/

























































































































































































Author: Шишман Б.А.
Tags: cтроительная механика графический и аналитический методы статики для исследования и расчета строительных конструкций теоретические основы строительства строительство
ISBN: 5-274-00618-3
Year: 1989



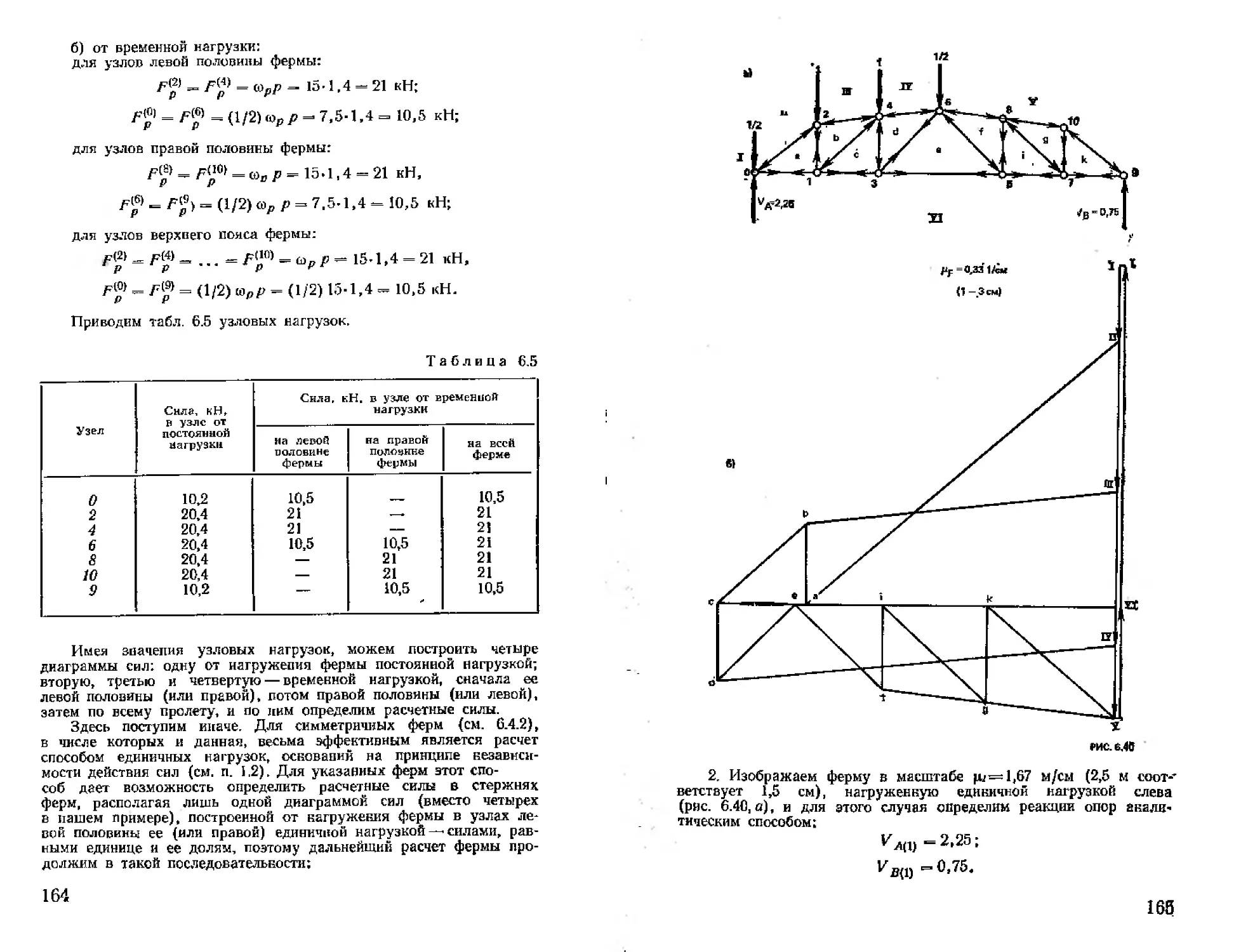
Text
Б А . Шиш май
СТАТИ КА
СООРУЖЕНИЙ
Б. А. Шишман
СТАТИКА
СООРУЖЕНИЙ
Допущено Государственным комитетом СССР по народно-
му образованию в качестве учебника для строительных
специальностей средних специальных учебных заведений
Москва
Стройиздат
19В9
ББК 38.112
Ш 65
УДК 624.041(075.32)
Рецензенты — канд, теки, наук Г, Н. Жиц (нач. строительной лабо-
ратории треста «Спецжелезобетонстрой»), А. Б. Абелева (препода-
ватель Московского строительно-экономического техникума Мосгор-
исполкома).
Редактор — 3. С. Шестопалова
Шиш май Б. А.
Ш 65 Статика сооружений: Учеб, для техникумов.—М.:
Строй изд ат, 1989. — 384 с.: ил.
ISBN 5-274-00618-3.
Изложены основы расчета плоских статически определи-
мых и неопределимых стержневых систем на неподвижную и
подвижную нагрузки. Теоретические положении и выводы со-
провождаются подробно разобранными примерами расчета
сооружений.
Для учащихся строительных техникумов.
3302000000-543 св. ил ВЬ1П для ср спец.
ш 047(01)-89 учеб, заведений, 65-89
Учебное издание
ШИШМАН БОРИС АЛЕКСАНДРОВИЧ
СТАТИКА СООРУЖЕНИЙ
Технический редактор М. В. Павлова
Корректор Т. Г. Бросалина
ИБ № 4714
Сдано а набор 15.03.89, Подписано в печать 21 06.69, Формат 84Х1087з2«
Бумага тип. № *2. Гарнитура литературная Печать нысоквя. Усл. печ. л, 20,16.
Усл. кр.-отт, 20,16 Уч.’Ияд. л. 20,50. Тираж 34 000 экз. Изд. № А.Ш-2331,
Заказ 432. Пена 1 р. 10 к.
Стройиздяг, 501442 Москва, Калкевская, 23а
Набрано в Московской типографии № 13 ПО «Периодика» БО «Союзнаяиграешь
пром® Государственного комитета СССР но делам издательств, полвграфии
и книжной торговли. 1О7(Ю5, Москва, Денисовский пер,( д. 20,
Отпечатано но Владимирской типографии Госкомитета СССР по печати.
600000 г. Владимир, Октябрьский пр-т, д. 7
ISBN 5 274-00618-3
(С) Стройиздат, 1989
Предисловие
Основные направления экономического и социального развития
СССР на 1986—1990 годы и на период до 2000 года предусматри-
вают создание единой системы непрерывного образования, совершен-
ствования деятельности общеобразовательной школы, развитие сред-
него специального и высшего образования. Необходимо поднимать
качество подготовки специалистов, в том числе и техников-строите-
лей, которые должны иметь высокий уровень подготовки по всем
общетехническкм дисциплинам и прежде всего по технической меха-
нике, являющейся базой для изучения всех специальных дисциплин.
Статика сооружений включена н третий раздел программы по
технической механике и ее изучение базируется на знании двух пред-
шествующих разделов технической механики — теоретической меха-
ники и сопротивления материалов.
В доступной форме изложены теоретические основы образования
и расчеты простейших сооружений. Даны решения задач, с которы-
ми техник-строитель может встретиться в своей производственной
деятельности. Приведены выводы всех важнейших формул и на
примерах показано решение многих типовых задач, при этом ис-
пользовалась только Международная система единиц измерений (СИ).
При работе с предлагаемым учебником необходимо помнить
следующее:
1) все размеры на рисунках указаны в метрах;
2) если в тексте или па рисунке не указаны направления осей
проекций, то имеется в виду, что ось х направлена по горизонтали
вправо, а ось у — по вертикали вверх.
Предполагается, что параллельно с изучением статики сооружений
учащиеся воспользуются также книгами {7] и [10], в которых они
иайдут решепия других примеров, а также обширный материал для
самостоятельной работы.
Все критические замечания читателей, которые помогут улучшить
содержание книги, будут приняты автором с благодарностью.
1*
Глава 1. Основные сведения
1.1. Задачи статики сооружений
До настоящего времени не существует точного оп-
ределения понятия «сооружение». Вероятно, многие,
не задумываясь, назовут сооружениями здания, стро-
пильные и мостовые фермы, опоры линий электропере-
дач и т. п. и, пожалуй, мало кто решится назвать соору-
жениями железнодорожные вагоны, автобусы или кор-
пуса самолетов. Тем не менее в курсе статики сооруже-
ний естественно речь будет идти о сооружениях — о спо-
собах их образования и расчете.
Условимся сооружением (системой) называть сово-
купность твердых тел (элементов), неподвижно соеди-
ненных между собой. К любому сооружению предъяв-
ляются следующие главнейшие требования:
1. Неподвижность относительно основания и неизме-
няемость приданной геометрической формы в течение
всего срока службы.
2. Прочность, жесткость, устойчивость. Прочность
и устойчивость гарантируют безопасность эксплуатации
сооружения, а достаточная жесткость ограничивает де-
формацию его в таких пределах, которые не препятству-
ют нормальным условиям эксплуатации.
3. Экономичность. Экономичность сооружений опре-
деляется наименьшими затратами средств на материалы
и возведение сооружения.
Чтобы удовлетворить этим требованиям, надо уметь
рассчитывать сооружение. Наука, изучающая расчет
сооружений на прочность, жесткость и устойчивость
независимо от метода расчета, свойств материала (ли-
нейно- или нелинейно-упругий, неупругий) и действую-
щей нагрузки (временной или постоянной, сплошной или
сосредоточенной, статической или динамической) на-
зывается строительной механикой. Строительная меха-
ника широко использует методы расчета и математиче-
ский аппарат сопротивления материалов, теории упру-
гости и теории пластичности в той мере, в какой они со-
держат материал для расчета сооружений.
Статикой сооружений называется раздел строитель-
ной механики, изучающий методы расчета сооружений
1 Необходимые для изучения статики сооружений сведения о на-
грузках приводятся в курсе «Сопротивление материалов» |6].
4
на прочность, жесткость и. устойчивость при статиче-
ском действии нагрузки. В этой книге рассматриваются
только линейно деформируемые сооружения (в дальней-
шем— упругие), т. е. такие, для которых в известных
пределах нагружения справедлив закон прямо пропор-
циональной зависимости между силами (нагрузками)
и вызываемыми ими перемещениями (закон Гука).
Между статикой сооружений, теоретической механи-
кой и сопротивлением материалов существует тесная
взаимосвязь. Сопротивление материалов базируется на
знании теоретической механики и изучает методы расче-
та отдельных элементов сооружений на прочность, жест-
кость и устойчивость. Статика сооружений применяет
методы теоретической механики и сопротивления мате-
риалов к статическому расчету сооружений н служит
базой для изучения последующих инженерно-строитель-
ных дисциплин.
Основными задачами статики сооружений являются
следующие.
1. Установление законов образования наивыгодней-
ших форм сооружений, т. е. таких форм, которые удо-
влетворяют вышеизложенным главнейшим требованиям,
предъявляемым к сооружениям.
2. Определение внутренних сил в различных сечени-
ях элементов сооружений и выполнение расчетов по под-
бору и проверке их размеров. Однако в статике соору-
жений, как правило, эти расчеты самостоятельно не рас-
сматриваются; предполагается, что они известны из кур-
са «Сопротивление материалов».
3. Изучение упругих перемещений, возникающих
в сооружении под влиянием внешних воздействий.
4. Исследование устойчивости сооружений.
Необходимо отметить, что статика сооружений—•
наука прикладная, она изучает современные методы
расчета сооружений и способствует более экономному
расходованию материалов и финансовых ресурсов
страны.
1.2. Основные допущения
Основные допущения, вводимые в статику сооруже-
ний для расчета упругих систем, те же, что и в сопро-
тивлении материалов, с той лишь разницей, что они от-
носятся не к отдельному элементу, а ко всему сооруже-
нию в целом.
5
1. В известных пределах нагружения материал соору-
жения обладает совершенной упругостью, т. е. после
прекращения действия нагрузки деформация полностью
исчезает.
2. Перемещения точек сооружения, обусловленные
его упругими деформациями, весьма малы по сравне-
нию с размерами самого сооружения. Из этого допуще-
ния следует, что изменения в расположении сил, проис-
ходящие при деформации сооружения, не следует учи-
тывать при составлении уравнений равновесия (при оп-
ределении реакций связей), а также при определении
внутренних сил. Это положение иногда называют прин-
ципом начальных размеров.
3. Перемещения точек упругодеформируемого соору-
жения в известных пределах нагружения прямо пропор-
циональны силам, вызывающим эти перемещения.
4. Справедлив принцип независимости действия сил:
результат действия на сооружение группы сил не зави-
сит от последовательности нагружения ими сооруже-
ния и равен сумме результатов действия каждой из сил
в отдельности.
Под результатом действия сил в зависимости от кон-
кретной задачи могут пониматься перемещения той или
иной точки сооружения, величина внутренней силы и т. п.
1.3. Расчетные схемы сооружений
Большинство сооружений имеет сложные соединения
составляющих их элементов. Расчет такого сооружения,
как единого целого, оказывается весьма сложным. Для
расчета прибегают к упрощениям, сознательно отказы-
ваясь от целого ряда сравнительно маловажных фак-
торов, и оперируют с упрощенными схемами сооруже-
ний, называемыми расчетными схемами. Расчетные схе-
мы представляют собой упрощенное изображение дей-
ствительного сооружения. Выбор расчетной схемы пред-
ставляет собой ответственную задачу. Расчетная схема
должна позволить сделать расчет сооружения по степе-
ни сложности практически приемлемым и в то же время
должна обеспечить расчету достаточную достоверность
и точность.
Хорошим примером замены действительного соору-
жения расчетными схемами является железнодорожный
мост (рис. 1.1,а), который обычно состоит из двух вер-
6
7
тикальных ферм, соединенных между собой продольны-
ми и поперечными связями, и проезжей части. Послед-
няя состоит из поперечных балок, прикрепленных кон-
цами к главным фермам, и продольных балок, соединен-
ных с поперечными. Стержни, образующие фермы, жест-
ко скреплены между собой своими концами сваркой или
заклепками. Мост несет вертикальную нагрузку от соб-
ственной силы тяжести и силы тяжести подвижного
состава, а также горизонтальную нагрузку от давления
ветра. Для расчета мост расчленяется на отдельные со-
ставные части — системы, расчетные схемы которых по-
казаны на рис. 1.1,6, в, а и представляют собой:
1) две вертикальные фермы ACCiAi и BDD\Bi
(рис. 1.1,6);
2) горизонтальную ферму CC^DiD, расположенную
между верхними поясами главных ферм и воспринимаю-
щую давление ветра (рис. 1.1,в);
3) две поперечные опорные рамы ACDB и A1C1D1B1
(рис. 1.1,г).
1.4. Классификация сооружений
Сооружения можно классифицировать по следую-
щим признакам:
1. В зависимости От расположения осей элементов
и нагрузок:
а) плоские сооружения, оси элементов которых и на-
грузки расположены в одной плоскости (рис. 1.2);
б) пространственные сооружения, оси элементов ко-
торых расположены в разных плоскостях (рис. 1.3,щ6),
или когда нагрузки действуют не в плоскости сооруже-
ния (рис. 1.3, в).
В этой книге рассматриваются лишь плоские си-
стемы.
2. По виду элементов, образующих сооружения:
а) стержневые сооружения. Под стержневым подра-
зумевается сооружение, состоящее из стержней, т. е. та-
ких элементов, два измерения которых значительно
меньше третьего. К стержневым сооружениям относятся
балки, фермы, рамы, арки (рис. 1.4,а, б,в,г);
б) тонкостенные сооружения. К ним относятся соору-
жения, состоящие из элементов, толщина которых на-
много меньше остальных размеров. Сооружение, состав-
ленное из таких элементов, называется пластинчатым,
8
если оно состоит из пластин (рис. 1.5,а), т. е. элемен-
тов, ограниченных плоскими поверхностями, или обо-
лочкой, если оно состоит из оболочек (рис. 1.5,6)—эле-
ментов, ограниченных криволинейными поверхностями;
9
a
si
10
в) массивные сооружения. Массивными называются
сооружения, у которых все три измерения примерно од-
ного порядка, например подпорные стены (рис. 1.6), ка-
менные своды (рис. 1.7), плотины, фундаменты.
3. В зависимости от направления реакций опор соору-
жений 1 различают:
а) безраспорные сооружения, у которых при верти-
кальной нагрузке возникают лишь вертикальные реак-
ции опор (рис. 1.8, а, б, в);
б) распорные сооружения, реакции опор которых
наклонны и могут быть разложены на горизонтальные
и вертикальные составляющие; наличие горизонтальной
составляющей опорных реакций, называемой распором,
и является характерной особенностью распорных систем.
1 Имеют в виду шарнирно-неподвижную, шарнирно-подвижную
и защемляющую опоры, устройство которых и направления соот-
ветствующих им реакций подробно рассматриваются в технической
механике [1|,
п
К распорным сооружениям относятся арки, своды и ра-
мы (рис. 1.9, а, б), арочные и вантовые фермы (рис. 1.9,
в, г).
4. В зависимости от метода расчета различают ста-
тически определимые сооружения и статически неопре-
делимые (подробно об этом см. п. 2.4). Для расчета
первых достаточно только уравнений равновесия стати-
ки. Вторые же могут быть рассчитаны только с помощью
дополнительных (к уравнениям равновесия статики)
уравнений, учитывающих деформацию сооружения.
Глава 2. Исследование геометрического
образования плоских стержневых систем
2.1. Геометрически неизменяемые и изменяемые
системы. Степень свободы и степень внутренней
изменяемости системы. Необходимые условия
геометрической неизменяемости систем.
Мгновенно изменяемые системы
2.1.1. Понятие о геометрически неизменяемой и из-
меняемой системах. Одним из основных требовании,
предъявляемых к сооружению (см. п. 1.1), является сле-
дующее: сооружение должно сохранять приданную ему
геометрическую форму в течение всего срока службы.
Этому требованию удовлетворяют так называемые гео-
метрически неизменяемые системы.
Рассмотрим систему, состоящую из трех стержней,
соединенных между собой шарнирами, и образующую
шарнирный треугольник АВС (рис. 2.1,а). Геометриче-
ская форма этого треугольника, очевидно, не изменится
при перемещении его в пространстве в любое положение
(вспомним, что по трем сторонам можно построить тре-
угольник и только один). Если же данную систему на-
грузить, например силой F (рис. 2.1,6), то она вслед-
ствие упругой деформации элементов все же изменит
свою форму, но очень незначительно (см. треугольник
HB.Ci).
Геометрически неизменяемой (или просто неизменяе-
мой) называется система, не изменяющая приданную ей
геометрическую форму ни при каких изменениях поло-
жения ее в пространстве.
Характерной особенностью неизменяемой системы яв-
12
ляется способность ее при нагружении в определенных
пределах лишь незначительно изменять свою форму
вследствие упругой деформации ее элементов, выра-
жающейся в изменении их размеров, (рис. 2.1,6) или
одновременно и размеров и формы (рис. 2.1, в). При
этом обусловленные упругими деформациями элементов
перемещения отдельных точек системы настолько малы,
что можно считать положение точек приложения сил
и их направления остающимися неизменными и поэтому
при расчете сооружений применять принцип независимо-
сти действия сил. Наипростейшей неизменяемой систе-
мой является шарнирный треугольник.
Геометрически изменяемой (или просто изменяемой.)
системой называют такую, форма которой резко изме-
няется при изменении положения ее в пространстве или
при нагружении даже весьма малой силой.
Характерной особенностью изменяемой системы яв-
ляется то, что изменение формы ее вызывает конечные
перемещения элементов системы без их деформации. На-
пример, шарнирно-стержневой прямоугольник A BCD,
показанный на рис. 2.2, а представляет собой изменяе-
мую систему, так как даже при бесконечно малых на-
13
грузках он приходит в движение без изменения длины
и искривления (деформации) стержней АВ, ВС, CD, DA.
Сначала этот прямоугольник принимает форму па-
раллелограмма AB'C'D, а затем стороны его, наклады-
ваясь друг на друга, располагаются почти по одной пря-
мой АС" в порядке АВ", В"С", C"D, DA. Если же в рас-
сматриваемый шарнирный прямоугольник включить диа-
гональный стержень АС (рис. 2.2,6) или BD (послед-
ний изображен на рисунке штриховой линией), то по-
лученная в результате система будет неизменяемой.
В строительной практике применяют только неизме-
няемые системы, неподвижно прикрепленные к земле,
или системы, по своей внутренней структуре изменяе-
мые, но так связанные с землей, что вместе с ней обра-
зуют неизменяемые системы.
2.1.2. Степень свободы и степень внутренней изме-
няемости системы. Исследование геометрического обра-
зования систем связано с такими понятиями, как диск,
степень свободы системы и степень внутренней изменяе-
мости ее.
Диском называется отдельный элемент, составляю-
щий плоскую систему (простой диск), целая неизменяе-
мая плоская система или ее неизменяемая часть (укруп-
ненный диск) или, наконец, неизменяемое основание.
Таким образом, к диску можно отнести стержень, неиз-
меняемую ферму или неизменяемую часть ее и т. п.,
а также землю.
Любой диск принято изображать плоской фигурой
произвольного очертания.
Например, неизменяемую систему — шарнирный тре-
угольник АВС (рис. 2.3, а) можно изобразить одним
диском (рис. 2.3,6) или, если каждый стержень рас-
сматривать как отдельный диск, то тремя дисками I, И
и III, соединенными между собой шарнирами А, В, С,
(рис. 2.3, в).
Степенью свободы системы называется наименьшее
число независимых друг от друга геометрических пара-
метров (обобщенных координат — координат точек, уг-
лов наклона элементов системы, их длины), вполне оп-
ределяющих положение системы (диска) на плоскости
в произвольный момент времени.
Установим степень свободы не прикрепленного к зем-
ле (свободного) диска. Пусть диск (рис. 2.4) движет-
ся относительно прямоугольной системы координат х
14
и у, неподвижно связанной с землей, и в некоторый мо-
мент времени занимает положение, показанное на
рис. 2.4. В плоскости диска выберем две произвольные
точки А и В и соединим их прямой АВ.
Легко заметить, что наименьшим числом независи-
мых друг от друга геометрических параметров, вполне
определяющих положение диска на плоскости в дан-
ный момент времени, является число три, которому со-
ответствуют параметры, выраженные координатами к
и у точки А и углом наклона (р, образованным прямой
АВ с осью х. Следовательно, степень свободы свобод-
ного диска равна трем; этому числу соответствуют и три
возможных движения диска: два поступательных по на-
правлениям, параллельным осям координат х и у,
и вращательное движение вокруг оси, проходящей через
точку А. Попутно отметим, что точку можно рассматри
15
вать как диск весьма малых размеров. Степень свобо-
ды диска, стягивающегося в точку, равна двум. Земля
принимается за диск весьма больших размеров, а сте-
пень свободы ее условно считают равной нулю.
Путем различных устройств, называемых связями,
можно ограничить число возможных движений системы
и, значит, уменьшить степень свободы ее или же вооб-
ще лишить систему возможности совершать какие бы то
ни было движения, т. е. получить систему со степенью
свободы, равной нулю.
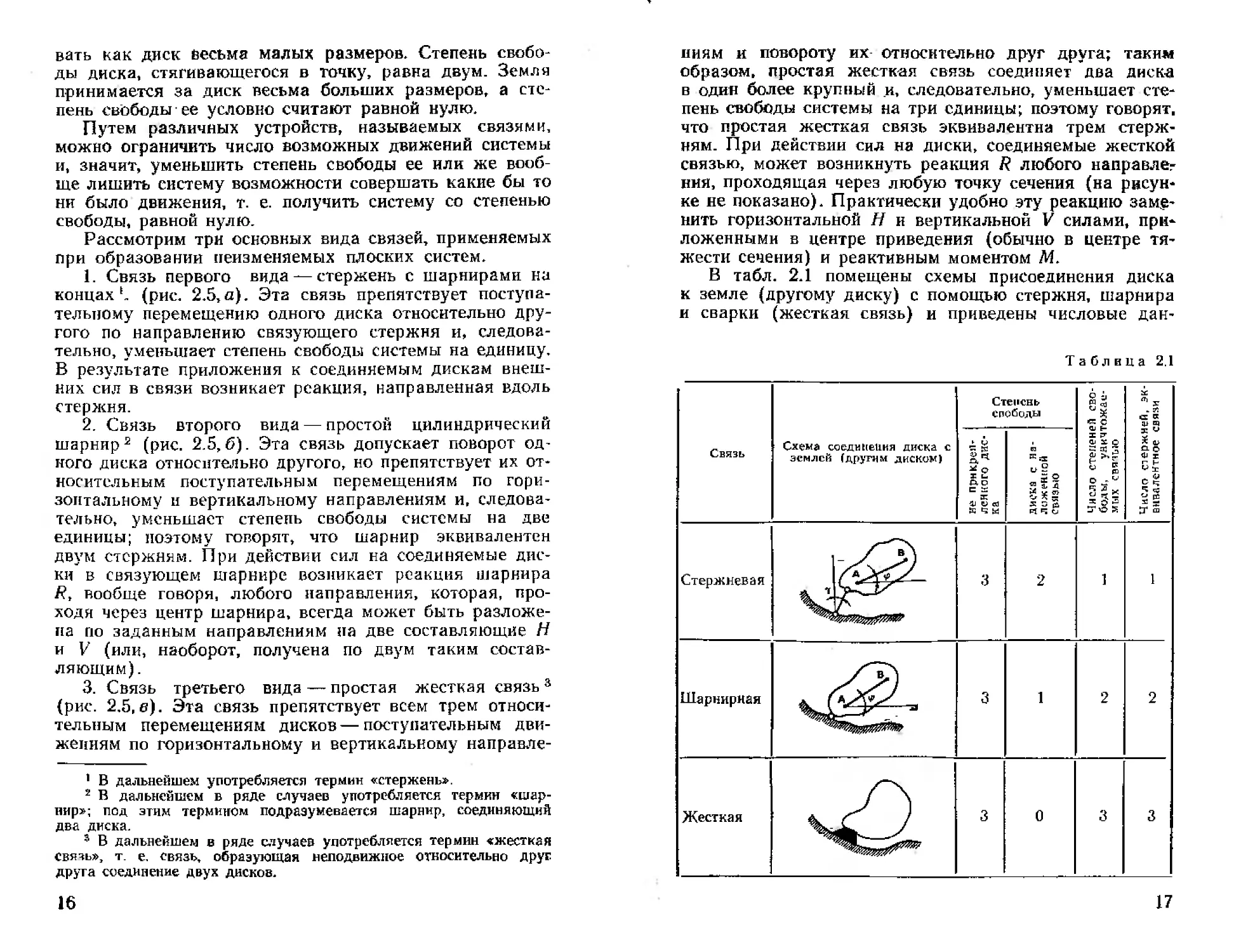
Рассмотрим три основных вида связей, применяемых
при образовании неизменяемых плоских систем.
1. Связь первого вида — стержень с шарнирами на
концах1, (рис. 2.5,а). Эта связь препятствует поступа-
тельному перемещению одного диска относительно дру-
гого по направлению связующего стержня и, следова-
тельно, уменьшает степень свободы системы на единицу.
В результате приложения к соединяемым дискам внеш-
них сил в связи возникает реакция, направленная вдоль
стержня.
2. Связь второго вида — простой цилиндрический
шарнир1 2 (рис. 2.5,6). Эта связь допускает поворот од-
ного диска относительно другого, но препятствует их от-
носительным поступательным перемещениям по гори-
зонтальному и вертикальному направлениям и, следова-
тельно, уменьшает степень свободы системы на две
единицы; поэтому говорят, что шарнир эквивалентен
двум стержням. При действии сил на соединяемые дис-
ки в связующем шарнире возникает реакция шарнира
/?, вообще говоря, любого направления, которая, про-
ходя через центр шарнира, всегда может быть разложе-
на по заданным направлениям па две составляющие Н
и V (или, наоборот, получена по двум таким состав-
ляющим).
3. Связь третьего вида — простая жесткая связь3
(рис. 2.5, е). Эта связь препятствует всем трем относи-
тельным перемещениям дисков—поступательным дви-
жениям по горизонтальному и вертикальному направле-
1 В дальнейшем употребляется термин «стержень».
2 В дальнейшем в ряде случаев употребляется термин «шар-
нир»; под этим термином подразумевается шарнир, соединяющий
два диска.
3 В дальнейшем в ряде случаев употребляется термин «жесткая
связь», т. е. связь, образующая неподвижное относительно друг
друга соединение двух дисков.
16
ниям и повороту их относительно друг друга; таким
образом, простая жесткая связь соединяет два диска
в один более крупный и, следовательно, уменьшает сте-
пень свободы системы на три единицы; поэтому говорят,
что простая жесткая связь эквивалентна трем стерж-
ням. При действии сил на диски, соединяемые жесткой
связью, может возникнуть реакция 7? любого направлег
ння, проходящая через любую точку сечения (на рисун-
ке не показано). Практически удобно эту реакцию заме-
нить горизонтальной Н и вертикальной V силами, при-
ложенными в центре приведения (обычно в центре тя-
жести сечения) и реактивным моментом М.
В табл. 2.1 помещены схемы присоединения диска
к земле (другому диску) с помощью стержня, шарнира
и сварки (жесткая связь) и приведены числовые дан-
Таблица 2.1
17
ные, относящиеся к степени свободы диска с наложен-
ными на него связями.
Если шарнир или жесткая связь соединяет более двух
дисков, то эти связи называются сложными. Докажем,
что каждая сложная связь эквивалентна количеству со-
ответствующих простых связей, равному числу соеди-
няемых дисков без единицы.
Пусть шарнир соединяет Д дисков (рис. 2.6). Дви-
жение центра шарнира (точка А, общая для всех дис-
ков) определяется двумя координатами х и у, а движе-
ние каждого из дисков, кроме того, углом наклона ф/.
Следовательно, степень свободы рассматриваемой си-
стемы равна 2+Д. Если бы данные диски не были свя-
заны с шарниром, то система Д обособленных дисков
имела бы степень свободы, равную ЗД. Таким образом,
число степеней свободы, уничтожаемых вводом в соеди-
нение Д дисков сложного шарнира, окажется равным
ЗД-(2+Д) =2 (Д-1).
Ранее было показано, что простой шарнир уменьша-
ет степень свободы на две единицы, а полученный ре-
зультат содержит Д—1 таких двоек; следовательно,
сложный шарнир, соединяющий Д дисков, эквивалентен
Д—1 простым шарнирам. Сложный шарнир, соединяю-
щий три диска и, следовательно, эквивалентный двум
простым шарнирам, называется двукратным, соединяю-
щий четыре диска и, значит, эквивалентный трем прос-
тым шарнирам,—трехкратным и т. д. Так, сложный
шарнир, приведенный на рис. 2.7, а, эквивалентен трем
(Д—1=4—1=3) простым шарнирам и поэтому являет-
ся трехкратным.
До сих пор мы говорили о сложном шарнире, соеди-
18
няющем все стержни, сходящиеся в узле; в дальнейшем
такой шарнир будем называть полным шарниром (см.
рис. 2.6; 2.7,а). Если же некоторые из сходящихся
в узле стержней соединены между собой жестко, а ос-
тальные прикреплены к узлу с помощью шарнира, то та-
кой шарнир будем называть сложным неполным шарни-
ром. Так, на рис. 2.7,6 показано соединение сложным
неполным шарниром: стержни АВ и ВС соединены меж-
ду собой жестко и образуют одни диск; к последнему
Шарниром прикреплены два других стержня. Этот слож-
ный неполный шарнир эквивалентен двум (Д—1 =
«=3—1=2) простым шарнирам и, значит, является дву-
кратным. Шарнир, показанный на рис. 2.7, в, надо счи-
тать простым, ибо он соединяет два диска: угловой диск
АВС, составленный из двух жестко соединенных стерж-
ней ВА и ВС, и диск BD, присоединенный к нему шар-
ниром. Шарнир, изображенный на рис. 2.7, г, сложный
неполный и двукратный (Д—1 — 3—1=2); он соединя-
ет три диска: диск DE, составленный из жестко соеди-
ненных стержней DA, AG, АЕ, и диски АВ и АС.
Рассуждая так же, как и при доказательстве экви-
валентности сложного шарнира, соединяющего Д дис-
ков, Д—1 простым шарниром, можно показать, что
19
сложная жесткая связь, соединяющая Д дисков, экви-
валентна Д—1 простым связям * *.
Итак, сложная связь (шарнирная или жесткая), сое-
диняющая Д дисков, эквивалентна Д—1 соответствую-
щим простым связям.
Выведем теперь формулу для определения степени
свободы П системы, прикрепленной к земле. Пусть по-
казанная на рис. 2.8 система состоит из Д дисков, сое-
диненных между собой стержнями2 в количестве Ссб,
шарнирами в количестве Ш, жесткими связями в коли-
честве Ж и прикрепленных к земле опорными стержня-
ми, число которых Соп При этом под Ш и Ж будем
понимать соответственно суммарное число простых и
приведенных к ним сложных шарниров и жестких
связей.
Так, если в систему введено Ш2 простых шарниров,
— двукратных, — трехкратных и т. д., то суммар-
ное число Ш простых шарниров и приведенных к ним
сложных определится выражением
Ш^\1Ж+21Ж+ЗШ<+-.. (2.1)
Здесь коэффициент I позволяет назвать простой шар-
нир однократным; коэффициенты же 2, 3, ... соответ-
ствуют числам кратности сложных шарниров, объеди-
няющих три, четыре и т. д. дисков. По аналогии будем
иметь
Ж = 1 Ж2+2Жз+ЗЖ4+. .. (2.2)
Степень свободы каждого обособленного диска рав-
на трем, а для Д таких дисков она будет равна ЗД.
Введенные в систему указанные выше связи снижают
степень свободы обособленных дисков на число, равное
СОп+Ссб+2Я/-{-ЗЖ *, и, следовательно, степень свобо-
ды системы, прикрепленной к земле, определится фор-
мулой
/7=ЗД-(С+2Ш+ЗЖ), (2.3).
где Д—число дисков системы без учета земли (основания); С —
суммарное число стержней в системе
С=Соп+Ссб. (2.4).
1 Предлагается самостоятельно убедиться в справедливости это-
го утверждения, приведя соответствующее доказательство.
2 Стержни, соединяющие собой диски, входящие в систему, бу-
дет называть собственными стержнями и обозначать нх число Ссв.
* Эту сумму можно рассматривать как суммарное число свя-
зей первого вида—стержней опорных и собственных — и приведен-
ных к стержням шарниров и жестких связей (см. табл. 2.1).
20
Если систему рассматривать без связей с землей
(свободная система), то ее степень свободы П' будет
складываться из двух частей: степени подвижности си-
стемы по отношению к земле, равной трем, и степени
внутренней изменяемости ее И, т. е,
П'=3+Я.
Отсюда получим
И=П'—3. (2.5)
Полагая в формуле (2,4) СОп=0 и подставляя в (2.3)
С=Сс6, получим формулу, определяющую степень сво-
боды системы, не прикрепленной к земле (основанию):
П'==зД—(Сов+2Ш+зЖ). (2.6)
Подставляй (2.6) в (2.5), после преобразования по-
лучим формулу для определения степени внутренней из-
меняемости И не прикрепленной к земле (свободной)
системы
И=3(Д-1)-(Сс64-2Ш+ЗМ). (2.7)
Особо подчеркнем, что при подсчете степени свобо-
ды П по формуле (2.3) или степени внутренней изме-
няемости И по формуле (2.7) некоторые затруднения
вызывает двойственность точки зрения на роль почти
каждого элемента системы. В этом смысле говорят
о так называемом свойстве дуализма диска (соединяе-
мого элемента) и связи (соединяющего элемента — стер-
жень, шарнир); в данной системе один и тот же эле-
мент по желанию счетчика может быть принят и за диск
и за связь. Единственно, что совершенно недопустимо
делать,—это учитывать один и тот же элемент два раза
или пропускать его вовсе.
Возвращаясь к системе, показанной на рис. 2.8, рас-
смотрим различные варианты определения ее степени
свободы.
Вариант 1, Примем элементы /, //, III, IV, (У), (УЛ, (VII)
за диски, а собственные стержни 1, 2 и все опорные стержни — за
связи первого вида (стержни), тогда будем иметь Д=7; Ш=1Ш^+
+2Й/3=Ы+2-1 = 3 (здесь шарнир #, объединяющий диски (V/)
и (VII), является простым, а шарнир А, объединяющий три диска
I, II, III — двукратным), /Д'=2, С=Соп+Себ = 2+5 = 7 и П =
= ЗД— (С+2Ш+ЗЖ) = 3-7— (7+2-3+3-2) =2,
Вариант 2, Примем собственные стержни системы 1 и 2 за
диски; тогда в совокупности с дисками I, II. (VII) будем иметь
Д=9; Ш=(1+2) + (1 + 1 + 1 + 1)=7; Ж = 2; С = СОП=5 и /7 =
1=3-9—(5+2-7+3-2) =2.
21
Вариант 3. Все элементы системы примем яэ л иски; тогда
Д=14; Ш=(Ц-2)4-7-2= 17, Л = 2; С —i) и и I—(0,2.17+
+3-2) =2.
Убеждаемся, что результаты подсчета степени свободы систе-
мы по всем трем вариантам совпадают, /7=2.
2.1.3. Необходимое условие геометрической неизме-
няемости системы. В результате вычисления величин П
и И по формулам (2,3) и (2.7). могут представиться
следующие случаи:
/7>0; (2.8)
И>0, (2.9)
система не имеет достаточного количества связей, обес-
печивающих ее неизменяемость, и, следовательно, явля-
ется изменяемой;
/7=0; (2.10)
Н=0, (2.11)
система имеет минимально необходимое число свя-
зей, чтобы быть неизменяемой1;
/7<0; (2.12)
И<0. (2.13)
система имеет так называемые лишние1 2 связи, т. е.
такие, которые не являются необходимыми для обеспе-
чения неизменяемости системы, значит, и в этом случае
система также может быть неизменяемой.
Объединяя (2.10) и (2.12), (2.11) и (2.13) и учиты-
вая (2.3) и (2.7), получим формулу, выражающую необ-
ходимое условие геометрической неизменяемости си-
стемы:
а) прикрепленной к основанию (земле)
/7=ЗД-(С+27У+ЗА’)<0; (2.14)
б) свободной от связей с основанием
И=3(Д-1)~(Сс6+2ДМ-ЗЛ<)<0. (2.15)
Знак равенства в этих формулах относится к систе-
мам с полным числом связей, а знак «меньше» — к си-
стемам с лишними связями.
1 В дальнейшем вместо «минимально необходимое число свя-
зей» введен термин «полное число связей».
2 Лишние надо рассматривать как избыточные по отношению
к связям, необходимым для обеспечения неизменяемости системы,
а не как ненужные.
22
РИС. 2-9
Условие (2.14) или (2.15) является необходимым, но
недостаточным для суждения о геометрической неизме-
няемости системы. Могут встретиться такие системы,
которые хотя и удовлетворяют этим условиям, но из-за
неправильного расположения в них связей оказываются
все же изменяемыми. Так, например, на рис. 2.9 пока-
зана балочная система, в которой Д=3, Ш~2, Ж=С),
С=С<П=5. Степень свободы этой системы определяет-
ся по формуле (2.3): П=ЗД—(С-|-2Д/4-ЗЖ) = 3-3—
— (5-(-2-24-3-0) =0, т. е. необходимое условие неизме-
няемости системы (2.14) удовлетворяется. Однако не-
трудно заметить, что при нагружении диска EG шар-
нир G свободно переместится, допустим, вниз в положе-
ние G' и тем самым вызовет конечное изменение перво-
начальной формы системы без деформации ее элемен-
тов (на рис. 2.9 это показано штриховой линией); сле-
довательно, данная система является все же изменяемой
из-за неправильного расположения связей (шарниров).
Неправильное соединение дисков может привести
к образованию и особого вида неизменяемых систем, ко-
торые также удовлетворяют одному из необходимых ус-
ловий геометрической неизменяемости, но все же ока-
зываются изменяемыми в первый момент приложения
23
нагрузки; это так называемые мгновенно изменяемые
системы.
2.1.4. Понятие о мгновенно изменяемых системах.
Рассмотрим систему (рис. 2.10, а), состоящую из узла С,
соединенного с диском с помощью двух стержней АС
и ВС, расположенных на одной прямой. В этой системе
Д~2, Ш=3, Ж=0, С=0 и 77=3-2—(0—2-34-3-0) =
= 6, т. е. условие (2.14) удовлетворяется и система
должна быть неизменяемой.
В действительности же это утверждение ошибочно.
В самом деле, геометрическая особенность данной систе-
мы состоит в том, что окружности / и 2, проведенные
из центров А и В радиусом /1С и ВС, имеют общую
касательную Т, поэтому при нагружении системы даже
весьма малой силой узел С, не встретив препятствий со
стороны стержней АС и ВС, переместится на весьма ма-
лую величину по направлению касательной Т, а вся
система изменит свою первоначальную геометрическую
форму без деформации ее элементов, что характерно для
изменяемой системы. Однако это весьма малое переме-
щение CCi точки С и соответствующее ему изменение
первоначальной геометрической формы системы длится
очень малый промежуток времени (мгновение), так как
вместе с ними происходит мгновенное смещение осей
стержней АС и ВС в новое положение Л Ci и BCi, при
котором они уже окажутся расположенными не на од-
ной прямой; при этом окружности 1 и 2, проведенные
из точек А и В радиусом АС{ и BCt пересекутся в точ-
ке С( (рис. 2.10, а') и поэтому дальнейшее перемещение
точки С станет невозможным без деформации стержней
АС и ВС, что характерно для неизменяемой системы.
Итак, приходим к выводу, что данная система ока-
залась изменяемой лишь на мгновение, а затем обрати-
лась в неизменяемую систему. Системы, поведение ко-
торых подобно рассмотренной на рис. 2.10, относятся
к так называемым мгновенно изменяемым системам.
Мгновенно изменяемой называется система, которая
допускает без деформации составляющих ее элементов
весьма малые относительные перемещения этих элемен-
тов в течение малого промежутка времени (мгновения),
после которого система становится неизменяемой.
В реальных условиях возникающие в нагруженных
мгновенно изменяемых системах перемещения вслед-
ствие несовершенства соединений и деформации мате-
24
риала переходят в конечные и, как правило, настолько
значительные по сравнению с перемещениями обычных
неизменяемых систем, что применение мгновенно изме-
няемых систем в качестве сооружений недопустимо.
Исследуем теперь силы, которые возникают в стерж-
нях рассмотренной мгновенно изменяемой системы от
действия в узле С силы F. Предположим сначала, что
стержни АС и ВС не лежат на одной прямой (рис.
2.10,6). Очевидно, что эти стержни от приложенной
к системе силы F в данном случае испытывают сжатие;
поэтому направим силы N к мысленно вырезанному
узлу С. Ввиду симметрии, силы N в обоих стержнях си-
стемы одинаковы. Из уравнения проекций сил, прило-
женных к узлу С на вертикальную ось, получим
= F/2 sin а.
Чтобы приблизить очертание системы (рис. 2.10,6)
к заданному для мгновенно изменяемой системы (рис.
2.10,а), надо допустить, что угол а стремится к нулю,
тогда и sin а будет стремиться к нулю, а сила N, как
это следует из полученного для нее выражения,— к бес-
конечности.
Возникновение в отдельных элементах системы,
имеющей достаточное для геометрической неизменяе-
мости число связей, бесконечно больших сил является
одним из статических признаков мгновенно изменяемой
системы.
Другим таким признаком является возникновение
в ее отдельных элементах неопределенных сил и, в част-
ности, противоречивость результатов, получаемых при
определении силы в одном и том же стержне из усло-
вий равновесия разных частей или узлов системы. На-
пример, при рассмотрении равновесия узла D системы,
изображенной на рис. 2.11, сила в стержне DG будет
равна нулю, а при рассмотрении равновесия узла G
25
сила в том же стержне окажется равной F; это указы-
вает на то, что система, изображенная на рис. 2.11, яв-
ляется мгновенно изменяемой.
Бесконечно большие усилия, возникающие в элемен-
тах мгновенно изменяемых систем, исключают возмож-
ность применения их в строительной практике. Необхо-
димо избегать также систем, близких к мгновенно из-
меняемым, так называемых почти мгновенно изменяе-
мых систем. Примером почти мгновенно изменяемой си-
стемы может служить система, показанная на рис.
2.10,6, в которой угол а принят весьма малым; в эле-
ментах этой и подобных ей систем возникают очень
большие силы и значительные деформации. Более того,
почти мгновенно изменяемая система при определенном
значении нагрузки может перейти в другое состояние,
изображенное на рис. 2.10, в штриховой линией, при ко-
тором сжатые ранее стержни становятся растянутыми.
2. 2. Структурный анализ систем
2.2.1. Правила образования геометрически неизменяе-
мых систем. В пп. 2.1.3; 2.1.4 были приведены примеры
таких систем, которые хотя и удовлетворяют необходи-
мому условию неизменяемости (2.14), но из-за непра-
вильного расположения связей все же являются изме-
няемыми или мгновенно изменяемыми системами. По-
этому, убедившись, что одно из условий неизменяемо-
сти системы (2.14) или (2.15) удовлетворено, необхо-
димо произвести структурный анализ системы, т. е. рас-
членить систему на образующие ее диски и проверить,
правильно ли они соединены связями между собой.
Рассмотрим основные правила образования геомет-
рически неизменяемых систем (рис. 2.12).
Правило I. Узел и диск образуют неизменяемую
систему, если узел присоединен к диску двумя стерж-
нями, оси которых не расположены на одной прямой
(рис. 2.12,а). Воспользовавшись свойством дуализма
(см. и. 2.1), примем в неизменяемой системе — шарнир-
ном треугольнике АВС. (рис. 2.1,а), стержень АС за
диск, а стержни АВ и ВС будем рассматривать как свя-
зи первого вида; тогда получим неизменяемую систему,
которая по своей структуре ничем не отличается от си-
стемы, изображенной на рис. 2.12, а. Следовательно, си-
стема на рис. 2.12, а также является неизменяемой.
26
Недопустимость соединения узла с диском двумя
стержнями, оси которых расположены на одной прямой,
обусловлена образованием мгновенно изменяемой си-
стемы (рис. 2.12, ai). Совокупность соединенных шарни-
ром двух стержней, оси которых не расположены на од-
ной прямой, называется диадой. Укажем на следующие
два свойства диад:
Свойство 1. Присоединение к неизменяемой системе
(диску) каждого нового узла с помощью диады снова
образует неизменяемую систему.
Отсюда следует: система, в основе которой находит-
ся шарнирный треугольник, а каждый последующий
узел системы присоединен к двум предыдущим се узлам
с помощью диады, геометрически неизменяема. Такие
неизменяемые системы называются простейшими. К прос-
тейшим, например, относятся системы, показанные на
рис. 2.13, а, б, в. Каждая из них получена из основного
шарнирного треугольника abc путем последовательного
присоединения шарнирных узлов указанным способом
(диадами) в порядке, обозначенном па рис. 2.13, а, б,в
цифрами. Непосредственно из этих рисунков вытекает
и такое определение понятия простейшей системы: прос-
тейшей называется неизменяемая система, образованная
только из шарнирных треугольников.
Свойство 2. Отбрасывание от неизменяемой систе-
мы диады оставляет вновь полученную при этом систе-
му неизменяемой. Это свойство диад позволяет произ-
водить проверку неизменяемости систем методом отбра-
сывания диад: если при этом в конечном счете получим
шарнирный треугольник, то можно утверждать, что дан-
ная система неизменяема.
Правило 2. Два диска образуют неизменяемую
систему, если они соединены между собой с помощью:
а) трех стержней, оси которых (или их продолже-
ния) не пересекаются в одной точке и не параллельны 1
(рис. 2.12, б);
б) одного шарнира и стержня, ось которого не про-
ходит через центр этого шарнира! (рис. 2.12,в);
в) одной жесткой связи (рис. 2.5,в). 1 * 3
1 Такие три стержня называются правильно расположенными,
при этом параллельность двух нз стержней допустима.
3 Шарнир и стержень, ось которого не проходит через центр
шарнира, также называются правильно расположенными.
27
FMC. 2.12
В справедливости этого правила можно убедиться
с помощью следующих рассуждений:
а) Примем один из дисков, (см. рис. 2.12,6), напри-
мер диск /, за неподвижный, тогда степень свободы
не соединенных дисков lull будет равна трем. Вводя
соединительный стержень 1, снизим степень свободы
системы на единицу. Два стержня 1 и 2, введенные
в соединение, эквивалентны простому шарниру, уничто-
жающему две степени свободы системы. Наконец, стер-
жень 3 уничтожает еще одну степень свободы системы,
и все три стержня 1, 2 и 3 обеспечивают неизменяемость
системы /, II.
Недопустимость соединения двух дисков тремя
стержнями, оси которых или их продолжения пересе-
28
РИС- 2,12
каются в одной точке или параллельны, обусловлена об-
разованием в первом случае (рис. 2.12, б() изменяемой
системы, а в двух других случаях (см. рис. 2.12,62,6S)~-
мгновенно изменяемых систем. Изменяемость системы
(см. рис. 2.12,6]) подтверждается тем, что точка пере-
сечения стержней О является не мгновенным центром
вращения, а центром вращения, вокруг которого диски
могут получить конечные угловые перемещения, не вы-
звав деформации стержней.
Докажем теперь мгновенную изменяемость системы
(см. рис. 2.12, б2). Точка Oj, в которой пересекаются
продолжения осей стержней 1, 2 и 3, является мгновен-
ным центром вращения, вокруг которого возможно бес-
конечно малое угловое перемещение одного диска отно-
29
РИС. 2.13
сительно другого и поэтому соответствующее ему изме-
нение первоначального положения системы без дефор-
мации ее элементов. Эти перемещение и изменение пер-
воначального положения системы длится лишь мгнове-
ние, так как вместе с ними произойдет мгновенное сме-
щение осей стержней в новое положение, при котором
они уже не будут пересекаться в одной точке, и систе-
ма, следовательно, станет неизменяемой. Таким обра-
зом, доказана мгновенная изменяемость системы.
Перейдем к доказательству мгновенной изменяемо-
сти системы по рис. 2.12, б3; для лучшей наглядности
она изображена на рис. 2.14. Будем считать диск 1 не-
подвижным, а длины стержней 1 и 3 одинаковыми. Так
как все три стержня 1, 2 и 3 параллельны, то они
не могут препятствовать поступательному перемещению
диска II (на рис. 2.14 не показано) и вместе с ним —
одинаковым линейным перемещениям центров шарниров
(точек А, В, С). Однако эти перемещения возможны
только в первое мгновение на весьма малую величину Д.
Последнее объясняется тем, что стержни 1 и 3, имею-
щие одинаковую длину, отклонятся от вертикали на
один и тот же угол <р, в то время как более длинный
стержень 2 отклонится от вертикали на другой угол
фСср*; в результате все три соединительных стержня 1,
2, 3 станут непараллельными, а система обратится
в неизменяемую. Таким образом, доказано, что система
является мгновенно изменяемой.
Интересно отмстить, что при стремлении длины
стержня 2 к длине стержней 1 и 3 система будет при-
* Обозначив длины стержней 1 и 2 соответственно через it и /2,
получим tg<p=A/li, tgi|}=A/l2, так как то tgipctgq) и
30
РИС. 2.14
ближаться к изменяемой и, наконец, при равенстве длин
всех трех стержней /, 2 и 3 она полностью выродится
в изменяемую.
б) Приняв в неизменяемой системе — шарнирном
треугольнике АВС (см. рис. 2.1, а) стержни АВ и ВС
за диски I и II, а стержень АС — за связь первого вида,
получим неизменяемую систему, которая по своей струк-
туре ничем не отличается от системы, изображенной на
рис. 2.12, в. Следовательно, эта система также является
неизменяемой.
Недопустимость соединения двух дисков шарниром
и стержнем, ось которого проходит через центр шарни-
ра, обусловлена образованием в этом случае мгновен-
но изменяемой системы (рис. 2.12, в^. Пользуясь свой-
ством дуализма, примем в мгновенно изменяемой си-
стеме (рис. 2.12, ai) стержень ВС за диск II, а другой
стержень АВ будем рассматривать как связь первого
вида, тогда получим мгновенно изменяемую систему, ко-
торая по своему структурному образованию ничем
не отличается от системы, изображенной на рис. 2.12,6j.
Следовательно, данная система также является мгно-
венно изменяемой.
в) Соединение двух дисков жесткой связью (см.
рис. 2.5, в) эквивалентно соединению их тремя правиль-
но расположенными стержнями и, следовательно, обра-
зует неизменяемую систему — диск.
Пра вило 3. Три диска образуют неизменяемую
систему, если они соединены между собой с помощью:
а) трех шарниров, расположенных между каждой
31
парой дисков так, что центры этих шарниров не лежат
на одной прямой (рис. 2.12,г); такие шарниры называ-
ются правильно расположенными:
б) шести стержней, каждые два из которых соеди-
няют по паре дисков так, что точки пересечения осевых
линий стержней или их продолжений (последние будем
называть фиктивными шарнирами) также не лежат на
одной прямой (рис. 2.12, д); такие стержни будем назы-
вать правильно расположенными;
в) частично с помощью шарниров и частично с по-
мощью стержней — смешанное соединение; при этом ре-
альные и фиктивные шарниры не должны лежать на
одной прямой (рис. 2.12, е).
Недопустимость соединения трех дисков способами,
противоположными указанным в правиле 3, а, б, в, обус-
ловлена образованием мгновенно изменяемых систем
(рис. 2.12,ei,c*i,₽]). В справедливости этого правила
и мгновенной изменяемости систем предлагается убе-
диться самостоятельно, приведя рассуждения, аналогич-
ные тем, которыми пользовались при доказательстве
правил 1 и 2, а, б, в.
Полученные ранее формулы (2.14) и (2.15), каждая
из которых выражает собой необходимое условие гео-
метрической неизменяемости систем и структурный ана-
лиз систем, позволяют выполнить полное исследование
геометрического образования данной системы, т. е. от-
ветить на вопрос о принадлежности ее к неизменяемой
системе, изменяемой или мгновенно изменяемой. Это ис-
следование выполняется в такой последовательности:
1. По одной из формул: (2.14) или (2.15)—прове-
ряют, соблюдается ли необходимое условие геометриче-
ской неизменяемости системы или нет. В последнем слу-
чае устанавливают, что система является изменяемой
и структурный анализ ее не производят.
2. Если же проверка покажет, что система удовлетво-
ряет одному из условий: (2.14) или (2.15),—то она мо-
жет оказаться неизменяемой. Для того, чтобы оконча-
тельно убедиться в ее неизменяемости (или изменяемо-
сти), производят структурный анализ системы, пользу-
ясь изложенными правилами 1, 2, 3 образования геомет-
рически неизменяемых систем.
При одновременном соблюдении необходимого усло-
вия геометрической неизменяемости системы по (2.14)
или (2.15) и упомянутых правил устанавливают, что си-
32
стема является неизменяемой; в противном случае она
будет изменяемой или мгновенно изменяемой. В заклю-
чение остановимся еще на следующих двух моментах:
1. О неподвижности диска относительно
земли (основания). Рассматривая землю как диск
и применяя правило 2 соединения двух дисков, прихо-
дим к следующему выводу: чтобы неизменяемая систе-
ма была неподвижна относительно земли (основания),
достаточно прикрепить ее к земле тремя правильно рас-
положенными опорными стержнями, или правильно рас-
положенными шарниром и стержнем, или, наконец, с по-
мощью жесткой связи.
Если прикрепляемая к земле система геометрически
изменяема, то для получения неизменяемой прикреплен-
ной системы недостающие связи в самой системе долж-
ны быть компенсированы дополнительными опорными
связями. Структурный анализ таких систем надо обяза-
тельно производить с учетом опорных прикреплений,
а в качестве необходимого условия неизменяемости их
принимать условие (2.14)
П=ЗД— (С+2Ш+ЗЖ) < 0.
2. О внешних и внутренних связях. Внеш-
ними называются связи, служащие для неподвижного
прикрепления системы к основанию. Внутренними назы-
ваются те связи, которые входят в структуру самой си-
стемы и служат для соединения между собой элементов
системы или отдельных неизменяемых ее частей. Необ-
ходимо обратить внимание на то, что приступая к рас-
чету любого сооружения, нужно убедиться в его неиз-
меняемости, так как в противном случае, если сооруже-
ние окажется изменяемым, расчет теряет всякий смысл.
2.2.2. Примеры на исследование геометрического обра-
зования систем
Пример 2.1, (К и. 2.2.1. Правило 1*). Исследовать геометри-
ческое образование показанной на рис. 2.15 системы, удерживаю-
щем от осыпания вырабатываемый грунт.
Решение. [ Проверка условия (2.14). Приняв все стерж-
ни за диски, видим, что все они соединены между собой шарнира-
ми. Здесь число простых шарниров ZZ/2=6 (шарниры /; 2; в; 7;
8; 9), число сложных полных шарниров Ш3=3 (шарниры -5; 4; 5).
Для удобства подсчета суммарного числа простых и приведенных
* Здесь и далее в п. 2.2.2 подразумеваются правила образова-
ния геометрически неизменяемых систем (см. и. 2.21).
2 Шшимап Б. А.
33
к ним сложных шарниров на рис. 2.15 рядом с номером каждого
шарнира в скобках указано его число кратности. Следовательно,
имеем; Д=8; С=0; 111 = 14-1 + 1 + 1 + 1 + 1+2+24-2= 12, но можно
(и лучше) воспользоваться формулой (2.1); тогда Ш = 1Д/2+
+2Д/3= 1-6+2-3 = 12; Ж—О и, следовательно, Д = ЗД—(C+2W+
+ЗЖ)=3-8—(0+2-12+3-0) =0, т. е. система удовлетворяет усло-
вию (2.14) и может быть неизменяемой, имея при этом, согласно
(2.10), полное число связей.
2. Структурный а и а л и з. Узел 3 присоединен к земле
(диску) стержнями 31 и 32, не расположенными на одной прямой
(диадой) и, значит, согласно правилу 1, образует с землей диск
земля — I. Аналогично диадой 56 и 57 присоединен к земле узел 5,
образуя с землей диск земля — I—II. Теперь к диску земля — /—II
диадой 43 и 45 присоединен узел 4, который вместе с предыдущим
диском образует новый диск земля — I—II—345. К этому послед-
нему диску диадой 84 и 89 присоединен узел 8, образующий с ним
одни общий диск — заданную систему.
Вывод. Условие (2.14) и правило 1 соблюдены; следовательно,
данная система неизменяема и, согласно (2.10),— с полным числом
связей.
Пример 2.2. (К и. 2.2.1. Свойства диад и правило 2, а). Иссле-
довать геометрическое образование системы, показанной на рис. 2 16.
Решение. 1. Проверка условия (2.14). Способ /. При-
мем все стержни системы за исключением опорных 23; 54; 76,
за диски; тогда будем иметь; Д=20, С=СОП = 4, Д/=1+2+3+3+
+3+2+3+2+3+3+1+2=28, или так:
III = 1 Ш2+2Ш3+ЗШ<= 1-2+2-4+3- 6 = 28, Ж=0,
и, следовательно,
Д=ЗД— (С+2Ш+ЗМ)=3-20-(4+2-28+3-0)=0,
т. е. система удовлетворяет условию (2.14) и может быть неизме-
няемой, имея при этом, согласно (2.10), полное число связей.
Способ 2 (укрупненных дисков). В системах с большим числом
стержней подсчет стержней, принимаемых за диски и числа простых
и приведенных к ним сложных шарниров становится утомительным
34
и часто приводит к ошибкам, влекущим за собой неправильное пред-
ставление о геометрическом образовании системы. Во избежание
этого целесообразно выделять из системы неизменяемые ее части —
укрупненные диски и затем применять условие (2.14) или (2.15).
Здесь так и поступим.
Легко заметить, что левая часть 2—8—9—10—15—5—2 нашей
системы состоит только из шарнирных треугольников и, значит,
образует простейшую и, следоватсчьно, неизменяемую систему —
укрупненный диск I (на рисунке заштрихован). По аналогии уста-
навливаем, что правая часть 16—11—12—13—14—7—16 данной
системы также образует простейшую и, следовательно, неизменяе-
мую систему — укрупненный диск II, заштрихованный на рисунке.
Теперь имеем: Д=2, Соп = 4, Ссд=2, Ш=0 н, следовательно,
П=ЗД— (С+2Л/+ЗЖ) =3-2— (6+2-0+30) =0, т. е. результат
совпадает с полученным способом 1, но приводит к цели значитель-
но быстрее
2. Структурный анализ. Диск / присоединен к земле
тремя правильно расположенными стержнями 21; 23; 54 и, следо-
вательно, образует с землей диск земля — I. К этому диску при-
соединен диск II также тремя правильно расположенными стерж-
нями: стержнем 76 к земле и стержнями 11—10 и 16—15 к диску 1.
В результате получим один общий диск — заданную систему.
Вывод- Условие (2.14), а также свойство 1 диад и правило 2, а
соблюдены, следовательно, данная система неизменяемая и, соглас-
но (2.10), с полным числом связей.
Структурный анализ систем и их частей, образованных из шар-
нирных треугольников, можно выполнить методом отбрасывания
диад, основанным на свойстве 2 диад. Покажем, как это делается
на примере левой части 2—8—9—10—15—5—2 нашей системы.
Будем считать шарнирный треугольник 258 (на рис. 2.16 он
заштрихован) основным. Далее, отбрасывая последовательно диады
10—9 и 10—15, 15—5 и 15—9; 95 и 98, в конечном счете, получим
неизменяемую систему — основной шарнирный треугольник 258,
следовательно, данная система неизменяема.
Пример 2.3. (К п. 2.2.1. Правило, 2,6). Исследовать геометри-
ческое образование системы, показанной на рис. 2.17.
Решение. 1. Данная система является свободной (не прикре-
пленной к основанию), поэтому делаем проверку выпол-
нения условия (2.15). Снова воспользуемся способом укруп-
ненных дисков1 2. Очевидно, что фигура 1—2—3—4, состоящая из
шарнирных треугольников 123 и 234, образует диск. К последнему
диадой 3'4 и У/ присоединен узел 3'; согласно свойству 1 диад, ле-
вая часть 1—2—4—3'—3—1 системы будет неизменяемой, т. е. об-
разует укрупненный диск 1.
По аналогии устанавливаем, что правая часть 5—3'—6—8—7—5
системы также образует укрупненный диск, который обозначим циф-
рой 11. Диски I и II иа рис. 2.17 заштрихованы.
1 Имеется в виду, что доказательство неизменяемости систем
или отдельных частей систем, состоящих из шарнирных треугольни-
ков, можно не приводить, ибо они, согласно определению, являются
простейшими, следовательно, неизменяемыми.
2 Рекомендуем в качестве упражнения проверить выполнение
условия (2.15), приняв все стержни за диски, и убедиться в совпа-
дении результатов.
35
1О{2>
11 (2>
РИС- 2-18
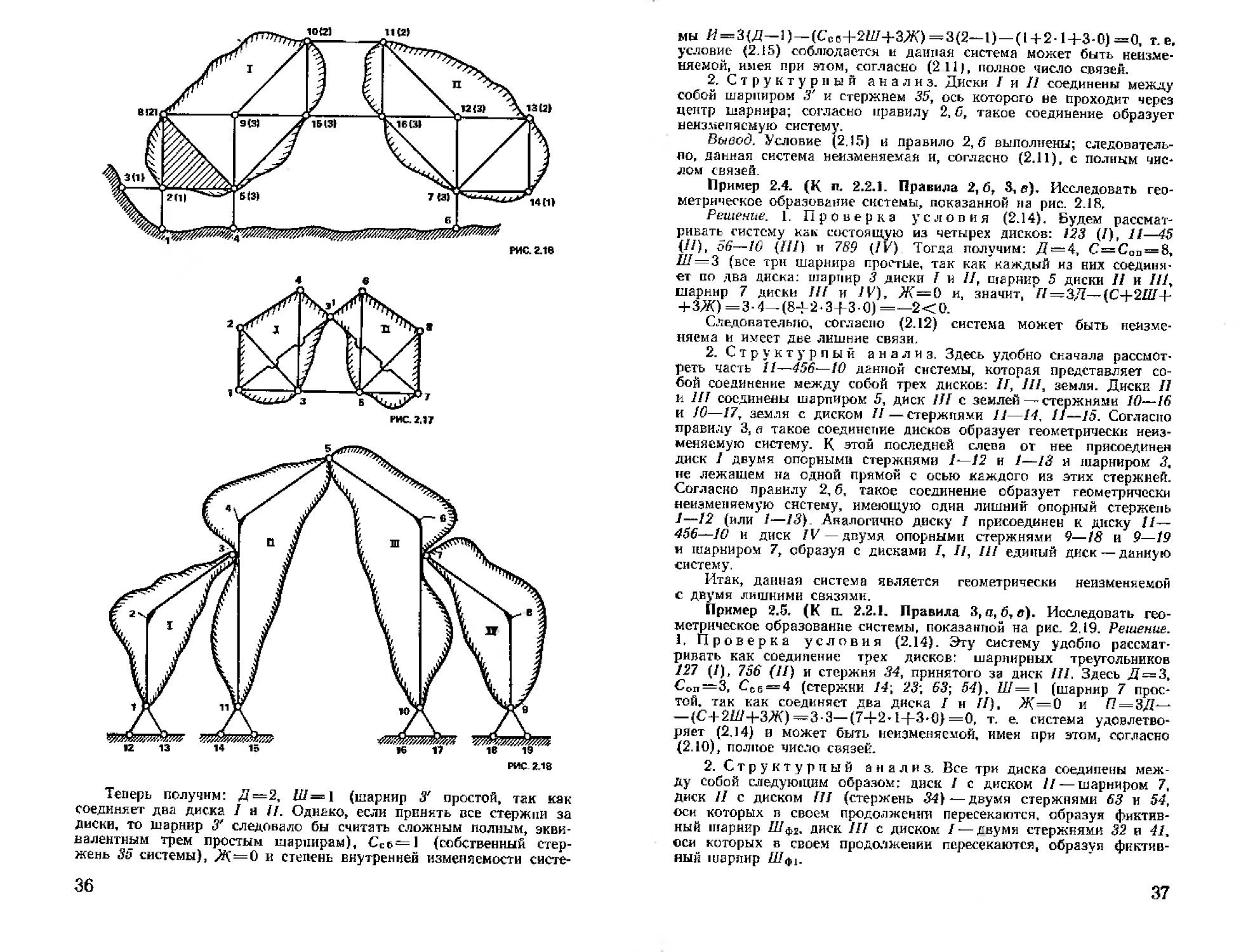
Теперь получим: Д=2, Ш = 1 (шарнир 3' простой, так как
соединяет два диска / а И. Однако, если принять все стержни за
диски, то шарнир 3' следовало бы считать сложным полным, экви-
валентным трем простым шарнирам), Ссе=1 (собственный стер-
жень 35 системы), ЛС=О и степень внутренней изменяемости систе-
36
мы И=3(Д— 1)—(Ссс+2Ш+ЗЖ) = 3(2—1) — (1 + 2-1+3-0) =0, т. е,
условие (2.15) соблюдается и данная система может быть неизме-
няемой, имея при этом, согласно (2 11), полное число связей.
2. Структурный анализ. Диски I и 11 соединены между
собой шарниром 3' и стержнем 35, ось которого не проходит через
центр шарнира; согласно правилу 2, б, такое соединение образует
неизменяемую систему.
Вывод. Условие (2.15) и правило 2,6 выполнены; следователь-
но, данная система неизменяемая и, согласно (2.11), с полным чис-
лом связей.
Пример 2.4. (К п. 2.2.1. Правила 2,6, 3, в). Исследовать гео-
метрическое образование системы, показанной на рис. 2.18.
Решение. 1. Проверка условия (2.14). Будем рассмат-
ривать систему как состоящую из четырех дисков: 123 (/), 11—45
(II), 56—10 (III) н 789 (IV) Тогда получим: Д — 4, С=СОП = 8,
111=3 (все три шарнира простые, так как каждый из них соединя-
ет по два диска: шарнир 3 диски I и II, шарнир 5 диски II и III,
шарнир 7 диски III и 117), Ж=0 и, значит, II =ЗД—(С+2Ш+
+ЗЖ) =3-4—(8+2-3+30) =—2<0.
Следовательно, согласно (2.12) система может быть неизме-
няема и имеет две лишние связи.
2. Структурный анализ. Здесь удобно сначала рассмот-
реть часть 11—456—10 данной системы, которая представляет со-
бой соединение между собой трех дисков: II, III, земля. Диски II
и III соединены шарниром 5, диск III с землей— стержнями 10—16
и 10—17, земля с диском II — стержнями 11—14, 11—15. Согласно
правилу 3, я такое соединение дисков образует геометрически неиз-
меняемую систему. К этой последней слева от нее присоединен
диск I двумя опорными стержнями 1—12 и 1—13 и шарниром 3,
не лежащем на одной прямой с осью каждого из этих стержней.
Согласно правилу 2, б, такое соединение образует геометрически
неизменяемую систему, имеющую один лишний опорный стержень
1—12 (или 1—13). Аналогично диску I присоединен к диску 11—
456—10 и диск IV—двумя опорными стержнями 9—18 и 9—19
и шарниром 7, образуя с дисками I, II, III единый диск — данную
систему.
Итак, данная система является геометрически неизменяемой
с двумя лишними связями.
Пример 2.5. (К п. 2.2.1. Правила 3, а, б, в). Исследовать гео-
метрическое образование системы, показанной на рис. 2.19. Решение.
1. Проверка условия (2.14). Эту систему удобно рассмат-
ривать как соединение трех дисков: шарнирных треугольников
127 (/), 756 (II) и стержня 34, принятого за диск III, Здесь Д—3,
Соп—3, Сс5 = 4 (стержни 14\ 23', 63\ 54), Ш=\ (шарнир 7 прос-
той, так как соединяет два диска I и II), Ж=0 и П = ?>Д—
—(С+2Ш+ЗЖ) =3-3—(7+2-1+3-0) =0, т. е. система удовлетво-
ряет (2.14) и может быть неизменяемой, имея при этом, согласно
(2.10), полное число связей.
2. Структурный анализ. Все три диска соединены меж-
ду собой следующим образом: диск I с диском // — шарниром 7,
диск II с диском III (стержень 54)—двумя стержнями 63 и 54,
оси которых в своем продолжении пересекаются, образуя фиктив-
ный шарнир Шф2, диск III с диском / — двумя стержнями 32 и 41,
оси которых в своем продолжении пересекаются, образуя фиктив-
ный шарнир Шфь
37
РИС. 2.19'
Итак, имеем три шарнира (из них шарнир 7 реальный), не рас-
положенные на одной прямой; согласно правилу 3, в, такая систе-
ма является неизменяемой — диском. Этот диск прикреплен к земле
тремя правильно расположенными стержнями 18; 19 и 6~10, Сле-
довательно, система в целом неизменяема.
Вывод. Условие (2.14) и правила 3, а, б, в, выполнены; следо-
вательно, данная система неизменяема и, согласно (2.10), с пол-
ным числом связей.
Замечание. Если бы соединительные стержни 63 и 54; 32
и 41 были соответственно между собой параллельны, то пересече-
ние каждой пары осей этих стержней произошло бы в точках, бес-
конечно удаленных от системы; иными словами, фиктивные шарни-
ры Шф1 и Шф2 оказались бы расположенными в бесконечности, но
опять-таки, не на одной прямой с реальным шарниром ш7. Послед-
нее означает, что и в случае параллельности соединительных стерж-
ней система будет неизменяемой.
Пример 2.6. (К п. 2,2,1. Правило 3,6). Исследовать геометри-
ческое образование системы, показанной на рис. 2.20.
Решение. Здесь имеем три диска: шарнирные треугольники
123 (/) и 456 (//) и стержень 78 (III). Стержни 24; 37; 67; 58; 81
будем рассматривать как соединительные.
38
Итак, Д = 3, Ссо = С=5 и степень внутренней изменяемости
Я=3(Д—1)—(ССб+2Ш+ЗХ) =3(3—1)—(5+2-0+30) = 1>0.
Согласно (2.9), данная система не имеет достаточного коли*
чества связей, обеспечивающих ее неизменяемость, и, следователь-
но, является изменяемой. В этом случае структурный ана-
лиз можно не производить.
Однако если требуется указать меры, с помощью которых мож-
но данную изменяемую систему обратить в неизменяемую, то
структурный анализ необходим. В нашем случае легко заметить,
что неизменяемость данной системы обеспечивается вводом одного
стержня, соединяющего узлы 3 и 6 (на рисунке не показан). При
этом, конечно, надо проследить за тем, чтобы выполнялось пра-
вило 3, б.
Пример 2.7, (К n. 2.2.1. Правила 1, 2. а). Исследовать геомет-
рическое образование системы (рис. 2.21).
Решение. 1. Проверка условии (2.14). Предварительно
докажем, что контуры левой части 1—2—3—4—5—6—10—8—7—3—1
системы и симметричной ей правой части 19—20—15—17—16—18—
14—13—11—15—19 являются дисками I и 11 (на рис. 2.21 эти дис-
ки заштрихованы). Займемся, например, левой частью системы. При-
мем за основу стержень (диск) 36. К нему диадой 13 и 14 при-
соединен узел (, образующий вместе со стержнем 36 диск
1—3—4—6; к этому диску диадой 21 и 26 присоединен узел 2, об-
разующий с ним новый диск 1—2—6—4—3—1. Этот последний сое-
динен со стержнем (диском) 7—10 тремя правильно расположев-
39
иыми стержнями 6—10; 58 и 37 и, значит, вместе с ним, согласно
правилу 2, а, образует неизменяемую систему — диск I.
Аналогично доказывается неизменяемость правой части систе-
мы, представляющей собой диск II.
Итак имеем:
Д=2, Соп = 3, Сс6=3, Д/ = 0, Л( = 0
и
/7=ЗД—(С+2Д/4-ЗЛЭ =3-2—(64-2-0+3-0) =0,
т. е. система удовлетворяет (2,14) и может быть неизменяемой,
имея при этом, согласно (2.10), полное число связей.
2. Структурный анализ. Теперь легко заметить, что дис-
ки I и II соединены между собой тремя параллельными стержнями
10—14; 9—12 и 7—11 одинаковой длины и вся система правильно
прикреплена к земле тремя опорными стержнями 1—21; 1—22 и
19—23.
Однако указанное соединение между собой дисков I и II, со-
гласно правилу 2, а, образует изменяемую систему. Если средний
соединительный стержень 9—12 будет длиннее двух других стерж-
ней 10—14 и 7—11, имеющих одинаковую длину, то данная систе-
ма окажется мгновенно изменяемой (подробно об этом см. п. 2.2.1).
Итак система по рис. 2.21 изменяема.
Пример 2.8. (К и. 2.2.1. Правило 2, с). Исследовать геометри-
ческое образование системы, показанной на рис. 2,22.
Решение. 1. Проверка условия (2.14). Предварительно
заменим диски 1—2—3 и 5—6—7 фиктивными стержнями 13 и 75*,
тогда данную систему можно рассматривать как соединение диска
II с землей — диском I.
Получим: Д=1, так как диск-земля н формуле (2.14) не учи-
тывается, С=3 и /7=ЗД—(С+2Ш+ЗЖ) =3-1—(3+2 0+3 0) =0,
система удовлетворяет условию (2.14) и может быть неизменяемой,
имея, согласно (2.10), полное число связей.
2. Структурный анализ. Оси всех трех стержней — двух
фиктивных 13 и 75 и одного реального 84, в своем продолжении
пересекаются в одной точке О. Такое соединение двух дисков, со-
гласно правилу 2, а (см. рис. 2.12, бг) образует мгновенно изменяе-
мую систему.
Вывод. Несмотря на то, что данная система удовлетворяет
(2.14) и имеет полное число связей, она, все-таки, оказалась мгно-
венно изменяемой из-за неправильного расположения связей — фик-
тивных стержней 13 и 75, и стержня 84.
2.3. Понятие о статически определимых
и неопределимых системах. Степень статической
неопределимости системы. Условие статической
определимости системы
2.3.1. Определения. Связи внешние и внутренние.
В гл. 1 было указано, что одной из задач статики соору-
* При структурном анализе системы любой ее диск, шарнирно
соединенный по концам с двумя дисками, можно рассматривать как
стержень, ось которого соединяет центры концевык шарниров. Та-
кой стержень будем называть фиктивным.
40
жений является определение внутренних сил в элемен-
тах сооружений. Эта задача решается по-разному в за-
висимости от того, является ли система статически опре-
деляемой или она статически неопределима.
Статически определимой называется геометрически
неизменяемая система, не содержащая лишних связей.
Неизвестные реакции связей такой системы и внутрен-
ние силы, возникающие в ее элементах, можно опреде-
лить, используя только уравнения статики. Следователь-
но, в статически определимой системе число всех неиз-
вестных величин, подлежащих определению, равно чис-
лу независимых уравнений статики, которые могут быть
составлены для этой системы.
Простейшей статически определимой системой яв-
ляется балка на двух опорах, изучаемая в курсе «Со-
противление материалов».
Статически неопределимой называется геометрически
неизменяемая система, содержащая лишние связи. Не-
известные реакции связей такой системы, или внутрен-
ние силы, возникающие в ее элементах, или то и другое
вместе не могут быть определены с помощью одних
уравнений статики и поэтому для расчета статически
неопределимых систем требуется составление дополни-
тельных уравнений (так называемых уравнений совмест-
ности перемещений), учитывающих характер деформа-
ции системы. Следовательно, в статически неопредели-
мой системе число всех неизвестных величин, подлежа-
щих определению, всегда больше числа независимых
уравнений статики, которые могут быть составлены для
данной системы.
Итак, статическая неопределимость системы обус-
ловлена наличием в ней лишних связей. По отношению
к самой системе связи вообще и лишние в частности мо-
гут быть внешними или внутренними. Так, в балках, по-
казанных на рис. 2.23, стержни (один на рис. 2.23, о
и два —на рис. 2.23, в), изображающие шарнирно по-
движные опоры, можно рассматривать как лишние
внешние связи; аналогично в раме (рис. 2.23, д) такими
связями можно считать два стержня (шарнирно непо-
движная опора). В системе (рис. 2.23,ж) любой нз двух
наклонных стержней можно рассматривать как лишнюю
внутреннюю связь. Наконец, система (рис. 2.23, и) од-
новременно имеет и внешнюю (один из опорных стерж-
ней) и внутреннюю (один из двух наклонных стержней
41
13 или 24) лишние связи. Устраняя указанные в систе-
мах на рис. 2.23, а, в, д,ж, и лишние связи, получим со-
ответствующие им геометрически неизменяемые статиче-
ски определимые системы (рис. 2.23, б, г, е,з, к).
42
Кроме уже рассмотренных внутренних связей систе-
мы, осуществляемых реальными стержнями, укажем еще
на так называемые внутренние связи в сечении элемен-
та. Пусть имеем стержень. Две части этого стержня, от-
деленные друг от друга произвольным сечением, могут
вновь образовать целый (данный) стержень, если обе
его части соединить неизменяемо жесткой связью (на-
пример, с помощью сварки). Но, как уже известно (см.
п. 2.1.2), соединение двух дисков (в данном случае двух
частей одного и того же стержня) жесткой связью экви-
валентно соединению их тремя воображаемыми правиль-
но расположенными стержнями, которые и условимся
называть внутренними связями в сечении.
2.3.2. Степень статической неопределимости системы.
В зависимости от количества лишних связей, содер-
жащихся в системе, различают системы один, два,
три, ..., п раз статически неопределимые.
Число, показывающее, сколько раз статически неоп-
ределима рассматриваемая система, называется сте-
пенью статической неопределимости этой системы, кото-
рая равна числу лишних связей, при отбрасывании ко-
торых система, оставаясь геометрически неизменяемой,
становится статически определимой.
Из этого определения следует, что задача о нахож-
дении степени статической неопределимости системы
сводится к отысканию числа ее лишних связей. Решим
эту задачу в общем виде.
