Мгхповые цепи 56
Мопщость активная 72, Я6 — двигателя номинальная 43D — мгновенная 71, 77
Мощность поминальная i<9
- no.TEia» 86, 182
- при 1зеснмусоидя.тьных папря-зсеннял J81, 182
- реактивная 86, 87
- средняя 72, 81
— элс«тромаг1Ент[|ак 422
Н
I lai pyiita несимметричная 134 — 136, 140 симметричная 132-134, !ЗВ
Напряжение 17
— короткого замыкания трансформатора 315
— лнчсйиос 128
— магнитное 205
— фвшос 128
Напряженность магнитного ПО-
ЧУ 198, 199
Начальная фиэн 62
Нейтраль icovcipHnccEar 347. 352
- физическая 353
Нейтральный провод 133
Нелинейные элементы 175
— - l'teKJ-рическон цели 50
Нсфсрромагпитпые инцествц 197, Г98
Номинальные велнтлпы электроизмерительных приборов 274
Нормальный элемси i 28,3
О
Обмотка побуждения 356
— компенсационная 353
— КйроТКГыммкнутяя 404
— памагннчянаюгЕ1ая 194. 21#
— — н.чсалширогшннля 228
- • параллельная 21Я
• ПОСлвдомтельнкя 21§
- обратной снизи 256
- рабочая 245
- ротора 403, 404, 413
— статора 403, 407
- трансформатора 301
— — вторичная 301
- - первичная 301
— управления 24В
— якоря 344
• — аолноння 345
- - петлевая 345
Обратная связь 256, 257
Ом 15
Омметр 289
540
Опыт короткого замыкания трансформатора 313
Опыт холостого хот» i-ранс-форыагора 307
Осциллограф свстолучсвон 279 — электронно-лучевой 293
П
Пй1 353, 401
ПараллельЕня работа генераторов 483
- — трансфер мл орал 323
Параллельное спели нение 31. 95 Паосиннын члеми- г хтектриче.
ексЛ цели 12
Перес рчючпая способность двигателя 370, 371. 432, 487
Переходный происсс .500 Период 62, 4Н Петля магнитного иперетнеа 201, 213 — — — пимами чесжая 225 — — — предельная 201 - — — ыагнтеская 201. 223 Пштность допустимая 23 Погрешность абсолютная 273 - дополнительная 274 • основная 273 - относительная 273 - приведенная 273 Полокмтсдчнпс nanpauneiEHe магпитион индуК1№И 204 — — ма1ннсныл потоков 294 — — напряжения 17, 112 — — налряжеипости магннтяо-।п поля 204 - - гена 17, 112 - • частоты вращения 36К, 369 ----ЭДС 17, 112 Полюсный иа,кон<г*ннк 343 Поспелова нелъмпе соединение 29, 84
Постоянная времени 154, 157 • прибора 273 - счетчитя 27?
Потеря мощности и асиихрын ном .'тяж итсле 422
— — — ыагпитопроводе 224
— - - машине постоянною тока 394
— — — обмотке 224
— — — синхронном двигателе 508
Поток рассеяния *3 7
Потокосцепление обмотки 203
Правило Ленца 224
Предохранитель ллавкнв 29
Преобразователи измерительные 298
— — генерн горние 29В
- - параметрические 298
Приемник одпофазпый 126
- трехфазпый 126
— электрической энергии 10, II
Принцип действии генераюра 348, 473
— — двигателя 349. 476
Проводимость 12, 96, 97
— активная 1 11
— xriwu.'iec-ciias 111
— реактивЕ1ая 111
— удельная 15
11родо л жнтсльн осп. BK ЧЮЧвЕЕИЯ 506
Пуск асинхронный синхронного дчигагеля 491
— acHicKpoiniux двигателей 433
Р
Реакция якоря 353, 473
Регулирование частоты вращения 380-587. 442, 446
Режим двигате сьныГе 368
— двдга-i В.Т» кратковременный 505, 506
— повторно - грят переменный 505, 506
- продолжительный 505, 506
— короткого Аимыхання 23, 28, 39
— номинальный 24. 2В
— cot ласоиаииий 22, 28. 39
— тормоз ной 387, 38-8, 44?
