/






















































































































































































































































































































Author: Белогородский С.Л.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника авиация самолеты
Year: 1972




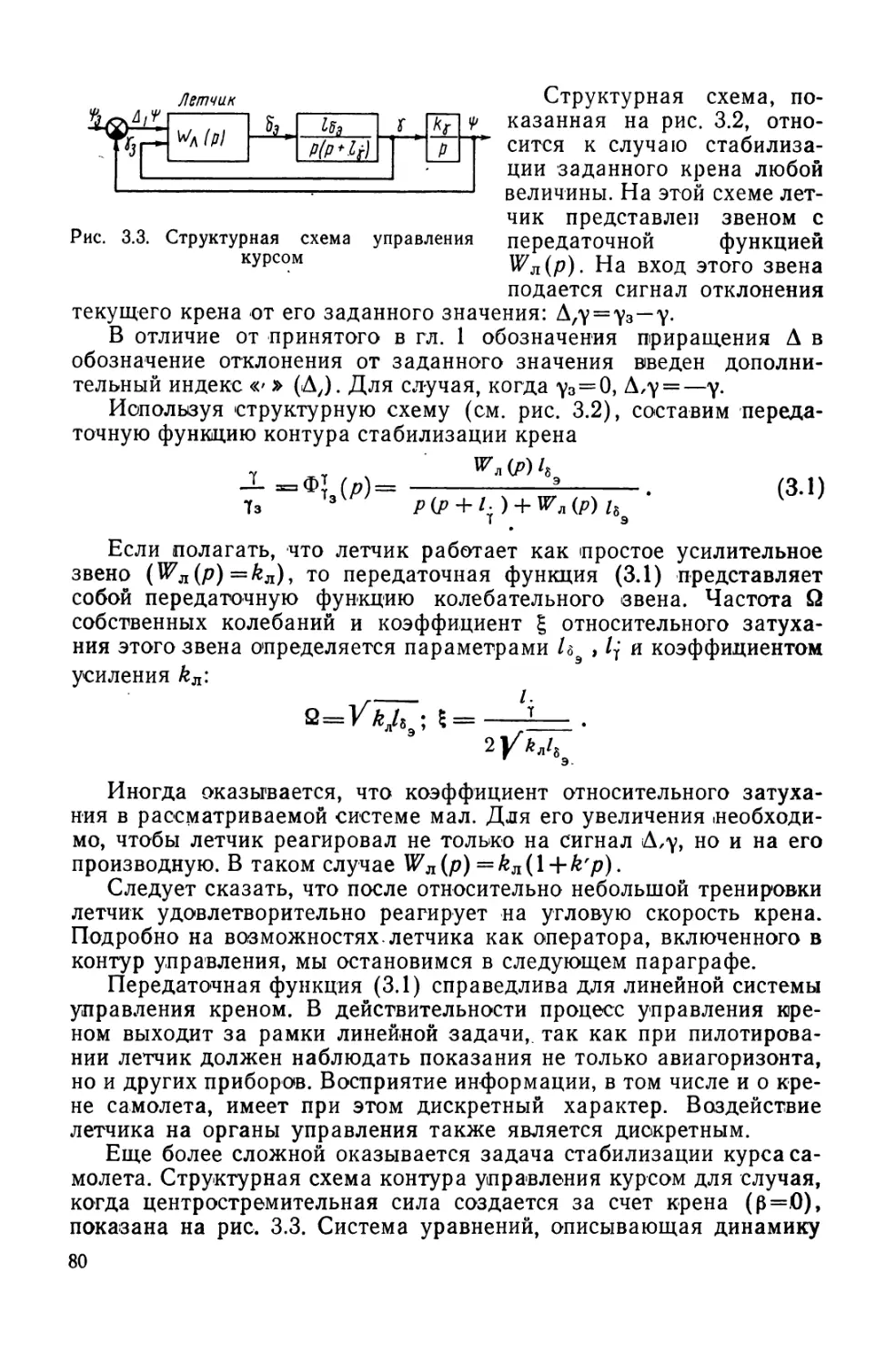
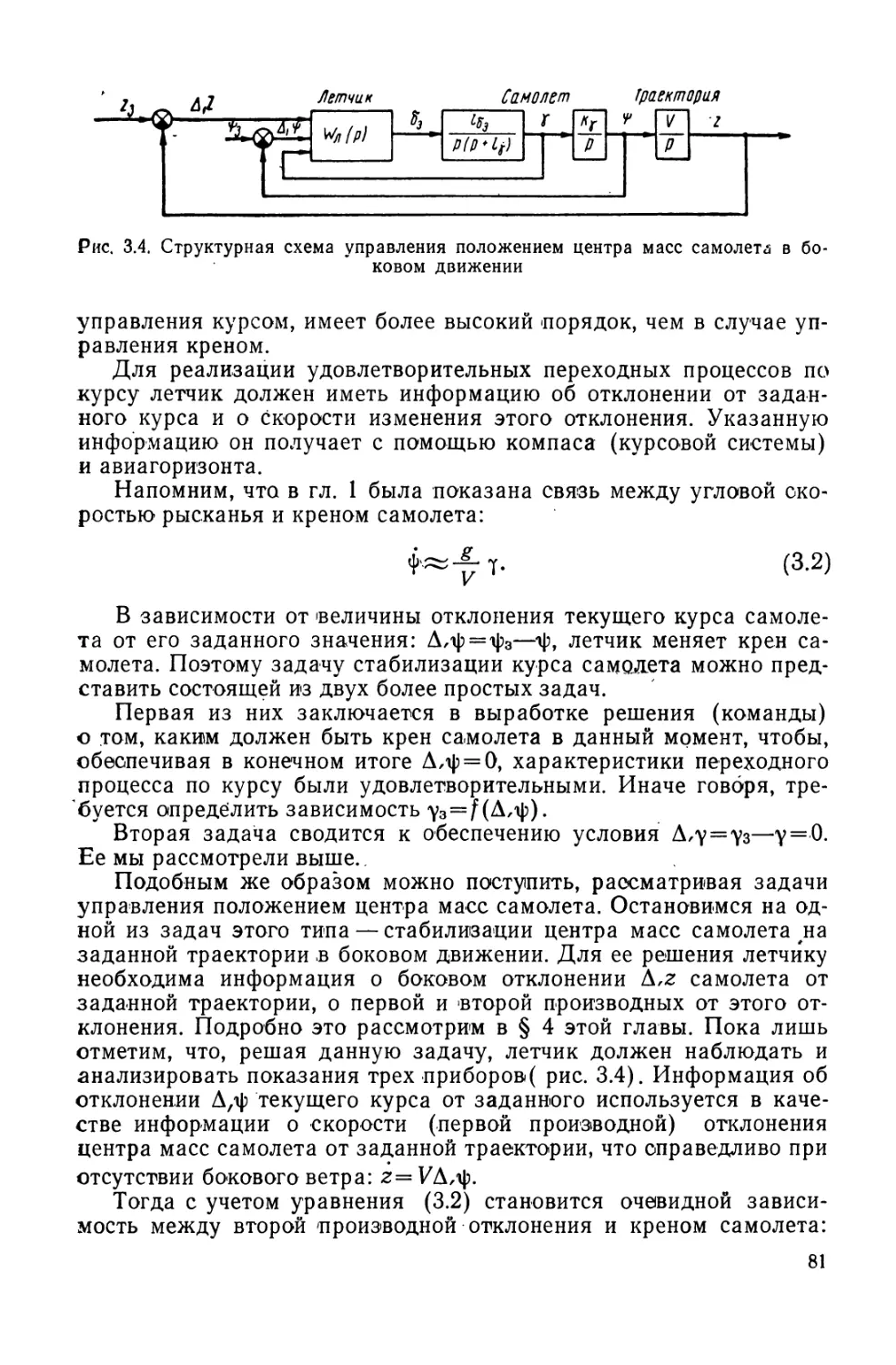
Text
АВТОМАТИЗАЦИЯ
УПРАВЛЕНИЯ ПОСАДКОЙ
САМОЛЕТА
С. Л. БЕЛОГОРОДСНИЙ
С. Л. БЕЛОГОРОДСКИИ
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
ПОСАДКОЙ САМОЛЕТА
Издательство «Транспорт»
Москва 1972
УДК 629.7.05.001(02)
Автоматизация управления посадкой самолета. Белогород-
ский С. Л. Изд-во «Транспорт», 1972 г., стр. 1—3'52.
В монографии рассматриваются вопросы автоматизации
одного из наиболее сложных этапов полета — посадки само-
лета. В ней освещены принципы действия радиотехнических
устройств, используемых для формирования посадочных траек-
торий. Подробно изложены вопросы динамики полуавтомати-
ческого и автоматического управления самолетом, рассмотрены
структурные схемы и особенности отечественных и зарубежных
систем автоматизированного управления посадкой самолета.
Большое внимание уделено методам и средствам обеспечения
безопасности автоматического полета, а также проблемам по-
садочных минимумов самолетов, оборудованных системами
автоматизированного управления.
Книга рассчитана на инженерно-технический и летный со-
став гражданской авиации, работников службы движения, ас-
пирантов и студентов старших курсов авиационных вузов.
Рис. 250, табл. 1, библ. 34.
3—18—6
3—БЗ—15—71
ПРЕДИСЛОВИЕ
Превращение гражданской авиации в один из основных видов
пассажирского транспорта выдвигает в первый ряд проблемы бе-
зопасности и регулярности полетов. Анализируя многолетние ста-
тистические данные по регулярности полетов, можно установить,
что более половины нарушений полетов по расписанию происходит
из-за ограничений по метеорологическим условиям, в основном по
дальности видимости на ВПП, от которых зависит выполнение на-
дежной посадки самолета в аэропорту назначения. Известно далее,
что более трети всех летных происшествий на мировом воздушном
транспорте имели место при заходе на посадку и посадке. Если
считать, что продолжительность захода на посадку и посадки со-
ставляет в среднем 2—3% всего времени полета, то аварийность на
этих этапах оказывается в 10—15 раз большей, чем средняя ава-
рийность в течение полета.
Указанные цифры объективно иллюстрируют ту известную в
авиации истину, что заход на посадку и посадка являются сложней-
шими этапами полета. На этих этапах происходят значительные
изменения режимов полета (скорости, высоты, курса и др.), конфи-
гурации самолета (выпуск закрылков, щитков, интерцепторов
и т. д.), режимов работы двигателей. При этом экипаж должен
наблюдать за показаниями большого количества приборов и на
основе анализа этих показаний принимать решения и управлять
самолетом, двигателями, системами. В условиях дефицита времени
на этих этапах полета правильное осуществление указанных опе-
раций является нелегким делом, требующим высокой квалифика-
ции экипажа.
Повышение регулярности и безопасности полетов может быть
достигнуто путем автоматизации управления заходом на посадку
и посадкой самолета.
Рассмотрение вопросов автоматизации управления самолетом
на этих этапах составляет основное содержание настоящей моно-
графии.
з
Для посадки в сложных метеорологических условиях Междуна-
родная организация гражданской авиации (ICAO) определила ряд
эксплуатационных категорий, или посадочных минимумов, харак-
теризуемых высотой принятия решения и дальностью видимости на
ВПП: эксплуатационная категория I (посадочный минимум I ка-
тегории) предусматривает выполнение захода на посадку до высо-
ты принятия решения 60 м при дальности видимости на ВПП не
менее 800 м (60x800 Л1); эксплуатационная категория II — до вы-
соты принятия решения 30 м при дальности видимости на ВПП не
менее 400 м (30x400 л); эксплуатационная категория ША — вы-
полнение захода на посадку, посадки, руления по ВПП при даль-
ности видимости на ВПП не менее 200 м (0X200 м) \ к эксплуата-
ционной категории ШВ относятся заходы на посадку, посадка,
руление по ВПП и рулежным дорожкам при дальности видимости
на ВПП не менее 50 м (0X50 м); категория ШС предполагает
заход на посадку, посадку, руление по ВПП и рулежным дорож-
кам без возможности использования внешних ориентиров (0x0 м).
Кроме этих основных, в ряде стран используются некоторые про-
межуточные категории.
К настоящему времени самолеты с газотурбинными двигателя-
ми широко используются в условиях категорий I и II. Идет освое-
ние посадочного минимума категории ША. Работы по созданию
аппаратуры, предназначенной для использования в условиях кате-
горий ШБ и ШС, носят в основном исследовательский характер.
В данной монографии рассматриваются вопросы автоматизации
управления заходом на посадку в условиях категорий I и II и по-
садкой в условиях категории ША.
Несколько слов об изложении материала. В гл. 1, 2 и 5 обобщен
и систематизирован материал, ранее излагавшийся в других кни-
гах. Остальные главы, составляющие большую часть книги, за не-
которым исключением, имеют оригинальный характер. Это обстоя-
тельство наложило определенный отпечаток на стиль и характер
их изложения. Однако во всех случаях автор стремился сделать
книгу доступной для широкого круга авиационных специалистов.
Автор выражает признательность кандидатам техн, наук
М. И. Кузнецову, В. Н. Просыпалову и сотрудникам кафедры, воз-
главляемой профессором Г. П. Астафьевым в Академии граждан-
ской авиации, за ценные замечания, сделанные ими при просмотре
рукописи.
ГЛАВА 1
САМОЛЕТ КАК ОБЪЕКТ РЕГУЛИРОВАНИЯ
§ 1. СИСТЕМЫ КООРДИНАТ
Движение самолета может быть определено в различных си-
стемах координат. При рассмотрении процесса посадки возникает
необходимость анализа движения самолета относительно различ-
ных точек земной поверхности и земных ориентиров: ВПП, радио-
маяков и т. п. В этих случаях удобно использовать системы коор-
динатных осей, связанных с Землей.
В общем случае направление системы земных осей Oxgygzg вы-
бирается таким, что взаимно перпендикулярные оси Oxg (рис. 1.1)
и Ozg лежат в горизонтальной плоскости, а ось Oyg направлена по
геоцентрической вертикали вверх. Система координат — правая.
Поскольку последний участок траектории захода на посадку в го-
ризонтальной плоскости, как правило, совпадает с продолжением
оси ВПП, часто оказывается удобным совмещать горизонтальную
ось Oxg с направлением оси ВПП.
Тогда линейная координата xg будет характеризовать расстоя-
ние самолета до точки О, выбранной в качестве начала координат.
Если, например, за начало координат принять заданную точку при-
земления самолета, то по оси Oxg определяется расстояние самоле-
та до этой точки вдоль заданной траектории, а по оси Ozg— линей-
ное боковое отклонение от нее. Линейная координата yg характери-
зует высоту полета относительно точки О.
Начало координат других применяемых систем располагается
в центре масс самолета. Поэтому переход от земной системы ко-
ординат к другим и наоборот осуществляется наиболее просто в
тех случаях, когда начало земных осей также расположено в центре
масс самолета, что и применяется в ряде случаев.
Наконец, в некоторых случаях целесообразно направлять ось
Oxg на север, по касательной к географическому меридиану; оче-
видно, при этом ось Ozg оказывается направленной на восток. Так
удобно поступать при решении навигационных задач, связанных с
маневрированием по сложным траекториям.
Рассматривая самолет как твердое тело, для определения его
угловых положений в земной системе координат необходимо задать
5
Рис. 1.1. Земная система коорди-
нат
Рис. 1.2. Связанная система коор-
динат
Рис. 1.3. Совмещенные земная и
связанная системы координат
положение системы координат, жест-
ко связанной с самолетом Ox^yiZi
(рис. 1.2). Начало этой так называе-
мой связанной системы координат
помещают в центре масс самолета.
Оси Oxi и Оу\ располагают в верти-
кальной плоскости симметрии само-
лета, а ось Ozi — перпендикулярно
этой плоскости. Ось Oxi направля-
ют по продольной оси самолета впе-
ред, а ось Oyi — перпендикулярно
ей вверх. Продольная ось Oxi вмес-
те с нормальной осью Оу\ и попе-
речной осью 0^1 образует правую
систему координат. Тогда угловые
положения связанной системы коор^
динат OxiZ/iZi относительно земной
системы Oxgygzg определяются угла-
ми рысканья ф, тангажа Ф и крена
у (рис. 1.3).
Угол рысканья измеряется меж-
ду направлением проекции оси
Oxi на горизонтальную плоскость
Ох' и направлением оси Oxg. Угол
рысканья образуется в результате
поворота самолета вокруг оси Oyg
на угол ф. В случае когда ось Oxg
ориентирована на север, этот угол
связан с истинным курсом фи само-
лета зависимостью ф = 360°—фи.
Угол тангажа измеряется между
направлением продольной оси само-
лета Oxi и горизонтальной плос-
костью. Угол тангажа получается в
результате поворота самолета вок-
руг оси Oz', образованной поворо-
том на угол ф оси Ozgy на угол О.
Угол крена измеряется между
направлением поперечной оси само-
лета Oz\ и горизонтальной плоско-
стью. Он образуется в результате
поворота самолета вокруг оси Ох\
на угол у.
При исследовании действия аэродинамических сил и моментов
часто оказывается удобным использовать скоростную систему ко-
ординат Oxyz (рис. 1.4), связанную с вектором скорости полета V,
направленным по касательной к траектории самолета. Начало этой
системы координат также распо-
лагают в центре масс. Ось Ох на-
правляют по вектору скорости
полета; ось Оу, лежащую в вер-
тикальной плоскости, — перпен-
дикулярно оси Ох; ось Oz перпен-
дикулярна к плоскости хОу и об-*
разует с осями Ох, Оу правую
систему координат.
Проекция вектора полной
аэродинамической силы (резуль-
тирующей аэродинамических сил,
действующих на самолет) R (рис.
1.5) на ось Ох называется силой
лобового сопротивления X, проек-
ция на ось Оу — подъемной си-
лой У, проекция на ось Oz — бо-
ковой силой Z. Аналогично про-
екции вектора полного аэродина-
мического момента М (рис. 1.6)
на соответствующие оси скорост-
ной системы координат получили
название момента крена Мх, мо-
мента рысканья Му, момента тан-
гажа Mz.
Взаимноё расположение ско-
ростной и связанной систем ко-
ординат определяется углом ата-
ки а и углом скольжения р
(рис. 1.7, а). Угол атаки а лежит
между продольной осью самоле-
та О%1 и проекцией вектора ско-
рости полета на плоскость сим-
метрии самолета х\Оу{, а угол
скольжения р — между направ-
лением вектора скорости полета
и плоскостью симметрии. Очевид-
но, при условии a=ip = O скорост-
ная и связанная системы коорди-
нат совпадают друг с другом.
Взаимное расположение ско-
ростной и земной систем коорди-
нат определяется углом 0 накло-
на траектории самолета относи-
тельно горизонтальной плоскости
и путевым углом 0Г (рис. 1.7, б).
Угол 0 измеряется между векто-
ром скорости V и плоскостью
У
к
Траектория
2 полета
Рис. 1.4. Скоростная система коор-
динат
Рис. 1.5. Проекции вектора полной
аэродинамической силы в скорост-
ной системе координат
Рис. 1.6. Проекции вектора, пол-
ного аэродинамического момента в
скоростной системе координат
7
Рис. 1.7. Взаимное расположение систем координат:
а — скоростной и связанной; б — скоростной и земной
XgOzg, а угол 0г—между проекцией вектора скорости на эту плос-
кость и осью Oxg.
При продувке моделей самолетов в аэродинамических трубах
величины аэродинамических коэффициентов определяют в полусвя-
занной системе координат Ох2у2г2 (рис. 1.8, а). Ось Ох2 направлена
параллельно проекции вектора скорости полета на плоскость сим-
метрии самолета Х\Оу\, а ось Оу2, расположенная в этой плоскости
перпендикулярно оси Ох2, совпадает с направлением подъемной си-
лы. Ось Ог2 перпендикулярна плоскости х20у2. Нетрудно увидеть,
что система полусвязанных осей повернута вокруг оси Oz2 на угол
атаки а относительно системы связанных осей. Скоростная система
координат повернута вокруг оси Оу на угол скольжения р относи-
тельно полусвязанной системы (рис. 1.8, б). Заметим, что в случае
Рис. 1.8. Взаимное расположение систем координат:
а — полусвязанной и связанной; б —полусвязанной и скоростной
8
отсутствия скольжения (₽=0) лолусвязанная и скоростная систе-
мы координат совпадают.
Для облегчения перехода от одной системы координат к другой
пользуются заранее подготовленными таблицами направляющих
косинусов [27], [12].
§ 2. ОБЩИЕ УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА
Во время захода на посадку самолет должен лететь по задан-
ной траектории, а параметры его движения (скорость и высота по-
лета, угол атаки, крен и др.) должны изменяться по определенному
закону. Это движение является основным (ведущим, про-
граммным). Вследствие возмущений внешней среды, изменения
тяги двигателей, отклонения рулей и других причин происходит на-
рушение основного движения. Вновь образовавшееся движение
называется возмущенным в отличие от исходного (н е в о з м у-
щенного) движения, причем исходное движение не обязательно
должно быть установившимся. Так, в процессе выхода самолета на
заданную траекторию снижения меняются скорость и высота поле-
та, углы атаки и тангажа и др. Тем не менее это неустановившееся
движение самолета может быть принято за невозмущенное.
После прекращения действия причины, вызвавшей возмуще-
ние, движение вновь становится невозмущенным, если оно устой-
чиво. Напротив, движение является неустойчивым, если воз-
мущенное движение продолжает еще больше отклоняться от основ-
ного после окончания действия причины, вызвавшей возмущение.
Иначе говоря, под устойчивостью самолета понимается его
способность самостоятельно, без вмешательства летчика, возвра-
щаться к исходному режиму полета после прекращения действия
причины, вызвавшей возмущение.
Современный пассажирский самолет обладает в эксплуатацион-
ном диапазоне режимов полета продольной и боковой устойчиво-
стью. С помощью систем автоматического управления может быть
обеспечено устойчивое движение самолета при полете по заданному
курсу на заданной высоте; в общем случае — устойчивость на за-
данной траектории.
С характеристиками устойчивости самолета тесно связаны две
другие важные характеристики: управляемость и маневренность.
Под управляемостью понимается способность самолета
реагировать изменением соответствующих внешних сил при воздей-
ствии летчика на органы управления непосредственно или через
систему автоматического управления. Управляемость характеризу-
ется величиной отклонений органов управления, величиной усилий,
необходимых для их отклонения, и быстротой изменения внеш-
них сил.
Под маневренностью понимается способность самолета
изменять свои кинематические характеристики движения (скорость,
курс и т. д.).
9
Исследование характеристик устойчивости, управляемости и
маневренности (в том числе и самолета с системой автоматического
управления) базируется на исследовании возмущенного движения
самолета. Уравнения возмущенного движения получаются из общих
уравнений движения.
Самолет является сложной динамической системой с большим
числом степеней свободы. Система дифференциальных уравнений,
описывающих движение самолета, получается настолько сложной и
громоздкой, что оказывается совершенно непригодной для решения
практических задач.
Вместе с тем для практических целей вполне допустимо исполь-
зовать уравнения движения самолета, основанные на предпосылке,
что самолет представляет собой твердое тело, масса и инерцион-
ные характеристики которого являются функцией времени. Тогда
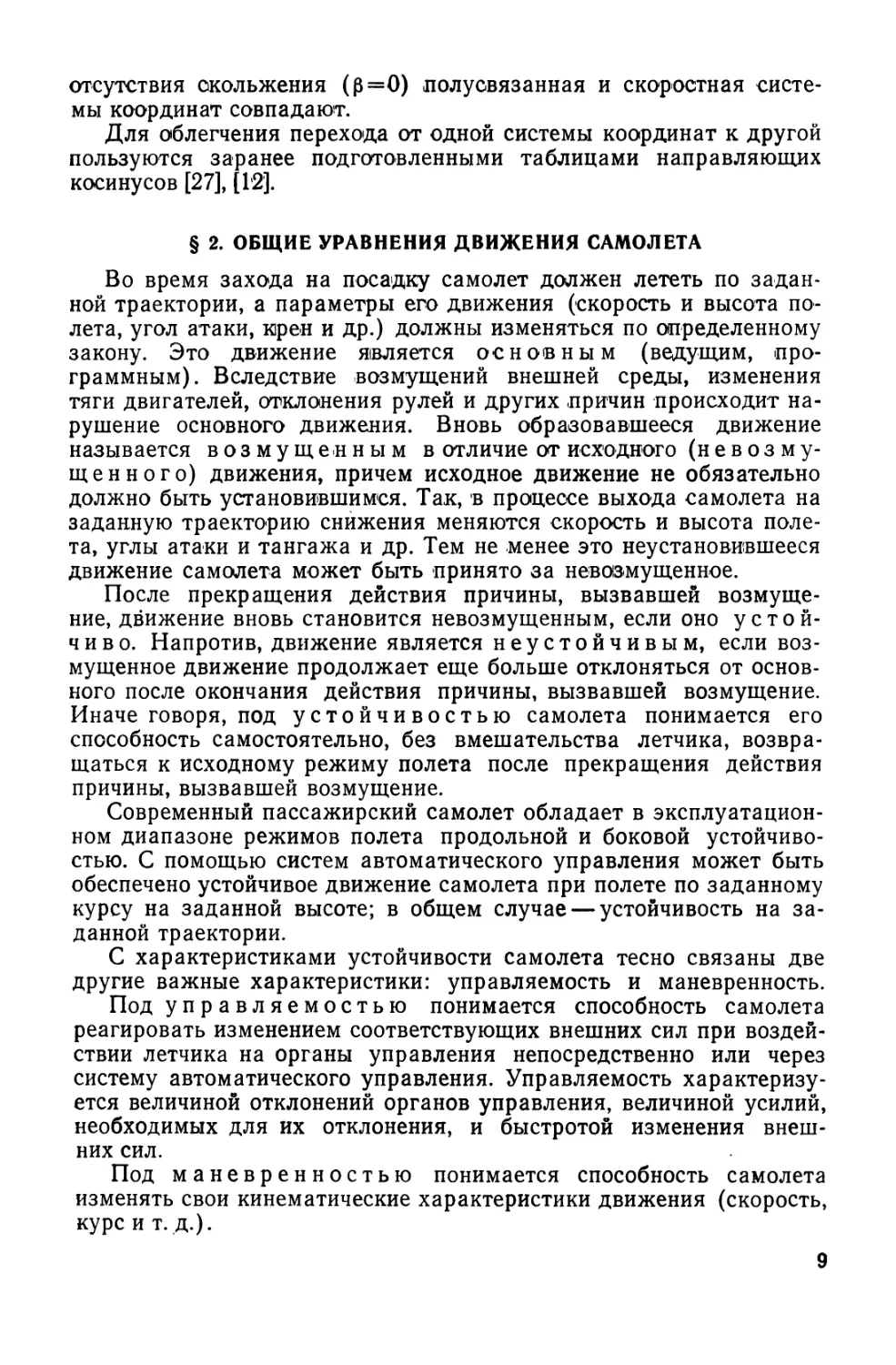
движение самолета описывается шестью дифференциальными урав-
нениями равновесия сил и моментов и шестью кинематическими
уравнениями линейных и угловых координат самолета [12]:
т V Х1 + тму f V Z2 = FX2;
tn (u>z2VX2~®xtVz2)=Fy2;
mV Zi — mu>y2V X2==F Z2\
II xy2 [^х2^г2 — ®y2) = MX2,
^У1°У1""" I z2®x2®z2 4“ x2^x^z2 /xy2 (®y2®z2 4“ ^2) ~^У15
Iz2^z2— х2{йх2{йу2~\~ Iyz^yi^Xi 4“ Ixy2 (Ox2) = ^z2i 1
. (1-1)
xg = VXi cos 6 cos ф4- V Zt (sin у sin 6 cos Ф4-cos I sin ф);
yg= VX1 sin 0— sin у cos 0;
zg= — VXi cos 0 sin ф4" Vz2 (cos y cos ф — sin y sin 0 siq ф);
I = <*>x2 — °>y2 tg 0 cos y 4" ®'z2 tg 0 sin y;
ф = (о)У1 cos y — wz2 sin y) sec 0; '
0 = <*>yя sin y 4" ®z2 cos y, j
где m — масса самолета;
VX2, Vz2—проекции скорости центра масс на оси полусвязанной
системы координат;
<*х, ^у2’ шг2—проекции угловой скорости самолета на оси полусвя-
занной системы координат;
w42—проекция угловой скорости полусвязанной системы
координат относительно земной;
/д-2, Iу2, IZ2—осевые моменты инерции самолета в полусвязанной
системе координат;
1ху*— центробежный момент инерции самолета;
10
Fx , Fy , Fz~ проекции равнодействующей внешних сил, приведен-
ной к центру масс самолета, на оси полусвязанной си-
стемы координат;
MXt), Myzt MZi—проекции момента внешних сил относительно центра
инерции на оси полусвязанной системы координат.
Однако и эти уравнения оказываются малопригодными для це-
лей исследования характеристик движения самолета, поскольку,
как правило, это нелинейные дифференциальные уравнения с пере-
менными коэффициентами, т. е. коэффициентами, зависящими от
времени.
Вследствие этого приходится идти на ряд упрощений, допусти-
мых при анализе основных характеристик движения самолета.
К ним, прежде всего, относится допущение о возможности линеари-
зации уравнений движения при помощи метода малых возмущений.
Метод малых возмущений предполагает, что параметры возму-
щенного движения динамической системы, возникшего вследствие
нарушения первоначально невозмущенного движения, изменяются
на очень малые величины, называемые вариациями этих пара-
метров. Предположение о малости отклонений позволяет считать,
что квадраты, высшие степени и произведения этих отклонений
пренебрежимо малы по сравнению с их первыми степенями.
Аналитически линеаризация сводится к разложению нелинейных
функций в ряд Тейлора по степеням отклонения и отбрасыванйю
всех членов выше первого порядка малости. Напомним, что графи-
чески линеаризация означает замену кривой отрезком прямой,
касательной к ней в точке, соответствующей невозмущенному дви-
жению.
Линейные уравнения, полученные путем отбрасывания нелиней-
ных частей, называют уравнениями первого (линейного) приближе-
ния или уравнениями в отклонениях (вариациях).
Здесь нужно отметить два обстоятельства. Если уравнение опи-
сывает систему с нелинеаризируемыми нелинейными элементами,
т. е. такими, которые не могут быть заменены линейными или от-
брошены как несущественные, то в этом случае метод малых воз-
мущений принципиально не применим. С другой стороны, при ли-
неаризации, выполняемой с учетом реальных условий задачи,
может оказаться, что в целом нелинейная функция (например,
су = су(а) в большой окрестности точки, соответствующей начально
невозмущенному движению, имеет линейный характер. В таком
случае возмущения могут считаться малыми в пределах всей этой
окрестности.
Итак, в результате линеаризации исходных уравнений движе-
ния получается система уравнений, описывающих движение линей-
ной модели самолета. Поскольку эти уравнения имеют переменные
коэффициенты, то следующие упрощения связаны с возможностью
замены их уравнениями с постоянными коэффициентами. Такая
замена оказывается возможной при использовании методов «за-
мороженных коэффициентов» [26].
11
Этот метод основывается на предположении, что продолжитель-
ность переходных процессов при возникновении возмущений неве-
лика, так что за это время характеристики основного (невозмущен-
ного) движения изменяются существенно слабее, чем характери-
стики возмущений. Иначе говоря, считается, что переходный
процесс успевает закончиться прежде, чем произойдут сравнитель-
но большие изменения характеристик основного движения. Тогда
кинематические характеристики основного движения можно поло-
жить постоянными в течение всего интервала времени возмущенно-
го движения и равными по величине их значениям в начале этого
интервала.
Далее, сильно упрощающим является допущение о возможности
разделения системы дифференциальных уравнений движения на
две независимые системы: систему, описывающую продольное воз-
мущенное движение, которое происходит в плоскости симметрии
самолета Х\Оу\, и систему, описывающую боковое возмущенное
движение самолета, которое происходит в плоскостях y\Oz\ и
XiOzi. Это допущение, основанное на учете симметричности самоле-
та относительно плоскости XiOyi, наиболее справедливо для случая,
когда в качестве основного невозмущенного движения принят уста-
новившийся прямолинейный полет. В этом случае силы и моменты,
действующие на самолет в плоскости симметрии XiOz/i, не зависят
от параметров бокового движения (р, у, ф, сох, ©у), а силы и момен-
ты, действующие в двух боковых плоскостях, — от параметров про-
дольного движения (а, О, 0, V, coz) \
Наконец, остановимся еще на одном важном вопросе. В общем
случае движение самолета является неустановившимся. Поскольку
при этом происходит обтекание самолета неустановившимся пото-
ком воздуха, то аэродинамические силы и их моменты зависят не
только от углов атаки и скольжения, скорости и высоты полета,
углов отклонения рулей, но и от их производных по времени, что
чрезвычайно усложняет исследование характеристик движения [28].
В связи с этим при исследовании неустановившегося движения
самолета используется гипотеза стационарности, которая
формулируется следующим образом: аэродинамические си-
лы и моменты, действующие на самолет в неустановившемся
полете в данный момент времени, такие же, какими они были бы
при обтекании стационарным потоком, т. е. определяются только
кинематическими характеристиками движения в данный момент.
Применение гипотезы стационарности основывается на том, что при
неустановившемся движении самолета изменение кинематических
характеристик движения: углов атаки и скольжения, скорости и
высоты полета происходит сравнительно медленно и нестационар-
ность обтекания на величины аэродинамических сил и моментов
сказывается незначительно.
В соответствии с гипотезой стационарности аэродинамические
1 Подробно эти вопросы освещены в работе [28].
12
силы являются функциями углов атаки и скольжения, скорости и
высоты полета, углов отклонения рулей; аэродинамические момен-
ты являются функцией этих же аргументов и угловой скорости вра-
щения самолета вокруг центра масс.
В результате всех рассмотренных выше упрощений удается по-
лучить две системы дифференциальных уравнений, достаточно
приемлемых для исследования динамики полета самолета.
§ 3. УРАВНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ САМОЛЕТА
(В СПОКОЙНОЙ АТМОСФЕРЕ)
В продольной плоскости на самолет действуют сила тяжести
G = mg (рис. 1.9), направленная по вертикали, подъемная сила У,
направленная перпендикулярно скорости набегающего потока, сила
лобового сопротивления X, направленная по скорости этого потока,
и тяга двигателей Р, направленная к потоку под углом, близким к
углу атаки а (полагая угол установки двигателей относительно
оси О%1 равным нулю).
Продольное движение самолета наиболее удобно рассматривать
в скоростной системе координат. В этом случае проекция вектора
скорости на ось Оу равна'нулю. Угловая скорость вращения каса-
тельной к траектории движения центра масс относительно оси Oz
<0^= —0 = $— а.
Тогда уравнения движения центра масс самолета в проекциях
на оси Ох и Оу имеют следующий вид:
проекции сил на ось Ох (касательную к траектории):
mV = - X—О sin 0 4- Р соз а; (1.2)
проекции сил на ось Оу (нормаль к траектории):
mV$ = Y — О cos 0Р sin а. (1.3)
Уравнения, описывающие вращение самолета относительно
центра масс, наиболее простыми получаются в связанной системе
координат, поскольку ее оси сов-
падают с главными осями инер-
ции. Так как при рассмотрении
изолированного продольного дви-
жения полагаем 0=0 (при этом
условии скоростная система ко-
ординат совпадает с полусвязан-
ной) и, следовательно, ось Oz ско-
ростной системы координат сов-
падает с осью Ozi связанной
системы, то уравнение моментов
относительно оси Oz имеет вид1:
1 Момент, создаваемый тягой двигателей, здесь не учитывается.
Рис. 1.9. Силы и момент, действую-
щие на самолет при продольном дви-
13
(1.4)
где Iz— момент инерции самолета относительно оси Oz\
Mz — аэродинамический момент тангажа, продольный момент.
Для анализа характеристик продольного движения самолета
относительно его центра масс необходимо добавить уравнение свя-
зи углов атаки, тангажа и наклона траектории:
а = &-9. (1.5)
При рассмотрении динамики продольного траекторного движе-
ния самолета — движения его центра масс относительно земли —
необходимы еще два кинематических уравнения:
xg = L~-=V cos 9; (1.6)
yg=Z/ = I/sin9, (1.7)
где Н — высота полета;
Л —пройденное расстояние вдоль оси Oxg земной системы координат, кото-
рая предполагается совпадающей по направлению с осью Ох скоростной
системы.
В соответствии с гипотезой стационарности аэродинамические
силы и моменты являются нелинейными функциями следующих
параметров:
Х=Х(а, V, М,р„);
К —К (а, V, М, ря);
Л1г=Л4л(8в, а. *, », К, М, ря),
где М = -----; (ан — скорость звука на высоте полета);
ан
рн — плотность воздуха на высоте полета;
6в — угол отклонения руля высоты.
Эти силы и моменты могут быть записаны через аэродинамиче-
ские коэффициенты:
X=cxS^-,
х 2
y=c.S^--, (1.8)
М,=п,5Ък ,
где Сх = сх (а, ТА) —коэффициент лобового сопротивления;
Cy = cv (а, М) —коэффициент подъемной силы;
mz—mz (6в, а, а, О, Л4) —коэффициент продольного момента Мг\
S —площадь крыла самолета;
Ьа — средняя аэродинамическая хорда САХ.
Тяга двигателей также является нелинейной функцией ряда па-
раметров:
Р=Р(8Д, М, р„, Т н),
14
где дд — перемещение органа, управляющего тягой двигателей;
рн —давление на высоте полета;
Тн — абсолютная температура воздуха на высоте полета.
Будем рассматривать в качестве невозмущенного движения ус-
тановившееся прямолинейное движение
(Йо=^=9о=^=О)’.
Тогда для невозмущенного движения система уравнений примет
вид:
— XQ —Gsin0o + Po cos а0=О; (1.9)
Yo — Geos 0о-^-Ро sin ао=О; (1.10)
^го = 0; (1.11)
«о=»о-9о; (Ы2)
•^^=l/ocos9o; (1-13)
№o = l/osin0o. (1.14)
Полагаем, что параметры возмущенного движения могут быть
выражены через их установившиеся значения и малые приращения:
а = ап4- Да;
' (1Л5)
6 = Оо+Д0.
Проведя с учетом (1.15) линеаризацию уравнений возмущенно-
го движения (1.2—1.7) и принимая во внимание уравнения невоз-
мущенного движения (1.9—1.14), получим систему линейных диф-
ференциальных уравнений с постоянными коэффициентами [12]:
/пДV = — XVW — ХМДМ -Л’Да - X?pyH&yg—О cos 0оД0 +
4*рм cos д0ДМ — Ро sin а0Да-|-Р? cos %ptAyg~\-PT cos %Гун^уе +
+ Р8 COS а0Д8д; (1.16)
/п1/оД0 = И'Д V + УМДМ + Г “Да -и Г₽рУД yg + G sin 0ОД0 +
4" Рм sin а0ДМ + Рй COS а0Да Р? sin аор^Д^
+ Р т sin *0TyfAyg + Р8 sin а0Д8д; (1.17)
7/= /И*Д8В 4- Ж^Да + М£Да -ф Л^Д» +
1 Обозначая переменные для невозмущенного движения, будем добавлять
индекс <0».
15
-\-Mvz^V ^M^M-\-M^yg- (1.18)
Axg = (lZ0+Al/)cos60-I/0sin60A9; (1.19)
A^=(Vo + Ar)sin9o + rocos6oA0; t1-20)
Д6 = д& — Да.
В этих уравнениях для упрощения письма введены символиче-
ские обозначения частных производных:
Xv= — ; хл= — ; Х° - — ; р*= и т. д.
dV да д?н dyg
При исследовании динамики захода на посадку и посадки са-
молета уравнения (1.16—1.18) могут быть упрощены за счет пре-
небрежения (по их малости) членами, содержащими производные
по параметрам р, Т, производными аэродинамических сил и их мо-
ментов по числу М. По аналогичным соображениям производную
Рм можно заменить производной Pv, а приращение ДМ — прира-
щением ДУ. Кроме того, в уравнении моментов необходимо учесть,
что М2г=0 и Л!? =0, поскольку коэффициент момента Щ2о=О. Тогда
уравнения (1.16—1.18) примут вид:
тду = - XvLV - - G cos 6оД0 + Pv cos а0ДV -
— Ро sin а0Да + Р* COS а0 Д 8Д;
/пУод9=У КЛИ + Г“Да + О sin 0оД0 -ф Pv sin а0ДУ +
+ Рй cos а0Да -|- Р° sin а0Д8л;
4» = М*г Д8В + Да + М“ Ья + М* Д
r^e Xv=cXaS?V0-,
yt />а S •
X =cxS—,
YV=cl/oSPV0-,
Г = еа^-у-0;
7И’г =m\ SbA i
A 2
(1.16a)
(1.17a)
(1.18a)
(1.21)
16
=niazSbA—\
л 2
-Л » m.
—tnг SbA —- •
Значения коэффициентов сх, су, с*, су, тг, mz, mz, mz оп-
ределяют с помощью графиков, составляемых на основании резуль-
татов продувки моделей самолетов в аэродинамических трубах и
летных испытаний самолета.
Характеристики Ps необходимы при рассмотрении случаев, ког-
да в возмущенном движении происходит перемещение органа,
управляющего тягой, например, при рассмотрении продольного
движения самолета, одновременно управляемого автопилотом и
автоматом тяги (автоматом скорости). Если же в процессе возму-
щенного движения Абд=0, то последний член в уравнениях (1.16 и
1.17) равен нулю.
Анализируя устойчивость движения неуправляемого самолета
(с зажатыми органами управления), нужно учитывать, что устой-
чивость такого движения совершенно не зависит от координаты xg
и практически не зависит, вследствие пренебрежения влиянием
рн и Тн, от координаты yg. Поэтому при анализе устойчивости дви-
жения самолета без системы автоматического управления уравне-
ния (1.19 и 1.20) можно исключить из рассмотрения.
Обозначив т = -2т и вводя у.п = — (коэффициент отно-
PflSVo РО^Д
сительной плотности самолета в продольном движении), после
некоторых преобразований и группировок подобных членов систему
уравнений неуправляемого самолета можно привести к следующе-
му виду [12]:
as Д 0 -|- аада + Д V + a j/Д V=at Д8д',
Дё-М0-6«Да-М^ = М8д; (1.22)
ДЯ Д& 4~ Да + £«Да=СгД8В;
Д0=Д&—Да.
где
at>=g cos 0О;
а — Ко _с । 20 cos flo \.
«а— [С Су -f- ,
т \ SpoV? )
PV COS ар \
•Sppyp /
= —COS а0;
17
. £sine0.
(cJ/o J
tVo '
, ___ P8 sin я0 .
S~ mV0 ’
2Gsin 6q
° SpoVg
PV sin яр \ ,
-'р(Уо '
h QP0^
4 = -—^—-
m"zz
(1.23)
x2rz
m^n .
T2r2
Л i.
Ca =----rt
Ci ~
bA bAm ’
а=Да — ;
V0
ш = w — = Д& — .
2 2 Vp Vp
Заметим, что члены, содержащие управляющие координаты
дд и _дв, находятся в правой части уравнений. Характеристический
полином для системы уравнений движения неуправляемого само-
лета (с зажатыми органами управления) имеет следующий вид:
>1(Р) = /’44-Л1Р3+«2Р2 + ааР + а4. (1.24).
где at=av +Ьа-Ь9-\-с^ -{-ci;
«2= a v (Ьа - *в) — bV (ал - йв) + V» + С а + (CS + Ci ) {av ~ 6«)>
a-3 = cAav — ^) + с&(«рА_аА') + (с& )(ао&и “avb^
aybfj)'
18
Согласно критерию Гурвица-Рауса движение, описываемое
уравнением четвертого порядка, устойчиво тогда, когда коэффици-
енты аь а2, а3 и а4 положительны и a3(aia2—аз)—a4ai2>0.
Эти условия обычно удовлетворяются не только для режимов
захода на посадку, но и для всех эксплуатационных режимов поле-
та дозвуковых гражданских самолетов. Корни характеристического
полинома (1.24) обычно комплексно-сопряженные, различные по
величине, и им соответствуют два различных колебательных движе-
ния. Одно из этих движений (короткопериодическое) имеет малый
период с сильным затуханием. Другое движение (длиннопериоди-
ческое, или фугоидное) является медленно затухающим движением
с большим периодом.
Вследствие этого возмущенное продольное движение может
рассматриваться как взаимное наложение этих двух движений.
Учитывая, что периоды этих движений весьма различны и что ко-
роткопериодическое колебание сравнительно быстро затухает (за
2—4 сек), оказывается возможным рассматривать короткоперио-
дическое и длиннопериодическое движения изолированно друг
от друга.
Возникновение короткопериодического движения связано с на-
рушением равновесия моментов сил, действующих в продольной
плоскости самолета. Это нарушение может быть, например, резуль-
татом воздействия ветрового возмущения, приводящего к измене-
нию угла атаки самолета, аэродинамических сил и моментов.
Вследствие нарушения равновесия моментов самолет начинает
поворачиваться относительно поперечной оси Oz. Если движение
устойчиво, то он вернется к прежнему значению угла атаки. Если
же нарушение равновесия моментов произошло вследствие откло-
нения руля высоты, то самолет в результате короткопериодического
движения выйдет на новый угол атаки, при котором равновесие мо-
ментов, действующих относительно поперечной оси самолета, вос-
станавливается.
За время короткопериодического движения скорость самолета
не успевает значительно измениться.
Поэтому при исследовании такого движения можно полагать,
что оно происходит при скорости невозмущенного движения, т. е.
можно принять AV=0. Полагая исходный режим близким к гори-
зонтальному полету (0 — 0), можно исключить из рассмотрения
член, содержащий &е.
В этом случае система уравнений, описывающих короткоперио-
дическое движение самолета, принимает следующий вид:
дё-Ма = 0;
+ Aa-|-6?aAa = fsA6B;
Д0 = Д& —Да.
(1.25)
19
Характеристический полином для этой системы
имеет вид:
где + +с9 I 1
уравнений
(1.26)
(1-27)
Короткопериодическое движение устойчиво, если коэффициенты
а\ и а2 положительны, что обычно и имеет место, поскольку в об-
ласти эксплуатационных режимов величины ba, са, са и с» сущест-
венно положительны.
Характеристический полином (1.26) имеет следующие корни:
а 1 / л?
2= —J ± / |/ "Т" > Рз = 0*
* 2 г 4
Отрицательная действительная часть корней pi,2 указывает на то,
что с течением времени отклонение угла атаки от исходного значе-
ния стремится к нулю. При этом величина
---- определяет
частоту собственных колебаний самолета в короткопериодическом
Д]
2
движении, а величина
их затухание. Первая величина
определяется главным образом коэффициентом т} , характеризу-
ющим степень продольной статической устойчивости самолета.
В свою очередь коэффициент зависит от центровки самолета,
т. е. от взаимного расположения точки приложения аэродинамиче-
ской силы и центра масс самолета.
Вторая величина, обусловливающая затухание, определяется
в большой степени коэффициентами моментов m^z и • Коэффи-
циент т\г зависит от площади горизонтального оперения и его
расстояния от центра масс, а коэффициент тлг еще и от запаздыва-
ния скоса потока у оперения. Практически, вследствие большого
затухания, изменение угла атаки имеет характер, близкий к апе-
риодическому.
Нулевой корень р3 указывает на нейтральность самолета отно-
сительно углов # и 0. Это является следствием сделанного выше
упрощения (ДУ=0) и исключения из рассмотрения сил, связанных
с изменением угла тангажа, что допустимо только для начального
периода возмущенного продольного движения — короткопериоди-
ческого *. Изменения углов ДО и Д0 рассматриваются в длиннопе-
риодическом движении, которое упрощенно можно считать начина-
ющимся после окончания короткопериодического движения. При
1 Подробно по этому вопросу см [26].
20
этом Да=0, а величины углов тангажа и наклона траектории отлич-
ны от значений, имевших место в исходном невозмущенном движе-
нии. Вследствие этого нарушается равновесие проекций сил на
касательную и нормаль к траектории, что приводит к возникнове-
нию длиннопериодических колебаний, в процессе которых происхо-
дят изменения не только углов # и 0, но и скорости полета. При
условии устойчивости движения равновесие проекций сил восста-
навливается и колебания затухают.
Таким образом, для упрощенного исследования длиннопериоди-
ческого движения достаточно рассмотреть уравнения проекций сил
на касательную и нормаль к траектории, полагая Да = 0. Тогда сис-
тема уравнений продольного движения принимает вид:
Характеристический полином для этой системы уравнений
имеет вид:
^(р)д=Р2 + «1Р + «2,
где cl 1 - cl Ьц• ^2—~~~
Устойчивость движения обеспечивается при условии ai>0;
02>О. Затухание колебаний существенно зависит от значений про-
изводной Pv и коэффициента сХо, а частота собственных колеба-
ний— еще и от коэффициента сУо, поскольку эти коэффициенты
определяют величины проекций сил на касательную и нормаль к
траектории.
Следует отметить, что для случаев горизонтального полета, на-
бора высоты и снижения с малыми углами 0 коэффициент bQ
имеет очень малую величину. При исключении члена, содержащего
йо, из второго уравнения (1.28) получаем a\ = av; a2 = a§bv.
§ 4. ВОЗМУЩЕНИЯ, ДЕЙСТВУЮЩИЕ В ПРОДОЛЬНОЙ
ПЛОСКОСТИ САМОЛЕТА. УРАВНЕНИЯ ПРОДОЛЬНОГО
ДВИЖЕНИЯ САМОЛЕТА В НЕСПОКОЙНОЙ АТМОСФЕРЕ
Возмущения, действующие в полете, могут быть разделены на
три группы. К первой из них относятся возмущения, вызванные
управляющими воздействиями летчика или системы автоматическо-
го управления, ко второй — возмущения, появляющиеся вследствие
изменения состояния самолета, к третьей — возмущения, связанные
с изменениями состояния атмосферы.
Рассмотрим подробно все три группы возмущений применитель-
но к продольному движению самолета.
В общем случае для управления движением самолета необходи-
мо иметь возможность воздействовать на вектор равнодействующей
внешних сил. Это может быть достигнуто путем управления аэро-
динамической силой и тягой двигателей.
21
В основном управление аэродинамической силой ведется с по-
мощью руля высоты. В последние годы для этих целей используют
управляемый стабилизатор.
При отклонении руля высоты и стабилизатора нарушается рав-
новесие моментов относительно оси Ozi, вследствие чего самолет
поворачивается вокруг этой оси. Изменяются угол атаки и аэроди-
намическая сила (рис. 1.10).'
Изменение аэродинамической силы может быть достигнуто и без
поворота самолета относительно оси Ozi, за счет отклонения за-
крылков (рис. 1.11), интерцепторов, щитков, предкрылков и других
средств, изменяющих эффективную кривизну профиля крыла, его
площадь или характер обтекания.
Управление аэродинамической силой по первому способу требу-
ет значительно меньших энергетических затрат. Это объясняется
тем, что даже малое изменение подъемной силы горизонтального
оперения ДУг.о (см. рис. 1.10), достигаемое небольшим отклонением
руля высоты или стабилизатора, создает значительный момент от-
носительно оси Oz\ на плече Lr.o- При этом энергетические затраты
на управление определяются величиной шарнирных моментов.
При управлении по второму способу энергетические затраты оп-
ределяются величиной моментов, потребных для отклонения на
большие углы закрылков и т. п., площади которых весьма значи-
тельны. Преимуществом данного способа управления является его
меньшая «инерционность». Отклонение этих управляющих поверх-
ностей сразу же приводит к изменению аэродинамической силы,
тогда как при отклонении руля высоты или стабилизатора измене-
ние аэродинамической силы рроисходит только после изменения
угла атаки самолета.
Если бы удалось обеспечить возможность быстрого отклонения
закрылков и т. п., что ограничивается необходимостью применения
Рис. 1.10. Изменение аэ-
родинамической силы и
ее проекций при откло-
нении руля высоты
22
очень мощных приводов и рядом
конструктивных трудностей, то
управление по второму способу,
довольно ограниченное в настоя-
щее время, нашло бы весьма ши-
рокое применение на посадочных
режимах.
Управление тягой достигается
путем изменения режима работы
двигателей. В тех случаях, когда
вектор тяги не проходит через
центр масс самолета, ее измене-
ние приводит к нарушению рав-
новесия моментов относительно
поперечной оси самолета.
Управляющие воздействия
учитывались в уравнениях про-
дольного движения (1.22) через
члены, содержащие координаты
бв и бд. Если же для управления
используются другие органы, то в
правой части уравнений движе-
ния необходимо ввести соответ-
ствующие члены. Например, при
Рис. 1.11. Поляры самолета Ту-124
при различных углах отклонения за-
крылков
управлении продольным движе-
нием с помощью закрылков в правую часть необходимо ввести
член, являющийся функцией угла отклонения закрылков б3. Изме-
нения состояния самолета возникают в результате уменьшения ве-
са самолета из-за выработки топлива, изменения центровки само-
лета, например,, из-за перемещения пассажиров, выпуска шасси.
Вследствие этого нарушается равновесие сил и моментов в про-
дольной плоскости самолета. Указанные изменения носят относи-
тельно медленный характер и не оказывают влияния на коротко-
периодическое движение самолета.
Когда необходимо учитывать изменения состояния самолета, в
правую часть уравнения моментов вводят член, пропорциональный
моменту дисбаланса вследствие изменения веса и центровки. Иног-
да в подобных случаях в правую часть уравнения проекций сил на
нормаль к траектории также вводят член, учитывающий изменение
веса самолета.
Возмущения, связанные с изменением состояния атмосферы,
являются следствием движения воздушных масс. Как показали ис-
следования, широко проводимые в последние два десятилетия, дви-
жение воздушных масс переменно как во времени, так и в про-
странстве. При схематизации этого чрезвычайно сложного движе-
ния его принято делить на крупномасштабное (ветры) и
мелкомасштабное (турбулентность). Такое деление, как это будет
ясно в дальнейшем, позволяет считать, что ветры главным образом
23
оказывают влияние на траекторное движение центра масс самоле-
та, а турбулентность — на угловые движения самолета относитель-
но его центра масс, азатем на траекторное движение.
Вектор скорости W движения воздушных масс относительно зем-
ли может быть условно представлен в виде двух составляющих
г=^0+Гс,
где 1Го — постоянная составляющая, учитывающая упорядоченные потоки возду-
__ ха большой протяженности;
Wc — переменная (случайная) составляющая, учитывающая турбулентные
порывы воздуха.
Ветры направлены в основном в горизонтальной плоскости.
Поэтому связанные с ними возмущения продольного движения яв-
ляются результатом изменения скорости движения самолета отно-
сительно земли.
Атмосферная турбулентность предположительно имеет форму
отдельных слоев. В каждом из них турбулентность гомогенна и изо-
тропна. Первое означает, что статистические свойства турбулентно-
сти одинаковы в каждой точке поля скоростей турбулентности,
второе, — что при статистическом описании поля скоростей турбу-
лентности координатные оси можно ориентировать любым образом.
Хотя в общем случае характеристики атмосферной турбулент-
ности не являются стационарными, все же оказывается возможным
с приемлемой точностью рассматривать турбулентность как стацио-
нарный случайный процесс, теория которых хорошо разработана.
Основным параметром, характеризующим турбулентность, яв-
ляется интенсивность представляющая собой среднеквадрати-
ческое значение случайной составляющей скорости Wc. При этом
интенсивность и спектр атмосферной турбулентности находятся во
взаимосвязи.
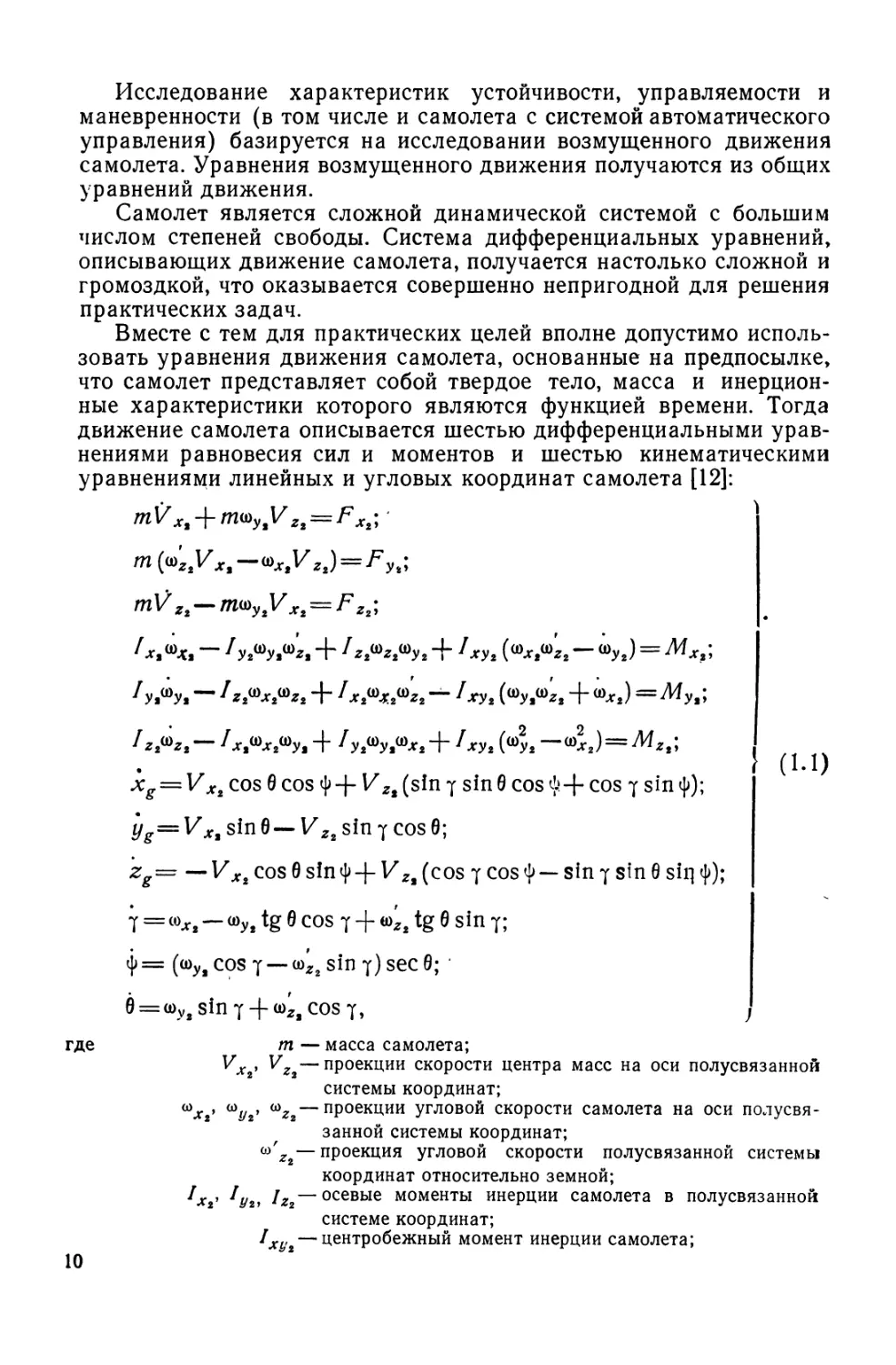
Характер распределения вероятности интенсивности (Jw
(рис. 1.12) позволяет оценить долю времени полета, которую само-
лет будет лететь в турбулентной атмосфере с определенной интен-
сивностью. Так, площадь, заключенная между ординатами o и
o^z2, характеризует долю времени, в течение которой самолет будет
лететь при интенсивности турбулентности в пределах между
□vTi и ovr, [38].
Анализируя характер распределения вероятностей ovr по высо-
там (рис. 1.13), нетрудно заметить, что вероятность полета при
сильной турбулентности уменьшается с увеличением высоты полета.
Это хорошо подтверждается опытом летной эксплуатации на даль-
них и местных авиалиниях.
Среднеквадратическое значение случайной составляющей ско-
рости находится в некоторой связи со средней скоростью ветра Wq.
Для приземных слоев атмосферы среднеквадратическую величину
случайной составляющей скорости часто полагают прямо пропор-
24
циональной Wo, причем коэффициент пропорциональности прини-
мают лежащим в пределах 0,03—0,3, т. е. ow~ (0,03-j-0,3) УУ0.
На малых высотах вследствие влияния рельефа и покрова зем-
ной поверхности турбулент-
ность обладает свойствами го-
могенности и изотропности в
значительно меньшей мере.
Для этих условий определен-
ный интерес представляет ис-
следование продольного дви-
жения самолета, на который
воздействует поток, имеющий
форму ступеньки (единичная
ступенчатая функция). В об-
щем случае поток действует
под некоторым углом к гори-
зонтальной плоскости.
Пусть в исходном режиме,
при отсутствии турбулентного
возмущения, самолет летел с
углом атаки ао (рис. 1.14, а),
образуемым вектором скорости
набегающего потока Уц, и
осью Oxi. Вектор Ущ, антико-
линеарен вектору _воздушной
скорости самолета УВо и совпа-
дающему с ним в этих услови-
ях вектору путевой скорости У.
Вследствие Действия возму-
щения W, которое будем пола-
гать имеющим форму ступень-
ки, направление вектора набе-
гающего потока сразу откло-
нится от своего прежнего по-
ложения на угол ат, который
представляет собой прираще-
ние угла атаки за счет турбу-
лентного возмущения (рис.
1.14, б). Очевидно, что и на-
правление вектора воздушной
скорости самолета Ув также
изменится на угол ат. Он не
будет совпадать_с вектором пу-
тевой скорости У, который, бу-
дучи направленным по каса-
тельной к траектории, сохра-
нит в начальный момент свое
прежнее направление.
Рис. 1.12. Функции распределения ве-
роятности flaw) среднеквадратиче-
ской скорости случайного ветра для
различных условий погоды:
/ — турбулентность ясного неба; 2 —куче-
вых облаков; 3 — гроз
Рис. 1.13. Функции распределения ве-
роятности среднеквадратической ско-
рости случайного ветра по Н:
/ — Я=30 Ч-300 ж; 2 — 300ч-600 ж; 3 — 600-ч-
4-3000 ж; 4 — 3000-М1 000 ж; 5 — 11 000 ч-
-т-15 000 ж; 6 — 15 ООО-т-18 000 ж
25
Поскольку в скоростной системе координат ось Ох направлена
по касательной к траекторий, вектор воздушной скорости FB обра-
зует с ней угол ат. Поэтому подъемная сила У, направленная пер-
пендикулярно скорости FB, и сила лобового сопротивления X, на-
правленная навстречу скорости FB, дадут ненулевые проекции на
оси Ох и Оу (рис. 1.15). Очевидно, что эти аэродинамические силы
являются функциями угла атаки а и модуля скорости FB. Заметим,
что угол а образуется между осью Охв, ориентированной по векто-
ру скорости Fb, и осью Охь
Угол, образованный осями Охв и Oxg, представляет собой угол 0
наклона вектора воздушной скорости VB относительно горизонталь-
ной плоскости. Он отличается от угла 0* наклона вектора путевой
скорости V (касательной к траектории) относительно горизонталь-
ной плоскости на величину ат.
Тогда уравнения продольного движения самолета в неспокойной
атмосфере получают такой вид:
mV = —X cosaT-\-Y sinaT — Gsin6* + ^*cos (a —aT);
mVft*=XsinaT-i-Kcos aT — G cos 6*-|-Psin(a—aT);
0 = 0 — a;
xg— V cos 0*;
26
yg~V sin 6*;
0* = 6 + aT;
aT = arctg
•®y
V 4- wx
где wx и wy — проекции вектора скорости ветра на соответствующие оси.
Ввиду малости w по сравнению с V можно полагать
smaT^aT, COsaT^l, tgaT«aT, aT= .
С учетом этих упрощений и допущений, сделанных ранее при выво-
де системы уравнений (1.22), можно получить систему уравнений
продольного движения самолета в неспокойной атмосфере в ва-
риациях [12]:
йфДв -j- “f“ д -р ci у —dy х -р я^д&д*,
дё-^дб — bh>.-bvbV = — bvwx— ^-®|/4-^д8д;
Д&+Д&-|- саДа + саДа = с8Д8в;
Lxg=(Уо + ДУ) COS 0О - Уо sin 90Д 6;
Д^= (Vo+д v) sin %+v0 cos е0 де*;
Д6 = Д& —Да;
Д6* = Д04- ?£. .
Vo
(L29:
Значения коэффициентов, входящих в уравнения (1.29), опреде-
ляются по формулам (1.23).
Реакцию самолета на различного рода воздействия удобно ана-
лизировать, используя передаточные функции, легко получаемые
по известным правилам из системы уравнений движения.
Рис. 1.15. К изменению
направления подъемной
силы и связи углов а,
ат, 0, 0* и -О*
27
Рис. 1.17. Структурная схема самоле-
та по углу наклона траектории
Рис. 1.16. Структурная схема са-
молета по углу атаки
Вначале приведем и проанализируем передаточные функции* 1
для углов Да, Д0 и ДО при отклонении руля высоты, полученные из
уравнений продольного движения при постоянной скорости (Д7=0).
Будем полагать при этом, что исходный режим близок к горизон-
тальному полету и поэтому бе = 0:
„+(,+е>+х+^. ; (1.зо)
— = 8 (р) =---------—------------------; (1.31)
AS Р [Р2 + (^а + Са + ) Р + Са + ]
А& IV7 Ъ \
— = w ъ(р)= ------------—-------.
AS Р [р2 + (^а + 4- ) Р 4- Ь]
Из рассмотрения передаточной функции (1.30) и соответствую-
щей ей структурной схемы (рис. 1.16) видно, что динамика движе-
ния самолета по углу атаки при отклонении руля высоты совпадает
с динамикой колебательного звена (на структурных схемах исполь-
зованы обозначения по формулам (1.26)).
Частота собственных колебаний звена
20 — V сл+ Ьасъ — у — I mz SbА.
Коэффициент относительного затухания колебаний
4" С 'а. 4"
2 /«а + Ьа С»
_а £ S&A (। со \
С ------~(тг +
m Iz
h \ 2т
Передаточная функция для угла наклона траектории представ-
ляет собой последовательное соединение колебательного и интегри-
рующего звеньев (рис. 1.17). Для угла тангажа передаточная
функция может быть представлена последовательным соединением
колебательного звена, параллельно включенных усилительного и
d
1 Здесь и далее используется оператор р = —
dt
28
дифференцирующего звеньев и интегрирующего звена (рис. 1.18).
Положив р=0 в передаточной функции Wl (р), получим значе-
ние установившегося а при отклонении руля высоты на Лбв:
Да= —-------Д5В=------------------------Д8В. (1.32)
Очевидно, что при подаче единичного скачка А6В на вход опера-
торов Wf (р) и Wf (р), содержащих интегрирующие звенья, нельзя
получить установившегося значения углов 0 и О.
Значительный практический интерес представляет реакция са-
молета на отклонение руля высоты с точки зрения изменения нор-
мальной перегрузки самолета пу. Как известно, в горизонтальном
полете пу=1. Приращение нормальной перегрузки при криволиней-
ном движении в продольной плоскости
кпу-=пу — 1= — , (1.33)
g
где jv — нормальное ускорение.
Поскольку jy= VpQ, то с учетом (1.31) получим
д»в= _ X.-----------------------------------дз (1.
g g Р2 4- (К + са 4- ) р + са + Ьа
Нетрудно увидеть, что передаточная функция для изменения
нормальной перегрузки №пъу (р) имеет ту же структуру, что и пе-
редаточная функция для угла атаки, отличаясь от нее коэффициен-
том — &а.
g
Заметим также, что, положив р = 0 в этой передаточной функции,
мы получим величину, обратную одной из важных характеристик
продольной статической управляемости 32 = ~— коэффициент
расхода руля высоты для изменения нормальной перегрузки само-
лета на Дпу= ± 1.
Зная передаточную функцию для нормальной перегрузки и учи-
тывая связь между линейным отклонением у, ускорением ]у и нор-
мальной перегрузкой (у= Цг=—^] » можно записать переда-
\ Р2 Г /
точную функцию для отклонения по нормали к траектории
Д& Р2 [р2 4- (Ра 4- ) р -Ь са 4- Ьл с* ]
х29
Для случая, когда в качестве исходного режима принят гори-
зонтальный полет, величина у характеризует изменение высоты
полета. Очевидно, что в таком случае отклонение руля высоты при-
водит к изменению высоты полета. Возвращение руля высоты в
исходное положение не приведет к выходу самолета на исходную
высоту полета. После окончания переходного процесса самолет бу-
дет лететь на другой высоте.
Сходная картина наблюдается и при попадании самолета в
вертикальные потоки воздуха. Это можно увидеть из рассмотре-
ния передаточной функции для отклонения по нормали к траекто-
рии под действием вертикального потока Wv:
(п)= ____________^а_СР_+£»)___________
p[f^ + (t>a + ^+c^) р + са + Ьас^]
Эту передаточную функцию легко получить из передаточной
функции для нормальной перегрузки
(,) =________________________________
Wy g [р2 4“ (\ 4- са + )р + са 4- Ьл С'§ ]
Передаточная функция (1.35) может быть использована для оп-
ределения зависимости нормальной перегрузки от нормальной со-
ставляющей случайного ветра.
Как известно, если на линейную систему с передаточной функ-
цией W (р) действует входная величина со спектральной плотностью
Sx((o), то спектральная плотность выходной величины Sy((o) опре-
деляется зависимостью
где | Wy (j(d) |—модуль1 комплексной передаточной функции системы, получае-
мой из передаточной функции W(p) подстановкой p=j&.
С учетом этого среднеквадратическая величина нормальной пе-
регрузки 0Пу может быть определена из следующей зависимо-
сти [12]:
где Gw — среднеквадратическая величина скорости случайного ветра;
L — интегральный масштаб турбулентности, равный 300 м\
V — скорость полета.
1 Иногда модуль комплексной передаточной функции | Wv(j&) | обозначают
через (со) и называют амплитудно-частотной характеристикой системы
30
Рис. 1.19. Зависимость коэффи-
циента реакции самолета на
нормальную составляющую
случайного ветра от приведен-
ной относительной плотности
оПу можно воспользоваться
Для приближенного определения
зависимостью [12]:
ч - —
у у 2G
//(Н) ж•
——'— коэффициент реакции самолета на нормальную составляющую
л
случайного ветра (рис. 1.19);
А Р*п
« —------приведенная относительная плбтность;
S __ Ь Д
л= ------отношение средней аэродинамической хорды самолета к масшта-
бу турбулентности.
(1.37)
Необходимо помнить, что зависимость (1.37) не учитывает из-
менения коэффициента реакции самолета на нормальный ветер при
автоматическом управлении, как это позволяет сделать зависи-
мость (1.36) благодаря члену W"? (/со).
§ 5. УРАВНЕНИЯ БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
В СПОКОЙНОЙ АТМОСФЕРЕ
Боковое движение самолета обычно рассматривают в связан-
ной системе координат (рис. 1.20), которая повернута на угол а
относительно полусвязанной системы координат и в которой были
записаны уравнения движения самолета (1.1). При раздельном рас-
31
zs
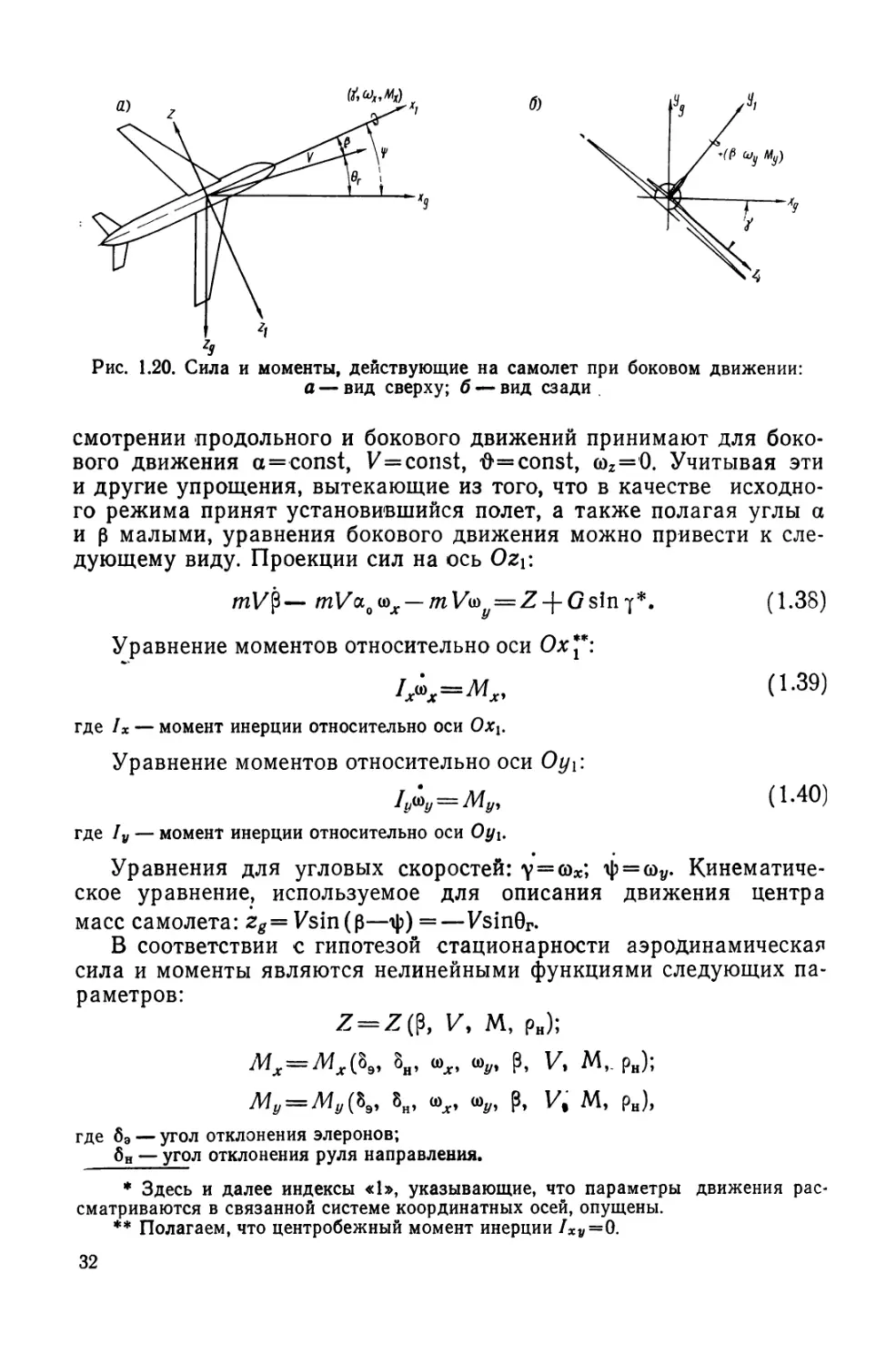
Рис. 1.20. Сила и моменты, действующие на самолет при боковом движении:
а — вид сверху; б — вид сзади
смотрении продольного и бокового движений принимают для боко-
вого движения а=const, V=const, 0=const, coz=0. Учитывая эти
и другие упрощения, вытекающие из того, что в качестве исходно-
го режима принят установившийся полет, а также полагая углы а
и р малыми, уравнения бокового движения можно привести к сле-
дующему виду. Проекции сил на ось Oz\\
mV$— mV^x-mVmy=Z-{Qs\n^t (1.38)
Уравнение моментов относительно оси Ох**:
1хшх=Мх, (1.39)
где /х — момент инерции относительно оси Ох^
Уравнение моментов относительно оси Oyi:
1у*у=Му, (1-40)
где 1У — момент инерции относительно оси Оу^
Уравнения для угловых скоростей: у = сох; 4> = co?/. Кинематиче-
ское уравнение, используемое для описания движения центра
масс самолета: zg = Vsin(p—ф) =—Vsin0r.
В соответствии с гипотезой стационарности аэродинамическая
сила и моменты являются нелинейными функциями следующих па-
раметров:
Z = Z(P, V, М, Рн);
^=44х(оэ, 8Я, со^, р, V, М,. ря);
^ = ^(89, 8„, <ох, р, У, М, рн),
где 6Э — угол отклонения элеронов;
бн — угол отклонения руля направления.
* Здесь и далее индексы «1», указывающие, что параметры движения рас-
сматриваются в связанной системе координатных осей, опущены.
** Полагаем, что центробежный момент инерции IXV=Q.
32
Боковая сила и моменты могут быть выражены через аэродина-
мические коэффициенты:
Z=^Z;
г 2
M =tn S Z;
2
где cz=cz (Р, М) —коэффициент боковой силы;
I — размах крыла;
тх=тх (бэ, бн, (Ох, соу, Р, М) —коэффициент момента Мх;
mv=mv (бэ, бн, (Ox, (ov, Р, М) —коэффициент момента Му.
При невозмущенном установившемся движении Ро=Ро = соЛО=
= со1/о=То=0- Следовательно, Др = р, Др=№, Дсох=(Ох, Дсо1/=(1)1/,
Ду=у* Очевидно также, что Zo=AfvO==tM?/o = O.
Тогда, проведя линеаризацию уравнений (1.38—1.40), можно
получить следующую систему линейных уравнений [30]:
т Vop —/nlZ0a0(ox -~tnV^y= 4“ (1-41)
/А=ЛфДВ9+Л/>Д8Н + (1-42)
7^=Л4‘эД88_|_ж‘нД8н+^>л + Ж^ + ХР. (143)
где Z*=&S ;
; M*=m?xS
М\э=т\эS Р^-1; Х» = ^у«S Z;
Af“-v=m“*5 Р~ l = m^S ;
МтуУ = m^S —l=m^S ;
2 у 4
X=m₽S^Z.
2-3261
33
Коэффициенты с*, /п*н, и т. д. определяют по результатам
продувок моделей самолета в аэродинамических трубах и летных
испытаний самолетов.
Вводя обозначенияЮд.=<0^--^---безразмерная угловая скорость
2 Vq
- I *
крена; —-----безразмерная угловая скорость рысканья;
Р-б= —; — коэффициент относительной плотности самолета в бо-
PoSZ
— 2г
ковом движении; гх= — безразмерный радиус инерции само-
л -— 2г и „
лета относительно оси Ох\, rv= — безразмерный радиус инер-
ции самолета относительно оси Oyi, после ряда преобразований и
группировки подобных членов система уравнений (1.41—1.43) бо-
кового движения приводится к виду [12]:
где
Й + М—Ф—®оТ“ *тТ = О;
т-НЛ+М+^=4э Зэ+Ч8»;
Ф+«фФ + «т т + »Р₽ = «гЛ + «8н8н;
4=v(p-^)=-v6r,
4
(1.44)
li
2т“
= —
Т V0
; h = —
I', = —
4
^3.
4/n^.
TFT ^б;
4/и^э
„-2 ^б’
Э т2/-2
4m5 н
(1.45)
2т*У
п\ -------— ;
4Ч
«р =-----zf-
% = -4-^;
т2г2
У
ns
“2
4т^э
~FT^'
^ry
4/, . -2 = 4/у
ml2 ’ У •
к =
э
)
В первых трех уравнениях (1.44) члены, содержащие управляю-
щие координаты бэ и 6Н, находятся в правой части уравнений. Для
34
(1.47)
этой системы уравнений характеристический полином имеет вид:
^(р)=/'(Р4+а1/’3+«2/’2+«зР + л4). (1-46)
где 4-Пф + ^;
а^—Цп^ — +(^ +
а3=Л#₽+^ «₽—M₽ + (zf «ф ^)^₽ + (^«ф -<р₽)ао;
«4=(Мф •
Один корень характеристического полинома (1.46) равен нулю,
что является следствием нейтральности неуправляемого самолета
(с зажатыми органами управления) по углу курса. В тех случаях,
когда в качестве неизвестной функции рассматривается не ф, а
ф— характеристический, полином имеет четвертый порядок.
• А (/>) = />4 +«1Р3 + а?Р2 + + «4- (1.48)
Значения коэффициентов а\, ая, а3, а4 определяются формула-
ми (1.47).
Характеристический полином имеет два сильно разнящихся по
величине вещественных корня и два комплексно сопряженных кор-
ня. Большой вещественный корень р\^—а\\ малый вещественный
а4
корень --------- ; комплексно сопряженные корни
03____________________________
„ __ 01 4" Р\ + Р2 I ; -| Г 04 (01 4- Р\ + Л>)2
Рзл---------г ± V i '
Этим корням соответствуют три взаимно накладывающихся
движения.
Большому отрицательному вещественному корню соответствует
быстрозатухающее креновое движение. Этот корень определяется
в основном значением коэффициента момента тшхх. Возникнове-
ние этого, так называемого поперечного демпфирующего момента
объясняется тем, что при вращении самолета относительно оси
О%1 угол атаки на опускающемся полукрыле увеличивается, а на
поднимающемся — соответственно уменьшается. Вследствие этого
изменяются подъемные силы полукрыльев. Равенство сил нару-
шается и образовавшийся момент, пропорциональный угловой ско-
рости сох и направленный ей навстречу, тормозит накренение са-
молета.
Малому отрицательному корню соответствует медленно зату-
хающее движение. Если этот корень положителен, что может быть
при а4<0, то движение является неустойчивым: оно характеризует-
ся нарастанием углов у и р и угловых скоростей сох и ыу. Такая не-
устойчивость носит название спиральной, поскольку самолет с
зажатым управлением, обладающий таким видом неустойчивости,
при возмущении движется по нисходящей спирали.
2* 35
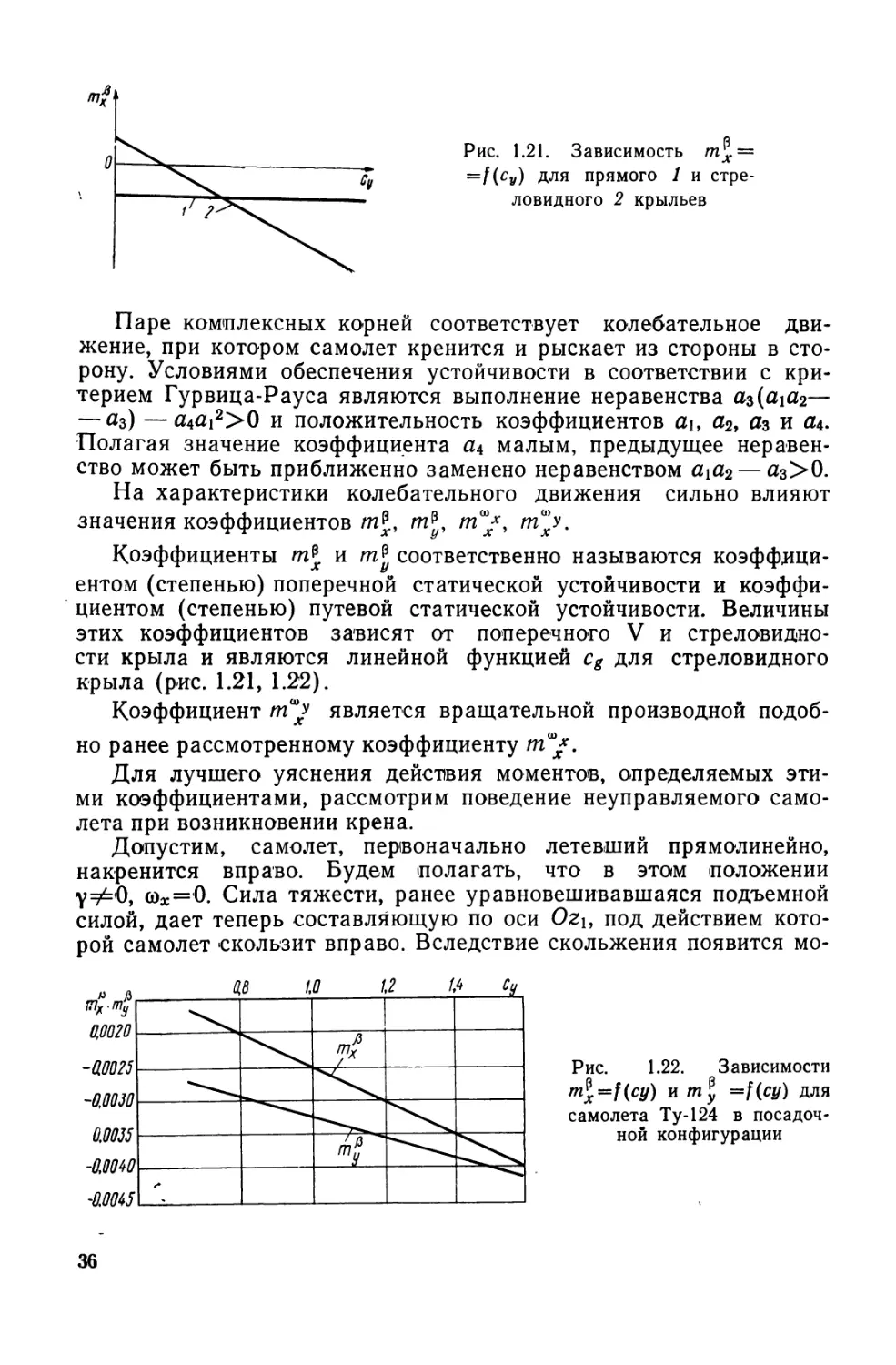
Рис. 1.21. Зависимость =
—f(cv) Для прямого 1 и стре-
ловидного 2 крыльев
Паре комплексных корней соответствует колебательное дви-
жение, при котором самолет кренится и рыскает из стороны в сто-
рону. Условиями обеспечения устойчивости в соответствии с кри-
терием Гурвица-Рауса являются выполнение неравенства аз(^1^2—
— а3) —a4ai2>0 и положительность коэффициентов ai, а2, аз и
Полагая значение коэффициента а4 малым, предыдущее неравен-
ство может быть приближенно заменено неравенством aia2 — аз>0.
На характеристики колебательного движения сильно влияют
значения коэффициентов zn£, т$, rrty.
Коэффициенты т^х и соответственно называются коэффици-
ентом (степенью) поперечной статической устойчивости и коэффи-
циентом (степенью) путевой статической устойчивости. Величины
этих коэффициентов зависят от поперечного V и стреловидно-
сти крыла и являются линейной функцией cg для стреловидного
крыла (рис. 1.21, 1.22).
Коэффициент является вращательной производной подоб-
но ранее рассмотренному коэффициенту т™*.
Для лучшего уяснения действия моментов, определяемых эти-
ми коэффициентами, рассмотрим поведение неуправляемого само-
лета при возникновении крена.
Допустим, самолет, первоначально летевший прямолинейно,
накренится вправо. Будем полагать, что в этом положении
у=£0, (оа = 0. Сила тяжести, ранее уравновешивавшаяся подъемной
силой, дает теперь составляющую по оси Ctei, под действием кото-
рой самолет скользит вправо. Вследствие скольжения появится мо-
Рис. 1.22. Зависимости
и ту Для
самолета Ту-124 в посадоч-
ной конфигурации
36
мент стремящийся выровнять самолет, накреняя его влево, и
момент стремящийся развернуть самолет вправо.
Вращение самолета с угловой скоростью cov\ являющееся след-
ствием действия момента Af^p, приводит к появлению демпфирую-
щего момента Мшу<Оу тормозящего это вращение самолета, и мо-
мента стремящегося увеличить крен самолета.
Момент направлен навстречу моменту AfjP 0. Если момент
поперечной статической устойчивости больше момента М“У(Оу,
то самолет возвращается в горизонтальное положение, но при этом
он летит в другом направлении. Если же момент от угловой скоро-
сти рысканья М^у больше момента от скольжения то крен
самолета возрастает и самолет движется по нисходящей спирали.
Это случай спиральной неустойчивости самолета.
В целом физическая картина бокового возмущенного движения
самолета достаточно сложна. Аналитическое исследование этого
движения без использования моделирующих устройств сопряжено
с большим объемом вычислительных работ. Вместе с тем для реше-
ния ряда практических задач представляется возможным ввести
некоторые упрощения, связанные с рассмотрением частных случа-
ев возмущенного движения, когда отсутствуем скольжение (р = 0)
или крен (у = 0).
Кроме того, для упрощения расчетов и моделирования в уравне-
ниях (1.47) оказывается допустимым исключить некоторые второ-
степенные члены: аоу,/фф, /«ибн, п 5эбэ. С учетом этих упрощений
система уравнений бокового движения приобретает следующий вид:
Ф—^тт=°;
Ф+ t+«₽?=«5h8h;
У(Р-Ф)=-уег.
(1-49)
При этом коэффициенты характеристических полиномов (1.46 и
1.48) также упрощаются:
Я1=/т- 4-/1ф +£₽;
а2=/^ п.^ +«ф)Ар-|-пр;
а3 = £т /р;
й4=/рЛф k-f.
(1.50)
37
§ 6. ВОЗМУЩЕНИЯ, ДЕЙСТВУЮЩИЕ В БОКОВЫХ
ПЛОСКОСТЯХ САМОЛЕТА. УРАВНЕНИЯ БОКОВОГО
ДВИЖЕНИЯ САМОЛЕТА В НЕСПОКОЙНОЙ АТМОСФЕРЕ
Возмущения, действующие в боковых плоскостях xlOzl и y\Ozu
вызываются управляющими воздействиями летчика или системы ав-
томатического управления, изменениями состояния самолета или
состояния атмосферы.
Управляющие воздействия необходимы для создания центро-
стремительной силы, искривляющей траекторию полета. Как
известно, при этом траектория искривляется в той плоскости, в ко-
торой действует центростремительная сила. Например, для выполне-
ния виража необходимо создать центростремительную силу в го-
ризонтальной плоскости. Такая сила может быть создана накрене-
нием самолета, скольжением или созданием одновременно крена и
скольжения.
При накренении самолета вектор подъемной силы, лежащий в
продольной плоскости самолета, дает проекцию на горизонтальную
плоскость У sin у (рис. 1.23, а). Эта проекция и является центростре-
мительной силой. Для сохранения высоты полета подъемная
сила должна быть увеличена так, чтобы ее проекция на вертикаль
была равна силе тяжести самолета. Поэтому, кроме управляющих
воздействий элеронами и рулем направления, в таком случае необ-
ходимо также отклонение руля высоты.