Пусть имеем статически неопределимую систему, при-
крепленную к основанию и содержащую связи в виде
опорных стержней в количестве Соп, собственных сте-
пеней Ссб (С=С0П+Ссб), шарниров Ш и жестких свя-
зей Ж.
Необходимым (но недостаточным) условием геомет-
рической неизменяемости этой системы, имеющей лиш-
ние связи, является неравенство (2.14): 77=ЗД—
— (С+2Ш+ЗХ)<0.
Умножив обе части этого неравенства на минус 1,
будем иметь (С-|-2Я/-[-ЗЖ)—ЗД>0. Здесь стоящая
в скобках сумма трех слагаемых выражает суммарное
число К связей первого вида, а число ЗД, представляю-
щее собой степень свободы обособленных дисков, в то
же время определяет и минимальное суммарное число
упомянутых связей Kmin, необходимых для обеспечения
43
геометрической неизменяемости системы. Согласно вве-
денным обозначениям,
Л'=С+2Ш+ЗЖ,
Кт1п = ЗД.
Вычитая почленно из первого равенства второе, по-
лучим
Л—КЮ1И= (С+2Ш+ЗЖ)-ЗД.
Левая часть этого равенства есть не что иное, как
число лишних связей, равное степени статической неоп-
ределимости системы. Обозначив это число через Л, по-
лучим следующую формулу для определения степени
статической неопределимости системы, прикрепленной
к земле (основанию):
Л=(С+2Д/+ЗЛ)—ЗД. (2.16)
Так, например, система, показанная на рис. 2.18,
имеет: С—Соп — 8; Ш — 3‘, Ж—0; Д=4 и, значит, сте-
пень статической неопределимости ее Л= (8-f-2-3-J-
4-3-0)—3-4=2, т. е. данная система имеет две лишние
связи и, следовательно, дважды статически неопреде-
лима.
По аналогии, степень статической неопределимости
свободной системы определяется по формуле
Л'=(С+2Д/+ЗЖ1— 3(Д—1). (2.17)
Часто бывает удобным определить степень статиче-
ской неопределимости системы по другой формуле, ко-
торую получим, заметив следующее:
1. Выражение, стоящее в круглых скобках правой
части формулы (2.16), представляющее собой суммар-
ное количество связей первого вида, в то же время оп-
ределяет и число неизвестных реакций всех реальных
связей, возникающих в нагруженной системе. Обозна-
чим это число буквой Н.
2. Расчленив систему на отдельные диски и рассмат-
ривая равновесие каждого такого диска под действием
нагрузок и реакций связей, можем составить для него
три уравнения статики, а для Д дисков будем иметь
число уравнений статики ЗД.
Обозначим это число буквой У. Теперь, в принятых
обозначениях, формула (2.16) примет вид:
Л=й—У. (2.18)
44
Итак, степень статической неопределимости системы
можно определить как разность между числом неизвест-
ных реакций внешних и внутренних связей системы
и числом независимых уравнений статики, которые
можно составить для данной системы.
2.3.3. Условие статической определимости систем. Из
формул (2.16) и (2.17) легко получить условие статиче-
ской определимости систем. Б самом деле, статически
определимая система, согласно определению, не содер-
жит лишних связей; отсюда сразу вытекает условие
статической определимости для систем:
прикрепленных
Л=0, (2.19).
свободных
Л'=0. (2.20)
Итак, равенство нулю степени статической неопре-
делимости системы свидетельствует о том, что эта систе-
ма является статически определимой.
Подставляя в (2.19) и (2.20) значения Л и Л', оп-
ределяемые соответственно по формулам (2.16) и (2.17),
получим в развернутом виде условия статической опре-
делимости для прикрепленной системы: (С+2Ш+ЗЖ)—-
—ЗД—0, для свободной системы: (CcC-)-2W-}~ЗЖ)—
—3(Д—1) = 0, или, что одно и то же,
ЗД-(С+2Л/+ЗЖ)=0, (2.21)
3(Д—1)—(Сс64-2Ш+ЗЛ)=0. (2.22)
Заметим, что формулы (2.21) и (2.22) ничем не от-
личаются от формул (2.14) и (2.15), выражающих не-
обходимое условие геометрической неизменяемости си-
стем, отнесенное к системам с полным числом связей.
Таким образом, доказано, что условие статической опре-
делимости системы, выраженное формулой (2.21) или
(2.22), совпадает с необходимым условием геометриче-
ской неизменяемости системы (2.14) или (2.15) с пол-
ным числом связей. Так, например, все системы, изо-
браженные на рис. 2.15, 2.16, 2.17, 2.19, как было пока-
зано, удовлетворяют одному из необходимых условий
геометрической неизменяемости систем с полным чис-
лом связей и, следовательно, являются статически опре-
делимыми.
45
Положив в (2.18) Л=0, получим
Н= + (2.23)
т. е. другую формулу, выражающую условие статиче-
ской определимости и, следовательно, необходимое ус-
ловие геометрической неизменяемости систем с полным
числом связей. Применение формул (2.18) и (2.23) см.
гл. 3, 4.
Здесь же приведем примеры на исследование стати-
ческого образования систем по формулам (2.16) и
(2.17) * Если по одной из этих формул получим Л>0
(или Л'>0), то система окажется статически неопре-
делимой, а число Л (или Л') укажет степень статичес-
кой неопределимости ее.
Если же Л (или Л') окажется равным нулю, то,
согласно условию (2.19) или (2.20), будем иметь стати-
чески определимую систему.
2.3.4. Примеры на исследование статического
образования систем
Пример 2.9. (К п. 2.3.2, 2.3.3). Исследовать статическое обра-
зование системы, показанной на рис. 2.24.
Решение. Данная система прикреплена к основанию; поэтому
если она имеет лишние связи, то число их Л надо определить по
формуле (2.16): Л= (С+2Ш+ЗШ)—-ЗД.
Способ 1. Удобно рассмотреть фигуру 1—2—3—4—15—10—5—
—6—7 как укрупненный диск, тогда Д = 1; С=СОп = 6; Д/=2,
Х=0 и Д =(64-2-2+3 0)—31=7>0, т. е. система статически
неопределима и ее степень статической неопределимости равна семи.
Способ 2. Если все стержни, за исключением опорных, принять
за диски, то получим Д = 10, С=6, Д/=2, Ж=1Мг+2Жа+ЗЖ4=
= 1-4+2-1+3-1 =9 и, следовательно, Л — (6+2-2-|-3-9)—3-10=
==7>0.
Таким образом, результаты определения степени статической
неопределимости системы двумя приведенными способами, как и сле-
довало ожидать, совпадают. Однако предпочтительнее, конечно, спо-
соб 1, как приводящий к цели значительно быстрее.
С точки зрения геометрического образования, данная система
геометрически неизменяема и имеет семь лишних связей.
В самом деле, для неизменяемости данной системы было бы
достаточно названный выше укрупненный диск соединить с землей
только тремя правильно расположенными опорными стержнями
и убрать шарниры 2' и 6'. Следовательно, три других опорных
стержня и шарниры 2' н 6’, эквивалентные еще четырем стерж-
* Формулы (2.16) и (2 17) не являются единственными для ис-
следования статического образования систем. В дальнейшем, при
изучении конкретных систем (шарнирные балки, рамы, арки, фер-
мы), будут приведены другие, более удобные формулы, представ-
ляющие собой частные случаи формул (2.16) и (2.17).
46
ням,— всего семь связей, с точки зрения неизменяемости системы,
являются лишними (их называют условно необходимыми).
Итак, установлено, что данная система статически неопреде-
лима (Л—7) и неизменяема, имея в своем геометрическом образо-
вании семь лишних связей
Пример 2.10. (К п. 2.3.3). Исследовать статическое образование
системы, показанной на рис. 2.25.
Решение, Здесь мы имеем свободную систему; поэтому, если
она имеег лишние связи, то число их Л' надо определить по фор-
муле (2.17): Л'=(Сс6+2Ш+3>¥()-3(Д—1).
Примем стержни /2; 34; 56 за диски, а все остальные стерж-
ни системы будем рассматривать как собственные (соединительные)
стержни. Тогда Д==3, Ссб=6, Ш~0, Ж=0.
Л'= (6+2-0+3-0)—3(3—1) =0
Итак, 27'=0; значит, согласно (2.20), данная система статиче-
ски определима и, кроме того, удовлетворяет необходимому усло-
вию геометрической неизменяемости (2 15) *.
Глава 3. Многопролетные статически
определимые (шарнирные) балки
3.1. Общие сведения
Перекрытие нескольких пролетов можно осуществить
отдельными простыми балками — однопролетными с шар-
нирными опорами или же неразрезной * 1 или шарнирной
балкой.
* Рекомендуем, в порядке упражнения, воспользовавшись пра-
вилом 3, б, выполнить структурный анализ системы н убедиться
в ее геометрической неизменяемости.
1 Неразрезной называется расположенная на опорах статически
неопределимая балка, имеющая непрерывное строение по всей своей
длине, с числом пролетов от двух и более (см. гл. 10).
47
ОДИОЛЕОЛЕТНЫЕ КОНСОЛЬНЫЕ БАЛКИ
Назовем шарнирной балкой геометрически неизме-
няемую статически определимую систему, образованную
из простых и однопролетных консольных балок
(рис. 3.1) или только консольных (рис. 3.2), соединен-
ных между собой шарнирами.
Шарнирные балки в сравнении с простыми и нераз-
резными имеют следующие преимущества:
1. Нагрузки, действующие на консоли балок, являю-
щихся составными частями шарнирной балки, уменьша-
ют величины максимальных изгибающих моментов в ее
пролетах в сравнении с этими же моментами, возникаю-
щими в сечениях простых балок, перекрывающих те же
пролеты, что и шарнирная балка.
Таким образом, вследствие разгружающего влияния
консольной нагрузки изгибающие моменты в сечениях
шарнирной балки распределяются рациональнее, чем
в сечениях простых балок, и поэтому шарнирные балки,
как правило, требуют меньшего расхода материалов, чем
простые, перекрывающие заданные пролеты.
2. Неравномерное изменение температуры по высо-
те шарнирных балок не вызывает в них дополнитель-
ных напряжений в отличие от неразрезных балок, в ко-
торых такие напряжения могут оказаться весьма значи-
тельными.
3. Сравнительно короткие элементы, составляющие
шарнирную балку, представляют удобство для их мас-
сового заводского изготовления и механизированного
монтажа.
Однако шарнирные балки имеют и серьезные недо-
48
статки, в значительной мере ограничивающие область
их применения:
1. Наличие шарниров, которые в последующем будем
называть промежуточными, усложняет изготовление и
монтаж таких балок, а также обусловливает перелом
упругой линии в местах установки шарниров, что при
подвижной нагрузке вызывает толчки и удары.
2. Обрушение шарнирной балки в одном пролете мо-
жет вызывать обрушение и некоторых других и даже
всех ее пролетов. Например, обрушение балки III (см.
рис. 3.1) вызовет обрушение балок 11 и IV, а обрушение
балки I (см. рис. 3.2) приведет к обрушению всей балки.
3.2. Статическая определимость
и геометрическая неизменяемость
шарнирных балок
3.2.1. Аналитическое условие статической определи-
мости шарнирных балок. Пусть имеем неразрезную бал-
ку (рис. 3.3, а), находящуюся в равновесии под действи-
ем внешних активных сил Ft; F2; F3; q и реакций свя-
зей lzA; НА- Vb; Vc; Vd. Число опорных стержней этой
балки и, следовательно, число неизвестных реакций свя-
зей Н—5. Число независимых уравнений статики, кото-
рые можно составить для балки, У=3.
Согласно формуле (2.18), степень статической неоп-
ределимости J1 данной балки
л=5—3=2.
В один из пролетов балки (например, в средний)
введем промежуточный шарнир Е (рис. 3.3,6). Легко
показать, что геометрическая неизменяемость балки при
этом не нарушится, предлагаем убедиться в этом само-
стоятельно, но степень статической неопределимости ее
снизится на единицу. Для доказательства последнего
освободим балку (рис. 3.3, а) от опор и заменим их ре-
акциями VA; НА; Vb; Vc; Vd- Получим систему
(рис. 3.3,6), состоящую из двух стержней АЕ и ED.
соединенных между собой шарниром Е и, по-прежнему,
находящуюся в равновесии под действием активных сил
и реакция связей (опор).
Заменим систему параллельных сил, действующих
левее шарнира Е, ее равнодействующей /?ле® и допу-
стим, что линия действия этой равнодействующей про-
ходит через некоторую точку К, лежащую на оси стерж-
49
ня /4jE (рис, 3.3,в). Тогда, очевидно, относительно цент-
ра шарнира Е возникнет момент /?лсвй, который вызовет
вращение стержня АЕ вокруг оси, перпендикулярной
плоскости рисунка и проходящей через центр шарни-
ра £; однако это противоречит условию, по которому
система AED находится в равновесии и поэтому сделан-
ное допущение относительно положения точки Л яв-
ляется неверным.
Отсюда следует, что равновесие системы AED воз-
можно только в том случае, если момент /?лева окажет*
50
ся равным нулю. Это, в свою очередь, означает, что ли-
ния действия равнодействующей Ялеи пройдет через точ-
ку А7, совпадающую с центром шарнира Е, ибо только
В этом случае а—0 и /?левп=0 (рис. 3.3, г).
Итак, доказано, что линия действия равнодействую-
щей сил, расположенных левее шарнира, проходит че-
рез его центр и, следовательно, момент этой равнодей-
ствующей относительно центра шарнира равен нулю;
в принятых обозначениях имеем
=0.
Согласно теореме Вариньоиа 1
щ£(йлев) =S»i£(FaeB).
Сравнив эти равенства, получим
=о.
Здесь левая часть равенства представляет собой ал-
гебраическую сумму моментов всех внешних сил, рас-
положенных левее шарнира относительно его центра,
и, следовательно, выражает записанный по силам слева
от шарнира изгибающий момент в сечении е—е
балки, проведенном через центр шарнира Е (см,
рис. 3,3,6); поэтому справедливо равенство
Л}*вв = о.
Аналогично доказывается, что
= 0.
Объединяя эти равенства в одно, получим
jW^B(np)=0 (3 Д)
Таким образом, в результате ввода в пролет данной
балки шарнира Е получено одно, так называемое до-
t полнительное, уравнение статики, выражающее условие
равенства нулю изгибающего момента в сечении, про-
веденном через центр шарнира, и записанного по силам
расположенным левее (или правее) шарнира. Теперь
для балки на рис, 3.3,6 можно составить 3+1 =4 урав-
1 Рассматривается в курсе теоретической механики и гласит:
момент равнодействующей силы относительно произвольной точки,
лежащей в плоскости сил, равен сумме моментов составляющих сил
Относительно той же точки.
51
нения; при этом степень статической неопределимости
ее окажется равной Л-=Н—У=5—4=1, т. е. на едини-
цу меньше степени статической неопределимости дан-
ной балки, что и требовалось доказать.
Выводы.
1. Промежуточный шарнир, введенный в пролет не*
разрезной балки, позволяет составить одно уравнение,
дополнительное к трем основным уравнениям статики
для плоской системы сил, и, следовательно, снизить сте*
пень статической неопределимости балки (системы) на
единицу.
2. Можно составить столько дополнительных уравне-
ний статики, сколько промежуточных шарниров содер-
жит данная балка.
Найдем условие статической определимости шарнир-
ной балки. Пусть дана шарнирная балка, у которой
число опорных стержней равно С011, а число промежу-
точных шарниров — Ш. По определению, шарнирная
балка является статически определимой системой, а по-
этому должно соблюдаться условие (2.23). Но число
неизвестных реакций связей Н=Ст, а число уравнений
статики, которые можно составить для данной балки
У=3-^Ш.
Подставив значения Н и У в (2.23), будем иметь
Соп=3-|-Ш, отсюда окончательно получаем условие ста-
тической определимости шарнирной балки
Ш = СОП—3. (3.2)
Итак, многопролетная балка статически определима
(является шарнирной), если она содержит число проме-
жуточных шарниров на три меньше числа опорных
стержней.
Условие статической определимости системы совпа-
дает с условием ее геометрической неизменяемости.
Следовательно, формула (3.2) в то же время выражает
необходимое, но недостаточное условие геометрической
неизменяемости шарнирной балки и дает возможность
выявить также максимальное число промежуточных
шарниров, при котором система еще может оставаться
геометрически неизменяемой. При Ш>СО„—3 система
будет изменяемой.
Возвращаясь к многопролетной балке, изображен-
ной на рис. 3.3,а (она же показана на рис. 3.4,а), уста-
навливаем, что для ее статической определимости (для
образования шарнирной балки) надо в пролеты этой
52
РИС. 3.4
балки ввести Ш—СиЛ—3=5—3=2 шарнира, которые
можно разместить так, как показано на рис. 3.4,6
или 3.4, г
3.2.2. Понятие об «этажной схеме» шарнирной бал-
ки. Для наглядного представления о характере взаимо-
действия между собой отдельных балок (элементов)
шарнирной балки, облегчающего ее расчет (см. п. 3.3),
1 Правила размещения промежуточных шарниров изложены
в п. 3.2.3.
53
прибегают к составлению так называемых «этажных
схем» (рис. 3.4, в, д).
«Этажной схемой» шарнирной балки условимся на-
зывать совокупность ее элементов, расположенных один
за другим в разных уровнях (этажах).
Чтобы выяснить, какая из двух балок, соединенных
шарниром, должна находиться как бы «этажом» выше
другой балки, достаточно удалить шарнир. Та балка,
которая при этом придет в движение, должна быть по-
ставлена «этажом» выше другой.
При составлении «этажных схем» среди элементов
шарнирной балки необходимо различать основные бал-
ки и второстепенные, которые в дальнейшем будем на-
зывать подвесными.
Основной называется балка, обе опоры которой свя-
заны с землей. Например, на рис. 3.4, б, в основной яв-
ляется балка ///, а на рис. 3,4, г, д — балки Н и III,
Все другие балки (не основные), входящие в состав
шарнирной балки, являются подвесными. Таким обра-
зом, к подвесным балкам следует отнести:
1) балки, одной опорой опирающиеся на «землю»
(основание), а другой —на консоль одной из основных
или подвесных балок (например, на рис. 3.4,6, в соот-
ветственно балка II и балка /);
2) балки, которые своими концами опираются на кон-
соли основных балок (например, балка I на рис.
3.4, г, д).
3.2.3. Правила размещения промежуточных шарни-
ров в шарнирных балках и их «этажные схемы». Здесь
рассматриваются схемы основных типов наиболее часто
встречающихся в инженерной практике шарнирных ба-
лок и их «этажные схемы». Промежуточные шарниры
в пролетах этих балок должны размещаться так, чтобы
нс нарушались условия образования геометрически
неизменяемых систем, изложенные в и. 2.2. Учитывая
это требование, получим следующие правила размеще-
ния промежуточных шарниров.
А) Шарнирные балки, расположенные
на шарнирных опорах.
Правило 1. Во всех пролетах шарнирной балки,
за исключением любого одного, можно разместить по
одному шарниру.
Такие шарнирные балки условимся называть шар-
нирными балками первого типа. Пример такой балки
54
IT
приведен на рис. 3.5,а. Здесь 1/7=4, Соп—7 и 4=7—3,
т. е. условие статической определимости (3.2) и оно же
необходимое условие геометрической неизменяемости
балки удовлетворяется.
Чтобы окончательно убедиться в неизменяемости
данной балки, произведем структурный анализ (рис.
3.5,а). Балка состоит из дисков АС, СЕ, EG, GI, IK.
Диск АС присоединен к земле тремя правильно распо-
ложенными стержнями /, 2, 3 и, следовательно, с зем-
лей образует неизменяемую систему диск АВС — земля.
К нему правильно расположенными шарниром С и опор-
ным стержнем 4 присоединен диск СЕ, образуя с пре-
дыдущим диском неизменяемую систему диск АВС —-
земля — СЕ. Аналогично к последнему присоединен диск
EG и за ним последовательно друг за другом, таким же
образом, диски GI и IK. В результате получаем неизме-
няемую систему —шарнирную балку по рис. 3.5, а. При-
веденная на рис. 3.5.0 шарнирная балка первого типа
расчленяется на основную балку V и подвесные балки
1, II, III, IV. «Этажная схема» этой балки показана на
рис. 3.5,6.
Построение «этажных схем» шарнирных балок пер-
55
вого типа начинают с основной балки, опирая ее опоры
непосредственно на основание. На конец консоли основ-
ной балки шарнирно неподвижно, а на основание —
шарнирно подвижно опирают смежную с ней подвес-
ную балку. Затем на конец консоли этой подвесной бал-
ки шарнирно неподвижно, а на основание — шарнирно
подвижно опирают следующую подвесную балку и т. д.
В результате такого построения получают «этажную схе-
му», в которой число «этажей» равно числу несущих
элементов.
Правило 2, В одном пролете шарнирной балки
можно разместить не более двух шарниров (размещение
в одном пролете более двух шарниров обращает балку
в геометрически изменяемую систему и поэтому не до-
пускается). Каждый пролет с двумя шарнирами должен
чередоваться с пролетом без шарниров; при этом в пер-
вом и последнем пролетах размещение шарниров не до-
пускается.
Из этого правила следует: в балках с нечетным чис-
лом пролетов можно разместить по два шарнира в чет-
ных пролетах. Такие шарнирные балки условимся назы-
вать шарнирными балками второго типа. Пример бал-
ки второго типа приведен на рис. 3.6, а. Здесь 6^=7,
Ш =4, 4=7—3, т. е. условие статической определимо-
сти (3.2) и оно же необходимое условие геометрической
неизменяемости балки удовлетворяется.
Чтобы окончательно убедиться в неизменяемости
данной балки, произведем структурный анализ (см.
рис. 3.6, а). Система состоит из дисков AC, CD, DG, GH
и НК‘, первый из них неподвижно прикреплен к земле
тремя правильно расположенными опорными стержня-
ми (двумя в точке А и одним в точке В), к этому диску
стержнем CD (он же диск CD) и к земле опорными
стержнями в точках Е и F также неподвижно присое-
динен диск DG; аналогично стержнем GH (он же диск
GH) к диску AG— земля и двумя опорными стержнями
в точках I и К к земле неподвижно прикреплен диск
НК- В результате получаем неизменяемую систему —
шарнирную балку АК.
Приведенная на рис. 3.6, а шарнирная балка второго
типа расчленяется на основные балки HI, IV, V и под-
весные балки / и II. «Этажная схема» этой балки по-
казана на рис. 3.6,6.
Построение «этажных схем» шарнирных балок вто-
56
РИС. 3.7
РИС. 34
рого типа начинают с изображения основных балок. Для
обеспечения геометрической неизменяемости одна из
опор каждой основной балки делается шарнирно непо-
движной, другая — шарнирно подвижной. Далее на кон-
цы консолей основных балок опирают подвесные балки
посредством шарнирно неподвижной опоры, расположен-
ной на одном конце этой балки, и шарнирно подвижной
опоры — на другом. В результате такого построения по-
лучаем «этажную схему» с двумя «этажами».
Правило 3. В шарнирной балке можно разместить
шарниры и так, чтобы один пролет балки (рис. 3.7, а)
или некоторые из ее пролетов (рис. 3.7,6) имели по два
шарнира, а некоторые другие — по одному.
Такие балки в отличие от других, образованных
в соответствии с правилами 1 и 2, будем называть шар-
нирными балками смешанного типа (или условно —
балками третьего типа). Так же, как и для шарнирных
балок, образованных согласно правилу 2 в шарнирных
балках смешанного типа, пролеты с двумя шарнирами
следует располагать между пролетами без шарниров.
В каждой из приведенных балок (рис. 3.7, с, б) име-
ем Соп=9, ffi=6 и 6—9—3, т. е. условие статической
определимости (3.2) и оно же необходимое условие гео-
метрической неизменяемости балки удовлетворяется.
57
Структурный анализ рассматриваемых балок (рис.
3.7, а, б) подтверждает их геометрическую неизменяе-
мость; предлагаем убедиться в этом самостоятельно.
На рис. 3.7, в показана «этажная схема» шарнирной
балки, изображенной на рис. 3.7, б.
Б) Шарнирные балки, имеющие помимо
шарнирных опор и жесткие (защемляю-
щие) опоры.
В этом случае при определении числа промежуточ-
ных шарниров и порядка их размещения в пролетах
балки необходимо помнить следующее:
1) защемляющая опора эквивалентна трем стержням
(см. табл, 2.1);
2) в пролете, примыкающем к защемляющей опоре,
обязательна установка хотя бы одного шарнира, но
не более двух шарниров;
3) правильность размещения шарниров (обеспечение
геометрической неизменяемости системы) должна быть
обязательна проверена с помощью структурного ана-
лиза.
На рис. 3.8 приведена шарнирная балка с защемляю-
щей опорой. Предлагаем убедиться в статической опре-
делимости и геометрической неизменяемости данной
балки и построить соответствующую ей «этажную
схему».
3.3. Расчет шарнирных балок
Статический расчет шарнирной балки сводится к по-
строению эпюр поперечных сил (эпюры Q) и изгибаю-
щих моментов (эпюры М). Затем по этим эпюрам про-
изводят подбор или проверку сечения. Существуют два
способа расчета шарнирных балок: первый способ пре-
дусматривает расчет шарнирной балки без расчленения
ее на составляющие элементы; при этом используются
три уравнения статики для плоской системы сил и до-
полнительные уравнения, которые получают, применяя
формулу (3.1). Этот способ сравнительно быстро при-
водит к цели в тех случаях, когда рассчитывают шар-
нирную балку с малым (не более трех) числом проле-
тов. В противном случае расчет становится трудоемким,
в особенности для балок второго и третьего типов, при
определении опорных реакций которых значительно
осложняется решение системы уравнений равновесия со
Б8
многими неизвестными (см. |7], пример 21). Второй
способ основан на расчленении данной шарнирной бал-
ки на отдельные балки (элементы) с построением
«этажной схемы» и последующим расчетом каждой бал-
ки в отдельности. Расчет следует начинать с самых
«верхних» балок и далее последовательно переходить
к нижележащим. При расчете нижележащих балок надо
учитывать нс только ту нагрузку, которая к ним непо-
средственно приложена, но и давления, передаваемые
на них опорами вышестоящих балок, равные опорным
реакциям последних, но имеющие обратное направление.
В соответствии с изложеным на «этажных схемах»,
показанных на рис. 3.5,6, 3.6,6 и 3.7, в, римскими циф-
рами обозначена последовательность расчета шарнирных
балок, приведенных на рис. 3.5, а, 3.6, а и 3.7,6. Второй
способ расчета шарнирных балок по сравнению с пер-
вым предпочтительнее, так как обладает большой на-
глядностью и приводит к сокращению объема вычисли-
тельной работы.
Порядок расчета шарнирных балок способом рас-
членения их на отдельные элементы приведен в приме-
ре 3.1, но раньше этого напомним основные положения,
связанные с построением эпюр поперечных сил и изги-
бающих моментов.
/. Численные значения Q и А1, а также знаки опре-
деляются по следующим правилам:
поперечная сила в рассматриваемом сечении балки
численно равна алгебраической сумме проекций всех
внешних сил (в том числе в реакций связей), действую-
щих по одну сторону от этого сечения, на ось, перпен-
дикулярную оси балки. Проекции той внешней силы, ко-
торая стремится рассматриваемую часть балки вращать
по часовой стрелке относительно центра тяжести взятого
сечения, приписывается знак «плюс», в противном слу-
чае — «минус»;
изгибающий момент в сечении балки численно ра-
вен алгебраической сумме моментов всех внешних сил
действующих по одну сторону от рассматриваемого се-
чения, относительно центра тяжести данного сечения.
Моменту той внешней силы, которая стремится рассмат-
риваемую часть балки, мысленно защемленную в дан-
1 Под внешними силами следует понимать и сосредоточенные
моменты.
59
ном сечении, деформировать выпуклостью вниз, припи-
сывается знак «плюс», в противном случае — «минус».
Иначе говоря, моменты внешних сил, вызывающих рас-
тяжение нижних волокон балки, считают положительны-
ми, а верхних — отрицательными.
2. Построение эпюр Q и М можно выполнять любым
из методов, рассматриваемых в курсе «Сопротивление
материалов». В данном курсе «Статика сооружений»
везде, где это удобно, применен метод построения эпюр
Q и М по характерным сечениям; наряду с ним приме-
няется и другой, основной, метод—исследование урав-
нений поперечных сил и изгибающих моментов в про-
извольных сечениях участков балки. Подробно об этих
методах изложено в литературе, например в [4].
3. При построении эпюры Q положительные ее орди-
наты откладывают в определенном масштабе перпенди-
кулярно оси балки вверх от нес, а отрицательные —
вниз.
При построении эпюры М у строителей принято ор-
динаты, выражающие в определенном масштабе значе-
ния изгибающих моментов, откладывать со стороны рас-
тянутых волокон; это означает, что при известном из
сопротивления материалов правиле знаков для изгибаю-
щих моментов в сечениях горизонтально расположенных
прямолинейных балок (зпак «плюс» ставят, если балка
изгибается выпуклостью вниз — растянуты волокна, рас-
положенные снизу от оси балки) положительные орди-
наты эпюры М надо откладывать снизу от оси балки,
отрицательные — сверху.
4. Правильность построения эпюр поперечных сил
(эпюр Q) и изгибающих моментов (эпюр Л1) проверя-
ется на основе зависимостей между очертаниями эпюр
Q и /И вытекающих из теоремы Д. И. Журавского
о дифференциальных зависимостях между интенсив-
ностью распределенной нагрузки и поперечной силой
и между поперечной силой и изгибающим моментом.
Напомним основные зависимости между очертания-
ми эпюр Q и М:
а) если на элементе системы отсутствует распреде-
ленная нагрузка (^=0), то в общем случае эпюра Q
представляет собой прямую, параллельную базовой ли-
нии, а эпюра ЛГ— наклонную прямую. В частном слу-
1 Этими же зависимостями пользуются и при построении эпюр
Q и Л1 методом характерных сечений (см. примеры 3.1, 3.2).
60
чае эпюра Q может совмещаться с базовой линией, тогда
эпюра М— прямая, ей параллельная; это так называе-
мый чистый изгиб;
б) если на элементе системы расположена равномер-
но распределенная нагрузка (Q=const), то эпюра Q
представляет собой прямую наклонную к базовой линии,
а эпюра АГ— квадратную параболу, обращенную вы-
пуклостью в ту сторону, в которую направлена эта на-
грузка;
в) если в сечении элемента системы приложена со-
средоточенная сила, то под ней на эпюре Q возникает
скачок на величину, равную модулю силы, и направ-
ленный в сторону действия силы (при перемещении
вдоль базовой линии эпюры слева направо), а на эпю-
ре М — излом, направленный своим острием также
в сторону силы;
г) если в сечении элемента системы приложен сосре-
доточенный момент, то на очертании эпюры Q это не от-
ражается, а на эпюре М в указанном сечении возникает
скачок на величину, равную этому моменту;
д) в сечениях, где поперечная сила равна нулю, из-
гибающий момент достигает экстремального значе-
ния-максимума или минимума;
е) если при перемещении вдоль базовой линии эпю-
ры слева направо ординаты эпюры Q имеют положи-
тельные значения, то ординаты эпюры Л1 возрастают
в алгебраическом смысле и наоборот: если ординаты
эпюры Q имеют отрицательные значения, то ординаты
эпюры М убывают в алгебраическом смысле;
ж) изменение величины изгибающего момента на за-
данном участке элемента системы между двумя его се-
чениями равно площади эпюры поперечных сил, соот-
ветствующей этому участку при условии, что в преде-
лах его не приложены внешние моменты.
Эту зависимость в буквенных обозначениях можно
представить так: Мк—Mt = [^Jf, откуда
= + (3.3)
Здесь индексы при Л1 указывают на те сечения, в кото-
рых действуют моменты Мк и AfIt а через j£' обозна-
чена величина площади эпюры поперечных сил на
участке элемента между сечениями 1 и К- Если полу-
ченные по формуле (3.3) значения изгибающих момен-
тов совпадут со значениями, вычисленными ранее по
61
общеизвестным правилам, то можно считать, что по-
перечные силы и изгибающие моменты определены пра-
вильно. Несовпадение результатов укажет на то, что
в вычислениях где-то допущена ошибка, которую сле-
дует искать в первую очередь в определения изгибаю-
щих моментов. Если здесь ошибки нет, то нужно про-
верить вычисления поперечных сил. Если же и здесь
все верно, то необходимо пересчитать опорные реакции
и рассчитать систему (в нашем случае балку) вновь.
Пример 3.1.
Построить эпюры Q и М для шарнирной балки, показанной иа
рис. 3.9, а.
Решение. 1. Изображаем схему данной балки в масштабе
(рис. 3.9, а).
2. Исследуем статическую определимость и геометрическую
неизменяемость. Имеем: 111=4, Сиа = 7 (напоминаем, защемляющая
опора эквивалентна трем стержням) и 4=7—3, т. е. условие ста-
тической определимости (3.2) и оно же необходимое условие гео-
метрической неизменяемости балки удовлетворяется.
Выполним структурный анализ.
К неподвижному диску 1 тремя правильно расположенными
стержнями — собственным GH (он же диск //), и двумя опорными
В и С неподвижно прикреплен диск /II. К диску АК — земля пра-
вильно расположенными шарниром К и опорным стержнем D при-
креплен диск /V и к диску Л£ — земля, аналогично, шарниром £
и опорным стержнем Е присоединен диск V. В результате получа-
ем неизменяемую систему — шарнирную балку ЛЕ.
3. Строим этажную схему (рис. 3.9, б). Сначала изображаем
основные балки AG и НК, затем подвесные в последовательности:
GH, KL, LE. Для обеспечения геометрической неизменяемости ле-
вую опору основной балки НК делаем шарнирно неподвижной (до-
бавляем один стерженек), а правую опору подвесной балки GH —
шарнирно подвижной (убираем один стерженек). На этажной схе-
ме (рис. 3.9, б) римскими цифрами указаны наименования дисков,
а в скобках арабскими цифрами обозначена последовательность
расчета отдельных элементов дайной шарнирной балки и ее в целом.
4. Под этажной схемой балки изображаем отдельные ее эле-
менты— основные н подвесные балки (рис, 3.9, в—ж).
5. Выполняем расчет каждого элемента шарнирной балки в от-
дельности.
Балка LE (рис. 3.9, в).
Определяем реакции опор.
2mi=0; 1М— ($4)2 = 0,
откуда
V£=(?4)2/4 =(20-4)2/4=40 кН;
Хт£=0; 41-7—4 £2— ($4)2=0,
откуда
У7= [4£г+ ($4)21 /4 = [4-20-1-(20 4)2] /4=60 кН.
62
3 РИС.ЗД
63
Проверка: ST=0; Vl+Vl—Fs—4<?=60+40—20—4-20=0.
Строим эпюры:
а) поперечных сил Qle
<?£-₽-0; Q^eB=—40кН; Q2p^60 — 20 = 40 кН; Qfв = 0.
б) изгибающих моментов MLE
0^х^4;
Mi = VEx—<?х!/2=40л:—20х2/2=40х—10х2.
Для определения Л4тах имеем: <?г°=40—20хс=0, откуда х0=
=2 м. Теперь получим:
х=0; Л1£ = 0
х=х0=2 м; МХ[1=Л1те1=40-2—10-22=40 кН-м;
х=4 м; М£ = 40-4—10-42 = 0.
Балка KL (рис. 39, г)
Определяем реакции опор.
Предварительно учитываем, что балка LE, опираясь своим кон-
цом L на коней L консоли балки KL, передает на последнюю дав-
ление в сечении L. Это давление V'l представляет собой силу, рав-
ную модулю реакции опоры Vi, направленную в противоположную
ей сторону и приложенную в точке L. Итак, V'l— | 1+| = +60 кН.
Составляя уравнения равновесия и решая их, получим: XmD —
=0; 1+4+60-2=0 и V\=— 30 кН; знак «минус» показывает, что
в действительности направлена сверху вниз (на рис. 3.9, а пра-
вильное направление реакции V* показано пунктиром).
2w=0; 60-6—41+=0,
откуда
Ко=90 кН.
Проверка:
ГУ=0; —Vk+Vd—V'l=—30+90—60=0.
Строим эпюры:
а) поперечных сил Qkl
QI™ = v'L = 60 кН; = 60 кН; <? д в= 60 — 90 = —30 кН;
Q"P== —30 кН;
б) изгибающих моментов МКЕ
ML=0; Мп=—60-2=—120 кН-м, Мк=0.
Балка GH (рис. 3.9, д)
V„ = V„=24 кН,
2У=0; Vc+V„—1/4=24+24—12-4 = 0.
Эпюры:
а) поперечных сил Qi,n
б) изгибающих моментов МОн.
Балка БК (рис. 3.9, е)
Определяем реакции опор.
64
К концам Н и К консолей балки НК приложены силы V+=
=24 кН n VV = 30 кН, представляющие собой давления, переда-
ваемые па балку НК в сечениях Н и К со стороны подвесных
балок HG и KL; учитывая это, получим:
Sfflc=0; —24 • 7+6 Vb— 1О • 3—24—30-2=0,
откуда
247+10.3 + 24 + 30-2 _ 282;6^)7,;H
Xms = 0; —24-1 + 10-3—6 Vc—24—30-8=0,
откуда
Действительное направление Vc показано на ркс. 8.9, е пунк-
тиром.
Проверка:
ЛУ = 0; —V'k+Vb—f—Vc+V+=—24+47—10—43+30 =0.
Строим эпюры:
а) поперечных сил Qhk
Q^tt - Q£P = — 30 кН; <?£св = —30 + 43 = 13 кН'
Q)[p = 13 кН; Qf° « 13 + 10 == 23 кН;
Q’^ = 23 кН; = Q1)}' = 23 — 47 = —24 kHj
б) изгибающих моментов Afw
Л1А' = 0; ,W£P = 30-2 = 60 кН - м; Af£EB = 60 4- 24 = 84 кН-М;
Mi=30-5+24—43-3=45 кН-м;
Мя=0, Мв=—24-1=—24 кН-м,
М,——24-4+47-3=45 кН-м.
Балка AG (рис. 3.9, ж)
Строим эпюры Qab и Млп от свободного конца G балки 4G,
не определяя при этом реакций защемляющей опоры А.
6. Строим окончательные для всей балки эпюры:
а) поперечных сил Q (рис. 3.9, з).
Эпюры Q, полученные ранее для каждого отдельного элемента,
располагаем на одпой оси в одном масштабе;
б) изгибающих моментов М (рис. 3.9,и). Эта эпюра строится
аналогично окончательной для всей балки эпюре Q
7. Производим проверку правильности построения эпюр Q и Л1,
пользуясь зависимостями 4, а—ж.
Анализируя эпюры Q и М (рис. 3.9, з, и), предлагаем убедить-
ся в том, что их очертания удовлетворяют зависимостям 4, а—е.
здесь же покажем, что они удовлетворят и зависимости 4, яс.
3 Шишман Б. А,
65
Применяя формулу (3,3), получим:
Мв = Л1с, + [9q]£, = 24 + ( — 24 -1 — 0,5-24-2) = —24 к11-м;
М/ = J- (CQ]^= -24 + 23-3= 15 кН-м;
Л1С = Л1/+ [2q]£ = 45 + 13-3 = 84 кН м,
Мк = А1С + [*2<у ] £ = 60 — 30- 2 = 0;
MD = JWA- + [2q]£ = 0-30-4 = — 120 кН-м;
ML = Л1с + [QQ]£ = — 120 + 60-2 = 0;
ML, = Л4^+ (2e]f = 0 + 0,5-40-2 = 40 кН-M;
МЕ = Л4Л, + [2Q]f, = 40 — 0,5-40-2 = 0.
Полученные значения изгибающих моментов совпадают со зна-
чениями этих моментов, указанными на эпюре Л1 и вычисленными
ранее по правилу, принятому в сопротивлении материалов; это еще
раз подтверждает правильность построения эпюр Q и М.
3.4. Равномоментные шарнирные балки
Выше отмечалось, что шарнирная балка, как прави-
ло, требует меньшего расхода материала по сравнению
с простыми балками, перекрывающими те же пролеты и
нагруженными теми же нагрузками, и поэтому является
конструкцией более экономичной, чем ряд указанных
простых балок, заменяющих ее, В свою очередь, эконо-
мичность шарнирной балки, имеющей определенную гео-
метрическую структуру и несущей определенную нагруз-
ку, будет различной, если в ней изменять расстояния от
опор до промежуточных шарниров. Рациональным регу-
лированием этих расстояний в ряде случаев можно до-
биться того, что максимальные изгибающие моменты в
пролетах будут равны по абсолютной величине момен-
там над опорами. Такие шарнирные балки являкнея
наиболее рациональными. Их принято называть равно-
моментными.
Покажем на конкретном примере, как определяются
расстояния от промежуточных шарниров до опор шар-
нирной балки, при которых она становится равномо-
мептнои.
Пример 3.2. Для шарнирной балки, показанной на рис. 3.10, а,
определить расстояние а от опор В и С до промежуточных шарни-
ров Е и G и величину силы г так, чтобы изгибающие моменты
66
j—-1-----4----1---J----1----*
диск I диски
рис. 3,iq
2*
67
в сечениях, соответствующих серединам проле юв и опорным, были
равны по абсолютной величине. По найденным значениям а в Л
и известным значениям q и I построить эпюры Q н Л4.
Решение. 1. Изображаем схему данной балки в масштабе
(рис. 3.10, а).
2. Исследуем статическую определимость в геометрическую
неизменяемость. Имеем: Ш=2, Спп=5 и 2—5—3, т. е. условие
статической определимости (3.2) и оно же необходимое условие
геометрической неизменяемости балки удовлетворяются.
Структурный анализ. Диск I (балка АЕ) присоединен
к земле тремя правильно расположенными опорными стержнями,
образуя диск I— земля: к последнему таким же способом присое-
динен диск II (балка DG): двумя опорными стержнями С и D
и земле и стержнем (балкой) EG к диску I. Вместе с диском I
земля диск II образует геометрически неизменяемую систему —
данную шарнирную балку AD. Итак, балка на рис. 3.10, а статиче-
ски определима и геометрически неизменяема.
3. «Этажная схема» представлена на рис 3.10,6.
4. Расчленение «этажной схемы» на отдельные элементы (ос-
новные балки АЕ к DG и подвесную балку EG) показано на
рис. 3.10, в.
5. Определяем требуемые величины — расстояние а и модуль
силы Р. Введем обозначения: Л1дв/г=Л41, Л1л=Л15!, Мвся—Мз- Со-
гласно условию, исходными являются уравнения;
Л4а=|М2|, |Л!г|=ЛЛ;
представив их в развернутом виде и решив совместно относитель-
но неизвестных величин а и F, получим ответы на вопросы, по-
ставленные в задаче. Для этого предварительно найдем Л1ч, |AJa|
и М{.
Из рис. 3.10, в (подвесная балка EG) находим
VE=V0 = q(l—2a) /2;
Мэ = ?((—2с)2/8.
Из рис. 3.10, в (основная балка ЛЕ), находим
|Л1г| = V’'£«+<?n!/2= [<?(/—2с) /2]с+?д3/2-
Для определения Afj предварительно найдем величину Ул —
реакцию опоры А. Имеем:
2тв=0: VAl— F0.5/+ V'ea+qa^i=0,
откуда
VA = (Г0.51— V'ga—qa2/2) ll={Flj2— [<?((—2a) /2]a—<?a2/2}/l =
= E/2—qa (I—2a) /21—qa2j2l.
Теперь по силам слева находим
Л1, = \F/2—qa (Z—2c) /2/—qa2/2l] Z/2=Flj4—qa (I—2a) j4-qa2!4.
Итак,
Mt=Fl/4—qa(I—2a) /4—qa2j4.
68
Подставляя найденные значения ЛЬ, |М2|, Л1, в исходные урав-
нения. получим:
q (l—2a) 2l8^q(l—2a)a/2+qasl2,
q(l—2а) a]2-\-qa?l2 — Fl/4—qa(l—2а)/4—qa2ft,
Первое уравнение после преобразований приводится к виду
8о2—8а/+/2=0,
откуда
я - (4/ ± У (4/)Е + 8/£)/8 = (4/ ± 2.63/)/8[
й(=0,854/, «2=0,146/;
«1=0,854/ не годится, так как 2ai>/.
Следовательно, надо принять й = 02=0,146/.
Подставляя a = 0,146/ во второе уравнение и решая его отно-
сительно F, получим F=0,373$/.
Итак, а = 146/; А=0,373$/.
При этих значениях, согласно условию, должно быть М} —
= |Л12|=Л13; проверим это.
Л1-, = [$ (/—2а)2] /8 = q (1—2 0,146/) 2/8 = $/20,708'78 =О,О63$Р.
|М2|=$д(/—2а)/2+$о2/2=$а(/—2-0,146/)/2+
+$(0.146/) 2/2=$0,146/0,7081/2+0,0213$/2/2 =
= 0.0517$/Е+ 0,0107$/2 = 0,063 qP\
M-=Fl/4—qa(l—2a) /4—$«!/4 = 0,373$///4—
—$0,146/ (/—2 • 0,146/) /4—$ (0,146/) 2/4 =
= 0,091$Р—0,0258$/!—0,00533$/2=0,063$+
Выполненные вычисления Alj, |Л12|, Л13 показывают, что Л4,=
= 1Л12! =(Н3 = 0,063$/2; это значит, что при а — 0,146/ и 7’ =
=0,373$/ шарнирная балка, (рис. 3.10, а) является равномоментпой.
6. На рис. 3.10, г показана данная балка с величинами сил F
и расстоянием а, полученными по расчету. Эпюры (ЗиЛ! показаны
соответственно на рис. 3.10, д и 3.10, е. Предлагаем построить их
самостоятельно и проверить правильность построения эпюр Q н Л4,
используя зависимости 4, а—ж.
Глава 4. Статически определимые
плоские рамы
4.1. Общие сведения о рамах
Рама — геометрически неизменяемая стержневая си-
стема, элементы которой соединены между собой жестко
во всех узлах (рис. 4,1, а) или в некоторых, а в осталь-
ных узлах —с помощью шарниров (рис. 4.1,6). Гори-
зонтальные или близкие к ним наклонные элементы ра-
69
мы называют ригелями, а вертикальные или близкие к
вертикальным элементы — стойками. Ригель может
иметь прямолинейное, ломаное или криволинейное очер-
тание.
Предполагается, что деформация рамы происходит
только за счет изгиба ее элементов (стержней)1. При
этом считают, что жесткие узлы рамы полностью обес-
печивают неизменяемость углов между ее элементами.
На рис. 4.1, в показано жесткое соединение двух стерж-
ней до деформации, на рис. 4.1,а — то же соединение
после деформации: стержни, соединенные в узле .4, изо-
гнулись, но угол между касательными к изогнутым осям
стержней остался равным углу между осями стержней
до деформации.
В раме с жесткими узлами изгиб одного элемента
под действием приложенной к нему нагрузки вызывает
деформацию изгиба во всех остальных ее элементах.
Это свойство указанных рам рассматривается как поло-
жительное, ибо здесь изгибающие моменты воспрпнпма-
1 Влияние продольных и поперечных сил на деформацию эле-
ментов рамы весьма незначительно, поэтому ими обычно пренебре-
гают.
70
ются не отдельными стержнями рамы, а распределяются
более или менее равномерно между всеми элементами
конструкции.
Рассмотрим две рамы, в одной из которых ригель
(балка CD) прикреплен к стойкам АС и BD шарнирно
(рис. 4.2, а), в другой он жестко связан по концам с та-
кими же стойками (рис. 4.2, б). В обоих случаях к риге-
лю приложена равномерно распределенная нагрузка.
В раме, показанной на рис. 4.2, а, ригель изгибается
так, что его концевые сечения поворачиваются свободно
п не вовлекают в изгибную деформацию стойки, поэтому
они испытывают только осевое сжатие. На рис. 4,2, б
приведена эпюра изгибающих моментов для этой рамы.
В раме, изображенной на рис. 4.2, в, при изгибе ригеля
концы его поворачиваются вместе с концами стоек, это
вызывает их изгиб. За счет возникновения изгибающих
моментов в сечениях стоек и концевых частях ригеля
уменьшаются изгибающие моменты в средней части. На
рис. 4.2, г показана эпюра изгибающих моментов для
рассмотренной рамы, полученная при условии постоян-
ной жесткости всех ее элементов.
Сравнивая эпюры на рис, 4.2,6 и 4.2, г, видим, что
при заданных размерах максимальный изгибающий мо-
мент в ригеле первой рамы вдое больше, чем в ригеле
второй рамы. Следовательно, сечение ригеля второй ра-
мы получается более экономичным. Тем не менее в каж-
дом конкретном случае надо помнить о появлении изги-
бающих моментов в стойках, которые помимо того, что
в той или иной мере заставляют увеличивать сечение
стоек, могут оказать существенное влияние на опорные
устройства. Так, при слабых грунтах основания возник-
новение изгибающих моментов в опорных сечениях стоек
требует устройства более тяжелого фундамента, поэтому
в данном случае будет лучше введение шарнирных
опор (рис. 4.2, с>). Тогда эпюра изгибающих моментов
будет иметь вид, показанный па рис. 4.2, е.
Рамные системы имеют широкое применение в желе-
зобетонных и металлических конструкциях. Реже они
применяются в деревянных конструкциях, по в связи с
широким распространением клеевых конструкций рамы
и здесь стали находить все большее применение (осо-
бенно для сельского строительства). Конструкции рам,
встречающиеся в инженерной практике, чрезвычайно
разнообразны: однопролетпые (рис. 4.3, а, д), много-
71
пролетные (рис. 4.3, б, в, г), одноярусные (одноэтаж-
ные) (рис. 4.3, а, б, в) и многоярусные (многоэтаж-
ные) (рис. 4.3,г, б). Одно- и многоэтажные рамы ис-
пользуются при возведении фабрично-заводских корпу-
сов, общественных зданий, складов. Узкие многоэтаж-
ные рамы характерны для различного рода башен, на-
пример для башен элеватора. Рамы широко применяют-
ся также в инженерных сооружениях (мосты, трубы
н т. д).
4.2. Статическая определимость
и геометрическая неизменяемость рам
Статическая определимость рамы и, следовательно,
необходимое условие ее неизменяемости проще всего
устанавливается согласно условию (2.23), по которому
Н=У.
Для рамы, показанной на рис. 4.4, а, число неизвест-
ных реакций связей Н равно трем (соответствует числу
опорных стерженьков), число независимых уравнений
статики У, которые можно составить для плоской систе-
мы, также равно трем. Следовательно, эта рама стати-
чески определима. Рамы, показанные на рис. 4,1, о, б,
72
РИС. 4 Л
также статически определимы; в раме (рис. 4.1,0) чис-
ло неизвестных хотя и равно пяти (помимо среднего и
правого опорных стерженьков имеем еще защемляющую
опору, эквивалентную трем стерженькам), но и число
независимых уравнений статики также равно пяти, ибо
к трем ее основным уравнениям добавляется еще два
дополнительных, каждое из которых выражает собой
равенство нулю изгибающего момента по силам, распо-
ложенным слева (или справа) от каждого шарнира [см.
формулу (3.1)].
Установив статическую определимость рамы, под-
тверждаем, что выполнено и необходимое условие ее
геометрической неизменяемости; однако чтобы оконча-
тельно убедиться в неизменяемости рамы, надо произве-
сти ее структурный анализ (см. гл. 2).
Отметим, что замена в статически определимой раме
жестких узлов шарнирными приводит к потере ее гео-
метрической неизменяемости (рис. 4.4,6).
4,3. Построение эпюр поперечных сил,
изгибающих моментов и продольных сил
4.3.1. Правила определения внутренних сил в сече-
ниях элементов рамы. При действии на раму внешней
нагрузки в сечениях ее элементов в общем случае воз-
никают поперечные силы Q, изгибающие моменты Л1 и
продольные силы N (в частных случаях отдельные сило-
вые факторы могут отсутствовать).
В большинстве своем рамные системы, применяемые
на практике, статически неопределимы, и, чтобы их рас-
считать, сначала строят эпюры для так называемых ос-
новных систем, которые чаще всего выбирают статиче-
ски определимыми. Поэтому прежде всего надо научить-
ся строить эпюры внутренних сил (Q, М и N) для ста-
тически определимых рам, но сначала получим общие
73
правила для определения внутренних сил в произволь-
ных сечениях элементов рамы.
Представим себе находящуюся в равновесии раму
(рис. 4.5,а), состоящую из горизонтального ВС и близ-
кого к нему EG элементов, вертикального CD и близ-
кого к нему АВ элементов и криволинейного элемента
DE. На рис. 4.5, б, в, г, д приведена рама, разделенная
сечениями 7—7 и 2—2, перпендикулярными осям эле-
ментов ВС и CD, соответственно на части левую и пра-
вую, верхнюю и нижнюю. В этих сечениях каждой из
частей рамы возникают внутренние силы Qi, Л4Ь
(рис. 4.5, б, в) и Q2, М2, Л'2 (рис. 4.5,г, д), заменяющие
действие одной части рамы на другую. Предполагается,
что все внутренние силы имеют положительные значе-
ния. Знаки и численные значения внутренних сил опре-
деляются по следующим правилам.
А. Правила знаков.
1. Поперечная сила в сечении считается положитель-
ной, если она направлена так, что стремится повернуть
отсеченную часть рамы по часовой стрелке относительно
некоторой точки k, лежащей на внутренней нормали к
сечению; в противном случае поперечная сила в сечении
считается отрицательной.
2. Изгибающий момент в сечении считается положи-
74
тельным, если он направлен так, что стремится вызвать
растяжение волокон, расположенных снизу от оси гори-
зонтального (или близкого к нему) элемента или справа
от оси вертикального (или близкого к нему) элемента;
в противном случае изгибающий момент в сечении счи-
тается отрицательным.
3. Продольная сила в сечении считается положитель-
ной, если она направлена в сторону внешней нормали к
сечению, т. е. так, что стремится вызвать растяжение
того элемента рамы, в сечении которого она приложена}
в противном случае продольная сила в сечении считает-
ся отрицательной.
Б. Правила определения численных зна-
чений Q, Л1, А/
Численные значения Q, ЛТ и Лг могут быть определе-
ны по силам, приложенным к левой или правой отсечен-
ной части рамы, или, что то же, по силам, действующим
на рассматриваемую часть рамы.
Обозначим на рис. 4.5,6, в нормаль к сечению через
х, а касательную к сечению через у и примем х и у за
оси проекции !.
Теперь, рассматривая, например, левую отсеченную
часть рамы (рис. 4.5,6), составим для нее три уравне-
ния статики:
а) уравнение, выражающее равенство нулю суммы
проекций всех сил на ось у,
V Г-Л.-Л. + А + С.-О,
рассч.
чаыь
откуда
Qi=—FiBT-FiB—/гз=— Н sin ai+Л sin аг— Fs;
б) уравнение, выражающее равенство нулю суммы
моментов всех сил относительно точки О (рис. 4.5,6) —
центра тяжести сечения 1—1
\т = /'ir /1г Т Л is flu — tx /аг -2в fгв 4" Ftfз + 4-*i —" О»
рассм.
часть
1 Встречаются и другие обозначения осей проекций. Например,
и и v вместо хну.
75
откуда
ЛЛ =—Fl, fir—f Infln+fsr^r+fanfs?—Fsf3“
= —Fjircos (Xi—Fifin sin ai+/ysr. cos a2+
‘f-Fsftn sin ag—Fsfa
в) уравнение, выражающее равенство нулю суммы
проекций всех сил на ось х,
V X~Flr-FiT±Nt -О,
рас см.
часть
откуда
Wi=—Fir+Fsr=— ft cos a,-|-f2cos a;
Исходя из равенств, определяющих Qb Mlt Nt, и
предположения о том, что в сечении действуют положи-
тельные поперечная сила, изгибающий момент и про-
дольная сила, получим следующие правила для опреде-
ления численных значений этих внутренних сил:
1. Поперечная сила в сечении численно равна алгеб-
раической сумме проекций всех внешних сил, действую-
щих на рассматриваемую часть рамы, на ось проекций
у — касательную к сечению. Если внешняя сила (или ее
составляющая, параллельная оси проекций у) направ-
лена в сторону, противоположную направлению положи-
тельной поперечной силы в сечении, то проекции этой
внешней силы (или ее составляющей) приписывается
знак «плюс», в противном случае — «минус». Оконча-
тельное направление поперечной силы в сечении уста-
навливается по знаку, полученному в результате вычис-
лений, согласно правилу A.I.
2. Изгибающий момент в сечении численно равен ал-
гебраической сумме моментов внешних сил, действую-
щих на рассматриваемую часть рамы, относительно
центра тяжести сечения (на расчетной схеме — относи-
тельно точки сечения, лежащей на оси соответствующе-
го элемента). Тому моменту внешней силы (или пары
сил), который направлен в сторону, противоположную
направлению положительного изгибающего момента в
данном сечении, или, что то же, вызывает растяжение
волокон, расположенных снизу от оси горизонтального
(или близкого к нему) элемента или справа от оси вер-
тикального (или близкого к нему) элемента, приписы-
вается знак «плюс», в противном случае — «минус».
Окончательное направление изгибающего момента в се-
76
чении устанавливается по знаку, полученному в резуль-
тате вычислений, согласно правилу А.2.
3. Продольная сила в сечении численно равна алгеб-
раической сумме проекций всех, сил, действующих на
рассматриваемую часть рамы, на ось проекций х— нор-
маль к сечению. Если внешняя сила (или ее составляю-
щая, параллельная оси проекций х) направлена в сто-
рону, противоположную направлению положительной
продольной силы в сечении, то проекции этой силы (или
ее составляющей) приписывается знак «плюс», в про-
тивном случае — «минус». Окончательное направление
продольной силы в сечении устанавливается по знаку,
полученному в результате вычислений, согласно прави-
лу А.З.
Вторые части правил Б.1, 2, 3, относящиеся к выбору
знаков для внешних силовых факторов (сил и момен-
тов), можно обобщить в одно следующее: в правую
часть каждого из равенств, определяющих Qb Л/ь Nit
внешний силовой фактор вводится со знаком «плюс»,
если он направлен в сторону, противоположную соответ-
ствующему ему внутреннему силовому фактору, в про-
тивном случае внешнему силовому фактору приписыва-
ется знак «минус».
Математическую сущность правил Б.1—Б.З .можно
выразить следующими формулами:
Си = Fky>
рассм.
часть
.н„= 2
рассч,
ЧЗС/Ь
лг«= 2
рассм,
часть
(4.1)
(4.2)
(4.3)
4.3.2. Некоторые правила построения эпюр Q, М и N
для рамных систем. При построении эпюр Q, М и N
условимся придерживаться следующих правил:
1. Ось любого стержня принимать за ось абсцисс.
2, Рассматриваемую часть рамы изображать на от-
дельном рисунке, а внутренние силы в сечении, принад-
77
лежащем этой части рамы, показывать действующими в
положительном направлении*.
3. Вычисленные ординаты внутрнних сил отклады-
вать перпендикулярно осям элементов рамы:
а) положительные ординаты эпюры поперечных сил
вверх от оси горизонтального (или близкого к нему)
элемента и влево от оси вертикального (или близкого к
нему) элемента, а отрицательные — соответственно вниз
и вправо от оси;
б) ординаты эпюры изгибающих моментов со сторо-
ны растянутых волокон, т. е. положительные ординаты,
вниз от оси горизонтального (или близкого к нему) эле-
мента и вправо от оси вертикального (или близкого к
нему) элемента, а отрицательные — соответственно
вверх и влево от оси;
в) ординаты эпюры продольных сил симметрично по
обе стороны от оси рассматриваемого элемента.
4. Эпюры штриховать прямыми линиями, перпенди-
кулярными осям элементов рамы.
5. На эпюрах Q и N ставить знаки: на участках эпюр
с положительными ординатами — «плюс», с отрицатель-
ными — «минус».
Знаки, поставленные на эпюре Q, не дают представ-
ления о характере деформации элемента, но все же
лучше их на этой эпюре показывать. Знаки, поставлен-
ные па эпюре -V, отражают характер деформации эле-
ментов рамы: «плюс» — растяжение, «минус» — сжатие.
На эпюре М необходимость в постановке знаков отпа-
дает, так как эта эпюра строится со стороны растяну-
тых волокон и поэтому ее очертание вполне определяет
расположение растянутых и сжатых зон у всех элемен-
тов рамы и тем самым отражает характер деформации
их.
4.3.3. Проверки правильности построения эпюр. Во
избежание ошибок при расчете необходимо максималь-
но использовать возможные проверки.
Первая проверка производится сразу после нахожде-
ния реакций опор (связей) для контроля правильности
1 Правило 3 применено при решении примера (см. п. 4.3.5).
В гл. 8 и 9 это правило учитывается мысленно; при этом рас-
сматриваемая часть рамы и направления Q, Л1 и N в сечении, при-
надлежащем этой части, на отдельных рисунках не изображаются.
Приобретя навык в определении Q, М, N с помощью правила 2,
в дальнейшем рекомендуем учитывать его лишь мысленно, не при-
б>" ая к отдельным рисункам.
78
их определения; при этом наиболее целесообразно со-
ставить сумму моментов всех сил, действующих на ра-
му, относительно какой-либо точки, не совпадающей ни
с одной из тех, которые использовались при определе-
нии реакций опор, и выбранной так, чтобы получилось
наиболее простое выражение Sm, по обязательно содер-
жащее моменты найденных реакций. Если в результате
получим нуль, то это даст основание полагать, что реак-
ции определены правильно;
вторая проверка производится после того, как по-
строены окончательные эпюры Q и М, и служит для
контроля правильности их построения.
При этом следует убедиться в соблюдении зависимо-
стей 4, а, б, в, г, д е, ж, между очертаниями эпюр Q и М
(см. п. 3.3).
После этого производят третью, так называемую
статическую проверку правильности построения эпюр
Q, Л1, jV для контроля условий равновесия выделяемых
из рамы узлов или отдельных произвольных се частей,
в сечениях которых действуют уже известные внутрен-
ние силы Q, ЛГ, tV. Если при этом условия равновесия,
выражаемые равенствами 1Л=0, £У=0 и Smo=0,
удовлетворяются, то считают, что все эпюры (помимо
уже проверенных эпюр Q и М) и эпюра N— продоль-
ных сил, построены правильно.
4.3.4. План расчета статически определимых рам.
Расчет статически определимых рам рекомендуется вес-
ти в такой последовательности:
1. Изобразить схему данной рамы в масштабе.
2. Исследовать статическую определимость и геомет-
рическую неизменяемость.
3. Произвести расчет рамы:
определить реакции опор; при этом исходят из пред-
положения, что вертикальные реакции направлены вер-
тикально вверх, а горизонтальные — слева направо.
Если в результате вычислений получим знак «плюс», то
это укажет на то, что направление реакций выбрано
правильно, если — «минус», то реакции направлены про-
тивоположно;
проверить правильность определения реакций опор;
вычислить значения ординат эпюр Q, Л/, N в харак-
терных сечениях рамы;
составить сводную таблицу значений ординат эпюр
Q, М и N в характерных сечениях рамы;
79
по данным, полученным в предыдущем пункте, по-
строй ib эпюры: поперечных сил (Q), изгибающих мо-
ментов (Л1), продольных сил (/V).
4. Произвести проверку Правильности построения
эпюр Q, М, М:
на основе зависимостей 4 а, б, в, г, д, е, ж между
очертаниями эпюр Q и Л4;
по условиям равновесия выделяемых узлов рамы или
отдельных ее частей.
4.3.5. Пример построения эпюр внутренних сид. Для простой
рамы ’, показанной на рис. 3.6, а, построить эпюры Q, ЛГ и N и про-
верить правильность их построения.
Решение. 1. Данная рама изображена в масштабе на рис. 4.6, о.
2. Рама статически определима и геометрически неизменяема
(см. п. 4 2).
3. Производим расчет рамы.
Определяем реакции опор. Горизонтальную реакцию Нл най-
дем из уравнения
XX = 0; Нд+F—q£,5h=O,
откуда
/Л =—F+^O.a/i = —24 4-10 0,5 • 8 = 16 кН;
Находим реакции 1'д и 1‘в из уравнений моментов соответствен-
но относительно точек В и Л:
2тя=0; VAl~ (^0,5/1)0,25/1=0,
откуда
Рд= (//лО,5й+О,50/г+О,125<72/1!) // = (16-0,5-8+
+0,5-20-6а+0,125-10-8г)/6=504/6=84 кН;
X тА=0; — (9,0,5/1) 0,75/1+ (g, I) 0,5/+F0,5/i = 0,
откуда
Vo= (—0,37592/is+0,5<7i/!+fO,5/i) // = (-0,375-10-82+
+0,5-20-65+24-0,5-8)/6 = 216/6=36 кН.
Проверяем правильность определения реакций опор.
Выбрав в качестве моментной точку О пересечения линии дей-
ствия силы F с прямой, перпендикулярной к пей и проходящей
через середину ригеля DG (рис. 4.6, с), получим:
Хгпо^=—3 Гд+ДДд+317д+да4 2=—3 - 84+4 -16+
+3-36+10-4-2=0.
Так как Х«1с-=0, то можно считать, что реакции опор определены
верно
1 Простой называется статически определимая рама, состоящая
из стержней, соединенных между собой жестко (см., например,
рис. 4.1, а и 4.6, а).
80
Вычисляем значении ординат эпюр Q, Л1 и Д' в харахюрных
сечениях рамы.
Данная рама состоит из четырех участков: AC, CD, (ID, GB
(рис. 4.6, а). Соответственно этим участкам на рис. 4.6, а показаны
произвольно выбранные сечения 1—1, 2—2, 3—3, 4—4 и указаны
x:, х2, -^31 Л'т—абсциссы этих сечений относительно начала каждого
участка (точки А, С, С и В). Далее для вычисления ординат эпюр
Q, М и N применяются все правила, наложенные в п. 4.3.1.
а) Участок А С (О^х^Ч м). Рассматриваем часть рамы, рас-
81
положенную ниже сечения I—I (рис. 4.6,6). Поперечная сила в се-
чении i—I
Qi = —Ha =—16 кН.
Реакции /Л приписан знак «минус», ибо ее направление совпа-
дает с направлением Qi. Так как на участке АС поперечная сила
пе зависит от переменной х, (Qi=—16 кН), то будем иметь
<?д = Ос' = -16 кН,
где Qa — поперечная сила в сечении Л; Q£H —поперечная сила
в сечении, бесконечно близком снизу к сечению С,
Изгибающий момент в сечении /—1
Ml=—НЛХ1 =-—16.С|.
Здесь моменту Нл х} приписан знак «минус», ибо его направление
совпадает с направлением АТ,:
при х,=0 Мл = 0;
при Xl=4 м Мс=—16-4=—64 кН-м.
Продольная сила в сечении 1—/
Д»1==_ ИЛ=—84 кН.
Реакции Ki приписан знак «минус», ибо ее направление совпа-
дает с направлением Л’(. Знак «минус» показывает, что стержень
AD на участке АС сжат. Так как на участке ЛС продольная сила
не зависит от переменной *! (,V|=—84 кН), то
-V»=A'c=—84 кН.
б) Участок CD (0sgx2^4 м). Рассматриваем часть рамы, рас-
положенную ниже сечения 2—2 (рис. 4.6, в). Поперечная сила в се-
чении 2—2
Q2=_йл—F=—16—24=—40 кН,
и значит
Qc = <?ос = -40 кН,
где С” — поперечная сила в сечении, бесконечно близком сверху
к сечению С; Que— поперечная сила в сечении D участка DC
стержня DA.
Изгибающий момен! в сечении 2—2
Л-Г2= — 16 (4+х2) — 24*а=—64—40*2;
при *2=0, Aic=— 64 кН-м,
при х2=4 м Л!дс =—64—40-4=—224 кН-м,
Продольная сила в сечении 2—2
<V2=—84 кН
и значит
,УС — Д'д,-—.... кН.
в) Участок GD (0^xs^6 м). Рассматриваем часть рамы, рас-
положенную справа от сечения 3—3 (рис. 4,6, г),
82
Поперечная сила в сечении 3—3
Q3= _Г0-|-9;х3=_36+20хэ;
здесь внешней силе </|*3 приписан злак «плюс», ибо она направле-
на противоположно поперечной силе Qs
при *3 = 0 <Эсо = —36 кН,
при х3 = 6 м <2вс=—364-20-6=84 кН.
Изгибающий момент в сечении 3—3
Мз = V’s*3—<?20,5/10,25/1 —^0.5*23=36*s—10 0,5 • 8 - 0,25 8—
—20 0,5*г3=36*5—80-10*Е3.
Здесь моменту 1'вХа=36лг приписан знак «плюс», ибо сто на-
правление противоположно А13. Эпюра изгибающих моментов на
этом участке представляет собой квадра1ную параболу, обращен-
ною выпуклостью вниз. Для построения эпюр М найдем предвари-
тельно *ц — абсциссу сечения, в котором изгибающий момент на
участке CD имеет максимальное (в алгебраическом смысле) зна-
чение; для этого приравняем пулю поперечную силу' в сечении
с абсциссой *33 и из полученного уравнения найдем *03;
0(-и3 = — 4- = 0,
X^Vn/q, =36/20= 1,8 м.
Теперь имеем:
при .т3=0 Aftb = —80 кН-м,
при х3=*яз=1,8 м А4Г =36-1,8—80—10-1,8г =—47,6 кН-м,
при -с3=6 м AID!i = 3G-6—80—10-6г=—224 кН м.
Продольная сила в сечении 3—3
Л’э=—/7/1,5ft =—10-0,5-8=—40 кН
и значит
Npd—Ndc =— 40 кН.
г) участок BG (0sg*<^4 м). Рассматриваем часть рамы, рас-
положенную ниже сечения 4—4 (рис 4.6, й).
Поперечная сила в сечении 4—4
Qt^qiXi,
при *4=0 Qe=0,
при *4=4 м Qcn— 10-4 = 40 кН.
Изгибающий момент в сечении 4—4
М 4 = q2x\ /2 = 10*г</2=5*%;
при *4 = 0 МЕ — 0,
при *4 = 2 м ЛТЛ ^.2 =5-22=20 кН-м,
при *4=4 м Afc=5-42 = 80 кН-м.
Продольная сила в сечении 4—4
Л'4=—;36 кН
и, значит,
Ат/зп=Л?ср=—36 кН.
Составляем сводную табл. 4 ! значений ординат эпюр Q, Л!
и Л' е характерных сечениях рамы.
83
Таблица 4.1
1 Сечение Ординаты зшпр
| кН | .И. кН-ч V. кН
А — 16 0 —84
с- -16 — —
С 0 —64 —84
С™ — 10 — —
DC —40 —224 —84
DG 84 —224 —40
х03 = 1,8 м 0 —47,6 —40
GO -36 —80 —40
GB 40 —80 —36
x-i—2 м 20 —20 —36
B 0 0 —36
По данным табл. 4.1, в соответствии с правилами, изложенны-
ми в и. 4.3.2, строим эпюры поперечных сил Q (рис. 4.6, е), изги-
бающих моментов Л1 (рис. 4.6, ж), продольных сил Л' (рис. 4.6, з).
4. Производим проверку правильности построения эпюр Q,
JW, /V:
на основе зависимостей между очертаниями эпюр Q и Л4 (см.
и. 3.3, зависимости 4,а—ж). Анализируя эпюры<2пЛ1 (рис. 4.6, е, ж),
устанавливаем, что их очертание удовлетворяет зависимостям
4, а—ж- следовательно, эпюры Q и М построены правильно, по
условиям равновесия узлов D и G рамы.
Узел D. Мысленно выделим из рамы этот узел двумя сече-
ниями. Одно из них проведем в ригеле на бесконечно близком рас-
стоянии справа от рассматриваемого узла, другое — в стоике на
бесконечно близком расстоянии снизу от него (рис. 4.6, и)
Из эпюр Q, М, N видно, что в первом из этих сечений попереч-
ная сила Qdg имеет положительное значение, изгибающий момент
MDG стремится вызвать растяжение верхних волокон, продольная
сила Л'дс имеет отрицательное значение; в другом сечении попереч-
ная сила Qdc имеет отрицательное значение, изгибающий момент
.'•Тос стремится вызвать растяжение левых волокон, продольная
сила iVjjr имеет отрицательное значение.
Эти внутренние силы, заменяющие действие отброшенных час-
тей рамы на узел D, приложены в соответствующих ему сечениях
и направлены согласно правилам Л.1, 2, 3 (см. п. 4.3.1).
Проверим, удовлетворяются ли условия равновесия узла D:
XX —О, УУ=О, XmD—0. При этом заметим, что так как сечения,
которыми выделен узел D, проведены на весьма близком расстоянии
от точки D (на рис. 4.6, и и это показано утрированно), то момен-
ты поперечных сил и QDC относительно точки D фактически
равны пулю и поэтому в условие Хгпп — 0 не войдут. Итак,
ЕХ = 0; —.Vdc+Qdc=—40+40=0;
2У=0; Фос+Агдс=—84+84 = 0;
imD=0; Мгс—Л(дс=224—224=0.
84
Таким образом, все условия равновесия узла D удовлетворяют-
ся, следовательно, узел D находится в равновесии и, значит, по-
перечные силы, изгибающие моменты и про долитые силы в сече-
ниях этого узла определены правильно.
Узел G. По аналогии с доказательством равновесия узла D
доказывается и равновесие узла G (рис, 4.6, к). При этом будем
иметь:
2Х=0;
ЕУ=0;
£то=0;
Л' gd^Qcb — 40—40=0;
—Qoc+^a=—364-36=0;
—‘Л4од4_*^ов=== —804-80 =0.
Итак, соблюдение зависимостей между очертаниями эпюр Q
и М и условий равновесия выделенных узлов свидетельствует, что
эпюры Q, Л4 и jv построены правильно.
Обратим внимание на то, что из S/nc=0 и Smo=0 следует:
Л1ос=Л4ос,
Л4с£>=Л4оз-
Из этих равенств вытекает следующее утверждение: если в узле
сходятся два стержня и в нем не приложен внешний момент, то
изгибающие моменты в сечениях этих стержней, бесконечно близ-
ких к узлу, равны. Следовательно, вблизи узла эпюры изгибающих
моментов для одного и другого стержней расположены по одну
сторону контура рамы. Если в узле приложен внешний момент, то
равенства типа последних двух теряют силу (обращаются в нера-
венства). В этом случае в условие равновесия узла необходимо
включить и приложенный в узле внешний момент.
Глава 5. Трехшарнирные арки
5.1. Общие сведения
Трехшарнирная арка относится к трехшарнирпым си-
стемам, состоящим из двух дисков, соединенных меж-
ду собой одним шарниром и двумя шарнирами с основа-
нием (шарниры С, А и В на рис. 5.1). Эти шарниры не
должны лежать на одной прямой. Если рассматривать
основание как третий диск, то трехшарнирная система
может быть представлена как соединение трех дисков с
помощью трех шарниров, не лежащих на одной прямой.
Такая система геометрически неизменяема.
Если диски I и П представляют собой стержни с кри-
волинейной осью, то система носит название трехшар-
нирной арки (рис. 5.2, а, б, е). Если дисками являются
прямые или ломаные стержни, то будем иметь трехшар-
мирную раму (рис. 5.2, в, г). Наконец, если дисками I и
85
11 являются фермы, то такая система называется трех-
шарнирной арочной фермой (рис. 5.2, d).
Арка отличается от балки характером воздействия
на опоры. Балка при вертикальной нагрузке передает
на опоры вертикальные силы, вследствие чего вызывает
со стороны опор только вертикальные реакции. Арка же
и при вертикальной нагрузке кроме вертикального дав-
ления на опоры оказывает на них еще и горизонтальное,
стремясь раздвинуть (распереть) опоры в противопо-
ложные стороны; поэтому обе опоры трехшарнирной ар-
86
«ис. ел
ки устраиваются шарнирно неподвижными. Реакции
этих опор — силы сопротивления распирающему дейст-
вию на них нагруженной арки, в отличие от вертикаль-
ных реакций опор балки, наклонны и могут быть разло-
жены на вертикальные и горизонтальные составляющие.
Последние и воспринимают горизонтальное давление
арки на опоры и называются распорами. Наличие рас-
поров является характерной особенностью распорных
систем (см. п. 1.4), и в частности трехшарнирных арок.
Опоры арок обычно располагают на одном уровне.
Если же опоры расположены на разной высоте, что в
практике встречается редко, то арка называется ползу-
чей (рис. 5.2,6). В дальнейшем рассмотрим трехшар-
нирные арки только с опорами, расположенными на од-
ном уровне и с вертикально действующей нагрузкой.
При значительном подъеме средней части получают
так называемую стрельчатую арку (рис. 5.2, е).
Иногда трехшарннрные арки конструируют с затяж-
кой, т. е, с дополнительным стержнем, стягивающим по-
луарки. Затяжка может быть расположена на уровне
опор (рис. 5.3,«) или выше их (рис. 5.3, б); в последнем
случае арка называется аркой с повышенной затяжкой.
Если требуется создать необходимые габариты под ар-
ками или устроить подвесные потолки, то затяжки де-
лают ломаного очертания — повышенными (рис. 5.3, в)
или понижетпгыми (рис. 5.3, г).
В арке с затяжкой последняя воспринимает распи-
рающее действие нагрузки, поэтому одна из опор арки
выполняется шарнирно-подвижной, другая — шарнирно-
неподвижной. Опорные реакции арки с затяжкой при
87
вертикальной нагрузке направлены вертикально, как у
балки, это дает основание для такой арки устраивать
менее массивные опоры. Ими могут служить колонны,
так как распор арки погашается затяжкой.
В арке имеется несколько характерных наименова-
ний ее частей, а именно (рис. 5.2, сг, б, е)1:
1. Ось арки — кривая линия, соединяющая центры
тяжести поперечных сечений; она может быть кругового,
коробового, параболического или эллиптического очер-
тания. Арки, очерченные по половине окружности, назы-
ваются полуциркульными.
2. Пяты арки — опорные плоскости Пл и Пв.
3. Замок, или ключ арки — в трехшарнирной арке
точка ее оси, совпадающая с центром промежуточного
шарнира (точка С на рис. 5.2, а, б, а).
4. Стрела подъема арки f — расстояние по вертикали
от замка до линии, соединяющей центры пятовых шар-
ниров.
5. Вершина арки — точка оси, наиболее удаленная от
линии, соединяющей центры пятовых шарниров (точка
С на рис. 5.2, б).
6. Высота арки h— расстояние по вертикали от вер-
шины арки до линии, соединяющей центры пятовых
шарниров (рис. 5,2,6). Часто стрела подъема арки f
совпадает с ее высотой (рис. 5.2, а, е). В бесшарпирннх
арках стреле подъема f и высоте арки h придается оди-
наковый смысл.
7. Пролет арки / — горизонтальное расстояние между
центрами пятовых шарниров.
8. Относительная стрела подъема арки ffl— отноше-
ние стрелы подъема арки к ее пролету. Это отношение
колеблется в очень широких пределах: от f/l=l до f/l=^
—’/ю и даже меньше.
9. Внешнее ребро, или внешний пояс арки — выпук-
лая сторона ее; внутреннее ребро, или внутренний пояс
арки — вогнутая сторона ее.
Арка называется сплошной, сели ее тело между реб-
рами сплошное, и — арочной фермой, если соединение ее
ребер сделано стержнями.
По роду материалов арки бывают металлические, де-
ревянные, каменные, бетонные и железобетонные.
! Приводимые ниже наименования частей арки относятся так-
же к трехшарнирной раме (рис. 5.2, в, г) и трехшарнирной арочной
ферме (рис. 5.2, д).
88
Строительный материал в арках используется более эко-
пом но, чем в балках. Основная задача при устройстве
арок состоит в том, чтобы заставить материал работать
преимущественно на сжатие, а не на изгиб. Поэтому
арочные конструкции, по сравнению с балочными, всег-
да отличаются большей легкостью, даже при перекры-
тиях больших пролетов.
Область применения трехшарнирных арок, позволяю-
щих возводить их как сборные конструкции, весьма об-
ширна при строительстве большепролетных обществен-
ных и промышленных зданий: ангаров, крытых стадио-
нов, выставочных павильонов, некоторых цехов авиа-
ционных заводов, складов и т. д.
5.2. Теоретические основы расчета арок
аналитическим способом 1
5.2.1. Трехшарнирные арки без затяжки.
А. Определение реакций опор. Нагрузки,
приложенные к арке, рис. 5.4, а, вызывают реакции опор
Ra и Rв, каждую из которых всегда можно представить
вертикальной (или Ув) и горизонтальной Нл (или
Нв) составляющими. В дальнейшем вертикальные со-
ставляющие реакций опор арки VA и VB будем называть
вертикальными реакциями, а горизонтальные состав-
ляющие, как уже условлено выше,— распорами.