— - генераторный 39!. 450
— — дитмичесЕнй 393, 451
- противовключения 3R8-
390, 450
• холостого xo;ia 24, 39
Гезкстивммй элемент 13
Рсзочэкс напряжений .90 — гокни 100
Реле времени 538—523
Ренегат пусковой 377, 37В, 446
— регулировочный 433, 446
Ротор 40!. 472
Самовозбуждение 360
Самопишущий прибор 278
Сдвиг фаз 110, 140, 143
541
Сельски 464
Сименс 15
Системы электронтмсрнтсакных ирнВоров 263
Се ii.ibztxHC 416
Скольжение критическое 428, 44 438
Смешанное сткдиценне 32. 99
Сопротивление 15 - активное 70, 110 - емкостное 77, 1Ю — нндулгивнем; 74, 87, 110 - aoMii'toccHCC НО
- короткого замыкания |рачс-фермата 515
— магнитол 206, 20$
- полное SU, 87
- удельное 15
Стабилизатор напряжения 24$ - • феррорезоиапсиын 245. 247 Статический преобразователь частоты 446
Сгнтор М2, 401, 472
Схема 11
— Чам&1 ценна 13
- — ашихрониого дынаталл 425
- — звезда 34, 127, 131
— — идсалнзвровашом обмотан 237
— — реальной обмотан 240 - - треугольник 34, 127 Саетчих индукционный одно-
фазный 270, 2S7
— — трсхфазмЫн 287
Tixoiekepaiup 463
Тепловое реле 515 1ярмопара 21>5, 266 Тесла 196
Ток внхревой 224
Ток денег иующий 64, контурный 42, 43 - лилейный 128
— нгеинуоонда.чьиыа 175, 177
— переменных 10, 60
— постоянный 10
- пусковой 477
- фазный 128
Трансформатор 30]
- броневой 332
— врАщаялцнхся 469
- лвухобмоточшай 332
- измерительный 305, 337
- многообмоточный 332
542
Трансформатор напряжения 337, 338 — однофазный 304 одиообмототный 332 - иовышзющнй 528 - пйнивщдощнй 528 - тока 337, 338 - трехфааиын 322-334 Тяговое усилие электромагнит 221
У
Угловая скорость 410
- частота 62, 411
Угол меклпичесжнн 4)2
— потере 234
— *лс« "рлчес1лй 412
Управляемый реактор 248
Уравнение бнлашз мощности 40
Условное оболвачеше электроизмерительны! тряборов 276
Успокоитель 263
Ф
Ферромагнитные вещества 197
200
Фильтр смкостпый 189
- хнградитслыпай 190
— индуктивный 189
- рминаиснын 190 — сглаясквающик 188
X
Характеристик асинхронного двигателя мештвческая 427, 429. 432, 436
— всбср-амиериая 212
— вебер-эЕвпвален гная 215
- нионняя 29, 36
- илиьт-амперпав 51
- двигателя естественная механическая 372 - 374
- - - члекчрлмстяничсская 373, 374
— — искусственная механическая 377 — 380
- - — элсктромеханичесхая 377—380
- синхронного двигателя механическая 486, 488
— - - угловая 486, 487
- - - И-сбразпая 490
тахогенератора выхоппэя 463
— управления машинного усилителя 254, 260
Характеристики генсраюра независимого яоКЗуждеиня 357-359
- — пападлЁЛЫгогсг возбуждения 560-363
- - синхронного 481
— — смешанного возбуждения 363-365
Холостой худ 306, 373
И
Цепь дифференцирующая !90
- измерительная 262
- НЕТСгрир)'Ю1г|ая 191
— частогно-ааннсамая 192
— элсприческая 11
- — |рехфазнад 123
Цифровые измерительные при боры 296
Ч
Часнп-а ярищеши 373, 410, 4LI
— ДМиДгчи ц лдунттллытл 412 — — холост о । о хода 373 — скольжения 416
Чередование фаз 125
Чувствительность крнборн 275
Ш
Шкаф распределительный 530
Шинная «борта 531 щ
Щетки 343
Э
Эквивалентная синусоида 136
Элек*|рн<|п{гация 5
Элек'1 ричрокая 31.еит> линейная 14
- - нелинейная 14
- — трекфаэиэя 12И
— — чстырсхлроводпая 128
Электрическое моделирование 57, 172
Элскчродинжусцйя Сила взаимной индукции 120
- — обмотки ротора 417
- - - статора 414
— — самоиндукции 74, 223