Если полет осуществляется со скольжением, то вектор аэроди-
намической силы не лежит в продольной плоскости самолета и даже
при отсутствии крена дает проекцию на горизонтальную плоскость,
являющуюся центростремительной силой (рис. 1.23, б). Управляю-
щим воздействием для получения скольжения может быть отклоне-
ние руля направления, создающее момент относительно оси Оу\,
Под действием этого момента самолет поворачивается на некото-
рый угол скольжения ]?.
Центростремительная сила, получаемая при крене, существенно
больше центростремительной силы, возникающей вследствие сколь-
жения. Поэтому выполнение боковых маневров только за счет
скольжения невыгодно. Использование скольжения оказывается це-
лесообразном в тех случаях, когда крен при маневре самолета ог-
раничен малыми значениями. Эти случаи, когда для создания цент-
ростремительной силы одновременно используются крен и скольже-
ние, будут специально рассмотрены нами в дальнейшем.
Необходимо также указать, что. маневры со скольжением весь-
ма сложны для выполнения. Кроме того, они ухудшают условия
комфорта пассажиров и экипажа.
Поэтому при ручном и автоматическом управлении самолетом,
как правило, стремятся выполнять маневры без скольжения, так
называемые координированные развороты. Для этого необходимы
одновременные отклонения элеронов и руля направления. Отклоне-
38
ние руля направления по соответ-
ствующему закону позволяет устранить
скольжение.
В уравнениях бокового движения
(1.44 и 1.49) управляющие воздействия
учитывались с помощью членов, содер-
жащих координаты бэ и бн.
Рассматриваемые нами в дальней-
шем изменения состояния самолета
связаны со случаями полета с несим-
метричной тягой двигателей, приводя-
щей к нарушению равновесия момен-
тов относительно осей Ох\ и Оу\. Для
учета изменения состояния самолета в
этом случае в правую часть уравне-
ния моментов, действующих относи-
тельно оси Оу\, вводится член, пропор-
циональный моменту из-за несиммет-
ричной тяги.
Из возмущений, связанных с изме-
нением состояния атмосферы, при ис-
следовании бокового движения наи-
больший интерес представляют возму-
щения, возникающие в. результате
действия на самолет ветра.
Рассмотрим случай, когда на само-
лет, летевший без скольжения, подейн
ствовало ветровое возмущение W
(рис. 1.24), имеющее форму сту-
пеньки.
Рис. 1.23. Возникновение
центростремительной силы:
а — при крене самолета;
б — при скольжении
До начала действия ветрового возмещения вектор воздушной
скорости VB и вектор путевой скорости V совпадали друг с_ другом
по величине и направлению. Вектор набегающего потока 7По анти-
колинеарен вектору VB, а значит, и вектору V.
Вследствие^ действия ветрового возмущения W вектор набегаю-
щего потока 7п отклонится от своего прежнего положения на угол
рт. На такой же угол повернется вектор_воздушной скорости VB
относительно вектора путевой скорости 7, который в начальный
момент сохранит свое прежнее направление, совпадающее с осью
О%1. Очевидно, что угол 0Т представляет собой угол скольжения
(или приращение угла скольжения, если в исходном режиме 0=И=О)
за счет турбулентного возмущения.
В общем случае угол скольжения 0 (рис. 1.25) образуется меж-
ду осью Охв, ориентированной по вектору воздушной скорости 7В,
и осью Oxi. С достаточной точностью можно считать, что силы
инерции в уравнении бокового движения являются функцией про-
изводной по времени угла (0—0Т), образованного осью Ох, ориен-
39
тированной по вектору путевой скорости, и осью Ох*. Боковая си-
ла Z является функцией угла скольжения р и модуля скорости VB.
Угол 0Г* характеризует направление вектора путевой скорости са-
молета относительно земной системы координат.
С учетом вышеизложенного и того, что sin рт~рт, tgpT~pT,
^x<^V, система уравнений бокового движения самолета в неспо-
койной атмосфере имеет следующий вид:
ml/p—т VpT— mV&y=Z-\-G sin 7;
I хтх=Мх\
I y^y — My-
40
б;=Ф-(₽_рт);
'т у
где wz — составляющая вектора W по оси Oz.
Принимая во внимание допущения, сделанные нами при выво-
де уравнений (1.44 и 1.49), можно получить систему уравнений бо-
кового движения самолета в неспокойной атмосфере в вариаци-
ях [14]:
т + —^э8э! (1.51)
Ф + «ф Ф + 7+«₽? = %8н!
^=И0(₽—ф)4-даг.
Значения коэффициентов, входящих в уравнения (1.51), опреде-
ляют по формулам (1.45).
Для анализа поведения самолета при различных воздействиях
воспользуёмся его передаточными функциями. В соответствии с
предыдущим будем рассматривать координированное движение,
полагая, что с помощью руля направления обеспечивается условие
р=0. В таком случае из системы уравнений (1.51) получим:
7+^T=V9; (1.52)
Ф+^т7 = (1.53)
^=-Уф+®г.
Из уравнения (1.52) вытекает передаточная функция для угла у
при отклонении элеронов
х=у; м Ч . (1.54)
бэ э р (р + L )
Эта передаточная функция может быть представлена последо-
вательным соединением апериодического и интегрирующего звень-
ев (рис. 1.26). Передаточная функция для угловой скорости крена
представляет собой передаточную функцию апериодического звена
с постоянной времени
7\= — =-------.
г- SpV/2
При ступенчатом отклонении элеронов (подаче единичного скач-
ка Адэ) после окончания переходного, процесса устанавливается
41
Р + If
Рис. 1.26. Структурная схема
самолета по углу крена
постоянная угловая скорость крена,
вследствие чего нельзя получить устано-
вившегося значения угла крена. Иначе
говоря, по отношению к углу крена при
отклонении элеронов самолет нейтрален.
При отсутствии ветра (wz=wz=0) из
уравнения (1.53) вытекает, что угловая
скорость разворота пропорциональна
крену.
Заметим, что для разворота вправо
(отрицательное приращение курса) не-
обходимо создать правый крен (положи-
Рис. 1.27. Силы, действующие
на самолет при правильном ви-
раже
тельное приращение крена) и для разворота влево — левый. Поэто-
му часто в уравнении типа (1.53) изменяют знак одного из членов,
приводя его к виду:
(1.55)
Эта зависимость может быть получена из уравнений движения
самолета при правильном развороте (рис. 1.27). В этом случае
имеем: Ycosy=G, = Ksiny, откуда (учитывая, что т— —)
g )
Используя зависимости (1.52 и 1.55), можно получить для слу-
чая полета в спокойной атмосфере передаточные функции:
li9k1 .
=1И (р)=-----------,
б9 8э р2(р + 1-)
V
— = М7г (р) =
8» /*(? + /•)
На рис. 1.28 представлена структурная схема, соответствующая
передаточной функции (р).
Рис. 1.28. Структурная
схема самолета по боко-
вому отклонению
42
Теперь запишем передаточные функции для углов у, £ и ф при
воздействии на неуправляемый самолет (с зажатым управлением)
ветровых возмущений te>z. Воспользуемся уравнениями (1.51):
wz
t v PGeP + Mi)
— =wl (p)=----------------LSl. .
VAx(p) ’
Q о P2 [P2 + (^; 4- Z- )P + П. I- 1
± (p)= - T —^jlL ;
Ф J, p(n9p + l. n» — 1м. )
JL (Д)=-----------------
wz z VAi (p)
где 4i(p) —характеристический полином (1.48), значения коэффициентов кото-
рого определяются по формулам (1.50).
Рассмотрим, как будут меняться углы у, 0 и ф в случае воздей-
ствия на неуправляемый самолет бокового ветра, имеющего форму
ступеньки wz = const.
Самолет, не имевший крена в невозмущенном движении, во вре-
мя переходного процесса будет иметь переменный крен, который
по окончании этого процесса вернется к нулевому значению. Угол
скольжения скачком изменится на величинуР = — а затем бу-
дет уменьшаться, стремясь к нулю.
Угол рысканья во время переходного процесса плавно меняется,
к концу этого процесса он возвращается к исходному значению.
Таким образом, по окончании переходного процесса у=Р = ,Ф = О-
Однако направление движения самолета (угол курса) изменится.
Это становится очевидным, если рассмотреть передаточные
функции для z и 0Г* при ветровом воздействии Ч
Р +l\) Р2 + + п^Р + \
Л(Р)
(1.56)
Р(Р3+(п. + Л)р2 + (и. I. +л₽)р + /.Пр_/рЛт) !
“------------------------------------------------V- (1,57)
В течение переходного процесса z изменяетя от нуля до —wZi а
~ a. 12) Z
угол 8г от нуля до —— .
1 При выводе передаточных функций (1.56 и 1.57) в последнем уравнении
системы (1.44) изменен знак перед z.
43
Рис. 1.29. Структурная схема самолета по
боковому отклонению с учетом действия
бокового ветра
Иначе говоря, после
окончания переходного про-
цесса самолет сносится со
скоростью, равной скорости
ветра. Величина 0Г* при этом
характеризует угол сноса.
Часто в практике прибе-
гают к упрощенному рас-
смотрению бокового траек-
торного движения, при кото-
ром сравнительно малое
(1.58)
время переходных процессов крепового движения самолета вообще
не учитывают. Полагая р = 0, запишем систему уравнений движения
самолета для случая, когда на него действует постоянный боковой
ветер:
ф —£iY==0;
г= 1Л|> —
Для случая wz= const из первого уравнения системы (1.58) и
аналогичного уравнения (1.55), справедливого для случая полета
в спокойной атмосфере, вытекает часто употребляемое в практике
уравнение для определения изменения курса
t
о
Используя эти уравнения, можно изобразить структурную схе-
му самолета по боковому отклонению с учетом действия бокового
ветра (рис. 1.29). Из рассмотрения этой схемы вытекает, что для
обеспечения движения самолета без бокового отклонения от траек-
тории в условиях постоянного бокового ветра необходимо удовлет-
ворить требование
ег* = ф_ J^=0.
Г V
Отсюда следует, что для компенсации сноса самолет должен
быть развернут по курсу навстречу ветру на постоянный по вели-
чине угол
Ф= • (1-59)
Самолет при этом должен лететь без крена, так как в против-
ном случае курс самолета изменится.
Следует указать, что в литературе по самолетовождению и на-
вигационным устройствам приняты другие обозначения для ско-
ростей самолета и ветра. Воздушная скорость самолета обозна-
чается V, путевая — W, скорость ветра — U. В обозначения гори-
44
зонтальных составляющих скоростей часто вводят индекс «г». При
рассмотрении задач стабилизации самолета на заданной траекто-
рии удобно оперировать с проекцией горизонтальной составляющей
скоростй ветра на ось, перпендикулярную траектории. Эту состав-
ляющую принято называть боковой составляющей или боковым
ветром и обозначать Uq. Принято также через гр обозначать курс
самолета, отсчитываемый от меридиана, а не угол рысканья. От-
клонение текущего курса самолета от заданного курса гр3 обозна-
чают через Дгр. Используя эти обозначения, для малых значений
Дгр зависимость (1.59) можно представить в виде
В тех случаях, когда будет рассматриваться боковое движение
самолета относительно заданной траектории в условиях постоян-
ного ветра, мы воспользуемся такими обозначениями. При этом
кинематические уравнения типа (1.8) примут вид:
ДФ-М=О; 1 (160)
i=v^-u6. )
Соответствующие изменения претерпевают структурные схемы
типа показанной на рис. 1.29. Некоторые дополнительные обозна-
чения угловых координат самолета введем позднее.
ГЛАВА 2
РАДИОТЕХНИЧЕСКИЕ УСТРОЙСТВА ДЛЯ ЗАДАНИЯ
ПОСАДОЧНЫХ ТРАЕКТОРИЙ
§ 1. ОБЩИЕ СВЕДЕНИЯ
Для автоматического управления самолетом необходима раз-
нообразная информация о его положении и параметрах движения.
Чтобы стабилизировать угловые положения самолета относитель-
но горизонтальной плоскости, требуется информация о текущем
значении углов крена и тангажа. Как правило, для улучшения ка-
чества стабилизации нужна, кроме того, информация о производ-
ных этих углов по времени. Аналогично для стабилизации ско-
рости полета необходима информация об отклонении скорости от
заданной величины и ее производных. Для вывода самолета на за-
данную посадочную траекторию и стабилизации на ней необходи-
45
Рис. 2.1. Траектория и плоскости захода на посадку
ма информация о величине линейного отклонения центра масс са-
молета от этой траектории.
Необходимую для целей управления информацию получают с
помощью соответствующих измерительных устройств — датчиков
информации (датчиков сигналов).
В литературе по автопилотам и авиационным приборам [3], [6],
[10], [29] достаточно подробно освещены датчики угловых отклоне-
ний, угловых скоростей и ускорений, высоты, скорости и линейных
ускорений. Ввиду ограниченности объема настоящей книги эти дат-
чики в ней не рассматриваются.
Существенно слабее освещены принципы действия и характерис-
тики датчиков информации об отклонениях самолета от посадоч-
ной траектории. Вместе с тем, как станет ясным в последующем,
они оказывают первостепенное влияние на точностные характерис-
тики и динамику бортовых систем автоматического управления.
Поэтому устройства для задания посадочных траекторий целесооб-
разно рассмотреть подробно.
Движение центра масс самолета при заходе на посадку и по-
садке может рассматриваться состоящим из двух изолированных
движений: бокового и продольного.
Боковое движение, происходящее в горизонтальной плоскости,
должно обеспечить вывод самолета в плоскость посадочного кур-
са— в вертикальную плоскость, проходящую через заданную тра-
екторию. Проекция этой плоскости1 на горизонтальную плоскость,
являющаяся также проекцией заданной траектории, называется
курсовой линией. Как правило, данная линия совпадает с
продолжением оси ВПП (рис. 2.1).
Продольное движение, осуществляемое в вертикальной плоско-
сти, должно обеспечить вывод самолета в плоскость глиссады сни-
жения (планирования) — в плоскость, проходящую через заданную
траекторию и перпендикулярную плоскости посадочного курса.
Плоскость глиссады снижения наклонена к горизонту, обычно на
угол 0 = 2,54-3°. Этот угол является углом наклона глиссады сни-
жения самолета.
Таким образом, траекторию захода на посадку можно предста-
вить как линию пересечения плоскостей посадочного курса и глис-
сады снижения.
Устройства, применяемые для задания траекторий (плоскостей)
захода на посадку, весьма различны по своим принципам действия.
46
Так, траектория захода на посадку может задаваться с помощью
радиотехнических, светотехнических, акустических и других уст-
ройств. В последние годы ведутся активные исследования в обла-
сти использования для этих целей лазерной техники и излучения
радиоактивных элементов.
В настоящее время широкое применение получили только ра-
диотехнические устройства. Это объясняется в первую очередь
меньшей зависимостью их точностных характеристик и радиуса
действия от метеорологических условий. У светотехнических же
средств в условиях облачности и тумана точностные характеристи-
ки ухудшаются, а дальность действия резко уменьшается. Поэтому
они используются при заходе на посадку как дополнительные для
облегчения визуальной ориентировки летчика.
В состав радиотехнических систем, кроме установленных на
земле радиомаяков, задающих посадочные траектории, входят так-
же бортовые радиоприемные устройства, воспринимающие излуче-
ние радиомаяков. В этих системах траекторией* захода на посадку
является линия пересечения плоскостей курса и глиссады сниже-
ния, создаваемых курсовым и глиссадным радиомаяками соответ-
ственно. Обычно эти плоскости представляют собой равносигналь-
ные зоны или, в ряде случаев, зоны минимума излучения частот
модуляции. В дальнейшем для краткости изложения мы будем те
и другие зоны условно называть равносигнальными. Очевидно, что
такие зоны радиомаяков должны совпадать с заданными плоскос-
тями захода на посадку.
Отклонения самолета от равносигнальной зоны курсового ра-
диомаяка (курсовой линии) определяются курсовым радиоприем-
ником, а отклонения от равносигнальной зоны глиссадного радио-
маяка (глиссады снижения)—глиссадным радиоприемником.
Информация об этих отклонениях выдается на нуль-индикатор,
являющийся визуальным указателем, и в системы управления в ви-
де тока, пропорционального этим отклонениям.
Кроме того, для обозначения (маркирования) нескольких, обыч-
но двух-трех, контрольных точек на земле устанавливают маркер-
ные радиомаяки, момент пролета над которыми определяется с по-
мощью маркерного радиоприемника. Информация о пролете над
маркерным маяком выдается в виде светового и звукового сиг-
налов.
Курсовые и глиссадные радиомаяки для захода на посадку ис-
пользуются уже более тридцати лет, в течение которых происходи-
ло непрерывное их совершенствование. Сейчас радиомаячные сис-
темы получили исключительное распространение при автоматиза-
ции управления заходом на посадку самолетов гражданской
авиации. Курсовые радиомаяки позволяют автоматизировать боко-
вое движение самолета также и при приземлении. Использование
глиссадного маяка возможно до высот порядка 15 м. Дальнейшая
траектория продольного движения самолета имеет нелинейный ха-
47
рактер и ее построение, как правило, осуществляется с помощью
радиовысотомеров.
В радиолокационных посадочных системах определение поло-
жения самолета в пространстве осуществляется с помощью назем-
ной радиолокационной станции (РЛС) и информация об отклоне-
ниях самолета от заданной траектории передается на его борт по
радио. Это обстоятельство позволяет существенно упростить бор-
товую радиоприемную аппаратуру. Однако РЛС присущ ряд недо-
статков, ограничивающих область их использования. Так, они имеют
меньшую точность по сравнению с радиомаячными системами.
Вследствие отражения сигналов радиолокатора от неровностей
земли вблизи места его установки, на экранах индикаторов созда-
ются засветки, в которых трудно выделить полезный сигнал, от-
раженный от самолета. Поэтому использование* РЛС для целей
приземления встречает очень большие трудности. За рубежом РЛС
получили распространение в военно-морской авиации для посадки
самолетов на авианосцы.
В гражданской авиации РЛС в настоящее время применяются
для целей наземного контроля захода на посадку, а также как дуб-
лирующие системы (на случай выхода из строя радиомаяков) для
захода по командам диспетчера с земли.
Системы с использованием так называемых ведущих, или
лидирующих, кабелей задают плоскость посадочного курса
на последнем этапе захода на посадку и при приземлении. Откло-
нения от этой плоскости воспринимаются специальным бортовым
приемником.
Эти системы позволяют задать траекторию и определять откло-
нения от нее с очень высокой точностью. Распространения они пока
не получили, однако исследования возможности их применения для
посадки военных самолетов продолжаются. Представляется перс-
пективным применение таких систем для задания траекторий руле-
ния самолета после его посадки в условиях тумана.
Поскольку радиомаячные системы почти исключительно рас-
пространены для автоматизации управления посадкой самолетов,
рассмотрим их более подробно. Далее будут рассмотрены также
системы ведущих кабелей и радиовысотомеры, сигналы которых
используются для формирования траекторий выравнивания и для
некоторых других целей.
§ 2. НЕКОТОРЫЕ ОБЩИЕ СВЕДЕНИЯ О РАДИОМАЯЧНЫХ
ПОСАДОЧНЫХ СИСТЕМАХ
В настоящее время в мировой практике гражданской авиации
используются две инструментальные радиомаячные посадочные
системы: международная система ИЛС (Instrument Landing
System) и отечественная система СП-50, отличающиеся друг от
друга характером излучения радиомаяков (рис. 2.2).
48
Q) •
КРИ
П
ВПП
ГРМ
Направление
посадки
ДМРМ
\Д00~450м
1050мД
7400 м
^500J
500-1000м
ГРМ
ВПП
1000м
4000 м
ДМРМ
Напрабление
посадки
Рис. 2.2. Размещение радиомаяков посадочных систем:
а — ИЛС; б —СП-50
Курсовой радиомаяк (КРМ) устанавливают на расстоянии
500—1000 м за концом ВПП, как правило, на продолжении ее оси.
Равносигнальная зона КРМ, располагающаяся в вертикальной
плоскости, при этом должна проходить через ось ВПП. В тех ред-
ких случаях, когда КРМ установлен не на продолжении оси ВПП,
его равносигнальную зону располагают под углом к оси ВПП та-
ким образом, чтобы она пересекала эту ось перед началом ВПП на
расстоянии не более 1000 м. Этот угол обычно не превышает од-
ного градуса. Если самолет будет двигаться по такой равносигналь-
ной зоне КРМ, то он вначале будет приближаться к оси ВПП, а
затем после ее пересечения уходить от нее. Заход на посадку при
подобном расположении КРМ возможен до точки пересечения рав-
носигнальной зоны с продолжением оси ВПП.
Очевидно, что смещение КРМ с продолжением оси ВПП являет-
ся нежелательным, однако в некоторых случаях, например из-за
рельефа местности, оно вынуждено.
Если на одном аэродроме используются одновременно две раз-
личные системы посадки, то КРМ одной из них приходится сме-
щать в сторону во избежание взаимовлияния их антенных систем.
Этот недостаток может быть избегнут, если КРМ обеих систем бу-
дут работать на общую антенную систему.
Равносигнальная зона глиссадного радиомаяка (ГРМ), распо-
лагающаяся под углом, равным заданному углу глиссады сниже-
ния к горизонтальной плоскости, должна, как правило, проходить
над началом ВПП на высоте 15 м.
Маркерные радиомаяки (МРМ) в системе СП-50 располагают
на расстоянии 4000 и 1000 м от начала ВПП. Первый МРМ назы-
вается дальним маркерным радиомаяком (ДМРМ), второй — ближ-
ним маркерным радиомаяком (БМРМ). Обычно ДМРМ совмеща-
ют с дальней приводной радиостанцией (ДПРС), а БМРМ — с
ближней приводной радиостанцией (БПРС).
49
В систему ИЛС входят не менее двух МРМ, устанавливаемых на
расстоянии 7400 и 1050 м от начала ВПП. Первый маяк называет-
ся дальним (ДМРМ), а второй — средним (СМРМ). Часто на рас-
стоянии 300—450 м от начала ВПП устанавливают еще один МРМ,
называемый ближним (БМРМ).
Все МРМ располагают возможно ближе к продолжению оси
ВПП.
Некоторые важные параметры КРМ и ГРМ даются в привязке
к нескольким характерным точкам 1 (рис. 2.3).
Точка, расположенная вертикально над точкой пересечения оси
и порога ВПП, через которую проходит продолженная прямая
часть глиссады снижения, называется базовой, или опорной.
Она располагается на высоте 15 м над уровнем порога ВПП.
Точкой А называется точка на линии глиссады, расположенная
над продолжением оси ВПП (со стороны захода) на расстоянии
«7,4 км (4 морских мили) от порога ВПП. Она находится на вы-
соте около 400 м. Обычно последняя часть предпосадочного манев-
ра выполняется на этой высоте. При этом в точке А осуществляет-
ся переход из режима горизонтального полета в режим снижения
по глиссаде.
Точкой В называется точка на линии глиссады на расстоянии
1050 м от порога ВПП.
Точкой С называется точка, через которую на высоте 30 м
(100 футов) над уровнем порога ВПП проходит продолженная пря-
мая часть глиссады.
Точкой D называется точка, расположенная на высоте 6 м над
осью ВПП и на расстоянии 600 м от порога в глубь ВПП.
§ 3. КУРСОВЫЕ РАДИОМАЯКИ И РАДИОПРИЕМНИКИ
В соответствии с действующими международными правилами
посадочные курсовые радиомаяки и радиоприемники работают в
диапазоне 108—112 Мгц.
1 См. «Аэронавигационные средства дальней связи». Приложение 10 к кон-
венции международной гражданской авиации ИКАО, 1968.
50
По принципу действия курсовые радиомаяки и радиоприемники
систем ИЛС и СП-50 различны. Сначала подробно рассмотрим кур-
совые радиоприемники и радиомаяки системы ИЛС, принцип дей-
ствия которых несколько проще.
Курсовые радиомаяки и радиоприемники системы ИЛС
Курсовой радиомаяк ИЛС излучает сигнал несущей частоты,
промодулированной по амплитуде двумя различными частотами
fi=}90 гц и /2=150 гц. Поэтому поле, созданное КРМ, можно пред-
ставить состоящим из двух пересекающихся полей: поля несущей
частоты, модулированной по амплитуде частотой Qi = 2jt/i, и поля
несущей частоты, модулированной по амплитуде частотой й2=2л/2
(рис. 2.4). При этом коэффициенты глубины модуляции /и21 и
т$2 меняются в зависимости от угловой координаты е, отсчитывае-
мой от оси ВПП.
Курсовой радиоприемник (КРП), установленный на борту само-
лета, измеряет разность глубин модуляций (РГМ) несущей часто-
ты обоих полей. На выходе КРП включен нуль-прибор.
На оси ВПП коэффициенты глу-
бины модуляций несущей 'частоты
обоих полей одинаковы и, следова-
тельно, РГМ равна нулю. Поэтому
ток на выходе КРП равен нулю и
стрелка нулъ-прибора находится в
среднем положении.
При отклонении от оси ВПП
разность глубин модуляции внача-
ле меняется по линейному закону, а
затем остается выше определенного
значения в пределах некоторого ра-
бочего сектора. Вследствие этого
Рис. 2.4. Характеристика на-
правленности КРМ с двойной
амплитудной модуляцией
каждому угловому отклонению са-
молета от оси ВПП в пределах ли-
нейного участка характеристики
РГМ соответствует определенное от-
клонение стрелки нуль-прибора.
Очевидно, если самолет пересе-
чет ось ВПП, то соответственно
стрелка нуль-прибора, пройдя ну-
левое положение, отклонится в про-
тивоположную сторону.
Колебания несущей частоты с
УВЧ-генератора (рис. 2.5) поступа-
ют на электромеханические модуля-
торы. На одном из них осуществля-
ется амплитудная модуляция несу-
щей частотой Qi=2nfi, а на дру-
Рис. 2.5. Функциональная схе-
ма КРМ с двойной амплитуд-
ной модуляцией
51
гом — несущей частотой Q2=2nf2. Коэффициенты глубины модуля-
ции в обоих каналах одинаковы. Полученные колебания излучают-
ся через две антенны. Характеристики направленности излучения
Fi(e) и F2(e) (см. рис. 2.4) таковы, что они являются функцией
угловой координаты, отсчитываемой от курсовой линии.
В направлении максимумов обоих лепестков характеристик на-
правленности интенсивность сигналов одинакова. Тогда одной ан-
тенной создается поле
е\ ^)^EmxsFx (е)(1 + т sin 2^) sin arf,
а другой — поле
^2(e)==FIliaxF2(e)(l-|-msin22f)sinarf.
При условии синфазного питания антенны и электрического со-
вмещения их центров образуется результирующее поле
е (е)[Fi (г) + F2 (е)] sin wt-f-тЕттЕг (е) sin 2^ sin at +
+ m£niaxF2 (e) sin QJ si n nt = £max [Fj (s) + F2 (e)] sin ш/+
4- [cos(a>-2i)/—cos(<o-|-2i)/] +
(® - 22) t - cos (« 4- 22) /].
Коэффициент глубины модуляции для частот Qi составит •
т (е)= 2m£maxAi (е) _ mF\ (е)
2£тах[Л1(е) + Л2(е)1 ^(0 + ^(0 ’
а для частот йг:
т /gA_ 2/n£,maxf'2 (е)____ _ mF2 (е)
°* 1 ' 2Emax [F1 (О + F2 О)] Fl (е) + F2 (е) '
Следовательно, коэффициенты глубины модуляции mSi (е) и
т (е) являются функциями угловой координаты е. Нетрудно за-
метить, что и РГМ, которую обозначим A/ni(e), является функцией
угловой координаты е:
Am(e) = mg,(e)-ma,(e)=m • (2-1)
^1(0 + ^2 (0
Равносигнальная зона представляет собой геометрическое место
точек, в которых А/п(е)—О. Это возможно при условии, что числи-
тель зависимости (2.1) тождественно равен нулю, т. е. Fi(e) = F2(e).
Эта равносигнальная зона должна как можно более точно пред-
ставлять собой вертикальную плоскость, проходящую через ось
ВПП. Курсовая линия, заданная КРМ, представляет собой геомет-
52
рические места точек, в которых
РГМ равна нулю, и имеющих наи-
большее приближение к оси ВПП
в любой горизонтальной плоско-
Ось ВПП
сти.
Курсовые радиомаяки, рас-
смотренные нами выше, иногда
№
называют маяками равно-
сигнального типа. В ПОС- Рис. 2.6. Характеристики направлен-
ледние годы в системах ИЛС на- ности КРМ> работающего с опорным
нулем
чали получать распространение
КРМ другого типа, работающие
с так называемым опорным нулем (mil reference).
В радиомаяках этого типа по симметричной относительно кур-
совой линии или по ненаправленной характеристике Л(е) излучает-
ся несущая частота, промодулированная частотами 90 и 150 гц.
Одновременно через другую антенную систему излучаются только
боковые частоты, образуя поле в виде двух лепестков с характерис-
тикой F2 (ie). Фазы соответствующих боковых частот в этих лепест-
ках противоположны. При этом в одном лепестке фаза боковых
частот совпадает с фазой боковых частот в излучении первой ан-
тенны, а в другом — находится в противофазе (рис. 2.6).
В работе [1] показано, что результирующее поле КРМ, работаю-
щего с опорным нулем, аналогично полю КРМ равносигнального
типа.
Вместе с тем КРМ, работающие с опорным нулем, обладают
большими регулировочными возможностями по формированию по-
ля, что позволяет получить более высокую точность и стабильность
характеристик, в частности стабильность залегания и линейность
курсовой линии.
Для получения необходимых характеристик направленности из-
лучения в КРМ используются направленные антенны. По принципу
действия и конструкции они весьма разнообразны (рис. 2.7). Обе
антенные системы предназначены для КРМ, -работающих с опор-
ным нулем. Первая система типа параболы с раскрытием ~30 м.
Через один из трех излучателей, расположенных в фокусе, излу-
чается несущая частота, промодулированная частотами 90 и 150 гц,
а через два других — боковые частоты.
В ряде случаев поле КРМ оказывается искаженным вследствие
паразитного отражения излучения различными препятствиями
(аэродромные строения, самолеты на стоянках и т. п.), находящи-
мися в зоне его действия. С точки зрения уменьшения этих иска-
жений выгодно сделать излучение КРМ остронаправленным с тем,
чтобы упомянутые препятствия оказались вне его. Однако в таком
случае и самолет окажется в зоне действия КРМ лишь вблизи (в
нескольких градусах е) от оси ВПП. Вместе с тем желательно иметь
возможность определять положение самолета относительно ВПП
в более широком секторе. Это достигается путем создания еще од-
53
Рис. 2.7. Антенная система КРМ, разработанная французской фирмой CSF для
обеспечения:
а — посадочных минимумов I и II категорий ИКАО; б—II и III категорий
ного поля на несущей частоте, несколько отличной (на 5—14 кгц)
от частоты первого поля. Такое поле, слабо направленное или нена-
правленное, имеет значительно более низкий уровень сигналов,
54
Рис. 2.8. Функциональная схема КРП с двойной амплитудной модуляцией
вследствие чего возможное паразитное переизлучение также имеет
очень низкий уровень.
Для формирования таких двух полей предназначена антенная
система, представленная на рис. 2.7, а. Она состоит из двух частей.
Одна из них формирует узконаправленное излучение. Десять эле-
ментарных источников отстоят друг от друга на одну длину волны.
Узкая направленность излучения достигается применением в эле-
ментарных источниках рефлекторов и директоров. При дозирова-
нии подаваемых в элементарные источники токов модулированной
несущей частоты формируется характеристика Л(е), а при дозиро-
вании токов боковых частот — характеристика ^(е). Раскрытие
этой части антенны достигает 20—25 м.
Вторая часть антенны, предназначенная для формирования сла-
бонаправленного поля, состоит из пяти элементарных источников.
На рис. 2.7, а они видны на втором плане.
Курсовые радиомаяки, в которых получение необходимых ха-
рактеристик поля достигается использованием двух независимых
диаграмм излучения, каждая на своей несущей частоте, называют-
ся двухчастотными. Необходимо подчеркнуть, что обе не-
сущие частоты укладываются в пределах полосы, выделенной для
данного канала работы. Очевидно, что КРП, работающий на кана-
ле этого КРМ, воспринимает оба излучения.
Наряду с двухчастотными КРМ довольно широкое применение
получили маяки с так называемой квадратурной модуля-
цией. В этом случае также создаются два поля: узконаправлен-
ное и слабонаправленное. Однако сигналы в них отличаются друг
от друга тем, что они сдвинуты по фазе на 90°. Несущие частоты
обоих сигналов генерируются одним источником. Сдвиг по фазе
достигается с помощью механического модулятора. Все это позво-
ляет сохранить постоянными фазовые соотношения между излучае-
мыми сигналами, что является важным преимуществом данного ти-
па КРМ. Антенна КРМ, общая для обоих излучений, представляет
собой линейную решетку из двенадцати диполей, позади которых
расположены уголковые отражатели.
Теперь перейдем к рассмотрению принципа действия КРП,
функциональная схема которого представлена на рис. 2.8. Сигналы
КРМ воспринимаются антенной, обычно представляющей собой
горизонтальный вибратор. Принятый сигнал -после прохождения
55
ж»
Рис.
для
2.9. Комбинированный прибор
инструментального захода на
посадку
высокочастотных каскадов, в ко-
торых происходит усиление по вы-
сокой, а после преобразования —
по промежуточной частоте, пос-
тупает на амплитудный детектор.
Выделенные на нагрузке детекто-
ра напряжения частот Qi и Q2
подаются на разделительные
фильтры, настроенные на часто-
ты 90 и 150 гц. Напряжения с
фильтров подаются на мостовые
выпрямительные схемы, с кото-
рых встречно направленные токи
поступают на нуль-прибор и дру-
гие потребители.
Нуль-приборы, используемые
в качестве указателей положения
самолета, представляют собой
высокочувствительные • гальвано-
метры. Отечественные гальванометры рассчитаны на отклонения
стрелки до крайней отметки при токе 250 мка. а зарубежные — при
150 мка.
Обычно указатель КРП входит в состав комбинированных при-
боров. На рис. 2.9 показана лицевая часть комбинированного при-
бора, включающего в, себя указатели КРП, ГРП и компаса.
Часто комбинированные приборы, состоящие из указателей
КРП и ГРП, называют приборами слепой посадки (ПСП).
В КРП предусматриваются два регулятора: «Чувствительность»
и «Баланс».
Регулятор «Чувствительность», меняющий усиление КРП по
низкой частоте (90 и 150 гц). позволяет так его отрегулировать,
чтобы при подаче на вход КРП сигнала с определенной РГМ, ток
на его выходе был строго определенной величины. Так, при
РГМ=0,155 выходной ток КРП должен быть таким, чтобы стрелка
нуль-прибора находилась на последней отметке. Из этого следует,
что отечественные КРП должны при указанной РГМ обеспечивать
ток в указателе, равный 250 мка. Соответственно в зарубежных
КРП при РГМ=0,155 ток, протекающий через указатель, равен
150 мка.
Регулятор «Баланс», стоящий на выходе выпрямителей напря-
жений 90 и 150 гц, позволяет так отрегулировать КРП, что при
РГМ = 0 ток на его выходе равен нулю, а значит, стрелка нуль-при-
бора находится в центре шкалы.
Познакомимся с некоторыми основными требованиями, предъяв-
ляемыми к КРМ и КРП систем ИЛС. (См. сноску на стр. 50).
Отклонения курсовой линии КРМ от оси ВПП в базовой точке
системы ИЛС должны быть в пределах ±10,5 м для КРМ I кате-
гории, ±7,5 м — II категории и ±3 м — III категории.
56
Допуск на искривление курсовой линии сужается по мере при-
ближения к КРМ. На больших расстояниях от него до точки А ам-
плитуда искривлений (РГМ) не должна превышать 0,031.
На участке от точки А до точки В амплитуда искривлений долж-
на уменьшаться по линейному закону от РГМ = 0,031 в точке А до
РГМ=0,015 в точке В для КРМ ИЛС I категории и до РГМ = 0,005
в точке В для КРМ ИЛС II и III категорий.
На участке от точки В до точки С для КРМ ИЛС I категории
амплитуда искривлений не должна превышать 0,015. Более близкие
к КРМ участки для КРМ ИЛС I категории не нормируются, по-
скольку заход по этим КРМ заканчивается еще до пролета точки С.
Для КРМ ИЛС II и III категорий амплитуда искривлений на
участке от точки В до базовой точки не должны превышать 0,005.
Для КРМ ИЛС III категории, используемых для приземления,
нормируются также искривления на участке от базовой точки до
точки D. Здесь они не должны превышать 0,005.
Излучение КРМ должно быть горизонтально поляризованны1м.
Вертикально поляризованная составляющая излучения при кренах
самолета меняет -входной сигнал КРП и вызывает искажение тока
на его выходе. Так, наличие вертикальной составляющей излуче-
ния на курсовой линии, где РГМ = 0, вызывает при кренах самолета
появление сигнала на выходе КРП и отклонение стрелки курсового
нуль-прибора от нулевого положения, что усложняет летчику заход
на посадку.
В связи с этим у КРМ ИЛС I категории вертикально поляризо-
ванная составляющая излучения на курсовой линии не должна пре-
вышать величину, которая соответствует погрешности РГМ=0,016
при нахождении самолета на курсовой линии. Для КРМ ИЛС II ка-
тегории в тех же условиях упомянутая погрешность РГМ = 0,008.
Для КРМ ИЛС III категории вертикально поляризованная состав-
ляющая в пределах сектора курса посадки ±0,02 РГМ от оси рав-
носигнальной зоны не должна превышать такую величину, которая
соответствует погрешности РГМ = 0,005 при кренах ±20°:
Линейность характеристики РГМ = /(е) должна обеспечиваться
при угловом отклонении от курсовой линии (где РГМ равна нулю)
до углов по обе стороны от нее, где РГМ=Ю,180. От этих углов до
углов е=±10° РГМ не должна быть меньше 0,180. В диапазоне
углов от е=±|10° до е=±35° РГМ должна быть не меньше 0,155.
При этих условиях в диапазоне углов е=±35° стрелка курсового
нуль-прибора отклоняется на крайнюю отметку или за нее. В не-
которых случаях РГМ^0,155 обеспечивается в еще большем секто-
ре углов е.
Дальность действия КРМ на высотах более 600 м над уровнем
порога ВПП должна быть не менее 45 км (25 морских миль) в пре-
делах е=±10°, не менее 31 км (17 морских миль) при е=)± (104-
4-35°) и не менее 18 км (10 морских миль) за пределами е=±35°,
если это требуется.
57
Рис. 2.10. Курсовой
сектор
Сектор, охватывающий курсовую линию и ограниченный геомет-
рическими местами точек, наиболее близко расположенными к кур-
совой линии, в которых РГМ=0,155, называется сектор курса посад-
ки (или курсовым сектором). Если пересечь сектор курса посадки
от одного края до другого, то стрелка нуль-прибора при этом перей-
дет от одной крайней отметки до другой.
Угловая ширина курсового сектора ео может меняться в значи-
тельных пределах в зависимости от расстояния между КРМ и ба-
зовой точкой ИЛС, в которой линейная ширина курсового сектора
z0 во всех случаях должна составлять 210 м. Иначе говоря, у всех
КРМ в базовой точке курсовой сектор создает одинаковые «вход-
ные ворота», равные 210 м (рис. 2.10).
Исключение составляют те случаи, когда при zo = 21O м курсо-
вой сектор получается больше 6°. В таких случаях угол курсового
сектора устанавливается равным 6°, хотя значение z при этом ме-
нее 210 м.
Полагая, что наибольшая длина ВПП составляет 4000 м и что
КРМ расположен за концом ВПП на расстоянии 1000 м, можно
определить угловую ширину наиболее узкого курсового сектора.
Она составляет ~2,4°. Таким образом, эксплуатационный диапазон
ео = 2,4—6,00.
Одной из важнейших характеристик курсового сектора являет-
ся чувствительность к боковому отклонению
с __ Д/п(е)
где Sz — чувствительность к боковому отклонению;
А/и(е) —РГМ в некоторой точке курсового сектора, лежащей вне курсовой
линии;
z — линейное отклонение этой точки от курсовой линии.
В базовой точке системы ИЛС при условии, что zo = 21O м чув-
ствительность к боковому отклонению составляет 0,0015 РГМ/jh.
Величина Sz для данного курсового сектора является величиной
переменной, поскольку линейная ширина этого сектора увеличи-
вается по мере удаления от КРМ. Вместе с тем для данного курсо-
вого сектора сохраняется постоянной чувствительность к угловому
отклонению
58
Рис. 2.11. К связи между боковым
и угловым отклонениями
курсов _
'линия
Д/n (е)
где Д/и(е) —РГМ в некоторой точке курсового сектора, лежащей вне курсовой
линии;
е —угловое отклонение от курсовой линии точки, в которой опреде-
ляется РГМ.
Нетрудно установить связь между Sz и 5е, поскольку из рис. 2.11
видно, что
z = Zkpm tgs~ Акрм £,
(2.2)
z L ’
ЬКРМ
Однако в практике более удобно пользоваться другой характе-
ристикой чувствительности к отклонению — чувствительностью вы-
ходного сигнала эталонного КРП к угловому отклонению от кур-
совой линии, часто называемой крутизной курсовой зоны
где SjE —крутизна курсовой зоны;
I — ток на выходе эталонного КРП при отклонении от курсовой линии
на угол е.
Считая, что на границе курсового сектора ) ток отечествен-
ного КРП равен 250 мка, легко определить диапазон крутизн кур-
совых зон:
откуда S / е=83—208 мка!град.
Указанный диапазон охватывает только номинальный разброс
крутизн зон. При эксплуатации КРМ ИЛС I и II категорий допус-
кается изменение крутизны зоны в пределах ±17%, а для КРМ
III категории — в пределах ± 10%.
С учетом этих допусков диапазон крутизн курсовых зон состав-
ляет S; е = 69ч-246 мка/град для КРМ ИЛС I и II категорий и SZe=
= 754-229 мка!град для КРМ ИЛС III категории.
Если полагать, что эталонный КРП работает на нуль-прибор, у
которого стрелка отклоняется на крайнюю отметку при /=150 мка,
59
то все указанные выше значения Sig должны быть уменьшены
на 40%.
При проектировании и эксплуатации систем захода на посадку
по КРМ представляет интерес возможный разброс крутизн сигна-
лов на выходе КРП, учитывающий также и допуск на этот параметр
КРП. Иначе говоря, необходимо выяснить, как изменяется чувстви-
тельность сигнала на выходе КРП по отношению к угловому от-
клонению от курсовой линии с учетом допусков на параметры КРМ
и КРП. Это легко сделать, зная допуски на параметры КРМ (при-
веденные выше), а точность определения РГМ курсовым радио-
приемником составляет ±20%.
При суммировании допусков КРМ и КРП по абсолютным зна-
чениям допуск для КРМ I и II категории получится равным ±37%,
а для КРМ III категории—±30%. Однако учитывая, что появле-
ние этих погрешностей носит вероятностный характер (обычно ого-
варивается, что 95% измерений параметра не должны превышать
допуска) и что погрешности характеристик КРМ и КРП статисти-
чески независимы, можно считать допуски на эти параметры по все-
му тракту «Борт — земля» равными ±25% для КРМ I и II кате-
горий и 22% для КРМ III категории.
При более строгом рассмотрении вопроса о назначении допуска
на изменение крутизны выходного сигнала из-за погрешностей в
тракте «Борт — земля» учитывают погрешности контрольно-пове-
рочной аппаратуры для КРМ и КРП, погрешности измерений и т. п.
С учетом всех этих погрешностей в настоящее время допуск на
изменение крутизны выходного сигнала КРП полагают равным
35%. В таком случае диапазон крутизн составляет Sie =54—
280 мка!град.
Укажем также, что подрегулировка крутизны выходного сигна-
ла может осуществляться с помощью регулятора «Чувствитель-
ность» в КРП.
При нахождении на курсовой линии (РГМ=0) выходной ток
КРП не должен превышать величину, соответствующую РГМ=г0,01
для КРП I категории и РГМ= 0,005— для КРП II категории. В слу-
чае необходимости подрегулировка КРП с целью устранения этих
ошибок («центровка» КРП) осуществляется регулятором «Баланс».
В заключение остановимся на вопросе фильтрации высокочас-
тотных помех в сигнале КРМ. Эти помехи являются следствием па-
разитных переизлучений, фазовых сдвигов в излучениях и др.
Рассмотренные выше мероприятия уменьшают уровень высоко-
частотных помех, представляющих собой коротко-периодические
искривления, однако не позволяют полностью избавиться от них.
Наличие помех приводит к флуктуациям выходного тока КРП
и колебаниям курсовой стрелки нуль-прибора. Пилотирование по
такой стрелке сильно затрудняется, так как летчику нужно осред-
нять ее колебания; в результате уменьшается точность захода на
посадку.
60
Рис. 2.12. Упрощенная струк-
турная схема КРП
Эти же высокочастотные флуктуации сильно ухудшают работу
директорных'приборов и систем автоматического управления посад-
кой самолета.
Для уменьшения высокочастотной составляющей выходного то-
ка применяются фильтры (7?С-цепочки, которые можно упрощенно
считать апериодическими звеньями). Постоянная времени таких
звеньев 7ф = 0,14-0,3 сек.
По сравнению с ней постоянные времени фильтров, содержа-
щихся в тракте КРП, пренебрежимо малы. В таком случае упро-
щенная структурная схема КРП с фильтром может быть представ-
лена как последовательное соединение усилительного и апериоди-
ческого звеньев (рис. 2.12).
На вход усилительного звена поступает сигнал, у которого РГМ
зависит от положения самолета относительно курсовой линии. Сиг-
нал засорен помехой f.
С выхода этого звена снимается нефильтрованный ток 7Нф, флук-
туации которого являются следствием помехи f и, строго говоря,
собственных шумов.
На выходе апериодического звена выделяется фильтрованный
ток /ф.
Передаточная функция КРП с фильтром имеет вид:
^КРП
ТфР 4-1
где k КРП =£пр6ф —общий коэффициент усиления КРП с фильтром;
Тф — постоянная времени фильтра.
Как правило, постоянная времени Гф=0,14-0,3 сек обеспечивает
необходимую фильтрацию высокочастотных помех. Если же уро-
вень помех в излучении курсового радиомаяка велик, что в основ-
ном объясняется наличием различных препятствий и неровностями
земной поверхности, то требуется увеличение постоянной времени.
Как показывает практика, увеличение постоянной времени до
Тф«1 сек допустимо для захода на посадку по нуль-прибору в ус-
ловиях высоких минимумов погоды, поскольку запаздывание сигна-
ла информации о положении самолета относительно курсовой ли-
нии резко уменьшает устойчивость траекторного движения.
Применение фильтров с такими и большими постоянными вре-
мени существенно ухудшает работу автоматических систем захода
на посадку.
61
Курсовые радиомаяки и радиоприемники системы СП-50
Курсовой радиомаяк СП-50 излучает сигналы двух видов. Один
из них представляет собой сигнал несущей частоты, промодулиро-
ванной по амплитуде низкой частотой f = 60 гц.
Характеристика направленности F2(e) этого излучения такова,
что образуются двц лепестка, разделенных плоскостыр посадочного
курса (рис. 2.13). При этом модулирующие напряжения в обоих
лепестках находятся в противофазе, а коэффициент глубины моду-
ляции является функцией угловой координаты 8, отсчитываемой от
оси ВПП (плоскости посадочного курса). На оси ВПП данный ко-
эффициент /и(е) =0.
Поскольку фаза модулирующего напряжения этого излучения
при переходе через плоскость посадочного курса меняется на 180°,
то излучение называют излучением «переменной фаз ы».
Второй вид излучения также имеет напряжение частоты f=
= 60 гц. Это излучение слабонаправленное (характеристика направ-
ленности Fi (е)), фаза напряжения f=60 гц постоянна в любой точке
поля, вследствие чего такое излучение называют излучением
«постоянной фазы». Напряжение f=60 гц сигнала постоян-
ной фазы синфазно с модулирующим напряжением сигнала пере-
менной фазы в одном из лепестков (см. рис. 2.13).
Курсовой радиоприемник, установленный на борту самолета,
используя напряжение f=60 гц излучения постоянной фазы в ка-
честве опорного сигнала, определяет фазу модулирующего напря-
жения излучения переменной фазы и коэффициент глубины моду-
ляции его несущей частоты.
На выходе КРП включен нуль-прибор. В плоскости посадочного
курса сигнал переменной фазы равен нулю. Поэтому ток на выходе
КРП равен нулю и стрелка нуль-прибора занимает нулевое поло-
жение.
При отклонении от оси ВПП появляется сигнал переменной фа-
зы, причем коэффициент глубины модуляции в определенном диа-
пазоне углов е нарастает по линейному закону. Благодаря этому
в пределах линейной части характеристики коэффициента глубины
модуляции сигнала переменной фазы [как функции углового откло-
нения zn(e)=f(e)] каждому угловому отклонению самолета от оси
Рис. 2.13. Характеристики на-
---\ ] правленности курсового радио-
эх. \ / маяка СП-50
-------' J^F/г)
62
Рис. 2.14. Сигналы, излучаемые курсовым радиомаяком СП-50
ВПП соответствует вполне определенное отклонение стрелки нуль-
прибора.
Не вдаваясь в рассмотрение схем КРМ, подробно освещенных
в ряде специальных работ (например, [1]), кратко остановимся
лишь на излучении КРМ.
Временные диаграммы сигналов, излучаемых КРМ, приведены
на рис. 2.14. Сигнал постоянной фазы представляет собой несущую
частоту, промодулированную по амплитуде поднесущей частотой
Fn=10000 гц, которая в свою очередь промодулирована по частоте
низкой частотой /=60 гц. Девиация поднесущей частоты AFn=
1100 гц. Поднесущая частота использована для того, чтобы напря-
жение f=60 гц в сигнале постоянной фазы можно было отделить
в КРП от такого же напряжения в сигнале переменной фазы.
Сигнал постоянной фазы излучается по ненаправленной или
слабонаправленной характеристике Fi(e), образуя поле
^(£) = ^'1п1ах/71(Ю[1+"1пС08 (si/+ cos 2/)1 COSO)/,
где тп — коэффициент амплитудной модуляции по поднесущей частоте (~30%);
2п=2кГп, Д2п=2кД£п, 2 = 2«/.
Сигнал переменной фазы, который представляет собой ампли-
тудно-модулированную несущую частоту (только боковые часто-
ты), излучается -по характеристике Г2(е), образуя поле
е2(е) =-E2inaJtf2(8) cos Ш cos со/.
Результирующее поле имеет вид:
е (е)=<?1 (е) + е^)=Е1тлхГ1 (е) [ 1 + тп cos (2П/
4- ^2- cos 2/^1 cos<o/+£2 Д2 (s) cos 2/cos <о/ =
Q / I 1 max x '
= £1 Fj(e)[l +
‘max 1 4 7
^ma/2* > cos2/-|~m„f 2/4- cos 2/
COS wt.
63
Отсюда следует, что коэффициент глубины модуляции сигнала
о . , \ ^2шах^2^£^ тт Z* ^2rnax
переменной фазы /п(е) = —— --------. При обеспечении------ =
Fi (О F-t
2тах 1 v 7 2тах
= const коэффициент глубины модуляции т(е) является функцией
угловой координаты е.
Характеристика этой функции близка по своему виду характе-
ристике направленности излучения переменной фазы и для малых
значений е она линейна.
Курсовая линия, заданная КРМ, представляет собой геометри-
ческие места точек, в которых коэффициент глубины модуляции
сигнала переменной фазы /и(е) равен нулю и которые имеют наи-
большее приближение к оси ВПП в любой горизонтальной плос-
кости.
Для получения необходимых характеристик направленности из-
лучения используются направленные антенны типа «Волновой ка-
нал» или параболические антенны. Направленная антенна типа
«Волновой канал» состоит из вибратора, нескольких директоров и
рефлектора.
Две антенны такого типа служат для формирования поля сигна-
ла переменной фазы, а одна — поля сигнала постоянной фазы. Все
три антенны устанавливаются в плоскости, перпендикулярной плос-
кости посадочного курса, причем антенна излучения постоянной
фазы располагается на продолжении оси ВПП.
На самолете принятые антенной сигналы КРМ поступают в вы-
сокочастотные каскады КРП (рис. 2.15). Здесь они усиливаются по
высокой частоте, преобразуются, а затем после усиления по про-
межуточной частоте поступают в амплитудный детектор. На нагруз-
ке детектора выделяются напряжения Fn=10 000 гц, .модулирован-
ные по частоте /=60 гц сигнала постоянной фазы, и напряжение
f=160 гц сигнала переменной фазы. С помощью фильтрующих цепо-
чек эти напряжения разделяются.
Частотно-модулированное напряжение Fn=10000 гц после уси-
ления и ограничения поступает на частотный детектор, на нагрузке
которого выделяется напряжение f = 60 гц сигнала постоянной фа-
зы. После усиления это напряжение поступает на фазовый детек-
тор. На него же подается напряжение f=60 гц сигнала переменной
фазы, также предварительно усиленное.
В фазовом детекторе происходит сравнение фаз этих двух на-
пряжений и преобразование напряжения f—60 гц сигнала перемен-
ной фазы в постоянный ток, знак которого зависит от соотношения
фаз сравниваемых напряжений.
Ток с фазового детектора поступает на нуль-прибор и другие
потребители.
В КРП СП-50 имеются регуляторы «Чувствительность» и «Ба-
ланс», назначение которых аналогично ранее рассмотренным регу-
ляторам КРП ИЛС.
64
Канал постоянной, фазы
Канал переменной (разы
Рис. 2.15. Функциональная схема курсового радиоприемника СП-50
Регулятор «Чувствительность» меняет усиление напряжения f =
= 60 гц в канале переменной фазы и позволяет регулировать вы-
ходной то-к КРП при постоянном значении коэффициента глубины
модуляции сигнала переменной фазы т(е). Этим обеспечивается
подача на вход КРП сигнала, у которого коэффициент глубины мо-
дуляции сигнала переменной фазы m (е) =0,175, ток, протекающий
через нуль-прибор, равнялся 250 мка с тем, чтобы курсовая стрелка
отклонилась на крайнюю отметку.
Регулятор «Баланс», установленный на выходе фазового детек-
тора, обеспечивает выполнение требования, чтобы при т(е)=0 вы-
ходной ток КРП равнялся нулю.
Характеристики КРМ и КРП СП-50 аналогичны характеристи-
кам КРМ и КРП ИЛС. Отметим, что курсовым сектором КРМ
СП-50 называется сектор, охватывающий курсовую линию и огра-
ниченный геометрическими местами точек, наиболее близко распо-
ложенных к курсовой линии, в которых коэффициент глубины мо-
дуляции сигнала переменной фазы т(е) =0,175.
Для уменьшения уровня высокочастотных флуктуаций выходно-
го сигнала КРП на его выходе установлен блок конденсаторов. Об-
разованный ими и сопротивлениями КРП фильтр эквивалентен
апериодическому звену с постоянной времени 1 сек.
§ 4. ГЛИССАДНЫЕ РАДИОМАЯКИ И РАДИОПРИЕМНИКИ
По своему принципу действия глиссадные радиомаяки (ГРМ) и
радиоприемники (ГРП) очень похожи на КРМ и КРП ИЛС. Они
также используют принцип двойной амплитудной модуляции. Глис-
садные радиомаяки и радиоприемники работают в диапазоне час-
тот 328,6—335,4 Мгц\ частоты модуляции Л = 90 и f2= 150 гц.
Излучение ГРМ образует в пространстве два пересекающихся
поля (рис. 2.16). Равносигнальная зона лежит в заданной плоско-
сти снижения, образуя с горизонтальной плоскостью угол 9 — 2,5-?-
4-3°. При этом в системе ИЛС над равносигнальной зоной преобла-
дает сигнал с частотой модуляции 90 гц, а в СП-50— 150 гц.
3—3261
65
Рис. 2.16. Характеристика направленности
ГРМ
Коэффициенты глубины
модуляции т<21 и то2 ме-
няются в зависимости от уг-
ловой координаты £, отсчи-
тываемой от линии глисса-
ды снижения — линии пере-
сечения равносигнальной зо-
ны ГРМ с плоскостью поса-
дочного курса. Оптимально
линия глиссады снижения
должна точно совпадать с
заданной траекторией захода на посадку.
На борту самолета ГРП, на выходе которого установлен нуль-
прибор с горизонтальной глиссадной стрелкой, измеряет разность
глубин модуляции обоих полей, вырабатывая ток, пропорциональ-
ный этой РГМ.
Когда самолет (точнее — антенна ГРП) находится на линии
глиссады (в плоскости снижения), являющейся геометрическим
местом точек, в которых РГМ = 0, ток на выходе ГРП равен нулю
и стрелка нуль-прибора находится в нулевом положении.
При отклонении от глиссады снижения в пределах некоторого
сектора РГМ меняется по линейному закону, благодаря чему каж-
дому угловому отклонению самолета от глиссады снижения соот-
ветствует определенное положение стрелки нуль-прибора. За пре-
делами линейного участка РГМ продолжает нарастать, достигая
некоторого экстремального значения. После этого РГМ уменьшает-
ся, находясь выше определенного значения в пределах некоторого
рабочего сектора.
Сигналы несущей частоты, модулированной частотами Qi = 2n/i
и Й2=)2л/2 (рис. 2.17), излучаются антенной системой, состоящей
в простейшем случае из двух элементарных антенн, расположенных
одна над другой на высоте hB и /гн.
На формирование характеристик направленности поля ГРМ
эчень большое влияние ока-
зывает земная поверхность,
что выражается, в частно-
сти, в многолепестковости
характеристик антенн и ис-
кривлении равносигнальных
зон.
Многолепестковость. ха-
рактеристик приводит к по-
явлению ложных равносиг-
нальных зон, имеющих зна-
чительно больший угол на-
клона к земной поверхности,
чем у плоскости снижения.
Соответствующими меро-
Рис. 2.17. Функциональная схем’а ГРМ
66
приятиями по формированию характеристик излучения антенн до-
биваются того, чтобы ближайшая ложная равносигнальная зона
отстояла от глиссады снижения на угол не менее 12°.
Для уменьшения искривлений равносигнальных зон используют
ГРМ, работающие b опорным нулем, и двухчастотные ГРМ, анало-
гичные по принципу действия соответствующим КРМ, подробно
рассмотренным выше.
Антенна ГРМ (рис. 2.18) имеет высоту ~ 15 м и потому является
летным препятствием, не позволяющим расположить ее вблизи
от ВПП.
Глиссадный радиоприемник
не имеет каких-либо принципи-
альных отличий от КРП с двой-
ной амплитудной модуляцией
(см. рис. 2.8).
Глиссадная стрелка нуль-при-
бора отклоняется на крайние от-
метки (верхнюю и нижнюю), ког-
да самолет находится на краю
сектора глиссады снижения, ко-
торый представляет собой гео-
метрическое место точек, наибо-
лее приближенных к линии дан-
ной глиссады, где РГМ равна
0,175.
Перейдем к рассмотрению
других основных характеристик
ГРМ и ГРП. Сделаем это при-
менительно к системе ИЛС.
Угол наклона глиссады сни-
жения 0, установленный для кон-
кретного аэродрома, должен под-
держиваться с точностью 7,5%
ГРМ I и II категорий и 4% —III
категории. При этом нижняя пря-
мая часть глиссады снижения
должна проходить базовую точку
ИЛС (15 м) с точностью ±3 м.
Для ГРМ I категории ампли-
туда искривлений глиссады сни-
жения (РГМ) не должна превы-
шать 0,035 на всем участке от
внешнего предела дальности до
точки С ИЛС. Для ГРМ II и
III категорий этот допуск дейст-
вует от точки А ИЛС. На участке
от точки А до точки В ИЛС
амплитуда искривления умень-
Рис. 2.18. Глиссадный радиомаяк
3*
67
шается по линейному закону от РГМ = 0,035 в точке А до РГМ=
0,023 в точке В. От точки В до точки С ИЛС амплитуда искривле-
ний не должна превышать 0,023.
Дальность действия ГРМ составляет не менее 18 км в секторах
е = ±8° в горизонтальной плоскости и секторе, ограниченном углом,
равным 1,750 вверху и 0,450 внизу, или таким наименьшим углом,
в котором РГМ=0,22 в вертикальной плоскости.
Угловая ширина сектора глиссады снижения £о является функ-
цией угла 0 и меняется в широких пределах. В значительных пре-
делах может изменяться и чувствительность к угловому отклонению
от линии глиссады снижения:
= Дт(0
С С
где — чувствительность к угловому отклонению;
А/ис—РГМ в некоторой точке сектора глиссады снижения, лежащей вне
линии глиссады;
С—угловое отклонение от линии глиссады снижения, в которой опреде-
ляется РГМ.
Обычно характеристики чувствительности к угловым отклоне-
ниям от линии глиссады снижения определяются в пределах полу-
секторов глиссады. Этот полусектор представляет собой сектор в
вертикальной плоскости, содержащей глиссаду снижения и огра-
ниченный геометрическими местами точек, наиболее приближенных
к ее линии, в которых РГМ=0,0875.
Для ГРМ I категории ширина полусектора глиссады снижения
может меняться в пределах от 0,14 до 0,280, причем обе части полу-
сектора над глиссадой снижения и под ней должны быть в преде-
лах 0,07—0,140.
Для ГРМ II категории ширина полусектора может варьировать-
ся в диапазоне 0,17—0,28 0, в том числе над глиссадой снижения —
в пределах 0,07—0,14 0 и под ней в пределах 0,10—0,14 0. Для ГРМ
III категории ширина полусектора составляет 0,20—0,28 0, причем
обе части полусектора должны иметь ширину 0,12±0,02 0.
В практике широко используется характеристика чувствитель-
ности выходного сигнала эталонного ГРП к угловому отклонению
от глиссады снижения, так называемая крутизна глиссад-
ной зоны:
где —крутизна курсовой зоны; Z—»ток на выходе эталонного ГРП при от-
клонении от глиссады снижения на угол £.
Полагая, что на границе полусектора глиссады снижения, где
РГМ=0,0875, ток на выходе ГРП равен 125 мка, можно определить
диапазон номинальных крутизн глиссадных зон. Для ГРМ I и II
125 125
категорий он составит -—- —* а для ГРМ III кате-
г 0,14 6 е 0,07 в
125
гории “ о?^
125
0,10 0
68
При расчете допустимого диапазона крутизн глиссадных зон
необходимо учитывать допуск на изменение крутизны по отноше-
нию к номинальному значению. Для ГРМ I категории этот допуск
составляет ±25% от установленного номинального значения, для
ГРМ II категории— ±20% и для ГРМ III категории— ±15%.
Определяя возможный диапазон крутизны выходного сигнала
ГРП, следует также иметь в виду допуск на точность определения
РГМ глиссадным радиоприемником, который на границе полусек-
тора составляет 13,5% (РГМ=Ю,012). Кроме того, следует учиты-
вать возможные погрешности из-за несовершенства контрольно-по-
верочной аппаратуры для ГРМ и ГРП, неточности измерений и т. п.
С учетом всех этих факторов можно полагать допуск на изме-
нение крутизны в глиссадном тракте «Борт — земля», равным 40%.
С учетом этого для глиссад снижения с углом наклона 0 = 2,7° диа-
пазон S? = 200-^-925 мка!град.
Указанные величины относятся к отечественным ГРМ, работаю-
щим с нуль-приборами, стрелка которых отклоняется на крайнюю
отметку при токе / = 250 мка. Если эталонный ГРП работает на
нуль-прибор, рассчитанный на /=150 мка, то все указанные выше
значения должны быть уменьшены на 40%.
Когда самолет находится на линии глиссады снижения (РГМ =
= 0), выходной ток ГРП не превышает величины, соответствующей
РГМ=Ю,014 для ГРП I категории и РГМ=0,007 — для ГРП II кате-
гории.
В излучении ГРМ, как и в излучении КРМ, имеются высокочас-
тотные помехи. Они являются следствием главным образом неров-
ностей земной поверхности, участвующей в формировании характе-
ристики направленности излучения. Для уменьшения флуктуаций
выходного сигнала ГРП применяется дополнительный выходной
фильтр. С учетом его передаточная функция ГРП имеет вид: '
где &грп —общий коэффициент усиления ГРП с фильтром;
Тф — постоянная времени фильтра.
Как уже указывалось ранее, постоянная времени должна быть
по возможности меньшей, около 7ф = 0,1—0,3 сек. У ГРП старых
конструкций Гф«1 сек.
§ 5. МАРКЕРНЫЕ РАДИОМАЯКИ И РАДИОПРИЕМНИКИ
Маркерные радиомаяки (МРМ) работают на частоте 75 Мгц.
Эта несущая частота модулируется низкими частотами /1 = 3000,
/2= 1300 и /з = 400 гц. Оба МРМ системы ОП-50 работают с ис-
пользованием модулирующей частоты 3000 гц. В системе ИЛС час-
тоты модуляции распределены следующим образом: ближний
МРМ — 3000, средний МРМ—1300, дальний МРМ — 400 гц.
69
Рис. 2.19. Характеристики
ности
ВПП
направлен-
маркерного
антенной системы
радиомаяка:
вертикальной плоскости; б — в
горизонтальной
а — в
Для опознавания МРМ низ-
кая частота манипулируется. В
системе СП-50 применяется сле-
дующая манипуляция низкой
частоты: ближний МРМ — непре-
рывная последовательность то-
чек, дальний МРМ — непрерыв-
ная последовательность тире. В
системе ИЛС принята такая ма-
нипуляция: ближний МРМ — не-
прерывная последовательность
точек, средний МРМ — непрерыв-
ная последовательность чередую-
щихся тире и точек, дальний
МРМ — непрерывная последова-
тельность тире. Тире передают-
ся 2 раза в секунду, а точки —
6 раз.
В вертикальной плоскости характеристика направленности ан-
тенной системы имеет вид факела (рис. 2.19). Благодаря тому что
в плоскости посадочного курса характеристика излучения сплюс-
нута, момент пролета над МРМ определяется с высокой точностью.
В то же время .некоторая вытянутость этой характеристики в плос-
кости, перпендикулярной плоскости посадочного курса, позволяет
отмечать моменты пролета траверза МРМ и в тех случаях, когда
самолет уклонится от курсовой линии.
Звуковой генератор (рис. 2.20, а) в зависимости от назначения
МРМ создает одну из трех частот: fi=3000, f2=1300, /3=400 гц.
Соответственно с манипулятора идут либо последовательность то-
чек, либо последовательность чередующихся тире и точек, либо по-
следовательность тире. Сигналы МРМ излучаются антенной, выпол-
ненной в виде вибратора, ось которого расположена параллельно
продолжению оси ВПП. Поскольку на характеристику направлен-
ности могут оказывать влияние электрические свойства почвы,
сильно зависящие от ее влажности и характера покрова, под виб-
раторами на расстоянии четверти волны располагают заземленную
металлическую сетку, являющуюся экраном.
Сигналы МРМ в МРП (рис. 2.20, б) преобразуются и затем
усиливаются в УПЧ, после чего они детектируются и усиливаются
в УНЧ. На выходе УНЧ установлены узкополосные фильтры частот
Л, /2 и f3, с которых напряжения низкой частоты поступают на спус-
ковые релейные схемы. При срабатывании реле загорается лампа
(табло) и срабатывает звонок. Благодаря манипуляции низкой час-
тоты световая и звуковая сигнализации воспроизводят тире и точки.
Лампы (табло), коммутируемые различными реле, могут отличать-
ся по цвету. Например, при пролете дальнего МРМ выдается зеле-
ный сигнал, при пролете среднего — желтый, при пролете ближне-
го— красный. В некоторых случаях устанавливается одна лампа,
70
Рис. 2.20. Функциональная схема:
а — маркерного радиомаяка; б — маркерного радиоприемника
загорающаяся при пролете любого МРМ. Кроме того, сигнал с де-
тектора поступает на УНЧ телефонного канала, к которому под-
ключены телефоны членов экипажа.
Весьма важным является точное определение момента пролета
над МРМ. Поэтому время приема сигналов должно быть строго
ограничено. В системе СП-50 это время для дальнего МРМ состав-
ляет 12±4, а ближнего —6±2 сек при снижении по глиссаде' со
скоростью 240 км!ч. В системе ИЛС время приема сигналов даль-
него МРМ — 12±4, среднего — 6±2, ближнего — 3±1 сек при сни-
жении со скоростью 180 км)ч. Это, в частности, достигается за счет
того, что напряжения включения и выключения релейных схем мало
отличаются друг от друга (примерно на 20%).
§ 6. ВЕДУЩИЕ КАБЕЛИ
Для задания траекторий на последнем этапе посадки могут так-
же применяться ведущие (лидирующие) магнитные кабели. Разра-
ботка систем таких кабелей 1 была предпринята вследствие того,
что в ряде случаев КРМ на этом участке полета (~ 1000 м до поро-
га ВПП) не обеспечивают необходимой точности и стабильности
залегания равносигнальной зоны. Иногда происходят значительные
искажения диаграммы излучения КРМ отражениями от местных
предметов.
1 См. Ч е р н л и У. Английская система слепой посадки самолетов в слож-
ных метеорологических условиях. — «Зарубежная радиоэлектроника», 1960, № 1.
X о лох ан. Автоматизация посадки — настоятельное требование эксплуата-
ции.— «Зарубежная радиоэлектроника», 1960, № 4.
71
Рис. 2.21. Система посадки по ведущим кабелям:
а — схема расположения ведущих кабелей; б — электромагнитные поля колеба-
ний; в — ток на выходе бортового приемника
Система магнитных ведущих кабелей состоит из наземного и
бортового оборудования. Наземное оборудование содержит два
кабеля К1 и К2 (рис. 2.21, а), проложенных вдоль ВПП на рас-
стоянии 75 м от ее оси. Кабели начинаются на расстоянии ~1500 м
от порога ВПП. Питание их осуществляется от специальных гене-
72
раторов переменного тока Г\ и Г2. Частота тока в одном кабеле —
Fi=fl070, а в другом — F2=1750 гц. Эти токи создают в простран-
стве магнитные поля (рис. 2.21, б). Разность напряженностей маг-
нитных полей различных частот прямо пропорциональна расстоя-
нию от оси ВПП.
В вертикальной плоскости, проходящей через ось ВПП, эта раз-
ность напряжений равна нулю. Иначе говоря, в этой плоскости ле-
жит равносигнальная зона.
Бортовая аппаратура состоит из вращающейся рамочной антен-
ны и радиоприемника (рис. 2.22). Сигнал; принятый антенной, по-
дается на УНЧ, на выходе которого установлены узкополосные
фильтры, настроенные на частоты Л = 1070 и 7*2= 1750 гц. Выде-
ленные на фильтрах напряжения этих частот подаются на блок
сравнения. Выходной сигнал (см. рис. 2.21, в), поступающий на
индикатор курса, аналогичен выходному сигналу КРП, работающе-
го в комплексе с КРМ. В достаточно широком диапазоне отклоне-
ний от равносигнальной зоны ток на выходе приемника пропорцио-
нален боковому отклонению от этой зоны. Благодаря этому система
ведущих кабелей обладает важным преимуществом по сравнению
с радиомаячными системами. Оно заключается в том, что чувстви-
тельность к боковому отклонению сохраняется постоянной вдоль
всей длины ведущих кабелей. Поэтому устойчивость движения са-
молетов, оборудованных бортовыми системами управления, кото-
рые работают по сигналам ведущих кабелей, не зависит от поло-
жения самолета вдоль ВПП.
Поскольку данная система -может использоваться только на по-
следнем этапе — посадке, для.задания траекторий захода на посад-
ку на начальных этапах приходится по-прежнему использовать ра-
диомаячные системы. Поэтому на самолете приходится иметь два
вида радиоприемных устройств: работающее по сигналам ведущих
кабелей и сигналам КРМ. Определенные трудности возникают с
размещением на самолете вращающейся антенны приемника систе-
мы, ведущих кабелей.
Указанные обстоятельства ограничивают применение этой систе-
мы, в связи с чем в настоящее время основные усилия направлены
на совершенствование радиомаячных систем.
Рис. 2.22. Блок-схема борто-
вой аппаратуры системы ве-
дущих кабелей
Индикшн)
73
§ 7. РАДИОВЫСОТОМЕРЫ
В основе принципа действия радиовысотомеров лежит явление
отражения электромагнитных колебаний (радиоволн) от земной
поверхности. Принцип действия радиовысотомера заключается в
следующем. Передатчик радиовысотомера, установленный на само-
лете, излучает через передающую антенну электромагнитные коле-
бания. Эти колебания, распространяясь в пространстве, достигают
земной поверхности, отражаются от нее и частично возвращаются
к приемной антенне радиовысотомера, установленной на самолете.
Для преодоления расстояния от самолета к земле и обратно по-
надобится время
где Н — высота полета (расстояние от антенн до земли);
с — скорость распространения радиоволн (3-108 .м/сек).
Строго говоря, путь радиоволн несколько больше, чем 2/7, по-
скольку в полете самолет перемещается относительно земли. Одна-
ко, учитывая, что скорость распространения радиоволн значитель-
но превышает скорость самолета, путь радиоволн полагают не за-
висящим от скорости полета.
В таком случае для определения высоты полета достаточно
измерить время между моментом посылки сигнала к земной по-
верхности и моментом приема отраженного сигнала. Это может
быть достигнуто различными способами [1]. В радиовысотомерах
малых высот, применяемых для целей автоматизации посадки са-
молетов, измерение времени осуществляется так.
Излучаемые через передающую антенну сигналы представляют
собой высокочастотные колебания, периодически модулированные
по частоте с помощью специального модулятора (рис. 2.23). Закон
частотной модуляции может быть любой периодической функцией
времени: синусоидальной, треугольной, пилообразной (рис. 2.24)
и т. п.
Частота излучаемого сигнала плавно изменяется в диапазоне
/о ± А/о,
где /о — среднее значение несущей частоты;
Д/о— девиация частоты (2Д/о— полоса качания частоты).
За время %н частота излучаемого передатчиком сигнала изме-
няется на величину Д/=4Д/0/?мг//= — .
с
Следовательно, в пределах полупериода модуляции изменение
частоты Д/ прямо пропорционально времени %н (или высоте по-
лета Н).
Для измерения величины Д/ к приемнику непосредственно от
передатчика подводятся высокочастотные колебания. Этот сигнал
принято называть прямым, в отличие от сигнала, возвращаю-
щегося от земли и называемого отраженным.
74
Рис. 2.23. Блок-схема радиовысотомера
Антенны радиовысотомера располагают на самолете таким об-
разом, чтобы исключить возможность попадания излучаемых сиг-
налов с передающей антенны непосредственно на приемную. Это
достигается соответствующим размещением антенн. Например, их
устанавливают так, чтобы оси располагались на одной линии. При
этом антенны радиовысотомера должны быть размещены на опре-
деленном расстоянии друг от друга и на определенном расстоянии
от поверхности земли (когда самолет находится в стояночном по-
ложении). Последнее требование вытекает из необходимости ис-
ключить явление переотражения излученного передатчиком сигнала
при полете на малых высотах. Таким образом, на балансный де-
тектор (см. рис. 2.23) одновременно поступают два сигнала: прямой
/пр и отраженный /Отр. Здесь происходит сложение обоих сигналов,
в результате чего на выходе балансного детектора выделяются низ-
Рис. 2.24. К принципу действия радиовысотомера:
а — высокая частота; б — частота биений;
1 — прямой сигнал; 2 — отраженный
75
кочастотные биения — колебания разностной частоты: F6 = Af =
= fnp — |отр. Рис. 2.24 иллюстрирует сложение прямого и отражен-
ного сигналов. За исключением небольших промежутков времени
на участках а, б, в и т. д.. частота биений Д/^ постоянна и пропор-
циональна Тн-
Низкочастотные биения усиливаются в УНЧ, а затем передаются
в ограничитель, где они преобразуются в импульсы строго опре-
деленной (независимо от высоты полета) амплитуды. Частота сле-
дования импульсов определяется частотой биений, а значит, высо-
той полета. С выхода ограничителя импульсы подаются на счет-
чик, выходное постоянное напряжение которого пропорционально
частоте следования импульсов. Далее это напряжение поступает в
усилитель постоянного тока, нагрузкой которого является стрелоч-
ный указатель высоты.
С этого же усилителя снимаются сигналы на другие потребите-
ли информации о высоте полета.
Кратко остановимся на некоторых вопросах точности измерения
высоты. Число импульсов, поступающих на счетчик в течение од-
ного периода модуляции, является функцией высоты полета. При
этом плавному изменению высоты соответствует дискретное изме-
нение числа импульсов, появляющихся за один период модуляции.
Если за один период модуляции число импульсов изменяется на
единицу, то это означает, что частота следования импульсов изме-
нилась на (поскольку за одну секунду проходит Лм периодов
модуляции). Иначе говоря, при плавном изменении высоты часто-
та следования импульсов меняется ступенями через FM. Вследствие
этого радиовысотомер дает дискретные показания через интервалы
ДЯ, соответствующие изменению на единицу числа импульсов в
одном периоде модуляции. Следовательно, самолет может изме-
нить высоту в пределах ±ДН, а показания высотомера останутся
неизменными.
Погрешность измерения высоты вследствие дискретности отсче-
та определяется следующей зависимостью: Д7У = -—-.
8 Vo
Эта погрешность уменьшается с увеличением девиации частоты
Д/о. У наиболее распространенных в настоящее время радиовысо-
томеров типа РВ-2, РВ-УМ девиация частоты Д/0=2О Мгц. Нетруд-
но подсчитать, что в таком случае интервал дискретности отсчета
составляет ~1,87 м. Разумеется, такие высотомеры не могут быть
использованы для автоматизации приземления самолета.
Повышение точности измерения высоты достигается за счет уве-
личения полосы качания частоты. Радиовысотомеры, используемые
в системах автоматической посадки, работают в диапазоне частот
4200—4400 Мгц, т. е. имеют Afo=^lOO Мгц, Кроме того, для повыше-
ния точности измерения высоты прибегают и к таким мерам, как
использование двойной частотной модуляции, введение фазовраща-
телей и др. [1]. Благодаря этому современные радиовысотомеры
76
имеют точность порядка ±0,25 м при изменении высот от 0 до 10 м
и 2,5—3% (среднее квадратическое отклонение) для высот бо-
лее 10 м.
Выходной ток радиовысотомера, поступающий к потребителям,
пропорционален высоте полета. Это позволяет рассматривать ра-
диовысотомер как простое усилительное звено с коэффициентом
усиления kp. Вместе с тем необходимо учитывать, что выходной
сигнал в определенной степени засорен помехами. Однако в ос-
новном флуктуация выходного сигнала является результатом не-
ровности рельефа пролетаемой местности.
Указатель высоты обычно выполняют на базе следящей систе-
мы. Шкала указателя, как правило, неравномерная, чаще всего —
логарифмическая. Это позволяет более точно отсчитывать малые
высоты.
В радиовысотомерах предусматривается выдача сигнала о до-
стижении некоторой заданной высоты, к примеру, высоты принятия
решения. Для задания нужного значения высоты служит специаль-
ный задатчик.
Формирование траекторий выравнивания по сигналам радиовы-
сотомера в системах автоматического приземления будет подробно
рассмотрено в гл. 3.
В системах автоматического захода на посадку по II категории
и системах автоматического приземления информация о высоте
часто используется для коррекции передаточных чисел в вычисли-
телях систем траекторного управления, а в некоторых случаях —
в системах контроля.
Рис. 2.25. Схема устройства, изменяющего передаточные числа и ограничения за-
данного крена
77
Рис. 2.26. Графики изменения
коэффициентов усиления сиг-
налов КРП, ГРП и ограниче-
ния заданного крена
В качестве примера на рис. 2.25 показана схема устройства,
примененного в системе автоматической посадки фирмы Бендикс
для самолетов Боинг, которое по сигналам радиовысотомера ме-
няет передаточные числа в продольном и боковом каналах вычис-
лителей и величину ограничения заданного крена (рис. 2.26).
Сигнал, пропорциональный высоте, поступает на усилитель, на
выходе которого установлен ограничитель с несимметричной харак-
теристикой. К ограничителю подключен электродвигатель, который
через редуктор перемещает щетки трех потенциометров. Один из
них служит для выдачи сигналов жесткой обратной связи на усили-
тель и сигнала в систему ограничения заданного крена у3. Два дру-
гих используются для изменения коэффициентов усиления (аттен-
нюации) сигналов КРП, ГРП (#крп и /?грп ) в функции истинной
высоты полета.
Генератор, связанный с электродвигателем, выдает сигналы ско-
ростной обратной связи.
Когда самолет, снижаясь по глиссаде, пролетает над ровной
поверхностью, сигнал на выходе радиовысотомера меняется во
времени (и в функции расстояния до порога ВПП) по линейному
закону. Так же меняются и сигналы, снимаемые с потенциометров.
Иначе обстоит дело, когда рельеф пролетаемой местности сильно
меняется. Для уменьшения влияния неровностей рельефа на кор-
ректируемые параметры служит нелинейный ограничитель. При
Рис. 2.27. К влиянию неровностей рельефа на передаточные числа:
/—«передаточное число при плоском рельефе; 2 — передаточное число при пересеченном
рельефе; 3 — рельеф
78
уменьшении сигнала на выходе радиовысотомера следящая систе-
ма поворачивает щетки с большой скоростью. При увеличении сиг-
нала скорость отработки этого сигнала следящей системы умень-
шается. Поэтому кратковременное увеличение сигнала высоты
вызывает более медленное по сравнению с кратковременным умень-
шением этого сигнала изменение параметров системы (рис. 2.27).
Как показал опыт полетов, благодаря этим мерам влияние изме-
нения рельефа местности на качество заходов на посадку практи-
чески незначительно.
ГЛАВА 3
ДИНАМИКА ПОЛУАВТОМАТИЧЕСКОГО
И АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ
§ 1. ОБЩИЕ СВЕДЕНИЯ
Выход самолета на посадочную траекторию, задаваемую назем-
ными радиотехническими средствами, и последующее удержание на
ней представляет собой частный случай задачи стабилизации цент-
ра масс самолета на заданной в пространстве траектории. В общем
случае задача стабилизации центра масс самолета на траектории
значительно сложнее задачи стабилизации угловых положений са-
молета относительно центра масс. Остановимся на этом вопросе бо-
лее подробно.
Рассмотрим одну из простейших задач стабилизации угловых
положений самолета — стабилизацию крена в прямолинейном поле-
те. В этом случае летчик должен выдерживать крен самолета рав-
ным нулю. Иначе говоря, в данном случае заданный крен у3=0. Ре-
шая эту задачу, летчик анализирует информацию о текущем (дей-
ствительном) крене самолета, получаемую от авиагоризонта, и
соответствующим образом воздействует на штурвал, отклоняя эле-
роны. Зависимость угловой ско-
рости крена и крена от отклоне-
ния элеронов была выяснена в
§ 6 гл. 1. По мере уменьшения
крена летчик соответственно
уменьшает отклонение элеронов
с тем, чтобы к моменту возвра-
щения самолета к горизонтально-
му положению элероны находи-
лись в нейтральном положении.
С учетом сказанного контур уп-
равления креном имеет вид, пред-
ставленный на рис. 3.1.
Рис. 3.1. Контур управления креном
Летчик Самолет
Г
1
L&3
P(P'lr)
4i (р)
Рис. 3.2. Структурная схема управле-
ния креном
79
Летчик
Рис. 3.3. Структурная схема управления
курсом
Структурная схема, по-
казанная на рис. 3.2, отно-
сится к случаю стабилиза-
ции заданного крена любой
величины. На этой схеме лет-
чик представлен звеном с
передаточной функцией
№л(р). На вход этого звена
подается сигнал отклонения
текущего крена от его заданного значения: Д,у = у3—у.
В отличие от принятого в гл. 1 обозначения приращения Д в
обозначение отклонения от заданного значения введен дополни-
тельный индекс «' » (AJ. Для случая, когда у3=0, Д,у = —у.
Используя структурную схему (см. рис. 3.2), составим переда-
точную функцию контура стабилизации крена
7
7з
= фт3(р) =
_____________________э___________
Р (Р + I- ) + (р) is
I э
(3.1)
Если полагать, что летчик работает как простое усилительное
звено (№л(р)=6л), то передаточная функция (3.1) представляет
собой передаточную функцию колебательного звена. Частота Q
собственных колебаний и коэффициент g относительного затуха-
ния этого звена определяется параметрами 1$э , и коэффициентом
усиления кл:
г____ I.
.
л Э г----
2у*л/8
Иногда оказывается, что коэффициент относительного затуха-
ния в рассматриваемой системе мал. Для его увеличения необходи-
мо, чтобы летчик реагировал не только на сигнал Д,у, но и на его
производную. В таком случае №л(р) =kn(l + k'p).
Следует сказать, что после относительно небольшой тренировки
летчик удовлетворительно реагирует на угловую скорость крена.
Подробно на возможностях, летчика как оператора, включенного в
контур управления, мы остановимся в следующем параграфе.
Передаточная функция (3.1) справедлива для линейной системы
управления креном. В действительности процесс управления кре-
ном выходит за рамки линейной задачи,, так как при пилотирова-
нии летчик должен наблюдать показания не только авиагоризонта,
но и других приборов. Восприятие информации, в том числе и о кре-
не самолета, имеет при этом дискретный характер. Воздействие
летчика на органы управления также является дискретным.
Еще более сложной оказывается задача стабилизации курса са-
молета. Структурная схема контура управления курсом для случая,
когда центростремительная сила создается за счет крена (р=.О),
показана на рис. 3.3. Система уравнений, описывающая динамику
80
Рис. 3.4. Структурная схема управления положением центра масс самолета в бо-
ковом движении
управления курсом, имеет более высокий порядок, чем в случае уп-
равления креном.
Для реализации удовлетворительных переходных процессов по
курсу летчик должен иметь информацию об отклонении от задан-
ного курса и о скорости изменения этого отклонения. Указанную
информацию он получает с помощью компаса (курсовой системы)
и авиагоризонта.
Напомним, что в гл. 1 была показана связь между угловой ско-
ростью рысканья и креном самолета:
(3.2)
В зависимости от величины отклонения текущего курса самоле-
та от его заданного значения: Д,ф = ф3—ф, летчик меняет крен са-
молета. Поэтому задачу стабилизации курса самолета можно пред-
ставить состоящей из двух более простых задач.
Первая из них заключается в выработке решения (команды)
о том, каким должен быть крен самолета в данный момент, чтобы,
обеспечивая в конечном итоге Д,ф = 0, характеристики переходного
процесса по курсу были удовлетворительными. Иначе говоря, тре-
буется опредёлить зависимость у3 = /(Д,ф).
Вторая задача сводится к обеспечению условия Д,у = уз—у = 0.
Ее мы рассмотрели выше..
Подобным же образом можно поступить, рассматривая задачи
управления положением центра масс самолета. Остановимся на од-
ной из задач этого типа — стабилизации центра масс самолета ^на
заданной траектории в боковом движении. Для ее решения летчику
необходима информация о боковом отклонении Д<г самолета от
заданной траектории, о первой и второй производных от этого от-
клонения. Подробно это рассмотрим в § 4 этой главы. Пока лишь
отметим, что, решая данную задачу, летчик должен наблюдать и
анализировать показания трех приборов^ рис. 3.4). Информация об
отклонении Д,ф текущего курса от заданного используется в каче-
стве информации о скорости (первой производной) отклонения
центра масс самолета от заданной траектории, что справедливо при
отсутствии бокового ветра: з=УД,ф.
Тогда с учетом уравнения (3.2) становится очевидной зависи-
мость между второй производной отклонения и креном самолета:
81
Рис. 3.5. Структурная схема с системой полуавтоматического управления
Z^g^. (3-3)
Система уравнений, описывающих рассматриваемую задачу как
линейную, имеет четвертый порядок. При некоторых условиях за-
дача может быть расчленена на две, каждая из которых описывает-
ся уравнениями второго порядка.
Первая из них заключается в определении зависимости
уз = /(Д,г, А,г). Вторая по-прежнему состоит в обеспечении условия
А,у=0.
Разумеется, такое деление одной сложной задачи на две прос-
тых является условным, так как летчик решает одну общую задачу.
Мы прибегли к такому делению, чтобы проанализировать процесс*
управления и возможные .пути, его автоматизации. Подобным уп-
рощающим приемом мы уже пользовались в гл. 1, когда при рас-
смотрении продольного движения самолета разделили его на ко-
роткопериодическое и длиннопериодическое. В данном случае про-
должительность переходных процессов крепового и траекторного
движений различается в 5—10 раз и более.
Первая задача связана с получением, анализом и обобщением
информации о параметрах движения самолета и выработке на этой
основе заданного крена. Она носит в основном вычислительный ха-
рактер и, как правило, требует для качественного решения спе-
циальной тренировки, особенно тогда, когда необходимы высокие
точность и качество стабилизации самолета на заданной траекто-
рии, например, при заходе на посадку.
Применение в подобных случаях устройств, автоматизирующих
решение этой задачи, позволяет существенно упростить работу лет-
чика. Такие устройства, получившие название систем полуавто-
матического или д и р е кт о р н о г о , управления (рис. 3.5),
широко используются на самолетах гражданской авиации уже бо-
лее десяти лет. Управление самолетом с использованием этих сис-
тем называют полуавтоматическим или д и р е к т о р н ы м.
Поскольку системы полуавтоматического управления применяют
для решения задач стабилизации самолета на заданной траекто-
рии, то очень часто ихvназывают системами траекторного
управления.
С некоторыми общими вопросами полуавтоматического управ-
ления мы познакомимся в следующем параграфе. Принципы дей-
ствия систем полуавтоматического управления, применяемых при
82
Рис. 3.6. Структурная схема системы автоматического управления
заходе на посадку, будут подробно рассмотрены в § 4 и, 5 ^той
главы.
Задача стабилизации заданного крена решается летчиком в те-
чение всего времени полета. Поэтому он настолько натренирован
в ее решении^ что делает это практически рефлекторно. Однако да-
же в тех случаях, когда самолет обладает хорошими характеристи-
ками устойчивости и управляемости, длительное пилотирование са-
молета вручную утомительно для летчика. Из сказанного следует,
что для облегчения работы летчика в маршрутном полете, где тре-
бования к точности выдерживания заданной траектории несрав-
ненно меньше, чем при заходе на посадку, в первую очередь необ-
ходимо автоматизировать стабилизацию самолета относительно
центра масс. Это задача решается с помощью автопилотов. Их
принцип действия и устройство подробно освещены во многих кни-
гах, например [3], [29], [32]. Поэтому этих вопросов мы коснемся
весьма кратко в § 3 этой главы.
Разумеется, целесообразно освободить летчика от управления
самолетом вручную и при заходе на посадку несмотря на относи-
тельную кратковременность этого этапа. Дело в том, что общая
нагрузка летчика во время захода на посадку резко увеличивается
по сравнению с этапами маршрутного полета. Кроме того, точность
стабилизации угловых положений самолета автопилотом выше, чем
при ручном управлении, что в конечном счете сказывается на точ-
ности стабилизации самолета на посадочной траектории.