Для определения вертикальных реакций арки VA и
Up воспользуемся уравнениями равновесия статики в
виде равенства пулю суммы моментов всех сил относи-
тельно центров соответственно правого В и левого А пя-
товых шарниров. Применительно к арке (рис. 5.4,а),
принимая момент силы, вызывающий вращение по часо-
вой стрелке, положительным, получим:
1н!в=0: VAl—F-ibi—F'Jbz—fsb3=0,
откуда
Va=
=0; —
откуда 1/е=(£1в1+Ла2Ч-р5«з)//.
В общем случае действия на арку сил Fz, ..Fv,
..., Fn реакции опор VA и Кв определяются по форму-
1 Существует и графический способ расчета; подробно он опи-
сан в работах [3J, [8],
89
Если вместо арки представить простую балку с про-
летом и вертикальной нагрузкой такими же, как и у
данной арки (рис. 5.4,6), то для определения реакций
и 1/ов этой балки, которую назовем балкой, сопутст-
вующей расчету, а в дальнейшем — сопутствующей бал-
кой, очевидно, также будут верны формулы (5.1) и
(5.2). Итак,
VB=VciS.
Назовем и балочными реакциями.
Чтобы найти горизонтальные реакции — распоры,
сначала используем уравнение равновесия, выражаю-
90
щее равенство нулю суммы проекции всех сил на гори-
зонтальную ось:
ХА'=0; На—Hs—Q, откуда На=Нб—Н.
Как видно, горизонтальные реакции опор от верти-
кальной нагрузки — распоры, всегда равны между со-
бой. Для определения их величины вспомним, что изги-
бающий момент в сечении, проведенном через шарнир,
равен нулю (п. 3.2), или, что то же, равна нулю сумма
моментов всех сил, взятых слева или справа от среднего
шарнира относительно его центра. Взяв силы, располо-
женные слева от промежуточного шарнира, получим
уравнение
X - 0; 1/ЛГ/2 — л (Z/2 — (//2 — аг) —
но Va = V°a и, следовательно,
Н = [V*AH2-FX (l/2-a,)-F3 (//2- c2)]f.
Числитель этой формулы представляет собой числен-
ное значение изгибающего момента в сечении С сопут-
ствующей балки, соответствующем центру промежуточ-
ного шарнира С арки.
Назовем этот изгибающий момент балочным и обо-
значим его через ЛРС, тогда
ЛРС= уод/2-f, (l/2-а,)-F2(ll2-a2).
Подставив обозначение ЛГф в числитель предыдущей
формулы, получим:
H=.\Pc/f. (5.3)
Из формулы (5.3) следует, что распор прямо пропор-
ционален балочному моменту и обратно пропорционален
величине стрелы арки у промежуточного шарнира. Най-
дя вертикальные реакции 1Ф1 п VB арки и распор И,
сможем определить и полные реакции Ra и Rb шарнир-
но неподвижных опор Л и В. Эти реакции приложены в
центрах пятовых шарниров А и В, их модули определя-
ются по формулам:
в А - У П + №; /?я = У V2H 4- № ,
а направления
₽d=arctg (HIVa)-, Po=arctg
где Рд и рв — острые углы, образованные соответственно направле-
ниями Ra и Rs с вертикалью.
91
Б. Определение внутренних сил — по-
перечной силы, изгибающего момента и
продольной силы в произвольном' сече-
нии трехшарнирной арки. Пусть имеем арку
92
(рис. 5.5,а); сечением k—k, проведенным нормально к
ее оси, арка делится на левую и правую части. Мыслен-
но, отбросив правую часть арки, рассмотрим равновесие
левой ее части (рис. 5.6), заменив действие на лее от-
брошенной правой части внутренними силами Q, М и IV,
приложенными в сечении k—k и действующими в поло-
жительном направлении (см. и. 4.3.1, правила А.1—А.З)1.
Обозначим на рис. 5.6 нормаль к сечению k—k через
п, она же касательная к оси арки в точке, соответствую-
щей центру тяжести сечения k—k, а прямую, ей перпен-
дикулярную,— t и примем п и t за оси проекций. Обо-
значим острый угол а^=фй, образованный нормалью п
с горизонталью (прЯхМой, параллельной оси х). Выведем
формулы для определения численных значений Q, М и
N в произвольных сечениях арки.
1. Поперечная сила в сечении [правило Б.1 и форму-
ла (4.1)]. Из рис. 5.6 устанавливаем, что составляющая
силы Ул, параллельная оси t — сила Vai, направлена в
сторону, противоположную положительной поперечной
силе Q в сечении, поэтому проекции силы УА на ось t
припишем знак «плюс». Составляющие сил F\, F2, па-
раллельные оси t (на рис. 5.6 они не показаны), и силы
НА — сила И At, параллельная этой же оси, направлены
в сторону положительной поперечной силы Q, поэтому
проекциям сил Flt F2, НА на ось t припишем знак «ми-
нус». Итак, получим:
Qk=YF,t~ Ул cos ак—Ft cos а*—f2cos щ—Я sin
= F,—fj) cos щ—H sin at.
Выражение, стоящее в скобках, в котором У°а = Уд,
дает поперечную силу в сечении k—k сопутствующей
балки, соответствующем сечению /г—k данной арки (см.
рис. 5.5, а). Назвав ее балочной поперечной силой и
обозначив через Q°&, получим:
cos щ—W sin at-
Эта формула справедлива для определения Qk в сече-
ниях арки, расположенных слева от ее вершины.
‘ Эти правила и приведенные ниже в п. 4.3.1 правила Б.1—Б.З,
служащие для определения знаков и численных значений внутрен-
них сил Q, М, N в сечениях рамы, применимы и для арки. Пред-
лагаем самостоятельно сформулировать указанные правила приме-
нительно к арке, пользуясь при этом рис. 5.6.
93
Таким же образом предлагаем доказать, что для се-
чений арки, находящихся справа от ее вершины, верна
с л е ду юта я фор мул а;
Q^Qak cos aft+Zfsin as.
В этих двух формулах балочная поперечная сила
Q% вычисляется по обычным правилам сопротивления
материалов (см. п. 3.3), распор Н — по формуле (5.3),
а острый угол а* принимается положительным незави-
симо от направления отсчета его от горизонтали до нор-
мали к сечению.
Однако вычисление Qft но двум приведенным форму-
лам неудобно, ибо при этом постоянно надо помнить о
пределах их применимости. Чтобы этого избежать, вве-
дем в них вместо угла as острый угол <р*, но будем рас-
сматривать его, в отличие от угла а к, как величину ал-
гебраическую и считать положительным при отсчете от
горизонтали до нормали к сечению против часовой
стрелки и отрицательным — по часовой стрелке.
Теперь рассмотрим три случая;
а) сечения арки расположены слева от ее вершины,
тогда (р«>0 и 0°<(р^^90°. Подставив в первую форму-
лу, определяющую Q* вместо aft угол тр*, получим
Qs = 0% cos <ps—Н sin <pft;
б) сечение проходит через вершину арки, тогда <р* =
=0 и Q.t = Q%,
в) сечения арки расположены справа от ее вершины,
тогда фл<0 и —90°^фл<0".
Подставив во вторую формулу, определяющую Qk,
вместо as угол (—<ps), получим:
Qs = Q°scos (—<₽»)-}-/7 sin (—= Q°t costps—H sin <ps.
Сравнив формулы, полученные в случаях а) и б),
убеждаемся в их полной идентичности. Следовательно,
следующая формула является общей для определения
поперечной силы в произвольном сечении арки:
Qi- = Q(’n cos фл—77 sin ф*. (5.4)
Еще раз подчеркиваем, что здесь трь является вели-
чиной алгебраической, a Q% и Н вычисляются так, как
это указано ранее.
94
2. Изгибающий момент в сечении [правило Б.2 * и
формула (4.2)]. Воспользовавшись указанными прави-
лом н формулой, читателю предлагается самостоятельно
доказать справедливость следующего равенства:
М* = У°лхк—г, (х4—в,) — Fi (ха—йг) — Ну*-
Заметим, что три первых члена этого равенства да-
ют величину M°h — балочный момент в сечении k—k
сопутствующей балки (рис. 5.5,6), соответствующем се-
чению k—k данной арки (рис. 5.5, а).
В результате вместо предыдущего равенства будем
иметь следующую формулу для определения изгибаю-
щего момента в произвольном сечении арки:
Мк=М\-Нук. (Б.5)
Очевидно, что изгибающий момент в сечении арки
всегда меньше, чем в балке того же пролета и с той же
нагрузкой; это обстоятельство позволяет перекрывать
арками пролеты значительно больше, чем балками.
3. Продольная (нормальная) сила в сечении [прави-
ло Б.З и формула (4.3)]. Для сечений арки, располо-
женных слева от ее вершины, будем иметь:
Л:й=Х/’/п=—sin ut-J-fi sin вь+Ге sin щ—II cos щ =
= — (У°л—F,—F2) sin Oft—H cos as,
или
A\=—sin at—H cos at.
Таким же образом предлагаем доказать, что для се-
чений арки, находящихся справа от ее вершины, верна
следующая формула:
W — Q-'t sin ак—Н cos a*.
Согласно правилу Б.З, считаем продольную силу
положительной, если она направлена в сторону внеш-
ней нормали к сечению и стремится вызвать растяже-
ние рассматриваемой части арки. Однако в большинстве
фундаментальных курсов по строительной механике (см.,
например, [3]), вводится противоположное правило, по
которому продольная сила в сечении арки считается по-
ложительной, если она направлена в сторону внутрен-
* Вторая часть этого правила применительно к арке может
быть выражена иначе: тот момент внешней силы, который направ-
лен так, что уменьшает кривизну оси арки, т. е. выпрямляет ее,
берется со знаком «плюс», в противном случае — «минус»,
95
ней нормали к сечению и, значит, стремится вызвать
сжатие данной части арки. В пашем курсе статики со-
оружений предпочтение отдано последнему правилу, как
более распространенному в учебной литературе.
Итак, принимая направление положительной про-
дольной силы в сторону внутренней нормали к сечению
(на рис. 5.6 это направление Лг не показано), получим
следующие две формулы, определяющие численное зна-
чение продольной силы соответственно в сечениях, рас-
положенных слева и справа от вершины арки:
Л> = Q3* sin й,..+/7 cos afc;
Л'*=—sin а«+Н cos a*.
Заменив в этих формулах аь соответственно на углы
Ф* и (—(рй), получим следующую формулу, являющуюся
общей для определения продольной силы в произволь-
ном сечении арки:
Vs=Qi]t, sin <р«+Я cos ф*. (5.6)
Пользуясь формулами (5.4), (5.5) и (5.6), можно
определить значения поперечной силы, изгибающего
момента и продольной силы для ряда сечений арки и
построить их эпюры (см. и. 5.5).
5.2.2. Трехшарнирная арка с затяжкой (см. п. 5.1)
является балочной системой: при вертикальной нагрузке
возникают только вертикальные опорные реакции УА и
VB, которые определяются так же, как и в простой бал-
ке. Для определения силы в затяжке S проведем сече-
ние через промежуточный шарнир и затяжку (рис. 5.7).
Из условия равновесия левой (или правой) части най-
дем;
£m£eD=0; VaU2 — — a)— S/= 0.
96
В этом уравнении первые два члена представляют
собой балочный момент в сечении С.
VAll2—F(l/2—a)
и значит
S=MBdf, (5.7)
т. е. величина силы в затяжке определяется так же, как
и распор в трехшарнирной арке без затяжки [см. фор-
мулу (5.3)].
Найдя силу в затяжке, можно определить попереч-
ную силу в сечениях арки по тем же формулам, что и
для трехшарннрной арки без затяжки, заменив в них
распор Н на силу S в затяжке, и затем построить эпю-
ры Q, М, N (см. пример 5.3).
5.3. Многоугольник и кривая давлений
5.3.1. Эксцентриситет продольной силы в сечении
арки. Центр давления. В п. 5.2 было показано, что в
произвольном, нормальном к оси арки, сечении дейст-
вуют поперечная сила Q, изгибающий момент М и про-
дольная сила Л'. Эти три внутренних силовых фактора
образуют в сечении арки плоскую систему сил, которая,
как это известно из теоретической механики, может
быть заменена одной равнодействующей силой [1]. На
рис. 5.8 изображена часть арки, находящаяся в равно-
весии под действием внешних сил НЛ, 1/д, F н равно-
действующей Ц внутренних сил, приложенной в точке s.
Силу R представим двумя составляющими; продольной
силой Лг, нормальной к плоскости сечения, и силой Q,
касательной к этой плоскости.
Из курса «Сопротивление материалов» известно, что
случай нагружения бруса внешними силами, ври кото-
ром в его поперечном сечении возникает продольная
сила, направленная параллельно оси бруса в сторону се-
чения, называется внецентренным сжатием. Итак, за
ключасм, что арка в основном работает на внецентрен
ное сжатие1; при этом максимальные и минимальные 1 * * 4
1 Мы говорим «в основном», ибо помимо продольной силы
в сечении действует и поперечная сила Q, и соответствующие ей
касательные напряжения, которые приходится учитывать при рас-
чете сплошных металлических или железобетонных арок, способных
воспринимать эти напряжения.
4 Шишиаи Б. А.
97
РИС.5.-Я'
(опасные) нормальные напряжения, возникающие в точ-
ках поперечного сечения, определяются по формуле
(5.8)
mln
где .¥ и Л1 соответственно продольная сила и изгибающий момент
в сечении; А — площадь поперечного сечения; W7 — момент сопро-
тивления сечения.
Точка s приложения равнодействующей R внутрен-
них силовых факторов Q, М, N в данном сечении назы-
вается центром давления. Расстояние Os = e, измеряе-
мое по нормали к оси арки от центра тяжести сечения
О до центра давления, называется эксцентриситетом
продольной силы N. Эксцентриситет е определяется из
уравнения
M—Ne,
откуда
е=Л1/ЛГ, (5.9)
где е — величина алгебраическая, зависящая от знака изгибающе-
го момента.
Если Af>0, то е получим со знаком «плюс», так как
сжатию соответствует продольная сила Лг2>0; при этом
она отклонится от центра тяжести сечения О к наруж-
ному ребру арки и, следовательно, эксцентриситет е в
этом случае надо отложить от точки О по нормали к
оси арки до точки s вверх. Если Л1<0— вниз.
5.3.2. Нестроение многоугольника давления. Кривая
98
давления. Для арки, показанной на рис. 5.9, предвари-
тельно проведем ряд сечений, нормальных к ее оси, и в
каждом из этих сечений по формулам (5.5) и (5.6) вы-
числим изгибающий .момент М и продольную силу N.
Теперь, зная в каждом сечении величины М и N, по
формуле (5.9) найдем эксцентриситеты продольных сил
в намеченных сечениях арки и отложим их в плоскостях
сечений по нормалям к осн арки вверх или вниз от нее
так, как указано в п. 5.3.1.
Соединив точки, соответствующие концам эксцентри-
ситетов (центры давлений), отрезками прямых (луча-
ми) I, II, III, IV, V, VI, получим многоугольник 1—
II—III—IV— V—VI, который назовем многоугольником
давления.
Итак, многоугольником давления называется лома-
ная линия, стороны (лучи) которой соединяют между
собой центры давлений в данных сечениях арки, нор-
мальных к ее оси.
Можно доказать что направление каждого луча
многоугольника давления совпадает с линией действия
равнодействующей сил, действующих слева (справа) от
центра давления в данном сечении. Точка перелома лу-
чей многоугольника давления получается в том сечепии
арки, нормальном к ее оси, в котором центр тяжести
этого сечения лежит на одной вертикали с линией дей-
ствия сосредоточенной силы. В правильно построенном
многоугольнике давления его лучи должны проходить
через центры пятовых и промежуточного шарниров, ибо
в соответствующих им сечениях изгибающий момент ра-
вен нулю и, следовательно, равны нулю эксцентриситеты
продольных сил. Если к арке приложена равномерно
распределенная нагрузка, то многоугольник давления
обращается в кривую давления.
На практике нс принято делать различие между мно-
гоугольником и кривой давлений, поэтому многоуголь-
ник давления, построенный от приложенных к арке со-
средоточенных сил, часто тоже называют кривой дав-
ления.
Многоугольник (кривая) давления дает наглядное
представление о работе арки: если центры давлений
расположены выше ее оси, то арка изгибается выпук-
1 Полное представление о многоугольнике давления и доказа-
тельстве, связанном с его построением, дает графический способ
расчета трехшарнирпых арок [3], [7], [8].
4*
99
лостыо вниз, т. е. происходит распрямление ее оси, в
противном случае арка изгибается выпуклостью вверх
и ее ось еще больше искривляется. Из рис. 5.9 следует,
что арка по длине всего пролета изгибается выпук-
лостью вниз. Чем ближе многоугольник давления рас-
положен к оси арки, тем меньше изгибающие моменты
в сечениях арки и тем равномернее распределяются в
нем нормальные напряжения.
Если арка находится под действием вертикальной
нагрузки, то при помощи многоугольника давления мож-
но найти изгибающий момент в произвольном сечении
арки. Не останавливаясь на доказательстве (см. [3]),
приведем следующее правило (рис. 5.10): изгибающий
момент в произвольном сечении арки, находящейся под
действием вертикальной нагрузки, равен произведению
распора Н на расстояние, измеряемое вертикальным от-
резком Os'—z между центром сечения О и точкой s' пе-
ресечения луча многоугольника давления с вертикаль-
ной прямой ии, проведенной через центр тяжести данно-
го сечения. Это правило можно выразить следующей
формулой (см. рис. 5.10):
(5.10)
5.4. Выбор очертания рациональной оси арки
Рациональной осью арки называется ось такого
очертания, при котором от действия на арку неподвиж-
ной нагрузки размеры поперечного сечения ее будут
наименьшими.
100
Уменьшение поперечных размеров сечения связано
со снижением опасных нормальных напряжений, опреде-
ляемых по формуле (5.8):
„шах (Дг/Д) + (ЛГ1Г),
mln
но, из формулы (5.9), Л'1==Л,ге к формула (5.8) примет
вид:
%вх = (Лг/Д) + (Ne:W),
Отсюда следует, что для заданного сечения арки
наименьшее опасное нормальное напряжение получим
при эксцентриситете е, равном нулю, или, что то же, при
равенстве нулю изгибающего момента в сечении. По-
следнее возможно лишь тогда, когда равнодействующая
внутренних сил проходит через центр тяжести сечения,
т. е. точку, лежащую на оси арки.
Этому условию должны удовлетворить все сечения
арки с рациональной осью, другими словами, центры
давлений в различных сечениях арки с рациональной
осью должны располагаться на ее оси. или, что то же,
изгибающие моменты во всех сечениях арки с рацио-
нальной осью равны нулю. Соединив центры давлений
в различных сечениях арки отрезками прямых (лучами),
получим многоугольник давления, вписанный в ось арки.
В пределе, при стремлении числа сечений к беско-
нечности, многоугольник давления обратится в кривую
давления, совпадающую с осью арки. Отсюда вытекает
следующее утверждение: если ось арки является рацио-
нальной, то с пей совпадает кривая давления, построен-
ная от неподвижной нагрузки. В этом случае арка бу-
дет работать на центральное сжатие. При этом в сече-
ниях арки возникают одинаковые сжимающие напряже-
ния
c=N„IA,
где Nf; — продольная сила в данном сечении; определяемая по фор-
муле (5.6); А — площадь поперечного сечения.
Теперь выясним, какому уравнению должна удовлет-
ворять рациональная ось арки. Ограничимся случаем
действия на арку вертикальной нагрузки, тогДа для вы-
числения изгибающего момента в сечении применима
формула (5.5):
101
или в обшем виде
Мх=№х_цу,
где х и у — текущие координаты точек оси арки; М*— изгибающий
момент в сечении арки с абсциссой х\ Л1% —балочный момент
в сечении сопутствующей балки с абсциссой х; Н — распор.
Так как в сечениях арки с рациональной осью изги-
бающие моменты равны нулю, то
0=Л1°х—Ну,
и
у=М^/Н. (5.11)
Равенство (5.11) выражает собой уравнение рацио-
нальной оси арки. Следовательно, при вертикальной на-
грузке ось арки будет рациональной, если ее очертание
меняется по закону изменения балочного момента.
Пусть требуется установить рациональное очертание
оси трехшарнирной арки от неподвижной, действующей
вертикально, равномерно распределенной по всему про-
лету нагрузки, если заданы пролет арки /, стрела подъе-
ма f и абсцисса х=Ц2 промежуточного шарнира С
(рис. 5.11). Для решения этого примера воспользуемся
формулой (5.11).
В данном случае имеем:
Л1°х= (<?f/2)x—(<?х)х/2= (<?х/2) {I—х).
По формуле (5.3) находим распор
н ~ = -ф-(/ “ 4-) Т =
Следовательно,
у=[(<?х/2) (/—х)8ЦМ2
или
4/
У = —.г), (5.12)
т. е. рациональной в данном случае является арка с
осью, очерченной по квадратной параболе. Итак, при
действии на трехшарнирную арку с осью, очерченной по
закону квадратной параболы, неподвижной, вертикально
направленной, равномерно распределенной по всему
пролету нагрузки, изгибающие моменты и поперечные
силы во всех сечениях арки равны нулю. Такая арка
работает только па центральное сжатие от продольных
102
КРИВАЯ ДАВЛЕНИЯ ПРИ
ЛЕВОМ ПОЛОЖЕНИИ
ВРЕМЕННОЙ НАГРУЗКИ
ПРОЕКТИРУЕМАЯ
ОСЬ АРКИ
КРИВАЯ ДАВЛЕНИЯ ПРИ В
•ПРАВОМ ПОЛОЖЕНИИ
ВРЕМЕННОЙ НАГРУЗКИ
ГИС. S.I3'
сил ;V и называется безмоментиой. Однако большей
частью арки одновременно подвергаются влиянию и
неподвижной (постоянно действующей), и подвижной
(временной) нагрузок. Временная нагрузка все время
меняет свое расположение, в связи с чем меняется и
положение кривой давления, тогда как ось арки остает-
ся неизменной. В таком случае достигнуть совпадения
кривой давления с осью арки за все время ее работы,
очевидно, невозможно.
В соответствии с этим очертание оси арки назначают
таким, чтобы отклонения от нее кривых давлений, по-
строенных от постоянной нагрузки и различных положе-
ний временной, были бы, по возможности, наименьшими.
Обычно бывает достаточно рассмотреть два случая рас-
положения временной нагрузки: сначала, например, на
103
левой половине арки, затем—на правой, и соответст-
вующие им кривые давлений (рис. 5.12, а, б).
В диапазоне расхождения кривых давлений намеча-
ют точки оси арки, равноотстоящие от крайних кривых
давлений, т. е. посередине между ними (рис. 5.13).
Плавная кривая, соединяющая такие точки, и будет ис-
комым очертанием оси арки. В арках с пролетом более
20 м преобладающее влияние на форму кривой давле-
ния имеет неподвижная постоянная нагрузка от собст-
венной силы тяжести арки (тело арки, надарочное
строение). В этом случае принимают ось арки совпа-
дающей с кривой давления, построенной от собственной
силы тяжести арки.
5.5. Расчет трехшарнирных арок
аналитическим способом
5.5.1. План расчета. Расчет трехшарнирпой арки ре-
комендуется вести в такой последовательности:
1. По заданному уравнению, выражающему геомет-
рическое очертание оси арки, вычислить достаточное
число ординат ее точек (но не менее пяти, включая зам-
ковый шарнир С), начиная от начала координат, а также
соответствующие этим ординатам острые углы между
нормалями к сечениям арки и горизонталью и триго-
нометрические функции этих углов sin <pfe, cosqjfc.
2. Вычертить в масштабе схему данной трехшарнир-
ной арки, представив ее осью арки в виде плавной кри-
вой, проведенной через точки, соответствующие верши-
нам вычисленных ординат.
3. Под схемой арки вычертить схему сопутствующей
балки.
4. Выполнить дальнейший расчет:
определить реакции опор;
проверить правильность определения реакций опор;
построить эпюры поперечных сил, изгибающих мо-
ментов и продольных сил.
5. Проверить правильность построения эпюр Q, М, N,
т. е. убедиться в соблюдении следующих зависимостей
между их очертаниями;
а) в том сечении арки, где приложена сосредоточен-
ная сила Fk, а в трехшарнирной арке с затяжкой и в
сечениях, соответствующих местам присоединения к ней
затяжки, на эпюре Q возникают скачки hq, Каждый из
104
этих скачков по величине определяется суммой или раз-
ностью абсолютных значений ординат эпюры Q, распо-
ложенных бесконечно близко к рассматриваемому сече-
нию слева и справа от него; при этом должны выпол-
няться следующие равенства:
в месте приложения сосредоточенной силы
/ic.=F*cos <p*;
в месте присоединения к арке затяжки
/io=S|sin<ps|,
На эпюре N в тех же сечениях (за исключением со-
ответствующего промежуточному шарниру) возникают
скачки An, каждый из которых по величине определяет-
ся арифметической разностью ординат эпюры N, распо-
ложенных бесконечно близко к рассматриваемому сече-
нию слева и справа от него; при этом должны выпол-
няться следующие равенства:
в месте приложения сосредоточенной силы
ft«=Ffclsin фб|;
в месте присоединения к арке затяжки
/ifj—S cos фл.
На эпюре М в указанных сечениях возникают пере-
ломы:
б) в сечениях, где поперечная сила равна нулю, из-
гибающие моменты достигают экстремальных значе-
ний— максимума или минимума;
в) в сечениях, соответствующих центрам пятовых и
промежуточного шарниров, изгибающие моменты долж-
ны быть равны нулю;
г) если при перемещении вдоль базовой линии эпюры
слева направо ординаты эпюры Q имеют положитель-
ные значения, то ординаты эпюры М возрастают, и на-
оборот: если ординаты эпюры Q имеют отрицательные
значения, то ординаты эпюры М убывают.
5-5.2. Примеры расчета.
Пример 5.1. Построить эпюры поперечных сил Q, изгибающих
моментов ЛТ и продольных сил N для трехшарнирной арки
(рис. 5.14, а). Ось арки — квадратная парабола, выраженная урав-
нением (5.12), отнесенным к прямоугольной системе координат с на-
чалом в центре шарнира Л левой опоры. Значения Q, М, N вычис-
лить в девяти сечениях арки, взятых через два метра по длине
пролета.
Ре шение. 1. Для вычисления ординат у и острых углов ф вос-
пользуемся заданным уравнением (5.12); получим:
105
= го нН/м
а) дня вычисления ординат
4/ 1-1
у - ~ х(!~л) х (16 — х) = 0,032дх (16 — х).
Например, в сечении 1 при Xj=2 м ордината
у, = 0,0625-2(16—2) = 1,75 и;
106
б) для вычисления углов ф преобразуем уравнение (5.12), взяв
производную от обеих его частей:
4/ 8/ / I \
у' ^dyjdx^ = х).
Из математики известно, что если y=f(x), то </'=tg«p; значит
при заданном уравнении (5.12) оси арки
tg<p=(8f/l2)(//2-x). (5.13)
Например, в сечении 1 при ^=2 м
tg ф, = (8-4/16г) (1/2—х) = 0,125(8—2) =0,750;
(p1=arctg 0,75=36,87°.
Зная ср,, находим sintp! = 0,6; cos фт =0,8
Аналогично вычисляются ординаты у, углы ф и их тригономет-
рические функции sin ф, cos <р для остальных сечений арки. Расчет
приведен в табл. 5.1. Ордината у (графа 5) получается перемноже-
нием данных, помещенных в графах 2, 3, 4; ?' = 1£ф (графа 8) —
перемножением данных граф б и 7. Угол ф° (графа 9) — по дан-
ным графы 8 и тригонометрические функции sin ф (графа 10),
cos ф (графа 11} по данным графы 9. В таблице 5.1 и далее
в табл. 5.6 углы ф выражены в градусах, а их числовые значения
записаны в виде десятичных дробей, в которых числа, стоящие
после запятой, отделяющей целую часть угла от дробной, дают со-
тые доли градуса. Например, в сечении 3 имеем 14 целых и четыре
сотых градуса. Такие записи связаны с тем, что вычисления ве-
дутся на микрокалькуляторе; при его отсутствии для определения
углов ф надо пользоваться таблицами тригонометрических функций
или логарифмической линейкой. В последних случаях углы ф выра-
жаются в градусах, а их доли — в минутах
2. На рис. 5.14, а изображена масштабная схема данной арки,
3. Сопутствующая балка изображена на рис. 6.14, 6.
4. Дальнейший расчет:
Определяем реакции опор:
2т£=0; 16V„—12f—(8?)4=0,
откуда
Ул = (12/4-32?) /16= (12- 40+32 20) /16 = 70 кН,
2тл=0; — 16ГЕ+(8?)12+4А = 0,
откуда
Ив = (96?+4 F) /16 = (96 - 20+4 • 40) /16= 130 кН.
Найдем распор Н из уравнения
У «сев = °; 81/д — иа/—4Т7 = о,
откуда
НА = (8 Ь- -4F) If = (8 70—4 40) /4 = 100 кН,
Из уравнения 2Х=0 получим Ня=Ив—100 кН (см. 5.2 1).
Итак, Уд = У°л = 70 кН, Ve=F%=130 кН.
107
Таблица 5
s 0,707 О i 0,97 - 0,97 168'0 J | 0,707
г 0,707 0.6 o’ 0,243 О § 7 | -0,447: 9‘0- о
Ъ. °-' О 36,87 26,57 11,04 | О —14,04 . 1-26.57 эс 7
&- Ь£- <= О 0,5 г>1 о S О1 о 1 1 ц,°- 1 o’ 1 "7
7 - со о О! О 7 т 0 00 1
f к 8 - 4 с-гго- _. t9l
* к О 1,75 Г со S£‘8 м- £ м | 1,75 о
* 2 2 =2 о ОС со тг о
* « О с -* СО 30 О £! 2
4/1Г-, M~’ сч 4 • 4 L
Сечение (рис. 5Л4а) ”4 °э со «э
108
Напоминаем, что У°л и — балочные реакции (рис. 5.14,6).
ЯЛ = НЛ=ЮО кН.
Проверим правильность определения реакций опор. Для этого
составим XУ и '£тп£; если каждая из этих сумм окажется равной
пулю, то можно считать, что реакции опор определены верно,
Е У=0; Va—F—q&+ VB=70—40—20 -8+130=0;
2>£₽ = 0; - ув8 + Я/+(8?) 4 =
=-130-8+100-4+(8-20)4=0.
Итак, получили Е1’=0, =0, следовательно, реакции опор
определены правильно.
Строим эпюры:
а) поперечных сил.
Воспользуемся формулой (5.4.):
Qu = Q°n cos ср*—/7 sin
Вычислим, например, поперечную силу в сечении 1 при Xi=s.
—2 м. Из рис. 5.14,6 имеем: Q°i = 70 кН. Из табл. 5.1, cosq?i=
= 0,800, sin <pi=0,600, //=100 кН. Следовательно, Qi =70-0,800—
—100 -0,600=+56—60 =—4 кН.
Аналогично вычисляются поперечные силы для остальных се-
чений арки Расчет выполнен в табл. 5.2. Поперечная сила <2%
Таблица 5.2
Сечение | (рис. К.14, в) Балочная попе- реччия сила кН Q*cos<fS, кН ^4 То j Hsltupg, кН <4? О'
1 О 3 4 5 6 7
А 70 0,707 49,49 0,707 70,7 —21,21
/ 70 0,8 56 0,6 60 —4
2-1еп 70 0,894 62,58 0,447 44,7 17,88
2«Р 30 0,894 26,82 0,447 44,7 — 17,88
3 30 0,97 29,1 0,243 24,3 4,8
С 30 1 30 0,0 0,0 30
5 30—20 - 2=—10 0,97 —9,7 —0,243 —24,3 14,60
6 30—20 • 1—50 0,891 —41,7 —0,447 —44,7 0,00
7 30—20 - 6=—90 0,8 —72 —0,600 —60 — 12
В — 130 0,707 —91,91 —0,707 —70,7 —21,12
(графа 2) легко определяется по схеме сопутствующей балки
(рис. 5.14,6), cos (графа 3) и sin фа (графа 5) берем из
табл. 5.1. Поперечная сила (графа 7) получается как разность
между данными, помещенными в графах 4 и 6.
109
Эпюра поперечных сил (рис 5.14, в) построена по данным
графы 7 табл. 5.2. Положительные ординаты ее отложены вверх,
отрицательные — вниз.
б) изгибающих моментов.
воспользуемся формулой (5.5):
M„=M°t-Hyk.
Вычислим, например, изгибающий момент в сечении / при
х(—2 м. Из рис. 5.14,6 имеем: АР, = 70-2= 140 кН-м.
Из табл. 5.1 находим при jq=2 м и г/1 = 1,75 м Н—100 кН.
Следовательно, Л11 = 140—100 1,75——35 кН - м.
Аналогично вычисляются изгибающие моменты в остальных се-
чениях арки. Расчет выполняется в табл. 5.3. Изгибающий момент
Таблица 5.3
Сечение (рис. 5.14.0) Белочный изгибающий момент Л1°Л, кН-м Нук, кН-м кН-м
1 2 3 4 3
А 0 0 0 0
1 70-2=140 1,75 175 —35
2 70-4=280 3,00 300 —20
3 70.6-40-2=340 3,75 375 —35
С 70-8—40-4 = 400 4 400 0
5 130-6—20-672=420 3,75 375 45
6 130-4—20-47= 360 3 300 60
7 130-2—20- 272=220 1,75 175 45
В 0 0.00 0 0
ЛРк (графа 2) определяем по схеме сопутовующей балки
(рис. 5.14,6). Ординаты у* (графа 3) берем из табл. 5.1. Изгибаю-
щий момент М„ (графа 5) определяется как разность между дан-
ными, помещенными в графах 2 и 4,
Эпюра изгибающих моментов (рис. 5.14, г) построена по дан-
ным графы 5 этой таблицы. Положительные ординаты эпюры от-
ложены вниз, отрицательные — вверх.
(?) продольных сил.
Продольная сила в сечении арки определяется по формуле (5.6):
jVft=Qnft sin Ц-k+H cos
Для сечения 1 имеем:
*1 =2 м; у. = 1,75 м; Q°i = 70 кН; /7=100 кН; sinq:i=0,6;
cos ф! = 0,8
и, следовательно,
N,=70-0,6+100 -0,8=122 кН.
Аналогично вычисляются продольные силы в остальных сече-
ниях арки (табл. 5.4). Балочная поперечная сила Q0* (графа 2)
110
Таблица 5.4
Сечение (рис. 5.14.0 4L Q* кН slnipjj, 0 Q^sin^, кН COS-ffl Л'й, кН
I 2 3 4 5 6 7
А 70 0,707 49,49 0,707 70,7 120,19
1 70 0,6 42 0,8 80 122
2 л ев 0 0,447 31,29 0,894 89,4 120,69
упр 30 0,447 13,41 0,894 89,4 102,81
3 30 0.243 7,29 0,97 97 104,29
С 30 0,000 0,00 1 100 100
5 —10 —0,243 2,43 0,97 97 99,43
6 —50 —0,447 22,35 0,894 89,4 111,75
7 —90 -0,6 54 0,800 80 134
В —130 —0,707 91,91 0,707 70,7 162,61
берется из графы 2 табл. 5.2, Н = 100 кН; sin tp» (графа 3) и
cos фь (графа 5) берем соответственно из граф 10 и 11 табл. 5.1.
Продольную силу IV* (графа 7) получаем как сумму данных из
граф 4 и 6.
Эпюра продольных сил (рис. 5.14, <9) однозначна. Сжимающие
силы приняты со знаком плюс (см. 5.2,1), поэтому все ординаты
эпюры N отложены вверх.
5. Проверим правильность построения эпюр Q, М, .V (см.
и. 5.5.1). Анализируя эпюры Q, Л1, <V (рис. 5.14, в, г, с>), устанавли-
ваем, что их очертание удовлетворяет изложенным в и. 5.5.1 за-
висимостям 5, б, в, г. Проверим, выполняются ли равенства:
hQ—Fk cos ф* и АЛ- = Fк sin фч,
приведенные в зависимости 5а.
Имеем
Ае = 17,88+ 1—17,881 = 35,76; F cos фг=40 0.894=35,76;
т. е. равенство ftQ= F*cosq>* выполняется;
АЛ- = 120,69—102.81 = 17,88; f sin фа=40 • 0,447= 17,88,
т. е. равенство h.v = Fk sin <ft тоже выполняется.
Проверка показывает, что эпюры Q, Л1, /V построены правильно.
Пример 5.2. Для трех шарнирной арки (рис. 5.15, в), показан-
ной в масштабе длин р/=0,2 м/мм, по данным предыдущего при-
мера 5.1 выполнить следующее:
1. Построить многоугольник давления.
2. С помощью многоугольника давления определить изгибаю-
щие моменты в сечениях 1, 5 и сравнить результаты с полученны-
ми в примере 6.1 по формуле (5.5).
3. По очертанию многоугольника давления охарактеризовать ра-
боту арки с точки зрения ее деформации.
Решение. 1. Проводим сечения, нормальные к оси арки, через
точки 1—7 (рис. 5.15,6). По формуле (5.10) e—M/N вычисляем
Ш
эксцентриситеты продольных сил, используя данные, помещенные
в графах 5 и 7 табл. 5.3 и 5.4. Вычисления представим в табл. 5.5.
В графе 5 вычислены эксцентриситеты в принятом по условию
масштабе длин, р;=0,2 м/мм. В каждом сечении
ev.t /р. =. е (и).'0,2 (м/мм) = 5<? мм.
Взятые из графы 5 эксцентриситеты отложены на рис. 5.15,6
так, как это объяснено в П. 5 3.1. Соединяя концы эксцентрисите-
та б л п ц а 5.5
СечеЕшс (рис. 5.15.а) Изгибающий момент Мг к/f М Продольная сила Л’. кН Эксцентри- ситет е, м Эксцентри- ситет в мае- штабных еди- ницах £»рЫМ
1 2 3 4 5
А 0 120,1 0 0
1 —35 122 —0,287 —1,433
-— 120,69 —0,166 —0,83
2”Р — 102,81 —0,195 —0,975
3 —35 104,29 —0,336 —1,68
С 0 100 0 0
5 45 99,43 0,453 2,265
6 60 111,75 0.537 2,685
7 45 134 0,336 1,68
В 0 162,61 0 0
112
тов (центров давления) отрезками прямых (лучами), получим иско-
мый многоугольник давления I—И—III—IV—V—VI (рис. 5.15,6).
2. С помощью многоугольника давления определяем изгибаю-
щие моменты в сечениях 1 и 5, применяя формулу (5.10), Л1*=//г.
Так как выражен в кН-м, а Н — в кН, то г надо выразить
в метрах. Учитывая масштаб длин р(=0,2 м/мм, получим
г = = 0,2^,
где z мм— величина z в масштабе длин, которая берется по
рис. 5.15,6 непосредственным измерением. В нашем примере
Mk = Hz - 100-0,22.. = 202 ,
тогда
Л), 20 (z \ = 20 ( — 1,75) = —35 кН м;
Afs 20 (2 )3 = 20-( 4- 2,25) = + 45 кН-м.
Сравнивая эти результаты с полученными по формуле (5.5),
убеждаемся в их полном соответствии.
3. По очертанию многоугольника давления (рис. 5.15,6) при-
ходим к выводам, что:
в левой половине арки эксцентриситеты имеют отрицательные
значения, поэтому сжимающие сечения продольные силы отклоняют-
ся от их центров тяжести к внутреннему ребру арки, а ось арки
искривляется выпуклостью вверх и, следовательно, кривизна ее уве-
личивается;
в правой половине арки наоборот: эксцентриситеты имеют по-
ложительные значения и значит сжимающие сечения продольные
силы отклоняются от их центров тяжести к наружному' ребру арин,
при этом ось арки искривляется выпуклостью вниз и, следователь-
но, кривизна ее уменьшается (здесь арка как бы выпрямляется).
Пример 5.3, Построить эпюры поперечных сил, изгибающих мо-
ментов и продольных сил для круговой трехшарнирной арки с за-
тяжкой, расположенной па уровне середины высоты стрелы подъе-
ма (рис. 5.16, а).
Решение. 1. Найдем уравнение оси арки, очерченной по дуге
окружности, отнесенное к началу координат, совмещенному с цент-
ром левого пятового шарнира А (рис. 5.16,6).
Из треугольника О К'!'. следует:
[у+(г-Л]2+(//2-х)!=Л
откуда
У + (г- /) =. /^-0/2-лр
и искомое уравнение примет вид:
У (г-/). (5.14)
Практически удобнее пользоваться преобразованным уравнени-
ем (5.14), Сначала из треугольника ОК'И находим
sin <p = КК'/ОК'~ (1/2—х)/г (5.15)
и, значит, (1/2—х) —г sin
ИЗ
114
Подставляя в (5.14) г sin <р вместо 7/2—х, получим уравнение
оси арки, очерченной но окружности в таком виде:
(/=ГСО5ф— (г—/). (5.16)
Найдя sin ф= (7/2—х)/г, сможем определить угол ф, а затем
и cos q>.
Радиус оси арки определим из треугольника АО'О:
r2=(r-f)s+(//2)2:
г5=/-г—2Г/+Р+/2/4;
т = //2+72/8/. (5-17)
В данном примере f=6 м, 7 = 16 м,
г=6/2+]62/8-6=3+5,33=8,33 м
и, следовательно,
р = 8,33 cos <р—2,33.
Проведем в арке двенадцать сечений, нормальных к ее осн:
А, Г, 1, 2, 3, 4, С, 5, 6, 7, 7', В (рис. 5.16,а). Обращаем внимание
на ю, что обязательно надо брать сечения в местах присоединения
затяжки к арке. На рис. 5.16, а эти сечения обозначены цифрами
ео штрихами так: Г и 7’. Найдем абсциссы указанных сечений.
Подставив в (5.14) у=3, получим уравнение, выражающее равен-
ство ординат оси арки и прямой у=3 в точках их пересечения
Г и 7':
/8,33s —(8—л)2 — 2,33 = 3,
откуда
8,33г— (8—х) 2=5,332; (8—х)2=40,98;
115
16х+23=0;
решая это уравнение, получим
xf=x7,= 14,40 м; хг=Х,, = 1.60 м.
Теперь вычисляем геометрические характеристики арки
(табл. 5.6) в намеченных сечениях, используя при этом формулы
(5.15) и (5.16).
Таблица 5,6
Сечение (рис, 5.16, а) S S ч аД и + Ьй 9- г W w 4/-J)- —*d>SO3 2—
1 2 3 4 5 6 7 8
А /' 1 2 3 4 С 6 1 7' В 0 1,6 2 3 4 6 8 10 12 14 14,4 16 1 1 1 1 1 OD Ст> О 4* Ю О 0,96 0,768 0,72 0,6 0,48 0,24 0 —0,24 —0, 18 —0,72 —0,768 —0,96 73,74 50,17 46,05 36,87 28,69 13,89 0 —13,89 —28,69 —46,05 —30,17 —73,74 0,28 0,64 0,694 0,8 0,877 0,971 1 0,971 0,877 0,694 0,34 0,28 2,33 5,33 5,78 6,66 7,31 8,09 8,33 8,09 7,31 5,78 5,33 2,33 0 3 3,43 4,33 4,98 5,76 6 5,76 4,98 3,45 3 9
2. На рис. 5.16, а изображена масштабная схема данной арки,
3. Сопутствующая балка показана на рис. 5.16, в.
4. Дальнейший расчет:
Определяем реакции опор;
вертикальные реакции Va и Vn.
2тг = 0; 16УЛ—Л13—F24=0,
откуда
l’/=(13F1+4F2)/16= (13-4(1+4.60)/16 = 47,5 кН;
£тл = 0; — 16Va+F212+Fi3 = 0,
откуда
=(12Л2+ЗЛ)/16= (12-60+3-40)/16=52,5 кН;
Горизонтальную силу S в затяжке. Проведем сечение 1—I че-
рез шарнир С и затяжку Г7' и составим уравнение
2 т£в - 0;
81+—3S—Л5=0,
116
откуда
5=(8Гл-5Г|)/3=(8-47.5—5+0)/3==60 кН.
Проверка;
2 Y=0; Гд—f । — F2+ VB=47,5—40—60+52,5 =0,
т. е. вертикальные реакции определены правильно;
2„,пр = о. - 8V+ + 3S 4- 1F, --- — 8-52,5 + 3-60 + 4-60 — 0,
т. е. сила в затяжке найдена правильно.
Строим эпюры (см. пример 5.1 и табл. 5.2, 5.3, 5.4); при этом
надо учесть, что для частей арки АГ и В7', расположенных ниже
затяжки (рис. 5.16,0), вторые члены в формулах (5.4), (5.5) и
(5.6) не берутся.
а) Поперечных сил. В табл. 5.7 приведены окончательные зна-
чения поперечных сил, вычисленные по формуле
Qii~Q\ cos <p,—S sin cp6.
Например, Q3=7,5-0,877—60-0,480=22,22 кН.
Таблица 57
Сечение л 2 3 f
кН 13,3 30,4 —15,68 — 10,23 2 —30 —22,22 —7,12
Продолжение табл. 5.7
Сечение с 5 * В
Qft, кН 7,3 21,68 35,-38 — 17,24 6,77 12,18 —33,60 —14,70
Примечание. Для сечений Г, 2, 6, 7‘ в числителе ука-
заны поперечные силы в сечениях, расположенных бесконечно
близко к сечениям 2, 6, 7' слева, в знаменателе—справа.
Эпюра поперечных сил (рис. 5.16, а) построена по данным
табл. 5.7.
б) Изгибающих моментов Вычисление изгибающих моментов
ведем по формуле (5.5) с заменой распора Н па силу S в затяжке.
Л( д=—S ytz.
При этом надо учесть два обстоятельства:
для частей арки АГ и ВТ, расположенных ниже затяжки, вто-
рой член в формуле (5.5) не учитывается;
117
при вводе второго члена в формулу (5 5) сила в затяжке
умножается на соответствующее ей плечо, равное у к—a—yll—O,5f=
=уь—3, м. Вычисления выполнены в табл, 5.8.
Таблица 5.8
Сечение, рис. 5.16, я Балочный изгибаю- щий момент /И °. кН -м ук, м ук-3. м кН«м Л1к, кН-н
1 о -3 4 5 6
A 0 0 0
Г 47,5-1,6=76 3 —= — 76
1 47,5-2=95 3,45 0,45 27 68
2 47,5-3=142,5 4,33 1,33 79,8 62,7
3 47,5-4—40 1 = 150 4,98 1,98 118,8 31,2
4 47,5-6—40-3=165 5,76 2,76 165,6 -0,6
С 47,5-8—40-5=180 6 3 180 0
5 52,5-6—60-2 = 195 5,76 2,76 165,6 29,1
6 52,5-4 = 210 4,98 1,98 118,8 91,2
7 52.5-2=105 3,45 0,45 27 78
lr 52,5-1,6=84 3 — -— 84
в 0 0 — — 0
Эпюра изгибающих моментов (рис. 5.16,5) построена по дан-
ным графы б табл. 5.8.
в) Продольных сил. Вычисление продольных сил выполнено
в табл. 5.9 по формуле (5.6) с заменой распора Н на силу 5 в за-
тяжке. Напоминаем [п. 4 настоящего примера], что для частей
арки АГ и ВТ, расположенных ниже затяжки, второй член фор-
мулы (5.6) не учитывается.
Эпюра продольных сил (рис. §16, е) построена по данным гра-
фы 7 табл. 5.9.
5. Проверим правильность построения эпюр (?, М, ,V (см,
п, 5.5.1). По эпюрам Q, М, ЛГ (рис. 5.16, г, 5, е) устанавливаем, что
их очертание удовлетворяет зависимостям 5, б, в, г (см. п. 5.5.1).
Проверим, выполняются ли указанные в зависимости 5, а равен-
ства, связанные с образованием скачков на эпюрах Q и ЛГ в сече-
ниях, где приложены сосредоточенные силы, н соответствующих мес-
там присоединения затяжки к арке.
а) скачки под силами в сечениях 2 и 6
hq — 2 Н- ] — 30 [ = 32; A, cos <р2 = 40-0,8 = 32
н, следовательно,
= Г, cos <р2; = 76,5 = 52,5 = 24;
F[ sin <р2=40-0,6=24
и, следовательно,
sin 'Pai hQt = 35"38 + i —17>24 I = 52,62;
Л cos ^=60-0,877 = 52,62
118
Таблица 59
Ссчепке, рис. 5.16,й ия ‘«д sin <?£ кН IP <Ь SO3 V г к ч
1 2 3 4 & 6 7
А 47,5 0,96 45,6 0,28 45,6
47,5 0,768 36,48 0,64 36,48
47,5 0,768 36,48 0,64 38,4 74,88
1 47,3 0,72 34,2 0,694 41,64 75,84
2лси 47,5 0,6 28,5 0,8 48 76,5
2 пр / 0,6 4,5 0,8 48 52,5
3 7,5 0,48 3,6 0,877 52,62 56,22
4 7,5 0,24 1,8 0,971 58,26 60,06
С / . 0 0 1 60 60
о 7,5 -0,24 —1,8 0,971 58,26 56,46
6-ев 7,5 —0,48 —3,6 0,877 52,62 49,02
6"Р —52,5 —0,48 25,2 0,877 52,62 77,82
7 —52,5 —0,72 37,8 0,694 41,64 79,44
7'(real —52,5 —0,768 40,32 0,64 38,4 78,72
/'iпр) —52,5 —0,768 40,32 0,64 40,32
в —52,5 0,96 50,4 0,28 — 50,4
и, следовательно,
Л<?в - ^2 cos<p6; ЛЛгв = 77,82 — 49,02 - 28,8;
F? sin фс=60|—0,481 =28,8
и, следовательно,
ЛЛ- = F2 sin <р6;
б) скачки в сечениях 1' и 7', соответствующих местам при-
соединения затяжки к арке,
ftQj, = 30,4-f- [—15,68 1= 46,08; S sin<pK = 60-0,768 = 46,08
и, следовательно,
hQy = -Ssin ф1Х;
/»v “ 74,88 — 36,48 = 38,4; S cos ?1, = 60-0,640 = 38,4
и, следовательно,
Л I = S cos <рр;
hQ_t = 12,48 -I- I —33,60 I - 46,08; S | sin <р7, | =-
- 601—0,768 [ = 46,08
119
и, следовательно,
hQir ™ S 1 sin <р7, | ;
hN1, = 78,72 — 40,32 = 38,4;
S cos = 60-0,640 = 38,1
и, следовательно,
ЛЛг„ = S cos q>7, ,
Как видим, ece равенства, приведенные в зависимости 5, а,
удовлетворяются. Итак, проверка показывает, что эпюры Q, Л1, N
построены правильно.
Глава 6. Статически определимые
плоские фермы
6.1. Общие сведения
Фермой называется геометрически неизменяемая
стержневая система (рис. 6.1, а), остающаяся такой же
при замене всех ее жестких узлов (мест соединения
стержней) шарнирами (рис. 6.1,6). Стержни фермы со-
единяются по концам друг с другом с помощью сварки
(реже заклепок) или различных врубок, если ферма де-
ревянная.
Если конструкция узла фермы допускает поворот
стержней, то соединение называется шарнирным; если
поворот невозможен — соединение жесткое. Почти все
узлы существующих ферм обладают жесткостью; расчет
таких ферм чрезвычайно сложен. Тем не менее, опытные
и теоретические исследования работы ферм показыва-
ют, что дополнительные напряжения в элементах ферм,
вызываемые жесткостью узлов, в современных фермах
невелики и составляют всего несколько процентов от
напряжений, возникающих в этих же элементах данной
фермы, но при шарнирных соединениях стержней в уз-
лах. Это дает основание, в целях упрощения расчета,
пренебречь влиянием жесткости узлов реальной фермы
и вести ее расчет, предполагая все узлы фермы шарнир
инми. При таком предположении расчет ферм становит-
ся очень простым,
В дальнейших рассуждениях и выводах будем осно-
вываться на следующих допущениях, позволяющих про-
120
изводить определение внутренних сил (продольных сил)
в элементах ферм с помощью обычных уравнений и
приемов статики:
1) стержни фермы принимаются прямыми и соеди-
ненными между собой в узлах идеальными шарнирами *;
2) нагрузка считается приложенной в узлах ферм;
3) деформации стержней пренебрежимо малы и по-
этому перемещением узлов фермы и изменением ее фор-
мы игнорируют.
При принятых допущениях в элементах ферм возни-
кают только продольные растягивающие или сжимаю-
щие силы. В самом деле, на каждый находящийся в
равновесии стержень фермы с шарнирами на концах со
стороны соседних стержней через эти шарниры переда-
ются только две силы1 2, являющиеся равнодействующи-
ми сил, распределенных по поверхностям концевых шар-
ниров. Поскольку стержень находится в равновесии, то
эти две силы равны по модулю и действуют вдоль оси
стержня в противоположные стороны, т. с. являются
продольными силами. Итак, считают, что любой стер-
жень фермы работает па растяжение или сжатие, а в
его сечениях возникает продольная сила и соответст-
вующие ей нормальные напряжения.
1 Если в шарнирном соединении пренебречь трением, то шар-
нир, введенный в соединение, называется идеальным.
2 Напоминаем, что в сечении, проведенном через шарнир, мо-
мент равен нулю (см. п. 3.2.1).
121
V
РЯС. 6.2
Фермы служат для перекрытия пролетов, т. е., по
существу, имеют такое же назначение, как и балки
сплошного сечения, но последние применимы при пере-
крытии только малых пролетов и становятся невыгодны,
а иногда даже непригодны при перекрытии больших
пролетов вследствие большой собственной силы тяжести
и невозможности полного использования материала.
Из сопротивления материалов известно, что нормаль-
ные напряжения при изгибе балки распределяются по
ее сечению неравномерно, по закону прямой линии
(рис. 6.2), достигая наибольших значений в крайних
точках сечения.
Желание использовать материал балки более эконо-
мично заставляет применять балки двутаврового сече-
ния (рис. 6.3, а), при котором большая часть материала
сосредоточивается в наиболее напряженных зонах бал-
ки (полках, поясах). Но и при двутавровом сечении бал-
ки вертикальная соединительная стенка между поясами
хотя и выполняется тонкой и удовлетворяющей условию
жесткости, но все же поглощает значительное количест-
во материала, особенно при большой высоте сечения
балки. Чем больше пролет, перекрываемый балкой, тем
выше сечение и тем большее количество материала идет
на вертикальную стенку и не используется полностью.
Это обстоятельство и ограничивает область применения
прокатных и составных балок сравнительно небольши-
ми пролетами. Избежать излишнего расхода недоста-
точно нагруженного материала можно, устроив в верти-
кальной стенке вырезы, которые могут быть прямоуголь-
ными, треугольными и др. В результате получаем фер-
мы. Ферма с прямоугольными вырезами (рис. 6,3,6) на-
122
зывается б езр а скос ной. При устройстве треугольных вы-
резов получается раскосная ферма (рис. 6.3,в).
В ферме имеется несколько характерных наименова-
ний ее частей, а именно (рис. 6.1,а) ;
1. Пояс фермы — совокупность стержней, составляю-
щих верхнюю часть (верхний пояс) или нижнюю часть
(нижний пояс), контура фермы.
2. Решетка фермы —совокупность стержней, распо-
ложенных между поясами фермы. Вертикальные эле-
менты решетки называются стойками, наклонные — рас-
косами.
3. Пролет фермы — расстояние I между центрами
опорных узлов.
4. Панель фермы — расстояние d между соседними
узлами любого пояса, измеряемое по горизонтали.
5. Высота фермы — расстояние й, измеряемое по вер-
тикали между точкой верхнего пояса фермы и прямой,
соединяющей центры опорных узлов; характеристикой
высоты фермы служит высота ее /i0 в середине пролета,
которая в зависимости от назначения фермы колеблется
в пределах от 1/2 до 1/10 пролета (и. 6.2).
По материалу’ фермы могут быть деревянные, метал-
лические, железобетонные и комбинированные. Область
применения ферм чрезвычайно обширна. Их широко
применяют в строительстве железнодорожных и автодо-
рожных мостов, в промышленном и гражданском строи-
тельстве, в конструкциях подъемных кранов, стрел
экскаваторов, а также в устройствах опор линий элект-
ропередач, радиомачт и др.
6.2. Классификация ферм
Фермы можно классифицировать по следующим при-
знакам:
1. По направлению опорных реакций, вызываемых
вертикальной нагрузкой:
а) безраспорные или балочные фермы с вертикаль-
ными опорными реакциями (рис. 6.4,а);
б) распорные фермы — арочные и висячие, у кото-
рых кроме вертикальных опорных реакций возникают и
горизонтальные (рис. 6.4,б,в).
2. По назначению:
а) стропильные, применяемые для поддержания
кровли в промышленных, общественных и жилых зда-
123
a
РИб.6?
124
РИС. 6Л
РИС. 6.9
ниях (рис. 6,5, с, б, в), В балочных фермах этого типа
высота hc в середине пролета, в зависимости от конст-
рукции кровли, колеблется от 1/2 до 1/6 пролета;
б) фермы железнодорожных и автодорожных мостов
(рис. 6.6, а, б, в). В балочных фермах этого типа высота
hc колеблется в пределах от 1/6 до 1/10 пролета;
в) фермы кранов промышленных цехов и складов
(рис. 6.7, а, б);
г) мачты высоковольтных линий (рис. 6.8);
д) нефтяные вышки (рис. 6.9);
е) фермы строительных кранов (рис. 6.10);
ж) фермы для легких мостовых опор (рис. 6.11).
3. По очертанию поясов:
а) фермы с параллельными поясами (рис. 6.12);
б) фермы с полигональными (или ломаными) пояса-
ми. Эти фермы часто называют также фермами с криво-
линейными поясами, имея в виду, что через узлы пояса
можно провести некоторую кривую (рис. 6.13).
Если узлы пояса расположены на параболе, то фер-
ма называется параболической; если на окружности—
круговой;
в) фермы трапецеидальной формы — пологие одно-
скатные и двухскатные (рис. 6.5,а, б), получившие ши-
рокое распространение в промышленном строительстве.
4. По системе решетки!
125
РИС. ВЛ2
РИС. 6.11
РИС. 6.16
РИС. 6.17
рис. ела
а) фермы с раскосной решеткой (рис. 6.12, 6.13), т. е.
такие, решетка которых состоит из раскосов, последова-
тельно чередующихся со стойками.
Раскосы, расположенные от опор фермы к ее сере-
дине, и неправленные снизу вверх, называются восходя-
щими, а, расположенные так же, но направленные свер-
ху вниз — нисходящими. Изображенная на рис. 6.12 рас-
косная ферма имеет только восходящие раскосы, а в
126
раскосной ферме (рис. 6.13)—лишь раскосы у опор
являются восходящими, остальные раскосы — нисходя-
щие. Если все раскосы фермы обращены в одну сторо-
ну (на рис. 6.12 раскосы в правой половине фермы изо-
бражены пунктиром), то в левой половине этой фермы
раскосы являются восходящими, а в правой — нисходя
щими;
б) фермы с треугольной решеткой, или иначе решет-
чатые фермы, т. е. такие, решетка которых состоит толь-
ко из наклонных стержней — восходящих и нисходящих
раскосов (рис. 6.14,а,б,в).
Иногда для уменьшения длины панели проезжего
пояса фермы в ее решетку вводят стойки (рис. 6.15),
которые поддерживают проезжий пояс фермы (на
рис. 6.15 нижний пояс) и называются подвесками; при
этом сами фермы называются треугольными (решетча-
тыми) с подвесками.
В решетчатой ферме, показанной па рис. 6.6, б не-
четные стойки выполняют роль подвесок и могут рас-
сматриваться как дополнительные к четным стойкам, ко-
торые служат для укрепления шарниров в местах изло-
мов верхнего пояса фермы и поэтому в ней являются
необходимыми;
в) фермы с полураскосной решеткой, применяемые
реже двух предыдущих типов ферм, являющихся основ-
ными. Полураскосная решетка отличается от раскосной
тем, что в панели вместо одного раскоса, идущего от
пояса к поясу, делается два полураскоса, идущих от
поясов к середине стоек (рис. 6.16). Эти три вида реше-
ток называются простыми. Из них можно образовать
сложные решетки наложением двух простых одпу на
другую, в соответствии с чем фермы получают названия
двухраскосных (рис. 6.17) и двухрешетчатых (рис. 6.18);
г) фермы с составной решеткой, т. е. такие, решетка
которых, кроме простых элементов — прямых стерж-
ней— содержит сложные элементы — малые фермы, раз-
деляющие большую панель на малые (рис. 6.19).
6.3. Геометрическая неизменяемость
и статическая определимость ферм
Ферма, как и всякое сооружение, должна быть не-
подвижной относительно земли и геометрически неизме-
няемой (см. п. 2.1). Неподвижность относительно земли
127
достигается устройством опор, а неизменяемость —
внутренней структурой фермы — правильным соедине-
нием стержней или отдельных дисков, входящих в со-
став ферм.
Большинство применяемых балочных ферм: раскос-
ных, полураскосных и решетчатых — относится к фер-
мам простейшего образования, состоящим из сочленен-
ных треугольников, заведомо геометрически неизме-
няемых; поэтому такие фермы в целом геометрически
неизменяемы и не требуют проверки неизменяемости.
Для других статически определимых ферм, отличающих-
ся от указанных, следует выполнить предварительную
проверку их неизменяемости, используя в качестве ис-
ходной формулу (2.14) в виде
д=ЗД—(С4-2Д74-ЗЖ) =0,
выражающую необходимое условие геометрической не-
изменяемости прикрепленной к основанию системы с
полным числом связей, и правила образования неизме-
няемых систем, изложенные в п. 2.2. Однако применение
этой формулы для ферм нецелесообразно ввиду большо-
го числа стержней, принимаемых за диски, и затрудне-
ний в подсчете суммарного числа простых и приведен-
ных к ним сложных шарниров; поэтому преобразуем ее
к виду, удобному для практического использования.
Представим себе ферму, в которой С$ — число собст-
венных стержней фермы, С011 — число опорных стержней
фермы. Принимая каждый стержень фермы за диск, по-
лучим
Д = Сф.
Для подсчета Ш — суммарного числа простых шар-
ниров и приведенных к ним сложных, заметим следую-
щее: в первом узле шарнир объединяет Сф1 стержней и,
следовательно, эквивалентен СФ1—I простым шарнирам;
по аналогии заключаем, что в узле п сложный шарнир
эквивалентен Сфп—1 простым шарнирам. Следовательно,
ш = (Сф1-1) -f- (Сфг-1) 4- ... 4- (Сф/-1) -ь ...
... 4- (СФл— 1) = (Сф1 4- Сф, 4- ... + Сф( 4-.,. 4- Сфп)—
л л
— О 4" 1 4" • • 4-1) “ Сф1- — 1 110 Сф; = 2Сф,
т. е. сумма стержней, объединяемых в каждом узле
шарниром, равна удвоенному числу стержней фермы;
128
это следует из того, что при последовательном обходе
всех узлов фермы каждый стержень ее встречается
2 раза, проверить это утверждение можно, например, на
ферме, показанной на рис. 6.14, а. Итак, Ш=2С^—п.
Подставляя значения Д и Ш в исходную формулу и,
учитывая при этом, что Ж=0, получим:
/7=ЗСф^[2(2Сф—и)+С0П] =0,
откуда
—Сф+2/i—СС1П=0,
или
Сф 4~Соп --
приняв во внимание (2.4), получим:
С=2н. (6.1)
Для исследования неизменяемости свободной фермы
с полным числом связей применим формулу (2.15) в
виде:
И=3(Д-1)~-(СсС+2Ш+ЗЖ) =0.
Приняв по-прежнему все собственные стержни за диски,
будем иметь ССб=О и, значит,
3(СФ—1)—[0+2 (2СФ—п)1 =0,
или
—Сф—3I-2м = 0,
и окончательно:
Сф = 2п—3. (6.2)
Ранее [см. и. 2.3.3 пояснения к формулам (2.19),
(2.20), (2.21), (2.22)] доказано, что условие статической
определимости системы совпадает с необходимым усло-
вием геометрической неизменяемости этой системы,
имеющей полное число связей. Следовательно, формулы
(6.1) и (6.2), выражающие необходимые условия неиз-
меняемости ферм с полным числом связей, в то же вре-
мя являются и условиями их статической определи-
мости.
Если число стержней С$<Дп—3, то ферма становит-
ся подвижной системой и не годится в качестве соору-
жения, она может быть только механизмом. Если число
стержней в ферме Сф>-2п—3, то силы в стержнях уже
не могут быть определены с помощью уравнений стати-
5 Шншмав Б. А*
129
ки и ферма будет статически неопределима. Такие фер-
мы в этом курсе не рассматриваются.
Проверка геометрической неизменяемости ферм по
формулам (6.1) и (6.2), устанавливающим зависимость
между числом стержней и числом узлов, является необ-
ходимой, но недостаточной, так как эти условия в неко-
торых случаях могут соблюдаться, но ферма все же ока-
зывается изменяемой. Примером может служить ферма,
изображенная на рис. 6.20, в которой Сф = 17; Соп=3;
С=20; н=Ю. Применяя (6.1), находим 20=2-10=20,
т. е. условие (6.1) удовлетворяется, но ферма все-таки
является геометрически изменяемой, так как в первой
панели имеет шарнирный квадрат (простейшую изме-
няемую систему), который даже при весьма незначи-
тельном нагружении фермы обращается в ромб и вызы-
вает перемещение всех ее узлов влево (на рис. 6.20 это
показано штриховой линией). Поэтому кроме проверки
неизменяемости фермы по формулам (6.1) и (6.2) надо
сделать еще и структурный анализ ее, который сводится
к проверке выполнения правил образования геометриче-
ски неизменяемых систем, изложенных в п. 2.2.1.
Применительно к фермам эти правила формулируем
так:
1. Если в ферме можно выделить шарнирный тре-
угольник (рис. 6.21, треугольник abc), то, присоединяя
каждый последующий узел (на рис. 6.21 порядок при-
соединения узлов обозначен арабскими цифрами) с по-
мощью двух стержней, не расположенных на одной пря-
130
мой,—диады, получим ферму геометрически неизменяе-
мую (и. 2.2.1—принцип образования простейших си-
стем, см. пример 2.1).
2. Если в ферме выделяются некоторые части, кото-
рые можно рассматривать как диски, то надо помнить
следующее:
а) два диска образуют неизменяемую систему, если
они соединены тремя стержнями, оси которых (или их
продолжения) не пересекаются в одной точке и не па-
раллельны (см. гл. 2, пример 2.2 и соответствующий
ему рис. 2.16), или шарниром и стержнем, не располо-
женными на одной прямой (см. гл. 2, пример 2.3).
Проверим еще неизменяемость полураскосной кон-
сольной двухпролетной фермы, показанной на рис. 6.22.
Характерно, что ферма в своей структуре имеет шарнир-
ный четырехугольник, т. е. для ее геометрической неиз-
меняемости не хватает одного собственного стержня, по
вместе с тем один опорный стержень лишний. Делаем
подсчет числа стержней и узлов: Сф=40; п=22; Соп=
=4; С=Сф-|-СОц=44. Проверяем, соблюдается ли
условие (6.1): С=2п- 44=2 -22=44. Условие (6.1) со-
блюдено и ферма может быть неизменяемой.
Выполним структурный анализ. Левая часть фермы
АВ представляет собой полураскосную неизменяемую
систему, так как составлена из треугольников; она при-
соединена к земле тремя опорными стержнями и обра-
зует с землей один общий диск. Правая часть фермы
CD также представляет собой диск. К общему диску,
состоящему из левой части фермы и земли, правая
часть присоединена тремя правильно расположенными
стержнями 1, 2, 3; поэтому вся ферма в целом неизме-
няема;
б) три диска образуют неизменяемую систему, если
они соединены между собой тремя шарнирами, не лежа-
щими на одной прямой (см. гл. 2, пример 2.5).
Подчеркнем, что все приводившиеся здесь в качестве
примеров фермы, являясь геометрически неизменяемы-
ми и имеющие полное число связей, в то же время бу-
дут и статически определимыми, ибо, как уже сказано,
условия геометрической неизменяемости (6.1), (6.2) яв-
ляются и условиями статической определимости ферм.
Если отдельные диски в ферме будут соединены меж-
ду собой тремя стержнями, оси которых (или их про-
должения) пересекаются в одной точке, то получим из-
5*
131
меняемую или мгновенно изменяемую систему (см.
и. 2.1.4).
Примером мгновенно изменяемой фермы является
изображенная на рис. 6.23 двухконсольная ферма 1—2—
7—8—12—11—6—5. Ферма имеет три диска: /, II, III,
показанные на рис. 6.23 штриховкой. Крайние два диска
II и III присоединены к среднему I тремя стержнями:
левый диск II — стержнями 12, 34 и 56\ правый III—
9—10, 78 и 11—12, пересекающимися в одной точке
(точки 01 и 02). Это мгновенные центры вращения, во-
круг которых возможен бесконечно малый поворот дис-
ков. Ферма мгновенно изменяема. Мгновенно изменяе-
мые фермы в строительстве не допускаются.
6.4. Аналитические способы расчета
балочных ферм
6.4.1. Теоретические основы. 1. Определение реакций
опор. Расчет фермы следует начинать с определения
реакций опор. Если на ферму действует только верти-
кальная нагрузка (рис. 6.24, а), то надо составить два
уравнения, выражающие равенства нулю моментов всех
внешних сил — активных и реакций связей относительно
центров опорных шарниров:
Smfi=0; 2мд=0.
Каждое из этих уравнений содержит по одной неиз-
вестной реакции; решив их, найдем соответственно ле-
вую VA и правую Ув вертикальные реакции.
Если вместо фермы представить себе простую балку
с пролетом и вертикальной нагрузкой, такими же, как
и у данной фермы (рис. 6-24,6), то нетрудно понять, что
реакции опор и этой балки, которую условимся
называть сопутствующей, окажутся равны соответст-
вующим реакциям опор фермы, т. е. будем иметь;
или иначе:
Vb=V°b.
Правильность определения вертикальных реакций
проверяется согласно уравнению 5У=0, выражающему
равенство нулю суммы проекций всех сил на вертикаль-
ную ось. Если в числе действующих на ферму сил есть
и наклонные (рис. 6.25), то их удобно предварительно
132
разложить на вертикальные и горизонтальные состав-
ляющие.
Вертикальные реакции опор и в этом случае опреде-
ляют только что описанным способом, а горизонталь-
ную реакцию шарнирно-неподвижной опоры находят из
уравнения SX—О, выражающего равенство нулю суммы
проекций всех сил на горизонтальную ось.
2. Определение сил в стержнях ферм. Как уже от-
мечалось ранее (п. 6.1), элементы фермы — стержни под
действием сил, приложенных к ней, работают только па
растяжение или сжатие.. Возникающую при этом про-
дольную силу в сечении стержня обозначают через
Nfk (t,k — обозначения узлов, ограничивающих длину
Стержня) и условно называют силой в стержне.
Определение сил в стержнях фермы основано на
применении метода сечений. Проведенным сечением
133
ферма делится на две части, отбрасывая одну из них и
рассматривая оставшуюся, находящуюся в равновесии
под действием приложенных к ней внешних сил и внут-
ренних, заменяющих влияние отброшенной части иа
оставшуюся, составляют уравнения равновесия так, что-
бы в каждое из них по возможности входила только
одна неизвестная сила; это достигается специальными
приемами. Сначала отметим, что сечение фермы может
быть проведено по-разному:
а) сечение, рассекающее ферму на две части — ле-
вую и правую1 (рис. 6.26, линия I—1 и рис. 6.27, линия
II—II);
б) сечение, с помощью которого происходит выде-
ление (вырезание) или одного узла фермы (рис. 6.26,
линия 111—III), или ее части (рис. 6.28, линия IV—IV).
Для составления уравнений равновесия сил, дейст-
вующих на рассматриваемую часть фермы, необходимо
знать направления искомых сил, которые пока остают-
ся неизвестными; поэтому- условно все силы считаются
положительными, т. с. растягивающими и направленны-
ми вдоль стержней от узлов. Если при решении урав-
нений равновесия сила в стержне получится со знаком
«минус», то это будет означать, что стержень работает
на сжатие и что действительная сила в нем будет на-
правлена к узлу.
Уравнения равновесия могут быть составлены для
любой из отсеченных частей фермы, но выбирается та
часть, к которой приложено меньше сил.
В зависимости от вида уравнений равновесия, со-
ставляемых для рассматриваемой части фермы, разли-
чают следующие основные способы определения сил
в стержнях ферм:
А. Способ моментной точки (способ Рит-
тера).
В основу этого способа положено условие, выражаю-
щее равенство нулю алгебраической суммы моментов
всех сил, приложенных к части фермы, находящейся
в равновесии, относительно любой точки, лежащей
в плоскости фермы.
В большинстве статически определимых ферм с прос-
той решеткой разрез фермы почти всегда можно про-
вести так, чтобы им перерезалось нс более трех стерж-
Часто такое сечение называют сквозным.
134
ней, не имеющих общей точки пересечения (рис. 6.26,
линия /—I). Если взять за точку моментов (в дальней-
шем— точку Риттера) точку пересечения двух из пере-
резанных стержней, то уравнение равновесия будет со-
держать лишь одну неизвестную силу в третье.м стерж-
не, величина которой определится из этого уравнения.
Сказанное поясним определением сил №35, #«, Л'46
в поясных стержнях 35, 46 и раскосе 45 полигональной
фермы, показанной на рис. 6.29, й. Для этого на
рис. 6.29, а проводим сечение 1—1 через три стержня 35,
46, 45. Этим сечением ферма делится на левую и пра-
вую части. Отбрасывая, например, левую часть (на нее
135
действует больше сил), рассматриваем равновесие
оставшейся правой части фермы (рис, 6.29, в).
Здесь помимо внешних сил Vb и на рассматривае-
мую часть фермы действуют и силы N6ir F'54) ;VS3
в стержнях 64, 54 и 53, представляющие собой влияние
левой отброшенной части на оставшуюся правую часть
фермы.
Так как направление этих сил неизвестно, то пока-
жем их направленными от узлов 5 и 6 (рис. 6.29, е), т. е.
будем исходить из предположения, что стержни рабо-
тают на растяжение. Теперь займемся определением
сил в каждом из данных стержней в отдельности.
Стержень 35, сила Лг3з.
В качестве точки Риттера бере.м точку 4 пересече-
ния осей стержней 46 и 45, силы в которых сейчас
не определяются; тогда для рассматриваемой части фер-
мы получим уравнение равновесия:
Злщ = 0; —V,5^-|-/*з^4“Л'Г5з^=0,
откуда
JV53=(1,5VM—F3d)/h.
Числитель последнего выражения представляет со-
бой балочный момент Лц, в сечении сопутствующей
балки (рис. 6.29,6), относительно точки 4', лежащей на
оси балки и соответствующей узлу 4 фермы. С учетом
сказанного можем написать;
Л53-= .</Л.
Балочный момептЛ?®» при действии на балку сил,
направленных сверху вниз, как известно, всегда поло-
жителен. Следовательно, сила Л'53 окажется положитель-
ной — со знаком «плюс», т. е. действительное направле-
ние силы Л'33 здесь совпадает с ранее принятым — от
узла и, следовательно, стержень 35 работает на растя-
жение.
Аналогично доказывается, что при нагружении фер-
мы вертикальными силами все стержни нижнего пояса
ее работают на растяжение.
Стержень 46, сила NM.
В качестве точки Риттера берем точку 5 пересечения
осей стержней 35 и 45, силы в которых сейчас не опре-
деляются; тогда имеем:
Х/и6=0; — 1'/Д-|-Д30,5с/—Л'иг5 = 0,
136
откуда
A^=-(VBrf-F30.5rf)/n>,
или
№« •= — Л4 j,/Гъ.
Поскольку 7W§,>0, то сила /V64 окажется отрица-
тельной—co знаком «минус»; действительное ее на-
правление будет не от узла, как предполагалось, а к не-
му, т. е. стержень 46 работает на сжатие.
Аналогично доказывается, что при нагружении фер-
мы вертикальными силами все стержни верхнего пояса
ее работают на сжатие.
Из формул, определяющих Лг53 и /VM, следует, что
сила в стержне пояса равна балочному моменту в се-
чении сопутствующей балки, соответствующем точке
Риттера, разделенному на длину перпендикуляра, опу-
щенного из точки Риттера на направление рассматри-
ваемого стержня (плечо усилия),
Стержень 45, сила N54.
Здесь точкой Риттера является точка k пересечения
осей стержней 35 и 46, силы в которых сейчас не опре-
деляются; тогда будем иметь:
откуда
Л-54= [f3(0,5d+a)-VEa]/rs.
Здесь выражение, стоящее в квадратных скобках,
представляет собой алгебраическую сумму моментов
всех сил, действующих на рассматриваемую часть фер-
мы, относительно точки Риттера, находящейся за преде-
лами фермы; обозначив его через Mk, получим /Vb4==
В результате вычислений сила в раскосе может ока-
заться со знаком «плюс» или «минус» и соответственно
этому раскос будет работать на растяжение или сжатие.
Определение сил в стержнях ферм способом Риттера
возможно и в некоторых других случаях разреза фермы
(см., например, [3]), и в частности тогда, когда можно
провести разрез, пересекающий кроме данного стержня
любое число стержней, сходящихся в одной точке, не ле-
жащей на направлении оси данного стержня. На
рис, 6.30 показана такая ферма. Предлагаем самостоя-
тельно определить силу W68 в стержне 68, проведя пред-
варительно соответствующее сквозное сечение.
137
РИС. £30
Б. Способ проекций.
В основу способа проекций положено использование
уравнений равновесия, составленных в виде равенства
нулю алгебраической суммы проекций сил, приложен-
ных к отсеченной части фермы, на одну или две оси
координат.
Способ проекций применяется в следующих случаях:
1. Определение силы в данном стержне фермы спо-
собом Риттера невозможно; это, например, может быть
при определении сил в стержнях ферм с параллельны-
ми поясами, когда из трех пересеченных сквозным сече-
138
пием стержней (см. сечения I—I и II—7/ на рис. 6.31, а)
два поясных, как параллельные между собой, пересе-
каются в бесконечности, т. е. не имеют точки Риттера,
а силу в третьем стержне (соответственно сечениям I—I
и 7/—7/ в стойке 34 и раскосе 45) требуется найти,
2. Силы в стержнях, сходящиеся в узле фермы, за
исключением сил в двух стержнях, известны и требует-
ся определить неизвестные силы в этих двух стержнях.
В отличие от первого случая здесь вместо сквозного се-
чения прибегают к сечению, отделяющему данный узел
от всей остальной части фермы (см., например, сечение
III—III на рис. 6.26), поэтому определение сил в стерж-
нях ферм способом проекций с помощью указанного се-
чения принято называть способом вырезания узлов.
Практическое применение способа проекций пока-
жем на расчете сил в элементах ферм, изображенных
на рис. 6.31 и 6.32.
1. Определить силы Лг34 и Лг45 в стойке 34 и раскосе
45 раскосной фермы с параллельными поясами и нисхо-
дящими раскосами (рис. 6.31,а).
Для определения силы в стойке 34 проводим сквоз-
ное сечение I—I (рис. 6.31, и), которое пересекает три
стержня 24, 34 и 35. Отбросим правую часть фермы
и рассмотрим равновесие оставшейся левой части
(рис. 6.31,6); на нее действуют внешние силы /д
и силы Лг24, Лг34 и TV35 в перерезанных стержнях, пред-
ставляющие собой влияние правой отброшенной части
фермы на оставшуюся левую. Предполагаем, что стерж-
ни 24, 34 и 35 работают на растяжение и поэтому силы
в них показываем направленными от узлов 2 и 3.
Стержни 24 и 35 параллельны, т. е. оси их пересе-
каются в бесконечности и, следовательно, не имеют точ-
ки Риттера, поэтому составляем уравнение равновесия
139
в виде равенства нулю алгебраической суммы проекций
всех сил, приложенных к отсеченной части фермы на
вертикальную ось:
2У=0; Ул-Р,+ЛГ34=0
И
N34=_Va+F1 = -2F+F/2=-l,5F. (6,3)
Сила jV34 получилась отрицательной. Следовательно,
стойка 34 сжата, а действительное направление силы
Л,г34 будет не от узла 3, а к нему.
Для определения силы Л'45 в раскосе 45, наклонен-
ном под углом к горизонту', проводим сквозное сече-
ние II—II (рис. 6.31, а), которое пересекает стержни 46,
45 и 35. Рассматривая равновесие левой части фермы
(рис. 6.31, в), будем иметь:
IУ=0; Va—F2—N<s sin q: = 0,
откуда
Лг43= (Уд—Fi—f2) /sin <j= (2F—F/2—F) /sin <jj=f/2sin <p.