Электродвижущая сила Гранр-форматорная 302
Электрон зыерительеые приборы нвдухцнолпые 270
— — мапштозлеггрвчсскис 263, 264
— — — выпрямительные 265, 266
— — — тсрмозлсггрнчесянс
265, 266
— — электрсдишмнчесгле 267
— — электро магнитные 266
Элеятромапштные устройства 194
Электропривод 499
Элсктрот?хкик4 5
Элск1poiехн ическне устройства 10
Я
Якорь 220, 343
ОГЛАВЛЕНИЕ
Предисловие ...... 3
Эведение....................... . . . ....... . 5
Глава первая. Элежтртеагае чсан постоянвмч) то** ... |д
1.1. Получение v области применения постоянное о тока ' 10 • 1.2. -Элементы .-ыенротслянчЕСмых устзнояпи, электриче-
ские EltJLH и схемы.............................. 10
1.3. Задачи расчета я анилиаа электрических цсПсм-Пнрамегри. испол!.:зуемие при расчете и -анализе ... 11
L 4. Некоторые условные обозначения и н.члеенфикапвя
э.чеятричесЕнх пеней. Понятие о двухполюсниках . , 13
1 5. Проводниковые и алектрон^исйцнопньгс материалы. Сопротивление проводников и электрическая прочность диэлектриков................................- . 14
16 Направленна гоеов. наиряжезня и ЭДС Елинкцы их намерения 17
1.7. Нсп>горые особенности испольювомня эаконон Ома н Кирхгофа гери расчете н анализе электрических целей...............................................,19
1 .8. Нагрсвпгснс :<jie.vcHiChB э.театэическпх цетин .... 22
1.9 Режимы работы элементов электрических цепгй . . • 24 1.19, Электрические дели с одним источником аибргии и
па№кяныш (резисгинными) элементами ..... 25
1.10.1 . Нростгйиин цепь с одним приемником ... 25
1.10.2 . Электрические цепи с тюиледовательнъгм сое-
динением резБстввзы* элементов ..... 29
1 ЮЗ. Элешричсскис пели е параллельным соедине-
нием резистивных хземягтои............... . 31
1.10.4 . Электрические цепн со смешанным соедввсянеы резне 1нвных элементов ............................ 32
1,10.5 . Элскврн веские пени, содержащие соединения реэмстшших элементов треугольником ... 34
1.11. Поня1ме сг& есточюскг юка . . . , ,................ 35
1.12. Меразветвленная э.зеявричеекая пень е одним источником звергнн н активным приемником . . _ 37
1.13. Уравнение баланса, мощностей алектричссхнх цепей . 40
1.14. Разветвленные элегтри^сскне цепи с нссяо.тьлнмн источниками .... -...................................... 41
1,14,1. Метод законов Кирхгофа < 41
L142. Метол контурных токов................... 42
(.14.3. Метод ухтового игщряжские................ 43
1,14.4. Метод наложения ... х . 45
1.14.5. Метод тавивалентного 1енератора . . . * . 46
544
I 15. Способысосдинендя источников лисктрнческой энергии 48 ].1f>. Нелинейные электрические цепи постоянного тока . 50
L 16 1 Нстинейпыс элемент электрических цепей, их вольт-амперные карлктсрнстикм и соп|ютнв-пенин ............................................ £0
1.16.2. Гр*1(юаиалп1'ическ11й метод расиста нелинейных тлектрпчсски* испей .......................... 33
ИЬ.З, Аналитический метод расчета лелчнейлых э.тек-ряческих цепей . 54
1.17. Мосторые элеятритеские псом 5-5
1.18. Понятие об элсктри песком моделировании .... 57
Глена вторим. Электргжкие нет сынусондальишо тока . . &о
2,1, Получение сннусодхтялыюй ЭДС. Основные состноше-имя ......................... 60
2.2. Дейн гвуюшсс и среднее значения синусоидальных тона.