Структурная схема системы автоматического управления поло-
жением центра масс самолета (рис. 3.6) отличается от схемы, по-
казанной на рис. 3.5, тем, что вместо звена с передаточной функци-
ей 1^л (р) летчика включено звено с передаточной функцией №а(р)
автопилота, стабилизирующего заданный крен. Кроме того, в дан-
ном случае система полуавтоматического управления названа си-
стемой траекторного управления.
Возможность использования автопилота на малых высотах и
скоростях полета зависит от решения ряда проблем. Наиболее
сложна из них проблема обеспечения безопасности автоматическо-
го полета. Если в случае отказа автопилота безопасность полета не
обеспечена, то такой автопилот использовать нельзя. Малая высота
полета обусловливает более высокие требования к безопасности
полета при заходе на посадку, чем в маршрутном полете. Вопросы
безопасности автоматического полета будут подробно рассмотрены
в гл. 4.
83
До сих пор мы говорили об управлении боковым движением
самолета. Однако все сказанное в принципе может быть отнесено
и к управлению продольным движением. При рассмотрении общей
задачи управления продольным движением самолета на заданной
траектории ее можно также условно разбить на две более простых.
Одна из них обычно сводится к определению заданного угла тан-
гажа в функции продольного отклонения самолета от заданной
траектории: $3=f(&,H)9 а вторая — к обеспечению условия Д,Ф =
= Ф3—,0’=0.
Возможны и другие варианты разделения общей задачи управ-
ления продольным движением.
§ 2. О ПОЛУАВТОМАТИЧЕСКОМ УПРАВЛЕНИИ
Свойства и динамические характеристики летчика как
звена системы управления
К настоящему времени накоплен большой материал о характе-
ристиках человека-оператора, работающего в системе «человек —
машина», частным случаем которой является система «летчик —
самолет». На основе этих данных человек-оператор в первом при-
ближении может быть представлен в виде совокупности трех звень-
ев, отображающих воспринимающие органы (рецепторы), централь-
ную нервную систему и двигательные органы (эффекторы) и цепи
обратной связи (рис. 3.7).
Воспринимающими органами являются органы чувств операто-
ра. С их помощью воспринимается и передается поступающая ин-
формация. В рассматриваемых нами задачах управления самоле-
том используется только зрение, являющееся наиболее совершен-
ным чувством. Из остальных чувств лишь слух находит некоторое
использование как канал для приема и передачи информации, вы-
даваемой звуковыми сигнальными устройствами (звонками, сире-
нами и др.).
От органов чувств полученная информация поступает в цент-
ральную нервную систему. Здесь происходит опознавание инфор-
мации, ее оценка и выработка ответных реакций на внешние раздра-
жения. Благодаря органам чувств и центральной нервной системе
оператору свойственны такие явления, как восприятие информа-
ции, запоминание, различение, распознавание, ассоциирование,
сравнение, обучение, обобщение, рассуждение и внимание1.
Воспринима-
ющие органы
(рецепторы)
Центральная
нервная
система
Трогательные я
органы
(эффекторы)
Рис. 3.7. Скелетная схема
модели человек — оператор
1 Подробно по этому поводу см. [3].
84
Рис. 3.8. Структурная схема
модели человек — оператор
По двигательным нервам от головного мозга поступают импуль-
сы к мускульным волокнам двигательных органов. Эти импульсы
возбуждают или расслабляют мускулы, вследствие чего осуществ-
ляется силовое воздействие на органы управления машины (само-
лета). При этом в центральную систему подается информация о
степени напряженности мускулов. Такая связь получила название
кинестатической обратной связи.
Летчик-оператор, включенный в систему управления, может
рассматриваться как линейная динамическая передающая систе-
ма. Поскольку летчик способен приспосабливаться к динамическим
характеристикам управляемого им самолета и обладает свойством
обучаться, эта динамическая система является системой с перемен-
ными параметрами. В результате экспериментальных исследований
выявлено, что приближенно передаточная функция оператора мо-
жет быть представлена в виде:
U7 (р) = . (3.4)
Численные значения коэффициентов передаточной функции (3.4)
для различных выходных сигналов приведены в табл. 3.1, заимство-
ванной из книги [4].
Таблица 3.1
Частота вынуждающей функции, рад[сек 1 1 Т а k
1 0,04 1,50 0,15 0,080 100
2 о,п 4,55 0,20 0,055 40
3 0,20 11,00 0,25 0,067 15
Структурная схема, соответствующая передаточной функции
(3.4), может быть изображена в виде последовательного соедине-
ния трех звеньев (рис. 3.8). Первое звено имеет передаточную
функцию
W^p) = e~^ (3.5)
где х—время запаздывания ответной реакции на воспринятый органами чувств
сигнал.
Передаточная функция (3.5) справедлива для случая, когда
летчик в процессе управления наблюдает за показаниями только
одного прибора, точнее —за отклонением одного параметра от его
заданного значения. Если необходимо наблюдать п параметров, то
передаточная функция звена приобретает вид:
1Г1(р) = е“^т- (3.5а)
85
Второе звено представляет собой комбинацию трех элементар-
ных динамических звеньев: усилительного, апериодического и фор-
сирующего
4- 1
Постоянная времени п апериодического звена определяется
главным образом продолжительностью оценки полученной инфор-
мации и выработки ответной реакции. Форсирующее звено
(ЯТ1Р+ 1) отражает способность оператора на основе рассуждения,
запоминания и других явлений, свойственных головному мозгу,
реагировать на скорость изменения контролируемого параметра,
компенсировать 'запаздывание в получении информации и выработ-
ке ответной реакции.
Нервно-мускульные процессы воздействия на органы управле-
ния отражаются динамикой третьего звена, представляющего со-
бой комбинацию усилительного звена (усилитель мощности) и апе-
риодического
гз(Р)=—тт
Z2P + 1
Постоянную времени т2 иногда называют постоянной времени
нервно-мускульной системы оператора. В зависимости (3.4)
k = kxk2 — коэффициент усиления оператора.
Реакция оператора имеет дискретный характер, причем он спо-
собен совершить до двух ответных реакций в -секунду. Отсюда сле-
дует, что его полоса пропускания ограничена частотой 0,5 гц. Тео-
ретически и экспериментально доказано, что легче и точнее всего
оператор выполняет функции простого усилителя. Более сложные
операции, в частности дифференцирование и интегрирование, вы-
полняются оператором значительно хуже. Указанные выше обстоя-
тельства учитываются при создании систем полуавтоматического
управления заходом на посадку.
Они оказывают определяющее влияние на выбор параметров, по
которым ведется управление. Наиболее оптимальные условия уп-
равления для летчика создаются, когда в качестве такого парамет-
ра при управлении боковым движением выбирается крен. На само-
летах с удовлетворительными характеристиками боковой устойчи-
вости и управляемости функции летчика наиболее близки к
функциям простого усилителя. Заметим, что при выборе курса в
качестве параметра управления функции летчика значительно ус-
ложняются, поскольку он должен реагировать на производную от-
клонения от заданного курса.
По аналогичным причинам в качестве параметра, по которому
ведется управление продольным движением, выбирают тангаж или
угловую скорость тангажа. Отметим, что в принципе в качестве
86
такого параметра возможно также использовать нормальную пе-
регрузку. На выбор того или другого из этих параметров оказывает
влияние вид командной информации, принятой в системе полуав-
томатического управления.
Командная информация в системах
полуавтоматического управления
Основными элементами системы полуавтоматического управле-
ния заходом на посадку являются вычислительное устройство (вы-
числитель) и командный пилотажный прибор. На основе сигналов
датчиков, характеризующих параметры движения самолета на за-
данной траектории, в вычислителе вырабатывается командный сиг-
нал. Этот сигнал служит для отклонения командной стрелки или
индекса в командном пилотажном приборе.
Будем полагать, что для управления боковым движением в вы-
числителе вырабатывается команда у3. На командном пилотажном
приборе (рис. 3.9) эта команда выдается в виде отклонения индек-
са 7 на угол уз по шкале кренов 2. Задача летчика заключается в
том, чтобы, создав правый крен, совместить кольцевой индекс 1 те-
кущего крена с индексом заданного крена. Очевидно, что при этом
выполняется условие у = у3. Такой способ раздельной выдачи ин-
формации о заданном и текущем крене называют индикацией
«преследования» («Запрос — ответ»). При управлении про-
дольным движением летчик должен совместить кольцевой индекс 3
текущего тангажа с индексом 4 заданного тангажа. Следователь-
но, при управлении боковым и продольным движениями летчик
имеет дело с двумя парами подвижных индексов, расположенных
в разных частях шкалы. Это создает определенное неудобство. Поэ-
тому такой способ индикации применялся лишь в первых команд-
ных пилотажных приборах.
Более удобной оказалась «нуль-индикация» (индикация
«с компенсацией»). Здесь при управлении боковым движением фор-
мируется разностный сигнал Л,у = у3—у (рис. 3.10). Он подается на
Рис. 3.9. Командный пилотаж-
ный прибор:
/ — индекс текущего крена: 2 —
шкала кренов; 3 — индекс текущего
тангажа; 4 — индекс заданного тан-
гажа; 5 — линия горизонта; 6 —
шкала тангажа; 7 — индекс задан-
ного крена
87
командный.
Рис. 3.10. Структурная схема с командным пилотажным прибором нуль-индика-
торного типа .
нуль-индикатор, стрелка которого является командной стрелкой
крена. Отклонение командной стрелки крена 6Z равно
8г=/сД,т=/с(Тз-т), (3.6)
где ic — коэффициент передачи на стрелку.
При управлении по такому прибору задача летчика заключается
в том, чтобы удерживать командную стрелку в нулевом (среднем)
положении. Отклонение командной стрелки указывает^ на необхо-
димость изменения крена, точнее — на выполнение координирован-
ного разворота с креном определенной величины. При таком крене
стрелка устанавливается в среднее положение. Если же самолет
накренить на больший угол, то стрелка перейдет через среднее по-
ложение в противоположную сторону, указывая на необходимость
уменьшения крена.
Для управления продольным движением самолета использует-
ся командная стрелка тангажа. Ее отклонение дн равно
(3.7)
Это указывает на необходимость изменения угла тангажа.
Если в качестве параметра, по которому ведется управление,
используется угловая скорость тангажа, то отклонение командной
стрелки
8„ = /сД,&=/с(&3_4). (3.8)
При этом появляется необходимость изменения угловой скоро-
сти тангажа.
При использовании в системе полуавтоматического управления
продольным движением способа нуль-индикации принципы реали-
зации алгоритмов (3.7 и 3.8) аналогичны.
Если бы мы захотели использовать способ «преследования»,
то для управления по угловой скорости тангажа рассмотренный
выше командный пилотажный прибор (см. рис. 3.9) не годится.
Дело в том, что каманды заданной угловой скорости тангажа име-
ют сравнительно высокочастотный характер и поэтому индекс
(стрелка) заданной угловой скорости тангажа был бы весьма под-
вижен. Вследствие этого совмещать с ним индекс (стрелку) текущей
угловой скорости тангажа было бы намного труднее, чем при уп-
равлении по заданному тангажу.
88
Оценивая систему полуавтоматического управления, летчики
уделяют особое внимание поведению командной стрелки и, в част-
ности, простоте управления по ней («послушности») и ее чувстви-
тельности. Эти характеристики главным образом зависят от вы-
бранного закона управления командной стрелкой и качества сиг-
налов, используемых для его реализации.
Обычно в командном пилотажном приборе командная стрелка
крена располагается вертикально, а командная стрелка тангажа —
горизонтально. Когда они находятся в нулевом положении, то об-
разуют перекрестие в центре прибора. Подробно устройство ко-
мандных пилотажных приборов освещено в гл. 5. Там же будет
рассмотрен еще один способ индикации, когда командная информа-
ция по крену и тангажу индицируется с помощью одного индекса,
а также некоторые другие устройства для выдачи этой информации.
С вычислителями систем полуавтоматического управления мы
познакомимся в § 4 и 5 настоящей главы. Эти же вычислители мо-
гут быть использованы в системах автоматического управления в
качестве вычислителей сигналов траекторного управления.
Упрощение структурных схем при полуавтоматическом
управлении движением самолета на заданной
траектории
Система управления, представленная на рис. 3.10, состоит из
нескольких контуров. Во внутренний замкнутый контур входят ко-
мандный пилотажный прибор, летчик и объект управления
(самолет).
Внутренний контур должен обладать двумя важными особен-
ностями. Во-первых, задача летчика по удержанию командной
стрелки в нулевом положении должна быть достаточно проста и он
мог бы точно обеспечить выполнение условия б2 = 0, или, что то же
самое, у = у3- Во-вторых, нужно, чтобы время переходных процессов
во внутреннем контуре (время установления у = у3) в 5—10 раз и
более было меньше времени переходных процессов траекторного
движения. Это позволяет при рассмотрении траекторного движения
-заменять внутренний контур передаточным звеном с единичным
усилением. Соответственно упрощается структурная схема управ-
ления боковым движением самолета на заданной траектории
(рис. 3.11).
Строго говоря, внутренний контур включает.в себя также дат-
чик сигналов текущего крена, например гировертикаль.ЗЭднако,
как правило, влиянием дина-
мических характеристик гиро-
скопических датчиков угловых
координат на динамику кон-
тура управления креном мож-
но пренебречь.
Необходимо подчеркнуть,
Рис. 3.11. Упрощенная структурная схема
управления боковым движением
89
командный.
пилотажный
Рис. 3.13. Упрощенная струк-
турная схема управления про-
дольным движением
Рис. 3.12. Структурная схема управления продольным движением
что при замене внутреннего контура звеном с единичным усилени-
ем динамика движения самолета на заданной траектории опреде-
ляется лишь законом формирования командных сигналов у3 или
и не зависит от субъективных особеностей и квалификации летчи-
ка. При приближенном рассмотрении задачи траекторного движе-
ния эта замена не отражается на уравнениях остальных контуров
(см. рис. 3.10 и 3.11), включающих кинематические уравнения
движения самолета относительно траектории и уравнения вычисли-
теля системы полуавтоматического управления.
Исходя из аналогичных соображений производится упрощение
структурных схем управления продольным движением самолета на
заданной траектории. Рис. 3.12 и 3.13 иллюстрируют пример упро-
щения структурной схемы с командным пилотажным прибором
нуль-индикаторного типа для случая, когда в вычислителе реали-
зуется алгоритм (3.8).
§ 3. ЗАКОНЫ УПРАВЛЕНИЯ И СТРУКТУРНЫЕ СХЕМЫ АВТОПИЛОТОВ
Некоторые общие сведения об автопилотах
Автопилотом называют устройство, служащее для автома-
тического управления движением самолета. Он представляет собой
совокупность трех аналогичных по принципу действия и устройству
автоматических регуляторов, обычно их называют каналами ав-
топилота. В зависимости от того, какая угловая координата ими
стабилизируется, различают каналы тангажа, крена и курса (рыс-
канья). Часто каналы классифицируют в зависимости от того, на
какую управляющую поверхность самолета они воздействуют: ка-
нал руля высоты, канал элеронов, канал руля направления. Иногда
удобно выделять продольный и боковой каналы, считая, что первый
из них управляет продольным движением, а второй — боковым.
90
В дальнейшем, говоря об автопилоте, мы будем в основном пользо-
ваться первой и второй классификацией, а говоря о системе управ-
ления, содержащей, кроме автопилота, еще и другие элементы,—
третьей.
Для пояснения структуры автопилота рассмотрим один из его
каналов, например канал крена (рис. 3.14). Он состоит из датчи-
ков сигналов (датчиков информации о параметрах движения само-
лета), задающих устройств, вычислительного (счетно-решающего)
устройства, усилителя и рулевого привода (рулевой машинки).
Снимаемые с датчиков информации сигналы у, у и у поступают
в вычислительное устройство. Сюда же подаются сигналы у3 и у3(/)
от задающих устройств, которыми являются пульты управления и
всевозможные (-не входящие в состав автопилота) вычислители, вы-
дающие сигналы заданного крена. В вычислительном устройстве
автопилота формируются управляющие сигналы иу, подаваемые
через усилитель в рулевой привод, который отклоняет элероны.
Усилитель необходим, потому что управляющие сигналы на выходе
вычислительного устройства автопилота обычно слабы для управ-
ления рулевым приводом, мощность которого составляет не менее
нескольких ватт.
На самолетах с бустерным управлением рулевой привод воздей-
ствует на элероны через бустер. При этом нет необходимости в мощ-
ном рулевом приводе. В некоторых случаях автономный рулевой
привод автопилота может вообще отсутствовать. Его функции вы-
полняет бустер элерона, имеющий дополнительные входы, на кото-
рые подаются сигналы от вычислительного устройства.
Современные бустерные устройства и рулевые приводы автопи-
лотов обладают большим быстродействием, которое является их
важнейшей характеристикой. Поэтому различие в их принципах
действия и устройстве оказывает влияние лишь на связи с вычисли-
тельными устройствами автопилота и практически не сказывается
на законах управления автопилота.
Я
Следует отметить, что в отечественной литературе по автопило-
там рулевой привод (сервопривод) автопилота чаще всего называ-
ют рулевой машинкой. Поэтому в дальнейшем изложении мы также
в основном будем пользоваться этим термином. Однако в некото-
рых случаях, где это нам будет представляться более удобным,
будет употребляться термин привод (сервопривод).
Различают два режима работы автопилота: стабилизация и
управление. В первом случае заданное значение стабилизируемого
параметра сохраняется постоянным во времени. В общем случае
заданное значение может быть отличным от нуля: Например, во
время разворота самолета канал крена стабилизирует заданный с
пульта управления автопилота угол крена у3. В режиме управления
заданное значение стабилизируемого параметра меняется во вре-
мени. К режимам управления могут быть отнесены изменение угла
тангажа и крена самолета с помощью соответствующих органов на
пульте управления автопилота.
Рассматривая в начале данной главы общую задачу стабилиза-
ции самолета на заданной траектории, мы выявили возможность
разделения ее на две частных задачи. Тогда же мы установили, что
при автоматическом управлении самолетом на посадочной траек-
тории основная задача автопилота состоит в том, чтобы стабилизи-
ровать заданные вычислителем значения параметров, по которым
ведется управление, например крен, угол тангажа. Очевидно, что
при этом автопилот также работает в режиме управления.
Вместе с тем, учитывая, что сигналы системы траекторного уп-
равления, если не говорить о помехах в этих сигналах, являются
медленно меняющимися. Поэтому режим работы автопилота в
большинстве случаев может рассматриваться как режим стабили-
зации. В дальнейшем основное внимание мы уделим режимам ста-
билизации положения самолета относительно его центра масс.
Самолет и установленный на нем автопилот образуют замкну-
тую систему стабилизации и управления самолет-автопилот. Ха-
рактеристики движения такой системы определяются динамически-
ми свойствами и характеристиками самолета, являющегося
объектом регулирования (стабилизации и управления), и законом
управления автопилота. Закон управления, или алгоритм, автопи-
лота представляет собой уравнение, устанавливающее связь между
отклонением управляющей поверхности самолета и сигналами дат-
чиков и задающих устройств.
К характеристикам системы самолет-автопилот предъявляется
ряд требований, вытекающих из необходимости обеспечения за-
данной точности стабилизации положения самолета относительно
центра масс и на заданной траектории, безопасности и комфорта
полета. Во всех случаях движение должно быть устойчивым, а ко-
лебательность переходных процессов и перерегулирование строго
ограниченными. Время переходных процессов стабилизации задан-
ных угловых положений должно быть по возможности минималь-
ным. Однако при этом в некоторых случаях из соображений без-
192
опасности и комфорта полета могут накладываться ограничения на
отклонения управляющих поверхностей, величины угловых скоро-
стей движения самолета относительно центра масс, перегрузки и др.
Большое внимание уделяется вопросам точности отработки сигна-
лов задающих устройств и минимизации ошибок стабилизации ре-
гулируемых параметров при воздействии различных возмущений
на систему самолет-автопилот.
Удовлетворение перечисленных требований, зачастую имеющих
противоречивый характер, составляет основную трудность при
выборе закона управления автопилота и его параметров. При ре-
шении этой задачи наряду с расчетными методами широко приме-
няется моделирование системы самолет-автопилот. На начальных
стадиях разработки автопилота ведется математическое моделиро-
вание на электронно-вычислительных машинах. На следующих
этапах моделирование осуществляется с подключением реальных
элементов автопилота. Окончательный выбор Параметров закона
управления автопилота происходит в процессе летных испытаний.
Законы управления автопилота
Рассмотрим простейший закон управления:
Д8 = /Д,ср, (3.9)
где Д6 — угол отклонения управляющей поверхности;
i — передаточное число (передаточное отношение, коэффициент
усиления) автопилота;
Д,ф=ф3 — <р — отклонение текущей величины регулируемого параметра от
его заданного значения.
При этом законе управления угол отклонения управляющей по-
верхности всегда пропорционален отклонению регулируемого пара-
метра. Очевидно, что такой закон мог бы быть реализован при
бесконечно большом быстродействии автопилота, что нереально.
Иначе говоря, уравнение (3.9) представляет собой закон управле-
ния идеального автопилота. С учетом инерционного запаздывания
автопилота простейший закон управления приобретает вид:
(7\р+1)ДЗ=/Д.?, (3.10)
где Та — постоянная времени автопилота.
Автопилоты с таким законом управления получили название
автопилотов с жесткой (позиционной) обратной
связью, что поясняется рис. 3.15, а. Вычислительное устройство
автопилота в данном случае является сумматором, в который по-
даются сигналы заданного и текущего значения регулируемого па-
раметра и обратной связи. Рулевая машинка, обычно представляю-
щая собой электрический или гидравлический двигатель, в первом
приближении является интегрирующим звеном (рис. 3.15, б). Уси-
лительное звено с коэффициентом усиления k характеризует усиле-
93
ние в прямом тракте, а звено с коэффициентом &ж.0.с— жесткую
/ \ 'г AS> k(\ty ^ж.о.сАй)
(позиционную) обратную связь. Тогда До= —=--------------------
Р
или pA6=A(A,(p — Аж.о.сДб), откуда
(Р + ^ж.о.с)Д8 = *Д'?.
Вводя подстановки
(3.11)
(3.12)
^ж.о.с
1
i=~k------
в зависимости (3.11), мы придем к уравнению автопилота (3.10).
Из уравнения (3.12) вытекает, что инерционное запаздывание
автопилота, характеризуемое постоянной времени Та, зависит от
коэффициентов k и £ж.0.с- Соответствующим выбором этих величин
добиваются того, что постоянная времени Та<0,14-0,3 сек. Учиты-
вая, что время переходных процессов угловых движений самолета
измеряется секундами, в подавляющем большинстве случаев иссле-
дования динамики системы самолет-автопилот можно пренебречь
постоянной времени автопилота и считать, что автопилот с жесткой
обратной связью имеет закон управления типа (3.9).
При таком рассмотрении усилитель, рулевую машинку и обрат-
ную связь целесообразно выделить в отдельный контур, так назы-
ваемый контур рулевой машинки или контур сервопривода (рис.
3.16). Цепь обратной связи здесь уже не проходит через вычисли-
тельное устройство автопилота. Теперь входным сигналом контура
рулевой машинки4 является входной сигнал 17в, формируемый в вы-
числительном устройстве автопилота. Тогда, при исследовании ди-
намики системы самолет-автопилот контур рулевой машинки с
жесткой обратной связью, как правило, можно заменить усилитель-
ным звеном с коэффициентом усиления i.
Вместе с тем необходимо иметь в виду, что динамика контура
рулевой машинки оказывает большое влияние на режимы работы
элементов этого контура, а следовательно, на их надежность. Как
показывает многолетний опыт эксплуатации, именно контур руле-
Рис. 3.15. Схемы автопилота с жесткой обратной связью:
а — функциональная; б — структурная
Рис. 3.16. Эквивалентная
структурная схема авто-
пилота с жесткой обрат-
ной связью
Рис. 3.17. Контур руле-
вой машинки с жесткой
обратной связью
Рис. 3.18. Контур ру-
левой машинки с же-
сткой и скоростной
обратной связью
вой машинки является наименее надежной частью автопилота.
Поэтому при создании автопилотов ему уделяется особое внимание.
Исследуя переходные процессы в этом контуре, рулевую машин-
ку уже нельзя рассматривать как идеальное интегрирующее звено.
•С учетом ее инерционности рулевая машинка отображается сое-
динением интегрирующего и апериодического (с постоянной вре-
мени Тм) звеньев. На рис. 3.17 они объединены вместе с усилитель-
ным звеном. Тогда передаточная функция прямой цепи контура
рулевой машинки будет:
(3.13)
С учетом жесткой обратной связи передаточная функция замк-
нутого контура рулевой машинки имеет вид:
ф (п} = ______________-_________==_____________-_________,
г1/?2 4-r2p + 1 Т2р2 + 2еГр + 1
(3.14)
где
!= —1—, л= -Ь_, т2= ——
^ж.о.с ^ж.о.с ^ж.о.с
7 = 1/, 5- -------- 1
V *Лж.0.с 2/гм*Лж.0.с
Обычно постоянная времени Тм составляет десятые и сотые до-
ли секунды. Поэтому постоянная времени 7\ значительно меньше
постоянной времени автопилота Т&=Т2.
Для улучшения динамических характеристик контура рулевой
машинки нередко используется скоростная обратная связь (рис.
3.18). Сигнал, пропорциональный угловой скорости отклонения
управляющей поверхности, чаще всего получают с помощью тахо-
генератора. На рис. 3.18 скоростная обратная связь отражена зве-
ном с передаточной функцией &с.0.ср, а жесткая обратная связь —
звеном с передаточной функцией /гж.0.с-
Передаточная функция этого контура имеет тот же вид, что и
передаточная функция (3.14) контура рулевой мишинки с жесткой
обратной связью (см. рис. 3.16), но в этом случае i = --»
^ж.о.с
95
1 4- ^с.о.с
• ^ж.о.с
, т=
1 + ^с.о.с
2 Т м^Ж.О.С
Из этих зависимостей ясно, что скоростная обратная связь, не
оказывая .влияния на величину передаточного отношения /, позво-
ляет эффективно воздействовать на величину коэффициента за-
тухания £.
При исследовании динамики контура рулевой машинки необхо-
димо учитывать наличие в характеристиках его элементов различ-
ного рода нелинейностей (ограничений, люфтов, зон нечувствитель-
ности и т. п.) L
Наиболее полно характеристики контура рулевой машинки мо-
гут быть изучены путем моделирования и натурных стендовых ис-
следований с применением нагрузочных устройств.
Автопилоты с простейшим законом управления (3.9) довольно
часто не позволяют получить удовлетворительные динамические
характеристики системы самолет—автопилот. В подобных случаях
для повышения устойчивости движения и улучшения качества пере-
ходных процессов в закон управления вводят дополнительные чле-
ны. Так закон управления
Д8 = /т д,<р4-/./)<£>
(3.15)
обеспечивает отклонение управляющей поверхности не только про-
порционально отклонению регулируемого параметра, но и пропор-
ционально скорости его отклонения.
Отклонение управляющей поверхности автопилотом с законом
управления
Д,<р
+ —, (3.16)
v J р
кроме того, пропорционально интегралу от отклонения регулируе-
мого параметра. В дальнейшем будет показано, что интегральный
член (/у вводится для устранения статических ошибок.
\ Р /
Коэффициенты в уравнениях типа (3.15 и 3.16) являют-
ся передаточными числами по сигналам отклонения, скорости от-
клонения и интеграла от отклонения регулируемого параметра со-
ответственно. В дальнейшем при рассмотрении законов управления
конкретных каналов автопилота обозначение передаточных чисел
будет уточнено.
1 Подробно о принципах действия, характеристиках и конструкции рулевых
машинок см. [18], [29].
96
Один и тот же закон управления может быть реализован раз-
ными способами. Для реализации закона управления (3.15) можно
суммировать в вычислительном устройстве автопилота сигналы
двух датчиков информации: датчиков сигналов Д/р и ф. Порции
суммируемых сигналов определяются соответствующими передаточ-
ными отношениями /<р и .
При другом способе, если ф3—постоянная или очень медленно
меняющаяся величина, требуется только датчик сигналов Д,ф, так
как
^_^L==_y> (ЗЛ7)
dt dt
В этом случае в вычислительном устройстве предусматривается
дифференцирующее устройство (обычно — дифференцирующая це-
почка RC). Снятый с него сигнал Д/р затем суммируется с сиг-
налом Дф.
Для формирования сигнала, пропорционального J Д, q>dt в вы-
числительных устройствах автопилотов, имеющих закон управле-
ния типа (3.16), предусматривается интегрирующее устройство,
реализация которого сложнее дифференцирующего.
• Закон управления автопилота типа (3.16) можно сформировать
и без применения специальных интегрирующих устройств. Выше
мы упоминали, что рулевая машинка может рассматриваться как
интегрирующее звено, но в рассмотренных автопилотах контур ру-
левой машинки потерял интегрирующие свойства в результате при-
менения жесткой обратной связи. При отсутствии обратной связи
передаточная функция контура рулевой машинки
совпадает с передаточной функцией (3.13). При этом i=k, Т& = ТМ.
Автопилоты, у которых контур рулевой машинки не имеет обрат-
ной связи, получили название автопилотов без обратной
связи. Закон управления простейшего автопилота этого типа
имеет вид:
(Лр+ 1) jpA8 = /Д.<р.
Член уравнения, содержащий постоянную времени Та, отражает
инерционность контура рулевой машинки. Для ее уменьшения при-
меняют скоростную (гибкую) обратную связь: Передаточная функ-
ция контура рулевой машинки со скоростной обратной связью
такая же, как и у контура без обратной связи (3.18). Однако в этом
k Тм
случае i= -----------, 7\ = -----------.
1 4- ^С.О.С 1 “1“ ^с.о.с
По аналогии с предыдущим автопилоты с рулевыми машинками,
охваченными скоростной обратной связью, называют автопило-
тами со скоростной обратной связью.
4—3261 97
Рис. 3.19. Контур руле-
вой машинки с изодром-
ной обратной связью
При рассмотрении динамики системы
самолет-автопилот постоянной времени Та
в законе управления автопилота без обрат-
ной связи можно пренебречь, тем более при
использовании автопилота со скоростной
обратной связью. Получаемый при этом за-
кон управления идеального автопилота без
обратной связи или со -скоростной обратной
связью имеет вид:
(3.19)
Таким образом, идеальный автопилот, описываемый уравнением
(3.19), отклоняет управляющую поверхность со скоростью, пропор-
циональной величине отклонения регулируемого параметра. Иначе
говоря, угол отклонения управляющей поверхности пропорциона-
Д, Ср
лен интегралу от отклонения регулируемого параметра АЗ = /- .
Р
Законы управления:
(3.20)
(3.21)
аналогичны законам управления (3.15 и 3.16) соответственно.
Для реализации закона управления (3.21) необходимо иметь
датчики сигналов А, ф, ф и ф или формировать сигналы производ-
ных с помощью дифференцирующих элементов в вычислительном
устройстве автопилота. Поскольку получение качественных сигна-
лов вторых производных путем дифференцирования на пассивных
элементах связано с большими трудностями, то обычно в автопило-
тах, работающих по закону (3.21), для стабилизации угловых по-
ложений самолета применяют гироскопические датчики угловых
скоростей ф и ускорений ф.
В последние годы широкое применение находят автопилоты с
изодромной обратной связью. Из их названия ясно, что в цепи об-
ратной связи контура рулевой машинки таких автопилотов включе-
но изодромное звено (рис. 3.19).
Передаточная функция контура
Фр.м(Р) =
7"ip3 + Т2/>2 р
где у___ -г _ ^м'^и 7\= ;
1 + ^и.а.с и 1 4" ^и.о.с Л, 1 4“ ^и.о.с и
Ти — постоянная времени изодромного звена (изодрома);
^и.о.с — коэффициент усиления изодрома.
Постоянная времени изодрома составляет несколько секунд и
на динамику контура рулевой машинки практически не оказывает
98
Рис. 3.20. К реализации изо-
дромного закона управления в
САУ-1Т
влияния. При необходимости улучшить динамику этого контура па-
раллельно изодромной обратной связи включают еще и скоростную
обратную связь.
Закон управления идеального автопилота с изодромной обрат-
ной связью в простейшем случае может быть выражен следующим
образом:
Автопилот с изодромной обратной связью отклоняет управляю-
щую поверхность со скоростью, пропорциональной величине управ-
ляющего сигнала и его производной. Отсюда становится ясной важ-
ная особенность такого автопилота: для формирования закона уп-
равления типа (3.20 и 3.21) не нужен сигнал второй производной.
Довольно часто используется еще одна форма записи закона
управления автопилота с изодромной обратной связью:
—До = г*Д’®, (3.22)
T’hP+I
где /*=-----------.
1 + ^и.о.С
Особенно удобной она оказывается в тех случаях, когда в пра-
вой части закона управления имеется несколько членов.
Реализовать закон управления (3.22) можно не только путем
включения изодрома в цепь обратной связи. На рис. 3.20 представ-
лена упрощенная схема формирования закона управления, приме-
ненная в канале тангажа системы автоматического управления
типа САУ-1Т. Здесь контур рулевой машинки содержит жесткую и
скоростную обратные связи. Кроме того, сигнал Ад пропускается
через электромеханическую следящую систему с большой постоян-
ной времени, имеющую передаточную функцию апериодического
звена ———- . Сигнал с выхода этой следящей системы вычи-
тается из основного сигнала д. Тогда при условии, что #и=£жос =
= ^и о.с, получаем
X, ^И.О.С __ ^И.О.С^иР
^И.о.с гг. . . 'Г л
ТпР+1 ТъР+1
и приходим к схеме автопилота с изодромной и скоростной обрат-
ными связями.
4*
99
Целесообразность такого способа реализации закона управления
типа (3.22) объясняется тем, что следящая система, используемая
для формирования сигнала — AS, входит в так называемый
механизм тангажа, необходимый и для других целей. Хотя в данном
случае изодрома в обратной связи автопилота в «чистом» виде нет,
закон управления все же называется изодромным.
В рассмотренных законах управления автопилотов мы полага-
ем, что на вход (вычислителя подаются сигналы заданного и теку-
щего значения регулируемого параметра или сигнал его отклоне-
ния, а также в некоторых случаях — сигналы производных откло-
нения того же параметра. В общем случае законы управления
автопилота могут содержать члены, являющиеся функциями разно-
родных входных параметров. Так, закон управления автопилота,
стабилизирующего заданную высоту полета, может содержать чле-
ны, пропорциональные отклонению от заданной высоты, углу тан-
гажа и угловой скорости тангажа, крену и др.
Обобщить законы управления для таких случаев не представ-
ляет трудности. Для этого в правых частях уравнений (3.9, 3.19 и
3.22) необходимо записать все дополнительные члены подобно то-
му, как в уравнениях (3.15 и 3.16).
Запись в форме
А (р) ДВ = (р) + B,t (р) ?2 +... + В,п (р) (3.23)
охватывает все рассмотренные выше законы управления для любо-
го количества входных параметров. Оператор А(р) характеризует
вид обратной связи, используемой в автопилоте. Очевидно, что
Л(р)='1 — у автопилотов с жесткой обратной связью, А(р)=р —
у автопилотов со скоростной обратной связью или без обратной
связи, у автопилотов с изодромной обратной
связью.
Рис. 3.21. Структурная схема
автопилота в общем случае
Иногда операторы меняются
Оператор В^ (р) определяется
составом управляющих сигналов по
входному параметру ф&, поступаю-
щих с вычислительного устройства
в контур рулевой машинки. Напри-
мер, В\ (р) =ifk + z\ р + «^ р2, если
с вычислительного устройства по-
ступают сигналы, пропорциональные
параметру ф& и его первой и второй
производной.
В некоторых случаях операторы
B^k (р) могут иметь довольно слож-
ный состав, в частности, содержать
фильтры низких и высоких частот,
в зависимости от режима полета.
100
Таким образом, в общем случае оператор BVk (р), как и опера-
тор А(р), может быть дробнорациональной функцией.
При анализе динамики и построении структурных схем системы
самолет-автопилот закон управления автопилота удобно представ-
лять с помощью передаточных функций. Чтобы перейти к такой
форме записи, нужно разделить обе части уравнения (3.23) на
А (р). Тогда
Д8 = (р) + W*, (р) Т2 +... W*п (р) ?л, (3.24)
где №*,(/>)= -3^, WsVt (р) = .., U7* (р)= -5^ -
Л(р) А(р) А{р)
передаточные функции по каждому входному параметру.
Пример структурной схемы, соответствующей уравнению (3.24),
показан на рис. 3.21.
В свою очередь, передаточная функция по каждому входному
параметру может быть представлена в виде совокупности переда-
точных функций последовательно -включенных элементарных
звеньев: апериодических, интегрирующих, колебательных и форси-
рующих. Входной координатой этой разомкнутой цепи является па-
раметр ф, а выходной—Дб. В ряде случаев эту передаточную
функцию целесообразно представлять в широко принятом в теории
автоматического регулирования виде:
— k (-d'*Pm + + ... + d1p + d0) , (g 25)
* P Cnpn + Cn-xp"-1 + . . . + CjP + Co
где k — коэффициент усиления, равный произведению коэффициентов усиле-
ния всех звеньев;
Q(p)—полином, образованный произведением передаточных функций фор-
сирующих звеньев;
Р(р) — полином, образованный произведением знаменателей передаточных
функций апериодических, интегрирующих и колебательных звеньев.
При отсутствии интегрирующих звеньев Со=1. При одном
интегрирующем звенесо=О и Ci=>l. При двух интегрирующих звень-
ях Co=’Ci=O и с2=1 и т. д. Необходимо подчеркнуть, что интегри-
рующие звенья характерны для автопилотов со скоростной и изо-
дромной обратной связью или без обратной связи и для автопило-
тов с жесткой обратной связью, имеющих интегральный член. Как
будет показано в дальнейшем, вид полинома Р(р) играет важ-
нейшую роль.
Рассмотренные выше законы отражают практически все приме-
няемые в настоящее время законы управления автопилотов само-
101
летов гражданской авиации. Следует обратить внимание на то, что
все эти законы являются линейными до тех пор, пока не начина-
ются ограничения управляющих сигналов и отклонений управ-
ляющих поверхностей. Делаются такие ограничения в основном из
соображений обеспечения безопасности автоматического полета. О
них будет идти речь в гл. 4.
Статические и астатические системы
самолет — автопилот
Рассмотрим один из каналов системы самолет — автопилот. В
соответствии с предыдущим будем считать, что такой канал пред-
ставляет одномерную систему регулирования, т. е. систему с
одним регулируемым параметром ср. В общем случае к системе
могут быть приложены не только управляющие, но и возмущаю-
щие воздействия или, короче, — возмущения.
Под управляющим воздействием будем понимать за-
данное значение регулируемого параметра <р3(0- Примером та-
кого воздействия в канале крена является сигнал заданного крена,
подаваемый от вычислителя системы траекторного управления.
Аналогично в канале тангажа управляющим воздействием являет-
ся, например, сигнал заданного тангажа.
Возмущающим воздействием F(t) будем называть
всякое воздействие, стремящееся нарушить требуемую функцио-
нальную связь между управляющим воздействием и регулируемым
параметром. В отличие от управляющего воздействия, которое во
всех случаях прикладывается к входу автопилота, возмущающие
могут быть приложены в любой точке системы, включая датчики
информации автопилота.
Возмущающими воздействиями являются моменты Мх и Mz, по-
являющиеся вследствие изменения режима полета, изменения кон-
фигурации самолета, отказа двигателей и др. К возмущающим
воздействиям относится атмосферная турбулентность. Ошибка из-
мерения датчиков информации, всевозможные помехи в сигналах,
дрейфы усилительных и вычислительных устройств и т. п. могут
стать возмущающими воздействиями, приложенными к автопило-
ту, в том числе и к его входу.
Управляющие и возмущающие воздействия приводят к тому,
что заданное и текущее значения регулируемого параметра отли-
чаются друг от друга. Отклонение Д,ф = ф3(/)—ф является ошибкой
системы.
Как известно \ системы автоматического регулирования под-
разделяются на статические и астатические. Систему регулирова-
ния называют статической но отношению к возмущающему
или управляющему воздействию, если при воздействии, стремя-
щемся с течением времени к некоторому установившемуся постоян-
1 См. например, [36].
102
Рис.
3.22. Система само-
лет — автопилот
ному значению, ошибка (отклонение регулируемой величины) так-
же -стремится к постоянному значению, зависящему от величины
воздействия. Систему автоматического регулирования называют
астатической, если при такого же рода воздействии ошибка
стремится к нулю вне зависимости от величины воздействия.
Одна и та же система может быть астатической по отношению
к одному возмущающему воздействию и статической по отношению
к другому в зависимости от того, к какой точке системы воздействие
приложено. Кроме того, одна и та же система может быть астати-
ческой по отношению к управляющему воздействию и статической
по отношению к какому-либо возмущающему воздействию и наобо-
рот.
Определить, является система статической или астатической по
отношению к данному воздействию, не представляет сложности,
если известны соответствующие передаточные функции.
Пусть, например, к системе самолет — автопилот приложены
управляющее и возмущающее воздействия (рис. 3.22). Управляю-
щее воздействие <р3(б и текущее значение регулируемого парамет-
ра <р сравниваются в устройстве, условно выделенном из автопило-
та -в отдельный элемент. Возмущение F(t) действует на самолет в
точке, характеризуемой некоторой координатой X. Самолет пред-
ставлен состоящим из двух звеньев, разделенных точкой приложе-
ния возмущения.
В данном случае выражение для передаточной функции системы
= ф (р) = (р) (3.26а)
<?з(0 ' 1 +Wa(p)Wc(p) V
где №а(р) —передаточная функция автопилота;
Wc(p) =W с(р) Wc"(p) —передаточная функция самолета.
Следовательно, передаточная функция для ошибки
Л,о 1
— = 5 (р) = 1 - Ф (р) = — . (3.266)
?з(0 1 + ^а(р)^с(р)
Управляющие воздействия в рассматриваемых нами системах
самолет—автопилот имеют весьма медленно меняющийся харак-
тер. Поэтому при исследовании точностных характеристик систе-
мы их можно полагать постоянным, т. е. исследовать реакцию сис-
103
темы на ступенчатое возмущение <р3(/) = (p3 = const. Тогда уравнение
ошибки имеет вид Д/р = 5(р)<р3.
Положив р = 0 в передаточной функции S(p), получаем уравне-
ние установившейся ошибки: Д,фуст = S (0)<р3.
Система самолет— автопилот будет астатической по отношению
к управляющему воздействию (Д,фуст=О), если S(0)=0. При
3 (0) #=0 система будет статической.
Представим передаточные функции автопилота и самолета по
образцу уравнения (3.25) в виде отношений полиномов:
Wa(P)=^rx~-, > (3.27)
Ра \Р)
Wc(p)= -kcQ^p) . (3.28)
Ре(р)
Подставив (3.27 и 3.28) в (3.26) и проведя преобразования, по-
лучим
S(p)= ----------^а(р)Рс (/>)------- (3.29)
P»(p)Pc(p) + WcQa(p)Qc(p) '
Из (3.29) вытекает, что 3(0) =0, если Ра(0)=0, независимо от
того, что Рс(0)=0 или /М0)#=0, т. е. от характеристик самолета.
Учитывая сказанное ранее о полиноме Р(р), можно сделать вывод
о том, что 3(0)=0, если в полиноме Р(р) отсутствует свободный
член (со = 0). Таким образом, достаточным условием астатичности
системы к ступенчатым управляющим воздействиям является нали-
чие интегрирующих звеньев в автопилоте. Заметим, что другим
достаточным условием астатичности является наличие интегрирую-
щих звеньев в структурной схеме самолета, при котором Рс(0)=0.
Проделав аналогичные операции с передаточной функцией
(3.26 а), можно показать, что при этих же условиях Ф(0) = 1. Сле-
довательно, по окончании переходного процесса установившееся
значение
<?уст = Ф(О)'Рз = 'Рз.
В статических системах Ра(0) =<Со=1. Поэтому для них спра-
ведливы равенства:
<330)
гти?- (3'3,)
Как видно из (3.30), в статической системе установившееся
значение регулируемого параметра всегда меньше заданного. Ста-
тическая ошибка (статизм) Д,фуст в соответствии с (3.31) пропор-
циональна управляющему воздействию и тем меньше, чем больше
произведение коэффициентов усиления kakc.
104
Для того чтобы ответить на воп-
рос, является ли система статичес-
кой или астатической по отношению
к возмущению,' необходимо знать
передаточную функцию для ошибки
от действия возмущения.
Вначале определим передаточ-
ную функцию для возмущения F(t),
действующего на рассматриваемую
Рис. 3.23. К определению переда-
точной функции для ошибки от
нами систему самолет — автопилот возмущения
(см. рис. 3.22). Приведем структур-
ную схему системы к виду, показанному на рис. 3.23, чтобы вход-
ным параметром было возмущение F(t), а выходным — регулируе-
мый параметр <р, который в данном случае будем считать не зави-
сящим от управляющего воздействия (ф3=Ю).
Передаточная функция для возмущения
-Т- == фр (р) =------------------------ (3.32]
F(0 ' 1 +Wa(p)Wc,{p)We(p) '
— передаточная функция звена, отображающе-
го цепь от входной координаты самолета (б)
до точки приложения возмущения (X);
— передаточная функция звена, отображающего
цепь от точки приложения возмущения до вы-
ходной координаты самолета (<р).
Поскольку при фз=0 ошибка от возмущения Л,фр = Л,ф =—ф,
то передаточная функция для ошибки от возмущения
^-==3Р(р)=-ФР(р). (3.33)
Уравнение для установившейся ошибки от действия ступенча-
того возмущения (F(t) = F(0) = const) имеет вид:
А-^уС1=5л(0)Г(/).
Чтобы система самолет — автопилот была астатична к такому
возмущению, необходимо, чтобы SF(0)=0. Если SF(0)#=0, система
оказывается статической.
В соответствии с (3.33) передаточные функции Фр(р) и SF(p)
отличаются только знаком. Поэтому очевидно, что система являет-
ся астатической при 0F(O)=O и статической — при 0F(O)=#O.
Приведя передаточную функцию (3.32) к виду:
F Ра (Р) Ре (Р) Pc" (Р) + Me' (р) Qe (Р) Qe (Р) ’
105
весьма просто убедиться, что система самолет — автопилот эстетич-
на к возмущению F(t), если Ра(0)=0 или Рс'(0)=0, т. е. если ав-
топилот или цепь 6—Л самолета содержит интегрирующие звенья.
Если же возмущение приложено к входу самолета (Х=б, = 1,
WQ, =<ЖС), как это чаще всего и бывает, условием астатичности
системы является наличие в автопилоте интегрирующего звена.
В статической системе при Рс-(0)=0 (цепь Z —<р содержит ин-
тегрирующие звенья)
A^=--L-F(/), С3.34)
у мс.
а при Рс"(0)=#1
Если возмущение меняется во времени, то в этом случае нали-
чие одного интегрирующего звена оказывается недостаточным для
астатичности системы. Так, при возмущении, меняющемся по ли-
нейному закону, для астатичности системы необходимы два интег-
рирующих звена в цепи от входа автопилота до точки приложения
возмущения L
Обычно при исследовании точности стабилизации угловых поло-
жений самолета ограничиваются оценкой ошибок системы при сту-
пенчатых воздействиях.
Применительно к таким воздействиям может быть сделан сле-
дующий общий вывод. Для астатичности системы самолет — авто-
пилот по отношению к управляющим и возмущающим воздействиям
необходимо, чтобы автопилот содержал интегрирующее звено. Та-
кой автопилот принято называть астатическим. Очевидно, что аста-
тическими являются автопилоты со скоростной и изодромной обрат-
ной связью или без обратной связи, а также автопилоты с жесткой
обратной связью, имеющие интегральный член в законе управления.
Автопилоты с жесткой обратной связью, в законе управления ко-
торых отсутствует интегральный член, получили название стати-
ческих. В статических системах ошибки от управляющих и воз-
мущающих воздействий складываются алгебраически.
Из вышесказанного следует, что очевидным преимуществом при:
менения астатических автопилотов является отсутствие статиче-
ских ошибок системы самолет—автопилот. Вместе с тем примене-
ние астатических автопилотов приводит к ухудшению устойчивости
системы. Ухудшается качество переходных процессов, особенно при
больших воздействиях. Кроме того, астатические автопилоты более
сложны, чем статические.
1 Подробно по этому поводу см. [18].
106
Поэтому довольно часто предпочтение отдается статическим ав-
топилотам с большими коэффициентами усиления. Такие автопи-
лоты имеют небольшие статические ошибки, что вполне допустимо
в ряде случаев.
Уравнения и структурные схемы систем
автоматического управления креном
Рассмотрим простейшую систему автоматического управления
креном с помощью автопилота с жесткой обратной связью. Бу-
дем по-прежнему полагать, что скольжение самолета отсутствует
(р=0) и в качестве управляющих поверхностей служат элероны.
В таком случае можно воспользоваться уравнением (1.62), записав
его в виде:
/>2т+^п=ЛЛ (3-35)
Уравнение автопилота с жесткой обратной связью (3.15), учи-
тывая (3.17) и отбросив обозначение приращения Д, запишем в сле-
дующей форме:
х* Х
Л
где 'т = S = —
(ъ—т)—(3.36)
— передаточное отношение (число) по углу крена (от-
ношение угла отклонения элеронов в градусах к углу
отклонения самолета по крену в градусах);
— передаточное отношение по угловой скорости крена
(отношение угла отклонения элеронов в градусах к
угловой скорости отклонения самолета по крену в гра-
дусах в секунду), сек.
На рис. 3.24 представлены наиболее употребительные варианты
структурных схем системы автоматического управления, описывае-
мой уравнениями (3.35 и 3.36).
Подставив (3.36) в ;(3.35), получим уравнение системы
P2y + (z; + = (3.37)
и передаточную функцию
— =ф; w=---------------------------
7з р2 + (/. +
(3.38)
Передаточная функция (3.38) является передаточной функцией
колебательного звена. Частота собственных колебаний 2 = ]Л/а /т
зависит от передаточного отношения по крену, а коэффициент от-
♦ Более точными обозначениями передаточных чисел являются и .
Однако во всех случаях, где это не будет вызывать сомнений, мы будем поль-
зоваться упрощенной формой записи типа и .
107
зависит также от переда-
носительного затухания Е = ——
точного отношения по угловой скорости крена.
Варьируя передаточные отношения iT и if , можно получить не-
обходимые характеристики переходных процессов. Вопросы выбо-
ра передаточных отношений автопилота подробно освещены во мно-
гих работах, например [3], [12], [29], [31] и др. Поэтому на этих воп-
росах здесь и далее мы останавливаться не будем.
Из (3.38) следует, что частота Q является функцией коэффи-
циента Z$9, характеризующего эффективность элеронов, которая в
соответствии с уравнением (1.45) зависит от скорости самолета.
На скоростях захода на посадку величина коэффициента /^суще-
ственно уменьшается, что в конечном счете приводит к затягиванию
переходных процессов. Во избежание этого во многих автопилотах
предусматривается увеличение передаточного числа ц на режимах
захода на посадку. Соответствующим образом увеличивается и пе-
редаточное число /;.Так, у автопилотов АП-6ЕМ-ЗП, устанавли-
ваемых на самолетах Ил-18 и Ту-134, /т «0,4 на режимах маршрут-
ного полета и i7 « 1,5 — на режимах захода на посадку.
Интересно отметить, что на режимах маршрутного полета
=0, поскольку при i\ = 0,4, собственное демпфирование самолета,
характеризуемое коэффициентом I* , обеспечивает удовлетворитель-
ное протекание переходных процессов. На режимах захода на по-
садку необходимое демпфирование достигается введением сигна-
ла угловой скорости крена (/} — 1,2 сек). При таких передаточных
отношениях время переходных процессов по крену не превышает
3—4 сек.
Увеличение передаточного отношения h целесообразно также и
с точки зрения повышения точности стабилизации. Однако повы-
шение передаточных чисел ухудшает динамику контура рулевой
машинки. В частности, увеличивается износ самих рулевых маши-
нок и тросов, соединяющих их с основной системой управления са-
108
молета. Именно это обстоятельство часто не позволяет использо-
вать повышенные передаточные отношения в длительном маршрут-
ном полете, хотя переходные процессы системы самолет — автопилот
при этом вполне удовлетворительны.
Поскольку у рассматриваемой системы Ф^з (0) = 1, она являет-
ся астатической к управляющим воздействиям. Это объясняется ха-
рактером передаточной функции самолета по крену, содержащей
интегральный член.
По отношению к возмущениям, приложенным к самолету, сис-
тема является статической. Допустим, что на самолет действует
момент ДА4Х, появившийся, например, вследствие отказа одного из
двигателей (рис. 3.25, а). Чтобы учесть это возмущение, необходи-
мо в правую часть уравнения (3.35) ввести дополнительный член.
/^ + /•^=45+ (3.39)
где 1х — момент инерции относительно оси Олт,
Приведем это возмущение ко входу самолета, т. е. к элеронам
(рис. 3.25, б). Величина приведенного возмущения
Теперь определим статическую ошибку от действия возмуще-
ния ДЛ4Х.
Для этого подставим (3.40) в (3.34), учтя, что ka = ip а =1
(так как возмущение приведено к входу). Получим
1 дмх 2ДМХ
Tvct =---------==-----------------•
Ч М>э m>p0SV2Z
Разумеется, к этому же результату можно прийти, если решить
совместно уравнения (3.39 и 3.36) относительно у, положив у3=0 и
р = 0.
При использовании астатического автопилота статическая ошиб-
ка отсутствует, однако система становится более сложной. Допус-
109
тим, что применен автопилот со скоростной обратной связью, имею-
щий закон управления
Р8Э = h (Уз - V) - h РУ — i] Р21 (3.41)
где /j =ij9 =^3, у/сек, =/’э=/Лэ>
. .&э . 6
= = 1-э, сек.
Заметим, что закон управления (3.41) интегрированием обеих
частей уравнения может быть приведен к виду
Зэ = Ц -3 —- - h V — к РУ (3.41 а)
Р 1
Подставив (3.41) в (3.35), получим уравнение системы
Р31 + zj )Р2У+4/т РУ+Z\ZJ У=^ЭЬ Уз (3.42)
и передаточную функцию
У Ч
— = ф] (р) =-------:------—----------------— . (3.43)
7з Р3 + (I- -+ h i- ) Р2 + h z\ Р + h г'г
(Сравнивая уравнения (3.42 и 3.43) с уравнениями (3.37 и 3.38)
соответственно, мы видим, что в астатической системе уравнение и
передаточная функция имеют более высокий порядок. Обеспечить
хорошее качество переходных процессов в такой системе значи-
тельно сложнее. Учитывая, что постоянные возмущающие воздей-
ствия вокруг оси Ох на самолетах гражданской авиации относи-
тельно невелики, чаще всего в системах автоматического управле-
ния креном применяют более простые статические автопилоты с
жесткой (типа АП-6Е) или жесткой и скоростной обратными связя-
ми (типа САУ-1Т).
В последние годы для управления креповым движением самоле-
та начали применять не только элероны, но и интерцепторы. С точки
зрения структуры и законов управления автопилота это не имеет
принципиального значения, если отклонение элеронов и интерцеп-
торов осуществляется с помощью общей системы управления, т. е.
если летчик управляет ими с помощью штурвала. В таких случаях
все сказанное выше об автоматическом управлении креном только
через элероны справедливо и для управления только через интер-
цепторы или через элероны и интерцепторы одновременно.
О координированном управлении боковым движением
самолета
Вопросы координированного управления боковым движением
самолета весьма подробно рассмотрены в ряде работ, например [3],
[17],[30J, [31] и др.
ПО
В этих работах показано, что при строгой постановке задачй не-
обходимо учитывать тесную связь движений крена и рысканья.
В этом случае оказывается необходимым использовать полную сис-
тему уравнений бокового движения (1.44). Для возможно более
точного выполнения условия 0=0 во время переходных процессов и
в установившемся движении необходимо, чтобы между каналами
крена и рысканья (курса) существовали взаимные (перекрестные)
связи.
Такие системы называются системами связанного регулиро-
вания.
Однако даже в системах связанного регулирования боковым
движением самолета практически невозможно добиться «идеальной
координации» на всех режимах полета. Необходимость и целесооб-
разность введения тех или иных перекрестных связей в основном
зависят от характеристик боковой устойчивости и управляемости
самолета, характеристик возмущающих .воздействий, а также требо-
ваний, предъявляемых к точности стабилизации 0=0.
На дозвуковых самолетах гражданской авиации при автомати-
ческом управлении на всех этапах полета, в том числе и при заходе
на посадку, требования к системе самолет — автопилот в отноше-
нии скольжения сводятся к следующему. При отсутствии постоян-
ных возмущающих воздействий скольжение во время переходных
процессов должно быть небольшим, а в установившемся движе-
нии— отсутствовать. При воздействии на самолет постоянных
возмущений, связанных с несимметричностью тяги двигателей, мо-
жет быть допущено небольшое скольжение. Таким образом, в це-
лом перечисленные требования можно считать сравнительно прос-
тыми.
Следует также иметь в виду, что крены на пассажирских само-
летах, как правило, не превышают 15—20° в маршрутном полете
и 10—15° — на посадочной прямой, причем угловые скорости крена
сравнительно невелики.
Учитывая сказанное, координированное управление боковым
движением самолета может быть осуществлено за счет соответ-
ствующего выбора закона управления рулем направления (канал
курса). Уравнения бокового движения возьмем в виде:
—Р?=0;
s . Шу (3.44)
1У
Эти уравнения получаются из первого и третьего уравнений сис-
темы (1.44) после исключения из них членов, содержащих угол
крена и его производную, и, следовательно, они описывают движе-
ние самолета относительно оси Оу\. Второй член в правой части
второго уравнения (3.44) отражает действие возмущений относи-
тельно оси Оу\.
111
Решив систему (3.44) относительно р, можно получить следую-
щую зависимость:
р2р+ +й п )₽ = га5 8Н+ .
1 у
Из нее следует, что в отношении скольжения самолет с зажа-
тым рулем направления (6н=0) ведет себя как колебательное звено
с частотой собственных колебаний 2=]/"лрПф Ч-Лр и коэффици-
^0 +
ентом относительного затухания $ =----------- —. которые опре-
2Vr кепф+
деляются характеристиками самолета (с^ 1У) и режимом
полета. Даже без автопилота движение устойчиво.
Действие возмущения ДЛ4У=const в установившемся движении
вызывает скольжение Ar™,, = -------------.
1у (*р И. + Пр )
Из второго уравнения (3.44) видно, что при зажатом руле на-
правления, даже при отсутствии возмущающих воздействий
(АА4^=0), во время разворота самолета с постоянной угловой ско-
ростью ip возникает скольжение
п- .
да. (3.45)
Применение автопилота (канал курса) направлено на повыше-
ние устойчивости движения и уменьшение скольжения в установив-
шемся движении.
Допустим, что используется автопилот с законом управления
8H=-ZP?— 1-9р$ (3.46)
и уравнение системы самолет — автопилот имеет вид:
р2Р-Ь(^р -f-n- Ч-тц/р)р$ Яф Ч-яр Ч~«8н/р )Р= .
В этом случае:
й = )/"^р «Ф Ч" «р Ч- ;
?= + лф+М
2^/"*р Пф + Лр + w5Hzp ’
AS., =--------—-------;--- ;
у ly (fy + лр + лбн )
п.
ДЗФ =---------*--ф. (3.45а)
112
Увеличение передаточного отношения ip уменьшает скольжение
на развороте и при ступенчатых возмущающих воздействиях. С
ростом передаточного отношения ip повышается демпфирование
системы.
Для реализации закона управления (3.46) необходимы сигналы
р и р. Получение этих сигналов, особенно сигнала р, сопряжено с
большими трудностями. Вместе с тем оказывается возможным за-
менить сигнал р в законе управления типа (3.46) сигналом ф,
получение которого не вызывает затруднений. В этом случае урав-
нение системы самолет —автопилот приобретает вид:
Р2₽ + (^р 4"Яф )/$!- +
+ «М₽)?=-^- (3.48)
Здесь нужное демпфирование можно получить, варьируя пере-
даточное отношение Ц . Скольжение на развороте при таком за-
коне управления
«р + «8Н 1'р
В числителе этого выражения имеется член п 5н/ф способствую-
щий увеличению скольжения. От него можно избавиться, если сиг-
нал /фф пропустить через изодром. В таком случае закон управ-
ления приобретает вид:
8 = —ip р — I• ——— ф.
н р г Ф Тр +1
В некоторых модификациях автопилота типа АП-28 в режиме
управления используют подобный закон управления, но не имею-
щий члена, пропорционального р, т. е.
ф.
н Ф Тр+ 1 т
(3.49)
При использовании закона управления типа (3.49) скольжение
на развороте определяется уравнением (3.45).
В автопилотах типа АП-6ЕМ-ЗП закон управления канала кур-
са имеет вид:
8н = — Y)-
Второй член уравнения является сигналом перекрестной связи
из канала крена в канал курса. Передаточное отношение z*H харак-
теризует отношение угла отклонения руля направления к углу от-
клонения текущего крена от заданного. Для определенных режи-
мов полета можно подобрать такое значение передаточного от-
ношения i^H, что при развороте скольжение отсутствует. Однако
113
при действии возмущения и в этом случае скольжение будет иметь
место.
Для получения астатизма по р на развороте и при действии
возмущений используются автопилоты со скоростной обратной
связью.
В качестве примера рассмотрим канал курса системы автоматического управ-
ления САУ-1Т, в которой реализован закон управления
рЪп = - nz - L рЦ, (3.50)
где nz — сигнал боковой перегрузки, снимаемый с датчика горизонтальных ус-
корений.
Нетрудно показать, что в данном случае сигнал датчика горизонтальных ус-
корений может рассматриваться как сигнал скольжения. Поэтому закон управле-
ния (3.50) равносилен закону
рЪн = -1$ Р — (3.51)
Используя уравнения самолета (3.44) и закон управления автопилота (3.51),
можно получить передаточную функцию
-J-- = ф₽
Му Му
(р) =
__________________________р________________________
М/>3 + (*з + Лф-+ «5н ь ) Р2 + «ф + «3 + *3 % /ф ) + Zp )
Поскольку в установившемся движении Фл1^(0)=0, то ^Му—&М (0)ДЛ1^=0.
Нетрудно также убедиться, что в установившемся развороте (рф= const) Др.0.
Очевидно, что сказанное о законе управления (3.50) распространяется и на
закон управления
nz
8н=--^-/фИ>,
Р *
применяемый в автопилотах с жесткой обратной связью.
Приведенные выше зависимости позволяют рассмотреть основ-
ные вопросы координации управления боковым движением и могут
быть также использованы для приближенных расчетов. Оконча-
тельный выбор передаточных отношений обоих каналов автопилота
осуществляется при моделировании и в летных условиях.
- Необходимо заметить, что сказанное о канале курса не относит-
ся к режиму приземления. При приземлении возможность создания
центростремительной силы для управления боковым движением за
счет крена практически почти полностью исключается. В связи с
этим функции канала курса на этом этапе становятся другими.
Вопросы управления боковым движением самолета при приземле-
нии будут затронуты нами* позднее.
114
Уравнения и структурные схемы системы
автоматического управления тангажом
При рассмотрении вопросов автоматического управления углом
тангажа будем пользоваться уравнениями короткопериодического
движения самолета (1.25), которые запишем в следующем виде:
рД& — рДа — Ьа Да = 0;
р2Д&-рб^рД&Ч- /?Аа4-сЛ*= Дов Ч—)
Л
Второй член в правой части второго уравнения отражает дей-
ствие возмущений относительно оси Oz\. Решив систему уравнений
относительно ДО, получим зависимость
рЗД& _|_ (^ 4- _|_ q ) р2Д& _|_ Са = с5 /?Д8в _|_
+ ьа а Д8В + р-^~ + . (3.53)
*Z *Z
Допустим, что на самолете установлен автопилот с законом
управления
8в=/»(63-Д&)-/^Дд. (3.54)
Используя уравнения (3.53 и 3.54), получим уравнения системы
р3Д& + (/>а 4-<^ 4-С5 I» )р2Д^ + (^« С» +^а Ci Zj Н-С8/»)^Д& +
+ a 1» Д& = <?8 Z» А + Ci I» »з+ > (3.55)
*z *z
из которого следуют передаточные функции:
V =<(/>) = (3.56)
__ ______________ci Р+ cl '&_____________________.
~ Р'' +- (*« + % + с • + с8 ) р2 + (6а с + са f \ с6 + с6 i& ) Р + ьа cs ц
^-=Л2(Р)= (3.57)
__________________________P + h___________________________
~ Iz №+(ЬЛ + С. + + с8 ({j ) р2 + (6а С. + СЛ + Ьа с5 4- cs ia ) р + ьа с8 ia]
В структурной схеме системы самолет — автопилот (рис. 3.26)
используются обозначения, частично уже встречавшиеся ранее в
уравнении (1.27):
аХ = ЬЛ Ч- Са Ч- Са. ; ^2 = Ч" С<х j = •
115
Структурная схема включает два контура. Внутренний являет-
ся контуром управления угловой скоростью тангажа, внешний —
контуром управления углом тангажа. Такое представление струк-
турной схемы удобно для расчета передаточных отношений авто-
пилота. При расчете передаточного отношения по угловой скорости
рассматривается только внутренний контур. Передаточное отноше-
ние ib выбирается таким, чтобы коэффициент затухания Для этого
контура был близок к оптимальному (£ = 0,707). После этого внут-
ренний контур заменяется эквивалентным звеном, благодаря чему
система самолет — автопилот становится одноконтурной. Затем
для этой одноконтурной системы рассчитывается передаточное от-
ношение по углу тангажа. Чаще всего при этом используется метод
логарифмических амплитудно-частотных характеристик или метод
стандартных коэффициентов L
Из (3.56) следует, чтоФ£з(0) = 1. Поэтому рассматриваемая
система является астатической к управляющим воздействиям. По-
ложив р=0 в (3.57), получим передаточную функцию установив-
шейся ошибки от возмущения
1 2
------ s -- ----------- ф
/ft/n*pSmA
S^(O)=-0^(O)=
Следовательно, установившаяся ошибка от действия момента
А»уст=5д1г(0)ДЛ1г=-
2ДЛ4г
ibmszfSV^bA
(3.58)
В отличие от каналов крена и курса канал тангажа системы са-
молет— автопилот подвержен действию большого числа возмущаю-
щих воздействий, величина которых может быть весьма значитель-
ной. Большинство этих возмущений приложено к самолету. Глав-
ными причинами нарушения балансировки самолета относительно
Рис. 3.26. Структурная схема
системы управления тангажом
1 Примеры расчетов коэффициентов этими методами даны, например, в кни-
гах Поспелова Г. С. «Автоматическое управление полетом самолета». Изд.
ВВИА им. Жуковского, 1959. 115 с. Боднера В. А. «Теория автоматического
управления полетом». М., «Наука», 1964. 698 с.
116
оси Oz\ в маршрутном полете являют-
ся изменения скорости полета, веса и
центровки самолета. Момент несбалан- • -
сированности AMZ появляется также —^^2/
вследствие изменения тяги двигателей
при^наличии децентрации их. Наруше- т 7°
ние продольной балансировки и появ-
ление момента AA1Z, направленого на Рис. 3.27. К определению мо-
пикирование, происходит во время раз- мента AAG при изменении цент-
воротов самолета, а появление момен- ровки самолета
та' AMZ,‘ направленного на кабрирова-
ние, — при наборе высоты и снижении.
При заходе на посадку большой по величине момент AMZ, на-
правленный на пикирование, возникает при выпуске закрылков,
предкрылков и применении других средств, увеличивающих значе-
ние Су при неизменном угле атаки самолета. Наоборот, выпуск ин-
терцепторов приводит к появлению момента AA4Z) направленного
на кабрирование.
Для наглядности рассмотрим картину возникновения момента AAfz при изме-
нении центровки самолета (рис. 3.27). Пусть вследствие выпуска шасси центровка
самолета стала более передней на величину
Дхт = &хтЬА ,
где Дхт — относительное изменение центровки (положительное при смещении
ц. т. назад).
Будем полагать, что исходным режимом был установившийся полет, при ко-
тором сумма моментов, действующих в продольной плоскости, была равна нулю.
Изменение центровки привело к появлению пикирующего момента
AMZ = G cos $Дхт£ А
(3.59)
Подставив (3.59) в (3.58), определим статическую ошибку системы самолет
автопилот от изменения центровки
2(7 cos
m* pSV2
(3.60)
Д &у СТ
Полагая cos О’и учитывая, что в установившемся полете (7 = Y =
= CyS —, можно выражение (3.60) представить в следующем виде:
С У^^ т
Д&уст=—. (3.60а)
m z
Теперь рассмотрим последствия изменения веса самолета. На
пассажирских самолетах эти изменения являются следствием вы-
горания или слива топлива. Кроме того, вес может измениться так-
же за счет сброса или приема груза. Поскольку величины устано-
вившихся ошибок не зависят от длительности переходных процес-
сов, будем полагать, что изменение веса происходит мгновенно. До-
117
пустим, что вследствие выгорания топлива вес самолета мгновенно
уменьшился на величину AG, причем центровка самолета сохрани-
лась неизменной (xT=const).
Поскольку угол атаки сохранился, равновесие проекций сил на
ось Оу оказывается нарушенным. Под действием появившегося
избытка подъемной силы траектория самолета начнет искривляться
вверх. Поворот вектора скорости вверх приводит к уменьшению
угла атаки самолета, а поэтому к уменьшению подъемной силы.
Установившееся прямолинейное движение возможно, когда подъем-
ная сила равна новому значению веса самолета. Однако уменьше-
ние угла атаки самолета приведет к появлению момента ДЛ12 =
= М2 Да, который стремится вернуть самолет к исходному углу
атаки, т. е. будет направлен на кабрирование. В конечном итоге
этот момент должен быть скомпенсирован моментом руля высоты,
отклоненным автопилотом.
mz
Учитывая уравнения (1.10, 1.21),^су-—сау Да и тсгу =-, а так-
су
же полагая, что изменение угла наклона траекторий в данном слу-
чае мало и, следовательно, cos0« 1 можно записать уравнение для
момента
ДС?/п“ ЬА
LMZ= - ^0тс2УЬА =-------
Суа
Тогда статическая ошибка от возмущения вызванного измене-
нием реса
4 QAGm'y 2bGm*
= -т-г1— • <3-61)
itm^SVZ ^caym^SV2
При совершении правильного разворота подъемная сила урав-
новешивает не только вес самолета, но и центробежную силу (точ-
нее их проекции на ось Оу\). С точки зрения продольной баланси-
ровки этот режим аналогичен режиму прямолинейного полета са-
молета, вес которого увеличился в ----- раз. С учетом (3.61)
статическая ошибка при развороте с креном
/ 1 \
муСТ=---------------------1}
у /#m*pSV2 \cos-f )
Для компенсации статических ошибок, возникающих при раз-
вороте, в закон управления автопилота часто вводят член, учиты-
вающий крен самолета. Закон управления
8в = 4({>3-Д&)-/^Д&-/«в|у| (3.62)
содержит сигнал перекрестной связи, характеризуемый передаточ-
118
б)
Рис. 3.28. Структурная схема системы управления тангажом, имеющей автопилот
с изодромной обратной связью
ным отношением i^3 (отношением угла отклонения руля высоты к
углу крена самолета). Знак этого сигнала, естественно, не зависит
от знака крена самолета.
Однако для использования на режимах захода на посадку ав-
топилот с таким законом управления все же оказывается непригод-
ным ввиду больших статических ошибок, возникающих вследствие
изменения скорости полета самолета и его конфигурации (выпуск
шасси, закрылков и др.). По этой причине в системах автоматиче-
ского управления заходом на посадку применяют астатические ав-
топилоты. Часто это — автопилоты с изодромной обратной связью,
имеющие закон управления типа
дзв=4 (&3-Д&) - рМ. (3.63)
ТиР 4- 1
Представим закон управления (3.63) в таком виде:
(3.64)
7 иР
Структурная схема, соответствующая закону управления (3.64),
приведена на рис. 3.28, а. Постоянная времени изодрома сравни-
тельно велика (Ти=15-т-'2б сек). Поэтому можно полагать, что для
высокочастотных сигналов в контуре управления угловой скоростью
Т'иР + 1 Г) «
член——------1. В таком случае оказывается возможным перейти
ТнР
к структурной схеме, показанной на рис. 3.28, б. Для этой схемы
расчет передаточного отношения по угловой скорости аналогичен
расчету для схемы с автопилотом с жесткой обратной связью (см.
рис. 3.26).
При использовании автопилота с законом управления (3.63)
уравнение системы самолет— автопилот имеет вид:
Р4А& 4" 4" = #1/^3 + d2p^3 +
п2ДЛ4 bn p'Mz
+ dzh + . (3-65)
‘ z ‘г
119
В данном случае
сг = Ьа ,
cj + са Т'и + с8 + Ьа Cj Ти + Cj Zj Ти
^2= .
1 и
Ьа. СЬ + С5 + Ьа. СЪ *0 Ьа С8
Га = — , ^4 = — , d 1 = С& Zo ,
* и * и
, съ + &а СЬ *& Тп . С8
а о — , tz о — *•
Тп 3 Ти
Из (3.65) вытекает, что Фдлт2 (0)=0 и рассматриваемая систе-
ма является астатической к возмущающим воздействиям ЛЛ12.
Динамика системы, описываемой уравнением (3.65), сильно за-
висит от величины постоянной времени изодрома. Если эта постоян-
ная времени, велика, то переходный процесс можно представить
состоящим из двух этапов. На первом этапе, заканчивающемся дос-
таточно быстро, движение системы с автопилотом с изодромной об-
ратной связью мало отличается от движения системы с автопило-
том с жесткой обратной связью, действующей в соответствии с урав-
нением (3.55). На втором этапе, длительность которого определяет-
ся постоянной времени изодрома, происходит компенсация статиче-
ских ошибок и «дотягивание» до б’з-
Чтобы устойчивость движения и качество переходных процессов
системы, описываемой уравнением (3.65), и системы, описываемой
уравнением (3.55), имеющим меньший порядок, были возможно бо-
лее близкими, постоянная времени должна быть возможно
большей. Однако величина этой постоянной времени не должна
быть слишком большой с тем, чтобы система успевала компенсиро-
вать возмущающие воздействия, на которые она рассчитывается, за
заданный промежуток времени.
В отечественной системе автоматического управления заходом
на посадку типа БСУ-ЗП автопилот имеет закон управления
J"'? Л8»=U3 - k ~Я1 ? , рД&-^| YI. (3.66)
где V3 — сигнал, подаваемый из вычислителя системы управления.
В отличие от закона управления (3.63) здесь имеется не только
изодром в цепи сигнала руля высоты, но и изодром в цепи сигнала
тангажа, причем Используя уравнения (3.53 и 3.66),
запишем передаточную функцию (член i*3 |у| не принимается во
внимание)
д» =фд»= + d2P + d3
Ua 3 P (P3 + C\P2 + <tf + c'3)
120
Здесь Cj — ba -|- -4- Cj ig ,
, \ ® j + ®a P« "b ci 4" Ьл Cj ig T„ + Cj z’g Ти
e2 =
, C8 l j + Ьа C J Z& TK
3 =
TH
Т’и
,, .8„ ,, ‘’Pm’ + M?!’ T«
, dv = Cb z„B, d2= --------
,•__ *'ив -p __________<p ____T
“3— ------------ . 1 и — 1 Hi —1 и,-
* и
TK
Совершенно аналогичная передаточная функция получается при
использовании системы автоматического управления САУ-1Т, ав-
топилот которой имеет закон управления
-пР- Д8В = /Ж - /» ТиР Д» - й рД&. (3.68)
Т„р+1 в 3 ГиР+1 v
Анализируя передаточную функцию (3.67), мы видим, что сис-
тема оказывается нейтральной по тангажу.<
Теперь запишем передаточную функцию для угловой скорости
тангажа
А» = ф9 = d'lP2 + d'2p + d'3
U3 Ua p^ + + c'2p + c'a
В установившемся движении
Таким образом, в установившемся движении каждому значению
входного сигнала t/3 соответствует определенная угловая скорость
тангажа. Поэтому такой сигнал может рассматриваться как сиг-
нал заданной угловой скорости тангажа Фз- Следовательно, в дан-
ном случае система самолет — автопилот стабилизирует заданную
угловую скорость тангажа, а не угол тангажа.
Нетрудно заметить, что при больших значениях Ти и »ив=г&
решение уравнения (3.68) приближается к решению уравнения
(3.54). При этих условиях динамика первых периодов переходных
процессов по углу тангажа в системах с автопилотами, имеющими
законы управления (3.54) и (3.68), весьма близка. Разумеется, это
же относится и к закону управления (3.66), поскольку последний
член уравнения в данном случае роли не играет.
Для реализации закона управления (3.66) в системе БСУ-ЗП
применяются два изодрома. В системе САУ-1Т закон управления
(3.68) реализуется с использованием одной следящей системы ме-
ханизма тангажа, имеющей передаточную функцию апериодическо-
го звена с постоянной времени Тя. Упрощенная блок-схема про-
121
Рис. 3.29. Блок-схема продольного канала САУ-1Т
дольного канала системы САУ-1Т в режиме захода на посадку при-
ведена на рис.'3.29.
Сигнал текущего тангажа & с центральной гировертикали
(ЦГВ) подается на сумматор и следящую систему механизма тан-
гажа (МТ). С выхода МТ снимается сигнал—-----------который
^иР + 1
с обратным знаком также поступает на сумматор. Поскольку
®-------— &= то эти два сигнала эквивалентны сиг-
?иР 4-1 Тир + 1
налу тангажа, пропущенному через изодромное звено.
Аналогично формируется сигнал изодромной обратной связи по
отклонению руля высоты — ^в- На сумматор также подает-
ся сигнал О, снимаемый с датчика угловой скорости (ДУС) танга-
жа, и сигнал U3, который формируется в вычислителе системы тра-
екторного управления (СТУ) из сигнала поступающего из ГРП.
§ 4. УПРАВЛЕНИЕ БОКОВЫМ ДВИЖЕНИЕМ САМОЛЕТА ПРИ
ЗАХОДЕ НА ПОСАДКУ
Некоторые общие вопросы стабилизации самолета
на курсовой линии
Рассматривая боковое траекторное движение самолета при за-
ходе на посадку, будем полагать, что переходные процессы стабили-
зации заданного крена как при полуавтоматическом, так и при ав-
томатическом управлении происходят мгновенно и что управление
движением осуществляется координированно (р=Ю). В таком слу-
чае боковое движение центра масс самолета относительно посадоч-
ной траектории (рис. З.ЗО) описывается уравнениями (1.60):
^ДФ-^Т = О; | (3.69)
pZ = V^-U6.]
122
Рис. 3.30. Схема соотношений угловых и линейных координат самолета в боко-
вом движении
В качестве линейного бокового отклонения самолета от посадоч-
ной траектории примем линейное отклонение самолета от курсовой
линии, заданной курсовым радиомаяком (КРМ). Тогда в соответ-
ствии с уравнением (2.2) линейное боковое отклонение
z=Lt. (3.70)
Текущее расстояние до КРМ может быть определено, если из-
вестно расстояние до него LQ в некоторый начальный момент вре-
мени и скорость самолета:
L = L^ — Vt. (3.71)
В тех случаях, когда необходимо подчеркнуть, что расстояние от
самолета до КРМ переменно, пользуются обозначением £(/).
Как было установлено ранее, параметром, по которому ведется
управление боковым траекторным движением, является крен. До-
пустим, что в каждый данный момент времени благодаря системе
управления крен самолета (у = у3) пропорционален боковому от-
клонению от курсовой линии, т. е.
Y=Y3=—4*, (3.72)
• 1
где — *— —передаточное отношение (число) по боковому отклонению (от-
ношение-угла крена самолета в градусах к боковому отклоне-
нию в метрах), град[м.
При £/б=0 в соответствии с (3.69) или (3.3) у= •
g
Объединяя два последних уравнения, получим
p2z+kzz =--0, (3.73)
где kz = izg.
123
a)
Рис. 3.31. Движение самолета при использовании законов управления:
а— (3.72); б— (3.74)
Как известно, уравнение типа (3.73) является уравнением гар-
монических колебаний. Поэтому движение самолета при законе уп-
равления (3.72) имеет характер незатухающих колебаний с часто-
той (рис. 3.31, а). Очевидно, что с такой частотой меняется
не только боковое отклонение г, но и курс Аф и крен у, причем фаза
колебаний по курсу сдвинута на 90°, т. е. в момент пересечения кур-
совой линии отклонение самолета по курсу будет максимальным.
Заметим, что рис. 3.31, а иллюстрирует случай, когда скорость поле-
та постоянна, а боковой ветер отсутствует.
Если учесть, что информация о боковом отклонении получается
с помощью КРМ и КРП в соответствии с зависимостью (3.70), то с
учетом (3.71) закон управления креном оказывается таким:
Уз = — М = — 4 у- , (3.74)
i1— ? ,
где — — — передаточное отношение (число) по угловому отклонению (отно-
шение угла крена самолета в градусах к угловому отклонению
от курсовой линии в градусах).
В таком случае вместо уравнения (3.73) получим уравнение
k'
p2z-\- yz==Q' (3.75)
где k'f—kg.
124
Уравнение (3.75) является уравнением с переменным коэффи-
k’ 1
циентом__увеличивающимся при приближении к КРМ. Траекто-
L
рия самолета при таком законе управления также имеет колеба-
тельный характер (рис. 3.31, б).
Следует указать, что по мере приближения к КРМ период ко-
лебаний уменьшается. На малых расстояниях от КРМ период
траекторных колебаний становится сопоставимым с длительностью
переходных процессов стабилизации заданного крена. В таких слу-
чаях разделение общего бокового движения самолета на изолиро-
ванные траекторное и креновое движения недопустимо.
Характер движения самолета с системами управления, реали-
зующими законы управления (3.72 и 3.74), неприемлем для успеш-
ного захода на посадку. Одно из основных требований, предъявляе-
мых к автоматизированным системам управления, заключается как
раз в том, чтобы амплитуда колебаний траекторного движения са-
молета была достаточно небольшой.
Для удовлетворения этого требования необходимо обеспечить
эффективное демпфирование колебаний, этого можно достигнуть
введением в закон управления сигналов, пропорциональных скоро-
сти изменения бокового отклонения.
Если заданный крен в каждый данный момент пропорционален
не только боковому отклонению, но и его производной, то закон уп-
равления приобретает вид:
Уз = — izz — iz pz, (3.76)
: _ 7
где — передаточное отношение по скорости бокового отклонения (от-
ношение угла крена самолета в градусах к скорости бокового
отклонения в метрах в секунду), град-сек/м.
Тогда уравнение траекторного движения самолета
p2z-\-kzpz-\-kzz=Q, (3.77)
где k-z =izg.
На рис. 3.32 представлена соответствующая структурная схема
системы самолет — бортовая система автоматического управления
(БСАУ).
Рис. 3.32. Структурная схема системы
самолет — БСАУ, реализующей закон
управления (3.76)
125
Под бортовой системой автоматического управления в этой гла-
ве будем понимать совокупность системы траекторного управления
и автопилота. Поскольку ранее было условлено, что автопилот мгно-
венно обеспечивает выполнение требования у = у3, на структурной
схеме он обозначен как звено с единичным усилением. Аналогичные
соображения ранее были учтены при упрощении структурных схем
в случае полуавтоматического управления. Поэтому рассматривае-
мая структурная схема распространяется и на случай полуавтома-
тического управления.
Формирование закона управления (3.76) производится в вычис-
лителе системы траекторного управления (СТУ), имеющем в дан-
ном случае передаточную функцию 1^(р)сту = G + g Р-
Очевидно, что для этой структурной схемы можно записать пе-
редаточную функцию
(iz + i-p)kV
— = Ф, (р) =-------------------. (3.78)
гз зк />2 4- izk.yp + i. k^V
Подставив в (3.78) k1= — , izg = kz, izg—kZf получим
передаточную функцию
kz + k. р
— =Фгг (р) =----------г---, (3.79)
знаменатель которой определяет собственное движение системы при
отсутствии управляющих воздействий (z3=0), что в данном случае
и имеет место. Будучи умноженным на z, знаменатель образует ле-
вую часть уравнения (3.77).
Поскольку коэффициент относительного затухания
ь / -2 “ '
5= —= 11/ Л * 4 '‘Ч (3-80)
2 V kz
зависит от передаточного отношения#^ , меняя последнее, можно по-
лучить необходимый вид траектории. Чаще всего для систем авто-
матического управления заходом на посадку коэффициент относи-
тельного затухания выбирают близким к единице. Задаваясь
временем регулирования, нетрудно определить приближенные значе-
ния коэффициентов kz nkz. Напомним, что при 1 для колеба-
тельного звена время регулирования /р~4,54-5,0 Т (Т=—----посто-
Qq
янная времени колебательного звена). Обычнохпринимают /р = 404-
4-50 сек. Тогда частота собственных колебаний Qo~0,1 \1сек. Отсю-
да следует: &z = Qo2~O,O1 1/селс2; kz =2§]Л&z«0,2 \!сек.
Примерный вид переходных процессов для этого случая пока-
зан на рис. 3.33.
126
Рис. 3.33. Движение самолета при использовании закона управления (3.76)
КРМ
-ВПП
Для лучшего понимания этих процессов рассмотрим их подроб-
но применительно к случаю полуавтоматического управления. Бу-
дем полагать для простоты, что боковой ветер отсутствует. До
начала управления по командной стрелке крена самолет летел пря-
молинейно с курсом, равным посадочному, имея некоторое откло-
нение вправо от посадочной траектории (z0>0)» При этом команд-
ная стрелка была отклонена влево, указывая на необходимость
создания левого крена (сечение 4). В соответствии с уравнениями
(3.6 и 3.76), а также учитывая уо=О и Дфо = 0,
МЛ
Отклонив штурвал влево, летчик добивается того, чтобы команд-
ная стрелка установилась в среднее положение (6z=0). Это, оче-
видно, станет возможным, когда самолет накренится на угол у =
= у3 (сечение Б).
К этому моменту летчик возвращает штурвал в нейтральное по-
ложение. Как было условлено при рассмотрении траекторного дви-
жения, считаем, что эти процессы происходят мгновенно. Поэтому
на рис. 3.33 показано, что текущий крен сразу достиг заданного зна-
чения.
Находящийся в левом крене самолет начнет разворачиваться
в сторону посадочной траектории. Вследствие отклонения курса
(Дгр<0) появляется сигнал, пропорциональный производной откло-
нения от заданной траектории (—pz=— УДгр). Этот сигнал —
—i'zpz— — /гУДф компенсирует сигнал izz, уменьшающийся вслед-
ствие приближения самолета к посадочной траектории. Поэтому
сигнал у3= —^г + ^УД-ф уменьшается и командная стрелка откло-
няется вправо, указывая на необходимость уменьшения левого
крена.
127
Пока самолет находится в левом крене, сигнал г^ИДф нарастает.
Так происходит до тех пор, пока заданный крен не станет равным
нулю, т. е. уз=— ^+^^Дф = 0 (сечение В). К этому моменту само-
лет развернется на угол — Дф =
Z
Вследствие продолжающегося уменьшения отклонения z сигнал
у3 изменит знак и командная стрелка отклонится вправо, указывая
летчику на необходимость создания правого крена. При появлении
правого крена самолет разворачивается вправо, возвращаясь к по-,
садочному курсу. Увеличение крена происходит лишь до некоторых
пор (сечение Г). Затем -сигнал заданного крена уменьшается (сече-
ние Д). На этой заключительной фазе переходного процесса посте-
пенно уменьшаются до нуля отклонения z и Дф (сечение £).
Разумеется, при автоматическом управлении, когда условие
у = у3 обеспечивается автопилотом, переходные процессы имеют точ-
но такой же вид.
Теперь учтем, что информация о боковом отклонении получает-
ся в соответствии с (3.70). Что же касается информации о скорости
бокового отклонения, то пока, не вдаваясь в способы ее получения,
рассмотрим два варианта: первый — на самолете имеется источник
такой информации, второй — эта информация получается косвенно,
за счет дифференцирования сигнала КРМ. Применительно ко вто-
рому варианту, взяв производные от обеих частей'уравнеция (3.70),
получим
pz = Lpz-\-zpL ^Lps. U "
Тогда закон управления при первом варианте
у3= — /£е — i-z pz. (3.81)
а при втором
у3= —/£е —/-ре, (3.82)
7
где ~ “» сек — передаточное отношение по скорости углового отклонения
£
(отношение угла крена самолета в градусах к скорости угло-
вого отклонения от курсовой линии в градусах в секунду).
Рассмотрим систему (рис. 3.34), реализующую закон управления
(3.81). Ее уравнение
ъ
p>z-\-k-zpz + -fz==Q- (3.83)
Для некоторой фиксированной дальности до КРМ, называемой
оптимальной, или расчетной Л(/)=£Опт, можно обеспечить ус-
ловие
ъ
-^--=kz. (3.84)
^ОПТ
128
Рис. 3.34. Структурная
схема системы само
лет — БСАУ, реализую-
щей закон управления
(3.81)
Следовательно, на этой дальности характеристики переходных
процессов системы, описываемой уравнением (3.81), такие же, как
и системы, описываемой уравнением (3.77).
Учитывая приближенность проводимых нами расчетов, будем по-
лагать возможным применить в данном случае метод «заморожен-
ных» коэффициентов I Заметим, что в практике этот метод широко
используется для приближенного анализа характеристик системы
самолет — БСАУ.
Введем обозначение
' kL = . (3.85)
^ОПТ
Тогда с учетом (3.84) уравнение (3.83) приводится к виду
^-z = 0. (3.86)
В таком случае
(3.87)
Wkz
На оптимальной дальности kL=\, Я0=йОпт, В = |опт, следова-
тельно, на других дальностях 1):
^0— ‘ Л__^опт!
Уч
]/*Лпт-
Отсюда следует, что при использовании закона управления
(3.80) по мере приближения к КРМ частота собственных колебаний
растет, а затухание уменьшается (рис. 3.35).
1 Строгое аналитическое исследование динамики автоматического управления
самолетом при посадке выполнено Г. С. Поспеловым. Им показано, что движение
самолета в зоне КРМ описывается уравнениями Бесселя [30].
5—3261
129
Рис. 3.35. Зависимость частоты собствен-
ных колебаний Q и коэффициента отно-
сительного затухания £ от дальности са-
молета до КРМ при использовании за-
конов управления (3.81 и 3.82). Опти-
мальная дальность ЛОпт = Ю км
Вычислитель кйтопилот-
Рис. 3.36. Структурная схема
системы самолет — БСАУ,
реализующей закон управле-
ния (3.82)
Структурная схема системы, реализующей закон управления
(3.82), приведена на рис. 3.36.
Уравнение системы может быть приведено к виду:
+ у pz+ Yz==0'
где k'z=kg, k\ = i;g.
Для оптимальной дальности можно обеспечить:
k.