Сила Лг45 получилась положительной. Следовательно,
раскос 45 растянут. Можно доказать, что в рассматри-
ваемой ферме раскосы, расположенные в ее левой поло-
вине, растянуты, а в правой — сжаты. Сжатые элементы
ферм вследствие возможности продольного изгиба на-
ходятся в худших условиях, чем растянутые, поэтому
в металлических фермах рациональнее все раскосы де-
лать нисходящими (на рис. 6.31, а нисходящие раскосы
в левой половине фермы показаны жирными линиями,
а в правой — пунктиром). В деревянных фермах наи-
более легко повреждаются узлы вследствие слабого со-
противления дерева скалыванию. Надежную конструк-
цию узла легче осуществить в сжатых элементах, поэто-
му в деревянных фермах часто предпочитают восходя-
щие раскосы нисходящим.
2. Определить силы и Voi в опорном узле А стро-
пильной фермы, изображенной на рис. 6.32, а. Приме-
ним способ вырезания узлов. Сечением /—/ (рис. 6.32, а)
вырезаем узел А (он же 0) и изображаем его схему на
рис. 6.32,6, предварительно направляя силы Nq2 и N0l
от узла А. Из равновесия узла А следует:
2Х=0; /V02cos a+M>i=0,
SK=0; Va—Fi+ATas sin q = 0.
140
Из второго уравнения находим
Azo2= (fi—Vx)/sin a= (0,5F—Sf) /sin a=—l,5F/sin a;
Ncs=—l,5F/sin a.
Подставляя значение Л?ов в первое уравнение, получим:
(—l,5F/sin a)cos a-HVOi==O,
откуда
Woi = l,5Fctg a.
Расчет этой фермы способом вырезания узлов мож-
но продолжить дальше, выделяя из нее узлы так, чтобы
в сходящихся в каждом из них стержнях не оказалось
более двух стержней с неизвестными силами. Для всех
простейших ферм определение сил во всех ее стержнях
можно произвести способом вырезания узлов.
Так, в нашем примере после определения сил
в стержнях Л'ог и 7V0J следует рассмотреть равновесие
узлов в последовательности /, 2, 4, 3, 5, 6 и, решив со-
ответствующие им уравнения равновесия, определить
величины сил во всех остальных стержнях данной фер-
мы (предлагаем выполнить эту работу самостоятельно).
Недостатком способа вырезания узлов является то,
что погрешности, допущенные при вычислении сил
в одних стержнях, сказываются на точности вычисления
сил в других стержнях, поэтому данный способ целесо-
образно применять только в том случае, когда силы
в стержнях фермы невозможно определить другим спо-
собом. Так, силу в стойке 34 (рис. 6.32, а) можно
определить, только рассмотрев равновесие узла 4.
В. Частные случаи определения сил в
стержнях ферм, нулевые стержни.
В частных случаях нагружения ферм целесообразно
применять следующие правила, которые позволяют оп-
ределять силы в стержнях фермы и выявить, в частно-
сти, те ее стержни, силы в которых равны нулю (нуле-
вые стержни), не прибегая при этом к составлению
уравнений равновесия:
1. Если в ненагруженном узле сходятся два стержня
(например, узел 2 на рис. 6.33), то силы в этих стерж-
нях равны нулю.
2. Если в узле сходятся два стержня и внешняя сила,
приложенная к узлу, направлена вдоль одного из них
(например, узел 10 на рис. 6.33), то сила в этом стерж-
не равна модулю внешней силы и противоположна ей
по направлению, а сила в другом стержне равна нулю.
141
3. Если в ненагруженном узле сходятся три стержня
и оси двух из них расположены на одной прямой (на-
пример, узлы 3 и 6 на рис. 6.33), то силы в этих двух
стержнях равны по модулю и противоположны по на-
правлению, а сила в третьем (одиночном) стержне рав-
на нулю.
4. Если в узле сходятся три стержня, два из которых
расположены на одной прямой, и узел нагружен силой,
действующей по направлению третьего (одиночного)
стержня (например, узлы 3 и 6 на рис. G.33), то сила
в последнем равна модулю приложенной в узле силы
и направлена в сторону, противоположную ей; силы
в двух других стержнях равны по модулю и противо-
положны по направлению.
В справедливости этих правил предлагаем убедить-
ся самостоятельно, применив для их вывода способ вы-
резания узлов.
Пользуясь изложенными правилами, определим ну-
левые стержни консольной фермы, показанной на
рис. 6.34. Весь расчет представим в табл. 6.1.
142
Таблица 6.1
№ п. л Узел Стержень Модуль СИЛЫ (Л'| в стержне Характер рабо- ты стержня ОбосповАпие (правило)
1 2 3 4 5 6
1 9 89 0 Не работает 2
79 |N7a|=Fi-F Сжат
2 8 68 0 Не работает 1
78 0 То же
3 1 37 1 1 = = |N„bF Сжат 9
67 0 Не работает
4 6 56 |Nw|-Fa=F Растянут 4
57 |N5J|=F Сжат
35 и 57 |M3s| = = |K57|=F Сжат
П р и > рве» 6.3 длину ci стсржен в табл. 89 равн сматрив лениям, примени ния I— ложенну в опредс 4 е ч а н и я 1. Стрел! ержня, оз ь растяну 6.1 указаъ нулю и ать), 3. С определи в, наприм и 11—1 ю справа ?леини peg 16 1 Л?24 | Растянут 3 т на □ШИМ ов— я, по ржне рас- ычис- айти, сече- аспо- MOCTL
21 |Л\в| Растянут
31 I. Хар< ш, naitpai начаютт ч т. 2. Хотя н только его, след< мы в сте гь нельзя ер, способ Л удобно от сечсни КЦИЙ 0П0| 0 шгер работы с ктепные к узл го он сжат, и нс в узле 8 сход два 68 и 78, та эвательно, можн жних 46 и 24, При желании j Риттера. При рассматривать я, ибо тогда от Не работает гержпей показа ам, ограничивак оборот — от узл ттся три стерж! t как сила в сте о отбросить (нс не прибегая к в их можно этом, проведя часть фермы, р задает необходн
143
Рве. 6.35
Заканчивая изучение аналитических способов опре-
деления сил в стержнях ферм, укажем на то, что при
этом не следует стремиться к исключительному примене-
нию какого-нибудь одного способа. Силу в каждом от-
дельном стержне надо определять тем способом, кото-
рый в данном случае дает наиболее простое решение.
Таким образом, при расчете одной и той же фермы мо-
гут быть использованы различные способы, указанные
выше, а также и другие способы (см. например, [3|),
не рассматриваемые в настоящем учебнике.
6.4.2. Пример 6.1. Определить силы в стержнях симметричной
балочной фермы с полигональным верхним поясом, находящейся
под действием симметричной нагрузки (рис. 6.35, а).
Симметричная — это такая ферма (система), у которой не толь-
ко ее геометрическая схема, образованная осями стержней, имеет
144
ось симметрии, но и жесткости симметрично расположенных эле-
ментов равны друг другу. Силовая симметрия фермы (системы)
характеризуется равенством друг другу внешних сил (в том числе
и реакций связей), симметрично расположенных относительно оси
симметрии фермы (системы).
Решение. 1. Определяем реакции опор фермы, В силу симмет-
рии фермы и нагрузки К,=УЯ=200/2 = 100 кН.
2 Определяем силы в стержнях фермы.
Силы Л\е и Was- Проводим сечение I—.1 и, применяя способ
Риттера, составляем уравнения равновесия части фермы, располо-
женной слева от сечения I—I*.
2wis=0; Л?46г54- V^3d—(F i+Fs)2d—(Fs+F?)d—О,
2 ni4=0; —Л'Я5й t— (F+№) d+ V42d=0.
Из первого уравнения находим
W«=-[Vx3d-(f ,+f6) 2d- (Fs+F7)d] /rs.
но
/ г-----—л 1 Л / d — (8,'9)d \z]
r5= ft cos K1 -= ft (/1 + tgSaJ-W L И ' + ----d~J J ”*
= d (vT012)-1 = 0,995 d
и, следовательно,
A\f.=_ [ 100 - 3d— (1 О-f- 30) 2d— (10+30) d] /0,995d « — 180 кН,
Из второго уравнения получим:
A'3S= |Л’л2й—(Fi+F6)d]/ft1 = [100-2d—(10+30) d]/(8/9) d» 180 кН.
Сила N,5. Пользуясь тем же сечением I—I, применяя способ
проекций, составим уравнение равновесия:
2У=0; sin (n-A^sin 0+Ул-(^+£6)—(Г2+Л) =0,
где
sin а, = (У 1 + etg2 ai)**1 «= ()1 + 9!)~* = 1/9,05 tgcti^sl/9,
sin ₽ = (/1 + etg2 р)-1 = (/1 + [d/(8/9)dJ2)"1 =
= (/1 + 1,126s )-1 = (У2^бб)~* = 0,667.
И, следовательно,
Л'1Б = [—180 • (1/9) +100— (10+30) — (10+30) ] /0,667=0.
* Здесь не изображаются отдельные рисунки рассматриваемых
в равновесии частей фермы. Предполагается мысленное отбрасыва-
ние той части фермы, равновесие которой не рассматривается, а дей-
ствие ее на оставшуюся часть заменяется внутренними силами,
которые показываем на стержнях фермы стрелками, направлен-
ными от узлов (считаем, что стержни работают на растяжение).
В данном примере рассматривается часть фермы, расположенная
слева от взятого сечения.
145
Сила N^. Вырезаем узел 5 сечением И—II. Имеем:
2+=0; А^5С“Ь^45 sin fJ+JVga sin fj—F3=0.
В силу геометрической и силовой симметрии и по-
этому
2У=0; W55+2IV45 sin f—Ft—О,
откуда
Aiss=—2iV15 sin 6+Ffi=—2-0-0,667+30=30 кН,
Силы Л'г4, N3i. Проводим сечение III—III и, применяя способ
Риттера, получим:
=0; JVS4r3+ VA2d- (F,+Fe) d=0,
S,i=0; —-Кдй+(Рi+Fe) (с+^О+РтЛе—Л/з4Гк=0.
Из первого уравнения находим:
JVM=-[ VA2d- (F1+f6)rf]/r3,
по (см. рис. 6.35, б)
г3 =- Л, cos а2 = (8d/9) (/1 + tg» = (8d/9) (^1 + (З/ь-)2)"1 -
= 0,843 d.
Следовательно,
/V24=— [100-2d—(10+30)d]/0,843d=—189,8 кН~—190 кН.
Из второго уравнения следует:
Ws4=l----PaO+(F |+/ б) (C+dJ+f 7гд]/гд,
но fh—2d-\-a, с другой стороны, из треугольника 436 имеем:
Г|г=Л1 ctg а2= (8/9)d3 = 2,66d
и значит
2,66d=2d+a, a = 0,66d.
Теперь имеем:
Яи= [—100-0,66d+( 10+30) (0,66d+d) +30-2,66dJ/2,66d=
=30,15₽s30 кН.
Силы Л'|3 и :V23. Проводим сечение IV—IV и, применяя способ
Риттера, получаем:
S :??2=—10; V tf—N 13/12 == 0,
2тй = 0; —1/ло+(fj+F3) (d+a)+Ws3r//t=0.
Из первого уравнения получим:
Wia==+,rf/fts==10(M/(5/9)d=180 кН.
Из второго уравнения —
Л'гз = [VAa~(Fi+T'e) (d+й) ] /r'fs.
146
но
r'k — (« + 2d)sin ч = (a+ 2d) (КI 4- ctg2 т) 1 =
- (a + 2d) (/1 + (9/5)")“1 - (0,66d + 2d}(1/2,08) - 1,29d.
Следовательно,
#2B = [ 100-0,664— (10+30) (rf+0,66d) ] /1,29d = —0,3 кН w 0,
Сила #12
#12= 30 кН (cm. n. 6.4.1, п. B).
Силы #ttl и #C2.
Сечением V—V вырезаем узел О,
Имеем:
SX=0; #о2соз a+#Oi=O;
2 У=0; #os sin a+ УЛ = 0.
Из второго уравнения находим:
#м=— Гл/sin a,
но
sin a = (У1 + ctg2 а )~** = 1 + (Э/З)2)"1 = 0,485
и значит
#02=—100/0,485 = —206,18 кН.
Перенося #В| и УА в правые части уравнений и затем разде-
лив почленно первое уравнение на второе, получим:
ctg а=Л'о1/Гд; #01 = VA ctg а —100-9/5= 180 кН.
Силы в стержнях правой половины фермы определять не бу
дем, ибо для симметричной фермы при силовой симметрии сила
в каждом стержне правой ее половины будет равна силе в симмет-
рично расположенном ему стержне левой половины фермы. На-
пример, Лг01=#9-и, Nl2=Ne-lB и т. д.
Проверить правильность расчета можно, рассмотрев равнове
сие части фермы, расположенной слева от сечения I—I. Так как
на эту часть фермы действует плоская система произвольно рас-
положенных сил, то уравнения IX = 0, 2У — 0 и Х/Пл = 0 при под-
становке в них найденных величин сил #46, #43 и #35, должны
обратиться в тождества вида 0=0. Если это будет соблюдено, то
можно полагать, что расчет фермы выполнен правильно.
Итак, будем иметь (рис. 6.35, в):
XX=0; #46 cos со+Л+cos p+#ss=—180 0,995+0-cos p+180=0,9;
Д=[(180—179,1)/180] 100 % = 0,5 %<£5 %.
Невязка пренебрежимо мала и можно считать, что уравнение
XX=0 при подстановке в него полученных значений Л«, #4s, #35
обращается в тождество 0=0.
X У=0; —#4s sin р+#16 sin а |— (F2+А?) = (+Е6) + Ел =
=0-sin р+(—180) - (1/9) — (10+30) — (10+30) +100 = 0,
1У=0 обращается в тождество 0=0.
147
Должна быть равна нулю и следующая сумма моментов
(рис. 6.35, в):
2 тА=0; Л«Гл+ЛГ«г'л+ (Л+Т в) d+ (Ъ+F 7) 2d=0,
здесь
гл — u cos сц = (d—3d tg a,) cos с^ = [d—3d (1/9) ] cos щ—
= (2d/3) 0,995 = 0,664d.
Следовательно.
—180 - 0,664d+0 rл + (10+30) d+ (10+30) 2d =
=—119,5d+40d+80d=0,5d;
Д=[(120—119,5) / I20J100 % =0,42 %<5 %.
Невязка пренебрежимо мала и можно считать, что 0=0.
Таким образом, все три уравнения равновесия для рассматри-
ваемой части фермы превратились в тождества вида 0=0. Следо-
вательно, силы в стержнях фермы определены правильно.
Приведем сводную таблицу 6.2 сил в стержнях фермы.
Таблица 6.2
Вид стержня Наименование стержня Сила А', кН
растяжение («+») сжатие (*->}
02 206,18
24 — 190
Верхний 46 — 180
пояс 68 — 180
8—10 — 190
10—11 — 206,18
01 180
13 180
Нижний 35 180
ПОЯС 57 180
79 180
9—11 180 —
23 0
Раскосы 45 0 —
58 0 —
7—10 0
12 30
34 30
Стойки 56 30
78 30
9—10 30 —
148
6.5. Графическим способ расчета балочных ферм
6.5.1. Теоретические основы. Графический способ оп-
ределения сил в стержнях ферм основан на построении
замкнутых многоугольников сил, сходящихся в одной
точке. Каждый узел фермы можно рассматривать как
точку, к которой приложена уравновешенная система
сходящихся внешних сил и искомых сил в стержнях.
Если число неизвестных сил в стержнях, сходящихся
в рассматриваемом узле, не более двух, то, построив
для этого узла замкнутый многоугольник сил, сможем
графически определить неизвестные силы. Выполнив
в определенной последовательности построение замкну-
тых многоугольников сил для всех узлов фермы, най-
дем графически неизвестные силы, возникающие во всех
стержнях фермы.
Рассмотрим ферму (рис. 6.36,а), на которую дейст-
вует постоянная нагрузка — силы Fb F2, ..., F$, прило-
женные в узлах ее верхнего пояса. В опорном узле А
(он же 0) сходятся четыре уравновешенные силы: ре-
акция VA=2F, сила Fi = F/2 и силы hT02 и JVqi в стерж-
нях 02 и 01. Вырежем этот узел (рис. 6.36,6) и постро-
им для него замкнутый многоугольник сил (рис. 6.36, fi).
Отложим вверх в масштабе сил p;=0,5F кН/см от-
резок ab, равный реакции VA=2F; из точки b — конца
этого отрезка построим вниз отрезок Ьс, равный силе
F\=Fj2. Из точки с проведем линию, параллельную
усилию Л'оа, а из точки а — линию, параллельную уси-
лию Л^о»; они пересекутся в точке d, образовав замкну-
тый многоугольник сил abeda. Длины линий ad и cd,
измеренные в масштабе сил, дадут величины сил Л?01
и Afo2 в стержнях 01 и 02. Их направления определятся
обходом многоугольника сил по направлению внешних
сил от и до начальной точки многоугольника сил — точ-
ки а. Направление силы Nqz, как видно из рис. 6.36, в,
оказалось к узлу, направление Лг01 — от узла. Стержень
Л’о2 сжат, стержень No\ растянут: N02==—2.75F; Л'о1 =
=2,3F.
Затем вырезаем узел 2 (рис. 6,36,0) и показываем
его на отдельном рисунке (рис. 6.36,г). В этом узле схо-
дятся данная сила F2=F, только что найденная сжи-
мающая сила Лг02> направленная к узлу 2, и две неиз-
вестные пока внутренние силы и Л'21 в стержнях
24 и 21.
149
Строим силовой многоугольник. От произвольной
точки е (рис. 6.36, д) отложим в масштабе величину
силы ЛГС2, проведя линию ef параллельно стержню 20
и указав стрелкой направление силы к узлу, как сжи-
мающей. Из точки f откладываем отрезок fg, выражаю-
щий силу Fz=F. Из крайних точек е и g проводим до
взаимного пересечения линии, параллельные стержням
21 и 24; получим точку h.
Отрезки gh и he будут соответствовать значениям
сил Nfu и N21', их направления определятся обходом
многоугольника сил в направлении известных сил.
Аналогично строятся многоугольники сил для всех
остальных узлов фермы. Последовательность выреза-
ния узлов определяется тем, что в каждом узле должно
быть не более двух неизвестных сил. Каждому узлу со-
ответствует отдельный замкнутый многоугольник сил.
Следовательно, для того чтобы определить силы во всех
стержнях, надо построить столько многоугольников сил,
сколько имеется узлов.
Разбросанные по всему листу многоугольники сил
неудобны для пользования и служат источником оши-
бок. Кроме того, каждая сила в стержне повторяется
2 раза, так как любой стержень входит в состав двух
узлов. Стремление избавиться от этих неудобств послу-
жило поводом к усовершенствованию графического спо-
соба определения сил в стержнях ферм методом выре-
зания узлов.
Английский физик Максвелл я итальянский матема-
тик Кремона почти одновременно (Максвелл—в 1870 г.,
Кремона — в 1872 г.) предложили объединить много-
угольники сил, построенные для отдельных узлов, в об-
щую диаграмму, в которой каждая сила встречается
один раз. Такая диаграмма носит название диаграммы
Максвелла — Кремоны. В дальнейшем некоторое усо-
вершенствование в обозначение сил внес английский ин-
женер Боу (1873 г.).
На практике диаграмму Максвелла — Кремоны обыч-
но называют диаграммой сил. Под этим названием она
фигурирует в нашем дальнейшем изложении.
Построим диаграмму сил для рассматриваемой фер-
мы, теперь изображенной на рис. 6.37, а. Сначала усло-
вимся в обозначениях. Будем обозначать (рис. 6.37, а)
узлы ферм арабскими цифрами 0, 1, 2, 3 и т. д.; внеш-
ние районы фермы, т. е. области, расположенные меж-
151
150
F3=F
сис. блг
ду линиями действия внешних сил, приложенных к уз-
лам фермы,— римскими цифрами /, II, III и т. д.; внут-
ренние районы фермы, т. е. области, расположенные
внутри фермы, ограничиваемые стержнями,— маленьки-
ми буквами латинского алфавита а, Ь, с и т. д.
При построении диаграммы сил каждый рассматри-
ваемый узел будем обходить по направлению часовой
стрелки, при этом любая сила будет читаться двумя
римскими цифрами, а стержень — буквой с римской циф-
рой или двумя буквами. Например, обходя узел 2
(рис. 6.37, а) по часовой стрелке, следует прочесть на-
152
звание силы и стержней так: III—IV (сила F%=F) и
далее стержни IVb, ba, alii. Теперь непосредственно пе-
рейдем к построению диаграммы сил (рис. 6.37,6).
Предварительно определяем реакции опор фермы.
В силу геометрической и силовой симметрии будем
иметь:
VA=VB=2f.
Примем .масштаб сил pjP=0,5/? кН/см. Считаем, что
ферма (рис. 6.37, а) вычерчена в масштабе длин pi =
=2 м/см и произведено районирование се.
Сначала строим в масштабе сил вблизи схемы фер-
мы многоугольник внешних сил, активных и реактивных
(рис. 6.37,6), начав, например, с силы //—III н обходя
внешний контур фермы по часовой стрелке. Из произ-
вольной точки откладываем в масштабе вектор II—III,
равный вектору силы Fj=F/2; из конца вектора //—///
(точки III) откладываем вектор III—IV, равный векто-
ру силы Fj=F и т. д. В результате получим разомкну-
тый многоугольник сил, вытянутый в прямую линию
II—VII. Так как ферма находится в равновесии, то
многоугольник сил должен оказаться замкнутым: из
конца вектора VI—VII, равного вектору силы F5=F/2,
проводим вектор VII—I, равный вектору реакции опо-
ры VB=2F, и, наконец, из конца вектора VII—1 (точ-
ки 7) проводим вектор 1—11, равный вектору реакции
опоры Va~2F, который и будет замыкающим вектором
разомкнутого многоугольника сил 11—III—IV—V—VI—
VII—I. '
Построение диаграммы сил начинаем с левого опор-
ного узла 0 (рис. 6.37,а), в котором сходятся только
два стержня Ilia и al. Мысленно, вырезая узел 0 и об-
ходя его по часовой стрелке, найдем сначала силы 1—II,
II—III и стержни Ша и а!.
На диаграмме сил (рис. 6.37,6) уже показаны из-
вестные внешние силы I—II и II—III. Им соответству-
ют исходные точки 1 III и 1, каждая из которых входит
в одно из наименований стержней, сходящихся в данном
узле (точка Ill — в наименование стержня Ша, точка
I—стержня al). Теперь из точки III диаграммы прово-
1 Исходными условимся называть точки, соответствующие на-
чалу первой и концу последней из заданных (внешних) сил, или
сил в стержнях. Если в узле только одна известная сила, то исход-
ными будут точки, соответствующие началу и концу ее.
153
дим прямую, параллельную стержню Ша (рис. 6.37, о)
а из точки / — прямую, параллельную стержню al. Эти
две прямые пересекутся в точке, которую назовем бук-
вой а по обозначению точки, входящей в наименова-
ние каждого из стержней, сходящихся в данном узле.
В результате получим замкнутый многоугольник 1—II—
Ша—1. Измеренные в масштабе прямые Ша, al и оп-
ределяют силы в стержнях Ша и al фермы.
Для определения знака силы в стержне пользуемся
правилом: в силовом многоугольнике, построенном для
находящихся в равновесии сил, стрелки, указывающие
направление сил, обтекают многоугольник сил в одном
и том же направлении. Сила 1—П (рис. 6.37,6) направ-
лена вверх, сила II—111— вниз, поэтому следующая за
ней сила Ша должна быть направлена справа налево,
а сила al — слева направо.
Перенося эти направления с многоугольника сил на
стержень левого опорного узла (рис. 6.37,а), видим, что
сила Ша направлена к узлу и стержень Ша сжат,
а сила а! — от узла и стержень а! растянут. Стрелка,
указывающая направление силы в стержне, наносится
на схему фермы и ставится на оси стержня у его конца,
примыкающего к рассматриваемому узлу; одновремен-
но в направлении, обратном уже поставленной стрелке,
на противоположном конце этого же стержня, примы-
кающем к соседнему узлу, ставится другая стрелка
(рис. 6.37,с).
Стрелки, нанесенные на оси стержня и направлен-
ные в противоположные стороны (например, стрелки на
стержне Ша), показывают, что данный стержень сжат,
если же стрелки направлены навстречу друг другу (на-
пример, стрелки на стержне al) — стержень растянут.
Однако удобнее, и так будем поступать в дальней-
шем, знак силы в стержне определять, не производя
обхода замкнутого многоугольника сил, а делая обход
узла па схеме фермы по часовой стрелке и читая обо-
значения встречающихся стержней с неизвестными сила-
ми. Прочитывая на диаграмме эти же обозначения, но
уже означающие силы в стержнях, устанавливают на-
правление, в котором перемещается по линии диаграм-
мы воображаемая точка от первой буквы (или цифры),
входящей в наименование силы, ко второй; это направ-
ление одновременно определяет и направление силы
в стержне, которое переносится на узел фермы, и обо-
154
значается стрелкой. На линиях диаграммы стрелки
нс ставятся. Например, при обходе по часовой стрел-
ке левого опорного узла читаем обозначение стержня
с неизвестным усилием al; первой встречается буква а,
второй цифра I. Прочитываем по диаграмме это же обо-
значение al, но уже означающее силу в стержне, и,
установив направление перемещения воображаемой точ-
ки от точки а к точке /, не ставя стрелки на прямой al,
переносим это направление на узел фермы—-от узла.
Далее встречаем стержень Ша; здесь первой являет-
ся цифра III, второй буква а; направление перемеще-
ния воображаемой точки от точки III к точке а по ли-
нии Ша диаграммы укажет и направление силы в стерж-
не Ша — к узлу. Как видим, направления сил в стерж-
нях al и IIIа получились такими же, что и при обходе
многоугольника сил.
Вырезаем следующий узел 2 (рис. 6.37, й), в кото-
ром сходятся уже найденная сила Ша и две неизвест-
ные силы в стержнях IVb и Ьа. На диаграмме сил на-
ходим линию al II—III—IV, соответствующую известной
силе в стержне alII и силе 111—IV. Через исходные точ-
ки а и IV проводим прямые, параллельные стержням
Ьа и IVb. В пересечении получим точку Ь, которая вхо-
дит в наименование каждого из стержней, сходящихся
в узле 2.
Величина силы в стержне IVb изображается на диа-
грамме измеренным в .масштабе сил отрезком прямой
IVb, а направление силы получается к узлу 2, как это
следует из обхода его но часовой стрелке. Аналогично
находим направление силы в стержне Ьа— тоже к уз-
лу 2. Таким образом, оба стержня IVb и Ьа сжаты.
Следующим вырезается узел 1 с двумя неизвестны-
ми силами Ьс и с/. На диаграмме сил находим линию
lab, изображающую уже известные в этом узле силы 1а
и ab, и через исходные точки I и b проводим прямые,
параллельные стержням ci и Ьс с неизвестными силами.
В пересечении прямых получим точку с. Отрезки пря-
мых Ьс и с! на диаграмме, измеренные в масштабе сил,
выражают величины искомых сил в стержнях тех же
наименований. Знаки сил находим указанным ранее спо-
собом обхода узла 1 по часовой стрелке. Направление
силы Ьс определяется направлением перемещения вооб-
ражаемой точки по линии Ьс диаграммы сил от точки Ь
к точке с — слева направо ио наклонной вверх, т. е. от
155
узла 1. Стержень be растянут. Направление силы с!
от точки с диаграммы к точке 1 слева направо, т. с.
тоже от узла I. Стержень с! растянут.
Продолжив подобным образом вырезание остальных
узлов фермы в последовательности 4, 3, 6 и выполнив
необходимые построения, получим на диаграмме сил
(рис. 6.37,6) многоугольники сил blV—Vdcb, Icdel и
edV—Vie, соответствующие указанным узлам фермы.
Узел 5 не рассматривается, так как силы в примыкаю-
щих к нему стержнях уже определены раньше из усло-
вий равновесия вырезанных узлов 3 и 6. Окончательная
диаграмма сил показана на рис. 6.37, б.
Проследим за тем, как был образован на диаграмме
сил последний, соответствующий узлу 6, многоугольник
сил edV—Vie, которым закончилось ее построение.
В узле 6 сходятся сила V—VI и стержни ed, dV и
Vie с пока еще неизвестной силой. Обходя этот узел по
часовой стрелке, замечаем, что на диаграмме сил уже
есть точки е, d, V, VI, соответствующие вершинам
разомкнутого многоугольника edV— VI, стороны которо-
го, измеренные в масштабе, выражают величины сил
в стержнях ed, dV и величину силы V— VI.
Для равновесия узла 6 необходимо, чтобы эти три
силы уравновесились четвертой — силой в стержне Vie;
при этом многоугольник сил edV—Vie должен быть
замкнутым, это получим, соединив точки VI и е на диа-
грамме сил прямой линией Vie. Эта прямая, измерен-
ная в масштабе, выражает силу в последнем по обходу
фермы стержне Vie и в то же время является контроль-
ной прямой, с помощью которой производится одна из
проверок правильности построения диаграммы сил.
Действительно, прямая линия Vie как линия диа-
граммы сил должна быть параллельной соответствую-
щему ей стержню Vie фермы (рис. 6.37, а). Если это
условие соблюдено, то можно считать, что диаграмма
сил построена правильно, если не соблюдено,— в по-
строение вкралась ошибка.
В нашем примере условие параллельности прямой
Vie на диаграмме стержню Vie (рис. 6.37, а) соблюде-
но; это дает основание считать, что диаграмма сил по-
строена правильно.
Другую проверку правильности построения диаграм-
мы сил сделаем так: проведем произвольный сквозной
разрез фермы, например s—$ на рис. 6.37, а. Условия
156
равновесия фермы требуют, чтобы силы, действующие
на каждую из двух частей фермы, образовали замкну-
тые многоугольники. На диаграмме действительно нахо-
дим замкнутый многоугольник сил I—H—Ill—IVbcI,
который подтверждает равновесие левой части фермы,
и такой же многоугольник сил cbiV—V—VI—VII—Ic,
подтверждающий равновесие правой части фермы. Та-
ким образом, и вторая проверка свидетельствует о пра-
вильности построения диаграммы сил. Измерив в мас-
штабе сил длины сторон диаграммы сил, получим соот-
ветствующие им величины сил в стержнях фермы. При
этом удобно пользоваться формулой
N=l[tF,
где N — сила в стержне в единицах силы, указанных в условии за-
дачи; I — длина стороны диаграммы сил, см; — масштаб сил.
Примем здесь pP=0,5F кН/см, тогда, например,
сила в стержне 02 определится так:
.Vina=5,5 - 0,5Д=2,75Д кН.
Аналогично вычисляем силы во всех остальных
стержнях фермы. Расчет сведен в табл. 6.3.
Сделаем еще одну (третью) проверку правильности
построения диаграммы сил. Для этого определим ана-
Таблица 6.3
Вид стержня Обозначение силы Сила, кН
общее по диа- грамме растяжение («+») сжатие (<:—»)
Л'сг a Ill 2,75 F
Верхний Л';4 b IV — 2,3 F
пояс Л\е V d — 2,3 F
Л,Г65 VI е —* 2,75 F
Нижний A’ot JVfs а 1 с I 2,3 F 1,55 F -
ПОЯС Л'з5 е I 2,3 F —
ЛГ12 а b 0,85 F
Раскосы ЛГы JVsi Ь с с d 0,85 F 0,85 F —
iVm d е — 0,85 F
157
литическим способом силы в каких-нибудь трех стерж-
нях фермы, например, в стержнях 24, 14 и 13 второй
панели 1—3, и сопоставим результаты вычислений с со-
ответствующими величинами сил в этих стержнях, по-
лученными графическим способом.
Если при этом величины сил в стержнях, определен-
ные двумя способами соответственно для каждого стерж-
ня, совпадут или будут отличаться друг от друга не бо-
лее чем на ±5 %, то можно считать, что диаграмма сил
построена правильно.
Разрежем ферму (рис. 6.38) сечением s—s на две
части. Мысленно отбросив правую часть, определим
силы в стержнях 24, 14 н 13 из условий равновесия ле-
вой части фермы, при этом применим способ Риттера.
Сила
Sm,=0; VAd—Ffd—F2k4-Nzfi = 0,
где k — плечо силы F% относительно точки Риттера 1; из
геометрических соображений (см. рис. 6.38) следует:
k = d—a=d—ft| ctg a=d—Q,5hl,5dlh=d-~0,75d—0^5d,
— плечо силы NSi относительно точки Риттера 1,
П = d sin a - d (/'1 + ctg^'a)"1 = d (/1 + = 0,556d.
Следовательно,
^24=—(VAd—F । d—F2k) jri=—(2Fd—0,5Fd—0,25Fd) /0,556rf -=
=—1,25Frf/0,556rf=—2.25F,
158
а по диаграмме N2n=blV=~2,3F.
Сила Na
Smo=0; F20,75d-W14r(l=0,
где
re = d cos ф - d (/1 + tg’V)-1 = * (/1 + (O. W)2)-1 -
*= d (КС®)-1 - 0,894<7.
Следовательно,
JV14 = F^lr,=0,75 Fd/0,894d=0,839F,
а по диаграмме №ц=Ьс~0.850F.
Сила Nt3
Zm4=0; VaI ,5d—Fj 1,5rf—Fa0,7M—N 13ft=0,
Откуда
дг13 = (VA1,5d—Ft 1,5 c/— F20,75cl) /Л=
== (2Fl,5d— 0,5Fl,5rf—0.75FJ) /rf= I,50F,
а по диаграмме ;V13=c/= 1,55F.
Составим сравнительную таблицу 6.4.
Таблица 6.4
Обозначения силы Сила в стержне. кН % расхож- дения
общее по диаграмме по диаграмме по аналити- ческому рас- чету
Ь IV 2.30 F 2,25 F 2,32
TV14 b с 0,850 F 0,839 F 1,29
/V.3 с 1 1,55 F 1,50 F 3,21
Сходимость очень хорошая, расхождение меньше
5 % — в допустимых пределах. Есть уверенность, что
диаграмма сил построена правильно.
Сравнивая схему фермы (рис. 6.37,а) с диаграммой
сил (рис. 6.37,6), устанавливаем между ними следую-
щие зависимости:
1. Число сторон у обеих фигур одно и то же.
2. Каждой линии на схеме фермы соответствует па-
раллельная ей линия на диаграмме сил и, наоборот,
каждой линии на диаграмме сил — параллельная ей ли-
ния на схеме фермы.
159
3. Каждому узлу фермы соответствует на диаграмме
сил многоугольник сил, стороны которого имеют такие
же обозначения, как сила и стержни, сходящиеся в этом
узле, и наоборот, каждому многоугольнику сил на диа-
грамме сил соответствует на схеме фермы узел, в кото-
ром сходятся силы и стержни, имеющие такие же обо-
значения, как и стороны многоугольника сил.
Например, узлу 4 на схеме фермы, в котором схо-
дятся сила /V—V и стержни Vd, de, cb, blV, на диа-
грамме сил соответствует замкнутый многоугольник сил
IV—VdcblV, стороны которого обозначены IV—V, Vd,
de, cb, blV, т. e. так же, как и сходящиеся в узле 4 сила
и стержни, и наоборот, многоугольнику сил IV—VdcblV
с указанными сторонами на диаграмме сил соответ-
ствует на схеме фермы узел 4, в котором сходятся сила
и стержни, имеющие такие же обозначения, как и сто-
роны многоугольника сил IV—VdcblV.
4. Определенному району на схеме фермы на диа-
грамме сил соответствует и определенная точка, в кото-
рой сходятся линии диаграммы, имеющие такие же
наименования, как и стержни фермы, ограничивающие
этот ее район, и наоборот. Например, району с фермы
(рис. 6.37, а), ограниченному стержнями cb, de и cl, на
диаграмме сил (рис. 6.37, б) соответствует точка с, в ко-
торой сходятся линии диаграммы, имеющие такие же
наименования, как и стержни, ограничивающие район с
фермы, и наоборот, в точке с диаграммы сил сходятся
линии cb, de, cl, соответствующие этим же наименова-
ниям стержней, ограничивающих район фермы с.
Фигуры, между которыми существуют указанные за-
висимости, называются взаимными фигурами.
Следовательно, схема фермы и соответствующая ей
диаграмма сил являются взаимными фигурами.
Перечисленные зависимости между взаимными фигу-
рами — схемой фермы и диаграммой сил — могут слу-
жить проверками (дополнительными к ранее приведен-
ным) правильности построения диаграммы сил.
Итак, для построения диаграммы Максвелла — Кре-
моны надо выполнить ряд действий в такой последова-
тельности, изложенной применительно к рис. 6.37, а, б:
1. Вычертить в масштабе геометрическую схему дай-
ной фермы (рис. 6.37,а).
2. Определить реакции опор фермы.
3. Обозначить, как показано на рис. 6.37, а, замкну-
160
тые и незамкнутые участки плоскости чертежа фермы,
ограниченные стержнями и внешними силами (районы
фермы),
4. Построить многоугольник внешних сил с учетом
реакции опор, обходя ферму по часовой стрелке (на
рис. 6.37, б многоугольник сил вытянут в прямую
/ П—П1—1V— V— V7— VII—I).
5. Перейти к построению собственно диаграммы сил,
обходя каждый узел фермы по часовой стрелке.
Начинать построение следует с того узла фермы,
в котором сходятся не более двух стержней, при этом
сначала читаются названия приложенных в узле извест-
ных сил, а затем — стержней.
Переходя от узла к узлу, надо следить за тем, что-
бы в сходящихся в узле стержнях не оказалось более
двух стержней с неизвестными силами. В качестве при-
вязки линий диаграммы сил к выполняемому ее черте-
жу используются исходные точки.
Каждому узлу фермы на диаграмме сил должен со-
ответствовать замкнутый многоугольник сил. Построе-
ние каждого из них выполняется в последовательности,
изложенной ранее применительно к узлам 0, 2, 1
(рис. 6.37, а). Полученные при этом на диаграмме бук-
венные обозначения точек пересечения ее линий долж-
ны соответствовать обозначениям замкнутых районов
фермы. На конечном этапе построения диаграмма сил
должна замкнуться, т. е. проведенная между двумя
последними исходными точками прямая (последняя ли-
ния диаграммы) должна оказаться параллельной соот-
ветствующему ей стержню; это служит контролем пра-
вильности построения диаграммы сил.
6. Определить знаки сил по приведенному способу
и обозначить на схеме фермы сжатые стержни стрелка-
ми, направленными к узлам, ограничивающим длину
стержня, а растянутые —стрелками, направленными на-
встречу друг другу.
7. Определить величины сил в стержнях путем изме-
рения линий диаграммы сил в масштабе сил и получен-
ные результаты выписать в таблицу.
В заключение отметим, что встречаются случаи
(в данном учебнике они не рассматриваются), когда по-
строение диаграммы сил становится возможным лишь
при условии введения вспомогательных приемов (об
6 Шиши ан В. А.
161
РИС. 6.39
этом подробно можно прочесть в одной из книг [3],
[5], [8]).
6.5.2. Фермы, находящиеся под действием постоянной
и временной нагрузок. Определение узловых нагрузок
на ферму и расчетных сил в ее стержнях.
В п. 6.5.1 рассмотрено построение диаграммы сил
для фермы, находящейся под действием постоянной на-
грузки. Здесь на конкретном примере показано решение
этой же задачи, но для фермы, на которую одновремен-
но действуют и постоянная, и временная нагрузки.
Пример 6.2. Рассчитать графическим способом стропильную
ферму, показанную на рис. 6.39, а и нагруженную равномерно рас-
пределенной по поверхности кровли постоянной и временной на-
грузками, передающимися в узлы верхнего пояса фермы.
Дано:
а) постоянная нагрузка действует на всем пролете фермы
в вертикальном направлении с интенсивностью
_____________________________кН _____________________
0=1,36 Ms проекцИИ кровли на горизонтальную плоскость J
162
б) временная нагрузка (снег) действует на каждую половину
фермы отдельно — левую или правую, или на всем пролете фермы
В вертикальном направлении с интенсивностью
1,40 м2 ПрОекции кровли иа горизонтальную плоскость ’
в) расстояние между двумя соседними фермами « = 6 м;
г) длина пролета фермы 1=15 м;
д) длина средней панели фермы dcp=5 м, остальных четырех
панелей — по d=2,5 м;
е) высота фермы (рис. 6.46, а); Л] =2 м; йя=2,25 м; й3=2,5м.
Решение этого примера сводится к определению расчетных сил
в стержнях фермы. Расчетной называется наибольшая по абсолют-
ной величине сила, возникающая в стержне от совместного действия
на ферму постоянной нагрузки и временной (снег), расположенной
для данного стержня в невыгоднейшем положении (в данном слу-
чае на левой или правой половине фермы, или па всем ее пролете).
Невыгоднейшим называется то положение временной нагрузки
(на левой или правой половине фермы, или на всем ее пролете),
при котором от нее в стержне возникает наибольшая по абсолют-
ной величине сила.
Решение. 1. Предварительно определяем узловые нагрузки, т. с.
силы, передающиеся па узлы фермы.
На рис. 6.39, б изображены проекции ферм с кровлей на го-
ризонтальную плоскость. На каждый из верхних узлов 2, 4, 6, 8,
10 рассчитываемой фермы передается постоянная нагрузка (сила),
определяемая произведением ее интенсивности на площадь прямо-
угольника (па рис. 6.39,6 обведен жирными линиями) со сторона-
ми, равными длине панели d и расстоянию между фермами а.
Что касается узлов 0 и 9, то, как это видно из того же
рис. 6.39,6, каждый из них воспринимает лишь половину той на-
грузки (силы), которая передается на каждый из узлов 2, 4, 6, 8,
10. Площадь прямоугольника со сторонами d и а (рис. 6.39,6),
расположенного так, что узел рассчитываемой фермы оказывается
в центре симметрии этого прямоугольника, назовем удельной гру-
зовой площадью. Обозначим удельную грузовую площадь от посто-
янной нагрузки через ыч, а от временной — тогда найдем:
для узлов 2, 4, 6, 8, 10
o»4=<Bp=dn=2,5-6—15 мг;
для узлов 0 и 9
w'9=w7= (1/2)1»,= (1/2)-15 = 7,5 м2.
Обозначая постоянную нагрузку (силу), передающуюся на каж-
дый узел фермы через Fl>'\ а временную нагрузку — , полу-
чим следующие значения узловых нагрузок:
а) от постоянной нагрузки:
для узлов 2, 4, 6, 8, 10
Ff _F™ =...= /ИОД = ГМ = q = 15-1,36 = 20,4 кН;
для узлов 0 и 9
Р%> = F™ = (l/2)<nf q = (1/2) 15-1,36 = 10,2 кН;
6*
163
б) от временной нагрузки:
для узлов левой половины фермы:
= ырР = 15 ’1 -4 “ 21 кН:
r(fl) = F(6) =(i/2)Wpjp = 7,5-l,4= 10,5 кН;
для узлов правой половины фермы:
F= /*10> = <ви р - 15.1,4 - 21 кН,
F^-F^)=(l/2)<Bp /> = 7.5-1,4 = 10,5 кН;
для узлов верхнего пояса фермы:
/7(2) = /7(4) = ,. = jplW _ р 15>1(4 = 21 кН,
/7(0) /7(9) = (1/2) Юрр = (1/2) 15-1,4 = 10,5 кН.
Приводим табл. 6.5 узловых нагрузок.
Таблица 6.5
Узел Сила, кН, р узле от ПОСТОЯННОЙ нагрузки Сила, кН. в узле от временной нагрузки
на Левой воловине фермы па правой половине фермы на всей ферме
0 10,2 10,5 10,5
2 20,4 21 »—• 21
4 20,4 21 — 21
6 20,4 10,5 10,5 21
8 20,4 — 21 21
10 20,4 — 21 21
9 10,2 — 10,5 10,5
Имея значения узловых нагрузок, можем построить четыре
диаграммы сил: одну от нагружения фермы постоянной нагрузкой;
вторую, третью и четвертую — временной нагрузкой, сначала ее
левой половины (или правой), потом правой половины (или левой),
затем по всему пролету, и по дим определим расчетные силы.
Здесь поступим иначе. Для симметричных ферм (см. 6.4.2),
в числе которых и данная, весьма эффективным является расчет
способом единичных нагрузок, оснований на принципе независи-
мости действия сил (ем. п. 1,2). Для указанных ферм этот спо-
соб дает возможность определить расчетные силы в стержнях
ферм, располагая лишь одной диаграммой сил (вместо четырех
в нашем примере), построенной от нагружения фермы в узлах ле-
вой половины ее (или правой) единичной нагрузкой — силами, рав-
ными единице и ее долям, поэтому дальнейший расчет фермы про-
должим в такой последовательности;
164
1«
2. Изображаем ферму в масштабе ц/==1,67 м/см (2,5 м соот-*
ветствует 1,5 см), нагруженную единичной нагрузкой слева
(рис. 6.40, о), и для этого случая определим реакции опор авали-
тическим способом;
^«=2.25;
ИВ(1) -0,75.
165
Строим диаграмму сил (рис. 6.40,6) в маштабе сил рг=0,33
1/см (1 соответствует 3 см), соответствующую нагружению фермы
по рис. 6.40, а. Рекомендуем самостоятельно построить эту диа-
грамму сил, руководствуясь планом, изложенным в в. 6.5.1.
3. Из диаграммы сил (рис. 6.40,6) определяем абсолютные
значения сил а стержнях фермы во формуле например:
Л'о™1) =/«и ^ = 8,3.0,33 = 2,72;
^«(1* = l<tiv ~ 8’15,0>33 = 2,69;
A’jt = leV! VF = 6,65-0,33 = 2, 19 и т. Д.
Знаки сил определяем по правилу обхода многоугольников сил
по часовой стрелке. Составляем табл. 6.6 расчетных сил. Заполне-
ние граф /, 2, 3, 4 этой таблицы пояснений не требует. В графу 5
вписываем полученные из диаграммы (рис. 6.40,6) значения сил
в стержнях от единичной нагрузки, левой половины фермы. Чтобы
определить силы в этих же стержнях от единичной нагрузки пра-
вой половины фермы, воспользуемся следующим правилом: для
симметричной фермы сила в данном стержне ее ог нагружения
правой половины фермы равна силе в стержне, расположенном
симметрично данному, от нагружения левой половины фермы.
Приведенное правило дает возможность воспользоваться уже
построенной диаграммой сил от единичной нагрузки левой полови-
ны фермы (рис. 6.40, б) и из нее получить следующие равенства,
выражающие единичные силы в стержнях от нагружения правой
половины фермы;
^(8-ю)(1) =Л/24(1) = 2,13;
= +2,67;
= Л'ши =-0,79 и т.д.
Эти силы ' и аналогичные им в остальных стержнях фермы
вписываем в графу 6 табл. 6.6.
4. Находим силы в стержнях фермы от единичной нагрузки
всей фермы; для этого алгебраически суммируем единичную силу
в каждом данном стержне от нагружения левой половины фермы
(графа 5) с единичной силой в этом же стержне от нагружения
правой половины фермы (графа 6) и результат записываем в гра-
фу 7. Например:
№6(1) = N^iy + Л7₽(„ - (-2,69) + ( - 1,63) = -4,32;
"57(i) = *зад + = ( + 1,62) + ( + 2,67) = + 4,29;
*36(0 " "зад + "зад = ( + 0,70) + (-0,79) = -0.09 и т. д,
5. Определяем величины сил в стержнях фермы от заданной
нагрузки.
* Обозначения 77^“ и т. п. читаются так; сила в стержне 46
от единичного нагружения левой половины фермы,
166
Заметим, что полученные силы в стержнях от единичной на-
грузки левой половины и отдельно правой половины фермы и за-
тем всей фермы выражены в долях узловой нагрузки; это позво-
ляет определить силы в стержнях фермы от заданных постоянной
в отдельно временной нагрузок следующим образом:
а) для получения величины силы в стержне от постоянной
нагрузки умножаем силу от единичного нагружения всей фермы
(графа 7) на величину узловой постоянной нагрузки =20,4 кН
(см. табл. 6.5) и результат записываем в графу 8, например *:
N^* = (]) F™ = -4,32-20,4 = —88,13 кН;
Л$’ = NS7 (и 4,29-20,4 -= 87,52 кН и т. д,
б) для получения величины силы в стержне от временной на-
грузки умножаем силу от единичного нагружения левой и от-
дельно правой половины фермы (графы 5, 6 табл. 6.6) на величи-
ну узловой временной нагрузки =21 кН (см. табл. 6.5)
и результат записываем соответственно в графы 9, 10, табл. 6.6,
Например:
Л'Й’ лев = 79лв{в. F™ = -2,69-21 = -56,49 кН ;
Л’$ пр = j j63.21 „ —34,23 кН.
Величины сил в стержнях От нагружения всей фермы времен-
ной нагрузкой получаем алгебраическим суммированием силы в каж-
дом данном стержне от нагружения заданной временной нагрузкой
левой половины фермы (графа 9) с силой в этом же стержне от
нагружения заданной временной нагрузкой правой половины фермы
(графа 10} н результат записываем в графу 11, например:
N$ = Me* лев + пр - ( — 56,49) + ( —34,23) = —90,72 кН.
6. Определяем расчетные силы в стержнях фермы: при этом
могут представиться следующие случаи:
1) если силы в стержне от заданных постоянной нагрузки
и всех видов временной имеют одинаковые знаки, то следует ал-
гебраически сложить величину силы от постоянной нагрузки с наи-
большей по абсолютной величине силой от временной нагрузки
И результат, в зависимости от знака силы, записать в графу 12
илн 13. Например:
Wa-io= (—62,02)+ (—63.84) =—125,86 кН;
результат записываем в графу 13.
Nxi— (+89,35) + (+91,98) =+181,33 кН;
результат записываем в графу 12.
2) если силы от заданных постоянной нагрузки и хотя бы
одной из временных имеют разные знаки и сила от этой одной
* Обозначения и т. п. читаются так: сила в стержне 46
от заданной постоянной нагрузки.
167
Стойки Раскосы Нижний пояс -
сл эо & 6 1 ей & * 43 5 «
£ т г у: > 55 е? £ > а
to- В. № % kVl iVl
от н- ф от к ф СП от Я'1-| 1 о со to £ от о 1-0,79| 1 го го со + 1,62 ="
99‘0+ -0,49 + о +0,64) 1 КЗ —0,79 + о 1 о ОТ £ £ to -4-
d- о 4-0,07 4-0,07) + о £ Л — 1,71 1 о от J> ъ £ [—3,86 4- го +
+ от | +1,43 + Г+24,48 | —78,74 | —34,88 48'1- | £ □с 88 *Н’“ | Л +60,79 | +87,52 а
+ -_1_ —10,29 [ | +11,76 | а Л | —19,32 £ ОТ ] +14,70 -16,59 | —57,12 + Со ОТ ОТ + £ о
+ -10,29 : + 11,76 | + 13,44 | -57,12 | —16,59 | —16,39 S£‘61- | 3 +43,89 +56,07
+ о т Zt‘l + | +25,20 1 от 8 | —35,91 68‘1~ | 68'1— [ £ ел от 1 ОТ +52,58 +90,09
от 13,19 13,19 | 49,68 । 1 98‘Sl | | 12,86 1 123,37 177,61 , 1 5
1 98'8 8,86 1 ОТ О | 70,79 | 18,43 [ 18,43 | 70,79 159,80 1 1
Нижний пояс Верхний пояс - Нид Стержня
& 5 \0l-8 1 £ Нэимелопанке с ге J/КПЯ
£ 1 расчетной Обозн С]
eV 1 | eV! aVI | 1 Л1Р I шч * от единичной на- грузки по днаграм мс сил - £ «э И К о
+ го от + to ОТ о |еэ*1— 1 ю от 1 to =» левой гл S а гы s »
+ го от + 1,62 + ОТ ОТ |-2, !3| S £ ОТ ф £ iyOflEdD £ а Z ® 24 О я л> 1 га
+ от [+4,29 + го со от - 3,04 1 к5 to +— на эсей ферме д: о » ° S
со 5978+ +60,79 —62,02 [ —88,13 j 1 от от 1 го ъ to ж настоянной j ферме а всей
+4.5,99 от +43,89 —19,11 | —34,23 | 6t‘99~ | 1 я £ № 5 со X S ф а в стерж» нагруз
+45,99 +34,02 4- от S —44.73 | 1 ел от 4^ О K+S— | —19,11 | = правой не фермы о S .3 0 ь ie от задан ки, кН
86'16+ +90,09 +62,58 —63,84 [ 1 —90,72 j 1 О (О -63,84 | на всей ферме ^3^ =
ОТ 177,61 123,37 I i 1 S растяже- ние (.+-) Расчета 1 п стержне
1 1 1 | 125,86 | 178,85 от от 125,86 Ф э: ? 5:
Таблица 6.6
временной нагрузки по абсолютной величине больше силы от по-
стоянной нагрузки, то находят две расчетные силы — растягиваю-
щую и сжимающую:
а) сначала поступают так же, как и в случае 1), а результат,
в зависимости от знака расчетной силы, записывают в графу 12
или 13\
б) величину силы от заданной постоянной нагрузки алгебраи-
чески складывают с наибольшей по абсолютной величине силон от
временной нагрузки, имеющей знак, противоположный знаку силы
от постоянной нагрузки. Результат, в зависимости от знака расчет-
ной силы, записывают в графу 1'2 или 13, например:
Л?з«=(“-1.84) + (—16,59) =--18,43 кН;
результат записываем в графу 13,
ЛГМ=(—1,84)+(14,70) = 4-12,86 кН,
результат записываем в графу 12. Таким образом, найдены рас-
четные силы во всех стержнях фермы (табл. 6 6, графы 12 и 13).
6. 6. Анализ работы балочных ферм по эпюрам
сил в их стержнях и оценка целесообразности
применения этих ферм
Рассмотрим часто применяемые в инженерной прак-
тике следующие типы ферм:
раскосную ферму с параллельными поясами и нисхо-
дящими раскосами (рис. 6.41);
ферму с параллельными поясами и треугольной ре-
шеткой с дополнительными стойками (рис. 6.42);
раскосную ферму с параболическим очертанием верх-
него пояса (рис. 6.43);
треугольную стропильную ферму с раскосной решет-
кой с нисходящими раскосами (рис. 6.44).
Пусть все эти фермы имеют одинаковые пролеты
и высоты посередине своей длины, одинаковое число
равных между собой панелей и находятся под действи-
ем приложенных во всех узлах (кроме опорных 1 и 13)
и направленных по вертикали вниз сил (на рисунках
схемы нагружения ферм силами не показаны); величи-
ны этих сил в каждом узле верхнего пояса по 10 кН,
в узлах нижнего — по 30 кН в каждом. Произведен рас-
чет этих ферм. Здесь, за исключением расчета фермы,
выполненного в примере 6.1, приводятся лишь оконча-
тельные результаты расчета, представленные на рис. 6.41,
6.42, 6.43, 6.44 в виде эпюр сил *, изображенных прямо-
1 Рекомендуем самостоятельно рассчитать рассматриваемые
здесь фермы и построить соответствующие расчету эпюры сил
в стержнях этих ферм.
170
РИС. 6.43
РИС. 6 44
171
угольными полосками, расположенными вдоль осей
стержней, на которых указаны полученные расчетом
силы в кН; полоски сжатых элементов заштрихованы.
Ширина полосок в условном масштабе пропорциональ-
на величине силы.
Сравнивая между собой эпюры сил в стержнях рас-
сматриваемых ферм, сделаем сначала общий, относя-
щийся ко всем эти фермам, вывод: при узловой нагруз-
ке ферм силами, действующими по вертикали вниз, все
стержни нижнего пояса работают на растяжение,
а верхнего—на сжатие. Теперь, пользуясь теми же эпю-
рами сил в стержнях ферм, укажем на некоторые осо-
бенности работы элементов рассматриваемых ферм и це-
лесообразность их применения.
Рассмотрим фермы с параллельными поясами:
а) эти фермы характеризуются неравномерностью
распределения сил. Силы в стержнях как верхнего, так
и нижнего поясов увеличиваются от опор к середине.
Силы в решетке (раскосах и стойках) уменьшаются от
опор к середине пролета;
б) величины сил в стержнях поясов зависят от на-
правления раскосов решетки; так, для какой-либо па-
нели с нисходящим раскосом сила в стержне нижнего
пояса по абсолютной величине равна силе в стержне
верхнего пояса той же панели, но в ферме с восходящим
раскосом. Например, | N%s гояс | = [Л^ пояс | (рис. 6.41 и
6.42);
в) при перемене направления раскоса в какой-либо
панели фермы абсолютная величина силы в раскосе
не изменяется, а знак силы меняется на противопо-
ложный. Например, если нисходящий раскос 9—12
(рис. 6.41) работает на растяжение, то после перемены
направления он станет восходящим раскосом 10—11
(рис. 6.42) и окажется сжатым; при этом будет соблю-
даться равенство | Л/™'*-1 = | |.
г) нисходящие раскосы работают на растяжение,
восходящие — на сжатие.
Главным недостатком ферм с параллельными пояса-
ми следует считать неравномерность распределения сил
по длине поясов (особенно для ферм с раскосной решет-
кой). Это приводит к необходимости изменять сечение
поясов по длине пролетов и устраивать в них стыки.
При этом либо перерасходуется материал (при выпол-
нении панелей поясов одинакового сечения по макси-
172
мальному усилию), либо затрудняется центрирование
узлов, имеющих различные сечения. Кроме того, в край-
них панелях на элементы решетки затрачивается из-
лишний материал.
По этим причинам фермы с параллельными поясами
целесообразно применять только при небольших про-
летах, когда вопросы экономии материала имеют вто-
ростепенное значение и можно пояса (в некоторых слу-
чаях и решетку) выполнять из стержней одинаковых
сечений без стыков в узлах. Так изготавливаются фер-
мы для кранов и подкрановых балок промышленных це-
хов с пролетом от 10 до 15 м.
На железнодорожном транспорте фермы с парал-
лельными поясами применяются при строительстве мос-
тов с пролетом от 40 до 50 м и главным образом из-за
удобства расположения поперечных связей.
Фермы с параболическим очертанием верхнего поя-
са (см. пример 6.1).
В работе элементов этих ферм (рис. 6.43) отметим
следующие особенности:
а) силы в элементах нижнего пояса равны между
собой;
б) силы в элементах верхнего пояса увеличиваются
от середины фермы к опорам, но незначительно;
в) раскосы совсем не работают — силы в них рав-
ны нулю;
г) силы в стойках между собой равны и меньше не-
которых сил в стойках ферм с параллельными поясами.
Сами стойки работают на растяжение от сил, приложен-
ных в узлах нижнего пояса фермы.
Из всех рассмотренных ферм ферма с параболиче-
ским очертанием верхнего пояса имеет наименьшую силу
тяжести, для ее изготовления требуется наименьшее ко-
личество материала и, следовательно, она является эко-
номически наивыгоднейшей. Фермы с параболическим
очертанием верхнего пояса целесообразно применять
в строительстве мостов с пролетами до 100—150 м
и в качестве стропильных в зданиях большой ширины:
в промышленных цехах, рынках и т. п.
Некоторым недостатком параболических ферм яв-
ляется необходимость стыковки параболического пояса
в каждом узле.
Треугольные стропильные фермы с раскосной решет-
кой и нисходящими раскосами.
173
РИС. 6.45
РИС. 6.46
В этих фермах характерно следующее:
а) величины сил в поясах значительно больше таких
же сил в фермах с параллельными и параболическими
поясами и они крайне неравномерно распределяются по
длине пролета фермы, возрастая от его середины
к опорам;
б) все стойки растянуты, причем в некоторых из них
(расположенных в средней части фермы) величины сил
значительно превышают силы в соответствующих им
стойках ферм с параболическими и параллельными
поясами;
в) все раскосы работают на сжатие.
Легко заметить, что общая площадь эпюры сил
в стержнях треугольной фермы много больше таких же
площадей для ферм с параллельными и параболически-
ми поясами. Так как площадь эпюры пропорциональна
силе тяжести фермы, то становится очевидным, что тре-
угольная стропильная ферма самая тяжелая по сравне-
нию с другими и для ее изготовления требуются наи-
большие затраты необходимых материалов.
Из всех рассматриваемых здесь ферм треугольная
ферма с раскосной решеткой и нисходящими раскосами
является экономически наиневыгоднейшей и сложной
в конструктивном отношении. По указанным причинам
следует избегать применения треугольных ферм и обра-
щаться к ним только в необходимых случаях: например,
при устройстве двускатной крыши для зданий неболь-
шой ширины.
Сопоставляя между собой указанные фермы, можно
сделать следующий вывод: все фермы, очертание поя-
сов которых находится между параллельными поясами
и параболической кривой (рис. 6.45), можно считать
рациональными, фермы же с очертанием ниже парабо-
лической кривой (рис. 6.46)—нерациональными и при-
менять их допускается лишь в исключительных случаях.
Подчеркнем, что все здесь сказанное о фермах по
рис. 6.41, 6.42, 6.43, 6.44 справедливо при условии на-
гружения их одинаковыми по величине силами, прило-
174
женными во всех узлах ферм и направленными верти-
кально вниз.
В других случаях нагружения ферм, конечно, изме-
нятся и величины, и знаки сил, а также характер рас-
пределения их в элементах поясов и решетки.
Глава 7. Линии влияния
7.1. Понятие о линиях влияния
При расчете таких конструкций, как фермы мостов
и кранов, подкрановые балки в промышленных цехах,
фермы эскалаторов в метрополитенах, приходится иметь
дело с подвижной, обычно вертикальной, нагрузкой, ко-
торая может перемещаться в пределах сооружения. При
этом величины сил, возникающие в элементах сооруже-
ния будут зависеть от положения нагрузки на соору-
жении. Так, например, чем ближе к левой опоре Л бал-
ки находится груз F (рис. 7.1, а, б), тем больше будет
величина опорной реакции УА.
Для определения размеров сечения балки или стерж-
ня фермы необходимо выбрать из всех возможных поло-
жений нагрузки такое, при котором сила в элементе
сооружения получилась бы наибольшей. Эта и некото-
рые другие задачи решаются с помощью так называе-
мых линий влияния (часто применяется обозначе-
ние л. в.).
Линией влияния какого-либо фактора (опорной ре-
акции, изгибающего момента и поперечной силы в оп-
ределенном сечении балки, силы в стержне фермы, пе-
ремещения сечения) называется график, изображающий
закон изменения этого фактора в зависимости от поло-
жения на сооружении подвижного груза F—\.
Произвольная абсцисса линии влияния соответству-
ет положению на сооружении груза, равного отвлечен-
ной единице (единичный груз), а численное значение
каждой ординаты выражает величину изучаемого фак-
тора при положении груза Р=1, установленного на
сооружении, над этой ординатой. Надо четко отличать
линию влияния от эпюры. При построении линии влия-
1 Здесь и в дальнейшем имеются в виду внутренние силы: по-
перечная сила, изгибающий момент и продольная сила.
173
РИС. 7Д
ния сечение остается неподвижным, а груз F— 1 пере-
мещается по сооружению; при построении эпюры ме-
няется положение сечения, нагрузка же остается непо-
движной. Сравнение линий влияния с эпюрами удобно
представить в табличной форме (табл. 7.1).
Таблица 7.1
Вид графика Признак сравнения
положение сечения положение груза характеристика действующей нагрузки
Линия влияния Не изменяется Изменяется Груз F=1
Эпюра Изменяется Не изменяется Любая нагрузка
Построение линий влияния будем выполнять статиче-
ским методом *, сущность которого поясняется на при-
мерах построения линий влияния опорных реакций
и внутренних сил в сечениях однопролетных балок и сил,
возникающих в элементах (стержнях) ферм.
7.2. Линии влияния опорных реакций и снл
в сечениях однопролетных балок
7. 2.7. Простая балка. 1. Линия влияния опорной ре-
акции Уд. Пусть движущийся по пролету балки единич-
ный груз F= 1 находится на расстоянии х от левой
опоры, прячем O^xs^J (рис. 7.2,а); тогда имеем
= х)=0
1 Существуют и другие методы построения линий влияния, ко-
торые здесь не рассматриваются.
176
и
Ри = (/—«)//=—(x//)-j-L (7.1)
Выражение (7.1) является уравнением линии влияния
опорной реакции VA; так как переменная х в это урав-
нение входит в первой степени, то оно может быть пред-
ставлено прямой, определяемой по двум точкам:
при х—О VA = 1;
при x—l УА=0.
Проводим базовую линию (прямая ab, параллельная
оси балки) и по полученным данным, откладывая поло-
жительные ординаты в выбранном масштабе, вверх от
базовой линии строим линию влияния реакции опоры
А — л. в. УА (рис. 7.2,6). Итак, л. в. VA представляет
собой прямую aib с ординатами нуль и единица, распо-
ложенными соответственно под правой В и левой А опо-
рами балки.
2. Линия влияния опорной реакции Ув (л. в. Ув).
При положении единичного груза F=1 на расстоянии х
от левой опоры, где (рис. 7.2,а), имеем
£тл=0; Ке1—1х=0 и VB=±x[l. (7.2)
177
Выражение (7.2) является уравнением линии влия-
ния опорной реакции Ув:
при х=0 Ув=0;
при x—l Ув=1.
Л. в. Ув показана на рис. 7.2, в и представляет со-
бой прямую abt с ординатами нуль и единица, располо-
женными соответственно под левой А и правой В опо-
рами балки. Обратим внимание на следующее: ордина-
ты линий влияния опорных реакций Ул и VB являются
величинами безразмерными, что непосредственно выте-
кает из уравнений (7.1) и (7.2). Любая ордината л.в.
Уд (или Ув), измеренная в определенном масштабе,
выражает собой величину опорной реакции VA (или Ув)
в момент нахождения единичного груза F= 1 над этой
ординатой.
3. Линия влияния поперечной силы в данном сече-
нии (л. в. Qc).
На рис. 7.3, с изображена простая балка. Требуется
построить линию влияния поперечной силы в данном
сечении С.
Пусть груз F= I находится слева от сечения С, т. е
О^х^а. При этом удобнее вычислить поперечную силу
по силам справа от сечения: Q£p =—У«=—х//;
при х=0 Qc—0;
при х—а Qc=—all.
По этим данным, откладывая отрицательные орди-
наты л. в. в каком-либо выбранном масштабе вниз от
базовой линии аф\, строим прямую apF, называемую
левой ветвью линии влияния (рис. 7.3,6).
Груз F—1 находится справа от сечения С, т. е.
a^x^l (на рис. 7.3,а это не показано). Рассматривая
левую часть балки, получим Qc=VA=(l—х)/1;
при х—а Qc=(l—a)ll=b/l-,
при х=1 Qc=0.
По этим данным построена правая ветвь л. в. Qc —
прямая Ь{С (рнс. 7.3,6). На этом же рисунке показана
л. в. Qc-
Л. в. Qc можно построить иначе. Продолжим прямую
biC до пересечения с вертикалью, проходящей через ле-
вую опору (точка а']), а прямую щс'— до пересечения
с вертикалью, проходящей через правую опору (точ-
178
ка b'i). Из подобия треугольников а'щЛг и cdb\, b'lb^ai
и c'dai соответственно следует;
O|«'i I , 1 — а £
(£ — «);/ = / — й 1 й1°1= I
(b,b't)l(ajl} =l/a, b,b', = («/£) (1/а) = 1.
Следовательно, построение л. в. Qc можно выпол-
нить графически: над левой опорой откладываем вверх
отрезок = над правой —вниз отрезок b^b't. Про-
ведем прямые Gib'i и Ьщ'^. Через заданное сечение про-
водим вертикальный отрезок сс'. Получаем л. в. Qc, ко-
торая на рис. 7.3,6 обозначена aic'cbt.
Ординаты линии влияния поперечной силы, как и ли-
ний влияния опорных реакций, являются величинами
безразмерными. Чтобы получить значение поперечной
силы в сечении С при заданном положении груза Г=1,
надо измерить ординату л. в. Qc под этим грузом в при-
нятом масштабе.
4. Линия влияния изгибающего момента в сечении С
(л. в. Мс).
Так же, как и при построении л. в. поперечной силы,
рассмотрим два положения груза F=l: слева и справа
от данного сечения С (рис. 7.3, а).
Груз F—1 слева от сечения С, изгибающий момент
Afc=VB6=(x/Z)/b.
Это выражение справедливо при
при х=0 Afc=O;
при х—а Мс—аЬ/1.
По полученным данным построена левая ветвь л. в.
Мс — прямая й]С (рис. 7.3, в).
Груз F=1 справа от сечения С, изгибающий момент
Мс=Ул0=[(£—х)/£]а.
Это выражение справедливо при a^Zx^l:
при х—а Мс—[(1—a)/l]a—ab/l;
при х=/ МС=Ь.
По полученным данным построена правая ветвь л. в.
Мс — прямая Ь[С (рис. 7.3,в). На этом же рисунке по-
казана л. в. Мс — aicbt с вершиной с, расположенной иа
вертикали, проведенной через точку С. Л. в. Мс можно
построить и иначе. Продолжим прямую Ь]С до пересече-
ния с вертикалью, проходящей через левую опору А
179
(точка a'i) и прямую a\c до пересечения с вертикалью,
проходящей через правую опору В (точка Ь\). Из подо-
бия треугольников a'^bj и cdb^ b^b^ и cdai находим:
aia\ _ I , a(l—a) I
а{1—-а};1 1—а *’Й1Й1 = i t~a=a’
61 b\
. _ а(1—а) I
bi b,---------- ----- t — a ₽ b.
1 1 / Л
Следовательно, построение л, в, Мс можно выпол-
нить графически: под левой опорой откладывается вверх
отрезок aia'i=a (расстояние от сечения до левой опо-
ры), а под правой опорой — также вверх отрезок btb'i=^
= l—a=b (расстояние от сечения до правой опоры).
Точка с пересечения этих прямых дает вершину л. в. Мс.
В результате получается л. в. Мс — линия ajcbi.
Ординаты линии влияния изгибающего момента из-
меряются в единицах длины, обычно в метрах. Чтобы
получить значение изгибающего момента в сечении при
заданном положении груза F= 1 надо измерить орди-
нату л. в. Л1С под этим грузом.
Выражения реакций опор Va и Vb простой балки
посредством формул (7.1) и (7.2), а также очертание
линий влияния этих реакций, поперечной силы Qc>
изгибающего момента Л1с в произвольном сечении С
указанной балки следует твердо запомнить, ибо и то
и другое является основным и используется в дальней-
шем при построении линий влияния усилий в сечениях
и элементах статически определимых систем.
7. 2.2. Консольная балка. 1. Линия влияния опорной
реакции Ил (л. в. Va)- При расположении груза в пре-
делах пролета балки (рис. 7.4, а) линия влияния опор-
ной реакции V'a будет, очевидно, такой же, как и
у простой балки.
Пусть груз F—1 находится на левой консоли на рас-
стоянии х от левой опоры (рис. 7.4, и); здесь d^x^O,
т. е. абсциссы положения груза —отрицательные
величины.
Тогда из уравнения статики Лтв=0 получим
-VxH-I(H-|4)=0
при х<0 |х| =—х и
1/л=(6-х)//=-(х/1)+1.
Здесь реакция в точности совпадает с выраже-
нием (7.1), ранее полученным для простой балки, и
180
представляет собой уравнение прямой с отрезком на оси
ординат, равным единице, и с угловым коэффициентом
(—I/O- Следовательно, л. в. VA для консольной балки
при расположении груза на левой консоли будет про-
должением л. в. VA в междуопорной части. При х=0
имеем УЛ=1, при х=—d определяем ординату л.в.
VA на конце левой консоли (рис. 7,4, б):
Рассмотрим теперь положение груза F=1 на пра-
вой консоли на расстоянии х от начала координат, т. е.
от левой опоры (рис. 7.4,а). Здесь Из урав-
нения 2тв=0 получим
—KJ—1 (х—1) =0,
откуда
VA=~(x-l)/l---(х/П + 1,
и здесь реакция VA совпадает с выражением (7,1), сле-
довательно, л. в. Рд при расположении груза F= 1 на
181
правой консоли представляет собой продолжение л. в. Va
в пролете. При х=1 при определяется
ордината л. в. VA на конце правой консоли (рис. 7.4,6):
//+!=-(*//).
Полная л. в. VA показана на рис. 7.4,6 и представ-
ляет собой прямую проходящую через точку b ба-
зовой линии difei, соответствующую правой опоре, а про-
тив левой опоры имеющую ординату, равную единице;
левая и правая концевые ординаты соответственно рав-
ны и — (k/l).
2. Линия влияния опорной реакции VB (л. в, VB).
Ход рассуждений при построении линии влияния пра-
вой опорной реакции Ув аналогичен только что изло-
женному для левой — VA с той лишь разницей, что
здесь уравнение статики имеет вид 0, т. е. рас-
сматривается сумма моментов сил относительно точки Л,
совпадающей с центром шарнира А. Поэтому соответ-
ствующие выкладки к построению л. в. VB не приводим.
Линия влияния правой опорной реакции VB показана
на рис. 7.4, в и представляет собой прямую d'lk'i, про-
ходящую через точку а базовой линии rfjAi, соответ-
ствующую левой опоре, а против правой опоры имею-
щую ординату, равную единице; правая и левая конце-
вые ординаты соответственно равны !-]-(£//) и —(d/l).
Из построения л. в. УА и л. в. VB для консольной
балки видно, что пока груз f=l перемещается в пре-
делах пролета, линия влияния опорной реакции в точ-
ности совпадает с линией влияния для консольной бал-
ки. Это обстоятельство позволяет легко, без вычислений,
построить линию влияния для консольной балки иным
путем — графическим.
Под той опорой, для которой строится линия влия-
ния, откладывают ординату, равную единице, а под
другой — ординату, равную нулю. Вершины этих орди-
нат соединяют прямой линией и эту прямую продолжа-
ют до пересечения с вертикалями, проведенными через
концы консолей. В результате такого построения полу-
чают линии влияния опорных реакций консольной балки.
3. Линия влияния поперечной силы. Рассмотрим три
сечения, расположенные в междуопорной части, на ле-
вой и на правой консолях.
а) Сечение Ct расположено в пролете на расстоя-
ниях а и b от левой и правой опор (рис. 7.5,а); постро-
им л. в. Qc,.
182
Груз F—1 движется по левой части балки от G до
D, т. е. —d^x^a. Рассмотрим часть балки справа от
сечения Сь получим
<?с, =
при х=—d Qc, =—(—dll)~dll\
при х~а Qc,
По этим данным строим прямую d'lCQ— левую ветвь
л. в. Qc, (рис. 7.5,6).
Груз F^=\ справа от сечения Clt т. е. a^x^l-Fk.
Рассматривая левую часть балки, получим
QCl ~УА~Ц~х)1Г.
при x=a QCi—(l—a)ll—bll-,
при х=/Ц-А Qc, «= [Z -(/-}-&))//=— (ft//).
183
По этим данным построена правая ветвь л, в. Qc, =
прямая Cik'i (рис. 7.5,6). На этом же рисунке показана
полная л. в. Qc,, Для данной консольной балки.
Эту же линию влияния можно построить и иначе,
не прибегая к вычислениям,— графически. Для этого
под левой опорой балки откладываем вверх ординату,
равную единице, а под правой —такую же ординату
вниз. Вершины этих ординат aS и b'i соединяем прямы-
ми a'lbl и b'tai с точками 6i и аь расположенными на
базовой линии dtki под правой и левой опорами. Пере-
несем сечение G на прямые и а\Ь'\ (точки Ci и cS)
и проведем вертикальный отрезок c^c'i, в результате по-
лучим график а\с'\С\Ь\, представляющий собой л. в.
Qc, для простой балки. Продолжая прямые afc'i и bjCi
соответственно влево и вправо до пересечения с верти-
калями, проведенными через концы консолей, получим
график d'ic'iCik'i—л. в. Qc, рля консольной балки.
б) Сечение С2 расположено на левой консоли на рас-
стоянии s от левого конца балки (рис. 7.5,а); построим
л. в. Qcs При движении груза слева от сечения С2 по-
перечная сила в этом сечении будет постоянна и равна
—1. Если же груз находится на балке справа от сечения
С2, то поперечная сила будет равна нулю. Линия влия-
ния Qc, будет представлять собой прямоугольник с ос-
нованием, равным з —части длины консоли от левого
конца до сечения С2, и высотой, равной —1 (рис. 7.5,в).
в) Сечение С3 расположено на правой консоли на
расстоянии f от правого конца балки (рис. 7.5,а); по-
строим л. в. Рассуждая подобно тому, как это
было сделано для сечения С2, легко убедиться, что л. в.
поперечной силы в сечении С3 будет тоже иметь вид
прямоугольника с основанием, равным f — части длины
консоли от правого конца балки до сечения С3, и вы-
сотой, равной единице (рис. 7.5, а).
4. Линия влияния изгибающего момента. Здесь, как
и в п. 3, рассмотрим три сечения, расположенные вмеж-
дуопорной части и на консолях (рис. 7.6,а).
а) Сечение Ci расположено в пролете на расстоя-
ниях а и b от левой и правой опор (рис. 7.6, а); постро-
им л. в. А1с,-
Груз слева от сечения Cj и —d-^-x^Za.
Изгибающий момент в сечении Cj по силам, распо-
ложенным справа, /Ис, —УвЬ= (х/1)Ь-,
184
при х~а М^ — аЬЩ
х = 0 Жс,=0;
х = — d Mct — ~bd II.
По этим данным строим прямую d'jfliCi — левую
ветвь л. в. Мс,-
Груз F—1 справа от сечения Ср, имеем a^x-^l-^-k
и момент ТИс, — VAa=[(l—х)/1]сг,
при х=а Мс, = [(/—a)ll]a—abll\
х=1 Мс, —0;
х=1+/г Me, ={[l-(l+k)]/l}a^~ak/l.
По этим данным строим прямую Cibik'i—правую
ветвь л. в, Мс, (рис. 7.6,6). Полная линия влияния из-
185
гибающего момента в сечении С] (л. в. Мс,} показана
на рис. 7.6, б.
Эту же л. в. Мс. можно построить и иначе. Заметим,
что участок л. в. /Ис, в пределах пролета полностью сов-
падает с линией влияния /Ис простой балки, поэтому
сначала строим линию влияния изгибающего момента
в сечении Сь расположенном в пределах пролета кон-
сольной балки, применяя при этом графический способ,
описанный при построении линии влияния изгибающего
момента в сечении простой балки. Полученные в ре-
зультате построения прямые a^i и blcl продолжаем
влево и вправо до пересечения с вертикалями, проведен-
ными через концы консолей, и окончательно получим
л. в.ТИс,, которая на рис. 7.6,6 обозначена d'iCik'i.
б) Сечение расположено на левой консоли (рис.
7.6, о), построим л.в.Л^с,-
Груз справа от сечения С2, т. е. d—s^x-^l-j-k',
составив момент по силам, расположенным слева, полу-
чим /Ис, ==0; это означает, что л. в. Мс, на протяже-
нии между точками С2 и К совпадает с базовой линией
(рис. 7.6, в).
Груз F— 1 слева от сечения С2, т. е. d^x^d—s.
Составив и в этом случае момент по силам, расположен-
ным слева, получим Мс, =— 1 [х—(rf—s)];
при x = cf —5 /ИСз = 0;
x=d MCt~ — s.
По этим данным построена л. в. Мс2 при положении
груза F=1 слева от сечения. Общий вид л. в./Ис, пока-
зан на рис. 7.6, в.
в) Сечение С3 расположено на правой консоли. Л. в.
Мс3 показана на рис. 7.6, г. Предлагаем выполнить по-
строение л. в. 7Иса, рассуждая так же, как и в и. «б».
7. 2.3. Консольная балка, защемленная одним кон-
цом. 1. Линия влияния вертикальной опорной реакции
VA (л.в. Уд).
Для определения Уд (рис. 7.7, а) воспользуемся
уравнением равновесия £У=0; VA—1=0, откуда Уд=
= 1, т. е. прямая, параллельная оси абсцисс, с отрез-
ком на оси ординат, равным единице. Линия влияния Уд
изображена на рис. 7.7, в.
2. Линия влияния опорного момента шА (л. в. тА).
186
РИС. 7.7
При О^л^/ (рис. 7.7,а), имеем тл—1х=0 и тА —
= 1л:
при х=О тА=О;
х—1 тА=1.
Л. в. тл изображена на рис. 7.7, 6.