ЭДС и напряжения....................... 64
*,3, .Виторные диаграммы Ьб
2.4. Цент., сооержащая ре-аистивнын «цемент с активным сопротивлением г...................................... 70
2.5. Цепь, содержащая индуктивный хиемсвт с нндукгив-
«остьк» L. J2
2 6. Цепь, содержащая емкостный элемент с емкостью С 76
2,7, Цепь, содержащая катушку с активным цилротивленнем
Г И НИДУ» явностью Z, - ТУ
2,Й. 1]<*пь, содержащая рсзис1наньЕй и емкоегдын элементы 82
2.9. Послсдснимелыюс соединение г, I. и С ..... . 94
2.10. Летнркжя, реактивная и полная мощности цепи . . 86
.2.11 . Законы Кирхгофа а векторной форме................ 89
2.12, Резонанс напряжений .............................. 90
2 И. Рал ветвленные цепи ................................ 95
2.М, Резонанс токов.................................... 100
2,15. Понятие о круговых диаграммах ........ 104
2 16. Расчет синусоидальных цепей с нспо.тъзоэахием ком-
олеженмк чисел ................................... J06
2,17. Изображение напряжений и токов комплексными
числами х векторами на комплексной плоскости . 10R
2.t8. Комплексные значения полных еопротннлеияй и про-
ьодвмосчей цепи. Ххкеп Ома и комп.чсксной форме - ПО 2.IV, Законы Кирхгофа в комплексной форме ..... Ill 2.20. Выражение мощности в комплексной форме ... 112
2.21. Расче! сложных цепей ИЗ
2.22. Цени, связанные взаимной индукцией ...... ]20
Глава т ре ь ья. Грсхфавюс злектричмкк цнн . . . . . 123
3.1. Понятие о чрелфатных цепи, и их преимущества . . 123
3.2. Способы соединения фаз дсточнмксв н ирнетиннкцв.
Положительные направлении ЭДС, напряжении и токов............................................. !27
3.3, CooiiiornctiWK между <|шэиыми н .тияейпымн напряже-
ниям]! нс1счинио9. Поминальные напряжений ... 129
3,4. Соединение приемников ?мидий................ .
3,4,3. Симметричнаянигру1*1 • - ...... .
3,4.2. Несймме1рячдая нагрузка .........
134
545
3,5. Соединение DpeeMHUKon треугольником............138
3.5 Л. Симметриями нагрузи ......... 138
3,5 .2. Несимметричная кыирузха ....... . * - 14U
3.6. Электрические челн < несколмимп приемниками . . . 143
3.7. Коэффициент мощности и спадабы сто пошлпсння . . 145
3.8. Влияние сопротивлений проводов сети иа напряжения приемников. Последовательное гв расчета ..... 148
Г лава четвертая. Переходные процессы лпонпиж злек-трпсскмх пелях. ............................. . . . . 149
4 I Общие Киросы и определения.............* - - 149
4.2. Подключение катушки с тг L к сети с тостояьным напряженней.......................................... 152
4.3. Подключение разветвленной цепи с ре^нстившдм к индуктивным я .теыснтзмтт к сети с цостолзпым напряжением ...........................................156
4,4, Подключение катушки с г. L г сети с синусоидальным напряжением ....... ...... 160
4.5. Отключение катушки с Г, £ от сета с тюстсянным напряжением............................................161
4,5. Переходный процесс з цепи при изменении се параметров .......... .................................. 164
4.7. Подключение цеди с иослецоватедьао соединенными ptim_in«iiiJM г д емкоетым с элементами к сети с х I пето яппи м иалрккжнем ......... 166
4,8. Разряд ксчиенсаюра С ва рсзнстишый элемент г . . 16Е
4.9, Разряд кондепсатори на катушку с г, £............169
4.10, Элемрнческдс моделирование цереходных процессов ыехаккчсскгх и арупи систем............................172
Гji 1 и а пятая, Перводичеож вееинуандяляы ЭДС» токи в напржпшя :>.метрических цатх........................ 17S