Ьопт LonT
Тогда после некоторых преобразований получим
k. h
z
Piz^TLPz^TLz=(i-
(3.88)
Следовательно, в этом случае частота собственных колебаний
определяется зависимостью (3.87), а коэффициент относительного
затухания
k.
5= —^=
2 1 kzkL
В данном случае:
2o= 2o„T;
Г kL
$= -L u-
VkL
(3.89)
130
Значит, по мере приближения к КРМ частота собственных коле-
баний и коэффициент относительного затухания увеличиваются (см.
рис. 3.35).
Таким образом, при использовании законов управления (3.81 и
3.82) на дальностях, отличных от оптимальной, переходные процес-
сы отличаются от оптимальных (по этой причине дальность, на ко-
торой переходные процессы оптимальны, получила название «опти-
мальной» Лопт). При выборе величины оптимальной дальности при-
ходится сталкиваться с противоречивыми требованиями. С точки
зрения оптимальности переходных процессов при выходе («вписы-
вании») самолета на курсовую линию целесообразно увеличивать
оптимальную дальность, а с точки зрения получения оптимальных
характеристик движения самолета вблизи ВПП — уменьшать ее.
Заметим, что при использовании обоих вышеуказанных законов
частота собственных колебаний увеличивается, что приводит к
уменьшению времени переходных процессов траекторного движения
самолета. Поэтому на малых дальностях от КРМ упрощенное рас-
смотрение траекторного движения самолета недопустимо.
Для получения оптимальных характеристик движения системы
самолет — БСАУ в широком диапазоне дальностей до КРМ неред-
ко прибегают к ослаблению (аттенюации) сигнала, снимаемого
с КРП по мере приближения самолета к КРМ. Предположим, на-
пример, что сигнал с выхода КРП и& = с{г (ci — постоянный коэф-
фициент) подается на усилитель, коэффициент усиления которого
пропорционален некоторому управляющему сигналу
ky = C<)Ul ,
где с2 — постоянный коэффициент;
Ul —управляющий сигнал.
Если управляющий сигнал пропорционален дальности до КРМ
UL = c3L(t) (с3 — постоянный коэффициент), то сигнал на выходе
усилителя
UBax = kyU,=cic2c3eL(t) = cz (3.90)
пропорционален боковому отклонению г.
Таким образом, ослабление сигналов КРП в функции дальности
L(t) представляет собой перемножение сигналов углового отклоне-
ния от курсовой линии и дальности до КРМ. Благодаря этому фор-
мируется информация об отклонении самолета от курсовой линии
в прямоугольной, а не в угломерной системе координат. Усилитель
с переменным коэффициентом усиления используется в данном слу-
чае как множительное устройство. Разумеется, для умножения сиг-
налов могут быть применены и другие технические средства.
Следует указать, что на самолетах не всегда имеется информа-
ция о дальности до КРМ. Поэтому вместо сигнала UL используют
сигнал UH, пропорциональный высоте полета. Сигнал UH при сни-
жении самолета по глиссаде зависит от дальности до ВПП. В дан-
5:
131
ном случае, когда не требуется большая точность измерения даль-
ности до КРМ, сигнал UH может рассматриваться как аналог сиг-
нала UL.
В § 2.7 было рассказано об операции умножения (3.90), выпол-
няемой на потенциометре следящей системы радиовысотомера.
В некоторых системах автоматического управления производит-
ся изменение передаточных отношений i£ и /е* в функции от высоты
полета, что в конечном счете равносильно вышерассмотренным опе-
рациям по ослаблению выходного сигнала КРП. В ряде систем из-
менение передаточных отношений осуществляется дискретно, через
определенные промежутки времени, связанные с моментом так на-
зываемого «захвата» глиссады, т. е. с моментом начала снижения
самолета по глиссаде. К примеру, в системе БСУ-ЗП, имеющей за-
кон управления типа (3.82), в момент «захвата» глиссады переда-
точные отношения по отклонению от курсовой линии и по производ-
ной этого отклонения (/еи ) уменьшаются на ~25%, а через
50 сек — еще приближенно на ~20%.
В системе САУ-1Т, имеющей закон управления такого же типа,
эти передаточные отношения в момент «захвата» глиссады умень-
шаются примерно iHa 30%.
Следует заметить, что применение непрерывной коррекции по
высоте полета позволяет обеспечить лучшие характеристики устой-
чивости движения, в особенности на малых дальностях от КРМ.
Во всех рассмотренных выше системах для улучшения характе-
ристик системы требовалась некоторая дополнительная информация
(дальность до КРМ, высота полета, фиксация момента «захвата»
глиссады, время полета после «захвата» глиссады). Поскольку не
во всех случаях такую информацию оказывается возможным и
удобным получить, иногда прибегают к переключению передаточ-
ного числа по производной отклонения от курсовой линии в зави-
симости от величины этого отклонения.
При таком методе коррекции передаточного отношения/- исхо-
дят из следующего.
Как видно из (3.89), в системах, использующих закон управле-
ния (3.82), коэффициент относительного затухания £ по мере при-
ближения к КРМ увеличивается. Если передаточное отношение/-
выбрать таким, чтобы на больших дальностях от начала ВПП, где
происходит выход самолета на посадочную траекторию, демпфиро-
вание было достаточным, то на малых дальностях коэффициент £
оказывается слишком большим. С другой стороны, можно полагать,
что переходные процессы выхода на посадочную траекторию вблизи
ВПП уже закончены, о чем свидетельствует малое значение откло-
нения 8.
Применив релейное устройство, срабатывающее при определен-
ном значении сигнала отклонения 8*, можно при 8<8* уменьшать
передаточное отношение /6- на 30—40%.
1132
Влияние характеристик радиотехнической
системы КРМ — КРП на динамику системы
самолет — БСАУ
Сначала рассмотрим влияние разброса крутизны сигнала такой
радиотехнической системы 3^. Ток на выходе КРП, используемый
в качестве сигнала углового отклонения самолета от курсовой ли-
нии, зависит не только от величины отклонения 8, но также от кру-
тизны курсовой зоны Si£> а именно
/е =rS/ee.
Как было показано в § 2.3, крутизна 31е зависит от длины ВПП,
расстояния КРМ до ВПП и допусков на параметры КРМ и КРП.
С учетом влияния этих факторов встречающиеся в эксплуатации ми-
нимальные крутизны 3; могут отличаться от максимальных
^г’епах пРимеРН0 в $ раз. При проектировании систем траекторного
управления выбирается некоторая расчетная крутизна
= 0,6) (S,, m,n + S,,„).
Введем коэффициент, учитывающий отличие фактической
крутизны сигнала радиотехнической системы КРМ — КРП от
расчетной,
Диапазон изменения коэффициента ks характеризует диапазон
возможного изменения тока I при одном и том же угловом откло-
нении 8. Чтобы оценить влияние изменения крутизны Sie умножим
члены законов управления, содержащие координату 8, на коэффи-
циент ks. В таком случае уравнения рассмотренных выше систем
примут вид:
p2zl~k-z pz-\-kz — =0; (3.86а)
kL
piz+ki — pz + k,^ z=0. (3.88a)
kL kL
Следовательно, отличие крутизны Зг-е от 3;ер аналогично изме-
нению коэффициента kz (в обоих уравнениях) и коэффициента k
(в уравнении 3.88а). Это соответственно отражается на динамике
системы самолет — БСАУ.
Коэффициент ks может быть представлен как произведение двух
частных коэффициентов
ks=k$ks, (3.91)
133
базовая точка
Рис. 3.37. К определению влияния
разброса крутизны Sie
где ks' — коэффициент, учитывающий разброс крутизны, вызванный различиями
в длине ВПП и расстоянии от КРМ до ВПП;
k$" — коэффициент, учитывающий разброс крутизн, вызванный нестабильно-
стью характеристик системы КРМ—КРП.
В § 2.2. .указывалось, что КРМ, как правило, настраивается та-
ким образом, чтобы на уровне порога ВПП курсовой сектор, имею-
щий угловую ширину во, образовывал «ворота» шириной zo = 21O м
(рис. 3.37). Отсюда следует
е =
° 9
где £б — расстояние от КРМ до базовой точки системы посадки (сумма длины
ВПП и расстояния КРМ до ВПП).
Тогда номинальная крутизна S/e0 = = — £б.
Е0 *0
Значит, расчетная крутизна однозначно определяется принятым
в расчет расстоянием Ар от КРМ до порога ВПП S, = — Zp, сле-
довательно,
__ L б
S 5/ер
Возможный диапазон изменений Lq определяется диапазоном
длин ВПП, на которых эксплуатируется данный тип самолета. Диа-
пазон Лб оказывается наибольшим применительно к самолетам с
малыми посадочными дистанциями, поскольку такие самолеты мо-
гут эксплуатироваться как на коротких, так и на длинных ВПП.
В этих случаях 0,64-1,4. Нестабильность характеристик систе-
мы КРМ — КРП, как указывалось в § 2.2, может приводить к из-
менению крутизны на 35%. Таким образом, ks" = 0,65—1,35.
В уравнениях
k с
соотношение _.
kL
(3.92)
(3.86а и 3.88а) имеются члены, в которые входит
Учитывая (3.85, 3.91 и 3.92), получим
kS __ i' L" ^>опт ^опт
kL “^£(0 5 А (0 ’ £р
(3.93)
134
На уровне порога ВПП, где L (/) =Лб, имеем
k г>
— =ck" ,
k, s
(3.94)
где c = -^^=const.
Ар
Из (3.93 и 3.94) сдедует, что на уровне порога ВПП соотноше-
ние — не зависит от величины Lq, Иначе говоря, несмотря
kL
на различие длин ВПП и расстояний КРМ до ВПП на уровне поро-
га ВПП частота собственных колебаний и коэффициент относитель-
ного затухания системы самолет — БСАУ постоянны при номиналь-
ных характеристиках системы КРМ — КРП. Изменение характерис-
тик системы самолет — БСАУ может иметь место лишь в связи с
нестабильностью характеристик системы КРМ — КРП в пределах,
учитываемых коэффициентом ks".
При регулировке курсового сектора по «воротам» наибольшее
различие динамических характеристик системы самолет — БСАУ,
вызванное отличием угловой ширины курсового сектора 8о, наблю-
дается на больших дальностях от порога ВПП. По мере приближе-
ния к порогу ВПП различие в динамике переходных процессов по-
степенно уменьшается. Это свойство является особенно ценным для
систем автоматического управления заходом на посадку, предназ-
наченных для эксплуатации в условиях посадочных минимумов II
и III категорий.
Теперь рассмотрим вопросы, связанные с наличием помех в сиг-
налах системы КРМ — КРП. Основными источниками помех яв-
ляется отражение энергии излучения КРМ различными неподвиж-
ными объектами (постройками, самолетами на стоянках и т. п.).
Для иллюстрации на рис. 3.38 показаны линии равных сигналов
КРМ, которые искривлены вследствие этих переотражений. При
пролете самолетов над КРМ, при движении крупных объектов вбли-
зи КРМ и в некоторых других случаях могут возникнуть времен-
ные искривления.
Пилотируя самолет по обычным приборам (авиагоризонты, ком-
пасы и ПСП), летчик до-
вольно легко «отфильт-
ровывает» помехи в сиг-
налах системы КРМ —
КРП. В процессе захода
на посадку он стремится
подобрать такой курс,
при котором обеспечива-
ется либо выдерживание
стрелки ПСП на нуле,
либо ее медленное дви-
Рис. 3.38. Линии равных сигналов КРМ
135
жение к нулю. При такой методике захода на посадку всякое вне-
запное быстрое движение курсовой стрелки ПСП воспринимается
летчиком как результат воздействия помехи.
По-иному обстоит дело при полуавтоматическом и автоматиче-
ском управлении. В этих случаях все команды, выработанные вы-
числителем СТУ, должны точно отрабатываться летчиком и авто-
пилотом. Поэтому вопрос борьбы с помехами при использовании
средств автоматизированного управления заходом на посадку при-
обретает значительно большую остроту, чем при заходе по обыч-
ным приборам.
В этой связи определенный интерес представляет вопрос о том,
гкаких величин может достигать угловая скорость 8 при заходе на
посадку. Для штилевых условий
L (О V
Если задаться Л(/)=8—10 км, V=75—90 м!сек и учесть, что
самолет входит в курсовой сектор под углом не более 30° к курсо-
вой линии, т. е. Д1|) = 30о, то в соответствии с (3.95) вшах —0,004—
0,006 \1сек. Поэтому даже с некоторым запасом сигналы, при дей-
ствии которых 8>0,01 1/сек, можно отнести к помехам.
Вследствие инерционности самолета помехи, лежащие в области
высоких частот, не могут быть «отработаны». Так, если ограничить
из соображений безопасности полета отклонения элеронов таким
образом, чтобы угловые скорости сох = 4—5 град!сек, то за помеха-
ми, соответствующими 8/ 0,1—0,15 1/сек, самолет не будет успевать
крениться. Если же ограничить допустимый крён при эволюциях
Ymax = 20°, то за помехами, при которых 8/>0,05—0,06 1/сек, само-
лет не будет успевать рыскать.
Более низкочастотные помехи, хотя и могут быть «отработаны»,
приводят к ненужному раскачиванию самолета. Это раскачива-
ние особенно опасно на Небольших дальностях от начала ВПП, где
при небольших линейных уклонениях самолета от оси ВПП угловые
отклонения имеют значительную величину вследствие малого зна-
чения дальности L(/). В этом случае могут возникнуть большие
крены, приводящие к интенсивному отвороту самолета от линии
посадки. ,
Таким образом, высокочастотные помехи влияют на динамику
угловых движений самолета, не сказываясь существенно на каче-
стве траекторного движения. Эти помёхи при автоматическом уп-
равлении вызывают резкие отклонения элеронов и руля направ-
ления.
Они ухудшают «поведение» командной стрелки и затрудняют
ручное (пилотирование при полуавтоматическом управлении.
Если задаться условием, чтобы при стабилизации самолета на
курсовой линии колебания по крену из-за действия помех не пре-
136
Рис. 3.39. К фильтрации помех
вышали 2—3°, то требования к частоте помех оказываются суще-
ственно более жесткими.
Как показывают расчеты, в этом случае частота помех в сигна-
лах КРМ I категории должна быть примерно в 10 раз меньше, чем
исходя из соотношения (3.95).
Низкочастотные помехи сказываются главным образом на тра-
екторном движении самолета и на малых дальностях от начала
ВПП могут существенно ухудшать точностные характеристики сис-
темы.
Как известно, создание низкочастотных фильтров в бортовой ап-
паратуре связано с большими трудностями. Обычно в системах
траекторного управления для фильтрации помех применяют один-
два фильтра типа апериодических звеньев с постоянными времени
Т= 1,54-2,5 сек. Такие фильтры эффективно подавляют лишь высо-
кочастотные помехи. Для иллюстрации этого рассмотрим аплитуд-
но-частотные характеристики бортовых систем автоматического уп-
равления заходом на посадку. Поскольку высокочастотные помехи
«не проходят» в курс и траекторию, амплитудно-частотные харак-
теристики можно рассматривать применительно к разомкнутому
контуру от входа до элеронов IT8/ (р) или от входа до командной
стрелки крена W*z (р). Учтем при этом, что на выходе КРП имеет-
ся фильтр с постоянной времени Ткрп =0,1—0,3 сек. На рис.
3.39, а показан контур с системой траекторного управления, реали-
зующей закон управления типа (3.81) с одним фильтром
Рис. 3.40. Логарифмические амплитудно-частотные характеристики систем с пере-
даточными функциями (3.97 и 3.99)
Уз= —
____1__
Т\р + 1
Zse — i-z pz.
(3.96)
6
Тогда передаточная функция цепи от входа до элеронов с уче-
том фильтра КРП имеет вид:
А = =
£ V (7’КРПр + 1)(7’1р+ 1)
(3.97)
В системе траекторного управления (рис. 3.39, б) использует-
ся закон управления типа (3.82) с двумя фильтрами, причем один
из фильтров ------- предназначен для фильтрации сигнала про-
Гор ч- 1
изводной отклонения:
1 /. । 1
Уз=-----------I Z£e 4------
Т\р + 1 \ Тър 4- 1
/• ре) .
(3.98)
В этом случае интересующая нас передаточная функция
&
8Э
А=г’э(р)=
г/
'г
Т 2 4- — I р + 1
(3.99)
Построим логарифмические амплитудно-частотные характерис-
тики (ЛАХ), соответствующие передаточным функциям (3.97 и
3.99). Примем iti^= 1, 7'крп =0,2 сек, Ti = l,5 сек, 7’2=2,5 сек,
Z.
— =20. Кроме того, построим также ЛАХ для системы с переда-
че
точной функцией (3.99), положив Т2=0. Это соответствует струк-
турной схеме, показанной на рис. 3.39, б, но только с одним общим
фильтром -—-—j- . Из сравнения ЛАХ (рис. 3.40) следует, что
наиболее эффективное подавление помех получается в системе с
передаточной функцией (3.97). В этом случае ослабление помех
138
начинается с<о= J- ^0,65 1/сек. У системы с передаточной функ-
'1 1
цией (3.99) Л АХ имеет подъем, начиная с оз= ---^0,05 Х/сек,
— А- Т2
4
и в области частот до сос~4,5 Х/сек происходит усиление помех.
Этот подъем объясняется наличием дифференцирующей цепочки с
большим коэффициентом усиления /£ , которая предназначена для
формирования сигнала производной отклонения самолета от кур-
совой линии. Как известно, при дифференцировании относительный
уровень помех резко увеличивается и отношение полезного сигнала
к помехе уменьшается (рис. 3.41).
Роль второго фильтра в структурной схеме, показанной на
рис. 3.39, б, совершенно очевидна из сопоставления ЛАХ систем с
фильтром и без него (Т2 = 0). В последнем случае подавление по-
мех начинается лишь в области весьма высоких частот. Заметим,
что если второй фильтр сделать таким же общим, как и первый, то
на помехозащищенности системы это практически не скажется.
Все сказанное полностью относится и к полуавтоматическим
системам. Если принять feic=l, то ЛАХ, приведенные на рис. 3.40,
соответствуют передаточным функциям W\z (р) полуавтоматиче-
ских систем (см. рис. 3.39).
Итак, с точки зрения помехозащищенности системы, содержа-
щие дифференцирующие звенья в цепи сигнала 8, т., е. с законами
управления типа (3.98), существенно уступают системам, в кото-
рых такие звенья отсутствуют. Вместе с тем ни те, ни другие сис-
темы не обеспечивают фильтрации низкочастотных помех. В связи
с последним к курсовым радиомаякам предъявляются весьма жест-
кие требования в части искривлений. Допуски на амплитуды ис-
кривлений приведены в § 2.3.
Следует также указать, что вероятность появления высокочас-
тотных помех значительно больше, чем низкочастотных. Как пока-
Рис. 3.41. К увеличению уровня
помех при дифференцировании
сигнала 8
139
зывает опыт эксплуатации систем автоматизированного захода на
посадку, применение законов управления типа (3.98) с постоянны-
ми времени фильтров около 2 сек обеспечивает приемлемый уро-
вень подавления наиболее часто встречающихся помех.
Попутно заметим, что в ряде случаев оказывается целесообраз-
ным фильтровать не только сигналы е и е, но также и другие, на-
пример сигналы z. В некоторых системах предусматривается фильт-
рация сигнала у3 и (у3—у).
О компенсации запаздываний, вносимых фильтрами
Введение фильтров для подавления помех в сигналах отклоне-
ния самолета от заданной траектории и производных отклонения
приводит к запаздыванию самих сигналов. Это может серьезно
сказаться на динамике системы самолет — БСАУ. Рассмотрим, ка-
ковы последствия введения фильтров. Для упрощения задачи не
будем учитывать влияния изменения дальности L(t). Пусть имеет-
ся система (рис. 3.42) с законом управления
ь= “тТТТ pz} ’ (ЗЛ00)
Т\Р + 1 \ т2р + 1 /
отличающимся от закона (3.76) наличием двух фильтров.
Передаточная функция
, , +k.) р + kz
~=фгг [Р)= -----------,-------*------------------
<2*3 Т {Г 2/?4 + (Г] 4- Т<2) р3 + р2 4- (kzT2 4- Р 4- kz
значительно сложнее передаточной функции (3.79). Уравнение соб-
ственного движения самолета имеет четвертый порядок:
pAz -|- axp3z t- a2p2z a3pz a4 = 0.
Коэффициенты определяются такой системой уравнений:
Вычислитель' С/Ь
Рис. 3.42. Система с законом управления (3.100)
140
Для обеспечения устойчивости дви-
жения и 'получения требуемого качества
переходных процессов необходимо ком-
пенсировать запаздывание сигналов z
и z на фильтрах, что достигается путем
подачи на фильтр некоторого дополни-
тельного сигнала. Познакомимся с этим
U+UK р-у
Рис. 3.43. Операцион-
ный фильтр
методом компенсации запаздывания на следующем простом при-
мере.
Допустим, что на фильтр —подается сигнал U, засорен-
ный помехой Uf. Тогда на выходе фильтра имеется суммарный
сигнал —— U -|-------5 Uf. Запаздывание полезного сигнала
Тр + 1 Тр ч-1 J
U отсутствует, если на вход фильтра подается еще один сигнал,
который образует на выходе сигнал Тр^ -- U. Для этого на вход
фильтра нужно подать сигнал Три. Таким образом, для компен-
сации запаздывания на вход фильтра необходимо дополнительно
подать сигнал производной от основного сигнала, конечно, не со-
держащего сигнала помехи. Порция сигнала производной должна
быть равна постоянной времени фильтра. В этом случае на выходе
фильтра выделяется полезный сигнал и подавленная помеха
(рис. 3.43).
Само собой разумеется, сигнал производной, используемый для
компенсации запаздывания, не может быть получен путем диффе-
ренцирования основного сигнала, содержащего помехи, поскольку
при этом уровень помех возрастает. Следовательно, для целей ком-
пенсации запаздывания необходимо использовать другой датчик
сигнала производной, который не содержит помех или же его поме-
хи— другого частотного спектра. Заметим, что фильтры, на кото-
рые подаются не только основной сигнал, но и сигналы производ-
ных от него, иногда называют операционными сглаживаю-
щими фильтрами.
Из сказанного следует, что для компенсации запаздывания сиг-
нала z на фильтре ——-j—j- необходимо подать на его вход допол-
нительный сигнал Tpz. Для компенсации запаздывания сигнала
производной pz на фильтре --------- необходимо подать сигнал
Тр + 1
Tp2z. -
Введем в закон управления компенсирующие сигналы
Тз = —-------Г + c';P2z +
Tip + 1 L
+ „ 1,т^рг-\-с-хрг-\-с-г^г)\ . (3.101)
141
Здесь
cz =izTx\
Cz=lz
C z~ 1^2 + izT2>
Если полагать, что в компенсирующих сигналах производных по-
меха отсутствует, то с учетом помехи в основном сигнале закон
управления (3.101) принимает вид:
11=~ [‘-г+(i-pz+pz+
. " 2 \1 I lz2f I
+ C •; p2Z) -4-------------------.
z J ЛР4-1 (Т^Ч- 1)(Г2р+1)
Порции Су с.. компенсирующих сигналов выбраны такими,
что правые части уравнений (3.76 и 3.101) равны и, следовательно,
уравнение системы, несмотря на наличие в ней фильтров, сохрани-
ло второй порядок.
Сравнивая между собой уравнения (3.100 и 3.101), мы видим,
что для компенсации запаздывания необходимо выполнить два ус-
ловия. >
- Во-первых, нужно увеличить сигнал производной от отклоне-
ния. Это легко достигается путем введения увеличенного переда-
точного отношения по сигналу скорости:
4=4 +ci-
Во-вторых, необходимо сформировать сигналы, пропорциональ-
ные вторым производным от отклонения. Как уже указывалось, по-
лучить такие сигналы путем дифференцирования сигналов отклоне-
ния нельзя из-за помех, для борьбы с которыми как раз и устанав-
ливают фильтры. Обычно в качестве сигналов второй производной
от отклонения используются либо сигналы крена, либо сигналы
скорости рысканья (рф).
В этих сигналах также возможны помехи. Однако частота
последних обычно значительно ниже, чем частота помех в сигналах
отклонений от траектории. Для отделения полезного сигнала от
низкочастотных помех могут быть использованы фильтры высоких
частот.
В общем случае для построения систем с операционными фильт-
рами необходимы по меньшей мере два источника информации.
При этом спектры возможных помех от каждого из источников
должны лежать в разных частотных диапазонах.
На рис. 3.44 показана схема одного из возможных вариантов
системы с компенсацией запаздывания, вносимых фильтрами. В
142
Рис. 3.44. К компенсации запаздывания на фильтрах
системах, реализующих законы управления типа (3.81 и 3.82) с
фильтрами, компенсация запаздываний оказывается возможной
только на одной, обычно оптимальной дальности. На других даль-
ностях L(t) компенсация нарушается. При использовании фильт-
ров с большими постоянными времени на дальностях, значительно
отличающихся от оптимальной, характеристики устойчивости дви-
жения систем самолет — БСАУ могут стать неудовлетворительны-
ми. В системы с одним фильтром, постоянная времени которого не
превышает 1,0—1,§ сек, часто вообще не вводят компенсирующих
сигналов. -
В цепях прохождения управляющих сигналов имеются элемен-
ты, также являющиеся фильтрами. Это — различные блоки связи,
следящие системы и т. п. Их постоянные времени обычно малы (от
0,5 сек и менее).
В компенсации запаздывания, вносимого этими элементами, нет
необходимости.
Точность стабилизации самолета на курсовой линии
Одним из важнейших требований, предъявляемых к автомати-
зированным системам захода на посадку, является высокая точ-
ность стабилизации самолета на посадочной траектории. Посколь-
ку в этих системах г3 = 0, появление отклонений самолета от курсо-
вой линии в установившемся движении может быть связано лишь
с действием на систему самолет — БСАУ возмущающих воздей-
ствий. Наиболее существенным возмущением является боковой
ветер.
Значительные ошибки могут возникать вследствие погрешностей
датчиков сигналов, используемых при формировании законов уп-
равления и дрейфов вычислительных устройств. Наконец, если ка-
нал крена автопилота не астатичен по отношеню к возмущающим
воздействиям, то могут иметь место ошибки АуУст = Тз“Т, появля-
ющиеся при действии на самолет возмущающих моментов АЛ4Х.
143
Рис. 3.45. Структурная
схема системы самолет —
БСАУ, реализующей за-
кон управления (3.102)
Эти ошибки также могут привести к ошибкам стабилизации само-
лета на курсовой линии.
Точность стабилизаций самолета на курсовой линии зависит от
закона управления, реализованного в системе траекторного управ-
ления. Различие в до сих пор рассматривавшихся законах управле-
ния было связано с членом, пропорциональным скорости отклоне-
ния от посадочной траектории. Мы уже указывали, что на самоле-
те отсутствует датчик сигналов этой скорости. Поэтому в системах
траекторного управления заходом на посадку в качестве сигнала
скорости отклонения от курсовой линии используется либо сигнал,
пропорциональный отклонению Дф текущего курса от заданного,
либо сигнал ре, получаемый дифференцированием сигнала КРП.
Рассмотрим подробно оба варианта систем, причем для упроще-
ния задачи не будем учитывать изменения дальности L и наличия
в системе сглаживающих фильтров.
Возможность использования сигнала, пропорционального
Дф = фз—ф, в качестве сигнала скорости pz вытекает из уравне-
ния (3.69):
‘ V “ V
Рассматривая действие бокового ветра как возмущение, закон
управления траекторным движением можно записать так:
у3= —/£е — /фДф, (3.102)
где /£ = izL\ /ф == iz.V\
7
— передаточное отношение по отклонению текущего
курса от заданного, т. е. отношение угла крена само-
лета в градусах к углу отклонения текущего курса
самолета от заданного, тоже в градусах.
Структурная схема системы самолет — БСАУ, реализующей за-
кон управления (3.102), представлена на рис. 3.45. На ней показа-
ны возмущения, приложенные к системе. Возмущение отражает
ошибки измерения текущего крена и выполнения условия у = у3.
К другой точке схемы приложено возмущение —, связанное с деи-
144
ствием бокового ветра, и возмущение отражающее ошибки вы-
ставки заданного и измерения текущего курсов.
Для этой системы справедливы передаточные функции:
у
Р2 + k^p + — lt
V(p + gl-) V(p + k.)
z z
P2+gi-P + giz P2 + k-p + kz
z z
— (/,)=---------------—----------=
1 P2 + Ь^Р+ — k-fie
=_______g________=_______g_____
P2 + gi-z P + g‘z P2 + k.^p + kz
где kz = izg- k-z = /. g.
Положив в этих уравнениях р = 0 и учтя 5^6(0)=— Ф^6(0)
5^(0)= — Флф(0), SJ7(O) = —Ф^(0),запишем уравнения для уста-
новившихся ошибок:
Т i т т I • k
густ-----А ----------- ---------U6- (3.103)
У Ч V 1г
Li i- V k-v
zyCT=-------------------------Т-Р*' (3-104)
e lz kz
густ= ~4-Ft=-----FT= - -f-Fr (3.105)
‘e lz kz
Из уравнений (3.103—3.105) следует, что линейные величины
статических ошибок зависят от дальности до КРМ, по мере при-
ближения к которому они уменьшаются. Учтя (3.70), выразим ста-
тические ошибки в угловых величинах:
-----(3.103а)
еуст=—(3.104а)
Ze
еуст=----(З.Ю5а)
145
Рис. 3.46. Статическая
ошибка при использова-
нии закона управления
(3.102)
В таком случае величины статических ошибок сохраняются пос-
тоянными независимо от дальности L.
Итак, система с законом управления (3.102) оказывается стати-
ческой то отношению ко всем этим возмущениям, поэтому его час-
то называют статическим заксином.
Величины статических ошибок могут оказаться недопустимо
большими. г
Покажем это на примере самолета типа Ту-134, имеющего скорость захода
на посадку V=70 м!се%. Зададимся следующими данными: передаточные отно-
шения /е =10, =2, скорость бокового ветра £/б = Ю м!сек. Тогда на расстоянии
от КРМ £=4000 м (при £б=3000 м это соответствует расстоянию 1000 м от на-
чала ВПП) статическая ошибка zyCT = 115 м. Разумеется, при таком боковом от-
клонении от курсовой линии посадка самолета в заданном месте ВПП невоз-
можна.
Следует указать, что величины статических ошибок от действия
бокового ветра могут быть в значительной степени скомпенсирова-
ны, если экипажу известна скорость ветра или угол сноса. В этом
U U
случае в заданный курс вводится поправка на угол----—.
Тем самым к системе самолет — БСАУ прикладывается допол-
- U.
нительное новое возмущение г----------—, которое в установив-
шемся движении компенсирует воздействие бокового ветра. Вели-
чину угла сноса экипаж может определить с помощью компаса
(курсовой системы).
После окончания переходных процессов самолет, управляемый
по сигналам системы траекторного управления со статическим за-
коном, летит, развернувшись по отношению к посадочному курсу на
угол, примерно равный углу сноса (рис. 3.46). Этот угол индици-
руется на курсовом (навигационном) приборе. Поправка на угол
сноса вводится-с помощью задатчика курса, расположенного на том
же приборе. Подробно об этих приборах будет говориться в гл. 8.
Статические ошибки, связанные с возмущениями Fy , сравни-
тельно невелики. Допустим, что вследствие действия на самолет
момента ДЛ1Х, погрешностей гировертикали и других причин, само-
лет имеет крен Fy =2°. В условиях предыдущего примера это при-
водит к статической ошибке zyCT~ 14 м.
Статический закон управления (3.102) применялся в наиболее
ранних системах траекторного управления. В ту пору отсутствова-
146
Рис. 3.47. Структур-
ная схема системы са-
молет — БСАУ, реа-
лизующей закон уп-
равления (3.102а)
ли жесткие требования к характеристикам курсо-глиссадных ра-
диомаяков и уровень помех в их сигналах был очень высок.
Как было показано выше, статический закон управления имеет
преимущества перед другими законами по помехозащищенности.
Это обстоятельство сыграло тогда немаловажную роль в примене-
нии таких законов в системах траекторного управления заходом на
посадку. После улучшения характеристик радиомаяков, особенно
в отношении уровня помех и применения фильтров в системах с дру-
гими законами управления, это преимущество практически стало
несущественным.
Для устранения статизмов иногда в закон управления типа
(3.102) включают член, пропорциональный интегралу от отклоне-
ния самолета от курсовой линии:
Тз== (3.102а)
J р
В этом случае порядок системы повышается. Передаточные
функции от возмущающих воздействий для системы (рис. 3.47) име-
ют вид:
v (Р + k^)p
V V
Р3 + Ь-^Р2 + ~k^p + —
V (р + ) р
р3 -I- k-zp^ + kzp +
z Vkp
Фг (p)=------------------------------------=
у V
P3 + k-fyP2 + — ^hP + — i
,
p3 + P2 4- kzp 4-
Фи.(р} = ФрЛр)
где
147
Рис. 3.48. Траектории полета
при использовании закона уп-
l2 * равления (3.102a)
Очевидно, что в установившемся движении передаточные функ-
ции для ошибок St/g (0)=S/^(0) = 0 и Sr* (0)=0. Вместе с тем
введение в закон управления интегрального члена ухудшает дина-
мику выхода -самолета* на посадочную траекторию. Если сигнал,
пропорциональный интегралу от отклонения, включен постоянно,
то неизбежно возникают значительные перерегулирования и уве-
личивается длительности переходных процессов (рис. 3.48).
Допустим, что в момент включения системы самолет имел
некоторое начальное отклонение от курсовой линии. При после-
дующем движении самолета до момента пересечения курсовой
f 1
линии на интеграторе накопится сигнал, пропорциональный f zdt
(кривая /). К моменту t2 окончания переходного процесса сигнал
на интеграторе должен стать равным нулю. Следовательно,
G ti
f zdt= edt. Иначе говоря, заштрихованные площади, которые
ограничены кривой движения самолета, над й под курсовой линией
должны быть одинаковыми. При увеличении передаточного отно-
шения if перерегулирование увеличивается, хотя продолжитель-
ность переходного процесса уменьшается (кривая 2). Однако воз-
можно, что переходный процесс при увеличении передаточного
отношения iy станет колебательном (кривая 3). В таком случае
он закончится, когда суммы площадей, ограниченных кривой дви-
жения, над и под курсовой линией одинаковы. При этом может
оказаться, что общая продолжительность переходного процесса да-
же увеличится.
Траектория самолета получается значительно лучшей, если ин-
тегратор включается при малых отклонениях е. В этом случае
сигналы, пропорциональные интегралу отклонения от курсовой ли-
нии, становятся сравнительно небольшими и меньше влияют на
характер переходных процессов. Однако для этого система траек-
торного управления должна быть снабжена дополнительным уст-
ройством включения интегратора, что ведет к ее усложнению.
Вместе с тем и в этом случае сигнал интегратора может сильно
ухудшить устойчивость движения самолета в конце захода на по-
садку. Укажем, что закон управления, содержащий интегральный
148
Рис. 3.49. Структурная
схема системы само-
лет — БСАУ, реализую-
щей закон управления
(3.82)
член/ часто называют интегральным и астатическим
законом.
Теперь рассмотрим систему самолет — БСАУ (рис. 3.49), реа-
лизующую так называемый дифференциальный закон уп-
равления (3.82):
Тз= — —/• рг.
Для этой системы справедливы передаточные функции
%(,)=*;,(,)=—v Vp v—
Рг + — k(l, Р + —
= . VP
р2 + к-гр + кг
где kz = lzg=~ г’е;
Поскольку в установившемся движении S&6 (0) (0) =0,
система не имеет статических ошибок при действии на нее посто-
янного ветра Uq и других постоянных возмущений . Во время
захода на посадку в условиях бокового ветра самолет летит с
«подобранным» углом сноса (рис. 3.50). По отношению к возму-
щающим воздействиям система оказывается статической. Хотя
величины статических ошибок сравнительно невелики, тем не менее
Рис. 3.50. К характеристике закона уп-
равления (3.82)
149
целесообразно их устранить, если система предназначена для ис-
пользования в условиях низких посадочных минимумов. Особенно
это важно для самолетов, у которых полет с несимметричной тягой
происходит со значительными кренами. Одним из наиболее употре-
бительных методов устранения ошибок от возмущений 7\ является
включение в закон управления интегрального члена:
7з = —/£е —Л pe-Zj —.
Р
Передаточное отношение q в таких системах выбирают очень
малым, так как статизмы относительно невелики. Включение ин-
тегрирующего устройства осуществляется на конечном этапе за-
хода. Например, в системе автоматической посадки, разработанной
фирмами Бендикс и Боинг для самолета Боинг-707, это устройство
включается в момент «захвата» глиссады. Иногда его включают
еще позже. При этом переходный процесс по компенсации стати-
ческой ошибки может даже и не закончиться полностью к моменту
выключения системы. Однако большая часть ошибки будет устра-
нена.
В заключение рассмотрим еще один закон управления, зани-
мающий промежуточное положение между статическим и диффе-
ренциальным (без фильтров) законами, так называемый изо-
др о м н ы й закон:
Тз = — - /фДр —— № — /фДф). (3.106)
1 р + 1
При 7 = 0 этот закон превращается в дифференциальный, а при
больших Т он приближается к статическому. Последний член пра-
вой части уравнения (3.106), отличающий изодромный закон от
статического, служит для формирования сигнала, пропорциональ-
ного углу сноса. Действительно, для оптимальной дальности член
-----— (С/78—4ДФ) = —— Ч - ^б
Тр + 1 k Тр 1 ф V
выражает сигнал, пропорциональный углу сноса и пропущенный
через фильтр. Постоянная времени фильтра выбирается такой,
чтобы, с одной стороны, фильтр эффективно подавлял помеху в
сигнале производной углового отклонения, а с другой — не вносил
существенного запаздывания в прохождении сигнала . Обыч-
но постоянная времени этого фильтра 7 = 3—7 сек. Кроме того,
как правило, в системе предусматривается еще один выходной
фильтр с постоянной времени 7 = 2—3 сек. Для компенсации за-
паздывания, вносимого фильтрами, в. закон управления вводятся
дополнительные члены.
Представив уравнение (3.106) в следующем виде:
Ъ = — 4е_ ррг (3’10ба)
150
Рис. 3.51. Структурная схема системы самолет — БСАУ, реализующей закон уп-
равления (3.1066)
легко заметить, что в данном случае сигнал Аф как бы пропускает-
ся через изодромный фильтр. Именно этим объясняется отсутствие
статических ошибок от действия бокового ветра. Попутно заметим,
что по той же причине закон управления получил название изо-
дромного, хотя изодромного звена как такового в схеме нет:
На рис. 3.51 представлена структурная схема системы с изо-
дромным законом, в котором предусмотрены два фильтра для
подавления помех и член, обеспечивающий частичную компенса-
цию запаздывания управляющих сигналов,
т * , х
^ip + i /
X + /фДф + 47 + _ * .
L + 1
(3.1066)
Подобный закон управления был реализован в первой отече-
ственной системе полуавтоматического управления типа «Путь»,
разработанной под руководством В. Г. Тарасова.
Из передаточной функции
ф^6(р)=ф^(^)
V (р2 4- Ь}р + »2) Р
рЬ + а^рЬ + а2р2 + агр + а4
где
Я4 = ------,
ы\т2 '
151
видно, что система является астатической по отношению к дейст-
вию бокового ветра и возмущений F$. Можно показать, что по от-
ношению к возмущениям Fr система является статической.
Итак, изодромный закон управления по сравнению со статиче-
ским обладает важным преимуществом — астатичностью к боково-
му ветру. Благодаря фильтрам с большими постоянными времени
он более помехоустойчив, чем дифференциальный. Эти преимуще-
ства особенно значительны при заходе на посадку по КРМ, имею-
щим большой уровень помех. Однако при этом характеристики
переходных процессов получаются удовлетворительными в сравни-
тельно узком диапазоне дальностей до КРМ и при небольших раз-
бросах крутизн сигналов радиотехнической системы маяк-прием-
ник. В связи с улучшением характеристик КРМ, о чем уже
упоминалось выше, в системах с изодромным законом управления
теперь применяют фильтры с небольшими постоянными времени.
Управление самолетом при больших накальных
отклонениях. Законы управления и структурные схемы
систем траекторного управления
Рассматривая вопросы автоматизированного управления боко-
вым движением самолета при больших отклонениях е и Аф, при-
ходится учитывать два важных обстоятельства. Одно из них заклю-
чается в необходимости ограничивать крены самолета. В основном
из соображений обеспечения безопасности полета на малых высо-
тах и скоростях обычно полагают, что крен не должен превышать
Ушах ~ 20°. Отсюда следует, что независимо от величины отклоне-
ний е и Аф заданный крен должен быть не более выбранного пре-
дельного значения. Для выполнения этого требования в цепи сиг-
нала заданного крена у3 устанавливают ограничитель, отрегулиро-
ванный на предельно допустимое значение крена утах- В некоторых
случаях это ограничение меняется по высоте полета. На рис. 2.29
показана зависимость y3max принятая в системе автомати-
ческого управления фирмы Бендикс. Заметим, что в этой системе
на высотах Я ^300 м предельный заданный крен у3тах =30°. Сле-
дует указать, что такое увеличение диапазона допустимых кренов
на больших высотах позволяет обеспечить быстрый вывод самолета
на посадочную траекторию при больших начальных отклонениях
самолета.
Другим важным обстоятельством является ограниченность ли-
нейного участка характеристики 7е=/(е) системы маяк — прием-
ник. В § 2.2 мы уже указывали, что у КРП линейность характе-
ристики РГМ=/(е) должна обеспечиваться при угловом откло-
нении от курсовой линии (где РГМ равна нулю) до углов по обе
стороны от нее, где РГМ = 0,180. От этих углов до е=±10° вели-
чина РГМ не должна быть менее 0,180. В диапазоне углов от е =
= ±10° до е=±35° РГМ должна быть не меньше 0,155. Напомним
152
также, что при РГМ = 0,155 выходной ток эталонного приемника
составляет 250 мка. Следовательно, за пределами /max =±300 мка
линейность характеристики Is = f(e) может нарушаться в связи с
нарушением линейности характеристики РГМ = /(е) курсового ра-
диомаяка.
Кроме того, выходной ток КРП благодаря имеющимся в нем
ограничителям обычно не превышает /Шах = 320—360 мка. Поэтому
линейность характеристики А = /(е) нарушается и в тех случаях,
когда характеристика PFM = f(e) линейна в широком диапазоне
углов е.
В связи со сказанным при анализе динамики системы само-
лет— БСАУ полагают, что линейный участок характеристики /е =
= /(е) доходит до углов е, при которых Л =±300 мка. В пределах
линейного участка характеристики Л =/(е) путем дифференциро-
вания сигналов КРП можно получить сигнал, пропорциональный
производной отклонения самолета от курсовой линии. За предела-
ми линейного участка сформировать такой сигнал этим методом,
уже не представляется возможным.
В дальнейших рассуждениях будем полагать, что характери-
стика /е =f(e) имеет вид, показанный на рис. 3.52. За пределами
углов ±е0Гр ток /е= const, т. е. наступает «насыщение».
Допустим, что самолет летит с курсом, перпендикулярным по-
садочному (Дф = 90°), имея значительное отклонение от курсовой
линии (рис. 3.53). Такое положение обычно возникает при выпол-
нении предпосадочного маневра типа «коробочки», когда самолет
находится на участке между третьим и четвертым разворотами.
Если в системе траекторного управления реализован дифферен-
циальный закон управления (3.82), то сигнал заданного крена в
этом случае обусловливается только сигналом 8, поскольку ре = 0.
Пока самолет находится левее курсовой линии (глядя по направ-
лению посадки), сигнал 8 независимо от курса самолета приводит
к созданию правого крена. Поэтому при таком законе управления
самолет из указанного исходного положения начнет разворачи-
ваться в сторону от ВПП (кривая 1). Чтобы исключить такое яв-
лениё, в закон управления вводится дополнительный член Гд^Дф
(рис. 3.54):
Тз= — 4е — — /^дфДф. (3.107)
Зависимость величины члена F^> Дф от отклонения Дф имеет
нелинейный характер
' />Дф=О при |Дф|<|Дф0|; |
/'дфДФ = Ар(ДФ —ДФо) при ДФ>Д%, )
где Дфо — некоторое пороговое значение Дф, при котором сигнал Дф отклю-
чается.
В рассматриваемом нами случае 8<0, Дф>0. При больших зна-
чениях Дф благодаря члену F^ Дф создается левый крен. Самолет
разворачивается в сторону ВПП (кривая 2), пока не установится
153
Рис. 3.52. Идеализированная
характеристика /Е=/(е)
Рис. 3.54. Зависимость
Дг|)=ДДг|))
равенство /7дфЛ'фп = Че, после чего, начиная от точки Л, самолет
под постоянным углом (углом подхода)
Z £
Д'К = —Т— + Н (3.109)
ч
летит до входа в зону лийейности сигнала е (е<е0Гр). При этом
7 = 73=0. После входа в эту зону (точка Б) сигнал е уменьшается.
Вместе с тем появляется сигнал производной отклонения pg>0.
Благодаря этому самолет получает левый крен и начинает плавно
154
Рис. 3.55. Структурная схема
системы траекторного управ-
ления с дифференциальным за-
коном управления
подходить к курсовой линии. Постепенно уменьшается также сиг-
нал ГдфДф. При Аф = Афо он равен нулю. Далее система самолет —
БСАУ управляется по дифференциальному закону (3.82), обеспе-
чивающему отсутствие статических ошибок от бокового ветра и
возмущений .
При более позднем начале четвертого разворота участок поле-
та с постоянным курсом Афп уменьшается. В оптимальном случае
траектория выхода самолета на курсовую линию представляет со-
бой кривую, близкую к дуге окружности, которая сопрягает линию
движения самолета до начала разворота с курсовой линией (кри-
вая 3). Радиус этой окружности является радиусом разворота са-
молета с постоянным креном:
2 ,
g-tglmax
где утах — предельный крен при автоматизированном управлении.
Если четвертый разворот будет начат еще позже, то вследствие
ограничения крена самолет пересечет курсовую линию (кривая 4).
Иначе говоря, в этом случае имеет место перерегулирование.
В зоне насыщения сигнала /е угол подхода самолета к курсо-
вой линии обычно составляет Афп = 30±5°. Для самолетов, имею-
щих большую скорость захода на посадку, а значит, большой, ра-
диус разворота, выбираются меньшие углы подхода. Это делается
с тем, чтобы при выходе в зону линейности сигнала 8 самолет ус-
пел установиться на посадочный курс к моменту выхода на курсо-
вую линию.
На рис. 3.55 показана структурная схема системы траекторного
управления с дифференциальным законом управления типа (3.107).
Здесь в- цепи сигнала отклонения от заданного курса Аф установ-
лена нелинейность, соответствующая уравнениям (3.108).
Другая нелинейность, включенная на выходе фильтра, служит
для ограничения величины заданного крена у3, который подается
в автопилот и на сумматор для формирования сигнала отклонения
командной стрелки крена.
, Подобная схема применяется в системе автоматического управ-
ления САУ-1Т. Укажем, что применительно к самолету Ил-62 эта
155
система в режиме автоматического захода на посадку имеет сле-
дующие характеристики: передаточные числа ге = 7, = 140 сек,
ц>=1,7; зона нечувствительности Агро—±18°, угол подхода Агрп =
= 28°; ограничение заданного крена у3тах=±20°; постоянная вре-
мени фильтра 7=1,5 сек. Для фильтрации помех в системе имеется
еще несколько фильтров с постоянными времени 7=0,24-0,5 сек,
не показанных на схеме. Ввиду малости постоянных времени фильт-
ров в законе управления отсутствуют компенсирующие сигналы.
В таком случае с учетом нелинейности и фильтра закон управле-
ния системы траекторного управления приобретает вид:
Тз = - — . (4s 4-№ 4- , (3.107а)
ГР + 1 '
где F\ —нелинейность, ограничитель заданного крена.
Напомним также, что в системе САУ-1Т предусмотрено измене-
ние передаточных отношений /е и .
Закон управления системы полуавтоматического управления
обычно представляют в виде закона управления командной стрел-
кой крена. Дифференциальный закон управления командной стрел-
кой имеет вид:
8z = 4(73-i) = — 4 [ Т 4- -гД t (4s 4- Z;ps 4- />&]>) j . (3.1076)
Часто сигнал, подаваемый в командный пилотажный прибор
для отклонения командной стрелки, пропускают через фильтр с
постоянной времени 7 = 0,7—1,0 сек.
На рис. 3.56 показана структурная схема системы траекторного
управления, а на рис. 3.57 — структурная схема системы самолет—
БСАУ, в которых реализован изодромный закон управления. Огра-
ничитель 72 ограничивает сигнал Аф и если ре = 0, «насыщение»
наступает при Аг|?0. Поэтому при | Агр| |гр0| сигнал"—/фДф, пода-
Рис. 3.56. К реализации изодромного закона управления
♦ Очень часто минус, стоящий перед правой частью закона управления
командной стрелкой, опускают.
156
Рис. 3.57. Структурная схема системы самолет—БСАУ, реализующей изодром-
ный закон управления
ваемый через ограничитель F2, компенсирует сигнал не
подвергающийся такому ограничению (рис. 3.58). При | Аф | >
> | Афо | эти сигналы уже не компенсируются и результирующий
сигнал в установившемся движении равен ц (Аф—Аф0).
Такой метод реализации зависимости (3.108) применялся в
первых модификациях систем полуавтоматического управления ти-
па «Путь», имевших закон управления (3.1066) и структуру, пока-
занную на рис. 3.56. На Ил-18 и Ту-124 эти системы имели следу-
ющие параметры: i£ =10; ге = 230 сек; /ф = 1,8; =0,6; Аф0=15°;
Афп=32°; Узтах=18°; 7\ = 3 сек; Т2 = 5 сек. Аналогичный закон
управления имела также система полуавтоматического управле-
ния типа «Привод» в первых модификациях.
В системах траекторного управления со структурой, представ-
ленной на рис. 3.55 и 3.57, величина угла подхода Афп связана с
величиной зоны нечувствительности ±Афо зависимостью (3.109).
При необходимости уменьшить угол подхода приходится умень-
шать зону нечувствительности. Однако это нежелательно, посколь-
ку из предыдущего ясно,; что она определяет зону отсутствия ста-
тических ошибок от действия рокового ветра и возмущений Гф.
1
рис. 3.58. К формированию зоны
нечувствительности ±Дфо
157
В автопилот
Рис. 3.59. Структурная схема системы траекторного управления с дифференциаль-
ным законом управления (3.180)
При Дф0 < 4- F появляется статическая ошибка
^Уст— . L
Следовательно, с точки зрения ликвидации статических ошибок,
выгодно увеличивать зону нечувствительности ±ф0. Для сохране-
ния приемлемых значений угла подхода Афп и зоны нечувствитель-
ности Аф0 иногда ограничивают сигнал
Теперь рассмотрим структурную схему системы траекторного
управления типа «Путь — 4МПА», в которой обеспечивается усло-
вие Афп=Афо (рис. 3.59). Ее закон управления:
Тз = - Т F\ [ F2 +-
Т\Р 4- 1 L
или
+*’фд<Н
T2P 4-1 J
t +
+4ДФ 4
Tip + l L
T * . + ^)]1*
T2P 4-1 * JJ
С помощью ограничителя F2 образуется зона нечувствительно-
сти ±Дф0=±28,5°. Поскольку через ограничитель пропускается
не только сигнал Аф, но и е, во всех случаях сигнал на его выходе
F /ф Дф) не превышает величины ц Аф0. Благодаря этому в
зоне насыщения сигнала е угол подхода Афп = Афо- При выходе в
* Здесь опущен минус перед правой частью закона управления командной
стрелкой.
158
зону линейности сигнала е появляется сигнал г£ре, приводящий
в конечном итоге к развороту самолета на посадочный курс и, сле-
довательно, к уменьшению величины угла Аф. При Дф<Аф0 начи-
нает «проходить» сигнал f£ е.
Член i служит для компенсации запаздывания сигнала
на фильтре с постоянной времени Т2 = 2,3 сек. Постоянная време-
ни другого фильтра 7\ = 1,7 сек. Для самолетов типа Ил-18 и
Ту-134 система имеет следующие настройки: исходные передаточ-
ные отношения Ze =7,8; Z;= 110 сек; ц=0,6; Q = l,4 сек. Во время
«захвата» глиссады и через 50 сек после этого происходит умень-
шение передаточных отношений /£ и Z;, о чем уже упоминалось
ранее. Ограничитель ограничивает заданный крен Узтах = 18,5°.
В заключение укажем, что некоторые зарубежные системы тра-
екторного управления не обеспечивают управление в зоне насыще-
ния сигнала е и потому не позволяют выполнять четвертый разво-
рот. При применении таких систем летчик должен вывести самолет
на некоторый постоянный курс Афп. Управление по сигналам си-
стемы траекторного управления начинается после входа в зону ли-
нейности сигнала е.
§ 5. УПРАВЛЕНИЕ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА
ПРИ ЗАХОДЕ НА ПОСАДКУ
Стабилизация самолета на заданной высоте
На начальных этапах захода на посадку обычно оказывается
необходимым стабилизировать самолет на заданной высоте. Урав-
нения, описывающие движение самолета в этом режиме, получим
из системы (1.29). Введем обозначения Ayg = AH, wy=UB. Полагая,
что V=const, f7B = const, А6д=0 и учтя, что 0о = О, получим:
—#аДа = 0;
pkH = VM-\-UB;
Д9 = —Да.
(3.110)
где/" =~ТТГгРад1м —
АП
Второе уравнение системы наглядно иллюстрируется рис. 3.60.
Будем полагать, что параметром, по которому ведется управ-
ление продольным движением, является угол тангажа. Примем
также, что, во-первых, благодаря системе управления в каждый
данный момент времени обеспечивается выполнение условия АФ =
= Ф3 и, во-вторых, заданный тангаж Фз пропорционален отклонению
самолета от заданной высоты. Тогда
Д& = »з=_/яДЯ, (З.Ц1)
передаточное отношение по отклонению от заданной
высоты (отношение угла изменения тангажа самолета
в градусах к отклонению от заданной высоты в мет-
рах).
159
Решив совместно уравнения (3.110 и 3.111), получим
р^Н + ЬлрЬН + Vb^H = pU* + bJJ*. (3.112)
На характер движения самолета относительно заданной высоты,
определяемой левой частью уравнения (3.112), можно воздейство-
вать путем изменения передаточного отношения /и, влияющего на
частоту собственных колебаний
20=/i7^7 (3.113)
и коэффициент относительного затухания
Чтобы иметь возможность менять демпфирование системы, не
оказывая воздействия на частоту ее колебаний, можно воспользо-
ваться законом управления
(3.114)
д&
где ifi = -, град . сек/м — передаточное отношение по вертикальной скорости
ДЯ
(отношение угла тангажа в градусах к вертикаль-
ной скорости в метрах в секунду).
В этом случае уравнение системы самолет — БСАУ имеет вид:
Р^Н + ba ( 1 + Vik )Р&Н + VbalH = PUB + baUB.
Частота собственных колебаний определяется зависимостью
(3.113), а коэффициент относительного затухания — уравнением
t__ 1 + ViH I f ba
2 V ViH'
На рис. 3.61 приведена структурная схема системы самолет —
БСАУ, реализующей закон управления (3.114). Здесь, кроме воз-
мущений, связанных с действием вертикального ветра UB, показа-
Рис. 3.60. К стабилизации задан-
ной высоты
160
Рис. 3.61. Структурная схе-
ма системы самолет —
БСАУ, реализующей закон
управления (3.114)
ны возмущения отражающие ошибки измерения угла тангажа
и выполнения условия Д0=03. Для оценки точности стабилизации
самолета на заданной высоте воспользуемся передаточными функ-
циями:
Д/7 ' V<J> + ba)
ив Р* + Ьл(\+У1-н)р+УЬл1н ’
V
УЬ.
™- = фнр(рУ=
P* + ba(l+Vih)p + VbaiH •
Положив в них р=0 и учтя 5ув (0)= — Фув(0) и (0) =
= — ФЯ9(0), получим уравнения для установившихся ошибок:
ДЯ = _ £в_ ;
уст VlH
LH - —
"уст .
1Н
Таким образом, рассматриваемая система является статической
по отношению к этим возмущениям. Следует указать, что на прак-
тике статические ошибки, связанные с действием вертикального вет-
ра, оказываются сравнительно небольшими. Другое дело — стати-
ческие ошибки, вызванные возмущающими воздействиями Fa. Как
уже указывалось в § 3.3, при изменении веса, центровки и конфигу-
рации самолета, скорости полета и т. д. условие Д$ = $3 выполняет-
ся с ошибками, если автопилот имеет закон управления типа (3.54
и 3.62). Поэтому возмущения Га = Д^уСт могут приводить к значи-
тельным статическим отклонениям самолета от заданной высоты.
В отечественных бортовых системах автоматического управле-
ния широко применяются автопилоты с изодромным законом уп-
равления типа (3.68). При рассмотрении вопросов точности стаби-
лизации самолета на заданной высоте можно считать, что такой
автопилот обеспечивает стабилизацию заданной угловой скорости
тангажа. Тогда закон управления системы траекторного управле-
ния имеет вид:
&3 = - iH ЬН-ifjpkH. (3.114а)
6—3261 161
Рис. 3.62. Структурная
схема системы самолет —
БСАУ, реализующей за-
кон управления (3.114а)
Структурная схема системы самолет—БСАУ с этим законом
управления изображена на рис. 3.62. Для этой системы справедли-
вы передаточные функции:
ЛН , ч v (Р + \) Р
—— = Фц (р) =---------------------- :
и. в Р*+ЬлР* + УЬл1йР + УЬа1н
V
^=ФЪ(Р)==--------------______________
P3 + t>ap^ + vbaijip + vbaiH •
Положив в них р=0, можно убедиться, что такая система яв-
ляется астатической по отношению к возмущающим воздействиям.
Сравним между собой законы управления продольного канала
наиболее распространенных отечественных систем автоматического
управления БСУ-ЗП:
Т р Ти р
8В= - iH &Н - I» » - к р§ - А | у | (3.115)
ГИ( р + 1 rHj р + 1 * 1
и САУ-1Т
8В = - ДА/ - (3.116)
ГИ Р + 1 Ги Р + 1
Закон управления (3.115) в отличие от закона (3.116) имеет
член, учитывающий крен самолета. Благодаря этому закон управ-
ления (3.115) обеспечивает более точное выдерживание высоты при
разворотах, особенно в переходных режимах. Заметим, что ни в
одном из этих законов нет члена, пропорционального вертикальной
скорости самолета. Это объясняется большими трудностями в фор-
мировании сигнала такой скорости. Вместе с тем и ^ез этого члена
указанные системы обеспечивают удовлетворительное качество
стабилизации заданной высоты. О различиях в реализации изодром-
ных законов управления автопилотов в системах БСУ-ЗП и САУ-1Т
мы уже говорили в § 3.3.
Обратим внимание на то, что в законах управления (3.115 и
3.116) используются сигналы а не Д6*. Такая замена, допустима,
Ги р Ти р
поскольку и -------=------------& существенно
Ги Р + 1 Ги Р + 1
облегчает реализацию закона управления.
Определенный интерес представляют вопросы качества стабили-
зации самолета на заданной высоте в условиях турбулентной ат-
162
мосферы. Эти вопросы подробно рассмотрены в ряде работ [13],
[28], [38]. Здесь мы ограничимся лишь указанием на то, что в насто-
ящее время наиболее полное исследование достигается путем моде-
лирования системы самолет — БСАУ. При таком моделировании
используются полные уравнения продольного движения самолета
типа (1.29) и бортовой системы автоматического управления типа
(3.115). По возможности при моделировании применяются реаль-
ные элементы системы автоматического управления (вычислитель-
ные устройства и сервоприводы).
Некоторые общие вопросы стабилизации самолета
на глиссаде
Динамика управления самолетом, снижающимся по глиссаде,
имеет много общего с динамикой стабилизации самолета на задан-
ной высоте. Углы наклона глиссады малы, обычно 0г л — 2,5—4°.
Поэтому при исследовании процессов управления самолетом на
глиссаде в большинстве случаев можно исходить из тех же допу-
щений, что и при исследовании вопросов стабилизации высоты
полета.
Наиболее важное отличие этих режимов связан© с измерением
отклонений самолета от заданной траектории в продольной плоско-
сти. При стабилизации на глиссаде информация об отклонении са-
молета представляет собой сигнал углового, а не линейного откло-
нения от траектории, задаваемой наземным ГРМ. Связь между
линейным и угловым отклонениями в этом случае (рис. 3.63) опре-
деляется уравнением
ЬН = 1£, (3.117)
где АЯ —линейное отклонение от глиссады (равносигнальной зоны ГРМ);
С — угловое отклонение от глиссады;
L — расстояние до ГРМ.
Ввиду малости величин 0 и £ линейное отклонение ЛЯ можно
считать отклонением самолета по высоте от глиссады. Как и при
рассмотрении бокового движения, в тех случаях, когда необходимо
подчеркнуть, что расстояние от самолета до ГРМ переменно, будем
пользоваться обозначением L (/).
Рис. 3.63. Схема соотношений
угловых и линейных координат
самолета в продольном движе-
нии
6*
163
Рис. 3.64. Структурные схемы систем самолет — БСАУ
Если в некоторый начальный момент времени известно расстоя-
ние до ГРМ £о,топри постоянной скорости полета самолета теку-
щее расстояние до ГРМ определяется зависимостью (3.71). С уче-
том (3.117) простейший закон управления углом тангажа имеет
вид: <
&3=-Z;C=-Ад/У, (3.118)
д»
где I? = ——передаточное отношение по угловому отклонению (отношение
отклонения угла тангажа самолета в градусах к угловому откло-
нению от глиссады в градусах).
Объединив уравнения (3.110 и 3.118) при условии ДФ=Ф3, по-
лучим
Vbn L
р^Н + ЬлрЬН + -А-L АЛ/ =pUB 4- baUB. (3.119)
Последний член в левой части уравнения (3.119) имеет пере-
менный коэффициент, увеличивающийся по мере приближения к
ГРМ. Частота колебаний системы самолет — БСАУ (рис. 3.64, а)
, /rVbnir
So=J/ (3-120)
164
по мере уменьшения дальности L увеличивается, а коэффициент
относительного затухания
уменьшается. В конечном счете это приводит к уменьшению устой-
чивости системы при приближении к ГРМ. Аналогичная картина
получается и в тех случаях, когда для увеличения демпфирования в
законе управления имеется член, пропорциональный вертикальной
скорости:
&3= if,P^H= — Mi — ifjpkH. (3.121)
Уравнение системы самолет — БСАУ, реализующей этот закон
управления (рис. 3.64, б), имеет вид:
р^н+м 1+р^н + ^н=Рив+baUB.
Частота собственных колебаний определяется зависимостью
(3.120), а коэффициент относительного затухания — зависимостью
? (1 + Vi#) V'bJ'
vW
В связи с трудностью формирования сигнала вертикальной ско-
рости вместо него в закон управления часто вводится сигнал произ-
водной углового отклонения от глиссады снижения. Связь этого
сигнала с сигналом вертикальной скорости вытекает из уравнения
pbH^Lfi+tpL^L/X.. (3.122)
В этом случае закон управления углом тангажа
»з=_^_,.рС=_Л.А//_Л рьн, (3.123)
Д&
где Ь ——сек — передаточное отношение по скорости углового отклонения (от-
' С
ношение отклонения угла тангажа самолета в градусах к ско-
рости углового отклонения от глиссады в градусах в секунду).
Уравнение системы самолет— БСАУ
/ Vif \ Vb L
Р2Д// + Ц1+ -Lj р!^н -\—^-^H = pUB-\-baUB
имеет переменные коэффициенты в двух членах левой части.
165
Частота собственных колебаний этой системы (рис. 3.64, в)
определяется зависимостью (3.120), а коэффициент относительного
затухания уравнением
При уменьшении дальности L величина первого слагаемого стре-
мится к нулю, а второго — к бесконечности. Поэтому вблизи от ГРМ
коэффициент относительного затухания резко возрастает. Очевид-
но, что при использовании законов управления (3.118, 3.121 и 3.122)
оптимальные значения QonT и £опт могут быть получены лишь на
одной дальности до ГРМ. Обычно на этой оптимальной дальности
Лопт обеспечивается £2Опт = 0,25—0,4 \1сек и £Опт=1. Если учесть, что
для системы второго порядка при £=1 время регулирования
«4,5—5 Т, то при таких частотах собственных колебаний это время
составляет 12—20 сек.
Теперь рассмотрим систему самолет — БСАУ (рис. 3.64, г),
реализующую закон управления
- А - Y Р^н- (3-124>
Уравнение этой системы имеет вид:
Vbt. Vb i,
рЗ&Н + ЬлрЧН + рЬН Н—ьн=p4J, + bapU,.
Следовательно, характеристический полином системы таков:
A(p)=/?3 + a2/?2 + a1p + a0, (3.125)
где
W а/.
а с .
#2 —
По аналогии с системами второго порядка частота собственных
колебаний в системах третьего порядка определяется величиной
свободного члена характеристического полинома.
В данном случае
Введем параметр
166
откуда
P = PsQo-
(3.126)
Подставив (3.126) в (3.125) и разделив все слагаемые на Qq,
приведем уравнение к форме Вышнеградского
+Д2р2 +Ар2+1 = 0, (3.127)
где
(3.128)
Переходные процессы получаются оптимальными при условии
Д1=Л2 = 3. В этом случае все три корня уравнения оказываются
действительными (отрицательными) и расположенными на одина-
ковом расстоянии от мнимой оси, т. е. кратными. Такое условие
может быть обеспечено лишь для одной оптимальной дальности
£опт. Из (3.128) следует, что на дальностях L(t)<LOm коэффици-
ент Л1 >3, а Л2<3. При этом в переходной функции появляется ко-
лебательная составляющая^1.
Следует подчеркнуть, что на малых дальностях от радиомаяка
период колебательной составляющей в траекторном движении ста-
новится сопоставимым с продолжительностью переходных процес-
сов угловых движений самолета относительно центра масс. Тогда
изолированное рассмотрение короткопериодического и траекторно-
го движений становится недопустимым.
Для оценки изменения дальности до ГРМ удобно воспользовать-
ся зависимостью (3.85), которую мы ввели ранее при рассмотрении
бокового движения. Естественно, что в данном случае L и £Опт —
текущая и оптимальная дальности до ГРМ соответственно. Для
приближенного определения диапазона изменения коэффициентов
Ai и А2 уравнения (3.127) подставим ,
Z = kLLOnr
в зависимости (3.128). Тогда
1 Подробно об устойчивости движения и качестве переходных процессов в
системах третьего порядка см. [18].
167
Если принять Д1опт=Д2опт=.3, то
^7
Определим примерный диапазон изменений коэффициента kL.
Допустим, что система автоматизированного управления заходом
на посадку рассчитана на использование от момента входа в глис-
саду снижения Явх=400 м до высоты ЯВых=30 м. Условно примем,
что ГРМ находится от порога ВПП на расстоянии 350 м и что рав-
носигнальная линия имеет наклон 0ГЛ=2,7О и проходит над порогом
ВПП (в базовой точке) на высоте 15 м. В таком случае удале-
ние самолета от ГРМ при входе в глиссаду снижения составляет
^4оо~ 350 + —ях-‘~— 8 500 м, а при достижении высоты 30 м L30 =
tg Огл
= 350-1- Явых~^%670 м.
tg ^гл
Следовательно, удаление самолета от ГРМ в момент входа в
глиссаду снижения более чем в 12 раз превышает его удаление в
момент выхода на высоту Н=30 м. Если принять Loirr = 2000 м, то
диапазон изменения коэффициента kL = 0,344-4,1. В этих условиях
получить качественные переходные процессы в системах самолет —
БСАУ, использующих законы управления (3.118, 3.121, 3.123 и
3.124), на больших и малых удалениях от ГРМ становится затруд-
нительным. Укажем для сравнения, что диапазон относительного
изменения дальностей до ГРМ почти в 2 раза превышает диапазон
относительного изменения дальностей до КРМ. Это становится по-
нятным, если учесть, что КРМ находится за ВПП, а ГРМ — вблизи
ее начала.
Для получения удовлетворительных характеристик переходных
процессов во всем рабочем диапазоне дальностей до ГРМ в систе-
мах траекторного управления предусматривают либо ослабление
сигнала ГРМ, либо изменение передаточных отношений в функции
дальности до ГРМ. Методы осуществления этих мероприятий не
отличаются от тех, которые были подробно рассмотрены нами в
предыдущем параграфе применительно к боковому движению са-
молета.
Так, в системах БСУ-ЗП и САУ-1Т предусмотрено дискретное
уменьшение передаточных отношений iz и на ~50% через 50 сек
после «захвата» глиссады снижения. В ряде зарубежных систем
предусмотрено плавное изменение сигнала ГРМ в функции высоты
полета.
На рис. 2.29 показан график изменения коэффициента усиления
сигналов ГРМ в системе автоматической посадки фирмы Бендикс.
В дальнейшем мы рассмотрим, как изменяется этот сигнал в
системе фирмы Лир,
168
При рассмотрении бокового движения было показано, что плав-
ное ослабление сигнала КРП в зависимости от дальности до КРМ
позволяет получать информацию о линейных, а не угловых откло-
нениях от посадочной траектории. Если вместо сигнала дальности
до ГРМ используется сигнал радиовысотомера, то при формирова-
нии сигнала линейного отклонения от глиссады снижения возника-
ет погрешность. Однако в данном случае она не имеет практическо-
го значения.
Влияние характеристик радиотехнической
системы ГРМ — ГРП на динамику системы
самолет — БСА У
Ток на выходе ГРП, используемый в качестве сигнала углового
отклонения самолета от^глиссады снижения, зависит от величины
этого отклонения £ и от крутизны зоны
В свою очередь, крутизна St-C зависит от угла наклона глиссады
снижения 0ГЛ и допусков на параметры ГРМ и ГРП. Встречающие-
ся в эксплуатации минимальные крутизны S<Cmin могут отличаться
от максимальных 5г-Стахв 5—6 раз. Расчетная крутизна 5гСр, вы-
бираемая при проектировании систем траекторного управления,
равна S1Cp «(0,4-4),5) (S<C min+SZtmax).
Чтобы учесть влияние возможных отличий крутизны сигнала
радиотехнической системы маяк—приемник от расчетной, восполь-
зуемся коэффициентом ks -----.
s/cP
Умножим на этот коэффициент члены законов управления, со-
держащие координату Тогда уравнения рассмотренных выше си-
стем примут вид:
Vb irkQ
р^Н + Ьар&Н Н----2-^- ДЯ = Рив + ьЛив,
д
Vb i?kQ
р^Н + ba (1 + ViЙ) рДН + s ьн=pUB + baUB ;
(V7. ks \ у I) i ъ
1 + j P^H+ у 5 ДЯ = pUB + baUB;
Vb„ i. y& i ь
рЧН + bap^H + — рДЯ H-------ДЯ=p4JB + bapUB.
169
Отсюда следует, что отличие крутизны от расчетной SfCp
по своим последствиям аналогично изменению передаточных отно-
шений 1с и /•. При больших диапазонах изменения крутизны дина-
мика управления может серьезно ухудшиться. Поэтому при экс-
плуатации бортовых систем автоматического управления в услови-
ях пониженных посадочных минимумов желательно уменьшить
диапазон возможных изменений крутизн. Как было отмечено в
§ 2.4, ГРМ II и III категорий имеют уменьшенный допуск на раз-
брос ширины полусекторов глиссады снижения. Кроме того, более
жесткие требования предъявляются к параметрам ГРМ и ГРП II и
III категорий, влияющих на стабильность крутизны.
Переходя к рассмотрению помех в сигнале ГРМ, прежде всего
определим возможный частотный диапазон полезного сигнала. При
снижении по глиссаде вертикальная скорость самолета
Vyo =U7tg9rjI^U79„, (ЗЛ28а)
где W — путевая скорость самолета.
Для устранения отклонений ДЯ в процессе стабилизации само-
лета на глиссаде снижения необходимо иметь возможность изме-
нять вертикальную скорость. Примем с запасом, что допустимое
изменение вертикальной скорости &Vy=Vy9 (вертикальная ско-
рость может меняться в пределах от 0 до 2 Vyo). Учтя (3.117,
3.128а), а также, что & Vy = pAH, получим для этих условий .
£ ^гл
Поскольку IF^const и 0ГЛ = const, величина^ главным образом
зависит от дальности до ГРМ L(t). Очевидно, что наибольшие зна-
чения £ будут при малых значениях L(t). Если задаться L(t) =
= 8004-1000 м, W=60—80 м!сек. то для глиссад снижения с углом
наклона 0Гл = 3° в соответствии с (3.129) £«0,003-4-0,005 \!сек. Поэ-
тому сигналы, при действии которых £>0,005, относятся к помехам.
В продольном движении, как и в боковом, помехи, лежащие в
высокочастотной части спектра, не могут быть «отработаны» вслед-
ствие инерционности самолета. Вместе с тем высокочастотные по-
мехи весьма отрицательно влияют на режим работы контура серво-
привода и сильно затрудняют пилотирование по командной стрел-
ке. Если задаться условием, чтобы при стабилизации самолета на
глиссаде снижения колебания по углу наклона траектории не пре-
вышали 1°, то требования к частоте помех оказываются существен-
но более жесткими (примерно в 5 раз), чем это следует из зависи-
мости (3.129).
Для подавления таких помех в системе траекторного управления
устанавливают фильтры, представляющие собой апериодические
звенья с постоянными времени Т«0,5—2,5 сёк. Поскольку высоко-
го
частотные помехи не оказывают существенного влияния на траек-
торное движение, при анализе последствий действия на систему
этих помех оказывается возможным рассматривать разомкнутый
контур от входа до руля высоты и командной стрелки (рис. 3.65).
На этих схемах показан фильтр на выходе ГРП, обычно имеющий
постоянную времени Тгрп = 0,14-0,3 сек.
Вначале рассмотрим систему самолет — БСАУ, реализующую
закон управления типа (3.121) с одним фильтром
*3= - 7^7 (3.130)
Интересующий нас контур показан на рис. 3.65, а. Передаточная
функция цепи от входа до руля высоты имеет вид:
12-=^ = VI/-B(p)----------. (3.131)
С (ГГРПр+ 1)(Г1Р+1)
- Такая же передаточная функция имеет место при использовании
закона управления типа (3.118), поскольку отсутствующий в нем
по сравнению с законом (3.121) член IfipkH не меняет вид этой пе-
редаточной функции.
На рис. 3.65, б показан контур с системой траекторного управ-
ления, в которой реализован закон управления типа (3.123) с дву-
мя фильтрами, один из которых I —----) служит для дополнитель-
' Т2Р + 1 /
ной фильтрации сигнала производной отклонения
»3= <3-132)
Т\р + 1 \ Т2р+1 /
171
Рис. 3.66. Логарифмические
амплитудно-частотные ха-
рактеристики систем с пере-
даточными функциями
(3.131, 3.133 и 3.133а)
Передаточная функция от входа до руля высоты для этого
случая
• -5 / Ci
г»в \ ?2 + ~ I Р + 1
IA Ч /
С С/
(7'ГРП/’ + + 0(7'2/’ + 1)
(3.133)'
При использовании системы траекторного управления с законом
управления
»3=-------1------------1— л /с),
ТхР + Ц Т2р + 1 г- )
правая часть которого такая же, как в законе (3.132), интересую-
щая нас передаточная функция
=uz*b (р) =-------------------------—
С С/ (7’ГРПр+1)(Г1/»+1)(7’2р+1)
(1.133а)
весьма близка передаточной функции (3.133).
Заметим, что передаточная функция (3.131) аналогична пере-
даточной функции (3.97). При условии iczSB=l ЛАХ этих функций
о
(см. рис. 3.40 и 3.66) оказываются одинаковыми, если соответствую-
щие постоянные времени фильтров в законах управления (3.96 и
3.130) одинаковы. Имеется много общего в ЛАХ, соответствующих
передаточным функциям (3.133 и 3.99). При прочих равных усло-
виях различие этих ЛАХ (см. рис. 3.40 и 3.66) связано с тем, что
z. zs*
обычно -у-=8 -ь 12 сек, в то время как — = 20 + 25 сек. Поэто-
му подъем характеристики L(co) начинается в области несколько
более высоких частот.
При условии itic=l, рассмотренные ЛАХ соответствуют также
передаточным функциям W^n(p) полуавтоматических систем (см.
рис. 3.65).
Из сопоставления ЛАХ (см. рис. 3.66) совершенно очевидно, что
при наличии в,законах управления членов, пропорциональных про-
изводной отклонения от глиссады, помехозащищенность системы
ухудшается. Иначе говоря, с точки зрения помехозащищенности
172
Рис. 3.67. К формированию сигнала производной рДЯ
более целесообразно применять законы управления типа (3.130).
Однако реализация этих законов связана с трудностями в формиро-
вании сигнала производной р\Н, поскольку в настоящее время
отсутствуют датчики сигналов вертикальной скорости, обладающие
необходимыми характеристиками. Так, наиболее распространенные
измерители вертикальной скорости — вариометры с капилляра-
ми— обладают запаздыванием. В первом приближении можно по-
лагать, что вариометр как измеритель вертикальной скорости имеет
передаточную функцию апериодического звена. Его постоянная
времени т определяется главным образом параметрами капилляра.
Простые измерители вертикальной скорости, основанные на
принципе интегрирования вертикального ускорения, обладают ма-
лой точностью.
Для получения сигнала вертикальной скорости обычно прибе-
гают к комплексному использованию информации этих двух дат-
чиков. На рис. 3.67, а показана возможная схема формирования
сигнала вертикальной скорости. С вариометра с электрическим вы-
ходом снимается сигнал . Сигнал р2ДЯ, снимаемый с аксе-
тр+ 1
лерометра, пропускается через фильтр с постоянной времени т и
коэффициентом усиления k, равным т. В таком случае суммарный
сигнал = Р^Н представляет собой искомый сигнал
производной отклонения.
В некоторых системах для получения сигнала вертикальной ско-
рости прибегают к дифференцированию сигнала барометрического
высотомера. Поскольку в результате дифференцирования уровень
помех Uf в сигнале возрастает, как правило, оказывается необходи-
мым полученный сигнал пропустить через фильтр. Для компенса-
ции запаздывания полезного сигнала на тот же фильтр подается
сигнал от акселерометра (рис. 3.67, б). Порция этого сигнала опре-
деляется постоянной времени фильтра т. В этом случае
—±—(pbH+Uf±Tp^H)=pbH + .
гр 4- 1 J ip 4- 1
Заметим, что в принципе существуют и другие способы получе-
ния сигнала производной ркН, однако широкого распространения
они не получили и потому на них останавливаться не будем.
173
Рис. 3.68. К компенсации запаздывания на фильтрах
Как и при рассмотрении бокового движения подчеркнем важ-
ность уменьшения уровня низкочастотных помех в сигналах назем-
ного радиомаяка, поскольку борьба с такими помехами при помо-
щи фильтров в бортовых системах автоматизированного управле-
ния практически невозможна.
Теперь кратко остановимся на вопросе компенсации запаздыва-
ния сигналов на фильтрах. Методы компенсации, применяемые в
продольных каналах систем траекторного управления, принципи-
ально такие же, как и в боковых каналах. Для компенсации запаз-
дывания на фильтре сигнала отклонения от глиссады на вход того
же фильтра подается сигнал, пропорциональный производной этого
отклонения. При необходимости компенсации запаздывания сигна-
ла производной на вход фильтра подают сигнал, пропорциональ-
ный производной следующего порядка.
Чтобы уяснить некоторые особенности компенсации запаздыва-
ния сигналов в продольном канале, рассмотрим структурную схему
системы самолет — БСАУ (рис. 3.68). Без компенсации запаздыва-
ния система траекторного управления имела бы закон управления
(3.132). Для компенсации запаздываний увеличено передаточное
отношение по сигналу производной и введены два дополнительных
сигнала. Покажем, что дополнительные сигналы при некоторых ус-
ловиях пропорциональны вторым производным от отклонения само-
лета от глиссады.
Из (3.110) следует, что при V=const и UB = const
Vb p
p^H = VpM =—— Д&. (3.134)
P +-
Разделим числитель и знаменатель правой части
(3.134) на Ьа и введем обозначение Те =-^- . Тогда
Ьа
р^н= Vp да.
Г9р+1
уравнения
174
Следовательно, для получения сигнала, пропорционального вто-
рой производной от отклонения, необходимо пропустить сигнал,
пропорциональный производной рДФ, через фильтр с постоянной
времени Ге= -X . Значит, если у используемых в данной схеме
фильтров выполняется условие Т3 = 1\, то снимаемые с них сигна-
лы действительно пропорциональны вторым производным р2ЬН.
С учетом компенсирующих сигналов закон управления СТУ име-
ет вид:
1 Г <4 Р
Я3=---------1--- z£-|----------Д& +
Tip +1 / тзР +1
1
РчР + 1
/г
_v_
ТзР + 1
(3.135)
Если обеспечить:
/ • ТхУ
и = ------;
* т >
‘-ОПТ
i,T,T2V , v T2V
Zrf = -i—----------k —---------
<> т 1 T
‘-опт ‘-опт
то на оптимальной дальности ЛОпт законы управления (3.123 и
3.135) тождественны. На других дальностях до ГРМ компенсация
нарушается. Компенсация также нарушается при изменении вели-
чины коэффициента &а..
Следует указать, что в ряде случаев во избежание усложнения
схемы в системах траекторного управления осуществляется частич-
ная компенсация запаздывания. При этом некоторые компенсирую-
щие сигналы. отсутствуют. Часто при использовании фильтров с
малыми постоянными времени (Т<1—1,5 сек) компенсация запаз-
дывания вообще не производится.
Точность стабилизации самолета на глиссаде
Статические ошибки при стабилизации самолета на глиссаде
возникают главным образом вследствие воздействия на систему
самолет — БСАУ таких возмущений, как изменения конфигурации
самолета, наклона траектории и скорости полета. К значительным
статическим ошибкам приводят погрешности датчиков сигналов и
некоторых задающих устройств, участвующих в формировании
управляющих сигналов. С другой стороны, в связи с кратковремен-
ностью этапа захода на посадку изменения веса и центровки само-
лета, вызванные выработкой топлива, оказываются небольшими.
Их влияние на точность стабилизации самолета на глиссаде можно
175
Рис. 3.69. Структурная
схема системы самолет —
БСАУ, реализующей за-
кон управления (3.118)
значения и статические
не рассматривать. Не имеют практического
ошибки, связанные с действием вертикального ветра, поскольку
протяженность восходящих и нисходящих потоков в приземном слое
весьма ограничена.
Все имеющие существенное значение возмущения могут быть
приведены к двум точкам структурной схемы системы самолет—.
БСАУ. В соответствии с точками приложения приведенные возму-
щения обозначаются Га и Fq . На рис. 3.69 показана структурная
схема системы самолет — БСАУ, реализующей закон- управления
(3.118). Для этой схемы справедливы передаточные функции (при
«замороженной» дальности L):
Ь<У
_____L_____
W
P2 + baP + —~
V(p + ba)
~=ф^р (p)=-------------
P2 + bap +
Тогда уравнения для установившихся ошибок будут:
Суст=-Ф^(0)Г#=—X~F.-
СусТ=-Ф^ (0)Fe = —
(3.136)
То, что эта система является статической по отношению к воз-
мущениям F§ и Fe, можно определить и не прибегая к вычислени-
ям. Как указывалось в § 3.3, система является статической по от-
ношению к_возмущающим воздействиям, если между входом и. точ-
кой п]щдфкещ1я этого воздействия отсутствуют интегрирующие
звенья. Воспользовавшись этим правилом, можно легко убедиться,
что системы, реализующие законы управления (3.121 и 3.123), яв-
ляются статическими по отношению к возмущающим воздействиям.
Система, реализующая закон управления (3.124), не имеет статиче-
ских ошибок. Несколько позднее мы рассмотрим еще один способ
определения статичности и астатичности систем траекторного уп-
равления.
176
Рис. 3.70. Структурная
схема системы самолет —
БСАУ, реализующей за-
кон управления (3.137)
Для повышения точности стабилизации самолета на глиссаде в
системах с законами управления типа (3.118, 3.121 и 3.123) часто
прибегают к компенсации возмущений, вызываемых изменением
угла наклона траектории при переходе от горизонтального полета
к снижению. Для этого в момент «захвата» глиссады вводится сиг-
нал, пропорциональный среднему углу наклона глиссады (0Гл~3°).
Подобное мероприятие полезно и для астатических систем, посколь-
ку оно значительно улучшает переходные процессы в начале сниже-
ния самолета по глиссаде.
Однако в этом случае постоянный сигнал 0ГЛ может привести к
статическим ошибкам. Поэтому в закон управления астатических
систем вводится так называемый форсирующий сигнал —— 6ГЛ.
Тр ч-1
Весьма эффективным средством устранения статических ошибок
является введение в закон -управления интегрального члена, на-
пример
&3 = - - /с с - /j -L . (3.137)
р
Чтобы интегральный член не ухудшал динамику системы, целе-
сообразно интегрирующее устройство включать в момент «захвата»
глиссады. Системы с интегральными законами управления типа
(3.137) практически свободны от статических ошибок, связанных с
собственными дрейфами вычислителей, неполной компенсацией уп-
равляющих сигналов и т. п. Это объясняется тем, что интегрирую-
щее устройство подключено непосредственно ко входу системы
(рис. 3.70). Интегральные законы управления довольно широко ис-
пользуются в зарубежных системах. Следует указать, что динамика
систем автоматизированного управления с интегральными закона-
ми типа (3.137) фундаментально исследована в работах Г. С. Пос-
пелова Ч
Для понимания другого широко распространенного способа
обеспечения астатизма системы к внешним возмущающим воздей-
ствиям запишем законы управления командными стрелками, соот-
ветствующие статическому закону управления типа (3.123) и аста-
тическому—типа (3.124):
=ч (&з - да)=- ic (да+«+ГЗ. 123а)
вя=/с (а3-Да)=-/с(рДа+^+^). (3.124а)
1 См., например [30].
177
Различие между этими законами управления заключается в
том, что в первом случае сигналы (ut-H:p£) суммируются (срав-
ниваются) с сигналом отклонения ДФ, а во втором — с сигналом
производной от отклонения рДФ. Этим объясняется тот факт, что в
структурной схеме, показанной на рис. 3.64, г, в отличие от схемы,
приведенной на рис. 3.64, в, имеется интегрирующее звено, обеспе-
чивающее астатизм системы с законом управления типа (3.124).
Теперь представим себе закон управления, в котором в отличие
от закона управления типа (3.123) сигнал отклонения ДФ пропуска-
ется через изодромное звено с большой постоянной времени:
-4 • (3-138)
Первый член, стоящий в скобках, можно представить как сиг-
т
нал производной рД^, пропущенный через фильтр-----2. Очевид-
Т’иР + 1
но, что в структурной схеме системы с законом управления (3.138),
как и в схеме системы (см. рис. 3.64, г), реализующей закон уп-
равления (3.124), имеется интегрирующее звено. Обе системы обла-
дают астатизмом к одним и тем же возмущениям.
К такому же выводу можно прийти и другим путем. Поскольку
при полуавтоматическом и автоматическом управлении обеспечи-
вается условие дн=0, правые части законов управления, записан-
ных в форме (3.123а, 3.124а и 3.138), равны нулю, т. е.
4(ДН4:+4Х)=О;
4(/^+4C+4/*)=o;
К^иР+1 /
(3.1236)
(3.1246)
(3.138а)
Если в этих уравнениях положить р = 0, то мы получим зависи-
мости для установившегося движения:
д»уст-НКуст = 0; (3.123в)
~ ЧСуст=О; (3.124в)
«уст = 0. (3.1386)
Из (3.123в) следует, что при воздействии на систему самолет —
БСАУ возмущений, приводящих к изменению угла тангажа, воз-
никает статическая ошибка
с,„ г49,..- (3.139)
ч 7
Зависимость (3.139) идентична ранее полученной зависимости
(3.136). Из (3.124в и 3.1386) следует, что в установившемся движе-
нии £уст = 0. Следовательно, системы, реализующие законы управ-
178
ления (3.124 и 3.138), являются астатическими по отношению к из-
менениям угла тангажа.
Такой астатизм имеет место не только в тех случаях, когда в
члене закона управления, содержащем координату ДФ, используют-
ся операторы р и . Аналогичный эффект дает применение
и других операторов, содержащих р в качестве сомножителя, на-
пример -------—--------, ----------------- и т. п. В дальней-
+ + (7^ +1)(ГзР+1)
шем такие комбинированные операторы будем называть изо-
др омными операторами.
Кроме того, весьма важным достоинством систем с изодромны-
ми операторами является возможность использовать в законах
управления сигналы текущего угла тангажа О, а не сигналов откло-
нения ДФ, формирование которых связано с определенными труд-
ностями.
Разумеется, все сказанное в отношении устранения статических
ошибок путем использования изодромных операторов относится
также и к законам управления типа (3.118 и 3.121). При этом сле-
дует иметь в,виду, что введение этих операторов не позволяет сни-
зить статические ошибки, связанные с дрейфами усилителей и по-
грешностями суммирования сигналов в вычислителях СТУ.
Чтобы система с законом управления (3.138) была возможно
ближе по динамическим характеристикам к системе, реализующей
исходный закон управления (3.123), целесообразно увеличивать
постоянную времени изодрома, но увеличение постоянной времени
Ти приводит к увеличению длительности переходных процессов.
При очень больших постоянных времени переходный процесс может
не закончиться к нужному моменту. Поэтому обычно Ти=15—
25 сек. Формирование сигналов Aft с такими значениями
постоянных времени, как правило, осуществляется путем суммиро-
вания двух сигналов. Этот способ, широко используемый в отечест-
венных бортовых системах автоматизированного управления, был
уже подробно рассмотрен в § 3.3.
Выход на глиссаду. „Захват" глиссады
Переход от горизонтального полета к снижению по глиссаде
является довольно сложным и ответственным этапом захода на по-
садку. От него в большой степени зависит качество последующей
стабилизации самолета на глиссаде.
Очевидно, что в идеальном случае траектория выхода самолета
на глиссаду представляет собой кривую, сопрягающую горизонталь-
ную прямую с глиссадой снижения (рис. 3.71, кривая /). Мини-
мальный радиус ее кривизны ограничивается некоторым допусти-
мым значением изменения вертикальной перегрузки \пу во время
этого маневра. Вертикальная скорость при движении самолета по
179
1 2 5
Рис. 3.71. Выход самолета на глис-
* саду
\ <
кривой 1 изменяется от Vy = 0 до Vy=WQPJ1. Полет по этой кривой
может быть осуществлен в том случае, если снижение 'начнется
при определенном линейном отклонении ДЯ0 самолета от глиссады.
Если снижение начать при большем отклонении, то самолет будет
двигаться по более низко расположенной траектории (кривая 2).