3. Линия влияния поперечной силы в некотором за-
данном сечении С консоли (л. в. Qc)- Определяя по-
перечную силу Qc по силам справа от сечения С, будем
иметь (рис. 7.8, а):
Груз F=1 движется правее сечения С, Qc=\.
Груз F=1 движется левее сечения С, Qc=0.
Эти данные показывают, что правой ветвью л. в. яв-
ляется прямая, параллельная оси консоли, с ордината-
ми, равными отвлеченной единице, а ее левая ветвь сов-
падает с базовой линией. Лилия влияния поперечной
силы для заданного сечения показана на рис. 7.8, б.
4. Линия влияния изгибающего момента в заданном
сечении С консоли (л. в. Мс). Определяя изгибающий
момент по силам справа от сечения С, найдем:
Груз F=1 движется правее сечения С, т. е. а^х^.
Л1С——1 (х—а):
при х=а Mc=Q;
x=a-f~b Мс=—б.
По этим данным построена правая ветвь л. в. Мс
{рис. 7.8,в).
187.
Груз движется левее сечения С, т. е. О^ха^а
Мс=0; т. е. на участке между точками А и С левая
ветвь л. в. Л1с совпадает с базовой линией. Полная л. в.
Л1С показана на рис. 7.8, в.
Обращаем внимание на то, что описанный статиче-
ский метод построения линий влияния представлен дву-
мя способами. Первый способ основан на исследовании
сил, выраженных посредством формул (7.1) и (7.2).
Второй способ является графическим. Для построения
линий влияния сил в различных сечениях однопролет-
ной балки первым способом надо выполнить ряд дейст-
вий в такой последовательности1:
А. Сечение расположено в пролете бал-
к и:
1. Рассмотреть движение груза слева от дан-
ного сечепия и на схеме балки указать абсциссу х по-
ложения этого груза в какой-то произвольный момент
времени.
2. По формуле (7.2) выразить силу в данном сече-
нии балки через ее правую реакцию опоры и исследо-
вать выражение этой силы в пределах изменения пе-
ременной х при движении груза F=1 слева от сечения.
В результате получим левую ветвь линии влияния.
3. Рассмотреть движение груза F = 1 справа от дан-
ного сечения и снова абсциссой х зафиксировать поло-
жение его на балке в произвольный момент времени.
4. По формуле (7.1) выразить силу в данном сече-
нии балки через ее левую реакцию опоры и исследовать
выражение этой силы в пределах изменения перемен-
ной х при движении груза F=1 справа от сечения.
В результате получим правую ветвь линии влияния
и вместе с ней полную линию влияния силы в данном
сечении балки.
Б. Сечение расположено в пределах кон-
сол и.
И здесь полностью применима последовательность А.
Однако в этом случае проще и следует поступать так, как
это показано в пп. 7.2.2, 7.2.3 на примерах построения
линии влияния сил в сечениях консолей консольных
балок.
1 Настоятельно рекомендуем сначала строить линии влияния
способом исследования сия, выраженных посредством формул (7.1)
и (7.2). Лишь приобретя твердые навыки в построении линий влия-
ния этим способом, в последующем для этой цели можно использо-
вать графический способ.
188
7.3. Основные свойства линий влияния.
Определение внутренних сил по линиям влияния
В п. 7.2 рассматривались вопросы, связанные с по-
строением линий влияния сил в сечениях балок. Теперь
необходимо изучить основные свойства линий влияния,
чтобы в дальнейшем перейти к построению линий влия-
ния сил, возникающих в элементах ферм, и расчету
элементов сооружений по линиям влияния.
1. Если известны линия влияния какой-либо силы
в элементе сооружения и положение на сооружении гру-
за F, то величина этой силы равна произведению силы
тяжести груза на ординату линии влияния, расположен-
ную под грузом.
В самом деле, если по сооружению перемещается
груз, равный единице, то, согласно определению (см.
п. 7.1), численное значение любой ординаты у линии
влияния будет выражать собой величину рассматривае-
мой силы при положении груза F=1 над этой орди-
натой.
Обозначив рассматриваемую силу через S, получим
S=y или 5=1 -у.
Если же над той же ординатой линии влияния рас-
положен груз F, не равный единице, то, применив прин-
цип независимости действия сил, получим
S^Fy. (7.3)
2. Если известны линия влияния какой-либо силы
в элементе сооружения и положение на сооружении си-
стемы сосредоточенных грузов Fb F2, ..., Fn (рис. 7.9, а),
то значение этой силы равно алгебраической сумме про-
изведений сил тяжести этих грузов на ординаты линии
влияния (рис. 7.9,6), расположенные под указанными
грузами.
Действительно, применив принцип независимости
действия сил и принятые обозначения, получим:
5=^11/1+^2^2+ . . ,
ИЛИ
д
S-V^yt- (7.4)
Пример 7.1. По консоли перемещается двухколесная тележка
грузоподъемного крана; расстояние между колесами 0,5 м; сила
давления от каждого колеса 5 кН. Вылет консоли (=1,2 м. Опре-
189
делить значение опорного момента при положении тележки, ука-
занном на рис. 7.10,0.
Решение. Значение опорного момента тл получим, применив
формулу (7.4) и используя л. в. тл (рис. 7.10,6).
5 (—0,70)+5 (—1,20) =—9,50 кН-м.
3. Система сосредоточенных сил или распределен-
ная нагрузка, расположенная над прямым участком ли-
нии влияния некоторой силы S, может быть заменена
равнодействующей силой, а сила S определена произ-
ведением величины этой равнодействующей на соответ-
ствующую ей ординату линии влияния.
Это свойство линии влияния называют теоремой. До-
кажем ее. Пусть нагрузка представляет собой систему
сосредоточенных сил Л; 7У, F3 (рис. 7.11,а), располо-
190
женных над прямым участком tu липин влияния неко-
торой силы X (рис. 7.11,6). Заменим данную систему
сосредоточенных сил их равнодействующей R\ если эта
замена возможна, то должно соблюдаться условие
Sr =- Sir,
где — сила 5, вызванная только одной равнодействующей силой;
Ser — то же, вызванная сосредоточенными силами l\, Fs, F3.
Допустим, что выполненная операция замены дан-
ных сил их равнодействующей является возможной.
Тогда, приняв за точку моментов точку пересечения про-
должения прямой tu линия влияния с ее основанием —
точку О (рис. 7.11,6) и применив теорему Вариньона,
получим:
F !<Ч-|-/?£а2-|-Дзаз=/?ая.
Но, по рис. 7.11,6:
ai=yictga; a2=ysetga; о3=!/з etg a; a^i/setga
и, следовательно,
FiFi etg a+F2yi etg a+F3y3 etg a=RyK etg a,
или
F it/i+FsJte+F 31/3 = Ri/r<.
Правая часть этого равенства выражает собой Xw—
значение силы X, вычисленное по формуле (7.3), левая
же его часть есть не что иное, как Хзд — значение той
же силы X, но определенное по формуле (7.4). Итак, ус-
ловие Хк = Хел соблюдается; следовательно, замена
расположенных над прямым участком линии влияния
сосредоточенных сил их равнодействующей оказалась
возможной, при этом сила X в соответствии с первым
свойством линий влияния определится по формуле:
S=RyK, (7.5)
что и требовалось доказать.
Если линия влияния имеет п прямых участков и каж-
дому ИЗ НИХ соответствуют /?! и уР1, R* и yfi
то, согласно второму свойству линий влияния, сила X
определится выражением
S = у^ + /?2 + ... + /?„ ,
или
Л
S = (7.6)
191
dR„ • Q dk
4. Если известны линия влияния какой-либо силы
в элементе сооружения и положение на сооружении рав-
номерно распределенной нагрузки (рис. 7.12), то значе-
ние этой силы равно произведению интенсивности рав-
номерно распределенной нагрузки на площадь линии
влияния, расположенную под участком действия указан-
ной нагрузки.
Это свойство линий влияния также называют теоре-
мой. Докажем ее. Пусть на некоторой длине балки дей-
ствует равномерно распределенная нагрузка интенсив-
ностью q (рис. 7.12, а) и задана линия влияния какой-
либо силы в сечении этой балки (рис. 7.12,6). Выделим
из балки элемент длиной dx; тогда равнодействующая
данной нагрузки на длине dx выделенного элемента
dRq—qdx, з величина силы, согласно первому свойству
линий влияния, будет
dS — (dRq) у — qydX.
Произведение ydx представляет собой площадь ли-
нии влияния в пределах длины dx выделенного элемен-
та, Обозначив ydx—d<d, получим dS=qde>. Расчленив
балку на множество таких весьма малых по длине эле-
ментов и заменив в пределах каждого элемента равно-
мерно распределенную нагрузку ее равнодействующей,
получим балку, нагруженную системой весьма малых
сосредоточенных сил. Применяя второе свойство линий
влияния, получим следующее выражение, определяющее
192
значение силы от всей равномерно распределенной на-
грузки, расположенной па балке:
ъ
S = J qdu>,
но так как q=const, то
<fa> = q —wo) = qa.
Итак,
(7.7)
что и требовалось доказать. В формуле (7.7) со — пло-
щадь линии влияния, расположенная под участком дей-
ствия равномерно распределенной нагрузки.
Если распределенная нагрузка расположена над ли-
нией влияния, состоящей из нескольких участков раз-
ных знаков, то величина силы равна произведению ин-
тенсивности нагрузки па алгебраическую сумму площа-
дей отдельных участков линии влияния (см. примеры
7.2, 7.3, заимствованные из [3]). Знаки площадей бе-
рутся соответственно знакам ординат тех участков, пло-
щади которых вычисляются.
Пример 7.2. Для балки пролетом /, нагруженной равномерно
распределенной нагрузкой q (рис. 7.13, л), с помощью линий влия-
ния определить опорную реакцию VA, изгибающий момент Л!/ и
поперечную силу Qj в середине балки. Линии влияния 1’л, Afj
и С, показаны на рис. 7.13, б, в, г.
Решение. Так как нагрузка расположена на всем пролете, то
площади линий влияния надо вычислять па протяжении всего
пролета.
Определение реакции VA. Площадь линии влияния
<й|= (//2) I =1/2. Опорная реакция Гл = ?в>1=<?(/2.
Определение изгибающего момента. Площадь
линии влияния (1/2) (Z/4) =1г/8. Изгибающий момент Mj =
=^сд2=<Д2/8.
Определение поперечной силы Qi.
Линия влияния состоит из двух участков: площади со3 и д>4
одинаковы по величине, но различны по знаку:
ы3=—(1/2) (1/2) (1/2) =—//8; И( = 1/8,
поэтому
0| = ?(й>з+кч) =$(—1/8-Н/8) =0.
Пример 7.3. Определить с помощью линий влияния изгибающий
момент и поперечную силу в сечении I—1 консольной балки от
заданной равномерно распределенной нагрузки (рис. 7.14,0).
7 Ши'лман Б. А.
193
Решение. Сначала строим линии влияния Af, и Qi (рис.
7.14, б, в). Определяем изгибающий момент Мх. Ордината л. в. Л1|
под силой F равна hi~—1,6 м; площадь линии влияния под на-
грузкой
©1= (1/2)8-1,6 = 6,4 м»;
Af!=—ГЛ,+?О1=—30-1,64-20‘6,4=80 кН-м.
Определяем поперечную силу Q|. Ордината л. в. Qi иод силой
F равна й2=0,2; площадь линии влияния под нагрузкой равна
ы2= (1/2) 8-0,8=3,2 №;
Qi = ДЛ2+(7(й2=30-0,2+20-3.2^70 кН.
7.4. Построение линий влияния при узловой
передаче нагрузки
До сих пор рассматривали построение линий влия-
ния в случаях, когда груз движется непосредствен-
но по балке. Однако часто нагрузка передается посред-
ством вспомогательных и поперечных балочек на дан-
ную балку в определенные ее места, называемые узла-
ми (рис, 7.15,а). Такая передача нагрузки называется
узловой, а воспринимающая ее балка — главной.
Узловая передача нагрузки встречается в балочных
клетках перекрытий промышленных зданий (рис. 7.15, б)
и в мостовых конструкциях (рис, 7.15,в), где нагрузка
передается через проезжую часть (настил) на попереч-
194
61
ПАНЕЛИ
НАСТИЛ
ПОПЕРЕЧНЫЕ БАЛКИ
РИС. 7.»^
ные балочки и далее в узлы мостовых ферм. Узловая
передача нагрузки несколько изменяет условия работы
балки и вид линии влияния по сравнению с той, которую
получаем при непосредственной передаче нагрузки на
балку. Убедимся в этом на примере построения какой-
нибудь линии влияния, например, л. в, Мс — изгибаю-
щего момента в сечении С главной балки АВ, распо-
ложенном между узлами 1 и 2 в панели 1 1—2 длиной
d (рис. 7.16,а). Для системы, находящейся в равнове-
сии, имеем следующие уравнения статики:
SmB=0. Находим реакции опор системы:
VA = (l—x)/l- Ve—x/l.
Таким образом, получены формулы, которые ничем
не отличаются от формул (7.1) и (7.2), выражающих
реакции опор однопролетной балки при движении по
ней груза F— 1.
Теперь рассмотрим следующие этапы движения гру-
за F—1 по вспомогательным балочкам.
Груз F=1 движется слева от разрезанной панели
от узла 0 до узла 1, т. е. при
Определяя изгибающий момент Мс по силам, распо-
ложенным справа от сечения С, получим:
Мс= Veb = (х//) Ь.
1 Здесь под панелью подразумевается часть главной балки, рас-
Положенная между двумя соседними узлами. Ту панель, в которой
расположено сечение, условимся называть разрезанной.
У* 195
Груз F= 1 движется справа от разрезанной панели
от узла 2 до узла 4, т. е. при Определяя
изгибающий момент Мс по силам, расположенным сле-
ва от сечения С, получим:
Мс=Ула— [(/—х)/1]а.
Точно такие же зависимости получены при построе-
нии линии влияния изгибающего момента в сечении С
196
простой балки при непосредственном действии на нее
груза F=1 (см. п. 7.2.1). Это означает, что при узловой
передаче нагрузки л. в. Л!с между узлами 0 и 1, 2 и 4,
т. е. вне пределов разрезанной панели, имеет очертание
и ординаты такие же, как и при непосредственном дей-
ствии груза F=1 на главную балку. Поэтому, построив
л. в. Мс в предположении, что нагрузка F=1 приложе-
на непосредственно к главной балке (рис. 7.16,6 — тре-
угольник CtC&i), надо заштриховать эту линию влияния
на участках 0—1 и 2—4.
Груз F=1 движется в пределах разрезанной пане-
ли 1—2, т. е. между узлами 1 и 2 (рис. 7.17,а), и на-
ходится на расстоянии z и d—z от левого 1 и правого 2
узлов. Груз F=1 раскладывается, по закону рычага, на
составляющие:
и
F^Fzjd,
приложенные в узлах 1 и 2. Так как F==l, то силы
и F2, выраженные через переменную г, представятся
следующими равенствами:
= z)rf,
' Fa=*z/d.
Ординаты линии влияния при положении груза F—1
’Жад узлами 1 и 2 обозначим yt и у?. Заметим, что они
’равны ординатам линии влияния при непосредственном
^действии на главную балку груза F=l. Очертание ли-
Дии влияния в пределах разрезанной панели пока неиз-
йЖестно и можем предположить, что она представляет со-
некоторую кривую (на рис. 7.17,6, эта кривая по-
197
казапа пунктиром), соединяющую точки Г и 2'—вер-
шины ординат у\ и у2. Обозначим через у ординату
линии влияния, расположенную под грузом F=l.
По формулам (7.3) и (7.4) получим Л1С при движе-
нии груза в пределах разрезанной панели:
Mc—Fy, ЛГс=/7|У1+Дг(/2
и значит
^=71^1+Л’^г.
Подставив сюда F=l, а вместо /д и F2 их значения,
выраженные через переменную г, получим
i/=((d—г)/с/]У1-|-(г/(/)у2. (7.8)
Здесь величины d, у^, у2— постоянные, а г и у —
переменные. Это значит, что выражение (7.8) представ-
ляет собой уравнение прямой я одновременно является
уравнением линии влияния Л1С в пределах разрезанной
панели; при этом вершина ординаты у лежит на пря-
мой 1'2'
при ?•= О у=уу,
при z=d у=у2.
Итак, при узловой передаче нагрузки линия влияния
некоторой силы в пределах разрезанной панели пред-
ставляет собой прямую, соединяющую вершины орди-
нат, расположенные под узлами разрезанной панели;
эта прямая называется передаточной (рис. 7.17,6).
Приведенное утверждение, которое часто называют
теоремой об узловой передаче нагрузки, позволяет за-
кончить построение л. в. Мс, для этого достаточно точ-
ки Г и 2' (рис. 7.16,6)—вершины ординат у\ и у2
л. в. Мс, расположенные под узлами 1 и 2, соединить
передаточной прямой 1'2'. Окончательная л. в. Мс по-
казана на рис. 7.16,6 ломаной линией ail'2'b).
Аналогично строится линия влияния поперечной
силы QC- При непосредственном нагружении главной
балки силой F = 1 л. в. Qc будет иметь очертание, пока-
занное на рис. 7.16, в ломаной линией а^щсЬ}, т. е. та-
кое же, как и л. в. поперечной силы в сечении С простой
балки (см. рис. 7.3,6). Далее вершины ординат Г и 2',
соответствующие узлам 1 и 2 разрезанной панели, в ко-
торой расположено сечение С, соединяем передаточной
прямой 1'2'. Полная л. в. Qc показана на рис. 7.16, в
ломаной линией a\l'2'bi. Таким образом, устанавливаем
198
следующий порядок построения линий влияния при уз-
ловой передаче нагрузки.
1. Сначала строят линию влияния без учета узловой
передачи нагрузки, т. е. в предположении, что нагрузка
приложена непосредственно к главной балке.
2. На полученной линии влияния отмечают вершины
ее ординат, расположенные под узлами разрезанной па-
нели, и соединяют их передаточной прямой. В резуль-
тате получают очертание полной линии влияния.
7.5. Построение пиний влияния сил
в стержнях ферм
Для построения линий влияния сил в стержнях ферм
используется метод сечений, позволяющий для отсечен-
ной части фермы составить уравнения равновесия и из
них выразить силы в стержнях через реакции опор фер-
мы, которые (см. рис. 7.18, о) определяются по фор-
мулам:
Ул = (1-х)/1, VB—x[lt
полностью совпадающим с формулами (7.1) и (7.2), по
которым определяются реакции опор одкопролетной бал-
ки при движении по ней груза Г=1.
Отсюда, в частности, следует, что линии влияния
опорных реакций балочной фермы совпадают с линия-
ми влияния реакций опор однопролетной балки с про-
летом, равным пролету фермы. В п. 6.1 приведены допу-
щения, вводимые в расчет ферм. Одно из них предпо-
лагает, что нагрузки приложены в узлах (шарнирах)
фермы; это позволяет при построении линий влияния
сил в стержнях ферм применить теорему об узловой пе-
редаче нагрузки. При этом поступают так:
1. Предполагая отсутствие узлов в структуре фермы,
рассматривают положение груза F=\ слева от разре-
занной панели, затем справа от нее и строят соответ-
ствующие положениям этого груза левую и правую вет-
ви линии влияния так же, как и при непосредственном,
действии груза F=l на однопролетную балку (см.
п. 7.2).
2. Вершины ординат этих ветвей линии влияния, рас-
положенные под узлами разрезанной панели, соединяют
передаточной прямой. В результате получают очертание
полной линии влияния.
199
ГИС.7.И
200
Построим линии влияния сил в стержнях фермы, по-
казанной на рис. 7.18, а; при этом применим способ ис-
следования сил, выраженных посредством формул (7.1)
и (72)
1. Л. в. силы #46 в стержне 46 верхнего пояса.
Проводим сечение I—/ и составляем два уравнения
равновесия для двух положений единичного груза: сле-
ва и справа от разрезанной панели 35.
Груз Г=1 слева от разрезанной панели. Рассматри-
ваем равновесие части фермы, расположенной справа от
сечения I—1 и составляем уравнение равновесия в фор-
ме равенства нулю суммы моментов всех сил относи-
тельно точки 5.
Силу #46 предполагаем растягивающей.
Имеем
О < х < d и Smj р = 0;
4d + гБ = 0,
ИЛИ
(х//) 4d -f- rs = О
и
при х=0 #46=0;
при x=d #46=—(d/6d) 46 -J- =—2d/3rs.
По этим данным построена левая ветвь л. в. #46—пря-
мая аЗ' (рис. 7.18,6).
Груз Г=1 справа от разрезанной панели. Рассмат-
риваем равновесие части фермы, расположенной слева
от сечения /—I. Имеем:
2d<r<6d И = 0; —Гд2d —#4,^ = 0,
откуда
^46=—b2d/rs=— [(/—х)//] 2d/rs;
при x—2d Nie——4d/3rz-,
при x=6d=l #46=0.
По этим данным построена правая ветвь л. в. #46 —пря-
мая 65' (рис. 7.18,б).
1 Графическая интерпретация построения линий влияния сил
в стержнях ферм здесь не приводится; с ней можно ознакомиться
по одному из учебников [3], (8], [9].
201
Соединяя точки 3' и 5' — вершины ординат, распо-
ложенных под узлами 3 и 5 разрезанной панели, пере-
даточной прямой 3'5', получим график аЗ'5'6 — полную
линию влияния Nie (рис. 7.18,6). Заметам, что в дан-
ном случае передаточная прямая 3'5' является продол-
жением прямой аЗ'; это следует из того, что угловые
коэффициенты у этих двух прямых одинаковые:
(2d/3r5)[(4d/3r,)-(2d/3r5)] /d=2/3rs.
Кроме того, из сопоставления рис. 7.18, а и 7.18,6
видно, что точка 5' пересечения левой и правой ветвей
л. в. лежит на одной вертикали с точкой Риттера 5.
Эта геометрическая особенность л. в. N4e является об-
щей для линий влияния сил в стержнях ферм, построе-
ние которых выполняется способом Риттера.
2. Л, в. силы, Л/35 в стержне 35 нижнего пояса.
Воспользуемся тем же сечением I—I. Точкой Ритте-
ра является верхний узел 4.
Груз F=1 слева от разрезанной панели. Имеем:
О х -С' d и £ = 0;
ИЛИ
— Л^/'4 = О,
(x/Z)5d—= 0
A,35=[(x/05d]/r4.
При х=0 N35—0;
при x—d Ат35=5с//6г4.
По этим данным построена левая ветвь л. в. Ns3—
прямая аЗ' (рис, 7.18,в).
Груз F=1 справа от разрезанной панели. Имеем:
2d<£x^.6d и Егя4св = 0; —d + Лг5Ег4= 0, или
-[((-х) /qd+^r,=o
М5= [('-*); Л d
при x~2d N35=4d/6ri-,
при x=6d=/ ^35=0.
По этим данным построена правая ветвь л. в. — пря-
мая 65' (рис. 7.18,в).
202
Соединяя точки 3' и 5' передаточной прямой 3'5', по*
лучим график аЗ'5'Ь — полную линию влияния МЭ5 (рис.
7.18, в). И здесь передаточная прямая 3'5' является про-
должением правой ветви Ь5' л. в. N35, так как угловые
коэффициенты этих двух прямых одинаковы. Кроме
того, точка 3' пересечения левой и правой ветвей л. в.
/735 лежит на одной вертикали с точкой Риттера 4.
3. Л. в. силы Ntf в раскосе 45.
И здесь воспользуемся сечением I-—1. Точкой Ритте-
ра является точка Л' пересечения стержней 46 и 35, взя-
тая на расстоянии с от левой опоры.
Груз F=1 слева от разрезанной панели. Имеем!
О < л < d и X «= 0;
или
Vb (H-c) + = 0,
WO U+cJ+A’isrX=0
И
—I WO (Н-с)]/гк;
при x=0 Л'45—0;
при x~d Л’45=— ((1/6) (l-^c)]/rh.
По этим данным построена левая ветвь л. в. Ni5—пря-
мая аЗ' (рис. 7.18,г).
Груз F=1 справа от разрезанной панели. Имеем!
2d < х < 6Й и Zm-gB = 0;
ИЛИ
Vac—Mi!SrK=0,
ИЛИ
1 (1—х) /I] c—N.i5rK=0
И Na = IG —х)/7]с—;
При x—ld JV4E==4c/6rfe;
при x~6d—l ДГ45=0.
По этим данным построена правая ветвь л. в. /V45 — пря-
мая Ь5' (рис. 7.18,а).
Соединяя точки 3' и 5' передаточной прямой, полу-
чим график аЗ'5'b — полную линию влияния М45 (рис.
7-18, г).
203
Покажем, что и здесь левая аЗ' и правая Ь5' ветви
л. в. Л45 пересекаются в точке Ль лежащей на одной
вертикали с точкой Риттера Л, т. е. на расстоянии х=
=—с от точки а (рис. 7.18, а).
В самом деле, силы в каком-нибудь одном стержне,
определяемые по силам, расположенным слева или
справа от разрезанной панели, одинаковы; в нашем слу-
чае
— [(л/Z) (Z + с)]!гк = [(/—-rJ/Z] с
К
Решая это уравнение относительно х, получим х=—с,
что и требовалось доказать.
4. Л. в. силы Л34 в стойке 34.
Проводим сечение II—II через панель 35. Точкой
Риттера является точка Л.
Груз F=1 слева от разрезанной панели. Имеем:
0<л<г/ и = 0, или
Vb(Z+c)-— Лт34 (с/—с J =0,
(x/Z) (Z+c)-ад+с) =0
При Л'=0 Л34 = 0;
при x=d N3i= (/-|-c)/6(t/-j-c).
По этим данным построена левая ветвь л. в. JVSi—пря-
мая аЗ' (рис. 7.18, д).
Груз F= 1 справа от разрезанной панели. Имеем
и Sm^B==0
или
V4c4-ZV 34 (rf-j-c) = 0;
[(Z-x)/Z]c+W34(d+c)=0
И
Л’14--[(* — X);'Z]C .
При x=2d jV34=— 2c/3(d+c);
при x=6d=I Л’34=0.
По этим данным построена правая ветвь л. в. —пря-
мая Ь5' (рис. 7.18, 6).
Соединяя точки 3' и 5' передаточной прямой 3'5',
напучим график аЗ'5'b — полную линию влияния Л34
(рис. 7.18,6).
5. Л. в. силы Nss в раскосе 58.
204
Здесь для определения силы У68 способ Риттера не-
применим, поэтому, проведя сквозное сечение III—III
через панель 57, воспользуемся способом проекций.
Груз F= 1 слева от разрезанной панели. Имеем:
0^x^2d и 2Упр=0,
ИЛИ
Гл—Nga cos a=0j
x/i—N& cos a=0;
/^58=x//cos a.
При x—0 W5e=0;
при x=2d A/ss=2/6cosa.
По этим данным построена левая ветвь л. в. — пря-
мая а5' (рис. 7.18, ё).
Груз Г=1 справа от разрезанной панели. Имеем:
и 2Улея=0;
Va+N^cos а—О
ИЛИ
(I—х) I l-}-Nbs cos (1=0;
Лги=—(I—х) jl cos a.
При x=3d IVss——3/6 cos a;
при x=6d=l Лг5е=0.
По этим данным построена правая ветвь л. в. Л'зз—пря-
мая Ь7' (рис. 7.18, е).
Соединяя точки 5' и Т передаточной прямой 5'7', по-
лучим график а5'7'Ь — полную линию влияния Лг58.
Заметим, что прямые а5' и Ь7' параллельны, так как
их угловые коэффициенты равны.
6. Л. в. силы jVJ8 в подвеске 78.
Для определения силы Л^8 сечением /V—IV (рис.
7.18, а) вырезаем узел 7 и применяем способ проекций
к равновесию этого узла (см. п. 6.4.1, п. Б.2 — способ
вырезания узлов).
Груз F=1 левее и правее разрезанных панелей 57
и 79; при этом сила в подвеске 78 равна нулю, так как
узел 7 оказывается ненагруженным. Следовательно, на
участках между узлами 0 и 5, 9 и 13 л. в. N?a предста-
вится прямыми а5' и 9'Ь, совмещенными с базовой ли-
нией ab (рис. 7.18,ж).
Груз F=1 в узле 7; тогда, взяв сумму проекций всех
сил, приложенных к узлу 7, на ось подвески, получаем
Л^78—1=0 И Д?78= 1.
205
При движении груза в пределах разрезанных
панелей 57 и 79 л. в. изменяется линейно и поэтому
будет иметь вид треугольника 5'7'У с ординатами, ран-
ными единице под узлом 7 и нулю под узлами 5 и 9.
При этом говорят, что подвеска 78 работает на мест-
ную нагрузку F—1, приложенную в узле 7.
Полная линия влияния N7s изображена на рис.
7.18, ж графиком а5'7’9'Ь.
7.6. Определение невыгоднейшего положения
системы грузов на сооружении
7.6.7. Общий критерий невыгодного положения на-
грузки на сооружении для ломаной линии влияния.
В п. 7.3 были приведены основные свойства линий влия-
ния, с помощью которых определяются силы при задан-
ном положении нагрузки.
Теперь выясним, как надо расположить заданную
нагрузку на сооружении, чтобы рассматриваемая сила
приняла максимальное положительное или минималь-
ное отрицательное значение. Условимся в дальнейшем
максимальную положительную силу обозначать Smax,
минимальную отрицательную — а соответствующие
им ординаты линии влияния — ymsx и уш1п.
Очевидно, что при движении только одного сосредо-
точенного Груза Sraax (ИЛИ Smin) ВОЗНИКНСТ При СОВПЯ-
дении груза с ординатой линии влияния 1/1иах (или
причем
я х = Tl/daxJ Sm 1 о = 5Уш Iи.
Также очевидно, что для определения по линии влия-
ния Smax (или Srotn) от системы грузов надо стремиться
к тому, чтобы наиболее тяжелые грузы были располо-
жены над наибольшими по абсолютной величине орди-
натами линии влияния. Выполнив ряд установок за-
данной системы грузов над ординатами линии влияния
и определив по формуле (7.4) значение силы S от каж-
дой установки грузов, можно построить график, выра-
жающий зависимость между силой S и абсциссой х си-
стемы подвижных грузов.
На рис. 7.191 показан график, имеющий вид лома-
1 График построен произвольно только для того, чтобы пред-
ставить картину изменения значения силы 5 в зависимости от по-
ложения, занимаемого подвижной нагрузкой.
206
ной линии и характеризующийся наличием местных мак-
симумов Smax i> Smax2> ^шахз> Smax4> которым на графи-
ке соответствуют абсциссы xi, лу, Л'з, То положение
подвижной нагрузки, при котором значение силы дости-
гает местного максимума, называется невыгодным. Из
приведенного графика видно, что, вообще говоря, систе-
ма подвижных грузов может занимать несколько раз-
личных невыгодных положений.
При х=х0 усилие S становится равным Smaxo. г. е.
наибольшей величине из всех возможных величин, со-
ответствующих местным максимумам. То положение
207
подвижной нагрузки, при котором S=5max0, называет-
ся невыгоднейшим или опасным2.
Указанный путь отыскания невыгоднейшего положе-
ния нагрузки является громоздким и поэтому не при-
меняется. Решение поставленной задачи значительно
упрощается с помощью теоремы, устанавливающей кри-
терий невыгодного положения на сооружении системы
сосредоточенных грузов.
Теорема. Невыгодное положение системы сосредото-
ченных грузов относительно линии влияния, имеющей
очертание ломаной линии, возможно только при усло-
вии нахождения одного из грузов над какой-либо вер-
шиной линии влияния.
Для доказательства этой теоремы рассмотрим систе-
му сосредоточенных сил Л, F2, F7 (рис. 7.20,с), рас-
положенных над линией влияния какой-либо силы S
{рис. 7.20,6), имеющей очертание ломаной линии, сто-
роны которой образуют с горизонтальными прямыми
углы сц, аг, «з-
Условимся эти углы считать со знаком «плюс», если
их отсчитывают от горизонтальной прямой в сторону
ветви линии влияния против часовой стрелки и со зна-
ком «минус» — в противоположном случае. Предполо-
жим, что положение системы сосредоточенных грузов Flr
F?, ..., F7 характеризуется некоторой абсциссой х=х'.
Пользуясь третьим свойством линий влияния, заме-
ним сосредоточенные силы Fp, F? и F3‘, F^ и Fs; F6 и F7,
действующие в пределах каждого отдельного участка
л. в., их равнодействующими Ri, Rs и R3. По формуле
(7.6) находим значение силы S при положении нагруз-
ки, соответствующей абсциссе х—х':
S—R1УI+йзУз^КзУз-
Это равенство можно рассматривать как функцио-
нальную зависимость между силой S и абсциссой х, ха-
рактеризующей положение подвижной нагрузки относи-
тельно линии влияния.
Очевидно, при перемещении системы грузов из дан-
ного положения (х=х') вправо или влево будет изме-
няться и значение силы S по закону, график которого
имеет ряд переломов и представлен на рис. 7,19. Когда
нагрузка при некотором x—xt займет невыгодное по-
1 В ряде случаев местный максимум силы в то же время яв-
ляется И Smai 0.
208
ложение, значение силы S достигнет местного максиму-
ма Smaxi. при этом в общем случае будут иметь место
следующие соотношения, известные из математики и вы-
ражающие собой достаточные условия существования
максимума и минимума функции:
а) если при х<х11 т. е. при смещении грузов влево
на dxt производная dS/dx^O, а при т. е. при
смещении грузов вправо на dx, производная dS/dx<Q,
то при x=xi будем иметь S=Smax 1;
б) если при х<х, производная dS/dx<Z0, а при
jcXxi производная dS/dx>0, то при x=Xi получим 5 =
t=,‘Sniln |.
Таким образом, задача, связанная с нахождением
невыгодного положения нагрузки, сводится к определе-
нию производной dS/dx и отысканию условия, при ко-
тором она меняет свой знак с плюса на минус, или
наоборот.
Для решения этой задачи сдвинем систему грузов
вправо или влево (на рис. 7.20, а показано смещение
всех грузов вправо) на величину dx так, чтобы ня один
из данных грузов не переместился из своего участка
в соседний; при этом сила S получит приращение dS
и станет равной
S-pdS—R;
Вычитая почленно из этого равенства другое, опре-
деляющее значение S по формуле (7.6), получим:
dS = idyi-i-Iizdyt-i-Rsdys,
из рис. 7.20 видно, что:
dgi = dxtg а,;
dy2=dx tg аг,
dys=dx tg а3.
f и значит
С dS=/?i tg aidx+ft2 tg tg a3dx
I или
R dS= (Ri tg a[-|-fi2 tg aj-p/fs tg a3)dx,
Цоткуда находим выражение искомой производной:
в?’ dS/dx=^itgai4-J?2tga2+^3tga3.
Распространяя вывод на линию влияния с числом
англов, равным п, получим:
* dS/dx=R1 tg ai-№ tg as+ ... +A’/< tg a*+ .,, -№ tg a„.
209
или
п
dS]dx = tg 0%.
(7.9)
Учитывая ранее приведенные соотношения, выражаю-
щие достаточные условия существования максимума
и минимума функции, получим аналитические условия
существования Smax 1 и Smm 1 в таком виде:
а) если x<Jfi, т. е, при смещении грузов влево (-*-)
на величину dx
S/?*tgaft>0,
а при т. е. при смещении грузов вправо (->-) на
dx
S/?jjtgaJb<0,
то при данном положении нагрузки, т. е. при x=Xi, сила
S окажется максимальной S=Smaxi;
б) если при я<>1
tg “л < О,
а при jc>Xi
S Яь tg > О,
то при х=Х[ сила 5 окажется минимальной S=Smmi.
Объединяя в одно неравенства, записанные в пи. а
и б, и опуская индекс 1 в обозначениях Smax t и Smm ь
получим следующие условия существования местного
максимума или местного минимума силы 5:
== Smal, если <0; (7.10)
ч—
S = Srain. если Я* >°- (7.И)
Теперь остается выяснить, при каком условии выра-
жения (7.10) и (7.11) могут изменить свой знак; для
* В дальнейшем индексы fe=l ил под и над буквой £ опу-
шены, но подразумеваются.
210
этого заметим, что при любом перемещении нагрузки
вправо или влево углы аь аг, ..., ап не изменяются, но
тогда остаются постоянными и тангенсы этих углов. Зна-
чит, изменение величины производной dS/dx=ЕГь tg at
и связанное с ним изменение ее знака возможны
только за счет изменения значения хотя бы одной
из равнодействующих Ль Лг, . . Лл, что в свою оче-
редь возможно лишь в результате перемещения хотя бы
одного груза из одного участка линии влияния в дру-
гой; вполне очевидно, что в этом случае всегда сущест-
вует такое положение перемещающегося груза, при ко-
тором он в точности располагается над одной из вершин
линии влияния, что и требовалось доказать.
Груз, установленный над вершиной линии влияния,
которому соответствует невыгодное положение нагрузки
(или, что то же,— S=Sexstr), будем называть критиче-
ским и обозначать FKp.
Подчеркнем, что доказанная теорема устанавливает
лишь необходимый, но недостаточный критерий невы-
годного положения нагрузки, ибо она не дает указания
на то, какой именно груз и над какой вершиной линии
влияния он должен быть установлен, чтобы вся систе-
ма грузов занимала невыгодное положение. Окончатель-
ное решение этого вопроса выполняется способом после-
довательных пробных установок нагрузки: поставив
систему грузов так, чтобы один из грузов ее находился
над вершиной линии влияния, проверяем, выполняются
ли условия (7.10) или (7.11); если эти условия выпол-
няются, то имеем местный максимум (или местный ми-
нимум) силы, который, согласно формуле (7.6), опре-
делится так:
(7-12)
mln k
Если же хотя бы одно из условий (7.10) или (7.11)
не выполняется, то делают вторую пробную установку
грузов так, чтобы теперь уже какой-нибудь другой груз
находился над одной из вершин линии влияния, и так
до тех пор, пока не будут удовлетворены условия (7.10)
или (7.11).
Рассмотрим следующие случаи:
1. Пусть требуется найти Smax и при первой пробной
установке грузов получили, что условия
йе удовлетворяются:
211
а) если при смещении нагрузки влево tgo*<0,
то для получения Smax надо перемещать нагрузку влево
до тех пор, пока не станет 2/?fttgah>-0;
б) если при смещении нагрузки вправо S^fttgah>0>
то для получения Smax надо перемещать нагрузку впра-
во до тех пор, пока не станет ал<0.
2. Пусть требуется найти Snun и при первой пробной
установке грузов получили, что условия E/^tgctk^O
не удовлетворяются:
а) если при смещении нагрузки влево 27?Иёаь>0,
то для получения Smin надо перемещать нагрузку влево
до тех пор, пока не станет Z7?fttgCfc<0;
б) если при смещении нагрузки вправо S/^tgatCO,
то для получения надо перемещать нагрузку впра-
во до тех пор, пока не станет SA?ft tg<u>'0.
Конечной целью исследования положений, занимае-
мых подвижной нагрузкой, является определение невы-
годнейшего (опасного) положения нагрузки и соответ-
ствующего ему Smaxo- Если линия влияния имеет не од-
ну, а несколько вершин /; 2 и т. д., то сначала надо
найти невыгодное положение нагрузки для каждого из
них, поочередно располагая над ними грузы и выпол-
няя проверку соблюдения условий (7,10) или (7,11).
Затем соответственно найденным невыгодным поло-
жениям нагрузки следует вычислить Smaxl, SmaX2. и т. д.
и из всех этих значений для расчета взять Smaxo, соот-
ветствующее невыгоднейшему (опасному) положению
нагрузки.
7.6.2. Определение критического груза для линии
влияния треугольного очертания. Часто линия влияния
имеет треугольное очертание. В этом случае отыскание
критического груза (невыгоднейшего положения нагруз-
ки ') упрощается, так как у линии влияния только одна
вершина, над которой и должен находиться критический
груз (рис. 7.21,а,б)1 2. Выражение (7.9) для производ-
ной dS/dx в этом случае примет вид:
dS/dx=Rt tg ai4-J?2 tg a2,
где Ri и Rz — равнодействующие групп сил над левой и правой
1 В треугольной линии влияния Smax и Sraax о совпадают и
поэтому здесь говорим о невыгоднейшем положении нагрузки,
2 Здесь допущено, что критическим является груз 5.
212
ветвями л. в. Критическим грузом будет тот, при сдвиге которого
с вершины л. в. на величину dx влево и вправо выполняются ус-
ловия (7.10) или (7.11).
Пусть, например, отыскиваем SDiax, тогда при сдвиге
критического груза влево (на рис. 7.21, а это не по-
казано) должно быть
fli tg a1+fl2 tg а2>0.
Обозначив /?1 = 7?лев_Ь7;'|ф; R2 = Rnp> где 7?лев и Rnp"“
равнодействующие сил, находящихся левее и правее кри-
тического груза, получим:
(Л лев -J-fKrJtg Oi*f-/?np tg
но tgai=/i/a; tga2 —— h/b,
тогда
(R ле в 4*Ки p) Л/я—Rn j>h/b>0,
ИЛИ
(Ллев-|-^вр) Rap[b, (7.13)
При смещении критического груза вправо будем
иметь:
/?1=7?лсв: Ri—Ркр.
При этом должно быть
Ri tg arHMgQzCO,
или
7? ле (Rnp-f-T^B p ) Л/& <10
и
/?лев/й-<(7?Ер-|-?Кр) I b. (7.14)
Из неравенств (7.13) и (7.14) следует, что критиче-
ский груз будет тот, который при перекосе из одной
213
части неравенства в другую меняет знак неравенства.
Путем несложных преобразований неравенствам (7.13)
и (7.14) можно придать другой вид, более удобный для
отыскания критического груза. Прибавив к обеим час-
тям неравенства (7.13) по (7?Лей+Екр)/й, получим:
(^лев+^ир)/с+ (-Клев+^кр) (Rnp+Rjieu+fкр)/6,
ИЛИ
(RneB-|-fвр) [о,-\-Ь) fab^RIb,
или
(R лев +R ир)
и
RneB-J-Rup^* (R/l)^, (7.15)
где /?=У?ир+/?лсв+7:'ир — равнодействующая всех сил, располо-
женных над линией влияния.
Если же к обеим частям неравенства (7.14) приба-
вить по Rndb, то получим,-
/?дев/л4"/? лев (b<2 (Rup-I-RkfJ/^+Rлев /й.
или
Ялев<(ЯЖ (7.16)
Неравенства (7.15) и (7.16) показывают, что крити-
ческим будет тот груз, который, складываясь с суммой
левых грузов, т. е. тех, которые расположены левее кри-
тического, делает левую часть неравенства больше про-
изведения из средней погонной пролетной нагрузки /?//
на длину а левого участка линии влияния, а сумму од-
них левых грузов — меньше того же произведения.
Применяя неравенства (7.15) и (7.16) к отысканию
невыгоднейшего положения системы грузов, надо ее дви-
гать с участка линии влияния большей длины в сторо-
ну участка меньшей длины так, чтобы более тяжелые
грузы (например, колеса электровоза или тепловоза)
находились впереди и располагались по возможности
над наибольшими ординатами линии влияния. Сказанное
можно сформулировать иначе: если a<Zb (рис. 7.21,6),
то систему грузов надо двигать влево так, чтобы впере-
ди находились более тяжелые грузы, если а>Ь (рис.
7.22, а) — вправо при том же порядке расположения
грузов.
Необходимо иметь в виду, что сделанные в п. 7.6
выводы справедливы только в тех случаях, когда при
214
РИС. М2
перемещениях нагрузки из первоначального положения
в опасное ни один из грузов не выходит за пределы ли-
нии влияния и никакой новый груз не входит в ее пре-
делы. В противоположном случае надо исключить груз,
вышедший за пределы линии влияния, или включить но-
вый груз, вошедший в ее пределы.
Пример 7.4. Определить невыгоднейшее положение системы
грузов, расположенных на балке (рис. 7.22, а), и величину макси-
мального изгибающего момента в сечении К (шаЛ), пользуясь ли-
нией влияния Л1я, показанной на рис. 7.22, г.
Решение. Для определения невыгоднейшего положения системы
грузов воспользуемся неравенствами (7.15) и (7.16).
Поскольку а=12 м > 6=6 м, то систему грузов будем двигать
вправо так, чтобы впереди находились более тяжелые грузы.
Предположим, что критическим грузом FKp оказался груз 2
(рис. 7.22,6), тогда
/?лев+Г2= 1140+220= 1360 кН> (/?//)« = (1580/18) 12=1053 кН;
Ялсв = 1140 кН> (R/l)a= 1053 кН.
т. е. неравенство (7.16) не удовлетворяется и, значит, положение
системы грузов, при котором груз 2 совмещается с вершиной ли-
нии влияния не является невыгоднейшим, а груз 2 — критическим.
Следующим грузом, который при движении системы грузов
вправо окажется над вершиной линии влияния, будет груз 3
(рис. 7.22,6); при этом
7?ле.+^3= 1080+220= 1300 кН> (Я/1)с= (1740/18) 12=1160 кН;
7?леВ=Ю80 кН< (R/l)a= 1160 кН.
т. е. оба неравенства (7.15) и (7.16) удовлетворяются, и, значит,
положение системы грузов, при котором груз 3 совмещается с вер-
215
шиной линии влияния, действительно является невыгоднейшим, а
груз 3 — критическим.
Теперь по формуле (7.4) вычислим шах Мк.
Предварительно находим;
tg ai=4/12=0,333;
Ух=3-0,666=2 м;
Уз=4 ы;
i/s=9-0,333=3 м;
у?=3,5-0,333=1,17 м;
tg =4/6 - 0,666;
</2=4,5-0,666=3 м;
</4=10,5-0,333=3,5 м;
у6=7,5-0,333=2,5 м;
ув=2,0-0,333 =0,67 м;
у9=0,5 0,333=0,17 м.
max Мк = 220ух + 220уг + 220(/3 + 220у, + 220у5 + 160у6 + 160(/т +
+160(/H-160ys = 220-2+220-3+220-4 + 220-3,5+220-3 + 160-2,5+
• +160-1,17+160-0,67+160-0,17=4132 кН-м.
Интересно отметить, что если при том же движении системы
грузов вправо впереди будут находиться менее тяжелые грузы
(рис. 7,22, д), то невыгоднейшим положением системы грузов ока-
жется то, при котором с вершиной линии влияния совместится груз
6, являющийся, следовательно, критическим; при этом max M'tr =
= 3426 кН м. В справедливости определения величины max Л!'*
предлагаем убедиться самостоятельно.
Итак, max М'кСтах М„ и поэтому положение системы грузов,
соответствующее критическому грузу 6, правильнее назвать невы-
годным в отличие от найденного невыгоднейшего, которому соот-
ветствует критический груз 3.
7.7. Эквивалентная нагрузка
Определение максимальных сил в стержнях ферм
железнодорожных и автодорожных мостов по линиям
влияния путем непосредственного нагружения их систе-
мой сосредоточенных грузов от подвижного состава тре-
бует длительных арифметических подсчетов, связанных
с отысканием опасного положения нагрузки и дальней-
шим определением величины силы по формулам, при-
веденным в п. 7.3. Для линий влияния треугольного
очертания эта операция значительно упрощается путем
введения в расчет понятия об эквивалентной нагрузке.
Эквивалентной нагрузкой называется расположенная
на всей длине линии влияния равномерно распределен-
ная нагрузка, которая в данном элементе (или сечении)
сооружения вызывает такую же силу, как и данная
система сосредоточенных грузов при невыгоднейшей
установке их на сооружении. Значение силы от равно-
мерно распределенной нагрузки определяется путем
умножения ее интенсивности на площадь л. в., располо-
женную под участком действия указанной нагрузки
(формула (7.7)].
216
Применительно к эквивалентной нагрузке будем
иметь:
S=?s<b, (7.17)
где — интенсивность эквивалентной нагрузки; и — площадь л. в.
Вместе с тем по формуле (7,4) имеем S=SFJii/ft и,
следовательно, ?эсо—откуда н определяем иско-
мую интенсивность эквивалентной нагрузки!
fle=(2F*y*)/a. (7,18)
Отсюда следует, что определение интенсивности эк-
вивалентной нагрузки предполагает предварительное
отыскание максимального значения силы S путем вы-
числения SFjj/fe при непосредственном нагружении ли-
нии влияния системой сосредоточенных грузов. На пер-
вый взгляд, может показаться, что эквивалентная на-
грузка не дает никакого облегчения в расчете. Но это
не так. Дело в том, что определение величин интенсив-
ности эквивалентной нагрузки1 по формуле (7,18) де-
лают только один раз для типовых линий влияния1 2, ибо
эти величины будут такими же и для других линий
влияния, подобных соответствующим типовым.
Две линии влияния условимся называть подобными,
если их вершины (вершины ординат высот треугольни-
ков) расположены на одинаковых расстояниях от соот-
ветствующих этим линиям влияния нулевых ординат.
Пусть на рис. 7.23, а изображена типовая линия
влияния какой-либо силы, для которой эквивалентная
нагрузка подсчитана по формуле (7,18). Приняв для ли-
нии влияния, показанной на рис. 7,23,6, а'=а и
можно утверждать, что эти две линии влияния подобны
друг другу, так как при этом их вершины С н С' рас-
положены на одинаковых расстояниях от соответствую-
щих этим линиям влияния нулевых ординат — точек А
и В, А' н В'.
Непосредственно из рис. 7.23, а, б имеем;
yt = (hja) х, /i = (h'la')x'.
Разделив почленно второе равенство на первое, по-
лучим;
V'ily^h'jh,
1 В дальнейшем вместо термина «интенсивность эквивалентной
нагрузки» употреблен «эквивалентная нагрузка».
2 Имеются в виду треугольные линии влияния с вершинами
в начале и посередине длины нагружения.
217
откуда
t/'i—yi (h'/k) =ytn. (7.19)
Равенство (7.19) выражает следующее свойство по-
добных линий влияния: в подобных линиях влияния
каждая ордината одной из них получается путем умно-
жения соответствующей ей ординаты другой линии влия-
ния на постоянное число п, равное отношению высот
треугольников, представляющих очертание этих линий
влияния.
Установим зависимость между эквивалентными на-
грузками для подобных линий влияния. Для этого сна-
чала определим площади верхней (рис. 7.23, а) и по-
добной ей ннжней (рис. 7.23,6) линий влияния:
<п = (а-|-&)Л/2; и'= (a’+b')fi'l2,
но из (7.19) следует, что h'!h=m и h'=nh, поэтому
и,'— (а'+6')Л72= ((а+й)й/2]п=ыл.
Теперь по формуле (7.18) и учитывая (7.19), нахо-
дим эквивалентные нагрузки для верхней и нижней ли-
ний влияния:
qa= (XFtyt) ft£>;
= (%Fkt/'k) /а>‘ = (nSFky>t)lwn= (ZFut/^/a^qa.
Итак,
q's=CSFkyk){(li=qa. {7.20)
Равенства (7.20) выражают следующие свойства эк-
вивалентной нагрузки:
218
для линии влияния треугольного очертания задан*
ной длины эквивалентная нагрузка зависит от величин
и расположения сосредоточенных грузов, установленных
в невыгоднейшее положение, а также н от площади ли-
нии влияния;
эквивалентная нагрузка, вычисленная по формуле
(7.18) для линии влияния, принятой за типовую, в то же
время определяет эту нагрузку и для линий влияния,
подобных типовой, или иначе: эквивалентная нагрузка
для подобных линий влияния, очерченных треугольника-
ми, не зависит от и.х высот.
Эти свойства эквивалентной нагрузки позволили пу-
тем непосредственного нагружения типовых линий влия-
ния составить таблицу эквивалентных нагрузок для же-
лезнодорожной поездной системы (табл. 7.2) и пользо-
ваться ею при расчетах по линиям влияния треуголь-
ного очертания с произвольным положением их вершин.
Таблица 7.2
Длина нагружения, А, м Коэффици- ент, характе- ризующий положение вершины ли- нии влияния прн: Длина нагружения, Л, м Коэффици- ент, характе- ризующий положение вершины ли- нии влияния при: Длина нагружений, X, м КозффнЦИ’ ент, характе- ризующий положение вершины ли- нии влиянии при:
а=0,0 и=0,£ а-0,5 а=0,0 а=0,5
1 50 50 12 17,11 14,97 60 11,01 10
1,5 39,92 34,93 14 16,51 14,45 70 10,68 10
2 31,15 27,26 16 15,97 13,97 80 10,46 10
3 24,24 21,56 18 15,49 13,55 90 10,30 10
4 22,12 19,36 20 15,05 13,17 100 10,2 10
у 20,77 18,17 25 14,12 12,36 ПО 10,14 10
6 19,98 17,4 30 13,36 11,69 120 10,09 10
7 19,21 16,81 35 12,75 11,16 130 10,06 10
8 18,68 16,34 40 12,25 10,72 140 10,04 10
9 18,22 15,94 45 11,84 10,36 130 10 10
10 17,81 15,58 50 11,51 10,07 и более — —
В табл. 7.2 эквивалентные нагрузки вычислены для
некоторой условной нагрузки в 25 кН на ось, называе-
мой нагрузкой «класса один» (К1), и выражены в ки-
лоньютонах на один метр пути (кН/м). При расчете на
реальные нагрузки табличные значения эквивалентной
нагрузки должны умножаться на коэффициент нагруз-
ки, который для постоянных сооружений берется рав-
ным 14, а для временных 10. Таблица составлена для
двух видов треугольных линий влияния:
1) с вершиной в начале длины нагружения (а=0);
2) с вершиной посередине длины нагружения (а=
=0,5), где а — меньшее расстояние от верши-
ны л. в. до ее конца, м.
Если вершина л. в. расположена так, что а=т^0 и
а =7^0,5 и длина нагружения отличается от табличной,
то предполагается линейное изменение эквивалентной
нагрузки между значениями а=0 и а=0,5 и значения-
ми длин нагружения, указанных в таблице. В этих слу-
чаях (или только в одном из них) для определения эк-
вивалентной нагрузки необходима линейная интерполя-
ция табличных значений.
Пример 7.5. Посредством эквивалентно?! нагрузки определить
возникающие от железнодорожной поездной системы силы N&,
в стержнях верхнего пояса и в раскосе фермы с параллель-
ными поясами н треугольной решеткой, изображенной на
рис. 7.24, а при езде понизу. Коэффипиент нагрузки Д = 14.
Решение. По правилам, изложенным ранее, построены линии
влияния Лг68, (рис. 7.24,6,6,?). Предлагаем самостоятельно
доказать правильность их построения.
Определим силы в указанных стержнях.
Сила Nes (см. л. в.
1. Определяем эквивалентную нагрузку.
Длина нагружения Х=1=36 м в табл. 7.2 не имеется; значит
требуется интерполяция по к (по вертикали табл. 7.2). Меньшее
расстояние от вершины линии влияния до ее конца а=18 м. Сле-
довательно, коэффициент а=а/Х= 18/36=0,5, т. е. совпадает с
табличным и, значит, интерполяция по о. (по горизонтали табл. 7.2)
не требуется.
Выполняем интерполяцию по X. (по вертикали) при а=0,5.
?э|'е.^0,5'1 ?э/а=0,5Х
9э(а=0,5\ - ?з(а=0,5Х 40 — 35 (36 —3d) =
1Д=36 J [х=3б J
- 11,16 —[(11,16—10,72)/5] 1 = 11,16 — 0,90 = 10,26 кН/м.
2. Расчетное значение эквивалентной нагрузки для данной ли-
нии влияния с учетом заданного коэффициента нагрузки на один
метр фермы (м. ф.):
расч “ [<7Э, 0>5 / 21 К = (10,26/2) 11 = 71,82 кН/м. ф
3. Находим 1У6в. Согласно четвертому свойству линий влияния
(формула 7.7), получим:
W6B=P.C4?B®=71,82 (—0,5-36-1,5) =71,82(—27) =—1946 кН.
Сила (см. л. в. Nk).
220
221
1, Определяем эквивалентную нагрузку.
Длина нагружения 1=36 м. Меньшее расстояние ст вершины
линии влияния до ее конца с = 12 м, a—aft.—12/36 = 0,33 в
табл. 7.2 не имеется. Следовательно, здесь требуется интерполяция
и по вертикали (по X) и по горизонтали (по а).
Интерполяция по вертикали:
а) при а=0
?9, {| 12,75 — [(12,75 —12,25)/5]>1 = 12,65 кН/м;
(х=зб)
б) при а=0,5 ранее получено
?>=о,51 = 10-26 кН/'м-
[Л=36 J
Интерполяция по горизонтали:
а — 0 а = 0,33 -х = 0,5
1-36 1 ~ 36 1 = 36
qs = 12,65 Чэ “ ? ?э- 10,26
Отсюда находим:
?эм=(|>™ = 12,65 —[(12,65—10,26)/0,5] 0,33 =
\Л=36 )
= 12,65— 1,58 = 11,07 кН/м.
2. Расчетное значение эквивалентной нагрузки на один метр
фермы (м. ф.):
= [<7Э . =0>33./2] К = (11,07/2) 14 = 77,49 к11/м.ф.
8. Находим N&:
(V«=расчет = 77,49(—0,5-36-4/3) =77,49(—24) =—1860 кН.
Сила Мм (см. л. в. N^). Линия влияния — двузначная в ви-
де двух треугольников.
Дли получения наибольшей растягивающей силы JVS6 надо на-
грузить эквивалентной нагрузкой левую (положительную) часть ли-
нии влиянии, для наибольшей по абсолютной величине сжимающей
силы — правую (отрицательную). Длина нагружения: у левой части
Х'=14,4 м; у правой 1"=21,6 м. Коэффициенты а: у левой части
а'=071=2,4/14,4=0,167; у правой — а"=а"/!"=3,6/21,6=0,167.
Длины нагружения К и коэффициенты а как для левой части
линии влияния /Vse, так и для ее правой части в табл. 7.2 отсутст-
вуют. Поэтому для каждой части линии влияния необходимо вы-
222
полнить две интерполяции — по вертикали (по 1) и по горизонтали
(по а).
Определяем тахЛ'56 — наибольшую растягивающую силу (левая
часть л. в, Л'56)
1. Находим эквивалентную нагрузку. Длина нагружения Л =«
= 14,4 м, а'=0,167. Интерполяция по вертикали
а) при а'=0
16,51 — 15,97 „
= 16,51—-----16„14— 0,4 =
= 16,51 — 0,11 = 16,40 кН/м.
б) при а'=0,5
, _ 14,15—13,97 Л
?э(а'=0,5 \ =11.45— jg_________14 ‘0,4 =
\л' —14,4)
= 14,45 — 0,096 = = 14,35 кН/м.
Интерполяция по горизонтали:
а/ - 0 а' = 0,167 а' = 0,5
V = 14,4 V = 14,4 Jl'= 14,4
= 16,40 = ? ?;= 14,35
Отсюда находим
д' = 16,40— [(16,40— 14,35)/0,5] 0,167 =
/а'=0,167 \
|.Х' = 14,4 J
= 16,40 — 0,68 = 15,72 кН/м.
2. Расчетное значение эквивалентной нагрузки на один метр
фермы (м. ф):
н-х - 14 -110 кН'м-*-
\V = H,4 )
3. Находим тохЛ'м:
m a JV56=Р« С Ч?3'ю' = 110 (0,5 • 14,4.0,373) = 110 2,69 = 296 кН.
Определяем тах|сжЛГдз1 — наибольшую по абсолютной величине
сжимающую силу (правая часть л. в. jV56).
Расчет выполняется по аналогии с определением в ре-
зультате получим BmilcHcA^el =598 кН.
Предлагаем убедиться в правильности ответа, выполнив само-
стоятельно все необходимые вычисления.
223
Глава 8, Определение перемещений
в статически определимых системах
8.1. Общие сведения
8.1.1. Понятие о перемещениях и их роли в строи-
тельной механике. Пусть сооружение, например, балка
АВ1 (рис. 8.1, а) испытывает прямой изгиб под дей-
ствием силы F, при этом балка деформируется, ее ось
искривляется1 2, в результате чего отдельные точки оси
балки, т. е. центры тяжести ее поперечных сечений, из-
менят то положение, которое они занимали до нагруже-
ния (например, точка К перейдет в положение К')»
а сами поперечные сечения нс только сместятся поступа-
тельно, но еще повернутся вокруг своих нейтральных
линий (например, сечение 1—1 перейдет в положение
1'—1'). Соединив прямой точки Л и К', изобразим век-
тор КК', начало которого совпадает с положением точ-
ки недеформированной оси балки, а конец — с положе-
нием, занимаемым этой же точкой на упругой оси бал-
ки, и назовем его вектором полного линейного переме-
щения точки Л', вызванного силой F. Разложим вектор
КК' по направлениям осей хну, тогда получим (рис.
8.1,6):
KL—вектор линейного перемещения точки К в го-
ризонтальном направлении; КМ — вектор линейного пе-
ремещения точки К в вертикальном направлении. В даль-
нейшем будем оперировать не с самими векторами КК',
KL, КМ, а с их модулями КК', KL, КМ, которые соот-
ветственно назовем полным линейным перемещением,
линейным перемещением в горизонтальном направлении
и линейным перемещением в вертикальном направлении.
В ряде случаев (например, в рассматриваемом слу-
чае прямого изгиба) линейными перемещениями в гори-
зонтальном направлении пренебрегают, ибо они весьма
малы по сравнению не только с длиной балки, но и с ли-
нейными вертикальными перемещениями; поэтому за
1 Все то, что относится к балкам, справедливо и для любого
другого сооружения и его отдельных элементов.
2 С целью придания рис. 8.1 большей наглядности, на нем
искривленная ось балки (упругая ось балки) изображена в значи-
тельной мере утрированно,
224
вертикальное линейное перемещение точки принимают
перемещение, равное модулю вектора КМ', направлен-
ное перпендикулярно к недоформированной оси балки.
Это перемещение также называют прогибом оси балки
в данной точке (или прогибом данного сечения балки).
Однако наряду с изменением положения точек оси бал-
ки, вследствие ее деформации одновременно происходит
поворот сечений балки вокруг их нейтральных линий.
Пренебрегая деформацией сдвига, можно считать угол (р
между прямыми 7—7 и Г—Г равным углу между каса-
тельной к упругой оси балки в данной точке и ее неде-
формированной осью. Этот угол характеризует угловое
перемещение сечения и называется его углом поворота.
Умение определять перемещения является одной из важ-
нейших задач строительной механики, решение которой
позволяет: оценить жесткость сооружения; рассчитать
статически неопределимую систему; сопоставить теоре-
тические и опытные перемещения, определяемые для
контроля работы сооружения после его постройки, в про-
цессе эксплуатации.
Рассмотрим только линейно деформируемые (упру-
гие) системы, поэтому при определении перемещений
необходимо учитывать все допущения, вводимые в рас-
чет упругих систем и изложенные в п. 1.2.
8.1.2. Обозначения перемещений. Как линейное, так
и угловое перемещение будем обозначать символом
Дкг- Первый индекс обозначает точку на оси элемента
сооружения, перемещение которой определяется по за-
8 Шишмаи Б. А.
225
данному направлению. Второй индекс указывает на при-
чину, вызвавшую перемещение, ею может быть сила,
момент, распределенная нагрузка, температура, осадка
опор или же их определенная совокупность.
Так, например, А1Р (рис. 8.2, а) означает перемеще-
ние точки 1 по заданному направлению 7—7’, вызван-
ное силой F; ЛКР (рис. 8.2, б) обозначает перемещение
точки К по заданному направлению КК, вызванное груп-
пой силовых факторов Л; F2\ tn. Часто вместо буквен-
ных индексов вводят цифровые. Например, Д21 (рис.
8.2, в) обозначает перемещение точки 2 по заданному
направлению И—II, вызванное моментом т, приложен-
ным в точке 1. Помимо перемещений типа Дц?, Дкр
в дальнейшем (гл. 8, 9) будем оперировать и так назы-
ваемыми единичными перемещениями, вызываемыми еди-
ничными факторами, например, силой F—1 или момен-
том т=1. Эти перемещения будем обозначать буквой
б с двумя индексами, имеющими такой же смысл, как
и индексы, приписываемые перемещениям Д. Так, на-
пример, обозначает перемещение точки К оси бал-
ки, вызванное силой F — 1 (рис. 8.2,е).
Определение перемещений может быть выполнено
различными методами [4]. Здесь же рассматривается
наиболее общий, так называемый энергетический метод,
разработанный Мором и основанный на знании закона
сохранения механической энергии в применении к упру-
годеформируемому телу,
8,2. Закон сохранения энергии в применении
к упругодеформмруемому телу
Закон сохранения механической энергии гласит: сум-
ма потенциальной и кинетической энергии системы при
различных положениях, занимаемых ею, не изменяется,
т. е. остается величиной постоянной в произвольный мо-
мент времени.
При этом считается, что энергия не подводится извне
* Если направление перемещения на рисунке не указано,
то пишут так: Д^ или Д[^₽; Д^ или д"£Рт; Д(;г или Д]'р\ что
означает соответственно горизонтальное, вертикальное переме-
щения точки 1 и угловое перемещение сечения, соответствую-
щего точке 7.
226
МОМЕНТ «□
рис.а,з
и не происходит рассеяние ее за счет работы сил тре-
ния, изменения теплового баланса и т. п.
Обозначим в произвольный момент времени i, пол-
ную механическую энергию системы через потенци-
альную энергию — ЭП£, кинетическую энергию — 3KiJ
тогда на основании закона сохранения энергии будем
иметь
Э1=ЭиН-Эк/=const. (8.1)
Теперь представим себе пружину АВ (рис. 8.3), под-
вергаемую упругой деформации статической нагрузкой,
осуществляемой последовательно помещаемыми на под-
ставке С отдельными грузами 1, 2, ..п, вес которых
постепенно возрастает от нуля до своего конечного зна-
чения, равного сумме весов всех п грузов; при этом ско-
рости перемещения точек системы пружина — груз на-
столько малы, что ими можно пренебречь и считать, что
в произвольный момент времени t\ кинетическая энер-
гия системы равна нулю, а сама система обладает лишь
потенциальной энергией Эщ, которую будем рассматри-
вать как сумму двух энергий: потенциальной энергии
упругой деформации пружины1 и потенциальной энер-
гии груза. Обозначив эти энергии соответственно через
U и Ur, получим
(8.2)
В процессе взаимодействия пружины со все возрас-
тающей нагрузкой пружина накапливает потенциальную
' энергию деформации1 2, увеличивающуюся от нуля до
; своего конечного значения, в то время как потенциаль-
1 В дальнейшем потенциальная энергия деформации пружины.
2 Это подтверждается тем, что при разгрузке пружины опа пол-
ностью восстанавливает первоначальное состояние за счет накоплен-
ной ею потенциальной энергии деформации.
«*
227
нал энергия грузов непрерывно уменьшается (утрачи-
вается) от своего первоначального значения до нуля.
Рассмотрим два момента времени to и tj, соответ-
ствующие началу и концу деформации пружины под дей-
ствием груза 1. Тогда, учитывая (8.1) и то, что 3Ki=0,
получим Эцо=ЭП] или, согласно (8.2),
U0+I/r0=(71+L/rl,
или
U i—Uo= Uro—Uri-
Левая часть этого равенства представляет собой потен-
циальную энергию деформации, накопленную пружиной
за промежуток времени (Оь а правая часть — потенци-
альную энергию, утраченную грузом I за тот же про-
межуток времени.
Догружая пружину грузами 2, 3, .... п, и рассуждая
так же, как и в предыдущем случае, получим равенства,
аналогичные последнему, соответствующие деформации
пружины за промежутки времени /12, t23, .,., учи-
тывая при этом и промежуток времени fOi> будем иметь:
и,—U0=Un— UTi,
U2—U i = U п—U
Un— Un—i = Uг,/-.—।—Um-
Складывая эти равенства почленно и обозначив суммы
левых и правых слагаемых соответственно через V и Ur,
окончательно получим
U=Ur. (8.3)
Равенство (8.3) выражает собой закон сохранения энер-
гии в применении к упругодеформируемому телу: на-
копленная телом потенциальная энергия деформации
равна утраченной потенциальной энергии внешних сил 1,
действующих на тело.
Из физики известно, что мерой потенциальной энер-
гии тела (груза) является работа, совершаемая силой
тяжести тела на соответствующем перемещении его
центра тяжести. Эту работу назовем работой внешних
1 Заметим, что на всех схемах сооружений, как правило, изо-
бражаются не сами грузы, а их силы тяжести, которые по отно-
шению к сооружению являются внешними силами; поэтому величи-
ну потенциальной энергии грузов будем называть потенциальной
энергией внешних сил.
228
сил и обозначим ее через IF; тогда будем иметь Ut=W
или, в силу (8.3), U — W и в общем виде
U=±W. (8.4)
В правой части этого равенства ставится знак «плюс»
(<+») при нагружении тела, когда сила тяжести груза
работает по направлению соответствующих ей переме-
щений различных точек тела, в противоположном слу-
чае— знак «минус» («—»). Учитывая это, равенство
.(8-4) можно выразить так: потенциальная энергия де-
формации, накопленная телом, численно равна работе
внешних сил, приложенных к этому телу при его нагру-
жении или разгрузке.
Итак, для определения потенциальной энергии де-
формации необходимо уметь вычислять работу внешних
сил. Эта работа может быть выражена через сами внеш-
ние силы или же через внутренние силовые факторы,
возникающие в сечениях деформируемого элемента.
8.3. Работа внешних сил
8.3.1. Выражение работы внешних сил через эти же
силы. Случай 1. Сооружение нагружается только одной
силой (теорема Клапейрона1). Пусть балка АВ (рис.
8.4, а) нагружается статически приложенной к ней си-
лой. при этом величина силы изменяется от нуля до
своего конечного значения F. Для упругой системы
между силой и деформацией существует прямо пропор-
циональная зависимость
Д = aF* *,
где «—коэффициент пропорциональности [4].
Графически эта зависимость изображается прямой ли-
нией (рис. 8.4,6). Промежуточное значение силы обо-
значим Fb а соответствующее ей перемещение —Д].
Пусть сила Ft получит приращение dFlt перемеще-
1 П. Клапейрон (1799—1864)—выдающийся французский ин-
женер; впервые в России (в 1830 г.) прочел курс сопротивления
материалов в Петербургском институте инженеров путей сообщения.
• При выводе теоремы Клапейрона индексы при Д не ставят
и под Д подразумевают перемещение точки приложения силы F
о ее направлению и ею вызванное.
229
ние при этом увеличится на d&t. Элементарная работа,
совершаемая силой F\ на перемещении г/Дь
dW= (Fy+dF})d^i=F1d^+dF)dAi.
Пренебрегая вторым членом как величиной второго по*
рядка малости и учитывая, что d&i=adFi, получим:
dir=f1dAI =F,adf ь
Полная работа силы при ее изменении от 0 до Fi
IT = J aFi dFt ~ (1/2) аГг,
о
так как Д=аЕ, то полученную формулу можно запи-
сать в виде:
Й?=(1/2)ГД. (8.5)
Если к упругой системе статически приложена пара сил
с моментом т (рис. 8.5), то, по аналогии, получим:
1Р= (1/2) т<р,
где <р — угол поворота сечения, к которому приложен момент т.
На основании изложенного сделаем заключение: ра-
бота внешней силы при статическом действии ее на
упругую систему равна половине произведения конеч-
ного значения силы на величину соответствующего ей
перемещения (теорема Клапейрона).
Случай 2. Сооружение нагружается группой сил.
Если на систему (балку АВ) действует группа внеш-
них сил Fx, F2, F3, Fn (рис. 8.6), то будем иметь:
W = ~2~ Л *i + ~2~ F? Щ + ~2~ Fs Лз — + ~2~ Fп&п,
или короче:
п
(8'6)
Таким образом, при статическом нагружении соору-
жения группой внешних сил работа этих сил равна по-
ловине суммы произведений конечной величины каждой
силы на величину соответствующего ей конечного пере-
мещения, вызванного действием всей группы сил.
8.3.2. Выражение работы внешних сил через внут-
ренние силовые факторы. Рассмотрим элемент какого-
230
a
нибудь сооружения, например, элемент ВС (ригель)
рамы ABCD (рис. 8.7.а), находящейся под действием
статически приложенной к раме группы сил F (Fl; Fv;
F3), В пределах ригеля ВС выделим элемент длиною
231
ds двумя произвольными сечениями I—I и И—II. Этот
элемент в увеличенном масштабе с действующими в его
сечениях статически возрастающими от нуля до своих
конечных значений продольной силой AZ, изгибающим
моментом М, поперечной силой Q показан на рис. 8.7,6.
По отношению ко всему элементу ВС возникающие
в его сечениях силовые факторы N, М и Q — являются
внутренними, но для выделенного элемента их надо счи-
тать внешними силами, а поэтому работа каждой из
этих статически действующих сил на соответствующем
ей перемещении может быть определена по форму-
ле (8.5).
Определим элементарную работу, затрачиваемую на
деформацию элемента длиною ds от каждого из сило-
вых факторов в отдельности.
Элементарная работа продольных сил. Пусть изме-
нение длины выделенного элемента в результате дефор-
мации всей системы (рамы) равно Ms (рис. 8.8), тогда
элементарная работа продольных сил:
dWN= (1/2) Nbds.
Но в соответствии с законом Гука перемещение Ms—
—NdsjEA и элементарная работа продольных сил на
соответствующем им перемещении Ms примет вид:
dWH~N2ds/2EA.
Элементарная работа изгибающих моментов. Пусть
взаимный угол поворота сечений I—I и II—II рассмат-
риваемого элемента окажется равным Му (рис. 8.9).
Тогда элементарная работа изгибающих моментов:
<ЛРЛ1==(1/2)Л1ДЛр.
Из рис. 8.9 находим:
My=ds/p,
где р — радиус кривизны нейтрального слоя деформируемого эле-
мента, определяемый по формуле:
поэтому
Ady=Mds/EJ
и, следовательно, формула элементарной работы изги-
бающих моментов на соответствующих им перемеще-
ниях Му примет вид:
dWM=M2ds/2EJ,
232
рис. bio
Элементарная работа поперечных сил. Деформация
рассматриваемого элемента от влияния поперечных сил
представлена на рис. 8.10. Не останавливаясь на дока-
зательстве, приводим окончательную формулу, опреде-
ляющую элементарную работу поперечных сил на соот-
ветствующих им перемещениях &у.
dWQ = -t№ds!2GA,
где ч — коэффициент, характеризующий неравномерность распре-
деления касательных напряжений по сечению и зависящий только
от формы поперечного сечения: для прямоугольного сечения т]=6/5;
для круглого т| = 32/37; для прокатных двутавровых профилей ч
можно приближенно принимать равным отношению площади по-
перечного сечения всего профиля к площади вертикальной стенки.
При одновременном действии на выделенный элемент
продольных сил, изгибающих моментов и поперечных
сил работа каждой из них на перемещениях, вызванных
остальными силами, равна нулю. В самом деле:
1. При действии продольных сил N сечения не пово-
рачиваются и перемещаются в направлении, перпенди-
кулярном поперечным силам Q. Следовательно, изги-
бающие моменты М и поперечные силы Q не соверша-
ют работы на перемещениях, вызываемых продольны-
ми силами N.
2. При действии изгибающих моментов М происхо-
дит взаимный поворот сечений так, что расстояние меж-
ду центрами тяжести их изменяется ничтожно мало; при
этом поперечные силы в сечениях элемента направлены
по нормали к его деформируемой оси. Следовательно,
на перемещениях, вызываемых изгибающими момента-
ми М, работой продольных сил N можно пренебречь,
а работу поперечных сил Q считать равной нулю.
3. Наконец, при действии поперечных сил Q сечения
не поворачиваются, а лишь сдвигаются относительно
друг друга, сближаясь на ничтожно малое расстояние.
Следовательно, на перемещениях, вызываемых попереч-
ными силами Q, работой продольных сил N можно пре-
небречь, а работу изгибающих моментов М считать рав-
ной нулю.
233
Поэтому, если в сечениях какого-либо элемента си-
стемы одновременно возникают продольные силы, изги-
бающие моменты и поперечные силы, то общую работу
внешних сил, выраженную через N, М и Q можно опре-
делить на основании принципа независимости действия
сил1 (и. 1.2), как сумму работ от каждого из силовых
факторов N, М, Q в отдельности. В результате получим:
AJ!ds _ r,Q* *ds
dW^ 2EA + 2£J + 2GA ’
Интегрируя полученное выражение в пределах длины
каждого участка системы и произведя суммирование
по всем п се участкам, определим работу заданных
внешних сил для всей системы:
л к п
Л=1 tk *=1 s6 Л = 1
Так как, согласно (8.4), U=±W, то формула (8.7)
применима и для определения потенциальной энергии
деформации системы. Из формулы (8.7) следует;
1. При растяжении (сжатии) Л1~С, Q—0 и
Г №ds
<8-8>
2. При прямом поперечном изгибе Af=0
UZM;Q = Zj| 2EJ +^J 2tM ‘ (8'9>
3. При прямом чистом изгибе и поперечном изгибе
без учета влияния поперечных сил имеем W=0, Q=0 и
<810>
8.4. Энергетический метод определения
перемещений — формула Мора
Вывод формулы Мора основан на применении зако-
на сохранения энергии к упругодеформируемому телу,
выраженного равенством (8.4) U—±W. Рассмотрим ка-
1 В данном случае имеются в ваду стержни с прямой осью
в стержни небольшой кривизны.
* В дальнейшем индексы k— 1 и п под знаком суммы и над
ним, а также индекс st под знаком интеграла не поставлены, по
подразумеваются.
234
кое-нибудь сооружение (систему), например балку АВ
(рис. 8.11, а). Условимся заданную и нагруженную си-
лами систему называть системой, находящейся в дей-
ствительном состоянии (часто это состояние системы на-
235
зывают также грузовым или первым). Пусть надо опре-
делить перемещение некоторой точки К. оси системы по
заданному направлению К—К, вызванное нагрузками
F, т. е. Дл-F. Для этого представим себе вспомогательное
(второе) состояние системы (в данном случае той же
балки АВ}, но нагруженной теперь только одной ста-
тически приложенной в точке К силой Г, действующей
«о направлению искомого перемещения Акр (рис.
8.11,6). При этом система деформируется (упругая ось
ее показана пунктиром), точка К получит перемещение
Акт. а сама система накопит потенциальную энергию
деформации Ur-
Затем уже деформированную систему нагрузим ста-
тически приложенной группой сил F (рис. 8.11, в). В ре-
зультате система будет продолжать деформироваться,
пока ее упругая ось не займет окончательное положе-
ние, показанное на рис. 8.11, в сплошной линией. При
этом точка К. получит дополнительное перемещение на
величину Акт, а потенциальная энергия деформации си-
стемы С'т возрастет на величину {/р+^доп- Здесь UF —
потенциальная энергия деформации, накопленная систе-
мой от влияния статически приложенной группы сил F,
1/дОп — дополнительная потенциальная энергия дефор-
мации, накопленная системой за счет работы уже по-
стоянной силы Т на перемещении Акр, вызванном груп-
пой сил F.
Таким образом, полная потенциальная энергия де-
формации, накопленная системой в результате последо-
вательного нагружения- ее сначала статически прило-
женной в точке К силой Т и затем статически прило-
женной группой сил F, выразится так:
U= UrFUf-{-Un0Ti,
но, согласно (8.4), U=W-, UT=WT-, UF=WF-, Пдоп=
= 1^доп- Подставив эти равенства в последнюю форму-
лу, получим:
где V — полная работа внешних сил; при этом возникающие в се-
чениях системы от совместного действия силы Т и группы сил F
внутренние силовые факторы N, М и Q определятся как алгебраи-
ческие суммы продольных сил, изгибающих моментов и поперечных
сил, полученных от действия в отдельности силы Т и группы
сил F.
236
Таким образом: Ar=2VT'-|-NP; Л1=Л)г4-ЛГР; Q=Qr4-
+C?f- Учитывая эти равенства, полная работа внешних
сил согласно формуле (8.7), примет вид:
V ГМОт + 0л)г ds
+2jJ 2GA
I?t — работа статически приложенной к системе силы Т на пере-
мещении Длт по ее направлению и ею же вызванном; Wr —
работа статически приложенной к системе группы сил F на пере-
мещениях Л|, Дг, Да по направлениям этих сил и ими же вы-
званных.
Согласно (8.7), W'T и И/р определятся соответственно
выражениями:
VI С , v f *4 ds VI f ds
2ea + 2£J + Zj | 2G4 ;
if V1 f ^ds + V Г W r&ds
^=2jJ-2E4- 2jJ^T- + 2jJ^G4-:
Й^лоп — дополнительная работа силы Т на перемещении Дк₽ по
направлению этой силы, вызванном статически действующей груп-
пой сил F. Так как к моменту нагружения системы группой сил F
сила Т уже достигла своего конечного (полного) значения, то ра-
бота, ею совершенная, равна произведению силы Т на соответ-
ствующее ей перемещение *.