5.1. ПрЕЧИНЫ МЭЗПНЕДОаения периодических Щуннусдигта тк-ных токов к напряжений ................................ 175
5.2. G глее бы представления псрподачесгак песинууокдьяь-ных величии........................................... 177
5.3. Основные соотяошезвя для нссзнусоилдльных величин 179
5,3.1. Максимальные значения нссямусондальпых величин ........................................... 179
5,3,2, Действующие энячсНЯя иескиусоицдлмшх эь-
ЛИЧНн ............................... , . . . 179
5.3,3. Средние значения нсснпусоидалытых величин . . ISO
5.3 4. KoMbuxhebTU, характеризующие нссипусомдадь-НЫС ПЁ.1ИЧННМ................................. 181
1,4. Поняпис о расчете активной н иодной мощности линейны* электрических цепей при неенчусоидальных напряжениях и ллгях ............ 181
5.5 Анализ линейных электрических цепей при нссныусои' дольном напряжении ксигчпика пи гания.............. 182
5.6, ВЛНЯННС рСЗИСТНВНОГО, ИНдустиИТОГО И ЁМКОСТНОГО ЭЛС' мсетод цепи на форму кривой тока Резонансные л^гения. 187
5.7, Пониже об п.гектрическнд фильтрах ....... Е88
5.R. Попятив о дпфференцзрующня, интегрирующих и избирательных цепях.................................. 190
546
Глава шестая, ЭлектрйыйГ1шп» устройства................... 193
* пшннтные цепи с постоянной МАГНИТОДВИЖУЩЕЙ силой из
•6-1. Понятие об электроми нвтных устройствах и wyi-интных пенях ............................... . . . . 193
6.2. Основные величины, используемые прн рягчеге и анализе магннтпых цепей, Задачи расчета е алэтаа . |$6
6.3. Свойства ферромагнитных MaiepnuroB.............. 200
6.4. Допущения и особенности ислольюванин основных законов маштных цепей при растете к анализе . . 203
6.5. Нсрв?!*стчи1енные магнитные upih................ 206
6,5.1. Оенойныд соотношения..................... 206
6.5.2. Последоьагслыгостн расчета . ....... 20S
6.5.3. Магнитные харэп-еристикн ........ 209
6.5.4. Индуктивность н ваавьшап нЕдукчивмость . . . 110
6 5.5. Аналогия м&тодов расчета магии гнел н электрически* целей................................... 211
6.6. Нератвствленныс магннтпыс пени с постоянными магнитьчи........................................... 2IJ
6.7. Разветвленные магштпьге пели ................... 215
6,7,1. Основные соотношения ......... 215
6 7.2. Последовательность расчета симметричных маг-пнтпых цепех. ............ 217
6.7.3. Посдсдовагсльноегь расчета нкимметрнчных магнитных цепей..................................217
6.8, Седовы расиста нмыатизчиваЕОшил обмоток .... 218
6.9. Тяговое усилие а электромагнитных устройствах . . 220
Б, Магнитные: цпи с пхгеменноЯ магнитодвижущей силой 223
6.10. Яи.тсиит. нронскадящве в магнитных пенях злегтро-м!4гннтных устройств переменного тока, и некоторые их яояструкпплсые осо&сгшктн ........ 223
6.11 Формы кривых ЭДС г, магнитного лого» Ф, гожа / я мгцйвепяой мощности р мдеа.ткзировднной оБмоткы 228
6.12. Волы-ампсрмыс характеристики ндеализнровавпой обмотки.............................................. 232
6.13. Эквивалснтт&гн ток и мггорнак лха1-рамма ядеалнзв-роганной oGmoikh.......................... . , , , 233
6.14, Схема яимещеинм идеалнзироваппой обмотки и параметры схемы замещении.......................... . 237
6.15. Схема замещения. векторные диаграммы и мощности реальной обмотки с ферромагнитным «апштонро-оодом ............................................. 240
6J6, Определение тока, мощностей, эквивалентных <х>-нрелмнлеивй и угла сдвига физ между напряжением и тоном реальной обмотки .... ... 243
6.17 Феррорезонансный стабилизатор напряжения. . . . 245