При более позднем начале снижения самолет пересечет глиссаду и
будет «садиться» на нее сверху (кривая 3). В последнем случае
самолет имеет повышенные вертикальные скорости.
С точки зрения безопасности полета лучше, чтобы при сниже-
нии самолет находился над глиссадой, чем под ней. Поэтому в
отечественных системах траекторного управления переключение на
режим снижения осуществляется после пересечения глиссады. Для
формирования сигнала «захвата» глиссады используется релейный
усилитель, на вход которого подаются сигналы ГРП. Релейный уси-
литель срабатывает при отклонениях самолета ?^?3ахв. В системах
САУ-1Т и «Привод» порог £захв = 0,1°. Траектория снижения само-
лета при использовании этих систем находится над глиссадой.
В некоторых зарубежных системах траекторного управления
сигнал «захвата» глиссады выдается, когда отклонение самолета
от равносигнальной зоны ГРМ станет меньше некоторой заданной
величины (—£захв^£^+£захв).
В других системах траекторного управления автоматический
«захват» глиссады отсутствует. При использовании таких систем
момент начала снижения определяет летчик по показаниям, прибо-
ров. Обычно сигналом для начала снижения является достижение
стрелкой глиссады нулевого положения. В этот момент летчик на-
чинает пилотировать по командной стрелке тангажа при полуавто-
матическом заходе на посадку или включает режим стабилизации
самолета на глиссаде при автоматическом заходе.
Законы управления и схемы систем
автоматизированного управления продольным движением
Характерной чертой отечественных систем траекторного управ-
ления является использование законов управления с изодромными
операторами в членах, содержащих сигнал угла тангажа. Рассмот-
рим закон управления, реализованный в одной из первых отече-
ственных систем полуавтоматического управления типа «Привод»1:
1 Здесь и далее опущен знак минус в правой части закона управления систем
полуавтоматического управления.
180
bH = i f &-I--J--Г ZcC 4-----(irpt---------&VI1 •
I лн i L ~ t2P+ i v тзР+1 Л/
Выполнив некоторые преобразования, этот закон управления
можно привести к следующему виду:
8„ = / Г___<Г-^ +Т-р+ ?->„__
" ' L + 1>(Г2Р + 1)<ГзР+1)
L Ь,Р 1
н---5— С н------------------ С
(7\р + 1) (Т2р 4- 1) J’
где T'==TJ\TZ\
Г"=Л + Л+Л-
В данном случае изодромный оператор сформирован в резуль-
тате сложения двух сигналов угла тангажа. Это наглядно вид-
но на структурной схеме (рис. 3.72). Укажем попутно, что в пер-
вых системах полуавтоматического управления типа «Путь» подоб-
ный оператор формировался путем суммирования трех сигналов
тангажа, два из которых проходили через фильтры. Для подавле-
ния помех сигналы отклонения £ пропускаются через один фильтр,,
а сигналы производной отклонения pt,— через два фильтра. В сис-
теме предусмотрена частичная компенсация запаздывания сигна-
лов на фильтрах.
С помощью нелинейности, включенной в цепь сигнала отклоне-
ния от глиссады, при £<0,08 передаточные отношения по сигналу
отклонения1 и производной от отклонения уменьшаются примерно
в 2 раза. Благодаря этому повышается устойчивость движения на
малых дальностях до ГРМ.
В системе предусмотрен режим стабилизации заданной высоты.
В момент автоматического «захвата» глиссады при £^0,Г к вы-
числителю система вместо сигналов отклонения ЛЯ от заданной
высоты подключаются сигналы отклонения £ от равносигнальной
зоны ГРМ.
_В связи с совершенствованием характеристик ГРМ и, в частно-
сти^ благодаря уменьшению уровня помех в их сигналах оказалось
Рис. 3.72. Структурная схема продольного канала системы полуавтоматического
управления типа «Привод»
181
Рис. 3.73. Упрощенная структур-
ная схема продольного канала си-
стемы САУ-1Т в режиме полуавто-
матического захода на посадку
возможным в системах автоматизированного управления заходом
на посадку более поздней разработки уменьшить фильтры сигна-
лов £ и р£. Тем не менее в законах управления предусматривается
частичная компенсация запаздываний на фильтрах. Кроме того, в
этих системах, как правило, предусмотрен ввод при «захвате» глис-
сады форсирующего сигнала, пропорционального углу наклона
глиссады.
На рис. 3.73 и 3.74 показаны упрощенные структурные схемы
системы САУ-1Т. Закон управления командной стрелкой в режиме
полуавтоматического захода на посадку по сигналам ГРМ:
+ 1 I < иР + 1 '1Р + 1 \ Тс1Р + 1 /J
Закон управления рулем высоты при автоматическом заходе на j
посадку:
- ТнР -i*-Tnp ъ-иръ--------------J—fa-t-z-x4--r2P егл1
ГиР+1 " гир + 1 Tip + 1 г т 1 гл;
Числовые значения основных передаточных чисел и постоянных
времени были приведены ранее. Для самолетов Ил-62 система име-
ет следующие исходные передаточные отношения: i(; = 9-r-10; /<=
р»
Рис. 3.74. Упрощенная структурная схема продольного канала системы САУ-1Т
в режиме автоматического захода на посадку
182
Рис. 3.75. Упрощенная структурная схема продольного канала системы БСУ-ЗГГ
= 724-84 сек (большие значения относятся к режиму полуавто-
матического управления); /я =3,5;/а =0,7 сек. В системе предус-
мотрен автоматический «захват» глиссады.
В момент «захвата» глиссады к цепи из последовательно сое-
диненных сопротивления и конденсатора подключается постоянное
напряжение, величина которого пропорциональна углу наклона
глиссады. Это обеспечивает формирование форсирующего сигнала
Т2Р д
вида ——у— 0ГЛ.
Т2Р +1
В заключение рассмотрим некоторые особенности продольного
канала наиболее распространенной отечественной системы полу-
автоматического и автоматического управления БСУ-ЗП (рис. 3.75).
Ее основными частями являются система полуавтоматического уп-
равления «Путь — 4МПА» и автопилот АП-6ЕМ-ЗП.
Система «Путь — 4МПА», вообще говоря, может устанавливать-
ся и эксплуатироваться самостоятельно и не иметь связи с автопи-
лотом. В-ней реализован закон управления типа (3.124):
3
ЧР
Т2Р + 1
1,Р
/
Отметим, что сигнал производной формируется за счет
дифференцирования сигнала угла тангажа, снимаемого с гировер-
тикали. Применительно к самолетам Ил-18 и Ту-134 система
«Путь — 4МПА» имеет следующие настройки: исходные (номиналь-
ные) передаточные отношения /< = 17; ij = 140 сек; =7 сек; пос-
тоянные времени Ti = 2,3 сек; Т2 = 0,7 сек.
183
В режиме автоматического управления сигнал с вычислителя
системы «Путь — 4МПА» через блок связи подается на сумматор
автопилота АП-6ЕМ-ЗП. Закон управления рулем высоты при ав-
томатическом заходе на посадку:
тп1Р 55 ; т**р
---------о = — ---------
( » + бгл) - — г'т В| II •
Особенностью этого закона управления является то, что в него
входит член 5Н'. Для улучшения динамики продольного движе-
ния при вводе самолета в крен предусмотрен член i*B |у|. В системе
отсутствует автоматический «захват» глиссады. Включение режима
стабилизации самолета на глиссаде («захват» глиссады) происхо-
дит при нажатии кнопки «Глис.» на пульте управления автопилота.
При этом в сумматор автопилота подается форсирующий сигнал
Ги Р Р
-----—6Гл. Подобно сигналу------—v он формируется путем сум-
ГИ2Р+1 ГИ2Р + 1
мйрования двух сигналов, один из которых пропущен через
фильтру—у Уменьшение передаточных отношений и /• на
~50% происходит через 50 сек после нажатия кнопки «Глис.». Ес-
ли при полуавтоматическом заходе на посадку не нажать эту кноп-
ку, то исходные передаточные отношения сохранятся в течение
всего захода на посадку.
§ 6. УПРАВЛЕНИЕ ДВИЖЕНИЕМ САМОЛЕТА ПРИ ПОСАДКЕ
Некоторые общие сведения о продольном движении
самолета при посадке
В процессе снижения по глиссаде самолет имеет довольно высо-
кую скорость Гпл. По существующим нормам она должна не менее
чем в 1,3 раза превышать скорость срыва (Vc). На скорости пла-
нирования самолет должен обладать удовлетворительной устойчи-
востью и управляемостью. В связи с этим у некоторых самолетов
скорость планирования оказывается существенно большей, чем
1,3 7С- У большинства современных пассажирских самолетов
(Ил-18, Ту-134, Ил-62 и т. п.) скорости захода на посадку (скоро-
сти планирования) лежат в диапазоне УПл = 704-85 м/сек. Верти-
кальные скорости этих самолетов при снижении по глиссадам с уг-
лами наклони Огл =2,54-3,0° составляют Vy =—3,54 4,5 м/свк.
Приземление, т. е. соприкосновение самолета с землей, с такими
скоростями недопустимо. В связи с этим возникает задача их умень-
шения. В настоящее время принято считать, что при автоматиче-
ской посадке в момент соприкосновения с землей самолет должен
иметь вертикальную скорость Vy =—0,54—Ofi м/сек.
184
Рис. 3.76. Траектория движе-
ния самолета при посадке
самолета вручную
Посадочная дистанции
ВыраЬ-
Планирование нивание
ВПП
Выдер-
живание
Парашютирование
Пробег
К моменту приземления поступательная скорость самолета
уменьшается йсего на 10—20% (ГПриз~ 0,84-0,9 7Пл). Поэтому не-
обходимое уменьшение вертикальной скорости может быть достиг-
нуто лишь за счет уменьшения угла наклона траектории движения
самолета. Этап полета, в процессе которого самолет, двигаясь по
криволинейной траектории, переходит от снижения по глиссаде на
траекторию с малым углом наклона к земной поверхности, получил
название выравнивания.
При посадке самолета вручную выравнивание обычно заканчи-
вается переводом самолета на траекторию, параллельную земле
(рис. 3.76). На этом этапе посадки, называемом выдерживани-
ем, самолет летит на высоте 0,5—1,0 м над землей, постепенно те-
ряя скорость. К концу выдерживания скорость самолета близка к
скорости приземления. Для поддержания величины подъемной си-
лы, уменьшающейся вследствие потери скорости, летчик постепен-
но увеличивает угол атаки самолета.
Когда скорость самрлета становится близкой к 7Приз, летчик
перестает увеличивать угол атаки самолета. Поскольку скорость
самолета продолжает уменьшаться, равенство подъемной силы весу
самолета нарушается и самолет начинает двигаться по криволиней-
ной траектории к земле. Этот этап посадки, получивший название
парашютирования, заканчивается приземлением самолета.
После соприкосновения самолета с землей начинается заключи-
тельный этап посадки — пробег, в процессе которого скорость
самолета уменьшается до нуля.
Одной из важнейших характеристик самолета является его п о-
садочная дистанция — горизонтальное расстояние между
точкой, над которой высота полета составляет 15 ж, и точкой пол-
ной остановки самолета после пробега, как было указано ранее,
линейная часть глиссады, задаваемой ГРМ, или продолжение этой
линейной части должны проходить через базовую точку радиотех-
нической посадочной системы. Эта точка находится на высоте 15 м
над порогом ВПП. При автоматизированном заходе на посадку и
автоматической посадке траектория антенны ГРП проходит через
базовую точку, если выравнивание происходит над ВПП. Высота
полета измеряется относительно нижней точки шасси, а не антенны
ГРМ. Поэтому начало посадочной дистанции находится до порога
ВПП. Совершенно ясно, что минимизация посадочной дистанции
является весьма желательным мероприятием.
При неизменной скорости в начале посадочной дистанции со-
кращение этой дистанции может быть достигнуто' в основном за
185
счет уменьшения участков выдерживания и пробега. Длина пробега
^проб тем меньше, чем меньше ИпРиз и, значит, с точки зрения со-
кращения £пРоб выгодно уменьшать скорость приземления. Однако
при этом увеличивается дистанция выдерживания. Очевидно, что
при пробеге по земле самолет тормозится более эффективно, чем в
процессе выдерживания. Поэтому целесообразно уменьшать дис-
танцию выдерживания. Это хотя и приведет к увеличению скорости
Уприз, но посадочная дистанция будет меньшая. Следует указать,
что у новых типов самолетов благодаря применению эффективных
средств торможения колес и в особенности при использовании ре-
верса тяги двигателей даже в случае больших скоростей приземле-
ния длины послепосадочного пробега получаются небольшими.
Вышесказанным объясняется имеющаяся в настоящее время
тенденция к уменьшению воздушного участка посадочной дистан-
ции за счет некоторого увеличения скорости приземления. В ряде
случаев скорость приземления равна скорости самолёта в конце
выравнивания. При этом этапы выдерживания и парашютирования
практически отсутствуют.
Следует указать, что деление воздушного участка посадки на
этапы выравнивания, выдерживания и парашютирования является
довольно условным. Нередко выдерживание, основной целью кото-
рого является погашение поступательной скорости, осуществляет-
ся на заключительной фазе выравнивания. Парашютирование в та-
ком случае отсутствует. Иногда парашютирование вообще не рас-
сматривается как отдельный этап посадки [5]. Вместе с тем во всех
случаях выравнивание оказывается необходимым этапом посадки.
Из сказанного очевидно, что оно также является одним из наибо-
лее сложных этапов.
Автоматизация процессов управления продольным движением
самолета при посадке, содержащей все перечисленные этапы, свя-
зана со значительными трудностями. Задача существенно упро-
щается, если исключить выдерживание и парашютирование как
отдельные этапы. Тогда она в основном сводится к автоматизации
выравнивания и пробега. Так обычно и поступают. В дальнейшем
будут рассмотрены только вопросы автоматизации выравнивания.
На важной, но совершенно самостоятельной проблеме автоматиза-
ции пробега, решаемой принципиально другими методами, мы оста-
навливаться не будем.
Траектории выравнивания
В процессе выравнивания самолет движется по криволинейной
траектории, сопрягающей глиссаду и прямую, параллельную или
имеющую малый наклон к земной поверхности. Искривление тра-
ектории происходит вследствие действия центростремительной си-
лы, возникающей при увеличении угла атаки самолета (рис. 3.77).
186
Рис. 3.77. Силы, действующие на са-
молет при выравнивании
Y>Gcosff
Центростремительная сила РЦ=У— Geos 0 создает нормальное
ускорение
V2
Ja~ г ’
где V — скорость самолета;
г — радиус кривизны траектории.
В соответствии с (1.33) в таком случае нормальная перегрузка
- . V2
пУ=\ +----- »
gr
а приращение нормальной перегрузки
л V2
fyly --------------------------- •
gr
Тогда радиус кривизны траектории
V2 172
Г —-----'---=------
g(ny—l) gfoly
(3.140)
При V=const и ny = const траектория выравнивания представ-
ляет собой дугу окружности радиуса г. На практике избегают рез-
кого изменения перегрузки. Обычно в начале выравнивания пере-
грузка плавно увеличивается до заданного значения, а к концу —
плавно уменьшается до пу= 1. Кроме того, в процессе выравнивания
происходит торможение самолета.
Поэтому реальные траектории выравнивания несколько отлича-
ются от дуги окружности. Тем не менее для приближенного анали-
за вполне допустимо полагать их дугами окружности некоторого
среднего радиуса.
Угловая скорость движения самолета в процессе выравнивания
по таким траекториям определяется из уравнения
ш== v g(ny — V = gkny
г V ‘
Поскольку траектория выравнивания
тывающую угол 0гл, время выравнивания
-__ ^гл _ _
выр w g(ny—V) g^ly
V
представляет дугу, охва-
187
Рис. 3.78. К зависимости
между радиусом кривизны г,
высотой начала выравнива-
ния Н и длиной выравнива-
ния L
Рис. 3.79. К определению вы-
соты начала выравнивания
Минимальный радиус кривизны гтщ траектории выравнивания и
максимальная угловая скорость сотах при данной скорости V огра-
ничиваются максимально допустимым значением перегрузки яуп1а
или приращения перегрузки ДпУп1ах при этом маневре:
1/2 1/2
rmin= - —= - ; (3.142)
max 1)
S (Л^тах 0 £^max
wmax — = — •
Допустимые значения перегрузки на выравнивании у пассажир-
ских самолетов примерно одинаковы. Поэтому отличие величин ми-
нимальных радиусов кривизны траекторий выравнивания и угловых
скоростей движения у разных типов самолетов в основном связано
с различием их скоростей. Увеличение радиуса кривизны траекто-
рии при неизменном угле наклона глиссады приводит к увеличению
высоты начала выравнивания (рис. 3.78). Поэтому при прочих рав-
ных условиях самолеты с большими скоростямй должны начинать
выравнивание на большей высоте.
Определим зависимость высоты начала выравнивания Ян.в от
основных характеристик движения, под которыми в данном случае
будем понимать средние значения скорости и перегрузки или при-
ращения перегрузки в процессе выравнивания. Из рис. 3.79 видно,
что
//H.B = rcp(l-cos9J. (3.143)
В соответствии с (3.140) при средних значениях Vcp, пУср, Д/Чр
радиус кривизны
у2 у2
. __ ср ср
ср г{пУс--1) ^пРср
(3.144)
188
Объединив (3.143 и 3.144), получим
!_! - VcpO — cos 0гл) Vcp (1 —COSf)rJI)
/7 =-------------- —--------------—
S^cp-1) ^cp
Учтя, что 1—cos 0 = 2 sin2-^ , и полагая sin-у!-, получим
н ^ср^л _
2*(^c;-i)' 2^д%>’
Интересно также оценить влияние этих параметров на длину
выравнивания £ВЫр, которая является проекцией пути S, проходи-
мого самолетом в процессе выравнивания, на горизонталь.
Ввиду малости угла 0ГЛ можно считать
^*выр ' ' *5 • ^*ср^ГЛф
Тогда с учетом (3.144)
__ Усрйгл _ У2р<)гл
вы₽ ^(Чр-1) *д%>
Укажем, что к такому же результату можно прийти исходя из
равенства ABbip~5 = Уср^выр. Значение /Ср определяется по формуле
(3.141).
Пусть имеются два самолета со средними скоростями на вырав-
нивании Vt и Уг, причем У1<Уг. Будем полагать, что на выравни-
вании средние значения nVcp(^nffcp) у обоих самолетов одинаковы.
В таком случае разность длин выравнивания этих самолетов
Поскольку практически у всех пассажирских самолетов высота
начала выравнивания не превышает 15 м, нетрудно определить, что
расстояние между точками начала посадочной дистанции и конца
выравнивания у второго самолета больше, чем у первого (см. рис.
3.78, 3.79) на величину
2
ДА = =-------®Г2--( V 2 _ V 2).
"ср
Если посадка происходит без этапа выдерживания, то на та-
кую же величину отличаются воздушные участки посадочных дис-
танций упомянутых самолетов.
Итак, параметры траекторий выравнивания (высота начала вы-
равнивания, длина выравнивания, радиус кривизны траектории) ап-
проксимируемых дугами окружностей, зависят от скорости самоле-
та, принятых значений нормальных перегрузок и угла наклона глис-
189
сады. Для самолетов с различными скоростями, снижающимися по
одной и той же глиссаде, оптимальные траектории выравнивания
могут существенно различаться. Очевидно, что использовать еди-
ную траекторию для выравнивания самолетов разных типов можно
только в случае, если она пригодна для самолетов с наибольшими
скоростями. Однако для самолетов с меньшими скоростями такая
траектория будет неоптимальной. При этом воздушный участок по-
садочной дистанции окажется неоправданно большим. Исходя из
сказанного целесообразно для каждого типа самолета иметь «свою»
траекторию, соответствующую его посадочным характеристикам.
Рассмотрим способы задания траектории выравнивания. Она
может задаваться либо с помощью наземных и бортовых устройств,
либо автономно только с помощью бортовых средств. Хотя в на-
стоящее время для задания траекторий выравнивания наземные
устройства не применяются, в целях общности картины остановим-
ся кратко на особенностях автоматического выравнивания по тра-
екториям, формируемым с их помощью.
Наземные устройства могут быть использованы двояко: для
задания в пространстве некоторой «жесткой» траектории выравни-
вания и выработки сигналов отклонения самолета от нее и для оп-
ределения координат самолета относительно некоторой точки, на-
пример расчетной точки приземления.
Теоретически «жесткая» траектория выравнивания, подобно
равносигнальной линии ГРМ, занимает неизменное положение от-
носительно земной поверхности. Каждая точка «жесткой» траек-
тории, в том числе и точка начала выравнивания, имеет вполне оп-
ределенное положение относительно расчетной точки приземления.
Вид «жесткой» траектории может быть различным (экспонента,
парабола и т. д.).
«Жесткая» траектория выравнивания, являющаяся продолже-
нием глиссады, позволяет очень точно вывести самолет в заданное
место приземления. Однако из-за ограничений по отклонениям уп-
равляющих поверхностей, допустимым угловым скоростям, пере-
грузкам, вследствие инерционности самолета и т. д. управление по
«жестким» траекториям для гражданских самолетов оказывается
невозможным. Поэтому «жесткие» траектории для приземления
гражданских самолетов не используются.
При наличии информации о текущем положении самолета от-
носительно точки приземления возможно обеспечить вывод самоле-
та в эту точку не только по одной («жесткой») траектории, а по»
множеству. Допустим, что в результате действия возмущений само-
лет отклонился от траектории, по которой происходило выравнива-
ние (рис. 3.80, кривая /). Дальнейшее движение может осущест-
вляться по новой траектории (кривая 2), рассчитанной таким обра-
зом, чтобы в момент приземления определенные параметры
движения, например Vy, имели заданные значения.
Подобный способ выравнивания иногда называют выравнивани-
ем по «гибкой» траектории. При таком способе выравнивания прин-
190
Рис. 3.80. К выравниванию по «гиб-
кой» траектории
Рис. 3.81. К выравниванию по экспо-
ненциальной траектории
ципиально возможно получить достаточно высокую точность при-
земления. Но в этом случае необходима дополнительная информа-
ция о дальности до точки приземления, что существенно усложняет
аппаратурное решение.
Как указывалось, необходимым- условием применения этого
способа является наличие информации о текущих координатах са-
молета относительно точки приземления. Одна координата (высо-
та полета) может быть измерена непосредственно на самолете.
Измерение второй координаты (дальности до расчетной точки
приземления или другой фиксированной точки на земле, находя-
щейся на известном расстоянии от расчетной точки) может быть
произведено только с помощью наземных средств. В настоящее
время источники информации о дальности, обеспечивающие необ-
ходимую точность измерения, в эксплуатации отсутствуют. Учиты-
вая ценность этой информации, в последние годы ведутся интенсив-
ные разработки посадочных радиодальномеров.
Из числа траекторий выравнивания, задаваемых с использова-
нием только бортовых средств, остановимся лишь на так называе-
мых экспоненциальных траекториях, единственно применя-
емых в настоящее время для автоматической посадки гражданских
самолетов1. Такая траектория (рис. 3.81) получается, если в каж-
дый момент времени вертикальная скорость снижения самолета
пропорциональна его текущей высоте, т. е.
— Н — сН, (3.145)
где с — коэффициент пропорциональности.
Введя обозначение Т = — , приведем уравнение (3.145) к виду
с
(7> + 1)// = 0. (3.146)
Решение этого уравнения дает текущее значение высоты
Н{1)^Нье т, (3.147)
1 О других траекториях см. [20].
191
где Hq — начальное значение высоты, в данном случае высоты начала выравни-
вания;
Т — постоянная экспоненты.
Следует заметить, что в рассматриваемом случае асимптота
экспоненты располагается на уровне ВПП.
В первом приближении можно полагать, что на выравнивании
скорость самолета меняется не очень значительно и потому в на-
ших расчетах примем ее постоянной и равной Vcp. В таком случае
уравнение траектории в координатах «дальность — высота» име-
ет вид
_ I
Н(1) = Нйе \
где l=Vt — текущее значение расстояния от начала выравнивания;
L=VT — постоянная экспоненты траектории выравнивания.
Для обеспечения плавного перехода от планирования к вырав-
ниванию необходимо, чтобы в точке начала выравнивания каса-
тельная к экспоненте совпадала с глиссадой. Это возможно, если
т ^0
выполнить условие L = —- или
^гл
Т=-^~ . (3.148)
Взяв производные от обеих частей уравнения (3.147), получим
уравнение для текущей вертикальной скорости
н ({)=--%-е т. (3.149)
При t = 0 Н (О) = /7о= —С учетом этого уравнение (3.147)
может быть представлено в виде
H(t) — HQe т. (3.150)
От зависимости (3.150) легко перейти к уравнению
Н[1)=Ное L,
с помощью которого можно проследить изменение вертикальной
скорости в функции от расстояния, пройденного самолетом с начала
выравнивания.
Из приведенных уравнений нетрудно найти выражение для угла
наклона траектории, угловой скорости изменения угла наклона тра-
ектории и радиуса кривизны:
_ t
г;
192
«>(/) = 6 (0=-^e r
,,s V VT
r (t) -------------
“ (0 _ 1
9Me T
В начале выравнивания радиус кривизны минимален:
''н.в=~. (3.151)
в гл
Как было показано ранее, минимальное значение радиуса кри-
визны ограничивается максимально допустимым значением изме-
нения перегрузки или ее приращения. Объединив (3.142 и 3.151)
при условии гн.в = Гщш» получим уравнение
Т _ V
0гл £^max
Решив его совместно с уравнением (3.148), определим высоту
начала выравнивания самолета, имеющего поступательную ско-
рость V и снижающегося по глиссаде с углом наклона 0ГЛ, при ус-
ловии, что приращение перегрузки не превышает заданного зна-
чения:
V2o2
^’о = ——• (3.152)
Произведение У0ГЛ представляет собой вертикальную скорость
самолета при планировании по глиссаде. Поэтому на основании
(3.152) можно сделать вывод, что высота начала выравнивания по
экспоненциальной траектории пропорциональна квадрату верти-
кальной скорости в начале выравнивания. Можно также указать,
что при прочих равных условиях высота выравнивания самолета
пропорциональна квадрату его поступательной скорости V,
При движении по экспоненте самолет с убывающей по закону
(3.145) вертикальной скоростью приближается к поверхности зем-
ли. Теоретически дистанция выравнивания в таком случае равна
бесконечности. Действительно, расстояние /, пройденное самолетом
от начала выравнивания до достижения высоты Н(1), определяется
зависимостью
Положив, что в конце выравнивания Н(1)=0, получим Z = oo.
Практически дистанция выравнивания конечна. Однако величина
ее оказывается весьма значительной. Она может быть сокращена,
если допустить, чтобы при соприкосновении с землей самолет имел
7—3261
193
некоторую вертикальную скорость ^приз(^приз). В соответствии с
(3.146) такую вертикальную скорость самолет имеет на высоте:
Н=ТНп^3. (3.153)
Следовательно, чтобы при приземлении самолет имел верти-
кальную скорость //приз, необходимо, чтобы асимптота экспоненты
находилась ниже по-верхности ВПП (см. рис. 3.82) на расстоянии
//ас, определяемом зависимостью (3.153). При 7=24-5 сек и /7ПрИз=
= 0,34-0,6 м/сек асимптота экспоненты должна быть ниже поверх-
ности ВПП на //ас = 0,64-3,0 м.
Длина дистанции выравнивания при приземлении с вертикаль-
ной СКОРОСТЬЮ //приз
I=L1 п —Я° = L 1 п —^-° .
7//приз ТНприз
В этом случае //о — высота начала выравнивания, отсчитывае-
мая от асимптоты экспоненты. Ее связь с высотой начала выравни-
вания отсчитываемой от уровня ВПП, очевидна из рис. 3.82.
При выравнивании абсолютное значение вертикальной скорости в
функции высоты Н, отсчитываемой от уровня асимптоты, опреде-
ляется уравнением
Н = ~ , (3.154)
а абсолютное значение вертикальной скорости в функции высоты
h, отсчитываемой от уровня ВПП, — уравнением
/7 = А + яприз = 1±Дас. (3.155)
График изменения вертикальной скорости приведен на рис. 3.83.
Теперь рассмотрим, какой будет траектория выравнивания са-
молета, если на него подействует возмущение. Обратимся к
рис. 3.84. При отсутствии возмущений траектория выравнивания
представляет собой экспоненту, проходящую через точку 1. Допус-
тим, что в результате действия турбулентного возмущения самолет
из точки 1 переместился в точку 2, после чего действие возмущения
прекратилось. Дальнейшее движение самолета происходит по
экспоненциальной траектории, проходящей через точку 2, эквидис-
тантной исходной траектории. Соответственно переместится и точка
приземления самолета. В связи с этим иногда рассмотренные выше
траектории называют «свободными» траекториями.
До сих пор мы говорили о выравнивании самолета по различ-
ного рода траекториям. В настоящее время известен также метод
программного выравнивания. В этом случае, начиная с высоты на-
чала выравнивания, задается программное изменение во времени
одного из параметров продольного движения самолета. В качестве
194
такого параметра может
быть выбран, например, угол
тангажа или атаки, пере-
грузка, угол отклонения ру-
ля высоты и др. Если в про-
цессе программного вырав-
нивания на самолет^ дейст-
вуют большие возмущения,
то может оказаться, что в
момент приземления само-
лет имеет недопустимо
большие отклонения пара-
метров движения. Для по-
садки пассажирских само-
летов этот метод не приме-
няется L
Теперь кратко остановим-
ся на управлении скоростью
самолета на этапе выравни-
вания. Подробно вопросы
управления скоростью са-
молета освещены в § 7 на-
стоящей главы. Здесь мы
лишь укажем, что обычно в
процессе автоматического
выравнивания осуществляет-
ся постепенное уменьшение
тяги двигателей в функции
времени. Иначе говоря, для
управления скоростью ис-
пользуется метод программ-
ного управления. В простей-
Рис. 3.82. Экспоненциальная траектория вы-
равнивания (асимптота экспоненты ниже
уровня ВПП)
Рис. 3.83. К изменению вертикальной скоро-
сти при выравнивании
Рис. 3.84. Траектория выравнива-
ния при действии возмущений
шем случае в процессе выравнивания рычаги управления двигате-
лями (РУД) с постоянной скоростью убираются в положение, со-
ответствующее режиму малого газа. Вместе с тем возможны и дру-
гие, более сложные способы управления скоростью, включая при-
менение средств реверсирования тяги двигателей.
Законы управления а схемы систем автоматического
управления продольным движением самолета
при посадке
Для выравнивания самолета по экспоненциальной траектории
необходимо, чтобы вертикальная скорость снижения самолета ме-
нялась в функции высоты полета в соответствии с уравнением
1 Подробно о программном приземлении см-. [30].
7*
195
(3.154 или 3.155). Иначе говоря, эти уравнения определяют задан-
ное значение вертикальной скорости, т. е.
(3.156)
ИЛИ
Н3=--у+Н^ю. ' (3.157)
По аналогии с предыдущим простейший закон управления сис-
темы автоматического управления выравниванием может быть
представлен в виде
где $з — заданный тангаж;
передаточное отношение по вертикальной скорости;
Н — текущая вертикальная скорость самолета.
Часто в закон управления системы вводится член, пропорцио-
нальный интегралу отклонения текущей вертикальной скорости
от ее заданного значения. Такой закон имеет вид:
- £ (Яз - н) + -1- (н3 - й).
р
Тогда с учетом (3.156)
или с учетом (3.157)
•В*
&з=4(-^+/?"₽-“/7)+7-(т+/?приэ-/7) • (ЗЛ58)
Для реализации этих законов управления необходимо иметь
информацию о текущей высоте полета самолета и его вертикаль-
ной скорости. Датчиками сигналов высоты полета относительно
земной поверхности h служат точные радиовысотомеры, принцип
действия которых подробно рассмотрен в гл. 2. Датчики сигналов
высоты полета относительно асимптоты Н отсутствуют. Однако та-
кую информацию можно получить суммированием сигналов h, по-
лучаемых от радиовысотомера, с постоянным сигналом //ас, сни-
маемым со специального задатчика.
Сигналы вертикальной скорости формируются путем комплекс-
ного использования информации от двух различных датчиков. Ча-
ще всего такими датчиками являются или радиовысотомер и аксе-
лерометр (датчик вертикальных ускорений), или барометрический
высотомер (вариометр) и акселерометр. Во всех случаях сигналы
акселерометра используются для компенсации запаздывания сиг-
налов вертикальной скорости на фильтрах.
196
Рис.
схема
3.85. Структурная
вычислителя вы-
равнивания
Структурная схема вычислителя выравнивания, использующего
информацию радиовысотомера и акселерометра, приведена на рис.
3.85. Здесь сигнал заданной вертикальной скорости Н3 формирует-
ся в соответствии с уравнением (3.157). Для этого сигнал текущей
высоты h от радиовысотомера с порцией у-суммируется с постоян-
ным сигналом /7пРиз, снимаемым с задатчика вертикальной скорости
приземления.
Для формирования сигналов текущей вертикальной скорости Н
используются сигналы того же радиовысотомера. Сигналы радио-
высотомера дифференцируются, ограничиваются, а затем подаются
на фильтр----. Ограничитель ОГР-1 предотвращает формиро-
7\р + 1
вание сигнала вертикальной скорости, превышающего сигнал нор-
мальной скорости снижения по глиссаде. Это необходимо на тот
случай, если поверхность земли перед порогом ВПП имеет значи-
тельные неровности. При отсутствии ограничителя с выхода диффе-
ренцирующего устройства в таких случаях на вход фильтра по-
даются большие сигналы. Накапливаясь на фильтре, эти сигналы
могут исказить сигналы вертикальной скорости в начальной стадии
выравнивания.
• Для компенсации запаздывания сигнала вертикальной скорости
на фильтре используется сигнал Н, снимаемый с акселерометра.
Для исключения постоянной составляющей из сигнала Н, возни-
кающей при тЭ’^О, иногда этот сигнал пропускают через изодром-
ный фильтр с большой постоянной времени.
Разностный сигнал (Н^—Н) поступает в две цепи. Одна из них
формирует сигнал +/7приз —//Другая цепь, содержащая
интегрирующее устройство, формирует сигнал —(у-+ /7приз — //)’
В результате суммирования этих двух сигналов получается сигнал
заданного угла тангажа О3 в соответствии с уравнением (3.158).
Ограничитель ОГР-2 предотвращает выдачу больших сигналов
Оз в систему управления. Иногда сигналы Фз пропускаются через
ограничитель с несимметричной характеристикой, предотвращаю-
щей выдачу в автопилот больших сигналов на пикирование.
197
В процессе выравнивания на систему самолет — БСАУ воздей-
ствуют различного рода возмущения, приводящие в конечном ито-
ге к рассеиванию траекторий выравнивания и точек касания. К ним
относятся турбулентность, изменения скорости полета, тяги двига-
телей, веса и центровки самолета и др.
Особенностью выравнивания является его кратковременность:
длительность выравнивания соизмерима с полупериодом длинно-
периодического колебания самолета. Поэтому при выборе переда-
точных отношений бортовой системы автоматического управления
приходится сталкиваться с противоречивыми требованиями. Для
уменьшения рассеивания целесообразно увеличивать передаточные
отношения. Однако это может привести к потере устойчивости дви-
жения. Уменьшение передаточных отношений увеличивает длитель-
ность переходных процессов. Оно способствует рассеиванию траек-
торий и точек касания.
Динамика выравнивания значительно улучшается при комби-
нированном управлении. В этом случае в вычислитель вводится еще
один сигнал, величина которого является функцией времени. На
рис. 3.85 цепь этого сигнала показана штрихами. Закон управ-
ления при этом приобретает вид:
ф $
= 4 (у + ^приз - ^') + -у- ( Т + К"»»3 - ~ • (3-159)
Первые два слагаемых правой части уравнения (3.159) форми-
руются в замкнутом контуре, а третье — в разомкнутом. Можно
считать, что разомкнутый контур обеспечивает движение самолета
по программе. Если бы на систему самолет — БСАУ не действовали
возмущения, траектория выравнивания была бы близка к некото-
рой средней заданной траектории. Заметим, что величина сигнала
подаваемого на вход интегрирующего устройства, определяет
угловую скорость заданного угла тангажа и тем самым вид траек-
тории движения. Замкнутый контур управления используется для
коррекции этой траектории с тем, чтобы в момент приземления са-
молет имел заданную вертикальную скорость.
В комбинированной системе управления передаточные отноше-
ния замкнутого контура существенно меньше, чем в системе без
него. Так, в комбинированной системе управления выравниванием,
разработанной фирмой Бендикс для самолетов Боинг-707, переда-
точные отношения замкнутого контура подобраны такими, чтобы за
счет этого контура обеспечивалось немногим более половины по-
требного изменения скорости.
Определенный интерес представляет решение вопросов выравни-
вания в системе автоматической посадки, применяемой на самоле-
тах «Каравелла». Для общности картины рассмотрим также работу
продольного канала этой системы в режиме стабилизации на глис-
саде. В продольном канале системы (рис. 3.86) используется ин-
формация от ГРП, радиовысотомера (РВ), датчика вертикальной
198
Рис. 3.86. Упрощенная схема продольного канала системы автоматического управ-
ления посадкой самолетов типа «Каравелла»
скорости, гировертикали (ЦГВ) и датчика угловой скорости (ДУС)
тангажа.
Сигнал £ с ГРП подается на функциональный потенциометр П2
радиовысотомера, служащий для уменьшения этого сигнала в за-
висимости от высоты полета. Движок потенциометра перемещается
следящей системой, отрабатывающей сигнал, пропорциональный
высоте полета h. Рабочий участок обмотки потенциометра соответ-
ствует высотам 15—200 м. Два других участка (0—15 м и 200—
750 м) закорочены. Этим достигается получение сигналов, пример-
но пропорциональных линейному отклонению ДЯ самолета от глис-
сады на участке высот 30—200 м. Начиная с высоты 30 м, сигналы
19»
♦ , £ резко уменьшаются и на
\ высотах менее 15 м в вьгчис-
( \ литель не проходят. Зависи-
। \ мость передаточного отно-
I шения kHi которое характе-
{. рцзует отношение величины
I сигнала, подаваемого в вы-
njg----------^5-----------числитель с потенциометра
л ' 772, к величине линейного от-
Рис. 3.87. К коррекции сигнала ГРП клонения от глиссады, пока-
зана на рис. 3.87. Там же по-
казана гипербола, по кото-
рой изменялось бы это передаточное отношение при отсутствии кор-
рекции сигнала £ по высоте. С помощью электромеханического ин-
тегрирующего устройства в вычислителе формируется также сигнал,
пропорциональный интегралу отклонения самолета от глиссады.
Потенциометр П\ радиовысотомера вступает в действие с высо-
ты 21 м. Последовательно с ним включен потенциометр *773, поло-
жение движка которого устанавливается в зависимости от принято-
го смещения асимптоты /7ас. Благодаря такой схеме с движка
потенциометра ГЦ снимается сигнал, пропорциональный высоте по-
лета относительно асимптоты Н. Заметим, что при h = 0 движок по-
тенциометра /71 находится в крайнем положении «О» и с него сни-
мается сигнал, пропорциональный Нас. Сигнал заданной вертикаль-
ной скорости Н3 формируется в соответствии с уравнением (3.156).
В момент приземления расчетное значение //приз = 0,404-0,45 м/сек.
Для выдачи сигнала текущей вертикальной скорости Н фирмой
Лир-Сиглер разработан специальный «вычислитель мгновенной
вертикальной скорости». Чувствительными элементами вычислителя
являются вариометр, реагирующий на изменение барометрическо-
го давления, и акселерометр. Сигналы акселерометра необходимы
для компенсации инерционных ошибок вариометра. Информация
о текущей вертикальной скорости, получаемая' от вычислителя, ис-
пользуется также при снижении по глиссаде. Благодаря этому от-
падает необходимость в переключениях в схеме при переходе на
выравнивание, что является определенным достоинством системы.
В системе предусмотрен режим автоматического ухода на вто-
рой круг. При перемещении РУД на режим полного газа включает-
ся реле через контакты которого в автопилот подается сигнал
на набор высоты с вертикальной скоростью //в.к = 3,6 м/сек.
О боковом движении самолета при посадке
В процессе стабилизации самолета на курсовой линии направ-
ление его продольной оси Ох зависит от действующих на систему
самолет — БСАУ возмущений. При симметричной тяге это направ-
200
a)
б!
Вид спереди
0
тс
Рис. 3.88. Посадка самолета в условиях бокового ветра
ление определяется главным образом величиной бокового ветра.
В процессе установившегося движения в штилевых условиях откло-
нения самолета по курсу от направления посадки (оси ВПП), как
правило, не превышают Д<р = 24-3°. Примерно таков же диапазон
колебаний самолета по крену. Такие отклонения допустимы и в
процессе приземления. Поэтому задача бокового канала БСАУ в
процессе приземления сводится к необходимости стабилизировать
самолет на курсовой линии так же, как это было в процессе захода
на посадку.
Значительно более qлoжнaя задача возникает при посадке в ус-
ловиях бокового ветра. В этих условиях самолет после окончания
переходных процессов летит с «подобранным» углом сноса ДФ~
~Его продольная ось Oxi отклонена от вектора путевой скоро-
сти IF, направленного вдоль оси ВПП, примерно на такой угол
(рис. 3.88, а). Однако в момент приземления этот угол должен быть
близок к нулю с тем, чтобы продольная ось Oxi по возможности
совпадала с направлением вектора путевой скорости.
Таким образом, при посадке в условиях бокового ветра перед
приземлением необходимо развернуть самолет вокруг оси Оух до
положения, при котором Дхр — О, т. е. довернуть его на угол сноса.
Доворот осуществляется с помощью канала рысканья (канала
руля направления). На вход канала подается сигнал разности меж-
ду заданным и текущим курсами. Канал крена (канал элеронов)
при этом стабилизирует самолет в горизонтальной плоскости. В ре-
зультате разворота самолета вокруг оси Оух возникает скольжение
(р~Дхр), и, как следствие последнего, появляется боковая ско-
рость. Чтобы самолет не усп^л слишком сильно отклониться от
курсовой линии, доворот самолета на угол сноса целесообразно осу-
ществлять непосредственно перед приземлением. Чаще всего коман-
да на этот разворот подается от радиовысотомера на высоте менее
м.
Существует другой способ управления боковым движением при
посадке. В отличие от предыдущего, доворот самолета на угол сно-
са производится раньше, еще на этапе планирования. После этого
канал рысканья удерживает продольную ось Ох\ параллельно оси
ВПП (рис. 3.88, б). Канал кренов обеспечивает стабилизацию са-
молета на курсовой линии по сигналам КРМ. Следовательно, век-
тор путевой скорости W направлен по оси Ох}. Поскольку вектор
?01
воздушной скорости V отклонен от этой оси примерно на угол сно-
са, самолет имеет скольжение, равное углу сноса. При небольших
значениях бокового ветра углы скольжения невелики, самолет ле-
тит с некоторым креном (рис. 3.88, в). Перед приземлением крен
убирается.
§ 7. УПРАВЛЕНИЕ СКОРОСТЬЮ ПОЛЕТА ПРИ ЗАХОДЕ
НА ПОСАДКУ И ПОСАДКЕ
Некоторые общие сведения об управлении скоростью
полета
Работа по автоматизации управления скоростью полета, являю-
щейся одним из важнейших параметров движения самолета, полу-
чила развитие лишь в последнее десятилетие. Запаздывание в раз-
вертывании этих работ по сравнению с работами по автоматизации
управления угловыми и траекторным движениями самолета объяс-
няется относительной простотой управления скоростью, особенно
на режимах маршрутного полета. Дело в том, что дозвуковые пас-
сажирские самолеты обладают в эксплуатационном диапазоне ре-
жимов полета большим запасом устойчивости по скорости. Изме-
нение скорости полета носит сравнительно медленный характер.
Как было показано в гл. 1, изменение скорости происходит в про-
цессе длиннопериодического продольного движения самолета. При
этом турбулентные возмущения, имеющие относительно высокочас-
тотный характер, существенно не сказываются на нем. Возмущения,
связанные с изменением состояния самолета, например изменением
его веса и центровки, имеют весьма медленный характер.
Как правило, требуемая точность выдерживания скорости в
маршрутном полете сравнительно невелика. В ряде случаев задача
по управлению скоростью сводится к установлению оптимального
режима работы двигателей и наблюдению за тем, чтобы при этом
скорость самолета не выходила за пределы допустимых минималь-
ных и максимальных значений. Минимальные скорости полета
обычно выбираются так, чтобы у самолета имелся запас по углу
атаки. Максимальные скорости на малых высотах полета ограни-
чиваются из соображений прочности самолета (ограничения по ско-
P/f ^77
ростному напору#=—-—). При полете на больших высотах мак-
симальная скорость самолета ограничивается критическим для дан-
ного режима полета числом М.
По указанным причинам управление скоростью не является
очень сложной задачей в маршрутном полете и не требует от эки-
пажа много времени и усилий. Значительно труднее управлять ско-
ростью при заходе на посадку и посадке. На этих этапах полета
меняется конфигурация самолета: производится выпуск шасси, за-
крылков, интерцепторов и др. Вследствие этого меняются сила ло-
202
бового сопротивления й подъемная сила. При входе в глиссаду
необходимо изменить угол наклона траектории.
Для разных участков захода на посадку существуют оптималь-
ные значения скорости, которые должны выдерживаться с большой
точностью. Уменьшение скорости чревато возможностью выхода на
недопустимые значения а и су. Завышение скорости после выпуска
средств механизации крыла (закрылков, щитков) недопустимо из
соображений прочности этих средств. В некоторых случаях увели-
чение скорости полета самолета с выпущенными закрылками при-
водит к недопустимо большому скосу потока у горизонтального опе-
рения. Следствием этого могут быть срывные явления на оперении.
Наконец, увеличение скорости на последних этапах захода на по-
садку, перед началом выравнивания, удлиняет посадочную дистан-
цию самолета. Сравнительно небольшое завышение скорости захо-
да на посадку приводит к такому же увеличению посадочной дис-
танции, как значительное превышение самолета над глиссадой.
Для иллюстрации сказанного приведем следующий пример. При
снижении по глиссаде самолет, находясь на расстоянии 1000 м от
торца ВПП, имеет высоту полета около 60 м. Для самолета типа
Ту-134 в этот момент превышение расчетной скорости захода на
посадку всего лишь на 10 км/ч с точки зрения увеличения посадоч-
ной дистанции эквивалентно превышению над глиссадой на 25 м.
Увеличение посадочной дистанции крайне нежелательно при по-
вадке в сложных метеорологических условиях на мокрую или обле-
деневшую ВПП малой длины. В условиях общего жесткого лими-
та времени при заходе на посадку экипаж вынужден уделять много
внимания управлению скоростью. В связи с этим возникает необ-
ходимость в автоматизации процессов управления скоростью поле-
та на режимах захода на посадку. Автоматизация управления ско-
ростью является необходимым условием осуществления автомати-
ческой посадки.
Из анализа уравнений продольного движения (1.22) следует,
что управлять скоростью полета можно путем воздействия на руль
высоты и путем изменения тяги двигателей. Вообще говоря, ско-
ростью можно также управлять путем изменения коэффициента
лотового сопротивления сх, например, за счет выпуска щитков, за-
крылков и др. Однако для автоматического управления скоростью
последний метод в связи со сложностью его реализации примене-
ния не нашел.
Обычно в полете необходимо выдерживать не только скорость,
но и стабилизировать еще некоторые другие параметры продоль-
ного движения. Например, при полете на эшелоне нужно стабили-
зировать высоту полета, при заходе на посадку — стабилизировать
самолет на глиссаде. Имея в своем распоряжении два регулирую-
щих органа: руль высоты и РУД, летчик может управлять двумя
независимыми параметрами продольного движения. Такими пара-
метрами на высотном эшелоне являются высота Н (или отклонение
А,// от заданной высоты) и скорость V (или отклонение A,V от
203
заданной скорости), а при заходе на посадку — отклонение Д£ от
заданной глиссады и скорость V (или отклонение Д,7). Отметим,
что в отличие от принятого в гл. Г обозначения приращения (Д)
в обозначение отклонения от заданного значения введен дополни-
тельно индекс «,» (Д,).
Во многих случаях полета на эшелоне требования к выдержи-
ванию скорости сводятся к невыходу за некоторые ограничения.
Вместе с тем оказывается весьма желательной эксплуатация дви-
гателей на оптимальных для данных условий режимах, что обычно
и определяет характер управления двигателями. Стабилизация са-
молета на заданной высоте эшелона осуществляется путем воздей-
ствия на руль высоты. В ряде систем автоматического управления
имеются режимы стабилизации заданной индикаторной (прибор-
ной) скорости и заданного числа М. Как правило, они используют-
ся при наборе высоты и снижении самолета.
Обычно эти режимы реализуются путем подачи в канал руля
высоты сигналов отклонения Д,У или Д/М вместо сигнала Д,/Л
Следовательно, на этих режимах управление скоростью осущест-
вляется путем воздействия на руль высоты. При заходе на посадку
стабилизация самолета на глиссаде достигается управлением ру-
лем высоты, а выдерживание заданной скорости — управлениехМ
РУД.
При изменении режима полета летчик обычно использует одно-
временно оба управляющих органа. Например, при входе в глисса-
ду летчик отклоняет руль высоты и уменьшает тягу двигателей.
Такое координированное управление целесообразно не только при
изменениях режима, но и при его стабилизации, потому что изме-
нение скорости при прочих равных условиях является следствием
изменения угловых положений самолета, точнее, угла 0 наклона
траектории. И, наоборот, изменение скорости может влиять на уг-
ловые положения самолета и его стабилизацию на заданной траек-
тории.
Схемы автоматического управления скоростью полета
В соответствии со сказанным автоматическое управление ско-
ростью полета возможно построить по трем основным схемам (рис.
3.89). Автоматическое управление скоростью полета в схеме, пред-
ставленной на рис. 3.89, а, осуществляется с помощью автопилота,
воздействующего на руль высоты. Для формирования управляюще-
го сигнала в вычислительное устройство автопилота в этом случае,
кроме сигнала Д,К, подаются сигналы ДФ и Aft, не показанные на
схеме. Такое управление скоростью применяется при подъеме на
заданный эшелон и снижении с него. Аналогично реализуется и ис-
пользуется режим стабилизации заданного числа М. Этот режим,
кроме того, может быть использован для полета по «потолкам».
При автоматическом управлении скоростью посредством изме-
нения тяги двигателей (рис. 3.89, б) для формирования управляю-
204
Рис. 3.89. К автоматическому управлению скорости полета
щего сигнала, кроме сигнала Д,7, используют обычно еще некото-
рые дополнительные сигналы. Автономно действующий автопилот
при этом обеспечивает стабилизацию угловых положений самоле-
та. Автоматическое управление скоростью по такой схеме приме-
няется в системах автоматического управления посадкой.
Третья схема автоматического управления скоростью (рис.
3.89, в) предусматривает одновременное воздействие на руль вы-
соты и тягу двигателей, при котором обеспечивается регулирование
скорости и еще одного параметра продольного движения. Вторым
параметром может быть отклонение А,// от" заданной высоты, от-,
клонение Д£ от заданной глиссады, угол 0 наклона траектории и др.
Подобная схема принципиально обеспечивает наилучшее качество
стабилизации обоих параметров как в маршрутном полете, так и
при посадке. Вместе с тем она оказывается наиболее сложной в
реализации, <в особенности для резервированных систем автомати-
ческого управления. По этой причине последняя схема автомати-
ческого управления скоростью в настоящее время распространения
не получила.
Таким образом, в настоящее время при заходе на посадку и по-
садке автоматическое управление скоростью осуществляется путем
воздействия на тягу двигателей. Поэтому далее нами будут рас-
сматриваться только1 устройства, работающие по второй схеме
(рис. 3.89, б). Эти устройства получили название автоматов
тяги. Часто их также называют автоматами скорости.
Некоторые общие вопросы автоматического управления
скоростью полета путем воздействия на тягу
двигателей
В простейшем случае принцип действия автомата тяги сводит-
ся к тому, что он перемещает РУД по сигналу разности между за-
данной V3 и текущей V значениями скорости:
Д,1/ = У3-V,
1 Об устройствах, реализованных по другим схемам, см. [3].
205
Если перемещение РУД Абд пропорционально этому сигналу, то
закон управления автомата тяги имеет вид:
Д8д = /К AV,
(3.160)
вд
где iy = —— передаточное число, характеризующее соотношение между пере-
мещением РУД и отклонением скорости в установившемся режиме.
Для получения удовлетворительных характеристик управления
скоростью обычно оказывается необходимым вводить в закон уп-
равления дополнительные члены.
В более общем виде закон управления автомата тяги имеет вид:
^ = ivA(p)b'V,
х (3.161)
где А(р) —полином, определяющий динамические параметры закона управления
автомата тяги.
Для случая пропорционального закона управления А (р) = 1.
Анализируя в первом приближении динамику автоматического
управления скоростью, можно не учитывать динамические харак-
теристики сервопривода автомата скорости, перемещающего РУД.
Вместе с тем необходимо учитывать динамические свойства двига-
теля. В первом приближении обычно принимают, что двигатель
вместе с его системой управления является апериодическим звеном.
В таком случае зависимость тяги двигателя от отклонения РУД
имеет вид:
+ = V8a, (3.162)
где Тд — постоянная времени двигателя;
Лд — коэффициент, характеризующий соотношение между тягой и отклоне-
нием РУД в установившемся режиме (А?д=р5).
При введении обозначения В(р) =Гдр+1 зависимость (3.162)
приводится к виду:
£(р)Др = АлД8д. (3.163)
В общем случае В(р)—полином, характеризующий динамиче-
ские свойства двигателя. Если инерцией двигателя пренебречь, то
В(р) = 1. Решая совместно (3. 1б| и 3 .163), получим
В (р) ЬР=кл1уА(р) АV. (3.164)
Пусть, как было условлено раньше, на самолете установлен ав-
топилот, обеспечивающий качественную стабилизацию самолета на
заданной траектории. Тогда скорость полета определяется зависи-
мостью
хp^V +avW = а6Д8д, (3.165)
являющейся первым уравнением системы (1.28).
Член а$А6д в уравнении (3.165), который характеризует изме-
нение тяги, не учитывает инерцию двигателя. Чтобы в дальнейшем
206
учесть эту инерцию и вместе с тем не изменять правую часть урав-
нения (3.165), можно и далее считать, что тяга в каждый момент
пропорциональна перемещению РУД, т. е. ДР = £дД6д, но перемеще-
ние РУД происходит с запаздыванием, определяемым полиномом
В(р). Тогда вместо (3.160) будет справедлива зависимость
Д8д = 4КА(£). д,1/.
В (р)
Очевидно, что уравнение (3.165) при этом сохраняется.
Законы управления и схемы автоматов тяги
Рассмотрим систему автоматического управления скоростью,
использующую автомат тяги с пропорциональным законом управ-
ления (Л(р) = 1). Примем, что полином В(р) =7др+1. Будем по-
лагать, что самолет летит горизонтально и автопилот стабилизирует
заданную высоту так, что колебания угла 0 отсутствуют. Для этого
случая (Д0 = О) скорость полета определяется зависимостью
pkV -^av^V =
В наиболее простом случае стабилизации скорости автомат тя-
ги должен обеспечить выдерживание скорости У3, равной той ско-
рости Vo, которую имел самолет в момент включения автомата тя-
ги. Сигнал, пропорциональный отклонению Д,У, выдается коррек-
тором скорости в вычислительное устройство, к выходу которого
подключен сервопривод, перемещающий РУД (рис. 3.90). Соответ-
ствующая структурная схема показана на рис. 3.91. На ней вычис-
литель и сервопривод представлены звеном iv, звено---- отра-
+ 1
жает динамические характеристики двигателя.
В целях общности изображения передаточных функций звеньев
Г аб
введены обозначения Тс ——и kc =------ в передаточной функции
tty &у.
самолета,
В более общем случае автомат тяги должен обеспечивать пере-
настройку на выдерживание любой заданной скорости. Для этого
в его составе имеется устройство, вырабатывающее сигнал V3 и
сравнивающее его с сигналом текущей скорости V (рис. 3.92). Сиг-
нал отклонения Д,У подается в вычислительное устройство.
Рис. 3.90. Автомат тяги для стабилизации скорости Vo
207
Рис. 3.91. Структурная схема
автомата тяги
Принципиально возможны и другие методы формирования сиг-
нала A,V. Например, для этого можно суммировать сигнал коррек-
тора скорости с сигналом разности между новой и начальной за-
данными скоростями
ДИ3 = 73-И3о, (3.166)
где V3 — новая заданная скорость;
V3 — заданная скорость в момент • включения корректора скорости
V3o=V°o).
Структурная схема (см. рис. 3.91) будет справедлива и для об-
щего случая стабилизации скорости, если считать, что заданная
скорость V3 может также отличаться от Vo. Вместе с тем следует
указать, что часто более удобной оказывается несколько другая
схема (рис. 3.93), на вход которой подается сигнал AV3. Выходным
сигналом является не текущая скорость V, а ее отклонение AV от
начальной установившейся скорости. Возможность перехода к этой
эквивалентной схеме вытекает из уравнений (1.15 и 3.166). Заме-
тим также, что, применяя эту схему к рассмотренному вначале слу-
чаю стабилизации исходной скорости Vo, необходимо положить
AV3=0.
Запишем некоторые передаточные функции:
= (р)=-----------------;
ДУз Уз 3 Гд Тср2 + (Тд + Тс) р + 1 + ivkc
=wi'v (р) =------------—------------------1. (3.167)
AV3 3 ТлТср2 + (Тд + Тс) Р + 1 +
Положив р = 0 в передаточной функции (3.167), определим ве-
личину отклонения установившейся текущей скорости от заданной
(3’165)
‘ Это отклонение является статической ошибкой автомата тяги,
имеющего пропорциональный закон управления (3.161). Очевидно,
I АВ том ат тяги "3
Рис. 3.92. Автомат тяги с перенастройкой V3
208
Рис. 3.93. Эквивалентная
структурная схема
что статическая ошибка отсутствует только при ДУ3=0. Следова-
тельно, при перенастройке автомата тяги на стабилизацию ско-
рости V3=/= V3o появляется статическая ошибка.
Л До сих пор мы рассматривали вопрос стабилизации скорости
в горизонтальном полете. Проведя аналогичные рассуждения при-
менительно к полету по наклонным траекториям (0=И=О), можно по-
казать, что изменение угла наклона траектории также приводит к
появлению статических ошибок. Если, например, автомат тяги был
включен в горизонтальном полете, то при движении по глиссаде
скорость самолета отличается от заданной. Величина статической
ошибки выдерживания скорости, вызванная изменением угла накло-
на траектории, определяется по формуле
AV =
уст
-------afc----
0 4*
(3.169)
где АОз — изменение угла наклона траектории.
Из зависимостей (3.168 и 3.169) следует, что величины статиче-
ских ошибок сильно зависят от передаточного числа iv. Однакр
увеличивать это передаточное число в реальных системах можно
лишь до определенной величины. При больших передаточных чис-
лах качество стабилизации скорости ухудшается. Кроме того, боль-
шие передаточные числа приводят к очень резким перемещениям
РУД, что также нежелательно. Как показывают расчеты и резуль-
таты испытаний, при таких ограничениях статические ошибки ста-
билизации скорости в области эксплуатационных режимов захода
на посадку получаются недопустимо большими.
Эти обстоятельства практически исключают использование ав-
томатов тяги с пропорциональным (статическим) законом управ-
ления. Как правило, в системах автоматического управления по-
садкой применяются автоматы тяги с астатическим законом управ-
ления (Л(р)=И=1). Чаще всего это достигается введением в закон
управления члена, пропорционального интегралу от величины Л,К
При этом
Л(л) = 1 + -1. (3.170)
Р
где i j — передаточное число по сигналу JA,V.
На рис. 3.94 дана структурная схема для общего случая автома-
тического управления скоростью применительно к уравнениям
(3.160, 3.162, 3.165 и 3.166). Соответствующие передаточные функ-
ции имеют вид:
209
Рис. 3.94. Структурная схема автомата тяги в общем случае
ду _ у —_______________Мс£(р)______.
ДУ3— Уз~ Уз~ ivkcA(p) + B(p)(Tcp+l) ’
— =KvV(P}=----------------------------
ДУ3 4V3 iykcA(p) + В (р) ( TQp + 1)
Д, У
А И А' ПЛ7Д'И/ X Мс^(?)
----=-------= w де (р) =---------------------------------------
Авз А03 3 at[ivkcA(p) + В(р)Тср + 1)] •
Используя эти передаточные функции, легко убедиться, что
если значение Д(р) определяется зависимостью (З.Г7О), а В{р) =
= Тдр4-1, то статические ошибки выдерживания скорости при изме-
нении V3 и 03 отсутствуют.
Для реализации зависимости (3.170) в вычислительном устрой-
стве автомата тяги применяют интегратор. Сервопривод автомата
тяги при этом должен работать как усилительное звено. Это может
быть достигнуто за счет использования жесткой обратной связи по
отклонению выходного устройства сервопривода (рис. 3.95). Закон
управления такого автомата тяги имеет вид:
8 + 4V= f/V + iUv. (3.171)
Р \ Р '
Введение в закон управления интегрального члена приводит к
ухудшению качества переходных процессов. В связи с этим целе-
сообразно порцию iу сигнала, пропорционального f Д,У, иметь воз-
можно меньшей.
Поскольку в состав автоматов тяги входит двигатель, служащий
для перемещения РУД, оказывается возможным построить схемы,
не содержащие интегратора. По такой схеме построен автомат,
представленный на рис. 3.96. В этой схеме для введения в закон
члена, пропорционального интегралу от используется силовой
210
двигатель-генератор, охваченный скоростной обратной связью. За-
кон управления этого автомата имеет вид:
p\ = ivky + i^p^V + . (3.172)
Особенностью этого закона управления является необходимость
формирования сигнала производной (рА,У). Для этого в вычисли-
теле необходимо иметь дифференциатор. Сигнал скоростной обрат-
ной связи снимается с двигателя-генератора.
Сравнивая между собой рассмотренные выше схемы автоматов
тяги, следует отметить, что в целом схема (см. рис. 3.96) более
предпочтительна. Большинство отечественных автоматов тяги по-
строено по этой схеме.
Сигналы текущей скорости V, подаваемые в вычислитель авто-
мата тяги, содержат высокочастотную составляющую fy, являю-
щуюся следствием пульсаций скоростного напора из-за атмосфер-
ной турбулентности. Для уменьшения влияния этой составляющей,
как правило, сигналы отклонения A,V пропускают через , фильтр
низких частот с передаточной функцией U7 (р) =------. Однако на
Тфр 4- 1
этом фильтре происходит также запаздывание полезного сигнала,
что сказывается на динамике управления скоростью. Для компен-
сации этого запаздывания используется сигнал продольного уско-
рения, этот сигнал подается через тот же фильтр, что и сигнал
А,К В таком случае суммарный сигнал на выходе фильтра име-
ет вид:
1
(AV+AH
ijj*'
где ij — порция сигнала ускорения.
Полагая в первом приближении jx~pAzV и обеспечив ^ = Тф,
получим зависимость
ТФР + 1 тфр + 1 тфр + 1
Таким образом, на выходе фильтра выделяется неискаженный
сигнал A,V и подавленная фильтром помеха fv-
Теперь рассмотрим, как получается сигнал, пропорциональный
продольному ускорению /х. Корпус акселерометра жестко скреп-
лен с самолетом и потому акселерометр измеряет .величину проек-
ции /Х1 вектора ускорения (перегрузки) на ось Ох^ связанной си-
Рис. 3.96. Блок-схема авто-
мата тяги, реализующего за-
кон управления (3.172)
211
Рис. 3.97. К формированию
сигнала продольного уско-
рения
стемы координат. Величины jx и jXl связаны следующей прибли-
женной зависимостью:
jx ~ Л. — g siП & jXt —
где g — ускорение силы тяжести.
Следовательно, сигнал, пропорциональный продольному уско-
рению /х, можно получить алгебраическим суммированием сигна-
ла /хР снимаемого с акселерометра, с сигналом получаемым от
гировертикали (рис. 3.97). В данном случае величина g может рас-
сматриваться как порция сигнала тангажа. С учетом сказанного
закон управления типа (3.172) приводится к виду:
а=-р- L IД'V+Т* “ al 173>
тфР + 1
Структурная схема автомата тяги, имеющего закон управления
(3.173), представлена на рис. 3.98.
В предыдущем параграфе отмечалась связь между колебаниями
угла наклона траектории и колебаниями скорости. Изменения угла
наклона, которые могут рассматриваться как возмущающий фак-
тор, опережают изменения скорости. Поэтому для улучшения дина-
мики управления скоростью оказывается целесообразным ввести в
закон управления сигнал, пропорциональный изменению угла на-
клона траектории. При этом можно считать, что по отношению к
изменениям углам наклона траектории обеспечивается регулирова-
ние по возмущению. Однако, как известно, в настоящее время от-
сутствуют простые датчики таких сигналов. Заметим также, что для
рассматриваемой цели обычно оказывается допустимым вместо сиг-
нала изменения угла наклона траектории ДО использовать сигнал
изменения угла тангажа ДО*. Такой сигнал получить весьма просто,
для этого, например, можно пропустить сигнал тангажа, снимае-
Рис. 3.98. Структурная схема автомата тяги, реализующего закон управления
(3.173)
212
Сигнал на уборку РУД
Рис. 3.99. Структурная схема автомата тяги, реализующего закон управления
(3.173а)
мый с гировертикали, через изодромное звено (высокочастотный
фильтр). Структурная схема автомата тяги, использующего этот
сигнал, показана на рис. 3.99. Соответствующий ей закон управле-
ния имеет вид:
р^= Т A lA'1Z+n(/x>-g&)] + ^4?.».' (3.173а)
ТфР + 1 ЧР + 1
Автомат тяги с таким законом управления обеспечивает хоро-
шее качество переходных процессов и стабилизации заданной ско-
рости при изменении угла наклона траектории, в частности, при
переходе от горизонтального полета на снижение по глиссаде. Вве-
дение в закон управления сигнала, пропорционального изменению
угла тангажа, позволяет существенно уменьшить порции iv ni-v*
что благотворно сказывается на помехозащищенности системы и
качестве стабилизации скорости. Разумеется, сигналы, пропорцио-
нальные изменению угла тангажа, целесообразно вводить и в за-
коны управления типа (3.171). В этом случае оказывается возмож-
ным уменьшить порции iv и iy, что весьма желательно.
Применяемые в настоящее время автоматы тяги принципиально
не отличаются от рассмотренных выше. Однако в структурных схе-
мах и законах управления некоторых из них имеются небольшие
отличия.
Так, иногда в законе управления отсутствует член, пропорцио-
нальный продольному ускорению. В отдельных случаях для форми-
рования члена, пропорционального изменению угла тангажа, вмес-
то сигнала гировертикали используется сигнал датчика угловой
скорости тангажа.
Рассмотренные выше автоматы тяги в конечном счете стабили-
зируют заданную скорость. В качестве основной информации, по-
даваемой в вычислитель для формирования управляющих сигна-
лов, в них используется отклонение от заданной скорости.
В последнее время началась разработка автоматов тяги, стабили-
зирующих заданное значение угла атаки а. Такие автоматы обла-
дают рядом преимуществ. Однако их разработка сопряжена с опре-
213
деленными трудностями, связанными с необходимостью создания
точных и надежных датчиков сигналов угла атаки.
До сих пор мы говорили об управлении скоростью на этапах,
предшествующих выравниванию. На этапе выравнивания управле-
ние тягой двигателей сводится к постепенной уборке РУД. Обычно
это достигается путем замены подаваемых на сервопривод автома-
та тяги сигналов вычислителя постоянным эталонным сигналом
(см. рис. 3.99). Такое переключение сигналов осуществляется в на-
чале выравнивания, после чего автомат тяги, работая в режиме
интегрирования, убирает РУД с постоянной скоростью.
Об устройстве автоматов тяги
В зависимости от типа самолета, числа двигателей, принятой
схемы управления и резервирования и некоторых других факторов
автоматы тяги довольно значительно различаются по своему
устройству.
В качестве датчика сигнала А,У применяется либо централь
скорости и высоты, либо специальное автономное устройство. Обыч-
но скорость V3, которую необходимо стабилизировать, задается
вручную. Это значение скорости индицируется на шкале указателя
скорости с помощью подвижного индекса или на цифровом счет-
чике.
Часто автономное устройство для выдачи сигнала А,У (Представ-
ляет собой совмещенный прибор-указатель скорости со следящей
системой, ручным задатчиком и индексом заданной скорости. В тех
случаях, когда для формирования сигнала отклонения от задан-
ной скорости используется
корректор скорости, задат-
чик скорости с цифровым
указателем выполняется в
виде отдельного блока (рис.
3.100). В дублированных ав-
томатах тяги задатчик ско-
рости делается общим для
обоих каналов. Скорость У3
задается рукояткой / сразу
в оба канала и индицирует-
ся на общем цифровом счет-
чике 2. Другие элементы та-
кого задатчика дублируют-
ся. В представленном на
рис. 3.100 задатчике автома-
та тяги фирмы Смит, кроме
цифрового указателя, на
лицевой стороне прибора
Рис. 3.100. Задатчик скорости с цифровым имеются два окошечка с
указателем бленкерами 3 и 4. При ис-
214
пользовании задатчика в
двухканальном варианте они
сигнализируют о включении
муфт. В одноканальном ав-
томате тяги один бленкер
сигнализирует о включении
муфты, а другой — о вклю-
чении автомата тяги.
Сигналы Л,У, как и сиг-
налы с других датчиков, по-
даются в вычислительное
устройство, формирующее
управляющие сигналы. Оно,
как Правило, содержит В Рис. 3.101. Блок-схема автомата тяги с че-
своем составе ограничитель тырьмя сервоприводами
скорости отклонения РУД.
Часто вычислительное устройство объединяют с усилителем сер-
вопривода (усилителем мощности) в единый блок, называемый
вычислителем-усилителем.
Наиболее сложным элементом автомата тяги является его ис-
полнительный механизм. Он состоит из сервопривода (обычно, дви-
гателя-генератора), редукторов, ограничивающих и отключающих
муфт и концевых выключателей. В большинстве случаев автомат
тяги управляет одновременно несколькими двигателями. Для пере-
мещения нескольких РУД одним сервоприводом в исполнительном
механизме имеется распределительное, или раздающее, устройство.
РУД подключаются к сервоприводу через ограничивающие муфты.
Приложив соответствующее усилие к РУД, летчик может «переси-
лить» автомат тяги и установить сектор в любое положение. Этим
можно воспользоваться для корректировки и синхронизации режи-
ма работы двигателя. Электромагнитные муфты служат для отклю-
чения автомата тяги как по отдельности от каждого двигателя, так
и от всех одновременно.
Рабочий диапазон отклонения РУД автоматом тяги ограничи-
вается с помощью концевых выключателей.
У автоматов тяги, использующих один исполнительный меха-
низм, для управления несколькими двигателями, сервопривод ав-
томата оказывается удаленным от двигателей. Это обстоятельство
накладывает довольно жесткие требования к величине люфтов в
проводке управления, поскольку эти люфты могут привести к ухуд-
шению динамики управления двигателями и появлению ошибок в
выдерживании заданной скорости. С этой точки зрения выгоднее
управлять каждым двигателем с помощью отдельных сервоприво-
дов, расположенных в непосредственной близости от него. Датчи-
ки сигналов и вычислительное устройство автомата тяги могут при
этом быть общими для всех сервоприводов (рис. 3.101). Однако
такой автомат тяги более сложен, чем автомат с одним исполни-
тельным механизмом.
215
Рис. 3.102. Блок-схема исполнительного механизма со сдвоенным сервоприводом
При разработке автоматов тяги большое внимание уделяют воп-
росу обеспечения безопасности полета в случае возникновения не-
исправностей в них. Для этого, кроме муфт и концевых выключа-
телей, исполнительных механизмов, предусматривают блоки конт-
роля вычислительных устройств и сервоприводов и некоторые
другие специальные средства.
В последнее время широкое распространение получили дубли-
рованные автоматы тяги со сдвоенными сервоприводами (рис.
3.102). Каждый из двигателей-генераторов исполнительного меха-
низма подключен к отдельному вычислителю-усилителю. Один из
них с помощью электромагнитной муфты связан с РУД, другой на-
ходится ъ резерве.' Благодаря электромагнитным и фрикционным
муфтам имеется возможность отключить любой из РУД от серво-
привода или «пересилить» его.
§ 8. АВТОМАТИЧЕСКОЕ ТРИММИРОВАНИЕ
Некоторые общие сведения об усилиях на органах
управления в установившемся полете
Для управления самолетом в полете необходимо отклонять его
управляющие поверхности: элероны и рули высоты и направления.
На отклоненную поверхность действует аэродинамическая сила,
создающая относительно оси вращения (шарнира) этой поверхно-
сти момент. Под действием этого момента, получившего название
шарнирного, отклоненная поверхность стремится вернуться к по-
ложению, при котором шарнирный момент становится равным ну-
лю. Чтобы удержать управляющую поверхность в отклоненном
положении, летчику необходимо прикладывать усилие к соответ-
ствующему рычагу управления: штурвалу 1 и педалям.
1 Подразумевается, что для отклонения руля высоты необходимо приклады-
вать усилие через штурвал к колонке.
216
Рис. 3.103. Система управления рулем высоты:
1 — штурвал; 2 —колонка; 3 — стабилизатор; 4 — руль высоты; 5 — шарнир руля высоты
Рассмотрим систему управления рулем высоты (рис. 3.103). Для
отклонения руля высоты летчик прикладывает к штурвалу усилие
Рв. Величины этого усилия и шарнирного момента Л4Шв связаны
зависимостью
---Мш = -km Мш , (3.174)
в в
где — рабочая высота колонки;
бв — угол отклонения руля;
бк— угол отклонения колонки;
dxK — линейное перемещение колонки (dxK = bKd6K);
/ 1
km — коэффициент передачи ( = — • —— I.
Величина шарнирного момента определяется по формуле
Л4Шв = fTiwQSp.RbpRk , (3.175)
где тШв — безразмерный коэффициент шарнирного момента;
5Р.в — площадь руля высоты;
Ьр.ъ — хорда руля высоты;
k — коэффициент торможения скорости у оперения.
Величина и направление действия шарнирного момента опреде-
ляются величиной подъемной силы Ур.в и точкой ее приложения
относительно оси вращения руля высоты. В свою очередь величина
и точка приложения подъемной силы зависят от угла атаки гори-
зонтального оперения аг.о и угла отклонения руля высоты 6В (рис.
3.104). Поэтому коэффициент тШв является функцией угла откло-
нения руля высоты 6В и угла атаки горизонтального оперения аг.о
+ (3.176)
«
ГДе ° даТ0 ’
217
Рис. 3.104. Изменение величины и точки приложения подъемной силы руля высоты
в зависимости:
а—от угла атаки горизонтального оперения аг.о; б—угла отклонения руля
высоты 6 в
6)
т'*=------?-
ш <?8в
Величина коэффициента оказывает первостепенное влияние
на величину усилий, которые летчик должен прикладывать к штур-
валу. С помощью различных конструктивных мероприятий удается
получить приемлемые с точки зрения управляемости самолета зна-
чения этого коэффициента Ч
В установившемся полете в соответствии с уравнением (1.11)
сумма моментов, действующих в продольной плоскости вокруг оси
Ог, равна нулю. Руль высоты занимает вполне определенное для
данного режима полета положение. Угол отклонения руля высоты,
необходимый для продольной балансировки самолета в установив-
шемся полете (Mz = 0), называется балансировочным
у г л о м.
При изменении скорости и высоты полета, веса и центровки са-
молета и в некоторых других случаях продольная балансировка
самолета нарушается. Чтобы восстановить ее на новом режиме, не-
обходимо соответственно отклонить руль высоты. Для удержания
руля высоты в новом балансировочном положении летчику необ-
ходимо прикладывать к штурвалу некоторое постоянное усилие.
Иногда при изменении режима полета потребные для балансиров-
ки усилия могут достигать недопустимо больших значений. Вместе
с тем, как показывает летная практика, даже небольшие постоян-
ные усилия, длительно прикладываемые к штурвалу, сильно услож-
1 Рассмотрение ведется применительно к системам управления без необрати-
мых гидроусилителей (бустеров).
218
няют пилотирование самоле-
та и утомляют летчика. Для
снятия такого рода усилий
применяют триммеры и пе-
редвижные стабилизаторы.
Триммер представляет
собой вспомогательную по-
верхность (маленький руль),
устанавливаемую в задней
части руля высоты (рис.
3.105).
Рис. 3.105. Руль высоты и его триммер:
/ — горизонтальное оперение; 2— руль высоты;
3 — ось вращения руля высоты; 4 — ось вращения
триммера; 5 — триммер
Управление триммером осуществляется летчиком с помощью
штурвальчика, связанного с триммером механической передачей,
или с помощью специального электромеханизма, включаемого на-
жатием переключателя.
При отклонении триммера подъемная сила горизонтального опе-
рения практически не меняется, поскольку площадь триммера со-
ставляет менее 10% площади руля. Вместе с тем, благодаря тому
что триммер расположен на большом расстоянии от оси вращения
руля высоты, момент, создаваемый триммером относительно этой
оси, получается весьма значительным.
Влияние этого момента на шарнирный момент учитывается в
уравнении для коэффициента шарнирного момента
"Ч=тшГ-°а.о+ <ВТв>
г„ дтиа
где /пшв =--2-;
тв — угол отклонения триммера.
(3.177)
Подставив значение..тШ[) из (3.177) в (3.175) и учитывая (3.174),
получим зависимость для определения величины усилия на штур-
вале
- Ч «Г'Ч.о + /Пш8»+ тшВТв) Sv.Kbp.nk
Допустим, что на некотором установившемся режиме, характе-
ризуемом параметрами аг.О1 и 6В1, летчик путем отклонения трим-
мера на угол тВ1 снял усилия со штурвала или, иначе говоря, от-
балансировал самолет по усилию. Затем самолет был переведен на
другой установившийся режим с параметрами аг.О2 и 6В2. Для ба-
лансировки по усилию Рв = 0 на этом режиме триммер был откло-
нен на угол тЕ2 . Условие балансировки по усилию может быть вы-
полнено только в том случае, если тШв=0. Имея в виду, что в
первом приближении коэффициенты mj-0’ и tri^ являются
219
постоянными величинами, легко определить приращение Дтв = тв±—
— тв, как функцию приращений Даг.о = ссг.о2—«г.91 и'ДВв = оВ2 — 8В1:
_ ^щг-°^г.о + Дбв
Взяв производные по времени от обеих частей этого равенства,
можно определить необходимую для балансировки скорость откло-
нения триммера:
а 6
^аг.О | 178)
dt
Как известно [26]
аг. о = ( ~7 — D + % 4- ср — еф;
\ су '
ПТ ~ । уу) У m
В — — °б.г.о «о + ? — £- mz__________mZp
mz 1в mz mz
где <—• производная коэффициента подъемной силы по углу атаки;
D — коэффициент, характеризующий скос потока от крыла;
а0 — угол атаки, при которое cv=0; >
Ф — угол установки оперения;
бф — скос потока от фюзеляжа;
^об.г.о — коэффициент продольного момента самолета без горизонталь-
ного оперения;
mz— производная коэффициента момента;
пв— коэффициент эффективности руля высоты;
с у ° °
mzy—мера продольной устойчивости по перегрузке;
mZp— коэффициент продольного момента силы тяги.
Большинство из этих параметров являются или могут считаться
величинами постоянными. К переменным величинам относятся су,
mCy, tnz^.r.o и mZp. Они меняются при изменении скорости полета,
веса, центровки самолета и конфигурации самолета, тяги двигате-
лей и др. Поэтому необходимая скорость отклонения триммера оп-
ределяется быстротой изменения указанных характеристик.
На режимах маршрутного полета конфигурация самолета, как
правило, не меняется. Если самолет летит с постоянной скоростью,
то балансировка самолета нарушается главным образом вследствие
выгорания топлива. При этом уменьшается вес самолета и меняет-
ся его центровка, а значит, меняются величины су и mczy. Аналогич-
но обстоит дело и при сбросе груза. На легких самолетах заметное
изменение центровки и, следовательно, величины пгСу может вы-
звать переход пассажиров с одного места на другое.
На режимах взлета и посадки изменения полетного .веса самоле-
та оказываются несущественными ввиду их кратковременности.
220
Вместе с тем на этих режимах значительно меняются скорости са-
молета. Соответственно меняется величина су. Вследствие измене-
ния конфигурации самолета меняются величины mczy и mZo6.r.o.
Если ось двигателя, вдоль которой направлена его тяга, лежит вы-
ше или ниже ц. т. самолета, изменение тяги двигателей приводит к
изменению’величины tnZp. Как показывает опыт летной эксплуата-
ции, наибольшие скорости перебалансировки самолета имеют мес-
то, на режимах взлета и посадки.
Выше мы довольно подробно познакомились с продольной ба-
лансировкой самолета по усилию путем отклонения триммеров.
Уменьшение усилий на штурвале может быть также достигнуто
путем отклонения стабилизатора. В этом случае изменяются угол
атаки горизонтального оперения аг.о и угол отклонения руля высо-
ты 6В (происходит нагружение стабилизатора и разгрузка руля
высоты). В соответствии^ (3.176 и 3.177) это приводит к изменению
тШв. По ряду причин такой метод балансировки в настоящее время
применяется ограниченно.
Балансировка самолета в автоматическом полете
Управляя самолетом, летчик с помощью триммера систематиче-
ски снимает усилия в системе управления рулем высоты, не допус-
кая накопления больших усилий на штурвале. В автоматическом
же полете при включенном автопилоте шарнирный момент преодо-
левается рулевой машинкой. Поэтому летчик не ощущает усилий,
возникающих в системе управления, и не снимает их своевременно.
Это может привести в момент отключения автопилота к резкому от-
клонению руля высоты.
Когда летчик отключает автопилот, он готов к тому, что на штур-
вале могут иметься определенные усилия. Более того, летные ис-
пытания показали, что в ряде случаев при автоматическом заходе
на посадку летчик перед отключением автопилота начинает его пе-
ресиливать, отклоняя штурвал на себя. Это делается им с целью
исключить рывок руля высоты вниз. Поэтому наличие даже отно-
сительно небольших усилий на штурвале в момент отключения ав-
топилота серьезно затрудняет переход на ручное пилотирование,
что нежелательно на малой высоте при заходе на посадку.
По-иному обстоит дело, если отключение автопилота произошло
внезапно, например, вследствие срабатывания системы контроля
при возникновении неисправности в автопилоте. В таком случае
неудерживаемый рулевой машинкой автопилота руль высоты под
действием шарнирного момента отклонится в положение, при кото-
ром Рв = 0. Вследствие этого изменится угол атаки, появится при-
ращение нормальной перегрузки. Если известно, на какой угол
Дбв переместился руль в момент отключения автопилота, то по фор-
муле (1.30) можно определить приращение угла атаки Да, а по
формуле (1.34) —приращение нормальной перегрузки Дпу. Устано-
221
Рис. 3.106. Коэффициенты расхода руля высоты и усилия для изменения нормаль-
ной перегрузки
вившееся значение приращения угла атаки рассчитывается по фор-
муле (1.32). Положив р=0 в (1.34), можно получить зависимость
для расчета установившегося значения приращения перегрузки
Vbc.
^Пу=------—— Д8В.
Ж + Ьа% )
Часто для определения установившегося значения приращения
перегрузки используют коэффициент расхода руля высоты для из-
менения нормальной перегрузки 82 = -^- и коэффициент расхода
dny
усилия для изменения нормальной перегрузки =—- (рис.
^Пу
3.106). Допустим, что для удержания руля высоты в момент отклю-
чения автопилота требовалось прикладывать к штурвалу некото-
рое усилие Р. Если руль высоты не удерживался, то его перемеще-
ние в положение, при котором Р = 0, приведет к изменению пере-
грузки на величину
(3.179)
R
<*Пу
о д, д, dPn
Величина коэффициента —— для данного режима полета оп-
dny
ределяется по графику.
Чтобы избежать возникновения значительных изменений режи-
ма полета и, в частности, больших приращений нормальной пере-
грузки при возможных отключениях автопилота, летчику приходит-
ся периодически выключать автопилот и балансировать самолет.
Чем быстрее меняется режим полета, тем чаще приходится выпол-
нять эту операцию. При заходе на посадку происходит выпуск шас-
си и закрылков, значительно меняются скорость полета и тяга дви-
гателей. Все это требует частого переключения автопилота, что не
может быть осуществлено на этом и без того напряженном этапе
полета.
Таким образом, становится очевидной необходимость создания
устройств, автоматически снимающих постоянную составляющую
222
усилий в системе управления при автоматическом заходе на по-
садку.
Заметим также, что такое мероприятие позволяет уменьшить
мощность рулевой машинки автопилота. Поскольку длительно
действующие усилия будут сниматься, ее мощность должна быть
достаточной лишь для относительно кратковременных отклонений
руля высоты. В свою очередь ограничение мощности рулевой ма-
шинки автопилота облегчает ее «пересиливание», что является
очень важным фактором обеспечения безопасности полета при воз-
можных отказах автопилота.
Наконец, укажем, что отсутствие больших усилий в системе уп-
равления на участке от рулевой машинки автопилота до руля вы-
соты положительно сказывается на динамике автоматического уп-
равления самолетом, поскольку при этом уменьшается влияние уп-
ругости тросовых соединений.
До сих пор рассмотрение велось применительно к системе уп-
равления рулем высоты. Однако все наши рассуждения справедли-
вы и для систем управления элеронами и рулем направления. Вмес-
те с тем необходимо заметить, что в этих системах сколько-нибудь
значительных постоянных усилий в нормальных эксплуатационных
условиях не возникает. Они могут иметь место только в особых
случаях полета, например при отказе двигателей. Поэтому обычно
в этих системах нет особой необходимости автоматически снимать
усилия, а для своевременного выявления и снятия усилий устанав-
ливают указатели (индикаторы) усилий.
Системы автоматического триммирования
Устройства, служащие для автоматического снятия усилий в сис-
темах управления рулями и элеронами, получили название систем
автоматического триммирования, или автоматов триммиро-
вания. Такое название объясняется тем, что для снятия усилий
в настоящее время обычно используются триммеры. Принципиаль-
но для этих целей можно использовать также передвижной стаби-
лизатор. Однако такой метод более затруднителен для практиче-
ской реализации.
Как было показано в предыдущем параграфе, существует ряд
причин, вызывающих перебалансировку самолета. Поэтому по-
строение системы автоматического триммирования по принципу
компенсации возмущений оказывается весьма сложным. Существен-
но проще построить систему автоматического триммирования по
принципу компенсации отклонения. В таком случае нужно лишь из-
мерять и компенсировать усилия в системе управления независимо
от породивших их причин.
На рис. 3.1-07 представлена блок-схема автомата триммирова-
ния, работающего по принципу измерения и компенсации усилия в
системе управления. В одну из тяг системы управления вмонтиро-
ван динамометрический датчик, с выхода которого снимается элек-
223
Рис. 3.107. Блок-схема си-
стемы автоматического
триммирования с дина-
мометрическим датчиком:
/ — штурвал; 2 — руль высо-
ты; 3 — триммер
трический сигнал, пропорциональный усилию, воспринимаемому
датчиком. Этот сигнал поступает в управляющее устройство. Отсю-
да после преобразования, усиления и прохождения цепи задержки
он подается на электромеханизм триммера — тр им мерную
машинку. Основной элемент цепи задержки — реле времени,
которое срабатывает через несколько секунд после появления сиг-
нала. Ток к электромеханизму триммера поступает только в том
случае, когда продолжительность действия усилия в тяге больше
времени задержки. Благодаря этому автомат триммирования сни-
мает только длительно действующие усилия, вызванные перебалан-
сировкой самолета, и не реагирует на кратковременные являющиеся
результатом управляющих отклонений руля высоты.
Вообще говоря, в системе автоматического триммирования
можно обойтись без цепи задержки, играющей в данном случае
роль фильтра низких частот. Дело в том, что таким фильтром яв-
ляется сам электромеханизм триммера. Если с помощью редуктора
сделать скорость отклонения триммера небольшой, то при кратко-
временных нагрузках в системе управления триммер не будет за-
метно отклоняться. Однако при отсутствии специальной цепи за-
держки электромеханизм отрабатывает каждое сколько-нибудь зна-
чительное колебание усилий в системе управления, непрерывно
работая в режиме реверса. Очевидно, что работа электромеханизма
в таком режиме нежелательна. Избежать этого можно не только
путем установки цепи задержки, но и подбором соответствующего
порога чувствительности усилителя, питающего электромеханизм
триммера. Однако в этом случае в системе остаются некоторые
усилия, величина которых определяется порогом чувствительности
усилителя.
При выборе времени задержки приходится сталкиваться с про-
тиворечивыми требованиями. С одной стороны, желательно увели-
чивать это время, поскольку облегчается работа системы автомати-
ческого триммирования, особенно при полете в турбулентной атмо-
сфере. С другой стороны, увеличение времени задержки приводит
к накапливанию усилий в системе управления. Это может, во-пер-
вых, привести к наличию усилий на штурвале при отключении ав-
топилота на переходных режимах и, во-вторых, к ухудшению дина-
мики системы управления триммером. Задавшись допустимым ос-
таточным усилием на штурвале и зная скорость нарастания усилий
в системе управления, можно рассчитать максимально допустимое
224
Рис. 3.108. Блок-схема
системы автоматическо-
го триммирования без
динамометрического дат-
чика:
1 — штурвал; 2 — руль высо-
ты; 3 — триммер
время задержки. Обычно в системах автоматического триммирова-
ния, устанавливаемых на пассажирские самолеты, оно не превы-
шает 5—6 сек.
Скорость отклонения триммера желательно делать возможно
меньшей. Однако она должна быть достаточной для того, чтобы
своевременно снимать усилия, появляющиеся в системе управле-
ния. Учитывая (3.178), скорость отклонения триммера
Тв
Д»шГ-° •
т г‘°тах Тт
/ишв тшв
втах
На режимах захода на посадку потребные скорости отклоне-
ния триммера обычно не превышают нескольких десятых градуса в
секунду.
Наряду с автоматами триммирования, построенными по рас-
смотренной схеме, широкое распространение нашли автоматы, не
имеющие динамометрического датчика (рис. 3.108). В таком слу-
чае сигнал, пропорциональный усилию в системе управления, бе-
рется с выхода усилителя рулевой машинки автопилота.
В автоматическом полете шарнирный момент уравновешивается
моментом рулевой машинки. При этом направление и величина
момента рулевой машинки находятся в определенной функциональ-
ной зависимости от знака и величины тока на выходе ее усилителя.
Следовательно, знак и величина выходного тока усилителя нахо-
дятся во взаимосвязи с усилием в системе управления. Поэтому
выходной сигнал усилителя в определенной мере является аналогом
сигнала динамометрического датчика усилий.