1^лоя=7Дкр-
Подставляя найденные значения W, Wr, В7Д0П
в приведенное равенство W— U7P-|-U7flon, получим:
V С (Mr + Nrfds ( VI С(Мт + мгуаз h
J +
л. V f TjCQr + Qf)*^ VI f ^Tds .
2GA ~2Л~2ёа~ +
VI r ds VI Г TjQpds VI f NzFds
J 2EJ + J " ‘2GA + J 2ЕЛ
V С ds VC iQf
+ J + J 2GA + T£iFF‘
1 В случае определения работы постоянной силы на перемеще-
нии, вызванном другими силами (на «чужом» перемещении), в фор-
муле (8.5) числовой множитель 1/2 спускается,
237
VI г , V’ f NTNFds V1 Г N*Pa$
ИЛИ 2EA + ^jJ EA +^J ЧЕА +
VIC Mj-as V1 С мтЛ1га$ \\CA1ras
+ J 2£/ + J £J + J 2£7~ +
\1 f ’l&ds V4 C T>QrQpds V C r&Fds
+ ^jJ 2GA +jZjJ ca + ^J ?GA "
VI f A'l ds V1 С Mr ds X1 f dS
“ J 2EA ’ + JU J .....2EJ~ + J r 2Ё4 +
ds V f ‘U^ds V fds
~2EA + J "2EJ + 20Л +t&kf-
Исключая из левой и правой частей этого равенства
члены, одинаковые по величине и знаку, и меняя эти
части местами, будем иметь:
Положив в этом равенстве силу Т равной единице
(Т=1), получим следующее равенство, выражающее
формулу Мора:
XI CNrNids XI Г Мр Л4, ds
Ajyf = 2j I ЕА + Zj I £/ +
где Дд-f—искомое перемещение точки Л' оси элемента системы по
заданному направлению К—К, вызванное заданной нагрузкой и чис-
ленно равное работе единичной силы на этом же перемещении.
Обозначение можно толковать и так: перемещение точки К
системы в действительном (первом) состоянии по направлению еди-
ничной силы Г=1, приложенной к точке К системы в ее вспомо-
гательном (единичном или втором) состоянии, вызванное силами,
приложенными к системе в ее действительном (первом) состоянии;
NP, Mf, Qr — соответственно продольная сила, изгибающий момент
и поперечная сила от заданной нагрузки (рассматривается действи-
тельное состояние системы); (Vlt At,, Q(—соответственно продоль-
ная сила, изгибающий момент и поперечная сила от единичной на-
грузки, приложенной по направлению искомого перемещения (рас-
сматривается единичное состояние системы) в сечении, соответ-
ствующем силовым факторам Nf, Mf, Qf; Е—модуль продольной
238
упругости материала; А — площадь поперечного сечения элемента;
J— момент инерции сечения относительно нейтральной оси; G —
модуль сдвига; q—коэффициент неравномерности распределения ка-
сательных напряжений в поперечном сечении элемента (см. 8.3.2).
Формула (8.11) почти никогда не применяется в сво-
ем полном виде. Рассмотрим частные случаи примене-
ния формулы Мора для определения перемещений
в различных сооружениях.
1. Балки и рамы. При расчете балок и вообще си-
стем, состоящих из прямолинейных брусьев и работаю-
щих преимущественно на изгиб (рамы), обычно пренеб-
регают влиянием на величины перемещений продоль-
ных и поперечных сил. Поэтому в формуле (8.11)
остается только один член, зависящий от изгибающих
моментов. При этом вместо ds пишут dx, а под знаком
интеграла вместо Sk подразумевается (но не пишется)
Ik — длина элемента. В результате формула (8.11) при-
мет вид:
<».«>
Если жесткости всех элементов системы одинаковые
(Е/=const), то получим;
Дат = Л1, dx. (8.13)
2. Фермы. В элементах ферм возникают только про-
дольные силы. Поэтому (8.11) примет вид:
f Nt dx
~ ЁЛ ’
но так как по длине каждого стержня силы NP и N]
и жесткость ЕА остаются постоянными, то их можно вы-
нести за знак интеграла. Приняв во внимание, что
J dx—lk, получим:
Дат - ‘
Если жесткости всех стержней фермы одинаковые, то
Дат = 2 w*1к' (8.14)
Приведем порядок вычисления перемещений систе-
мы по формуле Мора. Для вычисления перемещения
Дкг точки К системы, находящейся под действием дан-
ной нагрузки F, надо:
1. Рассмотреть систему в двух состояниях: действи-
239
тельном, в котором система несет данную нагрузку F,
и единичном, в котором единственной внешней нагруз-
кой является единичная сила, приложенная в точке К
по направлению искомого перемещения. В этом послед-
нем состоянии надо иметь в виду следующее:
а) если определяют линейное перемещение точки по
какому-либо направлению, то прикладывают сосредото-
ченную силу Т— 1 по направлению этого перемещения;
б) если определяют угловое перемещение какого-
либо сечения (угол поворота сечения), то соответствую-
щая «единичная сила» представляет собой сосредоточен-
ный единичный момент /п=1, приложенный в этом се-
чении;
в) при определении взаимного перемещения двух то-
чек по какому-либо направлению соответствующая «еди-
ничная сила» представляет собой две противоположно
направленные силы Т=1, Т=1, действующие по линии
искомого перемещения;
г) если определяют угол взаимного поворота двух
сечений, то соответствующая «единичная сила» пред-
ставляет собою два противоположно направленных еди-
ничных момента, приложенных к этим сечениям.
2. Определить общее для двух систем число участ-
ков, на длине каждого из которых выражение подын-
тегральной функции не изменяется. Число участков
устанавливается по схеме действительного состояния
системы с учетом того, что границами участков служат
точки приложения сосредоточенных сил и моментов, на-
чала и конца расположения распределенной нагрузки,
точки, в которых элементы системы образуют углы,
а также и та точка на оси элемента системы, переме-
щение которой определяется. Так, например, на рис.
8.12,0 показано действительное состояние элемента 04
некоторой системы, для которой определено четыре
участка 01, 12 (он же /Д), 23, 34\ тогда и в единичном
состоянии элемента 04 (рис. 8.12,6) также будем иметь
четыре участка О'Г, 1'2' (он же ГК'), 2'3', 3'4'. Усло-
вимся участки 01 и 0Т\ 12 и Г2' и т. д. действительно-
го и единичного состояний элемента (или системы в це-
лом) называть соответствующими 1.
* В дальнейшем, чтобы не осложнять записи, не будем ставить
индексы (') при цифрах или буквах. Как увидим, дальше обозна-
чения соответствующих участков в виде 12 и 12 (или АВ и АВ)
и т. п. не вносят никаких недоразумений.
240
3. Составить, зависящие от абсциссы сечения х, вы-
ражения Nf и Ny или MF и Л4ь отнеся их к одному
и тому же сечению каждой пары соответствующих участ-
ков и, подставив эти выражения в формулу перемеще-
ний, выполнить интегрирование в пределах длин sh этих
участков системы.
4. Суммировать значения интегралов, полученных от
интегрирования подынтегральных выражений. В резуль-
тате получим величину искомого перемещения
Если искомое перемещение получится со знаком
«плюс» («+»), то это будет означать, что оно совпа-
дает с принятым направлением единичной силы, если
же — со знаком «минус» («—»), то перемещение проти-
воположно этому направлению. Покажем на примерах,
как пользоваться приведенными формулами.
Пр имер 8.1. Для рамы, приведенной на рис. 8.13, а, опреде-
лить горизонтальное перемещение точки С — Жесткости
элементов указаны иа рисунке.
Ре шение. 1. Изображаем действительную (рис. 8.13, а) н еди-
ничную (рис. 8.13,6) системы. В точке С единичной системы при-
кладываем по направлению искомого перемещения горизонтальную
единичную силу.
2. Соответствующие участки АВ и АВ, ВС и ВС.
3. Составляем выражения и М, в функции от абсциссы
сечения х и интегрируем произведении этих функций в пределах
длин указанных участков:
участок ВС
------qxij2, м(всу = 0.
участок АВ
- — ?Р/2 — дх2/2, ЛГ}ЛВ) - 1х = х
241
и далее с учетом жесткостей элементов рамы:
/ Л1(/° /И\яс‘ dx е gx2l2-0dx
J ---- £J = “J EJ
о О
J /№> M\AB>dx 1 г ?
J " 2ё7-------=-^ЁГ[р^/2)^ +
h 27 21
+ J (9jc3/2 dxj --’2Zj'[?p/2 J xdx + qft J JtMxj-
- K^s/2) (2i’) + (?/2) (4/*)] =
= —jgj- (9i4 + 2?i4) = “ (3ff/*/2£J).
4. По формуле (8.12) находим искомое перемещение
= 0 4- (—39Z4/2£J) ------------(3^4/2£J)
Знак «минус» показывает, что направление перемещения противо-
положно направлению единичной силы.
Пример 8.2. Определить вертикальное перемещение узла 3 ме-
таллической фермы, изображенной на рис. 8.14, а. Поперечные се-
242
чения всех элементов фермы для упрощения вычислений приняты
одинаковыми, Л=37,5 см2. Модуль продольной упругости материа-
ла £'=2-1011 Па.
Решение. Изображаем действительную (рис. 8.14, о) и единич-
яую (рис. 8.14,6) системы. В точке 3 единичной системы прикла-
дываем по направлению искомого перемещения вертикальную еди-
ничную силу F=l.
Далее весь расчет выполняем в табличной форме (табл. 8.1). Вы-
числение продольных сил в стержнях фермы делается так же, как
И в гл. 6, и поэтому здесь не приводится.
Таблица 8.1
Наименова- ние стержня Длина стержня, <4-" Продольная сила в стержне, кН Л'г. Л„ кН-м
от заданной нагрузки, от единич- ной силы, /Vj
1 Й 3 4 5
12 0,5d/2 F/T 0,5/2 0,5Fd/2
23 O.arf/2 0 0,5/2 0
13 d F 0,5 0.5FW
24 d F 1 Fd
35 d F 0,5 0,5Fd
34 0,5d/2 0 0,5/2" 0
45 0,3d/2 F/2 0,5/2 0,5Fd/2 YN f N,11 = = Fd(/‘/ + 2)
Применяя формулу (8.14), получим:
£’д’ " “ “ДГ N* lk =
= -~Fd(/2 -f-2)-3,41 -gj-,
лили после подстановки чисел:
120-М«.6-3,41 а „
Да/7— 2*Ю1,-37 5-10-2 —32,5-Ю м 3,25 мм.
243
8.5. Определение перемещений по формуле Мора
способом перемножения эпюр —
правило А. Н. Верещагина
Для систем, состоящих из прямолинейных стержней,
интегралы, входящие в формулу Мора, могут быть вы-
числены по эпюрам продольных сил, изгибающих мо-
ментов и поперечных сил. Последующее изложение ве-
дется применительно к эпюрам изгибающих моментов;
при этом в качестве исходной используется форму-
ла (8.12)
” Zj I EJ ’
в которой MFMi представляет собой произведение ор-
динаты МР эпюры изгибающих моментов от заданной
нагрузки на ординату Л11 эпюры изгибающих моментов
от единичной нагрузки, отнесенных к одному и тому же
сечению.
Эпюры изгибающих моментов от заданной нагрузки
могут быть очерчены, в зависимости от вида нагрузки,
прямыми или кривыми линиями; эпюра же изгибаю-
щих моментов от единичной нагрузки в системах, со-
стоящих из прямолинейных стержней, очерчивается
только прямыми. Это свойство единичных эпюр изги-
бающих моментов позволяет преобразовать интеграл
Мора (8.12) в формулу, более удобную для вычисления
перемещений. Пусть для данной системы надо найти
перемещение Лкр. Рассмотрим два состояния какого-
либо прямолинейного стержня АВ этой системы. Пред-
положим, что в действительном (заданном) состоянии
эпюра Мр имеет криволинейное очертание abc (рис.
8.15, а), а в единичном состоянии (от единичной силы)
эпюра Alt изображается прямой линией пт (рис.8.15,б).
Приняв за начало координат точку О пересечения
прямой тп, ограничивающей прямолинейную эпюру
с осью абсцисс, выразим ординату этой эпюры через
произвольную абсциссу х:
Mt=xtg а.
Обозначив жесткость элемента АВ длиною 1Ь через EJ,
будем иметь:
244
Mp Af, dx
EJ
mf
PMC. ВЛ6
Из рис. 8.15, а следует, что MFdx—элементарная пло-
щадка dwF эпюры М/г, а произведение MFxdx—xd($F —
элементарный статический момент этой площадки отно-
сительно вертикальной оси, проходящей через начало
координат (точку О). Следовательно,
S = J Mpxdx = со/г х,,
где S=«/x0 — статический момент площади эпюры MF относи-
тельно упомянутой вертикальной оси; х0 — абсцисса центра тяже-
сти этой площади.
| Теперь можем написать:
МР Л!» dх = ыр хв tg a,
но, как видно из рис. 8.15,6, произведение x'otga опре-
деляет ординату у{ единичной эпюры Л4Ь находящуюся
Ьрод центром тяжести площади эпюры AfF, т. е. yt =
ps=xotga, и, следовательно, j MFMldx=(aFyi или, заме-
няя в правой части этого равенства индексы F и 1 на
‘Яндекс k, получим:
J Мр Midx = а>ц у kt
k обозначает наименование элемента или его участка.
245
Разделив обе части этого равенства на жесткость EJ
элемента АВ, получим:
р MpMidJC У»
J EJ ~~EJ~‘
Подставляя значение этого интеграла в (8.12), оконча-
тельно получим:
(8Л5>
Если жесткости всех элементов системы одинаковые,
то формула (8.15) примет вид:
У к• <8-16)
Формула (8.15) выражает собой содержание прави-
ла А. Н. Верещагина: перемещение какого-либо сечения
данной системы, вызванное, действующими на нее на-
грузками, равно алгебраической сумме дробей, в каж-
дой из которых числитель равен произведению площади
грузовой эпюры изгибающих моментов для рассматри-
ваемого элемента (или его участка) на ординату соот-
ветствующей этому элементу (или его участку) единич-
ной эпюры изгибающих моментов, расположенную под
центром тяжести площади грузовой эпюры, а знамена-
тель представляет собой жесткость элемента (или его
участка).
Если в результате вычислений перемещение по-
лучится со знаком «плюс», то это укажет на то, что
направление перемещения совпадает с принятым на-
правлением единичной силы (или момента), в против-
ном случае такого совпадения нет, т. е. перемещение
и единичная сила (или момент) направлены противо-
положно. Вычисление перемещений в упругих системах
по Мору с применением правила Верещагина является
наиболее простым из всех существующих методов. Од-
нако этот метод имеет и весьма существенные ограни-
чения— одна из эпюр в пределах данного участка на-
гружения должна быть линейной, а жесткость элемента
в пределах этого же участка — постоянной. Поэтому
правило А. Н. Верещагина применимо только для пря-
мого стержня (или для прямого участка стержня),
имеющего постоянную жесткость.
Укажем на следующие особенности применения фор-
мул (8.15) и (8.16) к вычислению перемещений в еисте-
246
мах, состоящих из прямолинейных стержней, каждый
из которых имеет постоянную жесткость:
1. Дроби сойУл/£7 или произведению оад* приписы-
вается знак «плюс», если площадь эпюры MF и соответ-
ствующая ей ордината эпюры расположены по одну
сторону от оси стержня (балки, элемента рамы и т. п.);
в противном случае дроби или произведению
©ftf/s приписывается знак «минус».
2. Эпюра, из которой берут площадь ий, может быть
любого очертания, эпюра же, из которой берется орди-
ната yh обязательно должна быть прямолинейной.
3. Если обе эпюры прямолинейные, то из одной (лю-
бой из них) берут площадь а из другой — ординату
у*. Выбор варианта зависит от того, какой из них быст-
рее приводит к результату.
4. Если для элемента (например, для балки АВ,
рис. 8.16, а) одна из эпюр (Л1Г или Мг) прямолинейная
(рис. 8.16,6), а другая представляет собою ломаную
линию (рис. 8.16, в), то удобно вычислить площадь ло-
маной эпюры и умножить ее на соответствующую ей
ординату прямолинейной эпюры.
В частности, здесь (рис. 8.16, а) будем иметь:
W = TFT ' "Г Fl = 5Г/3/48 £/.
5. Если обе эпюры — ломаные линии и границы
участков у них совпадают (рис. 8.17), то надо разбить
обе эпюры на участки, в пределах которых эти эпюры
очерчиваются прямыми линиями; причем удобно брать
площадь той эпюры, которая в пределах данного участ-
ка однозначна.
6. Если одна из эпюр (грузовая) криволинейная,
а другая (единичная) —ломаная линия (рис. 8.18), то
следует разбить единичную эпюру на отдельные участ-
ки, в пределах которых она очерчивается прямыми ли-
ниями.
7. Если одна из эпюр имеет сложное очертание (рис.
8.19,а), то ее расчленяют на простые фигуры, для ко-
торых известны формулы площадей и координаты цент-
ров тяжести (см. табл. 8.2), и затем «перемножают»
отдельные площади расчлененной эпюры на соответст-
вующие ординаты единичной эпюры (рис. 8.19,6) и ре-
зультаты суммируют. Справедливость этого утверждения
вытекает из рассмотрения рисунка 8.19, а, на котором по-
казано расчленение сложной фигуры abede на прямо-
247
РИС, 8,19'
угольник abed и криволинейный треугольник Ъсе. В про-
извольном сечении fe-ro элемента длиною lk имеем:
MF = Л^’ + А1*|’ + ....
или
икУк f MFMtdx _ Р (Л^+<]+...)лМх _
EJ ~ J EJ J EJ
(’ ах f *1$? Af, ах i
= J---EJ---+ j----Ё7---+ • “ £7 + W»y2 + •)-
Итак,
Ук I ,
₽ (И1У1 4- ©2^2 +••)>
откуда
C0*i/i = b>lf/l+G>2^2+- . • •
248
Рассмотрим частные случаи:
а) Пусть перемножаются две трапециевидные эпюры
(рис. 8.20, а,б). Расчленив одну из трапеций на два
треугольника и умножив площадь каждого из них на
соответствующую ей ординату, взятую из другой эпю-
ры, сложим полученные произведения, в результате
получим:
=a +<ад2= (aZ/2)[(2/3)c+(l/3)d} +
+ (M/2)[(I/3)c+(2/3)d] = (//6)(2ac-p2M4-ad+6c),
или окончательно
= (//6) (2ac+2bd+ad+bc). (8.17)
Равенство (8.17) называется формулой трапеций.
В ней I — длина участка, на котором перемножаются
эпюры моментов; 2ас — удвоенное произведение край-
них левых ординат перемножаемых эпюр; 2bd— удвоен-
ное произведение крайних правых ординат перемно-
жаемых эпюр; ad и be — произведения левой ординаты
первой эпюры на правую ординату второй, и наоборот,
правой ординаты первой эпюры на левую ординату
второй.
Формула трапеций пригодна и для перемножения
эпюр, одна из которых имеет очертание обычной трапе-
249
ции, другая — «перекрученной трапеции»1, или обе эпю-
ры представлены в виде «перекрученных трапеций».
При этом произведения ординат, расположенных по одну
сторону оси, берут со знаком «плюс», а по разные сто-
роны — со знаком «минус». Применительно к эпюрам,
очерченным на рис. 8.21, а, б сплошными линиями, фор-
мула (8.17) примет вид:
(//6) (2ac—2bd+ad~bc), (8.17а)
справедливость которой подтвердим следующим доказа-
тельством. Изображенную на рис. 8.21, а эпюру в виде
«перекрученной трапеции» ABDEC заменим эпюрой, со-
стоящей из площадей двух треугольников АВС и ABD,
имеющих общую сторону АВ. Возможность этой заме-
ны обоснована тем, что при алгебраическом сложении
ординат указанных треугольных эпюр получим эпюру,
совпадающую с очертанием данной эпюры ABDEC, и,
следовательно, с равной ей площадью; в самом деле из
рис, 8.21, й имеем:
ут=а— (а/1)х, уп—~(Ь/1)х,
следовательно,
у=ут+уп—а— (1/1) (а+Ь)х.
Это уравнение прямой;
при х—0 у0=а,
при x=l yiz=—Ь,
т. е. эта прямая проходит через точки (0; а) и (/; —&),
совпадающие с точками С и D данной эпюры и, следо-
вательно, представляет собой ее очертание.
Из рисунков 8.21,0,6 находим
»1б4(л=И1^1+шгУ2= (1/2) (al) [d-ф (2/3) (с—rf)]—•
— (1/2) (b()[rf+(l/3) (с—d)J = ((/6) (2ac-2bd+ad—be),
что в точности совпадает с формулой (8.17а) и, следо-
вательно, подтверждает ее справедливость.
б) Если перемножаются треугольные или трапецие-
видная и треугольная эпюры, то треугольник может рас-
сматриваться как трапеция с одной нулевой крайней
ординатой. В этом случае из формулы (8.17) исключают-
ся произведения, содержащие нулевые сомножители.
1 Условимся «перекрученной трапецией» называть плоскую фи-
гуру, образованную четырьмя прямыми, из которых две пересекают-
ся, а две другие перпендикулярны одной из пересекающихся пря-
мых и расположены по разные стороны от нее (рис, 8.21, а).
259
Таблица 8.2
Фигура Площадь <и Абсциссы центра тяжести
*1 хй
*1 *? Л f Ч ъ lh Ц2 //2
* *1 ПШ *2 'ЙЙ&Ъ. lh/2 ЦЗ 2//3
г
«1 *2 КУБИЧЕС К ПАРАБО КАЯ ПА lh/4 113 4//5
г
-ij *1 Х2 {квадрат НАЛ ОЛА lh/3 114 31/4
L
£ 1 *1 —?4' КВАДР/ nW?Apfl ИНАЯ БОЛА 2lh/3 3//8 51/8
1
>- *2 КВАДРАТНАЯ ПАРАБОЛА 2lhl3 1/2 1/2
КВАДРАТЫ ПАРАБО. , ”1 ргЧ Ч • —а АЯ ПА 2lh/3 1/2 U2
251
в) На рис. 8.22, а изображена сложная эпюра, кото-
рую можно представить в виде треугольной эпюры с ле-
вой ординатой а, расположенной выше оси АВ, тре-
угольной эпюры с правой ординатой Ь, расположенной
ниже оси АВ, и эпюры, ограниченной квадратной пара-
болой ACS;, построенной на наклонной оси AiBi: для
большей ясности эти эпюры показаны отдельно под ука-
занной сложной эпюрой на рисунках 8.22, б, в, г; при их
сложении получим в точности данную эпюру. Вторая
(единичная) эпюра изображена на рис. 8.22, д. В дан-
ном случае, в результате перемножения эпюры МР на
эпюру Ah, получим;
aikt/k=©ij/i—сад2—о>3!/3.
8. В практике часто встречается случай, когда эпю-
ра МР (на рис. 8.23,а она очерчена линией ODABO)
может быть расчленена на треугольник ОАВ и парабо-
лический сегмент ODA. Эта эпюра обычно получается
в результате действия на элемент равномерно распре-
деленной нагрузки. Можно доказать, что в этом случае
основные характеристики параболического сегмента
ODA (рис. 8.23,а), построенного на наклонной оси ОА,
такие же, как и у параболического сегмента OD'B
(рис. 8.23,6), построенного на отрезке прямой ОВ, яв-
ляющейся проекцией наклонной оси ОА на горизонталь,
и представляются следующими данными (рис. 8.23, а):
а) площадь = (2/3)/й,
где I — проекция наклонной ОА на горизонталь; h — максимальная
ордината, находящаяся на расстоянии, равном Ц2 от начала коор-
динат О, h—qP/8',
б) х{ = 1/2—абсцисса центра тяжести площади ODA.
Перемножая эпюру МР (рис. 8.23, а) на эпюру Mi
(рис. 8.23, в) получим:
(йкУк = СО iffi+OJ22/2 = (2/з)
9. Если элемент, в частности балка, имеет консоли
(одну или две), а определению подлежит перемещение
какого-либо сечения, расположенного между опорами,
следует мысленно отрезать консоли и заменить их дей-
ствие на оставленную часть балки поперечной силой
и изгибающим моментом (рис. 8.24).
Пример 8.3. Для рамы, показанной на рис. 8.25, о, определить
вертикальное перемещение точки К и угол поворота опорного се-
чения В. Жесткости EJ всех элементов рамы одинаковые.
252
Решение. 1. Действительная система изображена на рис. 8.25, а,
единичные системы — на рис, 8.25, в и 8.25, д.
2. Строим грузовую эпюру MF, для этого определяем реакции
опор: Vx = VB=F. Из XX=0, следует НЛ — НВ=Н, а из Хт«=0
следует HI—f(//2)=0, откуда H = F/2.
Эпюра MF:
fl) Участок AD:
Л1*/’ = О, Л)(/А) - (1 /2) F (112) = /7/4.
б) участок CD:
M^-Q, — f//2.
25Э
‘-РИС, 8^5»
в) Участок DG:
M^ = 6,SFl[2 — Fl/2 = — Fl/4,
M^D} = Л/2 —Л/2-0.
e) Участок GKf
во всех сечениях участка GK изгибающий момент О
ето следует из того, что поперечная сила в произвольном сече-
нии этого участка Q=F — Р «0 и значит Aljs- = cnosL Но
Л!^ = 0, и, следовательно, Аналогично выпол-
няется построение эпюры Мр и для правой половины рамы
(участки KL, LS, SU, SB).
254
Эпюра MF изображена на рис. 8.25,6.
3. Строим единичные эпюры ЛГь
От вертикальной единичной силы T=i, приложенной в точке К
(рис. 8.25, в).
Реакции опор:
= Vbt= 1/2, Нат = Нвг=1 /4,
Эпюра JWIT показана на рис. 8.25, г.
От единичного момента т=1 (рис. 8.25, д).
Реакции опор:
Единичный момент уравновешивается таким же моментом, но
противоположно направленным; из этого следует:
VZnt/ = VBm/=l1
откуда
VАт - I //,
= Рдт//2—
откуда
Ял«,=Я^=Рля./2=1/2/.
Строим эпюру М1т
а) Участок AG:
Л1$ =_ О, М'ОД) в _ (1/£0 / „ „ (1/2).
б) Участок GK:
Л1'^’= -(1/2/)/ = -(1/2),
ЛС°’= U2~HAm I = (1/Z) (Z/2) - (1/2/) I = 0.
в) Участок BL:
= -1 + HBm Z =- 1 + (1/2/) I = — (1/2)*
а) Участок LK;
= = (1/2/) I = 1/2,
Л'1(ДЛ> = 1 - I ~ 1 - (1//) (Z/2) — (1/2/) /= 0.
Эпюра Mim изображена на рис. 8.25, e.
4. Находим искомые перемещения.
Вертикальное перемещение (перемножаются эпюры
Мр и /Иц-)
“ (!/£•/) Е а>* у* = (\/EJ) 2 (ш, у, + ы, у, + со, у,) =•
= (1/£J) 2 [ - (1/2) (112) (Fl/4) (2/3) (Z/8) + w,-0 +
255
+ (1/2) (Z/2) (£7/4) (4" + 4 4")] = (U^)2[-(1/192) Fl' +
4- 0 + (1/96) FP] = £7’/93 EJ,
Угловое перемещение (перемножаются эпюры Мр и Afim)
д!вл “ (Ъ'£7) (“> У* + ю2 У» 4- Osyi 4- сщ У* 4* <о6 у5 + о), уе) -
= (1/£7)[ —(1/2) (1/2) (£1/4) (2/3) (1/4)+ 0 +
4- (1/2) (1/2) (Г//4) (— + 4“ ' 4-) + <V2> W2) <F/''4> х
*(4+4- 4-)+°-(i/2>w2) ^4>(-4+-г • 4-)] =
= (1/EJ)[—1 /96) FP 4- О + (1/48) FP 4- (5/96) FP 4-
4-0 — [ — 1/24) Г/2] = FPjA&EJ.
Знак «плюс» свидетельствует о том, что поворот сечения В совпа-
дает с направлением единичного момента и, следовательно, проис-
ходит против часовой стрелки.
8.6. Теорема о взаимности перемещений
[теорема Максвелла)
Из формулы Мора (8.11) можно получить зависи-
мость между перемещениями упругой системы, имею-
щую важное значение в строительной механике. Как
и при выводе формулы Мора, рассмотрим два состоя-
ния системы: в одном из них (рис. 8.26, а) в точке i
приложена сила Fi=l, а в другом в точке k — сила
Л = 1.
Любое из этих единичных состояний можно считать
действительным или вспомогательным, так как они со-
вершенно равноправны. Примем состояние по рис.
8.26, а (состояние г) за вспомогательное, а по рис. 8.26, б
(состояние k) за действительное. Тогда перемещение
точки i по направлению силы F»=l, вызванное прило-
женной к точке k силой Fh= I, согласно формуле Мора,
выразится так:
J N»Nids + J MkMjds + yi J
Теперь поменяем роли обоих состояний и будем считать
состояние k вспомогательным, а состояние i действитель-
256
ным. Тогда перемещение точки k по направлению
силы Л(=1, вызванное приложенной в точке i силой
Fi=l, будет равно:
й VI С Ni^ntis ’V'l р AfjAljfds V'l Г [iQiQhds
~~~ J ЕА~~ + ZjJ + Zj J “GA '
Сравнивая эти два равенства, убеждаемся в том, что
их правые части отличаются между собой только поряд-
ком записи сомножителей и, следовательно, они равны,
но тогда равны и левые части этих равенств, т. е.
—бн.
Эм равенство и выражает собой теорему о взаимности
перемещений; его удобнее представить в другом виде,
заменив буквенные индексы на цифровые. Назовем со-
стояние I системы вторым (рис. 8.27. а), а состояние k —
первым (рис. 8.27, б). Тогда получим:
612 = 62;. (8.18)
Это же соотношение между перемещениями получим,
если за единичные факторы примем в первом состоянии
системы момент т=1, а во втором силу F=\ или
наоборот. Таким образом теорему о взаимности пере-
мещений, выраженную равенством (8.18), можно сфор-
мулировать так:
если для упругой системы заданы два состояния 1 и
2 от единичных факторов, безразлично каких наимено-
ваний, то перемещение по направлению первого единич-
ного фактора, вызванное вторым единичным фактором,
численно равно перемещению по направлению второго
единичного фактора, вызванному первым единичным
фактором.
Часто приводят и другую (простейшую) формулиров-
9 Шишиан Б. А. 257
ку этой теоремы: перемещение 612 не изменяется от пе-
ремены местами индексов.
Равенство (8.18) остается в силе и в случае, когда
Fi=F2=^= 1, тогда оно приобретает такой вид;
д1а==д2[. (8.19)
Выясним в каких единицах измеряются единичные
перемещения. Воспользовавшись принципом независи-
мости действия сил (п. 1.2), можно полное перемещение
А, вызванное, например, силой, равной F единицам
силы (Н, кН), представить в виде A=F6, где 6 — еди-
ничное перемещение, т. е. вызванное безразмерной си-
лой F—1 (или моментом ш = 1). Из &=F8 найдем раз-
мерность:
[Д] длина
“ [Г] ' сила ’
т. е. она может быть выражена м/Н или м/кН и т, п.,
т. е. представляет собой размерность длины, приходя-
щейся на единицу силы.
Аналогично можно получить размерность всякого
другого единичного перемещения, она выражается отно-
шением размерности перемещения к размерности при-
чины, вызвавшей его (табл. 8.3).
Таблица 8.3
Перемешейие Причина, вызвавшая перемещение
единичная силл единичный момент
Размерность перемещения
Линейное длина сила длина 1 момент сила
Угловое 1 сила 1 1 момент “* силах длина
Пример 8.4. Даны два состояния I и 2 балки с жесткостью
EJ. В состоянии 1 (рис. 8.28, а) иа балку в точке 1 действует мо-
мент га = 1, а в состоянии 2 (рис. 8.28,6) в точке 2 — сила f = l.
Предлагается убедиться в справедливости теоремы Максвелла.
Решение. Согласно теореме Максвелла, должно быть 6ts=6ai.
Эти перемещения легко найти методом Мора с применением пра-
вила Верещагина (рекомендуем самостоятельно выполнить соответ-
ствующие вычисления).
258
m-I
В результате получим:
й12=ЛР/16£/, й21=тР/16£Л
При m=F~ 1 приходим к равенству (8.18). В данном примере
6lg=fi„=f2/16£Z.
Рассмотренная теорема о взаимности перемещений
играет важнейшую роль в расчете статически неопреде-
лимых систем (см. гл. 9), намного сокращая объем вы-
числительной работы.
Глава 9. Статически неопределимые
плоские рамы
9.1. Общие сведения о статически
неопределимых системах
К статически неопределимым системам относятся
геометрически неизменяемые системы, содержащие лиш-
ние связи (см. п. 2.3.1). Неизвестные реакции связей
такой системы или внутренние силы, возникающие в ее
элементах, или то и другое вместе не могут быть опре-
делены с помощью лишь одних уравнений статики, и по-
этому для расчета статически неопределимых систем
требуется составление дополнительных уравнений (так
называемых уравнений совместности перемещений),
учитывающих характер деформации системы. К стати-
чески неопределимым системам относятся:
1) миогопролетные неразрезные балки (рис. 9.1, а)
и однопролетные с одной или двумя защемляющими
опорами (рис. 9.1,6, в);
2) арки двухшарнирные (рис. 9.2, а) и бесшарнирные
(рис. 9.2,6);
3) рамы (рис. 9.3, а, б);
4) фермы с лишними опорными стержнями (рис.
S* 259
9.4, а) или с лишними стержнями в самой ферме
(рис. 9.4, б).
Отмстим, что в статически неопределимых системах
лишние связи, как внешние, так и внутренние, являются
лишними с точки зрения обеспечения неизменяемости и
равновесия системы, которая и без них может быть не-
изменяемой и находиться в равновесии. Постановка же
260
таких связей вызывается конструктивными особенностя-
ми системы. Так, '|рехпролетная балка, изображенная
на рис. 9.5,а, имеет две лишние внешние связи (два лю-
бых стержня из трех В, С, D). Если отбросить, напри-
мер, два промежуточных стержня В и С (рис. 9.5,6) или
стержни С и D (рис. 9.1, б), то полученная в обоих
случаях статически определимая балка останется неиз-
меняемой и может находиться в равновесии, однако
практически она окажется неприемлемой, так как в
первом случае при большом пролете, а во втором — при
большой длине консоли в балке возникнут большие из-
гибающие моменты.
При необходимости (см. п. 9.2) статически неопре-
делимую систему можно обратить в статически опреде-
лимую и нс устраняя лишние внешние связи. Это можно
сделать путем удаления соответствующего количества
внутренних связей. Так, для получения статически оп-
ределимой системы из однажды статически неопредели-
мой фермы (рис. 9.4. а) вместо лишнего опорного стерж-
ня (внешней связи) можно удалить внутреннюю связь —
любой из стержней, входящих в состав самой фермы (за
исключением стержней, отмеченных двумя черточками).
Рекомендуем убедиться в этом, произведя структурный
анализ.
Перечислим основные свойства статически неопреде-
лимых систем:
1. Статически неопределимая система благодаря на-
личию лишних связей оказывается более жесткой по
сравнению с той неизменяемой статически определимой
системой, из которой она может быть получена.
2. В элементах статически неопределимой системы в
связи с большей ее связанностью по сравнению с соот-
ветствующей ей статически определимой системой при
той же нагрузке получаются меньшие внутренние силы,
причем последние зависят от соотношения жесткостей
сечений элементов статически неопределимой системы.
Изменение этого соотношения приводит к новому рас-
пределению сил между элементами системы.
3. Некоторые элементы статически неопределимой
системы могут быть удалены или перенапряжены, одна-
ко система, оставаясь неизменяемой, сможет еще нести
нагрузку (немедленного разрушения системы не про-
изойдет). В статически же определимой системе устра-
нение или разрушение хотя бы одного элемента приво-
261
дит к изменяемой системе и зачастую к полному ее
разрушению (например, разрушение элемента I в шар-
нирной балке, показанной на рис. 3.2, приведет к раз-
рушению всей балки).
4. В статически неопределимой системе возможно воз-
никновение сил при отсутствии нагрузки. Это свойство
в подавляющем большинстве случаев является отрица-
тельным. Силы могут появиться в результате изменения
температуры, усадки материала, смещения опор, натя-
жения изготовленных элементов. В статически опреде-
лимых системах указанных воздействий не возникает.
Однако не все отмеченные свойства присуши любой
статически неопределимой системе, поэтому из всех этих
систем полезно выделить так называемые статически
неопределимые системы с внешней статической опреде-
лимостью, т. е. такие системы, у которых с помощью
уравнений равновесия статики могут быть определены
лишь реакции внешних связей — реакции опор, но не
внутренние силы, возникающие в сечениях элементов
системы. Примером такой системы может служить рама
с затяжкой, показанная на рис. 9.6, а.
В статически неопределимых системах с внешней
статической определимостью не могут возникнуть силы
вследствие осадки опор, не могут появиться (или изме-
ниться) опорные реакции в результате изменения тем
пературы и т. п. Наоборот, для других статически не-
определимых систем, показанных, например, на
рис. 9.6,б, в, как правило, характерны все перечислен-
ные свойства.
Любая статически неопределимая система характе-
ризуется степенью статической неопределимости (см.
262
п. 2.3.2), которая может быть определена по формуле
(2.16) или (2.17), однако для рамных систем она проще
определяется по формуле (9.2).
9.2. Анализ статической неопределимости
рамных систем
Рассмотрим раму, составленную из стержней, обра-
зующих один бесшарниряый замкнутый контур, рис. 9.7,я.
Замкнутый контур—-совокупность соединенных стерж-
ней, оси которых образуют замкнутую ломаную
линию. Замкнутый контур, не содержащий шарниров,
называется бесшарнирным замкнутым контуром; каж-
дый такой контур трижды статически неопределим.
В самом деле, если рассечь его сквозным поперечным
сечением и мысленно отбросить, допустим, правую
часть, то к оставшейся левой части (рис. 9.7,6) в месте
разреза каждого элемента надо приложить поперечную
силу, изгибающий момент и продольную силу, заменяю-
щие действие отброшенной части. Всего неизвестных сил
шесть (Qi, Мь JVlt QZ1 М2, Мг), а для их определения
имеем только три уравнения статики. Следовательно,
рама, представляющая собой один бесшарнирный замк-
нутый контур, трижды статически неопределима. Рама,
приведенная на рис. 9.7, в, также представляет собой
бесшарнирный замкнутый контур; снизу он ограничен
землей, которую можно рассматривать как бесконечно
жесткий стержень. Очевидно, что если рама состоит из
Кбш бесшарнирных контуров, то степень ее статической
неопределимости Л (число лишних связей) определяет-
ся по формуле
Л = ЗК<;Ш. (9.1)
Проследим, как влияет на степень статической неоп-
ределимости рамы (системы) включение шарниров в ее
структуру.
Ранее было установлено (см. табл. 2.1), что простой
шарнир эквивалентен двум связям первого вида (двум
стержням).
Следовательно, включение шарнира в жесткий узел
рамы, в котором сходятся два стержня, или же поста-
новка его в любое место на оси стержня снимает одну
связь и, таким образом, снижает общую степень стати-
ческой неопределимости системы на единицу. Если в
263
жесткий узел системы, в котором сходятся Д стержней,
включить шарнир так, чтобы оси всех этих стержней
сходились в центре шарнира, то такой шарнир, который
условились называть сложным (см. 2.1.2), уменьшит
общее число связей системы над Д—1 и настолько же
снизит степень ее статической неопределимости.
Следовательно, степень статической неопределимости
рамной системы равна утроенному числу замкнутых
контуров, уменьшенному на суммарное число простых и
приведенных к ним сложных шарниров, т. е.
Л=ЗК—Ш, (9-2)
где К — число замкнутых контуров, считая и те, которые образо-
ваны опорными стержнями с основанием рамы (например, 123 на
рис. 9.10,о); Ш — суммарное число простых и приведенных к ним
сложных шарниров в замкнутых контурах.
Если Ш=0 (рама состоит из бесшарнирных замк-
нутых контуров), то получим Л=ЗКпш. т. е. формулу
(9.1). Отсюда следует, что формула (9.2) является об-
щей для определения степени статической неопредели-
мости рам различного структурного образования.
Рассмотрим на примерах определение степени стати-
ческой неопределимости рам по формуле (9.2). При
этом условимся части плоскости, ограниченные замкну-
тыми контурами, нумеровать римскими цифрами, назы-
вая в дальнейшем тот или иной контур номером той
части плоскости, которая им ограничена.
Пример 0.1. Определить степень статической неопределимости
рамы, изображенной на рис. 9.8.
Решение. Рама состоит из трех замкнутых контуров J, II, III.
Около номера каждого шарнира в скобках указано соответствую-
щее ему число простых шарниров (так же сделано и при решении
примеров 9.2 и 9.3). Итак, число замкнутых контуров К=3, сум-
264
марное число простых шарниров и приведенных к ним сложных
Ш = 1 + 14-24-2=6.
Число лишних связей Л=ЗЛ—Ш=3-3—6 = 3. Следовательно,
данная рама трижды статически неопределима.
Пример 9.2. Определить степень статической нео пре делимости
рамы, показанной па рис. 9.9.
Решение. Рама состоит из трех бесшарпирных замкнутых кон-
туров; значит К=3, Ш=0 и. согласно (9.1), число лишних связей
Л = 3-3=9. Следовательно, данная рама девять раз статически не-
определима.
Пример 9.3. Определить степень статической неопределимости
рамы, показанной на рис. 9.10.
Решение. Эта рама состоит из шести замкнутых контуров /,
II, III. IV, I', VI. Суммарное число простых шарниров и приведен-
ных к ним сложных 1 +1+2+1+2+3+1 =11.
Число липших связей Л=ЗК—111=3-6—11=7. Следовательно,
данная рама семь раз статически неопределима.
Иногда удобно определять степень статической неоп-
ределимости рамы (системы), не прибегая к формуле
(9.2), путем устранения лишних связей. Покажем, как
это делается, на примере только что рассмотренной ра-
мы по рис. 9.10.
Заметим, что фигура ABCDEFCG (рис. 9.10, о) пред-
ставляет собой диск, для прикрепления которого к зем-
265
ле достаточно иметь вместо шести только три связи
(рис. 9.10,6): два опорных стержня вместо защемляю-
щей опоры А и один опорный стержень вместо защем-
ляющей опоры F. Для прикрепления диска (стержня)
36 к диску ABCDEFCG (рис. 9.10, а) помимо шарнира 6
достаточно иметь не пять стержней; горизонтальный
опорный 23, вертикальный опорный 13, наклонный 45 и
стержни 56, 67, а только один горизонтальный опорный
стержень 23 (рис. 9.10,6).
Таким образом, всего можно устранить связей 3-j-4 =
=7: один опорный стержень в защемляющей опоре А, два
опорных стержня в защемляющей опоре F, вертикаль-
ный опорный стержень 13, наклонный стержень 45 и
стержни 56, 67. Все эти стержни (связи) являются лиш-
ними и устранение их не нарушает геометрической не-
изменяемости рамы.
Число устраненных лишних связей Л=7 определяет
степень статической неопределимости данной рамы и
совпадает с этой величиной, полученной для этой же
рамы по формуле (9.2).
Теперь, переходя к расчету статически неопредели-
мых рам, укажем на то, что существуют различные ме-
тоды расчета этих рам (систем), но в основу всех их
положен общий метод определения перемещений, изло-
женный в предыдущей главе.
В настоящей же главе рассматривается расчет ста-
тически неопределимых рам методом сил, в котором за
неизвестные величины принимают силы, возникающие в
лишних связях.
9.3. Расчет статически неопределимых
рам методом сил
9.3.1. Основная система метода сил. При расчете
статически неопределимых рам (систем) методом сил
после выявления степени статической неопределимости
переходят к выбору основной системы. Основной систе-
мой метода сил будем называть геометрически неизме-
няемую статически определимую систему, полученную
из заданной статически неопределимой путем устране-
ния нагрузки и лишних связей.
Это может быть выполнено различными способами, но
в результате применения любого из них полученная ос-
266
ионная система должна быть геометрически неизменяе-
мой.
На рис. 9.11, а показана трижды статически неопре-
делимая рама (Л=3-3—6=3). Устранив нагрузку q и
защемляющую опору С средней стойки, получим основ-
ную систему (рис. 9.11,6). Сравнив рис. 9.11, а и 9.11,6,
приходим к заключению, что основная система отлича-
ется от заданной следующим:
1. Основная система не нагружена заданной на-
грузкой.
2. После устранения из заданной системы защемляю-
щей опоры С, эквивалентной трем опорным стержням, в
основной системе становятся возможны перемещения
сечения С по горизонтальному и вертикальному направ-
лениям и угол поворота его, т. е. именно те перемеще-
ния, которым в заданной системе препятствует защем-
ляющая опора.
Однако чтобы рассчитать заданную систему (рис.
9.11,0), это отличие между ею и основной системой
(рис. 9.11,6) должно быть устранено. Для этого надо
(рис. 9.11, в):
1. Нагрузить основную систему заданной нагрузкой.
2. Уничтожить возможную подвижность основной
системы путем догружения ее пока неизвестными сила-
ми Х2 и моментом Лз, приложенными в сечении С по
направлениям его возможных перемещений и подобран-
ными так, чтобы суммарное перемещение точки прило-
жения каждой из этих сил по ее направлению, вызван-
ное всеми неизвестными силами Х|, Х2, Х2 и нагрузкой,
равнялось нулю.
Силы Ль Х2, Х3 будем называть лишними неизвест-
ными; они заменяют действие на основную систему
устраненных связей и представляют собой их реакции.
Теперь основная система, нагруженная заданной на-
грузкой и лишними неизвестными1, будет находиться
точно в таких же условиях работы, как и заданная ра-
ма, или, что то же, будет по внутренним силам, возни-
кающим в ее сечениях и их перемещениям, эквивалент-
на заданной раме.
На рис. 9.11, а, Де показаны другие варианты основ-
ных систем; все они статически определимы, геометри-
1 В дальнейшем основную систему, нагруженную заданной на-
грузкой и лишними неизвестными, будем называть нагруженной
системой.
267
ПНИН
268
чески неизменяемы и образованы из заданной системы
(см. рис. 9.11, а) путем устранения нагрузки q и лишних
связей, характеризующихся следующими данными:
Вариант основ- ной системы по рисунку Характеристика устраненных лишних связей
9.11,г 9.11,5 9.11,е Три внешние связи — вертикальный и горизон- тальный стержни левой опоры А и вертикальный стержень правой опоры В. Две внешние связи — вертикальный и горизон- тальный стержни левой опоры А и одна внутрен- няя связь (см. п. 2.3,1) в сечении средней стойки, примыкающем к ригелю, устраняемая вводом в это сечение простого шарнира. В заданной раме стойки жестко соединены с ригелем и поэтому взаимный поворот сечений стойки и ригеля в месте примыкания их друг к другу здесь исключен (возможен только совмест- ный поворот этих сечений); в отличие от задан- ной рамы в основной системе вследствие наличия введенного в нес шарнира возникает возможность взаимного поворота сечений стойки и ригеля в месте соединения их этим шарниром. Одна внешняя связь — горизонтальный стержень левой опоры А и две внутренние связи в сечениях ригеля, устраняемые вводом в эти сечения двух промежуточных шарниров. В заданной раме ри- гель представляет собой целый стержень и поэто- му взаимный поворот сечений ригеля, примыкаю- щих друг к другу, здесь исключен (возможен только совместный поворот этих сечений); в отли- чие от заданной рамы в основной системе вслед- ствие наличия введенных в нее шарниров возни- кает возможность взаимного поворота сечений ри- геля в местах расположения шарниров.
Указанные основные системы (рис. 9.11,г, <?, е) так
же, как и основная система, по рис. 9.11,6, отличаются
от заданной рамы (рис. 9.11,а). Чтобы устранить это
различие, нагрузим каждую основную систему заданной
Нагрузкой q и лишними неизвестными, заменяющими
^действие па заданную раму отброшенных связей; тогда
^ соответственно основным системам по рис. 9.11, а, д, е
получим системы, изображенные па рис. 9.11, «i, dj, ех и
Г Находящиеся в таких же условиях, как и заданная си-
Дстема (рама )по рис. 9.11, а. При этом в качестве лиш-
^них неизвестных приняты:
269
Вариант основ- ной системы» нагруженной ^а- данпой нагруз- кой м лишни- ми неизвестны’ ми по рисунку Характеристика лишних неизвестных, введенных в основную систему в»мен устраненных лишних связей
9.11,г. Внешние силы Л), Ха, X's, заменяющие отбро- шенные три внешние связи (три стержня) и дей- ствующие по их направлениям.
9.11,5, Две внешние силы Л\, Лг, заменяющие отбро- шенные горизонтальный и вертикальный стержни левой опоры и действующие по их направлениям. Два противоположно направленных внутренних момента Xs, приложенных в месте соединения шарниром стойки с ригелем. В заданной раме, как уже сказано, отсутствуют взаимные поворо- ты сечений стоек и ригеля в месте примыкания их друг к Другу; в системе же по рис. 9.11,5) возможность взаимного поворота сечений стойки и ригеля -в месте соединения их шарниром исклю-
9.11,в! чается внутренними моментами Х$. Внешняя сила действующая по направлению отброшенного горизонтального стержня левой опо- ры, и противоположно направленные внутренние моменты Xi., Хц, приложенные в сечениях ригеля, соответствующих местам установки шарниров. В заданной раме, как уже сказано, отсутствуют вза- имные повороты сечений ригеля, примыкающих друг к другу; в системе же по рис. 9.11,С| воз- можность взаимного поворота сечений ршеля, при- мыкающих к каждому введенному в ригель шар- ниру, исключается внутренними моментами Xz, А'а.
Приведенные примеры не исчерпывают того много-
образия основных систем, которые могут быть получены
из заданной статически неопределимой рамы. Однако
из всех имеющихся для данной рамы основных систем
важно уметь выбрать рациональную, т. е. ту, которая
позволяет максимально упростить расчет заданной ра-
мы. Некоторые указания по выбору рациональной ос-
новной системы приведены в и. 9.4.
9.3.2. Канонические уравнения метода сил. После вы-
бора основной системы и преобразования ее в нагру-
женную переходят к определению величин лишних не-
известных. Для этого составляют систему уравнений
совместимости перемещений; эти уравнения, представ-
ленные в определенной (общепринятой) форме, назы-
ваются каноническими уравнениями метода сил *.
1 В дальнейшем — канонические уравнения.
270
В курсе статики сооружений рассматриваются толь*
ко линейно деформируемые системы (см. п. 1.1). Это
дает возможность применить принцип независимости
действия сил (см. и. 1.2) к составлению канонических
уравнений способом сложения перемещений.
Покажем, как это делается, на примере дважды
статически неопределимой рамы, изображенной на
рис. 9.12,а.
Основную систему получим из заданной, устранив
нагрузку, а также лишние связи — горизонтальный и
вертикальный опорные стержни (рис. 9.12,6). Устране-
ние горизонтального стержня позволяет левому опорно-
му сечению перемещаться по горизонтали, а вертикаль-
ного— по вертикали. Однако в заданной системе эти
перемещения невозможны. Не должно их быть и в ос-
новной системе. Это достигается нагружением основной
системы заданной нагрузкой и лишними неизвестными
и Ха, приложенными по направлениям устраненных
связей (рис. 9.12, в) и подобранными так, чтобы сум-
марное перемещение точки их приложения по направле-
нию каждой из неизвестных сил от действия всех сил (в
данном случае сил F, Хь Х2) равнялось нулю. Эти усло-
вия можно выразить так:
A-XiCXt, X,, F) = °; Лл’,(х„х„ л = °*
Применив принцип независимости действия сил,
представим эти равенства в форме канонических урав-
нений:
ч,, X) “Ь X? 4- ~ б;
Sh А. + Ь„ X, 4- - О,
(9.3)
где 6ц—перемещение точки приложения силы X, по направлению
этой силы, вызванное единичной силой X1 = l; 6(1X1— перемеще-
ние той же точки ио тому же направлению, вызванное силой X,
(не единичной, а действительной); б]2— перемещение той же точки
по тому же направлению, вызванное единичной силой Х2=1;
6[2Х2 — перемещение той же точки по тому же направлению, вы-
званное силой Х2; Д| г —перемещение той же точки по тому же
направлению, вызванное заданной нагрузкой; 62i — перемещение
точки приложения силы Хг по направлению этой силы, вызванное
единичной силой Xj=l; 62|Х1 — перемещение той же точки по тому
Же направлению, вызванное силой Хк 622 — перемещение той же
точки по тому же направлению от действия силы Х2=1; 622Х2—
перемещение той же точки по тому же направлению, вызванное
силой Х2; Д2г —- перемещение той же точки по тому же направле-
яию, вызванное заданной нагрузкой.
271
Учитывая смысл приведенных обозначений, сделаем
следующие выводы.
Первое уравнение системы (9.3) выражает собой ра-
венство нулю суммарного перемещения точки приложе-
ния силы Х( по ее направлению, второе — равенство ну-
лю суммарного перемещения точки приложения силы Х2
по ее направлению.
Если бы в рассмотренной рамс не было вертикально-
го стержня, то она была бы один раз статически неоп-
ределима. В этом случае, отбросив левый горизонталь-
ный стержень и приложив к полученной таким образом
основной системе по направлению этой связи неизвест-
ную силу Х1з получили бы систему с одним лишним не-
известным, для определения которого достаточно соста-
вить одно каноническое уравнение:
81Л+Л1г=0. (9.4)
При расчете статически неопределимой системы с п
лишними связями для получения основной системы надо
отбросить заданную нагрузку и все п связей. Затем, на-
грузив основную систему заданной нагрузкой и лишни-
ми неизвестными Xt, Х2, Хк, .... Х„, приложенными
но направлениям соответствующих связей, получим на-
груженную систему, для которой канонические уравне-
ния примут вид:
41 А', 4- 613 Х2 4- ... 4- би Хк + ... + Е,„ Л„ -г -'ip — о,
Лi 4- 631Х3 4- — 4- 6.h Хк 4- ... 4~ Ь1П Х„ 4- = О,
6*1 Xt - 6*3 Л'2 + ... + Хк 4- ... 4- оЛл A'n-f-Ajy? ^0, (
6„ 1 А', 4- 6Я,А 3 4- .., Вд£ А\ 4- ВЯПАп 4- Аяп — О,
Смысл каждого слагаемого, входящего в любое из
канонических уравнений (9.5), понятен из пояснений,
данных для рассмотренной дважды статически неопре-
делимой рамы. Например, 632X2 есть перемещение по на-
правлению силы Х3, вызванное силой Х2; 633X3 — пере-
мещение по направлению силы Х3, вызванное самой си-
лой; Х3; б^Х*— перемещение по направлению силы
A'ft, вызванное силой X*; ДАР — перемещение по направ-
лению силы X*, вызванное заданной нагрузкой, и т. д.
Любое из канонических уравнений (9.5) выражает
мысль о том, что сумма перемещений определенного се-
272
чения нагруженной системы по направлению соответст-
вующего лишнего неизвестного от каждой из сил
Хь Х2. ..Xk, .Хп и заданной нагрузки равна нулю;
или, иначе, суммарное перемещение определенного се-
чения нагруженной системы по направлению рассмат-
риваемого лишнего неизвестного, вызванное всеми неиз-
вестными и заданной нагрузкой, равно нулю. Из совме-
стного решения системы канонических уравнений (9.5)
находят значения лишних неизвестных Xj, Х21 .,Xk,
..Хп, после чего задача решается до конца как ста-
тически определимая.
Обращаем внимание на то, что один раз составлен-
ные в общем виде п канонических уравнений с п неиз-
вестными применимы для любой п раз статически неоп-
ределимой системы. Так, уравнения (9.3) могут быть
составлены для любой дважды статически неопредели-
мой системы.
Из (9.3), (9.4) и (9.5) следует, что канонические
уравнения являются линейными, а число их равно числу
устраняемых лишних связей.
9.3.3. Последовательность расчета статически неопре-
делимых рам методом сил.
1. Определяют степень статической неопределимости
рамы по формулам, приведенным в п. 9.2.
2. Из заданной статически неопределимой системы
образуют основную систему путем устранения заданной
нагрузки и всех лишних связей.
Чтобы привести основную систему в соответствие с
заданной, нагружают основную систему заданной на-
грузкой и лишними неизвестными Хь Х2, ..., Xk, .Хп,
приложенными по направлениям отброшенных связей.
Это могут быть внешние сосредоточенные силы и мо-
менты (если отброшены соответствующие опорные свя-
зи), внутренние силы в ниде групповых сосредоточенных
сил и моментов (если отброшены соответствующие внут-
ренние связи), комбинация тех и других (если удаляют-
ся частично внешние, частично внутренние связи). До
сих пор (см. рис. 9.11 и 9.12) основная система и она
же, нагруженная заданной нагрузкой и лишними неиз-
вестными, изображались на отдельных рисунках. Усло-
вимся в дальнейшем, как это принято в практических
расчетах, основную систему на отдельном рисунке не
показывать и взамен ее приводить рисунок нагруженной
системы.
273
3. Составляют канонические уравнения. Еще раз под-
черкиваем, что каждое из них выражает условие ра-
венства нулю суммарного перемещения определенного
сечения нагруженной системы по направлению отбро-
шенной связи, возникающего от действия заданной на-
грузки и всех лишних неизвестных. Число канонических
уравнений должно равняться числу отброшенных связей.
4. Составив канонические уравнения, переходят к вы-
числению единичных 6 и грузовых Д перемещений.
Для этого предварительно введем понятие о единич-
ном и грузовом состояниях основной системы.
Единичным будем называть состояние основной си-
стемы, при котором она нагружена только одной силой,
равной единице (А*=1), действующей в направлении
неизвестной реакции Хц.
Заметим, что число единичных состояний основной
системы должно соответствовать числу лишних неиз-
вестных.
Грузовым назовем то состояние основной системы,
при котором она находится только под действием задан-
ной нагрузки.
Изобразив на рисунках все единичные состояния
основной системы и отдельно ее грузовое состояние,
строят эпюры изгибающих моментов: единичные Л1и.
ЛЛз.....Л1щ соответственно от единичных сил A\ = l,
Аг—1, ..Хп = 1 и грузовую эпюру Мр от заданной на-
грузки.
После этого вычисляют все единичные б и грузовые
Д перемещения. Их можно найти непосредственно по
сокращенной формуле Мора (8.12) или, для рассматри-
ваемых рам с прямолинейными элементами, способом
перемножения эпюр по правилу Верещагина (8.15).
Перемножая эпюры, необходимо иметь в виду сле-
дующее:
а) единичные перемещения с одинаковыми индекса-
ми— бц, 622, .... ..., бпп называются главными;
они никогда не обращаются в нуль и всегда положи-
тельны, так как при их вычислении эпюры умножаются
сами на себя;
б) единичные перемещения с различными индексами
типа (i=^=k) называются побочными; они могут быть
величинами положительными, отрицательными, а при
удачном выборе основной системы обращаться в пуль;
в) на основании теоремы о взаимности перемещений
274
(теоремы Максвелла) единичные перемещения с взаим-
но переставленными индексами равны между собой, т. е.
—— бчЦ.
5. Вычислив все единичные и грузовые перемещения,
выполняют проверки правильности их определения (см.
9.3.4, А).
6. Найденные и проверенные значения единичных и
грузовых перемещений подставляют в канонические
уравнения, решают полученную систему уравнений и в
результате находят лишние неизвестные. Решение систе-
мы канонических уравнений проверяют (см. п. 9.3.4, Б).
7. Нагрузив основную систему заданной нагрузкой и
теперь уже известными силами Xi=Ai, А'г=А2.
Х„=Ап, строят эпюры Q, М и N, которые и будут окон-
чательными эпюрами поперечных сил, изгибающих мо-
ментов и продольных сил для заданной рамы. При этом
используются все правила и приемы построения этих
эпюр для статически определимых рам, изложенные в
гл. 4.
Однако окончательную эпюру М целесообразно по-
строить иначе— путем суммирования ординат MF гру-
зовой эпюры с соответствующими ей ординатами
единичных эпюр, увеличенными в Хь раз (Л = 1; 2...п);
в результате получим:
(9.6)
8. Выполняют проверку правильности построения
окончательных эпюр Q, М, N (ем. п. 9.3.4, В).
9.3.4. Поэтапные проверки расчета статически неоп-
ределимых рам.
А. Проверка правильности определения
единичных и грузовых перемещений — ко-
эффициентов б и Д при неизвестных кано-
нических уравнений. Во избежание ошибок, ко-
торые могут вкрасться в процессе расчета, надо на от-
дельных его этапах выполнять соответствующие провер-
ки. Имеется три вида проверок: построечная, универ-
сальная и постолбцовая. При применении каждой из них
используется эпюра изгибающих моментов, построенная
от нагружения основной системы одновременно всеми
единичными силовыми факторами Х1 = 1, Л'г=1, ...,
Хп = 1. Такую эпюру будем обозначать Afi, и называть
контрольной эпюрой изгибающих моментов. Значение
изгибающего момента Alt,— ординаты контрольной эпю-
ры изгибающих моментов в произвольном сечении рамы,
275
на основании принципа независимости действия сил оп-
ределяется равенством:
М1Е=Л111+М12-р.. ,+М,*+.. .4-М1л. (9.7)
Построчная проверка. Выражение | —' ej ---------
можно рассматривать как перемещение по направлению
силы Х* = 1, вызванное одновременным действием на
основную систему всех единичных силовых факторов.
Обозначив это перемещение через получим
Л4„ Mtlldx
EJ “
или короче
(9.8)
Левая часть этого равенства определяет перемеще-
ние 6Ss как результат перемножения эпюры Mis на эпю-
ру построенную от нагружения основной системы
единичным силовым фактором Х* = 1; правая его часть
дает это же перемещение как сумму коэффициентов
(г=1, 2, ..., п) при лишних неизвестных &-го уравнения.
Очевидно, что равенство (9.8) остается справедли-
вым для каждого уравнения данной системы канониче-
ских уравнений. Отсюда следует, что для построчной
проверки правильности определения коэффициентов при
лишних неизвестных канонических уравнений надо:
1. Определить перемещение (£=1, 2, .... /г), ис-
пользуя левую часть равенства (9.8).
2. Определить это же перемещение 6;<s, используя
правую часть равенства (9.8).
3. Сравнить между собой значения вычисленные
указанными двумя способами, для каждого уравнения
данной системы канонических уравнений; если эти зна-
276
чепия совпадают, то значит условие (9.8) выполняется
и коэффициенты при лишних неизвестных канонических
уравнений определены правильно.
Универсальная проверка. Пусть имеем систему кано-
нических уравнений с п лишними неизвестными. Соглас-
но (9.8), можем написать:
ЕВ,,-;
Г Л1 ш rfx-
EJ =
Складывая эти равенства почленно, вынося при этом
Л1ь- за скобку и, обозначив Ебц=би; Еб2;=б28; .
S6ni=6ns. получим:
S f Л4|Г (Мц-рМ^-Р.. ,-рЛ1)»-}-.. 4- Mln}dx/EJ=
= 6i,4-62s+. . .-pSfc-p. . .-p6-ts.
Согласно (9.17),
Alli “P Alta -p , • . -f- “p ... "p Afi,, ~ Л11.1
Обозначив
n
'hs P Cj -p ... -p S*t 4- ... +
S=1
окончательно получим:
(9.9)
Отсюда следует, что для выполнения универсальной
проверки надо:
1. Вычислить левую часть равенства (9.9) путем
умножения контрольной эпюры Л113 на эту же эпюру
AIIS.
2. Вычислить правую часть равенства (9.9) путем
алгебраического суммирования всех коэффициентов при
лишних неизвестных, входящих во все канонические
уравнения данной системы.
277
3. Проверить выполнение условия (9.9). Как правило,
при расчете ограничиваются лишь универсальной про-
веркой (см. примеры 9.4 и 9.5). Если эта проверка при-
водит к расхождению между значениями левой и пра-
вой частей условия (9.9) более чем па 1 %, то для на-
хождения ошибки в вычислениях нужно произвести по-
строчную проверку. Выявив ошибку, необходимо вновь
вычислить те перемещения, которые были найдены не-
правильно, и снова повторить универсальную проверку.
Постолбцовая проверка. Ею пользуются для провер-
ки правильности определения грузовых перемещений ~~
свободных членов Длк канонических уравнений. Пере-
множая контрольную эпюру Л118 на грузовую эпюру Alj-,
получим:
J J MisMidxjEJ — Aif-f-Aif-]-.. -+As/—f--. .-J-Akf,
или короче
S J AflsMfdx/£/ = 2A*r. (9.10)
Отсюда следует, что для выполнения постолбцовой
проверки надо:
1. Вычислить левую часть условия (9.10) путем
умножения контрольной эпюры на грузовую эпюру
МР.
2. Вычислить правую часть условия (9.10), восполь-
зовавшись следующим равенством:
2Д*х=Д1/Н-Д^-р.. .-рД*^+.,
3. Проверить выполнение условия (9.10). Расходи
мость между значениями левой и правой частей усло-
вия (9.10) не должна превышать 1 %.
Б. Проверка правильности решения си-
стемы канонических уравнений. Эта проверка
производится после решения системы канонических
уравнений путем подстановки в каждое из них найден-
ных значений лишних неизвестных. Если система кано-
нических уравнений решена правильно, то каждое ее
уравнение после упомянутой подстановки должно обра-
щаться в тождество 0=0.
В. Проверка правильности построения
окончательных эпюр Q, М, N. Проверка правиль-
ности построения окончательной эпюры изгибающих мо-
ментов называется кинематической или деформационной
278
и сводится к доказательству выполнения каждого усло-
вия деформации рамы, выраженного равенством вида:
Ллух,, X,..Хя, F} “°-
Левую часть этого равенства, т. е. перемещение по
направлению лишней неизвестной Хк от одновременного
действия нагрузки и лишних неизвестных Хь Х2....Хп,
найдем, перемножая окончательную эпюру М на еди-
ничную эпюру Л11А; в результате получим следующее
одно из условий правильности построения эпюры М
Подобная проверка (см. пример 9.1) должна быть
выполнена для каждой лишней неизвестной X* (k=
= 1, 2, ..п). Для этого предпочтительно использовать
основную систему, отличающуюся от принятой для рас-
чета данной рамы (системы); это в большей мере га-
рантирует расчетчика от допущения ошибок в расчете.
Часто производят так называемую универсальную
деформационную проверку. При этом окончательную
эпюру М умножают на контрольную эпюру A4is; тогда
вместо (9.11) будем иметь лишь единственное условие
правильности построения эпюры М, выражаемое равен-
ством:
В рамах, образованных на замкнутых бесшарнир-
ных контуров, наиболее удобно производить проверку
правильности построения эпюры изгибающих моментов
по углу взаимного поворота сечений в месте разреза ра-
мы (см. пример 9.5).
В этом случае условие (9.11) примет вид:
2 f =°-
Так как в замкнутом бесшарнирном контуре во всех
его сечениях моменты М^, вызываемые действием мо-
мента Х3 = 1, равны единице, то
Игр = V* Г dxjEJ = О,
считая £—const, получим:
Е J MdxjJ = 0.
279
Здесь подынтегральное выражение определяет собой
элементарную площадь dtoft эпюры изгибающих момен-
тов, деленную на соответствующую жесткость Jк k-ro
участка рамы. Следовательно,
S J AI dx!Jk = S J °'
Назовем отношение Ыц/Jk приведенной площадью эпюры
изгибающих моментов на й-м участке рамы; тогда усло-
вие правильности построения эпюр изгибающих момен-
тов для рам с бесшарнирпыми замкнутыми контурами
можно представить так:
2w4/J*=0, (9.13)
т. е. сумма приведенных площадей эпюры изгибающих
моментов всех бесшарнирных замкнутых контуров рамы
должна быть равна нулю; при этом надо помнить, что
участки эпюры, лежащие внутри контура, берутся с
одним знаком, а лежащие снаружи — с противополож-
ным.
Если правильность построения окончательной эпюры
М подтверждается выполнением условия (9.11) или од-
ного из условий (9.12) или (9.13), то переходят к про-
верке правильности построения эпюр поперечных Q и
продольных N сил; при этом используются проверки,
изложенные в гл. 4, основанные на существующих зави-
симостях между очертаниями эпюр Q и М и применении
условий равновесия узлов или отдельных частей рамы
(статическая проверка).
Пример 9.4. Построить эпюры Q, Л1 и N для рамы, изобра-
женной на рис. 9.13, а. Жесткости элементов указаны па рисунке.
Решение. 1. Найдем степень статической неопределимости Л=
= 3-2—(14-1+2) =2,
2. Устранив заданную нагрузку, а также стержни опоры А, по-
лучим основную систему в виде ломаного бруса АВС с одним сво-
бодным, другим защемленным копнами. Основная система, нагру-
женная заданной нагрузкой и лишними неизвестными X] и Хг, за-
меняющими стержни опоры А, показана на рис. 9.13,6.
3. Составляем канонические уравнения. В данном случае будем
иметь два канонических уравнения, что соответствует двум лишним
неизвестным:
=0;
621++62+2+Д2т=0.
4. Вычисляем перемещения бц> бгг, [имеется в виду
формула (8.18) — теорема Максвелла], ijF, A2jF; для этого предва-
рительно строим единичные Мп, Л1!2 и грузовую Мс эпюры
280
(рис. 9.13, в. г. д соответственно)'. Отметим, что при построении этих
эпюр удобно рассматривать часть рамы, расположенную ниже сече-
ния, взятого в пределах стойки ЛВ, или левее сечения — в пределах
ригеля ВС, так как при этом иет необходимости в определении
реакций защемляющей опоры.
Теперь, увеличив все перемещения в EJ раз, получим:
1 2
£Л„ =. -у- .6-6- -g-б + (6-9-6)/2 = 72 + 162 = 231;
£Лаг = (-у- .9.9. 121,5;
£/612=£762i= (—0,5-9.9-6)/2=—121,5;
EJiJF ~-g-6-360. •4'- 6-Ь {360-4,5+ [(360 + 495)/2]4,5] 6/2 =
= 3240+ 10 631 = 13871,
„ Г 1 360 + 495
EJ\,F — — 4,5-4,5-360 + 4,5-4,.> ---------+
2 =
+ 4 •1,5-4,5(зб0 + ^.з)]/2 =
= — (3645 + 8657 + 4555)/2 = —8429,
5. Проверяем правильность определения единичных и грузовых
перемещений. Для этого предварительно построена контрольная
эпюра (рис. 9.13, е).
а) Единичные перемещения. Должно выполняться условие
(9.9). Находим:
X? о, И. 3'1 . 1 , .
I "is “ ej 2EJ Wa У1' —
/ 1 2 „ X , 1^1 2
= <_.6.e_.6JZ£7+___k„,6.6. —,6 +
1 2 \
+ — -3.3- -д- -3 J = (72 + 36 + 4,5);£J = 112,5/£J;
Ef>kt = 6, i +5гЕ+25,s = (234+121,5—2 • 121,5) /£/ = 112,5/££
Итак, условие (9.9) выполняется и, значит, единичные переме-
щения вычислены правильно.
б) Грузовые перемещения. Должно выполняться условие (9.10).
Находим:
по стойке ЛВ (рис. 9.13,Де)
1/£J ( +ftJ MF dx = (-3-.З6О.6--4- -б) ! EJ = &AQ:EJ\
лв
по ригелю ВС (рис. 9.13, we, а)
1/2 £2 f MltMFdx = (з60-9--|-1,5)/2£7 —
— (4" • 4,5- !35-1,5) / 2£J = 2430/ EJ — 228/EJ = 2202/EJ.
281
шпшпш
282
283
Таким образом,
S f M11A4fdx/£Z=3240/£Z+2202/EZ=5442/EZ;
2Д»р=Ди4-Д2, = 13 871 /Е7—8429/EZ=5442/£Z.
Итак, условие (9.10) выполняется и, значит, грузовые переме-
щения найдены правильно.
6. Подставляя в канонические уравнения найденные перемеще-
ния, увеличенные в EZ раз, получим:
234X1— 121,5Х2+13 871 =0;
—121,5Х,+121,5Х2—8429 = 0.
Складывая эти уравнения почленно, получим:
112,5Х1+5442 =0,
откуда
Х,=—5442/112,5=—48,37 кН;
Х2= [234 (—48,37) +13 871] /121,5=21 кН.
Проверка: 234(—48,37)—121,5-21 + 13 871 =—11 319—2551 + 13 871 =
= 0; 0 = 0; (—121,5) (~48,37)+121,5-21—8429 =5877+2551—8429=
=0: 0=0.
При подстановке найденных значений X, и Х2 в канонические
уравнения, последние обращаются в тождества 0=0. Следователь-
но, лишние неизвестные Х1 и Х2 вычислены правильно.
7. Строим окончательные эпюры Q, М и N.
На рис. 9,13, и показана схема нагружения данной рамы задан-
ными нагрузками и теперь уже известными силами Х,=—48,37 кН;
Хг=21 кН — реакциями шарнирно-неподвижной опоры А.
а) Эпюра Q изображена на рис. 9.13, к; ее нулевая ордината
Определяется из уравнения
Qxo = 48,37 — 20 = 0;
откуда
ха=48,37/20=2,42 м.
б) Эпюра М. Используем формулу (9.6). В нашем случае
М = л;£+Л111Х1+Л4,гХ2.
Вычисления представим в табличной форме (табл. 9.1), по
предварительно вычислим максимальный изгибающий момент в се-
чении стойки АВ;
20-2.42*
Л1„1ах = Л1х0=2,42 = 48,37-2,42 —-=
= 117 — 58,56 = 58,44 кН • м.
Эпюра М приведена на рис. 9.13, л.
в) Эпюра N (нагрузки по рис. 9.13, и).
Элемент АВ. МАК—\'ВЛ ——21 кН (стойка АВ сжата).
Элемент ВС. Л’sc=Wcfl=48,37—20-6=—71,63 кН.
Эпюра /V приведена на рис. 9.13, jh.
Q Ч ^РовсРка правильности построения окончательных эпюр
284
Таблица 91
Характерные сечения рамы | Ли. м Х1=-48>37кН 3fnXi, «Н м 1* к “ I £ = " Мр, кН м iv-Н* ‘И'
1 2 3 4 5 6 7
д х»—2,42м ВА BD DB DC С 0 —2,42 —6 0 0 0 0 4,5 4,5 9 0 4-117,05 +290,22 +290,22 + 290,22 + 290,22 +290,22 0 0 0 0 +94.5 +94,5 + 189 0 —58,6 —360 —360 —360 —360 0 58,44 —69,78 —69,78 л-24,72 4-21,72 —15,78
а) Эпюра М. Должно выполняться условие (9.11).
Перемножая эпюры М и At; (см рис. 9.13, н, о), расслоим эпю-
ру Млд (по сгойке АВ) на прямоугольный треугольник с основа-
нием 69,78 !г высотой 6, и квадратную параболу со стрелой /=
= .Й=20-62/8=90 кН-м (см. пунктир на рис. 9.13, н), а эпюру
Мпс (по ригелю ВС) представим в виде трех треугольников так,
как это показано на рис. 9.13, к; тогда получим;
; V4 j" MM„dx/EJ = (—-6-69,78--^- • 6 — -д-6-9О-з)/ EJ 4-
+ (—-69,78-9-6 4-1-5,78-9-6 —~гр9-67,50-6)/2Е./ -
= (837,36— 1080),'£2 4- (942,03 4- 216 — 914,22)/£7 ==
- (1995,39 —1991,22);EJ - 1,17; £2 У*0.
Расхождение р= (1,17/1995,39) 100 % =0,05 % <1 %, т. е. в
допустимых пределах.
Перемножая эпюры Л1 и Л1]2 (рис. 9.13, и, я), получим:
MM^dx'EJ = ( — -^-9-69,78-^- -9 — -у- -9-15,78-у-9 4-
4- 9-67,50.4,5) / 2EJ = ( — 471,01 —213,03 4- 685,66), EJ -
= (—684,04 4- 685,66);• EJ = 1,62/EJ =£0.
р = (1,62/683,66) 100 % « 0,24 % < 1 %,
т. е. в допустимых пределах.
Итак, условие (9.11) выполняется; следовательно, эпюра Л1
построена правильно. Ранее (см. п. 9.3.4, В) было сказано, что для
285
большей гарантии правильности проверки безошибочности построе-
ния эпюры Л1 лучше выбрать основную систему для данной рамы
принципиально отличную от той, которая была принята для рас-
чета.
На рис. 9.13, р приведен другой вариант основной системы для ра-
мы по рис. 9.13,с. Предлагаем построить соответствующие ей еди-
ничные эпюры и, выполнив вычисления, вторично убедиться в пра-
вильности построения эпюры Л1.
б) Эпюры Q и N. Сопоставляя между собой эпюры Q и М,
убеждаемся в соблюдении зависимостей между их очертаниями (см.
п. 3.3). Теперь выполняем статическую проверку (см. п. 4.3.5).
Узел В (рис. 9.13, с).
S/n=Мвл—Мвс=67,78—67,78=0;
2X=QM—(Vec== 71,63—71,63=0;
2У=Д?вл—<^=21—21=0.
Итак узел В находится в равновесии. Аналогично доказывается
существование равновесия узлов Л и С. Следовательно, эпюры Q,
Л1, W построены правильно.
9.4. Некоторые данные о выборе рациональной
основной системы
9.4.1. Упрощение канонических уравнений. В настоя-
щее время применяемые в инженерной практике совре-
менные вычислительные машины позволяют существен-
но снизить трудоемкость основных этапов расчета ста-
тически неопределимых систем методом сил.
При этом выбору основной системы не придается
особого значения, так как отпадает трудность в реше-
нии системы канонических уравнений. Однако при руч-
ном расчете или расчете с использованием настольных
клавишных машин простота (или сложность) расчета
статически неопределимой системы в значительной сте-
пени зависит от конструктивных особенностей основной
системы. Отсюда следует, что из всех имеющихся у рас-
четчика вариантов основных систем он должен уметь
выбрать рациональную.
Наиболее существенным критерием, определяющим
рациональность основной системы, является равенство
нулю возможно большего числа побочных перемещений,
так как совершенно очевидно, что это приводит к упро-
щению решения канонических уравнений и, следователь-
но, всего расчета статически неопределимой системы.
Наиболее рациональным получается решение в том слу-
286
чае, когда все побочные перемещения обращаются в
нуль и канонические уравнения принимают вид:
6цЛ>4'Д1л=0;
622X2+Дг/- = 0;
бадХп+Д»? — 0.
Здесь лишние неизвестные полностью отделены друг
от друга и в результате получена система уравнений,
каждое из которых содержит только по одному лишнему
неизвестному.
Однако ие всегда просто удается обратить в нуль
все побочные перемещения. В таких случаях необходи-
мо стремиться хотя бы к частичному отделению лишних
неизвестных. Так, например, если в системе уравнений:
6uX1+6i2Xj+6i3Xs+Aif=0;
621X1 +622X5+623X3+ Л 2 р =г= 0;
fiaiXj-J-fiajXj-l-fissXs-J-AaF = 0
удастся путем рационального выбора основной системы
обратить в нуль некоторые побочные перемещения, на-
пример, 612— 621 =6|з—бз|=0, то система уравнений
примет вид:
бц-Х1+Д1^=0;
622X2 + 623X3 + А 2 f=б;
632X2+633X3+Дз/г=0.
Таким образом, вместо системы трех уравнений с
тремя лишними неизвестными X’i, Xz, Xs получили одно
уравнение с одним лишним неизвестным A\ и два урав-
нения с двумя лишними неизвестными Х2 и Х3) чем зна-
чительно упростили данную систему канонических урав-
нений.
Две эпюры, в результате перемножения которых по-
лучается значение перемещения, равное нулю, называ-
ются взаимно нулевыми; они образуются при следую-
щих условиях:
1. Одна из эпюр на рассматриваемом участке имеет
ординаты, равные нулю, а на том же участке ординаты
другой эпюры отличны от него. На рис. 9.14, а, б показа-
ны соответственно единичные эпюры Л411( Л112. Очевидно,
что в результате перемножения эпюр получим 6j2=
=621 —0.
287
2. На протяжении каждого участка хотя бы одна из
эпюр прямолинейная и имеет нулевую ординату против
центра тяжести площади другой эпюры (рис. 9.15, а, б).
В результате перемножения этих эпюр получим 612=
=621 =0.
288
3. Одна из эпюр симметрична, а другая обратпосим-
метрична *.