В. МА! ННТМЫТ ЦЕНИ С ПОСТОЯННОЙ И [ЫГЕМ1ННОЙ МАГНИТОДВИЖУЩИМИ силами 247
6.1S Понятие о дросселях насыщения и мыннтяых усн-
лителях . , , , ............................... . 247
6J9, Устройство МУ .................................... 248
6.20 Принцип дейсгвия МУ .............................. 250
547
<5 21 Соотношение между соками и карак-гсрис1нкз управлении МУ .............. 252
6-22. коэффициенты упоения МУ...........- 254
6.2.1, Обратные СЧЯ7И □ МУ . * . . ...... . 256
6.24, Смещение ь МУ .............. 260
6.25. Паллтне п двухпэктиых и трехфдтнык МУ .... зы
Глава седьмая, Э.-шп[иг1е£кяе ндмереняя н прнберы . . 262
7.1. Системы ^лекфопамсрительнык приборов лаюерел-стнсшюй сюенги . 262
7 1 !. Ма1нитй:1.г«ктрич«кан ьнстеми.............263
7J.2. 'Э.1-гктромаг11И1 наяСЕСгемй. ........ 2<4
7.1.3. Элек гроданямичеспая система............. 267
7 I 4. Индукционная система......................270
7.2. Погрсштхлч измерений, Номинальные величины и постоянные приборов. Условные обезнвчсш1л э.тепра-к^мсрИ1ельЕ1Ы1с приборов........................... 272
7.2, 1. Потребности измерений и :элсдтроиэмсрн1Елы1ыг
приборов .......... ....................... 272
7.2- 2. Ноиниапъиыс величины приборов ...... 274
7,2- 3. Постоянные приборов .......... 275
7.2Л . Чувствительность лриборол , . - . * . . . 275
7.2. 5. Условные обоэяаченпв электроизмерительные приборов 276
7.3. Самопишущие приборы. Осцн.тло1 рифы ...... 278
7,3- 1- Самопишущие приборы ► . ...... - . 27$
7.3, 2. Очтолучевыс OcJttf.UlOLрафы ........ 27Я
7.4. Измерение товй и напряжения ......... 279
74.1- Меры эле1с1рич-мкнх величин . .............279
7 4 2 Методы йтмерспий....................... . 2$0
7.4.3. Измерение тога . . -.............. , . , . 2Й0
7,4.4. Измерение напряжении ......... 281
7 4,5. Компенсационный метод измерения . - , , . 2$2
7.5, Измерение мошьвстм м -энергии л цепа* переменного тока ........................................... . 284
7,5.1. Измерение ах пивной мощности d цепях o.'iho-фащого гока ................................. , 2544
7.5,!, Измерение активной И реактивной улчшккыей
в це»як трехфвзвси с тенм ......... 284
7.5,3. Измерение электрической -энергии в ценят переменного тока ............. 2X7
7-6. Измерение сопротмлдецвй. ...»......................2R9
7.6 I- Измерение еопротни.тений амг»срме!рам и вольт1
метром ...................................... 289
7.6,2. Измерение сопротивлении oMxieipoM ..... 289
7 6,1’. Илмсрепне сопротивлений, индуктивностей и
емкостей мостовыми приборами ...... 291
7.7. Элек-1-роиао-лучсаой осциллограф 293
7.8. Понятие об ацаллгових и цифровых приборах . . 295
7R.I Аналоговые MBk-i ровные волы метры ..... J95
7.S.2, Ци||*р0вые измерительные приборы - > , . . 296
7.9, Электричестве ипэсрсьыя нсолек1-р1г’Еесяия величин . . 29'А
Г.тавд восьмая. Трвнсфорчагьры , 301
8.1- Harmn’ieitHt. устройство и дриштип действии трансформатора .....................................................301
548
8.2. Области применения трансфлрмнюроо . . х . . , 534
8.3. Режим холостого кода граисфюрмагоря . J06
8,4, Работа трансформатора с nnipy:itoii . . , . х , . jpg
R.SJ Мгновенные шйчен^м (ОКСА Н Напряжений трансформатора ........................................... ля
Внешняя характеристика трансформатора .... J23
8,7, Трсхфазнъзс трднеформлеры Д22
8.8. Параллельная работа |р£нм|шрмаюрсв ..... 323
8.9. Днтсираисфн'рмасары............................... 326
8.10. Потерн мощности н КПД Т]Я1Есформатора .... 330
8.11. Технические данные трансформаторов.................330