Очевидным достоинством этой системы автоматического трим-
мирования является отсутствие необходимости установки в систе-
му управления рулем высоты динамометрического датчика усилий.
Вместе с тем подобные системы предъявляют дополнительные тре-
бования к характеристикам выходного сигнала усилителя рулевых
машинок автопилота, которые не всегда могут быть удовлетворены.
Очевидно, что автомат триммирования такого типа может работать
только в комплексе с автопилотом.
Для сравнения укажем, что автоматы триммирования, постро-
енные по первой схеме (см. рис. 3.107), могут работать автономно
от автопилота. В частности, они могут быть использованы для так
! 8—3261
225
Рис. 3.109. Блок-схе-
ма системы автома-
тического и полуавто-
матического тримми-
рования
ПолуаЬтомот
называемого полуавтоматического триммирования. В этом случае
в цепи между управляющим устройством и электромеханизмом
триммера устанавливают переключатель режима работы «Ав-
томат— полуавтомат» (рис. 3.109). Когда переключатель находит-
ся в положении «Автомат», система работает так же, как система,
изображенная на рис. 3.107. В положении «Полуавтомат» питание
на электромеханизм триммера поступает только при нажатии
кнопки, устанавливаемой на штурвале. Режим полуавтоматическо-
го триммирования предназначен для использования при выключен-
ном автопилоте. Управляя самолетом вручную, летчик нажимает
на кнопку, когда возникает необходимость снять накопившееся
усилие в системе управления. После снятия усилия кнопку необхо-
димо отпустить. Если этого не сделать, то система работает в режи-
ме автоматического триммирования. Это может привести к суще-
ственному, часто к недопустимому изменению характеристик ус-
тойчивости и управляемости самолета. При нормальной работе сис-
темы автоматического триммирования постоянно действующие
усилия в системе управления не должны превышать некоторого не-
большого порогового значения. Наличие в системе управления
больших усилий, действующих продолжительнее времени задерж-
ки, свидетельствует о неисправности автомата триммирования или
автопилота. Этот факт может быть использован для сигнализации
неисправности и отключения автомата триммирования и автопило-
та. Датчик сигнала неисправности может быть выполнен на базе
реле времени. Величина задержки этого реле должна превышать
время задержки сигнала в цепи электромеханизма автомата трим-
мирования.
Такой способ контроля работы систем автоматического тримми-
рования в основном применяется в системах, не имеющих динамо-
метрического датчика усилий. В системе автоматического тримми-
рования с динамометрическим датчиком для контроля исправности
используется специальное контактное устройство, имеющееся в дат-
чике. Такое контактное устройство имеется, например, в датчике
усилий типа ДДУ, используемом в автомате триммирова1ния типа
АТ-2, который входит в состав бортовой системы автоматического
управления БСУ-ЗП. Оно представляет собой две пары контактов,
которые размыкаются при действии на датчик усилий определенной
величины, так называемых предельных усилий. При сжатии дат-
чика размыкается одна пара контактов, при растяжении — другая.
Сопоставляя знак сигнала контактного устройства со знаком сиг-
226
нала, снимаемого с индукцион-
ного датчика ДДУ, оказывает-
ся возможным построить логи-
гическую систему контроля ра-
боты автомата триммирования.
Для информации летчика
об усилиях в системе управле-
ния служат указатели усилий
(индикаторы нагрузок). На ря-
де самолетов их устанавлива-
ют не только в канал высоты,
но и в каналы крена и направ- Рис 3 1Ш Индикатор
нагрузки ИН-3
ления. На рис. 3.110 показан
комбинированный индикатор
нагрузок ИН-3, входящий в состав бортовой системы САУ-1Т.
Подвижный индекс указателя усилий в системе руля направле-
ния Н выполнен в виде вертикальной риски. При наличии усилий
он отклоняется влево или вправо в зависимости от знака усилия.
Индекс указателя усилий в системе управления элеронами обоз-
начен буквой К (крен). При наличии усилий в этой системе индекс
накреняется, поворачиваясь вокруг центра. Направление крена ин-
декса также зависит от знака усилия. Подвижный индекс указате-
ля усилий в системе управления рулем высоты обозначен буквой Т
(тангаж). Он может отклоняться вверх и вниз. В некоторых авто-
матах триммирования вместо указателя усилий используют две сиг-
нальные лампы. Когда усилие в системе управления превышает не-
который предел, загорается одна из ламп в зависимости от знака
усилия.
ГЛАВА 4
ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ АВТОМАТИЧЕСКОГО
ПОЛЕТА
§ 1. БЕЗОПАСНОСТЬ АВТОМАТИЧЕСКОГО ПОЛЕТА
Понятие о критической ситуации. Условия обеспечения
безопасности автоматического полета
Современные автопилоты (бортовые системы автоматического
управления полетом) обеспечивают управление самолетом в боль-
шом диапазоне режимов полета от набора высоты до захода на по-
садку. Такое широкое использование автопилотов предъявляет очень
высокие требования к их надежности. Удовлетворение этих требо-
ваний достигается путем применения высоконадежных схем, эле-
ментов и конструкций, высоким уровнем производства и контроля,
систематическим техническим обслуживанием во время эксплуата-
8* 227
Ции. Однако создание абсолютно надежных автопилотов принци-
пиально невозможно. В связи с этим возникает необходимость рас-
смотреть вопрос о последствиях возможных отказов автопилотов, а
также проанализировать методы повышения безопасности полета
при появлении наиболее опасных отказов автопилота.
Естественно, что наиболее опасными являются такие отказы,
которые вызывают отклонение рулевыми машинками автопилотов
управляющих поверхностей самолета (руля высоты, элеронов, руля
направления), поскольку при этом может возникнуть критическая
(опасная) ситуация. Под критической ситуацией понимается
выход самолета на недопустимые углы атаки, большие перегрузки
пу и числа М, возникновение значительных кренов, сильного сколь-
жения, нарушение нормальной работы двигателей и т. п. Для ре-
жима захода на посадку также недопустимы отказы, приводящие
к значительной потере высоты.
В случае возникновения неисправности в автопилоте, приводя-
щей к отклонению управляющих поверхностей, летчик, разумеется,
выключит или пересилит (а потом и выключит) неисправный авто-
пилот и начнет выводить самолет в режим нормального полета,
однако это потребует некоторого времени. Назовем время, необхо-
димое летчику для выявления факта неисправности и вывода са-
молета в исходное или другое неопасное положение, потребным
временем Тп. Оно может быть условно разбито на три составляю-
щие Ч
1. Время восприятия отказа tB. Оно уходит у летчика на то,
чтобы заметить появление отказа автопилота (например, резкого
отклонения органов управления) или отклонений от исходного ре-
жима полета (например, изменений высоты или скорости полета,
перегрузки; появлений или изменений крена, скольжения и др.).
Чем значительнее эти отклонения и чем быстрее они нарастают,
тем скорее летчик их замечает. Опыт показывает, что наиболее
быстро летчик выявляет отказы, приводящие к изменениям пере-
грузки. Вместе с тем в летной практике были зарегистрированы
случаи отказов автопилота, когда параметры движения самолета
изменялись весьма медленно. В этих случаях летчик замечал не-
нормальность протекания полета, когда эти параметры уже суще-
ственно отличались от исходных (например, крен самолета превы-
шал 40—50°).
Если появление отказа в автопилоте сопровождается выдачей
сигнала, то tB— время восприятия, сигнала. Очевидно, что время
восприятия сигнала тем меньше, чем более эффективны сигналь-
ные средства.
Время восприятия появления отказа и, в частности, время вос-
приятия сигналов зависит от психофизиологического состояния эки-
пажа, степени его загрузки на данном этапе полета. С одной сторо-
1 Подробно по этим вопросам см. Бойко Е. И. Время реакции человека.
М., «Медицина», 1964.
228
ны, во время маршрутного полета, длящегося несколько часов,
летчик не может постоянно также внимательно следить за парамет-
рами движения самолета, как он это делает во время относительно
коротких этапов взлета и посадки. С другой стороны, при взлете и
посадке общая нагрузка экипажа резко увеличивается. В целом на
этапах взлета и посадки время восприятия меньше, чем на этапе
маршрутного полета.
2. Время осмысливания, включая время принятия решения, t0.
Оно зависит от объема и характера информации, получаемой летчи-
ком для осмысливания. Если проявления последствий отказа харак-
терны, то время осмысливания уменьшается. То же происходит, ес-
ли экипаж получил соответствующую тренировку по выявлению и
устранению отказов. Применение сигнализации ускоряет процесс
осмысливания и выработки решения. В ряде автопилотов имеется
сигнализация, указывающая, какой элемент отказал, например вы-
дается сигнал «Отказ ЦГВ», «Отказ продольного канала». В этом
случае летчик не получает информацию о характере нарушения ис-
ходных параметров движения. Такую задачу помогает решать сиг-
нализация, указывающая на достижение самолетом опасных режи-
мов («Крен велик», «Скорость велика» и др.).
Заметим, что подобная сигнализация полезна и при ручном
пилотировании. Весьма целесообразно для уменьшения времени t0
выдавать летчику сигнал-команду, указывающую, какие действия
он должен предпринять в данной ситуации.
3. Время активных действий /д. Оно включает также время воз-
вращения самолета в исходное или допустимое состояние. Даже
после начала активных действий летчика самолет может еще неко-
торое время продолжать уходить от исходного режима полета. Так,
имея в момент вмешательства летчика некоторую вертикальную
скорость снижения, самолет будет продолжать терять высоту, хотя
летчик уже отклонил руль высоты вверх, стремясь восстановить
исходный горизонтальный режим полета. Очевидно, что время ак-
тивных действий зависит от тренированности экипажа по устране-
нию создавшейся аварийной ситуации. Следует иметь в виду, что
в ряде случаев при выводе самолета из такой ситуации летчик не
должен допускать больших отклонений органов управления. Напри-
мер, если вследствие отказа в продольном канале автопилота са-
молет вышел на недопустимо большое число М, то, отклонив руль
высоты на большой угол вверх, летчик рискует вывести самолет на
недопустимо большой угол атаки.
Итак, 7’П=/В-НО4Л.
Часто под потребным временем понимают промежуток времени
от начала заметного проявления отказа автопилота или нарушения
исходного режима полета до начала активных действий экипажа.
Будем такое потребное время обозначать через Тп*. Тогда
^п = ^+^о-
229
Время Тп зависит от большого числа факторов и может варьи-
роваться в широком диапазоне. В настоящее время отсутствуют на-
дежные методы расчета потребного времени, поэтому оно опреде-
ляется экспериментальным путем для каждого расчетного случая.
В отношении времени Гп* принято считать, что для маршрутного
полета оно составляет 5 сек, а для взлета и посадки — 3 сек (иногда
даже меньше). Обозначим через Гр время, которым располагает
экипаж с момента появления заметных признаков отказа автопи-
лота до момента возникновения критической ситуации.
Располагаемое время определяется характером отказа автопи-
лота и зависит от устойчивости и управляемости самолета. В связи
с последним оно оказывается сильно зависимым от режима полета,
на котором произошел отказ.
Очевидно, что условие обеспечения безопасности полета при
возможных отказах автопилота может быть записано в виде
(4.1)
В тех случаях, когда оказывается, что это условие не удовлет-
воряется, принимают специальные меры по обеспечению безопас-
ности полета при отказах автопилота. Суть их сводится в конечном
итоге к удовлетворению соотношения (4.1) за счет уменьшения
времени Гп и увеличения времени Тр.
Рассмотренный принцип оценки безопасности полета при отка-
зах в автопилотах может быть распространен и на командные пи-
лотажные системы. Как уже указывалось ранее, при управлении по
командному пилотажному прибору летчик стремится удержать
командные стрелки в нулевом положении. При этом предполагает-
ся, что летчик подобно автопилоту выполняет «готовые» команды на
создание крена и тангажа, не стремясь понять, правильно ли они
сформированы. Поэтому, получив неправильную команду от неис-
правной командной пилотажной системы, летчик будет выполнять
ее (разумеется, если она не является очевидно неправильной) до
тех пор, пока не заметит ненормальности протекания полета.
Пилотируя по командному прибору, летчик вынужден уделять
ему большое внимание, что снижает его возможности наблюдать за
показаниями других приборов. Заметим, что в автоматическом по-
лете летчик, освобожденный от необходимости непосредственно
управлять самолетом, имеет больше возможности для наблюдения
и анализа показаний ряда приборов. Поэтому во многих случаях
при возникновении неисправности в командной пилотажной системе
время /в при ручном управлении больше, чем при автоматическом
полете, когда командные стрелки удерживаются в нулевом поло-
жении автопилотом.
Время активных действий /д при ручном пилотировании оказы-
вается меньшим, чем в автоматическом полете, поскольку в пер-
вом случае летчик включен в контур управления самолетом.
До сих пор возникновение критической ситуации мы связыва-
ли с выходом самолета на опасные эволюции вследствие отклоне-
230
ния управляющих поверхностей самолета неисправным автопило-
том. Отказы автопилота такого типа часто называют активными.
Активные отказы, сопровождающиеся большими и быстрыми от-
клонениями управляющих поверхностей самолета, получили назва-
ние быстрых, или резких, отказов. Однако на этапах захода на по-
садку и посадки критическая ситуация может возникнуть и при
появлении других неисправностей.
Допустим, что в бортовой системе автоматического управления
произошел отказ вычислителя, формирующего траекторные сигна-
лы. Например, резко изменилось передаточное число по сигналу
производной отклонения от заданной траектории. В таком случае
самолет не выйдет на опасную эволюцию. Вместе с тем директор-
ный и автоматический заход на посадку могут стать невозможны-
ми. Если при этом метеорологические условия на аэродроме тако-
вы, что без использования средств автоматики точный заход на по-
садку не гарантирован, а запас топлива не позволяет уйти на
запасной аэродром, то возникает критическая ситуация.
Отказы такого типа часто называют пассивными, или мед-
ленными, отказами.
Особенности проблемы безопасности посадки в сложных
метеорологических условиях
Рассматривая проблему безопасности посадки в сложных метео-
рологических условиях, необходимо анализировать не только по-
следствия отказов бортовой аппаратуры, но и наземных курсоглис-
садных радиомаяков. Даже если отказы радиомаяков не сопровож-
даются резкими эволюциями самолета, продолжение нормального
захода на посадку становится невозможным. В подавляющем боль-
шинстве последствия отказов радиомаяков подобны последствиям
медленных отказов в бортовой аппаратуре.
Остановимся более подробно на вопросе безопасности посадки
в сложных метеорологических условиях при отказах в комплексе
наземных и бортовых технических средств. Для краткости будем
называть этот комплекс посадочными средствами или посадочным
комплексом.
Упростим рассматриваемый вопрос, положив, что запас топли-
ва на борту самолета во всех случаях достаточен для перелета на
запасной аэродром с простыми метеорологическими условиями.
Допустим также, что при любых видах отказов располагаемое вре-
мя на парирование отказа больше потребного. В таком случае
критическая ситуация может сложиться лишь при условии, что от-
каз посадочных средств, сопровождающийся большими отклонения-
ми самолета от посадочной траектории, возник на высоте, меньшей
минимально допустимой высоты ухода самолета на второй круг
^у.в.к-
Минимальная высота ухода самолета на второй круг является
одной из важных характеристик самолета в целом и определяется
231
характеристиками самолета и силовых установок на скоростях пред-
посадочного планирования. У многих самолетов эта высота не пре-
вышает высоты начала посадочной дистанции (~15 м).
Теперь познакомимся еще с одним важным понятием: высота
принятия решения. Высотой принятия решения //п.р на-
зывается высота, на которой должен быть начат маневр ухода на
второй круг, если до этой высоты не установлен надежный контакт
с огнями светооборудования аэродрома или другими ориентирами
по курсу посадки, позволяющий выполнить безопасную посадку са-
молета, или если отклонения самолета от посадочной траектории
превышают допустимые значения.
Таким образом, во всех случаях
^п.р ^у.в.к*
Выполнение этого соотношения является гарантией того, что
даже при недопустимо больших отклонениях самолета от посадоч-
ной траектории критическая ситуация не возникнет. Следователь-
но, безопасность захода на посадку при отказах посадочных средств
считается обеспеченной, если летчик располагает достаточным
временем для выявления факта неисправности и вывода самолета
в неопасное положение или ухода на второй круг.
Недопустимо большие отклонения самолета от посадочной тра-
ектории могут явиться следствием двух родов причин.
1. Отказ посадочных средств из-за внезапного выхода из строя
(повреждения) элементов этих средств, что может быть следстви-
ем пробоя конденсаторов, нарушения контактов реле, коротких за-
мыканий, поломки механических узлов и т. п. В этих случаях поса-
дочные средства могут иметь грубые ошибки. Если не устранить
причины появления грубой ошибки, например, путем замены по-
врежденого блока, узла или элемента, то аппаратура будет негод-
ной и при повторных заходах отклонения самолета от посадочной
траектории окажутся настолько большими, что возможность после-
дующей посадки не будет обеспечена.
2. Неблагоприятное сочетание ошибок отдельных элементов
посадочного комплекса. При правильном назначении допусков на
ошибки отдельных элементов предполагается, что эти ошибки будут
складываться случайным образом. Как правило, заданная точность
комплекса в целом обеспечивается.
Однако в некоторых сочетаниях ошибки отдельных элементов
могут привести к появлению недопустимо больших ошибок ком-
плекса в целом. Если эти сочетания становятся устойчивыми, то при
повторных заходах на посадку отклонения самолета от посадочной
траектории будут оставаться недопустимо большими и системати-
ческими. Этот случай по своим результатам совпадает со случаем
отказа посадочных средств, приводящего к грубым ошибкам. Если
сочетания ошибок отдельных элементов, приводящие к недопусти-
мым отклонениям самолета, не являются устойчивыми, то при пов-
торных заходах сочетания ошибок не будут приводить к появлению
232
таких отклонений. На характер сочетаний ошибок сильное влияние
оказывают ветровые и турбулентные возмущения, действующие в
боковых и продольной плоскостях самолета.
Вероятность возникновения недопустимых отклонений зависит
от точности элементов посадочного комплекса. Чем меньше допус-
тимые вариации ошибок отдельных элементов, тем меньше вероят-
ность возникновения сочетаний, приводящих к недопустимым откло-
нениям самолета.
Обозначим ра как вероятность исправной работы аппаратуры, а
рт — вероятность точного выхода на посадочную траекторию (от-
сутствие больших отклонений от нее) при исправной работе аппа-
ратуры посадочного комплекса. Тогда ^а=1—Ра — вероятность воз-
никновения недопустимых отклонений самолета по причинам пер-
вого рода (отказ аппаратуры), а <7т= 1—Рт — вероятность их воз-
никновения по причинам второго рода.
Вероятность успешного захода на посадку Р(3), т. е. вероят-
ность выхода самолета на посадочную траекторию с отклонения-
ми, обеспечивающими последующую надежную посадку самолета,
равна
Р(3) = рарт.
Вероятность больших отклонений самолета от посадочной траек-
тории, т. е. вероятность неудачных заходов Q(3), требующих ухода
самолета на второй круг, равна
Q(3)=1-P(3) = ^ + 7t-^. (4.2)
В настоящее время в нашей стране принято считать допусти-
мым, чтобы уходы на второй круг в сложных метеорологических ус-
ловиях по причинам, связанным с работой посадочных средств, про-
исходили не чаще одного раза на тридцать заходов: Q(3) ^7зо. Если,
например, положить <7а~?т, то, не учитывая произведения как
величину второго порядка малости, можно определить частные тре-
бования к надежности и точности посадочных средств. В рассмат-
риваемом случае они будут ?а« 7гС(3) и <7т~ 7гФ(3) =^7бо.
Очевидно, что аналогичный подход возможен для определения
вероятности успешных посадок
^(/7) = а,/>т,
где ра — вероятность исправной работы посадочных средств, т. е. отсутствия
отказов (быстрых и медленных), приводящих к критическим ситуациям;
рт — вероятность точного выдерживания посадочной траектории при исправ-
ной работе посадочных средств.
Соответственно Q (77) = 1—Р (77) — вероятность неудачной по-
садки. Под неудачной посадкой будем понимать посадку,
оканчивающуюся катастрофой. Вообще говоря, под неудачной по-
садкой можно подразумевать посадку, заканчивающуюся аварией.
Можно также неудачной посадкой считать такую, при которой са-
233
молет, хотя и не терпит аварии, но при приземлении или после него
оказывается за пределами ВПП. Такие толкования неудачной по-
садки представляются менее определенными, хотя отсутствие в них
понятия катастрофа делает их в определенном смысле более при-
влекательными.
Из сказанного становится очевидным, что обоснование допусти-
мого уровня Р(П) или Q(/7) связано с трудностями не только эко-
номического и технического, но и морально-этического порядка
(оказывается необходимым заранее планировать человеческие
жертвы). В настоящее время наиболее четко сформулированы
требования к Q (/7) английским авиационным регистром.
В результате обработки 'Статистических данных за 10 лет ре-
гистром установлено, что катастрофы при посадке имеют вероят-
ность Q(/7)^0,65* 10~6. Рассмотрев требования к автоматической
посадке, английский авиационный регистр предложил, чтобы
Q (77) 1 • 10-7 или Р (П) > 1 - 1 • 107.
Достижение такого уровня означает уменьшение вероятности
летных происшествий при посадке более чем в 6 раз по 'Сравне-
нию с существующим уровнем при посадке самолетов вручную.
Однако, принимая во внимание рост интенсивности пассажирских
воздушных перевозок и числа эксплуатируемых самолетов, абсо-
лютная величина этих происшествий снизится в меньшей мере. Поэ-
тому желательно стремиться к еще меньшей величине Q(J7). По
мнению английского авиационного регистра, следует стремиться к
Q(/7)^1-1O-8.
Каковы требования к точности и надежности посадочных
средств, если Q (77)^1 • 10~7? Очевидно, что
Q (П) = 1 — Р (П) = qa -|- qJ - qaq, ~ qa + q,.
Отсюда следует (для рассматриваемого случая):
^a^72Q(77)<0,5. IO"7 и ^t^1/2Q(77)<0,5.10-\
Как известно, вероятность отказа является функцией времени ра-
боты устройства ^времени выполнения задания) /р и средней нара-
ботки на отказ (среднего времени между отказами) То. Следова-
тельно, при экспоненциальном законе распределения вероятности
возникновения отказов, когда /Р<^ГО
<7а = 4" • (4-3)
Применительно к автоматической посадке время /р представляет
собой время между моментом принятия окончательного решения об
автоматической посадке и моментом окончания маневра посадки.
Разумеется, решение о посадке должно быть принято на высоте^ не
меньшей Т/у.в.к- Более того, по мнению широкого круга авиацион-
ных специалистов, оно должно приниматься на высотах не менее
30—45 м. Исходя из этого, часто для ориентировочных расчетов
234
принимают /р=30 сек. Как показывает элементарный расчет, для
обеспечения заданного уровня ^а^0,5-10_7 при /р = 30 сек (в мо-
мент принятия решения о посадке все посадочные средства исправ-
ны) необходимо, чтобы средняя наработка на отказ Т,о> 165 000 ч.
Поскольку такая наработка на отказ не может быть получена в
нерезервированной аппаратуре, то вопросам резервирования поса-
дочных средств и их элементов уделяется очень большое внимание.
В дальнейшем вопросы надежности посадочных средств мы бу-
дем рассматривать применительно к бортовой аппаратуре.
Следует добавить, что для пассажирских перевозок важное зна-
чение имеют вопросы комфорта. С этой точки зрения крайне жела-
тельно, чтобы отказы автопилота не приводили к ситуациям, при
которых возможно появление значительных перегрузок.
§ 2. ОБЩИЕ СВЕДЕНИЯ О СРЕДСТВАХ ОБЕСПЕЧЕНИЯ
БЕЗОПАСНОСТИ АВТОМАТИЧЕСКОГО ПОЛЕТА
Хотя автопилоты в современном их понимании используются на
самолетах уже более полувека, широкая разработка и применение
специальных средств обеспечения безопасности полета при их отка-
зах начались около двадцати лет тому назад. К этому времени на
самолетах преимущественное распространение получили электри-
ческие и электрогидравлические автопилоты (БСАУ). Поэтому
простейшей мерой обеспечения безопасности полета являлась ус-
тановка кнопок отключения автопилота на штурвалах. До этого
выключение автопилота осуществлялось выключателями на пульте
управления или электрощитках, а потому требовало сравнительно
более длительного времени.
Несколько позднее для обеспечения безопасности полета при
отказах автопилота широкое распространение получили разнооб-
разные устройства, ограничивающие углы отклонений рулей и
элеронов при перемещении их рулевыми машинками. Благодаря
этому ограничивается скорость отклонения самолета от исходного
режима и увеличивается время, которым располагает летчик для
выявления факта отказа и принятия мер по его нейтрализации.
Вместе с тем внешние проявления отказа могут стать менее замет-
ными, что может привести к увеличению времени восприятия /в-
В ряде случаев ограничение углов отклонения управляющих по-
верхностей приводит к сужению области режимов полета, на кото-
рых может использоваться автопилот. Чтобы избежать этого и од-
новременно сохранить высокую степень безопасности полета при
возникновении неисправностей в автопилоте, стали применять спе-
циальные устройства, отключающие неисправный автопилот. Эти
устройства получили название блоков контроля (блоков безопас-
ности, систем контроля и т. п.). Блоки контроля бывают трех типов:
реагирующие на достижение определенного значения контролируе-
мого параметра;, контролирующие сигналы в схеме автопилота;
235
использующие специальные тест-сигналы. В ряде случаев исполь-
зуются комбинированные блоки контроля.
Применение блоков контроля позволяет уменьшить потребное
Тп за счет сокращения времени восприятия отказа tB и времени
осмысливания t0. Чаще всего блок контроля предназначается для
отключения неисправного канала автопилота с одновременной вы-
дачей светового или звукового сигналов. Однако в ряде случаев
оказывается достаточным сигнализировать экипажу о возникнове-
нии неисправности, не отключая автопилот. Так имеет смысл посту-
пать при контроле отказов, приводящих к относительно медленным
отклонениям от исходного режима полета, например, к медленным
отклонениям от заданной траектории полета.
Кроме того, при использовании блоков контроля увеличивается
располагаемое время Тр, поскольку вмешательство летчика в уп-
равление происходит при меньших отклонениях от исходного режи-
ма, чем это было бы при отсутствии таких блоков.
В последние годы разработаны системы автоматического управ-
ления, в составе которых имеются два комплекта датчиков инфор-
мации и вычислительных устройств. При этом появилась возмож-
ность сравнивать между собой сигналы однотипных элементов.
Превышение величиной разности сигналов некоторого значения
свидетельствует о наличии неисправности одного из элементов и
необходимости отключения автопилота, поскольку в сдвоенной си-
стеме не представляется возможным определить, в каком из двух
элементов произошел отказ.
Применение трехканальных и двухканальных контролируемых
систем позволяет при возникновении отказа выявить отказавший
канал и отключить его. При появлении второго отказа происходит
полное отключение системы.
В последующих параграфах этой главы подробно рассматрива-
ются средства обеспечения безопасности, применяемые в автопило-
тах и бортовых системах автоматического управления, используе-
мых для захода на посадку.
§ 3. КНОПКИ И УСТРОЙСТВА ДЛЯ ОТКЛЮЧЕНИЯ АВТОПИЛОТА
Размещение кнопок отключения автопилота на штурвале поз-
воляет уменьшить потребное время Тп. Поэтому такие кнопки часто
называют кнопками быстрого отключения. В электрических авто-
пилотах при нажатии на кнопку происходит отсоединение рулевых
машинок от проводки управления рулями и элеронами (обычно
этой кнопкой отключаются электромагнитные муфты рулевых ма-
шинок). В электрогидравлических автопилотах нажатие кнопки
отключения приводит к закольцовыванию гидравлической рулевой
машинки и освобождению проводки управления.
К кнопкам отключения и их размещению предъявляются опре-
деленные требования. Например, по форме кнопка отключения ав-
топилота должна отличаться от других кнопок, также устанавлива-
236
емых на штурвал (кнопки включения ра-
диостанции, СПУ и др.). На многих са-
молетах управление двигателями осуще-
ствляется летчиками. Чаще всего при
этом РУД расположены у борта кабины.
В таком случае при заходе на посадку
левая рука левого летчика и правая ру-
ка правого летчика заняты управлением
двигателями. Отсюда вытекает необходи-
мость расположить кнопки отключения
на правой стороне обода (спице) левого
штурвала и на левой — правого штурва-
ла. На некоторых самолетах кнопка от-
ключения автопилота вмонтирована . в
обод штурвала таким образом, что, схва-
тывая штурвал для управления самоле-
том вручную, летчик нажимает на кноп-
ку и тем самым отключает автопилот.
Такое расположение кнопки отключения
весьма целесообразно для уменьшения
времени Тп, поскольку при возникнове-
тая пружина с контактом;
3 — неподвижные контакты:
I, II — клеммы
первым рефлекторным
нии неисправности в автопилоте, связан-
ной с перемещением органа управления,
движением является попытка управлять самолетом вручную, пере-
силивая автопилот.
Дальнейшим развитием этого мероприятия является применение
динамометрических устройств для отключения автопилота. Такие
элементы, встроенные в самолетные системы управления (штур-
вал, колонку, педали, тяги), отключают автопилот, когда летчик
прикладывает усилия к органам управления. Тот же эффект может
быть достигнут и некоторыми другими способами.
Принципиально возможны, хотя и очень редко, неисправности
и разрушения выходных устройств рулевых машинок, приводящие
к заклиниванию тяг и тросов, связывающих рулевую машинку с
основной системой управления самолетом. В этом случае для обес-
печения управления самолетом вручную необходимо иметь возмож-
ность отъединить рулевую машинку автопилота от основной систе-
мы управления. Это достигается установкой после рулевой машин-
ки расцепляющих устройств различных типов. Некоторые из этих
устройств управляются дистанционно. Например, при нажатии лет-
чиком специальной кнопки срабатывает пиропатрон, срезающий
соединительную чеку на выходном элементе рулевой машинки. В
некоторых расцепляющих устройствах применяется тросовое управ-
ление. В этом случае в кабине имеется специальная рукоятка, со-
единенная с расцепляющим устройством при помощи троса. Такая
система обеспечивает очень высокую степень надежности срабаты-
вания, однако обладает большой сложностью.
237
§ 4. ОГРАНИЧЕНИЕ ОТКЛОНЕНИЙ УПРАВЛЯЮЩИХ
ПОВЕРХНОСТЕЙ
Концевые выключатели
В простейшем случае концевой выключатель состоит из кулачка
и управляемых им контактных устройств (рис. 4.1). Кулачок свя-
зан с выходным валом рулевой машинки. Поэтому при отклонении
руля (элеронов) на определенный угол кулачок размыкает контакт
Ki или К2 в зависимости от направления движения руля, обесточи-
вая цепь к клемме I или II рулевой машинки. Вследствие этого
дальнейшее отклонение руля прекращается. Поскольку руль оста-
ется в отклоненном положении, то самолет уходит от исходного ре-
жима со скоростью, определяемой величиной отклонения руля и
характеристиками самолета. Так будет продолжаться, пока через
замкнутую цепь на рулевую машинку не поступит сигнал, застав-
ляющий отклонять руль в обратную сторону, или пока летчик не
выключит автопилот.
Рассмотрим рис. 4.2, на котором представлена зависимость угла
отклонения руля «6 (из балансировочного положения 6 = 0) от сиг-
нала ср на входе вычислителя автопилота с жесткой обратной
связью. До момента срабатывания концевого выключателя эта за-
висимость имеет вид: 4
8 = /ср,
где i — передаточное отношение (число).
После срабатывания концевого выключателя.
о = 8огр = const, (4.4)
где 6огр — угол отклонения руля, при котором срабатывает концевой выклю-
чатель.
Входной сигнал, при котором срабатывает концевой выклю-
чатель,
T* = -^L.
I
В ряде автопилотов при срабатывании концевого выключателя
рулевая машинка отъединяется от руля. В таком случае освобож-
денный руль под действием шарнирного момента устанавливается
в балансировочное положение. При таком использовании концевого
выключателя зависимость угла отклонения руля от входного сигна-
ла имеет вид, показанный на рис. 4.3. На участках | ф | | ср* | (до
срабатывания концевого выключателя) эта зависимость имеет та-
кой же характер, что и на рис. 4.2. На участках |ф|^|ф*| (после
срабатывания концевого выключателя) угол отклонения руля 6 = 0.
Существуют автопилоты, в которых после того как концевой выклю-
чатель сработал, угол отклонения руля 6 = 0 при любом значении ф.
238
Рис. 4.2. К характеристике конце-
вого выключателя, работающего
по схеме ограничения
Рис. 4.3. К характеристике конце-
вого выключателя, работающего
по системе отключения
После срабатывания концевого выключателя и возвращения ру-
ля в балансировочное положение (6 = 0) дальнейшее отклонение
самолета от исходного режима замедляется или вообще прекраща-
ется. По этой причине вариант использования концевого выключа-
теля для отключения рулевой машинки имеет определенные преи-
мущества по сравнению с вариантом использования концевого
выключателя для ограничения поворота выходного вала рулевой
машинки. Однако использование концевого выключателя для от-
ключения рулевой машинки имеет некоторые недостатки. Они свя-
заны с возможностью отключений рулевой машинки при воздейст-
вии на самолет внешних возмущений и при управлении самолетом
через автопилот. В этих случаях на рулевую машинку кратковре-
менно могут приходить сигналы, при которых рулевая машинка
отклонит рули на угол, соответствующий срабатыванию концевого
выключателя. Поэтому для уменьшения вероятности подобных
«ложных» отключений исправного автопилота концевые выключа-
тели, работающие на отключение, должны настраиваться на боль-
шие углы отклонения руля, чем выключатели, работающие по схеме
ограничения.
Разумеется, это нежелательно, поскольку можно представить
себе такие отказы автопилота, при которых выходной вал рулевой
машинки отклоняется почти до концевого выключателя, не вызывая
его срабатывания. В подобных случаях последствия отказов могут
быть более неприятными, чем если бы были применены концевые
выключатели, работающие как ограничители, при соответствующем
уменьшении диапазона углов ±6orp.
Применение концевых выключателей независимо от того, в ка-
ком варианте они используются, приводит к сужению области режи-
мов полета, на которых может эксплуатироваться автопилот.
Проиллюстрируем это примером. Для стабилизации и управления с помощью
автопилота в режимах маршрутного полета самолета Ил-18 (Vi = 350-^-500 к,м1ч)
необходимые отклонения элеронов составляют ±24-3°. Необходимые отклонения
239
элеронов в режиме захода на посадку (Vt=250-^270 км/ч) составляют ±44-5°.
Возникновение неисправности в автопилоте, приводящей к отклонению элеронов
на угол, при котором срабатывает концевой выключатель, при полете со скоро-
стью Vi=500 км/ч вызовет кренение самолета с угловой скоростью cox =
=8-^10 град/сек, что недопустимо для пассажирского самолета.
Отсюда следует, что для обеспечения безопасности во всем диапазоне режи-
мов полета угол отклонения элеронов должен быть не более 3ч-3,5°. А это озна-
чает, что на малых скоростях качество стабилизации самолета автопилотом мо-
жет оказаться неудовлетворительным.
Таким образом требования обеспечения безопасности полета на
больших скоростях противоречат требованиям, вытекающим из
необходимости обеспечить удовлетворительное качество стабилиза-
ции и управления самолета на малых скоростях.
Значительно лучшие результаты могут быть достигнуты, если
диапазон отклонения элеронов корректируется в зависимости от
режима полета (К* или М и Н). В этом случае на малых скоростях
и высотах возможные отклонения элеронов больше, а на больших
скоростях и высотах — меньше.
В гл. 1 была выведена передаточная функция (1.54), связывав-
шая угол крена с отклонением элеронов. Ею можно пользоваться
для приближенного анализа поведения самолета при отказах авто-
пилота, вызывающих максимальное отклонение элеронов. При этом
необходимо учитывать, что передаточная функция (1.54) справед-
лива для случая, когда с помощью руля направления обеспечива-
ется условие р=0. Как правило, при отказах автопилота р=#0. Это
иногда приводит не только к количественному, но даже к качест-
венному искажению результата. Так, наличие интегрирующего зве-
на в рассматриваемой передаточной функции формально приводит
к возможности неограниченного изменения крена. Однако вследст-
вие отклонения руля направления, при котором Р=#0, нарастание
крена в ряде случаев прекращается.
Для исследования поведения самолета при отказах, вызываю-
щих срабатывание концевых выключателей, а также для выбора их
рабочего диапазона обычно проводят моделирование на электрон-
но-вычислительных машинах (ЭВМ). Результаты моделирования
уточняют в летных испытаниях.
Плавающие концевые выключатели
Балансировочное положение элеронов и руля направления во
всем диапазоне эксплуатационных режимов при полете с симмет-
ричной тягой почти не отличается от нейтрального. Совсем другая
картина с балансировочным положением руля высоты, которое, как
правило, меняется в весьма значительных пределах. Если не учиты-
вать влияния веса самолета на балансировочное положение руля
высоты, то наибольшее отклонение руля вниз +бВ1 будет при боль-
шой скорости полета самолета и задней центровке (рис. 4.4). Наи-
большее отклонение руля высоты вверх — бВ2 будет на малой скоро-
240
Рис. 4.4. Балансировочные кри-
вые бв=ДУ<):
1 — минимальные эксплуатацион-
ные скорости; 2 — максимальные
этими 10°, не увеличивая его
сти и передней центровке самолета.
Тогда диапазон изменения баланси-
ровочных положений руля высоты
4 = SB1-(-SB2) = 8B1 + 8B2.
Для самолета Ил-18 диапазон
возможного изменения балансиро-
вочных положений руля высоты
Дбв>Ю° (при изменении центровок
в эксплуатационном диапазоне, а
скоростей — от максимальной крей-
серской до скоростей захода на по-
садку). Если диапазон возможных
отклонений руля ограничить только
на некоторую величину, потребную для стабилизации и управления
самолета от автопилота в продольной плоскости \ то при отказе
автопилота, вызывающем отклонение руля высоты вверх, на боль-
ших скоростях самолет выйдет на недопустимые углы атаки и пе-
регрузки. _
Если диапазон отклонений руля высоты ограничен исходя из
соображений безопасности, то при изменении режима полета, вызы-
вающем продольную перебалансировку самолета, концевой выклю-
чатель срабатывает. В таких условиях для обеспечения нормальной
работы автопилота необходимо часто его переключать (выключить
и после балансировки самолета вновь включить).
Для захода на посадку, когда изменения режимов происходят
очень часто, подобное использование автопилота неприемлемо. Это
обстоятельство привело к применению в автопилотах, используемых
не только в маршрутном полете, но и при заходе на посадку, так
называемых плавающих концевых выключателей. Такое назва-
ние объясняется тем, что выключатель все время следит («плава-
ет») за изменением балансировочного положения руля высоты.
Рассмотрим принцип действия плавающего концевого выключа-
теля (рис. 4.5). Как и в обычном концевом выключателе, кулачок
плавающего выключателя жестко связан с рулем высоты (выход-
ным валом рулевой машинки), а контакты К\ и Кг, в отличие от
обычного выключателя, подвижны. Они смонтированы на плате,
которая с помощью следящей системы (на рис. 4.5 не показана)
поворачивается при изменении балансировочного положения руля
высоты, как бы следя за ним.
В таком случае угол поворота кулачка, вызывающий размыка-
ние контактов, выбирается исходя из величин углов отклонения
руля высоты, потребных для стабилизации самолета автопилотом
1 Подробно по этому вопросу см. Белогородский С. Л. «Некоторые
вопросы методики определения углов отклонения руля высоты самолета, необхо-
димых для работы продольного канала автопилота». Труды ГосНИИ ГА. Вып. 29,
1962, с. 53.
241
Рис. 4.5. К принципу действия плава-
ющего концевого выключателя:
/ — плата; 2 — ламельно-контактный съем;
3 — кулачок; 4 — пластинчатая пружина с
контактом; 5 — контакты, укрепленные на
плате; I, II—клеммы
Рис. 4.6. Структурная схема
плавающего концевого выклю-
чателя
в условиях турбулентности и
управления самолетом через
автопилот. Эти углы, как по-
казывает летная эксплуата-
ция, невелики.
Важное значение играед*
правильный выбор скорости
отработки платы. При этом
руководствуются следующими
соображениями. Изменение
балансировочного положения
руля высоты происходит мед-
ленно. Практически в процессе
полета наиболее быстрое изме-
нение продольной балансиров-
ки самолета наблюдается при
выпуске механизации крыла и
изменении скорости полета во
время захода на посадку (этап
взлета нами не рассматрива-
ется). Этот режим является
расчетным при выборе скоро-
сти поворота платы. Очевидно,
что скорость поворота должна
быть не меньше скорости изме-
нения балансировочного поло-
жения руля высоты.
С другой стороны, эту ско-
рость целесообразно сделать
по возможности меньшей с
тем, чтобы плата не успевала
поворачиваться вслед за ру-
лем при кратковременных
возникающих в режимах ста-
быстрых отклонениях руля высоты,
билизации и управления. Иными словами, сигнал, проходящий на
следящую систему поворота платы, необходимо пропустить через
фильтр низких частот с передаточной функцией типа
W(p)=—-—.
U Тр 4- 1
Учитывая, что на кулачок, жестко связанный с рулем высоты,
все отклонения руля, включая кратковременные, проходят без како-
го-либо преобразования, систему плавающего выключателя можно
представить следующей структурной схемой (рис. 4.6).
Сигнал отклонения руля высоты проходит на суммирующий
элемент по двум цепям: по одной — без преобразования, что соот-
ветствует прохождению отклонений руля на кулачок, а по другой —
через низкочастотный фильтр, что соответствует его прохождению
на плату. В суммирующем элементе эти сигналы вычитаются и
242
Рис. 4.7. Эквивалентная струк-
турная схема плавающего кон-
цевого выключателя
разностный сигнал, пропорциональный отклонению руля высоты от
балансировочного положения, поступает на нелинейный (релейный)
элемент; зона нечувствительности этого элемента соответствует
выбранному ограничению отклонения руля высоты. Если отклоне-
ние руля высоты превышает допустимую величину, то на выходе
нелинейного элемента появляется сигнал на прекращение дальней-
шего отклонения.
При отключении от сумматора цепи с передаточной функцией
W (р) =------- мы приходим к структурной схеме обычного (не-
7'р + 1
плавающего) концевого выключателя. Практически тот же эффект
получается, если постоянная времени Т фильтра низких частот
велика. .
Рассмотренная структурная схема плавающего концевого вы-
ключателя может быть заменена эквивалентной схемой (рис. 4.7).
Звено с передаточной функцией VV'(p) ———— обеспечивает про-
Тр + 1
хождение только высокочастотных сигналов отклонения руля высо-
ты от его балансировочного положения. Получить звенья с такими
передаточными функциями можно на пассивных элементах в виде
цепочек RC. Логарифмическая частотная характеристика этого
звена представлена на рис. 4.8, а.
Легко реализуется звено с несколько другой характеристикой,
позволяющее эффективно подавить более широкий спектр низких
частот (рис. 4.8, б). Важным преимуществом такого способа реали-
зации концевого выключателя является отсутствие сравнительно
ненадежной следящей системы.
Теперь рассмотрим принцип действия и устройство плавающего
концевого выключателя, примененного в продольном канале борто-
вой системы автоматического управления БСУ-ЗП (рис. 4.9). Для
выдачи сигнала, пропорционального углу отклонения руля высоты,
служит датчик отклонения руля (ДОР). Он состоит из двух потен-
циометров и электромагнитной муфты (ЭМ), связывающей щетки
потенциометров с выходным валом ДОР, соединенным с системой
управления рулем высоты. Питание на электромагнитную муфту
Рис. 4.8. Асимптотические
логарифмические частот-
ные характеристики
243
о + 276
К системе конт-
роля исигнализации
продольного канала
Рис. 4.9. Схема плавающего концевого выключателя рулевой машинки продоль-
ного канала БСУ-ЗП
К рабочим соленои-
дам рулевой ма-
шинки руля Высоты
( + 27 в) подается при включении продольного канала автопилота.
После его выключения происходит отпускание муфты. Одновре-
менно щетки потенциометров с помощью центрирующих пружин
устанавливаются в среднее положение.
Сигнал постоянного тока с датчика через цепочку, состоящую
из емкости С и сопротивления R1, поступает на вход релейного
магнитного усилителя (РМУ), зашунтированного регулировочным
сопротивлением R2. Передаточная функция формирующей цепочки
имеет вид:
W = /1Р = k г"*' ’
72Р+1 Г8р+1
где 7\=R2C; T2—Tt, = {Rl-\-R2}C\
Постоянная времени изодромного звена ~ 10 сек. Срабатыва-
ние РМУ происходит при резком (ступенчатом) отклонении руля
высоты на угол Ддв=±2°. В зависимости от направления отклоне-
ния руля высоты в РМУ срабатывает определенное исполнительное
реле 1 или 2, замыкая цепь питания реле Р2 или РЗ. С контактов 1
реле Р2 и РЗ сигнал +27 в снимается в систему контроля и сигна-
лизации, работа которой будет рассмотрена позднее. Через контак-
ты 2 проходят цепи питания обмоток реле Р4 и Р5. Для их сраба-
тывания необходимо, чтобы был замкнут контакт рукоятки «Спуск-
подъем» и размыкающий контакт реле Р1.
244
Пока обмотки реле Р4 и Р5
обесточены, через их размыкаю-
щие контакты проходят цепи от
усилителя рулевой машинки к
рабочим соленоидам. При сраба-
тывании реле Р4 и Р5 соответст-
вующая цепь разрывается и даль-
Рис. 4.10. Отклонение руля высоты
рулевыми машинками с обычным 1 и
с плавающим 2 концевыми выключа-
телями
нейшее отклонение руля высоты
прекращается. С течением време-
ни происходит заряд конденсато-
ра С и спустя некоторое время
после отклонения руля (~4+
+5 сек) происходит размыкание контактов РМУ. Вследствие этого
происходит отпускание реле Р2 (РЗ) и Р4 (Р5). Цепи питания ра-
бочих соленоидов восстанавливаются и происходит повторное от-
клонение руля высоты на угол около 1,5—2,0°.
Допустим, что вследствие неисправности в автопилоте на выхо-
де его усилителя появился сигнал, для компенсации которого руль
высоты должен быть отклонен от балансировочного положения на
угол Лбв. Если бы концевые выключатели отсутствовали, то руле-
вая машинка сразу (за 0,24-0,5 сек) отклонила руль высоты на
этот угол (рис. 4.10). При наличии плавающего концевого выклю-
чателя движение руля имеет ступенчатый характер. Величина каж-
дой «ступеньки» не превышает 2°, а ее продолжительность — 5 сек.
Если не предпринять дополнительных мер, то в конце концов руль
высоты отклонится на угол Лбв. Это в ряде случаев недопустимо.
Поэтому в бортовой системе управления БСУ-ЗП предусмотрена
совместная работа плавающего концевого выключателя со специ-
альным устройством контроля резких отказов автопилота, которое
отключает продольный канал автопилота после первого отклонения
руля на 2°. Принцип действия подобного устройства будет рассмот-
рен в дальнейшем.
Диапазон отклонений руля высоты, ограниченный концевым
выключателем, обеспечивает стабилизацию движения самолета в
продольной плоскости. Однако этот диапазон недостаточен для вы-
полнения маневров, например для перевода самолета в режимы
снижения и набора высоты. Поэтому на режимах управления само-
летом с помощью автопилота предусмотрено снятие этих огра-
ничений.
При повороте рукоятки «Спуск-подъем» происходит размыкание
связанного с ней контакта, разрывающего цепь питания обмоток
реле Р4 и Р5 (см. рис. 4.9). Вследствие этого в течение всего вре-
мени управления рукояткой «Спуск-подъем» плавающий концевой
выключатель не ограничивает отклонения руля высоты. В момент
включения режима стабилизации самолета на глиссаде (при «за-
хвате» глиссады) напряжение +27 в подается на реле времени
(РВ) и реле Р1. Цепь питания обмоток реле Р4 и Р5, разомкнутая
контактом реле Р1У по истечении времени задержки (5±1 сек)
245
восстанавливается через контакт РВ. Следовательно, в этом слу-
чае плавающий концевой выключатель не ограничивает отклонений
руля высоты в течение времени задержки реле РВ.
Весьма целесообразно корректировать диапазон допустимых от-
клонений управляющих поверхностей в зависимости от режима
полета. Применительно к плавающим концевым выключателям это
означает целесообразность регулировки зоны нечувствительности
нелинейного звена (см. рис. 4.6 и 4.7) по определенному закону в
зависимости от скорости и высоты полета. На малых скоростях и
высотах зона нечувствительности должна быть больше, а на боль-
ших— меньше. Подобная корректировка зоны нечувствительности
связана с определенными схемными и конструктивными трудностя-
ми, поэтому пока она не применяется.
Ограничение тяговых моментов (усилий) рулевых
машинок
Ограничение отклонений управляющих поверхностей самолета
может быть достигнуто путем ограничения тяговых моментов (уси-
лий) рулевых машинок автопилота. В таком случае при возникно-
вении в автопилоте неисправностей, вызывающих перемещение
управляющих поверхностей, рули и элероны отклоняются до тех
пор, пока шарнирный момент не уравновесит тяговый момент, раз-
виваемый рулевой машинкой. Это относится к случаям, когда кон-
цевые выключатели рулевых машин отсутствуют или не срабаты-
вают. Далее мы рассматриваем именно такие случаи.
При ограничении отклонений управляющих поверхностей за
счет ограничения моментов рулевых машинок картина движения
самолета получается более сложной, чем в случае ограничения
концевыми выключателями. Это, в частности, является следствием
того, что при ограниченной мощности рулевых машинок скорости
перекладки рулей и элеронов уменьшаются, особенно к концу их
движения.
Наибольший интерес при отказах автопилота представляет по-
ведение самолета после того, как шарнирный момент уравновесит
тяговый. Условие Л4тяг-1-Л^ш=0 соответствует наибольшему откло-
нению управляющей поверхности. При МТЯГ=const величины углов
отклонений рулей и элеронов определяются режимом полета.
В гл. 1 и 3 было показано, что шарнирный момент зависит
главным образом от таких переменных параметров, как скорость
полета и углы отклонения управляющих поверхностей. Вследствие
этого на малых скоростях отклонения рулей и элеронов увеличи-
ваются, а их эффективность уменьшается.
Для приблизительной оценки последствий неисправностей авто-
пилота в случае ограничения тяговых моментов рулевой машинки
dPB dP3 „
используют характеристики управляемости ——, —— и т. п. Если,
например, известна величина тягового момента, развиваемого ру-
левой машинкой, то, используя зависимость (3.174), легко перейти
246
Рис. 4.11. Коэффициент расхода эле-
ронов для изменения угловой скоро-
сти (Ох
Подача гидросмеси
Рис. 4.12. Схема гидравлической ру-
левой машинки о несимметричной
силовой характеристикой
к усилию на штурвале Рв. Далее по формуле (3.179) можно рас-
считать изменение перегрузки.
Аналогично можно определить установившиеся значения угло-
вой скорости кренения сох при отказах в канале элеронов. Допу-
стим, что рулевая машинка элеронов развивает тяговый момент
МТЯГэ.Чтобы уравновесить этот момент, к штурвалу нужно прикла-
дывать усилие
Рэ = ^шэА1тяг,
где &шэ —коэффициент передачи.
Установившаяся угловая скорость кренения рассчитывается по
формуле
(4.5)
* э
(О =<---
х dP3
d^x
Величина коэффициента определяется по графикам
(рис. 4.11). При отказах автопилота обычно появляется скольже-
ние. Поэтому результат расчета по формуле (4.5) может быть ис-
пользован лишь для приближенной оценки поведения самолета.
„ dp3 dp3
Если характеристики—- и —-и т. п. меняются по режимам
dr\y db>x
полета в значительных пределах, то расчетным случаем для оценки
безопасности полета является режим, на котором эти характери-
стики имеют минимальные значения. Тогда, если тяговый момент
выбран так, чтобы на расчетном режиме неисправный автопилот
не мог вывести самолет на недопустимый режим, может оказаться,
что на части режимов управляемость самолета от автопилота не-
достаточна.
Большие трудности могут возникнуть, если силовая характери-
стика рулевой машинки имеет значительную несимметрию. На
рис. 4.12 изображена схема гидравлической рулевой машинки, име-
247
тощей несимметричную силовую характеристику. Активная площадь
поршня рулевой машинки справа больше, чем слева, где часть пло-
щади «пропадает» из-за штока. Поэтому усилие, развиваемое руле-
вой машинкой при движении поршня вправо, меньше, чем при ее
движении влево. При использовании такой рулевой машинки может
оказаться, что на одних режимах, когда шток движется внутрь
цилиндра, значительно хуже управляемость, а на других, при воз-
никновении неисправностей, вызывающих движение штока нару-
жу, не соблюдаются требования безопасности полета.
Использование метода ограничения тягового момента (усилия)
рулевой машинки позволило бы получить лучшие результаты в том
случае, если бы момент регулировался в зависимости от режима
полета. Вместе с тем добиться точного поддержания заданного тя-
гового момента (усилия) рулевой машинки в условиях эксплуата-
ции значительно труднее, чем заданных углов отклонения в случае
применения концевых выключателей.
Некоторые рулевые машинки в области малых моментов и уси-
лий работают неустойчиво. Иногда во избежание работы рулевых
машинок на этих режимах прибегают к «затяжелению» управления
самолетом. Например, с помощью сервокомпенсаторов элеронов
увеличивают значение коэффициента Поскольку при этом
ухудшаются характеристики управляемости самолета, такой спо-
соб обеспечения безопасности полета при отказах автопилота край-
не нежелателен.
Существенно лучший результат достигается за счет использо-
вания устройств, ограничивающих тяговый момент (усилие). Ча-
сто в качестве таких устройств используют муфты сцепления руле-
вых машинок. В некоторых случаях применяют специальные муф-
ты ограничения момента. Так, рулевая машинка автопилота АП-6Е
имеет значительную нестабильность тяговых характеристик, объяс-
няющуюся особенностями конструкции и режима работы управля-
ющих фрикционных муфт. В связи с этим в модернизированных
рулевых машинках, используемых в системе автоматического захо-
да на посадку БСУ-ЗП, предусматривается дополнительная муфта
ограничения момента. Регулировочные элементы этой муфты поз-
воляют ограничивать тяговый момент в диапазоне от 1 до 3,6 кГм.
Благодаря широкому диапазону рулевые машинки этого типа мо-
гут использоваться в разных каналах автопилота и на разных пас-
сажирских самолетах. Стабильность ограничения момента состав-
ляет ~15%.
Ограничение тягового момента (усилия) рулевой машинки соз-
дает предпосылки для обеспечения возможности их пересиливания
летчиком. Это является важным фактором обеспечения безопасно-
сти полета.
До сих пор мы рассматривали случаи ограничения отклонения
управляющих поверхностей либо концевыми выключателями, либо
за счет ограничения тягового момента рулевой машинки. В ряде
248
случаев весьма эффективным оказы-
вается совместное использование этих
средств.
Чтобы уяснить это, рассмотрим следующий
пример. Допустим, что на самолете Ил-18 вве-
дено с помощью плавающего концевого вы-
ключателя ограничение отклонения руля высо-
ты Д6В = ±2°, а тяговый момент рулевой ма-
шинки уравновешивается усилием на штурва-
ле, равным 40 кГ. Посмотрим, какие на разных
скоростях Vi возникают перегрузки при появ-
лении отказов автопилота, вызывающих пере-
кладку руля высоты. Воспользуемся характе-
dP3 d$B
ристиками —— и —— для интересующих
нас режимов полета, например: Я = 5000 м,
6=48 Т, хт = 19% (рис. 4.13, а и б) и вычис-
лим по формулам:
л 40
dp*
dny
Рис. 4.13. К совместному ис-
пользованию ограничения тяго-
вого момента и концевых вы-
ключателей рулевой машинки
--—
J
dny
И
установившиеся значения перегрузок при огра-
ничении отклонения руля высоты только за
счет ограничения тягового момента и только за
счет концевых выключателей.
Результаты этих расчетов представлены
на рис. 4.13, в. Заметим, что если на графике -—— = /(Ю нанести в соответ-
fl Пу
ствующем масштабе прямую Рв = 40 кГ, то величина Ди^, соответствующая этому
о
усилию, представляет соотношение ординат гв И —------- для каждой данной
dny
скорости Vi. Аналогично обстоит и с ограничением по бв.
Анализируя полученные результаты, можно отметить следующее. Точка пе-
ресечения кривой /, соответствующей ограничению по тяговому моменту, с кри-
вой 2, соответствующей ограничению концевыми выключателями, относится к
скорости на которой для отклонения руля высоты на 2° необходимо прило-
жить к штурвалу усилие Рв=40 кГ. В области скоростей Vi<Vi* ограничение
перегрузки происходит за счет концевых выключателей, а в области Vi>Vi* —
за счет ограничения тягового момента рулевой машинки.
Таким образом, ограничение отклонения руля концевыми вы-
ключателями наиболее эффективно в области малых скоростей, а
ограничение тягового момента (усилия)—в области больших ско-
ростей.
§ 5. БЛОКИ КОНТРОЛЯ
Блоки контроля, реагирующие на достижение
определенного значения контролируемого параметра
режима полета (пороговые блоки контроля)
Принцип действия таких блоков контроля весьма прост. Пусть,
например, для самолета одной из опасных эволюций является вы-
249
порогового
Рис. 4.14. Структурная схема
блока контроля
Рис. 4.15. Структурные схемы блоков конт-
роля с несимметричными характеристиками
нелинейного элемента .
ход на большие пере-
грузки. Тогда для предот-
вращения этого может
быть установлен акселе-
рометр, выдающий сиг-
нал на отключение авто-
пилота при достижении
самолетом некоторого за-
данного значения пере-
грузки. Аналогично при
помощи датчика угловой
скорости можно отклю-
чать автопилот, если уг-
ловая скорость движения
самолета превышает за-
данную величину, а при
помощи гировертикали —
если превышены задан-
ные углы крена и танга-
жа и т. д.
В простейшем случае блоки контроля рассматриваемого типа
имеют структурную схему, изображенную на рис. 4.14. Входной
величиной воспринимающего элемента является контролируемый
параметр 9г- (угол или угловая скорость крена, тангажа, курса;
перегрузка, угол атаки, скорость, число М и др.). Электрический
сигнал Uq с выхода воспринимающего элемента поступает на не-
линейный элемент. Если величина сигнала U6 превышает зону
нечувствительности, определяющую порог срабатывания блока
контроля, то на выходе нелинейного элемента появляется сигнал,
который может быть использован для отключения неисправного
канала автопилота.
Очевидно, что у блоков контроля, реагирующих на достижение
определенного значения контролируемого параметра режима поле-
та, важнейшей характеристикой является порог срабатывания. По
этой причине блоки контроля такого типа называют по рогов ы-
м и блоками контроля.
В качестве воспринимающих элементов пороговых блоков конт-
роля могут использоваться как датчики информации системы авто-
матического управления, служащие для формирования управляю-
щих сигналов, так и специальные (дополнительные) датчики. В не-
которых случаях в качестве воспринимающих элементов использу-
ют пилотажные приборы с электрическим выходом. Так, в блоках
контроля, реагирующих на достижение определенного угла атаки,
воспринимающим элементом служит автомат углов атаки типа
АУАСП.
Нетрудно усмотреть аналогию между структурными схемами
порогового блока контроля и концевого выключателя (см. рис. 4.7
и 4.14). Вообще говоря, концевые выключатели могут рассматри-
250
ваться как разновидность пороговых блоков контроля, срабатыва-
ющих при соответствующем отклонении рулей и элеронов.
Некоторые блоки контроля имеют нелинейный элемент с несим-
метричной характеристикой (рис. 4.15). При заходе на посадку бо-
лее опасны отклонения самолета от глиссады вниз, чем вверх. По-
этому порог срабатывания блока контроля, соответствующий от-
клонению самолета вниз (—Г7Н), меньше порога срабатывания при
отклонении вверх ( + 17в). Следовательно, в рассматриваемом слу-
чае (рис. 4.15, а) характеристика нелинейного элемента такова, что
| + С7в|> |-С7Н|.
В других случаях блок контроля реагирует только на отклоне-
ние контролируемых параметров в одну сторону (рис. 4.15, б).
Примером таких блоков контроля могут служить блоки, срабаты-
вающие при достижении определенного значения угла атаки, ско-
рости, числа М и др.
Как правило, блоки контроля с несимметричной характеристи-
кой нелинейного элемента используются для контроля продольного
канала автопилота.
Блокам контроля, реагирующим на достижение определенного
значения контролируемого параметра, в принципе присущи те же
недостатки, что и концевым выключателям.
Обычно диапазон допустимых («неопасных») значений контро-
лируемого параметра, обусловливающий диапазон порогов сраба-
тывания, зависит от режима полета. Поэтому блок контроля с по-
стоянной настройкой порогов срабатывания оказывается эффектив-
ным только для определенных режимов полета.
Предположим, что в качестве контролируемого параметра ис-
пользуется нормальная (вертикальная) перегрузка пу. Диапазон
допустимых изменений перегрузки Anv для режимов маршрутного
полета (АпУм) существенно шире, чем для режимов захода на по-
садку (АпУп). Если отрегулировать блок контроля так, чтобы он
срабатывал при изменениях перегрузки \пу^ то на посадоч-
ных режимах безопасность полета при некоторых отказах автопи-
лота не будет обеспечена. Если же отрегулировать блок контроля
так, чтобы он срабатывал при условии Ап^^ Ап2/п, то в маршрут-
ном полете будут происходить отключения исправного автопилота,
например, вследствие воздействия атмосферной турбулентности.
Отключения исправного автопилота блоками контроля называ-
ют ложными отключениями1. Понятно, что ложные отключе-
ния вообще нежелательны. Если же отключение автопилота не
сопровождается выдачей соответствующих сигналов экипажу, то
в некоторых случаях они могут привести к возникновению опасной
ситуации.
Чтобы обеспечить надежное отключение неисправного автопи-
лота и вместе с тем избежать ложных отключений во всем эксплу-
1 Иногда о таком отключении говорят, что имел место ложный отказ авто-
пилота или что имело место ложное срабатывание блока контроля.
251
оежима попета
Рис. 4.16. Структурная
схема блока контроля с
регулируемым порогом
срабатывания
атационном диапазоне режимов полета, необходимо корректиро-
вать настройку блока контроля. Чаще всего эта регулировка ведет-
ся по скорости (скоростному напору), числу М или высоте полета.
Регулировка порога срабатывания блока контроля может быть
осуществлена разными методами. Один из них иллюстрируется
рис. 4.16. Между воспринимающим элементом и собственно релей-
ным элементом включен усилитель, коэффициент усиления которого
меняется по режимам полета. При этом пороги срабатывания соб-
ственно релейного элемента блока контроля остаются неизменны-
ми. Однако введение корректировки порогов срабатывания блока
контроля по режимам полета связано со значительными схемными
и конструктивными затруднениями и понижением надежности этого
ответственного элемента. Поэтому часто ограничиваются двумя на-
стройками порогов: для режимов маршрутного полета и для захода
на посадку. В этом случае оказывается достаточным применить
вместо усилителя переключающее устройство.
Так сделано в пороговом блоке контроля системы автоматиче-
ского управления САУ-1Т, реагирующем на изменение перегрузки
Дпу. В качестве воспринимающего элемента блока контроля ис-
пользуется датчик вертикальных ускорений (ДВУ). Сигнал пере-
менного тока, снимаемый с датчика, поступает на фазочувствитель-
ный выпрямитель (ФЧВ). Выпрямленное напряжение подается на
магнитный усилитель, к выходу которого подключен полупроводни-
ковый релейный усилитель.
При полете на больших высотах блок контроля срабатывает,
если изменение перегрузки Azzy^0,35. Во время захода на посадку
через 30—50 сек после перехода на снижение по глиссаде проис-
ходит переключение по сигналу реле времени, обеспечивающее уве-
личение коэффициента усиления сигнала Апу. Поэтому на малых
высотах (<250 ;и) блок контроля срабатывает при изменениях
перегрузки Anv^0,27.
В полете вследствие турбулентных возмущений с выхода ДВУ
снимаются сигналы пропорциональные нормальной перегруз-
ке. В самом первом приближении можно считать, что эти сигналы
в горизонтальном прямолинейном полете распределены по нор-
мальному закону. В таком случае плотность распределения сигна-
лов Un равна
2U2
f(uny)= rr * е , (4-6)
252
где —среднее квадратическое отклонение сигнала (тока, напряжения) на
пу
выходе датчика, пропорциональное средней квадратической величине
нормальной перегрузки, определяемой по формуле (1.36);
Um — математическое ожидание сигнала на выходе датчика.
При отсутствии турбулентных возмущений в горизонтальном
полете математическое ожидание Umfl =0. Турбулентные возму-
щения также характерны тем, что Umri =0. Поэтому, рассматривая
горизонтальный полет в условиях турбулентности, можно считать
^тЛу =0 (дрейфами усилителей и постоянными сигналами, вызван-
ными погрешностями ДВУ, пренебрегаем). Тогда уравнение (4.6)
упрощается:
1
U°ny V 2п
и*
___ПУ
2U2
°пу
Рассмотрим вначале, какова вероятность ложного отключения
автопилота Рл.о блоком контроля, имеющим симметричные пороги
срабатывания tZ0 (см. рис. 4.14), вследствие турбулентных возму-
щений. Срабатывание происходит при условии Тогда
вероятность ложного отключения автопилота
Ря.о=Р(\иПу\ > и0) = 1 -Р (< и0),
где Р(|Un? | <U0) — вероятность того, что сигнал на выходе ДВУ меньше поро-
га срабатывания блока контроля, т. е. что ] Uny | <^/0-
Вероятность выполнения условия | Uny\ <U.o следует из фор-
мулы
и2
— Пу
+СЛ> 2U2
₽(|Л,1<^.)= ? JlU„)dU= 1 f е ‘".dU.
Д Д
Вводя подстановку
‘=УГ- <4-7)
°ПУ
и используя таблицы интеграла вероятностей вида [11]
Ф(0=—— 2dt,
(4-8)
253
легко определить вероятность ложного отключения
•_1_
2
^л.о = 1-
Ф(/)-^-Ф(-/)]=1-Ф(/).
для разных значений порога срабатывания f70 и средних квадра-
тических отклонений Ua .
пУ
Если блок контроля имеет несимметричную характеристику (см.
рис. 4.15, а) и срабатывает при напряжениях —и + t/2, то веро-
ятность ложного отключения автопилота
U2
Ря.0=Г-Р{иг<и„ 1 ( е "пу dU. (4.9)
L\ /2л
Вводя подстановки
пУ
и используя интеграл вероятности вида (4.8), можно определить
вероятность ложного отключения
^.0=1-[уФ.(/2)+уФ (*1)
(4.10)
Если блок контроля имеет нелинейный элемент типа, изобра-
женного на рис. 4.15, б, с порогом срабатывания U.o, вероятность
ложного отключения определяется из выражения
Uo 2У2
Рл.0=1-Р(иПу<ио)=1—- 1 \ е °nvdU.
С учетом (4.7 и 4.8)
РЛ.О = 1-^Ф(/).
Очевидно, что во всех случаях вероятность ложных отключений
тем меньше, чем большие значения принимают величины /(/ь /2).
Значит, увеличение порогов срабатывания tZo(t/i, Г72) и уменьше-
ние U *п ведут к уменьшению вероятности ложных отключений
254
автопилота. Однако увеличение порогов срабатывания лимитирует-
ся соображениями обеспечения безопасности при отказах авто-
пилота.
Другой путь уменьшения вероятности Рл.о связан с введением
фильтров низкой частоты на выходе ДВУ. Благодаря фильтру низ-
ких частот происходит сглаживание сигналов, снимаемых с ДВУ.
Дисперсия сигналов, поступающих на вход релейного усилителя,
уменьшается. Это вытекает также из анализа формулы (1.36),
при выводе которой предполагалось, что модулем комплексной
передаточной функции системы является модуль передаточной
функции для нормальной перегрузки (1.35).
При использовании на выходе ДВУ фильтра низкой частоты
среднее квадратическое отклонение сигнала, поступающего на вход
релейного усилителя, пропорционально величине
(4.11)
где П7ф(/(о) —комплексная передаточная функция фильтра.
Напомним, что для наиболее употребительного низкочастотного
фильтра с передаточной функцией апериодического звена
I (» I = Гф (ш) = - 1 ,
У 7'2ц)2 + 1
где Т — постоянная времени фильтра.
Сравнивая между собой формулы (1.36 и 4.11), нетрудно заме-
тить, что благодаря члену №ф(/со) во всех случаях .
Уменьшение величины сигнала ивпуф по сравнению с сигналом
приводит к росту величины t и уменьшению Рл.о при том же
значении порога срабатывания UQ. Следовательно, с точки зрения
уменьшения вероятности ложных отключений автопилота жела-
тельно применять фильтры с большими постоянными времени. Од-
нако применение таких фильтров приводит к заметной задержке в
выдаче сигналов неисправности, что в ряде случаев недопустимо
по соображениям обеспечения безопасности. По этой причине в по-
роговых блоках безопасности, реагирующих на изменение угла
атаки и нормальной перегрузки, фильтры либо вообще отсутствуют,
либо весьма малы (доли секунды).
Вероятность ложного отключения автопилота пороговыми бло-
ками контроля, как правило, минимальна на установившихся режи-
мах горизонтального полета. На других режимах эта вероятность
255
может существенно увеличиваться. Для иллюстрации этого рас-
смотрим работу блока контроля, реагирующего на изменение нор-
мальной перегрузки во время разворота самолета.
В этом случае на выходе ДВУ имеется постоянный сигнал, про-
порциональный приращению нормальной перегрузки,
&Пу = —------1 = —, (4.12)
cos 7 cos 7
где у — угол крена при развороте.
Сигналы, являющиеся следствием турбулентных возмущений,
суммируются с этим постоянным сигналом. Плотность распределе-
ния сигналов на выходе ДВУ в этом случае описывается уравне-
нием (4.6).
Математическое ожидание U тп в этой зависимости опреде-
ляется постоянным сигналом, пропорциональным величине Апу,
рассчитанной по формуле (4.12).
Определим вероятность ложного отключения автопилота в слу-
чае, если в сигнале на выходе ДВУ имеется постоянная составля-
ющая ({7W/^=#0).
Для простоты положим, что блок контроля имеет симметрич-
ные пороги срабатывания UQ (см. рис. 4.14). Для такого случая
Вводя подстановки
(4.13)
(4.14)
можно по формуле (4.10) определить вероятность ложного отклю-
чения.
Если в зависимостях (4.13 и 4.14) Umn положить равным нулю,
то мы получим уравнение (4.7). С помощью таблиц интеграла
вероятности (4.8J можно убедиться, что при тех же значениях
и 47^ ,но разных Um > вероятность ложного отключения тем
256
больше, чем больше величина
математического ожидания Umn ,
а значит, чем больше угол крена.
Сказанное наглядно иллюст-
рирует рис. 4.17. Заштрихован-
ный участок под кривой распре-
деления на рис. 4.17, а характе-
ризует вероятность ложного от-
ключения автопилота для слу-1
чая, когда 6/^ =0, а на рис.
4.17, б — когда Um #=0. Общая
пу
заштрихованная площадь на,
рис. 4.17, а меньше, чем на рис.
4.17, б.
Очевидно, что сказанное о
блоках контроля, срабатываю-
щих при определенном измене-
нии нормальной перегрузки, мо-
жет быть распространено также
на пороговые блоки, реагирую-
щие на другие параметры. В об-
Рис. 4.17. К вероятности ложных от-
ключений автопилота
2
щем случае для плотности рас-
пределения сигналов х на входе блока контроля справедлива зави-
(•у-*)2
1 2з2
симость /(х) =-------^е х , (4.15)
У^Л
где ах — среднее квадратическое отклонение сигнала на входе блока контроля;
х — математическое ожидание сигнала.
Следует иметь в виду, что приведенные в этом параграфе упро-
щенные зависимости, хотя и позволяют достаточно правильно и
наглядно показать картину возникновения ложных отключений и
проанализировать влияние ряда основных факторов на их вероят-
ность, все же грубы для количественной оценки вероятности лож-
ных отключений автопилота. Точный расчет вероятности ложных
отключений является довольно сложной задачей, требующей при-
менения громоздкого математического аппарата. При некоторых
условиях эта задача может быть сведена к одной из «задач о вы-
бросах», рассматриваемых в теории случайных функций.
В «задачах о выбросах» случайной функции определяется веро-
ятность того, что случайная функция в течение заданного интер-
вала изменения своего аргумента не выйдет за определенные пре-
делы. Очевидно, что в нашем случае под выбросом понимается
превышение контролируемым параметром порога срабатывания
блока контроля. Для нормального случайного процесса в теории
9—3261 257
случайных функций получены зависимости, позволяющие рассчи-
тать среднее число выбросов в единицу времени, среднюю продол-
жительность выброса и т. п. *. При этом используют не одномерную
плотность распределения вероятности f(x) ординаты х случайной
функции (4.15), а двумерную плотность распределения вероятно-
сти f(x, v), ординаты х случайной функции и ее производной
1 2аг 1
f (х, v)=--------е -----------—е , (4.16)
ах У 2л av V2л
где <т»2—дисперсия скорости изменения ординаты случайной функции.
При выводе зависимости (4.16) учитывается, что для стационар-
ного нормального случайного процесса ордината случайной функ-
ции и ее производная, взятые в один и тот же момент времени,
являются независимыми величинами. Кроме того, имеется в виду,
что для стационарного процесса математическое ожидание скоро-
сти изменения ординаты равно нулю.
Принципиальным недостатком пороговых блоков контроля яв-
ляется то, что они допускают возможность первоначальных боль-
ших отклонений управляющих поверхностей. Например, вследст-
вие неисправности в продольном канале руль высоты может откло-
ниться на большой угол прежде, чем блок контроля, реагирующий
на изменение перегрузки, отключит автопилот. Вследствие этого
самолет первоначально получает значительные угловые скорости coz
и ускорения ez. Поэтому даже после отключения автопилота и воз-
вращения руля к балансировочному положению может возникнуть
недопустимо большой заброс по углу атаки и перегрузке.
Вместе с тем в ряде случаев применение пороговых блоков конт-
роля оказывается весьма целесообразным. В первую очередь это
относится к блокам контроля, реагирующим на относительно мед-
ленно изменяющиеся параметры. Так, при заходе на посадку при-
менение порогового блока контроля целесообразно для выдачи
сигнала о недопустимом отклонении самолета от заданной посадоч-
ной траектории (по сигналам КРМ и ГРМ). Другим примером мо-
жет служить пороговый блок контроля, выдающий сигнал о дости-
жении некоторого предельного крена. Как указывалось ранее, если
летчик не наблюдает за авиагоризонтом, то он может не заметить
довольно больших кренов. В связи с этим на самолетах применяют
блоки контроля, выдающие сигналы: «Велик крен левый» и «Велик
крен правый» при кренах более 30—35° в маршрутном полете (на
высотах более 200 м) и более 12—15° на режимах захода на посад-
ку (на высотах менее 200 м). При этом часто ограничиваются
только выдачей светового сигнала, не отключая автопилот.
1 Подробно по этому вопросу см. [33].
258
Блоки контроля сигналов в схеме автопилота
Блоки контроля этого типа могут быть подразделены на две
группы. К первой группе относятся блоки, срабатывающие, если
контролируемый параметр автопилота превышает некоторое пре-
дельное значение в течение определенного времени. Ко второй груп-
пе относятся блоки, основанные на принципе сравнения.
Блоки контроля первой группы нашли широкое применение для
контроля работы контура сервопривода (контура рулевой машин-
ки) автопилота (рис. 4.18). Их принцип действия таков.
Сигнал ДГ7, поступающий с выхода вычислительного устройства
(агрегата управления, или, короче, вычислителя) на вход усилите-
ля рулевой машинки, может быть представлен в следующем виде:
где —сумма сигналов датчиков и задающих устройств автопилота;
Uo.c — сигнал обратной связи.
При исправной работе автопилота сигнал t/0.c после отклонения
управляющей поверхности на соответствующий угол компенсирует
сигналы th. Скорость отклонения управляющих поверхностей ру-
левыми машинками велика, компенсирующий сигнал поступает
очень быстро. Поэтому в исправном автопилоте сигнал ДГ7 одного
знака (полярности, фазы) подается в течение ограниченного про-
межутка времени — времени отклонения управляющей поверхности.
Если на самолет воздействуют турбулентные возмущения или если
в сигналах датчиков имеются помехи, то происходят изменения
сигналов U s, которые компенсируются сигналом £70,с. При этом
сигнал Д £7 имеет вид импульса того или иного знака.
Длительный сигнал Д(/ одного знака свидетельствует о том, что
рулевая машинка либо вообще не отклонила руль, либо отклонила
его в неправильном направлении. Очевидно, что и в том и в другом
случае автопилот неисправен.
Сказанное справедливо при условии, если рулевая машинка раз-
вивает большой тяговый момент и концевые выключатели не огра-
Ьлоь контроля
Рис. 4.18. К принципу действия блока контроля работы контура сервопривода
автопилота
9*
259
ничивают отклонений управляющих поверхностей. Как правило,
углы отклонения данных поверхностей от автопилота все же ока-
зываются ограниченными. Вследствие этого ограничена величина
сигнала обратной связи t/0.Cmax. Поэтому при воздействии на само-
лет сильных возмущений, при больших сигналах с задатчиков и т. п.
сигнал t/o.cmax может оказаться недостаточным для компенсации
сигналов t/s. В таком случае разностный сигнал At/ действует до
тех пор, пока под влиянием отклоненного руля (элеронов) пара-
метры движения самолета не изменятся таким образом, что сиг-
налы уменьшатся до величины t/o.cmax- Обычно это происходит
за счет сигнала датчика угловой скорости.
Таким образом, при ограничении углов отклонения управляю-
щих поверхностей сигнал At/=t/s— t/0.Cmax уменьшается со ско-
ростью изменения сигналов t/s и при больших начальных сигналах
Ux существует относительно долго.
При рациональном подборе углов отклонения управляющих
поверхностей и введении некоторых ограничений в использовании
автопилота подобные случаи сравнительно редки. Поэтому пока
их учитывать не будем.
Основным элементом блоков контроля рассматриваемого типа
является фильтр низких частот (или реле времени). Постоянную
времени такого фильтра (или задержку реле) выбирают такой,
чтобы кратковременные (импульсные) сигналы при нормальной ра-
боте автопилота не проходили через него. Сигналы большой дли-
тельности, свидетельствующие о неисправности автопилота, прохо-
дят через этот фильтр (реле времени) на релейный усилитель, при
срабатывании которого выдается сигнал на отключение авто-
пилота.
Однако рассмотренный блок контроля не реагирует на отказы,
приводящие к пропаданию сигнала At/ на выходе вычислительного
устройства или усилителя, поскольку при этом на фильтр (реле)
не поступает никакого сигнала. В режиме стабилизации, особенно
в условиях турбулентности и при наличии помех в сигналах дат-
чиков, управляющие поверхности практически все время колеблют-
ся относительно балансировочного для данного режима положе-
ния. Если такой отказ произошел, когда управляющая поверхность
находилась в отклоненном положении, то самолет может выйти на
недопустимый режим полета.
От этого недостатка свободен блок контроля, схема которого
представлена на рис. 4.19.
Этот блок имеет собственное вычислительное устройство, на
вход которого подаются те же сигналы, что и на вход вычислитель-
ного устройства (агрегата управления) сервопривода автопилота.
При исправной работе автопилота сигналы датчиков и задающих
устройств компенсируются сигналом обратной связи. В случае воз-
никновения неисправности в автопилоте на выходе вычислительно-
го устройства блока контроля появляется длительный сигнал. Та-
ким образом, по своему принципу действия этот блок контроля
260
Сигналы
датчиков и
задающих
устройств
Рис. 4.19. К принципу действия блока контроля с собственным вычислительным
устройством (аналогом)
аналогичен ранее рассмотренному (см. рис. 4.18). Вместе с тем
при возникновении в автопилоте отказов, приводящих к пропада-
нию сигналов на выходе вычислительного устройства и усилителя
рулевой машинки, на выходе данного устройства блока контроля
появляется сигнал. Он является следствием того, что при отсутст-
вии управляющего сигнала рулевая машинка не перемещает руль
(элероны) и сигнал обратной связи не компенсирует сигналы дат-
чиков и задающих устройств.
Вычислительное устройство блока контроля может рассматри-
ваться как аналог (модель) такого же устройства (агрегата уп-
равления) автопилота. Поэтому если в данном устройстве авто-
пилота происходит не только суммирование входных сигналов, но
и их преобразование, то это же должно происходить и в вычисли-
тельном устройстве блока контроля. Иначе говоря, передаточные
функции (законы управления) обоих вычислительных устройств
должны быть если не одинаковы, то весьма близки. В противном
случае даже при исправном автопилоте выходные сигналы вычис-
лительных устройств могут существенно различаться. Вследствие
этого могут иметь место ложные отключения автопилота.
Очевидно, что с этой точки зрения наилучший результат до-
стигается, если оба вычислительных устройства одинаковы по элек-
трической схеме. Однако с точки зрения надежности и экономич-
ности это нецелесообразно.
Поскольку отключение автопилота происходит не только при
его отказах, но и при неисправностях блока контроля, необходимо,
чтобы данный блок был как можно более надежен. Считается, что
надежность блока контроля должна быть на один-два порядка вы-
ше надежности контролируемого контура автопилота. Следует так-
же учитывать, что для срабатывания релейного усилителя, отклю-
чающего автопилот, нужны сигналы значительно меньшей мощно-
261
Рис. 4.20. Блок контроля с логической коррекцией, используемый в бортовой си-
стеме БСУ-ЗП
сти, чем для работы рулевой машинки. Поэтому в блоках контроля
применяют сравнительно простые, маломощные, высоконадежные
вычислительные устройства.
В простейшем случае вычислительное устройство блока конт-
роля представляет собой сумматор, реализованный на магнитном
усилителе с несколькими сигнальными обмотками. На эти обмотки
в определенной пропорции подаются сигналы датчиков, задающих
устройств и обратной связи.
Если передаточная функция (закон управления) основного вы-
числительного устройства меняется по режимам полета, то соот-
ветственно должна меняться и передаточная функция аналогового
устройства.
Блоки контроля рассмотренного типа используются в бортовой
системе автоматического управления САУ-1Т для выдачи сигналов
на отключение неисправного и включение дублирующего канала
автопилота.
Выше уже указывалось, что при ограничении углов отклонения
управляющих поверхностей сигнал Д(7 на входе усилителя руле-
вой машинки может быть сравнительно продолжительным. Если
постоянная времени фильтра или задержка реле времени недоста-
точны, то это приводит к выдаче сигнала на отключение исправного
автопилота. Вместе с тем увеличивать постоянную времени и за-
держку нежелательно, так как запаздывание отключения неисправ-
ного автопилота может привести к возникновению опасной ситуа-
ции. По этим причинам блокам контроля рассмотренного типа свой-
ственны ложные отключения автопилота.
Стремление избавиться от этого недостатка привело к появле-
нию блоков контроля с логической коррекцией (рис. 4.20).
Как и в предыдущих случаях, в этой системе оценка исправ-
ности автопилота производится по длительности управляющих сиг-
налов. В зависимости от фазы сигнала АС7, снимаемого с вычис-
лительного устройства (блока управления), появляется управляю-
щий сигнал постоянного тока U\ или U2 на одном из двух выходов
262
Рис. 4.21. К принципу
действия блока контроля
с логической коррекцией
усилителя. Через развязывающий диод Д1 или Д2 и размыкающий
контакт реле Р1 или Р2 этот сигнал попадает на реле времени.
Управление реле Р1 и Р2 осуществляет аналоговое устройство
(аналог), на вход которого подаются сигналы датчиков (кроме
сигналов датчиков угловой скорости) и задающих устройств авто-
пилота. При исправной работе автопилота примерно одновременно
с появлением сигнала U\ на выходе аналогового устройства 1' по-
является сигнал U\ или сигналы U2 и U2.
При появлении сигнала U\ разрывается цепь прохождения сиг-
нала U\ на реле времени, а при появлении сигнала U2— цепь сиг-
нала U2. Поэтому, при одновременном появлении даже длительных
сигналов (7] и U\ или U2 и U2 реле времени не срабатывает. Бла-
годаря этому исключаются ложные отключения автопилота при
резких отклонениях рукояток управления и сильных возмущениях,
приводящих к выдаче больших управляющих сигналов.
Работу блока контроля с точки зрения выполняемых в нем ло-
гических операций наглядно иллюстрирует рис. 4.21. Сигнал на вы-
ходе схемы совпадения «И» появляется только при наличии сигна-
лов на всех входах схемы. При отсутствии сигнала хотя бы на
одном входе сигнал на выходе схемы «И» отсутствует. Операция,
выполняемая на такой схеме, называется логическим умножением,
или конъюнкцией. Знак умножения обозначается символом &.
Сигнал на выходе схемы отрицания «НЕ» (схема инвертора)
, появляется тогда, когда на ее входе нет сигнала. Наоборот, при по-
явлении сигнала на входе схемы «НЕ» на ее выходе сигнал отсутст-
вует. В качестве символа отрицания служит прямая черточка, по-
ставленная над входной величиной.
Сигнал на выходе собирательной схемы «ИЛИ» появляется при
наличии сигналов на одном, нескольких или всех входах схемы.
Операция, выполняемая на схеме «ИЛИ», называется логическим
сложением, или дизъюнкцией. Знак сложения обозначается
символом V.
Применительно к рис. 4.21, из этого вытекает следующее. Сиг-
нал (// (не (7/) на выходе схемы «НЕр появляется при отсутствии
сигнала (7/ на выходе аналогового устройства, а сигнал О2 (не
U2) появляется на выходе схемы «НЕ2» при отсутствии сигнала
U2. Сигнал U1&U1'(UiU/) на выходе схемы «И1» появляется при
наличии одновременно сигналов (7t и (7/, а сигнал U2&02 (U2O2')
на выходе схемы «И2» — при наличии одновременно сигналов (72
263
и U2. Сигнал (7* на выходе схемы «ИЛИ» появляется при наличии
сигналов на выходе хотя бы одной из схем «И»:
(Г=ЩVU2&U2 (4.17)
или в упрощенной записи 1
U* = + (4.17а)
Таким образом, на реле времени сигнал со схемы «ИЛИ» вы-
дается в двух случаях: если имеется сигнал и при этом отсутст-
вует сигнал (7/, или, если имеется сигнал U2t но при этом отсутст-
вует сигнал U2.
При исправной работе автопилота сигналы Ux и или U2 и
U2 появляются одновременно. В таком случае на схему «Ир> по-
ступает только один из сигналов U\ или 17/, а на схему «Иг» —
один из сигналов U2 или U2. Следовательно, логические произведе-
ния Ui&U/и U2&U2 (U2U2) не образуются. Поэтому сиг-
налы на схему «ИЛИ» и на реле времени не поступают (независи-
мо от длительности управляющих сигналов C7i и U2).
При возникновении в автопилоте неисправностей, приводящих
к появлению сигналов C7i и U2 и отсутствию одновременно с этим
соответствующих сигналов U\ и U2, на реле времени будет про-
ходить сигнал U* с логической схемы. Если длительность сигнала
(7* превышает время задержки (обозначим это событие /*), то
реле времени срабатывает и выдает сигнал UQ (см. рис. 4.20) на
отключение неисправного канала автопилота, т. е. UQ=U*&t* или
с учетом (4.17) выражение для сигнала UQ примет вид:
t70=4/1&Z7;&/*Vt/2&^2&/* (4.18)
ИЛИ
UQ=UlU\t* + U'p2t*. (4.18а)
При возникновении отказов, не сопровождающихся выдачей
сигналов (71 и (72, сигнал (70 не появится. Следовательно, при таких
отказах рассматриваемый блок контроля неэффективен. Основное
назначение этого блока — контроль отказов, сопровождающихся
сравнительно длительной выдачей управляющих сигналов, кото-
рые могут привести к отклонению управляющей поверхности с
большой скоростью, т. е. для контроля так называемых резких
отказов.
Из формулы (4.18) очевидно, что отказы в блоке контроля, При-
водящие к исчезновению сигналов 17/ и (7/, прекращают контроль
отказов автопилота. Если вследствие отказа имеются постоянные
1 В целях упрощения письма часто символ & опускают, а символ знак дизъ-
юнкции V заменяют знаком +. В этом параграфе наряду с полной записью ос-
новных зависимостей мы будем давать их также в упрощенной записи. В даль-
нейшем мы будем придерживаться только упрощенной формы записи.
264
Рис. 4.22. Блок контроля с логической коррекцией по отклонению руля высоты
сигналы U/ и U2 (отсутствуют сигналы U\ и Uz), то прекраща-
ется действие логической коррекции.
Логическая функция (4.18), характеризующая работу блока
контроля (см. рис. 4.20), может быть реализована по другим схе-
мам и на других элементах. Вместо реле могут быть использованы
бесконтактные элементы, например, диодные схемы. Поэтому раз-
нообразные по схемам блоки контроля с логической коррекцией
удобнее всего рассматривать по реализованным в них логическим
функциям.
В дополнение к блоку контроля (см .рис. 4.20) в бортовой сис-
теме БСУ-ЗП имеется еще другой блок контроля (рис. 4.22), в ко-
тором применена логическая коррекция по отклонению руля вы-
соты.
Для уяснения его принципа действия вспомним, что при исправ-
ной работе автопилота сигнал обратной связи компенсирует сиг-
налы датчиков и задающих устройств. Поэтому знак сигнала, сни-
маемого с датчика обратной связи, определяется знаком суммы
сигналов датчиков и задающих устройств. В таком случае знаки'
сигналов на выходе датчика обратной связи и аналогового устрой-
ства, на вход которого подается эта сумма сигналов (кроме сиг-
нала датчика угловой скорости), также находятся в определенной
взаимосвязи.
При исправной работе автопилота примерно одновременно с
сигналом U\ на выходе аналогового устройства появляется сигнал
с датчика обратной связи, в качестве которого использован
плавающий концевой выключатель (см. рис. 4.9). Аналогично по-
являются сигналы U2 и U2".
Воспользовавшись рис. 4.23 и опустив промежуточные рассуж-
дения, запишем логическую функцию для этого блока контроля
UQ=U[& & Г VU2&U2& Г (4.19)
или UQ=+ U^j2e\ (4.19а)
где /**— задержка реле времени.
265
Рис. 4.23. К принципу дейст-
вия блока контроля с логи-
ческой коррекцией по от-
клонению руля высоты
Таким образом, сигнал Uq об отказе автопилота выдается, если
в течение времени более /** имеется сигнал U\ на выходе аналога,
но при этом нет сигнала U\ на выходе плавающего концевого вы-
ключателя, или, если в течение такого времени имеется сигнал U2'.
но нет сигнала С72".