Симметричными называют такие эпюры, ординаты
. которых расположены симметрично относительно оси
симметрии рассматриваемой системы и равны между
- собой (рис. 9.16,а). Обратносимметричные — это такие
tэпюры, ординаты которых в симметричных элементах
-.„системы по абсолютной величине равны между собой,
/ но расположены несимметрично относительно оси сим-
‘ метрик (9.16,6).
При перемножении частей симметричной и обратно-
симметричной эпюр, находящихся по одну сторону от
оси симметрии, получим результат со знаком «плюс», а
при перемножении частей этих эпюр, расположенных по
разные стороны от указанной оси,— такой же результат
со знаком «минус».
Таким образом, от перемножения симметричной эпю-
ры на обратпосимметричную в итоге получится нуль;
при этом необходимо помнить, что жесткости симмет-
рично расположенных элементов системы должны быть
одинаковыми. В противном случае при определении пе-
ремещения в результате перемножения двух таких эпюр
не получится нуль.
9.4.2. Указания по выбору рациональной основной
системы. Чтобы основная система оказалась рациональ-
ной, надо из всех имеющихся ее вариантов выбрать та-
кую, для которой возможно большее количество побоч-
ных перемещений обратится в нуль. Исходя из этого и
условий образования взаимно нулевых эпюр, при выбо-
ре основной системы нужно пользоваться следующими
1 указаниями:
1. Основную систему целесообразно выбрать так, что-
бы построенные для нее эпюры по возможности удов-
летворяли первому условию образования взаимно нуле-
вых эпюр.
С этой целью желательно расчленять заданную си-
, стему на ряд изолированных систем, делая в ней раз-
резы и вводя шарниры1 2. Так, например, для дважды
статически неопределимой рамы, показанной на рис.
м9.17, а, основная система получена путем устранения
ч шарнира В и представляет собой две изолированные
1 Такие эпюры также называют взаимно ортогональными.
2 Предпочтительнее делать разрезы—эпюры получаются более
простыми.
10’ Шишиан Б. А.
289
РИС. 9.17
консоли АВ и ВС. Эта система, нагруженная заданной
нагрузкой q и лишними неизвестными X, и Xs, изобра-
жена на рис. 9.17,6. Полученные при этом единичные
эпюры Л/ц и Л112 (рис. 9.17,в,г), а также грузовая МР
и единичная Л1ц эпюры (рис. 9.17, г, 6) имеют на одном
из каждых одноименных участков рамы ординаты, рав-
ные нулю. При перемножении этих эпюр получим 6i2==
=62!=Дгг-=0; следовательно, они являются взаимно
нулевыми.
2. Основную систему целесообразно выбрать так,
чтобы ординаты одной построенной для нее эпюры, рас-
положенные против центров тяжести площадей другой
эпюры, равнялись нулю.
В качестве примера рассмотрим дважды статически
неопределимую раму (рис. 9.18, а]. На рнс. 9.18,6 ио-
290
10е
291
казана основная система, нагруженная заданной нагруз-
кой q и лишними неизвестными силами; наклонной Хь
а не горизонтальной силой Хь как в примере 9.4 (см.
рис. 9.13,6), и вертикальной силой Х2. При этом эпюра
Л112 будет иметь вид, показанный на рис. 9.18, в. Если
лишнее неизвестное Xj направить так, чтобы линия ее
действия пересекала ригель против центра тяжести пло-
щади эпюры М12 (т. е. на расстоянии 1/3 от заделки), то
от силы Xj = l получим эпюру Л4и (рис. 9,18,г), в кото-
рой ордината на ригеле, соответствующая центру тяже-
сти эпюры Л112, равна нулю. На стойке же все ординаты
эпюры Л112 нулевые.
Следовательно, полученные эпюры Л1ц и Л112 взаим-
но нулевые — по стойке, согласно условию 1, по ригелю,
согласно условию 2 образования таких эпюр, и значит
612=621=0.
3. Если заданная система симметрична, то удобно
выбрать основную систему также симметричной. На-
помним (см. 6.4.2): симметричной называется система, у
которой не только ее геометрическая схема, образован-
ная осями стержней, имеет ось симметрии, но и жестко-
сти симметрично расположенных элементов равны друг
другу. На рис. 9.19, а, б приведены две статически неоп-
ределимые системы, имеющие внешнее сходство.
Однако первая система (но не нагрузка) симметрич-
на, вторая же несимметрична, так как жесткости сим-
метрично расположенных ее элементов неодинаковы.
Целесообразность выбора для симметричной рамы (си-
стемы) и симметричной основной системы подтвердим
приводимым конкретным примером 9.5, расчета статиче-
ски неопределимой симметричной рамы.
Пример 0.5. Построить эпюры Q, Л1 в N для рамы, изобра-
женной на рис. 9.20, а. Жесткости элементов указаны на рисунке.
Решение. 1. Рама симметрична относительно вертикальной оси
и трижды статически неопределима, так как
Л = ЗЛ-Ш=3-1—0=3.
2. Для упрощения расчета используем симметрию заданной
рамы. Основную систему получим, разрезав раму но оси симметрии
на две части; тем самым удаляем три внутренние связи, препятст-
вовавшие взаимному сдвигу примыкающих в месте разреза Друг
к другу сечений, их взаимному расхождению (или сближению) и,
наконец, их взаимному повороту. На рис. 9.20, б изображена ос-
новная система, нагруженная заданной нагрузкой и заменяющими
отброшенные связи лишними неизвестными — групповыми силами
Xi, и моментами А’з.
292
3. Составляем канонические уравнения.
6цА14б,гХ2461зХз4 Ajr = O;
621-^1+6^X24623-^3+42?=0;
6з1Х)+6з2Лв+6ззХ3+Лзг==0.
4. Вычисляем перемещения 6ц, 622, баз и 613=621, 613=63,,
623=632; для этого предварительно строим единичные Л/ц, М12. ЛТ13
и грузовую Л1? эпюры (рис. 9.20, в, г, д, е) соответственно.
Сравнивая между собой единичные эпюры, легко заметить, что
эпюры Л(12 и А113 (рис. 9.20, г, д), построенные от поочередного на-
гружения основной системы единичными силами Х2=1 и Л’з=1,
получаются симметричными; поэтому лишние неизвестные Х2 и Х3,
показанные на рис. 9.20,6 и представляющие собой соответственно
продольные силы и изгибающие моменты, будем называть прямо-
симметричными Эпюра Л!ц (рис. 9.20, о), построенная от нагруже-
ния основной системы единичными силами Х] = 1, получается об-
ратносимметричной; поэтому лишние неизвестные Х|— поперечные
силы в сечении (рис 9.20.6) называются обратносимметричными
Итак приходим к выводам:
а) если все лишние неизвестные распадаются на симметричные
и обратносимметричные, то первые из них дают симметричные эпю-
ры. а вторые — обратносимметричные;
б) симметричная н обратиосимметричпая эпюры являются
взаимно нулевыми, согласно третьему условию образования таких
эпюр.
Теперь, возвращаясь к вычислению единичных и грузовых пе-
ремещений и учитывая при этом только что сделанные выводы, бу-
дем иметь
6i2 = 62] = 613 = 631 = 0
и далее, увеличив все перемещения в EJ раз, получим Ч
£Л„ — 2 Г(4-6-4);2 4 .4-5- ~ 4)/11 = 2 [48 + 26,67] = 149,33;
Г 6
£Л,г -2 — (2-3-3 4 2-9-9 4 3-9 4 9-3) */2 4
+ ("Г ’3-’” 4" ’3 ) / 1 ] = 21П7 + ,51 264«
£Л33 = 2 [(1-6.1)/2 4 (i-5-IJ/1] = 16;
£Л!3-6-1)/ 2 + (y.3-5-l) j l]-2(18 + 7,5] ^51;
1 При определении всех единичных перемещений сразу же пос-
ле первого знака равенства поставлен коэффициент 2, так как пе-
ремножение соответствующих эпюр ведется для левой (или правой)
части основной системы и результат удваивается.
* Здесь применена формула (8.17), служащая для перемноже-
ния трапециевидных эпюр.
293
Х2*= 15,30 кН MBC-58r1flkH-I
EJi1F = (-у -6-360-4 ) / 2 -- 1440:
Е7ДаГ = —-тр6-360(з + -6 / 2 = — 2700;
EJS,P —-6-360-1) /2= —360.
5. Проверяем правильность определения единичных и грузовых
перемещений. Для этого предварительно строим контрольную эпюру
Mi,. Вычисления приведем в табл. 9.2.
Таблица 9.2
Характерные сечения рамы Единичные моменты, и Ординаты эпю- ры Л1 js, м
-«и мн
А —4 +9 4"1 4-6
ВА „4 + 3 + 1 0
ВС —4 + 3 +1 0
СВ 0 0 + 1 + 1
CD 0 0 + 1 + 1
DC + 4 + 3 +1 4" 8
DG + 4 + 3 + 1 4-8
G + 4 + 9 + 1 + 14
По данным таблицы 9.2 построена эпюра Л1ц (рис. 9.20, ж).
Единичные перемещения. Должно выполняться условие (9.9).
Находим:
f < WEJ = (-у- -6-6. -=--б)/2Е7 +
+ -5-Ь 4--1 )/ EJ +4" (2,ь1 + 2-8-8+ 1-8 ++
+ -|-(2-8-8 +2-14-14 + 8-14 + 14-8)/2£7 =
- (36 + 1,67 + 121,67 + 372)/£7 = 531,34,- EJ.
26^=6, ,+622+533+2823= (149,33+264+16+2-51)/£J=
=531,34/£7.
Условие (9.9) выполняется и, значит, единичные перемещения
вычислены правильно.
Грузовые перемещения. Должно выполняться условие (9.10),
Находим:
+fal Л'1р dX>EJ = (—J" 6 ‘ 360 ’ "J" * б)/ 2£J =
- —1620/£7;
296
S =Д iH-Длл+Д sr = 1440/EJ—2700/EJ—360/£7=—1620/EJ.
Условие (9.10) выполняется. Следовательно, и грузовые пере-
мещения вычислены правильно.
6. Подставляя в канонические уравЕЕепия найденные значения
единичных и грузовых перемещений, увеличенных в ЕЗ раз, и сокра-
щая обе части каждого из этих уравнении па EJ, получим:
149,33 Xi+ 1440 = 0;
264 Д', + 51 X, —2700 = 0;
51 X, + 16 Ла— 360 =0.
Как видно, эта система трех уравнений с тремя неизвестными
распалась на независимые Друг от друга одно уравнение с одним
неизвестным и систему двух уравнеЕШй с двумя неизвестными
Х2 и Х3. И вообще, выбор основной системы путем разреза сим-
метричной заданной системы по оси симметрии и введения в месте
разреза симметричных и обратно-симметричных лишних неизвест-
ных всегда позволяет привести общую систему канонических урав-
нений к двум независимым системам, одна из которых содержит
только симметричные, другая — только обратносимметричные лиш-
ние неизвестные.
Решая полученную систему канонических уравнений, найдем:
Х,=—9,64 кН; Х2=15,30кН; Х3=—26,28 кН.
Отрицательные значения лишних неизвестных и Х3 свиде-
тельствуют о том, что их направления были выбраны неправильно.
Проверка.
149,33(—9,64)+ 1440 = 0; 0=0.
264-15,30+51 (—26,28)—2700=0; 0 = 0.
51 • 15,30+16(—26,28)—360= 0; 0=0.
При подстаЕЕОвке найденных значений Х2 и Х3 в канониче-
ские уравнения последние обратились в тождества 0=0. Следова-
тельно, лишние неизвестные Х2 и Х3 вычислены правильно.
7. Строим окончательные эпюры Q, Л1 и N. На рис. 9 20, в по-
казана основная система, нагруженная заданной нагрузкой 7=
= 20 кН/м и теперь уже известными, правильно направленными
силами Х|=9,64 кН; Х2=15,30 кН и моментами Х3=26,28 кН.
Таким образом, имеем данные для построения окончательных эпюр
Q, М и <V. Сделаем это обычными приемами, известными из курса
«Сопротивление материалов».
а) Эпюра Q.
Qcb=Qbc=9,64cos ot+15,30 sin a— 9,64-0,8+15,30-0,6= 16.89 кН;
Qea ——15,30+20x;
при x=0 Qba~—15,30 кН;
при x=6 м Qxb = —15,30+20 6 = — 15,30+120=104,7 кН.
Из уравнения QxB~—15,30+20хо=0 находим jco=0,76 м.
Qcl> — Qdc— 15,39 sin a—9,64 cos a = 15,30 0,6—9,64 0,8=
=9,18—7,71 = 1,46 кН;
Qoc = Qgd = +15,30 кН.
297
По этим данным построена эпюра (?, показанная на рис, 9.20, и.
б) Эпюра Л1.
Л1СВ=—26,28 кН-и;
Мвс=9,64 4+15,30 •3—26,28 = 38,56+45,90—26,28=58,18 кН м;
Мва=9,64 4+15,30- 3—26,28=58,18 кН м;
ЛГ^ = 9,64-4 + 15,30(3 + 0,76) —20-0,76’/2 — 26,28 - 38,56 +
_|_ 57,53 — 3,78 — 26,28 - 61,03 кН-м;
Мая=9,64 4+15,30 - 9—20 - 6г/2—26,28 = 38,56+137,7—360—26,28 =
= —210,02 кН-м;
Мси = —26,28 кН-м;
ЛГСС = —9,64 4+15,30- 3—26,28=—38,56+45,90—26,28=
=—18,94 кН-м;
с=9,64 4—15,30-3+26,28 = 18,94 кН -м;
Л1СС = 9,64 -4— 15,30 -9+26,28 = 38,56—137,7+26,28=—72,86 кН ы.
По этим данным построена эпюра М (рис. 9,20, к),
в) Эпюра N.
Элемент АВ. Лдс=Л’вд = 9,64 кН.
Элемент ВС. ЛГ£с=ЛГсв=9,64 sin а—15,30 cos а — 9,64-0,6—
—15,30-0,8=5,78—12,24=—6,46 кН.
Элемент CD. NCD=NDC=—15,30-0,8—9,64-0,6=—12,24—5,78 =
= —18,02 кН.
Элемент DG. N = =—9,64 кН.
По этим данным построена эпюра Лг (рнс. 9.20, л),
8. Проверка правильности построения окончательных эпюр О,
М, N.
а) Эпюра М.
Так как данная рама представляет собой бесшарнирный замк-
нутый контур, то удобно применить условие (9.13).
В результате получим (рнс. 9.20, к):
/ 1 1 2
77 “k—”F'210’02‘6 + -r 58>18-6 + "з- -6-90 —
— пр 18,94-6+-— -72,86-б) ! 2 + (-“- 58,18-5 —-р26,28-5—
26,28 + 18,94 \/
—--------2------' 5) / 1 = 33,29— 33,49--0,20=^0,
ошибка [|—0,201/33,49] 100 % =0,6 % <1 %, что допустимо.
Итак, условие (9.13) выполняется, следовательно, эпюра ЛГ по-
строена правильно.
б) Эпюры Q н N.
Сопоставляя между собой эпюры Q в ЛГ, убеждаемся в соблю-
дении зависимостей между их очертаниями
Статическая проверка.
Узел В (рис. 9.20, м).
ХЛ1*=ЛГ*А—Л^с =58,18—58,18=0;
ZX=—Nbc cos a—Qbc sin a+QM =
=-6,46-0,8—16,89-0,6+15,30=—15,30+15,30= 0;
298
РИС. 9.21
2У=—iVвс siti ct+Qec cos =
=—6,46 - 0,6+16,89 - 0,8—9,64 = — 13,51 +13,51 = 0.
Узел С (рис. 9.20, н).
2отс=Л!св—Л!Ср=26,28—26,28=0;
2А =—Ncd cos u—Qcd sin a+Qcu sin <z+A?CjB cos a =
=-18,02-0,8—1,46-0,6+16,89 0,6+6,46-0,8=—15,27+15,27=0j
ZF = ;Vt-D sin a—Qcd cos a—Qcn cos a+Л'св sin « =
= 18,02 0,6— 1,46 0,8—16.89 0,8+6,46 0,6 = 14,68— 14,68= 0,
Узел D (piic. 9.20,o).
У - 18,94—18,94 == 0;
S.Y — — Qdc+Qdc sin a+iVoc cos a=
=—15,30+1,46 - 0,6+18,02- 0,8=—l 5,30+15,29 0,
SI =A'z?g+Q^< cos c—Ndc sin u=
=9,64+1,46-0,8—18,02 • 0,6= 10,81—10,81 = 0.
Итак, узлы В, С и D удовлетворяют условиям равновесия,
Следовательно, эпюры Q, 41 и ;V построены правильно.
Для рамы, приведенной в только что разобранном примере
(рис. 9.21, а), можно получить другой вариант основной системы,
если силы Xi, А'г н момент Х3, показанные на рис. 9.20,6 рассмат-
ривать как результат переноса их в некоторую точку т или п
(рис. 9.21, в), лежащую в плоскости этого сечения (1J. Чтобы этот
перенос сил не изменил влияния их на сечение в разрезе рамы, на-
до связать точку т неизменно с этим сечением. Это осуществляет-
299
ся с помощью воображаемых абсолютно жестких консолей ат и
Ьп (рис. 9.21,б,о) жестко связанных с сечением.
В самом деле, присоединенные к рамс, эти консоли, имеющие
жесткость EJ, равную бесконечности, нс будут деформироваться
под действием приложенных к их концам т и п сил Xi, Х2 и мо-
ментов Хэ (рис. 9.21, в), и так как относительные смещения точек
д и Ь, равны пулю, то относительные смещения точек тип также
равны' нулю.
Воспользовавшись описанным приемом переноса сил в новый
центр приведения без нарушения работы системы, получим для на-
шей рамы (рис. 9.21, а) другой вариант основной системы, пока-
занный на рис. 9.21,6. Нетрудно понять, что и в этом случае эпю-
ра Л1ц будет обратносимметрична, а эпюры Л(]2 и JWl3 прямосим-
метричны; поэтому 612=621 и 61з=бЭ| окажутся равными нулю и
по-прежнему получим распад системы трех уравнений с тремя лиш-
ними групповыми неизвестными на одно уравнение с одной лишней
групповой обратиосимметричной неизвестной Л, и два уравнения
с двумя лишними групповыми прямосимметричиыми неизвестными
А2 и Ад. Таким образом, по объему вычислительной работы основ-
ная система по рис. 9.21,6 не имеет преимущества по сравнению
с основной системой по рис. 9.20, б и наоборот.
Однако основную систему по рис. 9.21,6 можно значительно
улучшить (выбрать основную систему более рациональную, чем по
рис. 9.20,6), если соответствующим образом определить положение
точки т (или п)—центра приведения, или, что то же, правильно
подобрать длину консоли ат1, при этом перемещение 62з=6Э2 так-
же окажется равным нулю я система канонических уравнений, при-
веденная в примере 9.5, обратится в следующую систему трех
уравнений с тремя неизвестными, в каждое из которых войдет толь-
ко одно лишнее групповое неизвестное;
61 lAf-f-At,. =0; 622А2-(-Л2/’=9; 6ззАз4-Азг=0.
Решив эту систему, сможем построить окончательные эпюры Q,
Л1, N, которые получатся такими же, как и раньше (рис. 9.20, и,
к, л), по в последнем случае объем вычислительной работы окажет-
ся меньше, чем при расчете рамы по основной системе, изображен-
ной на рис. 9.20, 6. Теперь покажем, как определить длину консоли
ат дли рамы по рис. 9.21, в, чтобы достичь желаемого упрощения
системы канонических уравнении. На рис. 9.21,8 показана основная
система, нагруженная заданной нагрузкой q и лишними групповы-
ми неизвестными А,, Х2, А3. Обозначим через у длину консоли ат,
при которой будем иметь 6гз = бд2 = 0. Единичные эпюры Л1ц, М12,
Л(|з, ординаты которых выражены через длину консоли у и высоту
стоек ft, приведены соответственно на рис. 9.21, г, д, е; при этом
заметим, что в пределах консолей эти эпюры не изображены, так
как при перемножении единичных эпюр с базой, расположенной на
оси консоли, и делении полученных произведений Л112М13 на жест-
кость консоли EJ, равную бесконечности, в результате получается
ноль.
1 Описываемый прием определения длины консоли годен только
для рамы, имеющей бесшарвирные замкнутые контуры и хотя бы
одну геометрическую ось симметрии, совпадающую с упругой осью
симметрии.
300
Условие равенства нулю перемещения 623 = 632 запишется так;
£/623 =0,
или в развернутом виде (рис. 9.21,6, е):
£JB2S = 2^ — 4* (У + У~~ k/2)-^ Л-1 —-тг(у— Л/2>(у—Л/2> 1 4-
4- 4" (ЗЛ/2— у) (ЗЛ/2 — у) 1] = О,
Выполнив преобразования, получим уравнение (11/6)# =
= (29/24)/*, откуда находим
#= (29/24)й(6/11) = (29/24)6(6/11) =3,95 м.
Если теперь, приняв #=3,95 м, все ординаты единичных эпюр
выразить в числах, то в результате перемножения эпюр Л112 и М13
получим ноль. В этом предлагаем убедиться самостоятельно.
9.5. Дальнейшее упрощение системы
канонических уравнений
9.5.1. Способ группировки неизвестных. При расчете
симметричных статически неопределимых систем, имею-
щих несколько пролетов, невозможно разместить все
лишние неизвестные на оси симметрии. Кроме того, не
всегда имеется возможность провести разрез системы
по оси симметрии из-за расположения на этой оси стой-
ки. В этих случаях выгодно применить так называемый
способ группировки лишних неизвестных, дающий воз-
можность получения симметричных и обратносиммет-
ричных эпюр. Сущность способа рассмотрим на примере
двухпролетной четырежды статически неопределимой
рамы (рис. 9.22,а).
Основную систему выберем путем отделения от за-
данной рамы опор А н В. Нагруженная система пока-
зана на рис. 9.22, б. Действие отброшенных связей заме-
нено приложением пока неизвестных реакций VA, На,
VB> Яв. В общем случае нагружения рамы эти реакции
не равны между собой и поэтому канонические уравне-
ния примут вид системы четырех уравнений с четырьмя
неизвестными:
1/л4-б>2К^-р6|Э/(л-|-6|4//в+Д|г=0;
6211/я+б22]/в4-б2а//л4-б2«//в-|-Дг£=0;
Сз1 1л4*6зДв4* 6336/^4*634//в 4-А з/=0;
641 1л+б421’в+б4з//лЬ6.и(/в4'^'1Г = 0.
301
Если теперь построить единичные и грузовую эпюры
(предлагаем это выполнить самостоятельно), то можно
легко убедиться в том, что ни одно единичное переме-
щение не обращается в ноль и, следовательно, эту си-
стему уравнений нельзя расчленить на отдельные неза-
висимые системы и тем самым упростить ее решение;
придется решить одну систему четырех уравнений с че-
тырьмя неизвестными.
Однако реакции VA, НА, Ув, Нв можно преобразо-
вать так, чтобы рама оказалась под действием прямо-
симметричных и обратносимметричных лишних группо-
вых неизвестных, и тем самым добиться упрощения си-
стемы канонических уравнений. Это возможно осу-
ществить, опираясь на известное из математики поло-
жение: два числа а и b всегда можно представить как
сумму некоторых чисел с я d и их разность. Итак, если
даны а и Ь, то a=c-\-d и Ь=с—d; отсюда однозначно
определяются
а 4- b а— b
с = 2 “ d = 2 *
Например, если а=12 и й=8, то с= 10 и d=2. Про-
верка: а~ 10+2=12, 1> = 10—2=8.
На этом основании представим реакцию VA в виде
суммы лишних неизвестных сил и Хг, а реакцию
302
VB — в виде разности этих сил, реакцию НА — в виде
суммы неизвестных Х3 и Х'4, а реакцию Нв— в виде их
разности (рис. 9.22,в), т. е.
6/д=Хз+Х'4, —Х4.
В результате получены две группы прямосимметрич-
ных лишних неизвестных (X) и А’3) и две группы обрат-
носимметричных лишних неизвестных (Х2 и Х4). Первые
две группы дадут симметричные эпюры, вторые — обрат-
носимметричные. Система канонических уравнений при-
мет вид:
6цХ1+612Хг+6;3Хэ+614Х4+Д1в=0;
621X1+622X2+623X3+654X4+^/-=0;
бз [ Jf 1+632X2+633X3+634X4+ ЛЭл=О;
+643X2+643X3+644X4+Д4Г=0.
Единичные эпюры Л1ц, Л112, Л!13, Л1ц приведены на
рис. 9.22, г, д, е, ж.
Анализируя их, убеждаемся, что единичные эпюры
Мц И М12, Мц и М14, Мц И Л113, Л113 И М14 являются
взаимно нулевыми, поэтому побочные перемещения 612,
614, 6гз> 634 и соответствующие им перемещения с пере-
ставленными индексами обращаются в нуль и получен-
ная система четырех канонических уравнений с четырь-
мя неизвестными Хь Х'2, Х3, Х4 распадается на две не-
зависимые системы, каждая из которых содержит два
уравнения с двумя неизвестными:
6цХ1+6|3Хз+Д|^=0;
бз1Х1+6ззХэ+Дзг=0;
623X2+624X4+ —0;
643X2+644X4+Д4£ = 0.
В первую систему двух уравнений входят одни толь-
ко симметричные неизвестные JG, А3, во вторую —толь-
ко обратносимметричные Х4.
Объем вычислений при решении этих систем в
сравнении с решением системы четырех уравнений с че-
тырьмя неизвестными 1'л, На, Vв, Нв значительно со-
кращается, а точность определяемых неизвестных уве-
личивается. Решив полученные две независимые систе-
мы канонических уравнений, сможем построить оконча-
тельные эпюры Q, Л4 и N.
Эпюру М удобно строить, применяя формулу (9.6):
303
для рассмотренной рамы в каждом ее сечении бу-
дем иметь
Al = Л!^+Л11iX ] +Л1 ijAj-f-Al 13X3 +Л1нЛ\.
Что же касается построения эпюр Q и N, то рекомен-
дуем такой прием:
1. По найденным значениям Хь Х2, Х3, Х4 вычислить:
V^ = Xi+X2; Ha~Xs-\-Xc,
Vp=Xi-—Xs'r Нв=Х^—xt.
2. Нагрузить основную систему заданной нагрузкой
и уже найденными реакциями опор и далее выполнить
построение эпюр Q и N (см. п. 4.3.5).
9.5.2. Способ преобразования нагрузки — расчет сим-
метричной рамы на несимметричную нагрузку. В п. 9.4
и в п. 9.5.1 было показано использование свойства пе-
ремножаемых симметричных и обратносимметричных
эпюр, в результате которого ряд побочных перемещений
(коэффициентов канонических уравнений) при расчете
рам обращается в нуль. Это же свойство симметричных
и обратносимметричных эпюр можно использовать и с
целью обращения в нуль некоторых свободных (грузо-
вых) членов канонических уравнений при расчете
симметричных рам на несимметричную нагрузку. Для
этого заданную несимметричную нагрузку надо пред-
ставить в виде двух нагрузок: симметричной и обратно-
симметричной.
Суммарное воздействие этих нагрузок на раму долж-
но быть таким же, как и воздействие от заданной на-
грузки. Произведя такое преобразование нагрузки, надо
рассчитать раму на действие симметричной и отдельно
обратносимметричной нагрузок, а затем просуммировать
результаты. Для примера рассмотрим раму, показанную
на рис. 9.23, я. Она трижды статически неопределима.
На рис. 9.23, б изображена основная система, нагружен
ная в сечении ригеля, соответствующем оси симметрии
рамы, групповыми неизвестными Х1( Х2, Х3 и заданной
(еще не преобразованной) нагрузкой.
Для такой рамы (см. пример 9.5) вследствие обра-
щения в нуль ряда побочных перемещений вместо трех
уравнений с тремя неизвестными были получены сле-
дующие (более простые) уравнения:
51 jA 1 -|- Д1 f=0;
622X2+623X3+ 0:
632X3+633X3+&3F — 0.
304
При этом была использована основная система, на-
груженная в сечении ригеля, соответствующем оси сим-
метрии рамы, групповыми неизвестными Аг, Х3 и
равномерно распределенной нагрузкой q по длине ле-
вой стойки (рнс. 9.23,6).
Посмотрим какой вид примут эти уравнения в ре-
зультате преобразования заданной равномерно распре-
деленной нагрузки интенсивностью q в нагрузки симмет-
[ ричную интенсивностью q'=q!2 (рис. 9.23, в) и обратно-
j симметричную q"~q!2 (рис. 9.23,а). Нетрудно заметить,
1 что при наложении этих нагрузок на левой стойке они
просуммируются и дадут нагрузку заданной интенсив-
ности, а на правой стойке указанные нагрузки взаимно
уничтожатся.
Теперь вместо одной нагруженной системы (рис.
9.23,6) получим две такие системы: одну нагруженную
симметричной нагрузкой q'=q)2 и лишними групповы-
ми неизвестными и Х'3 (рис. 9.23, е), другую —
обратно симметричной нагрузкой q"=q!2 и лишними
групповыми неизвестными Х"\, Х"$ и А'"3 (рис. 9.23,г).
Единичные эпюры от нагружения основной системы
силами Х'| = 1, Х'2 = 1, Х'з=1 и отдельно Х"1 = 1,
==1, Х"з=1 совершенно одинаковы (рис. 9.23, 6, е,ж).
305
а следовательно, одинаковы и соответствующие им еди-
ничные перемещения.
Грузовые эпюры от симметричного (рис. 9.23, в) и
обратносимметричного (рис. 9.23, г) нагружений изобра-
жены соответственно на рис. 9.23, з, и. Имея единичные
и грузовые эпюры, и используя свойство перемножае-
мых симметричных и обратносимметричных эпюр, сразу
найдем 615^621=б1з=бз1=0 *, == Дг,;» = = 0.
Поэтому канонические уравнения для симметричного
(рис. 9.23, в) и отдельно для обратносимметричного
(рис. 9.23, г) нагружений рамы примут вид:
= 0; В„х" -г д1?„ = 0;
Ь3!Х2 Ь53 Х% 4- = 0» Ьаз-Л"2 4- в,эЛ3 — 0;
4“ 833 XJ —0: “0.
Из первого уравнения левого столбца следует, что
Х'1 = 0, поэтому на рис. 9.23,6 можно было бы сразу
показать только прямосимметричные лишние неизвест-
ные Х'2 и Х'а. Во вторых двух уравнениях правого
столбца отсутствие свободных членов указывает на ра-
венство нулю прямосимметричных лишних групповых
неизвестных Х"% и Х"а, в чем легко убедиться подста-
новкой в эти уравнения значений Х"г=0 и Х"3 = 0, по-
этому на рис. 9.23, г можно было бы сразу показать
только обратносимметричное лишнее неизвестное Х"г.
Теперь предыдущая система шести уравнений с
шестью неизвестными примет вид:
j 4* ^2^ i = 0;
4- ®гз Л'з 4* = о;
'.„А-" 4- - 0.
после ее решения можно построить окончательные эпю-
ры Q, М, N. Эпюру М удобно построить, используя за-
висимость (9.6); для рассмотренной рамы в каждом ее
сечении будем иметь:
М - Л1?, 4- Mq„ + Mix- X* 4- М1Х' X'., 4- Х^.
* Здесь индексы при единичных перемещениях б указаны без
значка' (илиибо соответствующие симметричному и обратно-
симметричному нагружениям рамы единичные перемещения одина-
кового смысла между собой равны (например, ti'2' = 61''2'' ит.д.).
306
Для построения эпюр Q и Л' надо нагрузить основ-
ную систему заданной нагрузкой q', q" и уже известны-
ми силами Х'%, Х'3 и X"i, построить соответствующие им
эпюры Q' и Q", N' и N" и, просуммировав эпюры одина-
кового смысла, получить окончательные эпюры Q и jV.
Из изложенного следует, что для расчета статически
неопределимой симметричной рамы способом преобразо-
вания нагрузки удобно отдельно рассчитать ее в сим-
метричном и обратносиммстрпчном состояниях и ре-
зультаты просуммировать. Кроме этого, рассмотренный
пример позволяет установить следующие правила, суще-
ственно упрощающие расчет симметричных рам (си-
стем) на симметричную или обратносиммстричную на-
грузку:
1. При действии на симметричную раму симметрич-
ной нагрузки в ее сечении, соответствующем оси сим-
метрии, возникают изгибающий момент и продольная
сила, т. е. прямосимметричпые лишние неизвестные, а
обратно-симметричные — поперечные силы равны нулю,
2. При действии на симметричную раму обратносим-
метричной нагрузки в се сечении, соответствующем оси
симметрии, возникают только поперечные силы, т, е. об-
ратносимметричпые лишние неизвестные, а прямо сим-
метричные— изгибающий момент и продольная сила
равны нулю.
Глава 10. Неразрезные балки
10.1. Общие сведения
Неразрезной называется расположенная на опорах
статически неопределимая балка, имеющая непрерывное
строение по всей своей длине, с числом пролетов от
двух и более. Схемы неразрезных балок изображены на
рис. 10.1, а, б. По числу пролетов неразрезные балки на-
зываются двухпролетными, трехпролетными и т. д. Одна
из опор делается шарнирно-неподвижной или защемлен-
ной; остальные опоры — шарнирно-подвижные. Опоры
принято именовать слева направо арабскими цифрами
0; 1; 2; 3; ..., а длины пролетов обозначать (также сле-
ва направо) через lit Is, /3, .... Индекс при длине каждого
пролета совпадает с номером правой опоры этого про-
лета. Сечение неразрезных балок делается преимущест-
307
РИС. 10.1
венно постоянным по всей длине, но иногда, при боль-
шой разнице нагрузок в пролетах, последние имеют раз-
ное сечение.
Опоры балок обычно располагаются на одной пря-
мой. В статической неопределимости неразрезных балок
можно легко убедиться подсчетом опорных реакций,
число которых всегда бывает больше числа уравнений
равновесия статики. Например, балка, изображенная на
рис. 10.1, а, имеет шесть опорных стержней и, следова-
тельно, возникает шесть опорных реакций, для опреде-
ления которых располагаем только тремя уравнениями
равновесия статики 2Х=0; 2У=0; 2т =0. Таким обра-
зом, балка имеет три лишние связи и, значит, три раза
статически неопределима. Балка, изображенная на рис.
10.1,6, имеет семь опорных стержней (защемление экви-
валентно трем опорным стержням). Следовательно,
лишних связей здесь четыре и, значит, данная балка
четыре раза статически неопределима.
Если обозначить через С()С число опорных стержней,
то степень статической неопределимости неразрезных
балок Л можно определить по формуле:
Л=СОП—3, (Ю.1)
где число 3 соответствует числу уравнений равновесия статики
для плоской системы сил.
308
Неразрезные балки широко применяются при строи-
тельстве гражданских и промышленных зданий для уст-
ройства перекрытий и подкрановых балок; они также
применяются в строительстве железнодорожных и авто-
дорожных мостов. Достоинством неразрезных балок
следует считать то, что, во-первых, они значительно лег-
че разрезных и, во-вторых, обеспечивают надежную
связь опор между собой.
Недостатком неразрезных балок является их чувст-
вительность к неравномерной осадке опор. Неразрезная
балка является статически неопределимой системой и
поэтому, подобно статически неопределимой раме, мо-
жет быть рассчитана методом сил.
10.2. Применение метода сил к расчету
неразрезных балок
10.2.1. Основная система. Пусть имеем многопролет-
ную неразрезную балку постоянного по длине сечения,
расположенную на z опорах (рис. 10.2, а); здесь же изо-
бражена упругая ось балки (см. штриховую линию) и
угол поворота 0п сечения балки, соответствующего опо-
ре п. Степень статической неопределимости этой балки,
согласно формуле (10.1),
Л=СОП—3= [1-2+(г—1)1]—3=z—2,
что соответствует числу промежуточных опор данной
балки. Б качестве основной системы для заданной бал-
ки примем предложенную французскими инженерами
Берто и Клапейроном балку с шарнирами, установлен-
ными в теле ее над промежуточными опорами (рис.
10.2,6). Каждый такой шарнир, введенный в заданную
систему, снимает одну лишнюю внутреннюю связь в
опорном сечении балки, а г—2 таких шарниров уничто-
жают г—2 лишних внутренних связей и, следовательно,
обратят заданную балку в основную, теперь уже стати-
чески определимую систему; вместе с тем эти же шар-
ниры уничтожают и те изгибающие моменты (см. п. 3.2),
которые возникают в опорных сечениях заданной балки.
; Основную систему по рис. 10.2,6 удобнее представить в
' виде ряда отдельных балочек на шарнирных опорах,
; торцами примыкающих друг к другу (рис. 10.2,в).
Сравнив рис. 10.2, а и 10.2, в, приходим к заключе-
нию, что заданная и основная системы различны между
собой.
309
рис. «л
1. Основная система не нагружена заданной нагруз-
кой.
2. После устранения из заданной системы лишних
внутренних связей в опорных сечениях и ввода в эти се-
чения шарниров в основной системе стали возможными
угловые перемещения — углы поворота опорных сече-
ний, примыкающих друг к другу, т. е. именно те пере-
мещения, которым в заданной системе препятствуют
лишние внутренние связи в опорных сечениях.
Тем не менее, чтобы рассчитать заданную неразрез-
ную балку (см. рис. 10.2, а), это различие между ею и
основной системой (рис. 10.2, в) должно быть устранено.
Для этого надо:
1. Нагрузить основную систему заданной, или, что
то же, пролетной нагрузкой (рис. 10.2, г); тогда вслед-
ствие наличия шарнирных опор отдельные балочки ос-
новной системы изогнутся, а их опорные сечения, примы-
кающие к каждой промежуточной опоре, повернутся от-
носительно друг друга и образуют вызванные пролетной
нагрузкой взаимные углы поворота сечений, называемые
также углами перелома: A1F, A2f, ...» Ап-i.f. A«f,
A«-h,f, • • -»
310
2. Однако упругая ось заданной балки представляет
собой неразрывную кривую (рис. 10.2, а) и значит она
не должна иметь углов перелома. Чтобы этому же усло-
вию удовлетворяла и основная система, нагруженная
пролетной нагрузкой, необходимо уничтожить возникшие
в ней углы перелома Ды?, Д2Г-, .... Для этого догрузим
основную систему в ее опорных сечениях попарно рав-
ными, но противоположно направленными неизвестными
моментами Хь Х2, ..., Х^-,, Хп, Хп+1, ..X2_i (рис.
10.2, д), которые примем положительными, т. е. направ-
ленными так, чтобы они вызывали растяжение нижних
волокон балки. Эти неизвестные моменты, заменяющие
изгибающие моменты в опорных сечениях балки, кото
рые оказались равными нулю в результате ввода шар-
ниров, подберем так, чтобы угол перелома в каждом
опорном сечении нагруженной системы (рис. 10.2, д) от
совместного действия па балку пролетной нагрузки и
неизвестных моментов Хь Х2, .... X2-i был равен нулю.
Теперь нагруженная система ничем не будет отли-
чаться от заданной и, следовательно, она может быть
принята для расчета. Обозначив угол перелома на опо-
ре п от совместного действия пролетной нагрузки и не-
известных моментов Хь Х2, .... Х2-1 через Д„, выразим
условие неразрывности упругой оси балки следующим
равенством:
Дп=0, (10.2)
где л=1, 2, .... (г—1).
Подчеркнем, что здесь речь идет именно об углах пере-
лома Дп, ибо угол поворота сечения 0„ на любой л-й
опоре (рис. 10.2,а), конечно, может быть отличен от
нуля.
10.2.2. У равнение трех моментов. Вернемся к нагру-
женной системе (см. рис. 10.2, д) и для ее л-й опоры
напишем условие (10.2) неразрывности упругой оси
балки (см. рис. 10.2, а) в форме канонического уравне-
ния метода сил:
।-f-finaXg-l-.. .-|-8п,л~2Хл_14-6в.п_1?Ся_|-рбяяЛ'я-|-6п,п+1Хв+|-1-
+6
П.л+»Х"1+2"Н .+бл11-2Х»-2-4-бв,г_1Хг-.14-Дял = 0.
Это каноническое уравнение выражает равенство ну-
лю перемещения по направлению /1-го лишнего неизве-
стного (момента Хп), вызванное всеми лишними неиз-
вестными (моментами Xlt Х2, Хп-г) и заданной на-
грузкой F.
311
Аналогичные уравнения можно составить для каж-
дой из остальных промежуточных опор. В результате
получим систему (г—2) уравнений с (г—2) неизвестны-
ми, решение которой, на первый взгляд, связано с боль-
шими трудностями из-за обилия неизвестных и коэффи-
циентов при них, а также и свободных членов.
В действительности это не так. Основная система,
принятая для расчета, позволяет произвести значитель-
ное упрощение уравнения, написанного для п-й опоры,
а следовательно, и всей системы канонических уравне-
ний 1.
Это упрощение основано на том, что при наличии в
опорных сечениях основной системы изолирующих шар-
ниров {рис. 10.2, б, в) угол перелома сечений двух смеж-
ных балочек на п-й опоре нагруженной системы (рис.
10.2,6) может возникнуть только от воздействия на них
пролетных нагрузок, а также и опорных моментов (лиш-
них неизвестных), приложенных в опорных сечениях
левой (п—1)-й п-й и правой (п-|-1)-й опор; отсюда сле-
дует, что единичные перемещения:
б л I = &п2 йл.п—2 . . = 0
и поэтому каноническое уравнение для п-й опоры балки
примет вид:
— 4-ДлГ= 0.
Заменяя здесь обозначения опорных моментов через
X па букву М (момент), получим:
6л,к-1АГЛ—1 -|-бллЛ1п-|-6л,п+ 1А1Я+1 + кпг — 0,
где — угол перелома на п-й опоре, вызванный моментом
Af„_[, приложенным в (п—1)-м опорном сечении п-го пролета;
fic.jAJn —то же, вызванный моментами М„, приложенными в п-м
опорном сечении; 6,,я+1АГп+1 — то же, вызванный моментом AfJ[+[,
приложенным в (n-f-l)-M опорном сечении (n-J-jJ-ro пролета; Д„г —
то же, вызванный пролетными нагрузками, действующими в ге-м
и (п+1)-м пролетах, примыкающих к опоре п.
Напишем это же уравнение в развернутом виде, для
чего вычислим соответствующие величины единичных и
грузового перемещений — углов перелома на n-й опоре.
С этой целью из нагруженной балки (см. рис. 10.2,6)
выделены два пролета (рис. 10.3, а); левый п-й и правый
1 Это является доказательством исключительной эффективности
основной системы, предложенной Берто и Клапейроном.
312
(н-Н)-й, примыкающие к опоре п, и построены грузо-
вая MF (рис. 10.3,6) и единичные Мцп-i), Мцпу,
A^i(n+i) (рис. 10.3, в, г, д соответственно) эпюры изгибаю-
щих моментов. Перемножая эти эпюры по правилу Ве-
рещагина, получим:
ln 1 ‘ "з“ = “б”>
1 2 1 1 2 I
= 2 ' 3 2 +1 I ' 3 = з (^л “I- + i)>
1 1 1„ 4- ,
я + 1 2 'I 1 ' 3 = 6
Грузовой член н-го канонического уравнения вычис-
лим перемножением эпюры М? на эпюру М1(ЭТ). Предва-
рительно обозначим (рис. 10.3,6): <оп+1 — площади
эпюр изгибающих моментов в n-м и (п-|-1)-м пролетах
балки от заданной нагрузки; ап, on+i— расстояния от
центров тяжести Сп и Сп+1 площадей этих эпюр соот-
ветственно до (п—1)-й и п-й опор; Ьп, Ьп-ы— расстояния
313
от центров тяжести площадей этих же эпюр до n-й и
(п+1)-й опор соответственно.
В этом случае изгибающие моменты по эпюре Мцп)
под центрами тяжести площадей и «n+i будут соот-
ветственно равны Дп//п и Ьп+1//и+1- В результате пере-
множения эпюр MF и ЛЬ(п) получим:
г. , . . СУп -Г I ^/1+1
ЕЛпг = "7— Т------Г—— •
1п *л + 1
Подставляя найденные значения единичных б и гру-
зового Д перемещений в уравнение с неизвестными мо-
ментами Л/п-i, Мп и Afn+i, после элементарных преобра-
зований окончательно получим:
Л1Д_, 1п + 2Л1л (/„ + Z„.H) + Л1п+1 - - 6 (-°7^ +
Сюда входят только три неизвестных значения опор-
ных моментов, поэтому равенство (10.3) называется
уравнением трех моментов. Для любой неразрезной бал-
ки (при шарнирном опирании концов) число таких
уравнений равно числу промежуточных опор. Следова-
тельно, для расчета неразрезной балки необходимо со-
ставить столько уравнений трех моментов, сколько в ней
промежуточных опор. Совместное решение этих уравне-
ний позволяет определить неизвестные опорные момен-
ты, после чего расчет неразрезной балки свести к рас-
чету простых балок нагруженной системы.
10.3. Особенности применения уравнения трех
моментов в особых случаях
1. Один или оба конца балки защемлены. На рис.
10.4, а показана неразрезная балка с защемляющей опо-
рой на левом ее конце. В этом случае уравнение трех
моментов для защемляющей опоры утрачивает свой
стандартный вид, ибо слева от этой опоры отсутствует
пролет. Однако это затруднение легко устраняется вво-
дом в данную неразрезную балку воображаемого про-
лета 1-1 (рис. 10.4,6), расположенного на 0 (нулевой) и
—-1 (минус первой) шарнирных опорах. Теперь для ну-
левой опоры уравнение трех моментов запишется так:
(Ш—а Д а Ю. 6а X
Д /’
314
Но так как пролет /_1 фактически не существует
(/_[—0 и значит (о_1=0, a_t=O), предыдущее уравне-
ние примет вид:
<01 bt
2 Л4 lt + All h = —6 , ,
<i
где Af0 — изгибающий момент в сечении, соответствующем защем-
ляющей опоре; сщ и bi—показаны на рис. 10.4, в.
Выполненное преобразование балки, изображенной
на рис. 10.4, а, путем ввода в нее воображаемого проле-
та можно обосновать следующими соображениями.
315
Пусть имеем неразрезную балку, показанную на рис.
10.5, а. При постоянном уменьшении длины левого про-
лета балки касательная к упругой ее оси, проведенная
через шарнир левой (минус первой) опоры, в пределе
(при /_|->-0) совпадет с недеформированной осью балки
(рис. 10.5,6); это значит, что поперечное сечение балки,
соответствующее промежуточной опоре 0 (ноль), не по-
ворачивается и, следовательно, балку, показанную на
рис. 10.5,6 (при l-i ->-0), можно рассматривать как бал-
ку, защемленную в сечении ноль (рис. 10.5, в).
2. Один или оба конца балки имеют нагруженные
консоли.
Пусть имеется неразрезная балка с правой консолью
(рис. 10.6,о). Отбросим мысленно консоль (рис. 10.6,6),
и влияние ее на оставшуюся часть балки заменим силой
F'—F" и парой сил с моментом Л12=—Fk, приложенны-
ми в опорном сечении, примыкающем к этой консоли.
Уравнение трех моментов примет вид:
Мой(/1+/2)4-Л1г12=—
где M2-~-Fk—величина известная и, кроме того, Л10—
=0, <в262//2=0, поэтому окончательно получим:
2Л1; (Zj -f-/2) — Fkl2 =-6(0 |С IЩ.
В дальнейшем при построении эпюр Q и М консоль
должна рассматриваться как самостоятельный участок
балки (см. п. 10.5, пример 10.1). Возможен и другой
учет влияния консолей в неразрезной балке. Так, в дан-
ном случае, отбросив консоль и заменив ее действие на
балку силой и парой (рис. 10.6,6), можно считать опор-
ный момент Л12=— Fk приложенным в пределах правого
пролета /2 дифференциально близко к опоре 2 (рис.
10,6. в). При этом опорный момент Л12=—Fk не вводит-
ся в левую часть уравнения трех моментов, а учитыва-
ется в площади со2 эпюры изгибающих моментов, по-
строенной от заданной нагрузки в пролете /2. Во всяком
случае, надо помнить, что один и тот же момент нельзя
вводить одновременно в левую и правую части уравне-
ния трех моментов.
3. Сосредоточенный внешний момент m приложен не-
посредственно над промежуточной опорой. В этом слу-
чае (рис. 10.7, а) проще всего сдвинуть сосредоточенный
момент m на дифференциал dx влево (рис. 10.7,5) или
вправо (рис. 10.7, в). Решение задачи, т. е. итоговые
эпюры поперечных сил Q и изгибающих моментов, в
316
обоих случаях получаются одинаковыми, но величины
лишней неизвестной (опорного момента MJ в обоих ва-
риантах решения будут различными: Mi==J-24 кН-м
(рис. 10.7,6), М( =—16 кН-м (рис. 10.7,в).
10.4. Определение изгибающих моментов,
поперечных сил и опорных реакций
Когда с помощью уравнений трех моментов опреде-
лены все опорные моменты, то устраняются затрудне-
ния, вызванные статической неопределимостью нераз-
резных балок, и дальнейший расчет по определению из-
гибающих моментов, поперечных сил в сечениях балки
и опорных реакций может быть выполнен как расчет
отдельных простых разрезных балок, испытывающих
действие заданной нагрузки в пролете, и концевых опор-
ных моментов.
Рассмотрим произвольный п-й пролет нсразрезной
балки, в котором действует некоторая произвольная
внешняя нагрузка, а на опорах приложены моменты
Л1П_, и Мп, которые будем считать положительными.
Возьмем в n-м пролете балки произвольное сечение на
расстоянии х от левой опоры (рис. 10.8,а). Изгибающий
момент в сечении представит алгебраическую сумму
трех величин:
а) изгибающего момента Л1°Л-п от действия внешней
пролетной нагрузки (рис. 10.8,6);
б) изгибающего момента Л1^*’«-^от действия левого
опорного момента Мн_| (рис. 10.8, в);
в) изгибающего момента от действия правого
опорного момента Мп (рис. 10.8, а). Суммарный изги-
бающий момент:
Л1хп = < 4- + Л1<>> - 4- (ЛК.,//,,) (/„ -х) +
+ (Мв//„)Х = + {(М„ - ЛК-,)/!,,] х.
Итак, окончательно имеем следующую формулу для
определения изгибающего момента в произвольном се-
чении д-го пролета балки:
ЛС„=Л1й1„+Л!я_1 + 1 (Л1„—jl„] X. (10.4)
Поперечная сила в произвольном сечении произволь-
ного ft-го пролета неразрезной балки также получится
317
как сумма поперечных сил от трех (перечисленных вы-
ше) силовых факторов:
<?л„ “ Q’„ + + <?5'“й) “ + М„/1п -
-Q“n + (^-AVi)//n-
Итак, окончательно имеем следующую формулу для
определения поперечной силы в произвольном сечении
п-го пролета балки:
Qx„=Qexn+(Afn—(10.5)
Напомним, что в формуле (10.3) опорные моменты
приняты положительными, но при решении конкретных
задач они могут получиться и отрицательными, во вся-
ком случае, в формулы (10.4) и (10.5) моменты надо
подставлять с их знаками.
Перейдем теперь к определению опорных реакций.
Допустим, надо иайти опорную реакцию Rn опоры п.
Для этого вырежем из балки опору п двумя сечениями,
расположенными бесконечно близко к ней слева и спра-
ва (рис. 10.9), и действие сил, расположенных на отбро-
шенных левой и правой частях балки, заменим по-
перечными силами в этих сечениях Q*et и Q“p. Искомой
318
реакции >?„ на рис. 10.9 придано положительное направ-
ление, т. е. вверх.
Поперечные силыф’св и будем считать положи-
тельными, т. е. направленными так, что они стремятся
вращать вырезанную часть балки по часовой стрелке
(рис. 10.9). Из условия равновесия 2У=0 следует:
С"3 + Д„- <3,7 = 0.
откуда
Ял = <?7-<?«ев> (10.6)
где /?,, — опорная реакция па опоре к; <?7' — поперечная сила
в сечении, находящемся на бесконечно малом расстоянии справа
от опоры и; СлеВ —то же, находящемся бесконечно близко
слева от опоры п.
Опорные реакции в неразрезных балках определяют
после построения эпюры поперечных сил, с которой и
берут значения Q7 и Q£eo с их знаками.
10.5. Расчет неразрезных балок
10.5.1. Последовательность расчета. Расчет перазрез-
ных балок рекомендуется вести в такой последователь-
ности:
1. Вычертить в масштабе схему заданной балки.
2. Пронумеровать слева направо опоры и обозначить
длины пролетов балки так, как это было сделано в
п. 10.1.
3. Определить степень статической неопределимости
балки по формуле (10.1).
4. Изобразить основную систему, нагруженную за-
данной нагрузкой и неизвестными опорными моментами.
5. Составить систему уравнений трех моментов, для
чего:
а) представить эту систему в общем виде [см. фор-
мулу (10.3)];
б) построить эпюры изгибающих моментов M°i, ЛГ°2,
..., АРЙ, ..., Af°n для всех полученных из основной си-
стемы разрезных балочек от нагрузки, расположенной
в их пролетах;
в) вычислить площади кч, «2, . -., «>*, ., Иц эпюр
Af°i, Л1°2, ..., M°k, ,.М°п и определить абсциссы ах и
319
b2, a2 и b3, ..as, и bk+... on_( и bn центров тяжести
площадей этих эпюр;
г) вычислить правую часть каждого из уравнений,
полученных в п. «а»;
д) составить систему уравнений трех моментов с чис-
ловыми коэффициентами.
6. Решить систему уравнений трех моментов и вы-
полнить алгебраическую проверку решения.
7. Построить линию опорных моментов, т. е. эпюру
изгибающих моментов Л10П, от нагружения разрезных
балок только опорными моментами. При этом положи-
тельные ординаты моментов отложить вниз, а отрица-
тельные — вверх.
8. Построить суммарную эпюру изгибающих момен-
тов, используя формулу (10.4) или графоаналитический
способ суммирования эпюр (см, пример 10.1),
9. Проверить правильность построения эпюры изги-
бающих моментов.
Так как неразрезная балка является статически не-
определимой системой и расчет ее основан на решении
уравнений перемещений, то гарантировать правильность
построения эпюры изгибающих моментов может только
кинематическая проверка, которая применительно к не-
разрезной балке заключается в соблюдении условия
(10.2) Дп=0, где п=1, 2, (г—1), выражающего не-
разрывность упругой оси неразрезной балки, или, что
то же, равенство нулю углов перелома на всех проме-
жуточных ее опорах.
Однако поскольку условие (10.2) было использовано
при выводе уравнения трех моментов, а следовательно,
и при дальнейшем расчете балки, то лучше вместо него
применить другое:Aw =0, где п=1;2; ..., (г—^.выра-
жающее равенство нулю прогибов сечений балки на
всех ее промежуточных опорах. Для п-й опоры, согласно
формуле (9.11), будем иметь:
‘У <ю.7>
В левой части этого равенства перемножаются окон-
чательная эпюра изгибающих моментов М на единичную
эпюру Л1щ, полученную от нагружения основной систе-
мы единичной силой Хп = 1, приложенной в сечении, со-
ответствующем п-й опоре балки по вертикальному на-
правлению.
320
В случае применения универсальной деформационной
проверки (см. п. 9.3.4 и пример 10.1) равенства вида
(10.7) заменяются одним (9.12):
у С „
J EJ ” ’
10. Убедившись в правильности построения эпюры
изгибающих моментов, построить эпюру поперечных сил,
применив формулу (10.5).
11. Проверить правильность построения эпюр по-
перечных сил и изгибающих моментов па основе зави-
4 симостей между их очертаниями (см. 3.3, п. 4, а—ж).
' 12. Вычислить реакции опор балки по формуле (10.6)
и выполнить статическую проверку решения задачи.
Должны обращаться в тождества 0=0 уравнения рав-
новесия 2У=0, Smo=O.
Пример 10.1. Построить эпюры Q и Л1 и определить реакции
опор балки, показанной на рис. 10.10, а.
Решение. 1 и 2. Масштабная схема балки с обозначением опор
2 и длин пролетов показана па рис. 10.10, а.
3. Степень статической непределимости Л=6—3=3 (напоми-
наем, что защемляющая опора эквивалентна трем стержням).
4. Нагруженная система показана на рис. 10.10,6, Слева от
защемляющей опоры 0 введен воображаемый пролет 0, —1 длиною
/_| -> 0, а консоль справа мысленно устранена и действие ее на
опору 3 заменено силой /-'2=20 кН и моментом ЛЦ=—
=—20-2=—40 кН м. Кроме того, будем считать, что момент
=36 кН-м действует в пролете 23 и приложен в сечении, располо-
женном дифференциально близко к опоре 2.
5. Составляем систему уравнений трех моментов:
а) и общем виде:
Л1~1/-1+2Мс(/_1+/1)+М111=—eiw-ta-i/l-i+mibtfh)-,
Alr,/i+2Afi (Z, -|-Z2) -f-A12?2=—6 (wiaj/Z] +co2&2/Z2);
Af)Z2-|-2Af2(Z2-|-Z3)-|-AlsZ3=—6((1)2о2^2+шзЬз/13);
б) строим эпюры изгибающих моментов для балок 01, 12, 23
от заданной (пролетной) нагрузки (рис, 10.10, в).
Балка 01 (рис. 10.10,6).
Реакции опор определяются из уравнений равновесия Smi = 0 и
; 1гпо=0; решая их, находим соответственно:
f Я°01=18кН; /?°10=36 кН.
< Эпюра 41%! показана на рис. 10.10, в.
Балка 12 (рис. 10.10,6).
Реакции опор определяются из уравнений Sm2=0 и 2mi=0; решая
их, получим соответственно:
7?°12=32 кН; /?|>21 = 16 кН.
11 Шишман Б. Л.
321
РИС. 10,10
322
. В пределах участка 11 при 0^х^4 имеем:
; ЛРх=32л—12*72=32*—Си=.
г Абсциссу ха сечения, в котором изгибающий момент от заданной иа-
: грузки максимален, найдем из уравнения = О, или
: 32— 12*с=0 и *0=8/3 = 2,67 м;
г- при х=0 №,=0;
при *=х0=2,67 м А1сп1 ах —32-2,67—6-2,67г=42.66 кП-м,
: при х=4 м =32-4—6-42=32 кН-м.
' Дальнейшее построение эпюры .4% не вызывает затруднений; окон-
i нательный ее вид показан на рис. 10.10, е.
: Балка 23
t Пользуясь принципом независимости действия сил, вместо
“ эпюры Afyg построим эпюры Л1^‘* и Л1^’' от действия каждого
из моментов ^ = 36 кН-м и = 48 кН-м в отдельности.
: Эпюра Л1^з[)
Реакции опор = 36/6 = 6 кН. Эпюра показана
на рис. 10. 10, в.
Эпюра
; Реакции опор = 48/6 = 8 кН. Эпюра показана
s на рис. 10. 10, в'-
! в) вычисляем площади ш построенных эпюр Л1С;. ;+1 и соответ-
; ствующие им расстояния а и b (рис. 10.10, е). При этом площадь
i эпюры А4°1г разбиваем на площади равнобедренного треугольни-
! ка с высотой 32 кН-м и ы, параболического сегмента с основанием
I (проекцией хорды на горизонталь) 4 м и стрелой, равной 12-4s/8 =
. =24 кН-м, а площадь эпюры /^^рассматриваем как две площади:
<а3 < 0 и <в3 > 0.
В результате получим:
со, = 0,5-6.72 = 216 кН-м2; а, = (0 + 4 + 6) = 3,33 м;
i, =2,67 м;
«5 = 0,5.6-32 = 96 кН-м:; а.1 = 3,33 м; й = 2,67 м;
«2 =(2/3)-4-24-64 кН -м=; а2 = 2 м; ^Мм;
= 0,5-6-36 = 108 кН-м2; 03 =-g--6 = 2 м; —4 м;
ш" - —0,5-3-24 -----36 кН-№; а" = 3 4- Д-З -4 м; = 2 м;
=0,5-3-24 = 36 кН-м2; -|-.3 - 2 м; &^-4м,
XI* 323
г) вычисляем правую часть П каждого из уравнений
П1==—= —6(0+216-2,67/6) =—576,72 кН-м’,
П, = — 6 [и, a tilt 4- (<i>2 4- /А)] =
[216-3,33 /96-2,67 64-4X1 .
~ —6 -----ё---+ (----6---+ ——) I - —1231.60 кН-мг,
Г t е>2 а2 Ш2 а1 / из °*з ^3
Пз-6[| —+ 6 — +
«зХЛ] Г/ 96-3,33 64-2 ч
+ —Ц—) J = “6|1 6 + —6^ / +
( 108-4 36-2 36-4
+ (~Г- __
= — 951,68 кН-м5;
д) подставляя числовые значения А, 12, Ц, П], П2, П3 в уравне-
ния трех моментов, и. 5, а) и, учитывая, что /_(=0; ш-1 = 0; а №=
=—40 кН-м, получим:
12Л4О 4-6ЛА=—-576,72;
6Л1о4-24Л1,4- 6Л12=— 1231,60;
6ЛА+24/И8=—711,68.
6. Решая эту систему, находим:
Л1о=—28,36 кН-и; ЛА=—39,28 кН-м; Ms——19,84 кН-м.
Проверка:
12 (—28,36) 4-6 (—39,28) =—576;
6 (—28,36) +24 (—39,28)+6(—19,84) =—1231,92;
6 (—39,28) +24 (—19,84) =—711,84.
Погрешности:
А = (0,72/576,72) 100 % = 0,12% 1
А =(0,32/1231,60) 100 % = 0,04 % 1<1%
Р, = (0,16/711,68) 100% - 0,02 % J
Погрешности в допустимых пределах. Следовательно, значения
опорных моментов вычислены правильно.
7. Строим линию опорных моментов (рис. 10.10,г).
8. Строим суммарную эпюру М изгибающих моментов графо-
аналитическим способом — алгебраическим суммированием ординат
эпюр Л1% ;+1 и линии опорных моментов Л1о0 в характерных сече-
ниях балки. Ординаты линки опорных моментов Afon, соответствую-
щие ординатам эпюр (рис. 10.10, а), вычислены геометриче-
ским способом из подобия треугольников и показаны на
324
рис. 10.10, г. Так, например, ордината, соответствующая максималь-
ному изгибающему моменту в пролете 01 равна:
„ 39,28 — 28,36
28,36 4--------g—----.4 = 28,36 4- 7,28 = 35,64 кН-м.
Ордината, соответствующая сечению 1' в пролете 12, равна:
19,84+ [ (39,28— 19,84) /6] 2 = 19,84+6,48=26,32 кН - м,
таким же образом вычисляются и другие ординаты эпюры М.
Все вычисления Ординат окончательной эпюры Л4 представим
в табл. 10.1, но предварительно найдем max^Miz—максимальный
изгибающий момент в пролете 12. По формуле (10.4), получим:
Л1л2 = + Л1, + [(Л12 — Afj).'/,] л = 32л — 12 л2/2 +
+ ( — 39,28) + [ — 19,81 — ( —39,28)]/6] х = 32л — 6л1 — 39,28 +
+ 3,24 л = — 6л2 4- 35,24л — 39,28;
(dM^ /dx) , — 12 л', 4 35,24 ~ 0 и
5 JT —X(j
х'0=35,24/12 = 2,94 м.
Следовательно,
та ХЛ1 iS=—6 2,942+35,24 2,94- 39,28=—51,86+103,60—39,28 =
= 12,46 кН-м.
При л'и=2,94 м поперечная сила в сечении обратится в ноль.
Снова введем консоль и в пределах ее строим эпюру Л1 по харак-
терным сечениям 3 и 3‘. По данным табл. 10.1 построена оконча-
тельная эпюра Л1 (рис. 10.10,6).
9. Проверим правильность построения эпюры М. Применим
универсальную деформационную проверку, выражаемую равенством
(9.12).
Таблица 10.1
Характерные сечения балки (рис. 10.10.а) Ординаты эпюр, кН*м
ЛР (рнс. 10.10,*?,*?') 'МО11 (рис. 10.10,г) Л1 (рис. 10.10/)
0 0,0 —28.36 —28,36
О' + 72 —35,64 + 36,36
1 0.0 —39,28 —39.28
х'о=2,94 м +42,22 —29,76 +12,46
Г —26.32 + 5,68
2 пев 0,0 —19,84 — 19,84
+ 36 — 19,84 + 16,16
2'(лев) + 42 —29,92 +12,08
2'(п₽) -6 —29,92 —35,92
ев 6 —40 —40
3"Р 0 0.0 0,0
325
На рис, 10.10, е показана основная система в виде консольной
балки 03, нагруженная силами A’i = l, Xj=l, Х3==1. Выбор такой
основной системы, принципиально отличающейся от принятой для
расчета (рис. 10.10,б), вполне допустим и даже рекомендуется (см.
п. 9.3.4, Б). На рис. 10.10,ж показана контрольная эпюра Л115.
Теперь, представив эпюру М1г (рис. 10.10, д) как сочетание кри-
волинейной части ее, расчлененной на перекрученную трапецию (см.
п. 8.5) и параболический сегмент (см. пунктирную прямую на
рис. 10.10, <Э), с другой перекрученной трапецией, боковые стороны
которой 5,68 и 19,84, а эпюры Л101 и Л<и соответственно как две
перекрученные и две обычные трапеции, применим условие (9.12)
и формулу трапеций (8.17); в результате получим:
V1 С MMIS dx з
2i J ----£7----= ^-(-2-3-35,92 - 40-3) +
3 2
-r g-(2-16,16-6 + 2-12,08-3 + 16,16-3 4-12,086)+ -g (2-5,68-10 - -
— 2-19,84-6 + 5,68-6—19,81-10) +-g-(—2-39,28-18 +
2
+ 2-5,68-10 — 39,28-10 + 5,68-18) +-g- 24-4-14 +
2
+ -g- (2-36,36-24 — 2-39,28-18 + 36,36-18 — 39,28-21) +
4
+-g-(-2-28,36-36 + 2-36,36-24 — 28,36-24 + 36,36-36) -
----167,76 + 193,68 — 96,27—1061,11 +896+ 14,32 + 221,12 =
- 1325,12—1325,44= —0,32.
Невязка |p] = (0,32/1325,12) 100 % =0,02 Vo d %, т. e. в допусти-
мых пределах. Следовательно, можно считать, что окончательная
эпюра М построена правильно.
10. Строим эпюру поперечных сил по формуле (10.5), руковод-
ствуясь схемами однопролетных балочек, приведенными на
рис. 10.10,6. Предварительно вычислим второй (добавочный) член
формулы (10.5), который обозначим буквой Д:
Д1 = (А1,—Л1«) //j = [—39,28— (—28,36) | /6=—1,82 кН;
Д2= (Rlj—Л11)//2=[—19,84—(—39,28) ]/6=+3,24 кН;
Дз = (М3—М2) /13 = [—40—(—19,84) ] /6=-3,36 кН.
Вычисления ординат эпюры Q представлены в табл. 10.2.
По данным табл. 10.2 построена окончательная эпюра попереч-
ных сил Q (рис. 10.10,з).
11. Сопоставляя очертания эпюр Q и М, приходим к заключе-
нию, что они построены правильно (см. гл. 3).
12. Определяем реакции опор балки по формуле (10.6):
Л„=
Ro = 16,18 кН; R, = 35,24— (—37,82) =73,06 кН;
Rs=—1,36— (—12,76) = 11,40 кН; R3=20—(—1,36) =21,36 кН.
326
Табл и ц а 10.2
Характерные сечения балки (рис, 10,10,6) Орда на? и эпюры Q, кН
0 (рис, 10.10,6} Ол-п
0 + 18 — 1,82 + 16,18
+ 18 — 1,82 -Ь 16, J 8
18—54 = —36 —1,82 —37,82
—36 —1,82 —37,82
уир + 32 + 3,24 +35,24
x'q=2,94 м 32-12-2,94 = + 3,24 0
= —3,2-1
Г 32-12-4 = —16 + 3,24 —12,76
2'п —16 + 3,24 — 12,76
2П» +2 —3,36 — 1,36
3я" +2 —3.36 —1,36
3' + 20 0 +20
Зпр + 20 0 + 20
Статическая проверка правильности решения задачи:
2У=0; (—54—12-4—20) +(16,18+73,06+11,40+21,36) =
=—122+122 =0,
Z т3=0; (—28,36—54 -14—48-10+36—48+20 • 2) +
+ (16,18 • 18+73,06 12+11,40 6) =—1236,36+1236,36=0.
Все проверки удовлетворяются, что свидетельствует о правиль-
ном решении задачи.
10.6. Основы расчета неразрезных балок
на совместное действие постоянной
и временной нагрузок
10.6.1. Невыгодные нагружения неразрезной балки.
Балка может быть одновременно нагружена постоянной
q и временной р нагрузками1 (рис. 10.11,а). В отличие
от постоянной, временная нагрузка в процессе эксплуа-
тации может занимать по длине балки различные поло-
жения, от которых зависят значения внутренних сил,
возникающих в сечениях балки.
1 В числе постоянных и временных нагрузок, действующих на
балку, могут быть сосредоточенные силы и моменты, а также дру-
гие силовые воздействия.
327
рис. кт
То положение временной нагрузки, при котором она
вызывает в определенных сечениях балки максимальные
или минимальные в алгебраическом смысле изгибаю-
щие моменты (или поперечные силы), называется невы-
годным, а соответствующее ему нагружение балки —
невыгодным нагружением.
328
На рис. 10.11 показана схема неразрезной балки
(рис. 10.11, а) и очертание соответствующих ей эпюр
изгибающих моментов от нагружения всей балки по-
стоянной нагрузкой (рис. 10.11,6), а также каждого ее
пролета в отдельности временной нагрузкой (рис.
10.11, в—ж). Все эти эпюры построены со стороны рас-
тянутого волокна, причем ординаты, отложенные вниз
от базовой линии, считаются положительными, а
вверх — отрицательными.
Можно доказать справедливость следующих законо-
мерностей, определяющих невыгодные нагружения не-
разрезной балки временной нагрузкой 1:
1. Максимальные изгибающие моменты в сечениях
данного пролета возникаю г при нагружении его и всех
остальных пролетов через один.
Так, в сечении щ первого пролета балки, показан-
ной на рис. 10.11, а, максимальный изгибающий момент
от временной нагрузки можно получить, использовав
схему невыгодного нагружения по рис. 10.12, а и эпюры
изгибающих моментов от нагружения временной на-
грузкой в отдельности первого, третьего и пятого про-
летов балки (рис. 10.11,6,д,ж). Применив принцип
независимости действия сил, получим:
тахЛ1^ = Т
где —максимальный изгибающий момент в сечении а-
первого пролета, возникающий от временной нагрузки, занимаю-
щей невыгодное положение: шахМ^ —- положительный изги-
бающий момент в сечении первого пролета от нагружения его
временной нагрузкой; —то же, от нагружения времен,
ной нагрузкой третьего пролета; —-то же, пятого про-
лета.
На рис. 10,12,6 приведена схема невыгодного нагру-
жения балки, от которого возникают максимальные из-
гибающие моменты в сечениях второго и четвертого
пролетов.
2. Минимальные изгибающие моменты в сечениях
данного пролета балки возникают при нагружении про-
лета, находящегося рядом с данным, и всех остальных
пролетов через один от нагруженного (рис. 10.12, а, б).
’ Доказательство приводимых закономерностей основано на ис-
следовании линий влияния изгибающих моментов в сечениях, взя-
тых в пролетах и над опорами неразрезпой балки [9J.
329
Так, в том же сечений ах первого пролета балки, по-
казанной на рис. 10.11,а, минимальный изгибающий
момент от временной нагрузки можно получить, исполь-
зовав схему невыгодного нагружения по рис. 10.12,6
и эпюры изгибающих моментов, от нагружения времен-
ной нагрузкой в отдельности второго и четвертого про-
летов балки (рис, 10,11, г, е); при этом будем иметь:
3. Минимальные изгибающие моменты в опорных се-
чениях балки возникают при нагружении обоих проле-
тов, примыкающих к опоре, и всех остальных пролетов
через один.
На рис, 10.12, в, г, д, е приведены схемы невыгодных
нагружений балки, от которых возникают Минимальные
изгибающие моменты в опорных сечениях 1, 2, 3, 4. На
основании этих схем и эпюр изгибающих моментов но
рис. 10.11,6—ж можно определить минимальный из-
гибающий момент в любом из указанных опорном сече»
нии балки.
330
Например, из эпюр по рис, 10.11, в, д, е находим:
lninAi^^Al^ + X? + X?-
4. Наибольшая по абсолютной величине поперечная
сила в опорном сечении балки или реакция опоры воз-
никают при нагружении балки, указанном в п. 3.
Из равенств, выражающих значения n,ax/WO’’’, ге1Г1ЛЙ₽) и
min^a следует: если для данной балки построены эпюры
изгибающих моментов от нагружения каждого ее про-
лета временной нагрузкой, то всегда можно определить
экстремальные значения изгибающих моментов в инте-
ресующем нас сечении, используя при этом названные
эпюры и схемы невыгодных нагружений балки, приве-
денные на рис. 10.12.
10.6.2. Расчетные изгибающие моменты. При кон-
струировании неразрезных балок необходимо учитывать
все отдельные возможные в эксплуатации случаи невы-
годных нагружений проектируемой балки. Расчет не-
разрезной балки на совместное действие постоянной
и временной нагрузок начинается с определения опор-
ных моментов и построения эпюр изгибающих моментов,
от нагружения балки постоянной нагрузкой и каждого
ее пролета в отдельности временной нагрузкой. На ос-
нове этих эпюр и схем невыгодных нагружений балки
временной нагрузкой (рис. 10.12) вычисляются макси-
мальные и минимальные изгибающие моменты в раз-
личных сечениях балки, учитывающие одновременное
действие на балку постоянной и временной нагрузок;
эти изгибающие моменты называются расчетными и ис-
пользуются для построения огибающей эпюры изгибаю-
щих моментов (см. пример 10.2).
Пусть, например, требуется найти расчетные изги-
бающие моменты в сечении «1 первого пролета нераз-
резной балки (рис. 10.11,ц). Для определения гаахМн
предварительно находим по эпюре, показанной на
рис. 10.11,6, изгибающий момент в сечении а\ от на-
гружения балки постоянной нагрузкой:
Чтобы получить максимальный изгибающий момент
в сечении от временной нагрузки, надо нагрузить пер-
вый, третий и пятый пролеты балки. Теперь, применив
331
принцип независимости действия сил, по эпюрам
10.11, в, д, ж найдем:
maX? = Af<₽> + Л1$ + + уХз + Х&
и, следовательно,
шахЛ1в) = Л1£> + maxAf™ = (у^>) + (>*£? + У1<$ + УЙ )•
Для определения ,1|1пЛ10] сначала выписываем 7W(’> =
= + у(£}- Чтобы получить минимальный изгибающий
момент в сечении щ от временной нагрузки, надо нагру-
зить второй и четвертый пролеты балки (рис. 10.12,6).
По эпюрам 10.11,6, г, е находим:
min А!в1 = Л«£’ + = (у£> ) + (-у<$ - у£’4)
Допустим далее, что нужно определить расчетные
изгибающие моменты в сечении 3—3, соответствующем
третьей опоре. Для этого предварительно по эпюре, по-
казанной на рис. 10.11,6, находим изгибающий момент
в сечении 3—3 от нагружения балки постоянной на-
грузкой: .
Чтобы получить максимальный и минимальный изги-
бающие моменты в сечении 3—3 от временной нагруз-
ки. надо нагрузить ею соответствующие пролеты балки:
в первом случае — второй и пятый (рис. 10.11,е,ж), во
втором — первый, третий и четвертый (рис. 10.11, в, д, е).
В результате получим:
«пах<> = + уИ’; тиХ* -у'&}
и, следовательно, расчетные изгибающие моменты:
„,ах.Н3 = 4 maxMj« = (-уН + (у£’ + >$’);
Ю1П,И5 = Л1<«» 4 minAl^ = (- у<”) 4- (- у^-у£} - у^’.
Сопоставив значения maxAIai и maxMis; minMD1 и
minAla г , получим следующие правила:
1. Расчетный максимальный изгибающий момент
в данном сечении балки равен алгебраической сумме ор-
динаты эпюры изгибающих моментов от постоянной на-
грузки, взятой в данном сечении, и соответствующих ей
положительных ординат эпюр изгибающих моментов от
временной нагрузки.
2. Расчетный минимальный изгибающий момент
в данном сечении балки равен алгебраической сумме
332
ординаты эпюры изгибающих моментов от постоянной
нагрузки, взятой в данном сечении, и соответствующих
ей отрицательных ординат эпюр изгибающих моментов
от временной нагрузки.
Вычислив расчетные изгибающие моменты П1ВХЛ1 и
minA'f в ряде сечений балки, откладывают положитель-
ные значения их вниз от базовой линии, а отрицатель-
ные— вверх от нее.
На рис. 10.11,з точки условно обозначают вершины
ординат maxAl и miiiAf в сечениях балки (рис. 10.11, а),
взятых посередине каждого пролета и в местах распо-
ложения опор !.
Соединив вершины ординат, соответствующих расчет-
ным .максимальным изгибающим моментам, получим
кривую abcdefghlkl, представляющую собой эпюру рас-
четных максимальных изгибающих моментов; по анало-
гии построена кривая ab'c'd'e'f'g'h'i'k'l—эпюра расчет-
ных минимальных изгибающих моментов. Эпюра
(или minAl) изображает графически закон изменения
расчетных максимальных (или расчетных минималь-
ных) моментов, возникающих в сечениях балки по всей
ее длине. Исключив из эпюр наименьшие положитель-
ные ординаты (например, ординаты на участке did'd2
и аналогичные нм) и наибольшие (в алгебраическом
смысле) отрицательные ординаты (например, ординаты
на участке щсс2 и аналогичные им), получим на рис.
10.11,з) график, очерченный жирной линией. Этот гра-
фик изображает так называемую огибающую эпюру
изгибающих моментов, т. е. эпюру, ординаты которой
выражают собой расчетные максимальные и минималь-
ные изгибающие моменты в сечениях данной балки.
Окончательный расчет балки сводится к проверке
прочности ее пролетов по нормальным напряжениям или
к подбору их сечений и должен выполняться на основе
огибающей эпюры изгибающих моментов. Балка, рас-
считанная таким образом, будет прочной при любом со-
четании данной постоянной нагрузки с временной, спо-
собной занимать любое возможное в эксплуатации невы-
годное положение. Все изложенное поясним примером.
Пример 10.2. Для балки, показанной па рис. 10.13, о, по-
строить огибающую эпюру изгибающих моментов. Постоянная рав-
1 Вообще говоря, число сечений берут в зависимости от длины
пролета; во всяком случае сечений должно быть столько, сколько
потребуется, чтобы составить правильное представление об очер-
тании эпюры.
333
Р - S7,E xHftt
834
номерпо распределенная нагрузка <7=20 кН/м расположена по всей
длине балки, а временная, также равномерно распределенная на-
грузка р=37,5 кН/м может нагружать всю балку целиком или же
некоторые из ее пролетов.
Решение. Применив уравнения трех моментов, найдем опорные
моменты от нагружения балки постоянной нагрузкой и каждого ее
пролета в отдельности — временной1. После этого построим эпюры
изгибающих моментов Л11®1, (рис. 10.13,6,6,
г, й). Дальнейший расчет сведен в табл. 10.3.
Огибающая эпюра моментов показана на рис. 10.13, е. Сделаем
некоторые пояснения:
1. Значения изгибающих моментов, приведенные в горизонталь-
ных строках 0, 1, 2, 3, взяты из эпюр изгибающих моментов, по-
казанных соответственно на рис. 10.13, б, е, г, й.
2. В горизонтальных строках 1—7 помещены схемы всех воз-
можных в эксплуатации невыгодных нагружений данной балки
временной нагрузкой (см. условие задачи) и соответствующие им
величины максимальных и минимальных изгибающих моментов, воз-
никающих в намеченных сечениях балки (рис. 10.13, а).
Приведем примеры вычисления этих моментов;
чтобы получить значение максимального изгибающего момента
в сечении Сз третьего пролета балки от нагружения ее временной
нагрузкой по схеме 5 (см. табл. 10.3), надо взять из вертикальной
графы t>3 числа, помещенные в горизонтальных строках 1 и 3, и их
сложить: при этом найдем
Л1$ + = 5 + 55 = 60 кН-и.
Полученное значение щах-И =60 кН-м записываем в горизон-
тальной строке 5 в месте пересечения ее с вертикальной графой Ь3;
чтобы получить значение минимального изгибающего момента
в опорном сеечнпи 1 от нагружения балки временной нагрузкой по
схеме 6, надо взять из вертикальной графы / числа, помещенные в
горизонтальных строках 1 и 2, и их сложить; при этом найдем:
= Л!1?’ + - ( — 40) -И —30) = —70 кН-м.