8.12. Конструктивное исполнение трянсфрр’-’ч трак , . . 352
8.13, Измерительные гринсф>с;р\<а'| оры ........ 337
Глатя девнта*. Мвлвкы шкпшмога тока..........................342
9.1. Назначенной устройство машин постошиюгс тока . . 342
9.2, Краткие сведения об обмотка! якорей. Принцип действия mmiuhh достоянного тока 344
9,2.1. УлроЙСЕНо обмоток якорей ...-.• W4
9.2.2. Принцип действия генератора..................348
9.2.3. Принцип дсйсТРН я днига геися. . ............349
9.3. ЭДС якоря и элся'Ч*о>ли'ннтный момент машин МПСТОЯЧЮ1 о Юка..................................... • 350
9,4, Явление реакции якоря S машинах постоянного тики . .152
9.5. Явление коммутации в машинах постоянного човя . . 354
9.6. Клаеенфпкапня генераторов постаянного тока по способу возбуждения. Схемы включения генераторов . 355
9.7. Свойства и карв»тсрисгиен icHcpaiopoe независимого возбуждение ............................................357
9,7.1, Хирцктвряссниа лолостото хода 357
9.7.2. Внешняя xaps-ticpttcTHKa < 358
9.7.3. Р& улнроьочизя характеристика ...... 359
9.R. СмонСТна и характеристики генераторов ивраллель-HI1LO ЕКИбуЖДС!ШЯ.......................... 360
9.8.1. Характеристики w.rocmro кода н процесс самовозбуждения....................................360
9 8 2. Внешняя .лрыяг ।ерпс । Httii......... ’62
9.8.3. Peiу.тнрооочная характеристика ...... ;,63
9,9- СишСтю'и харйктернстнхн ггнгран.1ров смешанного возбуждения..................' . . . ............363
9.9.1. Характеристика хшшеюьо хода................364
9,9.2, Внешняя j,aparicpHL‘jHtB.....................364
9.9.3, Регулировочная ларй1гтер»гстита ...... .165
9.10. Сравнительная одеяла н технические данные j внера-торо» jocjOkhuoto тока ............................365
9-1 I. К.'|ассифлкадия двигателей по ышсобу возбуждения. Схемы включения двигателей и полезен тельные илп-равлевия частоты яраеиення. момента, токов н лруч кт вс.тичин .............................................- 367
9.12. Эвинснмскти токов от н^|ру:'.ки jiuh швлен. Соотно-
шение между соками . * . 369
9 13. Зависимости магнитного потока от тока якоря дои* j а-педвй , , XX*. ................................369
9.14. Заькслхтос.-ги мимеита от тока якоря Перегрузочная способность двигателей....................................'. ,170
549
915 Соотношение между напрлтеиием, ЭДС в надето ем ивиражеяня ъ ео’протиапеняях цепы якоря. Формудн токи якоря................................. 372
9.1-6. Есатетвйвмые мекяничестн^ н электромеханические характеристики двигателей .......... 372
9.17. Пуск двигателей ........ х .... . 377
9.1В. Регулирование частоты врбшепня двигателей . . . 380
9.19. Тормозные режимы раба гм дпигачелей ...... 387
9,19,1. Режим (1рс3 1‘ивов£лючсния ........ .188
Ч 19.2. Генераторный режим с отпячен энергии, в сеть 391 9J9.3, Режим динамического юрможення . .... 393
9.20, Потери мощности Я КПД машин постоянного гига . 394
9.21. Сравнительная пдссва и технические данные донга--тилей иостоакного тока........................ . 395
9.22. Универсальные кол.'кхториыс двига гтля . ..... 396
9 23 Мятродиигателн постоянного тока . . . - . 397
Глава десятая. Аскикровные машины ........ до)
>0.1 Устройство асндкровкаго двигателя трехфзззого тока 401
Ю.2. братающееся магпктнос поле ........ 406
1(13. Прявцнп действия асинхронного дми атсля .... 413
10.4. ЭДС обыотхв статора............. . . . г 414
10.5. ЭДС, частота токи ротора» скольжение . . . . т 4-!б
10.6. Индутгишы? сонротикпенкя обмотпт статора н ротора.......................................... 417