При отказах в блоке контроля, приводящих к исчезновению сиг-
налов U\ и U2 или U"\ и U2" (имеются постоянные сигналы U\" и
£72,/), контроль отказов автопилота прекращается. Если вследствие
отказа в блоке контроля имеются постоянные сигналы и О2"
(нет сигналов U\" и CV'), то прекращаются действия логической
коррекции и блок контроля работает, как показано на рис. 4.19.
Объединив зависимости (4.18 и 4.19), получим логическую функ-
цию двух параллельно работающих блоков контроля (см. рис. 4.20
и 4.22).
Ц,=Uг &U[ & Г V U\ & U\ & Г &U2&t*VU2& Th & Г (4.20)
или
uQ=uJJ'j*+u\u\f*+и JU •+u2U2t**. (4.20а)
Из анализа этой зависимости вытекает, что отказы аналогового
устройства, приводящие к исчезновению или постоянному действию
сигналов U\ и и2' не приводят к прекращению контроля исправно-
сти автопилота. Однако при этом могут начаться ложные отключе-
ния автопилота. При исчезновении U\ они происходят за счёт пер-
вого члена, а при исчезновении U'2— за счет третьего члена зави-
симости (4.20). Источником ложных отключений при постоянном
сигнале [// является второй член, а при постоянном сигнале Ur2 —
четвертый член этой зависимости.
Также очевидно, что комбинация двух блоков контроля позво-
ляет обнаруживать отказы автопилота, при которых отсутствуют
сигналы и U2 на выходе усилителя рулевых машинок. Но отказы
автопилота, приводящие к одновременному исчезновению сигналов
на выходе этого усилителя и аналогового устройства, этими блока-
ми контроля не выявляются.
Схемы блоков контроля с логической коррекцией и их логиче-
ские функции могут быть весьма разнообразны. Даже в блоках
контроля одного назначения вместо одних сигналов могут исполь-
зоваться другие. Например, в блоке контроля продольного канала
БСУ-ЗП (см. рис. 4.22) в качестве сигнала обратной связи исполь-
266
зован сигнал с плавающего концевого выключателя. В подобном по
назначению блоке контроля бокового канала БСУ-ЗП вместо сиг-
нала обратной связи элеронов используется сумма сигналов угло-
вой скорости крена и производной так называемого заданного
крена.
Для построения логической коррекции по существу необходимо
иметь не менее двух источников информации о контролируемом
процессе. На рис. 4.20 такими источниками были усилитель рулевой
машинки и аналоговое устройство, а на рис. 4.22 — аналоговое уст-
ройство и плавающий концевой выключатель. Увеличение числа
источников аналогичной информации расширяет возможности по-
строения блоков контроля с логической коррекцией. Наиболее пол-
но такие возможности могут быть реализованы при использовании
для обработки информации цифровых вычислительных машин.
Применение логической коррекции оказывается эффективным
и в других средствах обеспечения безопасности полета. Например,
такого рода коррекция (контактное устройство) используется в
системе контроля автомата триммирования АТ-2. Это устройство,
находящееся в датчике усилий автомата триммирования, служит
вторым источником информации о знаке усилий в системе управле-
ния рулем высоты. С некоторыми другими логическими устройства-
ми, применяемыми в средствах обеспечения безопасности автома-
тического полета, мы познакомимся позднее.
Теперь перейдем к рассмотрению блоков контроля второй груп-
пы— блоков контроля сигналов в схеме автопилота, основанных на
принципе сравнения. Для уяснения этого принципа представим се-
бе, что на самолете, каждая управляющая поверхность которого
состоит из двух частей (секций), установлены два одинаковых ав-
топилота. Каждый из них имеет комплект датчиков сигналов, вычи-
слительные устройства, усилители, рулевые машинки (на рис. 4.24
показано только по одному каналу этих автопилотов).
В таком случае в одинаковых точках схемы сигналы в обоих
автопилотах, если они исправны, одинаковы. Следовательно, раз-
ность этих сигналов, измеряемая с помощью сравнивающих уст-
Рис. 4.24. К принципу действия блоков контроля, работающих на принципе
сравнения
267
ройств (компараторов), равна нулю. Неисправность в любом из
автопилотов приводит к появлению разностного сигнала на выходе
одного или нескольких последовательно установленных компарато-
ров. Эти сигналы используются для одновременного отключения
обоих автопилотов, поскольку в сдвоенной системе не представля-
ется возможным определить, вследствие отказа какого из них поя-
вился разностный сигнал.
В исправных автопилотах передаточные функции однотипных
элементов весьма близки и расхождение в сигналах, снимаемых с
одинаковых точек, невелико. Поэтому в такой системе уровень сиг-
нала рассогласования (разностного сигнала), при котором отклю-
чаются автопилоты, может быть достаточно мал. Поэтому отклю-
чение автопилотов происходит прежде, чем практически заметно
изменятся параметры движения самолета. После отключения авто-
пилотов самолет остается в сбалансированном положении. Такое
отключение часто называют мягким отключением.
Мягкость отключения отказавшего канала является важнейшим
преимуществом рассматриваемого метода обеспечения безопасно-
сти в системах автоматического управления заходом на посадку.
Другим важным достоинством этого метода является то, что конт-
ролируются все элементы автопилота, включая датчики сигналов.
Допустим, например, произошел завал гироскопа в гироверти-
кали канала 1. Вследствие рассогласования сигналов в точках Г и
2' и 2", 3' и 3" на выходе компараторов № 1, 2 и 3 появляются
сигналы отказа. В принципе для обеспечения безопасности полета
при любых отказах было бы достаточно компаратора № 3, сравни-
вающего сигналы на последних элементах. Однако применение ком-
параторов сигналов предыдущих элементов позволяет, во-первых,
выявить отказ раньше, чем сработает последний компаратор, и,
во-вторых, получить информацию, в какой группе элементов систе-
мы произошел отказ. В рассматриваемом случае сигнал компарато-
ра № 1 позволяет установить, что произошел отказ одного из вы-
числительных устройств или одного из датчиков. Часто такой
информации летчику достаточно для того, чтобы, воспользовав-
шись показаниями пилотажных и навигационных приборов, опре-
делить, какой из вычислителей или датчиков отказал.
Рассмотренный принцип действия использован для сигнализа-
ции неисправностей в пилотажной системе «Путь». Работу сигнали-
зации неисправностей продольного канала системы «Путь» иллю-
стрирует рис. 4.25. В данном случае сравниваются сигналы откло-
нений командных стрелок тангажа бН1 и 8/у2, снимаемых с вычис-
лителей:
Разностный сигнал, поступающий на вход компаратора Ддн =
= 8Я1 —8ЯгВ качестве компаратора используется мапнитно-элек-
268
Рис. 4.25. Сигнализа-
ция неисправностей
продольного канала
системы «Путь»
тронный усилитель, статическая характеристика которого показана
на рис. 4.26. Реле, включенное на выходе усилителя, срабатывает
(точка 1) при разностном сигнале Дбн, соответствующем расхож-
дению командных стрелок тангажа на пилотажных приборах ПП]
и ПП^ на величину 6±2 мм. При этом загорается лампа «Путь —
Прод.» на приборной доске и выдается сигнал отказа, который при
заходе на посадку отключает вычислитель пилотажной системы от
автопилота (на высотах ниже 200 м).
Из соображений безопасности порог срабатывания реле жела-
тельно делать как можно меньшим. Однако это лимитируется воз-
можностью ложных срабатываний сигнализации. Дело в том, что
из-за разброса характеристик радиотехнических элементов (сопро-
тивлений, конденсаторов и др.) передаточные функции и
U/|^(p)2 так же, как (p)i и W^(p)2 все же отличаются друг
от друга. Вследствие этого на переходных режимах могут возни-
кать сигналы Лдн, приводящие к срабатыванию реле. Информацию
об отказах гировертикали, связанных с завалом гироскопа, летчик
может получать не только от компаратора. Это видно также по по-
казаниям пилотажного прибора, в состав которого входит указатель
дистанционного авиагоризонта. Сравнивая показания обоих пило-
тажных приборов и резервного авиагоризонта, легко выявить отка-
завшую гировертикаль. Очевидно, что отказы ГРП, выдающего
сигналы в оба вычислителя, компаратор контролировать не может.
Сигнализация неисправностей
бокового канала системы «Путь»
построена по такой же схеме. Она
позволяет контролировать отказы
вычислителей и гировертикалей.
Курсовой радиоприемник и курсо-
вая система, подключенные к обоим
вычислителям, не контролируются.
В настоящее время на самолеты
Рис. 4.26. Статическая харак-
теристика усилителя
устанавливают, как правило, две
пилотажные системы с приборами
269
Рис. 4.27. к принципу действия блоков контроля, работающих на принципе срав-
нения с использованием аналогов
для левого и правого летчиков. Для контроля исправности этих си-
стем достаточно установить компараторы сигналов на выходе вы-
числителей продольного и бокового каналов. Если же нужно кон-
тролировать недублированный автопилот, то в соответствии с
рис. 4.24, кроме компараторов, необходимо устанавливать еще один
комплект автопилота, что связано с большими техническими труд-
ностями. Однако даже при наличии двух автопилотов система ав-
томатического управления в целом остается одноотказной: она ра-
ботает только до первого отказа, после чего отключаются оба
автопилота. К тому же вероятность отказа сдвоенной системы ав-
томатического управления удваивается. Вследствие этого примене-
ние подобных систем оказывается неоправданным.
В одноотказной системе второй автопилот необходим только для
контроля. Поэтому целесообразно заменить его элементы (все или
некоторые) простыми и надежными моделями (аналогами). Напри-
мер, усилитель и рулевая машинка канала № 2 заменены моделью
(аналоговым устройством) (рис. 4.27). Эта схема, как и схема,
показанная на рис. 4.24, обеспечивает мягкость отключения. Вместе
с тем отсутствие второй рулевой машинки и исключение необходи-
мости разделения на две части управляющих поверхностей самоле-
та существенно упрощают ее реализацию. Отметим, что исключение
из схемы компаратора сигналов на выходе усилителей, являющихся
сравнительно простым и надежным элементом автопилота, несу-
щественно уменьшает контролеспособность этой системы. .
Для построения аналога датчика углового положения самолета
можно воспользоваться датчиком угловой скорости. Так, для слу-
чая, когда на самолете имеется одна гировертикаль (ГВ) и датчик
угловой скорости крена (ДУС) сравнение сигналов крена можно
осуществить по схемам, показанным на рис. 4.28.
На рис. 4.28, а последовательно с ДУС установлен корректи-
IF (р)гв
рующий фильтр с передаточной функцией W (р)ф =---------.
w (р)дус
Благодаря этому передаточные функции обеих цепей оказыва-
ются одинаковыми и, следовательно, Очевидно, что в
простейшем случае корректирующий фильтр представляет собой
270
k
интегрирующее звено с передаточной функцией №'(р)ф =—. Схе-
р
ме, изображенной на рис. 4.28, а, присущ серьезный недостаток,
связанный с'накапливанием ошибок на выходе этого звена, вслед-
ствие чего, даже при условии исправности обоих датчиков, с тече-
нием времени различие в сигналах и U'y нарастает, что в конеч-
ном итоге приводит к ложному отключению.
От этого недостатка свободна схема, показанная на рис. 4.28, б.
Здесь сигнал, снимаемый с гировертикали, пропускается через кор-
ректирующий фильтр с передаточной функцией
^(/7)ф==
(Р)дус
«4/>)гв ’
В простейшем случае этот фильтр должен был бы представлять
идеальное дифференцирующее звено (W(p)$=kp). Реальная пере-
даточная функция имеет вид1Г (р)ф— t . При малых значе-
ниях Т это различие несущественно. С учетом флуктуации сигнала
Uf последняя передаточная функция даже предпочтительнее с точ-
ки зрения уменьшения вероятности ложных отключений.
Таким образом, в этой схеме сравнение ведется по сигналам уг-
ловых скоростей L/'и {/т . Отсюда вытекает основной недостаток
этой схемы сравнения: в ней не контролируются медленные завалы
гировертикали (с угловыми скоростями менее порога срабатывания
компаратора). Тем не менее в системах автоматического управле-
ния, устанавливаемых на легкие самолеты, применение подобных
схем сравнения оказывается целесообразным.
Рассмотренный принцип сравнения сигналов ГВ и ДУС являет-
ся частным случаем сравнения сигналов двух датчиков информа-
ции, один из которых дает информацию о контролируемом парамет-
ре, а другой — о скорости изменения этого параметра.
а)
Рис. 4.28. К сравнению сигналов гировертикали и датчика угловой скорости
271
Рис. 4.29. Сравнивающее устройство
Применение корректирующих фильтров в схемах сравнения от-
крывает широкие возможности для контроля не только датчиков
информации, но и других элементов бортовых систем автоматиче-
ского управления.
Выше отмечались два противоречивых требования, которые при-
ходится учитывать при выборе порога срабатывания компараторов.
Для обеспечения мягкого отключения порог должен быть возможно
меньше, а для уменьшения вероятности ложных отключений — воз-
можно больше. Вероятность ложных отключений возрастает, если
в сравниваемых сигналах содержатся значительные по величине
постоянные составляющие, которые обычно являются следствием
дрейфов усилителей.
Большие трудности по предупреждению ложных отключений
возникают, когда вычислитель пилотажной системы (вычислитель
сигналов траекторного управления) реализован по интегральному
закону. В этом случае даже при нормальной работе вычислителей
и датчиков сигналов системы сигналы, подаваемые на компаратор,
могут существенно различаться. Для уменьшения вероятности лож-
ных отключений в некоторых случаях сигналы на компаратор по-
дают через изодромный фильтр, имеющий передаточную функцию
Ц7(р)=—как известно, такой фильтр не пропускает посто-
янные и медленно меняющиеся составляющие сигналов. В других
случаях на изодромный фильтр подают разностный сигнал.
Иногда для уменьшения вероятности ложных отключений в со-
став компаратора может входить цепь задержки (фильтр низких
частот, реле времени). Их назначение в блоках контроля рассматри-
ваемого типа такое же, как и в пороговых блоках контроля, работа
которых была подробно рассмотрена выше.
При использовании изодромных фильтров блоки контроля не
реагируют на медленные отказы, например на медленные завалы
гировертикали. Для контроля подобного рода отказов блоки конт-
роля с изодромными фильтрами часто дополняют пороговыми бло-
ками контроля. Интересное решение этой задачи найдено в комби-
нированном блоке контроля, применяемом в системах автоматиче-
ской посадки на самолетах фирмы Боинг (рис. 4.29).
Сравниваемые сигналы поступают через два входа на дифферен-
циальный усилитель. С его выхода разностный сигнал подается на
полупроводниковый триггер через две цепи. В одну из них включен
изодромный фильтр, в другую — регулятор порога срабатывания
272
сравнивающего устройства по медленно меняющимся сигналам.
С помощью этого регулятора, а также подбором параметров изо-
дромного фильтра, по-существу определяющего порог срабатыва-
ния по быстро меняющимся сигналам, можно добиться того, что
сравнивающее устройство будет эффективно реагировать и на быст-
рые, и на медленные отказы. При этом порог срабатывания сравни-
вающего устройства при всех видах отказов получается весьма
низким. Для уменьшения вероятности ложных отключений на вы-
ходе триггера включена цепь задержки.
Интересной особенностью этой схемы является то, что при от-
сутствии или малом сигнале на входе триггера на его выходе име-
ется напряжение. Если на вход триггера подается сигнал, превы-
шающий порог срабатывания, то его выходное напряжение падает
до нуля, что и является сигналом отказа.
До сих пор мы рассматривали устройства сравнения сигналов
от двух источников информации. Если же имеется более двух ис-
точников однотипной информации, то оказывается возможным вы-
явить не только факт отказа, но и отказавшую цепь или элемент.
Поэтому с появлением в последние годы на самолетах многоканаль-
ных бортовых систем автоматического управления принцип сравне-
ния сигналов получил весьма широкое применение. Следует ука-
зать, что появление таких систем было продиктовано в первую
очередь необходимостью обеспечения высокой надежности аппара-
туры автоматического управления посадкой самолетов.
Учитывая важность и определенную самостоятельность этого
вопроса, мы подробно познакомимся с примерами реализации прин-
ципа сравнения сигналов для контроля исправности в системах,
имеющих три и более однотипных каналов или элементов. Это будет
сделано в следующем параграфе.
Блоки контроля, использующие специальные тест-
сигналы
Характерной чертой блоков контроля этого типа является нали-
чие в их составе датчика (генератора) специальных тест-сигналов,
выдаваемых в контролируемую схему. Существуют две разновид-
ности таких блоков контроля: с непрерывной и дискретной выдачей
тест-сигналов. Назовем первую разновидность блоками непрерыв-
ного тест-контродя, а вторую — блоками дискретного тест-
контроля.
Вначале рассмотрим принцип действия блока непрерывного
тест-контроля, используемого для контроля исправности автопило-
та (рис. 4.30). Блок состоит из генератора и приемника тест-сигна-
лов. В свою очередь, приемник тест-сигналов состоит из детектора,
фильтра с выпрямителем и релейного усилителя. Генератор тест-
сигналов вырабатывает сигналы Uf частоты 400 гц, модулиро-
ванные по амплитуде напряжением частоты 25 гц. Тест-сигналы
подаются на вход вычислительного устройства, где они суммируют-
273
Рис. 4.30. К принципу
действия блока конт-
роля с тест-сигнала-
ми
ся с управляющими сигналами At/, образованными в результате
сложения сигналов датчиков, задающих устройств и обратной свя-
зи согласно (4.38).
Результирующий сигнал At/4-t/y подается на усилитель, к вы-
ходу которого, помимо рулевой машинки, подключен приемниктест-
сигналов. На нагрузке детектора (фазочувствительного выпрямите-
ля) выделяется напряжение, содержащее переменную составляю-
щую U/ частоты 25 гц. С помощью специального фильтра сигнал
[//выделяется, а затем выпрямляется. Выпрямленное напряжение
подается на релейный усилитель, который при срабатывании сни-
мает сигнал отказа. Как видно, частота тест-сигналов Uf значитель-
но больше частоты управляющего сигнала At/. Благодаря этому,
во-первых, сигналы легко разделить и, во-вторых, тест-сигналы t/y
не отрабатываются рулевой машинкой, обладающей по отношению
к ним сравнительно высокой инерционностью.
Теперь допустим, что произошел обрыв цепи тракта прохожде-
ния управляющего сигнала. В таком случае тест-сигналы не посту-
пают в приемник и с выхода релейного усилителя выдается сигнал
отказа. Тест-сигналы не проходят в приемник и при других отка-
зах автопилота.
Это достигается за счет ограничения выходного сигнала усили-
теля. Пока автопилот исправен, и величина управляющего сигнала
Д[/мала, тест-сигналы линейно усиливаются в усилителей проходят
в приемник. При возникновении отказа, приводящего к появлению
большого управляющего сигнала At/ (например, при обрыве цепи
обратной связи), результирующий сигнал AU+Uf становится слиш-
ком большим для линейного усиления. Усилитель работает в режи-
ме ограничения (насыщения), причем ограничение происходит за
счет сигнала Uf. Вследствие этого сигнал [// пропадает или умень-
шается до величины, недостаточной для срабатывания релейного
усилителя, а значит — для снятия сигнала отказа.
Блок контроля рассмотренного типа реагирует также на неис-
правности рулевой машинки и усилителя. Сигналы отказа, кроме
того, выдаются при пропадании напряжения питания автопилота и
неисправностях самого блока контроля. Вместе с тем такой блок
не позволяет контролировать исправность датчиков сигналов в це-
274
лом. В некоторых случаях удается проверить выходные цепи от-
дельных датчиков. Для этого тест-сигналы Uf подают не прямо на
вычислительное устройство, а на выходные цепи одного из датчи-
ков, например гировертикали.
Следует также указать, что блоку контроля, представленному
на рис. 4.30, присущ серьезный недостаток: при резких отклонениях
рукояток управления автопилота имеют место ложные отключения.
Они являются следствием возрастания управляющего сигнала AU.
Для устранения ложных отключений блоки контроля дополняют
логическими устройствами, подобными ранее рассмотренным.
Принцип действия блоков дискретного тест-контроля рассмот-
рим на следующем примере схемы контроля системы директорного
управления заходом на посадку. Представим себе, что датчики сиг-
налов, используемых в системе, подключены к вычислителю через
размыкающие контакты реле. При срабатывании реле вместо этйх
датчиков к вычислителю через размыкающие контакты подключа-
ются датчики эталонных сигналов. Если все элементы директорной
системы (вычислители, усилители, командные приборы и т. д.) ис-
правны, то командные стрелки и другие индексы должны занять
некоторое вполне определенное положение. Тест-контроль осуществ-
ляется при нажатии летчиком кнопки, управляющей реле пере-
ключения сигналов. Очевидно, что в это время нельзя пользоваться
показаниями прибора для управления самолетом.
В настоящее время блоки контроля, использующие специаль-
ные тест-сигналы, применяются для контроля исправности бортовых
систем автоматического управления значительно реже, чем блоки
контроля других типов. Вместе с тем следует указать, что принцип
дискретного тест-контроля получил очень широкое применение для
проверки исправности блоков контроля. Такая проверка обычно
проводится перед выполнением режима, например перед началом
захода на посадку, перед началом выравнивания и т. д. При нажа-
тии кнопки включения тест-контроля на блоки контроля подаются
эталонные сигналы, вызывающие срабатывание этих блоков, если
они исправны. В некоторых бортовых системах автоматического уп-
равления режим тест-контроля может включаться не только вруч-
ную, но и автоматически. Например, в системах автоматической по-
садки на самолетах фирмы Боинг предусмотрено включение авто-
матического тест-контроля в момент захвата глиссады.
§ 6. РЕЗЕРВИРОВАНИЕ БОРТОВЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И ИХ ЭЛЕМЕНТОВ
Общие вопросы резервирования бортовых систем
автоматического управления
До сих пор мы рассматривали вопросы обеспечения безопасно-
сти в одноотказных бортовых системах автоматического управле-
ния. Однако, как это было уже показано в § 1 настоящей главы,
275
безопасность посадки не может быть обеспечена при использова-
нии таких систем. Это обстоятельство в основном послужило при-
чиной резервирования бортовых систем автоматического управления
и ее элементов. Причем, возвращаясь к формуле (4.3), можно ска-
зать, что задача резервирования в конечном счете сводится к повы-
шению наработки на отказ для резервированной системы. В данном
случае под отказом будем понимать полный отказ системы.
Допустим, что на самолете установлена система автоматическо-
го управления, состоящая из п одинаковых параллельно работаю-
щих каналов. Каждый из каналов работает автономно на управ-
ляющую поверхность, разделенную соответственно на п секций. Бу-
дем полагать также, что каждый канал снабжен соответствующими
блоками контроля, отключающими его при возникновении в нем
неисправности. Иначе говоря, на самолет установлена п-отказная
система.
В таком случае вероятность полного отказа системы qcx равна
произведению вероятностей отказов отдельных каналов qK\
= (4.21)
Зависимости (4.3 и 4.21) позволяют перейти к формуле для оп-
ределения необходимого числа автономных каналов п бортовой
системы, если заданы вероятность отказа q^, время работы системы
/р и известна наработка на отказ одного канала Т0.к
/г = -lg<7c . (4.22)
Определить потребную наработку на отказ Т0.к при заданных
значениях qc, пи можно по формуле
Т0.к=~£=- (4.23)
V Яс
Необходимо указать, что формулы (4.22 и 4.23) являются весь-
ма приближенными. Однако они позволяют определить порядок ве-
личин п и Т0.к. Задаваясь, как и ранее, величинами ^с^0,5-10-7
(ввиду приблизительности расчетов здесь мы не учитываем отка-
зов в наземных радиомаяках) и /р = 30 сек, можно рассчитать, что
в двухканальной (двухотказной) системе необходима наработка на
отказ Г0.к^38 ч. Наработка на отказ такого порядка для совре-
менных бортовых систем считается очень малой. Вполне реальной
можно полагать То.к~500 ч. Тогда для двухотказной системы при
1 Для того чтобы подчеркнуть, что речь идет о полном отказе системы, в
индекс введена буква с. Для упрощения обозначения из индекса опущена бук-
ва а. Поэтому в дальнейшем следует учитывать, что для резервированных си-
стем q&=qc.
276
/р = 30 сек вероятность полного отказа еще больше уменьшается и
имеет порядок qc<0,3 • IO"9.
Таким образом, если в момент принятия решения оба канала
системы будут исправны, то уровень обеспечения безопасности при
выполнении автоматической посадки оказывается достаточно высо-
ким. Иначе говоря, необходимый уровень безопасности посадки, для-
щейся 30 сек, обеспечивается при использовании двухотказной сис-
темы. К этому же выводу мы придем, воспользовавшись формулой
(4.21).
Задаваясь наработкой Т0.к для каждого канала n-отказной сис-
темы, можно определить максимальное время работы системы /р,
при котором не будет превзойден заданный уровень qc
^</7сЛ>.к-
Воспользуемся этой формулой и определим допустимое значе-
ние /р для двухотказной системы с наработкой Го.к=500 ч. Для при-
нятого уровня qc = 0,5 • 10-7 время /р^400 сек.
С появлением самолетов большой пассажировместимости и
сверхзвуковых самолетов проблема регулярности полетов приобре-
тает еще'более важное значение. На такие самолеты может ока-
заться целесообразным устанавливать многоканальные бортовые
системы автоматического управления, которые с большой вероят-
ностью обеспечат успешную автоматическую посадку самолета на
аэродроме назначения и не потребует ухода на запасной аэродром
вследствие отказа бортовых посадочных средств. В таком случае
время работы системы равно продолжительности всего полета. До-
пустим, что длительность полета не превышает 5 ч и что величины
qc и Т0.к взяты прежними. Тогда по формуле (4.22) можно опреде-
лить, что потребное число каналов бортовой системы должно быть
не менее четырех.
Необходимо подчеркнуть, что до сих пор рассмотрение велось
нами на примере системы, у которой количество каналов совпадает
с числом отказов в отдельных каналах, после которого система пол-
ностью отказывает (повторные отказы в каналах не учитываются).
В данном случае это было достигнуто благодаря автономности
каналов. Вместе с тем существуют также системы других типов, у
которых такое совпадение отсутствует. В дальнейшем нами будет
рассмотрена большая группа систем, у которых количество каналов
пк и число отказов п0 связаны зависимостью n0 = nK—1.
В таких системах после возникновения (ггк—1)-го отказа сразу
отключаются оба оставшихся канала. Поэтому в общем случае па-
раметр п в зависимостях (4.21—4.23) характеризует число отказов
в отдельных каналах,.после которого система полностью отказыва-
ет. С учетом этого обстоятельства можно считать, что для автома-
тической посадки с обусловленным ранее уровнем обеспечения бе-
зопасности бортовая система автоматического управления должна
быть двух-четырехотказной в зависимости от того, на какое время
работы она рассчитана.
277
Если для систем автоматического управления посадкой необхо-
димость резервирования диктуется соображениями обеспечения бе-
зопасности этапа приземления, то в системах автоматического и ди-
ректорного управления для захода на посадку к резервированию
прибегают в основном с целью уменьшения вероятности возникно-
вения необходимости в уходе самолета на запасной аэродром. Как
правило, приборы для директорного захода на посадку устанавли-
ваются и для левого, и для правого летчика. Чаще всего для рабо-
ты этих приборов используются два вычислителя и два комплекта
датчиков сигналов. В таких случаях на самолете имеется резерви-
рованная система директорного захода на посадку.
Установка на самолет в случае необходимости дополнительных
вычислителей и датчиков сигналов относительно проста и может
быть осуществлена также на самолетах, уже находящихся в экс-
плуатации.
Значительно сложнее обстоит дело с установкой на самолет ре-
зервных рулевых машинок, поскольку при этом затрагивается ос-
новная система управления самолета. Реализация такого мероприя-
тия на самолетах, находящихся в эксплуатации, связана с больши-
ми затратами и потому оказывается экономически неоправданной.
Поэтому в настоящее время большой парк гражданских самолетов
оборудован системами автоматического управления для захода на
посадку, построенными на базе двухканальных систем директорно-
го захода на посадку и одноканальных автопилотов. В соответствии
с § 1 данной главы, такие системы могут использоваться до наи-
меньшей высоты безопасного ухода самолета на второй круг.
Следует заметить, что за рубежом, главным образом в некото-
рых французских и американских авиационных кругах, существует
другой подход к вопросу резервирования систем автоматического
управления посадкой самолетов. Согласно этому подходу для ав-
томатической посадки пригодны одноотказные системы управления,
в которых обеспечивается мягкое отключение при отказах. Так,
французская фирма Сюд-Авиасьон, выпускающая самолеты «Ка-
равелла», оборудованные такими системами, предназначает их
также для автоматической посадки в условиях посадочных мини-
мумов для категории ША включительно. Фирма считает, что в этих
условиях необходимая безопасность полета при отказах аппарату-
ры обеспечивается своевременным вмешательством летчика, кото-
рому выдается наглядная информация о возникших отказах.
Французская система автоматического управления «Тапир 3»
фирмы Сфена с одноотказным автопилотом и частично резервиро-
ванными датчиками сигналов и вычислителями предназначена для
эксплуатации легких самолетов в тех же условиях.
Методы резервирования
В настоящее время в литературе по надежности автоматических
систем управления [15], [16], [32], [37] обстоятельно изложены общие
вопросы резервирования автоматических систем и элементов. Чита-
278
телей, подробно интересующихся этой проблемой, мы отсылаем к
этой литературе. В данном параграфе будут кратко рассмотрены
методы резервирования применительно к бортовой аппаратуре по-
садочного комплекса.
Резервирование возможно лишь в том случае, если кроме основ-
ных элементов, необходимых для выполнения предназначенной
функции, имеются избыточные элементы. В конечном счете методы
резервирования различаются способом использования этой избы-
точности. Укажем, что под элементами здесь мы подразумеваем та-
кие части системы автоматического управления, как функциональ-
ные блоки (усилитель, датчик сигнала, рулевая машинка и т. п.) и
отдельные каналы системы управления. Вопросы резервирования
таких элементов, как например конденсаторов, реле, сопротивле-
ний, нами специально не рассматриваются.
Резервирование может быть активным и пассивным. При актив-
ном резервировании в случае отказа элемента системы происходит
ее перестройка, в результате которой этот элемент отключается. Вы-
ше, рассматривая систему автоматического управления, состоящую
из п одинаковых автономно работающих каналов, мы полагали,
что отключение неисправных каналов не сказывается на качестве
стабилизации самолета системой управления. В действительности
же такое отключение каналов приводит к исключению из работы
части секций управляющей поверхности, что не может не сказаться
на качестве стабилизации. Во избежание этого недостатка в про-
цессе перестройки должно осуществляться соответствующее изме-
нение законов управления (переключение передаточных чисел,
порций) в исправных каналах. В некоторых типах систем перестрой-
ка сводится к отключению отказавшего элемента. Заметим, что на
время перестройки работа всей системы может нарушаться.
При пассивном резервировании перестройки системы не проис-
ходит и отказавший элемент не отключается. В этом случае может
происходить изменение режима работы исправных элементов, ко-
торые поддерживают систему в работоспособном состоянии.
В бортовых системах автомати-
ческого управления применяется в
основном активное резервирование.
Пассивное резервирование исполь-
зуется при построении некоторых
электронных й релейно-контактных
схем внутри функциональных бло-
ков (внутриэлементное резервиро-
вание).
Резервированные системы по
способу включения резерва могут
быть разделены на две группы.
По первому способу включения
из числа п элементов одного назна-
Рис. 4.31-. К резервированию
замещением
279
Рис. 4.32. Вероятность безотказной работы основного элемента р0 (t) и двух
резервных элементов РР1 (0 и Рр2 (0 в зависимости от вида резерва (7В1 —мо-
мент включения первого резервного элемента)
чения непосредственно в работе участвует только один (рис. 4.31).
Остальные п— 1 элементов находятся в резерве. При отказе рабо-
тающего элемента он отключается и заменяется одним из резерв-
ных и т. д. Этот способ резервирования получил название резерви-
рования замещением. Как правило, отключение неисправного
и подключение резервного элемента производятся автоматически.
Однако имеются некоторые устройства, в которых при отказе ра-
ботающего элемента выдается сигнал отказа, а переключение осу-
ществляется вручную. Разумеется, в обоих случаях каждый из
элементов должен иметь свой блОк контроля. В первом случае при
отказе элемента блок контроля должен отключить его и выдать
сигнал на подключение резервного элемента. Во втором случае
блок контроля служит лишь для выдачи сигнала отказа.
По условиям работы элементов, находящихся в резерве, разли-
чают нагруженный («горячий») резерв, облегченный («теплый») и
ненагруженный («холодный»). Резерв называется нагружен-
н ы м, если резервные элементы находятся в таких же условиях,
как основные (работающие). Вероятность безотказной работы или
вероятность отказа элемента, находящегося в резерве, такая же,
как и основного (рис. 4.32, а). Ресурс элемента, находящегося в
резерве, расходуется с момента включения всей системы. При ис-
пользовании «горячего» резерва перерывы в работе, вызываемые
280
отказами основных элементов, ми-
нимальны. Они определяются
временем срабатывания переклю-
чающих устройств.
Если условия, в которых нахо-
дятся резервные элементы, об-
легчены, по сравнению с услови-
ями основных элементов, резерв
является облегченным. Ве-
роятность безотказной работы
резервного элемента тем больше
отличается от вероятности без-
отказной работы основного эле-
мента, чем сильнее различаются
условия, в которых они находятся
Рис. 4.33. Схема безотказности си-
стемы с резервированием замещением
(рис. 4.32, б). Как и в предыду-
щем случае, ресурс элемента, находящегося в резерве, расходует-
ся с момента включения всей системы. Однако интенсивность рас-
ходования ресурса элемента во время нахождения в резерве зна-
чительно меньше, чем во время работы. Благодаря этому при
прочих равных условиях система с облегченным резервом более
надежна, чем система с нагруженным резервом. Однако перерывы
в работе при отказах основных элементов в системах с облегчен-
ным резервом оказываются большими.
Резерв считается ненагруженным, если резервные эле-
менты до включения в работу находятся в выключенном состоянии.
В идеализированном случае можно полагать, что ресурс резервных
элементов до включения их в работу не расходуется (рис. 4.32, в).
Очевидно, что надежность систем с ненагруженным резервом еще
выше. Однако перерывы при отказах основных элементов стано-
вятся еще большими. Иногда такие перерывы оказываются недо-
пустимо большими.
Очень часто при резервировании замещением в бортовых систе-
мах автоматического управления применяется нагруженный или об-
легченный резерв.
При оценке надежности системы с резервированием замещени-
ем необходимо учитывать надежность переключающих устройств. К
ним необходимо отнести блоки контроля, выявляющие факт отка-
за основного элемента, выключатель отказавшего и включатель
резервного элементов. Обозначим вероятность безотказной работы
функционального элемента рэ, а вероятность безотказной работы
переключателя рп. Тогда структурная схема, безотказной системы с
резервированием замещением имеет вид, показанный на рис. 4.33.
Схема состоит из п каналов (цепей), в каждую из которых вклю-
чены два звена, характеризуемых вероятностями безотказной ра-
боты рэ и рп. Звенья включены последовательно, поскольку для
функционирования элемента в системе необходимо одновременное
выполнение условий: должен быть исправен сам функциональный
281
элемент и должен быть исправен переключатель. Вероятность без-
отказной работы канала
Рк РэРп)
а вероятность его отказа
?к=1-А/>п-
Резервированная система исправно работает, пока исправен хо-
тя бы один канал. Следовательно, вероятность отказа резервиро-
ванной замещением системы qc,3 равна произведению вероятностей
отказа отдельных каналов
п
9сз = <7к1#к2..^КЛ = П
1=1
Для случая нагруженного резерва <7к1 = ?к2 = - = ?кл , тогда
п
^Лагр=П^, = ^1-
/-1
Для случая облегченного резерва <7к1><7к2>->^к„. Значит
п
Z=1
Отсюда следует
^с,3нагр < ^с’3обл’
где Рс.з —^с.з —вероятность безотказной работы системы с нагру-
женным резервом;
Рс.з б = 1 — ^с.з бл — вероятность безотказной работы системы с облег-
ченным резервом.
Выигрыш в надежности при использовании облегченного ре-
зерва
^•«обл = 1 ~ЧкхЧк,---ЧКп
Теперь познакомимся со вторым способом включения резерва.
В отличие от резервирования замещением, при котором в каждый
данный момент в работе участвует только один элемент, при этом
способе в работе участвуют все исправные в данный момент эле-
менты. Назовем этот способ резервированием с постоянным вклю-
чением исправных элементов, или кратко, хотя и не очень точно,—
постоянным резервированием. Подчеркнем разницу между пос-
тоянным и пассивным резервированием: при пассивном резервиро-
вании включенными в работу могут оказаться не только исправ-
ные, но и отказавшие элементы.
Итак, при постоянном резервировании необходимо отключать от-
казавшие элементы. Это может быть достигнуто двумя методами.
282
функциональные
элементы
Выключатели
Рис. 4.34. К реализации принципа выбора по большинству
Первый — снабдить каждый элемент блоком контроля. Однако та-
кой путь приводит к серьезному усложнению системы. Как было по-
казано в предыдущем параграфе, блоки контроля с малым поро-
гом срабатывания и с малой вероятностью ложных отключений —
это блоки с компараторами, зачастую требующие установки толь-
ко для целей контроля второго элемента или точного аналога. Поэ-
тому такой метод отключения применяется лишь в тех случаях, ког-
да удается обойтись простыми блоками контроля.
Второй метод основан на использовании принципа выбора по
большинству, принципа мажоритарной логики. Суть этого принципа
заключается в том, что выходные сигналы (состояния) большин-
ства элементов считаются истинными, поскольку вероятность одно-
временного отказа двух (или более) элементов значительно мень-
ше, чем одного. Пусть, например, имеется система из трех элемен-
тов одинакового назначения.
Если выходной сигнал одного из элементов отличается от двух
других, то этот сигнал считается ложным, а элемент, с выхода ко-
торого он снимается, — отказавшим.
Рассмотрим систему, построенную на этом принципе (рис. 4.34).
Сигналы, снимаемые с выходов функциональных элементов, попар-
но сравниваются друг с другом на компараторах 1—2, 2—3, 1—3.
Порог срабатывания компараторов выбирается заведомо большим,
чем разность сигналов исправно работающих функциональных эле-
ментов. Сигналы с выхода компаратора, появляющиеся при его
срабатывании, подаются на две схемы «И», причем на схему «Ир
подаются сигналы с компараторов 1—2 и 1—3, на схему «И2» — с
компараторов 1—2 и 2—3, на схему «И3» — с компараторов 1—3
и 2—3.
283
Со схем «И» сигналы снимаются на соответствующие выключа-
тели сигналов функциональных элементов, на регулятор усиления
и другие потребители.
Допустим, произошел отказ функционального элемента 1. Это
приведет к появлению разности сигналов на входе компараторов
1—2 и 1—3. Компараторы сработают и выдадут сигналы на все три
схемы «И». Однако только на схему «Ир поступят два сигнала,
необходимые для ее срабатывания. Схемы «И2» и «И3», на которые
поступят только по одному сигналу от компараторов 1—2 и 1—3
соответственно, не сработают. Благодаря этому сигнал на отклю-
чение поступит лишь на выключатель функционального элемента 1,
который отказал.
Если после отказа элемента 1 произойдет отказ любого из двух
оставшихся элементов, то это приведет к срабатыванию третьего
компаратора 2—3. Сигнал с этого компаратора поступит на схемы
«И2» и «Из», на которых уже ранее имелось по одному сигналу.
Обе схемы сработают и отключат оставшиеся элементы, хотя один
из них исправен. Таким образом рассматриваемая схема работает
до второго отказа и потому является двухотказной.
В схеме (см. рис. 4.34) сигналы с исправных элементов посту-
пают на сумматор. Очевидно, что при отказе одного элемента сум-
марный сигнал уменьшится примерно на одну треть. Для компен-
сации этого уменьшения служит регулятор усиления, который соот-
ветственно увеличивает этот сигнал в полтора раза. В некоторых
случаях такая регулировка суммарного сигнала может не требо-
ваться.
В последние годы на гражданских самолетах начали применять
так называемые блоки сравнения гировертикалей. Они предназна-
чены для сравнения между собой сигналов трех гировертикалей,
каждая из которых работает на свои потребители. Принципиально
схема блока сравнения гировертикалей отличается от только что
рассмотренной отсутствием сумматора и регулятора усиления. Уп-
рощенная схема блока сравнения гировертикалей по одному каналу
(тангажа) приведена на рис. 4.35.
Со щеток потенциометров гировертикалей, являющихся в дан-
ном случае функциональными элементами, снимаются сигналы,
пропорциональные углам тангажа. Пока гировертикали исправны,
независимо от эволюций самолета сигналы, снимаемые с потенцио-
метров, равны между собой. Попарное сравнение этих сигналов
осуществляется с помощью трех релейных магнитных усилителей
1—2, 2—3, 1—3. Эти усилители срабатывают при превышении раз-
ностью сигналов, снимаемых с потенциометров, заданного порога
срабатывания.
В блоке сравнения гировертикалей типа БСГ-2П порог сраба-
тывания соответствует расхождению углов, измеряемых гироверти-
калями, около 4°. Срабатывание каждого из релейных магнитных
усилителей приводит к замыканию двух пар контактов, через ко-
торые подается питание на обмотки реле Pl, Р2, РЗ. Заметим, что
284
Рис. 4.35. Блок контроля гировертикалей
каждое из этих реле питается через контакты двух релейных маг-
нитных усилителей. Поэтому для размыкания реле необходимо
снять питание по обеим цепям. Благодаря этому реализуется логи-
ческая операция «И». При исправной работе гировертикалей об-
мотки реле находятся под током, и через их замыкающие контакты
подаются сигналы «Годен».
Допустим, произошел отказ ЦГВ2. Это приведет к срабатыва-
нию релейных магнитных усилителей 1—2 и 2—3. Обесточится об-
мотка реле Р2, которое и выдает сигнал отказа ЦГВ2.
Принцип действия блока контроля гировертикалей по каналу
крена аналогичен. В блоке предусмотрена система тест-контроля,
позволяющая проверить его исправность в полете.
В обеих вышерассмотренных схемах (рис. 4.34, 4.35) исправ-
ность элементов определялась путем сравнения между собой их вы-
ходных сигналов. Этот метод, иногда называемый способом «сличе-
ния голосов» или «голосования», не является единственным мето-
дом определения исправности элементов. На рис. 4.36 представлена
схема, в которой сигналы функциональных элементов сравнивают-
ся с сигналом на выходе регулятора усиления:
up=k-uc=kpu'+U2+U3
3
где Ulf U2i U3—сигналы функциональных элементов;
Uс —сигнал на выходе сумматора;
kp — коэффициент усиления регулятора усиления.
285
Функциональные
Рис. 4.36. Схема с определением отказавшего элемента методом сравнения вы-
ходных сигналов с суммарным сигналом
Величина коэффициента усиления увеличивается в 1,5 раза при
отказе любого элемента. В простейшем случае регулятор усиления
представляет собой релейную схему, управляемую сигналами с по-
роговых блоков.
При срабатывании реле шунтируются гасящие сопротивления
в цепи сигнала на выходе сумматора.
Другой метод определения исправности элементов основан на
использовании выбирающих устройств (рис. 4.37). Выбирающее
устройство 1 из трех входных сигналов непрерывно выбирает и пе-
редает сигнал, имеющий промежуточную амплитуду. Наибольший
и наименьший сигналы отбрасываются. Поэтому если отказы со-
провождаются выдачей больших сигналов или их пропаданием, вы-
бирающее устройство такие сигналы не пропускает.
В работе выбирающего устройства используются логические
операции выделения наибольшей и наименьшей из двух или не-
скольких величин. Вначале рассмотрим схему выделения наимень-
шей из двух величин, реализованную на диодах (рис. 4.38). Ток че-
рез диод Д1 протекает при условии, что Ui<U0TI, а через диод Д2—
при условии, что U2<Uon.
При выполнении обоих условий ток протекает через диод Д1,
если Ui<U2, и через диод Д2, если U2<U\. В первом случае
[/вых=[/1, а во втором — ^вых=^2. Схема выделения наименьшей
из нескольких величин работает аналогично.
1 Мор ей нс (Н. Moreines), Уортингтон (R. Worthington), Томас
(F. Thomas). Мажоритарный выбор обеспечивает безопасность летчика и самоле-
та. «Электроника», том 37, 1964, № 16. с. 44.
286
Функциональные
элементы
Рис. 4.37. Схема с выбирающим уст-
ройством
и,
0-
^8ых
—0
Рис. 4.38. Схема выделения наимень-
шей из двух величин
Рис. 4.39. Схема выделения наиболь-
шей из трех величин
Теперь рассмотрим схему выделения наибольшей из трех ве-
личин (рис. 4.39). При малых входных напряжениях £Л, U2 и U3
диоды Д1, Д2 и ДЗ заперты отрицательным опорным напряжением
1/Оп. В этом случае £/ВыХ=0. При условии U2>Uon, U3>
>Uon открыт диод, к которому приложено наиболее положитель-
ное напряжение. Выходной сигнал равен этому напряжению.
Выбирающее устройство (рис. 4.40) состоит из трех схем выде-
ления наименьшего из двух сигналов: «mini», «min2», «min3» и од-
ной схемы выделения наибольшего из трех сигналов: «тах». Пусть
на вход выбирающего устройства поступают сигналы Ui>U2>U3.
Тогда во время положительного полупериода на выходе схемы
«mini» выделится сигнал U2l на выходе схем «min2» и «min3» — сиг-
нал U3. Из этих трех сигналов, поступивших на вход схемы «тах»,
наиболее положителен сигнал U2, который и является выходным
сигналом выбирающего устройства. Во время отрицательного полу-
периода выходной сигнал -схем «mini» и «min3» равен 1Л, а схемы
«min2»—U2. Выходной сигнал схемы «тах» во время отрицатель-
ного полупериода равен t/2.
Таким образом, через выбирающее устройство во время всего
периода проходит сигнал U2, имеющий промежуточную величину.
Рис. 4.41 иллюстрирует выделение выбирающим устройством про-
межуточного в каждый данный момент напряжения из трех напря-
жений f7i, U2 и U3, подаваемых на его вход.
Важнейшим достоинством выбирающего устройства является
отсутствие в .нем контактных устройств. Таким же достоинством об-
287
ладает и другое устройство аналогичного назначения, так называе-
мый кворум-элемент (рис. 4.42). Подобно выбирающему устройст-
ву, кворум-элемент при больших различиях сигналов t/b U2 и U3
пропускает на выход сигнал промежуточной величины. Однако при
небольших расхождениях сигналов t7i, U2 и U3 он работает в ре-
жиме осреднения. Выходной сигнал в этом режиме равен среднему
арифметическому трех сигналов
U — + U2 + U3
з
Наконец, если один из сигналов, например сигнал Z73, отличается
от осредненного сигнала U более чем на некоторую заданную ве-
личину + —Z73| >Д67), то он отключается. В этом
случае кворум-элемент выдает сигнал, равный среднему арифмети-
ческому двух остальных сигналов. В нашем случае
Рис. 4.41. К выделению сигнала промежуточной величины
288
Значение At7, при котором про-
исходит запирание цепи сигнала,
считающегося неисправным, уста-
навливается соответствующим под-
бором напряжений смещения, пода-
ваемых на диодные мосты. Следует
заметить, что принципиально выби-
рающее устройство также может
работать в режиме осреднения сиг-
налов. Для этого необходимо на ди-
оды выбирающего устройства подать
соответствующее смещение.
Как видно из предыдущего, в
принципах работы и реализации вы-
бирающих устройств и кворум-эле-
ментов много общего. Поэтому они
могут рассматриваться как разно-
видности логических избирательных
схем, построенных на нелинейных
элементах, в данном случае — на
полупроводниковых диодах.
Как правило, схемы резервиро-
вания, использующие выбирающие
устройства, и кворум-элементы со-
вершенно аналогичны. Поэтому схе-
ма, показанная на рис. 4.37, будет
работоспособной, если выбирающее устройство заменить кворум-
элементом. И в том и в другом случае при отказе одного функцио-
нального элемента резервированная схема имеет на выходе нор-
мальный сигнал.
Одновременно выдается сигнал об отказе этого функционально-
го элемента.
При возникновении неисправности еще в одном функциональ-
ном элементе выдается второй сигнал отказа. Наличие двух любых
сигналов отказа приводит к отключению всей системы. Этот вопрос
будет подробно рассмотрен несколько позже. Здесь мы лишь ука-
жем, что сигналы отказа проходят через устройство, запоминаю-
щее отказ. Например, в схеме, показанной на рис. 4.29, для этой
цели установлен триггер Шмитта. Необходимость в памяти на от-
каз необходима на тот случай, если в системе произойдет второй
отказ, похожий на первый. В этом случае сигналы отказавших
элементов будут одинаковыми. В соответствии с правилами ма-
жоритарной логики, положенными в основу работы системы, эти
два сигнала будут считаться истинными, а сигнал исправного эле-
мента— ложным. Если не предпринять специальные меры, для ко-
торых как раз и нужна память на отказ, то это приведет к отклю-
чению исправного элемента и выдаче сигнала с отказавших эле-
ментов.
10—3261
289
Функциональные Логическая избирательная
элементы схема
Рис. 4.43. Логическая избира-
тельная схема
Итак, только что рассмотренные нами устройства обеспечивают
выдачу нормальных сигналов, если исправны по крайней мере два
любых элемента из трех. На рис. 4.43 представлена схема, реали-
зующая такую логическую функцию:
Учитывая, что #1 + #1 = 1, #2+#2=1, #з+#з=1, в соответствии
с правилами алгебры логики запишем
г/=г/1б7Н^з+^з)+ад^2+^)+ад(^1+^1)=
= + UxUp2 + U2U3UX. (4.24)
Логическая функция такого вида реализуется схемой, изобра-
женной на рис. 4.44. Для определения вероятности безотказной ра-
боты резервированной системы, т. е. вероятности выдачи сигнала
(7, воспользуемся зависимостью (4.24). Будем полагать, что веро-
ятности исправной работы функциональных элементов одинаковы
ри\ = Ри2=Риг=Р^- Тогда вероятность отказа функционального
элемента равна (1—рэ). Вероятность безотказной работы системы
Рс =Рэ + 3^ (1 - рэ) =pl (3 - 2р9). (4.25)
290
Пока мы не учитывали надеж-
ность переключающего устройст-
ва, которым является логическая
избирательная схема (выбираю-
щее устройство, кворум-элемент
и т. п.). Если надежность пере-
ключающего устройства рп=#1,
то вероятность безотказной рабо-
ты системы определится зависи-
мостью
Рис. 4.45. Трехканальная схема с тре-
мя кворум-элементами
Рс = РпР1(3-2а)-
Для уменьшения вероятности
отказов из-за переключающих
устройств часто прибегают к их резервированию. Особенно целесо-
образно это делать в системах с несколькими выходами. На
рис. 4.45 в качестве подобного примера показана трехканальная
система с тремя кворум-элементами.
Рассмотренный принцип резервирования с использованием ло-
гических избирательных схем может быть распространен на систе-
мы с большим количеством каналов. В принципе с помощью таких
схем .на базе малонадежных функциональных элементов может
быть построена резервированная система с надежностью, сколь
угодно близкой к единице L Разумеется, это достигается за счет
сильного усложнения систем.
Тот факт, что благодаря использованию логических избиратель-
ных схем при отказах отдельных функциональных элементов вы-
ходная информация все же полностью сохраняется, послужил осно-
ванием называть такие устройства восстанавливающими
органами. Этот термин довольно широко распространен в ли-
тературе по надежности автоматических систем управления.
Теперь рассмотрим вопрос обработки информации об отказах
функциональных элементов, получаемой от компараторов (см. рис.
4.36 и 4.37). Обычно целью этой обработки является выдача сигна-
лов об отказе одного и двух элементов. Сигнал об отказе одного
элемента нужен, чтобы информировать летчика об отсутствии ре-
зерва. Сигнал об отказе двух элементов необходим для отключе-
ния всей системы. При этом, как правило, нет необходимости сигна-
лизировать, какие именно элементы отказали. Тогда логическая
функция для события, заключающегося в отказе одного элемента,
имеет вид:
01 — U\ 4- U2 U
(4.26)
где Ui, U2, U3 — сигналы отказа соответствующих функциональных элементов
/, 2 и 3.
1 Подробно по этому поводу см. Г16], [321.
10*
291
Рис. 4.46. Логическая схема, реали-
зующая логические функции (4.26,
4.27)
Логическая функция для случая отказа двух элементов
О2=ихи2 4- Z71Z73+W3. (4.27)
Функции (4.26 и 4.27) реализуются схемой (рис. 4.46).
По такому же принципу обрабатывается информация об отка-
зах функциональных элементов, когда число последних более трех.
Если система состоит, например, из четырех одинаковых элементов,
сигнал на отключение системы необходимо выдавать при отказе
трех элементов (О3). Сигналы отказа одного элемента и двух
элементов О2 используются для информации летчика об уменьше-
нии и отсутствии резерва соответственно.
Логические функции:
O1=.t71+t724-t73 + t74; (4.28)
О2 = СЩ2+Z71С73+Z71Z74+U2U3 4- U2U4 4- W4; (4.29)
О3=иШЛ + UxU2U, 4- 4- £72(73£74, (4.30)
где U2, —сигналы отказа соответствующих функциональных эле-
ментов, реализуются схемой, представленной на рис. 4.47.
Каждой из этих функций соответствует свой выход схемы.
О построении резервированных бортовых систем
автоматического управления
В настоящее время в построении бортовых систем автоматиче-
ского управления наметились два основных направления. Одно из
них базируется на использовании резервирования замещением, дру-
гое— на применении постоянного резервирования. В зарубежной
литературе бортовые системы первого направления получили на-
звание мультиплицированных, а второго — мульти-
плексных.
Мультиплицированная система, состоящая из двух каналов, на-
зывается дублированной, а состоящая из трех каналов —
триплированной или троированной. Мультиплексная систе-
ма, состоящая из двух каналов, называется дуплексной, а со-
стоящая из трех каналов — триплекс пой. Сказанное о мульти-
292
Рис. 4.47. Логическая схе-
ма, реализующая логические
функции (4.28, 4.29, 4.30)
плицировании и мультиплексировании справедливо не только по
отношению к каналам автопилота, но и к функциональным эле-
ментам.
Определенный интерес представляет тот факт, что первые муль-
типлицированные и мультиплексные бортовые системы автоматиче-
ского управления были разработаны практически одновременно.
Дублированная система была разработана английской фирмой
Эллиот для самолетов VC-10. Триплексная система, разработанная
английской фирмой Смит, предназначена для самолетов типа Трай-
дент. Обе системы предназначены для автоматизации посадки,
включая приземление; обе — двухотказные.
Разработчики системы автоматического управления для самоле-
та VC-10 отказались от триплексной схемы, ссылаясь на трудности,
связанные с установкой на самолет трех комплектов КРП и ГРП и
радиовысотомеров, работающих на разных частотах, и размещени-
ем их антенн 1. Это, по мнению фирмы, также требовало примене-
ния трех комплектов наземных радиомаяков, работающих на трех
разных частотах, что практически неприемлемо по ряду причин тех-
нического и экономического порядка. Вместе с тем имеется положи-
тельный опыт использования дублированных радиомаяков и радио-
приемников, каждый канал которых контролируется собственными
средствами. Учитывая этот опыт, фирма сочла целесообразным раз-
рабатывать дублированную бортовую систему управления, состоя-
щую из двух одинаковых каналов, снабженных собственными бло-
ками контроля (БК). При этом также предполагалось, что такая
система окажется проще и легче, чем триплексная.
В дублированной системе (рис. 4.48) автоматическое переключе-
ние при возникновении неисправностей может осуществляться в
двух местах: одно — для двух контролируемых наземных радиомая-
ков, другое — на выходе сервоприводов автопилотов. Сервоприво-
ды автопилотов имеют собственные БК. Поэтому на рис. 4.48 они
условно выделены из автопилотов, имеющих собственные БК.
1 Говард (R. W. Howard). Надежность при автоматической посадке.
Flight, 1960, № 7, October, с. 569.
293
Рис. 4.48. Упрощенная схема дублированной системы
В полете включены оба канала системы, однако к управляющим
поверхностям подключен только один из них. Другой находится в
резерве. При возникновении отказа в первом канале происходит ав-
томатическое переключение на резервный. Необходимо подчерк-
нуть, что в принципе подобные переключения на этапе посадки
весьма нежелательны, так как при переходе с неисправного канала
на исправный возможны значительные рывки. Эти рывки являются
следствием использования в системе аналоговых блоков контроля,
которые имеют довольно широкие пороги срабатывания.
От этого недостатка свободна триплексная система автоматиче-
ского управления (рис. 4.49) самолета Трайдент. Все три канала ее
работают совместно и одновременно. При отказе одного из каналов
он отключается практически без рывка. Система превращается в
дуплексную, а значит — одноотказную. При возникновении после-
дующего отказа происходит мягкое отключение обоих оставшихся
каналов. Отключающее устройство представляет собой разновид-
ность электромеханического кворум-элемента. Для обеспечения вы-
сокой надежности автоматической посадки в состав бортовых поса-
дочных средств входят три комплекса КРП и ГРП и три радиовы-
сотомера.
Общим для обеих рассмотренных систем является то, что при
отказе в любом функциональном элементе происходит отключение
Рис. 4.49. Упрощенная схема триплексной бортовой системы
294
Рис. 4.50. Упрощенная схема бортовой системы с кворум-элементами
всего канала. Таким образом, если в одном из каналов отказывает,
например, радиоприемник, а в другом — сервопривод, то вся систе-
ма отключается. Систему значительно большей надежности (живу-
чести) можно построить, применив логические избирательные схе-
мы: выбирающие устройства и кворум-элементы. Это может быть
сделано в мультиплексных схемах.
Рассмотрим рис. 4.50, на котором представлена схема триплекс-
ной системы с кворум-элементами (КЭ), включенными на выходе
однотипных функциональных элементов. На данной схеме на выхо-
де функциональных элементов показано только по одному кворум-
элементу, но их может быть установлено и по три, как это сделано
в схеме на рис. 4.45. В целях упрощения на рис. 4.50 не показаны
компараторы, с которых снимаются сигналы об отказе функцио-
нальных элементов, и схема формирования сигналов на отключе-
ние (см. рис. 4.46).
Рассматриваемая система остается работоспособной, пока не от-
кажут два однотипных функциональных элемента.
Обозначим вероятность безотказной работы бортового радио-
приемника ррп, автопилота — рап, сервопривода — рсп- Будем также
полагать, что надежность кворум-элементов практически равна еди-
нице. В таком случае с учетом (4.25) вероятность безотказной ра-
боты триплексной системы с кворум-элементами:
Ртск = Ррп (3 - 2рРп) Pin (3 - 2/7ап) Pin (3 - 2?сп)-
Если условно положить, что Ррп~Рап~Рсп~Рэ, то зависимость
примет вид
Лек =Х(3-2рэ)3.
При тех же условиях вероятность безотказной работы для обыч-
ной триплексной системы (см. рис. 4.49) определяется зависимо-
стями:
Рте 1 (I РрпРапРсп) »
/\с=1-(1-Рэ3)2.
295
Выигрыш в надежности при использовании системы с кворум-
элементами равен
/>тск _ ^(3-2А)з
Рте 1 — (1 — Рэ)2
Совершенно ясно, что чем больше функциональных элементов в
каждом канале, тем больший выигрыш в надежности получается
при установке кворум-элементов на выходе однотипных функцио-
нальных элементов.
Вообще говоря, целесообразность применения того или другого
метода резервирования при построении бортовой системы автома-
тического управления главным образом зависит от ее назначения,
летно-технических характеристик самолета, особенностей его систе-
мы управления. В ряде случаев оказывается целесообразным при-
менять гибридные (комбинированные) системы с мультиплексиро-
ванием некоторых функциональных элементов (гировертикалей, вы-
числителей траекторного управления и др.). Так, большинство бор-
товых систем автоматического управления заходом на посадку сос-
тоит из дуплексной директорной системы (вычислителей траектор-
ного управления) и одноканального автопилота с блоками контро-
ля. Датчики сигналов, используемых только автопилотом, обычно
не резервируются; датчики сигналов директорной системы, как пра-
вило, резервируются тем или иным образом.
Предпочтение отдается системам, в которых к каждому вычисли-
телю траекторного управления подключены свои датчики сигналов,
причем сигналы датчиков одного назначения и вычислителей взаим-
но контролируются компараторными блоками контроля. Примерно
по такой схеме построена наиболее распространенная отечествен-
ная бортовая система автоматического управления заходом на по-
садку БСУ-ЗП. Другая отечественная система САУ-1Т состоит из
дублированного автопилота, триплексированных вычислителей
траекторных сигналов и гировертикалей. Остальные датчики сиг-
налов дублированы или дуплексированы. Эта система путем моди-
фикации и доукомплектования может быть превращена в двухот-
казную систему, удовлетворяющую требованиям обеспечения бе-
зопасности автоматического приземления.
§ 7. НЕКОТОРЫЕ ДОПОЛНИТЕЛЬНЫЕ ВОПРОСЫ ОБЕСПЕЧЕНИЯ
БЕЗОПАСНОСТИ АВТОМАТИЧЕСКОГО ПОЛЕТА
Обеспечение безопасности полета при включении
автопилота
До сих пор возникновение критической ситуации мы связывали
с отказами включенного в работу автопилота. Однако, вообще го-
воря, такая ситуация может возникнуть и вследствие неправильных
действий экипажа при включении и использовании автопилота. Во
296
Сигнал аОртпной
-----связи
избежание этого в современных бортовых системах автоматическо-
го управления предусматривают ряд схемных и конструктивных
мер. Рассмотрим кратко лишь некоторые из них.
Для безопасного, безрывкового включения автопилота в его
схеме применяют различного рода блокировки, не позволяющие
включить рулевые машинки, если на выходе усилителей машинок
имеются сколько-нибудь значительные сигналы.
Включение автопилота происходит в несколько этапов. Вначале
подается питание на датчики сигналов, причем гироскопические
датчики обычно включают до выруливания самолета. На следую-
щем этапе, часто называемом режимом подготовки (согласования,
центрирования), подается питание на остальные элементы автопи-
лота. Исключение составляют муфты сцепления рулевых машинок с
управляющими поверхностями самолета и в некоторых случаях —
электродвигатели рулевых машинок. На этом этапе все элементы
приходят в рабочее состояние.
Даже в том случае, если включение автопилота осуществляется
в горизонтальном полете, на выходе усилителей рулевых машинок
может иметься значительный сигнал, вызванный отклонением уп-
равляющих поверхностей от их нейтрального положения. Если же
автопилот предназначен для включения и на других режимах: в
развороте, наборе высоты, снижении, то на усилитель, кроме того,
подаются сигналы с датчиков угловых положений самолета. Для
компенсации всех этих сигналов в режиме подготовки к выходу
усилителя подключается механизм согласования (обнуления, цент-
рирования), сигнал которого подается на вход вычислительного
устройства автопилота (рис. 4.51).
Механизм согласования представляет собой следящую систему,
работающую до тех пор, пока сигнал на выходе усилителя не умень-
шится практически до нуля. При этом снимается блокировка, пре-
пятствующая срабатыванию муфт рулевых машинок, и выдается
сигнал об окончании режима подготовки.
Затем следует этап непосредственного включения автопилота.
Для этого летчику необходимо нажать кнопку на пульте управле-
ния автопилота.
Применение в качестве включающего органа кнопки, а не вы-
ключателя, является конструктивной мерой, существенно умень-
шающей вероятность случайного включения автопилота. Другой
конструктивной мерой является ограждение выключателя питания
297
(тумблер «Подготовка») на пульте управления автопилота специ-
альными защитными скобами, предохраняющими его от случайно-
го включения.
Контроль питания автопилота
К нарушению нормальной работы бортовой системы автомати-
ческого управления, а в некоторых случаях к возникновению кри-
тической ситуации могут привести отказы в цепях питания системы.
Поэтому в большинстве современных систем предусматриваются
специальные устройства для контроля питания. Схемы и реализа-
- ция этих устройств весьма разнообразны. Для уяснения их принци-
па действия рассмотрим упрощенную схему контроля питания пос-
тоянным и переменным током автопилота АП-6ЕМ-ЗП (рис. 4.52).
Эта схема реагирует на обрыв цепи питания постоянным током,
обрыв цепей одной или сразу двух фаз переменного тока, наруше-
ние фазировки переменного тока. При любой из указанных цеис-
правностей схема контроля питания отключает автопилот. Одно-
временно срабатывает световая и звуковая сигнализации.
Если цепи питания автопилота постоянным и переменным током
исправны и питание включено, то срабатывают реле Ply Р4 и Р5.
Через контакты реле Р4 подается питание на автопилот: реле Р5
разрывает цепь +27 в, идущую в блок контроля. При обрыве лю-
бой из фаз источника переменного тока срабатывает поляризован-
ное реле Р2У подавая питание на обмотку реле РЗ. Контакт реле
РЗ разрывает цепь питания обмоток реле Р4 и Р5У вследствие чего
автопилот выключается и выдается соответствующий сигнал бло-
Рис. 4.52. Схема контроля питания автопилота по постоянному и переменному
току
298
ком контроля. Заметим, что одновременно при обрыве I и II фаз
отпускает реле Р1, отключая напряжение —27 в от обмоток реле
Р4 и Р5. Это позволяет осуществлять контроль при одновременном
обрыве двух любых фаз. Наконец, при обрыве цепи питания пос-
тоянным током происходит обесточивание обмоток и отпускание
реле Р4 и Р5.
ГЛАВА 5
ИНДИКАТОРЫ БОРТОВЫХ СИСТЕМ
§ 1. ИНДИКАЦИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ
ПРИ ПОСАДКЕ
Для управления современным самолетом летчику необходима
разнообразная информация о параметрах движения самолета, ра-
боте двигателей, систем оборудования и др. Совершенствование са-
молетов и расширение их летно-технических возможностей приво-
дит к увеличению объема необходимой информации. В связи с этим
на самолет нужно устанавливать все большее количество приборов.
Не говоря уже о том, что размеры приборных'досок ограничива-
ют число приборов, устанавливаемых на них, необходимо учиты-
вать, что возможности летчика по восприятию и переработке ин-
формации также ограничены. Увеличение скорости полета умень-
шает время, которым располагает летчик для этих операций, что
еще сильнее снижает его возможности. Это особенно существенно
проявляется на этапе захода на посадку, когда дефицит времени
наиболее ощутим.
Использование пилотажных систем с командными приборами
освобождает летчика от необходимости наблюдать и анализировать
показания нескольких приборов и вырабатывать на этой основе
решения по управлению самолетом. Применение автоматических
систем управления, кроме того, разгружает его от непосредствен-
ного управления самолетом. Все это позволяет летчику уделять
больше внимания контролю за параметрами движения самолета.
Однако это не единственный метод облегчения работы летчика по
восприятию и переработке информации.
Важное значение имеет то, как и в каком виде выдается эта
информация. Не имея возможности подробно остановиться на
этой важной и интересной проблеме, в целом выходящей за рамки
нашей книги, рассмотрим некоторые вопросы выдачи информации
применительно к индикаторам пилотажных систем.
При заходе на посадку по командным стрелкам летчик должен
систематически контролировать положение самолета относительно
плоскости горизонта. Поэтому вполне естественно, что командный
пилотажный прибор представляет собой комбинированный прибор,
299
в котором, кроме командных стрелок, имеется указатель дистанци-
онного авиагоризонта (центральной гировертикали) и указатель
скольжения.
Как правило, на командных пилотажных приборах дополнитель-
но выдается информация об отклонении самолета от равносигналь-
ных зон КРМ и ГРМ или от заданной траектории в горизонталь-
ной и вертикальной плоскостях. При пилотировании по такому
прибору летчику нет необходимости пользоваться приборами ПСП.
В некоторых командных пилотажных приборах имеются указатели
отклонения скорости от заданного значения и индексы-указатели
радиовысотомера, имитирующие положение ВПП относительно са-
молета. В таком случае на одном приборе оказывается сосредото-
ченной значительная часть информации, необходимой летчику на
заключительном этапе захода на посадку.
Комбинирование показаний нескольких приборов в одном ока-
зывается весьма полезным для выдачи летчику комплексной ин-
формации о положении самолета в горизонтальной плоскости. По-
этому в состав пилотажной навигационной системы входит также
навигационный прибор, иногда называемый индикатором положе-
ния самолета в горизонтальной плоскости L
В навигационный прибор входят указатель компаса (курсовой
системы), индикаторы курсового и глиссадного радиоприемников
(ПСП) и различные задатчики. В некоторых случаях они включа-
ют в себя указатели радиокомпасов, азимута всенаправленных ра-
диомаяков, указатели дальности до маяка «Свод» («Такан»).
Пилотирование по командным стрелкам требует от летчика кон-
центрации внимания 'на командном пилотажном приборе. Разуме-
ется, это уменьшает объем внимания, уделяемого другим при-
борам.
По-иному обстоит дело при использовании так называемых па-
равизуальных индикаторов.
Идея применения этих индикаторов основывается на способ-
ности человеческого глаза замечать движущееся изображение не
только в том случае, когда оно находится в направлении взгляда,
но и тогда, когда оно находится в стороне, выше или ниже направ-
ления взгляда. Благодаря периферическому зрению летчик, наблю-
дая за показаниями приборов, установленных на приборной доске,
замечает движение паравизуальных индикаторов, которые могут
быть расположены вне ее.
Применение паравизуальных индикаторов помогает решать еще
одну проблему: переход от полета по приборам к визуальному по-
лету в сложных метеоусловиях. Как известно, такой переход (как
и обратный — от визуального полета к полету по приборам) тре-
1 В ряде случаев их также называют навигационными курсовыми приборами
(НКП), навигационными пилотажными приборами (НПП) и т. п. В настоящей
книге будем называть эти приборы навигационными, хотя такое название, стро-
го говоря, весьма условно.
300
бует от летчика определенного времени. При этом после перехода
на визуальный полет летчик, наблюдающий за положением само-
лета через стекло кабины, не имеет возможности наблюдать за
показаниями приборов, расположенных на приборной доске. Меж-
ду тем он по-прежнему нуждается в информации о скорости, вы-
соте и других параметрах полета. Поэтому при заходе на посадку
и взлете скорость и высоту летчику подсказывает штурман или
другой член экипажа.
Этим объясняется большой размах научно-исследовательских
и опытно-конструкторских работ по созданию принципиально но-
вых индикаторов, обеспечивающих отображение необходимой при-
борной информации на переднее стекло кабины или на специаль-
ный экран, расположенный перед этим стеклом.
В дальнейшем такой способ отображения информации будем
сокращенно называть индикацией на стекле, а эти устрой-
ства— индикаторами на стекле.
Объем параметров, индицируемых на стекле, весьма значи-
телен. Помимо изображения искусственного горизонта, индициру-
ется командная информация от вычислителей пилотажной системы,
информация о положении самолета относительно равносигнальных
курсо-глиссадных зон, скорость и высота полета, а в некоторых слу-
чаях курс самолета, вертикальная скорость и сигнальная ин-
формация.
Важной особенностью индикации на стекле является коллима-
ция 1 изображения, благодаря чему оно представляется удаленным
в бесконечность. При этом отпадает необходимость в приспособле-
нии (аккомодации) глаз летчика при переходе на визуальный по-
лет по наземным ориентирам.
Большой интерес представляет разработка устройств для вы-
дачи летчику изображения ВПП. Такое изображение является весь-
ма ценным дополнением к уже перечисленной выше информации,
выдаваемой индикаторами на стекле.
Для получения изображения ВПП может, например, использо-
ваться бортовой радиолокатор и 8—<12 радиолокационных маяков,
устанавливаемых по обе стороны ВПП. На экране радиолокатора
наземные маяки имеют вид ярких точек, напоминающих посадоч-
ные огни. Благодаря коллимации изображения создается картина,
подобная той, которую видел бы летчик при заходе на посадку
ночью в хороших метеоусловиях.
Устройства индикации на стекле заменяют летчику командный
пилотажный прибор, имея в условиях низких посадочных миниму-
мов большие преимущества перед ним.
Весьма плодотворным оказывается подобный метод комплекси-
рования и для навигационной информации. Для этой цели исполь-
зуются электронно-оптические индикаторы навигационной обста-
новки с движущимися картами. Они дают летчику наглядную
1 Поэтому часто индикаторы на стекле называют коллиматорами.
301
Рис. 5.1. Показания авиагоризонтов с различными системами
индикации при левой восходящей спирали
картину положения самолета в горизонтальной плоскости. Рас-
смотрение этих устройств, предназначенных главным образом
для использования на режимах маршрутного полета, не входит в
нашу задачу. Укажем лишь, что в ближайшее время они найдут
широкое распространение на самолетах гражданской авиации.
§ 2. СИСТЕМЫ ИНДИКАЦИИ
В визуальном полете летчик определяет положение самолета от-
носительно земли, ориентируясь по линии естественного горизонта.
При полете в условиях отсутствия видимости естественного гори-
зонта летчик для этих целей использует авиагоризонт (указатель
гировертикали). Принципиально они могут выполняться по двум
системам индикации «Вид с земли на самолет» и «Вид с самолета
на землю».
В системе индикации «Вид с земли на самолет» (рис. 5.1, а)
силуэт самолета подвижен относительно корпуса прибора, как ка-
зался бы подвижным самолет, если наблюдать за ним с земли. От-
счет углов крена и тангажа ведется по положению крылышек под-
302
вижного силуэта относительно неподвижных индексов или рисок,
нанесенных на неподвижных частях прибора. Имитация естествен-
ного горизонта линией искусственного горизонта в этом случае от-
сутствует.
В системе индикации «Вид с самолета на землю» (рис. 5.1, б)
силуэт самолета или заменяющий его символ неподвижен относи-
тельно корпуса прибора. Линия искусственного горизонта переме-
щается так же, как перемещается линия естественного горизонта
относительно самолета. Отсчет углов крена ведется с помощью ин-
декса, перпендикулярного линии искусственного горизонта, пере-
мещающегося относительно неподвижной шкалы кренов в нижней
части прибора (на рис. 5.1 этот индекс не показан).
Вследствие конструктивной сложности и невозможности обес-
печить индикацию больших углов тангажа (при больших углах тан-
гажа подвижный силуэт самолета уходит из поля зрения) первая
система индикации применяется только для кренов. Поэтому прак-
тическое применение нашли приборы, у которых указатели авиаго-
ризонта выполнены либо по системе «Вид с самолета на землю» и
по крену и по тангажу, либо по системе «Вид с земли на самолет»
по крену и «Вид с самолета на землю» по тангажу (рис. 5.1, в).
Если задать летчикам вопрос: «Какой из видов индикации луч-
ше?», то можно услышать самые противоречивые ответы. Ответ в
значительной степени зависит от того, к какой индикации они при-
выкли.
Некоторые летчики утверждают, что после накопления опыта
пилотирования по приборам пилот вообще перестает замечать,
подвижен силуэт или линия горизонта. При этом информация, по-
лучаемая летчиком от авиагоризонта, воспринимается как «кар-
тинка» положения самолета относительно горизонта, на вид кото-
рой он реагирует.
Все же можно отметить, что при управлении самолетом (изме-
нения режима полета) некоторые преимущества имеет индикация
«Вид с земли на самолет», так как при этом летчик как бы управ-
ляет подвижным силуэтом самолета Ч В автоматическом полете
(режим стабилизации) это преимущество исчезает.
С точки зрения легкости перехода от наблюдения за положе-
нием самолета по авиагоризонту к наблюдению за положением по
естественному горизонту более предпочтительной является индика-
ция «Вид с самолета на землю»; в этом случае линии искусствен-
ного и естественного горизонта параллельны.
Эти преимущества особенно ощутимы в условиях низких поса-
дочных минимумов. Поэтому в командных пилотажных приборах,
предназначенных для этих условий, целесообразно использовать
авиагоризонты с индикацией «Вид с самолета на землю».
1 Подробно об этом см. Д е н и с о в В. Г., Лопатин Р. Н. Пилотажно-
навигационные приборы. М., «Воениздат, 1962. 111 с. Денисов В. Г., Лопа-
тин Р. Н. Летчик и самолет. М., Воениздат, 1962, 201 с.
303
Рис. 5.2. Показания компасов с различными системами индикации:
а —система индикации «Вид с земли на самолет»; б — система индикации «Вид с
самолета на землю»
В* еще большей степени эти преимущества сказываются в си-
стемах индикации на стекле. Поэтому во всех этих устройствах
применяется индикация «Вид с самолета на землю».
Указатели курса в навигационных приборах в принципе также
могут выполняться по одной из двух упомянутых систем индика-
ции. В первых навигационных приборах применялась система ин-
дикации «Вид с земли на самолет» (рис. 5.2, а). При разворотах,
особенно на небольшие углы, такие приборы, по мнению летчиков,
обладали некоторыми преимуществами: летчик как бы управлял
силуэтом самолета. Однако комплексирование таких компасов с
указателями радиотехнических навигационных устройств, напри-
мер радиокомпасов, связано с серьезными неудобствами. Это объ-
ясняется тем, что эти указатели обычно выполняются по системе
индикации «Вид с самолета на землю» (рис. 5.2, б). Смешение
двух индикаций приводит к потере наглядности индикации поло-
жения наземных радиостанций и радиомаяков. Это крайне неже-
лательно для маршрутного полета и построения схем предпосадоч-
ного маневра.
В настоящее время указатели курса в навигационных приборах
имеют, как правило, систему индикации «Вид с самолета на зем-
лю». В этом случае получается наглядная картина положения са-
молета в горизонтальной плоскости, в том числе и по отношению
к наземным радионавигационным устройствам; легко определяются
магнитные пеленги этих устройств.
В устройствах индикации на стекле информация о курсе выда-
ется также в системе «Вид с самолета на землю». Эта же система
индикации применяется в электронно-оптических навигационных
индикаторах.
Информация о положении самолета относительно заданных
траекторий в горизонтальной и вертикальной плоскостях выдается
в системе «Вид с самолета на землю». При этом стрелки (планки,
индексы), изображающие заданную траекторию, перемещаются
304
Рис. 5.3. Командный пилотажный при-
бор ПП-ШМ:
/ — шкала крена; 2 — шкала отклонения от
равносигнальной зоны ГРМ; 3 — силуэт са-
молета; 4 — указатель отклонения от рав-
носигнальной зоны ГРМ; 5 — командная
стрелка тангажа; 6 — указатель тангажа;
7 — командная стрелка крена; 8 — шкала
тангажа; 9 — кнопка быстрого восстанов-
ления гировертикали; 10 — указатель
скольжения; 11 — рукоятка выставки шка-
лы тангажа; 12 — сигнальная лампа
Рис. 5.4. Командный пилотажный при-
бор КПП:
1 — кнопка-лампа быстрого восстановления
гировертикали; 2 — шкала крена; 3 — си-
луэт самолета; 4, 5 — указатель и шкала
отклонения от равносигнальной зоны ГРМ;
6 — командная стрелка тангажа; 7 — блен-
кер отказа продольного канала вычисления
командных сигналов; 8, 9 — шкала и указа-
тель отклонения от равносигнальной зоны
КРМ; 10 — шкала тангажа; // — бленкер
отказа бокового канала вычисления
командных сигналов; 12 — рукоятка вы-
ставки шкалы тангажа; 13 — командная
стрелка крена; 14 — указатель скольжения
влево и вправо, вверх и вниз относительно центра, символизирую-
щего самолет.
Несмотря на то что, строго говоря, эти индикаторы показыва-
ют положение траекторий относительно самолета, в настоящее
время принято говорить, что они показывают отклонения самолета
от заданной траектории.
§ 3. КОМАНДНЫЕ ПИЛОТАЖНЫЕ ПРИБОРЫ
Как уже указывалось выше, командный пилотажный прибор
является комбинированным прибором, объединяющим ряд указа-
телей и сигнализаторов. Так, командный пилотажный прибор
305
Система команды по крону
iff
17
18
Система
тангажа
19
Система
команды
по тан гажу
Система отклонения
От заданной
траектории
8 вертикальной
плоскости
23 22 Z1 20
<4 ff
Рис. 5.5. Кинематическая схема командного пилотажного прибора ПП-1ПМ:
/ — командная стрелка крена; 2 — командная стрелка тангажа; 3 — силуэт самолета (указа-
тель крена); 4 — указатель отклонения от заданной траектории в вертикальной плоскости
(стрелки отклонения от равносигнальной зоны ГРМ); 5 — шкала тангажа; б, 11, 14, 17, 19 —
редукторы; 7, 10, 13, 16, 20 — электродвигатели, 8, 12, 18 — потенциометры обратной связи;
9 — потенциометр-приемник системы тангажа; /5 — генератор; 21 — потенциометр-датчик
сигнала тангажа; 22 — потенциометр-датчик сигнала крена; 23 — потенциометр-приемник
сигнала крена
ПП-1ПМ, входящий в состав отечественной пилотажной системы
«Путь» (рис. 5.3), содержит пять указателей: указатель команды
по управлению боковым движением (командная стрелка крена),
указатель команды по управлению продольным движением (ко-
мандная стрелка тангажа), указатель авиагоризонта, указатель
скольжения и указатель отклонения от заданной траектории в вер-
тикальной плоскости. Командный пилотажный прибор КПП из си-
стемы «Привод» (рис. 5.4), кроме того, включает в себя указатель
отклонения от заданной траектории в горизонтальной плоскости
и два сигнализатора (бленкера) неисправности бокового и про-
дольного каналов вычислительных устройств пилотажных систем.
В обоих командных пилотажных приборах указатель авиаго-
ризонта имеет систему индикации «Вид с земли на самолет» по кре-
ну и «Вид с самолета на землю» по тангажу.
306
Рис. 5.6. Схема управле-
ния командной стрелкой
крена
Командная
стрелка
крона
Рассмотрим командный пилотажный прибор ПП-1ПМ. Управ-
ление командной стрелкой крена осуществляется с помощью элект-
родвигателя 10 (рис. 5.5) через редуктор 11, входящий в состав
дистанционной передачи (рис. 5.6). На вход усилителя поступают
сигналы заданного крена у3 от вычислителя и текущего крена от
центральной гировертикали. В результате суммирования этих сиг-
налов образуется сигнал управления командной стрелкой крена
6Z, подаваемый на электродвигатель, который через редуктор от-
клоняет командную стрелку и щетку потенциометра обратной свя-
зи 12 (см. рис. 5.5).
Аналогично осуществляется управление командной стрелкой
тангажа 2, управляемой через редуктор 19 электродвигателем 20,
на вход которого подается сигнал управления этой стрелкой.
Силуэт самолета 3, являющийся указателем крена, приводится
в движение электродвигателем 13 через редуктор 14. Кроме них,
в состав дистанционной передачи (рис. 5.7), представляющей
собой следящую систему, входят генератор 15 (см. рис. 5.5), потен-
циометр-приемник 23 и усилитель, на котором происходит сумми-
рование сигнала рассогласования, снимаемого с потенциометра-
приемника, и сигнала скоростной обратной связи с генератора, при-
водимого во вращение электродвигателем 13.
Сигнал крена с потенциометра-датчика ЦГВ поступает на по-
тенциометр-приемник 23. При наличии сигнала рассогласования
Рис. 5.7. Схема дистанционной передачи указателя крена
307
Рис. 5.8. Командный пилотажный прибор
типа ПКП:
1 — индекс-стрелка радиовысотомера; 2, б, 10, 13,
18, 24 — юстировочные валики; 3 — шкала указа-
теля отклонения скорости самолета от заданной
скорости полета; 4 — линия искусственного гори-
зонта; 5 — указатель отклонения скорости самоле-
та; 7 — бленкер отказа бокового канала вычисле-
ния командных сигналов; 8 — командная стрелка
крена; 9 — шкала тангажа; // — силуэт самолета;
12 — бленкер отказа продольного канала вычис-
ления командных сигналов; 14, 15 — указатель и
шкала отклонения от заданной траектории в вер-
тикальной плоскости (отклонения от равносигналь-
ной зоны ГРМ); 16 — командная стрелка тангажа:
17 — бленкер отказа авиагоризонта; 19 — рукоятка
выставки шкалы тангажа; 20, 21 — шкала и ука-
затель отклонения от заданной траектории в гори-
зонтальной плоскости (отклонения от равносиг-
нальной зоны КРМ); 22 — указатель скольжения;
23 — указатель крена; 25 — шкала кренов
электродвигатель через ре-
дуктор поворачивает потен-
циометр-приемник 23 до со-
гласования с положением по-
тенциометра-датчика ЦГВ.
Одновременно поворачива-
ются силуэт самолета и по-
тенциометр-датчик 22, с
которого снимается сигнал
крена.
В дистанционную переда-
чу указателя тангажа вхо-
дит электродвигатель 16,
редуктор 17, потенциометр-
приемник 9. Схема этой пе-
редачи отличается от схемы
дистанционной передачи
указателя крена отсутстви-
ем в ней генератора скорост-
ной обратной связи. При
появлении сигнала рассо-
гласования на выходе по-
тенциометра-приемника 9
электродвигатель поворачи-
вает через редуктор шкалу
тангажа 5, потенциометр-
приемник и потенциометр-
датчик 21, с которого можно
снимать сигнал тангажа для
других потребителей. На
лицевой стороне прибора
(см. рис. 5.3) имеется руко-
ятка для установки шкалы
тангажа, при повороте кото-
рой перемещаются щетки на потенциометре-приемнике 9 (см.
рис. 5.5).
Указатель 4 отклонения от заданной траектории в вертикальной
плоскости индицирует при заходе на посадку отклонения самолета
от равносигнальной зоны ГРМ. Этот указатель отклоняется через
редуктор 6 электродвигателем 7. Схема дистанционной передачи
аналогична схеме управления командными стрелками. На лицевой
стороне прибора расположены также кнопка арретира гироверти-
кали и сигнальная лампа.
В отличие от прибора ПП-1ПМ в приборе КПП применена лен-
точная шкала тангажей. В нем используются только две следящие
системы: для индикации углов крена и тангажа, которые выполне-
ны на сельсинах. Для улучшения динамических характеристик в
этих системах используются двигатели-генераторы, с выхода ко-
308
торых снимаются сигналы скоростной обратной связи. Все осталь-
ные указатели и сигнализаторы выполнены на магнитоэлектриче-
ских системах. Для арретирования гировертикали имеется кнопка-
лампа. Лампа загорается не только при арретировании, но и при
возникновении неисправностей в гировертикали.
Для бортовых систем автоматического управления, предназна-
ченных для захода на посадку в условиях низких посадочных ми-
нимумов, разработаны командные пилотажные приборы типа ПКП
(рис. 5.8), выполненные по системе индикации «Вид с самолета на
землю».
Прибор типа ПКП обеспечивает индикацию значительно боль-
шего числа параметров, чем приборы ПП-1ПМ и КПП. Команда
по управлению боковым движением индицируется стрелкой 3, а
команда по управлению продольным движением — стрелкой 16.
Крен и тангаж самолета наглядно оценивают по положению
линии искусственного горизонта 4 на сферической шкале относи-
тельно неподвижного силуэта самолета 11. Верхняя часть полу-
сферы (над линией искусственного горизонта) окрашена в голубой
цвет, а нижняя — в коричневый. Для отсчета углов крена служит
треугольный указатель 23, перпендикулярный линии искусственно-
го горизонта и перемещающийся по шкале 25.
Направление отклонения указателя крена совпадает с направ-
лением крена: при правом крене указатель отклоняется вправо,
при левом — влево. Это, по мнению летчиков, очень удобно для
пилотирования.
Углы тангажа самолета отсчитываются по шкале 9 относитель-
но центра неподвижного силуэта самолета. Для повышения точ-
ности отсчета шкала тангажа растянута. С помощью рукоятки
(юстировочного валика) 18 может осуществляться выставка этой
шкалы.
Отклонения самолета от заданной траектории в вертикальной
плоскости индицирует указатель 14 по шкале 15, а в горизонталь-
ной плоскости — указатель 21 по шкале 20. Положения указате-
лей 14 и 20 соответствуют случаю, когда самолет летит ниже глис-
сады и левее равносигнальной зоны КРМ.
Наглядная индикация высоты полета осуществляется с по-
мощью индекса-стрелки радиовысотомера 1. По мере уменьшения
высоты индекс-стрелка перемещается снизу вверх, приближаясь к
силуэту самолета.
В левой стороне лицевой части прибора расположены шкала 3
и указатель 5 отклонения скорости самолета от заданного ее зна-
чения.
Отклонение указателя вверх от центральной отметки говорит
о том, что скорость самолета меньше заданной.
При возникновении неисправности в боковом канале вычисле-
ния командных сигналов в поле зрения появляется бленкер 7.
Неисправность авиагоризонта индицируется бленкером 17.
309
На лицевой части прибора выведены головки юстировочных ва-
ликов, служащие для выставки нулевых положений стрелок. Возле
головок имеются обозначения в форме концов соответствующих
стрелок. Благодаря этому легко определяется назначение каждого
юстировочного валика.
Командный пилотажный прибор типа ПКП рассчитан на работу
с гировертикалями, имеющими в качестве датчиков выходных сиг-
налов крена и тангажа синусно-косинусные трансформаторы. Сиг-
нал с такого датчика поступает на синусно-косинусный трансфор-
матор-приемник. Напряжение рассогласования с ротора трансфор-
матора-приемника поступает на усилитель следящей системы, к
выходу которого подключена управляющая обмотка двигателя-ге-
нератора. Двигатель-генератор поворачивает через редуктор сферу
с линией искусственного горизонта и ротор трансформатора-при-
емника до тех пор, пока сигнал на входе усилителя не станет рав-
ным нулю. Это соответствует согласованному положению обоих
синусно-косинусных трансформаторов. Скоростная обратная связь,
использующая сигналы с выхода двигателя-генератора, служит для
улучшения динамических характеристик следящей системы. Обе
следящие системы (крена и тангажа) аналогичны по схемному
решению.
В качестве остальных указателей используются магнитоэлект-
рические системы, имеющие в основном одинаковое конструктив-
ное исполнение. Различие главным образом состоит в форме и раз-
мерах стрелок. Бленкеры отказа представляют собой электромаг-
нитные системы. Пока контролируемый канал исправен, обмотка
электромагнитной системы находится под током и ее якорь уби-.
рает флажок бленкера из поля зрения на лицевой части командно-
го пилотажного прибора. ,
При обесточивании обмотки якорь под действием пружины не-,
ремещает флажок бленкера на лицевую часть прибора.
В приборе осуществлен красный и белый подсвет.
Во всех рассматриваемых нами командных пилотажных прибо-
рах команды по крену и тангажу индицировались с помощью двух
взаимноперпендикулярных планок.
Принципиально другая форма индикации этих команд осущест-
влена в командных пилотажных приборах, разработанных фирмой
Коллинз (рис. 5.9).