Полученное значение записываем в горизоптальвой строке
6 в месте пересечения ее с вертикальной графой 1.
Аналогично определяются и записываются в табл. 10.3 и все
другие значения максимальных и минимальных изгибающих момен-
тов от нагружения балки временной нагрузкой.
3. Расчетные изгибающие моменты ШЙХ;И' и Ш|цМ' приведены
в горизонтальных строках 8 и 9 и определены по правилам, ранее
изложенным в этом параграфе. Например:
= Л!*,’’ + тахЛТ^> - 2-1 + 60 = 84 кН-м;
minX =* X” + minXP) = ( ”32) + ( -70) = - 102 кН-м,
1 Составление и решение уравнений трех моментов здесь не
приводятся. Предлагаем сделать это самостоятельно и убедиться
в правильности полученных данных, сопоставив их с данными, при-
веденными на эпюрах изгибающих моментов (рис. 10.13, б, в, г, <5),
335
Данные для пи с троения огибающей
Характер нагрузки Схема нагружения балки (строки 0—7} Значения изгибаю максимальных и ми точных сечениях про
про
Опора 0 в]
О Постоянная нагрузка q = 20 кН/м 0 22 24
5^ -1 зА 2 <3
1 Невыгодные нагружения балки временной нагрузкой, р=37,5кН/м 0 46,2 55,0
Аг 1 Аг 2 Аг
2 0 —7,5 -15
Д тД
3 Ь ,А Д> 0 2,5 5,0
4 0 41,2 45
iXx 2 А зА
0 48,7 60,0
336
Таблица 10.3
ап юры изгибающих моментов
? гцех моментов от постоянной нагрузки (горизонтальная строка 0),
I нимальных от временной нагрузки (строки i—7) в опорных и пром ежу*
Слетов балки (рис. 10*13, а), кНм
пролет 3
пролет 2
f лет 1
Опора 1 Сз ь, ^Я Опора 2 пг ь. С5 Опора 5
6 -32 0 8 0 —32 6 24 22 0
26,2 —40 —27,5 —15 —2,5 10 7,5 5,0 2,5 0
-22,5 -30 26,3 45 26,3 —30 —22,5 —15 —7,5 0
7,5 10,0 —2,5 —15 27,5 —40 26,2 55,0 46,2 0
11,2 —60 —3,7 15 —3,7 —60 11,2 45 41,2 0
33,7 —30 -30 -30 -30 —30 33,7 60,0 48,7 0
337
Данные для веетроений огибающей
Характер нагрузки Схема нагружения балки (строки 0—7) Значения изгиба к; максимальных и ми точных сечениях пр-.:
Про
Опора fl
6 Невыгодные нагружения балки временной нагрузкой, р == 37,5 кН /,ч 0 38,7 40,0
7 0 —5,0 3,5
8 Расчетные изгибающие моменты Максимальный щах-^ 0 70,7 84,0
9 Минимальный 0 14.5 9
10 11 Расчетные изгибающие моменты огибающей эпюры изги- бающих момеи тон Максимальный тахЛ4 0 70,7 84,0
Минимальный т,пЛ1 0
4. Расчетные изгибающие моменты щатМ и minAl огибающей
эпюры изгибающих моментов, помещенные в горизонтальных стро-
ках 10 и И табл. 10.3, получены путем исключения из горизонталь-
ных строк 8 и 9 наименьших положительных и наименьших по аб-
солютной величине отрицательных изгибающих моментов. Если рас-
четные изгибающие моменты получаются разных знаков, то их вво-
дят в горизонтальные строки 10 и 11; если же одиваковых знаков,
то наибольший по абсолютной величине изгибающий момент запи-
сывают в одну из этих строк, а другая — ие заполняется.
338
Продолжение табл. 10.3
В заключение укажем на то, что в справочной ли*
тературе помещены различного рода таблицы для рас-
чета неразрезных балок. В расчетной практике широкое
.распространение получили таблицы Менша и Винклера.
Применение таблицы Менша особенно удобно, если
;рет необходимости в построении эпюр Q и М и можно
-ограничиться определением поперечных сил и изгибаю*
339
щих моментов лишь в некоторых заданных сечениях
балки.
По таблице Винклера можно вычислить расчетные
максимальные и минимальные изгибающие моменты
и поперечные силы в пролетных и опорных сечениях
балки, а поэтому ею целесообразно пользоваться при
построении огибающих эпюр поперечных сил и изгибаю-
щих моментов.
Подробное описание таблиц Менша и Винклера,
а также примеры расчета неразрезных балок по этим
таблицам приводятся в § 25 работы [7].
Глава 11. Подпорные стены
11.1. Общие сведения
Подпорными стенами называют сооружения, предна-
значенные для удержания грунта или какого-либо дру-
гого сыпучего тела от обрушения, а также для восприя-
тия напора воды в гидротехнических сооружениях. Сы-
пучим телом называется совокупность мелких по срав-
нению с общим объемом тела твердых частиц более или
менее округлой формы.
Само назначение подпорных стен указывает на об-
ласть их широкого применения — это наружные стены
подвалов (рис. 11.1, а), береговые устои мостов
(рис. 11.1,6), набережные рек (рис. 11.1, в), огражде-
ние горных дорог (рис. 11.1,а), плотины (рис. 11.1,6),
ограждение стенок котлованов (рис. 11.1, е) и другие
инженерные сооружения. Подпорные стены подразде-
ляются на массивные (рис. 11.2, а), полумассивные
(рис. 11.2,6), тонкоэлементиые (рис. 11.2, е) и шпунто-
вые (рис. 11.2,а). Под влиянием воздействия грунта,
оказываемого на подпорную стену, она может сдвинуть-
ся (рис. 11.3,а), опрокинуться (рис, 11.3,6) или разру-
шиться (рис. 11.3, в).
Устойчивость массивных стен обеспечивается в ос-
новном их собственным весом, полумассивных — как
собственным весом, так и весом грунта, лежащего на
фундаментной плите, тонкоэлементиых — в основном за
счет веса грунта, расположенного на фундаментной
плите, и лишь в незначительной мере за счет собствен-
ного веса; устойчивость шпунтовых стен достигается
340
защемлением шпунта в грунте, а часто дополнительно
и заанкерованием (собственный вес и реакция по ост-
рию шпунта ввиду их малости в расчете не учиты-
ваются) .
Для расчета стены необходимо определить воздей-
ствие сыпучего тела на ограждающую его поверхность.
Эта задача является очень сложной и до настоящего
341
» сид. Hi
рис. из
времени не имеет точного решения. Дело в том, что на
величину указанного воздействия оказывают влияние
физико-механические свойства сыпучего тела, которые
зависят от размеров и формы частиц тела, их твердо-
сти и шероховатости, от сил трения, действующих меж-
ду частицами, которые в свою очередь зависят от сте-
пени влажности сыпучего тела и ряда других факторов,
влияние которых не поддается точному учету. По этой
причине при расчете подпорных стен приходится прибе-
гать к различного рода упрощениям.
Одним из наиболее существенных упрощений яв-
ляется принятие сыпучего тела за идеально сыпучее —
это такое тело, между частицами которого отсутствуют
силы сцепления.
Идеально сыпучее тело по своим физическим свойст-
вам занимает промежуточное положение между твер-
дым и жидким телами. От первого оно отличается тем,
что не оказывает противодействия отделению частиц
друг от друга, а от второго — тем, что между его части-
цами существует значительное трение.
Грунты, с которыми приходится иметь дело в строи-
тельной практике (как и большинство других сыпучих
материалов), сильно отличаются от идеально сыпучего
тела, так как помимо сил трения между частицами
грунта действуют силы сцепления. Однако несмотря на
это отличие, грунты в практических расчетах рассмат-
риваются как идеально сыпучие тела с учетом соответ-
342
PMC. 11А
ствующих физических характеристик* 1. Приведем те из
них, которые будут использованы в дальнейших рас-
четах.
1. Объемный вес грунта угр — вес единицы объема
грунта, включая вес воды в ее порах, Н/м3 или кН/м3.
2. Пористость т] — отношение объема пустоты в об-
разце грунта ко всему объему образца. Выражается
в отвлеченных числах или в процентах.
3. Объемный вес грунта в воде уВЭЕ — вес единицы
объема грунта во взвешенном состоянии, Н/м3 или
кН/м3. При погружении грунта в воду потеря в весе
будет равна весу вытесненной воды. Так как вода вы-
тесняется только плотной частью грунта (пустоты же
заполняются водой), то потеря в весе единицы объема
грунта составит ув(1—л), где ув —объемный вес воды,
Н/м3 или кН/м3. Таким образом,
Увзв = Yrp*—Ув ( 1-Ц) . (11.1)
4. Угол естественного откоса <р-— наибольший угол,
который может быть образован свободным откосом с го-
ризонтом в состоянии равновесия (рис. 11.4). Этот угол
является и углом трения грунта по поверхности этого
же грунта. Коэффициент трения равен тангенсу угла
естественного откоса: f—tg<р.
5. Угол внутреннего трения р — угол трения между
частицами внутри массы грунта. Для расчетов его надо
принимать, а нс угол ф. Однако вследствие трудности
его определения, часто принимают р=ф, хотя это
не совсем точно.
6. Угол фо трения грунта о подпорную стену. Этот
угол зависит от шероховатости поверхности соприкаса-
ния стены с грунтом, степени влажности стены и харак-
. тера прилегающего к ней грунта. Угол принимают
равным нулю (это идет в запас устойчивости и прочно-
( Сти), когда задняя грань стены весьма гладкая или по-
стоянно смачивается водой; если грань стены относи-
| 1 В дальнейшем термин «идеально сыпучее тело» везде заме-
i вен словом «грунт».
343
тельно гладкая, то значение <р0 считают меняющимся
в пределах от 0,5р до 0,75р; при весьма шероховатой
грани считают, что <ро—Р, так как в данном случае
к стене прилипает тонкий слой грунта и скольжение
надавливающей на стену части грунта происходит по
этому слою.
В табл. 11.1 помещены ориентировочные значения
объемных весов и углов внутреннего трения некоторых
видов грунтов.
Таблица 11.1
Грунт Объемный вес Тгр» Угол внутрен- него трепня Р°
Растительная земля сухая То же, влажная » мокрая Песок сухой » влажный » мокрый Глина и суглинок сухие То же, мокрые Гравелистый грунт сухой Галька Каменная наброска 15—17 17—18 18 15—17 17—18 20 16—17 19 18-18,5 18 20 40—45 35 25—40 30—35 40 25 40—45 20—25 40—45 30 45
11.2. Понятие о теории предельного равновесия.
Активное давление грунта и предпосылки
к его определению
Существуют различные теории для определения воз-
действия грунта на подпорную стену. Наиболее прос-
той из них является предложенная в 1776 г. Кулоном
теория, сущность которой заключается в определении
такого воздействия грунта на подпорную стену, при ко-
тором она и удерживаемый ею грунт приходят в со-
стояние предельного равновесия *. Эта теория Кулона,
названная поэтому теорией предельного равновесия, ос-
нована на введенных в нее следующих допущениях:
1 Равновесие, при котором сдвигающие подпорную стену силы
равны силам сопротивлении ее движению.
344
1. Грунт рассматривается как однородная сплошная
среда, способная воспринимать лишь сдвигающие и сжи-
мающие силы.
2. С наступлением предельного равновесия подпор-
ная стена под действием грунта незначительно смеща-
ется (рис. 11.5, о) и одновременно со смещением стены
часть грунта начинает сползать по некоторой поверх-
ности, называемой поверхностью обрушения или поверх-
ностью скольжения. Эту поверхность для упрощения
расчета принимают за плоскость (на рис. 11.5, а она по-
казана сплошной линией). Часть грунта, заключенная
в объеме, образованном задней поверхностью подпор-
ной стены и плоскостью обрушения, называют призмой
обрушения (скольжения), угол 6 между следом плоско-
сти обрушения и горизонтальной прямой — углом обру-
шения, а давление грунта на стену £Ър, направленное
в сторону смещения ее,— активным давлением.
3. Грунт в объеме призмы обрушения находится в со-
стоянии пределвного равновесия, а призма обрушепия
представляет собой твердое тело—клин, который ока-
зывает давление на грань стены АВ и плоскость спол-
зания ВС; это допущение позволяет заменить действую-
щие на призму обрушепия объемные и поверхностные
силы их равнодействующими Gp, £^р, R'rp, Р и приме-
нить к ней уравнения равновесия статики.
4. Принимают, что стена имеет неограниченную дли-
ну, в плане является прямолинейной и что все прочие
условия постоянны по всей длине стены. Такие допу-
щения позволяют рассчитывать подпорную стену как
плоскую систему. При этом в расчет вводят участок
стены длиной 1 м и к нему приводят нагрузки, дей-
ствующие на стену и на поверхность поддерживаемого
ею грунта.
Выведем формулу, выражающую, зависимость меж-
ду активным давлением Еор и соответствующим ему
углом обрушения 0. На призму обрушения АВС (рис.
11.5, а) действуют объемные и поверхностные силы, ко-
торые заменены их равнодействующими, а именно;
силой Gp=G-|-P (где G — вес грунта в объеме приз-
мы обрушения; Р — равнодействующая распределенной
нагрузки, расположенной на призме обрушения), силой
Rrv=R'rp—реакцией неподвижной зоны грунта на
призму обрушения и силой Rct—Etj,— реакцией задней
345
грани АВ подпорной стены, равной активному давлению
грунта, направленному в сторону, противоположную
силе ^ст.
Призма обрушения под действием силы Gp стремит-
ся сдвинуться; при этом угол 0 должен быть больше
угла внутреннего трения р, ибо в противном случае
призма обрушения вообще не смогла бы сдвинуться
вследствие наличия сил трения покоя.
При скольжении призмы обрушения вниз силы тре-
ния, действующие по ее плоскостям АВ и ВС, будут
направлены вверх, и, следовательно, сила Рст отклонит-
ся от нормали пАВ на угол фо против часовой стрелки,
а сила — от нормали Пвс на угол р по часовой
стрелке. Обе эти силы действуют в сторону, противопо-
ложную движению призмы обрушения, препятствуя
смещению ее вниз.
Так как призма обрушения находится в состоянии
предельного равновесия под действием трех сил
= Е ар, Ср и Rrp, то линии действия этих сил должны
пересекаться в одной точке (рис, 11.5,а), а силовой тре-
угольник (рис. 11.5,6) должен быть замкнутым. По-
скольку Rci= ЕЪр, то определив реакцию стены RCT на
призму обрушения, тем самым найдем и активное дав-
ление Еер на эту же стену. Из силового треугольника
(рис. 11.5,6), согласно теореме синусов, получим:
/?ст/бР=Б1п (0-p)/sin [180°—ч|р—(0—р)},
346
откуда после замены /? СТ на Ецр и sin [180°—ф—(0—р)]
на sin [ip—(0—р)] будем иметь:
Евр “ Gp sin (6 — р)/sin [ф — (в — р>1, (11,2)
где ф = 90°—<рс—в; фо —угол трения грунта о кладку стены; е —
угол, образованный следом задней грани степы с вертикалью.
По формуле (11.2) еще нельзя определить активное
давление грунта Е$р, так как в нее входят пока еще
неизвестный угол обрушения 0 и зависящая от него
сила Gp=G+P. По мере незначительного сползания
призмы обрушения, находящейся в состоянии предель-
ного равновесия, будет изменяться положение плоско-
сти обрушения, и, следовательно, угол обрушения,
а вместе с ним величина активного давления грунта Е9р.
Зависимость Е^р от 0 можно представить в виде графи-
ка, изображенного на рис. 11.6.
При 0=р имеем sin (0—р)=0 и£ер = 0.
При 0=9О°+е (см. рис. 11.5, й) плоскость обруше-
ния ВС совместится с А В и сила Gp станет равна нулю,
но тогда и Е$р = 0. Наконец, некоторому углу обруше-
ния 0=0q (назовем его опасным) будет соответствовать
наибольшее возможное активное давление грунта, ко-
торое, ради краткости, также будем называть активным
давлением, но обозначать через Еар в отличие от ак-
тивного давления Е^р, соответствующего произвольному
углу обрушения 0.
При расчете подпорной стены определяется именно
наибольшее активное давление грунта Еар, т. е. то, ко-
торое грунт вместе с расположенной на нем нагрузкой
может оказать на находящуюся в состоянии предельного
равновесия подпорную стену в тот момент, когда в про-
347
цессе незначительного смещения стены по основанию
угол обрушения становится равным опасному. Если при
этом наихудшем условии устойчивость и прочность под-
порной стены будут обеспечены, то они будут обеспече-
ны и при любом другом направлении плоскости обру-
шения и активном давлении грунта.
При произвольном очертании поверхности грунта
активное давление грунта Епр и соответствующий ему
опасный угол обрушения Оо сравнительно просто опре-
деляется графическим способом (см. [2]). Если же по-
верхность грунта, как это показано на рис. 11.7, ограни-
чена плоскостью (а в дальнейшем рассматриваются
только такие случаи), то Еар и 0о удобнее определять
аналитическим способом.
11.3. Определение активного давления грунта
аналитическим способом
Для определения активного давления грунта Еар
аналитическим способом воспользуемся формулой (11.2),
представляющей собой функциональную зависимость ак-
тивного давления грунта Еъ от угла обрушения 6. Из
математики известно, что если дана функция y—f(x),
то она достигает своего экстремального значения при
некотором значении х=х0, определяемом из уравнения
(dy/dx)3C=Xe =0. В нашем случае соответственно будем
иметь:
^ = /(0): = О-
Эти тригонометрические уравнения удобнее решить ал-
гебраическим способом, введя в них вместо переменного
угла обрушения 0 другую переменную х (рис. 11.7), за-
висящую от 0 и представляющую собой отрезок прямой
AD, расположенный под углом р к горизонтали вдоль
оси Ах до пересечения со следом призмы обрушения
в точке D; при этом условии два предыдущие уравне-
ния примут вид:
£"^p=f(x); =0.
Чтобы представить эти уравнения в развернутом виде
в решить их, следовало бы выполнить довольно слож-
ные и громоздкие преобразования {2]; опуская их, при-
ведем лишь окончательные формулы, определяющие ве-
личину х0, при которой функция Exr,=f(x) достигает
348
максимального значения и соответствующее ей макси*
мальное значение активного давления Еар:
x0=K(jft/cose; (11.3)
Еар = 0,5угр (h?+2hhQKp) К*, (11.4)
где h — высота подпорной стены, равная проекции ребра АВ ее
задней грани на вертикаль; — коэффициент, учитывающий влия-
ние на величину активного давления временной нагрузки, располо-
женной на поверхности призмы обрушения;
Kp=cos е cos «/cos (е—a). (11.5)
Здесь углы е и а (рис. 11.7) при отсчете их соответ-
ственно от вертикали и горизонтали против часовой
стрелки принимаются положительными, в противном
случае — отрицательными.
Активное давление грунта на ограждающую поверх-
ность подпорной стены не зависит от вида временной
нагрузки; это могут быть мешки с каким-нибудь гру-
зом, люди, штабеля дров, подвижная нагрузка от транс-
портных средств и т. д. Каждую из этих нагрузок будем
рассматривать как временную равномерно распределен-
ную нагрузку интенсивностью р, кН/м2. На величину
активного давления грунта влияет только рабочая часть
этой нагрузки, т. е. та, которая расположена в пределах
поверхности призмы обрушения, и не влияет другая
часть, находящаяся за ней.
Если рабочую нагрузку снять и заменить ее вообра-
жаемым слоем грунта, оказывающим на стену такое же
* Формула (11.4) получена проф. В. В. Синельниковым и на-
звана его именем.
349
давление, как и рабочая нагрузка, то, очевидно, ничего
в работе стены нс измелится. Этот воображаемый слои
грунта называется эквивалентным слоем; обозначив вы-
соту эквивалентного слоя через /г0, определим се из ус-
ловия равенства весов рабочей нагрузки Рр.нагр и экви-
валентного слоя грунта Свкв.сда. Так как
fp.narp рАС cos с 1; Сайр_сд —Угр j4C cos ci Ihg,
то pAC cos a 1 =yrp AC cos a hoi,
где AC cos a — проекция прямой AC, на которой расположена ра-
бочая нагрузка па горизонтальную плоскость, а единица (1 метр) —
размер, перпендикулярный плоскости рисунка.
Решая это уравнение относителвно h0, получим
Ло=р/угр, (И.6)
К — коэффициент активного давления грунта на ограж-
дающую его поверхность стены,
Г cos(p — a) I2 1
К “ [ (1 + A'0A'i)cos е ] cos (г -р у0) ’ (п• 7)
где
1/ sin(P 4-<гв) CQS (е —«)
I cos ((е + <ptl) sin(p — а) ’
Kl = sin (р—a)/cos (e—a),
(11.8)
(И.9)
где p — угол внутреннего трепия грунта; <р0 — угол трения грунта
о подпорную стену.
В формуле (11.4) угр— объемный вес грунта, обычно
измеряемый в кН/м3; й и й0— выражаются в метрах,
Ер и Л' — величины безразмерные; поэтому активное
давление грунта Еар выражается в кН/м, т. е. в едини-
цах силы, отнесенной к одному погонному метру расчет-
ной длины степы.
11.4. Интенсивность давления грунта по высоте
подпорной стены. Эпюра интенсивности
давлений (напряжений]. Определение точки
приложения активного давления
По формуле (11.4) определяется лишв величина ак-
тивного давления грунта Еар. Однако при расчете под-
порной стены необходимо найти и его точку приложе-
ния, а это станет возможным, если будет известен закон
изменения интенсивности активного давления грунта по
350
РИС. 11.8'
всей высоте подпорной стены. Для его вывода выделим
на задней грани стены АВ (рис. 11.8, о) прямоугольную
площадку, проекция которой на вертикаль равна dy-1
(I — размер площадки в направлении, перпендикуляр-
ном плоскости чертежа). Пусть эта площадка отстоит
от верха стены на расстоянии у по вертикали.
Активное давление грунта на часть степы ABi, лежа-
щей выше рассматриваемой площадки, согласно (11-4),
равно:
Е-прь=0,5 угр К,
а на часть стены вместе с площадкой — Eap.yA-dEap
Очевидно, на всю рассматриваемую площадку пере-
дается активное давление грунта dEap.y, а на единицу
вертикальной проекции площади этой площадки актив-
ное давление грунта будет равно:
= [dEap.y] /1 'dy — (dEap у) fdy%
т. е. производной от силы Еар.,, по переменной высоте
стены у. Подставляя значение Еар.у в последнее равен-
ство, найдем:
= ТгрУА + Тгр fi« J\pK= Угр (У + hoKp) к.
351
Итак,
«/,>=ТГгР(у+ hcKp)K. (11.10)
Так как здесь определяется в кН/м3, а у в мет-
рах, то величина иРУ выражается в кН/м2 (кПа), т. е. в
единицах силы, приходящейся на единицу площади, и,
следовательно, представляет собой интенсивность актив-
ного давления грунта в точках поверхности стены,
ограждающей грунт, расположенных на высоте стены у
от се верха. В этих же единицах (кН/м2 или кПа) изме-
ряются и напряжения [4], поэтому величину иРу тоже
называют напряжением, понимая под ним интенсивность
активного давления грунта в названных точках стены.
В равенство (11.10) переменная у входит в первой сте-
пени, отсюда следует, что напряжение иРу меняется по
линейному закону, графическое изображение которого
будем называть эпюрой напряжений.
Для рассматриваемого случая по формуле (11.10)
находим:
иРу—угр (</+АоКр) К,
при y = —haKp Щ.=0;
при у—0 ил=уРрйоКрК;
при y=h . UB~yTt>{h+hvKp)K.
По этим данным построена эпюра напряжений a'bb'
(рис. 11.8,6); отбрасывая ее фиктивную часть а'аа", по-
лучим на том же рисунке действительную эпюру напря-
жений в виде трапеции aa"t>b'. Если из точки а' про-
вести прямую а'Ь", параллельную аЪ, то она разделит
эпюру напряжений на две части: одна из них — прямо-
угольная, отражает влияние на интенсивность давления
временной нагрузки, а другая—треугольная — влияние
засыпного грунта при отсутствии временной нагрузки.
По эпюре напряжений можно найти и активное дав-
ление грунта Еар. Для этого надо определить площадь
этой эпюры. В самом деле, сложив почленно приведен-
ные равенства, определяющие значения иА и Ив и, умно-
жив результат на 0,5/г, получим:
(ил4-«в) 0,5Л = [УтрЛой^Л+угр (Л+АоЯр) /С] 0,5й,
или после преобразований
(ял+«в) 0,5А=0,5угр (Л2-[-2йЛоКр) К.
Нетрудно заметить, что левая часть этого равенства
определяет площадь эпюры напряжений, а правая — ве-
352
личину активного давления грунта ЕаР по формуле
(11.4). Следовательно,
£во = 0,5(ид-(-«с)й. (11.11)
Положение центра тяжести эпюры напряжений (точка
С) определяется с помощью геометрического построе-
ния (см. пунктирные прямые па рис. 11.8,6), известного
из курса теоретической механики, а ордината точки С
вычисляется по формуле
Ус— (Л/3) [(2wi+iifl)/(«4-|-ик)]. (11,12)
Теперь через центр тяжести С эпюры напряжений про-
водим горизонтальную прямую до пересечения в точке
С' с гранью АВ (рис. 11.8, а). Активное давление Еар
прилагается в точке С', а его направление образует с
нормалью к грани АВ угол, равный углу трения грунта
о стену <р0.
Итак, величина силы активного давления грунта на
грань подпорной стены определяется по формуле (11.4)
или (11.11), точка ее приложения находится на одном
уровне с центром тяжести эпюры напряжений и отстоит
от низа грани подпорной стены на расстоянии, вычис-
ляемом по формуле (11.12), а направление силы актив-
ного давления образует угол <р0 с нормалью к грани АВ.
11.5. Частные случаи определения активного
давления грунта на подпорную стену
и построения эпюр напряжений
11.5.1. Давление грунта при отсутствии на его по-
верхности временной нагрузки (рис. 11.9,а). После под-
становки значений Ло=О в формулы (11.4) и (11.10),
получим:
fa =0,5угрЯ2/(, (11.13)
<11.14)
и
и л—С, UB = \ri>hK.
По формуле (11.12), yc=hj3. Эпюра напряжений для
этого случая показана на рис. 11.9,6.
11.5.2. Активное давление грунта на вертикальную
гладкую грань подпорной стены при горизонтальной по-
верхности грунта и временной равномерно распределен-
12 Шншман Б. А.
353
ной нагрузке (рис. 11.10,а). В этом случае е=фо=а=О,
По формулам (11.5), (11.8), (11.9), (11.7) соотвстст-
венно находим:
Др=cos е cos o/cos (г—а) = 1;
Т /~ sin (р + фа) cos (е — я) __ 1 /sin р-1
г cos (г 4- !f0) sin (р — а) — Т 1-sinp
Я)—sin (р—а)/cos (е—a)=sinp/I=sinp;
cos (р — а)
= U
К,
Sin2 p
(11.15)
(11.16)
3 1 cos’p
i cos (e + <p„) ~ (I + sin p)a =
sjnp 1—cos (90° — p)
~ (1 + sin p)! “ 1 + sin p ~ 1 + cos (90° — p)
2 sin1 (45° —p; 2)
= 2cos2(45° —₽,'2) “,g <4° —₽;2)-
Подставив найденные значения коэффициентов в
формулы (11.4) и (11.10), найдем:
£вр=0,5>-гр(АЧ2ЛЛ<|) tg2 (45°—р/2),
«P3=Vrp(tf+M tg* (45°—р/2), где — hb^:y^h
И иА, = 0;
Чл=?гр/го tg* (45°—р/2);
яв=Тп>(л+М tg2 (45°—р/2).
По формуле (11.12),
_ h 12fe0 +(ft-!-&„)] k ft+-3ft0
yc - 3 ft0 + (ft + ft0) ~ 3 ft + 2ft0 ‘
По этим данным построена эпюра напряжений a'bb'
(рис. 11.10, б); отбрасывая ее фиктивную часть а'аа",
354
получим на том же рисунке действительную эпюру на-
пряжений в виде трапеции aa"bb'. Направление поверх-
ности призмы обрушения найдем, если по оси х (рис,
10.10,а), проведенной под углом р к горизонтали, отло-
жим отрезок прямой AD—Xo, определяемый по формуле
1П-3):
A D—х0=/cos 0° = h/1 = h
и полученную точку D соединим прямой с точкой В. Из
построения (рис. 11.10, а) следует, что угол 0С равен
Оо=90°—Z./1 BD=90°— (180°— Z BA D) /2=90’— [ 180’— (9О’+р) ] /2,
ИЛИ
0о=45’+р/2.
11.5.3. Предыдущий случай при отсутствии времен-
ной нагрузки на поверхности призмы обрушения (рис.
11.11,с). Здесь к данным случая 11.5.2 (е==ср0=а—0)
добавим условие Ло=0. Теперь, подставив h0=0 в фор-
мулы (11.15) и (11.16), получим:
£а=0,5угр'1Чп2 (45е-р/2);
«^Yrpj/tg2 (45°—р/2), где
(11.17)
(11.18)
ил = 0: UB—yrph tg2 (45°—р /2); у с=h/3.
Эпюра напряжений показана ла рис. 11.11,6. Направле-
ние поверхности призмы обрушения такое же, как и в
случае 11.5.2, т. е. Оо=45°+р/2.
11.5.4. Ограждающая грунт шероховатая поверхности
стены имеет ломаное очертание (рис. 11.12,а). Времен-
ная нагрузка на наклонной поверхности призмы обру-
шения отсутствует, <poi—фиг^О. Сначала определяем
активное давление грунта Еа\ и интенсивность давления
иу на наклонную грань ЛВ(. Здесь: е>0, фщ=А0, с=?^0,
йо=О, что соответствует случаю 11.5.1 [см. формулы
(11.13) и (11.14)); поэтому
где
при
при
&=0 Мл=0,
У=Л|Нв1А=УгрЛ1К,
>С, “ Л»/3-
12*
355
ГИС. 11.12
По этим данным построена эпюра напряжений, по-
казанная на рис. 11.12,6 в виде треугольника abib'i. Ак-
тивное давление Eai на вертикальную грань В\В опре-
делим приближенно, как на часть В\В фиктивной
спрямленной грани ВВхА'. Для этого продлим след BBi
стены до пересечения с поверхностью призмы обруше-
ния в точке А’. Слой грунта толщиной /i0, расположен-
ный над прямой BjD справа от спрямляемой грани
ВВ^А', будем рассматривать как равномерно распреде-
ленную нагрузку с интенсивностью, равной р=угрЛ01
где ho=h}A-hrQ', hi — вертикальная проекция наклонной
грани ABlt h'o — вертикальная проекция отрезка АА'.
Теперь, для спрямленной грани BBiA' имеем: в=0
(Ар=1), а^О, йо^=0, что соответствует случаю
11.5.2 с добавлением условия ат^О; поэтому, применяя
356
формулы (11.4) и (11.10) и вводя в них ^ = 1, а вмес-
то Л’ —коэффициент К'<К, так как е=0, найдем:
£"д2—0,5угр {Агд—|—2/^ J Д',
аь=^(у+1гч')К', — ho'c/zcZit + ha
при у — — fy. иА, = 0,
при у—О Из = Yrp^inC.
при У - /О uBiB = 7ip(Ai+ h'(J) К’ =- Тгр к„ К',
При i/=!,ii4-/l2 Uli=Yrp(A2-{-/lQ) К'.
По этим данным построена эпюра напряжений, пока-
занная на рис. 11.12,6 в виде треугольника a'bb'-, эта
эпюра верна только в нижней части стены (на участке
ВВ,}, так как в верхней ее части ограждающая грунт
поверхность направлена нс по линии А'В, а по — ABt и
эпюра напряжений для участка ABi стены уже построе-
на. Поэтому, отбрасывая треугольник a'bib"i, получим
окончательную эпюру напряжений, состоящую из тре-
угольника abjb'i и трапеции bib"ibb', у которой ордина-
та центра тяжести определяется по формуле.
h, 2ин,в 4- ив fu, b, -г 3ft0
^с» 3 uBiB + “в 3 Л, 4- 2Л0
Против точки перелома Bi на эпюре напряжений
возникает уступ и напряжение в этом месте резко меня-
ется. Предполагая, что в рассматриваемом случае h\K~>
>h0Kr получимйщвОз.л > г. е. уступ здесь направ-
лен влево, как это и показано па рис. 11.12,6.
Приближенность способа определения £’о2 и, следо-
вательно, построения эпюры напряжений состоит в том,
что в нем не учитывается вес грунта в объеме АВ^А',
принадлежащем призме обрушения АВ^ВС.
11.5.5. Грунт, удерживаемый вертикальной гладкой
поверхностью стены, имеет слоистое строение (рис.
11.13,а). Временная нагрузка на горизонтальной по-
верхности призмы обрушения отсутствует. Для большей
определенности примем угр^угрг, pi=p2- Как и в пре-
дыдущем случае сначала находим активное давление
грунта Eai на верхний участок стены ABL и интенсив-
ность давления иу на эту же грань.
357
Здесь е=а=фо1 =^о=О, что соответствует случаю
11.5.3 [см. формулы (11.17) и (11.18)J, поэтому:
£О1=0Д\-гр:Л21 tg2 (45°—pi/2),
us=Yrpi*/tg2 (45°—pi/2),
при y=Q Ид=О,
при y^=hi Uj3lA = Yrpibtg1 (45° — p,/2),
Ус, *i'3.
По этим данным построена эпюра напряжений, по-
казанная на рис. 11.13,6 в виде треугольника abib'i.
Для определения активного давления Еа2 на нижний
участок стены В\В будем рассматривать верхний слой
грунта как равномерно распределенную нагрузку, пере-
даваемую па нижний слой; тогда высота Ьл верхнего
слоя, согласно формуле (11.6), определится равенством
/ii=Pi/yrpb откуда Р1=угр1Л1, где pi — интенсивность
давления верхнего слоя грунта на нижний.
Далее заменим верхний слой грунта (теперь равно-
мерно распределенную нагрузку с интенсивностью pi)
слоем толщиной 1г0, эквивалентным слою нижнего грун-
та, тогда получим:
Ло = Р1/\Тр2—Vrpjfti/yrpi—ft] (yrpi/yrpi). (II.19)
Для участка В\В имеем е=п=фоа=0 и, кроме того,
введена величина /10=й1 (уцп/угрг). Эти данные соответ-
358
ствуют случаю 11.5.2 [см. формулы (11.15) и (11.16)]«
поэтому;
£Я2=О,5угрг(/122+2Л2/1о) tg2 (45“—р2/2),
«»=Угик+(Ло—Л1)] tg2 (45°—р2/2),
где —(Лв—
при у = —(Ло — Л,) нд, = 0;
при у=0 Пл=угр2(Л0—hi) tg2 (45°—p2/2);
при у = Л, иВ1В •= ТГгр. Ло tg2 (45° —р,/2);
при y^h^+ht Ив=уГР2(Л2+Ло) tg2 (45°—рг/2).
По этим данным построена эпюра напряжений, пока-
занная на рис. 11.13,6 в виде треугольника a'bb'. Эта
эпюра верна только в нижней части стены высотой йг,
так как для верхней ее части эпюра напряжений уже
построена. Поэтому, отбрасывая треугольник a'ab'i, по-
лучим на том же рисунке окончательную эпюру напря-
жений в виде фигуры abb'b'ta, состоящей из треуголь-
ника abib'i и трапеции bib'ibb', у которой ордината
центра тяжести равна:
Ус, = (к,13) Цкг + ЗД0)г'(/ц + 2М-
Эта эпюра имеет перелом па границе между верхним
и нижним слоями грунта, причем из сравнения найденных
значений иВ1А и следует, что мВ1Л = ив,в. Это
равенство, конечно, не всегда соблюдается: в зависимо-
сти от соотношений между угр1 и угр2, pt и р2 получаются
различные очертания эпюр напряжений. Можно, напри-
мер, доказать, что если углы внутреннего трения грунта
разные (pi=#p2), то па эпюре напряжений образуется
уступ (рис. 11.14, а, би 11.15, а, б).
Суммарное активное давление грунта Ea=Eai+Ea2,
а точка С' его приложения определяется по теореме
Вариньона. Приняв за центр моментов точку b на эпюре
напряжений, получим:
EU1 (Ус, + А=) + Ус, = Еа Ус>
откуда
У с = !£ai (Ус, + А«) 4- £«2 Ус,1/£а.
11.5.6. Влияние грунтовых вод. Грунт, поры которого
заполнены грунтовой водой (водонасыщенный грунт),
вместе с ней оказывает на подпорную степу большее
давление, чем грунт естественной влажности. В качестве
примера рассмотрим подпорную стену с вертикальной
359
рис. n.te
гладкой поверхностью и горизонтальной засыпкой (рис,
11.16, а), удерживающую в своей верхней части ЛВ(
грунт естественной влажности с объемным весом угр, а
в нижней части В\В водонасыщепный грунт, объемный
вес которого уВав вычисляется по формуле (11.1). Гори-
зонт грунтовых вод находится на высоте от основания
степы. В этом случае для определения активного давле-
ния Еа, сначала надо найти следующие величины: Еа\ —
активное давление грунта естественной влажности на
участке стены HBi; Еа —то же, водонасыщенного
грунта (грунта во взвешенном состоянии) на участке
стены BiB; Еъ — гидростатическое давление воды на
участке стены BiB.
Для определения EaJ, согласно условию, имеем е=
360
==а=Фо=йо=О, что соответствует случаю 11.5.3 [см.
формулы (11.17) и (11.18)], поэтому:
£ot=0,5yrpft^ tg« (45°-р/2);
uJ, = Vrri/lg2(45o—р/2), где 0<(/<йь
Эпюра напряжений иу показана на рис. 11.16,6 в виде
треугольника abtb'i. Для определения £с заменим
верхний слой грунта слоем толщиной й0, эквивалентным
слою нижнего грунта; тогда по формуле (11.19) полу-
чим:
ha=h} (угр/увз®) -
Добавляя к условию в=а=<ро=йо=О это равенство,
приходим к случаю 11.5.2 [см. формулы (11.15) и
(11.16)], поэтому:
Еа взв=О,5увэв(Л22-|-2Лайо) tg2 (45°—рВав/2).
Напряжение грунта во взвешенном состоянии я,юв
определяется по формуле^
иивзв —Упав [</+(Л«г—A])J tg2 (45°—рвзв/2),
—(ЙО—Л1) ^У<Л,+Й2.
где рВзв — угол внутреннего трения грунта во взвешенном состоя-
нии (рвэвСр). Условно р1ЭВ можно принимать таким же, как и для
мокрого грунта (табл. 11.1).
Эпюра напряжений «Увэв показана на рис. 11.16,6 в ви-
де треугольника а'ЬЬ', по она верна только в нижней
части стены В^В, так как в верхней ее части эпюра на-
пряжений уже построена; поэтому, отбрасывая фиктив-
ную часть эпюры a'ab'ib"ia', получим на том же рисунке
действительную эпюру напряжений «увэв в виде трапе-
ции bib'^bb'.
При определении Си надо иметь в виду, что рв=0;
тогда, учитывая условие E==<x=<po=/io=O, по форму-
лам (11.17) и (11.18) найдем:
£,в=0,5у1!авА2гт
иув =УвзвУв, где 0<yB<ft2.
Эпюра напряжений иУв показана на рис. 11.16, в и имеет
вид треугольника b"xb'b". Складывая ординаты эпюр
напряжений, показанных на рис. 11,16, б и 11.16, в, по-
лучим окончательную эпюру напряжений в виде фигуры
abb"b"tb'ia (рис. 11.16, г). Определив Дд,, Еавзв , Ев,
найдем суммарное активное давление грунта на стену
Еа~ +^в. Точка С' приложения силы Еа
36!
<9
определяется по теореме Варинъоиа так, как это пока-
зано в п. 11,5.5.
В случае, если горизонт грунтовых вод совпадает
с поверхностью засыпного грунта высотой h2~h,
(рнс. н.17,а),то £авзв И £в; «у,, «увзп> «ув опре-
деляются по уже приведенным в п. 11.5.6 формулам с под-
становкой в них Лг = Ло = О и h2 = h. В результате по-
лучим Еаа — 0, сУ1 = 0 и Еа= Еаечв + Ёв. Суммарная
эпюра напряжений (и == двзв -И а„) показана на рис. 11.17,6.
11.5.7. Подпорная стена с характеристиками е=
=ф0=0 (рнс. 11.18, а) удерживает водонепроницаемый
362
грунт и расположенный над ним слой поверхностной
воды. Определение активного давления на стену в этом
случае является весьма условным. Приближенно его
можно найти в такой последовательности:
1) определяем давление воды и напряжения на часть
стены, находящуюся выше поверхности грунта!
£»=О,5увЛ®1;
нип=у»У> гЛе 0<y^ftr,
2) находим интенсивность давления воды на поверх-
ность грунта, рассматривая при этом действие воды как
нагрузку, равномерно распределенную по поверхности
грунта:
рв=увЛ,;
3) заменяем слой воды слоем грунта толщиной ho,
эквивалентным слою данного грунта:
Ло=Л’в/Ггр=Л1 (у'в/угр);
4) по формулам (11.15) и (11.16) определяем!
£вгр=0,5угГ(Лг=+2АА) tg2 (45°—р/2);
uv гР=угру tg2 (45°—р/2), где fti < </^Л| +Л2,
5) суммарное активное давление £,о=£в+^а.гр;
6) суммарная эпюра напряжений построена по фор-
мулам, определяющим значения иу.к и иь.гр, и показана
на рис. 11.18, б.
В заключение укажем на то, что при решении прак-
тических задач (п. 11.7.2 — пример расчета массивной
подпорной стены) сначала удобнее построить эпюру на-
пряжений для ограждающей грунт поверхности стены,
а затем по ней определить активное Еар давление грун-
та, применив формулу (11.11). При таком порядке рас-
чета формулу (11.4) можно использовать как провероч-
ную.
11.6. Понятие о пассивном давлении грунта
и его определение
Встречаются случаи, когда подпорная стена стремит-
ся сместить грунт и испытывает его противодействие.
Это может быть, например, при стремлении стены под
действием активного давления сдвинуться напротив
грунта, находящегося со стороны передней грани стены
(рнс. 11.19,а), или при распирающем действии распора
свода на его устой (рис. 11.19,6).
363
По мере увеличения сил, стремящихся сдвинуть сте-
ну в сторону грунта, увеличивается противодействие
последнего и это продолжается до тех пор, пока не на-
ступит процесс выпирания грунта. Поверхность ВС, по
которой происходит выпирание грунта стеной, называет-
ся поверхностью выпирания, а часть грунта АВС, под-
нимающаяся вверх,— призмой выпирания.
В процессе выпирания грунт и смещающаяся в сто-
рону грунта стена находятся в состоянии предельного
равновесия; при этом сопротивление грунта стене посте-
пенно падает и в дальнейшем остается стабильным. То
сопротивление, которое находящийся в состоянии пре-
дельного равновесия грунт оказывает смещающейся на
него стене, называется пассивным давлением (или от-
пором) грунта. Из всех возможных значений отпора в
расчет вводится наименьшее, обозначаемое Еа.
Подчеркиваем, что здесь речь идет именно о наи-
меньшем пассивном давлении грунта, ибо считают, что
если при нем прекратится незначительное смещение сте-
ны в сторону грунта, то его подавно не будет наблю-
даться при сопротивлении грунта, большем пассивно-
го Еп.
Как активное, так и пассивное давление грунта пред-
ставляют собой давление его на стену, но первое на-
блюдается при стремлении грунта сдвинуть стену, вто-
рое же — при стремлении стены сдвинуть грунт. Пассив-
ное давление грунта определяют на основании тех же
предпосылок, которые были приняты при определении
активного давления.
Чтобы получить формулу для определения пассивно-
364
го давления при е=0°, q>0=0° и горизонтальной поверх-
ности грунта, надо рассмотреть равновесие призмы вы-
пирания (аналогично рассмотрению равновесия призмы
обрушения при выводе формулы активного давления).
Вывод этой формулы не приводим, поскольку он прин-
ципиально не отличается от вывода формулы активного
давления. В окончательном виде формула имеет сле-
дующий вид:
Еа = 0,5уп.Л2 tg2 (45°+Р/2). (11.20)
Сравнивая формулы (11.17) и (11.20), замечаем, что
они отличаются друг от друга лишь выражением в скоб-
ках. Так как tg2 (45°-|-р/2)>tg2(45°—р/2),то при прочих
равных условиях пассивное давление будет значительно
превышать активное. Однако величину пассивного дав-
ления вводят в расчет не полностью, а с понижающим
коэффициентом. Так, по нормам ВСН (ведомственные
строительные нормы) этот коэффициент' разрешается
принимать равным 1/5 при расчете низовых (поддержи-
вающих откосы насыпей) и 1/3 при расчете верховых
(поддерживающих откосы выемок) подпорных стен на
автомобильных дорогах. В расчете низовых подпорных
стен на железных дорогах, согласно этим нормам, пас-
сивное давление грунта не учитывают. В некоторых слу-
чаях давление грунта со стороны передней грани стены
учитывают в виде активного давления (например, при
расчете мостовых устоев).
11.7. Расчет массивных подпорных стен
11.7.1. Теоретические основы. Расчет подпорных стен
производится по предельным состояниям [6]. Правиль-
но рассчитанная подпорная стена должна удовлетворять
условиям устойчивости, а также и условиям прочности
как самой подпорной стены, так и грунтового основания
(грунта под подошвой фундамента). Различают устой-
чивость подпорной стены от сдвига (скольжения) по ос-
нованию грунта и от опрокидывания вокруг ее передне-
го нижнего ребра (след этого ребра показан на рис.
11.20 точкой К).
А) Условия устойчивости подпорной сте-
ны (рис. 11.20).
Условие устойчивости подпорной стены от сдвига
365
РИС. 11.20
(скольжения) по грунту в плоскости подошвы фунда-
мента должно удовлетворять следующему неравенству:
или Г/Гир^Ис, (Н.21)
где Т — расчетная сдвигающая сила, равная сумме проекций на
плоскость скольжения расчетных сил стремящихся сдвинуть под-
порную стену по грунту (силы £а— активного давления); тс — ко-
эффициент условий работы, который можно принимать равным
тс=0,9; Гир — предельная расчетная сдвигающая сила, равная
сумме проекций на плоскость скольжения расчетных сил, препят-
ствующих сдвигу: силы Еп — пассивного давления и сил трения,
возникающих от расчетных сил, нормальных к плоскости скольже-
ния (сил G — веса призмы обрушения и Еау — вертикальной состав-
ляющей СИЛЫ Еа).
Силы трения определяются по формуле
Е тр=Л7,
где N—расчетная сила, нормальная к плоскости скольжения; f —
коэффициент трения подпорной стены о грунт, который можно при-
нять по следующим данным:
Грунты у
Глины, глинистые известняки, глинистые сланцы
влажные......................................0,25
То же. сухие, а также суглинки и супеси ... 0,3
Пески мокрые............................ 0,4
Пески сухие.................................. 0,5
Крупнообломочные грунты...................... 0,5
Скальные грунты с неомываютцейся поверхностью,
гравий....................................... 0,6—0,65
Каменная наброска............................ 0,9
1 На ряс. 11.20 и в дальнейшем указываются только норматив-
ные силы, с которыми соответствующие им расчетные силы (см,
ниже) совпадают по направлению.
366
При вычислении расчетных сил нормативные силы,
стремящиеся сдвинуть подпорную стену (силы типа
Ева}, умножаются на коэффициент перегрузки щ>-1
(для насыпного грунта ^[ = 1,2), а нормативные силы,
препятствующие сдвигу (сила Енп и силы Gn, Еваи, спо-
собствующие возникновению сил трения), умножаются
на коэффициент перегрузки n2< 1 (можно принимать
л2=0,9). При этом надо иметь в виду следующее прави-
ло: если нормативная сдвигающая сила Еи0 (рис. 11.20)
не параллельна плоскости скольжения, а составляет с
ней некоторый угол 6, то при следует принять
коэффициент перегрузки а при tg S< 1 —коэффи-
циент перегрузки «2<1.
Вводимые в расчет подпорной стены нормативные
силы Евах и Еаау, являющиеся составляющими норма-
тивной силы Еиа, должны быть умножены на один и тот
же коэффициент перегрузки, принятый в соответствии с
изложенным правилом. Так. если показанный па рис.
11.20 угол 6>45°, то tg6>l и значит tg6>f. Следова-
тельно, надо принять коэффициент перегрузки П1>1 и
на него умножить силы Еиаг и Ен„у. Для подпорной сте-
ны, показанной на рис. 11.20, силы Т и 7ср выразятся
следующими равенствами:
Гпр = 4- (ОНП5 + п*) /•
Условие устойчивости подпорной стены от опрокиды-
вания вокруг се переднего нижнего ребра должно удов-
летворять следующему неравенству:
m<momnp, или m/mnr<wo, (11.22)
где m — расчетный опрокидывающий момент, равный алгебраиче-
ской сумме расчетных моментов всех сил, действующих на подпор-
ную стену относительно центра тяжести подошвы фундамента;
mQ — коэффициент условий работы, который принимается для под-
порных стен промышленных сооружений т,т=0,9; а для подпор-
ных стен гражданских и транспортных сооружений то=0,8;
тпр — предельный опрокидывающий момент относительно той же
точки подошвы фундамента подпорной стены, определяемый ио
формуле
тПр=л2№,епр, (11.23)
где № — нормативная продольная сила, равная сумме проекций
всех нормативных сил, действующих на подпорную стену, на нор-
маль к подошве фундамента, епр — предельный эксцентриситет силы
№, равный расстоянию от центра тяжести подошвы фундамента
подпорной стены до ее переднего нижнего ребра; для прямоуголь-
ной подошвы фундамента епр=Ь<г/2.
367
При определении величин расчетных моментов нор-
мативные моменты сил, стремящиеся опрокинуть под-
порную стену относительно данной точки (опрокиды-
вающие моменты), умножаются па коэффициент пере-
грузки «!>!, а нормативные моменты сил относительно
той же точки, способствующие удержанию подпорной
стены от опрокидывания (удерживающие моменты),
умножаются па коэффициент перегрузки п2<1. В выра-
жение расчетного момента условимся вводить опроки-
дывающие моменты со знаком «минус», а удерживаю-
щие моменты — со знаком «плюс». Числовые значения
коэффициентов перегрузки принимаются такими же, как
и при проверке подпорных стен па устойчивость от сдви-
га: «1 = 1,2; п2=0,9.
Для подпорной стены, показанной на рис. 11.20, мо-
менты т и тПр выразятся следующими равенствами:
т == — Е„х Si nt п- Е"у et nf -j- G“ e, -f- £“ s, л,.
»'np = (GH «= + «1) 0,5 b.
Б) Условия прочности подпорной стены
и грунтового о с и о в а н и я. Прочность подпорной
стены в ее произвольном горизонтальном сечении обес-
печивается, если выполняются следующие неравенства:
Оmax' еж, Omln^'Rpac-
Эти два неравенства удобно объединить в одно, вы-
ражающее общее условие прочности подпорной стены в
данном сечении:
°тах'^- ^см ’
(11.24)
trtln
рас
где Птах и Отт — максимальные и минимальные расчетные нор-
мальные напряжения1; /?Си и /?гас— расчетные сопротивления ма-
териала подпорной стены сжатию и растяжению.
Для определения величин ст,^*в произвольном гори-
зонтальном сечении t — и подпорной стены (рис. 11.21, а)
находим расчетные силы £а и G, действующие на часть
стены, расположенную выше сечения / — и. Равнодейст-
вующая S этих сил пересекает плоскость сечения t — и
на расстоянии от центра тяжести его, равном эксцентри-
ситету е. Разложим силу S на составляющие N, перпен-
1 Напоминаем, что сжимающие нормальные напряжения при-
нимаются положительными — со знаком «плюс».
368
дикуляркую плоскости сечения t — и, и 7, лежащую в
этой плоскости. В результате от действия расчетной нор-
мальной силы Л' в сечении t — и возникнут расчетные
нормальные напряжения, а от расчетной силы Т — рас-
четные касательные напряжения, которые часто оказы-
ваются малы по сравнению с расчетным сопротивлением
материала стены на сдвиг, и поэтому ими пренебрегают.
Величины °™* определяем по формуле внецентренного
сжатия (5.8):
°п,ах = (*’/Л) ±(Л1/17).
infn
Следовательно, условие прочности подпорной стены
(11.24) примет вид:
°Ш0Х = <^/Л) ± W < Я™ . (П -24а)
mln рас
где N— расчетная продольная сила в данном сечении, .равная сум-
ме Проекций расчетных сил, действующих и а рассматриваемую
369
часть подпорной стены, на нормаль к плоскости сечения; А — пло-
щадь сечения; M=Ne — расчетный изгибающий момент в данном
сечении, е — эксцентриситет расчетной продольной силы; IP — осе-
вой момент сопротивления сечения (рис. 11.21,6) относительно ней-
тральной оси, перпендикулярной плоскости рис. 11.21, а.
Для определения расчетных нагрузок N и М надо их
нормативные значения № и Л1Н умножить на коэффи-
циент перегрузки «i > 1; это, как следует из формулы
(11.24, а), приводит к наиболее неблагоприятному слу-
чаю, когда при прочих равных условиях величины
становятся больше подобных им других, которые могут
быть получены при различных значениях fit и «2.
Для часто встречающихся в инженерной практике
подпорных стен прямоугольного сечения условие прочно-
сти (11.24 а) можно представить иначе. В самом деле, в
этом случае: Л=&-1
Ш’ = 1.^/6= 1Ь Ь/б=^Ь/6, Л1=Ж
После подстановки этих значений А, и М (в 11.24 а)
и простейших преобразований, условие прочности под-
порной стены прямоугольного сечения примет вид:
=та1 = (*М) П ± <6<6)1 < . (”-25)
mln рас
Согласно рис. 11.21, а, эксцентриситет силы Ni
e=(bft)—c, (11.26)
где с — расстояние от линии действия силы .V до передней грани
стены, которое можно определить по теореме Вариньона.
Составляя уравнение моментов всех расчетных сил, дей-
ствующих на рассматриваемую часть подпорной стены
относительно точки i (или точки и), и учитывая, что
mt (S)=mt (Лг) =Лгс, получим:
Л/С Gd—
откуда
С— {Gd—
или
с=2т*/1У. (11.27)
В формуле (11.27) — алгебраическая сумма расчет-
ных моментов всех сил, действующих на рассматривае-
мую часть стены, относительно точки t.
Если в результате вычислений получим e>0(ft/2>
>с), то эксцентриситет е надо отложить на централь-
ной оси сечения, параллельной плоскости рисунка 11.21, а
370
влево от центра тяжести сечения (рис. 11.21, а, б), в про-
тивном случае — вправо от него.
Условие прочности грунтового основания под подош-
вой фундамента должно удовлетворять неравенству
(11.28)
где шакПгр — наибольшее расчетное сжимающее грунт напряжение,
7?Гр — расчетное сопротивление грунта.
Для подпорной стены прямоугольного сечения усло-
вие прочности (11.28) примет вид:
tt.E<TrP= (W/Л) (l+(6e/d)l </?гр. (11.28а)
Здесь обозначениям N, А, Ь, е придается такой же
смысл, как и в условии прочности подпорной стены
(11.25), ио но отношению к сечению, совпадающему е
подошвой фундамента (на рис. 11.22, а показана только
часть фундамента подпорной стены).
Так как грунт не воспринимает растягивающих на-
пряжений, то размеры подошвы фундамента должны
371
быть выбраны так, чтобы по всей ее ширине возникали
лишь сжимающие грунт напряжения, а это возможно,
когда
ш1в0гр= (jV/A) [1—(6е/6)] >0
и, следовательно, е^Ь/6, т. е. если линия действия силы
N пересекает центральную ось сечения подошвы фунда-
мента, параллельную плоскости рисунка, в пределах ме-
нее или равной средней трети ширины сечения (рис.
11.22,6).
Если же допустить эксцентриситет продольной силы
е>Ь/6 (рис. 11.22,в), то в частицах грунта под подо-
швой фундамента возникли бы не только сжимающие
напряжения, но и недопустимые растягивающие. Соот-
ветствующая этому случаю эпюра напряжений показана
на рис. 11.22,г. Следовательно, при е>й/6 формула
(11.28 а) неприменима.
Иногда, в виде исключения, в подпорных стенах ма-
лоответственных сооружений допускают эксцентриситет
е>Ь/6 (рис. 11.22,а). Возможная при этом эпюра сжи-
мающих грунт напряжений показана на рис. 11.22, д.
Площадь этой эпюры численно равна силе JVrp— реак-
ции грунта под подошвой фундамента на подпорную
стену (рис. 11.22, а). Точка приложения силы NTp нахо-
дится в центре тяжести площади эпюры напряжений па
расстоянии, равном л*/3 от ее основания, а направление
этой силы совпадает с направлением продольной силы
N в сечении, совмещенном с подошвой фундамента
(рис. 11.22,а). Следовательно, с=х/3 и
х=3с. (11.29)
Величину тахОгр найдем из условия равновесия подпор-
ной стены:
ЕУ=Л'гр_^ = 0, или Nrp=.V
и
гоэхПгр.^/2 = JV, откуда шахОгр = 2jv/х,
или
maxdrpT=2iV/3C. (Н.оО)
Условие прочности грунтового основания в случае
>Ь/6 примет вид:
>т,а1<ггр=2У/Зс</?гр, (11.31)
где
с—Ъ]2—е.
372
гис. П 23
11.7.2. Пример расчета массивной подпорной стены. Проверить
устойчивость мостового устоя (рис. 11.23, а), а также прочность его
па уровнях V—В высоты шкафной стенки, L—D образа фундамента
и основания грунта под подошвой К—I фундамента. Мостовой
устой рассматривать как массивную подпорную стену (в дальней-
шем стену) протяженностью 1 м в направлении, перпендикулярном
плоскости рисунка.
Дано: объемный вес материала стены у=23 кН/м3, объемный
вес грунта угр= 17 кН/м3, угол внутреннего трения грунта р =
= 30°, угол трения грунта о материал кладки «ро=0°, коэффициент
трепня кладки о грунт по подошве фундамента f—0,5, коэффициен-
ты перегрузки «1=1,2; лг=0,9, коэффициенты условий работы
mt=0,9; m3 = 0,8; нормативное давление, передаваемое на подфер-
менную площадку, FB = 220 кН/м, интенсивность нормативной вре-
менной нагрузки на поверхности засыпного грунта р” = 20 кН/м2,
расчетное сопротивление материала стены сжатию Rem=4000 кПа,
то же, растяжению Rpae=500 кПа, расчетное сопротивление грунта
Ri? = 260 кПа. Линейные размеры указаны в метрах.
Ре шение. 1. В масштабе длин ц<=1 м/см изображаем сечение
стены вертикальной плоскостью, параллельной плоскости рисунка.
2. Строим эпюры нормативных напряжений по правой (задней)
грани AI стены и левой (передней) грани LK фундамента.
373
Для построения эпюры нормативных напряжений по грани АТ
предварительно заменяем нормативную временную нагрузку экви-
валентным ей слоем засыпного грунта, толщину которого Ло опре-
деляем по формуле (11.6):
Ло=ри/Тгг=2О/17 = 1,18 м,
Теперь по формуле (11.16):
иу=угру tg2 (45е—р/2)*,
находим:
u“ = 17у tga (45е —30е/2) = 17у tgs 30° =
= 17yO,577s = 17у 0,333 = 5,65 у,
и=г/=5,65у, где 0^(/^йо4-?7=9,18 м;
при р=0 инл,=0,
при я=1,18 м и'4=6,68 кПа,
при р=9,18 м nnf=51,87 кПа.
Действительная эпюра нормативных напряжений по грани АТ
изображена па рис. 11.23,6 в виде трапеции aa"ii'. Для построения
эпюры нормативных напряжений по передней грани LK фундамента
будем рассматривать пассивное давление грунта Екл па эту грань
как активное (см. п. 11.6), поэтому:
Ыуп =5,65 1/п, где м;
при £/п=0 ии£ = 0;
при {/л = 2 м п1,х= 11,30 кПа 11 кПа.
Эпюра нормативных напряжений по грани LK показана па
рис. 11.23,в.
3. Определяем величины, необходимые для проверочного рас-
чета степы. Нормативное активное давление Еиа грунта на грань
АЕ находим по формуле (11.11):
£“ - 0,5/7 (инА + и?) = 0,5-8 (6,68 4- 51,87)« 234 кН/м.
Проверка:
= 0,37гр (/Л ч- 2Яйв) tg* (45е - р/2) =
= 0,5-17 (8Е 4-2-8-1,18)0,333=^234 кН.'м.
Оба способа определения величины активного давления грунта на
грань АТ дали одинаковые результаты. Следовательно, Евв вычис-
лено правильно. Так как по условию угол трения грунта о стену
<рс=0, то сила £не направлена перпендикулярно грани АТ. Плечо
этой силы относительно центра тяжести подошвы фундамента (точ-
ка Os) определяем по формуле (11.12):
SO, =УС = (Н/3)[( 24 + а? )/(«« 4- 4 )] =
- = (8/3) [(2-6,68 [-51,87)/(6,68 4-51,87)1 =2,97 м.
* Здесь и дальше в этом примере ради упрощения записей
индекс «р» при величинах и и Еа опущен.
374
Нормативное активное давление EB„t на часть АВ стены А1
“О."’*» (л’д+ Ид) =0,5-2 (6,68 4-3,18(51,87/9,18)] =
= 0,5-2(6,68 + 17,97) йе 25 кН/м.
S1O1 = yCi = (2/3) [(2-6,68 4- 17,97)/(6,68 4- 17,97)] = 0,85 м.
Нормативное активное давление £“oi на часть AD стены А1
£«2 = 0,5(й, 4- Л,) (И" 4- «?>) = 0,5 (2 + 4) [6,68 +
+ 7,18) (51,87/9,18)] =0,5-6(6,68 + 40,57)]= 142 кН/м;
«20, = Ус, = (6/3) [(2*6.68 + 40,57)/(6 ,68 + 40,57)] - 2,28 м.
Нормативное пассивное давление £ип грунта па грань LK. оп-
ределяем по той же формуле (11.11), ибо, как уже упомянуто ра-
нее, оно вводится в расчет как активное давление:
£“ =0,5-11-2 = 11 кН/м; snO ус =0,67 м.
Нормативные силы веса отдельных частей стены, расчлененной
на четыре объема;
объем ABVW G[l = = 22-1,5.2-1 = 66 к 11;м;
объем BDQ4J С£ = = 22-3-4-1 = 264 кН/м;
объем UQ'Q G J = = 22-0,5-1-4-1 = 44 кН/м;
объем DIKL Од = УАК-1 = 22-5-2-1 = 220 кН/м.
Нормативное давление на подфермеиную площадку, согласно
условию, £Е=220 кН/м.
Эксцентриситеты сил бя,- и £п относительно центра тяжести
подошвы фундамента — точки О3. Непосредственно из рис. 11.23, а
находим:
е!=2,5—0,75 = 1,75 м; еЕ=2,5—1,5=1 м;
е3=2,5—[1 + (2/3)1]=0,83 м; Щ=0; е«н =2,5—2,25=0,25 м.
Плечи сил Gai и £°, действующих: выше сечения V—В, выше
сечения L—D, па всю стену соответственно относительно точек V,
Q, К. Непосредственно из рис. 11.23, о находим г(г=0,75 м; Гп2 =
= 4—0,75=3,25 м; гг0 = 1,5+1 = 2,5 м; гэ0 = (2/3) 1 =0,67 м;
гр =0,754-1 = 1,75 м; т1/С=5—0,75=4,25 ы; г2Л=5—1,5=3,5 м;
hQ
1-^ = 1+ (2/3) 1 = 1,67 м; Т4к=2,5 м; rf«l< =5—2,25 =2,75 м.
На основе полученных данных составляем табл. 11.2.
4. Выполняем проверочные расчеты.
А) Проверка стены на устойчивость. Проверяем сте-
ну на устойчивость от сдвига (скольжения) по грунту в плоскости,
совпадающей с подошвой фундамента. Должно выполниться усло-
вие (11.21);
7/Г пр <тс.
375
Алгебраичес- кие суммы по верти- кальным столбцам 3, 5, 8, 9, 12, 13, 16, 17 FK = 220 055 “ 7 GJ = 26-1 сь II 8? tn я 11 Е”, = 142 “ я и|| IO Сл Е " = 234 •- Величины нормативный сил, кН/м
1 О о О о О - 142 о! 234 Ki Проекции нормативных сил на осн, кН/м
814 220 220 264 8? о О о w
1 О ю О 0,83 1,00 1.75 | 1 1 1 1 *- Эксцентриситеты нор- мативных сил Си относительно точки Oi, м
398 о; О О {•95 — 1 1 1 1 О! о ч Моменты нормативных сил Gm и F» относи- тельно Оз, (кН/м), м
1 1 1 1 0,75 1 1 1 05 5 Плечи нормативных СИЛ, действующих ВЫ' ше сечения V—B отно- сительно точки V, м
1 1 1 1 1 1 1 1 0,85 | 1 -1 S,v
ё 1 1 1 1 СО 1 1 1 1 00 + Моменты нормативных сил, действующих вы- ше сечения V—B от- носительно точки 7, (кН/м) и
to 1 1 i i 1 1 1 ND 1 О 1
] 1,75 1 | 0,67 04 1 1 1 1 Б с Плечи нормативных сил, действующих вы- ше сечения Q—D отно- сительно точки Q, м
1 1 1 1 1 1 1 nd 1 1 со <о
1289 385 i 1 <с 660 S 1 1 1 1 nd + Моменты нормативных сил, действующих вы- ше сечения Q^D отно- сительно точки Q, (кН/м) и
| 324 1 1 1 1 1 1 ЙЕ 1 1 ОС 1
1 2,75 ND Ut 1,67 3,50 ND О 1 1 1 1 Е S Плечи нормативных сил, действующих на стену относительно точ- ки К, и
1 1 1 1 1 1 0,67 1 1 СЛ
0115 ад о со 924 085 •СО 1 1 1 Б + Моменты нормативных сил, действующих на стену относительно точ- ки К. (кН/м} м
695 1 1 1 1 1 1 1 1 695 1
Таблица 11.2
В нашем примере: коэффициент условий работы fflc=0,9; расчетная
сдвигающая сила T~Tani—£“ai«i = 234-l,2=281 кН/м; предельная
сдвигающаи сила:
7'np = [£n + (EG^ + fHJ/]n„
где f=0.5; л2=0,9. По табл. 11.2 (графы 2 и 3} находим £вя =
= 11 кН/м, 2GHi+FH=814 кН/м и, значит, 7,ap = (l 1+814-0,5) X
Х0,9=376 кН/м. Итак, 7/Гпр=281/376=0,75<0.9.
Следовательно, устойчивость стены от сдвига обеспечена.
Проверяем стену на устойчивость от опрокидывания вокруг
переднего нижнего ребра фундамента. Должно выполняться усло-
вие (11.22).
В нашем примере коэффициент условий работы то=0,8; рас-
четный опрокидывающий момент:
т = тО3 = — (£2 SOC + °3 ез> ,1‘ + (СГ ei + <?“* +
+ £Н егя + £П5пО3)Л‘«
Здесь «1 = 1,2, «2=0,9, а величины, помещенные в скобках, находим
по табл. 11.2 (графы 17; 5 и 16). В результате получим:
m=—(695+36) 1,2+ (115+264+55+8) 0,9 да —877+398 =
=—479 (кН/м)м.
Предельный опрокидывающий момент:
= ( Е 0? + Гн)0,5 ^-/«2 = 814-0,5.5-0,9 ^1831 (кН/м) - м.
Итак, m/mnp —-1—479| /1831 = 0,26 < 0,8.
Следовательно, устойчивость стены от опрокидывания также обес-
печена.
Б) Проверка прочности стены и основания
грунта под подошвой фундамента. Проверяем проч-
ность стены в сечении V—В на уровне высоты шкафной стеики.
Исходной является формула (11.25):
= W [1 ± (6е/6)] < Лсж .
mln ра с.
В сечении V—В имеем: ЛГР_в~GBща=66-0,9да59 кН/м,
Ау-в—1,5-1 =1,5 м!; м, величину cv-B — расстояние от
линии действия продольной силы Nv-c до точки V (рис, 11.23, а)
находим по формуле (11.27):
49.0.9-21-1,2 „
Ср—q - Ц ntp/JVp^/} = Fjg = 18,9/59 = 0,32 n,
Су—я ' п/2 - (у.;- — - 1,5/2—0,32=0,43 м,
отах = (59/1,5) (I + (6.0,43/1,5)] =39,3(1 + 1,72);
тГл
От«кда107 кПа4000 кПа,
|0т1п| да |—28] =28 кПа</?рВс=50О кПа.
Следовательно, прочность стены в сечения V—B обеспечена.
Проверяем прочность стены в сечении Q—,D на уровне обреза
фундамента (рис, 11.23,0).
378
Пользуясь той же формулой (11.25) и табл, 11.2, найдет
Л^_д = (GJ1 + б2“ + G" + Л11) па = (63 + 261 + 44 +
+ 220) 0,9 = 535 кН/м;
j4q^.£>=4 1 “:4 м2; д==4 м;
V, 1289.0,9 — 324.1,2
cQ~D “2, mQlNQ-D =------------5зЗ------= 771/535 - 1,44 MJ
=bq—ol'2'—cc_ o = 4/2—1,44 =0,56 м;
cmax = (535/4) [1 + (6-0,56/4)] = 133,75 (1 + 0,84),
min
откуда
Отах= Ос ж q—246 кПа;
Oinin =0cai.c = 21,4 КПа;
Итак = q=246 кПа</?Сж=4000 кПа. Следовательно, в
сечении Q—D на уровне обреза фундамента прочность стены также
обеспечена.
Проверяем прочность основания грунта под подошвой фунда-
мента, Предварительно найдем Ck-i и эксцентриситет eK-i продоль-
ной силы Nk-i (рнс. 11.23, е). Используя данные табл. 11.2 (графы
76; 17 и 3), получим:
сх_,=2тк/ЛГк_/ = (2440 - 0,9—695 1,2) /814 • 0,9= 1362/733 =) ,86 м,
««_,= (йк_,/2)—ск_,=5/2—1,86=0,64 м.
Так^как е«^/=0,64 м <. £«-//6=0,83 м, то применима формула
Отах гр = (Л’/Д) [1-]-(6е/6)| ^7?гр,
где
Лгк-/=814'0,9« 733 кП/м; /^-/=5-1=5 м2;
«к-/ = 0,64 м; Ьк_7=5 м
и Стах гР= (733/5) U-H6-0,64/5)] w 147(1+0,77), откуда ота1гр =
=260 кПа. Итак, Стах.гр=260 кПа=/?Гр = 2бО кПа. Следователь-
но, прочность основания грунта под подошвой фундамента обеспе-
чена.
379
Список литературы
1. Аркуша А. И., Фролов ЛА. И, Техническая механика. — М.: Выс-
шая школа, 1983.
2. Дарков А. В., Кузнецов В. И. Строительная механика.—-М.: Транс-
желдориздат, 1956.
3. Дарков А. В., Шапошников Н. Н. Строительная механика.—М.:
Высшая школа, 1986.
4. Ицкович Г. М. Сопротивление материалов. — М.: Высшая школа,
1987.
5. Киселев В. А. Строительная механика. — М.: Стройиздат, 1976.
6. Михайлов Л. М. Сопротивление материалов. — М.: Стройиздат,
1989.
7. Мухин Н. В. Статика сооружений в примерах.— М.: Высшая шко-
ла, 1979.
8. Прокофьев Н. П. Теория сооружений. — М.: Трансжелдоризлат,
1948, ч. 1.
9. Снитко И. К. Строительная механика. — М.: Высшая школа, 1980.
10. Улигин И. С., Першип А. Н., Лауенбург Л. В. Сборник задач по
технической механике. — М.: Высшая школа, 1978.
Предметный
Активное давление грунта 344,
347
Арка статически определимая
с затяжкой 87, 96
— трехшарнириая 85, 89
Балка многопролетяая статиче-
ски определимая (шарнирная)
47
— неразрезиая 47, 307
— основная 54
— подвесная 54
— простая 47
— равномоментная 66
— сопутствующая расчету 90
Балочная поперечная сила 93
Балочный изгибающий момент
91, 95
Бесшарнирный замкнутый кон-
тур 263
Внутренние связи 33
— силы в сечении балки 59
---------- рамы 73
— —-------трехшарнирной ар-
ки 92
Геометрически изменяемая си-
стема 12
— неизменяемая система 13
Грузовое (действительное) со-
стояние основной системы 274
Диаграмма Кремоны 151
Диада 27
Диск 14
Единичное (вспомогательное)
состояние основной системы
274
Закон сохранения энергии в
применении к у пру го деформи-
руемому телу 226, 228
Замкнутый контур 263
Исходные точки 153
Канонические уравнения мето-
да сил 270
Класс нагрузки 219
Коэффициент нагрузки 367
— условий работы т0 367
------ — тс 366
указатель
Кривая давления 97
Критический груз 211
Линии влияния внутренних сил
в сечении статически опреде-
лимых балок 176
---енл в стержнях статиче-
ски определимых ферм 199
Линия влияния 175
Лишние связи 22
Мгновенно изменяемая систе-
ма 23, 24
Метод сил 266, 267, 273
Многоугольник давления 97
Нагруженная система 267
Невыгоднейшее положение си-
стемы грузов на сооружении
206
Основная система 266
Ось арки 88
Пассивное давление грунта 363
Передаточная прямая 198
Перемещение грузовое 225
— единичное 226
— линейное 224
— угловое 225
Подобные линии влияния 217
Подпорная стена 340
Полное число связей 22
Потенциальная энергия дефор-
мации 226—229
Поэтапные проверки расчета
статически неопределимых рам
Правила размещения шарниров
в многопролетной статически
определимой (шарнирной) бал-
ке 54
Правило А. Н. Верещагина 244,
246
Приведенное число связей 20
Принцип независимости дейст-
вия сил 6
Пролет арки 88
— фермы 123
Простейшая система 27
Работа внешних сил 229, 230
Рама и ее элементы 69
381
Раскос восходящий 126
— нисходящий 126
Распор 87, 91
Расчетная сила в стержне фер-
мы 163
— схема сооружения 6
Рациональная ось арки 100
Свойство дуализма 21
Сила в затяжке статически оп-
ределимой арки 96
— - — стержне фермы 133
Симметричная ферма (систе-
ма) 144
Сквозное ссчсние 134
Соответствующие участки 240
Способ единичных нагрузок 164
— проекций 138
— Риттера 134
Статика сооружений 4
Статически неопределимая си-
стема 41
— определимая система 41
Степень свободы 14
•— статической неопределимос-
ти системы 43
—- •— определимости системы
45
Стержни нулевые 141
правильно расположенные 27
собственные 20
г— фиктивные 40
Строительная механика 4
Структурный анализ систем 26
Суммарное число связей перво-
го вида 20
Теорема Вариньона 51
Теорема Клапейрона 230
— Максвелла о взаимности пе-
ремещений 256, 257
— об узловой передаче нагруз-
ки 198
Теоремы о свойствах линяй
влияния 189
Угол естественного откоса 343
— обрушепия 345
— трения 343
Узловая нагрузка 194
Уравнение трех моментов 311
Ферма 120
Формула Мора 238
— В. В. Синельникова 349
— трапеций 249
Центр давления 98
Шарнир идеальный 121
— промежуточный 49
— простой 16
— сложный неполный 19
— - - полный 19
— фиктивный 32
Эквивалентная нагрузка 216
Эксцентриситет продольной си-
лы 28
Эпюра грузовая 280
— единичная 280
— контрольная 275
Этажная схема шарнирной бал-
ки 53
О Г Л А В Л ЕН ИЕ
Предисловие................................................ 3
Глава 1. Основные сведения
1.1. Задачи статики сооружений ........ 4
1.2. Основные допущения..................................... 5
1.3. Расчетные схемы сооружений............................. 6
1.4. Классификация сооружений............................... 0
Глава 2. Исследование геометрического образования плоских
стержневых систем
2.1. Геометрически неизменяемые и изменяемые системы. Сте-
пень свободы и степень внутренней изменяемости системы.
Необходимые условия геометрической неизменяемости систем.
Мгновенно изменяемые системы . . .............12
2.2. Структурный анализ систем .... . . 26
2.3. Понятие о статически определимых и неопределимых си-
стемах. Степень статической неопределимости системы. Ус-
ловие статической определимости системы.....................40
Глава 3. Многопролетные статически определимые (шарнир-
ные) балки
3.1. Общие сведения.........................................47
3.2. Статическая определимость и геометрическая неизменяе*
мость шарнирных балок.......................................49
3.3. Расчет шарнирных балок....................i . < 58
3.4. Равномоментныс шарнирные балки ( < . « 66
Глава 4. Статически определимые плоские рамы
4.1. Общие сведения о рамах.................................69
4.2. Статическая определимость и геометрическая неизменяе-
мость рам...................................................72
4.3. Построение эпюр поперечных сил, изгибающих моментов
и продольных сил............................................73
Глава 5. Трехшарнирные арки
5.1. Общие сведения.........................................85
5.2. Теоретические основы расчета арок аналитическим спо-
собом ......................................................89
5.3. .Многоугольник и кривая давлений.................97
5.4. Выбор очертания рациональной оси арки .... 100
5.5. Расчет трех шарнирных арок аналитическим способом , 104
Глава 6. Статически определимые плоские фермы
6.1. Общие сведения....................................... 120
6 2. Классификация ферм............................123
6.3. Геометрическая неизменяемость и статическая определи-
мость ферм.................................................127
6.4. Аналитические способы расчета балочных ферм . . 132
6.5. Графический способ расчета балочных ферм . 149
6.6. Анализ работы балочных ферм по эпюрам сил в их стерж-
нях и оценка целесообразности применения этих ферм . . 170
Глава 7. Линии влияния
7.1. Понятие о линиях влияния.......................... . 175
7.2. Линии влияния опорных реакций н сил в сечениях одно-
пролетных балок . . ..........................176
7.3. Основные свойства линий влияния. Определение внутрен-
них сил по линиям влияния..................................189
7.4. Построение линий влияния при узловой передаче нагрузки 194
7.5. Построение линий влияния сил в стержнях ферм . . 199
383
7.6. Определение невыгоднейшего положения системы грузов
на сооружении..............................................206
7.7. Эквивалентная нагрузка . . ................216
Глава 8. Определение перемещений в статически определимых
системах
8.1. Общие сведения........................................224
8.2. Закон сохранения энергии б применении к упругодефор-
мируемому телу.............................................226
8.3. Работа внешних сил..................................229
8.4. Энергетический метод определения перемещений — фор-
мула Мора..................................................234
8.5. Определение перемещений по формуле .Мора способом
перемножения эпюр — правило А. Н. Верещагина . . . 244
8.6. Теорема о взаимности перемещений (теорема .Максвелла) 256
Глава 9. Статически неопределимые плоские рамы
9.1. Общие сведения о статически неопределимых системах . 259
9.2. Анализ статической неопределимости рамных систем 263
9.3. Расчет статически неопределимых рам методом сил . . 266
9.4. Некоторые данные о выборе рациональной основной
системы.................................................. 286
9.5. Дальнейшее упрощение системы канонических уравнений 301
Глава 10. Неразрезные балки
10.1. Общие сведения.......................................307
10.2. Применение метода сил к расчету неразрезных балок . 309
10.3. Особенности применения уравнения трех моментов в осо-
бых случаях................................................314
10.4. Определение изгибающих моментов, поперечных сил
п опорных реакций..........................................317
30.5. Расчет неразрезпых балок.............................319
10.6. Основы расчета перазрезных балок на совместное дей-
ствие постоянной и временной нагрузок......................327
Глава 11. Подпорные стены
11.1. Общие сведения.......................................340
И.2. Понятие о теории предельного равновесия. Активное
давление грунта и предпосылки к его определению . 344
11.3. Определение активного давления грунта аналитическим
способом...................................................348
11.4. Интенсивность давления грунта по высоте подпорной сте-
ны. Эпюра интенсивности давлений (напряжений). Определе-
ние точки приложения активного давления....................350
11.5. Частные случаи определения активного давления грунта
на подпорную степу и построения эпюр напряжений . . 353
11.6. Понятие о пассивном давлении грунта и его определение 363
11.7. Расчет массивных подпорных стен......................365
Список литературы..........................................380
Предметный указатель ....................................381