10.7. Ток и эквивалентная схема фа.ты обм^ткн ротора . 418
10 S Магнигпдпнжулщс czjjai обмоюя статора в ро тора.
Тод обмотки ciitiopa.................................420
tO.9. Электромагнитная мощность и потерн а асинхронном двигателе 422
10,10. Момент, развеваемый двигателем . ..................423
10.11, Схема замещения асинхронного данглтсля .... 425
10 12. Механическая чарактеристни асинхронного двигателя 427
10,13. Паспортные данные двигателя Расчет и построение механической карактаригщки........................430
1-0.14 . Пуск асинхронных дишмтслей ....,.., 4-53
10,15. Двигатели с улучшенными пусковыми свойствами . . 440
10.16, Регулирование частоты вращения ....... 442
10 17. Тормозные режимы работы 449
10.18. Энергетические показатели асинхронного двигателя . 455
10,19. Однофазные асинхронные двиглгелн...................457
13.10. Асинхронный талогенера юр ........ ♦ 463
10,21. Сельсины ................ 464
10,22. Вращающейся трансформатор.......... . . 469
10.23. Понятие о линейном трехфазном асинхронном двигателе ................. 470
Глаза одиннадцатая. Синхронные машины.........................472
11.1. Назначение и устройстно синхронны* машин . . . 472
13.2. Принцип действия синлроЕшых машин Явление реатшЕ ......................................... 473
11.2.1, Принцип действия генератора ...... 473
11.2.2. Припили дейС1ан? ДВН1 атсля ...... 476
11,3. Схема включения и основные зависимости еппврчн-ного генератора................................. 477
550
ПЛ Вехторяыс диаграммы гаихроиного генератора . . 4П '
11.5. Осэювнысларактсристикасннхронпогоусасратора . . 481'
11.5.1. Характеристика холостого хода , , , , . 481
11.3.2. Внешние характеристики . . . * . * * . 482
11.5.3. Pci улкровичные характеристики . . . . . 482
11.6. nipajujejibHis работа геиератороь.............4S3
IU. Схема валючашя двигателя. Соотношение между
ЭДС, вплряжепнем я падением напряжения б цепи якоря............................................484
U.S, BcxTopswc диаграммы елнхромиио двигателя . , . 485
II 9 Угловая и механически® характеристики сн^кронмсио двигателя ........................................ , 486
11.10. Регулирование реактивного тока и реактивной мощности сиикроввого двигателя............................489
11.11. Пуск синхронного двигателя . -...............491
U,(2, Сравнение сэгнхряннъсх и асинхронных двигателей . 493
11.13. Синхронные микродвигатели........................ 494 '
1113.1. Мккродвмгатель с лостоякпымн милнглмн 495
11.13.2. Гистерезисный микродвигатель......496
11.13.3. Реактивный микродвигатель ...............497
11,13.4. ПГш-овыв микродвигатели ....... 498
Глава д в е п ад ца тая Эпсктроарнинщ выбор дквтсля, ннярвтуря упревшим, эпектроепэбкемм, миросы т*хвшш бемнмежктн ..........................................499
13.1. Общие сведения об электроприводе ...... 499
12.2. Переходные процессы в электроприводах .... 500
12.3. Определение кременн разгона и тормоагення электропривода .....................................• 503
J2.4. Определение мощности двигателя. Выбор двнглтелв по каталогу........................................'. 505
12.5. Аппаратура автоматического управления в простси-ifihc схемы управления электроприводами .... 513
!2.6. Бесконтактные системы управления . ..... 523
! 2.7. Общие нсшросы электроснабжения промышленных гтредлрнхгнй ................................... 524
12.8. Вну 1рн деловое *иек гросиабжснис ...... । 529
12.9. Выбор сечевна проводок........................- 531
12.19. Вопросы текинки безопасности................... 533
12 11 Оказанье первой помощи..........................537
Предметами указатель ..................................... 538