В них команды по крену и тангажу индицируются с помощью
индекса 4, образованного двумя объемными стрелками (желтого
цвета), связанными между собой. Командный индекс показывает
необходимое направление движения самолета. Например, в случае
необходимости увеличить угол тангажа индекс поднимается вверх;
поворот влево или вправо указывает на необходимость создания
крена. Задача летчика заключается в том, чтобы совместить ко-
мандный индекс с неподвижным треугольным объемным символом
(стилизованным силуэтом) самолета, окрашенным в оранжевый
310
Рис. 5.9. Командный пилотажный
прибор фирмы Коллинз:
/ — силуэт самолета; 2, 3 — указатель и
шкала отклонения от заданной траектории
в вертикальной плоскости; 4 — командный
индекс; 5 — шкала тангажа; 6 — шкала
крена; 7 — указатель крена; 8 — линия ис-
кусственного горизонта; 9, 10 — шкала и
указатель отклонения от заданной скоро-
сти; 11, /2 —шкала и указатель отклоне-
ния от заданной траектории в горизон-
тальной плоскости (отклонения от равно-
сигнальной зоны КРМ); 13 — указатель
скольжения
цвет. Таким образом, при правильном пилотировании командный
индекс как бы охватывает силуэт самолета. Проведенные летные
испытания показали, что при пилотировании по прибору с таким
индексом летчик может управлять самолетом одновременно и по
крену и по тангажу. Это является определенным достоинством по
сравнению с пилотированием по отдельным командным планкам,
когда летчик управляет по крену и тангажу по очереди.
В последние годы развернулись работы по автоматизации уп-
равления самолетом при взлете и, в частности, по созданию ко-
мандных пилотажных систем для взлета. В этих системах стремят-
ся использовать уже существующие командные пилотажные при-
боры. Информация выдается на те же стрелки и .индексы, что и при
заходе на посадку.
§ 4. НАВИГАЦИОННЫЕ ПРИБОРЫ
Наиболее распространенные в настоящее время навигационные
приборы НКП-4 (рис. 5.10) из командной пилотажной системы
«Путь» и НПП (рис. 5.11) из системы «Привод» объединяют ука-
затели дистанционного компаса (курсовой системы), КРП, ГРП и
радиокомпаса.
Такой прибор может применяться для захода на посадку авто-
номно от командной пилотажной системы. При использовании его
в составе указанной системы он служит не только для выдачи ви-
зуальной информации, но и для выработки сигнала отклонения от
заданного курса, который необходим для формирования команды
по крену.
Для индикации курса ф используется следящая система. В при-
боре НПП имеется сельсин-приемник 15 (рис. 5.12), связанный с
сельсином-датчиком компаса. Сигнал рассогласования с ротора
сельсина-приемника поступает на усилитель 16, к которому под-
ключен двигатель-генератор 17. Двигатель-генератор через редук-
тор поворачивает ротор сельсина-приемника к согласованному по-
311
ложению. Одновременно* поворачивается шкала курса 7 и диффе-
ренциал 10. Указатель компаса выполнен по системе индикации
«Вид с самолета на землю».
Курс отсчитывается по подвижной шкале 7 относительно ин-
декса 8 на (неподвижной шкале 4.
С выходным валом дифференциала 10 связана стрелка 6. По-
этому она поворачивается вместе со шкалой 7. Для установки
вручную нужного значения заданного курса ф3 служит рукоятка 11,
поворачивающая через дифференциал 10 стрелку 6 относительно
Рис. 5.10. Навигационный прибор
НКП-4:
/ — шкала курсовых углов радиостанции;
2—шкала курса; 3 — бленкер отказа ГРП;
4, /2 — шкала и стрелка (планка) откло-
нения от заданной траектории в горизон-
тальной плоскости (отклонения от равно-
сигнальной зоны КРМ); 5, 6 — юстировоч-
ные валики; 7, 13 — стрелка (планка) и
шкала отклонения от заданной траектории
в вертикальной плоскости (отклонения от
равносигнальной зоны ГРМ); 8 — стрелка
заданного курса; 9 — неподвижный индекс
отсчета курса; 10— стрелка КУР; И —
бленкер отказа КРП; 14 — рукоятка вы-
ставки заданного курса
Рис. 5.11. Навигационный прибор
НПП:
/ — шкала курсовых углов радиостанции;
2 —шкала кур(*а; 3 — бленкер отказа
КРП; 4 — стрелка заданного курса; 5 —
стрелка КУР; 6 — неподвижный индекс от-
счета курса; 7, 10 — стрелка (планка) и
шкала отклонения от заданной траектории
в вертикальной плоскости (отклонения от
равносигнальной зоны ГРМ); 8 — рукоятка
выставки заданного курса; 9, 11 — шкала и
стрелка (планка) отклонения от заданной
траектории в горизонтальной плоскости
(отклонения от равносигнальной зоны
КРМ)
312
Рис. 5.12. Кинематическая схема навигационного прибора НПП:
у__стрелка (планка) отклонения от заданной траектории в горизонтальной плоскости (от-
клонения от равносигнальной зоны КРМ); 2 — бленкер отказа ГРП; 3 — бленкер отказа КРП;
4 —шкала курсовых углов радиостанции (КУР); 5 — стрелка КУР; 6 — указатель (стрелка)
заданного курса; 7 — шкала курса; 8 — индекс; 9 — стрелка (планка) отклонения от заданной
траектории в вертикальной плоскости (отклонения от равносигнальной зоны ГРМ); 10, 14 —
дифференциалы; И — рукоятка выставки заданного курса; 12, 17, 22 — двигатели-генераторы;
13, 16, 21 —• усилители; 15, 19, 20 — сельсины-приемники; 18 — индукционный потенциометр;
23 — сельсин-датчик; 24 — ламельное устройство
шкалы 7. В приборе предусмотрена возможность задавать курс
или путевой угол по сигналам навигационного вычислителя. В этом
случае сигнал ф3 поступает на сельсин-приемник 19 следящей си-
стемы. Сигнал рассогласования с ротора сельсина-приемника после
усиления в усилителе 13 поступает на двигатель-генератор 12, по-
ворачивающий ротор и стрелку 6 (через дифференциал 10) до по-
ложения согласования. В этом режиме работы благодаря имею-
щейся в приборе блокировки рукоятка 11 отключается от диффе-
ренциала.
Формирование сигнала отклонения от заданного курса Лф = ф3—
—ф осуществляется на индукционном потенциометре 18. Статор
потенциометра механически связан с ротором сельсина-приемника
15 курса и потому устанавливается двигателем 17 в положение, со-
ответствующее курсу ф. Ротор потенциометра устанавливается в
положение, соответствующее заданному курсу ф3, рукояткой 11
или двигателем 12, в зависимости от режима работы. Выходной
сигнал потенциометра 18 определяется взаимным положением его
ротора и статора, а значит, углами ф и ф3.
Для улучшения динамических характеристик в следящих сис-
темах курса и заданного курса используется скоростная обратная
связь, сигнал которой снимается с двигателей-генераторов.
Стрелка курсовых углов радиостанции перемещается относи-
тельно шкалы КУР 4 через редуктор двигателем-генератором 22,
входящим в состав следящей системы. Сигнал курсового угла
радиостанции фкур с сельсина-датчика рамочной антенны радио-
313
компаса поступает на сельсин-приемник 20. Отсюда сигнал рассо-
гласования подается на усилитель 21, а затем — на двигатель-гене-
ратор 22. Двигатель-генератор поворачивает ротор сельсина-прием-
ника к согласованному положению.
Сочетание в одном приборе указателей магнитного компаса и
радиокомпаса упрощает решение целого ряда радионавигационных
задач, в частности облегчается заход на посадку по приводной ра-
диостанции (рис. 5.13).
Как известно, положение радиостанции относительно самолета
характеризуется значением магнитного или истинного пеленга ра-
диостанции.
Магнитный пеленг радиостанции (МПР)фмпропределяется маг-
нитным курсом (МК) фмк самолета и курсовым углом радиостан-
ции гр кур :
^мпр = ^мк “Ь ^кур-
На навигационном приборе фмпр отсчитывается по шкале МК
напротив острия стрелки КУР. Если, учтя магнитное склонение
Дм, использовать истинный курс самолета “фи, то легко определя-
ется истинный пеленг радиостанции:
^ИПР = Фи + Фкур = ^МК 4~ Дм 4- фкур-
Истинный пеленг самолета (ИПС) фипс от наземной радио-
станции определяется зависимостью
Фипс=Фипр i 18() 48,
где 6 — угол схождения меридианов места самолета и радиостанции.
При решении задач аэродромного маневрирования и захода
на посадку, когда удаления от радиостанции невелики, 6 = 0. Тогда
^ипс = ^ипр± 180 .
Эта величина отсчитывается по шкале курса напротив обрат-
ного конца стрелки КУР.
Для стабилизации самолета на линии заданного пути (ЛЗП)
при полете на радиостанцию необходимо, чтобы Дф = 0 и фкур=0
(для штилевых условий). При выполнении этих условий стрелки
КУР и заданного курса совпадают друг с другом и находятся на-
против индекса 8 (см. рис. 5.12). Выполнение четвертого разворо-
та прямоугольного предпосадочного маневра («коробочки») также
облегчается при использовании навигационного прибора. Для точ-
ного выхода на ЛЗП необходимо, чтобы в процессе разворота
стрелка КУР совпадала со стрелкой заданного курса.
В приборах типа НПП имеется возможность получить для по-
добных целей сигнал
£АРК ФмПР = ФкУР’
314
Формирование сигнала барк происходит на сельсине-датчике
23. Ротор этого сельсина-датчика механически связан с ротором
сельсина-приемника 20, а поэтому поворачивается на угол, соот-
ветствующий ф кур . Статор поворачивается выходной осью диф-
ференциала 10 на угол Лф = ф3—ф. Сигнал в арк используется в не-
которых случаях для формирования командных сигналов, но это
затруднено высоким уровнем помех в сигнале ф кур .
При помощи дифференциала 14 производится суммирование
тех же сигналов. Поскольку левая входная шестерня соединена с
выходной осью дифференциала 10, а правая входная шестерня —
с ротором сельсина-приемника 20, то угол поворота выходной оси
дифференциала 14 равен углу е арк - С этой осью механически свя-
зана щетка ламельного устройства, служащего для выдачи сигна-
лов на построение прямоугольного предпосадочного маневра. При
выполнении такого маневра щетка скользит по неподвижным ла-
мелям, замыкая в зависимости от величины 8 ту или иную ламель.
При достижении определенного значения 8 щетка замыкает соот-
ветствующую ламель, выдавая сигнал на выполнение разворота.
Указатели отклонения от заданной траектории в горизонталь-
ной плоскости 1 и от заданной траектории в вертикальной плоско-
сти 9 представляют собой магнитоэлектрические нуль-гальваномет-
ры. Их стрелки, выполненные в виде планок, перемещаются от
центра кружка соответственно влево и вправо, вверх и вниз, ука-
зывая положение заданных траекторий. При заходе на посадку
эти указатели подключаются к КРП и ГРП. В этом случае они
показывают положение равносигнальных зон КРМ и ГРМ отно-
сительно самолета.
В маршрутном полете они могут индицировать отклонения от
линий заданного пути, заданного азимута, заданной высоты и др.
Планки отклоняются на крайние отметки при силе тока 250 мка.
- Для сигнализации исправности КРП и ГРП и нахождения са-
молета в зоне действия КРМ и ГРМ служат бленкеры 2 (глисса-
да) и 3 (курс), выполненные на магнитоэлектрических системах.
Разработанный в последние годы навигационный прибор типа
ПНП 1 (рис. 5.14) индицирует большее число параметров и позво-
ляет решать более широкий круг задач.
Курс самолета отсчитывается по шкале 17 против индекса 7.
Индекс заданного курса 9 устанавливается с помощью рукоятки
24 или с помощью дистанционной передачи от специальных задат-
чиков, например по сигналам навигационного вычислителя. Вмес-
те с индексом 9 перемещаются еще три треугольных индекса 18,
расположенных через 90°. Используя эти индексы, удобно выпол-
нять «коробочку». С помощью рукоятки 20 устанавливается задан-
ный путевой угол (заданный азимут) на счетчике 11. Одновремен-
но поворачивается стрелка 4, наглядно индицирующая этот угол на
шкале курса 17. Сигнал заданного путевого угла может снимать-
1 ПНП — прибор навигационный плановый.
315
Рис. 5.13. Пример показаний навигаци-
онного прибора (курс самолета 1|)=300°,
заданный курс -фэ=100о, угол отклоне-
ния самолета от заданного курса Дф =
= 160°, курсовой угол радиостанции
4>кур=120°, магнитный пеленг радио-
станции ф мпр =60°, истинный пеленг
самолета (полагая Дм=0) Фипс =240°,
равносигнальная зона КРМ находится
справа от самолета, а равносигнальная
линия ГРМ над самолетом)
ся с навигационного прибора
на различные потребители.
Заданный путевой угол мо-
жет устанавливаться дис-
танционно, однако в этом
случае счетчик 11 этот угол
не индицирует.
Счетчик 2 выдает инфор-
мацию о дальности по сиг-
налам радиодальномерных
устройств и навигационных
вычислителей. При отсутст-
вии сигналов на счетчиках
2 и И они «перечеркивают-
ся» сигнализаторами отказа
1 и 12. Стрелка (индекс) 6
на шкале 5 индицирует угол
сноса самолета по сигналам
допплеровского измерителя.
Важной особенностью
рассматриваемого прибора
является то, что шкала 21 и
стрелка (планка) 14 указа-
теля отклонения от задан-
ной траектории в горизон-
тальной плоскости механи-
чески связаны со стрелкой
4 указателя заданного пу-
тевого угла. При изменении
курса самолета весь этот
узел поворачивается. Бла-
годаря этому создается на-
глядная картина положения
самолета относительно за-
данной траектории. На
рис. 5.14 показан случай, когда самолет летит к заданной траекто-
рии, находящейся справа от него.
Если самолет находится на заданной траектории, планка 14
совмещается со стрелкой 4.
При отклонении самолета от заданной траектории вниз или
вверх стрелка (планка) 3 перемещается соответственно вверх или
вниз от центрального кружка. Отметки шкалы 10 расположены по
вертикали.
Когда самолет летит на радиомаяк, загорается треугольный
световой индекс (острие стрелки) S, а при полете от маяка — ин-
декс 16.
При отказе КРП и ГРП или при отсутствии сигналов радио-
маяков выпадают бленкеры К (курс) и Г (глиссада). Отказ дат-
316
чика курса сигнализиру-
ется выпадением бленкера
КС (курсовая система).
Расположенное в ниж-
ней части прибора свето-
вое табло 23 указывает
режим работы прибора и
какие датчики траектор-
ных сигналов подключе-
ны. Сигнал «СП» озна-
чает режим захода на по-
садку по курсо-глиссад-
ным радиомаякам,
«VOR» — полет по сигна-
лам маяков системы
«VOR», «НВ» — полет по
сигналам навигационного
вычислителя, «РСБН» —
полет по сигналам ради-
отехнической системы
ближней навигации
«СВОД».
Рис. 5.14. Навигационный прибор типа
ПНП:
В дистанционных пе-
редачах курса, угла сно-
са и дальности, а также
в дистанционных задатчи-
ках положения стрелки
заданного путевого угла
и индекса заданного кур-
са применены следящие
системы. В качестве вход-
ных устройств (приемни-
ков) этих аналогичных по
своему принципу дейст-
вия систем используются
синусно-косинусные тран-
сформаторы.
Сигнал рассогласова-
ния с ротора трансформа-
1 — сигнализатор отказа счетчика дальности; 2 —
счетчик дальности; 3 — стрелка (планка) откло-
нения от заданной траектории в вертикальной
плоскости (отклонения от равносигнальной зоны
ГРМ); 4 — стрелка указателя заданного путевого
угла (заданного азимута); 5 — шкала указателя
угла сноса; 6 — стрелка (индекс) указателя угла
сноса; 7 — неподвижный индекс отсчета курса; 8 —
индекс сигнализатора полета на радиомаяк; 9 —
индекс указателя заданного курса; 10 — шкала
отклонения от заданной траектории в вертикаль-
ной плоскости; И — счетчик заданного путевого
угла (заданного азимута); 12 — сигнализатор от-
каза счетчика заданного путевого угла; 13 —
бленкер отказа ГРП; 14 — стрелка (планка) от-
клонения от заданной траектории в горизонталь-
ной плоскости (отклонения от равносигнальной
зоны КРМ); 15 — силуэт самолета; 16 — индекс
сигнализатора полета от радиомаяка; /7 — шкала
курса; 18— индекс; 19 — бленкер отказа курсовой
системы, 20 — рукоятка выставки заданного путе-
вого угла (заданного азимута); 21 — шкала откло-
нения от заданной траектории в горизонтальной
плоскости; 22 — бленкер отказа ГРП; 23 — свето-
вое табло режимов работы; 24 — рукоятка выстав-
ки заданного курса
тора подается на вход
усилителя, а затем — на управляющую обмотку двигателя-генера-
тора, который через редуктор поворачивает ротор к согласованно-
му положению. С ротором связаны подвижные элементы указате-
лей (шкала курса, стрелка указателя сноса и т. д.). В некоторых
системах с ротором связаны шестерни дифференциалов, служащих
для суммирования сигналов. Таким образом вырабатываются сиг-
налы ф3±ф, фзпу±ф, датчиками которых являются синусно-коси-
нусные трансформаторы. Эти сигналы используются для формиро-
317
вания команды по крену. Со следящими системами заданного пу-
тевого угла, заданного курса и угла сноса связаны дополнительные
синусно-косинусные трансформаторы, служащие датчиками этих
сигналов для других потребителей.
Для улучшения динамических характеристик в следящих систе-
мах применена скоростная обратная связь, сигналы которой сни-
маются с двигателя-генератора.
Указателями положения заданных траекторий являются магни-
тоэлектрические нуль-гальванометры. Подвижная система такого
гальванометра имеет две жестко скрепленные рамки. В одну пода-
ется измеряемый ток, другая служит для коррекции электрического
нуля указателя.
Бленкеры и сигнализаторы отказа счетчиков представляют со-
бой электромагнитные системы, отличающиеся друг от друга фор-
мой флажков и стрелок. Когда ток в обмотке электромагнитной
системы отсутствует, якорек под действием пружины перемещает
флажок бленкера (стрелку сигнализатора) на лицевую часть при-
бора.
Если контролируемый канал исправен, обмотка находится под
током й якорек, преодолевая действие пружины, убирает флажок
из поля зрения.
Сигнализаторы полета на радиомаяк и от радиомаяка механи-
чески связаны со стрелкой заданного путевого угла и разворачи-
ваются синхронно с ней.
Каждый из сигнализаторов представляет собой треугольное от-
верстие, под которым расположены две лампы. В приборе осу-
ществлен красный и белый подсвет.
§ 5. ПАРАВИЗУАЛЬНЫЕ ИНДИКАТОРЫ
Основным элементом паравизуального индикатора является ци-
линдр, на поверхности которого нанесена черная спиральная линия,
приводимый во вращение двигателем-генератором (рис. 5.15). По-
ка цилиндр 1 неподвижен, в прорези кожуха 2 видны неподвиж-
ные черные и белые ромбы При вращении цилиндра ромбы посту-
Рис. 5.15. Паравизуальный ин-
дикатор:
1 — цилиндр со спиральной линией;
2 — кожух цилиндра; 3 — корпус с
механизмом
318
Рис. 5.16. Размещение паравизуальных индикаторов тангажа Т и крена
пательно перемещаются вдоль прорези. Чем выше скорость враще-
ния, тем больше скорость их поступательного движения.
Один из трех индикаторов, входящих в комплект, устанавли-
вают перед летчиком (рис. 5.16). Он служит для выдачи команд
по крену.
При появлении команды на создание крена цилиндр со спи-
ральной линией начинает вращаться таким образом, что движение
этой линии показывает (Направление необходимого крена. Когда
крен достигает величины, нужной для выхода самолета на ЛЗП,
вращение цилиндра прекратится.
Таким образом, между отклонением командных стрелок и вра-
щением паравизуальных индикаторов существует аналогия: на-
правление отклонения командной стрелки и направление движения
спиральной линии показывают направление нужного крена. При
создании необходимого по величине крена командная стрелка воз-
вращается к нулевому положению, а паравизуальный индикатор
останавливается.
Два других индикатора, располагаемых по бокам впереди от
летчика, служат для индикации команд по тангажу. Направление
движения спиральной линии этих индикаторов («вперед» или «на-
Рис. 5.17. Структурная схема
паравизуального индикатора
^бх|----------
7 Усилитель
ДЬига тел1г\—^
генератор | Иж як. Л
иилиндр
Скоростная обратная сбязь
со
спиралью
319
Рис. 5.18. Совмещенный паравизуаль-
ный индикатор
Д)
Рис. 5.19. Показания совмещенного
паравизуального индикатора:
а — влево; б — вправо; в — ввепх: г —
вниз; д — вниз и влево; е — вниз и впра-
во; ж — вверх и вправо; з — вверх и влево
зад») указывает на необходи-
мость увеличения или уменьше-
ния тангажа.
На рис. 5.17 приведена струк-
турная схема паравизуального
индикатора с усилителем. Напря-
жение с вычислителя командных
сигналов подается на усилитель.
После усиления, а при необходи-
мости и преобразования оно по-
дается на двигатель-генератор»
приводящий во вращение ци-
линдр со спиральной линией. На-
пряжение, пропорциональное ско-
рости вращения, снимается с ге-
нератора и используется для ско-
ростной обратной связи, улучша-
ющей динамические характерис-
тики всего контура. Скорость
вращения цилиндра .и перемеще-
ния ромбов пропорциональна сиг-
налу вычислителя.
Как показали исследования,
летчики хорошо замечают изме-
нение скорости перемещения ром-
бов и учитывают это при управ-
лении самолетом. Поэтому пило-
тирование по паравизуальным
индикаторам не вызывает затруд-
нений.
Как уже указывалось раньше,
сигналы паравизуальных индика-
торов благодаря периферическо-
му зрению замечаются летчиком
и в тех случаях, когда его взгляд
направлен на другой объект, на-
ходящийся возле индикатора.
Этим объясняется название этих
индикаторов: приставка «пара»
(para) по-гречески означает
«возле, около». По некоторым
данным человеческий глаз спосо-
бен видеть движущиеся изобра-
жения, которые расположены вне
поля обзора, имеющего сердце-
образную форму с углами раство-
ра в стороны ±60°, вверх 55° и
вниз 70°.
320
Для полетов в ночных условиях каждый индикатор имеет осве-
титель, расположенный внутри его. При возникновении отказов в
тракте формирования командного сигнала или в самом индикаторе
прорезь в кожухе индикатора закрывается специальной шторкой.
Наряду с рассмотренными паравизуальными индикаторами,
каждый из которых служит для выдачи только одной команды —
по крену или тангажу, — в последние годы получили распростра-
нение совмещенные индикаторы (рис. 5.18). Один такой индикатор
может выдавать одновременно обе команды.
В совмещенном индикаторе имеются два коаксиальных цилинд-
ра, на которых нанесены черные спиральные линии. Внешний ци-
линдр выполнен из прозрачного материала и потому через него
видна поверхность внутреннего цилиндра. Направление спиральных
линий на внешнем и внутреннем цилиндрах разное: на одном на-
несена левая спираль, на другом — правая. В результате их нало-
жения образуются белые ромбики.
Каждый цилиндр приводится во вращение отдельным двигате-
лем. В зависимости от скорости вращения белые ромбики переме-
щаются в том или ином направлении. При этом перемещение ром-
биков влево и вправо указывает на необходимость создания крена
(рис. 5.19).
Команда по управлению тангажом выдается вертикальными
перемещениями ромбиков. Перемещение белых ромбиков в любом
другом направлении указывает на необходимость управления по
крену и тангажу одновременно.
Совмещенный паравизуальный индикатор используется в ко-
мандной пилотажной системе фирмы Коллинз в комплексе с пило-
тажнЫхМ прибором с А-образным командным индексом. Командные
сигналы в этом случае используются для отклонения командного
индекса и приведения в действие паравизуального индикатора. При
возникновении отказов в индикаторе или тракте формирования
командных сигналов цилиндры закрываются черной шторкой.
Проведенные испытания и опыт эксплуатации паравизуальных
индикаторов показали высокую точность и легкость пилотирования
по ним. Это обстоятельство побудило к расширению исследований
по их использованию, в частности, для выдачи информации об от-
клонениях различных контролируемых параметров (скорости, вы-
соты и других) от заданных значений.
§ 6. СИСТЕМЫ ИНДИКАЦИИ НА СТЕКЛЕ
В настоящее время существует ряд систем индикации на стек-
ле. Из их числа наибольшее распространение получили системы, в
которых применяются экраны (полупрозрачные пластины), уста-
навливаемые перед лобовым стеклом кабины пилотов (рис. 5.20).
Через такую пластину летчик хорошо видит внешнее пространство.
Благодаря специальной обработке поверхности пластина в то же
П-3261 321
Рис. 5.20. Принцип действия си-
стемы индикации на стекло:
/ — стекло кабины; 2 —экран; 3 —глаз
-летчика; 4 — коллимирующая линза;
5 — электроннолучевая трубка
время обладает свойством отра-
жения. Поэтому если на нее про-
ектировать, например, с помощью
электроннолучевой трубки неко-
торое изображение, то оно будет
отражаться, представляясь лет-
чику как бы наложенным на кар-
тину внешней обстановки. Про-
ектируемое на пластины изобра-
жение благодаря коллимации с
помощью линз представляется
удаленным в бесконечность.
Вследствие этого отпадает необ-
ходимость в аккомодации глаз
лётчика при переходе от наблю-
дения изображения на пластине
к наблюдению внешней обстанов-
ки и обратно.
Результаты некоторых психофизиологических исследований по-
казывают, что при полете в облаках летчик, наблюдая внешнее
пространство, фиксирует свой взгляд на лобовом стекле, находя-
щемся на расстоянии ~ 1 л/ от его глаз. В момент выхода из обла-
ков происходит переключение внимания летчика на внешние ори-
ентиры, расположенные на большом удалении. Это, естественно,
связано с необходимостью аккомодации его глаз. Если летчик ис-
пользует систему индикации на стекле, при которой изображение
представляется удаленным в бесконечность, то переход на наблю-
дение внешних ориентиров упрощается и ускоряется по сравнению
с обычными условиями.
Объем индицируемых на стекле параметров весьма значителен.
Прежде всего, это линия горизонта, информация о которой выда-
ется гировертикалью. Благодаря принятой системе индикации ли-
ния искусственного горизонта всегда параллельна линии естествен-
ного. Неподвижный силуэт самолета или заменяющий его символ
располагается в центре изображения.
При директорном заходе на посадку необходимо совместить
с этим силуэтом командный индекс, управляемый по сигналам
вычислителя пилотажной системы. Форма командных индексов
разнообразна. Чаще всего она такова, что при совмещении с си-
луэтом самолета они образуют единое изображение. Например,
в одном из образцов французского индикатора (Le collimateur
193), экран которого показан на рис. 5.21, командный индекс 9
состоит из центральной точки и двух пар параллельных черточек
по бокам от нее. В данном случае командный индекс указывает на
необходимость создания правого крена и увеличения угла тангажа.
Когда это будет сделано, центральная точка окажется внутри
кружка символа (силуэта) самолета <9, а крылышки символа рас-
положатся между параллельными черточками.
322
П 16 15
Рис. 5.21. Изображение на экране системы индикации на стекле:
/—•экран; 2 — линия искусственного горизонта; 3, 4 — шкала и указатель скорости; 5, 6—
указатель и крайние отметки отклонения от равносигнальной зоны ГРМ; 7 — индекс режима
работы; 5 —символ самолета; 9— командный индекс; 10 — индекс сноса; // — отметка шкалы
кренов (30°); 12 — отметка шкалы крена (0°); 13, /4 —указатель и шкала высоты; /5 — указа-
тель отклонения от равносигнальной зоны КРМ; 16, /7 —указатель и шкала курса;
18 — шкала тангажа
Для точного отсчета углов тангажа индикатор имеет сильно
растянутую шкалу 18.
В нижней части индикатора расположена шкала 17 и указатель
16 курса самолета. Датчиком информации служит компас (курсо-
вая система). Здесь также принята система индикации «Вид с
самолета на землю»: относительно неподвижного указателя пере-
мещается шкала. В поле зрения оказывается лишь некоторый сек-
тор этой шкалы. Подвижная шкала 3 и неподвижный указатель 4
воздушной скорости находятся слева от силуэта самолета. В каче-
стве датчика информации о воздушной скорости используется
специальное аэродинамическое устройство типа датчика воздуш-
ной скорости либо централь скорости и высоты, имеющие сельсин-
ные выходы.
Высота полета, измеряемая с помощью радиовысотомера, ин-
дицируется справа от силуэта. Подвижная шкала 14 высот имеет
линейную характеристику в диапазоне малых высот (до ~ 100 м)
и логарифмическую — в диапазоне больших высот (до ~750 м).
Для определения положения равносигнальной зоны КРМ слу-
жит треугольный указатель 15 под силуэтом самолета. В положе-
нии, изображенном на рис. 5.21, он указывает, что равносигналь-
ная зона находится справа. Датчиком сигнала положения зоны
является КРП. На режимах маршрутного полета этот индекс мо-
жет показывать положение равносигнальной зоны радиомаяков
типа «СВОД» и «VOR».
Н* 323
Индекс равносигнальной зоны ГРМ 5 расположен слева от си-
луэта.
Круглый индекс 7 над силуэтом изображает одну из несколь-
ких ламп, служащих для сигнализации режима работы системы.
Рассматриваемая система может использоваться не только при
заходе на посадку, но также при выравнивании, приземлении, взле-
те и полете по радиомаякам типа «СВОД» и «VOR». Поэтому та-
кого рода индикатор заменяет летчику командный пилотажный
прибор, имея в условиях низких посадочных минимумов большие
преимущества перед ним.
Информация, проектируемая на экране, вырабатывается гене-
ратором изображений. По своему принципу действия эти генера-
торы могут быть в основном сведены к трем разновидностям:
электроннолучевые, оптико-механические и комбинированные, со-
четающие элементы электроннолучевых и оптико-механических
генераторов.
В электроннолучевых генераторах для получения изображения
используются электроннолучевые трубки, на которых может быть
выдан очень большой объем информации, формируемой и переме-
щаемой при помощи электронных схем. Изображение в этом слу-
чае получается одноцветным, чаще всего желтовато-зеленым. При
использовании электроннолучевых генераторов применяются экра-
ны со специальным покрытием, хорошо отражающим световую
энергию того цвета, который излучается электроннолучевой
трубкой.
В оптико-механических генераторах необходимое изображение
(узор) выгравировывается на металлической или прозрачной
пластине. В первом случае источник света располагают сзади плас-
тины, а во втором — у ее края. Узор для каждого индицируемого
параметра гравируется на отдельной пластине. При использовании
прозрачных пластин одно изображение получается поверх другого
без заметного ухудшения видимости. Если же применяются метал-
лические пластины; то для получения необходимого взаимораспо-
ложения индицируемой информации применяются призматические
смесители. Перемещение изображений осуществляется путем пере-
мещения пластин или с помощью системы подвижных зеркал и
призм. Для перемещения подвижных элементов, как правило, ис-
пользуются следящие системы, на вход которых подаются сигна-
лы от датчиков информации.
Применяя для подсвечивания разноцветные источники света,
можно получить на экране разноцветные индексы и шкалы. Это,
наряду с большой четкостью изображения, является большим пре-
имуществом по сравнению с системами индикации на стекле, ис-
пользующими электроннолучевые генераторы изображений. Вместе
с тем объем индицируемой информации в системах с оптико-меха-
ническими генераторами более ограничен. По этой причине,^по-ви-
димому, наиболее перспективными являются системы индикации
324
на стекле с комбинирован-
ными генераторами, позво-
ляющими наилучшим обра-
зом использовать достоин-
ства оптико-механических и
электроннолучевых генера-
торов изображений.
Не останавливаясь на
методах коллимации изо-
бражения, поскольку этот
вопрос носит специальный
характер и выходит за рам-
ки настоящей книги, ука-
жем, что коллимация ис-
пользуется во всех системах
индикации на стекле неза-
висимо от метода получения
изображения.
В системе индикации на
стекле, экран которой пред-
ставлен на рис. 5.21, приме-
нен оптико-механический ге-
нератор изображений с при-
зматическим смесителем.
Принцип действия такой
системы поясняет рис. 5.22.
Изображения с помощью
Рис. 5.22. К принципу действия оптико-ме-
ханической системы индикации на стекле:
1 — глаз летчика; 2 — экран; 3 — коллимирующая
линза; 4 — зеркало; 5 — призматический смеситель
призматического смесителя накладываются одно на другое и про-
ектируются на зеркало. Далее полученное изображение отражает-
ся через коллимирующую линзу на экран.
Шкала и индексы разноцветные. Силуэт самолета — оранжево-
го цвета, линия горизонта и шкала тангажа — зеленого, командный
индекс — белый днем и синий — ночью и т. д. Яркость этих индек-
сов автоматически меняется в зависимости от внешней освещен-
ности. Кроме того, возможна ручная регулировка яркости каждо-
го индекса отдельно.
Значительное внимание уделено в этой системе вопросам на-
дежности и контроля исправности. Так, для повышения надежно-
сти источники света по каждому индицируемому параметру резер-
вируются. Благодаря системе автоматического контроля при
возникновении ряда неисправностей неправильная информация ис-
чезает с экрана. При нажатии кнопки тест-контроля проверяются
основные цепи аппаратуры. При этом на экране появляется харак-
терная «картинка».
В случае возникновения неисправности в датчике информации
на экране мигает соответствующая шкала и индексы. Например,
мигание линии горизонта сигнализирует о неисправности гировер-
325
тикали, а мигание индекса равносигнальной зоны КРМ — о неис-
правности КРП.
Расположение аппаратуры в кабине зависит от особенностей
компоновки оборудования. Генератор изображений обычно распо-
лагают на верхней части приборной доски или на потолке кабины.
Пульт управления устанавливают в легко доступных для летчика
местах.
Из других систем индикации на стекле следует упомянуть о си-
стеме, использующей электроннолучевую трубку с плоским проз-
рачным экраном. Такая трубка устанавливается непосредственно
перед лобовым стеклом. Изображение, индицируемое на ее экра-
не, оказывается наложенным на картину внешней обстановки.
ГЛАВА 6
ПОСАДОЧНЫЕ МИНИМУМЫ САМОЛЕТОВ,
ОБОРУДОВАННЫХ СИСТЕМАМИ АВТОМАТИЗИРОВАННОГО
УПРАВЛЕНИЯ
§ 1. ОБЩИЕ СВЕДЕНИЯ
Термин «посадочный минимум», или «минимум для посадки»,
происходит от термина «минимум погоды для посадки». Под мини-
мумом погоды для посадки самолета понимаются минимально до-
пустимые значения высоты нижней границы облаков и горизон-
тальной дальности видимости, при которых обеспечивается воз-
можность безопасной посадки. Высота нижней границы облаков и
горизонтальная дальность видимости являются метеорологически-
ми параметрами. Величины этих параметров характеризуют слож-
ность погодных условий, в которых осуществляются заход на по-
садку и посадка.
Минимумы погоды для посадки конкретного типа самолета уста-
навливаются в зависимости от его аэродинамических качеств и
оборудования, характеристик аэродрома, квалификации летчиков.
До внедрения средств автоматизации управления заходом на по-
садку эти минимумы были сравнительно высокими. Например, са-
молетам типа Ил-18 и Ту-134 разрешался заход на посадку, если
высота нижней границы облаков составляла не менее 100 м, а го-
ризонтальная дальность видимости — не менее 1000 м.
С внедрением средств, автоматизирующих управление заходом
на посадку, точность стабилизации самолета на посадочной траек-
тории повышается, а нагрузка летчиков снижается. Благодаря это-
му оказывается возможным снизить минимумы погоды.
326
Рис. 6.1. Результаты измерения высоты нижней границы облаков в аэропорту
Шереметьево:
а — 3 марта 1966 г.; б — 4 марта 1966 г.
Однако при этом выявилось, что высота нижней границы об-
лаков как параметр минимума для этих условий обладает рядом
существенных недостатков. Строго говоря, само понятие нижняя
граница облаков является в значительной степени условным. В ря-
де случаев четкая граница облаков вообще отсутствует, например,
при низкой облачности и тумане.
Обратимся к'рис. 6.1, на котором в качестве примера приве-
дены результаты измерения высоты нижней границы облаков че-
рез 15 сек1. Плавная кривая соответствует осредненным значениям,
1 По данным канд. геогр. наук Унукова В. И.
327
используемым для передачи информации о высоте нижней грани-
цы облаков на борт самолета. Вследствие осреднения результатов
измерения получаемая летчиком информация о высоте нижней
границы облаков имеет ошибку. Другие ошибки являются резуль-
татом того, что информация о высоте нижней границы облаков
передается летчику с запозданием. За время, прошедшее от момен-
та измерения до момента получения летчиком информации о ре-
зультатах измерений, высота нижней границы облаков может су-
щественно измениться. Следует также иметь в виду, что в каждый
данный момент времени значение высоты нижней границы облаков
в том месте, где производится их измерение (в месте установки
измерительных метеорологических средств), может существенно
отличаться от значения высоты нижней границы облаков в районе
нахождения самолета.
В связи с этим использование высоты нижней границы обла-
ков в качестве параметра при определении посадочного миниму-
ма самолета становится нецелесообразным. Поэтому в качестве
высотного ограничения (параметра минимума) для посадки ис-
пользуется высота принятия решения. Напомним, что высотой при-
нятия решения (Нщ) называется высота, на которой должен быть
начат маневр ухода на второй круг, если до этой высоты не уста-
новлен надежный контакт с огнями светооборудования аэродрома
или другими ориентирами по курсу посадки, позволяющий выпол-
нить безопасную посадку самолета, или если отклонения самолета
от посадочной траектории превышают допустимые значения. До-
стижение высоты принятия решения фиксируется непосредственно
на борту самолета по показаниям высотомеров, обладающих до-
статочно высокой точностью измерения.
Использование высоты принятия решения в качестве парамет-
ра посадочного минимума ни в коей мере не исключает необхо-
димости сообщения экипажу результатов измерения высоты ниж-
ней границы облаков. Такая информация весьма полезна для пред-
ставления обстановки и приближенной оценки условий перехода
на визуальный полет.
Поскольку высота принятия решения не является параметром
погоды (метеорологической характеристикой), применение терми-
на «минимум погоды для посадки» оказывается уже неоправдан-
ным. Этим объясняется переход к терминам «посадочный минимум»
и «минимум для посадки», имеющим, строго говоря, довольно ус-
ловный характер. Встречающийся в зарубежной практике термин
«эксплуатационная категория» соответствует этим терминам.
Кратко остановимся на втором параметре посадочного миниму-
ма — дальности видимости. При заходе на посадку видимый лет-
чиком в вертикальной плоскости участок поверхности земли огра-
ничивается остеклением кабины и дальностью видимости (рис. 6.2).
Чтобы определить положение и параметры движения самолета
относительно оси ВПП, летчику необходимо видеть некоторое коли-
чество ориентиров по курсу посадки. При посадке в сложных ме-
328
Рис. 6.2. Пространство, видимое летчиком:
/ — область ограничения по видимости; // — видимый участок; /// — область, закрытая обте-
4 кателем кабины
теорологических условиях основными наземными ориентирами яв-
ляются огни светооборудования аэродрома (огни подхода, огни
ВПП и др.). Поэтому говоря о видимости наземных ориентиров,
будем иметь в виду в основном видимость этих огней. На основа-
нии имеющихся материалов по заходам на посадку в сложных ме-
теорологических условиях можно считать, что для высот принятия
решения 30—100 м потребная длина видимого участка лежит в
пределах 300—700 м, причем меньшим высотам соответствуют
меньшие дальности видимости.
Из предыдущего ясно, что для летчика представляет первосте-
пенный интерес дальность видимости наземных ориентиров из ка-
бины снижающегося по глиссаде самолета — наклонная дальность
видимости. Однако в настоящее время отсутствуют надежные ме-
тоды ее измерения. Поэтому под дальностью видимости понима-
ется максимальное расстояние в направлении посадки, на котором
ВПП или установленные огни и маркеры, ограничивающие кон-
туры ВПП, можно видеть из положения над установленной точкой
осевой линии ВПП с высоты, соответствующей среднему уровню
глаз пилота в момент приземления (5 м).
Эта дальность видимости на ВПП, вообще говоря, не совпадает
с наклонной дальностью видимости, однако дает, как правило,
представление о ней. Вместе с тем в некоторых случаях даже при
достаточной дальности видимости на ВПП летчик на высоте при-
нятия решения может и не увидеть необходимое количество на-
земных ориентиров. В таких случаях на высоте принятия решения
должен быть начат уход на второй круг.
Таким образом, дальность видимости на ВПП не является пол-
ноценным параметром посадочного минимума. В связи с этим в не-
которых странах посадочный минимум характеризуется только
-высотой принятия решения, что не исключает необходимости пере-
дачи на борт информации о дальности видимости на ВПП. Такая
информация совершенно необходима для эксплуатации самолетов,
оборудованных системами автоматического управления посадкой
329
и послепосадочным пробегом. В этом случае высота принятия ре-
шения равна нулю, а дальность видимости на ВПП является един-
ственным параметром, определяющим посадочный минимум.
§ 2. УСПЕШНОСТЬ ОПЕРАЦИИ ЗАХОДА НА ПОСАДКУ И
ПОСАДКИ
В момент перехода на визуальный полет самолет, как правило,
имеет некоторое отклонение от линии посадки, а вектор его путе-
вой скорости отклонен от направления посадки. Кроме того, само-
лет может иметь отклонение от заданной глиссады. Вследствие
этого возникает необходимость в дополнительном корректирую-
щем маневре для приземления самолета в заданном месте ВПП.
Разумеется, чем точнее выведен самолет в точку перехода на ви-
зуальный полет, тем легче выполнить этот маневр. При очень точ-
ном заходе необходимость в таком маневре вообще отпадает. В от-
дельных случаях в точке перехода на визуальный полет возможны
столь большие отклонения самолета, что не могут быть безопасно
устранены корректирующим маневром. При таких неточных захо-
дах самолет должен уйти на второй круг (повторный заход).
Говоря о точке перехода на визуальный полет, мы имеем в виду,
что в этой точке летчик, используя наземные ориентиры (огни све-
тооборудования аэродрома), может начать корректирующий ма-
невр. Однако прежде летчик должен увидеть эти ориентиры и
оценить обстановку. На это требуется некоторое время, продолжи-
тельность которого может существенно различаться в зависимо-
сти от условий захода на посадку и в первую очередь — от види-
мости наземных ориентиров. Так, если облака имеют четко выра-
женную нижнюю границу, это время значительно меньше, чем в
случае, если она отсутствует, или при заходе на посадку в тумане.
Ввиду важности этого обстоятельства подчеркнем, что говоря
о точке перехода на визуальный полет, мы имеем в виду не точку,
в которой летчик впервые увидел наземные ориентиры, а точку, в
которой он, оценив положение самолета относительно посадочной
траектории и уверившись в успешности захода на посадку, начина-
ет активные действия по осуществлению корректирующего маневра.
С учетом сказанного заход на посадку может рассматриваться
как операция, цель которой вывод самолета в некоторую область
А4, представляющую собой пространство допустимых отклонений
самолета. Попадание самолета в эту область гарантирует, что
летчик, имеющий соответствующую подготовку, выполнит необхо-
димый корректирующий маневр и приземлит самолет в заданном
месте ВПП.
В общем случае область М представляет собой гиперпростран-
ство вокруг точки, лежащей на посадочной траектории на высоте
принятия решения. Иногда эту точку называют точкой мини-
мума. Границы гиперпространства определяются допустимыми
линейными боковыми отклонениями zmax и отклонениями по высо-
330
те ДЯтах от заданной посадочной траектории, их производными, а
также отклонениями AVmax от заданной скорости полета
M=M(z max» ^max, ^max, А-^тах» ДНтах, ДЯmax, max)*
Размеры этой области являются также функцией расстояния
от точки минимума до порога ВПП. Дело в том, что к моменту
пролета над порогом ВПП маневрирование по исправлению откло-
нений самолета от посадочной траектории должно быть в основ-
ном закончено. Следовательно, чем больше расстояние от точки
перехода на визуальный полет до начала ВПП, тем большие от-
клонения самолёта могут быть исправлены в процессе корректи-
рующего маневра. Иначе говоря, размеры области М увеличивают-
ся по мере отдаления точки перехода на визуальный полет от по-
рога ВПП.
Очевидно, что при больших удалениях точки начала маневри-
рования от порога ВПП длительность корректирующего маневра
возрастет. В подобных случаях производные отклонений от поса-
дочной траекторий (г, z, ДЯ, ДЯ) играет малую роль, тем более,
что при автоматизированном заходе на посадку их величины срав-
нительно невелики. Тогда в первом приближении можно полагать,
что область М представляет собой «окно», размеры которого огра-
ничены максимальными значениями исправляемых отклонений
— ^тах И ±ДЯтах (рис. 6.3), т. е.
/И = /И ( + Zmax, ±^Ятах).
Обычно исправление боковых отклонений самолета от посадоч-
ной траектории занимает существенно больше времени, чем исп-
равление отклонений по высоте. При больших дальностях точки
перехода на визуальный полет от порога ВПП оказываются допу-
стимыми весьма большие отклонения самолета по высоте от поса-
Рис. 6.3. Область допустимых отклонений
331
дочной траектории. При автоматизированном заходе на посадку
эти отклонения невелики. Поэтому при больших дальностях точки
перехода на визуальный полет решающее значение имеют боковые
отклонения самолета. На вопросе определения допустимых значе-
ний боковых отклонений мы остановимся в дальнейшем.
Заметим, что посадка самолета также может рассматриваться
как операция, основной целью которой является вывод—самолета
в некоторую область, представляющую собой окрестность некото-
рой точки на ВПП (расчетной точки приземления), после достиже-
ния которой начинается пробег самолета на ВПП. В момент каса-
ния ВПП параметры движения самолета (вертикальная скорость,
крен, тангаж и др.) должны находиться в регламентированных пре-
делах. Иначе говоря, при приземлении границы гиперпространства
допустимых отклонений определяются допустимыми боковыми от-
клонениями Zmax, продольными отклонениями ALmax от расчетной
ТОЧКИ Приземления, вертикальной скоростью Z/щах, креном Ymax,
отклонениями Афтах от курса и др. Укажем, что на этапе призем-
ления первые и вторые производные отклонений самолета от тра-
ектории (//, //, z, zj, пропорциональные вертикальной скорости,
нормальной перегрузке, отклонению по курсу и крену, играют ре-
шающую роль.
Успех захода на посадку и посадки зависит от ряда отдельных
постоянных и переменных факторов (точность вывода и параметры
движения самолета, посадочные характеристики самолета, атмо-
сферные условия и т. п.) и их сочетаний, меняющихся случайным
непредвиденным образом. Поэтому рассматриваемая задача носит
вероятностный характер. Нельзя заранее предсказать, как закон-
чится каждая конкретная операция. Однако, используя методы
теории вероятностей, оказывается возможным предсказать сред-
ний исход заходов на посадку и посадок.
Будем по-прежнему обозначать Р (3) —вероятность успешного
захода на посадку, т. е. такого захода, в результате которого са-
молет выведен в область М. Для того чтобы осуществить успешную
посадку, летчик к моменту достижения области М должен видеть
достаточное количество наземных ориентиров. Обозначим вероят-
ность таких событий Р(В). Тогда вероятность успешных посадок
Р(П)=Р(3)Р(В).
Если самолет выведен в область М. и при этом летчик видит до-
статочное количество наземных ориентиров, то вероятность после-
дующей успешной посадки предполагается равной единице.
Если в результате захода самолет не попал в область М. (не-
удачный заход) или он попал в эту область, но отсутствовала не-
обходимая видимость наземных ориентиров, летчик должен пре-
кратить дальнейшее снижение и выполнить повторный заход. Сле-
довательно, вероятность уходов самолета на повторный заход
Рпз = 1—Р(П)=1 —Р(В)Р(3).
(6.1)
332
Введем обозначения: Q(3) =1—Р(3) —вероятность неудачно-
го захода, Q(B) = 1—Р(В)—вероятность отсутствия необходимой
видимости. Тогда уравнение (6.1) может быть приведено к виду:
Pn3 = Q(3)+Q(B)-Q(3)Q(B).
С учетом (4.2)
^ПЗ = <?а Ч" 0т “Ь Q (В) — ЯуЯа — QjQ (В) — (JaQ (В)-р ЯаЯлФ (В)-
Ввиду малости <?т, ?shQ(B) произведениями этих величин
можно пренебречь. Тогда получим
Рпз ~ 0т + Ял + Q (В).
В настоящее время в нашей стране принято считать, что в слож-
ных метеорологических условиях самолеты должны уходить на по-
вторный заход по всем причинам не чаще чем один раз на двад-
цать заходов -на посадку. Приняв Рпз =0,05 и полагая в качестве
примера ^T«ts~Q(B), получим
. (6.2)
Напомним, что к таким же значениям q? и ра мы пришли в гл. 4.
Там указывалось, что частота уходов на повторный заход по при-
чинам, связанным с работой посадочных средств, не должна пре-
вышать Q(3) = ~- И тогда q^q^ ~Q(3)^ —. Там же мы под-
робно рассмотрели вопросы надежности посадочных средств, оп-
ределяющей величину параметра q&. Здесь мы остановимся на
выявлении факторов, влияющих на величину параметра q^, или од-
нозначно связанного с ним параметра рт = 1—<7т, который пред-
ставляет собой вероятность вывода самолета в область М при ис-
правных посадочных средствах. Иначе говоря, рт — вероятность
успешных заходов на посадку при исправной аппаратуре посадоч-
ного комплекса.
Вероятность рт зависит, во-первых, от величины этой области
(размеров «окна») и, во-вторых, от закона распределения откло-
нений самолета от посадочной траектории и его параметров. Ве-
роятность рт может быть представлена в виде произведения
Рт Рт«бокРт-прод» (6.3)
где Рт.бок —вероятность того, что боковые отклонения самолета от посадочной
траектории не превысят допустимые значения;
Рт.прод — вероятность того, что продольные отклонения (отклонения по
высоте) от посадочной траектории не превысят допустимые зна-
чения.
Как показывает опыт эксплуатации самолетов, оборудованных
системами автоматизированного управления заходом на посадку,
при дальностях точки перехода на визуальный полет от порога
ВПП более 300—400 м рт.бок<Рт.прод. В ряде случаев оказывается
333
возможным принять, что вероятность успешных заходов рт прак-
тически зависит лишь от вероятности рт.бок. Тогда вместо рассмот-
рения вероятности вывода самолета в область М достаточно рас-
смотреть вероятность того, что в момент перехода на визуальный
полет боковые отклонения самолета от посадочной траектории ле-
жат в допустимых пределах. Иногда принимают
^Т.бок 1 Рт.бок ___ 2
^т.прод 1 Рт.прод
Тогда с учетом (6.2) можно подсчитать, что рт.бок~ 0,988 и
Рт.прод—0,996. На эти величины будем ориентироваться и мы, оце-
нивая вероятность успешных заходов на посадку самолетов, обо-
рудованных системами автоматизированного управления.
В соответствии с ранее высказанными соображениями положим,
что для обеспечения заданной вероятности успешных заходов
рт~ 0,983 (<7т=1/6О) необходимо и достаточно, чтобы рт.бок~0,988
(*7т.бок= 1/80).
Далее будут рассмотрены вопросы определения посадочного
минимума, при котором обеспечивается такая вероятность успеш-
ных заходов. Поскольку вероятность успешных заходов на посад-
ку ^зависит от диапазона допустимых боковых отклонений и точно-
сти стабилизации самолета на посадочной траектории, следует
остановиться на них подробнее.
§ 3. ДОПУСТИМЫЕ ОТКЛОНЕНИЯ САМОЛЕТА ОТ
ПОСАДОЧНОЙ ТРАЕКТОРИИ
Проблемы предпосадочного маневрирования и, в частности, во-
просы определения диапазона допустимых боковых отклонений
рассматривались в ряде работ зарубежных и отечественных авто-
ров Ч Ниже будут использованы результаты и выводы исследова-
ний, выполненных в ГосНИИ ГА1 2.
В общем случае в момент перехода на визуальный полет само-
лет может иметь как линейное, так и угловое отклонение от поса-
дочной траектории. Основными источниками линейных боковых
отклонений самолета от посадочной траектории являются статизм
систем полуавтоматического и автоматического управления, а так-
же отклонения курсовой линии КРМ от оси ВПП. Боковые откло-
нения могут быть следствием траекторных колебаний самолета
относительно курсовой линии. Угловые отклонения (отклонения век-
тора путевой скорости самолета от направления посадки) в основ-
ном являются следствием траекторных колебаний самолета и не-
точного подбора угла сноса.
1 См. Дж. Мерсер. Количественное изучение захода на посадку по при-
борам.— «Вопросы радиолокационной техники», 1954, № 6.
2Белогородский С. Л. О некоторых вопросах предпосадочного ма-
неврирования. ОНТИ ГосНИИ ГВФ. 1964. с. 35. Горячев В. А. К вопросу о
выборе наивыгоднейших методов предпосадочного маневра. ОНТЭИ ГосНИИ ГА.
1969. с. 24.
334
Из гл. 3 известно, что к со-
временным системам траектор-
ного управления предъявля-
ются требования траекторной
устойчивости и автоматическо-
го учета сноса. Поэтому прак-
тически величины угловых от-
клонений самолета в момент
перехода на визуальный полет
невелики и их имеет смысл
учитывать лишь при неболь-
ших дальностях от ВПП.
Очевидно, худшим сочета-
нием бокового и углового от-
клонений является такое, при
Рис. 6.4. Устранение отклонений самоле-
та от посадочной траектории
котором самолет вследствие уг-
лового отклонения 0Г уходит от посадочной траектории, увеличивая
уже имеющееся боковое отклонение z (рис. 6.4). Для устранения
этих отклонений необходимо развернуть самолет вначале в одну, а
затем в другую сторону. При этом траектория движения самолета
имеет вид деформированной латинской буквы S, вследствие чего
корректирующий маневр часто называют S-образным маневром.
При расчете допустимых отклонений самолета от посадочной
траектории будем исходить из следующих предпосылок.
Боковое маневрирование происходит в процессе снижения са-
молета по заданной глиссаде. Маневрирование должно быть в ос-
новном закончено к моменту пролета порога ВПП (высота проле-
та порога ~ 10 м).
При посадке самолета в сложных метеорологических условиях
после окончания автоматизированного захода (отключение авто-
пилота, прекращение пилотирования по командным стрелкам), на
высоте принятия решения целесообразно и далее снижаться на ус-
тановившемся режиме по «предложенной» глиссаде вплоть до пе-
ресечения порога ВПП. Такая методика полета исключает случаи
посадки самолета перед ВПП и обеспечивает возможность эффек-
тивного маневрирования в процессе визуального полета.
При снижении по «продолженной» глиссаде в идеализирован-
ном случае в момент прохода над порогом ВПП антенна ГРП нахо-
дится на высоте базовой (опорной) точки курсо-глиссадной систе-
мы. При этом высота полета самолета, отсчитываемая от нижнего
края шасси, будет меньше на величину превышения антенны ГРП
относительно этой точки.
Принимая, что, во-первых, базовая точка системы СП-50 и ИЛС
находится на высоте 15 м и, во-вторых, превышение антенны ГРП
над нижним краем шасси составляет около 5 м, легко определить,
что при таких условиях самолет проходит над порогом ВПП на
высоте около 10 м.
335
Если в процессе снижения имеет место «подныривание» под
глиссаду, то высота окончания корректирующего маневра должна
быть не менее 10 м. При выполнении этих условий боковое манев-
рирование завершается до начала выравнивания. Когда мини-
мально допустимая высота ухода на второй круг превышает 10 м,
боковое маневрирование должно быть закончено до достижения
минимально допустимой высоты ухода на- второй круг.
В точке окончания бокового маневра по возможности не долж-
но быть угловых отклонений вектора путевой скорости от направ-
ления посадки (при расчете их полагают равными нулю). При при-
землении на ВПП могут быть допущены некоторые линейные бо-
ковые отклонения Дг0 самолета от ее оси, величина которых
зависит от ширины ВПП. Поэтому для определения допустимых
боковых отклонений в точке перехода на визуальный полет эти
допустимые отклонения Дг0 необходимо суммировать с отклонени-
ями, которые могут быть исправлены при маневрировании.
Ввиду близости к земле обычно вводят ограничения на величи-
ну максимального крена самолета при выполнении корректирую-
щего маневра. Для большинства реактивных самолетов можно
полагать, что на высотах Я>45-?50 м максимальный крен при
маневре не должен превышать утах=15°, а на меньших высотах
величина максимально допустимого крена уменьшается с высотой
примерно по линейному закону ттах ~ — (у, град; Я, м).
На выполнение корректирующего маневра определенное влия-
ние оказывают некоторые ограничения в части управляемости: мак-
симально допустимый угол отклонения штурвала фшт.тах=90°;
максимальное усилие, прикладываемое к штурвалу РЭл.тах = 25 кГ;
максимальное усилие, прикладываемое к педалям Рр.н=60 кГ.
Наибольшую роль эти ограничения играют при малых дистан-
циях маневрирования, так как ввиду кратковременности маневри-
рования самолет не успевает достичь предельно допустимых зна-
чений крена.
Ориентировочное значение допустимого бокового отклонения в
точке перехода на визуальный полет может быть определено из
следующей зависимости:
_ 2V2 Г1 + cos ег _ /~ 1 /AMaHgtg7* siner\2 . д
^тах.доп — 2 I/ 2V2 2 / J °’
(6:3)
где 0г — угол между направлением вектора путевой скорости самолета и на-
правлением посадки, град\
Аман— дистанция маневрирования, м\
Azo — допустимое линейное боковое отклонение самолета от оси ВПП в мо-
мент приземления, м\
у* — средний крен при маневрировании.
Если Диан >650 му то
т*arctg 110~°>27^ман-650) .
^ман
336
Если LMaH^650 м, то
Выполнив расчет для ряда
значений Лман и 0Г, можно по-
строить графики допустимых
боковых отклонений для дан-
ного типа самолета (рис. 6.5):
^тах доп ==-^ (^ман> ®г)*
Опыт эксплуатации пока-
зывает, что при автоматизиро-
ванном управлении заходом на
посадку отклонения вектора
путевой скорости от направле-
ния посадки находятся в пре-
делах 0г=±2ч-3°. С учетом
этого будем считать, что до-
пустимые боковые отклонения
отражаются графиком функ-
ции 2щах доп = | (^ман, 0г= 2 ).
Построив этот график и
симметричный ему график
^шах доп = f (^ман, 0Г — + 2 ) ,
выделим область (рис. 6.6) до-
пустимых отклонений самоле-
та. В соответствии с приняты-
ми ранее условиями будем
считать заходы на посадку ус-
пешными, если самолет при пе-
реходе на визуальный полет
находится внутри этой об-
ласти.
Заметим, что диапазон до
пустимых боковых отклонений
более точно определяется гра-
Рис. 6.5. Графики допустимых боковых
отклонений
6.6. Область допустимых
отклонений самолета
боковых
фо-аналитическим методом, по- Рис.
зволяющим учесть ограниче-
ния бэ max, max, -Рр.н max* Одна-
ко и в этом случае можно получить лишь приблизительные значе-
ния допустимых боковых отклонений, которые требуют уточнения в
летных испытаниях. Такие испытания включают полеты в различ-
ных условиях, в том числе ночью, при боковых ветрах и т. д.
Вместе с тем зависимость (6.3) позволяет достаточно полно оце-
нить значимость различных факторов, влияющих на диапазон до-
пустимых боковых отклонений. Весьма значительное влияние на
него оказывает скорость полета (рис. 6.7). Самолеты выпуска по-
337
Рис. 6.7. к влиянию скорости
полета на диапазон допустимых
боковых отклонений
следних лет имеют скорости захода на
посадку значительно меньшие, чем са-
молеты аналогичных типов, разрабо-
танные ранее. Достигается это в ос-
новном за счет применения всевозмож-
ных средств механизации крыла.
До сих пор мы полагали, что кор-
ректирующие маневры выполняются
координированно. При этом боковая
сила создается за счет крена, который
ограничивается по соображениям без-
опасности. Поэтому оказываются огра-
ниченными величина боковой силы и
диапазон допустимых боковых откло-
нений. При сохранении ограничений по
крену диапазон таких отклонений мо-
жет быть расширен, если корректиру-
ющие маневры выполнять с внешним
скольжением, создающим дополни-
тельную боковую силу. С этой точки
зрения применение внешнего скольже-
ния эквивалентно увеличению средне-
го крена. Некоординированный разво-
рот с креном у и боковой перегрузкой
nz происходит с такой же угловой ско-
ростью, что и координированный раз-
ворот с креном
nzx
1
cos 7
Особенно эффективно применение внешнего скольжения в тех
случаях, когда допустимы лишь небольшие крены L Однако выпол-
нение маневров со скольжением более трудно, чем координирован-
ных. Поэтому некоординированные маневры имеют ограниченное
применение.
В ряде случаев может быть рекомендовано применение внеш-
него скольжения («передача ноги») только в моменты ввода само-
лета в крен.
Этим уменьшается инерционное запаздывание в образовании
крена, что способствует увеличению среднего крена при выполне-
нии корректирующих маневров, а значит, приводит к расширению
области допустимых боковых отклонений самолета.
1 Подробно об использовании скольжения при предпосадочном маневриро-
вании см. Белогородский С. Л. О некоторых вопросах предпосадочного
маневрирования. ОНТИ ГосНИИ ГВФ, 1964. с. 35.
338
§ 4. О ТОЧНОСТИ СТАБИЛИЗАЦИИ САМОЛЕТА НА
ПОСАДОЧНОЙ ТРАЕКТОРИИ
Ранее при рассмотрении вопросов стабилизации самолета на
посадочной траектории мы полагали, что эта траектория точно за-
дается с помощью КРМ и КРП. Иначе говоря, мы считали откло-
нения курсовой линии от оси ВПП и ошибки КРП равными нулю.
В действительности эти отклонения и ошибки не равны нулю и при
необходмости оценить точность стабилизации самолета на посадоч-
ной траектории они должны быть учтены. Будем называть их
ошибками радиотехнической траектории (ошибками радиотехни-
ческого тракта «Борт — земля») и обозначать гр.
Отклонения самолета от радиотехнической траектории являют-
ся следствием погрешностей вычислительных устройств СТУ, оши-
бок нерадиотехнических датчиков, неточного выполнения команд,
выработанных вычислителями, турбулентных возмущений и др.
Обозначим ошибки стабилизации на траектории через гс.
В таком случае боковое отклонение z самолета от посадочной
траектории может быть представлено в виде суммы г=гр + гс.
Отклонения гр и гс являются результатом действия большого
числа статистически независимых факторов. В первом приближе-
нии можно.считать, что эти отклонения подчиняются нормальному
закону распределения, что математическое • ожидание отклонений
близко к нулю.
Тогда плотность распределения отклонений z
__z*
= —х—е з»’.
аг У 2Л
Здесь
а ==т/'о2 4-о2
г V V
где агр —среднее квадратическое отклонение радиотехнической траектории от
посадочной;
—среднее квадратическое отклонение самолета от радиотехнической
траектории.
Поскольку КРМ используют угломерную систему координат,
часто отклонения самолета от посадочной траектории характеризу-
ют в угловых единицах. Иногда оказывается удобным характери-
зовать эти отклонения эквивалентным током КРП. В соответствии
с (3.103) можно записать
где а£ — средняя квадратическая величина углового отклонения самолета от по-
садочной траектории;
L — дальность самолета до КРМ.
339
ВПП
I
^крм
^8ПП
ц______
Рис. 6.8. Область возможных отклонений (I)
С учетом (6.4) <зе
радиотехни*
самолета от
Величина
! +о2 .
Р ' ес
где а£ —средняя квадратическая величина углового отклонения
ческой траектории от посадочной;
<jec —средняя квадратическая величина углового отклонения
радиотехнической траектории.
Величина otp определяется категорией КРМ и КРП.
о6с характеризует точность стабилизации самолета на посадочной
траектории и, следовательно, определяется точностью системы ав-
томатизированного управления. Системы траекторного управления
рассчитывают таким образом, чтобы устойчивость движения обес-
печивалась на некотором участке траектории после пролета высо-
ты принятия решения. В этом случае на участке траектории протя-
женностью 2—3 км, охватывающем высоту принятия решения,
величина о6с может быть принята примерно постоянной. Определя-
ется величина о6с в специальных летных испытаниях.
Дальность L зависит от расстояния L& КРМ до базовой точки
и расстояния от порога ВПП (базовой точки) до самолета. Если
положить, что корректирующий маневр заканчивается в момент
пролета порога ВПП, то Л = Лб + Лман.
Выше было принято, что вероятность успешных заходов на по-
садку должна быть рт.бок~0,988. При нормальном законе распре-
деления отклонений это возможно, если^ «При соблюдении
2,6
этого условия боковые отклонения z с вероятностью рт.бок~ 0,988
не превысят zmax. Если известны величины оери о£с , то можно
определить область возможных боковых отклонений с вероятностью
Рт.бок~ 0,988 в функции от Аман (рис. 6.8). Очевидно, что эта об-
ласть тем шире, чем больше величины отклонений о£ри оес , т. е.
чем менее точны элементы посадочного комплекса.
При рассмотрении диапазона возможных отклонений самолета
при приземлении оказывается необходимым ориентироваться на
вероятности возникновения больших отклонений ~5о. В этом слу-
чае оценка ведется исходя из (Предположения о том, что отклонения
подчиняются двойному экспоненциальному распределению. Веро-
ятность больших отклонений (более Зо) для этого распределения
340
существенно выше, чем для нормального распределения. Оценки,
полученные на основании двойного экспоненциального распреде-
ления, являются более «пессимистическими» и при решении вопро-
сов безопасности полетов им отдается предпочтение [24].
§ 5. ОПРЕДЕЛЕНИЕ ВЫСОТЫ ПРИНЯТИЯ РЕШЕНИЯ
Наиболее просто высота принятия решения определяется гра-
фически. Совместив области допустимых II и возможных I боковых
отклонений, можно получить потребную дистанцию корректирую-
щего маневра Аман (рис. 6.9). Затем, спроектировав точки пере-
сечения линий, ограничивающих области допустимых и возможных
боковых отклонений на глиссаду, получим высоту начала манев-
ра. На этой высоте летчик должен начать корректирующий маневр
в том случае, если отклонения самолета не превышают допустимых
пределов, или начать уход на второй круг, если отклонения само-
лета превышают допустимую величину. Таким образом, эта высота
является ни чем иным, как высотой принятия решения.
При таком расчете высоты принятия решения частота уходов
самолета на второй круг ^т= 1/60. Занижение высоты принятия ре-
шения ведет к повышению частоты уходов самолета на второй круг
с меньшей высоты. Завышение высоты принятия решения неблаго-
приятно сказывается на регулярности полетов.
Очевидно, что при одной и той же дистанции маневрирования
высота принятия решения тем больше, чем больше угол 0гл накло-
на глиссады. Поэтому при оп-
ределении высоты принятия
решения необходимо учиты-
вать также возможный раз-
брос траекторий захода на по-
садку в вертикальной плоско-
сти. Можно выделить две груп-
пы источников отклонений от
заданной траектории в про-
дольной плоскости. Одна из
них связана с отклонениями
радиотехнической траектории
Д0р, другая —с отклонениями
самолета от радиотехнической
траектории Д0С.
После того как определена
высота принятия решения, лег-
ко найти также потребную
дальность видимости. Для это-
го можно задаться потребной длиной
верхности и
взгляда летчика часть земной
Рис. 6.9. К определению высоты при-
нятия решения
видимого участка земной по-
самолета закрывает от
учесть, что конструкция
поверхности.
341
ЛИТЕРАТУРА
1. Астафьев Г. П., Шебшаевич В. С., Юрков Ю. А. Радиотех-
нические средства навигации летательных аппаратов. М., «Советское радио»,
1962, 963 с.
2. Белогородский С. Л. К вопросу об определении минимумов пого-
ды для посадки самолетов, оборудованных системами автоматического захода на
посадку. ОНТИ ГосНИИ ГВФ, 1963, 30 с.
3. Б о д н е р В. А., Козлов М. С. Стабилизация летательных аппара-
тов и автопилоты. М., Оборонгиз, 1961, 508 с.
4. Б о д н е р В. А. Теория автоматического управления полетом. М., «Нау-
ка», 1964. 698 с.
5. Б р а г а В. Г. и др. Практическая аэродинамика самолетов с турбореак-
тивными двигателями. М., Воениздат, 1969. 408 с.
'6 . Браславский Д. А., Логунов С. С., Пельпор Д. С. Авиаци-
онные приборы. М., «Машиностроение», 1964, 740 с.
7. В е д р о в В. С., Т а й ц М. А. Летные испытания самолетов. М., Обо-
ронгиз, 1956. 483 с.
8. Вентце ль Е. С. Теория вероятностей. М., Физматиздат, 1962. 576 с.
9. Горощенко Б. Т. Динамика полета самолета. М., Оборонгиз,
1954. 336 с.
10. Д е н и с о в В. Г. Навигационное оборудование летательных аппаратов.
М., Оборонгиз, 1963. 384 с.
11. Длин А. М. Математическая статистика в технике. М., «Советская
наука», 1958. 466 с.
£2. Доброленский Ю. П., Иванова В. И., Поспелов Г. С.
Автоматика управляемых снарядов. М., Оборонгиз, 1963’. 548 с.
13. Доброленский Ю. П. Динамика полета в неспокойной атмосфере.
М., «Машиностроение», 1969. 256 с.
14. Добронравов О. Е., Кириленко Ю. И. Основы автоматиче-
ского регулирования. Автоматы и системы управления летательных аппаратов.
М., «Машиностроение», 1965. 457 с.
J5. Дружинин Г. В. Надежность систем автоматики. М., «Энергия»,
1967. 527 с.
16. Е п и ф а н о в А. Д. Надежность автоматических систем. М., «Машино-
строение», 1964. 336 с.
17. Колосов С. П., Стр ом и лов В. М. Основы автоматического пи-
лотирования. М., Оборонгиз, 1959. 232 с.
18. К р а с о в с к и й А. А., Поспелов Г. С. Основы автоматики и тех-
нической кибернетики. М., Госэнергоиздат, 1962. 600 с.
19. Лебедев А. А., Стражева И. В., Сахаров Г. И. Аэромеха-
ника самолета. М., Оборонгиз, 1955. 472 с.
20. Л е к а р е в Я. 3., Петров В. И. Автоматическое управление при-
342
землением самолета при использовании одного регулирующего органа. Труды
РИИ ГВФ, 1964, вып. 35, с. 41.
21. Маланов Б. В. и др. Авиационная радионавигация. Изд. ВВИА
им. Жуковского, 1962, 571 с. ,
22. Матвеев В. Н. Расчет возмущенного-движения самолета. М., Обо-
ронгиз, 1960. 223 с. _
23. М е р с е р Дж. Количественное изучение захода на посадку по прибо-
рам. — «Вопросы радиолокационной техники», 1954, № 8.
24. М о л о к а н о в Г. Ф. Точность и надежность навигации летательных
аппаратов. М., «Машиностроение», 1967. 215 с.
25. О л ь м а н Е. В., Соловьев Я. И., Токарев В. П. Автопилоты.
М., Оборонгиз, 1946. 472 с.
26. Остославский И. В. Аэродинамика самолета. М., Оборонгиз,
1957. 560 с.
27. Остославский И. В., Стражева И. В. Динамика полета. Тра-
ектории летательных аппаратов. М., Оборонгиз, 1963. 430 с.
28. Остославский И. В., Стражева И. В. Динамика полета. Ус-
тойчивость и управляемость летательных аппаратов. М., «Машиностроение»,
1965. 467 с.
29. Павлов В. А., Понырко С. А., Хованский Ю. М. Стабили-
зация летательных аппаратов и автопилоты. М., «Высшая школа», 1964. 483 с.
30. Поспелов Г. С. Динамика автоматического управления самолетом
при посадке. Изд. ВВИА им. Жуковского, 1959. 239 с.
31. Поспелов Г. С. Автоматическое управление полетом самолета. Изд.
ВВИА им. Жуковского, 1959. 115 с.
32. Сапожников Р. А., Бессонов А. А., Шоломицкий А. Г.
Надежность автоматических управляющих систем. М., «Высшая школа»,
1964. 264 с.
33. Свешников А. А. Прикладные методы теории случайных функций.
М., «Наука», 1968. 463 с.
34. С ел е з н е в В. П. Навигационные устройства. М., Оборонгиз,
1961. 615 с.
35. С л о м я н с к и й Г. А., П р я д и л о в. Ю. Н. Поплавковые гироскопы и
их применение. М., Оборонгиз, 1958. 244 с.
36. Техническая кибернетика. Под ред. Солодовникова В. В., М., «Машино-
строение», 1967. 768 с.
37. Шишонок Н. А., Репкин В. Ф., Б ар винский Л. Л. Основы
теории надежности. М., «Советское радио», 1964. 551 с.
38. Эткин Б. Динамика полета. М., «Машиностроение», 1964. 494 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автомат тяги (скорости) 17, 205
Автопилот 17, 90
— закон управления 91
— каналы 90
---- боковой 90
----высоты 90
----крена 90
---- курса 90
----направления 90
----тангажа 90
----элеронов 90
— обратная связь жесткая 93—95
-------изодромная 98, 99
-------скоростная 97, 99
— передаточное число (отношение)
93, 107, 118—119
— постоянная времени 93
— рулевой привод 91
Аккомодация 301, 322
Аналог 261
Аттенюация сигналов 78, 131
Б
Балансировочное положение (угол)
218, 238, 240, 241
Балансировочное усилие 218, 219
Блоки контроля (блоки безопасности)
235, 249—275
----логическая коррекция 262
----порог срабатывания — 250
Бортовая система автоматического
управления (БСАУ) — 125
344
В
Ведущие (лидирующие) кабели 48,
71—73
— магнитные поля 72, 73
— приемники 73
— равносигнальные зоны 71, 73
— чувствительность к боковому от-
клонению 73
Вероятность безотказной работы
системы 290, 295
— исправной работы 233
— неудачного захода 233
— неудачной посадки 233
— отказа 234
---отдельного канала 273
— полного отказа системы 276
— точного выдерживания посадочной
траектории 233
— успешного захода 233
— успешной посадки 233
— уходов самолета на повторный за-
ход 332
Ветры 23
— боковой 44
Воздействия 102
— возмущающие 102, 119
— управляющие 102, 119
Воздушные массы 23—25
---скорость 24
-------переменная (случайная) со-
ставляющая 24
-------постоянная составляющая 24
---среднеквадратическая величина
скорости случайного ветра 30
Возмущения, действующие в боковых
плоскостях самолета 38—40
---в продольных плоскостях 21—25
— связанные с изменением состояния
атмосферы 23—25, 38—40
Восстанавливающий орган 291
Время активных действий 229
— восприятия отказа 228
— осмысливания 229
— потребное 229
— работы 234
— располагаемое 230
Выбирающее устройство 286
Выдерживание 186
Выравнивание 185
— вертикальная скорость 192
— время 187
— высота начала 188
— дистанция 193
— перегрузка 187
— угловая скорость 187
Высота нижней границы облаков 326
— принятия решения 232, 328, 341
—ухода на второй круг 231
Г
Гипотеза стационарности 12
Д
Дальность видимости 326
---наклонная 329
---на ВПП 329
Движение боковое 12
— возмущенное 9
— длиннопериодическое 19
— короткопериодическое 19
— креновое 35
— невозмущенное 9
— неустойчивое 9
— продольное 12
— устойчивое 9
Динамометрический датчик 223—226
3
Закон управления автомата тяги 206,
210—214
---автопилота 92
---астатический 149, 177
---выравниванием 196, 198
---дифференциальный 149
---изодромный 149
---интегральный 149, 177
---креном 124
---статический 146, 177
---углом тангажа 164
«Захват» глиссады 132, 180
И
Индикация «нуль — индикация» 88
—«преследования» 87
— система «Вид с земли на самолет»
302
— система «Вид с самолета на зем-
лю» 302
К
Кворум — элемент 288
Коллиматор 301
Командная стрелка крена 88, 89
----тангажа 88, 89
----«послушность» 89
Компаратор 268
Контур рулевой машинки 94
— — — динамические характеристи-
ки 95
-------передаточная функция 95
Контур управления креном 79, 80
Контур управления курсом 80
Координированные развороты 38
----угловая скорость 42
Корректирующий маневр 330, 335
Коррекция передаточных чисел (отно-
шений) 77, 78, 132, 206, 238
Коэффициент боковой силы 33
— лобового сопротивления 14
— относительной плотности самолета
в боковом движении 34
— относительной плотности самолета
в продольном движении 17
— подъемной силы 14
— поперечной статической устойчиво-
сти 36
— продольного момента 14
Критическая ситуация 228
Курсовая линия 47, 52, 64, 123
Л
Летчик-оператор 85
Линеаризация уравнений II, 15, 33
Логическая функция 265, 266, 290, 292
Ложные отказы 251
Ложные отключения 251
----вероятность 253, 271
М
Мажоритарная логика 283
Маневренность 9
Метод «замороженных коэффициен
тов» 11, 129
345
Метод малых возмущений 11
Метод «сличения голосов» («голосова-
ния») 285
Моменты аэродинамические 6
— боковые 33
— инерции осевые 10
— инерции центробежные 10
— крена 7
— продольный 14
— рысканья 7
— тангажа 7
Н
Наработка на отказ 234, 276
Нейтральность самолета 20, 35
Неудачная посадка 233
Нуль-прибор 51, 56
О
Область (пространство) допустимых
отклонений 330, 331
-------боковых 337
Оператор, коэффициент усиления 86
— органы чувств 84
— передаточная функция 85, 86
Оптимальная дальность 128, 167
Отказы активные 231
— быстрые 231
— медленные 231
— пассивные 231
— резкие 231
Отклонение допустимое боковое 336
— линейное боковое 5, 123, 334
— от глиссады 163
— угловое от оси ВПП 51, 334
Ошибка, передаточная функция 103
—статическая 103
— установившаяся 104, 116, 117, 145
П
Парашютирование 185
Передаточная функция для нормаль-
ной перегрузки 29
---отклонения по нормали к траек-
тории 29, 30
---угла атаки 28
---угла крена 41
---угла наклона траектории 28
---угла тангажа 28
---угла рыскания 42
346
Перегрузка боковая 114, 338
— нормальная 29
— при отказах автопилота 249
— приращение 29, 221, 222
— среднеквадратическая величина 30
Пересиливание 215, 223, 237
Периферическое зрение 300, 320
Плоскость глиссады снижения 46
Плоскость посадочного курса 46
Помехи высокочастотные 137, 170
Помехи низкочастотные 136, 170
Порог срабатывания 250
Посадочная дистанция 185
Пробег 185
Производные аэродинамических сил
16
Производные аэродинамических мо-
ментов 16, 17
Р
Радиовысотомеры 74—78
— антенны 75
— девиация частоты 74—76
— частота излучаемого сигнала 74
Радиолокационные посадочные си-
стемы 48
Радиомаяки глиссадные 65—69
----антенная система 66, 67
----двухчастотные 67
----коэффициент глубины модуля-
ции 66
----крутизна глиссадной зоны 68,
169
----полусектор глиссады 68
----равносигнальная зона 65
----с опорным нулем 67
----угол наклона глиссады сниже-
ния 67
---- характеристики направленности
66
----чувствительность к угловому
отклонению 68
Радиомаяки курсовые 50—65
----амплитуда искривлений курсовой
линии 57
----антенные системы 53, 54, 64
----дальность действия 57
----двухчастотные 55
----коэффициент глубины модуля-
ции 62, 64
Радиомаяки курсовые, крутизна кур-
совой зоны 59, 133
----курсовая линия 52, 64
----курсовой сектор 58, 65
----угловая ширина 58
----линейность характеристики РГМ
57
----несущая частота 51, 62
----поднесущая частота 62
----равносигнальные зоны 47, 49, 52
----разность глубин модуляции
(РГМ) 51, 52
----с квадратурной модуляцией 55
----с опорным нулем 53
----угловое отклонение от курсовой
линии (угловая координата) 51, 52,
59
----характеристики направленности
излучения 51, 62
----чувствительность к боковому от-
клонению 58
Радиомаяки маркерные 69—71
----ближние 49, 50, 69—71
----дальние 49, 50, 69—71
----средние 50, 69—71
----характеристики направленности
70
Радиомаячные посадочные системы
базовая (опорная) точка 58
-------ИЛС 48—50
-------СП-50 48—50
Радиоприемники глиссадные 69
----возможный разброс крутизн
сигналов на выходе 69
----передаточная функция 69
----фильтры 69, 171
----эталонный 68
Радиоприемники курсовые, возмож-
ный разброс крутизн сигналов на
выходе 60
----передаточная функция 61
----фильтры 61, 65, 137
----эталонный 59
Радиоприемники маркерные 70, 71
Регулятор управления двигателями
(РУД) 195, 203
Резерв нагруженный 280
— ненагруженный 280, 281
— облегченный 280, 281
Резервирование активное 279
— замещением 280
— пассивное 279
— постоянное 282
Резервированнные системы дублиро-
ванные 292
----дуплексные 292
----мультиплексные 292
----мультиплицированные 292
----триплексные 292
----триплированные (троирован-
ные) 292
Рулевая машинка (сервопривод) 93,
228
----автомата тяги 210, 215, 216
---- контур 94
----концевые выключатели 238
---------плавающие 241
----отключение 236
----тяговые моменты (усилия)
246—248
С
Следящая система механизма танга-
жа (МТ) 121
Силы аэродинамические 6
— боковая 7
— лобового сопротивления 7, 13
— подъемная 7, 13
— тяги двигателей 13
Системы координат (координатных
осей) земная 5
----полусвязанная 7
----связанная 6
----скоростная 6
Системы «летчик — самолет» 84
— полуавтоматического (директорно-
го) управления 82
— траекторного управления (СТУ) 82
— «человек — машина» 84
Средняя аэродинамическая хорда 14
Стабилизация крена 79
— курса 80
— угловых положений 79
— центра масс 79, 81
Т
Тест — контроль 273
Тест — сигналы 236, 273
Точка минимума 330
Траектория выравнивания 77, 186
----асимптота 194
----«гибкая» 190
----«жесткая» 190
----параметры 189
----радиус кривизны 187
----«свободные» 194
----угол наклона 192
347
----экспоненциальная 191
— посадочная 45, 46
Триммер 219
— скорость отклонения 219
— угол отклонения 219
Триммерная машинка 224
Турбулентность 23—25
— интенсивность 24, 25
У
Угол балансировочный 218
— крена 6
----заданный 80
----предельный 155
— наклона траектории 7
— подхода 154
— путевой 7
— рысканья 6
— скольжения 7, 38—41
— сноса 44, 146, 201
— тангажа 6
Управление боковым движением 84
— полуавтоматическое (директорное)
82
— продольным движением 84
— скоростью 202—204
— траекторное 83
Управляемость 9
Усилие на органах управления 216,
217, 219
---------указатель 223, 227
Устойчивость 9, 21
— спиральная 35
— степень продольной статической
устойчивости 20
Ф
Фильтр операционный 141
— запаздывание на фильтрах 140—
143, 173, 197, 211
Фильтрация помех 135—140, 169—175,
211
X
Характеристики направленности из-
лучения
Характеристический полином 18—21,
35, 37, 43, 166
Ц
Центровка самолета 20, 117
Ш
Шарнирный момент 216, 217, 246
Э
Эксплуатационные категории 4, 328
ОГЛАВЛЕНИЕ
Предисловие...................................................... 3
Глава 1. Самолет как объект регулирования............................ 5
§ 1. Системы координат...................................... 5
§ 2. Общие уравнения движения самолета...................... 9
§ 3. Уравнения продольного движения самолета (в спокойной
атмосфере).............................................. 13
§ 4. Возмущения, действующие в продольной плоскости самоле-
та. Уравнения продольного движения самолета в неспокой-
ной атмосфере .............................•................21
§ 5. Уравнения бокового движения самолета в спокойной атмос-
фере .................................J.................. . . 21
§ 6. Возмущения, действующие в боковых плоскостях самолета.
Уравнения бокового движения самолета в неспокойной ат-
мосфере ............ ......................... .,. •........38
Глава 2. Радиотехнические устройства для задания посадочных траекторий 45
§ 1. Общие сведения..................................... . 45
§ 2. Некоторые общие сведения о радиомаячных посадочных си-
стемах ............................................... 48
§ 3. Курсовые радиомаяки и радиоприемники...................50
Курсовые радиомаяки и радиоприемники системы ИЛС ... 51
Курсовые радиомаяки и радиоприемники системы СП-50 . . 60
§ 4. Глиссадные радиомаяки и радиоприемники.................65
§ 5. Маркерные радиомаяки и радиоприемники..................69
§ 6. Ведущие кабели....................................... 71
§ 7. Радиовысотомеры .... ..................................74
Г лава 3. Динамика полуавтоматического и автоматического управления
х самолетом ....................................................... 79
§ 1. Общие сведения ... ................................... 79
§ 2. О полуавтоматическом управлении........................84
Свойства и динамические характеристики летчика как зве-
на системы управления.................................84
Командная информация в системах полуавтоматического уп-
равления .................'.............................87
Упрощение структурных схем при полуавтоматическом уп-
равлении движением самолета на заданной траектории ... 89
§ 3. Законы управления и структурные схемы автопилотов ... 90
Некоторые общие сведения об автопилотах.................90
Законы управления автопилота .......................... 93
Статические и астатические системы самолет — автопилот . . 102
349
Уравнения и структурные схемы систем автоматического уп-
равления креном ..........................................Ю7
О координированном управлении боковым движением само-
лета .................................................... по
Уравнения и структурные схемы системы автоматического
управления тангажом......................................115
§ 4. Управление боковым движением самолета при заходе на
посадку . . ................................................122
Некоторые общие вопросы стабилизации самолета на курсо-
вой линии................................................122
Влияние характеристик радиотехнической системы КРМ —
КРП на динамику системы самолет — БСАУ...................133
О компенсации запаздываний, вносимых фильтрами...........143
Точность стабилизации самолета на курсовой линии.........144
Управление самолетом при больших начальных отклонениях.
Законы управления и структурные схемы систем траекторно-
го управления . . s.................................. . . . 152
• § 5. Управление продольным движением самолета при заходе на
посадку . . . .............................................150
Стабилизация самолета на заданной высоте ............... 150
Некоторые общие вопросы стабилизации самолета на глис-
саде ......................,.............................163
Влияние характеристик радиотехнической системы ГРМ —
ГРП на динамику системы самолет — БСАУ . * . ............169
Точность стабилизации самолета на глиссаде...............175
Выход на глиссаду, «Захват» глиссады...................179
Законы управления и схемы систем автоматизированного
управления продольным движением...................... . 180
§ 6. Управление движением самолета при посадке...............184
Некоторые общие сведения о продольном движении самоле-
та при .посадке . . ............. . . J..................184
Траектории выравнивания .................................186
Законы управления и схемы систем автоматического управ-
ления продольным движением самолета при посадке .... 195
О боковом движении самолета при посадке..................200
§ 7. Управление скоростью полета при заходе на посадку и по-
садке .................................................... 202
Некоторые общие сведения об управлении скоростью полета 202
Схемы автоматического управления скоростью полета . . . 204
Некоторые общие вопросы автоматического управления ско-
ростью полета путем воздействия на тягу двигателей ... . 205
Законы управления и схемы автоматов тяги.............. . . 207
Об устройстве автоматов тяги.............................214
§ 8. Автоматическое триммирование........................... 216
Некоторые общие сведения об усилиях на органах управле-
ния в установившемся полете..............................216
Балансировка самолета в автоматическом полете............221
Системы автоматического триммирования....................223
Глава 4. Обеспечение безопасности автоматического полета..............227
§ 1. Безопасность автоматического полета.227
Понятие о критической ситуации. Условия обеспечения безо-
пасности автоматического полета..........................227
Особенности проблемы безопасности посадки в сложных
метеорологических условиях............................. 231
' § 2. Общие сведения о средствах обеспечения безопасности ав-
томатического полета...........................................235
§ 3. Кнопки и устройства для отключения автопилота.........236
§ 4. Ограничение отклонений управляющих поверхностей .... 238
Концевые выключатели . .................................238
350
Плавающие концевые выключатели ... . ..................240
Ограничение тяговых моментов (усилий) рулевых машинок 246
§ 5. Блоки контроля........................................249
Блоки контроля, реагирующие на достижение определенного
значения контролируемого параметра режима полета (поро-
говые блоки контроля) . . , . '........................249
Блоки контроля сигналов в схеме автопилота ........... 259
Блоки контроля, использующие специальные тест-сигналы . .273
§ 6. Резервирование бортовых систем автоматического управле-
ния и их элементов . ......................................275
Общие вопросы резервирования бортовых систем автомати-
ческого управления.....................................275
Методы резервирования . ±.............................278
О построении резервированных бортовых систем автомати-
ческого управления.....................................292
§ 7. Некоторые дополнительные вопросы обеспечения безопасно-
сти автоматического полета . .............................296
Обеспечение безопасности полета при включении автопилота 296
Контроль питания автопилота .......................... 298
Глава 5. Индикаторы бортовых систем................................\ 299
§ 1. Индикация пилотажно-навигационной информации при по-
садке ..................................................... . 299
§ 2. Системы индикации.................................... 302
§ 3. Командные пилотажные приборы...........................305
§ 4. Навигационные приборы..................................311
§ 5. Паравизуальные индикаторы..............................313
§ 6. Системы индикации на стекле............................321
Глава 6. Посадочные минимумы самолетов, оборудованных системами ав-
томатизированного управления........................................326
§ 1. Общие сведения........................................326
§ 2. Успешность операций захода на посадку и посадки.......330
§ 3. Допустимые отклонения самолета от посадочной траектории 334
§ 4. О точности стабилизации самолета на посадочной траектории 339
§ 5. Определение высоты принятия решения...................341
Литература..................................................342
Предметный указатель........................................344
Белогородский Семен Львович,
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
ПОСАДКОЙ САМОЛЕТА
Научный редактор В. Н. Просыпалов
Редактор изд-ва А. М. Мещеряков
Технический редактор Т. А. Гусева
Корректор А. П. Новикова
СдаНо в набор 27/V—1971 г. Подписано к печати 25/1—1972 г.
Формат бумаги 60 X90’/ie Печатных листов 22 Т-03002
Учетно-изд. листов 22,37 Тираж 10 000 экз. Изд. Ns 1—4—1/17 № 1393
Зак. тип. 3261. Бумага типографская № 2 Цена 1 р. 48 к.
Изд-во «ТРАНСПОРТ», Москва, Басманный туп., 6а
Московская типография № 8 Главполиграфпрома
Комитета по печати при Совете Министров СССР,
Хохловский пер., 7.